











































































































































































Similar




Text
УДК 629.1.032.1
Авторы: В. Ф. Платонов, А. Ф. Белоусов, Н. Г. Олейников, Г. И. Карцев
Рецензент проф. Л. В. Сергеев
Гусеничные транспортеры-тягачи. Под ред. д-ра техн, наук проф. В. Ф. Платонова. М., «Машиностроение», 1978, 351 с.
В книге показано развитие отечественных транспортно-тяговых гусеничных машин и приведены примеры конструкций наиболее распространенных образцов. Подробно описано устройство легких транспортеров-тягачей и дано обоснование целесообразности принятых конструктивных схем, обеспечивающих возможность разработки семейств унифицированных гусеничных машин различного назначения на основе единого базового шасси. Особое внимание уделено повышению надежности гусеничного движителя и рациональным способам обеспечения проходимости по снегу и грунтам с низкой несущей способностью.
Приведены данные по эксплуатационным качествам гусеничных машин и рекомендации по выполнению основных операций технического обслуживания транспортеров-тягачей.
Книга предназначена для инженеров и техников, связанных с разработкой, производством и эксплуатацией быстроходных транспортно-тяговых гусеничных машин. Она может быть полезна также механикам-водителям. Табл. 42, ил. 155, список лит. 8 назв.
31803-229
038(01)-78
229-78
© Издательство «Машиностроение», 1978 р.
ВВЕДЕНИЕ
Программа коммунистического строительства в нашей стране, получившая свое развитие в решениях XXV съезда КПСС, предусматривает дальнейший подъем материального и культурного уровня жизни на основе всестороннего развития народного хозяйства, непрерывного совершенствования материально-технической базы и ускорения темпов научно-технического прогресса.
Одним из важных факторов в осуществлении этой программы является рациональное развитие производительных сил страны, предусматривающее освоение районов Крайнего Севера, Сибири и Дальнего Востока и интенсивное использование богатых ресурсов этих районов. Развитие производительных сил в указанных районах в первую очередь связано с налаживанием транспортно-экономических связей.
Решение данной задачи применительно к условиям востока и севера страны представляет известные трудности. Одной из причин этого являются чрезвычайно суровые климатические условия. Другая причина связана с отсутствием на больших территориях этой зоны достаточно развитой дорожной сети. Строительство капитальных дорог при большой удаленности»промышленных центров и населенных пунктов друг от друга не всегда целесообразно, особенно если принять во внимание значительно большую сложность и трудоемкость строительства, чем в европейской части страны, и существенно большие затраты на их эксплуатацию.
Использование автомобильного транспорта в условиях бездорожья, особенно в весенне-летний период, когда оттаивают болота, недостаточно эффективно, а иногда и невозможно. Транспортные связи в этих районах безусловно осуществляются в определенном объеме, удовлетворяющем потребности сегодняшнего Дня, но перспективы более полного освоения богатств Сибири и Дальнего Востока и рационального развития этого столь обширного территориального массива в органическом единстве СО всем хозяйством страны настоятельно диктуют необходимость значительного расширения транспортного обслуживания.
Теоретический анализ и практика показывают, что это обслуживание должно быть комплексным, т. е. включать железно-1*
дорожный, автомобильный и внедорожный транспорт. При этом железнодорожный и магистральный автомобильный транспорт будут решать задачи массовых централизованных перевозок. Транспортные же связи в процессе освоения различных районов, при строительстве промышленных объектов, линий электропередач, прокладке нефте- и газопроводов наиболее эффективно могут осуществляться обычными автомобилями в сочетании с колесными к гусеничными машинами высокой проходимости, способными осуществлять перевозки в любое время года. Комплексное решение транспортной проблемы наиболее целесообразно, так как только в этом случае могут быть удовлетворены разнообразные транспортные потребности развивающихся районов.
При решении данной проблемы значительный народнохозяйственный эффект может дать применение быстроходных гусеничных транспортных машин. Гусеничные транспортные машины по конструктивному исполнению приспособлены для эксплуатации в суровых климатических условиях, обладают высокой проходимостью по слабому грунту, снегу, болотам, мелколесью и т. п. Возможность использования этих машин в различное время года позволяет ликвидировать сезонность в проведении транспортных работ. Если принять во внимание, что современные гусеничные транспортные машины обладают большой грузоподъемностью, а по скорости движения на грунтовых дорогах практически не уступают автомобилям, то вопрос более широкого применения транспортных средств этого вида приобретает актуальную практическую направленность.
Настоящая книга преследует две цели: первая — показать конструктивные и эксплуатационные особенности гусеничных транспортно-тяговых машин, уже находящих применение в народном хозяйстве, чтобы повысить эффективность их использования; вторая заключается в привлечении внимания к этому виду транспортной техники, имеющему, на наш взгляд, большое будущее. Технико-экономическая оценка эффективности использования быстроходных гусеничных транспортных средств как одного из звеньев комплексной транспортной системы подтверждает это.
Конечно, внедорожный вездеходный транспорт, в том числе и гусеничные транспортеры-тягачи, не заменит автомобильный и по масштабу использования в народном хозяйстве не сравнится с ним, тем не менее развитие этого вида гусеничных машин, как средства, не имеющего себе равных по простоте и экономичности использования в тяжелых дорожных условиях, остается актуальным.
Глава I
НЕКОТОРЫЕ ВОПРОСЫ ТЕОРИИ
ГУСЕНИЧНЫХ ТРАНСПОРТЕРОВ-ТЯГАЧЕЙ
Гусеничные транспортные машины сравнительно недавно на-
чали использоваться для удовлетворения нужд различных отраслей народного хозяйства. В связи с этим представления о принципах движения данных машин, их динамической нагруженности и конструктивных особенностях специфических агрегатов, в частности гусеничного движителя, для большинства специалистов, занимающихся эксплуатацией гусеничных машин, являются новыми. Простое описание конструкции быстроходных транспортеров-тягачей не всегда позволяет уяснить выбор конструктивного
решения, оценить практические возможности машины и способы
наиболее эффективного ее использования в процессе экспуатации.
Целесообразно предварительно изложить некоторые вопросы
теории быстроходных гусеничных машин, особенно теории гусеничного движителя, чтобы в дальнейшем были более понятными
конструктивные решения, применяемые в практике создания машин этого типа, и особенности их эксплуатации в различных условиях.
1. ОСОБЕННОСТИ ВЗАИМОДЕЙСТВИЯ ГУСЕНИЧНОГО ДВИЖИТЕЛЯ С ГРУНТОМ
Вследствие ограниченной проходимости колесных машин в тяжелых дорожных условиях в основном могут использоваться гусеничные машины. Более высокие сцепные качества гусеницы по сравнению с колесом позволяют гусеничной машине развивать на грунтах с низкой несущей способностью большую тягу, т. е. обусловливают расширение диапазона использования по тяговым возможностям этих транспортных средств. Хорошие тяговые возможности в сочетании с высокой проходимостью являются существенным качеством в тяжелых дорожных условиях, поскольку при ограниченном числе машин высокой проходимости позволяют использовать их и как транспортные средства общего назначения, и как тягачи для буксировки различных прицепов, оборудования, и как средство эвакуации застрявших машин.
Для, сравнения тяговых возможностей полноприводных автомобилей и гусеничных машин в табл. 1 приведены значения коэф-
1. Значения коэффициентов сопротивления качению/сцепления
Дорожные условия
Полноприводные автомобили
Гусеничные машины
Асфальт, бетон . . . . Сухая грунтовая дорога Размокшая грунтовая дорога ..................
Задерненный луг . . . . Песок..................
Заболоченная местность Снежная целина . . . .
0,018—0,025/0,6—0,8 0,03—0,05/0,5—0,6
0,1—0,25/0,25—0,4
0,06—0,12/0,2—0,5
0,1—0,3/0,2—0,5 0,2—0,35/0,1—0,3 0,2—0,3/0,15—0,25
0,03—0,04/0,6—0,65 0,06—0,08/0,6—0,8
0,1—0,15/0,4—0,6 0,08—0,10/0,65—0,85 0,15—0,2/0,4—0,7
0,2—0,30/0,3—0,4 0,15—0,25/0,25—0,35
фициентов сопротивления качению и сцепления на некоторых типах грунтов, которые в определенной степени могут дать представление о тягово-сцепных качествах колесных и гусеничных машин.
Из данных таблицы следует, что на дорогах с твердым покрытием преимущество по экономичности и тягово-сцепным качествам имеют автомобили, так как при равном с гусеничными машинами коэффициенте сцепления они имеют вдвое меньшее сопротивление качению. На деформируемых грунтах картина обратная: сцепление у гусеничных машин больше, а сопротивление качению меньше, чем у колесных. Это объясняется характером взаимодействия колесного и гусеничного движителей с грунтом.
Для уяснения процесса взаимодействия движителя с грунтом необходимо хотя бы коротко остановиться на свойствах грунта как опорно-сцепной поверхности. При этом рассмотрим лишь основные физико-механические свойства грунта, чтобы объяснить необходимость использования тех или иных конструктивных решений, обеспечивающих повышение проходимости машин на различных грунтах.
Процесс взаимодействия движителя с опорной поверхностью представляется сложным вследствие разнообразия и нестабильности свойств грунта. До последнего времени не найдено достаточно простых и надежных оценочных показателей (параметров) грунта, которые позволяли бы однозначно характеризовать его свойства, а в итоге и результат взаимодействия с ним того или иного движителя.
Наибольшее распространение в практике получил метод оценки механических свойств грунта как опорно-сцепной поверхности с использованием трех факторов:
сопротивления вертикальному деформированию, которое определяет несущую способность грунта;
сопротивления сдвигу в горизонтальной плоскости, от которого зависят сцепные качества движителя с грунтом;
стабильности свойств грунта при воздействии на него нагрузок различной продолжительности и кратности, что обусловливает 6
Рыс 1. Зависимость между удельной нагрузкой на грунт и деформацией:
/ _ грунт с линейной зависимостью между нагрузкой и деформацией (ц= 1): 2 ~ уплотняемый грунт (ц > 1); 3 - неуплот-няемый (разрушаемый) грунт (ц < 1); 4 — грунт с переменными по глубине свойствами (ц. » var)
взаимосвязь несущей способности грунта со скоростью движения и числом проходов.
При качении колеса или гусеницы по деформируемому грунту в результате действия
h
вертикальных и горизонтальных сил, передающихся от машины через движитель на грунт, образуется колея. Глубина колеи зависит от вертикальной нагрузки, типа и геометрических размеров движителя, режима движения и свойств грунта. Затраты мощности на образование колеи — один из основных компонентов сопротивления качению. Сопротивление качению,
как правило, пропорционально глубине колеи, поэтому важно знать способность грунта выдерживать вертикальную нагрузку. На рис. 1 представлена зависимость между удельной нагрузкой на грунт и вертикальной деформацией. Обычно такую зависимость получают путем погружения (вдавливания) штампа определенного размера и формы в грунт. При этом фиксируются значения вертикальных деформаций грунта и нагрузок, вызывающих эти деформации.
В простейшем виде связь между глубиной погружения штампа в грунт и удельной нагрузкой, действующей на него, может быть описана эмпирическим выражением [1, 41
q — Ch11,
где q — удельная нагрузка (давление) штампа на грунт; h — глубина внедрения штампа в грунт; Сир — показатели (константы), характеризующие свойства грунта.
Эта зависимость получила широкое распространение в практике исследования опорно-сцепных свойств грунта, однако ее использование сопряжено с рядом отрицательных моментов. Кон-
станты грунта Сир определяют опытным путем при вдавливании штампа определенных размеров и формы. Реальный контакт колеса или гусеницы с грунтом отличается от контакта штампа как по форме, так и по размерам. Известно [4], что количественные значения характеристик грунта, а иногда и качественная картина процесса деформирования существенно зависят от объема грунта, подверженного напряженному состоянию, т. е. от размеров площади контакта. В связи с этим характеристики грунта, получаемые при вдавливании штампов, не соответствуют реальным характеристикам при деформировании грунта гусеницей или колесом.
глубине погружения (кривая
Рис. 2. Схема прибора с двойным штампом для определения несущей способности грунта
Кроме того, степенная зависимость описывает только единственное качественное состояние грунта. Например, при р > 1 выражение (1) будет описывать свойства уплотняемого грунта (кривая 2 на рис. 1), при р < 1 — неуплотняемого (кривая 3), при р ~ 1 выражение (1) справедливо для грунта с линейной зависимостью нагрузки от деформации на всей /). Для грунта с переменными по
глубине погружения штампа свойствами, т. е. с переменным значением р (кривая 4), выражение (1) вообще не может быть применено, так как Сир-— константы. Попытки использования других, более сложных зависимостей для оценки свойств грунта
пока положительных результатов не дали.
Несоответствие характеристик, получаемых при вдавливании штампа и реальном погружении в грунт опорной части движителя, вызывается также и тем, что при записи усилия, действующего на штамп, замеряется суммарная сила, которая идет не только на преодоление сопротивления сжатию грунта, но и на его срез по периметру. Естественно, что при разных размерах штампа соотношения между усилиями среза и сжатия будут различными, в связи с чем и константы Сир даже для одного и того же грунта будут неодинаковыми.
Для получения более стабильных значений параметров С и р может быть использован комбинированный прибор, показанный на рис. 2 и позволяющий разделить усилия на деформацию грунта и на его срез.
Рабочая часть прибора состоит из наружного и внутреннего дисков комбинированного штампа 5, входящих один в другой с малым зазором. Наружный диск соединяется с корпусом 3, внутренний — со штоком 4, передающим силу Рвк от него тензо-звену 2, которое жестко связано со штоком и корпусом. Суммарная сила Р, необходимая для деформации грунта по всей площади комбинированного штампа, воспринимается тензозвеном 1, жестко связанным с корпусом 3. При деформации грунта внутренний и наружный диски перемещаются одновременно на одну и ту же глубину, замеряемую датчиком 6 деформации грунта.
Прибор для определения характеристик грунта работает следующим образом: под действием силы, замеряемой и фиксируемой посредством тензозвена /, рабочая часть прибора заглубляется в грунт до достижения несущей способности грунта, характери-
2. Результаты определения свойств грунта
h, см Z?BH = 2 см DBH =3 3 см Г>вн ~ 5 см
^вн, кгс Qo 9 S кгс/см2 кгс <7о • кгс/см2 ^вн, кгс ^0 » кгс/см2
3 6 13,80 18,20 6,12 31,6 40,8 6,24 86 117 6,11
3 6 13,97 18,21 6,10 32,1 40,8 6,25 89,4 117,3 6,32
3 6 13,14 18,22 6,18 30,0 40,9 6,01 83,5 112 5,98
3 6 13,80 18,40 6,21 31,9 41,3 6,08 86,2 113,2 6,15
3 6 13,80 18,0 6,06 31,0 40,6 5,92 87,9 114,0 6,23
— -- 19,3 6,16 43,4 6,15 • 120,9 6,16
зуемой давлением д^ при котором начинается течение грунта. Под действием сил сопротивления грунта нагружается тензо-звено 2, передающее усилие на внутренний диск. Запись одно-
временно силы Рвн и глубины погружения штампа позволяет
построить эмпирическую зависимость q = f (h) и по ней найти
коэффициенты Сир. Предельное значение силы Рвн, отнесенное
к площади внутреннего штампа, и есть несущая способность грунта
Разность сил Р и Рвн позволяет учитывать срез грунта по периметру штампа и, наряду с оценкой коэффициентов С и р, а также несущей способности грунта qQ, определять усилия среза и сопоставлять результаты исследований с ранее известными. Если предел несущей способности не достигнут вследствие недостаточной сжимающей силы или невозможно точно провести касательную к кривой сжатия в начале координат, то можно применить приближенный способ графической интерполяции кривой q = ~ f (h) по имеющимся нескольким точкам.
В табл. 2 в качестве примера приведены результаты определения несущей способности супесчаной пахоты прибором с комбинированными штампами трех вариантов: диаметр наружного Диска составлял 7 см, диаметр внутреннего диска 2, 3 и 5 см.
В таблице приведены средние значения пяти замеров для каждого варианта. В последней строке дано значение несущей способности при достижении грунтом предела текучести.
Из таблицы видно, что при использовании подобного прибора представляется возможность получить константу, характеризующую предельную несущую способность грунта, в меньшей степени
9
зависящую от формы и размера штампа, чем в случае деформирования грунта единичным штампом, т. е. получить достаточно объективную оценку свойств грунта. Однако еще раз подчеркнем, что многообразие грунтов, широкий диапазон изменения их характеристик, разные пределы нагрузок, для которых приходится определять сопротивляемость грунта, не позволяют с уверенностью рекомендовать даже самые совершенные приборы для универсального использования.
Необходимо указать, что и описанным прибором нельзя определить характеристики, точно соответствующие условиям взаимодействия реального движителя с грунтом, так как он не учитывает влияния бокового подпора грунта.
Из рассмотренного следует, что глубина погружения движителя в грунт, пропорциональная сопротивлению качению машины, зависит в основном от давления в зоне контакта. Чем меньше давление, тем меньше колея, меньше сопротивление качению и выше проходимость на деформируемых грунтах. Таким образом, можно с достаточным допущением считать, что у машины, имеющей более низкое давление на грунт, будет более высокая проходимость.
Гусеничный движитель при одинаковых габаритных размерах машины обеспечивает получение более низких средних давлений в зоне контакта, так как даже при равной ширине колеса и гусеницы у гусеничной машины опорная поверхность больше. Если у полноприводных автомобилей отношение опорной поверхности (при заглублении колес в грунт до 1/3 диаметра) к габаритной площади в плане составляет в среднем 0,07—0,15, то у гусеничных машин это отношение примерно равно 0,17—0,2.
Снижение давления в зоне контакта колесного движителя с грунтом может быть достигнуто применением шин увеличенного диаметра и ширины и дополнительно регулированием давления воздуха в них. Например, путем применения пневмокатков давление в зоне контакта может быть снижено почти до значений, характерных для гусеничных снегоболотоходных машин (0,2— 0,25 кгс/см2). Следовательно, потери мощности на образование колеи в этом случае будут примерно такие же, как у гусеничных машин, и проходимость их ориентировочно будет одинаковой. Однако сложность конструкции, низкая надежность и высокая стоимость таких машин пока не позволяют им конкурировать с быстроходными гусеничными машинами.
Другим фактором, определяющим возможность движения машины по деформируемому грунту, особенно при работе с прицепом или на подъемах, является способность реализовать достаточную силу тяги. Эта способность зависит от свойств грунта создавать касательные реакции при его сдвиге и может быть оценена зависимостью касательных сил Т от деформации сдвига А (рис. 3). Связь между горизонтальной касательной реакцией и сдвигом грунта, так же как и между вертикальными нагрузкой и деформацией, различна. Она зависит от соотношения сил, 10
рис. 3- Зависимость касательной реакции грунта от деформации сдвига:
/ — плотный суглинистый грунт; 2 — песок, пластичные грунты
определяемых сцеплением частиц грунта друг с другом, и внутреннего трения. Наиболее характерными являются зависимости двух типов. У плотных грунтов (глины, суглинка) с ненарушенной структурой с ростом деформации сдвига (кривая 1) сначала про
исходит уплотнение грунта и увеличение касательной силы, затем по достижении определенного предела (Tmzx при деформации До) происходит срыв грунта (преодоление сил сцепления),
и усилие сдвига резко падает до значения, определяемого только внутренним трением. Вследствие малости сил внутреннего трения
в таких грунтах по сравнению с силами сцепления падение касательной силы значительное.
У рыхлых пластичных грунтов с нарушенной структурой (песка, пахоты), т. е. грунтов, у которых сцепление частиц друг с другом почти отсутствует, характер протекания процесса сдвига иной (кривая 2). С ростом деформации здесь постепенно увеличивается касательная сила до значения, определяемого внутренним трением. При дальнейшем росте деформации касательная сила остается неизменной или несколько уменьшается.
Максимальное усилие сдвига (касательная сила) в простейшем случае при сдвиге пластины площадью F, нагруженной вертикальной силой Q, может быть определено выражением
+ = +
(2)
где Тс — сила сцепления частиц друг с другом; Tf — сила трения при сдвиге; £ — коэффициент сцепления; рЕ — коэффициент внутреннего трения.
Если разделить каждый член уравнения на площадь F, то получится выражение для определения удельного сопротивления сдвигу
V = £ + (3)
Из этого выражения видно, что удельное сопротивление сдвигу и» следовательно, касательная сила тяги зависят от давления в 30не контакта: чем больше давление, тем больше касательная сила. Однако следует помнить, что с повышением давления растут вертикальные деформации грунта, увеличивается сопротивление качению, поэтому изменение давления влияет на тяговые качества Движителя не однозначно. На деформируемых грунтах даже не-льшое повышение давления в зоне контакта приводит к резкому увеличению глубины колеи и потерь мощности, так что некоторое
приращение касательной силы тяги не компенсирует более интенсивного приращения силы сопротивления качению. Что касается плотных грунтов, то здесь имеется эффект приращения силы тяги при увеличении давления на грунт.
Так же как и при вертикальном деформировании грунта, характеристики грунта при сдвиге определяют с помощью различных приборов, в которых штамп той или иной формы нагружается вертикальным усилием и одновременно сдвигается. При этом в одних приборах сдвиг грунта осуществляется под действием поступательного перемещения нагружающей части штампа, в других — под действием вращения.
На рис. 4 показан простейший прибор для определения характеристик сопротивляемости грунта сдвигу. Принцип действия прибора основан на вдавливании штампа в грунт и вращении его
вокруг оси.
Треногу 4 прибора, в направляющем цилиндре 3 которой может вертикально перемещаться и вращаться шток 2, устанавливают на грунт. Нагрузка на головку 6 штампа создается грузами 5, а концентрический сдвиг головки 6 с насаженным на нее сменным штампом 7 производится динамометрической рукояткой /. Для разных грунтов применяются сменные штампы различной формы и размеров.
Как вытекает из графика на рис. 3, максимальная касательная сила возникает при достижении определенного сдвига слоев гру нта—деформации Д 0,
Рис. 4. ^Прибор для определения сопротивления грунта сдвигу
т. е. при определенном буксовании движителя. Буксование, при котором реализуется максимальная сила тяги, различное для гусеничного и колесного движителей. Для колесного
Рис. 5. Связь между буксованием и усилием на крюке для гусеничной и колесной машин
движителя оно существенно больше. Это объясняется тем, что у колесного движителя отношение шага грунтозацепов, а следовательно, и длины «кирпичиков» грунта, сопротивляющихся сдвигу, к общей длине контакта движителя с грунтом гораздо больше, чем у гусеничного (в 5—10 раз). Если у гусеничного движителя максимальная сила тяги соответствует буксованию не более чем 7—12%, то у колесного движителя максимальная сила тяги на деформируемых уплотняемых грунтах получается при буксовании 40—50%, а на песчаных грунтах даже 60— 80%. На рис. 5 приведены кривые зависимости крюковой нагрузки от коэффициента буксования для колесной (кривая /) и гусеничной (кривая 2) машин примерно одинаковой массы (на пахоте), наглядно иллюстрирующие разницу в значениях коэффициента буксования, соответствующего максимуму силы тяги. Большее буксование неизбежно приводит к более заметным потерям мощности на качение, поэтому избыточная тяговая сила у колесных
машин меньше, чем у гусеничных.
Кстати, до последнего времени в практике конструирования быстроходных гусеничных машин прибегали к повышению тяговых качеств машины установкой на гусеницу дополнительных съемных
грунтозацепов с интервалом между ними в несколько траков. Смысл установки таких грунтозацепов заключался в стремлении
увеличить длину «кирпичика» грунта, подвергающегося сдвигу,
т. е. в конечном итоге увеличить силу тяги при одновременном
увеличении коэффициента буксования. Однако эффект от этого
мероприятия на большинстве грунтов был незначительным, потери
же мощности на деформирование грунта сильно возрастали, поэтому в настоящее время подобные конструктивные решения по повышению тягово-сцепных качеств гусеничных машин на деформируемых грунтах не находят широкого применения. Съемные
грунтозацепы используются лишь для повышения сцепления на обледенелых грунтах и иногда на снегу.
2. ДАВЛЕНИЕ ПОД ОПОРНОЙ ВЕТВЬЮ
ГУСЕНИЧНОГО ОБВОДА
После того как схематически были рассмотрены факторы, обусловливающие взаимодействие движителя с грунтом, более подробно остановимся на двух моментах, являющихся основными в этом процессе: на распределении вертикальных реакций под опорной ветвью обвода (фактор, связанный с несущей способностью грунта) и на возникновении горизонтальных реакций или силы тяги (фактор, связанный с касательными усилиями на опорной ветви).
Вертикальную нагрузку, передаваемую опорной ветвью обвода на грунт, принято оценивать средним давлением. Следует заметить, что среднее давление с достаточной точностью характеризует проходимость машины по слабым грунтам, снегу, болотистой местности. Обычно под средним давлением понимают отношение
?сР == GT/(2bL).
Рис. 6. Характер распределения давлений под опорной ветвью обвода
где GT — полный вес транспортера (тягача); b — ширина гусеницы; L — длина опорной ветви обвода, т. е. той части гусеницы, которая при установке машины на твердый грунт непосредственно лежит на нем (база машины).
При движении по деформируемому грунту гусеницы погружаются на определенную величину в грунт и фактическая длина гусеницы, контактирующей с грунтом, больше, чем L, поэтому
величина qcp несколько снижается. Однако при сравнительной оценке различных конструкций этим, как правило, пренебрегают.
Истинные давления под опорной ветвью гусеницы значительно отличаются от среднего, так как вес машины передается на грунт преимущественно в зоне под опорными катками, а в пролетах между ними (рис. 6) гусеница выпирается грунтом вверх. Эти части опорной ветви передают меньшую нагрузку, чем те, которые лежат непосредственно под катками. Доля нагрузки, передаваемой участками гусеницы между катками, и, следовательно, степень неравномерности давлений под гусеницами зависят от схемы ходовой части, конструкции гусеницы и натяжения в обводе. Чем больше опорных катков при одинаковой длине опорной ветви, тем более равномерно распределяется нагрузка на ветвь, так как большее число звеньев непосредственно участвует в передаче веса машины на грунт.
Иногда в практике используют метод оценки проходимости машины, а точнее, степени неравномерности распределения давления под опорной ветвью, по двум показателям: среднему давлению <7ср и максимальному давлению {7тах, определяемому из расчета, что всю нагрузку от опорного катка воспринимает только один трак:
<7тах — GT/(2/ibZ0),
где п — число опорных катков с одной стороны машины; Zo — шаг гусеничной цепи (длина одного трака).
Это справедливо только для твердых грунтов, на деформируемых же грунтах нагрузка от катка передается (хотя и неодинаково) всей ветвью, расположенной между катками, поэтому определенное по приведенной формуле значение максимального давления q'maK для деформируемых грунтов будет существенно отличаться от фактического значения q^ (см. рис. 6).
Конструкция гусеницы сказывается на характере распределения давлений по длине опорной поверхности главным образом вследствие наличия упругого момента сопротивления в шарнире, т. е. изгибной жесткости. Чем больше упругий момент (сопротив-14
ление угловому скручиванию траков друг относительно друга), тем более жестким является участок ветви между опорными катками и тем равномернее давление в пролете между ними.
По этой причине гусеницы с упругими резинометаллическими шарнирами обладают потенциально лучшей проходимостью, особенно, если учесть, что для обеспечения надежной работы резиновых элементов траки соединяют друг с другом под определенным (установочным) углом, способствующим предварительному созданию в пролетах между катками выравнивающих давлений. Справедливости ради следует указать, что эти преимущества по сравнению с обычными гусеницами проявляются лишь в том случае, если гусеница с резинометаллическими шарнирами имеет примерно такую же форму в плане (т. е. такие же значения опорной поверхности) и если натяжение в обводе не вызывает существенного перераспределения сил под катками.
Гусеницы с параллельными резинометаллическими шарнирами обычно выполняют по так называемой скелетной схеме, характеризующейся тем, что фактическая опорная поверхность гусеницы значительно меньше номинальной, равной Ы. В этом случае увеличение максимальных давлений из-за фактического уменьшения несущей (опорной) поверхности трака не всегда компенсируется выравниванием давлений за счет изгибной жесткости, и проходимость машины может быть даже хуже, чем при использовании гусениц с обычными металлическими шарнирами.
Натяжение в обводе также существенно влияет на нагрузки под опорной ветвью обвода, но натяжение в ветвях обвода прямо связано со схемой гусеничного движителя. Рассмотрим этот вопрос подробнее.
Гусеничная цепь, замкнутая по контуру, образованному ведущим колесом, поддерживающими и опорными катками и направляющим колесом, составляет гусеничный обвод. Ветвь обвода, расположенная на участке от ведущего колеса до грунта (против направления движения) и передающая силу тяги, называется рабочей ветвью (ее длина /р), а участок обвода, расположенный между ведущим колесом и грунтом (по направлению движения) и не нагруженный силой тяги, называется свободной ветвью обвода (ее длина /св). В сумме с опорной ветвью L эти три участка составляют гусеничный обвод общей длиной Lo:
^о " I ^СВ I
В статическом состоянии, т. е. когда машина стоит и к ведущим колесам не подводится крутящий момент от двигателя, в обводе Действует только сила предварительного (статического) натяжения гусениц Тс, которая создается для того, чтобы обеспечить Устойчивую работу обвода без значительных колебаний его ветвей и нарушения кинематики.
В обводе с обычными гусеницами (с открытыми металлическими шарнирами) сила предварительного статического натяжения связана с весом гусениц зависимостью
Тс - qrl*/(8f), (4)
где <7Г —• вес единицы длины гусеницы; I — длина участка гусеницы, провисающего между какими-либо катками; f — стрела провисания этого участка, натяжение одинаковое во всех
Рис. 7. Схема провисания ветви гусеничного обвода
Поскольку предварительное ветвях обвода, то выражение (4) справедливо для любого участка, и, следовательно, отношение l2/f для любого участка обвода будет одинаковым. Отсюда вытекает, что при большей длине пролета ветви (т. е. при большем расстоянии между катками) одному и тому же значению натяжения будет соответствовать большее провисание ветви. Или иначе, для того чтобы длинная ветвь обвода провисала меньше, требуется создавать большее предварительное натяжение. Следует при этом иметь в виду, что величина I является горизонтальной проекцией расстояния между опорами провисающей ветви (она несколько меньше, чем расстояние между катками /к), а стрела провисания f наибольшим расстоянием по вертикали от линии, соединяющей эти опоры, до провисающего участка (рис. 7).
В упругом обводе, т. е. в обводе с упругими резинометаллическими гусеницами, соотношения между силой предварительного натяжения, длиной ветви и стрелой ее провисания несколько иные, поскольку угловая жесткость резинометаллических шарниров делает гусеницу более жесткой при продольном изгибе. Так, если обычная гусеница под действием силы тяжести занимает положение 1 , то упругая — положение 2. В случае предварительной установки траков под некоторым углом свободное состояние гусеницы соответствует положению 3.
Для практических расчетов может быть рекомендована следующая зависимость, устанавливающая связь между предварительным натяжением упругого обвода, параметрами гусеницы и провисающего участка:
4k
(5)
коэффициент, равный 1,5—2 (большее значение длинных ветвей); с0 — относительная угловая
где k — опытный принимается для жесткость шарнира; /0 — шаг гусеничной цепи; b — длина шарнира (ширина гусеницы).
Относительную угловую жесткость шарнира определяют следующим образом: трак относительно другого закручивается на угол а, которому соответствует определенный момент скручивания шарнира Мш. По этим двум величинам и ширине гусеницы находят относительную угловую жесткость
с0 =
Угол закручивания может быть принят практически любым s диапазоне до предельных углов складывания, определяемых кинематикой гусеничного обвода, так как зависимость упругого момента от угла скручивания линейная, т. е. отношение Мш/а при любых углах одинаковое.
Рассмотрим изменение натяжения в ветвях обвода, когда к нему подводится тяговое усилие ведущего колеса Рв.к- Поскольку ©едущее колесо движителя под действием приложенных к нему сил со стороны рабочей Тр и свободной Тсв ветвей и крутящего момента AfBK находится в равновесии, то можно записать
Мв к
IS
р' В. к л св' в. к •
При этом допускаем, что силы Тр и Тсв приложены на одном и том же расстоянии от центра ведущего колеса — на радиусе гв>к. Деля это выражение на гвк и имея в виду, что Мв.к/гв#к = Рь.к, получаем
^в. к — — ^Св • (6)
Таким образом, при приложении любого усилия Рв#к соблюдается условие, что разность сил натяжения в рабочей и свободной ветвях равна этому усилию. Однако сила предварительного статического натяжения не остается постоянной, она уменьшается с увеличением усилия Рв к. Это происходит вследствие того, что под действием тягового усилия свободная ветвь ослабляется и натяжение в ней падает. С достаточной точностью натяжение в свободной ветви при действии тягового усилия определяется формулой
В.К
Из формулы видно, что изменение натяжения в свободной ветви обвода и соответственно в рабочей, т. е. общая нагруженность 'Обвода, зависит не только от усилия Рв>к, но и от соотношения Длин свободной и рабочей ветви lcJl^ Наиболее значительно (в несколько раз) это отношение различается у машин, имеющих переднее и заднее расположение ведущих колес. У быстроходных гусеничных машин при переднем расположении ведущего колеса Отношение /св//р находится в пределах 0,08—0,14, а при заднем '—12. В связи с этим нагруженность обвода при данных схемах в одних и тех же условиях эксплуатации различна. Характер изменения натяжений в рабочей и свободной ветвях для машины кассой 16 т при изменении усилия Рвпоказан на рис. 8.
Рис. 8. Натяжение в рабочей и свободной ветвях:
1 — при переднем расположении ведущих колес; 2 — при заднем расположении ведущих колес; 3 — при отсутствии продольной податливости у гусениц; 4 — экспериментальная зависимость при переднем расположении ведущих колес
Из графика видно, что при переднем расположении ведущих колес (кривые 1 и 4) натяжение в свободной ветви на эксплуатационном режиме (Рв-К = 1000-S-2000 кгс) уменьшается по сравнению с первоначальным статическим натяжением (7\=2000 кгс) в 2—5 раз, а натяжение в рабочей ветви увеличивается всего на 100— 250 кгс. На основании этого
можно считать, что при тяговых усилиях, не превышающих предварительное статическое натяжение, растягивающая нагрузка в рабочей ветви примерно равна предварительному статическому натяжению, а при тяговых усилиях больших, чем натяжение Тс, когда свободная ветвь полностью ослаблена, натяжение равно усилию Ръ,к.
При заднем расположении ведущих колес (кривые 2, рис. 8) натяжение в свободной ветви уменьшается менее интенсивно. В эксплуатационном режиме оно только на 200—400 кгс меньше, чем натяжение в рабочей ветви при переднем расположении ведущих колес. Натяжение же в рабочей ветви возрастает в среднем на 0,8—0,9 Рв.к* Уменьшение натяжения в свободной ветви мало зависит от продольной жесткости гусениц, и поэтому выражение (7) справедливо практически для гусеничных обводов всех типов.
Следует подчеркнуть, что все приведенные рассуждения справедливы для случаев, когда центробежные силы не влияют на натяжение Тс, т. е. для режима движения с невысокими скоростями или при использовании гусениц с большой продольной жесткостью.
На рис. 9, а—в показаны эпюры растягивающих усилий для различных случаев загрузки гусеничной машины. Касательные реакции грунта в приведенных схемах приняты равномерно распределенными по длине опорной ветви, поскольку их закон изменения при заданном тяговом усилии Рв к (на одну гусеницу) не влияет на разность натяжений Тр — Тсв.
При усилии Рв#к, не превышающем предварительное статическое натяжение (см. рис. 9, а), верхняя ветвь обвода нагружена примерно одинаково как при переднем, так и при заднем расположении ведущего колеса. Наклонные же ветви значительно больше нагружены (почти на величину статического натяжения) в схеме
с задним расположением ведущего колеса. Более нагруженной в этой схеме является и опорная ветвь.
В связи с этим для машин, эксплуатирующихся при тяговых нагрузках меньших, чем статическое натяжение, предпочтительнее схема движителя с передним расположением ведущего колеса, так как она обеспечивает меньшую нагруженность обвода.
При усилии Рв-К, превышающем предварительное статическое натяжение (см. рис. 9, в), наклонные ветви обвода по-прежнему более нагружены (на величину, несколько меньшую силы Тс) при заднем расположении ведущего колеса. Верхняя же ветвь нагружается больше в схеме с передним расположением ведущего колеса. Превышение нагрузки равно разности между тяговым усилием и предварительным статическим натяжением ДТ = Рв_к — Тсв.зад. В связи с этим выбор рациональной схемы в последнем случае
Рис. 9. Эпюры растягивающих усилий в обводе:
---------- при переднем расположении ведущнх|колес;--•----при заднем расположении ведущих колес; 1, 2 - участки зацепления при переднем и заднем расположении ведущих колес
19
связан с ожидаемыми эксплуатационными тяговыми нагрузками, т. е. с назначением гусеничной машины.
Таким образом, для тракторов и других гусеничных машин, эксплуатирующихся в условиях больших сил тяги с точки зрения динамической нагруженности обвода целесообразна схема движителя с задним расположением ведущего колеса. Если же рабочие нагрузки сопоставимы с предварительным статическим натяжением (см. рис. 9, б), то предпочтение должно быть отдано схеме с передним ведущим колесом.
Быстроходные транспортные гусеничные машины эксплуатируются в основном на режимах повышенных скоростей при относительно невысоких тяговых нагрузках (коэффициент сопротивления качению 0,08—0,12). К тому же при использовании гусениц с резинометаллическими шарнирами предварительное статическое натяжение в их обводах делается достаточно большим. В связи с этим на большинстве гусеничных транспортных машин используется схема движителя с передним расположением ведущего колеса.
Остановимся на выборе оптимального предварительного статического натяжения. Исходя из требований устойчивой работы обвода, создания благоприятных условий для взаимодействия элементов зацепления гусеницы с ведущим колесом, нежелательно большое ослабление свободной ветви обвода, особенно образование «мешка» перед первым опорным катком. Чрезмерное ослабление свободной ветви может быть только в том случае, когда натяжение в ней отсутствует, т. е. 7СВ 0. Из формулы (7) следует, что ослабление свободной ветви или отсутствие нагрузки в свободной ветви может быть при определенном соотношении между тяговым усилием РВвК и предварительным статическим натяжением
р 'Г Г В. к
с 1 + (W/p) *
Таким образом, значение предварительного статического натяжения в обводе нужно выбирать исходя из вероятных эксплуатационных нагрузок и схемы гусеничного движителя (места расположения ведущего колеса). При переднем расположении ведущего колеса уменьшение натяжения в свободной ветви до минимального происходит при тяговом усилии, примерно равном предварительному статическому натяжению, т. е. в этом случае рациональным с точки зрения устойчивости работы обвода и зацепления является натяжение 7\ Рв к. При заднем расположении ведущего колеса натяжение Тсв уменьшается до минимального при РВфК
(7 -н!2) 7С, поэтому условия обеспечения устойчивости обвода достигаются при Тс 0,1РЕ к. Следовательно, при одинаковых условиях для устойчивой работы обводов с передним расположением ведущего колеса требуется более высокое предварительное натяжение.
<> /
1
Однако схема движителя и место расположения ведущего колеса влияют не только на динамическую нагруженность обвода. От места расположения ведущего колеса непосредственно зависит характер распределения нагрузок под опорной ветвью, а следовательно, проходимость и тягово-сцепные качества машины.
Изменение натяжения в ветвях обвода отражается на эпюре давления под катками. Нагрузка под передним или задним катком будет всегда меньше, чем нагрузка на этот каток, на величину вертикальной составляющей натяжения в наклонных ветвях обвода. При неизменной суммарной вертикальной реакции грунта на опорную ветвь обвода (которая равна весу машины и вертикальной составляющей от силы на крюке) изменение натяжения и, следовательно, давлений под крайними катками вызывает перераспределение всей эпюры давлений.
Определим влияние схемы движителя и сил в ветвях обвода на характер этого перераспределения. Статическая нагрузка на каток без учета натяжения от гусеничных цепей при постоянной жесткости /гт упругого элемента подвески определяется из выражения
р. = ь f •
1 I ^Т/ СТ I >
где fCT i — статический ход катка.
При нагруженном обводе силы под катками можно определить по следующимХформулам:
под передними
‘ (f ст 1
+ ~ Т“ Sin
(8)
под средними(внутренними)
•» п 1)»
(9)
под задними
(Ю)
где Afj — дополнительное поджатие катков в результате увеличения натяжения; GH — неподрессоренный вес; п — число опорных катков с одной стороны машины; уг, у3 — углы охвата на переднем и заднем катках (углы наклона ветвей).
Общая дополнительная нагрузка на все катки от натяжения обвода, эквивалентная увеличению веса машины на такую же величину,
п п
Е = Е kT^fi = sin у3 + Тсв sin уп. 1 1
21
Давление под каждым катком можно найти, если будут известны вызываемые приложением силы тяги перемещения всех катков ft — /ст z “h kft*
С этой целью рассмотрим силы, которые действуют на корпус гусеничной машины в общем случае движения (рис. 10). Заметим, что в данном случае растягивающие обвод усилия, являющиеся внутренними силами, выступают в качестве внешних по отношению к корпусу. Центробежные силы при этом не учитывают, так как они не создают реакций на направляющих элементах обвода.
На схеме (см. рис. 10) усилия от ветвей обвода показаны приложенными к осям ведущего и направляющего колес. Изменение точек приложения растягивающих усилий в рабочей и свободной ветвях скомпенсировано приложением к корпусу реактивного крутящего момента
^в.к = (Тр Л*) /'в. К = в. к ^в. К*
Сумма проекций всех сил на ось z
S ktfi = — -2 — cos ar 4- TP sln Та + TCB sin ?п + nrsin ‘Ркр’ (11) 1 ** “
где Ркр — нагрузка на крюке.
Уравнение моментов от действующих сил относительно оси
первого катка имеет вид
cos агат -]-
F/ + (GT —бн)51паг о *н. т
+ -кр-^р zH. кр + - (Тр cos 6 + Тр cos Тз) z„., к +
+ (Тр sin у3 - Тр sin 6) к + Рв. KrB> к + (7Р cos 6 +
*4~ св COS *уп) ZH> в> к (^р ^1П ® "4" Лв уп) CZB> к, (12)
22
где h-i — расстояние между первым и i-м катками; Ft — сила инерции (при неравномерном движении машины); z„. т, zH.KP, z н к» 2н.в.к —вертикальные координаты с учетом дополнительной осадки корпуса.
Вертикальные координаты приложения сил с учетом осадки корпуса связаны со статическими координатами (не учитывающими натяжение гусеничных цепей) зависимостями:
Двух уравнений сумм проекций сил и моментов (11) и (12) недостаточно для определения перемещения всехм катков. Недостающие уравнения записывают на основании связи между перемещениями катков. Поскольку деформация корпуса по сравнению с перемещениями катков ничтожно мала, то эта связь при постоянной жесткости упругого элемента может быть принята линейной
i = fi + k-t
(13)
где i = 2, 3, ..., п — 1.
Решение уравнений (11)—(13) позволяет найти полные ходы катков (с учетом их поджатия от натяжения в обводе) и определить значение сил, действующих на катки и под катками, по формулам (8)-(10).
Углы уп и 7з при изменении натяжения несколько изменяются вследствие изменения провисания ветвей и дифферента корпуса. Однако в эксплуатационном диапазоне изменения натяжений отклонение этих углов от их номинальных значений мало и существенно не сказывается на нагрузках под катками, поэтому в написанных уравнениях этн углы можно считать неизменными.
Анализ влияния натяжения гусеничных цепей на нагруженность катков показывает, что в пределах возможного изменения растягивающего усилия в ветвях дополнительное поджатие катков прямо пропорционально статическому натяжению.
На рис. И, а приведены кривые, показывающие изменение нагрузок под катками в зависимости от предварительного натяжения. Нз графика видно, что повышение натяжения приводит к значительному изменению нагрузки под катками: под крайними она Уменьшается (в пределе до нуля), а под средними увеличивается.
23
Рмс. 11. Изменение нагрузок под опорными катками!
а — в зависимости от натяжений в обводе (полная масса машины 16,2 т); б в зависимости от схемы движителя
Все это отражается на проходимости и тягово-сцепных качествах машины.
В процессе движения в результате изменения натяжений в рабочей и свободной ветвях происходит дополнительное перераспределение давлений по длине опорной ветви. Характер этого перераспределения зависит от схемы гусеничного движителя. В схеме с задним расположением ведущего колеса натяжение в свободной ветви, как уже было установлено, остается почти постоянным при различных тяговых нагрузках, поэтому увеличение силы тяги приводит к снижению нагрузки под задним опорным катком и увеличению ее под остальными катками. Под передним катком нагрузка почти не изменяется. При переднем расположении ведущих колес увеличение силы тяги приводит к снижению натяжения в свободной ветви и увеличению нагрузки под передним опорным катком. Эпюра давления в этом случае более равномерная. Следовательно, переднее расположение ведущего колеса у машин, предназначенных для эксплуатации на грунтах с низкой несущей способностью, более целесообразно.
В качестве примера на рис. 11, б показана зависимость изменения нагрузок под катками для движителя с передним (кривая 3) и задним (кривая 4) ведущими колесами при тяговом усилии на ведущем колесе РВфК = 2000 кгс. Кроме этого, показано изменение нагрузки под катками при отсутствии натяжения (кривая 1) и при натяжении Тс = 2000 кгс (кривая 2). Из графика видно, что нагрузка под внутренними катками при заднем расположении ведущего колеса на 15—30% выше, чем при переднем. Это приводит к соответствующему увеличению максимальных давлений под гусеницами (хотя среднее давление остается неизменным) и.к ухудшению проходимости машины. Нагрузка на катки, особенно на задние, при заднем расположении ведущего колеса также резко увеличивается.
На рис. 11, а и б показаны эпюры сосредоточенных нагрузок под опорными катками. Фактическое распределение давлений будет иметь иной вид (см. рис. 6), так как нагрузка на грунт передается всей опорной ветвью, а не только участками, расположенными под катками. Однако общий характер нагружения от этого не изменяется, и выводы, вытекающие из проведенного анализа, остаются справедливыми. Это подтверждается опытом создания гусеничных машин различного целевого назначения. В настоящее время считается, что для снегоболотоходов и других транспортных гусеничных средств, предназначенных для работы в условиях слабых грунтов, схема гусеничного движителя с передним расположением ведущего колеса более предпочтительна, так как обеспечивает лучшую проходимость.
3. СИЛА ТЯГИ, РАЗВИВАЕМАЯ ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ
Сила тяги, развиваемая гусеничной машиной, создается за счет крутящего момента, подводимого от двигателя к ведущим колесам гусеничного движителя. Этот крутящий момент, создавая соответствующее натяжение в гусеничном обводе, преобразуется гусеничным движителем в силу тяги.
Тяговое усилие на ведущем колесе РВк = Тр— Тсв определяется условиями движения, т. е. теми сопротивлениями, которые необходимо преодолеть машине: сопротивлением качению тягача, сопротивлением качению прицепа, составляющей веса при движении на подъем, инерционными сопротивлениями при разгоне, потерями мощности в гусеничном движителе. При этом усилие Рв.к не может быть больше определенных значений, обусловленных, с одной стороны, сцеплением движителя с грунтом, а с другой — мощностью (крутящим моментом) двигателя.
Рассмотрим сначала, как создается тяговое усилие в гусеничном движителе. Крутящий момент двигателя Л1ДВ через трансмиссию подводится к ведущим колесам. При равном распределении крутящего момента Л4ДВ по бортам машины крутящий момент на ведущем колесе будет
к = "о" ^дв^тр*1дв^1тр ’
где iTP — общее передаточное число трансмиссии от двигателя до ведущих колес; г]дв, г)тР — КПД соответственно двигателя и трансмиссии.
Здесь т]дв учитывает потери мощности на привод вспомогательных агрегатов и систем обслуживания двигателя; *]тР — потери на трение в сопряженных парах и на взбалтывание смазки.
Тяговое усилие на ведущем колесе соответственно будет
в. к ^дв^'тр^1двГ) | р/2г
Рнс. 12. Схема возникновения силы тяги:
а — при заднем расположении ведущего колеса; б — при переднем расположении
Определив усилие Рв>к на ведущем колесе, найдем силу тяги, двигающую машину. Для упрощения будем считать, что гусеничный обвод нагружается только усилием Рв.к, поскольку статическое натяжение, нагружая обвод равномерно по всему контуру, никакого внешнего по отношению к корпусу машины усилия создать не может. Что касается натяжения от центробежных сил, то оно вообще не создает никаких реакций на элементах движителя, оформляющих контур обвода.
Рассмотрим схему движителя с задним расположением ведущего колеса (рис. 12, а). В этом случае тяговое усилие Рвк действует только в наклонной ветви обвода. Отбросим остальные ветви обвода и заменим их действие соответствующими силами или моментами. Под задним опорным катком это будет то же усилие Рв- к (см. рис. 9). На другом конце наклонной ветви усилие Рв#к, приложенное на плече гв-к, уравновешивается крутящим моментом Л4В. к.
Равнодействующая R двух сил Рв.к, действующая на задний опорный каток, проходит через его ось (так как силы равны). Перенесем точку ее приложения по линии действия на ось катка и разложим на горизонтальную и вертикальную составляющие. Горизонтальная составляющая этой силы, толкающая машину (через ось заднего опорного катка), имеет вид
p; = Psin^- = PB.K(l—cos уз) .
Силу Рв-К, приложенную к верхнему концу наклонной ветви, также перенесем в центр ведущего колеса. При этом появляется пара сил PB.KfB.^ уравновешивающаяся крутящим моментом ^в. к‘
Горизонтальная составляющая перенесенной на ось ведущего колеса силы, толкающей машину через эту ось,
Р^ = Р. .cosy..
Суммируя силы Р'ч и Р? для обоих бортов машины, получаем общую силу Рт, толкающую машину, т. е. являющуюся силой тяги,
Поскольку РВл к = Тр — Тсв, следовательно, по величине сила тяги на каждой гусенице равна разности натяжений в рабочей и свободной ветвях.
Записанное выражение справедливо при отсутствии потерь в гусеничном движителе и равенстве сил сопротивления по бортам машины. С учетом потерь мощности на перематывание обвода
Рт = 2РВ, к1]г. д, (14)
где т]г.д— КПД гусеничного движителя.
Следовательно, при наличии потерь в гусеничном движителе сила тяги (в одной гусенице) несколько меньше, чем рабочее натяжение в обводе.
Что касается допущения о равенстве сил в левой и правой гусеницах, то оно характеризует лишь частный случай прямолинейного движения и принимается здесь и далее для упрощения изложения сущности процессов.
Теперь рассмотрим схему гусеничного движителя с передним расположением ведущего колеса (рис. 12, б). В этом случае на ось заднего опорного катка по-прежнему действует сила R, горизонтальная составляющая которой Р'т = Рвк (1 — cos у3) участвует в создании силы тяги. На ось направляющего колеса действует сила R' существенно большая, чем в предыдущем случае. Ее горизонтальная составляющая
Рт^Рв. к (1 +cosy8).
На ось ведущего колеса действует сила Рв>к, направленная против движения машины. Момент пары сил Ре.кгв.к здесь также уравновешивается крутящим моментом Л41КК.
Суммируя все силы, действующие на корпус в горизонтальном направлении по обоим бортам, получаем силу, толкающую машину вперед,
в. к*
С учетом КПД гусеничного движителя
Г. Д-
Таким образом, сила тяги не зависит от места расположения ведущего колеса.
Можно показать, что сила тяги не зависит также от формы гусеничного обвода, т. е. от наклона верхних участков ветви, от того, имеются поддерживающие катки или нет, имеется направляюще колесо или его функции выполняет задний опорный каток, как Делается в легких снегоболотоходных машинах.
27
Сила тяги идет на преодоление всех внешних сопротивлений: сопротивления ’ качению тягача Р/т и прицепа Рг„, инерционных сопротивлений при разгоне Pjt составляющей веса машины и прицепа на подъеме GT sin аг и Gn sin аг, сопротивления воздуха при повышенных скоростях движения Pw, т. е.
Сопротивление качению выражается через нормальную реакцию грунта на машину и коэффициент сопротивления качению
Pf f f-fit COS £Zr, Pfn ~ frfin COS 0Cr, где fT и fn — коэффициенты сопротивления качению соответственно тягача и прицепа.
Заметим, что сопротивление качению прицепа по горизонтальной поверхности есть не что иное, как составляющая крюковой нагрузки, параллельная поверхности движения,
I nGn == Ркр COS <ркр.
При движении на подъеме сопротивление качению в сумме с составляющей веса, направленной параллельно дороге, есть сопротивление движению
= Ат + Ап = A A cos ar + sin ar) + Gn (/„ cos ar + sin ar).
Выражения в скобках называются коэффициентами сопротивления движению фт и фп в отличие от коэффициентов сопротивления качению /т и /п:
Фт = ft cos ar 4- sin ar; ifn = fn cos ar sin ar.
Силы инерционного сопротивления равны произведению пр иве-денных масс тягача и прицепа на ускорение движения ~
В выражении (15) первый и второй члены определяют силы сопротивления равномерному движению тягача и прицепа, третий и четвертый — инерционные силы при разгоне, т. е. силы, необходимые для придания гусеничному поезду ускорения, последний член характеризует сопротивление воздуху и учитывается только при скоростях движения свыше 60 км/ч.
При установившемся движении по горизонтальному профилю пути (наиболее частый случай) и относительно малых скоростях (v < 60 км/ч), когда Pw 0, выражение (15) упрощается и принимает вид
Для этого случая, как это вытекает из формулы (14), тяговое усилие на ведущем колесе, потребное для преодоления сопротивления движению, будет
Из данного выражения следует, что в одних и тех же условиях движения (при одинаковых /т и fn) тяговое усилие на ведущем колесе постоянно при любой скорости. Фактически КПД гусеничного движителя с повышением скорости падает, поэтому сила тяги несколько возрастает.
Раньше упоминалось, что усилие Рв.к (и также сила тяги) ограничивается двумя условиями: сцеплением с грунтом и крутящим моментом двигателя.
Максимально возможная сила тяги по сцеплению
Где <р — коэффициент сцепления.
Предельно возможное усилие Рв.к
по сцеплению
Рв. к Ч> *Р^т/(2фг. д)‘
Предельно возможное тяговое усилие по двигателю
где 6Т и бп — коэффициенты, учитывающие увеличение инерционных масс тягача и прицепа за счет вращающихся деталей тягача (гусеницы, катки) и прицепа (колеса), так называемые коэффициенты учета вращающихся масс.
Лобовое сопротивление воздуха определяется зависимостью
/^Дв/фрЛдвЛтр/2Гв# к.
(17)
Таким образом, граничные условия для установившегося движения могут быть записаны в виде
Pw == kwFv2,
g>GT ^Чг. д
в. к
^1две'трЧдвЧтр
(18)
где kw—коэффициент сопротивления воздуха (0,05—0,07 кгс • с2/м4);
F—площадь лобового сопротивления, м8.
Суммарное выражение для силы тяги в общем случае, следовательно, будет иметь вид
SOI
или в целом для гусеничной машины
фбт > ftGt 4 /пбп - (^дв/трЧдвЧтр
Чг. д Чг. д гв. К
(19)
Рт = фА + фпОп + (бт А- + 4- (15)
28
Поскольку скоростная характеристика двигателя, т. е. зависимость мощности и крутящего момента двигателя от частоты вра-
29
'ЛК
щения N№ (Мдв) = f (пдв), обычно известна, можно найти зависимость крутящего момента Л!кР от скорости машины на каждой передаче. Скорость движения связана с частотой вращения двигателя зависимостью
V—- Мдв^*в. к/Ср ИЛИ V— 0,377ПдВГВ1 к/^тр,
(20)
где v — скорость движения, км/ч; <одв — угловая скорость, рад/с; п№ — частота вращения двигателя, об/мин.
По выражению (17) можно построить предельные значения тягового усилия по двигателю на каждой передаче. На
рис. 13 эти значения показаны в виде кривых, обозначенных римскими цифрами в соответствии с порядком передачи. Предельные значения тягового усилия по сцеплению Рв.кф зависят от массы
машины и коэффициента сцепления. Для одной и той же машины
они однозначно определяются
коэффициентом
сцепления.
На
рис. 13 предельное тяговое усилие по сцеплению, определенное по
выражению (17), показано штриховой линией для коэффициента
Текущие значения усилия РВеК для преодоления фактического сопротивления качению (движению) Р циенты сопротивления fT и fn по <
1ию) Рв> к । находят через коэффи-формуле (16). На рис. 13 они пока-
заны сплошными кривыми, соответствующими определенным значениям коэффициента fT в интервале 0,08—0,5.
Наглядное изображение на графике всех составляющих позволяет оценить динамическую нагруженность движителя и тяговые возможности машины в различных дорожных условиях, т. е. при различных значениях ф, fT и fn.
В практике обычно удобнее использовать не силы, действующие в гусеничном обводе и являющиеся активными силами, толкающими машину, а силы, приведенные к точке контакта гусеницы с грунтом. В этом случае можно оперировать соотношениями между коэффициентами Ф и Д, обычно определяемыми опытным путем. Из выражения (19) после умножения каждого члена на т]г. д и деления на GT можно получить соотношения между удельными величинами
Ф>
/т(1
А
в рТ] Дв^ ТрЧ г* д
в. к
(21)
Правая часть этого условия представляет собой предельное значение силы тяги по двигателю, отнесенное к весу машины, т. е> удельную силу тяги, или так называемый динамический фактор D.
Условие (21) можно также изобразить графически (рис. 14). Обычно этот график называют тяговой, или динамической, характеристикой машины. Качественное отличие графика на рис. 14 от предыдущего заключается помимо различия в размерности и значениях показателей по оси ординат в том, что функции ф = f (v) и fr = f (v) превратились в прямые линии, параллельные оси абсцисс , а кривые D = f (и) более круто опустились вниз от точки перегиба 30
Рис. 13. Текущие и предельные значения тягового усилия на ведущем колесе
Рис. 14. Динамическая характеристика машины
зоне повышенных скоростей по сравнению с кривыми Рв.к.дВ = f (v) вследствие уменьшения КПД движителя т]гд при увеличении скорости.
' Такой характер кривых ф (fT) = f (и) является следствием предпосылки, что коэффициент сопротивления качению не зависит от Скорости движения и нормальной реакции грунта. На самом деле Это не совсем так. Особенно сильно влияет на коэффициент сопротивления качению скорость. Однако для приближенных расчетов Дтим можно пренебречь.
, Динамическая характеристика позволяет определить ряд важных параметров и возможности работы гусеничной машины в тех Дли иных дорожных условиях. Так, при известном (заданном) сопротивлении движению можно найти максимально возможную при Этом сопротивлении скорость, а по заданной скорости — предельное сопротивление движению. При этом условие (21) выражается Ч простейшем виде
Ф > ф < D.
; Наиболее важными показателями динамической характеристики являются (см. рис. 14):
{ максимальный динамический фактор Dmax на низшей передаче, который характеризует предельные тяговые возможности машины йо двигателю;
Динамический фактор по сцеплению позволяющий судить том, насколько могут быть реализованы тяговые возможности Машины в тех или иных дорожных условиях, поскольку Рт <
минимальный динамический фактор на высшей передаче Dmln, величина которого определяет максимально возможную скорость ; max по тяговым параметрам машины.
31
Эти показатели динамической характеристики позволяют установить предельные возможности машины и уже на стадии проектирования судить о ее основных эксплуатационных качествах.
4. ВЛИЯНИЕ ПРЕДВАРИТЕЛЬНОГО СТАТИЧЕСКОГО НАТЯЖЕНИЯ В ОБВОДЕ НА ЭКСПЛУАТАЦИОННЫЕ КАЧЕСТВА МАШИНЫ
Из рис. 11 видно, что в зависимости от предварительного статического натяжения изменяется характер распределения нагрузок под опорной ветвью, следовательно, изменяется эпюра давлений по длине опорной ветви и проходимость машины по деформируемым грунтам. Кроме этого, от предварительного статического натяжения зависят экономичность машины, надежность и устойчивость работы обвода, предельные возможности машины по тяге и др., поэтому важно знать, какие фактические значения предварительного статического натяжения создаются в обводе, как они изменяются в процессе движения и какими их следует поддерживать в эксплуатации.
Вопросы нагружения обвода и усилия, передаваемые опорной ветвью на грунт, раньше были рассмотрены без учета влияния динамических нагрузок, возникающих^при повышенных скоростях гусеничной машины. Оценим влияние скорости движения на нагру-женность обвода.
Вследствие центробежных сил в обводе возникает дополнительное натяжение Тц, пропорциональное весу единицы длины гусениц qr и квадрату относительной скорости v перематывания обвода, которая при отсутствии буксования равна скорости движения машины
В жестком обводе, т. е. в случае использования гусениц, не обладающих продольной податливостью, натяжение от действия центробежных сил суммируется с усилиями, возникающими в ветвях обвода от предварительного статического натяжения и тяговой нагрузки, поэтому усилия в свободной и рабочей ветвях жесткого обвода в движении будут
где Гсв — натяжение, определяемое по формуле (7).
В упругом обводе картина несколько иная. Под действием центробежных сил упругий обвод растягивается, длина его ветвей увеличивается, а поскольку расстояния между катками не изменяются, то удлинение ветви вызывает увеличение стрелы ее провисания. Это хорошо видно из рис. 15, а—в. При скорости 10 км/ч (рис. 15, а), когда центробежные силы невелики, ветвь имеет малую 32
Рис. 15. Изменение провисания верхней ветви движущегося обвода (гусеница с рези неметаллическими шарнирами, переднее* расположение ведущего колеса):
а — при 10 км/ч; б — при 35 км/ч; в — при 60 км/ч
стрелу провисания и не касается переднего и второго опорных катков. При скорости 35 км/ч (рис. 15, б) удлинение ветви становится заметным, она уже ложится на второй опорный каток. При скорости 60 км/ч (рис. 15, в) удлинение ветви так велико, что она уже почти касается первого катка. Чем больше продольная податливость гусеницы, т. е. чем меньше ее продольная жесткость, тем вытягивание (удлинение) гусеницы от действия центробежных сил будет более значительным.
При увеличении провисания ветви натяжение, обусловленное весом гусеницы, согласно выражению (4), уменьшается. Если в покое оно было Тс, то в движении Tcv, причем Tcv < Тс. Это уменьшение предварительного статического натяжения (уело-вимся его называть в дальнейшем статическим натяжением в движении в отличие от динамического натяжения, вызываемого центробежными силами) необходимо учитывать, поскольку статическое натяжение является единственной силой, обеспечивающей устойчивую работу упругого обвода.
Натяжение Tcv создает удерживающие реакции на катках, а Центробежные силы таких внешних реакций не создают, они Уравновешиваются внутренним натяжением Тц. В связи с этим нужно знать характер изменения натяжения Tcv9 чтобы обеспечить в процессе эксплуатации машины минимально необходимое для Устойчивой работы ветвей обвода фактическое статическое натяжение на любых режимах работы.
2 В/p. в. Ф. Платонова 33
Найдем связь между скоростью движения машины, предварительным статическим натяжением Тс и статическим натяжением в движении Tcv. При отсутствии силы тяги общее натяжение в свободной ветви при движении
Это натяжение вызывает удлинение ветви. При линейной зависимости удлинения от растягивающего усилия по закону Гука
м
где Л/ — приращение участка гусеницы длиной /; /?0 — удельная продольная жесткость гусеницы, соответствующая по физическому смыслу модулю упругости; Рд — приведенная или условная поперечная площадь сечения гусеницы по шарниру, равная площади деформирования упругих элементов гусеницы.
Используя эту формулу для описания двух состояний ветви — в покое и в движении, можно получить следующее приближенное выражение, связывающее рассматриваемые параметры:
= f (V).
Из этого уравнения, задаваясь различными значениями v (и, следовательно, Тц), можно определить статическое натяжение в движении в функции скорости Tczl = f (и).
В итоге статическое натяжение в свободной ветви упругого обвода в отличие от жесткого будет определяться не формулой (7), а выражением
в. к
св CV
С учетом натяжения от центробежных сил суммарные натяжения в ветвях обвода будут
св V —
Ц’
^В. к
1 4* (/св/^р)
(24)
Таким образом, статическое натяжение в движении не остается постоянным. Оно уменьшается во всех типах обводов с увеличением силы тяги, а в упругом, кроме того, и с повышением скорости. В связи с этим выбор предварительного статического натяжения должен учитывать все эти обстоятельства и обеспечивать устойчивую работу обвода на всех режимах работы гусеничной машины. Очевидно, для того чтобы компенсировать уменьшение статического натяжения в движении, необходимо создавать более высокое
рис. К. Влияние типа гусениц и предварительного статического натяжения на расход топлива:
j ___ гусеница с жесткими шарнирами при Т =. 500 кгс; 2 — то же, при Гс — 300 кгс; д — гусеница с резииометаллическимн шарнирами при Тс — 1500 кгс: 4 — то же, при Тс = 500 кгс
предварительное статическое натяжение в обводе, при этом в упругом обводе оно должно быть более значительным, чем в жестком, так как более интенсивно изменяется с изменением
как силы тяги, так и скорости.
Исходя из этого, предварительное статическое натяжение в упругом обводе доводят до значений: у машин легких весовых классов 2000 кгс, у машин средних и тяжелых весовых классов 3000 кгс. В жестких обводах предварительное статическое натяжение обычно не превышает 800 кгс.
Повышение статического натяжения приводит к ухудшению ходовых качеств гусеничной машины. С повышением натяжения увеличивается сопротивление качению (из-за большей неравномерности давлений под опорной ветвью), возрастают потери мощности в гусеничном движителе, снижается максимальная сила тяги.
При сравнительных исследованиях проходимости различных машин на снежной целине установлено, что с повышением статического натяжения проходимость резко ухудшается. Так, натяжение 1500 кгс приводило к потере проходимости машин весовых категорий 8 и 16 т на снежной целине глубиной 400—500 мм. Снижение же статического натяжения до 500-—700 кгс обеспечивало возможность преодоления такого снежного покрова. От статического натяжения зависит и способность машины преодолевать заснеженные подъемы. При повышенном статическом натяжении угол преодолеваемого подъема меньше.
Повышение статического натяжения вызывает также увеличение расхода топлива (рис. 16). При снижении статического натяжения в жестком обводе с 500 до 300 кгс расход топлива уменьшается на 10—15% (в зависимости от скорости движения). При снижении натяжения в упругом обводе с 1500 до 500 кгс расход топлива уменьшается на 15—20%. Однако реализовать эту экономию У машин с упругими обводами практически невозможно, так как при натяжении 500 кгс провисание ветви перед передним опорным Катком на повышенных скоростях движения становится столь значительным, что создается опасность схода катка с беговой дорожки гусеницы (сбрасывания гусеницы). Вероятность сбрасывания гусе-йиц при малом натяжении возникает и при маневрировании машины. В этом случае сбрасывание может произойти даже при относительно невысоких значениях силы тяги.
При обычно создаваемом предварительном статическом натяжении расход топлива у машин с упругими обводами несколько больше, чем у машин с жесткими обводами, на пониженных скоростях движения (на 5—7%) и заметно меньше на повышенных скоростях движения, когда статическое натяжение в упругом обводе снижается примерно до значений, характерных для жесткого обвода. Экономия топлива в этом режиме является результатом более высокого КПД упругого обвода на высоких скоростях перематывания.
5. ЗАЦЕПЛЕНИЕ ГУСЕНИЦ
С ВЕДУЩИМИ КОЛЕСАМИ
Преобразование крутящего момента, подводимого к ведущему колесу, в силу тяги, нагружающую рабочую ветвь гусеничного обвода, и в результате в силу, толкающую машину, осуществляется в гусеничных машинах посредством зацепления гусеницы с ведущим колесом. Процесс зацепления весьма своеобразен, имеет много специфических особенностей, и в связи с этим его рассматривают в теории гусеничных машин в качестве самостоятельного вопроса.
Основные моменты теории гусеничного зацепления, имеющие практическое значение в эксплуатации машин, связаны с определением наиболее целесообразного типа и параметров гусеничного зацепления, обеспечивающего, во-первых, надежное взаимодействие гусеницы с ведущим колесом на всех режимах движения, а во-вторых, малые износ и потери мощности при длительной эксплуатации в наиболее характерных условиях использования.
До последнего времени вопросы гусеничного зацепления недостаточно освещались в технической литературе, поэтому в данной книге будут кратко изложены основы теории этого зацепления применительно к быстроходным гусеничным транспортным машинам.
Схем передачи силы тяги с ведущего колеса на гусеницу существует много. По их исполнению гусеничное зацепление называют:
цевочным, когда передача усилия от зуба к траку осуществляется через цевки, расположенные на проушинах траков;
гребневым, когда в роли элементов, воспринимающих силу тяги, выступают специальные гребни (зубья) траков;
роликовым, когда на ведущем колесе вместо зубьев делают ролики, вращающиеся на подшипниках;
комбинированным, когда используется одновременно несколько способов передачи силы тяги.
Почти повсеместное распространение на гусеничных тягачах и транспортерах, имеющих мелкозвенчатые гусеницы, получило цевочное зацепление. Гребневое и роликовое зацепления могут быть применены только при использовании гусеничных цепей с большим шагом, поскольку размеры тяговых роликов или греб-36
ней, воспринимающих усилие на траке, значительно больше, чем размеры цевок. Кроме того, в этих типах зацепления при передаче силы тяги возникает момент, скручивающий шарнир и ухудшающий условия работы зацепления.
Однако у всех типов гусеничного зацепления схема действия сил практически одинаковая, поэтому рассмотрим схему цевочного зацепления, которое получило наибольшее распространение в транспортных машинах.
Характер взаимодействия элементов зацепления (кинематика зацепления) существенным образом зависит от типа гусеницы, ее податливости в продольном направлении, формы взаимодействующих элементов и соотношений шагов гусеницы и ведущего колеса
Возможны три случая работы зацепления:
1) шаг гусеничной цепи меньше шага ведущего колеса;
2) шаг гусеничной цепи равен шагу ведущего колеса;
3) шаг гусеничной цепи больше шага ведущего колеса.
Зацепление с шагом гусеницы меньшим шага ведущего колеса применяется очень редко, в основном когда в гусеничном движителе используются ленточные гусеницы, обладающие большой продольной податливостью. Меньший шаг у них может делаться для того, чтобы скомпенсировать его увеличение при больших тяговых нагрузках.
Этому типу зацепления присущи два серьезных недостатка. Первый заключается в том, что сила тяги в ведущем режиме передается только одним зубом, выходящим из зацепления. В результате зуб нагружается значительной силой и выходит из зацепления как бы со срывом. Износы контактных поверхностей при этом получаются значительными.
Второй недостаток этого зацепления проявляется при маневрировании. В тормозном режиме работы, когда ведущим элементом является гусеница, а тормозным — ведущее колесо, с гусеницей контактирует уже не последний зуб, выходящий из зацепления, а первый, только начинающий входить в зацепление, своим тыльным профилем. Поскольку шаг гусеницы меньше шага ведущего колеса, то трак, находящийся перед первым зубом, попадает на вершину очередного зуба. Дальнейшее вращение ведущего колеса приводит к тому, что в какой-то момент входящий в зацепление трак уже ложится во впадину с противоположной стороны зуба. Происходит так называемое «проскакивание» гусеницы, которое сопровождается ударными нагрузками и нарушением взаимодействия гусеничной цепи с ведущим колесом.
Зацепление, у которого шаг гусеницы и ведущего колеса одинаковый, можно рассматривать лишь как теоретическое, поскольку практически в производстве этого достичь нельзя. Но даже если в начальный момент равенство шагов и может быть обеспечено, то по мере изнашивания шарниров зацепление становится соответствующим третьему случаю, когда шаг гусеницы больше шага ведущего колеса. Этот случай наиболее типичный и более благо-
Рис. 17. Схема сил в гусеничном зацеплен»
чить взаимодействие их с в зацепление или выходе
приятный с точки зрения нагруженное™ и изнашивания элементов зацепления.
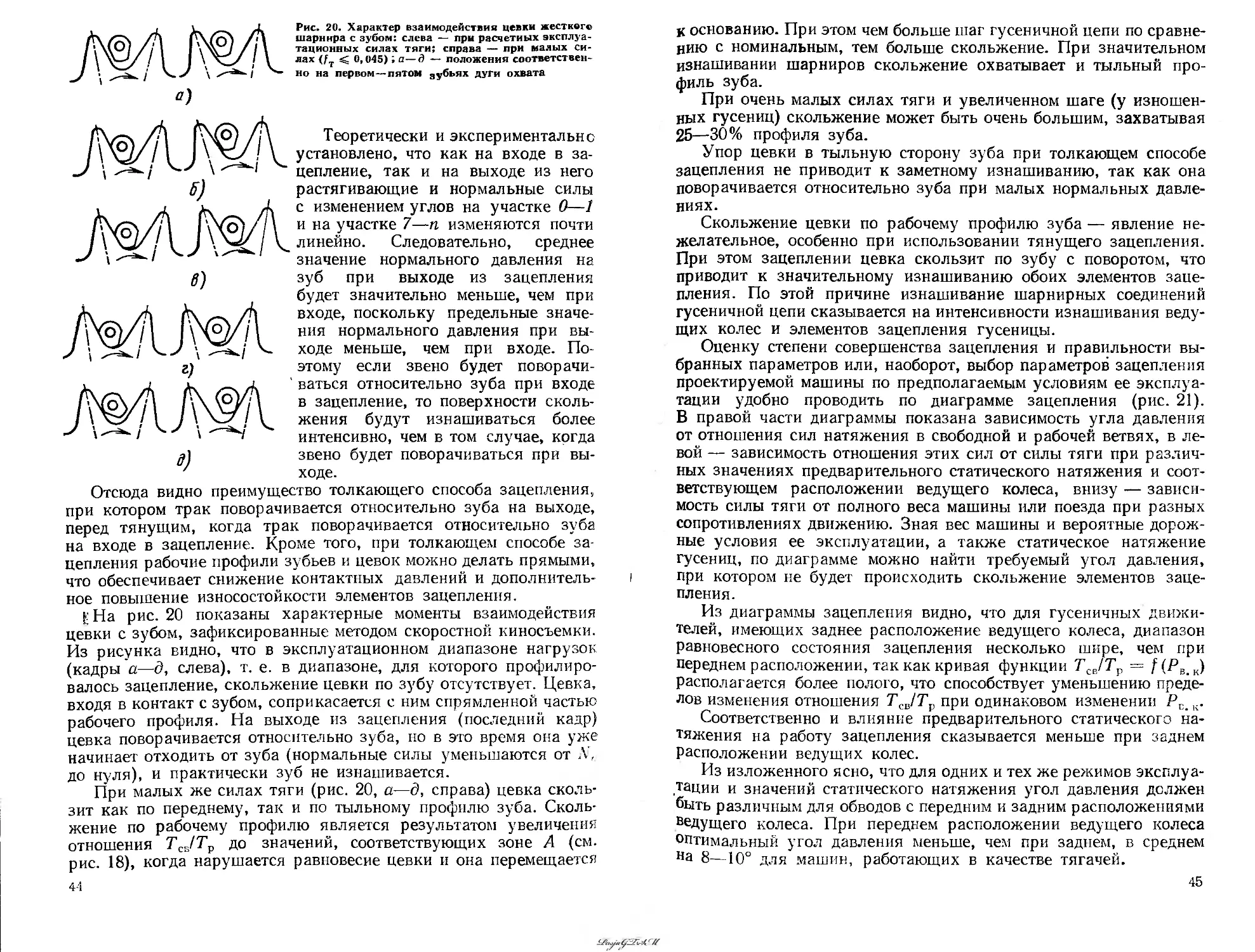
Весь период контактирования зуба с цевкой состоит из трех этапов: вход в зацепление, движение по дуге охвата, выход из зацепления. Значительная доля крутящего момента передается зубьями, находящимися на дуге охвата. Это — основной этап зацепления. Так как нагрузки в этот момент могут быть очень большими, то для уменьшения изнашивания зубьев важно обеспе-цевками без скольжения. На входе из него цевка обязательно скользит
по зубу.
При тянущем способе (когда цевка расположена на передних по ходу движения трака проушинах) скольжение происходит на входе в зацепление, при толкающем (когда цевка расположена на задних проушинах) — наоборот, на выходе из зацепления. В эти переходные этапы целесообразно свести к минимуму нагрузку на зуб, по которому скользит цевка. Помимо этого, необходимо по возможности снизить и ударные нагрузки, возникающие в момент контакта трака с зубом. Соблюдение этих требований создает более благоприятные с точки зрения изнашивания условия работы зацепления и обеспечивает повышение его работоспособности.
Рассмотрим схему сил, действующих на цевку, для основного этапа, т. е. для этапа передачи крутящего момента, когда цевка и зуб находятся на дуге охвата. На рис. 17 показана схема сил, действующих на цевку звена гусеницы, где — растягивающее усилие со стороны набегающего участка ветви; 7сб — растягивающее усилие со стороны сбегающего участка; Nh — нормальная и касательная силы в контакте зуба с цевкой; Л4Ш — внешний момент; а — центральный угол; 6 — угол давления. Индексом i обозначен порядковый номер шарнира, находящегося в зацеплении по ходу вращения ведущего колеса.
Момент, действующий на шарнир,
ш (фэ/ Фз £+1)»
где с0 — относительная угловая жесткость шарнира; Ьр — общая длина резиновых элементов в шарнире; <р3/, <р3 /+1 — фактические углы предварительной закрутки смежных траков.
Этот момент одинаковый для данного шарнира на всей дуге охвата.
В случае равенства углов предварительной закрутки смежных траков упругая составляющая внешнего момента, действующего
38
яа цевку, равна нулю, т. е. угловая жесткость гусеницы не влияет на характер распределения усилий.
Проектируя все действующие силы на оси х и у, запишем
N; + Лб icos (а + 6) — Тн; cos 0 = 0;
THi sin 6 4- TUt — Tc6 i sin (а 4- 6) = 0.
Сумма моментов относительно оси шарнира равна нулю, следовательно,
v • <26>
Эта сила в пределе не может быть больше силы трения, т. е.
T^i < где р — коэффициент трения.
Заменяя силу Nt ее значением из уравнения (25), получаем
f- + [TRi cos 6 - Тсб t cos (a + 6)]
(27)
Совместное решение уравнений (25) и (27) позволяет найти усилия в набегающем и сбегающем участках ветви
sin 0 4- -т— cos 0
ь
м
b sin (a 4- 0) + — cos (a + 0)
sin (a + 0) + ~ cos (a + 0)
sin 0 +
COS0
sin 0 4
(28)
M
Полученные выражения определяют взаимосвязи между текущими растягивающими усилиями и геометрическими параметрами зацепления: углом давления 0 и центральным углом а.
Нагруженность зуба определяется нормальной силой Nit которую можно найти при совместном решении уравнений (26) и (27):
У,- = Tni-----------—-----------------
1 ш (2
sin (а Ц- 0) Ц- — cos (a 4- 0)
____________COS (a + 6)_______
b a
sin (a 4- 0) 4- — cos (a 4- 0)
Или
дг __'T s*n a cos 0
/V i — 7 сб i -----7----------Z----------~-----• (30)
sin 0 4- -7-- cos 0 sin 0 4- —- cos 0
b b
39
В полученных зависимостях (27) —(30) искомые силы выра
жены через текущие, промежуточные величины, соответствующие i-му положению цевки на дуге охвата. Выразим их через силы натяжения в рабочей Тр и свободной Тсв ветвях, которые являются исходными при профилировании зацепления.
Согласно принятой схеме можно записать дополнительные условия для нахождения усилий на крайних (первом и последнем)
зубьях
И тсб1
HJ+1*
Для упрощения дальнейших рассуждений обозначим
sin (а 6) 4- cos (а 4- 6) -----------------£-------------- =Q;
sin 0 4- cos 0 1 b _
sin (а 4- 0) 4- -у- cos (а + 0)
(31)
(32)
Используя эти дополнительные условия, для каждой цевки запишем
Для силы Тсб, соответствующее выражение имеет вид
1
Qf“2
(34)
Текущее значение нормальной силы N t в^зависимости от рабочего натяжения может быть получено подстановкой в уравнение (30) вместо Тсб/ выражения (34)
sin а
sin 0 4- cos 0 b
cos 0
- л i a
Sin 0 +“T" C°S0 b
(35)
При i = n Тсбп — Тсв, тогда выражение (34) в уравнение равновесия цевки при определенных сил Гсв и Тр
Т =-Т _J L е ( !-------1---L_ J_ . . . _L
св J Р Qn I ° \ Qn-1 “ Qrt-2 И” Т
превращается соотношениях
1) . .(36)
Уравнение (36) дает связь между натяжениями в ветвях гусеничного обвода и геометрическими параметрами зацепления. При этом соотношения величин являются наиболее оптимальными, обеспечивающими равновесное положение цевки на всех зубьях без скольжения.
Согласно уравнению (36) равновесие цевки соответствует одному строго определенному соотношению натяжений в рабочей и свободной ветвях. В действительности при данном угле 6 равновесное состояние обеспечивается в некотором диапазоне изменения этого соотношения. Границы диапазона определяются коэффициентом трения между цевкой и зубом. Скольжения не будет до тех пор, пока сила Т^{ не превысит силу трения, равную
Касательную силу находят из уравнения (35), подставляя в него значения из выражения (26):
sin а
а Л cos0
sin 0
sin 0 +
а Л
— COS0
м
(37)
Из данного выражения видно, что на величину влияет не только соотношение растягивающих сил, но и момент в шарнире 7ИШ. При больших значениях момента сила Тц1 по величине может приближаться к силе трения и положение цевки на- зубе будет неустойчивым, поэтому при расчетах необходимо стремиться к тому, чтобы второй член уравнения (37) был минимальным.
Условие предельного равновесия
Тогда уравнения (25) запишем в следующем виде:
Ni — Ты cos 0 + Тсб/ cos (a-J-0) = 0;
(±> Tni sin 0 (+) 7сб t sin (а + 6) = 0.
Знаки в скобках соответствуют скольжению цевки к вершине зуба, над скобками — к основанию.
Исключив из этих уравнений силу Nh получим
sin 0ц cos 0
Лб i == ----------У2------------• (38)
sin (а + 6) (ij р cos (а + 0)
Знак плюс соответствует скольжению цевки к основанию зуба, минус — к вершине.
Учитывая равенство Тсб,- — THZ+1, можно предельную силу, Действующую на каждую цевку со стороны сбегающей или набегающей ветви, выразить через натяжение рабочей ветви'
_______sin 0 ± и cos 0________ sin (сс -J- 0) ± и cos (а + 0)
Для мей дуги охвата
________sin 0 ± pi cos 0_______ sm (а + 0) ± м cos (а + 0)
(40)
41
SJ7S
Из уравнения (40) определим угол давления для диапазона равновесного состояния цевки трака на зубе
tgO =
sin сс 7св/7р ± н coscz^J/Тск/Тр — р 1 — (cos а ± ,и sin а) д <ТСВ/7,Р
(41)
Выбор оптимального значения угла давления является одним из важнейших этапов при профилировании зубьев ведущего ко
леса.
На рис. 18 показан график, построенный согласно зависимости (41) для значений ц = 0,2, п = 6 и а == 27,7°. Кривая / соответствует скольжению цевки к основанию зуба (знак плюс — в числителе перед членом р cos а, минус — в знаменателе перед членом р sin а), кривая 2 — скольжению к вершине (знаки противоположные). Зона А (левее кривой /) определяет значения соотношений 7СВ/ТР, при которых цевка скользит к основанию, зона В (правее кривой 2) — к вершине. Зона Б (между кривыми 1 и 2) является зоной равновесного состояния, где скольжение цевок отсутствует.
Как видно из графика, диапазон равновесного состояния (зона Б) довольно широк. При изменении TCJT? от 0,04 (предельная сила тяги по сцеплению при <р = 0,7) до 0,5 (движение по бетону без прицепа) угол давления 6 может быть принят в интервале 15—73°. При этом если угол 6 не будет выходить за пределы зоны Б при заданных значениях отношения 7СЕ/Тр, скольжения цевки не будет. Если значения 6 будут находиться в зоне А или В, то цевка будет перемещаться. Заметим, что это перемещение, как правило, меньше перемещения, вызываемого удлинением гусеницы. Задача конструктора в данном случае сводится к тому, чтобы выбрать угол давления, обеспечивающий устойчивое положение цевки в диапазоне наиболее вероятного режима использования
машины.
Из графика видно, что для тяжелых условий эксплуатации, когда отношение Тсв/Тр невелико, целесообразно иметь небольшие углы давления (40° и менее), чтобы обеспечить устойчивое
положение цевки при больших
тяговых нагрузках. Если же предполагаемые условия работы тягача с точки зрения тяговых нагрузок легкие, то отношение Тсв/Тр будет большим, при этом необходимо иметь и большие значения угла 0.
Оптимальный угол давления зависит также и от предварительного статического натяжения, поскольку оно оказывает
Рис. 18. Зависимость отношения сил натяжения в свободной и рабочей ветвях от угла давления
рис. IS* Изменение растягивающих и нормальных сил на дуге охвата: / — скольжение к основанию зуба; 2 — скольжение к вершине зуба
влияние на отношение Тсв/Тр. Повышение статического натяжения вызывает необходимость увеличения угла давления для того, чтобы обеспечить равновесное состояние цевки. Таким образом, ста
новится возможным несколько расширить диапазон равновесия за счет изменения (в допустимых пределах) предварительного статического натяжения. Например, машина, предназначенная для работы в относительно легких грунтовых условиях и, следовательно, имеющая зацепление с большим углом давления, может быть использована и для работы при больших тяговых нагрузках. Зацепление без скольжения в этом случае может быть обеспечено не за счет уменьшения угла давления, что практически исключается, а за счет увеличения предварительного натяжения до значений, вызывающих повышение оптимального угла давления на величину, равную его необходимому снижению, вызываемому изменением уровня тяговых нагрузок.
Для оценки нагруженности зубьев ведущего колеса необходимо знать нормальное давление на зуб и закон его изменения по мере продвижения трака по дуге охвата для всего диапазона равновесия цевки. Нормальную силу можно найти из первого уравнения системы (25), если в него подставить значение Тсб t из выражения (28):
Т сб i
sin а
sin 0 ± н cos 6
(42)
По мере продвижения цевки к выходу из зацепления растягивающее усилие Тсб ,-/Тр и нормальная сила Л\-/Тр уменьшаются, как это следует из выражений (39) и (42), в геометрической прогрессии.
С точки зрения нагруженности изменение нормальной силы нежелательно, так как оно приводит к перегрузке первого зуба. Однако прочность зубьев ведущего колеса обеспечить более просто, чем долговечность, поэтому нет смысла выравнивать давление на всех зубьях, а целесообразнее максимально снизить давление на том зубе, на котором происходит поворот звена (при входе в зацепление или выходе из него). Из выражения (42) вытекает, что последний зуб дуги охвата в момент начала выхода из зацепления всегда менее нагружен.
Общая картина изменения сил, действующих в зацеплении на всех этапах при ц — 0,2, = 0 и 6 = 48°, будет иметь вид,
Показанный на рис. 19.
43
/о/
Рис. 20. Характер взаимодействия цевки жесткого шарнира с зубом: слева — при расчетных эксплуатационных силах тяги; справа — при малых силах (fT < 0,045) ; а— д — положения соответственно на первом—пятом Зубьях дуги охвата
мж
Теоретически и экспериментально установлено, что как на входе в зацепление, так и на выходе из него растягивающие и нормальные силы с изменением углов на участке 0—1 и на участке 7—п изменяются почти линейно. Следовательно, среднее значение нормального давления на
в)
зуб при выходе из зацепления будет значительно меньше, чем при входе, поскольку предельные значения нормального давления при выходе меньше, чем при входе. Поэтому если звено будет поворачи-' ваться относительно зуба при входе в зацепление, то поверхности скольжения будут изнашиваться более интенсивно, чем в том случае, когда
звено будет поворачиваться при выходе.
Отсюда видно преимущество толкающего способа зацепления, при котором трак поворачивается относительно зуба на выходе, перед тянущим, когда трак поворачивается относительно зуба на входе в зацепление. Кроме того, при толкающем способе зацепления рабочие профили зубьев и цевок можно делать прямыми, что обеспечивает снижение контактных давлений и дополнительное повышение износостойкости элементов зацепления.
U На рис. 20 показаны характерные моменты взаимодействия цевки с зубом, зафиксированные методом скоростной киносъемки. Из рисунка видно, что в эксплуатационном диапазоне нагрузок (кадры Ъ—д, слева), т. е. в диапазоне, для которого профилировалось зацепление, скольжение цевки по зубу отсутствует. Цевка, входя в контакт с зубом, соприкасается с ним спрямленной частью рабочего профиля. На выходе из зацепления (последний кадр) цевка поворачивается относительно зуба, но в это время она уже начинает отходить от зуба (нормальные силы уменьшаются от А\ до нуля), и практически зуб не изнашивается.
При малых же силах тяги (рис. 20, а—д, справа) цевка скользит как по переднему, так и по тыльному профилю зуба. Скольжение по рабочему профилю является результатом увеличения отношения ТСБ/ТР до значений, соответствующих зоне А (см. рис. 18), когда нарушается равновесие цевки и она перемещается
к основанию. При этом чем больше шаг гусеничной цепи по сравнению с номинальным, тем больше скольжение. При значительном изнашивании шарниров скольжение охватывает и тыльный профиль зуба.
При очень малых силах тяги и увеличенном шаге (у изношенных гусениц) скольжение может быть очень большим, захватывая 25—30% профиля зуба.
Упор цевки в тыльную сторону зуба при толкающем способе зацепления не приводит к заметному изнашиванию, так как она поворачивается относительно зуба при малых нормальных давлениях.
Скольжение цевки по рабочему профилю зуба — явление нежелательное, особенно при использовании тянущего зацепления. При этом зацеплении цевка скользит по зубу с поворотом, что приводит к значительному изнашиванию обоих элементов зацепления. По этой причине изнашивание шарнирных соединений гусеничной цепи сказывается на интенсивности изнашивания ведущих колес и элементов зацепления гусеницы.
Оценку степени совершенства зацепления и правильности выбранных параметров или, наоборот, выбор параметров зацепления проектируемой машины по предполагаемым условиям ее эксплуатации удобно проводить по диаграмме зацепления (рис. 21). В правой части диаграммы показана зависимость угла давления от отношения сил натяжения в свободной и рабочей ветвях, в левой — зависимость отношения этих сил от силы тяги при различных значениях предварительного статического натяжения и соответствующем расположении ведущего колеса, внизу — зависимость силы тяги от полного веса машины или поезда при разных сопротивлениях движению. Зная вес машины и вероятные дорожные условия ее эксплуатации, а также статическое натяжение гусениц, по диаграмме можно найти требуемый угол давления, при котором не будет происходить скольжение элементов зацепления.
Из диаграммы зацепления видно, что для гусеничных движителей, имеющих заднее расположение ведущего колеса, диапазон равновесного состояния зацепления несколько шире, чем при переднем расположении, так как кривая функции T.JTV располагается более полого, что способствует уменьшению пределов изменения отношения TCJTV при одинаковом изменении Рс к.
Соответственно и влияние предварительного статического натяжения на работу зацепления сказывается меньше при заднем расположении ведущих колес.
Из изложенного ясно, что для одних и тех же режимов эксплуатации и значений статического натяжения угол давления должен быть различным для обводов с передним и задним расположениями Идущего колеса. При переднем расположении ведущего колеса оптимальный угол давления меньше, чем при заднем, в среднем на 8—10° для машин, работающих в качестве тягачей.
45
Рис. 21. Диаграмма зацепления:
/ — скольжение цевки к основанию зуба; 2 — скольжение к вершине; 3 — при переднем расположении ведущего колеса и Тс = 200 кгс; 4 — то же, при Тс — 500 кгс; .5 при заднем расположении ведущего колеса и Тс — 500 кгс;---------без прицепа; — —• —*
с прицепом
В случае продольной податливости гусениц (при использовании гусениц с упругими шарнирами) шаг трака по мере его продвижения по дуге охвата изменяется. Изменение шага приводит к скольжению цевки по зубу, при этом скольжение будет тем больше, чем значительнее перепад усилий в рабочей и свободной ветвях и чем меньше продольная жесткость гусеницы. Найдем соотношения между силами, действующими на шарнир, и определим скольжение цевки.
Схема сил, действующих на цевку i-го упругого шарнира, показана на рис. 22. Инерционными силами ввиду их малости пренебрегаем. Проектируя все силы на оси х и у, имеем
- Г Тсб i cos (а + е 4-
+ Ф<+1) — THi cos (0 — if,) = 0;
THi sin (6 -f- ф() — Гсбsin (а 4-
-r e + T Тц, = 0. (43)
I
Рис. 22. Силы, действующие в зацеплении на цевку упругого шарнира
Вследствие непрерывного перемещения цевки по зубу, что и обусловливает появление угла яр, касательная сила будет всегда связана с силой нормального давления зависимостью Т.и = = г
Выражая нормальную силу через остальные в каждом из уравнений системы (43) и приравнивая левые части этих выражений, получаем зависимость между растягивающими шарнир усилиями
сб i
sin (6 4- tfc) 4- [л cos (6 4- ifr) sin («4-64- фг+1) + p. cos (a 4- 6 4- ф£+1) ‘
(44)
Данная зависимость аналогична выражению (38), выведенному для жесткого шарнира, когда он находится в состоянии равновесия, и принимает вид выражения (38) при $,- = ifI+1 = 0.
Зная соотношение между растягивающими усилиями, из уравнения (43) можно найти нормальную силу
sin (к — 44 + ’Фг+х) sin (0 4~ + И cos (6 + 47) *
(45)
Данное выражение также аналогично выражению (42) для жесткого шарнира. Используя уравнение (44) и имея в виду, что ^c6i “ Гн/+1, 2=3 Тп и Тр = Тн1, можно выразить текущие
растягивающие и нормальные силы через рабочее натяжение.
Эту зависимость можно записать в общем виде
/=1, 2, 3,
_______sin (0 4~ 4/) + И cos № + 47)_______ sin (a + 0 4- 4/+i) + ft cos (a + 0 4-4/+1) ’
I
(46)
ш
Нормальная сила, действующая на каждый зуб,
Лу- = Гр
_________sin (0 4- 47) 4- ц cos (0 4- яру)___________ sin (a 4- 0 4- 4/+i) + И cos (« 4~ 0 + 4/4-1) *
Шаг упругой гусеницы зависит от растягивающего усилия. По мере продвижения трака по дуге охвата усилия, растягивающие шарнир, изменяются, вследствие этого изменяется и шаг гусеницы. Текущее значение шага
(47)
ИзхМенение шага приводит к скольжению цевки по зубу. Максимальное скольжение элементов зацепления в случае применения упругих гусениц будет
sin CZ
max — ^0
(48)
Из данного выражения видно, что скольжение увеличивается пропорционально увеличению силы тяги и уменьшению продольной жесткости гусеницы. Некоторое влияние на скольжение оказывает угол давления: при его уменьшении скольжение увеличивается.
От места расположения ведущего колеса скольжение не зависит, так как отношение TQJTV в уравнение (48) не входит.
При использовании в движителе ленточных гусениц или гусениц с параллельными резинометаллическими шарнирами цевочное зацепление не обеспечивает устойчивого положения плицы или трака на зубе. Положение гусеницы на дуге охвата в этом случае становится неопределенным вследствие возхможности относительного перехмещения звеньев в нескольких направлениях. Конструкцией ведущего колеса при зацеплении с такими гусеницами обычно предусматривается принудительная стабилизация (подпор) плицы или трака, а в ряде случаев и соединительной скобы.
Подпор осуществляется установкой специальных барабанов на ступицах (для ленточных гусениц) или опорных площадок на зубьях (для гусениц с резинометаллическими шарнирами). Помимо стабилизации положения трака опорные площадки разгружают зубья ведущих колес, так как передают часть крутящего момента. Благодаря этому они обеспечивают более легкие условия для работы зацепления, способствуя повышению его долговечности.
Рассмотрим взаимодействие элементов зацепления с подпором и определим основные кинематические и силовые зависимости для этого случая.
Схема сил, возникающих в процессе зацепления, показана на рис. 23. Угол давления в зависихмости от профиля передней части зуба может изхменяться от 0min до 0тах. Если профиль зуба прямой и скоба не ложится во впадину, то 0 — 0mln. Если скоба в процессе зацепления ложится во впадину, то угол давления может увеличиваться до 0тах = (л — сс)/2. По мере изнашивания, как 48
показывают проведенные испытания, профили зубьев и скоб выравниваются и угол давления уменьшается, постепенно приближаясь к 6mln, поэтому при анализе зацепления этот угол можно считать постоянным и равным половине угла заострения зуба.
Вследствие податливости гусеницы углы у\ и yl не равны, так же как и центральные^глы <%£=ат/ + ссс на разных зубьях. Однако разница между углами у'- и yi настолько незначительная, что можно принять у\ = - az/2.
Рис. 23. Силы, действующие в зацеплении с подпором
Тогда можно написать зависимость, связывающую диаметр окружности шарниров с шагом цепи /0,- = /т- /с и центральным углом а,:
/Т. + /С cos = sin уо2ш-12с. (49)
(50)
где 1т0 — номинальный размер трака.
Из выражения (50) видно, что диаметр окружности шарниров должен быть согласован с растягивающей силой. Практически диаметр можно выбрать для какого-нибудь одного значения силы. Изменение же шага цепи (при уменьшении или увеличении растягивающей силы) должно компенсироваться скольжением траков по опорным площадкам, поэтому впадины между зубьями должны иметь уширение, которое обеспечит вход скобы в зацепление и выход из него как в тяговом, так и в тормозном режимах. Полагая растягивающую силу в рабочей ветви максимальной ТртП2Х, получим выражение для определения уширения впадины
^вп ~ I- Л
nl0 (^р шах — св min)
(51)
Оптимальным расчетным натяжением при выборе диаметра по уравнению (50) будет Тсв mln. Если за расчетную брать силу ?рас > Тсв тШ* то на режимах при Тсв < Трас ведущим будет последний зуб, и срыв скобы будет происходить при значительной нормальной силе Nci. v- V
49
Рис. 24. Положение соединительной скобы гусеницы с параллельными резинометаллическими шарнирами при наличии подпора у грака:
слева — при /т — 0,052; справа — при f = — 0,22; а—д — положения на первом—пятом зубьях дуги охвата
Найдем значения сил, действующих в зацеплении (см. рис. 23). Определить все текущие силы Nс, THi, тс6Nri, по значе-ниям натяжений в рабочей и свободной ветвях и геометрическим параметрам зацепления невозможно. Реализация силы тяги двумя элементами зацепления (опорной площадкой ведущего колеса и зубом) делает задачу неопределенной, так как неизвестно, какая часть силы тяги передается зубом, а какая опорной площадкой. Однако ее можно решить последовательно, исходя из таких соображений.
При относительно небольших тяговых нагрузках крутящий момент может целиком передаваться опорными площадками (рис. 24, а—д, слева). Максимальное значение крутящего момента, передаваемого опорными элементами, определяется натяжением в ветвях и коэффициентом трения траков по опорным площадкам. Если сила Рв к превысит максимальную, реализуемую площадками, то траки начнут перемещаться относительно ведущего колеса до тех пор, пока в контакт не войдут зубья со скобами (рис. 24, б, справа). Сила тяги, передаваемая площадками, останется неизменной (или несколько уменьшится), а вся избыточная сила будет передаваться на гусеницу зубьями (рис. 24, справа).
Максимальная сила тяги, передаваемая опорными площадками, определяется выражением
(52)
где п — число опорных площадок в зацеплении.
Из полученного выражения видно, что сила тяги, передаваемая опорными площадками, прямо пропорциональна натяжению в свободной ветви и зависит от числа площадок, находящихся в зацеплении, и коэффициента трения.
5Q
С увеличением числа площадок сила тяги возрастает, приближаясь при п —> ею к значению, определяемому формулой Эйлера
Р --: Р (р^ОХВ ____. 1 )
1 в. к. оп л св \v 1 / >
(53)
где аОхг> — угол охвата.
Данное выражение справедливо для ленточных гусениц, у которых при наличии опорных барабанов п бесконечно велико. Сравнивая выражения (52) и (53), можно заметить, что при одном
и том же коэффициенте трения сила тяги, передаваемая опорными элементами, у ленточных гусениц на 10—14% выше, чем у звен-
чатых. Дополнительное увеличение силы Рв.к.Оп происходит также за счет того, что коэффициент трения резины по металлу
выше, чем металла по металлу.
Натяжение в свободной ветви упругого обвода при переднем
расположении ведущего колеса в несколько раз меньше, чем при заднем. Следовательно, эффективность подпора будет выше в случае заднего расположения ведущих колес.
« Так как натяжение Тсв изменяется при изменении тяговой йнагрузки, то для определения максимально возможного значения А.к.оп необходимо уравнение (52) решить совместно с уравнением Тсв = f (РВк). Воспользуемся для этой цели выражением (7). В результате имеем
(54)
где
(55)
Из выражения (54) следует, что максимальная сила тяги, пере-•даваемая опорными площадками, зависит главным образом от предварительного статического натяжения и соотношения длин “рабочей и свободной ветвей. Это и определяет преимущество заднего расположения ведущего колеса.
Обозначим отношение длины короткой ветви обвода к длинной Через zL. Тогда отношение максимальных сил тяги для случаев заднего и переднего расположения ведущего колеса будет
В. ОГК 3
в. к. on. п
(56)
Для современных гусеничных движителей zL = 0,12 4-0,14, а и = 5 4-6, следовательно, отношение (56) лежит в пределах 1,35—1,55. Таким образом, при заднем расположении ведущего
51
колеса сила тяги, передаваемая за счет подпора трака, на 35— 55% выше, чем при переднем. Абсолютная величина силы тяги, передаваемой опорными элементами, довольно значительная. Так, при статическом натяжении 2000 кгс, характерном для упругих обводов современных машин, сила тяги, передаваемая опорными элементами гусеничной машины массой 35 т, при переднем ведущем колесе составляет 750 кгс, а при заднем 1240 кгс, т. е. обеспечивает движение машины без участия основных элементов зацепления при сопротивлении движению соответственно fT = = 0,035 и fт - 0,055 (т]г.д = 0,8).
При меньшей массе машины движение только за счет силы тяги от опорных площадок может осуществляться при значительно больших сопротивлениях, так как абсолютная величина силы Рв.КвОп не зависит ни от массы машины, ни от жесткости гусеничной цепи. Например, движение машины массой 16 т при переднем расположении ведущего колеса за счет силы тяги, реализуемой только подпором, возможно при коэффициенте сопротивления до 0,07.
При одновременной работе опорных площадок и зубьев, когда Рв.к > ^в.к.от сила, передаваемая площадками, будет меньше, чем определяемая по выражению (52), из-за уменьшения силы Тсв в связи с увеличением силы Рв.к. В этом случае сила тяги, передаваемая опорными элементами, будет определяться выражением (54). Подставляя в него силу 7СВ из выражения (7), получим
Рв. к. on = (Тс - ) (90- 1) • (57)
Из данного выражения можно видеть, что с увеличением силы Рв>к эффективность подпора заметно уменьшается.
От силы тяги зависит также скольжение скобы по зубу и по впадине. Характер взаимодействия элементов зацепления в упругом обводе при различных нагрузках и режимах движения неодинаков. Если при отсутствии скольжения скобы по впадине (Рв.к < ^в.к.оп) траектория оси шарнира при его движении относительно ведущего колеса имеет вид двух сомкнутых эвольвент, а точнее, кривых, состоящих из сочлененных дуг окружностей, радиусы которых кратны шагу гусеницы, то при наличии сколь жен и я ось шарнира движется по петлеобразной кривой.
На рис. 25 в качестве примера схематически представлены некоторые результаты экспериментального исследования кинематики зацепления гусеницы с резинометаллическими упругими шарнирами.
В случае оптимального соотношения параметров зацепления и условий работы машины положение скобы относительно зуба в процессе зацепления сохраняется довольно стабильным. Скоба контактирует с зубом в одном месте, у его основания, и весь период прохождения по дуге охвата зуб воспринимает силу 52
Рис. 25. Взаимодействие скобы с зубом иа различных передачах:
а—Q — передачи I—V
тяги. Скольжения скобы по основанию впадины нет или оно незначительное (на III—IV передачах).
При изменении скорости и силы тяги характер входа скобы в зацепление и выхода из него изменяется. При значительных тяговых нагрузках (передача I) из-за вытяжки гусеницы скоба скользит по рабочему профилю. Скольжение Sp в зависимости от типа грунта (сопротивления движению) может составлять 10— 15 мм.
При уменьшении силы тяги (передачи II—IV) скольжение по рабочему профилю Sp уменьшается, и при малых силах тяги (передача V) скоба настолько отходит от рабочего профиля, что скольжение ST начинается уже на тыльном профиле. При этом зуб получает нагрузку противоположного знака.
Так как передаваемый крутящий момент остается неизменным, то, следовательно, действие отрицательного окружного усилия на последние зубья должно компенсироваться увеличением нагрузки на зубья начальной части дуги охвата. Упор скобы в тыльный профиль приводит к изнашиванию тыльной части зуба и, кроме того, к увеличению потерь мощности в зацеплении, так как в отличие от жесткого шарнира при зацеплении упругих шарниров отрицательное давление на зуб может быть значительным и в некоторых режимах движения даже сопоставимым с рабочим Давлением на профиль передней части зуба.
Положение скобы во впадине изменяется также при маневрировании машины, так как при повороте происходит перераспределение сил в ветвях правой и левой гусеницы. При этом на забе-
53
гающей стороне скольжение по рабочему профилю возрастает по сравнению с прямолинейным движением, а на отстающей — уменьшается или даже возникает скольжение по тыльному профилю (в зависимости от момента сопротивления повороту).
Рассмотренный характер взаимодействия элементов зацепления упругого обвода одинаков при наличии подпора как у траков, так и у цевки или скобы, поскольку сущность процесса от этого не изменяется. Определяющим фактором при этом является, как уже отмечалось, продольная податливость гусеницы.
Податливость шарниров является причиной того, что сила от набегающей ветви на последнем зубе при использовании упругих гусениц больше, чем при использовании гусениц с жесткими шарнирами. Соответственно больше и нормальная сила. Вследствие этого сход скобы с зуба затруднен. При больших значениях силы Рв к может произойти подхват скобы на зубе, т. е. принудительное движение скобы по окружности вместе с ведущим колесом, а не по траектории дуговой ветви. Данное явление усугубляется еще тем, что при относительно постоянном диаметре окружности шарнира в случае наличия подпора зубья изнашиваются в одном и том же месте (у основания), образуя углубление, которое механически дополняет подхват.
Из анализа гусеничного зацепления следует, что хотя способ зацепления и параметры, принимаемые при его профилировании, не влияют на общую картину распределения нагрузок в обводе, тем не менее работоспособность гусеничного движителя существенно зависит от того, обеспечивают характеристики зацепления нормальную кинематику зацепления или создают условия для скольжения и изнашивания зубьев ведущего колеса и траков. Скольжение элементов зацепления приводит к увеличению потерь мощности и тем самым к снижению тягово-динамических и экономических качеств гусеничной машины.
6. ПОТЕРИ МОЩНОСТИ
В ГУСЕНИЧНОМ ДВИЖИТЕЛЕ
Ходовые качества гусеничной машины, как было уже установлено, в значительной степени зависят от схемы ходовой части и конструкции гусеничного движителя. Одним из результатов этого влияния являются потери мощности в гусеничном движителе, которые раньше учитывались КПД гусеничного движителя т)г>д. Потери мощности и КПД гусеничного движителя связаны зависимостью
Пг. д == Р<РЦР-Р + Wr. д),
где А’г.д — потери мощности в гусеничном|движителе.
Поскольку потери мощности в движителе существенно влияют на эксплуатационные качества, то рассмотрим от чего в основном зависят эти потери и каким образом можно их уменьшить.
Собственно потери мощности в гусеничном движителе без учета потерь, связанных с деформированием грунта, складываются из следующих основных составляющих:
^г.д = Лтш + Е NK + £ Лгуд + N3,
где Л'ш — потери мощности в шарнирах гусеницы; NK — суммарные потери на трение в опорных и поддерживающих катках и подшипниках ведущего и направляющего колес; Л/уд — потери мощности, возникающие в результате ударов между звеньями гусениц и деталями, оформляющими контур обвода; Л/3 — потери мощности в зацеплении.
Основная доля всех затрат мощности в движителе приходится на трение в шарнирах: внешнее — в гусеницах с открытым шарниром, внутреннее — в ленточных гусеницах и гусеницах с резинометаллическими шарнирами, комбинированное (внешнее и внутреннее) — в гусеницах с закрытым шарниром.
Следующей по значению составляющей потерь, особенно в гусеницах, обладающих значительной продольной податливостью, являются потери на трение между элементами зацепления при входе трака в зацепление, перемещении по дуге охвата и выходе из зацепления.
Остальные составляющие потерь весьма незначительны по сравнению с этими.
Рассмотрим, от чего зависят потери мощности в шарнирах гусениц и как можно их уменьшить. Эти потери мощности возникают при поворотах траков относительно друг друга. Если пренебречь провисанием ветвей, то потери мощности на трение в шарнирах будут только в точках перегиба обвода, т. е. в точках сопряжений свободно провисающих и дуговых ветвей, где траки складываются или распрямляются относительно друг друга.
Углы поворота траков в точках перегиба следующие: на оперных катках 2 arctg /0/do.K (где /0 — шаг гусеницы; do>K — диаметр опорного катка); на ведущем колесе 2л/г (где z — число зубьев ведущего колеса); на направляющем колесе 2 arctg Z0/rftU к (где — диаметр направляющего колеса).
Мощность, теряемую в шарнире, можно найти, определив работу трения. В гусеницах с открытым шарниром работа трения в каждом шарнире
Wi = рГшТ.Фм
где р — коэффициент трения; гш — радиус проушины; Т. — суммарное растягивающее усилие в соответствующей точке перегиба обвода; <р,- — угол поворота одного трака относительно другого в данной точке перегиба обвода.
За один оборот обвода каждый шарнир проходит все точки перегиба. Работа трения за весь цикл перемещения шарнира по обводу
НГш iSPl
55
или
МАв (^«вФобв
Фр)’
где фобв — сумма всех углов складывания (и распрямления) траков в точках перегиба; % — сумма углов, которые относятся к точкам перегиба, находящимся под тяговой нагрузкой (точкам перегиба участков рабочей ветви).
С учетом того, что работа трения происходит при складывании траков и при их распрямлении, полная сумма углов, при которых совершается работа по всему обводу,
фобв = 2 (4 arctg - 2 arctg -А-) .
Сумма углов фобв одинаковая для схемы как с передним, так и с задним расположением ведущего колеса и определяется общей формой гусеничного обвода и конструктивными особенностями элементов движителя. При использовании мелкозвенчатых гусениц сумма углов фобв складывания меньше, при этом меньше и потери мощности на перематывание обвода.
Сумма углов фр не одинакова для схем с передним и задним расположением ведущего колеса:
при переднем расположении
при заднем расположении
, Л 4- h ,
Фр. э “4 arctg . + г •
**о. к *
Суммируя^работу трения во всех шарнирах обвода и деля ее на время, в течение которого происходит одно перематывание обвода, получим выражение для определения потерь мощности в шарнирах гусеницы
Л7 ____ (Т г'-
— 1 \* св'юбв
В.кТр/’
(58)
В жестком обводе статическая составляющая натяжения зависит только от тяговой нагрузки и не зависит от скорости перематывания обвода (геометрия обвода не изменяется). В связи с этим силу ТСБ можно найти, используя формулу (7). Тогда мощность, теряемая в шарнирах,
__ Ргш^Фобв Г т 1 Т t D / Фр , \
/0 L В*к1фобв /p-Zcb/J’
Из выражения (59) следует, что увеличение предварительного натяжения на любом режиме приводит к увеличению потерь мощности. На рис. 26 показан график, построенный по результатам 56
f»nc. 26. Зависимость потерь мощности в жестком обводе от предварительного статического натяжения при заднем расположении ведущего колеса:
---------диаметр шарнира гусеницы 32 мм; -------- диаметр Шарнира гусеницы 16 мм
экспериментального исследования потерь мощности, из которого видно, что с увеличением предварительного натяжения потери мощности линейно возрастают. Более заметен рост потерь на повышенных скоростях движения.
Увеличение тяговой нагрузки, так же как и увеличение статического натяжения, приводит к возрастанию абсолютных потерь мощности. Однако КПД
движителя как относительная величина при этом возрастает ввиду того, что сила тяги увеличивается.
Из выражений (58) и (59) видно, что потери мощности в шарнире прямо пропорциональны диаметру проушины (пальца), поэтому применение многопроушинных траков, в которых диаметр пальца может быть значительно меньше, чем в трех- или пяти-проушинных, с точки зрения снижения потерь более целесообразно. Гусеницы с закрытым шарниром в этом отношении уступают обычным гусеницам с открытым шарниром, так как диаметр проушин у них (в сопоставимых весовых классах машин), как правило, больше и, следовательно, больше потери мощности при сухом трении. Однако в реальных условиях эксплуатации при наличии абразивных частиц в зоне трения потери в открытых шарнирах резко возрастают и становятся больше, чем в закрытых.
Потери мощности на внешнее трение в шарнирах зависят от скорости движения. Мощность с увеличением скорости изменяется нелинейно. Выражение (59) при постоянной тяговой нагрузке (постоянном сопротивлении движению) и неизменном статическом натяжении можно представить состоящим из двух членов
КшЧоб
/о
v Тс
ЦГщФобв^г
в
Первый член этого равенства увеличивается прямо пропорционально скорости, второй находится в кубической зависимости от скорости. В связи с этим КПД гусеничного движителя при использовании гусениц с открытым или закрытым шарниром с повышением скорости резко уменьшается. На рис. 27 в качестве примера приведены экспериментальные значения потерь мощности и КПД гусеницы с открытым шарниром. При повышении скорости перематывания обвода до 80 км/ч КПД движителя уменьшается от 0,83 до 0,5. Относительно высокие значения КПД движителя
K/J7Z
Рис. 27. Зависимость потерь мощности и КПД движителя от скорости (гусеницы с открытым шарниром, qr — = 56,7 кгс/м):
—•—•— Гс = 500 кгс;
—Q---О— Гг — 750 кг
в данном случае получены за счет того, что диаметр проушин у гусениц небольшой (16 мм).
Как уже отмечалось, потери мощности и КПД движителя неодинаковы для схем обвода с задним и передним расположением ведущего колеса.
Действительно, если взять отношение потерь мощности в шарнирах для этих схем обводов, то можно получить
В этом выражении члены с индексом «п» соответствуют схеме с передним расположением ведущего колеса, а с индексом «з» — с задним.
Зависимость (60) для двух гусеничных машин при различных статических натяжениях показана на рис. 28. Значения соответствующих углов следующие.
Масса машины, т................... 11 16
Тс, кгс.......................... 500 700
4обв, град........................ 168 210
-фр. п» град...................... 114 136
4р. з, град........................ 64 76
При определенных тяговых нагрузках, как это видно из графика на рис. 28, отношение меньше единицы, т. е.
при этих режимах работы потери мощности меньше в схеме с передним расположением ведущего колеса. На режимах, где это отношение больше единицы (при значительных РВвК), потери будут меньше в схеме движителя с задним расположением ведущего колеса.
При изменении скорости движения отношение Л^ш>п/Л^ш>3 изменяется, но принципиальные закономерности при этом оста-58
ются теми же. Таким образом, зная вероятные условия эксплуатации машины, можно по уравнению (60) определить схему гусеничного движителя, целесообразную с точки зрения снижения потерь мощности.
В упругих резинометаллических шарнирах основные потери мощности обусловливаются иными причинами и факторами, чем в жестких металлических.
При перематывании упругого гусеничного обвода его шарниры
--------------------------------
0 W0 800 1200 Р^Ш
Рис. 28. Зависимость отношения
7V... о от тягового усилия на ве-1X1 • Ц/ 1X1 ♦ <5
дущем колесе:
1 — для машины массой Пт при Тс = — 500 кгс; 2 — для машины массой 16 т при Т = 700 кгс
л
периодически скручиваются и раскручиваются в точках перегиба гусеничного обвода. В результате цикла скручивание — раскручивание в шарнире теряется энергия AIF, равная площади гистерезисной петли (рис. 29). Относительные потери энергии можно выразить через коэффициент потерь при скручивании x\w
где Wi — упругая энергия шарнира при его скручивании на угол
При линейной зависимости от деформации момент скручивания, соответствующий углу <ро
Л1£ = С06ф/,
здесь с0 — удельная угловая жесткость; b — ширина шарнира. Тогда упругая энергия скручивания шарнира на угол ф£
(61)
Таким образом, потери энергии за цикл скручивание — раскручивание будут определяться выражением
Д = Ц- T]W-Co&<jpf.
(62) « ♦
Фактические же потери энергии будут больше, так как при раскручивании шарнира запасенная упругая энергия не возвращается в обвод, а почти вся теряется на колебания ветвей, удары и т. п. Практически это означает, что коэффициент потерь r\w, равный по лабораторным замерам 0,15—0,35 в зависимости'; Jot сорта резины и конструкции шарнира (рис.
Рис. 29. Потери энергии при скручивании шарнира гусеницы
Рис. 30. Зависимость коэффициента потерь Y]^ в шарнирах гусеницы:
а — от угла складывания траков; б — от скорости деформирования; 1 — масса машины 11 т; 2 — то же, 36 т; 3 — то же, 16 т
30, а и б), должен при расчетах КПД движителя приниматься близким к единице.
За один цикл перематывания обвода в каждом резинометаллическом шарнире совершается работа внутренних диссипативных сил
В данном случае сумма квадратов всех углов складывания траков одинакова для обводов с передним и задним расположением ведущего колеса
* -8 +(пг)‘+4 (arcte &•)’• (63)
Суммируя, как и раньше для случая жесткого шарнира, работу внутренних сил по всему обводу и деля ее на время одного перематывания, получаем мощность потерь в обводе с резинометаллическими шарнирами гусениц
= Пг S (64)
Данное выражение отличается от выражения (59) для жесткого шарнира тем, что потери в резинометаллическом шарнире не зависят от растягивающих усилий, действующих в обводе, т. е. при любой тяговой нагрузке потери мощности одинаковые. Потери мощности зависят от угловой жесткости шарнира с0, коэффициента внутренних потерь при скручивании и скорости движения. С увеличением скорости потери в шарнирах пропорционально увеличиваются. В гусеницах с жесткими шарнирами потери мощности увеличивались за счет второго члена выражения (59) более интенсивно (второй член возрастал в кубе), чем в гусеницах с резинометаллическими шарнирами. Соответственно этому КПД движителя с резинометаллическими гусеницами с увеличением скорости уменьшается менее интенсивно, чем КПД движителя с жестким обводом (рис. 31).
|»ис. 31. Потери мощности и КПД движителя с рези неметаллическими гусеницами (</г = 56,7 кге/м)
Потери мощности в шарнирах упругого обвода не зависят от места расположения ведущего колеса, так как при любой схеме сумма углов складывания траков остается одинаковой, определяемой [выражением (63). Однако общие потери мощности
расположения ведущего колеса. Сила
х учетом потерь в зацеплении зависят от места
тяги, передаваемая элементами ведущего колеса без скольжения, больше при заднем расположении ведущего колеса. В связи
с этим вероятность скольжения элементов зацепления гусеницы по зубьям больше при переднем расположении ведущего колеса и, как правило, больше общие потери мощности. Это видно из графика (рис. 32), построенного по результатам экспериментального исследования движителя с резинометаллическими гусеницами на универсальном стенде.
Изменение статического натяжения в упругом обводе, хотя прямо и не сказывается на потерях мощности, однако косвенно через отношение TCJT^ влияет на скольжение траков по опорному профилю ведущего колеса и в итоге — на КПД движителя.
Потери мощности в движителе, имеющем гусеницы с закрытыми шарнирами, складываются из составляющих, определяемых выражениями (59) и (64). Однако общие потери мощности в шарнирах таких гусениц не являются суммой значений, определяемых по выражениям (59) и (64). Дело в том, что уплотнительные резиновые кольца шарниров частично воспринимают растягивающую нагрузку. Их относительный натяг составляет, как правило, не менее 30%, поэтому на опорную часть шарнира действует сила меньшая, чем натяжение в обводе. При больших силах тяги эффект разгрузки шарнира резиновыми уплотнениями мал, в связи с чем его можно не учитывать. В этом случае также можно пренебречь и сопротивлением от скручивания резиновых колец, поскольку Доля гистерезисных потерь при относительно небольшой ширине резиновых колец по сравнению с потерями на трение несущественна. Пренебрежение этими двумя факторами взаимно компенсируется, так как они вызывают изменение общих потерь, один в сторону •Увеличения, другой, наоборот, в сторону уменьшения.
Экспериментальные исследования (рис. 33) показывают, что Характер изменения потерь в закрытых шарнирах при значительных тяговых нагрузках такой же, как и в открытых, т. е. для этих
61
Чг.д
0,1
0,6
Рис. S2. Влияние статического натяжения на КПД упругого обвода: ---------при переднем расположении ведущего колеса;----------при заднем
расположении ведущего колеса
’ 500 1000 1500 Тс,кгс
Рис. 33. Потери мощности в движителе с гусеницами с закрытыми шарнирами (qr == 67 кгс/м„ 7*_ = 250, 500 и 750 кгс)
условий справедливо выражение (59). На рис. 33 большие значения КПД движителя (меньшие потери мощности) соответствуют меньшим значениям предварительного статического натяжения,, которое составляло в процессе эксперимента 250, 500 и 750 кгс.
При малых силах тяги разгрузка шарнира уплотнениями становится значительной — уменьшается составляющая потерь от трения скольжения. В результате потери мощности в гусеницах с закрытым шарниром уменьшаются по сравнению с потерями в гусеницах с открытым шарниром даже при значительно большем диаметре проушин у первых.
7. ОСОБЕННОСТИ ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ
Своеобразие конструкции и взаимодействия гусеничного движителя с грунтом предопределяет специфический принцип поворота гусеничных машин, отличный от поворота колесных, и использование для этих целей оригинальных механизмов поворота.
У колесных машин поворот осуществляется в результате отклонения (поворота) управляемых колес. При этом в зависимости от числа осей и требований к поворотливости машины управляемыми колесами могут быть колеса одной передней или нескольких передних осей или колеса передней и задней осей. Однако при всем многообразии конструктивных схем управления, т. е. комбинаций управляемых осей, получили распространение только два способа кинематической связи колес левой и правой стороны и соответственно две схемы изменения скоростей движения колес на повороте.
У подавляющего большинства колесных машин (для наглядности будем рассматривать двухосный автомобиль) в главной 62
Рис. 34. Схема поворота колесной машины:
л — с дифференциалом в главной передаче; б с муфтой свободного хода в главней передаче
передаче имеется дифференциал, поэтому при повороте управляемых колес (рис. 34, а) и движении машины по какой-то траектории центр заднего моста при неизменной частоте вращения двигателя движется с той же скоростью vnOB, что и при прямолинейном движении vnp, а скорости забегающего и отстающего колес соответственно больше и меньше скорости прямолинейного движения на величину Av.
Вследствие применения дифференциала крутящие моменты, подводимые к колесам,
^^отс ^^заб 2 ^^двЛтр^тр*
У некоторых колесных машин, в основном у большегрузных, вместо дифференциалов используются муфты свободного хода. В этом случае (рис. 34, б) при сохранении неизменной частоты вращения двигателя машина будет поворачиваться со скоростью большей, чем скорость прямолинейного движения, поскольку в соответствии с принципом действия муфты свободного хода скорость отстающего колеса равна скорости прямолинейного движения, а скорость забегающего колеса больше скорости прямолинейного движения на величину Av'. При этом Av' > Av.
Из схематического рассмотрения поворота автомобиля, имеющего в главной передаче муфту свободного хода, следует, что при входе в поворот скорость автомобиля изменяется скачком с vnp до vnOR. Практически же вследствие возрастания инерционных сопротивлений частота вращения двигателя уменьшается, и скорость движения автомобиля на повороте (особенно при невысокой Удельной мощности) мало отличается от скорости прямолинейного движения. Крутящий момент двигателя в схеме рис. 34, б целиком передается только отстающему колесу, так как забегающее колесо муфтой свободного хода отключается от главной передачи. Следовательно,
^отс
дВ Нтр^Тр»
^заб — О*
Рис. 35. Схема поворота гусеничной машины:
а — при сохранении скорости забегающей гусеницы; б — при уменьшении скоростей обеих гусениц
Таким образом, скорость поворота колесных машин по сравнению со скоростью прямолинейного движения не уменьшается, и крутящий момент подводится к обоим колесам (при дифференциале) или к отстающему колесу (при муфте свободного хода).
Поворот гусеничных машин осуществляется, наоборот, за счет уменьшения скорости одной из гусениц. При этом вторая гусеница (забегающая) у большинства современных гусеничных машин на повороте движется со скоростью равной (рис. 35, а) или меньшей (рис. 35, б), чем скорость прямолинейного движения при той же частоте вращения двигателя. Скорость движения на повороте вследствие этого меньше скорости прямолинейного движения. Сохранение скорости при повороте обеспечивается лишь при наличии в механизмах поворота дифференциальных механизмов, что в практике создания транспортных гусеничных машин находило ограниченное применение.
Поскольку отстающая гусеница притормаживается, а забегающая движется с большей скоростью и преодолевает большие сопротивления, то усилие на забегающей гусенице всегда положительное и больше, чем на отстающей (Л4в>к2 > Л4в.к1)-
Соотношения между усилиями на забегающей и отстающей гусеницах связаны с радиусом поворота. Если радиус поворота машины больше, чем так называемый радиус свободного поворота (когда скорость отстающей гусеницы при отсутствии на ней силы тяги определяется только сопротивлением качению этой гусеницы), то к отстающей гусенице необходимо приложить силу тяги, т. е. в этом случае Рг > 0. Если радиус поворота машины меньше радиуса свободного поворота, то гусеницу нужно затормозить, т. е. приложить отрицательную (тормозную) силу. Следовательно, для этого случая Рг < 0. При полностью заторможенной гусенице всегда соблюдается условие Рг <0. Практи-
^ески для большинства машин на расчетных (теоретических) радиусах поворота, когда отстающая гусеница полностью не заторможена, Рг < 0. Только при больших значениях радиуса поворота сила тяги на отстающей гусенице положительная.
Сопоставляя картину поворота гусеничной и колесной машин, видим, что у гусеничной в отличие от колесной скорость на повороте при использовании наиболее распространенных механизмов доворота меньше, чем при прямолинейном движении, и во всех случаях сила тяги приложена со стороны забегающего борта.
Соотношение между скоростями забегающей и отстающей гусениц позволяет найти радиус поворота гусеничной машины. Чем больше разность скоростей забегающей и отстающей гусениц, тем меньше радиус поворота. При некоторых механизмах поворота гусеничные машины могут поворачиваться вокруг своей вертикальной оси, т. е. с радиусом поворота, равным половине колеи ма-дцины. В этом случае одна из гусениц вращается вперед, а другая
назад.
Применяемые в настоящее время механизмы поворота могут обеспечить практически любое соотношение между скоростями гусениц, т. е. любое значение расчетного радиуса поворота. В действительности же поворот происходит с радиусом, отличающимся От расчетного, из-за буксования забегающей гусеницы и юза отстающей. Причем чем меньше радиус поворота и тяжелее дорожные условия, тем больше юз и буксование, тем больше расчетный радиус отличается от действительного. Определенное влияние на
это оказывает также конструкция гусеничного движителя, в частности отношение его базы к колее, а также сцепные качества траков гусениц с грунтом в продольном и поперечном направлениях. Несколько подробнее этот вопрос будет рассмотрен дальше.
Если гусеничная машина буксирует прицеп, то при большом значении силы тяги на крюке могут буксовать обе гусеницы, но забегающая гусеница при повороте будет буксовать больше, чем отстающая.
При повороте происходит сложное перемещение гусениц по Грунту. Одновременно с перекатыванием в направлении движения Они поворачиваются в плане вокруг какой-то точки, которая называется полюсом поворота. От бокового перемещения опорных бетвей гусениц возникают поперечные реакции, противоположные по направлению впереди и сзади полюса поворота. Эти реакции Являются результатом трения опорных ветвей о грунт, среза грунта ^грунтозацепами траков и сдвига срезанных слоев в сторону. Поперечные реакции во многом зависят от характера распределения Давлений по длине опорной ветви обвода. Обычно принято считать, что эти реакции пропорциональны вертикальным нагрузкам
S =[ц/,
В'де S — поперечная сила, действующая на единицу длины опор-рой поверхности гусеницы; q' — нормальная нагрузка на еди-
3 П/р. В. Ф. Платонова 65
а) б) В)
Рис. 36. Характер поперечных сил при различных эпюрах нагрузок под опорной ветвью обвода:
а — при равномерной эпюре; б — прн симметричной эпюре с разгрузкой крайних катков; в — при трапециевидной эпюре
ницу длины опорной поверхности, связанная с удельной нагрузкой зависимостью q' = qb\ р — коэффициент пропорциональности между поперечными реакциями грунта и нормальной нагрузкой.
Из данного предположения следует, что если эпюра давлений под опорной ветвью равномерная по длине ветви, то при отсутствии каких-либо боковых сил, извне действующих на машину (помимо реакций грунта), равнодействующие поперечных реакций впереди и сзади полюса поворота будут равными по величине и противоположными по направлению. В этом случае полюс поворота будет находиться у каждой гусеницы в центре опорной поверхности.
Если же на машину будет действовать боковая сила (центробежная, составляющая веса при повороте на косогоре, боковая составляющая от прицепной нагрузки, сила ветра), то поперечные реакции грунта перераспределяются таким образом, чтобы сумма равнодействующих этих реакций со стороны грунта и всех боковых сил, действующих на машину, была равна нулю. В этом случае равнодействующая поперечных реакций сзади полюса поворота уже не равна равнодействующей поперечных реакций впереди полюса поворота, т. е. полюс поворота смещается относительно центра опорной поверхности гусеницы на определенную величину, называемую смещением полюса поворота.
На рис. 36, а—в схематично представлены эпюры поперечных реакций, возникающих на повороте при трех схемах распределения вертикальных нагрузок под опорной ветвью обвода (для одной гусеницы). Эпюры поперечных реакций показаны для случая поворота со смещением полюса поворота гусеницы от центра опорной поверхности на величину ft.
Определим сопротивление, которое оказывают повороту по-
перечные реакции, иначе, определим момент сопротивления повороту машины, что представляется важным для оценки баланса мощности. Выполним это для схемы с равномерным распределением давлений под опорной ветвью (см. рис. 36, а).
|Г При линейной зависимости поперечных реакций от вертикальных сил, т. е. при представлении их силами трения, выражающимися через какой-то обобщенный коэффициент трения р, боковую силу, приходящуюся на единицу длины опорной поверхности, (ложно записать в виде рдср6.
Тогда с одной стороны гусеницы будет действовать сила
= Р?срЬ (-J- ~ х) ’ а с другой т" = Р9срЬ (-у + х) •
рила Т' приложена относительно полюса поворота на плече
Г = -4-------к-, а сила Т" на плече I" =
L*- ТГ Ал л Ал
^явления повороту
Момент сопро-
При отсутствии смещения полюса поворота относительно центра опорной ветви гусеницы (% ~ 0) момент сопротивления повороту одной гусеницы
Для машины в целом момент сопротивления
7ИС = pGTL/4.
Из этого выражения видно, что момент сопротивления повороту Прямо зависит от длины опорной ветви гусеничного обвода, т. е. от базы машины. Чем больше база, тем больше момент сопротивления повороту.
По абсолютной величине при одном и том же весе машины GT и базе L момент сопротивления повороту зависит от характера распределения давлений под опорной ветвью. Наибольшее значение момент поворота имеет при равномерной эпюре давлений, Наименьшее — при эпюре, соответствующей схеме на рис. 36, б, Когда крайние катки гусеничного движителя разгружены. Однако Поскольку по соображениям проходимости, напряженности и работоспособности катков стремятся обычно эпюру давлений сделать равномерной, то практически момент сопротивления повороту машин получается близким к максимальному и равным pGTL/4. г Момент сопротивления повороту преодолевается за счет увеличения силы тяги на забегающей гусенице и создания поворачивающего момента Л1ПОВ, равного моменту сопротивления повороту Л1С.
3* 67
G Если обозначить силу тяги на f/y отстающей гусенице через Р19 на *---забегающей через Р2 (рис. 37),
то для симметричной схемы, когда Т' = Т" = pGT/4, поворачивающий момент
fr'f M^P^+Pr) B/2=pGvL/4.
Из данного выражения следует, что
Р2 + Рг = iiGrL/(2B). (65)
Следовательно, векторная разность сил тяги на гусеницах для одних и тех же условий должна быть тем больше, чем больше
Рис. 37. Силы, действующие при повороте одиночного тягача
отношение базы L к колее В. При создании машины обычно стремятся обеспечить это отношение по возможности минимальным (1,2-1,8).
Из выражения (65) вытекает, что при повороте гусеничный движитель нагружается дополнительными силами. Величина этих сил значительная. Кроме того, каждая из гусениц преодолевает сопротивление перекатыванию, равное f^GJ2 f'r — коэффициент сопротивления качению при повороте). Значения сил тяги на гусеницах можно найти, составляя уравнения моментов относительно центра опорной ветви каждой гусеницы.
Так, сумма моментов относительно центра опоры забегающей гусеницы
PiB -i- 4-/т<ЗтВ--г pGTL = О,
а относительно центра опоры отстающей гусеницы — АВ + 4- f-firB + 4- = 0.
Л
Следовательно, суммарные силы тяги на гусеницах
у frG^ £
~ ~ля~ ^tL
(66)
Коэффициент сопротивления качению при повороте /4 в большинстве случаев больше, чем при прямолинейном движении (на некоторых грунтах в 2 раза). Тем не менее, как правило, на всех радиусах поворота
pGTL 4> у frGT.
Поэтому сила тяги на отстающей гусенице отрицательная, т. е. является тормозной силой.
Сила тяги на забегающей гусенице Р2 при повороте значительно больше, чем при прямолинейном движении, и может достигать предельного значения по сцеплению чаще, чем при прямолинейном движении. В связи с этим поворот машины будет происходить только тогда, когда сила Р2 меньше силы сцепления гусеницы с грунтом, т. е. когда выполняется условие
Р2 < <pGT/2.
Используя выражение для силы Р2, из уравнения (66) получаем
откуда
(67)
Это условие определяет предельное значение отношения L/B по сцеплению при повороте. Если отношение L/B больше, чем это определяется условием (67), то поворот машины невозможен. Таким образом, отношение L/B влияет не только на момент сопро-
тивления повороту, но и на возможность поворота вообще.
Значения коэффициента р зависят от свойств опорной поверх-
ности (грунта) и радиуса поворота. При минимальном радиусе
поворота коэ(
ициент р имеет максимальное значение, с увели-
чением радиуса поворота он уменьшается. Значения коэффициента Птах при повороте с полностью заторможенной гусеницей для
разных грунтов следующие.
Снежная целина....................... 0,6—0,8
Сухие грунтовые дороги .............. 0,7—0,75
Задерненный грунт.................... 0,8—1,0
Сухой песок.......................... 0,8—0,9
Болото (торфяник)...................0,85—0,9
Влажный суглинок.................... 0,4—0,5
Для определения коэффициента р на других радиусах может быть рекомендована формула А. О. Никитина
.. __ Ртах
LL —”
0,85 + 0,15
(68)
где R — радиус поворота по центру забегающей гусеницы.
Вследствие того, что коэффициент р зависит от радиуса поворота, условия поворота по сцеплению забегающей гусеницы с грунтом также зависят от того, с каким радиусом будет поворачиваться машина. Чем меньше коэффициент р, т. е. чем больше радиус поворота, тем требуется меньшее значение коэффициента сцепления
69
Рис. 38. Силы, действующие при повороте тягача с прицепом
для обеспечения поворота. Вот почему на грунтах с малыми коэффициентами сцепления <р гусеничные машины теряют проходимость при крутых поворотах и преодолевают более уверенно труднопроходимые участки при поворотах с большими радиусами. В пределе наилучшая проходимость обеспечивается при прямолинейном движении. В этом случае р = 0 и потребная сила тяги на забегающей гусенице (она
уже начинает двигаться с такой же скоростью, как и отстающая) принимает минимальное значение. Если при повороте условие возможности движения по
сцеплению имело вид
Фпов
2В
то при прямолинейном движении
Фпр > /т*
Отсюда вытекает, что прямолинейное движение обеспечивается при значительно меньшем коэффициенте сцепления <р, чем криволинейное. Поэтому при движении по деформируемым грунтам, обладающим большим сопротивлением и малым сцеплением (снег, болото), не рекомендуется делать резкие повороты, а рекомендуется преодолевать наиболее трудные участки прямолинейным курсом.
Момент сопротивления повороту и сила тяги на гусеницах были определены исходя из предположения, что полюс поворота находится в центре опорной ветви обвода, а поперечные силы, действующие на гусеницы впереди и сзади полюса поворота, одинаковые по величине, но противоположные по направлению. Такая картина соответствует случаю поворота при отсутствии боковых сил, действующих на корпус машины, и при равномерной эпюре давлений под опорной ветвью.
Если на машину действуют боковые силы (центробежная, составляющая крюковой нагрузки при буксировке прицепов, составляющая веса при повороте на косогоре), то полюс поворота смещается относительно центра опорной ветви и момент сопротивления повороту изменяется.
Рассмотрим наиболее частый случай, при котором происходит смещение полюса поворота, — движение гусеничной машины с прицепом. Схема действующих на машину сил для этого случая показана на рис. 38. Здесь РкР — горизонтальная составляющая 70
усилия со стороны прицепа, которая при повороте отклонена от реи тягача на угол укР.
• В результате действия составляющей Ркр sin укР полюс поворота смещается на величину %, которую можно найти из суммы проекций всех сил на поперечную ось
?кр sin Ткр + 2р?срЬ (
х) — 2р.?СрЬ
+ х) = О-
Полагая qcp = GT/(2&£), имеем
ркр sin ткР L
(69)
Из формулы (69) видно, что чем больше поперечная сила 1% sin укР, тем больше смещение полюса поворота.
1 Наличие поперечной силы приводит к увеличению момента сопротивления повороту. Найдем этот момент. Из рис. 38 следует, что момент сопротивления повороту равен сумме моментов поперечных сил относительно точки С
П1П
кр sin Ткр (^кр X)
кр sin Ткр (^кр X) •
Выражая qw через полный вес машины GT, получаем
sin укр (#кр х) •
(70)
Из этого выражения видно, что момент сопротивления повороту ^Гусеничной машины, движущейся с прицепом, существенно Дольше, чем одиночной машины. Больше первая составляющая
^равнения (70), т. е. сопротивление непосредственно от реакций Трунта, и, кроме того, повороту препятствует поперечная составляющая крюковой силы РкР sin укр, которая стремится возвратить машину в исходное положение. При этом чем больше вынос
Тягово-сцепного устройства (больше акр), тем больше момент
? При наличии крюковой нагрузки центр поворота смещается Йазад. Это смещение тем значительнее, чем больше крюковая рагрузка, вынос тягово-сцепного устройства и меньше радиус поворота (больше угол укР).
При повороте с прицепом в большей степени нагружаются также Двигатель, трансмиссия и гусеницы, особенно забегающая, так Жак сила Р2 в этом случае больше, чем при повороте без прицепа. Мтобы найти силы Рг и Р2, необходимо составить уравнение равно-
71
весия моментов относительно полюсов поворота гусениц и С2 Конечные выражения имеют вид
D _ f'GT , ]xGTL , 4Х2\ ,
1 ~~ 2 4В \' “Г L? ) f
Ркр sin уКр
(«КР - 7.) —
PKPcosyKp
2
РкР дП Vkp Кр - 7.) + 4е C0S Ткр-
(71)
Из приведенных выражений видно, что при повороте машины с прицепом по сравнению с поворотом одиночной машины сила тяги на забегающей гусенице увеличивается не только за счет составляющей крюковой нагрузки Ркр cos укР, но также за счет увеличения момента сопротивления повороту (вследствие появления смещения % полюса поворота) и дополнительного сопротивления от поперечной составляющей Ркр sin укр. Следовательно, в одинаковых дорожных условиях маневрирование гусеничной машиной с прицепом более затруднительно, чем одиночной, и потеря проходимости на повороте более вероятная.
Поворачивающий момент при движении с прицепом также значительно больше, чем без прицепа. Так как Л4ПОВ = (Р2 + Pi) В/2, то, подставляя Р2 и Pi из уравнений (71), имеем
AlnOB =(1+-¥)+sin Ткр - %) (72)
ИЛИ
•^пов ~ с*
Таким рбразом, поворачивающий момент равен суммарному моменту сопротивления всех сил повороту.
При повороте на повышенных скоростях полюс поворота также смещается, но в отличие от рассмотренного случая (движения с прицепом) смещается не назад, а вперед от центра машины. Смещение полюса поворота при наличии центробежной силы обусловливается необходимостью уравновешивания поперечной составляющей Y центробежной силы поперечными реакциями грунта, поскольку других поперечных сил нет. Данное условие равновесия можно записать в виде
У = 4%р^срЬ = 2%[iGJL.
Одновременно поперечная составляющая центробежной силы вызывает перераспределение нормальных давлений под гусеницами — увеличение под забегающей гусеницей и уменьшение под 72
отстающей. Однако при этом записанное условие равновесия остается справедливым, так как общий вес машины не изменяется.
Условие равновесия поперечных сил позволяет найти смещение полюса поворота
% = KL/(2p,GT).
Так как поперечная составляющая центробежной силы
V2
то х =
v2L
Из данного выражения видно, что смещение полюса поворота растет пропорционально квадрату скорости движения. При определенном режиме поворота (увеличении скорости) полюс поворота, постепенно смещаясь вперед от центра тяжести, может выйти за пределы базы машины, т. е. смещение будет равно или превышать половину базы (% > L/2). В этом случае боковые реакции грунта будут приложены только с одной стороны гусениц, что приводит к потере устойчивости и возможности заноса машины при значениях р,, достигающих значений коэффициента сцепления.
Таким образом, условие ограничения скорости движения на повороте по заносу можно записать в виде
откуда находится критическая скорость fKP. 3, при которой начинается занос машины от действия центробежной силы:
^кр. 3
При расчетах критической скорости по заносу принимают максимальное значение коэффициента р,, который ориентировочно равен коэффициенту сцепления р, = jxmax ср.
Следует отметить, что при подстановке в выражение для определения критической скорости по заносу значений расчетного радиуса поворота получается несколько меньшая скорость укр3 по сравнению с истинной (с запасом). Это объясняется тем, что забегающая гусеница движется с буксованием, а отстающая с юзом, и фактический радиус поворота больше расчетного. Разница между расчетным и фактическим радиусами поворота зависит как от свойств грунта, так и от отношения L/B.
На сухих грунтах фактический радиус поворота на 30—80% превышает расчетный; на влажных грунтах разница может быть еще большей. Однако это не означает, что в такой же степени увеличивается критическая скорость по заносу. Дело в том, что большее увеличение фактического радиуса поворота по сравнению с расчетным характерно для грунтов с меньшими значениями коэффициента сцепления, а коэффициент ф накладывает существенное ограничение на Ц-р. 3.
При повороте затрачивается значительная мощность, которая идет в основном на деформацию грунта гусеницами. Часть мощности может затрачиваться в механизмах поворота, обеспечивающих снижение скорости отстающей гусеницы. При этом потери мощности в механизмах поворота могут происходить только тогда, когда механизм включен (или выключен) не полностью, т. е. фрикционные элементы пробуксовывают. Например, это бывает, когда в качестве механизма поворота используется простой бортовой фрикцион. Отключение бортового фрикциона и затормаживание выходного (ведомого) вала до полной остановки приводят к резкому повороту машины, что создает определенную опасность при движении на повышенных скоростях. При этом, чтобы обеспечить радиус поворота больший, чем колея машины, остановочный тормоз полностью не включают, и за счет пробуксовки фрикционных элементов тормоза отстающая гусеница движется с некоторой скоростью.
Потери мощности на трение фрикционных элементов достигают максимума при определенном радиусе поворота. Чтобы снизить эти потери (у тяжелых машин они могут быть весьма значительными), применяют механизмы поворота, которые позволяют не только обеспечить полную остановку отстающей гусеницы, но и получить скорость ее движения меньшую, чем на прямолинейном движении, при полностью включенных (или выключенных) фрикционных элементах механизма поворота, т. е. обеспечить не один, а два или несколько фиксированных (расчетных) радиусов поворота. Это достигается использованием самостоятельных коробок передач для каждой гусеницы (с возможностью независимого включения любой передачи в каждой коробке) или планетарных механизмов, например двухступенчатых, у которых путем затормаживания того или иного элемента планетарного ряда изменяется частота вращения ведомого вала.
При расчетах потребной мощности двигателя для обеспечения поворота машины необходимо знать мощность внешних сопротивлений 7VO. Ее находят по известным силам Рг и Р2 и относительным скоростям гусениц vol и vo2, которые представляют собой скорости перематывания гусениц относительно корпуса машины:
Nq = + Р 2^о2*
С учетом этой мощности выбирают силовую установку и рассчитывают элементы трансмиссии.
8. ПЛАВНОСТЬ ХОДА
ГУСЕНИЧНЫХ ТРАНСПОРТЕРОВ-ТЯГАЧЕЙ
Гусеничные транспортно-тяговые машины предназначены для преимущественного использования в плохих дорожных условиях при неровном профиле пути, когда на ходовую часть и корпус действуют значительные возмущения (толчки) и динамические
нагрузки. Помимо того, что эти нагрузки способствуют более интенсивному разрушению всех деталей машины (по сравнению с движением по ровной дороге), они воздействуют на водителя и транспортируемый груз.
В процессе движения по неровному пути подрессоренная часть машины совершает три основных вида перемещений (колебаний): вертикальные колебания по оси z
Рис. 39. Схема к анализу колебаний подрессоренного корпуса машины
(рис. 39), продольные угловые
колебания вокруг оси у и поперечные угловые колебания вокруг реи х. Поперечные угловые колебания вызываются неодинаковостью уровней высот под катками левой и правой стороны машины (например, при переезде разбитой дороги или канавы под углом) и в процессе эксплуатации являются эпизодическими. Наиболее
постоянными являются вертикальные и продольные угловые колебания, присущие почти всем машинам.
Вертикальные и угловые колебания корпуса вызывают значительные вертикальные ускорения в каждой точке подрессоренной массы. От угловых перемещений корпуса возникают также продольные ускорения, однако они невелики. По этой причине, хотя в любой точке подрессоренного корпуса действуют перегрузки, определяемые геометрической суммой ускорений по всем трем осям qi = V zi + yl + обычно рассматривают только верти
кальные ускорения zz.
Теоретически и экспериментально установлено, что вертикаль-
ные ускорения прямо связаны со скоростью движения: чем больше скорость, тем больше ускорения. Чтобы снизить вредное действие ускорений на организм (перевозимый груз), водитель вынужден уменьшать скорость. В данном случае он выступает в роли своеоб
разного «регулятора», поддерживающего скорость движения ма
шины на уровне, при котором ускорения не превышают определенного предела, допустимого его физиологической стойкостью (выносливостью), и не оказывают заметного влияния на утомляемость и работоспособность. Этот допустимый предел зависит от индивидуальных особенностей человека и длительности воздей
ствия перегрузок. Для машин, эксплуатирующихся в условиях разбитых грунтовых дорог и бездорожья, допустимый предел перегрузок характеризуется следующими вертикальными ускорениями в долях от g. Колесные Гусеничные машины машины
Средние квадратические вертикальные ускорения . . 0,5 0,5
Максимальные вертикальные ускорения от действия: эпизодических толчков........................... 1,5 2,5
часто повторяющихся толчков................. 0,7 1,0
75
Рис. 40. Схема простейшей одиоопорной колебательной системы
дорогах. Однако из-за чрезмерных
С другой стороны, вертикальные ускорения непосредственно зависят от качества системы подрессорива-ния: чем лучше подвеска, тем большую скорость можно обеспечить при тех же значениях ускорений в одинаковых дорожных условиях.
У современных транспортных машин, предназначенных для эксплуатации в тяжелых условиях, запас мощности позволяет развивать высокие средние скорости движения на разбитых перегрузок, действующих на
водителя, пассажиров или транспортируемый груз (оборудование), высокие скорости практически не могут быть получены. При этом
чем хуже дорожные условия и менее совершенна подвеска машины, тем ниже фактические средние скорости движения и больше запас неиспользованной мощности двигателя. Таким образом, повышение удельной мощности (отношения максимальной мощности двигателя к полной массе машины) при наличии плохой системы под-рессоривания не дает заметного повышения средней скорости дви
жения.
Из рассмотренного становится понятным, что для гусеничных
машин, эксплуатирующихся в основном на грунтовых дорогах и
в условиях бездорожья, качество подрессоривания, т. е. плавность хода, является одним из определяющих факторов. Чем лучше плав-
ность хода, тем выше может быть средняя скорость движения и
ЗШ1
ективность использования машины при выполнении различ-
ных транспортных работ.
Коротко проанализируем основные показатели плавности хода
и влияние на них параметров системы подрессоривания, что позволит в последующем с более ясных позиций оценивать конструктивные решения, принимаемые при создании быстроходных гусеничных транспортно-тяговых машин.
Рассмотрим сначала простейшую одноопорную (одноосную) колебательную систему, поскольку основные физические процессы в ней такие же, как и у многоопорных (многоосных) систем, а, кроме того, практически любая многоопорная система может быть с определенными допущениями сведена к одноопорной. Схема одноопорной упругой колебательной системы представлена на рис. 40, где М — подрессоренная масса (корпус, кузов); т — неподрессоренная масса (колесо, каток); kT, km — жесткость подвески (торсиона) и шины; va — сопротивление амортизатора; q (х) — профиль дороги; z — перемещения подрессоренной массы.
76
Заметим, что если значения М и т отнести целиком к машине, jo они будут соответственно М = (GT — G^lg', tn — GJg.
Схему, показанную на рис. 40, а, используют, когда необходимо оценить нагруженность не только подрессоренной массы М, цо и неподрессоренной т (при этом колеса имеют резиновые шины, Характеризующиеся радиальной жесткостью &ш). При исследовании только нагрузок, действующих на подрессоренную массу, Часто прибегают к более упрощенной схеме, показанной на рис. 40, б. В этой схеме полагают, что колесо (каток) копирует црофиль дороги qx, а жесткость подвески kr является приведенной, т. е. учитывает и жесткость шины колеса (катка). Последнюю схему чаще используют при анализе плавности хода гусеничных машин, у которых неподрессоренная масса невелика по сравнению р подрессоренной, а пренебрежение жесткостью шин катков практически не приводит к заметным погрешностям.
Перемещение опорного катка по неровному профилю пути вызывает деформацию упругого элемента. Эта деформация равна 'разности z — q перемещений подрессоренной массы М и катка. Вследствие деформации рессоры возникает восстанавливающая сила Рк, препятствующая этой деформации:
Я}*
При наличии в подвеске амортизатора дополнительно возникает сопротивление от него. Обычно в современных машинах при
меняют гидравлические амортизаторы, сопротивление которых пропорционально скорости перемещения рабочих органов (ско-, роста перетекания жидкости через дроссельные отверстия). Следовательно, сила сопротивления амортизатора Ра может быть вы
ражена через скорость деформирования упругого элемента
Ря = %>(*— 9),
где va — коэффициент пропорциональности между силой сопротивления амортизатора и скоростью перемещения его рабочих элементов.
Инерционное сопротивление подрессоренной массы при ее колебаниях в соответствии с законом Ньютона
Р, = Мг.
Тогда уравнение равновесия массы М согласно схеме на рис. 40, б может быть записано в следующем виде:
Мг + (z —• 9) -J- va (z — 9) = 0
или
г + 2Xz + co2z — w29 -j- 2X9,
(73)
где 2X = va/M; to2 = kT/M.
77
Правая часть уравнения (73) представляет собой возмущающее воздействие профиля дороги на упругую систему. Здесь профиль дороги выражен в виде функции времени q (t), которая однозначно связана с функцией расстояния q (х) через скорость дви-
жения, поскольку х = vt.
Решение уравнения (73) позволяет установить, что при одном и том же возмущении перемещение массы М и ее ускорение г существенно зависят от коэффициентов о) и Z, которые обусловли
ваются жесткостью упругого элемента и наличием амортизаторов (демпфированием) в подвеске.
Коэффициент о представляет собой частоту свободных вертикальных колебаний системы, когда в ней отсутствуют силы демпфирования. Согласно принятому обозначению
О) = ]/ kJM .
Если в системе есть демпфирование, то частота свободных вертикальных колебаний несколько меньше, чем со:
(D2 — X2.
Однако вследствие того, что коэффициент X в реальных машинах значительно меньше, чем со, обычно качество подвески оценивают по величине w, а не по величине Чем меньше частота свободных колебаний, тем лучше плавность хода машины, тем меньше вертикальные ускорения.
Из выражения о) = V kJ М можно найти связь между частотой и конструктивными параметрами подвески, влияющими на частоту независимо от подрессоренной массы или от веса машины. Представим, что подрессоренная масса находится в положении статического равновесия. В этом случае упругий элемент сжат на величину статического хода fCT, следовательно,
GT — откуда
= (Рт СТ “ ^SlfcT
Подставляя это значение жесткости в выражение со — kJM, получаем
Таким образом, частота свободных вертикальных колебаний однозначно связана со статическим ходом подвески. Чем больше статический ход, тем меньше частота свободных колебаний и лучше качество подрессоривания. При больших ходах подвески можно получить более высокие скорости движения по неровным дорогам* Покажем это на примере одноопорной упругой системы. Поскольку реальный опорный профиль представляет собой случайную функцию, то аналитический вывод связи скорости движения с ходом подвески довольно сложен. Приведем здесь лишь конечный резуль
тат. Спектральную плотность возмущающего воздействия Kq (р) представим в виде зависимости, справедливой для дорог, включающих неровности различной длины:
Кд (Р) = kv/p2, где k — коэффициент, определяемый экспериментально и характеризующий среднюю высоту неровностей микропрофиля различной длины; р — частота воздействия неровностей (величина, обратная длине неровностей).
При этом для линейной подвески дисперсия деформаций упругого элемента, приведенных к колесу, будет выражаться зависимостью
Dz^q = 3te/(2co0 V2 ), а дисперсия ускорений
Dz = Awg/(2 ]/Y)>
здесь <d0 — параметр, зависящий от максимальной деформации упругого элемента подвески.
Выражая дисперсию деформаций упругого элемента Dz_q и дисперсию ускорений Dz через соответствующие средние квадратические значения Gz_q и gz, а параметр <оо через статический ход подвески /ст, получаем
f ст = g V 3 Gz-qlGz .
Следовательно, ход подвески, деформация ее упругого элемента, ускорения подрессоренной массы и скорость движения машины связаны однозначно: чем больше ход подвески, тем боль-щей может быть деформация упругого элемента без пробоев подвески и тем выше будет скорость движения. Эта зависимость графически представлена на рис. 41 для различных значений допускаемых вертикальных ускорений gz доп и различных коэффициентов k. Из графика видно, что при одном и том же уровне ускорений скорость движения машины по случайному микропрофилю прямо пропорциональна статическому ходу. При скоростях, выходящих за пределы допускаемого подвеской среднего квадратического значения деформации упругого элемента (хода подвески), будет наблюдаться отрыв катков или их удары в ограничители. В этом случае резко возрастут вертикальные ускорения.
Коэффициент X = та/(22И) в уравнении (73) характеризует Демпфирование в подвеске или интенсивность затухания колебаний, возникающих в упругой системе от какого-либо внешнего возмущения. При одной и той же частоте свободных колебаний они могут затухать за больший или меньший отрезок времени в зависимости от ф = Х/cd. При наличии более мощного амортизатора свободные колебания затухают значительно быстрее (кривая 2 На рис. 42), чем в случае амортизатора с меньшим сопротивлением (кривая /).
Рис. 41. Зависимость скорости движения по случайному микропрофилю от хода подвески
Рис. 42. Характер затухания колебаний в подвеске:
1 — сопротивление амортизатора vt; 2 — сопротивление амортизатора ve > vt; AjJAQ — относительная величина параметра
Способность подвески гасить колебания особенно необходима при движении по периодическим неровностям, когда возможно возникновение резонансных колебаний (колебаний с большой амплитудой), или по случайному микропрофилю, когда также наблюдаются значительные раскачивания подрессоренной массы, хотя и несколько меньшие, чем при резонансе.
Покажем влияние демпфирования на колебания или на ускорения подрессоренной массы на примере одноопорной системы, движущейся по периодическому (гармоническому) профилю. В этом случае функция q (t) профиля пути имеет вид синусоиды или косинусоиды.
Пусть
q (t) = qmax cos pt,
где 9max — амплитуда неровности; p — круговая частота неровностей, с"1.
Подставляя значение q (f) в уравнение (73), получаем
z + 2Zz + co2z = co2gmax cos pt — 2Xpgmax sin pt.
В правой части этого уравнения получилось два гармонических возмущения, действующих на упругую систему.
Для упрощения рассуждений рассматриваем линейную систему подрессоривания, т. е. полагаем коэффициенты и vT постоянными. В этом случае записанное уравнение можно решать отдельно для каждого из членов правой части с последующим суммированием частных решений. Рассмотрим для примера решение лишь одного уравнения
z 2Kz -J- cd2z = (o2<7max cos pt.
Не приводя известных из специальной литературы выкладок, запишем сразу частное решение этого уравнения
2 = V 2" C0S + fp)’ (74)
V (co2 — p2)2 + 4л2р2 где
ф=arc*g •
Из выражения (74) видно, что колебания системы под воздействием гармонической возмущающей силы происходят с частотой р, равной частоте возмущающей силы. Однако по времени максимум амплитуды перемещения (и ускорения) смещен относительно максимума амплитуды возмущающего воздействия на фазовый угол <р, т. е. он несколько отстает по фазе от возмущения.
Амплитуда колебаний при всех прочих постоянных факторах прямо пропорциональна амплитуде ^тах возмущающего воздействия.
Главное же следствие выражения (74) заключается в том, что амплитуда колебаний подрессоренной массы и амплитуда ее ускорений не являются постоянными величинами, а зависят от соотношения частоты свободных колебаний системы со и частоты возмущающего воздействия р.
Амплитуда достигает максимума, когда со = р, и выражение под корнем имеет минимальное значение. В этом случае наступает резонанс. Резонансная амплитуда колебаний при со = р будет
_ со2 kT
~~ ^П1ах У™*'
Из этого выражения видно, что чем больше демпфирование (коэффициент Z) в системе, тем меньше амплитуда колебаний. Изменения амплитуды колебаний упругой системы в зависимости от соотношения частот со и р и сопротивления амортизатора (коэффициента X) показаны на рис. 43.
Из графика видно, что амплитуда колебаний подрессоренной массы при резонансном режиме в несколько раз больше амплитуд колебаний при отсутствии резонанса. При этом чем меньше демпфирование, тем больше разница в амплитудах, и, наоборот, при значительном внутреннем трении в системе (при больших значениях X) возрастание амплитуд колебаний при резонансе не столь велико. Вот почему при создании машин, предназначенных для эксплуатации на неровных дорогах, стремятся использовать мощные амортизаторы.
Микропрофиль реальных дорожных условий, как правило, имеет случайный характер и представляет чередование неровностей различной длины и высоты. В этих условиях ярко выраженного резонанса, как на рис. 43, не бывает, однако интенсивность раскачивания подрессоренной массы и в этих условиях существенно
81
Ь)г
О 0,5 1,0 1,5 2,0 pfw
Рис. 43. Влияние демпфирования на амплитуду колебаний
Рис. 44. Определение параметров упругой системы по кривой затухающих колебаний
I
зависит от демпфирования в подвеске. Дело в том, что даже при наличии достаточно эффективных амортизаторов затухание свободных колебаний происходит не менее чем через 2—3 колебания. Период колебаний у большинства машин в среднем составляет 0,7—1,2 с. Следовательно, затухание колебания, вызванного случайным единичным возмущением, произойдет не ранее чем спустя 1,5—3 с. При скорости движения свыше 40 км/ч машина за это время пройдет около 2,5—3 м, на этом пути может встретиться еще несколько неровностей, которые сообщат машине свои возмущающие импульсы. В результате при движении по случайному микропрофилю возникает непрерывный колебательный процесс с частотой, близкой к частоте свободных колебаний. Амплитуды отклонений подрессоренной массы в этом случае существенно зависят от демпфирования, поэтому необходимость в установке
эффективных амортизаторов и в этом случае сохраняется.
Эффективность демпфирования можно оценивать как по коэффициенту \ так и по безразмерному отношению ф == Х/со, которое называется относительным коэффициентом затухания, или ко
эффициентом апериодичности. Чтобы обеспечить быстрое гашение колебаний в упругой системе, обычно достаточно иметь коэффициент апериодичности, равный 0,25—0,35.
Параметры со и X в простых колебательных системах можно с достаточной точностью определить расчетным путем. В сложных упругих системах расчетное определение частоты и демпфирова-
ния затруднено, при этом часто пользуются экспериментальными способами. Наибольшее распространение в практике получйл
82
Рис. 45. Схема сил, возникающих при колебании гусеничного тягача
метод затухающих колебаний, заключающийся в том, что упругую систему предварительно выводят из равновесия, а затем по кривой затухающих колебаний {рис. 44) определяют со и X. С небольшой погрешностью частоту свободных колебаний без затухания со принимают равной частоте свободных колебаний с затуханием сох, а последнюю находят по кривой затухания, так как период колебания связан с частотой зависимостью Т — 2зт/со.
Следовательно, зная время протекания одного колебания 7, можно найти частоту со ==
Относительный коэффициент затухания находят по отношению двух соседних амплитуд zt и z/+1, соответствующих одной и той же фазе движения:
J__________
4л2
•п2
В реальных гусеничных машинах колебательные процессы сложнее, чем в рассмотренной одноопорной системе. В задачу данной книги не входит подробный анализ таких процессов. Это особая область исследований. Здесь ограничимся лишь изложением принципиальных основ теории колебаний (что было сделано раньше) и покажем, как составляются исходные уравнения колебаний гусеничной машины с учетом ее основных компоновочных особенностей и влияния гусеничных цепей, что необходимо для последующего конструктивного анализа.
Сложные колебания корпуса гусеничной машины в продольной плоскости можно свести к двум видам колебательного движения: поступательные вертикальные перемещения корпуса по оси z (рис. 45) и продольные угловые перемещения вокруг центра тяжести О. При отклонениях корпуса от положения статического равновесия в ветвях обвода будут возникать дополнительные динамические силы: Т'д.в.к в наклонной ветви под ведущим колесом
83
(в свободной ветви) и ТДл н.к в рабочей ветви под направляющим колесом.
Непосредственным источником возбуждения колебаний корпуса и появления динамических растягивающих сил в ветвях обвода являются перемещения опорных катков при движении по микропрофилю местности. Возникающие при этом реакции под опорными катками будут определяться деформацией соответствующего упругого элемента, а сопротивление амортизаторов Pai скоростью этой деформации.
В связи с тем, что колебания корпуса непосредственно связаны с натяжением в обводе, а оно, как было выяснено раньше, бывает значительным в упругих обводах, при рассмотрении колебательного процесса корпуса необходимо учитывать также связи, накладываемые гусеницами. В данном случае следует анализировать в целом всю систему двигатель — трансмиссия — гусеничный обвод — подвеска — корпус. Схема этой системы показана на рис. 45. Эта схема позволяет учитывать массу тягача в поступательном движении, обусловливающую возникновение инерционной силы Ру-, вес подрессоренной части GT — GH, момент инерции Jn подрессоренной массы относительно поперечной оси,проходящей через центр тяжести корпуса О, моменты инерции двигателя /дв, трансмиссии JTP, бортовой передачи /беП и гусеничного движителя /ГеД.
Как видно из схемы, с учетом этих факторов в системе возможны уже не два, а пять независимых видов движения: вертикальные перемещения г0 корпуса по оси z, угловые отклонения <р0 корпуса относительно центра тяжести, перемещения х0 корпуса вдоль оси х, угловые перемещения масс трансмиссии <ртр и двигателя <рдв. Если моменты инерции двигателя, трансмиссии и бортовой передачи заменить одним эквивалентным моментом инерции JTP, приведенным к оси ведущего колеса, то перемещения корпуса и его ускорения могут быть описаны системой из четырех уравнений, характеризующих движения по координатам z0, (р0 и х0 с учетом изменения угла <рв к поворота ведущего колеса.
Чтобы написать эти исходные уравнения, необходимо составить соответствующие условия равновесия.
Составим уравнение равновесия сил, действующих на корпус в вертикальной плоскости.
Со стороны опорных катков в результате деформирования упругих элементов на корпус действуют силы РК1-. Эти силы с учетом отклонения корпуса от положения статического равновесия на z0 и <р0 и перемещения катков по неровностям грунта на qL могут быть найдены как
(г0 — //Фо
где kT — проведенная жесткость подвески (торсиона); lL — горизонтальная координата i-ro катка; qL — функция микропрофиля под этим катком. Если грунт считать недеформируемым, то микро-84
профиль под каждым катком будет одинаковым, только воздействие его будет смещено по времени на (/д+1 — I.)/v.
Сила сопротивления амортизаторов соответственно будет
Р ai (^0 — ^а/Фо Ч-
где — коэффициент сопротивления амортизатора.
Помимо сил от опорных катков и амортизаторов наГкорпус будут действовать составляющие динамических сил со стороны рабочей и свободной ветвей обвода 7До в> к sin уВв к и Тд.н,к sin ун<к.
Под действием всех этих сил корпус перемещается ’по оси "г, приобретая ускорение г0 и оказывая инерционное сопротивление
Приводя все силы к одной стороне машины, получаем
п
(q t ± /а1-Фо) + nkTz0 + kT
1
Гд. в. к sin Тв. к Ли н. к sifl Тн. к 1 0,
(Qi zt /гфо) —
(75)
где k — число амортизаторов на борту; п — число катков на борту.
Соответствующим образом можно получить уравнение всех моментов от действующих сил вокруг центра тяжести с учетом момента инерции подрессоренной массы Jn
у- Фо + va 2 (zo =t lai'<Po + qt) hi + kT 2 (zo ± h<Po + Qt) h — 1 1
Л*. В, кЛфВ. к Ч~ ^д. н. К^фн. К 6»
(76)
где Хфв.к и ХфНеК— расстояния от центра тяжести корпуса до линий, являющихся продолжением наклонных ветвей обвода. Расстояния \)В.к и к изменяются с изменением координаты центра тяжести при колебаниях корпуса, однако с небольшой погрешностью их можно считать постоянными.
Знаки сил Рк£ и Pai в уравнении (75) и моментов от этих сил в уравнении (76) учитываются знаком перед соответствующей линейной координатой lai, 1£.
При колебаниях корпуса дополнительные растягивающие силы возникают как в рабочей, так и в свободной ветви. Но в наклонной ветви, расположенной под ведущим колесом (при переднем расположении ведущего колеса это будет свободная ветвь, при заднем — рабочая), растягивающие силы будут значительно больше, так как приращение ее длины компенсируется в основном только
85
на участке между ведущим колесом и опорным катком, в то время как в длинной ветви, включающей верхнюю ветвь и наклонную под направляющим колесом, такое же приращение распространяется, кроме того, и на всю верхнюю ветвь.
Динамические силы Тд<в.к и Лив.к» воздействуя на корпус, вызывают перераспределение нагрузок на катки '(и под катками). Вследствие этого центр давления перемещается по длине опорной ветви, а равнодействующая 7?п упругих сил подвески, действующих на корпус, смещается относительно вертикальной оси, проходящей через центр тяжести, на величину а0. Это смещение в статическом положении или при движении находится в результате решения уравнений равновесия корпуса, в которых действие всех сил от опорных катков заменяется действием на корпус только одной силы /?п.
Третье уравнение, определяющее характер перемещения машины вдоль оси х, находится как уравнение связи удлинения ветвей с динамическими силами. Будем считать при этом процессы в короткой и длинной ветвях независимыми друг от друга, что вполне допустимо для качественного анализа. При точных расчетах необходимо учитывать взаимное влияние сил натяжения в ветвях.
Удлинение наклонной ветви Д/н при отклонении корпуса вверх возможно в результате уменьшения скручивания упругих элементов (в основном валов) трансмиссии и соответствующего поворота ведущего колеса Д/Вк, упругой деформации ветви Д/у и перемещения машины на х0.
Таким образом, суммарное приращение длины наклонной ветви
Д/н = ДZB. к (н. к) “Т" Д^у хо- (7 /)
Изменение длины ветви может быть найдено при известных перемещениях корпуса г0 и <р0
Д/н = zt \рфо> (78)
где лг — коэффициент пропорциональности между вертикальным перемещением корпуса и удлинением наклонной ветви.
Для большинства машин можно считать коэффициент л2 равным синусу угла у наклона ветви. Значения коэффициента понятны из рис. 45. Это — расстояния от центра тяжести до линий, являющихся продолжениями наклонных ветвей обвода.
Упругое приращение ветви пропорционально динамическому натяжению и определяется выражением
где I — длина соответствующей ветви.
86
Вследствие разных длин рабочей и свободной ветвей и различных значений динамических натяжений упругие деформации ветвей будут неодинаковыми. Деформация короткой ветви
д/ = /?..*. т
У Д. в. к»
деформация длинной ветви
А/
о (л Ун. к)
Д. н. к>
0^ Д
где £ZBt-— сумма длин всех верхних ветвей обвода.
Приращение длины наклонной ветви за счет дополнительного поворота ведущего колеса зависит от инерционного сопротивления двигателя и трансмиссии вместе с бортовой передачей иТведу-щим колесом, так как приращение Д/В.к сопровождается поворотом ведущего колеса на угол <рв>к:
= Фв.К^В. к» где гв.к — радиус ведущего колеса.
Угол поворота ведущего колеса <рв к связан с инерционным сопротивлением зависимостью
*^ТрФв. К’
Это сопротивление ведущего колеса обусловливает появление динамического натяжения 7\. Следовательно, можно записать
М. <^трФв. к 27'дГВф кт|тр,
откуда
<Р
В. К —
2Т дГв. К^Тр JTp
(79)
Продольное перемещение машины при колебаниях корпуса также связано с натяжением Тд, которое в данном случае является движущей силой, сообщающей машине ускорение х0. Поэтому можно выразить силу Тд и через параметры поступательного движения машины по оси х
°гв. к
где бп — коэффициент вращающихся масс прицепа, учитывающий приращение кинетической энергии прицепа в его поступательном движении от вращающихся масс; а — коэффициент буксования машины.
Выражение в скобках представляет собой приведенную массу тягача и прицепа при поступательном движении с учетом инерции вращающихся масс прицепа (учитывается коэффициентом 6П) и
87
тягача (учитывается моментом инерции гусеничного движителя Л.д), а также буксования машины (учитывается коэффициентом о).
Чтобы получить уравнение, связывающее динамическое натя-
жение Тд с перемещением х0 и углом поворота ведущего колеса <рЕ к> необходимо дважды продифференцировать выражение (77) и подставить в него значения <рв. к и х0. В итоге получается уравнение связи колебаний корпуса с нагрузками в гусеничных цепях
^Птр^В. к
тр
(80)
-- ^2^0 — \рФо-
Это уравнение является общим, оно справедливо для любой фазы колебания. Однако конкретно в определенной стадии колебательного процесса значения ТДлВ.к и н соответствующие увеличению или уменьшению координат г0 и <р0, вызывают положительное или отрицательное перемещение х0 корпуса. В связи с этим знак перед вторым членом правой части конечного уравнения (80) дважды изменяется за цикл колебания.
Общая картина колебательного процесса корпуса будет описываться системой из трех взаимосвязанных уравнений (75), (76) и (80). Решить эти уравнения аналитическим путем невозможно вследствие сложности, поэтому при их анализе часто прибегают к различным упрощениям. В частности, полагают, что вертикальные колебания и продольные угловые колебания не связаны друг с другом и могут рассматриваться изолированно. Иногда пренебрегают влиянием гусеничных цепей.
Наиболее полным и точным является решение полученной системы уравнений на ЭВМ. В настоящее время методика анализа колебаний транспортных средств при движении по случайному микропрофилю с использованием как аналоговых, так и цифровых электронных вычислительных машин достаточно хорошо отработана. Поэтому аналитические методы (как правило, упрощенные) применяют в основном для поверочной оценки качества подрессоривания, а параметры подвески вновь разрабатываемых машин выбирают с применением ЭВМ, которые позволяют проводить многовариантный анализ.
Плавность хода образцов машин оценивают путем специальных испытаний в различных характерных дорожных условиях. В процессе этих испытаний записывают перегрузки (вертикальные ускорения) в разных точках машины (как основной показатель плавности хода) и некоторые другие показатели (продольно-угловые колебания, число пробоев на километр пути, деформацию упругих элементов подвески).
Однако этот метод, хотя и позволяет получить довольно полную информацию о качестве системы подрессоривания в данных условиях, имеет недостатки. Степень достоверности оценки плав
ности хода зависит не только от объема экспериментальной информации, но и от сопоставимости результатов испытаний, проведенных в различное время, в разных дорожных условиях, которые не остаются постоянными. А в настоящее время пока еще неЛотра-ботаны методы сопоставимости характеристик случайного микропрофиля. Поэтому результаты испытаний на разных участках, как правило, не могут сравниваться.
Чтобы обеспечить стабильность и сопоставимость результатов испытаний, в последние годы широко практикуется метод сравнения показателей плавности хода различных машин при их испытаниях на эталонных дорожных участках. В качестве таких эталонов принимают единичные неровности, гармонический (синусоидальный) профиль и стабильный случайный профиль (булыжную до-рогу).
Записывая параметры плавности хода на этих эталонных участках при движении машины с разными скоростями (обычно с интервалами в 5—10 км/ч), получают стабильные данные, позволяющие оценивать совершенство систем подрессоривания различных машин.
Глава II
КОНСТРУКЦИИ БЫСТРОХОДНЫХ
ГУСЕНИЧНЫХ ТЯГАЧЕЙ И ТРАНСПОРТЕРОВ
Попытки создать вездеходные, в том числе и гусеничные, средства относятся практически к моменту начала распространения колесных транспортных средств, когда появились достаточно надежные и отработанные конструкции двигателей и трансмиссий. Сущность этих попыток заключалась главным образом в приспособлении к колесным машинам (мотоциклам, автомобилям) движителя, обеспечивающего более высокую проходимость их по снегу, грунту с низкой несущей способностью, размокшим и обледенелым дорогам. В качестве движителей использовались гусеничные, винтовые, колесные (с более развитыми шинами), как правило, в сочетании с управляемыми колесами или лыжами. Для увеличения проходимости по снегу уже первого отечественного автомобиля АМО-Ф-15 предпринимались попытки установить на задние колеса специальные барабаны с развитыми грунтозацепами, а к передним колесам прикрепить лыжи [7].
Вместо задних колес на ряде машин устанавливали гусеничный движитель типа движителя А. Кегресса с ленточными гусеницами. В этом случае автомобиль по конструктивному исполнению становился фактически полугусеничной машиной. Данное направление получило достаточно широкое развитие в 30—40-х годах. Отечественные заводы даже выпускали мелкими партиями полугусеничные автомобили, созданные на базе автомобилей ГАЗ-АА и ЗИС-5. Этот принцип повышения проходимости автомобилей получил распространение и в ‘зарубежной практике.
Безусловно, что применение гусеничного движителя несколько повышало тягово-сцепные качества автомобиля за счет снижения давления на грунт и увеличения сцепления гусениц с грунтом, однако эффективность таких машин в конечном счете была невысокой по следующим причинам.
Во-первых, такое конструктивное решение было половинчатым. Передние колеса автомобиля работали в тех же условиях, что и без установки гусеничного движителя, т. е. по-прежнему значительно деформировали грунт, создавая высокое сопротивление движению. При этом на грунтах с низкой несущей способностью из-за большой колеи полугусеничные автомобили теряли 90
управляемость. То же самое происходило на разбитых дорогах |рри движении по колее.
» Во-вторых, гусеничный движитель приспосабливался к уже ротовой конструкции автомобиля и его потенциальные возможности Цак механизма, обеспечивающего высокую проходимость, не могли !быть полностью реализованы, тем более, что он являлся лишь .частью всего движителя полугусеничной машины.
| В-третьих, надежность работы гусеничного обвода в таких фашинах была низкой как вследствие несовершенства конструкции из-за недостаточного конструкторского опыта в этой области, так и вследствие принципиальных ограничений, накладываемых на конструкцию движителя именно необходимостью приспосабливать его к автомобилю.
В результате в середине 40-х годов работы в данном направлении были прекращены и началось создание чисто гусеничных
№шин, специально предназначенных для эксплуатации в тяжелых
Дорожных условиях. Разработка гусеничных транспортных маслин на базе тракторов также оказалась недостаточно эффективной, ввиду того что обеспечить высокую скорость движения в этом
'случае практически невозможно. Все это и создало предпосылки Н тому, что гусеничные транспортные машины стали развиваться как самостоятельный вид техники с применением специфических ^конструктивных решений, направленных на удовлетворение основного качества, предъявляемого к ним, — высокой подвижности
на местности при выполнении транспортно-тяговых работ.
1 В развитии гусеничных транспортных машин наблюдалось несколько этапов. Вначале были созданы гусеничные тягачи легкой
весовой категории, предназначавшиеся для буксировки прицепов ‘массой 5—8 т. Эти тягачи разрабатывались как специальные быстроходные средства буксировки различных прицепных систем *И по эксплуатационным качествам и эффективности использования
значительно превосходили как полугусеничные автомобили, так и тракторы-тягачи. Опыт их создания и использования показал, что данное направление является наиболее рациональным.
С учетом положительного опыта эксплуатации первых гусеничных тягачей был создан ряд быстроходных гусеничных тягачей различной весовой категории, способных выполнять транспортнотяговые работы широкого диапазона. Эти машины разрабатыва
лись в основном как средство механической тяги по грунтовым Дорогам и бездорожью, поэтому имели большой сцепной вес и
относительно высокое давление на грунт.
Параллельно были разработаны и получили достаточно широкое использование гусеничные транспортеры-снегоболотоходы, Предназначенные главным образом для работы на Севере и Северо-Востоке страны, в условиях болот и снежной целины. В отличие от гусеничных тягачей основной функцией гусеничных транс-Портеров-снегоболотоходов было обеспечение транспортных перевозок. Они имели небольшую массу и низкое давление на грунт.
91
Стремление к универсализации транспортно-тяговых машин, к обеспечению более широкого диапазона их использования привело в последние годы к созданию быстроходных гусеничных транспортеров-тягачей, которые являются транспортно-тяговым средством широкого назначения и по условиям использования, и по виду выполняемых работ.
Дальше будут рассмотрены некоторые конструктивные и эксплуатационные особенности гусеничных машин применительно к изложенной последовательности их создания, что, на наш взгляд, представляет интерес с точки зрения более полной оценки конструктивного совершенства и эксплуатационных возможностей современных быстроходных гусеничных транспортных машин.
1. ПЕРВЫЕ ГУСЕНИЧНЫЕ ТЯГАЧИ
Первыми гусеничными транспортными машинами были тягачи Я-12, Я-13Ф и М-2, которые создавались специально как тяговые средства высокой проходимости, способные буксировать колесные, лыжные или гусеничные прицепы с повышенными скоростями в тяжелых дорожных условиях. Компоновка и конструктивное исполнение машин в целом, а также узлов и агрегатов были подчинены этой целевой задаче. Все три тягача по основным конструктивным решениям были однотипными; тягачи Я-12 и Я-13Ф различались только двигателями и некоторыми изменениями в трансмиссии.
Общая компоновка первых гусеничных тягачей напоминала больше автомобильную (рис. 46), чем тракторную. Так же как в автомобилях, все агрегаты тягачей смонтированы на раме 6, двигатель 2 расположен в передней части рамы. Крутящий момент от двигателя через главный фрикцион 3, коробку передач 4, карданный вал 5 подводится к главной передаче 9, расположенной в задней части рамы. Если принять во внимание конструкцию и
Рис. 46. Компоновка гусеничного тягача М-2
расположение кабины 12 и грузовой платформы 10, то сходство с классической автомобильной компоновкой становится очевидным.
Главная же передача и все последующие агрегаты, обеспечивающие передачу силы тяги, принципиально отличны от автомобильных. Здесь прежде всего следует указать на гусеничный движитель, конструкция которого рассчитана на работу в тяжелых дорожных условиях и обеспечивает надежное взаимодействие гусениц 8 со всеми элементами, оформляющими контур обвода: опорными катками 7 и направляющим колесом /. Главная передача тягачей представляет собой обычную пару конических шестерен. Поворот рассматриваемых машин осуществляется за счет торможения одной из гусениц. Для этих целей служат бортовые фрикционы. От главной передачи до ведущего колеса трансформация крутящего момента осуществляется еще одним агрегатом — бортовой передачей.
Трансмиссия тягачей исключительно проста. Однако наличие в качестве механизма поворота бортового фрикциона не вполне рационально из-за значительных потерь мощности при повороте и ухудшения маневренности на повышенных скоростях. Впоследствии эта схема не нашла широкого применения на быстроходных транспортных машинах и сохранилась только на снегоболотоход-ных машинах особо легкой весовой категории, работающих в диапазонах скоростей 40—50 км/ч.
Для выполнения транспортно-тяговых работ тягач имеет тяговосцепное устройство 11.
Создание первых быстроходных гусеничных тягачей явилось большим шагом вперед, так как эксплуатационные качества этих машин, особенно тяговые, были неизмеримо выше, чем у существовавших в то время полугусеничных автомобилей и тракторов.
В табл. 3 приведены основные технические показатели тягачей Я-12, Я13-Ф и М-2, которые дают представление о возможностях этих машин.
Так, максимальная скорость тягачей на хороших дорогах превышала 30 км/ч, а средние скорости на грунтовых дорогах достигали 15 км/ч. Эти скорости для того времени следует считать достаточно высокими.
Возможность буксировки прицепов в тяжелых дорожных условиях обеспечивалась тем, что тягачи имели среднее давление на грунт около 0,5 кгс/см2, а гусеницы шириной 300 мм имели развитый рисунок опорной части трака и позволяли реализовать высокую силу тяги по сцеплению. Достаточно большой дорожный просвет (более 300 мм) и малая высота центра тяжести позволяли уверенно преодолевать различные естественные препятствия (подъем до 30°, косогор 20—25°).
Основным эксплуатационным недостатком тягачей при работе в период весенней и осенней распутиц был повышенный износ гусениц и ведущих колес. Необходимо отметить, что у всех этих тягачей использовалось одинарное ведущее колесо (как это принято
93
3. Техническая характеристика первых отечественных быстроходных гусеничных тягачей
Показатели Я-12 Я-13Ф М-2
Масса снаряженного тягача, т . . Грузоподъемность платформы, т Масса буксируемого прицепа, т . . Габаритные размеры тягача, мм: длина ...........................
ширина ......................
высота (без груза) ..........
Колея, мм.......................
Ширина гусениц, мм...............
Дорожный просвет, мм.............
Среднее давление на грунт, кгс/см2 Тип двигателя....................
Мощность двигателя, л. с.........
Максимальная скорость по дороге с твердым покрытием, км/ч:
на повышающей передаче . . . » прямой передаче ..........
6,5 2,0 8,0 5,7 2,0 5,0 7,2 2,0 6,0
4890 4890 4973
2400 2400 2820
. 2200 2290 2325
2100 2100 2112
300 300 300
305 310 370
0,52 0,47 0,556
Дизель Карбюра- Дизель
торный
ПО 95 ПО
37 35
29 23 27
у тракторов), в связи с чем давления в зоне контакта элементов зацепления были высокими и, следовательно, значительно изнашивались детали движителя.
Опыт разработки и эксплуатации первых быстроходных гусеничных тягачей Я-12, Я-13Ф, М-2 показал, что создание специальных гусеничных средств тягово-транспортного назначения является принципиально правильным техническим направлением, и послужил в дальнейшем основой для более широкого развертывания работ в этой области.
2. БЫСТРОХОДНЫЕ ГУСЕНИЧНЫЕ ТЯГАЧИ
Общая компоновка и основные конструктивные решения, характерные для быстроходных гусеничных тягачей, определились при создании машин трех весовых классов: легкого (АТ-Л), среднего (АТ-С, АТС-59) и тяжелого (АТ-Т). Общие виды тягачей показаны на рис. 47, а—в.
Принципиальным отличием новых тягачей от тягачей первых моделей (Я-12, М-2) является компоновка, заключающаяся в переднем расположении ведущих колес и связанном с этим изменении расположения двигателя и агрегатов трансмиссии. У данных тягачей (за исключением АТ-С) схема компоновки практически одинаковая. В качестве примера на рис. 48 приведена схема компоновки трансмиссии тягача АТ-Л, являющейся типичной для рассматриваемых машин.
Применение гусеничного движителя с передним расположением ведущих колес потребовало отказа от традиционного разме-94
Рис. 47. Гусеничные тягачи:
а - легкий АТ-Л; б - средний АТС-59; в - тяжелый
Рис. 48. Компоновка трансмиссии тягача АТ-Л
щения двигателя носком коленчатого вала вперед. На большинстве гусеничных тягачей двигатель установлен, наоборот, носком коленчатого вала назад. Это расположение характерно также и для транспортеров-тягачей многоцелевого назначения.
Второй принципиальной особенностью тягачей, главным образом их трансмиссии, является наличие единого агрегата, предназначенного для изменения скорости движения и осуществления поворота машины. У тягача АТ-Л это механизм передач и поворота (МПП) 3 (рис. 48), который включает в себя коническую пару шестерен, коробку передач, механизм поворота и располагается непосредственно перед главным фрикционом 2 двигателя /, в передней части машины. Выходные валы МПП передают крутящий момент к бортовым передачам 5 через короткие соединительные валы 4, позволяющие компенсировать несоосность выходных валов МПП и входных валов бортовых передач. На выходных валах бортовых передач установлены ведущие колеса 6.
При такой компоновке МПП получается компактным, занимает мало места. Это позволяет высвободить значительную часть длины машины для размещения более вместительной грузовой платформы, топливных баков, различного вспомогательного оборудования. Одновременно улучшается доступ к основным агрегатам для проведения регулировок и технического обслуживания.
Однако сам механизм передач и поворота безусловно является сложным агрегатом.
У тягачей АТС-59 и АТ-Т для поворота используется планетарный механизм поворота (ПМП).
Третьей отличительной особенностью конструкции гусеничных тягачей является применение гусеничного движителя без поддерживающих катков. Если на тягачах первых моделей применялись движители с поддерживающими катками (при этом опорные катки были относительно малого диаметра), то в последующем на тягачах рассматриваемого типа получили распространение движители без поддерживающих катков с опорными катками большого диаметра. Такая схема гусеничного движителя имеет два существенных преимущества.
Во-первых, динамические нагрузки от верхних ветвей обвода при их колебаниях не передаются на корпус машины, а через опорный каток воспринимаются грунтом. Нагрузки от колебаний ветвей могут достигать нескольких десятков тонн (в зависимости от массы гусеницы и возможности ее перемещения в поперечном направлении), поэтому в схеме с поддерживающими катками приходится делать мощные опорные кронштейны и соответствующие элементы усиления борта машины. В ряде случаев, однако, и это
может оказаться недостаточным.
Увеличение массы ходовой части при использовании опорных катков большого диаметра компенсируется, с одной стороны, ликвидацией вообще поддерживающих роликов, а с другой — более высокой долговечностью ходовой части.
Во-вторых, в схеме без поддерживающих катков при правильно выбранных размерах и параметрах обвода изменение его периметра, т. е. степень ослабления, при перемещениях опорных катков меньше. Следовательно, улучшается стабильность работы гусеничного обвода, что является особенно важным для быстроходных машин. На рис. 49"приведено изменение номинальной длины (периметра) обвода машин, имеющих движитель без поддерживающих катков: с различными углами наклона ветвей (у = 35, 37 и 40°) при вертикальных колебаниях корпуса. Из графика
видно, что при перемещениях корпуса на полный ход подвески изменение общей длины обвода не превышает 20 см, т. е. практически длины шага одного-двух траков. В движителях с поддерживающими катками длина обвода может изменяться в более широком диапазоне, что требует применения различных компенсирующих устройств. В случае использования гусениц с упругими резинометаллическими шарнирами функции компенсации длины обвода выполняют
Рис. 49. Изменение длины обвода при вертикальных перемещениях корпуса машины
97
4 П/р. В. Ф. Платонова
непосредственно гусеницы за счет динамического изменения их шага и, следовательно, статического натяжения.
Недостатками ходовой части без поддерживающих катков по сравнению с ходовой частью, имеющей поддерживающие катки, являются повышенные общая масса1 и неподрессоренная масса, что обусловливает некоторое увеличение динамической нагруженности опорных катков.
Следующим конструктивным отличием новых тягачей от их предшественников является то, что все они оборудованы новым агрегатом — тяговой лебедкой, привод которой осуществляется от трансмиссии через специальную коробку отбора мощности (у тягачей АТ-Л, АТ-Т) или от носка коленчатого вала (у тягача АТС-59). Лебедка предназначена для эвакуации машины в случае застревания в особо тяжелых дорожных условиях, а также для вытаскивания прицепов и других транспортных средств, у которых лебедки отсутствуют.
Наконец, следует указать еще на одну характерную особенность конструкции тягачей, определившуюся в процессе их развития: тягачи вместо рамы имеют несущий корпус. Переход на корпусную конструкцию придал тягачам ряд эксплуатационных достоинств — более благоприятные условия работы агрегатов из-за отсутствия грязи и пыли, большая глубина преодолеваемого брода вследствие герметичности корпуса, лучшие ходовые качества при эксплуатации по глубокому снегу из-за меньшего нагребания снега, более высокая прочность и надежность несущей системы.
Техническая характеристика легкого, среднего и тяжелого гусеничных тягачей приведена в табл. 4.
Следует отметить одну особенность, которая отличает тягачи от транспортных средств других типов: их относительно большую собственную массу по сравнению с массой груза, перевозимого на
4. Техническая характеристика гусеничных тягачей
Показатели
АТ-Л
АТС-59
AT-T
Масса снаряженного тягача, т . .
Грузоподъемность, т .............
Масса буксируемого прицепа, т . . . Габаритные размеры тягача, мм: длина ...........................
ширина ......................
высота.......................
Колея, мм........................
Ширина гусениц, мм...............
Дорожный просвет, мм.............
Среднее давление на грунт, кгс/см2 Мощность двигателя, л. с.........
Максимальная скорость движения, км/ч.............................
6,3 2,0 6,0
5313 2214
2200 1900 300 350 0,45
130
42
13,0 3,0
14,0
6280
2780 2500
2200
460
425 0,52 300
39
20,0
5,0
25,0
6990
3140
2845
2640
500
425 0,68 415
35
платформе, при высоких значениях прицепной нагрузки. Это объ
ясняется тем, что тягачи по своему назначению являются средством механической тяги и должны иметь соответствующий сцепной вес, чтобы получить высокую силу тяги на крюке. Грузоподъем
ность тягача в этом случае имеет подчиненное значение.
В табл. 5 приведены значения удельных показателей некото-
рых тягачей по грузоподъемности и силе тяги: коэффициента грузоподъемности Кг, представляющего собой отношение массы
перевозимого груза к массе снаряженного тягача, и коэффициента
прицепной нагрузки Кп, представляющего собой отношение веса прицепа к полному весу машины. Эти значения показывают, что конструкция гусеничных тягачей отвечает главной функции — обеспечению надежной буксировки прицепов в различных дорожных условиях при сравнительно невысокой нагрузке на платформе тягача. Если у полноприводных автомобилей при сопоставимых массах и удельных мощностях коэффициент прицепной
нагрузки, несмотря на достаточно высокие тягово-сцепные качества, составляет в среднем 0,4—0,5, то у гусеничных тягачей он
равен 0,8—1,0, т. е. вдвое выше, коэффициенты же грузоподъем-
ности у них в 1,5—2 раза меньше.
Наряду с тем, что гусеничные тягачи созданы как машины, способные буксировать прицепы большой массы, они достаточно быстроходны. По сравнению с гусеничными тягачами первых моделей (Я-13Ф, М-2) у тягачей АТ-Л, АТС-59 и АТ-Т максимальная скорость движения в 1,5—2 раза больше. Для обеспечения возможности движения с такими скоростями по разбитым грунтовым дорогам или бездорожью необходимо было решить многие сложные вопросы конструкции силовой установки, трансмиссии, механиз
мов поворота, гусеничного движителя, систем управления.
5. Коэффициенты грузоподъемности и прицепной нагрузки колесных и гусеничных тягачей
Марка тягача
Полная масса тягача, т
Удельная мощность л. с./т
Коэффициент грузоподъемности
Коэффициент прицепной нагрузки
Колесные
ЗИЛ-131.............
«Урал-375Д».........
КрАЗ-255Б..........
10,5
13,2
19,7
14,4
13,7
12,2
0,52
0,54
0,63
0,4
0,38
0,51
Гусеничные
АТ-Л..............
АТС-59............
АТ-Т..............
8,3
16,0
25,0
15,6
18,7
16,6
0,32
0,23
0,25
0,73 0,88
1,0
6. Параметры систем подрессоривания гусеничных тягачей
Параметр •М-2 АТ-Л АТС-59 । АТ-Т *
Статический ход fCT катка, мм . . Динамический ход fa катка, мм . . Полный ход fa катка, мм Коэффициент динамичности fa/fCT 38 137 175 4,6 67 177 244 3,64 83 181 264 3,17 110 127 237 2,15
Большую сложность представляли выбор рациональных параметров и отработка конструкции системы подрессоривания, так как для условий движения по разбитым грунтовым дорогам или местности ограничивающим фактором является плавность хода. Как известно, плавность хода транспортных средств, имеющих упругую систему подрессоривания, в значительной степени опре-деляется ходами катков. У новых тягачей статический ход катков достаточно значительный (табл. 6), в 1,7—2 раза больше, чем у их прототипов. Это позволяет иметь достаточно высокие средние скорости движения по неровным дорогам и местности при относительно низких вертикальных ускорениях подрессоренной массы.
В народном хозяйстве наибольшее распространение получили гусеничные тягачи АТ-Л и АТС-59, поэтому остановимся более подробно на особенностях их конструкции и эксплуатационных свойствах.
Тягач АТ-Л имеет общую компоновку с расположением кабины за двигателем. В качестве силовой установки на этом тягаче используется двухтактный четырехцилиндровый двигатель Я АЗ-204К мощностью 130 л. с. Ярославского моторного завода.
Поскольку на транспортных гусеничных машинах применяются двигатели, широко используемые на машинах других типов (автомобили, тракторы и т. п.), то здесь не будем рассматривать особенности конструкции или эксплуатационные качества двигателей, а основное внимание уделим вопросам конструкции и эксплуатации гусеничных машин. В дальнейшем ограничимся лишь ссылками на тип двигателя или его модель и при необходимости дадим описание систем, обеспечивающих его работу в условиях специфической компоновки.
Кинематическая схема трансмиссии тягача АТ-Л представлена на рис. 50. Важнейшим агрегатом трансмиссии является механизм передач и поворота (МПП), предназначенный для передачи крутящего момента от двигателя к ведущим колесам, изменения скорости движения и силы тяги путем переключения передач, поворота тягача, кратковременного увеличения тягового усилия на ведущих колесах без переключения передач, передачи мощности от двигателя к лебедке.
МПП состоит из конической пары шестерен, коробки передач, планетарно-фрикционных механизмов поворота и механизма реверса лебедки, выполненных конструктивно в одном агрегате.
Непосредственно от двигателя мощность отбирается только для привода компрессора 3 и вентилятора 14 системы охлаждения.
Управление коробкой передач и планетарно-фрикционными механизмами поворота осуществляется раздельно, самостоятельными приводами. Изменение силы тяги на ведущих колесах и скорости движения достигается переключением передач или включением замедленных передач. Поворот машины осуществляется за счет полного затормаживания одной из гусениц остановочным тормозом 6 или уменьшения ее скорости движения включением с отстающей стороны замедленной передачи.
Рассмотрим, как передается крутящий момент на ведущие колеса через МПП при различных режимах работы. Мощность от Двигателя 1 при прямолинейном движении передается через главный фрикцион 2 и конические шестерни к планетарным редукторам механизмов поворота двумя потоками.
101
Один поток мощности идет от передаточного вала 4, связанного с ведомой конической шестерней, через пару шестерен включенной передачи и главный вал 8 к эпициклическим шестерням суммирующих планетарных рядов 7. Другой поток мощности идет от передаточного (разветвляющего) вала 4 через включенные блокировочные фрикционы 5 к солнечным шестерням суммирующих планетарных рядов 7. Оба потока мощности суммируются на водилах и далее через планетарные бортовые передачи 10 передаются к ведущим колесам 11.
t При нейтральном положении подвижных муфт механизмов переключения передач, выключенных тормозах 12 механизма поворота и включенных фрикционах 5 тягач не будет двигаться.
Вращение от двигателя в этом случае передается только по одному потоку — от передаточного вала 4 через включенные фрикционы 5 на солнечные шестерни обоих суммирующих планетарных рядов 7. Солнечные шестерни вращают сателлиты на осях водил, которые остаются неподвижными вследствие того, что их вращению препятствуют моменты сопротивления на ведущих колесах. Сателлиты увлекают эпициклические шестерни суммирующих рядов и заставляют вращаться связанный с ними главный вал 8 в направлении, противоположном направлению вращения при движении машины передним ходом. В этом случае через него не передается ни крутящий момент от двигателя, ни реактивный момент от тормозов 12 механизма поворота, он вращается вхолостую.
Если при нейтральном положении подвижных муфт в коробке передач выключить один из блокировочных фрикционов 5 и включить тормоз 12 ведомого барабана этого же фрикциона, то тягач будет поворачиваться на месте. Мощность от двигателя при таком положении передается на солнечную шестерню того суммирующего планетарного редуктора, который не связан с выключенным фрикционом и его заторможенным ведомым барабаном. Солнечная шестерня другого планетарного редуктора заторможена, будучи связанной с заторможенным ведомым барабаном фрикциона.
Тягач будет поворачиваться в ту сторону, где выключен фрикцион и заторможен ведомый барабан фрикциона. Радиус поворота тягача в этом случае будет неопределенным в зависимости от соотношения моментов сопротивления на ведущих колесах. Он может изменяться от R = В/2 до R = В в любую сторону от центра тягача.
При равных моментах сопротивления на ведущих колесах (одинаковом сопротивлении движению гусениц) тягач будет поворачиваться вокруг геометрического центра (R = BI2). В этом случае вращающаяся солнечная шестерня через сателлиты заставляет вращаться водило и связанное с ним ведущее колесо в направлении своего вращения. Эпициклическая же шестерня вместе с главным валом 8 вращается в обратную сторону. Через второй суммирующий планетарный ряд это вращение передается на другое ведущее колесо. В результате ведущие колеса вращаются в раз-102
/Ai/ir
ные стороны, т. е. одна гусеница движется вперед, а другая назад.
При большем моменте сопротивления на ведущем колесе, связанном с планетарным рядом, солнечная шестерня которого приводится во вращение от двигателя, тягач будет поворачиваться назад вокруг геометрического центра гусеничной цепи, со стороны которой действует больший момент сопротивления движению (вокруг незаторможенной гусеницы). В этом случае вращающаяся солнечная шестерня через сателлиты при неподвижном водиле заставляет вращаться эпициклическую шестерню с главным валом и через второй планетарный ряд другое ведущее колесо в сторону, противоположную направлению своего вращения.
При большем моменте сопротивления вращению на ведущем колесе, со стороны которого заторможен ведомый барабан фрикциона, тягач будет поворачиваться вперед, но уже вокруг геометрического центра другой (заторможенной) гусеничной цепи, с тем же радиусом поворота (R == В). В этом случае вращающаяся солнечная шестерня через сателлиты при неподвижной эпициклической шестерне, связанной через главный вал и второй планетарный редуктор с неподвижным ведущим колесом, заставляет вращаться водило и ведущее колесо в направлении своего вращения.
При прямолинейном движении, когда блокировочные фрикционы 5 включены, а тормоза механизмов поворота 12 и остановочные 6 отпущены, в зависимости от положения подвижных муфт может быть включена одна из пяти передач для движения вперед (передачи нормального ряда) или передача заднего хода.
При включении передачи I мощность к ведущим колесам передается только одним потоком — через включенные фрикционы 5 и солнечные шестерни суммирующих планетарных рядов 7. Эпициклические шестерни при этом не вращаются, так как подвижная зубчатая муфта включения передачи I блокирует главный вал 8 с картером МПП. Таким образом, на передаче I МПП работает как однопоточный механизм, передающий мощность от двигателя к суммирующим рядам только через передаточный вал 4.
На передаче II и последующих мощность от двигателя к планетарным рядам, как уже упоминалось, передается двумя потоками: через включенную пару шестерен соответствующей передачи и главный вал 8 к эпициклическим шестерням и через фрикционы 5 к солнечным шестерням. В суммирующих планетарных рядах 7 потоки мощности складываются. В результате водила начинают вращаться с определенной скоростью, передают крутящий момент к бортовым передачам и далее к ведущим колесам.
При включении передачи заднего хода мощность от передаточного вала 4 передается также двумя потоками. Различие заключается только в том, что первый поток мощности (к эпициклическим шестерням) передается через три шестерни вместо двух при включении передач переднего хода. Вследствие этого главный вал 8 и эпициклические шестерни вращаются в обратном направлении.
103
Солнечные шестерни вращаются в том же направлении, что и при движении вперед, но так как частота вращения эпициклических шестерен превышает частоту вращения солнечных (в результате соответствующего подбора передаточного числа), то водила вра-щаются в обратном направлении и обеспечивают тягачу задний ход.
При прямолинейном движении, когда блокировочные фрикционы 5 выключены, а тормоза 12 механизмов поворота включены, т. е. солнечные шестерни остановлены, могут быть включены передачи замедленного ряда. Передача мощности вторым потоком (через передаточный вал 4) при этом прекращается. Мощность передается одним потоком — через шестерни включенной передачи на эпициклические шестерни суммирующих планетарных рядов. В этом случае водила находятся под действием только эпициклических шестерен и частота вращения их снижается.
Вследствие того, что частота вращения солнечных шестерен при включенных фрикционах всегда одинаковая независимо от порядка включенной передачи, при их остановке снижается частота вращения водил на каждой передаче (исключая передачу I) на одинаковую величину. Соответственно на одну и ту же величину снижается скорость движения. Так как на передаче I главный вал останавливается (блокируется с картером), то при выключенных фрикционах механизмов поворота передача мощности на бортовые передачи прекращается и тягач останавливается. Таким образом, получается только четыре замедленные передачи (II-V).
В случае преодоления подъемов и спусков на передаче I запрещается устанавливать рычаги управления в первое положение, так как это может привести к скатыванию тягача в момент выключения фрикционов механизмов поворота при не полностью включенных тормозах механизма поворота.
При,включении замеденной передачи только в одном из планетарных механизмов поворота тягач будет поворачиваться по радиусу, соответствующему расчетному радиусу поворота на данной передаче, в сторону включенной замедленной передачи. Радиус поворота тягача увеличивается с повышением включаемой передачи, так как при этом скорости движения отстающей и забегающей гусеничных цепей увеличиваются, а разница в их скоростях движения, как указывалось выше, остается неизменной. Поэтому каждой передаче будет соответствовать свой расчетный радиус поворота (см. табл. 7).
При выключенном фрикционе 5 механизма поворота одного из бортов, выключенном его тормозе и включенном остановочном тормозе тягач поворачивается на любой передаче прямого хода вокруг заторможенной гусеничной цепи по радиусу, равному колее. В этом случае водило неподвижно, оно остановлено остановочным тормозом. Эпициклическая шестерня, вращая сателлиты вокруг неподвижных осей, приводит во вращение солнечную шестерню в обратном направлении. Солнечная шестерня вращается 104
вхолостую. Вся мощность передается двумя потоками только к одной гусенице — через суммирующий планетарный ряд, связанный с выключенным остановочным тормозом.
При движении задним ходом (включении передачи заднего хода в коробке передач) в случае разблокирования обоих фрикционов 5 и включении тормозов 12 механизмов поворота скорость тягача возрастает. Это происходит по следующей причине: если при движении задним ходом с включенными фрикционами в планетарных механизмах поворота частота вращения водил определяется разностью частот вращения эпициклической и солнечной шестерен, вращающихся в разные стороны, то на замедленной передаче при включении тормозов механизмов поворота водила находятся только под воздействием эпициклической шестерни. В результате частота вращения ведущих колес и скорость движения тягача увеличиваются.
Если на заднем ходу включить один из тормозов механизма поворота, то ведущее колесо со стороны включенного тормоза получит ускоренное вращение. Поворот тягача при движении задним ходом в отличие от поворота при движении передним ходом будет происходить в сторону, противоположную включенному тормозу механизма поворота.
Радиус поворота тягача, как это видно из схемы на рис. 35, а, R = Bv2/{v2 — t/x).
Следовательно, расчетный радиус поворота на каждой передаче при использовании механизма поворота будет
Ri = В[ = -=•-—г,
где vu — расчетная переносная скорость отстающей гусеницы на соответствующей (t-й) передаче или скорость движения отстающего борта машины; v2i — скорость забегающей гусеницы на той же передаче.
Скорости гусениц обратно пропорциональны передаточным отношениям ii {2> от двигателя к водилам суммирующих планетарных рядов, так как передаточные отношения от водил до ведущих колес (передаточные отношения в бортовых передачах) на обоих бортах одинаковые.
Поэтому
Для нахождения передаточных чисел от двигателя к водилам каждого борта необходимо воспользоваться уравнением кинематики для каждого планетарного ряда. В общем виде это уравнение для г-й передачи запишем так:
СО — (0<4 (1 - - k) -j- CO/fe = О,
105
где со — угловая скорость солнечной шестерни; сош — угловая скорость водила; k — характеристика планетарного ряда, равная отношению угловых скоростей солнечной и эпициклической шестерен при заторможенном водиле; coj- — угловая скорость эпициклической шестерни.
При включении разных передач значения угловых скоростей водил и эпициклических шестерен будут различными, а скоростей солнечных шестерен, как это видно из схемы МПП, — постоянными. Предполагается, что частота вращения двигателя сохраняется неизменной.
Угловые скорости, входящие в уравнение кинематики, могут быть выражены через угловую скорость двигателя содв, передаточное отношение конической пары in, передаточное отношение коробки передач (от передаточного вала до эпициклической шестерни), передаточное отношение привода от передаточного вала к солнечной шестерне суммирующего ряда ic и передаточное отношение МПП на Лй передаче при прямолинейном движении 1мпп i • При этом на всех передачах передаточное отношение L постоянно. Тогда со = солв/(гп£с); со(1/- = с^Лмппс; = содв//пгк-.
Подставляя значения со и о 2 в уравнение кинематики планетарного ряда, получаем
• С0ДВ *П*С*К£ О
‘МПП i - — - kic + iKl •
При повороте с расчетным радиусом, когда включен один из тормозов механизма поворота, передаточное отношение от двигателя к водилу отстающего борта находим из уравнения кинематики при со — 0, так как солнечная шестерня отстающего борта заторможена:
Передаточное отношение от двигателя к водилу забегающего борта есть не что иное, как передаточное отношение МПП на данной передаче при прямолинейном движении:
• иДв ________ ;
•<и — 1мпп I
<О02/
Подставляя значение передаточных отношений iu и i2i мулу для определения расчетного радиуса, получаем
в фор-
В =
Так как передаточное отношение ic постоянно на всех передачах, а передаточное отношение iKl с увеличением порядка передачи уменьшается, следовательно, расчетный радиус поворота 106
7. Радиусы поворота, передаточные числа коробки передач и скорости тягача АТ-Л
Передача Расчетный радиус поворота, м Передаточное число при передачах Расчетная скорость, км/ч при передачах
нормального ряда замедленного ряда нормального ряда замедленного ряда
I 1,9 7,86 4,51
II 4,75 3,15 5,258 11,26 6,75
III 8,1 1,845 2,412 19,21 14,7
IV 11,76 1,27 1,515 27,91 23,4
V 17,66 0,846 0,948 41,92 37,4
Заднего хода 4,2 6,56 3,58 5,42 9,93
увеличивается с повышением порядка включенной передачи, т. е. чем больше скорость движения машины, тем больше расчетный радиус поворота. При этом расчетный радиус поворота, как это видно из последнего выражения, не зависит от частоты вращения двигателя.
Вследствие возможности передачи мощности через МПП двумя потоками и осуществления движения не только при выключенных тормозах механизмов поворота, но (кратковременно) и при включенных, коробка передач имеет два ряда передач при прямолинейном движении — нормальный и замедленный (табл. 7).
При заднем ходе тягача, как это следует из кинематической схемы, передаточное число замедленного ряда меньше, чем нормального. В соответствии с этим расчетные скорости движения будут отличаться на всех передачах на одну и ту же величину 4,51 км/ч, соответствующую скорости движения на передаче I (см. табл. 7).
Поворот тягача или замедление его движения производится через специальный привод управления планетарно-фрикционным механизмом поворота и остановочными тормозами. Кроме того, имеется ножной привод, который действует только на остановочные тормоза.
При работе планетарно-фрикционного механизма поворота и тормозов рычаги управления могут занимать одно из трех определенных положений: при движении на передачах нормального ряда — исходное положение, при движении на замедленных передачах — первое положение, при выключенном планетарно-фрикционном механизме поворота и включенных остановочных тормозах —- второе положение.
Если оба рычага управления находятся в исходном положении, то тягач будет двигаться прямолинейно.
Если оба рычага управления установлены в первое положение, то тягач будет двигаться прямолинейно и замедленно на передачах II—V, а на передаче заднего хода — прямолинейно и уско-
107
ренно. На передаче I движение прекратится, так как кинематическая цепь будет разомкнута.
Если один из рычагов управления находится в исходном положении, а другой в первом, то тягач будет плавно поворачиваться на передачах I—V с расчетным радиусом поворота R^ На передаче заднего хода тягач будет поворачиваться назад с увеличенной скоростью.
Если оба рычага управления установить во второе положение,
то тягач резко остановится.
Если один из рычагов управления находится в исходном положении, а другой во втором, то при включении передач тягач буде! поворачиваться вокруг заторможенной гусеничной цепи.
В процессе эксплуатации зазоры в элементах привода управления механизмов поворота изменяются. Изменение зазоров может привести к нарушению синхронности срабатывания фрикциона и тормоза механизма поворота, т. е. к нарушению его нормальной работы. Поэтому периодически проверяют и регулируют: зазоры между накладками тормозных лент и тормозными барабанами механизма поворота;
зазоры между роликами рычагов тормозов механизма поворота
и кулаками мостиков управления;
свободный ход элементов механизма выключения фрикциона;
правильную установку рычагов управления в исходном положении (на расстоянии 50—60 мм от щитка приборов).
Регулируют также зазоры между лентой и барабаном оста-
новочного тормоза и между элементами привода к тормозу от ножной педали управления.
Бортовая передача 10 (см. рис. 50) тягача АТ-Л представляет собой одноступенчатый соосный планетарный механизм с заторможенной эпициклической шестерней. Передаточное число бортовой передачи равно 5,5.
Ходовая часть тягача АТ-Л выполнена по типичной схеме,
получившей распространение на транспортных гусеничных машинах: гусеничный движитель с передним расположением ведущего колеса, без поддерживающих катков, имеет в задней часта направляющее колесо с механизмом натяжения, обеспечивающим поддержание на заданном уровне статического натяжения в обводе. Опорные катки большого диаметра с наружной резиновой амортизацией (с наружным резиновым бандажом), гусеница мелко-звенчатая с открытым металлическим шарниром, подвеска торсион
ная.
Параметры подвески обеспечивают достаточную плавность хода тягача. Так, статический ход подвески составляет 67 мм, а динамический 177 мм, т. е. по этим параметрам подвеска тягача приближается к автомобильной.
Для выполнения эвакуационных работ тягач оборудован лебедкой, расположенной в его средней части под полом кузова. Выдача троса лебедки производится назад.
б)
Рис. 51. Зависимость сопротивления качению тягача АТ-Л от скорости при движении по бетону:
а — новые гусеницы; б — гусеницы после 50% пробега; в — изношенные гусеницы; Z — гусеницы с открытыми металлическими шарнирами; 2 — гусеницы с закрытыми шарнирами и пластмассовыми парами трения; 3 — гусеницы с закрытыми шарнирами и металлическими парами трения
Лебедка состоит из червячного редуктора, тягового барабана с тросом и механизма выключения барабана. Червячная пара редуктора самотормозящаяся, передаточное число ее равно 60. Привод лебедки 19 осуществляется от большого венца солнечной ше-
стерни левого суммирующего планетарного ряда 7, через механизм 13 включения и реверса, карданные валы 15 и 17, промежуточный редуктор 16 и предохранительную муфту 18.
В приводе лебедки установлена предохранительная муфта,
^Ограничивающая предельную силу тяги на тросе в диапазоне 4,5— 6,5 тс (меньшее значение при полностью намотанном барабане).
При работе лебедки зубчатые подвижные муфты МПП находятся в нейтральном положении, гусеничный движитель тягача блокируется путем соединения траков опорной ветви обвода £ тягово-сцепным устройством посредством буксирного троса 1см. гл. VI).
Для обеспечения работы тягача с прицепами он оборудован Пневматической системой, которая по составу элементов ничем Практически не отличается от соответствующих систем автомобилей.
а Практика эксплуатации тягача АТ-Л показала, что он имеет Хорошую проходимость, ходовые и динамические качества, хотя fero удельная мощность составляет всего 15,6 л. с./т, а при эксплуатации с прицепом 9,1 л. с./т. Это достигнуто в основном за £чет применения мелкозвенчатых гусениц с малым диаметром соединительных пальцев (20 мм).
, Коэффициент сопротивления качению по бетону у тягача на Малых скоростях равен 0,03—0,04 в зависимости от состояния шарниров (их изнашивания), а на высоких скоростях 0,07—0,08. На ₽ис. 51 показаны зависимости сопротивления качению тягача по ретону от скорости при установке гусениц как с открытыми металлическими шарнирами, так и с закрытыми. Из графиков видно,
1 68
169
8. Динамические качества тягача АТ-Л
Показатель
Время разгона до максимальной скорости (42 км/ч), с ..............
Путь разгона до максимальной скорости (42 км/ч), м ..............
Путь свободного выбега от максимальной скорости (42 км/ч) до полной остановки, м ................
Тип гусеницы
с открытыми металлическими шарнирами с закрытыми шарнирами и металлическими парами трения с закрытыми шарнирами и пластмассовыми парами трения
29,5 28,5 28,2
208 211 208
177 186 261
что характер изменения сопротивления качению тягача такой же, как и для колесных машин, только по абсолютной величине эти
сопротивления (и соответственно коэффициенты сопротивления
качению) несколько выше и с повышением скорости возрастают более интенсивно.
Вследствие невысоких значений сопротивления качению разгонные характеристики тягачей хорошие. Время разгона тягача до максимальной скорости составляет всего около 30 с (табл. 8), а путь разгона — около 200 м, что следует признать вполне удо
влетворительным.
Поскольку потери мощности в гусеничном движителе тягача сравнительно невелики, экономичность его также может считаться приемлемой. На рис. 52, а и б приведена экономическая характеристика тягача при движении по бетону и задерненному грунту, т. е. в наиболее легких и тяжелых дорожных условиях.
Удельный расход топлива у гусеничного тягача в эксплуатационном режиме несколько выше, чем у колесных полноприводных автомобилей, тем не менее при сравнении по удельным показателям, отнесенным к полной массе машины, можно видеть, что
гусеничные тягачи потенциально могут конкурировать с колесными полноприводными автомобилями, на которых установлены карбюраторные двигатели, и по экономичности.
Марка машины.............................. АТ-Л
без при- с прицепа цепом
Средняя скорость движения по размок-
шей грунтовой дороге, км/ч........ 25 22
Удельный расход топлива, л на 100 км,
отнесенный к полной массе в тоннах 12 7,4
«У р а л-375Д» без при- с прицепа цепом
29,4 26,2
9,33 7,75
В процессе создания быстроходных транспортеров-тягачей это положение в значительной степени подтвердилось.
110
a) 5)
Рис. Б2. Экономическая характеристика тягача АТ-Л:
а — при движении по бетону; б — при движении по задериенному грунту; /—V — передачи; 1 — гусеницы с открытыми металлическими шарнирами; 2 — гусеницы с закрытыми Шарнирами и металлическими парами трения; 3 — гусеницы с закрытыми шарнирами и пластмассовыми парами трения
Сцепные качества тягача АТ-Л достаточно высокие: коэффициент сцепления на бетоне составляет 0,6—0,65, а на задерненном грунте достигает 0,7.
Необходимо заметить, что в отличие от колесных гусеничные машины развивают наибольшую силу тяги, т. е. имеют наибольший коэффициент сцепления гусениц с грунтом, не на бетоне, а на .плотных грунтах с повышенным сопротивлением сдвигу. На беконных дорогах сцепление гусениц осуществляется в основном за .счет трения скольжения металла по полотну дороги, в то время !Как при работе на деформируемых грунтах в реализации силы ?гяги по сцеплению участвуют не только силы трения опорной Части траков по поверхности грунта, но и силы сопротивления Сдвигу и срезу участков грунта, находящихся между грунтозацепами гусеницы.
Чтобы судить о тяговых возможностях тягача, необходимо знать его предельную силу тяги, обусловленную двигателем. В табл. 9 приведены значения максимальной силы тяги на крюке при движении тягача по хорошей дороге (fT=0,04) для двух режимов: максимальной мощности двигателя и максимального крутящего момента.
ill
9. Сила тяги по двигателю на крюке тягача, кгс
Режим работы
Максимальной мощности:
с грузом в кузове 2т..
без груза ..............
Максимального крутящего момента:
с грузом в кузове 2 т
без груза...............
Передача
1 п П1 IV V заднего хода
5993 2141 1042 550 172 4928
6073 2221 1122 630 252 5008 ।
7028 2593 1320 758 334 5798
7108 2673 1400 838 414 5878
Из таблицы видно, что тяговые возможности тягача по двигателю вполне достаточны для буксировки прицепов массой 6 т в различных дорожных условиях, а на первой передаче они даже используются не полностью, так как при <ртах = 0,8 для тягача с грузом (полная масса 8300 кг) предельная сила тяги по сцеплению составляет 6640 кгс, а без груза (полная масса 6300 кг) 5040 кгс.
Тягач АТС-59 в отличие от тягача АТ-Л имеет переднее расположение кабины (кабина расположена впереди силовой установки). Вследствие того, что двигатель размещен в центральной части, грузовая платформа тягача сделана ступенчатой. Такая компоновка позволила уменьшить габаритную высоту тягача, понизить его центр тяжести.
Расположение двигателя в центральной части обусловило особенности некоторых конструктивных решений по сравнению с тягачом АТ-Л. Прежде всего применена эжекционная система охлаждения (у тягача АТ-Л — обычная система образования потоков воздуха вентилятором для обдува радиатора и двигателя). Привод лебедки осуществлен с носка коленчатого вала, что несколько упростило как сам привод, так и трансмиссию.
Кинематическая схема трансмиссии тягача АТС-59 приведена на рис. 53. Пятиступенчатая коробка передач 8 тягача смонтирована в общем картере с двухступенчатым планетарным механизмом поворота 3 и главной передачей 4. Конструктивное исполнение этих механизмов иное, чем у тягача АТ-Л. Если у тягача АТ-Л фрикционы и тормоза механизма поворота сухие, то у тягача АТС-59 они помещены внутрь картера планетарного механизма поворота (ПМП) и работают в масле. Кроме этого, система управления поворотом имеет гидравлический привод.
Однако главное различие заключается в том, что здесь в качестве механизма поворота применен двухступенчатый планетарный редуктор, и мощность от двигателя через карданную передачу 10, главный фрикцион 9, коробку передач 8 и механизм поворота 3 передается к бортовым передачам 2 и ведущим колесам / 112
Рис. 53. Кинематическая схема трансмиссии тягача АТС-59
не двойным, а одинарным потоком. Поворот тягача производится за счет затормаживания одного из двух барабанов ПМП.
ПМП может находиться в трех положениях в соответствии с положением рычага управления: в исходном (прямолинейное движение), в первом (поворот с частично заторможенной гусеницей) и во втором (поворот с полностью заторможенной гусеницей)
В исходном положении фрикцион 7 включен, а оба тормоза (5 и 6) выключены. В этом случае, как видно из схемы, частота вращения ведомого вала главной передачи равна частоте вращения ведущего вала бортовой передачи, поскольку солнечная шестерня сблокирована фрикционом 7 с водилом и весь планетарный механизм вращается как одно целое.
В первом положении рычага управления поворотом фрикцион 7 выключен, а солнечная шестерня остановлена тормозом 6. В этом случае частота вращения ведущего вала бортовой передачи равна частоте вращения ведомого вала главной передачи. При таком положении осуществляется поворот машины с расчетным радиусом, соответствующим разности скоростей забегающей и отстающей гусениц и значительно большим, чем колея машины.
Во втором положении рычага управления выключен фрикцион 7 и’включен (затянут) остановочный тормоз 5. В этом случае частота вращения водила равна нулю, гусеница полностью -заторможена и поворот происходит с радиусом, равным колее машины (R = В).
Так как ведомый вал главной передачи вращается, а водило остановлено, то солнечная шестерня при этом режиме вращается в обратную сторону.
Определим расчетный радиус поворота тягача АТС-59 при включении одного из тормозов 6 планетарного механизма поворота. В этом случае на отстающем борту фрикцион выключен, тормоз 6 полностью включен, а на забегающем борту ПМП заблокирован фрикционом.
Так как эпициклические шестерни левого и правого ПМП жестко соединены с главным валом коробки передач, то
С002 = 0)2 = <L>2 =
где <о02, «2 и о)2 — угловые скорости соответственно водила, эпициклической и солнечной шестерен ПМП забегающего борта; о)! — угловая скорость эпициклической шестерни ПМП отстающего борта.
Согласно кинематической схеме (рис. 53) отношение скоростей отстающей и забегающей гусениц равно отношению соответствующих угловых скоростей водил
У] _____ Q)qi _____ Q)qi
и2 ~~ 0)02 ~ 0)'1 ’
где о)оъ — угловая скорость водила ПМП отстающего борта.
Отношение cooi/coi может быть найдено из уравнения кинематики планетарного ряда. Для отстающего борта оно имеет вид
0)j — CDoi (1 Ц- k) -J- 0)i& =x О,
где о»! — угловая скорость солнечной шестерни ПМП отстающего борта; k — характеристика планетарного ряда.
Так как при включенном тормозе 6 солнечная шестерня остановлена, т. е. cox = 0, то из уравнения кинематики имеем
<00! = k _ со* 1 + & v2
Подставляя это значение в формулу R = •} , по-
лучаем R = (1 Ц- k) В.
Поскольку отношение угловых скоростей эпициклической ше-есть передаточное число ПМП г0> через
й)7соО1 расчетный радиус можно выразить и
стерни и водила (£>01 1
т. е. —~ , то
передаточное число
о
Таким образом, механизм поворота, используемый на тягаче АТС-59, позволяет получить расчетный радиус поворота (больший В), одинаковый на всех передачах и скоростях движения.
Поворот с радиусами большими или меньшими расчетного может осуществляться при выключенном фрикционе 7 соответственно за счет подтормаживания тормозом 6 или тормозом 5. В этих случаях ПМП работает по принципу бортового фрикциона.
В процессе движения могут быть осуществлены еще следующие режимы:
рычаги левого и правого ПМП установлены в первое положение. Тягач при этом будет двигаться с меньшей, чем для случая, соответствующего исходному положению рычагов, скоростью;
рычаг одного ПМП установлен в первое положение, а рычаг другого — во второе. В этом случае тягач будет поворачиваться вокруг одной из гусениц, однако средняя скорость поворота будет меньше, чем в случае, рассмотренном раньше, когда только один рычаг находился в первом положении.
Принцип управления ПМП тягача АТС-59 такой же, как у тягача АТ-Л. Отличие заключается в конструктивном исполнении деталей привода, а также в том, что привод фрикциона гидравлический, а ножного тормоза — пневматический. Использование гидро- и пневмоприводов здесь обусловлено существенно большим весом тягача и необходимостью создавать в приводе значительные усилия.
Бортовая передача представляет собой одноступенчатый соосный планетарный редуктор с заторможенной эпициклической шестерней. Передаточное число бортовой передачи 5,54.
Коробка передач обычного типа, обеспечивает получение пяти передач вперед и одной назад. Наличие ПМП, как и у тягача АТ-Л, позволяет иметь при переднем ходе пять передач нормального ряда и пять передач замедленного ряда.
При заднем ходе могут быть получены две скорости, но, в отличие от тягача АТ-Л, в случае установки рычагов управления в первое положение тягач АТС-59 будет двигаться с меньшей скоростью, чем в случае исходного положения рычагов.
Повороты при заднем ходе тягача АТС-59 происходят в ту сторону, на которую воздействуют рычаги управления (тормоза 5 и 6).
Ходовая часть тягача АТС-59 идентична ходовой части тягача АТ-Л: гусеничный движитель с передним расположением ведущего колеса, без поддерживающих катков, опорные катки большого диаметра, в задней части направляющее колесо с механизмом натяжения, подвеска торсионная. Так же как и у тягача АТ-Л, гусеничный движитель имеет пять опорных катков, однако ввиду того, что вес тягача АТС-59 вдвое больше, опорные катки двойные.
Гусеничная цепь тягача мелкозвенчатая, с открытым металлическим шарниром. В отличие от тягача АТ-Л, где палец шарнира Плавающий, здесь палец закреплен прямоугольной головкой, которая входит в паз на наружной проушине трака. По этой причине правая и левая гусеницы различаются расположением головок пальцев, которые всегда устанавливаются с внешней стороны для
115
своевременного обнаружения выхода пальца из проушины в процессе эксплуатации машины.
Тип зацепления — толкающий, что обеспечивает большую долговечность элементов зацепления.
Плавность хода тягача АТС-59 высокая. Это достигается относительно большим ходом подвески и установкой на крайних (передних и задних) катках гидравлических амортизаторов.
Тягач АТС-59 оборудован мощной лебедкой, имеющей тяговое усилие 15 тс и длину троса 100 м. Конструктивно лебедка отличается от лебедки тягача АТ-Л, имеет довольно сложное устройство и включает в себя механизм реверса 3, планетарный редуктор 6, барабан 4, автоматический тормоз 3, тросоукладчик 5, тяговые ролики 7, муфту включения 1, предохранительную муфту 2. масляный насос и привод управления лебедкой (рис. 54).
Муфта включения лебедки однодисковая, сухого сцепления. Основной режим работы муфты — при постоянно разомкнутых дисках.
Предохранительная муфта служит для автоматического отключения лебедки при силе тяги больше допустимой, т. е. для предотвращения разрушения деталей лебедки и ее привода. Она выполнена в виде двух полумуфт, имеющих сферические углубления по окружности, в которых помещены стальные шарики. Полумуфты сжимаются пружиной с усилием, рассчитанным таким образом, что шарики проскакивают, т. е. лебедка останавливается, когда крутящий момент на полумуфте достигает 28 кгс-м (или усилие на тросе достигает 15 тс).
нс-
Механизм реверса обычного типа, в виде двух конических деестерен, свободно скользящих по валу и блокируемых с ним зубчатой муфтой. Механизм реверса имеет нейтральное положение.
Автоматический тормоз предназначен для автоматической остановки выдачи троса (перемещения груза) при разъединении кинематической связи двигателя с редуктором, может использоваться также для подтормаживания груза при его спуске на уклоне. Тормоз работает по принципу блокировки фрикционных дисков при 'отсутствии крутящего момента с входной стороны.
Планетарная передача редуктора служит для увеличения крутящего момента, подводимого к барабану лебедки и тяговым роликам. Общее передаточное число редуктора вместе с конической и цилиндрической парами шестерен равно 119,98.
Сила тяги на тросе лебедки создается тяговыми роликами. На тяговых роликах имеются клиновидные канавки, при перекатывании троса по которым за счет сил трения и создается сила тяги. Равномерная укладка троса на барабан лебедки обеспечи
вается тросоукладчиком.
При работе с лебедкой для предотвращения скатывания тягача назад необходимо расчалить его гусеничные цепи (сблокировать йх с корпусом). Для этой цели тягачу придаются специальные цепи с захватами для гусениц и буксирных крюков.
Тягач АТС-59 — высокодинамичная машина. Несмотря на то, что максимальная скорость ее составляет 40 км/ч, средние скорости движения тягача по разбитым дорогам и местности значительные. Это объясняется тем, что тягач имеет высокую удельную Мощность (более 18 л. с./т.) и хорошую систему подрессоривания.
По сравнению с другими гусеничными тягачами тягач АТС-59 имеет более высокие показатели плавности хода.
Коэффициент сопротивления качению тягача по недеформируе-
юму грунту (бетонной дороге) весьма мал при установке гусениц юбых типов
Тип гусеницы.................. С открытыми
.• шарнирами
К
С закрытыми шарнирами
Коэффициент сопротивления качению при v ~ 3 км/ч:
на бетоне ................
» сухом песке.............
0,024—0,025 0,069—0,07
С резино-металлическими шарнирами
0,025—0,0255 0,03—0,031
0,063—0,065 0,062—0,063
При значительно большей массе по сравнению с тягачом АТ-Л абсолютные значения сопротивления качению тягача АТС-59 йочти сопоставимы с сопротивлениями качению тягача АТ-Л, Поэтому удельный показатель — коэффициент сопротивления калению — у него несколько меньше.
I На деформируемых грунтах коэффициенты сопротивления калению у всех тягачей в несколько раз больше, чем на бетоне.
117
Вследствие малого сопротивления качению и достаточно высокой удельной мощности разгон тягача до максимальной скорости происходит за короткий отрезок времени.
Сцепные качества тягача примерно такие же, как и у тягача АТ-Л. Экспериментальные значения коэффициента сцепления, определенные для трех типов гусениц, следующие.
Тип гусеницы...................
С открытыми шарнирами
С закрытыми шарнирами
Коэффициент
сцепления
значение):
(среднее
С резинометаллическими шарнирами
на бетоне
0,47
» задерненном лугу . . .
0,72
0,46 0,51
0,70 0,66
На снегу и обледенелых дорогах сцепные качества тягача ниже, чем на мягком грунте или бетонной дороге, но вполне достаточные для уверенной буксировки прицепа и маневрирования. В качестве примера, подтверждающего это, в табл. 10 приведены данные по тягово-сцепным качествам тягача АТС-59 на снежной целине с глубиной снега 250—500 мм и обледенелой дороге.
Следует отметить, что коэффициент сцепления гусениц на обледенелой дороге относительно высок, если принять во внимание, что в этих условиях сила бокового сдвига тягача (скольжение в поперечном направлении) составляет всего 650 кгс, а коэффициент бокового скольжения 0,042. Это является результатом того, что на опорной поверхности траков гусеничной цепи тягача имеются поперечные грунтозацепы, давление под которыми при перекатывании катков по беговой дорожке составляет 80— 100 кгс/см2, обеспечивая вдавливание их в ледяной слой и хорошее зацепление гусеницы с дорогой.
Хорошие сцепные качества тягача АТС-59 в различных дорожных условиях и наличие лебедки со значительной силой тяги позволяют использовать его как высокоэффективное средство эвакуации застрявших машин.
Высокие технико-эксплуатационные качества тягача АТС-59, простота использования и надежность работы способствуют тому, что этот тягач с успехом применяется в народном хозяйстве.
10. Тягово-сцепные качества тягача АТС-59
Показатель
Снежная целина
Обледенелая дорога
Усилие на крюке Ркр, кгс....................
Сопротивление качению Pf, кгс ..............
Сила тяги Ркр -t- Рfy кгс ..................
Коэффициент сцепления.......................
Коэффициент сопротивления качению...........
3100
2500 5600 0,36 0,16
2800
900 3700 0,24 0,058
3. ГУСЕНИЧНЫЕ
ТРАНСПОРТЕРЫ-СНЕГОБОЛОТОХОДЫ
Гусеничные транспортеры-снегоболотоходы создавались параллельно гусеничным тягачам и предназначались для выполнения главным образом транспортных работ в условиях глубоких снегов и заболоченной местности. При проведении работ, связанных с освоением природных ресурсов в труднопроходимых районах страны, получили широкое распространение снегоболотоходы двух весовых классов: среднего (ГТ-С, ГТ-CM) и тяжелого (ГТ-Т). j Транспортеры-снегоболотоходы предназначены в основном для ^транспортировки людей и грузов. Буксировка прицепов для них Является второстепенной задачей. В этом принципиальное отлитие транспортеров-снегоболотоходов от гусеничных тягачей. Исходя из назначения и определилась их конструкция. Так, необходимость перевозки людей обусловила выполнение более высоких требований по плавности хода, а необходимость перевозки груза — высвобождение значительных объемов машин под его размещение. В то же время эксплуатация в заболоченной местности диктовала потребность обеспечения хорошей проходимости и плавучести машины, т. е. снижения массы и применения корпусной конструкции. Все эти противоречивые требования необходимо было рационально сочетать в конструкции.
В результате по ряду принципиальных конструктивных решений гусеничные транспортеры-снегоболотоходы отличаются от гусеничных тягачей. Прежде всего они имеют емкий герметичный корпус, водоизмещение которого достаточно для обеспечения плавучести. Для снижения высоты центра тяжести и улучшения остойчивости на воде грузовая платформа (скамейки для людей) располагается непосредственно на днище корпуса в задней части машин, а все агрегаты силового привода размещаются в передней части. Движение на плаву осуществляется за счет гусениц.
В целях обеспечения хорошей проходимости по снегу и грунтам с невысокой несущей способностью конструкция транспортеров-снегоболотоходов максимально облегчена, а опорная поверхность гусениц по возможности развита. Среднее давление под гусеницами у них при полной нагрузке составляет 0,17—0,24 кгс/сма. Такое давление позволяет транспортерам-снегоболотоходам уверенно преодолевать глубокую снежную целину при малом погружении в снег, т. е. с небольшими сопротивлениями качению.
Общие виды отечественных транспортеров-снегоболотоходов показаны на рис. 55, а—в, а их техническая характеристика приведена в табл. 11.
Транспортеры ГТ-С и ГТ-CM являются машинами одного класса, имеют одинаковую грузоподъемность и примерно равные Тяговые качества на уплотняемых грунтах, но у транспортера гт-см более низкие значения давления под гусеницами (0,17 кгс/см2 против 0,2 кгс/см2 у ГТ-С) и, следовательно, более
119
11. Техническая характеристика транспортеров-снегоболотоходов
Показатели
гт-см
I i
1
Масса снаряженного транспортера, т Грузоподъемность, т . . ........
Масса буксируемого прицепа, т
Число мест: в кабине . . . на платформе (в кузове)
Габаритные размеры машины, мм: длина ... ..................
ширина высота ...................
Колея, мм .....
База, мм............................
Дорожный просвет, мм ...............
Среднее давление на грунт, кгс/см2 Мощность двигателя, л. с............
Максимальная скорость движения, км/ч
3,65 1,0
2,0
2
9
4900 2435 1960 2050 3350
400 0,2 70 35
3,75 1,0 2,0
2
10
5365 2585 1740
2180 3630 380 0,17
115
50
8,2 2,0
4,0
4 21
6340 3140 2160 2600 3914 450 0,24 200
45,5
высокая проходимость по рыхлому снегу и болоту. Снижение давления достигнуто удлинением базы машины. У транспортера ГТ-СМ установлено шесть опорных катков вместо пяти у ГТ-С. Эти транспортеры различаются также компоновкой агрегатов трансмиссии. Если у транспортера ГТ-С двигатель установлен по автомобильному принципу — носком коленчатого вала вперед и для подвода мощности от двигателя к главной передаче, расположенной в передней части машины у левого борта, потребовалась установка за коробкой передач дополнительного редуктора (гитары) и длинного карданного вала, то у транспортера ГТ-СМ установка двигателя выполнена по принятой для всех быстроходных транспортных гусеничных машин схеме — носком коленчатого вала назад (коробкой передач вперед). В этом случае агрегаты трансмиссии размещаются более компактно, поскольку крутящий момент от раздаточной коробки через короткий карданный вал непосредственно передается на главную передачу, установленную посередине передней части корпуса.
Учитывая, что агрегаты транспортеров ГТ-С и ГТ-СМ во многом унифицированы, рассмотрим особенности конструкции и эксплуатационные качества только транспортера-снегоболотохода ГТ-СМ.
Несущей системой транспортера ГТ-СМ является цельнометаллический сварной герметичный корпус, который включает в себя кабину, моторное отделение и платформу. Кабина расположена в передней части корпуса, моторное отделение — в средней и грУ' зовая платформа — в задней части. Жесткость и необходимую прочность корпусу придает основание, выполненное в виде свар' ной коробки с открытым верхом. Основание служит для монтажа всех агрегатов трансмиссии и подвески.
Рис. 55. Гусеничные транспортеры-снегоболотоходы: а — ГТ-С; б ~ ГТ-СМ: в — ГТ-Т
Рис. 56. Кинематическая схема главной передачи и бортовых фрикционов транс» портера ГТ-СМ
Двигатель и коробка передач транспортера унифицированы с двигателем и коробкой передач автомобиля ГАЗ-66. В трансмиссии транспортера неавтомобильными агрегатами являются по существу только главная передача с бортовыми фрикционами и тормозами и бортовые редукторы (бортовые передачи).
Главная передача с бортовыми фрикционами и тормозами выполнена в виде единого агрегата (рис. 56). Данный агрегат предназначен для увеличения крутящего момента (передаточное число конической пары шестерен 1 и 2 главной передачи равно 1,9), передачи крутящего момента на ведомые валы 6, расположенные перпендикулярно оси машины, поворота и торможения машины.
Для поворота применены бортовые фрикционы. В данном случае это оправдано тем, что транспортер прост по конструкции, имеет малый вес и небольшую мощность, вследствие чего тепловая нагруженность тормозов невелика, и такой механизм поворота . является в целом надежным. Маневренность машины, как показывает опыт эксплуатации, вполне достаточная.
Передача крутящего момента к бортовым передачам и поворот транспортера осуществляются следующим образом: в нормальном положении при выключенных тормозах 5 фрикционные диски ведущего 3 и ведомого 4 барабанов сжаты пружинами, поэтому крутящий момент через замкнутые бортовые фрикционы, соединительные муфты 7 и ведомые валы 6 передается к обеим бортовым передачам и затем к ведущим колесам. Когда включается один из тормозов (например, правый), то одновременно при помощи механизма выключения фрикциона освобождаются нажимные пружины и ведомый барабан фрикциона разъединяется с ведущим. Таким образом, правый ведомый барабан и правая полуось останавливаются, а весь крутящий момент передается только через левый бортовой фрикцион к левому борту машины. Пр1 повороте в другую сторону картина обратная. В связи с этим конструкция каждого из бортовых фрикционов рассчитана на пере дачу всего крутящего момента двигателя.
Тормоза 5 ленточного типа (стальная лента с внутренней фрикционной накладкой), двойные. Каждый барабан охватывается .двумя лентами, имеющими одну неподвижную точку крепления ;и одну подвижную, к которой прикладывается тормозное усилие. Наличие двух лент обеспечивает одинаковую эффективность торможения при переднем и заднем ходе, а также надежное удержание транспортера как на подъемах, так и на спусках.
Одной из особенностей рассмотренного механизма, имеющей практическое значение в эксплуатации, является необходимость обеспечения точного соответствия по времени срабатывания механизма отключения бортового фрикциона и тормоза, т. е. постоянное соотношение зазоров между фрикционными дисками в разобщенном состоянии, с одной стороны, и зазоров между ленточным тормозом и ведомым (тормозным) барабаном — с другой.
Если эти зазоры не будут выдержаны в необходимых пределах, то может быть или неполное разобщение фрикционных дисков при полностью заторможенном барабане (следовательно, их интенсивное изнашивание), или неполное торможение барабана. Поэтому очень важно в процессе эксплуатации своевременно проверять регулировку привода управления механизмом поворота и поддерживать зазоры в пределах, устанавливаемых инструкцией по эксплуатации транспортера.
Бортовая передача транспортера ГТ-CM представляет собой пару цилиндрических шестерен, заключенных в корпус. Это так Называемая простая однорядная несоосная бортовая передача. На ведомый вал бортовой передачи устанавливают ведущее колесо, от которого осуществляется привод спидометра. Следует отметить, что у многих гусеничных машин привод спидометра осуществляется именно от бортовой передачи, а не от коробки передач, как у автомобилей. Это объясняется тем, что при наличии механизмов поворота гусеничного типа фактическая скорость движения машины на повороте является полусуммой скоростей двух гусениц и, как правило, меньше скорости прямолинейного движения, т. е. меньше скорости, определяемой по частоте вращения любого из агрегатов, установленных до механизма поворота.
Транспортеры-снегоболотоходы ГТ-С и ГТ-CM являются одними из немногих машин, в которых применен гусеничный движитель без специального направляющего колеса. Его функции выполняет задний опорный каток, который имеет возможность перемещаться вдоль базы машины для обеспечения натяжения гусеничной цепи. Гусеницы транспортеров с открытыми металлическими шарнирами. Учитывая, что транспортеры используются прежде всего как снегоходы, т. е. в условиях, когда шарниры работают практически в безабразивной среде и изнашивание их незначительное, такое решение можно полагать вполне оправданным. С учетом наиболее вероятных условий эксплуатации выполнены и траки гусениц: они легкие, тонкостенные с сильно развитыми грунтозацепами, обеспечивающими хорошие сцепные качества движителя со снегом.
В гусеничном движителе имеется специальное устройство для очистки беговой дорожки гусеницы от снега и льда, представляю-щее собой звездочку, устанавливаемую на специальном кронштейне и прижимаемую пружиной к беговой дорожке гусеницы.
Надежная работа гусеничного движителя обеспечивается при оптимальном значении предварительного (статического) натяжения в обводе. Опытным путем установлено, что такое натяжение создается, когда между гусеницей и первым опорным катком имеется просвет, равный 15—20 мм. В процессе эксплуатации и изнашивания шарниров гусеницы ее длина увеличивается, а просвет уменьшается. При движении с ослабленными гусеницами создается опасность разрушения катков (от чрезмерных колебаний и ударов ветвей), сбрасывания гусениц, особенно при поворотах машины, поэтому по мере изнашивания пальцев и проушин траков гусеницу периодически натягивают механизмом натяжения (отведением заднего опорного катка). Если хода механизма натяжения недостаточно, то из гусеницы удаляют трак, и натяжение снова восстанавливается.
Отличительной особенностью опорных катков этих транспортеров является наличие пластмассовых дисков (наружного и внутреннего) и прессовая (с натягом 4 мм) посадка безбандажной резиновой шины на обод. Такое конструктивное решение способствует снижению веса опорного катка и обеспечивает возможность замены изношенной шины в условиях ремонтных мастерских.
Подвеска транспортера торсионная с гидравлическими телескопическими амортизаторами на крайних (передних и задних) катках. Для обеспечения равнопрочное™ подвески торсионы крайних катков имеют увеличенный диаметр по сравнению с торсио-нами внутренних катков (соответственно 31 и 27 мм). Торсионы предварительно заневоливаются, т. е. выдерживаются определенное время в закрученном состоянии. Подвеска транспортера позволяет получить достаточно удовлетворительную плавность хода. Параметры системы подрессоривания транспортера ГТ-CM следующие.
Полная масса транспортера (с грузом, водителем и пасса-
жиром), кг............................................ 4950
Подрессоренная масса, кг................................ 3920
Статический ход (средний), мм............................71,5
Динамический ход (средний), мм.........................123,5
Жесткость подвески (средняя), кге/мм.....................7.2
Частота колебаний, с"1: продольных угловых.................................. 7,8
вертикальных ......................................11,7
Период колебаний, с: продольных угловых...................................0,8
вертикальных ........................................0,54
Особенностью протекания динамических колебательных про цессов при движении транспортера по различным неровностям пути является отсутствие ярко выраженной резонансной зоны 124
- X z *
рис. 57. Максимальные ускорения в носовой части транспортера ГТ-СМ:
/ — при преодолении единичной неровности. L = 2,5 м, h = 170 мм; 2 — при движении по гармоническому профилю д = 8 м, h — 150 мм; 3 — то же» L ~ 2 м, h = 70 мм
в эксплуатационном диапазоне скоростей. Практически перегрузки, действующие на подрессоренный корпус, с повышением скорости возрастают монотонно, с той или иной интенсивностью
в определенных интервалах скоростей. На рис. 57 показаны кривые значений максимальных ускорений в носовой части транс
портера при преодолении единичной неровности и при движении по гармоническому профилю. Из графика видно, что наибольшие перегрузки (0,3—0,35 g) возникают при преодолении транспортером единичных неровностей. При движении по гармоническому профилю уровень нагрузки меньше; перегрузки в носовой части в наиболее вероятном эксплуатационном диапазоне скоростей составляют около 0,1 g.
Достаточно хорошая плавность хода в сочетании с маневрен-
ностью и проходимостью обеспечивает получение относительно высоких скоростей движения. Так, средние скорости движения транспортера по укатанным грунтовым дорогам составляют 28—30 км/ч, по проселочным дорогам в летний и зимний периоды 20—22 км/ч, ро снежной целине, бездорожью, болотам 10—14 км/ч.
г Представление о тягово-сцепных качествах транспортеров ГТ-СМ и ГТ-С дают сведения, приведенные в табл. 12, которые Еоказывают, что на твердых и уплотненных грунтах транспортеры огут реализовать значительную тягу. Коэффициент сопротивле-ия качению у них в этих условиях невысокий.
| Одним из важнейших эксплуатационных качеств транспортеров ГТ-С и ГТ-СМ наряду с хорошей проходимостью по снегу Lболотистой местности является способность преодолевать вод-ге преграды вброд и на плаву. Заболоченные участки глубиной
12. Тягово-сцепные качества транспортеров ГТ-С и ГТ-СМ
Показатель Бетонное шоссе ГТ-СМ Сухой задер-иелый грунт Влажный задерне-лый грунт
ГТ-СМ ГТ-С ГТ-СМ ГТ-С
Максимальная сила тяги, кгс Сопротивление качению, кгс Коэффициент сцепления Коэффициент сопротивления качению .... 2160 240 0,5 0,05 4450 450 1.0 0,092 3360 550 0,81 0,093 3300 150 0,71 0,03 3000 200 0,66 0,041
не более 1,2 м транспортеры преодолевают вброд. При глубине более 1,2 м они всплывают и могут двигаться на плаву. При этом торсионы подвески раскручиваются и обвод опускается несколько ниже обычного положения.
Движение на плаву, как уже указывалось, происходит за счет перематывания гусениц, которые создают общую силу тяги (так называемая сила тяги на швартовах) около 250 кгс. Поворот транспортера осуществляется притормаживанием одной из гусениц. Радиус поворота (циркуляции) значительный (30—35 м). Чтобы повысить маневренность и скорость движения на плаву, в передней части гусеничного обвода (с каждой стороны) устанав-
ливают гидродинамические кожухи, которые несколько изменяют направление потока воды, захватываемого верхней ветвью обвода.
Гидродинамические кожухи устанавливают непосредственно перед преодолением водной преграды. Для удаления воды, попадающей в
корпус, имеется водяной насос с электроприводом от бортовой сети.
Следует указать, что транспортеры ГТ-С и ГТ-СМ так же, как другие транспортеры, способные преодолевать водные^пре
грады на плаву, не являются специальными плавающими машинами, предназначенными для частой эксплуатации или выполнения каких-либо работ на воде. Они лишь приспособлены к эпизодическому, вызванному особой необходимостью, преодолению водных препятствий небольшой протяженности со спокойной водой (без волнения и заметного течения). Главной целью при создании машин такого типа является придание им хорошей проходимости по болотам и исключение неожиданного застревания или затопления машины при попадании на участки с большей глубиной, чем это допускается по условиям преодоления брода. Данное качество призвано обеспечить безопасность работы водителя и транспортировки людей. Это следует помнить, и при организации транспортных процессов не применять транспортеры •
в качестве плавающих и переправочных средств.
При эксплуатации по снегу и болоту транспортеры ГТ-С и особенно ГТ-СМ показывают достаточно хорошую маневренность, скоростные качества и экономичность, При этом в результате использования серийных автомобильных агрегатов обеспечивается простота обслуживания машин и их высокая надежность.
Из данных, иллюстрирующих маневренность транспортеров-снегоболотоходов ГТ-С, ГТ-СМ и ГТ-Т в одинаковых условиях — на снежной целине глубиной 0,8—0,9 м, видно, что даже при буксировке прицепов транспортеры не теряют проходимости и маневренности в таких тяжелых дорожных условиях:
Марка машины................... ГТ-С ГТ-СМ ГТ-Т
Максимальная скорость, км/ч: без прицепа........................ 10,3 16,3 14,5
с прицепом..................... 7,7 15,4 13,0
Максимальный радиус поворота, м: без прицепа......................... 25 15,8 12,7
с прицепом...................... 60 30 36
J3- Нагрузка под опорными катками транспортера^ ГТ-СМ
Показатель
Расстояние от днища корпуса до нижней части опорного катка при установке торсиона, мм . .
Нагрузка под опорным катком, кгс: без груза .....................
с грузом ..................
Номер катка
1 2 3 5 6
435 480 465 440 430 400
1000 760 620 545 500 215
925 815 735 765 705 695
Вследствие достаточно высокой удельной мощности транспортер ГТ-СМ развивает максимальную скорость за короткий промежуток времени: за 29—30 с на участке длиной не более 300 м бетонной дороги.
Необходимо отметить, что у транспортера ГТ-СМ центр тяжести смещен вперед относительно центра опорной поверхности тусениц. Это обусловлено размещением наиболее металлоемких дгрегатов в передней части корпуса. Чтобы обеспечить горизонтальное расположение корпуса, передние торсионы в статическом положении закручены на больший угол, чем задние (табл. 13). Таким образом, эпюра давлений под опорными катками у транспортера в статическом положении не прямоугольная, а трапециевидная (с большим основанием трапеции под передней частью «опорной ветви). Для движения машины без прицепа такое распределение давлений под опорной ветвью следует считать нерациональным, так как при этом максимальные давления больше, :дем при равномерной эпюре давлений (хотя среднее давление и не изменяется), и проходимость машины несколько хуже. ? При эксплуатации транспортера ГТ-СМ с прицепом нагрузки .перераспределяются по длине опорной ветви и эпюра давлений 'Выравнивается, она получается более благоприятной (становится равномерной), чем для случая начальной прямоугольной эпюры, так как если в статическом положении у одиночной машины эпюра нагрузок прямоугольная (давление под катками одинаковое), то в движении с прицепом задние катки получают значительно большую нагрузку, чем передние.
Исходя из этого, принятую для транспортера ГТ-СМ схему размещения опорных катков по базе и соответствующее ей распределение нагрузок по каткам, по-видимому, можно считать близкими к удовлетворительным, учитывая равную вероятность эксплуатации транспортера как с прицепом, так и без него.
Несмотря на простоту конструкции рассмотренных транспортеров, условия в кабине водителя и в кузове вполне удовлетворительные и обеспечивают работоспособность экипажа в течение Длительного пробега.
127
Поскольку транспортер предназначен в основном для эксплуатации в холодных климатических условиях, необходимо, чтобы в кабине и кузове поддерживался нормальный тепловой режим. Это достигается применением двух отдельных систем отопления: для кабины и для кузова.
Система отопления кабины состоит из водяного радиатора, соединенного с системой охлаждения двигателя, и двух электрических вентиляторов, подающих теплый воздух по шлангам к ветровым стеклам и ногам водителя и пассажира. Система отопления кузова включает самостоятельный радиатор, в котором также циркулирует жидкость системы охлаждения двигателя, и автономный электровентил ятор.
Транспортер-снегоболотоход ГТ-Т (см. рис. 55, в) является одной из лучших по проходимости гусеничных машин, именно с ним, как со своего рода эталоном, сравнивают по проходимости другие образцы транспортных гусеничных машин.
Высокая проходимость транспортера обусловлена значительной удельной мощностью (около 20 л. с./т), низким давлением на грунт (0,24 кгс/см2), рациональной схемой гусеничного обвода, хорошими сцепными качествами движителя со снегом и рыхлыми грунтами, большим дорожным просветом (450 мм), способностью преодолевать водные преграды вброд и на плаву. Большое отношение (0,221) опорной поверхности к габаритной площади транспортера в сочетании со значительным дорожным просветом сводит к минимуму «бульдозерный» эффект при движении по глубокому снегу и болоту.
Вследствие хорошей проходимости транспортер-снегоболотоход ГТ-Т получил широкое распространение на Севере и Востоке страны при строительстве нефте- и газопроводов, линий электропередач, освоении природных ресурсов, проведении геологоразведочных изысканий и др.
Общая компоновка транспортера-снегобол ото хода ГТ-Т выполнена по типичной для транспортеров схеме — все агрегаты привода размещены в передней части герметичного корпуса, расположение ведущих колес — переднее, двигатель максимально сдвинут в переднюю часть машины (фактически располагается в кабине), сиденья водителя и трех пассажиров, размещающихся в кабине, находятся по бокам двигателя. В результате такого решения удалось получить достаточно емкую грузовую платформу (грузовой отсек кузова) длиной 3500 мм и шириной 1800 мм. Размеры кузова позволяют перевозить 21 человека или грузы практически при полном использовании грузоподъемности.
Как и у транспортера-снегоболотохода ГТ-CM, полом платформы транспортера ГТ-Т служит днище корпуса. Центр тяжести машины расположен низко. Это обеспечивает хорошую устойчивость при движении по суше и остойчивость на воде. Плавучесть транспортера обеспечена за счет водоизмещения корпуса. В качестве водоходного движителя используются гусеницы.
128
г'
рис. 58. Кинематическая схема трансмиссии транспортера ГТ-Т
Двигатель транспортера — четырехтактный дизель В-6 с непосредственным впрыском топлива и жидкостным охлаждением. £ Трансмиссия транспортера ГТ-Т идентична трансмиссии тягача яТ-Л и представляет собой двухпоточный МПП, совмещающий Ь одном агрегате коническую пару шестерен, пятиступенчатую коробку передач с постоянным зацеплением шестерен, механизмы поворота, состоящие из суммирующих планетарных рядов, блокировочных фрикционов и тормозов, и механизм отбора мощности $для водооткачивающего насоса.
Кинематическая схема трансмиссии показана на рис. 58. При прямолинейном движении крутящий момент от двигателя через главный фрикцион 1 и пару конических шестерен 2 передается к суммирующим планетарным рядам 11 двумя потоками: |рдин — через включенную передачу II—V (кроме передачи /) р главный вал 12 эпициклическим шестерням, другой — через ^передаточный (разветвляющий) вал 5 и включенные блокировочные фрикционы 4 солнечным шестерням. Оба потока суммируются ра водилах планетарных рядов и затем передаются соединительными валами 9 (имеющими зубчатые муфты для компенсации ресоосности соединяемых валов МПП и бортовой передачи) на бортовые передачи 7 и ведущие колеса 6. При включении передачи I мощность передается только одним потоком — через Ьередаточный вал и блокировочные фрикционы солнечным шестерням суммирующих рядов. Эпициклические шестерни в этом Случае, как это видно из схемы, блокируются с картером МПП.
При выключении одного из блокировочных фрикционов 4 М включении тормозного барабана фрикциона на этом борту Тормозом 3 (установка рычага управления в первое положение) Мощность от двигателя к суммирующему планетарному ряду Ьтого борта передается лишь через шестерни соответственно включенной передачи, главный вал 12 и эпициклическую ше-
5 П/р. В. Ф. Платонова 129
стерню. При этом если в коробке включены II, III, IV или V передачи, то частота вращения водила "суммирующего планетар, ного ряда будет меньше, чем при невключенном тормозе, если же включена передача заднего хода, то частота вращения будет больше, чем при невключенном тормозе. В этом случае за счет разности скоростей гусениц происходит поворот машины с расчетным радиусом поворота.
При включенных тормозах 3 и выключенных блокировочных фрикционах 4 на передаче I замедленную скорость (замедленное движение) получить нельзя. На всех других передачах расчетная скорость движения при данных условиях будет меньше скорости движения на передачах нормального ряда на одну и ту же величину (5,07 км/ч), равную расчетной скорости движения на передаче I. Только на передаче заднего хода замедленного ряда скорость будет больше, чем на передаче заднего хода нормального
ряда.
Одновременное включение тормозов блокировочных фрикционов можно использовать лишь для кратковременного повышения силы тяги при преодолении каких-либо эпизодических препятствий.
Когда включен один из остановочных тормозов 8 и разблокирован фрикцион 4 этого борта, происходит поворот транспортера с радиусом, равным ширине машины, в сторону затянутого тормоза. В этом случае рычаг управления механизмом поворота
устанавливается во второе положение.
Расчетные радиусы поворота для транспортера ГТ-Т определяются по тем же формулам, что и для тягача АТ-Л, так как кинематические схемы их МПП идентичны.
Значения расчетных скоростей и радиусов поворота транспортера ГТ-Т приведены в табл. 14.
Поворот транспортера ГТ-Т при нейтральном положении зубчатых муфт в коробке передач и включении одного из тормозов механизма поворота происходит так же, как поворот тягача АТ-Л, т. е. радиус поворота (в интервале от R = = В/2 до R — В) и направление движения зависят от сопротивления под гусеницами.
Управление механизмами поворота транспортера-снегобо-лотохода ГТ-Т в принципе такое же, как у тягача АТ-Л-В процессе эксплуатации для обеспечения синхронного и полного срабатывания механизмов разблокирования фрикционов
14. Расчетные радиусы поворота и скорости транспортера ГТ-Т
Передача
Радиус поворота, м
(колея) 6,65
III
IV
16,9
Заднего хода
Скорость движения км/ч, при передаче
5,07
22,18
17,11
40,43
11,61
I
Рис. 69. Схема^снл, действующих на опорный каток прн его наезде на препятствие
и остановки тормозных барабанов необходимо постоянно поддерживать зазоры в элементах привода в установленных пределах.
От больших венцов солнечных шестерен суммирующих планетарных рядов МПП производится отбор мощности для привода водооткачивающего насоса 10 (с левой стороны) и масляного насоса 13 трансмиссии (с правой стороны).
Бортовая передача транспортера ГТ-Т представляет собой планетарный одноступенчатый соосный редуктор с заторможенной эпициклической шестерней, т. е. она по схеме точно такая же» как у гусеничных тягачей АТ-Л и АТС-59.
Ходовая часть транспортера ГТ-Т имеет своеобразную систему подвески.
, Во-первых, если у большинства транспортных гусеничных машин торсионные валы выполнены на всю ширину корпуса и вследствие этого ходовая часть асимметричная, так как опорные катки левой и правой стороны смещены относительно друг друга по базе на расстояние между осями торсионов, то у транспортера ГТ-Т торсионные валы короткие, расположены соосно у каждой пары опорных катков и ходовая часть симметричная.
Во-вторых, установка балансиров опорных катков выполнена симметрично относительно поперечной оси машины: балансиры трех передних катков машины направлены вперед, а трех задних назад.
Обычно стремятся к тому, чтобы все балансиры были направлены назад, так как это предотвращает встречный жесткий удар Катка о балансир. Когда балансир направлен назад (рис. 59, а), то Наезд на препятствие сопровождается в основном только поджимом катка от перпендикулярной балансиру составляющей Rn реакции грунта 7?г. В первый момент наезда может возникнуть сила встречного удара R6, если линия действия реакции грунта находится перед осью катка. Однако поскольку каток поджимается к корпусу, то сила R6 быстро уменьшается.
Если балансир направлен вперед (рис. 59, б), то при наезде На препятствие всегда будет возникать сила встречного удара R6 большая, чем в предыдущем случае. Тем не менее, если реакция грунта отклонена влево от направления балансира (составляет 5* 131
с ним положительный угол а), то при поджатии катка силон закручивающей торсионы, составляющая R6 уменьшается, и переезд через препятствие не сопровождается чрезмерными перегрузками.
Если направление реакции совпадает с направлением балансира или составляет с ним отрицательный угол а (рис. 59, в),то возникает жесткий встречный удар от силы 7?б, так как сила не поджимает каток к корпусу, а, наоборот, прижимает его к грунту, и переезд препятствия происходит при заблокированной подвеске.
Вероятность встречного удара при направлении балансиров катков вперед будет тем выше, чем меньше угол между направлением балансира и наиболее вероятным направлением реакции грунта. Практически это означает, что чем круче (отвеснее) установлен балансир, тем больше будет его нагруженность.
Для максимально возможного уменьшения вероятности встречного удара балансиры транспортера ГТ-Т установлены под очень небольшим углом к горизонтали. В практике эксплуатации транспортера случаи встречного удара наблюдаются редко.
В остальном ходовая часть транспортера ГТ-Т соответствует сложившейся в последние годы схеме. Гусеничный движитель выполнен с передним расположением ведущих колес, без поддерживающих катков, опорные катки большого диаметра, одинарные, с резиновыми шинами. В задней части гусеничного обвода имеется направляющее колесо с натяжным механизмом.
Гусеничные цепи мелкозвенчатые, траки семипроушинные, с открытым металлическим шарниром. Всего в цепях по 92 трака. В процессе эксплуатации в связи с изнашиванием шарниров допускается удаление траков так, чтобы в каждой цепи их оставалось не менее 86.
rii Как уже отмечалось, одним из наиболее важных качеств транспортера ГТ-Т является высокая проходимость по снегу и болоту и способность преодолевать водные препятствия. Водоемы (болота) глубиной 1,2—1,3 м транспортер преодолевает вброд, при глубине водоема (болота) свыше 1,3 м он всплывает и может двигаться на плаву за счет перематывания гусениц.
Для улучшения маневренности и повышения скорости движения на плаву в передней части машины с каждой стороны над гусеницами устанавливают гидродинамические кожухи, а также волноотражательный щиток, который способствует меньшему заглублению передней части в воду и препятствует захлестыванию водой смотрового стекла.
Водоемы с отлогими берегами транспортер преодолевает достаточно легко и уверенно. При преодолении водоемов с крутыми берегами необходимо помнить, что предельно допустимый угол входа транспортера в воду составляет 20°, поэтому крутизна берега не должна превышать этой величины. При выходе из водоема также целесообразно выбирать участок с пологим бере
гом, так как сцепные качества транспортера в момент выхода из воды значительно ниже, чем в обычном состоянии.
Это объясняется тем, что сцепной вес транспортера в погруженном состоянии меньше (в пределе в момент всплытия он равен нулю), а также тем, что из-за раскручивания торсионов происходит опускание катков, сильное натягивание гусеничного обвода и повышение потерь мощности на его перематывание в воде. При выходе на берег транспортер раньше касается грунта, чем при отсутствии раскручивания торсионов, и испытывает повышенное сопротивление движению на более длинном участке пути. Сцепление же с грунтом при касании вывешенных гусениц практически ничтожно, поэтому сопротивление движению в начальный момент выхода из воды транспортер преодолевает в основном только за счет инерции и силы тяги на воде (силы тяги на швартовах).
Ходовые качества транспортера ГТ-Т при эксплуатации на различных грунтах хорошие. Средние скорости движения его по укатанным грунтовым дорогам составляют 25—30 км/ч, по снежной ровной целине (на болотах, в долинах рек) 10—12 км/ч и по снежной целине на пересеченной местности 6—9 км/ч.
Транспортер обладает высокой проходимостью и маневренностью на снегу при эксплуатации как без прицепа, так и с прицепом. При этом достаточные сцепные качества гусениц позволяют ему уверенно преодолевать препятствия на пересеченной местности, в том числе значительные подъемы. Некоторые данные, характеризующие маневренность и проходимость транспортера на снегу глубиной до 0,5 м, следующие.
Транспортер ГТ-Т..............
Радиус поворота на снегу, м:
сухом сыпучем.............
влажном...................
Преодолеваемый угол подъема на снегу, град:
сухом сыпучем...........
влажном.................
Без прицепа
11—12
9—10
С колесно-лыжным прицепом
18—20
12—13
20—25
25—27
9—12
18—20
Плавность хода транспортера ГТ-Т несколько ниже, чем транспортера ГТ-СМ. Это обусловлено большей жесткостью подвески (из-за коротких торсионов) и отсутствием амортизаторов. Однако данное обстоятельство существенно не отражается на Динамических качествах машины и средних эксплуатационных Скоростях движения в наиболее характерных для этого вида Транспортных средств условиях, т. е. при эксплуатации по снегу и болотам, где средние скорости движения, как правило, невысокие.
4. ГУСЕНИЧНЫЕ ТРАНСПОРТЕРЫ-ТЯГАЧИ
Совершенствование конструкции и улучшение эксплуатационных качеств гусеничных транспортных средств позволило создать Новый тип быстроходной машины общетранспортного назначения — транспортер-тягач.
133
Наиболее характерными машинами этого типа являются транспортеры-тягачи легкой весовой категории (МТ-Л), получившие в последнее время признание как машины, отвечающие всем современным требованиям эксплуатации.
Необходимость создания транспортных средств типа транспортеров-тягачей обусловлена рядом требований. Одним из наиболее существенных является требование широкой универсальности при обеспечении экономической целесообразности производства многоцелевой машины. Это требование содержит в себе определенное противоречие: в нем заложены, казалось бы, несовместимые принципы эксплуатации и экономики производства.
Действительно, с точки зрения эксплуатации желательно иметь машину, которая бы работала в широком диапазоне нагружения и могла выполнять функции как быстроходной транспортной машины, так и тягача. При этом она, естественно, должна удовлетворять требованиям, предъявляемым к тем и другим машинам. А как следует из приведенного краткого обзора конструкций и эксплуатационных свойств тягачей и транспортеров, эти машины принципиально отличны друг от друга.
С экономической точки зрения создавать универсальную машину нецелесообразно, так как это ведет к ее удорожанию и усложнению. При этом не исключено, что по ряду эксплуатационных качеств универсальная машина не сможет достичь показателей, присущих машинам специализированным.
Решение проблемы найдено в разработке унифицированных семейств современных транспортно-тяговых машин на основе одной базовой модели. Базовая модель должна обеспечивать реализацию важнейших требований, предъявляемых к транспортно-тяговым машинам, и эффективное выполнение тяговых и транспортных работ в наиболее вероятном диапазоне природных и грунтовых условий, а модификации базовой модели должны быть приспособленными для выполнения более узких функциональных процессов или быть предназначенными для работы в определенных дорожно-климатических условиях.При таком подходе рационально сочетаются требования экономичности в производстве и эксплуатации, с одной стороны, и максимального расширения областей использования — с другой.
Данный принцип получает в настоящее время широкое распространение во многих областях техники, как наиболее эффективный в деле дальнейшего развития технического прогресса. При этом представляется возможным осуществить в наиболее полной степени унификацию как внутри семейства (параллельная унификация), так и с предыдущими (или последующими) образцами (преемственность).
Схема изложенного принципа разработки семейств унифицированных машин показана на рис. 60.
Базовую модель семейства отрабатывают таким образом, чтобы конструктивно обеспечивалось создание практически всех моди-134
Рис. 60. Схема создания семейства унифицированных машин
фикаций с использованием в них основных узлов и агрегатов без существенных изменений. Для гусеничных машин наиболее важно, чтобы унифицированными (или едиными) были силовая установка, агрегаты трансмиссии, узлы гусеничного движителя и подвески. Конструктивное исполнение корпуса, различного дополнительного и вспомогательного оборудования может быть специфическим у различных модификаций.
Так, для примерного состава модификаций, изображенного на рис. 60, отличия у модификаций от базовой модели могут быть по следующим агрегатам и системам:
у модификаций, предназначенных для работы в особых температурно-климатических условиях (арктических или тропических), по применяемым конструктивным и горюче-смазочным материалам, наличию дополнительного оборудования, необходимого для работы водителя и машины в задаваемых климатических условиях;
у модификаций, предназначенных для эксплуатации на снегу и болотах, — по ходовой части, главным образом по гусеничному движителю, с учетом необходимости снижения давления под гусеницами до оптимального и обеспечения маневренности и хороших сцепных качеств на снегу и слабых грунтах;
у шасси для размещения оборудования (энергетических установок, средств связи, технологического оборудования для проведения изыскательских и геологоразведочных работ и др.) и различных мастерских — по корпусу, исходя из необходимости высвобождения максимально возможной монтажной длины для установки оборудования, по наличию агрегатов отбора мощности от двигателя или трансмиссии, по общей компоновке, исходя из необходимости обеспечения равномерного распределения нагрузок по каткам и сохранения благоприятного распределения эпюры давлений под опорной ветвью обвода;
у седельных модификаций — по длине базы и числу опорных катков, наличию седельно-сцепных устройств;
у модификаций для производства дорожно-строительных, эвакуационных или подобных работ — по общей компоновке, наличию специального оборудования для выполнения работ, агрегатов отбора мощности, привода (механического, гидравличе-ческого или электрического) к специальному оборудованию и управления им;
у транспортеров повышенной грузоподъемности — по длине корпуса и числу опорных катков.
Однако у всех модификаций сохраняется практически без изменений комплекс агрегатов и систем, составляющих основу базовой машины, — двигатель, трансмиссия, гусеничный движитель, подвеска, электро- и пневмооборудование. Необходимо заметить, что наилучшие показатели получаются, когда все агрегаты силовой установки размещаются в передней части машины, остающейся почти без изменения у всех модификаций, т. е. в случае традиционной компоновки транспортных гусеничных машин, 136
а задняя часть машины, свободная от агрегатов, используется (приспосабливается, видоизменяется) в соответствии с назначением той или иной модификации.
При создании транспортеров-тягачей общетранспортного назна
чения решается и другая не менее важная и сложная задача — обеспечение одновременно высокой производительности машины, т. е. большой грузоподъемности и высокой скорости, чтобы эффективно осуществлять транспортные перевозки, и хороших тягово-сцепных качеств, чтобы машина могла уверенно двигаться в разнообразных дорожных условиях. Эта сложная инженерная задача решается применением ряда прогрессивных конструктивных схем, подробное описание которых на примере транспортеров-тягачей легкой весовой категории (МТ-Л) будет приведено дальше. Здесь же представляется целесообразным ограничиться оценкой тягово-транспортных возможностей транспортеров-тягачей МТ-Л и ранее рассмотренных гусеничных тягачей и транспортеров-снегоболотоходов такого же весового класса.
Показатели, характеризующие транспортно-тяговые качества тягача АТ-Л, транспортера ГТ-Т и транспортера-тягача МТ-Л, являющегося наиболее представительным образцом современных быстроходных гусеничных транспортеров-тягачей, даны в табл. 15.
Для сравнения использован относительный показатель бг / г»
уи vcp (где Gr — грузоподъемность; vcp — средняя скорость движения; Мт — масса с грузом), который позволяет более
полно характеризовать тягово-транспортные возможности машин.
В таблице для сравнения приведены также данные по автомобилю «Урал-375Д», который является машиной этого же весового класса и эксплуатируется достаточно широко в районах со слабо развитой дорожной сетью.
Из приведенных данных видно, что при использовании транспортера-тягача как средства механической тяги, т. е. для букси-
15. Сравнительная характеристика транспортно-тяговых возможностей машин
Показатель
Масса с грузом, т
Масса буксируемого прицепа, т ..........................
Коэффициент прицепной нагрузки Кп...................
бг
Мт —Gr С’ср.................
8,3 10,2
6,0
0,72
7,2
4,0
0,39
5,6
13,0
(10,5 при буксировке прицепа)
7,0
0,54
15,4
(7,0 при буксировке прицепа)
13,0
5,0
0,39
15,6
ровки прицепов, его удельные показатели такие же, как у гусеничных тягачей и транспортеров. При использовании транспорт
тера-тягача в качестве транспортного средства его показатели соответствуют показателям полноприводных автомобилей соответствующего класса грузоподъемности. Принимая во внимание значительно более высокую проходимость гусеничных машин
по бездорожью по сравнению с колесными, можно заключить, что использование транспортеров-тягачей для транспортных целей в тяжелых грунтовых условиях является целесообразным и эффективным.
Глава III ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ЛЕГКИХ ТРАНСПОРТЕРОВ-ТЯГАЧЕЙ
1. ОСНОВНЫЕ ПАРАМЕТРЫ. ОБЩАЯ КОМПОНОВКА
Базовой машиной семейства унифицированных быстроходных гусеничных машин легкой весовой категории является транспортер-тягач МТ-Л.
Техническая характеристика транспортера-тягача МТ-Л
Масса снаряженного транспортера-тягача, кг ... . 8500±2,5% Грузоподъемность, кг: при буксировке прицепа............................... 2500
» перевозке груза без прицепа............... ’4250
Масса буксируемого прицепа, кг..................... 7000
Число посадочных мест:
в кабине .................................. 8
на платформе ................................... 10
Габаритные размеры, мм: длина......................................... 6364
ширина......................................... 2850
высота......................................... 2013
Колея.............................................. 2500
Среднее давление на грунт, кгс/см2................. 0,428
Положение центра тяжести по длине (от оси ведущего колеса), мм:
без груза на платформе......................... 2230
с грузом....................................... 2640
Сила тяги на крюке по сцеплению, кгс (при ср = 0,8):
без груза на платформе......................... 6497
с грузом 2500 кг............................... 8417
Максимальная скорость движения, км/ч............... 61,5
Максимальный угол подъема (по сухому задернен-ному грунту), град:
с грузом и прицепом........................ 25
» грузом без прицепа....................... 35
Номинальная мощность двигателя, л. с........... 240
Номинальная частота вращения, об/мин.............. 2100
Максимальный крутящий момент двигателя, кгс-м 90 Напряжение бортовой электросети, В............. 24
Рабочее давление в пневмосистеме, кгс/см2...... 6—7
Максимальная сила тяги лебедки, кгс............ 7000
Рабочая длина троса лебедки, м ................ 50
Подача водооткачивающего насоса;'л/мин......... 400—450
Создание на основе базовой машины целого семейства унифицированных модификаций представляет собой сложную задачу из-за невозможности удовлетворить в равной степени значительное количество разноречивых (а иногда и противоположных) требо-
139
/sp
ваний. Особенно трудно совместить требования по проходимости, грузовместимости и возможности передвижения на плаву при переменных значениях общей массы и крюковой нагрузки. Все это обусловливает специфику компоновки транспортера-тягача.
Возможными вариантами компоновки гусеничного шасси для транспортеров-тягачей могут быть:
заднее расположение силовой установки и ведущих колес;
переднее расположение силового агрегата и заднее расположение трансмиссии и ведущих колес;
переднее расположение агрегатов силовой установки в одном блоке и ведущих колес;
переднее, но не моноблочное расположение агрегатов силовой установки и ведущих колес;
переднее расположение трансмиссии, ведущих колес и центральное расположение силового агрегата.
Первый и второй варианты компоновки нерациональны, так как не позволяют создать грузовую платформу достаточного объема и грузоподъемности в задней части машины.
Третий вариант характеризуется перегрузкой передних катков вследствие значительной массы силовой установки. Перегрузка передней части приводит к тому, что без груза транспортер имеет неблагоприятную эпюру давлений и пониженную проходимость на грунтах с малой несущей способностью. На плаву вследствие смещения центра тяжести вперед появляется недопустимый отрицательный дифферент (машина заглубляется передней частью в воду). Кроме этого, размещение силового агрегата и трансмиссии в одном блоке не позволяет производить отбор большой мощности от двигателя для привода дополнительных агрегатов, необходимых в различных дорожно-строительных модификациях.
Четвертый вариант компоновки является лучшим с точки зрения получения удовлетворительной эпюры давлений на грунт и элементы ходовой части при разных значениях нагрузки, однако в этом варианте необходимо либо кабину машины располагать над двигателем, что резко увеличивает габарит по высоте, либо двигатель размещать в кабине, что уменьшает полезный объем кабины и снижает комфортабельность.
Пятый вариант компоновки характеризуется тем, что между двигателем и трансмиссией образован промежуток. Двигатель расположен за кабиной и связан с коробкой передач посредством короткого карданного вала.
Анализируя возможные варианты, можно сделать вывод, что пятый вариант компоновки для машин общетранспортного назначения является наиболее приемлемым. Он дает возможность получить равномерное распределение нагрузок на опорные элементы ходовой части, а также обеспечить оптимальное положение ватерлинии при различных случаях нагружения. При этом водо-измещающие объемы распределяются достаточно равномерно по длине машины.
Исходя из этого, при разработке конструкций легких гусеничных многоцелевых транспортеров-тягачей была принята схема шасси с передним расположением трансмиссии и центральной установкой двигателя.
При такой компоновке многоцелевые качества транспортеров-тягачей обеспечиваются вследствие реализации следующих мероприятий:
применения унифицированных узлов силовой установки, трансмиссии и ходовой части при создании модификаций машин и монтажа различного оборудования в основном в результате перемещения силовой установки вдоль базы и некоторого изменения конструкции корпуса;
возможности увеличения грузоподъемности и полезного объема машин путем увеличения базы шасси;
универсализации ходовой части, позволяющей изменять среднее давление на грунт и создавать снегоболотоходные модификации установкой различных гусениц;
применения системы отбора мощности с большим диапазоном Значений для различных нужд и установки привода различного оборудования.
Основным принципом при создании модификаций на базе многоцелевого шасси является максимальное использование унифицированных агрегатов, узлов и систем. Обеспечение же установки специального оборудования или систем, обусловленных целевым назначением той или иной модификации, достигается за счет конструктивных изменений корпуса. Такое решение в наибольшей степени отвечает требованиям эксплуатации, уменьшая номенклатуру запасных частей и существенно упрощая техническое обслуживание и ремонт машин, поскольку корпуса машин в течение всего срока службы не меняют. В ряде случаев удовлетворять разнообразные и иногда противоречивые требования при монтаже оборудования различного назначения в единой ^корпусной конструкции нерационально. Для таких машин используют модификации корпуса, максимально соответствующие условиям рационального размещения данного оборудования. Однако при этом во всех модификациях корпусов обеспечивается полная унификация нижней поясной части, на которой монтируют узлы трансмиссии и ходовой части, что позволяет использовать в производстве однотипное технологическое оборудование.
Корпусная конструкция шасси в сочетании с индивидуальной системой подрессоривания опорных катков дает возможность Изменять базу путем изменения межкатковых расстояний или установки дополнительных спорных катков. Последнее является более целесообразным, так как при относительно небольшом увеличении массы шасси позволяет значительно поднять грузоподъемность, улучшить проходимость, обеспечить большие полезный объем и водоизмещение корпуса.
О
D
0.4
0.3
0,2
0,1
к я- > в» . ^3 ,1и** та» отж < Л— » eerw» ww И 4 г 1 _ 1 1 1 1 ( 1 1 1
а)
О 0,5 о,ч 0,3 0,2 0,1
п 3
£
1
J 7Z —. F, _ тг ” и
в х3 ¥
я* 1
О 4 8 12 16 20 24 28 32 36 40 44 48 52 56 у,км/ч
б)
Рис. 61. Тягово-динамическая характеристика транспортера-тягача:
а — общей массой 11,0 т, мощностью двигателя 240 л. с.; б — общей массой 15,7 т, мощностью двигателя 300 л. с.;----------передачи нормального ряда;--------- — передачи
замедленного ряда
Абсолютное повышение общей массы машины легкой весовой категории в этом случае не превышает 2,5 т.
Важным фактором при использовании такого принципа разработки семейств машин является правильный выбор типа и параметров (мощности) силовой установки, чтобы обеспечить удовлетворительную удельную мощность и требуемые эксплуатационные показатели для всех модификаций, входящих в состав семейства, или, иначе, обеспечить примерно равные эксплуатационные качества при изменении общей массы машины и ее прицепной нагрузки.
Установкой одного двигателя, по-видимому, эта задача не может быть решена (с точки зрения экономической целесообразности). Нерационально также применение нескольких различных двигателей. Это приводит к нарушению унификации агрегатов силовой установки. Наиболее разумное решение заключается в использовании двигателя, допускающего форсирование за счет наддува. Для легких транспортеров-тягачей применен четырехтактный дизель ЯМЗ-238 и его модификации-При этом на базовой машине и на машинах меньшей массы уста-142
^двливают двигатель ЯМЗ-238В мощностью 240 л. с. при |100 об/мин, а на машинах повышенной массы — двигатель JIM3-238H с турбонаддувом мощностью 300—320 л. с.
। В результате такого решения удается обеспечить достаточные ^яговые и скоростные показатели транспортеров-тягачей и их Модификаций при изменении общей массы от 11 до 16 т. В качестве примера, иллюстрирующего это, на рис. 61, а и б приведены тягово-динамические характеристики двух машин разной $ассы с установленными на них двигателями ЯМЗ-238В и $МЗ-238Н. Сравнение характеристик показывает, что и значения силы тяги на передачах, и максимальная скорость движения Машин находятся практически на одном уровне. При этом обе цашины могут буксировать прицепы массой до 7 т.
2. КОНСТРУКЦИЯ КОРПУСА И КАБИНЫ
Все узлы и агрегаты транспортера-тягача устанавливают на jfcopnyce. Корпус базового транспортера-тягача представляет собой Герметичную цельносварную конструкцию, обладает достаточной прочностью и необходимым водоизмещением, позволяющим транспортеру-тягачу держаться на плаву (рис. 62).
(Г- В носовой части корпуса расположена трансмиссия (МПП), ^ад которой размещена многоместная кабина 10. В средней части Iкорпуса по его продольной оси на основании 4 установлен двигатель, который соединяется с МПП карданным валом. Такое змещение исключает необходимость сложного и трудоемкого оцесса центрирования агрегатов, как это имеет место в некото-:х транспортерах, и позволяет при необходимости демонтировать игатель и трансмиссию раздельно.
Между двигателем и левым бортом находятся системы ох-ждения и предпускового подогрева двигателя. За двигателем ц днищем корпуса оборудована грузовая платформа 8 с от-дными сиденьями, укрытая сверху мягким быстросъемным 1том. Между двигателем и правым бортом корпуса под крышей 9 еется проход с герметичной дверью, соединяющий кабину 10 грузовой платформой S. Такая конструкция позволяет прово-гь обслуживание двигателя и трансмиссии без выхода из ма-[ны, что имеет немаловажное значение в суровых климатиче-ях условиях. Не выходя из машины, можно замерить уровень ела в двигателе и главной передаче и долить его при необхо-мости, провести различные регулировочные работы, предпу-эвой разогрев двигателя и даже натяжение гусениц.
| В конструкцию и технологию изготовления корпуса, как и уашин всего семейства, заложены многоцелевые принципы, исходя из которых цельносварной корпус расчленен на технологические узлы, такие, как носовая часть, корма, нижняя часть I сборе и т. д. Наличие этих узлов позволяет легко создавать Корпуса различного назначения и размеров.
143
Рис. 62. Корпус
Для уменьшения массы и увеличения грузоподъемности в конструкции транспортера-тягача МТ-Л широко использованы алюминиевые сплавы и пластмассы, например из алюминиевых сплавов выполнены цельносварной корпус и кабина; из высокопрочной пластмассы — стеклопластика изготовлены двери, крыша кабины, панели ограждения двигателя и трансмиссии, топливные баки.
Нижняя часть корпуса имеет форму лодки, выбранную с учетом получения минимально возможного сопротивления при движении по воде. Поскольку нижняя часть корпуса воспринимает нагрузки от ходовой части и силовой установки, то она имеет достаточно прочные бортовые, кормовые и носовые листы, кроме того, корма и днище усилены продольными и поперечными балками жесткости.
Листы и балки выполнены из алюминиевого сплава АМгб; кронштейны подвесок 2 и 5, а также направляющих колес 6 выполнены литыми из литейного сплава А124. Симметричные кронштейны подвесок левого и правого бортов соединены идущими по днищу балками жесткости.
В корпусе имеются торсионные коробки 5, в которых размещаются торсионные валы. Коробки предназначены для предотвращения попадания воды в корпус через уплотнения балансиров при нахождении машины на плаву.
К передней бамперной балке прикреплены буксирные крю
ки /, в кормовой поперечной балке смонтировано тягово-сцепное устройство на кронштейне 7.
В днище корпуса имеются люки, необходимые для обслуживания узлов и агрегатов машины.
Восьмиместная (по четыре места в ряду) кабина расположена в носовой части машины над трансмиссией. Такое расположение кабины, получившее широкое распространение в транспортном машиностроении, обеспечивает водителю и пассажирам хорошую обзорность и удобства при работе. В конструкции кабины широко использован стеклопластик, из которого изготовлены двери, крыша, люки крыши, панели, отделяющие обитаемое пространство от агрегатов силовой установки. Стеклопластиковые узлы наряду с легкостью и высокой механической прочностью обладают отличными изоляционными качествами (теплопроводность стеклопластика в 1000 раз ниже теплопроводности алюминия), поэтому применение этого материала позволяет обеспечить хорошие условия в кабине.
Лобовые стекла оборудованы эффективной системой смыва грязи, так как интенсивность забрасывания стекол кабины у гусеничных машин значительно выше, чем у колесных. Вода, находящаяся в специальном баке, по трубопроводам подается на стекла под щетки стеклоочистителей сжатым воздухом пневмосистемы машины. В зимнее время лобовые стекла для предотвращения обмерзания обогреваются. Нагревательным элементом служит токопроводящий прозрачный слой, нанесенный между двумя стеклами, склеенными в пакет.
В крыше кабины имеются два люка, через которые можно осуществлять наблюдение или выходить на крышу при движении на плаву, по глубокому снегу или болоту. Спинки сидений сделаны складывающимися, к обратной стороне спинок прикреплены специальные площадки с рифленой поверхностью для того, чтобы на них было удобно стоять при пользовании люками.
Для обогрева машины используется автономный отопитель ОВ-65Г производительностью 6500 ккал/ч, работающий на дизельном топливе. Отопитель расположен в средней части корпуса, в правой надгусеничной нише. Нагретый воздух по воздухопроводам поступает в кабину, а при необходимости и в отсек грузовой платформы.
В связи с тем, что двигатель расположен в середине корпуса транспортера-тягача, потребовалось создание отсека с надежной термошумоизоляцией. Панели отсека двигателя изготовлены из двух слоев листового стеклопластика, пространство между которыми заполнено специальным стекловолокном. В местах, наиболее близких к выпускным коллекторам двигателя, на панелях укреплены отражающие металлические экраны. Панели установлены герметично, и вместе с тем их можно быстро снять, что обеспечивает легкий доступ к двигателю при обслуживании.
В крыше корпуса над отсеком сделан люк для монтажа и демонтажа двигателя.
Грузовая платформа имеет пол, состоящий из съемных гофрированных алюминиевых панелей, что обеспечивает хороший доступ к топливным бакам, лебедке и другим механизмам и системам, находящимся под полом платформы. В заднем борту корпуса расположены широкие двустворчатые двери, при открывании образующие проем на уровне пола платформы, что создает существенные удобства при погрузке и выгрузке. Обычно на плавающих машинах нижняя кромка дверей поднята выше ватерлинии (например, у снегоболотохода ГТ-Т). Это обстоятельство, упрощая с одной стороны решение вопроса уплотнения дверей, с другой — резко ухудшает условия проведения погрузочно-разгрузочных работ. На транспортере-тягаче МТ-Л нижний уровень проема дверей, платформы и кабины из соображений максимальных эксплуатационных удобств сделан ниже ватерлинии. Для обеспечения герметичности на плаву все двери оборудованы надежными уплотнениями и запорами.
Тент, которым укрыта платформа, поддерживается трубчатым разборным каркасом, состоящим только из прямолинейных элементов. Для снегобол ото ходкой модификации тент изготовляют из двух слоев ткани с утеплительной прослойкой. Наличие быстросъемного тента позволяет перевозить на машине крупногабаритные грузы.
Безопасность машины при нахождении на воде обеспечивается герметичностью корпуса, дверей, люков, а также наличием аварийной водооткачивающей системы. Система состоит из двухсекционного водооткачивающего насоса вихревого типа, водо-заборников и трубопроводов выброса воды. Насос подачей 450— 500 л/мин имеет механический привод от двигателя через редуктор отбора мощности. Каждая секция насоса имеет свой заборник и свою трассу водовыброса. Один водозаборник установлен в носовой части корпуса, другой в кормовой. Для слива воды, просочившейся внутрь корпуса, после выхода машины на берег используют кормовой и носовой кингстоны. Через них же сливают воду при мойке внутренних отсеков корпуса, л
д 3. СИСТЕМЫ ОБСЛУЖИВАНИЯ ДВИГАТЕЛЯ
Повышенные требования к силовой установке гусеничных транспортеров-тягачей, вытекающие из того, что условия их эксплуатации значительно сложнее условий эксплуатации автомобилей и по характеру нагрузок, и по диапазону эксплуатационных температур, и по запыленности окружающего воздуха, а также специфика компоновки гусеничной плавающей машины требуют видоизменения ряда узлов двигателя и создания специальных систем его обслуживания. К этим системам относятся системы питания воздухом, подогрева, топливная, выпуска от-146
работавших газов, которые были разработаны, исследованы и доведены в процессе стендовых и ходовых испытаний на транспортерах-тягачах.
Система питания двигателя воздухом. Особенности эксплуатации транспортеров-тягачей выдвигают ряд специальных требований к системе питания двигателя воздухом, в том числе возможность длительной работы двигателя без промывки или замены воздушного фильтра в условиях высокой запыленности. Это требование вызвано спецификой работы транспортеров-тягачей в местах, удаленных от баз технического обслуживания и ремонта (например, работа в геологоразведочных партиях).
Использование серийного воздушного фильтра двигателя ЯМЗ-238 затрудняет решение некоторых задач компоновки транспортера-тягача в целом и отсека двигателя. Эти обстоятельства предопределили необходимость разработки другого фильтра и системы питания воздухом.
Характерной особенностью дизеля ЯМЗ-238 является его повышенная чувствительность к сопротивлению на всасывании (не более 600—700 мм вод. ст.) и сопротивлению .на выпуске (не свыше 1200 мм вод. ст.).
Система питания двигателя воздухом, разработанная на базе воздушного фильтра ВТИ-10, с внесением в его конструкцию ряда последовательных изменений позволяет обеспечить сопротивление на всасывании в пределах 395—400 мм вод. ст. для незагрязненного фильтра. При загрязнении фильтра и увеличении его сопротивления до 600—650 мм вод. ст. мощностные и экономические показатели^двигателя практически остаются неизменными.
Схема системы питания двигателя транспортера-тягача воздухом показана на рис. 63. Она состоит из воздушного фильтра, включающего фильтрующие кассеты 6, циклон 3 и пылесборник 4, воздухозаборных коммуникаций /, 5, 8 и патрубка, соединяющего фильтр с впускными коллекторами двигателя 7. Фильтр установлен на картере маховика двигателя перед топливным насосом высокого давления. Воздухосборник 1 фильтра выведен на крышу машины, в пространство с наименьшей запыленностью и менее всего доступное для воды при нахождении машины на плаву.
Воздушный фильтр двухступенчатый. На первой ступени осуществляется сухая инерционная очистка в циклонах с тангенциальным входом; на второй — очистка в трех фильтрующих кассетах 6 с проволочной набивкой, смоченной в масле.
Наружный воздух, входя в циклоны, приобретает вращательное движение. Под действием центробежной силы находящиеся в воздухе крупные частицы пыли отбрасываются к стенкам циклонов. Далее воздух проходит во внутренние трубки циклонов, резко изменяя направление движения (на 180°). Отброшенные к стенкам циклонов частицы пыли оседают в пылесборнике 4, а очищенный от них воздух попадает в кассеты 6. Мелкие частицы пыли улавливаются поверхностью проволочной набивки кассет.
Условные обозначения:
- воздух атмосферный;
< —< воздух очищенный;
< г—воздух, отсасываемый из пылесборника;
-«-оак Отработавшие газы
Рис. 63. Схема системы питания двигателя воздухом
Пройдя кассеты, чистый воздух через соединительный патрубок поступает в цилиндры двигателя. Пыль, выделенная из воздуха в первой ступени очистки и осевшая в пылесборнике, непрерывно с помощью эжекционного устройства Р, использующего энергию отработавших газов, удаляется. Первая ступень задерживает подавляющую часть пыли, поэтому сроки очистки кассетных фильтров значительно увеличены.
В обычных условиях эксплуатации воздух поступает в фильтр непосредственно из атмосферы. Однако в воздухозаборной коммуникации системы питания двигателя воздухом предусмотрен специальный клапан 2, обеспечивающий при необходимости забор воздуха в фильтр из отсека двигателя, температура в котором выше, чем снаружи машины. Такая схема подачи воздуха применяется для ускорения прогрева двигателя зимой, а также в случае работы многотопливного двигателя ЯМЗ-238М зимой на бензине.
На модификациях транспортера-тягача повышенной грузоподъемности (5—6 т) устанавливают двигатель ЯМЗ-238Н (с турбонаддувом) мощностью до 300 л. с. В связи с тем, что по сравнению с двигателем ЯМЗ-238В расход воздуха у него увеличен, а требования по допустимым сопротивлениям в линиях всасывания и выпуска более высокие, в двигателе ЯМЗ-238Н применяют
другую модификацию воздушного фильтра. Этот фильтр также двухступенчатый, но в отличие от уже рассмотренного вторая ступень его представляет собой бумажные фильтрующие элементы. Обслуживание такого фильтра сводится к периодической продувке бумажных фильтрующих элементов воздухом и редкой общей промывке. Для предохранения бумажных элементов от возгорания вследствие случайного прорыва отработавших газов через трубу отсоса пыли в трубе установлен обратный клапан.
Система питания топливом. Система питания двигателя топливом (рис. 64) включает в себя четыре топливных бака 10, топ-
г___... й я
е---в то пли оо;
воздух во время заправки системы;
о воздух во время работы двигателям
X—о топливо, пробившееся через зазоры 8 форсунках;
----о топливо и воздух во время прокачки системы ручным насосом и излишки топлива при работе двигателя
Рис. 64. Схема системы питания двигателя топливом
ливораспределительный кран 9, фильтры грубой 4 и тонкой з очистки топлива, ручной подкачивающий насос <8, топливный насос высокого давления 7 с регулятором и топливоподкачивающим насосом 5, форсунки 6, топливопроводы низкого и высокого давления, механизмы управления подачей топлива.
Для обеспечения эксплуатации в отрыве от сети автозаправочных станций, баз ремонта и обслуживания транспортеры-тягачи оснащены топливными баками большого объема. Топливо из баков подается также в предпусковой подогреватель двигателя и отопитель кабины.
Топливные баки из высокопрочной пластмассы—стеклопластика, размещены на днище корпуса под полом грузовой платформы и с помощью гибких лент закреплены на специальных постелях. Баки объединены в две группы (по два бака). Для удаления воздуха из баков при заправке имеются специальные трубки, выведенные от баков в заливные горловины 11. Сообщение баков с атмосферой при работе двигателя осуществляется через клапан 2 в топливном бачке 1 подогревателя, соединенном с баками трубками.
В кабине сбоку от сиденья водителя установлен топливораспределительный кран 9, который служит для переключения питания двигателя от той или другой группы баков (или для полного отключения баков).
Особенностью топливной системы является наличие в ней ручного подкачивающего насоса 8, который предназначен для заполнения системы топливом перед пуском двигателя и удаления из нее воздуха. В топливной системе транспортера-тягача, имеющей коммуникации большой протяженности, при высокой температуре окружающего воздуха не исключено появление воздушных пробок. Наличие воздушных пробок, образовавшихся в результате испарения топлива при длительной стоянке машины, затрудняет пуск двигателя, приводит к перебоям в его работе. Прокачка системы с помощью ручного насоса позволяет удалять воздух из системы через клапан топливного бачка 1 подогревателя и обеспечивает надежный пуск двигателя. Ручной насос установлен под сиденьем водителя. На машинах первых выпусков устанавливали насос диафрагменного типа РНМ-1 подачей 9,8 л/мин при ста двойных ходах рукоятки; на машинах более поздних выпусков — насос РНА-1А, лопастной, двойного действия, подачей 12 л/мин.
При работе двигателя излишки топлива из насоса высокого давления 7, а также топливо, просочившееся через зазоры между иглой и распылителем форсунки (это явление характерно для дизелей), собираются и отводятся обратно в топливные баки 10.
Управление подачей топлива осуществляется ножным и ручным приводами, которые системой тяг и рычагов соединены с рычагом регулятора насоса высокого давления и со скобой останова двигателя.
Ручной привод служит для задания определенного режима работы двигателя, а также для его останова. Рукоятка ручного привода фиксируется в нужном положении с помощью фрикционного механизма.
Устройство фильтров топливного насоса высокого давления с регулятором здесь не рассмотрено, так как подробно дано в «Инструкции по эксплуатации двигателей ЯМЗ-236 и ЯМЗ-238».
В многотопливном двигателе ЯМЗ-238М система питания топливом имеет некоторые отличия:
а) сделан дренаж для отвода топлива, просочившегося через зазоры плунжерной пары;
б) изменены регулировки перепускного клапана топливного насоса высокого давления;
в) введено устройство для изменения подачи подкачивающего насоса в зависимости от вида топлива.
Многотопливный двигатель может работать, кроме дизельного топлива, на следующих топливах и их смесях в любых соотношениях: керосин (ГОСТ 4753—68); топливо для реактивных двигателей (ГОСТ 10227—62, ГОСТ 12308—66, ГОСТ. 16564—71; бензины автомобильные А-66 и А-72 (ГОСТ 2084—67).
При работе на бензине А-72 мощность двигателя несколько снижается. Пуск и прогрев двигателя ЯМЗ-238М осуществляются в основном на дизельном топливе.
Пуск и работа многотопливного двигателя в случае использования в качестве топлива бензина производятся следующим образом. Сначала двигатель пускают на дизельном топливе. При этом рукоятка топливораспределительного крана находится в положении «Диз. топливо», а рычаг переключения вида топлива •регулятора топливного насоса высокого давления в положении «Д» (дизельное топливо). После пуска двигатель прогревается до температуры охлаждающей жидкости 70—80° С. Затем включают .перекачивающий насос, рычаг переключения вида топлива переводят в положение «Б» (бензин), а рукоятку топливораспределительного крана в положение, соответствующее забору из тех баков, в которых находится бензин. Через несколько минут шосле стабилизации режима работы двигателя перекачивающий •насос выключают.
I Перед остановом на длительное время двигателя, работающего на бензине, необходимо перевести его питание на дизельное топливо и проработать на холостых оборотах не ме-Лее 10 мин. Делается это для обеспечения смазки плунжерных ;пар топливного насоса высокого давления и распылителей форсунок. Одновременно’ эта операция подготовляет двигатель и топливную систему для предстоящего пуска на дизельном топливе.
При работе двигателя на бензине зимой забор воздуха в воздушный фильтр осуществляется, как уже было указано, из нагретого отсека двигателя через предусмотренный для этой цели
151
клапан. В результате воздух, поступающий в цилиндры двигателя, предварительно нагревается на 40—50° С, и тем самым обеспечивается лучшее воспламенение и сгорание бензина. Наружный воздух в отсек в этом случае поступает через открытый вентиляционный люк.
Система охлаждения. Режим работы двигателя на транспортере более напряжен по сравнению с режимом работы этого же двигателя на автомобиле. Это обусловлено рядом причин.
Во-первых, транспортер-тягач, эксплуатирующийся в условиях бездорожья, снежной целины, болотистой местности, пустыни, высокогорья, значительно большую часть времени, чем автомобиль, работает в режиме максимальной мощности двигателя или мощности, близкой к максимальной.
Во-вторых, установка двигателя в герметичном корпусе (в изолированном отсеке) ухудшает теплообмен с окружающей средой, так как двигатель не обдувается встречным потоком воздуха
от вентилятора.
В-третьих, расположение двигателя посередине машины, вызванное необходимостью обеспечения одинаковых нагрузок на опорные катки и устойчивости на плаву с грузом на платформе и без него, требует надежной термошумоизоляции отсека от кабины и платформы, что в свою очередь также ухудшает условия теплообмена.
Все эти причины диктуют необходимость создания эффектив-
ной системы охлаждения двигателя, обеспечивающей требуемый тепловой режим в любых условиях эксплуатации. На транс
портерах-тягачах применена система с использованием центробежного вентилятора высокой производительности (в автомобильном варианте на двигателе применяется осевой вентилятор).
Система охлаждения двигателя (рис. 65) жидкостная, принудительная, закрытого типа, состоит из водяного насоса 6, водяного радиатора 9, расширительного бачка 4 с паровоздушным клапаном 5, двух термостатов 3 с электротермометрами 2, центробежного вентилятора S, привода вентилятора, трубопроводов и жалюзи 11. Радиаторы (водяной 9 и масляный 10) и вентилятор 8 расположены между двигателем 1 и левым бортом машины в отсеке, изолированном от двигателя и других отсеков, чтобы не засорять двигатель и другие узлы машины пылью, забираемой
вместе с воздухом.
Водяной насос системы охлаждения центробежного типа, подачей 200 л/мин установлен на двигателе и имеет ременный привод от шкива коленчатого вала. Всасывающая полость насоса соединена трубопроводами с радиатором, нагнетающая полость —-с блоком цилиндров.
Радиатор пластинчато-трубчатый, имеет латунные трубки овального сечения, расположенные в шесть рядов в шахматном порядке. Полная поверхность охлаждения радиатора (площадь
152
йи/й'1
5
9 1011
Условные обозначения'.
-^и^газы из котла подогревателя; г —: охлаждающая жидкость;
ОСО
Рис» 65. Схема систем подогрева и охлаждения двигателя
трубок и пластин) составляет 38,73 м2, в то время как площадь сечения радиатора 0,283 м2.
Расширительный бачок обеспечивает возможность увеличения объема емкости для охлаждающей жидкости при нагреве и одновременно служит паросборником. В крышке бачка расположена заливная горловина, в которой установлена пробка с паровоздушным клапаном, обеспечивающим оптимальное давление в системе охлаждения.
В водосборных трубах левого и правого блоков цилиндров установлены термостаты, служащие для поддержания температуры охлаждающей жидкости не ниже 70° С.
Поступление воздуха в радиаторы регулируется жалюзи //, состоящими из 12 створок. В. закрытом положении жалюзи герметичны, что надежно защищает двигатель от переохлаждения В сильные морозы без применения специальных чехлов-утеплителей и исключает попадание воды (дождь, снег) в вентилятор на Длительных стоянках. Привод жалюзи устроен таким образом, Мто в начале хода рукоятки привода приоткрывается лишь одна Створка, а уже затем открываются все остальные створки одновременно. Такое устройство облегчает открывание жалюзи при работающем двигателе, так как из-за сильного разрежения,
Рис. 66. Характеристики вентиляторов трех вариантов:
1 — вариант I; 2 — вариант II; 3 — вариант III
создаваемого вентилятором под герметичными жалюзи, для одновременного открывания всех створок требуется достаточно большое усилие.
|Важным элементом системы охлаждения как с точки зрения получения относительного теплового режима вообще, так и с точки зрения возможности увеличения мощности двигателя при сохранении неизменными всех основных элементов системы охлаждения является центробежный вентилятор.
Определяющим фактором, позволяющим увеличить производительность вентилятора при принятых размерах, ограниченных компоновочными возможностями, является рациональное сочетание конструкции рабочего колеса с формой и размерами входного и выходного элементов воздушного канала. Для выявления оптимальной конструкции вентилятора при создании транспортера-тягача МТ-Л было разработано и испытано пять вариантов колес с лопатками различного профиля. Испытания проводили на специально оборудованной установке.
Сравнительные характеристики некоторых вариантов рабочих колес вентилятордв, различающихся радиусом лопаток и углом входа, приведены на рис. 66, а9 б. Лучшим из всех исследованных оказалось рабочее колесо, выполненное с профилированными лопатками, имеющими радиус 185 мм и угол входа 61°(вариантШ) Несмотря на то, что КПД этого колеса несколько ниже, чем колеса варианта I, производительность его в эксплуатационном 154
режиме на 12—18% выше. Этот вариант и был принят для производства.
Использование двигателя мощностью 300 л. с. на модификациях транспортеров-тягачей повышенной массы сопровождается увеличением теплоты, выделяемой двигателем в воду (со 100 000 ккал/ч для двигателя мощностью 240 л. с. до 114 000 ккал/ч для двигателя мощностью 300 л. с.).
Учитывая, что подача водяного насоса двигателя при этом остается прежней (200 л/мин), необходимо для увеличения отдаваемой в воду теплоты, повысить теплопередающую способность радиатора. Это в свою очередь может быть достигнуто или увеличением поверхности охлаждения радиатора (что приводит к увеличению его габаритов и массы), или повышением коэффициента теплоотдачи радиатора, т. е. производительности вентилятора.
С точки зрения компоновки и максимальной унификации узлов и агрегатов всего семейства машин наиболее целесообразным представляется вариант увеличения количества отводимой теплоты от двигателя путем повышения производительности вентилятора. Повышение производительности со 169 м8/мин (двигатель мощностью 240 л. с.) до требуемых 200 м3/мин’ (двигатель мощностью 300 л. с.) может быть достигнуто при увеличении частоты вращения вентилятора с 2890 до 3295 об/мин. Все остальные элементы систем охлаждения двигателя мощностью 300 л. с. в этом случае остаются такими же, как у двигателя мощностью 240 л. с.
Из других особенностей системы охлаждения двигателя следует указать на устройство для охлаждения выпускных коллекторов, являющихся источниками интенсивного тепловыделения. Температура внутри коллекторов достигает 500° С, при этом поверхность коллекторов, с которой происходит тепловыделение В отсек двигателя, довольно значительная.
т Выпускные коллекторы и присоединяемые к ним выпускные •Трубы заключены в металлические кожухи-экраны так, что между Йими и кожухами имеется воздушный зазор. Установленные на концах выпускных труб эжекторы при работе двигателя создают ₽ кожухах разрежение, благодаря которому между нагретым Коллектором и кожухом постоянно просасывается воздух, поступающий в отсек двигателя через специальный вентиляционный Дючок. Таким образом, значительная часть теплоты, излучаемой коллекторами, локализуется и 'уходит вместе с отработавшими разами.
Для надежного пуска двигателя зимой имеется система предпускового подогрева, которая обеспечивает подогрев охлаждающей жидкости двигателя, масла в поддоне двигателя и масла ® масляном баке МПП трансмиссии. Эта система используется ^акже для поддержания теплового состояния неработающего Двигателя. Прогрев двигателя и трансмиссии машины после ее Длительной стоянки осуществляется не более чем за 30 мин.
Система (см. рис. 65) состоит из подогревателя /2, насосного агрегата, включающего электродвигатель 16, топливный насос 17, водяной насос 18 и вентилятор 19, электромагнитного клапана 15, трубопроводов и шлангов. Основным узлом системы является подогреватель 12 марки ПЖД-44Б, в котором установлены свеча накаливания 13 и форсунки 14 подачи топлива.
Котел подогревателя состоит из теплообменника и горелки. Теплота, выделяемая при сгорании топлива (теплопроизводи-тельность котла 30 000 ккал/ч), через стенки теплообменника передается охлаждающей жидкости, поступающей в котел из водяного насоса 18.
Нагретая жидкость поступает в водяные рубашки двигателя и через водяной насос 6 снова возвращается в котел подогревателя.
Горячие газы, проходя через газоход масляного бака МПП, газоотводящую трубу и кожух поддона двигателя, нагревают масло в баке МПП и поддоне двигателя и по газоотводящим трубам удаляются в атмосферу.
Заправка системы подогрева охлаждающей жидкостью осуществляется через расширительный бачок системы охлаждения. Для выпуска жидкости из системы охлаждения и подогрева служат сливные краники 20.
В системе подогрева установлен обратный клапан 7, который открывается давлением охлаждающей жидкости, создаваемым насосным агрегатом подогревателя. При работающем двигателе клапан удерживается в закрытом положении давлением жидкости, создаваемым водяным насосом двигателя. Циркуляция охлаждающей жидкости через подогреватель при этом прекращается.
Пуск подогревателя и прогрев двигателя производятся в определенной последовательности. Закрывают жалюзи радиатора и открывают вентиляционный лючок надмоторного люка. Затем открывают кран подачи топлива и включают электродвигатель насосного агрегата на 10—15 с. При этом переключатель электродвигателя должен быть установлен в положение «Работа», а выключатель электромагнитного клапана -— в положение «Продув». Включают свечу накаливания, при этом контрольная спираль на щитке должна накаливаться до ярко-красного цвета.
По истечении 25—30 с выключатель электромагнитного клапана устанавливают в положение «Работа», а переключатель режима работы электродвигателя — в положение «Пуск». При начале гудения пламени в котле подогреватель переводят в положение «Работа», выключают свечу накаливания.
Подогреватель работает до тех пор, пока температура охлаждающей жидкости не достигнет 50—60° С. После этого производится пуск двигателя, работа в течение 1—2 мин при мини' мальной частоте вращения, а затем в течение 1—2 мин при средней частоте вращения для обеспечения подвода смазки к трущимся поверхностям механизмов двигателя и трансмиссии.
156
После пуска двигателя подогреватель выключают, выключатель |&лектромагнитного клапана устанавливают в положение «Продув», hi в течение 1—2 мин продуваются камера и газоход для удаления Достатков продуктов сгорания и исключения возможного взрыва Газов при последующем пуске.
По окончании прогрева переключатель электродвигателя переводят в нейтральное положение и топливный кран системы* питания подогревателя топливом закрывают.
Рассмотренная система обеспечивает довольно равномерный прогрев двигателя. Об этом свидетельствует то, что после пуска двигателя температура охлаждающей жидкости падает всего на 2—3° С.
4. ТРАНСМИССИЯ
Одним из наиболее ответственных и нагруженных механизмов транспортера-тягача является трансмиссия, состоящая (рис. 67) ji3 главного фрикциона 9, промежуточного редуктора 7, карданной передачи 6, механизма передач и поворота (МПП) 5, зубчатых ^членений (соединительных валов) 4 и бортовых передач 2 с остановочными тормозами 3.
Трансмиссия предназначена для передачи крутящего момента фт двигателя 8 к ведущим колесам /; изменения силы тяги на йедущих колесах ( и скорости движения) за счет изменения передаточных чисел в МПП или включения тормозов 10 МПП; разъединения двигателя и ходовой части при помощи главного фрик-
Рис. 67. Кинематическая схема трансмиссии
пиона Р; обеспечения поворота транспортера-тягача с различными радиусами; отбора мощности для привода других агрегатов или систем, в том числе для привода монтируемого на шасси специального оборудования.
Главный фрикцион силовой передачи представляет собой обычное двухдисковое сцепление автомобильного типа, поэтому описывать его конструкцию здесь не будем.
Отметим только, что на всех модификациях машин используется единый унифицированный главный фрикцион. Одинаковы^ коэффициент запаса по крутящему моменту у машин разной массы обеспечивается установкой нажимных пружин различной жесткости.
Под действием предварительно сжатых пружин главный фрикцион постоянно включен. При выключении фрикциона выжимная муфта перемещается и нажимает через подшипник на упорное кольцо и оттяжные рычаги, высвобождая тем самым ведомые диски.
При изнашивании накладок ведомых дисков свободный ход муфты выключения уменьшается, поэтому для нормальной работы главного фрикциона необходимо механизм выключения регулировать, чтобы всегда обеспечивался свободный ход муфты в пределах 3,2—4 мм.
Упорный подшипник выключения главного фрикциона смазывается консистентной смазкой, которая подводится через масленку переходного ниппеля, установленного на картере промежуточного редуктора, и гибкий шланг.
Для транспортеров-тягачей всех модификаций применен механический привод управления главным фрикционом. В целях уменьшения усилия выключения в его приводе имеется сервомеханизм. На модификациях массой до 12 т устанавливают сервомеханизм обычного пружинного типа, состоящий из сервопружины, вилки с регулировочной гайкой и специального кронштейна. С валом педали выключения главного фрикциона сервопружина связана через вилку. Принцип действия сервомеханизма основан на изменении плеча приложения силы сервопружины.
Чем больше ход педали и, следовательно, чем больше потребная сила выключения, тем больше увеличивается плечо приложения силы сервопружины. В результате усилие на педали главного фрикциона изменяется незначительно.
Необходимое сжатие сервопружины определяется положением кронштейна и выбирается таким образом, чтобы педаль после выключения главного фрикциона самостоятельно возвращалась в исходное положение и чтобы сохранялся закон возрастания усилия на педали с увеличением ее хода нажатия.
На модификациях общей массой до 16 т (на семикатковом шасси) в качестве сервоусилителя применен пневматический механизм следящего типа, состоящий из диафрагменной пневмо-камеры, соединенной через рычаг с валом педали выключения 158
Рис. 68. Пневмораспределитель сервомеханизма
равного фрикциона, и пневмораспределителя осевого действия, ^оторый установлен между педалью и валом педали (педаль на Ьси установлена свободно).
Пневмораспределитель (рис. 68) состоит из корпуса 6, плунжера 7, клапана 3, пружин 2 и 4, гаек 1 и 9. Для уплотнения |лунжера на нем установлены резиновые манжеты 5 и 8, а в регулировочной гайке 9 резиновое кольцо 10.
| Для обеспечения нормальной работы положение плунжера Относительно корпуса регулируется гайкой 9 так, чтобы клапан 3 кал закрыт, а между ним и плунжером был необходимый зазор ко л о 1,8 мм).
L В корпусе распределителя имеются три отверстия: а — для Модвода сжатого воздуха к пневмокамере; б — для подвода сжатого мзду ха из пневмосистемы к распределителю; в — для выхода воздуха из пневмокамеры в атмосферу.
г При действии на педаль выключения главного фрикциона гва через рычаги и вилку 11 воздействует на плунжер пневмо-Баспределителя, который, перемещаясь относительно корпуса, открывает клапан 3. Полость распределителя, связанная через Отверстие б с пневмосистемой, соединяется через отверстие а I пневмокамерой, и сжатый воздух поступает в пневмокамеру, «издавая необходимое усилие на штоке. Шток камеры, перемещая систему привода, одновременно поворачивает вал педали, |тодвигая от плунжера корпус пневмораспределителя. Клапан укрывается, и поступление воздуха прекращается. При дальнейшем движении педали процесс продолжается до полного выключения сцепления.
Если в пневмосистеме отсутствует давление, то при нажатии |а педаль плунжер пневмораспределителя перемещается до упора ‘ корпус и затем как одно целое воздействует через вал педали, Ычаги и тяги на механизм выключения главного фрикциона. Од-ко йри этом усилие на педали выключения будет значительным.
» Установка сервомеханизмов в приводе управления главным фрикционом транспортеров-тягачей обеспечивает усилие на пе-Ми выключения главного фрикциона в конце ее хода 16—19 кгс. i Простота конструкции приводов способствует повышению на-£жности и безотказности управления выключением главного Ьикциона.
159
Промежуточный редуктор (рис. 69) служит дЛя отбора мощности (100—120 л. с.) на привод лебедки, водоотка-чивающего насоса, гидронасоса системы управления дополни-тельным оборудованием и т. п. Он состоит из вала 3, передающего крутящий момент основного потока; распределительной конической прямозубой шестерни 5, установленной в картере 1 на одном шарикоподшипнике; трех радиально расположенных приводов с коническими шестернями 2, 6 и*7 и крепится к картеру маховика. В конструкции редуктора предусмотрена возможность его отключения посредством скользящей шлицевой муфты 4.
Зацепление конических шестерен регулируется прокладками; при этом регулировку выполняют по одной паре (обычно по зацеплению шестерни 2 привода водооткачивающего насоса с шестерней 5), а затем регулируют зацепление шестерен 6 и 7 приводов соответственно лебедки и дополнительного оборудования. Это возможно благодаря взаимозаменяемости шестерен без подгонки и прикатывания.
Вал 3 промежуточного редуктора опирается на два подшипника: один из них размещен в корпусе редуктора, а другой — в концевой части коленчатого вала двигателя.
На шлицевую часть вала устанавливают ведомые диски главного фрикциона.
При отключенных приводах (один из наиболее характерных режимов работы редуктора) распределительная шестерня принудительно не вращается, а скользит под действием сил трения по валу с частотой 550—2250 об/мин. Чтобы предотвратить заедание контактирующих поверхностей, в зону трения подведена смазка (разбрызгиванием) через открытые торцы и специальные отверстия в шестерне. Помимо этого, поверхность вала в месте трения выполняют рифленой (десять продольных канавок глубиной 0,5-—0,8 мм и шириной 6 мм каждая), фосфатируют на глубину 0,005—0,01 мм, а затем пропитывают дисульфидмолибденовой смазкой.
Карданная передача 6 (см. рис. 67), соединяющая промежуточный редуктор с МПП, обычной конструкции автомобильного типа, состоит из двух шарниров, скользящей шлицевой муфты и фланцев крепления.
Вследствие колебаний передаваемого крутящего момента (максимальные значения более чем вдвое превышают средний крутящий момент двигателя), расположения карданного вала в непосредственной близости от сиденья водителя, а также исходя из соображения унификации карданная передача на всех ‘модификациях выполнена с расчетом передачи среднего крутящего момента до 105 кгс-м (максимальные значения до 300 кгс-м) при необходимой балансировке. Это позволяет обесценить высокую надежность данного узла и относительную бесшумность работы вплоть до максимальной частоты вращения (2250 об/мин)’ При пробеге до 25 тыс. км карданная передача не требует какого-160
А-А
Рис. 69. Промежуточный редуктор
П/р. В. Ф. Платонова
161
либо ухода и шлицевых соединений незначительное.
кроме смазки, при этом изнашивание шарниров
как у тягача АТ-Л, состоит из кони-
малой высоты;
скоростей (vmax/ymin
= 15,4), соответ-
ачи
поточный механический ческой пары шестерен, коробки передач и двух планетарнофрикционных механизмов поворота (левого и правого), смонтированных моноблочно в одном алюминиевом корпусе.
Такое конструктивное решение узла обеспечивает:
хорошую компоновку на различных модификациях из-за компактности
широкий диапазон ствующий работе с прицепами и без них, а также с различным землеройным оборудова нием;
получение шести передач нормального и пяти передач замедленного ряда при движении вперед и двух передач заднего хода, что способствует повышению маневренных и тягово-сцепных качеств;
разделение передаваемой мощности на два потока с установкой фрикционных элементов в потоке с меньшей долей мощности. Эта особенность конструкции позволяет при малой массе МПП и достаточно широком диапазоне передаваемой мощности получить высокую долговечность механизмов;
наличие фиксированных радиусов поворота для каждой пере-возрастающих с увеличением порядка передачи, и воз-
можность поворота вокруг центра машины при нейтральном положении зубчатых муфт в коробке передач и равном сопротивлении на обеих гусеницах.
Коническая пара шестерен со спиральными зубьями (торцовый модуль 7,5) служит для передачи вращения от первичного вала 13 к передаточному (разветвляющему) валу 12 МПП.
Ведущая коническая шестерня выполнена заодно с первичным валом 13, установленным в двух конических роликовых подшипниках в специальном стакане, закрываемом крышкой. На шлицевой конец вала насажен фланец для соединения с карданной передачей. В крышке стакана размещены самоподжимной сальник и войлочное уплотнение. Осевой зазор в подшипниках регулируется прокладками 14, Стакан и его крышка прикреплены болтами к картеру и крышке МПП. Установка ведущей шестерни регулируется прокладками. Ведомая коническая шестерня расположена на передаточном валу 12 коробки передач.
Коробка передач шестиступенчатая с постоянным зацеплением шестерен, обеспечивает шесть передач для движения вперед и одну передачу заднего хода. Она имеет два вала: передаточный 12 и главный 9,
На передаточном валу /2, установленном в трех шарикоподшипниках, расположены кроме ведомой конической шестерни ведущие цилиндрические прямозубые шестерни с модулем т=5 соответственно слева направо — заднего хода, II, IV, III, VI 162
заднего хода, II, IV, III, VI
6
Рис. 70. Механизм передач и поворота
lea
и V передач, синхронизатор 10 передач V и VI и детали масло-подвода. Шестерни установлены на шлицах, кроме ведущих шестерен передач VI и V, каждая из которых установлена на двух шарикоподшипниках.
Смазка к шарикоподшипникам и синхронизатору 10 подается под давлением по маслоподводящей трубе, каналам опоры, шайбы
и передаточного вала.
Положение ведомой конической шестерни регулируется прокладками, устанавливаемыми между шестерней и подшипниками. Совпадение венцов ведущих шестерен с венцами соответствующих ведомых при сборке передаточного вала обеспечивается специ
альными кольцами.
На главном валу, также установленном в трех шарикоподшипниках, расположены ведомые цилиндрические шестерни, соответственно — заднего хода, II, IV, III, VI и V передач; подвижная зубчатая муфта 8 включения передач I и II; неподвижная зубчатая муфта 7 включения передачи заднего хода; эпициклические шестерни суммирующих планетарных рядов 6 и синхронизатор 11 передач III и IV. Ведомые шестерни установлены на шарикоподшипниках, кроме шестерен передач V и VI, установленных на шлицах.
Смазка к синхронизатору 11 и шарикоподшипникам подается под давлением по маслоподводящей трубе, каналам неподвижной
опоры, шестерни и главного вала.
Синхронизаторы 10 и 11 инерционного типа, установлены на эвольвентных шлицах, служат для безударного включения передач III—VI и состоят из муфт, конусов, пальцев, каретки и фиксаторов с пружинами. При перемещении каретки трение между конусами синхронизатора и шестерни обеспечивает выравнивание (синхронизацию) частоты вращения вала и шестерни включаемой передачи, поэтому передача включается безударно.
Промежуточная шестерня 5 заднего хода смонтирована на отдельной оси 4 в крышке картера 1 МПП.
Планетарно-фрикционные механизмы поворота состоят из суммирующих планетарных рядов 6, блокировочных фрикционов 2, тормозов 3 и предназначены для поворота транспортера с ^фиксированными (расчетными) радиусами поворота на каждой пе
редаче.
Пользуясь тормозами механизма передач и поворота, можно получить (при установке рычагов управления в первое положение) дополнительные передачи — пять замедленных для движения вперед и одну ускоренную для заднего хода. Скорости движения транспортера-тягача МТ-Л при пдв = 2100 об/мин следующие.
Передача ....................... I II III IV V VI Заднего
хода
Скорость, км/ч на передачах: нормального ряда .............. 4,0 12,0 20,7 34,1 46,8 61,5 6,3
замедленного ряда..........— 8,0 16,7 30,1 42,8 57,5 10,3
Различие в скоростях на нормальном и замедленном рядах составляет 4 км/ч для всех передач.
Блокировочные фрикционы МПП сухие многодисковые. Каждый из них состоит из ведущей и ведомой частей и выключающего устройства (шарикового типа).
Суммирующие планетарные ряды 6 представляют собой одноступенчатые планетарные передачи, состоящие из эпициклических шестерен, солнечных шестерен и водил с тремя сателлитами.
Вследствие высокой нагруженности МПП имеет специальную смазочную систему (рис. 71). Смазка МПП комбинированная: под давлением смазываются подшипники сателлитов суммирующих планетарных рядов, опоры постоянно вращающихся ведомых шестерен III—VI передач, подшипники ведомых шестерен фрикциона, подшипники конических шестерен и сухари переключения синхронизаторов, все остальные трущиеся элементы смазываются путем разбрызгивания масла.
Смазочная система МПП состоит из смазочного насоса 4 с перепускным и разгрузочными клапанами, смазочного бака 7, масляного радиатора 2, масляного фильтра 3 грубой очистки с перепускным клапаном, манометра /5, маслозаборников б и 7, распределителя 13 и труб (маслопроводов): 5 и 10 — к подшипникам соответственно ведущей и ведомой конических шестерен, 8 — к подшипникам главного вала планетарных рядов, 9 — к сухарям синхронизатора передач III и IV, 11 — к сухарям синхронизатора передач V и VI, 12 — к подшипникам шестерен передаточного вала, 14 — дренажного.
Смазочный насос шестеренный трехсекционный: две секции откачивающие, одна нагнетающая; установлен в картере МПП.
Управление МПП осуществляется механическим приводом. В приводе управления МПП предусмотрено наличие фиксирующего, замкового и блокирующего устройств.
Фиксирующее устройство предотвращает самопроизвольное включение или выключение передач; замковое — исключает одновременное включение двух и более передач; блокирующее — исключает возможность переключения передач при включенном главном фрикционе или при неполном его выключении.
Рычаги управления МПП, так же как и в рассмотренных ранее конструкциях приводов управления тягача АТ-Л и транспортера ГТ-Т, могут находиться в трех положениях:
нейтральном (исходном);
первом, когда освобождается блокировочный фрикцион 2 и включается тормоз 3 (см. рис. 70);
втором, когда блокировочный фрикцион также освобожден, а включен остановочный тормоз бортовой передачи.
В зависимости от положения рычагов мощность через МПП передается различными потоками, при этом соответственно изменяется и частота вращения ведущих колес.
166
От двигателя
fpftc. 72. Схема потоков мощности при прямолинейном движении на IV передаче нор-|нин>ного ряда
” 1
При нейтральном (исходном) положении рычагов МПП и включенной одной из передач (кроме передачи I), т. е. при прямолинейном движении транспортера, мощность от двигателя через фоническую пару шестерен подводится к суммирующим плане-Тарным рядам и далее к ведущим колесам двумя потоками. Схема подвода мощности к ведущим колесам для случая включения Передачи IV показана на рис. 72.
'' Основной поток мощности идет от передаточного вала через пару шестерен включенной передачи (в данном случае передачи IV) К эпициклическим шестерням суммирующих планетарных рядов.
Другой поток идет от передаточного вала через включенные блокировочные фрикционы к солнечным шестерням суммирующих планетарных рядов.
Оба потока мощности суммируются на водилах планетарных рядов и далее через полужесткие зубчатые сочленения передаются бортовым передачам и ведущим колесам.
Распределение мощности между основным и вторым потоками Для всех передач приведено в табл. 16.
Рассмотрим работу МПП при различном положении рычагов
управления.
При нейтральном положении синхронизаторов и муфт переключения передач, включенных блокировочных фрикционах механизмов поворота и выключенных тормозах транспортер-тягач Не будет двигаться. В этом случае крутящий момент двигателя
Передается только от передаточного вала через включенные фрик-Пионы, ведущие и ведомые шестерни фрикционов на солнечные
Шестерни обоих суммирующих планетарных рядов МПП. Солнечные шестерни через сателлиты и эпициклические шестерни вращают главный вал. Водила планетарных рядов механизмов поворота остаются неподвижными вследствие того, что их вращению Препятствуют моменты сопротивления ведущих колес.
167
16. Распределение мощности в МПП по потокам (мощность двигателя принята за единицу)
Соотношение мощностей потоков на передачах i
Направление потока
II
IV
VI
заднего хода
ш
I
Первый поток
Через включенную пару шестерен: передаточный вал — пара шестерен 11—VI передач и передачи заднего хода — главный вал — эпициклические шестерни — сателлиты — водила механизмов поворота ............. . . .
0,668
0,807
0,883
0,915
0,935
1,635*
t
Второй поток
Через блокировочные фрикционы механизма поворота: передаточный вал — фрикционы — солнечные шестерни — сателлиты — водила механизмов поворота ................
1,0
0,332
0,193
0,117
0,085
0,065
0,635 *
I*
* С учетом циркуляции мощности по замкнутому контуру.
I
При нейтральном положении муфт переключения передач, но выключенном одном из блокировочных фрикционов механизма поворота и включенном тормозе этого же фрикциона транспортер-тягач поворачивается в сторону выключенного фрикциона, но положение центра поворота зависит от соотношения моментов сопротивления вращению ведущих колес.
При равных моментах сопротивления вращению ведущих колес транспортер-тягач будет поворачиваться вокруг своего геометрического центра с радиусом, равным половине колеи (рис. 73, а).
При большем моменте сопротивления вращению ведущего колеса, связанного с планетарным рядом, на солнечную шестерню которого передается мощность двигателя, транспортер-тягач будет поворачиваться, двигаясь назад, вокруг геометрического центра гусеницы с большим моментом сопротивления движению и с радиусом, равным колее (рис. 73, б).
При большем моменте сопротивления вращению другого ведущего колеса транспортер-тягач будет поворачиваться, двигаясь вперед, но вокруг геометрического центра второй гусеницы также с радиусом, равным колее машины (рис. 73, в).
168
Рис. 73. Схема работы МПП при повороте:
<Л— сопротивление обеих гусениц одинаковое; б — сопротивление отстающей гусеницы Больше; в — сопротивление отстающей гусеницы меньше
При работе МПП на одной из передач (т. е. при прямолинейном движении) блокировочные фрикционы механизмов поворота Включены, оба тормоза механизмов поворота выключены. В зависимости от положения подвижных муфт или синхронизаторов Может быть включена одна из шести передач для движения вперед или передача заднего хода (рис. 74, а).
При включении передачи I (рис. 74, а) муфта включения вхо-Дит в зацепление с внутренними зубьями неподвижной муфты и останавливает главный вал и закрепленные на нем эпициклические шестерни. При этом мощность к планетарным рядам пере-
169
дается только одним потоком: от передаточного вала через включенные фрикционы к солнечным шестерням. Солнечные шестерни вращают сателлиты, которые, обкатываясь по остановленным эпициклическим шестерням, увлекают водила в направлении вращения солнечных шестерен, но с меньшей частотой. Так как
Рнс. 74. Схема работы
170
ЕЧастота вращения правого и левого водил планетарных передач Одинаковая, то транспортер-тягач движется прямолинейно вперед с наименьшей скоростью.
Г На передаче II и последующих муфта включения входит в зацепление с внутренним венцом шестерни соответствующей пере-ачи и блокирует ее с главным валом. Мощность при этом пере-ается двумя потоками: первый поток — от передаточного вала ерез шестерню включенной передачи, подвижную муфту на Главный вал и эпициклические шестерни планетарных рядов; второй поток — от передаточного вала через фрикционы и шестерни фрикционов на солнечные шестерни (рис. 74, б—е).
В планетарных рядах потоки мощности суммируются, в результате чего водила приобретают определенную частоту вращения Ш передают суммарный крутящий момент к бортовым передачам И далее к ведущим колесам.
При включении передачи заднего хода мощность от передаточного вала также передается двумя потоками: первый поток передается через шестерню заднего хода, промежуточную и ведомую щестерни заднего хода на главный вал; при этом главный вал и эпициклические шестерни вращаются в обратном направлении. Водила в этом случае находятся под воздействием разности частот
при Включении I—VI передач
с' Г
Рнс. 75. Схема работы МПП на передаче замедленного ряда:
а — замедленное движение вперед (передача V); б — движение назад
вращения эпициклической и солнечной шестерен. Так как частота вращения эпициклических шестерен больше, чем солнечных^ то водила вращаются в направлении вращения эпициклических шестерен и обеспечивают задний ход транспортеру-тягачу.
При включенной замедленной передаче и установке рычагов управления МПП в первое положение фрикционы МПП ^выключены, а тормоза включены, т. е. солнечные шестерни остановлены. Мощность передается одним потоком: через шестерни включенной передачи на эпициклические шестерни планетарных рядов. Эпициклические шестерни приводят во вращение сателлиты, которые, вращаясь вокруг своих осей, обкатываются по заторможенным солнечным шестерням и увлекают за собой водила (рис. 75).
Так как водила вращаются только от эпициклических шестерен, то частота вращения их уменьшается. В результате на передачах II—VI движение будет замедленным, т. е. можно получить передачи замедленного ряда (рис. 75, а).
На передаче I при выключении фрикционов МПП подвод мощности к бортовым передачам прекращается и транспортер-тяга^ останавливается.
При включении передачи заднего хода и установке рычагов управления МПП в первое положение транспортер-тягач движется ускоренно назад, так как в этом случае солнечные шестерни
суммирующих планетарных рядов остановлены и водила вращаются в обратную сторону с большей частотой (рис. 75, б).
При выключении только одного из блокировочных фрикционов МПП и включении соответствующего тормоза МПП транспортер-тягач поворачивается с расчетным радиусом в сторону выключенного фрикциона. На каждой передаче транспортер-тягач имеет определенный расчетный радиус поворота.
Как уже было показано ранее (см. гл. II), для МПП, примененного на транспортере-тягаче МТ-Л, значения расчетных радиусов поворота на передачах определяются выражением
\ Lki J
где В — колея машины; k — характеристика планетарного ряда, представляющая собой отношение угловых скоростей солнечной и эпициклической шестерен при заторможенном водиле (отношение числа зубьев эпициклической шестерни к числу зубьев солнечной); ic — передаточное отношение между раздаточным валом и солнечной шестерней суммирующего планетарного ряда; iki — передаточное отношение включенной передачи.
Значения расчетных радиусов поворота транспортера-тягача МТ-Л на разных передачах следующие.
Передача.................. I II III IV V VI Заднего
хода
Расчетный радиус поворота, м 2,5 7,5 13 21,35 29,3 38,6 3,9
Бортовые передачи, представляющие собой одноступенчатые планетарные редукторы с передаточным числом 6, расположены в передней части транспортера-тягача. Их картеры прикреплены к бортам рамы болтами. Бортовые передачи соединены с главной передачей легкосъемными зубчатыми соединительными валами.
Однорядный соосный планетарный механизм бортовой передачи состоит из водила, солнечной шестерни, трех сателлитов и неподвижной эпициклической шестерни, изготовленной заодно с картером.
Водило опирается на шарико- и роликоподшипник. На хвостовик водила насажено ведущее колесо.
Солнечная шестерня, изготовленная заодно со ступицей барабана остановочного тормоза, установлена на ролико- и шарикоподшипнике. Тормозной барабан прикреплен к ступице болтами.
Сателлиты установлены на осях, запрессованных в отверстиях водила, и вращаются каждый на двух роликоподшипниках.
С внутренней стороны картер передачи закрыт крышками, а с наружной — торцовым уплотнением. В местах разъема картера и крышек установлены уплотнительные прокладки. Для предотвращения вытекания смазки из полости бортовой передачи со стороны тормозного барабана установлены самоподжимное
173
уплотнение из фторкаучука и войлочный сальник. В месте разъема картера и корпуса торцового уплотнения установлены регулировочные прокладки.
В крышке левой бортовой передачи смонтирован червячный привод спидометра. Червяк привода насажен на хвостовик солнечной шестерни.
Остановочные тормоза ленточные плавающего типа, служат для торможения и остановки транспортера-тягача, для удержания его на подъемах и спусках, а также для торможения одной из гусениц при крутых поворотах.
Тормоза имеют два независимых привода: пневматический, управляемый от ножной педали, и механический, управляемый рычагами управления. Пневматический привод управления служит для торможения и остановки транспортера-тягача.
Тормоза механизма поворота плавающего типа ленточные с механическим приводом, предназначены для затормаживания солнечных шестерен планетарных рядов МПП с целью осуществления поворота транспортера-тягача и получения замедленного ряда передач. Тормозной барабан крепится к ведомому барабану фрикциона МПП.
Конструкция тормозов механизма поворота аналогична конструкции остановочных тормозов.
Привод управления остановочными тормозами выполнен совместно с приводом управления блокировочными фрикционами и тормозами МПП. Он состоит из двух рычагов управления, двух мостиков управления, передаточного вала, переходных кронштейнов, промежуточных кронштейнов и системы тяг и рычагов.
Рычаги 18 и 22 (рис. 76) управления смонтированы на валике 24, установленном в кронштейне 17 на двух опорах. С помощью рычагов управления осуществляется поворот, замедленное движение и остановка транспортера-тягача на подъемах и спусках.
Каждый рычаг имеет защелку /, которой можно фиксировать его в определенном положении. Для этого защелка связана тягой с собачкой, которая фиксируется на секторе, приваренном к кронштейну рычагов управления.
Левый рычаг 18 управления закреплен на валике 24 с помощью стопорного пальца с гайкой. К валику 24 с одной стороны приварен рычаг 3 для присоединения тяги 2 левого остановочного тормоза, с другой — прикреплен рычаг 23, к которому присоединена тяга 25 левого рычага управления. Тяга 25, регулируемая по длине, соединена с коротким рычагом трубы, установленной на неподвижной оси в левом переходном кронштейне 14. Тяга 2 левого остановочного тормоза присоединена к передаточному рычагу 20. Передаточный рычаг изогнутой формы со скосом, приварен к валику, установленному в двух металлокерамических втулках в левом промежуточном кронштейне 2/, таким образом, чтобы рычаг 20 скосом касался упора левого рычага 19 тормозной камеры.
174
Правый рычаг 22 управления двуплечий, установлен свободно во втулке на валике 24. К короткому плечу рычага присоединена тяга 16.
Мостики управления обеспечивают определенную очередность срабатывания элементов МПП: выключения блокировочных фрикционов, включения и выключения тормозов поворота и вклю
чения установочных тормозов.
Каждый мостик управления состоит из кронштейна /2, кулачка Р, валика 10, рычага 6 тормоза МПП, ролика фрикциона МПП, двух пружин 29 и ролика рычага тормоза МПП.
На кронштейне 12 смонтированы все детали мостика управления и закреплены концы лент тормоза МПП.
Кулачок 9 закреплен на валике 10 с помощью шпонки и стяжного болта. На рабочую поверхность кулачка, выполненную по
профилю
специальному
с двумя лунками, опираются ролики.
Лунки обеспечивают фиксацию рычагов управления в исходном
и первом положениях.
К валику кулачка с помощью шпонки и стяжного болта прикреплен рычаг 3, к которому присоединен один конец тяги 11 левого мостика управления. Другой конец тяги 11 соединен с длинным рычагом 13 трубы левого переходного кронштейна 14\ тяга 44 правого мостика управления соединена с рычагом 34.
К трубе 27, надетой на валик, установленный в кронштейне 129 приварены рычаг фрикциона МПП и короткий рычаг 28 с прорезью. В рычаге 28 с прорезью установлен ролик, который при повороте кулачка отжимается и поворачивает трубу 27 на соответствующий угол. На трубе 27 имеется рычаг, который шарнирно соединен с тягой 26 фрикциона механизма поворота.
В средней части фигурного рычага 6 тормоза МПП смонтиро-
ван ролик, который свободно вращается на оси и перекатывается по рабочей поверхности кулачка 9 при его поворотах. Рычаг 6 шарнирно соединен с регулировочной тягой 5, которая в свою очередь соединена с двуплечими рычагами 4 тормоза МПП.
Пружины 29 одним концом надеты на валик, запрессованный в мостик, другим — на зацеп 30, соединенный с передним концом рычага 6. Пружины постоянно прижимают ролик рычага 6 к кулачку и создают усилия для затяжки тормоза МПП.
Для кинематической связи правого рычага управления с пра
вым мостиком и правым остановочным тормозом служит передаточный вал 33, который соединен с помощью зубовых муфт 32 с валиками левого 31 и правого 35 кронштейнов.
К валику левого кронштейна 31 с помощью стяжного болта
прикреплен рычаг 15 передаточного вала, к которому присоединена тяга 16 правого рычага управления. К валику правого кронштейна 35 приварен рычаг 34 тяги 44 правого мостика и прикреплен с помощью шпонки и стяжного болта рычаг 36, к которому присоединен один конец переходной тяги 37 правого оста-
ковочного тормоза. Другой конец тяги 44 правого мостика прикреплен к рычагу 43.
Для связи передаточного вала с правым остановочным тормозом служит переходной кронштейн 38, прикрепленный к ребру рамы тремя болтами. К кронштейну консольно приварена ось,
на которой установлен свободно на втулке двуплечий рычаг 7.
короткому плечу рычага 7 присоединена переходная тяга 37
к длинному — тяга 39 правого остановочного тормоза.
К лобовому листу рамы тремя болтами прикреплен правый
промежуточный кронштейн, в котором в двух металлокерамических втулках установлен валик. К валику с одной стороны приварен передаточный изогнутый рычаг 41 со скосом, с другой прикреплен рычаг 42, к которому присоединена тяга 39 правого оста
новочного тормоза. Валик устанавливают таким образом, чтобы рычаг 41 скосом касался упора рычага 40 тормозной камеры.
Рассмотрим работу привода управления тормозами поворота
и остановочными тормозами. Как уже упоминалось, рычаги управления МПП при движении могут занимать три фиксирован
ных положения: исходное, соответствующее передаче нормального ряда; первое, соответствующее передаче замедленного ряда или повороту с расчетным радиусом; второе, соответствующее
Рис. 76. Управление остановочными тор
мами и механизмом передач и поворота
выключенным фрикционам МПП и заторможенным остановочным тормозам.
В исходном положении рычага управления ролик рычага 6 находится в верхней лунке профиля кулачка 9 и прижимается к нему усилием пружин 29. Рычаг 6 при этом занимает верхнее положение, и тормоз МПП выключен. Ролик же фрикциона МПП находится в нижней лунке на профиле кулачка, блокировочный фрикцион включен. Тяга остановочного тормоза не действует на его рычаг, поэтому остановочный тормоз выключен.
Если в исходном положении находятся оба рычага управления, то транспортер-тягач будет двигаться прямолинейно.
Перемещение рычага управления в первое положение вызывает поворот кулачка 9. Кулачок отжимает ролик фрикциона, поворачивает трубу 27 и через рычаг трубы перемещает тягу 26, которая, воздействуя на поводок, выключает фрикцион МПП. Ролик рычага 6 при этом выходит из лунки и перемещается во впадину кулачка. Под действием двух пружин 29 рычаг 6 поворачивается и перемещает регулировочную тягу 5 тормоза МПП вперед. При этом пальцы двуплечих рычагов 4 перемещаются по фигурным прорезям кронштейна 12 и включают тормоз МПП.
В момент полной затяжки тормозной ленты зазор между кулачком и роликом рычага должен быть 2—3 мм.
В первом положении рычаги управления фиксируются роликом рычага фрикциона, который находится в нижней лунке кулачка.
При установке обоих рычагов управления в первое положение транспортер-тягач будет двигаться прямолинейно и замедленно на передачах II—VI и ускоренно на передаче заднего хода. На передаче I движение прекратится, так как кинематическая цепь будет разорвана.
Если один из рычагов управления находится в исходном положении, а другой в первом, то транспортер-тягач будет поворачиваться с расчетным радиусом, соответствующим данной передаче, в сторону рычага, установленного в первое положение.
При перемещении рычагов управления из исходного во второе положение ролик рычага фрикциона перекатывается по профилю кулачка с постоянным радиусом и не оказывает воздействия на фрикцион, который остается выключенным.
Верхний выступ кулачка поворачивает рычаг тормоза МПП в обратном направлении; преодолевая усилие пружин, рычаг тормоза перемещается и выключает тормоз МПП. Под действием усилия, прилагаемого водителем к рычагам управления, тяга остановочного тормоза поворачивает рычаг и затягивает ленту остановочного тормоза.
Если во второе положение поставить оба рычага управления-то транспортер-тягач резко остановится.
Если один из рычагов управления находится в исходном положении, а другой во втором, то при включении передач транспортер-тягач поворачивается вокруг заторможенной гусеницы с радиусом, равным колее.
5. ХОДОВАЯ ЧАСТЬ
Ходовая часть транспортеров-тягачей включает гусеничный движитель и подвеску.
Гусеничный движитель выполнен с передним расположением ведущего колеса, имеет опорные катки большого диаметра с наружными резиновыми шинами, направляющие колеса, приподнятые над поверхностью земли, и не имеет поддерживающих катков.
Компоновка гусеничного движителя обеспечивает получение переднего угла атаки (въезда) в пределах 27—29°, заднего угла съезда 20—22°.
Элементы гусеничного движителя рассчитаны таким образом, чтобы удовлетворить возможность создания различных модификаций без изменения или введения каких-либо новых узлов или деталей. Учитывая разнообразие нагрузочных режимов семейства машин, создаваемых на базе унифицированного шасси, разработаны и используются два варианта гусеничного движителя и ходовой части в целом: с шестью и семью опорными катками на борту (рис. 77, а и б). Оба варианта идентичны, за исключением наличия дополнительных опорных катков в семиопорном варианте.
В схеме с шестью опорными катками у пяти катков балансиры направлены по ходу назад, у последнего (шестого) — вперед; в схеме с семью опорными катками шестой и седьмой катки имеют балансиры, направленные вперед.
Симметричное расположение балансиров крайних опорных катков целесообразно с точки зрения обеспечения равной натру женности катков при переднем и заднем ходах и с точки зрения унификации деталей подвески, так как на крайних катках всех модификаций машин установлены гидравлические амортизаторы и пружинные ограничители хода опорных катков.
Отношение L/B для обеих схем соответственно равно 1,48 и 1,78, т. е. обе схемы по условию поворачиваемости соответствуют требованиям, предъявляемым к быстроходным гусеничным машинам.
Расстояние между осями ведущего колеса и опорных катков в статическом положении корпуса (по вертикали) принято равным 265 мм, что при радиусе балансира 360 мм обеспечивает минимальное изменение периметра гусеничного обвода и его достаточно устойчивую работу при перемещениях катков в диапазоне Мх полного хода. На рис. 77, а и б показаны возможные предельные положения опорных катков.
Рис. 77. Схема ходовой части: а — с шестью опорными катками; б — с семью опорными катками
и уширенные несимметричные
с открытыми шарнирами
(по условию отсутствия контакта при их перемещениях), что способствует более равномерному распределению давлений на грунт по длине опорной ветви обвода при полной нагрузке на платформе.
Базовой гусеничной цепью семейства машин является гусеничная цепь металлическими
(рис. 78). Однако для комплектации модификаций, где требуются высокая долговечность или низкие давления на грунт, применяют другие гусеничные цепи: с закрытым шарниром Дальше они будут рассмотрены более подробно.
Гусеничная цепь с открытыми металлическими шарнирами выполнена мелкозвенчатой с литыми траками из марганцовистой стали 110Г13Л. Среднее давление на грунт под гусеницей равно 0,44 кгс/см2.
В обводе с шестью опорными катками в гусенице 108 траков, в обводе с семью опорными катками 122 трака. Траки гусеницы одиннадцатипроушинные. На крайних проушинах имеются утолщения для цевок. Вследствие того, что траки многопроушинные и расстояния между проушинами небольшие, диаметр проушин и пальца представилось возможным сделать минимальным (16 мм), что позволило существенно уменьшить массу гусеницы.
Все траки гусеничной цепи гребневые. Гребни служат для направления движения опорных катков по беговой дорожке, Боковая фиксация гусеницы на ведущем колесе осуществляется боковыми поверхностями траков, упирающимися во внутренние торцовые поверхности венцов ведущих колес.
Отверстия в проушинах траков калибруют специальными протяжками. Какой-либо другой механической обработки траков не требуется.
На гусеничные цепи (с открытыми и закрытыми шарнирами) транспортеров-тягачей можно устанавливать асфальтоходные башмаки.
Практика использования гусеничных машин для удовлетворения различных нужд показывает, что часто возникает необходи-
мость передвижения машин, особенно транспортного назначения, по дорогам с твердым покрытием. Однако высокие давления, развиваемые опорными элементами (грунтозацепами) траков гусениц, создают опасность разрушения дорогостоящего дорожного покрытия, в связи с чем движение гусеничных машин по дорогам такого типа запрещается.
Давление в контакте автомобильных шин с дорогой находится в пределах 1,5—6,5 кгс/см2, в то время как давление, возникающее на опорных поверхностях траков при движении по дорогам с твердым (асфальтовым или бетонным) покрытием, для гусеничных машин легкого класса составляет 10—20 кгс/см2. Естественно, что при таких удельных нагрузках на полотно дороги возможность разрушения покрытия дороги при интенсивной эксплуатации оказывается неизбежной.
Учитывая данное обстоятельство, с целью расширения области использования ряда модификаций легких многоцелевых гусеничных транспортеров-тягачей разработана конструкция асфаль-тоходных башмаков для гусеничных цепей. Геометрические размеры резиновой подушки асфальтоходного башмака определяли исходя из максимально возможных нагрузок на ходовую часть, числа траков в опорной ветви гусеничного обвода и необходимости обеспечения среднего давления на резину не более 1,5 кгс/см2. В соответствии с этим площадь подушки башмака выбрана равной 156 см2 (20X7,8 см).
Резина 4Э-420 башмака вулканизируется в пресс-форме к стальному литому из стали 45Л (ГОСТ 977—75) каркасу. Каркас имеет отверстия для крепления к тракам гусеницы с помощью болтов и гаек.
Как показали испытания, опорная поверхность башмака любой формы изнашивается по плоскости. Это позволяет считать, что наиболее целесообразной опорной поверхностью башмака является плоская. Испытания башмаков с криволинейной формой подушек подтвердили это. При криволинейной форме опорной части происходит форсированное изнашивание подушек на первых порах работы. Кроме того, такая форма подушек неоправданно усложняет процесс изготовления пресс-форм.
В процессе движения, разворотов и торможения асфальтовое покрытие дороги при установке на гусеницу асфальтоходных башмаков не повреждается.
Наиболее надежным способом присоединения башмаков к тракам является крепление при помощи контргайки и пружинной шайбы с обеспечением между телом каркаса и трака жесткого контакта. Крепление болтом^и гайкой с введением резинового элемента между обратной стороной башмака и трака ненадежно.
Всесторонние испытания башмаков показали их высокую работоспособность. Это позволило рекомендовать башмаки для комплектации машин, которые по назначению могут частично использоваться для эксплуатации по дорогам с твердым покрытием. 182
Следует отметить, что это первая попытка широкого внедрения асфальтоходных гусениц в практику отечественного тракторостроения.
Ведущие колеса транспортера-тягача с двойными съемными венцами, которые крепят к дискам ведущего колеса болтами. Зубья венцов ведущих колес, так же как и цевки траков, имеют прямой профиль, что в сочетании с толкающим типом зацепления позволяет обеспечить высокую износостойкость элементов зацепления. Зубья ведущего колеса, как это видно из диаграммы зацепления (см. рис. 19), нагружены достаточно равномерно.
Опорные катки движителя одинарные с наружной амортизацией. Отличительной особенностью катков является то, что их бандажи выполнены пустотелыми сварными из алюминиевого сплава АМг-бМ. Это позволило наряду со снижением массы ходовой части увеличить водоизмещающие объемы и повысить плавучесть машины.
Опорные катки устанавливают на малых (нижних) осях балан-сиров подвески на двух шарикоподшипниках каждый. Со стороны борта ступица катка имеет торцовое и лабиринтное уплотнения, а с наружной стороны закрыта колпаком, в котором имеются отверстия для заправки и слива масла.
Применению катков такой конструкции (впервые в практике создания транспортных гусеничных машин) предшествовали разработка и проведение сравнительных испытаний нескольких вариантов для определения более рациональных конструктивных решений и оптимальных значений параметров, обеспечивающих наибольшую несущую способность опорного катка, минимальную массу при возможно большем водоизмещающем объеме, хороший теплоотвод от резинового массива при движении на высоких скоростях и достаточную долговечность.
В результате анализа возможных конструктивных решений гусеничного обвода получили, что наиболее полно отвечают требованиям компоновки катки размером 670X140 мм (670 мм — диаметр по резиновой шине, 140 мм — ширина по ребордам). Катки таких размеров позволяют наилучшим образом реализовать динамический ход подвески, излишне не увеличивая высоту подкрылков корпуса и высоту машины в целом, а также дают возможность оптимизировать установку гидроамортизаторов и пружинных ограничителей хода катков при осуществлении оригинального конструктивного исполнения узла балансира в сборе и кронштейна для взаимодействия с ограничителем хода катка.
Резиновая шина с помощью клея «Лейконат» прикреплена без применения эбонитовой прослойки к гладкой поверхности бандажа, на которой нет канавок типа ласточкина хвоста. При таком устройстве тепло хорошо отводится от резины к материалу бандажа. Торцовые поверхности бандажа, которые в работе соприкасаются с гребнями траков гусеницы, армированы стальными ребордами, что способствует уменьшению их изнашивания.
183
Рис. 79. Варианты кон* струкции бандажа опор*
ного катка
алюминиевого сплава для изготовления
При использовании
опорных катков необходимо обеспечить их жесткость. Дело в том, что в процессе вулканизации резиновой шины под большим давлением бандаж катка может прогибаться в средней части. Наличие прогиба приводит к нестабильности (падению) давления в замкнутом объеме, ограниченном пресс-формой и бандажом, ухудшению качества крепления резины и преждевременному отслоению резиновой шины
Для предотвращения этого явления была проведена расчетная и экспериментальная оценка прочности бандажей различных вариантов, показанных на рис. 79.
Результаты сравнительного анализа жесткости бандажей разных вариантов приведены в табл. 17.
Из таблицы следует, что наибольшую жесткость при минимальном увеличении массы имеет каток варианта IV.
поэтому недопустим.
17. Жесткость бандажей опорных катков
Вариант конструкции
Прогиб бандажа /, см
Относительный макси-
мальный прогиб fEX X 10~'2/Р, см"1 . .
У вел ичение массы банда-
жа катка по сравнению с вариантом I Дтк, кг
0,659
0,41014
0
0,517
0,3216
0,46
0,2595
0,1615
1,38
0,239
0,1483
0,46
0,330
0,2045
0,46
Изготовленные по этому варианту бандажи после обрезинивания имеют действительный прогиб 0,5—1 мм, т. е. значительно меньший, чем бандажи других вариантов, особенно вариантов I и II. Ходовые, эксплуатационные и контрольные испытания
и II. Ходовые подтвердили высокую долговечность опорных катков варианта IV.
Следует отметить, что конструкция бандажа, выполненного по варианту IV, позволяет также усовершенствовать технологический процесс его изготовления применением для заготовок прессованной трубы из алюминиевого сплава вместо колец, получаемых многократной раскаткой.
Испытания, проведенные на форсированных режимах пробегом свыше 8500 км, показали высокую работоспособность катка данной конструкции. Это позволило поднять регламентируемую длительную статическую нагрузку на шину опорного катка размером 670 X140 мм до 1120 кгс при установке его на модификации повышенной массы.
Направляющее колесо движителя транспортера-тягача несколько необычной конструкции (рис. 80): оно не имеет бандажа. Контакт колеса с гусеницей осуществляется только по поверхности двух венцов (дисков). Такая конструкция обеспечивает скалывание льда с беговой дорожки гусеницы (вследствие высоких давлений в зоне контакта) и способствует улучшению самоочищае-мости гусеницы при эксплуатации по мокрому снегу.
Рис. 80. Направляющее колесо с механизмом натяжения гусениц
Направляющее колесо 1 установлено на малой оси кривошипа 2 на двух шарикоподшипниках и с наружной стороны закрыто колпаком, а с внутренней — торцовым 9 и лабиринтным 10 уплот
нениями.
Натяжение гусеницы осуществляется поворотом кривошипа 2 в кронштейне 3, приваренном к борту корпуса 8 транспортера-тягача. Для этого на шлицевом хвостовике длинной оси с помощью корончатой гайки закреплена вилка 6, в отверстиях которой свободно вращается палец, выполняющий роль гайки натяжного винта.
Натяжной винт 7 закреплен в шаровой опоре 5, установленной в кронштейне 4, вваренном в днище корпуса. Осевое перемещение винта в шаровой опоре ограничивается упорным шарикоподшипником, расположенным между буртом натяжного винта и торцом
опоры.
Прочность и износостойкость опорных дисков направляющего колеса зависят от их материала и режима термической обработки. Экспериментально найдено, что лучшие результаты по долговечности дает применение сталей 40Х и 38ХС с закалкой до твердости
Работоспособность гусеничного обвода в тяжелых условиях эксплуатации на мокром снеге, сыпучих грунтах, вязкой грязи и др. во многом зависит от степени очистки беговой дорожки
гусеницы, т. е. ликвидации предпосылок к явлению распора гусе-
ничного обвода. Для обеспечения этого в ходовой части транс-
портеров-тягачей применено специальное приспособление в виде качающегося скребкового устройства, укрепленного на балансире
заднего катка. Рабочий орган скребкового устройства разме
щается между дисками направляющего колеса.
Сочетание двухдискового направляющего колеса, разрушающего снежную корку, наледи или вязкий грунт на беговой дорожке, и скребкового устройства, постоянно перемещающегося вниз и вверх при движении машины (из-за поджатия и опускания последнего опорного катка) в пространстве между дисками, обеспечивает высокую эффективность снегоочистителя и предохраняет гусеничный обвод от распора.
Подвеска транспортера-тягача индивидуальная торсионная. Торсионные валы размещены на всю ширину машины. Конструкция подвески показана на рис. 81. Балансир 5 катка 1 стальной, вы по л нен шта м пова н ным,
заодно с малой и большой осями.
Для облегчения в теле балансира сделано отверстие. Балансиры всех катков взаимозаменяемые. На крайних балансирах имеются ушки 4 для установки амортизаторов и кронштейны 2 для упоров в ограничители хода 3.
Балансир устанавливают в кронштейне корпуса машины в двух пластмассовых (текстолитовых) втулках 7. В торец кронштейна вставляют уплотнение 6.
Торсионный вал 8 представляет собой цилиндрический стержень с утолщенными шлицевыми головками. Торсионные валы
I
Рис. 81
Подвеска
V
изготовляют из легированной стили и подвергают процессу зане-воливания. В^связи с этим различают правый и левый торсионные валы. Правый торсионный вал заневоливается закруткой по часовой стрелке (окрашивают в серый цвет), левый — против часовой стрелки (окрашивают в синий цвет). Заневоливание производится на угол несколько больший, чем максимальный угол закручивания торсионного вала при полном ходе катка.
Ограничитель 3 хода катка выполняют в виде листовой конической пружины. Наличие упругих ограничителей резко снижает
187
Рис. 82. Характеристика подвески:
1—при упоре в упругий ограничитель хода
Рис. 83. Характеристики амортизатора, приведенные к опорному катку, в зависимости от угла установки
вероятность жестких ударов балансира в ограничитель (пробоя подвески).
Гидроамортизаторы, устанавливаемые на балансирах крайних катков, двустороннего действия телескопические.
Как видно из описания, конструкция подвески транспортера-тягача довольно проста и принципиально ничем не отличается от конструкции подвески других гусеничных машин (тягачей или тра нспортеров- снегобол отоходов).
Транспортеры-тягачи МТ-Л в эксплуатации показывают хорошую плавность хода, что позволяет им на разбитых грунтовых дорогах двигаться с более высокими средними скоростями, чем даже автомобилям высокой проходимости. Высокая плавность хода достигнута в основном за счет значительного хода опорных катков и большой энергоемкости амортизаторов.
Характеристика подвески транспортера-тягача представлена на рис. 82, а основные параметры системы подрессоривания в табл. 18. Из таблицы видно, что показатели характеристики подвески транспортеров-тягачей более высокие по сравнению с другими машинами соответствующего весового класса.
Размещение телескопических амортизаторов в габаритах гусеничного обвода представляет определенные трудности, поскольку эффективность их работы находится в непосредственной зависимости от углов установки е по отношению к оси балансира. Это видно из характеристики амортизатора, приведенной к опорному катку (рис. 83). Амортизаторы установлены таким образом» чтобы в статическом положении угол в был в пределах 90—100°, что соответствует наиболее оптимальному соотношению демпфирования и жесткости (частоты свободных колебаний). Установка 188
18. Основные параметры систем подрессоривайия гусеничных машин
Параметр
АТ-Л
АТ-Л (модернизированный)
МТ-Л
Масса машины с грузом А1Т, кг . . Статическая нагрузка на каток Рст, кгс .............................
Максимальная нагрузка на каток (при упоре в ограничитель) Рдин, кгс .............................
Диаметр торсиона d, мм ..........
Рабочая длина торсиона £р, мм Жесткость подвески Лт, кгс/см . . . Статический ход /ст, мм . . . Динамический ход /дин, мм . . . . Полный ход /п, мм................
Максимальное напряжение в тор-
сионе т, кгс/см3 ..............
8250
600
8550
726
10 500
12 300
906
1480
32 1444
66 72,5 135,5 208
6540
2075 33
1452 105 67 ПО 177
6500
1780
1100
91,6
65,4
116
181,4
6510
1937 36
1960 51,9 142,6
335,9
7347
амортизаторов под таким углом позволяет обеспечить между ними и другими перемещающимися деталями ходовой части необходимые зазоры.
Экспериментальные характеристики трех гидравлических амортизаторов приведены на рис. 84. При прямом ходе максимальное усилие на штоке амортизатора Ршт составляет 7000—8000 кгс, при обратном — усилие не ограничивается.
Высокая плавность хода базового транспортера-тягача и его модификаций подтверждается расчетными и опытными данными. Вертикальные ускорения г при преодолении транспортером-тягачом единичных неровностей высотой 150 мм и длиной 2500 мм с различными скоростями не превышают 2,5g (рис. 85). Наибольшие ускорения возникают в носовой части, в остальных местах
Рис. 84. Экспериментальные характеристики амортизаторов: /—5 — амортизаторы; -----прямой ход; —--------обратный ход
189
Рис. 85. Вертикальные ускорения в различных точках траиспортера-тягача при движении через единичную неровность высотой 150 мм и длиной 2500 мм:
I — в носовой части: 2 — на сиденье водителя; 3 — в средней части; 4 — в кормовой части
транспортера-тягача ускорения примерно такие же, как на сиденье водителя.
Незначительные вертикальные ускорения получены и при движении транспортера-тягача в реальных дорожных условиях (табл. 19).
Участок разбитой заснеженной дороги длиной 80 м характеризуется наличием двух неровностей глубиной 550—600 мм с расстоянием между впадинами 4,5—6,0 м и семи неровностей глубиной 150—250 мм с расстоянием между впадинами 6—10 м.
19. Максимальные вертикальные ускорения в долях g
Место установки датчика
Транспортер-тягач
массой 12.3 т массой 12.5 т
Разбитая Заснеженная Разбитая Заснеженная [
грунтовая грунтовая i
грунтовая дорога грунтовая дорога
заснежен- среднего заснежен- среднего
ная дорога качества ная дорога качества
V — 45 км/ч V — 50 км/ч v = 40 км/ч v == 50 км/ч
Носовая часть (крайняя передняя)...........
Сиденье водителя .
Середина грузовой платформы ..............
Кормовая часть (крайняя задняя) . . .
4-2,2/—1,1 + 1 Л/—0» 7
+0,8/-0,8
4-0,7/—0,9
+0,8/—0,5 +0,3/—0,3
+0,5/—0,3
+0,4,-0,5
+2,1/—0,5
+0.7/-1,1
+0,5/—0,5
-1-0,5/—0,5
+1,4/—0,9 +0,6/—0,6
+0,6/—0,6
+0,5/—0,5
Примечание. В числителе — при перемещении корпуса машины вверх, в знаменателе — вниз.
Участок заснеженной дороги среднего качества длиной 65 м характеризуется наличием в основном более мелких неровностей и двух неровностей глубиной 100—180 мм с расстоянием между впадинами 8—12 м.
Данные таблицы свидетельствуют о том, что значения ускорений, полученные при движении машин в реальных дорожных условиях, находятся также в пределах, позволяющих считать плавность хода легких многоцелевых гусеничных транспортеров-тягачей достаточно высокой.
Испытания пл вности хода транспортеров-тягачей различных модификаций показывают, что углы отклонения корпуса при продольно-угловых колебаниях практически одинаковые у всех модификаций, в том числе у шести- и семикатковых. Это обусловливает большую нагруженность деталей подвески передних и задних катков машин, имеющих ходовую часть с семью катками. Особенно увеличивается нагруженность балансиров. Чтобы обеспечить максимально возможную долговечность деталей подвески, балансиры крайних опорных катков выполнены сплошными. В результате их изгибная жесткость увеличена примерно в 1,5 раза, что обеспечивает равнопрочность этих балансиров по' сравнению с балансирами других опорных катков как при статическом, так и при динамическом нагружении.
Необходимо отметить, что у транспортеров-тягачей с грузом нагрузка на опорные катки распределяется достаточно равномерно. Это способствует повышению проходимости машины. Поскольку грузовая платформа располагается в задней части корпуса, то в незагруженном состоянии машины задние опорные катки нагружены меньше (эпюра давлений — трапециевидная). Несколько меньше нагружены в статическом состоянии задние опорные катки по сравнению с передними и при частичной загрузке транспортера-тягача, когда он используется для буксировки прицепов. Однако при движении происходит перераспределение давлений по длине опорной ветви и нагрузки на опорные катки выравниваются, т. е. эпюра давлений становится благоприятной с точки зрения проходимости и для такого варианта применения транспортера-тягача.
6. УСТРОЙСТВА, ОБЕСПЕЧИВАЮЩИЕ ВЫПОЛНЕНИЕ ТЯГОВО-ТРАНСПОРТНЫХ ФУНКЦИЙ
ТРАНСПОРТЕРА-ТЯГАЧА
Из систем и устройств, обеспечивающих выполнение транспортером-тягачом тягово-транспортных функций, рассмотрим пневматическую тормозную систему, лебедку и тягово-сцепное устройство.
Пневматическая тормозная система служит для торможения тягача и прицепа. Пневмосистема (рис. 86) однопроводная, включает в себя компрессор /, регулятор давления 10, воздушные баллоны 6, тормозной кран 4, тормозные камеры 5, соединитель-
ную головку 2 с разъединительным краном, кран отбора воздуха S, предохранительной клапан, манометр 3 и трубопроводы. Кроме того, к пневматической системе относится устройство для обмыва стекол кабины, в которое входят водяной бачок 7 и кран-регулятор 9.
Компрессор 1 непрямоточный, двухцилиндровый, одноступенчатого сжатия, с водяным охлаждением, расположен на двигателе.
Привод компрессора осуществляется ременной передачей от шкива, установленного вместе с приводом генератора, смазка и охлаждение от смазочной системы и системы охлаждения двигателя.
Регулятор давления 10 типа АРП с шариковыми клапанами предназначен для поддержания постоянного рабочего давления в системе 6—7 кгс/см2 и установлен на компрессоре.
Воздушные баллоны 6 сварной конструкции, общим объемом 46 л, расположены: один — под полом кабины с правой стороны, другой — с правой стороны двигателя.
Тормозной кран 4 поршневого типа, состоит из двух кранов, объединенных в одном корпусе. Один кран служит для управления приводом остановочных тормозов транспортера-тягача, другой — для управления приводом тормозов прицепа. Тормозной кран установлен под полом кабины с левой стороны.
Тормозные камеры 5 диафрагменного типа, установлены на кронштейнах в носовой части рамы.
Соединительная головка 2 с разъединительным краном предназначена для соединения пневматической тормозной системы транспортера-тягача с пневматической тормозной системой прицепа и расположена на кормовом листе рамы.
Базовый транспортер-тягач МТ-Л оборудован мощной лебедкой, развивающей тяговое усилие до 7 тс. Лебедка предназначена для самовытаскивания транспортера-тягача, подтягивания грузов и преодоления труднопроходимой местности при буксировке прицепов. Наличие лебедки дает возможность получить усилие на тросе, значительно превосходящее усилие традапор-тера-тягача, обеспечиваемое сцеплением гусеничного движителя со слабым грунтом.
Лебедка установлена в средней части транспортера-тягача у правого борта под полом платформы.
Ось барабана лебедки расположена вертикально. Такая компоновка обеспечивает уменьшение высоты лебедки и тем самым способствует снижению погрузочной высоты платформы.
Кинематическая схема лебедки и привода показана на рис. 87. Основными узлами лебедки являются червячный редуктор 8 с барабаном 9, реверсивный редуктор 3 и предохранительное устройство, состоящее из датчика перегрузок /0, механически связанного системой тяг и рычагов с включателем магнитной муфты 4. Привод лебедки осуществляется от промежуточного редуктора /. В приводе имеется автоматический тормоз 5* срабатывающий в аварийных случаях. Узлы лебедки соединяются друг с другом карданными валами 2, 7 и упругой муфтой 6.
Наличие самоустанавливающихся выводных направляющих роликов 11 позволяет осуществлять эвакуационные и другие работы при значительных углах отклонения троса 12 от продольной оси транспортера-тягача (в горизонтальной и вертикальной, плоскостях).
Рис. 87. Кинематическая схема лебедки и привода
Рассмотрим устройство основных узлов лебедки. Червячный редуктор (рис. 88) имеет червячную пару, состоящую из глобоидального червяка 2 и червячной шестерни 3 с передаточным отношением, равным 40. Все детали редуктора помещены в разъемный, литой из стали картер /, верхняя и нижняя половины которого соединены болтами и не подлежат раскомплектовке. В картере выполнены окна, закрываемые крышками, служащие для осмотра и проверки приработки червяка и червячного колеса.
В верхней половине картера имеется маслозаливное отверстие, закрываемое пробкой со щупом; в крышке нижней половины картера — сливное отверстие, закрываемое обычной пробкой.
Червяк стальной однозаходный, выполнен заодно с валом и установлен в картере в двух шарикоподшипниках. Первый подшипник вмонтирован в стакан 16. На шлицевом конце вала червяка закреплен фланец для присоединения карданного вала привода. В целях восприятия осевых усилий в крышке стакана 16 установлен упорный шарикоподшипник 17. Осевой зазор червяка в подшипниках регулируется прокладками 18, а положение червяка относительно колеса — прокладками 15.
Червячное колесо 3 стальное, армированное бронзовым венцом, расположено на ступице барабана на втулке. На одной стороне ступицы червячного колеса имеются наружные шлицы для передачи крутящего момента на ступицу барабана.
Барабан 6 с вертикальной осью вращения установлен в верхней и нижней половинах картера на шарикоподшипниках.
Для регулировки зазора между шарикоподшипником и крышкой служат прокладки 8. Для регулировки положения червячного колеса относительно червяка служат установочные кольца 11, .а для регулировки зазора между ступицей колеса и муфтой 14 — прокладки 13.
Механизм включения и выключения барабана состоит из муфт 12 и 14 и валика переключения 20. Внутренняя муфта 14 установлена на шлицевом конце ступицы барабана. Для предотвращения самопроизвольного включения или выключения муфты служит фиксатор, состоящий из двух шариков и пружин.
В ступицу барабана вмонтирован датчик 9 электрического сигнального устройства выдачи троса лебедки, который крепится к планке 19.
Между картером червячного редуктора и барабаном установлены два тормозка 10, которые притормаживают барабан при выдаче троса вручную. Для предотвращения спадания троса через реборду барабана на картере редуктора закреплены четыре ограничителя 4.
Один конец троса 5 лебедки закреплен на верхнем торне барабана с помощью накладки 7 и двух болтов и выведен на обод; другой конец троса с коушем выведен наружу через ролики датчика перегруза и выводные ролики. Рабочая длина троса 50 м. 194
8 7
6
Электромагнитная муфта служит для отключения лебедки от привода при усилии на тросе, превышающем допустимое, и устанавливается в одном корпусе с реверсивным редуктором (рис. 89).
Муфта состоит из корпуса 21, катушки 23, якоря 26, ведущих дисков 25, ведомых дисков 24, вала 15 муфты, втулки 13, контактного кольца 12 и щеткодержателя 5 со щеткой.
Один конец катушки 23 соединен с корпусом 21, другой — с контактным кольцом 12, изолированным от корпуса.
Ведомые диски 24 и якорь 26 соединены с втулкой 13 при помощи эвольвентного шлицевого соединения; ведущие диски 25 соединены с поводками ведущей полумуфты 11.
Магнитный поток, создающийся при включении катушки 23, проходя через пакет дисков 24 и 25 и якорь, прижимает их к корпусу 21. Якорь служит для обеспечения замыкания магнитной цепи.
Силы трения, возникающие между дисками, заставляют их вращаться как одно целое. Крутящий момент при этом передается от дисков через втулку 13 на вал 15 муфты.
Привод лебедки осуществляется от промежуточного редуктора через поперечный карданный вал, реверсивный редуктор и продольный карданный вал.
Реверсивный редуктор служит для уменьшения частоты вращения и изменения направления вращения тягового барабана лебедки. Он состоит из корпуса 1, ведущей конической шестерни 9, двух ведомых конических шестерен 28, вала 27 реверса, зубовой муфты 29 и валика 32 с вилкой 31 выключения и рычагами.
Ведущая шестерня установлена в стакане 6 на двух шарикоподшипниках 8 и закреплена крышкой 7, в которой расположен самоподжимной сальник. На шлицевой хвостовик шестерни надет фланец для присоединения карданного вала.
Ведомые шестерни свободно установлены на валу реверса и имеют выступы с внутренними шлицами.
Для регулирования зацепления конических шестерен служат прокладки.
Между шестернями на шлицах вала реверса установлена муфта 29 включения, на шлицевом конце ведущая полумуфта 11 электромагнитной муфты. Вал реверса установлен в крышке 30 и опоре 10 в трех шарикоподшипниках. На шарикоподшипник, расположенный на хвостовике вала реверса, опирается ведущий вал 15 электромагнитной муфты.
Для заправки редуктора маслом служит отверстие с пробкой 4, для слива масла отверстие с пробкой 22. Пробка 4 снабжена щупом для замера уровня масла.
Для удержания груза на уклоне при отключенном приводе предусмотрен автоматический тормоз, установленный на ведомом валу реверса.
Тормоз винтовой дискового типа, состоит из ведущего 14, ведомого 2 и нажимного 17 дисков, пружин 18 и собачки 3.
Рис. S9. Реверсивный редуктор с электромагнитной муфтой
Рис, 90, Упрарлеиие лебедкой
Рис. 91. Тягово-сцепное устройство
Ведущий диск установлен на шлицах вала 15 электромагнитной муфты, ведомый — свободно на ступице нажимного диска. Нажимной диск резьбовой частью установлен на валу 15 муфты, шлицевой — на ведомом валу 20 реверса. Один конец ведомого вала 20 реверса надет на хвостовик вала 15 муфты. На другом конце вала 20 установлена эластичная муфта 19. Ведомый вал опирается в крышке 16 на два шарикоподшипника.
Управление лебедкой осуществляется механизмами включения реверсивного редуктора и барабана лебедки.
Механизм включения реверсивного редуктора состоит из рычага 2 (рис. 90) управления реверсом, трубы 3, валика 8 с рычагами, тяг 4 и 9.
Рычаг 2 управления реверсом может занимать три положения: переднее, соответствующее намотке троса; нейтральное, соответствующее нейтральному положению муфты включения реверса; заднее, соответствующее размотке троса.
Механизм включения барабана лебедки состоит из рычага 1 управления лебедкой, валика 7, трубы 5 с рычагами и тяг 6 и 10.
Рычаг управления лебедкой может занимать два положения: вертикальное, соответствующее выключенному положению барабана; заднее, соответствующее включенному положению барабана.
Для включения обоих приводов служит одна съемная рукоятка 11.
Тягово-сцепное устройство с двусторонним амортизационно-поглощающим устройством установлено в кронштейне, приваренном к кормовой балке.
К основным деталям тягово-сцепного устройства относятся тяговый крюк 1 (рис. 91), накидная скоба 2 с защелкой 3, обойма 4
199
пружины, пружина 5, упор 6, амортизатор 7, упорная шайба 8 и гайка 9.
Накидная скоба с защелкой обеспечивают замыкание сцепной петли буксируемого прицепа.
Амортизирующими элементами служат стальная цилиндрическая пружина 5 и резиновый амортизатор 7, состоящий из набора резиновых и металлических шайб.
При буксировке прицепа, когда действует крюковая нагрузка, пружина работает на протяжении полного рабочего хода тягового крюка, а резиновый элемент вступает в действие через 25 мм хода крюка. При накате прицепа оба амортизирующих элемента вступают в действие одновременно. Рабочий подрессоренный ход тягового крюка вперед при накате, равный 30 мм, ограничивается скобой 10, жестко прикрепленной к кормовой балке, корпуса. Ход назад (при буксировке прицепа) равен 55 мм.
Наличие комбинированной системы амортизации обеспечивает снижение динамических нагрузок в сцепке и повышение износостойкости пары крюк—петля.
Для защиты от попадания воды в корпус транспортера через тягово-сцепное устройство имеются два войлочных сальника, вложенные в кольцевые канавки кронштейна рамы и в обойму пружины. Для смазки тягово-сцепного устройства служит масленка.
Глава IV
НАДЕЖНОСТЬ
ГУСЕНИЧНОГО ДВИЖИТЕЛЯ
Одной из причин, сдерживавших до последнего времени широкое применение гусеничных транспортных машин в народном хозяйстве, является недостаточная надежность гусеничного движителя, так как работоспособность и долговечность движителя определяют ресурс гусеничной машины в целом. Раньше отмечалось, что по металлоемкости (коэффициенту грузоподъемности), сложности конструкции, скоростным качествам, . мощностным и экономическим показателям, грузовместимости и, наконец, по разнообразию областей использования гусеничные транспортеры-тягачи существенно не отличаются от колесных машин высокой проходимости, а по проходимости, плавности хода и средним скоростям движения на местности значительно превосходят их.
Что же касается надежности гусеничного движителя, то этот показатель у гусеничных транспортеров-тягачей (оцениваемый по сроку службы до выхода из строя) практически на порядок ниже, чем у колесных машин. Это и обусловливает осторожное отношение к гусеничным машинам как к потенциально возможному массовому транспортному средству. Однако недостаточная надежность этого важного механизма гусеничной машины стимулирует поиски эффективных способов решения данной проблемы. Пожалуй, можно считать, что в настоящее время уже найдены конструктивные пути существенного повышения долговечности гусеничного движителя. Практическая задача заключается лишь в реализации найденных решений применительно к конкретным образцам гусеничных машин. Дальше будут изложены основные способы повышения долговечности гусеничного движителя и некоторые результаты их практического применения.
1. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ НАДЕЖНОСТЬ РАБОТЫ ДВИЖИТЕЛЯ
Гусеничный движитель работает в условиях высоких динамических нагрузок, поскольку непосредственно воспринимает все возмущающие воздействия со стороны грунта на машину. Воздействия эти самые разнообразные: это и большая сила тяги при преодолении тяжелых участков местности, и высокие динамические
201
нагрузки в обводе при движении по дорогам с твердым покрытием на повышенных скоростях, и значительные ударные нагрузки во всех элементах движителя при преодолении неровностей дорожного профиля, и нагрузки, возникающие при маневрировании (поворотах) машины. Высокий уровень динамической нагруженности движителя определяет и относительно высокую металлоемкость ходовой части. У транспортных гусеничных машин масса только гусениц составляет 12—15% массы машины, а масса ходовой части иногда достигает 30%.
Однако обеспечение достаточной усталостной прочности — задача, не являющаяся особо сложной на современном этапе развития техники. Она успешно решается в различных областях, в том числе и применительно к гусеничным машинам. В настоящее время ресурс основных деталей гусеничного движителя по усталостной прочности практически не ограничивает его долговечность.
Определяющими факторами в проблеме надежности гусеничного движителя являются износостойкость гусеничных цепей, износостойкость гусеничного зацепления, стабильность взаимодействия гусеничного обвода с элементами, оформляющими его контур, особенно с ведущими колесами.
Необходимо отметить, что кинематическая нестабильность работы обвода (нарушение его взаимодействия) может быть следствием как конструкции движителя, так и влияния первых двух факторов — износов гусеницы и зацепления.
В наибольшей степени на надежности гусеничного движителя сказывается долговечность гусеничных цепей, срок службы которых у большинства машин в 1,5—2 раза меньше срока службы остальных агрегатов ходовой части. До последнего времени на отечественных гусеничных транспортно-тяговых машинах использовались преимущественно гусеницы с открытым шарниром, основным недостатком которых является незащищенность шарнирного соединения от проникновения частиц грунта в зону трения. В результате этого взаимодействие элементов шарнирного соединения происходит в присутствии абразивной среды. Чем больше абразивных частиц в грунте, тем интенсивнее изнашивается шарнир и быстрее выходит из строя гусеница.
В результате износа шарнирных соединений шаг гусеничной цепи увеличивается. Это приводит к уменьшению натяжения в обводе и большему провисанию участков обвода в пролетах между катками, вызывающему увеличение вероятности сбрасывания гусеницы. Уменьшение натяжения может быть компенсировано изменением хода натяжного механизма и последовательным удалением из гусениц траков, если хода натяжного механизма недостаточно. Однако при значительном увеличении шага гусеничной цепи нарушается взаимодействие гусеницы с ведущим колесом. Это проявляется или в проскакивании зацепления, или в его распоре. Проскакивание вызывает значительные ударные нагрузки в эле-
20. Минимально допустимое число траков в гусеничных цепях машин
Показатель
Номинальное число траков в гусенице .....................
Номинальный шаг гусеничной цепи, мм .....................
Минимально допустимое число траков в гусеничной цепи при эксплуатации ..................
82
123
75
58 85
178 137
53 78
93 83 92 108
137 128 133 111
ментах трансмиссии и потерю управляемости машины, а распор создает опасность серьезных поломок, так как в этом случае обе ветви, охватывающие ведущее колесо, нагружаются чрезмерными растягивающими усилиями, которые могут привести даже к поломкам бортовой передачи или ведущего колеса. Поэтому для каждой машины устанавливается предельно допустимое минимальное число траков в гусеничной цепи, меньше которого эксплуатация гусеничной машины недопустима. В табл. 20 приведены минимальные значения числа траков в гусеничных цепях для тягачей и транспортеров.
По достижении минимально допустимого числа траков гусеничная цепь подлежит замене, хотя по прочности и запасу на износ других элементов она могла бы еще работать.
У большинства машин при использовании гусеничных цепей с открытыми шарнирами ресурс гусеничного движителя определяется именно износостойкостью шарниров гусениц. В ряде случаев ограничивающим фактором является износостойкость и надежность взаимодействия гусеничного зацепления. Особенно это относится к машинам с тянущим принципом цевочного зацепления, при котором скольжение цевок на входе в зацепление происходит под полной тяговой нагрузкой, что приводит к интенсивному изнашиванию венцов ведущих колес.
Поскольку открытые шарниры гусениц и элементы зацепления работают в условиях свободного доступа в зону трения (скольжения) абразивной среды, а эффективность воздействия последней определяется наличием большего или меньшего количества частиц грунта высокой твердости, то срок службы гусениц до выхода из строя в значительной степени зависит от состава грунта, т. е. от характера дорожных условий, в которых эксплуатируется гусеничная машина. На песчаных грунтах, где преобладают абразивные частицы высокой твердости (кварц), изнашивание наиболее интенсивное, на черноземных грунтах и снегу, где твердых частиц почти нет, изнашивание шарнирных соединений существенно ниже, чем на песчаных. На грунтах промежуточных типов интен-
О 20 Ю 60 60 У,
Р.ро бег
Рис. 92. Удлинение Д/о шага гусеницы тя=» гача АТ-Л при эксплуатации в различных дорожных условиях в зависимости от пробега, взятого в % от пробега до капитального ремонта:
1 — песчаные грунты Белоруссии; 2 — супесчаные грунты Московской области; 3—супесчаные грунты Прибалтики; 4 — дороги Центральной черноземной зоны РСФСР; 5 — заснеженные дороги в зимний период
сивность изнашивания меньше, чем на песчаных, но больше, чем на черноземных и лессовых.
В качестве примера на рис. 92
приведено изменение шага гусеничных цепей тягачей АТ-Л при эксплуатации на различных грунтах разных районов страны. Из графика видно, что интен
сивность изнашивания шарнирного соединения в зависимости от характера дорожных условий меняется в широких пределах. На абразивных грунтах интенсивность изнашивания в несколько раз выше, чем на неабразивных. Отсюда и срок службы гусениц
на этих грунтах в несколько раз меньше.
Подобная картина характерна и для других гусеничных машин. При этом независимо от массы машины и конструкции гусеничной цепи количественные показатели интенсивности изнашивания шарниров (удлинение шага в миллиметрах за определенный пробег в километрах) у всех машин почти одинаковые. Это обусловлено тем, что гусеницы быстроходных транспортных машин мелкозвенчатые, т. е. их шаг примерно одинаков (см. табл. 20), а износостойкость материалов, используемых для изготовления траков и пальцев (табл. 21), существенно не различается. Удельные нагрузки на проушины также в среднем равны у всех машин,
21. Основные показатели гусениц с открытыми шарнирами
Показатель
Масса машины с грузом, кг..............
Масса гусениц, кг . .
Материал трака гусениц (сталь) . . , Материал пальца (сталь) .............
Диаметр шарнира проушины, мм . . . .
Длина шарнира (ширина гусеницы), мм
Среднее давление в зоне трения, кгс/смг: при fT = 0,06 . .
» К = 0,15 . .
АТ-Л АТ-С АТС-59 AT-T гт-см гт-т 1
8300 15 000 16 000 25 000 4750 10 200 12 000
940 1 180 1 870 2 406 690 1 770 1 400
110Г13Л твм 110Г13Л
50 38ХСА 40ХС 38ХС 45 38XC 50
20,5 22 19,4 20,8 15,5 19,5 16
300 420 460 500 390 540 350
8,3 9,8 11,0 15,0 4,7 6,0 13,7
20,8 24,4 27,5 37,5 11,8 15,0 34,3
хотя последнее обстоятельство при абразивном трении на изнашивании сказывается незначительно. Поэтому из всех факторов, влияющих на изнашивание шарнирного соединения, при определившихся конструктивных размерах гусениц, материалах и технологических приемах изготовления главным является состав абразивной среды. Средние данные интенсивности изнашивания шарниров гусениц на различных грунтах в разных дорожно-климатических условиях страны, обобщенные по результатам многочисленных пробеговых испытаний машин, следующие.
мм/тыс. км
Кварцевый песок западных районов...............
Каменистые и песчаные грунты северных районов Супесчаные и суглинистые грунты центральных районов европейской части .........................
Суглинистые дороги в период распутицы .........
Суглинистые сухие дороги ......................
Черноземный грунт европейской части............
Лессовые пески Средней Азии....................
Снежные дороги, снежная целина.................
Бетонные дороги в различное время..............
4,7-—4,9
3,5—4,0
3,0—3,4
2,5—2,7
1,8—2,0
1,1—1,7
1,2-1,9 0,6—1,1 0,55—1,15
На основании этих данных можно сделать вывод, что проблема создания надежного гусеничного движителя является актуальной в основном для тех районов нашей страны, где преобладают песчаные, супесчаные и суглинистые грунты. Для северных и восточных районов, в которых преобладают снежные дороги и целина или болотистая местность с органическим верхним покровом, задача повышения долговечности гусениц не имеет такой остроты.
Интенсивность изнашивания контактирующих элементов гусеничного зацепления также зависит от условий эксплуатации машины. На абразивных грунтах она значительно выше, чем на неабразивных, но различие интенсивности изнашивания элементов зацепления на разных грунтах меньше, чем относительного изменения шага гусениц. Поэтому если на грунтах с высокой абразивной активностью работоспособность гусеничного движителя лимитируется в основном износом шарниров, то на грунтах средней абразивной активности — в равной степени износостойкостью и шарниров, и зацепления, а на безабразивных грунтах — чаще износостойкостью зацепления.
Следует отметить, что работоспособность зацепления в процессе эксплуатации (во всех условиях) можно частично восстанавливать перестановкой венцов ведущих колес с одной стороны на другую. После такой перестановки рабочим профилем становится тыльный, износ которого всегда значительно меньше переднего.
Повышение износостойкости шарнирного соединения достигается в результате выполнения ряда конструктивных и технологических мероприятий, основными из которых являются:
2С5
совершенствование открытого шарнира путем выбора более оптимальных соотношений размеров проушины траков и пальцев гусениц, применения более стойких материалов (поверхностных покрытий) или технологических процессов, позволяющих повы-сить износостойкость трущихся поверхностей при абразивном трении;
применение закрытых шарниров, т. е. обеспечение условий безабразивного трения в шарнире;
исключение вообще внешнего трения в шарнирных соединениях и использование принципиально новых конструкций шарниров с внутренним трением, обеспечивающих поворот траков (звеньев, плиц) гусениц друг относительно друга, за счет деформации упругого элемента, связывающего траки.
2. СПОСОБЫ ПОВЫШЕНИЯ ДОЛГОВЕЧНОСТИ ГУСЕНИЦ С ОТКРЫТЫМИ ШАРНИРАМИ
Получившие широкое распространение на гусеничных машинах цепи с открытым шарниром обладают существенными преимуществами перед другими типами гусеничных цепей: они просты по устройству, так как включают только две детали — трак и соединительный палец; дешевы и технологичны в производстве, поскольку траки обычно изготовляют литьем, а пальцы (головки) штамповкой из проката, при этом помимо калибровки проушины по существу не требуется никакая другая обработка траков после .литья; в эксплуатации гусеницы не нуждаются в уходе или обслуживании, за исключением периодического контроля натяжения.
Предпринималось много попыток повысить долговечность этих гусениц, сохранив простоту их конструкции. Практически все попытки преследовали одну цель — уменьшить износ шарнирного соединения или каким-нибудь способом скомпенсировать его.
В качестве одной из возможных мер повышения износостойкости шарнирного соединения рассматривался способ фиксации соединительного пальца. Если палец в шарнирном соединении плавающий, то скольжение и изнашивание происходят во всех проушинах. Суммарное увеличение шага Д/Опл, следовательно, будет равно увеличению шага в результате изнашивания проушины Д/6пл и пальцев Д/опл с обеих сторон трака, т. е.
Д/о пл ===‘ пл “Н Д/о пл*
При закреплении пальца в проушинах одной стороны трака скольжение и изнашивание будут происходить только в проушинах другой стороны. В этом случае износ пальца и проушины, где они соединены неподвижно, будет равен нулю, т. е. ДZ6 закр = 0. Изменение шага при изнашивании пальца и проушины со стороны, где происходит скольжение, Д/'бзакр предполагалось меньшим, чем суммарное изменение шага при шарнире с плава-206
о) S)
Рис. 93. Схема шарнира:
а — с плавающим пальцем; б — с закрепленным пальцем; /, 2 — траки; 3 — палец
ющим пальцем, т. е. предполагалось меньшим и общее удлинение гусеницы
Д/о закр —- Д/о закр /о пл “ф- Д/о
ПЛ -— Д/о пл •
Дополнительными мотивами в пользу закрепления пальца были также соображения об уменьшении ширины проушин, в которых закреплен палец, для того чтобы при сохранении общей ширины гусеницы можно было увеличить ширину активных проушин и за счет этого снизить давление в зоне трения и, следовательно, износ трущихся поверхностей, иными словами, дополнительно уменьшить величину Д/о закр- Однако эта мера сколько-нибудь заметного эффекта в практике не дала, поскольку работа трения, которую можно рассматривать при прочих постоянных факторах как эквивалент износа, в обоих случаях одинаковая. Определим ее для шарнира с плавающим (рис. 93, а) и закрепленным (рис. 93, б) пальцами. Примем для упрощения схему трех-проушинного трака.
В обоих случаях, и при плавающем пальце, и при закрепленном, на него будет действовать одинаковое растягивающее усилие Т. Но в схеме с плавающим пальцем скольжение происходит в проушинах обоих траков 1 и 2, а в схеме с закрепленным пальцем — только в проушине трака 2. Поскольку общие углы складывания траков в точках перегиба обвода равны, то в схеме с плавающим пальцем каждый из траков поворачивается относительно пальца на угол а/2, в схеме же с закрепленным пальцем поворачивается относительно пальца только трак 2 на угол а.
2С7
При повороте траков в зоне контакта проушин с пальцем возникает сила трения. В случае плавающего пальца (см. рис. 93, а) общая сила трения на двух проушинах трака / будет 2 = рТ
и на проушине трака 2 — равна сумме произведения
рТ. Суммарная работа трения будет всех сил трения на их путь
При закреплении пальца (см. рис. 93» б) работа трения скольжения в проушине трака 2 будет
тр. закр
Таким образом, работа трения в обоих случаях одинаковая.
Рассматривая схематически эти два варианта, считали коэффициент трения одинаковым, однако это не совсем так. При увеличении скорости скольжения, т. е. в случае с закрепленным пальцем, коэффициент трения несколько уменьшается, но если при этом будет снижено давление в зоне трения, то он несколько возрастает. В итоге, при сухом трении работа трения и износ шарнирного соединения примерно одинаковые в обеих гусеницах — и с закрепленным, и с плавающим пальцами.
В присутствии абразивной среды влияние на износ закрепления пальца сказывается еще меньше, поскольку определяющим фактором является соотношение твердостей абразивных частиц и материалов трущихся поверхностей. По этой причине мало влияет на износостойкость шарнира и среднее давление в зоне
трения, т. е. геометрические размеры шарнира.
Износостойкость гусениц с открытым шарниром практически не зависит от марок сталей, применяемых для изготовления траков и пальцев. За счет подбора материалов, используемых в машиностроительных конструкциях, заметного эффекта в снижении изнашивания трущейся пары получить не удается. В качестве примера можно привести данные по изнашиванию двух гусениц на одном и том же тягаче в одинаковых условиях. Одна гусеница была изготовлена из стали ТВМ, другая из стали 40ХС. Обе стали примерно равноценны по динамической прочности, а твердость в зоне проушин траков из стали 40ХС несколько выше. Геометри-
ческие размеры гусениц
и массы идентичны.
Сталь.....................................
Количество циклов до разрушения трака при режимах нагружения:
Ршах ~ 5 ТС, Рmin ~ 1 ТС ...........
Ршах ~ 3 ТС, Р mln ~ 1 ТС ..........
ТВМ 40ХС
45 000 87 000
550 000 670 000
Эксплуатация тягачей с обеими гусеницами показала, что во всех дорожных условиях износостойкость гусениц примерно одинаковая (табл. 22).
208
22. Изменение шага гусениц
в мм/тыс. км при ходовых испытаниях гусениц с траками из сталей
ТВМ и 40ХС
Дорожные условия в средней полосе европейской части СССР
Грунтовые заснеженные дороги . . . . Бетонные дороги зимой ...............
Грунтовые дороги в период распутицы Бетонные дороги летом ...............
Пробег
Рис. 94. Изменение шага гусеницы до (зона А) и после (зона Б) замены изношенных пальцев
I ТВМ 40XC
5,3
1,78
7,22
5,0
9,3
0,96
9,3
3,5
В практике эксплуатации получил распространение достаточно простой, но эффективный способ восстановления работоспо-собности гусениц с открытыми шарнирами путем замены изношен-ных пальцев новыми. Естественно, износостойкость шарнирного соединения при этом не изменяется, просто в результате замены пальцев шаг гусеничной цепи восстанавливается на износ пальца. На рис. 94 показано изменение шага гусеницы при таком способе поддержания надежности.
Обычно пальцы заменяют, когда увеличение шага гусеничной цепи достигает 70—80% допускаемого. После замены пальцев шаг гусеницы уменьшается, что требует добавления в цепь ранее изъятых траков. Эффективность этого мероприятия зависит от соотношения износов проушин Д/пр и пальцев Д/н. Чем больше отношение Д/п/Д/пр, тем на большую величину восстанавливается шаг гусеницы, тем, следовательно, больше обеспечивается запас се хода при условии, конечно, достаточности запаса на износ у всех элементов трака — проушин, цевок, гребней, грунтозацепов.
Приходится^ однако, констатировать, что, несмотря на имеющийся большой статистический материал по износам проушин траков и пальцев, не установлено с достаточной достоверностью, от чего зависит отношение Д/п/Д/пр и каким образом можно его изменять. Можно лишь отметить, что использование способа замены изношенных пальцев новыми для существующих гусеничных цепей дает увеличение долговечности (по предельно допустимому удлинению гусеницы) на 25—35%.
Значительное количество работ в последнее время было посвящено повышению износостойкости открытого шарнира применением в трущейся паре материалов высокой твердости. Сущность этих работ состоит в следующем: необходимо трущимся поверхностям придать твердость более высокую, чем твердость абразивных частиц, тогда влияние абразива будет сведено к нулю, поскольку он будет являться индифферентной средой.
209
Твердость абразивных частиц (кварцевого песка) достигает 750—850 кгс/мм2 (на приборе ПМТ-3 при нагрузке 100 гс), поэтому твердость трущихся поверхностей должна быть еще выше. Материалы, применяемые для изготовления траков и гусениц, не позволяют обеспечить такую твердость. Отказаться от их использования и перейти на другие, более твердые, практически невозможно, так как получившие распространение для изготовления траков гусениц марганцовистые стали обладают наилучшей стойкостью к воздействию ударных нагрузок. Это является непременным требованием к материалу трака. Выход заключается в применении твердых втулок или технологических способов упрочнения трущихся поверхностей.
Установка твердых втулок в проушины траков неэффективна из-за выкрашивания втулок, обусловленного разной твердостью материала трака и втулки. Этот способ не получил распространения. Более рациональным является технологическое упрочнение поверхностного слоя проушин и траков на небольшую глубину (0,2—0,3 мм). Трущиеся поверхности упрочняются, как правило, путем поверхностного насыщения пальцев и проушин химическими соединениями, обладающими высокой твердостью (например, борирование). Поверхностная твердость в результате этого может быть получена значительно более высокой (1500-—1800 кгс/мм2), чем твердость абразивных частиц грунта. При такой твердости трущихся поверхностей износостойкость пары проушина—палец в абразивной среде существенно повышается.
Экспериментальные исследования показали, что наибольший эффект от поверхностного упрочнения достигается в том случае, когда упрочнению подвергается только палец, а проушины трака не упрочняются. По-видимому, это следует объяснить тем, что марганцовистая сталь после упрочнения теряет склонность к наклепу от действия высоких контактных давлений (характерных для случая абразивного изнашивания) и, следовательно, становится менее износостойкой. Для этой цели упрочнение по существу не дает повышения фактической твердости в микрозонах, где происходит взаимодействие абразивных частиц с металлом, поэтому не является эффективным.
При эксплуатации гусеничных машин в разных районах на различных грунтах одна и та же конструкция гусеницы с упрочненными пальцами имеет различную износостойкость. Так, в условиях кварцевых песков износостойкость гусениц при использовании упрочненных пальцев повышается на 60—65% по сравнению с обычными гусеницами, в условиях грунтов умеренной абразивной активности — в среднем на 20—30%, а при эксплуатации на дорогах с твердым покрытием, на снегу и неабразивных грунтах (чернозем, лессовые пески) эффект от применения упрочненных пальцев вообще отсутствует.
Это является результатом того, что износ упрочненного слоя не зависит от наличия и характера среды, в которой работает 210
шарнир. Упрочненный слой изнашивается в среднем на всех грунтах за один и тот же пробег. Поэтому интенсивность изнашивания гусениц в первый период, когда на пальце сохраняется твердый поверхностный слой, очень мала в любых дорожных условиях и находится в среднем в пределах 0,4—1,9 мм/тыс. км (по шагу гусеницы) для разных машин. Во втором периоде, после того как упрочненный слой полностью износится, интенсивность изнаши
вания и, следовательно, увеличения шага гусеничной цепи резко возрастает. В этот период темп увеличения шага примерно соответствует темпу у обычной неупрочненной гусеницы. Так, на грунтах со средней и высокой абразивной активностью он составляет 3,6—9,1 мм/тыс. км, что находится на уровне серийных гусениц € открытыми шарнирами (см. стр. 205).
Сравнивая интенсивность суммарного изнашивания упрочненного слоя пальцев и проушин с интенсивностью изнашивания обычных шарниров в безабразивной среде, можно видеть, что они примерно одинаковые. Следовательно, если гусеницы с упрочненными поверхностями трения эксплуатируются в начальный период на безабразивных грунтах (или на грунтах с низкой абразивной активностью), то срок службы их практически не увеличивается. Если же начальная эксплуатация происходит в условиях сильного абразивного воздействия, то обеспечивается прирост срока службы гусениц.
В этих условиях начальная интенсивность изменения шага упрочненных гусениц может быть в 8—10 раз меньше, чем у обычных. В результате общая долговечность гусениц повышается. Такой характер изнашивания упрочненных шарниров не позволяет однозначно оценивать, насколько возрастает износостойкость гусениц в относительных цифрах. Для этого способа повышения долговечности более показательными являются цифры абсолютного увеличения срока службы. В среднем при эксплуатации в смешанных дорожных и климатических условиях срок службы гусениц быстроходных машин при использовании упрочненных пальцев увеличивается на 20—25%.
Практически применение поверхностного упрочнения с точки
зрения увеличения ресурса гусеничного движителя равноценно использованию второго комплекта пальцев. При этом следует отметить, что в отдельных случаях для обеспечения использования упрочненных пальцев требуется некоторое изменение конструкции траков для того, чтобы предусмотреть необходимый запас толщины проушин на износ. Последнее обусловливается тем,
что соотношение износов проушин и пальцев при использовании
упрочненных пальцев в гусеницах с открытыми шарнирами изме-
няется в сторону относительного увеличения
Марка машины............. АТ-Л АТ-С
Отношение А/ПрМ/п Для гусениц:
с серийными пальцами 0,75—0,95 0,35—0,7
с упрочненными пальцами 1,1—1,25 0,45—1,6
износов проушин.
АТС-59 АТ-Т
2,2—3,1 1,7-2,4
0,65—1,5
1,8—2,3
Рассмотренные способы повышения долговечности движителя с обычными гусеницами (с открытыми шарнирами) позволяют несколько увеличить его срок службы, но не решают проблему принципиально, так как работоспособность гусениц по-прежнему остается ниже, чем остальных агрегатов, и, кроме того, изменяется в зависимости от дорожно-климатических условий ввиду того, что износостойкость открытого шарнира определяется характером среды, в которой он работает. Все это свидетельствует о том, что кардинально решить проблему создания долговечных гусеничных цепей для транспортных машин общего назначения можно лишь применением шарниров принципиально новых конструкций. Наиболее перспективными из них являются резинометаллические и закрытые.
Напомним еще раз, что для снегоболотоходных машин проблема надежности гусениц практически не является актуальной, так как эти машины большей частью используются в условиях безабразивных грунтов.
3. ГУСЕНИЦЫ е РЕЗИНОМЕТАЛЛИЧЕСКИМИ ШАРНИРАМИ
В гусеничных цепях с резинометаллическими шарнирами возможность складывания траков друг относительно друга в точках перегиба обвода обеспечивается использованием упругого элемента. Наибольшее распространение в качестве упругих элементов в гусеницах быстроходных машин получили резиновые кольца (втулки), работающие на сжатие и скручивание. В соответствии со схемой расположения резиновых втулок различают два вида упругих шарниров: с последовательным расположением упругих элементов (рис. 95, а) и с параллельным расположением упругих элементов (рис. 95, б), или, как принято сокращенно называть, последовательный и параллельный резинометаллические шарниры.
Рмс, Схема гусеницы с рези неметаллически ми шарнирами: а — последовательный шарнир; б — параллельный шарнир
212
В последовательном резинометаллическом шарнире траки / и 3 соединяют друг с другом соединительным пальцем 2. Сила тяги Р от одного трака к другому передается через резиновые кольца 4у которые в точках перегиба обвода скручиваются на угол а/2 в каждой проушине. В собранном виде резиновые элементы соединенных траков гусеницы составляют один блок из
последовательно расположенных вдоль оси пальца втулок чере
дующихся проушин.
В параллельном резинометаллическом шарнире растягивающее усилие от трака 1 к траку 3 передается посредством соединительных пальцев 2 и скоб 5. Резиновые кольца 4 каждого трака,
так же как и у последовательного резинометаллического шарнира, скручиваются в точках перегиба на угол а/2. У параллельного резинометаллического шарнира в собранном виде упругие элементы смежных траков составляют два блока.
Резиновые кольца, обычно привулканизированные к пальцу, в проушины запрессовывают с натягом. Чтобы обеспечить надежную фиксацию колец в проушинах (за счет чего осуществляется и фиксация соединительных пальцев относительно трака), натяг колец должен составлять около 40%.
В гусеницах с параллельными резинометаллическими шарнирами разборность обеспечивается при помощи соединительных скоб, которые крепят к пальцам болтами с клиновыми голов
ками.
Для обеспечения разборности гусениц с последовательными резинометаллическими шарнирами приходится шарнир делать в виде составного блока из резинометаллических втулок и соединительного пальца. При этом неподвижность посадки втулок на пальце (предотвращение их проворачивания от воздействия скручивающего момента) достигается тем, что палец и внутренние отверстия втулок делаются фасонными, чаще всего шестигранными. Втулки стягивают на пальце гайками.
Примеры конструктивного исполнения гусениц с последовательными и параллельными резинометаллическими шарнирами показаны на рис. 96, а и б.
При большой ширине гусениц (на машинах тяжелых весовых классов) пальцы параллельного резинометаллического шарнира вследствие большого расстояния между соединительными скобами имеют значительный изгиб, который приводит к чрезмерной деформации резиновых колец, расположенных у краев проушин, и к быстрому выходу их из строя. Для устранения этого явления траки гусениц с параллельным резинометаллическим шарниром большой ширины (свыше 500 мм) делают расчлененными по оси гусеницы, т. е. состоящими из двух отдельных плиц, и вводят третью соединительную скобу в центральной части. В результате Длина пролета между скобами уменьшается вдвое и соответственно уменьшаются изгиб пальца (так как в передаче силы тяги Теперь участвуют не один, а два пальца), а также нагруженность
Рис. 96. Гусеница с резинометаллическими шарнирами: а — с последовательными; б — с параллельными
резиновых колец шарнира. На рис. 97 показана гусеничная цепь с расчлененными траками.
Из схемы резинометаллического шарнира следует, что его упругие элементы работают как на сжатие, так и на скручивание. Работоспособность шарнира в определенной степени связана с характеристиками его при этих двух видах деформации, а эксплуатационные качества гусеницы зависят от этих характеристик.
Под действием растягивающего усилия шаг гусеницы увеличивается. Увеличение шага (податливость) будет тем больше, чем больше удельная нагрузка на резиновом элементе, т. е. чем меньше активная длина шарнира. У гусениц с последовательными резинометаллическими шарнирами податливость выше, чем у гусениц с параллельными резинометаллическими шарнирами, так как активная длина резиновых элементов, воспринимающих растягивающую нагрузку, у последовательного шарнира меньше-В применяющихся конструкциях активная длина шарнира со-214
ставляет у гусениц с последовательными резинометаллическими шарнирами 45—50% общей ширины гусениц, у гусениц с параллельными резинометаллическими шарнирами 60—70%. Вследствие этого при одинаковой ширине гусеничной цепи и одинаковых характеристиках резины податливость гусениц с последовательными резинометаллическими шарнирами в 1,3—1,4 раза больше,. чем с параллельными. Поэтому там, где необходимо обеспечить большую стабильность шага гусеничной цепи, чаще используют цепь с параллельными резинометаллическими шарнирами.
Угловая жесткость гусениц с параллельными резинометаллическими шарнирами вследствие большей активной длины резиновых элементов также выше. Однако это является недостатком,, так как с увеличением угловой жесткости шарнира растут потери: мощности в гусеничном движителе.
Удлинение гусениц под действием растягивающего усилия: происходит нелинейно. При значительных нагрузках, когда, основная часть упругого элемента уже деформировалась, интенсивность увеличения шага уменьшается. Такой характер изменения шага присущ практически гусеницам всех типов,- но у упругих гусениц он выражен более ярко. На рис. 98 в качестве примера приведены зависимости абсолютного прироста шага гусениц различных типов от растягивающего усилия, которые подтверждают эту закономерность.
Что касается углового деформирования шарнира под действием скручивающего момента, то здесь характер функции М = f (ф3)г где ф3 — угол закручивания шарнира, в пределах возможных углов складывания траков -— линейный для обоих типов шарниров. Пример экспериментальной зависимости момента сопротивления от угла закручивания для двух типов шарниров приведен на рис. 99.
Форма резиновых колец как у последовательных, так и у параллельных резинометаллических шарниров в основном бывает’
Рис. 97. Гусеничная цепь с параллельными резииометаллическими шарнирами и расчлененными траками
21S
Рис. 98. Зависимость увеличения шага гусениц от нагрузки:
1 — гусеница с открытыми шарнирами; 2 — гусеница с резинометаллическнми шарнирами; 3 — ленточная гусеница
Рис. 99. Зависимость момента сопротивления от угла закручивания шарнира:
/ — гусеница шириной 520 мм; 2 — гусеница шириной 435 мм
двух видов — прямоугольная и трапециевидная (рис. 100). Лучшее сцепление резины с пальцем (или втулкой) обеспечивается при трапециевидной форме, поэтому она более предпочтительна. Характеристики же шарнира от формы резиновых колец практически не зависят.
Характеристики упругих резинометаллических шарниров при растяжении и скручивании существенно зависят от температуры окружающей среды. С изменением температуры характеристики шарнира резко изменяются, при этом изменяются податливость и угловая жесткость гусеничной цепи. С понижением температуры продольная и угловая жесткость цепи возрастает. Однако если увеличение продольной жесткости является благоприятным фактором, так как становится более стабильным шаг гусеницы, то увеличение угловой жесткости крайне нежелательно, так как траки по-прежнему должны складываться на один и тот же угол, а это обусловливает резкое увеличение момента сопротивления (потерь мощности) и напряжений в резиновых кольцах.
На рис. 101 приведены зависимости момента сопротивления от угла закручивания шарнира при различных температурах t резины. Из графика видно, что с понижением температуры резины от +21° С до —30° С угловая жесткость шарнира возрастает в 7 раз. При этом относительный коэффициент гистерезисных потерь почти не изменяется.
При очень низких температурах податливость резины полностью исчезает и поворот траков один относительно другого вызывает разрушение резинового кольца или срыв его
Рис. 100. Резинометаллические пальцы гусе* ницы с прямоугольной (вверху) и трапециевидной (внизу) формой резиновых колец
Рис. 101. Изменение момента сопротивления в зависимости от угла закручивания шарнира при разных температурах
с пальца. И то, и другое приводит к преждевременному выходу гусеницы из строя.
Влияние низких температур особенно сильно сказывается в случае большой суммарной ширины резиновых колец, от которой зависит также степень увеличения жесткости. Это видно из графика (рис. 102) зависимости угловой жесткости шарнира от температуры для трех типов гусениц, имеющих различную активную длину резиновых элементов. Чем больше общая ширина резиновых колец, тем интенсивнее увеличение жесткости при понижении температуры.
При движении машины температура резиновых колец становится выше температуры окружающей среды, так как в результате внутреннего трения (а оно почти не уменьшается с понижением температуры) шарниры несколько разогреваются. Повышение температуры вследствие гистерезисных потерь и время прогрева зависят от температуры воздуха (рис. 103) и скорости движения. При более низких температурах время прогрева резины несколько больше, но значительного повышения температуры резины, даже при непрерывном движении с максимальной скоростью, не происходит (вследствие интенсивного охлаждения при этом). Максимальный прогрев резины составляет 10—15° С.
Увеличение жесткости резинометаллических шарниров приводит к увеличению потерь мощности в гусеничном движителе И к некоторому ухудшению эксплуатационных качеств машины. Сопротивление качению тягача, имеющего гусеницы с резинометаллическими шарнирами, при понижении температуры воздуха резко возрастает. Так, при понижении температуры от —5° С До —30° С сопротивление качению возрастает в 3 раза (рис. 104).
При температуре воздуха около —40° С резинометаллические Шарниры «застывают» и буксирование машины, имеющей большую Ширину гусеницы, возможно только юзом, так как сцепления t грунтом в зимних условиях недостаточно для создания силы Тяги, способной провернуть движитель.
217’
Рис. 102. Изменение удельной угловой жесткости шарниров:
J — закрытый шарнир с резинометаллнче-скими втулками, ширина гусеницы 350 мм;
2 — резинометаллический параллельный шарнир, ширина гусеницы 482 мм; 3 — рези неметаллический параллельный шарнир, ширина гусеницы 520 мм
Время движения
Рис. 103. Зависимость температуры резиновых колец от температуры окружающего воздуха и времени движения
При температурах ниже —50° С движение машины, имеющей гусеницы с резинометаллическими шарнирами, затруднено вследствие чрезмерного увеличения угловой жесткости шарниров. В связи с этим у машин, предназначенных для эксплуатации в широком климатическом диапазоне, в том числе и при низких температурах окружающего воздуха, более предпочтительными являются гусеницы с минимальным объемом резины в шарнирах. Этому требованию в большей степени соответствуют гусеницы с закрытым шарниром.
В снегоболотоходных модификациях, предназначенных главным образом для эксплуатации в условиях низких температур, на грунтах с невысокой абразивной активностью, нет особой необходимости применять гусеницы с резинометаллическими шарнирами. Подробнее гусеницы для таких машин будут рассмотрены дальше.
С повышением температуры (в области положительных значений температур) жесткость резинометаллических шарниров уменьшается, однако с меньшей интенсивностью, чем она возрастает в диапазоне отрицательных температур. При этом одновременно р заметно увеличиваются гисте-к2с резисные потери. В результате 150 ПРИ повь1шеннь1Х температурах окружающего воздуха сопро-500 тивление качению тягача остается таким же, как и при средних температурных уело-250
виях (15 4-20° С).
0
Рис. 104. Зависимость сопротивления качению тягача с резинометаллическими гусеницами от температуры воздуха
При повышенных температурах существенно уменьшается продольная жесткость гусеницы и вытяжка гусеницы становится более значительной. Это крайне нежелательное явление, приводящее к нарушению взаимодействия элементов гусеничного зацепления и их повышенному износу. Чрезмерное удлинение гусеницы при высоких температурах окружающего воздуха (40—45° С) из-за увеличения продольной податливости может стать причиной сброса гусеницы, а в ряде случаев (особенно 'при движении с большими тяговыми нагрузками) может привести к заклиниванию ведущего колеса из-за «подхвата» гусеницы.
Вследствие такой чувствительности гусениц с резинометаллическими шарнирами к температуре довольно сложно получить сравнительные данные даже по такому параметру, как сопротивление качению. Проведение эксперимента требует тщательного-соблюдения сопоставимости и температурных условий, и режимов, нагружения.
Характеристики резинометаллических шарниров с течением времени несколько изменяются вследствие того, что резина стареет и становится более жесткой.
Многократное деформирование шарниров в процессе пробегов, на их характеристики практически не влияет, т. е. вплоть до» разрушения колец продольная и угловая жесткости шарниров заметно не меняются. В качестве примера на рис. 105 приведены кривые нагрузка — удлинение для гусеницы с параллельными резинометаллическими шарнирами (резина на основе синтетического каучука), полученные на различных этапах эксплуатации (при различном пробеге) для одной и той же пары сопряженных траков. Из графика видно, что продольная жесткость на всем протяжении пробегов остается постоянной и несколько повышается лишь к концу испытаний.
Однако определенной закономерности в изменении характеристик продольной и угловой жесткости, общей для разных марок резин, не наблюдается. Вследствие достаточно стабильной продольной жесткости гусениц с резинометаллическими шарнирами их шаг в процессе эксплуатации почти не изменяется. Увели-
Рис. Ю5. Продольная жесткость гусеницы с резино-Металлнческими шарнирами °Ри различном пробеге:
J — новая гусеница; 2 — гусеница после пробега 4040 км; 3 — после пробега 0000 км; 4 — после пробега 8117 км
Рис. 106. Общий вид резинометалличе* ских пальцев гусениц по окончании испытаний
чение шага за весь период эксплуатации составляет 2—~ 4 мм, поэтому приходится удалять из цепей всего один-два трака (у гусениц с открытым шарниром семь —-восемь).
Гистерезисные потери и при растяжении, и при скручивании шарниров сохраняются стабильными в такой же степени, как и характеристики жесткости.
Упругий резинометаллический шарнир конструктивно достаточно отработан. Подобраны соответствующие рецептуры резиновых смесей для изготовления резинометаллических деталей, определены рациональная форма и параметры резиновых колец, разработаны достаточно достоверные методы расчета шарниров. Ресурс резинометаллических гусениц резко увеличен, их долговечность находится на уровне, отвечающем современным техникоэксплуатационным требованиям, предъявляемым к быстроходным гусеничным транспортным машинам. Срок службы гусениц с резинометаллическими шарнирами уже не лимитируется сроком службы шарйирного соединения. Резиновые кольца по надежности превосходят другие элементы движителя. На рис. 106 показан палец гусеницы с параллельными резинометаллическими шарнирами по окончании гарантийного пробега.
Как видно из рисунка, палец еще находится в работоспособном состоянии. Нуждаются в некоторой доводке и повышении надежности лишь элементы соединения траков друг с другом: в параллельном шарнире — клиновое соединение скобы с пальцами, в последовательном — фиксация втулки на фасонном
пальце.
Ответственным узлом в движителе с упругими резинометаллическими гусеницами является гусеничное зацепление. Вследствие динамического изменения шага гусеницы, обусловленного действием переменного растягивающего усилия, зацепление работает в нестабильных условиях. Обеспечить равновесное состояние элементов зацепления (работу без скольжения) в этом случае невозможно. Поэтому если в конструкции зацепления не будет принято специальных мер по предотвращению (или максимальному уменьшению) скольжения, то зацепление выйдет из строя быстрее, чем у движителей с обычными гусеницами (с открытым металлическим шарниром).
Наиболее эффективным средством по уменьшению изнашивания взаимодействующих элементов является применение зацепления с подпором. Раньше было теоретически показано преимуществ0 данного способа зацепления перед другими применительно к гу
сеницам с упругими шарнирами. Его эффективность подтверждается также экспериментально.
Сравнительные данные по износостойкости различных вариантов зацепления для тягача общей массой 16 т с гусеницами, имеющими резинометаллические параллельные шарниры, приведены в табл. 23. Как видно из приведенных данных, наиболее высокой износостойкостью обладают венцы ведущих колес, в которых предусмотрен подпор трака по всей длине плицы (вариант V). Повышение износостойкости является результатом того, что часть нагрузки с зубьев перенесена на опорные площадки ведущего колеса, и зубья стали работать при меньшей нагрузке, т. е. в более благоприятных условиях.
Применение различных материалов (в том числе и наплавка твердым сплавом), также как и изменение геометрии профиля зуба, заметного повышения износостойкости зацепления с упругими гусеницами не дает. Так, для обеспечения пробега двух комплектов гусениц с резинометаллическими шарнирами в объеме их срока службы потребовалось восемь комплектов венцов различной конструкции (варианты I — IV). При этом срок службы каждого варианта не превышал 30—40% требуемого.-Применение же подпора, позволяющего разгрузить зубья ведущего колеса, не только заметно снизило износ рабочего профиля (с 2,0—3,6 до 1,2—1,4 мм/тыс.км), но и позволило значительно повысить усталостную прочность венцов. Вследствие повышения усталостной прочности стало возможным после 60—70% пробега гусениц переставлять венцы и дополнительно их эксплуатировать, используя в качестве рабочего тыльный профиль.
4. ГУСЕНИЦЫ С ЗАКРЫТЫМИ ШАРНИРАМИ
Гусеницы с резинометаллическими шарнирами при всех положительных качествах имеют одну особенность, ограничивающую их широкое применение на многоцелевых машинах: они заметно вытягиваются под большой нагрузкой.
Динамическое изменение шага гусеницы с упругими резинометаллическими шарнирами в зависимости от режима эксплуатации может составлять 4—5 мм, а общее удлинение рабочей ветви при переднем расположении ведущего колеса и максимальном натяжении —300—>400 мм. Обеспечить нормальное взаимодействие гусеницы с ведущим колесом и устойчивость работы обвода в данном случае затруднительно. Поскольку гусеничные транспортные Машины общего назначения предназначаются для работы в широком диапазоне скоростей и нагрузок, в том числе и со значительными тяговыми усилиями, то отмеченная особенность резинометаллических гусениц в отдельных случаях на режимах большой тяги (или в условиях повышенных температур) может снижать тяговые возможности машины. Поэтому для машин многоцелевого Назначения крайне желательно обеспечить стабильность шага
ьэ to to
23. Результаты испытаний венцов ведущих колес
Пробег, км
Износ переднего профиля зуба
II
III
Краткая характеристика конструкции венцов
Опора скобы на дно впадины, вдоль зуба ребро жесткости, толщина зуба 30 мм, сталь Л50ХН
Опора скобы на дно впадины, зуб дополнительно усилен поперечным ребром у основания
То же, что для варианта II и наплавка рабочего профиля зуба электродом
Краткая характеристика конструкции венцов
общий
500
Ль
общи й
в том числе по видам дорог
Основные недостатки зацепления
Сухая грунтовая — 877, грязная грунтовая — 397
Сухая грунтовая — 500
Сухая грунтовая — 1386, грязная грунтовая — 1281, мерзлая—629, заснеженная — 160, бетонное шоссе — 381
Сухая грунтовая—415, грязная грунтовая — 374, мерзлая — 1089, заснеженная — 995
Заснеженная — 1354, бе-
тонное шоссе — 270
Пробег, км
в том числе
по видам дорог
8,0
6,8
4,0
3,0
Износ переднего профиля вуба
Интенсивный износ, недостаточная прочность зубьев, забивание клинового соединения
Чрезмерный износ переднего профиля, недостаточная прочность зубьев у основания, забивание клинового соединения
Интенсивный износ переднего [профиля, забивание клинового соединения, низкая прочность зубьев
Продолжение табл. 23
Основные недостатки зацепления
2 Я
2
U5
2 . Я
2
3 581
Сухая грунтовая -— 2599, грязная грунтовая —
IV
Утолщенный на 5 мм зуб с ребрами жесткости, подпор под среднюю часть плицы, сталь 110Г13Л
1 866
Сухая грунтовая — 1356, грязная грунтовая — 510
Значительный износ рабочего профиля, забивание клинового соединения
I 039
Сухая грунтовая — 958, заснеженная — 81
V
10 155
Зуб толщиной 35 мм с ребрами жесткости, опорные площадки под всю длину плиц, стали Л50ХН и КДЛВТ
10
10 477
Сухая грунтовая — 1559, грязная грунтовая — 2582, снежная — 2403, бетонное шоссе — 283, лессовый песок 3328
14
Перестановка венцов после 60—70% пробега
Сухая грунтовая —1933, грязная грунтовая — 3113, снежная — 1973, бетонное шоссе — 213, лессовый песок — 3245
12,1
тг
гусеницы во всем диапазоне режима нагружения гусеничного движителя, т. е. сохранить шарнир жестким в продольном направлении. Требование же повышения надежности движителя в условиях абразивных грунтов диктует необходимость защиты зоны трения от попадания грунта. Все это может быть удовлетворено с применением полуразгруженного резинометаллического шарнира или так называемого закрытого шарнира, т.е. шарнира трения, имеющего по краям проушин различного рода уплотнения.
В практике создания гусениц повышенной долговечности использовались различные способы уплотнения трущихся поверхностей шарнира. Основные из них достаточно полно оценены экспериментально при стендовых и пробеговых испытаниях.
Установлено, что использование различных лабиринтных уплотнений, которые лишь частично уплотняют полость трения, заметного эффекта не дает даже на тихоходных машинах. По-видимому, такие шарниры не представляются сколько-нибудь перспективными.
Применение сальниковых уплотнений позволяет на некоторый период защитить шарнир от попадания абразивных частиц, однако сальниковые уплотнения в условиях доступа абразивной среды сами быстро изнашиваются и теряют уплотняющую способность. Конструкции гусениц с такими уплотнениями преследовали цель скорее обеспечить условия работы пары трения со смазкой в полости шарнира, чем предотвратить попадание абразивных частиц в зоцу трения. Такие шарниры использовались на быстроходных полугусеничных машинах, при этом для снижения потерь мощности трение скольжения заменялось трением качения в результате установки игольчатых подшипников (рис. 107). Гусеница состояла из траков /, соединенных пальцами 4, которые закреплены в коротких проушинах 5. Поворот смежных траков относительно друг друга осуществлялся на игольчатых подшипниках 6, одновременно воспринимающих растягивающую нагрузку. Полость шарнира, заполненная смазкой, уплотнялась сальником 7, имеющим двустороннюю манжету, которая предотвращала попадание абразива в шарнир и вытекание смазки из него. Направляющие гребни 2 у таких гусениц служили для направления качения опорных катков и одновременно для восприятия силы тяги от ведущего колеса. Снизу к траку прикрепляли асфальтоходный башмак 3.
У гусениц более простых конструкций вместо игольчатых подшипников применялись пластмассовые или металлокерамические втулки.
Ввиду малых потерь мощности в гусеничном движителе применение гусениц с игольчатыми подшипниками позволяло обеспечить высокую скорость движения по дорогам при относительно невысокой удельной мощности машины.
Основными недостатками этих гусениц, обусловившими их ограниченное распространение, являлись сложность конструкции, 224
Рис. 107. Гусеничная цепь с игольчатыми подшипниками в шарнирах
большая трудоемкость изготовления и технического обслуживания большие поперечные колебания ветвей обвода вследствие малых потерь в шарнирах и, следовательно, малого демпфирования колебаний ветвей, недостаточная работоспособность на абразивных грунтах, повышенная масса.
Более компактными можно считать гусеницы, в которых уплотняется обычный шарнир трения скольжения (по торцам проушин) и тем самым обеспечивается повышение долговечности трущейся пары — трака и пальца — за счет создания условий для постоянного безабразнвного трения. При этом трение может быть как сухим, так и со смазкой.
8 П/р. В. Ф. Платонова 225
га за счет скольжения длинных
Рис. 108- Гусеница с торцовыми уплотнениями
Гусеница с торцовыми уплотнениями довольно проста по конструкции. Она включает всего три основные детали (рис, 108): трак /, соединительный палец 2 и торцовые резинометаллические уплотнения 3 с защитными кольцами 4. Чтобы уменьшить число уплотняемых зон, палец неподвижно (на шлицах) закреплен в коротких проушинах одного трака, а траки поворачиваются относительно друг дру-проушин по пальцу. Чтобы
уменьшить трение и изнашивание проушин, к зоне трения может подводиться смазка по полости пальца.. Защитные
кольца предохраняют резинометаллические уплотнения от прямого воздействия неровностей пути и, следовательно, от механического разрушения, а также воспринимают боковые усилия от траков, предотвращая чрезмерное сжатие уплотнений.
Гусеницы этого типа не только просты по конструкции, но легки и относительно надежны в работе. Однако трудоемкость их технического обслуживания достаточно велика вследствие сложности замены траков и необходимости смазывать в процессе эксплуатации каждый шарнир (в гусеницах со смазкой шарниров). Кроме того, долговечность уплотнений не обеспечивает требуемого пробега, так как абразивные частицы все же имеют доступ к трущимся торцовым поверхностям, где происходит скольжение уплотнений и проушин, что приводит к интенсивному изнашиванию этих участков трака.
Лучшие результаты по надежности имеют гусеницы с герметичным радиальным уплотнением шарнира, выполненным по типу сайлент-блочных резиновых колец, запрессованных в проушины трака с натягом.
Гусеницы такой конструкции используют на многоцелевых транспортерах-тягачах. Закрытый шарнир может быть выполнен в двух вариантах: разборным и моноблочным.
Общий вид гусеницы с закрытыми разборными шарнирами представлен на рис. 109. Особенностью ее является то, что траки гусеницы (гребневой 1 и безгребневой 4) литые из стали 110Г13Л-В каждую из проушин трака запрессованы резинометаллИ'
Рис. 109. Гусеница с закрытыми шарнирами (втулочный вариант)
ческие втулки. В гусенице два типоразмера втулок — короткие 3 и длинные 5.
Втулки имеют шестигранное внутреннее отверстие и соединяются шестигранным пальцем 2. Стягивание их осуществляется болтом 7, который фиксируется от отворачивания шайбой 6. От осевого смещения весь блок в сборе удерживается за счет натяга резиновых колец. Кольца по внутреннему диаметру привулкани-зированы к буртикам втулок.
Достоинством гусеничных цепей с закрытыми шарнирами является их идентичность по основным размерам обычным гусеницам с открытым шарниром. Это позволяет применять их на гусеничных машинах без особых переделок ходовой части или иных агрегатов.
В качестве примера на рис. ПО показан общий вид тягача АТ-Л, имеющего гусеницы с закрытыми шарнирами, из которого видно, что гусеничная цепь органически вписывается в общую конструкцию машины. При этом по основным компоновочным показателям и параметрам гусеницы с закрытыми и открытыми шарнирами различаются незначительно (табл. 24), хотя и имеют различный шаг и диаметр шарнира. Уменьшение шага обусловлено стремлением уменьшить угол закручивания резиновых колец и тем самым повысить их долговечность.
Угол закручивания резиновых колец шарнира <р3 равен половине угла складывания траков относительно друг друга на ведущем и направляющем колесах или на опорных катках. Угол же складывания траков а прямо связан с шагом гусеничной цепи 8* 227
Рис. 110. Тягач АТ-Л, имеющий гусеницы с закрытыми шарнирами
<0. Как видно из рис. 111, угол складывания траков равен центральному углу. Последний связан с шагом гусеничной цепи /0 и диаметром колеса dK (ведущего или направляющего) зависимостью
Следовательно»
<Гз-= 1 arctg А.
Отсюда следует, что уменьшить угол закручивания резиновых колец (р3 шарнира можно путем уменьшения шага гусеницы или увеличения диаметра ведущего колеса, направляющего колеса и катков. Однако увеличивать диаметр ведущего колеса не всегда
24. Основные параметры гусениц тягача АТ-Л
Гусеница с шарнирами
Параметр
открытыми закрытыми
Ширина гусеницы, мм...................
Шаг, мм............................. .
Число траков в одной гусеничной цепи .
Масса одного трака в сборе с пальцем, кг
Диаметр проушины, мм ...................
Число зубьев ведущего колеса............
Начальный диаметр ведущего колеса, _мм
300
123
82
5,43
20,5 13
515
315
107
95
6,43
30
15
515
'возможно, так как его выбирают исходя из условия обеспечения необходимой силы тяги движения. Увеличивать диаметр опорных катков во многих случаях нецелесообразно по соображениям снижения 'массы машины. Поэтому угол закручивания в практике может изменяться главным образом в результате изменения шага цепи. Значительное уменьшение шага также нежелательно, так как масса гусеницы в этом случае возрастает.
Диаметр шарнира в гусеницах с закрытыми шарнирами увеличивается из-за необходимости обеспечить нужную высоту резиновых колец в запрессованном состоянии, что в свою очередь приводит к увеличению массы гусеничной
Рис. 111. Схема для определения угла закручивания шарнира
цепи.
Втулочный вариант гусеницы с закрытыми шарнирами для легкого транспортера-тягача МТ-Л конструктивно отличается от предыдущей гусеницы тем, что траки гусеницы МТ-Л штампованные, а шарнир включает втулки трех типоразмеров.
Введение втулки третьего типоразмера позволяет более равномерно распределить угол закручивания между проушинами смежных траков и одновременно обеспечить более равномерную нагрузку на несущие части (передающие силу тяги) втулок. В результате применения штампованных траков (из стали ТВМ) масса гусеницы с закрытыми шарнирами повышается по сравнению с массой гусеницы с открытыми шарнирами незначительно.
Долговечность гусеницы с закрытыми шарнирами втулочного варианта определяется в основном двумя факторами: долговечностью резиновых уплотнений и плотностью соединения втулок с шестигранным пальцем (неподвижностью посадки втулок на пальце). Рассмотрим эти факторы.
Разрушение резиновых уплотнений ведет к быстрому последующему изнашиванию трущихся поверхностей шарнира и к потере гусеницей работоспособности, поэтому срок службы резиновых уплотнений должен соответствовать сроку службы гусеничного движителя.
Комплекс вопросов, связанных с отработкой параметров уплотнений, включает выбор оптимальной формы и размеров колец: определение рецептуры резины, имеющей наибольшую долговечность; выявление лучшего способа крепления резины; исследование воздействия смазки, вводимой в шарнир, на работоспособность колец; определение оптимальной угловой жесткости шарнира; анализ влияния времени эксплуатации (хранения) на жесткость резиновых колец.
Работоспособность уплотнений проверяют как при стендовых., так и при ходовых испытаниях. Последние, как правило, являются обязательными для окончательной оценки работоспособности уплотнений. При стендовых, как правило, ускоренных испытаниях тепловой режим работы существенно изменяется, что может иногда исказить действительные условия работы и дать неверное представление об истинной долговечности резины (так как резина многих рецептур очень чувствительна к температурному режиму). Кроме того, при испытаниях с равномерной цикличностью условия «отдыха» резины совершенно другие, чем в действительности, что также не может не сказаться на ее долговечности. В связи с этим исследования на стендах могут дать лишь предварительные сведения о работоспособности резины. Однако они позволяют определить большинство остальных параметров уплотнений. Так, стендовые испытания позволили установить, что при конструировании закрытого шарнира могут быть применены кольца как прямоугольной, так и трапециевидной формы. Более предпочтительной является трапециевиднаях форма, так как она позволяет обеспечить лучшие условия запрессовки' колец в проушины и снизить вероятность их повреждения. Такая форма обеспечивает более устойчивое положение кольца при поворотах траков и уменьшает склонность его к выворачиванию. Кроме того, при трапециевидной форме можно увеличить площадь крепления резины на всю ширину кольца (в запрессованном состоянии) и тем самым повысить абсолютную прочность крепления резины при одних и тех же относительных показателях адгезии (сцепления резины с металлом).
Износостойкость закрытого шарнира повышается с введением в него смазки. Однако создание смазываемого шарнирного соединения вследствие значительного усложнения конструкции гусеницы и увеличения трудоемкости ее обслуживания нецелесообразно.
Износ трущихся поверхностей шарнира при отсутствии смазки (сухое трение) возрастает в ‘2,5—7 раз по сравнению с износом смазанных поверхностей. Момент сопротивления повороту увеличивается при этом в 2—3 раза. Для ликвидации вредного воздействия на резину продуктов изнашивания, повышения износостойкости шарнира и снижения потерь мощности в движителе желательно использовать в качестве трущихся пар шарнира антифрикционные материалы, имеющие низкий коэффициент сухого трения и высокую износостойкость при возвратно-вращательном движении.
На работоспособность закрытого шарнира влияет прочность крепления резиновых колец к металлу, которая зависит от способа подготовки поверхности перед вулканизацией. Как латунирование, так и подслой из лейконата увеличивает прочность крепления большинства резин, предназначенных для изготовлении уплотнений, 230
г!'Кгс-см
160
120
80
40
г о
Рнс. 112. Влияние времени хранения
на угловую жесткость шарнира
Однако при латунировании требуется более тщательное соблюдение требований технологического процесса, особенно по времени разрыва между латунированием и вулканизацией. Задержка перед вулканизацией приводит к резкому снижению прочности крепления, поэтому крепление на лейконате предпочтительнее.
Радиальный относительный натяг в пределах 28—38% обеспе-
чивает надежную герметизацию полости шарнира и фиксацию колец при углах поворота до ±12° в течение всего срока службы. Исходя из условий сборки шарнира, оптимальный относительный натяг следует считать равным 30—32%.
Надежная фиксация резиновых колец шарниров определяется не только натягом, но и угловой жесткостью. При удельной угловой жесткости с0 > 400 кгс -см/(см • рад) кольца начинают проскальзывать в проушинах даже при относительном натяге 30—31%. В результате нарушается установленное при сборе гусеницы оптимальное положение шарнира (угол установки).
Следует отметить, что длительное хранение гусениц на открытом воздухе приводит к повышению угловой жесткости шарниров. Так, при шестилетнем хранении гусеницы с уплотнениями из резины А-6 жесткость шарнира возросла на 80% (рис. 112), поэтому для обеспечения надежной работы шарнирных соединений необходимо, чтобы начальная угловая жесткость резины не превышала 220—280 кгс«см/(см«рад).
Угловая жесткость шарнира зависит не только от выбранной рецептуры резины и натяга, но и от размеров резинового кольца. Так как у втулок разных типоразмеров резиновые кольца имеют различные размеры, то угловая жесткость втулок разная. Чем больше длина резинового кольца в запрессованном состоянии, тем больше угловая жесткость. На рис. 113, а и б приведены экспериментальные зависимости момента сопротивления от угла закручивания для втулок двух типоразмеров (кольца в запрессованном состоянии) при скручивании их под растягивающей нагрузкой и без нагрузки при покрытии втулок антифрикционной пластмассой и без покрытия. Из сравнения графиков видно, что основным фактором, влияющим на угловую жесткость, является длина резиновых колец. Растягивающая нагрузка, так же как и коэффициент трения в сопряжении, на угловой жесткости сказывается незначительно.
Для работы всех колец шарнира в одинаковых условиях необходимо, чтобы их угол закручивания был одинаковым. При разном угле закручивания кольца, закручивающиеся на больший
М, кгс-см
Рис. ПЭ. Угловая жесткость резниометаллической втулки:
а — с общей длиной двух резиновых колец 25,5 мм; б — то же, 18 мм; 1 с пластмассой, 2 — без пластмассы
%
угол, значительно раньше выйдут из строя, что приведет к общему выходу из строя гусеницы. Равный угол закручивания колец одной проушины будет, очевидно, получаться тогда, когда суммарная угловая жесткость колец одной проушины будет равна суммарной угловой жесткости колец другой проушины. Это достигается соответствующим подбором длин колец с таким расчетом, чтобы обеспечивалась равная угловая жесткость втулок проушин обеих сторон трака. Однако при этом следует учитывать, что за счет влияния торцовых слоев резиновых колец угловая жесткость не связана прямой пропорциональной зависимостью с длиной кольца. Экспериментально установлено, что суммарная жесткость шарнира увеличивается значительно интенсивнее, чем суммарная длина резиновых колец в запрессованном состоянии. При размерах колец, характерных для закрытых шарниров г\ сениц, отношение приростов длины шарнира и его жесткости можно считать равным 2: 3. Исходя из этого и выбирают форму колец для втулок каждой стороны трака, обеспечивая одинаковый угол закручивания колец на обеих сторонах.
Работоспособность колец из резин различных марок при разных способах их крепления проверена ходовыми испытаниями гусениц в реальных условиях на машинах весовых категорий от 8 до 25 тс. Работоспособность большинства колец обеспечивает срок службы гусениц, значительно превышающий срок службы гусениц с открытым шарниром. Это вполне естественно.
Рецептуры резиновых колец резинометаллических гусениц, описанных раньше, и гусениц с закрытыми шарнирами по составу или одинаковы, или очень близки, поэтому если обеспечивается требуемая долговечность резины в резинометаллических шарнирах, где она воспринимает растягивающие усилия и работает 232
на скручивание, то в закрытых шарнирах, где резина разгружена от восприятия растягивающих усилий, условия ее работы значительно легче и работоспособность (долговечность) более высокая.
В настоящее время можно считать, что резиновые уплотнения типа сайлент-блочных колец достаточно хорошо конструктивно отработаны и при условии соблюдения описанных рекомендаций не являются сдерживающим элементом при использовании гусениц с закрытым шарниром.
На работоспособности гусениц с закрытым шарниром сказывается также неподвижность блока втулок на пальце. В нормально работающем резинометаллическом (последовательном) или закрытом шарнире рассматриваемого типа втулки проушин должны быть неподвижными одна относительно другой и относительно соединительного пальца, иначе будут изнашиваться торцы втулок, в полость между пальцем и втулками будут попадать абразивные частицы, что приведет к прогрессирующему изнашиванию фасонных профилей пальца и втулок. В результате гусеница может выйти из строя не из-за разрушения резиновых колец шарнира и изнашивания несущих поверхностей втулок и проушин, а из-за изнашивания соединительных пальцев и внутренних поверхностей втулок. При этом соединительный палец и втулки изнашиваются, как правило, со стороны проушин только одного трака, где начальные условия для проникновения абразивных частиц более благоприятные, а со стороны проушин смежного трака втулки выключаются вообще из работы. В равной степени могут изнашиваться участки пальца, находящиеся в контакте как с короткими, так и с длинными втулками.
Как установлено испытаниями, фасонный (шестигранный) профиль пальца и втулок в закрытых шарнирах позволяет обеспечить относительную неподвижность деталей шарнира только в течение начального пробега. После этого появляются значительные зазоры в соединении палец — втулки, и оно практически начинает работать как открытый шарнир. Это приводит и к соответствующему изменению шага гусеничной цепи.
Следовательно, для создания условий, при которых втулки шарнира могут оставаться неподвижными в течение всего срока службы, необходимы дополнительные меры, кроме использования пальца и втулок фасонного профиля.
Наиболее эффективной мерой является силовое стопорение (стягивание) втулок на пальце. Осевую силу, необходимую для надежного стягивания втулок на пальце, определяют исходя из таких соображений.
При движении траков по обводу на шарнир действуют растягивающие усилия и скручивающие моменты. Под действием растягивающих усилий шарнир изгибается, и при определенных условиях образуются зазоры между торцами втулок в зон? растяжения пальца. Это приводит к попаданию абразивных частиц в межтор-Цовые зазоры шарниров, у которых в йена груженном состоянии 233
обеспечивается достаточно плотное прилегание торцов втулок. Скручивающие моменты заставляют втулки перемещаться одну относительно другой, увеличивая за счет смятия начальный угловой зазор и приводя в дальнейшем к аварийному изнашиванию. Таким образом, для обеспечения нормальных условий работы шарнира нужна такая осевая сила, чтобы исключить при движении машины как раскрытие торцов втулок, так и их взаимное проскальзывание.
Раскрытие торцов наступает в момент, когда напряжения от изгиба (в зоне растяжения) становятся равными напряжениям сжатия от осевой силы, поэтому для задания требуемой осевой силы необходимо знать истинные значения напряжений в пальцах. Существующие методы расчета обычных пальцев гусениц неприменимы для расчета закрытого шарнира из-за податливости опор пальца (втулок).
Аналитическое определение изгибающих напряжений в пальцах закрытых шарниров дает наиболее точный результат при использовании схемы, согласно которой шарнир рассматривают как монолитную неразрезную многоопорную балку переменного сечения, нагруженную равномерно распределенными силами рг и р2 на участках контакта втулок и проушин траков (рис. 114). Распределенные по длине нагрузки рг и р2 находят как частное от деления растягивающего усилия Тр на общую длину рабочей части втулок, воспринимающих это усилие. В этом случае изгибающие напряжения на поверхности пальцев могут быть определены по формуле
, _ Мх
и— Wx D.
(81)
где — диаметр вписанной окружности профиля пальца; Dx — наружный диаметр моноблока в рассматриваемом сече’ НИИ х.
В действительности напряжения будут отличаться от определенных по этой формуле вследствие наличия зазоров в сопряжении и неодинаковой податливости втулок в разных сечениях.
Влияние этих факторов можно оценить и учесть только опытными коэффициентами. С этой целью было проведено экспериментальное исследование напряженного состояния пальцев в шарнирах со втулками четырех типоразмеров (в различной комбинации) для случаев стянутого и нестянутого шарниров. Нагрузка на траки изменялась в диапазоне 0,5—10 тс.
На рис. 114 показаны экспериментальные и расчетные эпюры изгибающих напряжений в пальце шарнира гусеницы шириной 350 мм. Сравнение экспериментальных данных (кривая 1) с теоретическими (кривая 3), определенными по формуле (81), позволяет убедиться в том, что в некоторых сечениях шарнира расхождение напряжений значительное. Действительные напряжения в местах изменения сечений у средних втулок (т. е. в наиболее 234
Рис. 114. Расчетные и экспериментальные эпюры напряжений в пальце шарнира:
1 — экспериментальные данные; 2 — расчетные по формуле (82); 3 — расчетные по формуле (81)
опасных местах) превосходят теоретические в 4—6 раз. Из этого следует, что при определении напряжений в пальце необходимо учитывать влияние зазоров в сопряжении и податливости втулок, т. е. их геометрических размеров.
В результате анализа действительного характера распределения напряжений может быть предложена формула, позволяющая с достаточной точностью найти их величину:
___ Мх I г, 16Z? dobr Wx Dx (LBr + /вт)2 ’
(82)
где kM — опытный коэффициент монолитности; Ьг — радиальный зазор в сопряжении палец — втулка; LBT — общая длина втулки; 4т — длина несущей поверхности.
Значения коэффициента монолитности kM следующие: для сечений на рабочей длине втулок 0,06—0,08, для сечений на заплечиках 0,16—0,18.
Эксперименты с втулками различных типоразмеров подтвердили справедливость данной формулы в широком диапазоне из-
235
менений отношения LBT//BT и радиальных зазоров Ьг. На рис. 1г4 (кривая 2) показана эпюра напряжений в пальцах, определенных по формуле (82).
Зная напряжения в сечениях, соответствующих стыку втулок, можно определить требуемую осевую силу и момент затяжки шарнира. Применение силового стягивания пакета втулок решае' вопрос и стопорения резьбового соединения. Испытания различных вариантов стопорений показали, что наиболее надежным явля ется силовой.
Помимо того, что стягивание пакета втулок обеспечивает необходимую работоспособность шарнира и повышение долговеч ности гусеницы, эта мера позволяет существенно снизить нагру-женность пальца. При стянутом пакете втулок палец работаем как составная часть всего блока, поэтому напряжения и изгиба -ющие моменты в нем от действия одной и той же растягивающей силы меньше, чем при нестянутом шарнире (рис. 115, а, б). Прь этом напряжения в зависимости от растягивающей силы уменьшаются в 1,5—2,5 раза. Это очень важное обстоятельство, так как соединительный палец является^Паиболее нагруженной деталью шарнира. Стягивание пакета втулок позволяет уменьшить размер (диаметр) пальца, габаритные размеры трака и массу гусеницы.
При обеспечении надежного стопорения и посадки втулок на пальце работоспособность гусениц получается достаточно высокой. При этом интенсивность изменения шага гусеницы остается практически постоянной в течение всего срока эксплуатации Интенсивность изнашивания шарнира примерно соответствует интенсивности изнашивания трущихся поверхностей при сухом безабразивном трении.
В процессе эксплуатации отмечается некоторое преимуществе гусениц, имеющих втулки, покрытые антифрикционной пластмассой. Сроки службы таких гусениц несколько больше, чем при отсутствии пластмассы. Главное же заключается в том, что износ проушин, работающих в паре с пластмассовыми втулками, очень мал. Средний износ втулок как покрытых антифрикционной пластмассой, так и металлических практически одинаков и не превышает 2 мм за весь период эксплуатации. Износ же проушин, контактирующих с пластмассовыми втулками, составляет всего 0,3—0,5 мм или практически отсутствует. Это позволяет решить проблему ремонтопригодности гусениц за счет установки новых втулок в старые траки при условии сохранения работоспособности других элементов трака (цевок, направляющих гребней, беговой дорожки, грунтозацепов). Данный вопрос можно рассматривать в настоящее время вполне реально, поскольку уже созданы антифрикционные пластмассы, отличающиеся высокой твердостыа износостойкостью и широким температурным диапазоном применения (до + 300 °C).
л при нестянутом пакете втулок; б — при стянутом пакете втулок
5. РАБОТОСПОСОБНОСТЬ ГУСЕНИЦ
С ЗАКРЫТЫМИ МОНОБЛОЧНЫМИ ШАРНИРАМИ
Втулочный вариант закрытого шарнира все-таки достаточно сложен по конструкции и дорог в производстве, если учесть массовость деталей гусениц, поэтому стараются использовать шарниры более простых конструкций. Для гусениц небольшой ширины (400—450 мм) разборность шарнира может быть обеспечена запрессовкой и распрессовкой шарнирного блока целиком. В этом случае представляется возможным шарнир сделать моноблочным, что - существенно упрощает конструкцию гусеницы и позволяет ее сделать более легкой. Конструкция гусеничной цепи с закрытыми! моноблочными шарнирами показана на рис. 116.
Гусеничная цепь с закрытыми моноблочными шарнирами так же, как цепь с открытыми шарнирами, включает всего лишь две детали—трак 1 и палец 2. Только в гусенице с закрытыми шарнирами палец выполнен ступенчатым, и в местах меньшего диаметра (эти места соответствуют краям проушин траков при запрессованном положении пальца) на него навулканизированы резиновые уплотняющие кольца (рис. 117). При сборке гусеницы кольца запрессовывают с натягом, чем обеспечивается фиксация пальца в проушинах.
Рис. 116. Гусеничная цепь с закрытыми моноблочными шарнирами шириной 350 мм (траки штампованные) для машин легкого весового класса
зм*
Рис. 117. Моноблочный палец с закругленными резиновыми кольцами
Гусеницы с моноблочными шарнирами несколько легче гусениц втулочного варианта, так как диаметр шарнира может быть выполнен меньшим, чем при использовании втулок, а палец— пустотелым, но тяжелее обычных гусениц (с открытым шарниром).
Сопоставление основных параметров гусениц с различными вариантами шарнира приведено в табл. 25.
Основным препятствием для широкого распространения гусениц с закрытыми моноблочными шарнирами является сложность сборки и разборки в полевых условиях. При этом большую сложность представляет разборка гусеницы, так как в процессе эксплуатации машины в различных условиях резина плотно прихватывается к металлической поверхности проушин трака. Выбить моноблочный палец из проушин трака невозможно из-за упругости посадки его в проушинах (после удара палец возвращается в исходное положение). Это же характерно и для процесса сборки
25. Сравнительные показатели гусениц с шарнирами различных типов для машин АТС-59 и МТ-Л
Показатель Тягач АТС-59 Транспортер-тягач МТ-Л
Гусеница с шарнирами
открытыми закрытыми моноблочными параллельными резннометалли-ческими открытыми закрытыми втулочными закрытыми моноблочными
Ширина гусеницы, мм Шаг цепи, мм Диаметр проушины трака, мм . . Число траков в одной гусенице Масса единицы длины гусеницы, кг/см Начальный диаметр ведущего колеса, мм Число зубьев ведущего колеса . . 460 137 19,5 85 0,805 575 13 482 137 32 85 0,82 575 13 427 150 40 78 1,04 580 12 350 111 15 108 0,58 535 15 350 111 35 108 0,66 535 15 350 111 35 108 0,65 535 15
ям
гусеницы, но в данном случае применение технологической смазки значительно уменьшает сопротивление перемещению пальца и позволяет устанавливать его обычным способом.
Для сборки и разборки гусениц с закрытыми моноблочными шарнирами используют несложные приспособления, посредством которых осуществляют запрессовку или выпрессовку резинометаллических пальцев. Чтобы при выпрессовке или запрессовке пальцев не разрушались резиновые кольца (не срезался кольцевой слой по наружному диаметру), необходимо соблюдать ряд условий.
Кольцо перед непосредственной запрессовкой в проушину должно быть равномерно обжато до диаметра проушины. Для этого применяют направляющий конус. Чтобы кольца обжимались в конусе равномерно по всему периметру и усилие запрессовки было минимальным, кольца слегка смазывают технологической смазкой, состоящей из смеси касторового масла и этилового спирта.
Надежность фиксации пальца в проушинах зависит от натяга резиновых колец в запрессованном состоянии: чем больше натяг, тем надежнее закреплен палец. Однако при большом натяге требуется большое усилие запрессовки. Кроме того, положение резинового кольца в этом случае при прохождении через конус и проушины неустойчивое, возникает опасность выворачивания кольца, т. е. преждевременного выхода его из строя. Средний натяг в гусеничных цепях с моноблочными шарнирами не превышает 32%. Чтобы при запрессовке сохранилась правильная цилиндрическая форма, целесообразно применять кольца трапециевидной формы с закругленными кромками по наружному диаметру (см. рис. 117). При такой форме резиновых колец можно осуществлять запрессовку пальцев непосредственно в проушины без направляющего конуса. Его функции в данном случае выполняет заходная фаска на крайней проушине трака.
Одним из условий при сборке гусеницы без разрушения резиновых колец является обеспечение соосности всех смежных проушин и минимального зазора между их торцами. Если зазор между торцами обеспечивается при изготовлении траков (зазор между торцами должен быть I—3 мм), то соосность смежных проушин (т. е. взаимное расположение траков на удалении друг от друга, равном шагу гусеницы) достигается применением соответствующего приспособления.
Общий вид приспособления для разборки гусеницы с закрытыми моноблочными шарнирами показан на рис. 118, а. Приспособление состоит из стяжных хомутов 1 и винтового пресса 2. Стяжные хомуты надевают на крайние проушины смежных траков и при помощи винта 3, имеющего на концах резьбу с противоположным заходом (левую и правую), центры смежных шарниров устанавливают на расстоянии, равном номинальному шагу гусеничной цепи. В результате, проушины располагаются соосно, и выступы моноблочных пальцев выходят из образующихся при
Рис. 118. Приспособление для разборки и сборки гусеницы в полевых условиях и его установка на траки
изнашивании гнезд. Для выпрессовки пальца устанавливают винтовое устройство на трак (рис. 118, б) и крепят к траку болтами, входящими в отверстия 3 (см. рис. 116), предназначенные ’одновременно для крепления асфальтоходных башмаков и для установки винтового устройства.
Усилие выпрессовки зависит от состояния резиновых колец и времени эксплуатации машины. При достаточно плотном прихватывании резины к металлу трака это усилие находится в пределах 2000—5000 кгс. Операцию разборки и сборки гусеницы выполняет один человек.
Надежность работы рассматриваемых гусениц с закрытыми моноблочными шарнирами зависит от работоспособности главным образом резинометаллического пальца. Если для гусеницы со втулочными шарнирами основным вопросом, требующим более тщательной отработки, является обеспечение неподвижности втулок на шестигранном пальце, то для гусеницы с моноблочными шарнирами — обеспечение усталостной прочности ступенчатого пальца. Наличие выступов на пальце обусловливает высокую концентрацию напряжений в местах перехода от меньшего диаметра к большему и, следовательно, опасность преждевременного разрушения пальцев.
При одинаковом диаметре проушины напряжение в моноблочном пальце в местах изменения диаметра значительно выше, чем в соответствующих местах втулок составного шарнира. Это объясняется тем, что в составном шарнире (втулочный вариант шарнира) при одинаковой нагрузке шестигранный палец берет на себя большую часть нагрузки и деформируется существенно больше, чем моноблок. Однако увеличение нагруженности пальца одинакового сечения по длине не так заметно сказывается на его Усталостной прочности, как повышение напряженности ступенчатого блока.
Обеспечение требуемой прочности моноблока достигается в основном за счет улучшения качества материала (стали), его твер-
Рнс. 119. Изменение шага гусениц:
1 — с открытыми шарнирами; 2 — с закрытыми моноблочными шарнирами
Рис. 120. Состояние ведущих венцов траис-портера-тягача МТ-Л (толкающий способ зацепления) по окончании гарантийного пробега \
дости и введения закруглений чений.
(галтелей) в местах перехода ее-
Эксплуатационной особенностью гусениц с моноблочными шарнирами является высокая динамическая стабильность шага. При изменении тяговой нагрузки во всем диапазоне, допускаемом параметрами силовой установки, длина обвода изменяется незначительно и не приводит к нарушению взаимодействия элементов зацепления или сбрасыванию гусениц. Это обеспечивает надежную работу гусеничного движителя как при движении машины с высокими скоростями, так и при буксировке различных прицепов
в тяжелых дорожных условиях.
В процессе эксплуатации шаг гусеничной цепи постепенно увеличивается. При этом отмечается достаточно равномерная интенсивность изнашивания шарнирного соединения и соответ
ственно равномерное изменение шага.
По сравнению с гусеницей с открытыми металлическими шарнирами увеличение шага у гусеницы с закрытыми моноблочными шарнирами значительно меньше. В качестве примера на рис. 119 приведены кривые изменения шага двух комплектов гусениц с моноблочными пальцами при эксплуатации машин на слабоабразивных грунтах.
Наиболее надежным зацеплением при использовании гусениц с закрытыми шарнирами является цевочное толкающее. При использовании зацепления этого типа, правильно выбранном угле давления, исходя из диапазона изменения усилий в рабочей и свободной ветвях гусеничного обвода, и снижении давлений в зоне контакта применением прямого профиля зуба 41 цевки удается обеспечить работоспособность зацепления в процессе всего периода эксплуатации машин без перестановки венцов ведущих колес. Ходовые испытания движителей в различных дорожноклиматических условиях подтверждают эффективность этих мероприятий.
26. Относительный износ элементов зацепления {в мм на 1000 км пробега) на разных грунтах
В табл. 26 приведены данные по относительному износу элементов зацепления для двух типов зацепления — тянущего и толкающего, а на рис. 120 показан общий вид ведущего колеса при использовании толкающего зацепления по окончании испытаний.
Из данных табл. 26 видно, что износ переднего профиля зубьев венцов ведущих колес при толкающем типе зацепления в 2,5—3,5 раза, а износ профиля цевок в 3—5 раз меньше, чем при тянущем. Резкое снижение износа объясняется в первую очередь тем, что при толкающем способе зацепления поворот цевки на первом зубе, где нормальная нагрузка максимальная, отсутствует. Она поворачивается относительно зуба на выходе, где давление незначительное, а в некоторых случаях цевка перед поворотом отходит от переднего профиля.
Правильный выбор угла давления обеспечивает устойчивое положение цевки на дуге охвата в большом диапазоне тяговых нагрузок. Контактные напряжения при этом незначительные, так как контактирующие профили цевок и зубьев выполнены Прямыми. Положительное влияние на износостойкость зацепления оказывает и стабильность шага у гусениц с закрытыми шарнирами.
Венцы ведущих колес в случае использования толкающего зацепления, как правило, обеспечивают заданный пробег движителя без перестановки. С учетом возможностей перестановки вен-Цов и использования в последующем тыльного профиля зуба Долговечность ведущих колес при толкающем способе может быть Допол нител ьно повышена.
243
Приведенные в настоящей главе данные подтверждают, ч'г. на современном этапе быстроходные гусеничные машины мог\ » быть достаточно эффективными в народном хозяйстве при испол .. зовании в тяжелых дорожных условия х, поскольку проблем -долговечности гусеничного движителя, считавшегося до последнего времени наименее надежным механизмом, ограничивающие ресурс гусеничной машины в целом, практически решена, и ег , срок службы в основном соответствует сроку службы остальны агрегатов. При этом следует отметить, что потенциальные возможности дальнейшего увеличения долговечности гусеничного движителя еще далеко не исчерпаны.
Глава V
НЕСИММЕТРИЧНЫЕ
УРАВНОВЕШЕННЫЕ ГУСЕНИЦЫ
СНЕГОБОЛОТОХОДНЫХ МАШИН
1. КОНСТРУКТИВНЫЕ И ЭКСПЛУАТАЦИОННЫЕ ОСОБЕННОСТИ ГУСЕНИЦ
СНЕГОБОЛОТОХОДНЫХ МАШИН
Многолетним опытом эксплуатации снегоболотоходных транспортеров и болотных тракторов в труднопроходимых районах нашей страны и за рубежом установлено, что машины этого типа должны обладать рядом специфических качеств0
высокими проходимостью и скоростями движения по различной местности при разных атмосферных условиях, главным образом по слабым податливым грунтам (снегу, болоту, топям и др-);
возможностью преодоления болотистых участков и коротких водных преград на плаву; _
приспособленностью к пуску, работе и хранению при низких температурах окружающего воздуха;
приспособленностью к техническому обслуживанию и ремонту в условиях сурового климата;
удовлетворительной топливной экономичностью, сочетающейся с большим запасом хода по топливу;
хорошими условиями для водителя и пасса/киров в кабине и кузове машины.
Не менее важным для снегоболотоходных машин является общепринятые качества: простота конструкции, надежность, высокая степень унификации с другими машинами, технологичность и низкая себестоимость изготовления.
1 Разработка и совершенствование снегоболото ходных машин осуществляются по двум основным направлениям: 1) разработка специальных снегоболотоходных машин; 2) разработка снегоболотоходных модификаций на базе машин общего назначения, как правило, с установкой гусениц, несимметричных относительно оси беговой дорожки.
К машинам первого направления относятся отечественные тракторы ДТ-75Б, Т-130Б, ТБ-4, транспортеры-тягачи ГТ-С, ГТ-СМ, ГТ-Т и др. (табл. 27). За рубежом, особенно в США, Канаде, Швеции, разработка специальных снегоболотоходных
245
. Основные параметры специальных снегоболотоходных машин
4
машин является основным направлением в создании подобных машин высокой проходимости.
К машинам второго направления относятся болотные модификации тракторов ДТ-55, ДТ-54А, снегоходный транспортер-тягач «Харьковчанка», гусеничные тракторы повышенной проходимости С-80Б, С-80Б4 и др.
Специальные гусеничные снегоболотоходные машины обладают лучшей проходимостью и приспособленностью к разнообразным климатическим и почвенным условиям, более высокой надежностью при эксплуатации в труднопроходимых районах, чем машины, создаваемые как модификации на базе машин общего назначения. Данное положение, по-видимому, можно объяснить тем, что второе направление до последнего времени ни в отечественной, ни в зарубежной практике не получило теоретического обоснования и широкого хозяйственного распространения.
Однако это направление имеет существенные преимущества: позволяет снизить давление на грунт, получить снегоболотоходные машины из машин общего назначения с минимальными переделками; максимально унифицировать снегоболотоходные и базовые машины и удешевить их производство; снизить общие эксплуатационные расходы на содержание, ремонт и обслуживание всего семейства машин; сохранить полезный объем грузовой платформы базовой машины; упростить конструкцию и уменьшить массу машины (в этом случае не требуется расширения колеи, а следовательно, и создания новой ходовой части).
Эти преимущества особенно заметны в последнее время, когда определилась тенденция к созданию семейств машин на базе унифицированных шасси.
Путь создания снегоболотоходных машин как модификаций на базе машин общего назначения дает возможность при минимальных затратах обеспечить народное хозяйство необходимым количеством машин высокой проходимости для труднопроходимых районов Крайнего Севера и Сибири.
Разработка таких снегоболотоходных модификаций предполагает в первую очередь создание несимметричных гусениц, удовлетворяющих ряду специфических требований:
малое давление на грунт, обеспечивающее надежную работу движителя при любом состоянии и толщине снежного покрова (без опоры на подснежный слой грунта), а также на болотных грунтах (без разрушения поверхностного травяного покрова);
отсутствие перекосов звеньев и ветвей гусеничного обвода на податливых труднопроходимых грунтах под воздействием опорных катков при статическом и динамическом нагружении обвода;
достаточная динамическая прочность при движении на высоких скоростях по бесснежным грунтам и снежному покрову с наличием скрытых валунов, пней, а также по смерзшимся и обледенелым дорогам;
247
ЗэшЙг - X ✓ *
надежное сцепление при любом состоянии снега, на разных покровах болот, на обледенелых дорогах и льду, обеспечивающее устойчивое движение машины без буксования и бокового сползания на подъемах, спусках и кренах;
самоочищаемость от снега и грязи и исключение вероятности чрезмерного натяжения гусеницы и ее расклинивания.
При этом гусеничные цепи и гусеничный движитель в целом, как и у машин общего назначения, должны быть конструктивно просты, достаточно износостойки и надежны в работе, иметь высокий КПД во всем диапазоне скоростей движения, возможно меньшую массу и стоимость изготовления.
Вследствие низкой несущей способности грунтов для обеспечения достаточной проходимости машин^ необходимо иметь малые давления под гусеницами при движении, что конструктивно может быть достигнуто в основном установкой широких гусениц. Удлинение опорной поверхности гусениц (базы машины) практически невозможно, так как в этом случае ухудшается маневренность из-за возрастания момента сопротивления повороту (см. гл. I).
Как показывает многолетний опыт эксплуатации и исследования гусеничной техники в Антарктиде и на Крайнем Севере, гусеницы должны обеспечивать давление на грунт не выше 0,3 кгс/см2.
Широкие гусеницы имеют большую массу, поэтому снижение давления на грунт связано не только с изменением габаритов машины, но и с увеличением ее массы.
Что касается продольной прочности, прочности на растяжение и скручивание, то у снегоболотоходных гусениц они практически всегда значительно выше, чем у машин общего назначения того же класса, в связи со значительно большей шириной гусеницы. Для определения этих показателей, как правило, не требуются дополнительные исследования.
Поперечную жесткость снегоболотоходных гусениц необходимо рассматривать особо, в связи со значительным увеличением ширины и работой звеньев как балок с удлиненными пролетами.
Учитывая значительное увеличение массы гусеницы, высокие требуемые скорости и большие ударные нагрузки при движении по снежной целине с валунами, по обледенелым дорогам зимой и твердым грунтам летом, поперечная прочность на изгиб и усталостная динамическая прочность звеньев снегоболотоходных гусениц приобретают особо важное значение.
Отсутствие в грунтах, на которых эксплуатируются снегоболо-тоходные машины, значительных количеств сухой пыли, кварцевого песка и других абразивных частиц, обеспечивает достаточную износостойкость гусениц при использовании открытых шарнирных соединений. Это подтверждается опытными данными, приведенными на стр. 205.
Наиболее простым путем снижения давления на грунт является симметричное уширение гусениц. Характерным примером 248
Рис. 121. Симметричная гусеница транспортера- снегоболотохода ГТ-Т:
/ — палец; 2 — трак; 3 — стяжной болт: 4 — дополнительный грунтозацеп
гусениц такой конструкции служат гусеницы снегоболото-хода ГТ-Т (рис. 121), являющиеся типичными для отечественных снегоболотоходных машин. Данные по некоторым другим симметричным гусеницам приведены в табл. 27.
Симметричные гусеницы обеспечивают работу без перекосов звеньев на твердых и податливых грунтах, имеют хорошую работоспособность, высокие продольную и поперечную прочность, в то же время просты по устройству, надежны в эксплуатации, универсальны по применению и дешевы в изготовлении. Однако симметричные гусеницы имеют существенный недостаток — для их использования необходима специальная ходовая система
с расширенной колеей. При существующих же перевозочных железнодорожных габаритах такое расширение (особенно для большегрузных машин) не только затруднительно, но подчас и невозможно, поэтому обычно приходится идти на весьма нежелательное сокращение ширины рамы (корпуса) машин.
В случае создания снегоболотоходных модификаций на базе многоцелевого унифицированного шасси этот недостаток симметричных гусениц значительно осложняет и ограничивает их применение.
Стремление к уменьшению массы гусениц привело к созданию ленточных гусениц, у которых при одинаковых размерах опорной поверхности масса существенно меньше, чем у свенчатых. Эти гусеницы получили наибольшее распространение за рубежом. Данные по некоторым ленточным гусеницам приведены в табл. 28.
Ленточные гусеницы состоят из двух или более резиновых армированных стальными тросами или синтетическими тканями лент и поперечных металлических планок (плиц), прикрепленных болтами или заклепками к лентам. В окнах планок располагаются элементы зацепления с ведущим колесом. Беговые дорожки для опорных катков, как правило, образуются углублениями в плицах. Грунтозацепами являются ребра жесткости плиц.
249
Поскольку плицы отстоят друг от друга на некотором расстоянии, то перекатывание опорного катка по беговой дорожке сопровождается его вертикальным перемещением (перескакиванием). Чтобы свести это явление к минимуму, в качестве опорных катков иногда применяют пневматические шины. Если же используются обычные катки, то плицы гусеницы устанавливают практически без зазора, однако в этом случае выигрыша в массе не получается.
По конструктивному оформлению и устройству несколько выделяются протекторные гусеницы, которые состоят из секций, соединенных шарнирами. Каждая секция состоит из двух планок, соединенных тросами, на которых укреплены плицы с гребнями и цевками. Секции покрыты резиной, кроме рабочих частей гребней, цевок и проушин. Протекторные гусеницы имеют преимущество по сравнению с ленточными, так как отсутствие крепежных деталей секций упрощает обслуживание и эксплуатацию. При этих гусеницах не требуется установка резиновых башмаков для движения по асфальтированным дорогам. В остальном им присущи все достоинства и недостатки ленточных гусениц.
Особенностью ленточных гусениц является малая жесткость и, как следствие этого, недостаточная устойчивость обвода. Наличие у ленточных гусениц большого числа крепежных деталей (1400—1600 шт.) требует постоянного внимания в эксплуатации и приводит к удорожанию гусениц. Существенными недостатками ленточных гусениц являются пониженные прочность и долговечность при работе на твердых грунтах "и преодолении препятствий (валуны, камни, пни и т. п.).
Использование ленточных гусениц сопряжено с необходимостью разработки специальной ходовой части, т. е. практически с созданием новой машины, поэтому применение таких гусениц на модификациях машин общего назначения во многих случаях не представляется возможным.
Попытки повысить проходимость существующих машин привели к созданию несимметричных гусениц, уширенных только во внешнюю сторону, с опорными плицами, расположенными в одной плоскости.
По такому принципу были созданы многие гусеницы (табл. 29), в частности гусеницы тракторов ДТ-55, ДТ-54А, С-80Б и С-80Б4 и др. Например, несимметричные гусеницы трактора ДТ-55 (рис.122)<—болотной модификации трактора ДТ-54 — состоят из литых несимметричных звеньев, опорные плицы которых расположены в одной плоскости.
Однако несимметричные гусеницы не получили широкого распространения, так как установка их на машины обусловлена существенными ограничениями. Ограничения вызываются деформированием или значительными перекосами звеньев при работе на податливых грунтах. Опыт показывает, что несимметричное (одностороннее) уширение звеньев при расположении плиц в одной
араметры машнн с несимметричными гусеницами
Рис. 122. Болотный трактор ДТ-55
является нерациональным, так как приводит к частым п омкам пальцев, уменьшению средних скоростей движения, разрушению бандажей опорных катков
хопимпЛПмРИНИМаЛИСЬл В праКтике также попытки повышения про-упшпи?ЛрйМаШИН o6uier° ^значения использованием съемных У Р гусениц (рис. 123, а, б). Этот способ повышения
Т СледУющие преимущества: универсальность (уширители могут выполняться для любых машин); обеспечение боты^веня^™* уширителеи и’ следовательно, облегчение ра-илг-г / Р наезде на препятствие; хорошая ремонтопригодность (легкосъемность разрушенных уширителей)
DHT?™ °Л" ИНТерес И3 этих конструкций представляют уши-Snvtlu упругими цементами, функции которых выполняют яРУжинные стержни, листовые рессоры, резиновые амортизаторы <wnm У еницы с пружинными уширителями на твердых грунтах миРл=нЛОСНОВТ ЗВеНО; УшиРители же нагружаются Только X™ ™Л°вияеф0РМ,,РУе“М>’ грунту " "ри "а раз-i с?^Т°Р°™? -''"“I’™"1' приводит к постоянным перекосам !а =Ю работо^особности уширителей, пальцев и звеньев rvcpim Р руемых грунтах, а также к ускоренному износу самой зйя^ЦЫ И сопрягаемых элементов ходовой части. К тому же X ТЬН°е ЧИСЛ° кРепежных деталей существенно снижает :ГУс₽иы ТаЦИ°ННуЮ надежность гусеницы. По этим причинам ^обность1 С° съемнымп Уширителями имеют низкую работоспо-!Ионс1^М°ТрЯ На отсУтствие Д° последнего времени отработанных инструкции несимметричных гусениц, из-за простоты и деше-
6)
Рис. 123. Гусеничные цепн со съемными уширителями
визны в производстве следует признать такие гусеницы наиболее рациональными для снегоболотоходных модификаций, создаваемых на базе машин общего назначения.
2. ОБОСНОВАНИЕ ВОЗМОЖНОСТИ СОЗДАНИЯ НЕСИММЕТРИЧНЫХ УРАВНОВЕШЕННЫХ ГУСЕНИЦ
При создании снегоболотоходных модификаций несимметрич* ное двустороннее и особенно одностороннее увеличение ширннь каждой гусеницы не представляет особых затруднений, но^так°£ 25 4
<
«У,
увеличение ширины гусениц без расширения колеи машины приводит к несимметричности звеньев относительно оси беговой дорожки, внецентренному нагружению и перекосу звеньев на податливых грунтах, вызванному неуравновешенностью моментов реакции грунта на неравные по площади части звена.
Рассматривая упрощенно звено несимметричной гусеницы в виде прямоугольной пластины шириной Ьс + 2е (где Ьс — ширина неуширенной симметричной гусеницы; е — смещение оси катка от центра несимметричной гусеницы) и длиной /0, можно найти значения моментов и М2, действующих на внутреннюю и внешнюю части звена (рис. 124). Момент является результатом действия сил q на площади а момент Af2 — результатом действия сил q на площади /0
При погружении несимметричной гусеницы в грунт возникает опрокидывающий момент ДЛ4, равный разности моментов Afi и М2, действующих на звено с левой и правой стороны.
Полагая q = const, находим
= ql^bllS. (83)
Момент, опрокидывающий звено против часовой стрелки,
( 2 + 2е) ’
ТИ2 = [ql0 (bc + 4е)2]/8.
(84)
Так как Д7И — М2 — М19 то
ДЛ4 = ql^e (bc + 2е).
Это выражение справедливо при условии q => const по всей опорной поверхности, т.е. когда плица трака погружена в грунт без перекосов.
На податливых грунтах плоское звено при несимметричном приложении нагрузки будет погружаться в грунт с некоторым перекосом на угол а (рис. 125). В этом случае давление будет изменяться от ?га1п до ?тах.
При линейной связи между давлением и деформацией (погружением звена в грунт), т. е. при q == Ch, давление будет
Рис. 124. Схема сил, действующих иа несимметричную плоскую гусеницу
Рис. 125. Перекос несимметричного трака
прямо пропорционально глубине погружения Л, и, следе -вательно,
О'гпах _ ^tnax
<7min ^min
Угол перекоса вследствие разного погружения плиц звена найдем из треугольника О1О2О3
sin а = h™* ~ или sin а •-=
ь ьс
где b — ширина несимметричной гусеницы. \
Чтобы найти угол перекоса звена, необходимо знать давления 9паХ и <7min- В случае центрального нагружения давление под плицей равномерное и равно PJ(blQ). При внецентренном нагружении давления под концами плиц следующие:
В остальных точках давление будет линейно изменяться от ?mln 9шах-
Подставляя значения давлений и #min, получаем выра» жение для угла перекоса
sin а ==
12Рке 1^С
12Р е или а -- a resin .-гЛ-
Силу Р плицы Ло
можно выразить через глубину погружения центра
тогда а arcsm—~-
Из этого выражения видно, что для несимметричного плоского звена угол перекоса прямо пропорционален глубине погружения и эксцентриситету. Поскольку глубина погружения зависит oi свойств грунта, то, следовательно, перекос одного и того же плоского звена на разных грунтах будет различный.
Чтобы несимметричное звено гусеницы было уравновешенным., т. е. не перекашивалось при погружении в грунт, необходимо иметь одинаковыми моменты от давлений с каждой сторон в' звена Мг = М2-
Площадь наружной части плицы вследствие уширения гусеницы больше площади внутренней части, поэтому момент от давлений, возникающих под наружной (большей) частью, может быть равным моменту с противоположной стороны при условии,, если давления под наружной частью будут меньшими, чем пот внутренней. А это может быть только тогда, когда наружная часть плицы будет меньше углублена.
Рис. 126. Силы, действующие на звено с разновысотным расположением плиц
Располагая внешнюю плицу звена несимметричной гусеницы выше внутренней, можно добиться такого положения, когда опрокидывающий момент ДМ = 0, и наступит уравновешивание звена. В этом и заключается смысл создания несимметричной уравновешенной гусеницы.
Рассмотрим общий случай положения несимметричного звена, статически уравновешенного на податливом грунте (рис. 126). Для упрощения звено будем считать состоящим из трех участков: двух крайних и центрального под беговой дорожкой.
Если звено находится в равновесии, то ДМ = О (£]М = 0) или М2 — М2.
Так как давления на участке под беговой дорожкой вследствие ее симметрии относительно оси катка не создают опрокидывающего момента, то необходимо рассмотреть моменты только от действия сил, возникающих под крайними площадками (на наружной и внутренней плицах). Тогда
Мг =
М2 =
(^i “И
1*72^0^2 (^2 “И Ь0)]/2.
(86)
(87)
Приравнивая значения моментов, получаем
#i^obi(bi + &о) = q2^ob2(b2 + bo).
Учитывая, что
— Pit l^b2 — F 2;
Qi = Chy, q2 = Ch2, запишем
ChiFy (by bG) = Ch2F2 (b2 -|- b0). (88)
Из выражения (88) видно, что равновесие несимметричного звена на податливых грунтах зависит от соотношения площадей опорных плиц, их расположения относительно оси беговой дорожки, глубины погружения каждой плицы и свойств грунта. Таким образом, располагая на определенной высоте крайние
9 П/р. В. Ф. Платонова 257
плицы, можно уравновесить несимметричное звено и, следовательно, опорную ветвь несимметричной гусеницы.
Внутренняя (относительно машины), меньшая по площади плица должна располагаться ниже наружной, но вместе с тем как наружная, так и внутренняя плицы должны располагаться несколько выше центральной симметричной части звена. Конструкции шарнира, цевок, гребней и других характерных элементов звеньев в этом случае не будут отличаться от обычных и будут определяться общими требованиями, предъявляемыми к конструкции узлов ходовой части. \
Уравновешенность несимметричной гусеницы дает возможность на грунтах основных типов ликвидировать, а на грунтах, близких по характеристикам к основным, резко уменьшить перекосы звеньев опорной ветви гусеничного обвода и, следовательно, снизить потери мощности в гусеницах, уменьшить износы шарниров и сопрягаемых деталей гусеничного движителя. Этим гусеница данной конструкции выгодно отличается от обычной несимметричной и гусеницы со съемными уширителями. Вследствие устранения перекосов в несимметричной уравновешенной гусенице имеется возможность применения шарнира любого типа (открытого, закрытого, сайлент-блочного и др.) общей длиной, равной или меньшей ширины самого звена. В последнем случае шарнир может быть расположен как симметрично, так и несимметрично относительно оси беговой дорожки.
Конструкция несимметричной уравновешенной гусеницы позволяет обеспечить достаточно высокие поперечную и продольную жесткость звеньев и динамическую усталостную прочность.
3. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ПЕРЕКОС НЕСИММЕТРИЧНОГО ЗВЕНА
Хотя основными грунтами в труднопроходимых районах являются болотные и снег, однако это не исключает возможности движения снегоболотоходных машин по твердым и малоподатливым грунтам. Оценивая возможность применения несимметричных гусениц, необходимо рассматривать их работу на всех характерных и возможных грунтах от твердых до существенно податливых.
Основные случаи возможного положения несимметричного звена относительно поверхности при взаимодействии гусеницы с различными грунтами показаны на рис. 127, I—VII.
При работе несимметричной гусеницы могут возникнуть семь характерных положений звена относительно поверхности грунта.
Положение I. Глубина погружения hx = 0, что соответствует работе звена на твердых грунтах. При этом звено опирается центральной частью (практически выступающим над средней плицей грунтозацепом) на грунт. Опорная ветвь обвода полностью уравновешена, т. е. не имеет поперечных перекосов.
Рис. 127. Основные случаи возможного
положения несимметричного звена
Положение II. Глубина погружения не превышает высоту подъема внутренней плицы hx < /г'ь Это положение соответствует работе гусеницы на малоподатливых грунтах, оно практически не отличается от положения I. Звено при этом положении также полностью уравновешено.
Положение III. Глубина погружения равна высоте подъема внутренней плицы относительно центральной hx = ftj. Данное положение граничное и является переходным от положения II к положению IV; звено хотя и не уравновешено, но перекосы пока отсутствуют.
Положение IV. Глубина погружения превышает высоту подъема внутренней плицы над центральной, но меньше высоты подъема наружной плицы йг >• hx > /ij. Данное положение соответствует работе гусеницы на грунтах средней податливости. В этом положении возможны перекосы звена при взаимодействии с грунтом (от действия неуравновешенного момента Мх) в наружную сторону на угол а. Необходимо учитывать, что в реальных условиях при появлении перекоса нагрузка, действующая на звено, перераспределяется по ширине бандажа опорного катка и звено частично уравновешивается. Справедливо заметить, что при этом может происходить неравномерное изнашивание бандажа катка.
Положение V. Глубина погружения достигает высоты подъема наружной плицы hi < hx — fy.
Данное положение также граничное и может рассматриваться как переходное от положения IV к положению VI. Оно соответствует работе гусеницы на грунтах повышенной податливости. Перекосы от действия момента Л4Х здесь резко уменьшаются.
Положение VI. Глубина погружения превышает высоту подъема наружной плицы hi < hx > h%. Это положение звена соответствует работе гусеницы на грунтах значительной податли-
О*
а 259
Ц Рис. 128. Схема для определения
Q . j( угла перекоса звена
вости и вызывает особый интерес как самое типичное при работе на широко распространенных грунтах труднопроходимых районовХ При этом практически на определенном участке погружения звено полностью уравновешено,
так как реактивные моменты от различной деформации грунта с левой и правой стороны трака становяться равными.
Положение VIL При дальнейшем погружении звена в связи с неодинаковым сопротивлением деформированию на разных участках погружения может наступить перекос звена в противоположную сторону по сравнению с предыдущими положениями (изменяется знак угла а). Однако большой перекос возможен при значительном погружении, наступление которого обычно предупреждается осадкой машины на днище.
Как уже замечено, несимметричное звено даже с разновысотным расположением плиц при взаимодействии с грунтами различной податливости в определенные моменты погружения (положения IV, V, VII) имеет тенденцию к перекосам, поэтому для изучения уравновешивания звена во всем диапазоне погружения определим зависимость угла перекоса а от заглубления звена.
С целью упрощения выявления общей зависимости примем следующие допущения, принципиально не влияющие на ее характер: опорный каток воздействует на звено сосредоточенно в центре беговой дорожки; при погружении звена в грунт положение плоскости нагружения не изменяется (каток остается вертикальным).
Движение звена до окончательного положения можно представить как сумму поступательного и вращательного движений.
Принимаем, что звено вначале погружалось вертикально, поступательно до глубины h0 (рис. 128, положение I), а затем повернулось против часовой стрелки на угол а вокруг точки О и заняло окончательное положение II.
Для положения I звена можно записать
Рк = CZo [bQhG + Ьг (/ю - К) + b2 (ho - ПО]. (89)
Для положения II момент, опрокидывающий звено,
^опр == ^^0 :== R С^ц. д ^р)» (9ь)
где R — равнодействующая реакций грунта, равная силе и приложенная в центре давления.
260
В то же время
^опр ” R[ С^ц. д ^z)>
где — элементарная восстанавливающая сила участка плицы, ограниченного координатой xi9 при погружении на глубину
Rt ~ Ch(
Чтобы найти реакцию грунта под каждой плицей, необходимо знать ее глубину погружения в любом сечении hL.
Вертикальное перемещение любой точки звена Л, в общем виде
hi (*ц. д — *z) sin а.
Тогда
Rt = ClG kXi (хц> д — xt) sin а. (91)
Подставив значение из выражения (91), получим значение опрокидывающего момента в функции угла перекоса а
Л4ОПР = Е С10 (хц. д — х,)2 sin а. (92)
Определим моменты сопротивления каждой плицы, просуммировав выражение (92) в интервалах Ах£- для соответствующих плиц.
При этом для каждой плицы элементарные моменты интегрируются в пределах координат xi9 определяемых характерными точками плицы Л, В, С, D, Е и F (см. рис. 128). Например, для внутренней плицы
хв
Mj = f (*ц. д ““ xz)2 sin а
ХА
С учетом этого соответствующие выражения для плиц имеют вид:
для внутренней плицы
п - [(хц. д - xB)s - (хц. д - хл)3]; (93)
для центральной
мо = - Цхц. д - xD)3 - (X
ц. д
для наружной
М2 = - [(Хц. д - xf)8 - (хц. д - х£)3]. (94)
Опрокидывающий момент звена
М
ClG sin а
1С^ц. д хв) д ^д)3“1“(^ц. д
— (Л'ц. д - ХС)3 -4- (хц. д — Х£)3 — (Хц. д — х£)3].
(95)
261
Так как перекосы вертикальных стенок ВС и DE практически малы, то с достаточной точностью можно принять
Xg —- Х^, Xjj —
хА^0;
тогда
Опр
Cl0 sin a „ vs
3 НЛц- д ЛР) Лн- д
М
Подставив значение М
(90), получим
откуда
оир из выражения
C/e sin a r^s
о Иц- Д \*Ц.
Подставляя значение Рк из выражения (89), окончательно получим в общем виде зависимость угла перекоса несимметричного звена на податливом грунте от глубины погружения
sin а =
3 [Mo + by (h0 — h{) -|- b2 (Яр •— /ig)] (хц, д — Хр)
(96)
где Хд. т — координата дальней точки (точки F) соприкосновения звена с грунтом.
Как видно из полученного выражения, угол перекоса и, следовательно, возможность уравновешивания несимметричного звена зависят от размеров плиц и их расположения по высоте.
Проанализируем выражение (96) с целью определения значений а на отдельных этапах погружения звена.
Для положений I, II и III звена (см. рис. 127) будем иметь значения аргументов при начале координат в точке А
Числитель выражения (96) при этом равен нулю, так как Хп. д — хр = 0, поэтому
ai~m = 0. (97)
Для положений звена III — V эти же аргументы будут равны
о
Лр —* 2 Лд*т — г ^1’ *гц. д
Подставив аргументы в выражение (96), получим
„ ___ ягг<г;п f 6 [h0 (b0 + 6J — 6161] 6г ]
ССщ-V alCSHl ------
(61 + 6о)2
Рис. 129. Зависимость угла перекоса уравновешенного звена на податливом грунте от глубины погружения (Л — клиренс машины):
11— для несимметричного плоского звена; 2 — для несимметричных звеньев с разными соотношениями h' и h'
Л
Для положений V — VII звена значения аргументов, входящих в выражение (96), будут следующие:
Хр — —| g— , Хдв т - -у- Ьд —|— &2»
Поставив аргументы в выражение (96), получим
«v-vii = arcsin
6 [hg (&i Ч- ^2) — — ^2^2] (^2^1
(Z?i + 62)3
(99)
На основании выведенной для несимметричного звена зависимости построим график угла перекоса от глубины погружения в общем виде (рис. 129). Из графика видно, что для несимметричных звеньев с различными соотношениями hi и /12 предельные углы перекоса при любом погружении значительно меньше, чем для несимметричного плоского звена.
При этом если у плоского звена с увеличением глубины погружения угол перекоса монотонно возрастает, то у разновысотного изменяется знак угла, т. е. звено сначала перекашивается в одну сторону, а затем в другую. Начало перекоса разновысотного звена зависит от высоты h{ подъема внутренней плицы, а угол перекоса звена в положительной и отрицательной областях — От соотношения площадей крайних плиц и высоты их расположения относительно друг друга. Зная наиболее вероятные грунтовые условия использования снегоболотоходных машин, можно Подобрать форму звена такой, чтобы в этих условиях угол перекоса был равен нулю, т. е. чтобы звено и опорная ветвь в целом не имели перекосов.
4. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ НЕСИММЕТРИЧНОЙ ГУСЕНИЦЫ
При создании уширенных несимметричных гусениц для снегоболотоходных модификаций базового шасси важное значение имеет выбор эксцентриситета, являющегося исходным параметром при определении требуемой ширины гусеницы для получения необходимого давления на грунт.
Для внутренней части звена из рис. 130 имеем
b — — 4-6
UBH 2
где Ьс — ширина симметричной гусеницы базовой машины; б — возможное уширение гусеницы к борту базовой машины;
для наружной части звена
Ьс 2
б).
Используя предыдущие зависимости, получаем
(100)
Следовательно, эксцентриситет определяется шириной гусеницы базовой машины и возможным уширением гусеницы к борту за счет имеющегося (или предусмотренного) зазора.
С другой стороны, эксцентриситет определяется исходя из условий вписываемости гусениц в заданную габаритную ширину машины.
Согласно схеме на рис. 131 имеем
Вг - Вр + 2 б0 + 26,
где Вг — габаритная ширина; Вр — ширина рамы б0 — конструктивный зазор.
Подставляя в выражение (101) ^значение ширины + 61 + 62*| и используя условие (100), получаем
(101) (корпуса);
6 - 6п
е = |(Вр-Вг4-260 + 262 + 604-6). (102)
Наличие эксцентриситета несимметричных гусениц влияет на взаимодействие гусеничного движителя с грунтом. В первую очередь влияние сводится к тому, что колея машины изменяется, увеличиваясь на величину эксцентриситета с каждой стороны,
Вн = В + 2е,
где Вк — колея модификации с несимметричной гусеницей; В колея базовой^машины.
-Л—
Рис. 130. Схема расположения симметричного и несимметричного звеньев относительно корпуса машины
Рис. 131. Ширина машины с несимметричными гусеницами
Как уже отмечалось, оценочным параметром поворотливости гусеничной машины является отношение L/B. Для оценки пово
ротливости машин с несимметричными гусеницами следует использовать отношение L/(B 4- 2е).
Фактическое увеличение колеи машины с несимметричными гусеницами на податливых грунтах следует учитывать также при определении радиуса поворота, потребной мощности на поворот, сил тяги на гусеницах и т. п. Однако при движении по
твердым грунтам, когда звено опирается на центральную плицу, середина которой совпадает с осью опорных катков, колея машины с несимметричными гусеницами сохраняется такой же, как у базовой машины с симметричными гусеницами.
Особое значение при создании модификаций машин с несимметричными гусеницами имеет определение максимально возможного эксцентриситета етах. Как было показано, последний зависит от ширины звена, свойств грунтов, давления на грунт и глубины колеи:
^max f (Ь* ^cd)*
Для определения етах рассмотрим представим несимметричное звено, у ной плицы Ьо = 0 (рис. 132). В этом случае
b - Ъг + Ь2. (103)
Через середины крайних плиц проведем линию АгВъ а глубину колеи выберем такую, чтобы точка В± располагалась на пересечении с поверхностью грунта и звено при этом находилось в равновесии. Рас-
несколько случаев. Сначала которого размер централь-
Рис. 132. Схема несимметричного звена с bQ =* 0
смотрим работу, затраченную на деформацию грунта звеном АО2ОгВ и плоским штампом Объемы деформирования
грунта звеном и плоским штампом равны, поэтому при линейной связи давления с деформацией несимметричное звено и плоский штамп, нагруженные внецентреннЪ, находятся в равновесии. Однако нетрудно заметить, что несимметричное звено не имеет перекоса, в то время как плоский штамп имеет перекос на угол а'.
В точке А /будет давление qmax, а в точке Вт давление Qrain. При этом
(Ю4)
(Ю5)
где е', F', Ь’ — соответствующие параметры плоского штампа (плоской плицы).
При эксцентриситете е^ах точка В± штампа А1В1 будет располагаться на поверхности грунта; при меньшем эксцентриситете точка В ! будет погружена в грунт, а при большем будет находиться над поверхностью грунта. Из принятых ранее условий <7min = 0, следовательно,
= 0 или
Таким образом, для плоского штампа
Стах — Ъ /6.
Так как е — е’ cos а' и b = bf cos а', то максимальный эксцентриситет и для звена с разновысотными площадками будет также зависеть от угла а'
Стах == Стах COS CZ ,
откуда
Стах Ы^).
Следовательно, чтобы не было перекоса звена с разновысотными площадками (у которого Ьо = 0), должно быть соблюдено условие етах = Ь/6.
Поскольку реакции под центральной плицей отсутствуют и условия равновесия не изменяются, то вместо величины b можно принять b — Ьо (где b — ширина реального несимметричного звена). Тогда
Сщах ^о)^6.
(106)
Теперь определим минимальную глубину погружения несим
метричного звена до наступления момента уравновешенного по 266
ложения при максимально возможном эксцентриситете. Из принятых ранее условий точка Вг (рис. 132) лежит на поверхности грунта, поэтому В±В = й2га1п.
Из треугольника BB1O,,f видно, что
В.В = 4 tg а'
ИЛИ
^гат=4-^а'-
(Ю7)
Из треугольника О'СО'" видно, что СО’ = Д/г, поэтому
tga' =
Подставив значение tga', получим
(Ю8)
Для реального несимметричного звена, когда Ьо =/= 0 (рис. 133), из треугольника О'СО"'
. О'С х 2-АЛ
= или tga = T+V
Так как Д/г2 min = ВГВ =
^2 mln —
то
(109)
Из формулы (109) видно, что минимальное погружение наружной плицы до момента уравновешивания зависит от конструктивных размеров несимметричного звена, выбранных в свою очередь с учетом свойств грунта. Очевидно, что с увеличением ширины звена Ъ и ширины центральной плицы Ьо оно уменьшается, в то же
время с увеличением эксцентриситета е, перепада ДЯ и ширины внутренней плицы bt оно увеличивается.
Определим наибольшее заглубление несимметричного звена при максимальном эксцентриситете. Для этого выражение (106) подставим в формулу (109) и получим
wax - Ah - (И°) ° V7 Г ‘
Рис. 133. Равновесное положение несим» метрнчного звена гусеницы
Внутренняя плица до равновесного положения погрузится на глубину /г1р. Из рис. 133 следует, что
имеем
**1р rt2min Г
Подставив в это выражение значения величин из выражений (109) и (НО), ДЛЯ в <С вщах
(111)
ДЛЯ С — £\пах
'Чр-шц 3& + 3fc0 +1/’
(112)
Из выражений (111) и (112) следует, что чем меньше перепад высот между крайними плицами, тем быстрее наступает равновесное состояние несимметричного звена при погружении в снег или податливый грунт.
Таким образом, одним из основных параметров, определяющих уравновешивание несимметричного звена на податливых грунтах, является перепад высот между внутренней и наружной плицами.
Очевидно, чтобы обеспечить устойчивую работу опорной ветви на податливых грунтах, перепад высот у плиц должен быть по возможности больше, т. е. внутренняя плица должна располагаться как можно ниже, но, учитывая, что она не может располагаться ниже центральной плицы, так как это вызовет перекосы звена на твердых грунтах, высота hi должна быть минимальной и определяться из условия отсутствия касания выступающей внутренней плицы о грунт при работе на твердых грунтах. Наружная плица для обеспечения равновесного состояния должна располагаться относительно центральной на высоте, не превышающей предполагаемую глубину колеи hK, т. е. h'z < hK.
Перепад высот между крайними плицами
Д/г =/12 — hi или Д/г = hi —- hz. (113)
Так как hi > 0, то и Д/i < hK.
Перепад высот плиц Д/г является функцией параметров звена и свойств грунта, т. е.
Рассматривая звено несимметричной гусеницы в уравновешенном состоянии на податливом грунте при прохождении через него опорного катка (рис. 134), можно записать условия равновесия моментов и сил
= 0 и - 0 или
= 0; (114)
2г Ze
Рк 7?о — Т?2 — 0.
(115)
Рис. 134. Силы, действующие на звено при равновесном положении
Исходя из предположения о линейной связи давлений с деформациями, было установлено, что
Ri “ Ch^b^Q^ 7?о = C7i0&0Z0; R 2 ~ С^2^2^0*
Подставляя эти значения реакций в уравнение моментов, получаем
^2^0
^2 (&2 4~ fy)) hi (^i + b0)
Отсюда следует, что площади крайних плиц несимметричного звена должны быть обратно пропорциональны отношению глубины погружения к расстоянию их центров от точки нагружения.
Из уравнения равновесия сил, подставляя значения реакций, получаем
Zl2 —'
Р к • hobolftC
д —
После соответствующих преобразований имеем
Д/i = 2Ье
Р к — h<iMoC
(b bG)
(116)
Так как величина Рк в значительной степени зависит от некоторых трудно учитываемых факторов (натяжения гусеницы, рельефа местности и др.), целесообразно выразить Д/i через исходные параметры машины.
Примем для несимметричного звена и опорной ветви обвода предельное значение давления равным ^тах. Среднее расчетное давление под звеном будет
Qcp — е 9шах>
где 8 •— величина, обратная коэффициенту распределения давления под опорной ветвью, который, по опытным данным, для большинства грунтов находится в пределах 1,7—4,7, а для податливых грунтов в пределах 1,7—3.
Поэтому
zb— bQ
Подставив выражение (117) в зависимость (116), получим Ай = 2beh
(118)
Из выражения (118) можно заключить, что основной конструктивный параметр несимметричного звена, определяющий его уравновешивание, зависит в первую очередь от эксцентриситета е, соотношения размеров опорных плиц &2, ^0, свойств грунтов h0 и параметров обвода е.
Значительное уширение звена, необходимое для уменьшения давления (в 1,7—2 раза), и ограничения в выборе больших значений перепада Ah при создании несимметричной гусеницы обусловливают необходимость иметь внутреннюю плицу достаточно увеличенных размеров. Конструктивные же размеры опорных катков (особенно сдвоенных) и некоторых элементов самого звена в ряде случаев не позволяют сделать внутреннюю плицу нужных размеров без уширения звена во внутреннюю сторону (к борту машины), поэтому для создания снегоболотоходных модификаций с несимметричной гусеницей при проектировании базовых многоцелевых машин общего назначения необходимо предусматривать соответствующий зазор бт между симметричной гусеницей базовой машины и бортом. Определим, каким должен быть минимальный зазор, обеспечивающий создание несимметричной гусеницы.
Исходя из рис. 130, зазор между гусеницей и бортом
ST =6 +60, (119)
где 60 — конструктивный зазор снегоболотоходной модификации. Обычно конструктивный зазор берется минимально возможным: 60 = 2,5-^3 см.
Зазор, используемый для уширения гусеницы, исходя из выражения (100)
ь ьс
«г ~
где Ьс — ширина симметричной гусеницы.
Минимально необходимый зазор 6mln для создания снегоболотоходных модификаций определится при выборе максимального эксцентриситета. Подставив значение етах в выражение для определения 6, получим
6mln = (2b + b0- 36с)/6. (120)
Определим, при каком значении эксцентриситета ех нет необходимости предусматривать зазор бт, превышающий б0, т. е. когда 6Т = б0 (6 = 0).
С учетом выражения (100) при 6=0 имеем
ех = (Ь — Ьс)!2.
Так как всегда 60
Ьс, то, следовательно, всегда
^х < ^шах •
Определим разность между ними
Ае -= ^тах —ех = (ЗЬС — 2Ь ~~ Ьо)/6.
(121)
При 6 = 0 из рис. 130 видно, что
Ьс = 2&х + Ьо или Ьг = (bc — Ь0)/2.
Подставив значения Ьс и b в выражение (121), получим
^тах ^х — (2^1 Ь<^13>у
откуда
при Ь2 = 2Ьг при b2 > 2bt при Ь2 < 2Ьг
ИЛИ
ИЛИ €х ^тах,
ИЛИ
&х ^тах >
шах*
Таким образом, при 60 < Ьс и Ь2 2Ьг становится возможным не предусматривать на базовой машине дополнительный зазор 6.
У существующих машин отношение ширины опорного катка к ширине гусеницы находится в пределах 0,3—0,7. Ширина центральной плицы несимметричного звена Ьо при односкатной (одинарной) конструкции опорных катков может быть равна (0,4— 0,5) 6С, при двухскатной (двойной) конструкции (0,7—0,8) Ьс, тогда предельная ширина внутренней плицы Ьг == (0,3—0,25) ЬС9 а у двойных катков еще меньше. При этом Ь2 < (0,5—0,6) Ьс. Следовательно, отношение ЫЬС = 1,34-1,25. Для обеспечения <7ср = 0,25-^0,26 кгс/см2 это отношение должно быть в пределах 1,64-2,0.
Исходя из рассмотренного, при отсутствии дополнительного зазора на базовой машине возможное уширение при создании несимметричной гусеницы позволяет снизить давление всего на 25— 30%. Для более значительного снижения давления требуется уширение гусеницы и к борту машины, т. е. наличие у базовой машины зазора 6Т > 60.
Определим минимальный дополнительный зазор, который необходимо предусматривать на базовой машине. Выражение (120) можно записать в виде
(2ЫЬС) - 3 min ис а
&0
6 ’
(122)
^ср.сбх — среднее давление для снегоболото-
ходной модификации.
Для достаточно уверенной проходимости по слабым грунтам давление ?ср.сбх должно быть примерно 0,2—0,3 кгс/см2. Примем 9ср.сбх = 0,25 кгс/см2, тогда \
9ср Ьс " 0,25 •
Это значение b/bc и нужно подставлять в выражение (122) для определения 6mln.
5. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ УРАВНОВЕШЕННЫХ НЕСИММЕТРИЧНЫХ ЗВЕНЬЕВ
Основной зависимостью при создании несимметричных гусениц является зависимость деформации грунта от удельных нагрузок. Однако если экспериментальных данных этой зависимости для снега имеется значительное количество, то для болотных грунтов таких данных еще недостаточно. В этой связи были проведены исследования зависимости q = f (h) для заболоченной местности. Деформацию грунта сменными штампами замеряли на глубине до 400 мм. Размеры сменных штампов были выбраны следующими: штампа № 1 120X60 мм, штампа № 2 150X80 мм.
Для получения достоверных результатов опыты повторяли по нескольку раз. Отсчет замеров производили при наступлении стабилизации положения штампа. Результаты явно неудачных экспериментов (попадание штампа на корневища, кочки, глыбы и др.) не учитывали.
Результаты исследований механических свойств болотных грунтов приведены в табл. 30.
Зависимости сопротивления болотных грунтов деформированию показаны на рис. 135, а, б.
Кривые подтверждают влияние формы и размеров штампа на несущую способность грунта; особенно это проявляется на слабом
-----1--------------- „ „ 1 . . ___________I I I I |
О 25 50 75 100 125 150 175 h мм 0 25 50 75 100 125 150 175 0,мм
а) б)
Рис. 135. Зависимость сопротивления болотного грунта деформированию от глубины погружения h:
а —давления; б — нагрузки на штамп;--------штамп № 1; —• — штамп № 2
30. Экспериментальные значения qcp для штампов № 1 и 2
Условное обозначение грунта
Характер грунта
* 9
КГС
<7ср, кгс/см2, под штампом
ft, мм, штампа
Значительно задерненное болото (человек свободно удерживается на поверхности)
15 0,208 0,125 15 15
30 0,416 0,25 35 25
60 0,832 0,5 45 35
90 1,25 0,75 55 48
120 1,665 1,0 65 60
150 2,08 1,25 75 68
Болото средней задерненности (нога человека погружается значительно)
15
30
60
90
120
150
0,416
1,665
2,080
0,125 0,25 0,5 0,75
1,0
35
50
НО
150
15
37
55
80
НО
Болотный грунт мало задер-ненный (практически не удерживает человека)
15
30
60
90
120
150
0,208 0,416
0,832
0,125 0,25
1,665 2,08
0,75
1,0
18
53
118
161
240
12
58
87
№ I
№ 2
№ 1
№ 2
В
Примечание. При нагрузке 150 кгс и а грунтах Б и В штамп погружается до упора штока.
грунте В, где сопротивление срезу составляет заметную долю в общем сопротивлении внедрению штампа, так как по абсолютному значению собственно несущая способность грунта (сопротивление сжатию) меньше, чем на более плотных грунтах. Если на грунтах А и Б разница значений Р и дср для двух разных штампов составляет 3—30%, на грунте В эта разница достигает 80%.
Что касается протекания кривых, то для всех типов грунтов и размеров штампов они примерно соответствуют зависимости q = Ch.
На основании полученных данных можно определить значение коэффициента пропорциональности С сопротивления грунта деформированию глубине погружения штампа в пределах реального изменения значений h и qcp. Полученные таким образом значения коэффициентов, характеризующих механические свойства грунтов, были использованы в дальнейшем для практических расчетов основных параметров несимметричного звена.
Перекосы плоского звена при внецентренном нагружении и возможность уравновешивания несимметричного звена определяли при статическом нагружении макетов звеньев на естественных податливых грунтах (на болоте и снеге) в полевых условиях.
273
Опыты проводили на участках, где предварительно были сняты характеристики грунтов.
Макеты имели шаг /0 = 111 мм, ширину) b = 560 мм, несимметричность 2е = 90 мм (эксцентриситет е 45 мм).
Было проанализировано четыре варианта макетов звеньев, имеющих такие размеры и следующий перепад высот между внутренней и наружной плицами: вариант I — Д/г = 0 (плоское несимметричное звено); вариант II — Д/г = 17,5 мм; вариант III — Д/г = 35 мм; вариант IV — Д/г = 52,5 мм.
При исследовании фиксировали нагрузку и фактические углы перекоса. Устройство нагружения обеспечивало свободное положение звена (его самоустановку в соответствии с реакцией грунта). Опытные данные представлены на рис. 136, а и б.
Характеристика болотистых грунтов А, Б и В приведена в табл. 30, характер снежных грунтов следующий: грунт А — снежный покров поля рс = 0,64-0,7 г/см3; грунт Б — снег в лесу, на опушке рс = 0,54-0,6 г/см3; грунт В — снег в глубине леса рс = 0,254-0,4 г/см3.
Опытные данные, как это видно из графиков, хорошо подтверждают полученные раньше теоретические зависимости.
Плоское звено (вариант I) по мере погружения в грунт перекашивается односторонне. При этом с увеличением глубины погружения угол перекоса непрерывно увеличивается. Звенья с разновысотным расположением плиц (варианты II—IV) сначала перекашиваются в одну сторону, затем при определенной глубине погружения угол перекоса уменьшается вплоть до нуля, при дальнейшем погружении звено перекашивается в другую сторону. Глубина, при которой происходит выравнивание звена, наибольшая у звена (вариант IV), имеющего и наибольший перепад Д/г.
Интересными являются зависимости диапазона изменения углов перекоса несимметричного звена на различных грунтах от перепада высоты крайних плиц, построенные на основании опытных данных (рис. 137, а, б).
Исходя из полученных результатов, можно сделать следующие заключения:
при расположении крайних плиц несимметричного звена на разной высоте можно достичь уменьшения величины и перераспределения угла перекоса;
при выбранном перепаде Д/г и определенных удельных нагрузках (т. е. глубине погружения) достигается полное равновесие несимметричного звена (угол перекоса равен нулю); в диапазоне давлений 0—0,3 кгс/см2 абсолютное значение углов перекоса звеньев составляет: для болота от—3 до +4°; для снега ±2°; значение Д/г необходимо подбирать по среднему давлению на грунт или по предполагаемой глубине колеи на характерных податливых грунтах. Для несимметричной гусеницы приемлемый перепад ДЛ практически может быть принят в диапазоне 30—50 мм.
0 25 50 15 100 125 150 175 200 Ркгс
б)
₽мс. 136. Зависимость угла перекоса несимметричного уравновешенного звена от на-•РУзки:
/ ~7йа болоте; 6 — на снегу; — О — ~ грунт А; — А------грунт Б; — X-------грунт В;
— варианты макетных звеньев
Ла) грид
Рис. 137. Диапазон углов перекоса несимметричного звена: а — на снегу; б — на болоте
На основе выведенных теоретических положений и результатов исследований с учетом конструктивных параметров базовых машин разработана конструкция несимметричной гусеницы для снегоболотоходных модификаций легких весовых категорий.
Необходимо отметить, что предусматриваемый на базовых машинах этого класса зазор между гусеницей и бортом дает возможность симметричного уширения звеньев только до 470 мм и получения давления на грунт не менее 0,3 кгс/см2. Такое давление не обеспечивает уверенной проходимости машин по податливым грунтам. Применение на этих машинах уширенных несимметричных гусениц позволяет снизить среднее давление до 0,24— 0,26 кгс/см2 (по сравнению с 0,43—0,46 кгс/см2 у базовых машин).
Комплект несимметричных гусениц состоит из двух гусеничных лент: правой и левой, отличающихся друг от друга зеркально симметричными звеньями. Каждая лента состоит из гребневых звеньев, соответственно правых и левых, плавающих пальцев и дополнительных грунтозацепов (для преодоления обледенелых участков) .
Звенья гусеницы литые из высоколегированной марганцовистой стали, ажурной конфигурации и коробчатого сечения, имеют гладкую беговую дорожку, ограниченную двумя односторонними гребнями, шевронный грунтозацеп и ребра с нижней стороны. Для обеспечения зацепления в звеньях выполнены по два боковых окна с двухпрофильной цевкой, а связь крайних плиц с центральной осуществляется надцевочной перемычкой. Отверстия в проушинах звеньев упрочнены протягиванием.
Пальцы несимметричной гусеницы выполнены из калиброванного проката, подвергнутого объемной термической обработке до средней твердости.
Работа несимметричной гусеницы в обводе машины практически мало отличается от работы обычной симметричной гусеницы, особенным является только характер взаимодействия опорной ветви с грунтом. При движении по дорогам с твердым покрытием и по 276
Рис. 138. Схема взаимодействия несимметричной гусеницы с грунтом:
а — твердый грунт; б — деформируемый грунт; 1 — внутренняя плица; 2 — центральная плица; 3 — наружная плица
грунтам с малой податливостью звено несимметричной гусеницы работает как симметричное, опираясь на грунтозацеп (рис. 138, а). На деформируемом грунте вступают в работу основная часть центральной и крайние плицы (рис. 138, б). При этом звено проходит все положения, рассмотренные ранее (см. рис. 127), но так как расположение крайних плиц по высоте специально подобрано для работы на таких грунтах, то звено практически всегда работает
в уравновешенном горизонтальном положении.
Опытной проверке подвергалось несколько вариантов конструкций несимметричной гусеницы шириной 560 и 600 мм (несимметр ичность соответственно 90 и 130 мм). В процессе ходовых испытаний установлено, что при шаге 111 мм уширение гусеницы до 600 мм приводит к снижению ее усталостной прочности при эксплуатации на каменистых грунтах. Следовательно, наиболее целесообразной для этого класса ;Машин при мелкозвенчатой конструкции является гусеница Шириной до 560 мм. Варианты звеньев такой ширины — девя-типроушинного и десятипроу-Шинного — показаны на рис. 139, с, б.
Рис. 139. Усиленное звено несимметричной гусеницы шириной 560 мм:
а — девятипроушинное; б десятипро-ушинное
31. Параметры несимметричных гусениц
Параметр
Девятиироушииные шириной
600 мм 560 мм
Десяти-проушинная шириной 560 мм
Масса, кг: звена ............................
пальца .......................
дополнительного грунтозацепа (малого/большого) . . . комплекта гусениц . .
Число звеньев в ленте.............
Число дополнительных грунтозацепов на комплект...................
Материал: звена ............................
пальца .......................
грунтозацепов ................
Твердость: звена ............................
пальца .......................
грунтозацепов ................
Шаг гусеницы, мм .................
Ширина, мм: гусеницы..........................
внутренней плицы .............
наружной плицы................
Перепад высоты плиц, мм...........
Несимметричность/эксцентриситет, мм................................
Размер пальца (диаметр/длина), мм Суммарная длина шарнира, мм . . Несимметричность шарнира, мм . .
8,05 0,8
0,8
8,15 0,83
0,69/0,91
108
20/20
0,63/0,91 1778
108
20/20
1900
108
20/20
Сталь 110Г13Л (ГОСТ 2176—67) » »
38ХС (ГОСТ 4543—71) 45
(ГОСТ 1050—74)
НВ 156—229 HRC 38—45 НВ 241—285
600
150
280
560
150
240
560
150
240
35
130/65
17/445 447
90/45 17/445 447
90/45 17/480
482 25
I
Введением десятой проушины достигается уменьшение вылета (консоли) наружной плицы и увеличение длины шарнира, хотя последний в этом случае становится несколько (на 25 мм) несимметричным относительно оси беговой дорожки.
Конструктивные параметры несимметричных гусениц для транспортеров-тягачей приведены в табл. 31.
По результатам испытаний десятипроушинная несимметричная гусеница принята на серийное производство.
С целью экспериментальной проверки уравновешивания реальных несимметричных звеньев с расположением плиц на разной высоте были проведены исследования фактических давлений грунта на звено. Давления определяли с помощью специальных датчиков, устанавливаемых на внутреннюю и наружную плицы звена так, что их поршни находились заподлицо с нижней поверхностью плии-
Датчик (рис. 140) работает следующим образом: под давлением грунта поршень 1 деформирует пластинчатую мембрану 3, закрепленную в корпусе 2 крышкой 4. Деформация мембраны с помощью 278
Рис. 140. Схема датчика давления
тензодатчика сопротивления регистрируется обычной тензометрической аппаратурой. Толщина пластинчатой мембраны определяется из условия необходимости измерения давлений в диапазоне 0,2— 0,7 кгс/см2.
Фактические давления под плицами несимметричного звена исследовали в условиях заснеженного лесного массива и от-
крытого поля. Плотность снега находилась в пределах 0,3— 0,7 г/см3, температура от —20 до +3° С, глубина снежного покрова 600—900 мм. Плотность снега оценивали непосредственно на месте исследований методом взвешивания вырезанного объема мерным цилиндром.
При исследовании оборудованное датчиками несимметричное звено каждый раз укладывали на нетронутый участок снежного покрова. Нагрузка к звену прикладывалась статически по оси беговой дорожки.
Результаты трех наиболее характерных экспериментов приведены на рис. 141. Они подтверждают, что ранее выведенные теоретические зависимости остаются справедливыми и для реальных звеньев.
Фактическое соотношение давлений Под крайними плицами несимметричного звена при выбранном перепаде высот плиц Д/i = = 35 мм в среднем находится в пределах 1,8—2,7.
Ц,К2С1СМ2
О 25 50 75 100 125 150 175 200 225Р, кгс
*ис. 141. Давление под внутренней (датчик № 1) н наружной (датчик № 2) плицами несимметричного звена:
* — снег, рс — 0,3 4-0,4 г/см»; 2 — снег, рс = 0,5 4-0,6 г/см8; Л — снег, ₽с « 0,6-5-
**-0»7 г/см8; I —датчик № 1; // — датчик Ns 2
279
Результаты эксплуатации показывают, \что при установке несимметричной гусеницы проходимость машин значительно улучшается. Глубина колеи уменьшается по сравнению с движением на симметричных гусеницах (Ьс = 350 мм) более чем в 2 раза.
Несимметричная гусеница обеспечивает движение машин с грузом в кузове по снежной целине и заснеженным дорогам со значительно более высокими скоростями (vcp 21,2 км/ч). Перекосы ее звеньев при работе на податливом грунте практически отсутствуют. За все время испытаний на снежном покрове различной несущей способности перекосы отдельных звеньев и всей опорной ветви гусеницы не превышали 1°.
Таким образом, на основании проверки непосредственно на машине установлено, что несимметричные звенья и опорная ветвь несимметричной уширенной гусеницы при работе на наиболее вероятных грунтах могут быть уравновешены практически полностью. Отсутствие перекосов несимметричной гусеницы на податливом грунте (снег) свидетельствует об оптимальном значении перепада высот плиц (Дй = 35 мм).
6. ЭКСПЛУАТАЦИОННЫЕ КАЧЕСТВА МАШИН С НЕСИММЕТРИЧНЫМИ ГУСЕНИЦАМИ
С целью всесторонней проверки эксплуатационных качеств снегоболотоходных модификаций и работоспособности несимметричных гусениц были проведены пробеговые испытания. Зоны испытаний охватывали практически все наиболее характерные грунты труднопроходимых районов и дорожно-климатические условия, возможные при эксплуатации снегоболотоходных машин.
Испытания показали, что давление на грунт машин с несимметричными гусеницами находится в пределах 0,2—0,275 кгс/см2, т. е. близко к рекомендуемому (0,24—0,26 кгс/см2). Это позволило обеспечить высокие скорости движения транспортеров-тягачей, в том числе и с прицепом, на грунтах всех видов (снежная целина, болото) и разбитых размокших грунтовых дорогах Крайнего Севера. В этом отношении, как показали испытания, транспортеры-тягачи с уширенными несимметричными гусеницами даже несколько превосходят снегоболотоходы ГТ-Т и ГТ-СМ.
При движении по снегу малой плотности при отрицательных температурах, а также по болотам и размокшим дорогам самоочк-щаемость несимметричных гусениц вполне достаточная, поэтому забивания и расклинивания гусеничного движителя не наблюдалось. Расклинивание гусеничного обвода возникает, как правило, в момент маневрирования. Однако при движении по сыпучему снегу и болотным грунтам, отличающимся малой способностью к прессованию, этого не происходит. Вероятность расклинивания обвода резко возрастает при движении по снегу высокой плотности и влажности, обычно при оттепелях. Для предотвращения этого явления использовались снегоочистители беговой дорожки, предусмотренные для базовых машин.
Снегоочистители показали достаточно высокую эффективность, поэтому за два этапа пробеговых испытаний в специфических условиях болот и снежной целины распора гусениц у машин не было.
За весь период испытаний в тяжелых условиях бездорожья наблюдалось незначительное количество застреваний машин, при этом временная потеря проходимости преодолевалась практически с помощью простейших средств (см. гл. VI). Проходимость и подвижность значительно повышаются при групповом движении.
Из-за изменяющихся условий эксплуатации выявление влияния ширины гусеницы на скорость движения представляло определенную трудность, тем не менее при движении по снежной целине и сильно пересеченной местности было установлено, что более высокие скорости движения получаются при использовании несимметричных гусениц шириной 560 мм.
Снегоболотоходы без прицепов удовлетворительно движутся по обледенелым участкам местности и льду. Для повышения сцепления на льду необходимо устанавливать дополнительные грунтозацепы.
Маневренность снегоболотоходных модификаций • оценивали по радиусам поворота на бетонном шоссе, заснеженной местности, болоте на всех передачах и способности машины выдерживать заданное направление в различных дорожных условиях. Испытания показали, что маневренность транспортеров-тягачей удовлетворительная и обеспечивает надежное движение в любых условиях Крайнего Севера. Однако при движении по снежной целине с глубиной покрова более 600 мм и топким боЛотам маневрирование с минимальными радиусами затруднено, поэтому повороты здесь выполняются обычно на низших передачах и часто челночным способом. Минимальные радиусы поворота для всех гусениц на снегу глубиной 600 мм практически одинаковые и составляют для машины без прицепа 4,1—4,2 м, с прицепом КЛП-2 6,8—7,3 м. Минимальные радиусы поворота на более глубокой снежной целине и болоте больше. В условиях обычного бездорожья машины управляются четко.
Транспортеры-тягачи с несимметричными гусеницами преодолевают водные преграды на плаву со скоростями несколько большими, чем с обычными гусеницами. Увеличение скорости и усилия йа швартовах (табл. 32) являются результатами уширения гусениц И установки дополнительных грунтозацепов, однако при большой Ширине гусениц увеличиваются потери мощности. Последнее обстоятельство приводит к тому, что при установке гусениц шириной 600 мм усилие на швартовах меньше или практически такое же, Как при установке гусениц шириной 560 мм.
Маневренность снегоболотоходов на плаву обычно оценивается Минимальными радиусами поворота. Из табл. 32 видно, что ширина гусеницы практически не влияет на величину радиуса поворота на плаву. Радиусы поворота у снегоболотоходных модифика-281
32. Усилие на швартовах и радиус поворота на плаву транспортеров-тягачей \
Показатель
мт-л, образец 1 МТ-Л, образец 2 гт-т
Ширина гусеницы, мм
470 560 600 470 560 600 540
Усилие на швартовах, кгс при передаче:
II..................
III..................
IV..................
Минимальный радиус поворота на плаву, м . . . .
190
620
500
17,7
230
650
600
17,0
210
620
440
17,5
170 200
520 620
520 420
200 600 460
20,0
160 420 350
26,5
ций транспортеров-тягачей несколько меньше, чем у транспортера-тягача ГТ-Т.
В оценке проходимости снегоболотоходных машин важным показателем является преодоление подъемов, спусков и косогоров. Проверка максимально преодолеваемых препятствий производилась на склонах в летнее и зимнее время. В период зимних испытаний температура была от 0 до —7° С, глубина снежного покрова 550—950 мм.
Испытания показали, что транспортеры-тягачи с несимметричными гусеницами преодолевают более крутые заснеженные подъемы. Следует отметить, что крутизна последних в значительной степени зависит от состояния снежного покрова, поэтому при понижении плотности снега она резко уменьшается для всех гусеничных машин. Грунтовые подъемы летом снегоболотоходные модификации на всех гусеницах преодолевают уверенно.
Спуски без сползания транспортеры-тягачи с несимметричными гусеницами преодолевают несколько большей крутизны, чем подъемы.
При исследовании тягово-динамических и экономических качеств модификаций машин с уширенными гусеницами определяли максимальные и средние скорости движения на податливых грунтах и всех видах дорог, расход топлива на различных по качеству дорогах и местности, максимальные силу тяги и сопротивление качению, путь разгона.
Максимальные скорости движения и расход топлива оценивались на участках наиболее характерных грунтов: на твердых дорогах, снежной целине и моховом болоте.
При эксплуатации транспортеров-тягачей с уширенными гусеницами на твердых дорогах и на деформируемых грунтах значения максимальных и средних скоростей движения практически одинаковые при установке гусениц шириной 470—600 мм. При этом на твердых грунтах максимальная скорость у снегоболотоходных 282
33. Максимальные скорости движения транспортеровьтя гачей на снежной целине по сравнению с транспортером ГТ-Т
Тин и ширина гусеничной цепи Температура воздуха, °C Плотность снега, г/см8 Глубина снежного покрова, см Максимальная скорость движения, % от скорости ГТ-Т
без прицепа с прицепом
Симметричная, 4-3 0,26 60—70 104,5 78
b = 470 мм —7 0,20 55—60 102 89
Несимметричная, +7 0,35 60—65 98 91
b = 560 мм —7 0,20 55—60 103 104
Несимметричная, 4-5 0,30 65—70 103,5 105
b = 600 мм —9 0,20 40—45 89,5 63
Симметричная для транспортера ГТ-Т, b — — 540 мм 4-3 0,35 50—55 100 100
модификаций такая же, как при установке симметричных гусениц (350 мм), а на деформируемых грунтах — заметно выше.
Значения максимальных скоростей движения машин по сравнению с транспортером ГТ-Т, замеренных на снежной целине, приведены в табл. 33.
В среднем максимальные скорости движения транспортеров-тягачей, имеющих несимметричные гусеницы, с прицепом на снежной целине несколько выше, чем у транспортера ГТ-Т, в то время Зсак без прицепа скорости практически одинаковые. Увеличение ^корости при движении с прицепом объясняется меньшим буксованием и меньшим сопротивлением качению транспортеров-тяга-Ьей.
Такие же результаты получены и при испытаниях на болоте.
Средние скорости движения и расходы топлива машин с несимметричными гусеницами замеряли в процессе пробеговых испытаний при проверке эффективности использования их для буксировки прицепов и перевозки грузов. Значения скоростей движения ft расхода топлива по сравнению с транспортером ГТ-Т в различных дорожных условиях приведены в табл. 34.
I Анализируя полученные данные, следует отметить, что средние скорости движения машин с несимметричными гусеницами несколько выше, а расходы топлива меньше, чем у транспортера-жягача ГТ-Т. Особенно наглядно повышение динамических качеств проявляется на заснеженных дорогах и сильно пересеченной местности.
| На дорогах с твердым покрытием увеличение массы несимметричных гусениц приводит к некоторому повышению расхода топлива, однако расходы топлива на грунтах, характерных для Крайнего Севера, у транспортеров-тягачей с уширенными несимметричными гусеницами существенно ниже, чем с симметричными. На Нболоченной местности лучшие результаты по расходу топлива
оо 34. Скорость движения и расход топлива транспортеров-тягачей в различных дорожных условиях по сравнению с транспортером ГТ-Т
Транспортер Тип и ширина гусеницы Средняя скорость в % к скорости ГТ-Т] Расход топлива в % к расходу ГТ-Т
Снежная целина Разбитые дороги Болото Снежная целина Разбитые дороги Болото
МТ-Л, образец 1: без прицепа с прицепом Симметричная, b — 470 мм 192 133 * 124 144 185 91 86 85
без прицепа с прицепом Н еси мметр и чн ая, b — 560 мм 136 * 178 * 140 145 191 163 81 * 97 * 93 95 79
без прицепа с прицепом Несимметричная, b ~~ 600 мм 206 277 118 125 186 210 56,5 53,4 100 85 69 76
МТ-Л, образец 2: без прицепа с прицепом Симметричная, b — 470 мм 207 131 * 126 164 196 195 63 76 79 70 67 J
без прицепа с прицепом Несимметричная, b — 560 мм 226 271 132 167 64,5 72,5 78 68
без прицепа с прицепом Несимметричная, 6 — 600 мм 211 268 128 153 187 187 82 72 92 87 71
—гтт. без прицепа с прицепом Симметричная, b = 540 мм 100 100 100 100 100 100 100 100 100 100 100 100
♦ При движении по сильно пересеченной местности.
'"гя155во-СцеПйЬ1е качества транспортеров-тягачей в тяжелых дорожных условиях
Транспортер-тягач
Тип и ширина гусеницы
Температура, °C
Глубина снега или болота, см
Сила тягн на крюке Р . кгс
Сопротивление качению Pt, кгс
Коэффициент сопротивления качению
Коэффициент сцепления <р
Глубина колеи при перекатывании, мм
ина
МТ-Л, образец 2
МТ-Л, образец 1
МТ-Л, образец 2
Симметричная, b ~ 470 мм
Несимметричная, b — 560 мм
Несимметричная, b — 600 мм
Симметричная, b — 470 мм
Несимметричная, b ~ 560 мм
Несимметричная, b — 600 мм
Симметричная, b ~ 540 мм
Симметричная, Ъ — 470 мм
Несимметричная, b — 560 мм
Несимметричная, b " 600 мм
+2-5
60—70
60—70
60—65
60—70
60—70
50—60
60—70
50—60
60—70
4560
4375
5150
4700
5160
5175
5625
5666
4780
3760
1800
1560
1100
1400
1150
1900
1440
1400
1010
1500
0,166 0,144
0,1
0,127 0,145
0,176 0,12
0,117
0,1 0,145
0,40
0,47
0,47
0,45
0,47
0,46
>0 >400 2220 2800 0,24 0,19 400
>0 >400 2630 2470 0,21 0,22 330
>0 >400 в 3440 2200 0,187 0,29 330
МТ-Л, образец 1 Симметричная, b — 470 мм >0 >400 2815 1750 0,167 0,27 360
Несимметричная, b = 560 мм >0 >400 3800 1450 0,137 0,37 320
Несимметричная, b ~ 600 мм >0 >400 3700 «- - п. 0,35 300
| ГТ-Т Симметричная, b — 540 мм J^>Q >400 2750 1950 1 0,18 0,27 320 1
36. Износ элементов несимметричных гусениц шириной 560 мм
Показатель
Проушины
Пальцы
Цевки
Грунтозацепы
Десятипроушинная гусеница
Износ, мм...................
Интенсивность изнашивания, мм/тыс. км..................
3,4
0,68
1,42
0,28
2,74
0,55
Девятипроушинная гусеница
Износ, мм.........................
Интенсивность изнашивания, мм/тыс. км .......................
3,2
0,65
1,4
0,24
1,0
получены при использовании несимметричных гусениц шириной 560 мм.
Тяговые качества снегоболотоходных модификаций оценивались по сравнению с симметричной гусеницей шириной 470 мм и транспортером ГТ-Т по силе тяги на передаче I и по сопротивлению перекатыванию Pf на заснеженной местности и болоте. Результаты замера этих параметров приведены в табл. 35. Из таблицы видно, что сила тяги на крюке у транспортеров-тягачей с несимметричными гусеницами выше, чем с симметричными, на 500—600 кгс на снежной целине и на 1000—1200 кгс на болоте. Для машин с несимметричными гусеницами тяговые показатели находятся примерно на уровне показателей транспортера-тягача ГТ-Т или несколько превышают их.
Установка несимметричных гусениц на динамических качествах машин при их эксплуатации по твердым дорогам практически не сказывается. Путь и время разгона машин до максимальной скорости такие же, как у базовых моделей.
Надежность работы несимметричных гусениц в различных дорожно-климатических условиях достаточно удовлетворительная. Лучшие показатели по износостойкости и прочности имеют гусеничные цепи шириной 560 мм. Основным недостатком гусеницы шириной 600 мм является пониженная прочность наружной плицы, а отсюда более частые поломки и погнутости последней при наезде на пни, валуны и другие препятствия.
Износы звеньев и пальцев обеспечивают гарантийный пробег гусениц. За гарантийный пробег несимметричные гусеницы работоспособного состояния не теряют. Износы гусениц даны в табл. 36-
Средняя интенсивность удлинения (изменения шага) гусеничных лент составила 1,86 мм/тыс. км. В аналогичных условиях, на транспортере ГТ-Т из каждой ленты обычно удаляют 6—7 звеньев, а относительное увеличение шага гусениц транспортера ГТ-Т за пробег составляет в среднем 1,67—1,94 мм/тыс. км. Таким образом,
по работоспособности несимметричные гусеницы не уступают гусеницам транспортера ГТ-Т.
Длительная эксплуатация транспортеров-тягачей показывает, что перекосы опорной ветви обвода вследствие несимметричности гусеницы практически отсутствуют. Это подтверждается небольшими износами шарнирного соединения в поперечной плоскости. Так, суммарный износ (смещение одного звена относительно другого) в поперечном направлении у обоих вариантов несимметричных гусениц за весь срок службы составляет 2,5—2,8 мм. Такие же износы в аналогичных условиях и у симметричной гусеницы.
Ходовая часть снегоболотоходных модификаций с несимметричными гусеницами надежно работает в тяжелых дорожных условиях весь срок службы машин.
Глава VI
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ, ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И ИСПЫТАНИЙ ТРАНСПОРТНЫХ ГУСЕНИЧНЫХ МАШИН
1. ОБЩИЕ РЕКОМЕНДАЦИИ ПО ЭКСПЛУАТАЦИИ
Эффективное использование гусеничных машин достигается при соблюдении ряда правил эксплуатации, обусловленных особенностями конструкции. В инструкциях по эксплуатации, придаваемых к каждому образцу транспортера или тягача, подробно излагаются эти правила. Здесь приведем некоторые, являющиеся общими для всех быстроходных транспортно-тяговых машин.
В целях обеспечения более высокой надежности и продления срока службы для всех гусеничных машин устанавливается обкаточный период. Продолжительность его определяется пробегом, равным 300 км. В течение этого периода не допускается движение с максимальной скоростью и полной нагрузкой, а также эксплуатация в тяжелых дорожных условиях.
Во время обкатки прирабатываются трущиеся поверхности, происходит осадка прокладок, различных стяжных элементов, крепежных деталей, поэтому в процессе обкаточного периода и по окончании его производится тщательное техническое обслуживание машины.
Опыт эксплуатации гусеничных машин показывает, что недостаточная и некачественная (с отступлениями от требований инструкции) обкатка приводит к резкому снижению срока службы машин.
Пуск двигателя в летнее время производится без предварительного подогрева, зимой — с использованием системы предпускового подогрева.
На большинстве тягачей и транспортеров пуск двигателя осуществляется от электрического стартера. На средних и тяжелых тягачах имеется еще дублирующая система пуска от сжатого воздуха. Однако следует помнить, что эта система применяется в исключительно редких случаях (в случае отказа электрического стартера), и пользоваться ею в повседневной практике не рекомендуется.
Гусеничные машины обладают высокой проходимостью и способностью преодолевать различные естественные и искусственные препятствия, но эти качества в полной мере проявляются лишь при соблюдении определенных правил вождения, рациональных приемов эксплуатации. Остановимся на некоторых из них.
Проходимость транспортеров-тягачей на грунтах с низкой несущей способностью и болотах обычно ограничивается проходимостью (застреванием) прицепа, который, погружаясь в топкий грунт (снег), препятствует дальнейшему движению из-за большого сопротивления перемещению. Кстати, на таких грунтах более целесообразно использовать санные или гусеничные прицепы, чем колесные, так как у них сопротивление значительно меньше.
Для преодоления трудного участка с большей вероятностью следует снизить до минимума маневрирование. В гл. I было отмечено, что маневрирование на тяжелых грунтах приводит к потере проходимости гусеничной машины из-за увеличения сопротивления движению на повороте. Обычно заболоченные и труднопроходимые участки преодолеваются на второй и третьей передачах. Первая передача предназначена в основном для движения на крутых подъемах. При движении по заболоченному участку необходимо поддерживать постоянной частоту вращения двигателя, чтобы не сорвать поверхностный слой грунта (покров болота) гусеницами под действием динамических нагрузок.
Если труднопроходимый участок не удается преодолеть поезду, то прицеп отцепляют от тягача, одиночный тягач преодолевает трудный участок, а затем с помощью лебедки подтягивают прицеп. Если силы сцепления тягача с грунтом недостаточно для вытягивания прицепа лебедкой, то тягач необходимо зачалить, т. е. заблокировать его ходовую часть. Способ зачаливания всех гусеничных машин одинаковый и заключается в соединении посредством цепи или троса гусеницы (примерно около заднего опорного катка) с корпусом машины.
Если силы тяги лебедки недостаточно для вытаскивания застрявшего прицепа или машины, то применяют специальный блок-полиспаст, обычно придаваемый в групповом комплекте запасных инструментов и приспособлений (ЗИП).
При преодолении заболоченных участков, где ожидается движение транспортера-тягача на плаву, или при преодолении водных преград производят специальную подготовку транспортера-тягача, заключающуюся в установке гидродинамических щитков, предназначенных для повышения силы тяги и скорости движения на плаву, удлинителя заборной трубы воздухоочистителя, ограждения жалюзи радиатора и впуска, приспособления для выключения подвесок крайних опорных катков.
Гидродинамические щитки устанавливают на передние подкрылки. В транспортном положении щитки размещают на крыше корпуса транспортера-тягача и крепят ремнями. Гидродинамические щитки существенно улучшают маневренность и скорость движения на плаву. Радиус циркуляции транспортера-тягача без щитков больше в 2—3 раза, а скорость ниже на 30—40%.
При преодолении водных препятствий целесообразно блокировать подвеску, чтобы торсионы не раскручивались на плаву и не
10 П/р. В. Ф. Платонова 289
натягивали чрезмерно гусеничный обвод. В результате этого мероприятия резко снижаются потери в гусеничном обводе, движение может быть осуществлено на более высокой передаче и скорость на плаву повышена на 20—25%. При этом вполне достаточно блокировать подвески только крайних (передних и задних) катков, как это сделано, например, в конструкции транспортера-тягача МТ-Л.
Блокировка подвесок обычно осуществляется несложными приспособлениями, позволяющими зафиксировать балансир относительно корпуса машины. Эги приспособления можно использовать также для блокировки подвески при транспортировке машин автомобильным, железнодорожным, морским или воздушным транспортом, чтобы предотвратить нежелательное раскачивание корпуса или вибрацию машины.
Для каждого транспортера установлены предельно допустимые углы входа в воду и выхода из воды, поэтому во время преодоления водной преграды необходимо выбирать такие участки берега, чтобы эти углы не превышали предельно допустимых конструкцией машины по условию затопления. Одновременно следует стремиться к тому, чтобы преодолевать спуск к воде или подъем на берег под прямым углом к линии берега.
Движение на плаву вследствие значительных потерь мощности на перематывание гусениц и образование циркулирующих потоков осуществляется обычно не выше чем на третьей передаче. При этом для обеспечения работоспособности блокировочных фрикционов механизмов поворота (при наличии МПП типа установленного на транспортере МТ-Л) необходимо маневрирование осуществлять ступенчато: выдерживать рычаги в исходном положении не менее 5 с, в положении поворота не более 30 с и возвращать рычаги из второго положения в исходное с остановкой (выдержкой) 3—5 с в первом положении, чтобы уменьшить относительные частоты вращения ведущих и ведомых дисков фрикционов.
Водную преграду на плаву необходимо преодолевать с соблюдением всех мер предосторожности и техники безопасности, так как (еще раз подчеркнем) плавающие гусеничные транспортеры не являются средством, предназначенным для систематической эксплуатации на воде.
Одним из требований техники безопасности при водной переправе является обеспечение немедленного выхода из машины водителя и людей, размещающихся в кузове, для чего открываются люки в крыше кабины и проем в тенте платформы. Кроме этого, должно быть предусмотрено соответствующее число спасательных жилетов.
Нагрузку на платформе необходимо распределять по возможности равномернее, чтобы машина не потеряла остойчивости (не перевернулась на бок) и не имела большого дифферента (уклона) как на корму, так и на переднюю часть.
Водооткачивающие насосы должны быть исправными.
После преодоления водной преграды (болота) необходимо снять оборудование, установленное перед входом в воду, отключить водооткачивающий насос, открыть кингстоны и удалить воду из корпуса.
При первой же возможности следует проверить, не попала ли вода в смазку, находящуюся в картерах двигателя, главной передачи, коробки передач, бортовых передач и опорных катков, при необходимости заменить ее и устранить причины попадания воды.
В особо тяжелых дорожных условиях, как правило, на заболоченных участках, не исключается возможность застревания самого тягача или транспортер а-тягач а. Если в этом случае по каким-либо причинам нельзя использовать лебедку (отсутствие надежной опоры для захвата тросом лебедки), предусматривается применение простейшего способа самовытаскиванкя с помощью троса и бревна.
Для самовытаскивания застрявшей машины необходимо два троса прикрепить с помощью болтов к гусеницам, а затем в петли тросов продеть бревно диаметром 250— 350 мм и длиной, равной ширине машины или большей ее. При перематывании гусениц бревно затягивается под опорную ветвь обвода, за счет чего как бы увеличиваются несущая способность грунта и тягово-сцепные качества машины. После переезда через бревно приспособление снимают, при необходимости операцию повторяют.
При движении гусеничных машин по пересеченной местности или разбитой дороге из-за повышенных ходов катков увеличивается натяжение в гусеничном обводе. В таких условиях рекомендуется несколько ослаблять натяжение гусениц. Опасности для сброса гусениц данное мероприятие не представляет, поскольку машина в таких условиях движется с небольшими скоростями.
Помимо устранения чрезмерного динамического натяжения гусеничного обвода и снижения вероятности его распора уменьшение натяжения гусениц способствует увеличению КПД движителя и, следовательно, повышению средней скорости движения.
При выходе на ровные участки местности или на дорогу, где возможно движение с высокими скоростями, натяжение гусениц доводится до величины, предусмотренной инструкцией по эксплуатации данной машины.
Преодоление замерзших болот и водных препятствий не представляет какой-либо сложности для быстроходных транспортных гусеничных машин, однако при этом необходимо соблюдать определенные правила техники безопасности.
Не следует упускать из виду, что лед при определенной толщине может выдержать ограниченную нагрузку. Между несхщей способностью естественного пресноводного льда и массой гусеничной машины при температурах не ниже —23sС имеется следующая эмпирическая зависимость:
лл > ю
где йл — минимальная толщина льда, см; Л1Т — масса машины, т»
Ю* 251
5^7/
Для определения несущей способности льда вать также следующие данные [2].
Масса машины, т..................6 8 10 12
Допустимая минимальная толщина
льда, см ........... 28 30 35 40
МОЖНО использо-
15 20 25 30
45 50 60 65
При определении несущей способности льда необходимо учитывать, что она зависит от средней температуры воздуха в течение нескольких дней, предшествующих переправе. Приведенное эмпирическое соотношение справедливо для нормальной структуры льда. При длительных оттепелях структура льда изменяется и несущая способность существенно уменьшается. Так, в случае установившейся температуры воздуха от 0 до —10° С изложенные рекомендации справедливы в течение трех суток. В период длительных оттепелей движение по замерзшим водоемам, рекам, болотам не рекомендуется.
Если одновременно переправляются несколько машин по льду, толщина которого не обеспечивает значительного запаса прочности (несущей способности) при данной массе машин, т. е. когда /гл 10 Мт, то движение должно осуществляться колонной с интервалами между машинами
/л > 5/м;.
Для увеличения прочности льда при температуре воздуха ниже -—10° С допускается его намораживание на толщину до г/5 естественной толщины. При этом продолжительность процесса промерзания искусственного слоя довольно значительная: в среднем не менее 1 ч на 1 см толщины слоя. Иногда для ускорения процесса намораживания используют битый лед, снег или какой-либо другой наполнитель.
При толщине льда, близкой к минимальной, добавочные грунтозацепы ставить на гусеницу не рекомендуется, так как из-за повышенного локального давления под грунтозацепами лед может проломиться. Двигаться по такому льду нужно плавно, со скоростью 8—10 км/ч, не допуская резких поворотов, толчков и остановок.
Если переправа по льду не может быть организована вследствие его недостаточной прочности, то в крайнем случае для транс-портеров-снегоболотоходов и транспортеров-тягачей, способных держаться на воде, во льду проделывают проходы, и они преодолевают водное препятствие на плаву.
Для преодоления ледяных переправ тягачами, не обладающими качеством плавучести, в случае недостаточной несущей способности льда прибегают к устройству настила из бревен, досок и т. п.
При одинаковой толщине ледяного слоя несущая способность пресноводного льда значительно выше, чем морского, из этого следует, что морские прибрежные трассы для движения гусеничных машин следует выбирать с большой осторожностью.
Снежную целину гусеничные машины преодолевают достаточно уверенно. Особенно высокую проходимость по всем видам снежных дорог и снежной целины имеют транспортеры-снегоболотоходы ГТ-С, ГТ-СМ, ГТ-Т и транспортеры-тягачи МТ-Л с уширенными гусеницами. Глубина рыхлого снежного покрова, который может быть преодолен этими машинами, превышает 1 м. При этом скорость может достигать 15—20 км/ч. По уплотненному, слежавшемуся снегу машины движутся значительно быстрее, так как прокладывают колею относительно небольшой глубины.
Наиболее тяжелым с точки зрения проходимости гусеничных машин является мокрый снег, из-за налипания которого на беговую дорожку может произойти распор (чрезмерное натяжение) гусеничного обвода. Для предотвращения этого необходимо устанавливать специальные очистители беговой дорожки, которые, как правило, предусматриваются конструкцией гусеничного движителя, или периодически очищать беговую дорожку вручную.
Быстроходные гусеничные машины, как правило, имеют широкую колею и низкий силуэт, что обеспечивает их высокую боковую и продольную устойчивость и, следовательно, возможность движения по сильно пересеченной местности с наличием крутых подъемов, спусков и косогоров. Опрокидывание тягача или транспортера при движении по местности даже с большими уклонами практически исключается, более вероятным является сползание машины.
Если тягач (транспортер) движется на подъем или под уклон, то условие его продольного опрокидывания имеет вид
GT sin a/iu< т
т cos а
где а — угол подъема; /гц>т— высота центра тяжести машины; L — база машины.
Из этого выражения можно найти предельный угол подъема, который может преодолеть машина без опрокидывания:
Ш ^пр -- т)-
У существующих тягачей и транспортеров отношение Л/(2йц>т > 1, следовательно, угол продольного опрокидывания больше 45°. Однако преодолеть такой подъем невозможно из-за недостаточного сцепления гусениц с грунтом, так как составляющая веса GT sin а, направленная параллельно поверхности движения, в сумме с силой сопротивления качению /TGT cos а больше силы тяги по сцеплению, равной <pGTcos а.
Таким образом, движение на подъем может быть только тогда, когда соблюдается условие
GT sin а -|- fTGT cos а < cpGT cos а.
Отсюда максимально возможный угол подъема по сцеплению гусениц с грунтом будет определяться равенством
tg °Ч,р
Разность <р — /т на всех грунтах меньше единицы, т. е. а<рпр < < апр, поэтому продольное опрокидывание на ровных подъемах или спусках не должно иметь места.
Условие бокового опрокидывания при движении по косогору записывается аналогичным образом
GT sina/i„ т > GT cos аВ/2,
где В — колея.
Следовательно, угол бокового опрокидывания tg аб = т).
Фактически вследствие перераспределения веса по бортам машины, движущейся по косогору, и большего деформирования упругих элементов подвески на борту, обращенном к склону, центр тяжести смещается к этому борту и плечо восстанавливающей силы GTcos а будет меньше, чем В/2, на 15—20%. Ориентировочно можно считать, что
tga6^0,4B/ftn.T.
Угол бокового опрокидывания значительно меньше угла продольного опрокидывания, так как отношение LIB для современных транспортных машин находится в пределах 1,4—1,8. С учетом смещения центра тяжести к борту при опрокидывании на бок получается, что угол бокового опрокидывания в 1,8—2,0 раза меньше, чем угол продольного опрокидывания. Тем не менее и в этом случае на ровном косогоре бокового опрокидывания не произойдет.
По условию сцепления
tg “фс=<р, где <р — коэффициент сцепления в поперечном направлении, значения которого приближаются к значениям ршах.
Вследствие того, что на твердых грунтах коэффициент сцепления ф не превышает 0,8, сползание машины происходит на косогорах с углом не более 35°. Углы бокового опрокидывания у существующих машин имеют большие значения (т. е. аФс < аб), что гарантирует достаточно высокую боковую устойчивость гусеничных машин на различной местности.
Однако вероятность (хотя и очень малая) бокового опрокидывания может возникнуть на уплотняемых грунтах при преодолении крутого подъема или спуска с разворотом. В этом случае при сползании перед гусеницей нагребается земляной вал, который может послужить своего рода упором, препятствующим дальнейшему скольжению. Если при этом угол уклона местности больше угла опрокидывания (а >аб), то машина может перевернуться. Поэтому во время преодоления крутых подъемов или спусков не рекомендуется производить повороты, а следует проходить такие участки местности по возможности без маневрирования.
Условия использования гусеничных транспортеров-тягачей настолько разнообразны, что не представляется возможным осве-294
тить все наиболее рациональные способы их эксплуатации и приемы вождения. Это достаточно полно излагается в соответствующих инструкциях. Здесь же на некоторых примерах показано, как достигается реализация потенциальных тяговых возможностей и проходимости гусеничных машин, заложенных в их конструкции.
2. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ ГУСЕНИЧНЫХ МАШИН
Для транспортных быстроходных гусеничных машин установлены следующие виды технического обслуживания:
контрольный осмотр перед выходом из парка и в пути на остановках;
ежедневное техническое обслуживание по возвращении из рейса;
техническое обслуживание № 1 (ТО-1) через 800—1000 км пробега (для двигателя через 50 ч работы);
техническое обслуживание № 2 (ТО-2) через 2400—3000 км пробега (для двигателя через 250 ч работы).
Кроме того, предусмотрены два сезонных обслуживания в году: подготовка к осенне-зимней эксплуатации при температуре окружающего воздуха ниже +5° С и подготовка к весенне-летней эксплуатации при температуре окружающего воздуха выше +5° С.
Ежедневное, первое и сезонное технические обслуживания двигателя и транспортера-тягача проводят одновременно, второе техническое обслуживание двигателя проводят через одно техническое обслуживание № 2 машины.
Ежедневное техническое обслуживание включает в основном очистку и мойку транспортера-тягача, проверку и дополнительную заправку до необходимого уровня топлива, масел и охлаждающей жидкости, внешний осмотр двигателя, трансмиссии, гусениц, тягово-сцепного устройства, приборов электрооборудования и при необходимости устранение выявленных неисправностей.
При техническом обслуживании № 1 проверяют прочность крепления основных агрегатов и подтягивают болты, проверяют и регулируют зазоры в механизмах поворота и остановочных тормозах, производят очистку фильтрующих элементов двигателя, смазку согласно карте смазки.
При техническом обслуживании № 2 проводят работы, предусмотренные техническим обслуживанием № 1, и, кроме того, проверяют надежность крепления всех агрегатов и узлов, проверяют и регулируют зазоры в приводе управления двигателем, главным фрикционом, коробкой передач, остановочными тормозами и механизмами поворота (в более полном объеме, чем при техническом обслуживании № 1), меняют масло в двигателе и агрегатах, дополнительно заправляют амортизаторы и проводят смазочно-заправочные работы в полном объеме, предусмотренном картой смазки.
37. Топливо и смазочные материалы, применяемые в гусеничных машинах
Агрегаты и узлы Марка машины
гт-с гт-см гт-т АТ-Л АТС-59 АТ-Т мт-л
Двигатель Топливо
А-72 АС-10 А-76 АС-8 2,4—3,0 дл
ДЗ, ДА
Масло МТ-16п 0,8—1,0 дс-н МТ-16п 2,4—3,0 МТ-16п дс-п
АС-6, АС-8 0,8 ДС-8 0,8—1,0 МТ-14п 2,0 ДС-8 2,4—3,0
Трансмиссия | 3,0 4,8—6,0 МТ-16п 2,4—3,0
Бортовая передача 3,0 МТ-16п 4,8—6,0 2,4—3,0 ТАп-15 ТАп-10 МТ-16п 2,4—3, ЦИАТИМ-208 0 МТ-16п
Ступицы катков и направляющих колес Солидол «С» 0,75—0,8 4,8—6,0 МТ-16п 2,4—3,0 Солидол «С* МТ-16п
Водяной насос и вентилятор Смазка 1—13 жировая 0,35—0,4 Смазка 1—13 жировая ЯНЗ-2 0,8—1,0 Смазка 1—13 жировая 0,8—1,0 ———» Смазка 1—13 жировая 0,8—1,0
Редуктор лебедки д — — — ТАп-15 ТАп-10 2,4—3,0 4,8—6,0 МТ-16п 2,4—3,0
Редуктор вентилятора 1 МТ-16п 4,8—6,0 1 — — МТ-16п 2,4—3,0
Шарниры карданных валов МТ-16п 0,75—0,8 № 158 МТ-16п 4,8—6,0 — Смазка 1—-13 жировая (50%) и ТАп-15 (50%) 0,8—1,0 1 МТ-16п 2,4—3,0
Шлицы карданных валов Солидол «С» 0,75—0,8 1 2,4—3,0 — . 1— Смазка 1—13 жировая 2,4—3,0
Продолжение табл. 37
Агрегаты и узлы Марка машины
ГТ-С гт-см гт-т АТ-Л АТС-59 АТ-Т мт-л
Зубчатые соединения валов * ЦИАТИМ-201 2,4—3,0 — Смазка 1—13 жировая 0,8—1,0 1^—
Валики ножных педалей управления 0,75—0,8 Солидол «С» I 0,8—1,0
Подшипники генератора АС-10 0,4 № 158 4,8—6,0 ЦИАТИМ-201 2,4—3,0 УТ-1 4,8—6,0 ЦИАТИМ-201 При ремонте ЦИАТИМ-221 30,0 , .
Амортизаторы, гидроприводы АМГ-10 —— Турбинное (50%) и трансформаторное (50%) масла Турбинное (50%) и трансформаторное (50%) масла
Редукторы подогревателя АУ ДС-8 (70%) и дизельное топливо зимнее (30%) 2,4—3,0 ЦИАТИМ-201 ДС-8 (70%) и дизельное топливо Зимнее (30%) 2,4—3,0
Муфта выключения главного фрикциона Смазка 1—13 жировая 0,35—0,4 ЦИАТИМ-201 0,8—1,0 Смазка 1—13 жировая 0,8—1,0 0,4—0,5 УТ-1 0,5 Смазка 1—13 жировая 0,8—1,0
Мостики управления • Il III1 II Солидол «С» 0,8—1,0 Смазка 1—13 жировая 0,8—1,0
Примечания: 1. В числителе указан вид смазкн для летней эксплуатации, в знаменателе — для зимней. 2. Цифрами обозначена периодичность смены масел и смазок в тысячах кило метров пробега.
Сезонное техническое обслуживание заключается в основном в замене летних масел и специальных жидкостей на зимние (или наоборот, в зависимости от сезона) и подготовке к работе агрегатов в соответствии с наступающим сезоном эксплуатации (например, при переводе на зимнюю эксплуатацию предпускового подогревателя, отопителя). Помимо этого, проводят очередное техническое обслуживание.
Одним из факторов, способствующих повышению надежности транспортеров-тягачей в эксплуатации, является своевременная и полная смазка трущихся деталей и замена (или дополнительная заправка) масел и специальных жидкостей. Эти работы проводят строго в соответствии с требованиями инструкций по эксплуатации машин и картами смазок.
Для обеспечения эксплуатации гусеничных машин в основном используются распространенные сорта топлив, масел, смазок и других рабочих жидкостей. Номенклатура их примерно такая же, как и для автомобильной техники. В табл. 37 приведены основные сорта масел, смазочных материалов и рабочих жидкостей для основных типов тягачей и транспортеров, применяемые в процессе летней и зимней эксплуатации.
Заправку тягачей и транспортеров осуществляют только фильтрованным топливом (или маслом) с помощью малогабаритного заправочного агрегата МЗА-З (рис. 142), входящего в комплект ЗИП, который позволяет подавать топливо или смазку из бочек и различных контейнеров. Производительность заправочного агрегата на дизельном топливе 60—75 л/мин, на масле МТ-16п 2,5—
4,5 л/мин. При необходимости агрегат может быть использован и для мойки машин.
В комплект агрегата МЗА-З входят насос с электродвигателем 4, раздаточный шланг 2 длиной 5,4 м, раздаточный кран 1 и электрокабель 3 длиной 8 м. Кроме того, к агрегату придают два удлинителя 5.
В заборной части агрегата МЗА-З устанавливают топливный или масляный фильтр. При подаче агрегатом масла, а также дизельного топлива ДЗ и ДА (зимнего или арктического), предназначенного для эксплуатации при температуре ниже —20° С, необходимо предвари-
Рис. 142. Малогабаритный заправочный агрегат мзА-з тельно заменить топливный
фильтр на масляный.
Во избежание поломок запрещается заправлять агрегат маслом с температурой ниже +5° С. При необходимости оно должно быть подогрето.
При перекачке агрегатом воды для мойки транспортера-тягача на заборную часть необходимо устанавливать масляный фильтр. Перекачка воды без фильтрации недопустима.
При выполнении технического обслуживания машин производят различные крепежные, проверочные и регулировочные работы. Описать их в полном объеме не представляется возможным, поэтому ограничимся лишь рассмотрением специфических работ, характерных для быстроходных гусеничных машин, на примере транспортера-тягача МТ-Л. Сюда прежде всего следует отнести регулировку приводов управления МПП, обслуживание гусеничного движителя и лебедки, а также текущий ремонт деталей, изготовленных из легких сплавов и пластмасс.
3. РЕГУЛИРОВКА ПРИВОДОВ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТЕРА-ТЯГАЧА МТ-Л
Высокие тягово-динамические и экономические качества, устойчивость движения и маневренность транспортеров-тягачей обеспечиваются в том случае, если все их механизмы правильно функционируют. Последнее зависит от поддержания в требуемых пределах регулировочных зазоров, предусмотренных конструкцией этих механизмов. Особенно влияют на динамику транспортеров-300
тягачей зазоры в приводах управления МПП. В гл. III было показано, что для нормального взаимодействия элементов МПП необходимо строгое соответствие времени срабатывания блокировочных фрикционов и тормозов поворота. Это достигается тем, что зазоры в приводе этих механизмов должны иметь определенную величину. В процессе эксплуатации при проведении технических обслуживаний необходимо проверять зазоры и приводить их в соответствие с установленными. Дальше будут изложены рекомендации по проведению основных регулировочных работ при техническом обслуживании приводов управления МПП.
Регулировка привода переключения передач. В процессе эксплуатации в результате изнашивания соединительных пальцев и отверстий в вилках и рычагах увеличиваются зазоры в соединениях. Это вызывает неполное включение муфт коробки передач при включенном положении рычага переключения.
Признаком неполного включения является самопроизвольное выключение передачи при включенном положении рычага и заблокированном механизме.
При регулировке привода любой из передач необходимо выполнить следующие работы:
установить рычаг переключения передач в нейтральное положение;
расшплинтовать необходимые соединительные пальцы;
заменить соединительный палец у рычага соответствующей ре-гулируемай передачи специальным стержнем для выставки рычагов и поводков;
проверить положение заостренного конца для стержня выставки рычагов и поводков относительно углубления с отметкой Н (нейтральное положение) на крышке картера главной передачи;
ввинчивая или вывинчивая регулировочную вилку, подобрать длину регулируемой тяги так, чтобы заостренный конец стержня для выставки рычагов и поводков входил в углубление с отметкой Н на крышке картера главной передачи.
Отрегулированный привод при проворачивании трансмиссии должен обеспечить легкое с равномерным усилием переключение передач, свободное без заеданий в прорезях поводков и колонки перемещение рычага переключения передач, а также свободный проход соединительного пальца в отверстия вилок и рычагов от усилия руки при нейтральном и включенном положениях рычага переключения.
Окончательно работу привода управления трансмиссией проверяют при движении тягача. Следует отметить, что эта регулировка должна выполняться высококвалифицированными специалистами.
Регулировка привода главного фрикциона. Для педали главного фрикциона предусмотрены четыре регулировки: установка исходного положения, регулировка свободного хода, регулировка полного хода и регулировка усилия сервопружины.
2С1
210-215
1
Рис. 143 Схема привода главного фрикциона и ножного привода остановочных тормозов
Педаль в правильное исходное положение устанавливают при отсоединенной тяге 4 (рис. 143) управления главным фрикционом от двуплечего рычага 5 вала блокировки. С помощью упорного болта 2 педаль главного фрикциона устанавливают таким образом, чтобы расстояние от кромки педали со стороны водителя до вертикальной оси вала педали было 210—215 мм, а рычаг 1 сервопружины 15 упирался в головку болта 2.
После этого тягу 4 управления фрикционом соединяют с рычагом 5. Длину тяги при подсоединении регулируют так, чтобы длинное плечо рычага 5 вала блокировки было расположено горизонтально и направлено в сторону кормы машины. В выполнении этой операции и заключается регулировка блокировки коробки передач.
Свободный ход педали главного фрикциона в пределах 6,5— 8 мм регулируют изменением длины тяги 7, связанной с рычагом 8 и тягой 6.
Полный ход педали регулируется упорным болтом 13. Если полный ход отрегулирован правильно, то при выжиме педали 3 до упора в болт тяга 7 перемещается на 36—-39 мм.
Регулировка сервопружины 15 заключается в том, чтобы под действием усилия пружины педаль 3 главного фрикциона после снятия ноги самостоятельно возвращалась в исходное положение— до упора рычага 1 сервопружины в упорный болт 2.
При этом регулируется положение кронштейна 11 и усилие сервопружины 15. Предварительно кронштейн сервопружины устанавливают в такое положение, чтобы при выборе свободного хода педали 3 рычаг 1 и стержень 14 сервопружины составляли одну прямую. Если после этого педаль будет зависать (при выбранном 332
свободном ходе), то необходимо кронштейн 11 сервопружины сместить по пазу влево к носу машины от его предварительного положения до исключения зависания педали.
Усилие сервопружины 15 регулируют в таком порядке: выжимают педаль 3 до упора в болт 12 и сжимают сервопружину 15 с помощью гайки 16, чтобы педаль удерживалась сервопружиной в этом положении; отвертывают гайку 16 до тех пор, пока педаль не будет плавно возвращаться в исходное положение.
Регулировка ножного привода остановочных тормозов. Для педали остановочных тормозов предусмотрены две регулировки: установка исходного положения, регулировка полного хода.
Для установки педали 10 остановочного тормоза в исходное положение необходимо отрегулировать длину тяги 9 тормозного крана так, чтобы расстояние от верхней кромки педали до основания кронштейна педали было 245—250 мм (см. рис. 143).
Полный ход педали 10 остановочного тормоза регулируется болтом 12. При выжиме педали остановочного тормоза до упора в регулировочный болт тяга тормозного крана должна перемещаться в пределах 35—43 мм. После снятия ноги с педали остановочного тормоза педаль должна возвращаться в исходное положение.
Регулировка установки рычагов управления МПП. Для правильной установки рычагов управления 2 (рис. 144) в переднем крайнем (исходном) положении необходимо отсоединить тяги 3, 4 и 6 от рычагов управления и установить регулировочные болты 5 так, чтобы при упоре в них выступов рычагов 2 управления рукоятки рычагов отстояли от оси валика 1 педали на расстоянии 213—223 мм. Взаимное смещение положения рукояток рычагов 2 допускается не более чем на 3 мм. После этого нужно отрегулировать длины тяг 3, 4 и 6 рычагов управления и соединить их с соответствующими рычагами; при этом ролики рычагов тормозов механизма поворота должны находиться в лунках на профильной по-вер хности ку л а ков.
Регулировка свободного хода поводковой коробки фрикциона МПП. Включение блокировочных фрикционов МПП осуществляется посредством поводковой коробки, от ее свободного хода зависит полнота включения и выключения блокировочных фрикционов.
При отсутствии свободного хода (или при его малом значении) фрикцион пробуксовывает в заблокированном положении. Это вызывает увод транспортера-тягача в сторону, ухудшение его управляемости и тяговых качеств, поскольку снижается крутящий момент, передаваемый МПП из-за буксования фрикционов.
При чрезмерно большом свободном ходе поводковой коробки фрикцион не выключается полностью (ведомый и ведущие диски фрикциона касаются друг друга). В этом случае ухудшается маневренность транспортера-тягача (увеличивается радиус поворота).
303
213-223
Рис. 144. Схема установки рычагов управления
Как при малом, так и при большом ходе поводковой коробки диски фрикционов нагреваются и интенсивно изнашиваются, раз-регулирование (изменение) свободного хода поводковой коробки может также привести к короблению дисков (от нагрева).
Для проверки свободного хода поводковой коробки 1 (рис. 145) и определения необходимости его регулировки шарнирную тягу 3 фрикциона МПП с хвостовиком поводковой коробки подают до отказа назад, а затем вперед и по перемещению соединительного пальца замеряют свободный ход, который должен быть равен 7—9 мм.
Если свободный ход поводковой коробки больше или меньше указанного, нужно опустить контргайку шарнирной тяги 3 и, вращая тягу, отрегулировать свободный ход до необходимой величины, после чего еще раз проверить правильность регулировки и затянуть контргайку шарнирной тяги.
Регулировка зазора между роликом рычага тормоза МПП и впадиной кулака-разделителя. Для обеспечения нормальной 304
работы приводов управления и безопасности движения необходимо проверять и своевременно восстанавливать зазор а (рис. 146) между роликом рычага тормоза и впадиной кулака-разделителя, который при установке рычагов управления в первое положение должен быть равен 2—3 мм.
Если в первом положении рычага управления МПП нет зазора между роликом и впадиной кулака-разделителя мостика управления (или он очень мал), то не происходит полного затормаживания барабана, а если зазор между роликом и впадиной кулака-разделителя увеличен, то, наоборот, происходит прихватывание ленты к барабану тормоза. В этом случае транспортер-тягач при нормальном положении рычагов поворачивается и наблюдается повышенное изнашивание колодок тормозных лент механизмов поворота.
Для регулировки зазора между роликом рычага тормоза механизма поворота и впадиной кулака рычаги управления транспортером-тягачом ставят в первое положение и щупом проверяют зазор а
7-9 мм с Модный код
Рис. 145. Схема привода поводковой коробки фрикциона МПП
низма поворота,
Рис. 146. Определение зазора между роликом рычага тормоза МПП и впадиной кулака
между соединенным с регулировочной тягой 3 роликом рычага 4 тормоза механизма поворота и впадиной кулака 5.
Если зазор а мал, регулировочную гайку 2 необходимо навернуть на один-два оборота на серьгу 1 ленты тормоза меха-
если зазор а велик, регулировочную гайку 2
надо отвернуть на один-два оборота.
При длительной эксплуатации транспортера-тягача в результате изнашивания дисков блокировочных фрикционовМПП свобод-
ный ход поводковой коробки постепенно уменьшается и наступает
момент, когда его уже невозможно восстановить за счет укорачивания тяги поводковой коробки. В этом случае для восстановления хода поводковой коробки регулируют фрикционы.
Фрикционы механизма поворота регулируют в таком порядке: отгибают замковую шайбу 7 (рис. 147), отвертывают гайку 8 и сни-
Рис. 147. Фрикцион ме-< хаиизма поворота
мают ведущий барабан 6. После этого отгибают замковые шайбы 10 f отворачивают шесть гаек 9 на пальцах отжимного диска 3 и снимают нажимной диск 1. В зависимости от степени изнашивания дисков фрикциона с каждого пальца 2 снимают несколько регулировочных прокладок 11. При этом суммарная толщина снятых с каждого пальца прокладок должна быть одинаковой.
По окончании регулировки (удалении прокладок) устанавливают и закрепляют нажимной диск 1 на пальцах 2. При правильной регулировке свободный ход поводковой коробки 5 должен быть в пределах 14—18 мм. После проверки свободного хода поводковой коробки ведущий барабан 6 надевают на хвостовик вала 4 фрикциона главной передачи и закрепляют на нем, а тягу поводковой коробки присоединяют к хвостовику поводковой коробки.
Регулировка тормозов механизма поворота. Вследствие изнашивания тормозных колодок и барабана тормоза МПП зазор между ними увеличивается, что приводит к нарушению работы МПП. В процессе эксплуатации предусматривается периодическое проведение регулировок этого зазора. В отпущенном состоянии зазор между колодками и барабаном должен составлять 1—2 мм.
При данной регулировке тормозной рычаг 4 (см. рис. 145) перемещают в переднее крайнее положение и регулировочной гайкой 2 устанавливают требуемый зазор (1—2 мм) между колодками лент и барабаном механизма поворота.
Равномерность (одинаковость) зазора по окружности барабана обеспечивается соответствующей установкой регулировочных болтов 5 (проверяют щупом).
Регулировка приводов остановочных тормозов. Вследствие износов трущихся деталей периодически требуется также регулировать зазор между колодками и барабаном остановочного тормоза. Поддержание оптимального зазора между колодками и барабанами остановочных тормозов оказывает большое влияние на работоспособность этого узла и на ходовые качества машины в целом. При малых зазорах будет происходить интенсивное изнашивание колодок, а на поворотах (при установке рычагов управления во второе положение) транспортер-тягач будет резко бросать в сторону. При больших зазорах снижается эффективность торможения (увеличивается тормозной путь), что недопустимо по требованиям безопасности движения.
Для регулировки привода остановочных тормозов необходимо отрегулировать положение вилки 4 (рис. 148) тяги тормозной камеры так, чтобы палец 5 упирался в верхний торец прорези вилки, при этом рычаг 1 остановочного тормоза должен находиться в горизонт альном положении.
Затем нужно поставить рычаги управления поворотом в первое положение. При правильной регулировке рычаг 3 верхним скосом Должен касаться соответствующего скоса рычага 2 по всей пло-
Рис. 148. Мостик управления привода остановочных тормозов траиспортера-тягача МТ-Л
скости, а палец 7 рычага должен упираться в торец Д прорези тяги 6.
При соблюдении всех изложенных рекомендаций по регулировке приводов управления главным фрикционом и МПП управление транспортером-тягачом в движении осуществляется легко, обеспечивается хорошая устойчивость движения и длительное движение не вызывает утомления водителя.
4. ОСНОВНЫЕ РАБОТЫ ПО ОБСЛУЖИВАНИЮ ХОДОВОЙ ЧАСТИ И ЛЕБЕДКИ ТРАНСПОРТЕРА-ТЯГАЧА МТ-Л
Рекомендации по техническому обслуживанию ходовой части. В процессе эксплуатации машины требуется смазка подшипников опорных катков, ведущего и направляющего колес и регули-
ровка натяжения гусениц. В отдельных случаях возникает необходимость замены некоторых деталей или узлов (торсионов, катков, амортизаторов). Эти операции проводят с применением специальных приспособлений, для их выполнения необходимо знание соответствующих рекомендаций и технических требований на установку той или иной детали. Рассмотрим содержание основных работ по обслуживанию ходовой части.
В практике эксплуатации, особенно при ремонтных работах» приходится осуществлять операцию по замене торсионного вала (при его поломке или потере упругих свойств). При замене сломанного торсионного вала 1 необходимо вывернуть гайку л (рис. 149) и болт 2 балансира 8, снять уплотнительную прокладку 4 и регулировочные прокладки 3. Затем следует ввернуть специальное приспособление (рис. 150) в резьбовое отверстие большой головки торсионного вала и вынуть обломанную часть. Для удаления второй обломанной части торсиона с другой стороны надо вывер-
нуть болт 6 (см. рис. 149) из малой головки торсионного вала 1 и ввертыш 7 из кронштейна и, ввернув приспособление в резьбовое отверстие малой головки торсионного вала, извлечь второй конец торсиона.
Новый торсионный вал устанавливают с использованием того же приспособления. Перед установкой торсионного вала нужно выставить каток по высоте (как это делается, см. дальше) и установить на краске ввертыш 7 в кронштейн подвески. Затем вдвинуть торсионный вал 1 до упора его во ввертыш 7, ввернуть болт 6 в малую головку торсионного вала, установить на место внутренние регулировочные прокладки 3, болт 2, наружные регулировочные прокладки 3, уплотнительную прокладку 4 и гайку 5 балансира.
Для получения надежного уплотнения в месте сопряжения гайки 5 балансира и прокладки (в целях предотвращения попадания воды во внутреннюю полость) необходимо обеспечить зазор Г между торцом гайки 5 балансира и регулировочной прокладкой 3 в пределах 0,5—1,0 мм. Для этого при сборке узла I нужно замерить размеры Б и В. Размер Б должен быть больше размера В. Если эти размеры равны или размер В больше размера Б, следует удалить одну регулировочную прокладку 3 и надежно затянуть гайку 5 балансира.
Приспособление для извлечения и установки торсионных валов состоит из траверсы 6 (рис. 150), малой 5 и большой 4 наставки, винта 1 с воротком 2 и гайкой 7, нажимной гайки 3 и втулки 8. Оно служит также для монтажа и демонтажа опорных катков и направляющих колес.
309
Рис. 150. Приспособление для монтажа и демонтажа торсионных валов, опорных катков и направляющих колес
Чтобы обеспечить равномерную нагрузку на опорные катки и одинаковые напряжения в торсионных валах (т. е. их равнопрочность), опорные катки выставляются по высоте.
Для проверки правильности выставки опорных катков по высоте необходимо полностью ослабить натяжение гусеницы и с помощью домкратов, поставленных под кронштейны подвески, поднять борт машины. Затем натянуть струну 4 (рис. 151, а)
так, чтобы она легла на верхние головки 1 балансиров и расстояние от струны 4 до оси катка было равным 289—295 мм.
Указанное расстояние проверяют приспособлением 2, которое должно быть установлено, как показано на рис. 151, б, на стакане 3 уплотнения катка.
После выставки катка конец торсионного вала с меньшей головкой вводят через ось рычага в отверстие кронштейна подвески противоположного борта. При несовпадении шлицев следует проворачивать торсионный вал вправо или влево до их совпадения. Если это не помогает, можно поднять или опустить каток в пределах допуска на размер (292 zt 3 мм).
При выставке первого и шестого катков по высоте гидроамортизаторы отсоединяют от рычагов катков.
После замены торсионных валов проверяют выставку катков по колее. Все катки должны быть выставлены в одну линию посередине беговой дорожки гусеницы.
Для проверки выставки катков необходимо протянуть гладкую струну (нить) 3 (рис. 152) таким образом, чтобы один конец ее касался внутренней плоскости наружного зубчатого венца веду
Рис. 151. Схема выставки опорных катков по высоте
щего колеса /, а другой отстоял от наружного торца направляющего колеса 4 на 80,5—81,5 мм. Расстояние от струны 3 до реборд всех опорных катков 2 должно быть 78,5—81,5 мм.
Установка катков по колее производится при вывешенных катках (катки не касаются беговой дорожки гусеницы).
Необходимое положение катка обеспечивается подбором толщины регулировочных прокладок 3 (см. рис. 149). При этом должен сохраняться зазор Г между гайкой балансира и болтом торсиона.
Для выставки первого и шестого катков по колее, так же как и при выставке по высоте, необходимо отсоединить гидроамортизаторы от рычагов катков.
При всех видах технического обслуживания проверяют крепление гидроамортизаторов и отсутствие подтекания жидкости из них.
При обнаружении течи или другой неисправности необходимо снять гидроамортизатор, слить амортизаторную жидкость, разобрать гидроамортизатор и устранить неисправность. После сборки нужно заправить гидроамортизатор свежей жидкостью.
Перед снятием гидроамортизатора ослабляют натяжение гусениц и транспортер-тягач поднимают домкратами таким образом, чтобы рычаги перед-
Рис. 152. Схема выставки опорных катков по колее
них и задних опорных катков переместились вниз на величину, обеспечивающую снятие пальца 9 (рис. 153).
Демонтировать амортизатор нужно в такой последовательности: расшплинтовать и отвернуть корончатую гайку 10, снять шайбу 11 и уплотнительное кольцо 8, выбить палец 9 из проушины
Рис. 153. Установка гидроамортизатора
в сторону борта транспортера-тягача, снять втулку /2, расшплин-товать и отвернуть крышку 7, расшплинтовать и отвернуть корончатую гайку 6, снять шайбу 5 и вывести гидроамортизатор 14 т проушины рычага опорного катка, переместив его вверх, и снять с кронштейна /. После промывки снимают также шайбы 3 и 4.
Для слива жидкости из гидроамортизатора и заправки его свежей шток вытягивают в крайнее положение. В положении гидроамортизатора штоком вниз отвертывают пробку 13, вынимают пружину, компенсационный клапан и сливают отработанную жидкость. Через отверстие для компенсационного клапана заливают 900 см3 смеси согласно таблице смазки.
После заправки гидроамортизатора свежей жидкостью надо вставить компенсационный клапан, пружину и завернуть пробку 13 на лаке «Герметик» до упора. Выступание или западание пробки 13. относительно торца корпуса гидроамортизатора допускается не более чем на 1,5 мм.
Перед установкой гидроамортизатора на транспортер-тягач необходимо посадочные места под подшипники и уплотнительные кольца тщательно промыть и вытереть насухо, а подшипники в проушинах амортизатора смазать смазкой 1—13 жировой.
Установку гидроамортизатора начинают с крепления верхней проушины. Сначала надо проверить, имеется ли на кронштейне 1 (см. рис. 153) уплотнительное кольцо 2. Если этого кольца нет, то установить его на место. Установить на кронштейн 1 шайбы 3 и 4. Шайбу 4 устанавливают фаской к радиусу кронштейна 1. 312
После этого устанавливают гидроамортизатор 14 проушиной штока на кронштейн 1 так, чтобы компенсационная камера 15 находилась вверху. При необходимости надо отвернуть болты крепления кожуха гидроамортизатора к проушине штока и повернуть его так, чтобы овальный вырез в кожухе был направлен в сторону рычага опорного катка, а затем закрепить кожух гидроамортизатора болтами.
При закреплении амортизатора на кронштейне 1 обязательно зашплинтовывают корончатую гайку 6 и крышку 7 после их завертывания до упора.
После закрепления верхней головки амортизатора его нижнюю головку вставляют в проушину рычага опорного катка, устанавливают на место палец 9 с втулкой /2, уплотнительное кольцо 8 и шайбу 11. Корончатую гайку 10 также завертывают до упора и шплинтуют.
После установки амортизатора натяжение гусеницы доводят до требуемого значения.
Регулировка механизма привода лебедки. Лебедка 2 (рис. 154) транспортера-тягача — сильно нагруженный механизм, поэтому длительная непрерывная работа ее не допускается. Непрерывная работа лебедки ограничивается четырьмя-пятью подтягиваниями или тремя-четырьмя спусками при максимальной нагрузке на полную длину троса. Возобновляется работа лишь по истечении 30— 40 мин после того как остынет масло.
Во избежание обрыва зачалки троса на барабане запрещается разматывать трос на длину более 50 м. Выдача этой длины (50 м) фиксируется зажиганием контрольной лампочки с надписью «Трос выдан». При перегрузке троса зажигается контрольная лампочка с надписью «Перегруз лебедки».
Датчики размотки и перегрузки троса работают стабильно в течение длительного времени, однако периодически рекомендуется проверять и регулировать их работу.
Для проверки и регулировки датчика 1 размотки троса необходимо выдать трос на полную длину и на барабане оставить три витка. Установить рычаг реверса в положение «Размотка». В этом
Рис. 154. Узлы регулировки датчиков размотки и перегрузки троса лебедки
положении датчик должен отключить электромагнитную муфту и на щитке приборов включается лампочка «Трос выдан».
В случае включения лампочки, когда на барабане лебедки имеется больше или меньше трех витков троса, необходимо снять датчик с планкой и ввертыванием или вывертыванием шпинделя 9 отрегулировать момент включения лампочки; при этом на барабане должно быть три витка троса.
Для проверки и регулировки датчика 7 перегрузки троса следует трос лебедки выдать частично или полностью и включить рычаг реверса в положение «Намотка». При намотке троса должна быть создана нагрузка 6500—7500 кгс (нагрузка может быть замерена 10—15-тонным динамометром, установленным между тросом и грузом).
В случае правильной регулировки при нагрузке 6500—7500 кгс должен срабатывать переключатель <8, выключающий муфту и включающий лампочку «Перегруз лебедки». Если переключатель срабатывает за пределами нагрузки на тросе 6500—7500 кгс, то необходимо отрегулировать датчик 7. Для этого расшплинтовывают и снимают палец серьги 4 и отпускают гайку 5. Затем ввертыванием или вывертыванием серьги 4 из штанги 6 подбирают момент срабатывания рычага 3 и переключателя 8 в пределах указанной нагрузки.
Момент срабатывания переключателя определяют по включению лампочки. Если лампочка включается при завышенной нагрузке, то серьгу 4 следует удлинить, если при заниженной — укоротить.
5. РЕКОМЕНДАЦИИ ПО ВОССТАНОВЛЕНИЮ ДЕТАЛЕЙ КОРПУСА И КАБИНЫ
В быстроходных гусеничных машинах с целью уменьшения их массы достаточно широко используются (особенно для изготовления корпусов кабин и различных емкостей) алюминиевые сплавы АМг2, АМгб и АМг61 и пластмассы. В процессе эксплуатации нередко возникает необходимость ремонта (или восстановления) деталей, изготовленных из этих материалов. Ввиду того, что эти материалы пока имеют ограниченное применение, коротко рассмотрим приемы ремонта деталей из алюминиевых сплавов и пластмасс в полевых условиях или в условиях стационарных ремонтных мастерских.
Алюминиевые сплавы типа АМг относятся к группе термически необрабатываемых сплавов, обладающих достаточной прочностью, удовлетворительной пластичностью и хорошей коррозионной стойкостью. Однако в процессе эксплуатации могут быть случаи выхода из строя деталей вследствие вмятин, трещин и других дефектов, которые можно устранять правкой, заваркой, удалением дефектных мест, установкой вставок и накладок с последующей сваркой.
Обработка дефектных мест производится только механически (правка, сверление, вырезка фрезой, ножницами или ножовкой, 314
вырубка зубилом и доводка напильником). Накладки, вставки и т. п. можно вырезать также электродом или газоэлектрической горелкой с последующей обработкой кромок фрезами и напильниками.
Узлы и детали, подлежащие ремонту сваркой, очищают от грязи и масел, обезжиривают растворителями (уайтспиритом, четыреххлористым углеродом, ацетоном или бензином) и насухо протирают. Вокруг дефектного места на расстоянии 25—30 мм с лицевой и обратной стороны удаляют имеющуюся краску.
Дефектное место непосредственно перед сваркой зачищают металлической щеткой для снятия окисной пленки на расстоянии 25—30 мм.
В случае ремонта литых узлов или деталей основной металл вокруг дефектного места обрабатывают фрезой с целью удаления литейной корки.
Для сварки применяют присадочную проволоку только после химической очистки, заключающейся в обезжиривании растворителем; травлении при температуре 50—70° С до вспенивания раствора с выделением пузырьков газа в растворе следующего состава: 8—12 г/л едкого натра (ГОСТ 2263—71), 40—50 г/л кальцинированной соды (ГОСТ 83—63), 40—50 г/л тринатрийфосфата (ГОСТ 201—76); промывке в горячей и холодной проточной воде; осветлении в 25%-ном растворе азотной кислоты (ГОСТ 701—68) в течение 2—5 мин; сушке до полного удаления влаги.
Срок хранения проволоки после химической обработки не должен превышать 2 суток.
Проволоку следует хранить в герметической упаковке и перед сваркой осматривать. При наличии следов коррозии (темно-серый матовый налет, рыхлоты) проволока к сварке не пригодна.
В исключительных случаях в качестве присадки при ручной сварке допускаются прутки, нарубленные из листа АМгб толщиной 2 мм. Перед сваркой их обезжиривают и зачищают шабером или шкуркой при отсутствии химической очистки.
Качество аргона каждого баллона проверяют наплавкой валика ручной горелкой. Аргон пригоден, если наплавка получается блестящей, без следов окислов (налета).
Трещину любой длины для металла толщиной до 3 мм ограничивают по концам засверловкой, а при необходимости ставят накладку и обваривают.
Трещины на деталях толщиной свыше 3 мм разделывают с одной стороны и заваривают; трещины на деталях толщиной свыше 20 мм разделывают с двух сторон.
В случае образования трещин или обломов по швам приварки литья к прокату дефектный шов полностью удаляют и накладывают новый. Трещины любой длины на основном металле разделывают с одной или двух сторон листа на всю глубину.
При подготовке и проведении ремонтных работ необходимо соблюдать меры безопасности от поражения электрическим током и
излучения электрической дуги, соблюдать правила обращения и эксплуатации баллонов с аргоном, соблюдать меры безопасности при обработке узлов и деталей под сварку.
При ремонте деталей, изготовленных из стеклопластика, и не-нагруженных металлических деталей используют эпоксидный клей и стеклоткань. Текущий ремонт деталей выполняют заклеиванием трещин, отверстий или наложением заплат.
Эпоксидный клей обладает высокой адгезионной способностью и не требует применения высоких температур и давлений при склеивании.
Отвердение клея происходит без усадки, выделения летучих веществ и образования пористости, что исключает появление внутренних напряжений и снижение прочности швов.
Клеевые соединения не подвергаются коррозии, устойчивы к действию различных видов топлива, масел и растворителей, водонепроницаемы и выдерживают длительное воздействие как низких, так и высоких (до 4-120° С) температур.
Способ соединения деталей эпоксидным клеем прост и надежен, не требует специального оборудования и приспособлений.
Рекомендуется применять эпоксидный клей на основе смолы ЭД-5 (ГОСТ 10587—72) и полиэтиленполиамина (ВТУП 10-57).
Ремонт с помощью эпоксидного клея можно выполнять при температуре окружающего воздуха не ниже + 153 С. До склеивания поверхность необходимо подготовить. Подготовка поверхности заключается в очистке от грязи, зачистке напильником или наждачной шкуркой, обезжиривании растворителем или бензином и последующей просушке.
Для заклейки небольших поверхностных трещин и мелких отверстий нанести слой клея деревянной лопаткой на ремонтируемую поверхность, перекрывая трещину (отверстие) со всех сторон на 15—20 мм.
При заклейке сквозных трещин на неответственных ненагру-женных деталях необходимо разделать края трещины и заклеить ее эпоксидным клеем, армированным стекловолокном.
При необходимости заделать трещину на нагруженной несущей детали рекомендуется приклеивать дополнительные слои (накладки) из стекловолокна. Для этого нужно зачистить вокруг трещины поле необходимой величины так, чтобы накладка перекрывала трещину на 50—70 мм со всех сторон, и нанести слой эпоксидного клея без армирующего материала, затем пропитать клеем накладку из стеклоткани и наложить ее на деталь.
В зависимости от толщины ремонтируемой детали (панели) можно наложить два-три слоя стеклоткани. Каждый последующий слой должен по размерам накладки быть больше предыдущего, перекрывая его на 15—20 мм. Если ремонт производится на вертикальной панели, то можно сверху наклеить слой плотной бумаги для предотвращения стекания клея. После полного отвердения нанесенных материалов (через 8—10 ч) нужно зачистить наклеенный 316
слой снаружи напильником и шкуркой, затем покрасить отремонтированные места.
Эпоксидная смола ЭД-5 и полиэтиленполиамин входят в комплект запасных инструментов и приспособлений.
Для приготовления клея в мерный сосуд отвешивают необходимое количество смолы и вводят в нее 7—8 весовых частей полиэтиленполиамина (отвердителя) на 100 весовых частей смолы. Отвердитель тщательно размешивают в смоле деревянной палочкой.
Необходимо помнить, что склеивание следует выполнять непосредственно после приготовления рабочих композиций.
Эпоксидная смола и отвердитель могут храниться раздельно до 3 лет. После введения отвердителя клей пригоден к работе в течение 20—30 мин.
Сквозные отверстия большого размера можно заделать с помощью стекловолокна и эпоксидного клея, предварительно разделав края отверстия.
При работе с эпоксидными клеями и их компонентами следует соблюдать осторожность. Смола и отвердитель ядовиты, частицы стекловолокна вызывают раздражение, попадая на кожу или в дыхательные пути. Работать следует в перчатках, оберегать кожу, глаза и органы дыхания. При работе в помещении должна быть обеспечена хорошая вентиляция. После окончания работы необходимо тщательно вымыть руки горячей водой с мылом. Места на коже, которые пришли в соприкосновение с клеем, нужно смыть 30%-ным раствором уксусной или лимонной кислоты.
6. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ЭКСПЛУАТАЦИОННЫХ СВОЙСТВ ГУСЕНИЧНЫХ ТРАНСПОРТНО-ТЯГОВЫХ МАШИН
Для поддержания эксплуатационных свойств гусеничных машин на требуемом уровне необходимо своевременное проведение регулировок, технического обслуживания и текущего ремонта. Однако чем меньше объем профилактических и вынужденных воздействий, тем с большей эффективностью можно использовать машину, поскольку возможное время ее работы будет больше. При этом немаловажно знать, насколько сохраняются в течение всего срока службы значения основных показателей, характеризующих возможности машины при целевом использовании.
Субъективная оценка совершенства конструкции и эксплуатационных свойств гусеничной машины по существу невозможна, так как многие качества гусеничных машин в отличие от колесных рассчитаны на проявление в экстремальных условиях эксплуатации. По этой причине основные эксплуатационные свойства гусеничных машин определяют экспериментально на основе испытаний, выполняемых по специальным методикам.
Испытания транспортных средств в зависимости от целей и задач разнообразны. В настоящее время в соответствии
3i7
с ГОСТ 16504—74 определились следующие виды испытаний применительно к транспортно-тяговым гусеничным машинам:
для оценки опытных образцов:
а) предварительные (заводские);
б) приемочные (ведомственные, межведомственные, государственные);
в) доводочные;
для оценки образцов серийного производства:
а) приемо-сдаточные;
б) контрольные (гарантийные);
в) ресурсные;
г) эксплуатационные;
д) специальные.
Предварительные (заводские) испытания (часто именуемые конструкторскими) проводят с целью определения фактических значений параметров и эксплуатационных характеристик вновь разрабатываемых образцов машин, оценки степени соответствия созданного образца техническому заданию и технической документации, выявления необходимости внесения тех или иных конструктивных или технологических изменений и установления возможности представления опытных образцов на приемочные испытания. Обычно заводским испытаниям подвергают последовательно образцы нескольких серий, в конструкцию которых вносят изменения по результатам предыдущих испытаний. Как правило, изготовляют две-три серии опытных образцов. Объем испытаний образцов различный, пробег большинства из них значительно превышает гарантийный, в ряде случаев он доводится до ресурса, чтобы полнее оценить надежность узлов и агрегатов.
Приемочные испытания представляют собой один из важнейших этапов создания новой машины. Целью их является всесторонняя проверка эксплуатационных свойств опытных образцов в разнообразных дорожных и климатических условиях, оговоренных техническим заданием на разработку (в том числе в условиях тропиков, пустыни и районов с низкими температурами окружающего воздуха); определение фактических значений всех важнейших параметров; выявление надежности машины в целом, а также ее основных узлов, агрегатов и систем; установление степени соответствия созданной машины целевому назначению и определение целесообразности постановки нового образца на производство. На приемочные испытания представляют в среднем два—четыре образца. Испытания включают проведение значительного количества лабораторных и лабораторно-дорожных работ по определению технических и эксплуатационных показателей и пробегов машин во всех характерных условиях их предполагаемой эксплуатации.
По результатам приемочных испытаний вносят необходимые уточнения в конструкторскую документацию, устанавливают эксплуатационные нормативы, отрабатывают рекомендации по 318
правилам эксплуатации машин и выполнения работ по техническому обслуживанию и ремонту, а также уточняют технические условия на машину, которые являются важнейшим документом, характеризующим технический уровень конструкции.
Доводочные испытания проводят, если по окончании приемочных возникает необходимость в изменении конструкции ряда узлов и систем. Основная цель этих испытаний—оценить влияние изменений, внесенных в конструкцию образцов, на технико-эксплуатационные свойства и определить эффективность доработок, проведенных перед началом серийного производства. Объем доводочных испытаний меньше, чем приемочных. В процессе их выполняют лабораторно-дорожные испытания (работы) по проверке показателей, на которые может повлиять доработка конструкции, и пробеговые испытания в объеме, достаточном для выявления работоспособности измененных узлов и систем.
На стадии серийного производства контроль качества гусеничных машин осуществляется непрерывно. Каждая машина подвергается приемо-сдаточным испытаниям в объеме, установленном техническими условиями. Испытания, как правило; включают определение нескольких основных показателей технической характеристики и пробег до 50 км. Они позволяют лишь оценить соответствие выпускаемых заводом машин требованиям технических условий, т. е. правомерность производства.
Технический уровень, наличие каких-либо изменений в эксплуатационных свойствах машин, стабильность обеспечения этих свойств в производстве выявляются в результате периодических (через один-два года) контрольных (или гарантийных) испытаний. Эти испытания выполняют в объеме гарантийного пробега, установленного для данного образца, с проведением лабораторнодорожных работ по оценке практически всех основных техникоэксплуатационных показателей. Одновременно с этим проверяют соответствие конструкции машины действующей конструкторской документации и эффективность конструктивных и технологических мероприятий, внедренных в производство за период, прошедший после выпуска изделий, подвергавшихся предыдущим испытаниям. Одной из задач контрольных испытаний является оценка прилагаемого комплекта запасных частей, инструмента, приспособлений и принадлежностей, а также соответствие рекомендаций инструкций по эксплуатации машин характеру их использования в конкретных дорожно-климатических условиях.
Контрольные испытания, как правило, проводят на одной базе в дорожных условиях, соответствующих сезонности проведения испытаний.
На основании контрольных гарантийных испытаний могут быть даны рекомендации по некоторым изменениям конструкции машины, направленным на улучшение ее технико-эксплуатационных свойств.
319
Периодические ресурсные испытания проводят значительно реже гарантийных с целью выявления фактического ресурса машины в целом и ее основных агрегатов до капитального ремонта, определения надежности машины и показателей безотказности работы. В большинстве случаев ресурсные испытания проводят циклами, каждый из которых по объему пробега соответствует гарантийным испытаниям. Лабораторно-дорожные испытания по определению соответствия образцов требованиям технических условий выполняют только в первом цикле, в остальных циклах проводят лишь пробеги машин.
Совершенствование конструкций гусеничных транспортно-тяговых машин помимо испытаний указанных видов предопределяет необходимость проведения специальных испытаний, связанных с нахождением путей повышения надежности и дальнейшим расширением многоцелевых функций гусеничных машин. Эти задачи не укладываются в рамки стандартизованных испытаний, поэтому получили достаточно широкое распространение эксплуатационные испытания (как правило, на опорных пунктах) по определению показателей надежности в реальных условиях эксплуатации и уточнению нормативов эксплуатационной технологичности и специальные испытания по определению путей конструктивного усовершенствования (или приспособления) машин к выполнению тех или иных операций, задач, работ и т. п.
Эксплуатационные испытания наряду с оценкой надежности машин позволяют более полно выявить соответствие заданных эксплуатационных параметров требованиям использования машин в конкретных дорожных или климатических условиях. Достоинством испытаний этого вида является большой объем информационного материала, позволяющий применить для получения объективной оценки надежности математический аппарат теории вероятностей, так как количество обследуемых объектов при таких испытаниях исчисляется десятками. Следует отметить, что при эксплуатационных испытаниях наряду с вопросами надежности могут быть глубоко исследованы также вопросы эксплуатационной и ремонтной технологичности, поскольку пробеги машин могут значительно превышать гарантийные и даже ресурсные.
Специальные испытания проводят с целью проверки отдельных эксплуатационных качеств в ограниченных или экстремальных условиях использования, проверки эффективности усовершенствования отдельных агрегатов, отработки методов контроля свойств машины (в том числе методов ускоренных испытаний), проверки возможности и эффективности использования базового шасси под монтаж различного оборудования или при создании модификаций другого назначения. Круг таких вопросов настолько широк, что по существу на объем и порядок специальных испытаний не накладывают ограничений, за исключением ограничений, обусловленных принципиальными возможностями гусеничных машин.
Потребителей гусеничных машин в большей степени интересуют эксплуатационные свойства, а разработчиков — технический уровень. Наиболее полное сочетание возможностей проверки интересов производства и эксплуатации дают приемочные и контрольные (гарантийные) испытания, цели и объемы которых практически идентичны. На рис. 155 показаны основные этапы этих испытаний и перечень работ по каждому этапу. Рассмотрим их подробнее.
Образцы для испытаний отбирают: для контрольных — из числа выпущенных по серийной технологии, для приемочных — после приведения опытных образцов в соответствие с утвержденной, документацией. В любом случае при этом проверяют комплектность образцов, наличие соответствующей конструкторской и эксплуатационной документации, соответствие представленных на испытания образцов действующим нормативно-техническим требованиям, в том числе стандартам. Заметим, что последнее качество проверяют в течение всего периода испытаний в процессе выполнения различных лабораторных и лабораторно-дорожных работ.
В заключение проверяют работоспособность испытуемой машины на месте и при пробеге 25—50 км.
Следующим этапом испытаний является проверка качества сборки и регулировки. В связи с разнообразием конструкций гусеничных машин невозможно конкретно указать, какие узлы и детали подвергают проверке. Можно лишь отметить, что для машин всех типов проверяют надежность крепления основных агрегатов, состояние уплотнений, особенно силового агрегата и трансмиссии, состояние регулировок, главным образом приводов управления, наличие смазки в агрегатах, герметичность пневматической и гидравлической систем.
Затяжку креплений проверяют только у наружных резьбовых соединений (без разборки агрегатов) инструментом, входящим в ЗИП машины. Качество затяжки оценивают субъективно.
Из контролируемых и регулируемых параметров проверяют состояние аккумуляторных батарей (плотность электролита и напряжение); установку зажигания (у карбюраторных двигателей) и опережения впрыска (у дизелей); давление масла в смазочных системах двигателя и трансмиссии; максимальное давление воздуха в пневматической системе; свободные ходы педалей и рычагов управления; выставку катков по колее и высоте; шаг гусеничной цепи.
Допускается разборка отдельных узлов с целью установления правильности их сборки и наличия в них смазки (например, опорных катков).
Герметичность гидро- и пневмосистем проверяют при создании максимальных давлений, а состояние сальниковых уплотнений — при максимальной частоте вращения и температуре смазки.
11 П/р. В. Ф, Платонова 321
323
Рис. 155. Основные этапы приемочных и контрольных
испытаний
Перед началом испытаний, как и перед началом обычной эксплуатации, производят обкатку гусеничного транспортера (тягача) при пробеге 300 км с соответствующими ограничениями по скорости движения и тяговому усилию. После обкатки проводят техническое обслуживание № 1 и загружают платформу (кузов) до номинальной грузоподъемности.
Лабораторно-дорожные работы выполняют в течение всего периода испытаний, однако существует определенный порядок их проведения. Так, размерные и весовые параметры определяют перед пробеговыми испытаниями; тягово-динамические, экономические и тормозные свойства — после необходимой приработки агрегатов; оценку проходимости, устойчивости, управляемости и плавности хода выполняют в середине испытаний, а эргономические параметры, энергобаланс, уровень радиопомех — в конце испытаний, после того как могут выявиться результаты изнашивания деталей и осадки различных креплений.
Размерные и весовые параметры определяют, как правило, совместно. При этом если такие показатели, как габаритные размеры, база, колея, дорожный просвет, погрузочная высота, общая масса, распределение ее по бортам машины, определяют непосредственным измерением или взвешиванием, то расположение центра тяжести, распределение нагрузок по каткам находят расчетным путем по результатам взвешивания машины в различных положениях или определения угла бокового опрокидывания.
Расположение центра тяжести машины по базе (продольную координату) находят последовательным взвешиванием, при наезде машины на платформу весов каждой парой опорных катков:
а = — (шх/х 4- 4“ * * • •
где а—расстояние по горизонтали от центра тяжести до оси ведущего колеса; /пх, т2, ...» тп—масса, приходящаяся на первую, вторую и т. д. пару катков; /х, /2, •••> —среднее
расстояние (по двум бортам) по горизонтали от оси ведущего колеса до осей первой, второй и т. д. пары катков.
Для получения большей точности общую массу машины и распределение ее по каткам определяют двукратным взвешиванием .и осреднением значений, т. е. *
мт=4 W+м;);
mi = 4 + m2 4- • + т'д + (mi + 4- • • 4~ m"i) —
— 2 (mi 4~ /П2 4~ ’ 4“ mi—0 4* (m’i 4~ mi+t + ' ’ 4~ m'n) —
— -f- mi+2 4~ • • • 4~ 4- 4- ^«+14- • • • 4- ^n)
— (m"i+i 4- m'-+2 4--1- m'n)],
где М'^ М"—масса машины при первом и втором взвешиваниях; т'., т".— масса, приходящаяся на f-ю пару катков при первом и втором взвешиваниях.
Поперечную координату центра тяжести (смещение А от центра машины) находят по известным значениям масс, приходящимся на левый Л4лев \
и правый Л1пр борта машины: 0,5) или А = в(о,5 —
/ \ /Иг /
где В — колея машины.
Величина А считается положительной при смещении центра тяжести вправо (по ходу машины) от продольной вертикальной плоскости симметрии и отрицательной — при смещении влево.
Высоту центра тяжести Лц> т в практике испытаний определяют двумя способами: взвешиванием машины в наклонном положении и опрокидыванием на специальном стенде.
При первом способе машину устанавливают одним бортом на платформу весов, а другим—на подставку (рядом с весами), имеющую высоту АЛ. За счет перекоса и разной массы по бортам подрессоренная масса в этом случае имеет крен относительно продольной плоскости машины. Высоту центра тяжести находят по выражению
Мпр (лев)
0,5)+т № (У + У') + Ш Т1 + Actg(<p+y),
где Л1Г1р (ЛеВ) — масса, приходящаяся на правый (левый) борт в наклонном положении; с — смещение реакции относительно середины опорного катка (определяется ориентировочно); — угол наклона машины (sin ср = Ah/В); у— угол крена подрессоренной массы; А — поперечное смещение центра тяжести относительно продольной плоскости симметрии.
При втором способе машину на специальном стенде наклоняют до отрыва катков одного борта, т. е. до момента бокового опрокидывания. В этом случае угол наклона платформы стенда равен <рб и
/гц. т = - ~2~С- Ictg (срб + у) + tg у] + A ctg (фб + у).
Второй метод позволяет получить более точные результаты расчета высоты центра тяжести вследствие меньших погрешностей в определении угла наклона и крена.
Тягово-динамические свойства гусеничных машин определяют в основном такими же методами, как и при испытаниях автомобилей. Оценочными параметрами тягово-динамических свойств являются максимальная скорость; минимальная устойчивая скорость; путь и время разгона с места до максимальной скорости с переключением передач; максимальное тяговое усилие на крюке; сила сопротивления качению, тягово-динамическая характеристика на передачах.
Определение этих параметров требует тщательной подготовки машин и строгого соблюдения условий испытаний, чтобы обеспечить стабильность замеров и сопоставить их с результатами ранее выполнявшихся испытаний*
Испытания проводят в сухую погоду при скорости ветра не выше 3 м/с» атмосферном давлении 730—765 мм рт. ст. и температуре окружающего воздуха от +5 до +30° С. Предпочтительнее испытания выполнять на специальной динамометрической дороге. Если испытания проводят на дорогах общего пользования, то выбирают измерительный участок, который должен удовлетворять следующим требованиям: быть прямым (без поворотов), горизонтальным (с короткими уклонами не более 5%) и иметь твердое покрытие (асфальт, бетон) без выбоин с температурными швами шириной не более 20 мм; иметьддИну не менее 1 км с подъездными участками с обеих сторон протяженностью около 3 км.
Перед проведением испытаний машина должна быть подготовлена. При этом особое внимание уделяют проверке систем питания топливом и электрооборудования, неисправности которых могут привести к снижению Мощности двигателям вследствие этого к ухудшению динамических качеств* Проверяют также трансмиссию и ходовую часть машины и прицепа, предназначенного для буксировки.
Чтобы убедиться в исправности машины и довести температурный режим агрегатов до нормального состояния, совершают пробег по дорогам с твердым покрытием на расстоянии 100 км в двух противоположных направлениях. При этом замеряют расходы топлива и масла и сравнивают с данными, указанными в технических условиях. Испытания продолжают, если отсутствуют расхождения нормативных и опытных значений расходов топлива и масла. При наличии отклонений выясняют причину и устраняют дефект.
Методы определения максимальной скорости, минимальной устойчивой скорости и пути (времени) разгона общеизвестны 16], поэтому здесь целесообразно рассмотреть только, как определяют показатели тяговых свойств: сопротивление качению, максимальную силу тяги на крюке, тягово-динамическую характеристику.
Сопротивление качению гусеничной машины может быть определено одним из трех методов: буксирования, свободного выбега и замера крутящих моментов на ведущих колесах.
При использовании метода буксирования испытуемую машину буксируют тягачом и в сцепке замеряют усилие 7?, которое принимают равным силе сопротивления качению Pf, т. е. Р = Pf. Коэффициент сопротивления качению f находят как отношение Pf/GT.
Данный метод определения сопротивления качению достаточно прост. Его достоинством является возможность определения сопротивления качению на различных скоростях. Знание экспериментальной функции Pf = f[v) необходимо, поскольку у гусе-326
ничных машин коэффициент сопротивления качению увеличивается с повышением скорости, что не всегда учитывается в практике.
Точность определения силы сопротивления качению Pf этим методом зависит не только от ровности дорожного полотна, но и от условий буксирования. Чем равномернее скорость буксирования, тем точнее результат.
При испытаниях способом буксирования трансмиссию отключают от гусеничного движителя, чтобы сопротивление в трансмиссии не оказывало влияния на силу сопротивления качению.
Недостатком данного метода является то, что силу сопротивления качению замеряют для условий взаимодействия элементов гусеничного движителя, соответствующих тормозному, а не тяговому режиму движения. Сопротивление гусеничного движителя в этих режимах неодинаковое, следовательно, замеряемая сила буксирования отличается от фактического сопротивления качению. Кроме того, сила сопротивления качению включает две составляющие: сопротивление собственно гусеничного движителя и сопротивление от деформирования грунта, разделить которые при таком методе невозможно. Использование опытных данных по сопротивлению качению, замеряемых этим методом, не всегда возможно, особенно если в расчетах используют КПД гусеничного движителя, определенный на стенде и отражающий только потери в гусеничном движителе.
Метод свободного выбега заключается в следующем: машину разгоняют до определенной скорости (как правило, максимально возможной), и затем после выключения передачи в нейтральное положение она движется по инерции до полной остановки. Замеряя путь свободного выбега и полагая, что запасенная кинетическая энергия 6T7WTv2/2 превращается целиком в работу силы сопротивления качению Pf на пути SCB, можно найти
Pf = STM#/(2SCB),
где бт — коэффициент учета вращающихся масс транспортера (тягача).
Метод свободного выбега позволяет определить сопротивление качению без применения каких-либо вспомогательных тяговых
средств и специального измерительного оборудования. Однако он дает приближенные значения сопротивления качению, так как:
1) предполагается, что на всем пути SCB сила сопротивления качению остается постоянной, в действительности же она значи
тельно изменяется, при этом на высоких скоростях сила сопротивления в несколько раз больше, чем на малых;
2) в определяемую силу сопротивления качению входит сопротивление от прокручивания трансмиссии, которое по величине сопоставимо с истинным сопротивлением качению. Вследствие этого метод свободного выбега используют ограниченно.
Наиболее точные результаты по определению сопротивления качению получаются при тензометрировании выходных валов ведущих колес, т. е. при записи крутящих моментов на них. Так как при равномерном движении сила тяги равна силе сопротивления качению (Рт — Pf), то, записывая крутящий момент Л1Р>К, можно найти сопротивление качению,
В гл. I было установлено, что
к = ^В. к/Лг. д-
Отсюда
ЯГ в. к»
где ТИБ.К— сумма крутящих моментов на обоих бортах машины.
Следовательно, чтобы определить силу-сопротивления качению, необходимо помимо записи крутящих моментов на ведущих колесах знать функцию *пг.д f М» которую находят по данным стендовых испытаний гусеничного движителя или по эмпирическим формулам, в том числе приведенным в гл. I.
Максимальную силу тяги на крюке определяют методом торможения. При этом методе испытуемая гусеничная машина буксирует на крюке тормозную (динамометрическую) машину и динамометром записывается усилие в сцепке — сопротивление на крюке Ркр. Так как сила тяги равна сумме сил сопротивления качению и на крюке, то, зная силу сопротивления качению Pf и сопротивление на крюке, можно найти Рт = Ркр + Pf.
Для определения максимума силы Рт буксирующую машину ступенчато нагружают нагрузкой Ркр и записывают для каждого режима нагружения при установившейся скорости движения значения коэффициента буксования гусениц по формуле
о = (So — 5ф)/50,
ч
где So ’— теоретический путь движения, рассчитываемый по оборотам ведущих колес; — фактический путь движения.
Замеряя коэффициент буксования для каждой ступени нагружения, можно построить^зависимости Ркр = f (о) и Рт = f (<т) и по последней найти максимальное значение силы тяги и коэффициент сцепления ср — PrmaJGT.
Иногда при проведении испытаний гусеничных машин максимальную силу тяги определяют без замера буксования, сразу нагружая машину до полного буксования. Соответствующую этому режиму нагружения силу тяги по сцеплению считают максимальной. Этот способ значительно проще предыдущего, так как довести машину до буксования можно обычным гусеничным или колесным тягачом большой массы за счет торможения, в то время как для обеспечения стабильной крюковой нагрузки, равной силе тяги при определенном буксовании, требуется специальная динамометрическая машина.
Вместе с тем последний способ менее точный, так как фактически в этом случае замеряют не максимальную силу тяги, а силу тяги, соответствующую полному буксованию, которая, как известно, меньше максимальной силы тяги.
Тягово-динамическую характеристику определяют только с применением динамометрической тормозной машины. Замеры производят на ровном участке дороги с твердым покрытием во всем диапазоне скоростей на каждой передаче.
Тормозное усилие создается таким, чтобы двигатель работал на внешней характеристике. Режимы нагружения подбирают так, чтобы получить на каждой передаче пять—восемь значений скоростей движения, по которым можно построить кривую Ркр = = f (и) или D = f (v). При этом должны быть обязательно точки, соответствующие минимально устойчивой и максимальной частоте вращения двигателя.
Динамический фактор для построения тягово-динамической характеристики рассчитывают по формуле
D = (Ркр 4- Pf - PJ/GT, где Ркр — замеряемая тормозная сила, создаваемая динамометрической машиной; Pf — сила сопротивления качению, определяемая экспериментально для данного участка дороги; Pw — сила сопротивления воздуха, учитываемая при скоростях движения более 60 км/ч.
Значения скоростей движения, при которых выполняют замеры, регистрируются прибором типа «пятое колесо», который позволяет определить действительную скорость движения гусеничной машины.
Топливную экономичность гусеничных машин оценивают дорожно-экономической характеристикой, контрольным расходом п эксплуатационным расходом топлива. Эксплуатационный расход определяют в процессе пробеговых испытаний по разным дорогам и при различной загрузке (с прицепом и без прицепа). Дорожноэкономическую характеристику и контрольный расход топлива определяют на этапе лабораторно-дорожных работ.
Дорожно-экономическая характеристика представляет собой зависимость удельного расхода топлива (на единицу пути или времени работы) от скорости движения на каждой передаче. В зависимости от целей испытаний дорожно-экономическую характеристику можно определять для различных дорожных условий: при движении по дорогам с твердым покрытием, грунтовым, болоту и др. Однако чаще всего ее определяют при движении по дорогам с твердым покрытием (бетон), так как в этом случае сохраняется стабильным сопротивление качению и представляется возможным сравнительно оценивать топливную экономичность различных машин. Условия проведения испытаний при этом поддерживают такими же, как и при оценке тяговодинамических свойств. Дорожно-экономические характеристики
на деформируемых грунтах получают только тогда, когда проводят сравнительные испытания двух или нескольких образцов одновременно.
Для определения каждой точки дорожной экономической характеристики испытуемую машину разгоняют за пределами измерительного участка до заданной установившейся скорости и, строго выдерживая эту скорость, проходят измерительный участок с включенным расходомером. Длина измерительных участков на твердых грунтах составляет 1000 м, на деформируемых 300—600 м в зависимости от характера участка, но с таким расчетом, чтобы время работы на каждом режиме было не менее 2—3 мин. Скорость изменяют в определенных интервалах, обеспечивающих получение достаточного количества значений для построения кривой расхода топлива на каждой передаче. Каждое испытание повторяют 2 раза в противоположных направлениях непосредственно одно за другим. '
При испытаниях измеряют время проезда мерного участка и количество израсходованного топлива (расходомером). Подсчитанный расход топлива относят к действительной скорости (или времени) каждого проезда мерного участка.
Контрольный расход топлива служит одной из важных характеристик гусеничной машины, регламентируемой техническими условиями и проверяемой практически при испытаниях всех видов. Контрольный расход замеряют в литрах на 100 км при движении машины на высшей передаче с установившейся скоростью по дороге с твердым (бетонным) покрытием. Скорость движения устанавливают в зависимости от максимальной скорости (50—70% ywax). Длина измерительного участка составляет 3—5 км.
Помимо определения дорожно-экономической характеристики и контрольного расхода топлива в некоторых случаях для машин, используемых в качестве транспортной базы для установки различного оборудования, замеряют расход топлива на отбор мощности. При этих замерах частоту вращения коленчатого вала двигателя устанавливают в соответствии с условиями работы приводного агрегата и нагружают двигатель через механизм отбора мощности.
Устойчивость и управляемость оценивают, как правило, по параметрам курсовой устойчивости при прямолинейном движении и предельным скоростям при проезде трасс с различными радиусами. Предварительно перед этим определяют расчетные радиусы поворота на передачах.
В качестве оценочных параметров курсовой устойчивости при управляемом движении принимают число воздействий водителя на рычаги управления, среднюю величину хода рычагов управления, среднее отклонение машины от прямолинейного движения; при неуправляемом движении — суммарный увод машины в сторону.
Параметры управляемого движения определяют при движении машины по прямолинейному участку протяженностью не менее 1 км со скоростью 30—40 км/ч (на высшей передаче), увод машины— при движении на участке длиной 100—150 м со скоростью до 10 км/ч.
Курсовую устойчивость оценивают сравнением значений полученных показателей с нормативными или со значениями аналогичных параметров других гусеничных машин.
Управляемость проверяют при движении машины по специально размеченным (на горизонтальной бетонной площадке) трассам шириной 4 м с различными радиусами поворота. Обычно оборудуют несколько трасс:
малых радиусов (от — В/2 до R = ЬВ)\
средних радиусов (от R = 5В до R = 12В);
больших радиусов (R >> 12В);
для проверки разворота одиночной машины и с прицепом.
Оценочным параметром при данных испытаниях является предельная скорость, обеспечивающая вписываемость в габаритный размер полосы движения (4 м). Предельной считается скорость, при которой наступает занос или потеря управляемости — выход машины за предел полосы движения.
Последнее время в качестве дополнительного оценочного параметра управляемости гусеничной машины на поворотах стали использовать угловое ускорение при входе в поворот и выходе из поворота. Этот параметр характеризует способность механизма поворота гусеничной машины сохранять кинематическую стабильность и обеспечивать высокие средние скорости за счет более точного соблюдения траектории движения без существенного снижения скорости. Угловые ускорения замеряют при движении машины по траектории типа «змейки» на повышенных передачах.
Одним из важных свойств гусеничных транспортно-тяговых машин является проходимость, экспериментальной оценке которой при испытаниях уделяют значительное внимание. В обычных условиях эксплуатации проходимость гусеничных машин различных типов практически одинакова и существенно выше, чем колесных. Различие в проходимости гусеничных машин проявляется главным образом при эксплуатации на грунтах с низкой несущей способностью (снег, болото). Поэтому проходимость оценивают именно применительно к грунтам этих типов. Следует однако подчеркнуть, что как снег, так и болото имеют разнообразную структуру и несущую способность, изменяющуюся в широком диапазоне, в связи с чем наиболее объективная и достоверная оценка проходимости может быть получена только при сравнительных испытаниях. Испытания образцов без сопоставления могут иметь лишь вспомогательный характер, если их целью не является определение неизвестных показателей, имеющих прямое отношение к проходимости (например, замер давлений под опорной ветвью гусеничного обвода).
•цепочными параметрами проходимости служат среднее давление под опорной ветвью гусеничного обвода <?ср; максимальные давления под катками ^тах; отношение максимальных давлений к средним или минимальным; удельная избыточная сила тяги на крюке (отношение максимальной силы тяги на крюке к весу машины) <ркр = Р^вг\ максимально возможная скорость движения на данном грунте vmax; минимальный радиус поворота глубина колеи /гк.
Среднее давление на грунт определяют по известным размерам гусениц:
<7ср = GT/(2bL),
где b — ширина гусеницы; L — база машины.
Хотя среднее давление и характеризует во многом проходимость, тем не менее у машин, имеющих одно и то же среднее давление, проходимость может быть различной вследствие разных эпюр давлений. Вполне очевидно, что чем больше перепад между максимальным и минимальным давлением, тем проходимость машины будет хуже. Расчетным путем определить фактическое значение давления qmaK сложно из-за того, что оно различно для каждого грунта. Раньше (см. гл. I) отмечалось, что на твердых грунтах, когда нагрузка от катка воспринимается только одним траком, с достаточной точностью максимальное давление может быть определено по выражению
Vmax z= GT/(2/lb/o),
где Zo — шаг гусеничной цепи; п — число опорных катков на борту.
Однако на деформируемых грунтах, когда в передаче нагрузки от катков на грунт участвуют траки, не только находящиеся непосредственно под катками, но и в пролетах между ними, фактическое максимальное давление ^тахф будет больше дср, но меньше ^тах. Тогда для определения максимального давления на деформируемых грунтах используют формулу
GT
?шахф— 2+ (1 _ «ф) nblG] 9
в которой опытным коэффициентом ф корректируется давление. Недостатком этой формулы является то, что значения коэффициента ф изменяются в очень широких пределах, требуется его экспериментальное определение для грунта каждого типа, а это равноценно фактическому определению действительных давлений под гусеницами.
В табл. 38 приведены опытные данные по определению фактических значений давлений под опорными ветвями транспортеров-снегоболотоходов ГТ-СМ, ГТ-Т и транспортеров-тягачей МТ-Л.
Фактические давления замеряют с помощью датчиков мембранного типа, устанавливаемых на гусеницу или в грунт (на глубине 332
около 3—5 см). Машина при замерах движется со скоростью 2—3 км/ч.
Одним из показателей, часто используемых для оценки проходимости и тягово-сцепных свойств гусеничных машин, является максимальная удельная крюковая нагрузка <ркр, равная отношению максимального значения крюковой нагрузки к полному весу машины или поезда:
ФкР. м
кр тах/^т»
Фкр. п * кр max
Максимальное значение крюковой нагрузки находят по экспериментальной кривой Ркр = f (о), получаемой при испытаниях машины на том или ином грунте. Порядок и методика определения крюковой нагрузки в зависимости от буксования такие же, как и при определении тягово-динамических свойств (предельной силы тяги по сцеплению). При замере максимальной крюковой нагрузки для гусеничного поезда иногда определяют крюковое усилие, развиваемое не только тягачом, но и полностью гусеничным поездом. В последнем случае динамометрической машиной притормаживают прицеп.
Сравнительную оценку проходимости по удельной крюковой нагрузке производят по отношению этих показателей для двух сравниваемых машин, одну из которых принимают в качестве эталона:
А Пр Фкр. ясп/Фкр. ЭТ‘
Такой метод удобен тем, что позволяет сравнивать образцы машин разных типов и весовых классов по опытным данным, полученным в различное время. При этом можно даже сравнивать (с известным приближением) гусеничные машины, которые вместе никогда не испытывали, но обе в различное время проверяли по сравнению с эталонной.
Если, например, сравнивают два образца 1 и 2 с эталонным, то при имеющихся
Кпр 1 = фкр 1/<Ркр. эт И /Спр 2 = фкр. 2/ф*кр.эт можно найти
Кпр 1—2 —• фкр 1фкр. эт/(фкр, этфкр 2).
Здесь штрихами обозначены значения максимальной крюковой нагрузки, полученные в разных условиях испытаний.
Другие оценочные параметры — максимально возможная скорость движения на грунте того или иного типа минимальный радиус поворота глубина колеи hK служат, как правило, дополнительными (вспомогательными) данными для характеристики проходимости гусеничных машин.
Необходимо отметить, что проходимость гусеничных транспортно-тяговых машин существенно зависит от их технического состояния, натяжения в гусеничном обводе, правильности регулировок приводов управления. Все эти факторы подлежат тщательной проверке перед началом испытаний.
Для определения водоходных свойств плавающих гусеничных транспортеров-снегоболотоходов и транспортеров-тягачей проводят испытания на плаву, которые включают определение максимальной скорости движения на плаву, максимального тягового усилия на швартовах, маневренности (радиуса циркуляции), углов входа в воду и выхода из воды на берег по условию незато-пляемости, параметров плавучести (запаса плавучести, поперечной остойчивости, сопротивления буксированию), производительности водооткачивающих средств.
Испытания плавающих машин проводят в водоемах глубиной около 3—4 м со спокойной водой или небольшим течением. При меньшей глубине водоема возможен экранирующий эффект дна, снижающий максимальную скорость движения. Максимальную скорость движения на плаву определяют при движении с установившейся скоростью на мерном участке протяженностью 50— 100 м. - Экспериментально подбирают передачу трансмиссии, на которой машина развивает наибольшую скорость.
Максимальные тяговые усилия на швартовах замеряют при неподвижной машине, находящейся на воде и соединенной через динамометр с тягачом (или специальным устройством), расположенным на берегу. Последовательно включают все передачи трансмиссии и определяют усилие зачаливания через определенные интервалы частоты вращения двигателя. Максимальное значение этого усилия (как правило, при одной из промежуточных передач) и есть максимальное тяговое усилие на швартовах. У существующих гусеничных машин максимальное усилие на швартовах обеспечивается при передачах III и IV, при более высоких передачах работа невозможна из-за значительных потерь мощности на перематывание гусеничного обвода в воде.
Маневренность на плаву оценивают радиусом циркуляции (радиусом поворота) по наружному борту. Радиус циркуляции зависит не только от собственно маневренных свойств машины, определяемых значением поворачивающего момента на плаву, но и от скорости движения. Чем больше скорость движения, тем больше радиус циркуляции при одном и том же значении поворачивающего момента. В связи с этим радиус циркуляции необходимо определять как на максимальной скорости, так и на скорости, при которой возможно сопоставление машины по этому параметру с другими машинами.
Углы входа и выхода плавающей машины характеризуют ее способность преодолевать водные и заболоченные участки с различной крутизной берегов. Обычно определение максимально возможных углов входа и выхода по условию незатопляемости производится путем последовательных испытаний (по входу и выходу) на берегах с различной крутизной.
Как правило, у транспортеров-снегоболотоходов и транспортеров-тягачей, способных преодолевать водные преграды на плаву, углы входа в воду и выхода из воды на берег соответствуют возможностям машин по преодолению берегов, исходя из условия достаточности сцепных качеств.
Параметры плавучести характеризуют надежность нахождения гусеничной машины на плаву. Так, от запаса плавучести зависит возможность перегрузки, от остойчивости — возможность неравномерного распределения груза по бортам и маневрирования на высоких скоростях, от сопротивления буксированию — динамика машины на плаву. Параметры плавучести определяют следующим образом.
Запас плавучести находят в результате дополнительной загрузки платформы до момента начала заливания воды в платформу (кузов) или кабину. Он представляет отношение (в %) дополнительной загрузки воды к полной массе транспортера в груженом состоянии
Лзап = 100Л4ДОП/Л1Т.
Поперечную остойчивость оценивают по значению момента, возникающего при боковом крене машины до заливания борта. Момент определяют при создании крена тросами, прикрепленными к нижней и верхней частям машины и растягиваемыми в противоположные стороны. Для сравнительной оценки удобнее использовать удельный момент поперечной остойчивости
Сопротивление буксированию находят при буксировании машины другим плавающим средством, имеющим более высокие тяговые возможности на плаву. По результатам буксирования строят кривую R6 = f (v) в диапазоне скоростей от до vmax.
335
Иногда буксировочные испытания не проводят, а сопротивление на плаву оценивают по эмпирической формуле
= kFvn,
где k — коэффициент, зависящий от формы корпуса; F — площадь поперечного сечения машины ниже ватерлинии; п — показатель степени, определяемый опытным путем для машин различных типов (обычно п = 24-3).
Остальные виды лабораторно-дорожных работ, показанных на схеме проведения испытаний гусеничных машин, выполняют обычными способами, широко апробированными при испытаниях автомобильной техники.
Представляется необходимым остановиться на этапе пробеговых испытаний. Этот этап один из трудоемких и ответственных, так как только в процессе пробеговых испытаний можно установить, насколько полно гусеничная машина соответствует своему назначению, каковы ее эксплуатационные свойства в конкретных условиях использования, какова надежность.
Чтобы получить более полную оценку этих качеств, пробеговые испытания проводят на дорогах различных типов — с твердым покрытием (бетонных), булыжных, грунтовых различного состояния — и на местности. Соотношения дорог разных типов определяют, исходя из обеспечения разнохарактерного воздействия дорожных условий на работу машины и ее основных агрегатов. При этом на всех дорогах часть пробегов выполняется с прицепами, а часть — без прицепов, что расширяет диапазоны скоростного и тягового нагружения испытуемой машины.
Многолетней практикой установлена рациональная разбивка пробегов, которая регламентируется и поддерживается при испытаниях машин всех типов. Это позволяет наряду с получением информации о данной машине сравнивать ее с другими.
В табл. 39 приведена разбивка пробегов по видам дорог, наиболее часто используемая в практике испытаний гусеничных транспортно-тяговых машин.
Из данных таблицы видно, что для гусеничных машин, предназначенных преимущественно для выполнения тяговых работ, объем испытаний с прицепами составляет 70% от общего пробега, для транспортеров-снегоболотоходов и транспортеров-тягачей объем пробеговых испытаний с прицепами и без прицепов одинаковый, поскольку их используют и как транспортные средства, и как средства механической тяги. Если же транспортеры предназначены для использования только в качестве транспортных средств, то испытания проводят без прицепной нагрузки.
В процессе пробеговых испытаний замеряют продолжительность движения и остановок, расход топлива, фиксируют все возникающие дефекты.
В^качестве основных параметров оценки эксплуатационных свойств по результатам пробеговых испытаний используют сред-336
39. Объем пробегов (в % от общего) гусеничных транспортно-тяговых машин по дорогам различных типов
Дорожные условия
Тягачи Т ранспортеры-снегоболото-ходы
без прицепа с прицепом без прицепа с при цепом
Транспортеры -тягачи
без пр ице - па с прицепом
Дороги с твердым покрытием . . Г ру нтовые дороги удовлетворительного состояния, позволяющие двигаться со скоростью не менее 0,5ywax..................
Разбитые грунтовые дороги, позволяющие двигаться со скоростью до 0,25vniax...................
Грунтовые дороги в период распутицы ..........................
Снежная целина с глубиной снежного покрова более 0,4 м - . .
Болото ........................
10
10
10
15
15
15
25
5
5
10
10
10
10
10
10
20
5
5
15
20
10
15
20
10
30
70 50 50 50 50
Итого. . .
5 5
нюю скорость движения в различных условиях; эксплуатационные расходы топлива; показатели эксплуатационной технологичности; надежность конструкции.
Средняя скорость движения зависит от многих факторов: с одной стороны, на нее оказывают влияние конструктивные особенности машины, с другой — дорожные условия. При испытаниях ее стремятся поддерживать максимально возможной. Чтобы полнее выяснить причины, вызывающие ограничение скорости, принято определять среднюю скорость чистого движения и среднюю техническую скорость.
Среднюю скорость чистого движения находят по замеряемому времени и пути движения без учета остановок машины
п
где X — общая протяженность пробега за п интервалов вре-1
п мени на дороге данного типа; У LB ,• — соответствующее время нахождения машины в движении.
Среднюю техническую скорость определяют с учетом вынужденных остановок по техническим причинам (невозможность движения из-за отказов или нарушения режима работы агрегатов, 337
необходимость проведения регулировок или подготовительных работ и т. п.):
где tMi — продолжительность вынужденной остановки.
Время выполнения профилактических (регламентируемых) работ или текущего ремонта, необходимость в проведении которых возникла в процессе планового технического обслуживания, показателем £ост/ не учитывается.
Средние скорости определяют для дороги каждого типа, отдельно для режимов движения машины с прицепом и без прицепа. Соответственно этому замеряют расходы топлива и определяют эксплуатационные расходы. На основании данных по расходу топлива при пробеговых испытаниях устанавливают (при приемочных испытаниях) или корректируют (при контрольных испытаниях) норматив по общему эксплуатационному расходу топлива (Q, л/100 км).
По результатам пробеговых испытаний определяют показатели эксплуатационной технологичности, основными из которых являются периодичность технического обслуживания STwO, тыс. км; удельная трудоемкость технического обслуживания 7ТО, чел.-ч/тыс. км; удельная трудоемкость текущего ремонта чел.-ч/тыс. км.
После окончания пробеговых испытаний оценивают техническое состояние машины экспериментальным определением основных эксплуатационных показателей (в том числе и тягово-динамической характеристики), как это делали на этапе лабораторнодорожных работ, или диагностированием агрегатов, узлов и систем с проверкой состояния всех регулировок и параметров, подлежащих контролю.
Основные агрегаты разбирают (при необходимости может быть выполнена полная разборка) и измеряют детали для определения их износов. Отдельные детали подвергают исследованиям на прочность, химический состав, структуру. Делают анализ проб масел и рабочих жидкостей. В процессе разборки и сборки машин оценивают ремонтопригодность конструкции по удобству и трудоемкости разборочно-сборочных работ.
Таким образом, испытания гусеничных машин практически охватывают весь комплекс вопросов, прямо или косвенно относящихся к использованию машин по назначению, они позволяют всесторонне оценить эксплуатационные свойства и потенциальные возможности транспортно-тяговых средств в широком диапазоне применения, а также выявить в короткие сроки имеющиеся несоответствия конструкции требованиям эксплуатации и обосновать рекомендации по дальнейшему совершенствованию параметров гусеничных машин.
7- ОЦЕНКА НАДЕЖНОСТИ
Для гусеничных транспортно-тяговых машин, работающих в тяжелых дорожных условиях и часто при экстремальных параметрах окружающей среды, надежность приобретает особое значение. Применительно к рассматриваемым машинам надежность можно характеризовать как способность машин выполнять функции по основному назначению в установленных условиях использования, сохраняя в заданном интервале времени или пробега заданные значения эксплуатационных показателей.
Согласно ГОСТ 13377—75 надежность объектов является комплексным свойством, которое в зависимости от назначения и условий эксплуатации может включать безотказность, долговечность, ремонтопригодность и сохраняемость в отдельности или определенное сочетание этих свойств. Для гусеничных машин главным свойством, проявляющимся в эксплуатации, является безотказность.
Необходимо различать два существенных момента при оценке уровня надежности машины по безотказности. Статистический материал, получаемый по результатам испытаний или эксплуатации образцов (серийного производства или опытных), позволяет количественными показателями оценить надежность именно этих конкретных образцов. Достоверность этой оценки не вызывает сомнений, поскольку в основе ее лежат события (отказы), имевшие место в действительности. По полученным на основании обследования нескольких конкретных образцов статистическим показателям можно оценить надежность в принципе данной модели машины, т. е. прогнозировать надежность образцов, которые еще не испытывались (не эксплуатировались). Эта оценка будет уже вероятностной. Степень ее достоверности и приближения к истинной зависит к’ак от стабильности условий производства и эксплуатации, так и от характера распределения отказов и специально выбираемого для математического описания этого распределения закона.
Все отказы гусеничных машин классифицируют по четырем признакам: причине возникновения; характеру проявления; степени влияния на работоспособность машины; сложности устранения.
Отказы по первому признаку подразделяют на две группы — конструктивно-производственные и эксплуатационные.
К конструктивно-производственным относят отказы, обусловленные несовершенством конструкции и технологии производства или нарушением этих двух факторов (отступление от утвержденной конструкторской и технологической документации); к эксплуатационным — отказы, вызванные нарушением правил эксплуатации и внешними воздействиями, не свойственными нормальной эксплуатации.
При оценке надежности конструкции машины учитывают только конструктивно-производственные отказы, при прогнозировании 339
надежности в целях определения вероятных возможностей машины по выполнению тех или иных задач — конструктивно-производственные и эксплуатационные.
По характеру проявления отказы бывают внезапными и постепенными.
Внезапные отказы возникают в результате случайных причин, не повторяющихся в разных машинах одной и той же модели. Эти отказы — результат скрытых дефектов или неожиданных перегрузок, они проявляются без видимых признаков приближения. К внезапным отказам относят поломки, разрывы и т. п.
Постепенные отказы возникают вследствие закономерных изменений свойств деталей и машины в целом и систематически повторяются в машинах одной и той же модели. Постепенные отказы обусловливаются изнашиванием трущихся поверхностей, накоплением усталостных повреждений в деталях, ослаблением крепления и нарушением взаимного расположения деталей и агрегатов, изменением регулировок, засорением различных систем, старением конструктивных и эксплуатационных материалов. Постепенные отказы появляются в результате плавного изменения характеристик, их возникновение, хотя и случайное, не является неожиданным.
40. Типичные отказы деталей гусеничных машин
Отказ
Детали (узлы)
внезапный
постепенный
Валы, оси
Шестерни
Фрикционные муфты
Резьбовые соединения
Гусеничные цепи
Несущие элементы
Разрушение, изгиб
Выкрашивание и поломка зубьев, задир, заклинивание передачи
Выкрашивание фрикционных накладок, разрушение дисков Срыв резьбы, обрыв шпилек и болтов
Поломка траков и пальцев
Трещины, изгиб
Изнашивание посадочных мест под подшипники, изнашивание шлицевых соединений, смятие контактирующих поверхностей
Усталостные разрушения поверхности зубьев, смятие
Изнашивание фрикционных дисков, коробление
Ослабление затяжки и крепления
Изнашивание пальцев и проушин, изнашивание цевок
Смятие посадочных мест, деформация
В табл. 40 приведены наиболее типичные отказы деталей гусеничных машин в зависимости от характера их проявления. 340
®тказы в процессе эксплуатации имеют разнообразный характер. Классифицировать их по детализированным признакам затруднительно, однако можно отметить, что значительную долю отказов из общего числа составляют конструктивно-производственные, вызываемые коррозией и старением. С течением времени доля этих отказов постепенно возрастает, что видно из табл. 41.
41. Отказы гусеничных тягачей в зависимости от срока службы
Срок службы, лет
Показатель
9—10 II—12 13—14
15 и более
Общее число неисправностей одной машины ... ........
В том числе от коррозии и старения ..........................
Число отказов от старения и коррозии в % от всех неисправностей .........................
9,0
10 15
л
По степени влияния на работоспособность машины отказы делят на полные и частичные.
К полным относят такие отказы, без устранения которых дальнейшее использование машины по назначению невозможно или недопустимо из-за ограничений, накладываемых техническими условиями или требованиями техники безопасности (безопасности движения). При полном отказе машину восстанавливают на месте выхода из строя или буксируют в парк для устранения отказа соответствующими ремонтными средствами. Примерами таких отказов являются выплавление подшипников коленчатого вала двигателя, разрыв трубопроводов смазочной системы, выход из строя тормозной системы, разрыв гусеничной цепи, повышение температуры масла в трансмиссии сверх установленной нормативами.
К частичным относят отказы, которые допускают использование машины по назначению в течение некоторого времени (до возвращения в парк или выполнения задачи дня), но с частичным ухудшением эксплуатационных показателей: снижением скорости движения, уменьшением грузоподъемности, ухудшением плавности хода, повышением расхода топлива, затруднением поворота машины. В качестве примеров таких отказов могут служить нарушение работы системы питания двигателя, течи сальниковых уплотнений, нарушение регулировок приводов управления, выкрашивание резинового бандажа опорного катка, проскакивание гусеничного зацепления и другие подобные отклонения технического состояния машины от нормального. Однако при этом необходимо иметь в виду, что отклонения технического состояния
ст установленных норм, при которых не снижаются эксплуатационные показатели машины, не ухудшаются условия работы водителя и устранение которых может быть отложено до очередного планового технического обслуживания, не являются частичными отказами.
Основными оценочными показателями безотказности гусеничных машин являются средняя наработка на полный и частичный отказы, параметр потока отказов, средняя трудоемкость устранения отказов, коэффициент технического использования машины и средняя трудоемкость текущего ремонта по устранению отказов и неисправностей за 1000 км пробега.
Среднюю наработку на отказ (км) определяют по выражению
"о п
где No — число машин, по которым производят оценку; Sf/- — пробег /-й машины между f-ми отказами, км; п — число отказов.
Следовательно, средняя наработка на отказ есть частное от деления суммарного пробега всех машин на общее число отказов по этим машинам. При определении наработки на полный отказ учитывают только полные отказы, при наработке на частичный — все отказы.
Иногда вместо наработки на отказ в километрах пути исполь-
зуют наработку во времени:
п
где fcp — среднее время наработки на отказ; — время 1-го промежутка работы / й машины.
Следует иметь в виду, что наработка на отказ как статистическая характеристика более полно соответствует невосстанавли-ваемым изделиям, т. е. таким, которые допускают однократное появление того или иного дефекта. Гусеничные машины относятся к восстанавливаемым изделиям, для них большую достоверность оценки дает параметр потока отказов. Однако вследствие простоты определения и наглядности оценка безотказности по средней наработке на отказ широко используется в практике.
Параметр потока отказов представляет собой среднее число отказов за определенный интервал наработки
<o(S) =
"о "о
£ (S + AS) - £ т, (S)
1 1
где nij — число выявленных отказов на /-й машине;
"о
ш.- (S ~|~ 1
+ AS) — число отказов, выявленных на машинах за пробег
“о
(S + AS); /Пу(5) — число всех отказов за пробег S; AS — интервал пробега, в котором производится оценка безотказности.
Если параметр потока отказов рассчитывают за весь пробег с момента начала эксплуатации, то выражение для его определения имеет вид
<0 (S) = X mj (5)/(ВД.
Параметр потока отказов и наработка на отказ связаны зависимостью
r-N
Среднюю продолжительность устранения отказов находят как частное от деления общего времени, затраченного на восстановление машины, на число отказов.
В качестве дополнительного показателя безотказности работы машины иногда применяют коэффициент технического использования
где 2 /э, 2 ^т.о’ 2 — время нахождения машины соответ-
ственно в эксплуатации, техническом обслуживании и ремонте.
Показатели безотказности, определяемые для данной машины, сопоставляют с аналогичными показателями других машин или с нормативными и на основании этого оценивают надежность.
Прогнозирование^надежности, как уже отмечалось, может быть сделано только на основе вероятностного подхода. При этом необходимо выбрать закон распределения отказов как случайных явлений, наиболее близко совпадающий с действительным распределением. Выбор закона распределения для расчета вероятности безотказной работы встречает определенные трудности, вызванные тем, что истинный характер распределения отказов различных машин и даже агрегатов в одной машине различный. Более того, по мере эксплуатации одной и той же машины могут проявляться несколько законов распределения отказов.
В практике наибольшее распространение получили следующие распределения: экспоненциальное, нормальное, Вейбулла и лога-рифмически-нормальное. Основными характеристиками случайных величин и законов их распределения являются математическое ожидание и дисперсия (среднее квадратическое отклонение).
343*
Математическим ожиданием оценивают среднее положение случайной величины (например, количества отказов или наработки на отказ):
п
где Si — значение случайной величины; pt — вероятность возникновения этой величины.
Дисперсия характеризует рассеяние случайных событий, т. е. отклонение значений от среднего (от математического ожидания).
Для дискретных величин дисперсия
п
В практических расчетах часто используют среднее квадратическое отклонение
а — Ъ — *$ср)2 Pi .
Отношение среднего квадратического отклонения к математическому ожиданию представляет коэффициент вариации
v = o/Scp.
По коэффициенту вариации можно судить о законе распределения, который имеет данная случайная величина. Если знать среднюю наработку на отказ Scp и среднее квадратическое отклонение наработки на отказ oScp (по предыдущим испытаниям), то по коэффициенту вариации можно определить закон распределения отказов (или наработки) данной машины. Используя известные для этого закона выражения по определению плотности вероятности величин, можно вычислить вероятность безотказной работы
42. Показатели надежности для основных законов распределения
Закон распределения
Плотность вероятности распределения f (S)
Вероятность безотказной работы р (S)
Интенсивность отказов % (S)
Экспоненциальный
Вейбулла
Нормальный и логарифмиче-ски-нормаль-ный
X (5) е (S) s
fe(S)6-1 cfi
FO(S)
e- % (S) S
e-(S/a)6
1 -HF0(S)dS
0
X(S)
Fo (S) о
Примечания: a, b — параметры распределения Вейбулла; Fo (S) — интегральная функция распределения вероятности.
машины. В табл. 42 приведены выражения для определения вероятности безотказной работы применительно к часто встречающимся законам распределения отказов гусеничных машин.
Интенсивность отказов определяют по формуле
« Q _ n (S) - n (S + A<S)
Д5п(5) ’
где п (S) и п (S + AS) — число машин, оставшихся работоспособными за пробег соответственно S и S + AS.
Более точно соответствие принятого (теоретического) закона распределения экспериментальному при достаточно большом объеме выборки данных (результатов наблюдений) оценивается по критериям Пирсона %2 и Колмогорова X.
В последние годы для оценки машин различного типа и назначения, в том числе и гусеничных, все шире применяют методы форсированных (ускоренных) испытаний. В связи с этим встает вопрос об оценке фактической надежности машин, соответствующей условиям эксплуатации, по показателям надежности, получаемым в процессе форсированных испытаний. Многочисленными экспериментами установлено, что долговечность Деталей при циклическом нагружении практически не зависит от продолжительности интервалов между циклами нагружения, а определяется числом циклов одинаковой нагрузки. Уплотнение времени нагружения машины (уменьшение интервалов между циклами) с одновременным увеличением уровня напряжений в деталях позволяет форсировать испытания машин.
Из теории усталостной прочности известно, что связь между числом циклов нагружения и амплитудой напряжений определяется выражением
1\'ст = А
где о — амплитуда циклического напряжения; т — показатель степени, определяемый свойствами материала детали; А — постоянное для данного материала число; N — число циклов.
Если в процессе эксплуатации на каком-то гм режиме движения деталь нагружается до напряжений аЭ1-, а при форсированных испытаниях до напряжений 0ф£-, то, используя предыдущую зависимость, можно записать
Э£ Э1 фг .
откуда
где N3i и — число эквивалентных циклов нагружения при напряжениях соответственно оЭ£- и Оф?-, т. е. такое число циклов, которое вызывает одинаковые последствия, одинаковые усталостные накопления.
34Б*
От числа циклов можно перейти к протяженности испытательных и эксплуатационных маршрутов движения. Для этого необходимо знать число воздействий различного уровня напряжений на деталь при движении машины в реальных дорожных условиях n3i (на 1 км пути) и при движении по участку с повышенным нагружением нф/ (участку, на котором проводят форсированные испытания).
Тогда для сопоставляемых участков и режимов можно записать
Sq .а™ = S. п. .а™, Э1 3t фг фг фр
где S3i и 5ф/ — протяженность эквивалентных участков соответственно реального эксплуатационного и форсированного.
Число циклов различного уровня n3i и нф/ на мерных участках определяют экспериментально записью нагрузок или перемещений во всех характерных точках машины.
Поскольку при движении как в реальных дорожных условиях, так и на специально создаваемых испытательных трассах в деталях возникают напряжения различного уровня, то практически приходится иметь дело не с одним каким-то фиксированным значением напряжения для данного дорожного участка, а с их суммой, т. е. имеет место равенство
/ /
Zj I = ^фг Zj I Пф/ОфД/ ’
1 1
в котором напряжения и число циклов суммируют по /-му уровню.
Отсюда пробег S3i машины в реальных дорожных условиях, определяемый по эквивалентному пробегу 5ф/, выполненному в процессе форсированных испытаний, при условии накопления одинаковых усталостных повреждений будет
О 31
или
где Кэ!- — коэффициент эквивалентности пробегов.
Пробеговые испытания, как это было рассмотрено раньше, проводят в разных дорожных условиях при существенно различных режимах нагружения. Как правило, на разных по воздействию участках проводят и форсированные испытания. Поэтому чтобы сопоставить деталь по одинаковому накоплению усталостных повреждений за весь эксплуатационный пробег S3 и за весь эквивалентный пробег при форсированных испытаниях 5Ф, необходимо учитывать суммарное число циклов за весь испытуемый 346
период. В этом случае выражение эквивалентности пробегов имеет вид
Отсюда общий эквивалентный эксплуатационный пробег
S9 = К8ф.
Обычно находят эквиваленты для каждого типа дорожных условий и для типов участков форсированного нагружения. Общий пробег при этом определяется суммой
Таким образом, определяя наработку на отказ в условиях форсированных испытаний и зная коэффициенты эквивалентности пробегов, можно найти ожидаемую наработку на отказ в действительных условиях эксплуатации. Поскольку при форсированных режимах испытаний обеспечивается значительное сокращение времени, можно при тех же затратах труда и времени получить более полную информацию о долговечности машины и тем самым дать более объективную и достоверную оценку надежности.
Однако необходимо отметить, что данный метод оценки долговечности гусеничных машин сопряжен с определенными трудностями. Для разных агрегатов на одном и том же участке форсированного нагружения коэффициенты эквивалентности пробега различные. Например, на крупнобулыжном участке в большей степени нагружаются, по сравнению с обычными условиями* агрегаты ходовой части и корпуса, но весьма незначительно — двигателя и трансмиссии. Здесь коэффициенты эквивалентности пробегов для агрегатов ходовой части и корпуса будут больше* чем для двигателя и агрегатов трансмиссии. На участках со специальными клиновыми холмами сильнее нагружаются агрегаты трансмиссии, чем ходовой части, в этом случае коэффициенты эквивалентности будут больше для агрегатов трансмиссии и меньше для ходовой части.
Чтобы получить максимальное соответствие (по характеру дефектов и количественным показателям надежности) результатов пробеговых испытаний в реальных условиях эксплуатации и форсированных испытаний, необходимо на трассе для форсированных испытаний предусмотреть набор таких испытательных участков, при которых обеспечиваются одинаковые коэффициенты эквивалентности пробегов для всех основных агрегатов. В этом случае будет справедливо соотношение Хэ = /Сэ8ф.
Вопросам надежности машин в последнее время уделяется все большее внимание. При этом наряду с реализацией соответ-347
ствующих мер в производстве при практическом использовании гусеничных машин все чаще начинают планировать транспортные операции с учетом вероятности их безотказной работы по приведенным выше зависимостям. Это позволяет не только с большей достоверностью определять возможности каждой машины и парка машин в целом при выполнении планируемого задания, но также оценить степень загрузки средств технического обслуживания и ремонта, более обоснованно спланировать расход запасных частей. Безусловно, все это способствует дальнейшему росту эффективности использования гусеничных транспортно-тяговых машин в народном хозяйстве и расширению сферы их применения.
СПИСОК ЛИТЕРАТУРЫ
1. Агейкин Я. С. Вездеходные колесные и комбинированные движители. М. «Машиностроение», 1972. 184 с.
2. Балаболкин Р. К-, Купцов В. М. Эксплуатация автомобилей и гусеничных транспортеров. М., «Транспорт», 1975. 96 с.
3. Барский И. Б. Конструирование и расчет тракторов. М., Машгиз, 1962-376 с.
4. Беккер М. Г. Введение в теорию систем местность—машина. Пер. с англ. Под ред. В. В. Гуськова. М., «Машиностроение», 1973. 520 с.
5. Вопросы развития автомобильного транспорта. Под. ред. Д. П. Велика» нова, М., «Транспорт», 1971. 192 с.
6. Забавников Н. А. Основы теории транспортных гусеничных машин. М.. «Машиностроение», 1968. 448 с.
7. Львов Е. Д. Теория трактора. М., Машгиз, 1960. 252 с.
8. Платонов В. Ф. Динамика и надежность гусеничного движителя. М., «Машиностроение», 1973. 232 с.
ОГЛАВЛЕНИЕ
Введение .
Глава I. Некоторые вопросы теории гусеничных транспортеров-тягачей
1. Особенности взаимодействия гусеничного движителя с грунтом
2. Давление под опорной ветвью гусеничного обвода...............
3. Сила тяги, развиваемая гусеничным движителем.................
4. Влияние предварительного статического натяжения в обводе на
эксплуатационные качества машины............................
5. Зацепление гусениц с ведущими колесами......................
6. Потери мощности в гусеничном движителе......................
7. Особенности поворота гусеничной машины......................
8. Плавность хода гусеничных транспортеров-тягачей.............
5
5
13
25
32
36
54
62
74
5. Результаты экспериментальных исследований уравновешенных несимметричных звеньев....................................... 272
6. Эксплуатационные качества машин с несимметричными гусеницами 280
Глава VI. Особенности эксплуатации, технического обслуживания и испытаний транспортных гусеничных машин....................... 288
1. Общие рекомендации по эксплуатации....................... 288
2. Техническое обслуживание гусеничных машин ................. 295
3. Регулировка приводов управления трансмиссией транспортера-тягача МТ-Л ................................................. 300
4. Основные работы по обслуживанию ходовой части и лебедки транспортера-тягача МТ-Л ......................................... 308
5. Рекомендации ‘ по восстановлению деталей корпуса и кабины ... 314
6. Экспериментальное определение основных эксплуатационных свойств транспортно-тяговых машин............................ 317
7. Оценка надежности........................................ 339
Список литературы............................................... 349
Глава II. Конструкции быстроходных гусеничных тягачей и транспортеров ............................................................ 90
1. Первые гусеничные тягачи...................................... 92
2. Быстроходные гусеничные тягачи................................ 94
3. Гусеничные транспортеры-снегоболотоходы...................... 119
4. Гусеничные транспортеры-тягачи............................... 133
Глава III. Основные конструктивные особенности легких транспортеров-тягачей ..................................................... 139
1. Основные параметры. Общая компоновка........................ 139
2. Конструкция корпуса и кабины ............................... 143
3. Системы обслуживания двигателя.............................. 146
4. Трансмиссия ................................................ 157
5. Ходовая часть............................................... 179
6. Устройства, обеспечивающие выполнение тягово-транспортных функций транспортера-тягача.................................... 191
Глава IV. Надежность гусеничного движителя......................... 201
1. Факторы, определяющие надежность работы движителя.......... 201
2. Способы повышения долговечности гусениц с открытыми шарнирами 206
3. Гусеницы с резинометаллическими шарнирами................... 212
4. Гусеницы с закрытыми шарнирами.............................. 223
5. Работоспособность гусениц с закрытыми моноблочными шарнирами 238
Глава V. Несимметричные уравновешенные гусеницы снегоболотоходных машин....................................................... 245
1. Конструктивные и эксплуатационные особенности гусениц снегоболотоходных машин........................................... 245
2. Обоснование возможности создания несимметричных уравновешенных гусениц.................................................... 254
3. Факторы, влияющие на перекос несимметричного звена .... 258
4. Выбор основных параметров несимметричной гусеницы.......... 264
350
ИБ № 1138
Владимир Федорович Платонов, Анатолий Фролович Белоусов, Николай Георгиевич Олейников, Геннадий Иванович Карцев
ГУСЕНИЧНЫЕ ТРАНСПОРТЕРЫ-ТЯГАЧИ
Редактор М. Н. Журавлева
Технический редактор Я. Ф. Демкина
Корректоры В, А. Воробьева и Ж. Л. Суходолова
Переплет художника Е. Г. Шубенцова
Сдано в набор 23.03.77 Подписано в печать 25.11.77
Т-15361 Формат бОХЭО1/». Бумага типографская № 1
Литературная гарнитура - Печать высокая
Усл. печ. л. 22 Уч.-изд. л. 23,55 Тираж 7000 экз.
Заказ 76 Цена 1 р. 60 к.
Издательство «Машиностроение»,
107885, Москва, Б-78, 1-й Басманный пер., дом 3.
Ленинградская типография № 6 Союзполиграфпрома при Государственном комитете Совета Министров СССР по делам издательств, полиграфии и книжной торговли. 193144, Ленинград, С-144, ул. Моисеенко, 10