/























Author: Ярославский Л.П.
Tags: компьютерные технологии цифровая обработка сигналов информатика
Year: 1979




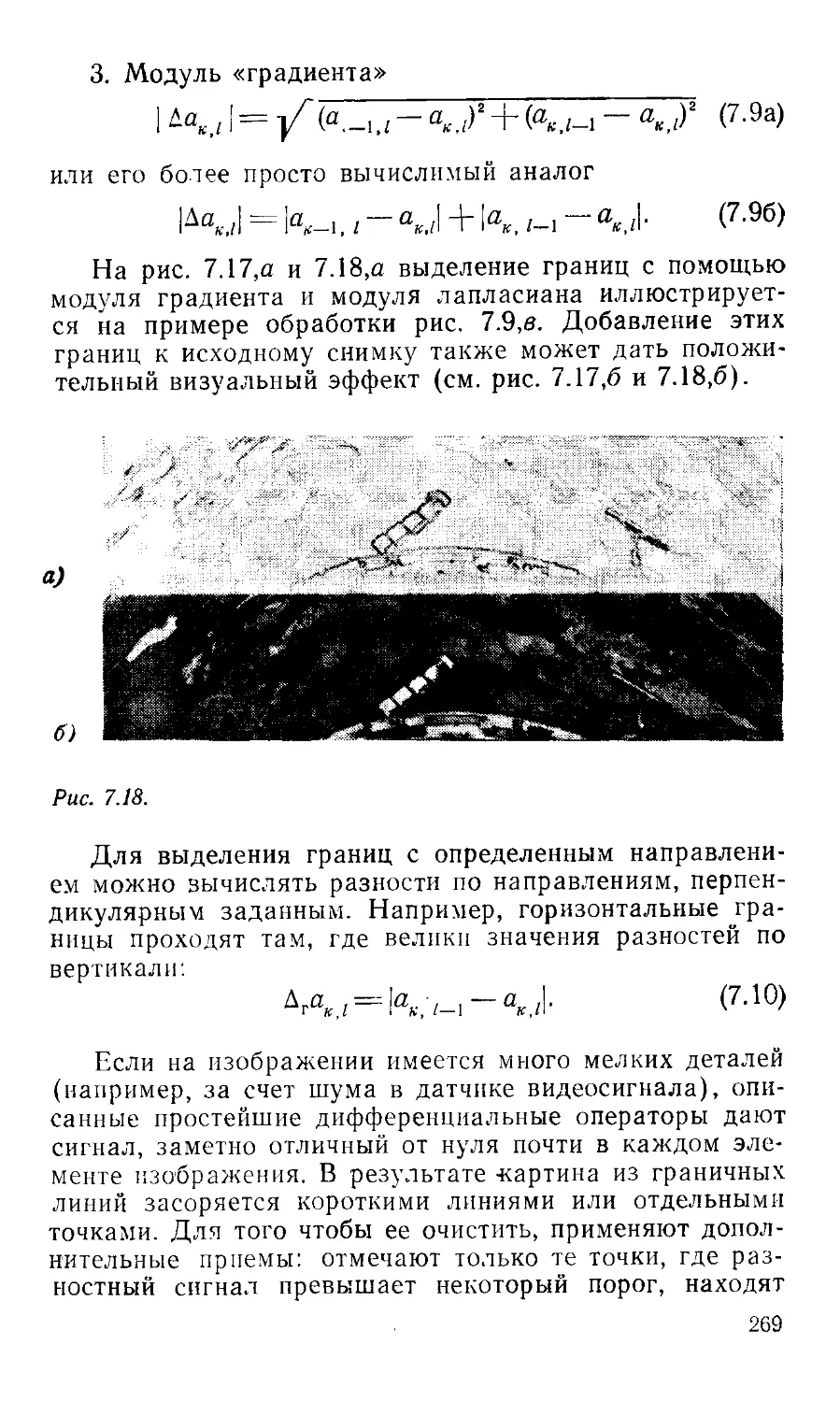
Text
УДК 681.3
Ярославский Л. П. Введение в цифровую обработку изо-
изображений.— М.: Сов. радио, 1979. — 312 с, ил.
В книге собраны основные сведения о методах цифровой
обработки изображений. Рассмотрены вопросы цифрового
представления непрерывных изображений и их линейных и не-
нелинейных преобразований, быстрые алгоритмы линейных пре-
преобразований, методы статистических измерений на изображе-
изображениях. Приведены примеры практического решения задач кор-
коррекции и препарирования изображений, измерений на изобра-
изображениях, визуализации информации. (
Книга предназначена для научных работников и специа-
специалистов, сталкивающихся по роду своей деятельности с обра-
обработкой изображений с целью извлечения информации, а также
для студентов и'аспирантов, готовящихся к такой деятель-
деятельности.
Табл. 9, рнс. 77, библ. 132 назв.
Редакция литературы
по вопросам космической радиоэлектроники t
ИБ № 265
Леонид Пинхусович Ярославский
ВВЕДЕНИЕ В ЦИФРОВУЮ ОБРАБОТКУ ИЗОБРАЖЕНИЙ
Редактор Я. К. Калинина
Художественный редактор Я. С. Шеин
Художник В. М. Аладьев
Технический редактор А. А. Белоус
Корректор 3. Г. Галушкина
Сдано в набор 11.01.79 Подписано в печать 23.05.79 Т 10514
Формат 84ХЮ8/зя Бумага типографская №1
Литературная гарн. Высокая печать
Объем • 16,38 усл. п. л. 16,18 уч.-изд, л.
Тираж 7500 Зак. 42 Цена 1 р. 90 к.
Издательство «Советское радио», Москва, Главпочтамт, а/я 693
Московская типография № 10 «Союзполиграфпрома»
Государственного Комитета СССР
по делам издательств, полиграфии и книжной торговли.
Москва М-114, Шлюзовая наб., 10
Я мб°01°M79 28'79 1502 000 000
© Издательство «Советское радио», 1979 г.
Оглавление'
Предисловие
Введение и обзор содержания
Часть I. ОСНОВЫ ТЕОРИИ ЦИФРОВОЙ ОБРАБОТКИ
СИГНАЛОВ 13
Глава 1. Элементы теории сигналов 13
1.1. Сигналы как математические функции 13
1.2. Пространство сигналов 15
1.3. Наиболее употребительные системы базисных функций 22
1.4. Непрерывные представления сигналов 28
1.5. Описание преобразований сигналов. Понятие о линей-
^ ных и нелинейных преобразованиях 37
1.6. Представление линейяых преобразований по отноше-
отношению к дискретным базисам 39
1.7. Представления операторов по отношению к непрерыв-
непрерывным базисам „ 41
1.8. Примеры линейных операторов 44
Глава 2. Дискретизация и квантование сигналов ... 47
2.1. Обобщенное квантование 47
2.2. Понятие о дискретизации и поэлементном квантовании 50
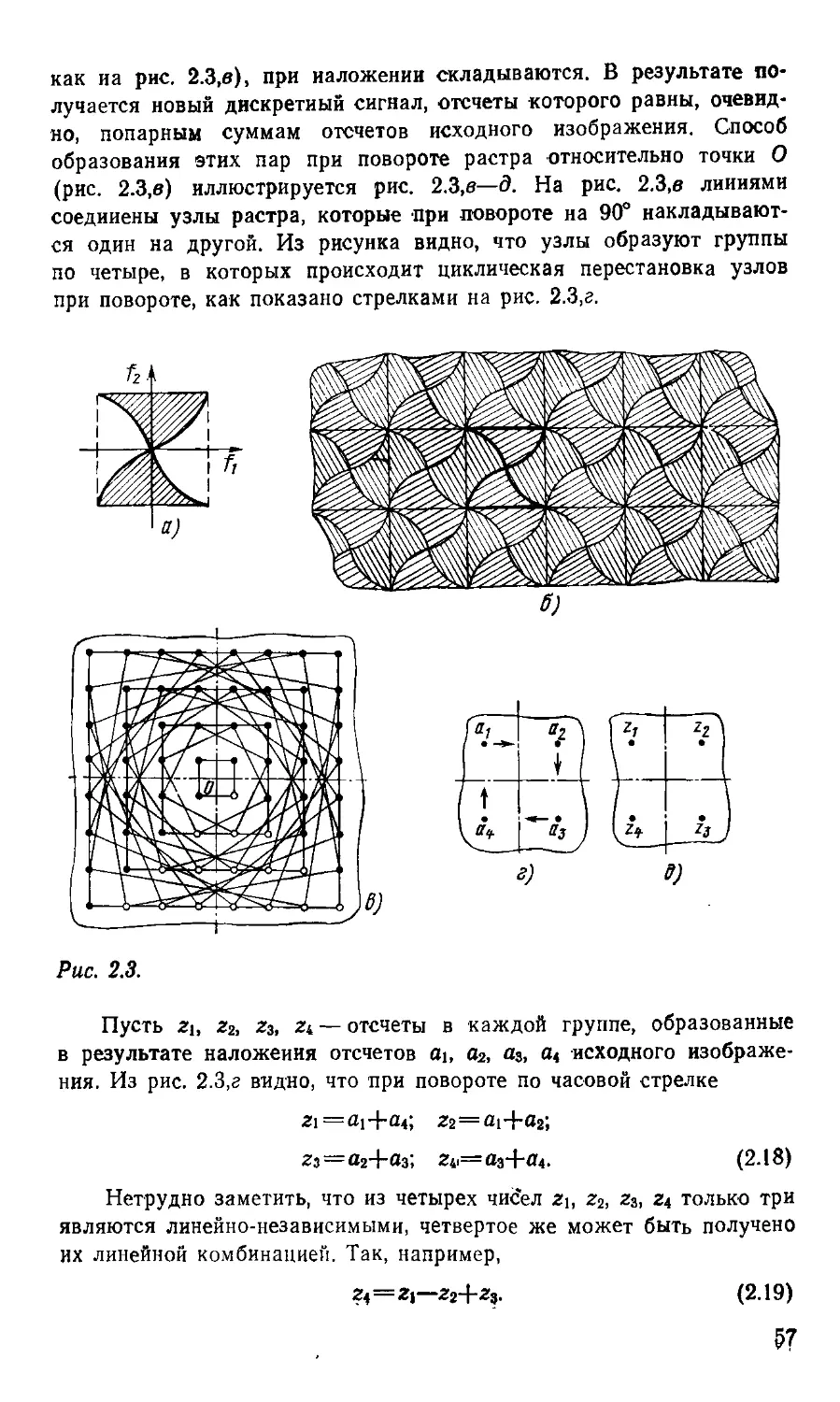
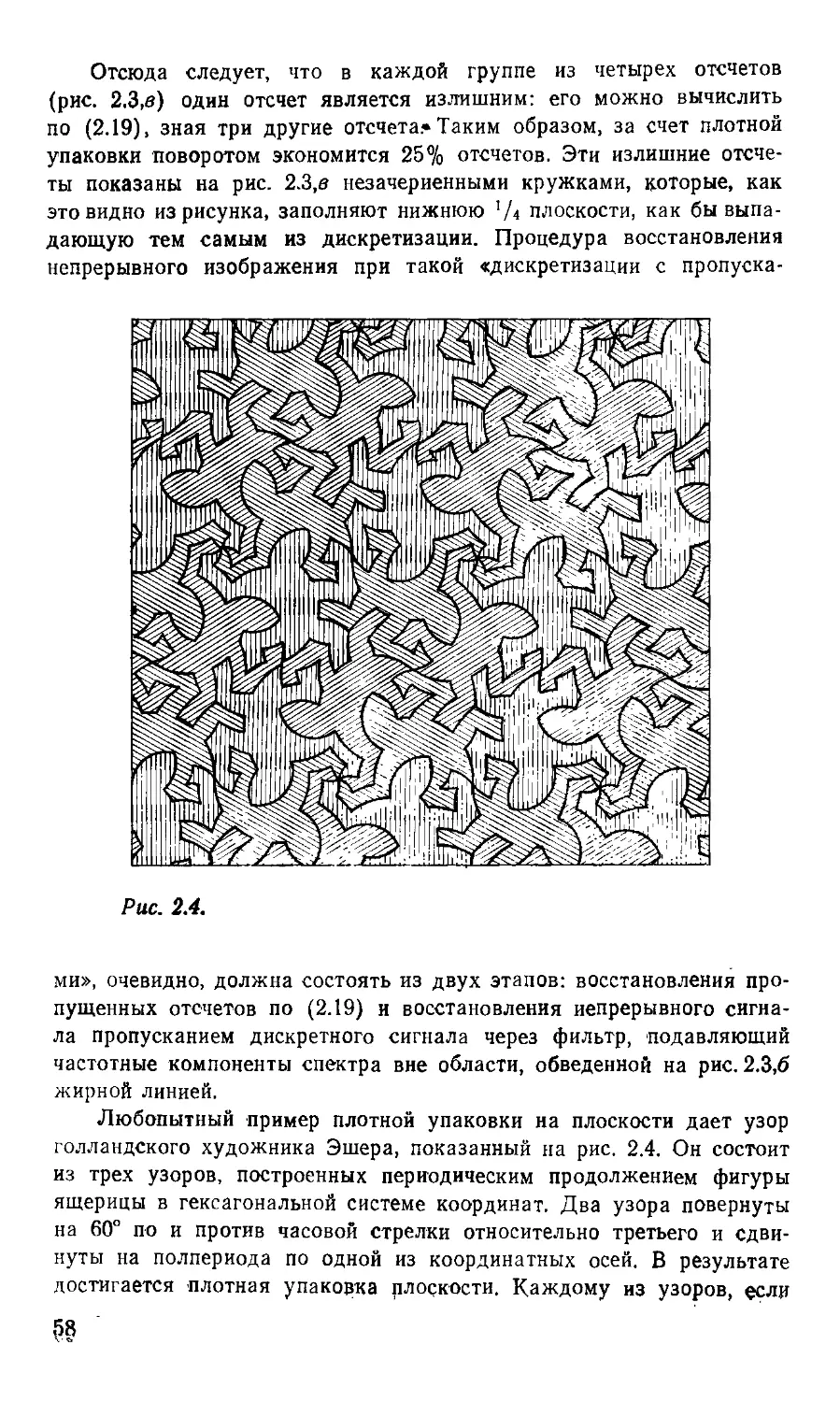
2.3. Теорема отсчетов 51
2.4. Теорема отсчетов для двумерных сигналов ... 53
2.5. Погрешности дискретизации и восстановления сигна-
сигналов по теореме отсчетов 60
2.6. Другие подходы к дискретизации 64
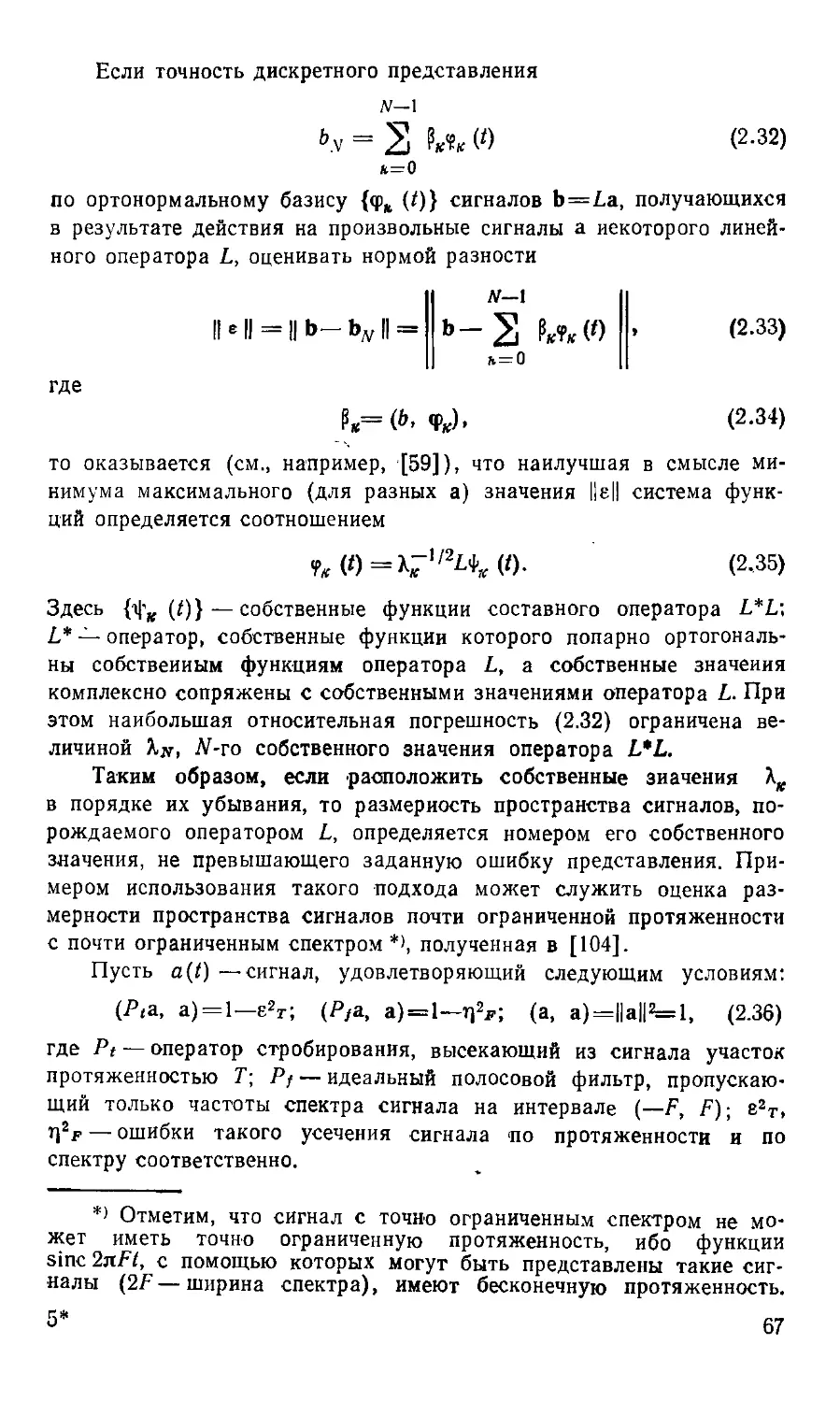
2.7. Оптимальное дискретное представление и размерность
сигналов 66
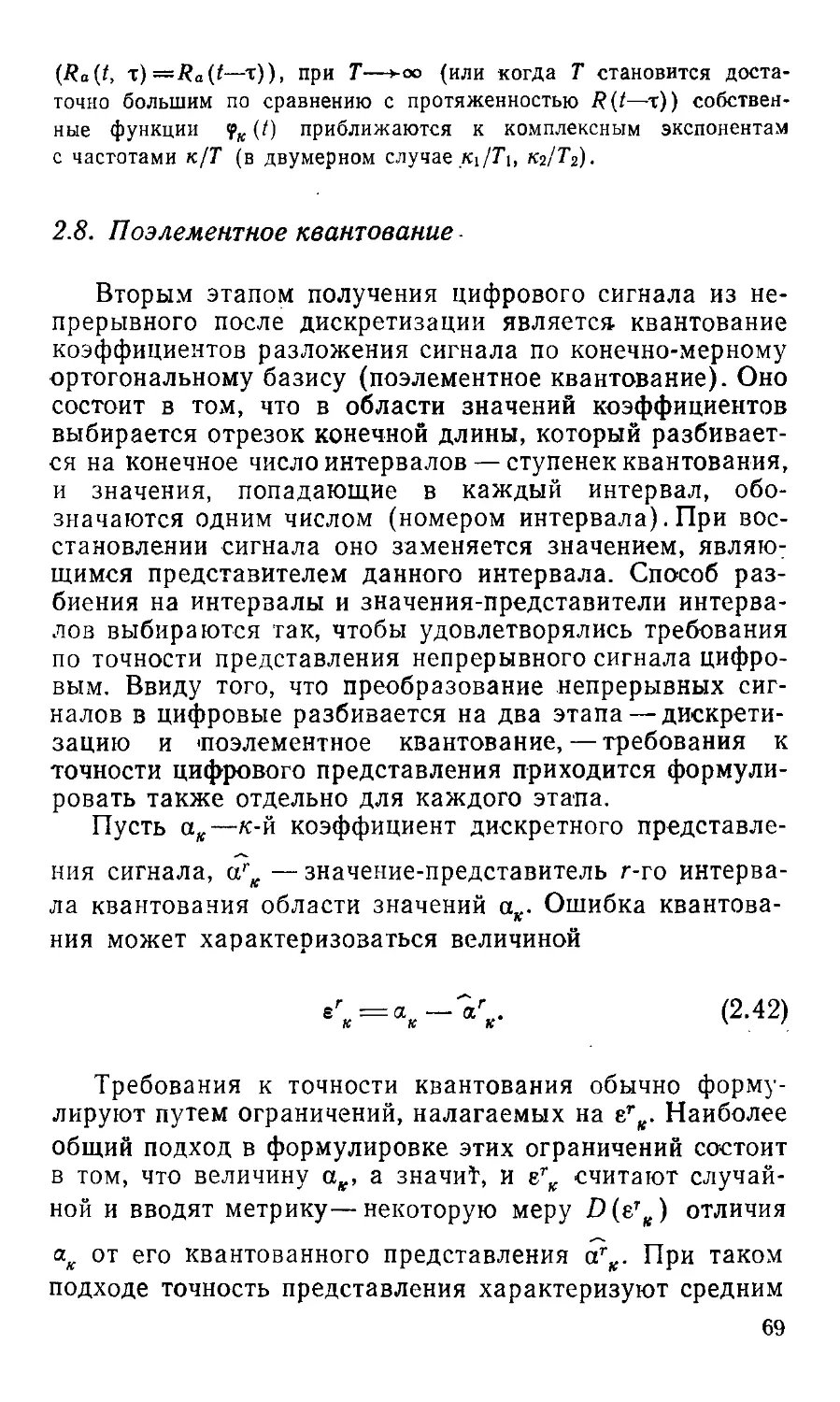
2.8. Поэлементное квантование 69
2.9. Примеры оптимального квантования 76
2.10. Квантование при наличии шума. Квантование и пред-
представление чисел в цифровых процессорах .... 81
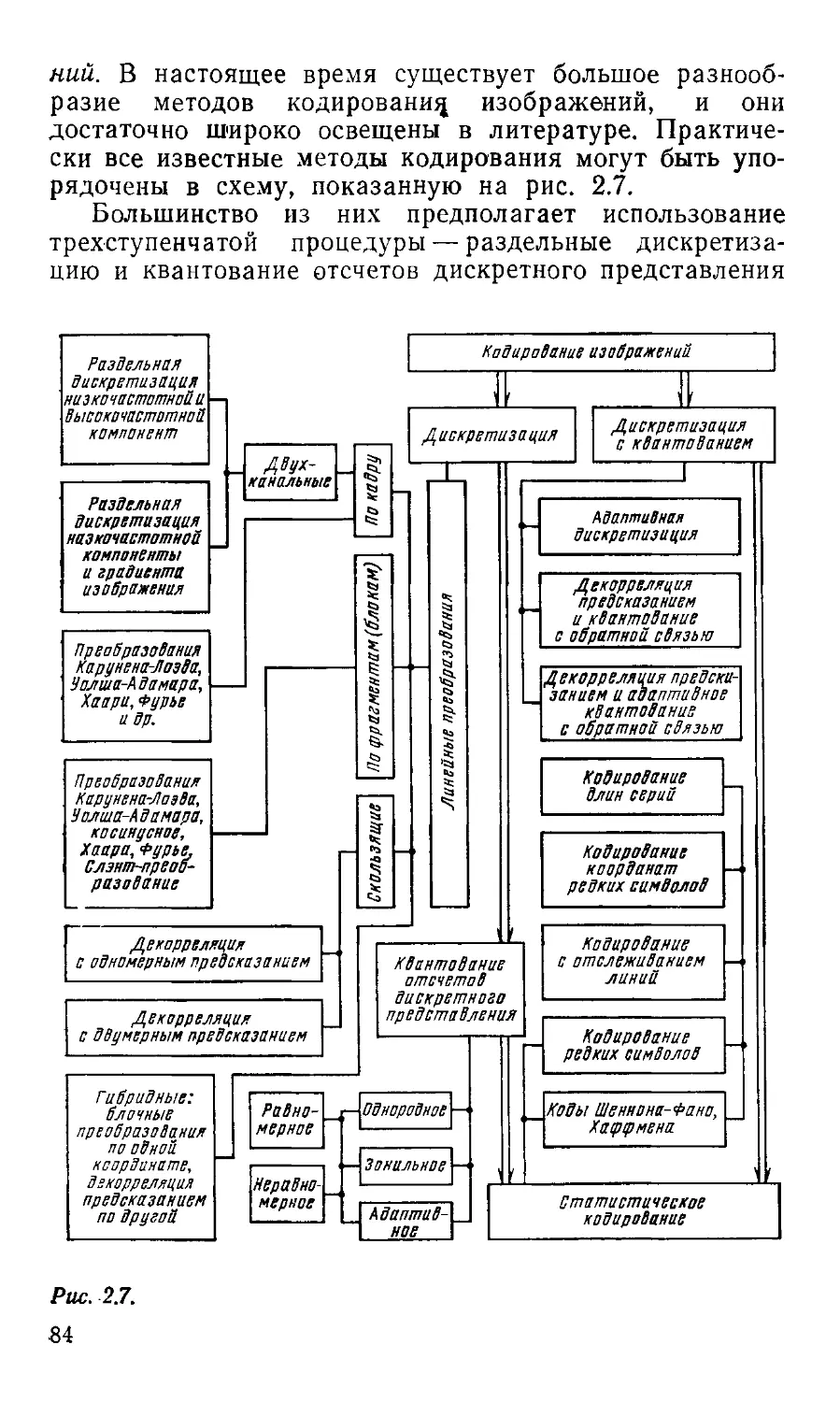
2.11. Обзор методов кодирования изображений ... 83
Глава 3. Дискретное представление линейных преобразо-
преобразований 87
3.1. Постановка задачи и общий подход 87
3.2. Дискретное представление инвариантных к сдвигу
фильтров, действующих на сигналы с ограниченным
спектром 89
3.3. Цифровые фильтры 92
3.4. Частотные характеристики цифровых фильтров . . 97
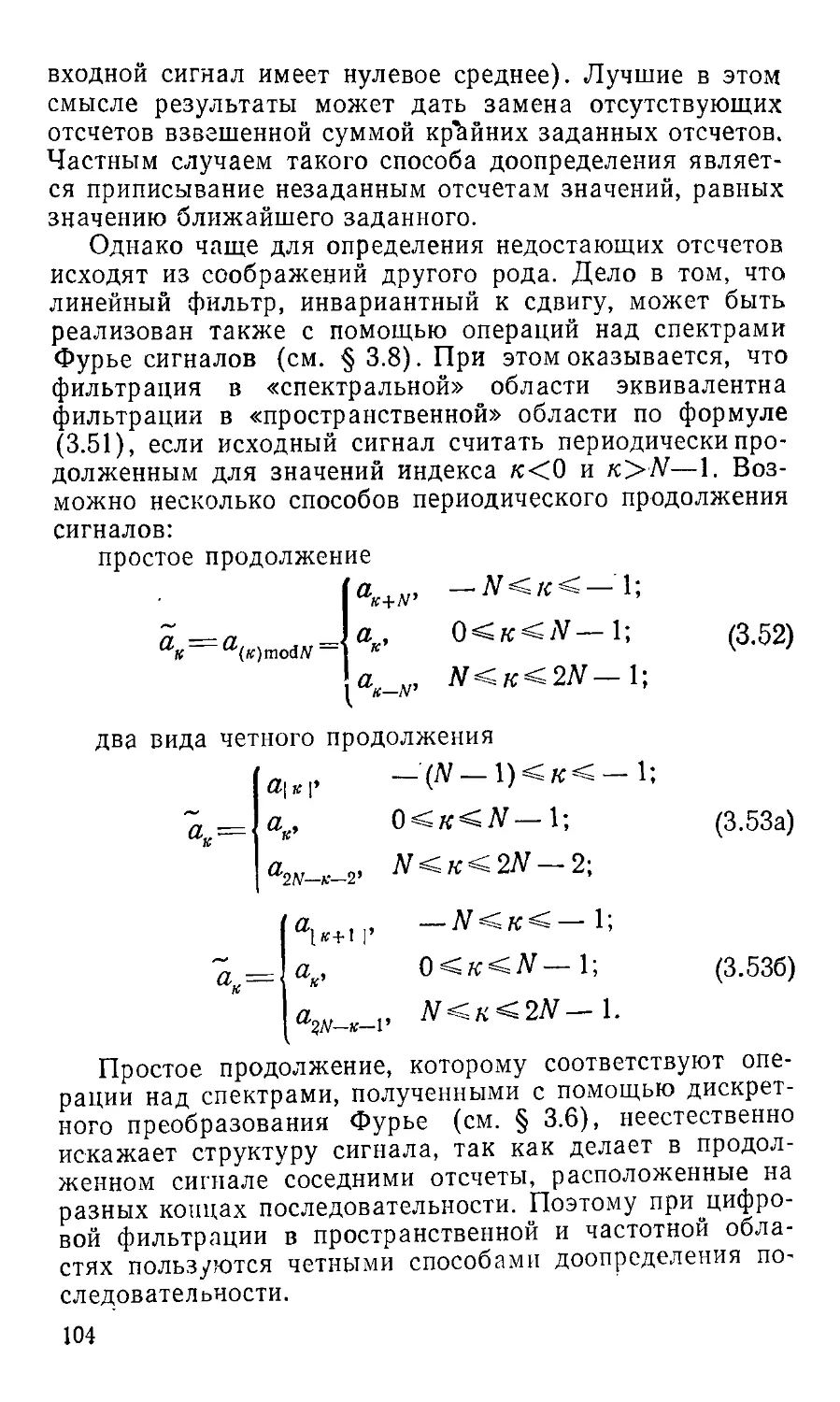
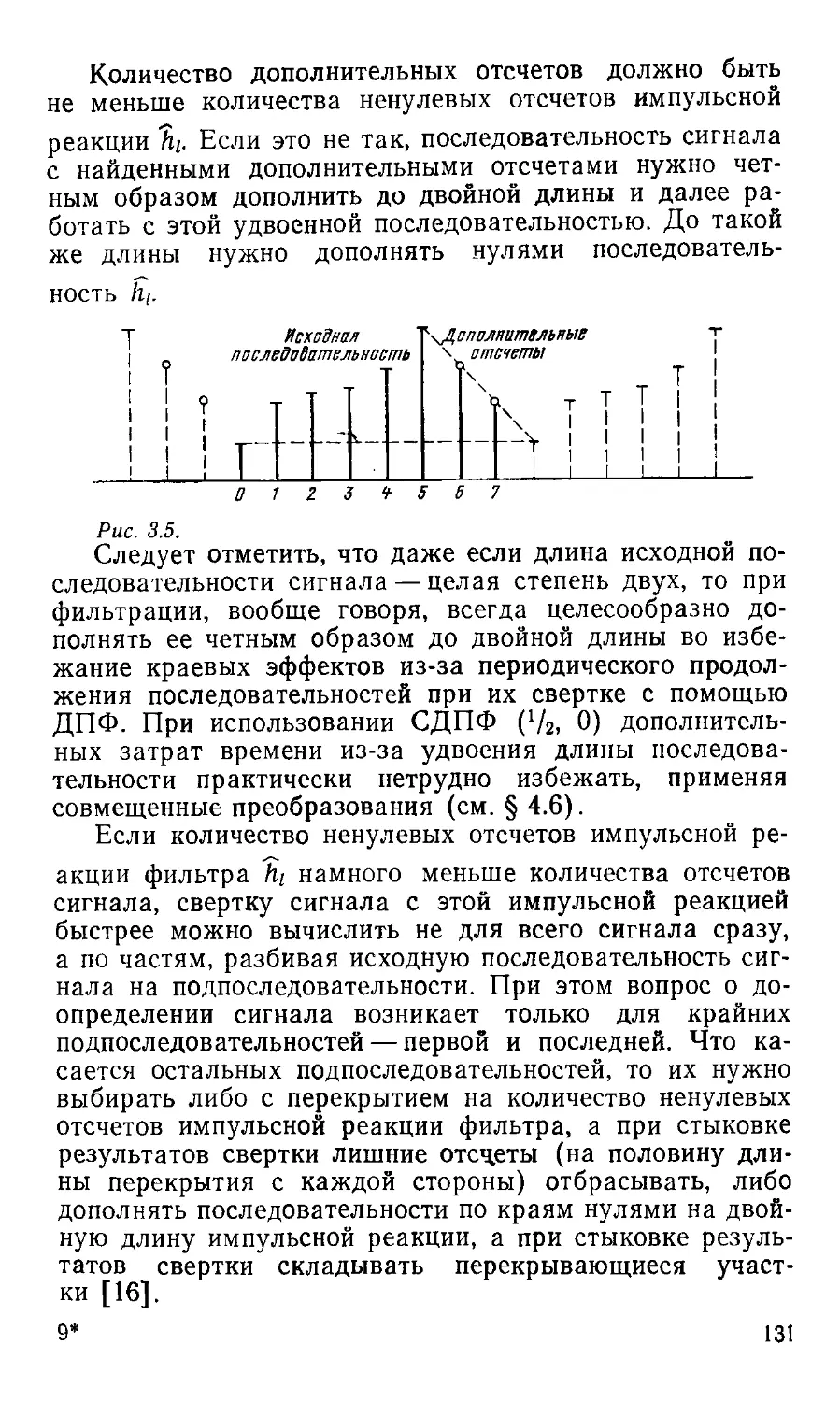
3.5. Краевые эффекты при цифровой фильтрации . . . 103
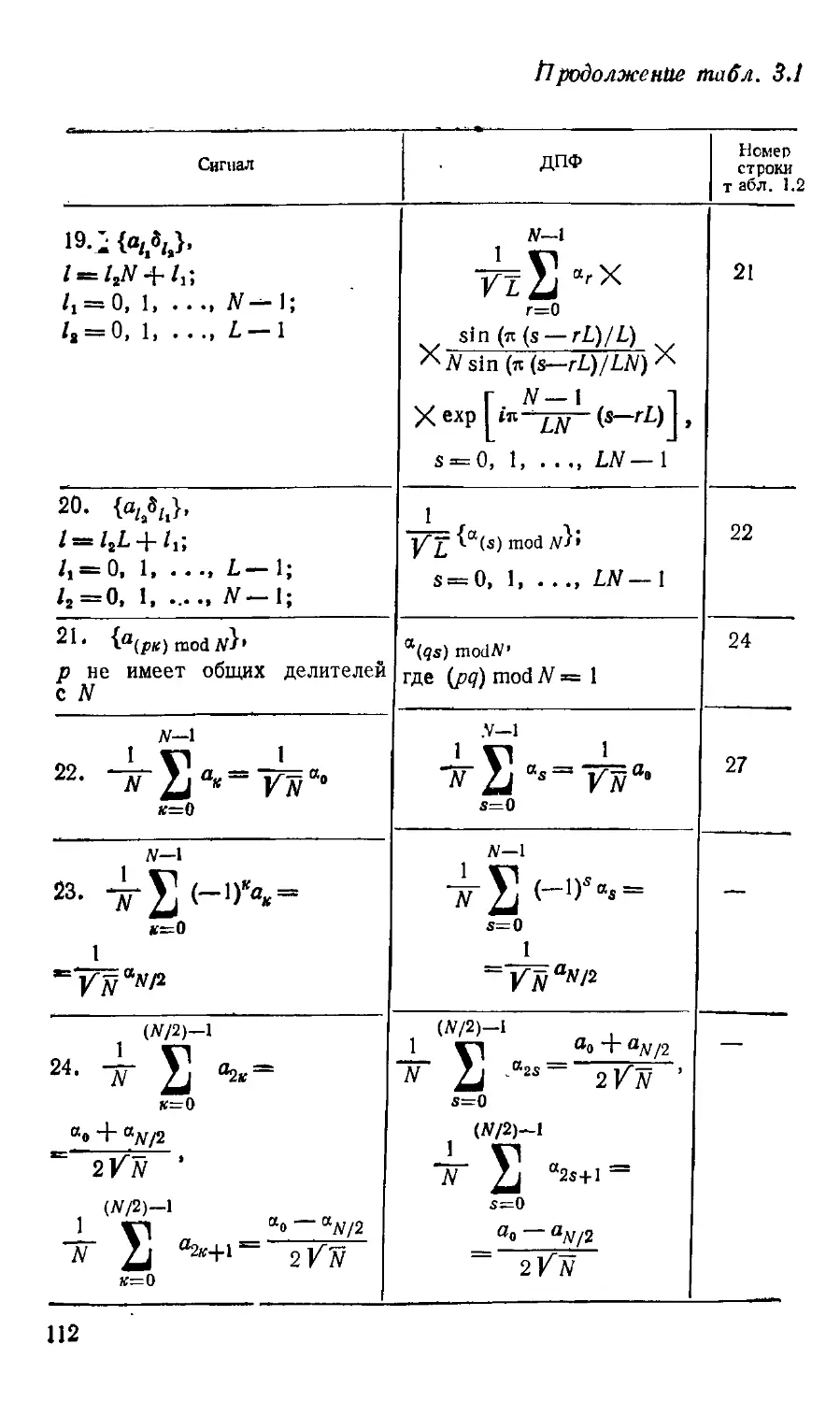
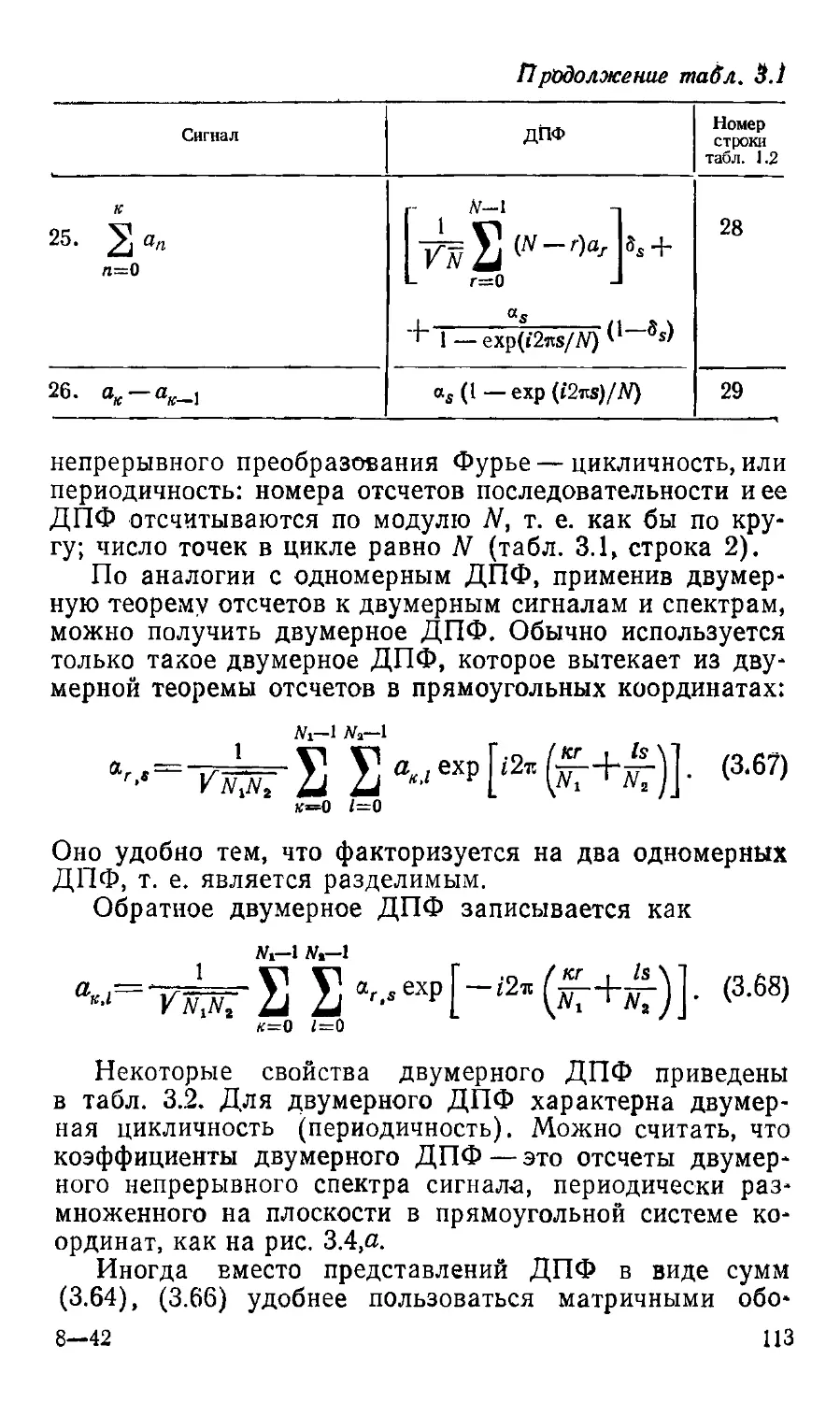
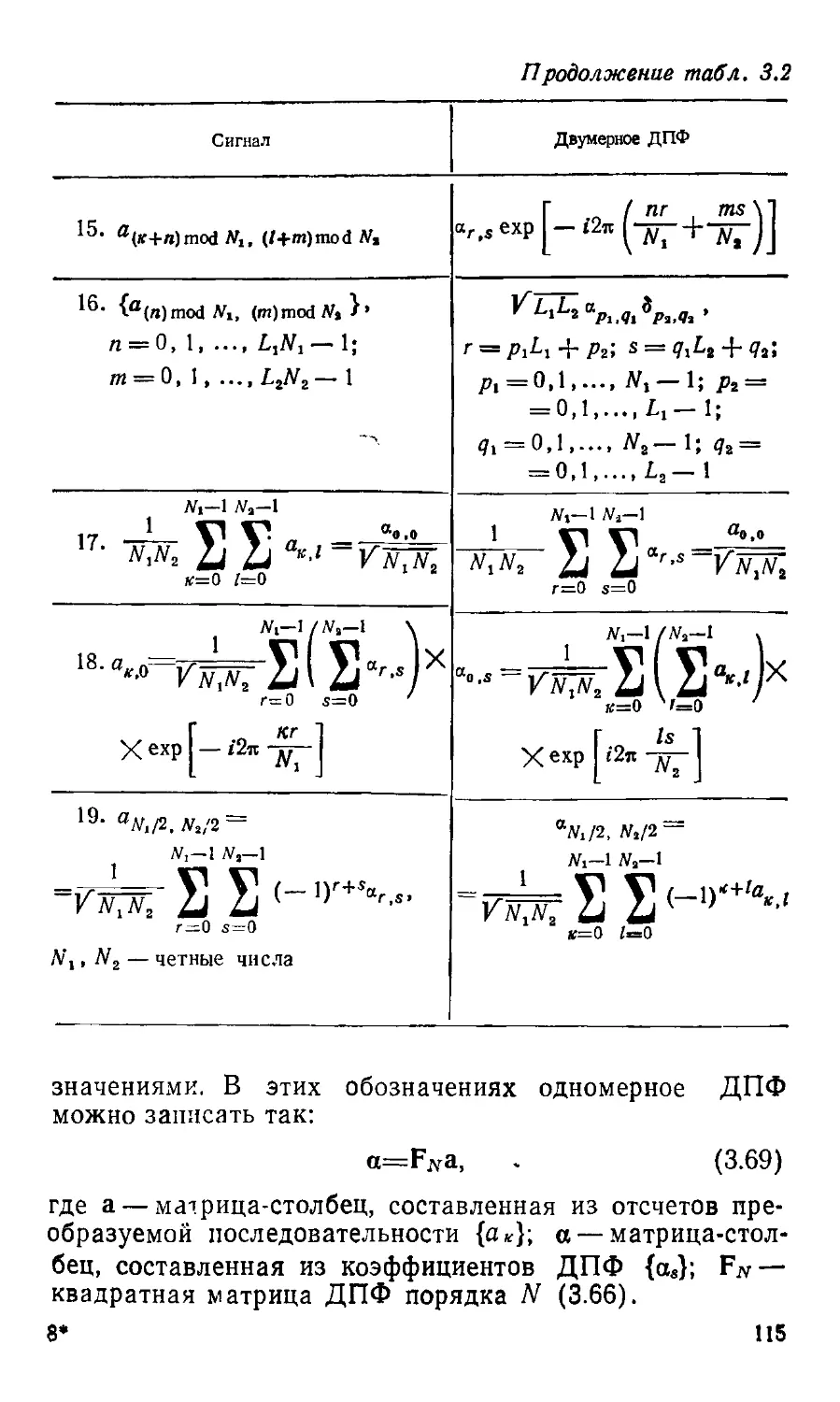
3.6. Дискретное преобразование Фурье 106
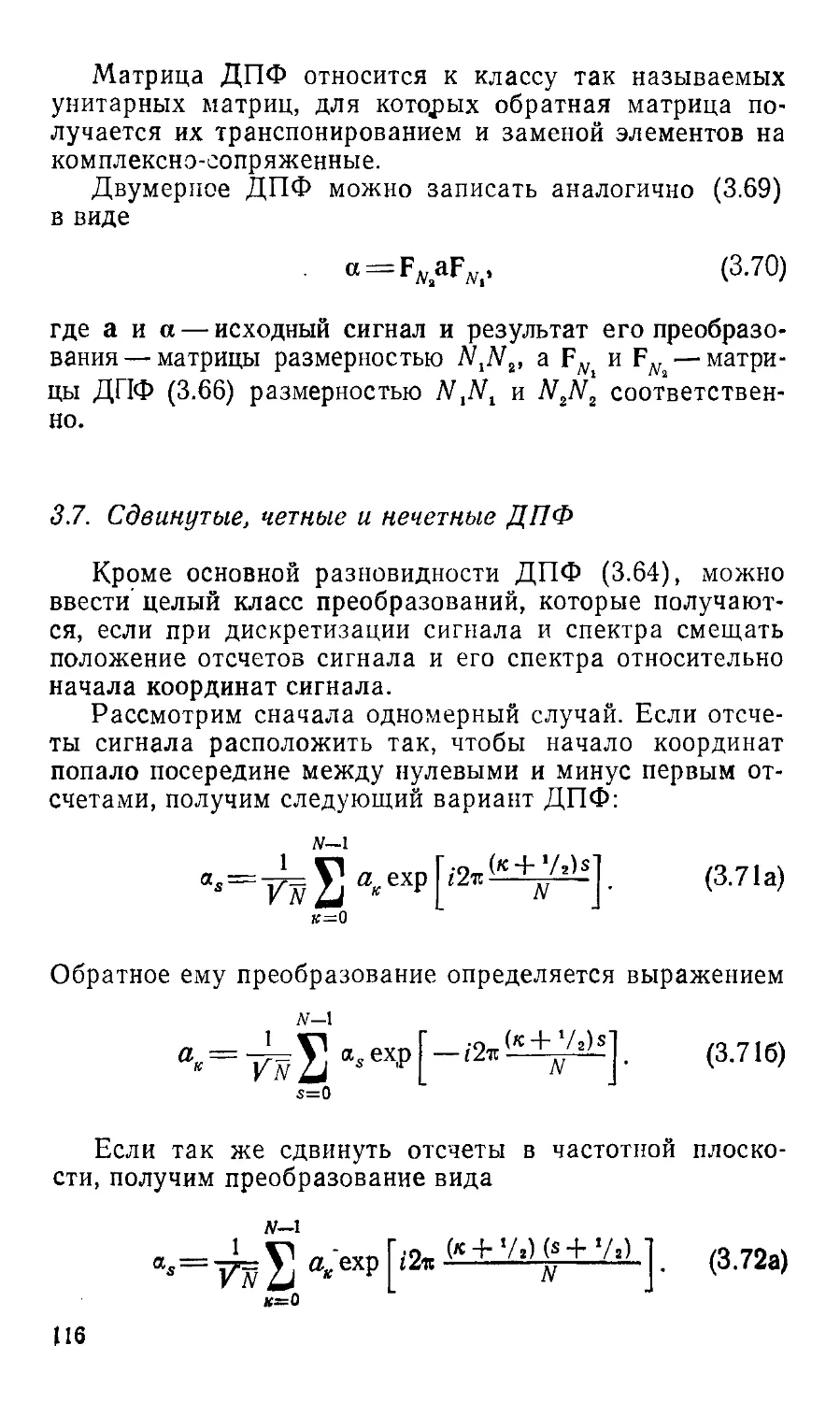
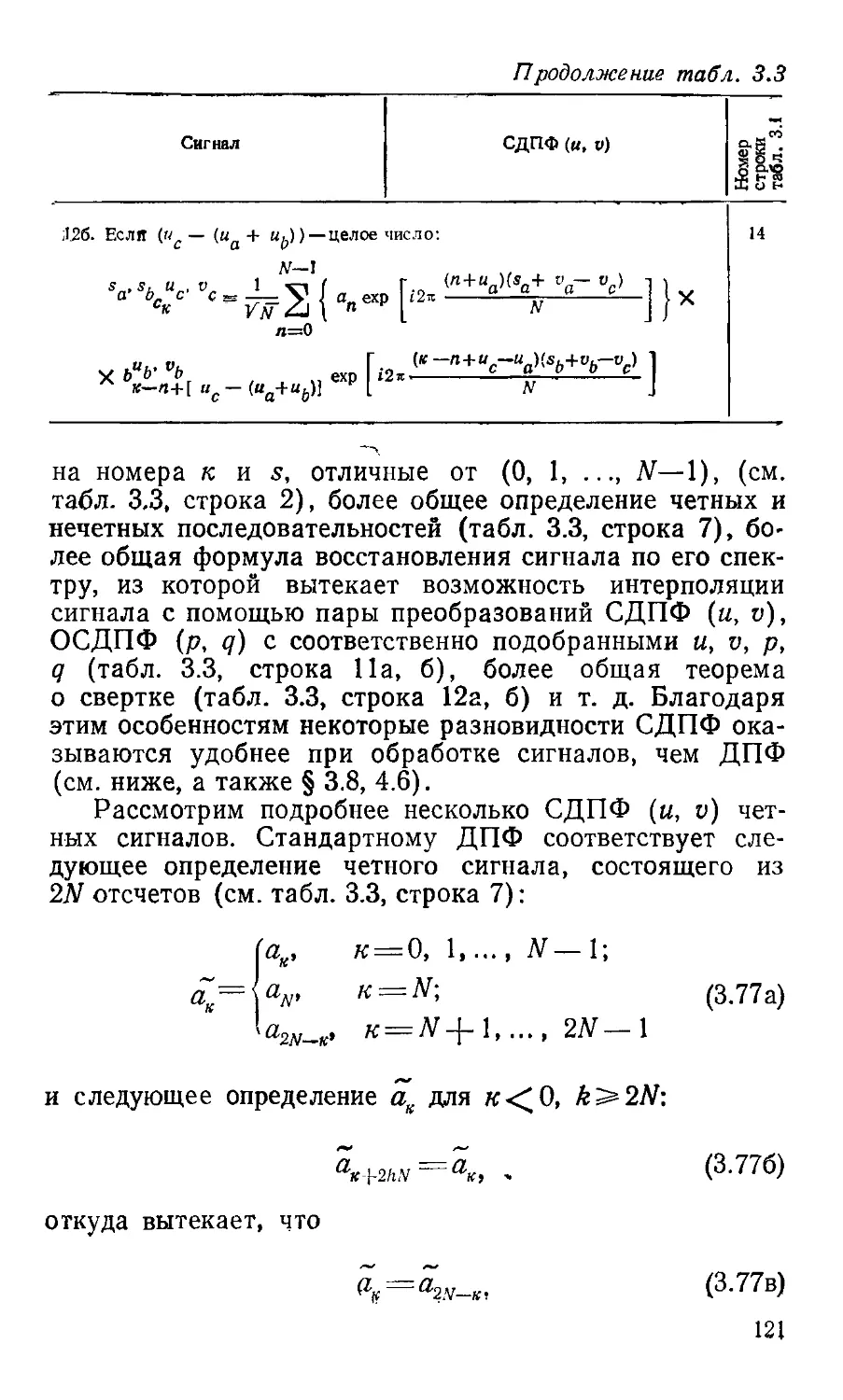
3.7. Сдвинутые, четные н нечетные ДПФ 116
3.8. Использование дискретных преобразований Фурье . 128
3.9. Преобразование Уолша и родственные ему ... 134
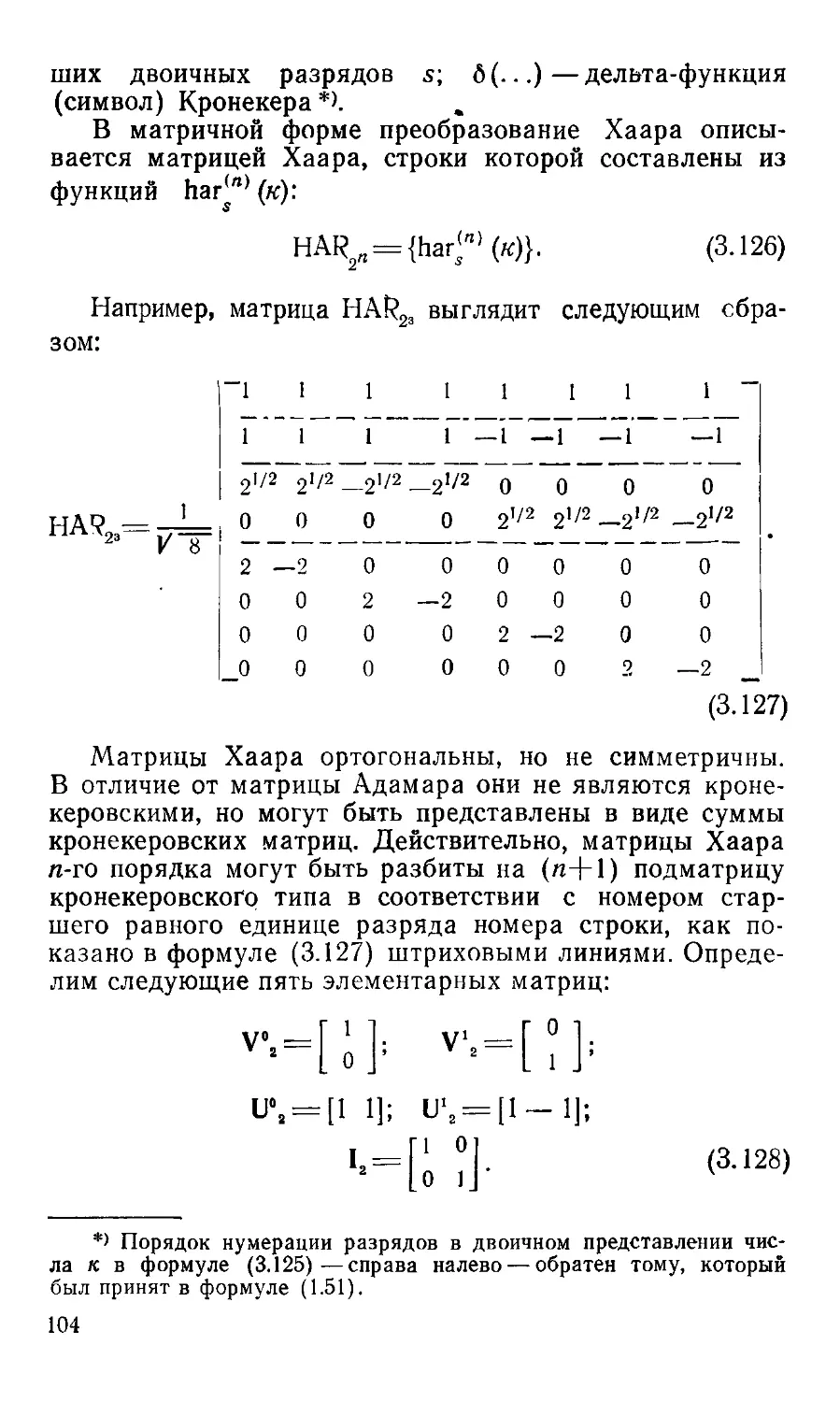
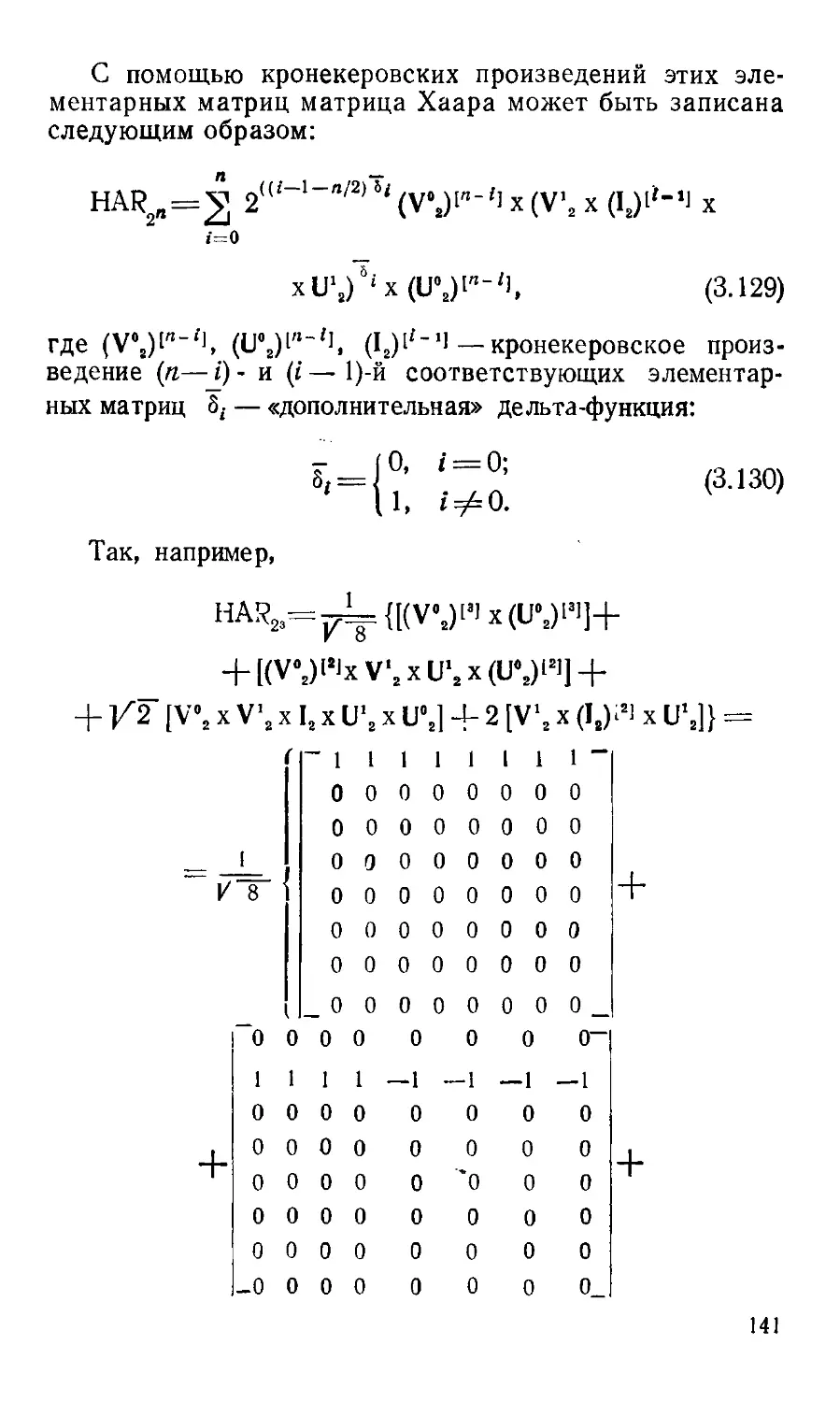
ЗЛО. Преобразование Хаара 139
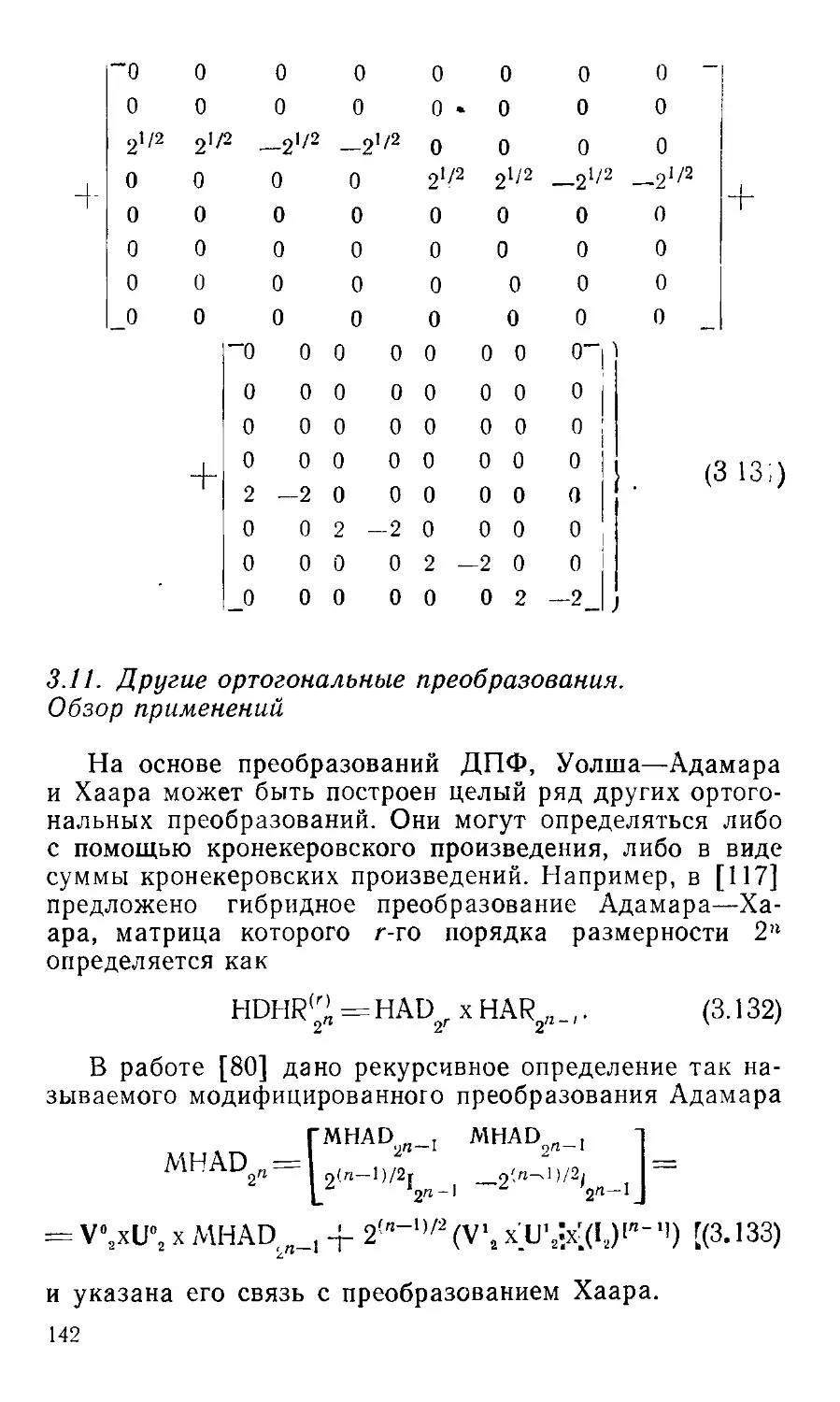
3.11. Другие ортогональные преобразования. Обзор приме-
применений 142
3
Глава 4. Алгоритмы линейных преобразований . . . . 148
4.1. Понятие о быстрых алгоритмах дискретных ортого-
ортогональных преобразований 148
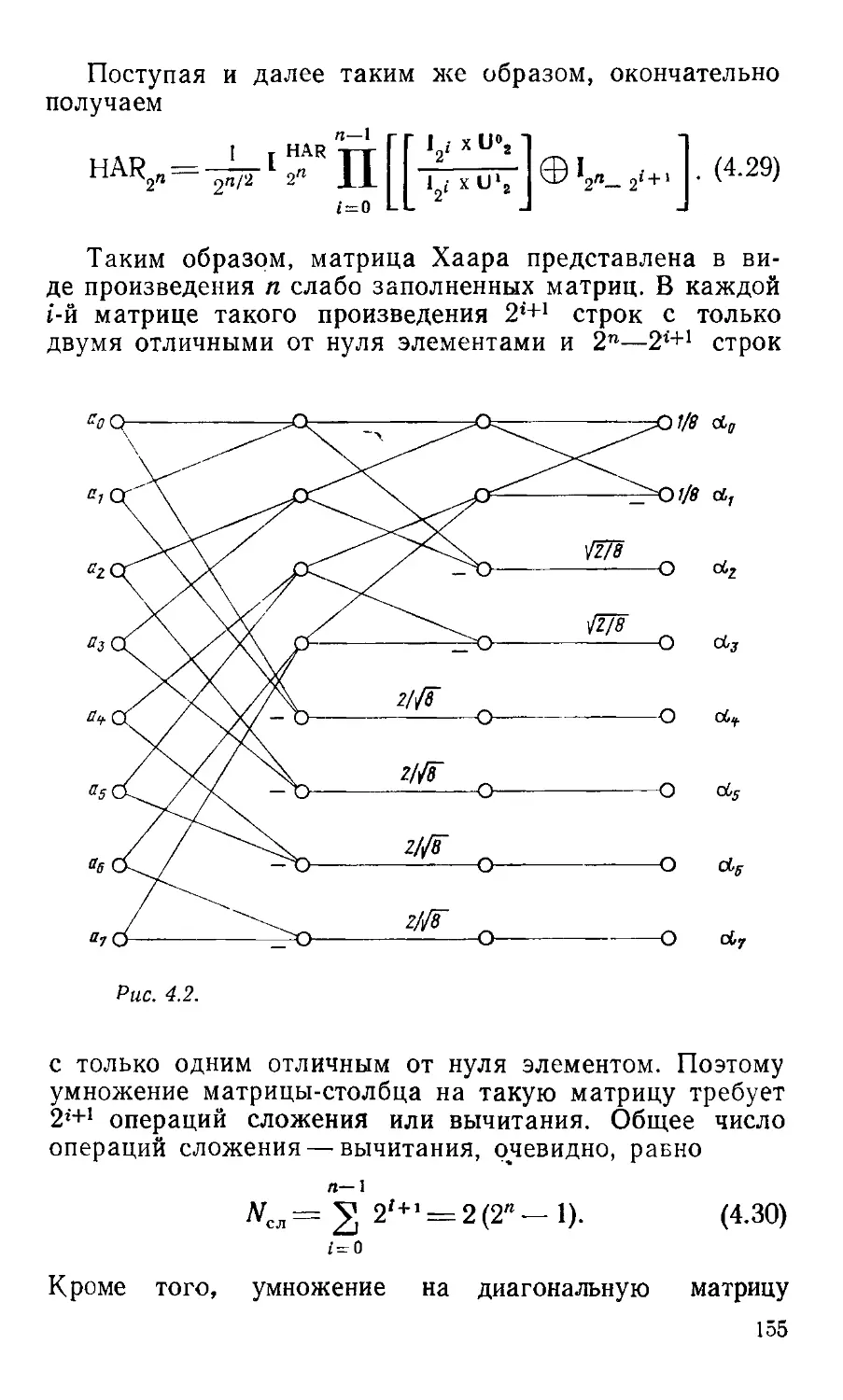
4.2. Алгоритм быстрого преобразования Хаара . . . 152
4.3. Алгоритмы быстрых преобразований Уолша (БПУ) 156
4 4 Алгоритм быстрого дискретного преобразования
Фурье (БПФ) 164
4.5. Обзор других быстрых алгоритмов. Особенности дву-
двумерных преобразований 168
4.6. Совмещенные алгоритмы ДПФ 179
4.7. Рекуррентный алгоритм вычисления ДПФ . . . 185
4.8. Ускоренный алгоритм свертки сигналов . . . . 188
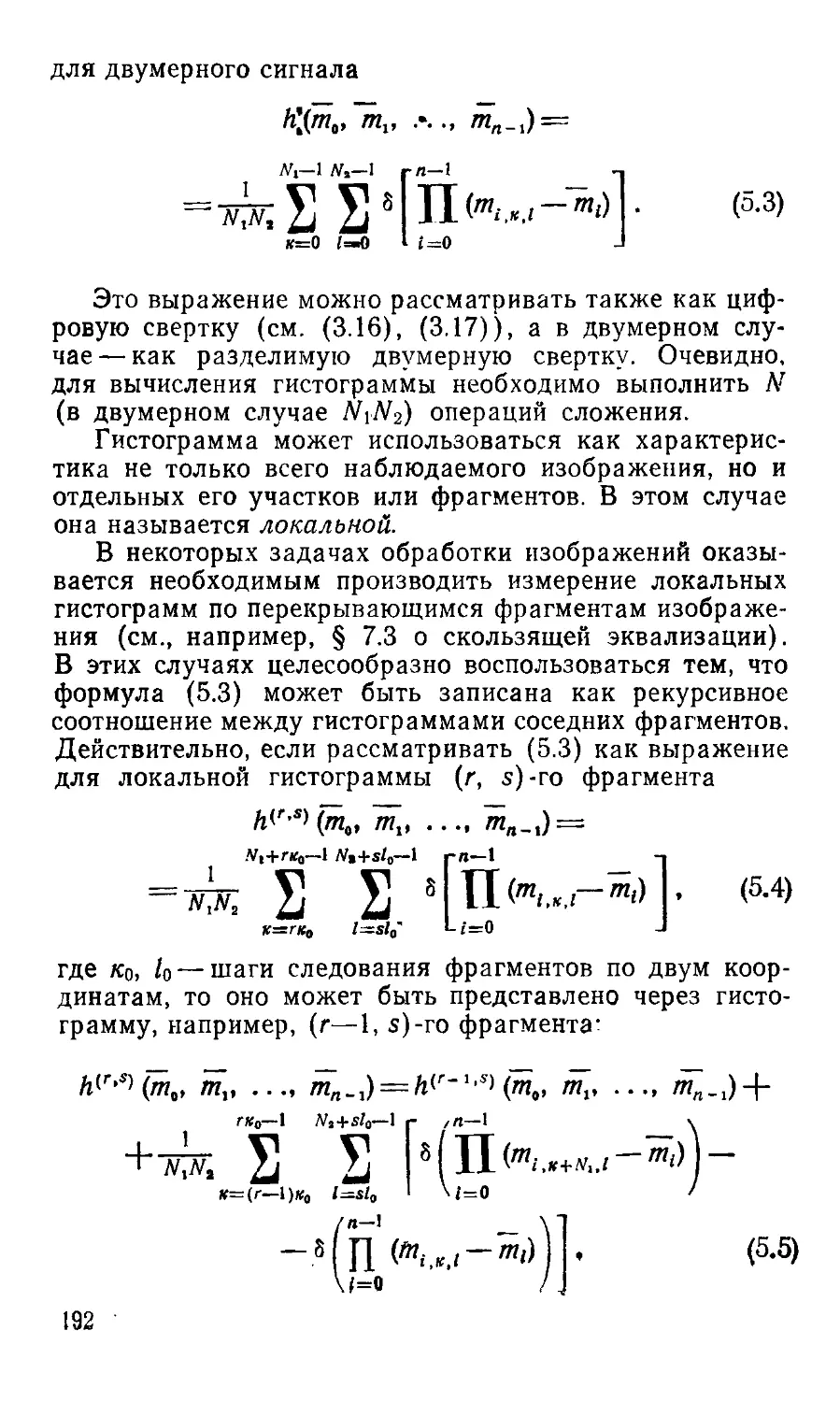
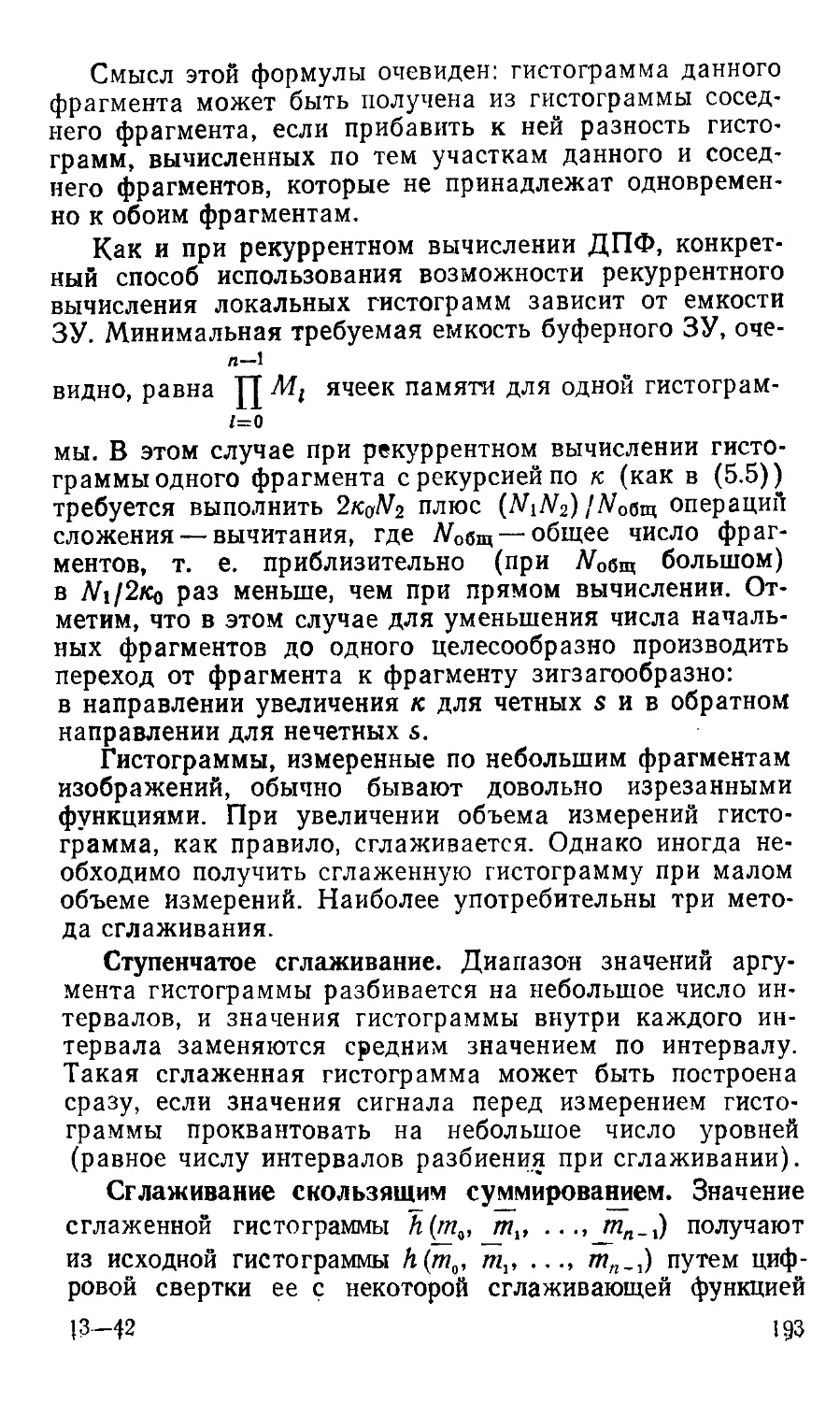
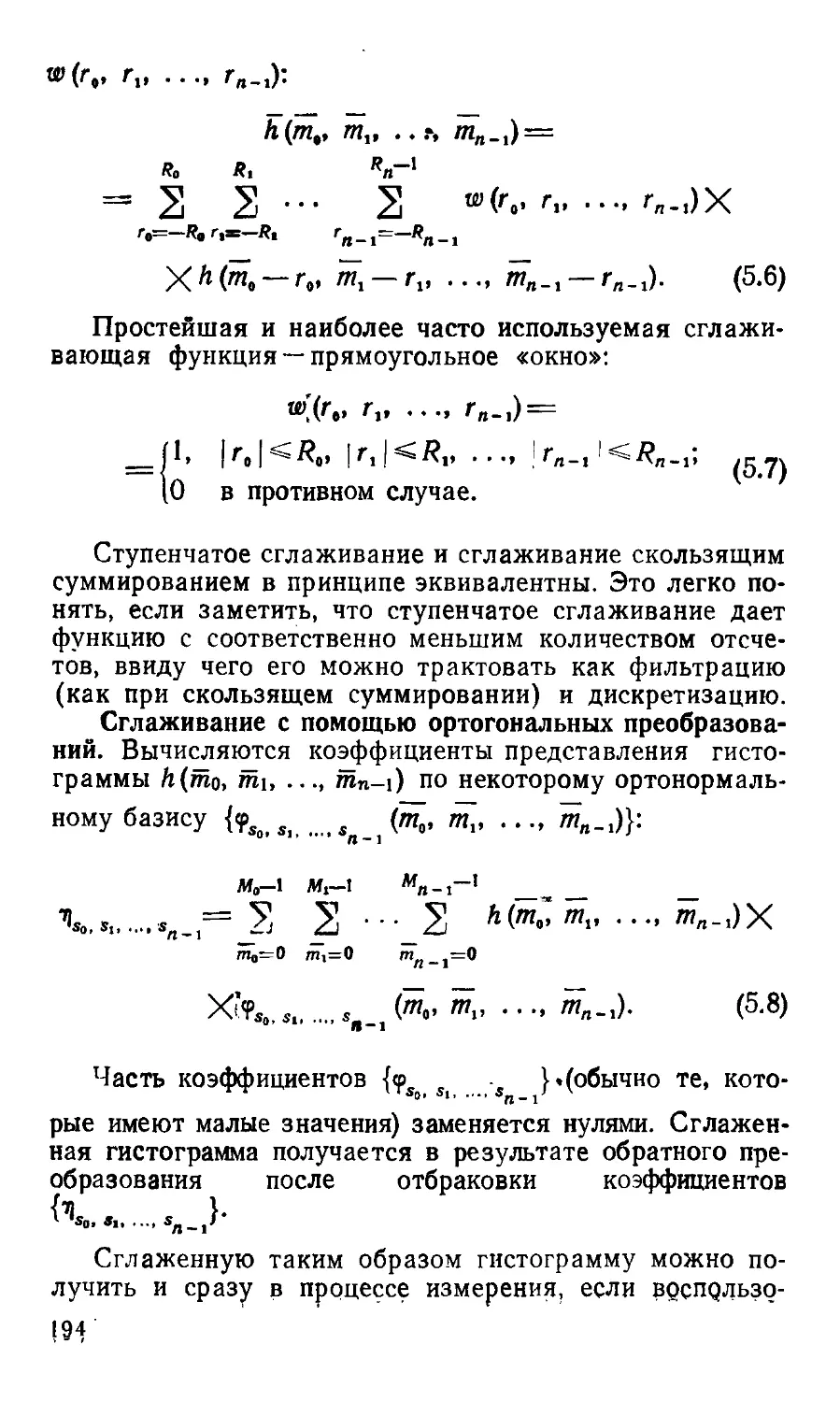
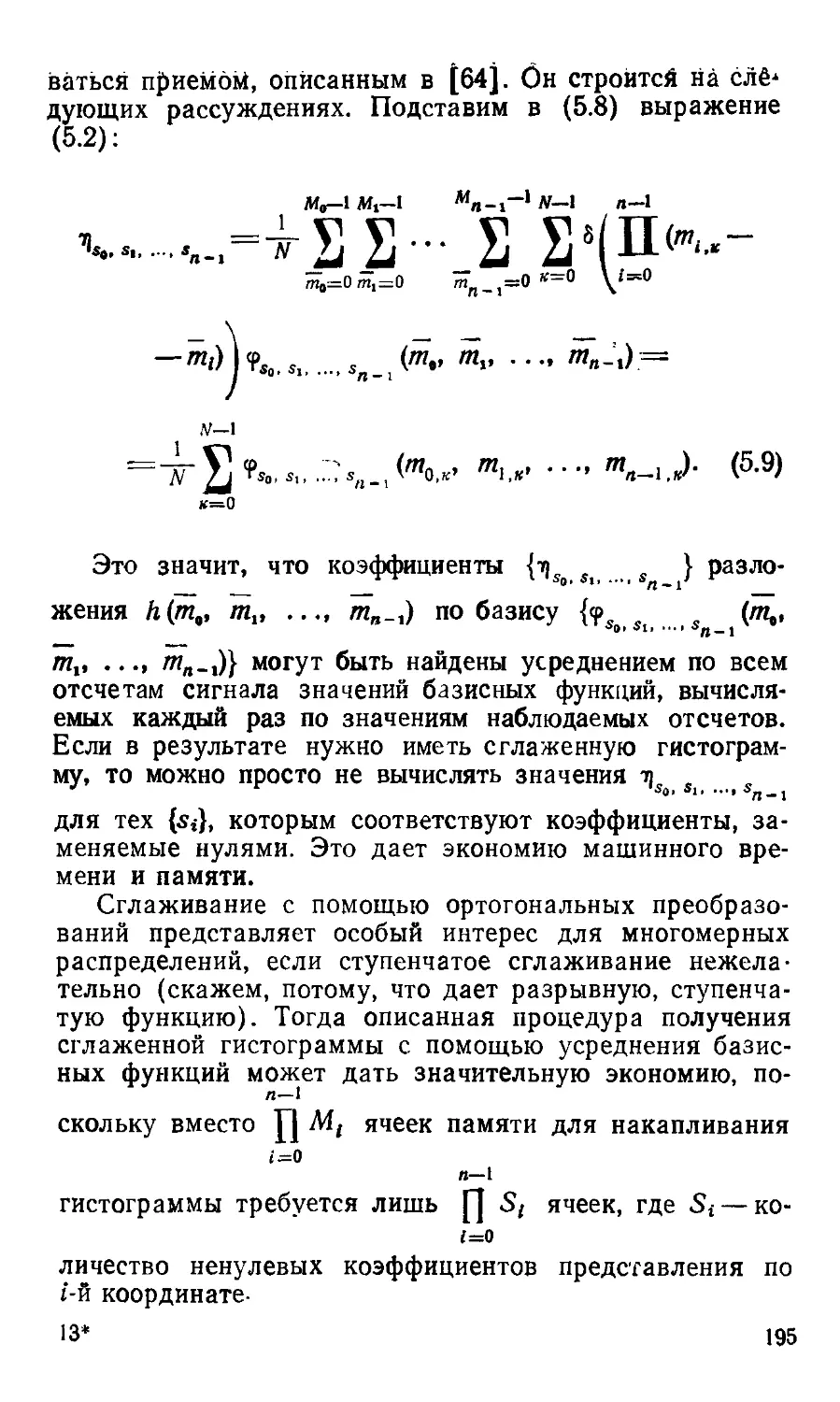
Глава 5. Цифровые статистические методы 191
5.1. Измерение гистограмм распределений 191
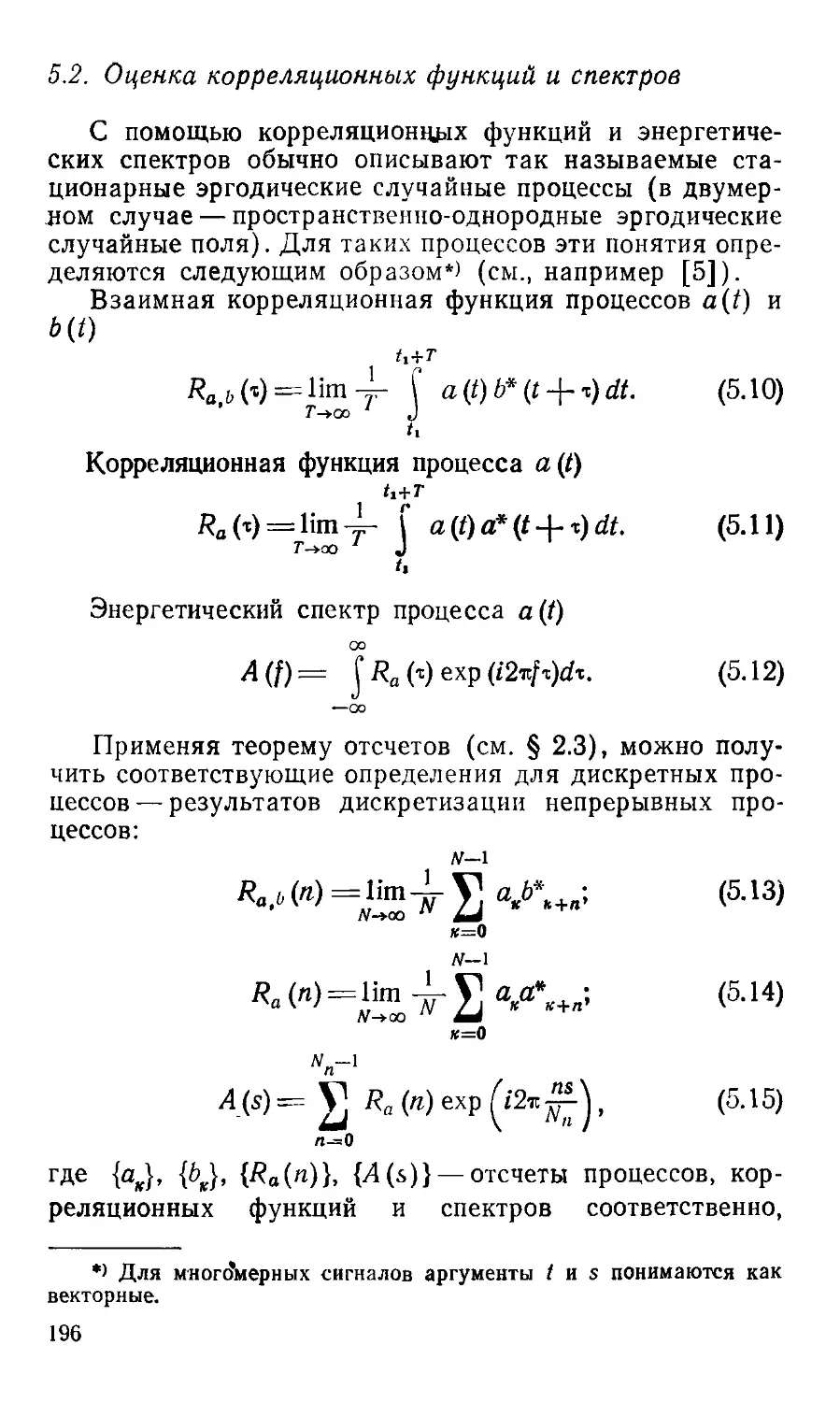
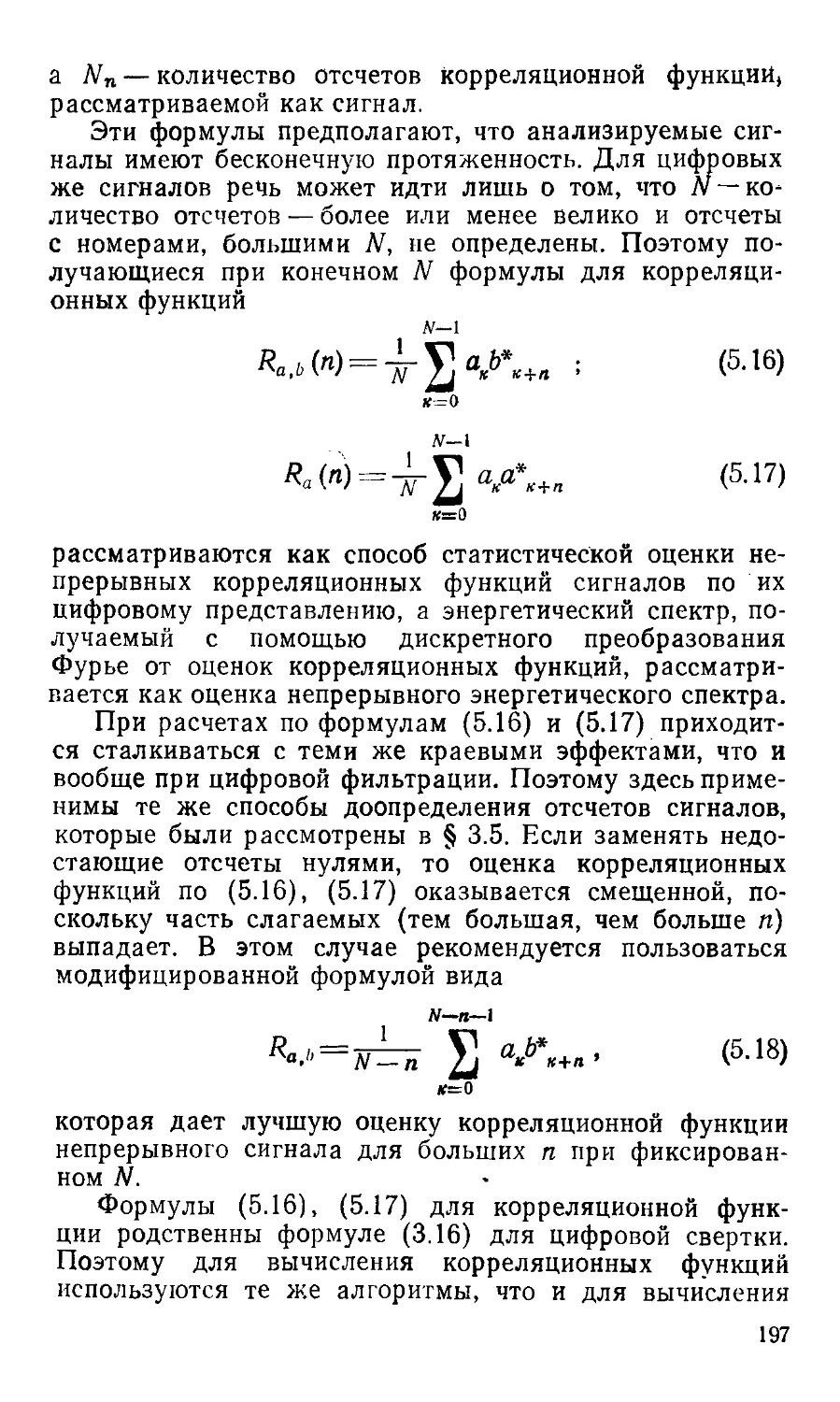
5.2. Оценка корреляционных функций и спектров . . . 193
5.3. Генерирование псевдослучайных чисел 199
5.4. Измерение шума на изображениях 203
Часть II. ОБРАБОТКА ИЗОБРАЖЕНИЙ 207
Глава 6. Коррекция изображающих систем .... 207
6.1. Постановка задачи 207
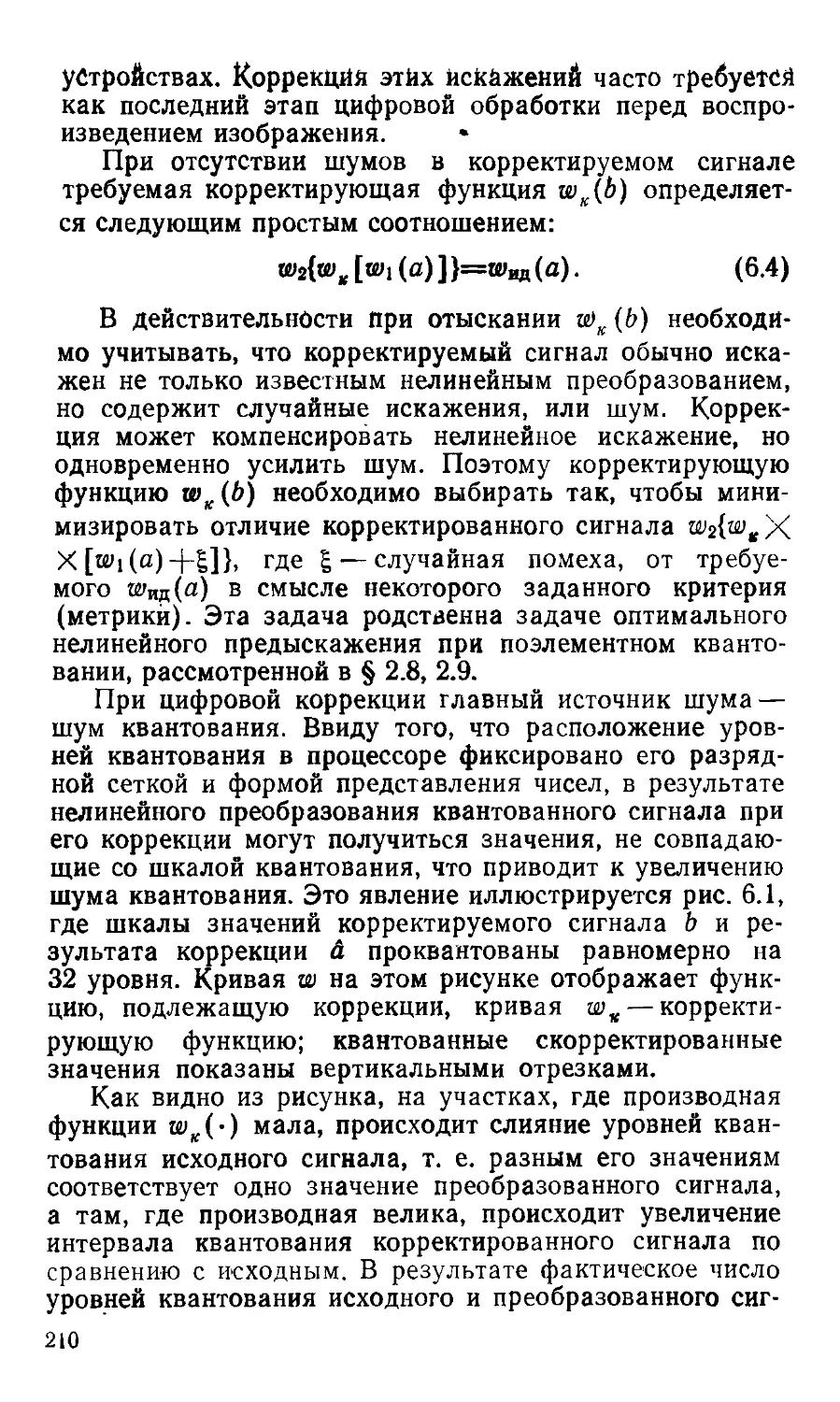
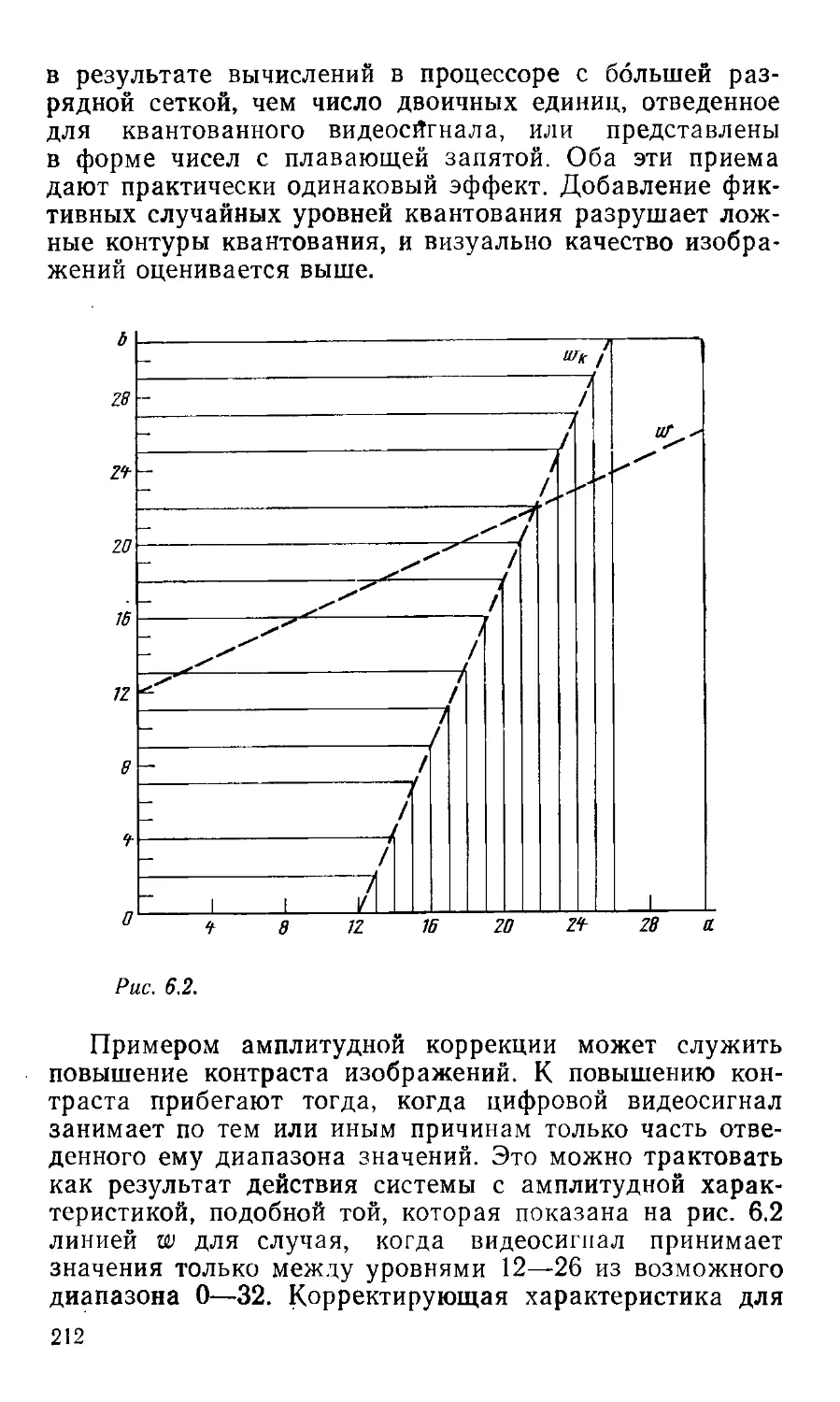
6.2. Коррекция амплитудных характеристик .... 209
6.3. Коррекция линейных искажений 214
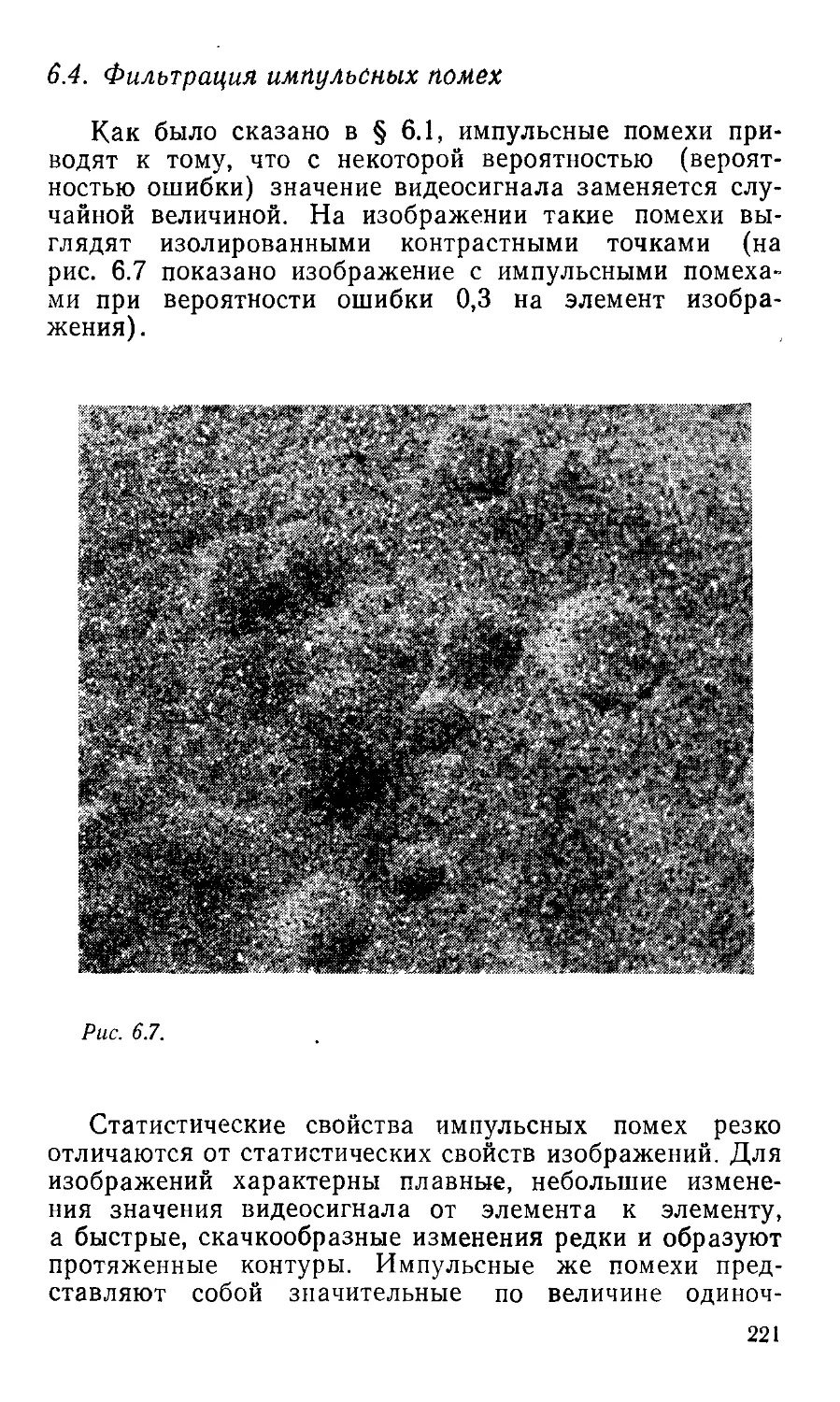
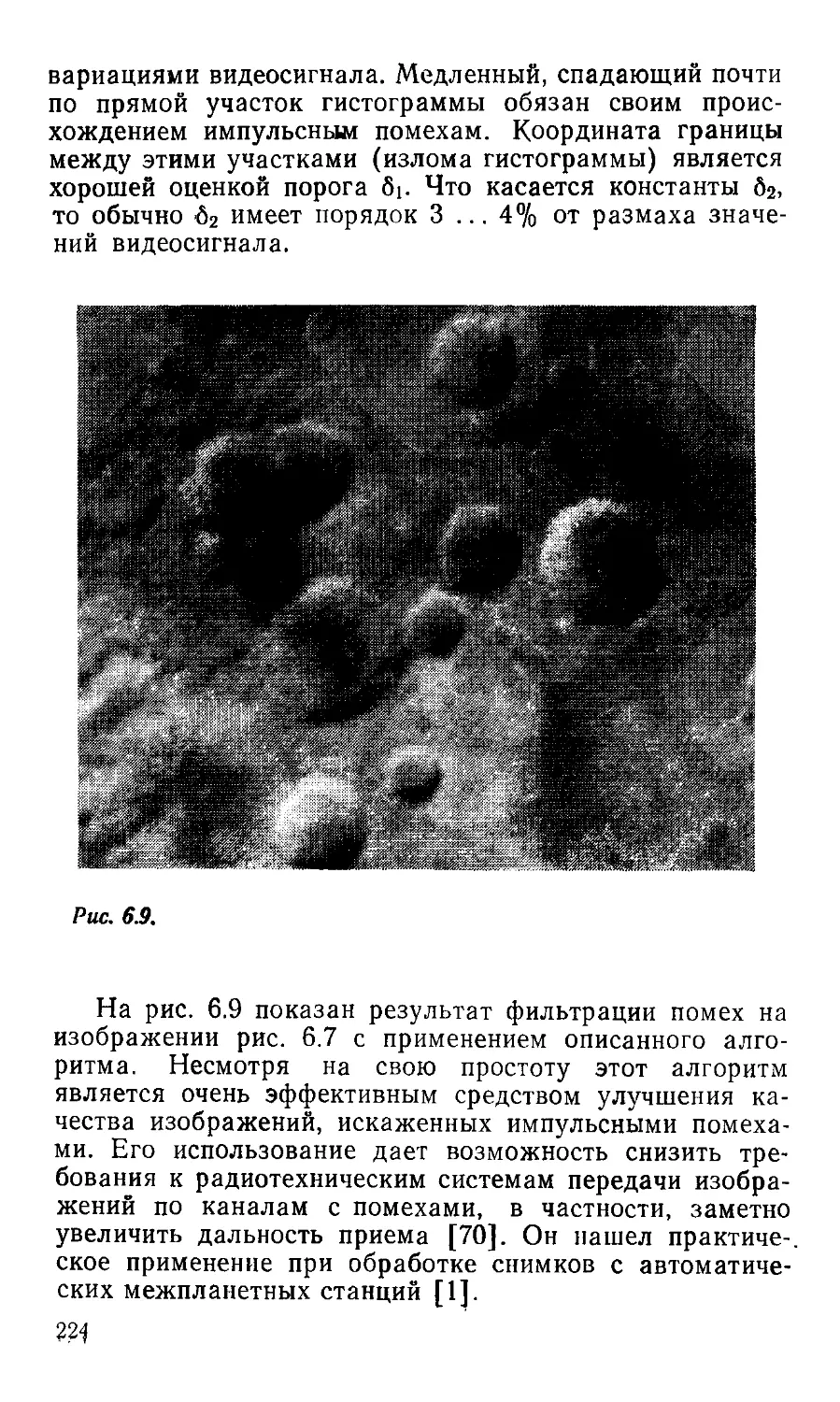
6.4. Фильтрация импульсных помех 221
а 6.5. Подавление аддитивного шума с помощью линейной
фильтрации 225
Глава 7. Препарирование изображений 237
7.1. Задачи препарирования и визуальный анализ изобра-
изображений . 237
7.2. Адаптивное квантование мод 239
7.3. Препарирование путем нелинейного преобразования
шкалы значений видеосигнала 251
7.4. Линейные методы препарирования 259
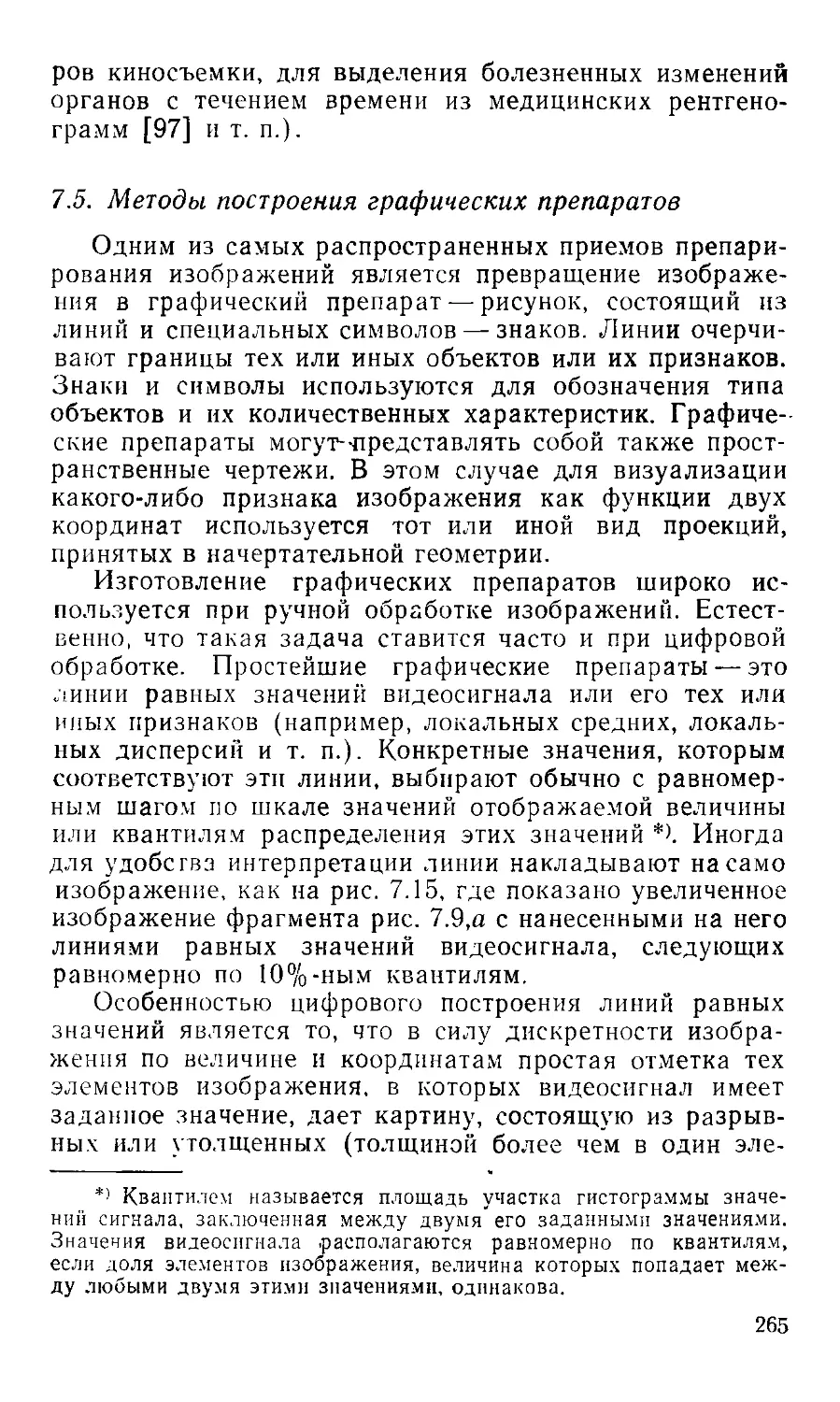
7.5. Методы построения графических препаратов . . . 265
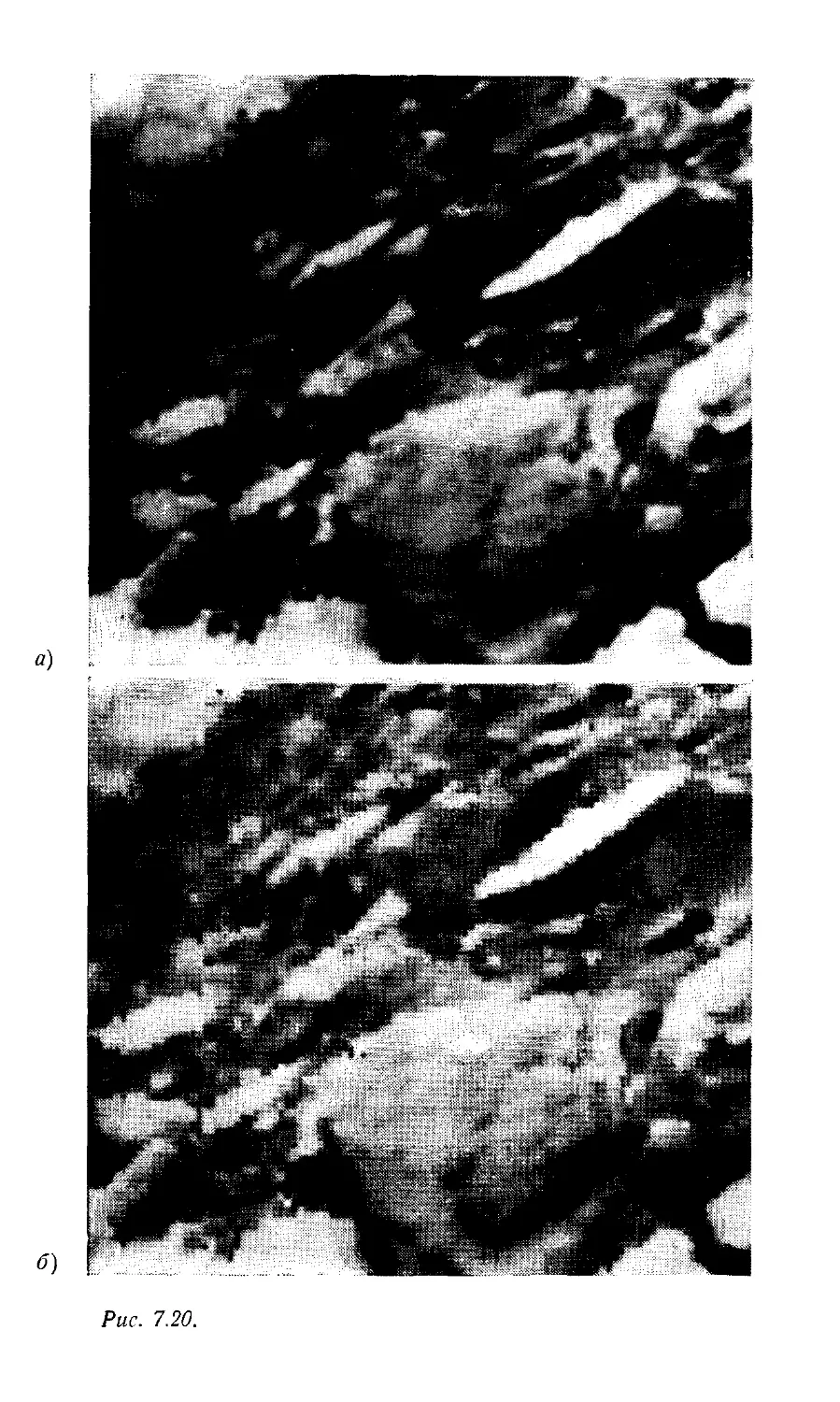
7.6. Геометрические преобразования изображений . . . 270
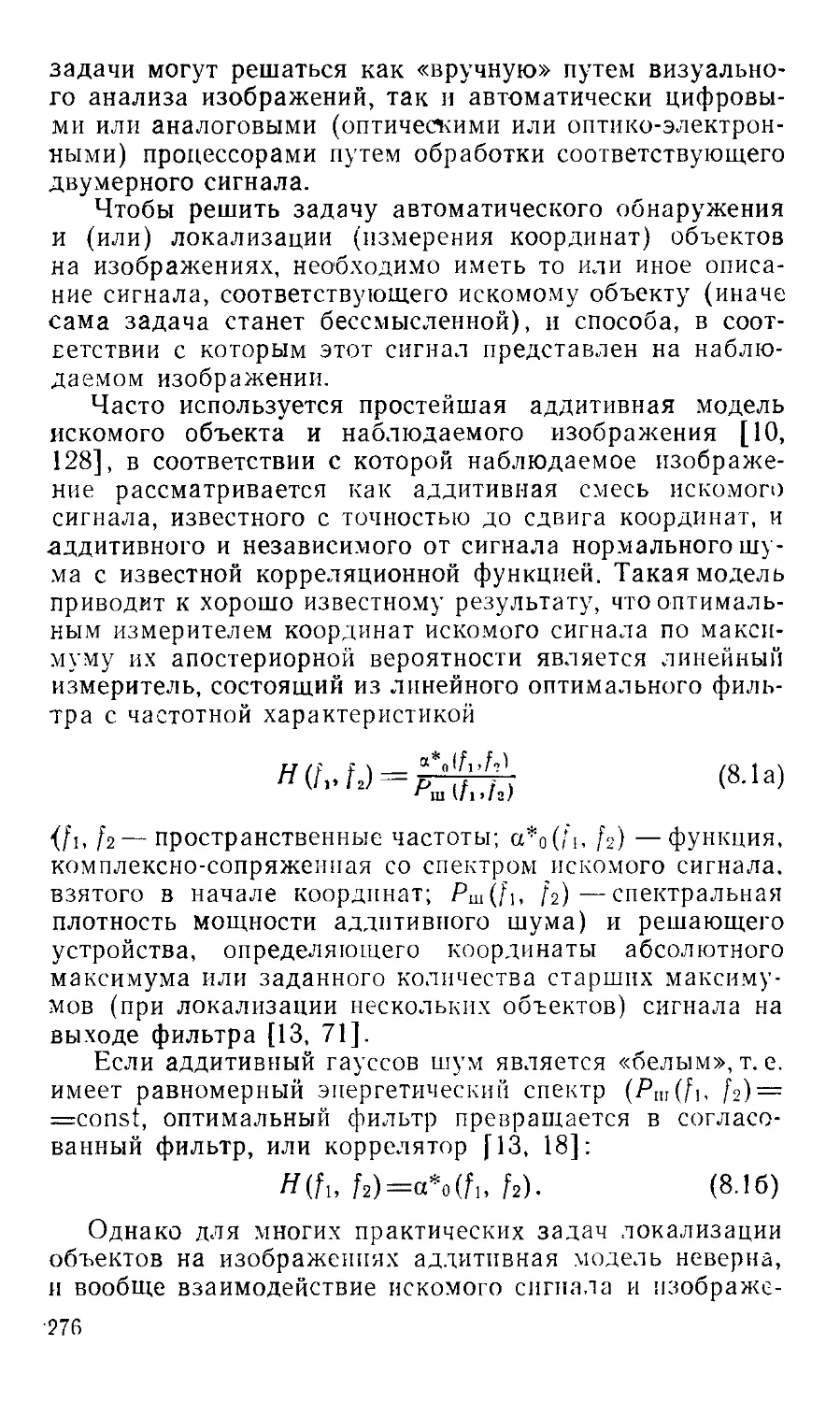
Глава 8. Измерение координат объектов на изображении . 275
8.1. Постановка задачи 275
8.2. Локализация точно известного объекта на простран-
пространственно-однородном изображении 280
8.3. Учет неопределенности в задании объекта и неодно-
неоднородности изображения. Локализация на «смазанных
изображениях» 286
8.4. Оптимальная локализация и контуры изображений.
Выбор эталонных объектов 292
¦ 8.5. Алгоритм автоматического обнаружения и выделения
реперных марок на аэро- и космических фотоснимках 297
Заключение. Вопросы аппаратурного и математического
обеспечения 300
Список литературы 304
Предметный указатель 311
Предисловие
В самых различных областях науки и техники име-
имеется множество задач, связанных с обработкой изобра-
изображений. Это, например, анализ и интерпретация аэрофо-
аэрофотоснимков и космических снимков в науках о Земле, в
метеорологии, астрономии, исследовании природных ре-
ресурсов; анализ оптических, рентгеновских, тепловых, ра-
радиографических и друщх изображений в медицинской
диагностике, промышленной дефектоскопии, научных ис-
исследованиях; анализ изображений и полей, зарегистриро-
зарегистрированных методами оптической, радио- и акустической го-
голографии и т. д.
До недавнего времени специалисты соответствующих
областей, ученые, дешифровщики аэрофотоснимков, гео-
геологи, фотограмметристы, врачи-рентгенологи и другие
в решении этих задач могли полагаться только на свое
зрение и работали вручную. Возрастающий объем задач
и повышение требований к точности и скорости их реше-
решения вызвали интенсивное развитие средств и методов
автоматизации обработки изображений. Ведущая роль
среди них принадлежит цифровым методам обработки
на универсальных ЦВМ и специализированных цифро-
цифровых процессорах.
В настоящее время цифровой обработкой изображе-
изображений начинает заниматься все большее число специали-
специалистов с разными традициями, уровнем подготовки, навы-
навыками. Поэтому возникла необходимость в пособии, кото-
которое позволило бы овладеть ее методами на профессио-
профессиональном уровне. Это определило построение книги, со-
содержащей изложение с единой методологической точки
зрения, базирующейся на теории сигналов и теории ин-
информации, теоретических основ цифровых методов обра-
обработки изображений и обзор самих методов с их конкрет-
конкретными применениями.
Изложение теоретического материала основано на
курсах лекций по цифровой обработке сигналов, кото-
которые автор читал с 1975 г. студентам факультета радио-
радиотехники и кибернетики Московского физико-техническо-
го института и студентам факультета повышения квали-
квалификации того же института, проходившим подготовку по
специальности «Теория и методы обработки изображе-
изображений». Часть книги, посвященная описанию конкретных
методов и результатов обработки, отражает главным об-
образом опыт работы автора и его коллег над задачами
обработки изображений в Институте проблем передачи
информации АН СССР, но упоминаются или описывают-
описываются и другие известные из литературы результаты.
Для чтения книги достаточно уровня подготовки, да-
даваемого высшими учебными заведениями физико-мате-
физико-математического и технического профиля. Для специалистов
иных профилей желательно знакомство с элементами
теории матриц, теории вероятностей и основами цифро-
цифровой вычислительной техники и программирования.
Автор благодарен студентам, которые своими вопро-
вопросами и замечаниями стимулировали совершенствование
первой части книги, являющейся основой прочитанных
лекций, и многим коллегам и товарищам по работе, с
которыми обсуждалась как вся книга, так и ее отдель-
отдельные разделы. Автор пользуется также случаем выразить
свою признательность за множество полезных советов
и критических замечаний А. М. Трахтману, вынесшему
основную тяжесть рецензирования книги, а также
С. Л. Горелику. Автор заранее благодарен всем чита-
читателям, которые пришлют свои замечания по содержа-
содержанию книги.
Введение и обзор содержания
С позиций предмета данной книги изображение —это
двумерный сигнал, предназначенный для зрительного
восприятия человеком. Зрение является одним из наи-
наиболее важных органов чувств человека. Посредством
зрения человек получает большую часть информации
о внешнем мире, поэтому столь велика роль изображе-
изображений в научно-технической практике и повседневной жиз-
жизни людей-
Объект
наблюдения
г—
1
1
-1*
1
1
1
Датчик
Видво-
сагяала
Устройство
преобразо-
преобразования
и передачи
Видеосигнала.
Изображающая система
Синте-
Синтезатор
изобра-
изображений
\
НаблюВатель
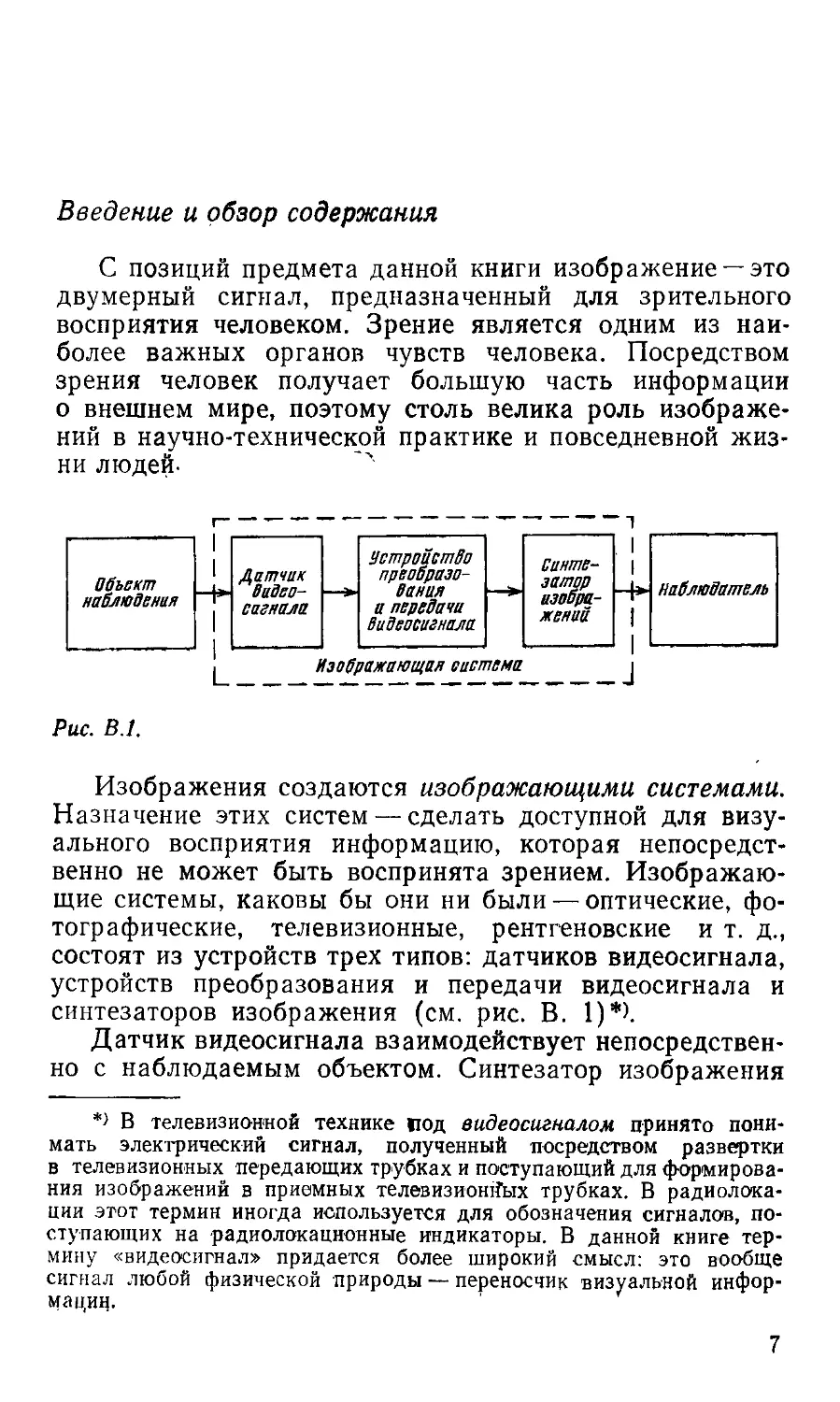
Рис. В.1.
Изображения создаются изображающими системами.
Назначение этих систем — сделать доступной для визу-
визуального восприятия информацию, которая непосредст-
непосредственно не может быть воспринята зрением. Изображаю-
Изображающие системы, каковы бы они ни были — оптические, фо-
фотографические, телевизионные, рентгеновские и т. д.,
состоят из устройств трех типов: датчиков видеосигнала,
устройств преобразования и передачи видеосигнала и
синтезаторов изображения (см. рис. В. 1)*).
Датчик видеосигнала взаимодействует непосредствен-
непосредственно с наблюдаемым объектом. Синтезатор изображения
*> В телевизионной технике год видеосигналом принято пони-
понимать электрический сигнал, полученный посредством развертки
в телевизионных передающих трубках и поступающий для формирова-
формирования изображений в приемных телевизионных трубках. В радиолока-
радиолокации этот термин иногда используется для обозначения сигналов, по-
поступающих на радиолокационные индикаторы. В данной книге тер-
термину «видеосигнал» придается более широкий смысл: это вообще
сигнал любой физической природы — переносчик визуальной инфор-
информации.
формирует изображение, доступное для непосредствен-
непосредственного зрительного восприятия. Устройство преобразова-
преобразования и передачи видеосигнала согласует и связывает
между собой датчик видеосигнала и синтезатор изобра-
изображения. Преобразования сигналов, выполняемые в этих
устройствах, могут производиться либо с целью измене-
изменения их физической природы, как, например, преобразо-
преобразования светового излучения в электрический сигнал, элек-
электрического сигнала в электромагнитное излучение ан-
антенны радиопередатчика и т. п., либо (или кроме того)
с целью изменения их структуры, т. е. математической
природы. Это деление несколько условно, но удобно,
так как позволяет отделить преобразования, описыва-
описываемые математически, от тех, которые описываются с
помощью физических терминов (вещества, энергии, дли-
длины волны излучения и т. п.).
Под обработкой изображений мы будет понимать
именно математическую обработку видеосигнала.
Можно выделить следующие категории задач обра-
обработки изображений:
— коррекция изображающих систем,
— препарирование изображений,
— визуализация информации,
— измерения на изображениях,
— кодирование изображений,
— моделирование изображающих систем.
Коррекция изображающих систем — это обработка
видеосигнала в реальной изображающей системе, на-
направленная на получение изображения, соответствующе-
соответствующего идеальной изображающей системе. Под идеальной
можно понимать систему, наличие которой между на-
наблюдаемым объектом и собой наблюдатель согласен не
замечать, т. е. это система, создающая изображение,
эквивалентное для наблюдателя объекту. При создании
изображающих систем требования к идеальной системе
обычно формулируются как требования к определенным
техническим характеристика^ системы, таким как раз-
разрешающая способность, фотометрическая точность, уро-
уровень посторонних шумов и т. д. Таким образом, коррек-
коррекция изображающих систем — это коррекция характери-
характеристик систем, приведение их к требуемым. Примером кор-
коррекции может служить повышение четкости расфокуси-
расфокусированных изображений, устранение смаза, подавление
шумов,
Идеальная изображающая система необязательно да-
дает изображение, наилучшим образом соответствующее
конкретным задачам визуального анализа изображений
и извлечения из них информации, поскольку требова-
требования к идеальным характеристикам практически явля-
являются компромиссом между требованиями широкого
класса задач. Для отдельных задач могут требоваться
дополнительные преобразования сигнала, облегчающие
визуальный анализ путем подчеркивания одних особен-
особенностей и деталей изображений и устранения других,
изменения пространственных соотношений, измерения и
визуализации количественных характеристик и т. п. Та-
Такие преобразования, являющиеся инструментом визу-
визуального анализа, называются препарированием изобра-
изображений. Примерами препарирования могут служить при-
приемы в художественной и научной фотографии: соляриза-
соляризация, построение изофот, оконтуривание, передача изо-
изображений в псевдоцветах и т. п.
Под визуализацией информации мы понимаем обра-
обработку сигналов для представления их в виде изображе-
изображений с целью последующей визуальной интерпретации.
Например, визуализацией является представление одной
величины как функции другой в виде графика.
В принципе любой сигнал может быть так или ина-
иначе представлен человеку в виде изображения. Но мно-
многие задачи извлечения информации из сигналов могут и
должны решаться автоматическими устройствами. Авто-
Автоматическую обработку сигналов, которые, будучи пред-
представлены в виде изображений, могли бы анализировать-
анализироваться визуально, мы называем измерениями на изображе-
изображениях. Это, например, автоматическое измерение разме-
размеров и пространственного расположения объектов, их об-
обнаружение, классификация.
Кодирование изображений — это преобразования ви-
видеосигнала, необходимые для его запоминания в запоми-
запоминающих устройствах или передачи по каналам связи
в цифровой форме.
Наконец, к моделированию изображающих систем
относится категория задач обработки изображений, ко-
которые решаются при создании и исследовании новых
типов систем.
Разумеется, все эти задачи тесно связаны между со-
собой и по методам их решения и по используемым для
этого техническим средствам.
Данная книга посвящена методам обработки изобра-
изображений средствами цифровой вычислительной техники —
универсальными цифровыми вычислительными машина.-
ми и специализированными цифровыми процессорами.
Использование цифровой техники является альтернати-
альтернативой традиционным аналоговым техническим средствам
обработки изображений — оптическим, фотографическим,
телевизионным и т. п. Она имеет большие преимущест-
преимущества перед аналоговой техникой там, где требуются гиб-
гибкость и программируемость, оперативный контроль и
вмешательство в процесс обработки, точная воспроиз-
воспроизводимость результатов. Цифровая техника в настоящее
время превосходит аналоговую и по надежности, и по
унификации узлов, т. е. по экономической эффективно
сти.
Исторически использование цифровой обработки изо-
изображений началось в конце 50-х начале 60-х годов с
применения универсальных ЦВМ для моделирования
изображающих систем и методов кодирования изобра-
изображений [32, 33, 68, 84, 93]. Но с развитием вычислитель-
вычислительной техники к концу 60-х годов стало ясно, что ЦВМ
можно использовать и для решения других задач обра-
обработки изображений,.в особенности для коррекции изо-
изображающих систем, препарирования изображений, клас-
классификации в космических и физических исследованиях,
медицинской диагностике, промышленной дефектоскопии.
Визуализация информации с помощью цифровой вычис-
вычислительной техники стала предметом отдельного направ-
направления в вычислительной технике — машинной графики
(см. [40]). Наконец, к середине 70-х годов благодаря
развитию микроэлектронной базы стали создаваться
специализированные цифровые устройства и системы об-
обработки изображений на базе мини-ЭВМ и микропроцес-
микропроцессоров и началось широкое практическое применение
этих систем главным образом в изучении ресурсов Зем-
Земли и медицине. Сегодня цифровая обработка изображе-
изображений для многих становитсяпрофессией.
В этой книге делается попытка объединить сведе-
сведения, необходимые для овладения этой профессией. По-
Поэтому она состоит из двух частей: основ теории (гл. 1—
5) и конкретных примеров решения задач цифровой об-
обработки изображений (гл. 6—8).
Глава 1 посвящена элементам теории сигналов,
используемым при последующем изложении. Главы 2-4
10
составляют основное содержание ч. 1, где соответствен-
соответственно по главам рассматриваются дискретизация и кван-
квантование изображений; дискретное представление преоб-
преобразований сигналов; алгоритмические способы выполне-
выполнения цифровых преобразований с минимальными затрата-
затратами вычислительных средств. Таким образом, эти главы
посвящены центральной проблеме цифровой обработки
сигналов: как должно строиться цифровое представление
сигналов и их преобразований при цифровой обработке.
Несмотря на принципиальное значение этой пробле-
проблемы, многие ее аспекты, в особенности касающиеся обра-
обработки двумерных сигналов, какими являются изображе-
изображения, недостаточно освепхены в литературе. Поэтому в
гл. 2—4 наряду с известными результатами приводятся
новые, полезные как с методической, так и с практиче-
практической точек зрения. Среди них можно назвать анализ
особенностей дискретизации изображений (§ 2.4); сдви-
сдвинутые дискретные преобразования Фурье (§ 3.7); пред-
представление ортогональных преобразований в виде сумм
кронекеровских произведений элементарных матриц
(§ 3.10—3.12), позволившее выработать единый подход
к выводу быстрых алгоритмов этих преобразований с
помощью операций матричной алгебры (§ 4.1—4.5); но-
новый алгоритм совмещенного дискретного преобразова-
преобразования Фурье для четных последовательностей (§ 4.6); дву-
двумерный рекуррентный алгоритм вычисления локальных
дискретных спектров Фурье (§ 4.7)-
Поскольку кодирование изображений в книге под-
подробно не рассматривается, в § 2.11 дан краткий обзор
используемых или исследуемых в настоящее время ме-
методов кодирования изображений, базирующийся на по-
понятиях, изложенных в гл. 2.
Глава 5 посвящена цифровым статистическим мето-
методам— измерению статистических характеристик изобра-
изображений по их цифровому представлению и генерирова-
генерированию псевдослучайных последовательностей и изобр'аже-
ний. Знание статистических характеристик изображений
обычно требуется при кодировании изображений и кор-
коррекции изображающих систем. Псевдослучайные после-
последовательности используются также при моделировании
изображающих систем.
Как уже упоминалось, ч. II книги содержит описание
конкретных примеров обработки изображений. Глава б
посвящена задаче коррекции изображающих систем.
11
В ней иллюстрируются методы коррекции линейных и
нелинейных искажений изображений и борьбы с помеха-
помехами. Подробно описываются методы, показавшие свою
эффективность на реальных изображениях. В материале
этой главы используются в основном результаты, полу-
полученные при обработке изображений с автоматических
межпланетных станций «Марс-4» и «Марс-5».
В гл. 7 рассматриваются некоторые методы препари-
препарирования изображений. Главное внимание уделяется ос-
основанным на измерении гистограмм распределений
методам нелинейного преобразования шкалы значений
видеосигнала (§ 7.2—7.3), так как они известны мень-
меньше, чем линейные методы, которым посвящен § 7.4, и ме-
методы построения графических препаратов, описанные в
§ 7.5. В § 7.6 кратко рассматривается задача геометри-
геометрических преобразований изображений и связь с вопросом
интерполяции для перехода от дискретного изображе-
изображения к непрерывному.
Глава 8 посвящена одной из задач измерений на изо-
изображениях— определению координат объектов на изо-
изображениях. Поскольку эта важная практическая задача
теоретически освещена в литературе недостаточно, в
§ 8.2—8.4 дается ее теоретический анализ, выводы ко-
которого иллюстрируются результатами моделирования на
ЦВМ. В § 8.5 описан пример практического использо-
использования этих выводов.
В отличие от ч. I книги ч. II носит в основном описа-
описательный характер (исключение составляет только гл. 8).
Ее можно читать независимо от ч. I, но понять точный
смысл описываемых r ней методов обработки и, глав-
главное, увидеть единство методов, используемых в разных
задачах, и обосновать их выбор без чтения ч. I нельзя-
Часть I
ОСНОВЫ ТЕОРИИ ЦИФРОВОЙ ОБРАБОТКИ
СИГНАЛОВ
Глава!
ЭЛЕМЕНТЫ ТЕОРИИ СИГНАЛОВ
/./. Сигналы как математические функции
Для аналитического описания сигналов и процессов
их преобразования используют математические модели.
Прежде всего сигналы рассматривают как функции, за-
заданные в физических координатах. В этом смысле гово-
говорят об одномерных сигналах (например, зависящих от
времени), двумерных, заданных на плоскости (например,
изображения), трехмерных (характеризующих, напри-
например, пространственные объекты). Чаще всего в качестве
математических моделей сигналов используются скаляр-
скалярные функции. Но иногда приходится прибегать к более
сложным моделям — комплексным и векторным функци-
функциям. Например, для описания электромагнитного поля
как сигнала удобно использовать комплексные функции,
для описания цветных изображений — трехкомпонентные
векторные функции, для описания данных многоспект-
многоспектральной съемки — четырех- шестикомпонентные вектор-
векторные функции.
Важными общими характеристиками сигналов явля-
являются множества значений, которые могут принимать са-
сами сигналы и их аргументы. Если сигнал и его аргумен-
аргументы принимают любые значения на отрезке или на беско-
бесконечной оси, т. е. несчетное множество значений, то сиг-
сигнал называется непрерывным, или аналоговым (являет-
(является как бы аналогом порождающих его природных объ-
объектов, обычно непрерывных). Сигнал, аргументы кото-
которого принимают только счетное множество значений,
называется дискретным. Сигнал, который принимает
счетное множество значений, называется квантованным.
Дискретные квантованные сигналы называются цифро-
цифровыми.
13
Классом сигналов, дуальных в известном смысле дис-
дискретным сигналам, является класс периодических сигна-
сигналов. Они описываются периодическими функциями, опре-
определяемыми в одномерном случае соотношением
a(t+KT)=a(t), A.1)
где к — натуральное число.
При переходе к двумерным и многомерным сигналам
аргументы описывающих их функций можно рассматри-
рассматривать как векторы, заданные в той или иной системе ко-
координат. Выбор этой системы координат определяется
обычно существом задачи, и от него сильно зависит про-
простота аналитического описания сигналов. Поясним это
на примере двумерных периодических сигналов.
Двумерный интервал — период периодического сиг-
сигнала — это плоская фигура, а не отрезок. Если двумер-
двумерный сигнал повторяется на плоскости с периодом в виде
прямоугольника, то целесообразно использовать прямо-
прямоугольную систему координат {t\, t2), в которой он запи-
записывается так:
a(U, ti)=a(ti-\-KiTlt h+K2T2). A.2)
Если же период является параллелограммом, то
предпочтительней косоугольная система координат, в
которой он также запишется в виде A.2). В прямоуголь-
прямоугольной системе координат такой сигнал будет выглядеть
сложнее:
a(tu ta)=a(ti+KiTn+KaTau ^+к,Г12+к2Г22), A.3)
где Тп, Т2\, Т\2—Т22 — проекции периодов по осям косо-
косоугольной системы координат на оси прямоугольной си-
системы координат.
С точки зрения математического описания сигналов
различают также детерминированное и вероятностное
описания. При детерминированном описании сигналы
рассматриваются изолированно, независимо друг от дру-
друга, и считается, что значение сигнала задано в каждой
точке, где он определен. Однако иногда важно учиты-
учитывать, что точное задание характеристик физических объ-
объектов невозможно, а измерить и учесть можно только
некоторое число, так сказать, макропараметров, кото-
которыми могут обладать различные математические функ-
функции. В этих случаях используется вероятностное описа-
описание, т. е. сигналы рассматриваются как выборочные
14
функции или реализации Из некоторого ансамбля сигна-
сигналов, и математическое описание строится не для каждо-
каждого отдельного сигнала, а для ансамбля в целом.
Так как книга посвящена цифровой обработке изо-
изображений, то в основном в ней рассматриваются цифро-
цифровые двумерные сигналы. Однако в цифровой обработке
изображений цифровые сигналы это искусственные объ-
объекты, являющиеся результатом преобразования непре-
непрерывных сигналов. Чтобы пояснить связь между цифро-
цифровыми сигналами и непрерывными, из которых они полу-
получены, рассмотрим сначала непрерывные сигналы. Усло-
Условимся также, что при изложении в ряде случаев, когда
это допустимо, для упрощения формул сигналы будем
записывать как функции одной переменной независимо
от того, являются ли эти сигналы одномерными или дву-
двумерными. Для последних эта переменная может рассмат-
рассматриваться как векторная.
1.2. Пространство сигналов
При математическом описании сигналы удобно рас-
рассматривать как точки или векторы в некотором функ-
функциональном пространстве — пространстве сигналов, пре-
преобразования сигналов рассматривать как отображения
в этом пространстве, а свойства сигналов — как свойст-
свойства пространства. Слово «пространство» используется
здесь, чтобы придать множеству сигналов геометриче-
геометрический смысл и тем самым наглядность.
Наиболее простой и в то же время физически доста-
достаточно содержательной является трактовка сигналов как
элементов нормированного линейного метрического про-
пространства.
Метрическим называется пространство, в котором определено
расстояние между элементами пространства (метрика), т. е. каждой
паре элементов, скажем ai и а2, может быть поставлено в соответ-
соответствие некоторое вещественное неотрицательное число й(вц, а2) и
способ, в соответствии с которым находится это число, удовлетво-
удовлетворяет следующим правилам:
d(ab а2)=0, если ai = a2;
d(ab a2)=d(a2, a,); A.4)
rf(a,, a3)«^d(ab a2)-f-d(a2> a3).
15
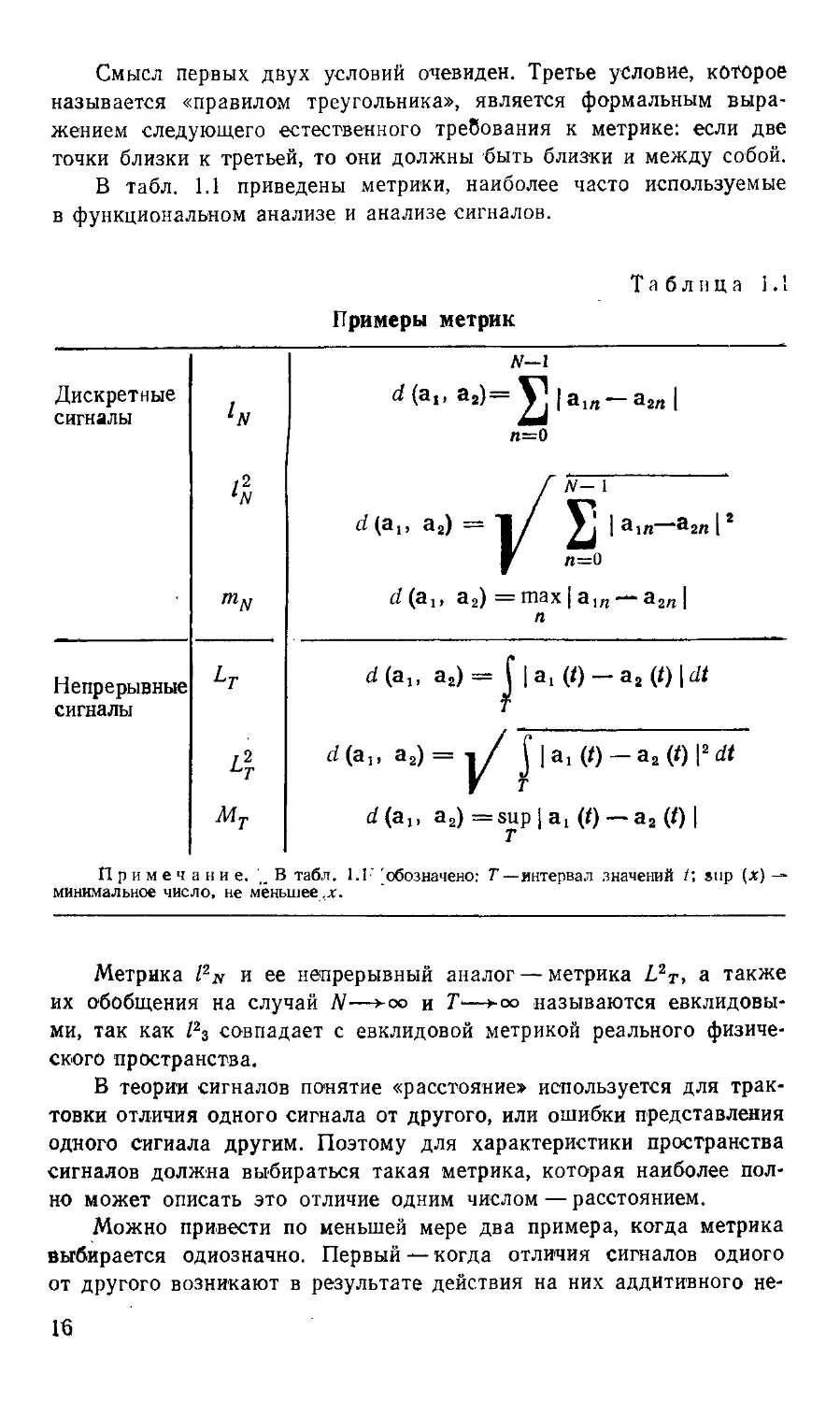
Смысл первых двух условий очевиден. Третье условие, которое
называется «правилом треугольника», является формальным выра-
выражением следующего естественного требования к метрике: если две
точки близки к третьей, то они должны быть близки и между собой.
В табл. 1.1 приведены метрики, наиболее часто используемые
в функциональном анализе и анализе сигналов.
Таблица 1.1
Дискретные
сигналы
Непрерывные
сигналы
LT
L\
Мт
Примеры
d(a,
rf(a,, a
Ct (Э j,
d(au .
метрик
yv—i
n=0
/ /V- 1
¦»-i/S>-
f n-0
, a2)=max|am-
n
4) = f 1 a, @ - a
i2) =sup 1 a. It) —
Г
in—a2n 12
,@| Л
a2 @ |2 dt
a2 @ 1
Примечание. _В табл. 1.1: обозначено: T — интервал значений t\ sup {x) --
минимальное число, не мёньшее.ж.
Метрика 12к и ее непрерывный аналог — метрика Ь2т, а также
их обобщения на случай N—>-оо и Т—>-оо называются евклидовы-
евклидовыми, так как /23 совпадает с евклидовой метрикой реального физиче-
физического пространства.
В теории сигналов понятие «расстояние» используется для трак-
трактовки отличия одного сигнала от другого, или ошибки представления
одного сигнала другим. Поэтому для характеристики пространства
сигналов должна выбираться такая метрика, которая наиболее пол-
полно может описать это отличие одним числом — расстоянием.
Можно привести по меньшей мере два примера, когда метрика
выбирается однозначно. Первый — когда отличия сигналов одного
от другого возникают в результате действия на них аддитивного не-
Ш
Коррелированного гауссова шума. Рассмотрим для простоты случай
различения двух дискретных сигналов:
°2«=ow +пк, к=0, 1, .... N— 1, A.5)
где пк — отсчеты, являющиеся независимыми случайными числами
с нормальной плотностью вероятностей
р(п) = A/У& а) ехр - (лг/2о2) A.G)
и дисперсией о2. Очевидно, все различия между сигналами а\ и at
заключены в сигнале п—{пк), а ои может быть полностью статисти-
статистически описан своей многомерной плотностью вероятностей
Р (я) = Р (я.) Р (я.) ... />(*v-i)
f~l П
[
-is'-Jjiato-'iA, A-7)
которая, в свою очередь, полностью определяется величиной
fN=\
1 К=0
A-8)
— евклидовым расстоянием между аг и аь Так порождается евкли-
евклидова метрика.
Евклидова метрика очень популярна в теории сигналов по двум
причинам. Во-первых, она очень удобна ори расчетах, имеет опре-
определенный физический смысл (она пропорциональна энергии разности
двух сигналов). Во-вторых, она в точности адекватна задачам, где
отличия между сигналами порождаются суммарным действием боль-
большого числа помех или ошибок измерения.
Евклидову метрику часто называют также среднеквадратичной,
ибо она дает квадрат разности сигналов, усредненный по области
их определения. В этом смысле ее обобщением является взвешенная
среднеквадратичная метрика, определяемая для дискретного слу-
случая как
у
к{а2х-а1ку, A.9)
к=0
где {шк) — набор весовых констант. Такая метрика потребовалась
бы, наяример, если бы в A.5) мы предположили, что {пк} имеют
разные значения дисперсии а2к.
Рассмотрим теперь другой пример — пространство цифровых би-
бинарных сигналов, отсчеты которых принимают только два значения
2—42
и которые переходит один в Другой в результате инвертирований
значений случайно выбранных отсчетов. Пусть а\ и аг — два таких
сигнала. Тогда все различия между *ннми можно описать бинарным
сигналом я и сложением отсчетов {ацх} и {пк} по модулю 2:
По условию сигнал п является случайным и его отсчеты с неко-
некоторой вероятностью принимают значения 1 или 0. Если эти отсчеты
независимы, то сигнал п полностью статистически описывается тем,
сколько его отсчетов имеют значения 1, т. е. количеством несовпа-
несовпадающих отсчетов ai и а2, равным
N— 1
<Цл» а,)=_2 (ai«®°2«)- 0-И)
Так возникает метрика, называемая хемминговой.
Линейным или векторным называется пространство сигналов,
если оно удовлетворяет следующим условиям.
1. Для любых двух его элементов ai и а? однозначно определен
принадлежащий ему третий элемент аз, называемый их суммой и
обозначаемый ai+аг, причем операция суммирования подчиняется
законам коммутативности
ai+a2=a2+ai A.12)
и ассоциативности
а,+ (а8+а3) = (а,+а2)+а3. A.13)
2. Существует такой элемент 0, что
а+0=а A.14)
для всех элементов пространства.
3. Каждому элементу а пространства можно поставить в соот-
соответствие противоположный ему элемент —а такой, что
а+(-а)=0. A.15)
4. Для любого числа а и любого элемента пространства а опре-
определен принадлежащий этому пространству элемент аа, причем
так, что
l-a=a;
A-16)
а (ai+аг) = aai+aa2.
Элементы линейного пространства называют векторами. Вектор,
образованный суммированием нескольких векторов со скалярными
коэффициентами, называется линейной комбинацией:
а=-2-А* AЛ7)
18
Множество векторов {av} называется линейно-независимым,
если приа^, отличным от нуля,
N-1
2vVj?0. A.18)
к О
Следовательно, линейно-независимое множество таково, что ни
один из его векторов не может быть представлен в виде линейной
комбинации других.
Пространство A.v, составленное из линейных комбинаций линей-
линейно-независимых векторов {<Гв}, к=0, 1, ..., N—1, называется N-мер-
ным пространством. Множество линейно-независимых векторов {фж }
называется дискретным базисом этого пространства; говорят, что
Аи натянуто на этом базисе. Любое множество N линейно-незави-
линейно-независимых векторов в An может служить его базисом.
Каждый вектор в пространстве An соответствует единственной
линейной комбинации векторов {ук} — единственному множеству
скалярных коэффициентов {о,.}. Набор (упорядоченный) скалярных
коэффициентов {ак } разложения данного вектора по данному бази-
базису является представлением вектора по отношению к данному ба-
базису.
Понятие линейного пространства математически описывает фи-
физический принцип суперпозиции. Поэтому пространству сигналов
свойство линейности приписывают тогда, когда для сигналов как
физических объектов выполняется принцип суперпозиции.
Нормированным линейным пространством называется линейное
пространство, в котором определена норма вектора, удовлетворяю-
удовлетворяющая следующим условиям:
а) ||а||>0; ||a||=0, если только а=0;
б) l^+azllsSHani+llazll;
в) ||аа|| = |а|||а||. A.19)
Геометрический аналог нормы вектора — его длина. Поскольку
норма удовлетворяет условиям A.19), ее можно использовать в ка-
качестве метрики:
d(a,, a2)=llai-a2||. A.20)
В этом случае
||a|| = d(a, 0). A.21)
Таким образом, если метрика пространства порождена его нор-
нормой в соответствии с A.20), то норма показывает, насколько вектор
отличается или далеко отстоит от нулевого вектора.
В линейном пространстве отождествление нормы и метрики
естественно ввиду наличия нулевого вектора.
2* 19
Используя пространство сигналов для описания так называемых
линейных систем обработки, ему обычно приписывают еще одну
геометрическую характеристику — скалярное произведение двух век-
векторов. Скалярное произведение двух векторов — это число (вообще
говоря, комплексное), способ вычисления которого обладает следую-
следующими свойствами:
а) (аь а2) = (а2, ai) *;
б) (aiai+a2a2> а3)=ш(а1, а3)+а2(а2, а3);
в) (а, а)^0; (а, а)=0, если только а=0 A-22)
(знак * означает комплексно-сопряженную величину).
Чаще всего пользуются следующим определением скалярного
произведения:
(а„ а,) = («!,(/) о*, (Q Л. A-23)
г
Понятия скалярного произведения и нормы векторов можно свя-
связать, определив норму как
|| а Ц = KETi). (Г.24)
Из свойств скалярного произведения A.22) вытекает, что такое
определение нормы удовлетворяет требованиям нормы A.19).
Как сказано выше, норма, в свою очередь, может порождать
метрику. Таким образом, пространство со скалярным произведением
можно сделать нормированным метрическим. Такое пространство
называется евклидовым (при конечном числе измерений N) или
гильбертовым (при бесконечном N).
Важным понятием в евклидовом и гильбертовом пространствах
является ортогональность векторов. Два вектора ai и а2 ортогональ-
ортогональны, если
(а,, а2)=0. A.25)
Если векторы {лк} взаимно ортогональны, то они линейно-не-
линейно-независимы. Поэтому ортогональные векторы можно использовать как
базисы линейных пространств.
В пространстве, в котором определено скалярное произведение,
можно установить простое соотношение между сигналом и его пред-
представлением.
Пусть Аи — N-мерное пространство, натянутое на базис {<рж }
к=0, 1 N—1, т. е. состоящее из векторов вида
N—i
а=2 Vfc. A-26)
*=0
20
a {iJ>K} — векторы, попарно ортогональные к {фж} и нормирован-
нормированные так, что
{J *jj' A.27)
Функция б (к, /) называется символом (функцией) Кронекера.
Тогда
JV-l .V-1J
(а, +,) = 2 <** (Ф«. *;) = 2 а«8 <*• ') = "'• С 28>
к=0 к=0
Формула A.28) является правилом вычисления коэффициентов
представления A.26). Базис {if>z}, удовлетворяющий A.27), назы-
называется взаимным к {<рк}. Очевидно, что
ы-\ ""¦ jv—1
а = 2 (а- *,) Ф» = 2 (а> Ф') *' <L29)
«-о i=o
для любой пары взаимных базисов в пространстве AN.
Если базис {(рк) содержит нормированные попарно ортогональ-
ортогональные векторы, т. е. взамен самому себе
{ф„. ф|}=в(к, I), A.30)
его называют ортонормальным. В этом базисе
N—I
а=2 (а-Ф»)Ф«- О-31)
Зная представление векторов по ортонормальному базису, легко
вычислить их норму
N—X
Ц а ||= (а, а)=2 , «J » A.32)
и скалярное произведение
(Af—I N—\ \ N—\ N—\ N—l
A.33)
Представления {«iiK}, {PiK}. {а2^}> (Рг.к) ЛК|бой пары сигна-
сигналов a, b по двум ортонормальным базисам {ф] к} и {ф2К} связаны
между собой соотношением
JV—I ЛГ-1
называемым равенством Парсеваля [59].
21
Линейное представление сигналов как элементов линейного мет-
метрического пространства, натянутого на конечно-мерный базис, удоб-
удобно потому, что позволяет описать любой сигнал набором некоторых
стандартных базисных функций и набором чисел. Выбор базиса
определяется удобством нахождения представления сигналов и, ко-
конечно, существом задачи.
1.3. Наиболее употребительные системы
базисных функций
Импульсные базисные функции. В одномерном случае
это функции вида
Фв (fi)=rect(fi—/с7\) /Ти A.35)
где
0<дг<1,
10 в противном случае
-I,
Функции q>K(ti) A.35) ортогональны на всей оси U.
Пространство, натянутое на этог базис, составляют сту-
ступенчатые функции. Взаимный базис для этой системы
функций образуют функции
Двумерные импульсные функции в прямоугольных
координатах можно определить аналогично A.35):
~«T" rect *'~/Г> . A.37а)
Взаимной является система функций
Представлением сигналов по этим базисам являются
их средние значения на соответствующих интервалах:
\
кГ, IT,
22
) (
\ dt* \ ^(tt,tt)dtxdtt. A.38)
Г IT
Гармонические функции. В одномерном случае это
ортогональные на интервале @, 7\) функции одного из
трех видов:
?%(*,) = sin (wrf./r,); A.39a)
?%(*,) = cos (wrtj/r,); A.396)
?%(f1) = exp(i2n/tf,/7'1). A.39в)
Наиболее употребительными из них являются ком-
комплексные экспоненциальные функции A.39в). Простран-
Пространство, натянутое на базис A.39в), составляют сигналы,
заданные на отрезке длиной Т±, а также периодические
сигналы с периодом 7\. Разложение сигналов по этим
базисным функциям называется разложением в ряд
Фурье.
Взаимный базис образуют функции
¦фв (h) = (l/7'i)exp(i2jt/c/i/7'i). A.40)
Коэффициенты ряда Фурье вычисляются по формуле
'-flfc-^-W. A.41)
Комплексные экспоненты образуют так называемую
мультипликативную систему функций: произведение
двух функций также дает функцию из системы, причем
номер функции произведения равен сумме номеров со-
сомножителей, а произведение двух функций с одним и
тем же номером, но с разными аргументами дает ту
же функцию при значении аргументов, равном сумме
аргументов сомножителей.
Двумерный базис, составленный из комплексных экс-
экспонент, определяется обычно в прямоугольных коорди-
координатах через произведение одномерных функций
A.42)
Пространство, натянутое на этот базис, составляют
функции, заданные в прямоугольнике (Ти Т2), и перио-
периодические двумерные сигналы с периодом в виде этого
прямоугольника.
Функции Уолша. Функции Уолша замечательны тем,
что принимают всего два значения. Рассмотрим сначала
23
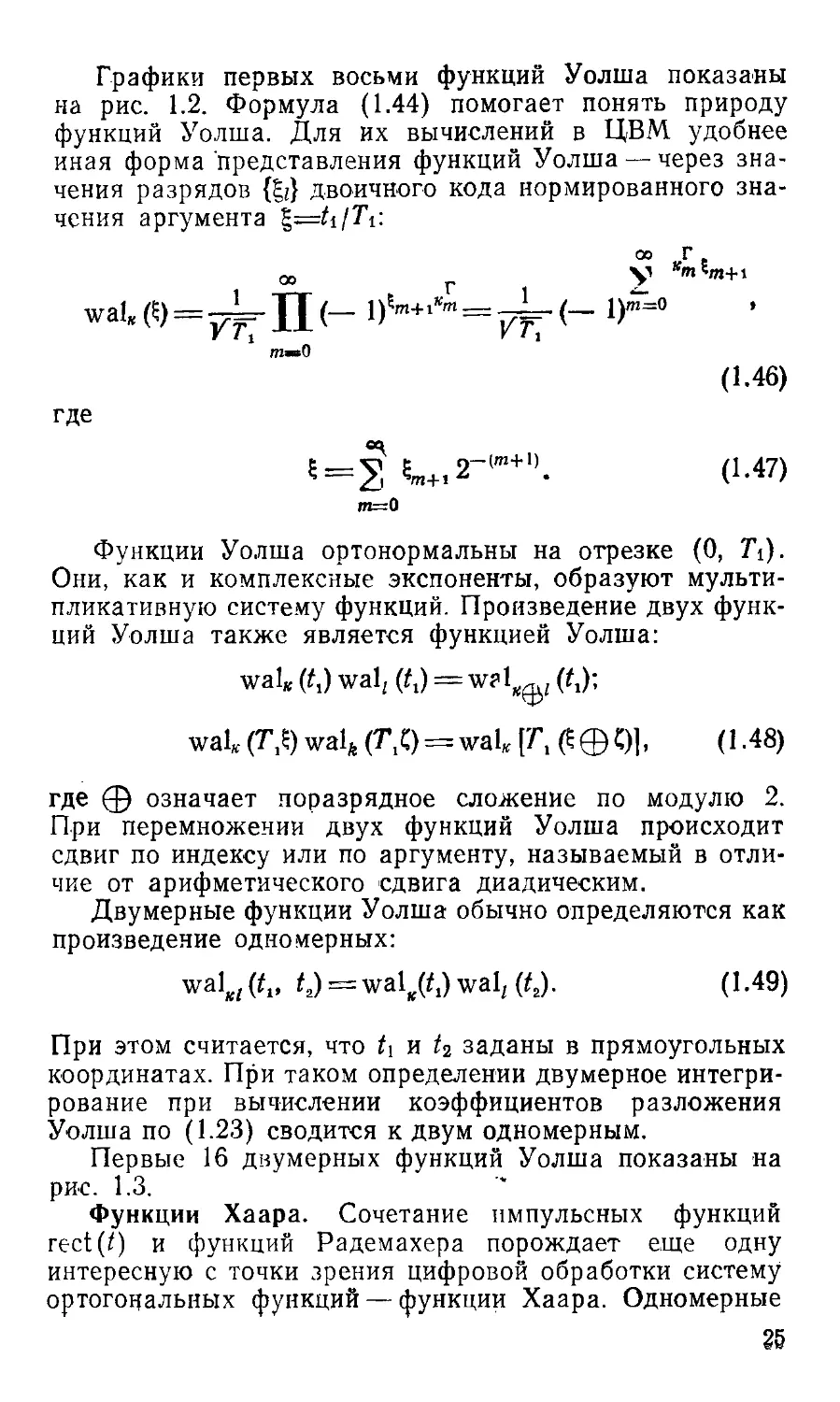
одномерные функции УолШа. Они Порождаются функ-
функциями Радемахера Vi
radK(t1) = sign[sinBHt1/T1)}. A.43)
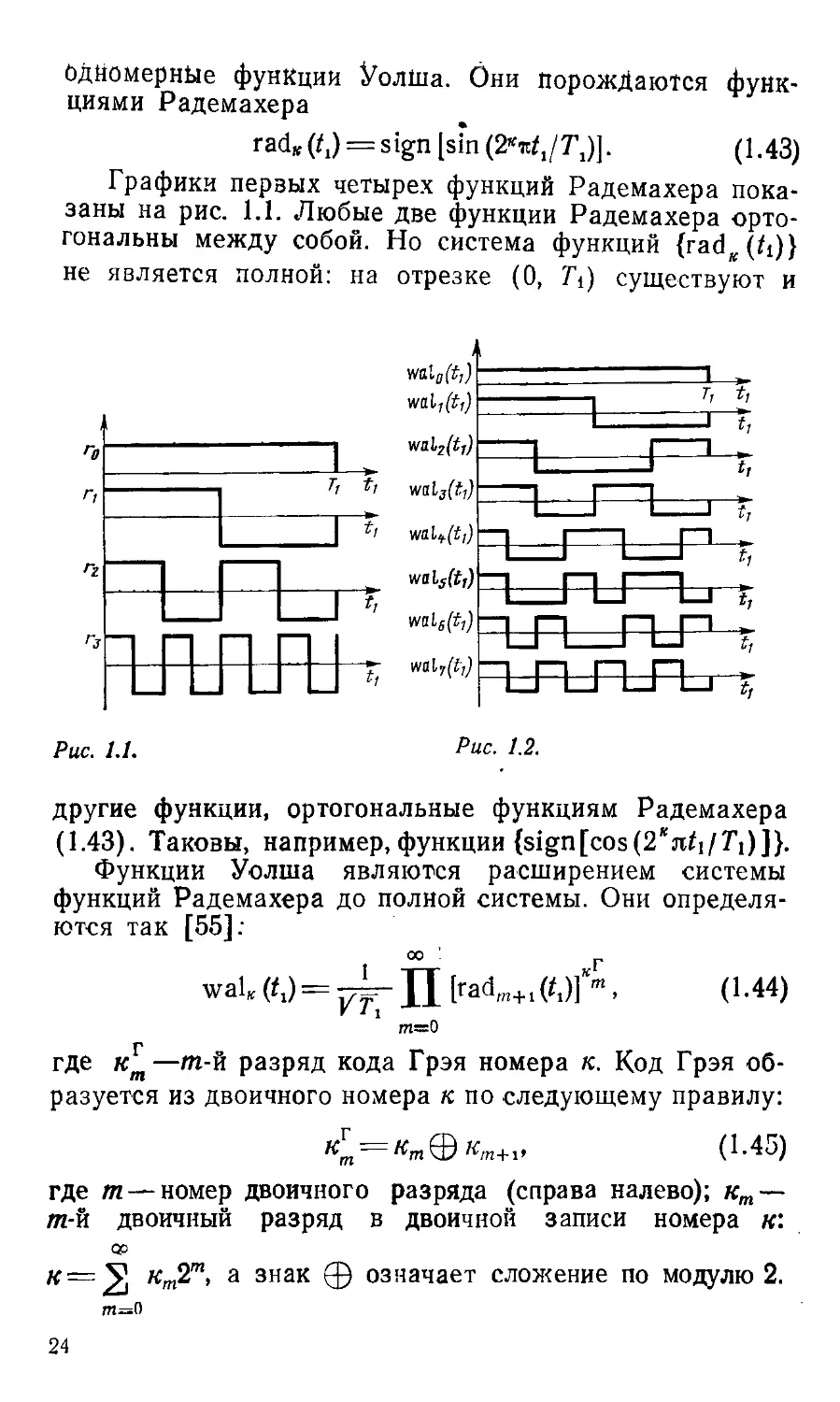
Графики первых четырех функций Радемахера пока-
показаны на рис. 1.1. Любые две функции Радемахера орто-
ортогональны между собой. Но система функций (rad^)}
не является полной: на отрезке @, Tt) существуют и
wnl2(t,)
т, t,
mls(tf)
wal,(t,)
т, t,
ТЛ-П-ГЬ ;,
Рис. 1.1.
Рис. 1.2.
другие функции, ортогональные функциям Радемахера
A.43). Таковы, например, функции {sign[cosB"Wi/Т\)\).
Функции Уолша являются расширением системы
функций Радемахера до полной системы. Они определя-
определяются так [55]:
walK(y = ^lllraCW'i)]m' A-44)
m=0
где кт —m-й разряд кода Грэя номера /с. Код Грэя об-
образуется из двоичного номера к по следующему правилу:
КГ =к (Ф) к (\ АЧ\
где ая-номер двоичного разряда (справа налево); кт —
m-й двоичный разряд в двоичной записи номера к:
к=2 кт%"> а знак Ф означает слох<ение по модулю 2.
24
Графики первых восьми функций Уолша показаны
на рис. 1.2. Формула A.44) помогает понять природу
функций Уолша. Для их вычислений в ЦВМ удобнее
иная форма представления функций Уолша — через зна-
значения разрядов {?г} двоичного кода нормированного зна-
значения аргумента g^i/Tii
а, у K
A.46)
где
e=S W.2"(B+I>- О-47)
m=0
Функции Уолша ортонормальны на отрезке (О, Т{).
Они, как и комплексные экспоненты, образуют мульти-
мультипликативную систему функций. Произведение двух функ-
функций Уолша также является функцией Уолша:
walK {Q wal, (f,) = ^
wal» (Г,?) walft G\Q = walK [7\ (? © Q], A.48)
где ф означает поразрядное сложение по модулю 2.
При перемножении двух функций Уолша происходит
сдвиг по индексу или по аргументу, называемый в отли-
отличие от арифметического сдвига диадическим.
Двумерные функции Уолша обычно определяются как
произведение одномерных:
waIBl(flt g = wal,(f,)wal/(y. A.49)
При этом считается, что t{ и t2 заданы в прямоугольных
координатах. При таком определении двумерное интегри-
интегрирование при вычислении коэффициентов разложения
Уолша по A.23) сводится к двум одномерным.
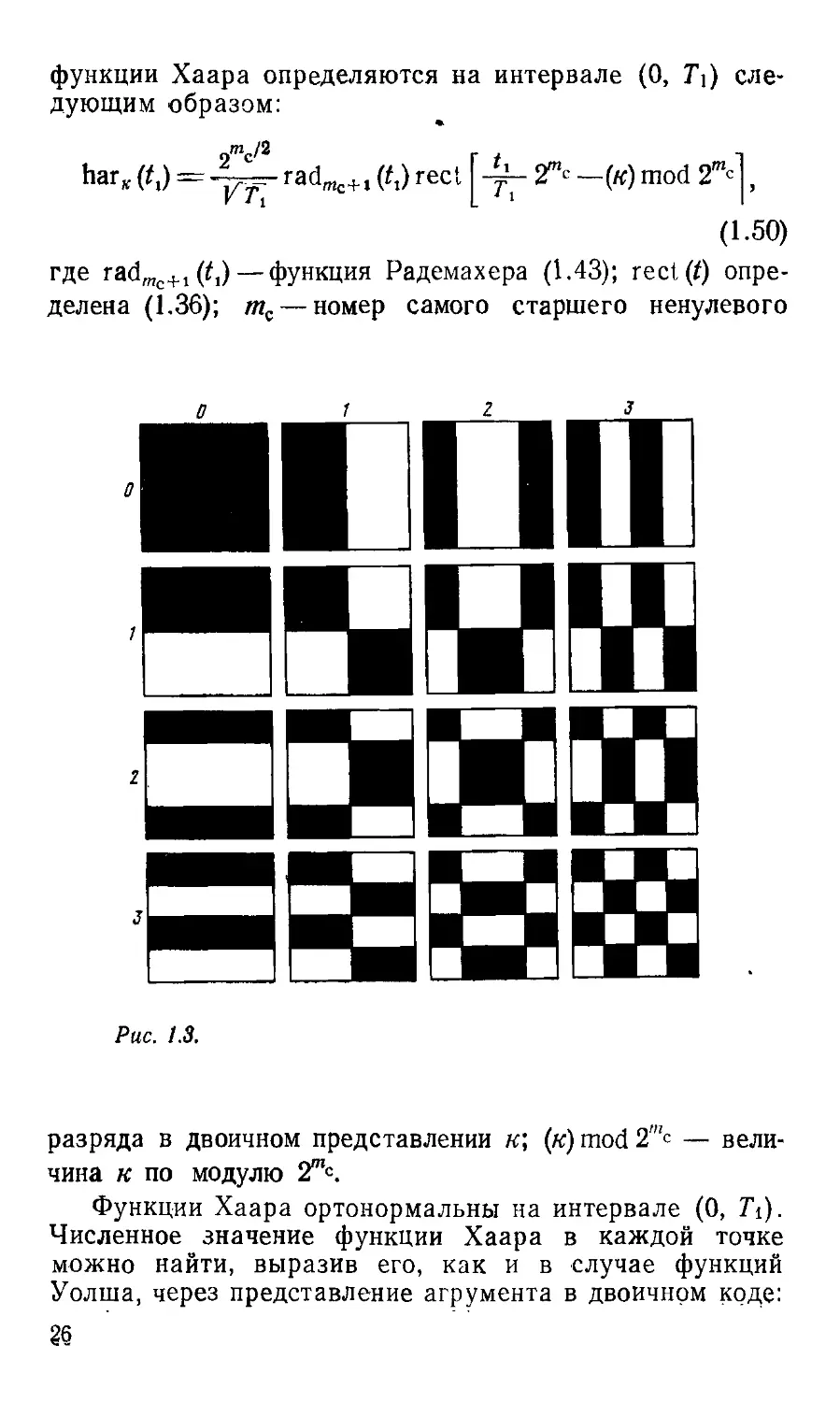
Первые 16 двумерных функций Уолша показаны на
рис. 1.3.
Функции Хаара. Сочетание импульсных функций
rect(O и функций Радемахера порождает еще одну
интересную с точки зрения цифровой обработки систему
ортогональных функций — функции Хаара. Одномерные
функции Хаара определяются на интервале (О, Т\) сле-
следующим образом:
harK (*,) = ^=-radmc+l ft) reel [А- 2' -(«) mod 2m<="|,
A.50)
где radmc+1(?,) — функция Радемахера A.43); rect(?) опре-
определена A.36); mQ — номер самого старшего ненулевого
/ г з
HIM
¦¦vv.
Рис. 1.3.
разряда в двоичном представлении к\ (к) mod 2"'c — вели-
величина к по модулю 2"Ч
Функции Хаара ортонормальны на интервале @, 7\).
Численное значение функции Хаара в каждой точке
можно найти, выразив его, как и в случае функций
Уолша, через представление агрумента в двоичном коде:
harK (Q =
«и
¦п
ш=»0
m /2
(Hmc. («)mod2"c), (i.5i)
где 8(-)—символ Кронекера; [?]тс — двоичное число,
составленное из тс старших двоичных разрядов числа |.
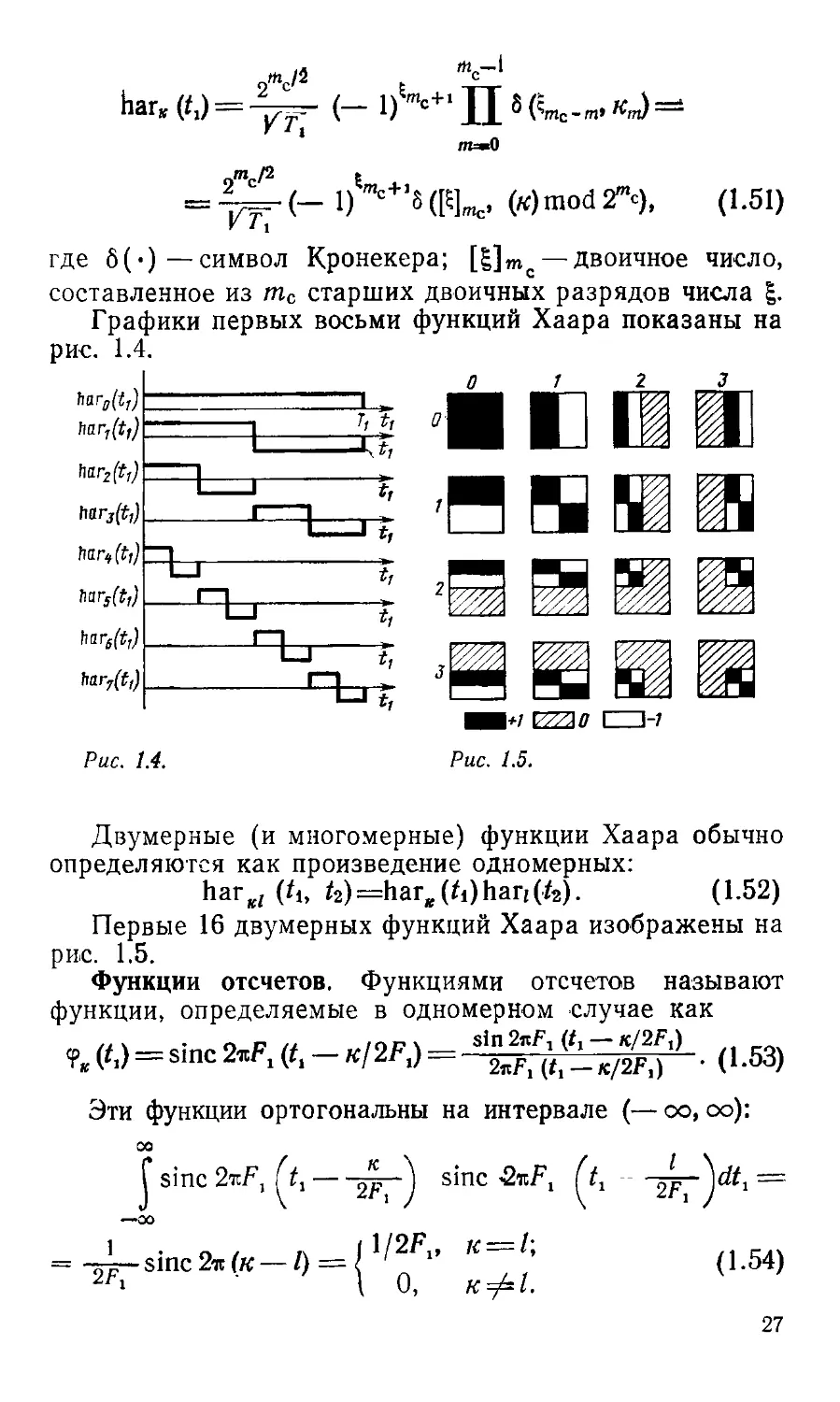
Графики первых восьми функций Хаара показаны на
рис. 1.4.
har7(t,)
СИ
¦HBli
аз о
Рис. 1.4.
Рис. 1.5.
Двумерные (и многомерные) функции Хаара обычно
определяются как произведение одномерных:
Ьагг1(^, fe)=har,(fi)hari(/g). A.52)
Первые 16 двумерных функций Хаара изображены на
рис. 1.5.
Функции отсчетов. Функциями отсчетов называют
функции, определяемые в одномерном случае как
• A-53)
Эти функции ортогональны на интервале (— оо, оо):
00
sine 2'kFi ftt —
2F,
sine
к
I
2F,
Sine &(«—/) =
{
\ 0,
A.54)
27
Отсюда видно, что взаимный базис к ним образуют
функции вида {2Fisinc2nFi(ti—/с/2/ч)}.
Функции отсчетов обычно используются для дискрет-
дискретного представления сигналов по теореме отсчетов (см.
§ 2.3). Такое название они получили потому, что для
сигналов с ограниченным спектром Фурье (см. § 1.4,
2.3) коэффициенты ак представления по этим базисным
функциям являются просто значениями (или отсчетами)
сигналов при- t=K/2Fi:
ак = 2F, j а (*,) sine 2-kF, (t, - k\2Fx) dt, == a («/2f ,)¦ 0 -55)
—oo
Двумерные функции отсчетов обычно определяются
как произведение одномерных функций.
1.4. Непрерывные представления сигналов
Выше было описано представление сигналов как элементов ко-
конечно-мерного евклидова или счетно-мерного гильбертова простран-
пространства. Это представление, ставящее сигналу в соответствие (при за-
заданном базисе) набор чисел, можно назвать дискретным. Оно явля-
является основой цифрового описания непрерывных сигналов. Для того
чтобы понять, как получается такое описание, удобно рассматривать
дискретное представление сигналов
N—\
* (о =2 "л w с-56)
к=0
как предельный случай непрерывного представления, которое полу-
получается, если заменить номер базисной функции к непрерывной пере-
переменной /eF, где F — конечный или бесконечный интервал [59].
Тогда аналогом A.56) будет
а№> [«(/)?(*. f)df, t<=T. A.57)
F
Естественно распространить такой подход и на способ определения
<х(/) по a(t), введя взаимные функции i|)(f, t) или сопряженное ба-
базисное ядро:
а(/)= fa(Q4.*tf, t)dt. A.58)
г
Функцию a(f) называют интегральным преобразованием сигна-
сигнала a(t), или его спектром по непрерывному базису (p(t, f).
28
Условие взаимности функций q>(/, /) и t|>(/, t) можно йолучить,
подставив A.58) в A.57):
a(t) = j Г f а (х) Ф* (/,
e f в (t) Г f f (f, fl Ф* (/, x) d/ "I dx = J a (x) 8 (f, x) dx, A.
%)<f(t, f)dz\ df =
59)
где
t(t,t)= fTtf,/)¦•(/, *)d/. A.60)
Таким образом, функции ф(/, /) и 1])(/, 0 взаимны, если интег-
интеграл A.60) от их произведения удовлетворяет условию
о@= f о(«)»:(/, x)dx.J [A.61)
т
Функция б(^, т), определяемая соотношением A.61), называется
б-функцией. Формула A.60) может рассматриваться как обобщение
условия A.27) взаимности базисных функций конечно-мерного или
счетно-мерного пространства сигналов, а также как вариант непре-
непрерывного представления сигнала A.57), когда базисом служит
б-функция.
Подставив A.57) в A.58), можно получить, что условие A.61)
распространяется и на второй аргумент / взаимных базисных
функций:
т
Часто удобно рассматривать б-функцию как функцию одного
аргумента, принимая б(/, т)=б(^—т). При этом A.61) принимает
вид
«W-J«<
—x)dx. A.62)
Пользуясь понятиями непрерывного представления, дискретное
представление сигналов A.56) можно записать так:
a(')=2vP(''W' A-63)
где if к} — дискретные значения непрерывного аргумента f базисной
функции ф(/, /), соотвествующие базисным функциям <pK(t)
в A.56).
29
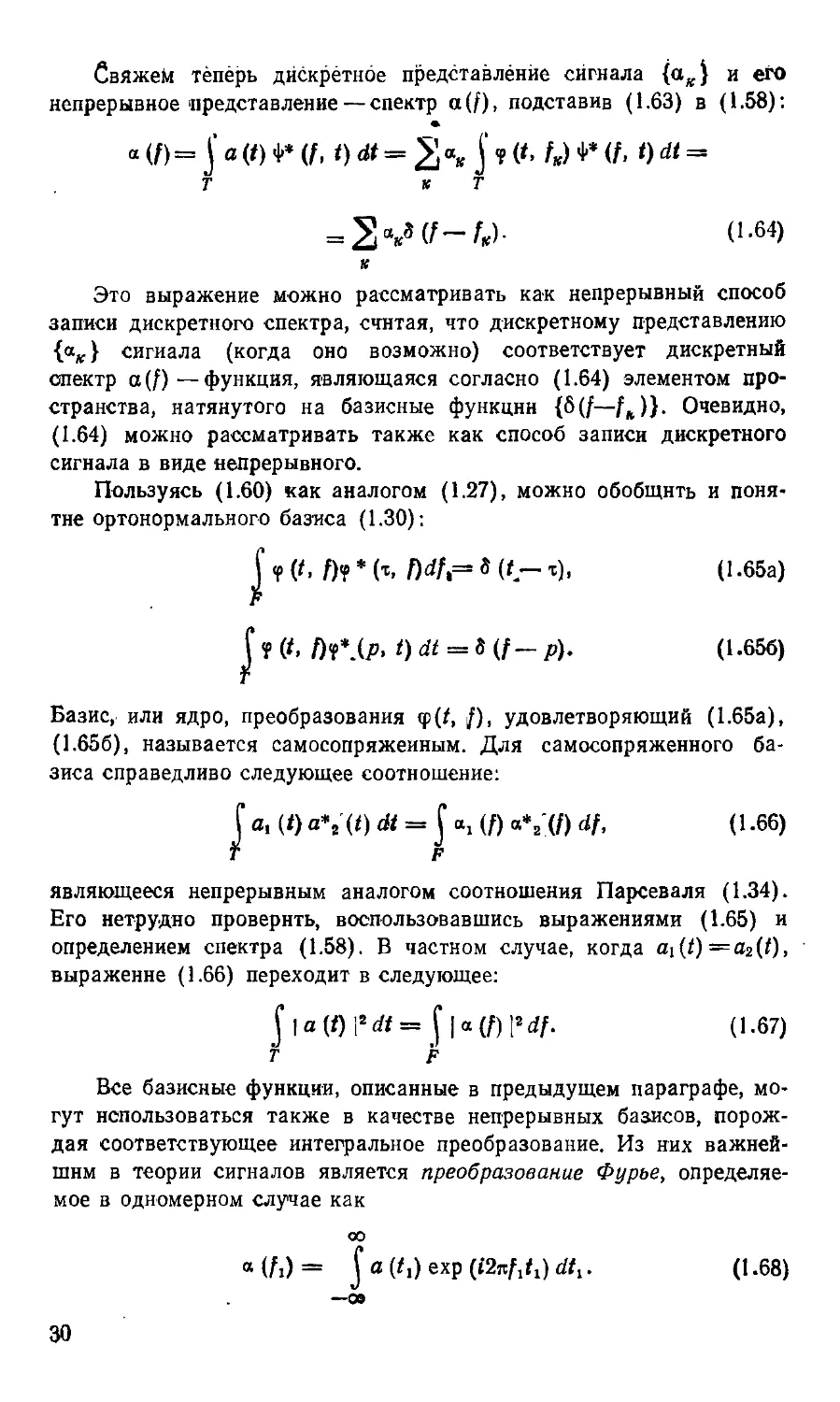
Свяжем теперь дискретное представление сигнала (ак\ и его
непрерывное представление — спектр a(f), подставив A.63) в A.58):
A-64)
a (f) = j a (t) Ф* (Л t) dt = 2t % j 4 (<> h) +* (/¦ П dt
Т к Т
Это выражение можно рассматривать как непрерывный способ
записи дискретного спектра, считая, что дискретному представлению
{ак} сигнала (когда оно возможно) соответствует дискретный
спектр а(/)—функция, являющаяся согласно A.64) элементом про-
пространства, натянутого на базисные функции {б(/—/s)}. Очевидно,
A.64) можно рассматривать также как способ записи дискретного
сигнала в виде непрерывного.
Пользуясь A.60) как аналогом A.27), можно обобщить и поня-
понятие ортонормального базиса A.30):
I
?('./)?* (x, M,= » С,- х), A.65а)
1 (*> f)t*AP> t) dt = S (f— p), A.656)
Базис, или ядро, преобразования ф(/, /), удовлетворяющий A.65а),
A.656), называется самосопряженным. Для самосопряженного ба-
базиса справедливо следующее соотношение:
Г a, (t) aV«) dt = f a, (/) «Vtf) d/, A.66)
Г F
являющееся непрерывным аналогом соотношения Парсеваля A.34).
Его нетрудно проверить, воспользовавшись выражениями A.65) и
определением спектра A.58). В частном случае, когда a\(t)=c
выражение A.66) переходит в следующее:
f ]a{t)\*dt= f|a(/)l«d/. A.67)
Г F
Все базисные функции, описанные в предыдущем параграфе, мо-
могут использоваться также в качестве непрерывных базисов, порож-
порождая соответствующее интегральное преобразование. Из них важней-
важнейшим в теории сигналов является преобразование Фурье, определяе-
определяемое в одномерном случае как
00
•(/.)=- |а(*,)ехр(Юв/А)Л1. A.68)
—ов
30
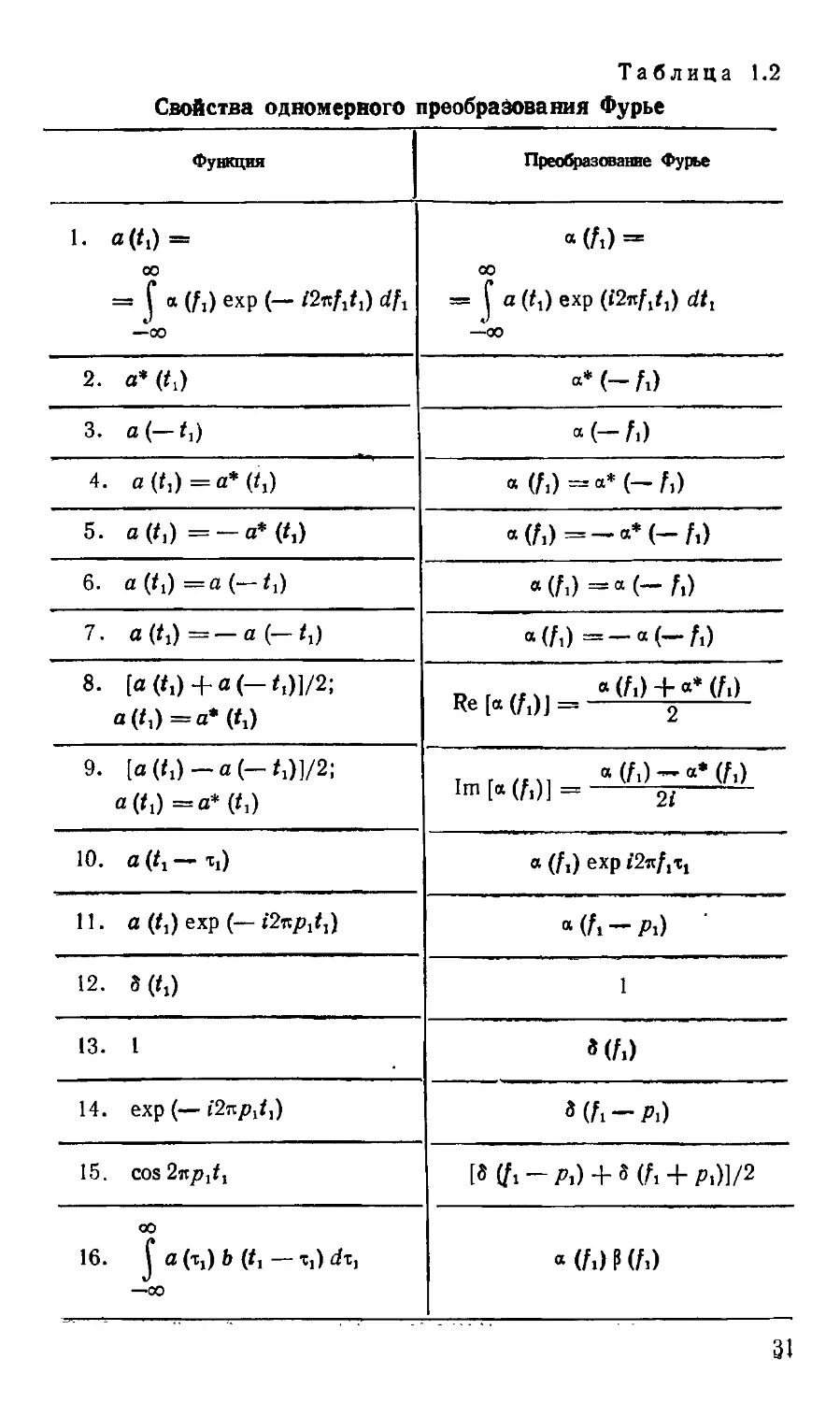
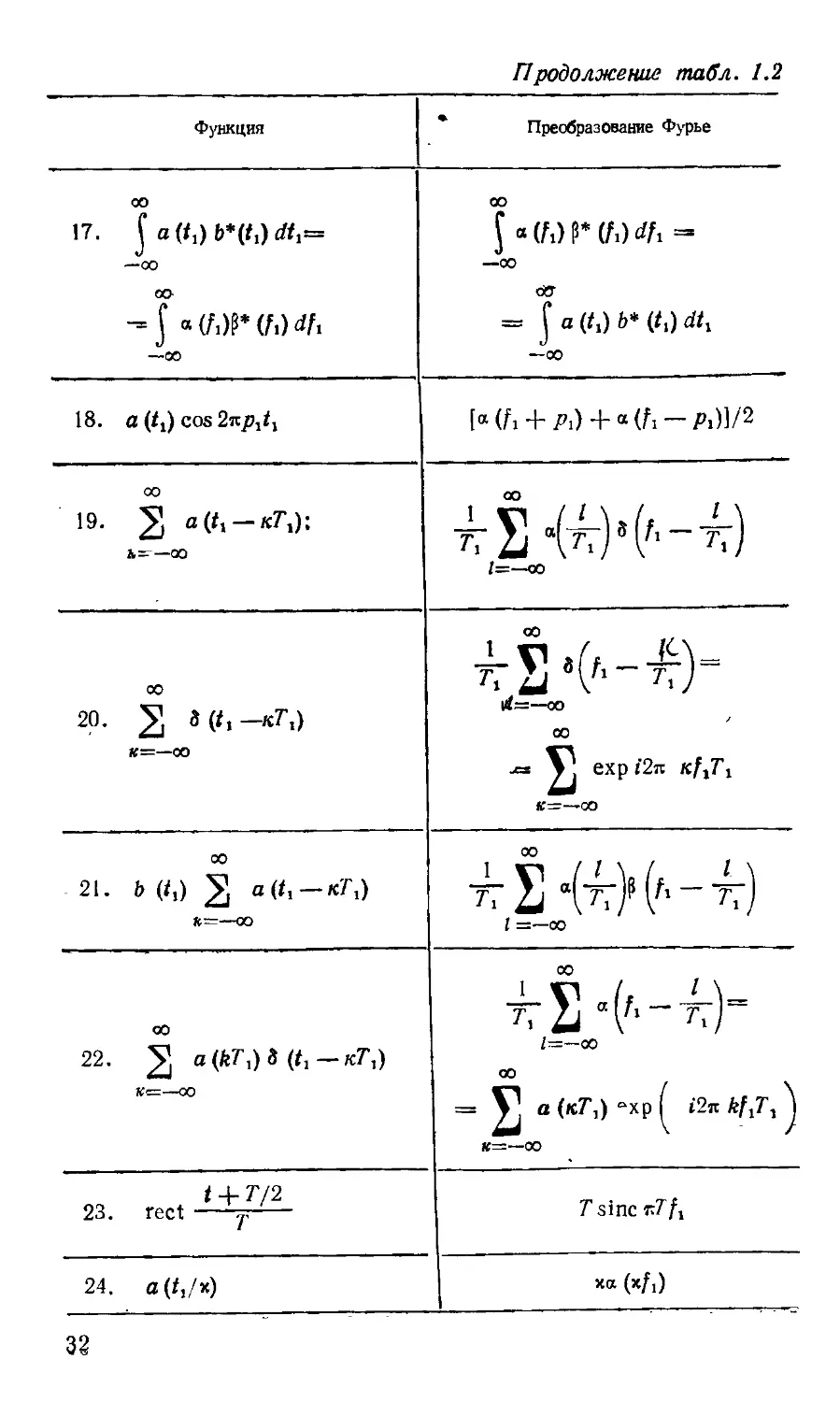
Таблица 1.2
Свойства одномерного преобразования Фурье
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
Функция
оо
= j « (/:) exp (- /2«Л<.) dh
—оо
a* (A)
a(-U)
a(U)=a*(U)
a(tt)=-a*(tj
a(f1)=a(-t1)
a(t1)=-a(-t,)
[а{.и)-а(-и)}/2\
a^-x.)
a (/,) exp (- i2«Plti)
Hti)
1
exp (— i2npj1)
cos 2jtjo,f,
00
—oo
Преобразование Фурье
«(Л) =
оо
—оо
«*(-/.)
«(-Л)
«(/.)=«*(- Л)
a (/,) =_«*(-Л)
»(Л)=«(-Л)
a (/,)=-«(-Л)
»(Л) + «*(Л)
Re [a (Л)] — 2
a (/,) - a* (/,)
Im[MA)l- 2f
a (/,) exp t2it/,x,
I
МЛ)
3 (/, _ p,)
[»<Г,-Л) + »<Л + Р,)]/2
3l
Продолжение табл. 1.2
Функция
00
17. J а (*,)*•(*,) Л,-
—00
оо-
-j <*(ЛГ(Л)#.
—00
18. а (<,) cos гпр,/.
00
19. 2 «С-*7"!):
I-—00
оо
20. 2 «С.-".)
«=—00
оо
21. b (*,) 2 а «.-«'Л)
*=—00
00
22. 2 о (*Л) « (*, — «сГ,)
К=—00
23. rect т?, х—
24. a(U/%)
Преобразование Фурье
00
j«(/.)p*(/.)^i =
—оо
—оо
ИЛ + А) + «(Л-Л)]/2
г=—оо
li=—00
оо
-и V ехр/2я /c/jfj
К=—00
I=—oo
г=-оо
00
= JJ а (/сГ,) »хр ( »2я ftf/, )
«=—оо
7" sine к77,
ха (х/,)
Продолжение табл. 1.2
25.
26.
27.
28.
Функция
00
d"a (/,)
л?
оо
-^00
f a (t) rfx
—oo
Преобразование Фурье
• Bп/)Л
(— 2raf,)na (f,)
a@)
00
—00
X Hm 27" sine 2nf, T =
r-»oo
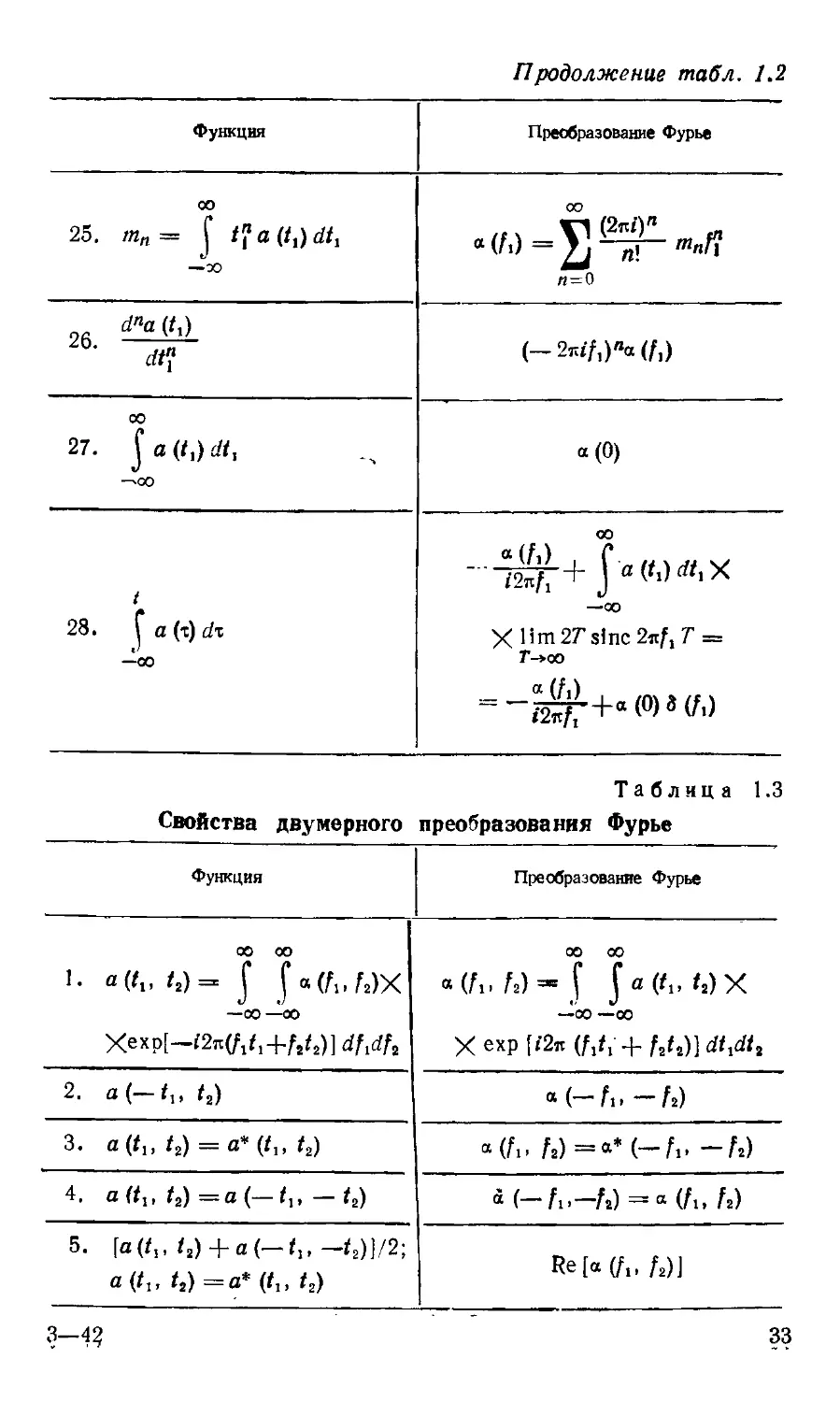
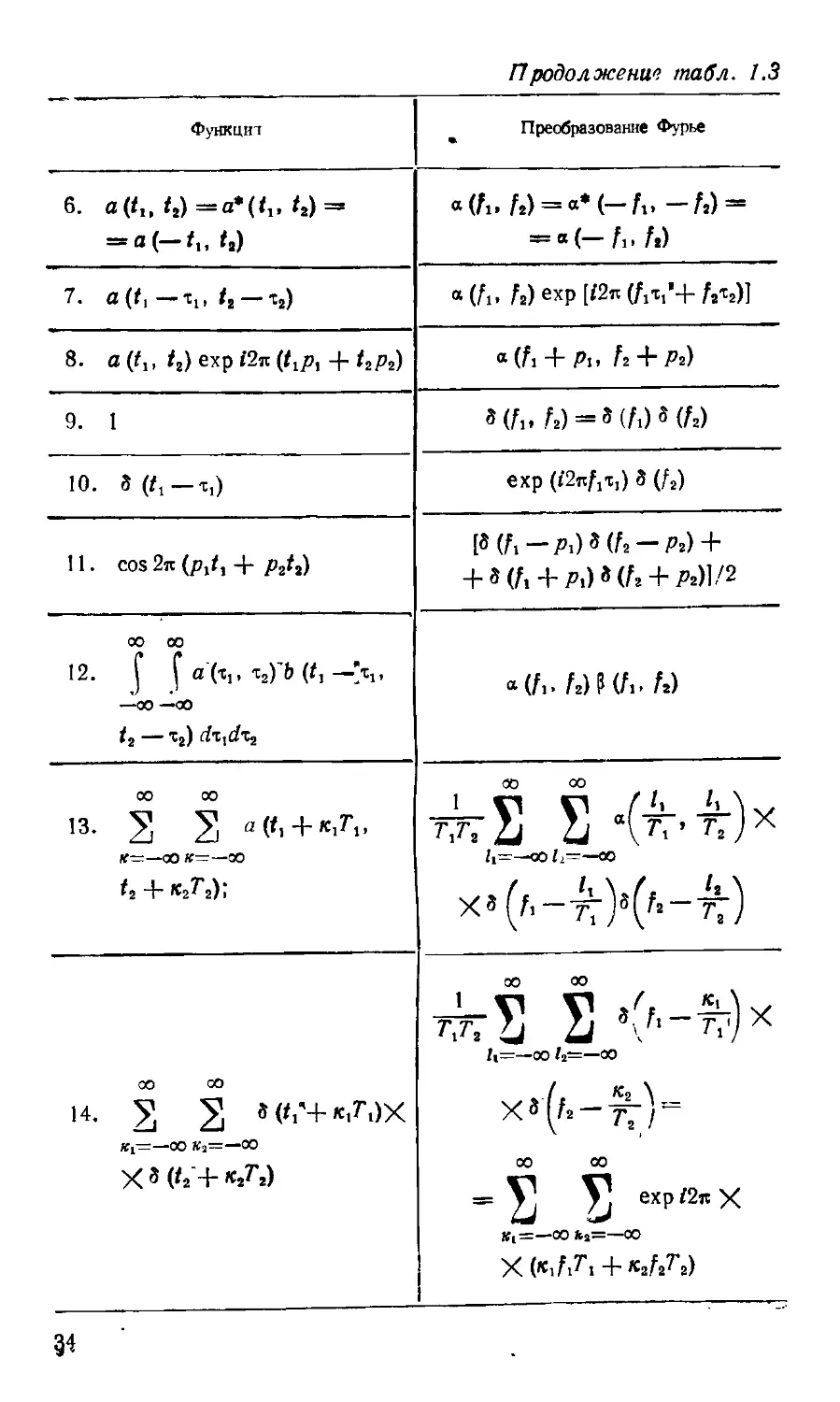
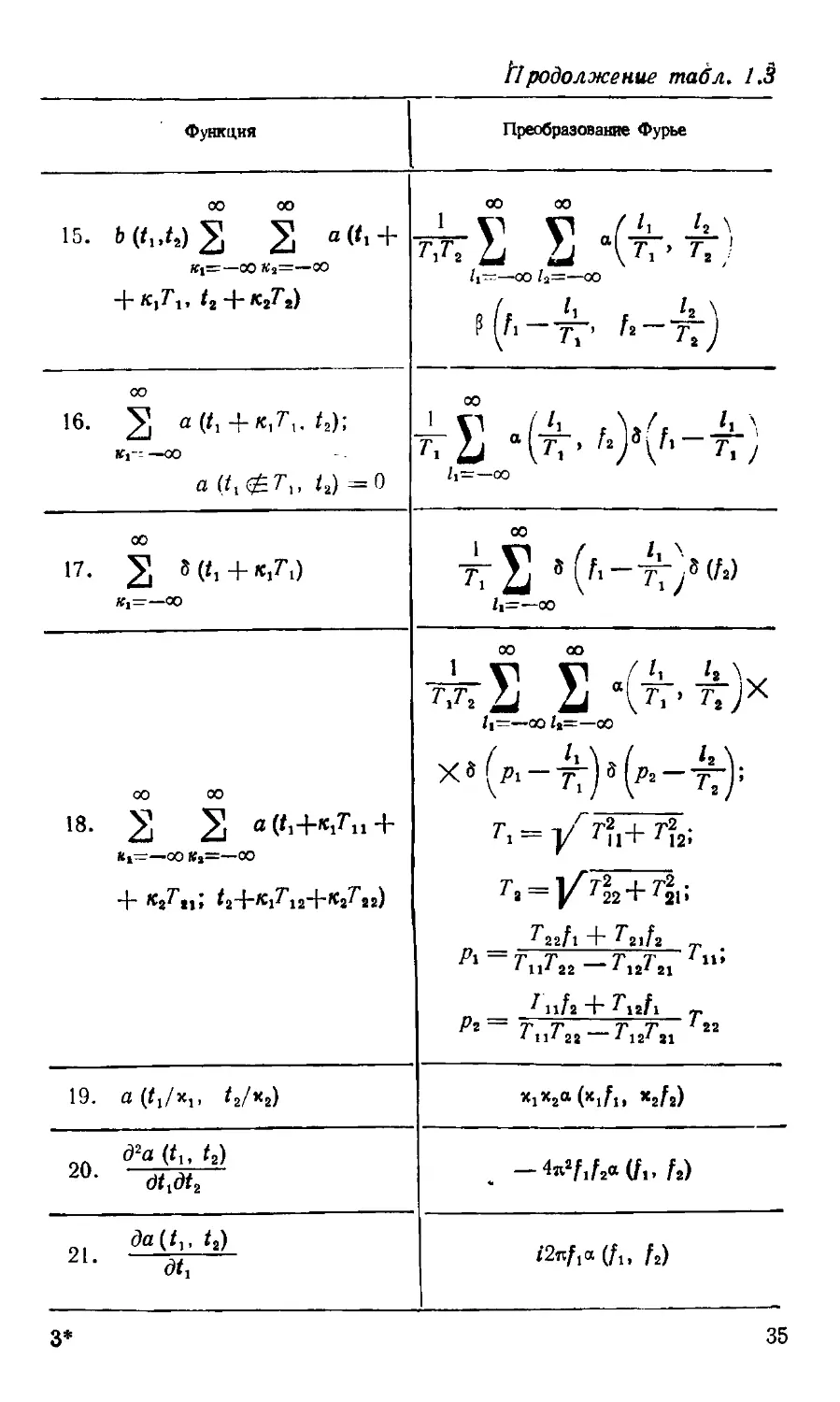
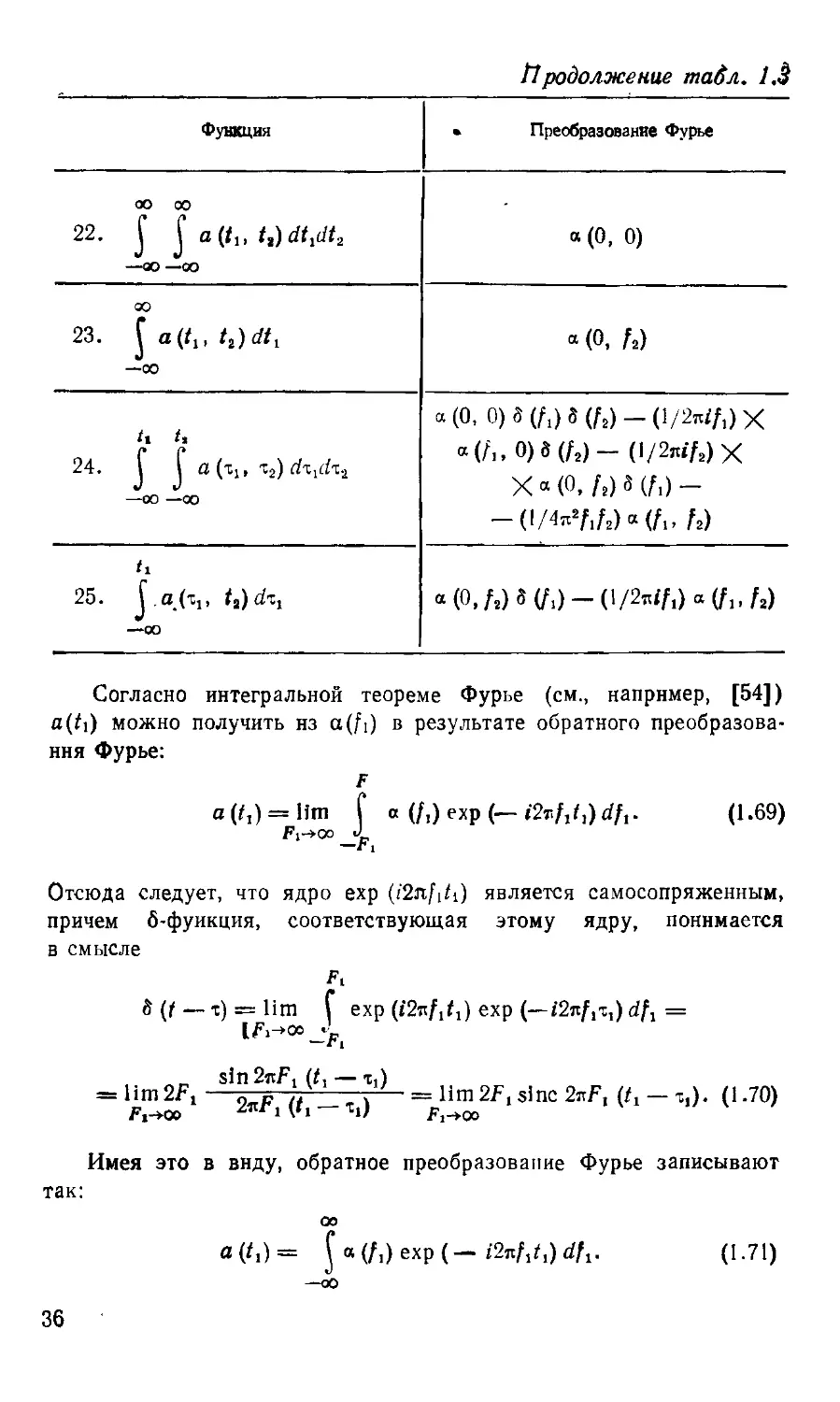
Таблица 1.3
Свойства двумерного преобразования Фурье
I.
2.
3.
4.
5.
Функция
00 00
«ft. /•)= J f <»№, MX
—oo-^oo
Xex?[—•'2n(/i<1+^ji2)] dftdf2
a(tl,tt) = a"(
a(t,, <2)=a*
['.. M
Преобразование Фурье
оо оо
«•(Л. fi)-J J a ft. MX
—oo —oo
« (— f l > — /2)
«ft. /i)=-»*(-fi. -/1)
3—4?
33
Продолжент табл. 1.3
6.
7.
8.
9.
10.
11.
12.
13.
14.
Функцит
a{tl—tl, /2 — t,)
a (?,, <2) exp «2it (*!/>, + /2p2)
1
cos 2я (p,f, + p2f,)
oo oo
f f a (Vx2rb (/,->,
<2 — x2) rfx,rfxj
oo oo
к——oo ж=—oo
00 00
«i=—oo Kj=—oo
X8('2"+«27-,)
Преобразование Фурье
* (Л» /2) = °* (— Л> — ft) =
-«(-/l.fi)
•(Л. М exp [Ю« (Лт.4-frt)]
• Cf. + л.Л + л)
»№./.)-»(/.)»№)
exp (йя/.х.) 8 (/,)
[О ffj — /?i) 0 (*2 — JP2) ~T~
• (Л.МКЛ.Л)
00 00
' ri «^ a/'ii_ ii Л x
/1=—00/j=—00
00 00
/,=—оо h-—00
/ \
хф- 77/ =
оо оо
Ki=—оо*11=—оо
15.
16.
17.
18.
19.
20.
21.
Функция
оо оо
Kt=— 0OK]=—00
oo
к,- —oo
a (/, ф.Ти t2) = 0
00
K,=— OO
00 00
Kl=—00 K«=—00
<?2a(<,, <2)
йа(/„ «,)
л,
hродолжение табл. 1.3
Преобразование Фурье
оо оо
1 у\ ri (ix 1, \
/,——оо h——оо
оо
/l = —00
оо
Л=—оо
00 ОО
Т Т /| /1 ° т > 7" JX
' J' 2 ^,J ^^ V ' 2 /
/l=—00 /«=—00
X» (а--?¦)» (л-¦?•);
/^1 — Т Т Т Т 'и»
' 11У 22 ' 12' 21
рг 7" У 7" 7" ' м
' 11' 2S ' 12' 21
wW,. «A)
.-«Л/,(/,.Ы
35
Продолжение табл. 1Л
Функция
00 00
22. j j a (it, /,)Л,Л,
—00 — 00
00
23. Jaft,/,)*/,
—оо
24. f j a (t,, x2)rfx,rft2
—00 —00
tl
25. уа(ъ, /,)dx,
—00
» Преобразование Фурье
a@, 0)
« @. h)
o@, 0K (Л) 9 (М- (l/2«/,)X
«(/,,0)8(/2)-(l/2ni72)X
X « @, /,) з (/,) -
-(!/4«Vi/»)«tf.. /»)
¦ @,/,) 9 Vi)-0/2«//,)-(/,,/,)
Согласно интегральной теореме Фурье (см., например, [54])
a(/i) можно получить из a(/i) в результате обратного преобразова-
преобразования Фурье:
F
a(tt)=-tim f «(/,)exp (—««/,/,)<//,. A-69)
Отсюда следует, что ядро exp (i'2n/i/i) является самосопряженным,
причем б-фуикция, соответствующая этому ядру, понимается
в смысле
Л
й (f —. 1) = lim f exp (<2яЛ/,) exp (— /2я/,х,) d/, =
lF+ccJ
lim 2f,
S Г '(<' ~
, sine 2*tF, (/, — x,). A -70)
Имея это в виду, обратное преобразование Фурье записывают
так:
36
«(/,)= J*tfi)exp(-/2«/I/,)d/1. A.71)
Преобразование Фурье двумерных сигналов обычно определяют
в прямоугольной системе координат:
оо оо
a (flt /8) = J J аЦи t2) exp [<2я (Д*, + /s*,)] Л, Л,. A.72a)
Благодаря использованию прямоугольной системы координат дву-
двумерное преобразование Фурье распадается на два одномерных:
оо оо
» (/.. М = J «р (»2*Ш Л, J1 a (tu tt) exp <йл/А) Л,. A.726)
—00 —00
В табл. 1.2, 1.3 приведены наиболее употребительные формулы, опи-
описывающие свойства одномерного и двумерного преобразований
Фурье.
1.5. Описание преобразований сигналов.
Понятие о линейных и нелинейных преобразованиях
Математически преобразования сигналов удобно
трактовать как отображения в пространстве сигналов.
В общем случае для описания такого отображения нуж-
нужно задать все возможные пары входных и выходных сиг-
сигналов, т. е. упорядочить все пары вход — выход. Но это
неконструктивная задача. Так как базовыми операция-
операциями существующих цифровых процессоров являются опе-
операции над отдельными числами, с их помощью такое
описание построить невозможно. Поэтому приходится
ограничиваться «иерархическими» описаниями, т. е. пред-
представлять желаемые преобразования как достаточно про-
простую совокупность «элементарных» преобразований,
каждое из которых может быть описано с помощью
небольшого подмножества из всех возможных пар
вход — выход.
Важнейшими из таких «элементарных» преобразова-
преобразований являются так называемые линейные преобразования
и поэлементные нелинейные преобразования.
Линейные преобразования определяются на линейном простран-
пространстве и обладают следующими свойствами:
L(aai+Pa2)=aLar+pZ.a2 A.73)
для любых векторов ai, a2 н скаляров а, р, где La обозначает опе-
операцию преобразования а или оператор. Очевидно,
1.0=0; Ц-а)=—и, A.74)
37
т. ё. множество линейно преобразованных векторов также образует
линейное пространство. Для линейных операторов удобно ввести еще
одну операцию — произведение •
A.75)
Физическим эквивалентом произведения является последователь-
последовательное (каскадное) соединение блоков, реализующих операторы — со-
сомножители.
Благодаря линейности операторов умножение дистрибутивно по
отношению к сложению:
A.76)
Если оператор L осуществляет взаимно-однозначное отображе-
отображение области определения, то существует обратный оператор L~',
такой, что
LLa=L-'La = a. A.77)
Нелинейные поэлементные преобразования — это преобразования
взятых по отдельности коэффициентов представления сигнала по
заданному базису, причем закон преобразования каждого коэффи-
коэффициента зависит только от его номера и не зависит от значений дру-
других коэффициентов.
Пояснить, в чем состоит простота этих «элементар-
«элементарных» преобразований можно на основе линейного про-
пространства квантованных сигналов. Рассмотрим линейное
Лг-мерное пространство сигналов, натянутое на некото-
некоторый базис {(T.J.}, к=0, 1 N—1 такое, что коэффициен-
коэффициенты представления сигналов по этому базису квантованы
на М уровней, т. е. могут принимать только М дискрет-
дискретных значений. Очевидно, количество различных сигна-
сигналов в таком пространстве равно MN. Столько строк дол-
должна иметь таблица, описывающая отображения этого
пространства в себя в общем случае.
Линейные преобразования характерны тем, что их ре-
результат может быть описан с помощью результатов пре-
преобразования только базисных функций. Для этого тре-
требуется задать N векторов, а в случае, если векторы-ба-
векторы-базисы являются так называемыми собственными вектора-
векторами преобразования, то N чисел.
Нелинейные поэлементные преобразования могут
быть описаны М числами — результатами нелинейных
преобразований коэффициентов представления сигналов
38
по заданному базису. Таким образом, для определения
нелинейного поэлементного преобразования достаточно
задать таблицу из М чисел.
1.6. Представление линейных преобразований
по отношению к дискретным базисам
Этот и следующий параграфы посвящены разбору конкретных
методов математического описания линейных преобразований.
Рассмотрим сначала преобразования сигналов в пространствах,
натянутых на дискретные базисы. Эти преобразования имеют непо-
непосредственное отношение к цифровой обработке сигналов, и, кроме
того, обобщив полученные для них результаты, можно перейти
к пространству непрерывных сигналов.
Пусть An — линейное пространство со скалярным произведе-
произведением, натянутое на линейно-независимый базис {<рк}, к=0, 1, ...
..., N—1. Возможно несколько способов представления линейных
преобразований элементов этого пространства.
Представление с помощью вектор-откликов. В силу линейности
преобразования L
ЛЛ—1 If— I N— 1
La = L 2 «A = 2 «Мк = S "Л- A-78)
ж=0 я—0 к—О
Множество {9К} содержит все отклики преобразования L на базис-
базисные функции {<рк}. Знание этого множества достаточно для того,
чтобы найти отклик оператора L на любой сигнал по представлению
этого сигнала {ак}. Поэтому оно может рассматриваться как пред-
представление для L по отношению к базису {<рж}. В отличие от пред-
представления вектора по этому базису, являющегося множеством чисел,
представление линейного преобразования это упорядоченный набор
векторов. Эти векторы не обязательно будут линейно-независимы.
Если они линейно-зависимы, то это значит, что существует подпро-
подпространство (т. е. сигналы в An), отображаемое L в нуль. Это под-
подпространство называется нуль-пространством линейного преобразо-
преобразования. Преобразование, имеющее непустое нуль-пространство, явля-
является сингулярным. Например, сингулярным является оператор
преобразования излучения фотоприемником, нечувствительным к не-
некоторым длинам волн излучения, или фотоприемником, входной зра-
зрачок которого закрыт решеткой, и т. п.
Для сингулярного преобразования размерность пространства вы-
выходов меньше размерности пространства входов, поскольку векторы
{8^} не являются линейно-независимыми,
Матричное представление. В представлении операторов с по-
помощью вектор-откликов неизменными оставались коэффициенты
представления сигнала, а при преобраэовании менялся как бы базис
пространства. В некоторых случаях удобно задаться базисом про-
пространства, содержащего результаты линейного преобразования сиг-
сигналов. Найдем представление оператора в этом случае.
Пусть {Вк}—множество линейно-независимых векторов, на ко-
которое натянуто пространство Вц результатов линейного преобразо-
преобразования входного пространства An. Любой вектор из BN можно пред-
представить в виде
N-l N—1
Ь=2 M.-S <blTU9«' С-79)
к—0 к=0
где {цх} —базис, взаимный {9Ж}.
¦V—1
Подставив b = La= ^ <*(?ф/, получим
—1 \ JV—1 N—1
П^ в,- A -80)
Отсюда коэффициенты представления выходного сигнала опера-
оператора L по базису { 9К } равны
N— 1
где
»*, = (?»!. Ч*)- A.82)
Соотношение A.81) может быть записано в матричной форме:
В=ЛА, A.83)
где Л — матрица {hK}', А, В — векторы-столбцы, являющиеся пред-
представлениями векторов а и b = La по базисам {<рж} и {8Ж} соответ-
соответственно.
Представление операторов с помощью их собственных функций
и собственных значений. Существует еще один способ представле-
представления операторов, являющийся обобщением их представления с по-
помощью вектор-откликов. Он строится на базе понятий собственных
функций и собственных значений оператора.
Собственные функции (векторы) eK(t) оператора это такие
функции, которые с точностью до скалярного множителя ?„, назь}-
4Q
ваёмОго собственным значением, Преобразуются оператором
в себя:
LeK{t) = EKeK(t). A.84)
Множество векторов {ек (/)} и собственных значений {Ек} пол-
полностью определяет оператор и является очень удобной формой для
его описания. Действительно, если выбрать (ек (<)} в качестве бази-
базиса, то результат действия оператора L на сигнал a(t), представлен-
представленный по этому базису
лг—1
««)= 2 «екк@. A-85)
*=о
очевидно, равен
yv—1 n— 1
ь (о=La.(t)= °-еки w = 2> ае«Ё«е« w• <* -86>
т. е. представление по собственному базису равно произведению ко-
коэффициентов представления сигнала a(t) на соответствующие соб-
собственные значения:
P* = «VV A-87)
Подставив A.84) в A.82), легко получить матричное представ-
представление оператора по такому базису:
¦к\А = ЕкЬ(к, I). A.88)
Матрица Ае представляющая оператор L по базису из его собствен-
собственных функций, является диагональной матрицей с собственными зна-
значениями {?к) по диагонали.
1.7. Представление операторов по отношению
к непрерывным базисам
Ядро оператора. Сигналы a(t) и результаты действия
на них линейных операторов 6(т) могут быть представ-
представлены их спектрами а(/) и р(/) по отношению к некото-
некоторому базисному ядру ф(^, /) *):
\
A.89)
f
t
*' Аргументы сигналов н результатов действия на них операто-
операторов могут, вообще говоря, не совпадать.
41
Для оператора L в силу его линейности имеем аналог
Соотношения A.78):
aO)^(<./)if=Ja(/-)e(t./)d/. A.90)
где 9(т, /)=1ф(/, /), а а(/) и р(/) связаны соотношением
$ A.91)
где
f, т) — ядро, взаимное ф(т, /) в смысле A.60).
Формула A.92) —аналог A.81). Можно сказать, что
линейный оператор по отношению к непрерывному бази-
базису характеризуется ядром H(f, p), которое, в свою оче-
очередь, определяется откликами оператора на базисные
функции.
Описание с помощью импульсной реакции. Распро-
Распространенным способом описания линейного оператора
является его описание с помощью импульсной реакции.
Такое описание соответствует базису из б-функций:
«p(f, т)=о(*—с). A.93)
Импульсной реакцией называется отклик оператора
на б-функцию:
h(t, x)=L8(t—х). A.94)
Для такого базиса ядро преобразования
7) A.95)
совпадает с импульсной реакцией, и A.91) при соответ-
соответствующей замене переменных имеет вид
р @ = 6@= $a(T)h(t,t)di. A.96)
—00
Описание с помощью частотной характеристики. Дру-
Другим часто используемым базисом является базис ф(?, /) =
—exp (—i2nft), который приводит к частотному представ-
представлению сигналов и операторов. В этом случае а(/) и
P(f)—преобразования Фурье от a(t) и b{t).
42
Отклик оператора L на базисную экспоненту равен
бехР if, f) = L ехр (- i2n;t) = L J exp (- i2*, 8 (f — т) cfc =
—00
= f h (t, t) exp (— t&tf*) rft. A.97)
—00
Поэтому ядром оператора по отношению к этому ба-
базису является
H(f,p)= ]
= f Г h (t, \) exp [i2% (ft — p%)] dtdx A.98)
—00
— так называемая частотная характеристика оператора.
Описание при разных базисах входных и выходных
сигналов. Иногда входные и выходные сигналы оператора
удобно предстазлять в разных базисах:
A.99)
F
В этом случае
$ A.100)
где
Ba(t, p)=L<fa(t, P). A.102)
Так, например, для анализа пространственно-неодно-
пространственно-неоднородных систем удобно частотное описание входных сиг-
сигналов, т. е. описание по базису {exp i2nft}, и описание
выходных сигналов по базису 6(t—т). В этом случае
H(f,p)=\bexp(t,p)b(t-})dt = beKP(f,p), A.103)
F
где 0еХр(/, р) определяется A.97).
43
Описание с помощью собственных функций. Наиболее
удобным описанием операторов является их описание
в базисе из собственных функций. Пусть e(t, f) —семей-
—семейство собственных функций оператора L; E(f) —семейст-
—семейство его собственных значений:
Le(t, f)=E(f)e(t, /). A.104)
Тогда ядро оператора L по отношению к e(t, /) как
к базису в соответствии с A.92) равно
Не(/,р)=\Е{р)е(t,р)е*вз(/,t)dt = Е(р)b(f-p), A.105)
т
где eB3(f, t)—функции, взаимные e(t, f) в смысле
A.60). Эта формула, очевидно, является непрерывным
аналогом формулы A.88).
Из A.91) следует, что представление (спектр) вы-
выходного сигнала по собственному базису будет равно
произведению спектра входного сигнала на спектр опе-
оператора:
? (П = f « (Р) На (/- Р) dp= J а (р) Е (р) b(f-p)dp =
F
= *(f)E(f). A.106)
1.8. Примеры линейных операторов
В теории сигналов линейные операторы часто называют линей-
линейными фильтрами. Приведем несколько примеров наиболее важных
классов фильтров.
Фильтры, инвариантные к сдвигу. Если импульсная реакция
фильтра (ядро оператора по базису 6-функций) не зависит от коор-
координат сигнала, т. е. если
оо
b(t + to)= Ja(x+f,)A(/, т)Л A.107)
—оо
при любом t0, то фильтр называется инвариантным к сдвигу. Не-
Нетрудно понять (например, произведя замену переменных в A.107)),
что импульсная реакция фильтра, инвариантного к сдвигу, является
функцией разности аргументов
h(t, т)=Л(/—т), A.108)
так что
оо
Ь (<) = ^а (i) h (t — i) tfi. A.109)
—00
44
Эта операция называется сверткой и обозначается знаком ®;
rb = ag>h. A.110)
Такой импульсной реакцией обладают линейные системы с по-
постоянными параметрами (для сигналов как функций времени) и про-
пространственно-однородные системы, инвариантные по отношению
к пространственному сдвигу.
Найдем вид ядра таких систем по экспоненциальному базису.
Согласно A.98) (см. также табл. 1.2, строка 16)
оо оо
H(f, р) = I" (A (t, т) ехо /2я (ft —>х) d-dt =
—ЭО —30
00 00
00 ОО
= j А (/) exp (i2izft) dt j ехр [12т. (/ — />)] х rfx>= H(f)i(f—p),
—00 —00
A.111)
где
00
//(/)=- j A (<) ехр (<2я/<) d< A.112)
—оо*
— так называемая частотная характеристика фильтра, инвариантно-
инвариантного к сдвигу.
Соотношение A.111) показывает, что комплексная экспонента
является собственным базисом фильтров, инвариантных к сдвигу.
Действительно, их отклик на комплексную экспоненту равен
ОО
A (t — т) ехр (— 12ф) rfx = ехр ( — I2nff) f A (/) ехр (t2nff)
dt
= Н (f) ехр (— I2nff). A.113)
Замечательным свойством фильтров, инвариантных к сдвигу,
является то, что последовательное действие на сигнал нескольких
таких фильтров равноценно действию одного фильтра, частотная ха-
характеристика которого равна произведению частотных характеристик
этих фильтров. Оно вытекает из формулы A.106), связывающей
спектр сигнала по собственному базису фильтра и частотную харак-
характеристику фильтра, а также из теоремы о свертке (табл. 1.2, стро-
строка 16):
f A.114)
45
Отсюда следует, что результат последовательного преобразова-
преобразования сигнала несколькими инвариантными к сдвигу фильтрами не
зависит от порядка действия этих фильтров, и можно объединять
эти фильтры в произвольной последовательности в произвольные
группы.
Тождественный оператор. Такой оператор описывается урав-
уравнением
оо
а@= f а (т) h (t, х) dx. A.115)
—оо
Ясно, что это оператор, инвариантный к сдвигу, и его импульс-
импульсная реакция есть б-функция.
Оператор сдвига. Этот оператор близок к тождественному и
отображает сигналы a(t) в сигналы вида a(t—/0):
00
a{t — /„)= f о (х) A (f, i) rfx. A.116)
—оо
Для него .
h(t, т)=8(*-<о-т), A.117)
а частотная характеристика
H(f)=exp(-i2nft0). A.118)
Оператор дискретизации. Этот оператор родствен тождествен-
тождественному оператору и оператору сдвига и описывается импульсной
реакцией
h(t—-x)=2Fsmc2nF{t—x) A.119)
и частотной характеристикой
^. A.120)
Очевидно, что для сигналов, спектр Фурье которых отличен от
нуля только на интервале (—F, F) (сигналов с ограниченным спект-
спектром), этот оператор эквивалентен тождественному оператору (и опе-
оператору сдвига):
00
о @ = 2F Го (т) sine 2rcF (t — т) di. A.121)
—00
Для остальных сигналов это оператор, превращающий их, как
это следует из A.114) и A.120), в сигналы с ограниченным
спектром.
46
бпёратор строёирования (умножитель). Этот оператор осу-
осуществляет преобразование вида
A.122)
Его импульсная реакция, очевидно, равна
h(t,T)=K(t)ti(t-x), A.123)
т. е. он не является оператором, инвариантным к сдвигу.
Применив к A.122) теорему о свертке (табл. 1.2, строка 16),
можно найти, что ядро этого оператора по отношению к экспонен-
экспоненциальному багису есть Х{]—р), где
оо
Ж (/) = s ^ к @ exp (i2nft) dt. A.124)
—00
Г лава 2
ДИСКРЕТИЗАЦИЯ И КВАНТОВАНИЕ СИГНАЛОВ
2.1. Обобщенное квантование
До сих пор мы рассматривали в основном аналоговые
сигналы. Они обычно являются исходными при цифро-
цифровой обработке, и первый этап обработки состоит в пре-
преобразовании их в цифровые.
Цифровой сигнал с самой общей точки зрения пред-
представляет собой некоторое число. Преобразование анало-
аналогового сигнала в цифровой состоит в отображении про-
пространства аналоговых сигналов в конечное множество
сигналов, т. е. пространство сигналов разбивается на ко-
конечное множество подпространств, и в каждом подпро-
подпространстве выбирается один принадлежащий ему сигнал-
представитель так, чтобы все остальные сигналы данного
подпространства можно было в пределах заданной сте-
степени точности заменить этим сигналом-представителем.
Подпространства перенумеровываются, и, таким образом,
каждому аналоговому сигналу в пространстве сиг-
сигналов, разбитом на ячейки, или области эквивалентно-
эквивалентности, может быть поставлено в соответствие число — но-
номер сигнала представителя. Такое разбиение пространст-
47
8а сигналов называется обобщенным НёанТоёанпеМ
(в отличие от просто квантования, о котором пойдет речь
ниже) [34]. Подпространства, или ячейки, на которые
разбивается пространство сигналов, называются е-обла-
стями. Этим подчеркивается, что для всех сигналов,
принадлежащих данному подпространству, или попадаю-
попадающих в данную ячейку, существует некоторый сигнал-
представитель, отличающийся в смысле определенной
метрики от остальных сигналов не более чем на некото-
некоторую достаточно малую величину е. И метрика — способ
измерения отличия сигналов — и сама величина е опре-
определяются требованиями к точности цифрового представ-
представления, т. е. должны задаваться с учетом запросов полу-
получателя и особенностей процедуры обработки цифрового
сигнала.
Важным вопросом обобщенного квантования являет-
является объем получающегося цифрового представления. Этот
объем можно оценить как количество дискретных кван-
квантованных сигналов-представителей. От него непосредст-
непосредственно зависит сложность (а аначит, реализуемость и
стоимость) цифровой системы обработки.
Наиболее общий метод оценки объема дискретного
представления дает теория информации на основе стати-
статистического описания сигналов и их преобразований. В со-
соответствии с теоретико-информационной трактовкой каж-
каждому элементу объема пространства сигналов приписы-
приписывается некоторая вероятностная мера — вероятность то-
того, что в массе реализаций (экспериментов, наблюдений
и т. п. актов) встретятся принадлежащие ему сигналы.
Точность воспроизведения сигналов также трактуется
статистически как среднее значение некоторого расстоя-
расстояния между сигналами в метрике, определяемой получа-
получателем сигналов и особенностями их обработки.
Пусть dP(a, b)—совместная вероятность того, что
сигналы из некоторого элементарного объема простран-
пространства сигналов {А} вблизи точки а перейдут в сигналы из
элементарного объема пространства их преобразований
{В} вблизи точки Ь; р(а), р(Ь), р(а, Ь) — соответствую-
соответствующие плотности вероятностей.
Введем величину
^frb), B.1)
АВ
48
которая в теории информации носит название количес?-
ва взаимной информации в сигналах из {А} и {В} [65].
Пусть также D(a, b) —мера отличия сигналов а и b
с точки зрения получателя.
Тогда величина
Ъ (А, В) = j JD (a, b) dP (a, b) B.2)
Ats
Является мерой отличия между сигналами и результата-
результатами их преобразований в среднем по всему пространству
сигналов и по их реализациям. Если при различных пре-
преобразованиях а-й) величина D все время остается мень-
меньше некоторой допустимой величины е, можно считать,
что сигналы из {В} в среднем не отличимы от сигналов
из {Л} в смысле заданного критерия D(a, b) и заданной
средней величины погрешности отображения е. Среди та-
таких преобразований существуют преобразования, при ко-
которых количество взаимной информации /(Л, В) оказы-
оказывается минимальным. Это минимальное значение 1(А,В)
называется е-энтропией пространства сигналов:
Яe = min / (А, В) при D (А, В) < е. B.3)
В соответствии с одним из основных результатов тео-
теории информации величина Ht определяет нижнюю гра-
границу числа сигналов N, необходимого и достаточного
для цифрового представления сигналов из пространства
{Л} при заданном критерии точности Z)(a, b) [65]:
г N^2Ht. B.4)
Численная оценка Ht для таких сигналов, как изо-
изображения, является достаточно сложной задачей, по-
поскольку вопрос о количественном критерии отличия
одного изображения от другого, адекватно и исчерпы-
исчерпывающе описывающем свойства зрительного восприятия
изображений, остается до настоящего времени открытым.
Грубой оценкой сверху значения Ht для изображений
может служить (как это следует из достигнутых резуль-
результатов по кодированию изображений с сохранением высо-
высокого качества воспроизведения [62j) произведение пло-
площади изображения Qx,y на площадь его пространствен-
пространственного спгктра Qfx- jy:
yQlx.fy B-5)
4—42 49
2.2. Понятие о дискретизации и поэЛемен+ндМ
квантовании
Перейдем к конкретным методам цифрового описания
сигналов. Обобщенное квантование обычно трудно реа-
реализовать как единую процедуру. Поэтому ла практике
при преобразовании непрерывных сигналов в цифровую
форму прибегают к двухступенчатой процедуре — дискре-
дискретизации и поэлементному квантованию.
Дискретизация — это замена непрерывного сигнала
последовательностью чисел, являющихся представлением
этого сигнала по какому-либо ортонормированному бази-
базису. В случае, если данный сигнал не является элемен-
элементом линейного пространства, натянутого на этот базис,
отыскивается такой сигнал из этого пространства, кото-
который в некотором (специально оговоренном для каждой
задачи!) смысле является наилучшим приближением
данного сигнала, и затем уже отыскивается представле-
представление полученного аппроксимирующего сигнала. Базис ли-
линейного пространства может выбираться исходя из удоб-
удобства физической реализации, точности аппроксимации
и т. п.
Под наилучшим представлением сигнала в линейном
нормированном пространстве с метрикой, порожденной
нормой, и нормой, порожденной скалярным произведе-
произведением (в гильбертовом пространстве), естественно пони-
понимать представление, при котором норма разности между
сигналом и представляющим его вектором минимальна.
Известно (см., например, [59]), что такое представление
состоит в проектировании сигнала на ЛЛ-мерное про-
пространство, натянутое на данный базис, т. е. коэффици-
коэффициенты представления находятся как скалярные произве-
произведения сигнала на соответствующие базисные функции *>:
а*=(а, %). B.6)
Поэлементное квантование — это квантование по от-
отдельности каждого из чисел {aj, представляющих дан-
*) Этот факт помогает понять смысл понятий нормы, метрики,
скалярного произведения, их связь и способ определения. Он пока-
показывает, что если отличие сигнала от его линейного представления
V ак?к @ характеризовать их разностью, то метрика пространства
к
сигналов и скалярное произведение определяются нормой—спосо-
нормой—способом, измерения длины вектора (в данном случае вектора разности).
50
ный сигнал по заданному базису, т. е. замена непрерыв-
непрерывной и, вообще говоря, бесконечной шкалы значений {а.}
дискретной и конечной. Дискретизация относится к клас-
классу линейных преобразований сигнала, поэлементное
квантование — к классу поэлементных нелинейных.
Использование такой двухступенчатой процедуры
цифрового описания означает, что в пространстве сигна-
сигналов строятся области эквивалентности (ячейки кванто-
квантования), представляющие собой гиперкубы с гранями,
параллельными базисным координатным осям. Размеры
граней определяются так называемым шагом квантова-
квантования— интервалом квантования в данной точке шкалы
чисел, соответствующих данной базисной функции. При
такой процедуре задача>оптимального квантования сво-
сводится к оптимальному выбору системы базисных функ-
функций и оптимальному расположению шкалы квантования
по координатным осям, соответствующим этим базисным
функциям, при которых получающиеся гиперкубы ячеек
квантования наилучшим образом и в минимальном ко-
количестве упаковываются в е-области, соответствующие
заданному критерию точности цифрового представления.
2.3. Теорема отсчетов
Самый распространенный способ дискретизации сигна-
сигналов основывается на так называемой теореме отсчетов
(теореме Котельникова): сигналы, спектр Фурье кото-
которых равен нулю за пределами интервала (—F, F), могут
быть путем интерполяции восстановлены по своим отсче-
отсчетам, взятым с шагом At=l \1F:
a(t)= V a(KM)sinc2itF(t — -?r). B.7)
Формула B.7) представляет сигнал a(t) в виде раз-
разложения по базисным отсчетным функциям sinc2jt.Fx
X (t—/c/2F), причем представлением сигнала по этому
базису являются отсчеты самого сигнала
00
а (кД/)'= 2F f a (t) sine 2xF ft — -57т) <#=
t, B.8)
—00
4* 51
Справедливость представления B.7) для любых сиг-
сигналов с ограниченным спектром вытекает из следующих
соотношений:
00
V
•—do
ОО 00
V] а{к
к=—оо —оо
оо
(—-?F\ B.9)
где 0 — операция свертки.
Спектр Фурье свертки B.9) по теореме о свертке
(см. табл. 1.2, строка 16) равен произведению спектра
rect(f+F)/2F функции 2Fs'mc2nFt (см. A.120)) и спек-
спектра
x (/ — 2FI) функции -stt 7' a («ДО
f=—оо к=—oo
(см. табл. 1.2, строка 22), т. е. повторенного с периодом
2F спектра а(/) сигнала a(t). Это произведение,очевид-
произведение,очевидно, равно а(/—2FI) при /=0, т. е. спектру сигнала а(/),
так как при всех других /rect „„ =0. Отсюда и сле-
следует B.7).
Если спектр сигнала a(t) ограничен интервалом (/ч,
F2), несимметричным относительно нуля, то с помощью
аналогичных рассуждений нетрудно показать, что теоре-
теорема отсчетов справедлива в следующем виде:
X sine ic (F2-FJ ft - FtO_Fi) exp \Ы (Ft + Ft) t]. B.10)
Способ, которым была доказана справедливость пред-
представления B.7), наглядно иллюстрирует смысл преобра-
преобразований непрерывного сигнала в последовательность от-
52
счетов и восстановления непрерывного сигнала из отсчет-
ного по теореме отсчетов. Дискретному сигналу вида
ж
составленному из отсчетов непрерывного сигтла, соот-
соответствует периодически продолженный спектр
_, /=-00
непрерывного сигнала; восстановление непрерывного сиг-
сигнала по его отсчетам может быть представлено как
преобразование дискретного сигнала инвариантным
к сдвигу линейным фильтром с прямоугольной частотной
характеристикой A.120).
2.4. Теорема отсчетов для двумерных сигналов
Дискретизацию двумерных сигналов и изображений
чаще всего основывают на теореме отсчетов, обобщенной
на двумерный случай, поскольку во всех практических
задачах можно считать, что спектр изображений отличен
от нуля только на ограниченном участке частотной пло-
плоскости. Однако двумерная теорема отсчетов богаче одно-
одномерной, так как двумерный интервал является сущест-
существенно более сложным математическим объектом, чем
одномерный [26].
Пусть спектр a (ft, fz) изображения a(h, h) отличен
от нуля в пределах фигуры s, ограниченной замкнутой
линией 5 на плоскости пространственных частот с декар-
декартовой системой координат (fi, f2) (рис. 2.1,а). Зная этот
спектр, можно полностью восстановить изображение.
Очевидно, что изображение можно восстановить также
из спектральной картины, показанной на рис. 2.1,6, по-
полученной из спектра на рис. 2.1,а периодическим продол-
продолжением его по координатам ft и /2 с шагом Fi и /г, пре-
превышающим продольные (по направлению fi) и попереч-
поперечные (по направлению /г) размеры фигуры s (рис. 2.1,а).
53
Для этого достаточно пропустить сигнал с периодически
продолженным спектром (рис. 2.1,6)
«(Ы,)= S 2 а(/»+/Л./.+'Л) B-13)
?!=—оо га=—оо
через двумерный фильтр с частотной характеристикой
Я(Л./,) = ПЛ(Л)ПЛ(/,), B-14)
где
B.15)
т. е. фильтр, пропускающий только те частотные ком-
компоненты пространственного спектра, которые находятся
У Г
Рис. 2.1.
внутри прямоугольника, показанного на рис. 2.1,6 сплош-
сплошной линией.
Как следует из свойств двумерного преобразования
Фурье (см. табл. 1.3, строка 13), спектру B.13) соот-
54
ветс+вует дискретный сигйал
Ki=— 00 K2=—00
B.16)
состоящий из отсчетов a(Ki/Fi, /C2/.F2) исходного изобра-
жения, расположенных на прямоугольном растре с ша-
шагом l/Fi и l/F2 по координатам U, tz (рис. 2.1,в). Исход-
Исходное изображение, восстановленное из отсчетов фильтром
B.14), может быть выражено в виде
»Г,=—00 Kj=—00
Xsine 2%FX ft,— -%-\ sine2%Ft ftt — -^-J, B.17)
где h(t\, tz) —импульсная реакция восстанавливающе-
восстанавливающего фильтра — фурье-преобразование функции #(/i, fi)
B.14).
Формула B.17) выражает двумерную теорему отсче-
отсчетов для случая дискретизации изображений на прямо-
прямоугольном растре.
Количество отсчетов изображения на единицу пло-
площади при такой дискретизации равно, очевидно, величи-
величине FiFz — площади прямоугольника, ограничивающего
пространственный спектр изображения. Для того чтобы
это число было минимальным, необходимо уменьшать
период повторения спектра. Это можно делать до тех
пор, пока соседние периоды не будут перекрываться,
иначе фильтрацией, отсекающей эти периоды, невозмож-
невозможно будет восстановить изображение без искажений. От-
Отсюда можно сделать вывод, что проблема уменьшения
числа отсчетов изображения при его дискретизации сво-
сводится к плотной упаковке составляющих спектра при его
периодическом продолжении на плоскости пространст-
пространственных частот.
Более плотной упаковки спектров, чем на рис. 2.1,6,
и соответственно менее плотного расположения отсчетов
при дискретизации изображения со спектром, показан-
55
ным на рис. 2.1,а, можно добиться, если Производить
периодическое продолжение спектра и соответственно
дискретизацию в косоугольной системе координат, согла-
согласованной с формой кривой, ограничивающей спектр изо-
изображения (рис. 2.2,а, б). Если пограничной линией спек-
спектра является окружность, то оптимальным будет распо-
расположение отсчетов изображения в узлах правильной
шестиугольной решетки. При этом достигается прибли-
приблизительно 15%-ная экономия в количестве отсчетов [34].
Соотношение между периодами продолжения спектра
в косоугольной системе координат и шагом дискретиза-
дискретизации дано в табл. 1.3, строка 18.
Выбор оптимальной формы растра — не единствен-
единственный способ плотной упаковки спектра при дискретиза-
дискретизации. Другая возможность, которая также не имеет одно-
одномерного аналога,—-использование поворота системы ко-
координат. При этом получается своеобразная форма ди-
дискретизации, которую можно назвать «дискретизацией
с пропусками».
Рассмотрим спектр на рис. 2.3,а, отличный от нуля только на
заштрихованном участке. Этот участок вписывается в квадрат. На
рис. 2.3,6 показана плотная упаковка спектральной плоскости, полу-
полученная наложением двух периодически повторенных в декартовой
системе координат и повернутых на 90° один относительно другого
исходных спектров рис. 2.3,а. Каждому из периодически повторен-
повторенных спектров соответствует дискретное изображение с расположе-
расположением отсчетов в узлах квадратной решетки, как показано на
рис. 2.3,в. Эти два дискретных изображения, повернутые, как и их
спектры, на 90° друг относительно друга (допустим вокруг точки О,
56
как иа рис. 2.3,в), при наложении складываются. В результате по-
получается новый дискретный сигнал, отсчеты которого равны, очевид-
очевидно, попарным суммам отсчетов исходного изображения. Способ
образования этих пар при повороте растра относительно точки О
(рис. 2.3,в) иллюстрируется рис. 2.3,8—д. На рис. 2.3,в линиями
соединены узлы растра, которые при повороте на 90° накладывают-
накладываются один на другой. Из рисунка видно, что узлы образуют группы
по четыре, в которых происходит циклическая перестановка узлов
при повороте, как показано стрелками на рис. 2.3,г.
б)
Рис. 2.3.
Пусть Z\, 22, z%, Zi — отсчеты в каждой группе, образованные
в результате наложения отсчетов Оь а2, а3, а4 исходного изображе-
изображения. Из рис. 2.3,г видно, что при повороте по часовой стрелке
B.18)
Нетрудно заметить, что из четырех чис'ел z\, г2, 23, г4 только три
являются линейно-независимыми, четвертое же может быть получено
их линейной комбинацией. Так, например,
г4=г,—2г+2,. B.19)
57
Отсюда следует, что в каждой группе из четырех отсчетов
(рис. 2.3,8) один отсчет является излишним: его можно вычислить
по B.19), зная три другие отсчета.»Таким образом, за счет плотной
упаковки поворотом экономится 25% отсчетов. Эти излишние отсче-
отсчеты показаны на рис. 2.3,8 незачериенными кружками, которые, как
это видно из рисунка, заполняют нижнюю 'Д плоскости, как бы выпа-
выпадающую тем самым из дискретизации. Процедура восстановления
непрерывного изображения при такой «дискретизации с пропуска-
Рис. 2.4.
ми», очевидно, должна состоять из двух этапов: восстановления про-
пропущенных отсчетов по B.19) и восстановления непрерывного сигна-
сигнала пропусканием дискретного сигнала через фильтр, подавляющий
частотные компоненты спектра вне области, обведенной на рис. 2.3,6
жирной линией.
Любопытный пример плотной упаковки на плоскости дает узор
голландского художника Эшера, показанный на рис. 2.4. Он состоит
из трех узоров, построенных периодическим продолжением фигуры
ящерицы в гексагональной системе координат. Два узора повернуты
на 60° по и против часовой стрелки относительно третьего и сдви-
сдвинуты на полпериода по одной из координатных осей. В результате
достигается плотная упаковка плоскости. Каждому из узоров, если
•5?
рассматривать его как периодическое продолжение спектра некото-
некоторого сигнала, соответствует дискретный сигнал с расположением
отсчетов в узлах гексагональной решетки, причем узорам, поверну-
повернутым иа ±60°, соответствуют сигналы, отсчеты которых домножаются
на комплексную экспоненту, зависящую от их координат (за счет
сдвига в соответствии с теоремой сдвига, см. табл. 1.3, строка 8).
Можно показать, что при наложении двух повернутых на 60° гекса-
гексагональных растров отсчеты распадаются на группы по 6 отсчетов,
суммируемых попарно. В результате из каждых шести сумм одна
оказывается излишней: ее можно вычислить по остальным пяти
(аналогично предыдущему случаю квадратного растра). Таким обра-
образом, при плотной упаковке спектров, показанной на рис. 2.4, эконо-
экономится 4/з Gв+7«) отсчетов исходного гексагонального растра.
Из этих рассуждений видно, что экономия в количестве отсче-
отсчетов при плотной упаковке в спектральной области за счет поворотов
не столь высока, как при оптимальном выборе системы координат.
Можно указать, однако, еще более общую процедуру дискретизации,
предполагающую нарушение топологии в спектральной области, из
которой вытекает принципиальная возможность довести количество
отсчетов на единицу площади изображения до минимальной величи-
величины, равной площади пространственного спектра изображения. Она
состоит в том, что фигура пространственного спектра изображения
разбивается на фрагменты, из которых с помощью поворотов, сдви-
сдвигов и зеркального отображения укладывается квадрат той же пло-
площади. Это соответствует выделению из изображения фильтрами,
частотные характеристики которых постоянны в пределах площади
каждого фрагмента и равны нулю вне ее, отдельных составляющих,
их повороту, умножению на комплексную экспоненту сообразно
сдвигу фрагмента и последующему сложению во вспомогательное
изображение, которое может быть уже без потерь подвергнуто дис-
дискретизации на квадратном растре. Исходное изображение восстанав-
восстанавливается при этом в обратной последовательности из восстановлен-
восстановленного обычным образом по своим отсчетам вспомогательного изобра-
изображения.
В заключение этого параграфа отметим, что в прак-
практике цифровой обработки изображений и двумерных сиг-
сигналов в настоящее время в основном используется про-
простая дискретизация по прямоугольному растру как наи-
наиболее универсальная и лучше отвечающая одномерной
структуре ЦВМ и цифровых процессоров, используемых
для обработки. Гексагональный растр используется
в цветном телевидении и полиграфии. Другие виды ко-
косоугольного растра иногда используются в специальных
цифровых телевизионных системах.
59
2.5. Погрешности дискретизации и восстановления
сигналов по теореме отсчетов
Теорема отсчетов справедлива для сигналов, спектр которых
точно равен нулю вне некоторого интервала частот. Таких идеализи-
идеализированных сигналов не бывает. Однако с известной степенью точно-
точности метод дискретизации, предлагаемый теоремой отсчетов, можно
применять для дискретизации сигналов, спектр которых более или
менее быстро спадает вне некоторого определенного интервала
частот.
Посмотрим, как можно оценить совершаемые при такой дискре-
дискретизации искажения сигнала. Искажения могут возникнуть как при
переходе от непрерывного к дискретному представлению, так и при
восстановлении непрерывного сигнала по дискретному представ-
представлению.
Согласно теореме отсчетов дискретным представлением сигнала
с ограниченным спектром, заданным на интервале (—F, F), яляют-
ся отсчеты этого сигнала, взятые с шагом At—l/2F:
Op ОО
а(кМ)= j a (t) S (t — tc&t) dt= IF f a (t) sine 2jtF (t — Ш) dt.
—00 —00
B.20)
В соответствии с B.7) для сигналов, спектр которых не строго
ограничен интервалом (¦—F, F), верна только вторая часть форму-
формулы B.20):
00
aK=2F f а @ sine 2nF (/— Ш) dt ф а (Ш). B.21)
—со
При этом норма ошибки восстановления
00
a (t) = ^ aKsinc 2nF(t — Khf) B.22)
К=—00
будет минимальна и равна, очевидно,
оо F оо
—оо —оо F
но величины ак уже не будут в точности отсчетами сигнала a(t),
а будут отсчетами сигнала
оо
о (t) = 2F Го (т) sine 2jiF (/ — т) rfx B.24)
—оо
60
—результата воздействия на исходный сигнал линейного оператора-
фильтра, пропускающего только те его частотные компоненты, кото-
которые попадают внутрь интервала (—F, F).
Если в качестве дискретного представления сигнала используют-
используются его истинные отсчеты
аи
а (/сД<) = j а @ 8 (t - кМ) dt,
—oo
норма ошибки восстановления по
00
a, (t)
а (кА0 slnc
B.25)
B.26)
к=—оо
будет больше той, которая определяется по B.23). Причина этого
увеличения ошибки иллюстрируется рис. 2.5, на котором сплошной
4AI
/ V/
\/ \|/
Л i
-F 1
V
1
/^\
/ \
' \/
\ X
f
Рис. 2.5.
линией показан одномерный спектр сигнала (или сечение двумерного
спектра), периодически продолженный с шагом 2F, штриховой ли-
линией — форма частотной характеристики восстанавливающего фильт-
фильтра. Как видно из этого рисунка, сигнал Si(t) B.26) отличается от
исходного сигнала аA) тем, что он не содержит спектральных со-
составляющих сигнала a(t) вне интервала (—F, F) (они определяют
величину минимальной ошибки), но содержит «лишние» составляю-
составляющие за счет наложения размноженных компонент спектра (на рисун-
рисунке заштрихованы).
Неточность восстановления сигнала по его отсчетам называют
еще строб-эффектом [25], так как в результате наложения спектров
компоненты исходного сигнала с частотой F+A появляются в вос-
восстановленном сигнале с более низкой частотой F—Д. При восстанов-
восстановлении изображений эти искажения наиболее заметны на пространст-
6!
веиных высокочастотных периодических структурах, которые вслед-
вследствие биений с растром дискретизации становятся низкочастотными.
Чтобы искажения не возникали, «необходимо, как это вытекает
из B.21), изображение пропустить перед дискретизацией через
фильтр низких пространственных частот с целью устранения высоко-
высокочастотных составляющих сигнала и ограничения пространственного
спектра в соответствии с принятым шагом дискретизации. На прак-
практике роль такого фильтра обычно выполняет стробирующий датчик
устройства дискретизации, производящий измерение отсчетов сигна-
сигнала. Результат этого измерения можно описать как
00
~к= (о(/)Аа(<— KAt)dt. B.27)
Это значит, что спектр сигнала домножается на маску (штрих-
пунктирная линия на рис. 2.5), являющуюся преобразованием Фурье
функции Лд(О> называемой апертурой или весовой функцией
датчика. Эта маска ослабляет верхние пространственные частоты
спектра сигнала и, значит, эффекты их наложения при периодиче-
периодическом продолжении за счет дискретизации. Но она в известной сте-
степени искажает и соотношение между спектральными составляющими
сигнала внутри «полезного» интервала (на рис. 2.5 интервал
(—F, F)), ибо весовая функция датчиков обычно отличается от тре-
требуемой по теореме отсчетов функции 2F sine 2nFt.
В используемых в настоящее время устройствах дискретизации
изображений это либо функция, равная константе в пределах прямо-
прямоугольного или квадратного окна, либо функция, приближенно опи-
описываемая как
Лд(*ь <2)=ftoexp[-(/VT2i+*VT22)], B.28)
где Т|, Тг — параметры, определяющие эффективный размер апер-
апертуры.
Формула B.22) синтеза непрерывного сигнала по его дискрет-
дискретному представлению так же ие может быть точно реализована на
практике, как и формула дискретизации B.21), и восстановление
производится линейным синтезатором, апертура которого hc (t) отли-
отличается от требуемой функции sine 2n,Ft:
~а* (t) = 2 «Л V~ *Ы)- B.29)
к
С этим связана дополнительная погрешность восстановления. По-
Поскольку, вообще говоря, частотная характеристика синтезатора
Hc(f) (преобразование Фурье от ha(t)) может также только более
С2 •
или менее быстро спадать за пределами интервала (—F, F), то
в спектр восстановленного сигнала попадают составляющие «раз-
«размноженного» спектра сигнала
¦J p) =¦ ^ a^ sfnc 2itF (t — icAt). B.30)
K——O0
Если в сигнале а @ имеется сильная компонента с частотой
F—А, то в сигнале S2(t) появится, хотя в известной степени и ослаб-
ослабленная фильтром Лс@. дополнительная компонента с частотой
F+Д. Между этими компонентами возникнут биения, которые на
изображениях проявляются как муаровая картина. Такой муар мож-
можно видеть, например, на телевизионном экране на горизонтальных
штриховых мирах телевизионной тест-таблицы [34].
Ослабить эти искажения можно, выбрав частотную характери-
характеристику синтезатора tfc(f) так, чтобы значения He(f) вне полезного
интервала (—F, F) были минимальными. Однако обычно это приво-
приводит к изменению значений Hc(f) внутри полезного интервала, т. е.
к искажению восстанавливаемого сигнала по сравнению с оригина-
оригиналом. Эти искажения, как и искажения при измерении отсчетов, не-
необходимо учитывать и корректировать при обработке цифрового сиг-
сигнала (см. гл. 6).
В существующих в настоящее время устройствах восстановления
изображений из цифрового сигнала обычно используется, как и
в устройствах дискретизации, прямоугольная (квадратная) или гаус-
гауссова (как в B.28)) весовая функция hc(t).
Восстановление непрерывного сигнала из последовательности
отсчетов имеет еще одну особенность, существенную именно для
изображений. Дело в том, что в реальных восстанавливающих
устройствах невозможно выдержать расстояние At между отдель-
отдельными отсчетами изображения при восстановлении изображения по
B.29) с абсолютной точностью. Колебания этого расстояния также
приводят к искажениям восстановленного изображения. Рассмотрим
эти искажения на примере устройств с прямоугольной апертурой
с размерами, равными шагу дискретизации по соответствующим на-
направлениям. Пусть отсчеты изображения имеют одинаковое значе-
значение. Тогда при нестабильности расстояния между отсчетами в неко-
некоторых точках восстановленного изображения произойдет удвоение
сигнала (за счет наложения апертуры в двух соседних точках раст-
растра), в некоторых же точках (там, где расстояние между отсчетами
оказалось больше размеров апертуры) значение восстановленного
сигнала окажется равным нулю.
Таким образом, небольшая ошибка в расположении отсчетов
может привести к существенной ошибке в передаче значений сигнала.
63
Однако при восстановлении изображений определяющим является
даже не это, а то, что нестабильность растра обычно более или
менее регулярна, например ошибки в расположении отсчетов повто-
повторяются от строки к строке. В результате на изображении появля-
появляются ложные узоры, заметные даже при малой ошибке в передаче
значений сигнала благодаря высокой чувствительности зрения к про-
протяженным контурам и линиям.
Описанные в этом параграфе факты имеют большое значение
при определении требований к устройствам дискретизации и восста-
восстановления изображений. Анализ этих требований можно найти
в [69, 83].
2.6. Другие подходы к дискретизации
Теорема отсчетов дает правило дискретизации сигна-
сигналов с ограниченным спектром. Чтобы ее использовать
для дискретизации изображений, необходимо знать форму
и размеры фигуры, ограничивающей спектр изобра-
изображений. Эти данные иногда непосредственно связаны с из-
известными конструктивными характеристиками изобра-
изображающих систем (скажем, с характеристиками объекти-
объективов и фотопленки для фотографических систем). Но во
многих случаях они неизвестны, либо неестественны для
описания класса изображений, для которых необходимо
выбрать параметры дискретизации. Кроме того, не всег-
всегда удобно описывать искажения изображений вследствие
дискретизации искажением их спектров, как это удобно
при использовании теоремы отсчетов.
В этих случаях параметры дискретизации — форму
растра, шаг дискретизации — выбирают, исходя из более
простых критериев оценки ошибки дискретизации и
задаваясь конкретным способом интерполяции отсчетов
при восстановлении непрерывного изображения. Одним
из таких критериев оценки ошибки является критерий
максимального значения отличия сигнала от результата
его восстановления по дискретному представлению. Учи-
Учитывая реальные характеристики устройств воспроизведе-
воспроизведения изображений, считают, например, что при восстанов-
восстановлении происходит ступенчатая интерполяция его отсче-
отсчетов (при квадратной апертуре). Поэтому задаются
квадратным растром дискретизации, а расстояние меж-
между отсчетами выбирают так, чтобы па этом расстоянии
сигнал не мог измениться больше, чем на заданную ве-
величину ошибки. Для этого нужно, конечно, задаться
•64
ограничениями на возможную скорость изменения сигна-
сигнала изображения по координатам, скажем, на максималь-
максимальное значение его производных. Если эта величина неиз-
неизвестна, то можно построить устройство дискретизации,
которое автоматически измеряет отличие текущего значе-
значения сигнала от его значения в ближайшем отсчете и вы-
выбирает следующий отсчет там, где это отличие достигает
заданного порога ошибки. Такой способ дискретизации
называется адаптивной дискретизацией. Очевидно, что
при адаптивной дискретизации расстояние между отсче-
отсчетами непостоянно. Поэтому этот способ, используемый
иногда для экономного кодирования изображений для
дискретных каналов связи, при представлении изображе-
изображений в цифровых процессорах для цифровой обработки
неудобен и не применяется. Он может, однако, исполь-
зваться при архивном хранении изображений в запо-
запоминающих устройствах цифровых процессоров.
Наконец, в некоторых случаях не удается найти и
сформулировать какой-либо определенный критерий точ-
точности дискретизации изображений. Тогда решение
о выборе параметров дискретизации приходится прини-
принимать, основываясь на полученных эмпирическим пу-
путем данных о требуемом количестве отсчетов на объект
минимальной площади или других подобных показа-
показателях.
В описанных способах дискретизации изображений
дискретным представлением служат отсчеты сигнала,
что, как уже отмечалось, соответствует представлению
сигнала по отсчетным функциям и б-функциям. В по-
последнее время при преобразовании излучения в дискрет-
дискретный электрический сигнал находят применение методы
представления сигналов по иным базисным функциям.
При использовании этих методов измеряемое поле излу-
излучения пропускают через сменные кодирующие маски,
функция пропускания которых соответствует каждой ба-
базисной функции, и затем измеряют энергию излучения
за маской, т. е. коэффициент представления поля излу-
излучения по данной базисной функции. В качестве масок
удобнее всего использовать бинарные маски (прозрач-
(прозрачные или непрозрачные), соответствующие базисным
функциям с двоичными значениями (например, функ-
функциям Уолша). Такой способ дискретизации получил
название мультиплексного кодирования [90] или метода
кодированных апертур [81]. Он находит применение
5—42 65
в устройствах измерения и дискретизации слабых излу-
излучений (радиоактивного, рентгеновского, инфракрасного
и т. п.) для увеличения чувствительности датчиков *).
Краткий обзор этих методов можно найти в [125, 126].
2.7. Оптимальное дискретное представление
и размерность сигналов
Важным принципиальным вопросом теории дискретизации явля-
является вопрос об объеме дискретного описания сигналов, т. е. о коли-
количестве N базисных функций, используемых для представления
ЛЛ-1
«W=2"AW. B-31)
к=0
или размерности конечно-мерного пространства, на которое проекти-
проектируется сигнал при дискретизации. Для сигналов с ограниченным
спектром .объем описания — это количество отсчетов сигнала. Как
следует из теоремы отсчетов, для двумерных сигналов количество
отсчетов на единицу площади равно площади прямоугольника, огра-
ограничивающего спектр сигнала в частотной плоскости (при прямо-
прямоугольной дискретизации). Но дискретизация посредством измерения
отсчетов — не единственный способ дискретизации. Естественно счи-
считать оптимальным такой способ, при котором размерность базиса
минимальна при заданной точности восстановления сигнала. Чтобы
найти оптимальный базис, нужно прежде всего определить класс
сигналов, для которых он отыскивается, а также задать точность
восстановления для этого класса. Пользуются двумя подходами
к описанию классов сигналов: детерминистическим и статистическим.
При детерминистическом подходе сигналы рассматриваются как
результат преобразования произвольных сигналов некоторым линей-
линейным оператором, так что разные классы различаются между собой
и описываются только видом этого оператора. Сигналы с ограни-
ограниченным спектром — один из таких классов. Им соответствует линей-
линейный фильтр — оператор с частотной характеристикой вида UF(f)
B.15). При таком подходе вопрос о выборе оптимального базиса
сводится к нахождению связи между характеристиками линейного
оператора, определяющего класс сигналов, и базисными функциями.
*' Заметим, что дискретизация измерением отсчетов может рас-
рассматриваться как частный случай такого метода, когда каждая мас-
маска— непрозрачная для излучения пластина с малым отверстием, ко-
координаты которого меняются от маски к маске в соответствии с вы-
выбранным растром.
66
Если точность дискретного представления
N— 1
ь.v = S РЛ W <2-32)
по ортонормальному базису {<рЛ @} сигналов b=La, получающихся
в результате действия на произвольные сигналы а некоторого линей-
линейного оператора L, оценивать нормой разности
N—\ (I
I! е || = || b- Ьд, || = b - 2 РЛ W • B.33)
н=0 ||
где
?*=(*• <РК)- B-34)
то оказывается (см., например, '[59]), что наилучшая в смысле ми-
минимума максимального (для разных а) значения |]е|| система функ-
функций определяется соотношением
M9=*7i/2lM0- B.35)
Здесь {я|'к (/)}—собственные функции составного оператора L*L\
L* — оператор, собственные функции которого попарно ортогональ-
ортогональны собственным функциям оператора L, а собственные значения
комплексно сопряжены с собственными значениями оператора L. При
этом наибольшая относительная погрешность B.32) ограничена ве-
величиной "кц, Af-ro собственного значения оператора VL,
Таким образом, если расположить собственные значения \
в порядке их убывания, то размерность пространства сигналов, по-
порождаемого оператором L, определяется номером его собственного
значения, не превышающего заданную ошибку представления. При-
Примером использования такого подхода может служить оценка раз-
размерности пространства сигналов почти ограниченной протяженности
с почти ограниченным спектром**, полученная в [104].
Пусть a{t) —сигнал, удовлетворяющий следующим условиям:
(Р(а, а) = 1— е2т; (Р/а., а)=1— r\2F; (а, а)=||а||2=1, B.36)
где Pt — оператор стробирования, высекающий из сигнала участок
протяженностью 7"; Р/ — идеальный полосовой фильтр, пропускаю-
пропускающий только частоты спектра сигнала на интервале (—F, F); е2т,
т]2г — ошибки такого усечения сигнала по протяженности и по
спектру соответственно.
*) Отметим, что сигнал с точно ограниченным спектром не мо-
может иметь точно ограниченную протяженность, ибо функции
sine 2nFt, с помощью которых могут быть представлены такие сиг-
сигналы BF — ширина спектра), имеют бесконечную протяженность.
5* 67
Тогда наилучшим является представление
N— 1 .
B.37)
по функциям срк(О> определяемым уравнением
Г/2
-Г/2
и называемым сфероидальными волновыми функциями, причем
B.38)
N-\
-2'
к=0
B.39)
если Af—наименьшее целое число, превышающее 2TF.
При Т—»-оо сфероидальные волновые функции приближаются
к отсчетным функциям sine inFt, и разложение B.37) переходит
в разложение по теореме отсчетов. При конечном Т представление
B.37) сигналов, заданных B.36), лучше их разложения по функци-
функциям sine 2nFt при том же числе членов.
При статистическом подходе оптимальный iV-мерный базис для
представления отдельных реализаций сигналов обычно определяют
как базис, при котором норма ошибки, усредненная по ансамблю
реализаций, минимальна. В этом случае получается результат, ана-
аналогичный B.35) и известный как теорема Кару пена — Лоэва [59]:
минимальное значение нормы ошибки представления сигналов на
интервале протяженностью Т достигается при использовании в ка-
качестве базиса собственных функций оператора, ядром которого явля-
является корреляционная функция сигналов Ra (t, т):
Г/2
f До С ')?»(*? Л = *Л@. B-40)
-Г/2
соответствующих N наибольшим собственным значениям. При этом
норма ошибки равна
N-1
к=0
-2
B.41)
K=N
Такое представление называется разложением Карунена — Лоэ-
Лоэва. Коэффициенты разложения Карунена — Лоэва являются некор-
некоррелированными (ввиду ортогональности q>K(<)) случайными величи-
величинами [59]. Отметим, что для стационарных процессов, когда корре-
корреляционная функция зависит только от разности аргументов
68
(Ra(t, i)=Ra(t—т)), при T—>-oo (или когда Т становится доста-
достаточно большим по сравнению с протяженностью R(t—т)) собствен-
собственные функции <fK (t) приближаются к комплексным экспонентам
с частотами к/Т (в двумерном случае /Ci/Ti, K2/T2).
2.8. Поэлементное квантование
Вторым этапом получения цифрового сигнала из не-
непрерывного после дискретизации является, квантование
коэффициентов разложения сигнала по конечно-мерному
ортогональному базису (поэлементное квантование). Оно
состоит в том, что в области значений коэффициентов
выбирается отрезок конечной длины, который разбивает-
разбивается на конечное число интервалов — ступенек квантования,
и значения, попадающие в каждый интервал, обо-
обозначаются одним числом (номером интервала). При вос-
восстановлении сигнала оно заменяется значением, являю-
являющимся представителем данного интервала. Способ раз-
разбиения на интерзалы и значения-представители интерва-
интервалов выбираются так, чтобы удовлетворялись требования
по точности представления непрерывного сигнала цифро-
цифровым. Ввиду того, что преобразование непрерывных сиг-
сигналов в цифровые разбивается на два этапа — дискрети-
дискретизацию и 'поэлементное квантование, — требования к
точности цифрового представления приходится формули-
формулировать также отдельно для каждого этапа.
Пусть ак—к-й коэффициент дискретного представле-
представления сигнала, агк — значение-представитель r-го интерва-
интервала квантования области значений ак. Ошибка квантова-
квантования может характеризоваться величиной
•'. = «.-«'.• B-42)
Требования к точности квантования обычно форму-
формулируют путем ограничений, налагаемых на егк. Наиболее
общий подход в формулировке этих ограничений состоит
в том, что величину а,., а значит, и егк считают случай-
случайной и вводят метрику—некоторую меру D(btk) отличия
ак от его квантованного представления агк. При таком
подходе точность представления характеризуют средним
69
по распределению вероятностей р(ак). значением рас-
расстояния D(sr):
B-43)
r=0
где a'K, a^~ —границы г-го интервала квантования; М —
число интервалов, или уровней, квантования.
Оптимальным считается такой выбор интервалов
квантования и их представителей, при котором Q мини-
минимально и не превышает заданного граничного значения.
В такой постановке задача оптимального поэлементного
квантования сформулирована в [14, 108].
Во многих случаях целесообразно различать два рода
ошибок квантования: ошибки ограничения, возникаю-
возникающие из-за ограничения области значений квантуемой
величины; и ошибки квантования внутри выбранного
ограниченного интервала значений. Действительно, если
плотность распределения р(ак) имеет длинные «хвосты»,
ошибки ограничения могут быть по абсолютной величи-
величине довольно значительными, тогда как ошибки кванто-
квантования внутри выбранного интервала существенно огра-
ограничены. Функции распределения этих' ошибок также
сильно различны. Поэтому требования к точности пред-
представления непрерывной величины квантованной целесо-
целесообразно формулировать отдельно для ошибок ограни-
ограничения
«V
= J
Q2rp= j P(\)DiT9^-l)daK B.44)
2rp j
aM-l
к
и ошибок квантования внутри ограниченного отрезка
М—2
г+1
М—2 "к
r=l г
70
где D)rp(e), 1>2гр(е), D0(s) —меры отличия для ошибок
ограничения и ошибок квантования на ограниченном
отрезке.
При такой постановке оптимальным является кван-
квантование, обеспечивающее минимум каждого из Qlrp,
С?2гр и Qo и удовлетворяющее условиям
Qiiv, MHa^eirp; Q2rp, мин^еггр; Qo, мин^ео, B.46)
где eirp, еггр, 8о — предельные значения ошибок ограни-
ограничения и квантования.
Оптимальные значения границ а"к, а.
~
отрезка,
внутри которого производится квантование, границ ин-
интервалов квантования arK(r=l, ..., М—2), а также
значений-представителей агк определяются, очевидно,
следующими системами уравнений, полученными из
B.44) и B.45) дифференцированием по искомым вели-
величинам и приравниванием производных нулю:
У -
Г г>
Й—1
(
о
м—1
if—К
г=1
J
B.47а)
B.476)
B.48а)
B.486)
B.49а)
B.496)
B.49в)
71
Из B.49а) вытекает правило: если ZH(e) является
четной функцией, то граница интервалов квантования
должна выбираться посередине между соответствую-
соответствующими значениями-представителями:
аГ*=К«Г'+^к),2. B.50)
Решение системы уравнений B.49а — в) для нахожде-
нахождения оптимальных агк и а'к и минимальчого М_можетбыть
выполнено итеративным путем в вычислительной ма-
машине. В [108] приведены некоторые результаты таких
расчетов для квадратичной функции потерь А>(е) и
гауссова распределения р{ак). Если квантуемые вели-
величины {ак} получены в результате расчетов в ЦВМ, то
такой подход к выбору оптимального квантования впол-
вполне оправдан. При выборе же оптимального квантования
непрерывного сигнала для ввода в цифровой процессор
удобнее несколько упростить задачу, чтобы получить ее
аналитическое решение, которое можно было бы вопло-
воплотить в устройстве преобразования аналогового сигнала
в цифровой.
Рассмотрим интеграл
Qr= J /'W^K-agrfa, B.51)
Плотность распределения р(\) и метрику Д,(г) обыч-
обычно можно считать гладкими функциями, а число уровней
квантования достаточно большим, так что ширина интер-
интервалов (ступенек) квантования (<з?+1— агк) мала, и на ин-
интервале (<хгк, ак+]) функции р(ак) и D0(aK — агк) можно
представить в виде
р К) - р (К)+р' С*гк) («,-»',.); B-52)
B.53)
B-54)
где а.гл — середина интервала квантования;
72
Подставляя B.53) в B.51) и учитывая B.496), полу-
получаем
B.55)
Этот результат по существу означает, что оптималь-
оптимальное значение представителя r-го интервала квантования
лгк мало отличается от величины arrf в центре интервала.
Подставляя теперь B.52) в B.55), получаем
г+1
««-О*,- B-56)
"к
«к
«к
Во всех практических задачах ZH(e) можно считать
четной функцией. Тогда второй интеграл в B.56) равен
нулю и
Qr-P (»V j O0 (a, - a^) Л, = 2/> &к) f
О
B.57)
где Дг— полуширина r-го интервала;
= (о.к —a K)jZ. (z.oo)
Обозначим
Дг. B.59)
Тогда, подставив B.59) и B.57) в B.45), получим
М—2 _
<2о^ 2 />К0)А,(Лг)BЛг B-60)
73
Тем самым задача оптимального квантования як в ог-
ограниченном диапазоне (а'к, а^~') сводится к минимизации
суммы B.60) посредством разбиения отрезка (а'к, \~1)
на интервалы 2^(г=\,2 М — 2) оптимальной шири-
ширины.
Существующие устройства квантования обычно осу-
осуществляют так называемое равномерное квантование
сигналов, т. е. квантование с равными интервалами
квантования. Используя такие устройства, оптимальное
неравномерное квантование можно осуществить, если
перед равномерным квантованием сигнал подвергнуть
нелинейному преобразованию (предыскажению), вид ко-
которого подбирается из условия минимума B.60).
Пусть w(aK)—функция, описывающая такое преоб-
преобразование. Это обычно гладкая монотонная функция,
так что можно приближенно считать
До = w' KJ Д', B.61)
где До — полуширина интервала равномерного кванто-
квантования;
Ао= [w (а^) - w (a'Jl/2 (M - 2). B.62)
Тогда B.60) можно переписать в виде
М-2
Q^%PK)D;[l^rj}(^). B.63)
г=1
По-прежнему основываясь на гладкости функций
р{\) и А)(е), минимум B.63) можно искать как мини-
минимум интеграла
М-1
Qo= j pK)~Dj^j)d\ B.64)
а к
по функции w(aK), Тем самым задача оптимального
квантования свелась к стандартной вариационной за-
задаче. Функция w(a), обеспечивающая минимум B.64),
определяется известным уравнением Эйлера—Лагранжа,
которое в данном случае записывается как
-T—r[p(a)D<, (— " И = const. B.65)
74
Таким образом, вид оптимального предыскажения
зависит от плотности распределения значений квантуе-
квантуемой величины и модифицированной в соответствии
с B.59) мерой ошибки квантования.
При восстановлении непрерывного сигнала из кван-
квантованного также обычно используют цифроаналоговые
преобразователи с равномерно квантованным выходным
сигналом. Чтобы получить значения-представителей ин-
интервалов квантования, соответствующие оптимальному
квантованию, равномерно квантованный сигнал подвер-
подвергают нелинейному преобразованию (коррекции). Не-
Нетрудно показать, что функция, описывающая вид кор-
коррекции, близка к функции, обратной функции нелиней-
нелинейного предыскажения при квантовании. Действительно,
пусть W\ (а) — функция коррекции, аг — представитель
г-го интервала (ar, ar+1) равномерного квантования
величины а. Тогда, поскольку величина представителя
г-го интервала должна находиться внутри этого интер-
интервала,
w-1 (аг) < агк= ш, @) < w~' (ar+1), B.66)
откуда и следует, что при малом (ar+l, ar) функция
коррекции Wi(a)^zw-l(a).
При практическом применении приведенных резуль-
результатов главным вопросом является выбор меры ошибок
квантования — критерия точности квантования. Он опре-
определяется характером решаемой после квантования зада-
задачи и смыслом квантуемых величин. Хотя в указанной
выше постановке критерий точности квантования яв-
является поэлементным, при его выборе необходимо учи-
учитывать свойства ошибки квантования как двумерного
процесса, вообще говоря, коррелированного с квантуе-
квантуемым сигналом. Так, если квантованию подвергается
яркость изображения, шумовой узор квантования оказы-
оказывается визуально изображениеподобным и потому может
мешать визуальному восприятию даже при незначитель-
незначительном искажении яркости элементов изображения.
Дело в том, что для многих изображений характерны
большие области с плавно меняющейся яркостью, от-
отделяемые друг от друга границами, где яркость меняет-
меняется намного резче. При квантовании может оказаться,
что одна область проквантована на два соседних уров-
уровня. В результате при восстановлении квантованного изо-
изображения между этими двумя участками одной области
75
возникает протяженная граница, легко заметная на глаз,
так как зрение обладает низким порогом обнаружения
контраста, если имеются большие площади для сравне-
сравнения. В этом состоит проблема так называемых ложных
контуров, с которой приходится сталкиваться при кван-
квантовании изображений [34, 69].
2.9. Примеры оптимального квантования
Разберем несколько примеров выбора оптимального расположе-
расположения и числа интервалов квантования. Для простоты будем опускать
индекс к при ак а границы отрезка значений квантуемого сигнала
будем обозначать аМпн и аМакс
Начнем с определения аМии, амакс. В задачах обработки изо-
изображений эти величины обычно либо заданы, либо определяются
исходя из заданной вероятности превышения квантуемой величиной
этих граничных значений:
j" /> (a) da < е,гр. B.67)
Это соответствует заданию критерия граничной ошибки в выра-
выражениях B.47а) — B.486) в виде
Z)irP(e)=ZJrp(e)=const. B.68)
В дальнейших примерах будем предполагать именно такой под-
подход к определению аМИя, аМакс и рассмотрим выбор оптимального
квантования только внутри заданного диапазона (амин, аМаксЬ
Интервалы квантования будем нумеровать от 0 до М—1.
Пример 1. Пороговая метрика. Пусть
Такую метрику можно назвать пороговой, а соответствующий
ей критерий точности — критерием незаметности ошибки квантова-
квантования. Для этого критерия решение задачи оптимального расположе-
расположения интервалов квантования и выбор числа интервалов тривиальны
и сводятся к решению уравнения
I Дг I = Д'пор- B.70)
Таким образом, ширина r-го интервала квантования должна вы-
выбираться равной 2Дгпор, а представителем r-го уровня — значение a
в центре r-то интервала. Если ArnOp не зависит от г, получаем рав-
76
номерную шкалу квантования. При этом число уровней (интерва-
(интервалов) квантования определяется соотношением
Л*р=(а„акс—аМИн)/2ДПор. B.71)
Важным и часто встречающимся на практике является случай,
когда
Д'-пор = 8Х. B-72)
т. е. когда ограничено значение относительной, а не абсолютной
ошибки квантования. Так, в соответствии с психофизическим зако-
законом Вебера — Фехнера можно в первом приближении описать тре-
требования к точности квантования значений яркости изображения,
предъявляемые зрительной системой человека. Воспользовавшись
B.61), нетрудно показать,, что в этом случае необходимо подвергать
равномерному квантованию не саму величину а, а ее нормирован-
нормированный логарифм:
W (а) — W Кии) _ 1п(«/«мин)
!»Кйкс)-!«Ы~ 1И<7 ' ( ' '
где </=аМакс/амин.
Число уровней квантования по такой логарифмической шкале
должно быть равно
М=Aп<7)/6„. B.74)
На практике так и поступают: перед равномерным квантованием
сигнал подвергают логарифмическому предыскажению (компрессии),
значения представителей интервалов квантования при восстановле-
восстановлении выбирают также по равномерной шкале, а затем синтезирован-
синтезированный сигнал подвергают потенцированию (экспандироваиию).
Найдем количество уровней, требуемое при квантовании ярко-
яркости изображений. Данные психофизических измерений показывают,
что в обычных условиях освещения порог относительной контраст-
контрастной чувствительности зрения бо оценивается величиной порядка
1,5—2% для тестового пятна большой площади при длительной
адаптации к фону [34]. Существующие устройства воспроизведения
изображений могут обеспечить динамический диапазон яркостей по-
порядка 9*100. Подставив эти величины в B.74), получим Af=s230.
Прямые эксперименты с квантованием яркости с использованием
телевизионных устройств воспроизведения изображений показали,
что достаточно 64—128 уровней [92]. Снижение требований отчасти
связано с наличием собственных шумов датчиков видеосигнала и
устройств воспроизведения изображений. В настоящее время
в устройствах квантования видеосигнала и восстановления изображе-
изображений принята величина 64—256 уровней при логарифмическом
предыскажении квантуемого видеосигнала.
77
Интересно оценить выигрыш в числе уровней квантования, да-
даваемый логарифмическим предыскажением, по сравнению с равно-
равномерным квантованием при той же точности. Он, очевидно, равен
g=(q-l)/lnq. B.75)
При больших q выигрыш может быть достаточно велик. Так, при
<7=Ю0 g=&20. Однако выигрыш обычно не столь значителен, по-
поскольку оценка погрешности по «наихудшему» случаю, как это де-
делается в пороговом критерии, излишне строга с практической точки
зрения.
Пример 2. Степенной критерий абсолютной ошибки кванто-
квантования
Д,(ЛГ)==(ЛГJ". B.76)
Подставив B.76) в B.65) и решив получающееся дифференци-
дифференциальное уравнение, получим
а
J (Р(а))'/2В+1Л
. W (а) — w (амии) _ «мин
Ю («макс) — W (амин) ^^ B-77)
J
Таким образом, требуемое нелинейное предыскажение зависит
только от распределения вероятностей квантуемой величины. Смысл
этой зависимости очевиден из соотношения
da J ~ IP (Ч\ . B.78)
т. е. интервалы квантования значений а обратно пропорциональны
плотности вероятностей этих значений в соответствующей степени.
Для распространенного случая оценки по среднеквадратическо-
му значению ошибки квантования (л=1)
а
С 3.
\ У Р(а) da
w{a) — w (амин) _ амш
W («макс) — В» (<хмин) Г— ' B- 79>
В некоторых случаях можно приближенно считать, что кван-
квантуемые коэффициеиты дискретного представления сигнала имеют
78
гауссову плотность распределения вероятностей в интервале (аИИя,
tt м а к с ) ¦
« /^ч r PYn J —-А ®1 1 /о ЯПЛ
где с — константа нормировки.
Тогда при я=1
Ф ( Тгт^- i - Ф
> Какс)
где
B.82)
Выигрыш в числе уровней квантования при заданной точности
зависит в этих случаях от параметра
Ц = («макс — <»мин)/»а B-83)
и равен
= ^Р_= I [Ф (9/2)-Ф(-9/2)]'^
g ф(<7/2Кз)]3/2 ' l> ;
При достаточно больших ? эта величина примерно равна q/5,7.
Таким образом, выигрыш становится ощутимым только при очень
больших q, когда существенно сказываются «хвосты» распределе-
распределения р(а).
Пример 3. Степенной критерий относительной ошибки кванто-
квантования
D"o (Дг) = (Д/а)=«. B.85)
Из уравнения Эйлера — Лагранжа B.65) для этого случая не-
нетрудно получить
ш(а)-ш(амш) -мин - Bg6)
(аМакс) — w (ямив) "макс
79
Если величина а имеет равномерное распределение, то
W (а) — Ы> (амин)
B.87)
Для оценки точности квантования по среднему значению моду-
модуля относительной ошибки (п = '/2)
а — К аь
W (a) — W (аМцн)
Ю 1амакс) — W («мин) VablaKC — V^a^
B.88)
Найдем выигрыш в числе уровней квантования, обеспечиваемый
нелинейным предыскажением по B.88) по сравнению с равномерным
квантованием. Интервал квантования в этом случае равен
дг = л/и,' (а) = гДоО^мак
[ К
макс — "^«мин ) V*
Кикс) — а»(аЛ1ин)]
B.89)
где Ао — интервал равномерного квантования величины w(a), а сред-
среднее значение ошибки квантования
B.90)
где Mi — число уровней квантования w(a); <7=амакс/амин.
В то же время при равномерном квантовании на М% уровней
амакс
«макс —»мгн
f — = 7Г
Из равенства Qo , = Qo 2 получаем
g = ^jii=^ ,Д+ ' ¦ B.92)
« Мг 4 /9_1 v '
Таким образом, при равномерном распределении р(а) выигрыш
невелик. При д=100 он равен 1,4. Сравнивая этот результат с ве-
величиной g = 20, полученной для порогового критерия относительной
ошибки, мы видим, что при "у\ете вероятностей различных значений.
сигнала выигрыш за счет нелинейного расположения уровней кван-
квантования значительно скромнее, чем при оценке по наихудшему слу-
случаю. Получающиеся для этих двух родственных случаев характери-
характеристики предыскажения показаны на рис. 2.6 (/ — логарифмическое
предыскажение по B.73); 2 — предыскажение по B.88)). Штрих-
пунктирной линией на этом рисунке показана линейная функция,
соответствующая равномерному квантованию без предыскажения.
2.10. Квантование при наличии шума. Квантование
и представление чисел в цифровых процессорах
При определении требований к способу квантования
непрерывных сигналов необходимо учитывать, что ре-
реальные датчики (фотопленка, фотоумножители, переда-
передающие телевизионные трубки, кристаллические свето-
тепло- и рентгеночувствительные датчики и т. п.) непре-
непрерывного видеосигнала и устройства воспроизведения
изображений (люминофор электронно-лучевых трубок,
модулируемые источники света, фоточувствительные ма-
материалы) обладают собственными шумами, в результате
чего отсутствует абсолютно точное соответствие между
сигналом и объектом "изучения. При расчете оптималь-
оптимального нелинейного предыскажения при квантовании
можно считать, что эти шумы, пересчитанные на вход
равномерно квантующего устройства, аддитивно склады-
складываются с шумом квантования. Таким образом можно
учесть возможную зависимость интенсивности шума дат-
датчиков и синтезаторов от уровня сигнала (так, дисперсия
шума ФЭУ пропорциональна величине сигнала). Крите-
6—42 81
рий точности квантования при этом должен быть пере-
переформулирован с учетом совместного действия шума дат-
датчика (синтезатора) и шума квантования.
Важной особенностью взаимодействия этих двух
видов искажений является рандомизация шума кванто-
квантования, разрушение его корреляционных связей с кван-
квантуемым сигналом. В результате требования к допусти-
допустимой величине шума .квантования могут быть несколько
снижены. Так, например, случайный шум датчика видео-
видеосигнала разрушает ложные контуры при грубом кванто-
квантовании яркости изображения, уменьшая тем самым их
заметность. На этом даже основан один из способов
сокращенного описания изображений, заключающийся
в том, что к видеосигналу перед грубым квантованием
добавляется псевдослучайный шум с независимыми от-
счетам'И, а при восстановлении изображения этот шум
вычитается из квантованного видеосигнала [119].
Аналогичный способ может использоваться и при по-
повышении контраста изображений при цифровой обра-
обработке (см. § 6.2). Конечно, благотворное действие слу-
случайного шума датчика сигнала и синтезатора на шумы
квантования сказывается только до определенной степе-
степени. Существует некоторое оптимальное соотношение
между этими видами шумов, зависящее от свойств кван-
квантуемого сигнала и содержания решаемой задачи.
В большинстве случаев случайный шум датчика и син-
синтезатора должен иметь примерно ту же интенсивность
(дисперсию), что и шум квантования. Так, в работе
[83]. на основании расчетов по трем разным критериям
рекомендуется, чтобы среднеквадратическое значение
случайного ,шума было примерно в три раза меньше
ширины интервала квантования (т. е. отношение диспер-
дисперсий равно 4/з, если считать шум квантования равномерно
распределенным в интервале квантования).
К процедурам квантования приходится прибегать не
только для преобразования непрерывных сигналов
в цифровые, но и при преобразованиях цифровых сиг-
сигналов в цифровых процессорах, например при необхо-
необходимости запомнить результаты вычислений в цифровых
запоминающих устройствах ограниченной емкости. Вы-
Высказанные выше соображения об оптимальном выборе
шкалы квантования в основном справедливы и здесь.
С этих позиций любопытно оценить различные спо-
способы представления чисел в цифровых процессорах. Как
82
известно, основными используемыми формами представ-
представления чисел являются представления с фиксированной
или плавающей запятой. Нетрудно понять, что при пред-
представлении с фиксированной запятой осуществляется рав-
равномерное квантование чисел с шагом квантования, рав-
равным минимальному числу разрядной сетки. Представле-
Представление с плавающей запятой соответствует двухступенчато-
двухступенчатому квантованию: с логарифмическим расположением
уровней квантования и нумерацией уровней, передавае-
передаваемой кодом порядка числа, и равномерным квантованием
внутри логарифмически расположенных уровней. Номер
этих последних уровней квантования определяется ман-
мантиссой числа. При таком смешанном квантовании не-
нетривиальным является вопрос о том, как распределить
заданное конечное число разрядов разрядной сетки
между кодами мантиссы и порядка. Решая его, можно
иметь в виду, что логарифмическое квантование опти-
оптимально для порогового критерия относительной ошибки,
равномерное квантование—для порогового критерия
абсолютной ошибки. Кроме того, решение этого вопроса
может зависеть не только от условия экономии коли-
количества разрядов, необходимых для представления чисел,
но и от быстродействия и простоты организации ариф-
арифметических операций над числами.
В заключение следует отметить, что на разных ста-
стадиях обработки могут оказаться целесообразными раз-
разные способы представления чисел. В частности, может
использоваться разный формат представления чисел
с плавающей запятой в вычислительном устройстве про-
процессоров и в его запоминающем устройстве.
Так, например, в работе [29] описан сокращенный
формат представления чисел с плавающей запятой
G разрядов на мантиссу, 4 разряда на порядок, 2 раз-
разряда на знак мантиссы и знак порядка), использовав-
использовавшийся для хранения результатов обработки на магнит-
магнитной ленте в работах по цифровой голографии и интер-
интерферометрии на ЦВМ «Минск-22».
2.11. Обзор методов кодирования изображений
Преобразования изображений в цифровой сигнал
применительно к задачам хранения изображений в циф-
цифровых запоминающих устройствах и передачи по цифро-
цифровым каналам связи называют кодированием изображе-
6* 8»
ний. В настоящее время существует большое разнооб-
разнообразие методов кодирования, изображений, и они
достаточно широко освещены в литературе. Практиче-
Практически все известные методы кодирования могут быть упо-
упорядочены в схему, показанную на рис. 2.7.
Большинство из них предполагает использование
трехступенчатой процедуры — раздельные дискретиза-
дискретизацию и квантование отсчетов дискретного представления
Раздельная
дискретизация
низкочастотной и
Высокочастотной
компонент
Раздельная
дискретизация
низкочастотной
компоненты
и градиента
изображения
Преобразования
Карунена-ЛоэВа,
Уолша-Адамара,
Хаари, Фурье
и др.
Преобразования
Карунена-ЛазВа,
Уолша-Адамара,
косинусное,
Хаара, Фурье,
Слэнт-преоо-
разаВание
ДВух-
кинальные
I Декорреляция
с одномерным предсказанием
Декорреляция
с двумерным предсказанием
Гибридные:
блочные
преобразования
по одной
координате,
дгкорреляция
предсказанием
по друзой
Кодирование изображений
Дискретизация
Дискретизация
с квантованием
т
Декорреляция предски-
занием и адаптивное
кВаитоданив
с обратной связью
Квантование
отсчетов
дискретного
представления
Равно-
Равномерное
Неравно-
Неравномерное
Однородное
Зопильное
АдаптивА
нов Г
Адаптивная
дискретизация
Декоррвляция
предсказанием
и квантование
о обратной связью
Кодирование
длин серий
Кодирование
координат
редких символов
Кодирование
с отслеживанием
линий
Кодирование
редких символов
_ Коды Шеннона-Фано,
Статистическое
кодирование
Рис. 2.7.
84
с последующим статистическим кодированием цифрового
сигнала. Дискретизация обычно основана на теореме
отсчетов и линейных преобразованиях, с помощью кото-
которых находят дискретное представление сигнала по раз-
различным базисам либо линейно предыскажают сигнал
с тем, чтобы затем использовать базис из отсчетных
функций. Линейным преобразованием может подвер-
подвергаться сразу все изображение (кадр) или фрагменты
изображения (блоки). Практически линейные преобра-
преобразования для кодирования выполняются в цифровых про-
процессорах после первичной избыточной дискретизации по
теореме отсчетов. Оптимальный размер блока при дву-
двумерном преобразовании — от нескольких десятков до
нескольких сотен элементов (отсчетов) изображения
(типичный размер блока 16X16 элементов) [58]). Из
рекомендуемых для кодирования линейных преобразо-
преобразований особо следует отметить как называемое косинус-
косинусное преобразование [7Щ (см. также § 3.7) и слэнт-пре-
образование [115]), лучше соответствующее структуре
изображений, чем преобразования Уолша—Адамара,
Хаара и Фурье, но столь же простые для реализации
в цифровом процессоре.
Для использования в специализированных телевизи-
телевизионных кодирующих устройствах, работающих в реаль-
реальном времени в темпе развертки видеосигнала, наиболее
удобны скользящие преобразования. Это преобразова-
преобразования, реализуемые с помощью операции свертки (иными
словами, преобразования с базисом, зависящим от раз-
разности аргументов). При этом линейное преобразование
сводится к декорреляции видеосигнала путем вычитания
из его текущего значения величины, найденной линей-
линейным предсказанием по прошедшим значениям. Предска-
Предсказание может быть как одномерным, так и двумерным.
Этот метод кодирования (в сочетании с соответствую-
соответствующим квантованием декоррелированного сигнала) назы-
называют дифференциальной импульсно-кодовой модуляцией
(ДИКМ) (см., например, [62]). В системах считывания
и передачи изображений с датчиками параллельно-по-
параллельно-последовательного типа (параллельным по одной коорди-
координате и разверткой по другой) определенные перспекти-
перспективы имеет гибридный метод преобразования — блочный
по одной 'координате с декорреляцией по другой [96].
Гибридные преобразования перспективны также для
межкадрового кодирования последовательностей кад-
85
ов при передаче изображений подвижных объектов
Простейший метод квантования отсчетов дискретного
представления — однородное'квантование, когда правило
квантования (число и расположение уровней) одина-
одинаково для всех отсчетов. Он употребляется обычно для
квантования при дискретизации посредством измерения
отсчетов исходного непрерывного сигнала и при дискре-
дискретизации с использованием скользящих преобразований.
В остальных случаях используется неоднородное кван-
квантование— зональное и адаптивное.
При зональном квантовании отсчеты разбиваются на
группы (зоны), для каждой из которых устанавливается
свое правило квантования. К зональным методам кван-
квантования можно отнести также квантование отсчетов при
двухканальнои дискретизации.
При адаптивном квантовании разбиение на группы
производится адаптивно. Возможны разные подходы
к адаптации. Например, отбрасываются все коэффи-
коэффициенты преобразования (отсчеты), сумма квадратов
которых не превышает заданной доли от суммы квадра-
квадратов всех коэффициентов, или коэффициенты, не превы-
превышающие по абсолютной величине заданный порог, или
разбиение на группы производится по величине суммы
квадратов коэффициентов и т. д.
Однородное и зональное квантование может быть
равномерным или — для более экономного квантова-
квантования — неравномерным.
В некоторых случаях оказывается возможным и
удобным (с точки зрения реализации) построить сме-
смешанную процедуру дискретизации и квантования, когда,
как при адаптивной дискретизации, расположение от-
отсчетов сигнала определяется результатами квантования
ошибки восстановления или, как при декорреляции пред-
предсказанием и квантовании с обратной связью, предска-
предсказанное значение сигнала формируется из квантованных
значений результата дискретизации предыдущих значе-
значений сигнала.
Заключительным этапом кодирования является ста-
статистическое кодирование результатов квантования от-
отсчетов. С помощью статистического кодирования полу-
получают значительную экономию в объеме цифрового
описания изображения за счет использования неравно-
неравномерности в частоте появления отдельных значений кван-
86
тованного сигнала. При этом используются неравномер-
неравномерные коды Шеннона—Фано и Хаффмена [34, 100], а так-
также различные методы кодирования редких символов
[34] в сочетании с кодами Шеннона—Фано и Хаффмена.
Последние используются в основном в системах с ДИКМ,
адаптивной дискретизацией, а также в двухканальных
системах (при кодировании сигнала градиента). Среди
методов кодирования редких символов, использующихся
для кодирования изображений, особо можно отметить
методы кодирования с прослеживанием линий (образуе-
(образуемых, например, сигналом градиента) как одни из наи-
наиболее эффективных.
Подробно методы кодирования изображений и об-
обширная библиография представлены в [58, 62, 96].
Глава 3
ДИСКРЕТНОЕ ПРЕДСТАВЛЕНИЕ ЛИНЕЙНЫХ
ПРЕОБРАЗОВАНИЙ
3.1. Постановка задачи и общий подход
Эта глава посвящена дискретному описанию линей-
линейных преобразований (операторов), которые можно
реализовать в цифровых процессорах, и связи его с не-
непрерывными представлениями. Способы описания опе-
операторов целиком определяются способами дискретного
представления обрабатываемых сигналов.
Поскольку обработке подлежат цифровые сигналы,
т. е. сигналы, получающиеся после дискретизации и
квантования, то при выборе способа дискретного описа-
описания оператора можно считать, что область его определе-
определения конечномерна. Пусть AN — линейное пространство
обрабатываемых сигналов {aN(t)}\ (срк(/)} — базис это-
этого пространства; L — оператор преобразования. Про-
Пространство сигналов {ftjv(t)}, получающихся в результате
преобразования, также конечномерно (см. § 1.6). При-
Примем в качестве базиса этого пространства базис {0 к (х)}.
Тогда, как это следует из формул A.80) — A.82),
М*)=2 Ш*)> (зл)
87
где
рк = 2 »„*„,«"' C.2)
п=0
ап=(а#, tyn) — коэффициенты представления ax(t) по
базису {<?K(t)}\ {4»„(/)} — базис, взаимный {fK(t)}\
лк:=' ?п> 1К) ("J-")
— дискретное представление оператора L по базису
{Мх)}; (\(х)} — базис, взаимный {бк(т)}.
Поскольку нас интересует дискретное представление
непрерывных операторов, выразим импульсную реакцию
HN(t, т) оператора L (см. § 1.7) через {Кп,к}, подставив
C.2) и C.3) в 3.1) и записав а„ по A.28), A.23):
JV-I Л'—I
' bN(,) = LaN(t)=2J 2V*eAW =
*=0 п—0
откуда ядро оператора
Ик if, х) = 2* S' lnj\ (t) K W- C.5)
Сигналы {ajv(/)}, рассматриваемые как объекты циф-
цифровой обработки, являются аппроксимацией непрерыв-
непрерывных сигналов {a(t)}—их проекцией на Л/-мерное про-
пространство (см. § 2.2). Поэтому сигналы {6jv(t)} яв-
являются аппроксимацией результатов преобразований
непрерывных сигналов непрерывным оператором.
В этом смысле можно рассматривать HN(t, т) как ко-
конечномерную аппроксимацию ядра непрерывного пре-
преобразования L.
88
3.2. Дискретное представление инвариантных к сдвигу
фильтров, действующих на сигналы с ограниченным
спектром
Дискретное представление сигналов при цифровой
обработке чаще всего основывают на теореме отсчетов,
рассматривая сигналы как функции с ограниченным
спектром Фурье. Как уже отмечалось, такое представ-
представление очень удобно ввиду простоты его получения как
совокупности отсчетов сигналов. Используемые в этом
случае отсчетные базисные функции sinc2jtF/ оказы-
оказываются удобными и для представления линейных филь-
фильтров, инвариантных к сдвигу.
Чтобы прояснить физический смысл соотношений
C.1) — C.5) в данном случае, повторим их вывод для
базиса отсчетных функций.
Пусть (—F, F) — интервал частот спектра Фурье
сигналов на входе линейных фильтров, инвариантных
к сдвигу, так что они могут быть представлены в виде
а (/) = JJ aK sine 2*F (t - -?-). C.6)
к=—оо
Пусть также h(t—т)—импульсная реакция опера-
оператора (фильтра) (см. § 1.8), т. е.
00 00
b(t)= \a(*)h(t— т)й(тг= \a(t— т)А(т)Л. C.7)
—аз —оо
Поскольку a(t)—сигнал с ограниченным спектром, то
a (I) = 2F f а (т) sine ТяР (t — t) rft; C.8)
00
2F
00 00
— z)di = 2F \ J a (t — *,) h (¦»,) X
00 / OO
Xsinc 2TiF(t — i)d-:dz1= [ h (т,) d\ I 2F fa(t —
—00 '" \ —00
— zt) sine 2^F (t — i)dA= f a (t — *,) h (-.,) d\ = & @-
C.9)
89
т. е. b(t)—также функция с ограниченным спектром,
которую можно восстановить по ее отсчетам {Ьк}'-
00
b(t)= X\ bK sine 2t.F ft — ?А , C.10)
К=— 00
где
00
be = bf^-\ — 2F fb(t)sine2vF(t—~}dt. C.11)
—00
Перепишем теперь C.7) в виде
00
b(t)= [в(х)А(< —
—00
00/00
—оо ^к=—оо
00 00
К=—ОС —00
где
h(t) = 2F jA(x)sinc2nF(f —t)rft C.13)
—00
— функция с ограниченным спектром, полученная в ре-
результате ограничения спектра импульсной реакции hit)
непрерывного фильтра.
Тогда отсчеты {Ьк} сигнала b(t) выражаются через
отсчеты {ак} сигнала a{t) и отсчеты {/ik} усеченной по
спектру импульсной реакции фильтра h(t):
п=—оо п=—оо
где
оо
.) \ /
90
Сравнив C.14) и C.7), можно заметить, что C.14)
есть не что иное, как известная формула прямоуголь-
прямоугольников для вычисления интеграла свертки C.7) при шаге
дискретизации по аргументу, равном 1/2F. Соотношение
C.14) (нетрудно видеть, что оно является вариантом
соотношения C.2)) —одно из основных соотношений,
используемых для цифровой реализации линейных ин-
инвариантных к сдвигу фильтров. На нем основывают
конечно-мерное приближение к непрерывному фильтру,
отбрасывая в C.14) члены с достаточно малыми значе-
значениями Нп:
*.* 2 в-Л- <ЗЛ6>
nf—N,
Этому дискретному фильтру соответствует непрерывный
фильтр с импульсной реакцией*'
Кр®= J] Яп*(*-?). C-17)
л=-ЛГ,
Действительно,
00 00
Ь) a(t — *) dx \t=zK/2F = j 7Torp (t) a (?- — ^ di =
00
J
= J
J
—30 n=—Ni
n=—JV,
Все соотношения этого параграфа очевидным обра-
образом обобщаются на двумерный случай. Так, C.16) мож-
можно переписать в виде
m=—Nn n=—N,i
гДе {bK,i}> {aK,i\> i hm,n}—взятые на прямоугольном
растре отсчеты сигналов и импульсной реакции фильтра,
усеченной по спектру прямоугольным окном.
*' Непрерывный фильтр соответствует дискретному, если отсче-
отсчеты его реакции на непрерывный сигнал, восстановленный по теореме
отсчетов из входной последовательности отсчетов дискретного
фильтра, совпадают с выходными отсчетами дискретного фильтра.
91
3.3. Цифровые фильтры
При обработке изображений используются как одно-
одномерные, так и двумерные линейные преобразования.
Цифровая реализация этих преобразований называется
цифровой фильтрацией. Способы цифровой фильтрации
двумерных сигналов, основанные на представлении сиг-
сигналов и импульсных реакций фильтров по теореме от-
отсчетов, как в формулах C.16)—C.18), называются
фильтрацией в пространственной области. Ниже будет
показано, что фильтрация сигналов может быть осу-
осуществлена путем преобразования их спектров (см. §3.8).
Такая фильтрация называется фильтрацией в частотной
области (в области пространственных частот). В этом
параграфе будут разобраны разные подходы к цифро-
цифровой фильтрации в пространственной области.
Рассмотрим сначала одномерные фильтры. Цифро-
Цифровой фильтр, реализуемый в цифровом процессоре непо-
непосредственно по формуле C.16), называется трансвер-
сальным, или нерекурсивным ([11, 16]). В вычисли-
вычислительной машине для вычислений по этой формуле не-
необходимо выполнить (Л/2+Л^ + 1) операций умножения
и (N2+iN[) операций сложения на один отсчет преобра-
преобразованного сигнала.
Существует класс операторов, вид ядра которых по-
позволяет преобразовать C.16) в рекурсивное соотношение
Нетрудно проверить, что отсчеты импульсной реакции
hn таких фильтров должны удовлетворять соотношению
*- = 2*Л~« «=1.2.... C.20)
Вычисления последовательности значений {Ьх} по
формуле C.19) требуют меньшего числа операций на
один отсчет, чем по C.16), так как они используют ре-
результаты предыдущих вычислений. Например, при
?2=?з= ... =0
. . ^u C.21)
92
т. е. каждое значение Ьк может быть найдено посредст-
посредством только двух умножений и одного сложения, тогда
как в прямой сумме C.16), где
й» = А*Г'. C.22)
количество членов, вообще говоря, бесконечно велико,
поскольку g1~l никогда не обращается в нуль. Это преи-
преимущество в быстродействии заставляет всегда искать
возможность аппроксимации требуемого фильтра ре-
рекурсивным. Хотя в принципе такая аппроксимация мо-
может быть построена на базе соотношения C.20), удоб-
удобнее пользоваться частотными характеристиками, которые
рассматриваются в следующем параграфе.
Соотношение C.19) описывает простейший рекурсив-
рекурсивный цифровой фильтр. В общем случае рекурсивный
цифровой фильтр определяется соотношением
л=0 л=1
где NT и Np— количество слагаемых в трансверсальной
и рекурсивной частях формулы соответственно.
Примером возможности рекурсивного представления
служит часто используемый при цифровой обработке
изображений фильтр, вычисляющий текущее среднее
сигнала на данном отрезке:
%-«- C4)
Л = — .V
В этом случае отсчеты импульсной реакции фильтра
An = l/BW+1), n=—N, ..., 0 N, и C.24) может
быть преобразовано в рекурсивную форму:
^i. C.25)
Нетрудно видеть, что C.25) является частным слу-
случаем соотношения C.23). Таким образом, построив вы-
вычисления по C.25), можно вычислить текущее среднее
сигнала не за 2.V сложений на один отсчет среднего, как
в C.24), а только за три. Замечательно, что число опе-
операций здесь не зависит от количества отсчетов, по кото-
которым происходит усреднение.
93
Двумерный нерекурсивный фильтр определяется со-
соотношением C.18). В двумерном случае также возмож-
возможно построение рекурсивных фильтров, но при этом необ-
необходимо задаться направлением рекурсии. Если считать
«прошлыми» значения сигнала сверху и слева от данно-
данного отсчета и нумеровать отсчеты слева направо и сверху
вниз, то формулу C.23) одномерного рекурсивного филь-
фильтра можно обобщить на двумерный случай следующим
образом:
m=0 n=0 m=l n-=—\'p2
C.26)
Существует еще один класс двумерных цифровых
фильтров, представляющих особый интерес с точки зре-
зрения экономии вычислительных затрат,— двумерные раз-
разделимые фильтры. Это фильтры, импульсная реакция ко-
которых Hmin может быть представлена в виде произведе-
произведения одномерных функций: hm>n = h^V'*).
Для таких фильтров формула C.17) переходит в
b ,= Я ?A) 51 ЪB)а , , C.27)
m=—JVn n=—.V21
которую можно вычислять рекурсивно. Действительно,
обозначив внутреннюю сумму в C.27) через Ck-m,i, по-
получим:
h =2 Л +hO\c . C.28)
где величины ск_,_(т_])Л под знаком суммы те же, кото-
которые использовались при вычислении Ьк] t на предыду-
предыдущем шаге, кроме одной, cK_x_Na<l. Поэтому для вычисле-
вычисления одного отсчета bk,i по C.28) требуется выполнить
(N22JrN2iJr'Ni2JrNn-\-2) операций умножения и (Л^22+
-HV2i+iiVi2+'Nii) операций сложения, а не (M^+A^i-j-
+ 1)(Л^12+Л/п+1) и (W22+W21+1)(JV12+WU + 1)-1 со-
соответственно, как требуется для вычислений по форму-
формуле C.17).
Примером двумерного разделимого фильтра являет-
является фильтр, используемый для получения текущего сред-
94
него значения сигнала по прямоугольной окрестности:
Г, + 1) BJV, + 1)
т=—Ni п=—JVj
Разделимое представление C.27) импульсной реак-
реакции требуемого двумерного фильтра не всегда возмож-
возможно. Можно поставить задачу об аппроксимации требуе-
требуемой функции Ят,п суммой разделимых функций:
Пт n = 2j ft Sn ' yo.oVf
u=0
Если число членов U в этой сумме невелико, такая
замена одного фильтра несколькими также может быть
эффективней в вычислительном отношении, чем фильтра-
фильтрация по C.18). Задача о наилучшем представлении C.30)
родственна задаче о наилучшем конечно-мерном прибли-
приближении сигналов [47, 62].
Возможность представления импульсной реакции
двумерного фильтра в разделимой форме в большой сте-
степени зависит от выбора системы координат. Например,
импульсная реакция изотропных фильтров, которые ча-
часто встречаются в задачах обработки изображений, по-
получаемых с помощью оптических изображающих систем,
в прямоугольной системе координат (^i, t2) является
функцией суммы квадратов координат (t2\-\-t22) и, вооб-
вообще говоря, не может быть представлена в разделимой
форме. В полярной системе координат та же импульс-
импульсная реакция не только разделима, но и просто является
функцией одной переменной.
Выбор системы координат при обработке изображе-
изображений важен также с точки зрения возможности рассмат-
рассматривать фильтры как инвариантные к сдвигу, или как
пространственно-однородные. В ряде случаев фильтр
можно сделать пространственно-однородным, если вы-
выбрать специальную систему координат с нелинейной шка-
шкалой по координатам (см., например, [48, 50]).
Представление C.30) импульсной реакции фильтра
в виде суммы импульсных реакций более простого вида
соответствует тому, что фильтрация сигнала осуществ-
осуществляется параллельно несколькими фильтрами и результа-
95
ты фильтрации складываются. Такое представление
можно назвать параллельно-каскадным. Возможно так-
также последовательно-каскадное представление цифровых
фильтров. В этом случае требуемая импульсная реак-
реакция представляется в виде свертки импульсных реакций
более простого вида:
Пт— 2. Пть-_1 Zi Пти_2 ¦ ¦ ¦
'«?/—1 Щ]—2
•••2А'0)с С C-31>
ш0 m- V т«
что соответствует последовательному пропусканию сиг-
сигнала через несколько фильтров.
В одномерном случае последовательно-каскадное
представление фильтра не дает выигрыша в количестве
операций, если фильтры каскадов не могут быть постро-
построены как рекурсивные, и даже уступает однокаскадному
представлению. Действительно, пусть .V — количество от-
отсчетов (протяженность) импульсной реакции фильтров
в каждом каскаде в C.31). Тогда протяженность им-
импульсной реакции hm при U каскадах составит
[U(N—1)-И] отсчет. Это значит, что если производить
фильтрацию таким однокаскадным фильтром по форму-
формуле C.16), то требуется выполнить [U(N—1) + 1] опера-
операцию на каждый отсчет сигнала, а при последовательно-
каскадной фильтрации U фильтрами требуется UN опе-
операций, т. е. больше. Но двумерные последовательно-кас-
последовательно-каскадные фильтры могут быть значительно выгоднее одно-
каскадных, так как в двумерном случае последние тре-
требуют затраты [U(N—l)-\-l][U(M—l) + l] операций
вместо UNM для эквивалентного последовательно-кас-
последовательно-каскадного фильтра с протяженностью импульсной реакции
каждого из U каскадов N\M отсчетов.
Поэтому последовательно-каскадное представление
двумерных фильтров представляет большой резерв эко-
экономии машинного времени при обработке сигналов на
ЦВМ и соответственно аппаратных средств в специали-
специализированных процессорах. Анализировать возможность
представления фильтра. в последовательно-каскадной
форме удобнее, пользуясь частотными характеристика-
характеристиками, которые рассматриваются в следующем параграфе.
96
3.4. Частотные характеристики цифровых фильтров
Как уже отмечалось в § 2.5, линейные фильтры, ин-
инвариантные к сдвигу, удобно анализировать и описывать
в частотной области, используя понятие ядра преобразо-
преобразования по экспоненциальному базису, т. е. частотной ха-
характеристики фильтра, и тот факт, что экспоненциаль-
экспоненциальный базис является собственным базисом таких фильт-
фильтров.
Частотной характеристикой цифрового фильтра,
определяемого соотношением C.16), называется частот-
частотная характеристика соответствующего ему непрерывно-
непрерывного фильтра с импульсной реакцией C.17):
? (?) C.32)
Найдем связь коэффициентов {Л„} цифрового фильтра
с частотной характеристикой аппроксимируемого им не-
непрерывного фильтра. Пусть Я (/) — частотная характери-
характеристика последнего; Яу (f) = Я (/) rect^-— частотная ха-
характеристика, полученная из H(f) ограничением (усече-
(усечением) интервала частот. Тогда из C.15) следует, что
^H(f) ехр (-i2rf ?r} df. C.33)
Эта формула может использоваться при синтезе циф-
цифрового фильтра для определения {Нп} по заданной ча-
частотной характеристике аппроксимируемого непрерыв-
непрерывного фильтра. Определяемые по н*ей величины /гп, вооб-
вообще говоря, отличны от нуля при всех п, ибо сигналы
с ограниченной полосой частот имеют неограниченную
протяженность, Частотная характеристика получающего-
7-42 97
ся цифрового фильтра с неограниченным числом членов
равна
оо .
#(/)= J] Мхр^^. C-34)
Из C.33) следует, что {hn} являются коэффициента-
коэффициентами разложения функции 2FH(f) в ряд Фурье на отрез-
отрезке (—F, F) (см. A.41)). Поэтому C.34) можно перепи-
переписать в виде
/?(f) = 2F 2 Hy(f + 2nF) C.35)
я=—оо
(см. также табл. 1.2, строка 22), т. е. частотная харак-
характеристика цифрового фильтра с неограниченным числом
членов представляет собой периодически повторенную
с шагом 2F усеченную частотную характеристику непре-
непрерывного фильтра. Ограничение количества коэффициен-
коэффициентов {hn}, как в C.32), искажает эту частотную характе-
ристику. Учесть это искажение можно, записав
«г ft л ,
Г\ I /I — "* I I » и q i г ^_—. —-
J I mm \
00 г 0О
*= Jrect ^, + iv, 2j
—да Ьл=_оо
— 9F)|eXpl
—да
C.36)
Пользуясь теоремой о спектре произведения (см.
табл. 1.2, строка 16), получаем
*.+*. .:-.-/- ^.+^i
(^)| C.37)
где (g) означает операцию свертки A.109). Первая из
свертываемых функций описывает влияние на частотную
характеристику цифрового фильтра ограничения числа
членов в C.17), вторая, очевидно, является частотной
характеристикой фильтра с неограниченным числом чле-
нов ff(f) в C.34). Подставив C.35) в C.37), оконча-
окончательно получим
п——оо —оо
C.38)
Таким образом, частотная характеристика Й0Гр (f)
цифрового фильтра, являющегося аппроксимацией не-
непрерывного фильтра с частотной характеристикой H{f),
представляет собой периодически повторенную с шагом
2F усеченную по частоте характеристику Яу(/) =
=H(f) rect -^p- сглаженную функцией
sine %( YF f) -exp (i% \p П .
Следует отметить, что такое сглаживание приводит
к наложению сглаженных функций #у(/) на частотах
вблизи границ интервала (—F, F).
Эффекты, связанные с переходом от непрерывного
фильтра к дискретному с ограниченным количеством от-
отсчетов импульсного отклика, проиллюстрированы на рис.
3.1 (а — частотная характеристика непрерывного фильт-
фильтра; б — усеченного по спектру непрерывного фильтра;
в — усеченного по спектру и ограниченного по протяжен-
протяженности импульсной реакции непрерывного фильтра; г —
дискретного фильтра, определяемого отсчетами импульс-
импульсной реакции фильтра рис. 3.1,в).
Рассмотрим в качестве примера частотную характе-
характеристику фильтра C.24), вычисляющего текущее среднее
последовательности отсчетов, т. е. фильтра с отсчетами
импульсного отклика:
7г„=1/B# + 1), a = — N О N. C.39)
Подставив C.39) в C.32), найдем
N
l)f/2F slncK(*!v-г 1,1/л- /34О)
sinnf/2F ~~ sincn{/2F
99
Частотные характеристики, построенные для Л/=2; 128
б C.40), показаны на рис. 3.2,а, б соответственно. Для
сравнения на рис. 3.2,а штриховой линией показана ча-
частотная характеристика #(/)=sinc (nNf/2F) соответст-
соответствующего непрерывного фильтра с импульсной реакций
C.41)
V
-F Ky(f)
V
TV
i
i
V
F f
I F f
V f
ЛА
i
-F
Рис. З.1.
Нетрудно видеть, что при малом N различие между
этими характеристиками может быть заметным*'.
Рассмотрим теперь частотные характеристики рекур-
рекурсивных фильтров, определяемых в общем виде форму-
*' Эти частотные характеристики лучше совпадают, если интер-
интервал суммирования для непрерывного фильтра простирается от
— BЛ?+1)/4Р до BЛГ+1) /4F, т. е. несколько отличается от интер-
интервала суммирования дискретного фильтра.
100
лой C.23). Для этого преобразуем ее в равенство
C.42)
п=1
из которого вытекает равенство для спектров и частот-
-1,0f/2F
Рис. 3.2.
ных характеристик:
C.43)
где
л=1
л=0
C.44)
101
Следовательно, частотная характеристика цифрового
рекурсивного фильтра может быть записана как
\ • jin eXp I i2r.f j
ПРФ=К:{П. =^п C-45)
л—1
Все эти результаты могут быть применены и к дву-
двумерному случаю. Так, частотная характеристика двумер-
двумерного неразделимого фильтра определяется выражением
33 J
m=—Nn n——Ni2
C.46)
Частотная характеристика двумерного разделимого
фильтра есть разделимая функция
(/,). C-47)
где fi^rptfi) и Я^р(/2) определяются выражениями вида
C.32).
Частотная характеристика двумерного рекурсивного
фильтра C.26) записывается как
Тг if f^— m=0 "=0
ш ¦ s - , C'48)
102
Очевидно, частотная характеристика параллельно-кас-
параллельно-каскадного фильтра равна
2 C-49)
а частотная характеристика последовательно-каскадно-
го фильтра —
и=0
5.5. Краевые эффекты при цифровой фильтрации
Вернемся к основной формуле C.16) цифровой филь-
фильтрации в «пространственной» области:
Количество отсчетов в исходной последовательности
входного сигнала {ак} всегда конечно. Пусть они нуме-
нумеруются от 0 до N—1, к=0, 1, ..., N—1. Тогда формула
C.51) определяет только отсчеты выходного сигнала
с номерами от k=N2 до k=N—Ni—1. Отсчеты с номера-
номерами от /с=0 до k=N2—1 и от k=N—Ni до k=N—1 ие
определены, так как не определены значения исходной
последовательности при к<0 и k>N—1. Таким образом,
длина последовательности при линейной цифровой филь-
фильтрации по C.51) сокращается.
Но обычно неудобно, чтобы количество отсчетов вы-
ходного сигнала отличалось от количества отсчетов вход-
входного. Поэтому прибегают к тому или иному способу до-
доопределения исходной последовательности. Существуют
два подхода к такому доопределению. Первый можно
назвать статистическим, второй — вычислительным.
Статистический подход состоит в том, что заданная
последовательность входных отсчетов рассматривается
как реализация некоторого случайного процесса и от-
отсутствующие крайние члены этой последовательности
определяются путем предсказания их значений по имею-
имеющимся членам. В простейшем случае отсутствующим
членам приписывается значение, равное математическо-
математическому ожиданию входного сигнала (например, нуль, если
№
входной сигнал имеет нулевое среднее). Лучшие в этом
смысле результаты может дать замена отсутствующих
отсчетов взвешенной суммой крайних заданных отсчетов.
Частным случаем такого способа доопределения являет-
является приписывание незаданным отсчетам значений, равных
значению ближайшего заданного.
Однако чаще для определения недостающих отсчетов
исходят из соображений другого рода. Дело в том, что
линейный фильтр, инвариантный к сдвигу, может быть
реализован также с помощью операций над спектрами
Фурье сигналов (см. § 3.8). При этом оказывается, что
фильтрация в «спектральной» области эквивалентна
фильтрации в «пространственной» области по формуле
C.51), если исходный сигнал считать периодически про-
продолженным для значений индекса к<0 и /c>7V—1. Воз-
Возможно несколько способов периодического продолжения
сигналов:
простое продолжение
а.
'tc+N'
а
a.
C.52)
два вида четного продолжения
. — 1;
0<h<N— 1;
*2IV—к—2'
а{
к+1
а,
•?а;—«¦—I*
0<k<N—\;
N<k<2N—1.
C.53a)
C.536)
Простое продолжение, которому соответствуют опе-
операции над спектрами, полученными с помощью дискрет-
дискретного преобразования Фурье (см. § 3.6), неестественно
искажает структуру сигнала, так как делает в продол-
продолженном сигнале соседними отсчеты, расположенные на
разных концах последовательности. Поэтому при^цифро-
вой фильтрации в пространственной и частотной обла-
областях пользуются четными способами доопределения по-
последовательности.
104
Описайныё способы доопределения конечной последо-
последовательности проиллюстрированы на рис. 3.3 (а — исход-
исходная последовательность; б — дополнение нулями; в —
периодическое продолжение; г — четное продолжение
по C.53а); д — четное продолжение по C.536)).
1
В 1 Z \
а)
IT , -г -/ I Т , J f I Т , в S
-5-t-3 | I 0 1 1 | I 5 В 7 J
В)
-J -г -? /7 7 i
6)
1
I
4—J—LL_i_4
J -1 -7 /7 7 2 \
7 8
-5 -f
I 1 1 I i.w.ll
, I— "IJJT
. 5.3.
Двумерные сигналы доопределяются аналогично:
простое продолжение
а. ,
a
а.,
aK-Nl,
C.54)
105
четные продолжений
ta- \w N1<K<2Nl — 2; — (#.—1) </<—ii
в
, — 2;
1 — 2;
Г, — 2;
N,—2;
C.55a)
, - 1; 0
N2 -
2N,-1;
C.556)
Наглядное представление об этих способах двумер-
двумерного продолжения можно получить из рис. 3.4 (а — про-
простое продолжение; б — четное продолжение по C.556)),
3.6. Дискретное преобразование Фурье
Преобразование Фурье (§ 1.5) можно рассматривать
как линейное преобразование с ядром
Я(/, /)=ехр (—йя/0. C.56)
106
Рис. S.4.
Найдем его дискретное представление по базису
{ук (t) =sinc [2nF (t—K/2F) ] } C.57)
для сигналов с ограниченным на интервале (—F, F)
спектром, для которых справедливо представление
00 .
а @ = J] «Bf) sinc [2itF (* ~ w)] •
Ю=—00
Преобразование Фурье такого сигнала равно
00 00 00
оо
C.59)
Рассмотрим теперь периодический сигнал
«п@= 5 а(^ + яТ). C.60)
П=—00
Его спектр равен
00
где aa(s/T) —отсчеты спектра сигнала aa(t), взятого на
отрезке (—Г/2, Г/2) (см. табл. 1.2, строка 19). Если Т
достаточно велико, а сигнал a(t) достаточно быстро спа-
спадает до нуля на этом интервале, так что его искажения-
искажениями в сумме C.60) за счет наложения периодов можно
пренебречь, то an(s/r)^a(s/r). Отсюда
*" ("Г) - 2Т- S а( ?г) ехр (й. й,), C.62)
причем суммирование по к проводится в пределах |к|
108
Значения Т и F можно всегда выбрать так, чтобы ве-
величина 2TF была целой. Обозначим ее N. Обозначим
также
у
\-f-J ехР («2« -77-
K C.63)
Здесь Ко выбрано так, чтобы суммирование в C.62) мо-
могло производиться по к от 0 до N—1. Тогда получим
а°=1к%а«ехрA2^)- Cl64)
к=0
Это соотношение называется дискретным преобразо-
преобразованием Фурье (ДПФ).
Дискретное преобразование Фурье обратимо:
e#exp('"i2"^")- C'65)
5=0
Его ядро — матрица
является дискретным представлением ядра непрерывного
преобразования Фурье.
Формула C.65) является аналогом C.3). Отметим,
что ее можно получить сразу из C.3) для базиса
{<?K(t)=smc2nF(t-/c/2F)}.
Коэффициенты {as} ДПФ последовательности {ah}
приближенно равны отсчетам спектра сигнала a(t), пе-
периодически продолженного с периодом Т, взятым с ша-
шагом 1/Т. Такова связь ДПФ с непрерывным преобразо-
преобразованием Фурье. Из предположения ограниченной протя-
протяженности сигнала вытекает, что для его спектра
справедлива теорема отсчетов и что, следовательно, он
может быть восстановлен по величинам {as}—коэффици-
{as}—коэффициентам ДПФ отсчетов сигнала. _%
Наиболее употребительные свойства одномерного
ДПФ приведены в табл. 3.1. Для удобства сопоставле-
сопоставления их со свойствами непрерывного преобразования
Фурье в правой колонке табл. 3.1 указаны номера соот-
соответствующих строк табл. 1.2. Главное отличие ДПФ от
109
Таблица 3.1
Свойства дискретного преобразования Фурье
Сигнал
N—l
h а*=т*?а*х
Xexpl— i2n-ff)
2. oAt = «r(K)mod,v
3- {«*J
4- (<W
5. K = a%}
6. {aK = -a*K}
7. {ак = ад,_к}
8- К = — %-«>
9- {ак = а\ = ам_к}
10. K=— ад,_к=а*к}
ДПФ
iV—1
'•i7Se'X
Xexpl izK-ff)
as = a(s)modjV
{«'Л'-.}
{as = — a^_s}
ЛГ—1 N—l
в=0 s=0
12. Cosf2^+^
1 J (_ l)s+!^sin7ra v
2 1 sin?t(s+so)/A' 'N
Г Л/"—1
Xexp lie N (s+so)+
1 (-lM-WSin.S v
1 ' Г sinn(s — sd)/N ¦ '
Г (ЛГ—1) ,
Xexp 1 ы- -N - (s
-So)-?]},
[s0] —целая часть s0; о —
остаток
Номер
строки
табл. 1.2
1
—
2
3
4
5
6
7
8
9
17
15
110
продолжение табл. §А
Сигнал
lo. \a(K+n)modNJ
N-\
л=0
15 Ь =
J 1, (к — n) mod N is Op
к — к,
16. rect^ ^ _^ »
—
0, 0<к<кг,
0, к, </е <Af— 1
17- (a»=@ mod «}'
Z = 0, 1, .... LA7 —1
1Г / — Af/2 1
18a. < 1 1—rectiAf ^д, ___ д7 1 X
/\ (t)modivr>
A7 — четное число
18C
{[
/ =
N
/-(V+l)/2 ч
-^ а@ mod N }'
= 0, 1, .... LA7 —1;
— нечетное число
ДПФ
1 sin [п(к8—ж,-J-1)s/A7]
^Л^ slnns/Л7 ^
Ss2=°o, V.'.v.'.l-V
r=0
sin it - r w ¦ (s — rL)
^ A7 sin (n(s — rL)/LN) '
s=0, 1, .... LA7—1
ttL "гХ
sln(n(s —rL)/L)
s = 0, 1, . . ., LN—l
Нойер
строки
табл. 1.2
10
16
12,13
23
19. )
21
21
111
продолжение табл. 3.1
IS
/,
20
if
h
Сигнал
• ' iO/ О/ g¦
= 0, I, Л'., JV-1;
= 0, 1 1-1
= 0, 1, .... 1—1;
= 0, 1. ..... N-l;
21' Црк) mod Af}>
p не имеет общих делителе]
с N
22.
23.
24.
,
Л
N-\
1 V1 '
N-\
1
1 (Tf'
> + аЛ^/2
V^ ао aN/2
^i а2к+1 2 УЯ
к=0
дпф
г=0
г N—\
s-0, 1
1
Vi 's)mo1^ ^
s = 0. 1
где (p^) mod N =
.V—1
4=0
JV—1
4=0
1
~~ Vn aNI
l (л^г'
4=0
- 2VN
(s-ri)],
LN—\
LN—l
1
2
0+^/2
2^ '
2
Номер
строки
табл. 1.2
21
22
24
27
—
—
112
Продолжение табл. B.I
Сигнал
к
/о. у. ап
л=0
26. ак — ак_^
ДПФ
г /V-1 -.
L r=o J
т~ 1 — exp(t2ros/W)A s'
as(l— exp (tits)/iV)
Номер
строки
табл. 1.2
28
29
непрерывного преобразования Фурье — цикличность, или
периодичность: номера отсчетов последовательности и ее
ДПФ отсчитываются по модулю N, т. е. как бы по кру-
кругу; число точек в цикле равно N (табл. 3.1, строка 2).
По аналогии с одномерным ДПФ, применив двумер-
двумерную теорему отсчетов к двумерным сигналам и спектрам,
можно получить двумерное ДПФ. Обычно используется
только такое двумерное ДПФ, которое вытекает из дву-
двумерной теоремы отсчетов в прямоугольных координатах:
l
1=0
*r+?)]- C-67)
Оно удобно тем, что факторизуется на два одномерных
ДПФ, т. е. является разделимым.
Обратное двумерное ДПФ записывается как
«¦¦'=
S S •"ехр [ ~ i2*(it+?)} ¦ <3-68'
0 10
к=0 1=0
Некоторые свойства двумерного ДПФ приведены
в табл. 3.2. Для двумерного ДПФ характерна двумер-
двумерная цикличность (периодичность). Можно считать, что
коэффициенты двумерного ДПФ — это отсчеты двумер-
двумерного непрерывного спектра сигнал-а, периодически раз-
размноженного на плоскости в прямоугольной системе ко-
координат, как на рис. 3.4,а.
Иногда вместо представлений ДПФ в виде сумм
C.64), C.66) удобнее пользоваться матричными обо-
8—42 113
Таблица 3J
Свойства двумерного ДПФ
Сигнал
Диумертое ДПФ
JV»—1 JV,—1
1. а„
Wi—1 JV,—I
Ny—l JV»— 1
¦ss-
n=0 m=0
X "(je-
(je-/j)mod /V,, {I—m)mod JV,
Э) 1=0
2> aK,i = a(K)mod/V1,Wmod JV,
4, -{a j
6- {% I
' • \Ц|..
8* V*A/
9. {oB ^
10. {йж
11. {aKl
12. {a,.
13. 2
в=0
= a*JV,-K, yva—/>
-«, *,-;}
г = aNl-te,i >
VI „ и V ^
^il ик,1"к,1~ Zj /\ ar
1=0 r=0 s=0
ar,s — a(r)mod Nl} (s)modN,
{«V-r, JV,-,}
{•*r.f}
<¦ /V,—r, Ni~st
{«JV,-.,,}
{«r,S = V,-r,JV,-J
{«f,s=Vr, Л
W,, = «^-r,^-s = <.S}
ar,sPr,s
114
Продолжение табл. 3.2
Сигнал
Двумерное ДПФ
a(K+n)mod Nlw
[I ПГ И5
-f2itpvT+lvr
16. {a(/,)mOdA\, (m)modJV, }•
л = 0, 1 ?,#,— 1;
m = 0, 1, ....LjAfj—1
= 0,1 1,-1;
0,l N*—li Яг
= 0,1 1,-1
Ni—l Л/а—1
17.
w. S S вк''~
W,— 1 Wj-1
К=0 /=0
0 0
«o.o
r=0 s=0
18.а„„=7
X
Хехр 1-е.
Xexp \i
19. a
Л\/2. Af2/2
1
jV, — 1 N,—1
r=0 s=0
;V,, N2 — четные числа
~V"Np
к=0 1=0
значениями. В этих обозначениях одномерное ДПФ
можно записать так:
а=Р^а, . C.69)
где а — матрица-столбец, составленная из отсчетов пре-
преобразуемой последовательности {а к}; а — матрица-стол-
матрица-столбец, составленная из коэффициентов ДПФ {as}\ FN —
квадратная матрица ДПФ порядка Af C.66).
8* 115
Матрица ДПФ относится к классу так называемых
унитарных матриц, для которых обратная матрица по-
получается их транспонированием и заменой элементов на
комплексно-сопряженные.
Двумерное ДПФ можно записать аналогично C.69)
в виде
. a = FJvaFWi, C.70)
где а и а — исходный сигнал и результат его преобразо-
преобразования— матрицы размерностью Л^Л^, a FN kFn —матри-
—матрицы ДПФ C.66) размерностью Л^,Л^ и NZN2 соответствен-
соответственно.
3.7. Сдвинутые, четные и нечетные ДПФ
Кроме основной разновидности ДПФ C.64), можно
ввести целый класс преобразований, которые получают-
получаются, если при дискретизации сигнала и спектра смещать
положение отсчетов сигнала и его спектра относительно
начала координат сигнала.
Рассмотрим сначала одномерный случай. Если отсче-
отсчеты сигнала расположить так, чтобы начало координат
попало посередине между нулевыми и минус первым от-
отсчетами, получим следующий вариант ДПФ:
Ee-Mph*^]- C-7ia)
в=0
Обратное ему преобразование определяется выражением
Б'-Ч-'2'^]- C-71б)
s=0
Если так же сдвинуть отсчеты в частотной плоско-
плоскости, получим преобразование вида
5^[а.?±а1?Ш.]. C.7ад
к=0
116
Обратным ему является преобразование
^—1
п _ а
s=0
N J "
Такому же сдвигу отсчетов только в частотной области
соответствует пара преобразований*)
N—1
a,exp|'t2w'c(g + '/t)]; C.73а)
к=0
N—1
C.736)
являющаяся двойником пары преобразований C.71а, б).
Вообще, сдвигу отсчетов сигнала на и и спектра на v
соответствует пара преобразований
а"'"ехр h
Индексы и, у над ак в C.746) поставлены для того,
чтобы подчеркнуть то обстоятельство, что в отличие от
исходной последовательности {ак}, определенной для к =
= 0, 1,..., N—1, (fKv определены при любых к. При
к = 0, 1 N—1 последовательность {а"'°} совпадает
с исходной {ак}.
Назовем пару преобразований C.74а, б) прямым и
обратным сдвинутыми дискретными преобразованиями
Фурье и будем обозначать их СДПФ (и, v) и ОСДПФ
(и, v) соответственно. Стандартное дискретное преоб-
преобразование Фурье, рассмотренное в предыдущем пара-
параграфе, является, очевидно, СДПФ @, 0).
Введены в работе [12].
117
СДПФ (и, v) выражается через ДПФ:
>с=0
- \h Б М
1
^). C.75)
«^1
Поэтому и вычислить СДПФ (u, v) можно через
ДПФ. Однако с точки зрения простоты вычислений
удобно несколько модифицировать СДПФ (и, v), устра-
устранив из ядра преобразования множитель exp(i2nuv[N),
не зависящий от к и s, и записав пару преобразований
как
4=0
C.766)
Назовем эту пару преобразований модифицированны-
модифицированными сдвинутыми преобразованиями Фурье (МСДПФ (и,
и)). Свойства СДПФ и МСДПФ сходны между собой.
При целых и и v СДПФ (и, v) сводится к цикличе-
циклическому сдвигу ДПФ циклически сдвинутых последова-
последовательностей, и поэтому свойства СДПФ (и, v) при целых
и, v совпадают со свойствами ДПФ или СДПФ @, 0).
При дробных и, v это не так. Основные свойства СДПФ
(и, v) приведены в табл. 3.3. Для удобства сравнения
их со свойствами стандартного ДПФ в правой колонке
табл. 3.3 даны номера соответствующих строк табл. 3.1.
Как видно из сопоставления табл. 3.1 и табл. 3.3,
СДПФ (и, v) обладает рядом особенностей по сравне-
сравнению со стандартным ДПФ. СДПФ (u, v) соответствует
более общий закон продолжения последовательностей
118
Свойства СДПФ
Таблица 3.3
Сигнал
СдПФ (и, V)
N-l
S=0
2. а"> » = а". °exp(-J2*/iO)
к+Л# к
, ¦ Г .„ 2о (к + и) 1
За. ак ехр - <2* дг I
36. а*
N—1
_И, О _
Хех
(к+и) (s+p)\
Если 2о—целое число.
4а.
46. Если 2«—целое число:
X exp -
N J
56. Если 2« и 20 целые числа,
«а. аЛ = ± а*кехр[—i2v2v(tc+u)/Nl
X exp (i2tt«)
! .в
66. ак at ±а
Если 2о—целое чясло:
7. Если 2«, 2о—целые числа,
„о, о _ . аи, о
к a N—2u-*к
7.8
119
П роЗолжскае табл. 3.S?
8.
9.
10.
II'
не
12a
Если
aft, i
к
au. V
к
у
Хехр
. Щн<
*о p-q
1
Сигнал
2«, 2о—целые числа.
4 ж ' ~ N—Zu—K
Af—1
s=0
'~* N
, = — (M— l)/2; so + v -
N—l
/и, n [' V „ sin
*
СДПФ (и, v)
aU. V сд Г j-o^ "« CS"
aU, t)
(«+ )(s+ I
J J Л' sin и (к—п—и+рI i
-0/2) ]
J
itAf (ч — k+k—p)IN]
IVJv'Zj ™" ^Vsinit(n—K+u—P)IN\
п=й
M—l
b V °e ' V a"a'
.V—1
^интерп _ VI \ъпЪ' "b exp Г<2и
к ZJ \ т [
in it (m — K)jN "* I
u,,v, Г -n (K+"c)(
^ —V )
я с ^интерп
(m+ub){sb+vb-vc) 1 1 ^
JV .1
s+fc) 1
J
Номер
строки
табл 3.1
9,10
13
13
120
Продолжение табл. 3.3
Сигнал
И26. Есля ("с— («а + и^)) —Целое
л=0
Х к—п+1 "с — ("a+uu'l е"Р L'
СДПФ (и, о)
гасло:
JV 1
N J
Номер
строки
табл. 3.1
14
на номера к и 5, отличные от @, 1, ..., N—1), (см.
табл. 3.3, строка 2), более общее определение четных и
нечетных последовательностей (табл. 3.3, строка 7), бо-
более общая формула восстановления сигнала по его спек-
спектру, из которой вытекает возможность интерполяции
сигнала с помощью пары преобразований СДПФ (и, v),
ОСДПФ (р, q) с соответственно подобранными и, v, p,
q (табл. 3.3, строка Па, б), более общая теорема
о свертке (табл. 3.3, строка 12а, б) и т. д. Благодаря
этим особенностям некоторые разновидности СДПФ ока-
оказываются удобнее при обработке сигналов, чем ДПФ
(см. ниже, а также § 3.8, 4.6).
Рассмотрим подробнее несколько СДПФ (и, v) чет-
четных сигналов. Стандартному ДПФ соответствует сле-
следующее определение четного сигнала, состоящего из
2N отсчетов (см. табл. 3.3, строка 7):
(ак, к = 0, 1,..., N—U
' k = N; C.77a)
\a2N_K, tc = N+l 2N—1
и следующее определение ак для #<0, k~>2N;
e«+2A.V=^, . C-776)
откуда вытекает, что
121
Подставив C.77) в C.64), получим, что дискретный
спектр такого сигнала определяется выражением
* = 0, 1,..., N C,78)
и обладает такой же симметрией, что и сигнал:
~о.о ~о,о 0 х 2N—X-
~°'° -=а°'°. C.79)
Поэтому обратное преобразование сводится к выраже-
выражению, аналогичному C.78):
a»]- C-80)
Для СДПФ @, !/2)четным является сигнал
!ак,
к,
C.81)
т. е. такой же, как и для ДПФ, или СДПФ @, 0).
Подставив C.81) в C.73а), получим
C.82)
Из-за того, что, вообще говоря а&фО, этот спектр не
вполне симметричен:
«Ь^-.=-^1/а + уУ«.- C-83)
122
Подставив это выражение в C.736), получим обрат-
Ное преобразование
Л/-1
5 = 0
C.84)
При ао=О СДПФ (О, У2) сигнала C.81) становится сим-
симметричным (см. табл. 3.3, строки 2, 7):
пк ' == п2Х-к '
~0 '/2 ~0 '/.
Такой сигнал является четным относительно точки
к — N и нечетным относительно точки к = 0. Его спектр
a°s'1/а являет ся нечетной последовательностью.
Для СДПФ (Уг, Уг) четным относительно точки /с=Л/
является сигнал
а а a (~^ a
нечетный относительно условной точки /с=—Уг. Его пре-
преобразование, как нетрудно показать, имеет вид
°-"/-=wSs-si"['("+'/''«+'/'']- C-87)
к=0
вследствие чего спектр а^''^ обладает тем же типом
симметрии, что и сигнал в C.81):
~'А. 'А ~'А. 'А ~'А. V. ( ueX'f- 'A /Q Яй\
Обратное преобразование и в этом случае аналогично
прямому C.87):
S [
к=0
123
Наконец, СДПФ G2, 0) соответствует четный сигнал
(см. табл. 3.3, строки 2, 7):
~'Л.о ~'/*.о ~ч„о _-•/.. о C.90)
Подставив C.90) в C.71а), получим, что для такого
четного сигнала СДПФ ('/г, 0) сводится к
JV-1
2 Га \{k + 1/2]s1 5—12 #—
L Г n
к-0
к-=0
Полученный по этой формуле дискретный спектр
является нечетным относительно точки s=N и четным
относительно точки s—0:
T'A.O я'/ а'/2'0==()
s 2.V—s ' JV '
Преобразованию C.91) соответствует обратное пре-
преобразование
C.93)
Пара преобразований C.91) и C.93) была предложена
в [79] (см. также [80]), где они названы дискретными
косинусными преобразованиями.
В [79, 80] показано, что базис /cos \%(к+^г) *)\ хо-
хорошо аппроксимирует собственные функции интеграль-
интегрального уравнения B.40) для экспоненциально спадающих
корреляционных функций, благодаря чему он дает луч-
лучшие результаты при кодировании изображений, чем дру-
другие известные базисы.
Полезным свойством СДПФ ('/г, 0) является то, что
при четной симметрии сигнала спектр его обладает не-
нечетной симметрией. Поэтому СДПФ ('/г, 0) удобно
124
использовать для вычисления спектров и свертки сиг-
сигналов при их четном продолжении (см. § 3.8, 4.6).
Аналогично можно рассмотреть СДПФ нечетных сиг-
сигналов. Из них можно выделить СДПФ A, 1) сигнала
вида
пк ~Г~ a2N-2-K'
к = 0, 1,..., N — 2, N, /V+l 2N — 2;
«l;-i=^,!-i=0. C.94)
Нетрудно показать, что преобразование такого сиг-
сигнала сводится к преобразованию вида
(«c+JHi+ill C95)
vm &"•""{ N
которое было предложено в [102] для кодирования изо-
изображений и названо «синусным».
Перейдем теперь к двумерным преобразованиям. Дву-
Двумерные СДПФ (и, v; w, z) так же, как двумерное
ДПФ, можно определить как разделяющиеся на два
одномерных:
^ H; + 'l]}. C.96a)
Им соответствуют обратные преобразования
Л\— 1 Л/а-1
и, о; w. z 1 <Г1 С1 и.
Г=0 5=0
C.966)
Некоторые свойства двумерный СДПФ (и, v; w, z)
приведены в табл. 3.4.
Аналогично определяются двумерные четные и нечет-
нечетные СДПФ. Так, двумерное СДПФ (У2, 0; У2, 0) порож-
125
Таблица 3.4
*
2.
За.
36.
4а.
46.
Свойства
Сигнал
аи v. wr z ... '
г —0 s-0
йи, в; ш, z —qU,v; w,z
K+hNi, 1 + g/Va К, I
X e.\p [—Bч; (Ло + gz)\
{au,p ю.г,.х
^ fBo—1) (<+ы) . Bг—!)(/+
[ Л/, «>
двумерных СДПФ
+
,]
а х
Если 2ц, 2и, 2ш, 2z—целые числа,
аи, v; w,z у
СДПФ
w. и* ш. Z 1
аи, о; и>, г
Nt-\ Л/»—1
V V а ,Х
к=0 I =0
'• J/
аи, о; ш, 2 v/
exp [12-a (u + w)]
При 2о, 2г—целых числах
(„u,v;w,z )•(_ ii2(«+bi)
Ni—2v—r, Ni—2z—s' K '
аи, v; w,
х [<-+^'Н
„и, v; w, г
Ni—r—2v.
Z у
jjp i
Bu — I)Bt)— 1)
)Bг—1) 11
va J/
A,2_s_22 X
126
Продолжени'; табл. 3.4
Сигнал
СДПф
Mi— 1 Af,-1
SV\ Bu, V, w, z e][ f {9k Г (к+ИрХг+И.)
^J f + ^Q» S-^-Sq \ I iVi
n = Om—0
jm+w) (Sh+z—Zq) Л\\ sin %M, (n—K + u — u^jNi
Ni J j / Л/, sin x (я — к+и-ко)/Л',
sinitAfa (m—l+w—wJ/N,^ ^ V (n—к+и—щ) (v0— (M.-D/2) +
(m—/+ai —
Л7.-1 Л/j— I
r = 0s = 0
t{?
n=0m=0
ub. vb; wb.
[ие— (Цд + ub)]; \wc— (a>0 + а>&I—целые числа
дает пару двумерных дискретных косинусных преобра-
преобразований:
в'/.. о; 'Л. о_ 2 \х
Л
I» r'
I ¦ •» i i ¦ • •
Ni—l JVj—1
•/,. о; -А. о L
P» s
127
.. 0; •/„ 0=_1_ГГ1
к=0 /=.0
x ]j] s' <ai/; 1/ai °cos - T'cos • (±ж^> C-97б)
r=0 s=O
которым соответствует следующий тип симметрии сиг-
сигнала:
'/.. 0; >/2. о 'А. 0; 'Л. о . '/*. 0: •/«. ° _'/.. О; V». о
UK, I U2N,—K-i, I UK, 2JV2—1—/ «•2Лг1_1_к> 2.V.-1—h
•/.. 0; »/>. О
a a
и спектра
¦/>. 0; Ч-i. О >Л, 0; >/2, 0 »Д, 0; >Л. О „Vs. 0; >/». О
г, s 2JV,—г. s ' г, 2.Va-s — 2Nl~r,2Ni—s<
Й Г
/а" °=<^1/2' °=«й I.l/i> °=°- C-986)
3.S. Использование дискретных преобразований Фурье
Вычисление свертки. Одно из важнейших примене-
применений дискретных преобразований Фурье — вычисление
с их помощью цифровой свертки сигналов. Как показано
в § 3.2, цифровая реализация интеграла свертки опре-
определяется выражением C.16):
К =
где {ак} — отсчеты сигнала; h/ — усеченные по протяжен-
протяженности отсчеты импульсной реакции линейного инвари-
инвариантного к сдвигу фильтра с усеченной частотной харак-
характеристикой.
J28
С помощью замены переменных и перенумерации от-
отсчетов hi соотношение C 99) можно переписать в виде
л=0
где No — значение п, соответствующее точке /=0 в фор-
формуле C.99); N^Ni+N2+l.
Сравним это выражение с выражением для цикличе-
циклической свертки, получаемой в результате обратного СДПФ
произведения циклически^ сдвинутых СДПФ {5"?.°х} и
{t)"y "</} последовательностей {х } и {у} (табл. 3.3, стро-
s+sy
ки 12 а, б):
Af-l
л=0
где
x
], О.-
, C.103а)
9—42 129
^^[ % } Cл03б)
Нетрудно видеть, что формула C.101) сводится
к C.100) цифровой свертки, если заменить в ней
«у) (Stf+^V — Vc
N0 = uc-(ux + uy) C.104)
и считать, что ак = л?нтерл продолжено на значения а:,
меньшие нуля и большие УУ — 1, по следующему правилу,
вытекающему из C.102):
C.105)
Таким образом, при вычислении свертки с помощью
дискретных преобразований Фурье имеется та же проб-
проблема краевых эффектов, которая была рассмотрена
в § 3.5, но здесь способ продолжения сигнала определен
выбором параметра vc обратного СДПФ.
При использовании дискретных преобразований
Фурье необходимо учитывать, что наиболее целесооб-
целесообразно вычислять их с помощью алгоритмов быстрого
преобразования Фурье БПФ (см. гл. 4). Это налагает
определенные ограничения на количество отсчетов сиг-
сигналов N. Обычно выбирают это число равным целой
степени двух, что соответствует наиболее экономичным
алгоритмам БПФ. Если фактически имеющееся количе-
количество отсчетов не целая степень двух, то сигнал дополня-
дополняют с учетом закона периодического продолжения
C.105) до ближайшего такого количества отсчетов так,
чтобы на краях новой продолженной последовательно-
последовательности не было разрывов сигнала. Хорошие результаты
получаются при определении недостающих отсчетов ли-
линейной интерполяцией между крайними отсчетами пе-
периодически продолженной последовательности. Этот спо-
способ дополнения последовательности иллюстрируется на
рис. 3.5 для случая простого периодического продолже-
продолжения (как на рис. 3.3,в), соответствующего стандартно-
стандартному ДПФ.
130
Количество дополнительных отсчетов должно быть
не меньше количества ненулевых отсчетов импульсной
реакции %. Если это не так, последовательность сигнала
с найденными дополнительными отсчетами нужно чет-
четным образом дополнить до двойной длины и далее ра-
работать с этой удвоенной последовательностью. До такой
же длины нужно дополнять нулями последователь-
последовательность \ц.
Т
I I
I I
I I
Исходная
послеВодательность
'^Дополнительные
отсчеты
т Т i
i i i
-L-v I I
I I
I I
о 1 г з ч- 5 б 7
Рис. 3.5.
Следует отметить, что даже если длина исходной по-
последовательности сигнала — целая степень двух, то при
фильтрации, вообще говоря, всегда целесообразно до-
дополнять ее четным образом до двойной длины во избе-
избежание краевых эффектов из-за периодического продол-
продолжения последовательностей при их свертке с помощью
ДПФ. При использовании СДПФ A/2, 0) дополнитель-
дополнительных затрат времени из-за удвоения длины последова-
последовательности практически нетрудно избежать, применяя
совмещенные преобразования (см. § 4.6).
Если количество ненулевых отсчетов импульсной ре-
реакции фильтра hi намного меньше количества отсчетов
сигнала, свертку сигнала с этой импульсной реакцией
быстрее можно вычислить не для всего сигнала сразу,
а по частям, разбивая исходную последовательность сиг-
сигнала на подпоследовательности. При этом вопрос о до-
доопределении сигнала возникает только для крайних
подпоследовательностей — первой и последней. Что ка-
касается остальных подпоследовательностей, то их нужно
выбирать либо с перекрытием на количество ненулевых
отсчетов импульсной реакции фильтра, а при стыковке
результатов свертки лишние отсчеты (на половину дли-
длины перекрытия с каждой стороны) отбрасывать, либо
дополнять последовательности по краям нулями на двой-
двойную длину импульсной реакции, а при стыковке резуль-
результатов свертки складывать перекрывающиеся участ-
участки [16].
9* 131
Когда количество отсчетов импульсной реакции
фильтра абсолютно мало или когда искомый фильтр
может быть представлен как рекурсивный, использова-
использование ДПФ для вычисления свертки может оказаться не-
нецелесообразным из-за низкой скорости вычислений. Точ-
Точные количественные соотношения, позволяющие выяс-
выяснить целесообразность использования ДПФ для вычисле-
вычисления свертки, зависят от типа используемого процессе-
ра [16].
Все сказанное выше можно отнести и к двумерному
случаю, не забывая при этом о двумерном доопределе-
доопределении сигналов.
В заключение отметим, что, как следует из C.102),
СДПФ могут использоваться для получения отсчетов
свертки, расположенных в произвольном месте между
заданными отсчетами сигналов. Это связано с возмож-
возможностью интерполяции сигналов с помощью СДПФ, рас-
рассмотренной ниже.
Интерполяция сигналов. Дискретные преобразования
Фурье являются удобным средством для нахождения
незаданных промежуточных (т. е. расположенных меж-
между заданными) отсчетов сигналов по его заданным от-
отсчетам (интерполяции сигналов). Оптимальная интер-
интерполяция непрерывных сигналов, для которых справед-
справедлива теорема отсчетов, определяется ею:
оо
а(к-\-х)= 2 ап sine [к (к —п-{-%)]. C.106)
п=—оо
Для последовательностей конечной длины это соот-
соотношение можно аппроксимировать с помощью пары пре-
преобразований СДПФ и ОСДПФ. Для СДПФ (и, v) и
ОСДПФ (р, q) последовательности {ан}, к=0, 1, ...
..., N—1, имеем (табл. 3.3, строка 11а)
s=0
= 5] |g,,expja»(>> + g)(* + p ч)]у
л=0
^У sin [пМ {к — п — и + p)/N\ w
: (к — п — и + p)/N] ^
132
Если выбрать
q={M—\)j2, so+v—q=0, C.108)
то
Л'-l
sonp, qiu, v Cl . sin
it.
'« ?j n Nsin{[n(K — n+(p — u)]/N} ¦
/1=0
Эту формулу можно рассматривать как дискретный
аналог C.106) при х=(р—и). При нечетном N следует
полагать M=N. Если, как обычно, при использовании
алгоритмов БПФ N — четное число, следует выбирать
M=N—1, т. е. при выполнении обратного преобразова-
преобразования для последовательности длины N последний
(N—1)-й коэффициент Фурье а^_°, полагать равным
нулю.
Как и в случае свертки сигналов с помощью дискрет-
дискретных преобразований Фурье, интерполяция сигналов по
формуле C.109) сопряжена со значительными ошибками
на краях последовательности. Для уменьшения этих
ошибок целесообразно четным образом продолжить ин-
интерполируемую последовательность.
Интерполяцию последовательностей можно произво-
производить также с помощью стандартного ДПФ, симметрично
дополняя спектр сигнала нулями до длины, во столько
раз превышающей длину исходной последовательности,
сколько требуется дополнительных отсчетов на один от-
отсчет исходного сигнала (см. табл. 3.1, строки 18,а, б).
Однако использование стандартного ДПФ менее эконо-
экономично в отношении времени вычислений и затрат памя-
памяти, чем СДПФ. Кроме того, полученные с помощью стан-
стандартного ДПФ дополнительные отсчеты эквидистантны,
тогда как с помощью СДПФ можно в принципе полу-
получить промежуточные отсчеты с произвольным смещени-
смещением относительно исходных.
Кроме описанных применений для свертки и интерпо-
интерполяции сигналов, дискретные преобразования Фурье ис-
используются для кодирования (см. § 2.11), а также для
оценки спектров Фурье и корреляционных функций сиг-
сигналов и изображений (см. гл. 5).
133
3.9. Преобразование Уолша и родственные ему
Подобно дискретному преобразованию Фурье можно
рассматривать дискретное преобразование Уолша как
дискретный аналог непрерывного преобразования сиг-
сигнала по базису, составленному из функций Уолша. Су-
Существует три версии этого преобразования, отличающие-
отличающиеся способом упорядочивания базисных функций, состав-
составляющих ядро преобразования: преобразование Уолша —
Адамара, преобразование Пэли и преобразование Уол-
Уолша. Все они определены на последовательностях, коли-
количество членов которых равно целой степени 2.
Начнем с преобразования Уолша. Выше уже приво-
приводилось определение функций Уолша (§ 1.3). Как и ди-
дискретное преобразование Фурье, дискретное преобразо-
преобразование Уолша строится как преобразование последова-
последовательности отсчетов сигнала по базису из отсчетов функций
Уолша, взятых в дискретной последовательности точек:
JV—I
as=2aKwals(K). C.110)
Пусть количество отсчетов сигналов N равно 2П, к=0,
1, ..., 2™—1. Таково же количество базисных функций:
s=0, 1, ..., 2"—1. Тогда, пользуясь формулой A.46),
значение базисной функции Уолша wal^K) можно запи-
записать как *)
n-i г
^-l)/=0 ' (ЗЛИ)
где srn_{_.—разряды кода Грея номера функции s, взя-
взятые в инверсном порядке (т. е. читаемые слева напра-
направо); к, — разряды двоичного кода номера отсчета.
*' Отметим, что в формуле C.111) нумерация двоичных разря-
разрядов отлична от той, которая использовалась в формуле A.49), по-
поскольку в ней к и s — целые числа, а разряды их двоичного пред-
представления нумеруются величиной / справа налево. В формуле A.46)
? — аргумент функции Уолша — был числом, меньшим единицы.
Инверсия порядка нумерации разрядов аргумента при переходе от
формулы A.49) к C.111) потребовала инверсии нумерации разря-
разрядов кода Грея номера функции.
134
Подставив C.111) в C.110), получим
л-1 Г
S ^(-])/" • (ЗЛ12)
Поскольку
суммирование в C.112) по к можно выполнить как мно-
многомерное ПО Kj."
1 Г
1"^ ¦-• ~D *¦',
J|Vi ,.(-./"-•. C.1,4,
Такое представление является основой построения алго-
алгоритмов быстрых преобразований Уолша (см. гл. 4).
Формула обратного преобразования Уолша совпада-
совпадает с формулой прямого преобразования C.106):
• (ЗЛ15>
Как следует из формулы C.111), функции Уолша
в преобразовании Уолша упорядочены в соответствии
с двоично-инвертированными (т. е. читаемыми в обрат-
обратном порядке) кодами Грея их номера. Если вспомнить,
что функции Уолша порождаются функциями Раде-
махера, то смысл такого упорядочения в том, что каж-
каждая следующая по номеру функция Уолша отличается
от предыдущей добавлением или изъятием только одной
функции Радемахера.
Можно упорядочить те же фу-нкции просто по их дво-
двоичным номерам. Преобразование по таким функциям
72-1
K) = V=r(-l)l=° C.116)
135
носит название преобразования Уолша—Адамара (в не-
некоторых источниках — преобразование Адамара или
BIFOR-преобразование [80])
2Л—1 VJ s,k
"I'J
at(—\)i=a ¦ C.117)
=o
Способ упорядочения базисных функций определяет-
определяется только соображениями удобства, так как независимо
от нумерации каждый коэффициент преобразования со-
соответствует своей базисной функции из одного и того
же множества функций. Обычно удобно связывать по-
порядок базисных функций со сходимостью представления
по ним сигналов, считая, что каждый старший по но-
номеру коэффициент представления, соответствующий
старшей по номеру базисной функции, вносит меньший
вклад в -сигнал. С этой точки зрения иногда оказывает-
оказывается лучше упорядочение базисных функций Уолша в со-
соответствии с двоично-инвертированным двоичным ко-
кодом. Такое упорядочение было введено Пэли [57]:
72-1
, 2 sn-i-\Ki
C.118)
Описанные дискретные преобразования могут быть
представлены в матричной форме как умножение мат-
матрицы-столбца исходной последовательности а на матри-
матрицу преобразования. В результате получается матрица-
столбец преобразования а:
a = HAD2«a, C.119a)
a, C.1196)
, C.119в)
где HAD „, WAL „, PAL n — матрицы преобразования
Уолша, в которых строки —базисные функции — опреде-
определяются C.116, 3.111 и 3.118) соответственно.
136
Например, матрицы HAD ., WAD », PAL 3 таковы:
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
—1
1
—1
1
—1
1
—1
1
1
1
1
—1
—1
—1
—1
1
1
1
1
—1
—1
—1
—1
1
1
—1
—1
1
1
—1
— 1
1
г
—1
—1
—1
—1
1
1
1
1
—1
—1
1
1
1
—1
1
]
—1
1
1
—1
—1
1
1
1
—1
[
1
1
—1
1
1
1
—1
—1
—1
—1
1
1
1
1
1
1
1
—1
—1
—1
1
—1
—1
1
1
1
—1
1
1
—1
1
1
1
—1
1
—1
1
—1
1
—Г
]
l
—i
l
l
—i
—i
l
—i
l
l
j
l
—i
l
—i
—l
l
j
l
l
l
—i
—i
j
—i
l
l
l
—i
l
—i
_i
l
—i
l
l
—i
—i
l
l
i
—i
l
r
—1
1
1
—1
1
1
1
1-
—1
1
—1
1
—1
1
—1_
1-
—1
—1
1
—1
1
1
-1
0
7
3
4
Г
6
2
5
0
1
2
3
4'
5
6
7
0
1
3
2
7
6
4
5
C.120a)
C.1205)
C.120b)
Справа от каждой матрицы в C.120) указано число
перемен знака в соответствующей строке матрицы. Срав-
Сравнивая эти данные, можно видеть, что строки матрицы
Уолша WAL „ упорядочены по числу перемен знака или
так называемой «частости».
Матрицы преобразований Уолша являются симмет-
симметрическими, т. е. не меняющимися при транспонировании,
и ортогональными, так как они обратны самим себе.
Таким образом, преобразования Уолша, так же как
и ДПФ, относятся к классу унитарных преобразований
(для действительных матриц, какими являются матри-
137
цы преобразований Уолша, понятия унитарности и орто-
ортогональности совпадают). %
Матрицы WAL и PAL можно свести к матрице Ада-
мара HAD; если домножить их на соответствующие мат-
матрицы перестановки, содержащие единицу на том элемен-
элементе строки s, чей номер к совпадает с номером элемента
переставляемой последовательности, который должен
перейти с номера к на s. При умножении матрицы-
столбца на такие матрицы происходит перестановка ее
элементов, при умножении матрицы на матрицы пере-
перестановки происходит перестановка ее строк.
Пусть Мипв—матрица двоичной инверсии; М'л'4' —
матрица перестановки кода Грея в простой двоичный код.
Тогда
, C.121а)
WAL2, = M2r^npM™BHAD2«. C.1216)
Поскольку матрица Уолша-Пэли, матрица двоичной ин-
инверсии и матрица Адамара являются симметрическими,
то справедливо также соотношение
PAL^HAD^M™. C.121b)
Важной особенностью матрицы Адамара является то,
что она принадлежит к так называемым кронекеров-
ским матрицам ([77]), т. е. может быть представлена
в виде кронекеровского (прямого) произведения матриц
Адамара h2 =
второго порядка*):
.1
^flp h2 = h2xh2x...xh2=(h2)N, C.122)
где При знак х — обозначения кронекеровского произ-
/ = 0
ведения п и двух матриц соответственно; [п\ — кронеке-
ровское возведение в степень п.
*' Кронекеровское произведение двух матриц определяется как
матрица, составленная из подматриц, равных произведению элемен-
элементов первой из перемножаемых матриц на вторую. Подробнее о свой-
свойствах кронекеровского произведения матриц см., например, в [57],
а также в § 4.1. Здесь и далее следует отличать знак кронекеров-
кронекеровского произведения х от знака обычного умножения Х-
138
Замечательной особенностью кронекеровских матриц
является то, что они представимы (факторизуются)
в виде произведения слабо заполненных матриц, т. е. мат-
матриц, большинство элементов которых равно нулю. Бла-
Благодаря этому при умножении на кронекеровскую мат-
матрицу требуется выполнить значительно меньше опера-
операций, чем обычно при матричном умножении (см. гл. 4).
Поскольку двумерные функции Уолша определяют-
определяются как произведение одномерных, от одномерных пре-
преобразований Уолша нетрудно перейти к двумерным.
Проще всего их записывать как произведение матриц,
например:
C.123)
где а „ и a n — двумерные последовательности (матрицы
размером 2"X2'2-
3.10. Преобразование Хаара
Дискретное преобразование Хаара строится как пре-
преобразование последовательности отсчетов сигнала {ак},
к=0, 1, ..., N—-1, количество которых выбирается рав-
равным целой степени 2, по базису har«(/c), составленному
из отсчетов функций Хаара A.51):
«5=2а>гГм- (ЗЛ24)
к=0
Пусть N = 2". Тогда согласно A.51)
har<"> (к) = 2^-пI2 (- 1) к-с-< 8 (M(Wc0 Smod 2Sc),
C.125)
где sc — номер старшего равного единице разряда в дво-
двоичном представлении числа s ; [#Jn_s —двоичное число,
составленное из sc старших разрядов двоичного числа
к\ 0— знак поразрядного сложения по модулю 2;
s _— двоичное число, составленное из sc млад-
139
ших двоичных разрядов 5; б (...) — дельта-функция
(символ) Кронекера *).
В матричной форме преобразование Хаара описы-
описывается матрицей Хаара, строки которой составлены из
функций har(n) (к):
HAR =
C.126)
Например, матрица HAkL выглядит следующим сбра-
зом:
1
:_21/2_21/2 0 0 0 0
0 Q 2I/2 2l/2 _2)/2 _2l/2
| 2I/2 21
HA9 =—— i 0 о
23 VT
2—2 0 0 0 0 0
0 0 2—200 0
0 0 0 0 2—20
0 0 0 0 0 0 2
0
0
0
—2
C.127)
Матрицы Хаара ортогональны, но не симметричны.
В отличие от матрицы Адам ара они не являются кроне-
керовскими, но могут быть представлены в виде суммы
кронекеровских матриц. Действительно, матрицы Хаара
л-го порядка могут быть разбиты на (п+1) подматрицу
кронекеровского типа в соответствии с номером стар-
старшего равного единице разряда номера строки, как по-
показано в формуле C.127) штриховыми линиями. Опреде-
Определим следующие пять элементарных матриц:
U\ = [l 1]; и% = [1 — 1];
Hi >\-
C.128)
*) Порядок нумерации разрядов в двоичном представлении чис-
числа к в формуле C.125)—справа налево — обратен тому, который
был принят в формуле A.51).
104
С помощью кронекеровских произведений этих эле-
элементарных матриц матрица Хаара может быть записана
следующим образом:
m_l_n/2)i
1=0
C.129)
где (V\)ln-4, (U°2)l"-'l, A,I'-Ч— кронекеровское произ-
произведение (п— i) - и (i — 1)-й соответствующих элементар-
элементарных матриц 8,. — «дополнительная» дельта-функция:
О, / = 0;
@, /
C.130)
Так, например,
+j/2 [\\ х V,х 12х U1, х U°2] 4-2 [V1, х (Is)i2i х U1,]} =
(
1
Т"
о с
1
о с
0 С
0 С
0 С
0 С
-О С
~ 1
0
0
0
0
0
0
_ 0
) 0
1
) 0
0
) 0
) 0
0
) 0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
—1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
-1
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
— 1
0
0
0
0
0
0
1 -
0
0
0
0
0
0
0 _
о-
—1
0
0
0
0
0
0
141
0
0
21/2
0
0
0
0
0
0
0
21/2
0
0
0
0
0
I
г
-o
0
0
0
2
0
0
0
0
0
_2./2
0
0
0
0
0
0
0
0
0
2
0
0
0
0
0
0
0
0
2
0
0
0
0
_2l/2
0
0
0
0
0
0
0
0
0
0
-2
0
0
0
0 •
0
2l/2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2 —2
0
0
0
0
0
2l/2
0
0
0
0
0
0
0
0
0
0
0
2
0
0
0
_21/2
0
0
0
0
o-
0
0
0
a
0
0
2
0
0
0
_2I/2
0
0
0
0
C is;)
3.11. Другие ортогональные преобразования.
Обзор применений
На основе преобразований ДПФ, Уолша—Адамара
и Хаара может быть построен целый ряд других ортого-
ортогональных преобразований. Они могут определяться либо
с помощью кронекеровского произведения, либо в виде
суммы кронекеровских произведений. Например, в [117]
предложено гибридное преобразование Адамара—Ха-
Адамара—Хаара, матрица которого r-го порядка размерности 2п
определяется как
HDHRBr> =
C.132)
В работе [80] дано рекурсивное определение так на-
называемого модифицированного преобразования Адамара
MHAD
MHAD
= V°2xU02 x MHADin_, -f 2("-1)/2(V'2 x.UVXfU1"-'1) [C.133)
и указана его связь с преобразованием Хаара.
142
В [57, 77] рассматривается матрица так называе-
называемого обобщенного преобразования Уолша r-го порядка
размерности 2пт (преобразования по функциям Вилен-
кина — Крестенсона — ВК.Ф), определяемая как г-я кро-
некеровская степень матрицы ДПФ F „:
G(r) /т* \f*1 /О 1 О>1\
= (г „)i '. (о. 1 о4)
В работе [118] описано так называемое /?-преобра-
зование, которое строится на базе преобразования Уол-
Уолша— Адамара путем замены каждой суммы в выра-
выражении C.114) ее абсолютным значением. Это преобра-
преобразование необратимо.
Следует упомянуть также предложенные для коди-
кодирования изображений слэнт-преобразование [115],
«слэнт-Хаар» преобразование [88] и преобразование по
дискретному базису [98].
Можно показать, что большинство используемых
в настоящее время в обработке изображений унитарных
преобразований может быть представлено в виде сумм
кронекеровских произведений элементарных матриц V°2,
V2, U°2, Vl2, Ь матриц перестановки и некоторых дру-
других. Такое представление матриц Хаара, Адамара,
Уолша, Уолша — Пэли, модифицированной матрицы
Адамара, матрицы Адамара — Хаара, матрицы ДПФ,
обобщенной матрицы Уолша показано в табл. 3.5 с ис-
использованием следующих обозначений:
Э д V,XU, '
d, =
[ ' ,А— , 1, C135)
10 е.хрBяК—1) Bп-//2") J'
М™в — матрица перестановки размерности 2l X2', приум-
приумножении которой на вектор происходит перестановка его
элементов в соответствии с двоично-инвертированным ко-
кодом их номера; М^пр — матрица перестановки размерно-
размерности 2*Х2'. осуществляющая нерестановку элементов
вектора в соответствии с обратным кодом Грея их номе-
номера; Пр — кронекеровское произведение i матриц; [i] — i-я
кронекеровская степень матрицы.
143
Преобразование Уолша
X
То
г
1УЛ
"Я.
t
"с
ю
'а
i
X
"с
О
1
II
То
"<
г»
м
X
"<
И
.—
1
ь
-
га
1
X
с
га
X
¦5
а
II
"to
<
a
i
•U
^.
jS
Преобразование
Уолша — Пэли
• ^^
Г
Ml
1
и
r
X
1
С
2-:
'r
a
i
II
<
С
"a1
j
X
X
л
II
.a
Ю
—
*».
X
?
X
i S
?
>
Преобразование
Уолша — Ада мара
>о»
? II
X ^_
ТЗ 7' 2
"Т^ II
О ю
Г "
О
1
li" ? =
а
ы
—- ю
_ "а1 ~^—<
'- 1
х ™
и
С
>
Преобразование
Хаара
X
С
^_
о
С
а
I
to
а
||
_
го
7'
1
З3
•"¦?
1
X
1
><
"О
3
2
г»
«За
¦1
1
(В
"О
о
Ш
Ш X
3 го
в) О
н ел
¦а "8
№
09
со
ел
Продолжение табл. 3.5
§
с? ю
п 1-1 -г
j=0
2 °i
i=0
Q.S.
\о га
О а
я—г ,-_1 _
,1
HDHR<;> = HAD,,,x HAR2«_r = -^г J] 2~ *' (h2)Crl x
¦ (V»2)I'l-r-']x [V1, х (!„)['¦-Чх U\] х (U»2)[«-'--']
si
-е-
¦^жм™ \zj
(S»,)[n-']xj"
S\ x
i> Э tu
!
!i
•э га
cu ш /
о щ o
s "
Это представление создает удобную основу для срав-
сравнения преобразований. Так, сравнивая представления для
матрицы HAR „ и MHAD п, легко «заметить, что они от-
отличаются инверсным порядком следования матриц LI02, U'2
и 12 в каждом слагаемом, матрица MHAD n отличается
от матрицы Адамара HAD n тем, что она строится не на
10—42
145
ii2, а на I2 и т. д. *'. Для всех этих матриц существуют
быстрые алгоритмы умножения их на вектор при выпол-
выполнении преобразования. Этот факт самым непосредствен-
непосредственным образом связан с возможностью представления
матриц в виде сумм кронекеровских матриц (см. гл. 4).
На основе описанных одномерных преобразований
могут быть построены соответствующие двумерные раз-
разделимые преобразования как двойные одномерные:
а=МаМ C.136)
где М — одна из матриц преобразований, описанных вы-
выше; а — двумерный дискретный сигнал; а — его преоб-
преобразование.
Отметим, что все используемые в настоящее время
в цифровой обработке изображений унитарные преоб-
преобразования изображений являются разделимыми, т. е.
выполняются отдельно по столбцам и строкам двумер-
двумерного сигнала. Благодаря этому уменьшается количество
операций, необходимых для их выполнения. Разделимые
преобразования можно также построить, выбрав для
преобразований по строкам и столбцам разные матрицы:
а=М!аМ2. C.137)
Так получаются смешанные преобразования, используе-
используемые в специализированных цифровых устройствах коди-
кодирования изображений (см., например, [78]).
Применения унитарных преобразований в обработ-
обработке изображений можно разбить на три группы:
— кодирование изображений;
— выделение признаков для препарирования и распо-
распознавания изображений;
— обобщенная фильтрация.
Кодирование изображений — основное в настоящее
время применение преобразований (кроме ДПФ). Более
того, некоторые из преобразований (например, слэнт-
преобразование и преобразование по дискретному ли-
линейному базису и др.) были введены специально для
использования при кодировании.
*> Заметим, что матрицы V2 и U2 в кронекеровском произведе-
произведении можно менять местами. Перемена порядка следования матриц
типа V2 в их кроиекеровском произведении соответствует двоичной
инверсии строк результирующей матрицы, перемена порядка следо-
следования матриц типа U2 в их кронекеровском произведении — двоич-
ной-инверсии столбцов.
146
Коэффициенты представления сигнала, полученные
в результате его преобразования, могут рассматривать-
рассматриваться как его признаки и использоваться при препарирова-
препарировании изображений (см. ч. II, гл. 7) и для распознавания.
Примером преобразования, придуманного специальна
для выделения признаков при распознавании, является
/^-преобразование. Применения преобразований для
кодирования и распознавания связаны между собой. Как
правило, преобразования, дающие лучшие результаты
при кодировании, лучше и для выделения признаков.
Использование унитарных преобразований для филь-
фильтрации сигналов основано на обобщении понятия филь-
фильтрации в частотной области дискретного преобразова-
преобразования Фурье. При фильтрации сигналов с использованием
ДПФ выполняется следующее преобразование сигнала:
a^F'H^Fa, C.138)
где а — последовательность исходного сигнала; F — мат-
матрица ДПФ; Hj? — диагональная матрица, состоящая из
коэффициентов ДПФ импульсной реакции требуемого
фильтра; F~l — матрица обратного ДПФ; а — сигнал
после фильтрации.
Если вместо ДПФ при таком преобразовании сигна-
сигнала использовать другое преобразование Т, то матрица
HF, описывающая фильтр, должна быть заменена другой
матрицей, вообще говоря, неднагональной:
а^Т'Н/Га. C.139)
Если надлежащим образом подобрать матрицу Нт, мож-
можно получить тот же результат фильтрации, что и с по-
помощью ДПФ по C.138). Очевидно, что для этого долж-
должно выполняться условие
C.140а)
или
Н г = TF-1 HrFT1 = тр~т HFM.T-F,
C.1406)
где
Mr-F=FT-!, M'-^TF-1 C.140b)
— матрицы перехода от преобразования Т к ДПФ и
наоборот.
10* 147
Такой подход был предложен в [113, 114] для обоб-
обобщения оптимальной линейно%й (винеровской) фильтра-
фильтрации (см. также [80]).
В зависимости от вида преобразования Т и свойств
требуемого фильтра сложность выполнения операции
фильтраций C.139), оцениваемая, скажем, количеством
операций, может меняться. В частности, может ока-
оказаться, что вместо ДПФ выгоднее использовать более
быстрое преобразование Уолша—Адамара несмотря на
большую сложность умножения на недиагональную мат-
матрицу фильтра в этом случае (см. также § 6.5).
Глава 4
АЛГОРИТМЫ ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИИ
4.1. Понятие о быстрых алгоритмах дискретных
ортогональных преобразований
Рассмотренные в предыдущей главе ортогональные
преобразования сигналов описываются общей формулой
к=0
где {ак}, к=0, 1, ..., ./V-—1, — последовательность отсче-
отсчетов сигнала; {<рЛк)} — базисные функции преобразо-
преобразования.
Если выполнять вычисления непосредственно по этой
формуле, то для нахождения всех ./V коэффициентов as
необходимо проделать ./V2 операций умножения и
(N—l)N сложения (в случае ДПФ— умножения и сло-
сложения комплексных чисел). Даже при умеренных значе-
значениях N это количество операций может оказаться очень
большим. Поэтому при цифровой обработке сигналов и
в особенности изображений, задаваемых обычно боль-
большим количеством отсчетов, ДПФ и другие ортогональ-
ортогональные преобразования получили практическое применение
только после изобретения так называемых быстрых алго-
алгоритмов преобразований, для которых число операций
растет с ростом N не быстрее, чем N\og2N.
148
Идея быстрых алгоритмов становится наглядной,
если рассмотреть двумерные разделимые преобразова-
преобразования, базисные функции которых являются произведени-
произведением одномерных базисных функций:
к=0 1=0
Поскольку они сводятся к двум одномерным преобра-
преобразованиям
к-0 1-0
количество операций равно Ar22A/'i-j-A/'2iJ/V2=A/'iA/'2 (Л/1] Н)
вместо {NiN2J операций, которые потребовались, если
бы двумерное преобразование не было разделимым.
Быстрые алгоритмы ортогональных преобразований как
раз основаны на представлении одномерных преобразо-
преобразований в виде разделимых многомерных.
В настоящее время существует обширная литерату-
литература по быстрым алгоритмам (см., например, [11, 16, 57,
67, 74, 77, 80, 91]) и описаны разные подходы к выводу
таких алгоритмов для различных преобразований.
В последующих параграфах представлен единый
подход к выводу быстрых алгоритмов, основанный на
представлении матриц преобразований в виде сумм кро-
некеровских матриц (§ 3.11). Показано, что матрицы
преобразований, размерностью 2™ могут быть фактори-
зованы, т. е. представлены в виде произведения п слабо
заполненных матриц, содержащих максимум два отлич-
отличных от нуля элемента в каждой строке. Получены также
факторизованные представления для матриц перестано-
перестановок и некоторых матриц, связывающих матрицы разных
преобразований между собой. Для этого используются
следующие определения и теоремы матричной алгебры.
Определение 1. Прямой суммой Mi0M2 матриц Mi
и М2 называется клеточная матрица М вида
D.4)
149
Прямая сумма обладает следующими необходимыми
в дальнейшем свойствами:
А,А2 ... Л„ЭВ,В2 ... В„ = (А1фВ1) (А20В2)...(А„0В„);
D.5)
где индекс Т означает транспонирование матрицы.
Определение 2 [4]. Правым прямым (кронекерэвским)
произведением матриц М'1^ и Л1B) называется матрица
М = М(|)хМB), D.7)
r.s p,q' V '
составленная из rxs подматриц, каждая из которых яв-
является произведением соответствующего элемента мат-
матрицы M|1J на матрицу М<2>.
Свойства прямого произведения матриц:
(А+В)хС=АхС+ВхС; D.8)
Ах(В+С)=АхВ+АхС; D.9)
(А,Аа ... А„)х(В!В2 ... Вп) =
= (А,хВ1)(А2хВ2) ... (А„хВ„); D.10а)
(AixA2x ... хА„)(В!хВ2х ... хВ„) =
= (А1В,)х(А2В2)х ... х(А„В„). D.106)
Теорема 1. Если матрица М может быть разделена
горизонтальной чертой на две подматрицы, каждая из
которых является произведением некоторых двух мат-
матриц
Г мA) м<2> 1
D.11)
'"V.s "ls,q
iylC) ]И(^) I *
и ,v v,q I
ТО
Теорема 2. Если матрица М может быть разделена
горизонтальной чертой на две подматрицы, каждая из
которых является прямым (кронекеровским) произве-
150
ml...}*
„(О
Mr.s
a
a)
0
"u,v
r el g{
\ V
У.
qs
В)
... I \ I
... i\ i
—4- -k—i
I N. I
ps
\
м(г) х г(а)'
7 О
Г О
О 1
О 1
Рис. 4.1.
дением некоторой матрицы-строки на некоторую мат-
матрицу
то
'¦"х r-s
GB)xMB' I'
1.8 p.'l J
-^—4
G x I I'
D.13)
где Is, \q — единичные матрицы размерности sXs и
qXq соответственно.
Теорема 3. Кронекеровская матрица
М = МA)хМB) D.15)
r,s q,p ч '
может быть предствлена в виде произведения двух сла-
слабо заполненных матриц *>.
M = (M^>xI9)(IsxM?>). D.16)
Теорема 4.
Гм<;.>хо(°П Го!">хм<'» I Г1,хо1°П
[M««iiO|»iJ-[oifixM№j [l.xOi:iJ« (- П
где
Доказать эти теоремы можно прямой проверкой,
пользуясь схемами умножения матриц, показанными на
рис. 4.1 (а — для теоремы 1, б — для теоремы 2, в — для
теоремы 3, г — для теоремы 4).
4.2. Алгоритм быстрого преобразования Хаара
Согласно табл. 3.5 матрица преобразования Хаара
может быть записана так:
^L- J] B<''-I)/2)T<- (V\)[»-'l x [V, х (I»I'
i-4
k— j \ ¦ 2/ "I1 2" \/
xU1,]*^^)!"-'!. D.19)
*» Эта теорема для квадратных матриц сформулирована и до-
доказана в [91].
152
Пользуясь теоремами § 4.1, преобразуем эту матри-
матрицу в произведение слабо заполненных матриц.
Прежде всего заметим, что из суммы матриц D.19)
можно вынести диагональную матрицу
где /сс — номер старшего равного единице разряда в дво-
двоичном представлении номера строки матрицы DH*R*>:
п—\
и- V* и- 9' (А 9\\
так что
1 = 0
xU12]5'x(U(J)In-'l. D.22)
Для упрощения дальнейших выкладок обе значим сум-
сумму в правой части D.22) HAR „. Выделим в этой сумме
последнее слагаемое с номером i = it и преобразуем ос-
оставшуюся сумму:
х U1,M; x(U#,)t"-'-'1 I х U°2 -4- V'2x(I2)I"" '1 х 1Гг =
-V^xHA^^xU^ + V'.x^P-'lxU1,
HARob-ixU°
*' Можно также представить матрицу D ^nR в виде прямой сум-
п—1 п—¦'
п
мы DH«R= 1 @ Е 21:2\ I, где 2 —знак прямой суммы п матриц.
2 /=о 2 г=о
153
Воспользовавшись теоремой 3 § 4.1 для кронекеров-
ских подматриц в D.27) и заменив AгI"-'] = 1 „_,, полу-
получим
и далее по теореме 1 § 4.1
D.25)
Формула D.25) является рекуррентным выражением
матрицы Хаара. Воспользовавшись ею для выражения
матрицы HARn_, через матрицу HAR „_2 получим
2n_xu,2 ©
I2«-.xU»2
,«-. X
X
'2"-хи°г
I D.26)
Для дальнейших преобразований используем свойство
D.5) прямой суммы матриц, из которого в данном слу-
случае вытекает, что
2п~2^±у 2п~
i2«-2xU»2
e.
D.27)
или, поскольку 12„.2 0 \n^ = I3 2„.г,
I Г Гп_гхи°, "I
HAR „= [HAR „ 2 0 I . J -^ гут- 0
ell ',«-! X U 2
I I _f
*оЛ-1 III v 111
2 V-1 2
J L J
D.28)
154
Поступая и далее таким же образом, окончательно
получаем
[[^] ,]. D.29)
Г
П [[^
Таким образом, матрица Хаара представлена в ви-
виде произведения п слабо заполненных матриц. В каждой
1-й матрице такого произведения 2i+1 строк с только
двумя отличными от нуля элементами и 2™—2i+1 строк
а7
О о67
Рис. 4.2.
с только одним отличным от нуля элементом. Поэтому
умножение матрицы-столбца на такую матрицу требует
2i+1 операций сложения или вычитания. Общее число
операций сложения — вычитания, очевидно, равно
ЛГС
2/+1 = 2 Bя — 1).
D.30)
Кроме того, умножение на диагональную матрицу
155
)^ требует 2" операций умножения*'. Таким об-
образом, количество операций, требуемых для быстрого
преобразования Хаара, пропорционально длине преобра-
преобразуемой последовательности. Быстрое преобразование Ха-
Хаара —• самое быстрое из используемых.
Для наглядности алгоритмы быстрых преобразова-
преобразований удобно представлять в виде графа, в узлах которого
располагаются исходные отсчеты сигнала и результаты
вычислений, а ребра связывают суммируемые величины
и результат суммирования. Числа при ребрах указыва-
указывают коэффициент, на который умножается величина в уз-
узле, из которого исходит данное ребро (единица не по-
показывается). Такой граф быстрого преобразования Ха-
Хаара, соответствующий формуле D.29), показан на
рис. 4.2 для и=3.
Обратное преобразование Хаара можно представить
как произведение транспонированной матрицы Хаара
на матрицу-столбец:
HAR-' = (HARan)r. D.31)
Поскольку для транспонирования произведения мат-
матриц выполняется соотношение [4]
(M,M2 ... М/^М^М^ ... М2ГМ|\ D.32)
а для прямой суммы — соотношение D.6), то
D.33)
4.3. Алгоритмы быстрых преобразований Уолша
(БПУ)
Матрица Адамара — кронекеровская матрица, и,
пользуясь теоремой 3 § 4.1, для нее нетрудно получить
п—\
^П^-'-^МУ- D-34)
»=о
*' Половина из лих является умножением на 2 в целой степени,
т. е. может быть заменена сдвигами — более быстрой операцией
в арифметических устройствах цифровых процессоров, чем умно-
умножение.
156
Граф преобразования, соответствующий D.34), по-
показан на. рис. 4.3 для /2=3. Его важной особенностью по
сравнению, скажем, с графом быстрого преобразования
Хаара, показанным на рис. 4.2, является то, что он дает
так называемое преобразование «с замещением»: на
каждом этапе преобразования вычисления производятся
над парами величин и результат помещается в узлы
на том же уровне, что и исходные величины. Так как
узлам на графе соответствуют ячейки памяти процессо-
процессора, то это значит, что на вычисление не требуется до-
дополнительная емкость памяти.
Матрица Адамара является симметрической, т. е. не
изменяется при транспонировании. Матрицы-сомножители
(I „_,_; xhaxl;) в ее Тракторизованном представлении
D.34) также являются симметрическими. Поэтому,
транспонировав матрицы в формуле D.34), можно по-
получить обращенный вариант факторизованного пред-
представления:
<=0
Матрица преобразования Уолша — Пэли PAL „ может
быть получена умножением матрицы HAD „ на матрицу
двоичной инверсии [см. C.121 а)], т. е.
п— 1
PAL2*= ~?jT М2Т П (\п-1-, х h2 х 12,). D.36)
1 = 0
С другой стороны, из представления матрицы PAL „ в ви-
виде суммы кронекеровских матриц в табл. 3.5
( = 0
xB'-1/2PAL2,._1) x U1,] 6'*x(lf2)l"-4 D.37)
можно, подобно тому, как это было сделано в § 4.2 для
матрицы Хаара, получить факторизовэнное представление
157
Рис. 4.3.
of*
Рис. 4.4.
матрицы PAL „, не требующее двоичной инверсии на по-
последней стадии преобразования (сравним с D.34)):
п—1 г i . „ 110 -\ \
PAL =
Граф, соответствующий такому представлению для
я=3, показан на рис. 4.4 (см. для сравнения рис. 4.2).
Формула D.37) дает возможность получить фактори-
зованное представление матрицы двоичной инверсии.
Действительно, обозначив
D.37) аналогично с D.23) — D.25) можно переписать
так:
1PAL,n-iX иол
-^ . D.39)
Применим теперь теорему 4 из § 4.1:
\[^^\- D40)
11о определению прямого произведения матриц матрицу
PALn_j можно вынести из первой матрицы D.40). По-
Поскольку остающаяся после этого матрица \гтг\ согласно
Lu 2J
C.135) равна h2, то
'2n-ixG°2 1
12«-,х0>2 J
или по теореме 3 из § 4.1
""~lX 2 ' D.42)
Эта формула является рекуррентным выражением для
матрицы PAL n (сравним с D.25)). Воспользовавшись ею
159
и преобразуя с помощью D.10) получающееся на t'-м шаге
итерации произведение матриц I (- x PAL „_г
2<- х РАЦ„_, = I2,y2; x (Kxl^.,.,) (I, хРАЬ2„_,.(.) X
получим
rt —1 П-l
D.44)
Сравнив это выражение с D.35) и C.121в), можно за-
заключить, что второе произведение в D.44) является фак-
торизованным представлением матрицы двоичной ин-
инверсии:
Граф двоичной инверсии в соответствии с D.45) по-
показан на рис. 4.5 для я=3. Такое факторизованное пред-
представление матрицы двоичной инверсии можно использо-
использовать в тех случаях, когда в системе команд процессора
нет удобных команд работы с отдельными двоичными
разрядами, которые необходимы для непосредственной
организации перестановок.
Это же соображение относится к матрице М2„ пере-
перестановки из кода Грея в простой двоичный код, необхо-
необходимой для перехода от матрицы Адамара к матрице
Уолша:
^ j ™ Д ft*-'-» x h>х ^ >•
г=о
160
"i/O
"oO-
О"}
a7
Рис. 4.7.
п-чг
Найдем факторизованиый вид матрицы Мг(,пр из представления
в виде суммы кроиекеровских матриц по табл. 3.5:
(У,)'—'I х IV». х ((I,)"-" X
1=0
XB('-1)/2WAL2<_,))xlIs]
D.47)
Для этого введем обозначения WAL „ = 2"/2 WAL „, 12<
L „
= (Ij)''' и запишем
Г"-1
= V2x 2 (V,)I"-I-'1x[V
., WALji-.jx
х UM^-x (U*,)!»-1-'] ] х
WAT2n_,
V'2xI2n_1WAL2,,_1xUV
Г WALjb.^US "I
= L12«-lWSl2'-lXU1' J
D.48)
Далее по теоремам 1 и З из § 4.1 имеем
Г WAL^.HU-.xU»,)
"-11 [
] * __ L
[_ 2" * J
Г I,n-,xU«, 1
», i e v-.] (i, x wal2«. ,)
D.49)
162
Формула D.49) является рекуррентным выражением матриЦы
\УАЬ2„ (сравним с D.25)). Преобразуя D.49) так же, как D.43),
D.44), получаем
л-1
=-^7a- П (V х [12»-'-< ©V'-']) X
п-1
_
=II(VX iI2"-«-^®\»-'-'i)PALf«- <4-50)
Учитывая связь между матрицами WAL ., и PAL^ по формулам
C.121), можно заключить, что
п—1
X л 2 2 2 2"
/ = 0
Таким образом, формула D.51) дает факторизованноэ представление
матрицы перестановки Л1\^пр. Соответствующий граф перестановки
показан на рис. 4.6 для л = 3.
Матрицу Мг^пр можно совместить с матрицами, составляющими
факторизованиое представление матрицы PAL „, и получить фактори-
зованное представление матрицы преобразования Уолша, не требую-
требующее перестановок:
Г 1а<'и>> 1-
D.52)
Граф преобразования Уолша, соответствующий. D.52), показан
на рнс. 4.7 для п=3.
11* 163
4.4. Алгоритм быстрого дискретного преобразования
Фурье (БПФ)
В соответствии с табл. 3.5 матрица ДПФ F2n может
быть записана так:
x 2 MT , Fa'—'^*P d;+i J D.53)
2'—' /=0 /
или
pHHB__v4 (S^)'"^ S'jXF™^_, xnpd/+j I » D.54)
,-=o \ l=o j
где обозначено
ИНВ л//2г,ИНВ СкЧ^-ТкЛ ИНВг, || гп
2* 2( 2* 2* v '
Выделим в D.54) последнее слагаемое и преобразуем
оставшуюся сумму.
(""' *-*] / 1 -инв !~2 \Tl)
С -1 g d/+. = S°'x C-. + S', x F™B_, g d/+2 =
'2X^L' D.56)
[¦ I I». y"F"hb
p/+2
Применим теперь теорему 2 из §4.1:
U°8xl2rt-i
164
Или благодаря D.5),
^4e-] . D.58)
По определению прямого произведения матриц подмат-
подматрицу Igrc-i в последнем сомножителе можно вынести за
знак матрицы:
|J h.xl^-a). D.59)
Подставив теперь сюда вместо F""^_, аналогичную фор-
формулу с заменой п на п — 1, получим
x
X (h, x \2ПЛ L, ф ГГ^2 d/+1j (h, x 12Л_,) D.60)
или, представив первую слева матрицу 12 в кронекеров-
ском произведении в фигурных скобках D.60) в виде
12=121212 и воспользовавшись D.10), запишем
(
i
X(I2xh2xI2n_2) [12П_,0Пр d/+2l (haxl2n_,). D.61)
Продолжая подобные преобразования с матрицами
Р"п-2' ^2^-з и т- Д-> окончательно получаем следующее фак-
торизованное представление матрицы ~F"^:
X (I2«_i_i x ha x I2<) D.62)
165
и соответственно матрицы F2n-
-*-1 х
X (Ijb-i-* x h, x I2,). D.63)
Таким образом, матрица ДПФ F2n может быть пред-
представлена в виде 2я матриц: п диагональных матриц вида
/ Г '"' ~1\
A2Л_1_,х 12гфПрA/+г j ил матриц вида A2„_1_,-х h2 x
х 12,), содержащих только по два ненулевых элемента
в каждой строке. Умножение матрицы-столбца на t-ю
диагональную матрицу требует 2п~1~г B*—1) операций
умножения (столько отличных от единицы чисел в диа-
диагонали этой матрицы). Поэтому общее количество опе-
операций умножения, необходимых при умножении на мат-
матрицу ДПФ, равно
л-1
ЛГум=2 2п-'-'B'— 1) = (л — 2Jя-'+1. D.64)
*=о
Умножение на t-ю матрицу (I2n_i_;xh2xl2i) требует
выполнения 2П операций сложения (по одной на каждую
строку матрицы), т. е. общее количество Л^Сл операций
сложения на всю матрицу равно
#сл=п2». D.65)
Если же не производить факторизацию матрицы
ДПФ, то для вычисления ДПФ требуется выполнить
2ПB"—1) операций умножения и сложения. Граф пре-
преобразования, соответствующий D.63) для л=3, показан
на рис. 4.8. Числа в узлах графа являются показателями
степени экспоненты expBit|/—1/8).
Сравнив D.63) с D.34), а также рис. 4.8 с 4.3, не-
нетрудно заметить сходство между факторизованными
представлениями матрицы Адамара и матрицы ДПФ со
строками, переставленными по закону двоичной инвер-
инверсии: они отличаются только наличием в каждом сомно-
166
жителе в D.63) диагональной матрицы. Транспонировав
D.63), можно получить представление матрицы ДПФ
л-1
1=0
аналогичное D.35).
<4-66>
Ot/7
Рис. 4.8.
Отмеченную аналогию можно обнаружить для всего
многообразия представлений ДПФ и преобразования
Уолша — Адамара, которые можно построить из D.63)
и D.34), применяя правила матричной алгебры. Некото-
Некоторые примеры таких преобразований для матрицы ДПФ
даны в [74]. Эта аналогия говорит также о том, что
любой алгоритм БПУ можно превратить в алгоритм
БПФ и наоборот, добавив или соответственно изъяв диа-
диагональные матрицы, содержащие комплексные экспонен-
экспоненциальные множители.
167
Описанные в этом параграфе алгоритмы БПФ требу-
требуют либо двоичной инверсии цррядка отсчетов спектра,
как в D.63), либо двоичной инверсии элементов исход-
исходной преобразуемой последовательности. Как и в случае
матрицы PAL „ , можно построить алгоритм, не тре-
требующий двоичной инверсии, но при этом нельзя будет
производить преобразование с замещением, как по
D.63) (см. также рис. 4.8). Следует отметить, что во
многих задачах обработки изображений, особенно когда
ДПФ используется для фильтрации сигналов в частот-
частотной области, двоичная инверсия отсчетов дискретного
спектра после БПФ не обязательна, так как после пря-
прямого преобразования в этих случаях следует обратное
преобразование, которое может выполняться по схеме
D.66).
4.5. Обзор других быстрых алгоритмов.
Особенности двумерных преобразований
Используя подход, описанный в предыдущих параграфах, можно
получить факторизованное представление матриц и других ортого-
ортогональных преобразований, описанных в § 3.11, а также ряд других
полезных результатов. Эти результаты сведены в табл. 4.1. Среди
них особый интерес представляют так называемые усеченные пре-
преобразования Фурье и Уолша и факторизованное представление
матриц, связывающих между собой матрицы различных преобразо-
преобразований.
Усеченные алгоритмы БПФ—БПУ. При выполнении дискрет-
дискретных преобразований Фурье и Уолша часто оказывается, что либо
исходная последовательность содержит много нулевых элементов,
либо требуется вычислить не все коэффициенты преобразования,
либо и то, и другое вместе. Это обстоятельство можно использовать
для дальнейшего (по сравнению с описанными алгоритмами БПФ—
БПУ) сокращения количества операций, затрачиваемых на выполне-
выполнение преобразования. Если обратиться к представлениям БПФ и БПУ
в виде графов, то станет ясно, что наличие некоторого количества
нулевых элементов в исходной последовательности или отсутствие
необходимости вычислять некоторые коэффициенты преобразования
приводит к выпадению некоторых ребер графа преобразования, т. е.
выпадает часть операций умножения (в БПФ) и часть операций сло-
сложения. Если количество нулевых элементов в преобразуемой после-
последовательности или количество ненужных элементов преобразования
меньше половины длины последовательности, то это существеннд це
F8
Т'аблийа 4.1
Факторизованные
Преобразование
Хаара
Уолша — Ада-
Адама ра
Уолша—Пэли
Уолша
Усеченное
Уолша—А да-
дама ра
РА
i
Представления матриц
преобразований
унитарных
Факторизованиое представление
п-1 |;xU
оЛ/2 ofi 11 1 . X L
HAD = —- (I
я—1
I —¦ . 1 1 I I „
L2" 2"^2 -1—1.1 2"—'—'
n-2
_ * ТТЛ (
* 2"/2 ^12П~2~'Л^
Г I2'xU°* Г- \\Г
1[I2'(I2'xul!)JI2'+I*
n—1—к
x(n(I2ixh,xWl_
1— I
Х<12/ХР2»-<-*Х8Г2К.
0
1 , ,
's ® '2" —2'+'
x hax i .)
1 xU»
f 1 \
1 1 x (J1 1 ]
Г 'г'3100» 1
V-i x U°* 1
=
169
Преобразование
Фурье
Усеченное
Фурье
Модифицирован-
Модифицированное Адама ра
Продолжение тйбл. 4.1
•
Факторизованное представление
л-1
•>=-?^ М7* П( 12П-1- х |> Ф %й<+*])Х
1 = 0
=
р(*> с Р<г> —
2" 2я 2"
л—1—к
2*/2 { П 02lxSo2xP«_1_()(l2J.x
? =0
x[p^_1_I-0P<*>_1_1.nlJ4+«J)}x
;— i
Х{ П Cj/ x h«x V-1-' > (^ х[ 'an-i-'®
(=Л—К
г —1
( = 0
х(|2,х[р^_1_1.фР<*>_1_гХ
х" Пр~Ч+°]) )^ х Р2«-'-«х SV >м^ •
к + /<л
л—1 U" х I
i = 0
л-1
< = 0
170
Продолжение табл. 4.1
Преобразование
Адамара—
Хаара
Двоичная ин-
инверсия
Перестановка
из кода Грея
в простой
двоичный код
Переход от мо-
дифицирован-
дифицированного преобра-
преобразования Ада-
Адамара к пре-
преобразованию
Уолша—Ада-
Уолша—Адамара
Переход от пре-
преобразования
Хаара к пре-
преобразованию
Уолша—Пэли
Переход от мо-
дифицирован-
дифицированного преобра
зования Ада-
Адамара к ДПФ
тт
1 = Г
\
1
}
ММН-
2"
Факторизованное представление
1
HDHR ^, = -^щ- A^ х D ф_г) X
г—1
i=0
/ г г I2,-rxU% . ,
l^Xll WxuUei2«-2'-— JJ
«-' i . xc, -..
2" i--» \ 2л-<-1 X [ I . xG'j \J
1 = 0
n-\
* 2" "" 1' ^ 2' 'V-i-' Ф V-1-' >'
1=0
ft— I ( — 1
H -~— \ 1 I I (I Y fl (\\
1 = 1 <f=0
ф (h2 x 1 ) ф 1 i K+il)
2 2—2
л-l i—1
MHR-P= TJ T|Y | ^j^ x [ I , ф
2 V 2 L
i =-- 1 «=0
L '2* x ^'2 J V — 2K+1 J/
Л—1 1—1
"F = H(IT( l2n-i-ix t'2i Ф (h»x 'a* ) Ф
i = 1 к=0
_2,+ 1])(^_1_;x[l21.®ri|od/+2])|
171
сказывается на структуре графа преобразования, и экономия в числе
операций невелика. Если же их намного больше половины длины
последовательности, выигрыш может Сказаться заметным.
Посмотрим, как меняется структура алгоритмов БПФ и БПУ
в этом случае и оценим возможный выигрыш. Ввиду отмеченного
выше родства БПУ и БПФ будем рассматривать только последнее.
Наличие нулевых элементов в преобразуемой последовательно-
последовательности и ненужных коэффициентов преобразования можно удобно опи-
описать, умножив матрицу преобразования справа и слева на диаго-
диагональные секущие матрицы (назовем их Р(^ и Р'^ соответствен-
соответственно) содержащие нули на тех местах диагонали, номера которых
соответствуют номерам нулевых или ненужных элементов.
С точки зрения возможности модификации алгоритмов преобра-
преобразования достаточно рассмотреть случай, когда количество ненулевых
или требуемых элементов является целой степенью 2. В этом случае
секущие матрицы можно представить в виде кронекеровских произ-
произведений матриц вида
и единичных матриц
Р,
I,=
[о o
о
D.67)
D.68)
Рассмотрим простейший случай, когда отсекаются последние эле-
элементы исходной последовательности и ее преобразования. Тогда се-
секущая матрица размерности 2™, содержащая 2' единиц в начале
диагонали, запишется следующим образом:
n-i
D.69)
Рассматривая факторизованный вид усеченной с двух сторон
матрицы
Fyc=p«OF о (О
D.70)
2" 2Л 2 2"
в два приема, сначала умножая F^, слева на Р**' , а затем умно-
умножая результирующую матрицу справа на Р'^ и используя приемы
совмещения матриц, подобные тем, которые применялись в § 4.3,
172
можно получить для факторизованного представления матрицы
ДПФ D.66) [74], что при /е+/3гя
in—1— к
<=0
х( vх [p/?-.-i ® р?
х
| П A21х11«х12»-'-»
©Др"' а/+1] Н A^ х S^,.,) М—, D.71)
где S0, определяется C.135), а
Wfl! ])'". D-72)
Таким образом, усеченное преобразование состоит из (я—к)-\-
+ (/+/е—п)+2 каскадов: одного каскада двоичного инвертирования;
одного каскада периодического повторения ненулевых входных
отсчетов (матрица размножения [I.t x ST ]); A+к—я) каска-
каскадов неусеченного преобразования (произведение матриц от i—n—к
до i=l—1); п—к каскадов преобразования «с пропусками (произ-
(произведения матриц от i=0 до 1=п—\—к).
При к+^п преобразование вырождается: выпадают матрицы
неусеченного преобразования, построенные на 1^:
Spi«™. D.73)
Граф усеченного преобртзования D.71) для п = 5, к = 3, / = 3
показан на рис. 4.9. Числа в узлах графа означают степень ком-
комплексной экспоненты expBicK—1/32). Нетрудно подсчитать количе-
173
ство операций, затрачиваемых усеченным преобразованием. Количе-
Количество операций сложения NJ?' '* и умножения Nj*[ '' равно:
ум
при К + / 3» П
.2" + 2""' С + к — п) — B* + 2') + 1; D.74)
при к + / < п
D.75)
Рис. 4.9,
174
Выигрыш в количеётве операции за счет усечеиия преобразова-
преобразования по сравнению с вычислением неусеченного преобразования равен:
при к+^я
&СЛ.П \т(К. I) /I I „ _ | 1\ пЖ—П У I'*'")
"ел
(l + K — П + 1) — 2*
eyji, n
при
П, П)
/уум
»(к. I),
K + / _ „ + 2 —
»СЛ, rt
- 2'+'-"
л —2 + 21-"
2
D.77)
При больших значениях п выигрыш в количестве операций сло-
сложения растет с ростом п примерно как п/A-\-к—n-fl); в количестве
операций умножения — как п/A+к—л+2). При большом п и боль-
большой избыточности он может оказаться заметным.
Матрицы перехода между различными преобразованиями. При
цифровой обработке сигналов иногда требуется, зная коэффициенты
представления сигнала по одному базису, найти его представление
по другому базису. Для этого достаточно умножить матрицу-стол-
матрицу-столбец коэффициентов на соответствующую матрицу перехода:
о<г)=М1-2о<1>. D.78)
С помощью представления матриц ортогональных преобразова-
преобразований в виде сумм кронекеровских матриц можно достаточно просто
найти матрицы перехода между этими преобразованиями. Покажем
это на примере связи матрицы ДПФ F^, с матрицей MHAD „ моди-
модифицированного преобразования Адам ара (см. § 3.11). Согласно
D.56)
U»,x~
~FT=
где
«—2
nPd/+1
1=0
п0 теореме 2 из § 4.1
D.79)
ИНВ
2„_ ,
Я—2
Фо
j * 2r~ I
D.80)
175
Используя D.80) как ргкуррзнтную формулу для F5f, можно по-
получить
я—I
где S —знак прямой суммы я матриц.
1=0
Сравнив выражение в фигурных скобках в правой части D.81)
с факторизованным представлением матрицы Хаара D.29), а также
представление матрицы Хаара с матрицей модифицированного пре-
преобразования Адамара в виде сумм кронекеровских матриц
(табл. 3.5), нетрудно видеть, что это выражение является с точно-
точностью до диагональной матрицы D^nAR факторизованным представле-
представлением модифицированной матрицы Адамара *>:
п-1
D П l№, * V) © W+'l- D.82)
Тогда первый сомножитель в D.81), очевидно, представляет со-
собой матрицу перехода от модифицированного преобразования Ада-
Адамара к ДПФ с двоичной инверсией:
м2м„н-р = 1 © "?у°? jg d/+1. D.83)
Для того чтобы фактО'ризовать эту матрицу, заметим, что из
D.83) следует
mmh-f, ммн-рд^-риив "п^2 н ¦ — ммн-р m
0M$V MHAD , Пр d/+t =
z * /=o
2„_, ф Г^2d;+2 \ . D.84)
Используя эту формулу рекуррентно, получаем
п—I
К"~ -П tV-1-'x [
/ Г I—I 1\
X\l2n-i-i x 112< ф П^/чч )• D.85)
*> Разумеется, это представление можно вывести н непосред-
непосредственно из выражения для MHAD „ в табл. 3.5
176
Наконец, подСтгГвив сюда выражение D.82) для MHAD /, после
очевидных преобразований окончательно придем к выражению
л—1 / /—1
л—1 / /—1
1=1 \*=0
НаВифацирпдпинпв
Рис. 4.10.
Обратная матрица перехода будет равна произведению этих же
матриц, взятых в обратном порядке и с заменой dj иа dj-1:
0 ехр((-2«/=Т);2-/)
т. е.
м?
(n—l—l
П ty-*^-'®^
к=0
12—42
D.88)
177
Переход от модифицированного преобразования Адамара к ДЙФ
с двоичной инверсией иллюстрируется графом на рис. 4.10. Для
удобства в левой части рисунка показан граф, соответствующий мо-
модифицированному преобразованию Адамара (см. табл. 4.1). Сравни-
Сравнивая этот совмещенный граф с графом БПФ на рис. 4.8, нетрудно
видеть, что граф MHAD^ является усеченным графом БПФ, а граф
•M*J F дополняет его до графа БПФ. Отсюда, в частности, выте-
вытекает, что по количеству операций алгоритмы вычисления ДПФ через
БПФ или через модифицированное преобразование Адамара с по-
последующим переходом к ДПФ эквивалентны.
Ввиду аналогии между факторизованными представлениями мат-
матриц F л и HAD „, матрицу M^H—F можно превратить в матрицу
М*^~н перехода от модифицированного преобразования Адамара к
преобразованию Уолша—Адамара, изъяв из M^J,H~F диагональные
матрицы. Наконец, действуя так же, как для матрицы F „, нетрудно
получить матрицу перехода от преобразования Хаара к преобразо-
преобразованию Пэли. Эти матрицы приведены в табл. 4.1.
Вычисление двумерных преобразований. Как уже отмечалось,
двумерные преобразования, описанные в § 3.11, определяются как
двукратное применение соответствующих одномерных преобразова-
преобразований. Для организации алгоритмов двумерных преобразований боль-
большое значение имеет емкость оперативного запоминающего устрой-
устройства (ОЗУ) процессора, с которым может оперировать его арифме-
арифметическое устройство. Если эта емкость достаточна для хранения все-
всего двумерного массива, двумерное преобразование можно выполнить
с помощью быстрого одномерного алгоритма с соответствующей
адресацией памяти при преобразовании по строкам и столбцам. Лю-
Любопытно отметить, что такая организация вычислений с точки зре-
зрения теории быстрых алгоритмов эквивалентна вытягиванию двумер-
двумерного массива в одномерный путем пристыковки строк массива друг
к другу и представлению матрицы двумерного преобразования как
кронекеровского произведения матриц одномерных преобразований.
Бели же, как это часто бывает, емкости ОЗУ недостаточно для
хранения двумерного массива, но достаточно для хранения одной
строки, преобразование проводят в три этапа: преобразование по
строкам с записью результата во внешнее запоминающее устройство
(ВЗУ), затем транспонирование и вновь преобразование транспони-
транспонированного массива по строкам. При этом время обработки опреде-
определяется временем доступа к ВЗУ, и оно увеличивается также за счет
необходимости транспонирования. Для повышения скорости траве*
понирования двумерного массива в ВЗУ его выполняют так: разби-
разбивают массив на фрагменты максимальных размеров, помещающиеся
178
в ОЗУ, транспонируют в ОЗУ массив внутри каждого фрагмента и
транспонируют порядок расположения фрагментов в двумерном мас-
массиве. Для удобства транспонирования расположения фрагментов це-
целесообразно иметь дополнительный буфер в ВЗУ с емкостью, равной
объему фрагмента.
Транспонирование — не неизбежная операция при выполнении
двумерных преобразований сигналов, не помещающихся в ОЗУ.
Используя такой же принцип переадресации, что и при двумерном
преобразовании в ОЗУ, можно построить алгоритмы двумерных пре-
преобразований без транспонирования (см., например, [86]).
4.6. Совмещенные алгоритмы ДПФ
При обработке изображений с помощью ДПФ исход-
исходный сигнал чаще всего представлен последовательностью
действительных чисел. Кроме того, как указывалось
в § 3.8, при вычислении свертки с помощью ДПФ сигнал
приходится иногда четным образом дополнять. В ре-
результате оказывается, что преобразуемые последователь-
последовательности имеют двойную (за счет вещественности) или
даже четырехкратную (за счет вещественности и четнос-
четности) избыточность. Эта избыточность может быть исполь-
использована для соответствующего ускорения вычисления
дискретных преобразований Фурье.
Совмещенные алгоритмы ДПФ действительных после-
последовательностей. Можно указать два способа использова-
использования двойной избыточности ДПФ последовательностей
действительных чисел. Первый — совмещение преобразо-
преобразования двух последовательностей, второй — разбиение
одной последовательности с четным числом членов на
две подпоследовательности, совместное преобразование
этих подпоследовательностей и пересчет результата на
всю последовательность.
Рассмотрим сначала первый способ; второй в конеч-
конечном счете сводится к первому-
Пусть {ак} и {Ь*} — две последовательности действи-
действительных чисел длиной N (к=0, l,...,N—1). Образуем
последовательность
D.89)
12* 179
и найдем ее ДПФ
/V—1
*=0
/V-1
где
N—1
S
?*.«Ч>(й«?), D.91)
«г=0
а индексы ге и im означают действительные и мнимые
части соответствующих чисел.
Так как
aN-s=a;, Pjv-,=P%, D.92)
(см. табл. 3.1, строка 5), то
VN-s=a.N-!,+i?LN-8=a;+i$\. D-93)
Поэтому
Ъ+Ъ-s = К+ О +1 (P.+Р\> = 2<е + '2prse; D-94)
Т. - Тд,-,=(«. -
т. е.
as=V2Gs+Y*Jv-s), Ps=— 72» (Т*—А-)- D-95)
Выражения D.95) показывают, как, выполнив
операции сложения действительных чисел, можно найти
коэффициенты Фурье последовательностей {ак} и {Ьк} ''из
результата преобразования совмещенной последователь-
последовательности'!^ -\-'ibK} (вычисления по D.95) достаточно выпол-
выполнять только для s=0, 1,...,Л^/2, а остальные as и р8
найти как комплексно-сопряженные найденным).
180
Описанная процедура вычислений иллюстрируется
схемой на рис. 4.11,а. Такой способ совмещения ДПФ
целесообразно применять, например, при преобразова-
преобразовании двумерных массивов, когда в качестве {ак} и {bt}
удобно выбирать соседние пары строк массива.
При преобразовании одномерных действительных
массивов удобнее второй способ сокращения количества
операций, вытекающий из следующего. Пусть {ак\ — по-
h
\
\
/
ДПФ
Ю
/
/
/
\
\
fa
+
У
/ \
с
«.
Ps
Ps
X
-I
fs 4
fas
\ ¦ /
\
f)
Рис. 4.11.
следовательность действительных чисел длиной 2N (к==
=0, 1,...,2^V—1) и необходимо найти ее дискретное
преобразование Фурье
2JV—1
D.96)
Выделим в сумме D.96) четные и нечетные слагаемые:
exp (/2,f) j exp (?) j . D.97)
181
Таким образом, ДПФ всей последовательности {ак}
можно найти, вычислив ДПФ% от двух ее подпоследова-
подпоследовательностей, составленных соответственно из четных и не-
нечетных членов исходной последовательности, и затем
просуммировав полученные результаты по формуле
D-98)
где а' и а™ —ДПФ от {а2к} и {а2к+1} соответственно.
Что касается а' и а, то их можно найти, пользуясь
первым способом совмещенного ДПФ D.95). В результа-
результате получим
где
ЛГ-1
J^ + '^^exp^f), D.100)
s=0, 1, ..., N. Значения as для остальных s находят-
находятся по формуле D.92).
Как видно из сравнения формул D.95) и D.99), вто-
второй способ требует более сложных дополнительных вы-
вычислений.
Описанные алгоритмы совмещенного преобразования
Фурье легко обратить и получить алгоритмы вычисления
ДПФ комплексно-сопряженных последовательностей.
Действительно, на рис. 4.11,а нетрудно видеть, что, имея
две последовательности {as} и {ps}, такие, что as = o,*N-s,
ps—P*jv-.s, можно образовать из них последовательность
ys по следующему правилу:
, s = 0, 1 N12. D.101)
Тогда действительная часть фурье-преобразования
этой последовательности есть фурье-преобразование
{as}, а мнимая — фурье-преобразование {р8}. Схема этого
алгоритма показана на рис. 4.11,6.
Точно так же, имея одну последовательность длиной
2N {as=a*2jv-s}. можно образовать из нее две последо-
182
вательностй
<_,=<*, DЛ02>
после чего действовать так, как описано выше Для двух
отдельных последовательностей.
Использование алгоритмов совмещенных преобразо-
преобразований и соответствующая экономия времени вычислений
возможны и для вычисления двумерного ДПФ действи-
действительных или комплексно-сопряженных последовательнос-
последовательностей, выполняемого как два одномерных преобразования.
В самом деле, при преобразовании двумерных последо-
последовательностей действительных чисел первое преобразова-
преобразование Фурье можно выполнять, совмещая ДПФ пар строк
массива последовательности, а второе преобразование
Фурье полученного массива комплексных чисел выпол-
выполнять только до половины столбцов, вторую же половину
находить как комплексно-сопряженную первой. При
преобразовании комплексно-сопряженного массива нуж-
нужно поступать в обратном порядке: первое преобразование
Фурье выполнять только до половины массива, дрпол-
нив его потом числами, комплексно-сопряженными с ре-
результатом первого преобразования, после чего второе
преобразование Фурье выполнять с помощью описанного
алгоритма совмещенного преобразования двух последо-
последовательностей с попарно комплексно-сопряженными чис-
числами.
Совмещенный алгоритм СДПФ A/2, 0) четных и дей-
действительных четных последовательностей. Для СДПФ
О/г. 0) четных последовательностей с четным числом
членов выполняются следующие соотношения (см.
табл. 3 3, строки 7, 13):
а, ехр (й.
D.1036)
D-ЮЗв)
183
Их можно использовать для построения
алгоритмов СДПФ ('/г, 0) четных последовательностей.
Действительно, пусть {ак}, {Ьк} — две [четные последова-
последовательности^ четным числом членов:
aK = ^2N-K-\' Ьк = Ь2Ы-к-^ « = 0,".1,..., 2Ы— 1. D.104)
Образуем последовательности
Ее СПДФ ('/г, 0) будет равно
где {«У} и {р/-°} — СДПФ ('/„О) соответственно {ак}
и {bj:
В соответствии с D.103а) и D.103в)
YV..o _-V..o ift7'-0 — _а'л-°—81/l>0 —
12N—S /V—s ~ V2N—S + N s Ps—N
Поэтому
s = 0, 1 Л^— 1. D.108)
Значения a^/l>0 и р^'^для других s можно найти из D.103а).
В результате такого совмещения время на преобразо-
преобразование четных последовательностей ненамного превышает
время преобразования последовательности половинной
длины.
Если преобразуемые последовательности являются
еще и действительными, то коэффициенты их СДПФ
С/г, 0) также чисто действительные (табл. 3.3, стро-
строка 8). Поэтому действительная и мнимая части a'j"
и рУ"° в D.107) являются СДПФ ('/г, 0) соответст-
соответственно действительной и мнимой частей {ак} и {bj. Таким
образом, формируя из двух пар действительных четных
184
последовательностей две комплексные четные последо-
последовательности, пользуясь описанным приемом совмещения
СДПФ ('/г, 0), можно осуществить преобразование дей-
действительных четных последовательностей за время, почти
вчетверо меньшее времени преобразования одной ком-
комплексной последовательности той же длины.
4.7. Рекуррентный алгоритм вычисления ДПФ
При обработке изображений и других двумерных сиг-
сигналов иногда необходимо вычислять спектры следующих
друг за другом сильно перекрывающихся фрагментов
сигнала, или так называемые локальные спектры. В этом
случае вычисление спектра каждого фрагмента целесо-
целесообразно производить рекуррентно, используя спектр пред-
предшествующего ему при обработке фрагмента. Пусть фраг-
Рис. 4.12.
менты состоят из N\XN2 элементов и размещаются на
изображении с шагом р и q по двум координатам. Свя-
Свяжем спектры двух соседних перекрывающихся фрагмен-
фрагментов. Предположим, спектр
первого из этих фрагментов:
.1@.0)
г .$
— двумерный спектр
*=Р 1=4
ехр Bя лг-г-дг-
D.109)
185
Тогда спектр a!f's4) второго фрагмента, смещенного по
координатам на р и q относительно первого, можно за-
записать как (см. рис. 4.12)
N,—1 /V,—1
»=0 *=0
l S S V-P^(^+A) X
f=o /=0
p-\ q-\
«c=0/=0
1=0
X=0 Issf
K=N, 1=4
N,+p—l Nt+q—l
ч...«»[«¦(?+?)]+
D.110)
№
или после группировки и замены переменных
¦г
,р-\ «-1
lrf=0/=0
Nr-lq-l
Xexp[/2.(J-+jg.)]+|j J К+„„,-^X
в.(^+^)]}ехр[-й.(^+^)]. D.111)
Таким образом, af^ вычисляется через a^0) и три
усеченных ДПФ.
В частном случае смещения только в одном направ-
направлении (например, вдоль /)
0 /0
-й^^). D.112)
ж=0 /=0
Если смещение равно одному элементу, как при так
называемой «скользящей» обработке,
л\_»
к-0
Хехр (i2it?-\ К ехр (— /2* ^-) . D.113)
187
В одномерном Случае, очевидно,
X ехр (»'2^I exp (-tfrp-fc} D.114)
и при „скользящей" обработке
](-^). D.П5)
Используя приведенные соотношения, можно полу-
получить определенную экономию в количестве операций,
необходимых для вычисления локальных спектров. Ве-
Величина этой экономии зависит от размеров фрагментов,
степени их перекрытия, а также от доступной емкости
запоминающего устройства, используемого для хранения
промежуточных результатов (буферного ЗУ)-
4.8. Ускоренный алгоритм свертки сигналов
В заключение этой главы приведем алгоритм уско-
ускоренной свертки сигналов, не нуждающийся в применении
ДПФ. Он описан в работах [95, 103, 132], и идея его
состоит в том, чтобы ценой некоторого увеличения ко-
количества операций сложения при вычислении свертки
сократить количество операций умножения, требующих
обычно больших затрат машинного времени.
Запишем формулу дискретной свертки C.16) следу-
следующим образом:
и будем считать, что заданы все необходимые N-\-k—1
отсчетов {а„}. Пусть также N — четное число; если N—
нечетное, то будем рассматривать сумму максимального
четного числа слагаемых.
188
Вычислим сначала попарные произведений внутри
последовательностей {hn} и {ак_п}:
4= S *"*•.+» D.117)
л=0
<к= 2 Л«-2
л=0
Тогда, как легко проверить,
(/V/2J-1
ь.= 2 (A.»!+^_Bn+i))(A
л=0
D.119)
Таким образом, вычисление свертки последователь-
последовательностей {hn} и {а„} сводится к вычислению свертки вдвое
более коротких последовательностей, составленных из
попарных сумм элементов исходных последовательнос-
последовательностей. Что касается добавочных членов т) в D.117) и ?ж
в D.118), то tj не зависит от к и ее достаточно вычис-
вычислить один раз для всех элементов свертки, a tK может
вычисляться рекуррентно для четных и нечетных к. Дей-
Действительно, при к четном (k=2/Ci)
(W/2J-1
V = ^2к, ~ 2 а2(«1-л)а2,<к,-л) +1 = а2к1п2*1+1 "Г
л=0
"Г 2j а2(к,-1-л)а2(«г
л=0
2- D-120)
Точно такая же формула справедлива для нечет-
нечетных к.
Оценим количество операций, требуемых для вычис-
вычисления К значений свертки D.116) *>- Для вычислений К
сумм D.119) требуется выполнить /С( (ЗЛА/2)—1) опера-
операций сложения и K.N/2 операций умножения. Вычисление
*> Время на сложение и вычитание считаем одинаковым.
189
t) требует (ht/U) — i операций сложения и (Af/2) опера-
операций умножения. Вычисление К/2 четных значений %к
требует (iV/2)—1 операций Сложения и N/2 операций
умножения для ?о плюс два сложения и два умножения
на каждое из (/С/2)—1 остальных tH, т.е. 2(/С+(#/2)—3)
операций сложения и 2 (/(-(-(JV/2)—2) операций умно-
умножения. Итого общее количество сложений
ЗМС/j . 2K + 3N-7)
и общее количество умножений
Отсюда видно, что по сравнению с прямым вычисле-
вычислением D.116), требующим K.(N—1) операций сложения
и KN операций умножения, описанный алгоритм требу-
требует примерно вдвое меньше умножений и в полтора раза
больше сложений. По оценке [103] он оказывается в вы-
вычислительном отношении эффективнее, чем использова-
использование БПФ при
/C<10(l-flog2A0. D.123)
Эта оценка, конечно, является грубой, и граница при-
применимости описанного алгоритма определяется соотноше-
соотношением времени сложения и времени умножения конкрет-
конкретного процессора.
Описанный прием в принципе можно использовать и
при вычислении двумерной свертки:
/V,_I N,—1
л=0 т=0
но дополнительный выигрыш за счет двумерности здесь
получить трудно, поскольку обычно свертка вычисляет-
вычисляется одномерно: сначала пробегаются все возможные зна-
значения к, после чего / изменяется на единицу.
190
Глава 5
ЦИФРОВЫЕ СТАТИСТИЧЕСКИЕ МЕТОДЫ
5.1. Измерение гистограмм распределений
Простейшей и в то же время одной из важнейших
статистических характеристик сигналов является распре-
распределение вероятностей их значений. Для цифровых сигна-
сигналов можно говорить о частоте, с которой встречаются
их отдельные значения. Эта частота как функция зна-
значений сигнала называется гистограммой распределения
значений.
Гистограмма, описывающая частоту появления зна-
значений отдельных отсчетов сигнала независимо от значе-
значений других отсчетов, называется одномерной, или гисто-
гистограммой одномерного распределения. Гистограмма, ха-
характеризующая частоту совместного появления значений
нескольких отсчетов сигнала, называется многомерной,
или гистограммой многомерного распределения.
Гистограмма распределения может быть построена
с помощью простого алгоритма: на каждом шаге выбор-
выборки отсчета измеряемого сигнала в ячейку памяти про-
процессора с адресом
Л-1 (-1
1=1 к=0
добавляется константа, например величина, обратная
количеству анализируемых отсчетов. Здесь Ао — на-
начальный адрес массива гистограммы; т, — квантован-
квантованное значение сигнала в ?-м измерении; /п*=0, 1, ...
..., Mi—1; Mi—максимальное количество уровней кван-
квантования сигнала в г'-м измерении; п — размерность ги-
гистограммы и векторе значений измеряемого сигнала.
Математически эту процедуру можно описать как
усреднение б-функции Кронекера:
/V—1 .-л-1
„ /й, да..,) = L
/V—1 .-л-1 -|
L JJ S Д (miK — m,) , E.2)
к-0 Ii=0 J
где h(m0, M\,..., mn-\)—n-мерная гистограмма;
{mi#} —квантованные значения к-го отсчета, сигнала или
191
для двумерного сигнала
h\{mt, mx, .:
IV,—1 /V,—1 г л— 1
к=0 (=-0
г л— 1 -¦
I i=0 J
Это выражение можно рассматривать также как циф-
цифровую свертку (см. C.16), C.17)), а в двумерном слу-
случае — как разделимую двумерную свертку. Очевидно,
для вычисления гистограммы необходимо выполнить Л'
(в двумерном случае Ni-N2) операций сложения.
Гистограмма может использоваться как характерис-
характеристика не только всего наблюдаемого изображения, но и
отдельных его участков или фрагментов. В этом случае
она называется локальной.
В некоторых задачах обработки изображений оказы-
оказывается необходимым производить измерение локальных
гистограмм по перекрывающимся фрагментам изображе-
изображения (см., например, § 7.3 о скользящей эквализации).
В этих случаях целесообразно воспользоваться тем, что
формула E.3) может быть записана как рекурсивное
соотношение между гистограммами соседних фрагментов.
Действительно, если рассматривать E.3) как выражение
для локальной гистограммы (г, s)-ro фрагмента
.V,+r«o—I /Vi+s/o—1 ГЛ—V
/Vi+s/o—1 ГЛ—V "I
где «о, /о — шаги следования фрагментов по двум коор-
координатам, то оно может быть представлено через гисто-
гистограмму, например, (г—1, s)-ro фрагмента-
гк0— 1 Ni+slo—1 г /Л—1
S S
A //
192
Смысл этой формулы очевиден: гистограмма данного
фрагмента может быть получена из гистограммы сосед-
соседнего фрагмента, если прибавить к ней разность гисто-
гистограмм, вычисленных по тем участкам данного и сосед-
соседнего фрагментов, которые не принадлежат одновремен-
одновременно к обоим фрагментам.
Как и при рекуррентном вычислении ДПФ, конкрет-
конкретный способ использования возможности рекуррентного
вычисления локальных гистограмм зависит от емкости
ЗУ. Минимальная требуемая емкость буферного ЗУ, оче-
видно, равна ТТ Mt ячеек памяти для одной гистограм-
мы. В этом случае при рекуррентном вычислении гисто-
гистограммы одного фрагмента с рекурсией по к (как в E.5))
требуется выполнить 2к0М2 плюс (NiN2) /#Общ операций
сложения — вычитания, где М>бщ— общее число фраг-
фрагментов, т. е. приблизительно (при Л^общ большом)
в NiI2kq раз меньше, чем при прямом вычислении. От-
Отметим, что в этом случае для уменьшения числа началь-
начальных фрагментов до одного целесообразно производить
переход от фрагмента к фрагменту зигзагообразно:
в направлении увеличения к для четных s и в обратном
направлении для нечетных s.
Гистограммы, измеренные по небольшим фрагментам
изображений, обычно бывают довольно изрезанными
функциями. При увеличении объема измерений гисто-
гистограмма, как правило, сглаживается. Однако иногда не-
необходимо получить сглаженную гистограмму при малом
объеме измерений. Наиболее употребительны три мето-
метода сглаживания.
Ступенчатое сглаживание. Диапазон значений аргу-
аргумента гистограммы разбивается на небольшое число ин-
интервалов, и значения гистограммы внутри каждого ин-
интервала заменяются средним значением по интервалу.
Такая сглаженная гистограмма может быть построена
сразу, если значения сигнала перед измерением гисто-
гистограммы проквантовать на небольшое число уровней
(равное числу интервалов разбиения при сглаживании).
Сглаживание скользящим суммированием. Значение
сглаженной гистограммы Л(/я0, /и„ ..., /я„_,) получают
из исходной гистограммы h(m0, mv ..., mn_,) путем циф-
цифровой свертки ее с некоторой сглаживающей функцией
13-42 193
r,f rx
А (/и,, /и„ ..
«„-1
= У У ••• У w(r , г г
\h(mt — г„, mx — rx, ..., тп-\ — гп-1)- E-6)
Простейшая и наиболее часто используемая сглажи-
сглаживающая функция — прямоугольное «окно»:
о^.. г, »•„_,) =
, |г, J
O в противном случае.
Ступенчатое сглаживание и сглаживание скользящим
суммированием в принципе эквивалентны. Это легко по-
понять, если заметить, что ступенчатое сглаживание дает
функцию с соответственно меньшим количеством отсче-
отсчетов, ввиду чего его можно трактовать как фильтрацию
(как при скользящем суммировании) и дискретизацию.
Сглаживание с помощью ортогональных преобразова-
преобразований. Вычисляются коэффициенты представления гисто-
гистограммы h(mo, mi, ¦•-, fhn-\) по некоторому ортонормаль-
ному базису {«pSoiSi ,д_,(»?• т» • • •» /"n-i)}:
\,s, *„_=Е S -- *
E.8)
Часть коэффициентов {<ps Sj -s }.(обычно те, кото-
которые имеют малые значения) заменяется нулями. Сглажен-
Сглаженная гистограмма получается в результате обратного пре-
преобразования после отбраковки коэффициентов
{>
Сглаженную таким образом гистограмму можно по-
получить и сразу в процессе измерения, если во,спо.л.ьзо-
(94
ваться приемом, описанным в [64]. Он строится на слё*
дующих рассуждениях. Подставим в E.8) выражение
E.2):
Ma-i~l N—1 л—1
т"„=0 т,=0
Это значит, что коэффициенты {t|s Si s } разло-
разложения h(mt, mlt ..., /и„_,) по базису {eps s (/и,,
/и, /"„_,)} могут быть найдены усреднением по всем
отсчетам сигнала значений базисных функций, вычисля-
вычисляемых каждый раз по значениям наблюдаемых отсчетов.
Если в результате нужно иметь сглаженную гистограм-
гистограмму, то можно просто не вычислять значения -л .
для тех {si}, которым соответствуют коэффициенты, за-
заменяемые нулями. Это дает экономию машинного вре-
времени и памяти.
Сглаживание с помощью ортогональных преобразо-
преобразований представляет особый интерес для многомерных
распределений, если ступенчатое сглаживание нежела-
нежелательно (скажем, потому, что дает разрывную, ступенча-
ступенчатую функцию). Тогда описанная процедура получения
сглаженной гистограммы с. помощью усреднения базис-
базисных функций может дать значительную экономию, по-
л—1
скольку вместо Y\ ^i ячеек памяти для накапливания
л-1
гистограммы требуется лишь [] S{ ячеек, где S* — ко-
{=0
личество ненулевых коэффициентов представления по
i-й координате-
13* 195
5.2. Оценка корреляционных функций и спектров
С помощью корреляционных функций и энергетиче-
энергетических спектров обычно описывают так называемые ста-
стационарные эргодические случайные процессы (в двумер-
дом случае — пространственно-однородные эргодические
случайные поля). Для таких процессов эти понятия опре-
определяются следующим образом*) (см., например [5]).
Взаимная корреляционная функция процессов a(t) и
b(t)
Г->оо J
U
a(t)b*{t + i)dt. E.10)
J
U
Корреляционная функция процесса a(t)
?e(t) = lim4- f a{t)a*(t4-x)dt. E.11)
Г->оо ' J
t,
Энергетический спектр процесса a (t)
A(f)= |Яа(*)ехр(/2ф)Л. E.12)
Применяя теорему отсчетов (см. § 2.3), можно полу-
получить соответствующие определения для дискретных про-
процессов— результатов дискретизации непрерывных про-
процессов:
/V—1
Ra>0 (л) =l^L-jf J]
^ака*к+п; E.14)
^ E.15)
где {ак}, {bK}, {Ra{n)}, {A(s)} — отсчеты процессов, кор-
корреляционных функций и спектров соответственно,
*' Для многомерных сигналов аргументы / и s понимаются как
векторные.
196
a Nn — количество отсчетов корреляционной функций,
рассматриваемой как сигнал.
Эти формулы предполагают, что анализируемые сиг-
сигналы имеют бесконечную протяженность. Для цифровых
же сигналов речь может идти лишь о том, что N — ко-
личество отсчетов — более или менее велико и отсчеты
с номерами, большими N, не определены. Поэтому по-
получающиеся при конечном N формулы для корреляци-
корреляционных функций
2а^+- EЛ7)
рассматриваются как способ статистической оценки не-
непрерывных корреляционных функций сигналов по их
цифровому представлению, а энергетический спектр, по-
получаемый с помощью дискретного преобразования
Фурье от оценок корреляционных функций, рассматри-
рассматривается как оценка непрерывного энергетического спектра.
При расчетах по формулам E.16) и E.17) приходит-
приходится сталкиваться с теми же краевыми эффектами, что и
вообще при цифровой фильтрации. Поэтому здесь приме-
применимы те же способы доопределения отсчетов сигналов,
которые были рассмотрены в § 3.5. Если заменять недо-
недостающие отсчеты нулями, то оценка корреляционных
функций по E.16), E.17) оказывается смещенной, по-
поскольку часть слагаемых (тем большая, чем больше я)
выпадает. В этом случае рекомендуется пользоваться
модифицированной формулой вида
которая дает лучшую оценку корреляционной функции
непрерывного сигнала для больших п при фиксирован-
фиксированном N.
Формулы E.16), E.17) для корреляционной функ-
функции родственны формуле C.16) для цифровой свертки.
Поэтому для вычисления корреляционных функций
используются те же алгоритмы, что и для вычисления
197
свертки: прямое вычисление по E.16), E17), ускорен-
ускоренные алгоритмы с уменьшенным числом умножений (как
в § 4.8, см. также [82]); вычисление с помощью ДПФ
и СДПФ (см. § 3.8) и такие же способы доопределения
сигнала. Использование СДПФ позволяет получить оцен-
оценки значений корреляционной функции сигналов в любых
точках между их отсчетами. В последнее время стали
разрабатываться методы вычисления корреляционных
функций с помощью преобразований Уолша [105, 120,
131].
Для оценки энергетического спектра изображений
обычно используется квадрат модуля его ДПФ или
СДПФ (если требуются значения спектра в произволь-
произвольных точках) благодаря тому, что для вычисления ДПФ
и СДПФ можно воспользоваться алгоритмами БПФ.
В соответствии с теоремой отсчетов разрешающая спо-
способность такого метода по частоте равна ширине полосы
(для двумерных сигналов — площади пространственного
спектра), поделенной на количество отсчетов последова-
последовательности, полученной в результате дискретизации.
Если анализируемые сигналы рассматриваются как
реализации некоторого ансамбля случайных сигналов, то
для получения спектра, характеризующего весь ансамбль
сигналов в целом, необходимо сглаживать оценки спект-
спектров, найденные для отдельных реализаций. Для этого
прибегают к методам, аналогичным методам сглажива-
сглаживания оценки распределений. Важнейшими из них являют-
являются следующие (см. [5, 20]):
Усреднение локальных спектров. Анализируемый сиг-
сигнал разбивается на фрагменты, размер которых соответ-
соответствует требуемой разрешающей способности анализа по
частоте. Сглаженная оценка спектра А(&) находится
как среднее
^'E) EЛ9)
1=0
оценок спектра At(s) для каждого фрагмента (локаль-
(локальных спектров).
Маскирование анализируемого процесса гладкой функ-
функцией. Если реализация анализируемого процесса недоста-
недостаточно длинна, чтобы воспользоваться предыдущим ме-
методом, ее умножают на некоторую гладкую функцию,
более или менее плавно спадающую к краям — так на-
198
зываемую функцию «окна», — и находят энергетический
спектр такого маскированного процесса.
Прямое сглаживание спектра. Осуществляется путем
свертки полученной оценки энергетического спектра
с нормированной гладкой функцией, простирающейся на
несколько отсчетов:
Л>)= 2 A(s+k)w(k); E.20)
*=-/?„
| в(«) = 1. E.21)
*=—Ко
Этот метод менее эффективен в вычислительном от-
отношении, но может оказаться полезным, когда нужно
иметь как сглаженную, так и несглаженную оценки
спектра.
5.3. Генерирование псевдослучайных чисел
При цифровой обработке изображений и при цифро-
цифровом моделировании изображающих систем часто возни-
возникает необходимость создания последовательностей псев-
псевдослучайных чисел с заданными статистическими свойст-
свойствами (см., например, § 6.2).
Обычный способ получения таких последовательнос-
последовательностей состоит в том, что сначала с помощью достаточно
простых алгоритмов генерируют независимые псевдослу-
псевдослучайные числа с равномерным распределением, а затем
их подвергают линейным и нелинейным преобразовани-
преобразованиям для получения заданных статистических свойств [7,
8, 15, 28]. Наиболее часто требуется обеспечить гауссов
закон распределения чисел и заданную функцию их кор-
корреляции или заданный энергетический спектр.
Построение датчика (генератора) псевдослучайных
чисел с равномерным распределением представляет со-
собой достаточно сложную и весьма своеобразную задачу,
ибо требуется с помощью несложного алгоритма, реали-
реализуемого небольшим числом команд, вырабатывать по-
последовательности чисел, которые можно рассматривать
с точки зрения решаемых задач как случайные, не опи-
описываемые простой закономерностью. Обычно основная
трудность — обеспечение независимости в статистиче-
статистическом смысле чисел последовательности.
199
Для получения последовательностей псевдослучайных
чисел с равномерным распределением чаще всего исполь-
используется так называемый конгруентный метод [28], в со-
соответствии с которым каждое следующее число |к в по-
последовательности получается из предыдущего |^_[ с по-
помощью простого соотношения
, E.22)
где си с2 и с3 —некоторые константы.
Начальное число |0 обычно мало влияет на качество
получаемой последовательности. Константа с3 опреде-
определяется длиной разрядной сетки используемого процессо-
процессора. От нее зависит период повторения последовательнос-
последовательности, поэтому ее желательно выбирать максимально воз-
возможной. Константа с? незначительно влияет на свойства
последовательности и даже может выбираться равной
нулю [28]. Наиболее критичным является выбор кон-
константы с\. Некоторые рекомендации в этом отношении
можно найти в [28].
Для проверки того, насколько статистические свойст-
свойства получающихся псевдослучайных чисел удовлетворяют
заданным требованиям (например, можно ли считать за-
закон их распределения равномерным или считать их не-
независимыми или некоррелированными), применяют из-
известные в статистике критерии.
В задачах обработки изображений и моделирования
систем преобразования изображений наиболее серьезные
требования предъявляются к пространственной корреля-
корреляции используемых псевдослучайных двумерных последо-
последовательностей. Для проверки независимости получаемых
чисел оказывается самым удобным воспользоваться
свойством зрительного аппарата обнаруживать на изо-
изображении регулярные структуры. Для этого значения
элементов последовательности передают как яркости
элементов изображения и таким образом превращают
поле псевдослучайных чисел с помощью соответствующих
устройств — фоторегистраторов или дисплеев в изобра-
изображение. Если при рассматривании такого изображения на
нем не обнаруживаются регулярные структуры, псевдо-
псевдослучайные числа считаются независимыми.
Чтобы из независимых псевдослучайных чисел с рав-
равномерным распределением получить гауссовы числа, про-
проще всего воспользоваться центральной предельной тео-
теоремой теории вероятностей, в соответствии с которой
2Q0
сумма Достаточно большого кбличества независимый
случайных величин имеет распределение, приближаю-
приближающееся (с ростом количества складываемых чисел)
к гауссову. Нормализующее линейное преобразование
чисел с равномерным распределением удобно выполнять
с помощью дискретного преобразования Фурье, реали-
реализуемого алгоритмами БПФ [43]. Рассмотрим этот метод
подробнее.
Пусть {?"}, {^ш}, к = 0,1, ...,#— 1, — два отрезкапо-
следовательности одинаково распределенных некоррели-
некоррелированных чисел. Образуем из этих чисел последователь-
последовательность комплексных чисел {^е+^т} и умножим каждое
число этой последовательности на отсчеты некоторой чет-
четной последовательности {hk=fiN-K}. Тогда в результате
дискретного преобразования Фурье этой модифицирован-
модифицированной последовательности получим комплексные числа
^^(!2%J?)> <523)
действительная и мнимая части которых имеют распре-
распределение, близкое к гауссову.
Можно показать [43], что многомерная характеристи-
характеристическая функция, вычисленная для чисел {тке} и {V.m}»
сходится к характеристической функции гауссова рас-
распределения как 0A/ УЩ. Таким образом, при боль-
больших N качество получаемых гауссовых чисел может быть
очень высоким.
Для иллюстрации этого факта на рис. 5.1 сплошной
линией показан в гауссовом масштабе график эмпири-
эмпирической функции распределения псевдослучайных чисел
для реализации в 262.144 числа, полученных описанным
методом сериями по 2048 чисел (Л/'=2048)- Точному га-
гауссову распределению на этом.графике соответствует
штриховая линия. Рисунок 5.1 показывает, что отклоне-
отклонения от гауссовой функции распределения заметны только
для вероятностей меньших 10~4.
В [43] показано также, что корреляционная функция
действительной и мнимой частей преобразованной после-
201
ДОЁательнОсти пропорциональна Дискретному преобразо-
преобразованию Фурье набора коэффициентов {h2K}:
' E'24)
ГДе ог^ — второй момент псевдослучайных чисел исходной
последовательности, а между собой действительная и
мнимая части не корре-
лированы. Отсюда выте-
вытекает, что коэффициенты
№к следует выбирать как
отсчеты требуемого энер-
энергетического спектра по-
последовательностей. При
этом описанный способ
позволяет получить из
двух последовательностей
некоррелированных рав-
равномерно распределенных
чисел некоррелированные
между собой последова-
последовательности гауссовых чи-
чисел с заданным энергети-
энергетическим спектром или кор-
корреляционной функцией.
При использовании
данного способа необхо-
10"
Рис. 5.1.
/
/
/
/
-з
-2
димо иметь в виду сле-
следующие нормировочные
соотношения:
ы—\
к=0
N—\
E.25)
E.26)
i-о
определяющие связь между дисперсиями чисел исходной
и преобразованной последовательностей и средние зна-
значения преобразованной гауссовой последовательности.
202
В частности, для того чтобы гауссовы последовательнос-
последовательности имели нулевое среднее, достаточно положить
gre0=iim0=0. E.27)
В общем случае для получения заданного среднего
значения необходимо задаваться соответствующим детер-
детерминированным (а не случайным) значением нулевого
элемента исходных последовательностей.
Описанный метод имеет ряд преимуществ перед дру-
другими методами генерирования гауссовых последова-
последовательностей [7, 8, 15]. Он обеспечивает при равных за-
затратах машинного времени существенно лучшее прибли-
приближение к нормальному закону распределения и
значительно экономнее использует исходную последова-
последовательность независимых чисел: на выработку одного га-
гауссова числа затрачивается ровно одно число исходной
последовательности чисел с равномерным распределени-
распределением- Последнее особенно важно при обработке изобра-
изображений и моделировании, когда приходится формировать
массивы объемом в миллионы отсчетов, не допуская
повторений.
5.4. Измерение шума на изображениях
Изображения в процессе формирования их изобража-
изображающими системами обычно искажаются случайными по-
помехами, или шумом. Для учета этих искажений необхо-
необходимо знать статистические характеристики шума. Иногда
эти характеристики можно определить, исходя из струк-
структуры и характеристик изображающих систем. Например,
шум зернистости фотопленки в фотографических систе-
системах определяется ее типом и режимом фотохимической
обработки, шум в радиотелевизионных системах — мощ-
мощностью радиосигнала в канале связи. При отсутствии
таких данных приходится оценивать характеристики шу-
шума по уже сформированному изображению или набору
изображений с однородным шумом. В этих случаях ста-
статистические характеристики шума нужно извлекать из
измерений статистических характеристик наблюдаемого
видеосигнала. Это можно сделать, используя различия
этих характеристик для шума и изображений.
Наиболее распространенным видом помех на изобра-
изображениях является аддитивный и статистически независи-
203
мый от видеосигнала флюктуационный шум. Он харак-
характеризуется своей дисперсией и корреляционной функци-
функцией. Если, как это часто * бывает, шум является
некоррелированным или слабо коррелированным, для
определения его дисперсии и корреляционной функции
можно построить простой алгоритм, основанный на из-
измерении корреляционной функции наблюдаемого изо-
изображения.
Благодаря аддитивности и независимости шума кор-
корреляционная функция Rv(k, I), измеренная по Q наблю-
наблюдаемым изображениям размером N\XN2 элементов, яв-
является суммой корреляционной функции незашумленного
изображения Rk(k, /), корреляционной функции шума
R. (к, /) и реализации некоторого случайного процесса
е(к, /), характеризующего ошибку измерения по реали-
реализации конечных размеров:
Яи (к. О = К (к. О + Яь (к, О + «(к, О- E.28)
Дисперсия случайного процесса в (к, /) обратно пропор-
пропорциональна квадратному корню из объема выборки
QN\N2, по которой производилось измерение Rh(k, I)
[5]- Этот объем обычно достаточно велик даже для из-
измерения по одному изображению, так как количество
отсчетов практически используемых изображений обыч-
обычно превышает сотни тысяч. Поэтому случайная ошибка
е(к, /) в E.28) достаточно мала, так что R^(k, l) мож-
можно оценить как
R% (к, I) = Ян (к, 0 - Яи (к, I). E.29)
Рассмотрим сначала случай некоррелированного шу-
шума, когда
Rx{K,l) = o\bKj, E.30)
где оа^—дисперсия шума; Ьк {— 8-функция Кронекера.
Таким образом, корреляционная функция наблюдаемого
изображения отличается от корреляционной функции не-
незашумленного изображения только в начале координат,
и это отличие равно дисперсии шума
o\=Ra@,0)-R!1@,0), E.31)
а для всех остальных значений (к, I) она может служить
оценкой Rv(k, I):
Rb(k, t)=Ra(K, I). E.32)
204
Как показывают измерения корреляционных функций
изображений [42], вблизи начала координат (к=0, 1=
=0) они являются весьма медленно меняющимися функ-
функциями к и /. Поэтому величину RK@, 0), необходимую
для вычисления дисперсии некоррелированного шума по
E.31), можно с высокой точностью оценить экстраполя-
экстраполяцией по значениям #и(к, /)=/?н(к» I) в точках к, / вбли-
вблизи нуля. Таким образом, для определения дисперсии
аддитивного некоррелированного шума на изображении
достаточно измерить корре- л|
ляционную функцию RH (к, /)
наблюдаемых изображений
в малой окрестности вблизи ^,
точки 0, найти экстраполя-
экстраполяцией оценку #и@, 0) вели- о,п
чины #и@, 0) и принять
в качестве оценки дисперсии
величину 0
(.
ч
= Ra @,0) - ?и @,0). «Ч I i ! ? t .
E.33) 01Z3+56789Wk
Эксперименты показывают, Рис. 5.2.
что хорошая оценка получа-
получается даже при экстраполяции по одномерным сечени-
сечениям корреляционной функции [44].
Очевидно, такой подход можно использовать также
для оценки дисперсии и корреляционной функции слабо
коррелированного шума, т. е. шума с функцией корре-
корреляции Rt (к, I), отличной от нуля лишь в небольшой об-
области вблизи начала координат, где значения корреля-
корреляционной функции незашумленного изображения можно
удовлетворительно экстраполировать по значениям
Rb(k, I) в тех точках, где R^ (к, I) заведомо равно нулю-
В обоих случаях для измерения шума используется
минимум априорных сведений о корреляционных свойст-
свойствах шума и изображения: примерные размеры области,
в пределах которой сосредоточены ненулевые значения
R^ (к, I), и гладкость Rn(к, I) в окрестности этой области.
Для иллюстрации этого метода на рис. 5.2 точками
показаны значения одномерного сечения /?н(к, 0) корре-
корреляционной функции изображения для к=0, 1,..., 10 [44].
По этим точкам легко заметить излом корреляционной
функции в точке к=4. Штриховой линией на этом ри-
205
сунке показаны экстраполированные /?и(к, 0) значения
корреляционной функции вблизи нуля, построенные по
значениям в области к>3; штрихпунктирной линией по-
показана разность Rb(k, 0)—Яв(к, 0), служащая оценкой
корреляционной функции шума.
Из других видов помех на изображении можно упо-
упомянуть импульсные помехи, периодические помехи и шум
квантования. Импульсные помехи — это случайные и
независимые искажения отсчегов изображения, при кото-
которых значения отсчетов сигнала с некоторой вероятностью
заменяются случайной величиной с равномерным распре-
распределением. Они характеризуются вероятностью искажения
отсчетов. Эту вероятность с удовлетворительной точ-
точностью для целей фильтрации таких помех можно оце-
оценить по «хвостам» гистограмм распределения разности
между значением каждого данного отсчета и средним
по его окрестности, воспользовавшись сильной коррели-
рованностыо соседних элементов изображения (см.
§ 7.5). Периодические помехи создают на изображении
периодические, мугровидные узоры. Способ измерения
интенсивности таких помех рассмотрен в § 6.5.
Шум квантования определяется числом уровней кван-
квантования сигнала (см. § 2.8). Для определения числа
уровней квантования сигнала достаточно построить гис-
гистограмму распределения его значений и подсчитать ко-
количество значений сигнала, для которых гистограмма
отлична от нуля. Таким же образом, обнаруживая «про-
«провалы» в гистограмме, построенной по достаточно боль-
большому набору изображений, и измеряя их глубину, можно
оценить вероятность сбоев (пропадания) тех или иных
уровней квантования. Такие сбои характерны для неко-
некоторых цифровых изображающих систем.
Часть П ' • ¦ ;
ОБРАБОТКА ИЗОБРАЖЕНИЙ
Глава б
КОРРЕКЦИЯ ИЗОБРАЖАЮЩИХ СИСТЕМ
6.1. Постановка задачи
Исходной предпосылкой при решении Задач коррек-
коррекции изображающих систем является предположение, что
существует некоторая функция, скажем a(ii, U), описы-
описывающая изображение на выходе идеальной изображаю-
изображающей системы, а действие реальной изображающей сис-
системы можно описать некоторым преобразованием У
идеального изображения в реально наблюдаемое:
*(/,, t2)=^[a(tu /«)]. F.1)
Тогда задача коррекции сводится к тому, чтобы, зная
те или иные параметры преобразования 9", найти такое
корректирующее преобразование Ф наблюдаемого изо-
изображения, чтобы его результат
A(tu Ь)=Ф[ЬЦи Ь)] F.2) •
был в смысле некоторого заданного критерия верности
воспроизведения, или метрики, возможно ближе к иде-
идеальному изображению. В такой постановке эту задачу
называют еще восстановлением, или реставрацией изо-
изображений ([9, 62]).
Способы ее решения зависят от способов описания
преобразования У.
Как уже отмечалось в § 1.5, практически при описа-
описании преобразований сигналов и тем более таких сложных
сигналов, как изображений, пользуются их иерархиче-
иерархическими описаниями как совокупности некоторых элемен-
элементарных преобразований. В дополнение к рассмотренным
в § 1.6 линейным преобразованиям и безынерционным
нелинейным преобразованиям, которые по отдельности
или в разных сочетаниях описывают обычно (хотя и
необязательно) так называемые детерминированные
искажения в изображающих системах, для описания
207
случайных воздействий на сигнал в изображающих сис-
системах пользуются моделями аддитивного, импульсного
и мультипликативного шума. *
Модель аддитивного шума используется тогда, когда
сигнал на выходе системы или на каком-нибудь проме-
промежуточном этапе его преобразования может рассматри-
рассматриваться как сумма полезного сигнала и некоторого слу-
случайного сигнала (шума). Так, например, описывают
действие зернистости фотопленки, флюктуационный шум
в радиотехнических системах и т. п.
Если действие шума сказывается не по всей протя-
протяженности сигнала, а только в случайно расположенных
точках, где значение сигнала заменяется случайной вели-
величиной, шум называют импульсным. Импульсный шум
характерен для систем передачи изображений по радио-
радиоканалам с использованием нелинейных видов модуляции
сигнала (частотной модуляции, время-импульсной и т. д.)
и для цифровых систем передачи и хранения изображе-
изображений [70].
Мультипликативная модель применяется тогда, когда
можно считать, что полезный сигнал умножается на слу-
случайный сигнал. Таково, например, в первом приближе-
приближении действие шума фотоэлектронных умножителей, шу-
шума диффузности в когерентно-оптических и других голо-
графических изображающих системах.
Поскольку логарифм произведения равен сумме лога-
логарифмов сомножителей, а экспонента от суммы равна
произведению экспонент от слагаемых, аддитивная и
мультипликативная модели в некоторых случаях могут
быть сведены одна к другой введением безынерционного
логарифмического или экспоненциального преобразова-
преобразования (см., например, [16,45]).
Линейные и нелинейные искажения также могут но-
носить случайный характер. Тогда они описываются как
преобразования, параметры которых (например, частот-
частотная характеристика искажающей линейной системы) яв-
являются случайными величинами или функциями.
В настоящее время имеется обширная литература,
посвященная разным аспектам задачи восстановления
изображений и способам ее решения как аналоговыми,
главным образом когерентно-оптическими, так и цифро-
цифровыми средствами (см., например, обзоры в [48, 50, 53,
62, 89]). Особенно это касается проблемы устранения
дефокусировки изображений (смаза).
208
В этой небольшой главе невозможно Дать исчерпы-
исчерпывающее изложение всех достигнутых в решении этой
задачи результатов. Поэтому приведено только несколь-
несколько характерных примеров, иллюстрирующих возможнос-
возможности применения цифровых методов обработки для реше-
решения некоторых конкретных практических задач.
6.2. Коррекция амплитудных характеристик
Одним из простейших видов искажений видеосигнала
в изображающих системах является его нелинейное пре-
преобразование, в результате которого наблюдаемая яркость
изображения на выходе системы отличается от той, кото-
которая была бы на выходе идеальной системы, причем
отличие в каждой точке зависит только от величины ви-
видеосигнала в этой точке. Такие искажения описываются
амплитудными характеристиками системы — функция-
функциями, показывающими зависимость величины выходного
сигнала от величины входного:
b=w(a). F.3)
Так, для описания фотографических и фототелевизи-
фототелевизионных систем пользуются так называемой гамма-харак-
гамма-характеристикой, связывающей плотность почернения фотоне-
фотонегатива на выходе системы с экспозицией или освещен-
освещенностью на входе, для описания телевизионных систем —
характеристиками «свет — сигнал», «сигнал — свет»
и т. п.
Идеальная амплитудная характеристика системы
wm(a) считается заданной. Чаще всего это линейная
функция. Таким образом, задача коррекции амплитуд-
амплитудной характеристики состоит в отыскании корректирую-
корректирующего преобразования wK(b), которое превращает харак-
характеристику системы с коррекцией в заданную.
Поскольку коррекция обычно выполняется перед
синтезом изображения, для отыскания w (b) приходит-
приходится разбивать общую характеристику системы, подлежа-
подлежащую коррекции, на две—характеристику системы до
участка, где может быть произведена коррекция (обо-
(обозначим ее W\(a)), и характеристику остальной части си-
системы— w2(a). Например, w2{a) может характеризовать
искажения, вносимые синтезатором изображения, ска-
скажем, при преобразовании электрического сигнала в плот-
плотность почернения фотопленки в фоторегистрирующих
14—42 209
устройствах. Коррекций этих искажений часто требуется
как последний этап цифровой обработки перед воспро-
воспроизведением изображения.
При отсутствии шумов в корректируемом сигнале
требуемая корректирующая функция wK(b) определяет-
определяется следующим простым соотношением:
w2{wlc[wi(a)]}=w1lia(a). F.4)
В действительности при отыскании wK (b) необходи-
необходимо учитывать, что корректируемый сигнал обычно иска-
искажен не только известным нелинейным преобразованием,
но содержит случайные искажения, или шум. Коррек-
Коррекция может компенсировать нелинейное искажение, но
одновременно усилить шум. Поэтому корректирующую
функцию wK (b) необходимо выбирать так, чтобы мини-
минимизировать отличие корректированного сигнала ДОг{и>вХ
X [iwi(a)-f-|]}, где ?— случайная помеха, от требуе-
требуемого 10щ{а) в смысле некоторого заданного критерия
(метрики). Эта задача родственна задаче оптимального
нелинейного предыскажения при поэлементном кванто-
квантовании, рассмотренной в § 2.8, 2.9.
При цифровой коррекции главный источник шума —
шум квантования. Ввиду того, что расположение уров-
уровней квантования в процессоре фиксировано его разряд-
разрядной сеткой и формой представления чисел, в результате
нелинейного преобразования квантованного сигнала при
его коррекции могут получиться значения, не совпадаю-
совпадающие со шкалой квантования, что приводит к увеличению
шума квантования. Это явление иллюстрируется рис. 6.1,
где шкалы значений корректируемого сигнала b и ре-
результата коррекции й проквантованы равномерно на
32 уровня. Кривая w на этом рисунке отображает функ-
функцию, подлежащую коррекции, кривая wK — корректи-
корректирующую функцию; квантованные скорректированные
значения показаны вертикальными отрезками.
Как видно из рисунка, на участках, где производная
функции шк(-) мала, происходит слияние уровней кван-
квантования исходного сигнала, т. е. разным его значениям
соответствует одно значение преобразованного сигнала,
а там, где производная велика, происходит увеличение
интервала квантования корректированного сигнала по
сравнению с исходным. В результате фактическое число
уровней квантования исходного и преобразованного сиг-
210
нала уменьшается и максимальная ошибка представле-
представления квантованным сигналом непрерывного сигнала воз-
возрастает. Это обстоятельство нужно учитывать при выбо-
выборе исходного числа уровней квантования непрерывного
изображения и при необходимости выбирать его с за-
запасом.
При коррекции изображений кроме выбора оптималь-
оптимальной корректирующей функции и избыточного числа уроВ-
20
да
12
—4
/
12 № 20
ZB ' b
Рис. 6.1.
ней квантования существует еще одна возможность
уменьшения шума квантования, о которой уже упомина-
упоминалось в § 2.10, — добавление к корректируемому сигналу
псевдослучайного шума. Это можно сделать двояко:
либо добавляя к корректируемому видеосигналу перед
коррекцией некоррелированные псевдослучайные числа
с равномерным распределением, получаемые от специ-
специального датчика псевдослучайных чисел (см. § 5.3), либо
не производя округление чисел после вычислений. По-
Последнее используется, если, как это обычно бывает, зна-
значения видеосигнала, подлежащего коррекции, получены
И* 211
в результате вычислений в процессоре с большей раз-
разрядной сеткой, чем число двоичных единиц, отведенное
для квантованного видеосигнала, или представлены
в форме чисел с плавающей запятой. Оба эти приема
дают практически одинаковый эффект. Добавление фик-
фиктивных случайных уровней квантования разрушает лож-
ложные контуры квантования, и визуально качество изобра-
изображений оценивается выше.
6
Z8
Zt
W
иг к
1Z
иг
1Z 16
ZD
ZB а.
Рис. 6.2.
Примером амплитудной коррекции может служить
повышение контраста изображений. К повышению кон-
контраста прибегают тогда, когда цифровой видеосигнал
занимает по тем или иным причинам только часть отве-
отведенного ему диапазона значений. Это можно трактовать
как результат действия системы с амплитудной харак-
характеристикой, подобной той, которая показана на рис. 6.2
линией w для случая, когда видеосигнал принимает
значения только между уровнями 12—26 из возможного
диапазона 0—32. Корректирующая характеристика для
212
4
a)
¦ J- ;<- .
этого случая показана на рисунке линией wK. Из-за того,
что крутизна линии w к по необходимости больше еди-
единицы, коррекция приводит к увеличению ошибки (шума)
квантования. Результат такой коррекции изображения,
показанного на рис. 6.3,я, иллюстрируется на рис. 6.3,6.
На этом рисунке хорошо видны кольца — ложные кон-
контуры, появившиеся в результате указанных эффектов
квантования. Рис. 6.3,в иллюстрирует, как введение
фиктивных уровней квантования разрушает ложные
контуры.
Наиболее простой, быстрый и часто используемый
способ реализации цифровой амплитудной коррекции
состоит в формировании в запоминающем устройстве
процессора таблицы корректированных квантованных
значений сигнала. Тогда значение преобразуемого сиг-
сигнала можно использовать просто как адрес в этой таб-
таблице, по которому находится соответствующая величина
корректированного сигнала. Такая реализация требует
затраты стольких ячеек памяти, сколько значений может
принимать преобразуемый сигнал, но зато само преоб-
преобразование выполняется за один такт выборки из памяти
на один отсчет сигнала. Такой способ применяется так-
также в специализированных процессорах, например дис-
дисплейных*). Если, однако, требуемая емкость памяти
слишком велика, запоминают не всю таблицу, а только
ее отдельные значения. Промежуточные же значения
находят интерполяцией.
6.3. Коррекция линейных искажений
Большинство изображающих систем можно, по край-
крайней мере в первом приближении, рассматривать как
линейные, инвариантные к сдвигу. Одной из основных
характеристик таких систем является импульсная реак-
реакция или ее преобразование Фурье — частотная характе-
характеристика, показывающая, как в этой системе передаются
пространственные гармоники изображения. Идеальной
можно назвать такую изображающую систему, которая
не изменяет пространственный спектр сигнала, т. е. си-
систему с равномерной частотной характеристикой в пре-
*> Дисплейный процессор —это устройство визуализации изобра-
изображений на выходе цифрового процессора, обеспечивающее интерактив-
интерактивный (с участием пользователя) режим обработки изображений.
214
Делах области пространственных частот, занйтШ
спектром изображений. Характеристики реальных изо-
изображающих систем — оптических, фотографических, те-
телевизионных— отличаются от идеальных. В результате
изображения на выходе таких систем претерпевают
искажения. Их называют линейными искажениями. Ча-
Чаще всего эти искажения заключаются в том, что изобра-
изображающая система ослабляет верхние пространственные
частоты изображения. Визуально это приводит к ухуд-
ухудшению резкости изображения.
Так как спектр Фурье сигнала на выходе линейного
фильтра, инвариантного к сдвигу, равен произведению
спектра входного сигнала на частотную характеристику^
фильтра (см. A.114)) ^ то при отсутствии шумов задача'
коррекции линейных искажений сводится к отысканию
линейного фильтра с частотной характеристикой, обрат-
обратной частотной характеристике системы в области частот,
занятой изображением. Если система ослабляет какие-то
пространственные частоты, то восстанавливающий
фильтр должен эти частоты усиливать тем сильнее, чем
больше ослабление.
Однако обычно корректируемый сигнал содержит
шумы. Действие обратного фильтра может привести
к усилению этих шумов, тем более значительному, чем
больше требуемая коррекция ослабленных спектраль-
спектральных составляющих изображения. Поэтому обратная
фильтрация, улучшая качество изображения по одному
показателю — резкости, может ухудшить его по друго-
другому— зашумленности. Очевидно, существует оптимальная
степень коррекции, когда резкость в достаточной степени
восстанавливается, а шум еще не слишком велик. Чтобы
ее найти, необходимо задаться критерием верности вос-
воспроизведения изображения.
Если отличие восстановленного изображения от иде-
идеального оценивать по среднеквадратичному критерию
(см. § 1.2), частотная характеристика Н (fu /2) опти-
оптимального восстанавливающего фильтра определяется по
частотной характеристике #(/ь /г) корректируемой си-
системы выражением [62]
Н (f f ) — Н* fo'^) /fi r\
где * — знак комплексного сопряжения; е2 — поправ-
поправка, равная отношению энергетического спектра Фурье
215
Шума Ап(/ь /г) к энергетическому спектру ансамбля
изображений Р0(/ь /2I рассматриваемых как случайные
поля.
Как и при коррекции амплитудных характеристик,
необходимо учитывать, что коррекция линейных искаже-
искажений производится обычно перед синтезом изображения.
Фотографический или другой регистратор, используемый
для воспроизведения скорректированного изображения,
также обладает отличной от идеальной частотной ха-
характеристикой, которую необходимо учесть при коррек-
коррекции. Если частотную характеристику системы до того
участка, где может быть произведена коррекция, обо-
обозначить через #i(/i, /2), а частотную характеристику
остальной части системы через #2(/ь /2), то можно по-
получить, что оптимальная по среднеквадратичному кри-
критерию частотная характеристика корректирующего
фильтра определяется выражением
и /f f \ " 1 (м >1г) "*2 (Л <fi) /с с\
Следует отметить, что при цифровой обработке в ка-
качестве шума выступает не только шум, имеющийся
в корректируемом видеосигнале, но и шум квантования
и ошибки, связанные с ограниченной точностью вычисле-
вычислений в процессоре.
Возможны два способа цифровой реализации коррек-
корректирующего фильтра: с помощью обработки дискретного
спектра Фурье с использованием алгоритма БПФ
(см. § 3.8) или с помощью цифровых фильтров (§ 3.2,
3.3). В первом случае отсчеты частотной характеристики
F.6) умножают на отсчеты дискретного спектра коррек-
корректируемого видеосигнала, после чего выполняют обратное
ДПФ. Для ослабления краевых эффектов фильтрации
при этом целесообразно прибегать к четному продолже-
продолжению сигнала (см. § 3.5) *), а для сокращения времени
обработки использовать совмещенные алгоритмы ДПФ
и СДПФ (§ 4.6). Во втором случае частотная харак-
характеристика F.6) используется для отыскания отсчетов
импульсной реакции цифрового фильтра (о связи между
ними см. § 3.3, 3.4). Для ослабления краевых эффектов
*' При восстановлении изображений иногда можно учесть
в алгоритме восстановления цикличность, характерную для ДПФ,
и доопределить недостающие отсчеты сигнала в точном соответствии
с критерием восстановления [37].
216
H(f,,O)
1,0
US
as
0Л
o,z
здесь также целесообразно четное продолжение сиг-
сигнала.
Выбор между этими двум^ способами реализации
определяется требуемым объемом вычислений и емкостью
запоминающих устройств. Практически оказывается, что
если корректирующий цифровой фильтр не может быть
удовлетворительно аппроксимирован разделимым и ре-
рекурсивным (см. § 3.3), обработка в спектральной обла-
области с использованием алгоритмов БПФ требует обычно
меньших вычислительных за-
затрат. Несколько расширяют
область применения цифро-
цифровых фильтров приемы, по-
подобные описанным в § 4.8.
Результат коррекции чет-
четкости изображения с исполь-
использованием обработки спектров
показан на рис. 6.4 (а —
исходное дефокусированное
изображение; б — изображе-
изображение после коррекции). На
рис. 6.4,6 можно заметить
эффекты усиления шума
в результате коррекции. Ис-
рис 5.5. точником шума в данном
случае был шум равномерно-
равномерного квантования отсчетов дискретного спектра изображе-
изображения на 256 уровней.
Рисунки 6.5, 6.6 иллюстрируют результаты коррекции
четкости изображений, переданных автоматическими
межпланетными станциями «Марс-4» и «Марс-5» [1].
Коррекция была выполнена с помощью простого разде-
разделимого рекурсивного цифрового фильтра типа C.29),
преобразующего отсчеты корректируемого видеосигнала
ал1 по формуле
[N\ N, "I
uk,1~{2N,+\)B!V2+ 1) Jj Ц пк+т-!+п Г
m=—Nt n=—N, J
F.7)
Коэффициент усиления разностного сигнала g и раз-
размеры окрестности BjVi+1) BN2+1), по которой произ-
производится усреднение, выбирались из условия аппрокси-
218
0,1 0,1 0,3
мацйи требуемой частотной характеристики корректи-
корректирующего фильтра частотной характеристикой фильтра
F.7), равной (см. 3.40))
sine («/,/25.)
^-х
X
sim[nBN2+l)f2/2F2]
sine (nf2f2F2)
F.8)
а) б)
Рис. 6.6.
где 2FU 2/72 —размеры прямоугольника, ограничиваю-
ограничивающего пространственный спектр изображения, в соответ-
соответствии с которыми производилась дискретизация сиг-
сигнала.
219
На рис. 6.5 штриховой линией показано сечение ча-
частотной характеристики системы, подлежавшей коррекции
[51], а штрих-пунктирной линией — корректирующая ча-
частотная характеристика F.8) для g=4, Ni=N2=\. Кри-
Кривая 1 на этом рисунке —частотная характеристика,
полученная в результате коррекции. Если учесть частот-
частотную характеристику фоторегистрирующего устройства,
с помощью которого производилось воспроизведение
скорректированного изображения, то получается сум-
суммарная характеристика, показанная кривой 2 на
рис. 6.5.
Таким образом, в результате цифровой коррекции
полоса пропускания пространственных частот по уровню
0,7 (уровень половинной мощности) увеличилась более
чем в два раза. Как это сказалось на визуально оцени-
оцениваемой резкости изображения, можно судить по рис. 6.6,
где показаны изображения до коррекции (а) и после
нее (б).
В этой задаче использование для коррекции разде-
разделимого рекурсивного фильтра оказалось возможным бла-
благодаря тому, что искаженная характеристика системы
имеет достаточно простой вид. Этот фильтр дает не
вполне совершенную коррекцию. Так, на «средних» ча-
частотах он приводит к некоторой перекоррекции. Но об-
обработка изображения с помощью такого фильтра зани-
занимает в несколько десятков раз меньше времени, чем
потребовалось бы при обработке в спектральной области
с помощью алгоритмов БПФ.
Мы рассмотрели коррекцию частотных характеристик
инвариантных к сдвигу (пространственно-однородных)
систем. Коррекция пространственно-неоднородных си-
систем сложнее. Как уже отмечалось в § 3.3, в некоторых
случаях цифровая коррекция таких систем может быть
выполнена сведением их к пространственно-однородным
с помощью неравномерной дискретизации (подробнее
см. [50, 62]).
Описанные в этом параграфе простые методы дают
возможность восстанавливать изображение при сравни-
сравнительно небольшой дефокусировке и, самое главное, не-
небольшом шуме в корректируемом сигнале. Методы вос-
восстановления при значительной дефокусировке и шуме,
а также неточно известных или случайных характеристи-
характеристиках дефокусировки, являются в настоящее время пред-
предметом интенсивных исследований [36, 78, 89].
220
6.4. Фильтрация импульсных помех
Как было сказано в § 6.1, импульсные помехи при-
приводят к тому, что с некоторой вероятностью (вероят-
(вероятностью ошибки) значение видеосигнала заменяется слу-
случайной величиной. На изображении такие помехи вы-
выглядят изолированными контрастными точками (на
рис. 6.7 показано изображение с импульсными помеха-
помехами при вероятности ошибки 0,3 на элемент изобра-
изображения).
/,. Jl'-J'^X---. ^ • ¦ -.- .--Л' •* {SUE •'««-..•¦- . *
c. 6.7.
Статистические свойства импульсных помех резко
отличаются от статистических свойств изображений. Для
изображений характерны плавные, небольшие измене-
изменения значения видеосигнала от элемента к элементу,
а быстрые, скачкообразные изменения редки и образуют
протяженные контуры. Импульсные же помехи пред-
представляют собой значительные по величине одиноч-
221
ные Изолированные выбросы. §тим объясняется tot
факт, что визуально очень легко отличить выбросы по-
помехи от изображения, хотя иакие помехи и оказывают
сильное мешающее действие.
Благодаря такому резкому отличию помех от изобра-
изображений алгоритм фильтрации импульсных помех ока-
оказывается весьма простым [35]. Он состоит из двух опе-
операций: обнаружения искаженных элементов изображе-
изображения и исправления значения видеосигнала в этих
элементах. Поскольку значение видеосигнала в каждом
элементе изображения вероятнее всего близко к значе-
значениям видеосигнала для соседних с ним элементов, обна-
обнаружить «выбросы» шума можно, сравнив в каждом
элементе значение видеосигнала с его значением, пред-
предсказанным по соседним элементам. Если различие пре-
превышает по модулю некоторый порог бь то принимается
решение о наличии шума. Правило исправления по-
поврежденных значений также может быть основано на
гладкости изображений. Используя это, можно заменять
искажелное значение видеосигнала предсказанным с до-
добавлением некоторой константы 62, которая подбирается
для исключения расфокусировки в результате усредне-
усреднения видеосигнала. Дело в том, что в результате исправ-
исправления контраст (отличие) данного элемента по отноше-
отношению к окружающим снижается до величины бг. Таким
образом, константа бг должна быть меньше порога ви-
визуального обнаружения для одиночных деталей и боль-
больше визуального порога обнаружения протяженных пере-
перепадов. В этом случае «стирание» импульсного шума не
приведет к визуальному впечатлению потери протяжен-
протяженных перепадов, имеющихся на изображении.
Так как значения видеосигнала, используемые для
предсказания, в свою очередь могут быть искажены, то
алгоритм обнаружения должен быть итеративным, на-
начинающимся с больших значений порога обнаружения
бь Чтобы избежать этого, обработку можно производить
рекурсивным фильтром, используя для предсказания
не все элементы окрестности, а только уже исправлен-
исправленные, предшествующие данному.
Приведенные соображения подтверждаются формаль-
формальным решением задачи фильтрации импульсных помех
[35].
Цифровая реализация описанной процедуры проста.
В соответствии с ней значение ак1 видеосигнала в эле-
222
менте {к, I) цифрового изображения преобразуется сле-
следующим образом:
ак1, если \aKl—аг>||<8,;
. — а.,), если F.9)
где ак1 —значение видеосигнала в анализируемом эле-
элементе изображения, пред-
предсказанное по соседним, уже
исправленным элементам.
Для вычисления этого
предсказанного значения
можно использовать простое
линейное предсказание, ког-
когда это значение находится
как сумма взятых с некото-
некоторыми весами значений со-
соседних элементов. Хорошие
результаты дает следующая
формула пресказания по че-
четырем ближайшим слева и Рис. 6.8.
сверху по растру элементам
изображения (имеется в виду, что обработка произво-
производится вдоль строк слева направо последовательно, начи-
начиная с нулевой строки сверху вниз):
В [35] показано, что порог обнаружения 6i опреде-
определяется дисперсией ошибки предсказания значения видео-
видеосигнала по окрестности (aKt —ак1) и вероятностью по-
появления импульсных помех на элемент изображения.
Обычно эти параметры априори неизвестны. Однако их
и величину порога 6i можно оценить по наблюдаемому
искаженному изображению, измерив гистограмму рас-
распределения значений модуля разностного сигнала
(ак>1 — ак1 ) по необработанному .изображению. Эта ги-
гистограмма обычно имеет два участка: быстро спадаю-
спадающий участок и участок, где значения гистограммы ме-
меняются значительно медленнее (см. рис. 6.8). Узкий,
быстро спадающий участок определяется естественными
вариациями видеосигнала. Медленный, спадающий почти
по прямой участок гистограммы обязан своим проис-
происхождением импульсным помехам. Координата границы
между этими участками (излома гистограммы) является
хорошей оценкой порога бь Что касается константы бг,
то обычно б2 имеет порядок 3 ... 4% от размаха значе-
значений видеосигнала.
Рис. 6.9.
На рис. 6.9 показан результат фильтрации помех на
изображении рис. 6.7 с применением описанного алго-
алгоритма. Несмотря на свою простоту этот алгоритм
является очень эффективным средством улучшения ка-
качества изображений, искаженных импульсными помеха-
помехами. Его использование дает возможность снизить тре-
требования к радиотехническим системам передачи изобра-
изображений по каналам с помехами, в частности, заметно
увеличить дальность приема [70]. Он нашел практиче-.
ское применение при обработке снимков с автоматиче-
автоматических межпланетных станций [1].
Щ
6.5. Подавление аддитивного шума с помощью
линейной фильтрации
Во многих случаях действие шума в изображающей
системе можно описать как добавление к незашумлен-
ному видеосигналу a(tu t2) независимого от него случай-
случайного сигнала g(^i, t2)—аддитивного шума. Задача вос-
восстановления изображения в этом случае состоит в полу-
получении из суммарного наблюдаемого сигнала
b(tu tt)=a(tu t2)+l{tu h) F.11)
оценки a{t\, t2) сигнала a{tu t2), как можно более близ-
близкой a(t\, t2) в смысле некоторой метрики, определяемой
критерием верности воспроизведения изображений. По-
Поскольку шум является случайным, эта оценка может
быть наилучшей только в статистическом смысле.
Простейшим средством подавления аддитивного шу-
шума является линейная фильтрация зашумленного сиг-
сигнала. Параметры требуемого фильтра обычно находят,
пользуясь принципами теории оптимальной (винеров-
ской) фильтрации, разработанной для среднеквадратич-
среднеквадратичного критерия верности воспроизведения [6, 13, 18].
Рассмотрим метод выбора параметров фильтра для
дискретного представления сигналов. Пусть ц>3{к)—от-
ц>3{к)—отсчеты базисных функций некоторого ортонормального
базиса; {ae}, {xs}, {ps} — коэффициенты представления по-
последовательности отсчетов незашумленного видеосигнала
{ак}, шума {у и их смеси {Ьк=ак-{-Ьк} по этому базису;
hs,n — коэффициенты дискретного представления линей-
линейного оператора, используемого для получения оценки
сигнала (см. § 3.1) *':
Требуется найти такие коэффициенты A,s,n, чтобы
в среднем по ансамблям шума и по восстанавливаемым
*' В целях компактности выкладок мы пользуемся одномерны-
одномерными обозначениями. Для перехода к двумерному случаю достаточно
заменить индексы к, s, n соответствующими парами индексов.
15-42 225
сигналам квадрат ошибки восстановления
F.13)
был минимален. Черта сверху в этом выражении озна-
означает усреднение по ансамблю шума, суммирование по к
дает усреднение квадрата ошибки по реализации сигна-
сигнала, уголковые скобки — усреднение по ансамблю сиг-
сигналов. Так как базис {ф8(к)} ортонормален, то по соот-
соотношению Парсеваля A.34)
ЛГ—1
F.14)
—о
Подставив сюда as из F.12), получим
/N—l \ /N—l N—l N—l
?J sn s
s=0 I \s=0 n = 0m=0
./V-l /V-l > M'-l /V-l
-B«.2A#-P*-)-Bee-2-
,N
(
Vs
s=O m=0 / s=0
Оптимальные значения A,en являются решением си-
систем уравнений
т. е. следующих систем:
fJV-l
N—l
F.16)
U=o
Если, как это обычно бывает, среднее значение шума
равно нулю,
F.18)
226
Поскольку системы уравнений F.17) для Ksn и А,*«п рав-
равносильны, достаточно решить только одну из них. Под-
Подставив F.18) в F.17), получим следующую систему
уравнений для ksn:
IN-1
> уГ I ч ОС ОС
Zi snVX п
п=0
F.19)
Она определяет обобщенный дискретный винеровский
фильтр [113]. Для так называемого собственного ба-
базиса, когда
4> т,
F.20)
система F.19) также вырождается и ее решением явля-
являются числа
I = <i^dll—§ Яв? F.21)
<1 «1г> + \* I2 ' '
<1 «,1> + \*s I2
Этот фильтр называют фильтром-маской, так как ко-
коэффициенты представления фильтрованного сигнала as
находятся просто умножением коэффициентов ps зашум-
ленного сигнала на Xs, или их «маскированием» после-
последовательностью {Ка}'.
а, = ЯД. F.22)
Формула F.21) является дискретным аналогом клас-
классической формулы винеровской фильтрации [6, 13, 18]:
где H(f)—частотная характеристика оптимального
фильтра; Pc(}f) и Pm(f)—спектральные плотности мощ-
мощности (энергетические спектры) сигнала и шума. Такой
фильтр оптимален для выделения стационарных гауссо-
гауссовых процессов из их смеси со стационарным гауссовым
шумом. Собственный базис ансамбля дискретных сигна-
сигналов {ак}, который определяется F.20), является, соот-
соответственно, дискретным аналогом ядра непрерывного
преобразования Фурье — собственного для стационарных
(в двумерном случае для пространственно-однородных)
случайных процессов.
15* 227
Матрица коэффициентов представления фильтра
F.21) является диагональной, и для его реализации по
F.22) требуется всего одна операция умножения на один
коэффициент ««, а не N, как в общем случае для филь-
фильтра F.19). Поэтому он предпочтительнее фильтра
F.19). Действуя так же, как при выводе F.19), не-
нетрудно получить, что при произвольном базисе соотно-
соотношение F.21) определяет наилучший фильтр среди филь-
фильтров-масок, описываемых диагональными матрицами.
Смысл этого соотношения прост: фильтр ослабляет спек-
спектральные компоненты фильтруемого сигнала тем боль-
больше, чем больше в среднем интенсивность присутствую-
присутствующего в этих компонентах шума по сравнению с интенсив-
интенсивностью сигнала.
Для определения матрицы коэффициентов Xsn опти-
оптимального линейного фильтра по F.19) или F.21) необ-
необходимо знать вторые моменты <ana*m> и хих*т сиг-
сигналов и шума. В принципе эти данные относятся к так
называемым априорным данным, которые должны быть
заранее найдены с помощью статистических измерений
для заданного класса сигналов и шума. Но на практике
во многих случаях их приходится извлекать непосред-
непосредственно из наблюдаемого «зашумленного» изображения
или набора изображений, которые должны быть восста-
восстановлены фильтрацией. Фильтрация, основанная на таких
эмпирически измеренных данных, называется эмпириче-
эмпирической. Некоторые методы эмпирической оценки характе-
характеристик шума на изображении были рассмотрены в § 5.4.
Оптимальные в среднеквадратичном смысле винеров-
ские линейные фильтры, как показывает практика, во-
вообще говоря, далеки от фильтров, действительно опти-
оптимальных для подавления аддитивного шума на изобра-
изображении. Например, использование фильтра типа F.21)
для подавления шума с равномерным энергетическим
спектром (|xs|2=const) в базисе комплексных экспо-
экспоненциальных функций приводит к ослаблению верхних
пространственных гармоник изображения, т. е. к его
дефокусировке, так что качество изображения после ви-
неровской фильтрации оценивается даже ниже, чем каче-
качество зашумленного изображения до фильтрации [38, 62].
Объясняется это, во-первых, тем, что вторые спектраль-
спектральные моменты сигнала и шума недостаточны для описа-
описания статистических отличий шума от сигналов, которые
228
мы относим к классу изображений, и, во-вторых, сред-
среднеквадратичный критерий плохо описывает мешающее
действие шума. Кроме того, получение хороших стати-
стических оценок самих величин <ana*m> и кпк*т на
основе эмпирических данных является непростой зада-
задачей. Поэтому в настоящее время продолжаются поиски
адекватного статистического описания изображений и
более совершенных методов фильтрации [38, 61].
Однако можно указать один практически важный
случай восстановления изображений, когда способ
фильтрации, вытекающий из F.12) и F.22), дает очень
хорошие результаты. Это случай фильтрации сильно
коррелированного аддитивного шума, в энергетическом
спектре которого {|xs|2} имеется только небольшое ко-
количество заметно отличных от нуля компонент, т. е. шу-
шума, реализации которого представляют собой комбина-
комбинацию небольшого количества базисных функций со слу-
случайной интенсивностью. Примером таких помех могут
служить периодические синусоидальные помехи, харак-
характерные для некоторых радиотехнических систем передачи
изображений. Образец изображения с такими помехами
показан на рис. 6.10.
Винеровский фильтр F.21), построенный для подав-
подавления таких помех, будет пропускать без ослабления те
спектральные компоненты видеосигнала, где интенсив-
интенсивность шума равна нулю, и значительно ослаблять те
компоненты, на которых интенсивность шума велика.
При большой интенсивности компонент шума |и«|2 по
сравнению с соответствующими компонентами сигнала
(|as|2) фильтр F.21) хорошо аппроксимируется «ре-
жекторным» фильтром, полностью подавляющим спек-
спектральные компоненты сигнала, искаженные интенсивным
шумом:
[1, К,2_0;
2
Режекторный фильтр еще проще в вычислительном
отношении, чем фильтр F.21).
В качестве базиса для синусоидальных периодиче-
периодических помех в принципе лучше всего базис комплексных
экспоненциальных функций, в котором их спектральные
компоненты наиболее локализованы. Для периодических
229
помех типа прямоугольных волн могут использоваться
функции Уолша. Если помехи, являются существенно од-
одномерными, как, например, на рис. 6.10, то и анализ
помех, и фильтрация также могут быть одномерными.
Спектральный состав и интенсивность периодических
помех обычно заранее неизвестны. Поэтому прибегают
%??... ¦ ¦;>v
1
As
. ... 1* Д*.
Рис. 6.10.
к эмпирической фильтрации, первым этапом которой
является оценка статистических параметров сигнала и
шума. Для этого усреднением по всем наблюдаемым
изображениям с однотипными периодическими помехами
находят среднее значение квадрата модуля каждой
спектральной компоненты зашумленного видеосигнала
(|ps|2). При одномерной фильтрации, скажем, вдоль
строк изображений и усреднение может выполнять-
выполняться по всем строкам изображений, подлежащих филь-
фильтрации. Затем производится обнаружение локализо-
230
ванных компонент шума. Возможность обнаружения
основывается на предположении о том, что последова-
последовательность {(|aJ2)} в среднем является «гладкой», т. е.
ее элементы не должны значительно отличаться от бли-
ближайших к ним. Поэтому локализованные выбросы, силь-
сильно отличающиеся от своего окружения, могут быть ква-
квалифицированы как компоненты, искаженные помехой.
Для обнаружения их можно использовать те же мето-
методы, что и при фильтрации импульсных помех (§ 6.4).
Для построения режекторного фильтра F.24) доста-
достаточно обнаружения выбросов шума. Для построения
фильтра-маски F.21) необходимо еще оценить значе-
значения интенсивности спектральных компонент шума и сиг-
сигнала. Для этого значения (|ps|2) в точках, отмечен-
отмеченных как содержащие выбросы шум_а, принимаются в ка-
качестве оценки суммы (|as\^)_ -+-1xs|2, т. е. считается,
что для получения оценки |xs|2 усреднение по наблю-
наблюдаемым зашумленным изображениям эквивалентно
усреднению по ансамблю реализаций шума. В качестве
оценки значений спектра незашумленного сигнала
(|as|2) в этих точках принимаются значения (|Ps|2),
предсказанные по ближайшим к ним неотмеченным от-
отсчетам, как и в случае фильтрации импульсных помех *>.
Предсказание может быть выполнено, например, интер-
интерполяцией между этими отсчетами.
Коэффициенты {!Ks}, описывающие фильтр-маску, на-
находят по формуле F.21). Непосредственно фильтрация
шума теперь состоит в вычислении с помощью ортого-
ортогонального преобразования по выбранному базису спек-
спектра наблюдаемого сигнала {ps}, маскировании его коэф-
коэффициентами {!ks} по формуле F.22) и восстановлении
сигнала обратным преобразованием. При режекторной
фильтрации спектральные компоненты сигнала с «отбра-
«отбракованными» на этапе обнаружения номерами s просто
приравниваются нулю. Другой вариант режекторной
фильтрации состоит в вычислении отдельных отмечен-
отмеченных при обнаружении спектральных компонент филь-
фильтруемого сигнала и вычитании их из сигнала. Если ко-
количество этих компонент невелико, такой способ может
оказаться экономнее способа с прямым и обратным
*> Как нетрудно понять, этот метод оценки интенсивности ком-
компонент сигнала и шума также родствен описанному в § 5.4 мето-
методу измерения интенсивности аддитивного некоррелированного шума.
231
a) J
6)
Рис. 6.1 J.
преобразованием сигнала даже при использовании для
преобразований быстрых алгоритмов.
Для иллюстрации описанной методики фильтрации
периодических помех на рис. 6.1 \,а показан в логариф-
логарифмическом масштабе график интенсивностеи горизонталь-
горизонтальных спектральных компонент преобразования Адамара
для изображения, показанного на рис. 6.10. На
Рис. 6.12.
рис. 6.11,6 показан график коэффициентов {Ks} фильтра-
маски. Результат фильтрации этим фильтром изображе-
изображения на рис. 6.10 с использованием преобразования Ада*
мара показан на рис. 6.12.
Эксперименты с фильтрацией периодических помех
на изображении показывают, что «режекторная» филь-
фильтрация дает результаты, визуально не отличимые от
фильтрации фильтром-маской, но при режекторной филь-
фильтрации следует более тщательно заботиться о надлежа-
233
щем продолжении сигнала для борьбы с краевыми
эффектами. Кроме того, наличие на изображении очень
контрастных деталей с резкими границами (как, напри-
например, граница планета — космос в космической съемке,
глубокие тени и т. д.) при режекторной фильтрации мо-
может привести, наоборот, к появлению периодических
искажений в районе этих границ, так как для таких де-
деталей не выполняется предположение о гладкости спек-
Рис. 6.13.
тра. В этих случаях приходится прибегать к специаль-
специальным мерам по удалению этих деталей из снимков перед
фильтрацией и восстановлению их после фильтрации.
Один из приемов такого удаления описан ниже (см. так-
также §8.7).
Другим примером аддитивных помех с сосредоточен-
сосредоточенным спектром, хорошо поддающихся линейной фильтра-
фильтрации, являются помехи типа полос и неравномерности
фона, возникающие в некоторых фототелевизионных
системах [1]. Пример изображения с такими помехами
показан на рис. 6.13. Дискретный спектр Фурье подоб-
подобных помех сосредоточен в области очень низких прост-
234
ранственных частот: спектр полос — в полосах «OlS и аг,о
в зависимости от их направления (/• и s — номера вдоль ¦
координат в частотной плоскости ДПФ), спектр пятна:
фона — в коэффициентах, близких к началу координат
(,-=0,5=0).
Фильтрацию таких помех целесообразно производить,
обработкой не в спектральной, а в пространственной
области. Так, в [1] описана фильтрация двукратной об-
обработкой сигнала одномерными рекурсивными фильтра-
фильтрами типа C.29) по следующим формулам:
[1 Nl ' I
а*,г— 2yv, + 1 J] a«+m.f +а
m=—Nt *
F.25)
n=-N,
?,2
0,8
8 12 IB 20 г
Рис. 6.14.
где а — константа, равная половине максимального зна-
значения видеосигнала, использовавшаяся в качестве оцен-
оценки неизвестного среднего по
кадру значения видеосигнала,
т. е. величины cto,o. Каждый
из одномерных фильтров, вы-
выравнивая локальное среднее
значение сигнала, подавлял
полосы в соответствующем на-
направлении. При этом пара-
параметры Ni и N2, сообразуясь
с размерами пятна фона, вы-
выбирались равными 256 (в от-
отдельных случаях 128) элементов при общих размерах
кадра 1024X1024 элемента. В спектральной области
эти два одномерных фильтра полностью подавляли ком-
компоненту ро,о, заменяя ее величиной, пропорциональной а,
и почти в три раза ослабляли компоненты спектра вдоль
полос ai,rHae>i (npa/Vi=256). Сечение частотной харак-
характеристики фильтра F.25) показано на рис. 6.14. Резуль-
Результат такой обработки снимка, показанного на рис. 6.13,
приведен на рис. 6.15. На примере этих снимков следует
снова остановиться на необходимости при режекторной
235
фильтрации помех с сосредоточенным спектром удалять
из изображения контрастные* детали с резкими грани-
границами. В данном случае это реперные крестообразные
марки (см. рис. 6.13, 6.15). Перед фильтрацией снимка,
показанного на рис. 6.13, с помощью нелинейной про-
процедуры обнаружения — сглаживания, описанной в § 8.5,
Рис. 6.15.
крестообразные марки были удалены, а после фильтра-
фильтрации они были восстановлены на своих местах [1, 73] *).
*> Отметим, что обработанные таким образом снимки поверхно-
поверхности Марса, переданные АМС «Марс-5», использовались впоследствии
для синтеза цветного изображения [39]. Среднее значение сигнала
в этом случае сказывается на среднем цветовом тоне цветного изо-
изображения. Поэтому оно было уточнено но данным прямых астроно-
астрономических наблюдений Марса с Земли.
236
Глава 7
ПРЕПАРИРОВАНИЕ ИЗОБРАЖЕНИИ
7.1. Задачи препарирования и визуальный анализ
изображений
Как уже отмечалось, в прикладных и научных зада-
задачах часто оказывается недостаточным представить на-
наблюдателю объект с помощью идеальной изображающей
системы. При решении сложных задач, требующих скру-
скрупулезного анализа изображений (поиск, идентифика-
идентификация объектов, определение разного рода количественных
характеристик, обобщающие описания и т. п.), жела-
желательно вооружить зрение, т. е. дать наблюдателю сред-
средства, облегчающие интерпретацию изображений, извле-
извлечение из них информации. Это, во-первых, технические
средства и, во-вторых, методы обработки видеосигнала.
Эту обработку, выступающую как вспомогательное
средство визуальной интерпретации изображений, мы
называем препарированием изображений.
В отличие от коррекции изображающих систем пре-
препарирование можно рассматривать как коррекцию спо-
способа взаимодействия датчика видеосигнала с объектом.
Например, в медицинской рентгеноскопии для увеличе-
увеличения контраста деталей снимка пациенту приходится вво-
вводить специальные контрастирующие вещества. Но
в принципе информация об этих деталях содержится и
в снимке, полученном без такого вещества, только зри-
зрительно трудно ее воспринять. Компенсировать этот не-
недостаток процесса съемки можно с помощью специаль-
специальной обработки снимка, или его препарирования.
Препарирование давно используется в научной и да-
даже художественной фотографии и технике визуализации
информации. Достаточно вспомнить о методах графиче-
графического изображения, о таких приемах, как соляризация
при изготовлении фотоотпечатков, метод «нерезкого ма-
маскирования», построение изофот, воспроизведение изо-
изображений в псевдоцветах и т. д. [31]. Естественно, что
методы препарирования во многом определяются исполь-
используемыми техническими средствами. Можно без преуве-
преувеличения сказать, что по многообразию возможных мето-
методов препарирования и удобству организации необходи-
237
мого при препарировании диалогового (интерактивного)
режима обработки, т. е. обратной связи от наблюда-
наблюдателя к процессу обработки, цифровая техника обработ-
обработки сигналов благодаря своей универсальности и гиб-
гибкости не имеет себе равных.
Развитие вычислительной техники и средств визуали-
визуализации информации на выходе цифровых процессоров от-
открывает в настоящее время перспективу создания диа-
диалоговых систем препарирования изображений, в кото-
которых наблюдатель, или, как принято говорить, пользова-
пользователь, при наличии развитого математического (програм-
(программного) обеспечения может, работая с изображением,
подвергать его по своему выбору разнообразным преоб-
преобразованиям и принимать необходимые решения по ре-
результатам непосредственного наблюдения за изображе-
изображением в процессе обработки. По существу можно говорить
о создании робота, усиливающего не только чисто опти-
оптические свойства зрения, но и его аналитические свой-
свойства.
Методы препарирования изображений могут быть
разбиты на два больших класса: обработка признаков
и геометрические преобразования.
Обработка признаков — это извлечение, измерение и
визуализация тех характеристик видеосигнала, или при-
признаков, которые наиболее информативны для зрения
в данной задаче анализа. Например, хорошим зритель-
зрительным признаком, необходимым для узнавания объектов
на изображениях, являются границы объектов. Другими
признаками могут быть, например, яркость, цвет, сте-
степень неоднородности объектов, или текстура и т. д. Мы
рассмотрим несколько линейных и нелинейных методов
обработки признаков: адаптивное квантование мод, по-
повышение локальных контрастов посредством нелинейно-
нелинейного преобразования значений видеосигнала, методы окон-
туривания и построения графических препаратов.
К геометрическим преобразованиям относятся все
виды обработки, связанной с преобразованием вида
плоской проекции трехмерных тел. Наиболее характер-
характерные задачи этого типа встречаются при обработке
аэрофотоснимков и космических снимков для составле-
составления карт. Иногда требуется произвести геометрические
преобразования изображений, чтобы сопоставить два
или несколько полученных в разных условиях изображе-
изображений одного и того же объемного тела. К этому же клас-
238
су задач препарирования изображений можно отнести
также задачи восстановления многомерных сигналов по
их проекциям. Такого рода задачи возникают, например,
в медицине и дефектоскопии, когда по нескольким рент-
рентгенограммам тела, снятым под разными ракурсами, тре-
требуется восстановить внутреннюю структуру этого тела.
7.2. Адаптивное квантование мод
Одно из направлений в препарировании изображе-
изображений с помощью цифровой обработки — использование
решающих алгоритмов, подобных тем, которые встреча-
встречаются в задачах классификации и распознавания образов
(см., например, [21]). Получающиеся с помощью таких
алгоритмов изображения — препараты представляют со-
собой как бы поля решений по некоторым, в общем случае
векторным признакам.
Такие решающие алгоритмы можно использовать, на-
например, когда на изображении необходимо выделить
участки, обладающие определенными свойствами, чтобы
затем визуально проанализировать конфигурацию этих
участков, их взаимное расположение, найти их размеры
и другие характеристики. Подобные задачи встречаются
в геологии, металлографии, в медицинской и промыш-
промышленной диагностике по изображениям. Признаки, по ко-
которым необходимо произвести разделение, обычно из-
известны только качественно: это могут быть значения
видеосигнала в разных спектральных диапазонах регист-
регистрируемого излучения, модуль или угол наклона гради-
градиента видеосигнала, интенсивность сигнала в разных диа-
диапазонах пространственных частот и т. п. Количественные
значения этих признаков, соответствующие тем или
иным участкам или деталям изображения, которые сле-
следовало бы отличать друг от друга и выделять на изо-
изображении как отдельные, обычно неизвестны, и их нахо-
находят, используя методы так называемого кластерного
анализа.
Эти методы основаны на представлении, что различ-
различные участки изображений могут группироваться по при-
признакам, отражающим определенные свойства изобра-
изображаемых объектов. Факт группировки элементов изобра-
изображения по этим признакам проявляется в том, что
в гистограмме распределения элементов изображения по
239
величине признака (или по составляющим признака,
если он — векторный) вокруг некоторых значений обра-
образуются сгущения, или моды (их еще называют класте-
кластерами— от английского слова, обозначающего сгущение),
а другие значения оказываются редко представленными
или не представленными вообще. Выделив эти моды,
можно найти разделяющие их границы, т. е. пороговые
значения признаков, по которым можно произвести за-
затем разделение изображения на участки.
Представим себе, например, что мы наблюдаем цвет-
цветное изображение песчаного морского побережья с участ-
участками растительности. Ясно, что если мы рассмотрим рас-
распределение элементов изображения по цвету, мы найдем
в нем три пика: в области сине-зеленого (по цвету мо-
моря), желто-зеленого (растительность) и серо-желтого
(песок). Эти пики будут более или менее сконцентриро-
сконцентрированными в зависимости от однородности окраски моря,
песка и растительности. Определяя теперь цвет каждого
элемента изображения, можно узнать, к какому из трех
пиков он принадлежит, и тем самым произвести класси-
классификацию, или разбиение элементов изображения по
цвету.
Разделение мод в распределении значений призна-
признаков можно назвать адаптивным квантованием мод. Ка-
Качество адаптивного квантования мод зависит от того,
насколько хорошо разделяются моды. Поэтому важным
вопросом использования метода адаптивного квантова-
квантования мод при препарировании изображений является обо-
обоснование критерия разделения мод. Разделимость мод
зависит от степени их сконцентрированности, т. е. от то-
того, насколько объективно однородны участки изображе-
изображения, которые в соответствии с данной конкретной зада-
задачей следует рассматривать как однотипные. Скажем,
в рассмотренном нами примере мы можем интересовать-
интересоваться отделением участков с растительностью от моря и от
песка. Но растительность может быть однородна по цве-
цвету, а может иметь и вариации (пожелтевшие листья,
блеск на листьях, цвет стволов, разные породы расти-
растительности и т. п.). Эти вариации размоют моду, и она
может перекрыться с модой, соответствующей песчаной
почве, цвет которой также может иметь разные оттенки.
Это значит, что нужно аккуратно выбрать разделяю-
разделяющие границы, а, возможно, при сильных вариациях и
вообще отказаться от такого признака, как цвет.
240
Для выработки количественных критериев выбора
оптимальных границ между модами необходимо иметь
описание причин размытия мод и потерь за счет непра-
неправильной классификации. Что касается функции потерь,
то она определяется требованиями дальнейшего визу-
визуального анализа изображения-препарата. В задачах пре-
препарирования изображений наиболее конструктивным
представляется требование, чтобы количество неверно
классифицированных элементов изображения было ми-
минимальным. Можно наложить также требование плав-
плавности границ выделенных участков или отсутствия мел-
мелких посторонних вкраплений внутри участка с большой
площадью и т. п. условия.
Степень размытия мод определяется свойствами
объекта по отношению к выбранному признаку. Их
обычно трудно описать формально и приходится строить
более или менее правдоподобные модели, основываясь
на априорном знании того, как проявляются интересую-
интересующие нас свойства объектов через наблюдаемый признак
и как формируется наблюдаемое изображение. Напри-
Например, наблюдаемое изображение, подлежащее препари-
препарированию, можно трактовать как результат преобразо-
преобразования исходного поля, в котором представлены только
«чистые» моды (т. е. поля, распределение значений ко-
которого по рассматриваемому признаку состоит из набора
6-функций) случайными операторами или (и) шумами.
Тогда, пользуясь методами теории статистических ре-
решений (см., например, [21]), можно построить решаю-
решающие правила, оптимальные, скажем, для критерия ми-
минимума частоты ошибки классификации элементов изоб-
изображения. Поле решений, получаемое в этом случае,
может трактоваться как оценка изображения-оригинала
в предположении, что препарируемое изображение было
получено искажением некоторого исходного поля с «чи-
«чистыми» модами.
Простейшие модели со случайными операторами,
воздействующими на «идеальное» изображение, и адди-
аддитивными или мультипликативными шумами, для которых
удается получить точные решающие алгоритмы, обычно
недостаточно удовлетворительно соответствуют дейст-
действительным соотношениям между выделяемыми свойст-
свойствами объектов и измеряемыми признаками, и приходит-
приходится принимать во внимание другие, иногда трудно фор-
формализуемые факторы.
16—42 241
Так, моды в распределении признаков по изображе-
изображению могут значительно размываться за счет усреднения
по всему наблюдаемому изображению; наблюдаемое
изображение чаще всего нельзя трактовать как резуль-
результат действия на сигналы только шума или только ли-
линейного оператора; элементы изображения, группирую-
группирующиеся по модам, образуют обычно протяженные участ-
участки или, во всяком случае, необходимо выделять именно
такие участки, а малоразмерные игнорировать.
Учесть подобные факторы можно, используя допол-
дополнительные приемы.
1. Ограничение размеров анализируемых изображе-
изображений. Изображение разбивается на отдельные фрагмен-
фрагменты, в пределах которых моды размываются незначитель-
незначительно, и обработка ведется по фрагментам. Эти фрагменты
можно располагать впритык друг к другу или с перекры-
перекрытием. В последнем случае обрабатывается только непе-
неперекрывающаяся часть фрагментов. Этот прием позво-
позволяет обрабатывать изображения с пространственно-не-
пространственно-неоднородной структурой.
2. Разделение по типам размытия мод. При обнару-
обнаружении мод и определении границ их разделения —гра-
—границ квантования —анализ распределения значений при-
признака производить лишь на тех участках изображения,
где размытие мод можно трактовать как результат дей-
действия только одного шума или только линейных опера-
операторов.
Этот прием поясняется рис. 7.1 для одномерного при-
признака, например, значения видеосигнала на изображе-
изображении. На рис. 7.1,а сплошными линиями показаны слева
график видеосигнала для перепада яркостей на изобра-
изображении, справа — гистограмма распределения значений,
представляющая собой две 6-функции. За счет шума
в видеосигнале пики б-функций несколько размываются,
но если шум достаточно слаб, моды не перекрываются
(см. штриховые линии на рис. 7.1,а). На рис. 7.1,6
¦сплошными линиями показаны слева график того же
видеосигнала на выходе низкочастотного линейного
фильтра, размывающего перепад, справа — гистограмма
распределения этого сигнала, на которой две моды сме-
смешались; штриховыми линиями на этом рисунке показаны
те же функции при наличии шума. Ясно, что если изме-
измерить гистограмму по участкам видеосигнала слева и
•справа от точек х и у на левом рис. 7.1,6, то снова полу-
¦242
моды, как на правом
чим отчетливо разделяющиеся
рис. 7.1,а.
3. Отбраковка мод по «заселенности». Игнорировать
моды с числом элементов изображения, меньшим неко-
некоторого порога, задаваемого, исходя из минимально до-
допустимой площади выделяемых участков изображения.
4. Отбраковка мелких деталей. Отфильтровывать пу-
путем присоединения к окружающей моде элементы изо-
Г
I»
i
л „ ,1|л
V
Пространственная
a b
Значение ЗиВеосигнала
Пространственная координата
11
It
a b
Значение ВиВеосианам
Рис. 7.1.
бражения, принадлежащие к иной моде, чем их окруже-
окружение, и образующие конфигурации с площадью, меньшей
задаваемого порога.
Для иллюстрации метода адаптивного квантования
мод приведем результаты его применения для разделе-
разделения участков изображения по величине видеосигнала
[2, 3]. Величина видеосигнала — простейший признак,
который можно измерить на изображении, но часто-
именно она связана с основными физическими свойства-
свойствами изображаемых объектов.
Схема операций по препарированию с использовани-
использованием адаптивного квантования мод видеосигнала показана
16*
243'.
на рис. 7.2 [3]. Прямоугольниками на этом рисунке
обозначены отдельные блоки программ, кружком — па-
параметры, задаваемые пользователем, овалом — этапы
обработки, на которых получаются изображения—пре-
изображения—препараты.
Блок «Выделение фрагментов» задает тип обработки
(по всему кадру в целом или по отдельным фрагментам).
Порог'
Выделения
„плоских
участка В"
Выведение
элементов
„плоских
участков"
С Препарат j-
Г Препарат у-
Рис. 7.2.
КВантоВание
па модам
Равномерное
квантование
Фильтрация
Выделение
отдельных мод
-( Препарат Л
Выделение.
контуров
Наложение
изображений
С Препарат
С препарат j С Препарат J
В последнем случае пользователь указывает размер
фрагментов и степень перекрытия. Относительно выбора
этих величин нельзя дать каких-либо точных обоснован-
обоснованных рекомендаций априори, и имеется в виду, что поль-
пользователь принимает решение об этих параметрах на
основе собственного опыта и визуальной оценки обраба-
обрабатываемого изображения. Эта же оговорка относится и
к остальным параметрам, задаваемым пользователем.
Блок «Выделение «плоских» участков» выделяет те
элементы изображения, для которых максимум модуля
244
их разности с соседними на растре слева, справа, свер-
сверху и снизу восемью элементами не превышает порог, за-
задаваемый пользователем. Тем самым в блок построения
гистограммы поступают только те значения видеосигна-
видеосигнала, которые соответствуют участкам изображения со
слабыми изменениями видеосигнала.
В блоке «Выделение границ мод» определяется поло-
положение мод (максимумов) гистограммы и границ кванто-
квантований. Если между соседними модами значения гисто-
гистограммы отличны от нуля, граница между модами прово-
проводится в точке минимума гистограммы; если имеется
участок с нулевыми значениями гистограммы — по сере-
середине между разделяемыми максимумами.
В блоке «.Проверка4 мощности мод» производится от-
отбраковка мод по «заселенности». Для этого подсчитыва-
ется площадь гистограммы в пределах каждой из раз-
разграниченных мод (мощность мод). Те моды, для кото-
которых она меньше порога, задаваемого пользователем,
объединяются с ближайшей соседней наиболее мощной
модой.
Блоки «Квантование по модам» и «Равномерное
квантование» осуществляют квантование значений ви-
видеосигнала по выбранным на предыдущих этапах грани-
границам. При квантовании по модам элементам изображе-
изображения, попавшим по величине видеосигнала в границы
данной моды, присваивается величина, которой соответ-
соответствует максимум гистограммы в этих границах. При
равномерном квантовании этим элементам присваивает-
присваивается величина, равная Ai, где i — порядковый номер моды;
А — отношение заданного размаха видеосигнала к обще-
общему числу выделенных мод. При квантовании по модам
сохраняется большее подобие препарированного изобра-
изображения исходному. Равномерное же квантование позволя-
позволяет увеличить относительный контраст деталей. При на-
наличии соответствующего устройства воспроизведения
цветного изображения результат равномерного кванто-
квантования может быть показан в псевдоцветах.
В блоке «Фильтрация» производится отбраковка ма-
малых по площади участков изображения, принадлежащих
к моде, отличной от их окружения. Для этого изображе-
изображение анализируется по фрагментам 6X6 элементов и рас-
рассматривается гистограмма значений элементов, принад-
принадлежащих внутренней области 4X4 элемента каждого та-
такого фрагмента. Если в этой гистограмме оказались
215
, ." й
a)
f
.ж
тип
6)
моды, по мощности меньшие некоторого задаваемого
порога, и граничные элементы фрагмента 6X6 не при-
принадлежат этим модам, то элементам, относящимся
к этим модам, присваивается величина, соответствующая
максимальной по мощности моде в гистограмме.
Блок «Выделение отдельных мод» позволяет предста-
представить на изображении-препарате только те участки изо-
изображения, которые отнесены к одной или нескольким
определенным модам.
В описываемой системе программ имеются также бло-
блоки «Выделение контуров» и «Наложение изображений»,
предназначенные для выделения границ объектов и их
наложения на исходное изображение (см. § 7.5).
Кроме изображений^репаратов в процессе обработ-
обработки с помощью этой системы программ пользователь мо-
может получать, если необходимо, также сопутствующую
количественную информацию, которая может быть важ-
важна для анализа изображения и принятия решений. Так,
в описанном методе адаптивного квантования мод ви-
видеосигнала можно получить гистограмму видеосигнала,
найденные пороги разделения, количество, мощность мод
247
б)
Рис. 7.4.
(т. е. относительную площадь, занятую деталями, при-
принадлежащими к каждой моде) и т. д.
Некоторые результаты работы описанной системы
программ показаны на рис. 7.3. На рис. 7.3,а показан
аэрофотоснимок, использовавшийся в экспериментах по
квантованию, а на рис. 7.3,6, в приведены результаты
его квантования (равномерного) с разными порогами от-
отбраковки мод по их мощности: 4% и 10% соответствен-
соответственно. В результате число уровней квантования (число мод)
оказалось равным 11 и 3. Сравнивая эти рисунки, можно
видеть, как при увеличении порога отбраковки мод
исчезают подробности и происходит своего рода генера-
генерализация препарата. Детали, принадлежащие к отдель-
отдельным модам, можно отделять от остальных деталей. При-
Примеры таких препаратов показаны на рис. 7.4,а—в, кото-
которые получены разделением деталей, принадлежащих
к разным модам, выделенным квантованием с порогом
10% (см. рис. 7.3,в).
Пофрагментное и глобальное (с анализом по всему
изображению) квантование можно сравнить по резуль-
результатам, показанным на рис. 7.5. Рис. 7.5,а — это исходное
изображение микрошлифа. Рис. 7.5,6 — результат его
249
a)
Рис. 7.5.
глобального квантования на три уровня. На рис. 7.5,в
показан результат пофрагментного квантования без
перекрытия фрагментов. Границы фрагментов показаны
сеткой. На рис. 7.5,6 осталась только грубая структура
шлифа; на рис. 7.5,в сохранены многие детали оригина-
оригинала, сам же снимок стал резче, границы между вкрапле-
вкраплениями просматриваются отчетливей, чем на исходном
снимке.
7.3. Препарирование путем нелинейного
преобразования шкалы значений видеосигнала
В тех случаях, когда требуется увеличить контраст
слаборазличимых деталей изображений, используют не-
нелинейное преобразование значений видеосигнала. Про-
Простейший пример—метод амплитудных разрезов, который
заключается в том, что определенный участок диа-
диапазона значений видеосигнала с помощью преобразова-
преобразования, показанного на рис. 7.6,а и совершаемого над каж-
fa
Г
Исходное значение
биВсасиена/ю
Исходное значение
Виреосигнала
Рис. 7.6.
дым элементом изображения, растягивается на всю шка-
шкалу допустимых значений. Тем самым контраст деталей,
попавших в этот участок значений, возрастает. Детали
же за пределами выбранного участка значений стирают-
стираются. Двигая этот участок по диапазону значений видео-
видеосигнала, можно последовательно просмотреть изображе-
изображение как бы через амплитудную л'упу. Такое растяжение
шкалы можно производить также сразу на нескольких
участках диапазона значений видеосигнала с помощью
преобразования, показанного на рис. 7.6,6. Если изобра-
изображение содержит крупные детали с медленно меняющи-
251
мися значениями видеосигнала, такое преобразование
почти не разрушает целостность образов, значительно
увеличивая в то же время контраст малоконтрастных
деталей. Имеются данные о применении такого метода
для препарирования изображений в биомедицинских
исследованиях [97].
Вариантом метода амплитудных разрезов является
метод отбрасывания двоичных разрядов в коде видео-
видеосигнала [76]. Он заключается в том, что изменения
одного или нескольких двоичных разрядов кода видео-
видеосигнала блокируются, и при преобразовании такого циф-
цифрового сигнала в аналоговую форму аналоговый сигнал
усиливается до полного диапазона. Нетрудно понять,
что если блокируются старшие разряды кода, то харак-
характеристика преобразования имеет вид, показанный на
рис. 7.6,6, с числом участков, равным двум в степени
числа блокируемых разрядов. Если блокируются млад-
младшие разряды, характеристика преобразования становит-
становится ступенчатой. Если блокируется один или несколько
из средних разрядов, характеристика становится более
сложной. Основным достоинством этого метода является
простота реализации в цифровых процессорах.
Метод амплитудных разрезов известен давно и мо-
может быть реализован не только цифровыми, но и чисто
аналоговыми, например фотографическими или телеви-
телевизионными, средствами. При их цифровой реализации
необходимо учитывать, что, поскольку преобразованию
подвергается квантованный сигнал, число уровней кван-
квантования в растягиваемом участке не изменяется, изме-
изменяется только расстояние между ними. В результате рас-
растяжения могут стать видными ложные контуры на гра-
границах перепада, где происходит смена уровня
квантования. Впрочем, иногда это даже удобно, ибо эти
контуры являются линиями равных значений и пред-
представляют интерес как таковые.
При использовании метода амплитудных разрезов
пользователь должен задать участки диапазона значе-
значений видеосигнала, которые нужно растянуть. Информа-
Информацию о них ззять обычно неоткуда, а, глядя на изображе-
изображение, можно указать эти участки значений только очень
приблизительно, и для получения высокоинформативно-
го изображения границы участков приходится подбирать
методом проб и ошибок. Поэтому гораздо удобнее ис-
использовать адаптивные амплитудные преобразования,
252
которые строятся на основе измерения и анализа гисто-
гистограммы распределения значений видеосигнала. Из них
наибольшую популярность приобрел так называемый
метод эквализации [2, 76, 97, 101, 109, 122, 123]. Он
заключается в том, что функцию преобразования видео-
видеосигнала подбирают таким образом,-чтобы преобразован-
преобразованный видеосигнал имел равномерную (откуда и произо-
произошло название «эквализация») гистограмму распределе-
распределения. Способ нахождения нужной функции преобразова-
преобразования проще всего пояснить для непрерывного сигнала.
Пусть h(а) -—плотность распределения значений преоб-
преобразуемого видеосигнала (auvm^.a^.aMSiKC), w(a) — иско-
искомая функция преобразования, h(d)—плотность распре-
распределения значений преябразованного сигнала a=w(a),
равная, очевидно, 1/[од(аМакс) —ш(амин)].
Из всех возможных функций од (а), дающих равно-
равномерное распределение преобразованного сигнала, будем
отыскивать только монотонные функции как сохраняю-
сохраняющие однозначность преобразования. Считая од (а) моно-
монотонно возрастающей (монотонно убывающая соответст-
соответствует передаче в «негативе»), из очевидного равенства
h (а) da =—. ^—, :- = h (a) da, G.1)
V ' W Какс) — W («мин) W V '
получим уравнение
решив которое, найдем, что
«(«макс)-«(««,)- .) hWda>- G"d>
При цифровой обработке можно пользоваться дис-
дискретным аналогом этого преобразования:
т==
m=l,2,...,M-U
G.4)
где т — кзачтованное значение преобразуемого сигнала;
й(к)—гистограмма распределения его значений; к=
=0, 1, ..., М—1; /ft — преобразованное значение, а квад-
квадратные скобки означают операцию округления до бли-
ближайшего целого числа.
253
Смысл операции эквализации гистограммы в том, что
она приводит к увеличению контрастов на участках изо-
изображения с наиболее часто встречающимися значениями
видеосигнала. Действительно, крутизна преобразова-
преобразования—-производная функции w{a)—тем больше, чем
больше h(a), как это следует из G.2). Если гистограм-
гистограмма h(a)—одномодовая, т. е. большая часть элементов
изображения имеет близкие значения яркости, образуя
фон для остальных элементов, то в результате эквализа-
эквализации она расширяется, причем контраст деталей относи-
относительно фона возрастает тем больше, чем он меньше был
до преобразования. Если гистограмма распределения
содержит несколько мод (например, для изображений
ландшафтов с глубокими тенями характерны двухмодо-
вые гистограммы), эквализация приводит к расширению
каждой моды, причем диапазон значений, который будет
занят каждой модой после преобразования, пропорцио-
пропорционален мощности моды. Эта избирательность эквализации
по отношению к частоте значений видеосигнала и явля-
является основным достоинством ее перед простым линейным
увеличением контраста, описанным в § 6.2.
Эквализацию можно производить по всему изображе-
изображению или пофрагментно, причем фрагменты изображения
могут перекрываться [2]. При пофрагментной эквализа-
эквализации с перекрытием гистограмма распределения строится
по всему фрагменту, а преобразуется только его цен-
центральная часть с размерами, равными размерам непере-
неперекрывающихся участков. Если каждый следующий фраг-
фрагмент сдвигается относительно предыдущего на один эле-
элемент, то преобразование называется скользящим. Табли-
Таблица скользящего преобразования — эквализации меняется
от элемента к элементу изображения в соответствии
с изменениями гистограммы окружающих эти элементы
фрагментов изображения. Пофрагментный и скользящий
режимы эквализации являются так же, как в случае
адаптивного квантования мод, средством учета про-
пространственной неоднородности изображения.
Эквализация является в известном смысле антипо-
антиподом адаптивного квантования мод, рассмотренного в пре-
предыдущем параграфе. Действительно, эквализация расши-
расширяет моды в распределении значений видеосигнала,
а адаптивное квантование мод сужает их до б-функций.
Сигнал, показанный на рис. 7.7,а, после квантования
превратится в чисто ступенчатый, а эквализация уничто-
254
жит ступеньку в таком сигнале, но увеличит контраст
отклонений от прежних двух значений (рис. 7.7,6).
Эффект эквализации наглядно виден на рйс. 7.8,а,
который представляет собой результат эквализации по
фрагментам 30X30 элементов с шагом 15X15. элементов
аэрофотоснимка, показанного на рис. 7.3,а. Йа рис. 7.8,а
видно, как в отличие от случая квантования резко уве-
увеличилась детальность снимка. Если этот аэрофотоснимок
\f^\^ji
Сиенам So якдализации
Рис. 7.7.
Сигнал поеме эк8амизациа
подвергнуть эквализации не по фрагментам, а целиком
(рис. 7.8,о), его общий контраст также возрастет, но
различимость деталей будет намного хуже, чем на рис.
7.7,а.
Два других примера использования пофрагментной
эквализации показаны на рис. 7.9,а—г. Это панорамы
поверхности Венеры, полученные автоматическими меж-
межпланетными станциями «Венера-9» и «Венера-10» (а, в—
до обработки; б, г — после обработки эквализацией).
Нетрудно видеть, что эквализация позволила выделить
много мелких малоконтрастных деталей в темных и свет-
светлых участках панорам, подчеркнуть объем. Этот резуль-
результат был получен при размере фрагмента 15X15 элемен-
элементов и шаге 3X3 элемента (общий размер изображения—•
128X512 элементов). Клеточная структура на некоторых
участках как раз связана с нестыковкой отдельных фраг-
фрагментов. Скользящая эквализация такой структуры не
дает.
Отметим, что при пофрагментной и скользящей эква-
эквализации число операций, необходимых для построения
таблицы преобразования, может стать чрезмерно боль-
большим, если не воспользоваться рекуррентными алгорит-
алгоритмами оценки текущих гистограмм, подобными описанным
в §5.1 [30].
255
a)
б)
Рис. 7.8.
б)
г)
Рис. 7.9.
Метод эквализации может применяться в сочетании
с другими методами препарирования. Особенно удобно
его использовать после линейных методов препарирова-
препарирования, описанных в следующем параграфе. В этом случае
эквализацию можно сделать пространственно-зависимой
(или контекстно-зависимой [101]). Интересные возмож-
возможности открывает управляемая препаратом эквализация,
когда закон преобразования строится по гистограмме
изображения-препарата, а преобразуется исходное изо-
изображение.
В заключение укажем на возможные обобщения про-
процедуры эквализации. Одно из них заключается в том, что
эквализацию можно рассматривать как частный случай
амплитудных преобразований, превращающих наблюдае-
наблюдаемый сигнал в сигнал с заданным законом распределения
значений. В случае эквализации — это равномерный за-
закон. Такое преобразование к некоторому заданному ис-
используется как средство стандартизации разных изобра-
изображений, например, при составлении из них фотомозаик
[101, 109] или в текстурном анализе [122].
Другая интересная возможность обобщения — в из-
изменении соотношения между крутизной нелинейного пре-
преобразования сигнала и его гистограммой. При эквали-
эквализации крутизна преобразования пропорциональна значе-
значениям гистограммы (см. G.2)). Можно потребовать, что-
чтобы она была пропорциональна некоторой степени р от
значений гистограммы [2]:
^йг= I» («макс) ~ w (О] hp(a). G.5)
Тогда получим следующую формулу преобразования:
w(a) —
W («макс)
W («мин)
— w(aum) ~~
a
j
"мин
макс
j
a
мин
hP (a,) da,
hP (a,) da,
При р>\ слабые моды в гистограмме будут в результа-
результате преобразования подавляться тем больше, чем больше
р, а наиболее мощные моды — растягиваться на весь
диапазон. Случай р=0 соответствует линейному растя-
растяжению шкалы значений видеосигнала. При р<0 в ре-
258
зультате преобразования будет происходить сжатие мод
тем большее, чем они мощнее. При больших отрицатель-
отрицательных р преобразование G.6) будет близко к адаптивному
квантованию мод с границами в минимумах между мо-
модами.
Формула G.6) совершенно аналогична формуле
B.77), описывающей оптимальный закон предыскажения
сигнала при его квантовании. Эта аналогия проливает
дополнительный свет на сущность адаптивных ампли-
турдных преобразований, какими являются адаптивное
квантование мод, рассмотренное в предыдущем пара-
параграфе, и эквализация.
Рассмотренные методы препарирования нелинейными
преобразованиями относились к скалярным сигналам.
Они могут применяться как к видеосигналу, так и к его
спектрам (см. § 7.4), а также к отдельным компонен-
компонентам векторных сигналов, например, к разным компонен-
компонентам многозональных снимков, используемых, в космиче-
космической и аэросъемке. Разновидностью такого нелинейного
преобразования векторных сигналов является метод
псевдоцветов, который заключается в том, что преобра-
преобразуемому сигналу (в общем случае векторному) ставится
в соответствие трехкомпонентный видесигнал, воспро-
воспроизводимый в виде цветного изображения. Чувствитель-
Чувствительность зрения к цветовым контрастам гораздо выше его
чувствительности к контрастам яркости. Поэтому метол
псевдоцветов очень удобен там, где требуется выявить
слабые неоднородности сигнала. При обработке скаляр-
скалярного сигнала метод псевдоцветов можно рассматривать
как обобщение метода амплитудных разрезов.
7.4. Линейные методы препарирования
Линейные методы препарирования изображений по
существу являются продолжением методов коррекции
линейных искажений изображающих систем, и их можно
трактовать как оптимальную линейную фильтрацию
сигнала в шуме, если под шумом понимать детали, не
существенные для данной задачи анализа изображения.
Наиболее часто используется* подавление низких и
усиление высоких пространственных частот ДПФ сигна-
сигнала. Эта операция дает хорошие результаты в тех случя-
ях, когда медленные изменения сигнала на изображении
занимают весь отведенный для сигнала динамический
17* 259
диапазон значений, а мелкие детали имеют низкий кон-
контраст. Подавление низких пространственных частот по-
позволяет ослабить медленные изменения сигнала и за счет
этого значительно усилить контраст, а значит, и замет-
ность мелких деталей. Наиболее удобный способ реали-
реализации такой обработки — однократная или многократная
(параллельно-каскадная или последовательно-каскадная
(см. § 3.3)) фильтрация сигнала двумерным разделимым
рекурсивным фильтром, представляющим собой модифи-
модификацию фильтра C.29):
+ 1) (Лг + N + 1) Х
(Дгп
/V» N,,
х ? S я.+«. 1+.,]+о-*.к
где a^j — исходный видеосигнал; gi — константа, опре-
определяющая степень ослабления низкочастотных (медлен-
(медленно меняющихся) составляющих сигнала; g2 — константа,
определяющая степень усиления высокочастотных со-
составляющих, ответственных за передачу мелких деталей.
Параметры Nn, Nl2, N2\, N22, определяющие размер пря-
прямоугольной окрестности, по которой производится усред-
усреднение сигнала, выбираются так, чтобы этот прямоуголь-
прямоугольник был примерно равен средним размерам деталей, ко-
которые необходимо усилить. Параметр а, определяющий
среднее (фоновое) значение сигнала после обработки,
выбирается так, чтобы значения обработанного сигнала
не выходили за пределы отведенного ему диапазона зна-
значений.
Форма импульсной реакции фильтра G.7)—прямо-
G.7)—прямоугольная, и он, таким образом, подходит для выделения
квазиизотропных, вертикально или горизонтально ориен-
ориентированных деталей. Многократной параллельно-каскад-
параллельно-каскадной фильтрацией можно сформировать произвольно ори-
ориентированную импульсную реакцию, соответствующую
ориентации деталей изображения. Последовательно-кас-
Последовательно-каскадная обработка позволяет сформировать более плав-
плавную, в частности, более изотропную импульсную реак-
реакцию.
На рис. 7.10, 7.11 показаны примеры такой обработ-
обработки флюорограммы грудной клетки и рентгенограммы со-
сосудов головного мозга (а — исходное изображение, б —
260
результат подчеркивания верхних пространственных ча-
частот). Параметры обработки (при общем размере изо-
изображений 512X512 элементов) составили для рис. 7.10:
?i=0, #2=2, а= (а„акс—Ямин)/2, Nn=N2l=N12=32;
для рис. 7.11: g, = l,g2=8, a=0, Nn = N21 = Ni2=N22 = 10.
Интересный эффект псевдорельефа получается, если
область суммирования в G.7) несимметрична относи-
относительно (к, /), т. е. N^=?N12, N2l^Ni2. Он иллюстрирует-
иллюстрируется рис. 7.12 для Аг11=ЛГ12=0, N2l=N22=l, g\=U g2=4.
б)
Рис. 7.10.
Для полного подавления отдельных спектральных
компонент сигнала или узких участков спектра сигнала
удобнее производить фильтрацию в частотной области.
Этим методом получен показанный на рис. 7.13 резуль-
результат ослабления периодического рисунка ребер на флю-
орограмме грудной клетки (см. рис. 7.10). Ослабление-
контраста ребер позволило усилить контраст деталей
в межреберном пространстве.
В спектральной области возможны и более сложные,
нелинейные виды обработки, направленной на изменение
соотношений между различными спектральными компо-
компонентами сигнала. Так, хорошие результаты дает приме-
применение в спектральной области нелинейного преобразова-
преобразования типа логарифмического, подавляющего большие
величины и усиливающего малые. Это преобразование мо-
может применяться к спектральным компонентам как пре-
преобразования Фурье, так и преобразования Уолша [76,
112]. Его визуальный эффект состоит в том", что повы-
18—42
261
л
Рис. 7./2.
с. 7.13.
шается резкость изображения: изображение кажется как
бы ретушированным.
Еще одним примером преобразования спектров может
служить процедура, описанная в [76]. Ее схема показа-
показана на рис. 7.14. Как видно из этой схемы, исходное изо-
изображение в результате обработки превращается в три
изображения, несущие информацию о трех отдельных
участках пространственного спектра. Чтобы сохранить
целостность образов и в то же время сделать различи-
различимой эту информацию, используется визуализация в псев-
Преобра-
Преобразование
Фурье
|»
Фильтр
низких
частот
Фильтр
средних
частот
Фильтр
Высоких
частот
—»¦
Обратное
преобразование
Фурье
Обратное
преобразование
Фурье
Обратное
преобразование
Фурье
—>¦
ЭкВализа-
цая гисто-
гистограммы
Экбализа-
граммы
Экдализа-
иия гисто-
гистограммы
красный
Зеленый
Синий
Рис. 7.14.
доцветах. Эта процедура интересна также как пример
комплексного использования нескольких методов препа-
препарирования: линейной обработки, нелинейного преобра-
преобразования сигнала, представления в псевдоцветах. Она мо-
может оказаться полезной при анализе текстур.
Интенсивность спектральных компонент изображения
вообще можно рассматривать как признак, лучше отра-
отражающий пространственную структуру изображения, чем
исходный видеосигнал. Так, изолированные выбросы
в спектре соответствуют периодическим структурам на
изображении. Поэтому такие манипуляции со спектром.
как выделение, подавление или усиление отдельных его
участков, являются очень эффективным средством пре-
препарирования изображений.
К линейным методам препарирования можно отнести
также методы сложения и вычитания нескольких изо-
изображений. Они обычно используются для того, чтобы на-
нанести на один снимок сигнал, выделенный из другого или
из результата обработки этого снимка, а также для ви-
визуализации изменений в объекте (например, для выде-
выделения движущихся объектов из последовательных кад-
264
ров киносъемки, для выделения болезненных изменений
органов с течением времени из медицинских рентгено-
рентгенограмм [97] и т. п.).
7.5. Методы построения графических препаратов
Одним из самых распространенных приемов препари-
препарирования изображений является превращение изображе-
изображения в графический препарат — рисунок, состоящий из
линий и специальных символов — знаков. Линии очерчи-
очерчивают границы тех или иных объектов или их признаков.
Знаки и символы используются для обозначения типа
объектов и их количественных характеристик. Графиче-
Графические препараты могут--представлять собой также прост-
пространственные чертежи. В этом случае для визуализации
какого-либо признака изображения как функции двух
координат используется тот или иной вид проекций,
принятых в начертательной геометрии.
Изготовление графических препаратов широко ис-
используется при ручной обработке изображений. Естест-
Естественно, что такая задача ставится часто и при цифровой
обработке. Простейшие графические препараты —это
линии равных значений видеосигнала или его тех или
иных признаков (например, локальных средних, локаль-
локальных дисперсий и т. п.). Конкретные значения, которым
соответствуют эти линии, выбирают обычно с равномер-
равномерным шагом по шкале значений отображаемой величины
или квантилям распределения этих значений *). Иногда
для удобства интерпретации линии накладывают на само
изображение, как на рис. 7.15, где показано увеличенное
изображение фрагмента рис. 7.9,а с нанесенными на него
линиями равных значений видеосигнала, следующих
равномерно по 10%-ным квантилям.
Особенностью цифрового построения линий равных
значений является то, что в силу дискретности изобра-
изображения по величине и координатам простая отметка тех
элементов изображения, в которых видеосигнал имеет
заданное значение, дает картину, состоящую из разрыв-
разрывных или утолщенных (толщиной более чем в один эле-
*' Квантилем называется площадь участка гистограммы значе-
значений сигнала, заключенная между двумя его заданными значениями.
Значения видеосигнала .располагаются равномерно по квантилям,
если доля элементов изображения, величина которых попадает меж-
между любыми двумя этими значениями, одинакова.
265
мент) линий. Если это по тем или иным причинам неже-
нежелательно, приходится усложнять процедуру отметки,
используя для принятия решения не только значение
в данной точке, но и значения в ее ближайшей окрест-
окрестности.
Очень легко получить графический препарат после
адаптивного квантования мод изображений (см. § 7.2).
Рис. 7.15.
Для этого достаточно просто отметить те элементы изо-
изображения, которые отличаются от соседних. Селектируя
одновременно с этим значения видеосигнала в отмеча-
отмечаемых элементах, можно выделить границы участков, при-
принадлежащих к одной или нескольким модам. Такой
препарат показан, например, на рис. 7.16,а. На нем от-
отражены границы участков аэрофотоснимка рис. 7.3,а,
выделенных на рис. 7.4,8. На рис. 7.16,6, где эти грани-
границы наложены на исходное изображение, хорошо видно,
как они очерчивают наиболее светлые преобразования
на аэрофогоснимке. Отметим, что если целью препари-
266
Рис, 7.16.
рования является получение графического препарата, то
процедуру адаптивного квантования мод, показанную на
рис. 7.2, нет необходимости проводить до конца. Доста-
Достаточно по гистограмме видеосигнала найти значения, от-
отделяющие одну моду от другой, а затем строить линии
значений, равных найденным.
Выделять границы объектов, отмечая элементы изо-
изображения, отличающиеся от окружающих элементов,
можно и непосредственно по исходному изображению.
Отличие от окружения можно измерять с помощью тех
или иных цифровых дифференциальных операторов.
Наиболее широко применяются следующие.
о)
б)
Рис. 7.17.
1. Дискретный аналог оператора Лапласа
или его более изотропные варианты
VaKj = aKj- V8 К_1( /_,+««_!,/
к_1ш;+1 +
+i./+ib G-86)
G.8в)
2. Модуль оператора Лапласа
268
3. Модуль «градиента»
или его более просто вычислимый аналог
*к.1\-
G.9а)
G.96)
На рис. 7.17,а и 7.18,а выделение границ с помощью
модуля градиента и модуля лапласиана иллюстрирует-
иллюстрируется на примере обработки рис. 7.9,6. Добавление этих
границ к исходному снимку также может дать положи-
положительный визуальный эффект (см. рис. 7.17,6 и 7.18,6).
а)
б)
Рис. 7.18.
Для выделения границ с определенным направлени-
направлением можно вычислять разности по направлениям, перпен-
перпендикулярным заданным. Например, горизонтальные гра-
границы проходят там, где велики значения разностей по
вертикали:
W« = K.-/-i-flJ- GЛ0>
Если на изображении имеется много мелких деталей
(например, за счет шума в датчике видеосигнала), опи-
описанные простейшие дифференциальные операторы дают
сигнал, заметно отличный от нуля почти в каждом эле-
элементе изображения. В результате -картина из граничных
линий засоряется короткими линиями или отдельными
точками. Для того чтобы ее очистить, применяют допол-
дополнительные приемы: отмечают только те точки, где раз-
разностный сигнал превышает некоторый порог, находят
269
разности между средними значениями по соседним фраг-
фрагментам, вводят алгоритмы прослеживания линий и т. п.
Обзор этих приемов можно н^йги в [85]. Их существует
достаточно много, ибо понятие границы точно не опре-
определено, а гибкость цифровых методов открывает широ-
широкий простор лля изобретательства.
Полученные в результате такого рода операций про-
протяженные границы могут оказаться сильно изрезанными
опять-таки, например, вследствие шума датчика видео-
видеосигнала. Чтобы их сгладить, применяют различные спо-
способы сглаживания линии, в частности проведение плав-
плавных кривых по методу наименьших квадратов (см.,
например, [124], где описано сглаживание границ крове-
кровеносных сосудов).
В заключение отметим, что к задаче выделения кон-
контуров можно подойти как к задаче измерения координат
заданного объекта (в данном случае так или иначе опре-
определенного перепада) на изображении, разобранной в сле-
следующей главе. С этих позиций легче упорядочить все
многообразие методов выделения границ и рационально
объяснить, почему они дают результат и как соотносятся
с оптимальными методами. Кроме того, анализ задачи
локализации объектов на изображениях позволяет по-
понять, что следует называть контурами изображений и
почему контуры так важны для зрительной системы (см.
§8.4).
7.6. Геометрические преобразования изображений
Можно указать следующие классы задач, требующих
геометрических преобразований изображений:
— составление фотокарт и фотомозаик по аэрофото-
и космическим снимкам поверхности Земли и планет; на-
нанесение на снимки координатных сеток;
— коррекция геометрических искажений, вносимых
изображающими системами (объективами, системами
телевизионной развертки и т. п.);
— сопоставление фотографий трехмерных объектов,
снятых при разном положении фотографирующей аппа-
аппаратуры;
— совмещение разных снимков одного и того же
объекта, снятых в разных спектральных диапазонах или
в разное время, для получения цветных изображений
пли выявления изменений.
270
Кроме того, геометрическое трансформирование изо-
изображений может входить как этап при коррекции абер-
аберраций изображающих систем, когда перед линейной
фильтрацией снимок подвергают геометрическим преоб-
преобразованиям, превращающим изображающую систему
в пространственно-однородную, а после фильтрации про-
производят обратное преобразование, восстанавливающее
прежнюю систему координат [48, 50]
В принципе задача геометрических преобразований
сводится к тому, чтобы по заданному изображению
a(t\,t2) определить значение видеосигнала в каждой точ-
точке изображения в новых координатах U\(t\,t2), u2{t\,t2).
Заметим, что, поскольку речь идет об изображении на
плоскости непрерывные объектов, закон преобразования
координат Ч\{1\, /?), «2(^1, h) задается обычно в непре-
непрерывном представлении. В зависимости от вида изобра-
изображений и способа задания закона преобразования коор-
координат возможны два подхода к решению этей задачи.
1. Для каждого элемента исходного изображения
с координатами (к, /) находить его координаты в новой
системе координат и(кКи 1А12), ы2(/х"Д^ь /Л/2) и при-
присваивать значение видеосигнала в этом элементе эле-
элементу преобразованного изображения с координатами
([(щ(Ши Ша)I\щ], [(u2(KAth /Д/2))/Дм2]), где А/,,
At2, Ащ, Д/ь — шаг дискретизации изображений по коор-
координатам t\, /2, щ, и-2, а квадратные скобки означают це-
целую часть от заключенных в них величин.
2. Для каждого элемента преобразованного изобра-
изображения с координатами (к'1') находить его координаты
(([(к'Аии ГАнг), t2(K'Atii, l'\u2)) в исходном изображе-
изображении a(ti, t2) и присваивать этому элементу значение ви-
видеосигнала, равное a(/,(K'A«i, I'\и2), /2(к'А«ь 1'Аи2)).
Поскольку при цифровой обработке исходное изображе-
изображение задано только в точках отсчета (кД/i, /Д/2), величи-
величину a(ti(K'.\uu l'Au2), t2(KrАЩ, l'Au2)) нужно находить
с помощью тех или иных способов интерполяции дис-
дискретного сигнала {aKl}-
Первый способ удобен в тех случаях, когда преобра-
преобразуемое изображение слабо заполнено, т. е. содержит ма-
мало ненулевых элементов (например, состоит из линий,
как в задаче нанесения координатной сетки). Если его
использовать для преобразования обычных заполненных
изображений, отличных от нуля в каждом элементе, то,
во-первых, будет велика ошибка в передаче координат
271
1-d
Рис. 7.19.
за счет их округления при пересчете и, во-вторых, на
преобразованном изображении наверняка останутся
пустые (незаполненные) места, которые нужно будет за-
заполнять интерполяцией. Поскольку они будут распола-
располагаться нерегулярно, то такая интерполяция может ока-
оказаться трудоемкой операцией.
Второй способ применяется для преобразования «за-
«заполненных» изображений. При этом иногда можно отка-
отказаться от интерполяции на исходном изображении и
округлить преобразованные координаты. Это уменьшает
точность, достижимую при измерениях координат объек-
объектов, на преобразованном изо-
изображении из-за деформаций
формы объектов за счет округ-
округления. Но если искривление
координат невелико, на такое
искажение можно пойти, так
как отказ от точной интерполя-
интерполяции значительно упрощает про-
процедуру преобразований [30].
Для более точного преобразо-
преобразования может оказаться необ-
необходимым производить интерпо-
интерполяцию значений отсчетов ис-
исходного изображения.
Строгие рекомендации по
правильной интерполяции дать затруднительно, ибо
пока трудно описать связь между точностью преобразо-
преобразования координат и точностью последующих измерений
с помощью преобразованного изображения. Поэтому
ограничимся описанием двух практических способов
интерполяции.
Билинейная интерполяция. Это один из наиболее про-
простых в вычислительном отношении способов интерполя-
интерполяции, являющийся двумерным аналогом одномерной
кусочно-линейной интерполяции. Его принцип иллюстри-
иллюстрируется рис. 7.19, где а\,а2, а3, а4—заданные значения в че-
четырех соседних отсчетах изображения; а — интерполи-
интерполированное значение в промежуточном отсчете в точке
с координатами (сх, р) относительно первого отсчета.
Расстояние между исходными отсчетами принято рав-
равным единице. Как видно из чертежа, а находится линей-
линейной интерполяцией между двумя величинами, найденны-
найденными в свою очередь линейной интерполяцией между па-
272
рами отсчетов (аи а4) и (а2, а3):
a=[ai(l— а)+а4а]A— р) + [а2A— а)+аэа]|3. G.11)
Интерполяция с помощью ДПФ и СДПФ. Этот спо-
способ интерполяции основан на свойствах ДПФ и СДПФ
(см. § 3.6, 3.7) и рассмотрен в § 3.8. Он является дис-
дискретным аналогом оптимальной непрерывной интерполя-
интерполяции сигналов по теореме отсчетов (см. § 2.4) и потому,
в принципе, лучше соответствует структуре изображе-
изображений. Однако он сложнее в вычислительном отношении.
На рис. 7.20,а в качестве примера показан результат
интерполяции этим способом фрагмента панорамы Ве-
Венеры с рис. 7.9,а. Чиело отсчетов на этом фрагменте
в четыре раза (по каждому направлению) больше чис-
числа отсчетов на исходном изображении. Для сравнения на
рис. 7.20,6 показано то же изображение, интерполиро-
интерполированное путем простого четырехкратного повторения каж-
каждого отсчета и строки исходного изображения рис. 7.9,а.
Операции по пересчету координат и интерполяции
значений видеосигнала являются, вообще говоря, до-
довольно громоздкими, и, если их проделывать для всех
отсчетов изображения, это потребует больших затрат ма-
машинного времени. Для уменьшения этих затрат можно
использовать методы сокращенного описания, которые
могут превратить «заполненное» изображение в «слабо
заполненное». Таковы, например, методы кодирования
изображений, основанные на передаче контуров или яв-
явно выраженных перепадов сигнала на изображениях
(см., например, [17, 33, 34]). Действительно, поскольку
преобразования координат являются топологическими,
достаточно выделить на изображении только некоторые
опорные точки, по которым можно восстановить изобра-
изображение с достаточной точностью, и подвергнуть преобра-
преобразованию только их, а остальное изображение восстано-
восстановить по этим опорным точкам.
Так, в [107] в качестве таких опорных точек были
использованы контуры, возникающие при выделении
в исходном изображении элементов, квантованное значе-
значение которых отличается от значения предыдущих по
развертке элементов. Координаты выделенных элемен-
элементов подвергаются преобразованию, а остальных — не
преобразуются, а находятся посредством линейной ин-
интерполяции между опорными точками.
273
a)
Рис. 7.20.
Поскольку авторы [107] ограничились линейной ин-
интерполяцией, им пришлось позаботиться, чтобы выделен-
выделенные элементы не находились слишком далеко друг от
друга. При этом они руководствовались следующим пра-
правилом: кривая может быть заменена прямой в новой си-
системе координат, если ее отклонение от прямой не пре-
превышает половины расстояния между элементами преоб-
преобразованного изображения. Было выяснено, что для того
типа проекции, который изучался (меркаторской), этому
критерию в большинстве случаев удовлетворяли точки,
отстоявшие друг от друга на расстояние от 6 до 16 эле-
элементов. Таким образом, оказалось возможным приблизи-
приблизительно на порядок снизить количество операций, необ-
необходимых непосредственно для вычисления преобразован-
преобразованных координат. Как показывает анализ задачи об изме-
измерении положения объектов на плоскости, приведенный
в гл. 8, есть основания ожидать, что при точной переда-
передаче координат быстрых изменений сигнала и грубой —
остальных элементов изображения достижимая точность
измерений по преобразованному изображению не долж-
должна сильно пострадать.
Глава 8
ИЗМЕРЕНИЕ КООРДИНАТ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ
8.1. Постановка задачи
Одно из главных назначений изображений — нести
информацию о взаимном пространственном расположе-
расположении объектов. Можно назвать несколько практических
задач, требующих обнаружения объектов и измерения их
координат (локализации): обнаружение и измерение ко-
координат объектов при фотоинтерпретации, измерение
взаимного расположения соответственных точек на сте-
стереопарах изображений, обнаружение и измерение поло-
положения реперных марок на аэрофото- и космических
снимках, обнаружение дефектов и инородных образова-
образований в медицинской и промышленной диагностике по
изображениям, обнаружение заданных объектов и сим-
символов в информационно-поисковых системах и т. д. Эти
275
задачи могут решаться как «вручную» путем визуально-
визуального анализа изображений, так и автоматически цифровы-
цифровыми или аналоговыми (оптическими или оптико-электрон-
оптико-электронными) процессорами путем обработки соответствующего
двумерного сигнала.
Чтобы решить задачу автоматического обнаружения
и (или) локализации (измерения координат) объектов
на изображениях, необходимо иметь то или иное описа-
описание сигнала, соответствующего искомому объекту (иначе
сама задача станет бессмысленной), и способа, в соот-
Еетствии с которым этот сигнал представлен на наблю-
наблюдаемом изображении.
Часто используется простейшая аддитивная модель
искомого объекта и наблюдаемого изображения [10,
128], в соответствии с которой наблюдаемое изображе-
изображение рассматривается как аддитивная смесь искомого
сигнала, известного с точностью до сдвига координат, и
аддитивного и независимого от сигнала нормального шу-
шума с известной корреляционной функцией. Такая модель
приводит к хорошо известному результату, что оптималь-
оптимальным измерителем координат искомого сигнала по макси-
максимуму их апостериорной вероятности является линейный
измеритель, состоящий из линейного оптимального филь-
фильтра с частотной характеристикой
(fu h~ пространственные частоты; а*о(Л, U) —функция,
комплексно-сопряженная со спектром искомого сигнала,
взятого в начале координат; Рш(/ь /г)—спектральная
плотность мощности аддитивного шума) и решающего
устройства, определяющего координаты абсолютного
максимума или заданного количества старших максиму-
максимумов (при локализации нескольких объектов) сигнала на
выходе фильтра [13, 71].
Если аддитивный гауссов шум является «белым», т.е.
имеет равномерный энергетический спектр (Pu,(f\, [2) =
=const, оптимальный фильтр превращается в согласо-
согласованный фильтр, или коррелятор [13, 18]:
H(fu /2)=a*o(fb М- (8.16)
Однако для многих практических задач локализации
объектов на изображениях аддитивная модель неверна,
и вообще взаимодействие искомого сигнала и изображе-
¦276
ния, на фоне которого он отыскивается, нельзя описать
детерминистически. Так, например, на аэрофотоснимках
сигналы от отдельных объектов не суммируются в на-
наблюдаемом общем сигнале, а «врезаются» в него. Кроме
того, наблюдаемый сигнал от искомого объекта опреде-
определяется не только самим объектом, но и соседними объ-
объектами (например, их тенями), условиями освещения при
съемке, метеоусловиями, шумами фоторегистратора
и т. п. случайными и трудно формализуемыми фактора-
факторами. Поэтому желательно решить задачу локализации
объектов на изображениях при более реалистических
предположениях о форме представления объекта на на-
наблюдаемом изображении и возможно меньшем числе
ограничений.
При решении задач обнаружения и локализации объ-
объектов на изображениях имеется еще одно, направление,
которое можно назвать эвристическим и которое харак-
характерно для исследований по распознаванию образов. Оно
основано на использовании неравенства Шварца, соглас-
согласно которому нормированный коэффициент корреляции
двух сигналов, скажем a(t) и b(t), не превышает еди-
единицы:
00
\a(t)b*(t)dt
1. (8.2)
/ оо со \
( f |о(/)!«л 116@1'л I
—ОО —00 /
1/2
и равенство достигается, только если сигналы совпадают
с точностью до мультипликативной константы a(t) =
—Kb(t). Этот подход также приводит к системе из кор-
коррелятора и решающего устройства, которое сравнивает
сигнал на выходе коррелятора с порогом, пропорцио-
пропорциональным квадратному корню из энергии наблюдаемого
изображения [49]. Известно, однако, что эта система
даже на простых изображениях типа букв, символов,
цифр дает большую вероятность ложного обнаружения,
или отождествления. Поэтому были предложены различ-
различные ее усовершенствования: предыскажение искомых
объектов перед корреляцией, разного рода выделение
«контуров», квантование и др.
Недостаток подобных усовершенствований в том, что
они изобретены без явного учета особенностей и ограни-
277
чений задачи и потому неясно, во-первых, возможны ли
дальнейшие усовершенствования и, во-вторых, когда ка-
какое предложение лучше. *
Корреляционный обнаружитель-измеритель является
разновидностью схемы линейного обнаружителя-измери-
обнаружителя-измерителя, в котором решение о наличии искомого объекта и
его координатах принимаются по величине сигнала
в каждой точке поля на выходе некоторого линейного
фильтра, действующего на наблюдаемое изображение.
Назначение линейного фильтра в такого рода устрой-
устройствах— так преобразовать пространство сигналов,чтобы
затем решение можно было принимать не по всему сиг-
сигналу в целом, а независимо по отдельным его координа-
координатам в преобразованном пространстве. Структура одно-
одномерного решающего устройства тривиальна — оно долж-
должно выполпять.только операцию сравнения двух величин.
Поэтому задача синтеза устройства сводится к синтезу
только его линейного блока, что намного проще. Кроме
того, благодаря разбиению на независимые линейный и
нелинейный безынерционные блоки значительно упроща-
упрощается не только анализ, но и реализация подобного
устройства в цифровых и аналоговых процессорах. Этим,
в частности, объясняется популярность корреляционного
метода обнаружения и локализации объектов на изобра-
изображениях.
Найдем оптимальный вид фильтра линейного измери-
измерителя координат объектов, обеспечивающий наилучшее
качество измерения.
Качество измерения координат объекта определяется
двумя видами ошибок: ошибками вследствие неверного
отождествления объекта с отдельными деталями на на-
наблюдаемом изображении и ошибками измерения коор-
координат вблизи их истинного значения. Ошибки первого
родя определяют большие отклонения в результатах из-
измерения координат, превышающие размеры искомого
объекта. При обнаружении это ошибки типа ложной тре-
тревоги и пропуска объекта. Будем называть их аномальны-
аномальными. Ошибки второго рода имеют величину порядка раз-
размеров объекта и связаны с неточным определением коор-
координат в пределах самого объекта. Будем называть их
нормальными.
Нормальные ошибки связаны » основном только с ис-
искажениями сигнала от искомого объекта. Они вполне
удовлетворительно описываются аддитивной моделью.
278
Поэтому оптимальным с точки зрения минимума нор-
нормальных ошибок (можно считать, что нормальные ошиб-
ошибки характеризуются своим стандартным отклонением)
является измеритель с фильтром (8.1 а). Он, однако, бу-
будет давать мною аномальных ошибок. Вероятность ано-
аномальных ошибок и связанное с пей свойство порога та-
такого измерителя рассмотрены в [71].
Найдем характеристики линейного фильтра измери-
измерителя, оптимального по отношению к аномальным ошиб-
ошибкам. Определим точный смысл оптимальности. Для того
чтобы учесть пространственную неоднородность изобра-
изображения, будем считать, что оно разбито на jV фрагментов
с площадью Sn, я=0, 1, . .., N—1.
Пусть liin>(b, /°i, t°2)—плотность распределения зна-
значений видеосигнала b(t\, tz) на выходе фильтра, изме-
измеренная для я-го фрагмента по точкам, не запятым объ-
объектом, при условии, что объект находится в точке с ко-
координатами (*°|, /°г), а Ьо — величина сигнала на выходе
фильтра в точке локализации объекта (без ограничения
общности можно считать, что Ь0>0). Тогда поскольку
рассматриваемый линейный измеритель принимает ре-
решение о координатах искомого объекта по координатам
абсолютного максимума сигнала на выходе линейного
фильтра, то интеграл
Qn{t\,t\)=\jhn(b,t\,t\)db (8.3)
представляет собой долю точек я-го фрагмента, коорди-
координаты которых могут быть ошибочно приняты решающим
устройством за координаты объекта.
Величину Ьй следует рассматривать, вообще говоря,
как случайную, поскольку на нее влияет шум датчика
видеосигнала, условия съемки, освещения, ориентация
объекта при съемке, соседние объекты и другие случай-
случайные факторы. Чтоб их учесть, введем функцию q(b0) —
априорную плотность вероятностей значений Ьи- Коорди-
Координаты объекта также нужно считать случайными. Кроме
того, в задачах локализации вес ошибок измерения для
разных участков изображения может быть неодинаков.
Для учета этих факторов введем весовые функции
wW(t°lt t°2) и Wn, характеризующие априорную значи-
значимость ошибок определения координат в пределах «-го
279
фрагмента и для каждого я-го фрагмента соответст-
соответственно:
• N—i
Тогда качество измерения координат рассматривае-
рассматриваемым измерителем можно описать средневзвешенной
по q(b0), wW(t°u t°2) и Wn величиной интеграла (8.3):
со
X[hn{b,t\,t\)db. (8.5)
Если нас интересует качество работы измерителя
в среднем по некоторому набору изображений, то вели-
величину Q нужно усреднить по этому набору.
Оптимальным будем считать измеритель, обеспечи-
обеспечивающий минимум Q.
8.2. Локализация точно известного объекта
на пространственно-однородном изображении
Предположим, что искомый объект задан точно.
В данном случае это означает, что может быть точно
вычислен отклик на этот объект любого фильтра, т. е.
q(b0) —б-функция:
q(bo)=6(bo-So). (8.6)
Тогда выражение (8.5), определяющее качество локали-
локализации, перейдет в
^ J (8.7)
или, если обозначить
hn (b) = j j ww (t\, t\) К (b, t\, t\) dt\di\, (8.8)
в
Q=^Wn]hn(b)db. (8.9)
Будем считать, что изображение пространственно-
однородно, если Яп{Ь) и Wn не зависят от п. Обозначим
280
гистограмму такого однородного изображения h(b):
Ъф) =. f \ w (t\, t\) h ф, t\, t\) di\di\, (8.10)
где S — площадь изображения; w(t°u t°2)—весовая
функция ошибок определения координат по изображе-
изображению.
При локализации на таком изображении
Q=<\h(b)db. (8.11)
к
Найдем сначала частотную характеристику Я(/ь /2)
фильтра, оптимального для пространственно-однородно-
пространственно-однородного изображения. Выбор Н(}\, /г) Елияет как на вели-
величину Бо, так и на гистограмму Я (Ь). Поскольку
бо — величина отклика фильтра в месте локализа-
локализации объекта, ее можно найти, зная спектр объекта
«о(/ь /г), как
оо
Что касается связи h(b) и Я(/ь /г), то она имеет,
вообще говоря, сложный характер. Явную зависимость
от #(/i, /2) можно записать только для второго момента
гистограммы Я(Ь), воспользовавшись соотношением Пар-
севаля для преобразования Фурье (см. табл. 1.2, 1.3,
строка 17):
—со /
оо \1/2
t\dt\ [J &'(/„*,) Л/
00 00
J ||аф(/„/г)Г
\ i' —ЭО —00
V/2 __
19—42 281
где Si — площадь анализируемого изображения без уче-
учета площади, занимаемой сигналом от искомого объекта
на выходе фильтра; аф(/ь /*2)—спектр Фурье изобра-
изображения, в котором значения сигнала на участке, занятом
искомым объектом, заменены нулевыми значениями, а
|«Ф (/,./,)!= ($ f о» (t\. t\) | аф (/„ f,)|Vr»,**, У/2 . (8.14)
Поэтому мы будем опираться на известное в теории
вероятностей неравенство Чебышева, которое для гисто-
гистограмм выглядит следующим образом:
^-, (8.15)
и потребуем, чтобы отношение
" О
было минимальным*).
Это условие эквивалентно условию максимума вели-
величины
/ ОО СО \ 2
/ГС \
¦— V .' .1 ' ' j
е,= г \ = оо оо • I8-17)
— X — 00
Для отыскания минимума gx по Я(/ь /2) восполь-
воспользуемся неравенством Шварца (8.2):
J J |аф(/1>/г)Г J
1,
ф
— 30—00
(8.18)
*' Строго говоря, ввиду того, что неравенство Чебышева (8.15)
является слишком грубой оценкой Q, требование минимума g явля-
является необходимым и достаточным условием минимума Q, только
если h(b) ¦—нормальная (гауссова) плотность распределения. Одна-
Однако, как показывают эксперименты на реальных изображениях, гисто-
гистограмма Ъ(Ь) сигнала на выходе фильтра, найденного из условия ми-
минимума g, близка к гауссовой. Это результат нормализующего дей-
действия линейного фильтра.
282
из которого вытекает, что максимальное значение
J J |«ф(Л,/,)|
ф
—30—00
достигается при
Эта формула сходна с (8.1), но смысл знаменателя
в ней другой. Здесь это энергетический спектр той части
наблюдаемого изображения, которая не содержит объ-
объект и, таким образом, выступает в качестве «шума».
Выразим |a<j»(fi, h)\2 через спектр наблюдаемого
изображения аи(Ь, /г) и спектр искомого объекта
ao(fi, fr>). Очевидно,
аф(/ь /2) =aH(fi, /2)—<ao(fu h) X
Xexp[-i2n(f,/0,+M0a)], (8.21)
Ха*о(/Ь Ыехр[42я(/1<°,+/2/02)]-<1*11(/ь /г) X
Хао(/ь /2)ехр[-йя(/1/01 + Г2/02)]. (8.22)
Тогда, подставив (8.22) в (8.14), получим
I «Ф (f,. /о;=к (f.. /,) - «о (Л, /,) w (Л. f2)i2. (8.23)
где
^ (/„ /,) = f f w (t\, t\) exp [- /& (/Л + /,f,)] <tf\rff,
(8.24)
— спектр весовой функции w(t°u t°2)-
Обычно площадь, занимаемая искомым объектом на
изображении, намного меньше площади самого изобра-
изображения. Поэтому на практике часто можно пользоваться
приближенной оценкой |аф(/ь f2) \:
К (/,./,) Г* К (МЛ1- (8-25)
Очевидно, если требуется построить оптимальный
фильтр для набора изображений, то в формулы (8.23) и
(8.25) следует подставлять вместо |ct,i(/i, /2) |2 результат
усреднения спектров изображений по заданному набору.
19* 283
Найденный оптимальный фильтр может быть сравни-
сравнительно просто реализован оптическими средствами [72]
и дает очень хорошие результаты [22].
При реализации его в цифровых процессорах естест-
естественней всего использовать обработку сигнала в частот-
частотной области, поскольку частотная характеристика (8.20)
Рис. 8.1.
оптимального фильтра основывается на измерениях
спектра наблюдаемого изображения.
Приведем результаты экспериментов по моделирова-
моделированию на ЦВМ оптимального линейного измерителя и
сравнению его с традиционным коррелятором. На рис. 8.1
показано изображение размером 512x512 элементов,
с которым проводились эксперименты по измерению ко-
координат наложенных на него 20 тестовых квадратных
темных меток размером 5x5 элементов. Схема распо-
284
ложения последних показана на рис. 8.2. Числа в квад-
квадратиках на рис. 8.2 указывают порядковый номер соот-
соответствующих пятен в списке 20 старших максимумов
сигнала на выходе оптимального фильтра. Как видно
из этой схемы, тестовые объекты нанесены на различных
по структуре участках аэрофотоснимка, что позволяет
Рис. 8.2.
оценить работу коррелятора и оптимального-линейного
измерителя в разных условиях. Контраст меток состав-
составлял примерно 25% от размаха видеосигнала на аэрофо-
аэрофотоснимке. Отношение амплитуды метки к среднеквадра-
тическому значению видеосигнала на фоновом изобра-
изображении около 1,5.
Результаты моделирования иллюстрируются рис. 8.3
и 8.4. На рис. 8.3 показаны (сверху вниз) графики сече-
285
ния исходного видеосигнала,
выхода коррелятора и опти-
оптимального фильтра, проходя-
проходящего через центры меток 12
и 15 (см. рис. 8.1, 8.2). На
графике выходного сигнала
коррелятора хорошо видны
корреляционные пики тесто-
тестовых меток и пики функции
взаимной корреляции тесто-
тестовых меток с деталями фоно-
фонового изображения, в том
числе превышающие корре-
корреляционные и дающие вслед-
вследствие этого ложные решения.
Картина таких решений,
принятых по превышению
сигналом порога, показана
на рис. 8.4. Порог подбирал-
подбирался из условия обнаружения
всех меток без пропусков.
При этом, как видно из
рис. 8.4, количество ложных
обнаружений очень велико. Сравнивая нижний график
на рис. 8.3 со средним, можно оценить, насколько опти-
оптимальный фильтр облегчает решающему устройству за-
задачу локализации. На данном снимке это позволило без-
безошибочно найти координаты всех 20 тестовых пятен.
Рас. 8.3.
8.3. Учет неопределенности в задании объекта
и неоднородности изображения. Локализация
на «смазанных изображениях»
Рассмотрим теперь случай, когда q{b0) нельзя счи-
считать б-функцией, т. е. объект известен неточно. Изобра-
Изображение будем считать по-прежнему пространственно-
однородным. Теперь оптимальный измеритель должен
обеспечить минимум интеграла
Q.=
(8.26)
где h(b) определяется (8.10).
286
Измеритель с перебором. Разобьем интервал возмож-
возможных значений Ьо на подынтервалы, в пределах которых
q(b0) можно считать постоянной. Тогда
f
(8.27)
где b{ot] — представитель г-го интервала; qt — площадь под
q (fe0) на t-м интервале.
Рис. 8.4.
Поскольку qL^Q, то Q1 минимально, если минимально
Q,(/) = Г h(b)db. (8.28)
287
.(О
Таким образом, задача свелась к предыдущей за-
задаче локализации точно известного объекта. Разница
только в том, что теперь нужно строить измеритель
с фильтром
отдельно для каждого «представителя» объекта из всех
возможных его вариаций, т. е. считать, что имеется не
один заданный объект, а несколько, отличающихся друг
от друга значениями неизвестных параметров. Это, ко-
конечно, приводит к потерям времени обработки на пере-
перебор.
Измеритель, настроенный на усредненный объект.
Если разброс параметров невелик, можно ценой некото-
некоторого увеличения частоты аномальных ошибок решать
задачу так, как если бы объект был известен точно,
скорректировав оптимальный фильтр с учетом разбро-
разброса параметров объекта. Чтобы найти скорректирован-
скорректированную характеристику фильтра, произведем в (8.26) за-
замену переменных b{-=b—b0 и изменим порядок интегри-
интегрирования:
Jq(b0) h(b,+bu)db0. (8.30)
Внутренний интеграл в (8.30) представляет собой
свертку двух распределений, или распределение разно-
разности двух независимых величин b и Ьо. Обозначим это
распределение hq{b\). Его среднее значение равно раз-
разности средних значений Бо и 6ср распределений q(b0) и
h{b), а дисперсия — сумме дисперсий этих распределе-
распределений, т. е. [т22—(bcPJ]+a2q, где а2, — дисперсия распре-
распределения q{b0). Поэтому
= I h (Ь^—- 60)с/й,. (8.31)
Тем самым задача свелась к рассмотренной в § 8.2,
и по аналогии с (8.20) можно записать следующее вы-
выражение для частотной характеристики оптимального
фильтра:
77 // п_ *\Ы*) ., (8.32)
/7ohtWi'/2/ — ; rj—г~Г2 i i ;f nr
Kb (fi./г) I + I S (fi. b)l'
288
где а*о(/ь /г) — функция, комплексно-сопряженная со
спектром ao(fi, /2) объекта, усредненным по множеству
его неизвестных параметров (усреднение по q(b$)
в (8.30)), а
1«з (Л. h) Г = [«.(/../.)-«.(/,. 1\)Г («-33)
— такое же среднее квадрата разности.
Отсюда видно, что оптимальный фильтр несколько
видоизменяется по сравнению с детерминированным
случаем, когда объект точно известен: он строится на
основе «усредненного» объекта и энергетического
спектра фонового изображения, скорректированного на
среднее квадратическое энергетического спектра вариа-
вариаций объекта.
Впрочем, основываясь на соображениях относительно
оценки энергетического спектра фонового изображения,
приведенных в § 8.2 в связи с (8.23), и на том, что
дисперсия распределения q{b0) должна быть достаточно
малой, чтобы использование усредненного объекта в ка-
качестве эталона имело смысл, можно предположить, что
поправка в знаменателе (8.33) при малой площади
объекта по сравнению с площадью изображения неве-
невелика и ею можно пренебречь.
Использованное выше предположение о пространст-
пространственной однородности изображения, т. е. о независимости
гистограммы h(b) от участка, на котором она измерена,
редко выполняется на практике. Чаще всего правильнее
считать, что изображение не является пространственно-
однородным в указанном в § 8.2 смысле. Поэтому об-
обратимся к общей формуле (8.5).
В зависимости от реализационных ограничений мож-
можно выбрать одну из двух возможностей достижения
минимума Q.
Перестраиваемый измеритель с пофрагментной опти-
оптимальной фильтрацией. При заданных Wn минимум Q
достигается при минимуме всех
Q™ = f q (b0) db0 j J ШС1 (/'„ i\) dl\dt\ f hn (b, t\, t\) db.
—gc Sn b0
(8.34)
Это означает, что линейный фильтр, преобразующий
изображение, должен быть перестраиваемым и произ-
производить обработку изображения по фрагментам, в пре-
пределах которых изображение можно считать пространст-
289
венно-однородным. Для каждого фрагмента оптималь-
оптимальная характеристика фильтра ^находится по (8.18) или
(8.32) на основе измерения локального наблюдаемого
энергетического спектра фрагментов (с учетом сделан-
сделанных выше оговорок о влиянии на наблюдаемый спектр
изображения спектра объекта). В соответствии с пред-
представлением (8.5) переход от фрагмента к фрагменту
происходит скачком. Но по смыслу (8.5) нетрудно по-
понять, что в принципе из нее вытекает скользящий алго-
алгоритм обработки, основанный на оценке текущего ло-
локального энергетического спектра изображения, так как
веса ошибок могут задаваться непрерывной функцией.
Отметим также, что при пофрагментной и скользящей
обработке перестраиваемым фильтром характеристика
фильтра не зависит от весов Wn или соответствующей
непрерывной функции.
Для оценки локального спектра можно пользоваться
рекуррентным алгоритмом, описанным в § 4.7.
Неперестраиваемый измеритель. Если невозможно
реализовать перестраиваемый измеритель с пофрагмент-
пофрагментной или скользящей обработкой, измеритель должен
настраиваться на усредненный по Wn энергетический
спектр фрагментов изображения. Действительно, из (8.5)
вытекает, что
_ оо оо /.V—1
—оо b0 \/i=0
X Кф, t\, t\)]dt\ dt\) db= Jq (bt) db0 J h ф) db, (8.35)
—oo ba
где h(b)—усредненная по {Wn} и йу(п)(/оь t°2) гисто-
гистограмма hn(b). Отсюда по аналогии с (8.20) и (8.32)
можно заключить, что
Яопт (/„ /,) = °*'(Л'М •, (8.36)
N—1
где | аф (/,, /2) |2 =f'2 Wn | аф[Ц„ /2)|2 . (8.37)
Таким образом, в этом случае передаточная харак-
характеристика оптимального фильтра зависит от весов {W'n}-
290
Иногда наблюдаемое изображение, содержащее ис-
искомый объект, расфокусировано или смазано из-за усло-
условий фотосъемки или несовершенства объективов. Как
уже было отмечено в гл. 6, этот эффект обычно можно
описать как результат действия на сфокусированное
поле некоторой линейной системы. Рассмотрим для про-
простоты случай пространственно-инвариантной системы.
Такая система полностью характеризуется своей частот-
частотной характеристикой. Обозначим ее Hc{fu fo)- Опти-
Оптимальный измеритель, очевидно, должен настраиваться
на объект, прошедший то же преобразование, что и
наблюдаемое изображение, т. е. передаточная характе-
характеристика его фильтра должна определяться соотноше-
соотношением*)
Яопт(f„ f2) = "''Udlj^M-. (8.38)
В зависимости от того, как удобнее реализовать этот
фильтр и в каком виде задан эталонный объект, воз-
возможны различные модификации этой формулы. Напри-
Например, представление #Опт(/ь /2) в виде
Н* а*
(8>39)
соответствует измерителю, в котором наблюдаемое сма-
смазанное изображение спектра подвергается «разбелива-
нию» фильтром #*с/ |#с| (|аф|2I/2 (операции, делаю-
делающей его энергетический спектр почти равномерным, от-
откуда по аналогии с термином «белый шум» и произошел
термин «разбеливание») и затем коррелированию с эта-
эталоном а*о/(К12I/2/|#с|. Отношение {\~^\2У'2/\НС\
можно рассматривать как спектр изображения на вы-
выходе фильтра, обратного расфокусирующему, т. е. как
спектр изображения, скорректированного обратным
фильтром. При таком подходе прослеживается связь
между задачами локализации на смазанных изображе-
изображениях и восстановления смазанных изображений (см.
§ 6.3). Еще глубже она обнаруживается, если рассмот-
рассмотреть случай, когда наблюдаемое изображение есть сум-
*> Для простоты будем исходить из формулы (8.20) для точно
известного объекта и пространственно-однородного изображения.
291
ма расфокусированного изображения и аддитивного
независимого шума. •
Пусть Pm(f\, /2) —энгргетический спектр такого шу-
шума. Тогда средний энергетический спектр наблюдаемого
фонового изображения может быть записан как
I «Ф (Л. У 2= i Нс (/„ /2)]г | афэ (/„ /,) |2 + РШ (/„ /\), (8.40)
где |афо(/ь [г) |2 —спектр сфокусированного изображе-
изображения. Подставив это выражение в (8.38), получим
И It М —И*с ^"f»)V
X а*°(f''C' (8.41)
I »•,.(/..ЫГ '
Таким образом, оптимальный фильтр состоит из двух
последовательных фильтров: оптимального винеровского
восстанавливающего фильтра (первый сомножитель
в (8.41), см. § 6.3) и оптимального фильтра типа (8.20)
для сфокусированного изображения.
8.4. Оптимальная локализация и контуры изображений.
Выбор эталонных объектов
Чтобы понять смысл операций над наблюдаемым изо-
изображением, которые выполняются оптимальным фильт-
фильтром линейного измерителя, удобно представить частот-
частотную характеристику (8.20) этого фильтра в виде
В этом представлении действие оптимального фильтра
сводится к уже упоминавшемуся в § 8.3 разбеливанию
фонового изображения (фильтр #J и последующему
коррелированию разбеленного изображения с точно
так же преобразованным искомым объектом (фильтр Я2).
Интересной особенностью оптимального фильтра
(8.42) является то, что действие разбеливающей ком-
компоненты #i(fi, /2)—-1/(|аф(/1, Ь)|2I/2 приводит обычно
к оконтуриванию наблюдаемого изображения за счет
усиления его верхних пространственных частот, так как
энергетический спектр изображений является обычно
достаточно быстро убывающей функцией пространствен-
292
ных частот и, следовательно, #i(/i, /2) является возрас-
возрастающей функцией частот. Этот вывод иллюстрируется
рис. 8.5, на котором представлен результат разбелива-
ния изображения, показанного на рис. 8.1, а также ре-
результатами разбеливания двух тестовых изображений,
представленными на рис. 8 6 и 8.7 (а — исходное изо-
изображение; б —результат разбеливания)*).
Тем самым получает рациональное объяснение эмпи-
эмпирически найденная некоторыми исследователями корре-
Рис. 8.5.
ляционного метода локализации- рекомендация, что для
более надежной локализации целесообразно перед кор-
коррелированием подвергать изображение оконтуриванию
*> При получении этих результатов была использована аппро-
аппроксимация (8.25).
293
с помощью тех или иных методов пространственного
дифференцирования или грубо квантовать изображение
для получения резких границ.'Кроме того, этот резуль-
результат по-новому объясняет, что следует называть конту-
контурами изображений и почему контуры так важны для
зрительной системы. Понятие контуров часто встречает-
встречается и по-разному определяется в работах по обработке и
распознаванию изображений. С точки зрения локализа-
локализации объектов на изображении оптимальным линейным
измерителем «контуры» — это то, что получается в ре-
результате «разбеливания» изображения. Чем интенсивнее
эта «контурная» часть сигнала, описывающего объект
(в частности, чем субъективно резче изображение объек-
объекта), тем надежнее локализация.
Возможно, с этих позиций можно также объяснить
тот известный в психофизике зрения факт, что визу-
визуальная заметность помех и искажений вблизи резких
перепадов яркости (границ объектов) ниже, чем там,
где яркость меняется плавно, т. е. интенсивность «кон-
«контурного» сигнала мала.
Отметим, что когда говорят о выделении контуров,
чаще всего имеют в виду изотропные процедуры выделе-
выделения (см., например [34]). Оптимальное же для локали-
локализации разбеливание необязательно изотропно, поскольку
оно определяется фоновым изображением (а в простран-
пространственно-неоднородном измерителе — фрагментами изо-
изображения), на котором должен быть произведен поиск
заданного объекта. Более того, по этой же причине оно
адаптивно, т. е. характеристика разбеливающего фильт-
фильтра подстраивается под наблюдаемое изображение, и
разбеливание по-разному сказывается на разных изо-
изображениях. Так, у прямоугольников и параллелограм-
параллелограммов на фоне кругов подчеркиваются угловые точки (см.
рис. 8.6,6), в изображении текста оконтуриваются вер-
вертикальные и горизонтальные фрагменты букв (от них
также остаются практически только угловые точки), но
почти не меняются наклонные фрагменты как редко
встречающиеся (см. рис. 8.7,6).
Весь предыдущий анализ основывался на предпо-
предположении, что объект локализации так или иначе задан.
Между тем имеется много задач, где он не задан и его
необходимо выбрать. Так, в стереограмметрии необхо-
необходимо выбрать фрагменты одного изображения из сте-
стереопары, которые нужно локализовать на втором изо-
294
ДЕВОЧКА Hfl -ШИРЕ
a)
Рис. 8.6.
б)
бражении. Спрашивается, как наилучшим образом
осуществить этот выбор. В этом состоит проблема так
называемых «характерных точек» изображения, которая
стоит в стереограмметрии и в некоторых задачах, отно-
относящихся к проблематике так называемого «искусствен-
«искусственного интеллекта» [21, 24].
В работах по стереограмметрии обычно рекомендуют
в качестве таких эталонных объектов выбирать фраг-
фрагменты изображений, обладающие резко выраженными
локальными характерными особенностями: перекрестья
дорог, излучины рек, отдельно стоящие строения и т. п.
В работе [24] рекомендуется в качестве таких эталонов
выбирать участки изображений, на которых достигается
экстремум некоторых локальных дифференциальных
операторов. Подобные качественные рекомендации встре-
встречаются и в других работах по распознаванию образов.
Представленный выше анализ показывает, в чем со-
состоит точный смысл таких рекомендаций. Действитель-
Действительно, из формулы (8.19) для максимального значения
отношения сигнал/шум, которое может быть достигнуто
на входе решающего блока линейного измерителя, вы-
вытекает, что наилучшими эталонами будут те фрагменты
изображения, энергия «разбеленного» спектра ао(/ь
Ы/(|аф(/1, /г)|2I/2 которых максимальна. Такие этало-
эталоны дадут наибольший отклик на выходе оптимального
295
фильтра и, следовательно, обеспечат минимум ошибок
ложного отождествления.
Отсюда вытекает следующая рекомендация к выбору
эталонных объектов, скажем, в задаче стереограммет-
рии. Одно из изображений стереопары необходимо раз-
разбить на достаточно малые по площади фрагменты и
найти отношение их спектра а(/ь /г) к модулю спектра
второго изображения |аф(/"ь ^)|- Затем для. каждого
фрагмента вычислить интеграл (8.19) (при цифровой
обработке — соответствующую ему сумму)*» и выбрать
нужное количество фрагментов, дающих наибольшие по
величине результаты.
ОПТИМЯЛЬНОЕ1рр1
ПРЕДЬЕКЯЖЕ-
НИЕ ЗТЯЛОНЯ
И ФОНОВОГО
ИЗОБРЯЖЕНИЯ
ДЛЯ ОБНЯРУ-
ЖЕНИЯ И J1D-
кялизяиии
БУКВЫ Н Б
ТЕКСТЕ
Рис. 8.7.
б)
Поскольку, как уже отмечалось, в большинстве слу-
случаев спектр изображений представляет собой быстро
спадающую к краям области определения функцию,
наилучшими эталонами будут такие, которые имеют
медленно спадающий спектр, т. е. участки изображений,
которые мы визуально оцениваем как содержащие ин-
интенсивные контуры.
*> В силу соотношения Парсеваля такой же результат можно
получить, интегрируя квадрат модуля «разбеленного» -сигнала.
296
В случае смазанного и зашумленного изображения
(8.19) переходит в формулу
00 00
(8.43)
из которой следует еывод, что при малой интенсивности
шума Pm'J], /2) по сравнению с фоновым изображением
эффективность локализации почти не зависит от степени
расфокусировки (смаза) изображения.
8.5. Алгоритм автоматического обнаружения
и выделения реперных марок на аэро- и космических
фотоснимках
В фотографических и фототелевизионных системах
для аэрофотосъемки и съемки Земли и планет с искус-
искусственных спутников и автоматических межпланетных
станций предусматривается экспонирование изображе-
изображений через маску, содержащую непрозрачные реперные
марки в виде точек или перекрестий. Эти марки предна-
предназначены для геометрической калибровки изображений
при их интерпретационной обработке. Одной из задач
автоматизации такой обработки является автоматиче-
автоматическое обнаружение и выделение этих марок на фотосним-
фотоснимках. Обнаружение и выделение марок необходимо так-
также при обработке снимков с целью улучшения их ви-
визуального качества, так как реперные марки являются
инородными объектами по отношению к изображениям
и их присутствие в результате обработки изображений
может привести к артефактам (см. § 6.5).
Ниже описаны алгоритм автоматического обнаруже-
обнаружения и выделения марок с помощью ЦВМ и результаты
его использования при обработке фотоснимков, пере-
переданных с АМС «Марс-4» и «Марс-5», для выделения
реперных марок, а также мелких дефектов и пятен,
имевшихся на некоторых снимках [73}. Этот алгоритм
основан на идеях, изложенных выше при анализе опти-
оптимального линейного обнаружителя — измерителя. В дан-
данном случае обнаружитель строился таким образом, что-
чтобы на выходе линейного фильтра не просто обнаружи-
обнаруживать реперные марки путем сравнения сигнала с поро-
20—42 297
Исходный снимок
том, но и выделять их по возможности без искажений
при таком сравнении, а также одновременно выделять
мелкие дефекты типа малоразмерных пятен, имевшихся
на отдельных фотоснимках. Таким образом, фильтр на-
настраивался не только на реперные марки в виде крестов,
но и на любые малоразмерные (размером несколько
десятков элементов) детали.
Спектр мелких деталей по сравнению со спектром
scero изображения можно считать в среднем практиче-
практически равномерным. Поэтому фильтр строился в предпо-
предположении, что средний спектр объектов ао(/ь /2) в фор-
формуле (8.32) для неточно заданного объекта постоянен.
Кроме того, чтобы фильтрация мало искажала реперные
марки, фильтр (8.32) аппроксимировался только в низ-
низкочастотной области. Для этого оказалось удобным
применить рекурсивный двумерный фильтр типа C.29).
Указанные аппроксимации в принципе снижают по-
-¦ мехоустойчивость обна-
обнаружителя, но зато дают
возможность путем про-
простого сравнения фильтро-
фильтрованного сигнала с поро-
порогом выделять марки прак-
практически без искажений.
Выбором порога можно
добиться, чтобы ни одна
из марок не была пропу-
пропущена. Правда, при этом
выделяются также неко-
некоторые контрастные эле-
элементы рельефа изображе-
изображений. Поэтому вся проце-
процедура обработки фотосним-
фотоснимков строилась с учетом
возможных ложных об-
обнаружений так, чтобы
контрастные элементы
рельефа поверхности Мар-
Марса, выделенные вместе с реперными марками и пятнами,
можно было восстановить на обработанном изображе-
изображении.
Для этого элементы изображения, в которых прини-
принималось решение о наличии марки или дефекта (по
превышению сигналом в этих элементах порога), поме-
ПоВаВление нижних
проетранстденных частот
Обнаружение марок и пятен путем
сравнения Величины Видеосйгнйла.
В каждой точке с порогом
1
Выделение марок и интерполяция
на исходном изображении
Вспомогатель-
Вспомогательное
изображение
Снимок со стертыми
марками, предназначен-
предназначенный для дальнейшей
обработки
Рис. 8.8.
"'•h, "'"
1 Xt
Рис. 8.9.
Ямс. S./0.
чались специальным образом, а значение видеосигнала
в этих элементах заменялось значениями, интерполиро-
интерполированными по соседним, не отмеченным элементам. Кроме
того, формировалось вспомогательное изображение, со-
содержавшее в выделенных элементах значения, равные
разности между исходным видеосигналом в этих эле-
элементах и его интерполированными значениями. Осталь-
Остальным элементам вспомогательного изображения припи-
приписывалось нулевое значение. Сложив это вспомогательное
изображение с обработанным изображением, из которо-
которого изъяты реперные марки и дефекты, можно было вос-
восстановить как реперные марки, так и выделенные
мелкие контрастные элементы рельефа. С помощью спе-
специальной программы можно было стирать на вспомога-
вспомогательном изображении ненужные участки (например,
пятна) перед его добавлением к обработанному фото-
фотоснимку [73].
Процедура обнаружения и выделения реперных ма-
марок показана на рис. 8.8.
Рисунки 8.9 и 8.10 иллюстрируют результаты выде-
выделения марок на изображении, показанном на рис. 6.14,а.
Рисунок 8.9 представляет собой вспомогательное изо-
изображение, полученное после выделения марок и пятен,
а на рис. 8.10 показано изображение после выделения
марок, пятен и интерполяции.
Заключение
Вопросы аппаратурного и математического
обеспечения
Реализация потенциальных возможностей цифровой
обработки изображений определяется уровнем аппара-
аппаратурного и математического обеспечения. В настоящее
время основное направление в разработке такого обес-
обеспечения— создание специализированных цифровых вы-
вычислительных комплексов, аппаратурно- и программно-
ориентированных на обработку изображений [75, 87, 106,
ПО, 111, 116, 130],
Главными особенностями обработки изображений яв-
являются: большой объем обрабатываемой информации
(до нескольких десятков мегабит на одно изображение);
двумерность массивов и векторный характер данных;
принципиальное отсутствие формального критерия ка-
качества окончательного результата обработки изображе-
300
ний, вследствие чего требуется обеспечить диалоговый
режим обработки, т. е. обработки под непосредственным
наблюдением и управлением пользователя. Это и опре-
определяет структуру специализированных комплексов и их
математического обеспечения.
В настоящее время специализированные комплексы
цифровой обработки изображений в большинстве слу-
случаев базируются на мини-ЭВМ в качестве центрального
цифрового процессора и содержат:
— устройства преобразования видеосигнала в цифро-
еой сигнал и устройства фоторегистрации результатов
обработки (устройства ввода — вывода изображений);
тип этих устройств определяется конкретным назначе-
назначением комплекса и формой представления исходной ви-
видеоинформации;
— запоминающие устройства большой емкости
с быстрым доступом (обычно накопители на магнитных
дисках);
— запоминающие устройства архивного хранения
(накопители на магнитных лентах);
— средства документирования количественных ре-
результатов и протоколов работы (алфавитно-цифровые
печатающие устройства, графопостроители и т. п.);
— устройства динамической визуализации изображе-
изображений (дисплеи и дисплейные процессоры);
—¦ специализированные цифровые процессоры (фурье-
процессоры, двумерные процессоры и т. д.).
Диалоговый режим обработки обеспечивают дисплеи
и дисплейные процессоры. Основное назначение дисп-
дисплея—воспроизведение высококачественного черно-бело-
черно-белого или цветного изображения и всей сопутствующей
служебной алфавитно-цифровой и графической инфор-
информации в форме, удобной для непосредственного визу-
визуального наблюдения, и в реальном времени, т. е. так,
чтобы воспроизведение изображения не замедляло
диалог.
Современная микроэлектронная база вычислитель-
вычислительной техники открывает возможность создания дисплей-
дисплейных устройств нового типа —дисплейных процессоров,
обеспечивающих некоторые виды обработки изображе-
изображений на аппаратурном уровне и гибкую связь пользо-
пользователя с центральным цифровым процессором комп-
комплекса обработки изображений через дисплейный про-
процессор на языке «ручек и клавиш», более естественном
301
для человека, чем язык программ и чисел. Такой дисп-
дисплейный процессор, снабженный устройствами типа свето-
световое перо или (и) курсор, д*ает возможность пользова-
пользователю активно участвовать в процессе обработки и
передавать свои решения в виде изображений в цен-
центральный процессор для дальнейшей обработки.
Дисплейный процессор имеет три характерные осо-
особенности, отличающие его от пассивного дисплея: ана-
аналоговые средства связи с пользователем (ручки, свето-
световое перо, управляющие кнопки, переключатели и т. п.);
аппаратурные средства преобразования изображений без
участия центрального процессора; канал двухсторонней
связи с центральным процессором комплекса.
Структура математического обеспечения специализи-
специализированных комплексов цифровой обработки изображений
определяется тем, что оно должно удовлетворять следу-
следующим требованиям.
1. Освобождать пользователя от забот по хранению
больших массивов изображений и доступа к ним. Обра-
Обращение пользователя к массивам данных, представляю-
представляющих изображения, должно производиться в естественной
координатной адресации, соответствующей координатам,
в которых изображение задается в устройствах ввода —
вывода и на экране дисплея.
2. Обеспечивать гибкое обслуживание специализиро-
специализированных устройств ввода — вывода изображений, диалог
пользователя, а в системах с дисплейным процессором —
обмен данными между центральным и дисплейным про-
процессорами.
3. Содержать средства автоматизации программиро-
программирования процедур обработки изображений. В принципе
желательно, чтобы программирование сводилось для
пользователя к написанию содержательных предложе-
предложений из заголовков готовых библиотечных программ, чис-
численных параметров, союзов и других служебных слов,
как в языках высокого уровня типа Фортран или Бэйзик,
и минимального числа специальных символов, не имею-
имеющих собственного общепринятого содержания.
4. Содержать специализированные средства отладки:
программы генерации тестовых сигналов и изображений,
а также программные средства быстрой визуализации
количественной информации и других результатов обра-
обработки тестовых сигналов в удобной для наблюдения
форме.
302
5. Включать в себя в качестве органической состав-
составной части специализированную библиотеку стандартных
программ обработки изображений. Опыт показывает, что
она должна состоять из программ следующих основных
категорий:
— поэлементные преобразования видеосигнала;
— линейные преобразования в пространственной об-
области;
— линейные преобразования в спектральной области;
—¦ нелинейные алгоритмы препарирования;
— статистические измерения;
— геометрические преобразования;
— программы кодирования и декодирования изобра-
изображений для архивного хранения.
Кроме того, математическое обеспечение обработки
изображений должно включать в себя и пакеты про-
программ общего назначения: ассемблеры, загрузчики, про-
программы отладки, трансляторы с языков программирова-
программирования, если необходимо, диспетчер для организации одно-
одновременной работы нескольких пользователей, библио-
библиотеку стандартных программ вычислительной математики.
Цифровая обработка изображений — одна из наибо-
наиболее быстро развивающихся областей технической ки-
кибернетики с большим диапазоном практических приме-
применений*). В данной книге рассмотрены лишь некоторые
основные проблемы цифровой обработки и на ряде
примеров проиллюстрированы возможности и результа-
результаты ее применения. Они показывают, что многие практи-
практические задачи можно решать уже существующими ме-
методами и с помощью существующих технических средств.
*> За время подготовки книги к печати вышло несколько книг
по цифровой фильтрации и обработке изображений, которые не во-
вошли в список литературы.
1. Рабинер Л. Р., Голд Б. Теория и применение цифровой об-
обработки сигналов: Пер. с англ. — М: Мир, 1978.
2. Digital picture analysis/ Ed. by. A Rosenfeld.—N. Y.: Springer
Verlag, 1976.
3. Rosenfeld А., Как А. С Digital picture processing. — New
York. Acad. Press, 1976.
4. Pratt W. K. Digital image processing. — N. Y.: Wiley, 1977.
5. Andrews H. C, Hunt B. R. Digital image restoration. — Engle-
wood Cliffs New Jersey: Prentice Hall, 1977.
303
Список литературы
1. Беликова Т. П., Кронрод М. А., Чочиа П. А., Ярославский Л. П.
Цифровая обработка фотоснимков поверхности Марса, пере-
переданных АМС «Марс-4» и «Марс-5». — Космические исследова-
исследования, 1975, № 6, с. 898.
2. Беликова Т. П., Ярославский Л. П. Использование адаптивных
амплитудных преобразований для препарирования изображе-
изображений.— Вопросы радиоэлектроники. Сер. Общетехн. 1974, вып. 14,
с. 88.
3. Беликова Т. П., Ярославский Л. П. Адаптивное квантование
как метод препарирования изображений. — Техническая кибер-
кибернетика, 1975, № 4.
4. Беллман Р. Введение в теорию матриц: Пер. с англ. — М.:
Наука, 1969.
5. Бендат Дж., Пирсол А. Измерение и анализ случайных про-
процессов: Пер. с англ.— М.: Мир, 1974.
6. Боде Г., Шеннон К. Упрощенное изложение линейной мини-
минимально-квадратичной теории сглаживания и предсказания. —•
В кн.: Теория информации и ее приложения: Пер. с англ.—
М.: Физматгиз, 1959.
7. Бусленко Н. П., Голенко Д. И., Соболь И. М., Срагович В. Г.,
Шрейдер Ю. А. Метод статистических испытаний. — М.: Физ-
Физматгиз, 1964.
8. Бычков В. В. Цифровое моделирование в статистической ра-
радиотехнике.— М.: Сов. радио, 1971.
9. Вайнштейн Г. Г., Лебедев Д. С, Ярославский Л. П. Улучше-
Улучшение качества изображений с помощью вычислительных
устройств. — Вестник АН СССР, 1969, JV° 3.
10. Вандер Люгт А. Когерентная оптическая обработка информа-
информации.—ТИИЭР, 1974, т. 62, № 10, с. 5.
11. Введение в цифровую фильтрацию/ Под ред. Р. Богнера,
А. Константинидиса: Пер. с англ.—М.: Мир, 1976.
12. Верне. Быстрое преобразование Фурье для действительных сиг-
сигналов: Уменьшение необходимой емкости памяти и числа шагов
за счет применения нечетного дискретного преобразования
Фурье — ТИИЭР, 1971, т. 59, № 10, с. 184.
13. Возенкрафт Дж., Джейкобе И. Теоретические основы техники
связи: Пер. с англ. — М.: Мир, 1968.
14. Гармаш В. А. Квантование сигналов с неравномерным шагом.—
Электросвязь, 1957, № 10.
15. Голенко Д. И. Моделирование и статистический анализ псевдо-
псевдослучайных чисел на электронных вычислительных машинах. —
М.: Наука, 1965.
16. Голд Б., Рэйдер Ч. Цифровая обработка сигналов: Пен.
с англ. — М.: Сов. радио, 1973.
17. Грэхем. Передача изображений посредством кодирования дву-
двумерных контуров. — ТИИЭР, 1967, т. 55, № 3, с. 102.
304 '
18. Гуткин Л. С. Теория оптимальных методов радиоприема при
флуктуационных помехах. — М.: Сов. радио, 1972.
19. Давенпорт В. Б., Рут В. Л. Введение в теорию случайных сиг-
сигналов и шумов: Пер. с англ. — М.: ИЛ, 1960.
20. Дженкинс Г., Ватте Д. Спектральный анализ и его приложе-
приложения: Пер. с англ. — М.: Мир, 1971.
21. Дуда Р., Харт П. Распознавание образов и анализ сцен: Пер.
с англ. — М.: Мир, 1976.
22. Дудинов В. Н., Кришталь В. А., Ярославский Л. П. Об изме-
измерении координат объектов на фотоизображениях методами ко-
когерентной оптики. — Геодезия и картография, 1977, № 1, с. 42
23. Дэвиссон. Скорость создания сообщений: Теория и примене-
применение. — В кн.: Обработка изображений при помощи цифровых
вычислительных машин: Пер. с англ. — М.: Мир, 1973, с. 87.
24. Завалишин Н. В., Мучник И. Б. Мидели зрительного восприя-
восприятия и алгоритмы анализа изображений. — М.: Наука, 1974.
25. Игнатьев Н. К. О стробоскопических явлениях в кино и теле-
телевидении.— Техника кино и телевидения, 1957, № 8, с. 21.
26. Игнатьев Н. К. Оптимальная дискретизация двумерных сооб-
сообщений.— Изв. вузов СССР. Радиотехника, 1961, № 6, с. 684.
27. Кендалл М. Дж., Стюарт А. Статистические выводы и связи.
Пер. с англ. — М.: Наука, 1973.
28. Кнут. Искусство программирования для ЭВМ: Пер. с англ. —
М.: Мир, 1977.— Т. 2.
29. Кронрод М. А. Библиотека программ Б-71 для работы с изо-
изображениями.— В кн.: Иконика.: Цифровая голография. Обра-
Обработка изображений.—М.: Наука, 1975, с. 99.
30. Кронрод М. А. Несколько задач обработки изображений. —
Вопросы кибернетики: Иконика, цифровая обработка и филь-
фильтрация изображений,— 1978, вып. 38, с. 49.
31. Круг Ф., Вайде Г. Научная фотография в применениях: Пео.
с нем. — М.: Искусство, 1972.
32. Кукинов А. М., Лебедев Д. С. Повышение помехоустойчивости
передачи двоичного сообщения по двоичному каналу. — Изз.
АН СССР. Техническая кибернетика, 1963, № 2, с. 17.
33. Лебедев Д. Г., Лебедев Д. С. Квантование изображений по-
посредством выделения контуров. — Изв. АН СССР. Техническая
кибернетика, 1965, № 1.
34. Лебедев Д. С, Цуккерман И. И. Телевидение и теория инфор-
информации.— М.: Госэнергоиздат, 1965.
35. Лебедев Д. С, Ярославский Л. П. Нелинейная фильтрация им-
импульсных помех на изображениях. — В кн.: Иконика. — М.:
Наука, 1970.
36. Лебедев Д. С, Милюкова О. П. Линейное восстановление изо-
изображений, искаженных линейным преобразованием. — Вопросы
кибернетики: Иконика, цифровая обработка и фильтрация изо-
изображений, 1978, вып. 38, с. 18.
37. Лебедев Д. С, Трушкин А. В. Восстановление с помощью БПФ
изображений, подвергнутых искажению типа свертки. — В кн.:
VII Всесоюзная конференция по теории кодирования и пере-
передачи информации: Доклады. — Ч. 7: Методы сокращения избы-
избыточности. Обработка изображений. — Москва — Вильнюс, 1978,
с. 119.
38. Лебедев Д. С, Миркин Л. И. Двумерное сглаживание изобра-
изображений с использованием «составной» модели фрагмента. —
305
В кн.: Иконика: Цифровая голография. Обработка изображе-
изображений.'— М.: Наука, 1975.
39. Лебедев Д. С., Ярославский Л. П., Нараева М. К., Селива-
Селиванов А. С, Файнберг И. С. Синтез цветных изображений Марса
по фотоматериалам, полученным с космического аппарата
«Марс-5», —ДАН СССР, 1975, т. 225, № 6.
40. Машинная графика: Тематический выпуск. — ТИИЭР, 1974,
т. 62, № 4.
41. Мартин Ф. Моделирование на вычислительных машинах: Пер.
с англ. — М.: Сов. радио, 1972.
^42. Миркин Л. И, Измерение статистических характеристик изо-
"""" бражений. — Вопросы кибернетики: Иконика, цифровая обра-
обработка и фильтрация изображений, 1978, вып. 38, с. 73.
43. Миркин Л. И., Рабинович М. А., Ярославский Л. П. Метод
генерирования коррелированных гауссовских псевдослучайных
чисел на ЦВМ. — Журнал вычислительной математики и мате-
математической физики, 1972, т. 12, № 5.
44. Миркин Л. И., Ярославский Л. П. Способ измерения зашумлен-
зашумленности изображений. — Вопросы кибернетики: Иконика, цифро-
цифровая обработка и фильтрация изображений, 1978, вып. 38. с. 97.
45. Оппенхейм, Шафер, Стокхэм. Нелинейная фильтрация перемно-
перемноженных и свернутых сигналов. — ТИИЭР, 1968, т. 56, № 8.
46. Папулис А. Теория систем и преобразований в оптике: Пер.
с англ. — М.: Мир, 1961.
47. Пинскер И. Ш. Представление функций многих переменных
в виде суммы произведений функций одной переменной. —
В кн.: Математическая обработка медико-биологической ин-
информации.— М.: Наука, 1976.
48. Роббинс, Хуанг. Принцип обратной фильтрации для линейных
пространственно-зависимых систем отображения. — В кн.: Обра-
Обработка изображений при помощи цифровых вычислительных ма-
машин: Пер. с аигл. — М.: Мир, 1973, с. 163.
49. Розенфельд А. Распознавание и обработка изображений: Пер.
с англ. — М.: Мир, 1972.
50. Савчук. Пространственно-зависимые искажения изображения,
вызванные движением, и реставрация изображений. — В кн.:
Обработка изображений при помощи цифровых вычислительных
машин: Пер. с англ. — М.: Мир, •]973, с. 153.
51. Селиванов А. С, Нараева М. К., Синельникова И. Ф., Суво-
Суворов Б. А., Еленский В. Я., Алешин Г. М., Шабанов А. Г. Фото-
Фототелевизионная система для исследования Марса. — Техника
кино и телевидения, 1974, № 9, с. 55.
52. Сокращение избыточности. — ТИИЭР, 1967, т. 55, № 3, спец-
спецвыпуск.
53. Строук Дж. У., Халиуа М., Тон Ф., Виллаш Д. Г. Улучшение
качества и восстановление трехмерных изображений голографч-
ческими методами. — ТИИЭР, 1977, т. 65, .№ 1.
54. Титчмарш Е. Введение в теорию Фурье: Пер. с англ. — М.: Гос-
техиздат, 1948.
55. Трахтман А. М. Спектральная теория сигналов. — М.: Сов. ра-
радио, 1972.
56. Трахтман А. М. Основы линейной теории сигналов и систем,
определенных «а конечном множестве точек. — Автоматика ii
телемеханика, 1974, № 4
306 '
57. Трахтман А. М., Трахтман В. А. Основы теории дискретных
сигналов на конечных интервалах.—М.: Сов. радио. 1975.
58. Уинтц. Кодирование изображения посредством преобразова-
преобразований.— В кн.: Обработка изображений при помощи цифровых
вычислительных машин: Пер. с англ. — М.: Мир, 1973, с. 98.
59. Френке Л. Теория сигналов: Пер. с англ. — М.: Сов. радио,
1974.
60. Функции с двойной ортогональностью в радиоэлектронике и
оптике: Пер. с англ./ Пер. М. К. Размахнина, В. П. Яковле-
Яковлева.— М.: Сов. радио, 1971.
61. Хармут X. Ф. Передача информации ортогональными функция-
функциями: Пер. с англ. — М.: Связь, 1975.
62. Хуанг, Шрейбер, Третьяк. Обработка изображений. — В кн.:
Обработка изображений при помощи цифровых вычислительных
машин: Пер. с англ. — М.: Мир, 1973.
63. Цыпкин Я. 3. Теория импульсных систем. --М.: Физматгиз,
1958.
64. Ченцов Н. И. Оценка неизвестной плотности распределения по
наблюдению. — ДАН СССР, 1962, т. 147, вып. 1, с. 45.
65. Шеннон К. Математическая теория связи. — В кн.: Работы по
теории информации и кибернетике: Пер. с англ. — М.: ИЛ, 1963.
66. Эндрюс Г. Послесловие редактора-составителя. — В кн.: Обра-
Обработка изображений при помощи цифровых вычислительных ма-
машин: Пер. с англ. — М.: Мир, 1973.
67. Эндрюс Г. Применение вычислительных машин для обработки
изображений: Пер. с англ. — М.: Энергия, 1977.
68. Ярославский Л. П. Применение ЦВМ для моделирования мето-
методов передачи неподвижных изображений. — Вопросы радио-
радиоэлектроники. Сер. 9. Техника телевидения, 1965, вып. 6.
69. Ярославский Л. П. Устройства ввода—вывода изображений длл
— ЭЦВМ. — М.: Энергия, 1968.
70. Ярославский Л. П. Исследование эффективности и помехо-
помехоустойчивости систем передачи неподвижных изображений.:
Канд. дисс/ МЭИ. —М., 1969.
71. Ярославский Л. П. Точность и достоверность измерения поло-
положения двумерного объекта на плоскости. — Радиотехника и
электроника, 1972, № 4.
72. Ярославский Л. П. А. с. 536497. Оптическое устройство обнару-
обнаружения объекта на изображении. — Опубл. в Б. И., 1976, № 43.
73. Ярославский Л. П. Алгоритмы автоматического обнаружения и
определения координат калибровочных меток на аэро- и косми-
космических снимках. — Геодезия и картография, 1976, № iO, с. 37.
74. Ярославский Л. П., Мерзляков Н. С. Методы цифровой голо-
голографии. — М.: Наука, 1977.
75 Ярославский Л. П. Цифровая обработка изображений. — Ра-
Радиотехника, т. 32, 1977, № И, с. 72.
76. Andrews H. С. Digital computers and image processing. — En-
Endeavour, 1972, v. 31, № 113, p. 88.
77. Andrews H. C, Kane J. Kronecker matrices. Computer implemen-
implementation and generalized spectra. — J. of. the ACM, 1970, v. 17,
Mb 2, p. 260.
78. Andrews H. C. Two-dimensional transforms. — In: Picture pro-
processing and digital filtering/ Ed. by. T. S. Huang. — N. Y.: Sprin-
Springer Vcrlag, 1975.
307
79. Ahmed N., Natarajan N., Rao K. R. Discrete cosine transform. —
IEEE Trans.. 1974, v. C.-23, № 1, p. 90.
80. Ahmed N., Rao K. R. Orthogonal transforms for digital signal
processing. — N. Y. Springer Verlag, 1975.
81. Barrett H. H. Fresnel zone plate imaging in nuclear medicine.—
J. Nucl. Medicine, 1972, v. 13, p. 382.
82. Biankinship W. A. Note on computing autocorrelations. — IEEE
Trans., 1975, v. ASSP-22, № 1, p. 76.
83. Billingsley F. C. Noise considerations in digital image processing
hardware. — In: Picture processing and digital filtering/ Ed. by
T. S. Huang. — N. Y.: Springer Verlag, 1975.
84. David E. E. Digital simulation in research on human communi-
communication. — Proc. IRE, 1961, v. 49, p. 319.
85. Davis L. S. A survey of edge detection techniques. — Computer
Graphics and Image Processing, 1975, v. 4, № 3, p. 248.
86. Delotto I., Delotto D. Two-dimensional transforms by minicom-
minicomputers without matrix transposing. — Computer Graphics and
Image Processing, 1975, v. 4, p. 271.
87. Extrom M. P., Mayall В. Н. Digital image processing at Low-
renre Livermorc laboratory. — Computer, 1974, May, p. 72.
88. Fino B. J., Algazi V. R. Slant Haar transform. — Proc. IEEE,
1974. v. 62, № 5, p. 653.
89. Frieden B. R. Image enhancement and restoration. — In: Picture
processing and digital filtering/ Ed. by T. S. Huang. — N. Y.:
Springer Verlag, 1975.
90. Girard A. Methodc d'analyse d'image infrarouge par codage mul-
multiplex. — Con.-франц. симпозиум по оптико-спектральным при-
приборам для обработки изображений. — М.. 1976, сент.
91. Good I. J. The interaction algorithm and practical Fourier ana-
analysis. — J. Roy. Statist. Soc, 1958. v. 20, ser. B, p. 361.
92. Goodal W. M. Television hv pulse-code modulation. — Bell Syst.
Techn. J., 1951, v. 30, p. 33."
93. Graham R. E., Kelly J. K. A computer simulation chum for re-
research on picture coding. — IRE. Wescon Convention Rec, 1958,
№ 4.
94. Habibi A., Robinson G. S. A survey of digital picture coding. —
IEEE Computer, 1974, v. 7, № 5. p. 22.
95. Harter R. The optimality of Winograd's formula. — Communica-
Communications of the ACM, 1972, v. 15, № 5, p. 352.
96. Habibi A. Hvbnd coHing of pictorial data. — IEEE Trans., 1974.
v. COM-22, № 5, p. 614.
97. Hall E. L., Kruger R. P., Owyer S. J., Hall D. L., Me Laren R. W.
Lodwik C. S. A survey of preprocessing and feature extraction
techniques. — IEEE Trans., 1971, v. C-20. № 9, p. 1032.
98. Haralick R., Shanmugam K. Comparative study of discrete linear
basis for image data compression. — IEEE Trans., 1974,
v. SMC-4, № 1, p. 16.
99. Huang T. S. Introduction. — In: Picture processing and digital
filtering/ Ed. by T. S. Huang. — N. Y. Springer Verlag, 1975.
100. Huffman D. A. A method for the construction of minimum-re-
minimum-redundancy codes.— Proc. IRE, 1952, v. 40, p. 1098.
101. Hummel R. A. Histogram modification techniques. — Computer
Graphics and Image Processing, 1975, v. 4, Л° З, р. 209.
308
102. Jain A. K., Angel E. Image restoration, modelling and reduction
of dimensionality.— IEEE Trans., 1974, v. C-23, № 5, p. 470.
103. Kend William B. New Algorithm for computing correlation. —
IEEE Trans.. 1974, v. C-23, № 2, p. 88.
104. Landau H. J,, Pollak H. O. Prolate spheroidal wave functions:
Fourier analysis and uncertainty: III. The dimension of the space
of essentially time and band-limited signals.— Bell Syst. Techn.
J., 1962, v. 41, № 4.
105. Lopresti P. V., Suri H. L. A fast algorithm for the estimation of
autocorrelation functions. — IEEE Trans., 1974, v. ASSP-22, №6,
p. 449.
106. Levinthal E. C, Green W. В. а. о. Mariner-9 image processing
and products. — Icarus, v. 18, 1973, p. 75.
107. Mach R. E., Gardner T. L. Rectification of satellite photography
by digital techniques. — IBM J. of Research and Development,
1962, July.
108. Max J. Quantizing for minimum distortion. — IRE Trans., 1960,
v. IT-4, March, p. 7.
109. Milgram D. L. Computer methods for creating photomosaics.—
Univ. of Md. Techn. Rept., 1974, July, p. 313.
110. Patterson C. L., Buechler G. Digital image processing at the
Aerospace Corporation. — Computer, 1974, May, p. 46.
111. Person E., Fu K. S. A mini-computer facility for picture proces-
processing and pattern recognition research. — Computer, 1976, № 5,
p. 70.
112. Pratt W. K. Linear and nonlinear filtering in the Walsh do-
domain. — IEFE Trans., 1971, v. FMC-13. № 3, p. 38.
113. Pratt W. K. Generalized Wiener filtering computation techni-
techniques.—IEEE Trans., 1972, v. C-21, p. 636.
114. Pratt W. K. Walsh functions in image processing and twodimen-
sional filtering. — Proc. Symp. Applications of Walsh Functions,
1972, p. 14.
115. Pratt W. K., Welch L. R., Chen W. Slant transforms for image
coding.— IEEE Trans., 1974, v. COM-22, № 8, p. 1075.
116. Prospecting for minerals with mini-computer. — Aviation Week
& Space Technology, 1975, May, 5, p. 48.
117. Rao K. R-, Narasimhan M. A., Revuluri K. Image data Proces-
Processing by Hadamard — Haar transform.— IEEE Trans., 1975,
v. С-24," № 9, p. 888.
118. Reitboeck H., Brody T. P. A transformation with imariance un-
under cyclic permutation for applications in pattern recognition.—
Information and Control, 1965, v. 15, p. 130.
119. Roberts L. G. Picture coding using pseudorandom noise. — IRE
Trans.. 1962, v. IT-8, № 2, p. 145—151.
120. Robinson G. S. Logical convolution and discrete Walsh and Fou-
Fourier power spectra.— IEEE Trans., 1972, v. AU-20, № 4, p. 271.
121. Roese J. A., Robinson G. S. Combined spatial and temporal co-
coding of digital image sequences. — Proc. SPIE, 1975, v. 66, Aug.,
p. 172.
122. Rosenfeld A., Troy E. B. Visial texture analysis. — In: Conference
Record of the Symposium on Feature Extraction and Selection
in Pattern Recognition. — IEEE Publ., 70C51-C, Argonne 111.,
1970, Oct., p. 115.
123. Seize,- R. H. Improving biomedical image quality with compu-
computers. JPL Techn. Rept., 1968, Oct. p. 1336.
309
124. Selzer R. H. Computer processing of angiograms. — In.: Sympo-
Symposium on Small Vessel Angiography, 1972. Apr.
125. Sloane N. J. A., Harwit M. Masjis for Hadamard transform op-
optics and weighing design.—Appl. Optics, 1976, v. 15, № 1, p. 107.
126. Swift R. D., Wattson R. В., Decker J. A., Paganetti R., Har-
Harwit M. Hadamard transform imager and imaging spectrometer.—
Appl. Optics, 1976, v. 15, № 6, p. 1595.
127. Treitel S., Shanks J. L. The design of multistage separable pla-
planar filters.— IEEE Trans., 1971, v. GE-9, p. 10.
128. Vander Lugt A. Signal detection by complex spatial filtering.—
IEEE Trans., 1964, v. IT-10, № 2, p. 139.
129. Wai-Hon Lee, M. O. Greer. Matched filter optical processor.—
Appl. Optics, 1974, v. 13, „Y° 4, p. 925.
130. Wecksung G. W., Campbell K. Digital image processing at EC
& G. — Computer, 1974, May, p. 63.
131. William K. A new algorithm for computing correlations. — IEEE
Trans., 1974, v. C-23, № 1, p. 88.
132. Winograd S. A new algorithm for inner product. — IEEE Trans.,
1968, v. C-7, p. 693.
Предметный указатель
Адаптивное квантование мод
240, 243
Алгоритм быстрого преобразо-
преобразования Фурье 130
— ускоренной свертки сигна-
сигналов 188
Анализ кластерный 239
Базис дискретный 30
— самосопряженный 30
Быстрые алгоритмы преобразо-
преобразований 149
Вектор 18
— линейная комбинация 18
— линейно-независимое мно-
множество 19
Видеосигнал 7
Виды сигналов 13, 14
Визуализация информации 9
Восстановление изображения
207
— сигнала 60, 63
Вычисление свертки с помощью
ДПФ 130
Генерирование псевдослучай-
псевдослучайных чисел 199
Гистограмма локальная 192
— распределения значений 191
Граф быстрого преобразова-
преобразования Хаара 156
— двоичной инверсии 160
— преобразования Уолша 163
— усеченного преобразования
73
Датчик видеосигнала 7
— стробирующий 62
Дскорреляция видеосигнала 85
Дискретизация адаптивная 65
— неравномерная 220
— сигналов 50
с пропусками 56
Дискретное косинусное преоб-
преобразование 124
— преобразование Уолша 134
Фурье (ДПФ) 109
Хаара 139
Дифференциальная импульсно-
кодовая модуляция (ДИКМ)
85
Изображение 7
— смазанное 292
Интерполяция билинейная 272
— сигналов 132
Искажения детерминирован-
детерминированные 207
— линейные 215
Квантование адаптивное 86
— глобальное 249
— зональное 86
— критерий точности 75
•— неоднородное 86
— обобщенное 48
— однородное 86
— поэлементное 50, 69
— — оптимальное 70, 71
— пофрагментное 249
— равномерное 74
— шаг 51
Код Грея 134
Кодирование изображений 9,
83, 146
— мультиплексное 65
— статистическое 86
Коды Хаффмена 87
Коды Шеннона — Фаио 87
Контуры ложные 76
Коррекция амплитудных харак-
характеристик 209
— изображающих систем 8
— четкости изображений 218
Марки реперные 299
Матрицы 137, 138, 140
Метод амплитудных разрезов
251, 252
— кодированных апертур 65
— конгруэнтный 200
— отбрасывания двоичных
разрядов 252
— псевдоцветов 259
— эквализации 253
Метрика евклидова 16
— среднеквадратичная 17
Моделирование изображающих
систем 9
Неравенство Шварца 277
Обеспечение обработки изобра-
изображений математическое 304, 305
Обнаружитель-измеритель ли-
линейный 278
Обеспечение оптимальной ли-
линейной фильтрации 148
Обработка изображений 8
— цифровая 306
—¦ признаков 238
Оператор дискретизации 46
311
— сдвига 46
— стробировапия 47
— тождественный 46
— цифровой дифференциаль-
дифференциальным 268
Ошибки аномальные 278
— нормальные 278
Помехи импульсные 206, 221
— периодические 206
Предыскажение оптимальное
75
Препарат графический 265
Препарирование изображений
9, 237
Произведение двух матриц
кронекеровское 138
— скалярное 20
Пространство Гильбертово 20
— евклидово 20
— сигналов 15
линейное (векторное) 16
— — — нормированное 19
метрическое 15
Процесс стационарный эргоди-
ческий случайный 196
Сглаживание скользящим сум-
суммированием 193
— спектра прямое 199
— с помощью ортогональных
преобразований 194
— ступенчатое 193
Синтезатор изображения 7
Система изображающая 7
— — идеальная 8
— препарирования изображе-
изображений диалоговая 238
Соотношение Парсеваля 30
Спектр по непрерывному ба-
базису 28
— энергетический 196
Стерсограмметрия 296
Строб-эффект 61
Сумма матриц прямая 149
Теорема Карунена — Лоэва 68
— отсчетов 51
¦ двумерная 53
— теории вероятностей цен-
центральная предельная 200
Уравнение Эйлера — Лагранжа
74
усреднение локальных спек-
спектров 198
Фильтр восстанавливающий
оптимальный 215
— двумерный разделимый 94
— дискретный винеровский 227
— инвариантный к сдвигу 44
— маска 227
— нерекурсивный двумерный
94
— режекторный 229
— трансверсальный 92
— цифровой рекурсивный 93
Фильтрация в пространствен-
пространственной области 92
— в частотной области 92
— линейная оптимальная 259
—¦ параллельно-каскадная 260
— сигналов 147
— цифровая 92
— эмпирическая 228
Функции базисные отсчетные
"8Э
— волновые сфероидальные 68
— гармонические 23
— импульсные базисные 22
— отсчетов 27
— Радемахера 24, 135
— собственные 40
— Уолша 23
— — двумерные 25
— Хаара 25
Характеристики шума стати-
статистические 203
Число перемен знака («ча-
(«частость») 137
Числа псевдослучайные, дат-
датчик 199
независимые 199
Шум аддитивный 208
— импульсный 208
— квантования 82, 206, 210
— мультипликативный 208
— флюктуациопный 204
Эквализация 254, 255
— иофрагментная 255
•— пространственно - зависимая
258
— скользящая 255