/





















































































































































































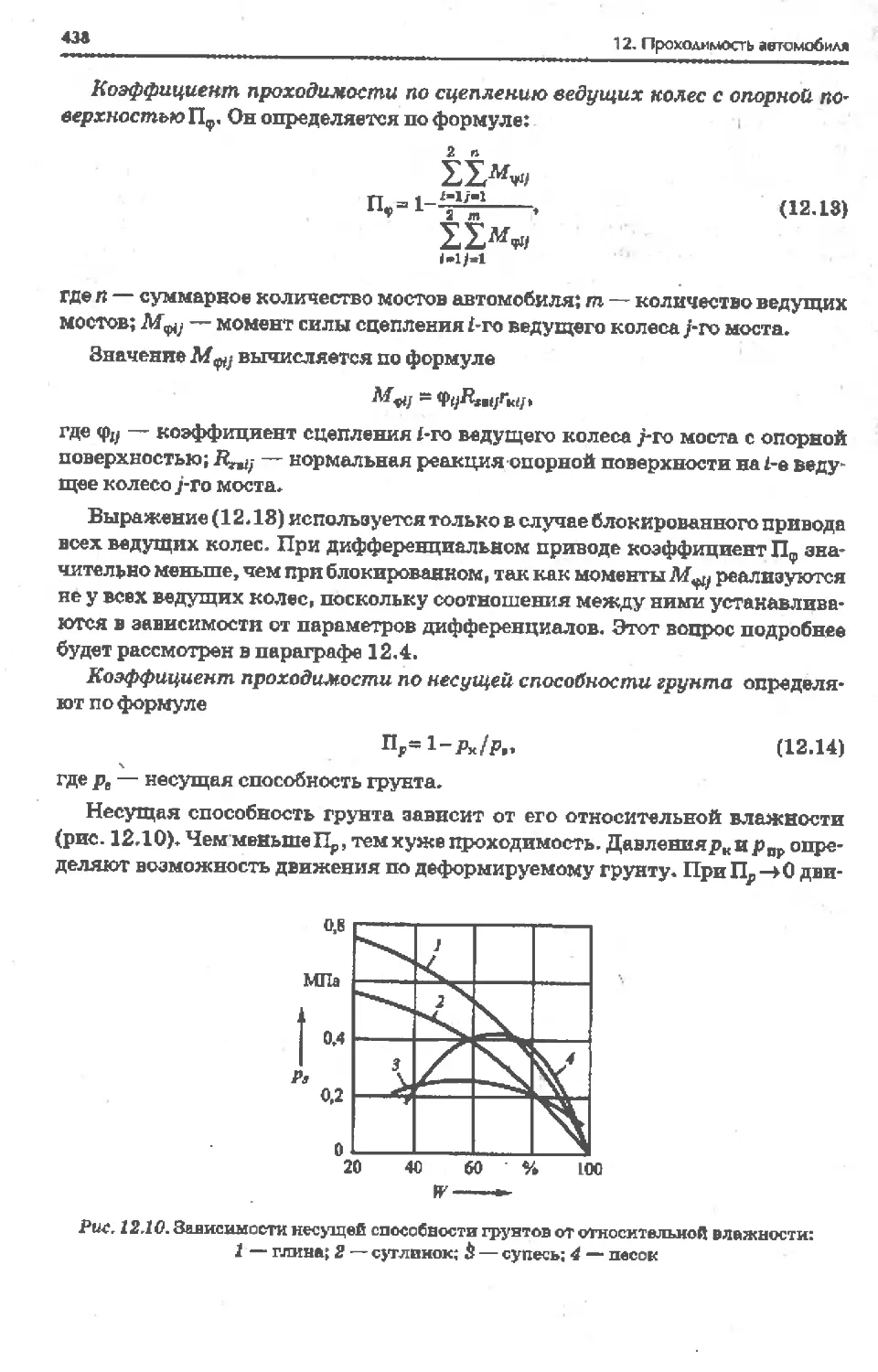















Author: Тарасик В.П.
Tags: техника средств транспорта автодорожный транспорт механика автомобилестроение движение автомобиля
ISBN: 5-94157-967-5
Year: 2006




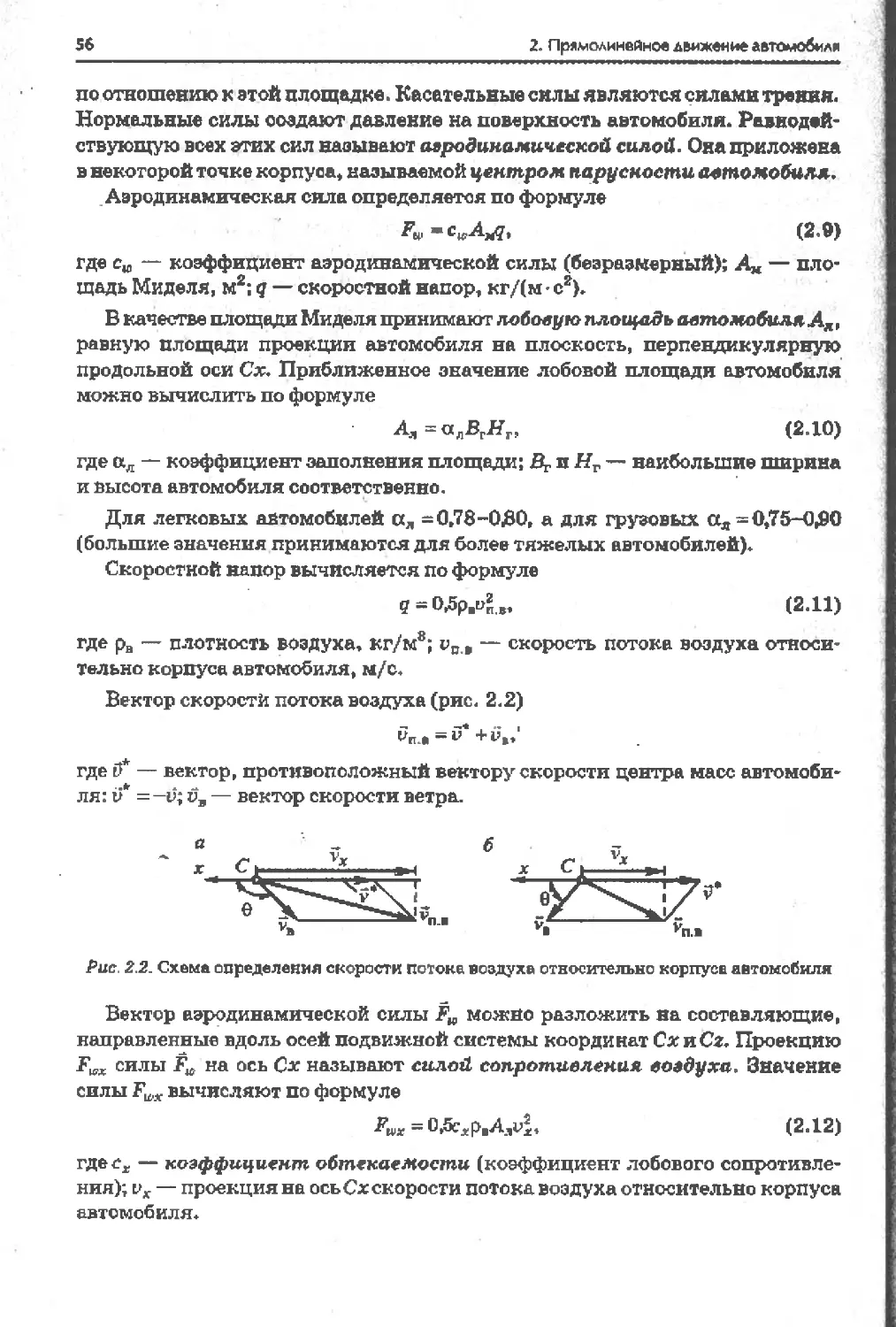
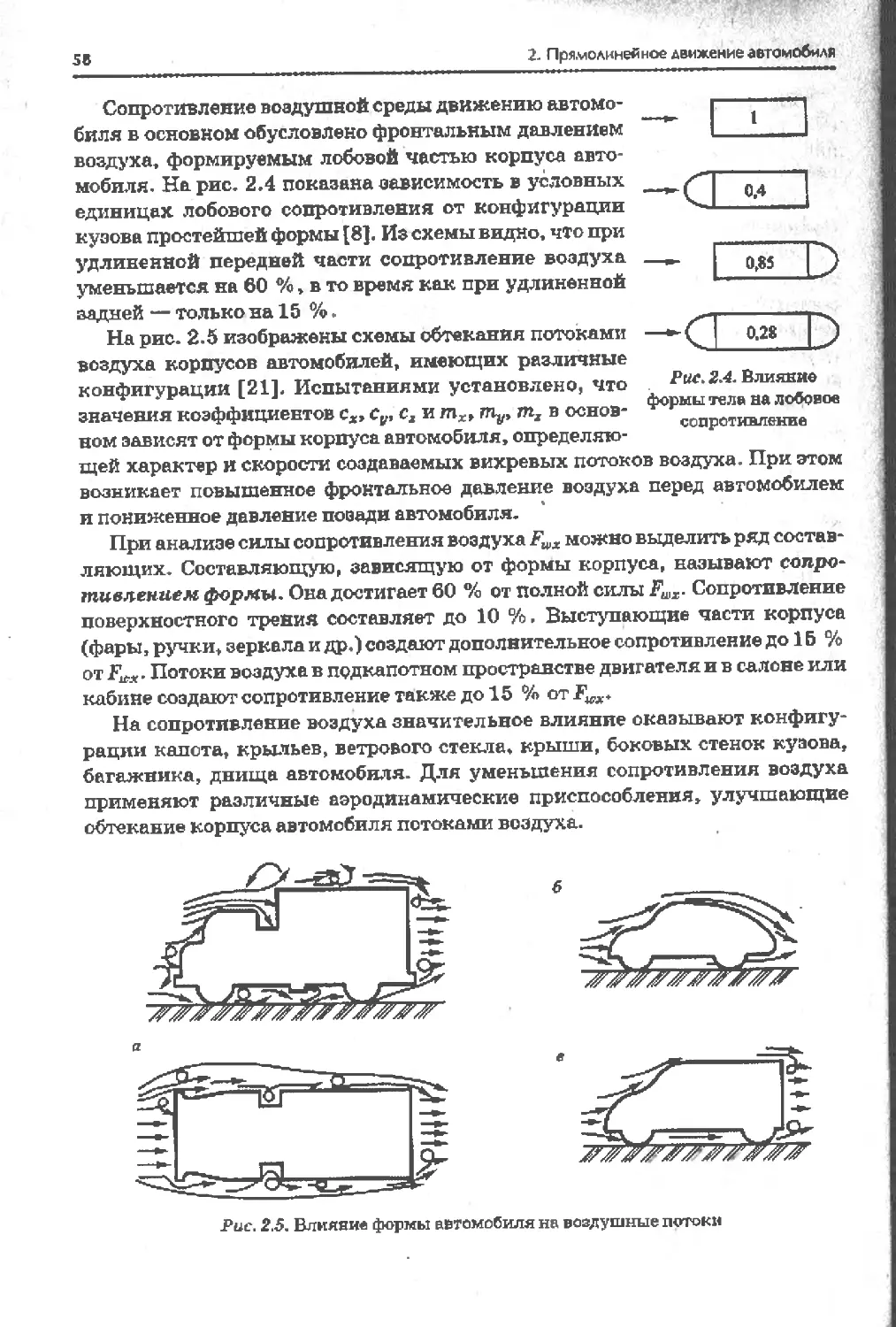
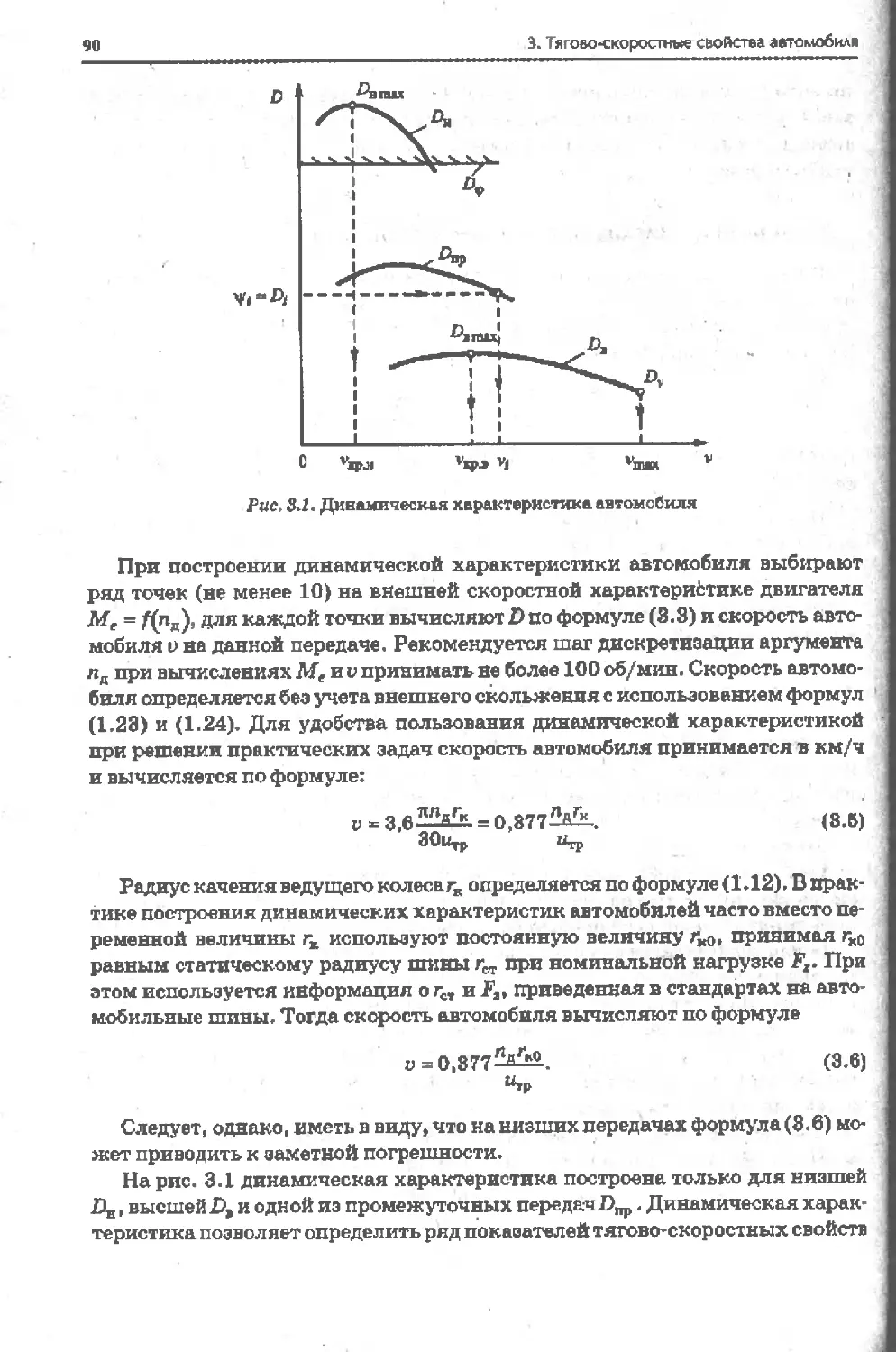
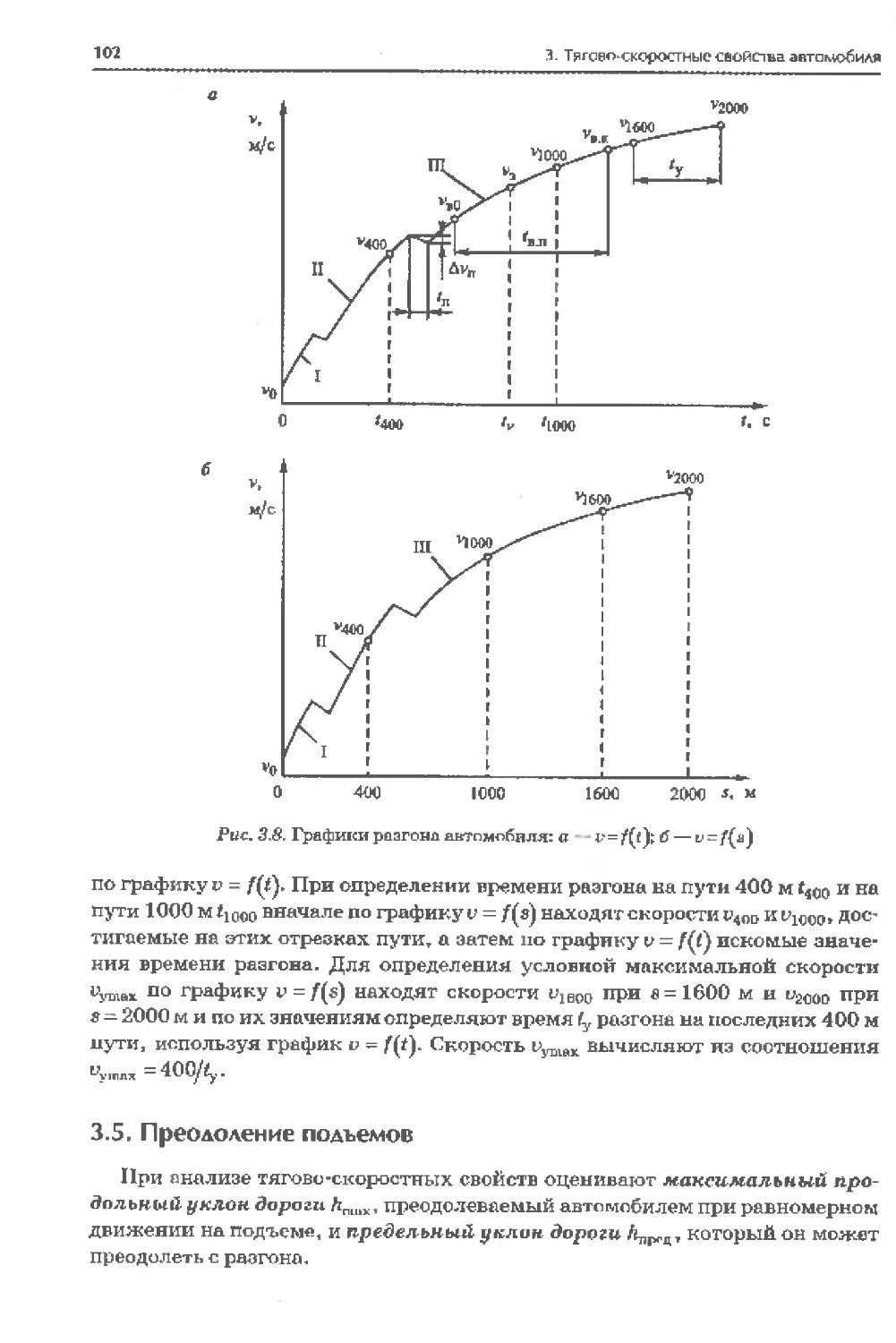
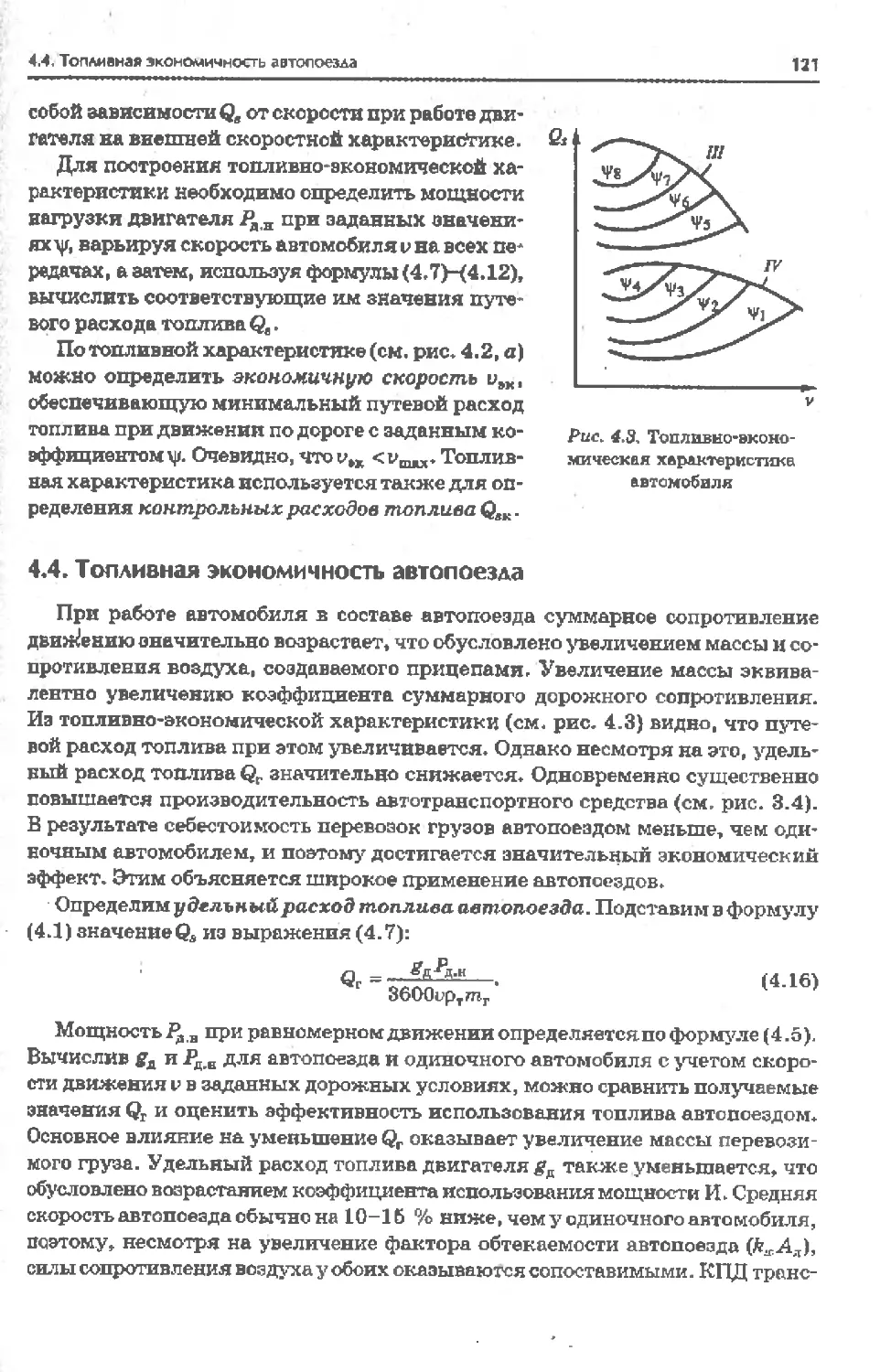
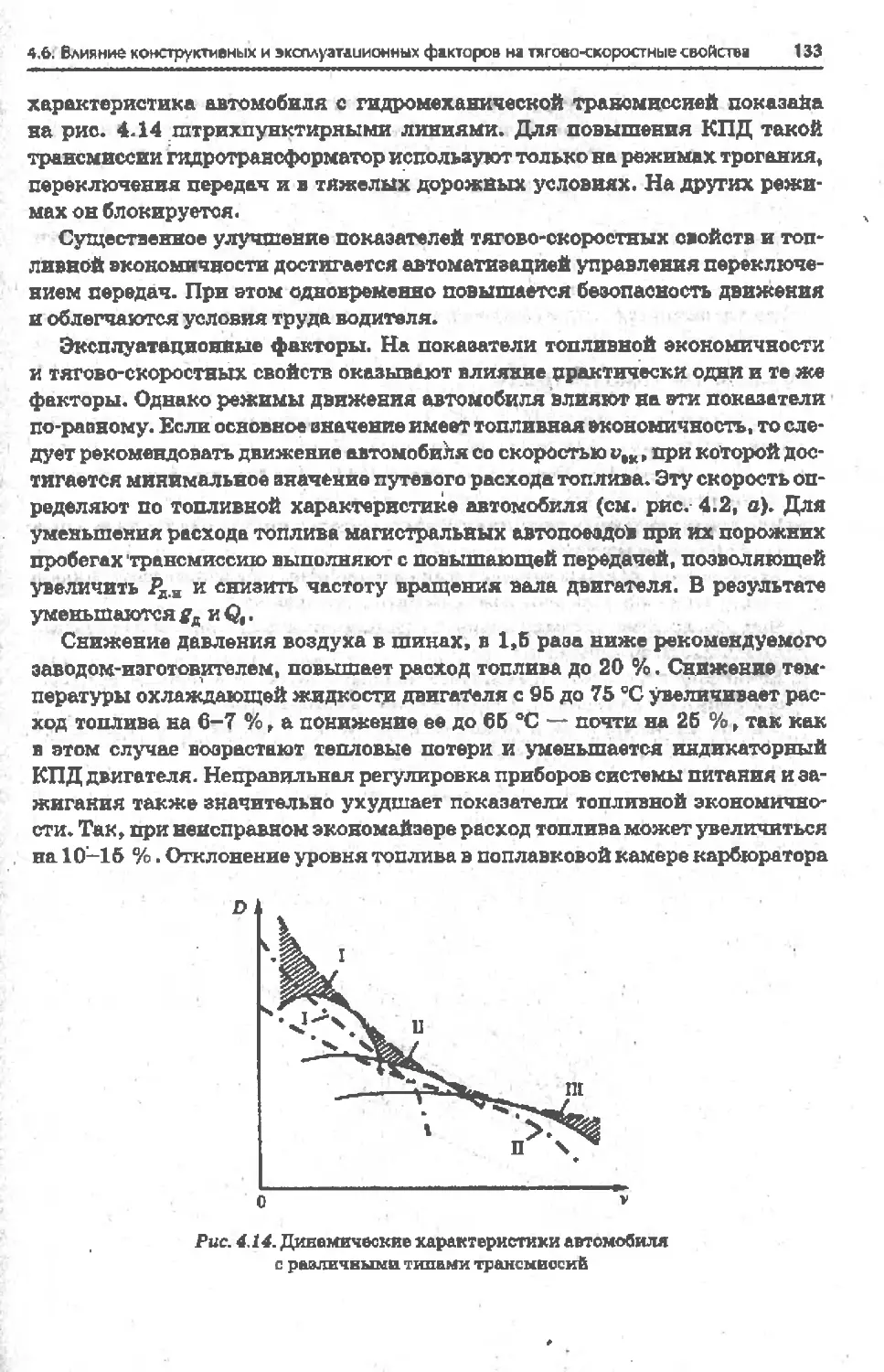
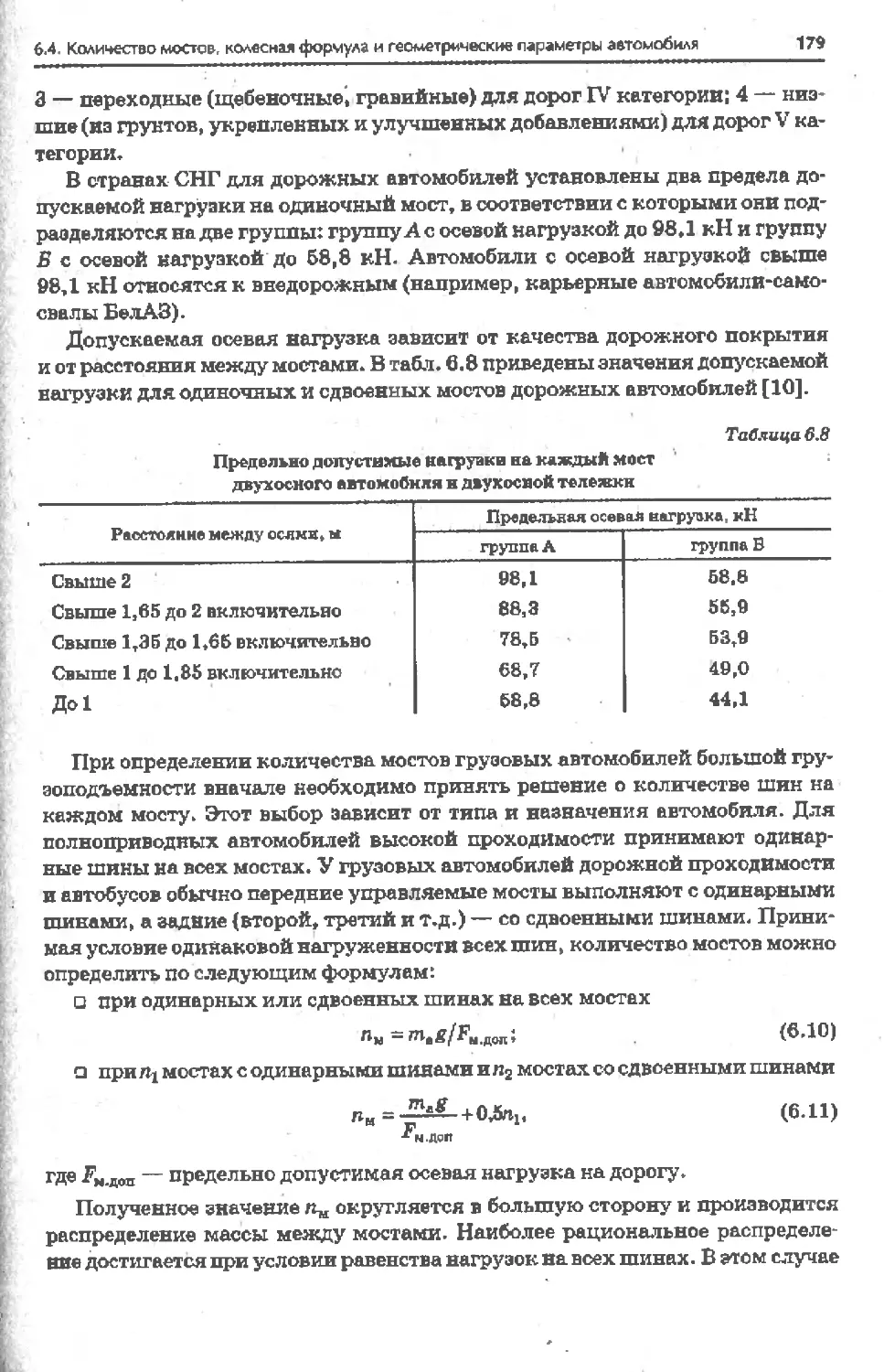
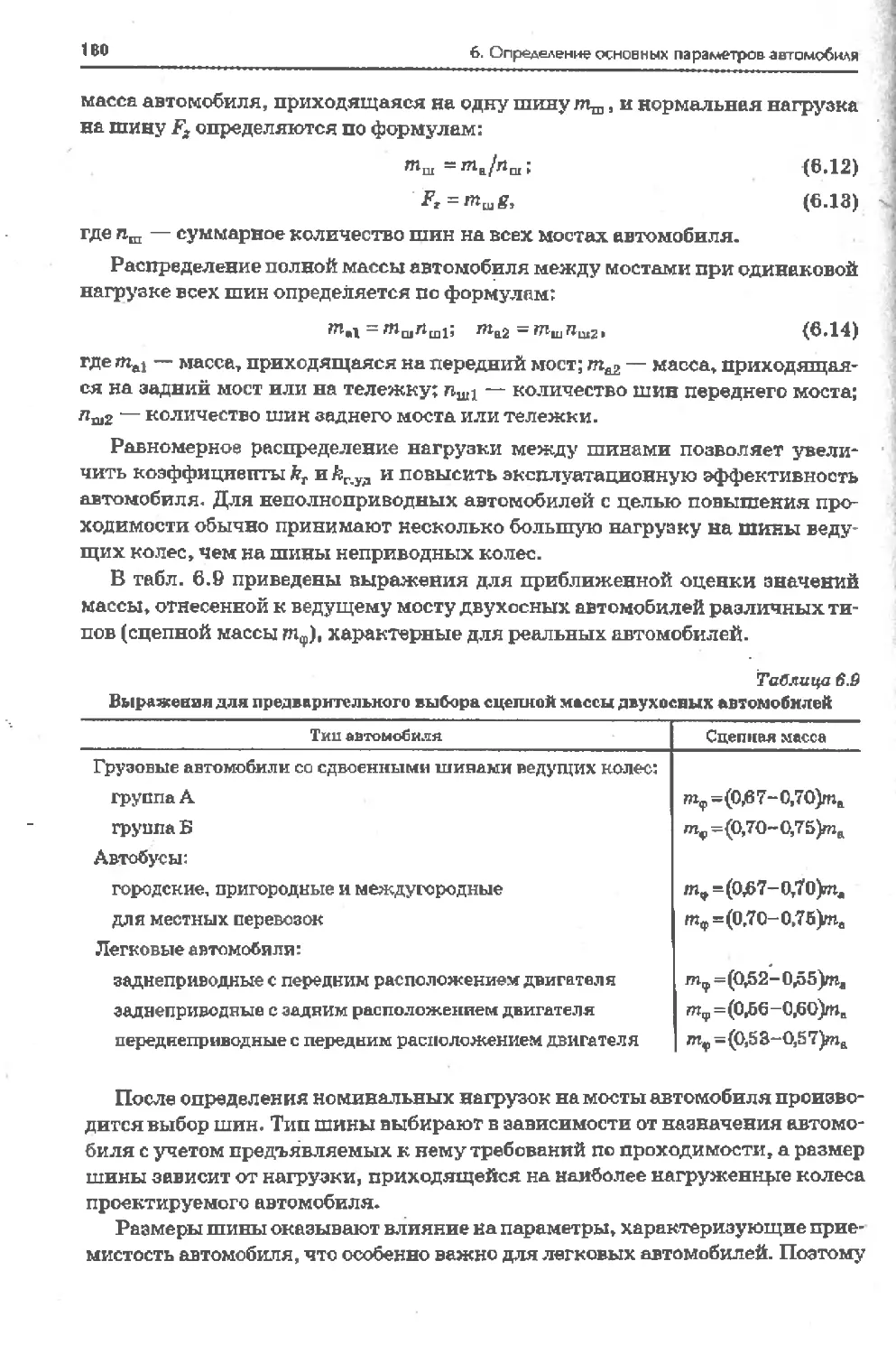
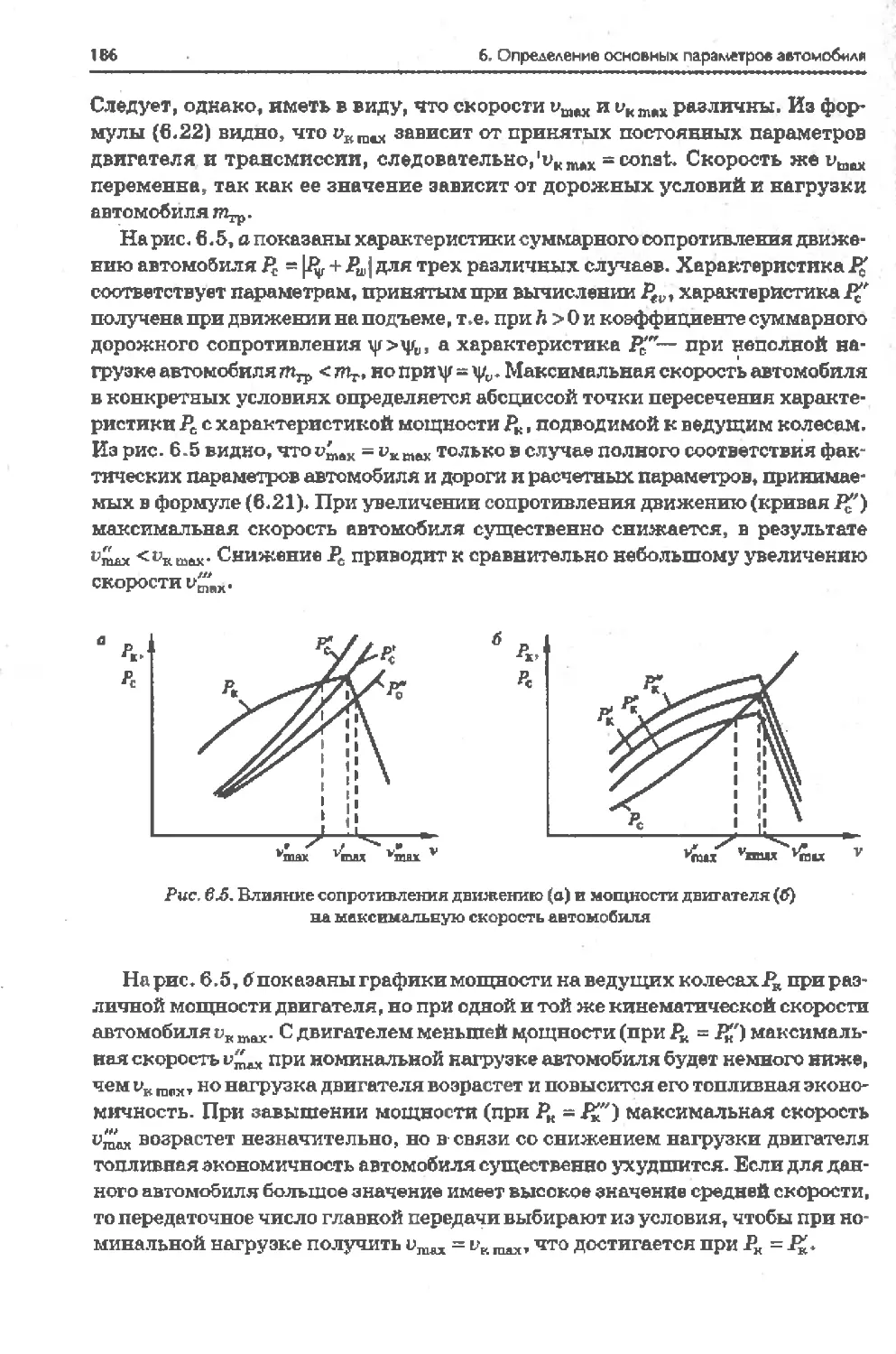
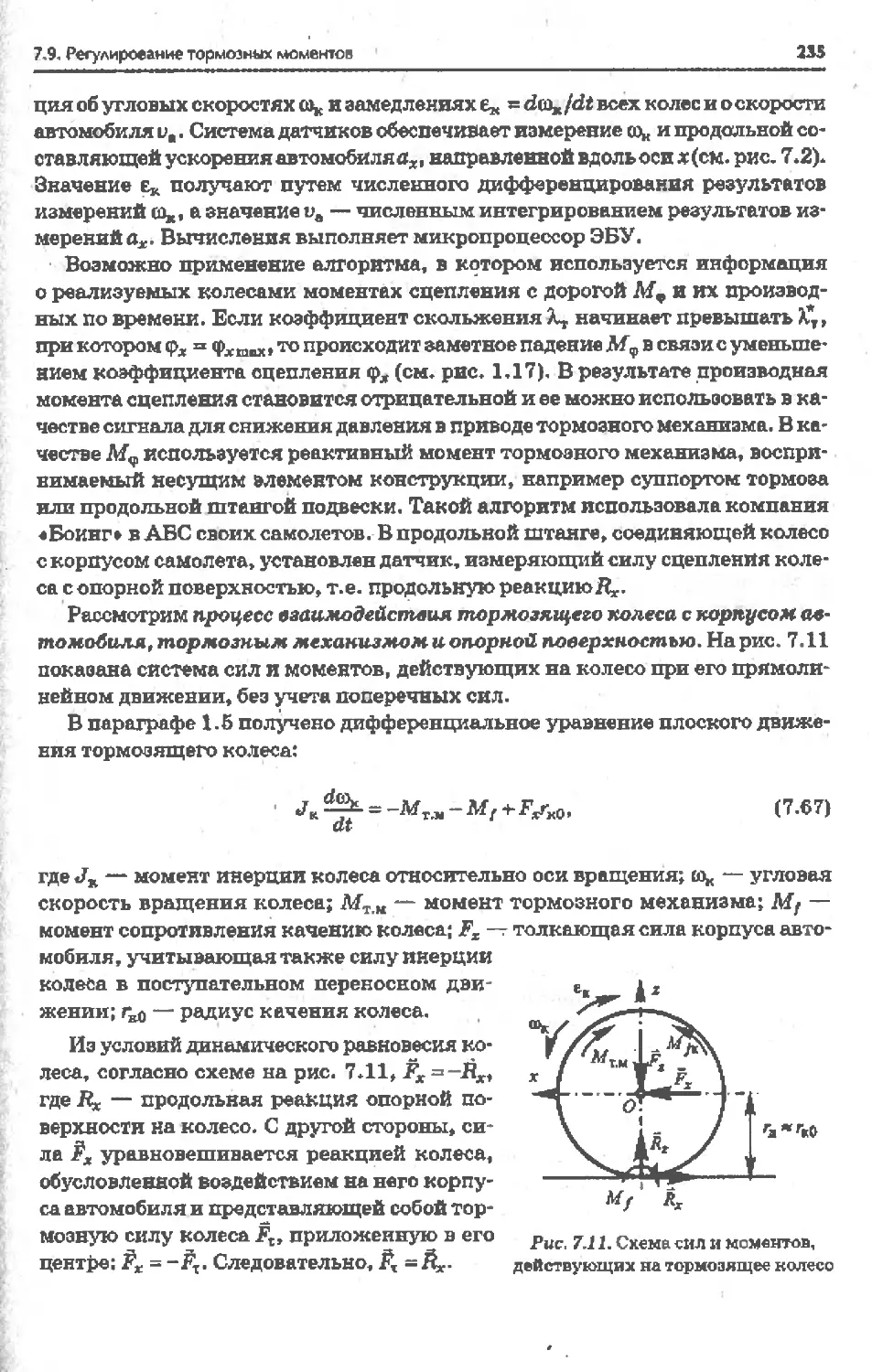
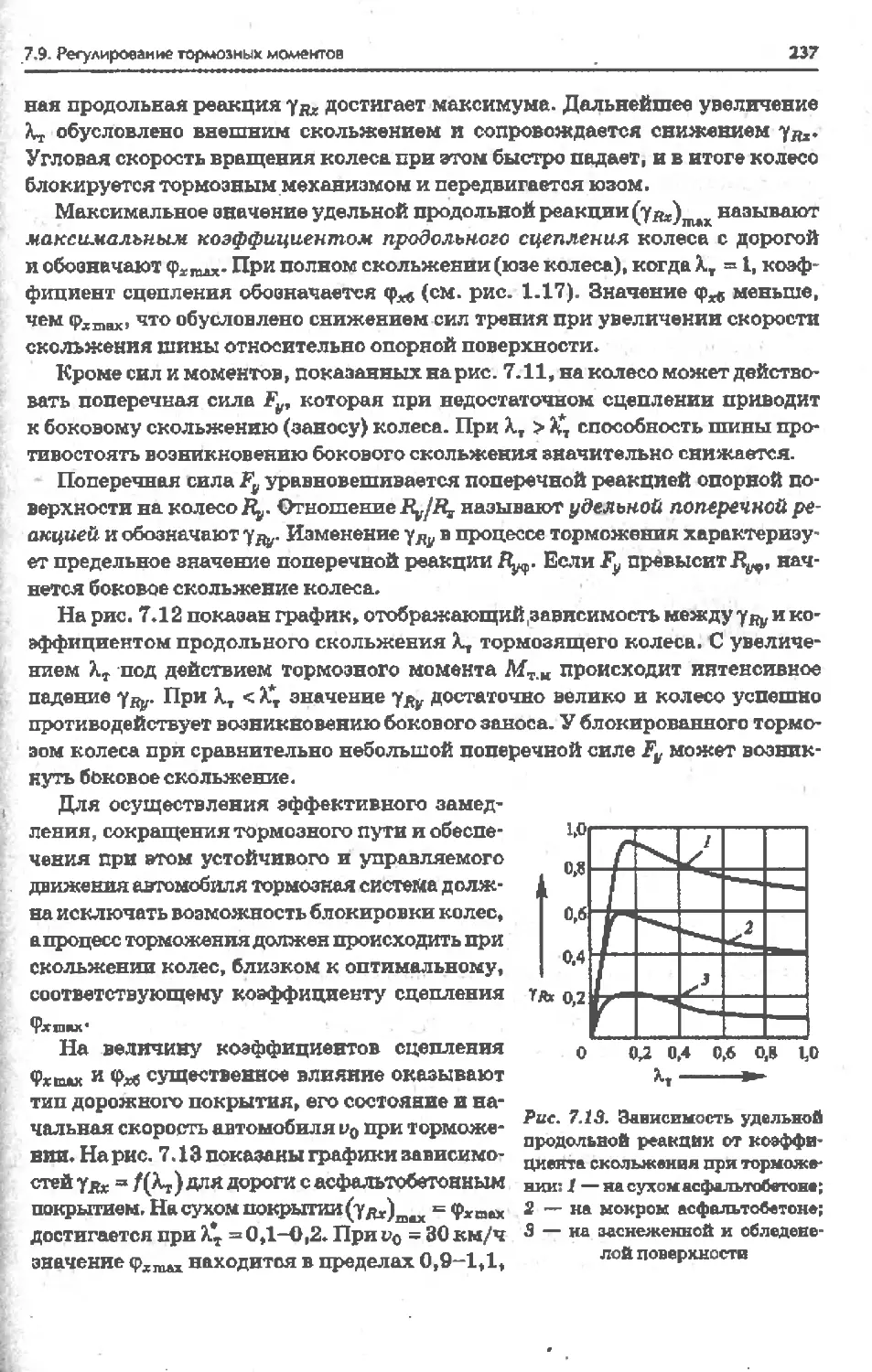
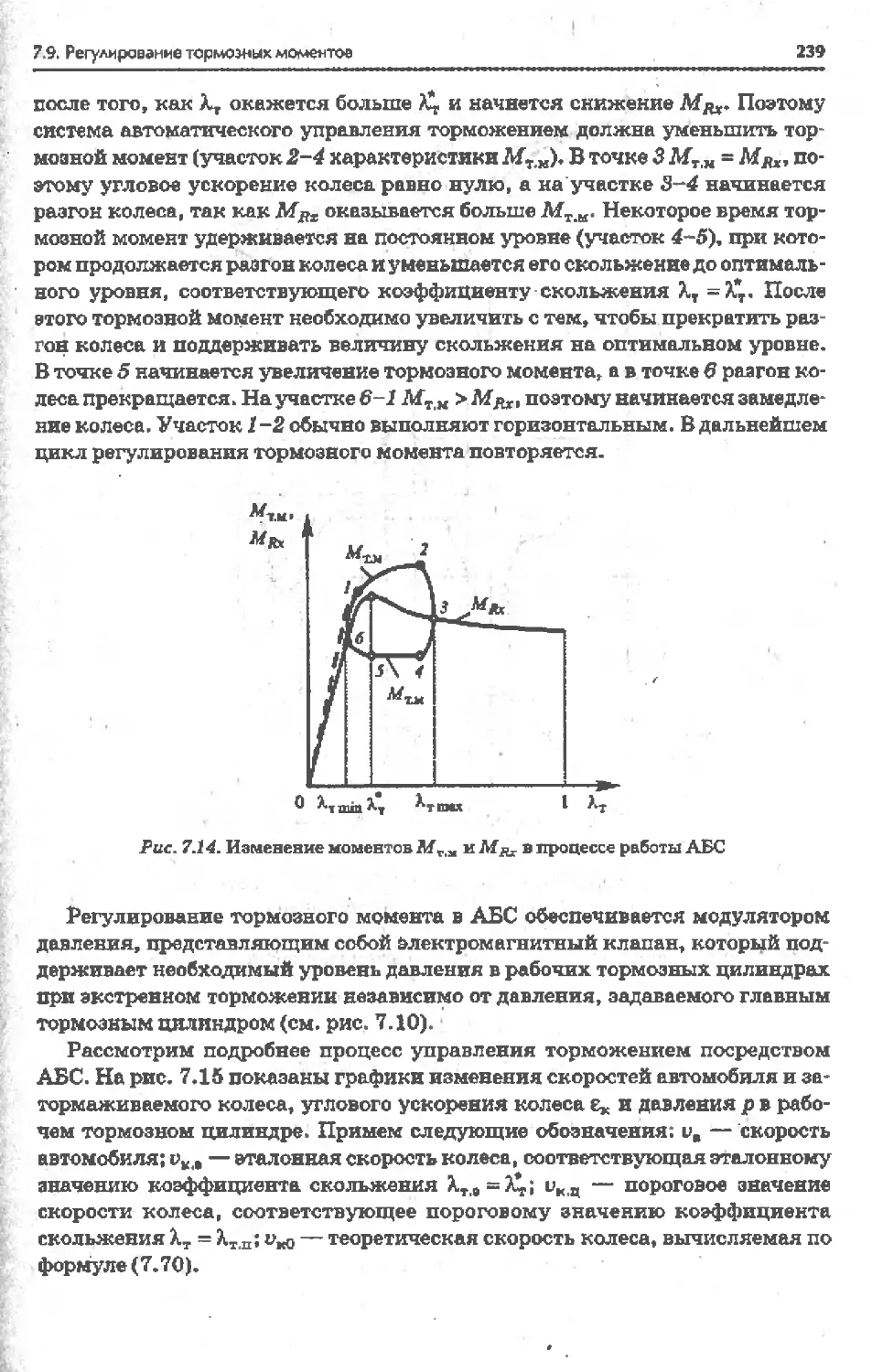
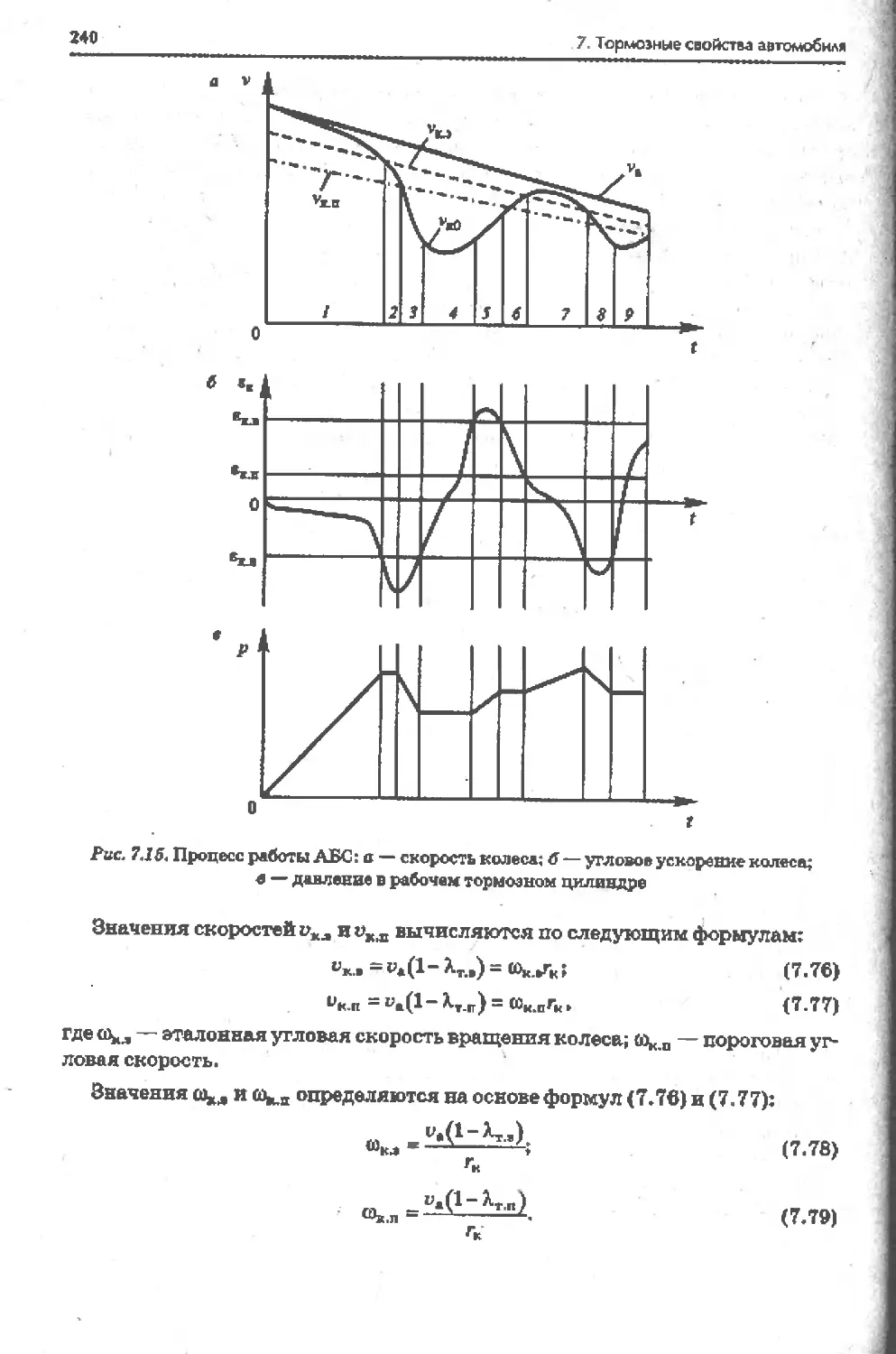
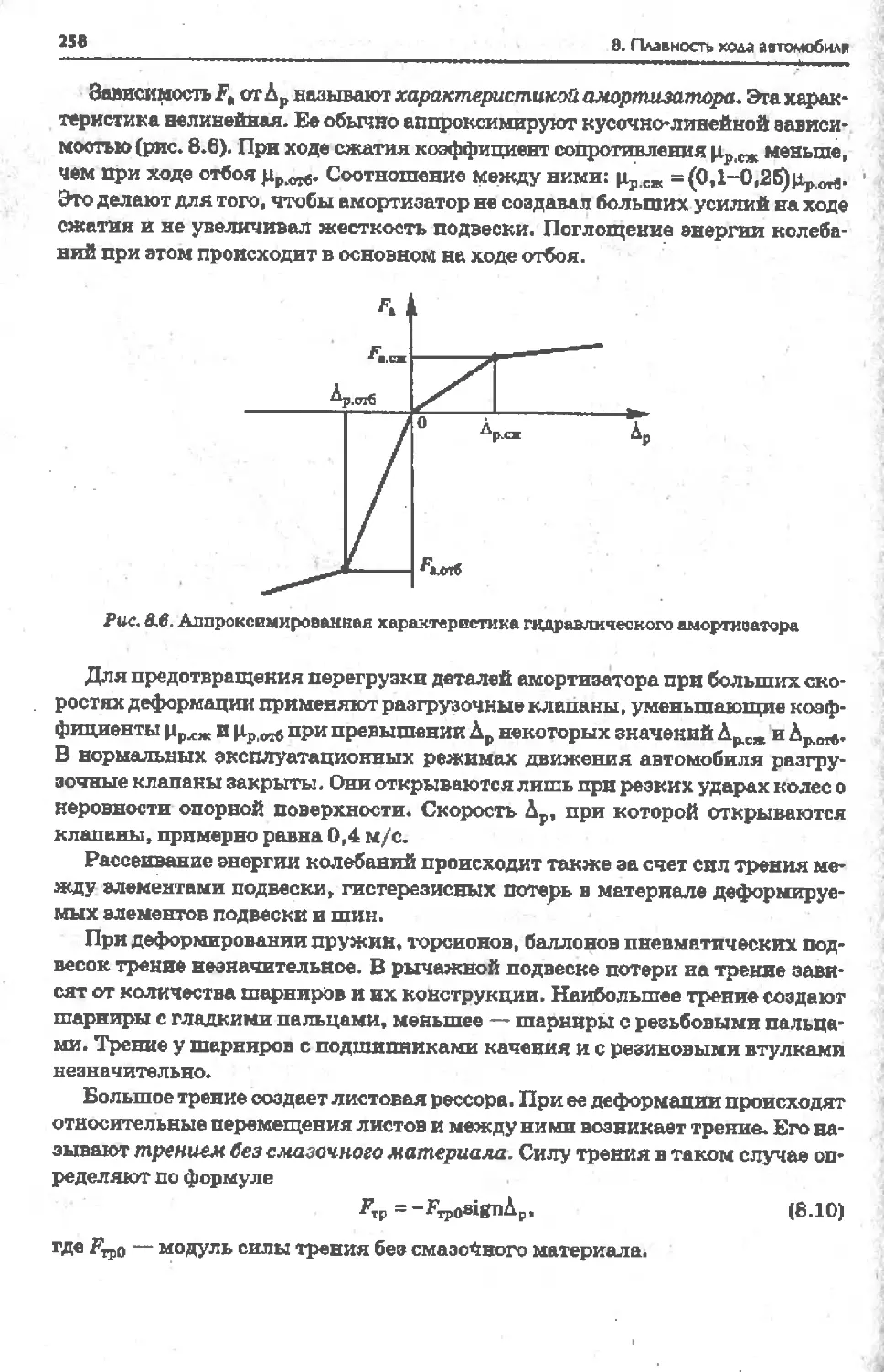
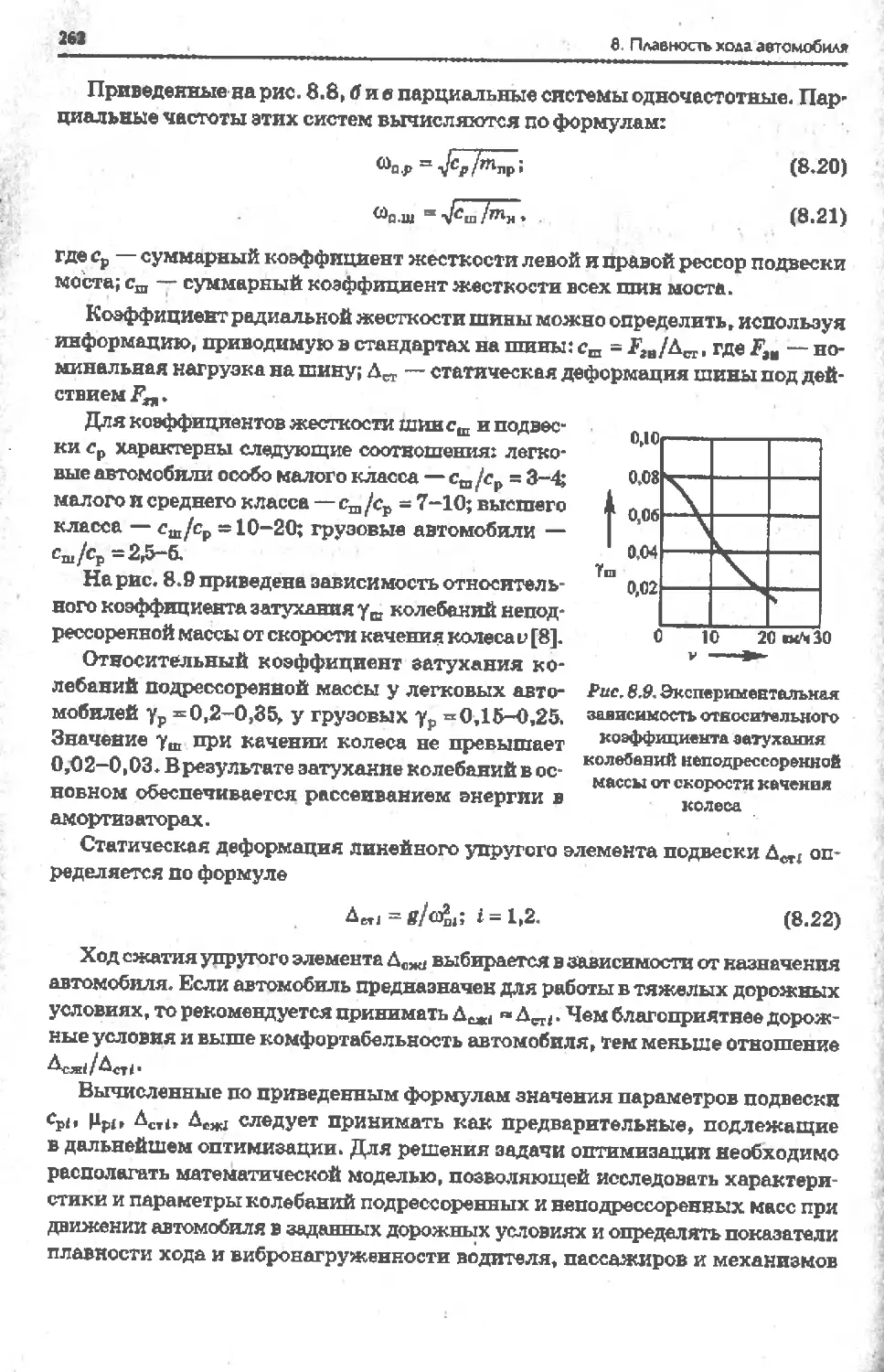
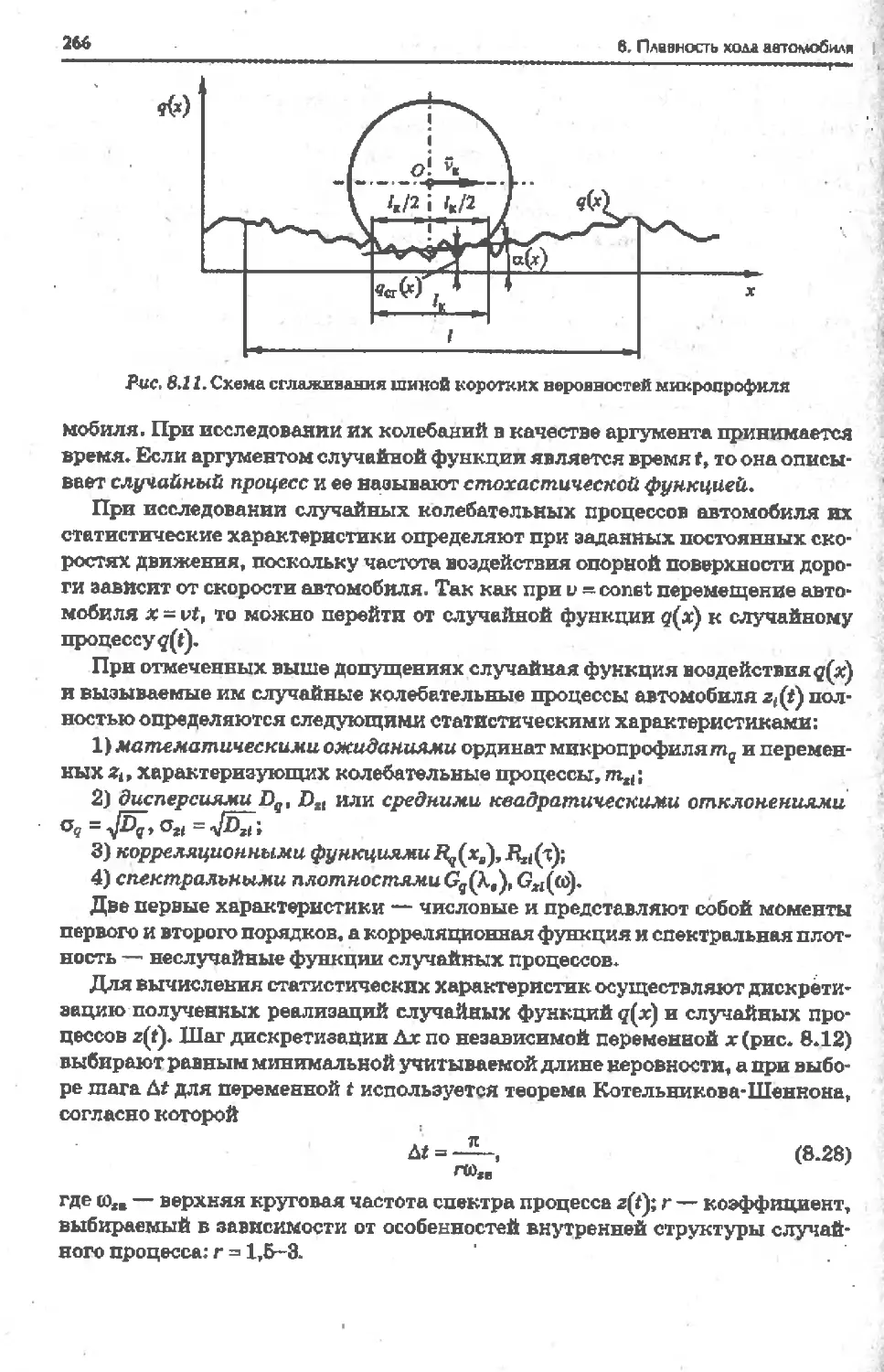
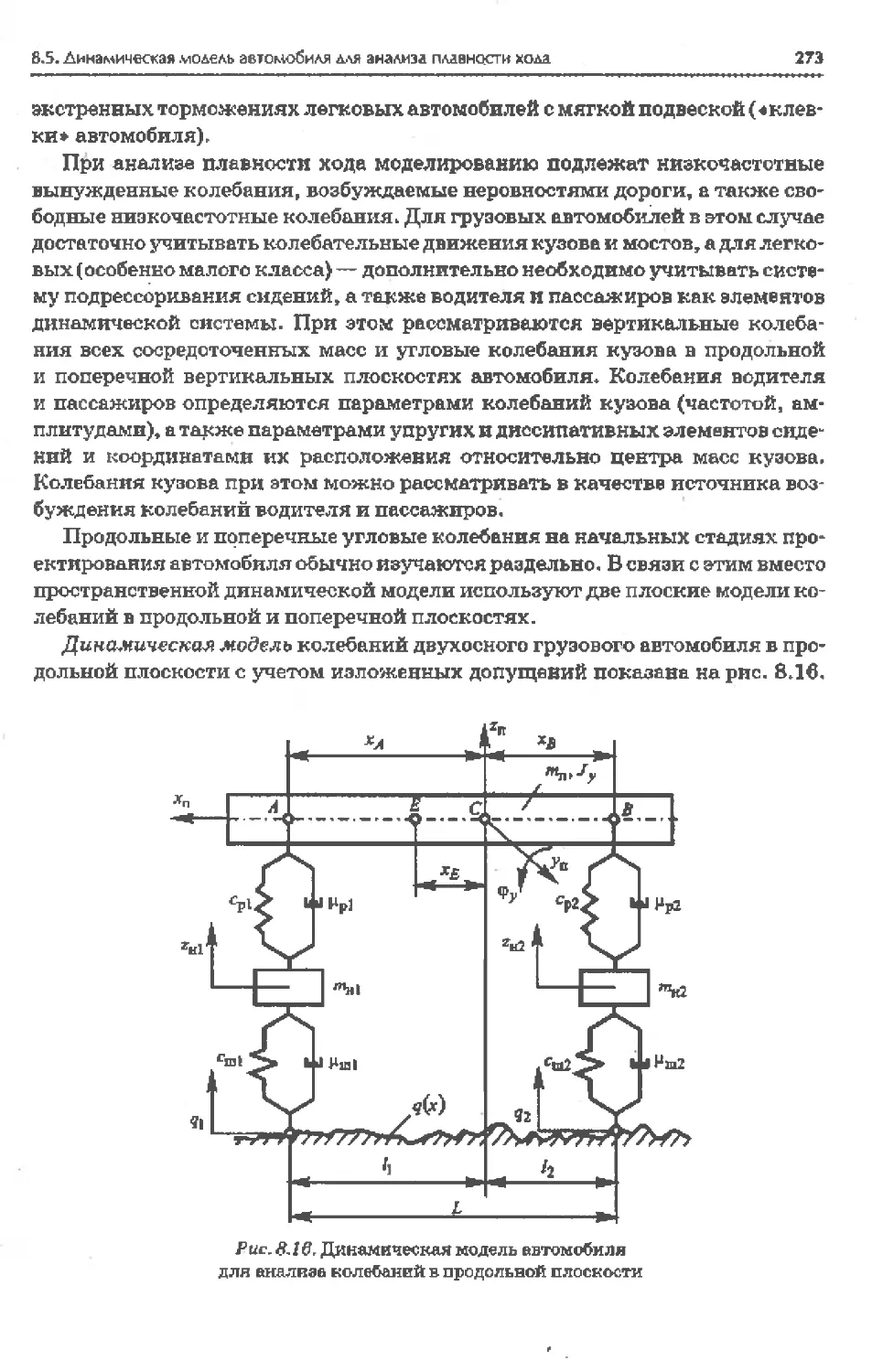
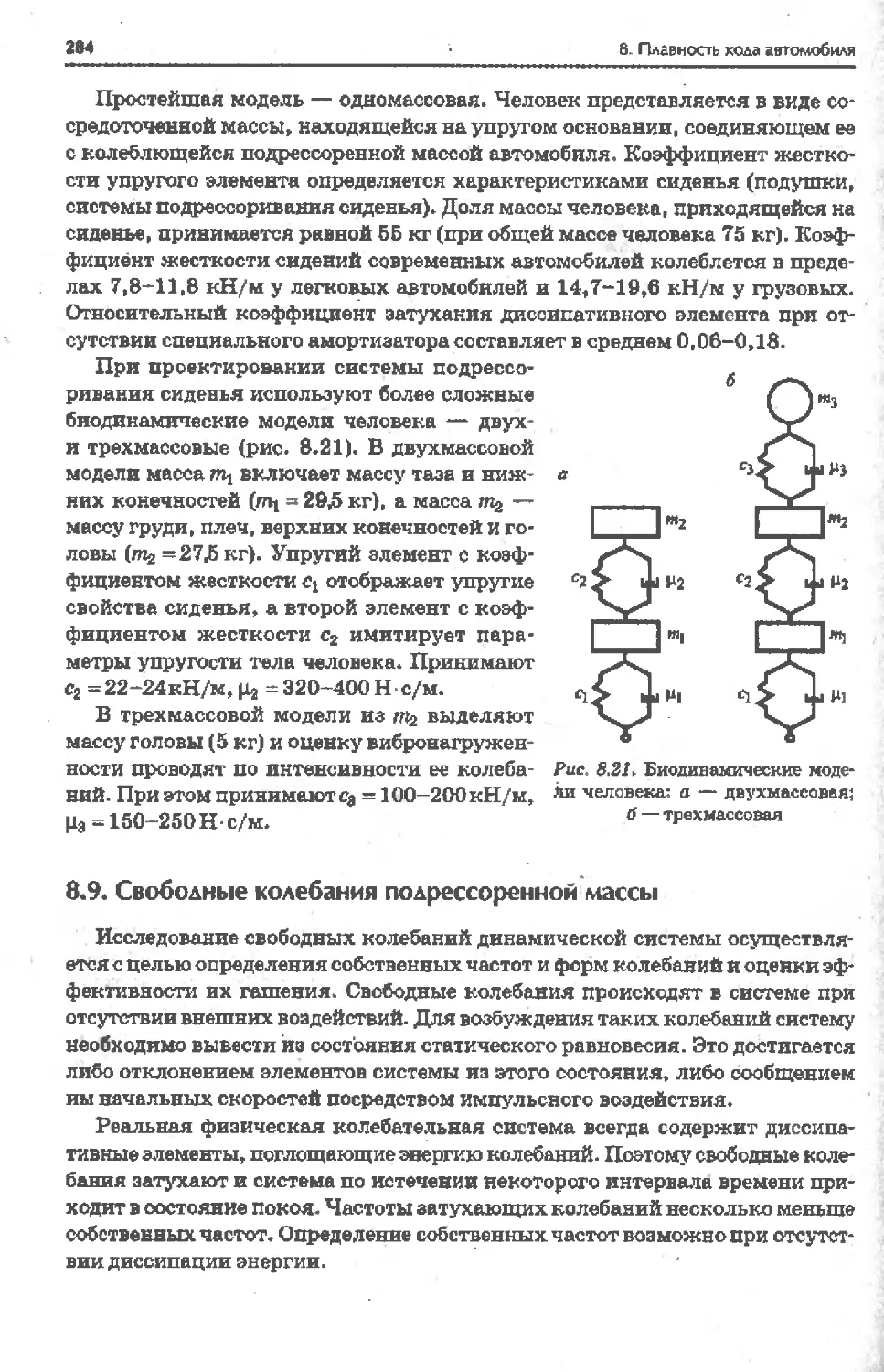
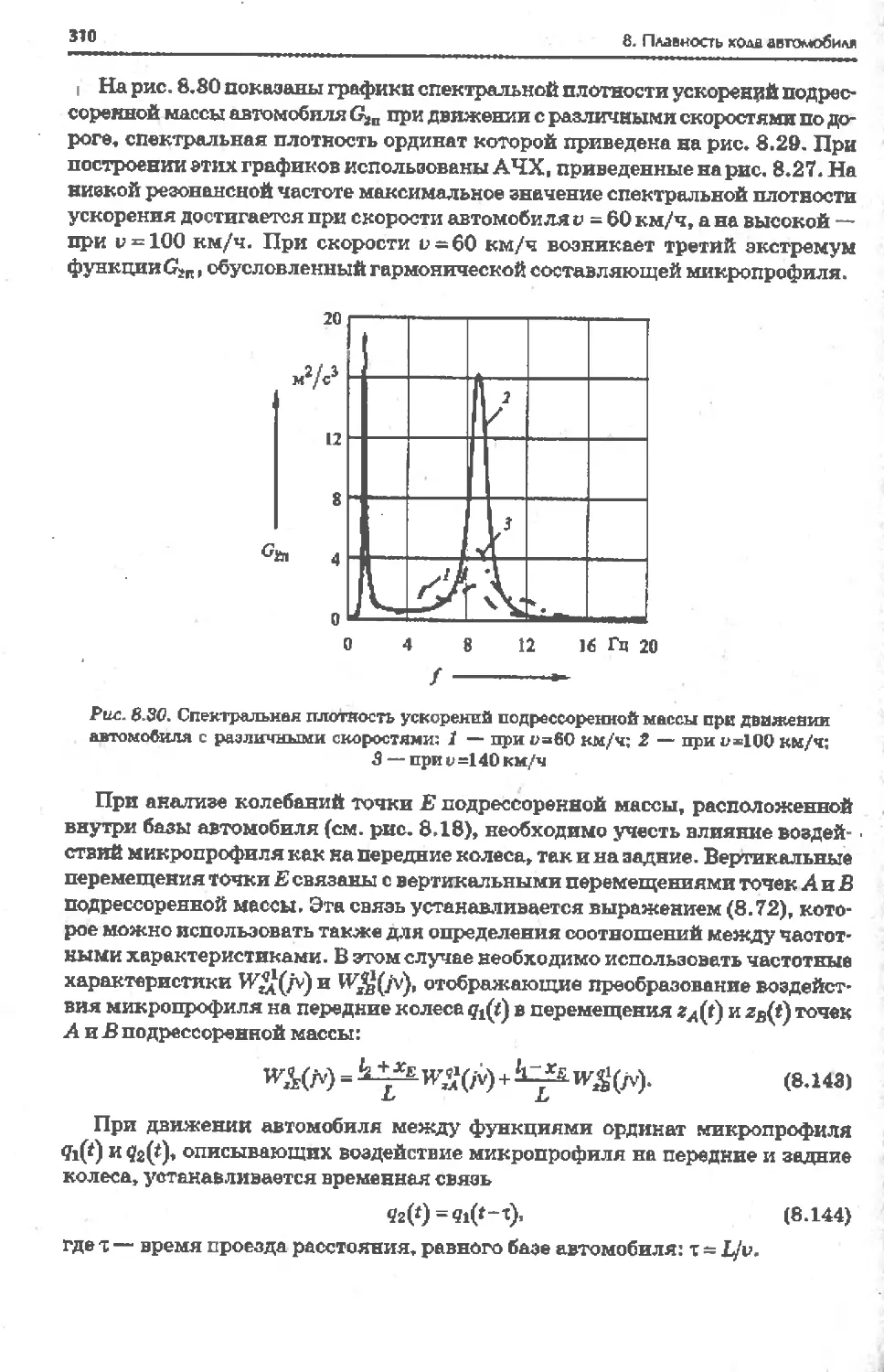
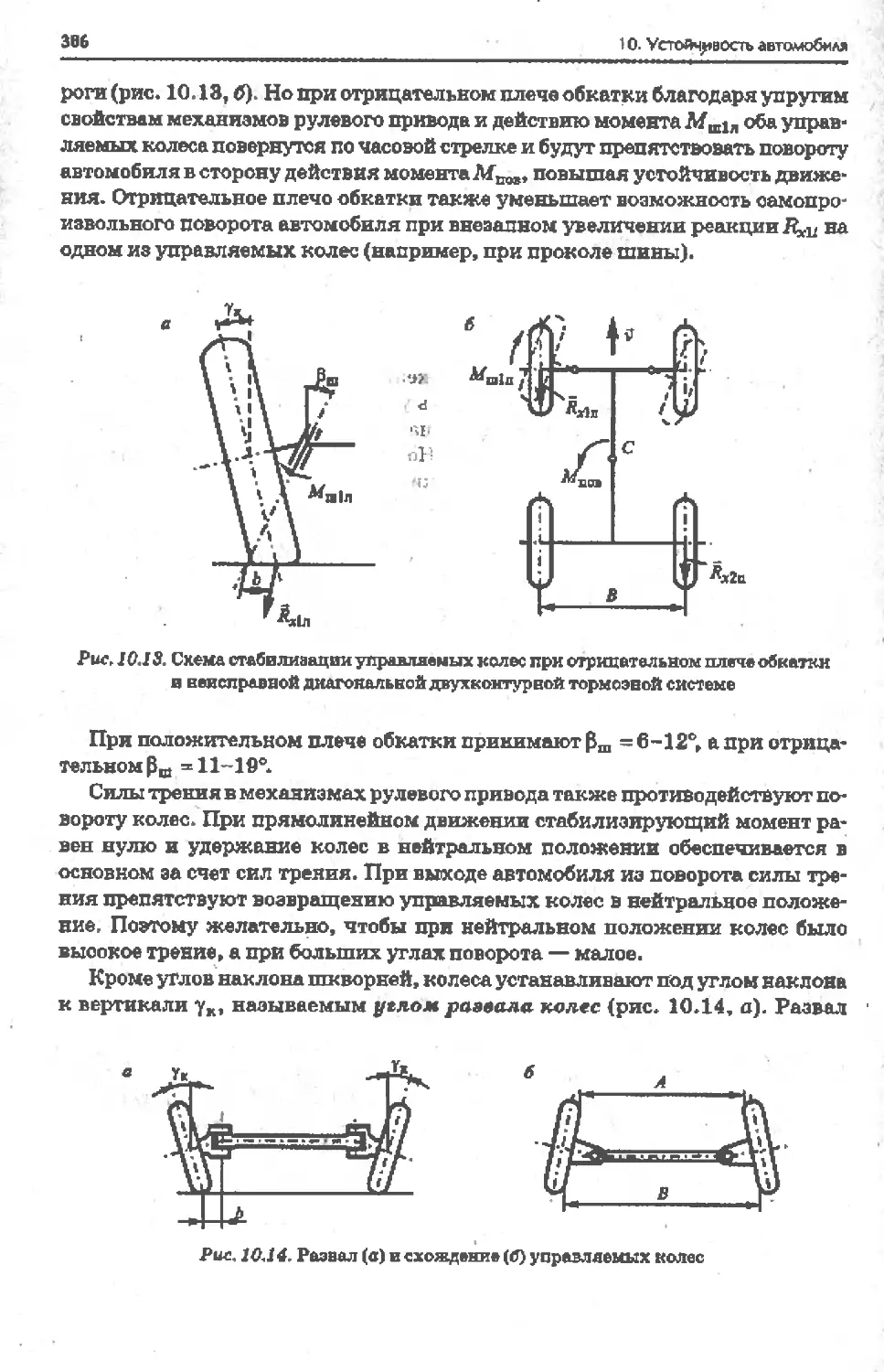
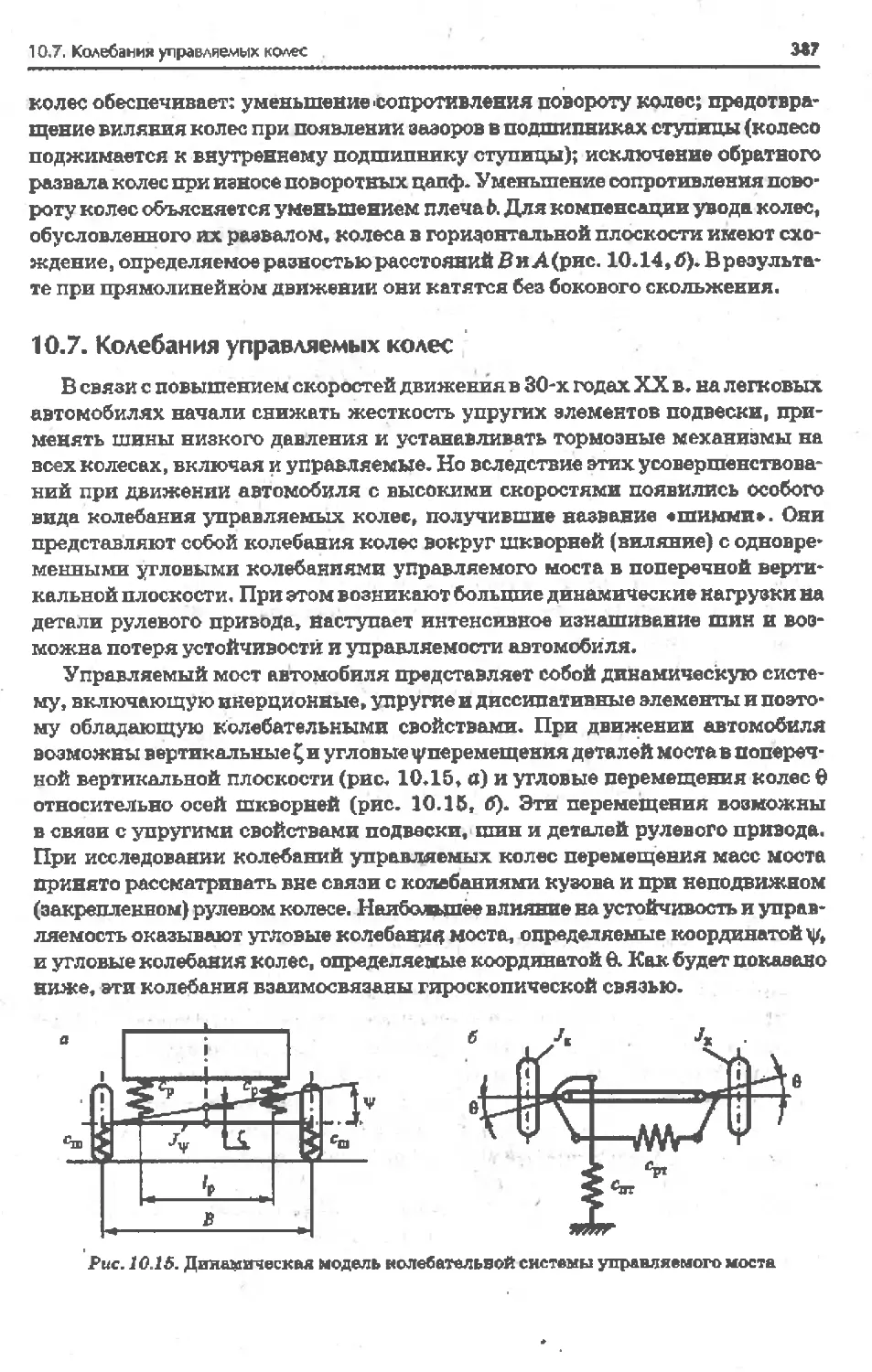
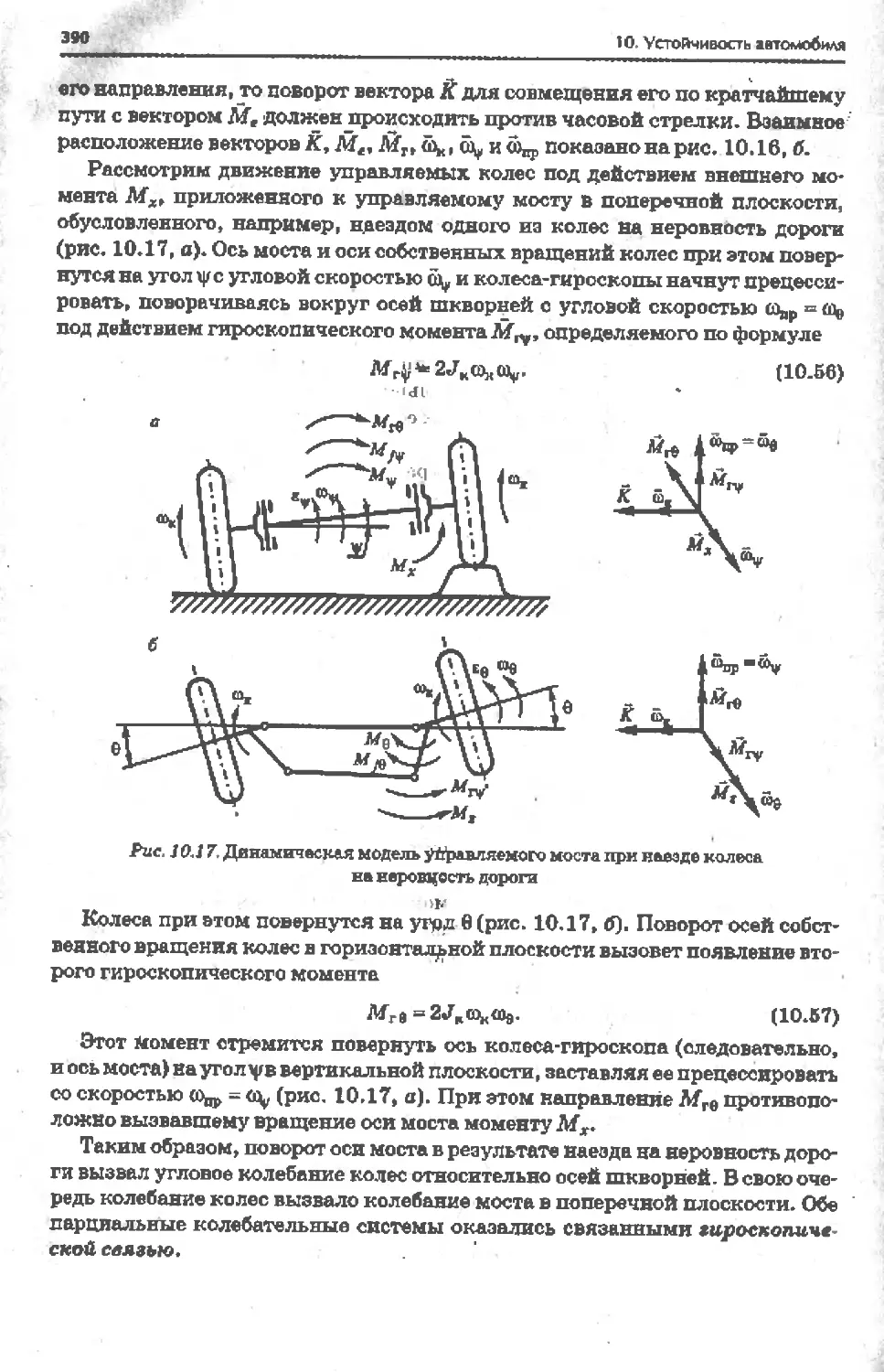
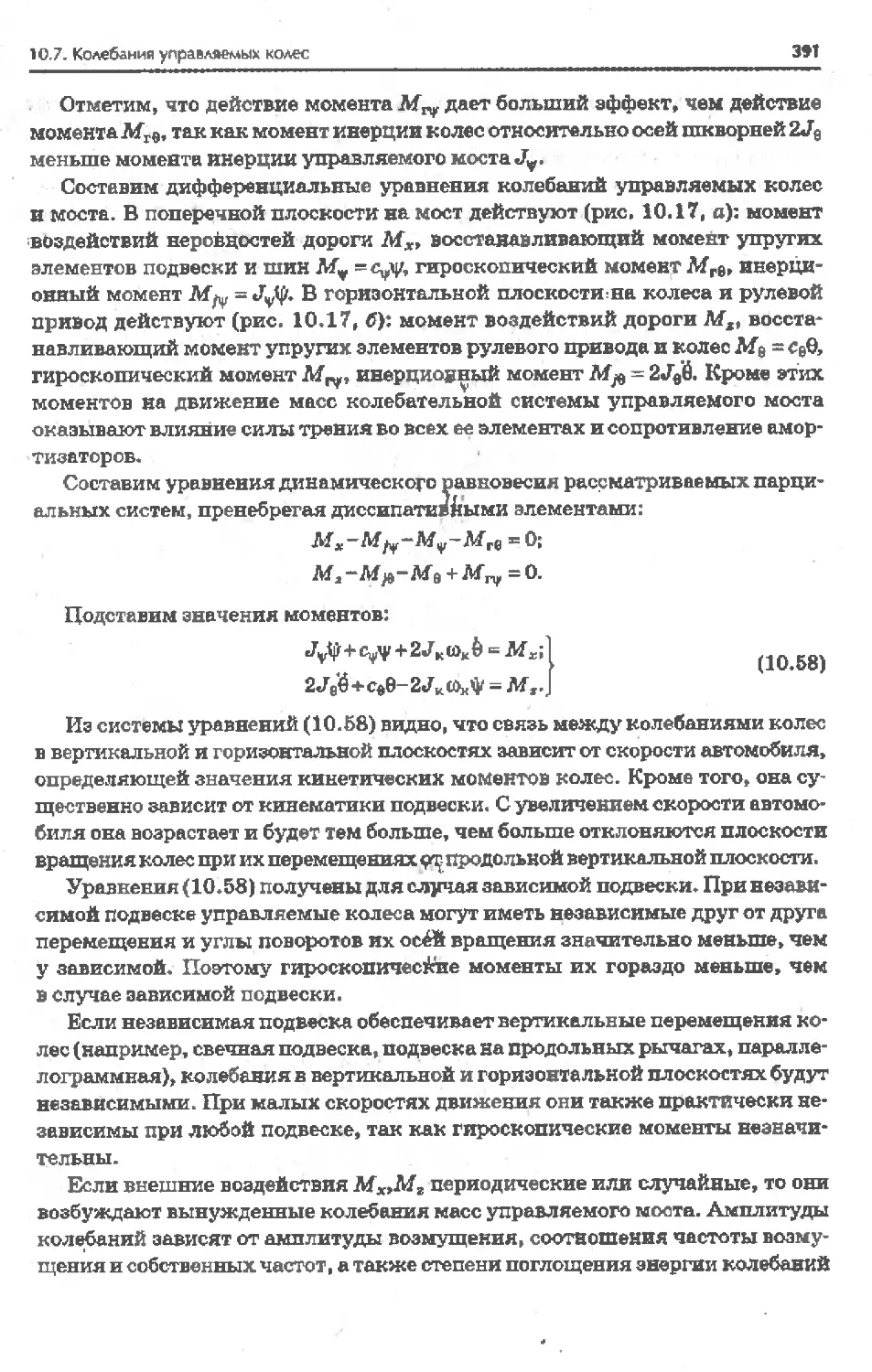
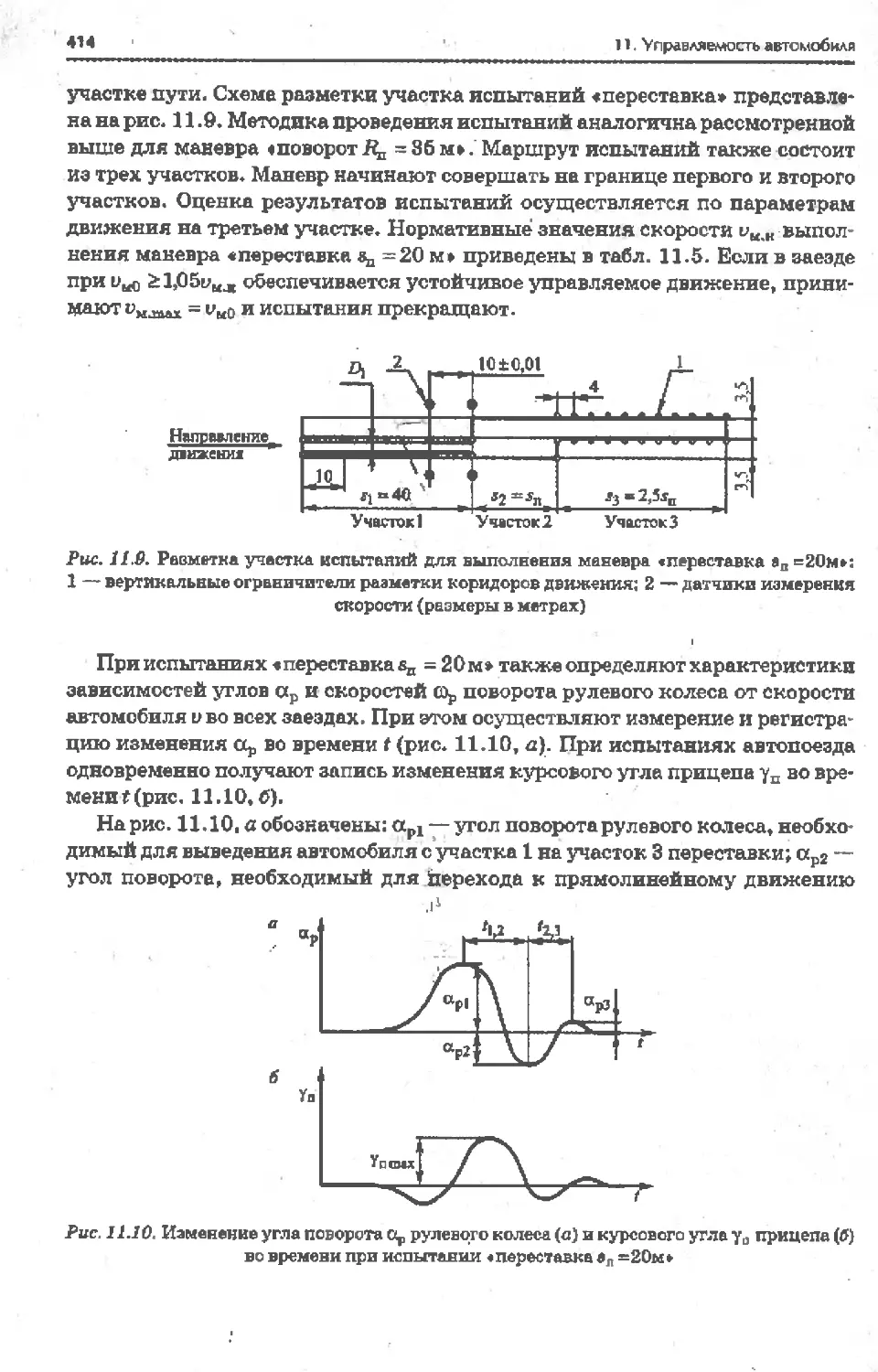
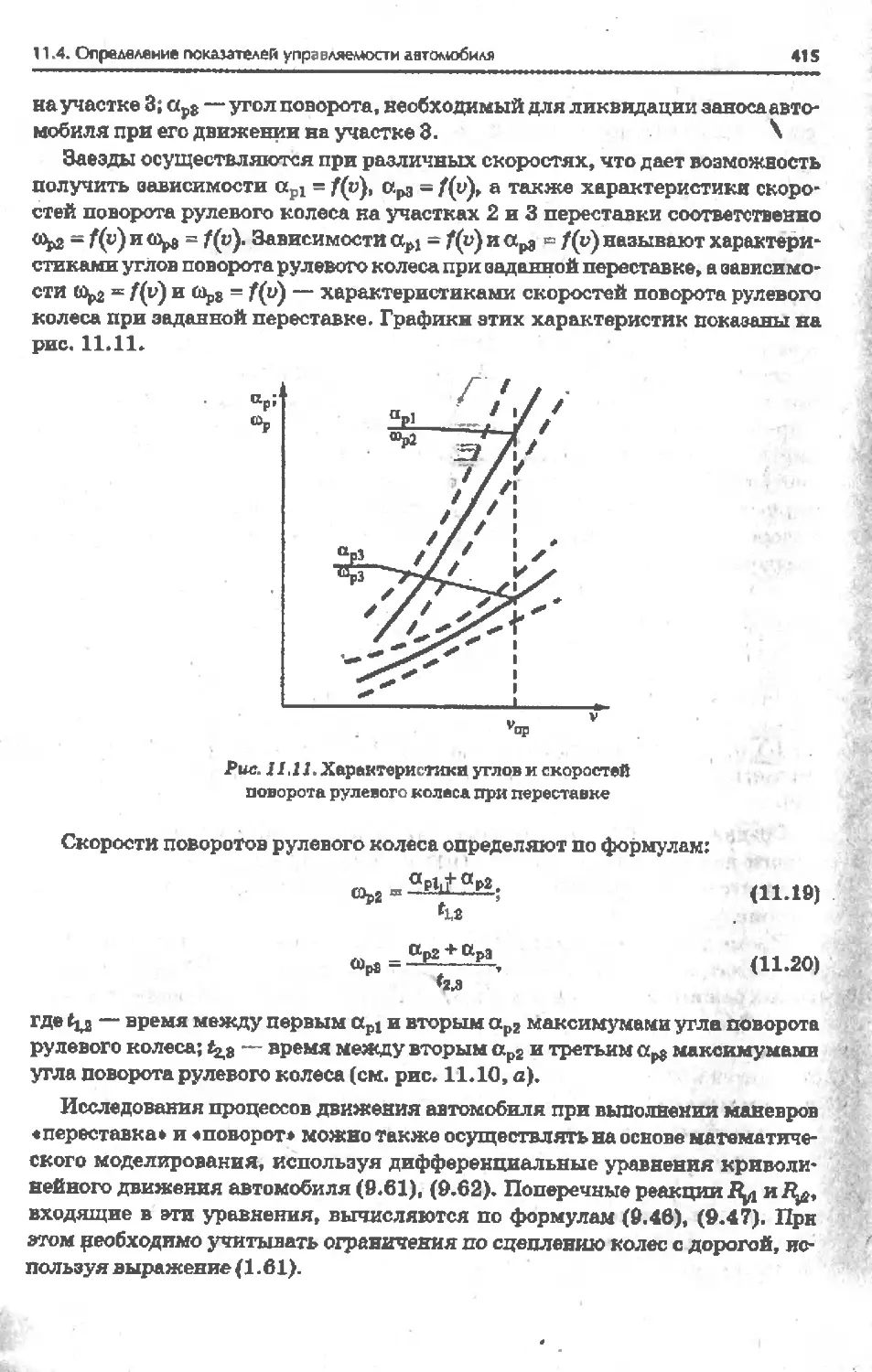
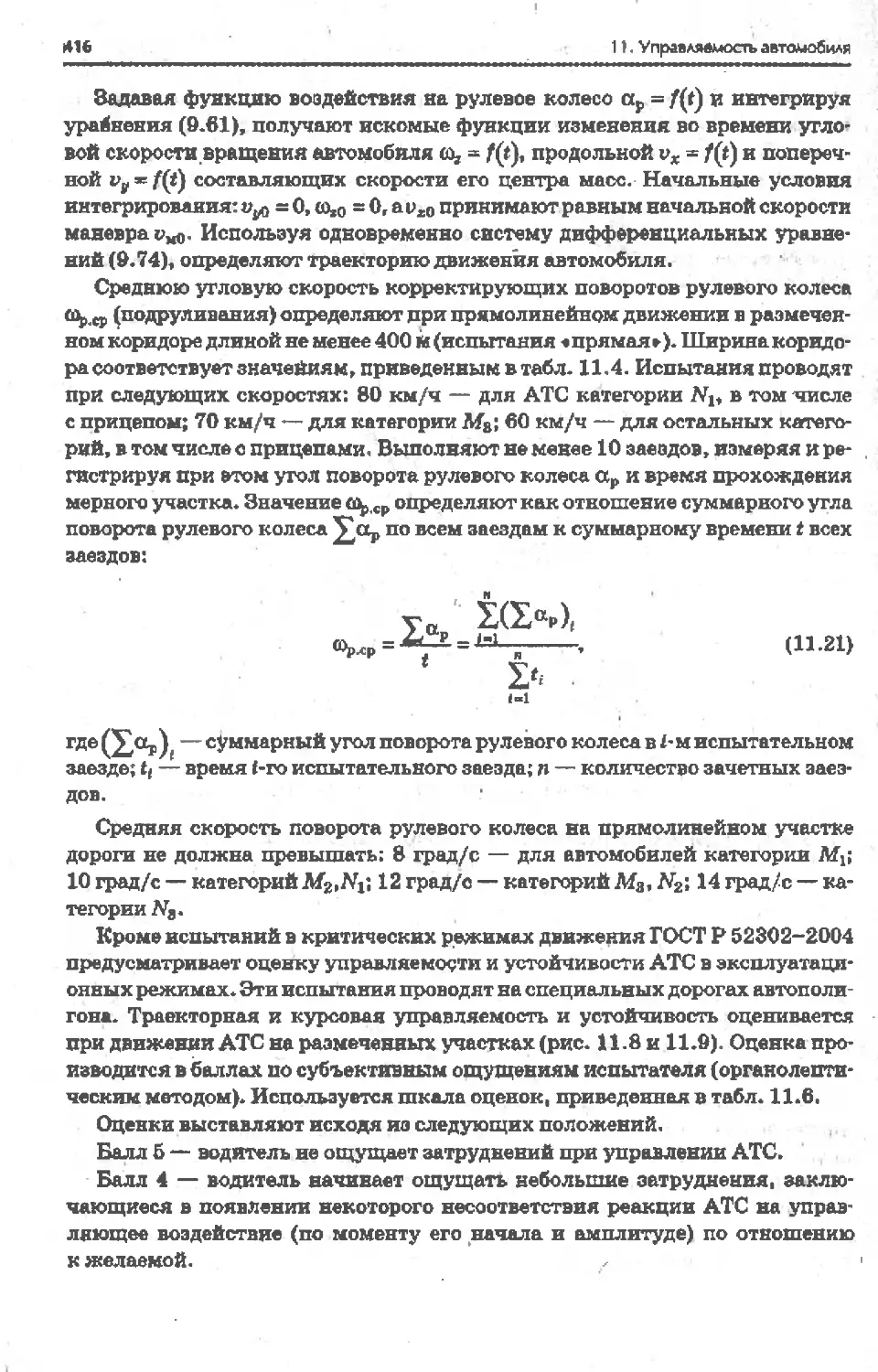
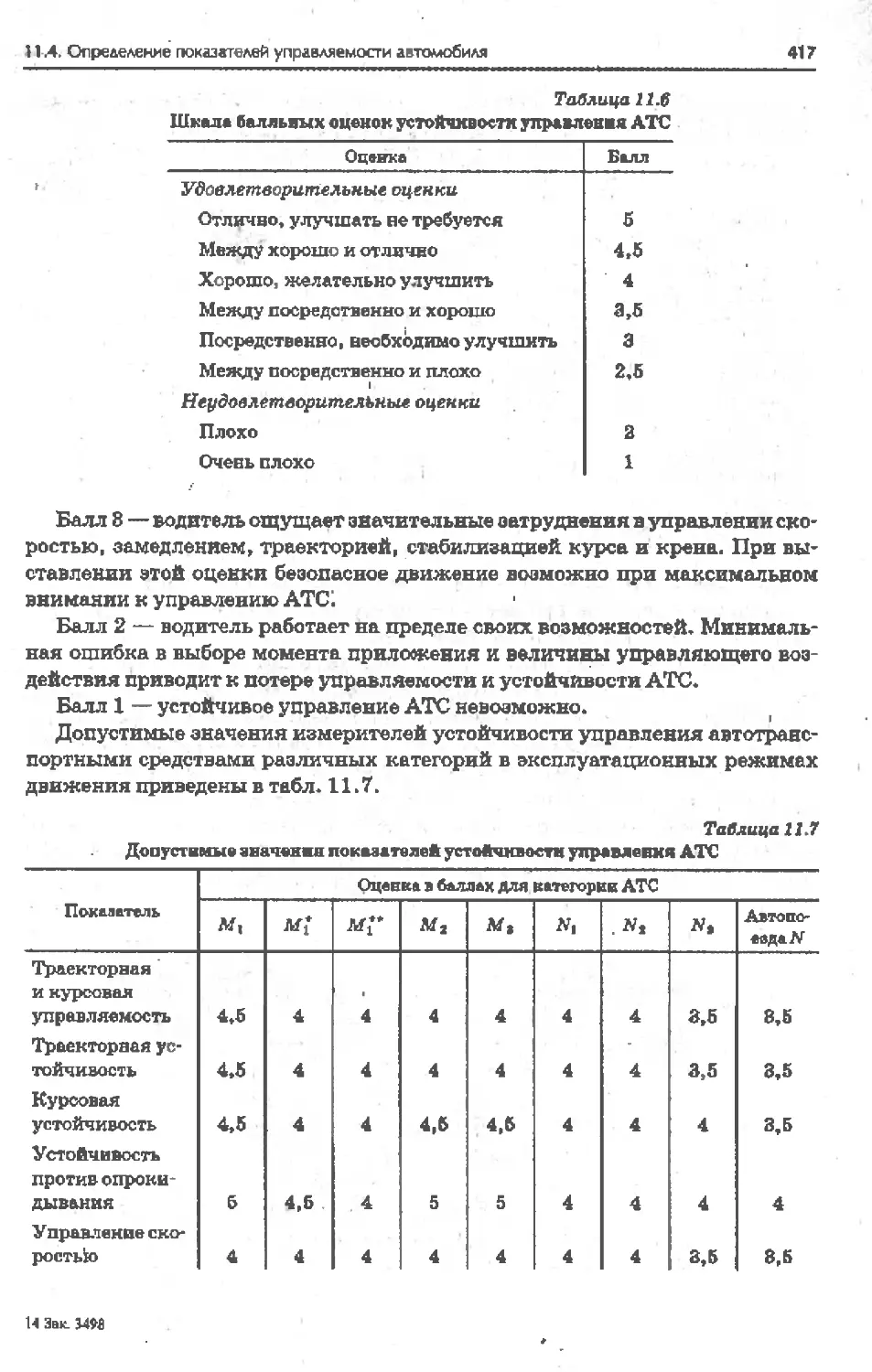
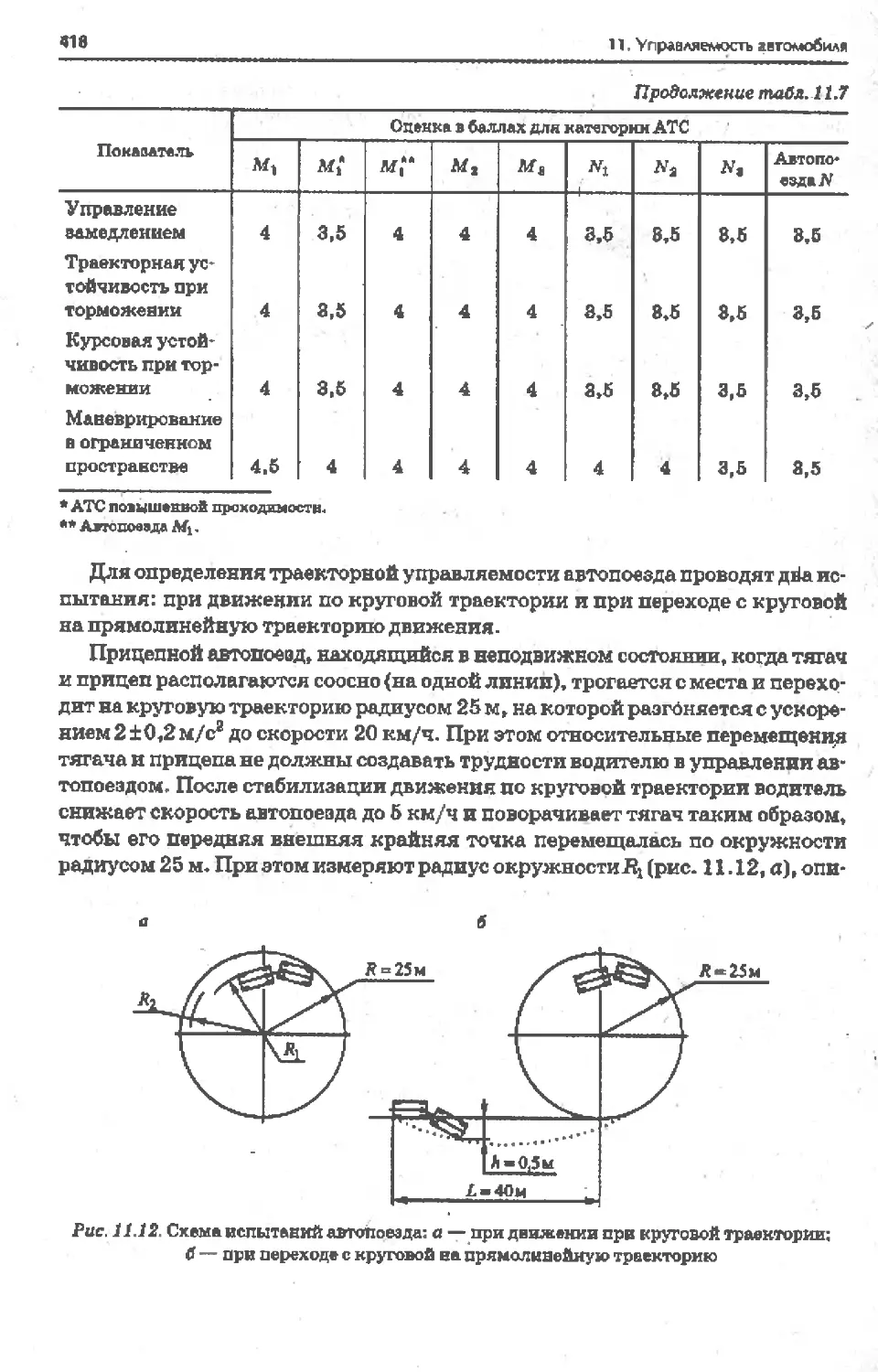
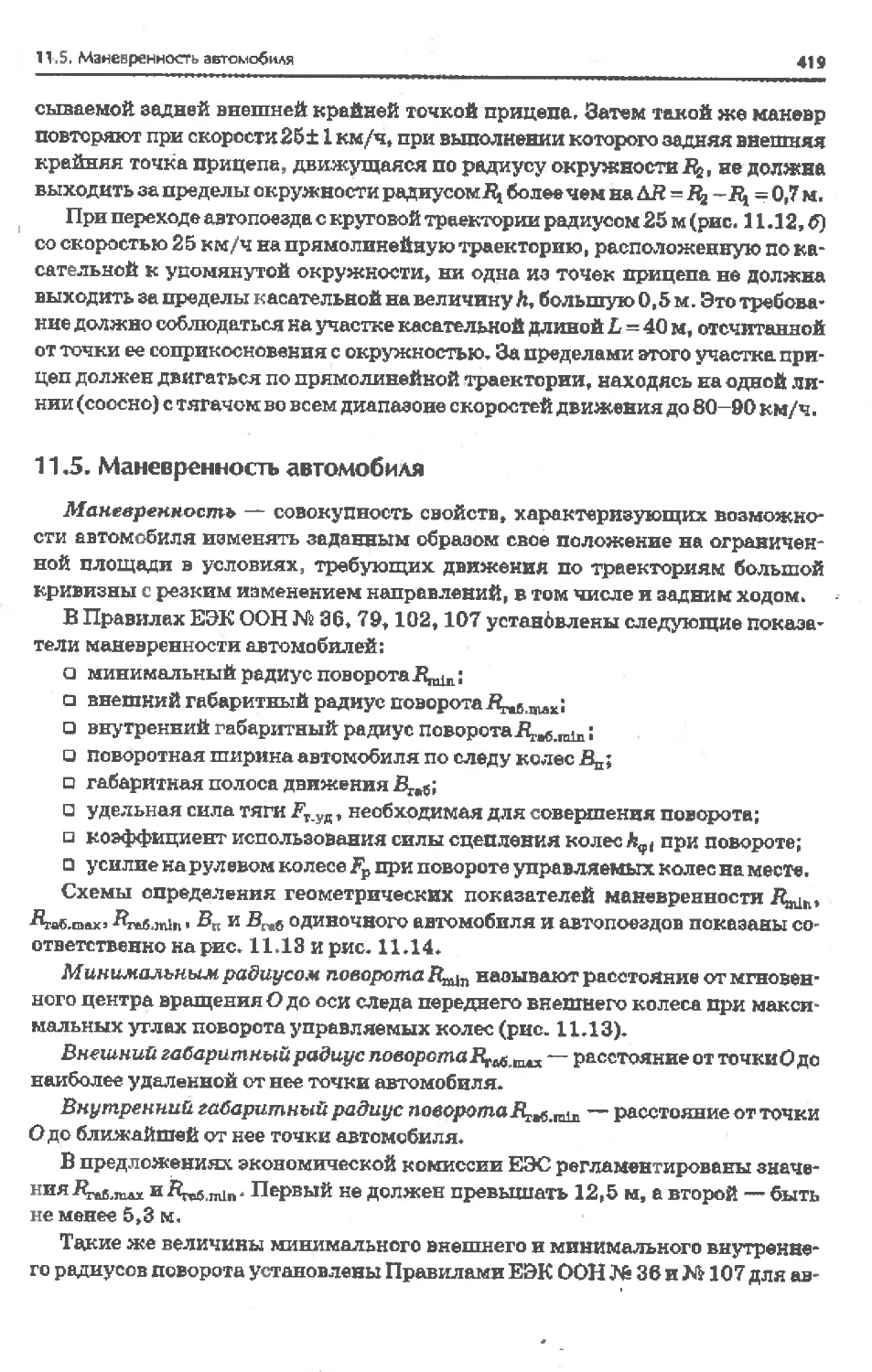
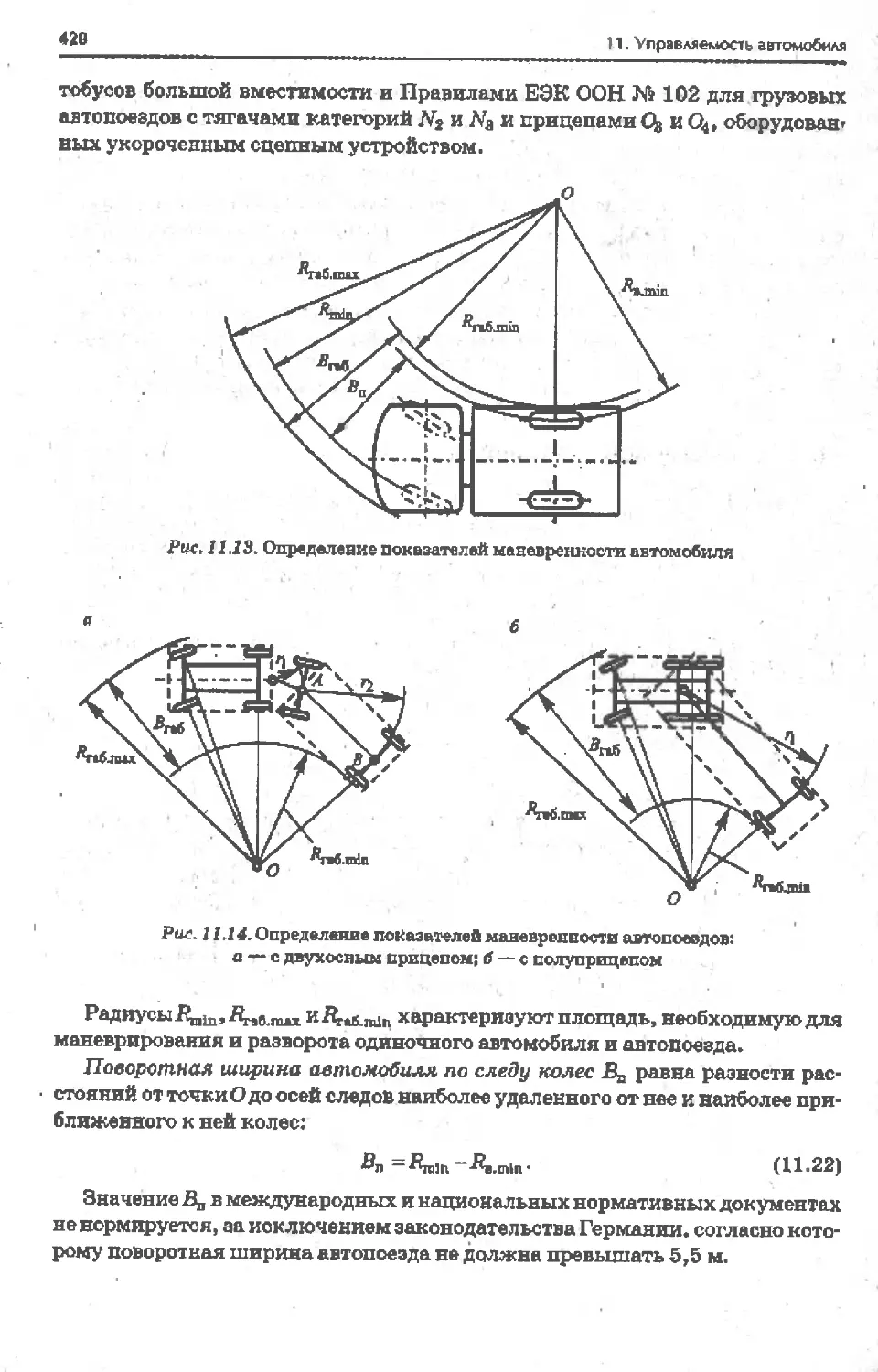
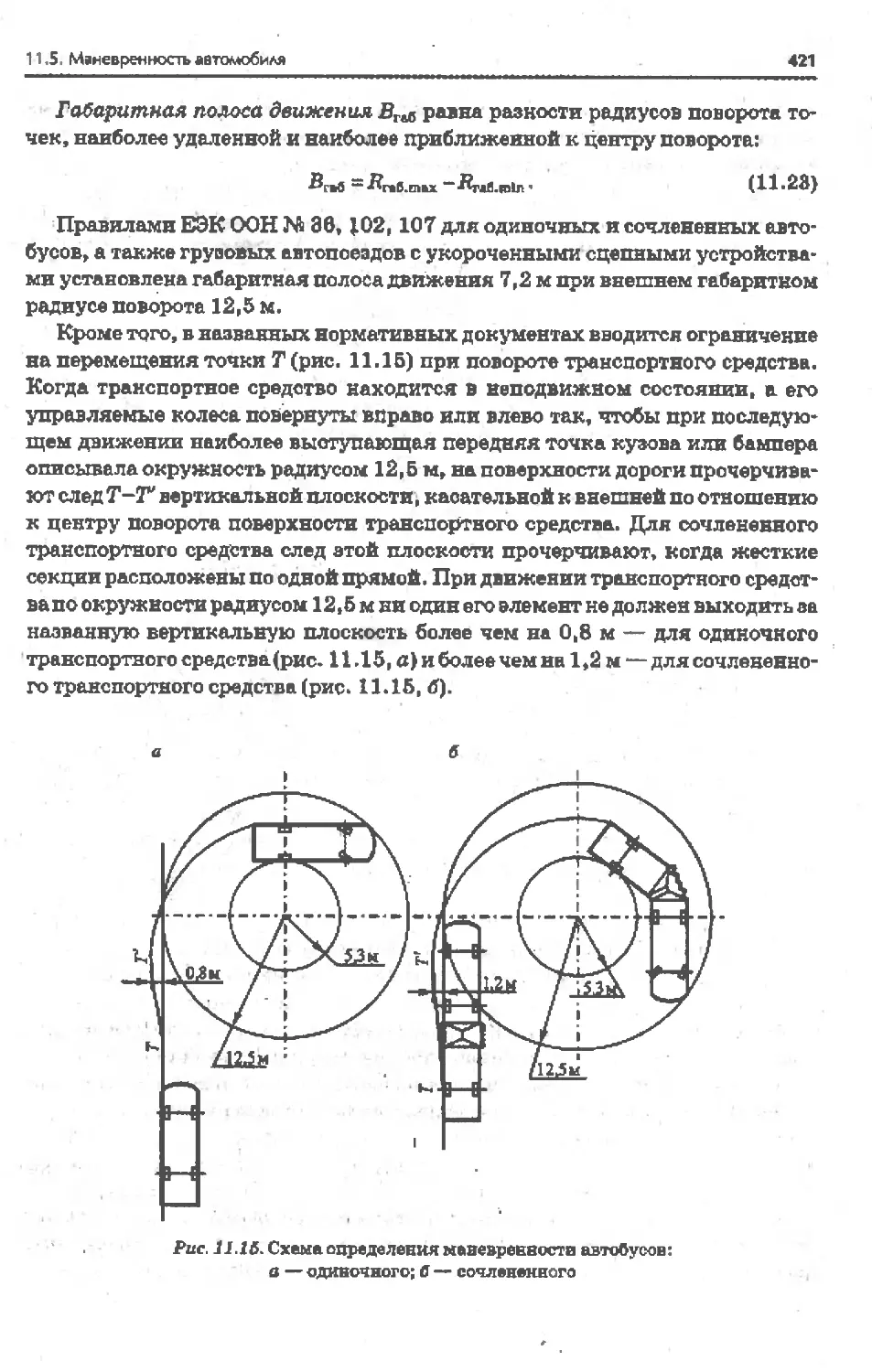
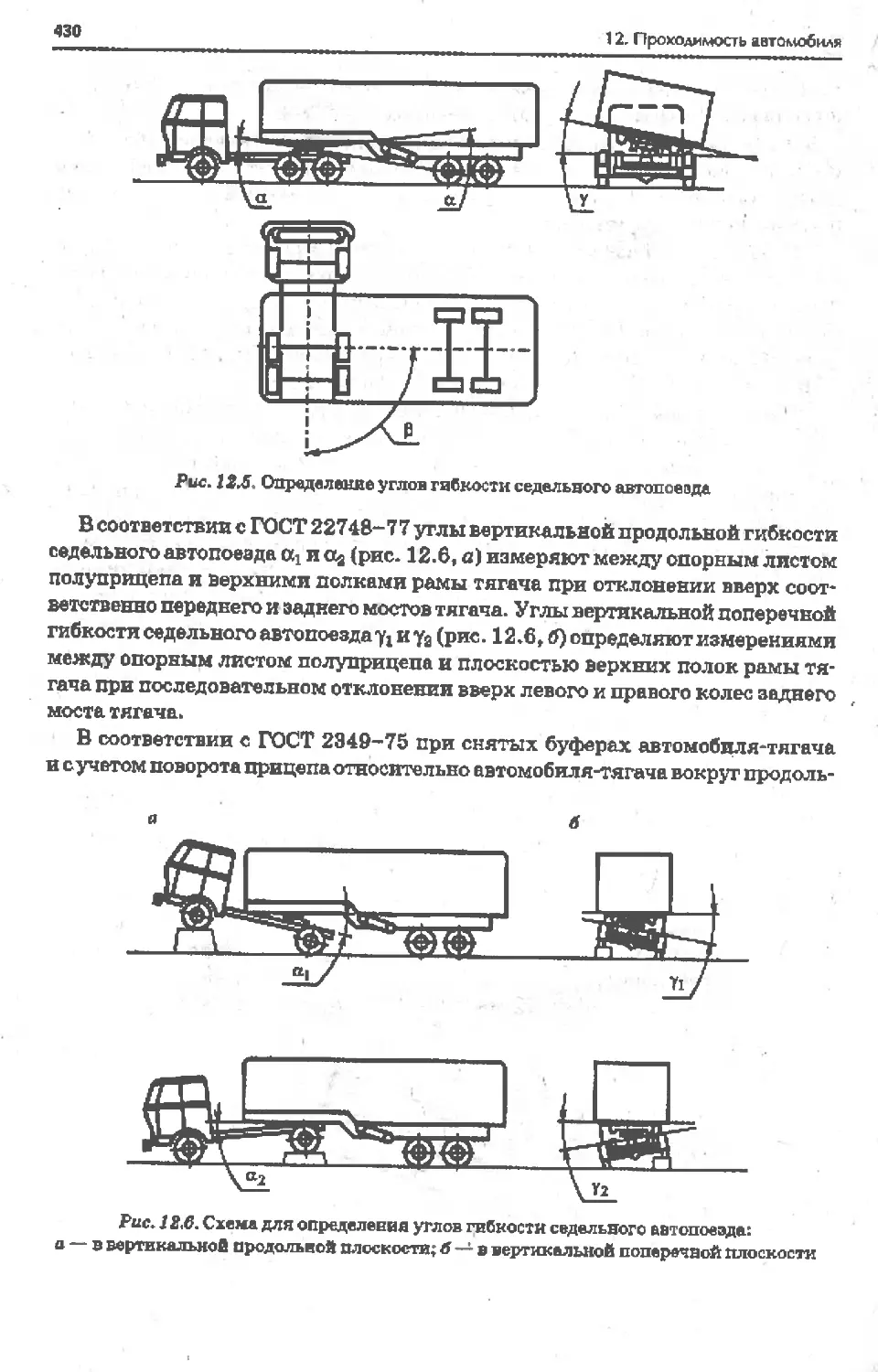
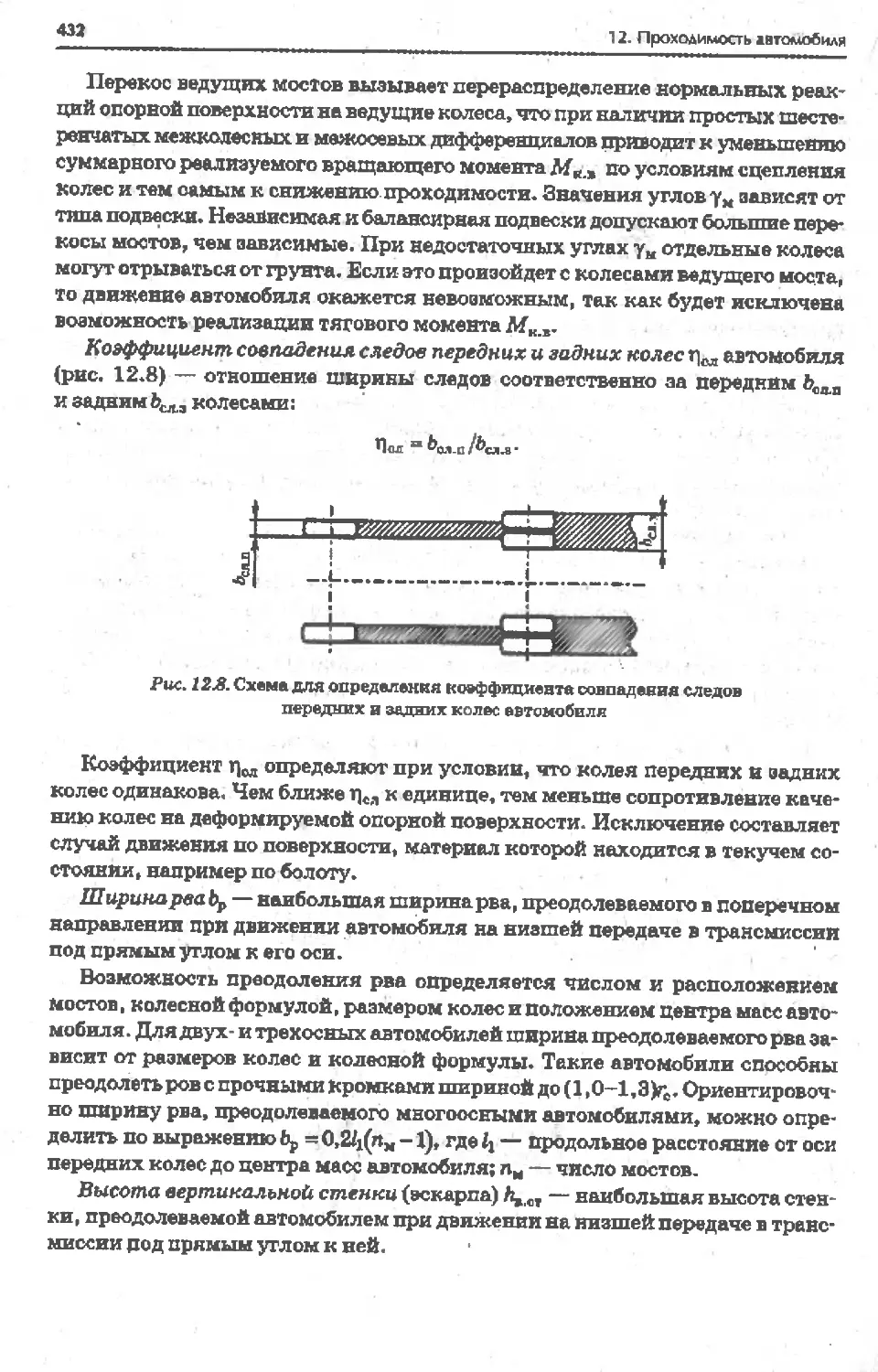
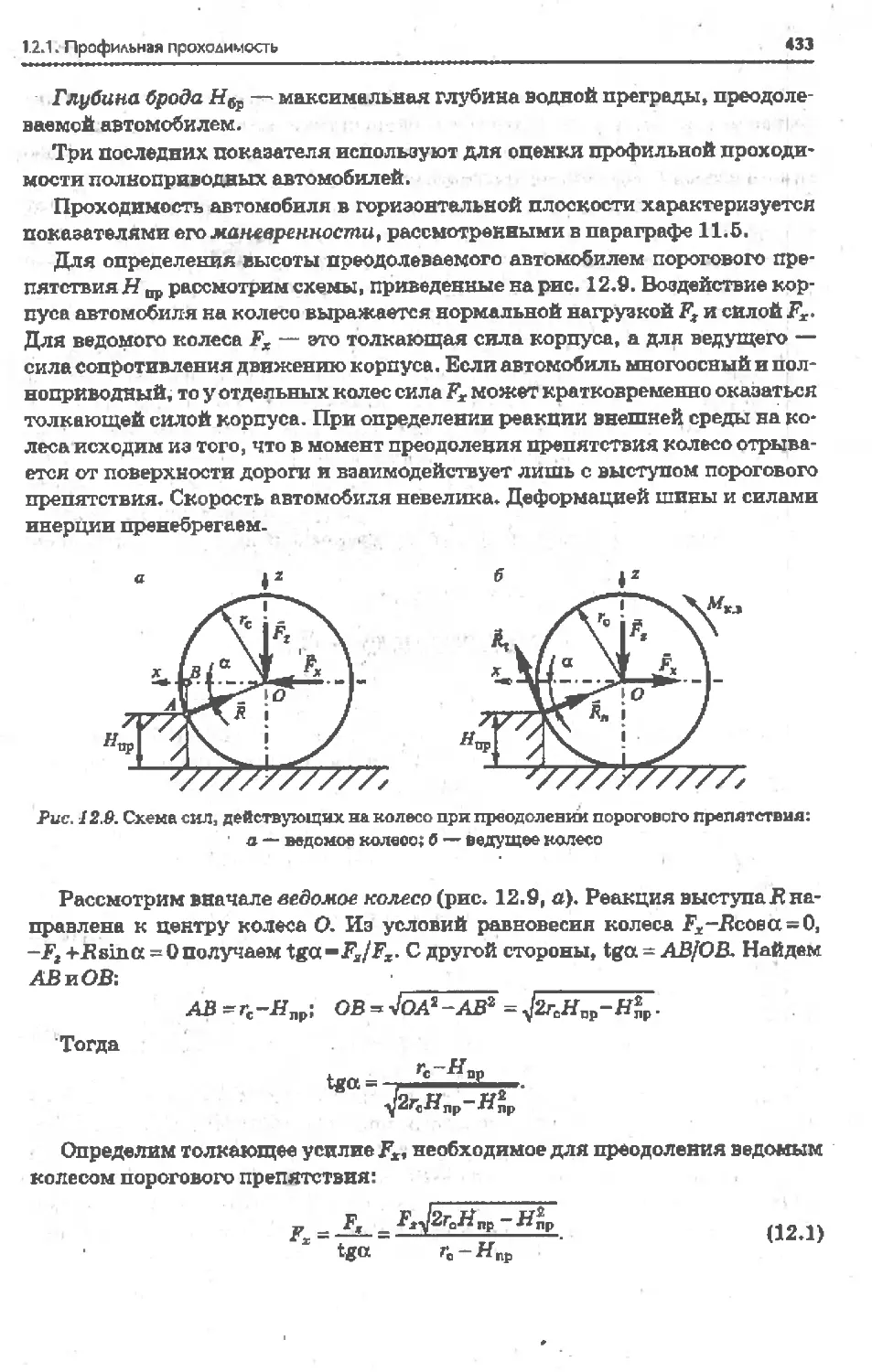
Text
В. П. Тарасик
Теория
движения
Автомобиля
Допущено УМО вузов РФ по образованию в области транспортных
машин и транспортно-технологических комплексов в качестве
учебника для студентов, обучающихся по специальности
190201 (150100) —Автомобиле- и тракторостроение
Санкт-Петербург
«БХВ-Петербург»
2006
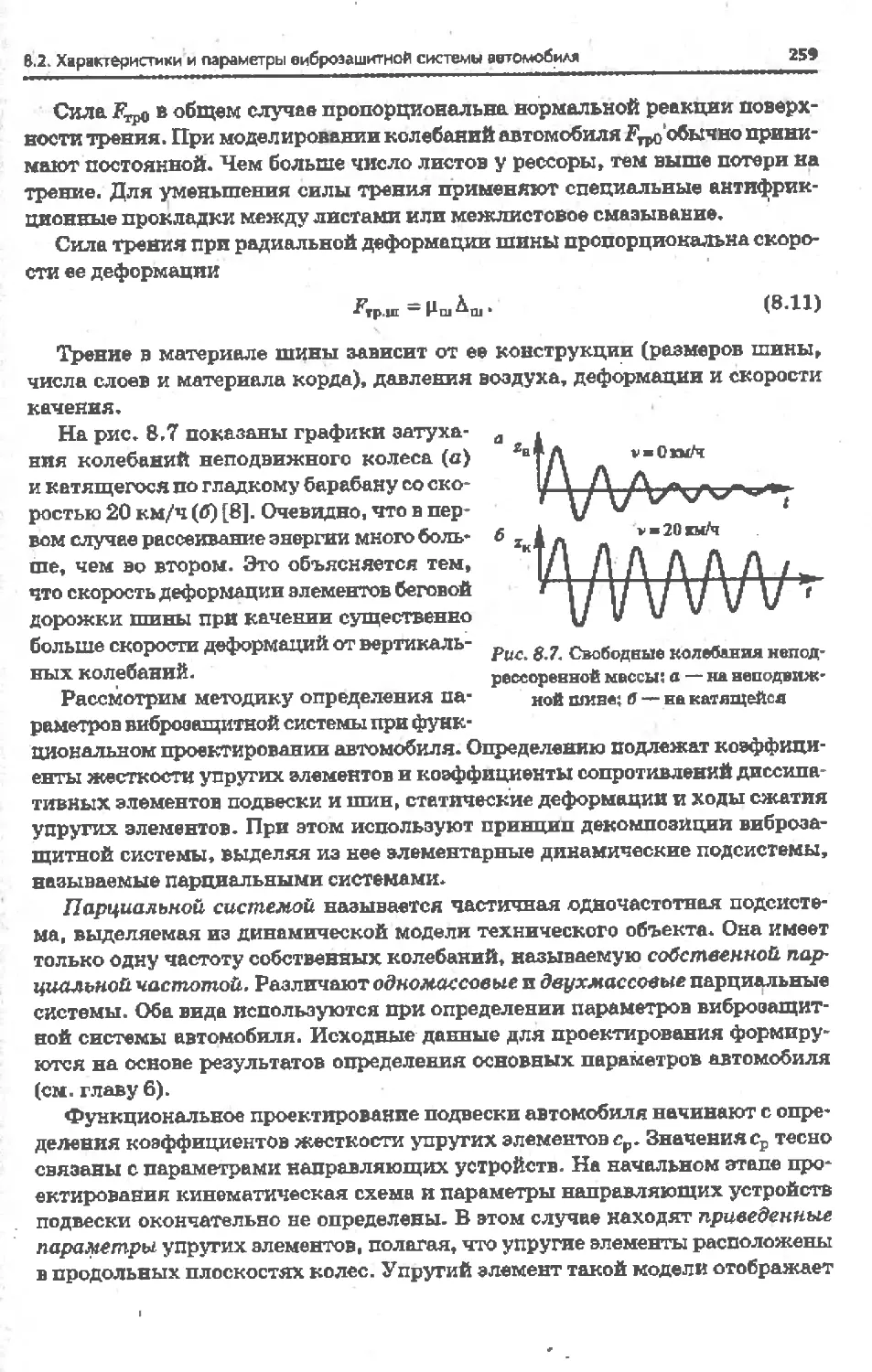
УДК 629.113 (075.8)
ББК 39.33-О1я73
Т19
Рецензенты:
кафедра «Автомобили» Белорусского национального технического университета
(заведующий кафедрой — доктор техн, наук, профессор О. С. Руктешель)-,
зам. генерального директора по научной работе
НИРУТТ «Белавтотракторостроение» доктор техн, наук, профессор В. Б.Алъгин',
У МО вузо РФ по образованию
в области транспортных машин и транспортно-технологических комплексов
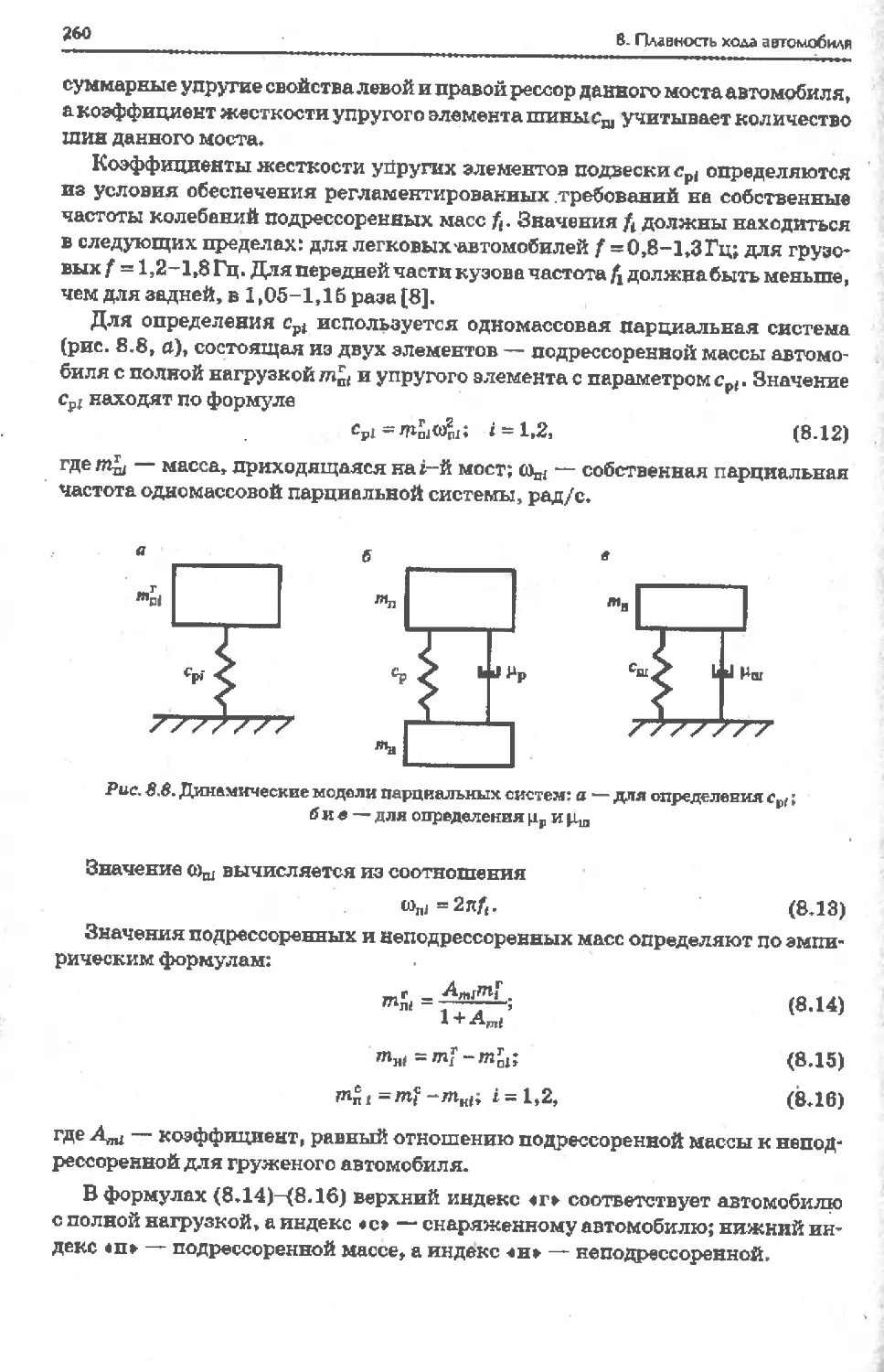
(зам. председателя Совета УМО профессор В. В. Серебряков)
Издание подготовлено при участии ООО «Техническая книга» (Москва)
Тарасик В. II.
Т19 Теория движения автомобиля: Учебник для вузов. — СПб.
БХВ-Петербург, 2006. — 478 с.: ил.
ISBN 5-94157-967-5
Учебник, наследуя положительные качества своих предшественников, содержит но
вые разработки и методические подходы к изучению физических свойств автомобиля
Расширена и обновлена информация о действующих стандартах, нормативах на показа
тели эксплуатационных свойств и методах их определения. Рассмотрен более широки»
круг вопросов теории движения автомобиля и дано их математическое описание. Теоре
тические обоснования, выводы формул н построение математических моделей движение
автомобиля приведены в более строгое соответствие с законами и методами классической
механики.
Для студентов вузов, обучающихся по специальности
«Автомобиле- и тракторостроение», а также для конструкторов
н исследователей автотранспортных средств
УДК 629.113(075.8)
ББК 39.33-01я73
ISBN 5-94157-967-6
© Тарасик В. Г!,, 2006
© Оформление, ООО «Техническая книга». 2006
Предисловие
Автомобильная промышленность — одна из ведущих отраслей народного
хозяйства. Уровень ее развития во многом определяет технический прогресс
страны. Автомобильный транспорт оказывает существенное влияние на раз-
витие экономики страны. Совершенствованию автомобильного транспорта,
повышению его безопасности, снижению вредного влияния на окружающую
среду неизменно уделяется большое внимание учеными и конструкторами.
Создание автомобиля с высокими технико-экономическими показателями —
сложная научно-техническая задача и ее решение требует высокой квалифи-
кации исполнителей. Подготовке квалифицированных кадров автомобиле-
строения уделяется особое внимание в вузах России и Беларуси.
Одной из важнейших дисциплин учебной программы по подготовке спе-
циалистов автомобилестроения является «Теория движения автомобиля».
Методология этой дисциплины составляет теоретическую основу функцио-
нального проектирования автомобиля. В связи с этим изучению физических
свойств механизмов и систем автомобиля, характеристик его взаимодействия
с внешней средой, процессов движения и управления движением уделяется
огромное внимание учеными и исследователями.
Основоположниками науки об автомобиле являются российские ученые
Н.Е. Жуковский и Е.А. Чудаков. Одним из первых исследователей законов
движения автомобиля был Н.Е. Жуковский, который в период 1905-1917 гг.
дал стройное изложение многих вопросов теории. Оформление теории авто-
мобиля как науки осуществилакадемик Е.А. Чудаков. В 1935 г. он выпустил
первый в мире учебник «Теория автомобиля».
Содержание настоящего учебника соответствует программе дисциплины
«Теория движения автомобиля». Учебник написан на основе материалов кур-
са лекций, которые автор читает студентам Белорусско-Российского универ-
ситета (бывшего Могилевского машиностроительного института) в течение
33 лет. Использованы также материалы научных исследований и разработок,
учебников и учебных пособий, опубликованных в России, Беларуси и других
странах. Основная использованная литература, а также литература, реко-
мендованная студентам для углубленного изучения отдельных разделов дис-
циплины, приведена в конце книги.
Автор считает приятным долгом выразить глубокую благодарность рецен-
зентам: доктору технических наук, профессору О.С. Руктешелю, доктору
технических наук, профессору В.Б. Альгину, профессору В.В. Серебрякову
и профессору Л А. Молибошко, критические замечания которых способство-
вали улучшению содержания книги.
Замечания и пожелания просьба направлять по адресу: 212005, г. Могилев,
пр. Мир, 43, Белорусско-Российский университет, кафедра «Автомобили».
Введение
Теория автомобиля — это наука о его функциональных свойствах, о зави-
симостях этих свойств от конструктивных параметров автомобиля, о законо-
мерностях движения автомобиля, об эффективных и безопасных режимах
движения в заданных условиях.
Автомобиль представляет собой транспортное средство, предназначенное
для перемещения людей и грузов по поверхности земли. Движение автомобиля
осуществляется благодаря наличию собственного источника энергии (двига-
теля) и механизмов, обеспечивающих управляемое взаимодействие с опорной
поверхностью дороги или грунта.
Эффективность функционирования автомобиля определяется его потен-
циальными физическими свойствами и степенью полноты их использования
в реальных условиях эксплуатации.
Свойство — это категория, выражающая такую сторону предмета, которая
обусловливает его различие или общность с другими предметами и обнару-
живается в его отношении к ним. Автомобиль представляет собой сложную
машину и характеризуется большим количеством свойств. Свойства образуют
иерархическую систему, включающую качество, крупные групповые свойства
(надежность, безопасность и др.), Мелкие групповые и единичные свойства.
Качество автомобиля — это совокупность свойств, обусловливающих его
пригодность для удовлетворения определенных потребностей в соответствии
с его назначением. Качество имеет первостепенное значение для производи-
теля и потребителя продукции, поскольку качество определяет ее потреби-
тельскую стоимость.
Различают две группы потенциальных свойств: функциональные свойст-
ва и свойства надежности.
Функциональные свойства определяются назначением автомобиля и харак-
теризуют его возможность выполнять предписанные функции. Они проявля-
ются в движении автомобиля и характеризуют его предельные эксплуатаци-
онные возможности.
Свойства надежности характеризуют способность автомобиля сохранять
работоспособное состояние в установленном интервале времени или пробега.
Важное значение для потребителя имеют эргономические, эстетические и мно-
гие другие свойства.
Функциональные свойства и свойства надежности определяют степень
приспособленности автомобиля к эксплуатации в качестве транспортного
средства. Их совокупность называют эксплуатационными свойствами авто-
мобиля.
В теории автомобиля изучаются только функциональные свойства. К ним
относятся: тягово-скоростные свойства, тормозные свойства, топливная эко-
номичность, устойчивость, управляемость, маневренность, плавность хода,
проходимость.
Тягово-скоростные свойства автомобиля характеризуют его способность
перевозить грузы или пассажиров с высокой средней скоростью и производи-
тельностью.
Введение
Тормозные свойства автомобиля характеризуют его способность быстро
снижать скорость при одновременном исключении заносов с целью уменьше-
ния вероятности дорожно-транспортных происшествий и повышения безо-
пасных скоростей движения.
Топливная экономичность характеризует эффективность использования
энергий топлива при выполнении работы по перевозке грузов или пассажиров.
Устойчивость — свойство автомобиля, определяющее его способность со-
хранять движение по заданной траектории, противодействуя силам, стремя-
щимся вызвать боковое скольжение или опрокидывание.
Управляемость — свойство автомобиля, определяющее его способность
изменять направление движения в соответствии с воздействием водителя на
рулевое управление.
Маневренность — свойство автомобиля, определяющее его способность
осуществлять движение по траектории большой кривизны в проездах задан-
ной формы и на ограниченных площадках.
Плавность хода — свойство автомобиля, определяющее его способность
уменьшать амплитуды колебаний кузова при движении по неровностям до-
роги и снижать вибронагруженность водителя, пассажиров, грузов и меха-
низмов автомобиля.
Проходимость — свойство автомобиля, определяющее его способность дви-
гаться в тяжелых дорожных условиях (скользкие, разбитые, размокшие до-
роги), по пересеченной местности вне дорог и преодолевать естественные
и искусственные препятствия (канавы, рвы, пороги) без вспомогательных
средств.
К свойствам надежности относятся: безотказность, долговечность, ремон-
топригодность, сохраняемость.
Bi зотказность — свойство автомобиля непрерывно сохранять работоспо-
собное состояние в течение некоторого времени или некоторой наработки.
Признаком нарушения работоспособности (отказа) является необходимость
текущего ремонта.
Долговечность — свойство автомобиля сохранять работоспособность до
наступления предельного состояния при установленной системе техническо-
го обслуживания и ремонта.
Ремонтопригодность — свойство, определяющее приспособленность авто-
мобиля к предупреждению и обнаружению причин возникновения отказов
или повреждений и поддержанию или восстановлению работоспособного со-
стояния путем проведения технического обслуживания и ремонтов.
Сохраняемость — свойство автомобиля сохранять безотказность, долго-
вечность и ремонтопригодность после хранения или транспортирования.
Для оценки эксплуатационных свойств автомобиля используется система
измерителей и показателей.
Измеритель характеризует качественную сторону свойства и представ-
ляет собой единицу измерения этого свойства (например, скорость — м/с,
путь — ми др.).
6
Введение
Показатель определяет количественное значение измерителя. Он позво-
ляет оценить степень выполнения заданных технических требований к экс-
плуатационным свойствам автомобиля и возможности реализации этих
свойств в заданных условиях функционирования.
Технические требования содержат нормативные значения показателей
эксплуатационных свойств, регламентируемые для различных автомобилей
существующими стандартами и другими нормативными документами. При
оценке эксплуатационных свойств конкретного автомобиля, реализуемых
в заданных условиях, определяют значения показателей этих свойств и срав-
нивают их с нормативными значениями. Например, при анализе тягово-ско-
ростных свойств определяют более 10 показателей. Среди них время разгона
автомобиля до заданной скорости, средняя скорость движения По дороге с за-
данными характеристиками и др.
Автомобиль — сложная механическая система, состоящая из множества
взаимодействующих элементов — функциональных механизмов: двигателя,
сцепления, коробки передач, карданной передачи, главной передачи, дви-
жителя, механизмов подвески, тормозных механизмов и др.
Движение автомобиля происходит в результате взаимодействия с другой
системой — внешней средой, в которую входят опорная поверхность дороги
или грунта и воздушная среда. Взаимодействие автомобиля с внешней средой
осуществляется посредством двух его элементов — движителя и корпуса.
Под корпусом понимается тело, конфигурацию которого образуют наружные
поверхности автомобиля.
Движитель — это механизм, осуществляющий взаимодействие автомоби-
ля с дорогой. Па большинстве автомобилей применяется колесный движи-
тель с пневматическими шинами. Колеса взаимодействуют с поверхностью
дороги, а корпус — с воздушной средой. В результате этого взаимодействия
внешняя среда оказывает сопротивление движению автомобиля и различные
воздействия, способные нарушить устойчивое управляемое движение.
С другой стороны, колесо как элемент системы «автомобиль — внешняя
среда* может взаимодействовать с механизмами автомобиля (трансмиссией,
подвеской, тормозными механизмами), что существенно влияет на характер
его взаимодействия с опорной поверхностью дороги.
Преодоление сопротивлений движению автомобиля требует затраты энер-
гии. Источником энергии на автомобиле является его двигатель. Он преобра-
зует химическую энергию топлива в механическую энергию на коленчатом
валу. Поток энергии от двигателя передается через механизмы трансмиссии
к ведущим колесам и в результате их взаимодействия с дорогой затрачивает-
ся на выполнение работы по преодолению сопротивлений движению автомо-
биля.
Факторы, характеризующие взаимодействие механизмов автомобиля ме-
жду собой и с внешней средой, обусловлены потоком передаваемой через них
энергии. Поток механической энергии характеризуется мощностью, которую
можно выразить через два векторных параметра — потенциал и скорость.
Введение
7
Вид этих параметров зависит от характера движения элементов системы.
Потенциалы взаимодействий элементов системы, совершающих поступа-
тельные движения, представляют собой силы (реакции), а вращательные —
моменты. Скорости элементов в первом случае линейные, а во втором — угло-
вые. Составление и анализ баланса мощности потока энергии, определение
потенциалов и скоростей механизмов позволяют оценить многие важнейшие
эксплуатационные свойства автомобиля и установить их зависимости от кон-
структивных параметров.
Приведем общие выражения для определения мощности и работы. Мощ-
ность — скалярная алгебраическая величина, а потенциалы и скорости —
векторные величины Поэтому мощность определяется как скалярное произ-
ведение векторов потенциалов и скоростей Скалярное произведение векто-
ров равно произведению их модулей, умноженному на косинус угла между
этими векторами.
Мощность силы вычисляется по формуле
Рр = Fv = Focos^F, б), (В-1)
где б — вектор скорости точки приложения вектора силы F; F,v — модули
векторов F и б.
Мощность Рм момента М
Рм = М й = Моасав(М, й), (В-2)
где й— вектор угловой скорости.
При передаче потока энергии через механизмы автомобиля на входе каж-
дого механизма направление вектора потенциала М (или F) совпадает с на
правлением вектора скорости й(или б), поэтому мощность положительна. На
выходе механизма мощность отрицательна, так как направления векторов
потенциала и скорости противоположны. Объясняется это тем, что потенци-
ал на выходе механизма представляет собой реакцию следующего за ним ме-
ханизма, которая характеризует его сопротивление.
Уравнение баланса мощности любого механизма автомобиля имеет вид
^вх+Лых+Аот =0. (В.З)
где Рвк, РВ1И — мощности соответственно на входе и выходе механизма; Рпо7 —
мощность потерь в механизме.
Потери мощности обусловлены трением в механизмах автомобиля, прокач-
кой и разбрызгиванием масла, необходимого для смазывания трущихся по-
верхностей, преобразованием вида передаваемой энергии. Например, в гидро-
трансформаторе происходит двукратное преобразование вида энергии: сначала
механическая энергия, передаваемая от двигателя, преобразуется в кинетиче-
скую энергию потока жидкости, а затем происходит обратное преобразование
вида энергии и на выходе гидротрансформатора опять получается механиче-
ская энергия. Процесс преобразования потока энергии сопровождается поте-
рями, что приводит к снижению КПД гидротрансформатора.
8
Введение
Мощность Рпот всегда отрицательна. Это легко показать на примере силы
трения. Вектор силы трения противоположен вектору относительной скоро-
сти трущихся деталей. В результате, согласно формуле (В. 1), получаем отри-
цательное значение мощности силы трения.
Работа силы или момента также скалярная алгебраическая величина,
равная скалярному произведению векторов потенциала и перемещения.
Элементарная работа 5WF силы F на возможном перемещении Бх
SlVp = F8x — FSxcos^F, 8x), (B.4)
а работа момента Л7 на возможном угловом перемещении 6ф
8VVW = Л/Бф = F8<pcos(\vf, 8ф). (В.5)
Элементарную работу можно также вычислить через мощность:
5W, = PF6t; (В.6)
8И'м = Яи&. (В-7)
где 8* — время осу: дсствления перемещений Бх или Бф
В создание и развитие автомобильной науки, внедрение ее результатов
и достижений в практику автомобилестроения значительный вклад внесли
российские и белорусские ученые. Профессор Н.Е. Жуковский и академик
Е.А. Чудаков заложили основы теоретического анализа эксплуатационных
свойств автомобиля и создали научную школу. Дальнейшее развитие теория
и совершенствование методов анализа получили в трудах их учеников и после-
дователей. Особо следует отметить заслуги ученых, внесших наиболее сущест-
венный вклад в фундаментальные научные исследования, теорию и практику
автомобилестроения.
Исследованию тягово-скоростных свойств и топливной экономичности
посвящены работы Г.В. Зимелева, Б.С. Фалькевича, П.В. Дивакова, Н.К. Ку-
ликова, Л .В. Крайныка. Вопросы динамики автомобилей как вероятностных
систем с учетом неголономных связей колес с опорной поверхностью исследо-
вали В.Ф. Платонов, Н.Н. Яценко, Д.А. Антонов. Исследованиям тормозных
свойств посвящены работы Н.А. Бухарина, Ю.Б. Беленького, Н.Ф. Метлюка,
Г.О. Котиева. В трудах Я.М. Певзнера, А.С. Литвинова, Я.Е. Фаробина изло-
жены результаты выполненных ими исследований по управляемости и устой-
чивости автомобиля. Устойчивость автопоездов исследовали Д.А. Антонов,
Я.Х. Закин. Изучению колебаний и плавности хода автомобиля посвящены
работы Р.В. Ротенберга, И.Г. Пархиловского, Н.Н. Яценко, А.А. Хачатуро-
ва, А.И. Гришкевича, А.В. Жукова. Проблемы повышения топливной эконо-
мичности и тягово-скоростных свойств автомобилей решали А.А. Токарев,
В. А. Петрушов, В.В. Московкин. Вопросам аэродинамики автомобилей посвя-
щены работы А.Н. Евграфова. Разработкой вопросов теории движения много-
осных полноприводных автомобилей занимались Г.А. Смирнов, В М. Семенов,
II.Ф. Бочаров, П.В. Аксенов, А.А. Полунгян. Исследования проходимости
Введение
9
автомобилей в сложных дорожных условиях выполнены Я.С. Агейкиным,
Н.И. Коротоношко. Разработкой теории и методов математического модели-
рования рабочих процессов механизмов трансмиссии и систем управления
занимались И.С. Цитович, В.Б. Альгин, Н.Л. Островерхое, О.С. Руктешель,
Л.А. Молибошко, О.И. Гируцкий, В.П. Тарасик, Л.Г. Красневский, А.Х. Ле-
фаров, А.А. Шимков, А.Н. Нарбут.
В процессе развития автомобильной науки выросла плеяда замечательных
конструкторов, внесших огромный вклад в становление и развитие отечествен-
ного автомобилестроения. Наиболее известные имена: А.М. Кригер, А. А. Лип-
гарт, А.Д. Просвирнин, А.Н. Островцев, В.В. Осепчугов, А.С. Айзенберг,
А.И. Титков, Г.Д. Чернышов, Б.Л. Шапошник, В.Е. Чвялев, Г.М. Кокин,
Л.В. Косткин, М.С. Высоцкий, З.Л. Сироткин, В.Н. Барун, Г-К. Мирзоев,
П.М. Прусов, Н.А. Сидоров.
Научные исследования и разработки российских и белорусских ученых
позволили создать превосходные учебники по теории автомобиля. Авторы наи-
более известных учебников: Е.А. Чудаков, Г.В. Зимелев, Б.С. Фалькевич,
А.И. Гришкевич, Г.А. Смирнов, А.С. Литвинов, Я.Е. Фаробин, Д.А. Чудаков,
Н.А. Яковлев.
Развитие автомобильной науки требует регулярного обновления содержа-
ния учебников. Со времени выхода последних изданий учебников прошло
более 20 лет. Данный учебник, наследуя положительные качества предшест-
венников, содержит новые разработки и методические подходы к изучению
физических свойств автомобиля. Расширена и обновлена информация о дейст-
вующих стандартах, нормативах на показатели эксплуатационных свойств
и методах их определения. Рассмотрен более широкий круг вопросов теории
движения автомобиля и дано их математическое описание. Теоретические
обоснования, выводы формул и построение математических моделей движе-
ния автомобиля приведены в более строгое соответствие с законами и метода-
ми классической механики.
Дисциплина ♦Теория движения автомобиля» составляет научную основу
функционального проектирования. Ее методология нацелена на определение
оптимальных параметров автомобиля, обеспечивающих высокую эффектив-
ность выполнения транспортных работ, устойчивость и безопасность движе-
ния, комфортные условия для водителя и пассажиров. В этой связи наряду
с описанием физических свойств и построением математических моделей
системы ♦автомобиль — внешняя среда* уделено значительное внимание во-
просам оценки показателей функциональных свойств автомобиля и влиянию
на них параметров автомобиля и внешней среды. Эти показатели используют-
ся при функциональном проектировании в качестве критериев оптимальности.
Процессы движения автомобиля описываются довольно сложными систе-
мами дифференциальных уравнений. Для их решения и анализа студентам
рекомендуется применять численные методы и использовать при моделиро-
вании прикладные программные обеспечения MathCAD, MatLab, Shnulink,
ADAMS и др.
10 Ввеление
В настоящее время основными задачами автомобилестроения являются:
повышение надежности и безопасности автомобиля, сокращение трудоемко-
сти технического обслуживания, повышение топливной экономичности дви-
гателя и снижение токсичности отработавших газов.
Основные проблемы теории автомобиля на современном этапе — углуб-
ленное изучение физических процессов взаимодействия автомобиля с внеш
ней средой, разработка математических моделей системы «автомобиль —
водитель — внешняя среда», совершенствование методов оптимизации пара
метров автомобиля.
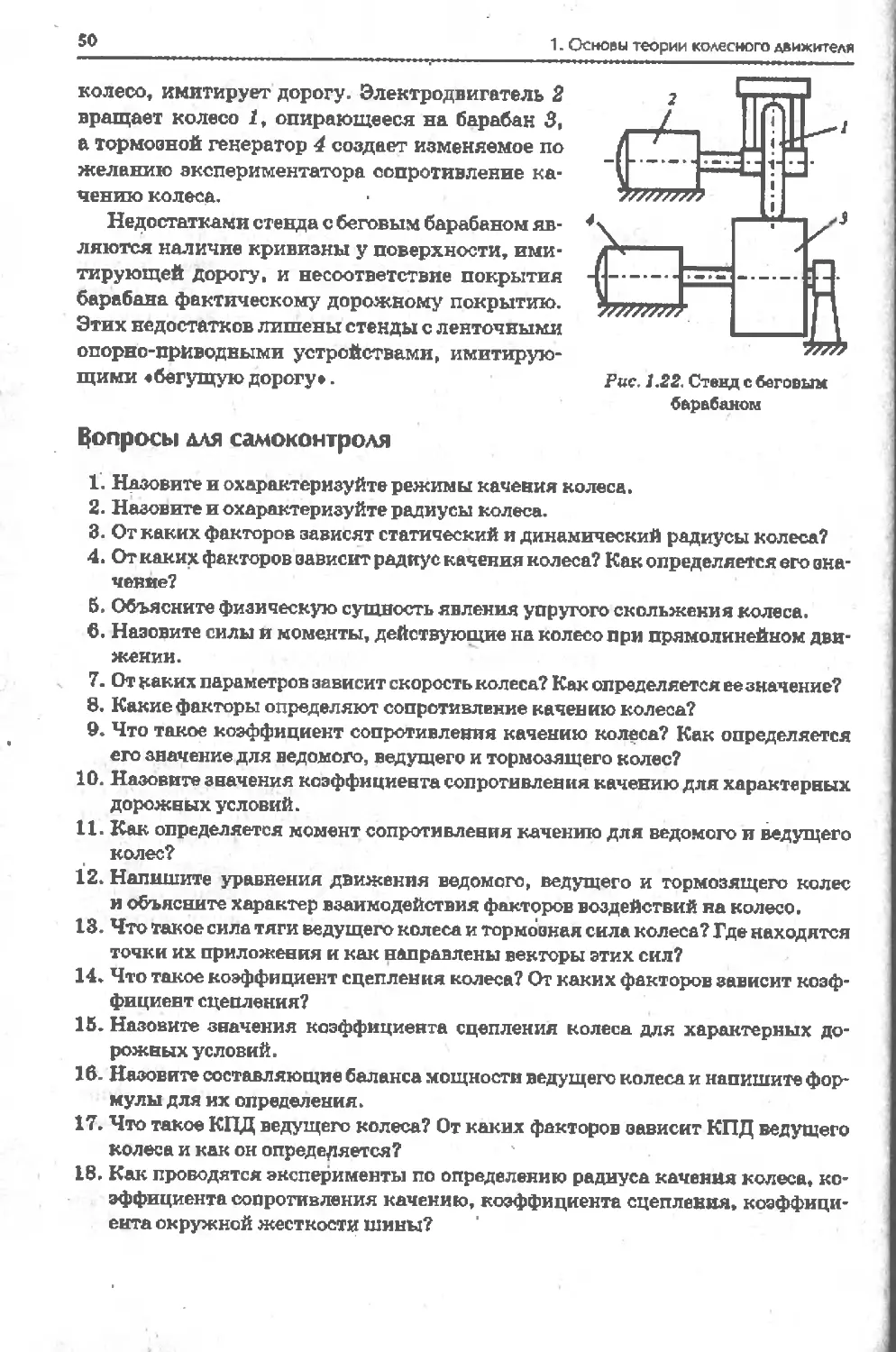
Основы теории колесного движителя
Движителем называют рабочий механизм автомобиля, посредством ко-
торого осуществляется его взаимодействие с опорной поверхностью дороги.
Движитель позволяет реализовать энергию двигателя автомобиля и обеспе-
чить его перемещение в заданном направлении. Он воспринимает и преобра-
зует воздействия внешней среды, формирующие сопротивления движению
автомобиля. В определенных условиях эти воздействия способны нарушить
устойчивое управляемое движение автомобиля или существенно снизить
эффективность его использования для выполнения транспортной работы.
Движитель также воспринимает управляющие воздействия системы рулевого
управления и обеспечивает изменение направления движения автомобиля.
Движитель оказывает непосредственное влияние на все показатели экс-
плуатационных свойств автомобиля. Поэтому изучению его физических
свойств и характеристик уделяется особое внимание в теории автомобиля.
Известны различные типы движителей: колесный, гусеничный, шнеко-
вый, шагающий и др. На автомобилях применяется колесный движитель,
представляющий собой систему колес с эластичными пневматическими
шинами.
1.1. Условия и режимы работы автомобильного колеса
Автомобильное колесо работает в сложных условиях. Это обусловлено
сложной системой сил и вращающих моментов, воздействующих на колесо.
Характер формирования системы сил и моментов определяется многочис-
ленными факторами: работой двигателя — источника энергии автомобиля;
преобразованием параметров потока энергии двигателя трансмиссией при
передаче ее колесу; воздействиями внешней среды; управляющими воздей-
ствиями водителя. Существенное влияние на условия работы колеса оказы-
вают упругие свойства шины и опорной поверхности.
Пневматическая шина представляет собой эластичную тонкостенную обо-
лочку, наполненную сжатым воздухом. При качении автомобильного колеса
по дороге происходит деформация как шины, так и опорной поверхности.
В зависимости от соотношения их деформаций принято рассматривать сле-
дующие модельные условия движения колеса:
□ эластичное (деформируемое) колесо по недеформируемой поверхности;
□ жесткое (недеформируемое) колесо по деформируемой поверхности;
□ деформируемое колесо по деформируемой поверхности.
Модельные условия первого вида используются при изучении процессов
движения автомобиля по дорогам с твердым покрытием. Эти условия наибо-
лее характерны для автомобилей при выполнении ими транспортной работы.
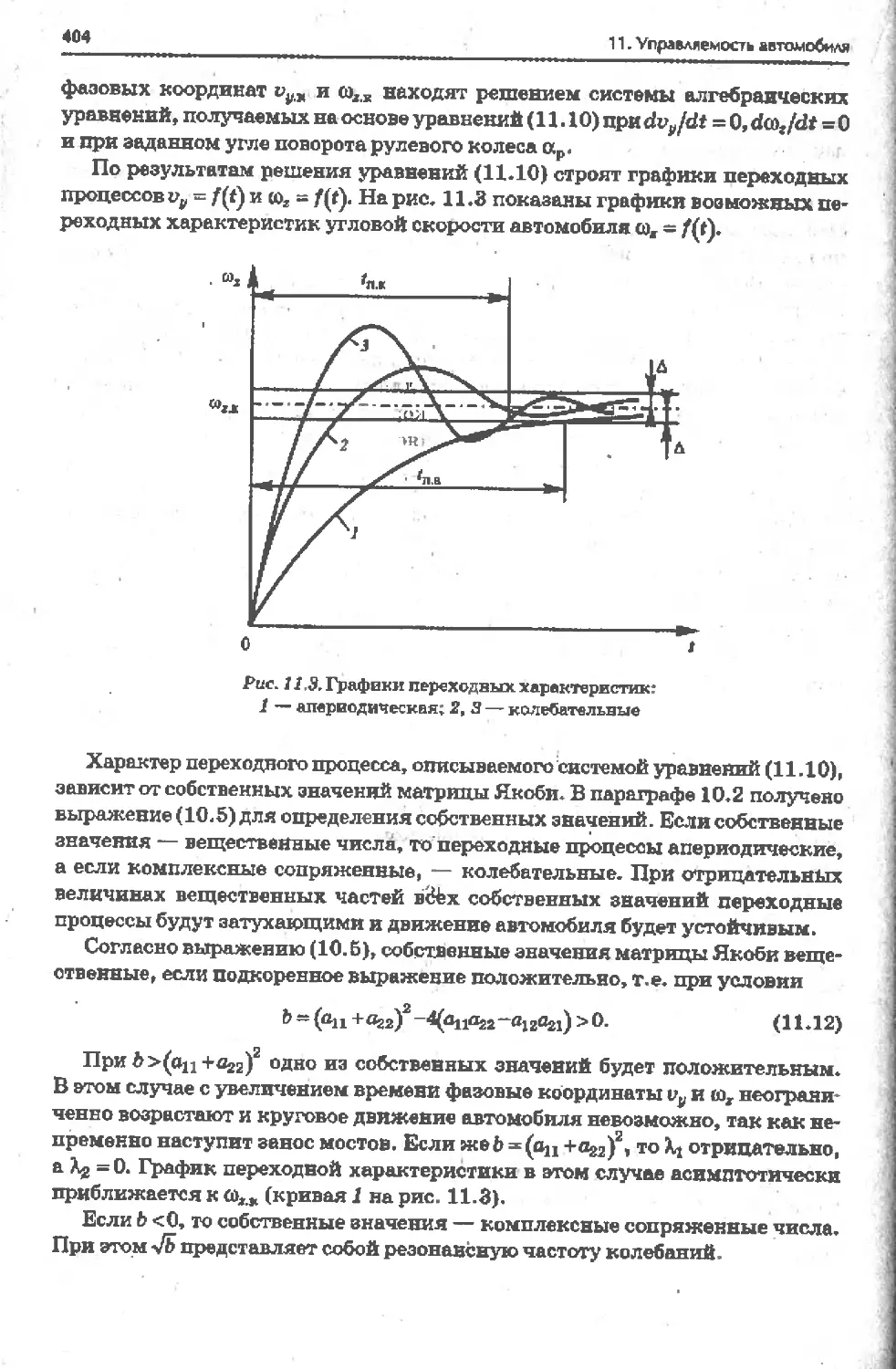
12
1. Основы теории колесного движителя
При оценке возможности движения автомобиля на рыхлых или болоти-
стых почвах, по снежной целине или сыпучему песку рассматривают второй
вид условий движения.
При пониженном давлении воздуха в шинах на грунтах с малой несущей
способностью (пашня, размокший грунт и т.п.) деформации шин и опорной
поверхности соизмеримы и их приходится учитывать.
В зависимости от дорожных условий автомобильное колесо может совер-
шать прямолинейное или криволинейное движение. В данной главе рас-
сматривается прямолинейное движение эластичного автомобильного колеса
по недеформируемой поверхности. Такие модельные условия используются
при исследовании и анализе тягово-скоростных и тормозных свойств авто-
мобиля. Пренебрегая развалом и схождением колес, можно считать, что при
прямолинейном движении автомобиля его колеса движутся в параллельных
плоскостях, т.е. совершают плоские движения, а центры колес движутся
прямолинейно. Особенности работы колеса в других условиях движения бу-
дут рассмотрены в соответствующих разделах.
При изучении физических свойств автомобильного колеса будем рассматри-
вать его как элемент системы «автомобиль — внешняя среда». С одной стороны,
колесо взаимодействует с опорной поверхностью, а с другой — с механизмами
автомобиля (трансмиссией, подвеской, тормозами, рулевым управлением).
Характер этих взаимодействий оказывает существенное влияние на движе-
ние автомобиля и на режимы работы его колес.
Используя принттип освобождаемости от связей, выделим из общей систе-
мы «автомобиль — внешняя среда» элемент системы «колесо» и заменим
исключенные элементы — механизмы автомобиля и опорную поверхность
дороги — их реакциями на колесо. Реакции представляют собой воздействия
на колесо исключенных из системы элементов. Воздействие каждого из этих
элементов заменяется двумя векторами — вектором силы и вектором вра-
щающего момента.
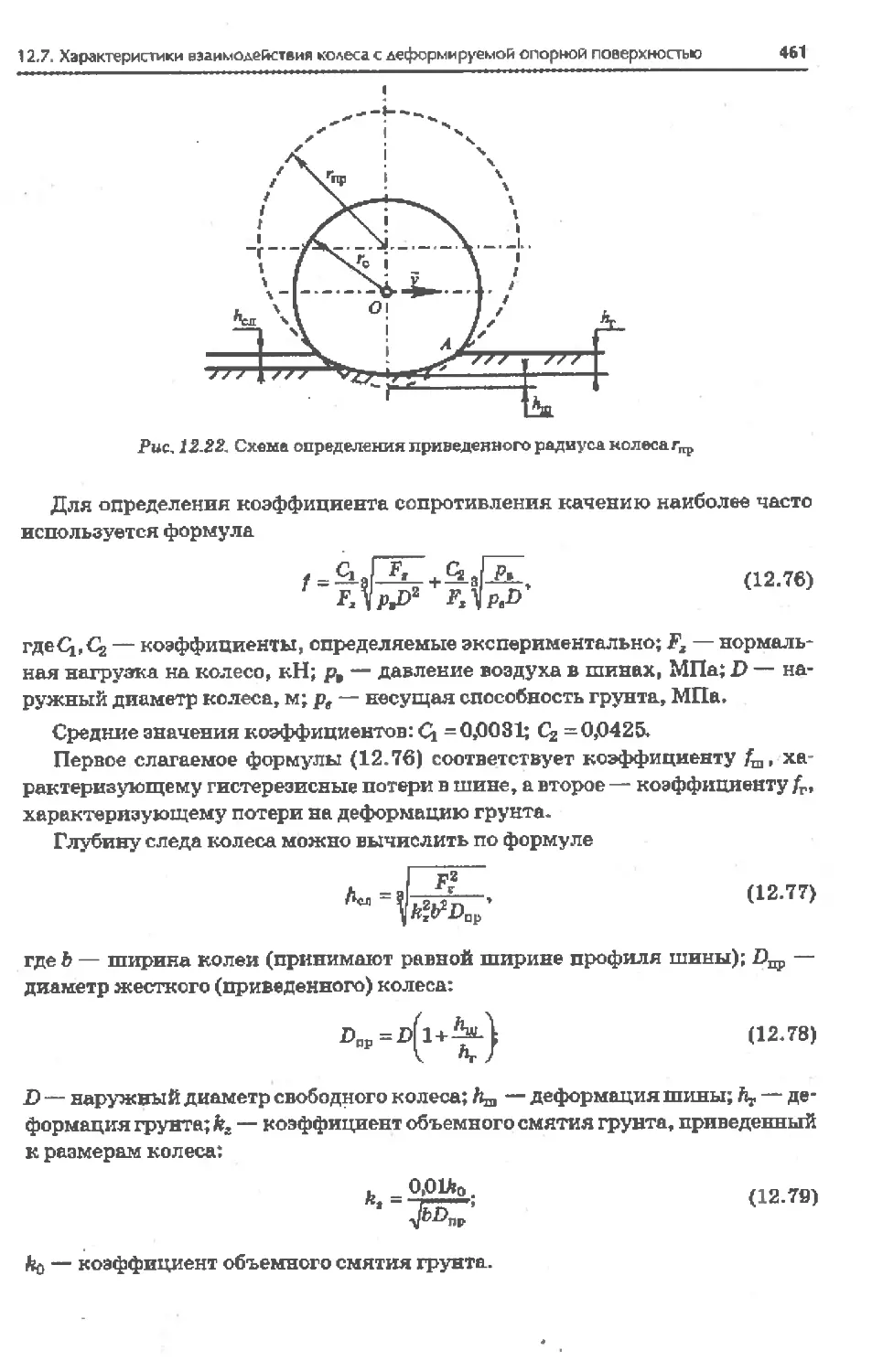
Выберем систему координат xyz, ось Оу кото-
рой совпадает с осью вращения колеса, ось Ог
перпендикулярна плоскости опорной поверх-
ности дороги, а плоскость хОг совпадает с про-
дольной плоскостью симметрии колеса (рис. 1.1).
Точку О назовем центром колеса.
Воздействие механизмов автомобиля на коле-
со отображается силой и моментом . Сила FR
приложена в центре колеса О. Ее можно разло-
жить на составляющие, направленные вдоль осей
выбранной системы координат: /в =
Сила Fx параллельна опорной поверхности и на-
зывается продольной силой колеса, сила Fy,
направленная вдоль оси вращения колеса, - по-
перечной силой, а сила F, перпендикулярна
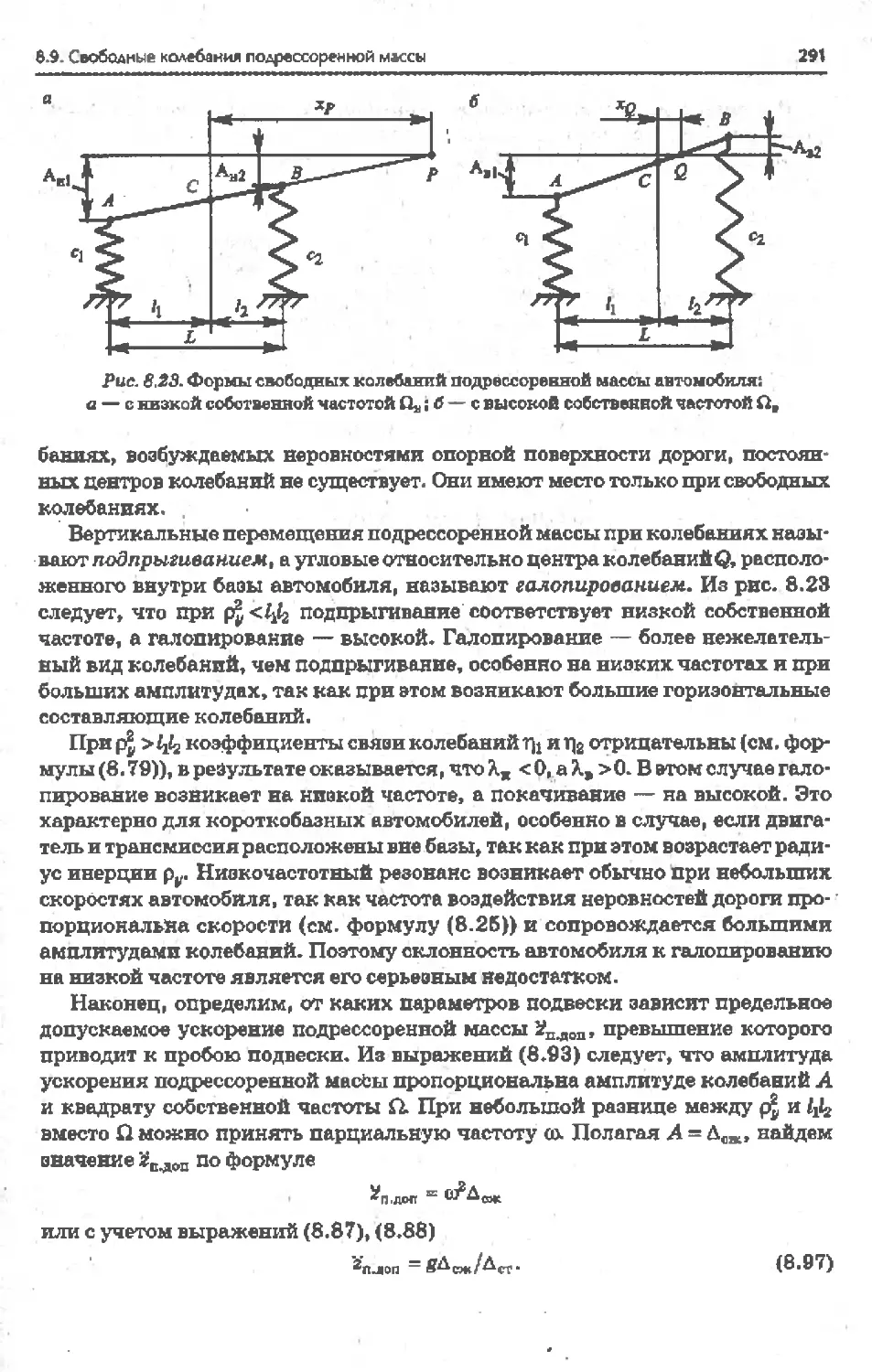
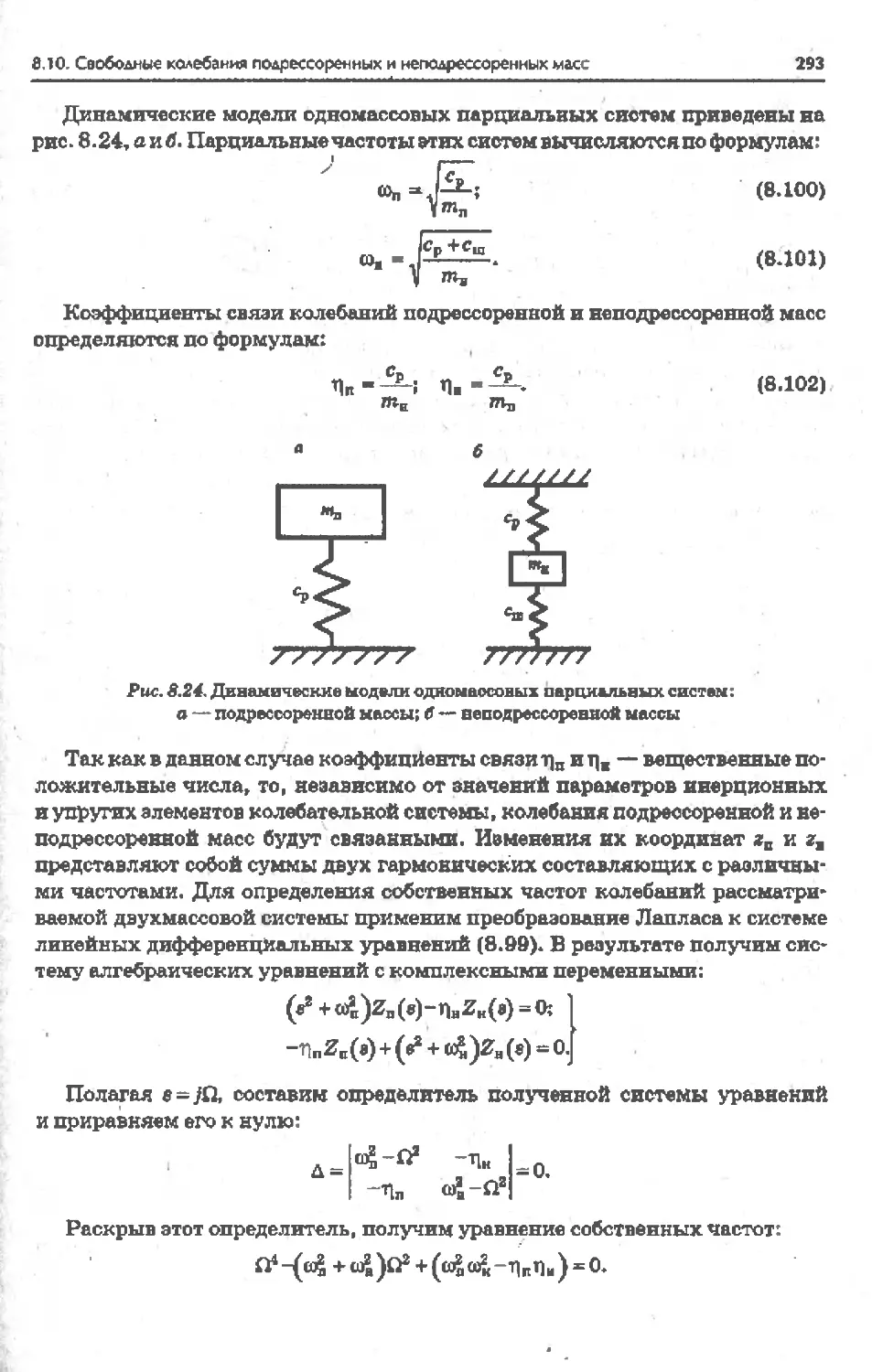
Рис. 1.1. Система сил и моментов,
воздействующих на колесо при
плоском движении
1.1. Условия и режимы работы автомобильного колеса
13
опорной поверхности и называется нормальной нагрузкой колеса. Ана-
логично раскладывается на составляющие вектор вращающего момента
мЛ = (мх,му,мг).
При плоском движении колеса на него действуют только силы Fx, Ёг и вра-
щающий момент Л/к = Му, направленный вдоль оси Оу и действующий в пло-
скости вращения колеса хОг (рис. 1.1). Они определяют режим работы колеса
и оказывают существенное влияние на деформацию шины. Вектор момента
Мк перпендикулярен плоскости хОг.
Воздействие опорной поверхности на колесо характеризуется силой R
и вращающим моментом MR. Сила R приложена в некоторой точке С площад-
ки контакта колеса с дорогой. Разложим ее на составляющие/? = (Rx, Ry, R^.
СилыД. и /^расположены на опорной поверхности, а сила/?, перпендикуляр-
на этой поверхности Силу R называют продольной реакцией дороги, на ко-
лесо, Ry — поперечной реакцией, а/?г — нормальной реакцией. Аналогично
раскладывается на составляющие вектор момента Мя = (Мд*, MRy, MR1).
При плоском движении колеса на него воздействуют только реакцииRx, Rt
и вращающий момент Mf = М}1у, действующий в плоскости вращения колеса
(рис. 1.1). Вектор момента перпендикулярен этой плоскости.
На рис. 1.2 показаны возможные варианты сочетаний сил и моментов,
действующих на колесо. Деформация шины на этих схемах не отображена.
Рис. 1.2, Системы сил и моментов, воздействующих на колесо
в различных режимах качения
14 1 - Основ t. теории колесног о движителя
Так как колесо совершает сложное движение (плоское), то разложим его на
простые составляющие: переносное поступательное вместе с центром колеса
О и относительное вращательное (относительно центра колеса). Линейную
скорость переносного движения обозначим бк, а угловую скорость относи-
тельного движения — сок.
Из рис. 1.2 следует, что нормальная нагрузка колеса А, нормальная реак-
ция дороги на колесо/?, и момент действуют во всех рассматриваемых слу-
чаях и имеют одинаковые направления. Изменяются лишь продольная сила
колеса Fx, продольная реакция дороги па колесо/?* и вращающий момент Мк.
Отметим, что векторы сил F* и/?*, а также сил F2 и Д, имеют взаимно противо-
положные направления.
Вектор момента противоположен вектору угловой скорости ик, следо-
вательно, мощность его отрицательная и он отображает сопротивление каче-
нию колеса. Для компенсации затрат энергии на преодоление сопротивления
качению необходим подвод энергии к колесу.
В зависимости от характера и направления сил и моментов, действующих
на колесо, различают следующие режимы качения.
Ведомый режим качения колеса (рис. 1.2, а). Сила F* совпадает по направ-
лению с вектором скорости бк. Следовательно, мощность этой силы, согласно
формуле (В.1), положительна, и она сообщает колесу энергию, необходимую
для качения. Поэтому Fx в данном случае называют толкающей силой. Вра-
щающий момент к колесу не подводится. Колесо, находящееся в этом режи-
ме, называют ведолеым. В таком режиме постоянно находятся неприводные
колеса автомобиля, т.е. колеса, не имеющие связи с трансмиссией (напри-
мер, передние колеса заднеприводных автомобилей или задние колеса перед-
неприводных).
Ведущий режим качения колеса (рис. 1.2, б). Колесо имеет привод от
трансмиссии (приводное колесо) и приводится во вращение моментом Мк,
вектор которого совпадает по направлению с вектором угловой скорости Иц.
Мощность этого момента положительна. Сила Fx представляет собой силу
сопротивления движению корпуса автомобиля. Вектор ее направлен про-
тивоположно вектору скорости бк, следовательно, мощность этой силы от-
рицательна, поэтому для движения корпуса автомобиля необходим подвод
энергии. В этом случае энергия, подводимая к колесу от двигателя через
трансмиссию, используется для преодоления сопротивления движению кор-
пуса автомобиля и сопротивления качению колеса. Колесо, находящееся в та-
ком режиме, называют ведущим.
Свободный режим качения колеса (рис. 1.2, в). Колесо приводится во вра-
щение от трансмиссии моментом А/к. Подводимая к колесу энергия затрачива-
ется лишь на компенсацию собственных потерь на качение. Такое приводное
колесо не выполняет полезной работы, поэтому его называют свободным.
Нейтральный режим качения колеса (рис. 1.2, г). Колесо получает энер-
гию для своего движения от двигателя через трансмиссию и от корпуса авто-
мобиля, т.е. оно приводится во вращение моментом jWk и толкающей силой /’*,
1.2. Физические процессы при прямолинейном движении колеса
15
но при этом не выполняет полезной работы. Колесо, находящееся в таком ре-
жиме, называют нейтральным.
Тормозной режим качения колёса (рис. 1.2, д) Колесо приводится во вра-
щение толкающей силой Fx. Вектор момента Мк направлен противоположно
вектору угловой скорости Фд, поэтому он создает сопротивление вращению
и отображает потребление энергии, сообщаемой колесу корпусом автомоби-
ля. Колесо, находящееся в таком режиме, называют тормозящим.
Режим качения колеса зависит от соотношений между силой Fx и вращаю-
щим моментом Л?к. Зависимость между ними отображена на рис. 1.2, е. Отре-
зок 1 графика соответствует ведущему колесу, отрезок 2 — нейтральному,
отрезок 3 — тормозящему. Точка а соответствует ведомому колесу, а точ-
ка b — свободному.
1.2. Физические процессы при прямолинейном движении колеса
При оценке эффективности выполнения колесом своего назначения необ-
ходимо знать его физические свойства и установить основные зависимости
между параметрами колеса и воздействиями на него механизмов автомобиля
и внешней среды.
Параметр — это величина, характеризующая физическое свойство или
режим работы объекта. Режим работы автомобильного колеса в общем слу-
чае характеризуется множеством параметров: угловой скоростью вращения
и скоростью поступательного движения центра колеса; силами и вращающи-
ми моментами, действующими на колесо со стороны различных механизмов
автомобиля и опорной поверхности дороги. Соотношения между этими пара-
метрами в значительной мере зависят от физических свойств эластичной
шины. В стандартах и каталогах обычно указываются следующие параметры
шин: наружный диаметр без нагрузки£>ш, высота Нш и ширина Вщ профиля,
статический радиус при номинальных значениях давления воздуха рв
и нормальной нагрузки Fz.
Воздействия сил и моментов на колесо приводят к деформации эластич-
ной шины, и параметры колеса изменяются. Для учета этих свойств шины
при математическом описании процесса качения вводится понятие о различ-
ных радиусах колеса.
Свободный радиус колеса гс — половина наибольшего наружного диамет-
ра шины без нагрузки.
Статический радиус колеса гст — расстояние от центра О неподвижного
колеса до опорной поверхности дороги при нагружении его нормальной на-
грузкой F, (рис. 1.3, а).
Динамический радиус колеса гЛ — расстояние от центра катящегося ко-
леса до опорной поверхности дороги.
Радиус качения колеса гк — отношение проекции их поступательной ско-
рости колеса на плоскость опорной поверхности к его угловой скорости Од
при качении без проскальзывания относительно опорной поверхности:
rR =Ох/фк.
16
1. Основы теории колесного движителя
При прямолинейном качении колеса деформации шины в основном опре-
деляются силой Fz и моментом Мк. Рассмотрим их влияние на параметры
движения колеса.
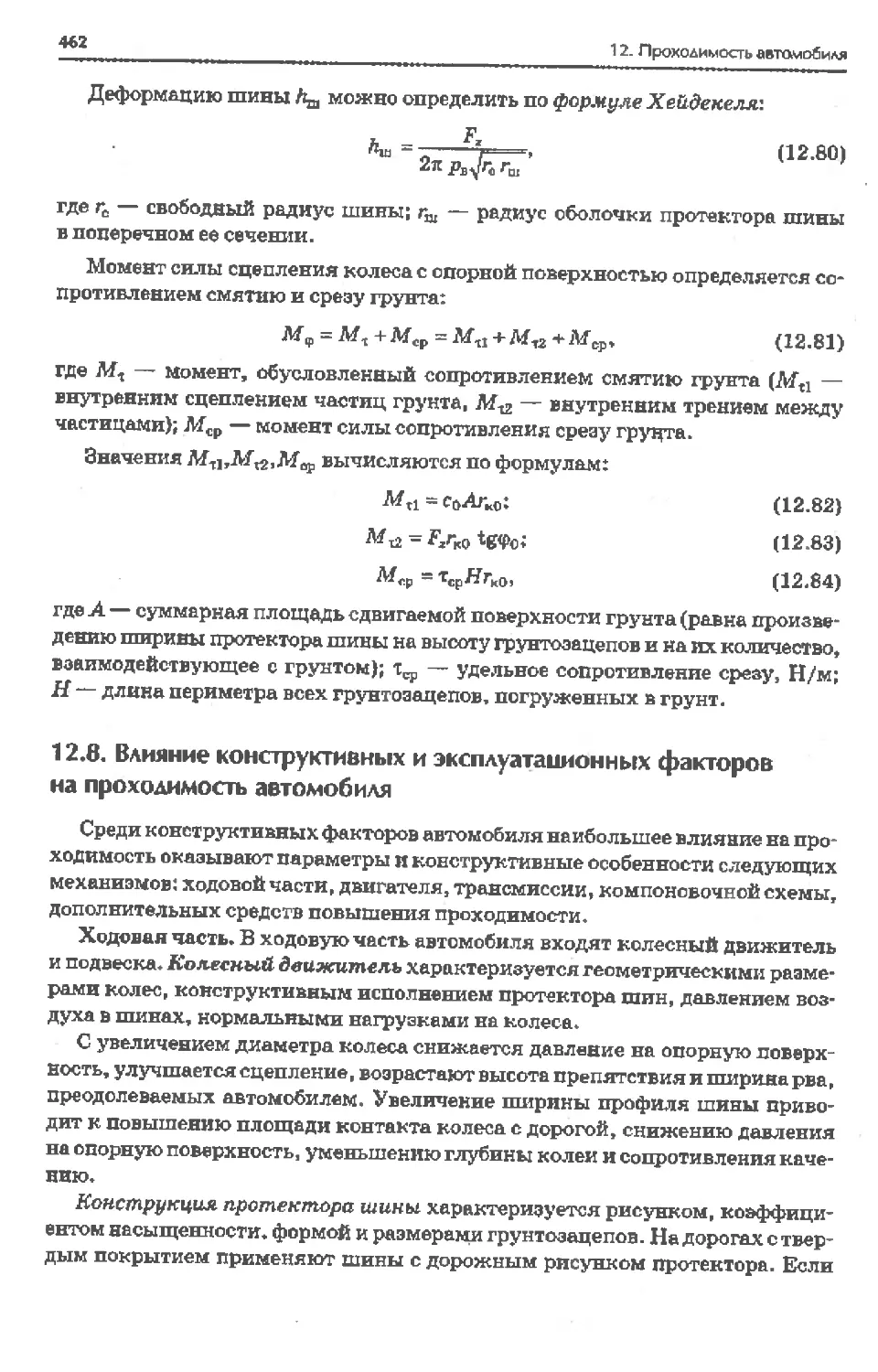
Рис. 1.3. Воздействие на колесо нормальной нагрузки (а)
и эпюра окружных деформаций шины (б)
Нормальная нагрузка колеса F, вызывает радиальную и окружную де-
формации сжатия элементов шины (протектора и боковин) в нижней части
полуокружности (рис. 1.3,6). Расстояние между центром колеса и поверхно-
стью дороги уменьшается, в результате г„ < гс. При этом образуется площадка
контакта колеса с опорной поверхностью. Форма площадки контакта близка
к эллипсу, у которого большая ось располагается в продольной плоскости
колеса xOz, а малая — в поперечной плоскости yOz. Окружная деформация
распределяется неравномерно, увеличиваясь с приближением к опорной
площадке.
Радиальную деформацию шины под действием нормальной нагрузки
называют нормальным прогибом шины hz. Его значение используется для
определения статического радиуса колеса:
= гс - Лг = 0,5Ош - h,. (1.1)
Опыты по измерению Л2 для различных типов шин показывают, что нор-
мальный прогиб шины зависит от Fz, нелинейно и обратно пропорционален
абсолютному давлению воздуха в шине. На рис. 1.4 показаны графики этих
зависимостей для стандартной шины 260-508. На основе экспериментов по-
лучена следующая формула для определения h2, м [14]:
где Л, — эмпирический коэффициент, зависящий от конструктивных пара-
метров шины, м Па/H0,75; рв — давление воздуха в шине, Па.
1.2. Физические процессы при прямолинейном движении колеса
17
Рис. 1.4. Зависимость нормального прогиба шины 260-508
от нагрузки Fz и давления воздуха ря:
1 — при р, =0,35; 2 — при р, =0 45; 3 — при/», =0,6 МПа
При определении значения коэффициента kz для данной шины измеряют
Л2 при двух значениях Fx к р„ - const или при двух значениях р, и F, = const.
В первом случае и пользуется формула
. _(^2-Лд1)(1 + рв)
рО,75 г 0,75 ’
*г2
а во втором —
k = (*Ь1-М(1+Д»1)(1+А>*) и 4)
F^(Pb2-Pb1)
В формуле (1.3) предполагается F# >Fa, а в формуле (1.4) рв2 > р„г.
При качении ведомого колеса толкающая сила Fx значительно меньше
нормальной нагрузки Ft и не оказывает существенного влияния на динами-
ческий радиус колеса, поэтому можно считать, что гд = гст.
В связи с окружной деформацией сжатия протектора периметр колеса ста-
новится меньше периметра окружности ненагруженного колеса. Поэтому
оно проходит за один оборот расстояние, меньшее, чем длина окружности ко-
леса в свободном состоянии. Это приводит к тому, что радиус качения гк0 ока-
зывается меньше свободного радиуса гс.
Радиус качения ведомого колеса гк0 можно определить из следующих сооб-
ражений. Если катящееся колесо повернется на угол 2а (см. рис. 1.3, а), то
при от утствии скольжения относительно опорной поверхности пройденный
центром колеса путь
e = 2rcsina. (1.5)
Разложив функцию si.nct в ряд и ограничиваясь двумя первыми членами
ряда ввиду сравнительно малой величины а, получаем
s = 2гс(а - а3/б). (1.6)
18 1. Основы теории колесного движителя
С другой стороны, значение в можно выразить через радиус качения:
а = 2гкОа. (1.7)
Из выражений (1.6) и (1.7) находим
Гко =ге(1-а7б). (1.8)
Радиус качения ведомого колеса связан с динамическим радиусом соотно-
шением 2гк0а = 2retga. Разложив функцию tga в ряд и ограничиваясь двумя
первыми членами ряда, получаем
Гх0=гд(1+а2/з). (1.9)
Из этого выражения следует, что гкС >гд. Для шин транспортных автомоби-
лей выражение в скобках составляет величину 1,03-1,06. Меньшие значения
относятся к шинам грузовых автомобилей, а большие — к шинам легковых
автомобилей. При одинаковых размерах шин с радиальным и диагональным
расположением нитей корда первые имеют большие значения гко, чем вторые.
Исключив из выражений (1.8) и (1.9) угол а, после несложных преобразо-
ваний получаем
Для большинства шин формула (1.10) позволяет определить гк0 с погреш-
ностью не более 3-8 %.
Более достоверные данные о значении гк0 можно получить эксперимен-
тально при качении ведомого колеса. Колесо нагружается нормальной на-
грузкой Ft и прокатывается по ровной горизонтальной поверхности дороги
с твердым покрытием (асфальт, бетон, асфальтобетон). Измеряется пройден-
ный колесом путь s и число оборотов N колеса на этом пути и вычисляется
значение гк0 по формуле
rK0=s/(2nN) (1.11)
Ведущее и тормозящее колеса одновременно с нормальной нагрузкой Fz
нагружаются вращающим моментом Мк. Под воздействием вращающего
момента протектор и боковины шины в секторе, примыкающем к поверхности
контакта колеса с дорогой, получают дополнительную окружную деформа-
цию. Если провести радиальные линии на боковине ненагруженного колеса,
то в этом секторе произойдет их искривление, а точки А, В, С обода колеса пе-
реместятся в положения А', В\ С' (рис. 1.5, а, б). В результате обод провернет-
ся на некоторый угол относительно части протектора шины, находящейся на
контактной поверхности. Поскольку при качении колеса в контакт с дорогой
постоянно вступают новые поверхности протектора, то процесс окружного
деформирования шины происходит непрерывно. Вследствие этого точка С',
принадлежащая ободу колеса, получает дополнительную относительную ско-
рость вектор которой у ведущего колеса (рис. 1.5, а) направлен противо-
1.2. Физические процессы при прямолинейном движении колеса
19
положно вектору скорости центра колеса £>к, а у тормозящего (рис. 1-5, б),
наоборот, в сторону вектора ок. В результате модуль вектора скорости ик веду-
щего колеса уменьшается на величину , а тормозящего увеличивается. Это
явление называют упругим скольжением колеса.
Рис. 1.5. Впздкйстния нн колесо вращающего момента и нормальной нагрузки:
и — ведущее колесо; 5 — тормозящее колесо
Упругое скольжение приводит к изменению радиуса качения колеса гк.
На рис. 1.6 показаны графики, отображающие зависимость гк от вращающе-
го момента AfK при различных нормальных нагрузках и давлениях возду-
ха рв. Графики получены в процессе лабораторных испытаний шин в НАМИ
[14]. Из графиков следует, что в некоторых пределах изменения зависи-
мость между гк и Д/к линейная. При этом колесо катится без проскальзыва-
ния относительно опорной поверхности, т.е. без внешнего скольжения, а гк
изменяется вследствие упругого скольжения колеса.
Впервые явление упругого скольжения колеса экспериментально обнару-
жил и детально исследовал академик Е. А. Чудаков, основоположник теории
автомобиля. Для описания зависимости гк от Af к он предложил формулу, ко-
торую посредством обобщающих преобразований можно представить в сле-
дующем виде:
А = гкс - ;-* сов (а/ к > “к )> (1-12)
с иг»
где ^1) — радиус качении колеса при Af ь = 0 (ведомое колесо); „ коэффи-
циент окружной жесткости шины, II м/м.
Из формулы (1.12) следует, что с увеличением момента А/,, радиус каче
пня ведущего колеса уменьшается, а тормозящего, наоборот, увеличивается.
Динамический же радиус ко’Леса в обоих случаях уменьшается, что видно ил
рис. 1.5.
20
1. Основы теории колесного движителя
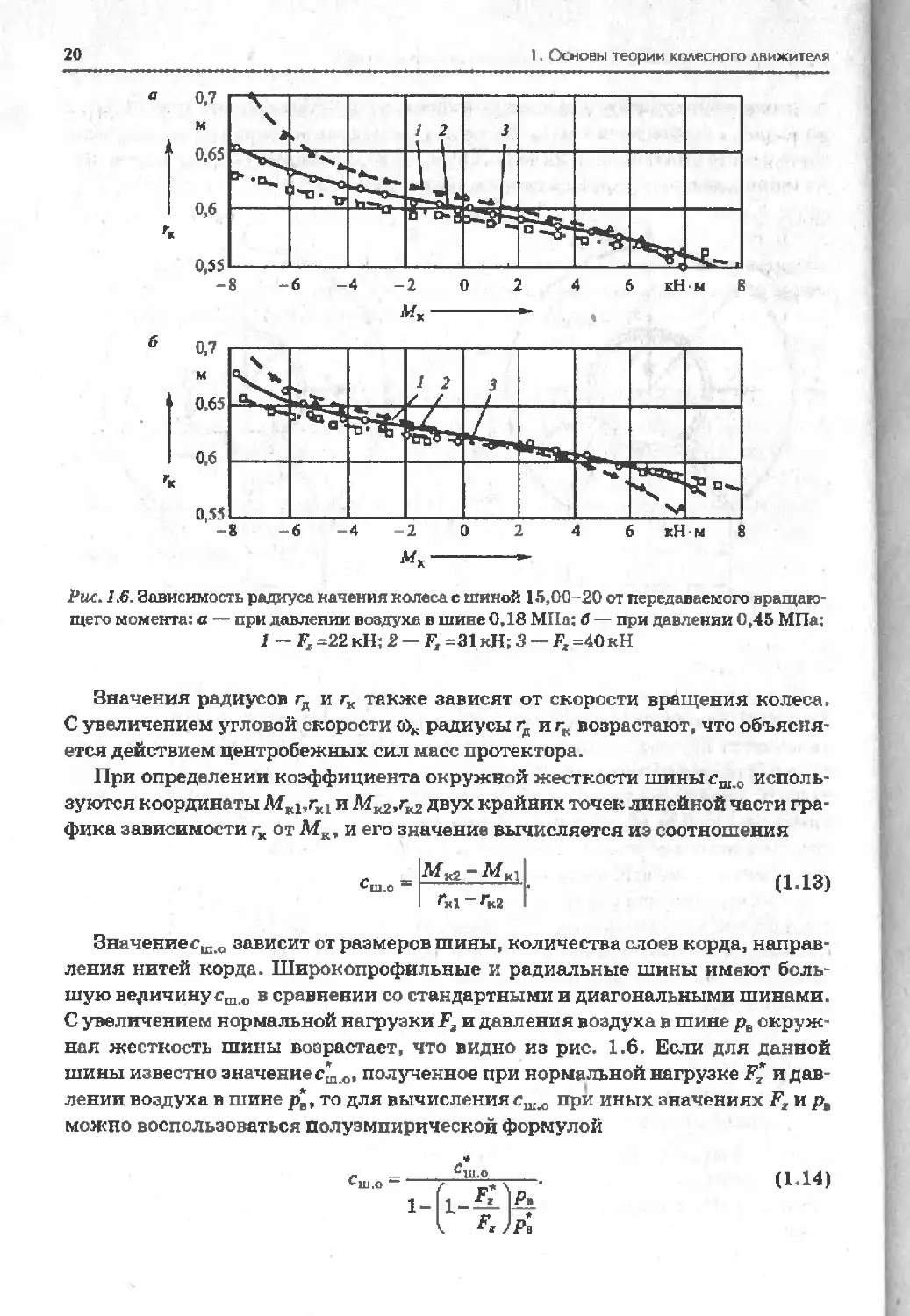
Рис. 1.6. Зависимость радиуса качения колеса с шиной 15,00-20 от передаваемого вращаю-
щего момента: а — при давлении воздуха в шине 0,18 МПа; б — при давлении 0,45 МПа;
1 — Ъ =22 кН; 2 — F, =31 кН; 3 — Ft =40кН
Значения радиусов гд и гк также зависят от скорости вращения колеса.
С увеличением угловой скорости (0* радиусы гд игк возрастают, что объясня-
ется действием центробежных сил масс протектора.
При определении коэффициента окружной жесткости шины сш.о исполь-
зуются координаты Мк1,гк1 и двух крайних точек линейной части гра-
фика зависимости гк от Мк, и его значение вычисляется из соотношения
Гк1 ~гк2
(1.13)
ЗначениесШЛ зависит от размеров шины, количества слоев корда, направ-
ления нитей корда. Широкопрофильные и радиальные шины имеют боль-
шую величинуо в сравнении со стандартными и диагональными шинами.
С увеличением нормальной нагрузки Ft и давления воздуха в шине рв окруж-
ная жесткость шины возрастает, что видно из рис. 1.6. Если для данной
шины известно значение c„.o, полученное при нормальной нагрузке F* и дав-
лении воздуха в шине рв, то для вычисления сшл при иных значениях Ft и рв
можно воспользоваться полуэмпирической формулой
gUI.O
1-fl-—
I F? JPb
(1.14)
1.2. Физические процессы при прямолинейном движении колеса
21
Для автомобильных шин средние значения коэффициента сш.о находятся
в пределах (1,0-3,3)’ 105 Н-м/м. Меньшие значения характерны для шин
легковых автомобилей, а большие — для шин грузовых автомобилей.
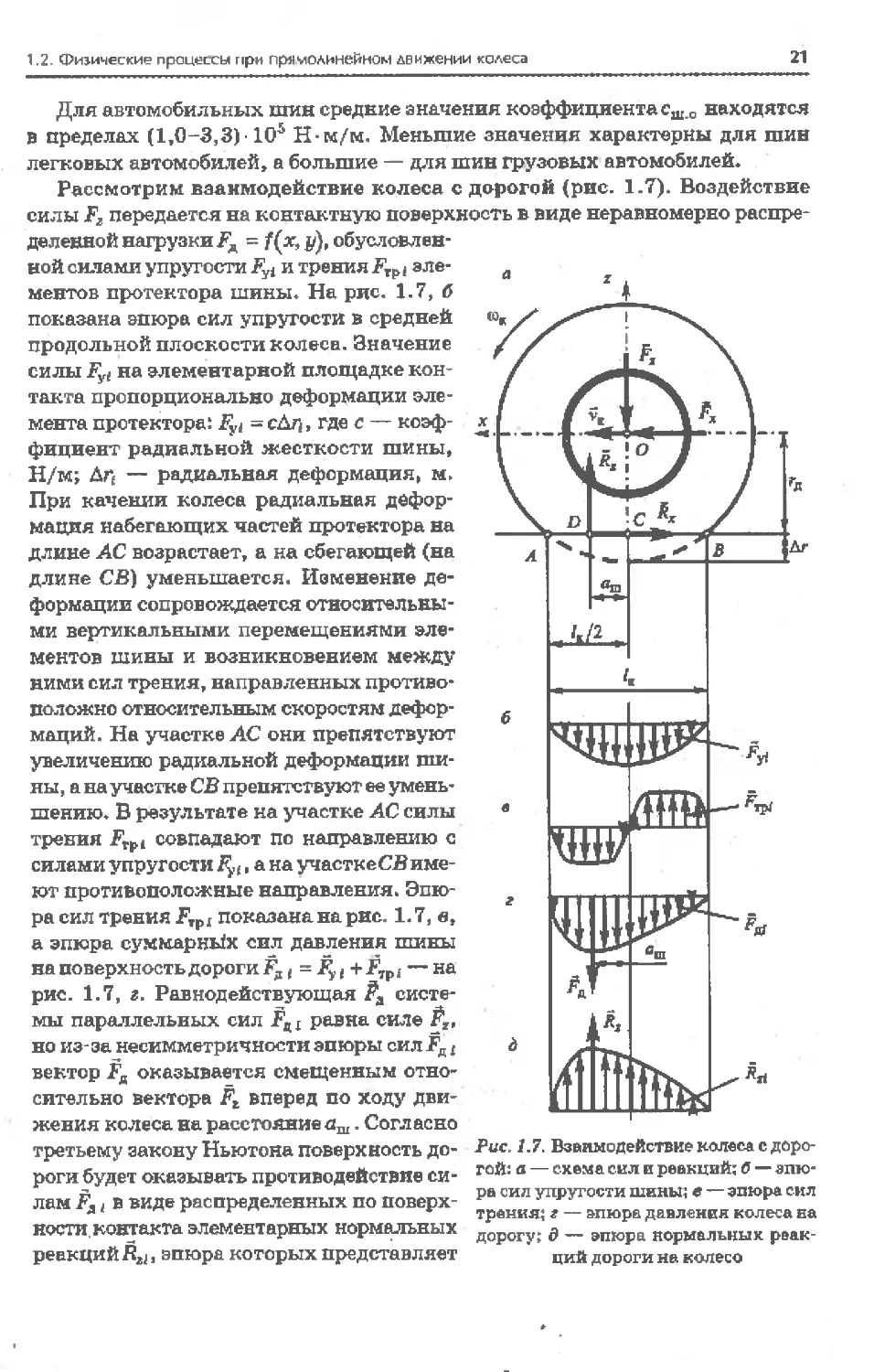
Рассмотрим взаимодействие колеса с дорогой (рис. 1.7). Воздействие
силы Гг передается на контактную поверхность в виде неравномерно распре-
деленной нагрузки/^ = f(x, у), обусловлен-
ной силами упругости Fvl и трения BTf>i эле-
ментов протектора шины. На рис. 1.7, б
показана эпюра сил упругости в средней
продольной плоскости колеса. Значение
силы Fyl на элементарной площадке кон-
такта пропорционально деформации эле-
мента протектора: ZJj = сДг(, где с — коэф-
фициент радиальной жесткости шины,
Н/м; Дг( — радиальная деформация, м.
При качении колеса радиальная дефор-
мация набегающих частей протектора на
длине АС возрастает, а на сбегающей (на
длине СВ) уменьшается. Изменение де-
формации сопровождается относительны-
ми вертикальными перемещениями эле-
ментов шины и возникновением между
ними сил трения, направленных противо-
положно относительным скоростям дефор-
маций. На участке АС они препятствуют
увеличению радиальной деформации ши-
ны, а на участке СВ препятствуют ее умень-
шению. В результате на участке АС силы
трения совпадают по направлению с
силами упругости , а на участкеСВиме-
ют противоположные направления. Эпю-
ра сил трения показана на рис. 1.7, в,
а эпюра суммарных сил давления шины
на поверхность дороги Вд ( = Д ( + Др1 — на
рис. 1.7, г. Равнодействующая систе-
мы параллельных сил х равна силе
но из-за несимметричности эпюры сил Вд t
вектор Гд оказывается смещенным отно-
сительно вектора Рг вперед по ходу дви-
жения колеса на расстояние . Согласно
третьему закону Ньютона поверхность до-
роги будет оказывать противодействие си-
лам i в виде распределенных по поверх-
ности, контакта элементарных нормальных
реакций эпюра которых представляет
Рис. 1.7. Взаимодействие колеса с доро-
гой: а — схема сил и реакций; б — эпю-
ра сил упругости шины; е — эпюра сил
трения; г — эпюра давления колеса на
дорогу; & — эпюра нормальных реак-
ций дороги на колесо
22
1. Основы теории колесного лвижителя
собой зеркальное отражение эпюры сил Ёя ( (рис. 1.7, 5). Равнодействующая
нормальных реакций Rz - -Ёя = -F.. Силу Д называют нормальной реакци-
ей дороги на колесо. ВекторЛг, так же как и вектор F,, смещен относительно
вектора F. на величину аш вперед по ходу движения колеса. Точку/), в кото-
рой приложены векторы сил F, ий2, называют центром давления.
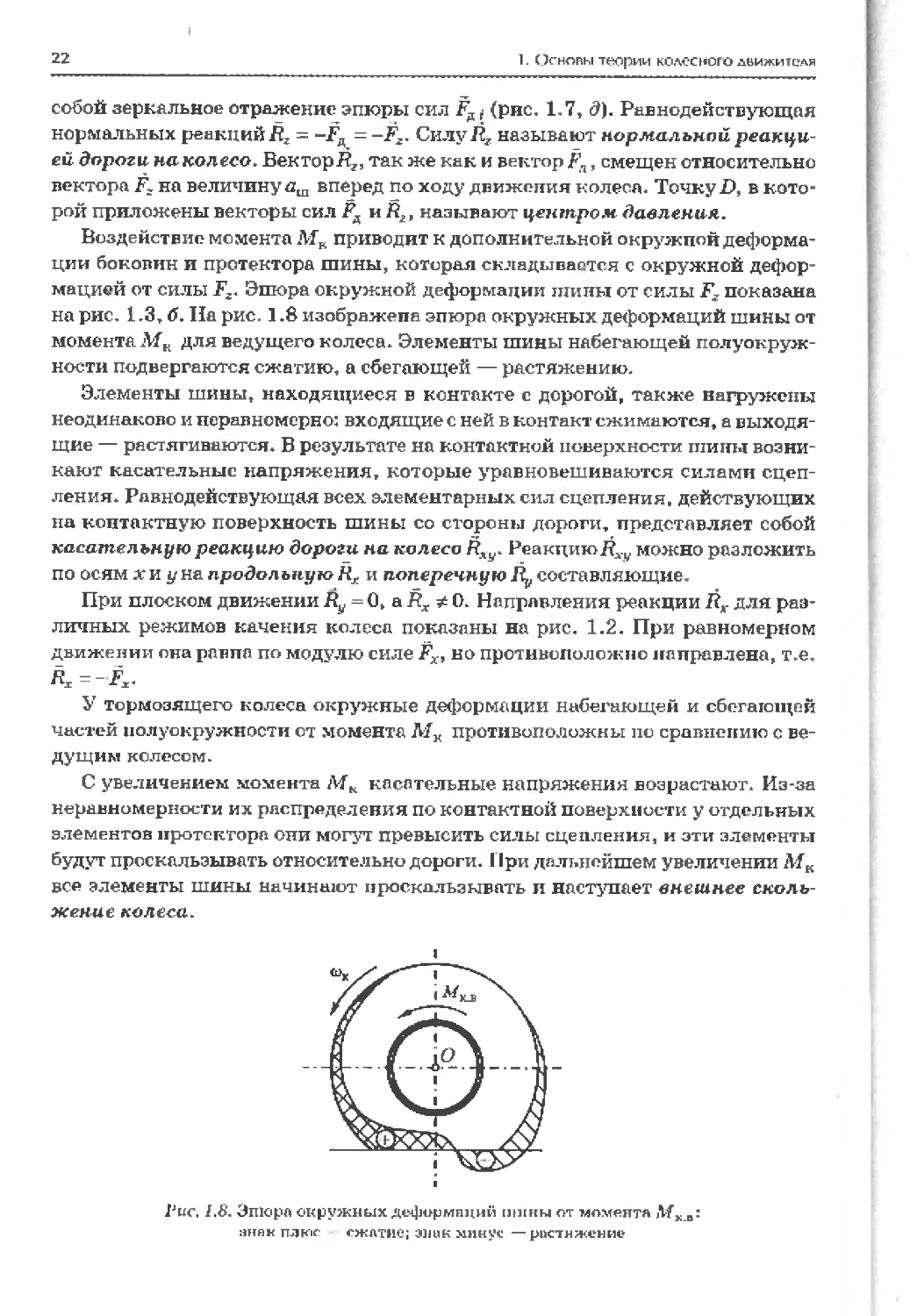
Воздействие момента AfK приводит к дополнительной окружной деформа-
ции боковин и протектора шины, которая складывается с окружной дефор-
мацией от силы F.. Эпюра окружной деформации шины от силы F, показана
на рис. 1.3,6. На рис. 1.8 изображена эпюра окружных деформаций шины от
момента AfK для ведущего колеса. Элементы шины набегающей полуокруж-
ности подвергаются сжатию, а сбегающей — растяжению.
Элементы шины, находящиеся в контакте с дорогой, также нагружены
неодинаково и неравномерно: входящие с ней в контакт сжимаются, а выходя-
щие — растягиваются. В результате на контактной поверхности шины возни-
кают касательные напряжения, которые уравновешиваются силами сцеп-
ления. Равнодействующая всех элементарных сил сцепления, действующих
на контактную поверхность шины со стороны дороги, представляет собой
касательною реакцию дороги на колесо Rxy. Реакцию/? можно разложить
по осям х и у на продольную Нх и поперечную Д составляющие.
При плоском движении Ry = 0, a Rx * О. Направления реакции Д. для раз-
личных режимов качения колеса показаны на рис. 1.2. При равномерном
движении она равна по модулю силе Fx, но противоположно направлена, т.е.
Д=-Д.
У тормозящего колеса окружные деформации набегающей и сбегающей
частей полуокружности от момента Л/к противоположны по сравнению с ве-
дущим колесом.
С увеличением момента AfK касательные напряжения возрастают. Из-за
неравномерности их распределения по контактной поверхности у отдельных
элементов протектора они могут превысить силы сцепления, и эти элементы
будут проскальзывать относительно дороги. 11ри дальнейшем увеличении AfB
все элементы шины начинают’ проскальзывать и наступает внешнее сколь-
жение колеса.
1‘ис. 1.8. Эпюра окружных деформаций шины от момента
знак плюс сжатие; знак минус —растяжение
1.3. Скорость колеса и автомобиля
23
При криволинейном движении колеса его взаимодействие с дорогой ха-
рактеризуется реакциями Rx, Ry, Rx и вектором момента Мл. Физическая
сущность этого момента при плоском движении колеса будет рассмотрена
в параграфе 1 Л, а в общем случае движения — в главе 9.
1,3, Скорость колеса и автомобиля
Скорость любой точки колеса при плоском движении в каждый момент
времени по модулю равна произведению угловой скорости вращения колеса
на расстояние точки до мгновенного центра скоростей (МЦС), а вектор скоро-
сти перпендикулярен линии, соединяющей данную точку с МЦС, и направ-
лен в сторону вращения колеса.
Если центр колеса О движется прямолинейно и гд = const (а это возможно,
если поверхность дороги плоская и нормальная нагрузка Fx на колесо не
меняется), то МЦС находится на линии, проходящей через точку О перпенди-
кулярно поверхности дороги. В зависимости от режима работы колеса и усло-
вий сцепления с дорогой МЦС имеет различное положение на этой линии
(на рис. 1.9 МЦС обозначен буквой р). Он может совпадать с точкой А опорной
поверхности дороги (рис. 1.9, а), находиться выше ее (рис. 1.9, б) или ниже
(рис. 1.9, а), совпадать с центром колеса О или располагаться в бесконеч-
ности.
Рис. I.J>. Положение МЦО(точкар) при качении колеса:
<□ — ведомого; fi — ведущего; в — тормозящего
Обозначим расстояние от МЦС до центра колесагОр. Тогда модуль поступа-
тельной скорости колеса
ук=(ингОр. (1.15)
Величину гОр называют кинематическим радиусом колеса. Так как
значение гОр переменно и в процессе движения автомобиля в разнообразных
условиях может изменяться в очень широких пределах 0<гОр <°°, то его
24
1. Основы теории колесного движителя
использование для определения скорости колеса ик создает очевидные слож-
ности.
Ведомое колесо на дороге с твердым сухим покрытием катится без про-
скальзывания относительно опорной поверхности, поэтому гОр = гк0. Как от-
мечалось в предыдущем параграфе, гк0 больше гд в 1,03—1,06 раза. Следова-
тельно, МЦС ведомого колеса лежит несколько ниже поверхности дороги. Но
поскольку разница между гк0 и гд незначительна, то скорость точки А невели-
ка и ее величиной обычно пренебрегают.
Для ведущего колеса характерно неравенство гОр <гд (рис. 1.9, б), а для
тормозящего гОр >гд (рис. 1.9, в). В обоих случаях иА *0. Различие между
ними состоит лишь в том, что для ведущего колеса направления векторов иА
и противоположны, а для тормозящего — совпадающие.
Скорость бА называют скоростью скольжения колеса и обозначают
Она равна геометрической сумме скоростей упругого скольжения vv и внеш-
него скольжения колеса
и, = + о... (1-16)
Если внешнее скольжение отсутствует, тогда и, = бду, а =0. Но в этом
случае точка А, принадлежащая протектору шины, неподвижна, поэтому
вектор определяет относительную скорость скольжения элементов шины,
обусловленную их окружной деформацией под воздействием момента AfK
(см. рис. 1.5, а, б). Скорость ведущего колеса ик при этом уменьшается на
величину бду, так как направления векторов бк и бду противоположны, а ско-
рость тормозящего колеса, наоборот, возрастает в связи с совпадением на-
правлений ик и бду (рис. 1.9, б, в).
При возникновении внешнего скольжения обычно uSB >>0^, поэтому уп-
ругое скольжение не выделяют, а учитывают суммарное скольжение. Внеш-
нее скольжение ведущего колеса называют буксованием, а тормозящего —
юзом.
Скорость колеса ик0 , определяемая без учета скольжения (упругого и внеш-
него), называют теоретической скоростью колеса. Ее значение определя-
ется по формуле
L\o = о„гк0 . (1.17)
Действительную скорость колеса вычисляют по формуле
1’к =о„0-о, соз(мк,йк). (1.18)
Модуль скорости суммарного скольжения
у. =®в|Гко-Гор|. (1-19)
а упругого —
ив>. — сок |гко —гк|. (1.20)
Скольжение колеса удобно оценивать безразмерной положительной ве-
личиной к, называемой коэффициентом скольжения. Для ведущего колеса
1.3. Скорость колеса и автомобиля
25
он равен отношению скорости скольжения v, к скорости колеса без учета
скольжения 1>к0 . Примем во внимание, что в ведущем режиме сое(мк,ц)1(') = 1,
так как направления векторов Мк и сив совпадают, а гк0 >гОр (рис. 1,9, б).
С учетом этого коэффициент скольжения ведущего колеса
= = = = (1.2Ц
рк0 икС 1>к0 гк0
В тормозном режимесоа^Мк,о\,^ = -1, так как направления векторовМк
и б)к противоположны, а гн0 <гОр (рис. 1.9, в). Коэффициент скольжения
тормозящего колеса равен отношению скорости скольжения о, к действи-
тельной скорости колеса ик
Хт = ~?”Д = 1-Etg. = i-Zisg.. (1.22)
гОр
Коэффициенты скольжения к, и Ат изменяются в пределах от нуля до еди-
ницы. Нулевые значения этих коэффициентов соответствуют условию i>K = ик01
что характерно для ведомого колеса при отсутствии внешнего скольжения.
Для ведущего и тормозящего колес X, и Хт всегда больше нуля, так как они
определяются как упругим, так и внешним скольжением. При полном буксо-
вании ведущего колеса Хв = 1, ti\ * 0, а скорость колеса = О. Полный юз ко-
леса наступает при его блокировке тормозным механизмом. При этом: = О,
Хт = 1, а скорость колеса определяется скоростью центра масс автомобиля,
которая зависит от многочисленных факторов внешних и внутренних Воз-
действий на автомобиль.
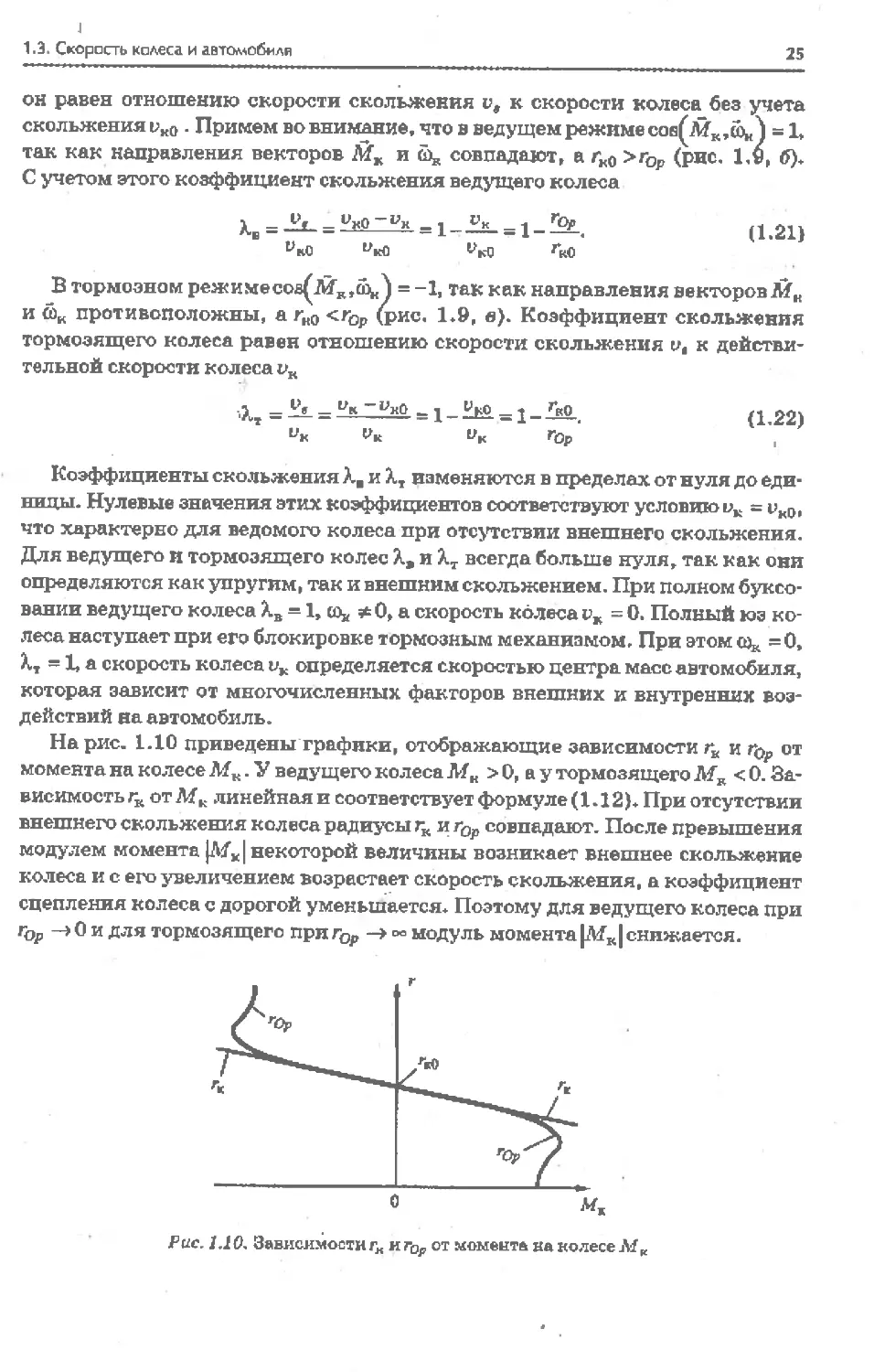
На рис. 1.10 приведены графики, отображающие зависимости гк и гОр от
момента на колесе Мк. У ведущего колеса Мк > 0, а у тормозящего Мк < 0. За-
висимость^ от Л/,, линейнаяи соответствует формуле(1.12). При отсутствии
внешнего скольжения колеса радиусы гк и гОр совпадают. После превышения
модулем момента |МХ| некоторой величины возникает внешнее скольжение
колеса и с его увеличением возрастает скорость скольжения, а коэффициент
сцепления колеса с дорогой уменьшается. Поэтому для ведущего колеса при
гоР —* 0 и для тормозящего при гОр —> •» модуль момента |МК| снижается.
Рис. 1.10. Зависимости г„ и гОр от момента на колесе Af„
26
1. Основы теории колесного движителя
При прямолинейном поступательном движении автомобиля скорости всех
точек его корпуса, включая точки центров колес, одинаковы, поэтому ско-
рость автомобиля и можно определять по тем же формулам, что и скорости
колес. На тяговом режиме скорость автомобиля определяют по скорости цен-
тра ведущего колеса ик_в. На дороге с твердым покрытием в сухую погоду
внешнее скольжение практически отсутствует, поэтому, учитывая упругое
скольжение, скорость автомобиля определяют по формуле
г = ек.в = rk wH.s. (1.23)
Радиус качения ведущего колеса гк вычисляют по формуле (1.12). Угло-
вую скорость ведущего колеса С)к_, можно выразить через угловую скорость
коленчатого вала двигателя Од или через частоту его вращения пд (об/мин):
“к. в = <вд/иТр = япд/(30игр), (1.24)
где Ufp — передаточное число трансмиссии автомобиля.
При больших значениях момента на ведущих колесах ЛГК.В или при дви-
жении по скользкой дороге возникает внешнее скольжение колес. Тогда ско-
рость автомобиля определяют с учетом внешнего скольжения. На основе
формулы (1.21) получаем
” = ”х.в = ”ко(1-М = Лл“к.в(1-Хв). (1.25)
В этом случае при определении скорости автомобиля вместо гк использует-
ся гк0, так как коэффициент Хв учитывает как внешнее, так и упругое сколь-
жение ведущего колеса. Из формулы (1.25) следует, что при полном буксовании
ведущих колес, когда Л,„ = 1, скорость автомобиля г =0.
1.4. Сопротивление качению колеса
Деформации шины при качении колеса, обусловленные действующей на
него системой сил и моментов, сопровождаются необратимыми потерями
энергии. Эти потери определяют сопротивление качению колеса — один из
основных видов сопротивлений движению автомобиля. Потери энергии при
качении колеса по твердой опорной поверхности обусловлены следующими
причинами:
□ внутренним трением в шине;
и упругим скольжением колеса;
□ проскальзыванием элементов шины относительно опорной поверхности;
□ присасыванием шины к опорной поверхности;
□ аэродинамическим сопротивлением.
Внутреннее трение в шине вызывается межмолекулярным трением в ре-
зине и корде и механическим трением между элементами шины: покрышкой
и камерой, покрышкой и ободом колеса. Потери на трение в основном определя-
ются радиальной деформацией шины под воздействием нормальной нагруз-
ки F;. Если бы шина обладала только упругими свойствами, то при качении
ведомого колеса вся энергия, израсходованная на сжатие элементов шины на
1.4. Сопротивление качению колеса
27
Рис. I.II. Нагрузочная
характеристика шины
начальном участке площадки контакта АС, возвращалась бы обратно при их
расширении на конечном участке СВ (см. рис. 1.7, а). Однако в действи-
тельности из-за наличия внутреннего трения, обусловленного взаимным
перемещением элементов шины при ее деформировании, происходят гисте-
резисные потери энергии.
Если осуществить цикл нагружения и раз-
грузки неподвижного колеса силой F,, то по-
лучим график, представленный на рис. 1.11.
Зависимости радиальной деформации шины
Дг от силы Ft при нагружении и разгрузке
не совпадают, образуя петлю гистерезиса.
Площадь петли гистерезиса (заштрихована)
в соответствующем масштабе определяет ме-
ханическую работу трения, которая равна
выделяемой тепловой энергии, расходуемой
на нагрев шины. Тепловая энергия рассеи-
вается в окружающую среду, а ее величина
составляет необратимые потери. Аналогич-
ную петлю гистерезиса имеют все элементы
шины, входящие в контакт с опорной по-
верхностью дороги и затем выходящие из контакта в процессе качения коле-
са. При движении автомобиля по дороге с твердым покрытием потери на
внутреннее трение в шинах составляют до 85-95 % всех потерь на качение.
Качение ведущего колеса сопровождается упругим скольжением. При этом
почти вся работа, затрачиваемая на окружную деформацию шины, оказыва-
ется потерянной. Поэтому затраты энергии на качение ведущего колеса выше,
чем на качение ведомого колеса.
Проскальзывание элементов шины относительно опорной поверхности
возникает вследствие неравномерности распределения окружных деформа-
ций, а также из-за сложной геометрической формы шины. Потери на трение
при этом составляют до б—10 %. Отметим, что здесь речь не идет о внешнем
скольжении колеса под действием предельного момента по сцеплению, кото-
рый может вызвать буксование ведущего или юз тормозящего колеса.
Потери, обусловленные присасыванием шины к опорной поверхности,
происходят из-за образования рисунком протектора на площадке контакта
замкнутых объемов, из которых выжимается воздух и создается разрежение,
препятствующее отрыву шины от дороги. Наличие влаги на опорной поверх-
ности герметизирует присасываемые участки шины и способствует увели-
чению потерь на качение.
Ведомое колесо. Рассмотрим равномерное прямолинейное движение ведо-
мого колеса. На колесо действует система сил Fx, F3, R*, R2 (рис. 1.12, <z). Усло-
виями равновесия системы сил при плоском движении являются равенства
нулю сумм проекций этих сил на оси хи ги их моментов относительно произ-
вольно выбранной точки. Для ведомого колеса эти условия имеют вид:
= О; R2-F, = 0; RxrR -R^ = 0.
28
1. Основы теории колесного движителя
Рис. 1.12. Воздействия на ведомое колесо при равномерном качении
Отсюда следует, что его движение определяется двумя парами сил: пара
сил Fx, Rx создает движущий момент, а пара сил Fz, Rz — момент сопротив-
ления качению М/г
М( = Rflta = F,am, (1.26)
гдеаш — плечо пары Д, Rt, представляющее собой коэффициент трения ка-
чения шины, м.
Величиназависит от параметров шины и воздействующей на нее систе-
мы сил. Для ее вычисления не существует надежных методов, а измерение
в эксперименте представляет значительные трудности. Поэтому вместо аш
используют более удобный, безразмерный параметр — коэффициент сопро-
тивления качению.
Коэффициент сопротивления качанию ведомого колеса обозначим fa, а мо-
мент сопротивления качепию Mf0. Значение fa соответствует соотношению
fa—aui/r.i- (1.27)
Тогда момент сопротивления качению ведомого колеса можно вычислить
по формуле
(1-28)
Поскольку гд отличается от незначительно, то при анализе эксплуата-
ционных свойств автомобиля для вычисления момента сопротивления каче-
нию ведомых колес обычно используют формулу
Mf0 = faRtrK0. (1.29)
Перенесем вектор R2 параллельно самому себе из точки D в точку С, чтобы
он проходил через центр колеса О. В этом случае для сохранения эквива-
лентности действия системы сил на колесо необходимо к нему приложить
дополнительно момент М - . Очевидно, что это — момент сопротивления
качению.
Таким образом, воздействие опорной поверхности дороги при прямоли-
нейном движении ведомого колеса выражается вектором силы (реакции)
Я -Н. и вектором момепта Л/я = Mf0. Вектор моментаперпендикуля-
1.4. Сопротивление качению колеса
29
рен плоскости вращения колеса, т.е. направлен вдоль оси Оу противоположно
ее положительному направлению. Его направление на рис. 1.12, б отобра-
жено круговой стрелкой, так же как и вектора угловой скорости , Векторы
момента сопротивления качению и угловой скорости для любого режима дви-
жения колеса имеют взаимно противоположные направления. Отметим, что
вектор момента можно переносить в плоскости движения колеса в любую
точку без изменения его воздействия на колесо, что будет использовано
в дальнейшем на рис. 1.14-1,16 и др.
Момент MfQ обусловлен внутренними силами трения элементов шины при
их деформировании под воздействием нормальной нагрузки Ft. Он характе-
ризует гистерезисные потери энергии в шине при качении колеса.
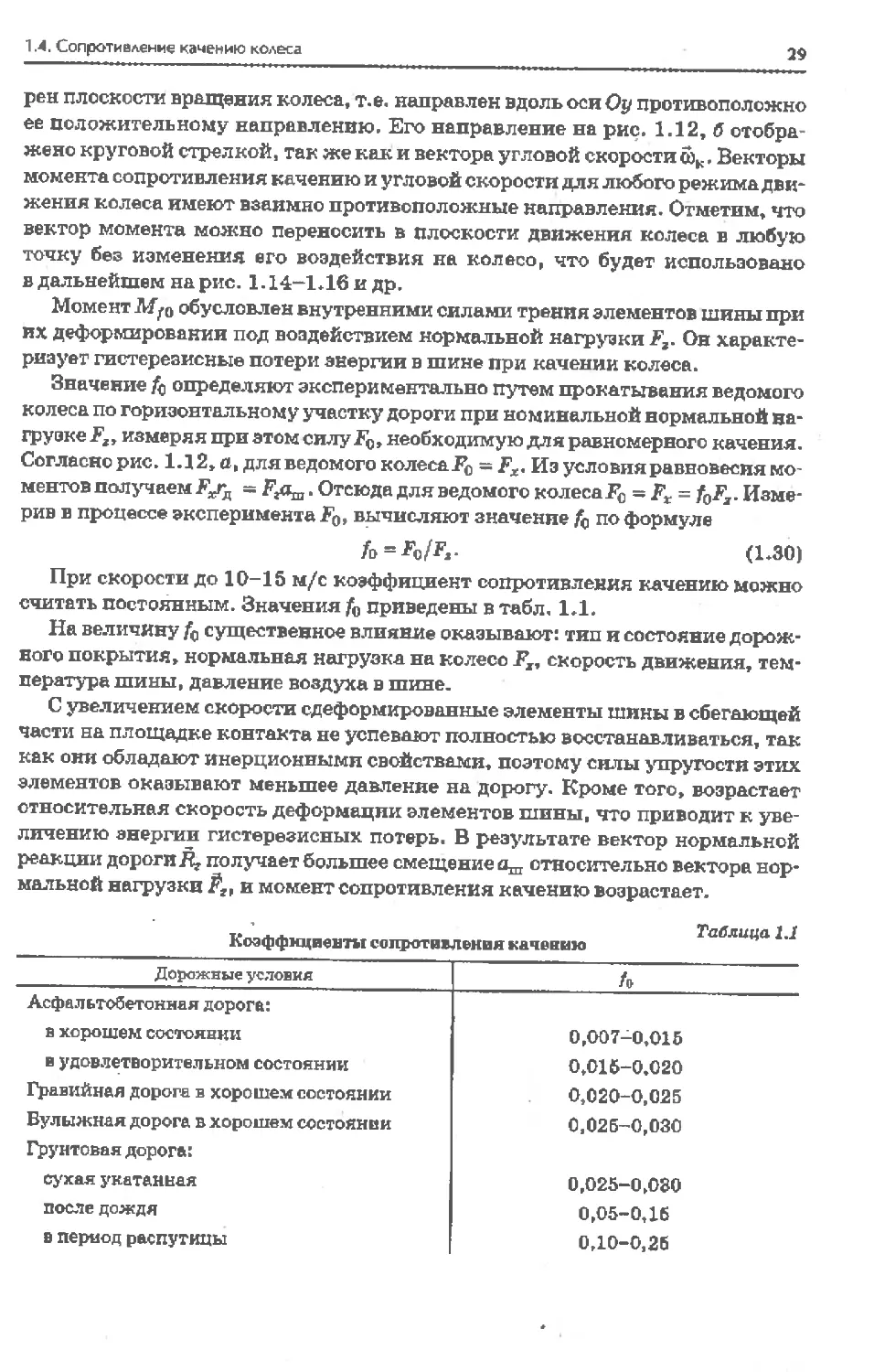
Значение fa определяют экспериментально путем прокатывания ведомого
колеса по горизонтальному участку дороги при номинальной нормальной на-
грузке Ft, измеряя при этом силу необходимую для равномерного качения.
Согласно рис. 1.12, а, для ведомого колеса _F0 = FX. Из условия равновесия мо-
ментов получаем F^ = . Отсюда для ведомого колеса Fo = Fx = /0Р2. Изме-
рив в процессе эксперимента Ео, вычисляют значение fa по формуле
fo~Fo/Ft- (1.30)
При скорости до 10-15 м/с коэффициент сопротивления качению можно
считать постоянным. Значения приведены в табл. 1.1.
На величину / существенное влияние оказывают: тип и состояние дорож-
ного покрытия, нормальная нагрузка на колесо скорость движения, тем-
пература шины, давление воздуха в шине.
С увеличением скорости сдеформированные элементы шины в сбегающей
части на площадке контакта не успевают полностью восстанавливаться, так
как они обладают инерционными свойствами, поэтому силы упругости этих
элементов оказывают меньшее давление на дорогу. Кроме того, возрастает
относительная скорость деформации элементов шины, что приводит к уве-
личению энергии гистерезисных потерь. В результате вектор нормальной
реакции дороги В? получает большее смещение Ощ относительно вектора нор-
мальной нагрузки Ёг, и момент сопротивления качению возрастает.
„ ’ Таблица 1.1
Коэффициент сопротивления качению
Дорожные условия /о
Асфальтобетонная дорога:
в хорошем состоянии 0,007-0,015
в удовлетворительном состоянии 0,016-0.020
Гравийная дорога в хорошем состоянии 0,020-0,025
Булыжная дорога в хорошем состоянии 0,025-0,030
Грунтовая дорога:
сухая укатанная 0,025-0,080
после дождя 0,05-0,16
в период распутицы 0,10-0,26
30
1. Основы теории колесного движителя
Продолжение табл 1.1
Дорожные условия Л>
Песок:
сухой 0,10-0.30
сырой 0,06-0,15
Суглинистая и глинистая целина:
сухая 0,04-0,06
в пластическом состоянии 0,10-0,20
Обледенелая дорога 0,015-0,030
Укатанная снежная дорога 0,03-0,05
Рыхлый снег 0,10-0,30
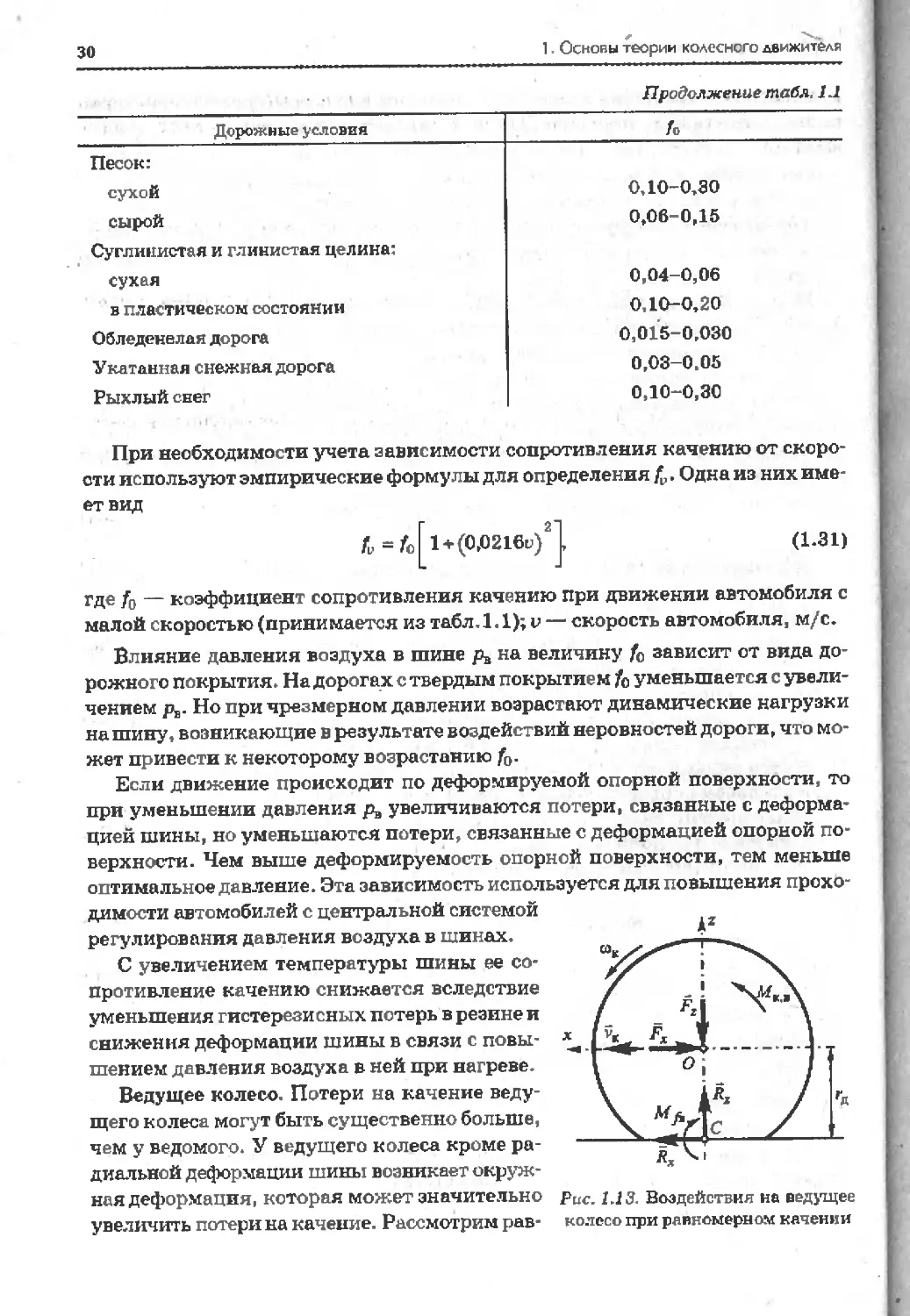
При необходимости учета зависимости сопротивления качению от скоро-
сти используют эмпирические формулы для определения fv. Одна из них име-
ет вид
Г 2'
Л. =fo 1+(0,0216с) ,
(1.31)
где Л — коэффициент сопротивления качению при движении автомобиля с
малой скоростью (принимается из табл. 1.1); о — скорость автомобиля, м/с.
Влияние давления воздуха в шине р* на величину f0 зависит от вида до-
рожного покрытия. На дорогах с твердым покрытием /о уменьшается с увели-
чением рв. Но при чрезмерном давлении возрастают динамические нагрузки
на шину, возникающие в результате воздействий неровностей дороги, что мо-
жет привести к некоторому возрастанию fa.
Если движение происходит по деформируемой опорной поверхности, то
при уменьшении давления д, увеличиваются потери, связанные с деформа-
цией шины, но уменьшаются потери, связанные с деформацией опорной по-
верхности. Чем выше деформируемость опорной поверхности, тем меньше
оптимальное давление. Эта зависимость используется для повышения прохо-
димости автомобилей с центральной системой
регулирования давления воздуха в шинах.
С увеличением температуры шины ее со-
противление качению снижается вследствие
уменьшения гистерезисных потерь в резине и
снижения деформации шины в связи с повы-
шением давления воздуха в ней при нагреве.
Ведущее колесо. Потери на качение веду-
щего колеса могут быть существенно больше,
чем у ведомого. У ведущего колеса кроме ра-
диальной деформации шины возникает окруж-
ная деформация, которая может значительно
увеличить потери на качение. Рассмотрим рав-
Рис. 1.13. Воздействия на ведущее
колесо при равномерном качении
1.4. Сопротивление качению колеса
31
номерное прямолинейное движение ведущего колеса. На колесо действуют
силы Fx, F2, Rx, Rf и момент Мкл (рис. 1.18). Уравнения равновесия сил и мо-
ментов:
Я, - Рх = 0; ' Rt - F, = 0; Мk-R^ - - 0.
Определим модуль силы сопротивления движению корпуса автомобиля:
Рх=Пх^(М11Л-П2аш)/Гд. (1.32)
Составим уравнение баланса мощности ведущего колеса, полагая, что ко-
лесо катится без внешнего скольжения:
Рк.« + Рг + ^.=0, (1.33)
где Ркл — мощность, подводимая к колесу; Рх — мощность, передаваемая коле-
сом корпусу автомобиля; Pft — мощность потерь на качение ведущего колеса.
Составим выражения для вычисления мощностей РклиРх, используя при
этом формулы (В.1) и (В.2):
Rc.» = -^к.и®кСов(Л£К1>, = AfKiIo)K; (1.34)
Рх = FxV* сое^Гх,йк) = ~FzuK = -Улсок. (1.36)
Мощность потерь на качение
Р/в = "(Я., + Рх) = -(М К.в-Рл)®к - (1-36)
С другой стороны
Р^в = M’/BoKcos(M/B,toK) = -Af>aK, (1.37)
где — момент сопротивления качению ведущего колеса.
Сопоставляя выражения (1.36) и (1.37), находим
Л/Л, = Мка-^гх. (1.38)
Подставим значение Fx из формулы (1.32):
Mf. = + 7^). (1 8g)
Га гл
По аналогии с ведомым колесом определим силу FB, которую необходимо
приложить к центру ведущего колеса, чтобы преодолеть сопротивление каче-
нию. Мощность этой силы Рв - FtvK, н она по модулю равна мощности Р^„ оп-
ределяемой по формуле (1.36). Тогда силу F, вычислим по формуле
г, = —- (1.40)
(-’к Гк
Отношение этой силы к нормальной реакции R, представляет собой коэф-
фициент сопротивления качению ведущего колеса',
(1.41)
32
1. Основы теории колесного движителя
Используя формулы (1.39) и (1.40), найдем
4 = Нн. -Т. Мн-,(ГД~Гк) (1.42)
Gj кгв
Из этого выражения следует, что коэффициент сопротивления качению
ведущего колеса ft содержит две составляющие:
fa = fo + f,y> (1.43)
где /о — составляющая, обусловленная гистерезисными потерями при ради-
альной деформации шины под действием нормальной нагрузки на колесо Р2;
fgy — составляющая, обусловленная потерями на окружную деформацию
шины под действием момента М^, т.е. потерями на упругое скольжение:
/о=аш/гд; (1.44)
z = Л^к.в(гд -Гк)
* ЯЛГд
Принимая во внимание, что гд незначительно отличается от гк0, и учиты-
вая формулу (1.12), выражение для вычисления /,у можно записать в следую-
щем виде:
ж _
'•У “ р
kGcO^oi.o
(1.46)
Используя выражения (1.39), (1.43)—(1.46), формулу для определения мо-
мента сопротивления качению ведущего колеса можно записать в виде
м2
М/в = = (/0 + Г.у)КЛ = /Дгк. (1.47)
Лс(И*1п.о
Подставим значение Л-f в в выражение (1.37):
Pf. =-|7о«л +-^=-к W
k GcO^-ui.o J
(1.48)
где Pf0 — мощность гистерезисных потерь; Р/(у — мощность на упругое сколь-
жение:
к,в1
Pfo =-W?zkmk;
D _ Af и BWK
---------------
6<(X-U1.O
(1.49)
(1.50)
Из формулы (1.50) следует, что мощность потерь на упругое скольжение
/)ву зависит от квадрата подводимого к колесу вращающего момента Мн.в.
Ее величина может значительно возрастать в тяжелых дорожных условиях
или при преодолении автомобилем крутых уклонов, требующих существен-
ного увеличения Л'/К_в. Для уменьшения Р^у необходимо увеличивать количе-
ство приводных колес автомобиля, с тем чтобы уменьшить значение Мкл на
1.5. Уравнения движения колеса
33
каждом колесе. Увеличение радиуса качения гк0 и окружной жесткости шин
сШЛ также способствует уменьшению Pftv,
Если сопротивление движению автомобиля значительно возрастает (дви-
жение по песку, на крутом уклоне дороги, с прицепом и др.), то оказывается,
что потери на качение у полноприводного автомобиля меньше, чем у непол-
ноприводного. В таких условиях все мосты полноприводного автомобиля
должны быть включены.
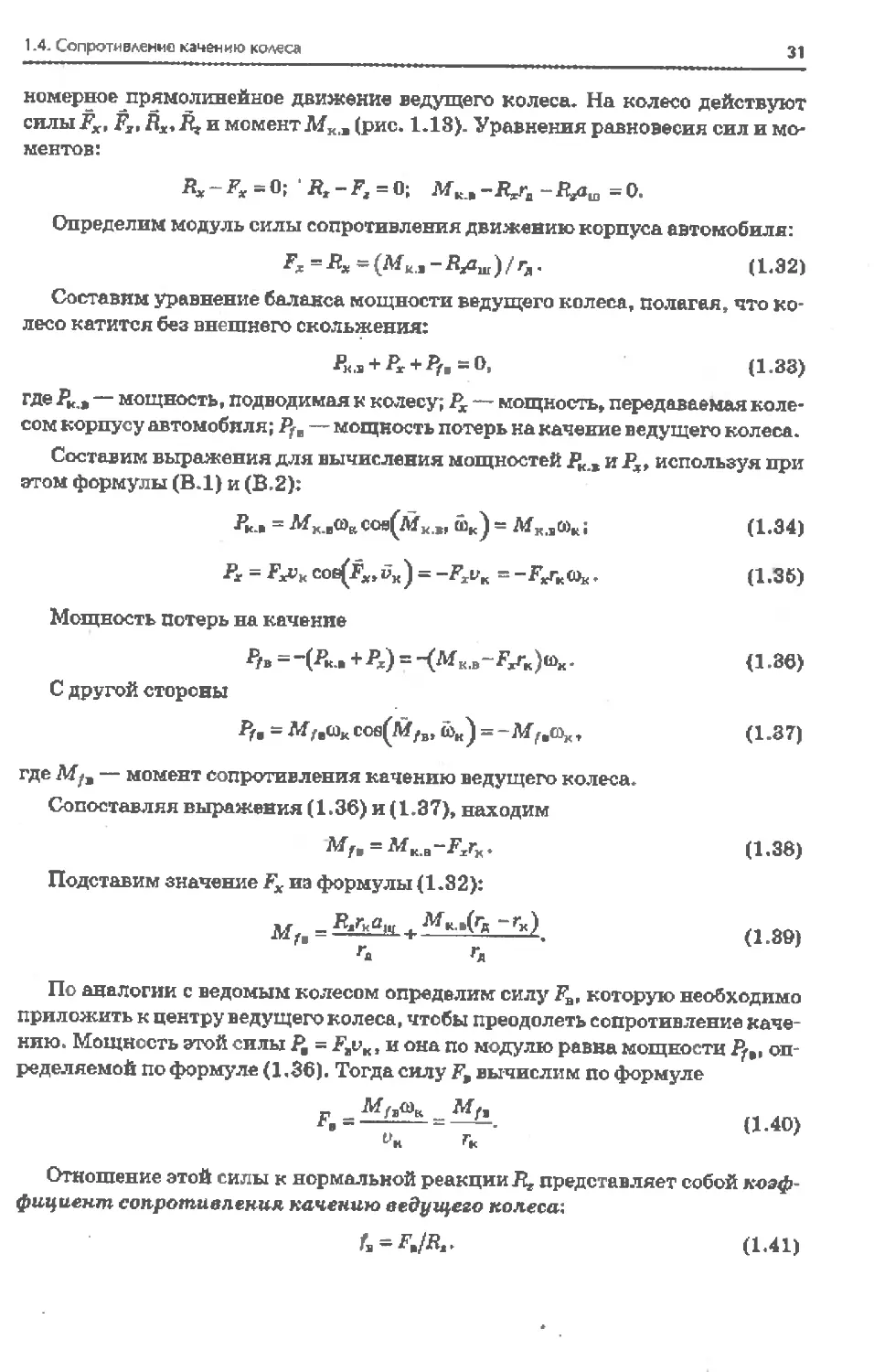
Тормозящее колесо. При определении момента сопротивления качению
тормозящего колеса используются те же формулы, что и для ведущего коле-
са, только вместо Мк.» подставляется тормозной момент ЛГХ Т.
1.5. Уравнения движения колеса
Составим уравнения неравномерного движения колеса на различных ре-
жимах работы, предполагая, что колесо катится по гладкой горизонтальной
поверхности дороги с твердым покрытием.
Ведущее колесо. Система сил и момен-
тов показана на рис. 1.14. На нем отобра-
жена лишь радиальная деформация шины
и осуществлен параллельный перенос нор-
мальной реакции дороги таким образом,
чтобы ее вектор К, проходил через центр
колеса О. В этом случае действие пары сил
заменено моментом сопротивления ка-
чению Mf0, обусловленным гистерезисны-
ми потерями в шине. На рис. 1.14 отображен
суммарный момент сопротивления качению
ведущего колеса Mf„ учитывающий также
потери на упругое скольжение Mfty, т.е.
Mf, = М(о +M{rf.
При математическом описании плоско-
Рис. 1.14. Воздействия ва ведущее
колесо ври нерезвомерном движении
го движения колеса в общем случае составляют три уравнения динамическо-
го равновесия:
£Х(=О; 5>л-«0,
где Xi и Zt — проекции сил на оси х и г; Мзд — моменты относительно центра
колеса О.
Первое уравнение динамического равновесия имеет вид:
1 Fx~Fj^ «О,
где Rx — продольная реакция; Ех — сила сопротивления движению корпуса
автомобиля; F^ — сила инерции колеса в переносном поступательном дви-
жении.
Вектор силы инерции F^ трът* — масса колеса;^ — вектор ус-
корения центра колеса.
2 Эм. 3498
34
1. Основы теории колесного движителя
При принятых допущениях перемещение центра колеса будет только
вдоль оси х, а его ускорение равно ускорению центра масс автомобиля а.
В этой связи силу инерции колеса FjK целесообразно объединить с силой
инерции остальных масс автомобиля, совершающих поступательное движе-
ние. Тогда сила Д будет учитывать и силу F^, Поэтому вектор силы F^ на
рис. 1.14 изображен штриховой линией и в дальнейшем не используется.
В этом случае Rx = Fx.
Вместо уравнений динамического равновесия сил и моментов составим
общее уравнение динамики, согласно которому алгебраическая сумма работ
всех внешних сил, приложенных к системе, реакций неидеальных связей
и сил инерции на возможных перемещениях системы равна нулю. Дадим воз-
можное перемещение центру колеса бх вдоль оси х. Этому перемещению будет
соответствовать некоторый угол поворота колеса и величина проскальзы-
вания колеса относительно опорной поверхности 6s. Составим выражение
для суммы работ сил на перемещениях бхи 63 и моментов на угловом переме-
щении Зф. Используя выражения (В.4) и (В-5) и учитывая взаимные направле-
ния векторов сил и моментов и соответствующих им векторов перемещений,
получаем
МКЛ &р - F,6 х - М, в&ч>- ЛДя - М = О, (1.51)
где Afк в — момент, передаваемый ведущему колесу от двигателя через транс-
миссию; Л/,к — инерционный момент колеса в его относительном вращатель-
ном движении.
Вектор инерционного момента
(1.52)
где JK —момент инерции колеса относительно оси вращения Сф;ек -da^/dt—
вектор углового ускорения колеса.
Работа сил Д и Д равна нулю, так как их векторы перпендикулярны век-
тору перемещения бх.
Величина перемещения бх связана с углом поворота колеса Згр соотноше-
нием Зх = гОрЗ<р, где г'ор — кинематический радиус колеса. Величина про-
скальзывания 3s за время Of, соответствующее повороту колеса на угол бгр,
составляет 3s = i?,6f, где о, — суммарная скорость упругого и внешнего сколь-
жения колеса. Используя выражение (1.19) и принимая во внимание, что
Зф= найдем
(1.53)
После подстановки значений Зхн Зав выражение (1-51) получаем искомое
дифференциальное уравнение движения ведущего колеса
Л/dt^MK„-Дгк0. (1.54)
Это же уравнение описывает движение ведущего колеса при отсутствии
внешнего скольжения.
1.5. Уравнения движения колеса
35
Уравнение (1.64) можно записать в виде
М«.. = ^Ло+М/. + М>- (1-55)
Из уравнении (1.66) следует, что подводимый к ведущему колесу момент
Мк.а затрачивается на преодоление сопротивления движению корпуса авто-
мобиля, сопротивлений качению и разгону колеса. Сила Fx — это реакция
корпуса автомобиля. Она уравновешивается силойс которой колесо воз-
действует на корпус автомобиля. Следовательно, = -Ёх. Силу F, называют
силой тяги ведущего колеса. Она обеспечивает преодоление всех сопро-
тивлений движению корпуса автомобиля, включая сопротивление качению
ведомых колес. Сила FT приложена к центру колеса О и направлена в ту
же сторону, что и вектор скорости но противоположно вектору силы Ёх
(на рис. 1.14 сила /т не показана, так как она воздействует на корпус авто-
мобиля).
При равномерном движении сила тяги ведущего колеса, согласно (1.66),
F,=FX = (МКЛ -М,,)/Гка. (1.56)
У многоосных полноприводных автомобилей при движении в сложных
дорожных условиях со значительными неровностями опорной поверхности
для отдельных ведущих колес могут возникать кратковременные режимы,
при которых Fx = 0 или же вектор Ёх меняет знак на противоположный. При
Fx - 0 сила тяги ведущего колеса FT = 0, а его режим называют свободным ре-
жимом качения. В этом случае подводимая к колесу энергия затрачивается
на преодоление сопротивления качению свободного ведущего колеса и на его
разгон, а при равномерном движении AfK.B = Mfa. Во втором случае сила Ёх
становится толкающей, а режим ведущего колеса называют нейтральным.
Ведомое колесо. Система сил и моментов показана на рис. 1.16. Учиты-
вая, что Мк - 0, a Fx направлена противоположно по сравнению с ведущим
колесом, дифференциальное уравнение движения ведомого колеса имеет вид
JKdnK!dt = Fja -Mf0. (1.57)
Рис, 1.15. Вов действия на ведомое колесо при неравномерном движении
36
1. Основы теории колесного движителя
Запишем уравнение (1.57) в следующем виде:
^ = (Мщ+М>к)/гв0. (1.58)
Согласно уравнению (1.58), толкающая сила корпуса Fx (движущая сила)
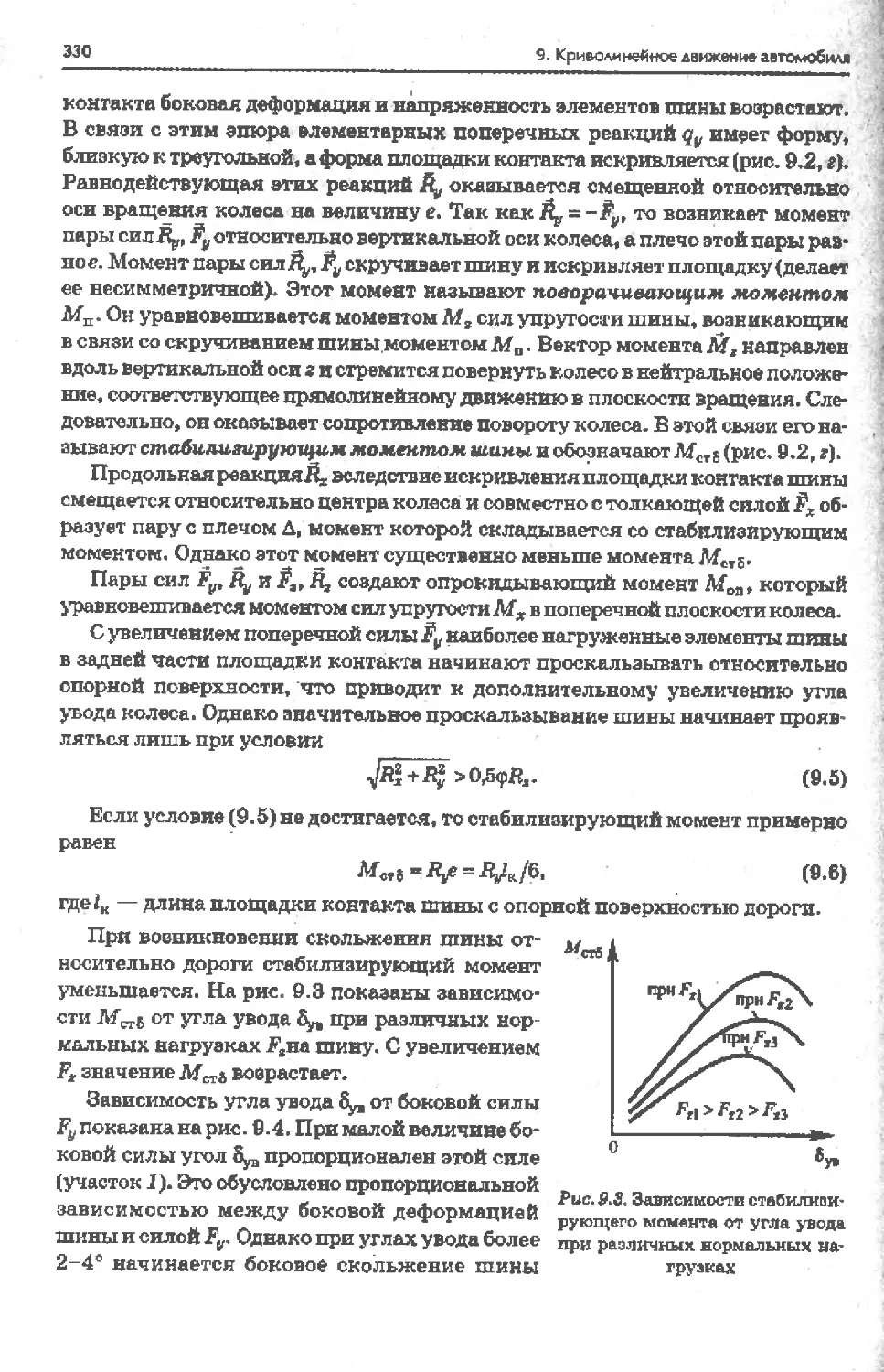
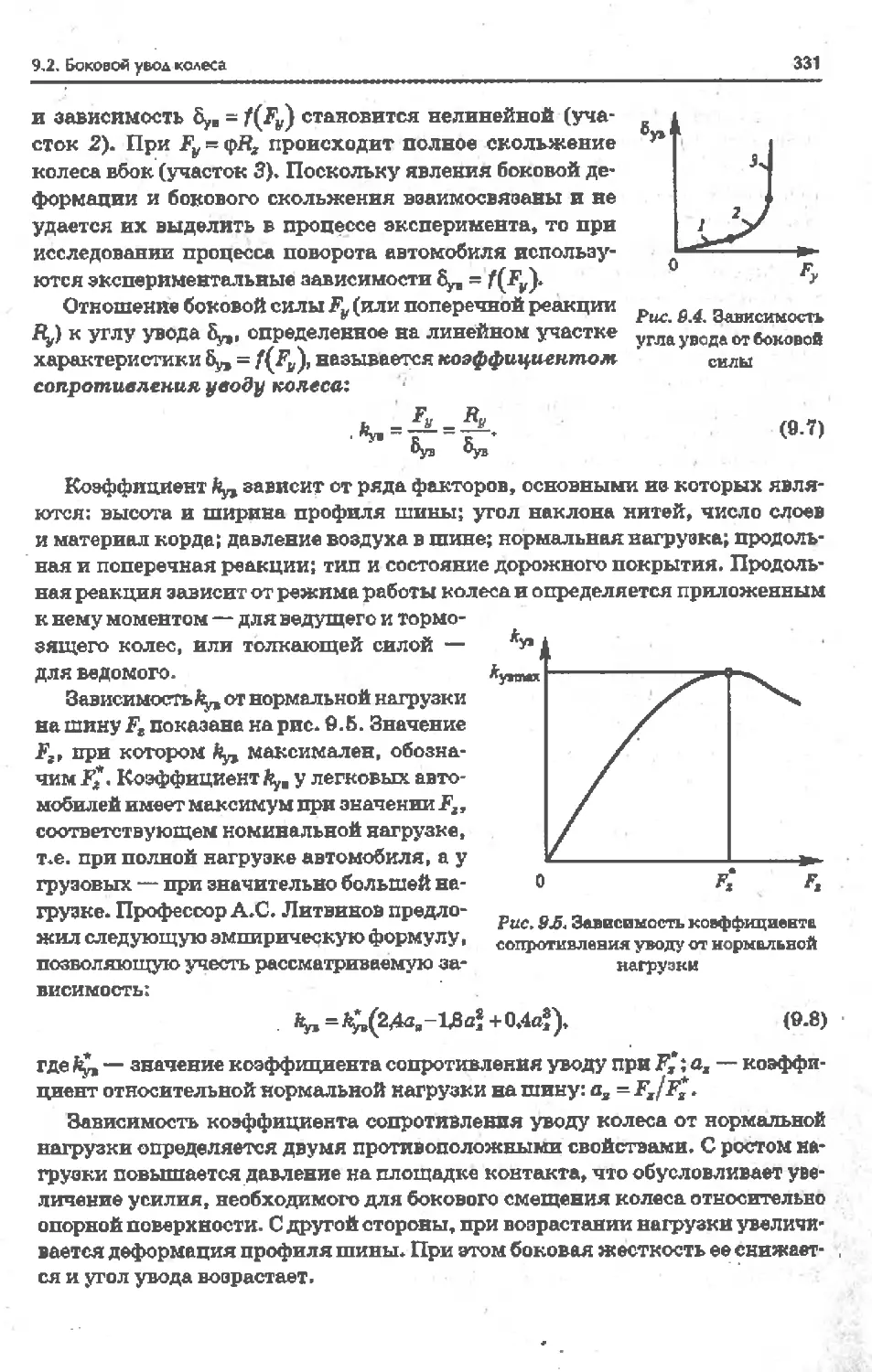
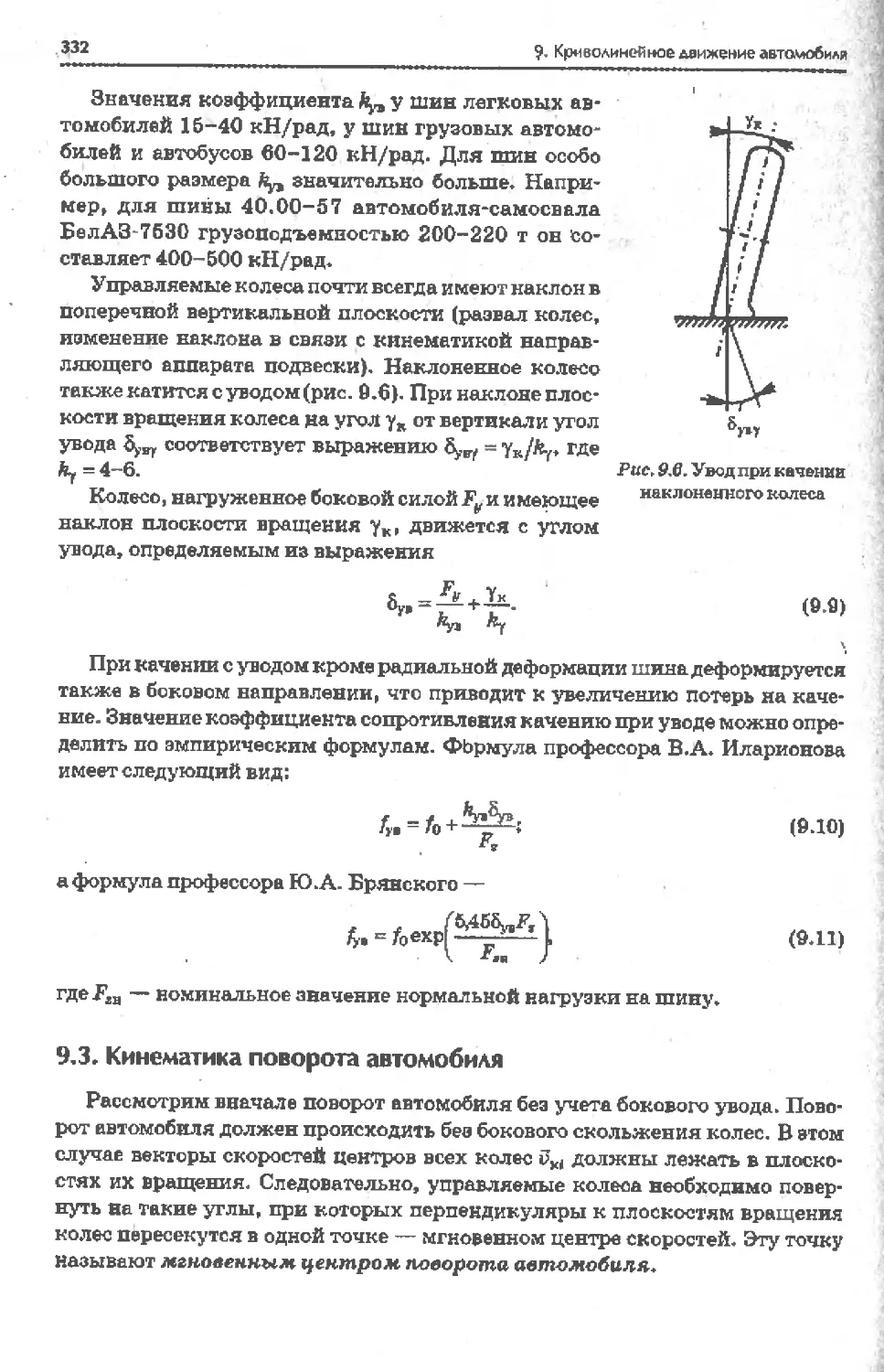
обеспечивает преодоление сопротивлений качению и разгону ведомого колеса.
Тормозящее колесо. Система сил и моментов показана на рис. 1.16- У тор-
мозящего колеса силы Fx, RK и моменты Мк т, Л£направлены противоположно
по сравнению с ведущим колесом- С учетом этого получаем дифференциальное
уравнение движения тормозящего колеса
J„dti>K/dt = FxrK0 - Л1В.Т - Mlr, (1.59)
где AfK.T — тормозной момент; М/т — момент сопротивления качению тормо-
зящего колеса.
Рис. 1.16. Воздействия нл тормозящее колесо при неравномерном движении
Момент MfT вычисляется по такой же формуле, как и для ведущего коле-
са, только в формуле (1.47) Л/Х,в необходимо заменить на Мк t.
Приведем уравнение (1.59) к виду
Af к.т + М Л = Fxr1[D + М}к. (1.60)
Из уравнения (1.60) следует, что тормозной момент AfKiT и момент сопро-
тивления качению Af^T обеспечивают преодоление толкающей силы корпуса
автомобиля Fx и инерционного момента . Следовательно, сопротивление
качению колеса способствует процессу торможения автомобиля, а силы
инерции колеса этому препятствуют. Сила Ёх уравновешивается тормозной
силой колеса Fx, с которой тормозящее колесо воздействует на корпус авто-
мобиля в точке О, причем Fx --Fx (на рис. 1.16 сила Ёх не показана).
Из условий равновесия проекций сил на ось х при равномерном качении
колеса на любом режиме получаем FX=RX. Но продольная реакция опорной
поверхности Rx — это результирующая элементарных сил сцепления на по-
верхности контакта колеса с дорогой, поэтому она существует лить при на-
личии нормальной реакции Rz. Следовательно, сила Fx, а также сила тяги
1.6. Сцепление колеса с дорогой
37
ведущего колеса FT и тормозная сила колеса возникают и реализуются
только при взаимодействии колеса с опорной поверхностью дороги. Если
контакт колеса с дорогой отсутствует, эти силы не возникают и сопротивле-
ние качению также отсутствует. В этом случае, согласно выражениям (1.64)
и (1.59), момент AfK.B или Млл затрачивается на преодоление сил инерции
разгона или торможения колеса, а после завершения разгона или торможе-
ния колеса момент становится равным нулю.
1.6. Сцепление колеса с дорогой
При качении колеса его взаимодействие с дорогой характеризуется векто-
ром силы R и вектором момента В общем случае вектор силы состоит из
трех составляющих R = Rx+RJ/+Rt, причем составляющие Я* и находятся
на площадке контакта шины с дорогой и образуют касательную реакцию
= RX+RV. Выясним физическую сущность силы R^v.
В связи со сложной тороидальной формой оболочки шины даже при неболь-
шом моменте AfK, приложенном к ободу колеса, некоторая часть элементар-
ных площадок протектора шины всегда скользит относительно дороги, а ос-
тальная часть поверхности контакта протектора неподвижна. С увеличением
момента М* количество скользящих площадок возрастает, но пока имеется
хотя бы небольшая площадь неподвижного контакта, колесо удерживается
силой ЯХ(Г от полного скольжения. Касательная реакция Rzy представляет собой
геометрическую сумму элементарных сил , возникающих на всех элемен-
тарных площадках контакта шины с дорогой. На неподвижных площадках/?^
представляют собой силы сцепления Ясц (, а на скользящих — силы трения .
Сида сцепления Ясц1 переменна и изменяется от нуля до некоторого макси-
мального значения Ясц{1ПВХ, пропорционального элементарной нормальной
реакции на неподвижной площадке R^, а коэффициентом пропорционально-
сти является коэффициент сцепления :
=FC4jni<K.
Сила трения FTp( на скользящей элементарной площадке также перемен-
на, но изменяется в гораздо меньших пределах и зависит от относительной
скорости скольжения. Значение FTpl пропорционально R# и коэффициенту
трения щ?,:
С увеличением скорости скольжения уменьшается.
При плоском движении колеса вектор результирующей всех сил сцепле-
ния и сил трения, возникающих на элементарных площадках контакта, на-
правлен вдоль оси Ох. Следовательно, он представляет собой продольную
реакцию дороги на колесо Rx, а составляющая R? - 0.
Отношение Rx/R? назовем удельной продольной реакцией и обозначим
уДх. На рис. 1.17 показана зависимость уд* от коэффициента скольжения X,
полученная опытным путем. Коэффициент X при этом учитывает упругое
38
1. Основы теории колесного движителя
и внешнее скольжения шины. Восходящая часть графика соответствует посте-
пенному увеличению упругого скольжения, обусловленному возрастанием
момента Мк, и увеличивающейся площади контактной поверхности шины,
проскальзывающей относительно дороги. При определенной величине X = X*
удельная продольная реакция достигает максимума.
УЯл
Рис, 1,17. Зависимость удельной продольной реакции Ул*
от коэффициента скольжения к
Величину (улх)гаал - ф^тдх называют максижальнылс коэффициентом про-
дольного сцепления колеса с дорогой. Его значение обусловлено совокупным
влиянием элементарных сил сцепления и сил трения на различных площадках
контакта (неподвижных и скользящих). При полном скольжении, когда X = 1,
значение <рг = ф^ определяется лишь силами трения и поэтому представляет со-
бой коэффициент трения скольжения. Значение коэффициента трения
на 10-30 % меньше коэффициента сцепления фхтвх. В теории автомобиля <рх
принято называть коэффициентом сцепления. На дороге с твердым покрытием
максимального значения коэффициент сцепления достигает при X* =0,1-0,2,
а на дорогах с деформируемой поверхностью X* может доходить до 0,5.
В справочной литературе обычно приводятся значения фх> определяемые
экспериментально (табл. 1.2).
На дороге с твердым покрытием боль-
шое влияние на коэффициент фх оказывает
шероховатость и влажность поверхности,
рисунок протектора, степень изношенно-
сти шины, наличие грязи или ледяной
корки. Влияние давления воздуха в ши-
нах зависит от вида и состояния поверхно-
сти дороги. На дороге с твердым покрыти-
ем максимальное значение <рх достигается
при определенном давлении воздуха, а на
деформируемых поверхностях <рл возрас-
тает с уменьшением давления благодаря
увеличению площади контакта. Недоста-
точная величина <рх является причиной
многих дорожно-транспортных происше-
ствий.
Таблица 1.2
Коэффициенты сцепления
Дорожные условия Ф*
Сухой асфальт и бетон 0,70-0,80
Мокрый асфальт 0,46-0,60
Мокрый бетон 0,60-0,70
Гравийная дорога 0,50-0,55
Грунтовая дорога:
сухая 0,40-0,60
мокрая 0,20-0,40
Уплотненный снег 0,16-0.20
Лед 0,07-0,15
1.6. Сцепление колеса с дорогой
39
Коэффициент сцепления зависит прежде всего от рода и состояния сцеп-
ляющихся тел — шины и опорной поверхности. На сухих твердых и относи-
тельно ровных опорных поверхностях, где контакт шины с опорной поверх-
ностью осуществляется лишь по внешней поверхности шины, коэффициент фж
в основном зависит от свойств опорной поверхности. Это объясняется тем,
что фрикционные свойства всех шин почти одинаковы. Некоторое различие
коэффициентов фх может быть следствием неодинаковой формы и направле-
ния рисунка протектора. Продольные канавки протектора увеличивают сце-
пление Шины в боковом направлении, а поперечные — в продольном.
Коэффициент фх также зависит от площади контакта шины с опорной по-
верхностью. Объясняется это тем, что с увеличением площади контакта воз-
растает количество микронеровностей дороги, покрываемых шиной.
При наличии на поверхности дороги водяной пленки может наступить
явление аквапланирования, заключающееся в том, что вода не успевает
вытесняться из зоны контакта шины с дорогой. На мокрых дорогах уже .при
толщине пленки влаги около 0,2 мм начинается заметное снижение коэффи-
циента <рх. С увеличением толщины водяной пленки на части контактной по-
верхности шины начинает действовать подъемная гидродинамическая сила Fn
(рис. 1.18) и непосредственно с поверхностью дороги взаимодействует лишь
часть поверхности контакта. Чем больше толщина водяной пленки, тем мень-
ше фх. Поэтому при испытаниях шин на мокрой дороге для определения коэф-
фициента фх толщину водяной пленки нормируют (обычно принимают 1 мм).
Рис. 1.18 Схемы взаимодействия колеса с мокрой дорогой:
а — при частичном контакте шины с поверхностью дороги;
б — при полном отсутствии контакта
Зависимость коэффициента сцепления на мокрой опорной поверхности от
скорости автомобиля и удовлетворительно описывается эмпирической фор-
мулой
Л ku
Фх ~ Фхгеах * 7
I ZxPx
где k — опытный коэффициент, зависящий от конструкции шины, типа и со-
стояния опорной поверхности (ровности дороги, формы площадки контакта,
неравномерности контактного давления по ширине опорной площадки коле-
са, вязкости жидкости); I* — длина площадки контакта; р* — среднее по ши-
рине опорной площадки давление.
Как видно, величина <рх линейно снижается с ростом скорости автомобиля
и при определенном ее значении становится равной нулю. Тогда колесо под
1. Основы теории колесного движителя
действием гидродинамических сид как бы всплывает и начинается его аква-
планирование. Скорость, при которой водяной слой распространяется на всю
иону контакта, называется скоростью аквапаанирования.
Если на дороге имеется пленка грязи, то в связи с более высокой ее плотно-
стью по сравнению с водой подъемная сила увеличивается и коэффициент <рх
снижается в еще большей степени.
Склонность к аквапланированию зависит от толщины водяной пленки,
скорости автомобиля, формы рисунка протектора, его износа, давления, ока-
зываемого шиной на дорогу. Широкопрофильные шины более подвержены
аквапланированию. При аквапланировании автомобилем невозможно управ-
лять и производить торможение, так как колеса скользят по поверхности
воды и касательные реакции практически равны нулю.
В табл. 1.8, заимствованной из [1], приведены данные по коэффициентам
сцепления в различных дорожных условиях. Эти данные можно использо-
вать для дорог с высококачественным покрытием.
При воздействии на колесо поперечной силы Fv может возникнуть боковое
скольжение. Коэффициент поперечного сцепления <ру несколько выше коэф-
фициента продольного сцепления фх, однако их различием обычно пренебре-
гают. Значение <р„ зависит от тех же факторов, что и <рх.
Поскольку предельное значение коэффициента сцепления ограничено, то
это приводит к ограничению величины касательной реакции дороги
^ = •^+«2 (1.61)
Таблица 1.3
Коэффициенты сцепления <р, для пневматических шин
на различных поверхностях дороги
Скорость автомобиля, км/ч Состояние шины Состояние дорожного полотна
сухое мокрое, яодявде пленка 0,2 мм сильный дождь, «оде- вая пленка 1 мм лужи, водяная пленке 2 мм лед
50 Новая 0,85 0,65 0,55 0.5 0.1
Изношенная 1 0,5 0,4 0,25 И менее
90 Новая 0,8 0,6 0.3 0,05 —
Изношенная 0,95 0,2 0,1 0,05 —
180 Новая 0,75 0,55 0.2 0
Изношенная 0,9 0,2 0,1 0 -
Из формулы (1.61) следует, что воздействие поперечной силы Fv на колесо
и возникающей при этом реакции Яу может значительно уменьшить продоль-
ную реакцию дороги Rx, а следовательно, и силу Fx взаимодействия колеса
с корпусом автомобиля. При/^ =0 получим
Rx 5 фхЛ,.
(1.62)
1.6. Смешение колеса с дорогой 41
II « III ................ И.................. .. ...........
При плоском движении колеса продольная реакция дороги уравнове-
шивается продольной силой воздействия колеса на дорогу . Сила пред-
ставляет собой продольную силу отталкивания колеса от опорной поверхности
дороги. Природа силы Fa1 и реакции Rx одинакова — это результирующие сил
сцепления на поверхности контакта колеса с дорогой. Для ведущего колеса
(см. рис. 1.14) направление вектора реакции совпадает с направлением
вектора скорости , а направление вектора F„ противоположно. Действие
силы F„ ведущего колеса аналогично действию продольной составляющей
силы отталкивания пешехода от опорной поверхности. Различие состоит лишь
в том, что сила F„ колеса имеет непрерывный характер, а сила отталкивания
пешехода — дискретный характер. В связи с этим отметим, что наряду с ко-
лесным движителем в мобильных машинах используется также шагающий
движитель.
У тормозящего колеса (см. рис. 1.16) направления векторов Д; и взаим-
но противоположные, а векторов и tJK — совпадающие.
Из выражений (1.61) и (1.62) следует, что при отсутствии контакта колеса
с дорогой Rx = Ry = Kg = 0, следовательно, = 0; Fx - 0; Fr - 0; = 0.
Выражения (1.61) и (1.62) позволяют определить предельные (экстремаль-
ные) условия работы колеса на различных режимах. Рассмотрим установив-
шееся равномерное движение колеса (vK = conet, Юк = const, £* =0, = 0)
при условии^, = 0.
Ведомое Колесо. Согласно выражению (1.58), Fx = М/о/гк0. Используя выра-
жения (1.29) и (1.62), получаем Fx = foR2 S Отсюда можно записать условие
равномерного качения ведомого колеса без скольжения относительно дороги
/о^Фх- (1.68)
Это условие в большинстве случаев выполняется (см. табл. 1.1-1.3). Оно
может быть нарушено лишь при движении по гладкому льду при пониженном
давлении воздуха в шинах или при движении по мягкому грунту с большими
углами поворота ведомых управляемых колес, когда возникает бульдозер-
ный эффект нагребания грунта, а также при аквапланировании.
Ведущее колесо. Определим максимальный момент , который может
реализовать ведущее колесо, учитывая ограничение (1.62). Этот момент назы-
вают моментом ведущего колеса по сцеплению с дорогой н обозначают М
Значение момента Мя соответствует предельной силе сцепления 1?^ колеса
с опорной поверхностью. Сила 74,, в соответствии с выражением (1.62)равна:
Rx<t = Фх"«Л- <1.64)
Для определения момента Л/К.,ф подставим в уравнение (1.55) предельное
значение продольной силы fxta,x = R^ и значение Mfx из формулы (1.47), пре-
небрегая различием между гк и гк0:
= *" М (t ~ (фхгпах + /в)7?*б<0 » (1.65)
где — момент предельной силы сцепления Rxv колеса с дорогой относи-
тельно оси вращения колеса:
ЛГф — ф*
(1.66)
п
1. Основы теории колесного движителя
Поскольку при возникновении внешнего скольжения колеса коэффици-
ент сцепления фг изменяется в пределах <pi6 <<рж фГ111ау, то в общем случае
формулы (1.64) и (1.66) целесообразно записать в виде:
Д^ = фЛ; (1-67)
(1.68)
Если подводимый к ведущему колесу момент AfK-B > Л/К.,ф, то наступает
буксование колеса, а избыток этого момента ДМК1В = Л/* B-AfK.»p согласно
уравнению (1.55), идет на увеличение MjK. В этом случае угловое ускорение
колеса Ек >0 и увеличивается его угловая скорость <ок, однако скорость посту-
пательного движения не возрастает, а может даже уменьшаться, вплоть до
полной остановки колеса, когда ок = 0 и Л. — 1. Так как сила тяги ведущего ко-
леса по модулю равна силе сопротивления корпуса Fr, то ее предельное зна-
чение также ограничено сцеплением колеса с дорогой: FTQ> = <pAJ?7 = фд.Е7.
Тормозящее колесо. Максимальный момент тормозного механизма, ко-
торый может реализовать тормозящее колесо по условиям его сцепления
с опорной поверхностью, определим, используя формулы (1.60), (1.64),
(1.66) и (1.47):
Мк.т« - М^-М(т = . (1.69)
где /т — коэффициент сопротивления качению тормозящего колеса.
Сравнивая выражения (1.65) и (1.69), можно констатировать, что
Мк.и1р > Мк.тф • Как отмечалось в параграфе 1.4, коэффициенты [а и Д зависят
от одних и тех же величин и определяются по аналогичным формулам. Пре-
небрегая различием между значениями /в и ft, получаемым соответственно
при .'Vf КЛ1ф и Мк.тф, найдем разность между этими моментами:
ДМ = А^к.шР = 2/Яло = 2Mf
Следовательно, ведущее колесо позволяет реализовать больший момент,
чем тормозящее, что обусловлено различным влиянием сопротивления каче-
нию на величину продольной реакции дороги. Согласно выражениям (1.65)
и (1.68), прий7 - const получаем:
Л7ф = Af кя1р — М [ = Мк ,7ф + Mf.
Следовательно, у ведущего колеса способствует увеличению реализуе-
мого момента Мк.яф, а у тормозящего — уменьшению Ми Тф.
Если воздействующий на колесо тормозной момент Л7К т > Л/К.тф, то насту-
пает юз колеса. Избыток тормозного момента приводит к быстрому уменьше-
нию угловой скорости колеса <пк. При га,. =0 колесо будет заблокировано
тормозным механизмом и начнется полное скольжение, при котором коэф-
фициент скольжения A. — 1. При этом скорость центра колеса ок 0 и будет оп-
ределяться скоростью движения автомобиля о.
При AfK1,>AfKW> или AfKT >М„..ГФ режим работы колеса становится не-
управляемым, следовательно, и неустойчивым. Коэффициент скольже-
ния колеса X при этом быстро возрастает, начиная от Л - Л* и кончая Л - J
(см. рис. 1.17).
1,7. Баланс мощности и КПД ведущего колеса
43
1.7. Баланс мощности и КПД ведущего колеса
Ведущее колесо автомобиля представляет собой механизм, преобразую-
щий вращательное движение колеса в поступательное движение автомоби-
ля. К ведущему колесу от двигателя автомобиля через трансмиссию подво-
дится энергия. Часть этой энергии используется для выполнения полезной
работы по перемещению автомобиля и обеспечению заданных параметров его
движения, другая же часть затрачивается на компенсацию потерь, обуслов-
ленных сопротивлением качению и внешним скольжением, колеса.
Эффективность работы колеса по передаче и преобразованию энергии оце-
нивается коэффициентом полезного действия (КПД). Основным параметром
потока энергии при ее передаче через механизмы автомобиля является мощ-
ность — энергия в единицу времени.
Составим уравнение баланса мощности ведущего колеса при движении ав-
томобиля по горизонтальной недеформируемой опорной поверхности.
Мощность — скалярная алгебраическая величина, поэтому баланс мощ-
ности имеет следующую формулировку: алгебраическая сумма мощностей
всех внешних сил и моментов, воздействующих на колесо как элемент систе-
мы «автомобиль — внешняя среда», с учетом мощности потерь на внешнее
скольжение, равна нулю:
4.» + Рх + Pf9+PjK + Р, = О, {1.70)
где Ркл — мощность, подводимая к ведущему колесу; Рх — мощность, переда-
ваемая от колеса к корпусу автомобиля; — мощность, затрачиваемая на
преодоление сопротивления качению ведущего колеса; — мощность, обу-
словленная неравномерностью вращения колеса; Рв — мощность потерь на
трение при скольжении колеса относительно опорной поверхности.
На рис. 1.14 показана система сил и моментов, воздействующих на веду-
щее колесо.
При вычислении мощности воспользуемся формулами (В. 1) и (В.2).
Мощность, подводимая к колесу:
х МсовМкв, (о у = Мк,в<ок. (1.71)
Мощность, передаваемая от колеса к корпусу автомобиля, затрачивается
на преодоление сопротивления движению корпуса и характеризует полез-
ную работу ведущего колеса. Эта мощность вычисляется по формуле
Рх = f^B coa(Fx, , (1-72)
где Fx — сила сопротивления движению корпуса автомобиля, учитывающая
воздействия внешней среды на корпус и сопротивление качению ведомых ко-
лес автомобиля.
Сила Fx, как отмечалось в параграфе 1.6, уравновешивается силой тяги ве-
дущих колес FT. Согласно выражению (1.65),
_ ЛГнЯ-М/.-ЛГ;,.
Fx = ——----г—---(1.73)
гк0
♦4 1. Основы теории колесного лвижителя
Скорость колеса при отсутствии внешнего скольжения
”к « (1.74)
а при качении с внешним скольжением
ж “кПл(1-Х.), (17Б)
где X, — коэффициент скольжения ведущего колеса, вычисляемый По фор*
муле (1.21).
Учитывая выражения (1.73)-(1,7б), получаем следующие формулы для
вычисления мощности Рх\
□ при отсутствии внешнего скольжения
Рх = — (MKil — М ft — ^>к.ги/гк^1 (1-76)
□ при качении с внешним скольжением
Рх - "(Afк.« - Mf, - М1х) (йк(1 - Хв). (1.77)
Мощность потерь на качение ведущего колеса
Р/л = Aifi(OxCOB^.Mf>><6lt) = (1.78)
Момент сопротивления качению Mfx при равномерном движении колеса
вычисляется по формуле (1.47), а при неравномерном Из Л/К.ж необходимо вы-
честь значение инерционного момента .
Мощность, обусловленная неравномерностью вращения колеса, опреде-
ляется по формуле
Af (ок cos(MjK, <вк у (1.79)
Вектор инерционного момента М;х определяется по формуле (1.Б2). Очевид-
но, что знак мощности Р/к зависит от взаимного направления векторов угло-
вой скорости й),, и углового ускорения колеса е*. При ускоренном вращении
колеса направления этих векторов совпадают и тогда значение 7}к отрица-
тельно, так как на разгон колеса затрачивается энергия. При замедленном
вращении колеса энергия, затраченная на его разгон, возвращается и может
быть использована для преодоления сопротивления движению корпуса авто-
мобиля. Значение вычисляется по формуле
P/к = -Jkc)k^K (1.80)
at
Мощность потерь, обусловленных внешним скольжением колеса:
Р, =7?^,сов(дх,б,) = -Rxvtt (1.81)
где v, — скорость скольжения ведущего колеса относительно опорной по-
верхности.
Скорость скольжения о,, согласно выражению (1.21);
“ УкО^.» = ^к^кО^-в- (1-62)
1.7. Баланс мощности и КПД еелушего колеса
45
Продольная реакция Ях по модулю равна силе Fx, что следует иа условий
равновесия сил, действующих на ведущее колесо. Подставив значение Fx и и,
в выражение (1.81), получим
Р,=(МК.В-М/В-М/К>ВХВ. (1.83)
КПД ведущего колеса — скалярная положительная величина, вычисляе-
мая по формуле
Пк=Мй (1-»4)
КПД обычно определяют на установившемся режиме при постоянной уг-
ловой скорости . В этом случае = 0.
При качении колеса без внешнего скольжения на основе формулы (1.84)
получаем
а(Мв.,-М„)гв (1.85)
Введем обозначения:
nf=(MB.B-M,B)/Mk.B: (1.86)
П.У = Гк/Гио, (1.87)
где i)f — составляющая КПД, учитывающая потери, обусловленные сопро-
тивлением качению колеса; — составляющая КПД, учитывающая поте-
ри, обусловленные упругим скольжением.
С учетом (1.86)и (1.87) выражение (1.85) можно записать в виде
Пк-ПНЪу- (1-88)
При возникновении внешнего скольжения Рх вычисляется по формуле
(1.77), тогда
Пк = , (1.89)
л*к.в
где т], — составляющая КПД, учитывающая потери, обусловленные внеш-
ним и упругим скольжением колеса:
Т|, - 1-Хв. (1.90)
Используем приведенные формулы для оценки КПД ведущего колеса
с шиной 220-508 при движении по дороге с твердым покрытием. Примем
Ft = 12250 Н, Фхпих = ОД
На рис. 1.19, а показаны полученные графики зависимостей КПДт)к от
вращающего момента Мж.в. Характеристики 1 и 2 получены с учетом влияния
упругого скольжения на коэффициент сопротивления качению, т.е. с учетом
составляющей формулы (1.47), а характеристика 3 — без учета. Пренебре-
жение fv приводит к значительной погрешности определения Г|в при боль-
ших значениях Мк.в. Характеристика 1 получена при сшо = 1,3-105 Нм/м,
46
1. Основы теории колесного движителя
Рис. 1.19. Зависимости КПД ведущего колеса от вращающего момента:
а — зависимости ти от Мк.,; б — зависимости и т), от AfK.B;
1—с учетом f,r при сш о =1,3 106; 2 — с учетом fty при сш,0 =2 10s;
3 — без учета Ду (только /0)
а характеристика 2 — при сшл = 2 -105 Н м/м. Снижение окружной жестко-
сти шины понижает КПД ведущего колеса.
Карис. 1.19, б показаны составляющие ty, Лву и Лз прис„ГГ| = 2 106 Н - м/м.
При малых и средних значениях сопротивления движению колеса, опреде-
ляющих величину момента Мк„ наибольшее влияние на снижение КПД ока-
зывает сопротивление качению. В тяжелых условиях движения автомобиля
при больших значениях Мкл существенно снижается составляющая д,, обу-
словленная внешним скольжением.
Графики на рис. 1.19, а и б построены для работы колеса в доэкстремаль-
ной области при Хв <Хв(см. рис. 1.17). Дальнейшее увеличение коэффициен-
та скольжения при Хв > Хв приводит к неустойчивой работе колеса с резким
уменьшением Т|к и может закончиться полным буксованием, при котором
Пк ®0.
1.8. Экспериментальное определение параметров
и характеристик шин
При испытаниях шин определяют параметры и характеристики, необхо-
димые для моделирования и исследования взаимодействия колеса с опорной
поверхностью.
Испытания шин и колес проводят на стендах в лабораториях, с помощью
специальных динамометрических тележек на дорогах и непосредственно на
автомобилях. В последнее время все шире входят в практику испытания шин
на масштабных моделях. В этом случае закономерности, полученные на моде-
лях, переносят на полноразмерные шины с учетом масштабов модели и суще-
ствующих законов подобия.
1.8. Экспериментальное определение параметров и характеристик шин
47
Для определения радиальной жесткости шины используют пресс, имею-
щий механизм нагружения и систему регистрации нормальной нагрузки Ft
и радиальной деформации шины кг. Нагрузка создается гидравлическим ци-
линдром и изменяется с некоторым шагом. Одновременно измеряют значе-
ния F, и й, и строят график зависимости кг = /(F,). Замеры выполняют как
при увеличении нагрузки, так и при ее уменьшении. В результате получают
характеристики, показанные на рис. 1.20 [21]. Испытания проводят при не-
скольких давлениях воздуха в шине и повторяют по несколько раз с тем, что-
бы обеспечить достаточную достоверность результатов.
Ft----------
Рис. 1.20. Нагрузочная характеристика шины
На таком же стенде можно определять статический радиус колеса, пло-
щадь контакта шины с опорной поверхностью и эпюры распределения нор-
мальных давлений и касательных напряжений по контактной площадке.
Для определения площади контакта шину покрывают краской, а под шину
подкладывают бумагу, после чего по отпечатку на бумаге измеряют полную
контурную площадь контакта и площадь по выступам рисунка протектора.
Для записи эпюр распределения нормальных давлений и касательных на-
пряжений применяют специальные измерительные преобразователи, уста-
навливаемые в опорной поверхности или в протекторе шины. Для измерения
напряжений в контакте движущегося колеса используют тензорезисторы
и пьезоэлектрические преобразователи.
Одновременно с регистрацией напряжений выявляют проскальзывание
элементов протектора шины фотографированием поверхности контакта через
прозрачную опорную поверхность с нанесенной на нее масштабной сеткой.
Для определения радиусов качения, коэффициентов сопротивления каче-
нию и сцепления широко используются динамометрические тележки, схема
одной из которых показана на рис. 1.21. Испытания проводятся на прямоли-
нейном горизонтальном участке дороги с твердым покрытием.
4В
1. Основы теории колесного движителя
Рис. 1 Л. Динамометрическая тележка для испытания шин
Тележка буксируется автомобилем-тягачом 1. Нормальная нагрузка Fz на
испытуемое колесо 4, установленное в раме 5 тележки, создается грузами 8.
С помощью специального привода 6 можно формировать вращающий момент
Мк, воздействующий на испытываемое колесо, что в сочетании с продольной
силой Fx, передаваемой через динамометрическое устройство 2, обеспечивает
возможность проведения испытаний в любом режиме качения колеса. Система
привода обеспечивает регулирование величины момента в диапазоне из-
менения от нуля до максимального значения по сцеплению колеса с дорогой.
Вращающий момент измеряется тенэореэисторами 3, наклеенными на
тензометрический вал. Токосъемник 7 позволяет снять сигналы тензореэи-
сторов с вращающегося вала и передать в магнитограф или осциллограф для
последующей их обработки.
При определении радиуса качения в любом режиме работы колеса измеря-
ют путь, пройденный колесом, и число оборотов колеса, совершенных на
этом пути. Для измерения пути используют прибор «путь — скорость — вре-
мя». Прибор снабжен специальным тарированным колесом («пятое колесо»)
с фиксированным значением радиуса качения. С этим колесом посредством
гибкого вала связано устройство, формирующее заданное количество им-
пульсов тока за один полный поворот колеса, что позволяет вычислить число
оборотов «пятого колеса» на пройденном пути. Импульсы тока передаются
регистрирующей аппаратуре, а их количество фиксируется счетчиком. Ана-
логичным устройством определяется число оборотов испытываемого колеса
на том же отрезке пути. Одновременно регистрируется время. Автоматиче-
ская аппаратурная обработка полученных результатов измерений позволяет
определить пройденный путь, скорость и ускорение автомобиля, а также ра-
диус качения испытываемого колеса.
Радиус качения определяется по формуле
Г“ = 2xN’
где а — путь, пройденный колесом, м; N — число оборотов, совершенных ко-
лесом на этом пути.
1.8. Экспериментальное определение параметров и характеристик шин 49
Если колесо отъединено от привода, то показание динамометра JFe равно
продольной силе Fx, необходимой для качения колеса в ведомом режиме
(см. рис. 1.12). Тогда, согласно формуле (1.30), коэффициент сопротивления
качению ведомого колеса
где Ft — нормальная нагрузка на колесо с учетом массы самого колеса.
Если к колесу подводится вращающий момент Мк, направление которого
совпадает с направлением угловой скорости вращения о^,, то испытываемое
колесо будет работать в ведущем режиме. Коэффициент сопротивления каче-
нию ведущего колеса можно вычислить по формуле
F,
При использовании формулы (1.12) для вычисления радиуса качения ве-
дущего или тормозящего колеса необходимо знать коэффициент окружной
жесткости шины сшл. Он может быть определен при испытаниях шины. Для
этого необходимо в процессе испытаний при двух различных значениях вра-
щающего момента МК1 и Мк2 определить радиусы качения колеса гк1 и в ве-
дущем режиме, исключив при этом возможность возникновения внешнего
скольжения колеса. Для выполнения этого условия значения моментов не
должны превышать (0,4-0,6)МКВф, где — момент ведущего колеса по
сцеплению с дорогой. Значение сшл вычисляется по формуле
г —
СШ.Р-----
Гк1 —
Динамометрическая тележка позволяет также определить коэффициент
продольного сцепления <р2 ведущего колеса с опорной поверхностью. Опыты
проводятся следующим образом. Уменьшают вращающий момент двигателя
вплоть до полного отключения двигателя от ведущих колес. В случае необхо-
димости на автомобиле-тягаче даже включают тормоза. Одновременно уве-
личивают вращающий момент испытуемого колеса Мк. Испытание и замеры
проводят до полного буксования колеса. Коэффициент сцепления находят из
выражения
Ф* = Fffi/Fft
где Едв — продольная сила, зафиксированная динамометром при полном бук-
совании колеса. '
Необходимо отметить, что во всех экспериментах регистрируемые изме-
рительными приборами величины не являются установившимися, а непре-
рывно изменяются во времени. Поэтому обработка экспериментальных дан-
ных требует применения научно обоснованных методик и осуществляется на
ЭВМ по соответствующим программам.
Коэффициенты сопротивления качению и сцепления определяют также
на стенде с беговым барабаном (рис. 1.22). Барабан, по которому катится
50
1. Основы теории колесного движителя
колесо, имитирует дорогу. Электродвигатель 2
вращает колесо 1, опирающееся на барабан 3,
а тормозной генератор 4 создает изменяемое по
желанию экспериментатора сопротивление ка-
чению колеса.
Недостатками стенда с беговым барабаном яв-
ляются наличие кривизны у поверхности, ими-
тирующей дорогу, и несоответствие покрытия
барабана фактическому дорожному покрытию.
Этих недостатков лишены стенды с ленточными
опорно-приводными устройствами, имитирую-
щими «бегущую дорогу».
Рис. 1.22. Стенд с беговым
барабаном
Вопросы для самоконтроля
1. Назовите и охарактеризуйте режимы качения колеса.
2. Назовите и охарактеризуйте радиусы колеса.
3. От каких факторов зависят статический и динамический радиусы колеса?
4. От каких факторов зависит радиус качения колеса? Как определяется его зна-
чение?
В. Объясните физическую сущность явления упругого скольжения колеса.
6. Назовите силы и моменты, действующие на колесо при прямолинейном дви-
жении.
7. От каких параметров зависит скорость колеса? Как определяется ее значение?
8. Какие факторы определяют сопротивление качению колеса?
9. Что такое коэффициент сопротивления качению колеса? Как определяется
его значение для ведомого, ведущего и тормозящего колес?
10. Назовите значения коэффициента сопротивления качению для характерных
дорожных условий.
11. Как определяется момент сопротивления качению для ведомого и ведущего
колес?
12. Напишите уравнения движения ведомого, ведущего и тормозящего колес
и объясните характер взаимодействия факторов воздействий на колесо.
13. Что такое сила тяги ведущего колеса и тормозная сила колеса? Где находятся
точки их приложения и как направлены векторы этих сил?
14. Что такое коэффициент сцепления колеса? От каких факторов зависит коэф-
фициент сцепления?
15. Назовите значения коэффициента сцепления колеса для характерных до-
рожных условий.
16. Назовите составляющие баланса мощности ведущего колеса и напишите фор-
мулы для их определения.
17. Что такое КПД ведущего колеса? От каких факторов зависит КПД ведущего
колеса и как он определяется?
18. Как проводятся эксперименты по определению радиуса качения колеса, ко-
эффициента сопротивления качению, коэффициента сцепления, коэффици-
ента окружной жесткости шины?
Прямолинейное движение автомобиля
Оценка тягово-скоростных и тормозных свойств автомобиля, топливной
экономичности, проходимости осуществляется в процессе моделирования
прямолинейного движения автомобиля. При прямолинейном движении пред*
полагается, что центр масс автомобиля перемещается по прямой линии, рас-
положенной в неподвижной вертикальной плоскости. В этом случае все силы
воздействий внешней среды на автомобиль расположены в этой плоскости,
а векторы моментов внешних воздействий перпендикулярны плоскости.
В данной главе рассмотрены закономерности формирования внешних воз-
действий и получено дифференциальное уравнение прямолинейного движе-
ния автомобиля, которое позволит в последующих главах проводить анализ
процессов движения и определять показатели эксплуатационных свойств ав-
томобиля.
t
2.1. Система сил и моментов, действующих на автомобиль при
прямолинейном движении
Движение автомобиля как единой системы, в которую входят все его меха-
низмы, включая колеса, происходит под воздействием сил и моментов внешней
среды. Силы взаимодействия механизмов автомобиля как элементов системы
являются ее внутренними взаимно уравновешивающимися силами и поэтому
непосредственно на движение автомобиля влияния не оказывают. Их влия-
ние опосредствовано и обусловлено взаимодействием автомобиля с опорной
поверхностью дороги и воздушной средой. В связи с этим силы взаимодейст-
вия колес с корпусом автомобиля Fxl, Ftl, а также силы тяги ведущих колес FT1
(или тормозные силы колес — на тормозном режиме) как внутренние силы
системы не относятся к системе сил, действующих на автомобиль.
При составлении модели системы внешних сил и моментов, действующих на
автомобиль при прямолинейном движении, примем следующие допущения:
□ автомобиль симметричен относительно продольной вертикальной плос-
кости, проходящей через его центр масс;
□ левые и правые колеса одноименных мостов имеют одинаковые нагруз-
ки и находятся в одинаковых дорожных условиях;
□ конфигурация автомобиля изображается в виде плоской фигуры;
□ опорная поверхность дороги представляется в виде прямой линии, на-
клоненной под углом а к горизонту;
□ упругие свойства подвески не учитываются и колебания кузова не про-
исходят.
В результате центр масс автомобиля С и все точки приложения сил внеш-
них воздействий совершают прямолинейные перемещения, параллельные
поверхности дороги.
52
2. Прямолинейное движение автомобиля
Выберем две системы координат: неподвижную XOZ и подвижную хСг,
связанную с автомобилем. Начало подвижной системы координат находится
в центре масс автомобиля С, ось Схперемещается параллельно оси ОХ, а ось
С? — параллельно оси OZ. Неподвижная система координат предназначена
для определения перемещения автомобиля и параметров характеристик его
движения — скорости и ускорения. Подвижная система координат необхо-
дима для ориентации направления векторов внешних воздействий относи-
тельно корпуса автомобиля и определения проекции векторов сил на оси этой
системы координат.
Система внешних сил и моментов, действующих на автомобиль при приня-
тых условиях, показана на рис. 2.1. В нее входят: G* — сила тяжести автомо-
биля; — сила сопротивления воздуха; _Fnp — сила сопротивления прицепа;
Й*1, Йха — продольные реакции опорной поверхности дороги; — нор-
мальные реакции опорной поверхности; — моменты сопротивлений
качению колес. Направления продольных реакций Rxl и Дд на рис. 2 Л вы-
браны исходя из предположения, что передние колеса автомобиля ведомые,
а задние — ведущие.
На параметры движения автомобиля (скорость и ускорение) также влияют
сила инерции поступательно движущейся массы автомобиля Fjn и инерцион-
ные моменты колес двигателя М,д и трансмиссии (на рис. 2.1
и Afj-rp не показаны, так как они действуют в поперечной вертикальной
плоскости).
Во многих учебниках по теории автомобиля продольную реакцию опорной
поверхности на ведущие колеса называют силой тяги автомобиля. Одна-
ко, как показано в параграфе 1.5, при движении без внешнего скольжения
2.2 внешние воздействия на автомобиль
53
колес работа реакцийВх( равна нулю. Так как — одно иэ воздействий внеш-
ней среды на автомобиль, то ато означает, что не внешняя среда сообщает
энергию, необходимую для движения автомобиля. Источник энергии нахо-
дится на самом автомобиле. Это его двигатель, энергия которого передается
ведущим колесам и реализуется ими посредством суммарного момента веду-
щих колес Мк в при их взаимодействии с опорной поверхност : дороги.
В связи с этим момент можно назвать тяговым моментом автомоби-
ля. Двигатель обеспечивает покрытие затрат энергии на преодоление всех со-
противлений движению автомобиля. По существу Л?„.в — это внутренний
момент автомобиля, так как он формируется источниками воздействий, на-
ходящимися в автомобиле, и воздействует на один иэ его элементов — веду-
щее колесо. Но этот момент может быть реализован только при условии
взаимодействия с внешней средой (опорной поверхностью), и только он обес-
печивает возможность преодоления сопротивлений движению автомобиля,
создаваемых внешней средой. Поэтому вращающий момент МКЛ входит
в систему сил и моментов, представленных на рис. 2.1. Необходимо иметь
в виду, что момент Мк ,в — это параметр потока энергии, поступающей к веду-
щему колесу, его потенциал.
Таким образом, при моделировании процесса движения автомобиля необ-
ходимо учитывать не только внешние воздействия, но и воздействие источника
энергии с учетом потерь при передаче энергии от двигателя к ведущим колесам.
При возникновении внешнего скольжения реакции J?x( будут совершать
работу. Однако эта работа будет отрицательной, так как реакцииЛх( в данном
случае — это силы трения. Поэтому внешнее скольжение сопровождается
дополнительными потерями, компенсация которых на тяговом режиме осу-
ществляется за счет энергии двигателя, а на тормозном режиме — за счет
кинетической энергии автомобиля.
2.2. Внешние воздействия на автомобиль
Внешние воздействия на автомобиль при его движении формируются
внешней средой — опорной поверхностью и воздушной средой. Внешняя сре-
да создает сопротивления движению автомобиля. Необходимо также учиты-
вать силы гравитационного тяготения Земли — силы тяжести, которые тоже
относятся к внешним воздействиям.
Рассмотрим характеристики внешних воздействий и установим их зави-
симости от параметров автомобиля и внешней среды.
Сила тяжести автомобиля. Сила тяжести обусловлена массой автомобили.
Вектор силы тяжести G* приложен в центре масс автомобиля (точка С на
рис. 2.1) и совпадает по направлению с вектором g;
(2.1)
где ma — масса автомобиля, кг; g — ускорение свободного падения, м/с2.
54
2. Прямолинейное движение автомобиля
Разложим силу Ge на составляющие: Ga = Gtt +Gai. Составляющую G<x,
параллельную поверхности дороги, называют силой сопротивления подъе-
му и обозначают Fh. Модуль этой силы
Fh “G, since = msgeina. (2.2)
где a — угол продольного уклона дороги.
На автомобильных дорогах с твердым покрытием углы «обычно не превы-
шают 4-5°. Тогда ein a *> tga = h, а модуль силы Гд вычисляют по формуле
Г* = m*gh. (2.3)
Сила Д стремится скатить автомобиль под уклон, поэтому ее называют
также скатывающей силой, что соответствует ее физическому смыслу.
В дорожном строительстве величину h называют продольным уклоном
дороги.
При движении на спуске вектор силы Д совпадает по направлению с век-
тором скорости 6, поэтому Д становится движущей силой. В связи с этим
угол а и уклон дороги Л считают положительными при движении автомобиля
на подъеме и отрицательными — на спуске.
Составляющая силы тяжести Gef = mBtfcosa, направленная перпендику-
лярно поверхности дороги, непосредственного воздействия на движение ав-
томобиля не оказывает, так как ее вектор перпендикулярен вектору скорости
и, Но она определяет нормальные реакции дороги и, следовательно, влияет
на сопротивление качению и сцепление колес с дорогой.
Сопротивление качению. Сопротивление качению автомобиля определя-
ется суммарным моментом сопротивления качению всех его колес:
П га
<2-4>
<«1
где fi — коэффициент сопротивления качению /-го колеса (зависит от режима
качения); Rtl — нормальная реакция дороги на i-e колесо; — радиус каче-
ния i-го колеса; п — количество колес автомобиля.
В соответствии с принятыми допущениями относительно модели прямо-
линейного движения автомобиля левые и правые колеса / -го моста объедине-
ны в одно колесо. Поэтому представляет собой суммарную нормальную
реакцию дороги на все колеса i-ro моста. Это же касается и параметров ft и
При движении автомобиля по неровностям дороги возникают колебания
мостов и кузова автомобиля, что приводит к изменению нормальных реак-
ций и к увеличению гистерезисных потерь в шинах. Кроме того, необходимо
учитывать потери в амортизаторах подвески кузова автомобиля. Эти допол-
нительные потери принято учитывать соответствующим увеличением коэф-
фициентов ft. При средних скоростях движения на изношенном асфальтовом
шоссе значение ft возрастает на 5-10 %, на ровном булыжном покрытии — на
30-50, на профилированной грунтовой дороге — на 10-30 %. Кроме того, со-
противление качению зависит от конструктивных параметров шин: количе-
2.2. Внешние воздействия на автомобиль
55
ства слоев и расположения нитей корда, толщины и состояния протектора.
Уменьшение количества слоев корда, толщины протектора, увеличение на*
ружного диаметра шины, применение синтетических материалов с малыми
гистерезисными потерями способствуют снижению сопротивления качению.
С увеличением степени изношенности шины значение f{ уменьшается. Влия-
ние эксплуатационных факторов на величину рассмотрено в параграфе 1.4.
Так как все параметры формулы (2.4) переменные, это создает неудобства
ее использования при проведении сравнительной оценки показателей тяго-
во-скоростных свойств автомобиля. Поэтому обычно пользуются осредненным
значением коэффициента сопротивления качению fa, считая его одинаковым
для всех колес автомобиля. Принимают также одинаковое значение радиуса
качения для всех колес, равное гко- Формула (2.4) в этом случае приводится
к виду
M,=fa ГноЪ, (2.5)
i-i
где/?, — суммарная нормальная реакция дороги на колеса автомобиля.
Значение fa в рассматриваемом случае выбирается из табл. 1.1, полагая
/а = /о»или вычисляется по формуле (1.81).
Для определения/?, спроецируем на осьCz все силы, действующие на авто-
мобиль (см. рис. 2.1). В результате получим
/?, =ЛЛ+ЛЛ -Gat = лц^сова. (2.6)
С учетом выражения (2.6) момент сопротивления качению всех колес авто-
мобиля
Mt - f, r„Qma ясова. (2.7)
При малых углах продольного уклона дороги сона ~ 1, тогда
Mz = 4rKC>mag. (2.8)
При проведении исследовательских работ используется формула (2.4),
а значения ft и rKj вычисляются по формулам, приведенным в главе 1. Учиты-
вается также изменение/?^ в процессе движения по неровностям дороги, обу-
словленное колебаниями мостов и кузова автомобиля, а также влияние на ft
скорости автомобиля.
Сопротивление воздуха. При движении автомобиля воздушная среда ока-
зывает воздействие на его корпус, создавая соответствующее сопротивление
движению. Сопротивление воздуха обусловлено трением в прилегающих
к поверхности корпуса слоях воздуха, сжатием воздуха движущимся автомо-
билем, разрежением воздуха за автомобилем, вихреобразованием в слоях
воздуха, окружающих корпус автомобиля.
В результате взаимодействия корпуса движущегося автомобиля с воздуш-
ной средой на каждой элементарной площадке его поверхности возникают
силы, которые можно разделить на нормальные и касательные составляющие
56
2. Прямолинейное движение автомобили
до отношению к этой площадке. Касательные силы являются силами трения.
Нормальные силы создают давление на поверхность автомобиля. Равнодей-
ствующую всех этих сил называют аэродинамической силой. Она приложена
в некоторой точке корпуса, называемой центром парусности автомобиля.
Аэродинамическая сила определяется по формуле
(2.9)
где си — коэффициент аэродинамической силы (безразмерный); А^ — пло-
щадь Миделя, м2; g — скоростной напор, кг/(м-сг).
В качестве площади Миделя принимают лобовую площадь автомобиля Ал,
равную площади проекции автомобиля на плоскость, перпендикулярную
продольной оси Сх. Приближенное значение лобовой площади автомобиля
можно вычислить по формуле
А, =алВгЯг, (2.10)
где ал — коэффициент заполнения площади; Д, и Нг — наибольшие пшрнна
и высота автомобиля соответственно.
Для легковых автомобилей ал а0,78-0,80, а для грузовых ая =0,75-0,00
(большие значения принимаются для более тяжелых автомобилей).
Скоростной напор вычисляется по формуле
д = (2.11)
где рв — плотность воздуха, кг/м8; оп_, — скорость потока воздуха относи-
тельно корпуса автомобиля, м/с.
Вектор скорости потока воздуха (рис. 2.2)
+ УВ»'
где 0 — вектор, противоположный вектору скорости центра масс автомоби-
ля: и* = -о; ив — вектор скорости ветра.
Рис. 2.2. Схема определения скорости потока воздуха относительно корпуса автомобиля
Вектор аэродинамической силы F„ можно разложить на составляющие,
направленные вдоль осей подвижной системы координат СхнСг. Проекцию
Fax силы на ось Сх называют силой сопротивления воздуха. Значение
силы F^ вычисляют по формуле
Fu,x = 015с±р1А.,и2, (2.12)
где сх — коэффициент обтекаемости (коэффициент лобового сопротивле-
ния); о, — проекция на ось Сх скорости потока воздуха относительно корпуса
автомобиля.
2.2. Внешние воздействия на автомобиль
S7
Определение vx показано на рис. 2.2, из которого следует:
|их| = о-и,сов6, (2.13)
где 0 — угол между вектором О'» и продольной осью автомобиля Сх.
При встречном ветре (рис. 2.2, a}vx больше, чем при попутном (рис. 2.2, б).
Следовательно, встречный ветер увеличивает силу Fu,x, а попутный уменьшает.
Составляющую FW1 аэродинамической силы называют подъемной силой,
так как она у обычных транспортных автомобилей направлена вверх. У ско-
ростных автомобилей (гоночных, спортивных и др.) благодаря специальной
форме кузова она направлена вниз и увеличивает нормальные реакции доро-
ги на колеса, улучшая их сцепление с дорогой. При v £ 100-120 км/ч она не-
велика и ею можно пренебречь.
Кроме аэродинамической силы возникает также аэродинамический мо-
мент Af„:
Afut (2.14)
где т# — коэффициент аэродинамического момента (безразмерный); b — ха-
рактерный линейный размер корпуса автомобиля, м.
Обычно значение Ь принимают равным колее автомобиля В.
Вектор момента Мю, так же как и вектор Fw, приложен в центре парусности
автомобиля. Его можно разложить на составляющие, направленные вдоль осей
координат. В плоской модели автомобиля учитывается только проекция Ми(|
вектора М№ на ось Су, называемая .моментом продольного крена:
Миу = туА^В, (2.15)
где ту — коэффициент момента крена.
Момент М№1/ вызывает перераспределение нормальных реакций на перед-
ние и задние колеса автомобиля и может учитываться при определении про-
дольного крена кузова на упругих элементах подвески.
Коэффициентысх,Су, ся проекций аэродинамической силы на оси координат
и коэффициенты тх, mv, тя проекций аэродинамического момента определя-
ют при продувке модели автомобиля в аэродинамической трубе. Принципи-
альная схема аэродинамической трубы показана на рис. 2.8. Вентилятор
создает поток воздуха, обтекающий модель автомобиля, помещенную в рабо-
чую полость трубы. Специальными измерительными приборами измеряют
силы и моменты, действующие на модель в трех взаимно перпендикулярных
направлениях.
Рис. 2.3. Определение сопротивления воздуха в аэродинамической трубе
5В
2. Прямолинейное движение автомобиля
Рис. 2.4. Влияние
формы теле на лобовое
сопротивление
Сопротивление воздушной среды движению автомо-
биля в основном обусловлено фронтальным давлением
воздуха, формируемым лобовой частью корпуса авто-
мобиля. На рис. 2.4 показана зависимость в условных
единицах лобового сопротивления от конфигурации
кузова простейшей формы [8]. Из схемы видно, что при
удлиненной передней части сопротивление воздуха
уменьшается на 60 %, в то время как при удлиненной
задней — только на 15 %.
На рис. 2.5 изображены схемы обтекания потоками
воздуха корпусов автомобилей, имеющих различные
конфигурации [21]. Испытаниями установлено, что
значения коэффициентов сх, cv, с2итх, mv, т2 в основ-
ном зависят от формы корпуса автомобиля, определяю-
щей характер и скорости создаваемых вихревых потоков воздуха. При этом
возникает повышенное фронтальное давление воздуха перед автомобилем
и пониженное давление позади автомобиля.
При анализе силы сопротивления воздуха Fux можно выделить ряд состав-
ляющих. Составляющую, зависящую от формы корпуса, называют сопро-
тивлением формы. Она достигает 60 % от полной силы Fwx. Сопротивление
поверхностного трения составляет до 10 %, Выступающие части корпуса
(фары, ручки, зеркала и др.) создают дополнительное сопротивление до 1 б %
от . Потоки воздухе в подкапотном пространстве двигателя и в салоне или
кабине создают сопротивление также до 15 % от
На сопротивление воздуха значительное влияние оказывают конфигу-
рации капота, крыльев, ветрового стекла, крыши, боковых стенок кузова,
багажника, днища автомобиля. Для уменьшения сопротивления воздуха
применяют различные аэродинамические приспособления, улучшающие
обтекание корпуса автомобиля потоками воздуха.
Рис. 2.5. Влияние формы автомобиля на воздушные потоки
2.2. Внешние воздействия на автомобиль
59
В процессе проведения испытаний автомобиля плотность воздуха остается
практически постоянной. Приняв р, = const, введем следующее обозначение
произведения постоянных параметров формулы (2.12):
ku = О,5сгр>. (2.16)
Параметр называют коэффициентом сопротивления воздуха. Его
численное значение равно силе сопротивления воздуха, действующей на 1 м2
лобовой площади автомобиля при относительной скорости потока воздуха
1 м/с. Коэффициент^ по определению имеет размерность плотности. В сис-
теме СИ его размерность кг/мэ или Н • с2/м4.
Плотность воздуха на уровне моря составляет 1,225 кг/м8. При испытани-
ях автомобилей в равнинных условиях принимают р. = 1,25 кг/м8.
Зцачениясх и^Ц1 для различных типов автомобилей приведены в табл. 2.1.
Таблица 2.1
Коэффициенты обтекаемости И сопротивления воздуха
Тил автомобиля 4?ж fcu,,H-.cW
Легковые автомобили 0,30-0,60 0,20-0,35
Грузовые автомобили: бортовые 0,90-1,15 0,50-0,70
с кузовом фургон 0,80-1,0 0,50-0,60
Автобусы: капотной компоновки 0,75-0,90 0,45-0,55
вагонной компоновки 0,60-0,75 6,35-0,45
Автопоезда 1,40-1,55 0,85-0,95
Автоцистерны 0,90-1,10 0,55-0,65
Гоночные автомобили 0,25-0,30 0,15-0,20
При использовании коэффициентами, вместо сх формула (2.12) принима-
ет вид
=kltA„vl. (2.17)
Произведение называют фактором обтекаемости автомобиля.
Испытания автомобилей по определению показателей тягово-скоростных
свойств и топливной экономичности проводят в безветренную погоду. Ско-
рость ветра при этом незначительна, не более 8 м/с. Поэтому учитывают
лишь скорость автомобиля и силу сопротивления воздуха вычисляют по
формуле
F,. (2.18)
Сопротивление разгону. При неравномерном движении автомобиля с пе-
ременной скоростью возникают силы инерции поступательно движущих-
ся масс и инерционные моменты масс, совершающих относительные вра-
щательные движения (относительно корпуса автомобиля). При ускорении
«о
2. Прямолинейно» движение автомобиля
автомобиля эти силы и моменты создают дополнительное сопротивление дви-
жению и требуют увеличения затраты энергии на этом режиме движения.
Сила инерции поступательно движущейся массы автомобиля
FJn э (2.19)
где Зии — векторы скорости и ускорения автомобиля соответственно.
Суммарный инерционный момент колес автомобиля
х. СХ* ctf У
где JK1, — суммарный момент инерции всех ведущих колес относительно их
осей вращения, кг - м2; JKpM — суммарный момент инерции всех ведомых ко-
лес; йл „ €КЛ — векторы угловой скорости и углового ускорения ведущих ко-
лес соответственно; й^.,,, ёж., — то же — ведомых колес.
Выражение (2.20) составлено исходя ив предположения, что параметры
всех ведущих колес и соответственно всех ведомых колес одинаковы. В про-
тивном случае необходимо определять инерционные моменты каждого коле-
са в отдельности. В частности, такая необходимость может возникнуть при
моделировании движения автомобиля по неровностям дороги с учетом коле-
баний кузова и мостов для того, чтобы учесть изменения радиусов качения
колес.
При разгоне автомобиля часть мощности двигателя расходуется также на
разгон деталей двигателя и трансмиссии.
Инерционный момент двигателя
(2-21)
ы-Г
।
где — момент инерции двигателя, равный сумме момента инерции махо-
вика и приведенных к нему моментов инерции подвижных деталей двигателя,
кинематически связанных с коленчатым валом; , ед — векторы угловой
скорости и углового ускорения коленчатого вала двигателя.
Инерционный момент А-й вращающейся массы трансмиссии
МЛР* = (2-22)
at
где — момент инерции А-й массы трансмиссии; — векторы угло-
вой скорости и углового ускорения А-й массы.
Выразим угловые скорости 0^,01^ через скорость автомобиля,
полагая, что скорости центров всех колесик равны скорости центра масс авто-
мобиля и:
~ v/rni ~иигр/гк', tOrp* = >
гдегк ^к0 — радиусы качения ведущих и ведомых колес соответственно; итр —
передаточное число трансмиссии; — передаточное число от А-ой массы
трансмиссии до ведущего колеса.
2.2. Внешние воздействия на автомобиль
61
Подставим значения <okIl,o>KII,wA,wtp* в выражения (2.20)-(2.22):
М + (2.23)
к Гл Jdt
*» (2.24)
гК at
Йда-*=^£. (2.2S)
ГК di
Суммарный инерционный момент всех вращающихся масс трансмиссии
M/Tp=_W£lfe> (2.26)
*-Д rK )dt
где пи — количество учитываемых масс трансмиссии.
На рис. 2.1 изображен только вектору и показаны направления векторов
инерционных моментов MjK_, и Л?;к.я. На схеме принято, что передние колеса
автомобиля ведомые, а задние ведущие, поэтому н,
Векторы инерционных моментов М1я и на рис. 2.1 не изображены, так
как их направления совпадают с направлениями осей вращения соответст-
венно вала двигателя и валов трансмиссии и действуют они в поперечной
плоскости.
Сопротивление прицепа. Сопротивление движению прицепа обусловлено
теми же факторами, что и сопротивление движению автомобиля, поэтому оп-
ределяется аналогично.
Сила сопротивления прицепа
*’s.tp = ^Апр + ^/лр /б<0 + ^ыпр + f/rtp + М/х.пр/гкО. (2.27)
где — скатывающая сила прицепа; Mfap — момент сопротивления каче-
нию колес прицепа; Гипр — сила сопротивления воздуха, действующая на
прицеп; — сила инерции поступательно движущейся массы прицепа;
М;к.пу — инерционный момент колес прицепа.
Формулы для вычисления сил и моментов сопротивления движению при-
цепа аналогичны соответствующим формулам для автомобиля. Различается
лишь определение сопротивления воздуха. Коэффициенты обтекаемости сх
и сопротивления воздуха kw зависят не только от формы отдельных звеньев
автопоезда (автомобиля-тягача и прицепов), но и от взаимодействия воздуш-
ных потоков, обтекающих эти звенья. В промежутках между звеньями сверху
и по бокам образуются мощные завихрения. Увеличивается также вихреоб-
разование в нижней части звеньев и за последним прицепом. Поэтому для ав-
топоездов значения коэффициентов сх и на 16-30 % больше, чем для
одиночных автомобилей. У магистральных автопоездов, движущихся с боль-
шими скоростями, на преодоление сопротивления воздуха затрачивается до
50 % мощности двигателя.
62
2. Прямолинейное движение автомобиля
2.3. Внутренние воздействия на механизмы автомобиля
Источником анергии, необходимой для движения автомобиля, является
его двигатель. Количество энергии, вырабатываемой двигателем в единицу
времени, оценивается эффективной мощностью. Параметры мощности —
вращающий момент на валу двигателя Mt, Н м и угловая скорость вращения
вала сйд, рад/с, или частота вращения пд, об/мин. Значения этих параметров
определяют величину мощности двигателя Ре = Ме0)к, Вт. Мощность двигате-
ля Ре и ее параметры изменяются в соответствии с количеством подаваемого
топлива в двигатель.
При передаче энергии двигателя через трансмиссию к ведущим колесам
происходит преобразование параметров потока энергии, в процессе которого
возникают потери, поэтому часть мощности двигателя затрачивается на их
компенсацию. Потери мощности в трансмиссии определяются характером
взаимодействия ее элементов, прежде всего силами и моментами взаимодей-
ствия между различными деталями.
Вращающий момент двигателя, силы и моменты взаимодействия элементов
трансмиссии, момент на ведущем колесе — это внутренние силы и моменты
автомобиля. Для определения суммарного тягового момента ведущих колес
автомобиля AfK B необходимо располагать характеристиками двигателя и ме-
ханизмов трансмиссии.
Характеристики двигателя. На автомобилях применяются в основном
двигатели внутреннего сгорания: бензиновые и дизельные. Их энергетические
свойства принято оценивать скоросшныжи характеристиками, представ-
ляющими собой зависимости эффективной мощности и вращающего момен-
та на валу двигателя от частоты его вращения при установившемся режиме
работы.
Скоростная характеристика, полученная при полной подаче топлива, на-
зывается внешней скоростной характеристикой (ВСХ), а полученные при
неполной подаче топлива — частичными скоростными характеристика-
ми (ЧСХ).
Мощность и вращающий момент на валу двигателя при работе по внешней
скоростной характеристике будем обозначать Pt и Мг соответственно, а на
частичных характеристиках — Рд и Мд.
Скоростные характеристики определяют на специальных тормозных стен-
дах, позволяющих создавать нагрузку и фиксировать значения вращающего
момента и частоты вращения вала двигателя. Изменяя дискретно тормозной
момент, после достижения установившегося значения частоты вращения
= const фиксируют вращающий момент Мес и вычисляют мощность двига-
теля (кВт) по формуле
р - г-п‘М~
п ~ 30000 *
Полученную при испытаниях мощность необходимо привести к нор-
мальным (стандартным) атмосферным условиям, с тем чтобы учесть влияние
2,3. Внутренние воздействия на механизмы автомобиля
63
на энергетические показатели двигателя температуры и давления окружаю-
щего воздуха. При этом мощность Р^ умножают на поправочный коэффици-
ент. Для двигателей с искровым зажиганием поправочный коэффициент Кж
определяют по формуле
X0-®
Р°~Р™9 [Х , (2.28)
Р-Рв.п J ХТс)
где р,р»1П — атмосферное давление и давление водяных паров при испытани-
ях; Ро)Р*.пО — стандартные атмосферное давление и давление водяных паров;
Т — температура воздуха при испытаниях; Го — стандартная температура.
Согласно ГОСТ 14846-81 и стандартам 180 1585 и SAE J 1849, принима-
ются следующие значения стандартных параметров воздуха: ро = 100 кПа;
р»,п0 = 1 кПа; То = 298 К.
По стандарту DIN 70 020 рь = 1013 кПа; 70 = 293К, а коэффициент Ки вы-
числяется по формуле
„ Vt^6
_ I Ро Р».гЛ | * j
I р-Рв.а ДТЬ J
Для дизелей поправочный коэффициент определяют по формуле
где 4 — коэффициент, учитывающий атмосферные условия; fm — коэффици-
ент, учитывающий тип двигателя и его регулировку.
Для дизелей без над дува и с наддувом от нагнетателя с механическим при-
водом коэффициент вычисляется по формуле
/ х/ „ х0-7
г _ | Ро Pb.dO i Г ।
/а — I I *
l Р-Р1.П Mb J
а для дизелей с турбонаддувом и с охлаждением или без охлаждения нагне-
таемого воздуха
/ X0'7/ m Х«
f _ I P<? -P.-rO I | И
l Р-Р..Ч J W
Значение коэффициента fm зависит от параметраqt = q/r, где? — цикловая
подача топлива, отнесенная к рабочему объему двигателя в один литр,
мг/(л цикл); г — отношение давления на выпуске к давлению на впуске ком-
прессора. Для двигателей без наддува г = 1.
При?г <40принимают fm =0,3; при?с >65 — fm = 1,2; при40 <.qc <65эна-
чение fm вычисляют по формуле
fm = 0Х)36?с -1.14.
Значения коэффициента Кк должны находиться в пределах0,9 SКя 51,1.
В стандарте DIN 70 020 принято: Д = Ка; fm = 1.
64
2. Прямолинейное движение автомобиля
На рис. 2.6 похавана типовая ВСХ поршневого двигателя внутреннего
сгорания. Важнейшие параметры ВСХ: максимальная мощность Peiatxt кВт;
максимальный вращающий момент М<ПХЛХ, Н м; вращающий момент при
максимальной мощности МР, Н-м; частота вращения вала двигателя при
максимальной мощности пР, об/мин; частота вращения при максимальном
моменте п^, об/мин; коэффициенты приспособляемости по моменту kM и по
угловой скорости (частоте вращения) k№;
*M = M4n„/Aff; (2.28)
= <йр/®м = (2.30)
Рис. 2.6. Внешняя скоростная характеристика двигателя ввутренвего сгорания
Коэффициенты км и ka характеризуют способность двигателя преодоле-
вать кратковременные перегрузки, обусловленные повышением сопротивле-
ния движению автомобиля, без необходимости переключения на низшую
передачу. Чем больше значения kM uka, тем выше средняя скорость автомо-
биля.
У карбюраторных двигателей при максимальной частоте вращения вала
Пдщлх мощность может быть меньше, чем P<nubX. Тогда пР<пДП£Х, а -
~ па гсдх/^W •
Идеальная ВСХ двигателя отвечает следующим требованиям: мощность
двигателя остается постоянной в рабочем диапазоне частоты вращения вала
двигателя от лд до пв иах, а вращающий момент изменяется по гиперболе.
На рис. 2.7 идеальная характеристика соответствует кривой 4. Характери-
стики дизельного 1 и бензинового 2 двигателей существенно отличаются от
идеальной, что отрицательно сказывается на тягово-скоростных свойствах
Автомобиля. Характеристика газотурбинного двигателя 3 более предпочти-
тельна, особенно для автомобилей, работающих в тяжелых дорожных усло-
виях. Близкую к идеальной характеристику имеет электрический двигатель
постоянного тока.
2.3. Внутренние воздействия на механизмы автомобиля
65
У карбюраторных двигателей kM = 1,20-1,36; »1,6-2,5; у дизельных
и бензиновых с впрыском топлива = 1,06-1,20; ka = 1,46-2,0. У современ-
ных дизельных двигателей с электронным управлением подачей топлива
значения^ достигают 1,4-1,5. Характеристики таких двигателей в широ-
ком диапазоне изменения частоты вращения обеспечивают получение прак-
тически постоянной мощности, а при средних значениях частоты вращения
имеют значительный участок характеристики с постоянным моментом. Дви-
гатели с такими характеристиками иногда называют двигателями постоян-
ной мощности, хотя это название лишь частично Характеризует их свойства.
Такие двигатели изготавливает^ в частности, Ярославский моторный завод,
а также многие зарубежные фирмы.
Рис. 2.7, Скоростные характеристики двигателей различных типов
Водитель, воздействуя на педаль акселератора, поддерживает необходимую
в реальных дорожных условиях скорость движения автомобиля. На каждом
конкретном участке пути необходимо увеличивать или уменьшать скорость,
либо поддерживать ее постоянной. В этой связи скоростные характеристики
двигателя должны изменяться. При полном нажатии на педаль акселератора
получают ВСХ, а при промежуточных ее положениях — ЧСХ.
У бензиновых двигателей педаль акселератора непосредственно связана
с дроссельной заслонкой, которая регулирует количественный и качествен-
ный состав рабочей смеси. Двигатели грузовых автомобилей снабжаются огра-
ничителями максимальной частоты вращения. После превышения двигате-
лем частоты вращения пР вступает в работу ограничитель, обеспечивающий
постепенное снижение подачи топлива по мере возрастания частоты враще-
ния вала двигателя пя, что приводит к соответствующему уменьшению вра-
щающего момента двигателя.
На рис. 2.8 показаны скоростные характеристики бензинового двигателя.
Кривая 1 соответствует внешней скоростной характеристике, кривые 2-4 —
частичным скоростным характеристикам. Цифрой S обозначена характе-
ристика ограничителя максимальной частоты вращения вала двигателя,
J 3*к. М9В
66
2- Прямолинейное движение автомобиля
Рис. 2£. Скоростные характеристики бензинового двигателя:
I — внешняя скоростная характеристика; 2-4 — частичные скоростные характеристики;
S — характеристика ограничителя максимальной частоты вращения вала двигателя;
6 — характеристика минимального холостого хода
а цифрой 6 — характеристике минимального холостого хода. Характеристи-
ка 5 соответствует полному нажатию на педаль акселератора, а характери-
стика 6 — полностью отпущенной педали. Значение Лххщ« называют мак-
симальной, а пхкш1п — минимальной частотой холостого хода двигателя. При
этих частотах вращающий момент двигателя равен нулю, следовательно,
двигатель работает без нагрузки (вхолостую).
Управление подачей топлива дизельного двигателя осуществляет регуля-
тор частоты вращения. Различают двухрежимные и всережимные регулято-
ры. Наибольшее применение нашли всережимные регуляторы частоты вра-
щения вала двигателя. У дизельного двигателя с всережимным регулятором
педаль акселератора связана с задающим элементом (задатчиком). Положе-
ние педали определяет настройку скоростного режима двигателя. Задающим
элементом механического центробежного регулятора является пружина, на-
тяжение которой осуществляется педалью акселератора. У двигателя с элек-
тронным регулятором положение педали акселератора определяет пороговое
значение частоты вращения, после превышения которого начинается огра-
ничение подачи топлива. В результате частичные скоростные характеристики
дизельного двигателя имеют вид кривых, подобных характеристике ограни-
чителя максимальной частоты вращения вала бензинового двигателя.
На рис. 2.9 показаны скоростные характеристики дизельного двигателя
с всережимным регулятором. Характеристику 2 называют предельной регу-
ляторной характеристикой. Она соответствует полному нажатию на педаль
акселератора. При промежуточных положениях педали получаются частич-
ные регуляторные характеристики 3,4,6. Полностью освобожденной педали
соответствует характеристика минимального холостого хода 6.
Штриховые линии на рис. 2.8 и 2.9 отображают тот факт, что получить
в процессе испытаний внешнюю скоростную характеристику при низкой
частоте вращения вала двигателя не представляется возможным из-за не-
устойчивости его работы в этом диапазоне частот. Характеристики мини-
2.3. внутренние воздействия на механизмы автомобиля
67
мяльного холостого хода также отображены условно, за исключением точки,
соответствующей r.urjr., которую получают фиксацией частоты вращения
вала двигателя с отсоединенным тормозным устройством и освобожденной
педалью акселератора.
В процессе движения автомобиля двигатель может работать на тяговом
режиме, когда Ма >0, на тормозном режиме, когда Мд <0, на режиме холо-
стого хода при Ме =0. На рис. 2.10 показана полная скоростная характери-
стика двигателя, отображающая область возможных режимов работы. Эта
область ограничена сверху внешней скоростной характеристикой Ме = 7(лд),
снизу — тормозной характеристикой MK.t - справа — характеристи-
кой ограничения максимальной частоты вращения Мд.р = /(лд)> слева — ха-
рактеристикой минимальной частоты холостого хода.
Рис. 2.10. Полная скоростная характеристика двигателя
Частота вращения вала двигателя пд и вращающий момент Мд являются
фазовыми координатами, характеризующими режим функционирования дви-
гателя. Они зависят от режима движения автомобиля и определяются сопро-
тивлением движению и скоростью автомобиля. Так как условия движения
68
2. Прямолинейное движение автомобиля
постоянно меняются, то значения фазовых координат пд и Мд также пере-
менны и определяют рабочую точку Л характеристики двигателя. В этой точ-
ке двигатель развивает мощность
РД1 = Mutual = jh/30.
При установившемся движении автомобиля положение рабочей точки Д
остается неизменным, т.е. = conet, Мд| = conet. Координаты рабочей точки
зависят от положения педали акселератора у, и от нагрузки двигателя, опре-
деляемой моментом нагрузки Л/дя.
При моделировании процесса движения автомобиля и выполнении анали-
за тягово-скоростных свойств необходимо располагать математической мо-
делью скоростных характеристик двигателя.
Для описания внешней скоростной характеристики обычно используют
формулу С.Р. Лейдермана
где а, Ъ, с — коэффициенты, значения которых зависят от тина двигателя
и особенностей его рабочего процесса; Рв, пя — текущие значения мощности
и частоты вращения вала двигателя.
Коэффициенты а, Ь, с можно определить по методике, разработанной
в МАДИ. Сущность ее заключается в следующем. Для определения трех не-
известных необходима система алгебраических уравнений третьего порядка,
т.е. система должна состоять иэ трех независимых уравнений, включающих
искомые неизвестные.
Первое уравнение получают, полагая в выражении (2.31) пд = пР. В точке
ВСХ с абсциссойпд = пр ордината Pt = ^тюс. Тогда согласно выражению (2.31)
получаем уравнение
a+i+c = l. (2.32)
Учитывая, что пя]Пр = <ад/соР, выражение (2.31) можно записать в виде
Вынесем за скобки отношение од /<Вр и примем во внимание, что Ре - ,
fimax = Мра>р. В результате получим выражение для определения вращающе-
го момента двигателя:
Mt =Мр о + Ь^З-+с|
СОр ’
ССД \
,<Лр)
(2.34)
Приняв cq, = фЛ< и Mt = пи, и учитывая соотношения (2.29) и (2.30), по-
лучаем второе уравнение:
Ь с
о + “- + ^- = *м- (2.38)
2.3. Внутренние воздействия на механизмы автомобиля
«»
Третье уравнение получается из условия наличия экстремума функции
(2.34) при фд » и равенства нулю производной в этой точке характеристики:
&од фр 1 Op J
Отсюда следует Ъ + — = 0. (2.36)
Решение системы уравнений (2.82), (2.36) и (2.36) дает искомые коэффи
циенты: *«) 1. (2.37) АЛ(2—Лю)—1 (2.88) М2"М-1 с „ (2.39) *и(2-Ли)-1
Формулы (2.31) и (2.33) удовлетворительно аппроксимируют внешние
скоростные характеристики Pt - /(пд)и Mt - /(пд) только в случае, если гра-
фики этих характеристик представляют собой плавные кривые, выпуклые
вверх и не имеющие перегибов. Скоростные характеристики многих совре-
менных двигателей, применяемых на грузовых автомобилях и самосвалах
большой грузоподъемности, строительно-дорожных машинах, имеют более
сложный вид.
На рис. 2.11, а и б показаны ВСХ двигателя ЯМЗ-850.10, обозначенные
цифрой 1. При изменении частоты вращения в диапазоне 1500-1900 об/мин
двигатель развивает практически постоянную мощность, а максимальный
Рис. В.11. Внешние скоростные характеристики двигателя ЯМЗ-860.10:
а — мощность; б — вращающий момент
70
2. Прямолинейное движение автомобиля
момент остается постоянным в диапазоне 1300-1400 об/мин* Штриховыми
линиями2 показаны характеристики, построенные поформулам(2.31)и(2.34).
Очевидно, что они существенно отличаются от действительных характери-
стик 1. Коэффициенты уравнений (2.31) и (2.34) при этом имеют следующие
значения: а = -0,9995; Ъ =6,2208; с = -4,2213. Среднее квадратическое откло-
нение мощности составляет оР = 20,287 кВт, а момента — = 146,98411 м.
Для аппроксимации скоростных характеристик таких двигателей необхо-
димо использовать регрессионные модели. Достаточно высокая точность дос-
тигается применением полиномов до б-го порядка. Регрессионная модель
ВСХ представляется в виде
П = (2.40)
л » 0
где Ь„ — коэффициенты регрессии; N — порядок полинома; <од оти — относи-
тельная угловая скорость вала двигателя:
«л оти = “д /<0р = Пд (2.41)
Вращающий момент двигателя в этом случае вычисляется по формуле
Ме = . (2*42)
Од.оть
При N = 5 для двигателя ЯМЗ-850.10 получены следующие значения ко-
эффициентов регрессии: Ьо = 1,6273; =-14,3655; =36,8332; (% =-23,4921;
Ь, =-10,0676; = 10,4553.
Полученные по уравнениям (2.40) и(2*42) значения/’ nMt отображены на
рис. 2.11, а и б кружками. Среднее квадратическое отклонение значений
мощности, полученных по уравнению регрессии, ст экспериментальных зна-
чений составляет = 0,681 кВт, а момента — = 4,233Н м, что существен-
но меньше, чем при аппроксимации характеристик двигателя формулами
(2.31) и (2.34).
Тормозную характеристику двигателя Мд Т = /(пд) можно аппроксимиро-
вать с достаточной точностью полиномом второго или третьего порядка
Мля = k'Mp , (2.43)
где^,, — коэффициент тормозного момента;бд тп — коэффициенты регрессии*
Значение коэффициента k? для дизельных двигателей находится в преде-
лах 0,20-0,25-
Регуляторные характеристики дизельного двигателя 2-5 (см. рис. 2.9)
представляют собой круто падающие с увеличением пд линии, соединяющие
между собой ВСХ и тормозную характеристику (см. рис. 2.10)* У двигателя
с механическим центробежным регулятором с уменьшением скоростного ре-
жима наклон регуляторных ветвей скоростной характеристики уменьшается.
Электронный регулятор обеспечивает постоянный угол наклона регулятор-
ных ветвей во всем диапазоне изменения частоты вращения вала двигателя.
2.3. Внутренние воздействия на механизмы автомобиля
71
Угол наклона регуляторных ветвей определяется коэффициентом нерав-
номерности регулятора ер:
£р Е 2 ^кхспи Нр
ПХХШЯХ + Пр
(2.44)
Значение коэффициента €р находится в пределах 0,11-0,13. Регулятор-
ные ветви у большинства двигателей практически прямолинейные.
Определение значений фазовых координат Мя ,пд при работе двигателя на
регуляторной ветви удобно осуществлять с использованием коэффициенте
наклона ветви йр, Н м/(об/мин):
йр =----------- 2Мр------(2.46)
rtxxmax пР £p(nxxm*x
Вращающий момент в рабочей точке R на i-й регуляторной ветви скорост-
ной характеристики вычисляется по формуле
pi - Йр(лхх[ —
(2.46)
где пкх[ — частота холостого хода двигателя на i-й регуляторной ветви; пд( —
текущее значение частоты вращения вала двигателя на l-й регуляторной
ветви.
Значение nXKt вычисляется по формуле
nxxl “ ^XXtnln *"(ЛХХП>»Х ~ЛХХШ|п)Т*1» (2.47)
где — значение координаты положения педали акселератора, соответст-
вующее 1-й регуляторной характеристике.
Координата у. — безразмерная, изменяемая в пределах О 5 у, S1. Значе-
ние у, = 1 соответствует полному нажатию на педаль, а ув = 0 — освобожден-
ной педали акселератора.
При неустановившемся движении автомобиля (разгон, замедление, тор-
можение) рабочая точка Rj скоростной характеристики постоянно меняет
свое положение, поэтому необходимо определять ее координаты п^М^. Но
заранее неизвестно, какой из характеристик двигателя — внешней скорост-
ной, регуляторной или тормозной — принадлежит рабочая точка. Поэтому
при решении системы дифференциальных уравнений, описывающих процесс
движения автомобиля, на каждом шаге интегрирования осуществляется вы-
числение всех моментов и затем определяется принадлежность
рабочей точки соответствующей характеристике. Выбор координаты МЕ$ ив
трех возможных значений Me,Ma_v,Ma T осуществляется в соответствии со
следующим алгоритмом:
Мв пример 2 Mt;
Мдо =
ЛГд,р приЛ/д.т < ЛГд.р < Мг;
Мял приМд.р <ЛГД,Т.
(2.48)
72
2. Прямолинейно» движение автомобиля
Условия работы двигателя, установленного на автомобиле, отличаются от
стендовых. На стенде двигатель комплектуется внешними системами в соот-
ветствии с принятыми стандартами. Компонентный состав этих систем и их
конструктивное исполнение могут существенно отличаться от используемых
на автомобиле. Поэтому необходимо учитывать затраты мощности Р,.о на
привод вспомогательного оборудования, которым двигатель укомплектовы-
вается при установке его на автомобиль. К вспомогательному оборудованию
относятся: вентилятор, генератор, компрессор, насос гидроусилителя руле-
вогоуправления и др. Опыт показывает, что зависимость Р,.а от угловой скоро-
сти вала двигателя может быть с достаточной точностью описана полиномом
третьего порядка. Поскольку в математической модели движения автомобиля
используется вращающий момент двигателя ЛГя0, а не мощность, то необхо-
дима функциональная зависимость вида М,.о = При наличии экспе-
риментальных данных по затратам мощности на привод вспомогательного
оборудования можно получить уравнение регрессии
N
в.о = ^».оМ/> У’А.оцФд.отх > (2.49)
п»0
гдеЛ,.о — коэффициент отбора мощности на привод вспомогательного обору-
дования двигателя; Ьллп — коэффициенты регрессии; N — порядок полино-
ма: N = 2.
Значение коэффициента к^л определяется при максимальной мощности
двигателя Рвтях и моменте Мр. Для двигателей грузовых автомобилей, само-
свалов и автобусов А,.о «0,05-0,15. Большие значения относятся к больше-
грузным и специализированным автомобилям.
У легковых автомобилей затраты мощности на вспомогательное оборудо-
вание двигателя в стендовых условиях и реальных на автомобиле отличают-
ся незначительно, поэтому можно принять o = 0 и Млл не учитывать.
При отсутствии данных о затратах мощности на вспомогательное оборудо-
вание Мал можно вычислять по упрощенному выражению:
M,_0=k^oMt. (2.60)
Для дизельного двигателя можно воспользоваться эмпирической форму-
лой [14]:
М.,о = ^-(а.о+!чХ), (2.61)
где — рабочий объем двигателя, л; т— тактность двигателя; <од — угловая
скорость вала двигателя, рад/с; К.оЛ*р — эмпирические коэффициенты.
Численное значение коэффициентов: р*о = 0,01 МПа для всех типов
дизельных двигателей; = 0,66 МПа с2 — для двигателей без наддува;
6^, =0,90 МПа с2 — для двигателей с наддувом.
При работе на неустановиВшемся режиме мощность, отдаваемая двигате-
лем, меньше мощности на установивЩемся режиме. Это обусловлено ухуд-
2.3. Внутренние воздействия на механизмы автомобиля 73
шением процесса наполнения цилиндров рабочей смесью или воздухом,
а также тепловой инерцией двигателя. На рис. 2.12 приведен эксперимен-
тальный график, из которого следует, что величина снижения момента двига-
теля ДМд линейно зависит от углового ускорения его вала4й)д jdt в переходном
процессе [8]:
(2.52)
at
где у, — коэффициент: уя = 0,001-0,002.
Величина &МЛ сравнительно невелика, не превышает 3-4 % от Mt.
У автомобилей с автоматическим переключением передач коэффициент уя
незначителен и им можно пренебречь.
Передаваемый от двигателя в трансмиссию вращающий момент на уста-
новившемся режиме
Л^МдС-м|. (2.БЗ)
На неустановившихся режимах необходимо дополнительно учесть ЛЛ/Д
и инерционный момент двигателя М;д, определяемый по формуле (2.21):
Мд = Мдо - Мв.о - ДМд - Мд. (2.54)
Характеристики трансмиссии. При передаче мощности двигателя веду-
щим колесам часть ее затрачивается на преодоление сил трения в механиз-
мах трансмиссии. На установившемся режиме движения автомобиля потери
мощности в трансмиссии можно разделить на две группы. К первой группе
относятся потери, зависящие от величины передаваемой нагрузки (момента).
Они обусловлены трением в зубчатых зацеплениях, карданных шарнирах,
подшипниках и примерно пропорциональны передаваемому моменту. Вторую
группу составляют гидравлические потери, обусловленные перемешивани-
ем и разбрызгиванием масла шестернями и другими подвижными деталями.
Они в основном зависят от скоростей деталей механизмов трансмиссии, вяз-
кости и количества масла в картерах, но практически не зависят от переда-
ваемого момента.
Рис. 2.12. Изменение вращающего момента двигателя
в зависимости от углового ускорения коленчатого вола
74
2- Прямолинейное движение автомобиля
На неустановившемся режиме движения, в особенности на переходных
режимах, обусловленных переключением передач или преодолением дорож-
ных препятствий, возникают дополнительные потери. Эти потери обусловле-
ны изменениями деформации упругих элементов трансмиссии и взаимными
перемещениями сопрягаемых деталей. При колебаниях момента упругого
элемента происходит последовательное увеличение и снижение потенциаль-
ной энергии. Однако энергия двигателя, затрачиваемая на увеличение де-
формации, полностью возвращается в систему после снижения деформации.
Но деформирование деталей трансмиссии сопровождается дополнительными
сопротивлениями, обусловленными внутренним трением в материале дета-
лей (валов, резиновых элементов соединительных муфт и др.). Эти элементы
трансмиссии называют диссипативными элементами. Потери энергии
в диссипативных элементах пропорциональны относительной скорости их
деформирования. Коэффициент пропорциональности называют коэффици-
ентам демпфирования.
На стационарных режимах потери в трансмиссии оценивают коэффици-
ентом полезного действия (КПД).
КПД трансмиссии Т|тр представляет собой отношение мощности на веду-
щих колесах автомобиля Р* к мощности двигателя Ра, передаваемой в транс-
миссию,
<2.55)
где ДР- — мощность потерь в трансмиссии (скалярная отрицательная вели-
чина): ДР7р = ДРМ+ДРГ; ДРМ — мощность механических потерь; ДРГ — мощ-
ность гидравлических потерь.
Мощность механических потерь равна
|ДРн| = Рд(1-цм) = Мдод(1-пн),
где 1]ы — КПД, учитывающий механические потери в зубчатых зацеплениях
и карданных шарнирах; — момент двигателя, передаваемый в трансмис-
сию; Од — угловая скорость коленчатого вала двигателя.
Гидравлические потери определяют экспериментально. Для этого выве-
шивают ведущие колеса автомобиля и, вращая их с постоянной скоростью,
измеряют момент Afr, необходимый для прокрутки валов трансмиссии вхо-
лостую. /Мощность гидравлических потерь равна
|ДРг|=Мг№к=^Д,
«то
гдеитр — передаточное число трансмиссии.
Подставим полученные значения мощностей потерь в выражение (2.5б):
Мг
Птр а Лм
(2.56)
2.3. Внутренние воздействия на механизмы автомобиля
75
В зависимости от дорожных условий и режима движения автомобиля зна-
чение rj-rp может изменяться в очень широких пределах. Чем выше степень
загрузки двигателя, т.е. чем больше Мд, тем выше Дело в том, что возрас-
тание механических потерь происходит медленнее, чем увеличение нагруз-
ки , что видно из выражения для определения ДРЫ. При движении автомобиля
по хорошей дороге с небольшой степенью загрузки двигателя Т[и уменьшает-
ся, а второе слагаемое формулы (2.56) увеличивается, особенно при высокой
скорости движения, когда Л/г существенно возрастает, а с увеличением
номера передачи уменьшается. КПД трансмиссии при этом может снизиться
до 0,4-0,5.
На рис. 2.13, а показаны зависимости КПД трансмиссии на различных
передачах от относительного момента нагрузки двигателя М^/Мр, а на
рис. 2.13, б — зависимости Т)тр от температуры масла при различных скоро-
стях движения.
Рис. 2.13. Зависимость КПД трансмиссии от относительного момента нагрузки двигателя (а),
от температуры масла и скорости автомобиля (б)" I, II, Ш, IV — номера передач
При работе двигателя с полной нагрузкой момент Мг значительно меньше
МдЫтр, поэтому вторым слагаемым формулы (2.56) можно пренебречь и при-
нять Лп» В этом случае КПД трансмиссии можно считать постоянным
и вычислять по формуле
Птр — Пм — Лщя Пц?в Л Лх*ш >
(2.57)
где Л ц.н ,Лц.»,Лх — КПД зубчатых передач соответственно цилиндрических
с внешним и внутренним зацеплением и конических; г„.я, гц.,, — число пар
соответствующих зубчатых зацеплений; т)к.ш — КПД карданного шарнира;
г«.ш — число карданных шарниров.
76 2. Прямолинейное движение автомобиля
На практике обычно принимают следующие значения КПД: т]с„ =0,98;
Лц.в = 0^9; = 0,97; т|в.ш = 0,996. При определении г]тр рассматривают лишь
одну последовательную цепь кинематической схемы трансмиссии от двига-
теля до ведущего колеса, так как каждому колесу передается только часть
мощности двигателя.
2.4. Тяговый момент ведущих колес
При движении автомобиля по неровностям дороги вращающие моменты
на его ведущих колесах, безусловно, различны даже на прямолинейном гори-
зонтальном участке дороги. Еще в большей мере это относится к криво линей-
ному движению. Но при анализе тягово-скоростных свойств автомобиля, как
отмечалось выше, принята модель прямолинейного движения, не учитываю-
щая неровностей дороги и различий между левыми и правыми колесами. При
отсутствии внешнего скольжения ведущих колес для этой модели не имеет
принципиального значения и количество ведущих мостов. По существу, в этом
случае можно рассматривать модель автомобиля с одним обобщенным веду-
щим колесом, к которому через трансмиссию передается вращающий момент
двигателя.
При определении суммарного тягового момента ведущих колес необходимо
учесть все составляющие сопротивлений, преодолеваемых двигателем в про-
цессе передачи энергии к ведущим колесам, а также диссипацию энергии
в механизмах трансмиссии.
Вращающий момент двигателя, передаваемый в трансмиссию на неуста-
новившемся режиме, определяется по формуле (2.54). В трансмиссии осуще-
ствляется преобразование этого момента трансформаторными элементами
(в механической трансмиссии — зубчатыми передачами). Преобразование
момента сопровождается потерями, которые можно учесть посредством КПД.
Одновременно часть передаваемой энергии двигателя затрачивается на раз-
гон вращающихся масс трансмиссии, которые также связаны с ведущим ко-
лесом соответствующими трансформаторными элементами. Следовательно,
при преодолении сопротивления разгону масс также необходимо учитывать
КПД этих элементов. В результате выражение для определения момента на
ведущем колесе можно представить в следующем виде:
= (МдО — ~ — ^Уд) ^трЛтр ~ М Л тр> • (2.58)
*-1
где Л/утр* — инерционный момент А-й массы трансмиссии; итр*,'П¥р* — переда-
точное число и КПД участка трансмиссии от А-й массы до ведущего колеса.
Подставим значения М/Т]Л, ДМЛ, используя формулы (2.24), (2.25),
(2.52) и учитывая при этом, что для автомобиля с механической трансмисси-
ей при отсутствии внешнего скольжения ведущих колес
da)., _ Uyp dv
dt rK dt
2.5. Дифференциальное уравнение прямолинейного движения автомобиля
77
В результате получаем следующее выражение для определения Мкл:
^к.в
(Мл-М..>ЧЛ„4(7.ЛГ. . J,)^+
Гк ь-1 Пс
. (2.60)
at
Значение удМ4 существенно меньше Ja, поэтому в моделях, испольеуе-
мыт для анализа показателей тягово-скоростных свойств автомобиля, обыч-
но этой величиной пренебрегают. Тогда выражение (2.Б0) упрощается:
Мм = (Мдо -М..вКПар + (2.60)
Ot
где — суммарный приведенный к ведущему колесу момент инерции вра-
щающихся масс трансмиссии:
*^тр = *Лт>ацтп*'Пто* - (2.61)
*»1
При установившемся движении
= (М „о-М ..„ХрПтр • (2.62)
Испытания автомобиля по определению показателей тягово-скоростных
свойств, согласно стандартным методикам, проводятся при полной подаче
топлива в двигатель, поэтому он работает по внешней скоростной характери-
стике. В этом случае в формулах (2.60) и (2.62) вместо Л/д0 необходимо ис-
пользовать вращающий момент двигателя Мв. Тогда с учетом выражения
(2.50) эти формулы запишем в следующем виде:
м*л = м,(1-л,.о)иТРпч>; (2.63)
Мк , = М:.в - (2.64)
rK dt
где М^Л,МЖЛ — тяговый момент ведущего колеса соответственно на устано-
вившемся и неустановившемся режимах движения.
2.5. Дифференциальное уравнение
прямолинейного движения автомобиля
Рассмотрим движение автомобиля без учета внешнего скольжения ве-
дущих колес. Внешнее скольжение практически отсутствует при условии
Мк., ^(0,4-0,6)AfKJi;>. Это условие выполняется при движении автомобиля на
промежуточных и высших передачах по дороге с твердым покрытием.
При составлении дифференциального уравнения прямолинейного дви-
жения автомобиля используем схему системы сил и моментов, приведен-
ную на рис. 2.1. Составим общее уравнение динамики, применив принцип
78
2. Прямолинейное движение автомобиля
Лагранжа — Даламбера, согласно которому алгебраическая сумма работ всех
внешних сил и моментов, приложенных к системе, реакций неидеальных
связей и сил инерции на возможных перемещениях системы равна нулю.
Введем следующие возможные перемещения системы: линейное перемеще-
ние центра масс автомобиля 8х, угловые перемещения ведомого колеса 8ф1
и ведущего 8%.
Используя выражения (В.4) и (В.б) и учитывая при этом взаимные на-
правления сил и моментов и соответствующих им векторов возможных пере-
мещений, получаем общее уравнение динамики:
-Мк.я&Рг - М /1&р1 - М /48ф2 -Глбх-^бх-Гпрбх-
(2.65)
Установим соотношения между возможными перемещениями бфр 8фг и 8х
при условии отсутствия внешнего скольжения колес:
&Р1 = бх/пю; (2.66)
5фа=8х/гк. (2.67)
Проанализируем вначале выражение виртуальной работы моментов со-
противления качению 6W} на возможном перемещении автомобиля 8х:
SWr = ИИ. V = (2.68)
V б<о б< J
При принятом ограничении момента Afki> различие коэффициентов со-
противления качению ведомых f0 и ведущих fa колес сравнительно невелико.
Поэтому можно для обоих колес принять одинаковое осредненное значение
коэффициента сопротивления качению ft = А = А- Тогда с учетом выражения
(2.6) находим
8И^ = -ftm,gcoBa8x. (2.60)
Это выражение, безусловно, дает приближенную оценку потерь на каче-
ние, однако вполне приемлемую при моделировании движения автомобиля
по дороге с твердым покрытием.
Подставим в уравнение(2.65) значения Мкл из формулы (2.64) иFh из фор-
мулы (2.2). Используем также выражения (2.66), (2.67), (2.69) и выражения
для определения силы инерции F^ и инерционных моментов М^, В ре-
зультате получим:
---г~ сова + sin а) - Ftt, -
Gt
- fm. + + +iik-= о,
V 67 r£o 67 Jdt
где Jk я, e — суммарные моменты инерции соответственно всех ведомых
и ведущих колес.
~m. 1+
2.5. Дифференциальное уравнение прямолинейного движения автомобиля 79
Объединим все члены этого выражения, содержащие ускорение автомоби-
ля dv/dt, и обозначим полученную сумму
«^дцтр'Птр + «^кя Jy H (2.70)
rK2ma r^m^Jdt'
Сила Fja представляет собой приведенную силу инерции автомобиля,
приложенную в его центре масс и эквивалентную силам инерции и инерцион-
ным моментам всех механизмов автомобиля при неустановившемся прямо-
линейном движении. Иными словами, силана в рассматриваемых условиях
движения эквивалентна совокупности силы инерции FlB поступательно дви-
жущейся массы автомобиля и инерционных моментов MjK, MlTp, М1кл, М^Л
масс, совершающих вращательные движения относительно корпуса авто-
мобиля.
Введем обозначения:
7»».вр ш 6„.ыта. (2.72)
Величину тв.пр называют приведенной массой автомобиля. Кинетиче-
ская энергия поступательного движения этой массы равна сумме кинетиче-
ских энергий всех масс автомобиля в их действительных движениях.
Величина Зп.ы называется коэффициентом приведенной массы. Коэффи-
циент бп ы учитывает влияние относительного вращательного движения масс
двигателя, трансмиссии и колес на изменение кинетической энергии автомо-
биля. Он показывает, во сколько раз энергия, затрачиваемая на разгон масс
реального автомобиля, больше энергии, необходимой для разгона поступа-
тельно движущегося твердого тела массой т&.
Учитывая выражения (2.71) и (2.72), дифференциальное уравнение дви-
жения автомобиля с механической трансмиссией можно записать в виде
5П ~ сова + Einct)-FK . (2.73)
dt г*
Второе слагаемое правой части уравнения (2.78) характеризует суммарное
сопротивлений дороги (сопротивление подъему и сопротивление качению).
При малых значениях а, характерных для автомобильных дорог с твердым
покрытием, можно принять сова = 1, sin а = tga = h и ввести обозначение
V = /k+A, (2.74)
где у- коэффициент суммарною дорожного сопротивления.
Подставим значение Fw в уравнение (2.73), пренебрегая скоростью ветра,
и получим дифференциальное уравнение движения автомобиля с механи-
ческой трансмиссией".
ЬвмтЛ kwA.y. (2.75)
at rK
ао
2- Прямолинейное движение автомобиля
Уравнение движения автомобиля (2.75) позволяет проанализировать
влияние параметров автомобиля на характеристики движения и в конечном
итоге дать оценку показателей его тягово-скоростных свойств в конкретных
дорожных условиях.
При анализе движения автопоезда в уравнения (2.79) и (2.75) включается
дополнительно сила сопротивления движению прицепа:
Л.Р = mD gvf + np> (2.76)
где Юл — масса прицепа; fin,MinJ) — коэффициент приведенной массы прицепа;
а — ускорение прицепа: а ~ dvjdt', Fwnp — сила сопротивления воздуха движе-
нию прицепа.
Если рассматривать движение автопоезда как единой системы, тогда це-
лесообразно использовать уравнение, аналогичное уравнению (2.75):
с dv — ^в.о)^трЛтр , л 2 tri ггпч
^п.и.яп^Чп *77= — Лщ|1П-4ли ♦ (2.77)
dt Гк
где 5n.4_.fi — коэффициент приведенной массы автопоезда (отличается от 8П М
учетом моментов инерции колес прицепа); — масса автопоезда; ш —
коэффициент сопротивления воздуха: kw = (1,2-1,8)^.
Если значения моментов инерции «7д, Jh.B, Jr., неизвестны, то 8П.И
(или 8п,мап) определяют по эмпирической формуле
5П.М = 1+(&! + бги® ,п) mjm, (2.78)
где Sj = 0,03-0,06; 82 = 0,04-0,06; — передаточное число коробки передач;
тк — полная масса автомобиля (автопоезда); т — фактическая масса авто-
мобиля.
Для случая движения автомобиля с отсоединенным от трансмиссии двига-
телем (накат, торможение) 82 = 0. Тогда 8П,И ~ 1,05,
2.6, Дифференциальные уравнения движения автомобиля при
буксовании ведущих колес
При движении автомобиля по дороге с низким коэффициентом сцепления
и высоким сопротивлением движению (крутой подъем, размокшая грунто-
вая дорога, движение с прицепом и др.), когда AfK_, >0,6AfKiW, необходимо
учитывать внешнее скольжение (буксование) ведущих колес. В этом случае
автомобиль при прямолинейном движении необходимо рассматривать как
систему с двумя степенями свободы и использовать две независимые фазовые
координаты для описания параметров его движения. Выберем в качестве фа-
зовых координат угловую скорость ведущего колеса и линейную ско-
рость центра масс v и составим два дифференциальных уравнения.
Первое уравнение получим, рассматривая систему моментов, действую-
щих на ведущее колесо. При неустановившемся движении на ведущее колесо
2.6. Дифференциальные уравнения движения автомобиля при буксовании ведущих колес 61
действуют моменты Мк.а, Afy„ М}*л и момент силы сцепления колеса с опор-
ной поверхностью Мф. Сила сцепления равна предельному значению про-
дольной реакции дороги = <рА.- Момент этой силы относительно оси
вращения колеса определяется по формуле Мф - фАл. Динамический ра-
диус колесаГд, как отмечалось в параграфе 1.2, примерно равен радиусу каче-
ния ведомого колеса г^, поэтому примем = гк0. В результате
М^-фАЛо- (2.79)
Составим общее уравнение динамики ведущего колеса, ив которого получим:
Мк,в-М/в-ЛГ/к,.-ЛГф=хО. (2.80)
Инерционный момент ведущих колес М^л, согласно выражению (2.20),
MZk.b = Jk.b^x. (2.81)
at
Для определения подводимого к ведущему колесу момента Мкл использу-
ем выражение (2.60). Принимая во внимание, что v = получаем:
Мк.в = (Мдо - Мв.о) и^Птр - +Лр)“7Гк (2-82)
4 'at
После подстановки значений моментов в выражение (2.80) получаем пер-
вое дифференциальное уравнение:
•Лде.пр = (МдО “ И-трЛ-тр ~ Му, — фАнгхО> (2.83)
U-1
где 3К.ВЛЦ1 — приведенный к ведущему колесу суммарный момент инерции
двигателя, трансмиссии и колеса:
•7ц.а.пр ** + *Гк-»< , (2.84)
Второе дифференциальное уравнение составляется для поступательного
движения корпуса автомобиля. Движущей силой корпуса является тяговая
сила ведущего колеса Гт, приложенная к его оси. При внешнем скольжении
эта сила равна силе сцепления ведущего колеса с опорной поверхностью:
Ло = фАв- (2.86)
На корпус действуют силы сопротивления движению Fh, Fwr F^, Кроме
того, необходимо учесть сопротивление качению ведомых цолес и их инерци-
онные моменты. Учитывая эти факторы, составим общее уравнение динами-
ки, описывающее процесс движения корпуса автомобиля:
FT4te-Fb&x-F№&x-Ffll5x-Mfn&h -Мук.в6фв =0. (2.86)
Принимая во внимание соотношение бфд = 6л/гк0 для ведомых колес, полу-
чаем второе дифференциальное'уравнение:
f™. VV1- (2.87)
\ Пл )dt Пл
«2
2. Прямолинейное движение автомобиля
Коэффициент сцепления <рл зависит от коэффициента скольжения веду*
щего колеса X,. График функции фж = /(Хв) показан на рис. 1.17. Коэффици-
ент 4 определяется по формуле (1.21). В данном случае, согласно этой форму-
ле, ик = v, avK(i = со^Ло-В результате Хв зависит одновременно от обеих фазовых
координат v и с\.в:
4 = 1----— (2.88)
°к.вгвО
Следовательно, и коэффициент сцепления также является функцией двух
переменных: <рд. = f(y, со*,). Поскольку входит в оба уравнения (2.83)и (2.87),
то они представляют собой систему дифференциальных уравнений, решение
которых должно осуществляться совместно.
Вращающий момент двигателя Л/д0, определяемый по формуле (2.48), не-
обходимо представить в виде функции угловой скорости двигателя юд и учесть,
что<ок,в = й)д/иТр.
При неустановившемся движении необходимо также учитывать измене-
ние нормальной реакции опорной поверхности на ведущие колесаОпре-
деление нормальных реакций рассмотрено в параграфе 2.7.
В сложных дорожных условиях сопротивление движению автомобиля
и сцепление колес с дорогой могут изменяться в широких пределах. Поэтому
на отдельных участках дороги возникает буксование ведущих колес, а на дру-
гих участках движение происходит без проскальзывания. Это необходимо
учитывать при моделировании движения автомобиля. Для этого на каждом
шаге интегрирования дифференциальных уравнений проверяется условие
отсутствия скольжения колес и вычисляется значение коэффициента сколь-
жения 4- При ЛГк.,-ЛГ/в > Mv ведущие колеса начинают буксовать, тогда ре-
шаются уравнения (2.83) и (2.87). При 4 и Л-М^ <М^ скольжение
прекращается, тогда вместо этих уравнений используется одно уравнение
(2.76), которое в данном случае записывается в виде:
с „ du _ (AfлО — ^в,д)ЩрПтр . . « fn cni
— (2.89)
at
Дифференциальные уравнения(2.81), (2.87) и (2,89) позволяют моделиро-
вать движение автомобиля по заданному маршруту и определять интеграль-
ный показатель тягово-скоростных свойств автомобиля — среднюю скорость
на маршруте. Маршрут представляется в виде совокупности участков доро-
ги, каждый из которых характеризуется продольным уклоном , коэффици-
ентом сопротивления качению f{, коэффициентом сцепления <pxi, радиусом
кривизны участков в плане различного рода ограничениями скорости,
в том числе из-за продольного и поперечного скольжения колес. Ограниче-
ния скорости приводят к необходимости управления скоростным режимом
двигателя, поэтому в уравнениях используется универсальная функция мо-
мента Мд0 = /(фц,Ув).
2.7. Нормальные реакции дороги
83
2.7. Нормальные реакции дороги
Нормальные реакции дороги на колеса автомобиля в процессе его движе-
ния непрерывно изменяются. Они влияют на сопротивление качению, предель-
ные значения продольных и поперечных реакций, максимальные значения
реализуемых по условиям сцепления колес с дорогой моментов на тяговых
и тормозных режимах.
Для определения нормальных реакций и R& составим уравнения мо-
ментов относительно центров контактных поверхностей передних и задних
колес с дорогой (см. рис. 2.1), заменяя силу F^ и инерционные моменты
MfK приведенной силой инерции :
-RaL + Мf—FaЛщ —Fhhc~Fap Лгр = 0;
RtzL — — Mf — Fifhn,Ffthc — Fnp h^p « 0.
Учитывая, чтоб*, = 6acosct, получаем
Яи = [</?. сова-Л// - Fuhv -he(Fh + F^ )- Fnp ЛпР] /L; (2.90)
.Kjj = cos ci + Mf + J)a) + FDpftnp]/L. (2.91)
Из выражений следует, что силы и моменты, уменьшающие нормальную
реакцию J?,!, ровно на столько же увеличивают
Момент сопротивления качению Mf и сила сопротивления воздуха Fw
в любых случаях движения уменьшают Д,1 и увеличивают Я^. Скатывающая
сила Fh при движении на подъеме уменьшает а на спуске увеличивает.
При разгоне автомобиля сила инерции F^ уменьшает Кл, а при торможении
увеличивает. Сила Кщ, в зависимости от уклона дороги h и режима движения,
определяющего величину и направление вектора ускорения а, может как
уменьшать, так и увеличивать Да (см. формулу (2.76)).
Так как условия движения меняются (изменяются коэффициенты сопро-
тивления кдчению f, продольные уклоны дороги к, скорость и и ускорение а
автомобиля), это приводит к перераспределению нормальных реакций. Обо-
значим Gj и ба — нормальные нагрузки на колеса соответственно переднего
и заднего мостов неподвижного автомобиля, стоящего на горизонтальной по-
верхности. На автомобиль в этом случае действует лишь сила тяжести ба. Из
условий равновесия находим:
Gj = б. fe/L; G? = бв fj/L. (2.92)
Следовательно, в рассматриваемом случае сила тяжести автомобиля рас-
пределяется между колесами переднего и заднего мостов обратно пропорцио-
нально их продольным координатам относительно центра масс автомобиля.
Отношения нормальных реакций дороги на колеса движущегося автомо-
биля к нормальным нагрузкам колес неподвижного автомобиля на горизон-
84
2. Прямолинейное движение автомобиля
тальной поверхности называются коэффициентами перераспределения
нормальных реакций:
^га-^л/^it kfQ = (2.93)
Значения km и kj& на тяговом режиме приведены в параграфе 3.2, а на тор-
мозном — в параграфе 7.5. \
Вопросы для самоконтроля
1. Назовите внешние силы и моменты, действующие на автомобиль при прямо-
линейном движении.
2. Что такое скатывающая сила и от каких факторов она зависит?
3. Как определяется продольный уклон дороги?
4. От каких факторов зависит сила сопротивления воздуха?
5. Что такое скоростная характеристика двигателя? Назовите основные виды
скоростных характеристик.
6. От каких факторов зависит КПД трансмиссии и в каких пределах находятся
его значения?
7. Какие слагаемые входят в дифференциальное уравнение прямолинейного
движения автомобиля? Каков их физический смысл?
8. Каков физический смысл приведенной массы автомобиля и коэффициента
приведенной массы?
9. От каких параметров автомобиля зависит коэффициент приведенной массы
и на что он влияет?
10. От каких факторов зависят нормальные реакции дороги на колеса автомобиля?
Тягово-скоростные свойства автомобиля
Тягово-скоростными свойствами автомобиля называют совокупность
свойств, определяющих возможные по характеристикам двигателя или сце-
пления ведущих колес с дорогой диапазоны изменения скоростей движения
И предельные интенсивности разгона автомобиля при его работе на тяговом
режиме в различных дорожных условиях. Тяговым 'повывают режим, при
котором энергия передается от двигателя к ведущим колесам.
Выполняя транспортную работу, водитель выбирает скорость движения
исходя из эксплуатационных условий. Этот выбор ограничен диапазоном
скоростей от максимальной, определяемой максимальной мощностью двига-
теля или сцеплением ведущих колес с дорогой, до*минимальнойпо условиям
устойчивой работы двигателя. Чем тяжелее дорожные условия, тем более
узок этот диапазон и меньше возможные ускорения. В некоторых условиях
может оказаться единственно возможное значение скорости. Такие дорож-
ные условия являются предельными для данного автомобиля по его тяго-
во-скоростным свойствам.
3.1. Оценочные показатели тягово-скоростных свойств
Тягово-скоростные свойства автомобиля оценивают системой показате-
лей, предусмотренных ГОСТ 22576-90, ГОСТ 21398-89 и Правилами ЕЭК
ООН № 68. Каждый показатель количественно оценивает определенное свой-
ство в регламентируемых условиях движения, а их совокупность позволяет
оценить технический уровень автомобиля в сравнении с лучшими мировыми
образцами, а также возможность и целесообразность его использования
в данных эксплуатационных условиях.
Часть показателей тягово-скоростных свойств нормируется стандартами,
устанавливающими их предельные значения. Остальные показатели долж-
ны быть не ниже среднестатистических, полученных на основе анализа ре-
презентативной выборки показателей лучших отечественных и зарубежных
аналогов. Следует отметить, что в зависимости от решаемой задачи (конст-
рукторской, исследовательской, эксплуатационной) применяют различный
набор оценочных показателей.
При выборе автомобиля для заданного целевого назначения обычно при-
нимают во внимание следующие показатели:
1) максимальная скорость автомобиля
2) условная максимальная скорость
3) время разгона на участке пути 400 м, t400;
4) время разгона на участке пути 1000 м, *юоо J
5) время разгона до заданной скорости,
6) время разгона на передаче, обеспечивающей максимальную скорость, t,.n;
66
3. Тягово-скорОстные свойства автомобиля
7) максимальный динамический фактор на высшей передаче Danux и соот-
ветствующая ему критическая скорость у»г.:
8) максимальный динамический фактор на низшей передачеDa max и соот-
ветствующая ему критическая скорость и,ф.м;
9) динамический фактор при максимальной скорости Д,;
10) максимальный преодолеваемый уклон Лщ^.
Показатели определяют в процессе испытаний автомобиля или посредст-
вом моделирования его движения на ЭВМ. Испытания делятся на дорожные
и стендовые. Дорожные испытания проводятся на горизонтальном участке
дороги с твердым и ровным покрытием в сухую погоду. Продольный уклон
дороги не более 0,6 % на участке длиной не более 50 м, поперечный уклон —
не более 3 %. Температура воздуха 5-30 °C, скорость ветра не более 3 м/с, ат-
мосферное давление не ниже 91 кПа, относительная влажность воздуха не
выше 95 %. Плотность воздуха pj не должна отличаться более чем на 7,5 %
от плотности ро = 1,189 кг/м8 при нормальных атмосферных условиях, соот-
ветствующих давлению = 100 кПа и температуре То =f 293 К (20 °C). Плот-
ность воздуха при испытаниях вычисляют по формуле
- РоАуо
А>71 '
где Pi, Tt — атмосферное давление и температура воздуха при проведении ис-
пытаний.
Заезды осуществляются в двух направлениях. Количество повторных за-
ездов для каждого вида испытаний установлено стандартом.
Автомобили полной массой свыше 3,5 т должны иметь полную нагрузку,
адоЗ,бт — половинную нагрузку, но не менее 180 кг. Перед началом испыта-
ний механизмы автомобиля должны иметь нормальные температурные ре-
жимы, что обеспечивается пробегом не менее 50 км при скорости движения
не ниже (2/3 В процессе испытаний регистрируют скорость, ускорение
и время прохождения мерных участков. Способы измерения и обработки
информации о параметрах процесса движения автомобиля при испытаниях
зависят от применяемой аппаратуры. Средства измерения должны быть ком-
пактными, простыми в установке и использовании, вибростойкими и обеспе-
чивать необходимую точность измерений при температуре воздуха ±40 °C на
всех режимах движения. Установка их на автомобиль не должна влиять на
сопротивление движению. Современная аппаратура основана на применении
микропроцессорной техники и позволяет полностью автоматизировать про-
цесс испытаний.
Стендовые испытания проводятся на специальных стендах, имитирующих
<бегущую дорогу*. Автомобиль при этом неподвижен, а его ведущие колеса
взаимодействуют с вращающимися беговыми барабанами или стальными
лентами, покрытыми абразивом. Имитацию сопротивления движению автомо-
биля обеспечивают тормозные электрические генераторы, снабженные д инамо-
метрическими муфтами для измерения моментов сопротивления вращению
3.1. Оценочные показатели тягово-скоростных свойств
В7
ведущих колес автомобиля. Стенды позволяют значительно упростить про-
цесс проведения испытаний, стабилизировать получаемые результаты, про-
водить испытания в любое время года, использовать сложную аппаратуру
с автоматической обработкой результатов.
Математическое моделирование позволяет заменить натурный экспери-
мент вычислительным и значительно сократить материальные и временные
затраты. При моделировании целесообразно использовать стандартное про-
граммное обеспечение (Например, MathCAD, MatLab и др.).
Дорожные условия, в которых проводятся испытания по определению по-
казателей тягово скоростных свойств, практически исключают буксование
ведущих колес, поэтому при моделировании движения автомобиля с меха-
нической трансмиссией используется уравнение (2.75). Для определения
перемещения автомобиля математическую модель необходимо дополнить
дифференциальным уравнением de/dt = и. Интегрирование уравнений дви-
жения позволяет определить изменения ускорения а, скорости v и перемеще-
ния в автомобиля во времени на различных передачах и найти искомые
показатели тягово-скоростных свойств.
Моделирование движения автомобиля с гидромеханической трансмисси-
ей рассмотрено в главе 5.
Рассмотрим условия получения оценочных показателей тягово-скоро-
стных свойств автомобиля.
Максимальная скорость — это наибольшая средняя скорость устано-
вившегося движения автомобиля на участке дороги протяженностью 1 км.
Скорость измеряют на прямолинейном участке или на кольцевой дороге. На
кольцевой дороге допускается проводить испытания при условии, что цен-
тробежная сила инерции не превышает 20 % силы тяжести автомобиля
и компенсируется поперечным уклоном испытательного участка. До въезда
на измерительный участок дороги автомобиль разгоняют до максимально
возможной скорости. Значение vmtx определяют при полной подаче топлива
на передаче (высшей или предшествующей), обеспечивающей достижение
наибольшей устойчивой скорости движения. Для грузовых автомобилей зна-
чение wraax установлено Правилами ЕЭК ООН № 68 и ГОСТ 22576-90 и зави-
сит от типа и назначения автомобиля: для одиночных автомобилей полной
массой mt < 3,5т должна быть не менее 110 км/ч; полной массой zne £3,5т —
не менее 95 км/ч; автопоездов — не менее 100 км/ч. Для легковых автомоби-
лей vmax зависит от класса и по статистическим данным составляет; для особо
малого класса — до 140 км/ч; малого класса — до 170 км/ч; среднего и боль-
шого — до 220 км/ч.
Условная максимальнаяскорость^п^ — это средняя скорость на послед-
них 400 м мерного участка Дороги в 2000 м при разгоне автомобиля с места
с полной подачей топлива. Разгон начинается с передачи, предназначенной
для трогания с места. При наличии делителя в коробке передач переключение
ступеней производят согласно рекомендациям завода-изготовителя, а при их
вв
3. Тяпоео-осоросгные свойства автомобиля
отсутствии используют верхний ряд передач. Переключение передач должно
осуществляться при номинальной частоте вращения коленчатого вала дви-
гателя.
Время разгона на участках пути 400 и 1000 м фиксируют при разгоне
в тех же условиях, в которых определяется иутах.
Время разгона до заданной скорости Условия проведения испытаний
те же, что и для предыдущих показателей. Заданная скорость разгона ив зави-
сит от типа автомобиля: для автомобилей всех типов полной массой до 3,6 т
иа = 100 км/ч; для грузовых автомобилей, автобусов (кроме городских) пол-
ной массой свыше 8,Б т и автопоездов ив - 80 км/ч; для городских автобусов
ив = 60 км/ч.
Время разгона на передаче, обеспечивающей максимальную скорость, fBiB.
Вначале достигается установившееся движение с постоянной скоростью, соот-
ветствующей критической скорости икргВ. Затем осуществляют резкое и пол-
ное нажатие на педаль акселератора и одновременно включают секундомер.
Разгон производят до скорости и = при полной подаче топлива и заме-
ряют время разгона tB.n.
Показатели 7-10 определяются по динамической характеристике авто-
мобиля. Значения нормированы: для грузовых автомобилей с полной на-
грузкой £0,25, для автопоездов 6^ £0,18. Значения Дяшвх для ряда
автомобилей приведены в [18].
При подборе автомобиля для работы с прицепом оценивается возможность
обеспечения необходимой силы тяги на крюке при заданных дорожных усло-
виях и параметрах прицепа.
Кроме рассмотренных показателей тягово-скоростных свойств автомобиля
стандартом предусмотрено определение скоростных характеристик < разгон —
выбег» и «разгон на передаче, обеспечивающей максимальную скорость». Эти
характеристики позволяют сравнивать эксплуатационные свойства данного
автомобиля и аналогов. Определяется также установившаяся скорость на
затяжных подъемах v^4. Ее определяют при заданных значениях уклонов
на участках дороги заданной длины. Значение иуст оказывает влияние на
среднюю скорость автомобиля и транспортного потока в целом. Для автопо-
ездов с полной нагрузкой параметры затяжного подъема регламентированы
ГОСТ 21398-89: автопоезд должен иметь скорость оу<т £30 км/ч на участке
дороги протяженностью не менее 3 км с уклоном h = 0,03(3 %).
Наиболее полную комплексную оценку тягово-скоростных свойств дает
средняя скорость движения автомобиля, так как она определяет его про-
изводительность. Одйако средняя скорость зависит не только от параметров
автомобиля, но и от условий движения, характеризующихся множеством
факторов случайного характера (выбор маршрута движения, помехи, созда-
ваемые транспортным потоком, дорожные ограничения, метеоусловия, время
года и суток и др.). Поэтому объективная оценка средней эксплуатационной
скорости требует проведения испытаний на нескольких специально подобран-
ных маршрутах, способных отобразить весь спеКтр характерных эксплуата-
3.2. Динамически! характеристика автомобиля
89
ционных условий для данного автомобиля. По результатам этих испытаний
может быть дана статистическая оценка скоростных свойств созданного ав-
томобиля, однако это требует значительных затрат материальных и времен-
ных ресурсов.
3.2. Динамическая характеристика автомобиля
В параграфе 2.6 получено уравнение прямолинейного движения автомо-
биля с механической трансмиссией (2-75). Перенесем в правую часть этого
уравнения все члены, содержащие массу автомобиля тл, и разделим левую
и правую части полученного равенства на тл g
Л^дМтрЛтрАк _ 6n х dv 1
———— ------— -V+-----
m,g g dt
где Мд — вращающий момент двигателя, реализуемый на входе в трансмис-
сию.
Поскольку показатели тягово-скоростных свойств определяются при пол-
ной подаче топлива в двигатель, то Мя определяется по формуле
Мд (3.2)
Отношение в левой части уравнения (3.1) называется динамическим фак-
тором автомобиля
D - ,^д1*п>Лп>/л< -~Ец Ало® (з
Динамический фактор — это безразмерная величина, характеризующая
потенциальные возможности автомобиля по преодолению дорожных сопро-
тивлений или сообщению ему ускорения в данных дорожных условиях. Следо-
вательно, динамический фактор характеризует тяговые и скоростные свойства
автомобиля.
Графическое изображение зависимости динамического фактора от скоро-
сти движения D ~ /(и) на всех передачах трансмиссии называется динамиче-
ской характеристикой автомобиля (рис. 3.1).
Величина D зависит от конструктивны^ параметров автомобиля и режима
его движения. Из формулы (3.3) следует, что чем выше передаточное число
трансмиссии и^ (т.е. ниже номер включенной передачи) и.ее КПД и чем
меньше масса автомобиля т^, лобовая площадь Ая и коэффициент сопротив-
ления воздуха k№, тем больше!). Фактор обтекаемости Ал оказывает значи-
тельное влияние лишь при большой скорости и поэтому заметно снижает D
' только на высших передачах.
При равномерном движении суммарный момент ведущих колес автомоби-
ля Мк.» = А^дИтрЛтр- Тогда выражение (8.8) примет следующий вид:
D - -?*!», (3.4)
ma g
90
3. Тягово-скоростные свойства автомобиля
При построении динамической характеристики автомобиля выбирают
ряд точек (не менее 10) на внешней скоростной характеристике двигателя
Мр - /(лд), Для каждой точки вычисляют D по формуле (3.3) и скорость авто-
мобиля о на данной передаче. Рекомендуется шаг дискретизации аргумента
Пд при вычислениях Ме и и принимать не более 100 об/мин. Скорость автомо-
биля определяется без учета внешнего скольжения с использованием формул
(1.23) и (1.24). Для удобства пользования динамической характеристикой
при решении практических задач скорость автомобиля принимается в км/ч
и вычисляется по формуле:
и = з.в^к = о,877^&^-. (3.5)
ЗОи^ Ujp
Радиус качения ведущего колесагв определяется по формуле (1.12). В прак-
тике построения динамических характеристик автомобилей часто вместо пе-
ременной величины гк используют постоянную величину г^о, принимая гх0
равным статическому радиусу шины гет при номинальной нагрузке Fx. При
этом используется информация о г€Т и Fa, приведенная в стандартах на авто-
мобильные шины. Тогда скорость автомобиля вычисляют по формуле
и =0,377^2. (3.6)
“тр
Следует, однако, иметь в виду, что на низших передачах формула (8.6) мо-
жет приводить к заметной погрешности.
На рис. 3.1 динамическая характеристика построена только для низшей
Лн, высшей й, и одной из промежуточных передач Z>„p. Динамическая харак-
теристика позволяет определить ряд показателей тягово-скоростных свойств
3,2, Динамическая характеристика автомобиля 91
автомобиля и решать многие важнейшие эксплуатационные задачи, связан-
ные с оценкой возможности и эффективности использования автомобиля
в конкретных условиях.
Важной особенностью динамической характеристики является то, что она
позволяет сравнивать тягово-скоростные свойства автомобилей различных
типов и назначений и автомобилей с различающимися массо-геометрически-
ми параметрами.
Используя выражение (3.3), запишем уравнение (3.1) в виде
р = + й + (3.7)
gdt g di
При равномерном движении
D=y=f+fc. (3.8)
Из выражения (3.8) следует, что если два различных автомобиля имеют
одинаковые значения динамического фактора при одной и той же скорости
движения, то они оба на данном скоростном режиме могут преодолевать оди-
наковые дорожные сопротивления, т.е. их тяговые свойства одинаковы, хотя
автомобили при этом могут существенно различаться по всем конструктив-
ным параметрам.
На рис. 3.1 выделены характерные точки динамической характеристики,
используемые при сравнительном анализе тягово-скоростных свойств.
Динамический фактор Dv при максимальной скорости автомобиля
определяет возможность достижения в заданных дорожных услови •
ях, характеризуемых коэффициентом суммарного дорожного сопротивле-
ния у„. Значение Гр,,, должно достигаться на горизонтальной поверхности,
поэтому принимают уклон дороги Л = 0, а коэффициент сопротивления каче-
нию f = fp определяют по формуле (1.31). При этом должно выполняться усло-
вие Д, 2 4,.
Максимальный динамический фактор на высшей передачеDBmax опре-
деляет максимальную величину уклона дороги который
может преодолеть автомобиль без перехода на низшую передачу, а соответст-
вующая ему критическая скорость гнрв ограничивает диапазон скоростей ус-
тойчивого движения автомобиля на высшей передаче окр.в <и <итах.
Предположим, что автомобиль движется со скоростью Vj на высшей пере-
даче по дороге, коэффициент суммарного дорожного сопротивления которой
V! (рис. 3.2). Поскольку в этом случае У! то, согласно выражению (3.7),
dvjdt = 0. Следовательно, vj = const и движение автомобиля равномерное. При
увеличении у на величину Ду, т.е. до \/2 = 'Л + А у, окажется, что <у2, тогда
dvfdt < 0 и автомобиль начнет снижать скорость. Замедление его при этом бу-
дет соответствовать разности (П-у2). Значение dv/dt можно определить из вы-
ражения (3.7), согласно которому
o = (8.в)
dt Sn м
92 3. Тягово-скоростные свойства автомобиля
Рис. 5.2. Динамическая характеристика автомобиля на высшей передаче
По мере снижения скорости D увеличивается, а модуль разности D-yj
уменьшается, что приводит к уменьшению модуля замедления dv/dt. При
достижении скорости окажется справедливым равенство = у2 = У1 + Ду>
поэтому dv/dt=0 и снижение скорости прекратится.
Если сопротивление дороги уменьшится на величину Av °РИ исходной
скорости то окажется, vrodv/dt > 0, и автомобиль будет разгоняться вплоть
до достижения скорости при которой -уа =Ух~Ду- Чем меньше коэф-
фициент приведенной массы автомобиля 8П.И, тем выше ускорение. Значение
5ц.м> согласно выражению (2.71), зависит от моментов инерции двигателя ,
трансмиссии и колес JK и передаточного числа трансмиссии и^.
Приведенный пример показывает, что если выполняется условие
Do SySDBm„,
то скорость автомобиля может изменяться в пределах vKp,a S v £ошвх, но движе-
ние его при этом устойчиво и не требуется переключения на низшую передачу.
В результате обеспечивается высокая средняя скорость и производительность
автомобиля.
Рассмотрим случай, когдау>Лвтвя. Предположим, что при скорости
произошло резкое увеличений дорожного сопротивления отух доу4. Посколь-
ку y4 >Da при любой скорости движения на высшей передаче, то падение ско-
рости будет непрерывным. Причем после достижения v < окр-в замедленье по
модулю начнет прогрессивно возрастать, так как будет увеличиваться раз-
ность между!) и у<. Это приведет к остановке двигателя и прекращению дви-
жения. Следовательно, движение автомобиля в рассматриваемых условиях
будет неустойчивым, поэтому скорость v = окр_, называют критической ско-
ростью.
На основании изложенного можно записать условие устойчивого движе-
ния автомобиля по возможностям двигателя
D £у.
(3.10)
3.2 Динамическая характеристика автомобиля
93
Если на данной передаче условие (3.10) выполняется, то в этом случае
можно при необходимости обеспечить равномерное движение автомобиля,
несмотря на изменения у. Это достигается изменением режима работы двига-
теля. Например, нужно сохранить ч = const при изменении у от уц до
(рис. 3.2). Для этого воздействием на педаль акселератора переводят двига-
тель на частичную скоростную характеристику (или частичную регулятор-
ную характеристику — для двигателя с всережимным регулятором частоты
вращения), изменяя его мощность и вращающий момент. Получаемая при
втом характеристика динамического фактора изображена на рис. 3.2 штри-
ховой линией. Если условие (3.10) не выполняется, необходимо включить бо-
лее низкую передачу.
Условие устойчивости движения автомобиля в общем случае можно пред-
ставить в виде неравенства частных производных
ЭР Эу
du dv
(3.11)
Это неравенство можно использовать для прогнозирования устойчивости
работы двигателя и выявления необходимости переключения передач при
моделировании движения автомобиля по заданному маршруту.
Максимальный динамический фактор на низшей передаче -DHmax
(рис. 3.1) определяет максимальное дорожное сопротивление, характеризуе-
мое коэффициентом утах, которое может преодолеть автомобиль при доста-
точном сцеплении ведущих колес с дорогой. Но коэффициент сцепления фх
зависит от дорожных условий и изменяется в весьма значительных пределах
(см. табл. 1.2). Поэтому значение Ри ГОЫ( не всегда может быть реализовано.
В параграфе 1.6 получено выражение (1.65) для определения максимального
момента реализуемого ведущими колесами по условиям сцепления
с дорогой. Так как f «<рж, то вместо можно принять момент суммар-
ной предельной силы сцепления всех ведущих колес с дорогой Я±ф относи-
тельно их осей вращения колеса. Значение силы определяется на основе
выражения(1.62) путем преобразования его в равенство:
гдеЯ„ — суммарная нормальная реакция дороги на ведущие колеса.
Искомый момент JW ф силы Л^ф найдем по формуле
Подставив в выражение (3.4) ЛСФ Вместо Af«.B и пренебрегая Fw, получим
значение динамического фактора по сцеплению
D ф = (3.12)
ЕслиПф <Da max, то условие устойчивого движения автомобиля принимает
ВИД
Лф гу. (3.13)
94
3- Тягово-скоростные свойства автомобиля
У полноприводного автомобиля = пга£сова-mKg, тогда
Г>, = <рЛ. (3.14)
У неполноприводных автомобилей значительно меньше <рх1 так как на
ведущие колеса приходится только часть массы автомобиля, что приводит
к уменьшениюR^- Пр^ определении Л» необходимо также учитывать пере*
распределение нормальных реакций (см. параграф 2.7). При анализе тяго-
во-скоростных свойств неполноприводных автомобилей часто используют
приближенные оценки Л,, и D^, вычисляемые по формулам:
□ для заднеприводного автомобиля
=kKG2^kR2maeki = (3.15)
L» Lt
□ для переднеприводного автомобиля
п» = <8.16)
Lj Xj
На дорогах с хорошим сцеплением (фх =0,6-0,8) коэффициенты пере-
распределения нормальных реакций находятся в пределах =0,8-0,9;
kfa = 1,1-1,3. На скользких дорогах (фх - 0,1-0,2) значения кщ и кт можно не
учитывать. Формулы для уточненного определения коэффициентов будут
получены в параграфе 3.5.
Динамическую характеристику автомобиля используют также для опре-
деления режимов его движения. Рассмотрим примеры решения таких задач.
Предположим, необходимо определить скорость устойчивого установив-
шегося движения в заданных дорожных условиях с известным значением
Рис. 3,3. Определение ускорения и скорости автомобиля в заданных дорожных условиях
по динамической характеристике
3.3. Тигово-скоростныа свойства автопоезда
99
= 4 + Л1 и установить, на какой передаче будет происходить движение. Для
этого проведем линию функции Vi = /(f) до пересечения с линиями динамиче-
ского фактора D = /(f) на различных передачах (рис. 8.3). В точке пересече-
ния графиков этих функций, в которой выполняется условие (3.11), получим
искомое значение скорости. В данном случав это соответствует движению на
IV передаче со скоростью 14. Движение со скоростьюиг, при которой также
пересекаются графики функций^ = /(о) яОг, = /(и), неустойчиво: автомо-
биль либо начнет разгоняться, либо последует замедление и остановка. На
дороге с характеристикой - /(f) движение на IV передаче невозможно, необ-
ходимо использовать III передачу. Отметим, что графики функций Vi = f(y)
и^ = /(f) построены с учетом зависимости коэффициента сопротивления ка-
чению / от скорости.
Определим ускорение автомобиля, движущегося на IV передаче по дороге
с характеристикой Vi = /(о)- Предположим, что скорость в данный момент
времени равна . Находим разность!)/^ -^ипо формуле (3.9) вычисляем ус
корение. Так какЛдл >у1( то движение автомобиля ускоренное. Если ско-
рость автомобиля^, то движение будет с замедлением.
Преодолеть дорожное сопротивление, характеризуемое уэ = /(и), невоз-
можно, так как динамический фактор по сцеплению.!^ и ведущие колеса
автомобиля будут буксовать.
3.3. Тягово-скоростные свойства автопоезда
Автопоезда позволяют существенно повысить эффективность автомобиль-
ного транспорта. При одной и той же грузоподъемности собственная масса
прицепа значительно меньше, чем собственная масса тягача. Поэтому коэф-
фициент грузоподъемности автопоезда kr =тТ/та (гдетг— грузоподъем-
ность; т, — полная масса автомобиля или автопоезда) значительно выше,
чем одиночного автомобиля.
При комплектовании автопоезда необходимо определить пределы целесо-
образного увеличения его грузоподъемности, обеспечиваемого путем измене-
ния количества буксируемых прицепов и подбора прицепов по их грузоподъ-
емности. Максимально возможная производительность автопоезда без учета
простоев (теоретическая производительность} пропорциональна грузоподъ-
емности /Пр и скорости и. При увеличении полной массы автопоезда т^ вели-
чина mr растет, а скорость движения уменьшается, поэтому производитель-
ность вначале увеличивается, азатем, достигнув максимума, падает (рис. 3.4).
Оптимальное значение массы автопоезда соответствует заштрихованной эоне.
Фактическая производительность автомобильного транспортного сред-
ства меньше теоретической, так как последняя не учитывает ряда факторов:
простоев под погрузкой и разгрузкой; снижения скорости, обусловленного
транспортным потоком и дорожными ограничениями; влияния порожних
пробегов и др. Опыт эксплуатации показывает, что фактическая производи-
тельность автопоезда на 40-50 % выше, а средняя скорость движения на
10-15 % ниже по сравнению с одиночным автомобилем. Затраты топлива на
единицу выполненной транспортной работы также существенно снижаются.
46
3. Тягово-скоростные свойства автомобиля
Рис. 3.4. Зависимости скорости о, грузоподъемности тг и проивводительности W
от полной массы автопоезда тш
Тягово-скоростные свойства автомобиля-тягача и формируемого на его ос-
нове автопоезда существенно различаются. Основное влияние на них оказы-
вает масса автопоезда, так как она непосредственно определяет величину
дорожного сопротивления и сопротивления разгону. Сопротивление воздуха
автопоезда с одним прицепом на 26-30 % выше, чем у тягача, и увеличивает-
ся на 16-20 % при добавлении каждого последующего прицепа. При этом
увеличивается момент AfK>a, подводимый к ведущим колесам, что приводит
к возрастанию мощности потерь на упругое скольжение и внешнее проскаль-
зывание шин. Это обычно учитывают посредством увеличения значений ко-
эффициента сопротивления качению на 6-10 %.
Для анализа тягово-скоростных свойств автопоезда можно использовать
динамическую характеристику автомобиля-тягача, дополнив ее номограм-
мой нагрузки и номограммой контроля буксования (рис. 3.5). Используя вы-
ражение (3.8), составим приближенное соотношение между динамическими
факторами автопоезда D№ и автомобиля-тягача £>а:
<3.17)
Снижение динамического фактора по сравнению с Вл приводит к
уменьшению скорости и преодолеваемого уклона. Снижается также динами-
ческий фактор по сцеплению. Для автопоезда его можно определить, подста-
вив в формулу (3-12) та вместо
n ф(Э,18)
^ЖП^ ^яп
гдеХгф — коэффициент сцепной массы: = т9/тл; тф — масса, приходящаяся
на ведущие колеса автомобиля-тягача (сцепная масса).
Номограмма нагрузки (сплошные линии) отображает зависимости между
DM, Д и коэффициентом нагрузки Н /т^. Параллельно оси абсцисс Н
можно провести ось Пщ,, установив соотношение между количеством прице-
пов Лдр выбранной грузоподъемности и Н. НоМограмма контроля буксования
(штриховые линии) отображает зависимости между Др.., и Н при заданном
3.3. Тягово-скоростные свойства автопоезда
97
Рис. 8.5. Динамическая характеристика автопоезда
На рис. 3.£ она построена для Л* = 0,67, т.е. для двухосного тягача с колесной
формулой 4x2. Номограммы дают возможность осуществить обоснованный
выбор количества прицепов для эффективной работы автопоезда в заданных
эксплуатационных условиях. Рассмотрим примеры их использования.
Предположим, необходимо определить скорости движения одиночного
автомобиля и автопоездов с одним и двумя прицепами при у=OJO&. Построе-
ния для этого случая показаны линиями со стрелками. Одиночный автомо-
биль сможет двигаться на IV передаче со скоростью « 29 м/с, автопоезд
с одним прицепом — также на IV передаче, но со скоростью Рь? =2&5 м/с,
а с двумя прицепами — на III передаче со скоростью =18 м/с.
Определим далее возможность движения автопоезда с одним прицепом по
грунтовой дороге после дождя (/ = 0,06-0,16; <рх =0,2-0,4; см. табл. 1.1и 1.2).
Для этого проведем вертикальную линию, соответствующую = 1, до пере-
сечения с линиями Р,п = V- Движение без буксования ведущих колес возмож-
но, если >у. Полагая у = Л находим, что при / = 0,05'достаточно иметь
<рх 20Д 4; при f = ОД-фх 2 ОД при f = 0,15 - фх 20,46. Следовательно, при f 2ОД
движение автопоезда практически невозможно из-за недостаточного оцепле-
ния ведущих колес с дорогой. При f - 0,05 автопоезд сможет преодолевать ук-
лоны = 2>фМ ~f 50,04(2,25 °).
Теперь определим возможное количество прицепов для работы в условиях
Vmax - ОД и = 0,4-0,6. При двух прицепах в этом случае необходимо, чтобы
фх 20,66, а для одного — достаточно фх = ОД Следовательно, уверенная работа
возможна лишь с одним прицепом.
4 Звк. 349»
98
3. Тягово-скоростиые свойства автомобиля
3.4. Разгон автомобиля
Время равномерного движения автомобиля обычно невелико по сравне-
нию с общим временем его работы. Так, при эксплуатации в городах автомо-
били движутся равномерно всего лишь 16-26 % времени; от 30 до 46 %
времени приходится на ускоренное движение и 80-40 % — на движение
накатом и торможение. Для достижения высокой средней скорости в таких
условиях автомобиль должен обладать высокими показателями приемисто-
сти. Приемистость оценивается временем разгона до заданной скорости, на
заданном пути и на высшей передаче (см. параграф 8.1). Их значения можно
определить экспериментально или расчетным путем. В последнем случае
необходимо построить графики характеристик разгона, представляющие
собой зависимости изменения скорости v и пути а от времени t.
Рассмотрим методики расчета и построения характеристик разгона авто-
мобиля с механической трансмиссией. Получить эти характеристики можно
посредством моделирования на ЭВМ процесса разгона автомобиля, описы-
ваемого дифференциальным уравнением (2.75), либо используя графоанали-
тический метод решения этого уравнения. При моделировании имитируются
условия и режимы движения, предусмотренные стандартными методиками,
содержание которых изложено в параграфе 3.1. Автомобиль движется по го-
ризонтальной дороге (Л - 0) с твердым покрытием при работе двигателя по
внешней скоростной характеристике и при отсутствии буксования ведущих
колес.
При моделировании процесса разгона используется система дифференци-
альных уравнений
dt
da
— »i>.
dt
(3.1©)
Интегрирование этих уравнений позволяет получить характеристики
разгона о = f(t) и а = f(t). Начальные условия интегрирования: =2-3 м/с;
«о =0. При решении уравнений (3.19) используются следующие функции:
Л/д = М, = /(лд); fcB1O = /(лд); ~ /(Л/К_ж). Момент Мял вычисляет-
ся по формуле (2.60), а коэффициент сопротивления качению — по форму-
ле (1.31).
Моделирование движения начинается с передачи, предназначенной для
трогания автомобиля с места. Начальная частота вращения вала двигателя
вычисляется по формуле
ЗОЦтр.н^о
(3.20)
3.4. Разгон автомобиля
99
Разгон на каждой передаче осуществляется до достижения частоты вра-
щения вала двигателя пР, после чего включается следующая передача. При
этом в первом уравнении системы (3.19) изменяются значения передаточного
числа Иц, и КПД т)^ трансмиссии. В течение некоторого времени Гп, необходи-
мого для переключения передачи, вращающий момент Мя в трансмиссию не
подводится (принимается Мд = 0). После переключения передачи разгон на-
чинается при частоте вращения вала двигателя
Пд| = Пр------,
«TW-1
(3.21)
где Игр,, Ujy, _г — передаточные числа трансмиссии соответственно на данной
передаче и на предыдущей.
Разгон завершается после прохождения расстояния ак = 2000 м.
На рис. 3.6 показаны графики разгона автомобиля ВАЭ-21103, полученные
при моделировании на ЭВМ. На графиках отображено определение показате-
лей тягово-скоростных свойств автомобиля. Значения показателей приведены
втабл. 3.1.
Таблица 3.1
Показателя тягово-скороствых свойств Автомобиля ВАЗ-21103
Наименование показателя Значение
Максимальная кинематическая скорость, км/ч 160
Условная максимальная скорость, км/ч 162
Максимальный динамический фактор
на низшей передаче 0,623
на высшей передаче 0,081
Максимальный преодолеваемый уклон 0,616
Время разгона на участке пути 400 м, с 18,5
Время разгона на участке пути 1000 м, с 34,4
Время разгона до скорости 100 км/ч, с 12.5
Время разгона на высшей передаче, с 28.7
Рассмотрим графоаналитический метод получения характеристик разго-
на. Вначале необходимо построить динамическую характеристику автомоби-
ля. Затем эта характеристика используется для получения характеристик
ускорения, позволяющих определить время, скорость и путь разгона и по-
строить графики о = /(Ом у = Лй)-
Ускорение при разгоне вычисляют по формуле (3.9) и строят графики за-
висимостей ускорения от скорости на всех передачах (рис. 3.7).
Примерные значения максимальных ускорений для различных типов ав-
томобилей приведены в табл. 3.2.
Ш
3. Тягоео-скоростныв свойства автомобим
IV 4»л V
ш
11 rJ । 1
1 1 1 1 -А—
О 10 1Г 20 30 <40 50 с 60
Рис. 3.6. Графики разгона легкового автомобиля ВАЗ-21103
3.4. Разгон автомобиля
101
Таблица ЗЛ
Значения максимальных ускорений, м/с3
Автомобили Передаче
КНЛП1АЯ высшая
Легковые 2,6-8,б 0,8-1,2
Грузовые 1,7-2,0 0,8-0,Б
Автобусы 1,8-2,3 0,4-0,8
Автопоезда 1,0-1,2 0,2-0,5
Время разгона. Д ля достижения мак-
симальной интенсивности разгона исполь-
зуются ускорения, максимально возмож-
ные при данной скорости. Поэтому пере-
ключения передач с низших на высшие
осуществляют в точках Я, С, Е (рис. 8.7)
при скоростях соответственно ,
0*3 . Разгон начинают на передаче, пред-
назначенной для трогания с места, при
минимальной устойчивой скорости дви-
жения ОцЦп, а заканчивают при или при а «0. Полагают, что ускорение
в каждом интервале изменения скорости постоянно. Тогда время разгона на
этом интервале А2( = Aut/acp Например, в интервале изменения скоростей
bj 5 v S v2 находим: Aoj = - рц; сср1 = (aj +Оа)/2. Общее время разгона от скоро-
сти Unjn до pmwt равно сумме составляющих времени разгона At, и суммарному
времени, затраченному на переключения передач:
(3.22)
t-i
где п — количество интервалов изменения скорости; £п — время переключе-
ния передачи; лкп — количество ступеней в коробке передач, используемых
при разгоне автомобиля.
Время tn зависит от квалификации водителя, конструкции коробки передач
и типа двигателя. Для механических коробок передач принимают in -1-2 с.
Для автомобилей с дизельными двигателями значения tQ большие, так как
снижение угловой скорости коленчатого вала у них менее интенсивное, чем
у бензиновых (из-за больших инерционных масс).
На рис. 3.8, а показана характеристика и = /(/). В течение времени tn мощ-
ность не подводится к ведущим колесам, поэтому!) < 0, автомобиль движется
накатом и скорость его уменьшается на величину Avc. Замедление при этом,
согласно формуле (3.9), приближенно равно a = -fg. Тогда
(3.23)
Путь разгона. Для получения характеристики разгона и = /(в) необходимо
определять приращения пути Лв;, проходимого автомобилем на всех интер-
валах изменения скорости. Полагают, что в каждом из этих интервалов авто-
мобиль движется равномерно со средней скоростью (. Тогда Aef = оср (At(.
Например, в интервале скоростей Vj <; о <и2 получаем otpl = (oi + i^)/2. Анало-
гично находится путь за время переключения передачи.
Полный путь разгона от скорости до составляет
в = £ Де, + (3.24)
(-1 ;-i
На рис. 3.8, б показана характеристика о = /(а).
Время разгона tL, до заданной скорости оа и время разгона на высшей пере-
даче tB n в заданных пределах скоростей и ив.н определяют непосредственно
102
3. Тягово-скоростные свойства автомобиля
по графику и = /(f). При определении времени разгона на пути 400 м t4C0 и на
пути 1000 и <1ск)0 вначале по графику v = f(s) находят скорости v40D И1>1СС0, дос-
тигаемые на этих отрезках пути, а затем по графику у = f(t) искомые значе-
ния времени разгона. Для определения условной максимальной скорости
по графику v = /(а) находят скорости и1В00 при а = 1600 м и о2ооо при
а - 2000 м и по их значениям определяют время (у разгона на последних 400 м
пути, используя график и = Скорость 1’1па1ЙК вычисляют из соотношения
Ц.,глх =400/«у.
3.5. Преодоление подъемов
При анализе тягово-скоростных свойств оценивают .максимальный про-
дольный уклон дороги Лпшк, преодолеваемый автомобилем при равномерном
движении на подъеме, и предельный уклон дороги Л^д, который он может
преодолеть с разгона.
3.5. Преодоление полъе.мов
103
Значение Л^сх на любой передаче зависит от соотношения между макси-
мальным динамическим фактором на данной передаче Отлх и динамическим
фактором по сцеплению Др. Если£»тВ1 <£>ф, тсЛщ^ определяется потенциаль-
ными возможностями двигателя {максимальным моментом AfemaK) и вычис-
ляется по формуле
^«=-Dra.x-A (325)
Если же jDmaK >DV, то ограничивается сцеплением ведущих колес с до-
рогой и определяется по формуле
(3.26)
Для полноприводного автомобиля Dv вычисляют по формуле (3.14), для
неполноприводных автомобилей используют приближенные формулы (3.15)
и(3.16). При необходимости более точного определения для этих автомоби-
лей используют условие (1.62), согласно которому движение автомобиля без
буксования ведущих колес обеспечивается при74« < фАг Значение продоль-
ной и нормальной Лгв реакций определяют при равномерном движении без
учета сопротивления качению и сопротивления воздуха. Для заднеприводно-
го автомобиля используют формулу (2.91), согласно которой при принятых
допущениях
R =R - llG* СОБК + heGi sinCt + Л°РJn(> (3.27)
L
Значение Дхя = R& при тех же допущениях найдем, используя схему на
рис. 2.1. Пренебрегая реакцией ДЛ1, так как она обусловлена сопротивлением
качению ведомых колес, получаем
/?ЛВ =ГЛ +F1[p = (GB + Gnp)ainot,
где Сщ, — сила тяжести прицепа (Gnp = g)
Используя условие Ехв < и принимая во внимание, что ft = tga, нахо-
дим максимальный уклон, который может быть преодолен заднеприводным
автомобилем с прицепом без буксования ведущих колес:
А а___________________________
mBX mt(L - <ряЛг) + mdp(£ - фЛр)'
При выводе этой формулы не учитывалось сопротивление качению, поэто-
му из полученного значения следует вычесть значение коэффициента со-
противления качению /-
Учитывая выражение (3.26), получаем формулу для определения динами-
ческого фактора по сцеплению заднеприводного автомобиля с прицепом:
-----------(3.28)
~ ФхАс) + ninp(L — ФуЛдр)
Для одиночного автомобиля
Д,=- - (3.29)
104
3. Тярэво-скоростные свойства автомобиля
Для переднеприводного автомобиля формулы аналогичны, только в круг-
лых скобках вместо знаков минус следует принять знак плюс, а 4 заме-
нить на 4*
При <рх —0,3 для автопоездов не превышает 0,06-0,09 (З-б6), для
одиночных автомобилей 4x2 — 0,14-0,22 (8-12°), для полноприводных —
0,27-0,28(16-16°).
Используя формулы (3.15), (3.16) и (3.29), получим выражения для опре-
деления предельных значений нормальных реакций дороги на ведущие ко-
леса и коэффициентов перераспределения нормальных реакций
ограничиваемые сцеплением;
□ для заднеприводного автомобиля
р _ ,
— т —•
k - L
кЛвф — т . ’
L - Ф А
(3.30)
□ для переднеприводного автомобиля
Р _ , J, _ I'
L + <рхЛг L + <рхЛ,
(3.31)
Величину преодолеваемого уклона можно значительно повысить, если ис-
пользовать кинетическую энергию автомобиля, накопленную им до въезда
на подъем.
Предельным уклоном дороги, преодолеваемым автомобилем на данной
передаче, называют уклон, который на отрезке пути заданной длины Вызы-
вает падение скорости от начальной у0 , соответствующей движению на гори-
зонтальном участке, до критической скорости .
Предельный уклон Лщ^д равен сумме максимального уклона Л1пвх, преодо-
леваемого за счет работы двигателя, и дополнительного уклона ЛДцц, преодо-
леваемого за счет использования накопленной автомобилем кинетической
энергии:
А пред — Атах + АДи и.
Значение Нлап можно определить, используя теорему об изменении кине-
тической энергии, согласно которой в рассматриваемом случае изменение
кинетической энергии автомобиля равно работе силы тяжести при преодоле-
нии дополнительного уклона Лди[:
0,5£п.мт„ (о£р - £ЙДМ1,
где Ядоп — высота дополнительного подъема: Ндс>„ = зв1падоп = ; s — дли-
на отрезка пути, на котором скорость падает от до окр (путь затухания);
дои — угол уклона.
Дополнительный уклон, преодолеваемый автомобилем с разгона, вычис-
ляется по формуле
3.6. Мощностное баланс автомобиля
105
Формула (3.32) дает возможность определить при заданном а, или а
при известном h^. Чем выше начальная скорость г0 и меньше длина участка
подъема дороги, тем больший дополнительный уклон может преодолеть ав-
томобиль. Важно отметить, что величина hR<>n не зависит от сцепления колес
с дорогой, так как работа, затрачиваемая на преодоление дополнительного
подъема, выполняется за счет уменьшения кинетической энергии автомоби-
ля без необходимости взаимодействия ведущих колесе дорогой. Разгоняя ав-
томобиль перед началом преодоления подъема до максимально возможной
скорости на выбранной передаче, во многих случаях можно преодолеть подъ-
ем без переключения на низшую передачу, что позволяет повысить среднюю
скорость и производительность автомобиля.
3.6. Мощностной баланс автомобиля
Мощностной баланс автомобиля позволяет анализировать затраты мощно-
сти на преодоление сопротивлений движению, обусловленных воздействиями
внешней среды и внутренним трением в механизмах автомобиля. Это дает
возможность оценивать эффективность использования мощности двигателя,
анализировать топливную экономичность автомобиля и выявлять влияние
различных факторов на расход топлива.
Эффективная мощность двигателя Ре затрачивается на привод вспомога-
тельного оборудования двигателя и механизмов управления автомобилем, на
преодоление сил трения в трансмиссии, сопротивлений движению и разгону
автомобиля. Учитывая все затраты мощности, составим уравнение мощно-
стного баланса'.
^-ьД.о + Д'р + + Д + =0- (8.33)
Эффективная мощность двигателя (Вт) определяется выражением
Pt=Mta>a=Mt^. (3.34)
ov
Эта мощность положительна, а мощности сил и моментов сопротивлений
отрицательны, так как их векторы противоположны соответствующим век-
торам скоростей.
Мощность, затрачиваемая на привод вспомогательного оборудования
двигателя и механизмов управления автомобилем, составляет часть мощно-
сти двигателя и вычисляется по формуле
Л.«,=-Лвл^. (3.35)
где Л..о — коэффициент отбора мощности.
Мощность потерь на трение в трансмиссии составляет
Ртр = -Р, (1 - л тр) = -3(1 - Л».о XI -ПгР). (3.36)
где Pa = Р«(1-Лво) — мощность двигателя, передаваемая в трансмиссию при
равномерном движении автомобиля; Т1тр — КПД трансмиссии.
106
3. Тягово-скоростные свойства автомобиля
Мощность, затрачиваемая на преодоление сопротивления качению, оп-
ределяется выражением
Pf=~Mf(aK3.
Учитывая выражения (1.23) и (2.8) и полагая гв = г1[0, получаем
Р( gvcosa gv. (8.87)
Мощность, затрачиваемая на преодоление сопротивления подъему, оп-
ределяется по формуле
Д = -До = -т, gv Hina = ghv. (8.88)
При определении Д следует учитывать, что на подъеме а и ft положитель-
ны, а на спуске — отрицательны. Следовательно, на спуске Д будет положи-
тельной, В этом случае реализуется потенциальная энергия, обусловленная
уменьшением высоты положения автомобиля.
Сложив Pf и Д, получим мощность, необходимую для преодоления сум.'
мерного дорожного сопротивления:
Pv = Pf + Д = gv. (8.89)
Мощность, затрачиваемая на преодоление сопротивления воздуха, оп-
ределяется выражением
Я = -FwV = ~Ь№АЛ о3 . (3.40)
Мощность, затрачиваемая на разгон автомобиля, равна
Р/ = -Fj„v = -8п = -5п,мташ’. (3.41)
at
К ведущим колесам автомобиля при равномерном движении подводится
мощность
Рк=Д(1-*,Р)ц^. (3.42)
Используя уравнение (3.38), можно построить график мощностного ба-
ланса автомобиля на всех передачах. На рис. 3.9 показан график мощностного
баланса на высшей передаче. По этому графику можно определить коэффи-
циент использования мощности двигателя при равномерном движении с лю-
бой скоростью vL в дорожных условиях, характеризуемых коэффициентом^,
при любом значении полной массы автомобиля та.
Коэффициентом использования мощности двигателя И называют от-
ношение мощности, необходимой для равномерного движения автомобиля
в заданных условиях (мощности нагрузки двигателя Д.Е), к мощности Pt, ко-
торую при этом может развивать двигатель при полной его нагрузке, т.е. при
работе по внешней скоростной характеристике:
И = = Р*-о + Р'гр + Ру +-р»' /3 43)
Р< Л
3.7. Экспериментальное определение параметров и характеристик автомобиля
107
Рис 3.9. График мощностного баланса автомобиля на высшей передаче
Значение И можно определить непосредственно по графику мощностного
баланса. Например, при скорости и, и у =
д— AB+CD
AD ’
(3-44)
где АВ, CD, AD — отрезки, длины которых намеряют непосредственно по гра-
фику.
Чем меньше коэффициент ф и скорость автомобиля v и чем больше переда-
точное число трансмиссия и_ (т.е. чем ниже номер передачи), тем хуже исполь-
зуется мощность двигателя при равномерном движении и, следовательно,
тем меньше И.
При разгоне автомобиля с максимальной интенсивностью и при достиже-
нии отвх двигатель работает по внешней скоростной характеристике. В этом
случае И = 1.
3.7, Экспериментальное определение параметров
и характеристик автомобиля
При создании нового автомобиля не всегда представляется возможность
получения полной и достоверной информации по всем его параметрам и харак-
теристикам. Использование неточной информации может привести к ошибоч-
ной оценке показателей эксплуатационных свойств автомобиля. Определение
некоторых параметров требует значительных временных и материальных за-
трат. К таким параметрам можно отнести приведенную массу автомобиля,
коэффициент сопротивления воздуха, коэффициент сопротивления качению,
параметры и характеристики двигателя и др. Их значения часто принимают,
используя информацию об аналогах.
Параметры автомобиля с достаточно высокой точностью можно определить
экспериментально. Для этого выполняются гностические (познавательные)
106
3, Тягово-скоростные свойства автомобиля
пробеги автомобиля. При определении приведенной массы гностический
пробег осуществляется по следующей программе. Автомобиль в снаряжен-
ном состоянии разгоняют до максимальной скорости на горизонтальном пря-
молинейном участке дороги с твердым покрытием в сухую безветренную
погоду. Разгон осуществляют при полной подаче топлива в двигатель и по-
следовательном переключении всех передач. В процессе разгона на каждой
передаче посредством соответствующей измерительной аппаратуры фикси-
руют по два значения ускорения автомобиля ад и при заданных значениях
частоты вращения вала двигателя пц1 и пд2. Так как скорость автомобиля
в моменты фиксации ад над на данной передаче изменяется на сравнительно
небольшую величину, то можно считать, что коэффициент сопротивления
качению / и сила сопротивления воздуха остаются практически постоян-
ными.
Приведенная масса автомобиля определяется выражением (2.72). Для
снаряженного автомобиля представим его выражение в виде
т.,гр = = (l + m,p/mc)mc +rnFt>, (3.46)
где РЦ) — снаряженная масса, значение которой получают путем взвешива-
ния автомобиля; — дополнительная масса, кинетическая энергия кото-
рой в поступательном движении равна кинетической энергии вращающихся
масс двигателя, трансмиссии и колес автомобиля.
Подставим в дифференциальное уравнение движения автомобиля (2.75)
значения входящих в него величин, соответствующих полученным в экспе-
рименте на /-Й передаче ускорениям;
(то = — AB Oi)b'TpjT]TJ>J/z‘K —mogfj —
(rtio + лЦру)сд = — йв,О2)и7р/Лтр//^х — moSfj ~
где Mrt, Mt2 — значения момента двигателя, получаемые при частотах вра-
щения вала двигателя соответственно при пд1 и пд2-
Различием между коэффициентами отбора мощности и й,.о2 можно
пренебречь, так как их значения существенно меньше единицы.
Решив совместно уравнения (3.46), получаем выражение для определения
массы на у-й передаче:
т - ^^*1 ~
лг,р;-------------г------пт0, (а.47)
Ч«П’<Ю
Значения Ме1 и Mf2 вычисляются по уравнению регрессии Mf - f(na ).
Таким образом, в процессе одного сеанса гностического пробега снаряжен-
ного автомобиля определяются искомые значения m,pj на всех передачах
трансмиссии.
Отметим, что для автомобиля с автоматической трансмиссией по анало-
гичной формуле вычисляется в бортовом компьютере полная масса автомо-
биля ть, используемая в качестве информационной переменной алгоритма
3.7. Экспериментальное определение параметров и характеристик автомобиля
109
управления. Она отличается от формулы (3.47) лишь тем, что т,р; заменяется
на тв> а вместо т$ подставляется Известное дам каждой передачи значение
Для определения приведенной массы автомобиля на нейтрали в коробке
передач тЛЩ1н подставим значение бп.н нз выражения (2.71) в формулу (2.72)
и преобразуем полученное выражение к виду:
( ti A* j*
m..npw = mo + Лд I -22- "Итр + -j-, (3.48)
\гк J
где J*a — приведенный к валу двигателя момент инерции вращающихся масс
двигателя и ведущей части трансмиссии; — приведенный к ведущему ко-
лесу момент инерции всех колес и вращающихся масс ведомой части транс-
миссии.
Составив выражения вида (3.48) для двух произвольных передач, полу-
чим систему линейных алгебраических уравнений, из которых найдем зна-
чения искомых моментов инерции и :
= . (т-Р£-^Х.; (3.49)
—^трЛЛтрА
& = . (3.60)
В формулах (3.49) и (3.50) индексы j и к обозначают номера передач.
Подставив полученные значения и в выражение (3.48), найдем иско-
мое значение приведенной массы снаряженного автомобиля m, .
Для определения коэффициента сопротивления качению осуществляют-
ся два прогона автомобиля по испытательному участку дороги. В одном из
них участвует снаряженный автомобиль, а во втором — тот же автомобиль,
но с известной величиной нагрузки. Масса груза при этом должна быть не ме-
нее четверти номинальной грузоподъемности автомобиля. В обоих заездах
в процессе разгона на всех передачах с полной подачей топлива записывают-
ся ускорения af при одном и том же значении частоты вращения вала двигате-
ля пд. Поэтому вращающий момент двигателя при фиксациях а} во всех
случаях остается практически одинаковым. Скорости снаряженного и гру-
женого автомобиля на каждой из передач одинаковы, следовательно, не раз-
личаются и значения Подставив в уравнение (2.75) значения полученных
в обоих заездах величин, составим систему алгебраических уравнений, со-
вместное решение которых приводит к выражению для определения коэффи-
циента сопротивления качению:
, = (3.51)
g(m. -m0)
гдет^ору,^ — приведенная масса и ускорение снаряженного автомобиля на
У-й передаче; т. — то же для автомобиля с контрольным грузом; тА —
масса автомобиля с контрольным грузом.
110
3. Тяговоскоростные свойства автомобиля*
Так как скорость автомобиля на различных передачах различна, то полу-
ченные значения f) позволяют получить регрессионную зависимость коэффи-
циента сопротивления качению f от скорости v.
Значение коэффициента сопротивления воздуха^ определяется в режи-
ме выбега автомобиля. Автомобиль может иметь ту же нагрузку, что и при
определении /. До въезда на испытательный участок дороги автомобиль раз-
гоняют до максимально возможной скорости (но не выше 100 км/ч) и в режиме
выбега на этом участке с постоянным временным интервалом Д#в осуществля-
ют фиксацию значений скорости и ускорения а( автомобиля. Полученный
двумерный массив данных сохраняют в памяти используемой при испыта-
ниях аппаратуры. Значение выбирается из условия, чтобы количество
элементов фиксируемых параметров было не менее 25. При этом ограничива-
ют минимальное значение используемой скорости величиной (0,2-0,3) Уювя.
Дифференциальное уравнение движения автомобиля в этом случае
^e.npN ~г~ ~ Али Y (3.52)
где — приведенная масса автомобиля на нейтрали в коробке передач,
вычисленная с учетом массы та.
Зависимость между ускорением a = do/dt и скоростью о, согласно уравне-
нию (3.52), можно аппроксимировать квадратичной параболой. Поэтому вы-
бираем уравнение регрессии в виде
а = bc +bjV + tfeu2. (3.53)
Используя полученный массив данных по а( иц, определяем значения ко-
эффициентов регрессии ЬагЬцЬ^. Если гипотеза об адекватности полученной
модели подтверждается, то значение коэффициента сопротивления воздуха
в первом приближении можно определить из соотношения
Лц. = -^^le.np.v Мл • (3.54)
Коэффициент при этом будет также учитывать нелинейные потери
в трансмиссии (гидравлические потери). Два первых члена уравнения (3.53)
можно использовать для оценки зависимости f от о:
/ = -Иа.орЛ- (ъо + ^/(m.g). (3.55)
При известных значениях приведенной массы автомобиля таср, коэффи-
циента сопротивления качению f и коэффициента сопротивления воздуха kw
можно определить характеристику момента двигателя MR ~ /(пд), передавае-
мого в трансмиссию. Эта задача решается в процессе гностического пробега
следующим образом. Осуществляется разгон автомобиля (снаряженного или
с фиксированной нагрузкой) на одной иа промежуточных передач и фиксиру-
ются значения скорости и ускорения а( при заданных значениях nai в же-
лаемом диапазоне изменения пд. Значения лд1 принимаются с постоянным
шагом Дпд. Максимальное значение лДЛ1ах принимается равным пр (т.е. при
37. Экспериментальное определение параметров и характеристик автомобиля 111
максимальной мощности двигателя Petatxh & минимальное пдю1а — из условия
обеспечения устойчивой работы двигателя при разгоне на выбранной переда-
че. Значения вычисляются при фиксированных в процессе эксперимента
значениях ut и at по формуле:
(т..то<Ь+т»*Л+*иАл1>?)гк
Л!д( = 21------------------£-. (О.ОО)
Полученные значения Ма1 позволяют оценить вращающий момент М,.ы
и мощность £> л1 (кВт), затрачиваемые на привод вспомогательного оборудо-
вания двигателя:
(3-57)
Р,.ы = М.,0(ппд(/30000. (3.58)
Значения Af<t вычисляются по уравнению регрессии Mt - Г(ля), описы-
вающему эталонную характеристику двигателя, представляемую предпри-
ятием-изготовителем.
Результаты вычислений по формулам (3.56), (3.57), (3.58) позволяют по-
лучить регрессионные зависимости Мд = f (пд), Af>ZJ = f(na ), Р9Л - f(n9 ), а так-
же зависимость коэффициента отбора мощности от частоты вращения вала
двигателя feBi(h = f(na ).
Сохраняя значения М^, МВ1О1, и сравнивая их с информацией об этих
параметрах, полученных в предыдущих сеансах гностического пробега, можно
судить об изменении технического состояния двигателя, т.е. осуществлять
его диагностирование.
Вопросы лая самоконтроля
1. Что такое тягово-скоростные свойства автомобиля?
2. Назовите показатели тягово-скоростных свойств автомобиля. Как они опре-
деляются?
3. Что такое динамический фактор автомобиля и от каких параметров автомо-
биля он зависит?
4. От чего зависит предельное значение динамического фактора и как его опре-
делить?
Б. Что такое динамическая характеристика автомобиля? Какие показатели тя-
гово-скоростных свойств автомобиля можно по ней определить?
6. Как выглядит график динамической характеристики? Приведите примеры
ее использования для определения параметров движения автомобиля в за-
данных дорожных условиях.
7. Что такое номограммы нагрузки и контроля буксования и как они использу-
ются для решения эксплуатационных задач?
8. Как определить ускорение, время и путь разгона автомобиля? Каковы при-
мерные максимальные ускорения автомобилей разных типов?
112 3. Тягово-скоростные свойства автомобиля
&. Что такое характеристики разгона автомобиля? Какие показатели тягово-ско-
ростных свойств автомобиля определяют по этим характеристикам?
10. Как определить величины максимального и предельного уклонов, которые
может преодолеть автомобиль?
11. Каковы примерные значения коэффициентов перераспределения нормаль-
ных реакций на тяговом режиме автомобиля и на что они влияют?
12. Что собой представляет уравнение мощностного баланса автомобиля? По ка-
ким формулам вычисляют все его составляющие?
13. Для решения каких задач используется мощностной баланс автомобиля? Что
такое коэффициент использования мощности двигателя и как он определяется?
14. Каковы преимущества и недостатки автопоездов?
15. Какие параметры автомобиля можно определить в процессе гностического
пробега автомобиля? Как проводятся эксперименты и как используются их
результаты?
Топливная экономичность автомобиля
Топливной экономичностью называют совокупность свойств, определяю-
щих расходы топлива при выполнении автомобилем транспортной работы
в различных условиях эксплуатации.
Топливная экономичность непосредственно зависит от конструкции авто-
мобиля. Она определяется степенью совершенства рабочих процессов двигате-
ля и трансмиссии, оцениваемой их КПД, совершенством формы автомобиля,
характеризуемым потерями на преодоление сопротивления воздуха, рацио-
нальностью использования массы автомобиля, оцениваемой коэффициентом
грузоподъемности.
Показатели топливной экономичности характеризуют потребительские
качества автомобиля. Стоимость топлива составляет до 20-30 % всех затрат
на перевозки, поэтому топливная экономичность оказывает существенное
влияние на экономическую эффективность автомобильного транспорта. Ана-
лиз топливной экономичности позволяет осуществить обоснованный выбор
подвижного состава автотранспортного предприятия и рациональное его ис-
пользование при выполнении транспортных работ.
4.1. Оценочные показатели топливной экономичности
Основным измерителем топливной экономичности автомобиля в большин-
стве стран является расход топлива в литрах на 100 км пройденного пути —
путевой расход топлива Qtt л/100 км.
В качестве обобщающих (интегральных) показателей при оценке топлив-
ной экономичности автомобиля используют средний путевой расход топлива
Явор и удельный расход топлива .
Средний путевой расход топлива — расход топлива в литрах на 100 ки-
лометров, определяемый при нормальном эксплуатационном режиме движе-
ния в наиболее типичных для данного автомобиля дорожных условиях.
Эффективность использования топлива оценивают его расходом на едини-
цу выполненной транспортной работы — удельным расходом топлива.
Удельный расход топлива представляет собой отношение среднего путе-
вого расхода топлива к выполненной полезной работе по перевозке грузов
или пассажиров:
а
0>д.г=т^-. л/(т км); (4.1)
гя 100mr
0ю.п Ж л/(пасс. км), (^.2)
где Шг — масса перевезенного груза, т; п^ — количество перевезенных пасса-
жиро^.
114
4. Топливная экономичность автомобиля
Ввиду большого разнообразия условий работы автомобилей определение
обобщающих показателей топливной экономичности представляет сложную
и трудоемкую задачу. Поэтому нормативными документами установлены част*
ные (единичные) оценочные параметры топливной экономичности» опреде-
ляемые в конкретных дорожных условиях с указанием скоростных и нагру-
зочных режимов работы. В ГОСТ 20306-90, ГОСТ 4.401-88, ГОСТ 4.396-88
и в Правилах ЕЭК ООН № 16 и 84 предусмотрены следующие частные показа-
тели и характеристики топливной экономичности автомобиля:
1) контрольный расход топлива;
2) расход топлива в магистральном цикле на дороге;
3) расход топлива в городском цикле на дороге;
4) расход топлива в городском цикле на стенде;
5) топливная характеристика установившегося движения;
6) топливно-скоростная характеристикана магистрально-холмистой дороге;
7) удельный контрольный расход топлива для грузовых автомобилей;
8) обобщенный приведенный расход топлива;
9) топливно-экономическая характеристика.
Испытания автомобиля на топливную экономичность проводят в дорож-
ных и стендовых условиях.
Дорожные испытания проводят на горизонтальных измерительных участ-
ках прямолинейной или кольцевой дороги с твердым покрытием в сухую по-
году. Атмосферные условия при испытаниях: температура воздуха 278-308 К
(6-25 °C); атмосферное давление 91-104 кПа (683-780 мм рт. ст.); относи-
тельная влажность не выше 95 %. Средняя скорость ветра при испытаниях
не должна превышать 3 м/с. Испытания проводятся при нормальных тепловых
режимах двигателя и механизмов трансмиссии. Для этого осуществляется про-
бег автомобиля на расстояние не менее 50 км при скорости не ниже (2/3)итах.
Заезды выполняют в прямом и обратном направлениях. Для определения
расхода топлива при каждой постоянной контрольной скорости производят
не менее четырех измерений. Отклонения скорости автомобиля от контроль-
ных значений не должны превышать 2 км/ч. Полученные значения путевого
расхода топлива при каждой контрольной скорости усредняются.
Для испытаний автомобиля на топливную экономичность используются
также динамометрические стенды с беговыми барабанами. Стенд оборудует-
ся тормозным, регулировочным и программным устройствами. Тормозное
устройство предназначено для воспроизведения сопротивлений движению
автомобиля. Регулировочное устройство позволяет имитировать и изменять
силы инерции, возникающие при разгонах и торможениях транспортного
средства. Программное устройство должно задавать программу движения ав-
томобиля в соответствии с имитируемым ездовым циклом.
Контрольный расход топлива Q,K (л/100 км) определяют при установив-
шемся движении на высшей передаче при двух значениях скоростей: 40
и 60 км/ч для городских автобусов и полноприводных автомобилей полной
массой свыше 3,5 т; 60 и 80 км/ч для грузовых автомобилей, автобусов спе-
4.1 Оценочные показатели топливной экономичности 11S
циального назначения, междугородных и дальнего следования, автопоездов
полной массой свыше 8,5 т; 90 и 120 км/ч для легковых автомобилей, автобу-
сов и грузовых автомобилей полной массой до 8,5 т.
Контрольный расход топлива приводят в нормативно-технической доку-
ментации автомобиля. Этот показатель отражает технический уровень авто-
мобиля и характеризует его потребительские качества. Его используют для
оценки технического состояния автомобиля в процессе эксплуатации, а так-
же на предприятии при контроле соответствия выпускаемой продукции тех-
ническим требованиям.
Путевой расход топлива при циклическом движении Qau (л/100 км)
оценивает показатели 2-4. Стандартом регламентированы три вида ездовых
циклов: магистральный, городской и стендовый. Ездовые циклы диффе-
ренцированы в зависимости от типа автомобиля и его полной массы. При
испытаниях автомобиля полной массой до 8,5 т нагрузка на него должна со-
ставлять половину номинальной грузоподъемности, но не менее 180 кг. Авто-
мобили полной массой свыше 3,5 т испытывают с полной нагрузкой. Ездовые
циклы представляют собой соответствующие программы движения автомо-
биля на участке дороги длиной 4000 м, на котором предусмотрено движение
на различных передачах, включающее этапы разгона, равномерного движе-
ния, торможения и остановок. Схемы различных ездовых циклов представ-
лены в параграфе 4.5.
Топливная характеристика установившегося движения представляет
собой график зависимости путевого расхода топлива от скорости в заданных
дорожных условиях. Испытания проводят при полной нагрузке, без груза,
с прицепом. Заезды совершают при нескольких постоянных значениях ско-
ростей, определяя при этом объемы израсходованного топлива. Условия ис-
пытаний те же, что и при определении Q, „. Усреднив полученные значения
расходов и умножив их на 100, получают значения путевого расхода топлива
в л/100 км.
Топливная характеристика установившегося движения и контрольный
расход топлива позволяют сравнивать уровень топливной экономичности
автомобилей-аналогов. Остальные показатели оценивают средние расходы
топлива в типизированных характерных условиях движения. На основании
топливной характеристики установившегося движения может быть пример-
но определен средний эксплуатационный расход топлива.
Топливноскоростная характеристика на магистрально-холмистой
дороге — зависимость путевого расхода топлива и средней скорости от допус-
тимой на маршруте скорости движения. Строят также характеристики зави-
симости расхода топлива от средней скорости движения. Они позволяют
судить о топливной экономичности автомобиля при переменных режимах
движения в условиях, когда скорости ограничены.
Удельный контрольный расход топлива грузового автомобиля — расход
топлива в литрах на единицу транспортной работы (100 т- км) при движении
с установившейся скоростью 60 км/ч на горизонтальной дороге с твердым
116
4. Топливная экономичность автомобиля
покрытием. Этот показатель предназначен для сравнения автомобилей-ана-
логов и оценки их технического уровня с точки зрения экономии топлива.
Обобщенный приведенный расход топлива автомобилей полной массой
менее 3,5 т вычисляют по формуле
= 0,25(Q,K1 +Q,kZ)+0,5Qtruc, (4.3)
где ОмциО,к2 — контрольные расходы топлива при скоростях движения соот-
ветственно ск1 = 90 и ик2 = 120 км/ч; Qw.u.e — путевой расход топлива в город-
ском цикле на стенде.
Топливно-экономическая характеристика — зависимость путевого рас-
хода топлива от скорости установившегося движения при различных значе-
ниях коэффициента суммарного дорожного сопротивления ц/. Построение
этой характеристики осуществляют на высшей или предшествующей пере-
даче, на которой достигается итвк.
4.2. Уравнения расхода топлива
Показатели и характеристики топливной экономичности можно получить
не только в процессе испытаний автомобиля, но и теоретическими методами,
вычисляя их значения по соответствующим формулам. Для этого использу-
ются характеристики удельного и часового расходов топлива двигателя и ха-
рактеристики мощностного баланса автомобиля. Удельный расход топлива
двигателя [г/(кВтч)] представляет собой отношение расхода топлива
в единицу времени при установившемся режиме работы двигателя К разви-
ваемой на этом режиме мощности. Для оценки расхода топлива в единицу
времени используют часовой расход топлива G, (кг/ч), Удельный и часовой
расходы связаны соотношением
(4.4)
*ди
где — мощность, развиваемая двигателем на установившемся режиме
при Од = conat, Вт.
Мощность Рдн характеризует нагрузку двигателя, определяемую сопро-
тивлениями движению автомобиля, потерями в трансмиссии и затратами
мощности на привод вспомогательного оборудования двигателя и систем
управления автомобилем. Значения определяют по графику мощностно-
го баланса автомобиля (см. параграф 3 6) либо вычисляют по формула
^.H=Hko + fTp + Pv + ^|- (4.5)
Путевой расход топлива автомобиля Q, (л/100 км) зависит от часового рас-
хода G7 и скорости v и вычисляется по формуле
где и скорость автомобиля, м/с; рг — плотность топлива, кг/м8 (плотность
бензина рт =730 кг/м8, дизельного топлива рт - 860 кг/м8).
4.2. Уравнения расхода топлива 117
Выразим Gt через gR и подставим в формулу (4.6):
«.=4^- (4.7)
86орт
Удельный расход топлива gя зависит от режима работы двигателя. На
рис. 4.1 приведена характеристика топливной экономичности двигателя,
на которой нанесены линии мощностей нагрувки Рял t при постоянных зна-
чениях удельных расходов топлива gKt * const. Их называют линиями рав-
ных удельных расходов топлива. Они отражают зависимости gR от частоты
вращения вала двигателя пк и мощности нагрузки Номера линий £д ।
соответствуют но мерам индекса I, причем чем больше номер, тем выше gл i,
т.е. gn J < gд г <.. .< в'дв. Точке А соответствует минимальный удельный расход
топлива а точке В максимальной мощности двигателя ~ удель-
ный расход топлива gtp. На внешней скоростной характеристике удельный
расход топлива обозначают^ = Из рис. 4.1 следует, что при одной и той
же мощности нагрузки двигателя Рдл удельный расход топлива равличен
и зависит от скоростного режима двигателя.
Рис. 4.1. Характеристика топливной экономичности двигателя
На линиях равных уровней gn t отметим точки, соответствующие макси-
мальным значениям мощностной нагрузки Рд,в t и проведем через них линию
АВ. Эта линия представляет собой характеристику оптимальной нагрузки
двигателя по удельному расходу топлива. Ее также называют характери-
стикой минимального удельного расхода топлива двигателя.
Минимальный удельный расход топлива gK ю1п (г/(кВт-ч)] зависит от
типа, конструктивных особенностей и совершенства рабочего процесса дви-
гателя и находится в пределах 260-310 — для карбюраторных двигателей;
220-250 — для бензиновых с впрыском топлива; 175-220 — для дизельных.
Удельный расход топлива при максимальной мощности обычно на 6-15 %
большее^:
ff4P = (W5-l,15)£AmlB.
11В
4. Топливная экономичность автомобиля
Удельный расход топлива g* зависит от нагрузки двигателя и скоростного
режима. Эту зависимость можно представить выражением
8Я ~ 8еР^Ъ^ (4.8)
где Ли — коэффициент, учитывающий зависимость g* ст уровня нагрузки
двигателя; ЛЕ — коэффициент, учитывающий зависимость £д от скоростного
режима двигателя.
Коэффициент кя представляется в виде функции kK = f(H), где И — коэф-
фициент использования мощности двигателя, равный отношению мощно-
сти нагрузки двигателя к эффективной мощности £, определяемых на
одном и том же скоростном режиме. Значение И вычисляется по формуле
(3.43) или (3.44).
Коэффициент/^ представляется в виде функции= /(Е), где Е — коэффи-
циент использования угловой скорости вала.двигателя, равный отношению
угловой скорости Мд (или частоты вращения пл) на данном скоростном режи-
ме к угловой скорости юр (или частоте пР) при максимальной мощности дви-
гателя РГ1МЯ:
Е = —= ^-. (4.9)
Коэффициенты Ли иЛЕ определяются по эмпирическим формулам, получае-
мым путем статистической обработки результатов экспериментов, проводи-
мых для построения нагрузочных характеристик двигателей. Испытаниям
должно подвергаться возможно большее количество однотипных двигателей,
различающихся между собой основными параметрами (Ретлх, Метах, пР, пм).
Но испытания требуют значительных материальных и временных затрат.
Вместе с тем полученные результаты довольно быстро устаревают в связи
с постоянным совершенствованием рабочих процессов двигателей. Для дви-
гателей, разработанных до 1980 г., получены формулы в виде полиномов
третьего порядка [8]:
□ для карбюраторных двигателей
Лн = 3,27-8,22И+ 9.13И2-3,18Иа; (4.10)
□ для дизельных двигателей
Ли = 1.2+0.14И - 1,8Иг+1,46И8; (4.11)
□ для всех типов двигателей
ЛЕ = 1,25-0^9Е + 0,98Еа-0.24Е3. (4.12)
При определении Q„ по формуле (4.6) необходима эмпирическая зависи-
мость вида<?т = Стр/?цЛЕ, гдебтР — часовой расход топлива при В учеб-
нике [12] предлагается более простая зависимость: GT -G^pk^. Значение Ли
вычисляется по формуле
Ли 3 во -к^И-н^И2, (4.13)
гдеа0, ai.Oj — эмпирические коэффициенты, значения которых для некото-
рых двигателей приведены в табл. 4.1.
4.2. Уравнения расхода топлива
11»
Таблица 4.1
Эмпирические коэффициенты для двигателей
Двигатель «0 «1 ei
ЗИЛ-481410 0,174 0,428 0,887
ЯМЗ-286 (288) 0,188 0,640 0,172
КамАЗ-740 0,284 0,461 0,805
При отсутствии данных для современных четырехтактных дизельных
двигателей можно принимать ас = 0,20; щ .= 0,44; а$ = 0,36.
В заключение отметим, что формулы (4.10)-{4.13) позволяют осуществ-
лять лишь приближенную сравнительную оценку топливной экономичности
автомобиля.
Более высокую точность можно получить при наличии эксперименталь-
ных характеристик топливной экономичности двигателя в виде, представ-
ленном на рис. 4.1. Такие характеристики позволяют получить уравнение
регрессии, связывающее безразмерный коэффициент расхода топлива kG
с коэффициентами И и Е. Часовой расход топлива при этом вычисляется по
формуле
GT = GTPk0. (4.14)
Регрессия третьего порядка ko = f(H,E) обеспечивает достаточно высокую
точность определения GT. Уравнение регрессии имеет вид
*o = &o + 6iH + EbIi4 + t(BH3+t!4E + 6jlEa+AjE® +Ь7ИЕ + ЬйИЕ2+6ьИгЕ. (4.15)
В табл .4.2 приведены значения коэффициентов уравнения (4. 1 5), а также
коэффициентов уравнений регрессий (2.42) и (2.4Э), описывающих функции
моментов Ме = /(Шд-отн) и = /(фдЛТН) двигателя КамАЗ-7408.10.
Таблица 4.2
Коэффициенты регрессий эмпирических функций
характеристик двигателя КамАЗ-7408.10
Коэффициенты регрессий Эмпирические функции
АГ, = Г(а>я.о,я)
ь0 -0,30831 0,94984 -0,10660
bi -0,76082 -12,6881 2,27069
ьг -0.12728 51,8150 -2,56828
Ъъ 0,03228 -84,4782 1,40808
1,41014 68,8380 -
Ьб -1,68688 -18,6842 -
be 0,97593 - -
Ъ 3,16595 - -
ье -1,58046 - -
Ьв 0,16892 - -
120
4. Топливная экономичность автомобиля
4.3. Топливная характеристика автомобиля
Различают топливную характеристику установившегося движения Q, = f(y)
и топливно-экономическую характеристику Qs =
Топливная характеристика установившегося движения представляет со-
бой график зависимости путевого расхода топлива от скорости v при уста-
новившемся движении автомобиля. При оценке топливной экономичности
автомобиля встречается большое многообразие решаемых задач, поэтому
графики топливной характеристики имеют несколько разновидностей. На
рис. 4.2, а показана топливная характеристика автомобиля при движении на
различных передачах, а на рис .4.2,6— для груженого (1) и снаряженного (2)
автомобиля на высшей передаче. Эти характеристики строят для наиболее
характерных дорожных условий, принимая f = const и Л=0, При движении
с одной и той же скоростью с уменьшением номера передачи Q, возрастает.
Это происходит потому, что частота вращения вала двигателя пд увеличива-
ется, а мощность его нагрузки Рлл снижается, вследствие чего возрастает
(см. рис. 4.1). Путевой расход топлива груженого автомобиля обычно не-
сколько больше, чем порожнего. В данном случае влияние оказывают два
противоположных фактора: с одной стороны, у груженого автомобиля воз-
растают затраты мощности на преодоление дорожного сопротивления, с дру-
гой — увеличение Рк,н приводит к снижению gp.
При эксплуатации автомобиля в условиях широкого изменения дорожных
условий используется топливно-экономическая характеристика, приведенная
на рис. 4.3. Эту характеристику строят на нескольких высших передачах при
различных коэффициентах суммарного дорожного сопротивления = const.
Из рис. 4.3 видно, что при изменении коэффициента у в пределах Vi
автомобиль может работать на IV передаче, а при у>у4 движение возможно
только на III передаче. С увеличением дорожного сопротивления путевой рас-
ход топлива Qs существенно возрастает. Кривые III и IV, ограничивающие свер-
ху топливные характеристики на соответствующих передачах, представляют
Рис. 4.2. Топливная характеристика автомобиля: а — на различных передачах;
б — в зависимости от нагрузки (J — полная нагрузка; 2 — без нагрузки)
4.4. Топливная экономичность автопоезда
121
собой зависимости Q, от скорости при работе дви-
гателя на внешней скоростной характеристике.
Для построения топливно-экономической ха-
рактеристики необходимо определить мощности
нагрузки двигателя Р„.а при заданных значени-
ях у, варьируя скорость автомобиля о на всех пе-
редачах, азатем, используя формулы(4.7)-(4.12),
вычислить соответствующие им значения путе-
вого расхода топлива Q,.
По топливной характеристике (см. рис. 4.2, а)
можно определить экономичную скорость vtlt,
обеспечивающую минимальный путевой расход
топлива при движении по дороге с заданным ко-
эффициентом \|1- Очевидно, что и». <vnuci. Топлив-
ная характеристика используется также для оп-
ределения контрольных расходов топлива QSK.
2,
Рис. 4.3, Топливно-эконо-
мическая характеристика
автомобиля
4.4. Топливная экономичность автопоезда
При работе автомобиля в составе автопоезда суммарное сопротивление
движению значительно возрастает, что обусловлено увеличением массы и со-
противления воздуха, создаваемого прицепами. Увеличение массы эквива
лентно увеличению коэффициента суммарного дорожного сопротивления.
Иэ топливно-экономической характеристики (см. рис. 4.3) видно, что путе-
вой расход топлива при этом увеличивается. Однако несмотря на это, удель-
ный расход топлива Qr значительно снижается. Одновременно существенно
повышается производительность автотранспортного средства (см. рис. 3.4).
В результате себестоимость перевозок грузов автопоездом меньше, чем оди-
ночным автомобилем, и поэтому достигается значительный экономический
эффект. Этим объясняется широкое применение автопоездов.
Определим удельный расход топлива автопоезда. Подставим в формулу
(4.1) значениеиз выражения (4.7):
q =____°дхд-н
г 3600иртт
(4.16)
Мощность Р,.а при равномерном движении определяется по формуле (4.5).
Вычислив и Рд.Е для автопоезда и одиночного автомобиля с учетом скоро-
сти движения v в заданных дорожных условиях, можно сравнить получаемые
значения Qr и оценить эффективность использования топлива автопоездом.
Основное влияние на уменьшение QT оказывает увеличение массы перевози-
мого груза. Удельный расход топлива двигателя также уменьшается, что
обусловлено возрастанием коэффициента использования мощности И. Средняя
скорость автопоезда обычно на 10-16 % ниже, чему одиночного автомобиля,
поэтому, несмотря на увеличение фактора обтекаемости автопоезда (ЙД),
силы сопротивления воздуха у обоих оказываются сопоставимыми. КПД транс-
122
4. Тояливналэкономичность автомобиля
миссии в связи с увеличением передаваемой нагрузки повышается, поэтому
потери мощности в трансмиссии хотя и возрастают, но не пропорционально
нагрузке. Мощности Р,.о у автопоезда и одиночного автомобиля практически
одинаковы.
Учитывая отмеченные особенности, примем в первом приближении, что
|^.в + Д? + ^ц1| У автопоезда и одиночного автомобиля примерно одинаковы,
а значение мощности, затрачиваемой на преодоление дорожного сопротивле-
ния, определим по формуле |^| = gyv к подставим в выражение (4.16).
Представим Qr в виде суммы слагаемых Qr - Qri + Qr2 > где Qri — составляю-
щая удельного расхода топлива автопоезда, обусловленная дорожным сопро-
тивлением; Qr2 — составляющая QT, обусловленная остальными сопротивле-
ниями: ।
3600vpTmr
Из формулы (4.17) следует, что(?г1 зависит от отношения собственной мас-
сы автопоезда к его грузоподъемности т^.. С уменьшением этого отноше-
ния Qrl снижается, а следовательно, уменьшается и Qr. Собственная масса
прицепа значительно меньше массы автомобиля той же грузоподъемности.
Поэтому в случае применения прицепа масса перевозимого груза увеличи-
вается примерно вдвое, а собственная масса автопоезда возрастает всего на
50-60 %.
4.5. Расход топлива в ездовом цикле
Ездовой цикл представляет собой чередование режимов разгона, устано-
вившегося движения, торможения и остановок. На основе ездового цикла оп-
ределяют путевой расход топлива при циклическом движении Qta, л/ 100км.
Решение этой задачи возможно либо на основе моделирования движения ав-
томобиля в соответствии с программой ездового цикла, либо графоаналити-
ческим методом.
Схемы различных ездовых циклов представлены на рис. 4.4. Для непо-
средственного выполнения программы ездового цикла в процессе испытаний
используется операционная карта. Пример операционной карты приведен
в табл. 4.3. Полная информация о параметрах ездовых циклов для автомоби-
лей различных категорий приведена в [10].
Для оценки токсичности отработавших газов в различных странах ис-
пользуют разработанные ими нормативы и ездовые циклы [1]. В странах ЕС
в 1997 г. директивой ЕС 94/12 принят ездовой цикл ЕЭК/ЕС и введены Пра-
вила ЕЭК R 15-04и ЕЭС 88/76. В СШ А Действует федеральный цикл испыта-
ний FTP 75. В Японии используют комбинацию из двух ездовых циклов.
4.5. Расход топлива в ездовом цикле
123
а 100
/
OV
/V
си 1
□и 4Л
ал
XV
JU
( 500 1000 1500 J— 2000 2500 3000 1 4 4000
Рис. 4.4. Схемы ездовых циклон: а — магистрального циклана дороге для автомобилей пол-
ной массой до 3,5 т и автобусов дальнего следования; б — то же для грузовых автомобилей
н автопоездов полной массой свыше 3,5 т и междутородных автобусов; в — городского цикла
на дороге для АТС полной массой до 3,5 т; г — то же для АТС полной массой свыше 8,6 т
В курсе теории автомобиля рассматриваются только вопросы, связанные
с оценкой расхода топлива в ездовых циклах.
Рассмотрим вначале методику графоаналитического метода и определим
суммарные расходы топлива на всех участках ездового цикла.
124
4. Топливная экономичность автомобиля
Таблица 4.3
Операционная карта магистрального цикла на дороге для грузовых автомобилей
и автопоездов полной массой свыше 3,5 т и междугородных автобусов
Номер операции Отметка пути, м Последовательность операций
1 - Установление постоянной скорости 30 км/ч
2 Нуль В момент пересечения отметки «нуль» (начало мерного участка) одновременное включение приборов, измеряю- щих время движения и расход топлива
а 0-60 Движение со скоростью 30 км/ч
4 60-300 Разгон до скорости 50 км/ч и движение о этой скоростью
б 300-1000 Разгон до скорости 70 км/ч и движение с этой скоростью
в 1000-1300 Торможение двигателем до скорости 50 км/ч
7 1300-1400 Движение со скоростью 50 км/ч
8 1400-2200 Разгон до скорости 70 км/ч и Движение с этой скоростью
9 2200-2700 Разгон до скорости 75 км/ч и движение с этой скоростью
10 2700-2900 Торможение двигателем до скорости 65 км/ч
11 2900-3500 Движение со скоростью 65 км/ч
12 8500-3860 Торможение двигателем до скорости 45 км/ч
13 3850-4000 Движение со скоростью 45 км/ч
14 — В момент пересечения отметки 4000 м выключение изме- рительных приборов
15 - Занесение результатов измерений в протокол испытаний
Участки разгонов. Для определения расхода топлива на участках разгона
необходимо построить характеристики часового расхода топлива GT (кг/ч)
как функции скорости автомобиля v на всех передачах.
Двигатель при разгонах работает на внешней скоростной характеристике,
поэтому часовой расход топлива можно определить по формуле
GT в/Л-Ю"®. (4.19)
где gt — удельный расход топлива двигателя при работе на внешней скорост-
ной характеристике, г/(кВтч); Ре — мощность двигателя, Вт.
Так как при этом = 1, то gt = gtpk^. Тогда
G, =gtpk^Pt IO"8. <4 20)
Определив значения Рв ъ feE при принятых значениях пд и вычислив при
этом скорость о на соответствующих передачах, получим необходимые дан-
ные для построения характеристик часового расхода топлива, показанных на
рис. 4.6.
На схеме ездового цикла для каждого участка разгона указана начальная
и конечная и(к скорости. Время разгона на i-м участке определяется
по графику характеристики разгона о = /(Г) (рис. 4.6, а). При этом отрезок
4.5. Расход топлива в валовом цикле
125
времени tft разбивается на т пример-
но равных интервалов Aty. Количество
интервалов т принимается в зависимо-
сти от. кривизны характеристик v = f(t)
и G, = Ди). Чем больше их кривизна,
тем больше необходимо принять ин-
тервалов. Минимальное количество
т = 5—6. Для каждого интервала по
графику на рис. 4-6 находятся GTy и
Gr/+i, а затем вычисляется расход топ-
лива за время Д^
Рис. 4.5. Характеристики чаеового расхода
топлива автомобиля на передачах
{4.21)
w 7200 4 '
Суммируя AGp/- для всех интервалов т, получаем расход топлива на i-м
участке разгона
(4-22)
/-1
Рис. 4.6. Характеристики разгона автомобиля: a —v=f(t); б — c=/(S)
126
4. Топливная экономичность автомобиля
Путь вр(> проходимый автомобилем на i-м участке разгона, находится по
графику рис. 4.6, б по значениям скоростей в начале и конце разгона nute.
Суммарный расход топлива на всех участках разгона (л) определяется по
формуле
QP = S— 103 > (4.28)
1-1 Рт
где Wp — количество участков разгона в ездовом цикле.
Участки установившегося движения. Определение расхода топлива 0,ст*
(л) на участках установившегося движения с заданными постоянными ско-
ростями осуществляется по формуле
=Q,^CT* -IO’5, (4.24)
гдеОн, — путевой расход топлива (л/100 км) при скорости определяе-
мый по топливной характеристике установившегося движения (рис. 4.7);
— часть длины fe-ro участка, на которой автомобиль движется с постоян-
ной СКОРОСТЬЮ ОустД.
Рис. 4.7. Топливная характеристика установившегося движения автомобиля
При определении необходимо из длины fe-ro участка вычесть путь раз-
гона и путь торможения в,*, отнесенные к Л-му участку.
Суммарный расход топлива на всех Nr„ участках установившегося дви-
жения
0*я = io,™*- (4.26)
В схемах ездовых циклов предусмотрены режимы торможения для сни-
жения скорости до заданных значений и до полной остановки на указанном
отрезке пути . При этом осуществляется служебное торможение, при кото-
ром наряду с тормозными механизмами используется торможение двигателем.
4.5, Расход топлим в ыдоеом цикле
127
В системах питания современных двигателей предусмотрены устройства, от-
ключающие подачу топлива при торможении двигателем. Поэтому расход
топлива на участках торможения незначителен и им можно пренебречь.
В городском цикле предусмотрены остановки автомобиля. Расход топли-
ва (л) за время остановки tMT вычисляется по формуле
<?ост=%^. (4.26)
где <?„ — часовой расход топлива на холостом ходу двигателя.
В первом приближении GTX = (Oj05-0j07)GTp, где GTp — часовой расход топ-
лива при максимальной мощности двигателя.
Путевой расход топлива при циклическом движении Q,u (л/100 км) опре-
деляется по формуле
(?,ц = 10\ (4.27)
вц
где вц — длина пути ездового цикла, м (обычно 4000 м).
При определении расхода топлива в ездовом цикле методом моделирова-
ния на участках разгона и торможения используется математическая модель
движения автомобиля, описываемая системой дифференциальных уравне-
ний (3.19). На режиме разгона координата педали акселератора у, -1 и двига-
тель работает на внешней скоростной характеристике, а при торможении
Y* =0, поэтому он переходит на тормозной режим. Для вычисления вращаю-
щего момента двигателя используется выражение (2.48). Йа режиме тормо-
жения в дифференциальном уравнении движения кроме момента двигателя
учитывается также момент тормозных механизмов.
Для определения расхода топлива за время разгона используется диффе-
ренциальное уравнение
GT
dt -здр,'
(4.28)
Часовой расход топлива GT вычисляется по формуле (4.14). Уравнение
(4.28) включается в общую систему и его интегрирование осуществляется со-
вместно с уравнениями (3.19). При торможениях подача топлива в двигатель
отключается.
После достижения конечной скорости разгона на i-м участке интегри-
рование системы уравнений прерывается и сохраняется суммарное значение
расхода топлива Qp{, полученное с учетом расхода топлива на всех предыду-
щих участках разгона. При моделировании разгона на (i+l)-M участке Qpl
используется в качестве начального условия при интегрировании уравнения
(4.28).
При переходе на участок установившегося движения автомобиль продол-
жает двигаться с постоянной скоростью = conet, достигнутой в конце i-ro
1зе
4. Топливная экономичность автомобиля
участка разгона, а расход топлива на этом участке вычисляется по фор-
муле (4.24). Значение Qs* при этом находят по формуле (4.7).
Расход топлива за время остановок определяется по формуле (4.26).
После вычисления всех составляющих Q,ct,Qp и определяют путевой
расход топлива 0(Ц по формуле (4.27).
4.6. Влияние конструктивных и эксплуатационных факторов
на тягово-скоростные свойства и топливную экономичность
автомобиля
Основное влияние на тягово-скоростные свойства и топливную экономич-
ность автомобиля оказывают следующие конструктивные факторы: удель-
ная грузоподъемность; обтекаемость; характеристики двигателя; удельная
мощность; параметры шин; передаточные числа механизмов трансмиссии;
количество ступеней в коробке передач; тип трансмиссии.
Удельная грузоподъемность автомобиля. Удельная грузоподъемность
автомобиля определяется отношением его грузоподъемности к собственной
массе йг.уд С увеличением грузоподъемности йг.уд возрастает, так
как значение то увеличивается в меньшей мере, чем Увеличение полной
массы автомобиля m, = + т? равносильно повышению коэффициента сум-
марного дорожного сопротивления V» поэтому возрастают сопротивления
качению, подъему и разгону и увеличивается путевой расход топлива Q.
Однако удельный расход топлива автомобиля QT в л/(т-км) уменьшается
(рис. 4.8). В этой связи перевозки значительных объемов грузов автомобиля-
ми большой грузоподъемности более выгодны.
Обтекаемость автомобиля. Мощность, за-
трачиваемая на преодоление силы сопротив-
ления воздуха, пропорциональна кубу скоро-
сти автомобиля. При она может дости-
гать 50-60 % мощности двигателя. Наиболь-
шее внимание уделяется совершенству формы
кузовов легковых автомобилей. Для улучше-
ния обтекаемости им придают строгие очер-
тания с плавными переходами, снижающими
завихрения воздуха и обеспечивающими хо-
рошее обтекание потоками воздуха. Особое
значение имеет форма передней части кузо-
ва, поскольку она создает наибольшие возму-
щения воздушной среды и формирует воздушные потоки, взаимодействую-
щие с кузовом автомобиля. У грузовых автомобилей снижение аэродинами-
ческого сопротивления достигается установкой обтекателей, скруглением
передних углов грузовой платформы, затягиванием тентом платформы и про-
странства между тягачом и полуприцепом. Установка обтекателя на крыше
кабины тягача может снизить сопротивление воздуха на 15-30 %. Обтекатель,
Рис. 4.8. Влияние грузоподъемности
автомобиля на путевой и удельный
расходы топлива
4.6. Влияние конструктивных и эксплуатаиионных факторов на тягово-скоростные свойства
129
укрепленный под передним буфером перед колесами, снижает аэродинами'
ческое сопротивление на 10-15 %.
Характеристики двигателя. Идеальной ха-
рактеристикой вращающего момента двига-
теля Ме = ^(Яд) является гипербола (рис. 4.9).
В этом случае Ре - conet во всем рабочем диа-
пазоне изменения частоты вращения вала
двигателя от пл „ц до пДИ)ак. Близкую к иде-
альной характеристику имеет электриче-
ский двигатель постоянного тока. Значения
пи tnfo и пц т«х У электродвигателя обусловле-
ны ограничениями по току и напряжению,
что сужает диапазон изменения пд. Однако
его величина обычно вполне достаточна, что-
бы обходиться без коробки передач.
Характеристики ДВС существенно отли-
Рие. 4.9. Характеристика
идеального двигателя
чаются от идеальных. Использование ДВС невозможно без регулируемой
трансмиссии (механической коробки передач, гидромеханической, гидро-
объемной или электромеханической передачи). Основными параметрами,
определяющими форму внешней скоростной характеристики ДВС, являют-
ся коэффициенты приспособляемости по моментуЪм и по угловой скорости
kv. При одной и той же максимальной мощности двигатель с большим
kM имеет более выпуклую характеристику и больший запас мощности при
снижении частоты вращения, что диет возможность преодолевать большие
сопротивления, быстрее разгоняться, обеспечивать более высокую среднюю
скорость движения. Увеличение ka снижает критическую скорость икр и по-
зволяет уменьшить необходимое количество ступеней в коробке передач.
На рис. 4.10 показаны характеристики мощностного баланса двух автомо-
билей. Двигатель первого автомобиля обладает большим чем второго, по-
этому при одной и той же скорости vt запас мощности, используемой для
разгона, у первого гораздо выше, чем у второго, так как > |^|.
Pur. 4.10. Мощностные балансы автомобиля с двумя различными двигателями:
1 — с большим Ам; 2 — с малым kM
S 3»К. 349В
130
4. Топливная экономичность автомобиля
Дизельные двигатели обладают более высокой экономичностью, чем бен-
зиновые (см. параграф 4.2). Они также менее чувствительны к уровню на-
грузки двигателя, оцениваемой коэффициентом И. При уменьшении И от 1
до 0,1 у карбюраторных двигателей gK увеличивается почти в 8 раза, а у ди-
зельных только на 30 %. Применение дизельного двигателя на легковых ав-
томобилях позволяет снизить расход топлива на 25-30 %, а на 1руэовых —
на 30^40 %. Кроме того, дизельное топливо дешевле бензина. Значителен
расход топлива карбюраторных двигателей и на принудительном холостом
ходу. Он достигает 10-15 % от расхода топлива при максимальной мощно-
сти. При этом возрастает токсичность отработавших газов. Поэтому карбю-
раторы современных двигателей снабжают клапаном отключения системы
холостого хода при торможении двигателем. У дизельных двигателей отклю-
чение подачи топлива на этом режиме осуществляет всережимный регулятор
частоты вращения коленчатого вала.
Наддув и охлаждение нагнетаемого воздуха у дизельных и бензиновых
двигателей повышают экономичность до 10 %.
Улучшение характеристик современных ДВС достигается применением
электронных систем, обеспечивающих оптимальное управление топливопо-
дачей и смесеобразованием, зажиганием, газораспределением. В результате
значительно улучшаются мощностные характеристики двигателей, увеличи-
ваются коэффициентыкм и Аи, обеспечивается высокая топливная экономич-
ность двигателей на частичных скоростных режимах при малом коэффициенте
использования мощности И.
Удельная мощность. Отношение максимальной мощности двигателя к пол-
ной массе автомобиля называется удельной мощностью автомобиля
(4.29)
С увеличением удельной мощности улучша-,
ются все показатели тягово-скоростных свойств.
На рис. 4.11 показано влияние Руа на среднюю
скорость автомобиля иер и путевой расход топли-
ва Q,. Увеличение Цд до определенных пределов
приводит к снижению Qt, но при >^д.опт ДОС-
ход топлива заметно возрастает. Одновременно
снижается интенсивность роста скорости Воз-
растание Q, при малой удельной мощности объяс-
няется тем, что приходится чаще пользоваться
Рис. 4.11. Влияние удельной
мощности автомобиля на путе-
вой расход топливе и среднюю
скорость
промежуточными передачами трансмиссии, на ко-
торых Q, больше, чем на высшей передаче (см.
рис. 4.2, а). При большой удельной мощности не-
рационально используются его характеристики,
так как при снижении нагрузки возрастает
удельный расход топлива (см. рис. 4.1).
Минимальное значение для грузовых автомобилей, автопоездов и авто-
бусов регламентируется. Это способствует выравниванию скоростей транс-
4.6. Влияние конструктивных и зксплуатвиионных факторов на тягоео-скоростные свойства 131
портных потоков на дорогах и повышению эффективности использования
автотранспортных средств. Для автопоевдов рекомендуется %д - 7-9 кВт/т,
для автобусов — 9-13 кВт/т. У грузовых автомобилей Рул зависит от полной
массыта: прита <3,5т^д = 16-40кВт/т;притл «8,5-10т^д =10-25кВт/т;
при Ид = 10-30 т^д =8-15кВт/т.
Легковые автомобили имеют гораздо большую удельную мощность, чем
грузовые. Это обусловлено высокими значениями максимальной скорости
и значительным увеличением сопротивления воздуха. Автомобили особо
малого класса характеризуются удельной мощностью до 40 кВт/т, макси-
мальной скоростью до 140 км/ч и временем разгона до 100 км/ч — 19-23 с.
Эти ясе показатели у легковых автомобилей среднего и большого классов дос-
тигают следующих значений: Руд - 90 кВт/т; ити = 220 км/ч; = 8-10 с.
Параметры шин. Сопротивление качению оказывает значительное влия-
ние на топливную экономичность. В зависимости от конструкции и приме-
няемых материалов коэффициенты сопротивления качению f современных
шин различаются почти в 2 раза. Так, на асфальтобетонной дороге в хорошем
состоянии f = OJD07-ОД 15. Уменьшение количества слоев корда, толщины
протектора, применение широкопрофильных шин, шин с радиальными
нитями корда, использование синтетических материалов с малыми гисте-
резисными потерями или натурального каучука приводят к снижению f
и уменьшению расхода топлива.
Передаточные числа механизмов трансмиссии. Передаточное число глав-
ной передачи По влияет на реализацию максимальной скорости в заданных
дорожных условиях. На рис. 4.12 изображен график мощностного баланса
автомобиля с тремя различными главными передачами, причем u£ >и% >и$'
Максимальные скорости движения при у=const обозначены (’лих.
Наиболыпая скорость достигается в случае, когда характеристики Рк и
р’г+Рц,| пересекаются в точке, соответствующей максимальной мощности
двигателя, поэтому Uq будет оптимальным.
Рис. 4.12. Мощностной баланс автомобиля с различными
передаточными числами главной передачи
132
4. Топливная экономичность автомобиля
Передаточное число низшей ступени коробки передач определяет возмож-
ность преодоления максимального дорожного сопротивления, характеризуе-
мого коэффициентом Vmu* Передаточные числа промежуточных ступеней
выбирают из условия оптимального использования мощности при разгоне
автомобиля. На рис. 4.13 отображено влияние числа ступеней в коробке пере-
дач на ускорение автомобиля. При скорости о( >|/у|, следовательно, ускоре-
ние автомобиля с пятиступенчатой коробкой передач будет выше, чем с трех-
ступенчатой.
Тип трансмиссии. Ступенчатое изменение передаточных чисел трансмис-
сии приводит к значительному уменьшению эффективности использования
мощности двигателя. Если бы трансмиссия позволяла непрерывно (бессту-
пенчато) изменять передаточное число и обеспечивать при этом работу двига-
теля на режиме максимальной мощности, то при одинаковом КПД со ступенча-
той механической трансмиссией она имела бы динамическую характеристику,
изображенную на рис. 4.14 штриховой линией. Показатели тягово-скорост-
ных свойств автомобиля с такой трансмиссией были бы значительно выше,
чем со ступенчатой коробкой передач (сплошные линии). Непрерывное ги-
перболическое изменение динамического фактора позволяет использовать
заштрихованные области на рис. 4.14 и за счет этого увеличить среднюю ско-
рость автомобиля и повысить эффективность разгона.
Преимущества бесступенчатой трансмиссии особенно существенно прояв-
ляются в тяжелых дорожных условиях, при работе автомобиля в городских
условиях и в холмистой местности. Поэтому на легковых автомобилях высо-
кого и частично среднего класса, городских автобусах, карьерных самосвалах
применяют бесступенчатые трансмиссии (гидромеханические, электромеха-
нические, фрикционные). Такие трансмиссии обеспечивают легкость управ-
ления, плавность разгона, уменьшение динамических нагрузок, высокую
проходимость благодаря плавному изменению момента на ведущих колесах
и возможности движения с небольшой скоростью . Однако КПД у сущест-
вующих бесступенчатых трансмиссий существенно ниже, чем у механических,
а их конструкции много сложнее и стоимость гораздо выше. Динамическая
Рис. 4.18. Мощностной баланс автомобиля с трехступенчатой и пятиступенчатой
коробками передач
4.6. Влияние конструктивных и эксплуатационных факторов на тягово-скоростные свойства
133
характеристика автомобиля с гидромеханической трансмиссией показана
на рис. 4.14 щтрихпунктиряыми линиями. Для повышения КПД такой
трансмиссии гидротрансформатор используют только на режимах трогания,
переключения передач и в тяж лых дорожных условиях. На других режи-
мах он блокируется.
Существенное улучшение показателей тягово-скоростных свойств и топ-
ливной экономичности достигается автоматизацией управления переключе-
нием передач. При этом одновременно повышается безопасность движения
и облегчаются условия труда водителя.
Эксплуатационные факторы. На показатели топливной экономичности
и тягово-скоростных свойств оказывают влияние практически одни и те же
факторы. Однако режимы движения автомобиля влияют на эти показатели
по-разному. Если основное значение имеет топливная экономичность, то сле-
дует рекомендовать движение автомобиля со скоростью о,к, при которой дос-
тигается минимальное значение путевого расхода топлива. Эту скорость оп-
ределяют по топливной характеристике автомобиля (см. рис.- 4.2, а). Для
уменьшения расхода топлива магистральных отопоеа.> при их порожних
пробегах 'трансмиссию выполняют с повышающей передачей, позволяющей
увеличить ^,н и снизить частоту вращения вала двигателя. В результате
уменьшаются уд и Q,.
Снижение давления воздуха в шинах, в 1,6 раза ниже рекомендуемого
заводом-изготовителем, повышает расход топлива до 20 %. Снижение тем-
пературы охлаждающей жидкости двигателя с 95 до 75 °C увеличивает рас-
ход топлива на 6-7 %, а понижение ее до 66 ’С — почти на 26 %, так как
в этом случае возрастают тепловые потери и уменьшается индикаторный
КПД двигателя. Неправильная регулировка приборов системы питания и за-
жигания также значительно ухудшает показатели топливной экономично-
сти. Так, при неисправном экономайзере расход топлива может увеличиться
на 10-15 %. Отклонение уровня топлива в поплавковой камере карбюратора
Рис. 4.14. Динемические характеристики автомобиля
с различными типами трансмиссий
134
4. Топливная экономичность автомобиля
от нормального также сопровождается ухудшением топливной экономич-
ности, в особенности при малой скорости движения. Неработающая свеча
зажигания приводит к увеличению расхода топлива на 20-25 %. Неправиль-
ная установка зажигания может вызвать повышение расхода топлива до
7-10 %.
Неисправности двигателя, механизмов трансмиссии и ходовой части,
неправильные их регулировки, являющиеся результатом некачественного
проведения технического обслуживания, могут значительно ухудшить пока-
затели тягово-скоростных свойств и топливной экономичности автомобиля.
Вопросы для самоконтроля
1. Какие существуют измерители и показатели топливной экономичности авто-
мобиля? Какие способы определения вы знаете?
2. От каких факторов зависит расход топлива? Какова формула путевого расхо-
да топлива?
3. Что такое характеристика минимального удельного расхода топлива двига-
теля? Каков ее график?
4. Что такое топливная характеристика автомобиля, как ее построить и какие
эксплуатационные задачи можно решать с ее помощью?
6. Чем обусловлена лучшая топливная экономичность автопоезда в сравнении
с одиночным автомобилем?
6. Какие конструктивные и эксплуатационные факторы и в какой мере оказы-
вают влияние на топливную экономичность автомобиля?
7. Каковы преимущества и недостатки дизельного двигателя по сравнению
с бензиновым (карбюраторным и с впрыском топлива)?
Тягово-скоростные свойства
и топливная экономичность автомобиля
с гидромеханической трансмиссией
На автомобилях различных типов и назначений довольно широкое приме-
нение получили гидромеханические трансмиссии. Гидромеханическая транс-
миссия отличается от механической тем, что в ее состав дополнительно входит
гидродинамическая передача. Гидродинамическая передача (ГДП) обычно
размещается в общем блоке с механической ступенчатой коробкой передач.
Такой комплексный блок называют гидромеханической передачей (ГМП).
Характерные свойства гидродинамических передач:
□ бесступенчатое преобразование угловой скорости и вращающего момента;
□ саморегулирование преобразующих свойств, что исключает необходи-
мость в применении органов управления рабочим процессом.
Следовательно, гидродинамическая передача является автоматическим
трансформатором механической энергии.
Конструкция и физические свойства гидродинамических и механических
передач имеют существенные различия. Различаются и методы их моделиро-
вания и анализа.
В данной главе рассмотрим методы анализа тягово-скоростных свойств
и топливной экономичности автомобиля с гидромеханической трансмиссией.
5.1. Особенности гидродинамических передач
Гидродинамическая передача представляет собой гидравлическую лопа-
стную машину, основными элементами которой являются насосное и турбин-
ное колеса. Насосное колесо выполняет функцию генератора, преобразуя
подводимую к нему механическую энергию двигателя автомобиля в кинети-
ческую энергию рабочей жидкости. Турбинное колесо представляет собой
гидравлический двигатель, который энергию рабочей жидкости преобразует
в механическую энергию. Двойное преобразование энергии сопровождается
значительными потерями. В результате КПД гидродинамической передачи
значительно меньше, чем механической.
Схемы гидродинамических передач показаны на рис. 6.1.
В зависимости от способности преобразования вращающего момента гид-
родинамические передачи делятся на гидродинамические трансформато-
ры (ГДТ) и гидродинамические муфты (ГДМ).
ГДМ имеет только два колеса: насосное Н и турбинное Т (рис. 5.1, а).
Насосное колесо соединено с двигателем, а турбинное — с входным валом
механической коробки передач (непосредственно или через фрикционное
сцепление).
136
5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
Рис. 5.1. Схемы гидродинамических передач; а — гидромуфта; б и в — гидротрансформатор;
Н — насосное колесо; Т — турбинное колесо; Р, Pj ,Рг — колеса реактора; I — входной вал;
2 — выходной вал; 3 — муфта свободного хода; Ф — блокировочный фрикцион
Полость ГДМ, образованная колесами и кожухом, заполнена рабочей
жидкостью. При вращении насосного колеса его лопатки, воздействуя на
жидкость, заставляют ее перемещаться в межлопастных каналах в направле-
нии от меньшего к большему радиусу. При атом возрастает переносная ско-
рость жидкости и увеличивается ее кинетическая энергия. Поступая затем
на лопатки турбинного колеса, жидкость реализует на нем некоторую часть
накопленной энергии. После выполнения полезной работы по передаче энер-
гии турбинному колесу жидкость, сходящая с лопаток турбинного колеса,
непосредственно попадает на лопатки насосного колеса. В результате образу-
ется круг циркуляции, определяющий относительное движение жидкости
в межлопастных каналах гидродинамической передачи (показано стрелками
на рис. 5.1).
В ГДТ в отличие от ГДМ жидкость после турбинного колеса поступает вна-
чале на лопатки направляющего аппарата, а затем — на лопатки насосного
колеса (рис. 5.1, б и в). Лопатки направляющего аппарата связаны с корпусом
гидропередачи, поэтому изменяют соответствующим образом направление
потока жидкости, поступающего на насосное колесо. В результате изменяется
момент количества движения потока жидкости и вращающие моменты на
насосном и турбинном колесах оказываются различными. Следовательно,
гидротрансформатор осуществляет преобразование не только угловых скоро-
стей, но и вращающих моментов.
Существует множество конструктивных схем ГДТ, отличающихся коли-
чеством насосных и турбинных колес, количеством и расположением в круге
циркуляции направляющих аппаратов. В автомобильных гидротрансформа-
торах лопатки направляющего аппарата обычно выполняют в отдельных ко-
лесах, которые устанавливают на неподвижную опору в круге циркуляции
на муфтах свободного хода. Колесо направляющего аппарата принято назы-
вать реактором.
На автомобилях наибольшее распространение получили трех- и четырех-
колесные ГДТ, содержащие по одному насосному и турбинному колесу и одно
или два колеса реактора (рис. 5.1, б и в).
5.2. Режимы работы и параметры гидродинамических передач
137
Применение на автомобилях гидродинамических передач способствует уве-
личению срока службы двигателя и трансмиссии, уменьшению количества
ступеней в механической части трансмиссии, сокращению числа переключе-
ний передач, повышению проходимости автомобиля и комфортабельности за
счет более плавного изменения момента на ведущих колесах и трогания с места.
Но гидромеханические передачи по сравнению с механическими имеют более
сложную конструкцию, повышенную материалоемкость и стоимость. Кроме
того, из-за сравнительно низкого КПД возрастает расход топлива.
5.2. Режимы работы и параметры гидродинамических передач
Режимы работы гидродинамической передачи определяются угловыми
скоростями насосного Од и турбинного о\ колес и вращающими моментами
на этих колесах Мл и ЛГТ. Эти переменные являются фазовыми координата-
ми ГДП и характеризуют состояние ее двух основных колес и их взаимодей-
ствие с другими механизмами автомобиля. При 0^ = const значение о\. может
изменяться в широких пределах и быть как положительным, так и отрица-
тельным, а в частном случае 0^=0 — столовый режим ГДП. В связи с этим
в качестве параметра кинематической характеристики ГДП вместо переда-
точного чисда используют передаточное отношение (величина, обратная
передаточному числу):
Ч.и = ш‘г/<йм- (6.1)
Отношение моментов на турбинном и насосном колесах называют коэффи-
циентом трансформации
(5.2)
КПД гидродинамической передачи определяют по формуле
П,.к=& = ^^| = |^.ки|. (Б.8)
где PB,Pt — мощности соответственно на насосном и турбинном колесах.
Относительные безразмерные величины ц.л, К1Л и Лт.н являются парамет-
рами ГДП. Параметры К,л и Т]т.и — скалярные положительные величины,
поэтому в формулах (5.2) и (5.3) соотношения моментов и мощностей берутся
по модулю. Передаточное отношение ц.л — скалярная алгебраическая вели-
чина. Угловая скорость «д, принимается положительной величиной, а
может быть как положительной, так и отрицательной. Поэтому знак переда-
точного отношения (т-н соответствует знаку От-
Параметры ГДП в отличие от параметров механических зубчатых передач
(передаточногочисла и КПД) — переменные величины, зависящие от переда-
точного отношения /,.ж.
Внешние воздействия на гидродинамическую передачу определяют скоро-
стной и нагрузочный режимы ее работы. Скоростной режим характеризуется
138
S. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
угловыми скоростями сов и со,., а нагрузочный — вращающими моментами
Мв иМт.
На рис. 6.2 показана схема нагружения элементов гидродинамической пе-
редачи. Насосное колесо создает нагрузку на двигатель, которая определяет-
ся моментом на валу насосного колеса Мн. Нагрузку на турбину ГДП создает
суммарное сопротивление движению автомобиля. На рис. 5.2 это сопротив-
ление отображено приведенным к валу турбины моментом Ме.
Рис. 5.2. Схеме нагружения гидродинамической передачи
При установившемся движении автомобиля можно записать следующее
уравнение равновесного режима ГДП:
Л£н+Л/т+ЛГр=О, (5.4)
где Мр — вектор момента на колесе реактора.
Зависимости моментов JWH, Мт и от /7 Н показаны на рис. 5.3. Момент
на насосном колесе Мн принят постоянным и отрицательным, а момент на
турбине Мт положительным в соответствии со схемой на рис. 5.2. При
О <'т.в <гт.н.м момент Мр отрицателен, а ЛГТ по абсолютной величине больше
момента Мя. Если iT H >1т,н.м, то момент реактора Д/р меняет знак на противо-
положный, а момент на турбине Л/т оказывается меньше и стремится
к нулю. При этом резко падает КПД т]т.н» что обусловлено возрастанием по-
терь на гидравлический удар струи жидкости, входящей на лопатки непод-
вижного реактора из-за несовпадения угла их наклона с углом входа струи.
Если на этом режиме отключить реактор, предоставив ему возможность сво-
бодно вращаться в потоке, то ГДТ будет работать как ГДМ и КПД его значи-
тельно повысится (штриховая линия). Для этого реактор устанавливают на
муфте свободного хода, которая приМр <0заклинена (Ир = 0), априМр >0ре-
актор освобождается и ГДТ переходит на режим ГДМ. Такой ГДТ называют
комплексным. Если реактор постоянно неподвижен, ГДТ называют про-
стым, а его характеристика на рис. 5.3 показана сплошной линией.
В зависимости от дорожных условий и взаимодействия с двигателем раз-
личают несколько режимов работы ГДП. Символическое их изображение
представлено на рис, 5.4. Режимы определяются сопоставлением знаков
5.2. Режимы работы и параметры гидродинамических передач
139
Рис. 5 Л. Внешняя характеристика гидродинамической передачи
Рис. 5.4. Режимы работы гидродинамической передачи:
а — тяговый; 0 — тормозной; в — обратимый
вращающих моментов на колесах ГДП и угловых скоростей их вращения,
а также знаками мощностей на этих колесах.
Мощности на насосном и турбинном колесах определяются по формулам:
Р, =Мнй)Есое^Мн,аи); (Б.Б)
।
Рт » Мтютсов^Мт.йту (6.6)
Если мощность положительна, то энергия отводится от ГДП, а если отри-
цательна, то подводится к ней.
Согласно схемам на рис. 5.4, различают следующие режимы работы ГДП:
а) тлаовыйрежим: Ря <0; Д >0; со, йО;
б) тормозной режим: Рж £ О; Рт < О (различают два случая: обгонный режим
при со, > со, >0 и режим противовращения при со, <0 и ю, >0);
в) обратилЛый режим: Ря >0; РТ <0; со, >©, >0.
На тормозном режиме мощность ГДП может значительно возрасти, по-
скольку энергия подводится как от двигателя, так и от ведущих колес авто-
мобиля.
Обратимый режим характерен для ГДМ. На этом режиме мощность пере-
дается от ведущих колес к двигателю, и двигатель переходит на тормозной
режим. У ГДТ при этих условиях возникает тормозной обгонный режим.
140
S. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
5.3. Безразмерные характеристики гидродинамических передач
Свойства ГДП полностью определяются
безразмерными характеристиками 1Ж = /(^н),
^т.и = Пт,ж = /(<Т.Е)- На рис. 5.5 приведе-
ны безразмерные характеристики гидромуф-
ты, а на рис. 5.6 — гидротрансформаторов —
однореакторного и двухреакторного. Харак-
теристики представлены только для тягового
режима.
В свою очередь на тяговом режиме можно
выделить следующие характерные режимы
работы ГДП: 1 — стопсвый режим (i^ =0;
Ьч = Ьво; - К’т.жС; Лт.ж = О); 2 — режим холо-
стого хода или синхронного вращения (ir.B = 1;
Хк = 0; Ктх = 1; Г|т ж — 0>; 3 — режим равенства
Рис. 5Д. Безраэмерные-характе-
ристики гидромуфты
моментов я - 1у,я,м; Хж = Х„_м; ХТ.Е = 1; цтж = Пт.и.м); 4 — режим максимально-
го КПД (tTE =^л; = Хн; К,в = Хт,н; Т1т.и = Тиллих); & — режим наибольшей
нагружающей способности (?.„ =
У ГДМ реактор отсутствует, поэтому Mf = 0. Тогда, согласно формуле (5.4),
AfT = -Л£я. Следовательно, Ктл =1при всех значениях/ТгЕ, а КПД, согласно
формуле (5.3), Пт.н =4л-
КПД гидротрансформатора при малых и средних значениях передаточного
отношения (в интервале 0 S <т н <Ij.h.m) значительно выше, чем у гидромуфты,
и достигает максимума Лт.ктжх при некотором значении i*,„, которое находит-
ся в том же интервале (рис. 5.6, д). При атом коэффициент трансформации
момента >1, т.е. гидротрансформатор осуществляет преобразование на
только угловой скорости, но и вращающего момента. В этом заключается его
преимущество по сравнению с гидромуфтой. Однако с увеличением 1ТЯ при
^т.в >'т.н.м КПД простого гидротрансформатора с неподвижным реактором
Рис, 5.6. Безразмерные характеристики гидротрансформатора:
а — однореакторнога; 6 — двухреакторного
S3. Безразмерные характеристики идродинамических передач
141
начинает резко снижаться (штриховая линия). Поэтому реактор снабжают
муфтой свободного хода, которая при ^-в > iT,a<M освобождает его и он начина-
ет свободно вращаться в потоке жидкости, а гидротрансформатор переходит
на режим гидромуфты.
Если реактор выполнить в виде двух раздельных колес (см. рис. 6.1, б),
установив каждое из них на своей муфте свободного хода, то можно заметно
повысить КПД при низких значениях ,и. Эти муфты разблокируются после-
довательно с увеличением 1™. Такой ГДТ обладает одновременно характери-
стиками двух разных гидротрансформаторов и гидромуфты, что позволяет
значительно расширить .область высоких значений КПД (рис. 5.6, б). Такой
ГДТ называется полимерическим.
Так как на режиме ГДМ преобразования момента не происходит, а работа
ГДТ сопровождается непроизводительными потерями, то его целесообразно
блокировать. Для этого используют фрикционную муфту, позволяющую
сблокировать насосное и турбинное колеса (см. рис. 5.1, а).
При tTH ->0 КПД гидротрансформатора быстро снижается, а при г^л =0
(столовый режим)!)™ =0. Поэтому целесообразно ограничить используемый
в обычных условиях эксплуатации диапазон изменения . Эксплуатаци-
онный диапазон ГДТ ограничивают величиной допустимого значения КПД
Т)т.в.» (Рис- б 6, а). Обычно принимают Пт.к.» “ Соответствующее ему значе-
ние Х'т.и,, находится в пределах 1,5-2,0, а 1^, = ОД-ОД Переход на режим
гидромуфты обычно осуществляется при 1^.* = 0,84-0,87, а при >0,95 зна-
чение коэффициента момента насосного колеса быстро снижается, и ГДТ пе-
реходит на режим холостого хода.
Диапазон малых значений 1™ (05(т.в £!т.н») используется при трогании
автомобиля с места и при движении в тяжелых дорожных условиях или в без-
дорожье при большом сопротивлении движению и низком коэффициенте
сцепления.
Таким образом, в эксплуатационном диапазоне гидротрансформатора его
передаточное отношение изменяется в пределах 1?лл а коэффици-
ент трансформации момента — в пределах к й1. Максимальное
значение коэффициента трансформации момента у современных авто-
мобильных ГДТ находится в пределах 2,0-3,5.
Коэффициент Хж определяет нагружающие свойства ГДТ. Вид зависимости
= /(i™) характеризует свойство прозрачности ГДТ. Это свойство отображает
способность ГДТ изменять нагрузку двигателя при изменении сопротивле-
ния движению автомобиля. Оно оценивается коэффициентом прозрачности
П = ^ктах/^-в.м- (6.7)
Если Хв щах соответствует >0, как показано на рис. 5.6, а, то это означа-
ет, что ГДТ имеет одновременно прямую и обратную прозрачность. В этом
случае определяют два показателя прозрачности: коэффициент прямой про-
зрачности Щр, вычисляемый по формуле (6.7), и коэффициент обратной
прозрачности П^:
Побр — ^кшах/^иО' (6.8)
142
S. Тягоео-скорпстоые свойства автомобиля с гидромеханической трансмиссией
Если на режиме трансформации момента Хн «const, тоП = 1, а ГДТ называ-
ют непрозрачным. Двигатель с таким ГДТ не реагирует на изменение сопро-
тивления движению автомобиля. При П = 1-1,2 ГДТ считают практически
непрозрачным, при П = 1,2-1,5 - малопрозрачным, а при П Й 1,5 - прозрач-
ным.
5.4. Выбор характеристик и параметров
гидродинамической передачи
При выборе гидротрансформатора для проектируемого автомобиля прини-
мают во внимание значения его параметров на характерных режимах работы,
учитывают тип, категорию и назначение автомобиля, а также особенности
скоростных характеристик двигателя. Процедура выбора осуществляется
в два этапа.
На первом этапе производится поиск и отбор аналогов. Сравнивая между
собой безразмерные характеристики существующих образцов гидротранс-
форматоров, выбирают несколько вариантов, отличающихся высокими значе-
ниями параметров. Принимаются во внимание прежде всего максимальный
КПД Птягам и значения Атнэ. Параметры и^ц характеризу-
ют скоростной интервал рабочей характеристики гидротрансформатора. Чем
меньше и больше тем меньшее количество ступеней может иметь
коробка передач. Значение КТ1Н.Э характеризует уровень преобразования вра-
щающего момента в эксплуатационной области характеристики ГДТ. С уве-
личением Хт,|(.э и Г|т.н гаал характеристика динамического фактора автомобиля
приближается к идеальной (гиперболической).
Принимается во внимание также прозрачность гидротрансформатора.
С двигателями, имеющими большие значения коэффициента приспособляе-
мости по моменту (км >1,35) целесообразно использовать прозрачные или ма-
лопрозрачные ГДТ. Для легковых автомобилей при любой характеристике
двигателя используют прозрачные гидротрансформаторы. Это обусловлено
необходимостью снижения шума двигателя и повышения топливной эконо-
мичности при эксплуатации в городских условиях. На грузовых автомобилях
большой грузоподъемности с дизельными двигателями применяют малопро-
зрачные или практически непрозрачные ГДТ.
На втором этапе выбора ГДТ решается оптимизационная задача. Прини-
мается несколько конкурирующих вариантов аналогов и осуществляется
моделирование движения автомобиля в модельных условиях. При моделиро-
вании разгона автомобиля по методике, предусмотренной ГОСТ 22576-90,
для оценки эффективности вариантов в качестве критериев оптимальности
используются показатели тягово-скоростных свойств, характеризующие
приемистость автомобиля (показатели #40(), (1000, t{l, tB_n, оу1ШИ). Моделирование
движения автомобиля по типовому маршруту позволяет определить среднюю
скорость и путевой расход топлива — наиболее значимые критерии опти-
мальности. Варьируя в процессе моделирования параметры конкурирующих
5.4. Выбор характеристик и параметров гидродинамической передачи 14Э
аналогов я их геометрические размеры, можно выбрать оптимальный вари-
ант аналога и на его основе спроектировать гидротрансформатор для данного
автомобиля.
' В практике проектирования автомобильных гидродинамических передач
получил широкое применение метод, основанный на принципах теории подо-
бия. Установлено, что для геометрически подобных гидродинамических пе-
редач их безразмерные характеристики практически одинаковы. Поэтому,
выбрав соответствующий аналог, остается лишь определить оптимальное
значение его активного диаметра. Активным диаметром ГДП называют
наибольший радиальный размер его рабочей полости (круга циркуляции').
Вращающий момент насосного колеса гидродинамической передачи зависит
от активного диаметра в пятой степени и определяется по формуле
МИ = Х„ро^1)*, (6.9)
где X, — коэффициент момента насосного колеса (безразмерная величина);
р — плотность рабочей жидкости, кг/м9; — активный диаметр ГДП, м.
Из формулы (Б.9) следует, что функция Мя = /(Фж) представляет собой
квадратичную параболу, крутизна которой определяется коэффициентом
момента насосного колеса Хж и величиной Л*. Функцию» /((^называют
нагрузочной характеристикой гидродинамической передачи. Она. определяет
нагрузку двигателя.
Скоростной и нагрузочный режимы работы двигателя определяются ко-
ординатами точек пересечения характеристик Мл » и Мв = /(«>)• На
рис. Б.7, а цоказаны характеристики совместной работы двигателя и про-
зрачного гидротрансформатора, у которого на режиме трансформации мо-
мента Хх изменяется в достаточно широких пределах Х^ 2 X* 2 Xx.K, а после
перехода на режим гидромуфты — в пределах Хв.м 2 Хж 20. Прозрачный ГДТ
обладает множеством нагрузочных характеристик. На графике изображено
Рис. S.7. Характеристики совместной работ двигателя и гидротрансформатора:
а — прозрачный гидротрансформатор; б — непрозрачный гидротрансформатор
144 5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
лишь несколько парабол Мв = соответствующих дискретным значени-
ям Xai и tj.Bi. Изображены также линии равных удельных расходов топлива
двигателя gai - const, причем gai <gR2 <...<£дв. Минимальный удельный рас-
ход топлива достигается в точке G скоростной характеристики двигателя,
в точке В двигатель развивает максимальную мощность, а в точке С — макси-
мальный вращающий момент.
Иэ рис. 5.7,а следует, что двигатель с прозрачным гидротрансформатором
на тяговом режиме может осуществлять совместную работу в любой точке,
расположенной в области, ограничиваемой линиями ABCDEF. Линия BCD
соответствует внешней скоростной характеристике двигателя, АВ — пре-
дельной регуляторной характеристике, EF — характеристике минимального
холостого хода двигателя. Из рассмотренного графика видно, что примене-
ние прозрачного гидротрансформатора позволяет обеспечить высокий уро-
вень использования мощности двигателя при разгоне автомобиля и высокую
топливную экономичность при установившейся скорости движения на час-
тичных скоростных режимах двигателя. Такое совмещение характеристик
используют для легковых автомобилей. Следует отметить, что нагрузочная
характеристика прозрачного ГДТ, получаемая при ЛЕ „1ак, должна обязатель-
но пересекаться с внешней скоростной характеристикой двигателя. Это обес-
печит устойчивую работу двигателя в любых эксплуатационных условиях,
исключит перегрузку двигателя и его остановку.
На тормозном и обратимом режимах коэффициент Хн отрицателен, поэто-
му характеристики совместной работы двигателя и гидротрансформатора
располагаются в области AFKL. Линия KL соответствует работе двигателя на
тормозной характеристике.
У непрозрачного гидротрансформатора (рис. 5.7, б) Хн = const, поэтому на
графике совместной работы будет только одна парабола AfH = f(nB). Если вы-
брать вариант нагрузочной характеристики, показанной сплошной линией,
то можно использовать полную мощность двигателя. Координаты точек со-
вместной работы будут расположены только на этой параболе в пределах от
точки В до точки Е. Но она проходит далеко от точки G минимального удель-
ного расхода топлива, поэтому частичные режимы работы двигателя будут
неэкономичные. Вариант характеристики, обеспечивающей работу двигате-
ля при минимальном удельном расходе топлива (отображен штриховой ли-
нией), лишает возможности полного использования мощности двигателя,
что снижает показатели тягово-скоростных свойств автомобиля. Очевидно,
что непрозрачный гидротрансформатор не позволяет в полной мере реализо-
вать потенциальные возможности двигателя, поэтому применение его на ав-
томобилях нецелесообразно.
При проектировании гидродинамической передачи на основе теории подо-
бия после выбора аналога определяют активный диаметр. Для этого исполь-
зуется формула (5.9), из которой следует:
I м
<5Л0>
5.4. Выбор характеристик и параметров гидродинамической передачи
145
Если насосное колесо гидротрансформатора соединено непосредственно
с валом двигателя, то Мн = Мл, щ, - <0д ипк = пд. Для определения Da необхо-
димо выбрать некоторую расчетную точку внешней скоростной характеристи-
ки двигателя и расчетную нагрузочную характеристику. Опыт проектирования
гидромеханических передач показывает, что в большинстве случаев на началь-
ном этапе проектирования в качестве расчетной принимают нагрузочную ха-
рактеристику гидротрансформатора, соответствующую переходу на режим
гидромуфты, т.е. при Хж.р = Хв.и, и эта характеристика должна проходить че-
рез точку внешней скоростной характеристики двигателя с координатами
Пр,МР. В этом случае формула (6.10) приводится к виду:
= J?-00Aa-f- <в11>
^н.рР®? р улжр| Лд.р
гдепд р,ЛГд.р — координаты расчетной точки внешней скоростной характери-
стики двигателя: лд.р = пР; Л/д_р = Л/р*, Хж р — коэффициент момента насосного
колеса на расчетной нагрузочной характеристике.
В этом случае в момент перехода на режим гидромуфты мощность двига-
теля будет максимальная, а КПД гидротрансформатора будет находиться
в пределах 0,84-0,87. Окончательный выбор параметра осуществляется
в процессе оптимизации параметров гидромеханической передачи.
Иногда вместо проектирования нового гидротрансформатора используют
существующий образец, а для согласования его характеристик с характеристи-
ками Двигателя вводят согласующую зубчатую передачу, которая размещается
между двигателем и ГДТ. В атом случае необходимо учитывать соотношения
между параметрами характеристик двигателя и гидротрансформатора:
— Л^Д^С.пПс п * (В.12)
Мя = Яд/Ue.it, (6.13)
где u0.D,i]CiC — соответственно передаточное число и КПД согласующей пере-
дачи.
Передаточное число согласующей передачи определяется по формуле
_ _ |Хи.рр7СгПд.рРж
“ “V Л/д.рПс.г V 900Мд.рПс.с ‘
Применение согласующей передачи снижает КПД трансмиссии, увеличи-
вает ее массу и усложняет конструкцию. Однако имеются и положительные
факторы: исключается необходимость освоения производства нового гидро-
трансформатора; можно уменьшить геометрические размеры гидротрансфор-
матора, есди выбрать Uc,B У короткобазных машин упрощается решение
компоновочных проблем, связанных с обеспечением оптимальных углов уста-
новки карданных шарниров.
146 5- Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
5.5. Выходные характеристики системы
двигатель — гидродинамическая передача
При определении показателей тягово-скоростных свойств автомобиля с гид-
ромеханической трансмиссией необходимо располагать характеристиками,
получаемыми на выходе системы двигатель-гидродинамическая передача.
Эти характеристики учитывают преобразование параметров скоростной ха-
рактеристики двигателя гидротрансформатором. Выходные характеристики
системы ДВС — ГДТ представляют собой зависимости мощности Pt и вра-
щающего моментаMt навалу турбинного колеса от частоты вращения турби-
ны пт при полной подаче топлива в двигатель. Для вычисления значений Мг
и ztj используются координаты точек, характеризующих совместную работу
двигателя и гидродинамической передачи. Значения этих координат можно ,
получить либо непосредственно из графиков (рис. б. 7, а и б), либо вычислить
аналитически.
Рассмотрим аналитический метод определения координат точек совмест-
ной работы двигателя и гидродинамической передачи. Предположим, что
внешняя скоростная характеристика двигателя описывается уравнением
(2.34). При построении характеристик совместной работы необходимо учесть
отбор мощности на привод вспомогательного оборудования двигателя. Тогда
вращающий момент двигателя, воздействующий на насосное колесо при ус-
тановившемся движении автомобиля, определится по формуле
Од 1
©,
(6.16)
Юр <£0р
Мя =AfP(l-fc,.o)
При непосредственном соединении насосного колеса с валом двигателя на
установившемся режиме Мя = AfH, сод = Тогда на основе уравнений (6.9)
и (б. 15) получаем систему нелинейных алгебраических уравнений:
WWp(l-fcB.o) cMP(l-ktA ,
АГ«-----------^<оа - -—* - сМР(1
<0р ОУр 7 (6.16)
Мв -ХярП’сД =0.
Искомые неизвестные в этих уравнениях AfH и ц,.
Введем обозначения:
А = ЬМг,(1-къв)/(йР; В = сМ?(1-Л..0)/с4; С = аМР(1-Лвл); Z) = XHpD?.
Тогда уравнения (5.16) можно записать в следующем виде:
x^-Axq -Вх£ -С;
x^-D^ =0.
(5.17)
Решение системы уравнений (5.17) осуществляется на ЭВМ с использова-
нием станд артного программного обеспечения (например, MathC AD), варьируя
5,5. Выходные характеристики системы двигатель — гидродинамическая передача 147
—f ...............-
при этом все табличные значения Кя £ Хк.р для принятой гидродинамической
передачи.
При работе двигателя на регуляторной характеристике используется урав-
нение (2.46), которое в данном случае можно записать в виде
Мд = МР(1 - Л„.о) - ЗО*р,г(<0д - <о₽)/л. (5.18)
Используя выражения (5.9) и (5.18), получаем систему нелинейных алгеб-
раических уравнений, описывающих совместную работу двигателя и гидро-
динамической передачи на регуляторной характеристике:
Л.Г и. .. М Л JL 1 I ,
Af„+ п “Mp(l-fc,.0)+ я {B.10J
Мв-Хнрр^<4 =0.
Используя обозначения: Е = 3(№реГ/л; Г = МР(1-Лжо)+30йрвгС1р/л, уравне-
ния (6.19) можно записать в виде
«***-*1 (5.20)
- Длд = 0. J
При решении системы уравнений (5.20) варьируют табличные значения
Хя >Х.я,р. В результате решения систем уравнений (5.17) и (6.20) получают
двумерный массив фазовых координат Мв и . Количество элементов этого
массива равно количеству дискретных табличных значений Хк. Затем вычис-
ляют значения параметров выходных характеристик системы ДВС — ГДП:
0>т=И|Дг.в; (5.21)
пт = ЗОсйт/я; (5.22)
Мт=МвК1.к; (5.23)
Рт = Мт<Пг. (5.24)
Значения iT.H и соответствуют принятым табличным значениям А,н,
использованным при решении уравнений (5.17) и (5.20). По результатам
вычислений осуществляется построение искомых выходных характеристик
Мт = и Р? - /(лт), а также характеристики Г[т.а = /(пт) и графика кинема-
тической характеристики гидродинамической передачи геи = /(пт).
На рис. 5.8 показаны выходные характеристики системы двигатель —
гидротрансформатор.
Сравним выходную характеристику ДВС — ГДТ с внешней скоростной ха-
рактеристикой двигателя (рис. 5.9). Двигатель может устойчиво работать при
изменении частоты вращения в интервале пм £ па £ п** швх. Частота вращения
вала турбины может изменяться в пределах 0 5 п? 5пТП1<х. При этом обеспечи-
вается устойчивая работа двигателя во всем диапазоне изменения частоты
вращения его вала от до пИ1ШЯ. Форма характеристики Мт = /(пт) при-
ближается к идеальной, показанной штриховой линией.
148
5. Тягово-скоростн||1е свойства автомобили с гидромеханической трансмиссией
Рис. 5.8. Выходные характеристики системы двигатель — гидротрансформатор
Рис. 5.9. Сравнение характеристик Л/, -7(лт ) и Л/, =
-------------------идеальная характеристика
В эксплуатационном диапазоне использования характеристики гидро-
трансформатора (при т]т в £ 0,8) вращающий момент на валу турбины изменя-
ется в пределах Мтл ЙЛГТ ?МТ м, где Мт.» — момент, соответствующий КПД
гидротрансформатора Пт.н.®! Л^т.к — момент, соответствующий переходу на
режим гидромуфты. Частота вращения турбины при этом изменяется в ин-
тервале пгл £пт £пт м.
Для системы ДВС — ГДТ, так ясе как и для двигателя, применимы понятия
коэффициентов приспособляемости по вращающему моменту и по угловой
скорости. Коэффициент приспособляемости системы ДВС — ГДТ по вращаю-
щему моменту определяется по формуле
{6.26}
а коэффициент приспособляемости по угловой скорости (частоте вращения
вала турбины)
_ж/пг ,э-
(Б.26)
5.5. выходные характеристики системы двигатель — гидродинамическая передача 145
Значение находится в пределах 1,6-2,6, а значение — ъ пределах
2,0-2,6. Поскольку существенно больше значений иэто позво-
ляет уменьшить количество ступеней в механической коробке передач и уп-
ростить ее конструкцию.
Выходные характеристики системы ДВС — ГДМ Получают таким же обра-
зом, как и для системы ДВС — ГДТ. Рассмотрим некоторые особенности вы-
ходной характеристики ЛГТ = /(пт) этой системы. Так как у ГДМ Ктл = 1 на
всех режимах, то Мт = Мл = ЛГД. В этой связи характеристики AfT = f(nT)
обычно строят на одном и том же графике, что и характеристики совместной
работы ДВС и ГДМ Мв = f(nB) и Ма = /(пд).
На рис. 5.10 показаны эти характеристики. Характеристика ЛГТ = lf(n1)
существенно отличается от характеристики двигателя Мр = Г(яд). Характе-
ристика ЛГ7 = /(пт) существует при любых значениях ш,,, в том числе и при
(От =0. Следовательно, ГДМ не позволяет двигателю остановиться при любой
нагрузке. Она предотвращает возникновение больших динамических нагру-
зок и предохраняет двигатель и трансмиссию от перегрузок.
Рие. 5.10. Характеристики системы двигатель — гидромуфта
Активный диаметр ГДМ выбирают из условия, чтобы при Р,т., скольже-
ние ГДМ не превышало 3 %, т.е. 1Т Н 2:0,97.
Отметим важную особенность выбора безразмерной характеристики ГДМ
Хв = Z(ir,B)- Желательно, чтобы эта характеристика имела участок обратной
прозрачности, а >.н0 было значительно меньше Хв В этом случае при отпу-
щенной педали акселератора момент на турбине будет сравнительно неболь-
шой, что позволит останавливать автомобиль у светофора без выключения
передачи в коробке передач. Это обеспечивает быстрое и в то же время плав-
ное, без рывков и больших динамических нагрузок, трогание автомобиля
с места и его разгон. При этом значительно упрощается управление автомо-
билем.
150 5. Тяго&о-скоростные свойства автомобиля с гидромеханической трансмиссией
5.6. Дифференциальное уравнение движения автомобиля с
гидромеханической трансмиссией
Дифференциальное уравнение прямолинейного движения автомобиля
с гидромеханической трансмиссией аналогично уравнению для автомобиля
с механической трансмиссией, только вместо характеристики двигателя
Л1Д = /(пд) в нем используется выходная характеристика Л/т = f(nT) системы
ДВС — ГДТ. С учетом этого дифференциальное уравнение имеет вид
2 ^^Т^ТрПтр т 2 ZBf or,
“77 — • (5.27)
af г*
При определении коэффициента приведенной массы Бп.м автомобиля
с гидродинамической передачей необходимо дополнительно учесть влияние
моментов инерции насосного и турбинного колес на изменение кинетической
энергии системы.
Суммарный инерционный момент двигателя и насосного колеса
Л*д.й = -Л.н --Л.И (5-28)
dt diiip dt
где Лл u — суммарный момент инерции двигателя и насосного колеса ГДП;
Фн, — векторы угловых скоростей соответственно насосного и турбинного
колес.
Если насосное колесо соединено с коленчатым валом двигателя непосред-
ственно или с помощью карданной передачи, то их угловые скорости одина-
ковы, т.е. <о„ = а>д. В этом случае
^д.н “ +’Ли (5.29)
где — момент инерции двигателя, определяемый так же, как и при меха-
нической трансмиссии; JH — момент инерции насосного колеса с учетом мо-
ментов инерции всех деталей, кинематически связанных с ним, включая
массу жидкости в полости насосного колеса.
При установке согласующей передачи между двигателем и гидротранс-
форматором момент инерции Длн вычисляется но формуле
«и
*Льк — ^дис.п + + (5.30)
f=l
где ц. It — передаточное число согласующей передачи: uc.a - <од /wH; Jc п( — мо-
мент инерции i-й вращающейся массы согласующей передачи; — переда-
точное число от i-й массы до насосного колеса.
Инерционный момент турбинного колеса
jlf = (5.31)
at
где JT — момент инерции турбины с учетом массы жидкости в се полости.
5.6, Дифференциальное уравнение движения автомобиля с гидромеханической трансмиссией 151
............. -4.............—......-........................... ...............
Выразим угловую скорость си, через скорость автомобиля и:
о, =иыи,/гк, (5.32)
где Игр — передаточное число механической части трансмиссии между ГДП
и ведущими колесами автомобиля.
Подставим значение со, в выражения (5.28) и (5.32):
М)я „ - -; (5.33)
>Я rK d©, dt
М (5.34)
r„ dt
При установившемся движении автомобиля вращающий момент турбины
вычисляется по формуле (5.23), а при неустановившемся необходимо учесть
влияние инерционного момента М/дж и динамическое изменение момента
двигателя ДМЯ, определяемое по формуле (2.52):
М;=(Мд-ДМд-МУял)/Гтк.
Подставив значения MiRJL и ДМд, предполагая ©д = ©,, получаем выраже
ние для определения момента турбины на неустановившемся режиме:
М*
(5.35)
При передаче энергии от турбины ГДТ к ведущему колесу необходимо
учесть затраты на разгон турбины и вращающихся масс механической части
трансмиссии, а также потери в механической части. В результате получаем:
мк..=(м:-м/тХп
Подставим значениям^ из выражения (5.34) и Миз выражения (2.25),
принимая во внимание формулу (2.61):
г S г
_ •'.ЦгрЛтр dv
Л^к.и — ^т^трПтр “
Подставим значение из выражения (6.Э5). В результате получаем сле-
дующее выражение для определения Мк.ж автомобиля с гидромеханической
трансмиссией:
WB,i
= мдкт.нитрПтр - Г(Уд М,++
[L d©, J гк гк J dt
(5.36)
Для определения производной du^/da^ используется кинематическая
характеристика гидродинамической передачи ©д = /(©,) или пв = f(nT). По-
скольку ЖОя/с!©, =dnB/dnT, то характеристики ©я = [(ы^яп* = f(n?) эквива-
152
5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
лентны. Но на практике обычно используют
последнюю. На рис. 5.11 показан пример-
ный вид графиков характеристик пн = /(пт) и
dnB!dnx = f(nT). Если принять одинаковые
масштабы для пн ипт, то проиэводяую^Пн/йПт
можно определить непосредственно из графи-
ка, принимая во внимание, что производная
функции по своему аргументу равна тангенсу
угла наклона Р касательной к графику функ-
ции в данной точке с абсциссой пт1:
dnB/dnT =tgp.
Рис. 5.11. Схема определения
производной dnK /dnr
При использовании аналитических методов оценки тягово-скоростных
свойств автомобиля производная dnK/dnT вычисляется с помощью метода
численного дифференцирования.
Значение удМе существенно меньше «1Д.Н, поэтому в моделях, используе-
мых для анализа тягово-скоростных свойств автомобиля, обычно этой вели-
чиной пренебрегают. Тогда выражение (5.36) упрощается:
Мк_.
— Мд К Т1 н Ит-рТ] тр I *^д.в Кти
> г ^рПтр 'Л'р dv
---- т е/ г -Т — ——,
dnT ) rR rK dt
(5.87)
При установившемся движении автомобиля
= AfTurpT)Tp.
(5.38)
Сравнивая выражение (5.37) с аналогичным выражением (2.60) для авто-
мобиля с механической трансмиссией и учитывая выражение (2.71), получа-
ем формулу для определения коэффициента приведенной массы автомобиля
с гидромеханической трансмиссией:
Л.иKr„ иЛтр + j7P+ JK,
к J tJ
г^ота
(5.39)
Для непрозрачного ГДТ dnB/dnT =0, поэтому 5П М значительно меньше,
чем у автомобиля с механической трансмиссией.
5.7. Динамическая характеристика автомобиля
с гидромеханической трансмиссией
При построении динамической характеристики автомобиля с гидромеха-
нической трансмиссией значения динамического фактора D и скорости v ав-
томобиля вычисляются по формулам:
£> _ ^тцтр'11тр/гк 4Q)
m„g
= —£-*- =—(5.41)
^тр ЗО^р
5.7. Динамическая характеристика автомобиля с гидромеханической трансмиссией
153
Для вычисления D и у используется
выходная характеристика AfT = /(п7) си-
стемы ДВС — ГДТ (или системы ДВС —
ГДМ).
На рис. 5.12 показана динамическая
характеристика автомобиля с гидротранс-
форматором. Она существенно отличается
от динамической характеристики автомо-
биля с механической трансмиссией (см.
рис. 3.1). В связи с этим определение от-
дельных показателей тягово-скоростных
свойств автомобилей с гидромеханической
и механической трансмиссиями произво-
дится по-разному.
У автомобиля с ГМП значения динами-
ческого фактора на передачах достигают
максимумов при нулевой скорости, а у ав-
Рис. 5.12. Динамическая характеристика
автомобиля с гидротрансформатором
томобиля с механической трансмиссией — при критических скоростях дви-
жения, значения которых превышают 50 % максимальных скоростей на со-
ответствующих передачах (низшей и высшей). Поэтому для автомобиля
с гидротрансформатором вместо DK mftt и!)имх определяют условные макси-
мальные динамические факторы соответственно на низшей DB у|Пвя и на выс-
шей Лв.угапя передачах. Значения этих показателей вычисляют при AfT = .WTJ
и пг = пТ1Э. Преодолеваемые автомобилем уклоны определяют с учетом значе-
ний Х>н.угаах и £>ь ут„.. При оценке максимального уклона выбирают мень-
шее из значений, вычисляемых на основе выражений:
Лщлх ~ r\uj'»nax “ f > (5.42)
(•ни — И,,, — f. (5.43)
Значение Пв.,-тах характеризует величину уклона, при котором автомо-
биль может осуществлять движение на высшей передаче неограниченное
время, поскольку КГТД гидротрансформатора при этом не ниже Т)71И.Э - 0,8.
Автомобиль с гидродинамической передачей может беспрепятственно
двигаться вперед до тех пор, пока его максимальный динамический фактор
на данной передаче D1]IiaJt не окажется меньше коэффициента суммарного
дорожного сопротивления ф. При у>В;тах автомобиль начнет скатываться
с уклона назад, однако двигатель при этом будет работать устойчиво, без ос-
тановки. Таким образом, критическая скорость автомобиля с гидродинами-
ческой передачей имеет иной смысл, чем для автомобиля с механической
трансмиссией (см. параграф 3.2), а ее величина - О.
На рис. 5.12 отображены определяемые показатели тягово-скоросгных
свойств автомобиля с гидромеханической трансмиссией.
Как отмечалось в параграфе 5.3, работа гидротрансформатора па режиме
гидромуфты неэффективна, поэтому автомобильные гидромеханические
154
5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
Рис. 5.13, Динамическая характеристике автомобиля
с блокируемым гидротрансформатором
передачи снабжают системами автоматического блокирования гидротранс-
форматора. Это позволяет существенно повысить среднее эксплуатационное
значение КПД трансмиссии. В качестве примера на рис. 5.13 приведена ди-
намическая характеристика карьерного самосвала БелАЗ с блокируемым
гидротрансформатором. Сплошной линией показано протекание характери-
стики динамического фактора, ограниченной точками переключения пере-
дач и блокирования гидротрансформатора в процессе разгона автомобиля.
5.8. Характеристики разгона автомобиля
с гидромеханической трансмиссией
Характеристики разгона можно получить посредством моделирования на
ЭВМ процесса движения автомобиля, либо графоаналитическим методом.
Назначение характеристик разгона — определение показателей приемисто-
сти автомобиля, характеризующих способность быстро разгоняться и обеспе-
чивать высокую среднюю скорость движения.
При моделировании имитируются условия и режимы движения, преду-
смотренные стандартными методиками, содержание которых изложено в па-
раграфе 3.1. Автомобиль движется по горизонтальной дороге с твердым
покрытием с полной подачей топлива и при отсутствии буксования ведущих
колес.
Рассмотрим методики получения характеристик разгона на примере авто-
мобиля с гидромеханической передачей, состоящей из блокируемого гидро-
трансформатора и многоступенчатой механической коробки передач. При
использовании гидромеханической передачи такой структуры гидротранс-
5.в. Характеристики разгона автомобиля с гидромеханической трансмиссией 155
форматор на низшей (первой) передаче обычно не блокируют, так как эта пе-
редача используется только для трогания автомобиля с места, преодоления
дорожных препятствий и при движении в особо тяжелых условиях (бездо-
рожье). Блокирование гидротрансформатора на всех остальных передачах
осуществляется в соответствии с программой алгоритма автоматического
управления гидромеханической передачей. При отсутствии информации
о такой программе предполагают, что блокирование гидротрансформатора
в процессе разгона автомобиля осуществляется при условии, когда ускоре-
ние автомобиля с блокированным гидротрансформатором окажется выше ус-
корения при неблокированном его состоянии. Но при большом количестве
ступеней механической коробки передач с плотным рядом передаточных чи-
сел часто оказывается, что блокированное состояние гидротрансформатора
обеспечивает более высокое ускорение на всем интервале изменения скоро-
сти автомобиля. В этом случае принимают во внимание, что с целью сниже-
ния динамических нагрузок и обеспечения плавного движения автомобиля
при переключении передач гидротрансформатор разблокируется и некото-
рое время после переключения, необходимое для завершения переходного
процесса, остается в неблокированном состоянии.. Этот интервал времени
обычно принимают равным Э с.
С учетом изложенных особенностей при моделировании принимается сле-
дующая программа управления механизмами гидромеханической передачи.
Переключение с низшей на высшую передачу осуществляют при достижении
скорости разгона на предыдущей i-й передаче, соответствующей номинальной
частоте вращения вала двигателя. При этом разблокируют гидротрансфор-
матор, включают последующую (I + 1)-ю передачу и осуществляют движение
на этой передаче до тех пор, пока ускорение разгона с неблокированным гидро-
трансформатором выше, чем с блокированным. Затем осуществляют блокиро-
вание гидротрансформатора. Если же блокированный гидротрансформатор
обеспечивает более высокое ускорение сразу же после переключения переда-
чи, то движение с неблокированным гидротрансформатором ограничивают
интервалом времени длительностью в 3 с. Предполагают, что переключение
передач осуществляется без разрыва потока мощности.
Рассмотрим вначале графоаналитический метод получения характери-
стик разгона. Для определения ускорения автомобиля используется динами-
ческая характеристика. Ускорение вычисляется по формуле
<,ДР7^. (5.44>
6П,Ж
При отсутствии денных по коэффициенту приведенной массы 6П1М его зна-
чение вычисляют по полуэмпирической формуле
Sn.M-l + [Si + M.n^T.K—L'|—. (5.45)
< аптJт
где 51,5г — эмпирические коэффициенты ($i = 0,03-0,05; So = 0,04-ОДб); ьК1П —
передаточное число коробки передач; /СТ1И — коэффициент трансформации
136 5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
момента; /п* — полная масса автомобиля (с учетом его номинальной грузо-
подъемности); т — фактическая масса автомобиля.
На рис. Б.14, а показаны характеристики ускорения автомобиля с небло-
кированным гидротрансформатором, а на рис. 5.14, б — с блокированным
ГДТ. При разгоне автомобиля эти характеристики чередуются последова-
тельно в соответствии с изложенной выше программой управления.
Получение характеристик разгона v = f (t) и v ’ f (а) осуществляют по мето-
дике, изложенной в параграфе 3.4. Вид этих характеристик такой же, как
и для автомобиля с механической трансмиссией (см. рис. 3.8).
Методика моделирования раагона автомобиля на ЭВМ. Так как в про-
цессе разгона автомобиля с гидромеханической передачей гидротрансформа-
тор может находиться в двух различных состояниях — неблокированном
Рис. 5 14. Ускорение автомобиля БелАЗ-7516:
в — на режиме ГДТ; б — при блокированном ГДТ
5.8. Характеристики разгона автомобилях гидромеханической трансмиссией
157
и блокированном, то математическое описание этого процесса требует исполь-
зования двух различных систем дифференциальных уравнений. При неблоки-
рованном гидротрансформаторе процесс разгона описывается уравнениями:
dt
dv MrUT^p/rK-m,gw-k№Ant>a
— ----------------------------; (6.46)
A 8r..Mm,
dt 1
а при блокированном ч
dv _ А^д(1~^в.о)ьЧрПтр/*к ~ ,
dt 8n.Mm. ’ (6.47)
При трогании автомобиля с места используется система уравнений (5.46),
для которой принимают следующие начальные условия: = ®д0; *>с =0;
8q = 0. При переходе гидротрансформатора иэ одного состояния в другое и при
переключении передач в качестве начальных условий решения уравнений
принимаются конечные значения скорости и пути разгона, полученные в ре-
зультате решения уравнений предыдущего этапа разгона, а значение угловой
скорости вала двигателя вычисляется с учетом изменения передаточного
числа трансмиссии .
Значение 5ПМ для уравнений (5.47) вычисляют по формуле (2.71), а для
уравнений (6.46) — по формуле
6D „ = 1+ + (5 _4Й)
/рЛ, ГиШа
При решении систем уравнений (5.46) и (5.47) необходимо на каждом
шаге интегрирования вычислять значения функций Мв = Г(шд); Мн =
Мт = и устанавливать соотношения между аргументами этих функций
Двигатель при разгоне автомобиля работает на внешней скоростной харак-
теристике. Для вычисления его момента Ме используется уравнение регрес-
сии (2.34) или (2,42). Момент насосного колеса гидротрансформатора Мв
определяется по формуле (5.9). При вычислениях М, и М„ должны быть
согласованы угловые скорости вращения вала двигателя од и насосного коле-
са о,. При непосредственном соединении колеса насоса с валом двигателя
фи = <оя, а при наличии согласующей передачи <вн = (од /uCJI.
Угловую скорость (о, и момент Мт турбины вычисляют по формулам:
Фг=^^-; (5.49)
JW т — в ^Т.Н *
(5.50)
1S1 5. Тяговоскоростные свойства автомобиля с гидромеханической трансмиссией
Необходимо также постоянно иметь информацию о значении передаточного
отношения гидротрансформатора ^ж, так как параметры Х.и и КТ11 являются
функциями аргумента Значение t,,, при неблокированном гидротранс-
форматоре вычисляется по формуле
^т.« " озг/а>н, (5.51)
а при блокированном ^,к = 1.
Для математического описания функций = Z(iT.B) и Кт н = исполь-
зуют уравнения регрессий, получаемых путем статистической обработки ре-
зультатов испытаний гидротрансформатора. Эти уравнения представляют
собой полиномы до десятого порядка, в зависимости от требуемой точности
описания аппроксимируемых функций, и имеют следующий вид:
к
(&.Ь2)
^0
J^t.h = (Б*БЭ)
«о
где Ьхп, bg„ — коэффициенты регрессий; N — порядок полинома.
В результате решения систем уравнений (5.46) и (6.47) получают графики
характеристик разгона и = f(t) и в = f(t).
На рис. Б. 15 показаны графики ускорения автомобиля БелАЗ-7516 в про-
цессе разгона. Графики на рис. 6.1 б, а соответствуют переключению передач
с разрывом потока мощности, а на рис. 5.15,6 — без разрыва. При прекраще-
нии подвода энергии к ведущим колесам автомобиль движется с замедлением,
которое на горизонтальной дороге достигает -0,2 м/с8. При переключениях
передач на подъемах замедление гораздо выше, что снижает показатели тяго-
во-скоростных свойств автомобиля. Поэтому для карьерных самосвалов необ-
ходимо автоматическое переключение передач без разрывапотока мощности.
При моделировании движения автомобиля по маршруту может возник-
нуть необходимость учета буксования ведущих колес. В этом случае при не-
блокированном ГДТ используется следующая математическая модель:
dc»n _ M«(l-fe,lO)-Мн
d# «/'д.н
dC^,t _ ^т^тр'Птр — ,
dt ^х.».Вр (5.54)
do _ фЛ, - mtgh -Mfr /rR0 - kwAnv2.
dt ’
ds
— = v,
dt
где — приведенный к ведущему колесу суммарный момент инерции
турбины, механической части трансмиссии и ведущих колес:
*Л«.1.пр = ^гр”А»р + *^тр + Л.1- (5.65)
5.6. Характеристики разгона автомобиля с гидромеханической трансмиссией
13»
Рис. 6.15. Изменение ускорения при разгоне автомобиля.*
а — переключение передач с разрывом потока мощности; б — без разрыве
При блокированном гидротрансформаторе дифференциальные уравнения
движения автомобиля с гидромеханической и механической трансмиссиями
одинаковы. Уравнения для автомобиля с механической трансмиссией приве-
дены в параграфе 2.6.
160
5- Тягово-скоростные свойства автомобиля с.гидромеханической трансмисси й
5.9. Топливная характеристика автомобиля
с гидромеханической трансмиссией
Рассмотрим методику построения топливной характеристики устано-
вившегося движения автомобиля с гидромеханической трансмиссией. Эта
характеристика позволяет определять путевой расход топлива на всех пере-
дачах в зависимости от скорости установившегося движения в заданных ха-
рактерных дорожных условиях при v - const.
Для определения путевого расхода топлива необходима информация о па-
раметрах режимов работы двигателя и гидротрансформатора — о значениях
угловых скоростей вала двигателя, насосного и турбинного колес и значени-
ях вращающих моментов или мощностей на валах двигателя и гидротранс-
форматора.
Вращающий момент нагрузки на валу турбины обозначим Мтн. Его значе-
ние при заданной скорости о и принятом коэффициенте суммарного дорожно-
го сопротивления у вычисляется по формуле
Мт-н
и-гр'Птр
(5.56)
Режим работы гидротрансформатора характеризуется передаточным от-
ношением 4л- При известных значенияхскорости автомобилями момен-
та нагрузки на турбине ЛГТ1Ж можно определить режим работы двигателя, т.е.
его угловую скорость сод и мощность нагрузки Ря я. Используя выражения
(5.6) и (5.23) для определения моментов на колесах гидротрансформатора Ми
и Mj, составим следующее равенство:
А/т рХ.нЛ,ЛГтн
<4 4л
Введем обозначение:
Р^Х.к
4.
Поскольку параметры безразмерных ха-
рактеристик гидротрансформатора Хн, Jlt b
и /тв взаимосвязаны, то переменную Y мож-
но считать функцией аргумента . Выра-
жение (5.57) позволяет построить график
зависимости Y = /(4.е) (рис. 5.16). Функция
Y = f(i7.H) вычисляется для всех значений
4.Н» Для которых получены эксперименталь-
ные данные по параметрам Хв и А"т.н, кроме
/тл = 0. Для повышения точности определе-
ния топливной характеристики рекоменду-
ется использовать дополнительные проме-
S.9. Топливная характеристика автомобиля с гидромеханической трансмиссией
161
шуточные точки, координаты которых считываются иэ безразмерных харак-
теристик гидротрансформатора Хж = /(iT а) и Хт.„ = f(irx).
При известном моменте нагрузки на валу турбины AfTJI функция У = /(^.а)
позволяет определить режим работы гидротрансформатора- Определив Мтл
для принятых значений v на данной передаче, вычисляют функцию У:
Затем по графику зависимости У = /((т.н) (рис. 5.16) Находят значения
1,.,, а по графику безразмерных характеристик гидротрансформатора (см.
рис. 5.6) — соответствующие им значения Кгв. При вычислениях ЛГТ.В на
каждой передаче принимается 8-10 значений о с равномерным шагом в пре-
делах изменения скорости, определяемых по динамической характеристике
автомобиля, исключая скорости, близкие к нулю.
Параметры режима работы двигателя для каждого значения нагрузки на
турбине Мт.н определяются по формулам:
<»Д = ®К - -г1- = ^2-; (5.59)
*Т.В WH
(6.60)
где — мощность нагрузки двигателя; Ря — мощность на валу насосного
колеса; Рял — мощность, затрачиваемая на привод вспомогательного обору-
дования двигателя.
Мощности Рн и Рвл вычисляются по формулам:
Рн =w,jV„ =о)нЛ/тн/ЛГт.„: (5.61)
Д О ~ О*
(5.62)
где Pt — значение мощности двигателя на внешней скоростной характеристи-
ке при данной угловой скорости о>д.
Используя полученные значения мощности
нагрузки я и соответствующие им значения
угловой скорости Рлл, по формуле (4.7) опре-
деляют путевой расход топлива^, (л/100 км).
Удельный расход топлива ga, необходимый
для вычисления Q,, определяют по методике,
изложенной в параграфе 4.2.
На рис. 5.17 показана топливная харак-
теристика установившегося движения авто-
мобиля с неблокированным гидротрансфор-
матором. Штриховыми линиями изображены
характеристики, получаемые после его бло-
кирования.
Рис. 5,17. Топливная характери-
стика установившегося движения
автомобиля
6 Зак. J49«
162 5. Тягово-скоростные свойства автомобиля с гидромеханической трансмиссией
5.10. Расход топлива автомобиля с гидромеханической
трансмиссией в ездовом иикле
При определении путевого расхода топлива автомобиля с гидромеханиче-
ской трансмиссией в ездовом цикле приходится учитывать режимы движе-
ния с блокированным и неблокированным гидротрансформатором. Такие
режимы характерны для участков разгона. Процесс разгона сопровождается
переключением передач, поэтому происходит чередование блокированного
и неблокированного состояний гидротрансформатора. Участки же установив-
шегося движения преодолеваются о блокированным гидротрансформатором.
Средний путевой расход топлива в ездовом цикле Q,u можно определить
посредством моделирования движения автомобиля, либо графоаналитиче-
ским методом.
Сущность методики моделирования движения в ездовом цикле изложена
в параграфе 4.5. На участках разгона в зависимости от состояния гидротранс-
форматора (блокирован или не блокирован) решаются системы уравнений
(5.46) или (5.47) совместно с дифференциальным уравнением текущего путе-
вого расхода топлива (4.28). Положение педали акселератора при этом соот-
ветствует полной подаче топлива в двигатель, т.е. уа = 1. При торможении
автомобиля используется система уравнений (5.47). Момент двигателя при
этом вычисляется по формуле (2.48) и дополнительно учитывается момент
тормозных механизмов. На участках установившегося движения определе-
ние расхода топлива осуществляется так же, как для автомобиля с механиче-
ской трансмиссией (см. параграф 4.5). Расход топлива за время остановок
вычисляется по формуле (4.26).
При использовании графоаналитического метода расходы топлива на уча-
стках установившегося движения, торможения, на остановках, а также при
разгоне с блокированным гидротрансформатором определяются таким же
образом, как для автомобиля с механической трансмиссией. Различаются
лишь способы определения расхода топлива на участках разгонов при движе-
нии с неблокированным гидротрансформатором. На участках разгона, как
отмечалось в параграфе 4.5, необходимо построить характеристики часового
расхода топлива GT (кг/ч) в зависимости от скорости о на всех передачах. Так
как двигатель при этом работает с полной подачей топлива, то, используя па-
раметры характеристик совместной работы двигателя и гидротрансформато-
ра, можно определить для каждой параболы нагружения значения од и
и вычислить мощность нагрузки двигателя (Вт)
Рд.„ = <»д М д + Ра.о = ПП*^Л + (5.63)
Затем вычисляется часовой расход топлива и скорость автомобиля:
G. =grpkTPRll.W-e-> (6.64)
Р - <ад*7ДГк _ (6.65)
итр 30итр
5.11. Экспериментальное определение характеристик -идрадииамичееких передач
163
По полученным результатам осуще-
ствляется построение характеристик,
показанных на рис. 5.18. Используя эти
характеристики и характеристики раз-
гона автомобиля (см. рис. 5.14), можно
определить расход топлива Qp (л) на уча-
стках разгона автомобиля при движении
с неблокированным гидротрансформа-
тором. Методика вычисления Qp в этом
случае такая же, как для автомобиля
с механической трансмиссией. При этом
используются формулы (4.21)-(4.23).
Рис 5А 8> Характеристике часового
расхода топлива
5.11. Экспериментальное определение характеристик
гидродинамических передач
Проектирование гидродинамических передач осуществляется на основе тео-
рии подобия. Однако методы теории подобия не гарантируют достаточной точ-
ности получения характеристик проектируемых передач. Поэтому после изго-
товления опытных образцов в обязательном порядке проводятся их испытания.
Методика проведения стендовых испытаний изложена в ГОСТ 17069-71.
Испытательный стенд должен обеспечивать работу гидродинамической
передачи и измерение параметров рабочего процесса на всех возможных режи-
мах. Схема стенда показана на рис. 5.19. Стенд должен содержать следую-
щие основные устройства: корпус для установки и закрепления гидродина-
мической передачи 15; приводную электрическую балансирную машину 11;
нагрузочное устройство 15 (балансирная машина или индукторный тормоз);
систему питания и охлаждения рабочей жидкости; карданные передачи 12
для соединения валов приводной машины и нагрузочного устройства с вала-
ми гидродинамической передачи; устройства для контроля и измерения час-
тот вращения валов 7 и S; устройства для измерения вращающих моментов 6
приводной машины и нагрузочного устройства.
Испытания проводят при постоянной частоте вращения вала насосного
колеса пж или при постоянном моменте на насосном колесе Мн. Эти парамет-
ры должны соответствовать номинальным расчетным значениям. Отклоне-
ния от номинальных значений не должны превышать ±2 %, а колебания
и в процессе измерений — не более ±1 % от установившихся значений.
Температура рабочей жидкости прн испытаниях должна поддерживаться
в пределах 90 ± З'С. Количество измеряемых точек должно быть достаточным
для выявления формы кривых функциональных зависимостей безразмер-
ных характеристик со всеми их особенностями (изломами, перегибами) во
всем диапазоне изменения передаточного отношения iIH.
По результатам испытаний производится вычисление параметров гидро-
динамической передачи if.R, Кгл, Т]Ф.К, Хя с использованием формул (Б.1),
164 5. Тягово-скоростные свойств* автомобиля с гидромеханической трансмиссией
Рис. 5.19. Схема стенде для испытания гидромеханической передачи: 1 — термометр; 2 —
насос; 3 — переливной клапан; 4 — фильтр; 5 — манометр; 6 — весовое устройство; 7 —
счетчик импульсов; 8—измеритель тахометра; 9 — датчик тахометра; 10 —датчик импуль-
сов; 11 — приводная балансирная машина; 12 — карданная передача; 13 — испытываемая
гидродинамическая передача; 14 — преобрааователь постоянного тока; 15 — тормоэпая
балансирная машина (или индукторный тормоз); 16 — редукционный клапан; 17 — вен-
тиль; 18 — откачивающий насос; 19 — теплообменник
(6.2), (5.3), (5.9) и построение графиков. Для гидротрансформатора осуще-
ствляется построение безразмерных характеристик Ан = /(iT.B), KTJi = /(i, в),
Лт.и = ^('т.я)> а для гидромуфты — только характеристики = /(it.E)-
При создании новых автомобилей особо большой грузоподъемности не
всегда представляется возможность проведения стендовых испытаний в свя-
зи с отсутствием стендового оборудования требуемой мощности. В этом слу-
чае характеристики гидродинамической передачи могут быть получены при
ее испытании непосредственно на автомобиле в процессе гностического про-
бега. Предварительно необходимо провести испытания по определению ха-
рактеристики двигателя ЛГД = f(ne), приведенной массы автомобиля me ^р,
коэффициента сопротивления воздуха ки и коэффициента соцротивления ка-
чению на испытательном участке f. Методики этих испытаний изложены
в параграфе 3.7.
Методика испытаний по определению безразмерных характеристик гид-
ротрансформатора заключается в следующем. Непосредственно перед испы-
таниями прогревают двигатель и механизмы трансмиссий для обеспечения
номинальных тепловых режимов и отключают систему автоматического
блокирования гидротрансформатора. При заторможенном автомобиле вклю-
чают высшую передачу в ГМП, дают полную подачу топлива в двигатель
и включают аппаратуру измерения параметров. Затем отпускают педаль тор-
5.11. Экспериментальное определение характеристик гидродинамических передач 165
моэа и осуществляют разгон снаряженного автомобиля до максимальной
скорости. В процессе разгона производится фиксация следующих параметров:
частоты вращения вала двигателя пд и вала турбины пт, скорости и и ускоре-
ния а автомобиля. Фиксация этих параметров производится при заданном
шаге Дл, изменения частоты вращения турбины ГДТ пт Минимальное значе-
ние = 0, а максимальное п1П1<1Х соответствует достигнутой максимальной
скорости разгона
Полученные результаты измерений используются для вычислений пара-
метров гидротрансформатора:
1 (те = п1и£д.; (5.66)
пя
М, . (б в7)
ЦгрЛ'тр
tfTF =—; (5.68)
Мдив.п-По.п
хн = 900^гЦ°^° д . (5.69)
nzn*pD°
Формулы (5.66)-(5.69) записаны в предположении наличия согласующей
передачи между двигателем и гидротрансформатором с передаточным чис-
лом . При непосредственном соединении насосного колеса с валом двига-
теля необходимо принять Uc,n = 1, Т)с.п = 1.
Гидромеханические передачи современных автомобилей снабжены элек-
тронными системами автоматического управления. Электронный блок реали-
зует программу алгоритма управления переключением передач и блокирова-
нием гидротрансформатора, а также производит диагностирование состояния
исполнительных механизмов, осуществляющих управление гидромеханиче-
ской передачей. Потенциальные возможности электронного блока огромны,
поэтому целесообразно с его помощью организовать сбор и обработку инфор-
мации о режимах работы механизмов и систем автомобиля в процессе гности-
ческого пробега, а также реализовать в нем алгоритмы определения параметров
автомобиля и характеристик двигателя и гидротрансформатора. Это сущест-
венно упростит проведение испытаний автомобиля.
Вопросы для самоконтроля
1. По каким признакам и. как классифицируют гидродинамические передачи?
2. Каковы характерные свойства гидродинамических передач? В чем преиму-
щества и недостатки гидродинамических передач по сравнению с механиче-
скими передачами?
8. Каковы параметры гидродинамических передач и как они определяются?
4. Охарактеризуйте режимы работы гидродинамической передачи и значения
ее параметров на этих режимах.
166 5. Тягово-скоросгные свойства автомобиля с гидромеханической трансмиссией
б. Что такое безразмерные характеристики гидродинамической передачи? Изо-
бразите графики безразмерных характеристик гидротрансформатора и гид-
ромуфты.
6. Что такое прозрачность гидротрансформатора и какие физические свойства
она характеризует? Каковы преимущества и недостатки прозрачного и не-
прозрачного гидротрансформаторов?
7. Что такое нагрузочная характеристика гидродинамической передачи и от ка-
ких параметров она зависит?
8. Какой метод используется при проектировании гидродинамических передач
и в чем его сущность?
9. Как называется основной геометрический размер гидротрансформатора и как
он определяется?
10. Что собой представляют выходные характеристики системы двигатель —
гидротрансформатор и как вычисляются их параметры?
11. Напишите формулу динамического фактора автомобиля с гидродинамиче-
ской передачей.
12. Что такое динамическая характеристика автомобиля? Чем различаются ди-
намические характеристики автомобилей с гидромеханической и механиче-
ской трансмиссиями?
13. От каких параметров зависит приведенная масса автомобиля с гидромехани-
ческой трансмиссией?
14. Что такое условный максимальный динамический фактор автомобиля с гид-
ромеханической трансмиссией?
15. Как определяется максимальный преодолеваемый уклон автомобилем с гид-
ромеханической трансмиссией?
16. Какие устройства входят в состав стенда для испытаний гидротрансформатора?
17. Как проводится эксперимент по определению характеристик гидротрансфор-
матора в процессе гностического пробега автомобиля?
Определение основных параметров
автомобиля
Методология дисциплины «Теория движения автомобиля» составляет тео-
ретическую основу функционального проектирования автомобилей. Целью
функционального проектирования является определение и выбор структуры
и параметров автомобиля, обеспечивающих высокие показатели эффектив-
ности в заданных условиях эксплуатации.
Рассмотрим основные положения методологии системного подхода, ис-
пользуемого при функциональном проектировании автомобиля.
6.1. Основы методологии системного подхода
к проектированию автомобиля
Характеристики функционирования автомобиля зависят от его физиче-
ских свойств, воздействий внешней среды и управляющих воздействий води-
теля или системы автоматического управления. Поэтому проектирование
необходимо осуществлять на основе системного подхода, рассматривая сис-
тему «автомобиль — водитель — внешняя среда». В свою очередь автомобиль
представляет собой сложную механическую систему, состоящую из взаимо-
действующих элементов и подверженную комплексу внешних воздействий.
Элементами автомобиля являются механизмы и системы, обладающие соот-
ветствующими физическими свойствами. Количественно физические свой-
ства оцениваются параметрами.
Параметр — это величина, характеризующая свойство или режим рабо-
ты объекта (автомобиля или его отдельного механизма). Различают внутрен-
ние, внешние и выходные параметры.
Внутренние параметры проектируемого автомобиля — это параметры
элементов, из которых состоит автомобиль, т.е. параметры его механизмов
и систем (двигателя, трансмиссии, тормозной системы, подвески и др.).
Внешние параметры — это параметры внешней среды, оказывающей
влияние на функционирование автомобиля. Элементы внешней среды — до-
рога, транспортный поток, воздушная среда. Параметрами дороги являются
продольные и поперечные уклоны, радиусы кривизны составляющих ее уча-
стков, коэффициенты сопротивления качению и сцепления, ограничения
скорости на участках дороги (административные и по условиям безопасности
движения). Транспортный поток характеризуется интенсивностью (количе-
ством автомобилей, проходящих в единицу времени), количеством полос
и качественным составом. Параметры воздушной среды — плотность и отно-
сительная влажность воздуха, скорость и направление ветра.
Выходные параметры автомобиля характеризуют его эффективность
и качество процессов функционирования (производительность, рабочая
168
6. Определение основных параметров автомобили
скорость, удельная грузоподъемность, удельный расход топлива, показатели
приемистости и др.).
При проектировании механизмов автомобиля его внутренние параметры
становятся выходными параметрами механизмов, а внутренними парамет-
рами оказываются параметры элементов, из которых состоят эти механиз-
мы. Например, передаточные числа коробки передач являются внутренними
параметрами автомобиля. При проектировании же коробки передач они
оказываются ее выходными параметрами (показателями эффективности),
а определению подлежат числа зубьев, межосевые расстояния и другие внут-
ренние параметры. В этом суть технологии системного подхода при проекти-
ровании автомобиля.
Целью проектирования любого объекта (автомобиля, его механизмов и си-
стем) является определение внутренних параметров. Внутренние параметры
объекта проектирования подлежат оптимизации, а в качестве критериев опти-
мальности используются выходные параметры. Первичным документом для
проектирования автомобиля является техническое задание. При разработке
технического задания учитываются: назначение автомобиля; характеристики
внешней среды (дорожные и климатические условия); характеристики типо-
вых маршрутов и режимов движения; нормативные материалы (стандарты
ISO, Правила ЕЭК ООН, ГОСТы); законодательные акты стран, в которые
предполагается продажа автомобилей; условия технического обслуживания
и хранения. Техническое задание содержит обоснование выбора главного
классификационного параметра автомобиля и его основных массогеометри-
ческих параметров. Массогеометрические параметры автомобилей регламен-
тированы законодательными актами и стандартами.
Главный параметр — это параметр, наиболее полно выражающий или
регламентирующий технические и эксплуатационные свойства автомобиля
и остающийся постоянным при технических усовершенствованиях автомо-
биля. Для грузовых автомобилей в качестве главного параметра принята
полная масса автомобиля, для легковых и автобусов — габаритная длина.
Основные параметры — это параметры, зависящие от главного и характе-
ризующие отдельные из наиболее важных технических и эксплуатационных
свойств автомобиля. Они могут изменяться при модернизации автомобиля.
В число основных параметров входят как внутренние, так и выходные пара-
метры автомобиля. При проектировании или модернизации основные внут-
ренние параметры подлежат определению и оптимизации.
Методология системного подхода базируется на принципах декомпози’
ции, иерархичности, итеративности, локальной оптимизации и комплексного
осуществления процесса проектирования. Декомпозиция приводит к выде-
лению составных частей объекта (блоков), иерархических уровней, аспек-
тов. Это позволяет сложную задачу проектирования свести к решению более
простых задач с учетом взаимодействия между объектами проектирования.
Каждая задача решается на основе локальной оптимизации, но декомпози-
ция критериев при этом осуществляется таким образом, чтобы локальные
цели были подчинены конечной цели проектирования.
6,2. Классификация автомобильных транспортных средств
169
Используя изложенные принципы методологии системного подхода, выде-
лим локальный аспект проектирования автомобиля, целью которого поставим
обеспечение высоких показателей тягово-скоростных свойств и топливной
экономичности автомобиля. Критериями эффективности проекта примем
показатели этих свойств.
В предыдущих разделах учебника рассмотрены физические процессы
взаимодействия автомобиля с внешней средой на тяговом режиме и получены
математические модели, позволяющие осуществлять количественную оценку
эффективности выполнения автомобилем его функционального назначения.
Выявлены факторы, оказывающие влияние на формирование тягово-скорост-
ных свойств и топливной экономичности автомобиля, установлен комплекс
основных параметров, подлежащих определению:
1) масса автомобиля и ее структура;
2) распределение массы между мостами автомобиля;
3) колесная формула, тип и параметры шин;
4) геометрические параметры автомобиля;
б) тип и параметры характеристик двигателя;
6) структура трансмиссии и параметры ее механизмов.
Задача проектирования решается в два этапа. На первом этапе, учитывая
требования к выходным параметрам, обусловленные назначением автомобиля
и условиями эксплуатации, и используя полученные зависимости между вы-
ходными и внутренними параметрами автомобиля и параметрами внешней
среды, определяют предварительные значения основных параметров автомо-
биля. Затем на основе комплекса показателей эффективности, характеризую-
щих тягово-скоростные свойства и топливную экономичность, формируют целе-
вую функцию и осуществляют решение задачи оптимизации этих параметров.
6.2. Классификация автомобильных транспортных средств
Под классификацией понимают систему понятий, используемую в соот-
ветствующей области знаний как средство для установления связей между
этими понятиями или классами объектов.
В автомобильной промышленности цель классификации заключается в ран-
жировании автомобилей в соответствии с их потенциальными потребитель-
скими свойствами или для предъявления к ним дифференцированных по
какому-либо параметру технических или фискальных (налоговых) требова-
ний. Используются международные и национальные системы классификации
транспортных средств.
В табл. 6.1 приведена классификация транспортных средств, разработанная
Комитетом по внутреннему транспорту Европейской экономической комис-
сии Организации Объединенных Наций (ЕЭК ООН) и принятая Женевским
соглашением 1968 г.
При оценке потенциальных потребительских свойств автомобильных транс-
портных средств используют понятия вместимости автомобиля, снаряженной
и полной массы, грузоподъемности и др.
170
6. Определение основных параметров автомобили
Таблица 6.1
Классификация автотранспортных средств
Категория АТС Полная МАССА, Т Количество пассажирских МЕСТ Вид автотранспортного средства
М Автотранспортные средства, предназна- ченные для перевозки пассажиров ,
Ml - £8 Легковые автомобили и автобусы
М2 >8 Автобусы
м3 т„ >Б Автобусы, пассажирские автопоезда
N Автотранспортные средства, предназна- ченные для перевозки грузов
N1 58,6 Грузовые автомобили, автомобили-тяга-
чи
512 Тоже
>12 Тоже
О Прицепы и полуприцепы
Q mrq, 50,76 Одноосные прицепы
Qs . 0,75 <т„р £3,5 Прицепы и полуприцепы
Q 3,5</nop <10 Тоже
тяр>10 Тоже
Вместимость автомобиля — наибольшее количество грузов или пасса-
жиров, которые может одновременно перевозить автомобиль исходя из его
прочности и размеров кузова, при соблюдении допустимых значений нагру-
зок на опорную поверхность дороги. Применительно к грузовому автомобилю
вместимость называют грузовместимостью, применительно к пассажирско-
му автомобилю — пассажировместимостью (или просто вместимостью)
автобуса или легкового автомобиля.
Термины, определения и допустимые значения размерных параметров
и показателей масс, оказывающих влияние на вместимость автомобилей,
приведены в многочисленных международных нормативных документах.
Различают собственную и полную массы автомобиля, массы снаряженно-
го и неснаряженного автомобиля, грузоподъемность автомобиля.
Определение собственной массы автомобиля дано в Правилах ЕЭК ООН
Ns 68 и № 101. Под собственной массой подразумевают массу транспортного
средства в снаряженном состоянии (без водителя, экипажа, пассажиров и гру-
за), оснащенного инструментом, запасным колесом и всем предусмотренным
для данного транспортного средства оборудованием. В собственную массу сна-
ряженного автомобиля также включают массу охлаждающей жидкости и сма-
зочных материалов, массу топлива при полностью заправленных топливных
баках. Для электромобиля учитывают массу служебной и тяговой аккумуля-
торных батарей, бортового и переносного зарядных устройств.
6.2. Классификация автомобильных транспортных средств
171
Из приведенного определения следует, что масса снаряженного автомо-
биля соответствует его собственной массе. Масса неснаряженного автомо-
биля определяется путем вычитания из массы снаряженного автомобиля
массы заправки и снаряжения.
Полная масса одиночного автомобиля складывается из массы снаряжен-
ного автомобиля, масс водителя, обслуживающего персонала (экипажа), гру-
за, пассажиров и багажа. Для автопоезда полная масса равна сумме полной
массы автомобиля-Тягача и полной массы буксируемых прицепов или полу-
прицепа.
; Грузоподъемность автотранспортного средства — наибольшая масса
груза, который может быть им перевезен при соблюдении допустимых значе-
ний нагрузок на.опорную поверхность дороги. Понятие грузоподъемности
применимо как к грузовым, так и пассажирским автомобилям. Для автобу-
сов и легковых автомобилей грузоподъемность складывается из массы пасса-
жиров и багажа.
Очевидно, что основным параметром, определяющим функциональные
возможности автотранспортного средства, является его грузоподъемность.
Но показатели тягово-скоростных свойств и топливной экономичности, харак-
теризующие эффективность автомобиля, согласно стандартным методикам,
определяются при полной его массе. Следовательно, главным параметром
целесообразно принять полную массу.
Для грузовых автомобилей, прицепов и полуприцепов такой вывод не
вызывает сомнений. Пассажирские же автомобили при одной и той же пасса-
жировместимости (грузоподъемности) могут иметь существенно различаю-
щиеся полные массы. Это обусловлено широким разнообразием назначений
этих машин и условий их использования.
Автобусы в зависимости от назначения разделяют на городские, пригород-
ные, междугородные, туристские. Городские автобусы предназначены для
массовых перевозок пассажиров в городах, поэтому они имеют ограниченное
количество мест для сидящих пассажиров, а большая часть пассажиров пе-
ревозится стоя. Междугородные и туристские автобусы перевозят только
сидящих пассажиров. Норма площади на каждого стоящего пассажира су-
щественно меньше, чем для сидящего. Поэтому количество пассажиров,
приходящихся на единицу полезной площади городских и пригородных
автобусов, значительно больше, чем для междугородных и туристских. Сле-
довательно, при одной и той же собственной массе автобуса его полная масса
будет зависеть не только от конструктивного совершенства, а в значительно
большей мере отего назначения.
Легковые автомобили характеризуются еще большим разнообразием от-
личительных черт, что не позволяет установить однозначные зависимости
между полной массой и грузоподъемностью.
По классификации ЕЭК ООН все легковые автомобили относятся к одной
категории Mi. Однако'с точки зрения потребителя при выборе легкового ав-
томобиля имеют важное значение многие параметры, среди которых тип
172' 6. Определение основных параметров автомобиля
кузова количество пассажирских мест, рабочий объем двигателя, максималь-
ная скорость и др. В связи с этим в качестве основного классификационного
параметра легкового автомобиля в европейских странах принята габаритная
длина автомобиля. Этот ясе параметр принят и для классификации автобу-
сов. Обоснованность такого подхода к выбору классификационного параметра
обусловлена тем, что значение габаритной длины удовлетворительно корре-
лируется с собственной массой пассажирского автомобиля.
Легковые автомобили общего назначения подразделяются на шесть ос-
новных классов, обозначаемых буквами латинского алфавита (табл. 6.2).
Таблица в,2
Классы легковых автомобилей согласно европейской классификации
Обозначение класса А В с В Е Г
Габаритная длина Д, м Д <3,5 3,55 Д <3,9 3.9 5 Д <4,3 4,35 Д <4,6 4,6 5 Д <4,9 Д 2>4,9
В привычных для стран СНГ терминах автомобили класса А относятся
к особо малому классу, класса В — малому, классов С и В — среднему, класса
Е — большому, класса F — высшему классу. Кроме того, в каждом классе
предусмотрено по 2 группы (в малом классе 3 группы), различающихся не-
снаряженной массой автомобиля и рабочим объемом двигателя.
Однако не для всех видов легковых автомобилей принятый классифика-
ционный параметр Д отражает особенности их потребительских качеств. На-
пример, спортивные высокоскоростные машины, снабженные двигателями
большой мощности, выделены в два специальных класса G и Н, в которых
они различаются не длиной, а стоимостью. К отдельному классу, не имеюще-
му пока общепринятого буквенного обозначения, относят полноприводные
автомобили высокой проходимости. Выделяют также отдельный класс авто-
мобилей повышенной вместимости, называемых мини-венами.
Автобусы, согласно классификации ЕЭК ООН, разделены на две катего-
рии* Мд — автобусы малой вместимости с полной массой до б т и Мя — боль-
шой вместимости с полной массой свыше Б т(см. табл. 6.1).
В Российской Федерации используется более детальная классификация,
приведенная в табл. 6.3.
Таблица 6.3
Классификация автобусов
Класс Особо малый Малый Средний Большой Особо большой
Габаритная длина Lr,ы Д <5 55 Д <7,6 7,6 5 Д <05 9,55 Д <12 Д £12
6.3. Определение масс автомобиля
173
Особо большой автобус может быть
только сочлененным.
Классификация ЕЭК ООН предусмат-
ривает деление грузовых автомобилей в
зависимости от полной массы и вводит
три категории и N3 (см. табл. 6.1).
В Российской Федерации деление грузо-
вых автомобилей на категории более де-
тальное, но категории не имеют специ-
альных обозначений (табл. 6.4).
Таблица 6.4
Категории грузовых автомобилей
Номер категории Полная масса т,, т
1 т, £1,2
2 1,2 <т, £2
3 2<та <8
4 8<п% 514
5 14<тй £20
6 20<пг„ £40
7 та >40
6.3. Определение масс автомобиля
Определению подлежат полная и снаряженная массы автомобиля и масса
нагрузки.
Полная масса автомобиля тЛ (грузового, легкового, автобуса) вычисляет-
ся по формуле
тд = т0+т,„ (6.1)
где — масса снаряженного автомобиля (снаряженная масса), кг; тг — мас-
са нагрузки, кг.
Для грузового автомобиля масса нагрузки Шр состоит из массы груза
и массы членов экипажа т,:
тг — тгр + тэ (6.2)
Значение соответствует номинальной грузоподъемности автомобиля,
ат, вычисляется по формуле
m, = п,тч„ (6.3)
где пЛ — количество членов экипажа (водители, экспедиторы и др.); —
масса члена экипажа грузового автомобиля (принимают = 75 кг).
Для грузового автомобиля полная масса т„ — главный параметр. Ее зна-
чение указывается в техническом задании на проектирование автомобиля.
Определению подлежат массы то ит,.. Для их определения можно использо-
вать статистическую информацию о значениях коэффициента грузоподъем-
ности k,. или коэффициента удельной грузоподъемности , вычисляемых
по формулам:
Лг = тг/т,; (6.4)
*г.уд =/пг/то. (6.5)
На рис. 6.1 показаны зависимости Аг от полной массы тд грузовых автомо-
билей, которые можно использовать для приближенного определения масс
гпя и То;.. Снаряженная масса полноприводного автомобиля на 20-25 % больше
массы снаряженного базового автомобиля (при одной и той же грузоподъем-
ности).
Характеристики параметров масс автомобилей-тягачей аналогичны ха-
рактеристикам одиночных грузовых автомобилей. При оценке полной массы
174
6. Определение основных параметров автомобиля
0,8
0,7
Рис. в.1. Зависимости коэффициента грузоподъемности kr
от полной массы т. грузовых автомобилей
автомобиля, являющегося седельным тягачом, его снаряженная масса скла-
дывается с нагрузкой, создаваемой полуприцепом на седельное устройство
при номинальной нагрузке полуприцепа.
Полная масса прицепа (полуприцепа) является его главным параметром.
Полная масса автопоезда в составе автомобиля-тягача и прицепа равна сумме
их полных масс. Для приближенного определения масс прицепов и полупри-
цепов общего назначения используются зависимости соответственно между
^г.пр и Аг.пп и полной массой прицепа т^р и полуприцепа т, , приведенные
на рис. 6.2, а и б.
Рис. 6.2. Зависимости коэффициентов грузоподъемности прицепов Лг.Вр (в)
и полуприцепов ^г,т (б) от их полных масс ит.,оп
Для пассажирских автомобилей (автобусов, легковых автомобилей) глав-
ный параметр — габаритная длина L?. Масса снаряженного автобуса то
примерно пропорциональна габаритной длине Lp и зависит от типа автобуса.
Значение можно определить из соотношения
m0=cmLr, (6.6)
гдест — коэффициент массы, кг/м; L* — габаритная длина автобуса, м.
На рис. 6.3 приведены графики зависимости сж от L*, полученные путем
статистического анализа параметров автобусов.
6.3. Определение масс автомобиля
175
Рис. 6.3. Зависимости коэффициента массы ст от габаритной длины автобуса Lt:
1 — городской; 2 — пригородный; 3 — междугородный
I t
Графики на рис. 6.1 и 6.2 построены по материалам, приведенным в [7],
а на рис. 6.3 — в [11].
Грузоподъемность автобуса тт определяют по формуле
mr = +nn(mn +m8 + mplt), (6.7)
где п* — количество членов экипажа (водители, экскурсоводы и др.); пц, —
масса члена экипажа; пп — количество перевозимых пассажиров (пассажи-
ровместимость); /Пп — масса пассажира; те — масса багажа на одного пасса-
жира; трМ — масса ручной клади на одного пассажира.
Принимают следующие значения параметров масс: = 75 кг;/Пц =68кг;
в городском автобусе т6 = 0, т?* = 3 кг; в пригородном т$ = 10 кг, - 0;
в междугородном и туристском - 20, трм = 3.
При определении номинальной пассажировместимости учитывается ко-
личество мест для сидящих пПЛ и стоящих пп сг пассажиров. Методика опре-
деления вместимости автобусов изложена в Правилах ЕЭК ООН № 36, 52
и 107. Общее количество мест в автобусе вычисляют по формуле
лЛ = ^П.С -‘^П.СГ = ^П.О + ^Ст/Y СТ» (6'8)
где А,т — площадь для размещения стоящих пассажиров, м2; Уст — норма
площади на одного стоящего пассажира, м2/пасс.
Норма площади уст в городском и пригородном автобусах при номиналь-
ной вместимости составляет 0,2 м2/пасс, а в часы пик — 0,125 мг/пасс.
В междугородных и туристских автобусах перевозка стоящих пассажиров
не предусмотрена.
Приближенно пассажировместимость в городских автобусах можно оце-
нить, используя денные табл. 6,5 [11].
Таблица 6.5
Пассажировместимость городских автобусов
Класс Особо малый Малый Средний Большой Особо большой
Вместимость, пасс 15-18 30-38 90-100 115-120 175-190
176
6- Определение основных параметров автомобиля
Главный параметр легкового автомобиля — габаритная длина Д.. На
рис. 6.4 показаны зависимости снаряженной то и полной тЛ массы от Д, лег-
ковых автомобилей всех основных классов, полученные путем статистиче-
ского анализа параметров автомобилей, предлагавшихся к продаже в 2002 г.
4
It
4
Рис. 6.4. Зависимости снаряженной т0 и полной т, массы от габаритной длины Lr
легковых автомобилей: а — классА; б — класс В; в — класс С; а—класс Р; с? — класс £;
е — класс F
6.4. Количество .мостов, колесная формула и геометрические параметры автомобиля
177
Графики построены по полученным уравнениям регрессий. Использованы
регрессии второго порядка:
mt =bQ+b1LT+b2I^; i = 0, а, (6-9)
где fee, bj, tfe — коэффициенты регрессий.
В табл. 6.6 приведены значения коэффициентов уравнений (6.9).
Таблица 6,в
Коэффициенты уравнений регрессий для определения
масс пг0 и пгА легковых автомобилей
Класс автомобиля Определяемый параметр Коэффициенты
to 61 6s
А т0 -2,711 10s 1,027 0
-3,368 10® 1,816 0
В 1,629 104 -8,818 1,259 -IO'3
1,720 IO4 -9,182 L322 10'®
с 4,279 1 O'1 -20,892 2,615-10'®
-4381 104 23,478 -2,728-10-®
D то 2,46 Б 104 11Д09 -1,186 10'®
м* -4£90 10s 2J321 -1,808 10"4
Е пц 1,266 105 -53,747 5,771-10'3
т» 1^56-10® -53,771 5345 10'3
F mD 5,475 IQ4 -22,421 2359 10’®
1,036 106 -40,675 4,078-10'®
6.4. Количество мостов, колесная формула
и геометрические параметры автомобиля *
Количество мостов определяется из условия рационального распределе-
ния между ними полной массы автомобиля с учетом допускаемой нагрузки
на дорогу.
Директивами ЕС 8Б/3, 86/360, 88/212, 89/838 установлены предельные
значения осевых нагрузок и габаритных размеров автомобилей. Предельные
значения осевых нагрузок зависят от конструктивного исполнения мостов
автомобиля и количества колес на каждом мосту. Нагрузки на ведущие мос-
ты не должны превышать следующих значений: для мостов со сдвоенными
колесами — 116 кН; для мостов с одинарными колесами — 92 кН. Предель-
ные нагрузки на ведомые мосты: со сдвоенными колесами —101,7 кН; с оди-
нарными управляемыми колесами — 71,2 кН.
178
6. Определение основных параметров автомобили
Для тележек автотранспортных средств предельно допустимые нагрузки
установлены в зависимости от расстояния между осями смежных мостов
(табл. 6.7 [10]).
Таблица 6.7
Предельно допустимые нагрузки на тележки автотранспортных средств
Тип тележки Расстояние между осями, ы Предельная нагрузка, нН
Двухосная с близко рас- 1,02-1,06 162,6
положенными осями 1,05-1,20 172,8
1,20-1,36 183,0
1,35-1,50 188,0
1 1,50-1,80 193,2
1,80-1,85 200,0
1,85-2,50 230,4
Трехосная полуприцепа Менее 3 182,9
при превышении нагруэ- 3,0-3,9 203,3
ки на каждый мост 75 кН 3,9-4,6 223,6
4,6 и более 243,9
Предельные полные массы автотранспортных средств установлены в зави-
симости от количества мостов. Для двухосных одиночных автомобилей,пре-
дельно допустимая масса составляет 18 т; трехосных — 25 т, а при сдвоенных
шинах и пневматической подвеске — 26 т; четырехосных — 82 т; для трехос-
ных седельных автопоездов — 28 т; четырехосных — 36 т, а при сдвоенных
шинах и пневматической подвеске — 38 т; пятиосных — 40 т; шестиосных,
предназначенных для перевозки комбинированных контейнеров ISO длиной
40 футов (около 12 м), зарезервирована величина 44 т; для прицепных авто-
поездов — 36 т.
Автотранспортные средства, у которых полная масса, осевая нагрузка или
габаритные размеры превышают предельные значения, установленные нор-
мативными документами, относят к внедорожным. Движение таких машин
по автомобильным дорогам не допускается.
В соответствии с действующими строительными, нормами и правилами
СНиП.2.05.02-95 все дороги общего пользования транспортной сети СНГ
делятся на 5 категорий. Технические показатели дорожных условий, по ко-
торым относят дорогу к определенной категории: расчетная интенсивность
движения АТС в сутки; расчетная скорость; число полос; ширина полосы
движения; наибольшие продольные уклоны; наибольшая продольная види-
мость до остановки и до встречного автомобиля; наименьшие радиусы кри-
визны в плане.
Дороги имеют покрытия четырех основных типов: 1 — капитальные
(цементно-бетонные и асфальтобетонные) для дорог I-III категорий; 2 — об-
легченные (асфальтобетонные, дегтебетонные) для дорог III и IV категорий;
6.4. Количество мостов, колесная формула и геометрические параметры автомобиля 179
3 — переходные (щебеночные, гравийные) для дорог IV категории; 4 — низ
шие (из грунтов, укрепленных и улучшенных добавлениями) для дорог V ка-
тегории.
В странах СНГ для дорожных автомобилей установлены два предела до-
пускаемой нагрузки на одиночный мост, в соответствии с которыми они под-
разделяются на две группы: группу А с осевой нагрузкой до 98,1 кН и группу
Б с осевой нагрузкой До 58,8 кН. Автомобили с осевой нагрузкой свыше
98,1 кН относятся к внедорожным (например, карьерные автомобили-само-
свалы БелАЗ).
Допускаемая осевая нагрузка зависит от качества дорожного покрытия
и от расстояния между мостами. В табл. 6.8 приведены значения допускаемой
нагрузки для одиночных и сдвоенных мостов дорожных автомобилей [10].
Таблица 6.8
Предельно допустимые нагрузки на каждый мост
двухосного автомобняя и двухосной тележки
Расстояние между осями, м Предельная осевая нагрузке. кН
группа А группа В
Свыше 2 98,1 68.8
Свыше 1,65 до 2 включительно 88,3 56,9
Свыше 1,36 до 1,6 Б включительно 78,6 - 53,9
Свыше 1 до 1,85 включительно 68,7 49,0
До1 58,8 44,1
При определении количества мостов грузовых автомобилей большой гру-
зоподъемности вначале необходимо принять решение о количестве шин на
каждом мосту. Этот выбор зависит от типа и назначения автомобиля. Для
полноприводных автомобилей высокой проходимости принимают одинар-
ные шины на всех мостах. У грузовых автомобилей дорожной проходимости
и автобусов обычно передние управляемые мосты выполняют с одинарными
шинами, а задние (второй, третий и т.д.) — со сдвоенными шинами. Прини-
мая условие одинаковой нагруженности всех шин, количество мостов можно
определить по следующим формулам:
□ при одинарных или сдвоенных шинах на всех мостах
лм =т,£/ГИДОТ1; (6,10)
а при П1 мостах с одинарными шинами и п2 мостах со сдвоенными шинами
пи = -р^+0Л1х,
-^м.Доп
(6.11)
где Гм.доп — предельно допустимая осевая нагрузка на дорогу.
Полученное значение округляется в большую сторону и производится
распределение массы между мостами. Наиболее рациональное распределе-
ние достигается при условии равенства нагрузок на всех шинах. В этом случае
1В0
6. Определение основных параметров автомобиля
масса автомобиля, приходящаяся на одну шину , в нормальная нагрузка
на шину Ft определяются по формулам:
тш=та/пш; {6.12)
Рг = тш8, (6.13)
где пш — суммарное количество шин на всех мостах автомобиля.
Распределение полной массы автомобиля между мостами при одинаковой
нагрузке всех шин определяется по формулам:
^•1 ^а2 (6.14)
где та1 — масса, приходящаяся на передний мост; — масса, приходящая-
ся на задний мост или на тележку; — количество шин переднего моста;
лш2 — количество шин заднего моста или тележки.
Равномерное распределение нагрузки между шинами позволяет увели*
чить коэффициенты kT и Аг,уд и повысить эксплуатационную эффективность
автомобиля. Для неполноприводных автомобилей с целью повышения про-
ходимости обычно принимают несколько большую нагрузку на шины веду-
щих колес, чем на шины неприводных колес.
В табл. 6.9 приведены выражения для приближенной оценки значений
массы, отнесенной к ведущему мосту двухосных автомобилей различных ти-
пов (сцепной массы тф), характерные для реальных автомобилей.
Таблица 6.9
Выражения для предварительного выбора сцепной массы двухосных автомобилей
Тип автомобиля Сцепная масса
Грузовые автомобили со сдвоенными шинами ведущих колес:
группа А игф - (0,67-0,70)та
группа Б и, =(0,70-0,75^
Автобусы:
городские, пригородные и междугородные m^=(0^7-0,70)m.
для местных перевозок тф=(0,70-0,75>пв
Легковые автомобили:
заднеприводные с передним расположением двигателя гПф = (0,52- 0Д5)т1
заднеприводные с задним расположением двигателя тф =(0^6-0,60)mn
переднеприводные с передним расположением двигателя Шф - (0,53-0,57)та
После определения номинальных нагрузок на мосты автомобиля произво-
дится выбор шин. Тип шины выбирают в зависимости от назначения автомо-
биля с учетом предъявляемых к нему требований по проходимости, а размер
шины зависит от нагрузки, приходящейся на наиболее нагруженного колеса
проектируемого автомобиля.
Размеры шины оказывают влияние на параметры, характеризующие прие-
мистость автомобиля, что особенно важно для легковых автомобилей. Поэтому
6.4. Количество мостов, колесная формула и геометрические параметры автомобиля
161
предпочтительно использовать шину минимально возможного размера. Ог-
раничением является допускаемая нагрузка на шину, указываемая в стан-
дартах. Там же приводится информация о статическом радиусе шины Ге1 при
номинальных значениях давления воздуха р, и нормальной нагрузки Рг.
Динамический радиус колеса гя на дорогах с твердым покрытием можно
принимать равным статическому радиусу г„. Радиус качения колеса в ведо-
мом режиме rxo - (1,03-1,06)гд, причем меньшее значение относится к шинам
грузовых автомобилей, а большее — к шинам легковых автомобилей.
Радиус качения ведущего колесагк определяется по формуле Е.А. Чудако-
ва (1.12), согласно которой он зависит от вращающего момента Мк. Но при
решении проектных задач по определению основных параметров автомобиля
обычно эту зависимость не учитывают и принимают гк = гд = гст.
Колесную формулу автомобиля выбирают в зависимости от его назначе-
ния и условий эксплуатации. При этом необходимо обеспечить возможность
надежного трогания автомобиля с места и движения без буксования ведущих
колес. Это условие ставит задачу определения количества ведущих мостов
большегрузного автомобиля. Проходимость автомобиля в данных дорожных
условиях, характеризуемых коэффициентом сцепления <рх и коэффициентом
суммарного дорожного сопротивлениях)/» обеспечивается при выполнении не-
равенства
(6.15)
Одним из показателей проходимости автомобиля является коэффициент
сцепной массы Аф:
Аф = тф/та. (6.16)
Из выражений (6.16) и (6.16) следует, что увеличение сцепной массы шф
приводит к повышению проходимости автомобиля.
Минимально допустимое значение коэффициента сцепной массы Афт1п
для автомобилей группы А определяют из условия надежного трогания с мес-
та и движения по скользкой дороге при коэффициенте сцепления <рх = 0,2
и коэффициенте сопротивления качению f = 0,008-0)012 на подъеме с наи-
большим допустимым для дорог с капитальным покрытием уклоном h = 0,05.
Используя формулы (6.15) и (6.16), находим
Афшш = —=0,20-0,31.
Фх
Для автомобилей группы Б значение определяется с учетом более
трудных дорожных условий: <рх = 0,2; /=0,02-0,03; Л = 0Д6. В результате
= 0,40-0,46.
В табл. 6.10 приведены значения для неполноприводных грузовых ав-
томобилей с колесными формулами4x2 и 6x4, ио которой следует, что коэф-
фициенты этих автомобилей превышают значение . Это означает, что
такие автомобили можно использовать в качестве тягачей в составе автопоез-
дов, что и подтверждается данными, приведенными в табл. 6.11 [7].
182
6. Определение основных параметров автомобиля
Таблица 6.10
Коэффициенты сцепной массы одиночны* грузовых автомобилей
Группа автомобиля Колесная формула Допустимая осевая вагрувка, кН Полям масса автомобиля, т Значение
С ПОЛНОЙ нагрувкой без груза
А 4x2 80 12 0,67 0,47
4x2 100 16 0,62 0,41
6x4 140 18,5 0,76 0,57
6x4 180 24 0,75 0,54
Б ' 4x2 60 8 0,75 0,55
6x4 ПО 15 0,73 0,55
Таблица 6.11
Коэффициенты сцепной мессы автопоездов общего назначения
Группа автомобиля Колесная формула автомобиля-тягача Допустимая осевая нагрузка, кН Полная масса, т Значение
А 4x2 80 18,5-28,5 0,34-0,42
100 27,0-28,0 0,35-0,87
100 32,0-34,0 0,29-0,31
6x4 140 29,0-32.0 0,43-0.46
180 39,0-48,0 0,88-0,44
Б 4x2 60 8,0-11,5 0,47-0,52
6x4 по 26,0-27,0 0,40-0,42
Грузовые автомобили с колесной формулой 6 X 2 не нашли широкого при-
менения из-за низких сцепных свойств.
В тяжелых дорожных условиях (грунтовая дорога, бездорожье, весенняя
распутица и др.) используются полноприводные автомобили.
Геометрические параметры автомобиля зависят от его назначения
и от принятой компоновки, определяющей его общий вид. На этапе функцио-
нального проектирования разрабатывают макет общего вида автомобиля.
При этом используется информация о существующих аналогах.
Предельные значения габаритных размеров автомобилей регламентиро
ваны Директивами ЕС 85/3,86/360,88/212,89/338. Согласно этим докумен-
там, предельно допустимые габаритные размеры автомобилей не должны
превышать следующих значений; ширина — 2,55 м (для рефрижераторов
и изотермических фургонов допускается до 2,6 м); габаритная высота — 4 м;
полная длина одиночного автомобиля с любым количеством мостов — 12 м;
седельного автопоезда — 18 м; прицепного автопоезда с одним прицепом —
18,75 м; с двумя прицепами — 25,9 м.
6 5. Определение мощности двигателя
163
Колея В и база L автомобиля выбираются по аналогам. Затем определяются
координаты центра масс автомобиля — продольные координаты 4 и 4 и высо-
та Для автомобиля со сдвоенным мостом (тележкой) 4 представляет собой
горизонтальную координату расположения оси балансира относительно цен-
тра масс. При выбранном значении L и принятых значениях масс та1 и
относящихся соответственно к переднему и заднему мостам (или к тележке
сдвоенного моста), вычисляются координаты 4 и fa:
4 = Ътл2/тл; = Ьтл/тл. (6.17)
Вертикальные координаты центра масс 1руженого h? и снаряженного
автомобиля можно приближенно определить из соотношений:
йег = (0.30-0,3 б) L; (6.18)
Ле°=(О^-ОД)Ь. (6.19)
6.5. Определение мощности двигателя
Мощность двигателя Определяется из условия обеспечения максимальной
скорости автомобиля в заданных дорожных условиях. Движение автомобиля
предполагается на прямолинейном горизонтальном участке дороги с твердым
покрытием в сухую безветренную погоду. Максимальная скорость достигается
при dvjdt = 0. Составим уравнение баланса мощности при этих условиях:
/к + + jFui = 0, (6.20)
где Р* — мощность, подводимая к ведущим колесам при установившемся
движении; — мощность, необходимая для преодоления суммарного до-
рожного сопротивления; — мощность, затрачиваемая на преодоление со-
противления воздуха.
Подставляя значения/^, из формул (3.39), (3.40) и (3.42), получаем
выражение для определения искомой мощности двигателя:
Р„ = (6.21)
V-
где Р^ — мощность двигателя, Вт; — полная масса автомобиля, кг; g— ус-
корение свободного падения (£ = 9,81м/с2); — максимальная скорость ав-
томобиля, м/с; Vv — коэффициент суммарного дорожного сопротивления при
umax; — сила сопротивления воздуха при о,^, Н; — коэффициент,
учитывающий затраты мощности на привод вспомогательного оборудования
двигателя; — КПД трансмиссии на высшей ступени коробки передач,
обеспечивающей достижение скорости при полной массе автомобиля.
Значение Ptv соответствует необходимой мощности для движения автомо-
биля на прямолинейном горизонтальном участке дороги с асфальтобетонным
покрытием со скоростью Значение скорости и».., выбирается в соответ-
184
С. Определение основных параметров автомобиля
ствии с регламентирующими нормативами или с учетом информации о лучших
мировых образцах. Рекомендации по выбору итах приведены в параграфе 8.1.
Значение F^ mox вычисляется по формуле (2.18).
В рассматриваемых условиях движения автомобиля продольный уклон
дороги h = 0, поэтому принимается и значение fv вычисляется при
по эмпирической формуле (1.31). При этом на асфальтобетонном покрытии
высокого качества (дороги I и II категории) принимают f0 = 0,007-0)01. Для
дорог III и IV категории с твердым покрытием и для карьерных дорог можно
принимать /0 = 0,02.
Двигатели легковых автомобилей обычно поставляются комплектно со
всеми механизмами вспомогательного оборудования (вентилятором, гене-
ратором, воздухоочистителем и др.). Мощность двигателя в этом случае ука-
зывается с учетом затрат на привод этих механизмов, поэтому можно прини-
мать = 0. Двигатели грузовых автомобилей большой грузоподъемности
и автобусов большой вместимости обычно поставляются не в полном ком-
плекте. Поэтому при учете необходимых затрат мощности на собственные
нужды двигателя коэффициент принимают в пределах 0,05-0,10.
Для определения КПД трансмиссии цч.р„ необходимо принять техниче-
ское решение о структуре трансмиссии, представить ее функциональную
схему и определить для каждого механизма трансмиссии тип и количество
зубчатых зацеплений, передающих энергию от входного к выходному валу
на высшей передаче, на которой достигается При вычислении КПД
используют формулу (2.57). При этом рассматривают лишь одну последо-
вательную цепь кинематической схемы трансмиссии от двигателя до веду-
щего колеса, так как каждому колесу передается только часть мощности
двигателя.
Вычислив значение подбирают двигатель для проектируемого авто-
мобиля. При этом принимают во внимание топливную экономичность, эко-
логичность, массу, габариты, надежность и гарантийный средний ресурс
двигателя. Выбор типа и модели двигателя должен быть тщательно обос-
нован.
После выбора двигателя составляется его краткая техническая характе-
ристика, в которой указываются следующие параметры:
— максимальная мощность, кВт;
Л/р — вращающий момент при Pf mja, II - м;
пР — частота вращения коленчатого вала при Ff mjE1, об/мин;
— максимальный вращающий момент, Н м;
n,v — частота вращения коленчатого вала при Л/ет4Я, об/мин;
— максимальная частота холостого хода (при наличии регулятора
или ограничителя), об/мин;
gep — удельный расход топлива при максимальной мощности, г/(кВт'Ч).
В пояснительной записке к проекту также приводятся графики внеш-
них скоростных характеристик двигателя = /(пд), Мг (?7 = /(пд),
Sf = /«)•
6.6. Определение передаточного числа главной передачи
IBS
6.6. Определение передаточного числа главной передачи
Передаточное число главной передачи Но определяется из условия обеспе-
чения максимальной кинематической скорости автомобиля оКП1ВХ. Эта ско-
рость соответствует максимальной частоте вращения вала двигателя при его
работе на внешней скоростной характеристике и при движении автомобиля
на высшей ступени в коробке передач. У современных автомобильных двига-
телей, как правило, максимальная частота вращения вала двигателя соот-
ветствует его максимальной мощности Р<1ЮЛХ, т.е. пДП1ДХ = пР. В этом случае
вычисляется по формуле
^Х ПНЯ
ППрГк
ЗО«гр..’
(6.22)
где Ltjp., — передаточное число трансмиссии при включении высшей ступени
в коробке передач.
В общем случае в трансмиссию могут входить коробка передач, раздаточ-
ная коробка и главная передача. При вычислении необходимо учесть их
передаточные числа:
^тр.а ” ^к.п.в^р.кЛ)' (6.23)
rfleu^ j.Up m, — передаточные числа высших ступеней соответственно короб-
ки передач и раздаточной коробки.
В раздаточной коробке обычно принимают Up.^ = 1, поэтому исключим
Ирл., из выражения (6.23) и передаточное число главной передачи определим
по формуле
Ч——pr,t------- (6.24)
бб^Х.П.В^К П1*Г
Из формулы (6.24) следует, что при определении необходимо распола-
гать значениями ихпв и ск тах.
Выбор икп,Е зависит от кинематической схемы трансмиссии, определяе-
мой компоновкой автомобиля. Для грузовых автомобилей используют трех-
вальную схему коробки передач, позволяющую получить прямую передачу,
КПД которой примерно на 4 % выше, чем на остальных передачах. Так как
автомобили до 85-90 % времени движения работают на высшей передаче,
то ее передаточное число целесообразно получить на прямой передаче при
“к.п.а = I- Аналогичное решение рационально также для легковых автомоби-
лей классической компоновки, т.е. для заднеприводных автомобилей с пе-
редним расположением двигателя. На этих автомобилях также применяют
трехвальные коробки передач. На переднеприводных легковых автомобилях
и заднеприводных с задним расположением двигателя применяют двухваль-
ные схемы коробок передач. В этом случае прямая передача отсутствует,
а значение Ых-п,! принимают в пределах 0,65-0,80.
Значение кинематической скорости ик так обычно принимают равной мак-
симальной скорости omex, при которой определяется мощность двигателя Реи.
186
6. Определение основных параметров автомобиля
Следует, однако, иметь в виду, что скорости uWW{ и иКП1||Х различны. Из фор-
мулы (6.22) видно, что окпмх зависит от принятых постоянных параметров
двигателя и трансмиссии, следовательно, 'vKm*x = const. Скорость же
переменна, так как ее значение зависит от дорожных условий и нагрузки
автомобиля Игр.
На рис. 6.5, а показаны характеристики суммарного сопротивления движе-
нию автомобиля + Рш| для трех различных случаев. Характеристика %
соответствует параметрам, принятым при вычислении характеристика f%f
получена при движении на подъеме, т.е. при Л > 0 и коэффициенте суммарного
дорожного сопротивления у >iyL, а характеристика /£"— при неполной на-
грузке автомобиля < тг, но при\г - %. Максимальная скорость автомобиля
в конкретных условиях определяется абсциссой точки пересечения характе-
ристики Ре с характеристикой мощности , подводимой к ведущим колесам.
Из рис. 6.5 видно, чтои^х = только в случае полного соответствия фак-
тических параметров автомобиля и дороги и расчетных параметров, принимае-
мых в формуле (6.21). При увеличении сопротивления движению (кривая /£')
максимальная скорость автомобиля существенно снижается, в результате
иткх <иктвх- Снижение Ре приводит к сравнительно небольшому увеличению
скорости и"'ак.
Рис. 65. Влияние сопротивления движению (а) в мощности двигателя (б)
на максимальную скорость автомобиля
На рис .6.5,6 пок азаны графики мощности на ведущих колесах при раз-
личной мощности двигателя, но при одной и той же кинематической скорости
автомобиля ок max. С двигателем меньшей мощности (при = /}<") максималь-
ная скорость при номинальной нагрузке автомобиля будет немного ниже,
чем ив галя, но нагрузка двигателя возрастет и повысится его топливная эконо-
мичность. При завышении мощности (при Рк = JJ") максимальная скорость
vmox возрастет незначительно, но в связи со снижением нагрузки двигателя
топливная экономичность автомобиля существенно ухудшится. Если для дан-
ного автомобиля большое значение имеет высокое значение средней скорости,
то передаточное число главной передачи выбирают из условия, чтобы при но-
минальной нагрузке получить итвя = i?K что достигается при _РК =
6.6. Определение передаточного числа главной передачи 187
У большегрузных автомобилей и автопоездов нагрузка может изме-
няться в довольно, значительных пределах. Снижение нагрузки приводит
к уменьшению Рй и, следовательно, к снижению коэффициента использова-
ния мощности двигателя И, в результате ухудшается топливная экономич-
ность автомобиля. Иэ рис. 4.1 видно, что минимальный удельный расход
топлива двигателя gR достигается при частоте вращения вала двигателя,
приближающейся к Пщ, и нагрузке двигателя по мощности, приближающей-
ся к полной. Следовательно, для эффективного использования топлива, оце-
ниваемого удельным расходом 0^л (л/т-км), необходимо обеспечить работу
двигателя с максимально возможной нагрузкой в области средних значений
частоты вращения вала. Этого можно достичь, если принять октах
На рис. 6.6 показаны графики Рн на двух высших передачах и графики Ре
при полной и частичной Д,.ч нагрузках и движении автопоезда на горизон-
тальном участке дороги. Характеристика соответствует высшей ступени
коробки передач, а Р^в-ц — предшествующей ей ступени. При этом принято,
что характеристика £.в пересекается с характеристикой Pk(B-i j в точке, соот-
ветствующей максимальной мощности двигателя а максимальная ско-
рость равна При снижении мощности сопротивления движению до
включается высшая передача и автомобиль может развить скорость p^.v. су-
щественно большую, чем Овиис- Если же нагрузка автомобиля полная, то мак-
симальная скорость автомобиля на этой передаче окажется ниже итах.
Но при этом увеличится нагрузка двигателя и снизится частота вращения его
вала Пд. В результате будет обеспечена высокая топливная экономичность,
а снижение ля приведет к увеличению срока службы двигателя.
Рие. SjB. Влияние выбора испольвувмой высшей передачи
не максимальную скорость автомобиля и нагрузку двигателя
при изменении суммарного дорожного сопротивления
Н автомобильных магистралях, как известно, скорость движения транс-
порта ограничена исходя из условий безопасности. Так, на большинстве дорог
республиканского значения максимальная скорость не должна превышать
90 км/ч, и только на автомагистралях I категории с многополосным движе-
нием на отдельных участках допускается до 120 км/ч. Вследствие этого мож-
но рекомендовать следующий подход к выбору и$ и ик п в для большегрузных
168
6. Определение основных параметров автомобиля
автомобилей и автопоездов. Значение отвк целесообразно принять по мини-
мальному рекомендуемому уровню, т.е. примерно 100 км/ч (см. параграф 3.1),
а он так = 120-130 км/ч, В этом случае будет выполнено нормативное требова-
ние на максимальную скорость автомобиля при полной его нагрузке и движе-
нии на передаче, предшествующей высшей. Использование высшей передачи
при скорости 70-90 км/ч позволит экономно расходовать топливо и повысить
срок службы двигателя.
С целью повышения КПД трансмиссии значение передаточного числа
высшей передачи и в этом случае целесообразно принять равным единице,
т.е. Ык.п.в = 1» н Икос»-!) — примерно равным 1.2. Такое решение характерно
практически не менее чем для половины выполненных конструкций. Приме-
няются также коробки передач, у которых = 1» аИк.п.в находится в пре-
делах 0,75-0,85, т.е. высшая ступень коробки передач повышающая. Это
позволяет расширить диапазон передаточных чисел коробки передач и сни-
зить нагрузки в механизмах трансмиссии, расположенных за коробкой пере-
дач.
Для грузовых автомобилей большой грузоподъемности значение вы-
численное по формуле (6,24), достигает 8-10, а у внедорожных карьерных
самосвалов 15-20. В этом случае кроме главной конической передачи ис-
пользуют планетарные колесные передачи. В дальнейшем полагаем, что Uq
учитывает также передаточное число колесной передачи.
6.7. Определение передаточного числа
низшей ступени коробки передач
Передаточное число низшей ступени коробки передач определяют
исходя из обеспечения трех условий:
□ преодоление максимального дорожного сопротивления, определяемого
коэффициентом суммарного дорожного сопротивления утах;
□ предотвращение буксования ведущих колес при заданном значении ко-
эффициента сцепления <рх;
□ возможность движения с заданной минимальной устойчивой скоро-
стью fmltl (для маневрирования в стесненных условиях).
Для легковых автомобилей учитывается только первое условие. Это обу-
словлено большой удельной мощностью этих автомобилей. Поэтому ведущие
колеса на низшей передаче при полной подаче топлива в двигатель буксуют
в любых дорожных условиях, а минимальная устойчивая скорость достига-
ется практически при минимальной подаче топлива.
Значения Уыах, иот1п регламентированы и зависят от типа автомобиля.
Для легковых автомобилей принимают Vmox =0,35-0,50; для грузовых V =
= 0,35-0,40; для полноприводных автомобилей = 0,7-0,8; для автопоез-
дов Vuiax для карьерных автомобилей-самосвалов утпх = 0,30-0,40. Для
неполноприводных автомобилей принимают ipx = 0,7-0,8, а для полнопри-
водных = 0,7-0,9.
6.7. Определение передаточного числа низшей ступени коробки передач
189
Минимальная устойчивая скорость на низшей передаче соответствует
минимальной устойчивой частоте вращения коленчатого вала двигателя
лдот11;. Современные бензиновые и дизельные двигатели могут устойчиво ра-
ботать и обеспечивать преодоление сопротивления качению на горизон-
тальной поверхности при Пд^ £1000 об/мин. Для грузовых автомобилей
принимают = 4-5 км/ч (1,1-1,4 м/с), для полноприводных автомобилей
и автомобилей-фургонов - 2-3км/ч (0,56-0,83 м/с).
Если коробка передач автомобиля имеет сложную структуру (кроме базо-
вой коробки передач содержит делитель или умножитель) или на автомобиле
используется раздаточная коробка, то вначале определяется передаточное
число низшей ступени трансмиссии в, а затем вычисляется передаточное
число низшей ступени коробки передач Пк.ц.ц с учетом параметров умножите-
ля или раздаточной коробки.
Автомобиль сможет преодолеть максимальное дорожное сопротивление
при выполнении условия
^вгоах
(6.25)
где2)ятах — максимальный динамический фактор на низшей передаче.
Исходя из этого условия, определяется передаточное число низшей ступе-
ни трансмиссии и,р.ж = u^. Значение DKtatx достигается при максимальном
моменте двигателя Mt п^. Так как скорость автомобиля на низшей передаче
небольшая, то силой сопротивления воздуха Fa, можно пренебречь. Тогда, со-
гласно выражению (3.3), получаем
_ Mt njax(l~^B.o^rp-HnTp в
(6.26)
Используя выражение (6.26), получаем неравенство, которому должно
удовлетворять значение 14,^ ,
(в-27)
-М е 1П«Х V* "в л)Л тр.н
Для грузовых автомобилей и автобусов необходимо обеспечить движение
без скольжения ведущих колес на низшей ступени трансмиссии. Условие от-
сутствия буксования ведущих колес соответствует неравенству
(6.28)
т»8
где — суммарная нормальная реакция опорной поверхности на ведущие
колеса.
Передаточное число низшей ступени трансмиссии исходя из
этого условия, определяется по формуле
—qffiA
(6.29)
190
6. Определение основных параметров автомобиля
Значение Rn зависит от колесной формулы автомобиля. Для полнопри-
водных автомобилей J?,B = mag, а для неполноприводных Я,, вычисляется по
формулам (3.30) или (3.31).
Скольжение ведущих колес будет исключено при условии £ и^.ф.
В этом случае принимают = и^.у. Если для неполноприводного автомоби-
ля окажется, чтои^,^ >Urp.9, то необходимо проверить возможность увеличе-
ния нагрузки на ведущие колеса за счет уменьшения ее на ведомые колёса.
При этом должны учитываться ограничения на осевые нагрузки на дорогу
и допускаемые нагрузки на шины. Если не удается добиться условия отсутст-
вия скольжения, тогда следует принять - и^.ф.
ДЛя полноприводного автомобиля обычно принимают утах £<рх, в резуль-
тате условие Ujpjf £ всегда выполняется, поэтому = Urpy.
Отношение передаточных чисел низшей uTpJt и высшей ступеней
трансмиссии называют диапазоном передаточных чисел трансмиссии;
Д = ' (6.30)
^Тр.» ык.п.»иО
Полученные передаточные числа главной передачи и низшей ступени
трансмиссии л используются для определения передаточного числа низшей
ступени коробки передач и*.п.в • Но для этого необходимо вйачале выбрать
структуру трансмиссии. Наиболее сложную структуру имеют трансмиссии
полноприводных автомобилей. В ее состав кроме многоступенчатой коробки
передач и главной передачи входит раздаточная коробка.
Трансмиссии большинства автомобилей общего назначения более просты
и включают только коробку передач и главную передачу. В этом случае пере-
даточное число низшей ступени коробки передач вычисляется по формуле
= И-гр-и /«С ‘ (6,31)
Если полученное значение и^и то можно использовать кинематиче-
скую схему трехвальной коробки передач с двумя степенями свободы. Такую
схему применяют для грузовых автомобилей, автобусов и легковых автомо-
билей классической компоновки. Ограничение максимального значения iVn.«
обусловлено тем, что максимально допустимое передаточное число цилинд-
рической зубчатой передачи £ 3. Если передаточное число высшей ступени
коробки передачик.п.в = 1, то максимальное значение диапазона ее передаточ-
ных чисел
Д К.П = Цк.П.В А^К.П.В 9.
При двухвальной схеме коробки передач » - 0.65-0В0. поэтому ДХ1П не
превышает 4,6.
При Цс.п.к > 9 возникает необходимость применения кинематической схе-
мы с тремя или четырьмя степенями свободы. В этом случае коробка передач
имеет сложную иерархическую структуру. В ее состав входит базовая короб-
ка передач и дополнительные редукторы, располагаемые спереди или сзади
।
6.7. Определение передаточного числа нишей ступени коробки передач
191
базовой коробки передач. Редуктор, располагаемый спереди, навивают дели-
телем, а сзади — умножителем (или демультипликатором}. Низшая
ступень делителя может быть прямой или понижающей, а умножителя —
только понижающей.
Информация о структуре трансмиссии и ее кинематической схеме необхо-
дима на данном этапе проектирования для определения КПД трансмиссии на
низшей передаче . При этом учитываются потери в зубчатых вацеплени
ях всех механизмов трансмиссии, а также в шарнирах всех карданных пере-
дач, через которые передается энергия двигателя к одному из ведущих колес
автомобиля. Значение т)1р.в вычисляется по формуле (2.57).
При наличии раздаточной коробки передаточное число низшей ступени
коробки передач определяется по формуле
(6.32)
ир.и.ниО
гдеир.а.н — передаточное число низшей ступени раздаточной коробки.
Передаточное число Up.KiB выбирают обычно в пределах 1,5-2, б.
После определения uK>D.B проверяется возможность использования данной
ступени коробки передач для маневрирования. Вычисляют необходимое пе-
редаточное число Ищщ, обеспечивающее движение со скоростью при
пдш1и*
. (6.33)
где Onju — минимальная устойчивая скорость автомобиля, м/с.
При отсутствии раздаточной коробки в формуле (6133) принимается
Ир.К.Н =
Если Ык.п.н >Ux,n.H, то коробка передач должна располагать дополнитель-
ной ступенью для маневрирования. Обычно необходимость в такой ступени
возникает для автопоездов, автомобилей-фургонов и для автомобилей высо-
кой проходимости.
Для гидромеханической передачи определяется по формуле
„ т.^'гг.Л
Tpv
(6.34)
где Хт-Вл — коэффициент трансформации гидротрансформатора при мини-
мально допустимом эксплуатационном значении его КПД "Ht.».»» Мр —
момент двигателя при Нм; т^.н — КПД механической части транс-
миссии.
Рекомендуется принимать Т|тлл =0,8. При этом у гидротрансформаторов
грузовых автомобилей Кглл находится в пределах 1,8-2,0, а легковых авто-
мобилей — 1,5-1,7. Второе и третье ограничения на и^^ не проверяются,
а принимается uten„ =
192
6. Определение основных параметров автомобиля
6.8. Определение количества ступеней коробки передач
Количество ступеней коробки передач пм выбирается из условия опти-
мального использования мощности двигателя с целью обеспечения высоких
показателей тягово-скоростных свойств и топливной экономичности автомо-
биля. При этом должно обеспечиваться устойчивое движение автомобиля
во всем диапазоне скоростей с учетом падения скорости при переключениях
передач, а скоростной режим двигателя должен находиться в пределах
<пд Snp.
Но при работе двигателя на режиме максимального момента ЛГвпшх его
мощность будет существенно ниже максимальной мощности. Действительно,.
максимальная мощность двигателя Ретах = а, мощность при макси-
мальном моменте = AfemaxcoAf. Отношение Р^/Рета характеризует величи-
ну коэффициента снижения мощности:
(6.35)
Р* mux МрОЗр ka
Значение 'jj> для двигателей внутреннего сгорания находится в пределах
0,6-0,7, поэтому для повышения использования мощности необходимо ис-
пользовать более узкий диапазон изменения частоты вращения вал а двигате-
ля Пд Й пд £Пд, принимая п' >пм, а п" й пР.
Скорость автомобиля (км/ч) на i-й передаче
v, = = 6-^-, (6.36) j
гдеб — постоянный коэффициент:
ь_ 3,6дгк
30ио
Введем на графике внешних скоростных характеристик двигате л я- /(пд)
и = /(пд) дополнительную ось ординат о и построим графики функций
ц = /(пд) для всех передач! = 1, ли п (рис. 6.7). Графики зависимости ц = /(ид)
представляют собой лучи, проведенные из начала координат. Углы наклона
лучей относительно оси абсцисс определяются значениями передаточных чи- •
сел коробки передач ик.п(. Совокупность всех характеристик = /(пд) на од-
ном графике называют лучевой диаграммой.
Если пренебречь падением скорости за время переключения передач, то
начальная скорость на (! + 1)-й передаче должна быть равна скорости
в конце разгона автомобиля на 1-й передаче и":
t Т- И Ь
^+1 = Ь--— = = Ь—А-.
^k.dI+1 ^K.ni
В результате получаем следующее соотношение:
-“и-"' = (6.37)
ЦК.П1+1 пд
6.8. Определение количества ступеней коробки передач
193
Рис. 6.7. Графики к определению количества ступеней коробки передач
Характер изменения скорости автомобиля при трогании с места и после-
дующем разгоне отображен жирной линией на рис. 6.7. Изменение пд в пре-
делах от Пдо ДО пд.б соответствует буксованию сцепления, а при движении на
соответствующих передачах частота вращения вала двигателя изменяется
в пределах п' £пд Sn". В результате использование мощности двигателя
ограничивается пределами
Используя выражение (6.37), можно составить ряд соотношений:
_ &JJL 1.»-Ц дъ (6.38)
^K.nS “в.пЭ *А<.пл
где в — количество ступеней в коробке передач.
Из выражения (6.88) следует, что передаточные числа коробки передач
при принятых условиях составляют числовой ряд геометрической прогрес-
сии. со знаменателем q. Перемножим все члены равенств (6.88), определяю-
щие соотношения передаточных чисел, полагая u^i ~ »“кли х Ихл.»- Так
как количество этих соотношений равно п-1, то в результате получаем
^ьа=“- = Дк.п =gn“-1, (6.39)
^K.n.B
где Ди.ц — диапазон передаточных чисел коробки передач.
Реализовать в коробке передач ряд передаточных чисел, строго соответст-
вующих геометрической прогрессии, практически не представляется возмож-
ным из-за дискретности чисел зубьев шестерен, определяющих реальные
значения передаточных чисел. Фактические соотношения <?( между переда-
точными числами смежных ступеней коробки передач будут немного откло-
няться от значения показателя геометрической прогрессии q. Поэтому при
определении количества ступеней пГ|ТТ принимают некоторое среднее значе-
ние qlt называемое показателем средней плотности ряда передаточных
чисел коробки передач и обозначаемое q^. Чем меньше значение тем
7 3м. 349В
194
6. Определение основных параметров автомобиля
более плотный ряд передаточных чисел, меньше диапазон изменения часто-
ты вращения вала двигателя пд £ пд £ пв и выше уровень использования мощ-
ности двигателя (см. рис. 6.7). Однако при этом увеличивается количество
ступеней коробки передач и усложняется ее конструкция. Поэтому выбор
количества ступеней представляет собой задачу поиска оптимального
компромисса.
На рис. 6.8 показаны графики, отображающие влияние количества сту-
пеней коробки передач на среднюю скорость иср и средний путевой расход
топлива Q, большегрузного автопоезда в различных дорожных условиях,
характеризуемых максимальными продольными уклонами Л на испытатель-
ном маршруте [7]. Из приведенных графиков следует, что переход от пяти-
ступенчатой коробки передач (кривые 1) к шестиступенчатой (кривые 2) дает
ощутимый эффект во всем исследуемом диапазоне дорожных условий. В то
ясе время десятиступенчатая коробка передач (кривые 3) существенно влияет1
на Оф nQt лишь в условиях, приблиясающихся к горным (при h > 0j06).
Рис. 6.8. Влияние количества ступеней коробки передач на среднюю скорость
и средний путевой расход топлива <?,
Согласно статистическим данным, на грузовых автомобилях и автопоез-
дах большой грузоподъемности применяют коробки передач с количеством
ступеней 12-20. Коробки передач легковых автомобилей выполняют с коли-
чеством ступеней 5-6, а автобусов — 6-8. Количество ступеней зависит от не-
обходимого диапазона передаточных чисел коробки передач ДВ1П, удельной
мощности и назначения автомобиля. В табл. 6.12 приведены статистиче-
ские данные, отображающие зависимость между пв.в и Дк.в [7].
Таблица 6.12
Зависимость между количеством ступеней н диапазоном передаточных чисел
большегрузных автомобилей н автопоездов
д..« 5,7-8,б 7.9-9,4 8-10 9,2-18,5 13,0-19,4 17,0-24,7
пк.п 5 в 8 10 16 20
6.6. Определение количества ступеней коробки передач
195
Количество ступеней базовой коробки передач обычно не превышает шес-
ти. При большем количестве ступеней затрудняется возможность обеспече-
ния необходимой жесткости валов коробки передач, так как существенно
возрастает их длина. Если необходимо иметь большее количество ступеней,
то применяют коробку передач сложной структуры, состоящую из четырех-
или пятиступенчатой базовой коробки передач в сочетании с делителем или
умножителем — прИп*.,, =8-10, или одновременно с делителем и умножи-
телем — при пк.п = 16-20. Такие коробки передач применяются на грузовых
автомобилях и автопоездах большой грузоподъемности. Значение показа-
теля средней плотности ряда передаточных чисел у этих коробок передач
д^ = 1,2-1,4. Для остальных типов автомобилей обычно используют коробки
передач простой структуры, в которых принимаютд^ 1,40-1,65.
Используя выражение (6.39), получаем формулу для определения количе-
ства ступеней коробки передач:
n , 1 + _ 1+Н-ч"11*”»-» (в 40)
Мер lng€p
Выбрав значение^ и определив Д к д, по формул е (6.40) вычисляют значе-
ние п нп. Полученное значение пкд округляют до целого в сторону увеличения
и затем уточняет значение д^ по формуле
<?о=K-/U- (в.41)
Количество ступеней лк.п коробки передач сложной иерархической струк-
туры равно
— ^Й.к.пп двл^ум. (6.42)
где Пе.к.п >пдел,ЛуК — значения чисел ступеней соответственно базовой коробки
передач, делителя и умножителя.
Делитель и умножитель обычно выполняют двухступенчатыми, поэтому
при их применении полное количество ступеней коробки передач лкп должно
быть четным.
Передаточные числа промежуточных ступеней коробки передач вычисля-
ют по формуле
= til-l/Чор {6.48)
ИЛИ
Цк.п1 (6.44)
При выборе структуры сложной коробки передач и определении переда-
точных чисел ее компонентов (базовой коробки передач, делителя, умножи-
теля) используют древовидный иерархический граф. На рис. 6.9 показан
такой граф для коробки передач, состоящей из двух компонентов: четырех-
ступенчатой базовой коробки передач (БКП) и двухступенчатого умножите-
ля (Ум).
Граф состоит из вершин и ветвей. Ветви отождествляются с элементами
структуры, а вершины отображают реализуемые параметры системы на каж-
дом иерархическом уровне. Элементами структуры в данном случае являются
196
6. Определение основных параметров автомобиля
Рис. 6,9 Граф структуры коробки передач с умножителем
зубчатые механизмы, реализующие передаточные числа конкретных ступе-
ней. Вершины графа образуют уровни иерархии. В рассматриваемом приме-
ре уровень 1 составляют параметры ступеней на выходе базовой коробки
передач, а уровень 2 — параметры ступеней на выходе умножителя. Таким
образом, каждый уровень иерархии отображает количество ступеней на вы-
ходе соответствующего механизме коробки передач и значения их параметров.
Вершина графа О находится на самом верхнем (нулевом) уровне иерархии
и называется корневой вершиной. Она отображает входной элемент коробки
передач. Поскольку вершинам присвоены значения параметров компонен-
тов системы, то такой граф называют взвешенным.
Рассмотрим методику построения взвешенного иерархического графа
структуры коробки передач. Вначале выделяется количество уровней иерар-
хии структуры. Их количество, с учетом нулевого уровня, равно числу степе-
ней свободы коробки передач:
a = N + l, (6.45)
где з — число степеней свободы коробки передач, N — количество уровней
иерархии, равное количеству компонентов коробки передач.
Иерархические уровни изображают горизонтальными линиями, равноот-
стоящими друг от друга. На каждом уровне располагаются вершины, коли-
чество которых равно количеству ступеней передаточных чисел, получаемых
на выходе данного компонента коробки передач. Для определения положе-
ния вершин на линии уровня используют значения натуральных логарифмов
передаточных чисел lnut. Принимая линию уровня в качестве оси, отклады-
вают на ней в соответствующем масштабе значения IrtUj и полученные точки
соединяют ветвями с вершинами предыдущего уровня. Начало отсчета зна-
чений lnut принимают в точке пересечения линии иерархии с вертикальной
линией Н-Н, проведенной через точку О. В результате ветвь механизма,
обеспечивающего передаточное числом >1, имеет наклон вправо, при и£ <1—
наклон влево, а приU( = 1— ветвь вертикальна, так как1п1 = 0. Чем оначитель-
6.8. Определение количества ступеней коробки передач
197
нее отличается и( от единицы > тем больше угол наклона ветви. Так, на выходе
БКП (см. рис. 6.9) получены четыре передачи с передаточными числами
^в.к-пъ ивл.п2> иб.к.пз> U6.K.n4- Вершины, отображающие эти передачи, обозначе-
ны соответственно Г, 2\ У, 4'. Очевидно. ЧТО и >Ue » .а >Ц».к.п4' ДРИ-
чем и#,ХЛ1 и Ыб.к.пв больше единицы, u*.R na = 1, < 1.
В рассматриваемом примере умножитель двухступенчатый, т.е. распола-
гает двумя зубчатыми механизмами, поэтому для их отображения на графе
необходимо использовать только два типа ветвей, отличающихся между собой
углом наклона. В результате получим удвоение количества ступеней на вы-
ходе умножителя по сравнению с количеством ступеней базовой коробки пере-
дач. Предположим, что передаточное число высшей ступени умножителя
Upc., = 1, а низшей u^H.H > 1. Тогда ветви высшей ступени умножителя верти-
кальны, а низшей ступени — наклонены вправо. Соединяя поочередно верши-
ны выхода базовой коробки передач!', 2', У, 4' с соответствующими вершинами
выхода умножителя вначале наклонными ветвями, азатем вертикальными,
получаем восьмиступенчатую коробку передач. В рассматриваемом примере
передаточные числа первых шести ступеней больше единицы, седьмая пере-
дача — прямая, а восьмая — повышающая.
Диапазон передаточных чисел коробки передач сложной структуры равен
произведению диапазонов передаточных чисел всех ее компонентов:
Дк.о = Дв.К.П Дд*Л Духт (6.46)
где Дв1К д, Д, Др, — диапазоны передаточных чисел соответственно базовой
коробки передач, делителя и умножителя:
Дв.К.П= {6-47)
Д д«л= /*^д«л.в» (6.48)
ДуМ=иуИ.Н/КуМ.в» (6.49)
— передаточные числа низших ступеней соответственно ба-
зовой коробки передач, делителя и умножителя; ивл.п.ж, идал.ж, Up,., — то же —
высших ступеней.
Из рис. 6.9 видно, что
1пД к.п = 1пДб.К1П+1пДу„. (6.50)
Граф структуры коробки передач позволяет непосредственно составлять
выражения для определения передаточных чисел коробки передач. Напри-
мер, передаточное число третьей Передачи ,пэидмл > пятой передачи
^и.пВ = Нв.к.п1^д«л.и И Т.Д.
Полагая = const для всего ряда передаточных чисел коробки передач,
получаем:
Дкж^ЗГ’1; (6.51)
Дежл-вЗ?*"’1? ' (6-52)
Ду-= = <№• " • (6-53)
Дб.х.п
где пН1П — суммарное количество ступеней коробки передач с умножителем;
— количество ступеней базовой коробки передач.
19В
6. Определение основных параметров а томобиля
Для двухступенчатого умножителя, согласно выражению (6.42), nR C -
= 2пб л в. Тогда
Дуи=^“ = Дв.к.п<гер- . (в.54)
Из формулы (6.54) следует, что диапазон передаточных чисел умножите-
ля шире диапазона передаточных чисел базовой коробки передач.
Умножитель применяют при необходимости получения большого диапа-.
зона передаточных чисел коробки передач, что наиболее характерно для полно-
приводных автомобилей повышенной или высокой проходимости, у которых
функции умножителя выполняет раздаточная коробка. Понижающую сту-
пень раздаточной коробки включают в тяжелых дорожных условиях, а при
движении по дороге с твердым покрытием используют высшую ступень
На рис. 6.10 показаны графы структуры коробки передач с делителем.
В варианте на рис. 6.10, а высшая передача делителя прямая (^«., = 1),
а низшая — понижающая (пд<л_я >1), на рис. 6.10, б высшая передача —
повышающая (идел.» < 1), а низшая — прямая (Нд,л н = 1). Из данного рисунка
следует:
1пДд»л=|1п9в.к.п, . (6.55)
л
где <7а.к.п — показатель средней плотности ряда передаточных чисел базовой
коробки передач.
Риг. 6.10. Графы структуры коробки передач с делителем
6.8. Определение количества ступеней коробки передач 1М
На основании выражения (6.55) находим диапазон передаточных чисел
делителя: ____
Ддад= л/фв.к.с (6.56)
Если делитель двухступенчатый, то
5дм “5ор = ^5б.к.к — Ыдвд.к/Уд«л.я- (6.57)
Значение ддея обычно принимают в пределах 1,15-1,20, поэтому диапазон
передаточных чисел делителя Ддм оказывает незначительное влияние на об'
щий диапазон передаточных чисел коробки передач Дк.п. Делитель позволяет
увеличить количество ступеней коробки передач без усложнения конструк-
ции базовой коробки передач и обеспечить высокую плотность ряда переда-
точных чисел.
При необходимости в большом диапазоне передаточных чисел и высоких
требованиях к показателям тягово-скоростных свойств и топливной эконо-
мичности автомобиля используют коробки передач с делителем и умножите-
лем. Это характерно для большегрузных автопоездов. Иерархический граф
структуры такой коробки передач приведен на рис. 6.11.
При осуществлении транспортных перевозок в обычных дорожных усло-
виях движение автомобиля до 85-90 % времени осуществляется на двух
высших передачах. Примерно такую же долю составляет и путь, проходи-
мый автомобилем на этих передачах. Поэтому соотношение передаточных
чисел высших ступеней коробки передач целесообразно уменьшить по срав-
нению cqcp на 5-15 %, а низших соответственно на столько же увеличить, со-
храняя при этом = conet и требуемый диапазон передаточных чисел Дкл.
Такое решение целесообразно как для коробки передач простой, так и слож-
Рис. 6.11. Граф коробки передач с делителем и умножителем
200
6. Определение основных параметров автомобиля
ной структуры. В коробке передач с делителем при определении ддад по фор-
муле (6.67) вместо среднего значения двжл используют значение <?в.х.п.» —
соотношение между передаточными числами двух высших ступеней базовой
коробки передач В этом случае значения передаточных чисел низших ступе-
ней могут существенно отклоняться от чисел ряда геометрической прогрес-
сии. Однако в связи с кратковременностью их использования это не влияет на
показатели тяговых свойств автомобиля.
6.9. Оптимизация основных параметров автомобиля
Определение основных параметров автомобиля в предыдущих разделах
осуществлялось на основе предельных значений отдельных показателей
функциональных свойств автомобиля и параметров внешней среды. Так, на-
пример, мощность двигателя определена при максимальной скорости авто-
мобиля Опцд (предельное значение одного из показателей тягово-скоростных
свойств) и коэффициенте суммарного дорожного сопротивления (предель-
ное значение параметра внешней среды), соответствующем скорости
Значения параметров оюад и регламентированы стандартами и норма-
тивными документами. Но основные параметры автомобиля оказывают су-
щественное влияние на многие другие показатели функциональных свойств
автомобиля, что не учитывалось при их определении, поскольку значение
каждого параметра получено исходя из обеспечения требований к отдельным
выходным параметрам автомобиля. Поэтому полученные таким образом зна-
чения основных параметров автомобиля не могут обеспечить желаемого соче-
тания всего комплекса показателей качества и эффективности автомобиля.
Эти значения следует рассматривать как предварительные, т.е. как началь-
ные значения при их последующей оптимизации.
Постановка задачи оптимизации включает следующие этапы: выбор кри-
териев оптимальности, формирование целевой функции (зависит от стратегии
оптимизации), выбор управляемых (оптимизируемых) параметров, назначе-
ние ограничений, нормирование управляемых и выходных параметров [23].
Решение задачи оптимизации осуществляется на основе математического
моделирования. Основные параметры автомобиля, подлежащие оптимиза-
ции на рассматриваемом этапе проектирования: максимальная мощность
двигателя Р*тод-, количество ступеней пу „ и передаточные числа промежуточ-
ных ступеней коробки передач
Критериями оптимальности при оптимизации основных параметров
автомобиля принимают показатели тягово-скоростных свойств и топливной
экономичности. Наиболее полными, комплексными показателями этих
свойств являются средняя скорость оср и удельный расход топлива . Одна-
ко значения этих показателей зависят от конкретных условий эксплуатации
автомобиля, а их определение требует значительных затрат временных и мате-
риальных ресурсов. Поэтому при проектировании автомобиля иногда исполь-
зуют некоторое множество частных показателей. Каждый из этих показате-
лей оценивает эффективность автомобиля в частном случае движения, но их
6.9. Оптимизация основных параметров автомобиля
201
совокупность позволяет дать комплексную оценку его функциональных
свойств. Частные показатели тягово-скоростных свойств и топливной эконо-
мичности и способы их определения рассмотрены в параграфах 3.1 и 4.1.
В качестве критериев обычно используют: время разгона на пути 400 и 1000 м
i400 и *юоо! время разгона до заданной скорости ; путевой расход топлива в ез-
довом цикле . Остальные частные показате и эффективности учитывают
в качестве ограничений.
Обозначим вектор оптимизируемых параметров X = а вектор
критериев Y = Математическое описание критериев целесооб-
разно получить в виде регрессионных моделей, представляемых многомер-
ными полиномами второго порядка:
П Й Л н
У = *0 + YbJxi + Z + ХЬН$ • <в,б8>
/-1 /-1Й-М /-1
где do, dp bj),, bjf — коэффициенты уравнения регрессии.
В уравнениях регрессий компоненты вектора X называют факторами,
а компоненты вектора У - функциями отклики.
Для получения уравнений регрессий ? = проводятся вычислитель-
ные эксперименты на математических моделях, позволяющих имитировать
процессы движения автомобиля в заданных условиях. Эксперимент плани-
руют, используя методы теории планирования эксперимента, а результаты
его подвергают регрессионному анализу, позволяющему получить значения
коэффициентов уравнений (6.68). План эксперимента определяет условия и
порядок реализации опытов. В вычислительном эксперименте выбор факто-
ров и характер их изменения ничем не ограничен, поэтому при математиче-
ском моделировании проводятся активные эксперименты, которые более
информативны, чем пассивные. В активном эксперименте значения факто-
ров задаются и поддерживаются на заданных уровнях в каждом опыте в соот-
ветствии с планом эксперимента. Для получения регрессионных моделей
второго порядка принимают не менее трех уровней варьирования факторов.
Факторы при этом нормируют, а их уровни кодируют. В кодированном Виде
верхний уровень обозначают +1, нижний -1, а основной 0 (в центре плана).
Нормирование факторов осуществляют на основе соотношения
v _ уО _____
Xf = = 1,п, (6.59)
ДЛ.у
где X] — нормированное значение /-го фактора; Xj — натуральное значение
фактора; — натуральное значение фактора в центре эксперимента; —
интервал варьирования /-го фактора:
ДХ; = (6.60)
2
где -XjmaxjXjmin — минимальный и максимальный уровни/-го фактора.
202
6. Определение основных параметров автомобиля
Результаты эксперимента подвергают регрессионному анализу и получа-
ют регрессионные модели критериев оптимальности, представляемые в виде
выражений (6.58). Модели критериев затем используются для формирова-
ния целевой функции. Поскольку критерии и оптимизируемые параметры
составляют соответствующие множества, то оптимизацию в этом случае на-
зывают векторной и многомерной.
Стратегия оптимизации определяется способом свертки векторного
критерия в скалярную целевую функцию. Один из наиболее эффективных
методов оптимизации основан на минимаксной стратегии. Целевая функ-
ция минимакса при использовании регрессионных моделей критериев фор-
мируется на основе выражения:
f(x) “ , (6.61)
1 Vi max “ Й mln j
где йш1п * йшад — минимальное и максимальное значения i-ro критерия, дос-
тигаемые в области варьирования факторов в процессе эксперимента (опре-
деляются по графикам, построенным на основе уравнений регрессий (6.58));
Jfaxtr — экстремальное значение i-ro критерия (при максимизации критерия
й(Х) принимается ptoxtr = yitnax, а при минимизации — pUxtr = yimbl); ct —
весовой коэффициент, характеризующий значимость i-ro критерия.
Весовые коэффициенты выбираются иэ условия:
£с(=1;С;>0. (6.62)
Целевая функция (6.61) подлежит минимизации. Она позволяет обес-
печить максимально возможное приближение всех критериев к их экстре-
мальным значениям и реализует стратегию минимакса. Оптимальными
называют параметры автомобиля, доставляющие экстремум целевой функ-
ции.
Отметим важную особенность векторной оптимизации. Критерии оптималь-
ности, как правило, конфликтны; улучшение одних критериев сопровождается
ухудшением других. Например, увеличение средней скорости автомобиля оср
непременно приводит к увеличению удельного расхода топлива, т.е. с улуч-
шением тягово-скоростных свойств ухудшается топливная экономичность.
Следовательно, оптимальные параметры автомобиля по критерию иср оказы-
ваются неоптимальными по критерию 0,д. Целевая функция минимакса позво-
ляет сбалансировать противоречия между критериями и получить оппш-
малъно-компромиссное решение задачи оптимизации.
Рассмотрим методику проведения оптимизация параметров Ретдх, пк.п и
Wjt-iu- Решение задачи оптимизации целесообразно выполнять в два этапа.
Вначале необходимо определить оптимальные значения Регалх и пк.п, а затем
выполнить оптимизацию передаточных чисел коробки передач ц, ,n(. Оптими-
6.9. Оптимизация основных параметров автомобиля 203
аации ие подлежат передаточные числа низших ступеней, предназначенных
для преодоления ^т« и обеспечения , и высших ступеней, предназначен-
ных для достижения отах и osmBX.
При решении первой задачи факторами являются мощность двигателя
Дшмс и количество ступеней коробки передач nk,n. Интервал варьирования
фактора F<ai*x обычно принимают Л^твх = (0,15-0,20)11 вил* а факторам^ —
Дпк.п = 1. При варьировании фактора пк п необходимо изменять значения пе-
редаточных чисел промежуточных ступеней, сохраняя неизменными диапа-
зон передаточных чисел коробки передач Дк.п и передаточные числа низшей
ult,n.B и высшей ступеней.
Рассмотрим пример. Предположим, что базовая коробка передач пятисту-
пенчатая, причем = 5,063, a Uk,SiS = 1- Тогда, согласно формулам (6.39)
и (6.41), Дк.в=5,О63идср = 1,6.
Примем в центре плана л£л = 5, интервал варьирования Дпкл = 1, тогда
Лжл mln = 4; Пклшвх = 6. По формуле (6.41) вычислим значения9ср для трех ва-
риантов передаточных чисел, а значения передаточных чисел найдем, исполь-
зуя формулу (6.44). Полученные варианты передаточных чисел приведены
в табл. 6.13.
Если коробка передач с делителем, то определяют оптимальное количест-
во ступеней базовой коробки передач nfi.K n, изменяя передаточные числа ее
промежуточных ступеней аналогично рассмотренному примеру. При опти-
мизации параметров коробки передач с умножителем моделируется движе-
ние автомобиля только на высшей ступени умножителя.
После проведения первого этапа оптимизации принимается окончательное
решение о выборе Р,твх и лк.п. При этом значение пкл округляют до целого.
Таблица 6.13
Передаточные числа варьируемых вариантов коробки передач (КП)
Номер ступени КП Передаточные числа вариантов КП
1 5,068 5,068 5,068
2 2,948 8,375 3,658
3 1,717 2,250 2,645
4 1 1,600 1,913
б - 1 1,883
6 - - 1
Показатель 1,717 1,500 1,383
На втором этапе оптимизации параметров автомобиля осуществляется
поиск оптимальных значений передаточных чисел промежуточных ступе-
ней коробки передач. Интервал варьирования значений передаточных чисел
выбирают исходя из условия, чтобы верхний уровень передаточного числа
был меньше нижнего уровня передаточного числа т.е. передаточ-
ные числа смежных ступеней не должны перекрываться. Значения переда-
204
6. Определение основных параметров автомобиля
точных чисел не верхнем уровне варьирования должны быть больше, чем на
нижнем.
При выборе в качестве критериев оптимальности Vcp и <?вк получение их
регрессионных моделей осуществляется посредством имитации движения
автомобиля по типовому маршруту. Моделирование движения осуществ*
ляется на основе использования математических моделей, приведенных в па-
раграфах 2.6, 4.2, 5.8 и 5.9.
Маршрут движения автомобиля представляется в виде совокупности уча-
стков дороги, каждый из которых характеризуется продольным уклоном
коэффициентом сопротивления качению ft, коэффициентом сцепления фж(,
радиусом кривизны дороги в плане ограничением скорости иогр|. Два
смежных участка дороги отличаются как минимум одним из указанных па-
раметров. На каждом 1-м участке все параметры считаются постоянными.
В реальных условиях между участками с постоянными параметрами, безус-
ловно, существуют переходные участки, на которых происходит, например,
изменение уклона или радиуса кривизны и'т.д. Но переходные участки не-
большие по сравнению с выделяемыми участками маршрута и не могут ока-
зать существенного влияния на среднюю скорость автомобиля. Поэтому их
обычно не учитывают при моделировании.
Для достижения максимальной средней скорости на маршруте необходимо
обеспечить полное использование потенциальных возможностей автомобиля,
обусловленных тягово-скоростными свойствами. Однако в действительности
достичь этого невозможно в силу ряда причин:
□ ограничения скорости по условиям управляемости и устойчивости дви-
жения автомобиля, устанавливаемые водителем на основе своих ощущений,
знаний и опыта (определяют логику действий водителя);
□ ограничение скорости по условиям вибронагруженности водителя, пас-
сажиров и сохранности перевозимого груза;
□ административные ограничения скорости на отдельных участках дороги;
о ограничения скорости, обусловленные транспортным потоком;
□ ограничения скорости согласно правилам дорожного движения (на пе-
рекрестках, в населенных пунктах и др.);
О ограничения скорости, связанные с безопасностью движения (трудно-
сти обгона, плохая видимость и др.).
Формирование (синтез) типового маршрута требует всестороннего изуче-
ния эксплуатационных условий конкретного типа автомобилей. Рассмотрим
некоторые данные, характеризующие условия движения по автомобильным
дорогам.
На автомобильных дорогах устанавливается значительное количество до-
рожных знаков, регламентирующих административные ограничения скоро-
сти. В табл. 6.14 приведены данные статистических исследований, выполнен-
ных в Республике Беларусь на дорогах республиканского значения общей
протяженностью 3944 км (по данным Я.Е. Фаробина и М-И. Гриффа).
6.9. Оптимизация основных параметров автомобиля
205
Таблица 6.14
Характеристики .ограничений скорости на дорогах общей сети
Скорость ограничений, км/ч Нет 30 40 50 60 Обгон запрещен
Количество участков 465 4 61 34 108 106
Средняя длина участка, км 6,95 0 50 1,55 1,67 1,54 0,99
При движении на криволинейных участках возникает опасность потери
устойчивости, что требует от водителя осторожной тактики вождения. На до-
рогах общей сети протяженность криволинейных участков и их кривизна
зависят от категории дороги и рельефа местности. В табл. 6.15 приведены
статистические данные по этим характеристикам дорог различных катего-
рий [12].
Таблица 6.1 S
Относнтельвая длина криволинейных участков, %
Категория дороги Интервалы радиусов кривизны участков, м Всего
1000-600 600-800 300-100 Менее 100
I 1,85 0,05 - - 1,90
п 8,80 1,20 0,235 - 5,235
III 6,60 । 2,20 0,80 0,10 9,70
IV 8,30 3,21 1,40 0,40 18,31
На грунтовых дорогах количество участков с радиусами rjn, <800-400 м
составляет 30-35 %, а время движения на этих участках достигает 65-70 %
ст общего времени прохождения маршрута.
Наиболее значительное количество криволинейных участков имеют гор-
ные дороги. Например, на горных дорогах Закавказья суммарная длина пово-
ротов в среднем составляет 43 % от общей длины маршрута, а на отдельных
участках достигает 65 %. При этом 80 % поворотов имеют радиусы закруг-
лений /jn, < 100 м, а 35 % — < 40-65 м. На серпантинах радиусы достигают
10-15 м, а углы поворотов доходят до 180 °. Такие повороты составляют Б %
от общего их количества.
Карьерные автомобильные дороги для сверхтяжелых самосвалов отлича-
ются от автомобильных дорог общего пользования относительно небольшой
длиной, крутыми уклонами, чередованием спусков и подъемов, поворотами
с малыми радиусами кривизны, большой интенсивностью движения, а так-
же повышенной несущей способностью дорожного покрытия, так как они
рассчитаны на высокие осевые нагрузки транспортных средств. Карьерные
дороги близки по своим характеристикам к горным дорогам.
В монографии [22] приведено описание типовых маршрутов движения,
использовавшихся при решении задач оптимизации параметров городских
автобусов и карьерных самосвалов.
Моделирование ограничений скорости по условиям управляемости и ус-
тойчивости будет рассмотрено в главах 8 и 9.
206
6. Определение основных параметров автомобиля
Как отмечалось выше, моделирование движения автомобиля по типовому
маршруту связано со значительными затратами времени, поэтому во многих
случаях целесообразно при решении задач оптимизации параметров автомо-
биля использовать методики, предусмотренные стандартами для определения
показателей тягово-скоростных свойств и топливной экономичности автомо-
биля (ГОСТ 22576-90 и ГОСТ 20306-90). В качестве критериев оптимальности
при этом используют показатели t40Q, А?» Qsu ♦ Для получения регрессион-
ных моделей критериев f4W, осуществляется моделирование разгона
автомобиля согласно методикам, изложенным в параграфах ЗА и Б.8. Рег-
рессионное уравнение критерия Qeu получают при моделировании движения
автомобиля в ездовом цикле по методикам, изложенным в параграфах 4,6
Я 5.10 Использование критериев t40o> Чмо» К направлено на обеспечение вы-
соких показателей приемистости автомобиля, а критерия Qeil — на достижение
высокой топливной экономичности. Очевидно, что эти критерии конфликт-
ны, поэтому возможно лишь оптимально-компромиссное решение, которое
в известной мере зависит от выбора весовых коэффициентов, определяющих
значимость принятых критериев.
Вопросы для самоконтроля
1. Как классифицируются параметры автомобиля при решении задач проекти-
рования ?
2. Что таксе главный параметр автомобиля? Назовите главные параметры гру-
зовых автомобилей, автобусов и легковых автомобилей.
3. Как классифицируются автотранспортные средства?
4. Дайте определения масс снаряженного и неснаряженного автомобиля, собст-
венной и полной массы.
5. Из каких условий выбираются количество мостов и колесная формула авто-
мобиля?
6. Назовите установленные предельные значения осевых нагрузок автомобилей
в странах ЕС и СНГ.
7. Назовите предельно допустимые значения габаритных размеров автомоби-
лей и автопоездов.
8. Из каких условий определяется мощность двигателя?
9. Из каких условий определяется передаточное число главной передачи?
10. Из каких условий определяется передаточное число низшей ступени коробки
передач?
11. Из каких условий выбирается количестве ступеней коробки передач? Напи-
шите формулу для вычисления количества ступеней.
12. Что такое диапазон передаточных чисел коробки передач?
13. Что собой представляет ряд передаточных чисел коробки передач и каким па-
раметром он характеризуется?
14. Каковы назначения делителя и умножителя (демультипликатора)? Как они
влияют на общий диапазон коробки передач?
6,9. Оптимимиия основных параметров автомобиля 207
16. Как определяются диапазоны передаточных чисел делителя и умножителя?
Напишите формулы для их вычисления.
16. Изобразите графы структур коробки передач с делителем и коробки передач с
умножителем.
17. Назовите основные этапы постановки и решения задачи оптимизации пара-
метров автомобиля. Какие параметры автомобиля подлежат оптимизации?
1В. Что такое критерии оптимальности, целевая функция и оптимальные пара-
метры?
19. Какие критерии оптимальности попользуют при решении задач оптимиза-
ции основных параметров автомобиля?
Тормозные свойства автомобиля
Торможение — процесс создания и изменения искусственного сопротив-
ления движению автомобиля с целью уменьшения его скорости вплоть до
полной остановки или удержания в неподвижном состоянии.
Тормозные свойства — совокупность потенциальных свойств автомобиля,
характеризующих способность интенсивного снижения скорости, поддержа-
ния постоянной скорости на уклонах, обеспечения устойчивого прямолиней-
ного движения в процессе торможения, надежного удержания автомобиля
в покое.
Тормозные свойства определяют активную безопасность автомобиля и по-
этому регламентируются международными документами, разработанными
Комитетом по внутреннему транспорту Европейской экономической комис-
сии Организации Объединенных Наций (ЕЭК ООН) — Правила № 13, в соот-
ветствии с которыми разрабатываются национальные стандарты.
Лктивкол безопасность — совокупность свойств и конструктивных особен-
ностей автомобиля, обеспечивающих снижение вероятности дорожно-транс-
портных происшествий.
7.1. Тормозные системы автомобиля и виды торможений
Чем эффективнее и совершеннее тормозная система автомобиля, тем выше
безопасная скорость, а следовательно, средняя скорость движения и произво-
дительность автомобиля.
При торможении кинетическая энергия автомобиля превращается в теп-
ловую вследствие трения, возникающего в тормозных механизмах и в кон-
такте шин с опорной поверхностью дороги. На спусках тормоза позволяют
поддерживать постоянную скорость, а тормозные механизмы поглощают по-
тенциальную энергию автомобиля. Некоторая часть кинетической и потен-
циальной энергии затрачивается на компенсацию работы сил и моментов
сопротивлений движению автомобиля.
В соответствии с Правилами ЕЭК ООН № 13 все автотранспортные средст-
ва должны быть оборудованы тормозными системами, предназначенными
для осуществления рабочего, стояночного и аварийного торможения. Эти
функции выполняют соответственно рабочая, стояночная и запасная тормоз-
ные системы. На автотранспортных средствах категории 7V3 с дизельными
двигателями и категории М8, предназначенных для эксплуатации в горных
районах, необходимо дополнительно иметь вспомогательную тормозную сис-
тему. Транспортные средства категории О можно не оборудовать запасной
тормозной системой.
Тормозная система в общем случае состоит ив источника энергии, тормоз-
ного привода и тормозных механизмов. В качестве источника энергии исполь-
зуют компрессор или гидравлический насос. На автомобилях Малой массы
используется мускульная энергия водителя. Тормозной привод осуществляет
7.2. Оценочные показатели тормозных свойств автомобиля
209
передачу энергии от источника к тормозным механизмам и обеспечивает не*
обходимое регулирование тормозных моментов. Различают механические,
гидравлические, пневматические, гидропневматические, электропневмати-
ческие приводы.
Рабочая тормозная система является основной тормозной системой, обеспе-
чивающей процесс торможения в нормальных условиях функционирования
автомобиля. Тормозными механизмами рабочей тормозной системы являют-
ся колесные тормоза. Управление этими механизмами осуществляется по-
средством педали.
Стояночная тормозная система предназначена для удержания автомобиля
в неподвижном состоянии. Тормозные механизмы этой системы располагают
либо на одном из валов трансмиссии, либо в колесах. В последнем случае ис-
пользуются тормозные механизмы рабочей тормозной системы, но с дополни-
тельным приводом управления стояночной тормозной системы. Управление
стояночной тормозной системой ручное.
Запасная тормозная система используется при отказе рабочей тормозной
системы. Отдельная запасная система практически не применяется. Обычно
ее роль выполняют оставшийся исправным тормозной привод и тормозные
механизмы двухконтурной рабочей тормозной системы. У некоторых авто-
мобилей функции запасной выполняет стояночная тормозная система.
Вспомогательная тормозная система предназначена для торможения ав-
томобиля на затяжных спусках. В этой системе используются специальные
тормоза-замедлители — моторные и трансмиссионные. Управление тормоза-
ми-замедлителями автоматизированное или ручное.
Различают следующие виды торможений: экстренное (аварийное), слу-
жебное, торможение на уклонах.
Экстренное торможение осуществляется посредством рабочей тормозной
системы с максимальной для данных условий интенсивностью. Количество
экстренных торможений составляет 6-10 % от общего числа торможений.
Служебное торможение применяют для плавного снижения скорости ав-
томобиля или остановки в заранее намеченном месте. Замедление автомобиля
при этом в 2-8 раза меньше, чем при экстренном, и не превосходит 1,6-2 м/с2.
Торможение на уклонах дороги предназначено для обеспечения постоян-
ной безопасной скорости движения. В горных условиях с длинными спусками
эффективное торможение можно обеспечить лишь тормозами-замедлителями,
рассчитанными на длительную непрерывную работу. Тормозные механизмы
рабочей тормозной системы на такие режимы не рассчитаны. В горных усло-
виях они быстро перегреваются, изнашиваются и преждевременно выходят
из строя.
7.2. Оценочные показатели тормозных свойств автомобиля
Существующими стандартами предусмотрены следующие показатели
тормозных свойств автомобиля:
□ установившееся замедление ат#уст, обеспечиваемое рабочей тормозной
системой при постоянном заданном усилии на тормозную педаль;
210
7. Тормозные свойства автомобиля
□ тормозной путь в, — расстояние, проходимое автомобилем от момента
нажатия на педаль тормоза до остановки;
о время срабатывания тормбзного привода f — время от момента начала
нажатия на педаль тормоза дс достижения ат.уст;
□ установившееся замедление, обеспечиваемое запасной тормозной сис-
темой;
□ максимальный уклон на котором автомобиль удерживается стоя-
ночным тормозом;
Q установившаяся скорость на спуске при торможении тормозом-замед-
лителем или двигателем ит .
Нормативы показателей тормозных свойств АТС, предписываемые ГОСТ
22895-77 для рабочей тормозной системы, приведены в табл. 7.1, а для запас-
ной — в табл. 7.2. Они полностью совпадают с нормативами, предусмотрен-
ными Правилами ЕЭК ООН №13.
Таблица 7.1
Нормативы эффективности рабочей тормозной системы
автотранспортных средств категорий М и N И автопоездов
АТС Категория Начальная скорость, км/ч Усилие на педа- ли, Н Термосной путь, м (замедление, м/сг) при испытаниях
типа «ноль* типе! типа II
Пассажирские Afi 80 500 43,2(7,0) 52,1 (5,6) —
автомобили, Af, 60 700 32,1 (6,0) 38 0 (4,8) —
автобусы Пассажирские 5 £ <*? 1 80 500 50,7(5,8) 61,7(4,6) 89,8(4,5)
автопоезда Ма Ма 60 700 33,9 (6т0) 39,8(4,8) 41,6(4,5)
Грузовые авто- м ВО 700 61,2(5,0) 73,5 (4,0) —
мобили Л-э 60 700 36,7(5,0) 43,6 (4,0) 45,9(3,7)
Грузовые авто- Ni 80 700 68,6(5,0) 75,9 (4,0)
поезда 60 700 38,5 (6,0) 45,4 (4,0) 47,7(3,7)
Испытания по определению эффективности рабочей тормозной системы
разделяют на три типа: «ноль», I и II. Испытания типа «ноль» проводят
при «холодных» тормозах, когда температура вблизи поверхности трения
тормозного барабана или диска менее 100 °C. Испытания типа I проводят
при «горячих» тормозах. Нагрев осуществляют путем предварительных тор-
можений. Испытаниям «ноль» и I подвергаются все типы АТС. Назначение
этих испытаний — подтверждение выполнения нормативных требований
к показателям эффективности тормозных систем вновь созданного автомобиля.
7.2. Оценочные показатели тормозных свойств автомобиля
211
Таблица 7.2
Нормативы эффективности запасной тормозной системы
автотранспортных средств категорий М и N и автопоездов
АТС Катего- рия Начальная скорость, км/ч Усилие не органе управления. Н Тормозной путь, м, ве более Установившееся замедление, м/с1, ве менее
ручном ножвоы
Пассажирские Mj 80 400 500 93,8 2,9
автомобили,
автобусы Ms ,60 600 700 64,4 2,5
Пассажирские Mi 80 400 500 100,7 2,5
автопоезда м2
Ms 60 600 700 66,2 2,5
Грузовые *1 70 95,7
автомобили N2 50 600 700 51 2,2
Mi 40 33.8
Грузовые м 70 97,8
автопоезда *2 50 600 700 52.5 2,2
Ns 40 85
Дорожные испытания по определению показателей тормозных свойств
проводят при тех же условиях, что и при определении показателей тяго-
во-скоростных свойств (см. параграф 3.1), за исключением того, что плот-
ность воздуха не контролируется. Испытаниям подвергаются автомобили
с полной нагрузкой. Выход автомобиля из коридора шириной 3,6 м и блоки-
рование колес при торможении недопустимы. При торможении водитель не
должен подправлять траекторию движения АТС с помощью рулевого управ-
ления, если этого не требует безопасность движения.
В процессе испытаний посредством специальной аппаратуры измеряют
и регистрируют скорость и замедление автомобиля, тормозной путь и время.
Для измерения усилия на педали используют «тензометрическую педаль».
Аппаратура должна обеспечивать измерение тормозного пути с точностью
±2fi %, замедления и скорости начала торможения — с точностью ±1,6 %,
усилия на педали, курсового угла, температуры тормозных механизмов —
с точностью ±3 %. При испытаниях применяют измерительные комплексы
Datron, Мотомер, Пайслер и др.
Рассмотрим методику проведения испытания типа «ноль». До въезда на
испытательный участок дороги автомобиль разгоняют до скорости, пример-
но на 5 км/ч больше заданной (<;м. табл. 7.1). Затем водитель отсоединяет
двигатель от трансмиссии, и автомобиль продолжает двигаться накатом. По-
сле снижения скорости до заданного значения водитель по сигналу оператора
выполняет экстренное торможение с усилием на педали, соответствующим
регламентируемому значению (см. табл. 7.1). Начальная скорость торможе-
ния при испытании должна составлять не менее 98 % от заданной.
212
7. Тормозные свойства автомобиля
На рис. 7.1 приведен пример регистрации процесса торможения автомо-
биля. После нажатия на тормозную педаль до начала замедления автомобиля
проходит время f3 — время запаздывания тормозного привода. Время *и со-
ответствует времени нарастания замедления, а в период замедление
считается установившимся. Суммарное время торможения tT. Вследствие
непостоянства дорожного сопротивления, наличия вибрации тормозных ме-
ханизмов, нестабильности сил сцепления шин с опорной поверхностью гра-
фики замедления а,, и усилия на педали F7,n носят колебательный характер
и при повторении испытания не остаются постоянными. Поэтому проводят
не менее 3-5 испытаний и результаты их усредняют.
Рае. 7.1. Пример осциллограммы процесса торможения автомобиля:
1 — замедление; 2 — усилие не педали тормоза; 3 — время;
4 — давление В тормозном приводе
Значение установившегося замедления вычисляется по формуле
. । 1>? -1>2
^'УСТ ^2 5432^-^’ (7lJ
где их = О,8ио, км/ч; = ОДо0, км/ч; — начальная скорость торможения,
км/ч; Sj — путь, пройденный автомобилем при снижении скорости от l>0 доих, м;
% — путь, пройденный автомобилем при снижении скорости оти0 до о2, м.
Значение коэффициента 25,92 в формуле (7.1) обусловлено измерением
скорости при испытаниях в км/ч и установившимся равнозамедленным дви-
жением автомобиля.
Время срабатывания тормозного привода рабочей тормозной системы tcp
не должно превышать 0,6 с.
Испытания типа I предназначены для оценки снижения эффективности
рабочей тормозной системы при «горячих* тормозных механизмах. Испытание
проводят в два этапа. На предварительном этапе производят нагрев тормозных
механизмов, а на основном — определяют остаточную эффективность тор-
мозной системы. Нагрев тормозных механизмов Транспортных средств кате-
горий Л1 и N при полной нагрузке осуществляют посредством многократных
торможений, параметры режима выполнения которых приведены в табл. 7.8.
7.3. Уравнение движения автомобиля при торможении
213
Усилие на тормозной педали выбирают таким, чтобы достигалось среднее
значение замедления 8 м/с2. Это обеспечивает необходимую длительность
цикла нагрева. Циклы нагрева следуют друг за другом непрерывно, т.е, по-
сле завершения торможения до скорости ок = 0 осуществляется интенсив-
ный разгон автомобиля до скорости и0 = OjBvmu( и производится повторное
торможение.
Таблица 7,3
Режим многократного торможения транспортных средств категорий М к N
Категория АТС Условия проведения испытания
Начальная скорость торможения, км/ч Конечная скорость тормо- жения, км/ч Длительность цикла» с Число торможений
Mi Vo =0^рт>х. во не более 120 =0Д>0 45 15
Мя Ь’о во не более 100 То же 55 15
Ni о0 “ОДЗ^т**. но не более 120 Тоже 55 15
M3tNs.Na =03^пих> но не более 60 То же 60 20
Величина установившегося замедления при испытании I должна быть не
менее 60 % величины, полученной при испытании «ноль» данного автотранс-
портного средства. Снижение эффективности торможения при «горячих»
тормозах обусловлено уменьшением коэффициента трения фрикционной пары
по мере возрастания температуры нагрева.
Методика и условия испытаний запасной тормозной системы аналогич-
ны. Нормативы показателей эффективности запасной тормозной системы
приведены в табл. 7.2.
Испытаниям типа II подвергаются АТС категорий Мд и Ng, а также
грузовые автопоезда, тягачами которых являются автомобили категорий
иЛгз. Эти испытания проводятся при «горячих* тормозах, аналогично испы-
таниям 1, и предназначены для определения эффективности рабочей тормоз-
ной системы после движения на затяжных спусках. Прогрев тормозных
механизмов осуществляется на спуске длиной 6000 м с уклоном Л = 0j06 при
скорости 36 ± S км/ч.
Вспомогательная тормозная система должна обеспечивать поддержание
постоянной установившейся скорости при затяжном спуске 1\,уст = 30 ±2 км/ч
на уклоне Л = 0,07. Протяженность спуска 6 км. При торможении двигателем
в этих же условиях ит,уст = 30 + Бкм/ч.
Стояночная тормозная система должна удерживать автомобиль в покое на
уклоне Лппах не менее: для пассажирских автомобилей — 0,25; для грузовых
автомобилей — 0,20; для автопоездов — 0,18.
7.3. Уравнение движения автомобиля при торможении
На рис. 7.2 показана схема сил и моментов, действующих на автомобиль
при торможении. Сравним ее со схемой для тягового режима (см. рис. 2.1).
При торможении на колеса автомобиля вместо движущего момента Мн-в дей-
214
7. Тормозные свойства автомобиля
ствуют тормозные моменты Мн т1 и Мк.т2, направленные противоположно
моменту М. Продольные реакции дороги тормозящих и ведущих коЛео Я,
также противоположны изображенным на рис. 2.1. При торможении автомо-
биль движется замедленно, поэтому сила инерции F& и инерционные момен-
ты колес М-р.ъ Мjta становятся движущими. Заменим в уравнении движения
автомобиля на тяговом режиме (2.76) момент Мг , = Л/в(1 -£в.о)итрТ|п> на сум-
марный момент тормозящих колес Мкл = Мк.т! + ^х.т2 • принимая во внима-
ние, что направления моментов Мк-Ч и AfK., противоположны. В результате
получим уравнение движения автомобиля при торможении
5П.Ы ° 1 = -fМ клг + +Fw'l (7.2)
« l Гк J V Гк )
Pue. 7.2. Воздействия на автомобиль при торможении
Из уравнения (7.2) следует, что при торможении все внешние силы и момен-
ты оказывают сопротивление движению и направлены на увеличение модуля
замедления joj) = |do/df |. Исключение составляет лишь сила при
движении на подъем она положительна и способствует замедлению, а на спуске
отрицательна, т.е. становится движущей силой и уменьшает замедление.
Замедление автомобиля при торможении. Замедление при торможении
на горизонтальной дороге определяется по формуле
|От|^(Л/нт+ЛЧ^+^, (7.3)
Суммарный тормозной момент Мх,т может включать моменты тормозных
механизмов М,.м и тормозной момент двигателя Мт.я. Если при движении
автомобиля, не отсоединяя двигатель от трансмиссии, освободить педаль ак-
(7.4)
7.3. Уравнение движения автомобиля при торможении 215
селератора, то двигатель перейдет на тормозной режим (режим принудитель-
ного холостого хода). В этом случав энергия передается от ведущих колес
автомобиля к двигателю и затрачивается на преодоление сил трения в меха-
низмах двигателя и компенсацию компрессионных потерь.
Рассмотрим торможение автомобиля рабочими тормозными механизмами.
В параграфе 1.6 показано, что максимальный момент, реализуемый тормозя-
щим колесом, ограничен его сцеплением с дорогой и определяется выражени-
ем (1.69). Предположим, что все колеса автомобиля находятся в одинаковых
дорожных условиях, и найдем лсаксилшльно возможное замедление авто-
мобиля. Оно достигается, если все тормозные механизмы будут развивать
предельные тормозные моменты по сцеплению соответствующие
выражению (1.69). Для этого необходимо обеспечить строгое согласование
значений тормозных моментов с нормальными реакциями дороги Пг1,
Используя формулы (1.69) и (2.8) и суммируя моменты всех тормозящих ко-
лес, получаем:
+ Mf = .
Подставим это значение в формулу (7.2):
При интенсивном торможении скорость автомобиля очень быстро умень-
шается, поэтому влиянием сопротивления воздуха на замедление можно пре-
небречь. При торможении автомобиля только тормозными механизмами с от-
соединенным от трансмиссии двигателем коэффициент приведенной массы
Sn.M нв превышает 1,05, согласно выражению (2.78). Поэтому примем jF„ =0,
8П1М = 1 Тогда максимально возможное замедление можно определить по при-
ближенной зависимости
l^rniax| = Фх£- (7.6)
Так как <рх<1, то из выражения (7.5) следует, что максимальное замедле-
ние автомобиля, обеспечиваемое колесными тормозными механизмами, не
может превышать ускорение свободного падения g = 9,81 м/с2.
У спортивных и гоночных автомобилей применяют специальные аэроди-
намические средства, которые создают дополнительную силу, прижимающую
автомобиль к дороге. При этом |atmwt| может превышать значение (да.
Тормозная диаграмма. Процесс торможения во времени описывается зави-
симостями |ат| = f(i) и v = /(#). Эти зависимости называют тормозной диа-
граммой (рис. 7.3). Начало координат t *= О соответствует моменту возникно-
вения ситуации, вынуждающей водителя тормозить. Общее время процесса
торможения включает следующие составляющие:
а время реакции водителя fp = tpl + ip2, где tpi — время психической реак-
ции водителя (оценка обстановки и принятие решения о необходимости тор-
можения); tp2 — время физической реакции водителя (перенос ноги с педали
акселератора на педаль тормоза);
216
7. Тормозные свойства автомобиля
Рис. 7.3. Тормозная диаграмма антомобиля
□ время срабатывания тормозного привода tep = i, +tM, где t, — время за-
паздывания тормозного привода (выбор свободного хода в системе привода
тормозных механизмов); tB — время нарастания замедления (зависит от ин-
тенсивности нажатия на педаль тормоза, от типа и конструктивного исполне-
ния тормозной системы);
□ время торможения с установившимся замедлением ;
□ время оттормаживанияеот.
Время реакции водителя зависит от его индивидуальных особенностей,
физического состояния и квалификации и находится в пределах 0,8-1,7 с.
При экстренном торможении t0 не должно превышать 0,2 с, а (ж — 0,4 с.
В течение времени замедление автомобиля увеличивается от нуля (начало
действия тормозов) до максимального установившегося значения агуст, аза-
тем в течение времени оно остается практически постоянным.
Тормозной путь. Различают тормозной путь автомобиля 8, и остановочный
путь 8^ . Тормозной путь автомобиля складывается из пути, проходимого
автомобилем за время запаздывания тормозного привода t,, время нарастания
замедлениям и время торможения с установившимся замедлением :
= Ва + 8И + . (7.6)
Остановочным путем называют весь путь, проходимый автомоби
лем от момента обнаружения препятствия до полной остановки автомобиля.
Для его определения к 8т необходимо добавить путь вр, проходимый автомо-
билем за время реакции водителя tp:
®МТ — + 8р = • (7. 7)
В течение времени tp и t, автомобиль движется с постоянной начальной
скоростью 1>0, поэтому путь за это время
в₽+«в я»о(*р+*»)- (Т.8)
Нарастание замедления в течение времени tH принимается по линейной
зависимости a? Поскольку a, -dv/dt, то движение на интервале
времени tE описывается дифференциальным уравнением
dv = ^Idt.
tB
7.3. Уравнение движения автомобиля при торможении
217
Проинтегрируем это уравнение по переменной v в пределах от и0 Д° f» а по
переменной t — от О до t (где v и Г — текущие значения скорости и времени):
о = о0 +
Дт.уст^
2tH
(7.0)
Скорость ря в конце периода нарастания замедления доат уст найдем, под-
ставив в уравнение (7.9) t = ta.
Уи =ио-ОД]ат_уст|*н. (7Л0)
Для определения пути 3д за время t„ составим дифференциальное уравне-
ние, учитывая, что и = dsjdt, и используя выражение (7.9):
I 2t« J
Интегрируя это уравнение, получаем
(7.11)
О
Ввыражениях(7.10) и(7,11) учтено, чтоатух.т отрицательное, поэтому его
значение принято по абсолютной величине и умножено на (-1). Для определе-
ния пути торможения за время t^.T представим ускорение следующим образом:
dv _ dv ds _ dv_________________________, ,
dt da dt ds T>CT
Полученное выражение преобразуем к виду
da - У —dv.
кн
Проинтегрируем это дифференциальное уравнения по з от 0 до , а по и
оти„ доик:
где — скорость в конце процесса торможения.
Так как движение при этом равнозамедленное, то конечная скорость ок=
= ve ~|<1т.ует|<уст* При торможении до остановки автомобиля ок = 0, тогда
о2
^=^-1’ <713>
2|ату„|
^=-^2-. (7.14)
|^т.уст|
Подставим в формулу (7.18) значение l>h из формулы (7.10):
21В
7, Тормозные свойства автомобиля
При полном использовании сцепных возможностей всех колес автомоби-
ля вместо lawyer] в формулу (7.15) следует подставить значение , опреде-
ляемое по формуле (7.6):
2<PJ?
Используя выражения (7.7), (7.8) и (7.16), получаем формулу для опреде-
ления остановочного пути:
=vo(tp+*a+OJ5eB) + -^-^-. (7.17)
Численное значение последнего члена выражения (7.17) небольшое, по-
этому им можно пренебречь. В результате остановочный и тормозной пути
можно вычислять по формулам:
' i>s
«ост = ио(А> + +0 Лн) + —2—, (7.18)
2<pxg
„2
вт=М*з+0-5е") + 7Ей-- (7-19)
2фхг
7 А. Способы торможения автомобиля
Служебное торможение автомобиля может осуществляться различными
способами:
□ только тормозными механизмами рабочей тормозной системы (приме-
няется в хороших условиях сцепления колес с дорогой при необходимости ос-
тановки автомобиля в намеченном месте);
□ тормозными механизмами и двигателем (применяется наиболее часто
для снижения скорости, в особенности на скользких участках дороги с целью
предотвращения блокировки колес тормозными механизмами и исключения
заноса автомобиля);
□ двигателем.
Рассмотрим совместное торможение тормозными механизмами и двига-
телем. В этом случае уравнение движения автомобиля (7.2) принимает вид
5п„тд — = -[ М-м + Fh + Fw 1, (7.20)
dt I f~ I
гдеЛ/т.м — суммарный момент тормозных механизмов; Мт.ц — тормозной мо-
мент двигателя; 5П.М — коэффициент приведенной массы автомобиля, вычис-
ляемый по формуле (2.71).
Представим формулу (2.71) в следующем виде:
ПтРГ£ т*
где 5К - 1”----------------коэффициент учета относительного движения
Пк т« 4<о
масс колес и трансмиссии.
7,5. Распределение тормозных моментов между мостами автомобиля
219
С учетом этого выражения формулу (2.70) для определения приведенной
силы инерции автомобиля представим в виде
FM =SD.-^|ar| = 6>lm.|fll|+4^1- (7.21)
г?Птр
Подставим это значение в уравнение (7.20), перенеся второе слагаемое
в правую часть:
1 +Г _ JaUjpW рз> + д +f, 1 (7.22)
Ок «а L Гк V Гк X Птр
Из уравнения (7.22) следует^ что совместное торможение тормозными ме-
ханизмами и двигателем эффективно при условии, если выражение в круг-
лых скобках больше нуля, т.е. если
М J?Ma.Tl, (7.23)
г
'к
При большом замедлении, характерном для экстренного торможения,
а также при торможении на низших передачах условие (7.23) не выполняет-
ся. В таких случаях двигатель 'при торможении необходимо отсоединять от
трансмиссии посредством выключения сцепления.
На дороге с низким коэффициентом сцепления целесообразно применять
торможение только двигателем или тормозом-замедлителем. При симмет-
ричном межколесном дифференциале это обеспечивает одинаковые продоль-
ные реакции дороги на левое и правое колеса, вследствие чего снижается
вероятность их бокового скольжения.
Совместное торможение двигателем и тормозными механизмами предот-
вращает блокировку колес. Это повышает устойчивость прямолинейного
движения автомобиля, так как уменьшается вероятность заноса при дейст-
вии боковых сил, возникающих вследствие неровностей опорной поверхно-
сти или бокового уклона дороги. Этим обусловлена целесообразность такого
способа торможения на скользкой дороге.
Торможение только тормозными механизмами рабочей тормозной систе-
мы или только двигателем является частным случаем рассмотренного выше
совместного торможения. .
7.5. Распределение тормозных моментов
между мостами автомобиля
Момент Мт.м, который может развивать тормозной механизм, пропорцио-
нален усилию нажатия на педаль тормоза Fn.t: Л£т.и = Fn.T . Коэффициен-
ты пропорциональности для тормозных механизмов передних и задних
колес обычно различны, поэтому отличаются и развиваемые ими моменты.
Степень различия оценивается коэффициентом распределения тормозных
моментов
Л Мт н,
Рт= —----777---• (7-24>
Т. N 1 + М Т1М 2
220
7. Тормозные свойства автомобиля
Коэффициент рт определяет относительную часть суммарного тормозного
момента AfTM = AfT.«i +-Мт.м2< развиваемого тормозными механизмами перед-
них колес.
Если в приводе тормозов не используются специальные регулирующие
устройства, то соотношение между моментами тормозных механизмов перед-
него и заднего мостов Мт.к j иМтм2 постоянно, т.е. Рт = conet. Однако возможно-
сти тормозных механизмов не всегда могут быть реализованы колесами автомо-
биля, так как продольная реакция дороги Дх не может Превосходить своего пре-
дельного значения по сцеплению, определяемого формулами (1.61) и (1.62).
Максимальный тормозной момент по сцеплению реализуется при Д. = О
и коэффициенте скольжения колес относительно дороги А = X* (см. рис. 1.17).
Значение определяется по формуле (1,69). Если после достижения равен-
ства = ^т<р продолжать увеличивать усилие на педали тормоза, то произой-
дет быстрое снижение угловой скорости колеса, и оно заблокируется тормозом.
При блокировке задних колес незначительная боковая сила может вы-
звать занос заднего моста и автомобиль начнет разворачиваться в плоскости
дороги, создавая аварийную ситуацию. Поэтому блокировка задних колес
недопустима. Блокировка передних колес приводит к потере управляемости.
В этом случае автомобиль не реагирует на повороты рулевого колеса, а про-
должает прямолинейное движение в сторону вектора скорости центра масс.
Очевидно, что блокировка передних колес менее опасна, чем блокировка зад-
них. Эффективность торможения при блокировке колес значительно снижа-
ется в связи с уменьшением <рх (см. рис. 1.17).
Наибольшее замедление при торможении обеспечивается, если колеса пе-
реднего и заднего мостов одновременно достигают условий предела блоки-
ровки, т.е. когда AfT,Mi = и Мт,м2 = при Х = X*. Это возможно лишь
при условии строгого согласования соотношений между моментами AfTM(
и нормальными реакциями дороги Д^. Прирт = const это условие не выполня-
ется, так как при торможении происходит перераспределение нормальных
реакций Д* и Д^. Для определения Да и Дд можно воспользоваться формула-
ми (2.90) и (2.91), заменив в них знак приведенной силы инерции F в на проти-
воположный (при торможении движение замедленное, а формулы получены
для ускоренного движения). Согласно этим формулам, сила^д при торможе-
нии увеличивает нормальные реакции дороги на передние колеса и уменьша-
ет нормальные реакции на задние. Так как Д-i и постоянно изменяются, то
изменяются и моменты колес по сцеплению Мт(р.
Определим, как должен изменяться коэффициент рт, чтобы обеспечива-
лось оптимальное распределение тормозных моментов ЛГт1 и Мт2 между мос-
тами автомобиля. Пренебрежем сопротивлением качению в формулах (2.90)
и (2.91) и примем = Ле, а = 0. Тогда для двухосного автомобиля без прицепа
р ~Fie)
=---------л-----
7.5. Распределение тормозных моментов между мостами автомобиля
221
Для определения силы инерции воспользуемся уравнением (7.4), согласно
которому = 5n,MmM|arinM| = <pa.mBg4-Fw. В результате получаем значения
нормальных реакций, обеспечивающих условия достижения одновременной
блокировки колес:
(7.25)
L
(7.26)
L
Оценим величину перераспределения нормальных реакций при полном
использовании сцепных возможностей всех колес автомобиля. Нормальные
нагрузки на колеса неподвижного автомобиля на горизонтальной поверхно-
сти равны: Gj = Коэффициенты перераспределения нор-
мальных реакций найдем по формулам:
= 1-М* .
Gi (j ’ G2
Иэ этих выражений следует, что перераспределение нормальных реакций
в рассматриваемом случае зависит от координат центра масс Лс, llt 4 и коэф-
фициента сцепления <рх. Чем выше расположен центр масс автомобиля и чем
лучше дорожные условия, тем значительнее перераспределение нормальных
реакций. Значения Лй, Zj, 4 зависят от нагрузки автомобиля. Так, у грузового
автомобиля в снаряженном состоянии величина Zj значительно меньше, чем
при полной нагрузке, значение hc также снижается, но в гораздо меньшей
мере, 4eMZj. Поэтому величина^ У снаряженного автомобиля существенно
меньше, чем у груженого.
При <рх = ОД-6,7 коэффициенты перераспределения реакций при экстрен-
ном торможении достигают следующих значений: для легковых автомоби-
лей йи = 1,2-1,4; kjs = 0,6-0,8; для грузовых — = 1,4-1,6; = 0,6 0,8.
Подставим R,i в формулу (1.69)инайдем для данного случая моменты
по сцеплению колес с дорогой:
М„, = (7.27)
(7.28)
L
Выражения (7.27) и (7.28) позволяют определить соотношение тормозных
моментов, при котором достигается полное использование сцепных возмож-
ностей всех колес двухосного автомобиля. При одинаковых коэффициентах
сцепления всех колес с дорогой оптимальное распределение тормозных мо-
ментов обеспечивается, если они будут изменяться пропорционально нор-
мальным реакциям дороги, т.е. при выполнении условия
(7.29)
т.«2 ^г2
222
7. Тормозные свойства автомобиля
Принимая Мт ы1 = МТф1, Мт к2 = МтчЯ в формуле (7.24), найдем оптималь-
ный коэффициент распределения тормозных моментов:
R _ ^2 4* ftcVx fij 20j
Pt* M1vl + Mtvi~ RA+Ra " L '
Из выражения (7.30) следует, что оптимальное значение коэффициента
0Т ф зависит от координат центра масс автомобиля 4» Ле» коэффициента сцеп-
ления фх и базы автомобиляL. Так как параметры 1$, Д. и <pz переменны, то0Тф
также должен быть переменным. Координаты Лй зависят от степени за-
грузки автомобиля, расположения груза в кузове или пассажиров в салоне.
Коэффициент сцепления <рх также изменяется в широких пределах (0,15-
0,80). В процессе торможения он может в различные моменты времени ока-
заться разным для всех тормозящих колес. Поэтому при 0Т = const экстрен-
ное торможение неизбежно приводит к блокировке каких-либо колес. Для
устойчивости движения при торможении более предпочтительна блокировка
передних колес. В связи с этим, согласно предписаниям Правил ЕЭК ООН№ 13,
первыми должны достигать условий блокировки колеса переднего моста при сле-
дующих интервалах изменения <рх: для легковых автомобилей фх = ОД 5-ОД;
для грузовых — фх = ОД 5-ОД Выполнение этих требований ставит задачу
обоснованного выбора значения коэффициента 0Т.
7.6. Снижение эффективности тормозной системы
при постоянном распределении тормозных моментов
Нагрузка автомобиля и дорожные условия изменяются в широких преде*1
л ах, поэтому в случае 0Т = const при экстренном торможении значительно
снижается эффективность тормозной системы. Это обусловлено тем, что рас-
пределение тормозных моментов между мостами не соответствует нормаль-
ным реакциям, изменяющимся во время торможения под действием силы
инерции Fj„, т.е. не выполняется условие, определяемое равенством (7.29).
Фактическое замедление автомобиля при торможении оказывается меньше
максимально возможного, определяемого по формуле (7.5), а тормозной путь
превышает значение, получаемое по формуле (7.19). Это обусловлено тем,
что при экстренном торможении колеса одного из мостов достигают цредела
блокировки, в то время как колеса другого моста еще не реализуют полно-
стью свои сцепные возможности. Дальнейшее увеличение давления в приводе
тормозных механизмов при этом не допускается. Выполнение этого требова-
ния необходимо, чтобы исключить блокировку колес и предотвратить воз-
можность потери управляемости и устойчивости автомобиля.
Определим предельное значение замедления автомобиля при экстренном
торможении в случае 0Т = conet. Значение 0, определим для автомобиля с пол-
ной нагрузкой по формуле (7.30), полагая в ней <рх = <р0:
+ (7.31)
7.6. Снижение эффект еностм тормозной системы 223
Выбор значения <р0 должен обеспечить выполнение требований Правил
ЕЭК ООН № 13. Для этого необходимо осенить его влияние на замедление ав-
томобиля в рассматриваемом случае.
Для определения замедления используем уравнение (7.3), пренебрегая со-
противлением воздуха и полагая бп.н = 1:
мтф+м,, (782)
тагк
где М1ф — суммарный момент тормозных механизмов передних и задних
колес:
тф = тф1 *" '“т.н/!
Мтф< — момент тормозных механизмов моста, колеса которого находятся на
пределе блокировки; — момент тормозных механизмов моста, колеса
которого не реализуют полностью сцепные возможности.
Значение согласно формуле (1.69), равно:
мТЩ - («₽Х - - <р*Я,л - МЦ,
TJ» Mfi — момент сопротивления качению колес 1-го моста.
На колеса, не достигшие предела блокировки, кроме момента также
действует момент сопротивления качению способствуя снижению значе-
ния М^, аналогично тому, как Mfl снижает МТф(. Поэтому при подстановке
значения Мт ф в формулу (7.32) моменты Mf, M/t, взаимно компенсируют-
ся. В-связи с этим при определении замедления автомобиля в рассматриваемом
случае ими можно пренебречь и использовать выражение (7.32) в следующем
виде:
(7.33)
m.ark
Момент MTtf в этом случае вычисляется по формуле
М^М^ + М^. (7.34)
где — момент предельной силы сцепления ,Влф( колес i-го моста относи-
тельно оси вращения колес.
Согласно выражению (1.62), значение jR^ равно:
(7.35)
где Нл — суммарная нормальная реакция дороги на колеса 1-го моста.
Искомый момент скпыК^ найдем по формуле
ЛГф[ =фЛ|Гк. (7.36)
Нормальные реакции дороги на колеса определим без учета сопротивле-
ния качению и сопротивления воздуха:
(7.37)
Li
(7.33)
ы=
224
7. Тормозные свойства автомобиля
Приведенная сила инерции автомобиля определяется по формуле
(2.70). Экстренное торможение осуществляется при отсоединенном двигате-
ле от трансмиссии. В этом случае коэффициент приведенной массы 6П м не
превышает величину 1,05, поэтому им можно пренебречь и силу инерции^
вычислять по упрощенной формуле:
FM=ma|aT|. (7.39)
Первыми могут достичь предела блокировки колеса переднего либо задне-
го моста. Рассмотрим каждый из этих случаев отдельно.
Первыми предела блокировки достигают колеса переднего моста. В этом
случае момент тормозных механизмов передних колес Мтм1 ограничен их
сцеплением с опорной поверхностью, а момент тормозных механизмов задних
колес не достигает предельного значения по сцеплению, т.е. ЛГтн1 = Мтф1;
AfTj*2 <AfT<f2. Соотношение между Л/т м1 и определяется выражением
(7.24). Используя это выражение, найдем зависимость между Л4т м2 и Л/Тч>1:
(7.40)
Рг
Принимая AfT<pi = Afvi, суммарный тормозной момент на всех колесах, со-
гласно выражению (7.34), найдем по формуле
MT, = Mvl/pT. (7.41)
Используя формулы (7.36) и (7.37), определим искомый момент А/Т<р:
(,М)
Подставим AfTe в формулу (7.33). После несложных преобразований полу-
чаем выражение для определения замедления автомобиля для случая, когда
первыми предела блокировки достигают колеса переднего моста:
Ы = 4>*g ? <7ЛЗ)
4 + Лг(<₽0-<Рх)
Для оценки снижения эффективности тормозной системы при постоянном
распределении тормозных моментов найдем соотношение между достигае-
мым в этом случае замедлением la?) и максимально возможным замедлением
(Отшх], получаемым при полном использовании сцепных возможностей всех
колес. Используя выражения (7.43) и (7.5), находим:
Knud 4 + МФо-Фх)'
Величину К„ называют коэффициентом эффективности тормозной си-
стемы при рт = const. При ф, <фо его значение меньше единицы. Следова-
тельно, полученные формулы (7.43) и (7.44) справедливы при фх <ф0.
Первыми предела блокировки достигают колеса заднего моста. В этом
случае = Л4т^й-
7.6. Снижение эффективности тормозной системы
225
Суммарный тормозной момент определяется аналогично предыдущему
случаю:
М^ = М^. (7.4Б)
После подстановки значения получаем:
Л1Тф — _ _ • (7.46)
РтЬ
Замедление при торможении в рассматриваемом случае найдем по формуле
Ы = <Рх«г-Т7^-----V (7.4 7)
G-ЛДфо-ф.)
Коэффициент эффективности тормозной системы
X, = J^L =------Ь------. (7.48)
Pim»| ii-ЛДфо-фх)
Так как Ка < 1, то очевидно, что формулы (7.47) и (7.48) справедливы при
<рх >Фо. Этот случай наиболее характерен для грузовых автомобилей и авто-
бусов, так как для них обычно принимают <р0 меньше, чем для легковых.
Формулы (7.31)-(7.48) получены для автомобиля полной массы тл. При
определении замедления автомобиля с измененной массой т* (например, для
снаряженного автомобиля) в формулы (7.48) и (7.47) вместо <р0 необходимо
подставить значение <pj, при котором колеса обоих мостов одновременно дос-
тигают предела блокировки, а также новые координаты центра масс £ и А*,
соответствующие массе т*. Значение фп вычисляют на основе формулы (7.31),
используярт, принятое для автомобиля полной массы, и координаты и А*.
В результате получаем следующую формулу:
<р«=Ёх£г£. (7.40)
Тормозной путь автомобиля при 0Т = const определяется по формуле
•»«(*.+<ЦИВ)+
(7.60)
На рис. 7.4, о и б показаны графики зависимостей замедления грузового
автомобиля|вт|, анарис. 7.6, а кб—тормозного пути в, от коэффициента сце-
пления при экстренных торможениях. На обоих рисунках использованы
одинаковые обозначения характеристик. Прямая линия 1 соответствует иде-
альной характеристике, определяемой зависимостью (7.5), которая соответст-
вует полному использованию сцепных возможностей всех колес автомобиля.
Характеристики 2 и 3 получены при 0Т = const. Кривые 2 относятся к автомо-
билю полной массы mt, а кривые 3 — к снаряженному автомобилю. Очевид-
но, что при Рт = const реальная характеристика замедления о, совпадает
«3». 3498
226
7. Тормозные свойства автомобиля
с идеальной только в одной точке при фх ? фо При всех остальных значениях фг
характеристики 2 и 3 проходят ниже идеальной. Следовательно, прирт = conet
эффективность тормозной системы автомобиля существенно снижается. Осо-
бенно значительное снижение | а? | происходит при торможении снаряженного
автомобиля в условиях хорошего сцепления колес с дорогой.
Рис, 7.4. Зависимости замедления | а, | грузового автомобиля от коэффициента сцепления фж t
а — при фо =0,3; о — про <ро =0,6; 1 — идеальная характеристика; 2 и 3 — характеристики
при = const (2 — автомобиль полной массы; 3 — снаряженный автомобиль)
Графики на рис. 7.4, айна рис. 7.5, а получены при фо = 0,3, а на рис. 7.4, б
и на рис. 7.5, б— при фо = 0,6 для автомобиля полной массы. Согласно Прави-
лам ЕЭК ООН № 18, у грузовых автомобилей первыми должны достигать пре-
дела блокировки передние колеса при фх = ОД 5-0,30. Приведенные графики
показывают, что для выполнения этих требований во всем диапазоне измене-
ния массы автомобиля значение рт необходимо выбирать для снаряженного
состояния при фф = ОД Однако при этом снижается замедление и возрастает
тормозной путь з, автомобиля полной массы при низких значениях коэффи-
циента сцепления (см. рис. 7.4, б и 7.5, б).
Рис. 7.S. Зависимости тормозного пути вт от коэффициента сцепления
(обозначения соответствуют рис. 7.4)
7.6. Снижение эффективности тормозной системы
227
Из рис. 7.4, б видно, что с уменьшением полной массы автомобиля снижа-
ется по сравнению с фо> В приведенном примере при фо = 0,6 для снаряженно-
го автомобиля получаем фо = 0,29. Если выбор рг осуществить для автомобиля
полной массы при фо = 0,3, то у снаряженного автомобиля в любых дорожных
условиях первыми будут блокироваться задние колеса (см. рис. 7.4, а) и его
тормозной путь существенно увеличится (рис. 7.5, а). Тормозной зре путь ав-
томобиля полной массы при высоких значениях <рх будет больше, чем в реко-
мендуемом варианте, а на скользкой дороге, наоборот, меньше.
Таким образом, при 0Т = const в любом случае потенциальные тормозные
свойства автомобиля в полной мере не реализуются.
На рис. 7.6 показаны графики оптимального регулирования коэффициен-
та распределения тормозных моментов Рт. Характеристика 1 соответствует
автомобилю полной массы, а характеристика 2 — снаряженному автомоби-
лю. Построение этих характеристик осуществлено по формуле (7.30).
Рис. 7Л. Зависимости оптимального вначеяия коэффициента распределения тормовных
моментов ртф от коэффициента сцепления: 1 — автомобиль полной массы; 2 — снаряжен-
ный автомобиль
Прн построении характеристик, приведенных на рис. 7.4, 7.5 и 7.6, при-
няты следующие значения параметров: Z = 8,96 м; If =2,642 м; 4 = 1,808 м;
he =1,7 м; £ =1,938 м; 1$ *=2/312 м; hg = 1,1 м; т, =14950 кг; у0 = 60 км/ч
(16,67 м/с); ta = 0£ с; = 0,4с.
На рис. 7.7, а и б приведены графики характеристик |<?т| - /(<рх) и = 7(<рх)
для легкового автомобиля. Обозначения на этих графиках такие же, как
и на предыдущих. Приняты следующие параметры: L = 2,49 м; 4 = 1,245 м;
4 = 1,245 м; hg =0,81 м; % = 1,06 м; $ - 1,44 м; h* =0,62 м; = 1525 кг; и0 =
= 80 км/ч (22,22 м/с); = 0,2 с; tE =0,4с. Выборрт осуществлен для автомо-
биля полной массы при фо = ОД Как видно из рис. 7.7, а, при экстренном тор-
можении легкового автомобиля с полной нагрузкой практически в любых
дорожных условиях первыми условий блокировки будут достигать передние
колеса. Следовательно, требования Правил ЕЭК ООН № 18 в этом случае бу-
дут выполняться. Однако у снаряженного легкового автомобиля нагрузка на
226
7. Тормозные свойства автомобиля
Рис. 7.7. Зависимости замедления |дт| (а) и тормозного пути в, (б) легкового автомобиля
от коэффициента сцепления : 1 — идеальные характеристики; 2 — автомобиль полной
массы; 3 — снаряженный автомобиль
задние колеса существенно ниже по сравнению с нагрузкой при полной мас-
се т.- В этом случае в хороших дорожных условиях при <рх = 0,6-0,8 первыми
будут блокироваться задние колеса, что может привести к заносу автомобиля
и потере устойчивости его прямолинейного движения.
Проведенный анализ подтверждает необходимость и целесообразность регу-
лирования тормозных моментов в соответствии с выражениями (7.29) и (7.30).
Эффективность тормозной системы уменьшается в процессе эксплуатации.
Поэтому правилами дорожного движения установлены требования проверки
наибольшего допустимого тормозного пути 6^,, и наименьшего допустимого
замедления для автомобилей в снаряженном состоянии при торможе-
нии с начальной скоростью 40 км/ч на горизонтальном участке дороги с ров-
ным, сухим, чистым асфальтобетонным покрытием. Эти значения, регламен-
тируемые ГОСТ 25478-91, приведены в табл. 7.4. Они значительно отличаются
от нормативных показателей, приведенных в табл. 7.1 и используемых в кон-
структорской практике при создании и испытаниях новых автомобилей.
Нормативы, приведенные в табл. 7.4, применяются при эксплуатационной
проверке технического состояния автомобилей, производство которых осу-
ществляется начиная с 1981 г.
При эксплуатационных испытаниях или при проведении экспертизы
дорожно-транспортного происшествия профессор Д.П. Великанов предла-
гает использовать-следующие формулы для оценки показателей тормозных
свойств автомобиля:
®т.тст — Фх (7.61)
8т ® u0(t, +0,6tB) +Ofik,>vl/($xg); (7.62)
вООт = вт+о0Гр, (7.53)
где k, — коэффициент эффективности торможения, который учитывает
степень использования теоретически возможной эффективности тормозной
системы.
7.7. Эффективность запасной тормозной системы
229
Таблица 7.4
Нормативы эффективности рабочей тормоввой системы
при проверке технического состояния АТС
АлтотрлБспортпые средства Категория Усилие на падали, Н ТормсаиоЯ путь*т»«ж. “ Замедленна втейл> в/®8
Пассажирские Afi 500 12,2 6,8
автомобили, Afj 700 13,6 6,8
автобусы м3 700 16,8 6,7
Пассажирские Mi 500 18,6 5,9
автопоезда Mt 700 16,2 6.7
Mg 700 18,4 б,б
Грузовые . N1 700 16,1 5,7
автомобили Xa 700 17,8 5,7
Ns 700 16,0 6,2
Грузовые 700 17,7 4,6
автопоезда Xi 700 18,8 5,5
Xg 700 18,4 5,5
Нн основании опытных данных принимают: для легковых автомобилей
А» = 1,1-1,2; для грузовых автомобилей и автобусов А, - 1,3-1,4 При<рх <0,3-0,4
можно принимать А, - 1 для всех автомобилей, так как в этом случае перерас-
пределение нормальных, реакций невелико.
7.7. Эффективность запасной тормозной системы
В качестве запасной тормозной системы можно использовать стояночную
тормозную систему, либо один из контуров двухконтурной рабочей тормоз-
ной системы.
Рассмотрим два варианта расположения тормозных механизмов запасной
тормозной системы: в задних колесах и в передних.
Тормозные механизмы запасной тормозной системы расположены в зад-
них колесах. Для определения замедления используем формулу (7.33). Мо-
мент AfTip в рассматриваемом варианте равен моменту предельной силы
сцепления колес заднего моста поэтому его значение определяется по
формуле
Л^т1> = М,<2=Вх2^к“ФхКй''к- (7.В4)
Подставим значение R# из формулы (7.3В), учитывая при этом формулу
(7.39). В результате получим:
(7Ю)
230
7. Тормозные свойства автомобиля
Подставим Мт* в формулу (7.38). После несложных преобразований полу-
чаем выражение для определения замедления автомобиля при торможении
только задних колес:
|в,| = ФяЯ—4—• (7.56)
L + ft<.<px
Сравнивая между собой |о,г| и | л-maxi, определим коэффициент эффективно-
сти запасной тормозной системы:
К, - -Ь1_ 11
lOmail Ь + М>/
(7.57)
Ив выражений (7 56) и (7.57) следует, что чек больше и меньше hc, тем
эффективнее торможение запасной тормозной системой, использующей тор-
мозные механизмы задних колес. У грузовых автомобилей с полной нагрузкой
продольная координата центра масс^ значительно больше, чем у снаряженно-
го. Вертикальная координата центра масс hc также увеличивается с возрас-
танием нагрузки, но в меньшей мере, чем^. Поэтому для грузового автомоби-
ля полной массы тд нормативное требование Правил ЕЭК ООН № 18 на
величину установившегося замедления выполняется практически при
всех значениях <рх, а для снаряженного автомобиля может не выполняться.
У легковых автомобилей положение аналогичное, однако может проявляться
в меньшей мере, особенно если координаты и Лс изменяются в небольших
пределах. Нормативные значения a1Vf.T для запасной тормозной системы
приведены в табл. 7.2.
Тормозные механизмы запасной тормозной системы расположены в пе-
редних колесах. Момент Л/,ф в этом случае определяется по формуле
Af“ Afк = <рхВ11Гк.
После подстановки значения/?д из формулы (7.87) получаем:
(7.5В)
Замедление находим по формуле
. (7.59)
£-Лсфх
а коэффициент эффективности — по формуле
= . (7.60)
У грузовых автомобилей полной массы координата значительно мень-
ше, чем в снаряженном состоянии, поэтому в последнем случае нормативное
требование на величину установившегося замедления выполняется все-
гда, а при полной нагрузке часто не выполняется. У легковых автомобилей
нормативное значение достигается практически всегда.
7.8, Тормозной момент стояночной тормозной системы 231
Таким образом, наилучший вариант расположения тормозных механиз-
мов запасной тормозной системы — в колесах переднего моста.
На рис. 7.8, а показаны характеристики замедления при экстренном тор-
можении грузового автомобиля запасной тормозной системой. Использова-
ны те же параметры автомобиля, что и при построении графиков на рис. 7.4.
Кривые 1 й 3 изображают характеристики замедления при использовании
тормозных механизмов передних колес, а кривые 2 и 4 — задних колес. Ха-
рактеристики 1 и 2 соответствуют автомобилю полной массы т*, а характе-
ристики 3 и 4 — снаряженному автомобилю. В приведенном примере для
автомобиля с полной нагрузкой более эффективны тормозные механизмы
задних колес, а для снаряженного автомобиля, наоборот, тормозные меха-
низмы передних колес. Однако при любом варианте расположения тормоз-
ных механизмов в данном случае нормативное значение установившегося
замедления отусг £2,2 м/с2 достигается.
Рис. 7.8. Зависимости замедлевил | ат | грУмвого (а) и легкового (б) автомобилей от коэффи-
циента сцепления при торможении запаской тормозной системой: 1, 2 — автомобиль
полной массы; 3,4 — снаряженный автомобиль; 1,3 — торможение нередкими тормоэвыми
механизмами; 2,4 — торможение задними тормозными механизмами
На рис. 7.8, б приведены аналогичные характеристики для легкового
автомобиля с параметрами, при которых построены графики на рис. 7.7.
Очевидно, что для легковых автомобилей при любой нагрузке торможение
передними тормозными механизмами значительно эффективнее, чем задни-
ми. В приведенном примере при <рх = 0,7 тормозные механизмы задних колес
обеспечивают величину замедления при торможении автомобиля с полной
нагрузкой 2,8 м/с2, а снаряженного автомобиля 2,47 м/с2. Нормативное же
значение установившегося замедленияПт уп £ 2,8 м/с2. Следовательно, задние
тормозные механизмы не обеспечивают выполнения нормативных требований.
7.8. Тормозной момент стояночной тормозной системы
Стояночные тормоза должны надежно удерживать автомобиль в непод-
вижном состоянии на уклоне Л^. Значения регламентированы в зави-
симости от типа автомобиля (см. параграф 7.2).
232
7. Тормозные свойства автомобиля
Тормозные механизмы стояночной тормозной системы могут распола-
гаться на одном из валов трансмиссии, имеющем постоянную связь с каки-
ми-либо колесами автомобиля, либо непосредственно в колесах. В общем
случав суммарный момент тормозных механизмов стояночной тормозной
системы должен соответствовать неравенству
jy > Птр.
(7.61)
где игр.в.т,1]т11.с.т — передаточное число и КПД участка трансмиссии от стоя-
ночного тормоза до колес.
При использовании в качестве стояночных тормозов тормозных механиз-
мов рабочей тормозной системы параметры Щ.р.с.т и Tl¥p.c.r в формуле (7.61) ис-
ключаются.
7.9. Регулирование тормозных моментов
Для повышения эффективности функционирования рабочей тормозной
системы применяют устройства автоматического регулирования тормозных
моментов. Существует два типа устройств: регуляторы тормозных моментов
и антиблокировочные системы.
Регулятор тормозных моментов (РТМ) представляет собой автомати-
ческий регулятор без обратной связи, устанавливаемый в контуре привода
тормозных механизмов задних колес. Он позволяет изменять Р, в зависимости
от нагрузки автомобиля и интенсивности торможения таким образом, чтобы
первыми блокировались передние колеса. Тормозные моменты пропорцио-
нальны давлениям в контурах приводов тормозных механизмов A'fT sfl =
Л/Т.и2 = АгРг- У тормозных систем без регуляторов р - р2 (прямая линия 1 на
рис. 7.9, и), поэтому рт = const. Оптимальное соотношение между рпр обес-
печивается при выполнении условия (7.30). Однако оптимальная характери-
стика ра - /(а) практически недостижима. Рабочая характеристика РТМ
представляет собой зависимость р = /(а)» пРи которой первыми достигают
предела блокировки передние колеса автомобиля.
Для построения оптимальной характеристики =* /(а) необходимо опре-
делить моменты тормозных механизмов передних и задних колес по сцепле-
нию с опорной поверхностью и М1ф2 и вычислить соответствующие им
значения давлений в контурах приводов тормозных механизмов р и р. Мо-
менты Л/Тф1 и Л/Тф2 вычисляют по формулам (7.27) и (7.20), варьируя коэффи-
циент сцепления в пределах 0,1-0,8. Коэффициентом сопротивления каче-
нию f при этом можно пренебречь. Вычисление Л£гф1 и производится при
различных уровнях нагрузки, характеризуемых коэффициентом нагрузкиka.
Для автомобиля в снаряженном состоянии А’,, =0, а при полной нагрузке
kK = 1. При изменении нагрузки изменяются координаты центра масс^, t2, hc,
чго учитывается при вычислениях по формулам (7.27) и (7.28).
Рис. 7.9. Характеристики регуляторов тормозных моментов: а — регулятор с ограничением
давления; б — регулятор лучевого типа; --- — рабочие;---------оптимальные; J —
бм регуляторе; 5-7 — регуляторные; 2-4 — идеальные; 2 и 5 — для автомобиля с полной
нагрузкой; 3 и 6 — при нагрузке 50 %; 4 и 7 — для снаряженного автомобиля
После определения характеристик ЛГ1ф1 = /(фЛ,Ан), МТфй = f(^K,kxy опреде-
ляют характеристики давлений в контурах:
Pi = (7.62)
Pz — ^тца/^2’ (7.63)
где fej, k% — коэффициенты передачи, характеризующие преобразующие
свойства приводов тормозных механизмов соответственно передних и задних
колес.
Значения этих коэффициентов определяют по формулам:
М ,
= -“r.Hlmax. (7.64)
Ртах
(7.65>
Рт
где М7 .„i пищ — максимальное расчетное значение суммарного момента тор-
мозных механизмов передних колес; — максимальное расчетное давле-
ние привода.
Для гидравлического привода обычно принимают = 10 МПа, а для
пневматического = 1,0 МПа. Значение рт вычисляют по формуле (7.30)
ПРИ фх = фо.
Тормозной момент Л1Т.м1тлк определяют по формуле
Мт.х11та> - . (7.66)
Li
Принимают сртм = 0,75-0Д5 без усилителя и фтпУ =0,85-1,0 при наличии
усилителя.
234
7. Тормозные свойства автомобиля
На рис. 7.9 оптимальные характеристики ft = /(ft) изображены штрихо-
выми линиями. Рабочие характеристики РТМ получают посредством кусоч-
но-линейной аппроксимации оптимальных характеристик.
Если оптимальная характеристика ft ° /(ft) проходит выше характери-
стики ft = ft, то первыми блокируются передние колеса и РТМ не включает-
ся. При интенсивном торможении нормальная реакция дороги на задние
колеса Ей резко уменьшается и при А > ft давление ft начинает превышать
необходимое значение. Тогда включается РТМ и снижает давление ft по срав-
нению с а (линии 5, 6, 7 на рис. 7.9, о). Давление включения РТМ р$,
зависит от уровня нагрузки автомобиля. Информацию об изменении
РТМ получает на основе измерения деформации упругого элемента задней
подвески.
У грузовых автомобилей кривизна оптимальных характеристик ft =
значительно меньшая, чем у легковых. Поэтому на них наиболее часто ис-
пользуют РТМ лучевого типа (рис. 7.9, б). Характеристика лучевого РТМ
описывается линейной зависимостью ft = Oft, где а — коэффициент передачи
регулятора. Лучевой РТМ также реагирует на величину нагрузки автомоби-
ля. С уменьшением нагрузки а снижается.
В связи с отсутствием в РТМ обратной связи результат регулирования не
контролируется, поэтому при чрезмерном усилии на педали тормоза не ис-
ключена блокировка колес.
Акгпиблокировочная система (АБС) управления тормозными момента-
ми представляет собой систему автоматического регулирования с обратной
связью. Она получает информацию о характере движения колес, на основа-
нии которой определяется начало процесса блокирования и включается сис-
тема импульсного регулирования давления, которая уменьшает тормозной
момент и обеспечивает исключение блокировки колес. АБС поддерживает
среднее значение тормозного момента на уровне максимально возможного по
сцеплению колес с дорогой.
На рис. 7.10 показана функциональная
схема АБС. Она включает систему датчи-
ков для сбора информации о характери-
стиках процесса торможения, регулятор
давления (модулятор) и электронный блок
управления (ЭБУ). Микропроцессор ЭБУ
реализует в режиме реального времени ал-
горитм управления. Основная идея боль-
Рис. 7.10. Функциональная схема АБС:
1 — колесо автомобиля; 2 — рабочий
тормозной цилиндр; 3 — модулятор;
4 — источник энергии; б — главный
тормозной цилиндр; в — педаль тормо-
за; 7—электронный блок управления;
8 — датчик продольного ускорения ав-
томобиля; 9 — датчик угловой скоро-
сти колеса
шинства алгоритмов основана на том, что
при превышении скольжения, соответст-
вующего максимальному коэффициенту
сцепления, скорость вращения колеса рез-
ко уменьшается, поэтому в этот момент не-
обходимо кратковременно снизить давле-
ние в тормозном приводе. Для реализации
такого алгоритма используется информа-
7.9. Регулирование тормозных моментов 235
ция об угловых скоростях со* и замедлениях е» - dfbjdt всех колес и о скорости
автомобиля и,. Система датчиков обеспечивает измерение сц, и продольной со-
ставляющей ускорения автомобиляаХ1 направленной вдольосих (см. рис. 7.2).
Значение е* получают путем численного дифференцирования результатов
измерений cOg, а значение оа — численным интегрированием результатов из-
мерений ах. Вычисления выполняет микропроцессор ЭБУ.
Возможно применение алгоритма, в котором используется информация
о реализуемых колесами моментах сцепления с дорогой М9 и их производ-
ных по времени. Если коэффициент скольжения Л, начинает превышать Х*т,
при котором (рл = фхтвя»то происходит заметное падение в связи с уменьше-
нием коэффициента сцепления фя (см. рис. 1.17). В результате производная
момента сцепления становится отрицательной и ее можно использовать в ка-
честве сигнала для снижения давления в приводе тормозного механизма. В ка-
честве используется реактивный момент тормозного механизма, воспри-
нимаемый несущим элементом конструкции, например суппортом тормоза
или продольной штангой подвески. Такой алгоритм использовала компания
«Боинг» в АБС своих самолетов. В продольной штанге, соединяющей колесо
с корпусом самолета, установлен датчик, измеряющий силу сцепления коле-
са с опорной поверхностью, т.е. продольную реакцию 74-
Рассмотрим процесс взаимодействия тормозящего колеса с корпусом ав-
томобиля, тормозным механизмом и опорной поверхностью. На рис. 7.11
показана система сил и моментов, действующих на колесо при его прямоли-
нейном движении, без учета поперечных сил.
В параграфе 1.5 получено дифференциальное уравнение плоского движе-
ния тормозящего колеса:
(7.67)
at
где JK — момент инерции колеса относительно оси вращения; — угловая
скорость вращения колеса; AfT K — момент тормозного механизма; М/ —
момент сопротивления качению колеса; Fs — толкающая сила корпуса авто-
мобиля, учитывающая также силу инерции
колеса в поступательном переносном дви-
жении; г^о — радиус качения колеса.
Из условий динамического равновесия ко-
леса, согласно схеме на рис. 7.11, Fx=*—Rx,
где 74 — продольная реакция опорной по-
верхности на колесо. С другой стороны, си-
ла Д уравновешивается реакцией колеса,
обусловленной воздействием на него корпу-
са автомобиля и представляющей собой тор-
мозную силу колеса Ft, приложенную в его
центре; Fx - -Д. Следовательно, Д = Й,.
Рис. 7.11. Схема сил и моментов,
действующих на тормозящее колесо
236
7. Тормозные свойства автомобиля
Максимальное значение продольной реакции Кгщо ограничено сцеплени-
ем колеса с опорной поверхностью, поэтому силы Д и Д также ограничены по
величине. Реакцияпредставляет собой предельную силу сцепления ко-
леса jR^ и, согласно выражению (1.62), равна
= ср,/?,, (7.68)
где <рх — коэффициент продольного сцепления колеса с опорной поверхно-
стью; Rt — нормальная реакция опорной поверхности на колесо.
Значение/?^ зависит от многочисленных
факторов, прежде всего от типа дорожного
покрытия и его состояния (сухое, мокрое,
покрытое льдом, неровности микропрофи-
ля, выбоины и т.д.), а также от интенсивно-
сти торможения. В конкретных дорожных
условиях наибольшее влияние на величи-
ну Яур оказывают нормальная реакция Я,
И коэффициент скольжения колеса А.т.
Отношение Rx/R, называют удельной
продольной реакцией и обозначают уйх. На
рис. 7.12 показан график, отображающий
характер зависимости Yr, от коэффициен-
та скольжения колеса Хт. Коэффициент X,
учитывает упругое и внешнее скольжение
шины и вычисляется по формуле
Рис. 7.12. Зависимость удельных
продольной уд, и поперечной
реакций от коэффициента
скольжения при торможении
Хг=£ь = £1ь1£1й.,
V* VR
(7.69)
где vt — результирующая скорость упругого и внешнего скольжения колеса;
рк — действительная скорость колеса (скорость центра колеса); ико — теоре-
тическая скорость колеса (без учета скольжения):
“ юкгкО-
(7.70)
Пренебрегая влиянием колебаний подрессоренных и неподрессоренных
масс автомобиля, возникающих вследствие неровностей дороги, примем рк
равной скорости автомобиля: ук = иа. Тогда формулу (7.69) с учетом выраже-
ния (7.70) представим в виде
Хт - ~°Уко
Од
(7.71)
Увеличение тормозного момента AfT.H вначале сопровождается постепен-
ным возрастанием упругого скольжения и практически линейной зависимо-
стью между уДх и X,. Затем на отдельных площадках контакта начинает
возникать внешнее скольжение, что приводит к нарушению линейной зави-
симости. При некотором значении коэффициента скольжения Хт = X*t удель-
7.9. Регулирование тормозных моментов
237
ная продольная реакция у^ достигает максимума. Дальнейшее увеличение
X, обусловлено внешним скольжением и сопровождается снижением Удх.
Угловая скорость вращения колеса при этом быстро падает, и в итоге колесо
блокируется тормозным механизмом и передвигается юзом.
Максимальное значение удельной продольной реакции (Уй«)пих называют
максимальным коэффициентом продольного сцепления колеса с дорогой
и обозначают <piniax. При полном скольжении (юзе колеса), когда Хт = 1, коэф-
фициент сцепления обозначается (см. рис. 1.17). Значение ф^ меньше,
чем фЛ1ПВХ, что обусловлено снижением сил трения при увеличении скорости
скольжения шины относительно опорной поверхности.
Кроме сил и моментов, показанных на рис. 7.11, на колесо может действо-
вать поперечная сила Fv, которая при недостаточном сцеплении приводит
к боковому скольжению (заносу) колеса. При Хт > Х*т способность шины про-
тивостоять возникновению бокового скольжения значительно снижается.
Поперечная сила Fv уравновешивается поперечной реакцией опорной по-
верхности на колесо)^. Отношение называют удельной поперечной ре-
акцией и обозначают уд^. Изменение yR]/ в процессе торможения характеризу-
ет предельное эначение поперечной реакции Если превысит Rw, нач-
нется боковое скольжение колеса.
На рис. 7.12 показан график, отображающий .зависимость между и ко-
эффициентом продольного скольжения Хт тормозящего колеса. С увеличе-
нием Хт под действием тормозного момента Л/Т.и происходит интенсивное
падение у^. При Хт < Х*т эначение удг достаточно велико и колесо успешно
противодействует возникновению бокового заноса. У блокированного тормо-
зом колеса при сравнительно небольшой поперечной силе Fv может возник-
нуть боковое скольжение.
Для осуществления эффективного замед-
ления, сокращения тормозного пути и обеспе-
чения прн этом устойчивого и управляемого
движения автомобиля тормозная система долж-
на исключать возможность блокировки колес,
а процесс торможения должен происходить при
скольжении колес, близком к оптимальному,
соответствующему коэффициенту сцепления
фхших’
На величину коэффициентов сцепления
Фхшы и Ф»в существенное влияние оказывают
тип дорожного покрытия, его состояние н на-
чальная скорость автомобиля при торможе-
нии. На рис. 7.13 показаны графики зависимо-
стей удх = /(кг) для дороги с асфальтобетонным
□ОКрЫТИеМ. На СУХОМ ПОКРЫТИИ (у фхтех
достигается при = 0,1-0,2. При v$ - 30 км/ч
эначение находится в пределах 0,9-1,1,
Рис. 7.13. Зависимость удельной
продольной реакции от коэффи-
циента скольжения при торможе-
нии: 1 — на сухом асфальтобетоне;
2 — на мокром асфальтобетоне;
3 — на заснеженной и обледене-
лой поверхности
23В
7. Тормозные свойстм автомобиля
а при и0 = 100 км/ч — в пределах 0,7-0,8. При блокировке колеса оказы-
вается меньше <рхпмхна2О-ЗО %.Мокрое покрытие и наличие водяной пленки
значительно снижают коэффициенты сцепления. Значения <рх в зависимости
от толщины водяной пленки и скорости автомобиля приведены в табл. 1.3.
Еще большее снижение <рхш<х и <рхв происходит на заснеженном и обледене-
лом покрытии.
Ив рис. 7.11 следует, что силы Д. иЁ. образуют пару, момент которой назо-
вем моментам силы сцепления и обозначим
^Ях — ~ (7.72)
С учетом введенного обозначения уравнение (7.67) принимает вид
= ~{М,м +Mf-MRr). (7.73)
at
Если сумма моментов в скобках положительна, вращение колеса будет за-
медленное, т.е. da^/dt <0, а если отрицательна, то вращение колеса ускорен-
ное и do^/dt >0. Кроме моментов М,.м, Мд, Mg* на изменение оказывает
влияние снижающаяся скорость автомобиля при торможении, что также не-
обходимо учитывать в алгоритме АБС.
При экстренном торможении момент М{ значительно меньше моментов
Мт в и ЛГл*, поэтому для упрощения анализа исключим Mf из уравнения
(7.73):
(7.74)
at
Значение тормозного момента Л/т м определяется усилием нажатия на пе-
даль тормоза
— ^Т.п-^П.Т’
где Лтд — коэффициент пропорциональности, определяемый параметрами
тормозного привода; Гп.т — усилие на педали тормоза.
Момент Мд* зависит от изменения продольной реакции Rx в процессе тор-
можения. Используя график зависимости yRx- можно построить гра-
фик функции Mfo. = /(Хт) для даннЬго значения нормальной реакции В,:
Мд* = (7.75)
На рис. 7.14 представлен график данной функции. Используя этот гра-
фик, рассмотрим взаимодействие моментов к М1м и их влияние на про-
цесс качения колеса при торможении. В начальный момент торможения
AfTiM >МЛе, поэтому угловое ускорение dca^/dt <0, угловая скорость колеса
уменьшается, а скольжение возрастает (к, увеличивается). Изменение тор-
мозного момента в начальный период торможения показано штриховой ли-
нией. В этот период происходит в основном упругое скольжение колеса. При
дальнейшем увеличении тормозного момента Мт-(1 на участке характеристи-
ки 1-2 начинается интенсивное увеличение внешнего скольжения, особенно
7.9. Регулирование тормозных моментов 239
после того, как X, окажется больше и начнется снижение Мд*. Поэтому
система автоматического управления торможением должна уменьшить тор-
мозной момент (участок 2-4 характеристики Мт,м). В точке 3 Мгм = М^, по-
этому угловое ускорение колеса равно нулю, а на участке 3-4 начинается
разгон колеса, так как Мдх оказывается больше AfT M. Некоторое время тор-
мозной момент удерживается на постоянном уровне (участок 4-5), при кото-
ром продолжается разгон колеса и уменьшается его скольжение до оптималь-
ного уровня, соответствующего коэффициенту скольжения Хт =Х.*Т, После
этого тормозной момент необходимо увеличить с тем, чтобы прекратить раз-
гон колеса и поддерживать величину скольжения на оптимальном уровне.
В точке 5 начинается увеличение тормозного момента, а в точке 6 разгон ко-
леса прекращается. На участке 6-1 JtfTiK > поэтому начинается замедле-
ние колеса. Участок 1-2 обычно выполняют горизонтальным. В дальнейшем
цикл регулирования тормозного момента повторяется.
Рис. 7.14. Изменение моментов МГ1М и Мв процессе работы АБС
Регулирование тормозного момента в АБС обеспечивается модулятором
давления, представляющим собой Электромагнитный клапан, который под-
держивает необходимый уровень давления в рабочих тормозных цилиндрах
при экстренном торможении независимо от давления, задаваемого главным
тормозным цилиндром (см. рис. 7.10).
Рассмотрим подробнее процесс управления торможением посредством
АБС. На рис. 7.16 показаны графики изменения скоростей автомобиля и за-
тормаживаемого колеса, углового ускорения колеса е* и давления р в рабо-
чем тормозном цилиндре. Примем следующие обозначения: и. — скорость
автомобиля; — эталонная скорость колеса, соответствующая эталонному
значению коэффициента скольясения А.Т1, = А^; ик,ц — пороговое значение
скорости колеса, соответствующее пороговому значению коэффициента
скольжения Хт = Хтп; — теоретическая скорость колеса, вычисляемая по
формуле (7.70).
240
7. Тормозные свойства автомобиля
Рис. 7.15. Процесс работы АБС: а — скорость колеса; б — угловое ускорение колеса;
а — давление в рабочем тормозном цилиндре
1 .
Значения скоростей окл и уК1В вычисляются по следующим формулам:
У*.» = (7.76)
^к.п = “ ^-т-г) “ Юк.пГк> (7.77)
где <0цд — эталонная угловая скорость вращения колеса; о^.п — пороговая уг-
ловая скорость.
Значения и определяются на основе формул (7.76) и (7.77):
(7.78)
'к
(7.79)
7.9. Регулирование тормозных моментов 241
Отметим три пороговых уровня углового ускорения колеса: ЕцЛ — ниж-
ний; £*., — верхний; — промежуточный (рис. 7.15,6). Разделим фрагмент
представленного цикла управления торможением колеса на девять времен-
ных интервалов и проанализируем поведение системы в каждом из этих ин-
тервалов.
Интервал 1 соответствует начальному этапу торможения. Нарастающее
давление р(рис. 7.15, е) приводит к увеличению тормозного момента, вслед-
ствие чего происходит падение скорости автомобиля и скорости колеса ик0.
Замедление колеса постепенно возрастает и в конце интервала достигает
нижнего порогового значения EKJ[. Модулятор АБС прерывает рост давления
и в течение небольшого интервала 2 поддерживает его на постоянном уровне.
Замедление колеса продолжает нарастать, что нежелательно. Однако при вы-
соких значениях коэффициента сцепления это необходимо для исключения
помех, обусловленных переходным процессом и влиянием колебаний подрес-
соренных и неподрессоренных масс автомобиля. После снижения скорости
колеса ниже порога допустимого скольжения, определяемого по значению
скорости vK.D, модулятор в течение интервала 3 сбрасывает давление до неко-
торого уровня и поддерживает его постоянным в течение интервала 4. В
третьем временном интервале и в начале четвертого замедление колеса умень-
шается, однако скорость ик0 продолжает падать и скольжение колеса увели-
чивается. В заключительной фазе интервала 4 колесо начинает разгоняться
и скорость его возрастает. В конце интервала 4 угловое ускорение колеса дос-
тигает верхнего порога ек.,, поэтому модулятор начинает подъем давления.
Это приводит к прекращению роста Ускорения в интервале 5 и к последующе-
му его уменьшению. Поэтому на некоторое время (интервал 6) задерживается
нарастание давления, и после достижения промежуточного порогового зна-
чения ускорения Ек.п модулятор начинает медленно увеличивать давление
(интервал 7). В результате начинается замедленное вращение колеса, сколь-
жение увеличивается и скорость колеса приближается к эталонной скоро-
сти . После достижения нижнего порогового значения ускорения Ец^ опять
начинается сброс давления (интервал 5) и формируется следующий цикл
управления.
Каждый последующий цикл регулирования давления включает три фазы:
фазу нарастания давления, фазу спада давления н фазу выдержки постоян-
ного давления. Частота пульсации давления около 10 Гц.
В результате автоматического управления измененнем давления в рабо-
чем тормозном цилиндре скорость колеса колеблется вокруг эталонной
скорости и поддерживается оптимальный уровень скольжения колеса,
при котором достигается наилучшее его сцепление с опорной, поверхностью.
При этом уменьшается тормозной путь, так как коэффициент сцепления фх
изменяется в узких пределах, приближаясь к <рх|ых. Но самое главное пре-
имущество АБС состоит в том, что она предотвращает блокировку колес авто-
мобиля и вследствие этого обеспечивает надежную управляемость и устойчи-
вость автомобиля при торможении.
242
7. Тормозные свойства автомобиля
В случае большого момента .инерции колеса, малого коэффициента сцеп-
ления и медленного нарастания давления в рабочем тормозном цилиндре (ос-
торожное начальное торможение, например на льду) замедление колеса
будет небольшим и АБС может на него не среагировать. В результате колесо
заблокируется. В этом случае АБС должна обеспечить процесс регулирова-
ния по величине скольжения колеса.
При торможении в условиях, когда сцепление левых и правых колес зна-
чительно различается (сухой асфальтобетон и обледенелая обочина), раз-
ность продольных реакций создает вращающий момент, который стремится
развернуть автомобиль вокруг его вертикальной оси, проходящей через центр
масс. Для уменьшения вероятности разворота и последующего заноса задних
колес разработано множество вариантов исполнения АБС с различным коли-
чеством и расположением датчиков и модуляторов и с различными порогами
настройки алгоритмов управления. Ознакомиться с ними можно в специаль-
ной литературе [1].
Учитывая существенное влияние АБС на активную безопасность автомо-
биля, директива 71/320 ЕЭС и Правила ЕЭК СЮН № 13 предписывают ее обя-
зательную установку на грузовые автомобили полной массой свыше 16 т,
прицепы и полуприцепы полной массой свыше Юти автобусы полной мас-
сой свыше 12 т. Предполагается распространить это требование и на автомо-
били полной массой свыше 3,5 т.
7.10. Особенности торможения автопоезда
Составим дифференциальные уравнения движения автомобиля-тягача к
прицепа при торможении. Они будут отличаться от уравнения (7.2) дополни-
тельным слагаемым F„p — усилием в сцепном устройстве автопоезда:
dv„ „ М+ + /т опч
—— -
s.
______AfBT.n/rK+mngy + ^«10 ^np trj Q. .
--_ --------------------------.
Переменные с индексом «а» относятся к автомобилю-тягачу, а с индексом
«п» — к прицепу. Предполагается, что колеса у них одинаковые и радиусы
качения ихгк не различаются.
При торможении автопоезда эффективность использования колесных
тормозных механизмов автомобиля-тягача и прицепа может быть различ-
ной, что обусловлено большим количеством факторов, в числе которых пе-
рераспределение нормальных реакций при торможении, значение коэффи-
циента распределения тормозных моментов 0Т, наличие регуляторов (РТМ
или АБС). Оценку степени использования моментов тормозных механиз-
мов автомобиля-тягача и прицепа дают удельные тормозные моменты
и 7т.п» представляющие собой отношения суммарных тормозных моментов
7,10. Особенности торможения аетопоеэда 243
' ....".............. ~ ' —.....f......~:
всех тормозящих колес Мклл и AfKiTл к полным массам соответственно авто-
мобиля-тягача и прицепа т^:
Ут.* = МКЛ.а/т,; (7.82)
Ут.П = МК.Т.С 1тп • (7.88)
Если считать, что сцепное устройство жесткое и не имеет зазоров, тоаа = ап.
Приравняем правые части уравнений (7.80) и (7.81), пренебрегая сопротив-
лением воздуха и полагая, что автопоезд движется по горизонтальной поверх-
ности. В этом случае у = f. Примем во внимание, что в первом приближении
при торможении БП МЛ “бп.НЛ1 • Подставляя значения Мк.т.в и Мг-П, выра-
женные из формул (7.82), (7.83), получаем
Из этого равенства находим
г = Тт1а~Тт.* (7.84)
mt+ma гк
Согласно формуле (7.84), взаимодействие автомобиля-тягача с прицепом
в процессе торможения зависит от соотношения ут.п и ут,а. Возможны три слу-
чая:
1) если уж.п =Ут.«, то ^пр =0 — торможение автомобиля-тягача и прицепа
происходит синхронно;
2) если ут.п > Ут.*» то /'пр >0, т.е. прицеп усиливает торможение автомоби-
ля-тягача;
3) если уТЛ < ут_в, то Fnp <0 — при торможении автопоезда прицеп накаты-
вается на автомобиль-тягач.
Случай 1 идеальный, но равенство у,.о =ут.« для всех случаев движения
в обычных тормозных системах недостижимо.
Случай 2 обеспечивает растяжку автопоезда при торможении, что исклю-
чает его складывание и способствует повышению устойчивости. Однако это
достигается за счет уменьшения интенсивности торможения автомобиля-тя-
гача, что снижает эффективность торможения автопоезда. Кроме того, воз-
можно полное скольжение колес прицепа, в результате чего прицеп начинает
сползать вбок и тянет за собой весь автопоезд.
В случае 3 может наступить потеря устойчивости в виде так называемого
складывания автопоезда.
К тормозным системам автопоездов предъявляются требования совмести-
мости их звеньев и допустимой асинхронности времени срабатывания тор-
мозных приводов звеньев. Совместимость звеньев автопоезда оценивается
коэффициентом совместимости
К. = уТ.п/уТ*. (7.86)
244
7. Тормозные свойства автомобиля
Асинхронность времени срабатывания тормозного привода тягача
и прицепа определяется по формуле
= кср.я — Аф.п I' { (
Значение Kt должно быть не менее 0,9, a Ztf — не более 0,3 с.
В случае многозвенного автопоезда параметры уТЛ и в формулах (7.85)
и (7.86) относятся к предыдущему звену, а утп и tt|IJ3 — к последующему.
7.11. Понятие об экспертизе дорожно-транспортного
происшествия
Дорожно-транспортные происшествия (ДТП) возникают в результате нару-
шения режимов движения транспортных средств. Их последствия — травмы
или гибель людей, повреждения транспортных средств и грузов, искусствен-
ных сооружений и пр. При возникновении ДТП проводится дорожно-транс-
портная экспертиза, целью которой является получение научно-обоснованной
характеристики происшествия и выяснение, имеет ли место несчастный слу-
чай или же ДТП явилось следствием неправильных действий его участников.
При проведении экспертизы на месте происшествия выполняют следую-
щие действия;
□ определяют скорость движения, тормозной и остановочный пути транс-
портных средств;
□ осуществляют опрос участников и очевидцев происшествия;
□ проводят следственный эксперимент по замеру максимального устано-
вившегося замедления аж.уст или коэффициента сцепления с помощью пере-
носных приборов.
Рассмотрим в качестве примера ДТП, результатом которого был наезд ав-
томобиля на пешехода (рис. 7.16). Автомобиль А двигался на расстоянии вп
от тротуара, на краю которого находился пешеход П. Когда между автомоби-
лем и пешеходом было расстояние а, пешеход начал движение по проезжей
части перпендикулярно направлению движения автомобиля. Положение ав-
томобиля и пешехода, соответствующее этому моменту, отмечено цифрой I.
Водитель затормозил, однако избежать наезда не смог. Автомобиль, ударив
пешехода (положение III), переместился еще на некоторое расстояние и оста-
новился (положение IV).
Рис. 7.16. Схема ДТП
7.11. Понятие об экспертизе дорожно-транспортного происшествия
245
На месте происшествия фиксируют длину следа юза шин по дороге пе-
ремещение автомобиля после его наезда на пешехода в , а также путь, прой-
денный пешеходом вп по проезжей части до наезда. Проведя следственный
эксперимент, замеряют диселерометром максимальное (установившееся) за-
медление или при помощи переносных приборов коэффициент сцепле-
ния в эоне происшествия. Если не определялось экспериментально, то
его вычисляют по формуле (7.51). Используя эти данные, определяют пара-
метры движения участников, необходимые для анализа ДТП.
Начальную скорость автомобиля и0 перед торможением определяют на ос-
нове формулы (7.15). Принимая = ®юз> находим
Уо = |#н - (7.87)
По аналогичной формуле определяется скорость автомобиля в момент его
наезда на пешехода
v = °т.у«|+0-5|<гт.уст|*я • (7.68)
Используя и0 и и*, найдем время движения автомобиля с момента, когда
водитель начал реагировать на пешехода, до момента наезда на него
«.-#₽+*. + ^4- (7.8©>
|®т.уст|
Время движения пешехода по проезжей части дороги до момента наезда
определяется по формуле
(7-00)
где — скорость пешехода (задается на основе опроса очевидцев).
Условие своевременности торможения автомобиля выражается неравен-
ством fB Если это условие не выполнено, то водитель действовал с запо-
зданием и автомобиль успел переместиться из положения I в положение II.
Чтобы установить, мог ли водитель избежать наезда на пешехода, если бы не
допустил этого запоздания, а действовал своевременно, определяют проме-
жуток времени, просроченный водителем:
(7.91)
За время t„,n автомобиль перемещается на расстояние а^п = fME. Соглас-
но рис. 7.16, расстояние з между автомобилем и пешеходом в момент начала
движения последнего по проезжей части составляет
« = вост + ««о -«*• (7.92)
Если в результате расчетов получится, что расстояние зболыпе остановоч-
ного пути вост» то водитель мог, применив экстренное торможение, остано-
вить автомобиль до линии следования пешехода. При в £ водитель не
имел возможности предотвратить наезд путем торможения, так как пешеход
начал движение на слишком малом расстоянии перед автомобилем или дви-
гался с большой скоростью.
244
7. Тормозные свойства автомобиля
Вопросы для самоконтроля
1. Что таков тормозные свойства автомобиля?
2. Назовите основные требования к тормозным системам, регламентированные
Правилами ЕЭК ООН № 13.
3. Назовите показатели тормозных свойств и их нормативные значения для ав-
томобилей различных категорий, регламентированные стандартами.
4. Назовите типы испытаний, проводимых при определении показателей тор-
мозных свойств автомобилей, и изложите их характерные особенности.
5. Изложите основные положения методики проведения испытаний по опреде-
лению установившегося замедления и тормозного пути.
6. Напишите уравнение движения автомобиля при торможении и объясните
физический смысл его составляющих. Каково влияние этих составляющих
на величину замедления?
7. Чему равно максимально возможное замедление автомобиля?
8. Что такое тормозная диаграмма? Перечислите временные составляющие диа-
граммы и назовите их примерные значения.
9- Напишите формулу для .вычисления тормозного пути.
10. Какие существуют способы торможения автомобиля? В каких условиях реко-
мендуется использовать каждый из этих способов?
11. Сформулируйте условия, при которых полностью реализуются сцепные воз-
можности всех колес.
12. Какие причины вызывают снижение эффективности торможения автомоби-
ля в реальных дорожных условиях?
13. Какие существуют способы повышения эффективности торможения автомо-
биля?
14. Объясните принцип работы регуляторов тормозных моментов.
15. Объясните принцип работы антиблокировочной системы.
16. Какие требования предъявляются к тормозным системам автопоездов?
Плавность хода автомобиля
Плавность хода — это совокупность потенциальных свойств автомоби-
ля, характеризующих его способность двигаться в заданном интервале ско-
ростей без превышения установленных норм вибронагруженности водителя,
пассажиров, грузов и конструктивных элементов автомобиля.
Нормы вибронагруженности устанавливаются такими, чтобы на дорогах,
для которых предназначен автомобиль, колебания водителя и пассажиров не
вызывали у них неприятных ощущений и быстрой утомляемости, а колеба-
ния грузов и конструктивных элементов автомобиля не приводили к их по-
вреждениям.
Возникающие при движении автомобиля колебания, вызванные неровно-
стями дороги, оказывают влияние не только на плавность хода, но и на ряд
других эксплуатационных свойств. Так, при эксплуатации грузовых автомо-
билей на дорогах с неудовлетворительным состоянием поверхности средняя
скорость движения уменьшается на 40-60 %, межремонтный пробег — на
86-40, расход топлива увеличивается на 50-70, а себестоимость перевозок —
на50-60 %.
Колебания масс автомобиля обусловлены неровностями опорной поверх-
ности дороги. Интенсивность колебаний зависит от параметров и характери-
стик компоновки автомобиля, его подвески и шин, а также от характеристики
воздействий дороги, определяемой геометрией неровностей и скоростью дви-
жения автомобиля. Параметры автомобиля, его механизмов и систем определя-
ются в процессе функционального проектирования и зависят от его назначения.
Вначале определяются основные параметры автомобиля исходя из требова-
ний обеспечения высоких тягово-скоростных свойств и топливной экономич-
ности. Показатели этих свойств характеризуют потенциальные возможности
автомобиля по эффективному выполнению функционального назначения.
Производительность автомобиля непосредственно связана со скоростью его
движения в реальных дорожных условиях. Однако потенциальные скорост-
ные свойства автомобиля могут ограничиваться необходимостью обеспече-
ния виброзащиты водителя, пассажиров и груза. Поэтому для достижения
высокой эффективности выполнения транспортных работ автомобиль должен
обладать возможностью длительного движения по дорогам с неровной поверх-
ностью в интервале высоких эксплуатационных скоростей. Это свойство обес-
печивается выбором рациональной структуры и оптимальных параметров
подвески автомобиля. В качестве исходных данных при функциональном
проектировании подвески принимаются параметры компоновки автомобиля,
характеристики дорожных условий и технические требования на показатели
оценки плавности хода, устанавливаемые на основе действующих норматив-
ных документов.
24В
8. П.мвгюстъ хода автомобили
8.1. Оценочные показатели плавности хода
Показатели плавности хода автомобиля характеризуют воздействия коле-
баний на водителя, пассажиров, элементы конструкции и перевозимый груз.
Особое внимание уделяется виброэащите человека. Колебания автомобиля ока-
зывают неблагоприятные воздействия на организм человека, вызывая функ-
циональные расстройства ряда внутренних органов, отражающиеся на его здо-
ровье. Организм человека адаптирован к частотам колебаний до 1,5-2,5 Гц
при ускорении тела до 0,4g, что соответствует средней скорости пешехода.
Изменение частоты и интенсивности колебаний может оказать серьезное влия-
ние на состояние человека. Одиночные воздействия большой интенсивности
могут привести к травматическим повреждениям (ушибам, переломам, кон-
тузии). Колебания с частотой 3-5 Гц вызывают реакции вестибулярного ап-
парата, расстройства сосудистой системы, укачивание (морскую болезнь).
При частотах 4-11 Гц возникают резонансные колебания головы, желудка,
печени, кишечника. Колебания с частотами 11-45 Гц приводят к ухудшению
зрения, вызывают тошпоту и рвоту. При частоте свыше 45 Гц и определенной
интенсивности возникает так называемая вибрационная болезнь.
Исследованиями уставов тено, что человек воспринимает колебания вес-
тибулярным аппаратом, глазами, суставами и мышцами, кожей. Колебания
передаются через костную ткань и могут действовать непосредственно на
внутренние органы. Человеческий организм воспринимает воздействия ко-
лебаний ио-разному в зависимости от их частоты. При низких частотах (до
15-20 Гц) он наиболее восприимчив к ускорениям, при средних частотах —
к скоростям колебаний, при высоких частотах — к перемещениям. Наиболь-
шая чувствительность отмечается к вертикальным колебаниям в диапазоне
частот 4 8 Гц и горизонтальным — 1-2 Гц.
11ри опенке плавности хода автомобиля и вибрационной нагрузки водите-
ля и пассажиров используются следующие показатели:
□ собственные частоты колебаний подрессоренных масс;
и максимальные и средние квадратические значения ускорений в различ-
ных точках автомобиля:
□ средние квадратические значения виброускорений на сиденьях водите-
ля И пассажиров в первых пяти октавных полосах частот.
Оценку воздействий вибрации на человека и нормирование ее допустимого
уровня производят в соответствии с международным стандартом ISO 2631-78
и ГОСТ 12.1.012-90. Линейные вибрации, передаваемые человеческому телу,
измеряют в трех направлениях декартовой системы координат. Установлено
три критерия неблагоприятного воздействия вибрации на человека-оператора.
Критерий « безопасность о обеспечивает исключение нарушения здоровья
оператора оцениваемого по объективным показателям с учетом риска возник-
новения предусмотренных медицинской классификацией профессиональных
болезней и патологий. При этом также должна исключаться возможность
возникновения травмоопасных или аварийных ситуаций из-за воздействия
вибрации.
6.1. Оиеноянь» показатели плавности кола
249
Критерий «граница снижения производительности труда» обеспечивает
поддержание нормативной производительности оператора, не снижающейся
из-за развития усталости под воздействием вибрации.
Критерий «комфорт» обеспечивает оператору ощущение комфортности
условий труда при полном отсутствии мешающего действия вибрации.
По способу передачи вибрации на человека различают общую вибрацию,
передаваемую через опорные поверхности на тело сидящего или стоящего
человека, и локальную, передаваемую через руки человека. В автомобиле
человек подвергается общей вибрации. Измерителями вибрационной нагруз-
ки при испытаниях автомобилей принимают виброускорение, время воздей-
ствия и диапазон частот.
Частотный состав вибраций принято делить на октавы. Октава — это
полоса частот, в которой конечная граничная частота vK в 2 раза выше на-
чальной VK. Каждой октаве присвоен номер и она характеризуется средним
геометрическим значением частоты октавной полосы
3 l/VKVK (6.1)
Для общей вибрации установлен нормируемый диапазон частот в виде ок-
тавных и третьоктавных полос. Диапазон частот разделен на семь октавных
полос со средними геометрическими частотами 1; 2; 4; 8; 16; 31,6; 68 Гц. Ка-
ждая октава в свою очередь разделена на третьоктавные полосы со средними
геометрическими частотами от 0,8 до 80 Гц.
Для каждой октавной и третьоктавной полосы регламентировано норми-
рованное значение виброускорения. Допустимые значения виброускорений
установлены на основе критерия «граница снижения производительности
труда» для восьмичасовой продолжительности рабочей смены. Их значения
для октавных полос при вертикальных и горизонтальных направлениях виб-
раций приведены в табл. 8.1. Там же указаны границы октавных полос и при-
ведены весовые коэффициенты чувствительности человека к вертикальным
и горизонтальным вибрациям.
Санитарные нормы показателей вибрационной нагрузки в третьоктавных
полосах частот приведены в упомянутых выше стандартах, а также в [10].
Определены также нормы вибронагруженности, допустимые по критериям
«безопасность» и «комфорт». Предельные ускорения по безопасности здоро-
вья в 2 раза выше приведенных в табл. 8.1, а соответствующие комфортным
условиям — в 3,15 раза ниже норм уровня производительной работы.
С учетом приведенных в табл. 8.1 нормативов на виброускорения разра-
ботаны методики проведения испытаний автомобилей на плавность хода
и вибронагруженность водителя и пассажиров. Для проведения испытаний
выбирают прямолинейные горизонтальные участки дорог различного типа
и состояния с однородным микропрофи лам. Измерение оценочных показа-
телей производят при постоянной скорости движения автомобиля. Методы
испытаний автотранспортных средств на плавность движения изложены
в ОСТ 37.001.291-84. В соответствии с этим стандартом испытания проводят
250
в. Плавность холаавтомобиля
на участках дорог автополигона НИЦИАМТ (г. Дмитров, Российская Феде-
рация), номенклатура и характеристики которых приведены в табл. 8.2, при
скоростях, указанных в табл. 8.3 [10].
Таблица 8.1
Частотные характеристики октавных полос и санитарные нормы
показателей вибрационной нагрузки на оператора
Параметр Номер октавы
1 2 э 4 5 6 7
Граница диапазона, Гц: нижняя 0,7 1.4 2,8 5,6 11,2 22,4 44,8
верхняя 1.4 2.8 5,6 11.2 22,4 >44,8 89,6
Среднее геометрическое значение частоты, Гц 1 2 4 8 16 31,5 68
Допустимое значение виброускорения, м/с9: вертикального 1,10 0,79 0,57 0,60 1.14 2,25 4,5
горизонтал ьнсго 0,39 0,42 0,80 1,62 8,20 6,40 12,8
Весовой коэффициент чувствительности чело- века к вибрациям: вертикальным 0,50 , 0,71 1,00 1,00 0,50 0,25 0,125
горизонтальным 1,00 1,00 0,50 0.26 0,125 0,063 0,032
Таблица 8.2
Характернстнкк участков дорог автополигона НИЦИАМТ
для испытаний на плавкость хода АТС
Номер участка дороги Вид дороги Длина участка» м Диапазон длин воля» м СКВ высоты неровностей, м
I Цементобетонная дина- мометрическая дорога 1000 0,4-40 0,610-г
II Булыжная мощеная до- рога без выбоин 1000 0,25-25 1,110-г
III Булыжник с выбоинами 500 0,12-12 2,9-10‘s
Измерения ускорений, характеризующих вибронагруженность людей,
производят на рабочем месте водителя; на заднем сиденье, с правой стороны
легкового автомобиля; у левой стенки пассажирского помещения автобуса,
над передними и задними левыми колесами или по возможности ближе к ним.
При этом измеряют вертикальные и горизонтальные (продольные и попереч-
ные) ускорения.
Для оценки вибронагруженности подрессоренных масс грузового авто-
мобиля, тягача, самосвала измерение ускорений производят в следующих
8.1 - Оценочные показатели плавности хода
251
характерных точках: на левом лонжероне над передним мостом; на левом
лонжероне над задним мостом двухосного автомобиля и посредине между
средним и задним мостами трехосного автомобиля.
Таблица 8.3.
Скорости движения АТС при испытаниях на плавность хода
Тип АТС Скорость движения АТС, км/ч
Номер участка дороги
I 11 III
Легковые автомобили: неполноприводные 50; 70; 90; 110 30; 45; 60 —
полноприводные 30; 50; 70 30;45; 60 10-15
Автобусы, неполноприводные гру- зовые автомобили и автопоезда 30; 50; 70 30; 45; 60 —
Полноприводные грузовые автомо- били и автопоезда, самосвалы 30; 50; 70 30; 45; 60 10-15
У двухосного прицепа характерные точки располагаются на левом лонже-
роне над обоими мостами; у полуприцепа — на полу платформы кузова, слева
от вертикальной оси, проходящей через седельно-сцепное устройство на рас-
стоянии, равном половине колеи задних колес тягача, а также на левом лон-
жероне рамы, над задним мостом. У прицепов и полуприцепов с двумя или
несколькими задними мостами характерные точки выбирают посредине ме-
жду крайними мостами задней колесной тележки.
У специальных автотранспортных средств, создаваемых на базе грузовых
и пассажирских автомобилей, замер ускорений производят на полу грузовой
платформы (отсека, кабины) или на элементах рамы (основания, несущей си-
стемы) в продольной плоскости симметрии АТС над задним мостом (тележкой).
С помощью системы датчиков и измерительной аппаратуры регистрируют
вертикальные и горизонтальные ускорения на сиденьях водителя и пасса-
жиров, на полу кабины и в других контролируемых точках автомобиля. По-
лученная информация вводится в ЭВМ и по соответствующим алгоритмам
определяются искомые показатели оценки плавности хода.
Предельные технические нормы плавности движения всех категорий АТС,
установленные ОСТ 87.001.275-84, приведены в табл. 8.4.
Корректированное по частоте среднее квадратическое значение виброуско-
рения (СКЗУ) <7К определяется по формуле
(8-2)
«1=1
где off — СКЗУ в i-й октавной полосе частот; kt — весовой коэффициент чувст-
вительности человека к ускорениям в i-й октавной полосе частот; п — количе-
ство учитываемых октавных полос.
232
8 Плавность хода автомобиля
Таблица 8.4
Предельные технические нормы плавности движения автотранспортных средств
Грузовые автомобили
Номер участка автол ага гова НИЦИАМТ Корректированные значения ииброуско- ревий иасидевье, м/с1, не более СКЗ вертикальных виброускореяий в характер- иых точках подрессоренной части, м/с1, не более
вертикаль- кых горизонтальных
продольных поперечных
I 1 0,65 0,65 1,8
П 1,5 1 0,8 1,8
1П 2,3 1,6 1,6 2,7
Прицепы в полуприцепы
Номер участка азтополнгоиа НИЦИАМТ СКЗ вертикальных вибрсускорений в характерных точках подрессоренной части, м/с*, не более
прицепов полуприцепов
I 2,5 2
II 3,5 8
ш 4,5 4
Автобусы
Номер участка отополигона НИЦИАМТ Корректированные значения виброуокоренсй ив сиденьях автобусов, м/с*, не более
городских остальных типов
воднтелл пассажира водителя и пасса- жиров
вертикаль- ных горизон- тальных вертикаль- ных горизон- тальных верти- кальных горизон- тальных
I 0,65 0,45 0,8 0,6 0,8 0,6
II 0,9 0,65 1,1 0,8 1,1 0.8
Легковые автомобили
Номер участка автополнгока НИЦИАМТ Корректированные значения внброускоревий не сиденьях водителя и пассажиров, м/с*, не более
вертикальных горизонтальных
I 0.8 0,6
п 1.1 0,8
III 2 1.8
Специальные автотранспортные средства
Номер участка автополкгоиа НИЦИАМТ СКЗ вертикальных ваброускорений вад оадиим мостом, м/с*, не более
набам
легковых автомобилей и автобусов грузовых автомобилей
вертикальных горизонтальных вертикал ьвык горизонтальных
I 1 0,65 1,3 0,8
П 1,4 0,9 1,8 1,1
ш - 2,7 1,6
8.1. Оценочные показатели плавности хода
253
Весовой коэффициент позволяет осуществить приведение СКЗУ различ-
ных октавных полос к полосе частот, при которой организм человека наибо-
лее чувствителен к колебаниям (4-8 Гц для вертикальных и 1-2 Гц для
горизонтальных колебаний).
Скорость автомобиля, при которой во время испытаний корректирован-
ное значение СКЗУ на рабочем месте водителя достигает нормативной вели
чины, приведенной в табл. 8.4, называют предельно допустимой скоростью
по вибрационным условиям труда водителя. Скорость, при которой СКЗУ
в характерных точках подрессоренной части АТС достигает нормативной ве-
личины, является предельно допустимой скоростью по вибрационной на-
грузке конструктивных элементов АТС.
Оценку вибронагруженности водителя и пассажиров обычно проводят по
ускорениям, частоты которых соответствуют первым пяти октавным полосам
частот. Результаты испытаний или расчетов изображают графически в виде
ломаной линии, соединяющей точки, ординаты которых равны средним квад-
ратическим значениям ускорений в октавных полосах, а абсциссы — сред-
ним геометрическим частотам. На этом же графике изображают предельно
допустимые СКЗУ. На рис. 8.1 показаны такие графики при оценке верти-
кальных виброускорений. Цифрой 1 обозначена полученная при испытани-
ях характеристика СКЗУ, цифрой 2 — характеристика предельных СКЗУ
для восьмичасовой продолжительности рабочей смены, а цифрой 3 — пре-
дельные по критерию безопасности. Полученные при испытаниях результаты
позволяют выявить неблагоприятные диапазоны частот, при которых виб-
роускорения превышают допустимые уровни, и в дальнейшем осуществить
целенаправленный поиск приемлемых параметров и характеристик подвес-
ки создаваемого автомобиля.
Рис. в.2. Графики опенки вертикальных виброускорений на сиденье водителя: 1 — поре-
иультатам испытаний; 2 — характеристика предельных СКЗУ для 6-часовой рабочей смены;
3 — предельная по критерию безопасности
Реальные условия эксплуатации автомобилей весьма разнообразны, поэто-
му может оказаться, что в отдельных конкретных случаях подвеска создан-
ного автомобиля не обеспечивает нормативных значений СКЗУ, соответст-
вующих уровню производительной работы, т.е. характеристике 2 на рис. 8.1.
354
в. Плавность кода автомобиля
В этом случае должно быть уменьшено время работы водителя: при пр выше-
нии допустимой нормы в 1,4 раза — до 2 часов; в 2 раза—до 1 часа; в 4 раза —
до 16 минут.
Определение параметров виброзащитной системы автомобиля при функ-
циональном проектировании осуществляется посредством математического
моделирования. Математическая модель должна отображать основные физи-
ческие свойства подвески автомобиля, рабочего места водителя, пассажир-
ских сидений, а также воздействий внешней среды — опорной поверхности
дороги. В процессе моделирования движения автомобиля в заданных дорож-
ных условиях определяют рассмотренные выше показатели плавности хода
автомобиля и вибронагруженности людей и элементов конструкции. Исполь-
зуя значения этих показателей в качестве критериев оптимальности, опреде-
ляют оптимальные параметры виброзащитной системы автомобиля.
8.2. Характеристики и параметры
виброзащитной системы автомобиля
Автомобиль представляет собой колебательную систему, в которую входят
инерционные, упругие и диссипативные элементы. К инерционным относят-
ся массы кузова, мостов с колесами, людей и грузов. Различают подрессорен-
ные и иеподрессоренные массы. К подрессоренным относятся массы, сила
тяжести которых передается на упругие элементы подвески (массы кузова,
груза, водителя, пассажиров). Остальные массы относятся к неподрессорен-
ным (колеса, мосты). Массы конструктивных элементов подвески частично
относятся к подрессоренным, а частично к неподрессоренным.
Упругие и диссипативные элементы составляют основу виброзащитной
системы автомобиля. В эту систему входят: подвеска, шины, сиденья води-
теля и пассажиров. К подвеске относятся все конструктивные элементы, соеди-
няющие мосты или отдельные колеса с рамой или кузовом. Кроме упругих
и диссипативных элементов в нее входят направляющие устройства, опре-
деляющие кинематические характеристики перемещения колес относительно
рамы или кузова и обеспечивающие передачу между ними усилий и момен-
тов. Воздействия неровностей дороги на колебательную систему автомобиля
вызывают колебания масс и приводят к изменению их кинетической энергии.
Упругие элементы предназначены для преобразования энергии толчков
и ударов, создаваемых неровностями дороги, в потенциальную энергию упру-
гих элементов. Назначение диссипативных элементов — гашение колебаний.
Они обеспечивают рассеивание энергии, превращая механическую энергию
колебаний в тепловую. Интенсивность гашения колебаний эавнсит от вели-
чины трения диссипативного элемента (гидравлического сопротивления амор-
тизатора, внутреннего трения элементов шины и сидений).
Характеристику упругого элемента подвески существующего автомобиля
получают экспериментально путем нагружения и разгрузки. Для этого авто-
мобиль устанавливают колесами на весовые устройства (ладометры). К кузову
В. 2. Характеристики и параметры виброэашитной системы автомобиля
255
Рис. 8.2. Характеристике упругого
элемента подвеска: 1 — нагружения;
2 — разгрузка
автомобиля прикрепляется трос лебедки, посредством которой кузов подтя-
гивают вверх или вниз, изменяя деформацию упругого элемента от его полной
разгрузки до максимальной Нагрузки, определяемой ограничителями хода.
На рис. 8.2 показана характеристика уп-
ругого элемента подвески, представляющая
собой зависимость усилия упругого элемен-
та Fp от его деформации Др. Эта зависимость
при нагружении и разгрузке различна вслед-
ствие неизбежного гистерезиса, обусловлен-
ного трением (меж л истовое трение, внутрен-
нее трение в материале упругих элементов
и др.). В качестве характеристики упругого
элемента принимается средняя линия меж-
ду кривыми нагружения и разгрузки (штри-
ховая линия).
На характеристике упругого элемента от-
мечают полный ход подвески Дв, ход сжатия
Дсж и ход отбоя Д^. Ход сжатия — это пе-
ремещение оси колеса от положения стати-
ческого равновесия автомобиля до верхнего
ограничителя хода подвескц. Ход отбоя —
перемещение оси колеса от положения статического равновесия автомобиля
до нижнего ограничителя, а при его отсутствии — до полного освобождения уп-
ругого элемента. Полный ход подвески равен сумме ходов сжатия и отбоя:
Дп = Дсж + Дето-
Кроме ходов подвески определяют коэффициент жесткости упругого эле-
мента ср и коэффициент поглощающей способности подвески
Коэффициент жесткости упругого элемента подвески ср равен произ-
водной усилия упругого элемента JFp по перемещению Др:
Cp-dFp/dAp. (8.8)
Еслиср = const, характеристика упругого элемента линейная (рис. 8.8, а),
а если ср зависит от деформации Др — нелинейная (рис. 8.3, б). В первом слу-
чае подвеску называют линейной, а во втором — нелинейной.
Усилие упругого элемента с линейной характеристикой определяется по
формуле
Fp^CpAp. (8.4)
Однако следует иметь в виду, что в связи с наличием ограничителей хода
подвески характеристика упругого элемента в любом случае оказывается
нелинейной, что должно учитываться при моделировании колебаний авто-
мобиля в тяжелых дорожных условиях, характеризуемых значительными
неровностями.
Если нет ограничителя хода отбоя, то ход отбоя Д^ равен статической де-
формации упругого элемента Д„, а при его наличии Д^ < ДС1 (рис. 8.3, а).
2S6
в. Плавность хода автомобиля
Рис. 8.3. Характеристики линейного (в) и велинейного (б) упругих элементов подвески
На характеристиках упругих элементов обозначают три значения усилий:
Fpmin — усилие сжатия, обеспечиваемое ограничителем хода отбоя; Fpxt —
усилие, соответствующее положению статического равновесия автомобиля;
FpMX максимальное усилие, соответствующее полной деформации пружины
до упора в ограничитель хода сжатия.
Отношение максимального усилия упругого элемента Гртах к статическому
усилию Грлт называют1 коэффициентом поглощающей способности подвески
*л.е = Прямое/-^р.ст- (8.5)
Этот коэффициент характеризует потенциальные возможности движения
автомобиля без ударов в ограничители хода подвески. Д ля линейной подвески
ftn.c = Дет+Д— = 1 + (8.6)
Дот Лет
При экспериментальном определении характеристик упругого элемента
прогибы измеряются в плоскости колеса. У независимой подвески колес они
отличаются от действительных прогибов упругого элемента (рис. 8.4). Поэто-
му получаемые по результатам экспериментов характеристики упругих эле-
ментов называют приведенными характеристиками. Их используют при
моделировании колебаний автомобиля, полагая, что упругий элемент под-
вески расположен в плоскости колеса. Зависимости между действительными
и приведенными параметрами упругого элемента при независимой подвеске
колес легко определить из соотношений Су Ду = срДр, ДуД, “ Лр/1ш. откуда
Др=Ду(ш/1у1 (8.7)
где Су, Ду — коэффициент жесткости реального упругого элемента и его де-
формация.
При наклонном расположении упругого элемента следует также учесть
влияние угла наклона.
8.2. Характеристики и параметры вибромшитной системы автомобиля 257
Характеристики упругих свойств шины также определяют эксперимен
тально. На рис. 8.5 показана зависимость усилия сжатия шины от ее дефор-
мации Дщ при нагружении и разгрузке. При малой нагрузке эта зависимость
нелинейная, но с ее увеличением постепенно становится практически линей-
ной. Характеристика упругого элемента шины также имеет петлю гистерезиса.
Нелинейным участком характеристики обычно пренебрегают и в качестве
характеристики упругого элемента шины принимают среднюю линию между
кривыми нагружения и разгрузки в линейной области (штриховая линия).
Рис. 8.4. Схема для определения приве-
денных параметров упругого элемента
при независимой подвеске колеса
Рис, 8£. Характеристика
упругого элемента шины
Коэффициент радиальной жесткости шины сш определяют, вычисляя
производную усилия сжатия Fa по перемещению Дш в точке с координатами
Аш.ст» -Рщлт > соответствующей статической нагрузке на шину:
сш =dFm/<fAnl. (8.8)
Значение сш зависит от конструкции шины, ее размеров, давления возду-
ха, а также от формы опорной поверхности. На выпуклых поверхностях же-
сткость уменьшается, а на вогнутых возрастает.
На площадке контакта колеса с опорной поверхностью могут быть неров-
ности различных размеров и конфигурации. Если их размеры соизмеримы
с размерами площадки контакта, то шина эти неровности сглаживает. При
моделировании таких неровностей их профиль аппроксимируют соответст-
вующими выражениями, В результате чего он сглаживается, исключаются
отдельные выступы и впадины, а максимальные высоты неровностей умень-
шаются. Однако задача сглаживания довольно сложная, поэтому часто при-
нимается некоторое допущение о форме неровностей и рассматривается
точечный контакт колеса с такой модельной неровностью.
Рассеивание энергии при колебаниях в основном обеспечивается аморти-
заторами. Сила сопротивления амортизатора зависит от скорости деформа-
ции упругого элемента подвески Лр:
(8.9)
где цр — коэффициент сопротивления амортизатора.
9 Зак. 1498
258
8. Плавность хода автомобиля
Зависимость F„ от Ар называют характеристикой амортизатора. Эта харак-
теристика нелинейная. Ее обычно аппроксимируют кусочно-линейной зависи-
мостью (рис. 8.6). При ходе сжатия коэффициент сопротивления Цр,сж меньше,
чем при ходе отбоя Соотношение Между ними: рр ся< =(0,1-0,2б)рт.ота.
Это делают для того, чтобы амортизатор не создавал больших усилий на ходе
сжатия и не увеличивал жесткость подвески. Поглощение энергии колеба-
ний при этом происходит в основном на ходе отбоя.
Рис. 8.8. Авпроксимировамнвя характеристика гидравлического амортизатора
Для предотвращения перегрузки деталей амортизатора при больших ско-
ростях деформации применяют разгрузочные клапаны, уменьшающие коэф-
фициенты Црхж и |1р1ОТ« ПРК превышении Лр некоторых значений Ар,сж и Др,^.
В нормальных эксплуатационных режимах движения автомобиля разгру-
зочные клапаны закрыты. Они открываются лишь при резких ударах колес о
неровности опорной поверхности. Скорость Др, при которой открываются
клапаны, примерно равна 0,4 м/с.
Рассеивание энергии колебаний происходит также за счет сил трения ме-
жду элементами подвески, гистерезисных потерь в материале деформируе-
мых элементов подвески и шин.
При деформировании пружин, торсионов, баллонов пневматических под-
весок трение незначительное. В рычажной подвеске потери на трение зави-
сят от количества шарниров и их конструкции. Наибольшее трение создают
шарниры с гладкими пальцами, меньшее — шарниры с резьбовыми пальца-
ми. Трение у шарниров с подшипниками качения и с резиновыми втулками
незначительно.
Большое трение создает листовая рессора. При ее деформации происходят
относительные перемещения листов и между ними возникает трение. Его на-
зывают трением без смазочного материала. Силу трения в таком случае оп-
ределяют по формуле
^rp =-FrposiffnAp, (8.10)
где 7^0 — модуль силы трения без смаэоЧного материала.
6.2. Характеристики и параметры еиброэашитной системы автомобиля
259
б к * 20 жы/ч
Рис. 8.7. Свободные колебания непод-
рессоревиой мессы: а — на неподвиж-
ной шине; О — на катящейся
Сила Fjpo в общем случае пропорциональна нормальной реакции поверх-
ности трения. При моделировании колебаний автомобиля ^тро'обычно прини-
мают постоянной. Чем больше число листов у рессоры, тем выше потери на
трение. Для уменьшения силы трения применяют специальные антифрик-
ционные прокладки между листами или межлистовое смазывание.
Сила трения при радиальной деформации шины пропорциональна скоро-
сти ее деформации
Лрш =РП1ЛШ- (8.11)
Трение в материале шины зависит от ее конструкции (размеров шины,
числа слоев и материала корда), давления воздуха, деформации и скорости
качения.
На рис. 8.7 показаны графики затуха-
ния колебаний неподвижного колеса (о)
и катящегося по гладкому барабану со ско-
ростью 20 км/ч (б) [8]. Очевидно, что в пер-
вом случае рассеивание энергии много боль-
ше, чем во втором. Это объясняется тем,
что скорость деформации элементов беговой
дорожки шины при качении существенно
больше скорости деформаций от вертикаль-
ных колебаний.
Рассмотрим методику определения па-
раметров виброзащитной системы при функ-
циональном проектировании автомобиля. Определению подлежат коэффици-
енты жесткости упругих элементов и коэффициенты сопротивлений диссипа-
тивных элементов подвески и шин, статические деформации и ходы сжатия
упругих элементов. При этом используют принцип декомпозиции виброза-
щитной системы, выделяя из нее элементарные динамические подсистемы,
называемые парциальными системами.
Парциальной системой называется частичная одночастотная подсисте-
ма, выделяемая из динамической модели технического объекта. Она имеет
только одну частоту собственных колебаний, называемую собственной, пар-
циальной частотой. Различают одномассавые и двухмассовые парциальные
системы. Оба вида используются при определении параметров виброзащит-
ной системы автомобиля. Исходные данные для проектирования формиру-
ются на основе результатов определения основных параметров автомобиля
(см. главу 6).
Функциональное проектирование подвески автомобиля начинают с опре-
деления коэффициентов жесткости упругих элементов ср. Значения ср тесно
связаны с параметрами направляющих устройств. На начальном этапе про-
ектирования кинематическая схема и параметры направляющих устройств
подвески окончательно не определены. В этом случае находят приведенные
параметры упругих элементов, полагая, что упругие элементы расположены
в продольных плоскостях колес. Упругий элемент такой модели отображает
260
8. Плавность хода автомобиля
суммарные упругие свойства левой и правой рессор данного моста автомобиля,
а коэффициент жесткости упругого элемента шиныСщ учитывает количество
шин данного моста.
Коэффициенты жесткости уйругих элементов подвески ср( определяются
из условия обеспечения регламентированных .требований на собственные
частоты колебаний подрессоренных масс ft. Значения Д должны находиться
в следующих пределах: для легковых-автомобилей / =0,8-1,3 Гц; для грузе*
вых f = 1,2-1,8 Гц. Для передней части кузова частота Д должна быть меньше,
чем для задней, в 1,05-1,16 раза [8].
Для определения cpi используется одномассовая парциальная система
(рис. 8.8, а), состоящая иэ двух элементов — подрессоренной массы автомо-
биля с полной нагрузкой и упругого элемента с параметром ср(. Значение
ср1 находят по формуле
Ср! * = 1,2, (8.12)
где — масса, приходящаяся на *-й мост; (йщ — собственная парциальная
частота одномассовой парциальной системы, рад/с.
Рис. Р.8. Динамические модели парциальных систем: а — для определения ср(;
бив — для определения цр и
Значение 0)^ вычисляется из соотношения
ып1=2л/,(. (8.13)
Значения подрессоренных и неподрессоренных масс определяют по эмпи-
рическим формулам:
(8.14)
= -mH(; * = 1,2,
(8.15)
(8.16)
где — коэффициент, равный отношению подрессоренной массы к непод-
рессоренной для груженого автомобиля.
В формулах (8.14)-(8.16) верхний индекс «г> соответствует автомобилю
с полной нагрузкой, а индекс *с» — снаряженному автомобилю; нижний ин*
деке *п> — подрессоренной массе, а индекс 4Н» — неподрессоренной.
8.2. Характеристики и параметры виброзашитиой системы автомобиля 261
В табл. 8.5 приведены статистические данные по коэффициентам
В скобках указаны данные для легковых автомобилей с зависимой подвес-
кой колес.
Таблица8£
Наименование Значение коэффициентах,,
автомобиль с полной нагрузкой снаряженный автомобиль
Передние колеса: легковых 8-12 (4,6-7,0) 7-10 (4-6)
грузовых 8,0-5,0 2,5-5,0
Задние колеса: легковых 5,5-10,0 8,5-6,0
грузовых 4,5-6,5 1,2-8,0
Коэффициент сопротивления диссипативного элемента зависит не только
от его физических свойств, но и от параметров Элементов динамической колеба-
тельной системы, с которыми он непосредственно взаимодействует. Определе-
ние коэффициентов сопротивления амортизатора pip и шины осуществляют
также на основе использования парциальных систем. Парциальная система
при этом должна включать диссипативный элемент, параметр которого под-
лежит определению, а также сопутствующий ему упругий элемент и все
инерционные элементы (сосредоточенные массы), непосредственно связан-
ные с данным диссипативным элементом.
На рис. 8.8, бив приведены динамические модели парциальных систем,
предназначенные для определения коэффициентов цр и . Значения цр и
вычисляют по формулам:
р.р = 2тртпршп.р; (8.17)
gin =2уштнсов.в1, (8.18)
где Yp> Тш — относительные коэффициенты затухания колебаний, обуслов-
ленные соответственно гидравлическим сопротивлением амортизатора под-
вески и трением в шине; — приведенная масса двухмассовой парциальной
системы; т^ —неподрессоренная масса моста; ох, г, cXt.iw —парциальные час-
тоты колебаний рассматриваемых парциальных систем соответственно двух-
массовой и одномассовой.
Приведенная масса двухмассовой парциальной системы вычисляется по
формуле
mnp
mn +т.
(8.19)
где ггц, — подрессоренная масса, приходящаяся на данный мост автомобиля.
263
6. Плавность хода автомобиля
Рис. 8.9. Экспериментальная
зависимость относительного
коэффициента затухания
колебаний неподрессоренной
массы от скорости качения
Приведенные на рис. 8.8, б и в парциальные системы одночастотные. Пар-
циальные частоты этих систем вычисляются по формулам:
~ -\1ср/ттц>» (8.20)
^о.щ ™ Мн ♦ (8.21)
где ср — суммарный коэффициент жесткости левой и правой рессор подвески
моста; сш — суммарный коэффициент жесткости всех шин моста.
Коэффициент радиальной жесткости шины можно определить, используя
информацию, приводимую в стандартах на шины: сш = fJH/ACT, где — но-
минальная нагрузка на шину; Дет — статическая деформация шины под дей-
ствием F„.
Для коэффициентов жесткости шинс^ и подвес-
ки ср характерны следующие соотношения: легко-
вые автомобили особо малого класса — са/ср - 3-4;
малого и среднего класса — сш/ср = 7-10; высшего
класса — с^[ср -10-20; грузовые автомобили —
сш/ср = 2,5-5.
На рис. 8.9 приведена зависимость относитель-
ного коэффициента затухания ую колебаний непод-
рессоренной массы от скорости качения колеса о [8].
Относительный коэффициент затухания ко-
лебаний подрессоренной массы у легковых авто-
мобилей ур = 0,2-0,35, у грузовых ур «0,15-0,25.
Значение уш при качении колеса не превышает
0,02-0,03. Врезультате затухание колебаний в ос-
новном обеспечивается рассеиванием энергии в
амортизаторах.
Статическая деформация линейного упругого элемента подвески оп-
ределяется по формуле
=s/c?al; 1 = 1,2. (8.22)
Ход сжатия упругого элемента Дe5Kj выбирается в зависимости от назначения
автомобиля. Если автомобиль предназначен для работы в тяжелых дорожных
условиях, то рекомендуется принимать Деж( « Дст(. Чем благоприятнее дорож-
ные условия и выше комфортабельность автомобиля, Тем меньше отношение
Вычисленные по приведенным формулам значения параметров подвески
сро цр(, Л€т(, Деж1 следует принимать как предварительные, подлежащие
в дальнейшем оптимизации. Для решения задачи оптимизации необходимо
располагать математической моделью, позволяющей исследовать характери-
стики и параметры колебаний подрессоренных и неподрессоренных масс при
движении автомобиля в заданных дорожных условиях и определять показатели
плавности хода и вибронагруженности водителя, пассажиров и механизмов
8.3. Характеристики неровностей дороги 263
автомобиля. Методики получения таких моделей и их использования при
функциональном проектировании системы виброзащиты рассматриваются
в последующих параграфах данной главы.
8.3. Характеристики неровностей дороги
Источником возбуждения низкочастотных колебаний масс автомобиля
являются неровности опорной поверхности дороги. Для моделирования коле-
баний необходимо математическое описание этих источников воздействий.
Неровности дороги имеют различную геометрическую форму, различные
размеры и случайное беспорядочное расположение. Они могут налагаться
друг на друга или следовать друг за другом. В общем случае их математиче-
ское описание может быть представлено случайными функциями.
Неровности дороги во взаимодействии с колесами формируют внешние
воздействия, которые передаются на конструктивные элементы автомобиля,
вызывая их колебания. Поскольку внешние воздействия носят случайный
характер, то колебания представляют собой случайные процессы, изучение
которых основано на использовании методов теории вероятностей и матема-
тической статистики.
Применение этих методов требует значительной затраты времени, поэтому
на начальных этапах проектирования используют более простые — детерми-
нированные модели, основаниые на ряде допущений. Предполагается прямоли-
нейное движение автомобиля с постоянной скоростью. Профиль неровностей
рассматривается в некотором оечении опорной поверхности продольной вер-
тикальной плоскостью. Используется плоская модель автомобиля, в которой
правые и левые колеса объединяются в одно колесо данного моста, имеющее
точечный контакт с линией профиля опорной поверхности. В этом случае все
колеса движутся по одной и той же линии, профиль которой в простейшем
случае описывают косинусоидой (рис. 8.10):
q = <7о^1-сов~ J (8.23)
где — амплитуда высоты неровности; х — абсцисса неровности; I — длина
волны косинусоиды.
Рис. 8.10. Профиль косинусоидальной неровности опорной поверхности
264
В. Плавность хода автомобиля
При постоянной скорости автомобиля v const абсцисса х изменяется со-
гласно выражению х = ut. Тогда изменение ординаты профиля опорной по-
верхности g можно представить функцией времени t;
g = go[l-COB(vOL (в.24)
где v — частота возмущающего воздействия дороги:
v = 2nu/f. (8.25)
Но характеристики профиля опорной поверхности не связаны со скоро-
стью автомобиля, поэтому при их описании вводятся понятия путевой и цик-
лической частот.
Циклическая частота X равна количеству неровностей, расположенных
на участке дороги длиной 1м:
\ = ' (8.26)
Путевая частота X, связана с циклической соотношением
Х,-2пК = 2я/1. (8.27)
Путевая и циклическая частоты представляют собой частоты возмущений,
передаваемых на автомобиль от неровностей дороги при его движении со ско-
ростью 1 м/с. Единила путевой частоты — рад/м , а циклической — 1/м.
Из теории колебаний известно, что реакция динамической системы на внеш-
нее воздействие зависит от отношения частоты воздействия к собственной
частоте системы. При сближении этих частот реакция динамической системы
на воздействие будет наибольшей, что соответствует резонансному режиму.
Если частота воздействия в 5-10 раз меньше собственной частоты, то переме-
щения сосредоточенных масс системы будут практически такими же, как
при статическом внешнем воздействии. Деформации всех упругих элементов
при этом остаются неизменными и систему можно рассматривать как одно
твердое тело. Если частота воздействия выше собственной частоты в 6-10 раз,
то массы системы будут практически неподвижны. Будет лишь изменяться
деформация упругого элемента, взаимодействующего с внешней средой.
У автомобиля в этих условиях деформируются только шины, а все остальные
элементы движутся прямолинейно, параллельно горизонтальной плоскости.
В связи с изложенными свойствами автомобиля как колебательной дина-
мической системы все дорожные неровности принято делить на три группы;
неровности макропрофиля, неровности микропрофиля и шероховатости.
Первые не оказывают динамического воздействия на автомобиль, а послед-
ние не влияют на показатели оценки плавности хода, а лишь создают шум,
изнашивают шины и увеличивают расход топлива. Колебания автомобиля
возникают лишь под воздействием неровностей микропрофиля.
8.4. Статистические математические модели микропрофиля
Исходные данные о параметрах микропрофиля получают путем измере-
ний ординат неровностей непосредственно на дороге. Для этого используют
профилографы или нивелиры. Микропрофиль дороги является случайной
8.4. Статистические математические модели микропрофиля
26S
функцией протяженности дороги (или перемещения автомобиля х), т.е. его
ординаты q при любом значении х — случайные величины.
Одну запись случайной функции микропрофиля д(х) называют реализаци-
ей этой функции, а несколько повторных записей образуют аксожбль реали-
заций, Отметим, что одна реализация является неслучайной функцией.
Случайная функция характеризуется статистическими характеристика-
ми, которые получаются усреднением, проводимым либо по ансамблю реали-
заций, либо по аргументу — для одной реализации. Поскольку на различных
участках одной и той же дороги статистические характеристики обычно раз-
личаются, то функция д(х) нестационарная. Однако, как правило, на дороге
происходит чередование таких участков. Поэтому на достаточно большом
отрезке пути оказывается, что статистические характеристики стабильны.
Если статистические характеристики случайной функции, полученные иэ
ансамбля реализаций, совпадают с характеристиками, полученными по од-
ной реализации усреднением по аргументу, то такую случайную функцию
называют эргодической.
Многочисленные исследования микропрофиля существующих дорог по-
казывают, что функцию д(х) можно считать стационарной и эргодической,
а ординаты микропрофиля подчиняются нормальному закону распределе-
ния. При измерениях микропрофиля длины неровностей оказываются огра-
ниченными по верхнему и нижнему пределам. Самыми длинными являются
неровности, проезд которых может вызвать перемещения кузова, превышаю-
щие высоту данной неровности. Короткие неровности, длина которых значи-
тельно меньше длины площадки контакта колеса с дорогой, сглаживаются
шиной благодаря ее упругим Свойствам [24,31,32]. Поэтому при моделирова-
нии воздействий микропрофиля на шину учитываются лишь те неровности,
длина которых немного превышает длину площадки контакта. Минималь-
ную длину обычно принимают не менее 0,2-0,4 м.
На рис. 8.11 показана схема, отображающая сглаживающую способность
шины. При этом принимается, что колесо взаимодействует с осредвенным
текущим значением ординаты неровности gw(x). Аналитическая зависимость
между действительным микропрофилем и сглаженным описывается выра-
жением [32]
1 °'5Л
М*)-у
'К -I
где 1К — длина пятна контакта колеса с дорогой.
Для определения статистических характеристик функции д(х) достаточно
произвести измерения микропрофиля на участке не менее б 00 м. Для дорог
с булыжным или щебеночным покрытием возможно уменьшение длины уча-
стка до 2В0-300 м.
Так как воздействие опорной поверхности дороги на автомобиль представ-
ляет собой случайную функцию, то случайными оказываются и функции
изменения координат колеблющихся масс конструктивных элементов авто-
266
В. Плавность хода автомобиля
Рис. 8.11. Схема сглаживания шиной коротких неровностей микропрофиля
мобиля. При исследовании их колебаний в качестве аргумента принимается
время. Если аргументом случайной функции является время t, то она описы-
вает случайный процесс и ее называют стохастической функцией.
При исследовании случайных колебательных процессов автомобиля их
статистические характеристики определяют при заданных постоянных ско-
ростях движения, поскольку частота воздействия опорной поверхности доро-
ги зависит от скорости автомобиля. Так как при о = conet перемещение авто-
мобиля х = vt, то можно перейти от случайной функции д(х) к случайному
процессу ^(t).
При отмеченных выше допущениях случайная функция воздействия
и вызываемые им случайные колебательные процессы автомобиля z (f) пол-
ностью определяются следующими статистическими характеристиками:
1) математическими ожиданиями ординат микропрофиля тп? и перемен-
ных zif характеризующих колебательные процессы, тг1;
2) дисперсиями Dg, Dxl или средними квадратическими отклонениями
= yfDq > = yfoti »
3) корреляционными функциями ^(х,),
4) спектральными плотностями Gg(X,),
Две первые характеристики — числовые и представляют собой моменты
первого и второго порядков, а корреляционная функция и спектральная плот-
ность — неслучайные функции случайных процессов.
Для вычисления статистических характеристик осуществляют дискрети-
зацию полученных реализаций случайных функций д(х) и случайных про-
цессов z(t). Шаг дискретизации Ах по независимой переменной х (рис. 8.12)
выбирают равным минимальной учитываемой длине неровности, а при выбо-
ре шага At для переменной t используется теорема Котельникова-Шеннона,
согласно которой
At = —, (8.28)
rto„
где — верхняя круговая частота спектра процесса z(t); г — коэффициент,
выбираемый в зависимости от особенностей внутренней структуры случай-
ного процесса: г = 1,6-3.
6,4. Статистические математические модели микропрофиля
267
Рис. 8.12. Пример реализации функции микропрофиля д(х)
При моделировании механических колебательных систем принимают оп =
- 126-167 рад/с (соответствует частоте f «20-25 Гц).
В результате дискретизации функций q(x), 3(f) получаются конечные на-
боры значений реализаций случайных величин g(, zt, I = 1,N, называемые вы-
борками. Число элементов выборки N называют ее объемом. Объемы выборки
определяют по формулам:
N = (Г/Дх) + 1; (8.29)
W = (T/At) + 1, (8.80)
I - : '*• ' ‘
где L — длина участка дороги, на котором осуществляется измерение орди-
нат микропрофиля; Т — время реализации случайного процесса z(j).
При выборе Т принимают N = 200-500. Так как объем выборки ограничен,
то при вычислениях статистических характеристик случайного процесса по-
лучают не их истинные значения, а оценки этих характеристик, которые
сами по себе являются случайными величинами или функциями. Необходи-
мо, чтобы погрешности оценок не выходили за доверительные интервалы,
определяющие вероятность погрешностей. Оценки статистических характе-
ристик случайных процессов должны быть состоятельными, несмещенны-
ми и эффективными [23].
Увеличение объема выборки N позволяет повысить точность статистиче-
ских оценок. Однако следует иметь в виду, что реализации случайных процес-
сов могут содержать низкочастотные составляющие с периодом, соизмеримым
с длительностью реализации, или отдельные короткие участки с выражен-
ной нестационарностью. В этом случае увеличение N может привести к обрат-
ным результатам. Для уменьшения влияния возможных нестационарностей
необходимо реализации случайных процессов подвергать фильтрации.
Оценку математического ожидания ординат микропрофиля q (или любой
другой случайной величины) в математической статистике называют выбо-
рочным средним к обозначают q, а оценку дисперсии — выборочной дисперсией,
обозначаемой .
Будем полагать, что по полученным реализациям и z(t) статистиче-
ские оценки вычисляются достаточно точно, поэтому в дальнейшем слово
8- Плавность хода автомобиля
«оценка» опустим и используем принятые в теории вероятностей обозначе-
ния истинных характеристик.
Математическое ожидание ординаты микропрофиля определим по фор-
муле
1 j1i,t
При определении остальных статистических характеристик случайную
функцию ^(х) центрируют, перенеся ось абсцисс до совпадения с прямой АА,
ордината которой соответствует mq (рис. 8.12). Центрированную случайную
функцию ординат обозначают д(х), е ее ординаты вычисляют из выражения
9(Л) = 9(*)“т9- <8-32>
Дисперсию ординат микропрофиля определяют по формуле
1 N 9 I n ( >2
<8'33>
Корреляционная функция — статистическая характеристика стационар-
ного случайного процесса в области изменения аргумента (во временной
области — для случайных процессов). Она отражает основные свойства про-
цесса, прежде всего его внутреннюю структуру. Корреляционная функция
характеризует степень линейной связи (корреляцию) между ординатами
случайной функции, смещенными относительно друг друга на величину х,
(или на интервал времени т — для случайных процессов).
Корреляционную функцию ординат микропрофиля вычисляют по формуле
1 А
л’(ж*)=(8-34)
гдед( — текущая центрированная ордината микропрофиля при значении ар-
гумента х,; qt+n — центрированная ордината при значении аргументах* + х4;
я = 0,1,2,3, — число, определяющее величину сдвига по оси абсцисс и од-
новременно номер точки дискретного аргумента х* = пДх; Дх— шаг дискрети-
зации аргумента х.
При л ® 0 корреляционная функция равна дисперсии: 2^(0) Значение
Д;(х,) при этом максимально.
В исследованиях случайных процессов удобно пользоваться нормирован-
ной корреляционной функцией
Р$ (х«) ж • (8.35)
При X, « 0 получаем р,(0) = 1, а при увеличении сдвига хв = пДхзависимость
между ординатами 9 ( и$(+п ослабевает и значение корреляционной функции
уменьшается (рис. 8.18).
В.4. Статистические математические модели микропрофиля
269
Рис. S.13. Корреляционные функции микропрофилей дорог
Корреляционные функции 1 и 2 соответствуют случайным функциям без
гармонических составляющих, а 3 и 4 относятся к функциям, в которых явно
присутствуют гармонические составляющие. Чем быстрее затухает корреля-
ционная функция, тем- выше степень случайности функции д(х). Кривая 4
описывает процесс с малой случайностью, близкий к обычному гармониче-
скому процессу. При некотором значении х, - хм кривая пересекает ось
абсцисс. Значение х<0 называют интервалом корреляции. Случайные значения
функции д(х) при х4 > хг0 практически независимы друг от друга. Конечное
значение рд(°°) должно быть равно нулю. Стремление корреляционной функ-
ции к нулю при хЙ —> «свидетельствует об эргодичности случайной функции.
При вычислении корреляционной функции необходимо определить наи-
больший сдвиг аргумента х4 ЮШ( = Величина определяет количество
вычисляемых точек корреляционной функции. Как показывает опыт иссле-
дований, можно принять пгаа1 «ОД?/.
Быстро убывающая монотонная функция 1 характерна для дорог с булыж-
ным покрытием. Медленно убывающая функция 2 свидетельствует о нали-
чии длинных волн неровностей асфальтобетонных покрытий. Колебатель-
ный характер корреляционной функции указывает на износ и деформацию
дорожного покрытия, вызывающих появление на нем волн преобладающей
частоты. Периодический характер неровностей обусловлен колебанием масс
автомобиля после проезда какой-либо неровности, вследствие чего возникает
переменное давление на дорожное покрытие. Так как собственная частота
всех автомобилей и их эксплуатационные скорости близки, то все автомоби-
ли в одних и тех же местах создают повышенное или пониженное давление.
Это в конечном счете приводит к появлению периодических неровностей:
длинных и коротких, соответствующих двум собственным частотам колеба-
ний масс автомобиля — низким и высоким. На цементобетонных дорогах
длина периодических волн может определяться длиной плит.
270
8. Плавность хода автомобиля
Полученные в процессе обработки реализаций микропрофиля дороги
графики корреляционных функций аппроксимируют соответствующими
аналитическими выражениями. Наиболее часто используются следующие
выражения:
Л9(х1)=Г9е-“1*11; (8.36)
ДДх,) = Г>7е"с^сов[3х,; (8.87)
Я9(х,) = + Aje'^^coepx,), (8.38)
где а — коэффициент, характеризующий затухание корреляционной функ-
ции; р — коэффициент, характеризующий колебательный процесс.
Для случайных процессов колебаний автомобиля 2(f) аргументом в форму-
лах (8.86)-(8.38) является временной сдвиг т, равный разности значений ар-
гумента t в 0 + п)-й и l-й точках дискретизации случайной функции 2(f).
При исследованиях плавности хода автомобиля часто используется описа-
ние свойств случайных процессов посредством спектральной плотности,
Спектральная плотность характеризует распределение дисперсий случайно-
го процесса по частоте. Для микропрофиля дороги она дает представление
о частоте повторения длин неровностей и выражается зависимостью плотно-
сти дисперсии Gf от путевой частоты X,.
На рис. 8,14 показаны характерные зависимости G?(X,). Графики спек-
тральных плотностей на этом рисунке соответствуют графикам корреляци-
онных функций на рис. 8.13. Путевая частота X, обратно пропорциональна
длине неровностей I и определяется по формуле (8.27).
Спектральная плотность G?(Xt) и корреляционная функция Дд(х,) взаимо-
связаны преобразованием Фурье
(?9(Xt) = — JjL(xJcosXfx,dx,. (8.39)
яо
Рис, 8.14. Спектральные плотности микропрофилей дорог
8.S. Динамическая модель автомобиля для анализа плавности хода
271
Определение спектральных плотностей случайных колебательных процес-
сов автомобиля будет рассмотрено в параграфах 8.13 и 8.14. Здесь же приве-
дем формулы для вычисления спектральной плотности ординат микропрофи-
ляОд(Хв), соответствующие аппроксимирующим выражениям (8.86)-(8.38)
корреляционной функции ^(х,):
gjm=-¥sS-! cr+X, Gg(X.) = 2Dga <а2+Ра + Аг„ . (Xat-a®-p®) + 4a®X2 (8.40) (8.41) 1
(?/>.,) = 2Dfa
Ai a2+p2 + X®
a2+b2
(A?.-as-₽2)2 +4asX®
(8.42)
Выражения (8.36) и (8.40) используются для описания микропрофиля
дорог с цементобетонным покрытием или булыжным в удовлетворительном
состоянии. Для асфальтового покрытия и для булыжного с выступами и впа-
динами используются выражения (8.37), (8.38), (8.41), (8.42).
В табл. 8.6 приведены параметры корреляционных функций микропро-
филей для некоторых видов дорог.
Таблица 8.в
Параметры корреляционных функций мнкропрофилей автомобильных дорог
Дорожные условия Коэффициенты
О,,М А. As at, м * аа, м 1 Р. м 1
Шоссе:
цементобетонное 0,005-0,012 1 - 0,15 — -
асфальтированное 0,008-0,012 0,85 0,15 0,20 0,05 0,60
ровное булыжное 0,018-0,022 1 - 0,45 —’ -
разбитое булыжное 0,025-0,088 - 1 - 0,10 0,238
изношенное бетонное 0,018-0,025 0,85 0,15 0,50 0,20 2,0
кру пнобул ыжное 0,080-0,045 0,67 0,38 1,10 10,6 19.71
Разбитая грунтовая дорога 0,100-0,140 0,55 0,45 0,085 0,08 0,235
8.5. Динамическая модель автомобиля для анализа плавности хода
Автомобиль представляет собой сложную многомассовую механическую
колебательную систему, находящуюся во взаимодействии с внешней средой.
В ее состав входят подрессоренные массы кузова, водителя, пассажиров, Гру-
за и неподрессоренные массы мостов. Взаимодействия масс осуществляются
посредством упругих и диссипативных элементов подвески, шин и сидений,
допускающих их взаимные перемещения. Каждая масса может иметь от 1 до
6 степеней свободы. Например, кузов благодаря наличию упругих элементов
272
в. Плавность кола автомобили
подвески может совершать 6 видов движений относительно неподвижной
системы координат xyg, начало которой расположено в центре масс С кузова
автомобиля (рис. 6.16). Линейные перемещения вдоль осей х,у,г называют
соответственно подергивание хс, шатание ус, подпрыгивание zc, а угловые
перемещения кузова вокруг этих осей — соответственно покачивание а, гало-
пирование Р виляние или рыскание у.
Движение неподрессоренных масс ограничено направляющими устройст-
вами подвески, поэтому число степеней свободы их меньше, чем кузова. Тем
не менее суммарное число степеней свободы всей колебательной системы
сравнительно велико. Уровень сложности системы оценивается количеством
учитываемых степеней свободы и принимаемыми допущениями при описании
физических свойств составляющих ее элементов и характеристик внешней
среды. Число степеней свободы динамической системы равно количеству не-
зависимых геометрических координат, необходимых для описания всех ви-
дов движений сосредоточенных масс, составляющих динамическую систему.
Причинами возбуждения колебаний сосредоточенных масс являются ис-
точники возмущающих воздействий: микропрофиль опорной поверхности
дороги; неравномерность вращения коленчатого вала двигателя; неуравнове-
шенность вращающихся масс колес, трансмиссии и двигателя; управляющие
воздействия водителя (изменение скоростного режима двигателя, управле-
ние трансмиссией и тормозными механизмами); порывы ветра и др. Ускоре-
ния масс автомобиля под влиянием этих воздействий имеют широкий спектр
частот. В зависимости от количества включаемых в динамическую модель со-
средоточенных масс максимальная частота регистрируемого спектра частот
может достигать 500 Гц и выше.
Спектр частот при исследовании колебаний автомобиля принято делить
на два диапазона: низкочастотный (0-25 Гц) и высокочастотный (свыше
25 Гц). Низкочастотные вынужденные колебания обусловлены в основном
взаимодействием автомобиля с опорной поверхностью дороги, а высокочас-
тотные — неравномерностью работы двигателя и механизмов трансмиссии.
Последние практически не зависят от параметров подвески. Управляющие
воздействия водителя приводят к переходным процессам, колебания при ко-
торых быстро затухают. Однако при этом могут быть значительные продольные
угловые наклоны кузова, что необходимо учитывать при выборе принципи-
альной схемы подвески и ее параметров. Большие наклоны возникают при
8.5. Динамическая модель автомобиля для анализа плавности хода
273
экстренных торможениях легковых автомобилей с мягкой подвеской («клев-
ки* автомобиля).
При анализе плавности хода моделированию подлежат низкочастотные
вынужденные колебания, возбуждаемые неровностями дороги, а также сво-
бодные низкочастотные колебания. Для грузовых автомобилей в этом случае
достаточно учитывать колебательные движения кузова и мостов, а для легко-
вых (особенно малого класса) — дополнительно необходимо учитывать систе-
му подрессоривания сидений, а также водителя и пассажиров как элементов
динамической системы. При этом рассматриваются вертикальные колеба-
ния всех сосредоточенных масс и угловые колебания кузова в продольной
и поперечной вертикальных плоскостях автомобиля. Колебания водителя
и пассажиров определяются параметрами колебаний кузова (частотой, ам-
плитудами), а также параметрами упругих и диссипативных элементов сиде-
ний и координатами их расположения относительно центра масс кузова.
Колебания кузова при этом можно рассматривать в качестве источника воз-
буждения колебаний водителя и пассажиров.
Продольные и поперечные угловые колебания на начальных стадиях про-
ектирования автомобиля обычно изучаются раздельно. В связи с этим вместо
пространственной динамической модели используют две плоские модели ко-
лебаний в продольной и поперечной плоскостях.
Динамическая модель колебаний двухосного грузового автомобиля в про-
дольной плоскости с учетом изложенных допущений показана на рис. 8.16.
Рис. 8.1 в. Динамическая модель автомобиля
для анализа колебаний в продольной плоскости
274
8. Плавность хода автомобиля
Эта модель позволяет исследовать колебательные движения трех твердых тел
массами , шн1, »взаимодействующих между собой посредством упругих
и диссипативных элементов подвески. Воздействия опорной поверхности
дороги передаются на колебательную систему через упругие и диссипатив-
ные элементы шин. Твердое тело массой та совершает плоское движение.
Для отображения физических свойств колебательной системы введено четыре
типа абстрактных элементов: инерционные, упругие, диссипативные и транс-
форматорные.
Инерционные элементы отображают способность системы накапливать
кинетическую энергию. В них сосредоточена вся масса системы. Остальные
элементы безынерционные. Упругие элементы отображают способность си-
стемы накапливать потенциальную энергию. Колебания масс считаются
малыми, поэтому изменение потенциальной энергии масс при изменении ИХ
положения в пространстве не учитывается. Диссипативные элементы ото-
бражают рассеивание энергии колебаний. Трансформа торные элементы
отображают безынерционные преобразования поступательных движений то-
чек А и В крепления Упругих элементов подвески к кузову во вращательное
движение кузова (подрессоренной Массы тп).
Состояние системы характеризуется переменными типа потока — гео-
метрическими координатами положения масст„, m^j, соответственноzn,
2вь ги2 и их первыми производными по времени (скоростями уг0, ога1,
а взаимодействие масс характеризуется переменными типа потенциала -г-
усилиями упругих Fpl, Fp2, и диссипативных Ге1, Fr2, Erp.vrt
элементов.
Масса mn совершает плоское движение, поэтому ее положение определя-
ется тремя координатами: линейными перемещениями центра масс кузова
хс и гп и углом поворота <р^. Следовательно, для описания ее физических
свойств необходимо ввести три инерционных элемента: два из них отобража-
ют накопление кинетической энергии при поступательном движении вдоль
осей хи г, а третий — при вращательном движении относительно оси у. Пара-
метрами первых двух инерционных элементов является масса т^, а третье-
го — момент инерции относительно оси у, определяемый по формуле
= (8.43)
где pv — радиус инерции твердого тела массой тП относительно оси у, харак-
теризующий распределение массы по длине тела, т.е. вдоль оси х.
Твердые тела массами и т^2 совершают поступательные движения
вдоль осей 2Х и 2o, поэтому рассматриваются как материальные точки, каж-
дая из которых имеет по одной степени свободы.
Таким образом, состояние динамической системы характеризуется пятью
независимыми координатами х^, zD, фр1 zMl, z^. Следовательно, она имеет
пять степеней свободы.
Параметрами упругих элементов подвески и шин являются коэффициенты
жесткости ср и еш, параметрами диссипативных элементов подвески и шин —
6.5. Динамическая модель автомобиля для анализа плавности хода
275
коэффициенты сопротивлений р.р и цш. Эти параметры приведены к продоль-
ным плоскостям колес. В динамической модели продольных колебанийср1 —
суммарная приведенная жесткость рессор подвески левого и правого колес
переднего моста, — то же заднего моста. Эго же относится и к параметрам
^ш1> сш2> Нр1* Нрв» НпП> Pni2*
Трансформаторными элементами в динамической модели на рис. 8.16 яв-
ляются безынерционные рычаги АС и ВС. Параметры трансформаторных
элементов — передаточные числа и КПД. Передаточное число трансформа-
торного элемента равно отношению скоростей на его входе и выходе. Вход
и выход трансформаторного элемента определяются по направлению передачи
потока энергии. В рассматриваемом случае энергия передается от неровно-
стей микропрофиля через упругие и диссипативные элементы шин и подвески
к подрессоренной массе . Поэтому на входах трансформаторных элементов
будут проекции на ось г скоростей точек Аи ВигЛ и ожв, а на выходах — угловая
скорость фу относительного вращательного движения твердого тела массой лц,
относительно оси у. Соотношения между этими скоростями устанавливаются
формулой Эйлера
= 0)гу( - (йух,, (8.44)
где иг1 — проекция скорости i-й точки твердого тела на ось z; сог, — угловые
скорости вращения тела соответственно относительно осей хи у", Xi, yt — коор-
динаты i-й точки тела.
При плоском движении твердого тела в плоскости xCz его вращение про-
исходит только относительно оси у, поэтому о)х = О. В этом случае
о,( “-ОуХс (8.46)
Аналогичное соотношение устанавливается и между перемещениями:
з, (8.46)
где zt — проекция на ось z перемещения i-й точки при повороте твердого тела
относительно оси у на угол <рр.
Если в качестве упругих элементов используются листовые рессоры, то
параллельно диссипативным элементам с параметрами цр1 и необходимо
расположить элементы, моделирующие трение без смазочного материала,
описываемые зависимостями вида (8.10). Параметром такого элемента явля-
ется модуль силы трения F^q.
При описании воздействий микропрофиля на колеса автомобиля прини-
мается допущение о точечном контакте и используются математические мо-
дели микропрофиля, рассмотренные в параграфах 8.8 и 8.4. Для передних
колес принимается функция g(t), а для задних, учитывая, что и = const, —
функция g(t-i), где т = L/v (L — база автомобиля).
Динамическая модель для исследования колебаний в поперечной плоско-
сти показана не рис. 8.17. В этом случае упругие элементы подвески, аморти-
276
8. Плавность хода автомобиля
гн.п
Рис. 8.17. Динамическая модель автомобиля для анализа колебаний
в поперечной плоскости
заторы, шины и неподрессоренные массы объединяются по бортам, а для
обозначения их параметров вводятся индексы «л» и «п*, что означает их при-
надлежность соответственно к левой и правой сторонам автомобиля.
8.6. Математическая модель автомобиля
для анализа плавности хода
Составим математическое описание модели колебаний автомобиля в про-
дольной плоскости. При исследовании колебаний автомобиль движется вдоль
оси хс постоянной скоростью о = const, поэтому составляющая перемещения
описывается простой зависимостью х = ut, что дает возможность не учиты-
вать одну степень свободы динамической модели.
Начала отсчета линейных координат сосредоточенных масс zn, zB1 и 2,2
примем в положении статического равновесия системы. В этом случав силы
тяжести Fn, F н1, Гв2 сосредоточенных масс т^, тв2 уравновешиваются
статическими составляющими усилий упругих элементов подвески fp.0Ti, -FP.OT2
и шин Гшст1, Лп.ст2 и исключаются из математической модели.
Структура и взаимодействие элементов динамической модели описывают-
ся топологическими уравнениями, а физические свойства элементов (компо-
нентов модели) — компонентными уравнениями.
Компонентные уравнения элементов динамической модели составляются
на основе физических законов, описывающих их физические свойства. Физи-
В. 6- Математическая модель аетомобичя для анализа плавности хода
277
ческие свойства инерционных элементов описываются уравнениями второго
закона Ньютона. Для инерционных элементов динамической модели, пред-
ставленной на рис. 8.16, компонентные уравнения имеют вид:
= <б-47>
4*5
= <в.48)
at
F1Kt = ~тв! = -ШеД:: * = t 2, (8.49)
dr
где — вектор инерционного момента подрессоренной массы; — вектор
силы инерции подрессоренной массы; — вектор силы инерции Z-й непод-
рессоренной массы.
Физические свойства линейных упругих элементов описываются законом
Гука, а линейных диссипативных элементов — законом Ньютона. Компо-
нентные уравнения этих элементов представляют собой выражения вида (8.4),
(8.9), (8.11).
Для составления топологических уравнений можно использовать уравне-
ния Лагранжа второго рода, принцип Лагранжа — Даламбера (принцип воз-
можных перемещений) или принцип Даламбера (уравнения динамического
равновесия потенциалов, приложенных к твердому телу). Врезультате по ка-
ждой независимой (обобщенной) координате получаем дифференциальное
уравнение второго порядка.
Составим вначале дифференциальное уравнение вращательной состав-
ляющей движения подрессоренной массы, используя принцип Лагранжа —
Даламбера, согласно которому сумма работ всех внешних сил и моментов,
приложенных к твердому телу, реакций неидеальных связей и инерционного
момента на возможных перемещениях равна нулю. Сообщим подрессорен-
ной массе возможное угловое перемещение относительно оси Ср в положи-
тельном направлении отсчета угловой координаты <рг Тогда точки Л и В
приложения усилий упругих и диссипативных элементов подвески получат
некоторые возможные перемещения, проекции которых на ось г будут соот-
ветственно равны и . Для определения соотношений между перемеще-
ниями &ру, SzA, Ъгв используем выражение (8.46):
5гл =-8<РрСл -&₽/!;
5zB - -бфр* = 6<р^,
(8.50)
(8.51)
где 4, 4 — продольные координаты осей мостов относительно центра масс ав-
томобиля.
Значения параметров 4 и 4 считаются положительными, а координаты то-
чек хА и хв принимаются со своими знаками.
270
8. Плавность хода автомобиля
Вычислив по формулам (ВЛ) и (В. б) виртуальную работу всех сил и мо-
ментов, приложенных к подрессоренной массе, получаем следующее выра-
жение:
(“М/п-+ ^р2^2 + “&
Подставляя значение модуля инерционного момента Mjn, получаем диф-
ференциальное уравнение вращательного движения подрессоренной массы:
= + ^р2$2 + Л>2^2- (8.62)
Дифференциальные уравнения поступательных движений масс т~, т,,!,
относительно координат zn, ян1, составим на основе принципа Даламбера.
В результате получаем следующую систему топологических уравнений:
+-fp2^
= ^pl + ^sl + ^р2 + ^2»
тв1^н1 = “fpl-^*1 + ^inl + frp.tul!
Я1н2^'н2 “=_-Гр2“-₽'а2 + Д112 + ^тр.012
(8.63)
Компонентные уравнения упругих и диссипативных элементов составим
на основе выражений (8-4), (8.9> и (8.11):
f₽i =сР1(г„1-2п
fp2 =Ср2(ги2-гп-^фу);
„ / \ ( (8.54)
^1п2 ~
•P«i ~ Цр1(^и1 ~^п + *А);
= НргОкг -*п “И,); (8
^трло! — ^Я1):
^тр.1п2 “ Цш2(^2~^нг),
где — усилия диссипативных элементов, отображающих физиче-
ские свойства соответственно амортизаторов подвески и шин.
Полученные уравнения (8.53)-(8.ББ) позволяют провести детальное ис-
следование колебаний автомобиля при любых характеристиках микропро-
филя gj и<у2. Из этих уравнений следует, что колебания всех сосредоточенных
масс оказываются взаимосвязанными. Так как система имеет четыре степе-
ни свободы, то количество собственных частот также равно четырем.
Вертикальное перемещение произвольной точки Е подрессоренной массы,
координата которой по оси хравна хЕ, найдем из выражения
2£ = 2П - <рухг. (8.Б6)
Скорость и ускорение этой точки вычисляются по формулам:
= ±0 -ojjX^, (8.57)
8.7. Приближенные модели колебаний автомобиля
279
' <868>
Решение системы дифференциальных уравнений (8.53) осуществляется
численными методами с использованием стандартного программного обеспе-
чения.
8.7. Приближенные модели колебаний автомобиля
Для проведения приближенного анализа плавности хода систему уравне-
ний (8.63) необходимо упростить. Рассмотрим возможные способы ее упро-
щения.
Для описания движения подрессоренной массы вместо координат (pv и za
можно использовать координаты zal и z^ точек А и В кузова автомобиля, нахо-
дящихся над осями переднего и заднего мостов. Соотношения между этими
координатами устанавливаются уравнениями связей:
« М.~?й1, (8.59)
X
zn - (8.60)
L
Используя эти выражения, заменим переменные в уравнениях (8.53)-(8.55).
Преобразуем вначале выражение для определения усилия упругого элемента
подвески Fpl:
Fpl (в-в!)
\ Lt Lt J
Аналогично получаем выражения для определения Fel, F^:
Fta =Ср2(2И2-«пг): (8-62)
F*i = Цр1(4я1“^п1)» (8.63)
F^2 ж Ррг(^н2“*п2)- (8.64)
Рассмотрим два первых уравнения системы дифференциальных уравне-
ний (8.53). Заменим в них переменные на основе выражений (8.59) и (8.60),
подставим значения Рр1, Fp2, Fal, F,2 из уравнений (8.61)-(8.64) и эначение
из выражения (8.43):
-^Р1(«к1-2п1) + ^р2(2н2-гп2); (86б)
= Цр1(^к1~^Я1) + Црй(^иа“^п2) +
+ Ср1 (яЕ1 - 2П1) + ср2 (гн2 - 2П1).
Умножим второе уравнение системы(8.65) на^ и вычтем из него первое:
mn [^2^п1 +(А^п2 ~ Рр(^п2 ~^п1)] я Мр1(^м1 — ^П1Х^1 +^) + ср1(гв1 +^j)-
280
8. Плавность хода автомобили
Учитывая, что L = +4» получаем:
^ц1 + Цр1(^п1-^1)+ер1(гП1-гН1) + тс—$ v2п2 =0. (8.66)
Умножим второе уравнение системы (8.65) на (-Q и вычтем из него пер-
вое. В результате получим:
/2 + 11л“" 0^
тп ^2~^п2 + Нрз(^п2—^нг)+срг(гп2-гмг) + —& ^ni ~ 0. (8.67)
Два последних уравнения системы (8.53) после подстановки значений
усилий упругих и диссипативных элементов имеют вид:
тк1^1 + Нр1(^и1 — *п1)"Н1п1(41 — ^Н1)'*‘^р1(^н1“^р1)“
-сШ1(?1-*Н1) = 0; (8б8)
тв2*2 + Ц₽г(^и2 — ^d2)“Hijj202 — ^нг) + ср2(гн2 —znz)“
—Сш2 ?3 — ^яа) = 0.
Уравнения (8.66)-(8.68) составляют систему дифференциальных уравне-
ний, полностью эквивалентную системе (8.53), но только в ней использованы
иные координаты. При выполнении условия
р*=У2 (8.60)
эта система распадается на две самостоятельные системы, в которые входят
по два уравнения:
+ Hpl^ni +<-pi^ni —
+(Ppi + (<-p< 4*"<-ml)2Mi~=
= НшА+смла f-i- 2,
(8.70)
гдетп1, — части подрессоренной массы, отнесенные соответственно к пе-
реднему и заднему мостам:
(8.71)
Динамическая модель колебаний автомобиля, описываемых системой
уравнений (8.70), представлена на рис. 8.18. Она состоит ив двух независи-
мых двухмассовых колебательных систем. Перемещения подрессоренных
масс тп1 и тц2 описываются координатами зя1 и 2ai, а неподрессоренных масс
гд,1 и — координатами 2^1 й зи2. Все массы колебательной системы в этом
случае рассматриваются как материальные точки, так как они совершают
поступательные движения. Для определения положения любой точки полной
подрессоренной массы т* соединим точки А и В подрессоренных точечных
масс гПц! и безынерционным недефорнируемым рычагом. Тогда верти-
кальное перемещение гЕ произвольной точки Е можно найти иа соотношения
= [(4 + X£)2tri + (4 ~ (8.72)
где хв — координата точки Е по оси х.
8.7. Приближенные модели колебаний автомобиля
261
Аналогичны и соотношения между скоростями и ускорениями точек А,
ВяЕ.
Для большинства современных автомобилей условие (8.69) выполняется
с погрешностью, не превышающей 10 %. Поэтому на начальных стадиях
проектирования часто используют упрощенную математическую модель, опи-
сываемую уравнениями (8.70).
При исследованиях низкочастотных колебаний подрессоренных масс
в диапазоне частот, не превышающих 6-6 Гц, можно пренебречь влиянием
неподрессоренных масс и использовать динамическую модель, приведенную
на рис. 8.19. Эта модель позволяет анализировать вертикальные и продоль-
ные угловые колебания кузова автомобиля. При v = const система имеет две
степени свободы. Для ее описания можно использовать уравнения (8.66),
(8.67), заменив в них координаты исключенных из модели неподрессорен-
ных масс zM1, 2М и их производные ial, iE2 ординатами микропрофиля glt д2
и их производными 0р 02- Кроме того, необходимо объединить упругие эле-
менты рессоры и шины в эквивалентный упругий элемент, а также диссипа-
тивные элементы амортизатора и шины в эквивалентный диссипативный
элемент. Коэффициенты жесткости эквивалентных упругих элементов q и с2
вычисляются по формуле
С)= { = 1Д
Cpf +CU(
(8.73)
282
8. Плавность хода автомобиля
Рис. 8.18. Динамическая модель автомобиля для аяалиоа
низкочастотных колебаний подрессоренной массы
а коэффициенты сопротивлений эквивалентных диссипативных элементов —
по формуле
f \а / >а
Ц/ - м CaL- + М Ср* ; I = U. (8.74)
V'pi + +CIJO< J
Математическая модель для анализа низкочастотных колебаний кузова
автомобиля при изложенных упрощениях принимает вид:
—^2П1 + МП1 +ci2ni +тп » Mi +<hfli;
m„ +to*nz +сггп£ + то^тг^п1 = М2 +czG,2-
L Zz
(8.76)
8.8. Особенности моделирования колебаний
многоосных автомобилей, водителя и пассажиров
При индивидуальной подвеске мостов моделирование физических свойств
динамической системы автомобиля не отличается от рассмотренного в пара-
графе 8.6 для двухосного автомобиля. Дифференциальные уравнения коле-
баний многоосного автомобиля получают таким ясе образом, как и уравнения
(8.53) для двухосного.
Если на автомобиле применяется балансирная рессорная подвеска, то ее
динамическую модель представляют одним из вариантов, показанных на
рис. 8.20.
В первом варианте подрессоренная масса опирается через упругий эле-
мент с коэффициентом жесткости сб, соответствующем рессоре балансира, на
0.8. Особенности моделирования колебаний многоосных автомобилей, водителя и пассажиров 2АЗ
Рис. 8.20. Динамические модели балансирной подвески
жесткий балансир, момент инерции Je которого равен моменту инерции
реального балансира. Во втором варианте жесткий безынерционный балан-
сир опирается на два одинаковых упругих элемента с коэффициентами жест-
кости Ср| =С(/2. В третьем варианте используется один упругий элемент
с коэффициентом жесткостисб, опирающийся на безынерционный балансир,
инерционные свойства которого учитываются приведенными неподрессорен-
ными массами:
mnp< +4*^вАв,
где pij — неподреесоренная масса i-ro моста; — длина балансира.
При проектировании системы подрессоривания сидений, а также для ана-
лиза вибронагруженности водителя и пассажиров разработаны многочислен-
ные биодинамические модели человека.
284
8. Плавность хода автомобиля
Простейшая модель — одномассовая. Человек представляется в виде со-
средоточенной массы, находящейся на упругом основании, соединяющем ее
с колеблющейся подрессоренной массой автомобиля. Коэффициент жестко-
сти упругого элемента определяется характеристиками сиденья (подушки,
системы подрессоривания сиденья). Доля массы человека, приходящейся на
сиденье, принимается равной ББ кг (при общей массе человека 75 кг). Коэф-
фициент жесткости сидений современных автомобилей колеблется в преде-
лах 7,8-11,8 кН/м у легковых автомобилей и 14,7-19,6 кН/м у грузовых.
Относительный коэффициент затухания диссипативного элемента при от-
сутствии специального амортизатора составляет в среднем 0,06-0,18.
При проектировании системы подрессо-
ривания сиденья используют более сложные
биодинамические модели человека — двух-
и трехмассовые (рис. 8.21). В двухмассовой
модели масса mi включает массу таза и ниж-
них конечностей (яц = 29,5 кг), а масса —
массу груди, плеч, верхних конечностей и го-
ловы (m2-27Д кг). Упругий элемент с коэф-
фициентом жесткости отображает упругие
свойства сиденья, а второй элемент с коэф-
фициентом жесткости с2 имитирует пара-
метры упругости тела человека. Принимают
с2 = 22-24кН/м, Цг = 320-400 Нс/м.
В трехмассовой модели из пъ выделяют
массу головы (5 кг) и оценку вибронагружен-
ности проводят по интенсивности ее колеба- Рис. 8,21. Биодинамические моде-
ний. при этом принимаютса - 100-200кН/м, человека- а — двухыассовая;
Цз = 150-250 Н- с/м. ° ~ трехмассовая
8.9. Свободные колебания подрессоренной массы
Исследование свободных колебаний динамической системы осуществля-
ется с целью определения собственных частот и форм колебаний и оценки эф-
фективности их гашения. Свободные колебания происходят в системе при
отсутствии внешних воздействий. Для возбуждения таких колебаний систему
необходимо вывести из состояния статического равновесия. Это достигается
либо отклонением элементов системы из этого состояния, либо сообщением
им начальных скоростей посредством импульсного воздействия.
Реальная физическая колебательная система всегда содержит диссипа-
тивные элементы, поглощающие энергию колебаний. Поэтому свободные коле-
бания затухают и система по истечении некоторого интервала времени при-
ходит в состояние покоя. Частоты затухающих колебаний несколько меньше
собственных частот. Определение собственных частот возможно при отсутст-
вии диссипации энергии.
8.9. Свободные колебания подрессоренной массы
283
। Определим собственные частоты и формы колебаний подрессоренной массы,
используя динамическую модель, приведенную на рис. 8.19. Для анализа сво-
бодных колебаний используем систему дифференциальных уравнений (8.76),
исключив из нее компоненты описания диссипативных элементов и возмущаю-
щих воздействий микропрофнля опорной поверхности. Математическая мо-
дель свободных колебаний подрессоренной массы та имеет вид:
т,
~^ani + Ci2nl+mB-
* L2 *^42 +C2z„s + тп
Уг“Й2 _0.
g*2-pL _o
(8.76)
тп
Разделим все члены первого уравнения системы (8.76) на множитель при
переменной 2п1, а второго уравнения — на множитель при 2п2:
2п1 + С0?гп1+Т12^2 =0;
i<n2+Cje*n2+ЛЛ.1 =0,
где
s с1^2 дЛ — С2^
™it((l+p|)’ 2 mn(^ + ₽y)’
(8.77)
(8.78)
Л1 = ^4: Пв-^4
(8.79)
Параметры Th и называются коэффициентами связи. Они характеризу-
ют связанность колебаний по обеим координатам гп1 и подрессоренной
массы т^. Это означает, что изменение каждой из этих координат представ-
ляет собой сумму двух синусоид с различными амплитудами и частотами, за-
висящими от параметров элементов подвесок переднего и заднего мостов.
Определим собственные частоты этих колебаний. Так как дифференци-
альные уравнения системы (8.77) линейные, ток ним можно применить пре-
образование Лапласа и привести их к системе алгебраических уравнений
с комплексными переменными и Zn2(e}. Аргумент а комплексных пере-
менных также комплексная величина: я = а + Для осуществления преоб-
разования исходную систему дифференциальных уравнений целесообразно
записать в операторной форме:
(₽* + + пгрЧг(9 = 0;
ПьРЧ1(*) + (р2 + <^)*пг(0 = 0,
(8.80)
гдер = —— оператор дифференцирования.
dt
Для осуществления преобразования дифференциальных уравнений по
Лапласу необходимо в уравнениях (8.80) оператор ри независимую перемен-
266
8. Плавность хода автомобили
ную t заменить комплексной переменной я. В результате получим систему ал*
гебраических уравнений:
(вг + + Пг«%а(в) = 0:1 (8 81)
nis%i(e) + (в2 + <^)2П2(в) = О.
При проведении частотного анализа динамической колебательной системы
используется только мнимая часть комплексного аргумента в. Принимая
во внимание, что j - 1, а (jfl)2 =-П®, уравнения (8.81) приведем к следую-
щему виду:
-n,o,z„1(jti)+(<o?-a,)z„!(^i)*o.
Комплексные функции Znl(;fl) и Z^QQ) называют частотными характе-
ристиками функций znl(t) и zn2(:).
Составим определитель системы уравнений (8.82) и приравняем его к нулю:
-^.0.
-ThO2 cog-fl®
Раскрыв этот определитель, получим частотное уравнение собственных
колебаний подрессоренной массы тп:
(l-iljilzjfl1-^ + cog)fl® + ccgcog =0.
Это биквадратное уравнение имеет четыре корня: два положительных
и два отрицательных. Но собственные частоты — величины положительные,
поэтому используем только положительные корни:
- (cog + tog) ± ^(cog - teg/ +
2(1-Л1Пг)
Таким образом, динамическая модель, представленная на рис. 8.19, имеет
две собственные частоты колебаний — низкую и высокую П,, определяе-
мые из выражений:
|(cog н- ag)-^-~^)* +4П1М<
к ] 2(1-П1Л2) ’
IK + (tg)++41у)2фГ
2(1-ЩП2)
Если коэффициенты связи t]i и Пг равны нулю, то из выражений (8.83)
и (8.84) следует, что йв = Пв <= СО) (или - C0j, flj, = coj, так как выражения
(dig - (й^и - cog)2 под квадратным корнем равнозначные). В этом случае ко-
8.9. Свободные колебания подрессоренной массы 267
лебания точек А и В подрессоренной массы оказываются независимыми
и вертикальные перемещения их при свободных колебаниях представляют
собой синусоиды с частотами соответственно Wi и
Коэффициенты и T|j равны нулю при выполнении условия (8.69), т.е.
при что следует из выражений (8.79). Определим для этого случая
значения частот сц и <% по формулам (8.78), заменив в них р£ на
где nij, m2 — части подрессоренной массы mn, нагружающие подвески соот-
ветственно переднего и заднего мостов автомобиля:
т1 = тп^/£; mi=mnll/L.
Обозначим нормальные нагрузки, создаваемые массами mi nmj на подвес-
ки в положении статического равновесия, соответственно = m^g и F2 = m?g,
а усилия упругих элементов подвесок в этом положении jFyl = С1Дст1> = С2дст2-
Поскольку при этом Fi = Fyl, Fs = Fy2, то Cj = mig/AOT1, с2 - Подставив
значения Ct исг в выражения (8.85), (8.86), получаем:
«1 = Vs/act1« (8.87)
<02 ’ 7*/див- (8.88)
Параметры сот и называют парциальными частотами подрессоренной
массы автомобиля. В общем случае * е%. Отношение между ними зависит
от соотношения коэффициентов жесткости упругих элементов подвески с1г с2
и масс 7^. Низкую или высокую парциальную частоту может иметь любая
ив этих масс. Сравнивая значения парциальных частот с действитель-
ными собственными частотами fig, подрессоренной массы т^, вычисляе-
мыми по формулам (8.88) и (8.84), нетрудно видеть, что в общем случае,
когда т)1 и Пз не равны нулю, низкая частота меньше низкой парциальной
частоты <0и, а высокая частота О, больше высокой парциальной частоты (0,.
Таким образом, парциальные частоты щ и определяются статическими
деформациями упругих элементов подвески Дет1 и ДОТ2- Чем больше статиче-
ская деформация упругого элемента, тем меньше парциальная частота, а следо-
вательно, и действительная собственная частота колебаний подрессоренной
массы. Так как у современных автомобилей значения pj и 44 в большинстве
случаев различаются не более чем на 10% (в редких случаях до 20 %), то фор-
мулы (8.85)-(8.88) широко используются для предварительного выбора па-
раметров упругих элементов подвески.
По статистическим данным статическая деформация упругих элементов
независимой подвески передних колес легковых автомобилей составляет
0,15-0,26 м, а зависимой подвески заднего моста — 0,12-0,18 м. При этом
288
8, Плавность хода автомобиля
соотношение q/mj меньше соотношения q/m? на 10-30 %, т.е. обычно перед-
няя подвеска «мягче» задней. Статическая деформация передних подвесок
грузовых автомобилей 0,06-0,1 м, а задних — 0,07-0,1 м.
Парциальные частоты подрессоренной массы современных автомобилей
находятся в следующих пределах: легковых — 0,8-1,3 Гц, грузовых — 1,2-
1,8 Гц. Обычно плавность хода автомобиля улучшается с уменьшением пар-
циальной частоты. Однако при линейной характеристике упругого элемента
подвески это требует увеличения прогибов подвески, что приводит к следую-
щим нежелательным явлениям:
о затрудняется компоновка автомобиля, так как увеличивается необхо-
димое свободное пространство для перемещения колес;
□ при изменении нагрузки происходит значительное изменение высоты
автомобиля и дорожного просвета;
□ увеличивается амплитуда колебаний кузова;
□ увеличиваются продольные наклоны кузова при торможениях и крены
на поворотах;
□ затрудняется согласование кинематических характеристик направляю-
щих устройств подвески и механизмов рулевого привода.
Применение нелинейной подвески, т.е. подвески с нелинейной характе-
ристикой упругого злемента, позволяет в значительной мере уменьшить от-
меченные недостатки линейной подвески. У нелинейной подвески жесткость
упругого элемента возрастает с увеличением деформации (см. рис. 8.3,6). Это
позволяет обеспечить высокую поглощающую способность при низкой собст-
венной частоте колебаний. Нелинейную характеристику упругого элемента
имеют пневматические и гвдропневматические подвески. При применении
металлических упругих элементов (спиральных пружин, листовых рессор,
торсионов) нелинейность подвески создается введением резиновых буферов,
а на грузовых автомобилях — дополнительных рессор (подрессорников —
в подвесках задних мостов).
Резиновые буферы начинают воспринимать нагрузку при прогибах, состав-
ляющих (0,25-0,Б)Дсж. При использовании дополнительной рессоры подрессо-
ренная масса автомобиля без груза совершает колебания на основной рессоре,
а с грузом — на основной и дополнительной. На рис. 8.22 показана характе-
ристика упругого элемента подвески с основной и дополнительной рессорами.
На характеристике показаны точки, соответствующие статическим деформа-
циям упругого элемента при полной нагрузке Др.ет.Р и снаряженного автомоби-
ля Дретл. В точке с координатами Дрл, Fp д включается дополнительная рессо-
ра, происходит излом характеристики и увеличивается жесткость упругого
элемента.
Для определения коэффициентов жесткостей основной и дополнительной
рессор ср и срл необходимы следующие исходные данные: полный прогиб под-
вески Др.ю*х> парциальная частота колебаний подрессоренной массы авто-
мобиля с грузом т^г приходящейся на задний мост; подрессоренная масса
снаряженного автомобилямасса груза, приходящаяся на задний мостт^
при полной нагрузке; коэффициент поглощающей способности подвески зад-
8.9. Свободные колебания подрессоренной массы
289
Рис. 8.22. Характеристика упругого элемента подвески
с основной и дополнительной рессорами
него моста Лпх,2 (см. формулы (8.5) и (8.6)); коэффициент а, определяющий
часть груза от тг2, при которой включается подрессорник.
Определение значений ср и ср,д осуществляют на основе использования
следующих зависимостей между упомянутыми параметрами:
Jp2max =^n,c2tf^2'
(™г + алм)? Fp2 nmx -(m£ + wir2jg
Op Cp+Cpj
При определении cp и cpд рекомендуется принимать следующие значения
параметров Лпл2 и а: = 1,8-2,2; а = 0,5-0,75.
Для определения форм колебаний подрессоренной массы необходимо най-
ти соотношения между амплитудами колебаний точек А и В (см. рис. 8.19)
с низкой Од и высокой О, частотами. При свободных незатухающих колеба-
ниях эти отношения постоянны. Их оценивают коэффициентами распреде-
ления колебаний:
^и “Amj/Ahi; (8.89)
^ = А.а/А,1, (8.90)
где Ад!» А^ — амплитуды вертикальных колебаний точек Аи В с низкой час-
тотой 1),; А^, А,2 — то же — с высокой частотой О».
Уравнения колебаний точек А и В подрессоренной массы представляют
суммы двух гармоник и имеют вид:
гп1 = Ан1сов(Пкг + фн ) + А^сое^ + <р,);
гп2 = X.HAK1coe(nBt + фн ) + X»A*icoe(n^ + <р,)
(8.91)
ЮЭ»к .ИМ
2W
8. Плавность хода автомобиля
Решение для гармонического составляющего колебаний на любой частоте
П будем искать в виде: гп1 = А1Сое(^ + ф):1 zn2 ж А2сое(П2 + ф),]
где ф — начальная фаза колебания.
Найдем вторые производные координат znl, zc2 точек А и В по времени:
2„i = -Q2AiCOfl(Qt + ф); * (8.93) ¥п£ = -£r А2 сое(П( + ф).
Подставим значения из уравнений (8.92), (8.98) в систему
уравнений (8.77):
-0;
(8.94)
-ihtfAt + (со§ - Лг ) А2 - 0
Из уравнений (8.94) найдем коэффициенты распределения колебаний на
низкой Пд и высокой £2, частотах:
1
^-П2., Tlltf.
ПаО2. о^-Л2.'
(8.96)
(8.96)
Предположим, что pj а Лст1 > Дст2. Тогда, согласно выражениям (8.87)
и (8.88), coj т.е. = со,, coj = В результате получаем:
1 _ 1 _ П1П2
" 1)2^ *
Поскольку Пд <0^, £1, > о>„ а 1)! и 1)2 положительны, согласно (8.79), то
в соответствии с этими выражениями получаем Хж >0, X, <0. Следовательно,
гармонические составляющие колебаний точек А и В на низкой частоте О,
совпадают по фазе, а на высокой частоте Пд происходят в противофазе. На
рис. 8.23 дано схематическое изображение амплитуд колебаний AHi, А^ с низ-
кой частотой О, и Aai, А>2 с высокой частотой П, при условии, что передняя
подвеска более «мягкая», чем задняя, т.е. Дст1 >Дет2' Свободные колебания
кузова на низкой частоте можно представить как угловые гармонические ко-
лебания вокруг неподвижной точки Р, а колебания на высокой частоте как
угловые колебания вокруг неподвижной точки Q.
Точки Р и Q называют центрами колебаний. Положения центров колеба-
ний зависят от коэффициентов жесткости упругих элементов и распределе-
ния масс. Точка Рнаходится вне базы автомобиля (сзади, если A^j > Дст2, или
спереди, если Дст1 < А^), а точкаQ—- внутри базы- При вынужденных коле-
6.9. Свободные колебания подрессоренной массы
291
Рие. 8.23. Формы свободных колебаний подрессоренной массы автомобиля:
а — с низкой собственной частотой ftj; б — с высокой собственной частотой ft.
баниях, возбуждаемых неровностями опорной поверхности дороги, постоян-
ных центров колебаний не существует. Они имеют место только при свободных
колебаниях. ,
Вертикальные перемещения подрессоренной массы при колебаниях назы-
вают подпрыгиванием, а угловые относительно центра колебаний Q, располо-
женного внутри базы автомобиля, называют галопированием. Из рис. 8.23
следует, что при <1^ подпрыгивание соответствует низкой собственной
частоте, а галопирование — высокой. Галопирование — более нежелатель-
ный вид колебаний, чем подпрыгивание, особенно на низких частотах и при
больших амплитудах, так как при этом возникают большие горизонтальные
составляющие колебаний.
При p® коэффициенты связи колебаний rfo ит|2 отрицательны (см. фор-
мулы (8.79)), в результате оказывается, что <0, а X, >0. В этом случае гало-
пирование возникает на низкой частоте, а покачивание — на высокой. Это
характерно для короткобазных автомобилей, особенно в случае, если двига-
тель и трансмиссия расположены вне базы, так как при этом возрастает ради-
ус инерции ру. Низкочастотный резонанс возникает обычно при небольших
скоростях автомобиля, так как частота воздействия неровностей дороги про-
порциональна скорости (см. формулу (8.25)) и сопровождается большими
амплитудами колебаний. Поэтому склонность автомобиля к галопированию
на низкой частоте является его серьезным недостатком.
Наконец, определим, от каких параметров подвески зависит предельное
допускаемое ускорение подрессоренной массы 2nJ|OI1, превышение которого
приводит к пробою подвески. Из выражений (8.93) следует, что амплитуда
ускорения подрессоренной масСы пропорциональна амплитуде колебаний А
и квадрату собственной частоты О. При небольшой разнице между р£ и
вместо Л можно принять парциальную частоту со. Полагая А = Двж, найдем
значение йплоп по формуле
^п.лмт =
или с учетом выражений (8.87), (8.88)
"2'njon = вДсж/ДсГ- (8.97)
292
8. Плавность хода автомобиля
В тяжелых дорожных условиях ускорение подрессоренной массы может
достигать 7-8 м/с2, поэтому при проектировании автомобилей, предназна-
ченных для работы в таких условиях, соотношение между ходом сжатия
и статической деформацией упругого элемента Дст должно быть близким
к единице, т.е. Дсж/Дс, -1.
У автомобилей, предназначенных для движения только по хорошим доро-
гам, отношение Дсж/Дет выбирают меньше единицы, причем, чем выше тре-
бования к комфортабельности автомобиля, тем оно меньше.
Таким образом, значение Дст определяют по формулам (8.87), (8.88) в за-
висимости от выбранного значения низкой парциальной частоты со, а Дсж вы-
бирают в зависимости от назначения автомобиля.
По статистическим данным полный ход зависимой подвески грузовых ав-
томобилей составляет 0,16-0,22 м для переднего моста и 0,20-0,24 м — для
заднего. У легковых автомобилей полный ход подвесок 0,18-0,50 м.
8.10. Свободные колебания подрессоренных
и неподрессоренных масс
На колебания подрессоренных масс, безусловно, оказывают влияние не-
подрессоренные массы. Особенно значительно их влияние, когда численные
значения подрессоренных и неподрессоренных масс т^, т^, ткг сопостави-
мы, что характерно для грузовых автомобилей большой грузоподъемности
при движении без груза.
Будем полагать, что р2 отличается от Z& не более чем на 10 %. Тогда коле-
бания точек А и В подрессоренной массы можно считать несвязанными. Ди-
намическая модель колебательной системы автомобиля Для такого случая
приведена на рис. 8.18. Она представляет собой две идентичные независимые
двухмассовые колебательные системы, движения которых описываются оди-
наковыми дифференциальными уравнениями (8.70). Рассмотрим одну из
них, опуская индексы I в системе уравнений (8.70). Так как исследованию
подлежат свободные незатухающие колебания, то исключим из уравнений
описания диссипативных элементов и функций внешних воздействий. В ре-
зультате получим следующую систему дифференциальных уравнений:
+ср2п-ср2в =0; 1 (8 08)
Разделим все члены первого уравнения системы (8.08) иа/п,,, а второго на т*:
*. *<*.-».*.’<>:1 (8.М)
=°J
где со,,, Од — парциальные частоты подрессоренной и неподрессоренной масс
соответственно; т|п,Г|и — коэффициенты связи колебаний подрессоренной
и неподрессоренной масс.
0.10. Свободные колебания подрессоренных и неподрессоренных масс
293
Динамические модели одномассовых парциальных систем приведены на
рис. 8.24, аиб. Парциальные частоты этих систем вычисляются по формулам:
Коэффициенты связи колебаний подрессоренной и неподресооренной масс
определяются по формулам:
Пп--% (8.102)
я б
Рис. 8.24. Динамические модели одноыассоных парциальных систем:
а — подрессоренной массы; б — неподрессоревной массы
Так как в данном случае коэффициенты связи т]п и — вещественные по-
ложительные числа, то, независимо от значений параметров инерционных
и упругих элементов колебательной системы, колебания подрессоренной и не-
подрессоренной масс будут связанными. Изменения их координат жв и гж
представляют собой суммы двух гармонических составляющих с различны-
ми частотами. Для определения собственных частот колебаний рассматри-
ваемой двухмассовой системы применим преобразование Лапласа к системе
линейных дифференциальных уравнений (8.99). В результате получим сис-
тему алгебраических уравнений с комплексными переменными;
(? +с4)гп(в)-Пн2н(з) = 0:
-'Пп£11(а) + (в* + (4 )гн (е) = 0.
Полагая составим определитель полученной системы уравнений
и приравняем его к нулю:
Д =
~"Пп
-Пн
<4-ла
=о.
Раскрыв этот определитель, получим уравнение собственных частот:
ft1 -(с^ + оД )О2 + ((£§ -ЛпПи) « 0-
294
в. Плавность хода автомобиля
Положительные корни этого биквадратного уравнения определяют две
собственные частоты колебаний рассматриваемой системы:
(8.105)
Парциальные частоты (йц и со» представляют собой приближенные оценки
собственных частот ft» и ft» двухмассовой колебательной системы. Так как
коэффициент жесткости шиныеш больше коэффициента жесткости упругого
элемента подвески ср, а неподрессоренная масса т* меньше подрессоренной
та, то, как следует из выражений (8.100) и (8.101), со» > Од. Отметим также,
что в соответствии с выражениями (8.103) и (8.104) низкая собственная час-
тота системы ft» меньше парциальной частоты подрессоренной массы со^,
а высокая частота £1» больше парциальной частоты неподрессоренной массы
Уравнения колебаний подрессоренной и неподрессоренной масс имеют
следующий вид:
«п = сов(£2иС + фи) + Лмсов (ГЦ + <рв);
«я = А« coB(£JHt + фи) + Awcos(ft»t + фв).
Графики колебаний этих масс представляют собой сложные кривые, по-
лученные в результате сложения двух гармонических составляющих с раз-
личными амплитудами и частотами.
Так как высокая частотаП» обычно в 6-10 раз выше низкой частоты QB, то
амплитуда высокочастотной гармоники Д, значительно меньше амплитуды
низкочастотной гармоники Дщ. Поэтому влияние неподрессоренной массы
на перемещение купона сравнительно невелико. Значительно больше ее влия-
ние на ускорение кузова. Найдем ускорение подрессоренной массы, вычислив
вторую производную координаты zB по времени:
= ~[Д1е^ coe(ft»« + фн) + Ai.ft2» соа(£2^ + ф,)].
Хотя До < Да, но второе слагаемое этого выражения может быть весьма
значительным, так как ft£ >£^ в 36-100 раз.
Подвеску автомобиля считают удовлетворительной, если низкая собствен-
ная частота £1д для легковых автомобилей составляет 0,8-1,3 Гц, для грузо-
вых автомобилей 1,2-1,8 Гц, а высокая собственная частота ft» для легковых
автомобилей 8-12 Гц, для грузовых 6,6-9,0 Гц.
8.11. Свободные колебания с учетом сил сопротивления
В конструктивных элементах подвески и в шинах при колебаниях подрес-
соренных и неподрессоренных масс всегда имеют место силы внешнего и вну-
треннего трения, которые приводят к рассеиванию энергии. Поэтому свободные
8.11. Свободные колебания с учетом сил сопротивления
295
колебания системы затухают. Наибольшее влияние на скорость затухания
свободных колебаний оказывают силы сопротивления амортизаторов и силы
трения в листовых рессорах. Сила сопротивления амортизатора в первом при-
ближении пропорциональна относительной скорости перемещений подрессо-
ренной и неподрессоренной масс. Такое ясе допущение обычно принимается
и в отношении сил трения в листовой рессоре, других элементах подвески
и шинах при анализе плавности хода автомобиля. Вместе с тем следует иметь
в виду, что силы трения без смазочного материала описываются более слож-
ными зависимостями, как отмечено в параграфе 8-2, что учитывается обычно
при моделировании колебаний на заключительных этапах проектирования.
Для анализа свободных затухающих колебаний подрессоренной массы ис-
пользуем динамическую модель, приведенную на рис. 8.1©, которой соответ-
ствует система дифференциальных уравнений (8.75), если в ней исключить
функции воздействий дороги qt. Примем допущение о выполнении условия
(8.69), т.е. предположим, что pj «4^ • Тогда уравнения колебаний точек А и В
. подрессоренной массы будут идентичны. Поэтому используем лишь одно
уравнение свободных затухающих колебаний
mn2n +pin +мп = 0, (8.106)
гдетв — часть подрессоренной массы, нагружающая подвеску соответствую-
щего моста.
Параметры диссипативного ц и упругого с элементов определяются по
формулам (8.73) и (8.74). Коэффициент жесткости шины с ш на порядок выше
коэффициента жесткости упругого элемента подвески с?, а относительный
коэффициент сопротивления шины уш также на порядок меньше относи-
тельного коэффициента сопротивления амортизатора ур. Кроме того, уш зна-
чительно снижается с увеличением скорости автомобиля (см. рис. 8.9). Тогда,
согласно выражению(8.74), коэффициент сопротивления рв уравнении (8.106)
в первом приближении можно принять равным Цр и влиянием сил трения
в шинах на затухание колебаний подрессоренной массы пренебречь.
Разделим все члены уравнения (8.106) натпп:
’ 2П +2hin +<i?zn »0, । (8.107)
где h — коэффициент затухания колебаний, рад/с; 0) — собственная парци-
альная частота, рад/с.
Параметры Ли савычисляются по формулам:
Составим характеристическое уравнение дифференциального уравнения
(8.107):
рг +2hp + a? =0.
Корни этого уравнения
Pi.a =-Л±7й2-и?.
296
8. Плавность хода автомобиля
Предположим, что Л < ед тогда корни характеристического уравнения мож-
но представить в виде
i Р1.!=-Л±/Оэ*
где со» — круговая частота затухающих колебаний, рад/с:
ед = о^1-(Л/со)2. (8.108)
Решение дифференциального уравнения {8.107) при h < со имеет вид:
zn = ein(co»t + фо), (8.109)
где Ац — максимально возможная амплитуда затухающих колебаний, полу-
чаемая при t = 0; фо — начальная фаза.
Рассмотрим правомерность принятого допущения о том, что Л<<в, Для
этого выясним, что собой представляет отношение Л/сх
Л__ F .
ш 2тлсо
Сопоставляя это выражение с выражениями (8.17), (8.18), находим, что
отношение й/<о равно относительному коэффициенту затухания колебаний у
(называемому также коэффициентом апериодичности). Так как значение у
для автомобильных подвесок с линейными упругими элементами не превы-
шает 0,3-0,36 (см. параграф 8.2), то принятое допущение обосновано и коле-
бания подрессоренной массы описываются уравнением (8.109). График этих
колебаний приведен на рис. 8.2В.
При у = 0,3разница между частотами сои со» составляет 4,5 %. Поэтому
при наличии графиков затухающих колебаний, полученных при проведении
экспериментов по оценке плавности хода автомобиля, различием между
периодами свободных затухающих и незатухающих колебаний Тв и Т пре-
небрегают. Замерив значение Тл, находят оценку собственной частоты со по
формуле
о «ед = 2л/Т„. (8.110)
Рис. 8.25. График свободных затухающих колебаний подрессоренной мамы
$.11. Свободные колебания с учетом сил сопротивления
297
Оценку эффективности гашения колебаний осуществляют по декременту
колебаний, представляющему собой отношение смежных амплитуд, которые
чередуются через полупериод затухающих колебаний Т,/2. При этом смежные
амплитудные отклонения и «ui получаются с противоположными знака-
ми. Пусть в момент времени tt от начала колебаний возникает первое ампли-
тудное значение Л}. Тогда последующие амплитудные значения А%, Да и т.д.
появятся при tt + T,/2, ti + T, я т.д. Значения амплитуд при этом, согласно
уравнению (8.109), будут равны:
Ai - Aoe“h‘‘; А2 - До*-**' Да = Дов-*^ *т,).
Декремент колебаний определяется по формуле
Д.А^ОД‘7.,
А+1
(8.111)
Учитывая выражения (8.108) и (8.110), формулу (8.111) приведем к виду:
D = ехр
яу
(8.112)
В качестве характеристики затухания используют также натуральный
логарифм отношения смежных амплитуд. Это отношение называют логариф-
мическим декрементом колебаний,
ItlD = .. -> тгу.
>7
(8.113)
Это выражение используется для определения относительного коэффици-
ента затухания колебаний у по результатам экспериментальных исследований
колебаний подрессоренной массы. По полученной при испытаниях осцилло-
грамме находят отношение смежных амплитуд, т.е. значение D, а затем вы-
числяют у:
у = 1п£.
я
(8.114)
Определим относительное количество энергии, рассеиваемой амортизато-
рами за один период колебаний:
ДИ^ _ 17f-VTi+2 -,^2
Wt W, '
(8.11Б)
где Д1У4 — количество механической энергии, перешедшей в тепловую за
один период колебаний; — потенциальная энергия системы при достиже-
нии максимальной амплитуды колебаний (кинетическая энергия при этом
равна нулю, так как скорость равна нулю); Wi+S — то же по истечении одного
периода колебаний.
296
в. Плавность хода автомобиля
Значения W( и Ж(+г вычисляются по формулам:
wi = wp( + W„M (; w(.2 = wp((+2)+w11H(1+2p
где 1Ур1, Wp(J+2) — приращения потенциальной энергии рессоры; WnM (, у—
то дао подрессоренной массы лгп, приходящейся на данную подвеску.
Примем условие, что в положении статического равновесия колебатель-
ной системы ее потенциальная энергия равна пулю, а смежные односторонние
амплитудные значения координат ztI ( и 2пр+2) соответствуют максимальным
деформациям рессоры при колебаниях Д, и Д;+2. В этом случае подрессорен-
ная масса т„ опускается и ее потенциальная энергия уменьшается. В резуль-
тате получаем:
1Ур< - 0,5с (д* - Д2СТ); Wp(i+2) = ОД: (л2+2 - Д* г);
ЛМ1 = ““ (Д J ” Д СТ )1 пх(/ +2) ~ f 42 & СТ )«
Найдем вначале значение!^, принимая во внимание, что/п.п£ = сДст:
W, =0Лс(^-Д2сг-2Д(Дст ^2Д2,) = 0.5с(Л;-ДГ7;)г.
Так как zt = Д(—Д„;, то Wt -0,5czf.
Аналогично получаем ИЛ1+2 = 0,&czf+2.
Подставим значения Ж, и iV(+2 в выражение (7.115):
,811в)
Оценим скорость затухания колебаний и относительную величину рассеи-
ваемой энергии амортизаторами для двух значений относительного коэффи-
циента затухания колебаний у = 0,2 и у - 0,3.
При у = 0,2 получаем D = 1,87; Л1У(/1УХ =0,92. Следовательно, за одно пол-
ное колебание в тепло переводится 92% энергии, запасенной колеблющейся
системой, а амплитуда уменьшается в £>г =3,51 раза. За два периода колебаний
амплитуда уменьшится bD4 = 12,35раэа, а за три периода bDb = 43,38раза.
При? = 0,3 получаем!) = 2,57;ДИ^/1У( = 0,98. За одно колебание в тепло бу дет
переведено 98 % запасенной энергии, а амплитуда уменьшится в 6,59 раза.
За два периода амплитуда уменьшится в 43,38 раза.
В связи с быстрым уменьшением амплитуды возникают сложности точной
оценки значения декремента колебаний. Поэтому с целью снижения погрешно-
сти при определении значения!) по осциллограмме колебательного процесса
используют амплитудные значения отклонения от положения статического
равновесия, следующие друт за другом с интервалом, равным полупериоду за-
тухающих колебаний 7^/2. Этим и объясняется применение формулы (8.112).
У автомобилей с гидропневматическими подвесками амортизаторы выпол-
няют со значительно большими относительными коэффициентами затухания
8.12 Вынужденные колебания автомобиля 299
колебаний у: у легковых автомобилей до 0,4, а у грузовых — до 0,6. Примене-
ние гидропнеэматических подвесок позволяет значительно снизить собствен-
ные частоты подрессоренных масс — до 0,5-0,8 Гц у легковых и 0,8-1,2 Гц
у грузовых автомобилей. Подвески с такими характеристиками дают воз-
можность существенно повысить скорости движения автомобилей на плохих
дорогах.
8.12. Вынужденные колебания автомобиля
Прежде чем рассматривать вынужденные колебания автомобиля, напом-
ним следующее свойство колебательной системы с одной степенью свободы.
Если к такой системе в момент времени t0 приложить гармоническое воздей-
ствие g(f) = g0 sin vt с частотой v и постоянной амплитудой qQ, то в начальный
период колебания ее будут иметь сложный негармонический характер. Они
представляют собой сумму двух составляющих: свободных затухающих коле-
баний, частота которых близка к собственной частоте системы, и вынужден-
ных гармонических колебаний с частотой внешнего воздействия. Но свободные
колебания довольно быстро затухают, и в системе устанавливаются вынужден-
ные гармонические колебания z(f) = Д, sln(vZ + <р) с постоянными характери-
стиками: частотоЙУ, амплитудой Ла к углом сдвига фаз <р между гармониками
z(t) и g(t). Аналогичными свойствами обладают колебательные системы с конеч-
ным числом степеней свободы, описываемые линейными дифференциальными
уравнениями. Поэтому в дальнейшем будут рассматриваться только вынуж-
денные колебания.
При движении автомобиля его колеса взаимодействуют с неровностями
микропрофиля опорной поверхности дороги. В результате этого взаимодей-
ствия возникают переменные силы в упругих и диссипативных элементах
шин и подвески, которые осуществляют воздействия на подрессоренные и не-
подрессоренные массы. Возбуждаемые при этом колебания масс называются
вынужденными > Характеристики вынужденных колебаний определяются
как физическими свойствами колебательной системы автомобиля, так и за-
кономерностями изменения внешних воздействий. Характер внешних воз-
действий на автомобиль определяется микропрофилем опорной поверхности
дороги. В общем случае он описывается случайной функцией д(х), аргумен-
том которой является перемещение автомобиля х.
Исследование вынужденных колебаний позволяет определить один из
основных показателей плавности хода — среднее квадратическое значение
виброускорения (СКЗУ). Этот показатель используется для оценки вибро-
нагруженности водителя и пассажиров и определяется для различных точек
подрессоренной массы автомобиля.
Для анализа вынужденных колебаний используем динамическую модель,
приведенную на рис. 8.18, которая соответствует случаю р£ ” Угг когда прак-
тически отсутствует связь между колебаниями точек А к В подрессоренной
массы.
300
8. Плавность хода автомобиля
Математические модели вынужденных колебаний этих точек идентичны
и представляют собой системы уравнений вида (8.70). Запишем эти уравне
ния, опустив индекс!:
+сргп—Р-р^в — срзи =0;
'*"(Рр '^Рй|)^и "*'(<"р *’сш)гя “Нр^п **СР^П = +Сц1?"
Разделив все члены первого уравнения системы (8.117) на/пц, а второго
на тв, приведем их к виду:
+2/^473+<о^2п—2ftn4H—<о^гн = 0; га пят
2В + 2ЛЖДЯ +с4гк_2аАвйо_с<л^гп = 2Actf + £c&7.
В уравнениях (8.118) приняты следующие обозначения:
2m„ 2т„ 2тя тп
тя
^ = £ш_; аА
тв т„
Поскольку дифференциальные уравнения системы (8.118) линейные, при-
меним к ним преобразование Лапласа:
(а2 + 2ЛП в + o£)Zn + с£)2и(в) = 0;
-a(2ftne + «§)Zn(8) + (es +2Л,в + <в^2в(в) = (2M + <B&)Q(e)-
Предположим, что микропрофиль описывается гармонической функцией
g(t), круговая частота которой V, рад/с. Тогда в системе установятся вынуж-
денные колебания с этой же частотой. Заменим комплексную переменную а
ее мнимой составляющей jvi
(aft-va + /2ft„v)zn(fv)-(o£ + /2hnv)ZH(jv) = 0;
+/2/t,v)Zn(jV) + (<o2-vz +/2AHv)ZH(/v) = (wg + )2hov)Q(}v),
(8.119)
где Zn(/v), ZH(/v) — частотные характеристики функций zB(t) и zM(t); Q(jv) —
частотная характеристика функции ординат микропрофиля g(t).
Уравнения (8.119) позволяют определить частотные характеристики
колебательной системы, характеризующие зависимости амплитуд, скоро-
стей и ускорений подрессоренной и неподрессоренной масс от частоты воз-
действия. Частотные характеристики системы позволяют проанализировать
ее реакцию на внешнее воздействие в исследуемом диапазоне частот. Если
необходимо выяснить, как изменяется амплитуда колебаний массы т{ при
внешнем воздействии g на систему с различными частотами, то на это дает
В.12. Вынужденные колебания автомобиля
301
ответ частотная характеристика W^O’v), определяемая отношением частот-
ных характеристик Перемещения массы Ej (jv) и воздействия Q(/v):
О»
Частотные характеристики исследуемой колебательной системы по входу
q и выходам 2П и хя определяются по формулам:
и'"(Л)=а^:
Решения уравнений (8.119) относительно частотных характеристик вы-
ходной координаты Zn(jv), характеризующей колебания подрессоренной
массы, и координаты характеризующей колебания неподрессореиной
массы, определяются по формулам Крамера. Если при этом принять Q(/v) = 1,
то непосредственно получаем искомые частотные характеристики:
; (8120)
= (8.121)
> д(л)
где A(jv) — главный определитель системы уравнений (8.119); Aan(/v) — опре-
делитель, у которого столбец коэффициентов при ZB(jv) заменен столбцом
коэффициентов npnQ(/v); A„(jv) — определитель, у которого столбец коэф-
фициентов при заменен столбцом коэффициентов при 0(A)-
Составим главный определитель:
мм= -(^+>2М .
' +/2Anv) (aS-v®+y2h„v)
Раскроем этот определитель и представим его в виде:
А(Л) = Со +/А)»
гдеСз J>o — вещественная и мнимая части главного определителя A(/v):
C0 = v*-(coS + +4ftnAH-4aft®)vz + ci^o)®-aoi*;
%
-Do =-2[(Лп +hn)\?~(hn<x?,l +ftnc4“2aftnc^)v].
Определитель A,n(/v) = Q+jDi имеет вид:
,., 0 -(aS +M,v)
(o^+;2Aov) (a£-№+/2hBv)‘
302
8. Плавность хода автомобиля
Раскрыв определитель, найдем его вещественную Q и мнимую Д части:
Q = с$ oft -IMnV2; А = + “S *o)v.
Наконец, составим определитель A^/v) =
(“W+Av) О
' ~а(о£+j2ftnv) (сс^ + /2М)*
Сз = +4ЛОЛП)^;
Подставим полученные значения определителей в выражения (8.120)
и (8.121), умножив при этом числители и знаменатели на комплексно-сопря-
женную с числителем величину Cq-jDq. В результате получим искомые час-
тотные характеристики перемещений подрессоренной и неподрессоренной
масс динамической колебательной системы, представив их в следующем виде:
^(р) = U„ (v)+Mr(v); (8.122)
^(Л) = (8-123)
где Um (v) = Re W/n (/v), U„ (v) = Re (/v) — вещественные частотные характе-
ристики подрессоренной и неподрессоренной масс, соответствующие проекци-
ям векторов Qv) и W£a (/у) на вещественную ось Re комплексной плоскости;
Kn(v)=Im^»n(/v)> KB(V) = И7и(Л') — мнимые частотные характеристики,
соответствующие проекциям этих же векторов на мнимую ось Im.
Значения вещественных и мнимых частотных характеристик рассматри-
ваемой системы соответственно равны:
<81и’
t'“<v’-so!li <81“>
Рассмотрим пример, приняв следующие параметры автомобиля:
тс1 = 550 кг; тп2 = 565кг; mHj = 58 кг; ти2 = 92 кг;
cpi = ср2 - 30000 Н/м; сш1 = си2 - 250000 Н/м;
Tpi = Т₽2 = 03; Ywi = Тшг * 0-03.
Собственные частоты колебаний передней и задней частей автомобиля,
вычисленные по формулам (8.103) и (8.104), соответственно равны:
£}щ = 6,97 рад/с (1,11 Гц);
0,1 = 69,52 рад/с (11,06 Гц);
8.12. Вынужденные колебания автомобиля 303
йн2 ® 6,88 рад/с (1,00 Гц);
Яв2 = 56,22 рад/с (8,70 Гц).
Определим частотную характеристику Поскольку W/n(/v) — ком-
плексная величина, то ее можно изобразить в виде вектора на комплексной
плоскости. При изменении частоты v вектор W®n(/v) изменяет свой модуль и
направление, а его конец описывает на комплексной плоскости линию, назы-
ваемую годографом. Годограф вектора Wfn (/v) называют амплитудно-фазо-
вой частотной характеристикой (АФЧХ).
На рис. 8.26 представлен годограф вектора Wyn(/v)> полученный для рас-
сматриваемого примера. Вектор W&Qv) характеризуется модулем |W&(/v)|,
определяющим его длину, и аргументом argW^(/v), отображающим направ-
ление этого вектора. Зависимость модуля частотной характеристики от частоты
называют амплитудно-частотной характеристикой (АЧХ) исследуемой
динамической системы, а зависимость ее аргумента от частоты называют фа-
зо-частотной характеристикой (ФЧХ).
Рис. 8.26. Амлитудно-фавовая частотная характеристика подрессоренной массы
Обозначим АЧХ перемещения подрессоренной массы Afn(v), а. ее ФЧХ —
<p$n(v). Значения A£j(v) и (pfn(v) вычисляются по формулам:
^n(v) »|^(Л)| = ^n(v) + ^n(v);
4>L(v) = argVTA (л) = arctg-^2^
(8.126)
(8.127)
Аналогично выглядят выражения для определения АЧХ Ajn(v) и ФЧХ
4>Sa(v) неподрассоренной массы.
304
8. Плавность хода автомобила
Если подставить значения Ut„(y) и V,n(v) ив выражений (8.124) в формулу
(8.126), то после несложных преобразований получим более удобную форму-
лу для вычисления АЧХ перемещений подрессоренной массы:
A<n(v)“IO- (8128)
IjCo+Uo
Аналогично получается формула для вычисления АЧХ перемещений не-
подрессоренной массы:
(8129)
При определении частотных характеристик было принято единичное внеш-
нее воз дейсТвиеО(/у) = 1. поэтому АЧХ А$а (v) и (v) представляют собой отно-
шения амплитуд перемещений соответственно подрессоренной zn(v) и непод-
рессоренной ^(v) масс к амплитуде гармонического внешнего воздействия
при данной частоте хл
Л®, (v) = ^£2; А«н (v) = ^1. (8.130)
9о 9с
ФЧХ <p?n(v) и <р5л (v) определяют углы сдвига фаз гармонических функций
гп(0 и ^(0 колебаний соответственно подрессоренной и неподрассоренной
масс относительно гармонической функции микропрофиля опорной поверх-
ности q(t).
Исследователя обычно интересуют зависимости АЧХ и ФЧХ от частоты
гармонического воздействия v. Но на линии годографа значения v отсутству-
ют, что требует дополнительных вычислений. Кроме того, значения v распо-
ложены неравномерно (на рис. 8.26 показано несколько точек с указанием
значений v). Поэтому годограф обычно не используют для решения практиче-
ских задач.
При исследовании виброэащитных свойств подвески автомобиля наиболее
удобно использовать графики зависимостей А^ пА?„ от частоты V. Эти зави-
симости, как отмечалось выше, называют амплитудно-частотными характе-
ристиками.
Для определения ускорений подрессоренной и неподрессоренной масс
можно построить АЧХ ускорений. Из выражений (8.93) видно, что амплитуда
ускорения равна произведению амплитуды перемещения на квадрат часто-
ты. Аналогичные соотношения существуют между АЧХ ускорений и переме-
щений:
Ajn(v) = v«A’,(v); (8.131)
А?е(у)И^А«б(у), (8.132)
где j4jn(v),Ajn(v) —- АЧХ ускорений соответственно подрессоренной и непод-
рессоренной масс.
в.12. Вынужденные колебания автомобиля
305
На рис. 8.27 показаны амплитудно-частотные характеристики перемеще-
ний (в) и ускорений (б) подрессоренной и неподрессоренной масс динамиче-
ской модели, представленной на рис. 8.18. Кривые 1 относятся к подрессо-
ренной массе, а кривые 2 — неподрессоренной. При вычислениях использо-
ваны приведенные выше параметры автомобиля. АЧХ для передней и задней
частей автомобиля при принятых параметрах практически одинаковы.
Рис. 8.27. Амплитудно-частотные характеристики перемещений (а) и ускорений (б)
подрессоренных (/) и неподрессоренных (2) масс
Из графиков АЧХ на рис. 8.27, а видно, что при малых частотах возму-
щающих воздействий перемещения масс практически равны высотам неров-
ностей . При приближении частоты воздействия v к низкой Q, или высокой П,
собственным частотам на графиках амплитудно-частотных характеристик
возникают экстремумы. Наибольшее перемещение подрессоренной массы
имеет место при частоте vpl *> Он, а неподрессоренной — при vp2 - О,. Частоты
vPi и Vp2, при которых достигаются экстремумы амплитудно-частотных ха-
рактеристик, называются резонансными частотами. Их значения несколь-
ко меньше значений собственных частот fig и £2,, что определяется влиянием
сопротивлений диссипативных элементов. Резонансные режимы колебаний
сопровождаются также наибольшими ускорениями масс (рис. 8.27, б). При
v > £4 с увеличением v значения АЧХ уменьшаются, причем наиболее интен-
сивно для перемещения подрессоренной массы. АЧХ ускорения при этом па-
дает гораздо медленнее, чем АЧХ перемещения.
Если автомобиль движется по дороге с гармоническим микропрофилвм,
то амплитуды перемещений и ускорений подрессоренных и неподрессорен-
ных масс, согласно выражениям (В. 130), определяются по формулам:
zn(v) > ?oAfn(v); гн (v) = g0ASK(y);
(8.138)
ЗМ
8. Плавность холл автомобиля
Mv) = 9oA?n(v) - (v); 5?и (v) = qQ Af„ (v) = A«„(v). (8.134)
Максимальное ускорение подрессоренной массы находят по формуле
^ипик = ffo[Aw(v₽')]„M- <8.135}
Где £а^п (vpi)] — максимальное значение АЧХ ускорения подрессоренной
массы, соответствующее одной иэ резонансных частот vpl или vp2.
Аналогично определяется максимальное ускорение неподрессоренной
массы:
^ншм =?t>r^-jit(vpi)l - (8.186)
* ГП-ДЛ
В формулах для определения частотных характеристик частота V, рад/с.
Если при построении графиков АЧХ по оси абсцисс отложить частоту /, Гц,
то при использовании формул (8.134) необходимо учитывать, соотношение
между v и f:
v~2r.f. (8.137)
Например, ускорение подрессоренной массы в этом случае вычисляется
по формуле:
Ъ, (/) = 5о< (Г) = 4кг/гдМ (v). (8.138)
8.13. Оиенка плавности хода автомобиля при движении
по дороге со случайным микропрофилем
В общем случае микропрофиль дороги описывается случайной функцией.
Поэтому при движении автомобиля возбуждаемые неровностями дороги ко-
лебания подрессоренных и неподрессоренных масс также носят случайный
характер и представляют собой случайные процессы, характеризующиеся
широким спектром частот. Для оценки вибронагруженности водителя, пас-
сажиров и конструктивных элементов автомобиля обычно рассматривается
спектр частот, охватывающий первые пять октавных полос. В практике испы-
таний и теоретических исследований используют два метода оценки. Первый
заключается в том, что весь исследуемый частотный спектр ускорений делят
на полосы частот и оценку вибронагруженности проводят для каждой поло-
сы отдельно. При этом предполагается, что в пределах каждой полосы влия-
нием изменения частоты на чувствительность человека к вибрации мойсно
пренебречь. Оценка плавности хода автомобиля этим методом иллюстриру-
ется на рис. 8.1.
Во втором методе оценка вибронагруженности осуществляется по корректи-
рованному (эквивалентному) среднему квадратическому значению ускорения
(СКЗУ), определяемому по формуле (8.2) с учетом весовых коэффициентов
чувствительности человека к ускорениям в различных октавных полосах.
8.13. Оценка плавности хода автомобиля
307
Первый метод называют методом раздельной частотной оценки, & вто-
рой — интегральной взвешенной частотной оценки. Преимущества раздель-
ной частотной оценки — высокая чувствительность и возможность получения
более детальной оценки вибронагруженности. Даже небольшие изменения
в спектре ускорений, воздействующих на водителя и пассажиров, выявляются
этим методом. Интегральная взвешенная оценка — более грубая. Она менее
чувствительна к изменению спектрального состава вибрационного воздейст-
вия. Даже если в какой-либо узкой полосе частот уровень ускорений далеко
выходит за допустимые пределы, это может не отразиться на интегральном
показателе, если В другой полосе уровень ускорений снизится.
Для определения СКЗУ в Ьй полосе частот используется график спек-
тральной плотности ускоренийОД^. На рис. 8.28 показан вид графика спек-
тральной плотности ускорений на сиденье водителя . Спектральная плот-
ность характеризует распределение дисперсии по частоте. Для определения
дисперсии ускорения в заданной полосе частот необходимо вычислить инте-.
грал от спектральной плотности в этой полосе. Он соответствует площади, заклю-
ченной между кривой спектральной плотности, осью абсцисс и границами
полосы частот, определяемыми начальной граничной частотой 4 и конечной fK.
На графике выделены две октавные полосы частот — первая (1} и вторая (2).
Заштрихованные площади с учетом масштабов переменных Gjc и f соответст-
вуют дисперсиям виброускорений в указанных полосах частот. Границы диа-
пазона частот октавных полос приведены в табл. 8.1.
Среднее квадратическое значение ускорения в t-й полосе вычисляется по
формуле
1 jG,(v)dv.
vid
(8.139)
В формуле (8.189) частота v в рад/с, что следует иметь в виду при использо-
вании графика на рис. 8.28.
При определении СКЗУ в характерных точках автомобиля интеграл от
спектральной плотности вычисляется по аналогичной формуле, но не в ок-
тавных полосах, а в пределах низкочастотного диапазона, т.е. до 20 Гц. Нор-
мативы на показатели вибронагруженности людей и подрессоренных частей
различных автотранспортных средств приведены в табл .8.4.
Для определения спектральных плотностей ускорений масс динамиче-
ской системы применяются два подхода. Первый базируется на использовании
спектральных методов исследования, а второй — на методе статистических
испытаний.
Спектральный метод используется при анализе плавности хода автомо-
биля на основе упрощенных математических моделей, рассмотренных в пре-
дыдущих параграфах. Он не требует значительных затрат на проведение
анализа и позволяет даже вручную определить искомые значения СКЗУ.
Метод статистических испытаний используют при анализе нелиней-
ных моделей и при проведении экспериментальных исследований.
308
8. Плавность хода автомобиля
Рис. 8.28. График спектральной плотности ускорений на сиденье водителя
Рассмотрим применение спектрального метода для анализа вибронагру
женности автомобиля. Исходными данными для его выполнения являются
спектральные плотности микропрофилей дорог и частотные характери-
стики динамической системы автомобиля Для описания спектральных
плотностей дорог G?(ks) используются выражения (8.40)-(8.42). Значения
параметров этих выражений для основных видов дорог даны в табл. 8.6. Но
аргументом спектральных плотностей дорог является путевая частота X,,
а аргумент спектральной плотности перемещения или ускорения — частота
воздействия V. Поэтому для возможности использования выражений (8.40}-
(8.42) и данных табл. 8.6 необходимо перейти к аргументу v. Для этого рас-
смотрим корреляционные функции микропрофиля J^(x4)h ускорения некото-
рой массы автомобиля Я»(т). Соотношение между аргументами этих корре-
ляционных функций устанавливается выражением х, = in. где и — скорость
автомобиля, м/с. Следовательно, Для перехода к аргументу v параметры кор-
реляционных функций аир необходимо умножить на и. Например, выраже-
ние спектральной плотности (8.41) в этом случае преобразуется к виду:
C.M-ZP.ta») ---- <8.140>
р'2 - (ао)2 - (ро)2 J + 4(аш)5
Аналогично можно преобразовать и спектральные плотности, определяе-
мые выражениями (8.40) и (8.42),
Из выражения (8.140) видно, что спектральная плотность воздействия
ординат микропрофиля C?v(v) зависит от скорости автомобиля. На рис. 8.29
8.13. Опенка плавности хода автомобиля
309
показаны графики G5, полученные с использованием формулы (8.42) для
дороги с изношенным бетонным покрытием при =0,02 м. Параметры
корреляционной функции микропрофиля приняты ив табл. 8.6 при Аг« 0,8
и Дг =0,2. Экстремумы на графиках Gv обусловлены гармонической состав-
ляющей ординат микропрофиля, характеризуемой коэффициентом р корре-
ляционной функции.
Рис. 8.29. Спектральная плотность воздействий ординат микропрофиля при различной
скорости автомобиля: 1 —при о =60 км/ч; 2 — при о “100 км/ч; S — при о =140 км/ч
Спектральная плотность G,(v) любого случайного процесса ) равна про-
изведению квадрата модуля частотной характеристики (или квадрата АЧХ)
этого процесса на спектральную плотность воздействия. В соответствии с этим
определением спектральную плотность перемещения точки А подрессорен-
ной массы автомобиля, обусловленную воздействием неровностей микропро-
филя дороги, вычислим по формуле
G«a(v) = = [AL(v)]2G?(v). (8.141)
где W&(/v) — частотная характеристика, отображающая преобразование воз-
действия q в перемещение гл точки А подрессоренной массы.
Спектральная плотность ускорения точки А определяется по формуле
<MV) = [АМ]* *4(v). (8.142)
Выражение (8.142) учитывает соотношение (8.131) между АЧХ ускоре-
ния и АЧХ перемещения точки А. 1
Аналогично выглядят выражения для определения спектральных плот-
ностей перемещений и ускорений точки В подрессоренной массы и неподрес-
соренйых масс пг5|1 н переднего и заднего мостов автомобиля.
310
8. Плавность хода автомобиля
। На рис. 8.30 показаны графики спектральной плотности ускорений подрес-
соренной массы автомобиля Gjn при движении с различными скоростями по до-
роге, спектральная плотность ординат которой приведена на рис. 8.29. При
построении этих графиков использованы АЧХ, приведенные на рис. 8.27. На
нивкой резонансной частоте максимальное значение спектральной плотности
ускорения достигается при скорости автомобиля о - 60 км/ч, а на высокой —
при о = 100 км/ч. При скорости и —60 км/ч возникает третий экстремум
функции GJn, обусловленный гармонической составляющей микропрофиля.
Рис. 8.30. Спектральная плотность ускорений подрессоренной массы при движении
автомобиля с различными скоростями: 1 — при о=60 км/ч; 2 — при о =100 км/ч;
3 — при и =140 км/ч
При анализе колебаний точки Е подрессоренной массы, расположенной
внутри базы автомобиля (см. рис. 8.18), необходимо учесть влияние воздей-
ствий микропрофиля как на передние колеса, так и на задние. Вертикальные
перемещения точки Е связаны с вертикальными перемещениями точек А и В
подрессоренной массы. Эта связь устанавливается выражением (8.72), кото-
рое можно использовать также для определения соотношений между частот-
ными характеристиками. В этом случае необходимо использовать частотные
характеристики W^(/v) и V^(/v), отображающие преобразование воздейст-
вия микропрофиля на передние колеса Qi (О в перемещения Зд(г) и zB(£) точек
А и В подрессоренной массы:
(8.143)
X/
При движении автомобиля между функциями ординат микропрофиля
<Ji(t) и 9г (О’ описывающих воздействие микропрофиля на передние и задние
колеса, устанавливается временная связь
9г(*) (8.144)
где т: — время проезда расстояния, равного базе автомобиля: т = Ljv.
8.13. Опенка плавности хода автомобиля
311
Рассмотрим движение автомобиля по дороге с синусоидальным микро-
профилем q - <;о sin(vt). В этом случае функции 91(0 и (*) имеют следующий
вид:
91»«о ein(vt); qz = $с ein[v(t-T)].
Найдем отношение между этими функциями:
q2 goein[v(t-t)] coefvf)
— _------L-i—= cob(vt)------—e-sin/vx).
q0 einfvi) v 1 ein(vtf) Л 1
Применим к этому отношению преобразование Лапласа:
з
- cos(vt)--a^i^-sin(v‘t) = cos(vt)-— sin(v'c).
e^v2
Введя подстановку 8 = /V, найдем соотношение между частотными харак-
теристиками воздействий Ог(л) и 01(А):
~ сое(ут)-—sin(vz) = cob(vt)- /вш(ут).
Это соотношение позволяет выразить частотную характеристику воздей-
ствия микропрофиля на задние колеса через частотную характеристику воз-
действия на передние колеса:
=»01(л)[сов(а)_ jeiii(7v)], (8.145)
Периодическую функцию, как известно, можно разложить в ряд Фурье
и рассматривать как сумму гармонических составляющих различной часто-
ты. Полученное выражение (8.146) справедливо для любой такой функции.
Оно также применимо для случайных функций.
Установим соотношение между частотными характеристиками
и (/v). Первая характеризует преобразование воздействия микропрофиля
на передние колеса в перемещение точки В подрессоренной массы, а вто-
рая — воздействия микропрофиля на задние колеса в перемещение той же
точки:
Q(*)‘ ’W)
Подставим в первое выражение значение Q(/v) ив выражения (8.151):
ж ^^[co^vt)-jBin(vt)] “ wr^(/v)[ooe(vi:)-/flin(v't)]- (8.146)
312
В. Плавность хода автомобиля
Использование выражения (8.152) позволяет определить частотную ха-
рактеристику любой точки Е подрессоренной массы автомобиля, получив
предварительно частотные характеристики точек А и В по формуле (8.122);
Wft(n') = PiWJa О)^М^в (jv)[coe(vT)-)Bin(vT)], (8.147)
гдер1=Ц^;Рг=^£.
£j L
Спектральные плотности перемещения G,£(v) и ускорения <4js(v) точки Е
находятся по формулам, аналогичным (8.141) и (8.142). Используя точку Е
в качестве источника возбуждения вертикальных колебаний массы, эквива-
лентной массе водителя или пассажира на сиденье, можно определить спек-
тральные плотности его перемещения Gip(v) и ускорения 6^, (v):
GV(v) = KE(v)]2Gf£(v);
G3p(v)-[a;J(v)]2v4G,£(v),
где AfJ(v) — АЧХ виброзащитной системы сиденья.
Используя Gjp(v), по формуле (8.139) определяют искомые СКЗУ в октав
ных полосах частот.
На рис. 8.31, а приведены графики АЧХ ускорений на сиденье водителя
А%с, а на рис. 8.30, б — спектральной плотности ускорений^. При вычисле-
ниях АЧХ приняты параметры колебательной системы автомобиля, приве-
денные в параграфе 8.12, и учтены параметры компоновки автомобиля:
L = 1,42 м; 21 = 1,225 м; = 1Д95 м; хЕ = 0,2 м. Параметры сиденья: тс = 66кг;
= 26000 Н/м;ус = 0,26; собственная частота сос = ЗД2Гц. Штриховой линией
на рис. 8.80, а показан график АЧХ ускорения на сиденье водителя для по-
рожнего автомобиля (без пассажиров и груза). АЧХ порожнего автомобиля
выше, чем груженого, что приводит к увеличению вибронагруженности ав-
томобиля. Следовательно, порожний автомобиль имеет худшие показатели
плавности хода.
При проектировании упругих элементов подвески возникает необходимость
вероятностной оценки их долговечности. Для этого необходимо определить
спектральную плотность и средние квадратические значения деформации
упругого элемента при движении в различных дорожных условиях. Деформа
ция упругого элемента Др = zE - zn. Квадрат модуля частотной характеристики,
отображающей преобразование воздействия микропрофиля в деформацию
упругого элемента, определяется по формуле
где Q, Д ,2 = 0,1,2 — коэффициенты, вычисляемые по формулам, приведен-
ным в параграфе 8.12.
8.13. Опенка плавности хода автомобиля
313
Рис. 8.31. Графики АЧХ ускорений ив сиденье водителя Afc (а) и спектральной плотности
ускорений Gfe (fl) при движении автомобиля с различными скоростями: 1 —прио=60км/ч;
2 — при о=100 км/ч; 5 — при о=140км/ч
314
8. Плавность хода автомобиля
Таким образом, спектральный метод исследования колебаний позволяет
сравнительно легко получить показатели вибронагруженности линейной ко*
лебательной системы — значения СКЗУ в октавных полосах частот для води-
теля и СКЗУ в различных точках автомобиля. Используя эти показатели
в качестве критериев оптимальности, можно определить оптимальные пара-
метры подвески автомобиля и сидений — коэффициенты жесткости упругих
элементов и относительные коэффициенты затухания колебаний. Методика
решения задачи оптимизации параметров подвески аналогична методике,
применяемой при оптимизации основных параметров автомобиля (см. пара-
граф 6.9).
8.14. Основы анализа нелинейных виброзашитных систем
На заключительных этапах проектирования и при проведении научно-ис-
следовательских работ в процессе доводки конструкции автомобиля приме-
няют сложные динамические модели с большим числом степеней свободы,
позволяющие моделировать пространственные перемещения подрессорен-
ной и неподрессоренных масс, водителя, пассажиров и. перевозимого груза.
Учитываются нелинейные характеристики упругих и диссйпативных эле-
ментов системы, в том числе элементов виброзащиты кабины и рабочего места
водителя. Моделируется взаимодействие каждого Колеса автомобиля с опор-
ной поверхностью дороги. Учитываются воздействия от неуравновешенно-
сти колес, трансмиссии и двигателя, Математическая модель в этом случае
представляет собой систему нелинейных дифференциальных уравнений вы-
сокого порядка, что исключает возможность получения аналитических вы-
ражений частотных характеристик.
Простейшая математическая модель, позволяющая определить предусмот-
ренные стандартами показатели плавности хода и вибронагруженности (см.
параграф 8.1), представляет собой систему дифференциальных уравнений
(8.53). Для определения виртикальных виброускорений водителя на сиденье
эта система дополняется дифференциальным уравнением
+ce(^-zc), (8.149)
где тс — масса водителя на сиденье; цс,се — коэффициенты соответственно
демпфирования и жесткости Подушки сиденья; za — координата вертикаль-
ного перемещения водителя на сиденье; z£ — координата вертикального пере-
мещения точки Е подрессоренной массы автомобиля, вычисляемая по фор-
муле (8.66). Усилия упругих и диссипативных элементов подвески и шин •
могут быть представлены нелинейными функциями фазовых координат
(см. графики в параграфе 8.2). Решение системы дифференциальных урав-
нений осуществляется численными методами с использованием стандартно-
го программного обеспечения.
в.14. Основы анализа нелинейных еиброэашкгных систем 315
Для исследования случайных процессов в сложной нелинейной динами-
ческой системе применяют метод статистических испытаний. Этот метод
основан на статистической обработке реализаций случайных процессов, по-
лученных при проведении физических или вычислительных экспериментов.
В вычислительном эксперименте осуществляется моделирование движения
автомобиля по дороге со случайным микропрофилем. Для получения дис-
кретного множества значений ординат микропрофиля, соответствующих за-
данным корреляционным функциям (см. параграф 8.4), на ЭВМ реализуют
специальный алгоритм, основанный на преобразовании последовательности
>5^° независимых нормально распределенных чисел с математическим ожи-
данием тх = 0 и дисперсией = 1 в последовательность случайных чисел —
ординат микропрофиля qk [23].
Для получения случайных чисел х^'° обычно применяют следующую фор-
мулу:
хл'°774596^ x^-ioj
где xf — значения случайной равномерно распределенной величины xR в ин-
тервале [0,1], получаемые посредством генератора случайных чисел, имею-
щегося в ЭВМ.
Случайные нормально распределенные числа с заданными параметрами
тх и сх получают из чисел xN<> по формуле
х* = mJt + c,xw’.
Последовательность ординат случайного процесса с корреляционной функ-
цией (8.36) получают по формуле
qk =а(Р^+Ь1ф „i; ft =0,1,2,..., (8.160)
где do = = e-aA I — шаг дискретизации независимой переменной.
Если независимой переменной принять время t, то значение параметра а
корреляционной функции микропрофиля дороги необходимо умножить на и
так же, как это сделано в выражении (8.140).
При использовании корреляционной функции (8.37) ординаты случайно-
го процесса вычисляют по формуле
в* +aia*-i + +tM*-2S Л = 0,1,2,... (8.161)
В формуле (8.161) приняты следующие обозначения:
до - ^0,5 - 4cQ; = 2е-аАсов0Л;
рг=^?-2<=Л; Со=е-«*(е 2кА -l)coepft; cl = l-e‘<“ft.
316
8. Плавность хода автомобиля
Для корреляционной функции (8.38) значение дк равно сумме ординат,
вычисленных по формулам (8.160) и (8.1Б1), но л*' в этих формулах должны
быть независимыми последовательностями нормально распределенных слу-
чайных величин с параметрами тх = 0; сх = 1.
Корреляционные функции случайных процессов динамической колеба-
тельной системы автомобиля вычисляют по формулам, аналогичным форму-
ле (8.34), соблюдая при этом условия обработки реализаций этих процессов,
изложенные в параграфе 8.4.
Запишем в качестве примера формулу корреляционной функции верти-
кального перемещения z(t) Л-й точки подрессоренной массы автомобиля (или
k-й точечной массы):
(8.152)
где 2i — текущая центрированная ордината микропрофиля при значении ар-
гумента t(; zi+я — центрированная ордината при значении аргумента t(+t;
л =0,1, 2, 3, ... — число, определяющее величину сдвига по оси абсцисс и од-
новременно номер точки дискретного аргумента т = nAt; At — шаг дискретиза-
ции аргумента t.
Корреляционные функции перемещений Яй(т) и ускорений Дц(т) ДЛЯ под-
рессоренных и неп одре ссоре иных масс далее используются для вычисления
спектральных плотностей Gr,((v) и G2I(v). Спектральная плотность и корреля-
ционная функция случайного процесса взаимосвязаны преобразованием Фу-
рье (8.39). Однако непосредственное применение формулы (8.39) дает оценку
спектральной плотности с существенными погрешностями, так как к по-
грешностям вычисления корреляционной функции по выражению (8.151)
добавляются ошибки интегрального преобразования по выражению (8.39).
Поэтому при определении спектральной плотности применяют сглаживание
корреляционной функции посредством спектрального окна. Спектральную
плотность дискретизированной случайной функции a(t) вычисляют по фор-
муле:
G,(v„) = — fiJ(0) + 2r^f*RJ(lAT)/'e(iAt)cos(mAvtAT) ,
л L i-i
(8.153)
где Ат— шаг дискретизации аргумента т корреляционной функции; Av— шаг
дискретизации аргумента v спектральной плотности; т — номер точки дис-
кретного аргумента v: vm -mAv;m=0,1, 2,3,...;= ттнх/Дт; fc(iАт) — функ-
ция сглаживания.
Значение определяет разрешающую способность сглаживающего
фильтра при спектральном анализе. Чем шире полоса анализируемых час-
тот, тем меньше должно быть Поэтому для выбора ттах необходима ин-
формация о собственных частотах системы и ее преобразующих свойствах.
8.15. Влияние конструктивных и эксплуатационных факторов на плавность хода автомобиля
317
Предварительно можно принять тт>х, соответствующее одному периоду коле-
баний корреляционной функции после первого пересечения ею оси абсцисс,
а затем в процессе исследований уточнить его эначение.
При спектральном анализе наиболее часто пользуются функциями сгла-
живания Барт лета, Хеннинга и Хэмминга. Функция Бартлета имеет вид
W) =
1-|т1Ллих при|т|£т„.к;
О при|т|>ттх.
(8.154)
а функции Хеннинга и Хэмминга
а + Ьсое^т^при |т| £ тп1гх;
О приЦ:*^.
(8.155)
В функции Хеннинга а =Ь= ОД а в функции Хэмминга а = 0,64; Ъ = 0,46.
По результатам моделирования или испытаний автомобиля получают кор-
реляционные функции всех интересующих исследователя и конструктора
процессов и определяют их спектральные плотности, вычисляют показатели
вибронагруженности И оценивают виброзащитные свойства автомобиля. Полу-
ченные спектральные плотности позволяют также построить графики АЧХ,
вычисления которых осуществляются на основе формул (8.141) и (8.142).
Например, АЧХ ускорений подрессоренной массы в точке А определяют по
формуле
(8.156)
Метод статистических испытаний является универсальным методом ис-
следования физических свойств сложных нелинейных вероятностных сис-
тем.
8.15. Влияние конструктивных и эксплуатационных факторов
на плавность хода автомобиля
Основное влияние на плавность хода и комфортабельность автомобиля
оказывают следующие конструктивные факторы: тип и параметры подвес-
ки; параметры шин; конструкция и параметры пассажирских сидений; рас-
пределение подрессоренной массы по длине кузова.
Тип и параметры подвески. На автомобилях используют зависимые и не-
зависимые подвески с различными типами упругих элементов — металличе-
скими, резиновыми, пневматическими. Конструктивно упругие элементы
выполняют в виде листовых рессор, пружин, торсиоиов, пневматических
баллонов, гидропневматических цилиндров. Независимая подвеска применя-
ется наиболее часто для передних колес легковых автомобилей. Она является
прежде всего эффективным средством борьбы с колебаниями управляемых
31В
8. Плавность хода автомобиля
колес, а также улучшает плавность хода и устойчивость движения, что обу-
словлено независимыми перемещениями колес, снижением величины непод-
рессоренных масс, увеличением хода подвески и уменьшением вероятности
отрыва колес от дороги.
Наибольшее влияние на показатели плавности хода оказывает характери-
стика упругого элемента подвески, определяющая собственные частоты ко-
лебаний кузова. Чем ниже собственная частота вертикальных колебаний
кузова О,, тем выше плавность хода. Согласно формуле (В. 100), собственная
парциальная частота подрессоренной массы со^ зависит от коэффициента же-
сткости подвески ср и подрессоренной массы . При изменении нагрузки ав-
томобиля подрессоренная масса изменяется в широких пределах, особенно
у грузовых автомобилей и автобусов- При постоянной жесткости подвески
это приводит к существенному изменению Юц, в результате плавность хода
порожнего автомобиля может значительно ухудшиться. Поскольку <вп -Пд,
то для сохранения О, - conet необходимо пропорционально изменению тп
изменять ковффнциенты жесткости подвески cpi и cpg. Характеристики ме-
таллических упругих элементов фактически линейные (см. рис. 8.2). Для
линейной подвески с - conet, что является ее серьезным недостатком.
Характеристики подвески с линейными упругими элементами можно
улучшить, если использовать несколько упругих элементов, вступающих
в работу последовательно по мере увеличения нагрузки. Такое техническое
решение используется в подвесках грузовых автомобилей. Подвеска содер-
жит две рессоры — основную и дополнительную. У снаряженного автомобиля
и при малой нагрузке работает основная рессора, а при увеличении нагрузки
свыше значения Гр.д (см. рис. 8.22) включается дополнительная рессора. Ха-
рактеристика упругого элемента в этом случае кусочно-линейная.
Пневматические и гидропневматические упругие элементы имеют нели-
нейные характеристики (рис. 8.32). С увеличением нагрузки угол наклона ка-
сательной к кривой Fp = /(Др) возрастает, следовательно, увеличиваетсяср, что
позволяет значительно сузить пределы изменения Пд и повысить плавность
хода.
Недостатком рассмотренных подвесок является зависимость статического
прогиба Др.от от нагрузки Fp <Др.етл — для снаряженного автомобиля; Лр.т-j —
для автомобиля с полной нагрузкой). Это приводит к изменению высоты кузо-
ва и влияет на устойчивость и профильную проходимость автомобиля.
Подвеска с пневматическим упругим элементом может обеспечить посто-
янную величину статической деформации независимо от нагрузки автомоби-
ля, если ее снабдить автоматическим регулятором давления газа в рабочей
полости упругого элемента. Собственная частота колебаний в этом случае по-
стоянна при любой нагрузке, и автомобиль будет иметь оптимальные показа-
тели плавности хода. Кроме того, такая подвеска позволяет изменять высоту
кузова. Ее применяют на автобусах, тяжелых грузовых автомобилях и авто-
поездах. Снижение высоты кузова создает удобства для входа пассажиров
6.1 S. Влияние конструктивных и эксплуатаиионных факторов на плавность хода автомобиля 319
Рис. 8.32. Характеристика нелинейного упругого элемента
в салон и выхода их ио салона на остановках автобуса, облегчает выполнение
погрузочно-разгрузочных работ при перевозке грузов.
Чем ниже коэффициент жесткости подвески, тем комфортабельнее авто-
мобиль. Однако при движении такого автомобиля по разбитым дорогам воз-
никают большие амплитуды колебаний, сопровождаемые ударами кузова
в ограничители хода подвески, т.е. наступает так называемый пробой подвес-
ки. В этом случае более жесткие подвески обеспечивают лучшие показатели
плавности хода.
На плавность хода автомобиля также оказывает влияние трение в подвес-
ке. Увеличение сил трения приводит к увеличению жесткости подвески, так
как к силам упругости рессоры прибавляются силы трения. Следует разли-
чать гидравлическое трение в амортизаторах и трение в упругих элементах
и на равняющих устройствах подвески. Конструкция амортизатора выпол-
нена таким образом, что его сопротивление на ходе сжатия упругого элемента
значительно меньше (в 4-10 раз), чем на ходе отбоя. Поэтому на ходе сжатия
он практически не влияет на жесткость подвески, а основная доля поглощае-
мой им энергии колебаний приходится на ход отбоя. Силы же трения в упру-
гих элементах пропорциональны нагрузкам и направлены противоположно
относительной скорости деформации или взаимного перемещения элементов
подвески. При значительном возрастании нагрузки может наступить блоки-
ровка подвески и упругий элемент не будет деформироваться. Это характер-
но для листовых рессор. Для уменьшения трения между листами рессор
устанавливают антифрикционные прокладки или вводят смазку. Уменьше-
ние числа листов у рессор способствует снижению трения. У пружинных,
торсионных и пневматических баллонных упругих элементов трение незна-
чительное.
Шины. Шины влияют на-высокочастотные колебания неподрессоренных
масс автомобиля, которые могут привести к вибрациям кузова. Влияние их
на амплитуды колебаний кузова обычно незначительное. Жесткость шин
целесообразно уменьшать. Эго достигается снижением давления воздуха,
320
8. Плавность хала автомобиля
применением шин с радиальным расположением нитей корда, увеличением
ширины профиля, уменьшением количества слоев корда.
Конструкция и параметры сидений. Сиденья снабжают устройствами
регулирования положения подушки и спинки, позволяющими обеспечить
удобную позу человека, в которой снижаются неблагоприятные воздействия
колебаний на его организм. Значительное влияние на комфортабельность
оказывают коэффициенты жесткости подушки и спинки сиденья. Они опре-
деляют собственные частоты вертикальных и горизонтальных колебаний
человека. Собственная частота вертикальных колебаний определяется по
формуле
«о = . (8.167)
Vm4+m0
гдесе — коэффициент жесткости подушки (или специального упругого эле-
мента) сиденья; — доля массы человека, приходящаяся на сиденье (при-
нимается равной ББ кг при общей массе человека 75 кг); т, — подрессоренная
масса сиденья.
Для обычного сиденья с раздельной подушкой и спинкой собственная час-
тота составляет около 2-3 Гц, а относительный коэффициент затухания
находится в пределах 0,06-0,18. На тяжелых грузовых автомобилях с жест-
кими упругими элементами подвески мостов осуществляют так называемое
вторичное подрессоривание за счет применения подрессоренного сиденья.
Собственная частота такого сиденья может быть уменьшена до 1-1,5 Гц. Си-
денье в этом случае может быть снабжено специальным гидравлическим
амортизатором, обеспечивающим эффективное гашение колебаний водителя
на резонансных режимах. Особенно эффективны сиденья с пневматическими
упругими элементами. В связи с нелинейностью их характеристик они хоро-
шо приспосабливаются к различной массе человека.
Собственная частота сиденья должна как можно больше отличаться от
низкой собственной частоты подрессоренной массы автомобиля Од. При сов-
падении этих частот возникают резонансные колебания водителя иа сиденье.
Чем меньше в сравнении с Пд, тем меньше виброускорения колебаний.
Виброускорения также снижаются, если увеличивать щ. по отношению к (1*.
Однако увеличивать <0,. свыше 2-3 Гц недопустимо, так как собственная час-
тота колебаний человека = 3-БГц. В этом диапазоне частот возникают ре-
зонансные колебания жизненно важных органов человека (головы, желудка,
печени, кишечника), наступает расстройство сосудистой системы, укачива-
ние (морская болезнь).
Практически выбор параметров упругого элемента сцденья зависит от
собственной частоты колебаний подрессоренной массы автомобиля. В связи
с этим различают мягкую и жесткую подвески. При мягкой подвеске низкая
собственная частота колебаний подрессоренной массы находится в предо-
8.15. Влияние конструктивных и эксплуатационных факторов на плавность хода автомобиля 321
яах 0,8-1,3 Гц, что характерно для легковых автомобилей. Поэтому на лег-
ковых автомобилях применяют жесткие сиденья с собственной частотой
С0к= (1,6-2,0)0,. В результате это приводит к значению о>е=2-8 Гц.
Рекомендуемая частота подрессоренной массы грузовых автомобилей со-
ставляет 1,2-1,8 Гц, однако может достигать и больших аначений, в частно-
сти при движении автомобиля без нагрузки. Поэтому грузовые автомобили
должны иметь мягкие сиденья.
На рис. 8.33, а и б приведены графики, отображающие результаты иссле-
дования влияния собственной частоты сиденья водителя <ов на АЧХ А£.
и спектральную плотность ускорений G>.. Параметры подвески и компонов-
ки автомобиля приняты те же, что и для графиков на рис. 8.27 и 8.30. Кривые
3 на рис. 8.88 практически соответствуют резонансному режиму, так как
<0с = 1Д8 Гц, а низкие собственные частоты колебаний подрессоренных масс
передней и задней частей автомобиля равны соответственно = 1Д1 Гц;
0,2 = Ц)9 Гц. Приведенные графики показывают, что увеличение или сниже-
ние CDj, по сравнению с ОЕ приводит к уменьшению АЧХ и спектральной плот-
ности ускорений. Причем более эффективно снижение чем его повышение.
Однако, как показывает опыт, нельая сделать сиденье настолько мягким,
чтобы сос было ниже 1 Гц.
Рис. 8.33. Графики АЧХ ускорений (а) в спектральной плотности ускорений (fl) при раз-
личных значениях собственной частоты подрессоренного сиденья; 1 — при =3,12 Гц;
2 — при «1,97 Гц; 3 — при <йс =1,13 Гц; 4 — <ос «0,71 Гц
Распределение подрессоренной массы по длине кузова. Момент инерции
кузова Jv зависит от расположения,механизмов автомобиля относительно по-
перечной оси у, проходящей через его центр масс. Чем дальше они находятся
ст этой осн, тем больше радиус инерции и выше Особенно возрастает Jv,
если наиболее тяжелые механизмы автомобиля (двигатель, трансмиссия,
рабочее оборудование специальных автомобилей) располагаются вне базы,
11 Зв». 349Э
322
В. Плавность хода автомобиля
т.е. выносятся вперед относительно оси передних колес или назад относи*
тельно оси задних колес. Склонность к галопированию таких автомобилей
значительно возрастает. Особенно это относится к короткобазным автомо-
билям. В параграфе 8.9 показано, что при условии галопирование
возникает на низкой собственной частоте. Как следует из выражений (8.78),
увеличение радиуса инерции pv (а следовательно, и Jy) и уменьшение базы ав-
томобиля L приводит к уменьшению собственной частоты галопирования.
В результате возрастают амплитуды вертикальных и горизонтальных коле-
баний в различных точках автомобиля. Если у такого автомобиля рабочее ме-
сто водителя вынесено за пределы базы, то в этом случае создаются весьма
неблагоприятные условия для его работы.
Эксплуатационные факторы. Вибронагруженность конкретного автомо-
биля в основном определяется дорожными условиями и скоростными режи-
мами движения. Но на нее оказывает также влияние техническое состояние
подвески, ее упругих элементов, амортизаторов, резиновых буферов ограничи-
телей ходов сжатия и отбоя. Износ резиновых втулок (сайлентблоков) и других
деталей шарнирных соединений направляющих устройств и амортизаторов
приводит к возникновению вибраций и шума.
Вопросы для самоконтроля
1. Что такое плавность хода автомобиля?
2. Каково влияние колебаний и вибраций на организм человека?
3. Что такое октавная полоса частот? Как определяется эначение октавной час-
тоты?
4. Какие показатели используются для оценки виброзащитных свойств автомо-
биля? Каковы их нормативные значения?
Б. Как проводятся испытания по определению показателей виброзащитных
свойств автомобиля?
6. Каково назначение упругих и диссипативных элементов подвески?
7. Назовите типы упругих элементов и охарактеризуйте их свойства.
8. Какие виды колебаний совершают подрессоренная и неподрессоренные мас-
сы автомобиля? Какие виды колебаний учитываются в простейшей модели?
9. От каких параметров зависят собственные частоты вертикальных и продоль-
ных угловых колебаний подрессоренной массы? Напишите формулы для их
вычисления.
10. Как определить коэффициенты жесткости упругих элементов подвески и шин?
Каково между ними соотношение?
11. Что такое галопирование? Какие параметры автомобиля оказывают влияние
на склонность автомобиля к галопированию?
12. Какими показателями оценивается затухание свободных колебаний подрес-
соренной массы? Как они определяются?
13. Что такое АЧХ? Для решения каких задач она используется?
8.15. влияние конструктивных и эксплуатационных факторов на плавность хода автомобиля 323
' I
14. Какие графики и какие формулы используются для определения СКЗУ при
движении автомобиля по дороге со случайным микропрофилем?
15. Какие методы исследований используются при проведении анализа виброэа-
щитных свойств автомобиля?
16. Как влияют шины на плавность хода автомобиля?
17. Что такое пробой подвески? Назовите способы предотвращения пробоя под*
вески.
18. С какой целью применяются подвески с нелинейными упругими элементами?
19. Каковы преимущества независимой подвески?
Криволинейное движение автомобиля
Одной из характеристик механического движения является траектория.
При движении автомобиля обычно определяют траекторию движения цен-
тра масс, а движение остальных точек находят по отношению к центру масс.
Автомобиль практически все время движется по криволинейной траекто-
рии. Это обусловлено не только криволинейностью дороги, но и условиями
движения* повороты с одной дороги на другую; объезды препятствий, вклю-
чая обгоны других автомобилей; изменение направления движения нод воздей-
ствием боковых сил. Условно прямолинейным движением называют движение
по траектории с радиусом крив изны более 500-10 00 м. При меньшем радиусе
кривизны движение относят к криволинейному.
По статистическим данным, на грунтовых дорогах 66-76 % времени авто-
мобили движутся по траекториям с радиусами кривизны менее 300-400 м
и средними скоростями 15-20 км/ч. На городских перекрестках и на отдель-
ных участках дорог радиусы поворота составляют 20—25 м, а скорость сни-
жается до 8-10 км/ч. На площадках стоянок и в закрытых помещениях ра-
диусы поворота снижаются до минимально возможных по конструктивным
возможностям автомобиля, а скорости составляют 2-5 км/ч.
Траектория движения автомобиля изменяется либо по желанию водите-
ля, либо вследствие внешних воздействий. В первом случае криволинейное
движение принято называть поворотом автомобиля.
Свойство автомобиля совершать повороты с минимальным радиусом тра-
ектории (с максимальной кривизной) называется поворотливостью. Чем
меньше радиус поворота, т.е. чем больше кривизна траектории, тем лучше
поворотливость автомобиля. Радиус поворота автомобиля является одним из
основных показателей его поворотливости.
Различают радиус поворота автомобиля/^ и радиус кривизны траектории
р. Радиусом поворота называют расстояние от мгновенного центра вращения
(поворота) до продольной оси автомобиля. Мгновенный центр вращения мо-
жет находиться в неподвижной точке на местности, если поворот осуществ-
ляется с постоянным радиусом, т.е. при - const, или же изменять свое
положение во времени, если/^ — var.
Радиус кривизны траектории — это расстояние от мгновенного центра
вращения до центра масс автомобиля.
При изучении кинематики криволинейного движения кроме траектории
центра масс рассматриваются движения продольной и вертикальной осей ав-
томобиля, проходящих через его центр масс. Если при моделировании пара-
метры подвески не учитываются, т.е. продольными и боковыми наклонами
подрессоренной массы пренебрегают, то достаточно рассматривать лишь вра-
щение продольной оси автомобиля относительно плоскости опорной поверх-
ности дороги.
9.1. Условия осуществления поворота
325
Угол у между проекцией продольной оси автомобиля на плоскость дороги
и выбранной неподвижной прямой в этой плоскости называют курсовых уг-
лом, ।
При изучении плоского криволинейного движения автомобиля без учета
параметров подвески его положение определяется координатами центра масс
в неподвижной системе координат XOY и курсовым углом у. Для автопоезда
принимаются во внимание повороты его звеньев относительно автомоби-
ля-тягача. Силы инерции при криволинейном движении могут вызвать зна-
чительные наклоны подрессоренной массы и изменить распределение реак-
ций дороги на колеса. Это может оказать существенное влияние на процесс
поворота автомобиля и поэтому должно учитываться при определении пре-
дельных значений параметров и характеристик поворота.
Колесные машины могут совершать поворот тремя способами:
□ изменением углов между плоскостями вращения колес и продольной
осью машины посредством поворота управляемых колес;
□ изменением этих же углов путем поворота одной части машины относи-
тельно другой (сочлененные машины или машины с шарнирно-сочлененной
рамой);
□ изменением скоростей вращения колес левой и правой сторон машины.
Для автомобилей наиболее характерен первый способ, поэтому он и будет
рассматриваться в дальнейшем.
Процесс поворота автомобиля состоит из трех этапов: вход в поворот, рав-
номерный поворот, выход из поворота. На первом этапе происходит переход
от прямолинейного движения к криволинейному и постепенное увеличение
кривизны траектории. Равномерный поворот осуществляется при постоян-
ном радиусе кривизны. При выходе ив поворота кривизна траектории посте-
пенно уменьшается. В частном случае второй этап может отсутствовать.
Исследование криволинейного движения автомобиля осуществляют в двух
направлениях: определение кинематических параметров траектории, скоро-
сти и ускорения автомобиля; определение параметров и характеристик взаи-
модействия автомобиля с внешней средой.
9.1. Условия осуществления поворота
Рассмотрим процесс поворота заднеприводного и переднеприводного двух-
осных автомобилей с передними управляемыми колесами. Примем следующие
допущения: поворот совершается с малой постоянной скоростью на горизон-
тальной площадке с твердым покрытием; центробежная сила инерции невели-
ка и ею можно пренебречь; колеса в боковом направлении абсолютно жесткие;
боковое скольжение колес отсутствует. При этих допущениях автомобиль
можно рассматривать как твердое тело, совершающее плоское движение.
Внешние воздействия на автомобиль — продольные Д И поперечные Д^ ре
акции дороги ня колеса.
Определим условия осуществления поворота заднеприводного автомо-
биля (рис. 9.1, а). При принятых допущениях взаимодействие ведущих колес
326
9. Криволинейное движение автомобиля
с дорогой определяется только продольными реакциямииД^, воздейст-
вующими на внутреннее и наружное задние колеса. Боковые реакции Дд,
и Дан равны нулю. Межколесные дифференциалы характеризуются малым
внутренним трением, поэтому распределяют подводимый к ним момент
примерно поровну между левым и правым колесами. Тогда можно считать
Дг, = Дзл. Сила тяги ведущих колес Д2 равна равнодействующей этих реак-
ций R& и приложена к оси заднего моста в ее средней точке В. Сила Дг обеспе-
чивает преодоление сопротивления движению переднего моста автомобиля
Fcl. Перенесем силу Д2 в точку Л середины оси переднего управляемого моста
и разложим на две составляющие: силу направленную под углом 0 к про-
дольной оси автомобиля, и силу Др перпендикулярную силе Fxl. Угол 6при-
мерно равен полусумме углов поворота наружного 6Н и внутреннего 0, управ-
ляемых колес. Сила уравновешивается равнодействующей продольных
реакций дороги на управляемые колеса Др а сила Д} — равнодействующей
поперечных реакций Др Следовательно, Fxl — это толкающая сила ведомых
управляемых колес, а Дд — боковая сила.
Рис. 9.1. Внешние воздействия на автомобиль при повороте с малой скоростью:
я — заднеприводные автомобили; б — переднеприводные
Разложим теперь силу Ft2, приложенную в точке В, на две составляющие:
силу Ё'2, параллельную силе и силу Г/г» параллельную силе ЯЛ. Очевид-
но, что силы Дд, /т2 и Rxp Ftz попарно равны друг другу по модулю и противо-
положно направлены. Следовательно, это пары сил. Пара сил FT'Z создает
9.1. Условия осуществления поворота
327
момент Ма -RyiLcoeb, стремящийся повернуть автомобиль в направлении,
в котором повернуты управляемые колеса. Этот момент называют поворачи-
вающим моментом. Он обусловлен поперечной реакцией дороги на управ-
ляемые колеса Дд. Момент пары сил Ях1, F"3 направлен противоположно
поворачивающему моменту. Его называют моментом сопротивления пово-
роту. При равномерном д вижении эти моменты взаимно уравновешиваются.
Для того чтобы ведомые управляемые колеса переднего моста катились
в направлениях своих продольных плоскостей вращения, необходимо вы-
полнение двух условий:
1) создание достаточного толкающего усилия ЁЛ, способного преодолеть
сопротивление качению колес;
2) отсутствие скольжения колес.
Эти условия выражаются неравенствами:
(0.1)
ГкО
М+Ч (0.2)
Нарушение неравенства (9.2) приводит к скольжению управляемых колес
относительно опорной поверхности. Скольжение происходит как в продоль-
ной плоскости колес, так и в поперечной, поэтому коэффициент сцепления ф
в формуле (9.2) должен учитывать сцепные свойства колеса в обоих направ-
лениях, т.е. учитывать коэффициенты фх и <pF. Считают, что ф изменяется
по эллиптическому закону с осями эллипса фх и фг В большинстве случаев
(fy > фх, однако на практике их различием обычно пренебрегают и принимают
ф*фх- _______
Принимая во внимание, что Ят2 - ^ci - ^*1 - ^тйC°G0, Mfi = /ЯдЛо,
и используя неравенства (9.1) и (9.2), находим условие качения ведомых
управляемых колес без скольжения при повороте заднеприводного автомо-
биля:
0 Sarccos—. (9.3)
• Ф
Из выражения (9.3) следует, что максимальный угол поворота управляе-
мых колес 0 зависит от коэффициента сопротивления качению / и коэффици-
ента сцепления колес с дорогой ф. Чем больше / и меньше ф, тем на меньший
угол 0 можно повернуть колеса при условии обеспечения отсутствия их сколь-
жения. Если неравенство (9.3) не выполняется, управляемые колеса будут
скользить в направлении вектора толкающей силы Да и поворота автомобиля
не произойдет. На скользкой дороге и на мягком грунте отношение f/фзначи-
тельно возрастает и управляемость заднеприводного автомобиля ухудшается.
Установим соотношение между необходимым толкающим усилием перед-
него моста Ft2 и моментом сопротивления качению колес этого моста Мц"-
р - Мп
* т2-----~-
COG0
(9.4)
328
9. Криволинейное движение автомобиля
Очевидно, что при увеличении угла поворота колес необходимое толкаю-
щее усилие возрастает. Это равносильно увеличению сопротивления каче-
нию управляемых колес.
На рис. 9.1, б показана схема поворота переднеприводного автомобиля.
Разложим силу тяги передних ведущих колес на составляющие: FT\, на-
правленную вдоль продольной оси автомобиля, и FT'{, перпендикулярную
силе FT\. Сила jPt'j уравновешивает суммарную продольную реакцию дороги
на задние колеса R& Приложим в точке В две вэаимноуравновешивающиеся
силы и F^, перпендикулярные продольной оси автомобиля. Модули этих
сил примем равными модулю силы . Тогда силы ^1, F£ образуют пару, соз-
дающую поворачивающий момент MD = F£L = FT1Lsin0.
Таким образом, у переднеприводного автомобиля поворачивающий мо-
мент создается не поперечной реакцией дороги на управляемые колеса, как
это имеет место у заднеприводного автомобиля, а силой тяги передних ведущих
колес, обусловленной подводимым к колесам от двигателя черев трансмиссию
моментом Л£к.в. Следовательно, поворачивающий момент в этом случае будет
создаваться всегда и управляемые колеса будут двигаться в направлении век-
торов продольных реакций-RxlB и Рл1н , а точка А — в направлении вектора FT1.
Этим объясняется лучшая управляемость переднеприводных автомобилей
по сравнению с заднеприводными, особенно на скользких дорогах и на мягких
грунтах.
При повороте автомобиля с большой скоростью возникающая центробеж-
ная сила инерции может вызвать боковое скольжение колес. На возникновение
скольжения оказывают влияние не только поперечные силы, но и продольные
реакции дороги (согласно формуле (9.2)). Поэтому при интенсивном тормо-
жении, когда полностью использованы сцепные свойства управляемых ко-
лес с дорогой, поворот автомобиля становится невозможным и наступает
потеря управляемости. Направление движения автомобиля в этом случае не
зависит от угла поворота управляемых колес, а определяется внешними воз-
действиями (неровностями дороги, боковым ветром, поперечным уклоном
дороги) и силой инерции.
9.2. Боковой увод колеса
При движении автомобиля на него почти всегда действует какая-либо бо-
ковая сила. Этой силой может быть составляющая силы тяжести при попе-
речном уклоне дороги, сила ветра, случайные воздействия от неровностей
дороги и др. При криволинейном движении на автомобиль действует боковая
составляющая центробежной силы инерции. Боковые силы могут возник-
нуть из-за различий продольных реакций дороги на колеса левой и правой
сторон автомобиля.
Шина автомобильного колеса под действием приложенных к ней сил и мо-
ментов может деформироваться в радиальном, боковом и окружном направ-
лениях. Нагрузим колесо нормальной силой Ft (рис. 9.2, а). Шина получит
9.2. Боковой уеод колеса
329
радиальную деформацию и ее взаимодействие с опорной поверхностью доро-
ги будет осуществляться на контактной площадке, ось симметрии которой
совпадает с проекцией плоскости вращения колеса на поверхность дороги
(рис. 9.2,6). Отметим на поверхности беговой дорожки в плоскости вращения
колеса точки Л, В, С. При качении колеса эти точки вступят в контакт с дорогой
соответственно в точках Alr траектория движения колеса (линия ON)
будет располагаться в плоскости его симметрии.
Рис. 9.2. Качение колеса с уводом
Приложим к колесу дополнительно поперечную силу перпендикуляр-
ную плоскости вращения и совпадающую по направлению с осью вращения
колеса (рис. 9.2, в). Шина получит боковую деформацию, плоскость враще-
ния колеса сместится в сторону действия силы Fy на величину А, а линия АВС
станет изогнутой. Элементы шины, находящиеся на площадке контакта,
благодаря сцеплению колеса с дорогой останутся на месте. В результате на
шину будут действовать поперечная реакция Д, и момент Мх. Если колесо
начнет катиться, то точки А, В, С войдут в контакт с дорогой в точках А,
Q, а траектория движения колеса ON отклонится от плоскости вращения на
угол бу,. Направление вектора скорости центра колеса ук будет совпадать с на-
правлением линии ON.
Отклонение вектора скорости эластичного колеса от плоскости его враще-
ния под действием поперечной силы называется явлением бокового увода.
Угол буэ отклонения траектории движения колеса от плоскости вращения на-
зывают углом увода колеса. Этот угол может достигать 7-8° (иногда 10-12°).
Он соизмерим с углом поворота управляемых колес 0, поэтому при повороте
автомобиля может оказывать существенное влияние на изменение траекто-
рии движения.
Вступающие в контакт с дорогой элементы шины практически не восприни-
мают боковые нагрузки, но по мере удаления их от передней части площадки
330
9. Криволинейное движение автомобиля
контакта боковая деформация и напряженность элементов шины Возрастают.
В связи с этим эпюра элементарных поперечных реакций qv имеет форму,
близкую к треугольной, а форма площадки контакта искривляется (рис. 9.2, г).
Равнодействующая этих реакций Д, оказывается смещенной относительно
оси вращения колеса на величину е. Так как ^ = -^, то возникает момент
пары сил Д,, Д относительно вертикальной оси колеса, а плечо этой пары рав-
ное. Момент пары сил Д, Д скручивает шину и искривляет площадку (делает
ее несимметричной). Этот момент называют поворачивающим моментом
Мп. Он уравновешивается моментом Мг сил упругости шины, возникающим
в связи со скручиванием шины моментом Ма. Вектор момента 2ЙГ, направлен
вдоль вертикальной оси з и стремится повернуть Колесо в нейтральное положе-
ние, соответствующее прямолинейному движению в плоскости вращения. Сле-
довательно, он оказывает сопротивление повороту колеса. В этой связи его на-
зывают стабилизирующим моментом шины н обозначают Л£ст$ (рис. 9.2, г).
Продольная реакция Д вследствие искривления площадки контакта шины
смещается относительно центра колеса и совместно с толкающей силой Fx об-
разует пару с плечом Д, момент которой складывается со стабилизирующим
моментом. Однако этот момент существенно меньше момента Мст6.
Пары сил Fv, Ry и Д, Л, создают опрокидывающий момент Моа, который
уравновешивается моментом сил упругости Мх в поперечной плоскости колеса.
С увеличением поперечной силы наиболее нагруженные элементы шины
в задней части площадки контакта начинают проскальзывать относительно
опорной поверхности, что приводит к дополнительному увеличению угла
увода колеса. Однако значительное проскальзывание шины начинает прояв-
ляться лишь при условии
>0,5^. (9.5)
Если условие (9.5) не достигается, то стабилизирующий момент примерно
равен
Мст!-Де = Д2к/б, (9.6)
где/к — длина площадки контакта шины с опорной поверхностью дорога.
При возникновении скольжения шины от-
носительно дороги стабилизирующий момент
уменьшается. На рис. 9.3 показаны зависимо-
сти от угла увода при различных нор-
мальных нагрузках Fsna шину. С увеличением
Ft значение возрастает.
Зависимость угла увода 8^ от боковой силы
Fy показана на рис. 9.4. При малой величине бо-
ковой силы угол Зуэ пропорционален этой силе
(участок 1). Это обусловлено пропорциональной
зависимостью между боковой деформацией
шины и силой Fv. Однако при углах увода более
2-4° начинается боковое скольжение шины
Pue. fi.S. Зависимости ствбилиои-
рующего момента от угла увода
при различных нормальных на-
грузках
9.2, Боковой увод колеса
331
и зависимость бу, = f(fir) становится нелинейной (уча-
сток 2). При происходит полное скольжение
колеса вбок (участок 3). Поскольку явления боковой де-
формации и бокового скольжения взаимосвязаны и не
удается их выделить в процессе эксперимента, то при
исследовании процесса поворота автомобиля использу-
ются экспериментальные зависимости б^, = f(FF).
Отношение боковой силы Fv (или поперечной реакции
Ry) к углу увода бу,, определенное на линейном участке
характеристики бу, = Z(Ft), называется коэффициентом
сопротивления уводу колеса:
ь - Г» -
Рис. 0.4. Зависимость
угла увода от боковой
силы
(9.7)
Коэффициент Ау, зависит от ряда факторов, основными из которых явля-
ются: высота и ширина профиля шины; угол наклона нитей, число слоев
и материал корда; давление воздуха в шине; нормальная нагрузка; продоль-
ная и поперечная реакции; тип и состояние дорожного покрытия. Продоль-
ная реакция зависит от режима работы колеса и определяется приложенным
к нему моментом — для ведущего и тормо-
зящего колес, или толкающей силой —
для ведомого.
Зависимость^, от нормальной нагрузки
на шину Ft показана на рис. 9.Б. Значение
Рг, при котором Лу, максимален, обозна-
чим F*. Коэффициент fy, у легковых авто-
мобилей имеет максимум при значении Ft,
соответствующем номинальной нагрузке,
т.е. при полной нагрузке автомобиля, а у
грузовых — при значительно большей на-
грузке. Профессор А.С. Литвинов предло-
жил следующую эмпирическую формулу,
позволяющую учесть рассматриваемую за-
Рис. 9J>. Зависимость ковффициеитв
сопротивления уводу от нормальней
нагрузки
висимость:
= ^(2Дав-иВо* +0,4а®).
(9.8)
где Лу, — значение коэффициента сопротивления уводу при F,*; а, — коэффи-
циент относительной нормальной нагрузки на шину: а, = FjF*.
Зависимость коэффициента сопротивления уводу колеса от нормальной
нагрузки определяется двумя противоположными свойствами. С ростом на-
грузки повышается давление на площадке контакта, что обусловливает уве-
личение усилия, необходимого для бокового смещения колеса относительно
опорной поверхности. С другой стороны, при возрастании нагрузки увеличи-
вается деформация профиля шины. При этом боковая жесткость ее снижает-
ся и угол увода возрастает.
332
?. Криволинейное движение автомобили
Значения коэффициента у шин легковых ав-
томобилей 15-40 кН/рад, у шин грузовых автомо-
билей и автобусов 60-120 кН/рад. Для шин особо
большого размера значительно больше. Напри-
мер, для шины 40.00-57 автомобиля-самосвала
БелАЗ-7530 грузоподъемностью 200-220 т он со-
ставляет 400-500 кН/рад.
Управляемые колеса почти всегда имеют наклон в
поперечной вертикальной плоскости (развал колес,
изменение наклона в связи с кинематикой направ-
ляющего аппарата подвески). Наклоненное колесо
также катится с уводом (рис. 0.6). При наклоне плос-
кости вращения колеса да угол от вертикали угол
увода соответствует выражению 8^, = yK/fef, где
^=4-6.
Колесо, нагруженное боковой силой Fv и имеющее
наклон плоскости вращения ук, движется с углом
увода, определяемым из выражения
5>-»у
Рис. 9.С. Увод при качении
наклоненного колеса
—
Лу
(9.9)
При качении с уводом кроме радиальной деформации шина деформируется
также в боковом направлении, что приводит к увеличению потерь на каче-
ние. Значение коэффициента сопротивления качению при уводе можно опре-
делить по эмпирическим формулам. ФЬрмула профессора В.А. Иларионова
имеет следующий вид;
А» = й> +
^yi^yB t
(9.10)
а формула профессора Ю.А. Брянского —
4, = frexp
(9.11)
где Г2а — номинальное значение нормальной нагрузки на шину.
9.3. Кинематика поворота автомобиля
Рассмотрим вначале поворот автомобиля без учета бокового увода. Пово-
рот автомобиля должен происходить без бокового скольжения колес. В этом
случае векторы скоростей центров всех колес vK( должны лежать в плоско-
стях их вращения. Следовательно, управляемые колеса необходимо повер-
нуть на такие углы, при которых перпендикуляры к плоскостям вращения
колес пересекутся в одной точке — мгновенном центре скоростей. Эту точку
называют мгновенным центром поворота автомобиля.
9,3. Кинематика поворота автомобиля
333
На рис. 9.7 показана схема поворота автомобиля при качении колес без
бокового увода. Мгновенный центр поворота находится в точке О на продол-
жении оси неуправляемых колес. Радиусом поворота автомобиля на-
зывается расстояние от мгновенного центра поворота О до продольной оси
автомобиля АВ, Найдем соотношение между углами поворотов наружного 0в
и внутреннего 9, управляемых колес. Из треугольников ODE и ОСЕ находим:
ctg9H = OE/DE; ctg6„ = OF/CF. (9.12)
Рис. 9.7. Схема поворота автомобиля при качении колес без бокового увода
Вычитая иэ первого равенства второе и принимая во внимание, что
DE -CF-L, ОЕ - OF - получаем
ctg9H -ctg0B = fe-, (9.13)
Xi
где 1$ — расстояние между осями шкворней поворотных цапф управляемых
колес автомобиля.
Для поворота управляемых колес на различные углы 6Я и 6В используется
рулевая трапеция (Жанто, Франция, 1878 г.). Максимальные'утлы поворота
колес у современных автомобилей достигают 35-46°. При изменении углов
поворота в таких широких пределах рулевая тра-
пеция не обеспечивает точного выполнения равен-
ства (9.13). Обычно выбирают углы наклона пово-
ротных рычагов таким образом, чтобы в положении
рулевой трапеции, соответствующем прямолиней-
ному движению автомобиля, их осевые линии пере-
секались в некоторой точке Е внутри базы автомо-
биля (рис. 9.8). При этом точка Е должна находить-
ся на расстоянии^ от оси вращения управляемых
колес, определяемом соотношением - kEL. Зна-
чение коэффициента kE находится в пределах
0,7-0,9. Несоответствие углов поворота 0Н и 0,
Рис. 9.8. Схема выбора
параметров рулевой
трапеции
33* Э. Криволинейное движение автомобиля
условию (9.13) компенсируется боковой деформацией шин и их боковым
скольжением на поворотах. При этом возрастают затраты энергии на качение
и увеличивается износ шин. Поэтому в процессе проектирования системы
рулевого управления необходимо осуществлять поиск оптимального значе-
ния kE, при котором обеспечивается наи лучшее согласование углов поворота
управляемых колес 0Н и О,.
Для определения зависимости от углов поворота управляемых колес
сложим левые и правые части выражений (9.12). Принимая во внимание, что
ОЕ = Яд +4)/2; OF -Rn-lfj/Z, получаем
ctgGB +ctg©, - (9.14)
Ju
При сравнительно небольших углах поворота управляемых колес, харак-
терных для обычных эксплуатационных условий (кроме маневрирования на
площадках ограниченной величины), в первом приближении можно цри-
HHTbctg6“0,5(ctg0H +ctg0B), где 6 — средний угол поворота управляемых ко-
лес: 0 “(6Н + 0в)/2. Тогда
(915)
tgti
При движении автомобиля на повороте с высокими скоростями возника-
ют значительные боковые составляющие сил инерции, поэтому колеса катят-
ся с боковыми уводами. В общем случае углы увода всех колес различны.
Однако с целью упрощения во многих случаях без существенной ошибки
можно принимать для колес одного и того же моста одинаковые углы увода
бух = (8ув.н1 + )/2- В этом случае угол б^в( называют углом увода. 1-го
моста.
При возникновении бокового увода векторы скоростей центров колес tJH (
не лежат в плоскостях их вращения, а отклоняются в сторону действии боко-
вых сил на углы увода 5уй и S^, как показано на рис. 9.9. Вследствие этого
мгновенный центр поворота перемещается из точки О в точку О*, а радиус
поворота становится равным расстоянию O*D, где O*D — длина перпенди-
куляра, опущенного из точки О* на продольную ось автомобиля. Векторы
скоростей точек АкВ без учета бокового увода колес обозначены йА и vB, а при
уводе — и бд. Точка О* находится на пересечении перпендикуляров к век-
торам и vB. Из рис. 9.9 непосредственно находим AD =J^tg(6-6yBl);
BD = Rt tgSy^- Так как L = AD + BD, то
4 я" ♦ (0.16>
Углы увода колес обычно не превышают 6-10°, а углы поворота управляе-
мых колес при высоких скоростях движения также невелики. Поэтому выра-
жение (9.16) можно упростить:
(в1’>
9.4. Внешние воздействия на автомобиль при криволинейном движении
335
Рис. 8J). Схема поворота автомобиля при качении колес с боковым уводом
В зависимости от соотношения углов увода колес переднего и заднего мос-
тов радиус поворота может быть равным радиусу поворота Ra без увода
(при бу,! = 6у,г), меньше (при б^ < 5у,2) или больше его (при 6y,i > б^).
Мгновенный центр поворота при уводе колес всегда смещается внутрь
базы автомобиля. Смещение Е центра поворота О* определяется по формуле
(018)
9.4. Внешние воздействия на автомобиль
при криволинейном движении
Внешние воздействия на автомобиль можно разделить на две группы:
возмущающие и управляющие. Возмущающие воздействия возникают
в результате взаимодействия автомобиля с внешней средой, а управляющие
создаются в результате воздействий водителя на органы управления автомо-
билем: рулевое колесо; педали акселератора, тормоза и сцепления; рычаг
переключения передач.
Возмущающие воздействия представляют собой силы и моменты сопро-
тивления движению, реакции опорной поверхности дороги, инерционные
силы и моменты. Управляющие воздействия формируют вращающие моменты
на колесах автомобиля. В плоскости вращения колес при этом могут возникать
тяговые и тормозные моменты, а относительно осей шкворней управляемых
колес — поворачивающий момент, создаваемый рулевым управлением.
Сопротивление качению, как отмечалось в параграфе 9.2, при криволи-
нейном движении возрастает, поэтому при вычислениях моментов сопротив-
ления качению следует,учитывать углы бокового увода и коэффициенты
336
9. Криволинейное движение автомобиля
сопротивления качению колес соответствующих мостов оцределять по фор*
муле (9.1О)|ИЛИ (9.11).
Силы сопротивления воздуха Fw и сопротивления подъему определяют
по тем же зависимостям, что и для прямолинейного движения.
Инерционные силы и моменты пропорциональны соответствующим уско-
рениям, а их векторы неправлены противоположно векторам ускорений.
Определим ускорения автомобиля для общего случая криволинейного
движения, рассматривая автомобиль как твердое тело, совершающее движе-
ние в горизонтальной плоскости относительно неподвижной системы коор-
динат XOY(рис. 9.10, а).
о
Рис. 9 10. Схема к определению ускорений автомобиля при повороте
X
Введем подвижную систему координат хСу, связанную с автомобилем, на-
чало которой расположим в центре масс автомобиля (точкеС). Ось хподвиж-
ной системы координат совпадает с продольной осью автомобиля, а ось у
направлена перпендикулярно к ней.
В связи с уводом колес мгновенный центр поворота находится в точке О*.
Точка!) продольной оси автомобиля находится на перпендикуляре, опущен-
ном на нее из точки О*. Векторы скоростей всех точек автомобиля перпенди-
кулярны линиям, соединяющим их с точкой О*, и направлены в сторону
угловой скорости вращения автомобиля й, в плоскости ХОУ. В общем случае
9.4. Внешние воздействия на автомобиль при криволинейном движении 337
_ л - 1
точка D не совпадает с центром масс С, поэтому вектор скорости центра масс
будет отклонен от продольной оси на угол fy
№-DC/R*-,
DC =1^ — RntgBjqjJ,
— радиус поворота автомобиля с учетом углов увода колес; 4 — рас-
стояние от центра масс до оси заднего моста.
Считая углы 4 и малыми, можно записать следующее выражение -
Подставим в это выражение значениеиз выражения (9.17):
(9.19)
L
Проекции вектора скорости центра масс ve на оси подвижной системы ко-
ординат:
их = Oj. сов^; и* = vc sin
Проекции скорости vc на оси неподвижной системы координат найдем,
проецируя на них и l>„:
= Drcoey~t^siny; (9.20)
Оу = oxsiny-Носову. (9.21)
Дифференцируя по времени скорости и и учитывая, что угол у изме-
няется во время поворота, получаем проекции ускорения центра масс на оси
неподвижной системы координат:
ах =йясову-оя$01пу-1)м8и1у-1>1гУсо8у;
ay «^einy + игУсоау ч-йуСову-п^вшу.
Для нахождения ускорения центра масс автомобиля в подвижной системе
координат спроецируем составляющиеах waY вектора ускорения^ на оси х и
у (рис. 9.10, б):
ах « ах cosy +ау sin у; a* = -ах elny+су cosy.
Подставив в эти выражения значения ах и aY из уравнений (9.22), полу-
чим:
а* = ёД!-о1Г?; (9.23)
+ (9.24)
где их — скорость продольного перемещения центра масс (в направлении про-
дольной оси автомобиля Сх); — скорость бокового перемещения центра
масс (в направлении поперечной оси автомобиля Ср); (>х, — ускорения соот-
(0.22)
338
9. Криволинейное движение автомобиля
ветственно продольного и бокового перемещений центра масс; 7 — угловая
скорость курсового поворота автомобиля, т.е. угловая скорость его вращения
в неподвижной системе координат со,.
Скорости vx и связаны соотношением Так как угол £ неболь-
шой, можно принять vv = vД. Подставим значение £ из выражения (9.19):
= (925)
Из выражения (9.25) следует, что скорость бокового перемещения центра
масс автомобиля зависит от угла поворота управляемых колес 6 и углов увода
передних и задних колес автомобиля. При этом ее значение пропорциональ-
но скорости продольного перемещения центра масс автомобиля vx и обратно
пропорционально базе L.
Для определения ускорения бокового смещения центра масс £>„ продиффе-
ренцируем по времени выражение (9.25), принимая во внимание, что О, 6^ и
Брг могут изменяться во время движения автомобиля:
, _ + Був/) ~^5уд]
Скорость vx при криволинейном движении определяется по такой же фор-
муле, как и при прямолинейном. Только в этом случае в формулу скорости
подставляется среднее значение угловой скорости правого и левого ведущих
колес. Скорость центра масс автомобиля определяется по формуле
t>£
При малых углах поворота управляемых колес 9, характерных для боль-
ших скоростей.движения, vx незначительно отличается от vc, при условии,
что движение автомобиля устойчиво и отсутствуют заносы.
Угловую скорость вращения автомобиля в плоскости дороги У = <ог найдем
иэ выражения
где vD — скорость точки D (см. рис. 9.10, а).
Как известно, проекции скоростей точек твердого тела, лежащих на одной
прямой, на эту прямую равны между собой. Поскольку вектор скорости точ-
ки!) совпадает с направлением продольной оси автомобиля, на которой нахо-
дятся точки, то ее скорость vD = 1>ж. Тогда, учитывая формулу (9.17), угловую
скорость курсового поворота автомобиля найдем из выражения:
V = (9.27)
9.4. Внешние воздействия на автомобиль при криволинейном движении
339
Используя выражения (9.23)-(9.27), получаем уравнения для определе-
ния продольной и поперечной составляющих ускорения центра масс автомо-
биля в подвижной системе координат:
* RnL
(0.28)
vt ^ув1) + ^уи) ~
°’=Й
(0.29)
L
Дифференцируя по времени выражение (9.27), найдем угловое ускорение
автомобиля относительно вертикальной оси:
|\(3 ~ був! + &у»г) + мд(9 ~ ву»1 + ^2y,)
(9.30)
Векторы продольной и поперечной составляющих силы инерции автомо-
биля Ff найдем по формулам:
FfX=-^DMrnaax; (0.81)
F)v = (0.32)
где 8ПК — коэффициент приведенной массы автомобиля.
Кроме сил инерции Ffx и Р1у, приложенных в центре масс автомобиля, на
него действует инерционный момент М;г, направление которого противопо-
ложно вектору углового ускорения а его модуль пропорционален моменту
инерции автомобиля Jt относительно вертикальной оси Cz подвижной систе-
мы координат, проходящей через его центр масс:
= -т,р“£„
(9.33)
где рх — радиус инерции автомобиля относительно оси Cz.
Рассмотрим подробнее поперечную составляющую силы инерции автомо-
биля на повороте. Модуль этой силы Flv можно представить, в виде трех со-
ставляющих:
Fw-FH/1+F№+F№‘
Составляющие силы Fjy вычисляются по формулам:
2
%
- буд) -
=-------- L ------------•
(9.34)
(9.35)
(9.36)
FW ~--
340
9. Криволинейное движение автомобиля
Первое слагаемое представляет собой проекцию центробежной силы инер-
ции на ось Су и зависит только от скорости и радиуса поворота. Второе слагае-
мое возникает в результате изменения угла поворота управляемых колес
и изменения углов увода. При отсутствии увода оно положительно при входе
автомобиля в поворот и отрицательно при выходе. При уводе колес, если
утлы 8ув1 и Sj^2 велики, то сила может быть отрицательной при входе в по-
ворот и положительной при выходе. Слагаемое Где возникает в результате из-
менения скорости автомобиля. При отсутствии увода оно положительно при
ускоренном движении и отрицательно — при замедленном. При больших уг-
лах в, буй и силаГде может быть положительной и в процессе замедления.
9.5. Определение поперечных реакций дороги
при криволинейном движении автомобиля
При определении поперечных реакций дороги автомобиль будем рассмат-
ривать как твердое тело, движущееся в опорной плоскости дороги под воздей-
ствием системы внешних сил и моментов. На рис. 9.11 показаны внешние
воздействия на автомобиль при повороте. В число этих воздействий входят:
сила сопротивления подъему' ; си ла сопротивления воздуха ; реакции до-
роги на колеса (продольные Ддм, Яд,, и поперечные Я^, R^, Л^ж,
Я^,): момент сопротивления повороту М^п; сила инерции F; и инерционный
момент М-}г относительно вертикальной оси Сг.
Рис. 6.11. Внешние воздействия на автомобиль
с задними ведущими колесами при повороте
При высокой скорости углы поворота управляемых колес небольшие, по-
этому разницей между углами поворота левого и правого колес можно пре-
небречь и суммарную силу боковых реакций обоих колес Я^ приложить
в точке А середины переднего моста пдд углом 0 = 0j5 (0„ + 0,) к оси моста.
9.5. Определение поперечных реакций дороги при криволинейном движении автомобиля 341
а суммарную продольную реакцию этих же колесБх1 — под углом 0к продоль-
ной оси автомобиля.
На тяговом режиме при криволинейном движении вращающие моменты
на наружном (забегающем) Мк и и внутреннем (отстающем) Мкл колесах мо-
гут быть различными, что зависит от коэффициента блокировки межколес-
ного дифференциалаАб, определяемого по формуле:
д _ Мк., -.Мх.н = Мк,-Мк, (0.37)
Mxj + Mxj Мк
где Мк — суммарный вращающий момент, подводимый к обоим колесам ве-
дущего моста,
На основании формулы (9.37) получаем следующие выражения для опре-
деления вращающих моментов на ведущих колесах:
Мк.в=0^Мк(1 + Лв); (9.38)
Мк.н =0,5Мк(1-Ае). (9-39)
В связи с различием моментов на ведущих колесах различаются также
и продольные реакции дороги на эти колеса иЯйв. В результате возника-
ет момент сопротивления повороту:
м В(МКЛ-МК.К)
мс.п--------------'
^4
где В — колея ведущего моста.
С учетом выражения (9.87) получаем следующую формулу для вычисле-
ния момента сопротивления повороту:
М0П=^£А. (9.40)
Ь
У конического шестеренного дифференциала в среднем составляет око-
ло 0,05, поэтому различие моментов Мкл и МкЛ незначительно и момент Мсл
практически не оказывает влияния на поворот автомобиля. Дифференциалы
повышенного трения могут создавать значительные моменты сопротивления
повороту. У дифференциала с муфтами свободного хода fc6 = 1. На повороте та-
кой дифференциал передает вращающий момент только внутреннему коле-
су, поэтому создается момент сопротивления повороту Мсл **ВМк/г*.
Предполагается, что автомобиль входит в поворот и угловое ускорение ев
увеличивается. Тогда, согласно рис. 9.11, вектор ё, направлен по часовой
стрелке, а вектор инерционного момента — против часовой стрелки. На-
правления компонентов &)х и /д, вектора силы инерции F} противоположны
соответствующим компонентам ах вектора ускорения центра массйе.
Составим уравнения динамического равновесия всех сил и моментов, дей-
ствующих на автомобиль при криволинейном движении в плоскости дороги
342
9. Криволинейное движение автомобиля
согласно схеме, показанной на рис. 9.11. На основе принципа Даламбера по-
лучаем следующую систему уравнений:
= -7?у1 соев-й^ sinG+Rx2 -Fh ~Fjx = 0; £ У = Я,1 йпО-Я^соаб-Я^ + Fjy = 0; 0—Ryiliсовб+n + ~ 0. (9.41)
Решив совместно второе и третье уравнения этой системы, находим иско-
мые поперечные реакции:
LcobO p c,n L (9.42) (9.43)
При небольшом угле поворота управляемых колес можно принятьсоаб = L
Если управляемые колеса при этом ведомые, а в ведущем мосту установлен
межколесный дифференциал с малым трением, то слагаемыми и Мел
можно пренебречь. В этом случае
L (9.44) (9.45)
Подставим значения Flv и М)г, используя при этом формулы (9.29)-(9.83).
После соответствующих преобразований получаем:
+ ~|(pt +$)(&_^й) + (р*_^4)8уй^+
[(p* + ^X® “ +(p* ~ : + (P- +iia)^]- (9.46)
(9.47)
где /лл1,пгд2 — массы, приходящиеся на колеса переднего и заднего мостов:
та1 = т^Щ = mJi/L.
Для большинства типов автомобилей р5 с погрешностью, не превы-
шающей 10-16 %, поэтому можно принять =^2. Тогда формулы (9.46)
и (9.47) упрощаются и приводятся к виду:
9.5. Определение поперечных реакиий дороги при криволинейном движении автомобиля
343
гг(р»+^)^у»2
Рассмотрим множители при переменных 6, §y,i, 5^ и их производных:
Pi +$ + ^2 _ -р
ZjL 1%L
hL
В результате при (£ - Мг формулы для определения поперечных реакций
имеют следующий вид:
" 2 4
Вт -mai ^+”x(6-8>rt)+Me“A*d :
— 171*3 ~J"
(9.48)
(9.49)
При равномерном движении автомобиля, т.е. при их = conetnux =0, полу-
чаем следующие выражения:
/41
Bja — ти»2
(9.50)
(9.51)
При установившемся круговом движении с постоянной скоростью vz - conet
параметры 6, 5^, 6^ остаются постоянными, следовательно, 6 = 0; = 6j,,2 =
= 0. В этом случае поперечные реакций вычисляются по формулам:
о2
= (б-б2)
"в
^=таЯ§- (9-53)
Согласно выражениям (9.46) и (9.47), сила инерции распределяется меж-
ду мостами пропорционально распределению масс автомобиля. При входе
в поворот 6 положительно, поэтому составляющая силы инерции Ffv уве-
личивает боковую реакцию передних колес, а боковая реакция задних колес
может как увеличиваться, так и уменьшаться, в зависимости от отношения
р*/(Уг) и соотношения между 9, и . Так как в большинстве случаев
р, > /14» 1°. как правило, F^ отрицательна и поперечная реакция уменьша-
ется при входе в поворот. При ускоренном движении автомобиля на повороте
поперечные реакции увеличиваются, а при замедленном — уменьшаются, за
исключением случая, когда при малых углах поворота управляемых колес
возникают большие углы увода передних колес.
В большинстве случаев наибольшее влияние на боковые реакции оказы-
вает центробежная сила инерции. При резком повороте управляемых колес
344
9. Криволинейное движение автомобиля
решающее значение на увеличение боковых реакций может оказать значе-
ние угловой скорости поворота управляемых колес 6, особенно при большой
скорости автомобиля. Поэтому при оценке устойчивости автомобиля широко
используется круговое движение с установившейся скоростью» а также резкие
повороты рулевого колеса при переходе с одной полосы движения на другую.
9.6. Определение нормальных реакций дороги
при криволинейном движении автомобиля
При криволинейном движении автомобиля под действием силы инерции
происходит перераспределение нормальных реакций опорной поверхности
между колесами. Наибольшее влияние при этом оказывает поперечная со-
ставляющая силы инерции Fyp. Нормальные реакции дороги на внутренние
по отношению к центру поворота колеса уменьшаются, а на наружные — уве-
личиваются. Однако задача определения нормальных реакций при криволи-
нейном движении автомобиля оказывается статически неопределимой даже
для двухосного автомобиля, так как необходимо найти четыре реакции, то-
гда как для плоской системы можно составить лишь три уравнения равнове-
сия. В этом случае систему необходимо разделить на три взаимодействующие
подсистемы: подрессоренную массу и две неподрессоренные массы — перед-
него и заднего мостов.
Взаимодействие этих подсистем осуществляется посредством упругих
элементов подвески. Под действием силы инерции изменяется нагрузка на
упругие элементы левой и правой подвесок и происходит поперечный наклон
подрессоренной массы относительно неподрессоренных масс на угол Х.кр, на-
зываемый углом крена. Крен подрессоренной массы происходит относитель-
но некоторой прямой Л^Л^, называемой осью крена (рис. 9.12). Точки и Л’2
оси крвна находятся в вертикальных плоскостях, проходящих через оси пе-
реднего и заднего мостов. Эти точки называют центрами крена передней
и. задней подвесок, а длину перпендикуляра ftj., опущенного из центра под-
рессоренной массы Ся на ось крена, — плечом крена.
Рис. 9.12. Схема к определению оси ирона кузова
Положения центров крена и оси крена зависят от кинематики подвески. При
зависимой подвеске на продольных рессорах центр крена находится в плоско-
сти, проходящей через ушки рессор. При независимой подвеске центр крена
может располагаться выше, ниже уровня поверхности дороги или совпадать
9.6. Определение нормальных реакций дороги при криволинейном движении автомобиля
345
с ней. Для его определения необходимо вначале найти мгновенные центры
вращения Од и Оп левого и правого колес относительно неподвижной подрес-
соренной массы. Затем провести прямые через точки Оя и Оа и точки Da и£>п
центров площадок контактов соответствующих колес с дорогой. В точке пе-
ресечения этих прямых находится центр крена — точка
На рис. РДЗ.а изображена схема однорычажной независимой подвески,
на которой показаны мгновенные центры вращения колес Ол и Оа. Проведя
прямые через точки Оя, D„ и Оп, D,,, находим центр крена в точке Nj на верти-
кальной оси симметрии автомобиля.
Рис. 6.13. Положение центра крена при независимой подвеске
Независимая двухрычажная подвеска может иметь различные углы на-
клона верхних рычагов (рис. 9.13, би в), а нижние рычаги при номинальной
нагрузке обычно расположены горизонтально. Мгновенные центры враще-
ния колес находятся на линиях пересечений осей рычагов. Для схемы на
рис. 9.13, б каждый из них расположен на стороне своего колеса, а для схемы
на рис. 9.13, в — на противоположной стороне. В связи с этим центр крена Л]
для первой схемы находится ниже поверхности дороги, а для второй — выше.
346
9. Криволинейное движение автомобиля
Если независимая подвеска обеспечивает перемещение колес относитель-
но подрессоренной массы в плоскостях их вращения, то мгновенные центры
вращения колес при деформациях подвесок находятся в бесконечности, по-
этому центр крена рассоложен на опорной поверхности дороги в точке пере-
сечения с нею оси симметрии автомобиля (рис. 9.13, г). Такую кинематику
обеспечивают свечная, параллелограммная и торсионная подвески, а также
подвеска с качанием рычагов в продольной плоскости и двухрычажная под-
веска с параллельными рычагами. Если свечная подвеска имеет наклон
упругих элементов, то центр крена находится ниже поверхности дороги
(рис. 9.13, 5).
В связи с изменением нагрузки на колеса при крене подрессоренной массы
изменяются деформации шин и происходит наклон осей мостов, однако он
сравнительно небольшой и им можно пренебречь.
Составим уравнения динамического равновесия подрессоренной и непод-
рессоренных масс при следующих допущениях: центры неподрессоренных
масс находятся на высоте гк посередине колеи; центр подрессоренной массы
при отсутствии крена расположен в продольной вертикальной плоскости,
проходящей через продольную ось автомобиля; поперечные ускорения цен-
тров подрессоренной и неподрессоренных масс равны поперечной составляю-
щей ускорения центра масс автомобиля ау, определяемой по формуле (9.29).
На подрессоренную массу действуют следующие силы и моменты
(рис. 9.14, а): сила тяжести подрессоренной массы m^g, сила инерции
jFjn = инерционный момент Мд =- суммарные вертикальная
и боковая реакции неподрессоренных масс и суммарный реактивный мо-
мент упругих элементов подвески Мр. Иэ условий равновесия подрессорен-
ной массы следует, что FKr =-пЪаё, Fay = следовательно, это пары сил,
создающие опрокидывающий момент подрессоренной массы Моп. Сила F^
равна суммарной силе всех упругих элементов подвески в состоянии покоя
автомобиля. При криволинейном движении автомобиля возникает крен под-
рессоренной массы, происходит перераспределение нагрузок на упругие эле-
менты подвески, их деформации изменяются и возникает момент Мр, урав-
новешивающий опрокидывающий момент Мсп. Реактивный момент подвески
определяется из выражения
^р = -^pl = (^‘1 =£?Акр» (9.54)
где ,q2 — коэффициенты угловой жесткости передней и задней подвесок.
Коэффициент угловой жесткости зависимой подвески определяется по
формуле
=О,бСрГ|рВр, (9.55)
где ср — коэффициент жесткости упругого элемента подвески при вертикаль-
ной деформации; — коэффициент, учитывающий увеличение жесткости
упругого элемента при его скручивании в поперечной плоскости автомобиля
(для листовой рессоры Г]р = 1,06-1,26); Вр — расстояние между упругими эле-
ментами.
9.6. Определение нормальных реакций дороги при криволинейном движении автомобиля 347
Рис. 9.14. Схемы для определения нормальных реакций
при криволинейном движении автомобиля
Для независимых подвесок
сх = О^прВ2, (9.56)
гдеСщ, — коэффициент жесткости упругого элемента, приведенный к плоско-
сти вращения колеса; В — колея моста-
Для определения угла крена составим уравнение динамического равнове-
сия подрессоренной массы, рассматривая действующие на нее моменты отно-
сительно оси крена:
m„auhK созХКр +mngh} sinXKp-Jni.XRp -Afp = О,
где та — подрессоренная масса автомобиля; йА — плечо крена; — момент
инерции подрессоренной массы относительно оси крена.
Так как угол сравнительно небольшой (не превышает 10- 15е), примем
einX = X, cosX = 1. Подставим эначение Мр из формулы (9.54):
ЛДкр = hKmnav. (9.57)
При установившемся круговом движении Хкр = const, Хкр = 0, тогда эначе-
ние Хкр можно найти по формуле
Мб
9. Криволинейное движение автомобиля
Определив найдем Мр по формуле (9.54). Суммарный реактивный мо-
мент Мр распределяется между передней и задней подвесками пропорцио-
нально коэффициентам их угловых жесткостей:
Мр^-^СЛ ; Mp2=-^i-.
% +<*, +С1Ж
Моменты Afpi и Afj# действуют на неподрессоренные массы в противопо-
ложном направлении по сравнению с моментом Мр (рис. 9.14, б и в). Кроме
того, подрессоренная масса оказывает воздействия на неподрессоренные
массы в вертикальном и боковом направлениях силами Fnzl, FntZ,
причем = -(Лй + ^вй)! &>ц/ ~ ~ (Лцг1 + Эти силы приложены в цен-
трах кренов подвесок Nj и N% и распределяются между неподрессоренными
массами обратно пропорционально расстояниям 4,1 и in2 от центра подрессо-
ренной массы до осей переднего и заднего мостов:
ij is
J? — a.
----p----------
Л-Л i-i
p _ ^Н|/л2 _ тпа{/п2 _
*5ц1 “ £ ~ “ m<lla4"
j, mti aJ-u 1
= ?— “• mD!«p
is L
гдетпп1, тя2 — части подрессоренной массы, отнесенные соответственно к пе-
реднему и заднему мостам.
Кроме того, на неподрессоренные массы действуют их силы тяжести m^g,
силы инерции FjBl = —т^у и нормальные реакции дороги на наружные Ди
и внутренние колеса.
Составим уравнения равновесия моментов относительно точки 1\ для пе-
реднего моста автомобиля (рис. 9.14, б):
-Л,1Н J3t+O,5(mnl+m+mnia/M +m,iiaJ/;t +-Wpi = 0.
Из этого уравнения находим нормальную реакцию дороги на переднее на-
ружное по отношению к центру поворота колесо:
Ян» = 0&W + fr*014 +т“1Гк^+МР1, (9.59)
где mal = тп1 + mKi — масса автомобиля, отнесенная к переднему мосту.
Таким же образом из уравнения моментов относительно точки находим
нормальную реакцию дороги на переднее внутреннее колесо:
Дн, = (9.60)
Bi
9.7. Уравнения криволинейного движения автомобиля
349
Ио выражений (9.59) и (9.60) следует, что чем выше расположен центр
крена над поверхностью дороги и чем больше подрессоренная масса, тем зна-
чительнее перераспределение нормальных реакций. Увеличение колеи спо-
собствует уменьшению перераспределения реакций.
Выражения для нормальных реакций дороги на колеса заднего моста ана-
логичны. Если подвеска заднего моста зависимая, а переднего — независимая,
то обычно центр крена у первой значительно выше, чем у второй. В этом слу-
чае'перераспределение нормальных реакций на колеса заднего моста значи-
тельно большее, чем переднего. Поэтому условия сцепления ведущих колес
с дорогой у переднеприводных легковых автомобилей при криволинейном
движении лучше, чем у заднеприводных.
9.7. Уравнения криволинейного движения автомобиля
На рис. 9.11 показана система внешних сил и моментов, действующих на
двухосный автомобиль с передними управляемыми и задними ведущими
колесами при плоском криволинейном движении. У переднеприводного ав-
томобиля продольные реакции дороги на колеса имеют противоположные
направления. Составим уравнения динамического равновесия сил в проек-
циях на оси х и у и моментов относительно центра масс С:
= '^RxiCOBQ±RX2-Rj/i&in.6-Fl, -Fw;
= Wri.ein 9+^0080+7?^;
(9.61)
= -^Rx/i ein 9+Я0/1со80-й!д/2 -ЛГеп.
В уравнениях (9.61) верхние знаки соответствуют автомобилю с задними
ведущими колесами, а нижние — с передними.
Рассмотрим вначале первое уравнение системы (9.61). При высокой ско-
рости движения угол 9 небольшой, поэтому примем sinO = 0, cos0 -1. В этом
случае алгебраическая сумма продольных реакций не зависит от того, какие
колеса автомобиля приводные, и ее можно определить по формуле
р — Л/дИц/Птр .
Г Г
'к 'к
где /уд — коэффициент сопротивления качению колес с учетом их бокового
увода.
Подставим эначение ах из формулы (9.28). Принимая во внимание, что
Fh = mtgh, получаем:
8п.нтд1>, = МдитрПтр-т<уу-.Р41, -Гкрнв, (9.62)
где у/ — коэффициент суммарного дорожного сопротивления: \|/= Л+ 7^;
FxpHs — дополнительная сила сопротивления, обусловленная криволиней-
ностью траектории движения автомобиля:
^кри» =Лу10—(9.63)
350
9 Криволинейное движение автомобиля
Уравнение (9.62) отличается от дифференциального уравнения прямоли-
нейного движения автомобиля лишь слагаемым а также необходимо-
стью учета повышения сопротивления качению колес при их боковом уводе.
Значения поперечных реакций к R& неизвестны, поэтому выразим их
через коэффициенты сопротивления боковому уводу мостов согласно форму-
ле (9.7):
(9.64)
Углы увода мостов 8^ также неизвестны, но их можно выразить через фа-
зовые переменные процесса движения. Для этого используем выражения
(9.25) и (9.27):
L
СО - + (^у|й
1 L
Решив совместно эти уравнения, получим:
Syri = е-^Ю*+1>у; (9.66)
fx
(9.66)
fx
Подставим значение в выражение (9.63), используя при этом выраже-
ние (9.65):
FKPBB = (9.67)
^Л!
При исследованиях траекторной и курсовой устойчивости автомобиля
обычно используются два последних уравнения системы (9.61).
Значение поперечной составляющей ускорения центра масс автомобиля
представим выражением (9.24), принимая во внимание, что у = <ог:
а„ = их(0ж+1^. (9.68)
Рассмотрим движение автомобиля с задними ведущими колесами. При
высокой скорости движения угол 6 небольшой, поэтому примем соа0 = 1,
а влиянием^ и Ме.п пренебрегаем. Подставим значенияav, пН# в уравне-
ния (9.61). После соответствующих преобразований получим:
Г т Uff ' т, ’ kyB$+ify2& w , А>.Д6 J,tix Ш' ' Л (9.69)
Введем обозначения:
^в1+Луя2 «и - ; aia = Wr*>^+or;
(9.70)
„ kytlll-kyilk «21 “ г ’ A ^f* ’ J
9.7. Уравнения криволинейного движения автомобиля
351
Е>! =-; б. - —-—.
<9 71)
С учетом этих обозначений уравнения (9.69) принимают вид:
cfi>„
------ciiUy+&i;
at
— ~a2iL\ _ +^2-
dt J
(9.72)
Решая систему уравнений (9.72), можно определить изменения фазовых
координату и характеризующих криволинейное движение автомобиля,
в зависимости от угла поворота управляемых колес 6 при различных значе-
ниях скорости автомобиля у. Эти уравнения используются при оценке
управляемости и устойчивости автомобиля. При движении автомобиля с пе-
ременной скоростью в систему уравнений (9.69) дополнительно включается
дифференциальное уравнение, необходимое для определения скорости у:
~Т’ц, — FKpt1,
dt ^л-ий«
Для определения координат центра масс автомобиля X, У в неподвижной
системе координат XOY и курсового угла у, характеризующего угол поворота
продольной оси автомобиля относительно оси ОХ, составим систему диффе-
ренциальных уравнений. Используя уравнения (9.20) и (9.21) и учитывая,
что dX/dt = J dY/dt = су; dy/dt = сзг, получаем следующую систему уравне-
ний:
dX
соя у-су sin?;
dY
— = и, sin? + uvcoe?;
(9.74)
d?
dt
Интегрируя совместно системы дифференциальных уравнений (9.72),
(9.73) и (9.74), определяют изменения фазовых координат в подвижной и не-
подвижной системах координат. По результатам интегрирования строят гра-
фик траектории движения автомобиля в системе координат XOY и графики
изменения во времени скорости, курсового угла и всех других интересующих
исследователя фазовых координат. Можно также построить графики изме-
нения этих же координат по перемещению автомобиля, учитывая, что пере-
мещение s связано с координатами X, У следующей зависимостью:
з = 7х2 + Уг.
(9.75)
352
9. Криволинейное движение автомобиля
Рас, 9.15. Принципиальная
схема стенда для исследо-
нания увода колеса
9.8. Экспериментальное определение параметров
и характеристик увода колеса
Параметры и характеристики увода колеса определяют эксперименталь-
но. Испытания проводятся на стендах или непосредственно на автомобиле.
На стенде имитируют увод колеса и по результатам испытаний определяют
коэффициент сопротивления уводу. При испытаниях на автомобиле опреде-
ляют коэффициент сопротивления уводу моста.
На рис. 9.15 показана принципиальная схема
стенда, позволяющего определить зависимость бо-
ковой силы Fu от угла увода колеса 3^. Стенд состоит
из барабана 1, приводного электродвигателя 2 и уст-
ройства 3 для установки подлежащего испытанию
колеса 4. Устройство 3 позволяет устанавливать ко-
лесо на барабан таким образом, что ось вращения ко -
леса располагается под углом к оси вращения
барабана. При вращении барабана и колеса этот угол
соответствует углу увода, поскольку траектория
движения центра колеса относительно барабана на-
ходится в одной и той же поперечной плоскости ба-
рабана А-А, а продольная плоскость симметрии
колеса В-В повернута к плоскости Д~Д барабана
под углом Sj,,. Угол установки колеса 8^ можно ме-
нять и фиксировать в необходимых пределах.
На-за наличия угла SyB при движении колеса по
поверхности барабана шина получает боковую де-
формацию, и возникает поперечная реакция Ry, ко-
торая уравновешивается усилием^ на оси колеся.
В процессе испытаний замеряют силу 2^, действующую на колесо со сторо-
ны устройства его закрепления 3, и угол Б^. По этим данным строят график
зависимости Fv = /(Зув), аналогичный показанному на рис. 9.4.
Для возможности проведения испытаний колеса в различных режимах
его качения (ведущем, ведомом, тормозном, нейтральном) стенд снабжен
вторым двигателем 5, который установлен на раме устройства 3 и связан с ко-
лесом карданной передачи 6. Электродвигатели стенда 2 и 5 могут работать
как в тяговом, так и в тормозном режиме. Наличие двух двигателей позволя-
ет создавать необходимый режим качения колеса, который зависит от того,
какой из электродвигателей является приводным, а какой тормозным. Нор-
мальная нагрузка колеса создается грузом 7.
Полученные при испытаниях на таком стенде значения коэффициента со-
противления уводу оказываются несколько меньше, чем при испытаниях на
плоской опорной поверхности. Это обусловлено кривизной площадки кон-
такта колеса с барабаном. Поэтому испытания предпочтительнее проводить
на ленточных стендах.
9.6. Экспериментальное определение параметров и характеристик увода колеса
353
При испытаниях, проведенных в НАМИ, получена эмпирическая форму-
ла для определения коэффициента сопротивления уводу шин с диагональ-
ным расположением нитей корда [8]:.
Ь = бООВ^Р*+2Вов)(рв +1),
(9.76)
где Bot.Dat — ширина и диаметр обода колеса, м; р„ — давление воздуха в ши-
не, МПа.
Если к колесу приложен момент (тяговый или тормозной), то коэффици-
ент сопротивления уводу уменьшается. В этом случае его приближенное зна-
чение можно вычислить по формуле
(9.77)
Приведенное выражение справедливо при выполнении условия
£0,5фЛ.
Если это условие не выполняется, то возникает значительное внешнее бо-
ковое скольжение колеса и зависимость между 8^ и Fv становится существен-
но нелинейной. Методы моделирования бокового увода колеса для такого
случая разработаны профессором Д.А. Антоновым [5].
Параметры увода колеса можно определять непосредственно на автомоби-
ле. При этом измеряют углы увода мостов, а не отдельного колеса. Автомо-
биль при испытаниях движется по круговой траектории при закрепленном
рулевом колесе, т.е. при неизменных углах поворота управляемых колес.
Боковой силой, вызывающей увод мостов, в данном случае является попереч-
ная составляющая центробежной силы инерции. Величина этой силы зави-
сит от скорости автомобиля и от радиуса траектории движения.
Угол увода моста фиксируется с помощью прибора «пятое колесо» специ-
альной конструкции (рис. 9.16). «Пятое колесо» I устанавливается таким об-
разом, чтобы его продольная плоскость симметрии совпадала с продольной
осью автомобиля, а точка его контакта с дорогой находилась в вертикальной
плоскости, проходящей через ось зад-
него моста (или ось тележки — у трех-
осного автомобиля). «Пятое колесо*
закрепляется к раме или кузову авто-
мобиля на специальном кронштейне 2,
допускающем его повороты относи-
тельно вертикальной оси 3. Для обес-
печения надежного контакта с дорогой
колесо прижимается к ней посредст-
вом пружины 4.
Рис. 6.1 в, Схема прибора «пятое колесо «
для определения угла увода мостов
12 3нс. 3498
354
9. Криволинейное движение автомобиля
Конструкция прибора «пятое колесо» выполнена таким образом, что его
инерционный момент относительно вертикальной оси вращения 3 полностью
уравновешивается инерционным моментом противовеса 6 относительно этой
же оси. В результате при движении автомобиля по круговой траектории «пятое
колесо» не подвержено боковому воздействию и поэтому катится без бокового
увода. Ось вращения «пятого колеса» при этом Направлена к точке мгновен-
ного центра поворота автомобиля (к точке МЦС). Поэтому угол между про-
дольной осью автомобиля и плоскостью вращения «пятого колеса* является
углом увода заднего моста автомобиля. Угол увода измеряется потенциомет-
ром 5, а боковая составляющая силы инерции, приходящаяся на задний мост
и вызывающая увод моста, вычисляется либо на основе параметров движения
автомобиля, либо через поперечное ускорение автомобиля, измеряемое дат-
чиком.
Вопросы для самоконтроля
1. Каковы условия осуществления поворота заднеприводного автомобиля с пе-
редними управляемыми колесами? Напишите формулу, выражающую усло-
вие отсутствия бокового скольжения управляемых колес.
2. Какой автомобиль обладает лучшей управляемостью: переднеприводный или
заднеприводный? Почему?
3. Что такое боковой увод колеса? По какой причине возникает боковой увод?
4. Что такое коэффициент сопротивления уводу колеса?
5. Какие конструктивные и эксплуатационные факторы влияют на сопротивле-
ние уводу колеса?
6. Как влияет увод колеса на сопротивление качению?
7. Как проводятся эксперименты по определению коэффициента сопротивле-
ния уводу колеса на стенде и на автомобиле?
8. Каковы внеш ние воздействия на автомобиль при криволинейном движении?
9. Какие факторы влияют на величину поперечных реакций дороги при криво-
линейном движении автомобиля?
10. В чем заключается особенность методики определения нормальных реакций
дороги при криволинейном движении автомобиля?
11. Что такое угол крена, ось крена, плечо крена подрессоренной массы автомо-
биля?
12. Как определяется положение центра крена независимой подвески?
13. Как влияют схемы направляющего устройства независимой подвески на по-
ложение центра крена?
14, Как влияет положение центра крена на перераспределение нормальных реак-
ций между наружными и внутренними колесами при криволинейном дви-
жении?
Устойчивость автомобиля
Понятие устойчивости системы связано с ее способностью возвращаться
в состояние равновесия после исчезновения внешних воздействий, которые
вывели ее из этого состояния. Если Система неустойчива, то она не возвраща-
ется в состояние равновесия, а либо удаляется от него, либо совершает вокруг
него колебания с недопустимо большими амплитудами. Определение пара-
метров автомобиля, обеспечивающих устойчивое, управляемое движение,
является одной из первостепенных задач проектирования.
Устойчивостью называют совокупность свойств автомобиля, характери-
зующих его способность сохранять заданное направление движения при воз-
действиях внешней среды, стремящихся отклонить его от этого направления.
Различают траекторную и курсовую устойчивость и устойчивость По опро-
кидыванию. Траекторная устойчивость характеризуется способностью сохра-
нять направление движения центра масс автомобиля, а курсовая устойчи-
вость — способностью сохранять ориентацию продольной оси автомобиля.
Первая оценивается боковым смещением центра масс от заданной траектории,
а вторая — курсовым углом. Если при этом наступает боковое скольжение колес
одного или всех мостов, то это представляет собой предельный случай потери
устойчивости, называемый заносом.
Другим предельным случаем потери устойчивости является опрокидыва-
ние, Опрокидывание представляет собой поворот автомобиля в поперечной
или продольной плоскости с отрывом соответствующих колес от опорной по-
верхности дороги. В первом случае происходит поперечное опрокидывание,
а во втором — продольное.
При преодолении автомобилем крутого продольного уклона его устойчи-
вое движение ограничено условиями сцепления ведущих колес с дорогой.
При недостаточном сцеплении уклон может оказаться непреодолимым. На-
ступившее буксование ведущих колес может закончиться сползанием авто-
мобиля вниз.
В связи с изложенным различают поперечную и продольную устойчи-
вость автомобиля. Потеря поперечной устойчивости может произойти либо
вследствие бокового опрокидывания, либо бокового скольжения (заноса) ко-
лес. Ванос и боковое опрокидывание происходят под действием поперечных
сил: центробежной силы инерции (при криволинейном движении), состав-
ляющей силы тяжести (при движении на косогоре), силы бокового ветра. Оп-
рокидывание также может произойти в результате наезда на выступающее
над поверхностью дороги препятствие или бокового скольжения и последую-
щего удара о препятствие.
Потеря продольной устойчивости обычно наступает при чрезмерном воз-
растании буксования ведущих колес. Для современных транспортных авто-
мобилей характерно низкое расположение центра масс, поэтому буксование
356
10. Устойчивость автомобиля
колес возникает при значительно меньших уклонах по сравнению с уклона-
ми, на которых возможно продольное опрокидывание. Однако при движении
в горных условиях, в бездорожье, при преодолении отдельных видов препят-
ствий вероятность продольного опрокидывания не исключается, особенно
это относится к короткобазным автомобилям высокой проходимости с высо-
ким расположением центра масс.
Определение максимальных продольных уклонов, преодолеваемых авто-
мобилем, рассмотрено в главе 3 (см. формулы (3.26), (3.28), (3.29)).
10.1. Оценочные показатели устойчивости
Характер и параметры движения автомобиля определяются его внутрен-
ними физическими свойствами и внешними воздействиями — возмущающими
и управляющими. Возмущающие воздействия зависят от условий движения
и определяются физическими свойствами внешней среды, прежде всего ха-
рактеристиками опорной поверхности дороги: коэффициентами сцепления
и сопротивления качению, продольным и поперечным углами уклонов. Кроме
того, автомобиль подвержен случайным воздействиям, которые обычно не
учитываются в уравнениях движения: порывы ветра, неровности дороги,
непредвиденные препятствия и т.д.
При выполнении транспортной работы автомобиль постоянно подвергается
управляющим воздействиям, осуществляемым водителем. Воздействия во-
дителя на органы управления автомобилем направлены на сохранение или
изменение величины и направления скорости и ориентации продольной оси
автомобиля. При изучении свойств устойчивости автомобиля учитываются
только возмущающие воздействия внешней среды.
При постоянных внешних воздействиях движение автомобиля установив-
шееся, его фазовые координаты (скорость центра масс vc и угловая скорость
вращения coz относительно вертикальной оси Cz) остаются постоянными. Такое
состояние динамической системы обусловлено равновесием сил и моментов,
приложенных к автомобилю. Решение уравнений, описывающих условия
динамического или статического равновесия, позволяет определять гранич-
ные значения параметров автомобиля и фазовых координат, при которых
система может находиться в устойчивом состоянии равновесия.
При воздействии на автомобиль случайных факторов, неучитываемых
в уравнениях динамического равновесия, параметры движения могут откло-
ниться от заданных значений. Если после прекращения этого воздействия
параметры движения воввращаются к исходным значениям, то такое движе-
ние автомобиля называется асимптотически устойчивым. Если же вызван-
ные возмущением отклонения параметров движения с течением времени
увеличиваются, несмотря на прекращение действия возмущения, то такое
движение называется неустойчивым.
Показателями оценки устойчивости являются критические значения
параметров движения и положения автомобиля. Для оценки устойчивости
10.1. Оценочные показатели устойчивости 357
автомобиля при действии на него боковых сил используют следующие пока-1,
эатели:
О критические скорости по боковому скольжению о8рф и по боковому оп-
рокидыванию VKp.on •
а критические углы косогора по боковому скольжению р и по боковому
опрокидыванию ркр.оп;
□ коэффициент поперечной устойчивости Ппу1
□ критическая скорость по курсовой и траекторной устойчивости ;
□ критическая скорость по вилянию прицепа ;
□ угол крена Хкр;
□ угол дрейфа Рдр.
Все показатели, кроме и Укр.пп, характеризуют поперечную устойчи-
вость автомобиля.
Рекомендуемые величины показателей устойчивости АТС и методы их оп-
ределения приведены в Правилах ЕЭК ООН № 107, МС ИСО 4138-82, ГОСТ
3163-76, ГОСТ Р 52302-2004, ОСТ 37.001.471-88, ОСТ 37.001.487-89.
Скорости Окрф и vKp.DJJ определяют при круговом движении автомобиля
с заданным радиусом поворота на горизонтальной площадке с твердым покры-
тием. Плавно увеличивая скорость автомобиля, фиксируют начало бокового
скольжения колес или начало отрыва внутренних по отношению к центру по-
ворота колес. Угол крена подрессоренной массы Лкр при боковом ускорении
аи = 4 м/с2 не должен превышать 6-7°.
Критические углы косогора pKpi? и Pkp.«n определяют на стенде, имеющем
платформу, которая может наклоняться на различные углы в поперечной
плоскости.
Скорость икр(ф соответствует прямолинейному или установившемуся кру-
говому движению по горизонтальной дороге.
Критической скоростью L»Kpien называют установившуюся скорость пря-
молинейного движения автопоезда, при которой виляние прицепа в каждую
сторону превышает 3 % его габаритной ширины.
Угол дрейфа — это угол между направлением вектора скорости dn p.y
полюса рулевого управления С^.р.г и продольной осью автомобиля Сх. Полю-
сом рулевого управления называют точку Оп.р.у проекции центра поворота
автомобиля О без учета увода колес на продольную осьСх. При воздействии на
автомобиль какой.-либо боковой силы происходит боковое смещение полюса
рулевого управления и отклонение вектора его скорости относительно осиСх.
Боковое смещение полюса ута называют дрейфом автомобиля, а угол рдр меж-
ду вектором скорости о„.р.у и осьюСх — углом дрейфа.
У двухосного автомобиля с передними управляемыми колесами полюс ру-
левого управления Оп.р.у совпадает с точкой В средины оси заднего моста
(см. рис. 9.7). При боковом воздействии на автомобиль происходит увод мос-
та, вектор скорости точки В отклоняется от направления продольной оси авто-
мобиля, а угол дрейфа 0др у двухосного автомобиля оказывается равным углу
увода заднего моста 6^ (см. рис. 9.9).
358
10. Устойчивость автомобиля
Угол дрейфа характеризует склонность автомобиля к заносу. Рекоменду-
ется, чтобы при боковом ускорении ау - 4 м/с2 в пределах скоростей движения
v в 40-100 км/ч значение угла дрейфа соответствовало ограничению 0 £ 7°.
При этом сохраняется возможность ликвидации заноса без перехвата рулевого
колеса.
10.2. Траекторная и курсовая устойчивость автомобиля
Рассмотрим траекторную и курсовую устойчивость автомобиля при кри-
волинейном движении.
Предположим, что автомобиль движется по круговой траектории с посто-
янной скоростью и при постоянном угле поворота управляемых колес 0. Для
анализа траекторной и курсовой устойчивости используем систему диффе-
ренциальных уравнений (9.72), полученную в параграфе 9.7. Запишем снова
эти уравнения:
dco, .
-rf- - + Ргт
(Ю.1)
гдеву — коэффициенты уравнений, вычисляемые по формулам (9.70); bt —
функции воздействий, определяемые по формулам (9.71).
Характер и параметры движения автомобиля в рассматриваемом случае
определяются фазовыми координатами vy и 0)„ т.е. поперечной составляю-
щей вектора скорости центра масс ис и угловой скоростью вращения корпуса
автомобиля о, в плоскости дороги.
Воздействия в уравнениях (10.1) определяются углом поворота управляе-
мых колес 6 и зависят от параметров автомобиля ma, J, Л Так как принято
6 = const, то функции воздействий и^ оказываются также постоянными:
bj = const; = const. Тогда уравнения (10.1) описывают состояние динамиче-
ского равновесия при круговом движении, определяемое на основе принципа
ДаЛамбера. При этом фазовые координаты vv И остаются постоянными.
Следовательно, автомобиль не отклоняется от заданного направления дви-
жения, а вектор скорости центра масс сохраняет неизменное направле-
ние по отношению к продольной оси автомобиля Сх, определяемое углом
(см. рис. 9.10).
В системе уравнений (10.1) учтено лишь кинематическое воздействие на
управляемые колеса 6. Но при движении автомобиля, как отмечалось выше,
действует множество других возмущений, не учтенных в уравнениях (10.1).
Представим, что в некоторый момент времени под влиянием какого-либо
случайного внешнего воздействия фазовые координаты vy и (»г отклонились
от установившихся значений и
^(t) = и^о + Ди у; (i)i(t) = иг0 + (10.2)
где Дов, До), — отклонения фазовых координат от их установившихся значений.
10.2- Траекторная и курсовая устойчивость автомобиля
35»
Тогда &vv и Да», окажутся кинематическими возмущениями движения
автомобиля и динамическое равновесие, определяемое уравнениями (10.1),
нарушится. В результате в системе возникнет переходный процесс.
Переходным процессом системы называют переход ее из одного устано-
вившегося состояния в другое. Если система устойчива, то по истечении оп-
ределенного времени переходный процесс завершается и система приходит
в установившееся состояние равновесия. После прекращения внешнего воз-
действия устойчивая система возвращается в начальное (исходное) состоя-
ние равновесия.
Из теории дифференциальных уравнений известно, что решение неодно-
родного дифференциального уравнения dxjdt = tfx, b, t) (где b — функция
внешнего воздействия) представляет собой сумму двух решений — частного
решения данного неоднородного уравнения и общего решения однородного
уравнения (без учета воздействия Ь). Первое слагаемое определяет вынужден-
ную составляющую #,(/), второе — переходную составляющую Xn(f), характе-
ризующую свободный переходный процесс исследуемой системы:
x(t) — + •сл (t)-
Техническая система будет устойчива, если переходная составляющая
с течением времени затухает, т.е. выполняется условие
lim хп (t) = 0.
Если с увеличением времени t переходный процесс расходится, т.е.
11m xn(t) - °°,
то система будет неустойчивой.
Системы, в которых переходный процесс с течением времени не расходит-
ся и не затухает, называются находящимися на границе устойчивости.
В связи с изложенным свойства линейной системы изучают на основе ана-
лиза функции Хп(?), которая является общим решением однородного диффе-
ренциального уравнения и представляется в виде следующего выражения:
*„(«) = (10-8)
<-1
где С( — постоянные интегрирования, определяемые из начальных условий;
Xj — корни характеристического уравнения (собственные значения матрицы
Якоби дифференциального уравнения); п — порядок системы уравнений.
Подставив значения фазовых координат из выражений (10.2) в систему
уравнений (10.1) и учитывая, что = conet и согО = conet, получаем систему
однородных дифференциальных уравнений относительно отклонений фазо-
вых координат и Д<о7 :
ydt г
d(A<Bt)
at
(Ю-4)
Э60 10 Устойчивость автомобиля
Рассмотрим коэффициенты а1} уравнений (10.4). Как следует иэ выраже-
ний (9.70), значения этих коэффициентов зависят от параметров автомобиля
коэффициентов сопротивления уводу мостов и составляю-
щей скорости центра масс ос. В обычных эксплуатационных режимах
движения автомобиля углы увода мостов 6^, 6у,2 сравнительно невелики
и определяются в основном боковой деформацией шин. Поэтому значения ко-
эффициентов сопротивления уводу можно считать постоянными.
В результате коэффициенты Оц уравнений (10.4) будут постоянными. Следова-
тельно, переходный процесс в рассматриваемом случае описывается системой
линейных дифференциальных уравнений, а коэффициенты aj;- представляют
собой элементы матрицы Якоби этих уравнений.
Теория устойчивости движения и методы исследования устойчивости систем
разработаны А.М. Ляпуновым. Он сформулировал условия устойчивости.
Если динамическая система описывается линейными (или линеаризованными)
обыкновенными дифференциальными уравнениями, то устойчивость движе-
ния оценивается по спектру матрицы Якоби этой системы. Матрица Якоби
квадратная, ее порядок равен порядку системы дифференциальных уравне-
ний, а элементами являются коэффициенты при фазовых координатах.
Согласно теореме Ляпунова, для устойчивости линейной системы необхо-
димо и достаточно, чтобы все вещественные части собственных значений
матрицы Якоби были отрицательными.
При определении собственных значений матрицы Якоби необходимо
составить определитель этой матрицы и приравнять его к нулю:
det(A-AE) = 0.
где А — матрица Якоби; Е — единичная матрица той же размерности, что
и матрица А.
Раскроем определитель матрицы Якоби системы дифференциальных урав-
нений (10.4):
“fall + А) —Ли - < , «. v
Д - f = (°п + + ^)-а12а21 = 0-
-«21 -(«22
В результате получаем квадратное уравнение относительно собственных
значений:
А2 +(<3ц + О22)^ + аиа22 — —0.
Корни этого уравнения соответствуют собственным значениям матрицы
Якоби:
Aj,2 - 0,5^-(оц + а>2) ±^(оц+о^г) — —«12^21)^| (10.5)
В общем случае собственные значения матрицы Якоби представляют со-
бой комплексные числа:
= Re(A() + Дт(Х|) = a.j +M, (10.6)
где Ro(?uj) - <т, — вещественная часть собственного значения А( матрицы А;
1ш(Х;) - toj — мпимая его часть; j = 4-1 —- мнимая единица.
10.2. Траекторная и курсовая устойчивость автомобиля 341
Если собственные значения вещественные, т.е. =а(; i = l,n, то пере-
ходные процессы по фазовым координатам AuF и Дсо, Носят апериодический
характер, а если они комплексные, то переходные процессы будут колеба-
тельные. В последнем случае оказываются комплексными сопряженными
числами, т.е. = <х( ±;о>(.
На рис. 10.1 показаны возможные виды графиков изменения во времени
характеристик отклонений фазовых координат &vv и Дсо^, обусловленных
кратковременным возмущением. Графики на рис. 10.1, а и в соответствуют
случаю, когда вещественные. Если а^сО (рис. 10.1, а), то переходный про-
цесс затухающий и отклонения фазовых координат £л>в и Дсо, от их значений
в положении равновесия и со,0 с течением времени уменьшаются, стремясь
кнулю. При >0(рис. 10.1, в) отклонения Auv и До, от равновесного положе-
ния возрастают, исходное равновесное состояние не восстанавливается, задан-
ное направление движения автомобиля не обеспечивается. Причем поскольку
отклонения координат Ди& и Да), неограниченно возрастают, то это означает,
что происходит потеря устойчивости движения автомобиля. Автомобиль на-
чинает быстро отклоняться от заданной траектории и раскручиваться в плос-
кости дороги.
Рис. 10.1. Переходные характеристики отклонений фазовых координат £я>у и Дю,
при различных собственных значениях матрицы Якоби
При комплексных сопряженных собственных значениях X, графики изме-
нения координат &vy и Дф, имеют колебательный характер (рис. 10.1, б, г и <5).
Вид ^рафика колебаний зависит от значения вещественной части а(. Если
<0 (рис. 10.1, б), колебания затухают и отклонения Аив и Дю, с течением
362
10. Устойчивость автомобиля
времени уменьшаются до нуля. Процесс движения автомобиля в этом случае
устойчивый. При а( > 0 (рис. 10.1, г) амплитуды колебаний Ди*, и Дю, при слу-
чайном их отклонении от равновесного состояния начинают быстро возрас-
тать и автомобиль теряет устойчивость движения. Если = 0 (рис. 10.1, б),
колебания будут незатухающими с постоянными амплитудами изменения
координат Дн^ и До>,. В этом случае движение автомобиля находится на Гра-
нице устойчивости. Такой режим следует считать недопустимым.
Анализ приведенных на рис. ЮЛ графиков показывает, что если вещест-
венные части собственных значений матрицы Якоби отрицательны, то откло-
нения Диу и Дю, от их исходных значений (т.е. значений до начала действий
возмущения) будут с течением времени уменьшаться и переходные процессы
будут затухающими. Это означает, что автомобиль способен в силу присущих
ему физических свойств сопротивляться внешним возмущениям и движение
его будет устойчивым. Если же вещественная часть хотя бы одного собствен-
ного значения матрицы Якоби положительна, то переходные процессы будут
расходящимися. В этдм случае отклонения фазовых координат Ди^, и До, от-
носительно исходных значений и юг0 после прекращения внешнего воз-
действия будут возрастать и движение автомобиля окажется неустойчивым.
При наличии собственных значений с нулевыми вещественными частями
движение автомобиля будет на границе устойчивости. В этом случае при ком-
плексных сопряженных собственных значениях вызванные внешним возму-
щением колебания будут незатухающими, а при вещественных — vv и юе не
будут возвращаться к исходным значениям и св,0.
Анализируя выражение (10.5), приходим к следующим выводам. Если
собственные значения матрицы Якоби комплексные сопряженные, то устой-
чивость движения автомобиля обеспечивается при условии
«Тц+Ц22>0. (10.7)
При вещественных собственных значениях условия устойчивости имеют
следующий вид:
‘111а23~а12а21 >0* (10.8)
Коэффициенты ап и а^г положительны, поэтому неравенство (10.7) вы-
полняется всегда. Следовательно, колебательные переходные процессы зату-
хающие и движение автомобиля устойчиво.
Определим условия, при которых обеспечивается устойчивость движения
автомобиля, если переходные процессы апериодические. Подставим значе-
ния коэффициентов в неравенство (10.8):
в2^2 )
«нога -ЯпЛи =--------г*—5--------L -
_ ft?81*1 +(W1 "fcyBzkjfrtal’x > 0 (Ю.9)
Полученное выражение позволяет определить критическую скорость по
курсовой и траекторной устойчивости движения автомобиля.
10.3. Поворачиваемость автомобиля
363
Рассмотрим предельный случай, когда неравенство (10.8) превращается
в равенство, т.е.аца^ =0. Подставим это равенствоввыражение(10.5).
В результате получаем, что одно из собственных значений матрицы Якоби
равно нулю. Следовательно, движение автомобиля будет на пределе устойчи-
вости. Поскольку все величины, входящие в выражение (10.9), постоянны,
за исключением скорости то критическое состояние устойчивости возни-
кает при вполне определенном значении скорости, которую называют крити-
ческой скоростью по курсовой и траекторной устойчивости движения
автомобиля. Используя выражение (10.9), выполнив несложные преобразо-
вания, получаем формулу для определения критической скорости uxpw:
^ув!^ув2
(10.10)
При положительной разности (Ay»i(i-Ay»2k) движение автомобиля устой-
чиво, если его скорость меньше критической, т.е. их < икр0). При отрицательной
разности (А?в14 -Ау^) движение автомобиля всегда устойчиво. Из формулы
(10.10) следует, что на величину критической скорости оказывает влияние
расположение центра масс автомобиля, определяемое координатами и
и соотношение коэффициентов сопротивления уводу переднего и заднего
мостов Л^в1 и Коэффициенты Л^в1 и характеризуют упругие свойства
шин в боковом направлении. Так как и 1% для данного автомобиля постоян-
ны, а коэффициенты и при принятых условиях обратно пропорцио-
нальны углам увода мостов 6^ и 6^, то процесс изменения траектории его
движения без управляющих воздействий водителя фактически определяется
соотношением углов увода мостов.
10.3. Поворачиваемость автомобиля
Для оценки влияния увода колес на устойчивость автомобиля рассмотрим
движение по круговой траектории с постоянной скоростью. На автомобиль
в этом случае действует боковая составляющая центробежной силы инерции
и поперечные реакции дороги на колеса^ (см. рис. 9.11). Сила/д, рас-
пределяется между мостами автомобиля пропорционально массам и
приходящимся соответственно на передний и задний мосты, а боковые реак-
ции дороги на колеса этих мостов вычисляются по формулам:
= (10.11)
•ГСд
где — проекция скорости центра масс автомобиля на его продольную ось.
Углы увода колес мостов, согласно выражению (9.7), определим по фор-
мулам:
_ Дуа _
^у»1 Дл^у>1 ДпАувЗ
(10.12)
U4
10. Устойчивость автомобиля
Подставим значения 5^, 6^3 в уравнение (9.17) и определим радиус пово-
рота автомобиля с учетом увода колес переднего и заднего мостов:
(10.13)
Из выражении (10.18) следует, что радиус поворота автомобиля Д* в об-
щем случае зависит от утла поворота управляемых колес 0, скорости автомо-
биля vx, базы L, а также от разности
_ т<2
^ув! ^ув2
Радиус поворота без увода колес = 1/0 называют кинематическим ра
диусом поворота автомобиля. Используя этот радиус, приведем выражение
(10.13) к виду:
= Йц 1 +
Ух
/\’в1 ^у*2 )
(10.14)
Согласно этой формуле, при отрицательном значении выражения в круг-
лых скобках радиус поворота автомобиля/^ оказывается меньше кинемати-
ческого радиуса Вц, определяемого углом поворота управляемых колес 0, и
уменьшается с увеличением скорости их, что может привести к неустойчиво-
сти движения.
Свойство автомобиля изменять кривизну траектории при изменении ско-
рости называется статической поворачиваемостью. Для ее количествен-
ной оценки введен коэффициент статической поворачиваемости
= « (10.16)
1
где li, 4 ~ продольные координаты центра масс автомобиля относительно
осей вращения соответственно передних и задних колес.
Если Т]в<51 = 1, радиус поворота автомобиля /£ с уводом колес будет такой
же, как и автомобиля с жесткими колесами, т.е.Д^ = Д,. При этом углы увода
обоих мостов одинаковы (S^j = 8^2)» а/С не зависит от скорости их. Такой ав-
томобиль называют автомобилем с нейтральной поворачиваемостью.
то Sy,,! > S^,2, а радиус поворота автомобиля/^ больше /^ и при
возрастании скорости будет увеличиваться. Такой автомобиль имеет недос-
таточную поворачиваемость.
Прит1пов > 1 получим^,,] < 6у,2 и/^ <fL, причем/^ с увеличением скорости
уменьшается. Это автомобиль с избыточной поворачиваемостью.
Проанализируем влияние поворачиваемости автомобиля на его траектор-
ную и курсовую устойчивость, полагая при этом 0=0. Если на движущийся
прямолинейно автомобиль с жесткими в боковом направлении колесами
действует боковая сила/?,, то он будет продолжать двигаться прямолинейно
10.3. Поворачиваемость автомобиля
365
до тех пор, пока эта сила не увеличится настолько, что начнется скольжение
колес.
Автомобиль с нейтральной поворачиваемостью в этом случае будет также
двигаться прямолинейно, но под углом 8у> к продольной оси автомобиля, так
как 5^,1 = (рис. 10.2, а).
Рис. 10.2, Движение автомобиля под действием боковой силы
а — при нейтральной поворачиваемости; б — при избыточной; в — при недостаточной
Автомобиль с избыточной поворачиваемостью начнет вращаться относи-
тельно мгновенного центра поворота О (рис. 10.2, б). При этом возникает цен-
тробежная сила инерции поперечная составляющая которой F)y совпадает
по направлению с боковой силой Fy, вызвавшей боковой увод колес и поворот
автомобиля. Это приводит к дальнейшему увеличению углов увода колес
и соответствующему уменьшению радиуса поворота, что в свою очередь уве-
личивает центробежную силу инерции F;. В результате автомобиль теряет
устойчивость прямолинейного движения. Для сохранения направления
прямолинейного движения водитель должен повернуть управляемые колеса
так, чтобы мгновенный центр поворота переместился из точки О в точку, рас-
положенную на противоположной стороне автомобиля. Поскольку при дви-
жении автомобиля поперечные силы действуют практически непрерывно,
водителю приходится постоянно воздействовать на рулевое управление, что-
бы удержать автомобиль на заданной траектории.
Если автомобиль обладает недостаточной поворачиваемостью, поперечная
составляющая центробежной силы инерции направлена в сторону, противо-
366
10. Устойчивость автомобиля
положную возмущающей силе (рис. 10.2, в). В результате этого увод быстро
уменьшается и автомобиль практически сохраняет прямолинейное направ-
ление движения.
Таким образом, автомобиль с недостаточной поворачиваемостью более ус-
тойчив и лучше сохраняет заданное направление движения, чем автомобиль
с избыточной поворачиваемостью. Сложность управления автомобилем с из-
быточной поворачиваемостью возрастает с увеличением скорости движения.
При некоторой скорости, называемой критической скоростью по условиям
увода наступает потеря управляемости и устойчивости движения авто-
мобиля. Значение oKJ(! можно определить, используя формулу (10.13) при
0 = 0:
• <10Л6)
[ ^ув2
Недостаточная поворачиваемость достигается: выбором давления воздуха
в шинах передних и задних колес; распределением масс между мостами; вы-
бором конструкции и параметров направляющих устройств подвески.
С уменьшением давления воздуха в шине увеличивается угол увода колеса
и уменьшается коэффициент сопротивления уводу k^. Как следует из форму-
лы (10. 15), при уменьшении и снижается коэффициент статической по-
ворачиваемости Г|п<я, что приводит к повышению курсовой и траекторной
устойчивости автомобиля. Поэтому давление воздуха в шинах передних ко-
лес устанавливают обычно меньше, чем в шинах задних. У легковых автомо-
билей центр масс рекомендуется располагать ближе к оси переднего моста,
чтобы на передние колеса приходилась большая часть поперечной состав-
ляющей силы инерции, а также составляющей силы тяжести — при движе-
нии по дороге с поперечным уклоном.
Отметим, что формулы (10.10) и (10.16) эквивалентны и для данного авто-
мобиля ияри = 1>кр8. Поэтому при оценке курсовой и траекторной устойчиво-
сти автомобиля можно пользоваться любой из них.
Устойчивость автомобиля существенно зависит от конструкции направ-
ляющего устройства подвески. При действии на автомобиль боковой силы
происходит крен кузова. Колеса автомобиля могут при этом отклоняться в ту
или иную сторону в зависимости от кинематической схемы направляющего
устройства подвески. Так, если применяется независимая подвеска колес
на двух параллельных поперечных рычагах одинаковой длины (параллело-
граммная подвеска), то колеса наклоняются в ту же сторону, что и кузов
(рис. 10.3, а). В результате боковой увод колес увеличивается (см. рис. 9.6).
Аналогичный результат получается для подвесок на продольных рычагах,
торсионных и свечных. В двухрычажных подвесках с поперечными рычага-
ми различной длины и различными углами наклона верхнего рычага колеса
также поворачиваются в сторону крена кузова, но углы их поворота могут
быть различными.
10 3. Поворачиваемость автомобиля
М7
Pue. 10.3. Наклоны кузова и колес при воздействии боковой силы:
а — независимая двухрычажная подвеска; б — независимая
однорычажная подвеска; е — зависимая подвеска
При независимой подвеске колес на одном поперечном рычаге (рис. 10.3, б)
колеса наклоняются в сторону, противоположную наклону кузова, что при-
водит к уменьшению увода колес.
При зависимой подвеске крен кузова не приводит к боковому наклону ко-
лес (рис. 10.3, в), однако ось моста может повернуться на некоторый угол
в горизонтальной плоскости и оказать влияние на поворачиваемость автомо-
биля. Направляющее устройство зависимой подвески может быть выполне-
но в виде рычагов (двух продольных и одного поперечного) либо его функции
может выполнять листовая рессора. Изменяя длины рычагов или положе*
ние серьги листовой рессоры, можно изменять углы наклона оси моста. На
рис. 10.4, а показана схема зависимой рессорной подвески. При крене кузо-
ва и деформации рессоры точка крепления ее с мостом перемещается по дуге
а—а. Если серьга закреплена сзади, как показано на рис» 10.4, а, то нагружае-
мое боковой силой колесо отклоняется назад в связи с увеличением дефор-
мации рессоры, а противоположное колесо, наоборот, отклоняется вперед.
Предположим, что у передних рессор серьга расположена спереди, а у зад-
них — сзади. Тогда при действии боковой силы Fv поворот осей мостов про-
изойдет согласно рис. 10.4, б, т.е. в ту же сторону, в которую поворачивает
автомобиль. В результате автомобиль получит избыточную поворачиваемость.
Если поменять местами расположение серег обеих рессор, то поворот мостов
будет противоположный, как показано на рис. 10.4, е, и автомобиль будет
обладать недостаточной поворачиваемостью.
В легковых автомобилях наиболее часто используют переднюю подвеску
на двух поперечных рычагах, а заднюю выполняют зависимой или независимой
Рис. 10.4, Влияние крепления рессор ва поворачиваемость автомобиля
368
10. Устойчивость автомобиля
однорычажной с поперечным качанием рычага. Тогда угол увода передних
колес получается большим, чем задних.
Однако слишком большой увод колес переднего моста может привести
к ухудшению способности автомобиля изменять направление движения в со-
ответствии с поворотом рулевого колеса, т.е. ухудшит его динамическую по-
ворачиваемость. При этом увеличивается работа, выполняемая водителем по
управлению автомобилем, и может происходить заметное запаздывание по-
ворота автомобиля относительно поворота рулевого колеса.
Значительное улучшение управляемости и устойчивости двухосных авто-
мобилей достигается, если управлять одновременно и передними и задними
колесами. При большой скорости движения задние колеса поворачиваются
в ту же сторону, что и передние. Это обеспечивает недостаточную поворачивае-
мость и высокую устойчивость движения на поворотах. При малой скорости
и больших углах поворота рулевого колеса задние колеса поворачиваются
в противоположную сторону по отношению к передним. Этим достигается
высокая маневренность автомобиля. Максимальный угол поворота задних
колес 5-8°. Такие системы управления находят широкое применение на лег-
ковых автомобилях.
10.4. Поперечная устойчивость автомобиля
Рассмотрим условия, при которых возникают поперечное опрокидывание
и занос автомобиля, и определим показатели поперечной устойчивости авто-
мобиля.
Боковое опрокидывание может произойти при движении автомобиля на
косогоре, при крутом повороте, резком повороте рулевого колеса, в результа-
те заноса и последующего удара колес о препятствие.
Рассмотрим общий случай движения автомобиля с поворотом на косогоре
и определим условия, при которых возможно его боковое опрокидывание.
Примем допущение о том, что при опрокидывании оба левых или правых ко-
леса двухосного автомобиля отрываются от дороги одновременно, а поворот
автомобиля при опрокидывании происходит относительно оси, проходящей
через центры площадок контактов колес с опорной поверхностью. Пренебре-
жем возможной разницей между колеями переднего и заднего мостов и не
будем учитывать боковые деформации шин. В таком случае можно использо-
вать плоскую модель автомобиля, которая отображает действующие на него
силы в поперечной плоскости.
Обозначим суммарные нормальные и боковые реакции обоих левых колес
соответственно и йул >а правых — Йгп и R^. Примем угол р наклона косого-
ра положительным, если сила инерции при повороте направлена в сторону
косогора (рис. 10.5, а), и отрицательным — в противном случае (рис. 10.5, б).
В центре масс автомобиля приложена сила тяжести mag и поперечная со-
ставляющая силы инерции Равнодействующую этих сил обозначим Fc.
Угол отклонения силы от вертикальной оси симметрии автомобиля, прохо-
10.4. Полеречная устойчивость автомобиля
369
Рис. 105. Внешние воздействия на автомобиль поперечной плоскости
при повороте на косогоре
дящей через центр масс С, обозначим а, а угол ее отклонения от вертикали — у.
Соединим прямыми линиями центр масс С с точками центров площадок кон-
такта левого и правого колес А и D. Углы между этими линиями и продольной
вертикальной плоскостью симметрии, в которой расположена ось Cz, будем
считать одинаковыми и обозначим их 0О.
Очевидно, что при а <0О бокового опрокидывания автомобиля не произой-
дет(рис. 10.5, а), при а >0с автомобиль опрокинется (рис. 10.5,6), а равенство
а ~ 0о соответствует критическому состоянию равновесия, когда автомобиль
находится на пределе бокового опрокидывания. Движение автомобиля без
бокового опрокидывания обеспечивается при условии, что вектор силы Fc бу-
дет находиться в секторе угла0о.
Если учесть принятое правило знаков для угла наклона косогора 0, то
можно записать следующее соотношение между углами а, 0 и у:
а = у-0. (10.17)
Тогда условие движения автомобиля на косогоре без бокового опрокиды
вания можно записать в виде:
Т-0 <0о- (10.1В)
На горизонтальной опорной поверхности 0-0, тогда условие движения
без бокового опрокидывания выражается неравенством
у <0о- (ЮЛ©)
Если прежде, чем наступит боковое опрокидывание, начнется боковое
скольжение колес, то опрокидывания не произойдет. Условие отсутствия бо-
кового скольжения, согласно выражению (1.61), в общем случае имеет вид:
«Р*,. (10.20)
При крутых поворотах и на косогорах, когда существует опасность заноса
или опрокидывания, движение осуществляется с определенными предосто-
рожностями. В таких случаях обычно не осуществляют интенсивных тормо-
370
10. Устойчивость мггомобиля
жений и ограничивают подачу топлива в двигатель. В результате вращающие
пли тормозные моменты на колесах сравнительно невелики, поэтому боковые
реакции Ry могут значительно превосходить продольные реакции Пренеб-
регая Rx, условие движения без бокового скольжения напишем в виде:
(10.21)
Составим уравнения динамического равновесия сил и моментов, дейст-
вующих на автомобиль в рассматриваемом случае движения:
+^-^в:па =0;
=Rta +^n -Fccosa = 0;
2>c = + Я^)Ле -(B„ -Д1П) B/2,
(10.22)
где he — высота расположения центра масс автомобиля относительно опор-
ной поверхности; В — колея автомобиля.
Учитывая, что Rv ~ Ry-+Rva; Rx = Ям +Д,П, где Ry и Rx — суммарные попе-
речная и нормальная реакции дороги соответственно, на основе уравнений
(10.22) получаем:
Принимая во внимание выражения(10.17) и (10.21), находим условие от-
сутствия бокового скольжения автомобиля при движении на косогоре:
tg(yP)<^, (10.23)
Условие движения автомобиля на косогоре без бокового опрокидывания
(10.18) можно записать также в виде:
t«C/-p)<tgPo- (10.24)
Сопоставляя выражения (10.23) и (10.24), можно сделать вывод, что боко-
вое скольжение будет предшествовать боковому опрокидыванию при усло-
вии
tgp0><p. (10.26)
Потеря устойчивости автомобиля, заключающаяся в опрокидывании, вле-
чет за'собой гораздо более серьезные последствия, чем занос. Поэтому при вы-
боре параметров компоновки автомобиля необходимо обеспечить такие его
физические свойства, при которых потеря устойчивости всегда начиналась
бы с заноса.
Угол р0 называют углом поперечной устойчивости, а тангенс этого угла —
коэффициентом поперечной устойчивости цщу. Значение Г]ПгУ можно вы-
разить через параметры автомобиля Ви hc. Согласно рис. 10.5, находим:
n«.,=tgpo = -^-. (10.26)
10.4 Поперечная устойчивость автомобиля 371:
Для того, чтобы боковое скольжение происходило раньше, чем наступит
опрокидывание, необходимо, чтобы коэффициент поперечной устойчивости
был больше коэффициента сцепления:
Пп.у > Ф- (10.27)
Притру <<р автомобиль может опрокинуться.
Для уменьшения вероятности опрокидывания автомобиля необходимо
стремиться к уменьшению высоты центра масс he и максимальному исполь-
зованию допускаемой нормативами колеи В.
В табл. ЮЛ приведены статистические данные по показателям попереч-
ной устойчивости для различных типов автомобилей.
Таблица 10.1
Показатели поперечной устойчивости автомобилей
Твп аатомобвля ^Irc.y Ро.грвд
Легковые 0,90-1,20 42-50
Грузовые 0,55-0,80 29-89
Автобусы 0,50-0,65 27-33
Поперечная устойчивость у прицепов обычно хуже, чем у тягачей, поэто-
му она и определяет показатели устойчивости автопоезда.
Выразим угол у черев силу инерции я силу тяжести автомобиля
mtg. Согласно рис. 10.5, находим:
g
(10.28)
Учитывая выражения (10.28) и (10.18), условие движения без опрокиды-
вания можно записать в виде:
^<^g(Po+₽)- (10.29)
Из выражения (10.29) следует, что если угол косогора р отрицательный
(рис. 10.5, б), то величина допустимого бокового ускорения ау значительно
снижается, а это означает, что при заданном радиусе кривизны траектории
{или радиусе поворота автомобиля ) необходимо существенно снижать ско-
рость (см. формулу (9.34)). При р = -р0 предельное значение ау оказывается
равным нулю. Следовательно, в этом случае поворот автомобиля в сторону,
противоположную косогору, недопустим и даже прямолинейное движение
по косогору становится практически невозможным.
Предельное значение ау можно найти, используя выражения (10.23)
и (10.28). В результате получаем:
ау < +arctg<p). (10.30)
На горизонтальной поверхности р = 0. Условие движения без опрокиды-
вания
«jr<^tgPo
(10.31)
372
10. Устойчивость автомобиля
а условие отсутствия заноса
ayCgq. (10.32)
Для повышения устойчивости движения автомобиля на криволинейных
участках дорог устраивают виражи с положительными углами поперечных
уклонов дороги. В этом случае угол наклона виража £ складывается с углом
поперечной устойчивости автомобиля £0. Рекомендуемые поперечные укло-
ны виражей для дорог в районах с небольшой продолжительностью сохране-
ния снежного покрова приведены в табл. 10.2.
В районах с продолжительным снежным
покровом и частым гололедом поперечный ук-
лон дорог не должен превышать 0,04 независи-
мо от крутизны поворота, так как на скользкой
дороге автомобили, движущиеся с малой ско-
ростью, могут сползать вниз по крутому склону
виража.
Перейдем к определению показателей попе-
речной устойчивости автомобиля: критических
скоростей по боковому опрокидыванию rKp.0D
и боковому скольжению i^; критических углов косогора по боковому опро-
кидыванию Ркр.оп и боковому скольжению £крр.
Значения критических скоростей г,,рлш и икрф определяются при устано-
вившемся круговом движении с заданным радиусом поворота Д, на горизон-
тальной площадке с твердым покрытием. В этом случае скорость автомобиля
vx = const и средний угол поворота управляемых колес 0 = const. Тогда, согласно
выражению (9.29) и без учета увода колес, поперечную составляющую уско-
рения центра массау вычислим по формуле
Таблица 10.2
Поперечные уклоны виражей
Радиус кривой, м <кР
Менее 600 0.1
600-650 0,06-0,05
650-700 0,05-0,04
700-1000 0,04-0,03
1000-2000 0,03-0,02
(10.33)
Используя формулы (10.81) и (10.32) и подставляя в них значение ау из
формулы (10.33), находим критические скорости по боковому опрокидыва-
нию и по боковому скольжению на горизонтальной поверхности:
^кр.оп
^Kf<; = •
V Z/le
(10.34)
(10.36)
При сравнительно небольших углах поворота управляемых колес 0, при
которых проводят испытания по оценке поперечной устойчивости автомоби-
ля, можно принятьВц = L/в. Тогда формула (10.84) приводится к виду:
ILBg
’"КРЛП =У2Ле0'
(10.86)
10.4. Пстереч пая устойч ивосгь автомобиля 373
Автомобиль может потерять устойчивость и во время прямолинейного
движения. Если резко повернуть рулевое колесо, то при определенных усло-
виях может произойти опрокидывание или боковое скольжение автомобиля.
При прямолинейном движении с постоянной скоростью Яд « °®, t>x =* 0, поэто-
му два первых слагаемых бокового ускорения а*,, как видно из выражения
(9.29), равны нулю. Третье слагаемое этого выражения зависит от угловой
скорости поворота управляемых колес & При рывке руля значение угловой
скорости 6 кратковременно резко возрастает. В связи с кратковременностью
рассматриваемого процесса и инерционностью автомобиля увод мостов начи-
нается с некоторой задержкой во времени, поэтому скоростями изменения
углов увода мостов 6^ и S^.e2 за время рывка руля можно пренебречь. Тогда
боковое ускорение центра масс аи определим по формуле
а - (10.37)
L Lup
где <0р — угловая скорость поворота рулевого колеса; Up — передаточное чис-
ло рулевого привода.
Используя формулы (10.31), (10.82) и (10.37), находим критические ско-
рости поворота рулевого колеса, характеризующие устойчивость автомобиля
соответственно по боковому опрокидыванию и боковому скольжению (заносу)
при рывке руля:
ж (10.38)
2h^Vx 1?их
0)ркрф = ^ (10.39)
. Из выражения (10.38) следует, что чем меньше колея и база автомобиля и
чем выше и дальше от оси заднего моста находится центр масс, тем опаснее
резкий рывок руля, так как при данной скоростиих критическая скорость по-
ворота рулевого колеса Юр кр.оп по боковому опрокидыванию снижается. Чем
выше скорость автомобиля vx, тем меньше допускаемая скорость поворота
рулевого колеса dip. Параметры автомобиля L и tg оказывают аналогичное
влияние на критическую скорость поворота рулевого колеса по боковому
скольжению автомобиля На скользкой дороге при малых значениях
коэффициента сцепления ф величина (Opjcp* существенно меньше Ыр.кРлп«
поэтому резкий поворот рулевого колеса обычно приводит к заносу заднего
моста, что предотвращает опрокидывание. На сухом чистом асфальтобетоне
вероятность бокового опрокидывания значительно возрастает. Поэтому важ-
но, чтобы автомобиль обладал высокой поперечной устойчивостью, которая
оценивается коэффициентом поперечной устойчивости Т)п.у - Чем выше значе-
ние Лп.у>тем меньше вероятность бокового опрокидывания.
Критические углы косогора по боковому опрокидыванию рвр.оп и боково-
му скольжению ркрф определяют при прямолинейном движении вдоль косо-
371
10. Устойчивость автомобиля
гора с постоянной скоростью. Боковой силой при этом будет составляющая
силы тяжестиGasf - Ga sinp(рис. 10.6). Составим уравнение моментов сил от-
носительно точки А:
hcG„ ain0-O^BGa совР + = 0.
Рис. 10£. Схема к оценке поперечной устойчивости автомобиля на косогоре
В момент отрыва правого колеса от дорогиВгп = 0. При этом условии нахо-
дим критический угол косогора по боковому опрокидыванию:
Рьр.оп =arctg-5_ = arctgT)D.y. (10.40)
При Р = Рвр.оп вектор силы тяжести Ga будет расположен на линии СА. Если
этот вектор окажется вне сектора угла поперечной устойчивости р0, то боко-
вое опрокидывание автомобиля произойдет непременно.
При оценке устойчивости автомобиля по боковому опрокидыванию необ-
ходимо принимать во внимание схему расположения колее автомобиля. Из
рис. 10.7 видно, что боковое опрокидывание автомобиля происходит относи-
тельно линий А1В1 или А2В2, проходящих через центры площадок контакта
передних и крайних задних колес. При сдвоенных колесах заднего моста
обычно средние продольные плоскости вращения передних и крайних зад-
них колес не совпадают. В этом случае линии А^ и А2В2 не параллельны
продольной оси автомобиля Сх. Поэтому в формулах (10.26), (10.34), (10.36),
(10.38), (10.40) вместо параметра В необходимо принимать величину б, опре-
деляемую в соответствии со схемами на рис. 10.7. Точка С на этих схемах соот-
ветствует проекции центра масс автомобиля на опорную поверхность дороги.
Нормативные значения 0кр.оп зависят оТ коэффициента поперечной устой-
чивости т]ц у. Для их оценки используются выражения:
0кр.оп = (42,4цп у - 2,4)° при 0,55 Пп.у * 1;
Ркр.оп ~ (25г|Г у +15) при Ц||.у > 1;
Ркр.оп ~ 21 прит]П у <0,55.
10.4. Попаренная устойчивость автомобиля
375
Рие. J 0.7. Схемы для определения величины приведенной колеи Ъ
Для определения критического угла косогора по боковому скольжению
pKP4) составим уравнения равновесия сил в проекциях на оси утл г (рис. 10.6):
+ Ryn -G. eblp = 0; 1
+ Дгл севр = 0. J
Решив совместно эти уравнения, получаем:
Л,
Учитывая ограничение суммарной поперечной реакции/^ по сцеплению,
определяемое выражением (10.21), получаем искомое значение Ркрч,:
pKpo = arctg<p. (10.41)
На поперечную устойчивость автомобиля значительное влияние оказы-
вает крен подрессоренной массы. Под действием боковой силы изменяются
нагрузки на упругие элементы подвески и шины левой и правой сторон авто-
мобиля, вследствие чего кузов его наклоняется и поворачивается в попереч-
ном направлении. Схема на рис. 10.в отображает крен кузова при движении
автомобиля на косогоре под действием силы инерции FjK и силы тяжести mag
подрессоренной массы. Кроме того, на ней учтены радиальные и боковые де-
формации шин. Так как радиальные деформации шин левых и правых колес
различны из-за перераспределения нормальных реакций, то ось моста повер-
нута на угол %, а в связи с боковой деформацией шин центры площадок кон-
такта колес с дорогой смещены относительно плоскостей вращения колес на
величину Дш.
Обозначим угол поперечной устойчивости автомобиля при учете крена
подрессоренной массы Рх- В соответствии со схемой на рис. 10.8 его величину
найдем по формуле
ШРх = (0,5В - ^Лкр - h(x - Л1Ц )/Лс •
(10.42)
376
10. Устойчивость автомобиля
Коэффициент поперечной устойчивости в этом случае
Лп-ул = tgpx.
Плечо крена определим, используя схему на рис. 9.12:
Лх « (\.п - JcosG, (10.48)
где — угол наклона оси крена:
. hr. 1 + Л1о
<; = arctg 1 ~
Угол поворота оси моста найдем по формуле
9,5сin пш В
гдесш — коэффициент радиальной жесткости шины; лш — суммарное коли-
чество шин.
Смещение центра площадки контакта колеса с дорогой относительно
плоскости его вращения
д = Д?.~
“ш — »
где Ry — суммарная боковая реакция дороги на все колеса автомобиля; сшЯ —
коэффициент боковой жесткости шины.
У грузовых автомобилей и автобусов основное влияние на поперечную ус-
тойчивость оказывает крен кузова на подвеске, а углы поворота осей мостов %
и смещения Дш незначительны из-за высокой жесткости шин. Пренебрегая X
я Д1Н, подставим в выражение (10.42) значение угла крена при установив-
шемся движении автомобиля, определяемое по формуле (9.68):
Лл-ул - Лп.у -Т~7 ~~г
10.4. Поперечная устойчивость автомобиля
377
Подставим в эту формулу предельное значение av по боковому опрокиды-
ванию при движении автомобиля по горизонтальной поверхности, используя
выражение (10.31):
Лп.уХ — Впу
1-
Aam„g
(10.44)
Полученные выражения показывают, что крен кузова существенно сни-
жает поперечную устойчивость автомобиля. Наибольшее влияние оказывают
плечо крена и коэффициент угловой жесткости упругих элементов подвес-
ки Сх- Для увеличения «х используют стабилизаторы поперечной устойчиво-
сти. Они представляют собой торсионы, которые закручиваются при крене
кузова. Однако стабилизатор отрицательно влияет на поперечные угловые
колебания кузова, вызываемые наездом колеса одной стороны автомобиля на
неровность дороги, так как при этом стабилизатор увеличивает жесткость
подвески. Поэтому значение коэффициента жесткости стабилизатора огра
ничивают, выбирая его таким образом, чтобы крен кузова уменьшился на
20-40 %, Расчетная величина Па.уХ должна быть не менее 0,38.
В соответствии с РД 37.001.005-86 максимально допустимая величина
угла крена 1кр определяется в зависимости от коэффициента поперечной ус
тойчивости т]п у с использованием выражений:
ккр = (103-4,Зт1п.у)° при т]п.у £1;
Ькр при цп у >1.
Формула (10.44) позволяет лишь приближенно оценить поперечную ус-
тойчивость автомобиля, так как в ней не учитывается влияние угла наклона
опорной поверхности р на угол крена Хкр. Для определения предельного угла
косогора по боковому опрокидыванию с учетом крена кузова необходимо рас-
смотреть условия равновесия системы. Составим уравнения моментов сил отно-
сительно точки А, рассматривая систему в целом, и уравнения моментов сил,
приложенных к подрессоренной массе, относительно оси крена N (рис. 10.8):
Xм л = J9 + sinp—mEg (0,5В-Дкр)соер + F}„hf. +
+ тцдкен slJip-0,&7iKgBco8p + = 0;
= mnghk einp +mnjAKpCoep+ Fjnftx-Afp =0,
где — подрессоренная и неподрессоренная массы соответственно; F^,
FjE — силы инерции подрессоренной и неподрессоренной масс; Двр — боковое
смещение центра масс при крене кузова; — высота центра неподрессорен-
ной массы; Afp — реактивный момент упругих элементов подвески.
Значения 2%, F&, Дкр и Mv вычисляются по формулам:
„ <4 „ и*
= mn f/н - т» ~~ тк
Акр - sinkKp *= Л\?.Кр; Afр — Сх^-кр»
378
10. Устойчивость автомобиля
Разложим функции sinp и совр в ряды:
впф = т...; СО8р = 1-£1+£1т.„
31 81 н 21 41
При опрокидывании автомобиля R^ = 0. В результате получаем следую-
щую систему нелинейных алгебраических уравнений:
ojp8 +fljp2 +аар +а4Хкр +а5раХкр =
eep8+e7P+aeJi1,p+aBp2XEp = tt!.
Коэффициенты в; nbj этих уравнений вычисляются по формулам:
оа (m0+mH)gB •
02=^----———; ng =(тпЛс+ а4=тпуЛх;
v 4
О?
а5 = ад = а? = m„g; aa = maghk-q ; ац=
л О Z
Ь1 = 0,5(mn + mH )gB-(mn he + mxh£B - -тп ftx ^-.
Ал Aa
Решение системы уравнений (10.46) позволяет определить критический
угол косогора по боковому опрокидыванию ркрлП и угол крена подрессорен-
ной массы Хир. Угол крена при этом не должен превышать 7е.
10.5. Занос мостов автомобиля
В предыдущем параграфе поперечная устойчивость рассматривалась
в предположении, что при заносе боковое скольжение колес обоих мостов на-
чинается одновременно. На самом деле обычно начинают скользить колеса
одного из мостов. Причем, как следует из формулы (10.20), возникновение
скольжения зависит не только от поперечной реакции дороги Д,, но и от про-
дольной Rx. Чем больше продольная реакция/^, тем при меньшем значении
Rv начинается скольжение колеса. Наиболее устойчиво в поперечном направ-
лении ведомое колесо, так как продольная реакция дороги на это колесо
определяется лишь сопротивлением качению и значительно меньше <рЯ,. На
ведущее и тормозящее колеса кроме момента сопротивления качению Mf
действуют моменты ЛГК1> и Мк.т, соответственно. Поскольку ЛГК_, и МК1 зна-
чительно больше Mf, то они в основном и определяют ве личину Значения
Я± у ведущих и тормозящих колес существенно больше, чем у ведомого коле-
са, и нередко достигают предела по условиям сцепления колеса с дорогой.
Эти колеса значительно хуже противостоят заносу, чем ведомое колесо. Если
Ях = $Нг, то достаточно приложить к колесу небольшую поперечную силу,
чтобы началось его боковое скольжение.
Предположим, что в результате кратковременного воздействия некото-
рой, достаточной по величине, поперечной силы Fv колеса переднего моста
10.5. Занос мостов автомобиля
379
начали скользить вбок со скоростью vpl, а колеса заднего моста продолжают
двигаться без бокового скольжения (рис. 10.9, а). Несмотря на то что управ;
ляемые колеса находятся в нейтральном положении, автомобиль начнет по*
ворачиваться относительно мгновенного центра вращения р, и возникнет
центробежная сила инерции Ее поперечная составляющая Fiv направлена
противоположно скорости скольжения vpi, вследствие чего скольжение пе-
редних колес автоматически прекращается и автомобиль не теряет устойчи-
вости.
Если боковое скольжение получат задние колеса (рис. 10.9, б), то направ-
ление силы окажется совпадающим с направлением скорости скольжения
v^. Поэтому будет возрастать, увеличивая угол наклона вектора скорости
середины заднего моста относительно продольной оси автомобиля. Радиус
поворота автомобиля уменьшается, а сила увеличивается, в результате за-
нос будет прогрессировать. Таким образом, занос заднего моста опаснее, чем
переднего. В связи с этим не следует допускать блокировку задних колес тор-
мозными механизмами.
Для устранения возникшего заноса заднего моста необходимо снизить ве-
личину продольной или поперечной/^ реакции, или обеих реакций одно-
временно.
Снижение Ну достигается поворотом передних управляемых колес в сторо-
ну начавшегося заноса. Если во время заноса передние колеса занимали ней-
тральное положение, а МЦС находился в точке р (рис. 10.9, б), то после
поворота передних колес он сместится в точку д, так как вектор скорости пе-
реднего моста повернется в сторону заноса и займет положение £>{. Радиус
Рис. 10.6. Схемы заноса мостов автомобиля: а — переднего; б — заднего
300
10. Устойчивость автомобиля
траектории р увеличится и станет равным расстоянию Сд. Рассмотрим, как
это отразится на величине силы инерции F).
Если автомобиль движется с постоянной скоростью, то F) представляет со-
бой центробежную силу инерции:
где Од — вектор центробежного ускорения.
Модуль силы определяется по формуле
и2
Р.=тл^-, (10.46)
Р
гдеог — скорость центра масс; р—радиус траектории центра масс автомобиля.
Поперечная составляющая F^ силы инерции равна
и2
Fjs/ = Г, cosy = ma—(10.47)
Дп
где — проекция скорости центра масс на продольную ось автомобиля; —
радиус поворота автомобиля.
Так как после поворота управляемых колес значение р увеличилось (см.
рис. 10.9, б), то силы/) и FjVt согласно формулам (10.46) и (10.47), уменьшатся.
При дальнейшем повороте управляемых колес угол отклонения вектора^
от продольной оси автомобиля будет увеличиваться. Если его величина ока-
жется больше угла отклонения вектора скорости заднего моста , то МЦС
перейдет на противоположную сторону автомобиля, а сила Flv изменит на-
правление на противоположное, что может вызвать скольжение задних ко-
лес в обратную сторону. Поэтому сразу же после прекращения заноса колеса
следует возвратить в нейтральное положение.
Занос заднего моста может возникнуть при движении автомобиля на по-
вороте. Предположим, что автомобиль движется с постоянной скоростью
vx - const на вираже с постоянным радиусом кривизны траектории р - const.
Тогда в горизонтальной плоскости на автомобиль будут действовать: центро-
бежная сила инерции Ff, суммарные поперечныеR^R# и продольные^.j,
реакции дороги на колеса (рис. 10.10, а). Пока выполняется неравенство
(10.20), движение автомобиля устойчиво. Но коэффициент сцепления<р— ве-
личина переменная и в зависимости от погодных условий может изменяться
в широких пределах, в том числе на коротких отрезках пути. Если в процессе
движения произойдет снижение <ри нарушится условие (10.20), то возникнет
боковое скольжение колес и начнется занос заднего места. Исходный вектор
скорости заднего моста и2 будет поворачиваться, принимая положение Cj.
Центр поворота автомобиля (МЦС) при этом перемещается из точки О в точ-
ку О*, арадйус кривизны траектории р* уменьшается (р* < р). Одновременно,
в соответствии с выражением (10.46), возрастает сила инерции (I)* >/)). Так
как этот процесс происходит непрерывно, то явление заноса прогрессирует.
10.5. Занос мостов автомобиля
381
Рис. 10.10. Схема авноса заднего моста автомобиля
при движении на повороте
302
10. Устойчивость автомобиля
Для прекращения начавшегося заноса необходимо плавно поворачивать
колеса в сторону ааноса, как показано на рис. 10.10, б, С поворотом управляе-
мых колес изменяется направление вектора скорости переднего моста vj, что
приводит к увеличению радиуса кривизны траектории р**, сила инерции F**
уменьшается (F/*< Fj) и явление заноса постепенно ликвидируется. МЦС
при этом постепенно перемещается из точки О* в исходную точку О и траекто-
рия движения центра масс автомобиля восстанавливается.
Сила ^распределяется между мостами обратно пропорционально их рас-
стояниям от центра масс. С учетом этого поперечную реакцию дороги на зад-
ние колеса определим из выражения:
Я*а = (10.48)
Л7 Jig гСд
гдета2 — масса, приходящаяся на задний мост.
Продольная реакция R* зависит от режима работы колеса. Для ее сни-
жения на тормозном режиме необходимо прекратить торможение, тогда зна-
чение будет определяться лишь сопротивлением качению. На тяговом
режиме у заднеприводного автомобиля необходимо уменьшить подачу топ-
лива в двигатель, что приведет к снижению и, следовательно, Я*.
Для снижения вероятности ааноса на влажной и скользкой дороге необхо-
димо до начала поворота заблаговременно уменьшить скорость. При прохожде-
нии поворота нельзя осуществлять торможение рабочими тормозами. Двига-
тель рекомендуется не отсоединять от трансмиссии. В случае необходимости
дальнейшего снижения скорости торможение нужно осуществлять двигателем
либо тормозом-замедлителем. Такой способ торможения исключает блокиров-
ку колес и обеспечивает равенство продольных реакций на левом и правом
колесах. В результате уменьшается вероятность заноса. Положение педали
акселератора и угол поворота рулевого колеса необходимо изменять плавно,
что исключит недопустимые резкие изменения реакций Rx T/iRy.
10.6. Стабилизация управляемых колес
К неустойчивости движения автомобиля могут привести также переме-
щения управляемых колес, обусловленные упругими свойствами деталей
рулевого привода и зазоров в его механизмах. Действующие на колеса силы
приводят к изменению деформаций деталей рулевого привода, в результате
чего колеса отклоняются от установленного положения. Эти отклонения мо-
гут быть причиной неустойчивого движения автомобиля. Их уменьшение
достигается стабилизацией управляемых колес. Под стабилизацией управ-
ляемых колес понимается их способность возвращаться в нейтральное поло-
жение без участия водителя.
Стабилизация управляемых колес обеспечивается стабилизирующим мо-
ментом шины МСТ8, обусловленным ее упругими свойствами, и кинематиче-
ский связью колес с направляющими устройствами подвески (или мостами —
10.6. Стабилизация управляемых колес 383
при зависимой подвеске). Стабилизирующий момент шины обусловлен
уводом колес и определяется параметрами шины и характером ее взаимодей-
ствия с опорной поверхностью дороги, а также характеристиками процесса
движения автомобиля (см. параграф 9.2). Кинематическая связь колеса с на-
правляющими устройствами или с мостом обеспечивается конструктивными
мероприятиями и характеризуется углами установки шкворней поворотных
цапф в поперечной и продольной вертикальных плоскостях.
Поперечный наклон шкворня на угол рш (рис. 10.11) выеывает подъем пе-
редней части автомобиля при повороте управляемых колес. Если повернуть
колесо на угол 0, то точка контакта его с дорогой А должна была бы перемес-
титься по дуге радиуса г и опуститься на величину h ниже опорной по-
верхности. Поскольку это невозможно, поворот колеса вызовет подъем части
автомобиля, связанной с данным колесом, на эту же высоту. Для осуществле-
ния подъема необходимо совершить работу. При этом произойдет увеличение
потенциальной энергии автомобиля. Элементарная работа, совершаемая при
подъеме, равна
= rn^gdh,
Tjifi mal — масса автомобиля, приходящаяся на управляемые колеса; dh —
элементарная высота подъема массы та1.
При повороте управляемых колес совершается элементарная работа
dwK=M^e,
где AfCT(} — момент сопротивления повороту колес; <20 — элементарный угол
поворота колес.
Рис, 10.11. Схема стабилизации управляемого колеса
при поперечном угле наклоне шкворня
Момент AfCTp стремится возвратить колеса в нейтральное положение, по-
этому его называют стабилизирующим моментом колеса.
ЗВ4
10. Устойчивость автомобиля *
Если пренебречь силами трения в рулевом приводе, то можно принять
dWx = dWb. Тогда
„dfi
Ат стр —
Из схемы на рис. 10.11 находим:
А = хв1прш; х = г(1-сов8); г = бсоврш,
гдеЬ — плечо обкатки управляемого колеса.
Используя полученные зависимости, находим высоту подъема:
Л = Ь(1-соае)з1п0ш соврш.
Принимая во внимание, чторш — const, и вычислив производную dA/dO, по-
лучаем выражение для определения стабилизирующего момента колеса:
AfCTp = та1££81прш соври sin6. (10.49)
Из выражения (10.49) следует, что стабилизирующий момент зависит от
угла наклона шкворня в поперечной плоскости рш, плеча обкатки Ъ и угла по-
ворота управляемых колес 6. Он достигает значительной величины лишь при
больших углах поворота, характерных для малых скоростей движения.
Для обеспечения стабилизации управляемых колес при большой скорости
шкворни в продольной плоскости устанавливают под углом аш к вертикали
с наклоном назад (рис. 10.12). Поперечная реакция дороги Ry у жесткого
в поперечном направлении колеса приложена в точке пересечения верти-
кальной оси колеса с опорной поверхностью (рис. 10.12, а). Боковая сила Fv,
действующая на колесо, приложена к центру колеса и направлена вдоль его
оси вращения. Силы и Fv образуют пару, плечо которой а определяется уг-
лом наклона шкворня аш и радиусом качения колеса гк0 . Момент этой пары,
Рис. 10.12. Схема стабилизации управляемого колеса при продольном угле
наклона шкворня: а — жесткое колесо; б — деформируемое колесо
10.6 С абилизаиия управляемых колес 335
стремящийся возвратить управляемое колесо в нейтральное положение, так-
же представляет собой стабилизирующий момент Л/ст0.. Пренебрегая разли-
чием углов поворота левого и правого управляемых колес, определим этот
стабилизирующий момент по формуле
М „ „ = Я/1 = вташ.
При круговом движении с постоянной скоростью поперечную реакцию
определим по формуле
Яс ВпЬ ’
ri<;
В результате получаем выражение дэдя определения стабилизирующего
момента, обусловленного продольным наклоном шкворня:
а “ Binay. (10.50)
Из выражения (10.50) следует, что момент Мта зависит от продольного
угла наклона шкворня сЦд и скорости.автомобиля. При малой скорости мо-
мент Мсто небольшой, но значительно возрастает с ее увеличением. Поэтому
его называют скоростным стабилизирующим моментом.
Поскольку шина обладает упругими свойствами в поперечном направле-
нии, то, как показано на рис. 9.2, в, поперечная реакция^ смещается назад
по ходу колеса на величину е, что создает стабилизирующий момент шины Мg
(рис. 10.12, б)- Суммарный момент + обеспечивает стабилизацию
управляемых колес при движении автомобиля. Обычно аш находится в пре-
делах 0-5°.
Большой стабилизирующий момент затрудняет управление автомобилем,
поэтому у некоторых легковых автомобилей, имеющих шины с низким коэф-
фициентом жесткости, аш делают нулевым или даже отрицательным.
1 Для снижения сопротивления повороту управляемых колес при маневри-
ровании, когда углы поворота В велики, уменьшают плечо обкатки Ь. На ве-
личину b влияют угол поперечного наклона шкворня рш и расстояние
(см. рис. 10.11). Увеличение Рш и уменьшение приводят к уменьшению Ь.
В результате снижается момент сопротивления повороту колес относительно
осей шкворней. Однако уменьшение 4п снижает стабилизирующий момент,
что следует иметь в виду при выборе значения .
У переднеприводных легковых автомобилей о диагональной двухконтурной
тормозной системой часто плечо обкатки делают отрицательным (рис. 10.13, а).
В этом случае ось шкворня пересекает опорную поверхность о противополож-
ной стороны колеса. В результате изменяется знак момента продольной реак-
ции Л11( i-го колеса (правого или левого) относительно оси шкворня М= bRxit.
У легкового автомобиля при торможении xR^, следовательно, иДд >R^.
При отказе одного из контуров тормозной системы, например контура право-
го переднего и левого заднего колес, создается момент Мяо> = 0(5В(Адл -Aj2D),
стремящийся повернуть автомобиль против часовой стрелки в плоскости до-
13 Зек. 3498
306
10. Устойчивость автомобиля
роги(рис. 10.13, б). Но при отрицательном плече обкатки благодаря упругим
свойствам механизмов рулевого привода и действию момента Мш1л оба управ-
ляемых колеса повернутся по часовой стрелке и будут препятствовать повороту
автомобиля в сторону действия момента МЕог, повышая устойчивость движе-
ния. Отрицательное плечо обкатки также уменьшает возможность самопро-
извольного поворота автомобиля при внезапном увеличении реакции на
одном из управляемых колес (например, при проколе шины).
Рис, IC.I3. Схема стабилизации управляемых колес при отрицательном плече обкатки
и веисправной диагональной двухконтурвой тормоэвой системе
При положительном плече обкатки принимают рш = 6-12е, а при отрица-
тельном рш = 11-10°.
Силы трения в механизмах рулевого привода также противодействуют по-
вороту колес. При прямолинейном движении стабилизирующий момент ра-
вен нулю и удержание колес в нейтральном положении обеспечивается в
основном за счет сил трения. При выходе автомобиля из поворота силы тре-
ния препятствуют возвращению управляемых колес в нейтральное положе-
ние. Поэтому' желательно, чтобы при нейтральном положении колес было
высокое трение, а при больших углах поворота — малое.
Кроме углов наклона шкворней, колеса устанавливают под углом наклона
к вертикали ук, называемым углом развала колее (рис. 10.14, а). Развал
Рис. 10,14. Развал (а) в схождение (б) управляемых колес
10.7. Колебания управляемых колес 3*7
колес обеспечивает: уменьшение сопротивления повороту колес; предотвра-
щение виляния колес при появлении зазоров в подшипниках ступицы (колесо
поджимается к внутреннему подшипнику ступицы); исключение обратного
развала колес при износе поворотных цапф. Уменьшение сопротивления пово-
роту колес объясняется уменьшением плеча h Для компенсации увода колес,
обусловленного их развалом, колеса в горизонтальной плоскости имеют схо-
ждение, определяемое разностью расстояний Ви А (рис. 10.14,6). В результа-
те при прямолинейном движении они катятся без бокового скольжения.
10.7. Колебания управляемых колес
В связи с повышением скоростей движения в 30-х годах XX в. на легковых
автомобилях начали снижать жесткость упругих элементов подвески, при-
менять шины низкого давления и устанавливать тормозные механизмы на
всех колесах, включая и управляемые. Но вследствие этих усовершенствова-
ний при движении автомобиля с высокими скоростями появились особого
вида колебания управляемых колес, получившие название «шимми». Они
представляют собой колебания колес вокруг шкворней (виляние) с одновре-
менными угловыми колебаниями управляемого моста в поперечной верти-
кальной плоскости. При этом возникают большие динамические нагрузки на
детали рулевого привода, наступает интенсивное изнашивание шин и воз-
можна потеря устойчивости и управляемости автомоби ля.
Управляемый мост автомобиля представляет собой динамическую систе-
му, включающую инерционные упругие и диссипативные элементы и поэто-
му обладающую колебательными свойствами. При движении автомобиля
возможны вертикальные £ и угловые у перемещения деталей моста в попереч-
ной вертикальной плоскости (рис. 10.15, а) и угловые перемещения колес 0
относительно осей шкворней (рис. 10.16, 0). Эти перемещения возможны
в связи с упругими свойствами подвески, шин и деталей рулевого привода.
При исследовании колебаний управляемых колес перемещения масс моста
принято рассматривать вне связи с колебаниями кузова и при неподвижном
(закрепленном) рулевом колесе. Наибольшее влияние на устойчивость и управ-
ляемость оказывают угловые колебание моста, определяемые координатой V»
и угловые колебания колес, определяемые координатой 6. Как будет показано
ниже, эти колебания взаимосвязаны гироскопической связью.
Рис. 10.15. Динамическая модель нолебательвой системы управляемого моста
МВ
10. Устойчивость автомобиля
Для исследования колебаний управляемых колес рассмотрим колеба-
тельную систему с двумя степенями свободы, включающую два инерцион-
ных элемента. Параметром первого инерционного элемента является момент
инерции управляемого моста вместе с колесами относительно продольной
оси, проходящей через его центр масс. Параметр второго инерционного эле-
мента — удвоенное значение момента инерции «7е управляемого колеса с по-
воротным кулаком (цапфой) и деталями тормозного механизма относительно
оси шкворня.
Вычленим из полной динамической модели управляемого моста две одно-
массовые парциальные системы, как показано на рис. 10.15, а и б, и рассмот-
рим их взаимодействие. Парциальные частоты этих систем вычисляются по
формулам:
(10.61)
(10.52)
где Су — коэффициент приведенной угловой жесткости упругих элементов
колебательной системы моста; св — то же — управляемых колес.
Значение коэффициента определяется по формуле
cv=0^(cpi®+cuB2),
।
где ср,сш — коэффициенты жесткости соответственно рессоры и шины; —
рессорная база, В — колея моста.
Подставим значение су в формулу (10.51):
m
У пт
ОТ т
При снижении жесткости рессор'% шин и увеличении момента инерции
управляемого моста парциальная частота оу уменьшается.
Значение коэффициента жесткости св зависит от упругих свойств деталей
рулевого привода и шин. Его можно определить из соотношения сг =Afe/6,
где М9 — момент, необходимый для поворота управляемых колес на угол 0.
Момент Л1 е равен сумме моментов сил упругости рулевых тяг и стабилизирую-
щего момента, обусловленного наклоном шкворня и уводом колес. Поскольку
стабилизирующий момент зависит от скорости движения, то парциальная
частота од также изменяется в зависимости от скорости автомобиля.
В связи с упругими свойствами подвески, шин и рулевого привода ось вра-
щения колеса может поворачиваться на углы у и 0. Следовательно, положе-
ние точек колеса характеризуется тремя угловыми координатами: у, 0 и фк,
где фи — угол поворота колеса относительно оси собственного вращения.
В связи с этим колесо представляет собой быстро вращающийся маховик
107. Колебания управляемых, колес 389
с тремя степенями свободы, т.е. гироскоп (рис. 10.16, а). Гироскоп характе-
ризуется кинетическим моментом fit
К = JKar, (10.53)
где *ГК — момент инерции колеса относительно оси собственного вращения;
(jj^ — вектор угловой скорости вращения колеса.
Рос. 10.16. Схеме гироскопа с тремя степенями свободы
Гироскоп реагирует на любое угловое перемещение его оси. Если, прило-
жив внешний момент Л?,, поворачивать ось вращающегося колеса-гироскопа
в поперечной плоскости автомобиля с угловой скоростью ^dyjdt, то коле-
со станет поворачиваться вокруг оси шкворня с угловой скоростью (Оа - (0^.
Это движение носит название прецессии и совершается под действием гиро-
скопического момента МГ. Вектор гироскопического момента МТ опреде-
ляется векторным произведением векторов кинетического момента К и уг-
ловой скорости поворота оси гироскопа 6^:
(10.54)
Угловую скорость называют угловой скоростью прецессии.
Модуль гироскопического момента.вычисляется по формуле
М,. - Кац зн1(А\ <\) = (10.55)
Из выражения (10.Бб) следует, что чем быстрее вращается колесо вокруг
оси собственного вращения и чем выше скорость поворота его оси te^ под дей-
ствием внешнего момента М,, тем больше гироскопический момент, следо-
вательно, и выше скорость прецессии co^,, т.е, скорость поворота колес
относительно осей шкворней.
Для определения направления угловой скорости прецессии используется
теорема Резаля, в соответствии с которой конец вектора кинетического мо-
мента К поворачивается по кратчайшему пути в сторону вектора момента
внешней силы Ме с угловой скоростью прецессии <о„р. Другими словами, век-
тор угловой скорости прецессии ц,р перпендикулярен плоскости, проходящей
через векторы К и Ме, и направлен таким образом, что если смотреть против
390 10. Устойчивость автомобиля
его направления, то поворот вектора К для совмещения его по кратчайшему
пути с вектором Мг должен происходить против часовой стрелки. Взаимное
расположение векторов К, Mt, Мт, <л\., и ©др показано на рис. 10.16,6.
Рассмотрим движение управляемых колес под действием внешнего мо-
мента Мх, приложенного к управляемому мосту в поперечной плоскости,
обусловленного, например, ндездом одного из колес на неровность дороги
(рис. 10.17, а). Ось моста и оси собственных вращений колес при этом повер-
нутся на угол у с угловой скоростью оу и колеса-гироскопы начнут прецесси-
ровать, поворачиваясь вокруг осей шкворней с угловой скоростью Одр =
под действием гироскопического момента определяемого по формуле
2JK(oKo\_.
Ml
(10.66)
Рис 10.17 Динамическая модель управляемого моста при наезде колеса
на неровность дороги
Ж
Колеса при атом повернутся на угол 6 (рис. 10.17, б). Поворот осей собст-
венного вращения колес в горизонтальной плоскости вызовет появление вто-
рого гироскопического момента
МТЙ = 2Jlt(i\<o)e. (10.67)
Этот Момент стремится повернуть ось колеса-гироскопа (следовательно,
и ось моста) на угол у в вертикальной плоскости, заставляя ее прецессировать
со скоростью Ющ, = (рис. 10.17, а). При этом направление Afre противопо-
ложно вызвавшему вращение оси моста моменту Мх.
Таким образом, поворот оси моста в результате наезда на неровность доро-
ги вызвал угловое колебание колес относительно осей шкворней. В свою оче-
редь колебание колес вызвало колебание моста в поперечной плоскости. Обе
парциальные колебательные системы оказались связанными гироскопиче-
ской связью.
10.7. Колебания управляемых колес
391
Отметим, что действие момента дает больший аффект, чем действие
момента Мт9, так как момент инерции колес относительно осей шкворней 2J„
меньше момента инерции управляемого моста Jv.
Составим дифференциальные уравнения колебаний управляемых колес
и моста. В поперечной плоскости на мост действуют (рис, 10.17, а): момент
воздействий неровностей дороги Мх, восстанавливающий момент упругих
элементов подвески и шин ЛГу =<^1/, гироскопический момент Л/Ге> инерци-
онный момент Mfy = В горизонтальной плоскости: на колеса и рулевой
привод действуют (рис. 10.17, С); момент воздействий дороги Мх, восста-
навливающий момент упругих элементов рулевого привода и колес Мв = се0,
гироскопический момент инерционный момент = 2 Je6. Кроме этих
моментов на движение масс колебательной системы управляемого моста
оказывают влияние силы трения во всех ее элементах и сопротивление амор-
тизаторов.
Составим уравнения динамического равновесия рассматриваемых парци-
альных систем, пренебрегая диссипативными элементами:
Мх-М jy-Mv-Mre = 0;
t + Mpy =0.
Подставим значения моментов:
JvV+<VW+2JK(OKH = Mi:;l
(1V.06J
- мг.
Из системы уравнений (10.58) видно, что связь между колебаниями колес
в вертикальной и горизонтальной плоскостях зависит от скорости автомобиля,
определяющей значения кинетических моментов колес. Кроме того, она су-
щественно зависит от кинематики подвески. С увеличением скорости автомо-
биля она возрастает и будет тем больше, чем больше отклоняются плоскости
вращения колес при их перемещениях рт; продольной вертикальной плоскости.
Уравнения (10.58) получены для случая зависимой подвески. При незави-
симой подвеске управляемые колеса могут иметь независимые друг от друга
перемещения и углы поворотов их ocfiS вращения значительно меньше, чем
у зависимой. Поэтому гироскопические моменты их гораздо меньше, чем
в случае зависимой подвески.
Если независимая подвеска обеспечивает вертикальные перемещения ко-
лес (например, свечная подвеска, подвеска на продольных рычагах, паралле-
лограммная), колебания в вертикальной и горизонтальной плоскостях будут
независимыми. При малых скоростях движения они также практически не-
зависимы при любой подвеске, так как гироскопические моменты незначи-
тельны.
Если внешние воздействия Мх,Мг периодические или случайные, то они
возбуждают вынужденные колебания масс управляемого моста. Амплитуды
колебаний зависят от амплитуды возмущения, соотношения частоты возму-
щения и собственных частот, а также степени поглощения энергии колебаний
3W
10. Устойчивость автомобиля
диссипативными элементами. Интенсивность колебаний возрастает, когда
частота возмущения приближается к одной из собственных частот. Наиболь-
шие амплитуды соответствуют резонансным режимам.
Определим собственные частоты колебаний системы управляемого моста.
Для этого используем систему дифференциальных уравнений (10.68) без пра-
вых частей. Решение этих уравнений будем искать в виде
у = Asin of; О = Весе at.
Найдем производные фазовых координат, входящие в уравнения (10.68), ,
и подставим их значения. В результате получаем систему алгебраических
уравнений относительно амплитудугловых колебаний осей моста и колес со-
ответственно А и В:
(су - Jvcc?) йг-2 <йк оВ = О;
-а^ОлОА+^се-г^с/^В =0.
Составим определитель этой системы уравнений и приравняем его к нулю:
I
д = -2Jk<ob(d=0
-2JK шк «в ce -2Jea?
Раскрыв определитель, получим уравнение частот;
AL.St.iSiiV +_Щ_ ,о.
2Jry«Jg J
Введем обозначение
Я=ЙР“’ <10БО)
где Н — коэффициент гироскопический связи.
Используя выражения (10.51), (10152) и (10.60), уравнение частот приве-
дем к виду ’.₽•
со4 - + w§ + №)(!? + (£^о^ = О. (10.ВО)
Решая полученное биквадратное уравнение и учитывая, что частоты суть
вещественные положительные величины, находим две собственные часто-
ты — низшую Qg и высшую 12,:
£2. = + Н2) + + со£ + Н2)г -4<^оД ,
(10.61)
(10.62)
10.7. Колебания управляемых колес
зад
Из выражений (10.61) и (10.62) следует, что при Н ->0:
£2Н -> од, <1» -» од, если од < од:
О„ ->од, Л, ->ОД, если сое >од.
Кроме того, поскольку подкоренное выражение для внутреннего корня
всегда положительно, то:
Пк<од, Q, >од при од<од;
Пн < од, Пя > mg при од > од.
Таким образом, наличие гироскопической зависимости связывает две пар-
циальные системы в единую колебательную систему, имеющую две собствен-
ные частоты, которые при слабой гироскопической связи (Н мало) близки
к парциальным частотам од и од.
Так как кинетический момент колес зависит от скорости ИХ вращения, то
с увеличением скорости автомобиля гироскопическая связь усиливается (Я
растет), а меньшая из частот становится ёще меньше, большая — еще больше.
Вынужденные колебания управляемых колес возбуждаются неровностями
дороги, неуравновешенностью или эксцентричностью колес, плохой согласо-
ванностью кинематики подвески и рулевого привода, автоколебательными
режимами гидроусилителя рулевого управления при неудачном выборе его
параметров или при возникновении неисправностей.
При наезде колеса на неровность (рис. 10.18)
нормальная реакция дороги отклоняется от вер-
тикали на угол а, причем
tga = dqfds,
где q - f(t) — функция микропрофиля дороги; 8 —
путь, проходимый колесом.
Для ведомого колеса нормальная реакция обыч-
но много больше касательной, поэтому при качест-
венном анализе последнюю можно не учитывать.
Реакцию N можно разложить на две составляю-
щие: вертикальную Na и горизонтальную JVX. Составляющая Nx переменная.
Она изменяет свое направление при наезде колеса на неровность и при съезде
с неровности. Сила 27* создает переменный моментМг относительно оси шквор-
ня, который возбуждает вынужденные колебания колес (см. рис. 10.17, б).
Значение М3 вычисляется по формуле
м, = NJta = NJiu tga,
где (щ — расстояние от оси шкворня до плоскости вращения колеса (см.
рис- 10. 11).
Изменение составляющей Nt приводит к изменению радиуса качения ко-
леса. При постоянной скорости автомобиля при этом должна изменяться уг-
ловая скорость вращения колеса. Вследствие этого возникает инерционный
момент колесе, что приводит к изменению касательной реакции дороги. При
Рис. 10.18. Реакции дороги
на колесо автомобиля при
проезде неровностей
ЭМ
10. Устойчивость автомобиля
этом создается дополнительный момент поворота управляемых колес отно-
сительно осей шкворней, усиливая их колебания.
Колебания неподрессоренной массы моста при проезде по неровностям из-
меняют величину деформации рессоры, в результате чего происходит относи-
тельное перемещение подрессоренной й неподрессоренной масс автомобиля.
При этом шарнир рычага поворотной цапфы должен качаться, с одной стороны,
в соответствии с кинематикой рессорной подвески по траектории АА, а с дру-
гой — по дуге ВВ, радиус которой равен длине продольной тяги рулевого
привода (рис. 10.19, а). Расхождение дуг ААи ВВ приводит к тому, что управ-
ляемые колеса при их вертикальных перемещениях относительно подрессо-
ренной массы автомобиля поворачиваются вокруг шкворней, что приводит
к возбуждению колебаний колес. Поэтому взаимная кинематика подвески
и рулевого привода должна быть согласована. Центры качания направляю-
щих элементов подвески и рулевогр;рривода должны быть как можно ближе
друг к Другу. С этой целью серьгу рессоры иногда располагают спереди
(рис. 10.19, б) или рулевой механизм помещают впереди переднего моста
(рис. 10.19, а).
Если колесо имеет неуравновешенность (дисбаланс), то при качении воз-
никает сила инерции Fj (рис. 10.20). Разложим ее на две составляющие: гори-
зонтальную и вертикальную Сила F# создает момент относительно оси
шкворня М, = Ff&x, который заставляет колесо совершать периодические
колебания (виляния). Сила F^ возбуждает колебания колес в вертикальной
плоскости, в результате чего изменяются нормальные реакции. Сила Fj про-
порциональна неуравновешенной массе тЕ и квадрату скорости автомобиля и:
2
F}=mKr^=^L., (10.68)
Ъ
где г — радиус расположения неуравновешенной массы; гк — радиус качения
колеса.
10.7. Колебания управляемых колес
395
Рис. -10.20. Воздействие на колесо неуравновешенной массы та
Силы Fye и FyT представляют собой гармонические функции времени t, ам-
плитуды которых равны F/, а частоте сооп^тствует угловой скорости колеса :
Ffi - Fjcot^f, (10.64)
(10.65)
Если Шк совпадет с одной на собственных частот колебаний колес (в гори-
зонтальной или вертикальной плоскости), то возникнут резонансные колеба-
ния с большими амплитудами. При этом ухудшается связь колес с дорогой
(вплоть до отрыва колес от дороги), что может привести к потере управляемо-
сти и устойчивости автомобиля.
,При неуравновешенности колес возможны два случая резонанса: при
(Оц = £2В, что соответствует скорости автомобиля ир1 - при ~ О,, если
скорость Ор2 =£!/*«. Они могут проявиться при условиях, если l>pI
ир2 S Ота*. Если низшая собственная частота Он невелика, то резонанс будет
при небольшой скорости. Так как амплитуда возмущающего момента при
этом невелика, то интенсивных колебаний наблюдаться не будет. Когда резо-
нанс соответствует частоте, близкой к co#, то происходит главным образом
виляние колес. Если же наступает резонанс при частоте, близкой к о^, то поя-
вится интенсивное подпрыгивание колес.
Вынужденные колебания могут вызываться также эксцентричностью ко-
лес, так как в атом случае ось вращений колеса периодически перемещается
в вертикальном направлении. Однако амплитуда возмущения с изменением
скорости автомобиля изменяться не будет.
Резонансные режимы колебаний управляемых колес наиболее вероятны
у легковых автомобилей, имеющих колеса малого диаметра и сравнительно
низкую собственную частоту колебаний управляемых колес. Поэтому колеса
легковых автомобилей подвергают обязательной балансировке, которая заклю-
чается в закреплении на ободе колеса балансировочных грузов, создающих
центробежные силы, компенсирующие действие силы Ft неуравновешенной
массы.
Уменьшение амплитуд колебаний управляемых колес можно достичь
увеличением трения в механизмах системы. В рулевом приводе некоторых
быстроходных автомобилей устанавливают для этой цели гидравлические
амортизаторы. Основным средством устранения колебаний управляемых ко-
лес является независимая подвеска.
эк
10, Устойчивость автомобиля
Колебательная система управляемого моста может обладать особым свой-
ством, заключающимся в ее способности к самовозбуждению незатухающих
колебаний при непериодических внешних воздействиях. Такие системы отно-
сят к автоколебательным. На поддержание незатухающих колебаний необходим
постоянный подвод энергии к системе, которая затрачивается на преодоление
различного рода сопротивлений. При этом система сама управляет поступле-
нием энергии от источника. Источником энергии на автомобиле является его
двигатель.
Вопросы лая самоконтроля
•Id)
1. Что такое устойчивость автомобэдя? Назовите виды устойчивости.
2. Назовите показатели устойчивое^ и изложите способы их определения.
8. Каковы необходимые и достаточке условия устойчивости?
4. Для каких условий характерна критическая скорость по курсовой и траек-
торной устойчивости? Напишите формулу для ее определения.
5. Что такое статическая поворачиваемость автомобиля? Какое свойство авто-
мобиля она характеризует? Как называется количественная оценка статиче-
ской поворачиваемости и от чего она зависит? Напишите формулу для ее
вычисления.
в. Как влияет статическая поворачиваемость на траекторию и устойчивость
движения автомобиля?
7. От каких факторов зависят критические скорости автомобиля по условиям
заноса и опрокидывания? Напишите формулы для их вычисления.
8. От каких факторов зависят критические углы косогора по условиям заноса
и опрокидывания? Напишите формулы для их вычисления.
9. Что такое коэффициент поперечной устойчивости и от чего он зависит? Како-
вы его средние значения для автомобилей различных типов?
10. Занос какого моста опаснее: переднего или заднего? Почему? Каковы способы
ликвидации начавшегося заноса заднего моста? Объясните их физический
смысл.
11. Что такое угол дрейфа и как он определяется?
12. Как влияет подвеска на поперечную устойчивость автомобиля?
13. Как определить положение оси кренц подрессоренной массы? Какое предельно
допустимое значение угла крена? Какими техническими средствами умень-
шают крен кузова?
14. Что такое стабилизация управляемых колес? Как она достигается и от каких
факторов зависит? Что такое плечо обкатки?
15. По каким причинам возникают колебания управляемых колес и как они
влияют на устойчивость движения автомобиля? Как уменьшить колебания
колес?
Управляемость автомобиля
Управляемостью навивают свойство управляемого водителем автомоби-
ля сохранять заданное направление движения или изменять его в соответст-
вии с воздействием на рулевое управление.
В реальных дорожных условиях постоянно возникает необходимость кор-
ректирования или изменения направления движения автомобиля. Это дости-
гается воздействиями водителя через рулевое управление на управляемые
колеса. Действия водителя, направленные на сохранение или изменение ве-
личины и направления скорости движей# ,' а также ориентации продольной
оси автомобиля, называются управлением. Управление автомобилем явля-
ется основной производственной функ'Щхей водителя. Для успешного осу-
ществления этой функции автомобиль Должен обладать соответствующими
свойствами; адекватно реагировать на управляющие воздействия водителя;
обеспечивать устойчивое прямолинейное движение и движение на повороте;
сохранять нейтральное положение управляемых колес (занимаемое ими при
прямолинейном движении) к автоматически возвращаться в него после со-
вершения поворота; исключать колебания управляемых колес. Эти свойства
определяют надёжность и эффективность управления автомобилем и его
устойчивое движение.
Свойства управляемости и устойчивости тесно взаимосвязаны и имеют
много общих черт. Они зависят от одних и тех же параметров механизмов ав-
томобиля — рулевого управления, подвески, шин, распределения масс меж-
ду мостами и др. Различие состоит лишь в способах оценки критических
параметров движения автомобиля. Параметры, характеризующие свойства
устойчивости, определяются без учета управляющих воздействий, а пара-
метры, характеризующие свойства управляемости, — сих учетом.
11.1. Оценочные показатели управляемости автомобиля
Для оценки управляемости автомобиля предложено множество показа-
телей. Устойчивость управления хар актеризуется свойством системы води-
тель — автомобиль выполнять с оговоренной заранее точностью на заданном
отрезке пути задаваемые характеристики движения. Характеристики дви-
жения определяют зависимости изменения скорости, траектории, курсового
угла и угла крена подрессоренной массы в функции времени или пути.
В правилах ЕЭК ООН № 79, в ГОСТ Р 52302-2004 и ОСТ 37.001.471-88
предусмотрены следующие показатели и характеристики управляемости
автомобиля и автопоезда: 1) скорость самовозврета рулевого колеса
2) остаточное значение угла поворота рулевого колесе а^; 8) заброс угла по-
ворота рулевого колеса ctp$; 4) время стабилизации б) усилие на рулевом
колесе при повороте на месте Гр; 6) усилие на рулевом колесе при движении
39® 11. Управляемость автомобиля
автомобиля по круговой траектории Грд; 7) характеристика траекторной
управляемости при установившемся круговом движении К = f(ctp ); 8) харак-
теристика заброса угловой скорости автомобиля (или прицепа) над устано-
вившимся значением этой скорости при входе в поворот Дсо, = /(а^) (или
Дсо^п = /(<xv)); 9) характеристика обратного заброса угловой скорости прицепа
при входе в поворот Мм - f(av)l Ю) характеристика времени 90%-ной
реакции автомобиля (или прицепа) при входе в поворот Д«д0% - яли
A<so%B - 11) максимальная скорость выполнения маневра «поворот»;
12) максимальная скорость выполнения маневра «переставка»; 13) характе-
ристика углов поворота рулевого колеса при заданной переставке ар = /(о);
14) характеристика скоростей поворота рулевого колеса при заданной пере-
ставке Юр » /(и); 15) средняя скорей?^ корректирующих поворотов рулевого
колеса при прямолинейном дниже^Йи Ц>лр.
Рекомендуемые предельные значения показателей управляемости даны
в правилах ЕЭК ООН № 79, МС ЙЬО/ТР 8888-75, ГОСТ Р 52302-2004,
ОСТ 87.001.471-88 и ОСТ 87.001,487-89. Согласно этим нормативным доку-
ментам, показатели управляемости определяют экспериментально. Методи-
ки их определения рассмотрены в параграфе 11.4. Эти показатели можно
также определять посредством математического моделирования. Для этого
используются системы дифференциальных уравнений криволинейного дви-
жения автомобиля (9.61) и (9.74).
11.2. Траекторная управляемость автомобиля
Рассмотрим физические свойства автомобиля, обеспечивающие его дви-
жение по заданной траектории на опорной плоскости дороги.
Для обеспечения движения по заданной траектории водитель изменяет
углы поворота управляемых колес, поворачивая рулевое колесо в ту или
иную сторону на некоторый угол. Однако он не может обеспечить абсолютно
точного движения по заданной траектории. Это обусловлено рядом причин.
Во-первых, водитель не видит центра масс автомобиля и о совпадении дей-
ствительной траектории с задаваемой<йожет судить лишь по некоторым кос-
венным признакам. При управлении направлением движения автомобиля
водитель ориентируется на некоторую^гочку, расположенную на дороге впе-
реди автомобиля, называемую направляющей точкой. Направляющая точка
меняет свое положение вместе с перемещением автомобиля.
Во-вторых, на автомобиль постоянно действуют различные Возмущения,
стремящиеся изменить его траекторию.
В-третьих, автомобиль обладает значительными инерционными свойства-
ми, а его колеса — упругими свойствами в боковом направлении, поэтому
реакция автомобиля на управляющее воздействие имеет определенное запаз-
дывание.
В-четвертых, углы бокового увода колес изменяются в широких пределах,
так как изменяются продольные, боковые и нормальные реакции дороги на
колеса, а также сцепление колес с дорогой.
11.2. Траекторная управляемость автомобиля
399
Рассмотрим реакции автомобиля на поворот рулевого колеса. Одной ив
важнейших характеристик управляемости автомобиля является зависимость
кривизны траектории К = 1 /Д, от угла поворота рулевого колеса ар, называе-
мая характеристикой траекторной управляемости. При постоянном пере-
даточном числе рулевого привода и^ вместо зависимости К = /(<хр) можно
использовать зависимость К ® /(0), учитывая при этом, что 0 = а^и?.
Зависимость К = ftctp) позволяет определить коэффициент чуестоителъ-
дК
ности автомобиля к повороту р =-. Чем больше изменяется кривизна
Эар
траектории К (или радиус поворота автомобиля Яд ) при определенном повороте
рулевого колеса, тем выше увствительв ойь автомобиля к повороту и больше
величина реакции автомобиля на управляющее воздействие водителя.
Для двухосного автомобиля с передней управляемыми колесами без бо-
кового увода радиус поворота, согласно отражению (9.16), ® L/lgO, тогда
К =
L I,4’»,
Коэффициент чувствительности автомобиля к повороту без учета бокового
увода определяется по формуле
ц = — =------57—Г"\’ (! 1-1)
Эар Lupco^(ap/up)
В действительности при криволинейном движении автомобиля, а также
при прямолинейном движении, когда на автомобиль действуют те или иные
боковые силы, увод колес всегда имеет место и его следует учитывать при
оценке чувствительности автомобиля к повороту. Радиус поворота автомоби-
ля при этом, согласно выражению (9.16),
Я; = —у--------—. (11.2)
Поскольку угол поворота управляемых колес 0 может изменяться в широ-
ких пределах, достигая 30° (а у некоторых легковых автомобилей и более),
а углы увода при отсутствии заметного бокового скольжения не превышают
2-4°, то выражение (11.2) можно заменить приближенным выражением:
14" wo+(i-W <и’3)
С учетом выражения (11.3) формула для определения кривизны траекто
рии принимает следующий вид:
400
11. Управляемость автомобиля
Выразим углы увода 5^ и 6у>2 через боковые реакции R^ttFfa
После подстановки этих значений получим следующее выражение для оп-
ределения кривизны траектории К при уводе колес:
К = + (11 4)
L Up
С момента начала поворота рулевого колеса до начала осуществления
поворота автомобиля проходит некоторое время, называемое временем за-
паздывания реакции автомобилй^,.р. Запаздывание реакции обусловлено
упругими свойствами деталей рулевого привода и шин, а также зазорами
в механизмах рулевого привода. В результате проходит некоторое время,
прежде чем произойдет полное согласование углов поворота рулевого колеса
сср и управляемых колес 0 и боковые реакции достигнут своего установивше-
гося значения.
Боковые реакции^ иRg в общем случае движения зависят от радиуса по-
ворота, скорости и ускорения автомобиля, угла и скорости поворота управ-
ляемых колес, базы автомобиля, координат центра масс и радиуса инерции
автомобиля и определяются по формулам (9.46) и (9.47). Рассмотрим, как
будет изменяться чувствительность автомобиля к повороту при следующих
допущениях: скорость автомобиля постоянная; поворот рулевого колеса осу-
ществляется с небольшой скоростью, характерной для обычного движения
автомобиля по дороге (рывок руля исключается). В этом случае влиянием 6
на величины реакций и R^ можно пренебречь и вычислять их по форму-
лам (9.62) и (9.53), согласно которым:
0 я: " R‘CL ’ “ R^L ’
п
Подставим эти значения в выражение (11.4). В результате получим:
К = Itggp + - W;) (115)
Второе слагаемое правой части выражения (11.5) характеризует влияние
увода колес при повороте на кривизну траектории. Полученное выражение
можно несколько упростить, если вместо подставить значение радиуса по-
ворота без учета увода колес, т.е. R„ = Z/tgO. Тогда оно приводится к виду
К = 2-tg^ 1 + (11.6)
^ув!^уи2
11.2. Траекторная управляемость автомобиля
401
Коэффициент чувствительности автомобиля к повороту при боковом уво-
де колес в этом случае определим по формуле
(11-7)
Lupco^fap/u,,)
Сравнение выражений (11 Л) и (11.7) показывает, что при боковом уводе
колес чувствительность автомобиля к повороту может увеличиться либо умень-
шиться, в зависимости от значения величины b = ) Бели Ъ <0, ав-
томобиль обладает свойством недостаточной поворачиваемости, так как
в этом случае коэффициент статической поворачиваемости 1]по> <1(см. пара-
граф 10.3). Кривизна траектории вследствие увода уменьшается и, согласно
выражению (11.7), уменьшается чувствительность автомобиля к повороту
рулевого колеса. При б >0 имеет место из^щточная поворачиваемость, Кри-
визна траектории становится больше «..увеличивается чувствительность
к повороту. Отсюда следует, что если повышается устойчивость, то одновре-
менно ухудшается управляемость, и наоборот. При b * 0 чувствительность
к повороту зависит также от скорости автомобиля.
Из выражения (11.7) также видно, что на величину ц оказывают влияние
многие конструктивные параметры автомобиля:, сопротивление шин боково-
му уводу, база автомобиля, координаты центра масс, передаточное число ру-
левого привода. Кроме того, значительное влияние могут оказать дорожные
условия и режим движения, так как значения коэффициентов сопротивле-
ния уводу и Ауаг зависят от сцепления колес с дорогой, величины и распре-
деления реакций дороги между колесами автомобиля.
При высокой скорости автомобиля угол поворота рулевого колеса а? не-
большой, поэтому можно принять tg(ap/up) = ctp/Up. Тогда формула (11.6)
приводится к виду:
к = ri,.”»^(Wi-W)l (11Л)
Upi<
На рис. 11.1 показаны зависимости Х' = /(<хр), получаемые при различных
значениях коэффициента статическо^роворачиваемости Т]пх>»- Для автомоби-
ля с нейтральной поворачиваемостью
(И.&)
upL
В этом случае зависимость К - f(cLp ) линейная. На рис. 11.1 она изображе-
на прямой линией 1 с угловым коэффициентом l/(upL). Для автомобиля с не-
достаточной поворачиваемостью характеристики проходят ниже прямой 1,
а с избыточной поворачиваемостью — выше этой линии. Линейные зависи-
мости К - f(ap) указывают на постоянство коэффициента статической пово-
рачиваемости Цпоэ. Выпуклые кривые относятся к автомобилям, у которых
с увеличением <хр недостаточная поворачиваемость возрастает (кривые 2) или
402
11. Управляемость автомобиля
избыточная уменьшается (кривые 3), вогнутые — свидетельствуют об об-
ратном. Если кривая К = /(ар) пересекает прямую 1, то автомобиль в одном
диапазоне изменения ар обладает недостаточной, а в другом — избыточной
поворачиваемостью.
Рис. 11.1, Характеристики траекторной управ-
ляемости: I — при нейтральной поворачиваемо-
сти; 2 — при недостаточной поворачиваемости;
3 — при избыточной поворачиваемости
Рис. 11.2. Характеристика траекторной
управляемости: 1 — при нейтральной
поворачиваемости; 2 — оптимальная
При езде с большими скоростями нежелательно иметь большую чувстви-
тельность к повороту, так как незначительный неосторожный поворот рулевого
колеса может вызвать поворот автомобиля с большой кривизной траектории
и этим создать опасную ситуацию. Вместе с тем при маневрировании, которое
обычно совершается при малой скорости, целесообразно иметь большую чув-
ствительность, чтобы сократить энергозатраты водителя, обеспечить доста-
точно большие углы поворота управляемых колес при сравнительно небольших
углах поворота рулевого колеса. В этой связи желательно иметь характери-
стику К = f(ctp), представленную на рис. 11.2 (кривая 2}. При otp <<хр получа-
ем недостаточную поворачиваемость, а при ар >а* — избыточную. Такую
характеристику может обеспечить рулевой механизм с переменным переда-
точным числом.
11.3, Переходные процессы при управлении автомобилем
При повороте рулевого колеса автомобиль изменяет траекторию движения
не сразу, а постепенно, приводя ее кривизну К через определенный интервал
времени в соответствие с утлом поворота рулевого колеса ар. Это обусловлено
тем, что автомобиль обладает инерционными и упругими свойствами. При
исследовании управляемости используется динамическая модель плоского
движения автомобиля (см. рис. 9.11). Инерционные свойства в этом случае
характеризуются мессой тл и моментом инерции J. относительно вертикаль-
ной оси Cz. Упругие свойства определяются жесткостью шин в боковом на-
правлении и при небольших углах увода характеризуются коэффициентом
сопротивления уводу. Переход от прямолинейного движения к криволиней-
11.3. Переходные процессы при управлении автомобилем
403
ному характеризуется изменением во времени угловой скорости вращения
автомобиля со, относительно оси Сг и скорости бокового перемещения центра
масс Рр. Изменение фазовых координат vy и со, при переходе от одного устано-
вившегося режима движения к другому называется переходным процессом,
а график этого процесса — переходной характеристикой. Переходные про-
цессы предшествуют любому установившемуся виду движения. Характери-
стики протекания переходных процессов имеют важное значение при оценке
управляемости автомобиля.
При определении показателей управляемости используется несколько ти-
повых тестовых режимов: «переставив*, «поворот*, «рывокруля*.
В теории автоматического управления переходные процессы принято оце-
нивать по реакции управляемой системы на ступенчатое воздействие. Для
автомобиля это соответствует реакции на быстрый поворот рулевого колеса с
нейтрального (нулевого) положения в некоторое новое положение, характе-
ризуемое углом с£р = const. Автомобиль при этом переходит с прямолинейной
траектории к движению по кругу. Таким образом, начальное установившее-
ся состояние — прямолинейное движение, а конечное — движение по круго-
вой траектории с постоянным радиусом поворота/^ - const.
Рассмотрим характеристики переходных процессов при ступенчатом воз-
действии — рывке руля.
Криволинейное движение автомобиля в плоскости дороги описывается
системой дифференциальных уравнений (9.69). В компактной форме эти
уравнения имеют следующий вид:
—- - -ОпГу-чЬа®* +bi>
at
dot.
, = -021^ “«22“» + Й2>
at
(11.10)
гдеа(/ — коэффициенты, определяемые по формулам (9.70); Ъ( — функции
воздействий, вычисляемые по формулам (9.71).
На устойчивых режимах движенш/при постоянной скорости vx = const
коэффициенты а(/ можно считать постоянными. Тогда уравнения (11.10)
представляют собой систему линейных дифференциальных уравнений. Воз-
мущающим воздействием на автомобиль является угол поворота рулевого
колеса ар. Учитывая зависимость 8 = ар/Пр между ctp и углом поворота управ-
ляемых колес 6, функции воздействий принимают вид:
m,Up
(11.11)
Д ля решения системы дифференциальных уравнений (11.10) используют
ЭВМ. В рассматриваемом случае исходное установившееся состояние —
прямолинейное движение, поэтому начальные условия нулевые, т.е. =0
и ого = О. Рывок руля выводит систему из состояния равновесия и в резуль-
тате начинается переходный процесс. Конечные установившиеся значения
404
11. Управляемость автомобиля
фазовых координат vvtt и ш2к находят решением системы алгебраических
уравнений, получаемых на основе уравнений (11.10) при dvyjdt = 0, datjdt = 0
и при заданном угле поворота рулевого колеса ар.
По результатам решения уравнений (11.10) строят графики переходных
процессов =Л0' На рис.11*3 показаны графики возможных пе-
реходных характеристик угловой скорости автомобиля со. - /(t).
Рис. 11.3. Графики переходных характеристик:
1 — апериодическая, 2, 3 — колебательные
Характер переходного процесса, описываемого системой уравнений (11.10),
зависит от собственных значений матрицы Якоби. В параграфе 10.2 получено
выражение (10.5) для определения собственных значений. Если собственные
значения — вещественные числа, то переходные процессы апериодические,
а если комплексные сопряженные, — колебательные. При отрицательных
величинах вещественных частей в&х собственных значений переходные
процессы будут затухающими и движение автомобиля будет устойчивым.
Согласно выражению (10.6), собственные значения матрицы Якоби веще-
ственные, если подкоренное выражение положительно, т.е. при условии
e = +022) ~^(aiiai2~aiza2i) (11.12)
При *>(а11+с2г)г °дно из собственных значений будет положительным.
В атом случае с увеличением времени фазовые координаты vv к to, неограни-
ченно возрастают и круговое движение автомобиля невозможно, так как не-
пременно наступит занос мостов. Если жеб = (оц +ag2)2, то kj отрицательно,
а =0. График переходной характеристики в этом случае, асимптотически
приближается к (кривая 1 на рис. 11.3).
Если Ь <0, то собственные значения — комплексные сопряженные числа.
При этом Vb представляет собой резонансную частоту колебаний.
11.4. Определение покамтелей управляемости автомобиля 405
Колебательные переходные процессы, как отмечалось в параграфе 10.2,
затухающие. В этом случае после завершения переходного процесса, обуслов-
ленного рывком руля, обеспечивается устойчивое движение автомобиля по
круговой траектории. Но для колебательных переходных процессов харак-
терно перерегулирование, т.е. кратковременное превышение значения фазовой
координатой со, ее установившегося значения со/Л. Величина перерегулирова
ния зависит от коэффициента статической поворачиваемости и от скоро-
сти автомобиля. Наличие значительного перерегулирования свидетельствует
о чрезмерной недостаточной поворачиваемости автомобиля. Чем выше ско-
рость, тем больше перерегулирование. В тех случаях, когда перерегулирова
ние невелико, время переходного процессддля автомобилей с недостаточной
поворачиваемостью обычно меньше, чемСдля автомобилей с избыточной по-
ворачиваемостью, и меньше зависит от скорости автомобиля V.
Величина перерегулирования определяется из выражения:
= Юлтис-Южх , (11.13)
где — максимальное эначение угловой скорости поворота автомобиля.
Перерегулирование Д(ол принято называть аабросом ценовой скорости
автомобиля. Предельная величина заброса Аса, регламентирована норматив-
ными документами (см. табл. 11.3 в параграфе 11.4).
Одним из показателей качества управляемости является время переход
ного процесса t„. Для его определения устанавливается коридор стабилиза-
ции Д фазовой координаты со,, величина которого определяется по формуле
Д-О,Об<о, к. (11.14)
Время переходного процесса tn равно интервалу времени от момента осу-
ществления рывка руля до момента, когда график переходной характеристики
последний раз пересечет одну из линий коридора стабилизации. На рис. 11.3
показано определение Гп для апериодического 1пл и колебательного in.K пере-
ходных процессов.
Значение времени переходного процесса можно приближенно вычислить
по формуле
-W--
где |X|mJn — минимальное по модулю собственное значение матрицы Якоби.
11.4. Определение показателей управляемости автомобиля
В Правилах ЕЭК ООН № 79 и № 102 и в ГОСТ Р 52302-2004 изложены
методы экспериментального определения показателей управляемости авто-
транспортных средств различных категорий.
Испытания АТС по определению показателей управляемости проводятся
на горизонтальном участке дороги с твердым покрытием в сухую безветрен-
ную погоду. Скорость ветра в любом направлении не должна превышать
б м/с. Температура окружающего воздуха от минус б °C до плюс 30 °C. Уклоны
406
11. Управляемость автомобиля
дороги не более 1 %. Видимость на дороге не менее 1000 м. Испытываемое
транспортное средство должно иметь полную нагрузку. Распределение на-
грузки между мостами и давление воздуха в шинах должны соответствовать
предписаниям завода-изготовителя. Давление воздуха проверяют перед на-
чалом испытаний, измеряя его при расположении транспортного средства на
горизонтальной площадке. Износ шин должен быть равномерным и не пре-
вышать 40 % полной высоты протектора. Непосредственно перед проведени-
ем испытаний прогревают механизмы и шины АТС пробегом не менее 15 км.
На испытательных участках выполняется разметка, определяющая траек-
торию движения и ограничивающая ширину коридора движения в зависи-
мости от габаритной ширины АТС. измеряемой по крайним колесам на высоте
150 мм от опорной поверхности дороги. Разметка осуществляется посредст-
вом специальных эластичных элементов.
Во время испытаний оформляк}т протокол, в котором отображают усло-
вия испытаний, результаты замерев параметров движения, особенности вы-
полненных заездов (появление заноса мостов, курсовых колебаний, отрыва
колес от поверхности дороги, сноса ограничителей разметки). Отмечают также
возможные отклонения от предусмотренных условий испытаний, отклонения
в работе средств измерений и регистрации параметров движения, фиксируют
замечания водителей-испытателей, оператора и контролера (наблюдателя).
Показатели и характеристики устойчивости управления определяют в кри-
тических (нештатных) режимах движения транспортных средств, выполняя
при этом соответствующие маневры: смену полосы движения («переставка»),
вход в поворот, рывок руля и др. Скорости движения на испытательных уча-
стках должны соответствовать требованиям Правил ЕЭК ООН и националь-
ных стандартов. Если максимальная скорость ниже регламентированного
значения, транспортное средство испытывают при максимальной скорости.
Рассмотрим условия и методики проведения испытаний по определению
показателей управляемости и устойчивости движения, предусмотренных
Правилами ЕЭК ООН 79, ГОСТ Р 52302-2004 и ОСТ 37.001.471-88.
Скорость самовоэврата рулевого колеса (0^, остаточное значение угла по-
ворота рулевого колеса <Хр2, заброс угла поворота рулевого колеса и время
стабилизации fCT определяют при испытании «стабилизация», которое пред-
назначено для определения параметров, характеризующих самовозврат управ-
ляемых колес и рулевого колеса в нейтральное положение.
Оценку показателей стабилизации рулевого управления проводят при рав-
номерном движении АТС по круговой траектории: внутреннее управляемое
колесо движется по дуге окружности радиусом 50 м с расположением следа
пятна контакта шины в полосе, ограниченной радиусами 50 и 51 м. Скорость
АТС категорий Afj и составляет(50± 2) км/ч, категорий Af2»-^8i^2 E^s “
(40 ±2) км/ч. После достижения установившегося движения по круговой
траектории освобождают рулевое колесо, и управляемые колеса автомобиля
начинают самостоятельно возвращаться в положение прямолинейного дви-
жения. Скорость АТС поддерживают постоянной до прекращения вращения
11.4. Определение показателей управляемости автомобиля
407
освобожденного от усилий рулевого колеса и в течение 6 с от начала выполне-
ния маневра непрерывно измеряют и регистрируют изменение угла поворота
рулевого колеса ар во времени t. При повороте рулевого колеса в каждую сто-
рону проводят не менее трех заездов и вычисляют средние значения определяе-
мых показателей. Образец полученного графика зависимости а? = /(t) приведен
на рис. 11.4.
Рис, 11.4, Изменение угла поворота рулевого колеса во времепи
при испытании «стабилизация»
Скорость самовоэврата рулевого колеса о>ар представляет Отношение умень-
шения угла поворота рулевого колеса на величину ОЛ^а^-Орг) ко времени
этого уменьшения А<ао%:
(11.1S)
где ар1 — исходное значение угла поворота рулевого колеса; аР2 — остаточное
значение угла поворота. iv
Заброс угла Поворота рулевого колеса — это максимальный угол пово-
рота колеса после перехода его через нейтральное положение.
Время стабилизации t„ равно интервалу времени от момента освобожде-
ния рулевого колеса to до достижения установившегося (остаточного) значе-
ния угла поворота рулевого колеса ар2.
При испытании «стабилизация* скорость самовоэврата рулевого колеса
должна быть не менее: 400 град/с — для автомобилей категории 240 град/с —
категорий М2, N2; 120 град/с — категории Ма; 70 град/с — категорииNa-
Остаточный угол поворота рулевого колеса ар2: 20 град — для автомобилей
категорий Aflt Wp 50 град — категорий M2,N2,N8- Заброс угла поворота руле-
вого колеса а^: 20 град — для автомобилей категорий М21 W2, Wa; 30 град —
категорий MltN^
400
11. Управляемость автомобиля
Усилия hr рулевом колесе при повороте на месте Fp и при движении авто-
мобиля по круговой траектории FpJS определяют при испытании «усилие на
рулевом колесе».
Усилие на рулевом колесе при повороте на месте Fp — это среднее значение
усилий на рулевом колесе при его повороте отдельно вправо Fp,0 и влево Fp.„
на углы, соответствующие движению передним наружным управляемым
колесом по окружности радиусом Д, -12 м или по окружности минимального
радиуса, если больше 12 м. Скорость поворота рулевого колеса не долж-
на превышать 60 град/с, В процессе испытаний непрерывно измеряют и ре-
гистрируют угол поворота рулевого колеса <хр, усилие на рулевом колесе Ff
и время t. ,u<
Усилие на рулевом колесе Fpjl ври движении автомобиля по круговой тра-
ектории — это среднее значение усилий на рулевом колесе при повороте впра-
во Fp.e.D и влево Рр.дл с постоянной скоростью поворота рулевого колеса, обес-
печивающей переход автомобилей всех категорий без усилителя рулевого
управления или с работающим усилителем в течение 4 ± 0,25с от прямолиней-
ного движения к движению передним наружным колесом по окружности,
радиус которой равен 12 м, или по окружности минимального радиуса, если
Ящщ больше 12 м. Скорость автомобиля при испытании (10 ±2) км/ч. Для
автомобилей с неработающим усилителем рулевого управления скорость
поворота рулевого колеса должна быть такой, чтобы обеспечить переход ав-
томобилей категорий Afi, М2, и в течение 4±0,2Б с, а автомобилей кате-
горий Mg, Ns в течение 6±025с от прямолинейного движения к движению
передним наружным колесом по окружности, радиус которой равен 20 м.
При испытаниях измеряют и регистрируют ар, Fpjl, t и скорость автомобиля о.
Усилие на рулевом колесе автомобиля не должно превышать величин,
указанных в табл. 11.1.
Указанное в скобках усилие 500 Н допускается для грузовых автомобилей
большой грузоподъемности с управляемыми колесами двух или более мостов.
Таблица 11,1
Предельные величины усилий на рулевом колесе
Категория автомобиля Усилие на рулевом колесе, Н
неподвижного автомобиля движущегося автомобиля
с усилителем рулевого управлении бе® усилителя рулевого управления с исправным усилителем при откаве усилителя
Mi 60 200 150 300
м2 60 250 150 300
ма 250 350 200 460
М 180 300 200 300
*2 180 350 250 400
Хя 260 350 200 450 (500)
11.4. Определение показателей управляемости автомобиля
*»
Характеристики траекторной управляемости К - /(04,), заброса угловой
скорости автомобиля Ло>2 - (или прицепа) над установившимся значе-
нием, обратного заброса угловой скорости прицепа Л и времени
90% -ной реакции автомобиля Ai«0% = f(ay (плн прицепа) определяют при ис-
пытании «рывок руля».
Для испытаний используют площадку минимальным диаметром 100 м
с примыкающей к ней разгонной полосой длиной не менее 1000 м и шириной
не менее 7 м. Разгонная полоса предназначена для разгона АТС до заданной
скорости и последующего равномерного прямолинейного движения до нача-
ла совершения маневра «рывок руля». Скорость АТС категорий Мъ М2 и NT
должна составлять (80 ±3) км/ч, а категорий Ma,N2 nNa — (60± 3) км/ч.
При испытаниях производят максималвно быстрый, с угловой скоростью
не менее 400 град/с, поворот рулевого колеса в заданное положение. Рулевое
колесо удерживают в этом положении до начала установившегося кругового
движения. Угол поворота рулевого колеса ар в каждом последующем заезде
увеличивают ступенчато до достижения бокового ускорения аи для АТС катего-
рий Mi, М2 и N-i не менее 4,5 м/с2, а категорий М&, ЛГ2 и — не менее 2,5 м/с2.
Но предельное значение а*, должно быть ограничено по условиям сцепления
шин с опорной поверхностью и предотвращения отрыва колес от дороги. Угол
поворота рулевого колеса в первом испытательном заезде выбирают из усло-
вия достижения бокового ускорения 1,0-1,5 м/с2. Всего должно быть выпол-
нено не менее 12 заездов с поворотами в каждую сторону — как влево, так
и вправо.
При испытаниях измеряют и регист-
рируют изменения во времени следую-
щих параметров движения: скорости
автомобиля о; угловой скорости его вра-
щения ш, относительно вертикальной
оси О?; бокового ускорения av в центре
масс; угла поворота рулевого колеса ар.
На рис. 11.5 показаны графики процес- (.
сов изменения во времени; утла поворо-
та рулевого колесаар, угловой скорости
автомобиля ф, и прицепа сага, получен-
ные при испытании «рывок руля». За-
меры исследуемых параметров движения
выполняют с помощью специальных дат-
чиков и аппаратуры. Регистрация па-
раметров осуществляется в течение не
менее 3 с от начала поворота рулевого
колеса — для завершения переходного
процесса.
Если определить ускорение центра
масс непосредственно не удается, то
Рас. 11.5. Изменение угла поворота а?
рулевого колеса (а) и угловой скорости
автомобиля о>г и прицепа wJB (б) во вре-
мени при испытании срывов руля»
410
11. Управляемость автомобиля
ускорение измеряют в другой точке автомобиля с последующим пересчетом к
центру масс. Боковую составляющую ускорения центра масс можно также
вычислить по формуле
(11.16)
Минимальное cXpmjn и максимальное арвик значения угла поворота рулево?
го колеса регламентированы. Их вычисляют по соответствующим формулам
в зависимости от базы автомобиля L и передаточного числа рулевого привода
Up. В табл. 11.2 приведены формулы для определения значений ctpmln и apmM
при испытаниях автомобилей различных категорий.
Таблица 11.В.
Предельные величины углов поворота рулевого колеса автомобилей
Категория автомобиля Боковое ускорение, м/с® Радиус траектории м (ДЛЯ СПРАВОК^ . Угол поворота рулевого колеса, рад
минимальный максимальный
AG, ЛГ2, М 1 . 500 (O^lL+O^UplO-2 (0^1jL + 1^)up10-s
2 250 (0Д2£+0Д)ир-10-2 (042L+2^)up 10" 2
4 125 (0J84L+0,48)ир-1(Г 2 (OjB4L+5,0)Up-10-s
Afs, Ni, 1 280 (0361 +0,l)up. 10“ z (озбь+их-ю-2
2 140 (0,72L+0^Х 10" 2 (0,72L+2^)up-10-8
Характеристика траекторной управляемости автомобиля при установив-
шемся круговом движении — это зависимость кривизны траектории устано-
вившегося поворота автомобиля К от угла поворота рулевого колеса Ор.
Кривизну установившегося поворота К в каждом опыте определяют как
отношение угловой скорости со, к скорости автомобиля и:
К = <11.17)
v
При отсутствии датчика угловой скорости со, ее значение можно вычис-
лить из выражения
о,=—, (11.18)
где tKp — время проезда одного замкнутого круга, с.
По полученным в ходе эксперимента данным строят график зависимости
X = /(<Хр). Эта характеристика показана на рис. 11.2 (кривая 2). Прямая ли-
ния 1 на графике соответствует нейтральной поворачиваемости. Ее получают
при скорости движения 3—5 км/ч. При такой скорости сила инерции незначи-
тельна, и увод мостов практически отсутствует. Если полученная характери-
стика проходит выше линии 1, автомобиль обладает избыточной поворачивае-
мостью, а если ниже, то недостаточной. В приведенном примере при малых
11.4. Определение показателей управляемости автомобиля
411
углах поворота рулевого колеса ар получается недостаточная поворачивае-
мость, а при больших — избыточная. Такая характеристика, как отмечалось
в параграфе 11.2, наиболее предпочтительна.
Характеристика заброса угловой скорости автомобиля — это зависимость
заброса угловой скорости Дю, над ее установившимся значением ю, к после
входа в поворот от бокового ускорения ад. Пример такой характеристики по-
казан на рис. 11.6. Заброс угловой скорости не должен превышать величин,
приведенных в табл. 11.3.
Таблица 11.3
Предельные величины заброса утлпвой скорости автомобилей
Категория автомобиля Заброс угловой скорости, %, при боковом ускорении автомобиля, м/с*
1 и > 2 4
Mi 10 30 80
10 20 во
Ms.Ns.Ws 10 10 -
Аналогичная характеристика определяется и для прицепов. Предельные
значения заброса угловой скорости прицепа не должны превышать;
20 % — для категорий О}, Q, Qg и 10 % — для категории О4. Кроме того, для
прицепов характерен обратный заброс угловой скорости при входе в поворот,
(см. рис. 11.5. б). Характеристика обратного заброса угловой скорости при-
цепа — это зависимость обратного заброса реакции прицепа по угловой ско-
рости Д®л1,о от бокового ускорения а„. Обратный заброс угловой скорости
прицепа при боковом ускорении 3 м/с5 должен быть не более 10%.
Характеристика времени 90%-ной реакции автомобиля представляет со-
бой зависимость времени 90% -ной реакции автомобиля Д<ео% от бокового ус-
корения ад. Эта характеристика показана на рис. 11.7.
Рис. 11.6. Зависимость заброса угловой скоро-
сти автомобиля Дшт, прицепа в обратно-
го заброса угловой скорости прицепа Дсз^.п
от бокового ускорения
Рис. 11.7. Характеристика времени
90% -ной реакции автомобиля
(прицепа)
Время 90% -ной реакции автомобиля — это интервал времени (см. рис. 11.5)
между моментами достижения 50 % установившегося угла поворота рулево-
го колеса и 90 % установившегося значения угловой скорости автомобиля.
Аналогичная характеристика Д^»о%п определяется и для прицепа.
412
11. Управляемость автомобиля
Время Д^о% в интер! л боковых ускорений 2-4 м/с2 не должн превы-
шать 0,3 с для автомобилей категории Мi, Ms, Nt и 2 с — категорий М3 ,NS ,Nj.
Рекомендуемые цредельные значения времени составляют для кате-
горий автомобилей: — 0,6 с; М3 — 0,8 с; Мг — 3 с; NY — lc;Na — 2 с; Ns —
3 с. Аналогичная характеристика определяется и для прицепов. Рекомендуе-
мые предельные значения времени Д<ао%п для категорий прицепов: Q — 1,6 с;
0% — 2,6 с; Q — 4 с; О4 — б с.
Для определения показателей, характеризующих управляемость и устой-
чивость АТС в критических режимах движения, выполняют испытания «по-
ворот» и «переставка».
Испытания «поворот Дх =35 од предназначены для определения макси-
мальной скорости им>вшх, при которрй еще возможно выполнение данного ма-
невра при сохранении управляемости и устойчивости. Разметку маршрута
движения для этих испытаний осуществляют в соответствии со схемой, пред-
ставленной на рис. 11.8, а. Маршрут состоит из трех участков. Первый участок
прямолинейный. Он позволяет обеспечить исходное равномерное прямоли-
нейное движение и установить заданную начальную скорость маневра
Значение скорости контролируется и фиксируется датчиками 2. Второй
участок переходный. При пересечении границы между первым и вторым участ-
ками водитель быстро снимает ногу с педали акселератора и начинает пово-
рачивать рулевое колесо вправо для выполнения маневра. На третьем участке
совершается управляемый поворот и контролируется качество его выполнения.
Ширина коридора 1*1 первого участка для всех вариантов испытаний «по-
ворот», «переставка» и «прямая» приведены в табл. 11.4. Значение Dj зависит
от ширины АТС В*, измеряемой по крайним колесам на высоте от 0 до 150 мы
Рис. 11£. Разметка участков испытаний для выполнения маневров: о — «поворот Нв “35м«;
tf — «поворот Кш =25м»: 1 — вертикальные ограничители разметки коридоров движения;
2 — датчики измерения скорости (размеры в метрах)
11.4. Определение показателей управляемости автомобиля
413
от опорной поверхности дороги. Для АТС, размер Вк которых превышает 2,5 м,
значениепринимается на 0,5 м больше В*. Ширина криволинейного участка
= (3$ ±0,06) м. Точность разметки ширины коридора Dj составляет ±0Д м.
Таблица 11.4
Значения ширины коридора испытательных участков
Рпамер Д, АТС, м До 1.8 Св. 1,3 до 1,5 Св. 1.5 До 1,7 Св. 1,7 до 1,9 Св 1.» до 2,1 Св. 2,1 до 2,8 Св. 2,3 до 2,5
Ширина коридора Dt. м 1,7 1,9 2,1 2,3 2,6 2,7 2,9
При испытаниях совершается некоторое количество заездов, начальная
скорость в которых постепенно ступен4Я^о увеличивается. В первом заезде
принимают 0*0 = Oj6uK.B, где ии.ж — нормативное значение скорости выполне-
ния маневра. Значения ии.в для АТС рааЯЙ^ных категорий при выполнении
маневров «поворотЛ,, = 85м» и «переставай Вц = 20 м» приведены в табл. 11.5.
Таблица 11 j5
Нормативные значения скоростей имм, км/ч
выполнения маневра «поворот Я„ =35м* (иж и1) н «перестлана е0 =20м»
Категория АТС Mi Afj м, № Ns Авто- поезд
£<8м 8 S L£12 и £>12м т,£20т тп, >20т
Ц|.«1 72 60 66 51 48 60 60 49 46 42
83 71 63 66 62 70 59 56 64 47-62
Результаты выполнения маневра контролирует наблюдатель, находящийся
вне АТС. Кроме того, при испытаниях регистрируют угол поворота рулевого
колеса ар. Форма графика ctp = f(t) и максимальная величина ар позволяют
судить о наличии заноса или выхода за пределы коридора. Если в очередном
заезде при S 1j05ok,k обеспечивается устойчивое управляемое движение,
отсутствует занос мостов или отрыр колес от дороги, АТС не выходит за пре-
делы коридора, то испытания заканчивают и констатируют выполнение нор-
мативных требований к управляемости автомобиля по определяемому пара-
метру омлмх. Если же одно из отмеченных явлений неустойчивого движения
возникает при < им н, зто свидетельствует о неудовлетворительных резуль-
татах испытаний.
Для автомобилей многоцелевого назначения категории N вместо испыта-
ний «поворот Ед = 35м» допускается проводить испытания «поворот/^ = 25м»
(рис. 11.8, б}. В этом случае водитель на всем маршруте управляет педалью
акселератора, поддерживая постоянную скорость на протяжении всего заезда.
Размеры коридоров В, и Dg устанавливаются по согласованию с заказчиком.
Участки 4 и б на маршруте ♦ поворот Д, = 25м» размечаются только при испы-
таниях автомобилей с задними управляемыми колесами.
Испытания «переставка а. =20 м» предназначены для определения макси-
мальной скорости маневра 1>МЛШХ при смене полосы движения на ограниченном
414
11. Управляемость автомобиля
участке пути. Схеме разметки участка испытаний «переставка» представле-
на на рис. 11.9. Методика проведения испытаний аналогична рассмотренной
выше для маневра «поворот = 35 м». Маршрут испытаний также состоит
из трех участков. Маневр начинают совершать не границе первого и второго
участков. Оценка результатов испытаний осуществляет я по параметрам
движения на третьем участке. Нормативные значения скорости ои.к выпол-
нения маневра «переставка «ц =20 м» приведены в табл. 11.5. Если в заезде
при о„о £1,05и„л обеспечивается устойчивое управляемое движение, прини-
мают Омлаах = уи0 и испытания прекращают.
Направление
движения
Участок! Участок! Участок 3
Рис. 11.6. Равметка участка испытаний для выполнения маневра «переставка ап =20м»:
1 — вертикальные ограничители разметки коридоров движения; 2 — датчики измерения
скорости (размеры в метрах)
При испытаниях «переставка 8ц = 20м» также определяют характеристики
зависимостей углов цр и скоростей Ор поворота рулевого колеса от скорости
автомобиля о во всех заездах. При этом осуществляют измерение и регистра-
цию изменения а*, во времени t (рис. 11.10, а). При испытаниях автопоезда
одновременно получают запись изменения курсового угла прицепа уп во вре-
мени ((рис. 11.10,6).
На рис. 11.10, а обозначены; ар1 — угол поворота рулевого колеса, необхо-
димый для выведения автомобиля с участка 1 на участок 3 переставки; ар2 —
угол повороте, необходимый для Перехода к прямолинейному движению
Рис. 11.10. Изменение угла поворота а,, рулевого колеса (а) и курсового угла у„ прицепа (б)
во времени при испытании «переставка ал =20м»
11.4. Определение показателей управляемости автомобиля
415
на участке 3; ар8 — угол поворота, необходимый для ликвидации заноса авто-
мобиля при его движении на участке 3. \
Заезды осуществляются при различных скоростях, что дает возможность
получить зависимости «р1 = f(v), = /(о), а также характеристики скоро-
стей поворота рулевого колеса на участках 2 и 3 переставки соответственно
0^2 - f(y) и <Орэ = f(v). Зависимости apj = f(y) п = /(и) называют характери-
стиками углов поворота рулевого колеса при заданной переставка, а зависимо-
сти Юрз = f(y) и (Bp8 = f(u) — характеристиками скоростей поворота рулевого
колеса при заданной переставив. Графики этих характеристик показаны на
рис. 11.11.
Рие. 11.11. Характеристики углов и скоростей
поворота рулевого колеса при переставив
Скорости поворотов рулевого колеса определяют по формулам:
CJpj п, (11.19)
О)ра (11.20)
tija
где tL2 — время между первым ар1 и вторым ар2 максимумами угла поворота
рулевого колеса; —- время между вторым ар2 и третьим максимумами
угла поворота рулевого колеса (см. рис. 11.10, а).
Исследования процессов движения автомобиля при выполнении маневров
«переставка* и «поворот* можно Также осуществлять на основе математиче-
ского моделирования, используя дифференциальные уравнения криволи-
нейного движения автомобиля (9.61), (9.62). Поперечные реакции иЛ^,
входящие в эти уравнения, вычисляются по формулам (9.46), (9.47). Прн
этом необходимо учитывать ограничения по сцеплению колес с дорогой, ис-
пользуя выражение (1.61).
416
11. Управляемость автомобиля
Задавая функцию воздействия на рулевое колесо ар = /(f) и интегрируя
уравнения (9.61), получают искомые функции изменения во времени угло-
вой скорости.вращения автомобиля со, - /(f), продольной vx = f(t) и попереч-
ной vg = f(t) составляющих скорости его центра масс. Начальные условия
интегрирования: = 0, щ,0 = 0, аи20 принимают равным начальной скорости
маневра Используя одновременно систему дифференциальных уравне-
ний (9.74), определяют траекторию движения автомобиля.
Среднюю угловую скорость корректирующих поворотов рулевого колеса
(подруливания) определяют при прямолинейном движении в размечен-
ном коридоре длиной не менее 400 М (испытания в прямая в). Ширинакоридо-
ра соответствует значениям, приведенным в табл. 11.4. Испытания проводят
при следующих скоростях: 80 км/ч — для АТС категории в том числе
с прицепом; 70 км/ч — для категории Afs; 60 км/ч — для остальных катего-
рий, в том числе с прицепами. Выполняют не менее 10 заездов, измеряя и ре-
гистрируя при атом угол поворота рулевого колеса ар и время прохождения
мерного участка. Значение й^.ср определяют как отношение суммарного угла
поворота рулевого колеса ^Ор по всем заездам к суммарному времени t всех
заездов:
О'р-ср =
(11.21)
где (£0,), — суммарный угол поворота рулевого колеса в i-м испытательном
заезде; t( — время t-ro испытательного заезда; п — количество зачетных заез-
дов.
Средняя скорость поворота рулевого колеса на прямолинейном участке
дороги не должна превышать: 8 град/с — для автомобилей категории Afj
10 град/с — категорий Af2,Ni; 12 град/с — категорий Afa, N2; 14 град/с — ка-
тегории N9.
Кроме испытаний в критических режимах движения ГОСТ Р 52302-2004
предусматривает оценку управляемости и устойчивости АТС в эксплуатаци-
онных режимах. Эти испытания проводят на специальных дорогах автополи-
гона. Траекторная и курсовая управляемость и устойчивость оценивается
при движении АТС на размеченных участках (рис. 11.8 и 11.9). Оценка про-
изводится в баллах по субъективным ощущениям испытателя (органолепти-
ческим методом). Используется шкала оценок, приведенная в табл. 11.6.
Оценки выставляют исходя из следующих положений.
Балл 5 — водитель не ощущает затруднений при управлении АТС.
Балл 4 — водитель начинает ощущать небольшие затруднения, заклю-
чающиеся в появлении некоторого несоответствия реакции АТС на управ-
ляющее воздействие (по моменту его начала и амплитуде) по отношению
к желаемой.
J1.4. Определение показателей управляемости автомобиля
417
Таблица 11.С
Шкала балльных оценок устойчивости управления АТС
Оценка Балл
Удовлетворительные оценки Отлично, улучшать не требуется Между хорошо и отлично Хорошо, желательно улучшить Между посредственно и хорошо Посредственно, необходимо улучшить Между посредственно и плохо Неудовлетворительные оценки Плохо Очень плохо б 4,5 4 3,5 3 2,5 3 1
Балл 8 — водитель ощущает значительные затруднения в управлении ско-
ростью, замедлением, траекторией, стабилизацией курса и крена. При вы-
ставлении этой оценки безопасное движение возможно при максимальном
внимании к управлению АТС i
Балл 2 — водитель работает на пределе своих возможностей. Минималь-
ная ошибка в выборе момента приложения и величины управляющего воз-
действия приводит к потере управляемости и устойчивости АТС.
Балл 1 — устойчивое управление АТС невозможно.
Допустимые значения измерителей устойчивости управления автотранс-
портными средствами различных категорий в эксплуатационных режимах
движения приведены в табл. 11.7.
Таблица 11.7
Допустимые значения показателей устойчивости улравлевхя АТС
Показатель Оцевка в баллах для категории АТС
м. м; мг* м2 м, у. я» Автопо- «одаАГ
Траекторная и курсовая управляемость 4,5 4 4 4 4 4 4 3,5 8,5
Траекторная ус- тойчивость 4,5 4 4 4 4 4 4 3,5 3,5
Курсовая устойчивость 4,5 4 4 4,5 4,5 4 4 4 3,5
Устойчивость против опроки- дывания 6 4,5 . 4 5 5 4 4 4 4
Управление ско- ростью 4 4 4 4 4 4 4 3,5 8,5
14 Зак. J4M
418
11. Управляемость автомобиля
Продолжение табл. 11.7
Показатель Оценка в баллах для категории АТС
Mi ЛГ,“ Mt JVl Na N> Автопо- езда JV
Управление замедлением 4 3,5 4 4 4 3,5 3,5 8,6 8,5
Траекторная ус- тойчивость при торможении 4 8,5 4 4 4 3,5 8,6 3,6 3,5
Курсовая устой- чивость при тор- можении 4 3,5 4 4 4 8,6 8,5 3,5 3,5
Маневрирование в ограниченном пространстве 4.5 4 4 4 4 4 4 3,5 8,5
* АТС по>) шеивой проходимости.
•* Аэтоповадд Mi.
Для определения траекторной управляемости автопоезда проводят дйа ис-
пытания: при движении по круговой траектории и при переходе с круговой
на прямолинейную траекторию движения.
Прицепной автопоезд, находящийся в неподвижном состоянии, когда тягач
и прицеп располагаются соосно {на одной линии), трогается с места и перехо-
дит на круговую траекторию радиусом 25 м, на которой разгоняется с ускоре-
нием 2 ±0,2 м/с2 до скорости 20 км/ч. При этом относительные перемещения
тягача и прицепа не должны создавать трудности водителю в управлении ав-
топоездом. После стабилизации движения по круговой траектории водитель
снижает скорость автопоезда до 5 км/ч и поворачивает тягач таким образом,
чтобы его передняя внешняя крайняя точка перемещалась по окружности
радиусом 25 м. При этом измеряют радиус окружности^ (рис. 11.12, а), опи-
Рис. 11.12 Схема испытаний автопоезда: а — при движении при Крутовой траектории;
б — при переходе с круговой на прямолкаейнук» траекторию
11,5. Маневренность автомобиля
419
сываемой задней внешней крайней точкой прицепа. Затем такой же маневр
повторяют при скорссти25± 1 км/ч. при выполнении которого задняя внешняя
крайняя точка прицепа, движущаяся по радиусу окружности^, не должна
выходить за пределы окружности радиусом Ri более чем на ДЛ ~ = 0,7 м.
При переходе автопоезда с круговой траектории радиусом 25 м (рис. 11.12,6)
со скоростью 25 км/ч на прямолинейную траекторию, расположенную по ка-
сательной к упомянутой окружности, ни одна из точек прицепа не должна
выходить за пределы касательной на величину Л, большую 0,5 м. Это требова-
ние должно соблюдаться на участке касательной длиной L = 40 м, отсчитанной
от точки ее соприкосновения с окружностью. За пределами этого участка при-
цеп должен двигаться по прямолинейной траектории, находясь на одной ли-
нии (соосно) с тягачом во всем диапазоне скоростей движения до 80-90 км/ч.
11.5. Маневренность автомобиля
Маневренность — совокупность свойств, характеризующих возможно-
сти автомобиля изменять заданным образом свое положение на ограничен-
ной площади в условиях, требующих движения по траекториям большой
кривизны с резким изменением направлений, в том числе и задним ходом.
В Правилах ЕЭК ООН Na 36, 79,102,107 установлены следующие показа-
тели маневренности автомобилей:
а минимальный радиус поворота ;
□ внешний габаритный радиус поворота ЯГ1й.пи1,.;
□ внутренний габаритный радиус поворота J4«6.rain!
□ поворотная ширина автомобиля по следу колес
□ габаритная полоса движения
□ удельная сила тяги Гт.уя, необходимая для совершения поворота;
□ коэффициент использования силы сцепления колес при повороте;
□ усилие на рулевом колесе F? при повороте управляемых колес на месте.
Схемы определения геометрических показателей маневренности Rmih,
Brats may, Ягай.ийп' &п и -Вг*б одиночного автомобиля и автопоездов показаны со-
ответственно на рис. 11.13 и рис. 11.14.
Минимальным радиусом поворота называют расстояние от мгновен-
ного центра вращения О до оси следа переднего внешнего колеса при макси-
мальных углах поворота управляемых колес (рис. 11.13).
Внешний габаритный радиус поворота .Кмв.них — расстояние от точкиО до
наиболее удаленной от нее точки автомобиля.
Внутренний габаритный радиус поворота — расстояние от точки
Одо ближайшей от нее точки автомобиля.
В предложениях экономической комиссии ЕЭС регламентированы значе-
ния Кпл.тлх и Kms.nun • Первый не должен превышать 12,5 м, а второй — быть
не менее 5,3 м.
Такие же величины минимального внешнего и минимального внутренне-
го радиусов поворота установлены Правилами ЕЭК ООН № 36 и Nf 107 для ав-
426
11. Управляемость автомобиля
тобусов большой вместимости и Правилами ЕЭК ООН №102 для грузовых
автопоездов с тягачами категорий N? и ^я и прицепами 0^ и О4, оборудован»
ных укороченным сцепным устройством.
Рис 11,14. Определение показателей маневренности автопоевдов:
а — с двухосным прицепом; б — с полуприцепом
РадиусыДП1П,Ягвв.п1*х K^*s.nUn характеризуют площадь, необходимую для
маневрирования и разворота одиночного автомобиля и автопоезда.
Поворотная ширина автомобиля по следу колес равна разности рас-
стояний от точки Одо осей следов наиболее удаленного от нее и наиболее при-
ближенного к ней колес:
Вл (И-22)
Значение Д, в международных и национальных нормативных документах
не нормируется, за исключением законодательства Германии, согласно кото-
рому поворотная ширина автопоезда не должна превышать 5,5 м.
11.5. Маневренность автомобиля
421
Габаритная полоса движения ВТвв равна разности радиусов поворота то*
чек, наиболее удаленной и наиболее приближенной к центру поворота:
= 2?гав.пих -/?г*в.ю1л • (11.23)
Правилами ЕЭК ООН Ni Зв, 102,107 для одиночных и сочлененных авто-
бусов, а также грузовых автопоездов с укороченными сцепными устройства-
ми установлена габаритная полоса движения 7,2 м при внешнем габаритном
радиусе поворота 12,5 м.
Кроме того, в названных нормативных документах вводится ограничение
на перемещения точки Т (рис. 11.15) при повороте транспортного средства.
Когда транспортное средство находится в неподвижном состоянии, а его
управляемые колеса повёрнуты вправо или влево так, чтобы при последую-
щем движении наиболее выступающая передняя точка кузова или бампера
описывала окружность радиусом 12,5 м, на поверхности дороги прочерчива-
ют след Т-Т вертикальной плоскости, касательной к внешней по отношению
к центру поворота поверхности транспортного средства. Для сочлененного
транспортного средства след этой плоскости прочерчивают, когда жесткие
секции расположены по одной прямой. При движении транспортного средст-
вапо окружности радиусом 12,5 м ни один его элемент не должен выходить за
названную вертикальную плоскость более чем на 0,8 м — для одиночного
транспортного средства(рис. 11.15, а) и более чем на 1,2 м — для сочлененно-
го транспортного средства (рис. 11.15, б).
Рис. 11.16. Схема определения маневренности автобусов:
а — одиночного; О — сочлененного
4П
11. Управляемость автомобиля
Поворотная ширина и габаритная полоса движения характеризуют шири-
ну коридора, необходимого для совершения крутых поворотов, а также воз-
можность движения в проездах заданной формы и размеров.
Удельная сила тяги Гт , необходимая для совершения поворота, пред-
ставляет собой отношение силы тяги на ведущих колесах Гт к силе тяжести
автомобиля G„ - т^при повороте с минимальным радиусом и минимальной
устойчивой скоростью » б км/ч. Значение Гт уд определяется по формуле
Гт _ Мк,в
тЛ8 magrK ’
(11.24)
где Мк.а — суммарный вращающий момент на ведущих колесах, необходи-
мый для преодоления суммарного момента сопротивления качению Afy
при движении автомобиля с минимальным радиусом поворота
Чем меньше Г,.уд, тем меньше нагружается двигатель при переходе авто-
поезда от прямолинейного движения к криволинейному с крутыми поворота-
ми. Как отмечалось в параграфе 9.1, при повороте автомобиля значительно
возрастают потери на качение в связи с боковым уводом колес, поэтому
существенно увеличивается по сравнению с прямолинейным движением.
Коэффициент использования силы сцепления колес при повороте опре-
деляется для /-го моста. Он представляет собой отношение
. (11.25)
где, Rul, Пг1 — продольная, поперечная и нормальная реакции, действую-
щие на колеса i-ro моста при повороте автомобиля; <р— коэффициент сцепле-
ния колее с дорогой.
Чем меньше тем выше потенциальная возможность автомобиля или
автопоезда к совершению крутых поворотов и меньПю вероятность снижения
маневренности.
Рекомендуемые ГОСТ Р 52302-2004 величины усилий на рулевом колесе
Fp при повороте управляемых колес приведены в табл. 11.1.
Сравнивая схемы поворота автотранспортных средств, представленные на
рис. 11.13 и рис. 11.14, можно отметить, что маневренность автопоездов
значительно хуже маневренности одиночных автомобилей. Это обусловлено
смещением прицепа (или полуприцепа) к центру поворота. Для уменьшения
габаритов поворота длинных автопоездов управляемыми делают колеса по-
луприцепа. Схема поворота такого автопоезда показана на рис. 11.16.
С этой же целью у автомобилей выполняют управляемыми передние и зад-
ние колеса. Особенно часто это используется у многоосных автомобилей.
Если повернуть передние и задние колеса двухосного автомобиля на одинако-
вые углы в противоположные стороны, то радиус поворота уменьшится вдвое
по сравнению с поворотом колес только одного моста. Мгновенный центр
поворота О у такого автомобиля находится внутри его базы и при отсутствии
11.5. Маневренность автомобиля
423
бокового увода расположен на одинаковом расстоянии от осей переднего и
заднего мостов, равном 1/2 (рис. 11.17). Кинематический радиус поворота Д,
в этом случае определяется по формуле
. (11.26)
2tg6
Однако такая схема поворота имеет и недостатки: затрудняется отъевд ав-
томобиля от стенки или бордюра тротуара, если он стоял вплотную к ним;
ухудшается устойчивость движения при входе автомобиля в поворот. Ухуд-
шение устойчивости объясняется тем, что на начальном и конечном этапах
Рис. 11.17. Схема поворота двухосного автомобиля
со всеми управляемыми колесами
424
11. Управляемость автомобиля
входа в поворот угол увода колес заднего моста меняет свое направление, вре-
зультате изменяется и направление действия боковой силы на колеса. Это
приводит к тому, что на начальном этапе возникает дестабилизирующий мо-
мент, а затем он изменяется на стабилизирующий, способствующий возврату
колес в нейтральное положение.
Отметим также, что при необходимости уменьшения радиуса поворота Д,
более эффективно уменьшать базу автомобиля L, чем увеличивать углы пово-
рота управляемых колес 6.
Вопросы для самоконтроля
1. Что такое управляемость автомобиля?
2. Какие показатели управляемости вы знаете и каковы способы их определения?
8. Что такое органолептический метод оценки управляемости автомобиля?
4. Что такое характеристика траекторной управляемости? От каких парамет-
ров автомобиля она зависит? Напишите формулу для ее определения.
Б. Какова оптимальная характеристика траекторной управляемости?
б. Как оценивается чувствительность автомобиля к повороту? От каких пара-
метров автомобиля она зависит?
7. Каковы виды графиков переходных характеристик, получаемых при рывке
руля? Какими показателями характеризуются переходные процессы?
8. Что такое заброс угловой скорости автомобиля, обратный заброс угловой ско-
рости прицепе? При каком виде испытаний они определяются?
9. Как проводятся испытания автомобиля при определении характеристики
траекторной управляемости?
10. Какие виды маневров используются при испытаниях автомобилей по оценке
управляемости?
11. Какие характеристики определяют при испытаниях «переставка»?
12. Какие виды испытаний проводят при оценке управляемости автопоездов?
Проходимость автомобиля
Проходимость автомобиля — комплексное свойство, характеризующее
его подвижность и эффективность использования в конкретных условиях.
Показатели проходимости характеризуют возможность и эффективность
выполнения транспортных работ в тяжелых дорожных условиях. Степень
подвижности автомобиля характеризуется уровнем потери проходимости.
Потеря проходимости может быть полной или частичной. При полной потере
проходимости происходит застревание — прекращение движения. Частич-
ная потеря проходимости связана со снижением скорости движения и увели-
чением расхода топлива.
Факторы, влияющие на потерю проходимости:
□ задевание выступающих частей автомобиля за неровности дороги или
местности;
□ продольные и поперечные уклоны, вызывающие опасность опрокиды-
вания;
а препятствия, создающие большие сопротивления движению и непре-
одолимые либо из-за недостаточных тяговых свойств, либо из-за ограниче-
ний по сцеплению ведущих колес с опорной поверхностью;
□ препятствия, способные вызвать затопление автомобиля (топкие боло-
та, водные преграды).
Все препятствия можно разделить на две группы: препятствия, обуслов-
ленные профилем дороги или местности; препятствия, обусловленные сла-
бой несущей способностью опорной поверхности. В связи с этим различают
профильную и опорно-сцепную проходимость. Способность автомобиля пре-
одолевать названные препятствия оценивается двумя группами показателей
проходимости:
□ показателями профильной проходимости;
Q показателями опорно-сцепной проходимости.
Проходимость автомобиля в значительной мере зависит от его колесной
формулы, которая составляется из двух цифр. Первая цифра соответствует
общему числу колес автомобиля, а вторая — числу ведущих колес- Например,
колесная формула двухосного автомобиля с одним ведущим мостом имеет вид
4x2, а с двумя ведущими мостами (полноприводного) — 4x4. По уровню тре-
бований к показателям проходимости автомобили делят на три категории:
ограниченной, повышенной и высокой проходимости.
Дйтполнэбили ограниченной проходимости (дорожные автомобили) пред-
назначены для эксплуатации на дорогах с твердым покрытием и грунтовых
дорогах в сухое время года. К ним относятся автомобили с колесными форму-
лами 4x2,6 х2,6 х4,8x4
Автомобил и повы шеи ной проходимости имеют привод на все коле са (4 х 4,
6x6 и т.д.), более сложную трансмиссию (обычно с раздаточной коробкой
426
12. Проходимость автомобиля
и межосевыми дифференциалами), шины с пониженным или регулируемым
давлением воздуха. В дифференциалах трансмиссии применяют механизмы
блокирования с командным или автоматическим управлением. Широко ис-
пользуются дифференциалы повышенного трения и самоблокирующиеся
дифференциалы. Для самовытаскивания застрявшего автомобиля преду-
сматривают установку лебедки.
Летолсобили высокой проходимости — это специальные автомобили для
работы в условиях бездорожья. Они обладают способностью преодолевать ка-
навы, вертикальные уступы, большие подъемы и др.
Отдельную группу составляют специальные автомобили. Они создаются
для эксплуатации в определенных условиях: заболоченная местность, песча-
ная местность, глубокий снег и др.
12.1. Профильная проходимость
Показатели профильной проходимости характеризуют возможности ав-
томобиля преодолевать неровности и препятствия на пути движения и впи-
сываться в требуемую полосу движения на дороге. Часть этих показателей
совпадает с показателями устойчивости и управляемости, рассмотренными
в главах 10 и 11. Рассмотрим показатели, характеризующие проходимость
автомобиля в вертикальной плоскости. Значения ряда показателей норми-
рованы и приведены в следующих нормативных документах: Правила ЕЭК
ООН № бб и 102; ГОСТ 22653-77; ГОСТ 2349-75; ГОСТ 12105-74; ОСТ
37.001.061-74.
Дорожный просвет — это расстояние Лд п от низшей точки автомобиля до
плоскости дороги (рис. 12.1), характеризующее возможность движения по
деформируемым опорным поверхностям и преодоления без задевания еди-
ничных препятствий — камней, пней, кочек и т.п.
Рис. 12.1. Определение показателей продольной проходимости автомобиля
В технике эксплуатационных требованиях (ТЭТ) восточноевропейских
стран указаны минимальные значения дорожных просветов грузовых авто-
мобилей и автопоездов общего назначения, приведенные в табл. 12.1.
12.1. Профильная проходимость
427
Таблица 12,1
Дорожвые просветы автомобилей различных категорий
Категория автомобиля I II III IV V vi-vm IX X
Полвая масса,т .1,76 2,5 3,5 5,2 8,3 12-18,5 16,5 27
Дорожный просвет, мм 160 180 200 220 245 260 270 270
Значения дорожного просвета автомобилей, производимых в странах
СНГ, находятся в следующих пределах: грузовые дорожные автомобили —
170-360 мы; автобусы — 165-340 мм; легковые автомобили — 150-180 мм;
автомобили повышенной проходимости — 220-400 мм; полноприводные ав-
томобили сельскохозяйственного назначения — 340-400 мм.
Передний Д, и задний Д свесы (рис. 12.1) определяются как расстояния
между проекциями на плоскость дороги крайних точек выступающих частей
поперечного контура автомобиля и осями вращения ближайших колес.
Величина заднего свеса автобусов в европейских странах и в странах СНГ
регламентируется нормативными документами и составляет 60-67 % от
базы L, но не должна превышать 3,5 м.
Значения переднего и заднего свесов влияют на проходимость автомобиля
при переезде через канавы, кюветы, пороги и другие препятствия. Чем меньше
свесы, тем выше проходимость при преодолении единичных препятствий.
Углы переднего ув и заднего ув свесов представляют собой углы между
опорной поверхностью и плоскостью, касательной к окружностям соответст-
венно передних и задних колес и к таким точкам выступающих передней
и задней частей автомобиля, для которых эти углы минимальны.
Углы свеса автомобилей, выпускаемых в странах СНГ, находятся в сле-
дующих пределах: грузовые дорожные автомобили — уп = 20-42°, ув = 11-63°;
автобусы — уп = 7-39°, у, = 7-36°; легковые автомобили — уп = 20-38°,
ув = 12-44°; автомобили повышенной проходимости — уп = 32-52°,
у„ = 27-65°; автомобили высокой проходимости — уп = 19-43°, у„ =30-52°.
Большие углы свеса обеспечивают возможность преодоления автомоби-
лем коротких единичных препятствий без задевания за них выступающими
частями.
Продольный клиренс Хпр(рис. 12.2) — минимальный острый угол между
двумя плоскостями, которые расположены перпендикулярно к средней про-
дольной плоскости автомобиля и проходят по касательным к передним и зад-
ним колесам. Угол определяет наибольший перекат, который может быть
преодолен автомобилем.
Продольный радиус проходимости Ищ> (рис. 12.1 и 12.3) равен радиусу
окружности, касательной к окружностям колес и одной из низших точек
в пределах базы автомобиля £. Все остальные точки автомобиля должны на-
ходиться вне этой окружности. Согласно ГОСТ 22748-77 продольный радиус
42*
12 Проходимость автомобиля
Рис. 12.2, Определение продольного клиренса
проходимости многоосного автомобиля (рис. 12.3, а) определяют между все-
ми смежными мостами при последовательном подъеме до упора колес всех
мостов, кроме первого и последнего, и берут большее из найденных значений
^прь Дфа» • У трехосного автомобиля с балансирной подвеской Мостов те-
лежки (рис, 12.8, б) продольный радиус проходимости находят при подъеме
колес среднего моста до полной деформации буфера, когда начинается отрыв
колес заднего моста от опорной поверхности. У седельного автопоезда, состоя-
щего из трехосного седельного тягача и двухосного полуприцепа с балансир-
ными подвесками мостов тележек (рис. 12.8, в), значение Лщ, тягача измеряют
по схеме, показанной на рис. 12.8, б, и дополнительно определяют Ящ, полу-
прицепа при подъеме колес заднего моста тягача и колес переднего моста те-
лежки полуприцепа до полной деформации буферов, когда начинается отрыв
колес среднего моста тягача и колес заднего моста тележки полуприцепа от
опорной поверхности.
Рис. 12.2. Схемы для определения продольного радиуса проходимости: а — многоосного
автомобиля; В—трехосного автомобиля с балансирной подвеской мостов; е — седельного
автопоезда с балансирными подвесками мостов тележек
12.1, Профильная проходимость 429
Значения находятся в пределах: у грузовых автомобилей — 2,Б-6,0 ы;
у автобусов — 4-9 м; у легковых автомобилей — 3-8 м.
Продольный радиус проходимости характеризует возможность преодоле-
ния автомобилем выпуклых препятствий (складок местности, насыпей, бугров
и др.). Чем меньше Др, тем лучше проходимость автомобиля. С уменьшением
базы автомобиля Др уменьшается.
Поперечный радиус проходимости Дот (рис. 12.1) равен радиусу окруж-
ности, касательной к колесам данного моста и поверхности поперечного кон-
тура нижней части автомобиля. Этот показатель определяет возможность
преодоления поперечных неровностей, ширина которых соизмерима с колеей
автомобиля. Чем меньше Д^, тем лучше проходимость автомобиля. С умень-
шением колеи В автомобиля значение Д^ уменьшается.
Углы гибкости используют для оценки профильной проходимости сочле-
ненных автотранспортных средств — прицепных и седельных автопоездов.
На автомобиль-тягач прицепного автопоезда устанавливают тягово-сцепное
устройство, представляющее тяговый крюк или тяговую вилку, на прицепе
шарнирно закрепляют дышло, передний конец которого в форме сцепной
петли или кольца взаимодействует с крюком или вилкой тягача. На седель-
ном тягаче закрепляют седельно-сцепное устройство, представляющее опор-
ный круг, в отверстие которого входит сцепной шкворень полуприцепа.
У автопоездов различают углы гибкости в вертикальной и горизонтальной
плоскостях. Для прицепного автопоезда (рис. 12.4) вертикальный продоль-
ный угол гибкости а и горизонтальный угол гибкости р представляют углы
возможного отклонения оси дышла прицепа от оси тягово-сцепного устрой-
ства тягача, а вертикальный поперечный угол гибкости у — угол поворота
прицепа вокруг продольной оси относительно автомобиля-тягача. Для седель-
ного автопоезда (рис. 12.6) углы гибкости аир образуются соответствующими
предельными положениями продольных осей седельного тягача и полуприце-
па, угол гибкости у — поперечным наклоном полуприцепа относительно тягача
(при наличии в седельно-сцепном устройстве третьей степени свободы).
Рис. 12.4. Определение углов гибкости прицепного автопоезда
430
12. Проходимость автомобиля
Рис. 12.5 Определение углов гибкости седельного автопоезда
В соответствии с ГОСТ 22748-77 углы вертикальной продольной гибкости
седельного автопоезде а: и ag (рис. 12.6, а) измеряют между опорным листом
полуприцепа и верхними полками рамы тягача при отклонении вверх соот-
ветственно переднего и заднего мостов тягача. Углы вертикальной поперечной
гибкости седельного автопоезда "ft и уа (рис. 12.6, б) определяют измерениями
между опорным листом полуприцепа и плоскостью верхних полок рамы тя-
гача при последовательном отклонении вверх левого и правого колес заднего
моста тягача.
В соответствии с ГОСТ 2349-75 при снятых буферах автомобиля-тягача
и сучетом поворота прицепа относительно автомобиля-тягача вокруг продоль-
Рис. 12.6. Схема для определения углов гибкости седельного автопоезда:
а — в вертикальной продольной плоскости; б — в вертикальной поперечной плоскости
12.1. Профильная проходимость
431
ной оси на угод не более ±15е углы гибкости должны быть в вертикальной про-
дольной плоскости для автопоездов общетранспортного назначения не менее
±40° и для многоцелевых автомобилей повышенной проходимости не менее
±62°, в горизонтальной плоскости для всех авто обил ей и тягачей не менее ±55°.
По ГОСТ 12106-74 для седельных автопоездЬв угол вертикальной про-
дольной гибкости должен быть не менее ±8°, а угол горизонтальной гибко-
сти — не менее ±90° при поперечном наклоне полуприцепа относительно
тягача (в случае наличия третьей степени свободы) на угол 8°; при этом пово-
рот полуприцепа в горизонтальной плоскости до ±2 5е должен быть возможен
при его продольном наклоне на угол 8° и поворот на ±(25- 90)° при изменении
продольного угла наклона в пределах 8-0° в конце поворота, а при наличии
третьей степени свободы — в пределах 8-3°.
В соответствии с ГОСТ 25907-89 угол гибкости, обеспечиваемый бук-
сирным устройством грузового автомобиля, должен быть в вертикальной
продольной плоскости для дорожных автомобилей не менее ±15°, а для авто-
мобилей высокой проходимости — не менее ±45°; в горизонтальной плоско-
сти — не менее ±50°.
Легковые автомобили оборудуют тягово-сцепными устройствами шарового
типа, которые цреднаэначены для буксировки легких прицепов с полной кон-
структивной массой не более 350Q кг. ИСО 1103—76 и ГОСТ 28248—89 регла-
ментируют размеры свободного пространства вокруг шарового пальца тяго-
во-сцепного устройства, которое должно обеспечивать возможность отклонения
замкового устройства прицепа относительно сцепного шара на угол не менее
±25° в вертикальной продольной плоскости и не менее ±60° в горизонтальной
плоскости.
По углам вертикальной гибкости оценивают способность автопоезда дви-
гаться по пересеченной местности с продольными и поперечными уклонами
и единичными неровностями, а по углам горизонтальной гибкости — способ-
ность автопоезда маневрировать на ограниченном пространстве.
Угол перекоса мостов автомобиля ук (рис. 12.7) — равен сумме углов пе-
рекоса переднего и заднего мостов относительно горизонтальной
плоскости. Угол перекоса моста — это угол поворота его относительно про-
дольной оси автомобиля. Перекос мостов автопоезда определяют экспери-
ментально одновременно с определением углов его вертикальной поперечной
гибкости. У автомобилей, имеющих ведущие мосты, которые соединены ме-
жду собой балансирной подвеской и образуют тележку, определяют также
угол перекоса мостов тележки.
Рис, 12.7, Схема определения углов перекоса мостов автомобиля
432 12. Проходимость автомобиля
Перекос ведущих мостов вызывает перераспределение нормальных реак-
ций опорной поверхности на ведущие колеса, что при наличии простых шесте-
ренчатых межколесных и межосевых дифференциалов приводит к уменьшению
суммарного реализуемого вращающего момента Мял по условиям сцепления
колес и тем самым к снижениюпроходимости. Значения углов ум зависят от
типа подвески. Независимая и балансирная подвески допускают большие пере-
косы мостов, чем зависимые. При недостаточных углах уы отдельные колеса
могут отрываться от грунта. Если это произойдет с колесами ведущего моста,
то движение автомобиля окажется невозможным, так как будет исключена
возможность реализации тягового момента Мк.в.
Коэффициент совпадения следов передних и задних колес T|M автомобиля
(рис. 12.8) — отношение ширины следов соответственно за передним ftcan
и задним бед., колесами:
По. “ ^ОЛ-П
Рис. 12 JS. Схема для определения Коэффициента совпадения следов
передних и задних колес автомобиля
Коэффициент г|м определяют при условии, что колея передних и задних
колес одинакова. Чем ближе т]сл к единице, тем меньше сопротивление каче-
нию колес на деформируемой опорной поверхности. Исключение составляет
случай движения по поверхности, материал которой находится в текучем со-
стоянии, например по болоту.
ШиринарваЬр — наибольшая ширина рва, преодолеваемого в поперечном
направлении при движении автомобиля на низшей передаче в трансмиссии
под прямым углом к его оси.
Возможность преодоления рва определяется числом и расположением
мостов, колесной формулой, размером колес и положением центра масс авто-
мобиля. Для двух- и трехосных автомобилей ширина преодолеваемого рва за-
висит от размеров колес и колесной формулы. Такие автомобили способны
преодолеть ров с прочными Кромками шириной до (1,0-1,3)гс. Ориентировоч-
но ширину рва, преодолеваемого многоосными автомобилями, можно опре-
делить по выражению ftp - 0,2/1(пм -1), где — продольное расстояние от оси
передних колес до центра масс автомобиля; — число мостов.
Высота вертикальной стенки (эскарпа) Л, ет — наибольшая высота стен-
ки, преодолеваемой автомобилем при движении на низшей передаче в транс-
миссии под прямым утлом к ней.
1.2.1 Профи ьная проходимость
433
Глубина брода —- максимальная глубина водной преграды, преодоле-
ваемой автомобилем.
Три последних показателя используют для опенки профильной проходи*
мости полноприводных автомобилей.
Проходимость автомобиля в горизонтальной плоскости характеризуется
показателями его маневренности, рассмотренными в параграфе 11.5.
Для определения высоты преодолеваемого автомобилем порогового пре-
пятствия Н пр рассмотрим схемы, приведенные на рис. 12.9. Воздействие кор-
пуса автомобиля на колесо выражается нормальной нагрузкой Ег и силой Fx.
Для ведомого колеса Fx — это толкающая сила корпуса, а для ведущего —
сила сопротивления движению корпуса. Если автомобиль многоосный и пол-
ноприводный, то у отдельных колес сила Fx может кратковременно оказаться
толкающей силой корпуса. При определении реакции внешней среды на ко-
леса исходим из того, что в момент преодоления препятствия колесо отрыва-
ется от поверхности дороги и взаимодействует лишь с выступом порогового
препятствия. Скорость автомобиля невелика. Деформацией шины и силами
инерции пренебрегаем.
Рис. 12.6. Схема сил, действующих на колесо при преодолении порогового препятствия:
а — ведомое колесо; б — ведущее колесо
Рассмотрим вначале ведомое колесо (рис. 12.9, а). Реакция выступав?на-
правлена к центру колеса О. Из условий равновесия колеса Fx-Бсова = 0,
-Ft -kRsinct = О получаем С другой стороны, tga = АВ/ОВ. Найдем
АВкОВ;
АВ = гс-Япр; OB = JOAS-AB* -
Тогда
, rc ~^np
^2TjJ?np—J?np
Определим толкающее усилие Fx, необходимое для преодоления ведомым
колесом порогового препятствия:
р = ~ -^"р (12.1)
tga re-Hnp
434
12. Проходимость автомобиля
Из формулы (12.1) следует, что с увеличением Я„р необходимая сила Fx
возрастает, а при =гс достигает бесконечности- Следовательно, препят-
ствие высотой Нцр = гс автомобиль преодолеть не может. Толкающая сила ве-
домого колеса Fx создается силой тяги ведущих колес Рт, причем j?T = Яхв, где
— суммарная продольная реакция дороги на все ведущие колеса. Но
величина R^ ограничена сцеплением колес с дорогой и не может превышать
значения/?^ = фЛЯге, где Я/я — суммарная нормальная реакция дороги на ве-
дущие колеса. Следовательно, ограничено и максимальное значение Fx. В ре-
зультате Нщ, обычно не превышает (0,2-0,3)гс.
Для ведущего колеса (рис. 12.6, tf) реакцию выступа порогового препятст-
вия представим в виде двух составляющих — нормал ьноййл и касательной Я,
по отношению к поверхности колеса. Составляющая Л. обусловлена действи-
ем момента МКЛ, подводимого к ведущему колесу. Предположим, что осталь-
ные колеса автомобиля ведомые и для их движения ведущее колесо должно
развивать силу тяги FT, необходимую для преодоления силы сопротивления
корпуса Fx, т.е. FT =—Fx. Таг: как автомобиль преодолевает препятствие на
малой скорости, то можно считать, что Fx обусловлена лишь сопротивлением
качению. Тогда Fx = mngf.
Составим уравнения равновесия колеса:
-F„-R„ сова + sina = О;
-Fz + R„ sina j-Rtcosa = 0.
Касательная реакция Rl ограничена сцеплением. Предельное ее значение
J?t = Rn фх подставим в уравнения равновесия. Решив их совместно, исключим
неизвестную реакцию В результате получим
F*(eina + ф^сова) = Г,(фл sina-cosa),
откуда
tga = (12.2)
Г2фх-1\
Если пренебречь Fx, то
tga-1/ф,. (12.3)
Из выражения (12.3) следует, что чем меньше коэффициент сцепления <рх,
тем больше угол а, т.е. меньше высота преодолеваемого порогового препятст-
вия Нпр. Сопротивление корпуса Fx также снижает Нпр. Кроме на величи-
ну Ипр влияет размер колеса. При одном и том же значении а чем больше гс,
тем выше Нпр. Максимальная высота преодолеваемого неполноприводными
автомобилями порогового препятствия составляет (0,3-0,5)г^, а полнопри-
водными — (0,5-0,8)гс.
12.2. Опорио-сивпная проходимость
435
12.2. Опорно-сиепная проходимость
Показатели опорно-сцепной проходимости характеризуют возможность
движения автомобиля в тяжелых дорожных условиях и по деформируемым
поверхностям. Опорно-сцепная проходимость автомобиля зависит от пара-
метров и конструктивного исполнение механизмов и систем автомобиля,
а также от несущих свойств опорной поверхности. Основное влияние на про-
ходимость оказывают движитель, трансмиссия и подвеска.
Показатели опорно-сцепной проходимости автомобиля тесно связаны с по-
казателями тягово-скоростных свойств. Ряд показателей тягово-скоростных
свойств непосредственно характеризует степень подвижности автомобиля
в тяжелых дорожных условиях. К ним относятся: максимальный динами-
ческий фактор автомобиля динамический фактор по сцеплению Z\,
максимальный преодолеваемый подъем ft,^, удельная мощность автомоби-
ля . Используют также специфические показатели опорно-сцепной прохо-
димости.
Показатели опорно-сцепной проходимости установлены ГОСТ 22653-77,
ГОСТ 17697-72. Общее количество предусмотренных показателей достигает
18. Среди них имеются относительные или удельные показатели и показате-
ли, определяющие абсолютные значения параметров автомобиля (например,
мощность сопротивления движению автомобиля, свободная сила тяги и др.).
Однако последние не позволяют сравнивать свойства проходимости автомоби-
лей различных категорий, поэтому их рассматривать не будем. Рассмотрим
лишь относительные и удельные показатели опорно-сцепной проходимости.
Коэффициент сцепной массы представляет собой отношение массы тф,
приходящейся на ведущие мосты, к полной массе автомобиля шв:
= (12.4)
Коэффициент^ используется при оценке возможности движения автомо-
биля в заданных дорожных условиях. Для определения условий устойчивого
движения воспользуемся выражениями (8.12) и (3.13), на основании кото-
рых можно записать:
Р (12.5)
где!), — динамический фактор автомобиля по сцеплению; — суммарная
нормальная реакция дороги на ведущие колеса.
Значение К,, можно выразить через к9‘.
Тогда на основании выражения (12.5) получаем необходимое условие ус-
тойчивого движения автомобиля:
й =£±Л. (12.6)
Фх фх
436
12. Проходимость автомобиля
У полноприводных автомобилей = 1. Для повышения проходимости не-
полноприводных автомобилей смещают центр масс к ведущему мосту.
Наименьшая величина коэффициента сцепной массы у автопоездов. При
движении магистральных автопоездов на дорогах с максимальными уклона-
ми =0,05при ледяном покрытии, когда <рг ^0,2 и ' = 0,012, коэффициент
сцепной массы должен быть не ниже 0,31. В нормативных документах вос-
точноевропейских стран допускаемое значение для автопоездов с неполно-
приводным автомобилем-тягачом должно быть не менее 0,263; в странах
ЕЭС: в Бельгии — 0,33; Италии и Люксембурге — 0,27; Великобритании —
0,263.
Коэффициент свободной силы тяги — отношение свободной силы тяги
FTiCB к силе тяжести автомобиля полной массы пц:
= ~ Mf/rK0,
G. mag
где FT — суммарная сила тяги ведущих колес; Fa — сила сопротивления воз-
духа; — суммарный момент сопротивления качению колес автомобиля.
Коэффициент удельной силы тяги на крюке — отношение силы тяги
на крюке автомобиля Гкр к силе тяжести автомобиля полной массы:
(12.8)
Силу тяги на крюке автомобиля-тягача, необходимую для буксирования
выбранного прицепа, определяют по формуле (2.27), полагая fBp = Fnp,
Удельная тяговая мощность на крюке Ркр уд равна отношению тяговой
мощности на крюке автомобиля РКр = F^v к полной массе те:
^р.уд=^- (12-9)
Давление колес на опорную поверхность оценивают двумя показателями:
средним давлением на поверхности контакта и средним давлением по высту-
пам рисунка протектора. Среднее давление в контакте рк вычисляется по
формуле
Рх=Я>Мк, (12.10)
где — контурная площадь контакта: Ак Вщ — ширина профиля
шины; I* — длина контактной поверхности.
На дороге с твердым покрытием 1К = , где г0 и гст — свободный
и статический радиусы колеса. На деформируемой поверхности I* зависит от
глубины погружения колеса в грунт.
Среднее давление колеса по выступам рисунка протектора
Рар ~ Рч/^trp » (12-11)
где Ацр — коэффициент насыщенности протектора.
12,3. Обобщенные покамтели проходимости 437
Значение k зависит от.типа рисунка протектора: для дорожного рисунка
находится в пределах 0,6-0,8; для универсального — 0,5-0,7; для вездеход-
ного — 0,5-0,6.
Средние давления рк и р^ оказывают влияние на проходимость автомобиля
при движении по деформируемым опорным поверхностям. С уменьшением
давления глубина образуемой колеи становится меньше и, соответственно,
уменьшается сопротивление движению. В восточноевропейских странах ре-
комендуются величины среднего давления в контакте рк £0,65 МПа для АТС
с осевой нагрузкой до 100 кН и рк £0,5 б МПа — с осевой нагрузкой до 60 кН.
Для дорожных автомобилей в странах СНГ средние давления колес на опор-
ную поверхность с твердым покрытием должны быть в следующих пределах:
рк £ 0,6 МПа и рщ, £0,85МПа.
Для предотвращения быстрого разрушения дорожных покрытий во многих
странах в законодательном порядке вводятся ограничения на осевые нагруз-
ки АТС. В параграфе 6.4 приведена информация по установленным ограни-
чениям.
12.3. Обобщенные показатели проходимости
Кроме рассмотренных в параграфе 12.2 показателей опорно-сцепной про-
ходимости используются обобщенные показатели проходимости, которые
подразделяются на две группы. Первая группа показателей оценивает прин-
ципиальную возможность движения автомобиля в заданных дорожных усло-
виях, а вторая — эффективность выполнения транспортной работы в этих
условиях.
Первая группа показателей позволяет ответить на вопрос, проедет или не
проедет автомобиль по заданному участку местности. Эта группа включает
Несколько коэффициентов и Показателей проходимости.
Коэффициент проходимости по тяговым возможностям автомобиля Пт.
Он определяется по формуле
2 П
Пт= , (12.12)
где п — суммарное количество мостов автомобиля; — момент наг-м ко-
лесе /-го моста, обусловленный коэффициентом суммарного дорожного со-
противления у(у-, преодолеваемого этим колесом; — максимальный
суммарный тяговый момент на всех ведущих колесах, получаемый на низ-
шей передаче.
Значение определяется по формуле
где — нормальная реакция опорной поверхности наЬе колесо /-го моста.
43Л
12. Проходимость автомобиля
Коэффициент проходимости по сцеплению ведущих колес с опорной, по-
верхностью Пф. Он определяется по формуле: i
2 п
Пф=1 (12.13)
ZZ"w
им
где п — суммарное количество мостов автомобиля; т — количество ведущих
мостов; — момент силы сцепления 1-го ведущего колеса /-го моста.
Значение вычисляется по формуле
где фу — коэффициент сцепления 1-го ведущего колеса /-го моста с опорной
поверхностью; — нормальная реакция опорной поверхности на 1-е веду-
щее колесо j-to моста.
Выражение (12.18) используется только в случае блокированного привода
всех ведущих колес. При дифференциальном приводе коэффициент Пф зна-
чительно меньше, чем при блокированном, так как моменты реализуются
не у всех ведущих колес, поскольку соотношения между ними устанавлива-
ются в зависимости от параметров дифференциалов. Этот вопрос подробнее
будет рассмотрен в параграфе 12.4.
Коэффициент проходимости по несущей способности грунта определя-
ют по формуле
П^1-л/р„ (12.14)
где ре — несущая способность грунта.
Несущая способность грунта зависит от его относительной влажности
(рис. 12.10). Чем меньше Пр, тем хуже проходимость. Давленияркн рор опре-
деляют возможность движения по деформируемому грунту. При Пр-» О дви-
Рис. 12.10. Зависимости несущей способности грунтов от относительной влажности:
1 — глина; 2 — суглинок; 3 — супесь; 4 — песок
12.3 Обобщенные показатели проходимости
439
жение становится невозможным. С уменьшением давления уменьшаются
глубина колеи и сопротивление движению.
Коэффициент проходимости по погружению колеса в грунт Т^ Значение
Ц, вычисляется по формуле
. ПЛ 1-Лг/Ля.п, (12.1В)
где hj. — глубина погружения колеса в грунт; — дорожный просвет авто-
мобиля.
Рассмотренные коэффициенты проходимости позволяют оценить влияние
тягового момента, моментов сцеплении ведущих колес с опорной поверхностью,
а также несущей способности грунта и дорожного просвета на проходимость
автомобиля в одинаковых дорожных условиях. Они удобны для сравнения
проходимости нескольких автомобилей в одинаковых условиях движения.
Если возникает необходимость оценки проходимости данного автомобиля
в различных дорожных условиях, то для этой цели удобнее пользоваться по-
казателями проходимости.
Наиболее распространена оценка проходимости автомобиля по деформи-
руемой опорной поверхности с осредненными параметрами ее механических
свойств по показателю Пср, вычисляемому по формуле:
Пор—tgctniiK = У, (12.16)
где kq — коэффициент сцепной массы.
Данный показатель отличается простотой и наглядностью, но не учитыва-
ет важных особенностей взаимодействия колес автомобиля с деформируемой
опорной поверхностью (грунтом). В связи с этим предложено уточненное вы-
ражение для показателя проходимости:
Па= tgO-nKK =Лсцф* — (1 — ^ф)/ш —/г.ож ~ /г.од /корп ~~ ^хр> (12.17)
где йсц — коэффициент использования сцепления; /ш — осредненный коэф-
фициент сопротивления шин по твердой опорной поверхности; уг ея[ — осред-
нениый коэффициент сопротивления качению, обусловленный вертикальной
деформацией опорной поверхности; Угед — коэффициент сопротивления ка-
чению, обусловленный сдвигом грунта; — коэффициент сопротивления
движению, обусловленный скольжением корпуса автомобиля по грунту; йвр —
коэффициент удельной силы тяги на крюке.
Этот показатель проходимости, численно равный тангенсу угла подъема
ccmwt, преодолеваемого автомобилем в заданных дорожно-грунтовых услови-
ях, представляет запас удельной силы тяги по сцеплению, который может
быть использован на преодоление различных препятствий, на разгон и т.д.
Чем больше величина показателя Ц<, тем выше проходимость автомобиля.
Если необходимо знать не предельные возможности автомобиля в ка-
ких-то определенных дорожных условиях, а оценить его проходимость по
маршрутам, содержащим разнообразные грунты или поверхности движе-
ния, механические показатели которых могут быть заданы статистическими
440
12. Проходимость автомобиля
характеристиками, то следует пользоваться вероятностным показателем
проходимости:
Лв~ ^[^оцФх 0 +/г.сж + Л'.СЛ + /хори + ^8а]> (12.18)
где Р — вероятность преодоления автомобилем без застревания маршрута,
сопротивление на котором характеризуется величинами /ГЛЯ, , а,
сцепление и его реализация — величинами <рЛ> .
Для оценки эффективности выполнения автомобилем транспортной рабо-
ты в ухудшенных дорожных условиях или в условиях бездорожья можно ис-
пользовать комплексные показатели проходимости:
= (12,19)
mru
П^3тг.м8мФ, (12.20)
где /Ирл, «и, QM, f„ — соответственно масса перевозимого груза, скорость,
длина участка, расход топлива, время движения при преодолении автомоби-
лем труднопроходимого участка местности; rr^, v, a, Q, t те же параметры
при движении автомобиля на дороге с усовершенствованным покрытием,
принятой в качестве эталона.
Комплексный показатель проходимости представляет собой отношение
производительности автомобиля на местности к его номинальной производи-
тельности на дороге с твердым покрытием, а показатель l£* дополнительно
учитывает расход топлива. Комплексные показатели проходимости П„ и1£*
применяются для сравнительной оценки эффективности использования кон-
кретного автомобиля на различных участках местности, расположенных вне
дорог. ।
Для сравнения различных автомобилей в одинаковых дорожных условиях
используют показатель эффективности П4ф, вычисляемый по формуле
(12.21)
V
Этот показатель представляет собой отношение производительности авто-
мобиля к количеству израсходованного топлива. Он позволяет оценить не отно-
сительные, а абсолютные возможности выполнения автомобилем транспортной
работы вне дорог без сравнения их с возможностями на дороге с усовершенст-
вованным покрытием.
12.4. Влияние дифференциалов трансмиссии
на проходимость автомобиля
Проходимость автомобиля в значительной мере зависит от типа привода
ведущих колес. Различают дифференциальный, блокированный и комби-
нированный приводы. При дифференциальном приводе все ведущие колеса
12.4. Влияние дифференциалов трансмиссии на проходимость автомобиля
44Т
кинематически связаны между собой дифференциалами. В зависимости от
расположения в трансмиссии автомобиля дифференциалы подразделяются
на межколесные и межосевые. Межколесный дифференциал используется
для привода ведущих колес одного и того же моста, а межосевой — обеспечи-
вает кинематическую связь и взаимодействие ведущих мостов автомобиля.
При криволинейном движении автомобиля левое и правое колеса ведущего
моста проходят различные расстояния, поэтому для исключения скольжения
колес относительно опорной поверхности они должны вращаться с различ-
ными угловыми скоростями. При прямолинейном движении проходимые
ими пути также различаются, что обусловлено неровностями дороги под ле-
вым и правым колесами. Кроме того, угловые скорости их вращения должны
различаться из-за неизбежного различия свободных радиусов шин, обуслов-
ленных погрешностями изготовления, различным износом протекторов, раз-
личием давлений воздуха в шинах, колебаниями нагрузки на шины и др.
Межяолесный дифференциал представляет собой механизм с двумя сте-
пенями свободы, предназначенный для обеспечения возможности вращения
левого и правого ведущих колес моста с различными угловыми скоростями.
В качестве межколесных дифференциалов наиболее часто используют шесте-
ренчатые планетарные механизмы с коническими или цилиндрическими
зубчатыми колесами.
Основными алементами любого дифференциала являются два централь-
ных зубчатых колеса и водило Посредством этих элементов дифференциал
взаимодействует с другими механизмами трансмиссии и колесами автомоби-
ля, поэтому они относятся к основным. Кроме того, в дифференциал входят
вспомогательные элементы — сателлиты, которые обеспечивают взаимодей-
ствие между собой основных элементов дифференциала.
В автомобилестроении используются специфические термины для наиме-
нования основных элементов межколесных дифференциалов: центральные
зубчатые колеса называют полуосевыми шестернями, так как они устанав-
ливаются на полуосях ведущего моста и связаны с ведущими колесами; води-
ло называют корпусом дифференциала.
На рис. 12.11, а приведена кинематическая схема простого конического
дифференциала, наиболее часто применяемого в межколесном приводе.
Цифрами 1 и 2 обозначены центральные зубчатые колеса, цифрой 3 — води-
ло, цифрой 4 — сателлиты, цифрами 5 и 6 — полуоси, цифрами 7 и 8 — веду-
щие и ведомые шестерни главной передачи.
Рассмотрим основные физические свойства межколесного дифференциа-
ла и оценим его влияние на проходимость автомобиля.
На рис. 12.11, б показаны направления вращающих моментов и угловых
скоростей основных элементов межколесного дифференциала. Полуоси и свя-
занные с ними ведущие колеса обозначены буквами ей б, а водило — буквой Л.
Индексы в обозначениях моментов и угловых скоростей имеют аналогичные
обозначения.
442
12. Проходимость автомобиля
Рис. 12.11. Кинематическая схема межколесного дифференциала (й) и схема его установки
в ведущем мосту автомобиля (б)
Кинематические свойства дифференциала описываются уравнением:
(оа - Код - (1 - £)од « 0, (12.22)
где од,од — угловые скорости полуосей (центральных зубчатых колес); од —
угловая скорость водила (корпуса дифференциала); К — кинематический па-
раметр.
Кинематический параметр представляет собой внутреннее передаточное
число м^жду центральными зубчатыми колесами а и Ъ при остановленном во-
диле, т.е. при ОД -0. Значение кинематического параметра вычисляется по
формуле:
Л" = — . (12.23)
ш*-0
Для рассматриваемого конического дифференциала центральные зубча-
тые колеса одинаковы, следовательно, имеют одинаковые числа зубьев. По-
этому при од - 0 они вращаются в противоположные стороны с одинаковыми
угловыми скоростями. В результате кинематический параметр этого диффе-
ренциала равен
tf = ^ = -l. (12.24)
“ft
Дифференциал, у которого К =-1, называют симметричным.
Подставим значение К = -1 в уравнение (12.22) и определим соотношения
между угловыми скоростями простого конического дифференциала:
од - + (12.25)
2
Формула (12.25) отображает одно из основных свойств симметричного
дифференциала, которое заключается в том, что угловая скорость водила
равна полусумме угловых скоростей центральных зубчатых колес. Из фор-
мулы (12.25) также вытекает следующее свойство: если одно из центральных
зубчатых колес остановлено, то второе имеет угловую скорость в 2 раза боль-
шую, чем скорость водила.
12.4. Влияние дифференциалов трансмиссии на проходимость автомобиля
443
Определим, как распределяется вращающий момент, подводимый к диф-
ференциалу, между полуосями, т.е. между левым и правым колесами веду-
щего моста. Составим уравнение баланса мощности, принимая во внимание
потери мощности на трение в дифференциале:
Рв + Я + Д+Д₽=0. (12.26)
где — мощности соответственно на левой и правой полуосях; Д' — мощ-
ность на водиле дифференциала; — мощность потерь на трение.
Значения мощностей Ро, Д, Д, Ду определяются по формулам:
Д =—Л/аов; Д=—Д Др =—AfTpU)0T11,
где Л/а,Мь — вращающие моменты соответственно на левой и правой полу-
осях; Mh — момент на водиле дифференциала; — приведенный момент
сил трения в дифференциале; — приведенная относительная скорость
(в рассматриваемом случае — полуосевой шестерниЪотносительно корпуса).
Остановим водило и пренебрежем силами трения. Тогда, согласно выра-
жению (12.26), получаем
-МдОд + Л/ьЮь =0.
Ив этого выражения находим следующие соотношения:
= (12.27)
Ма со*
Так как у симметричного дифференциала К = -1, то в результате получаем
следующее равенство:
Ма - Aft. (12.28)
Равенство (12.28) выражает второе важнейшее свойство простого кони-
ческого дифференциала: моменты на центральных зубчатых колесах этого
дифференциала равны между собой. Это означает, что если не учитывать
внутреннее трение в дифференциале, то простой конический дифференциал
распределяет подводимый к нему вращающий момент Mh поровну между
обеими полуосями — левой н правой.
Предположим, что колесо ведущего моста, связанное с полуосью Ь, нахо-
дится на опорной поверхности с низким коэффициентом сцепления ф^
н буксует, а второе колесо а имеет более высокий коэффициент сцепления
фиш*. Следовательно, полуось Ь вращается быстрее, чем полуось а, т.е. колесо b
забегает вперед, а колесоц отстает. В этом случае момент на колесе b достигает
предельного значения по сцеплению. Так как момент сопротивления каче-
нию Mf значительно меньше момента предельной силы сцепления, то с це-
лью упрощения выкладок величиной Mf пренебрегаем. Тогда вращающий
момент забегающего колеса Мь определим по формуле:
М)> “А/фццп — Фв,ьп^*<^к0> (12.29)
где/Lt, — нормальная реакция буксующего колеса.
444
12. Проходимость автомобиля
Из условия равновесия дифференциала под действием внешних моментов
(см. рис. 12.11, б) получаем следующее равенство:
Mh-Ma + Mt. (12.30)
На основе выражений (12.28)(12.30) находим (значение максимального
суммарного реализуемого момента обоими колесами ведущего моста в слу-
чае, если у одного ив них коэффициент сцепления <р^„, а у другого фт1Х:
= 2<рт1П/?»|/><о. {12.31)
Следовательно, при буксовании одного из колес суммарный реализуемый
момент обоими колесами ведущего моста равен удвоенному моменту буксую-
щего колеса. При этом сцепные возможности второго (не буксующего) колеса
не будут использоваться в полной мере. В результате проходимость автомо-
биля может резко ухудшиться.
Для обеспечения полного использования сцепных возможностей обоих
колес дифференциал необходимо блокировать. В этом случае реализуемый
ведущим мостом вращающий момент равен сумме моментов по сцеплению
обоих колес и определяется по формуле:
^Л.бл = Фпйп^жй^хО + ФтиЛ’вПсО’ (12.32)
При Я*, =выражения (12.81) и (12.32) принимают следующий вид:
Л'Ъир = фпйпДЛо. (12.33)
Л^Я.вл — 0«5(фт1л + Фатх^Ло, (12.34)
где J4 — суммарная нормальная реакция опорной поверхности на оба колеса
ведущего моста: Я, =Ига +Кгь-
Найдем соотношение между моментами Л/АЛл и Л/А:
_ фтШ + Фпмх _ ФДР (12 36)
^(Pnjin фв11п
где фср — среднее значение коэффициента сцепления.
Таким образом, наряду с положительным свойством дифференциала, ото-
бражаемым уравнением кинематики (12.25), обеспечивающим исключение
проскальзывания колес при криволинейном движении в условиях хорошего
сцепления, простой конический дифференциал имеет серьезный недостаток,
обусловленный свойством распределения моментов поровну между полуося-
ми. Это свойство отображается формулами (12.28) и (12.31).
Уменьшить отмеченный недостаток можно несколькими способами. Один
из них заключается в повышении внутреннего трения при возникновении
буксования одного из колес. Такие дифференциалы называют дифферен-
циалами повышенного трения или самоблокирующимися дифференциала-
ми. Свойствами самоб локирования обладают шестеренчатые дифференциалы
с фрикционными элементами, кулачковые, червячные, дифференциалы с муф-
тами свободного хода и с вязкостными муфтами.
12.4. Влияние дифференциалов трансмиссии на проходимость автомобиля
445
Примем во внимание внутреннее трение и. приведем момент трения к од-
ной из полуосей дифференциала, например к забегающей. Тогда при останов-
ленном водиле = со4, а уравнение баланса мощности {12.26) получает
следующий вид:
М О<оа + JW + М трсоь - 0.
Разделим все члены этого уравнения на о^:
ЛГа^- + ЛГ4 + М_=0.
<оь
Так как для симметричного дифференциала справедливо выражение (12.24),
то в результате получаем следующее равенство:
Ма-Мь=Мп. (12.36)
Очевидно, что в этом случае моменты на левом и правом колесах ведущего
моста различны. Для описания физических свойств дифференциала повы-
шенного трения вводится показатель называемый коэффициентом бло-
кировки дифференциала. Его значение определяется из соотношения:
(12.37)
ЛГд +Aqi jW^
Сведем уравнения (12.30) и (12.36) в единую систему:
Сложив почленно левые и правые части этих уравнений, получим
= (12.39)
£
Вычитая второе выражение системы (12.38) из первого, найдем
(12.40)
Найдем значение из уравнения (12.37) и подставим его в выражения
(12.39) и (12.40). В результате получим следующие выражения для определе-
ния моментов на полуосях дифференциала:
= (12.41)
Mb = ^(l-kin). (12.42)
а
Если колесоb находится в плохих условиях по сцеплению, т.е. имеет коэф-
фициейт сцепления (pnjn, а кол еоо а-фпищ, тогда, подставив в уравнение (12.42)
446
12. Проходимость мтомобиля
Mj, = найдем суммарный вращающий момент, реализуемый обоими
колесами ведущего моста с дифференциалом повышенного трения:
= (12.43)
1~«вл
Если вычисленное по этой формуле значение МЛф превышает МкЛя, полу-
чаемое по формуле (12.32), то принимают = М^, так как MhjBa опреде-
ляет предельный реализуемый обоими колесами момент По сцеплению с опорной
поверхностью. Сравнивая формулы (12.81) и (12.43), можно отметить, что
дифференциал повышенного трения увеличивает реализуемый момент на
колесах автомобиля за счёт более полного использования сцепных свойств
небуксующего колеса. Чем выше коэффициент блокировки k$a, тем выше
реализуемый момент М^.
Примем AfeDiLn = 1 и представим на графике зависимость отношения момен-
тов Mfi^/MpnUn от коэффициента блокировки Эта зависимость показана
на рис. 12.12.
Рис. 12.12. Зависимость относительного изменения суммарного момента
по сцеплению M^/Af от коэффициента блокировки дифференциала :
1 Af f №in = 1
В реальных условиях движения коэффициент сцепления может изме-
няться в пределах от ф^щ = ОД до ф^ = 0,8. Найдем необходимое значение ко-
эффициента блокировки дифференциала для полной реализации сцепных
возможностей обоих колес, если одно из них имеет коэффициент сцепления
Фпцп, а второе —ф^.
Моменты по сцеплению отстающего Ма и забегающего Мь колес выража-
ются следующими формулами:
— MtptlMX =
~ ^vtnlo “ Фт
12.4. Влияние лифференииалое трансмиссии на проходимость автомобиля 447
Полагая Я,Q =В,ьиподставляяД1(ргаи(иЛСфП11Г1 в формулу (12.37), получаем
искомое значение коэффициента блокировки дифференциала:
(12.44)
фтах + фткп
На рис. 12.13 показана зависимость от отношения коэффициентов
сцепления фиад/фш!,!. Из этого рисунка следует, что чем меньше разница меж-
ду Фт*х и Фицц, тем меньше требуемое значение А^. При = 0£ и ф^ = ОД
получаем = 0,778. Очевидно, что при изменении дорожных условий и пе-
рераспределении нагрузок на колеса значение коэффициента блокировки А^я
должно автоматически изменяться.
Фвих/фпш> ' 1
Рис. 13.13. Зависимость необходимого коэффициента блокировки дифференциала Aj,,
от отношения коэффициентов сцепления отстающего и забегающего колес
Выполненные конструкции дифференциалов повышенного трения обес-
печивают Ав* =0,8-0,б. У обычных шестеренчатых конических дифферен-
циалов Лвд = 0,05-0,1.
В трансмиссиях многоосных полноприводных автомобилей иногда при-
меняют межколесный дифференциал с муфтой свободного хода. У этого диф-
ференциала забегающее колесо автоматически отключается, поэтому Мь = 0,
&Ма = Мк. Следовательно, при движении на повороте функции ведущего вы-
полняет только отстающее колесо, а забегающее работает в режиме ведомого
колеса.
При повороте автомобиля с самоблокирующимся дифференциалом или диф-
ференциалом с муфтой свободного хода возникает момент сопротивления пово-
роту Маа,, обусловленный разностью моментов на отстающем и забегающем
448
12. Проходимость автомобиля
колесах, что затрудняет осуществление поворота. Величина Мпо> определя-
ется по формуле
2 2гио
гдеРжа, — продольные реакции соответственно отстающего и забегающе-
го колес; В — колея ведущего моста.
Проходимость автомобиля в значительной мере зависит от своевременно-
сти включения механизма блокировки дифференциала. Если автомобиль по-
терял подвижность, блокирование может не спасти положения. Блокировать
дифференциал необходимо, как только начинается пробуксовка колес. Для
этого применяют противобуксовочную систему (ПБС) с электронным блоком
управления. Включение блокировки осуществляется автоматически на основе
анализа информации об изменении угловых скоростей ведущих колес и угла
поворота рулевого колеса, а выключение — по истечении заданного интерва-
ла времени. В результате обеспечивается полное использование сцепления
колес и предотвращается движение со сблокированными колесами или мос-
тами после преодоления труднопроходимого участка пути.
Такого же результата можно достичь и с простым коническим дифферен-
циалом посредством регулируемого подтормаживания буксующего колеса.
При этом должно обеспечиваться равенство МОф = Mblf + М,м_ь, где MT.Kj> —
момент тормозного механизма буксующего колеса. Достижение предельных
моментов Ма9 и контролируется по скольжению колес, определяемому
по изменениям их угловых скоростей (0а и (0^,, а автоматическое управление
моментом МТ.М1Й осуществляет ПБС.
Если наступает буксование всех ведущих колес автомобиля, ПБС умень-
шает подачу топлива в двигатель, в результате снижается вращающий мо-
мент на ведущих колесах и уменьшается их скольжение. Обычно ПБС и АБС
объединяют в единую систему, так как решаемые ими задачи связаны с одни-
ми и теми же физическими процессами, обусловленными взаимодействием
колес с дорогой, и используются одни и те же датчики источников информа-
ции для алгоритмов управления.
Межосевой дифференциал. В трансмиссиях полноприводных автомобилей
кроме межколесных устанавливают межосевые дифференциалы. В межосе-
вых приводах применяют симметричные и несимметричные дифференциалы.
Межосевой дифференциал осуществляет передачу мощности к соответствую-
щим ведущим мостам, каждый из которых в свою очередь снабжен межко-
лесным дифференциалом. В связи с этим все ведущие колеса автомобиля
имеют между собой дифференциальную связь.
В двухосных полноприводных автомобилях с равномерным распределе-
нием нормальных нагрузок между ведущими мостами применяют симмет-
ричный межосевой дифференциал. Кинематические схемы симметричных
межосевых и межколесных дифференциалов аналогичны (см. рис.2.11, а).
12.4. влияние дифференииалов трансмиссии на проходимость автомобиля
449
Если нормальные нагрузки на мосты различаются существенно (обычно
около 2 раз), то используют несимметричный дифференциал, который обеспе-
чивает распределение моментов между ведущими мостами примерно пропор-
ционально их нормальным нагрузкам. Несимметричный межосевой дифферен-
циал применяют также в раздаточной коробке трехосного полноприводного
автомобиля. В этом случае примерно третья часть суммарного момента пере-
дается на передний мост и две трети — на оба задних моста.
Кинематическая схема несимметричного меж-
осевого дифференциала приведена на рис. 12.14. Он
содержит два центральных зубчатых колеса: коле-
со 1 внешнего зацепления и колесо 2 внутреннего
зацепления. Центральные колеса 1 и 2 взаимодей-
ствуют с сателлитами 4. Мощность подводится к во-
дилу 3 дифференциала и распределяется между мос-
тами в соответствии с внутренним передаточным
числом дифференциала |Х| = 2^/гм, где Zi и z2 — чис-
ла зубьев центральных колес. С передним мостом
связано зубчатое колесо 1, а с задним — колесо 2.
Составим уравнение равновесия внешних мо-
ментов, действующих на основные элементы не-
симметричного дифференциала:
Рис. 12.14. Кинематическая
схема несимметричного
межосевого дифференциале
Л1”з — Afj + Af2.
(12.46)
Если пренебречь внутренним трением в дифференциале, то соотношение
между моментами и М2, согласно выражению (12.27), имеет вид:
Л^.=-К. (12.47)
Mi
Предположим, что автомобиль двухосный с несимметричным межосевым
дифференциалом. Определим предельное по условиям сцепления ведущих
колес переднего и заднего мостов значение момента на водиле дифференциа-
ла Обозначим предельные значения моментов на полуосях дифферен-
циала М?1 и М^.
Если момент ограничен сцеплением колес переднего моста, то, исполь-
зуя выражения (12.46) и (12.47), получим следующую формулу:
МфЗ^ЛМ1'*); (12.48)
а если сцеплением колес заднего моста, то Мцй равно
(12.49)
Значения моментов и М^, в свою очередь, определяются сцеплением
одного из колес соответственно переднего или заднего моста, находящегося
в худших условиях, и вычисляются по формуле (12.31) или (12.33), полагая
в них Mk — М^.
15 Зак. 3498
450
12. Проходимость автомобиля
Меньшее из значений, полученных по формулам (12.48) и (12.49), опреде-
ляет максимальный суммарный момент по сцеплению М^, реализуемый
всеми ведущими колесами автомобиля с несимметричным межосевым диф-
ференциалом.
Если межосевой дифференциал симметричный, то суммарный реализуе-
мый момент определим по формуле
Af^ = яМ(ф1п1л)в (12.50)
гдеп — общее количество ведущих колес; M(einlI1-g — минимальный момент,
реализуемый ведущим колесом, находящимся в наихудших условиях по сце-
плению.
Значение вычисляется по формуле
= Фт1п-^»1гк01 (12.61)
где — нормальная реакция опорной поверхности на I-е ведущее колесо.
Значение кинематического параметре К несимметричного межосевого
дифференциала выбирают из условия
= (12.52)
где ЙЛ, — нормальные суммарные реакции на колеса соответственно пе-
реднего и заднего мостов неподвижного автомобиля на горизонтальной пло-
щадке.
Поскольку нормальные реакции при движении автомобиля переменны,
то полное использование сцепных возможностей не достигается даже при
ср,. = const для всех ведущих колес.
Межосевые дифференциалы также ухудшают проходимость автомобиля.
Поэтому на некоторых полноприводных автомобилях применяют блокиро-
ванный привод ведущих мостов. При движении такого автомобиля в хоро-
ших дорожных условиях привод одного или нескольких мостов отключают.
12.5. Распределение вращающих моментов
при блокированном приводе ведущих колес
Ведущие колеса автомобиля при блокированном приводе вынуждены вра-
щаться с одинаковыми угловыми скоростями, независимо от условий движе-
ния (поворот автомобиля, неровности дороги, различные нагрузки на колеса
и т.д.). Упругие свойства валов трансмиссий и шин обеспечивают лишь коле-
бания угловых скоростей относительно среднего значения.
Рассмотрим прямолинейное движение автомобиля по дороге с твердым
покрытием. В связи с неизбежным различием наружных диаметров шин, дав-
12.5. Распределение «решающих моментов при блокированном приводе ведущих колес
451
лений воздуха, коэффициентов окружной жесткости шин, нагрузок на шины,
а также в связи с разной степенью изношенности протекторов шин и другими
факторами радиусы качения всех колес в ведомом режиме rKVf будут различ-
ными. Но благодаря упругим свойствам шины радиусы качения ведущих
колес будут изменяться под воздействием вращающих моментов таким об-
разом, чтобы обеспечить их качение без внешнего скольжения. Для опреде-
ления радиусов качения гн/ воспользуемся формулой Е.А. Чудакове:
rKj = ГкС; “ •
(12.53)
где MKj — момент/го ведущего колеса; сш^ — коэффициент окружной жест-
кости /го колеса.
Если же момент на каком-либо колесе увеличится настолько, что продоль-
ная реакция Rxj достигнет значения Rxi й(0,4-0,6)ф;гЕ,;, то начнется про-
скальзывание колеса относительно дороги. Радиусы качения колес rKJ при
этом могут быть различными, но произойдет согласование кинематических
радиусов rop} всех колес, в соответствии с расстояниями, проходимыми ими
в течение данного интервала времени.
Если предположить, что поверхность дороги гладкая и ровная, то кинема-
тические радиусы колес должны быть одинаковыми, а при отсутствии внеш-
него скольжения одинаковыми будут и радиусы качения всех колес, т.е.
= — ~ *кп •
Пусть все ведущие колеса различных мостов полноприводного автомобиля
имеют разные радиусы качения в ведомом режимегв0/ и разные коэффициенты
окружной жесткости шин <‘1111ОГ Тогда, используя формулу (12.63), составим
систему уравнений для определения вращающих моментов каждого из веду-
щих колес автомобиля:
(rKQi гк)сЩ101;
М/g = (,кО2 ~
^к} “ (б<0;
(12.54)
-М"кл - гк)сШ1ОЛ,
где п — количество ведущих колес.
Суммарный вращающий момент, реализуемый всеми ведущими колеса-
ми автомобиля, равен
Мк
(-1
(12.56)
452
12- Проходимость автомобиля
Сложив левые и правые части всех выражений, входящих в систему урав-
нений (12.54), и разрешив полученное выражение относительно радиуса ка-
чения гк, найдем выражение для его вычисления:
п
беО [С ш-oi— к
= 111_______________
л
У/tu.oi
1-1
(12.56)
Подставим значение гк из выражения (12.56) в уравнение (12.53), полагая
- В результате получим формулу для определения момента j- го колеса:
п
~У.0кО| —ГcQrV^nr.ol -1п,о/
MKj =
л
J"1
(12.57)
Второе слагаемое числителя формулы (12.57) может иметь любой знак,
что зависит от соотношения радиусов качения колес в ведомом режиме гкОу и
гк0[ >е по абсолютной величине оно может превосходить первое слагаемое, т.е.
быть больше, чем Мк. Следовательно, значения вращающих моментов на ве-
дущих колесах многоосного полноприводного автомобиля могут быть
как положительными, т.е. направленными в сторону вращения колес, так
и отрицательными, а в частном случае — равными нулю. При отрицательном
моменте мощность поступает не от трансмиссии к колесу, а наоборот — от ко-
леса к трансмиссии и далее через механизмы трансмиссии к другим ведущим
колесам. В результате происходит циркуляция мощности в некотором замк-
нутом контуре: колесо — корпус автомобиля — другие колеса — ветвь транс-
миссии — колесо. При этом мощность, передаваемую от раздаточного меха-
низма к данному колесу, можно условно разделить на два потока: мощность,
необходимую для преодоления сопротивления движению автомобиля, и бес-
полезную мощность, циркулирующую в замкнутом контуре.
Циркуляция мощности — вредное явление. Она приводит к дополнитель-
ным потерям в трансмиссии и шинах. При этом увеличивается нагруженность
трансмиссии и шин, возрастает их износ, увеличивается расход топлива.
Из формулы (12.57) следует, что отрицательное значение момента Мк1
имеет место при условии
< У,(б<01 —,к01Уш.оГ* (12.68)
1-1
Неравенство (12.58) показывает, что вероятность возникновения цирку-
ляции мощности возрастает с увеличением разности радиусов качения колес
в ведомом режиме, увеличением коэффициентов окружной жесткости шин
и с уменьшением суммарного момента сопротивления движения Мс, обуслов-
ливающего снижение необходимого вращающего момента Мк для движения
12.5. Распределение вращающих моментов при блокированном приводе ведущих колес 453
автомобиля в данных дорожных условиях. При равномерном движении
должно выполняться равенство Мк = Мс.
На рис. 12.15 отображено влияние Мс на распределение моментов между
мостами четырехосного полноприводного автомобиля с блокированным при-
водом ведущих колес. Из рисунка видно, что при небольшом сопротивлении
движению автомобиля с блокированным приводом (например, при движении
по дорогам с твердым покрытием) отдельные колеса работают в тормозном ре-
жиме и моменты на этих колесах отрицательны. В результате возникает цир-
куляция мощности в замкнутых контурах системы привода ведущих колес.
В этом случае целесообразно отключать отдельные ветви приводов, например
отдельные ведущие мосты, или разблокировать межосевые дифференциалы,
если они были заблокированы.
Рис. 12.15, Влияние суммарного момента сопротивления движению автомобиля Мс
на распределение моментов Мr.,j при блокированном приводе ведущих колес
Циркуляция мощности может также возникнуть в контуре привода колес
отдельного ведущего моста при движении автомобиля с блокированным
межколесным дифференциалом по твердой опорной поверхности.
Определим значения вращающих моментов на колесах двухосного полно-
приводного автомобиля с блокированным приводом колес. На основе форму-
лы (12.57) находим:
Мж +Агс‘У-вг)Сш-о1. (12.69)
^*сШлО2
Мж,12 = (Ми-Агсш.о1)си,.е^ (12 60)
где Дг = гК01-гк02
На рис. 12.16 показаны графики зависимостей между моментами Л/*.,!,
Мк.,2 и радиусами качения колес гк1, гк2, полученных по формуле (12.53) при
условии, что гк01 > ги02. Поскольку при движении автомобиля радиусы качения
колес переднего и заднего мостов одинаковы, т.е. гк1 = гк2, то прямая, парал-
лельная оси абсцисс, при пересечении с линиями характеристик гк1 = /(ЛГк в1)
и гк2 = /(Л^к.вг) отсекает отрезки, пропорциональные вращающим моментам
AfKi,lи • При этом момент на колесах большего радиусе (в рассматривае-
454
12. Проходимость автомобиля
мом примере — передние колеса) будет всегда положительным. Момент же
на кол есе меньшего радиуса по л ожителен только при гк <гх02 (линия/). Если
гк >гк02» ю колеса меньшего радиуса будут работать в тормозном режиме
и момент MK1B2 будет отрицательный (линия 3). При гк = гх02 колесо меньшего
радиуса окажется в ведомом режиме (линия 2).
Рис. 12.16. Зависимости между моментами ЛГК.В| и радиусами качения гкГ при блокированном
приводе ведущих колес двухосного автомобиля: 7 — при большом сопротивлении движению;
2 — граничный случай; 3 — при малом сопротивлении
На рис. 12.17 схематически показаны потоки мощности, циркулирующей
в замкнутом контуре при условии, что гк01 <гк02- Eha ж® схема потоков мощ-
ности при блокированном приводе характерна и для криволинейного движе-
ния автомобиля. В этом случае передние колеса проходят больший путь, чем
задние, поэтому для качения их без проскальзывания диаметр передних ко-
лес должен быть больше, чем задних. Но поскольку угловые скорости всех
колес одинаковы и гх01 rk02, то на повороте задние колеса будут работать в ве-
дущем режиме, а передние — в тормозящем. Задние колеса толкают корпус
автомобиля силой тяги F.,, а передние тормозят его движение силой Е,.
Мощность, подводимая от двигателя через коробку передач к раздаточ-
ной коробке, /р.п = Л/д<ВдГ)кв. Мощность на выходе раздаточной коробки
/р.х2 = ^р.ьлПр.х- Уравнение баланса мощности на выходе раздаточной короб-
ки:
Ек.»2 = Рр Х2 + Л-ЕЖР1-РТР2, (12.61)
где J’-в2 — мощность, потребляемая задними ведущими колесами; Ет — мощ-
ность тормозной силы FT, создаваемой передними колесами; , J^p2 — мощ-
ности потерь на трение в механизмах трансмиссии, связывающих ведущие
колеса с раздаточной коробкой (главные передачи, карданные передачи).
Из выражения (12.61) следует, что тормозной режим передних колес при-
водит к возрастанию мощности в приводе задних колес. Одновременно воз-
растает величина потерь мощности в этом приводе.
12.5. Распределение ерашакиних моментов при блокированном приводе ведущих колес
455
Рис. 1217. Схема потоков мощности при блокированном приводе ведущих колес
двухосного полноприводного автомобиля
Составим уравнение баланса мощности привода задних колес, работаю-
щих в ведущем режиме
Рк.в2=Л+Р/2+^2. (12.62)
где Рт — мощность силы тяги Рт, затрачиваемая на преодоление сопротивлений
движению корпуса автомобиля; Р^,Р»2 — затраты мощности соответственно
на преодоление сопротивления качению и скольжение задних колес.
Мощность Рт определим иэ следующего равенства:
РГ=Я+РЦ1+РК.71, (12-63)
где Д, Pw — мощности, затрачиваемые соответственно на преодоление силы
сопротивления подъему и силы сопротивления воздуха; Ркт1 — мощность,
подводимая к переднему тормозящему колесу:
Рк.т> = Рг + Рл+Р.н
— затраты мощности на преодоление сопротивления качению и сколь-
жение передних колес
Подставив значение мощности Д в равенства (12.62), найдем мощность,
потребляемую задним колесом, работающем в ведущем режиме:
Л.в2 = Pf + Р. + Л + 3» + (12-64)
где Р{ « Рп +РП2; Р, = Р.1 + Р^.
При дифференциальном приводе ведущих колес мощность, потребляе-
мую задними колесами, вычислим по формуле:
#.2 = (Р, + Р. + Я + (12.65)
К
где К — кинематический параметр межосевого дифференциала.
456
12. Проходимость автомобиля
Сравнивая выражения (12.64) и (12.65), найдем величину дополнительной
мощности, нагружающей механизмы привода задних колес при циркуляции
мощности, обусловленной блокированным приводом:
Aft.irt = ft.»2 “Д*.б2 = Л +(^/+^ + ft + ^)т~ZZ- (12.66)
А.
При симметричном межосевом дифференциале выражение (12.66) полу-
чает следующий вид:
ДРк.,2 = ft + + ft + ft + Р„). (12.67)
При прямолинейном движении автомобиля в случае, если гк01 >5^2, пе-
редние колеса будут работать в ведущем режиме, а задние — в тормозящем.
Тогда возрастет мощность в приводе передних колес на величину, определяе-
мую выражением:
ДРК..1 = ft + (ft + ft + ft + (12.68)
А *~1
Из выражения (12.68) следует, что в этом случав при блокированном не-
симметричном дифференциале привод переднего моста получает значитель-
но большую нагрузку, чем привод заднего моста в случае, когда в ведущем
режиме работают задние колеса.
Аналогичные процессы происходят и в межколесном приводе при блоки-
рованном дифференциале.
Рассмотренные особенности блокированного привода необходимо иметь
в виду для обеспечения рационального использования преимуществ, предос-
тавляемых автомобилю данным видом привода.
При движении автомобиля с блокированным приводом колес по деформи-
руемой грунтовой поверхности циркуляция мощности не возникает. Обуслов-
лено это тем, что согласование угловых скоростей вращения колес и прохо-
димых ими путей в этом случае происходит за счет различной величины
пробуксовки каждого из колес. Моменты, реализуемые колесами в этом слу-
чае, зависят от скорости скольжения, т.е. от величины смятия грунта (см.
параграф 12.7).
12.6. Характеристики дорожно-грунтовых поверхностей
Для определения численных значений показателей опорно-сцепной про-
ходимости при движении автомобиля в бездорожье необходимо установить
зависимости между характеристиками грунта и факторами взаимодействия
колеса с грунтом.
Основной особенностью грунтов является то, что они представляют собой
дисперсное вещество, в котором среди мелко раздробленных тел могут нахо-
диться влага, воздух, остатки растительных и животных организмов. На ме-
ханические свойства грунтов влияют размеры частиц твердых тел, плотность
их размещения, степень заполнения пространства между частицами воздухом
12-6- Характеристики дорожно-грунтовых поверхностей
457
и влагой. От этих характеристик зависит прочность связи между твердыми
частицами, которая, однако, существенно меньше прочности самих частиц.
Размеры частиц грунта характеризуют грану- Таблица 12.2 Классификация грунтов
лометрический состав. По размеру твердые час- тицы подразделяют на глинистые (до 0,006 мм).
Содержание
пылевато-илистые (0,005-0,05 мм), песчаные Тип грунте
глинистых
(0,05-2,0 мм). частиц, %
Классификация грунтов осуществляется в за- Глинистый Более 80
висимости от содержания самых мелких, глини- Суглинистый 30-12
стых частиц (табл. 12.2). Глинистые и суглини-
стые относятся к связным грунтам, а песчаные — Супесчаный 12-8
к сыпучим. Песчаный Менее 3
Важной характеристикой грунтов является
их относительная влажность:
_ т
пг0
где m — масса пробы грунта в естественном состоянии; т0 — масса высушен-
ной пробы.
Связные грунты характеризуются наличием в них сил сцепления, завися-
щих от содержания влаги, вследствие чего эти грунты могут быть в твердом,
пластичном и текучем состояниях.
Сыпучие грунты характеризуются отсутствием сцепления между части-
цами грунта в сухом состоянии.
Под воздействием движителей возникают упругие и пластические дефор-
мации грунта.
Проходимость автомобиля зависит от механических свойств грунтов, ха-
рактеризующих сопротивления сжатию, сдвигу и срезу. Характеристики
этих свойств определяются экспериментально.
Для определения сопротивления грун-
та сжатию вдавливают в грунт специ-
альный штамп. Измеряют нагрузку и глу-
бину погружения штампа в грунт Ар и
строят график зависимости между дав-
лением р^ и ftj. На рис. 12.18 приведена
характерная зависимость hf = При
малых значениях р^ деформация грунта
hj. практически пропорциональна давле-
нию (участок 1). Грунт при этом уплот-
няется. При дальнейшем увеличении рГ
происходит не только уплотнение, но и
сдвиг массы грунта в стороны. Характе-
ристика hr = f(Pt) становится нелинейной
(участок 2). При некотором давлении р,
Рис. 12.18. Зависимость между давлением
на грунт рТ и деформацией грунте Л,
458
12. Проходимость автомобиля
грунт более не уплотняется, а вытесняется в стороны, т.е. наступает теку-
честь грунта и деформация /ц. резко возрастает (участок 3).
Давление pt называют несущей способностью грунта. Несущая способ-
ность грунта зависит от относительной влажности (см. рис. 12.10).
На основе обработки результатов экспериментов предложено множество
зависимостей между и рг. Известны формулы М.Н. Летошнева, М.Г. Бек-
кера, В-В. Кацыгина, Я.С. Агейкина.
Формула Летошнева:
pT=crh», (12.69)
гдесг, р. — параметры, определяемые экспериментально.
Параметрысг и ц зависят как от вида и состояния грунта, так и от размеров
штампа, что создает неоднозначность при использовании данных, получен-
ных разными исследователями.
Формула Беккера устраняет этот недостаток и имеет следующий вид:
(12.70)
где Aj — коэффициенты, определяемые экспериментально; Ъ — наимень-
шая ширина штампа.
Формула Кацыгина:
pr = p^th—ftr, (12.71)
А
гдеЛф — коэффициент объемного смятия грунта, численно равный тангенсу
угла наклона касательной к кривой деформации грунта в начале координат
(см, рис. 12.18).
Наиболее полное описание свойств грунта обеспечивает формула Агей кина:
рг =----ЙА-------(12.72)
ЕЛГ +0,5np,abIQ
где Е — модуль деформации грунта; а — коэффициент, характеризующий за-
тухание напряжений в грунте; I — коэффициент, учитывающий соотноше-
ние длины I и ширины b площадки контакта колеса с грунтом; Q — параметр,
учитывающий толщину мягкого слоя грунта.
Основные преимущества этой формулы: базируется на параметрах Е и pt,
широко используемых в механике грунтов; позволяет учесть наличие жест-
кого основания под мягким слоем грунта.
Под действием продольной силы Fx воздействия колеса на грунт происхо-
дит сдвиг грунта в направлении этой силы. Одновременно на грунт действует
нормальная нагрузка колеса Сопротивление грунта сдвигу также опреде-
ляют посредством специального штампа, к которому приложены силы Fx и Fx
(рис. 12.19).
12.6- Характеристики лорожно-грунтовых поверхностей
459
Сопротивление сдвигу Fx по модулю равно силе Fx и выражается формулой
Л = с0А +F,tg<to*
(12.73)
где с0 — внутреннее сцепление грунта, которое зависит от молекулярных
и капиллярных сил сцепления; А — площадь сдвигаемой поверхности грунта;
<Ро — Угол внутреннего трения (tg<po называют коэффициентом внутреннего
трения}.
Разделив все члены выражения (12.78) на Д, получим выражение для оп-
ределения удельного сопротивления сдвигу:
t = co + prtg<₽o=T4.+v
Составляющая тс =с0 наиболее характерна
для связных грунтов. В сыпучих грунтах она
мала или даже равна нулю, но в них значитель-
на вторая составляющая ц, — внутреннее тре-
ние, возникающее между твердыми частицами.
Внутреннее трение пропорционально нормаль-
ному давлению д. и коэффициенту внутреннего
трения tg^.
На рис. 12.20 показаны зависимости тот де-
формации сдвига Л для связных 1 и для сыпучих 2
Рис. 12.19. Схема определения
сопротивления грунта сдвигу
грунтов.
На рис. 12.21 приведен график зависимости г
от рг, который позволяет определить с0 и фо.
Рис. 1220. Зависимость удельного сопро-
тивления сдвигу f от деформации сдвига &
1 — для связных грунтов; 2 — для сыпучих
грунтов
Рис. 12.21. Зависимость удельного
сопротиалевия сдвигу Т от нормаль-
ного давления на грунт рГ
В табл. 12.3 приведены некоторые характеристики связных грунтов при
влажности, близкой к пределу пластичности [8].
Песчаные грунты в зависимости от зернистости имеют tg<p0 = 0,6-0,8 и
с0 =0/)01-0р08 МПа. Если штамп погружен в грунт на глубину Л^, помимо
460
12. Проходимость автомобиля
сдвига грунта происходит его срез по боковым граням. Усилие (Н), необ-
ходимое для среза грунта, вычисляется по формуле
Jep =
где Трр — удельное сопротивление срезу, Н/м.
Таблица 12.3
Характеристики грунтов
Вид грунта Несущая способность р,, МПа Внутреннее сцепление Со. МПа Коэффициент внутреннего трения
Супесчаный 0,25-0,50 0,035-0,070 0,40-0,45
Суглинистый 0,35-0,60 0,04-0,08 0,3-0,4
Глина 0,35-0,70 0,05-0,10 0,2-0,8
Суглинистые грунты имеют сопротивление срезу 1,2-2,0 кН/м, а супесча-
ные — 1,5-2,6 кН/м.
12.7, Характеристики взаимодействия колеса
с деформируемой опорной поверхностью
Рассмотренные в предыдущем параграфе характеристики механических
свойств грунтов позволяют определить численные оценки характеристик
взаимодействия колеса с опорной поверхностью.
При оценке проходимости автомобиля по деформируемой опорной по-
верхности определяют коэффициент сопротивления качению, глубину следа
колеса и момент силы сцепления колеса с опорной поверхностью.
При качении колеса необходимо учесть гистерезисные потери при дефор-
мации шины и потери на деформацию грунта. В этом случае коэффициент
сопротивления качению можно представить состоящим из двух состав-
ляющих:
/ = /ш+/г- (12.75)
Характер деформирования шины и грунта иллюстрируется рис. 12.22.
Деформация грунта под колесом состоит из упругой и пластической состав-
ляющих. После прохода колеса остается пластическая деформация, которая
соответствует глубине следа колеса Лся. Деформация шины в атом случае зна-
чительно отличается от деформации при качении по недеформируемой опорной
поверхности. Поверхность контакта оболочки шины с грунтом приобретает
криволинейную форму, близкую к форме эллипсоида, а в сечении продоль-
ной плоскостью — к дуге окружности, радиус которой гпр значительно боль-
ше, чем свободный радиус колеса rt. В связи с этим при оценке деформации
опорной поверхности упругое колесо радиусом гс заменяют условным жест-
ким колесом радиусом . На основании такого подхода получен ряд моде-
лей, описывающих характеристики качения колеса.
12.7. Характеристики взаимодействия колеса с деформируемой опорной поверхностью
461
Рис, 12.22. Схема определения приведенного радиуса колеса
Для определения коэффициента сопротивления качению наиболее часто
используется формула
f -
F^pJ? Ft\ptD
(12.76)
TfleQ.Q — коэффициенты, определяемые экспериментально; Ft — нормаль-
ная нагрузка на колесо, кН; р, — давление воздуха в шинах, МПа; D — на-
ружный диаметр колеса, м; рв — несущая способность грунта, МПа.
Средние значения коэффициентов: Q = 0,0081; С2 = 0,0425.
Первое слагаемое формулы (12.76) соответствует коэффициенту ха-
рактеризующему гистерезисные потери в шине, а второе — коэффициенту /г,
характеризующему потери на деформацию грунта.
Глубину следа колеса можно вычислить по формуле
I F?
k^Dnp
(12.77)
где b — ширина колеи (принимают равной ширине профиля шины); Вщ, —
диаметр жесткого (приведенного) колеса:
DBP=Z)(1+M
V "г )
(12.78)
D — наружный диаметр свободного колеса; йщ — деформация шины; й, — де-
формация грунта; kz — коэффициент объемного смятия грунта, приведенный
к размерам колеса:
. 0,0Цо.
(12.79)
ко — коэффициент объемного смятия грунта.
462
12. Проходимость автомобиля
Деформацию шины Лщ можно определить по формуле Хейдекеля:
1^=------У- (12.80)
2л Лл
где гс — свободный радиус шины; гш — радиус оболочки протектора шины
в поперечном ее сечении.
Момент силы сцепления колеса с опорной поверхностью определяется со-
противлением смятию и срезу грунта:
М ф = М. + Мср = Mtl+М« + Мер, (12.81)
где ЛГ1 — момент, обусловленный сопротивлением смятию грунта (Mtl —
внутренним сцеплением частиц грунта, — внутренним трением между
частицами); Мср — момент силы сопротивления срезу грунта.
Значения М^М^гМвр вычисляются по формулам:
AfT1 - CtfAr^t (12.82)
АГй = tg<p0; (12.83)
Afep =тсрДгк0, (12.84)
где А — суммарная площадь сдвигаемой поверхности грунта (равна произве-
дению ширины протектора шины на высоту грунтозацепов и на их количество,
взаимодействующее с грунтом); — удельное сопротивление срезу, Н/м;
Н — длина периметра всех грунтозацепов, погруженных в грунт.
12.в. Влияние конструктивных и эксплуатационных факторов
на проходимость автомобиля
Среди конструктивных факторов автомобиля наибольшее влияние на про-
ходимость оказывают параметры и конструктивные особенности следующих
механизмов: ходовой части, двигателя, трансмиссии, компоновочной схемы,
дополнительных средств повышения проходимости.
Ходовая часть. В ходовую часть автомобиля входят колесный движитель
и подвеска. Колесный движитель характеризуется геометрическими разме-
рами колес, конструктивным исполнением протектора шин, давлением воз-
духа в шинах, нормальными нагрузками на колеса.
С увеличением диаметра колеса снижается давление на опорную поверх-
ность, улучшается сцепление, возрастают высота препятствия и ширина рва,
преодолеваемых автомобилем. Увеличение ширины профиля шины приво-
дит к повышению площади контакта колеса с дорогой, снижению давления
на опорную поверхность, уменьшению глубины колеи и сопротивления каче-
нию.
Конструкция протектора шины характеризуется рисунком, коэффици-
ентом насыщенности, формой и размерами грунтозацепов. На дорогах с твер-
дым покрытием применяют шины с дорожным рисунком протектора. Если
12,0- Влияние конструктивных и эксплуатационных факторов на проходимость автомобиля
463
автомобиль эксплуатируют в разнообразных дорожных условиях, то целесо-
образно использовать шины с универсальным рисунком протектора. На авто-
мобилях, предназначенных для работы по грунтовым дорогам и вне дорог,
применяют шины с вездеходным рисунком протектора, имеющим развитые
грунтозацепы большой высоты. С увеличением коэффициента насыщенно-
сти протектора происходит снижение давления колес на дорогу, что приводит
к уменьшению износа шин и дорожного покрытия и увеличению коэффици-
ента сцепления с сухой поверхностью дороги. На мокрых и грязных дорогах
уменьшение давления колеса на дорогу снижает коэффициент сцепления.
Уменьшение давления воздуха в шине приводит к увеличению площади
контакта и снижению давления на дорогу. Поэтому влияние давления возду-
ха на проходимость аналогично влиянию ширины профиля шины. Коэффи-
циент сопротивления качению на дороге с твердым покрытием снижается
с увеличением давления. На деформируемой поверхности дороги минималь-
ное сопротивление качению достигается при определенном давлении воздуха
в шинах, поэтому целесообразно применять автоматическое регулирование
давления
У автомобилей повышенной и высокой проходимости с одинарными ши-
нами колеи всех мостов должны совпадать. В противном случае сопротивле-
ние качению на деформируемых грунтах значительно возрастает.
Распределение массы автомобиля между мостами обычно выполняют так,
чтобы нормальные нагрузки на все колеса были примерно одинаковы. Это
способствует уменьшению потерь на качение. Однако на деформируемых уп-
лотняющихся грунтах целесообразно увеличить нагрузку на передние колеса.
Тогда задние колеса будут двигаться по более уплотненной поверхности и со-
противление качепию уменьшится.
Применение независимой или балансирной подвески увеличивает допусти-
мые перекосы мостов, предотвращает отрывы колес от дороги. Снижение жест-
кости и увеличение хода подвески уменьшает пределы изменения нормальных
реакций при колебаниях кузова и улучшает сцепление колес с дорогой.
Двигатель. На проходимость автомобиля оказывает влияние удельная
мощность автомобиля. Высокая удельная мощность позволяет автомобилю
двигаться на труднопроходимых участках местности с более высокой скоро-
стью. С увеличением скорости снижается деформация грунта и уменьшается
глубина колеи, что способствует уменьшению сопротивления движению. Вы-
сокая удельная мощность также позволяет эффективнее использовать кинети-
ческую эпергию автомобиля для динамического преодоления препятствий,
сократить количество переключений передач. Существенное влияние на сред-
нюю скорость и производительность автомобиля оказывает внешняя скорост-
ная характеристика двигателя. Совершенствование характеристик направлено
на увеличение коэффициентов приспособляемости двигателя по вращаю-
щему моменту и угловой скорости, на снижение удельного расхода топлива.
На тяжелых грузовых автомобилях и автопоездах находят применение так
называемые двигатели постоянной мощности, у которых обеспечивается
постоянство мощности в значительном диапазоне частоты вращения вала.
464 12- Проходимость автомобиля
Трансмиссия. Параметры трансмиссии оказывают существенное влияние
на диапазон регулирования момента на ведущих колесах и скорости движе-
ния, на плавность изменения моментов и скоростей. Чем больше диапазон
передаточных чисел и меньше показатель средней плотности ряда передаточ-
ных чисел, тем выше потенциальные возможности автомобиля для обеспече-
ния устойчивого движения в тяжелых дорожных условиях. У автомобилей
о механическими ступенчатыми коробками передач во время переключения
передач мощность к ведущим колесам не подводится и автомобиль теряет
скорость. Последующее включение передачи сопровождается динамической
нагрузкой в трансмиссии и возрастанием момента на колесах, что может
быть причиной срыва верхнего слоя грунта и последующего интенсивного
буксования колес. Этот недостаток в значительной мере устраняется приме-
нением автоматических коробок передач.
Значительное улучшение проходимости автомобиля достигается приме-
нением бесступенчатых трансмиссий — гидромеханических, электроме-
ханических. Они позволяют существенно снизить минимальную устойчивую
скорость движения, уменьшить динамическое воздействие на грунт, что оп-
ределяет успешное осуществление трогания автомобиля с места и непрерыв-
ное устойчивое движение.
При эксплуатации автомобилей на размокших грунтовых дорогах или
в бездорожье наибольшее влияние на проходимость оказывают колесная
формула, тип привода ведущих колес и способ управления механизмами
привода. В связи с деформируемостью грунта, низкими значениями и пере-
менностью коэффициента сцепления высокие показатели проходимости
достигаются только для полноприводных автомобилей с блокируемыми диф-
ференциалами. Циркуляция мощности в этих условиях исключена, так как
вследствие неизбежной пробуксовки все колеса работают в ведущем режиме
и полностью реализуют свои сцепные возможности.
Для большегрузных автопоездов, тягачами у которых используются двух-
осные неполноприводные автомобили, возникает проблема трогания с места
на скользкой дороге или в условиях, когда одно из ведущих колес находится
на опорной поверхности с низким коэффициентом сцепления. Решение про-
блемы достигается применением противобуксовочной системы (ПБС). Эта
система обеспечивает автоматическое управление блокировкой межколесно-
го дифференциала, подтормаживанием буксующего колеса и подачей топли-
ва в двигатель, независимо от положения педали акселератора.
Компоновочная схема автомобиля. Компоновка автомобиля характери-
зуется колесной формулой, схемой размещения колес, распределением массы
между мостами, типом подвески мостов или колес, типом привода ведущих
колес. Все эти факторы определяют категорию проходимости автомобиля
(см. параграф 12.1). Рациональное их сочетание позволяет создавать боль-
шое многообразие типов автомобилей, наиболее приспособленных к конкрет-
ным условиям эксплуатации.
Дополнительные средства повышения проходимости. Повышение прохо-
димости автомобиля в ухудшенных дорожных условиях или по бездорожью
12-8. Влияние конструктивных и эксплуатаиионных факторов на проходимость автомобиля
465
может быть обеспечено установкой на колеса дополнительных устройств, уве-
личивающих сцепление с опорной поверхностью и уменьшающих сопротив-
ление движению. По выполняемым функциям их условно можно разделить
на четыре группы: цепи противоскольжения, уширители колес, легкосъем-
ные гусеницы и устройства для самовытаскивания. Наибольшее распростра-
нение получили цепи противоскольжения. Они повышают сцепление колес
с грунтом на 20-45 %. Однако на слабых грунтах (рыхлых, песчаных, боло-
тистых и т.п.) их использование может привести к срыву грунта и быстрому
зарыванию в грунт. В этих условиях целесообразнее применять уширители
колес. Они представляют собой специальные устройства, имеющие сильно
развитые грунтозацепы, что позволяет уменьшить давление на грунт, сни-
зить сопротивление движению и улучшить сцепление. Аналогичный эффект
достигается применением арочных шин, а также сдвоенных шин. Легкосъем-
ная гусеница представляет собой ленту, надеваемую на колесный движитель
и стягиваемую по концам при помощи специальных устройств. Известны
цельнометаллические и резинометаллические конструкции гусениц. Их обыч-
но устанавливают на колеса тележки среднего и заднего ведущих мостов трех-
осного автомобиля с колесной формулой 6 к 4 или бхб. Проходимость автомо-
биля улучшается на 25-40 %.
Для преодоления особо тяжелых участков местности и крутых подъемов,
а также для вытаскивания застрявшего автомобиля применяют лебедки. Их
устанавливают на большинстве полноприводных автомобилей повышенной
и высокой проходимости.
Эксплуатационные факторы проходимости обусловлены техническим со-
стоянием механизмов автомобиля, квалификацией водителя, умелым и рацио-
нальным использованием дополнительных средств повышения проходимости.
Вопросы для самоконтроля
1. Что такое проходимость автомобиля? Назовите факторы, влияющие на потерю
проходимости.
2. Назовите показатели профильной проходимости автомобиля.
3. От каких факторов зависят возможности преодоления пороговых препятст-
вий ведомыми и ведущими колесами автомобиля? Назовите предельные зна-
чения высоты препятствий, преодолеваемых этими колесами.
4. Назовите показатели опорно-сцепной проходимости автомобиля. Напишите
формулы для их вычисления.
5 Назовите обобщенные показатели проходимости. Напишите формулы для их
вычисления.
6. Каковы значения допускаемых нагрузок на мосты автомобилей и давлений
колес на дорогу?
7. Какие конструктивные факторы влияют на проходимость автомобиля? Объ-
ясните физический смысл и причины их влияния.
8. Назовите типы дифференциалов, применяемых в трансмиссиях автомоби-
лей. Объясните их назначение и охарактеризуйте свойства дифференциалов
различных типов.
4М 12. Проходимость автомобиля
9. Какими свойствами обладает простой конический дифференциал? Напишите
формулу для определения суммарного момента, реализуемого таким диффе-
ренциалом в условиях различного сцепления колес.
10. Назовите способы повышения проходимости автомобиля с дифференциаль-
ным приводом колес. Объясните, за счет чего они улучшают проходимость.
11. Чтотакое несимметричный дифференциал? В каких случаях егоприменяют?
Как определяется кинематический параметр несимметричного дифферен-
циала?
12. Что такое циркуляция мощности? При каких условиях и по какой причине
она возникает?
13. Назовите дополнительные средства повышения проходимости автомобиля.
Литература
1. Автомобильный справочник BOSCH / Пер. с англ. — М.: За рулем, 2002. — 896 с.
2. Агейкин Я.С. Проходимость автомобилей. — М.: Машиностроение, 1981. — 282 с-
В. Аксенов ПВ. Многоосные автомобили. — М.: Машиностроение, 1989 — 280 с.
4. Альгин BJ3. Динамика, надежность и ресурсное проектирование трансмиссий мо-
бильных машин. — Мн.: Наука и техника, 1995. — 256 с
б. Антонов ДА. Теория устойчивости движения многоосных автомобилей. — М<:
Машиностроение, 1978. — 216 с.
6. Вонг Дж. Теория наземных транспортных средств. / Пер. с англ. — М.: Машино-
строение, 1982. — 282 с.
7. Высоцкий М.С. Грузовые автомобили / М.С. Высоцкий, Л.Х. Гилелес, С.Г. Хер-
сонский. — М.: Машиностроение, 1995. — 256 с.
8. ГришкевичА.И. Автомобили. Теория. — Мн.: Вышэйшая школа, 1986. — 208с.
9. Колебания автомобиля. Испытания и исследования / Под ред. Я.М. Певзнера. —
М.: Машиностроение, 1979. — 208 с,
10. Кравец В.Н. Законодательные и потребительские требования к автомобилям /
В.Н. Кравец, Е.В. Горынин. — Нижний Новгород, 2000. — 400 с.
11. Кравец В.Н. Проектирование автомобиля. — Нижний Новгород, 1992. — 230 с.
12. Литвинов АС. Автомобиль. Теория эксплуатационных свойств / А.С. Литвинов,
Я.Е. Фаробин. — М.: Машиностроение, 1989. — 240 с.
13. Литвинов А.С. Управляемость и устойчивость автомобиля. — М.: Машинострое-
ние, 1971. — 416 с.
14. Петрушов В А. Мощностной баланс автомобиля / В. А. Петрушов, В. В. Москов-
кин, А.Н. Евграфов. — М.: Машиностроение, 1984. — 160 с.
15. Петрушов В А. Сопротивление качению автомобилей и автопоездов / В А. Петру-
шов, С.А. Шуклин, В.В. Московкин. — М.: Машиностроение, 1975. — 226 с.
16. ПирковскийЮ.В. Теория движения полноприводного автомобиля / Ю.В. Пирков
ский, С.Б. Шухман. — М.: ЮНИТИ-ДАНА, 2001; Элит-2000, 2001. — 230с.
17. Платонов В.Ф. Полноприводные автомобили. — М.: Машиностроение, 1989. —
312 с.
18. Проектирование трансмиссий автомобилей: Справочник / Под ред. А.И. Гришке-
вича. — М>: Машиностроение, 1984. — 272 с.
19. Работа автомобильной шины / Под ред. В.И. Кнороза. — М.: Транспорт, 1976. —
238 с.
20. Ротенберг Р.В. Подвеска автомобиля. — М.: Машиностроение, 1972. — 392 с.
21. Смирнов ГА. Теория движения колесных машин. М.: Машиностроение, 1990. —
352 с.
22. Тарасик ВЛ. Интеллектуальные системы управления автотранспортными сред-
ствами / В.П. Тарасик, С.А. Рыякевич. — Мн.: УП «Технопринт», 2004. — 512 с.
23. Тарасик В.П. Математическое моделирование технических систем. — Мн.: «Ди-
зайн ПРО», 2004- — 640 с.
24. Тарасик В.П. Проектирование колесных тягово-транспортных машин. — Мн.;
Вышэйшая школа, 1984. — 163 с.
Литература
466
25. Тарасик В.П. Теория автомобилей и двигателей / В.П. Тарасик, М.П. Бренч. —
Мн.: ООО «Новое знание», 2004, — 400 с.
26. Токарев АЛ Топливная экономичность и тягово-скоростные качества автомоби-
ля. — М.: Машиностроение, 1982. — 224 с.
27. £(итович И.С. Динамика автомобиля / И.С. Цитович, В.Б. Альгин. — Мн.: Наука
и техника, 1981. — 191 с.
28. Чудаков ЕЛ, Избранные труды. Том I. Теория автомобиля. — М,: АН СССР,
1961. — 463 с.
29- Vj/дакчэв ЕЛ. Теория автомобиля. — М.: Машгиз, 1950. — 343 с.
30. Эллис Д.Р. Управляемость автомобиля- — М.: Машиностроение, 1975. — 214 с.
31. Яценко Н.Н. Плавность хода грузовых автомобилей / Н.Н. Яценко, О,К. Прутчи-
ков. — М.: Машиностроение, 1969. — 220 с.
32. Яценко Н.Н. Поглощающая и сглаживающая способность шин. — М_: Машино-
строение, 1978. — 132 с.
33. Georg Hili. Vehicle Dynamics. Lecture Notes. 2005. — 1 53 p.
34. Hans B. Pmjejka. Tire and Vehicle Dynamics. SAE Edition. Second Edition. 2005. —
642 p.
35. ГОСТ 4.396—88. Автомобили легковые. Номенклатура показателей.
36. ГОСТ 4.401-88. Автомобили грузовые. Номенклатура показателей.
37. ГОСТ 21398 89. Автомобили грузовые. Общие технические требования.
38. ГОСТ 22576-90, Автотранспортные средства. Скоростные свойства. Методы ис-
пытаний,
39. ГОСТ 22895-77. Тормозные системы и тормозные свойства автотранспортных
средств. Нормативы эффективности. Общие технические требования.
40, ГОСТ 25478-91. Автотранспортные средства. Требования к техническому состоя-
нию ио условиям безопасности движения. Методы проверки.
41. ГОСТ 20306-90. Автотранспортные средства. Топливная экономичность. Методы
испытаний.
42. ГОСТ 12.1.012-90. Система стандартов безопасности труда. Вибрационная безо-
пасность. Общие требования безопасности.
43. ГОСТ 3163-89 Прицепы и полуприцепы автомобильные. Общие технические тре-
бования.
44. ГОСТ 4364-81. Приводы пневматические тормозных систем автотранспортных
СреДСТП.
45. ГОСТ 12105—92. Тягачи седельные и полуприцепы. Присоединительные размеры.
46. ГОСТ 17697-72. Автомобили. Качение колеса. Термины и определения.
47, ГОСТ 22653-77. Автомобили. Параметры проходимости. Термины и определе-
ния.
48. ГОСТ 2349-75. Устройства тягово-сцепные системы *Крюк-иетля* автомобиль-
ных и тракторных поездов. Основные параметры и размеры. Технические требо-
вания.
49. ГОСТ 17069 71. Передачи гидродинамические. Методы стендовых испытаний.
Литература 469
60. ГОСТ 22748-77. Автотранспортные средства. Номенклатура наружных раамеров.
Методы намерений.
51. ГОСТ 12105-74. Тягачи седельныеи полуприцепы. Присоединительные размеры.
52. ГОСТ 25907-89. Устройства буксирные автомобилей. Общие технические требо-
вания. Методы испытаний.
53. ГОСТ 28248-89. Легковые автомобили. Тягово-сцепные устройства шарового типа.
Основные равмеры.
54. ГОСТ Р 52302-2004 Управляемость и устойчивость. Технические требования.
Методы испытаний.
55. ОСТ 37.001.471-88. Управляемость и устойчивость автотранспортных средств.
Методы испытаний.
56. ОСТ 37.001,487-89. Управляемость и устойчивость автомобилей. Общие техниче-
ские требования.
Предметный указатель
А
Автомобиль высокой проходимости 426
- ограниченной 425
- повышенной 425
Автопоезд 80. 95,121, 242
Аквапланировдние 39
Асинхронность времени срабатывания
тормозного привода тягача и прице-
па 244
Б
База автомобиля 183
Баланс мощностной автомобиля 105
--ведущих» колеса 43
Безопасность автомобиля активная 208
Блокировка дифференциала 444
Буксование колеса 24
В
Виброускоревие 249
Время переключения передач 101
- разгона автомобиля 88,101
- реакции водителя 215
- срабатывания тормозного приво-
да 210,216
Г
Галопирование 272, 291
Гидродинамическая муфта 135
Гидродинамический трансформатор 136
Гистерезисные потери 27
Грузовместимость 170
Грузоподъемность 171
А
Давление воздуха в тине 30, 331,463
- колеса на опорную поверхность 21,
436
Двигатель внутреннего сгорания 62
Движитель И
Декремент колебаний 297
— логарифмический 297
Деформация упругого элемента подвес-
ки статическая 255
Диаграмма тормозная 215
Дисбаланс колеса 394
Дифференциал межколесный 441
- межосевой 448
- повышенного трения 444
- свободного хода 444
3
Заброс угловой скорости автомобиля 398,
405,411
Замедление автомобиля 214
— максимально возможное 215
— установившееся 209
Занос автомобиля 355
- мостов 378
И
Измеритель 5
Испытания дорожные 86
- вспомогательной тормозной системы
213
- по определению коэффициента сопро-
тивления качению 29,49
-----сцепления 49
-----радиуса качения колеса 18, 48
- стендовые 86
- типа 0 210
- типа 1210
- типаП213
- топливной экономичности автомоби-
ля 114
- тормозных свойств 210
- тягово-скоростных свойств 87
К
Колебания кузова вынужденные 299
- затухающие 294
- свободные 284
- управляемых колес 387
Колесо ведомое 14, 35
- ведущее 14,33
Предметный указатель
- приводное 14
— тормовящее 16, 36
- управляемое 325
Колея 183
Коэффициент апериодичности 296
- блокировки дифференциала 445
- грузоподъемности 173
- грузоподъемности удельной 173
- жесткости упругого элемента под-
вески 255
- затухания относительный 261
- использования мощности двигате-
ля 106,118
— угловой скорости 118
- насыщенности протектора 436
- обтекаемости 56
- отбора мощности двигателя 72
- перераспределения нормальных
реакций 84, 94,104, 221
- поперечной устойчивости 370
- приведенной массы автомобиля 79
- приспособляемости двигателя 64
- прозрачности ГДП 141
- проходимости 437
- радиальной жесткости шины 21, 257
- распределения тормозных момен-
тов 219
- скольжения 24
- совместимости тормозных приводов
тягача и прицепа 243
— сопротивления воздуха 69
--уводу колеса 331
— качению 28
- статической поворачиваемости 364
- сцепления поперечного 40
— продольного 38
- сцепной массы 96,181, 436
- суммарного дорожного сопротивле-
ния 79
- трансформации момента 137
- трения качения 28
— скольжения 38
471
- эффективности тормовной систе-
мы 224,230
КПД ведущего колеса 45
- гидродинамической передачи 137
- трансмиссии 74
М
Маневренность 419
Масса автомобиля полная 171
--приведенная 79
--собственная 170
- неподрессоренная 254
- подрессоренная 264
- снаряженного автомобиля 171
Момент ведущего колеса 34, 41
- гироскопический 389
- инерции двигателя 60
— колеса 34,60
— подрессоренной массы 274
- инерционный двигателя 60
- насосного колеса ГДП 143
- поворачивающий 327, 330
- сопротивления повороту 327, 341
— качению 28
- стабилизирующий 330, 383, 385
- силы сцепления колеса с дорогой 41
- тормозной 36, 42
--удельный 242
- турбины ГДП 146
- тяговый 76
Мощность 7
- двигателя эффективная 62
- нагрузки двигателя 106,116
- потерь в трансмиссии 106
- сопротивления воздуха 106
— качению 31, 44,106
--подъему 106
- удельная 130
Н
Нагрузка колеса нормальная 13
Наклон шкворня 383
472
Предметный указатель
Номограмма контроля буксования 96
- нагрузки 96
О
Опрокидывание автомобиля боковое
355,868
Ось крена 344
П
Параметр 15,167
- главный 168
- основной 168
Передаточное отношение ГДП 187
- число главной передачи 185
— коробки передач 188,195
Передача гидродинамическая 185
- гидромеханическая 135
Плавность хода автомобиля 247
Плечо обкатки 384, 385
Площадь лобовая 66
Поворачиваемость автомобиля избыточ-
ная 364
— недостаточная 364
--нейтральная 364
--статическая 364
Подвеска автомобиля зависимая 344
— независимая 344
Показатели б
- маневренности 419
- плавности хода 248
- проходимости обобщенные 437
— опорно-сцепной 435
--профильной 426
- топливной экономичности 114
- тормозных свойств 209
- тягово-скоростных свойств 85
- управляемости 897
- устойчивости 357
Полоса частот октавная 249
Приемистость автомобиля 98
Пробой подвески 291
Просвет дорожный 426
Путь остановочный 216
- разгона 101
- тормозной 210, 216
Р
Радиус инерции 274
- колеса динамический 16
,---качения 15,19
— кинематический 23
— свободный 15
--статический 15
- кривизны траектории 324
- поворота 324
- проходимости(продольной и попе-
речной) 427,429
Развал колес 386
Разгон автомобиля 98
Расход топлива в городском цикле 114
— в магистральном цикле 114
— контрольный 114
— путевой ИЗ
--удельный автомобиля 113
--автопоезда 121
--двигателя 116
— часовой 116
Реакция (опорной поверхности на колесо)
- касательная 22
- нормальная 22
- поперечная 22
- продольная 22
- удельная поперечная 237
--продольная 37ч 236
Регулятор тормозных моментов 232
С
Свойства надежности 4
- функциональные 4
- эксплуатационные 4
Сила аэродинамическая 56
- инерции автомобиля приведенная 79
— поступательно движущейся массы
автомобиля 60
— центробежная 340, 880
Предметный указатель
473
- подъемная 57
- сопротивления воздуха 56
— подъему (скатывающая) 54
--прицепа 80
— тормозная 86
- тяги ведущего колеса 85
Система антиблокировочная 234
- виброэашитная 254
— тормозная вспомогательная 209
--запасная 209
--рабочая 209
--стояночная 209
Скольжение колеса боковое 830,869
--внешнее 22
--упругое 19
Скорость автомобиля 26,90
— максимальная 87
--условная максимальная 87
— установившаяся на спуске 210,213
— экономичная 121
- колеса 24
— теоретическая 24
- критическая по устойчивости рабо-
ты двигателя 92
— по курсовой и траекторной устой-
чивости автомобиля 363
— по условиям бокового опрокидыва-
ния 372
-----бокового скольжения 372
- скольжения колеса 24
Спектральная плотность 270,308
Способность грунта несущая 438
Стабилизация управляемых колес 382
Схождение колес 387
Т
Торможение автомобиля 208
--двигателем 218
- на уклонах дороги 209
- служебное 209
- экстренное 209
V
УвоД колеса 329
Угол дрейфа 357
- крена кузова 344
— наклона шкворня (поперечный, про-
дольный) 382
- поперечной устойчивости 370
- развала колес 386
- свеса 427
- увода колеса 329
Уклон дороги максимальный 102
— поперечный 372
--предельный 102
--продольный 54
Управляемость автомобиля траектор-
ная 399
Устойчивость автомобиля 355
— курсовая 358
— по боковому скольжению 369
— по опрокидыванию 370
--поперечная 368
--траекторная 858
Ф
Фактор динамический 89
- обтекаемости 59
Формула колесная 425
X
Характеристика автомобиля динами-
ческая 89
--топливная 120
- амплитудно-частотная 303
— двигателя 62
— регуляторная 66
— скоростная 62
--холостого хода 66
- минимального удельного расхода то-
плива двигателя 117
- траекторией управляемости 399
Характеристики гидродинамической пе-
редачи безразмерные 140
----выходные 146
----нагрузочные 143
474
U
Центр колебаний кузова 290
- крена подвески 344
- масс автомобиля 51
- мгновенного поворота автомоби-
ля 332
- парусности 56
Цикл еадовой 122
Ч
Частота колебаний парциальная 260,
293
— резонансная 305
— собственная 286, 294
Предметный указатель
- октавная 249
- путевая 264
- циклическая 264
Ш
Шимми 387
Э
Элемент подвески диссипативный 254
— упругий 254
Экспертиза дорожно-транспортная 244
Ю
Юз колеса 24
Оглавление
Предисловие ................................................. 3
Введение ................................................. .....4
1. Основы теории колесного движителя.............................. 11
1.1. Условия и режимы работы автомобильного колёса ............ 11
1.2. Физические процессы при прямолинейном движении колеса.......16
1.8. Скорость колеса и автомобиля ........................... 28
1.4. Сопротивление качению колеса ........................... 26
1.5. Уравнения движения колеса .............................. 33
1.6. Сцепление колеса с дорогой ............................. 37
1.7. Баланс мощности и КПД ведущего колеса ......................43
1.8. Экспериментальное определение параметров и характеристик шин .46
2. Прямолинейное движение автомобиля ............................ 61
2.1. Система сил и моментов, действующих на автомобиль
при прямолинейном движении .......................................51
2.2. Внешние воздействия на автомобиль...........................53
2.3. Внутренние воздействия на механизмы автомобиля ......... 62
2.4. Тяговый момент ведущих колес........................ 76
2.5. Дифференциальное уравнение прямолинейного движения автомобиля .... 77
2.6. Дифференциальные уравнения движения автомобиля при буксовании
ведущих колес................................................... 80
2.7. Нормальные реакции дороги ....................................83
3. Тягово-скоростные свойства автомобиля........................ 85
3.1. Оценочные показатели тягово-скоростных свойств .............85
3.2. Динамическая характеристика автомобиля ................... 89
3.3. Тягово-скоростные свойства автопоезда.......................95
3.4. Разгон автомобиля...........................................98
3.5. Преодоление подъемов .................................... 102
3.6. Мощностной баланс автомобиля...............................105
3.7. Экспериментальное определение параметров и характеристик
автомобиля .................................................... 107
4. Топливная экономичность автомобиля ............................113
4.1. Оценочные показатели топливной экономичности...............113
4.2. Уравнения расхода топлива................................ 116
4.3. Топливная характеристика автомобиля ............. 120
4.4. Топливная экономичность автопоезда................... 121
4.6. Расход топлива в ездовом цикле....................... 122
4.6. Влияние конструктивных и эксплуатационных факторов на тягово-
скоростные свойства и топливную экономичность автомобиля.........128
476
Оглавление
5. Тягово-скоростные свойства и топливная экономичность автомобиля
с гидромеханической трансмиссией....................................135
5.1. Особенности гидродинамических передач...........................135
5.2. Режимы работы и параметры гидродинамических передач .......... 137
5.3. Безразмерные характеристики гидродинамических передач........140
5.4. Выбор характеристик и параметров гидродинамической передачи..142
5.6. Выходные характеристики системы двигатель — гидродинамическая
передача ..................................................... 146
5.6. Дифференциальное уравнение движения автомобиля
с гидромеханической трансмиссией ...................................160
5.7. Динамическая характеристика автомобиля с гидромеханической
трансмиссией ................................................... 162
5.8. Характеристики разгона автомобиля с гидромеханической
трансмиссией ............................................... 164
5.9. Топливная характеристика автомобиля с гидромеханической
трансмиссией ................................................. 160
5.10. Расход топлива автомобиля с гидромеханической трансмиссией
в ездовом цикле ................................................. 162
5.11. .Экспериментальное определение характеристик гидродинамических
передач........................................................ 163
6. Определение основных параметров автомобиля......................... 167
6.1. Основы методологии системного подхода к проектированию
автомобиля ..................................................... 167
6.2. Классификация автомобильных транспортных средств ........... 169
6.3. Определение масс автомобиля.....................................173
6.4. Количество мостов, колесная формула и геометрические параметры
автомобиля ,.................................................... 177
6.5. Определение мощности двигателя .................................183
6.6, Определение передаточного числа главной передачи ...............185
6.7. Определение передаточного числа низшей ступени коробки передач .188
6.8. Определение количества ступеней коробки передач .......... 192
6.9. Оптимизация основных параметров автомобиля......................200
7. Тормозные свойства автомобиля ......................................208
7.1. Тормозные системы автомобиля и виды торможений .................208
7.2. Оценочные показатели тормозных свойств автомобиля ............ 209
7.3. Уравнение движения автомобиля при торможении.................. 218
7.4. Способы торможения автомобиля...................................218
7.5. Распределение тормозных моментов между мостами автомобиля....219
7.6. Снижение эффективности тормозной системы при постоянном
распределении тормозных моментов .................................222
7.7. Эффективность запасной тормозной системы .......................229
7.8. Тормозной момент стояночной тормозной системы ..................231
7.9. Регулирование тормозных моментов................................232
Оглавление
477
7.10. Особенности торможения автопоезда ........................... . 242
7.11. Понятие об экспертизе дорожно-транспортного происшествия .... . 244
8. Плавность хода автомобиля ................................................. 247
8. 1. Оценочные показатели плавности хода ..................... 248
8.2. Характеристики и параметры виброзащитной системы автомобиля ..2S4
8.3. Характеристики неровностей дороги .......................... 263
8.4. Статистические математические модели микропрофиля........... 264
8.5. Динамическая модель автомобиля для анализа плавности хода....271
8.6. Математическая модель автомобиля для анализа плавности хода ..276
8.7. Приближенные модели колебаний автомобиля .................. 279
8.8. Особенности моделирования колебаний многоосных автомобилей,
водителя и пассажиров ....................................... 282
8.9. Свободные колебания подрессоренной массы ...................284
8.10. Свободные колебания подрессоренных И неподрессоренных масс ...292
8.11. Свободные колебания с учетом сил сопротивления................294
8.12. Вынужденные колебания автомобиля .............................299
8.13. Оценка плавности хода автомобиля при движении
по дороге со случайным микро профилем .......................... 306
8.14. Основы анализа нелинейных виброзащитных систем ...............314
8.15. Влияние конструктивных и эксплуатационных факторов
на плавность хода автомобиля......................................317
В. Криволинейное движение автомобиля................................ 324
9.1. Условия осуществления поворота............................... 326
9.2. Боковой увод колеса ........................................ 328
9.3. Кинематика поворота автомобиля ............................. 332
9,4. Внешние воздействия на автомобиль при криволинейном движении .335
9.5. Определение поперечных реакций дороги при криволинейном
движении автомобиля............................................ 340
9.6. Определение нормальных реакций дороги при криволинейном
движении автомобиля............................................ 344
9.7. Уравнения криволинейного движения автомобиля ............... 349
9.8. Экспериментальное определение параметров и характеристик
увода колеса............................................. 352
^.Устойчивость автомобиля....................................... 855
10-1. Оценочные показатели устойчивости ....................... 356
10.2 . Траекторная и курсовая устойчивость автомобиля ......... 358
10.3 . Поворачиваемость автомобиля ............................ 363
10.4 . Поперечная устойчивость автомобиля ....................... 868
10.5 . Занос мостов автомобиля................................. 378
10.6 Стабилизация управляемых колес .......................... ...382
10.7 Колебания управляемых колес................................. 387
478
Оглавление
11 .Управляемость автомобиля...........................................................397
11.1. Оценочные показатели управляемости автомобиля ...................397
11.2. Траекторная управляемость автомобиля.............................398
11.3. Переходные процессы при управлении автомобилем ..................402
11.4. Определение показателей управляемости автомобиля.................405
11.5. Маневренность автомобиля..................................... 419
12 .Проходимость автомобиля............................ ............... 426
12.1. Профильная проходимость .........................................426
12.2. Опорно-сцепная проходимость ................................... 435
12.8. Обобщенные показатели проходимости ..............................437
12.4. Влияние дифференциалов трансмиссии на проходимость автомобиля ... 440
12.5. Распределение вращающих моментов при блокированном приводе
ведущих колес .........................................................450
12.6. Характеристики дорожно-грунтовых поверхностей.................. 456
12.7. Характеристики взаимодействия колеса с деформируемой опорной
поверхностью .........................................................460
12.8. Влияние конструктивных и эксплуатационных факторов
на проходимость автомобиля ...........................................462
Литература.............................................................. 467
Предметный указатель ....................................... 470