
































































































































































































































































































































































































































































































































































































Similar




Text
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ,
МОЛОДЕЖИ И СПОРТА УКРАИНЫ
Институт инновационных технологий и содержания образования
Национальный аэрокосмический университет им. Н.Е. Жуковского
«Харьковский авиационный институт»
Научно-производственное предприятие «Хартрон-Аркос»
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
Том 1
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
РАКЕТ-НОСИТЕЛЕЙ
Учебник
Утверждено Министерством образования и науки,
молодежи и спорта Украины в качестве учебника
для студентов высших учебных заведений,
обучающихся по направлению «Авионика»
Харьков «ХАИ» 2012
УДК 629.7.05.01:004.9(075.8)
П79
Розглянуто етапи проектування систем управлшня (СУ) ракет-носнв косм!чного
призначення (РКП). Описано динам!чн1 властивосй РПК як об'скта управлшня, а також методи
проектування бортових цифрових обчислювальних машин, особливосй командно-
вим!рювальних прилад!в, узгоджувальних пристроТв, що входять до складу системи
управлшня. Основну увагу придшено розробленню таких пщсистем СУ, як навшацтя,
наведения, стабипзац!я, безпека польоту та проектування бортсвоТ апаратури.
Для докторанпв, асшранйв, MaricTpie i студентлв, що навчаються за напрямом
"Авюника”.
Авторский коллектив: Ю.С. Алексеев, Ю.Е. Балабей, Г.А. Барышникова, В.А. Батюк,
А.А. Батюченко, В.Д. Безус, В.И. Богданов, А.М. Быков, С.И. Галас, АН. Генрихов,
Н.А. Голинка, А.Н. Дихтярь, И.С. Дорош, С.Г. Дручинина, Т.П. Евреинова, М.П. Евтефеев,
В.И. Емельянов, З.Д. Ефремова, Я.Б. Зайченко, Ю.М. Златкин, О.Ю. Златкин, В.Г. Игнатьев,
В.П. Каменев, Л.И. Карпеко, А.Ф. Кириченко, И.Е. Коломейцев, В.П. Кошель, С.С. Корума,
М.Е. Костенко, В.С. Кривцов, Ю.А. Кузнецов, Г.А. Кузьмин, А.С. Кулик, О.А. Лабазов,
О.А. Лученко, А.Е. Лукьянович, А.И. Мальцев, М.З. Марголин, А.А. Мартынюк,
Н.Ф. Меховской, Т.Г. Молчанова, К.В. Немов, В.И. Новожилова, С.В. Олейник,
В.М. Остапенко, И.Т. Постолов, Д.В. Подойницын, П.Л. Рычко, А.П. Скибин, В.М. Тиховский,
В.И. Чумаченко, А.В. Чумаченко, А.В. Шуляк, А.И. Царан, Ю.Б. Юрченко, В.Ю. Ярошенко
Под общей редакцией Ю.С. Атексеева, Ю.М. Златкина, В.С. Кривцова, А.С Кулика,
В.И. Чумаченко
Рецензенты: д-р техн, наук, проф. В.М. Свищ,
д-р техн, наук, проф. А.В. Збруцкий,
д-р техн, наук, проф. А.Н. Петренко
П79 Проектирование систем управления объектов ракегно-космической техники. Т. 1.
Проектирование систем управления ракет-носителей [Текст]: Учебник I Ю.С. Алексеев,
Ю.Е. Балабей, Т.А. Барышникова и др.; под общей ред. Ю.С. Алексеева, Ю.М. Златкина,
В.С. Кривцова, А.С. Кулика, В.И. Чумаченко. - X.: Нац. аэрокосм, ун-т им. Н.Е. Жуковского
«Харьк. авиац. ин-т», НИИ «Хартрон-Аркос», 2012. - 578 с.
ISBN 978-966-662-2-2672
Рассмотрены этапы проектирования систем управления (СУ) ракет-носителей
космического назначения (РКН). Описаны динамические свойства РКН как объекта
управления, а также методы проектирования бортовых цифровых вычислительных машин,
особенности командно-измерительных приборов, согласующих устройств, входящих в состав
системы управления. Основное внимание уделено разработке таких подсистем СУ, как
навигация, наведение, стабилизация, безопасность полета и проектирование бортовой
аппаратуры.
Для докторантов, аспирантов и студентов, обучающихся по направлению "Авионика”.
Ил. 289. Табл. 31. Библиогр.: 135 назв.
УДК 629.7.05.01:004.9(075.8)
Гриф присвоен Министерством образования и науки, молодежи и спорта Украины
(письмо № 1/11-18660 от 03.12.12 г.)
ISBN 978-966-662-2-2672
© Авторский коллектив, 2012
© Национальный аэрокосмический университет
им. Н.Е. Жуковского «Харьковский авиационный
институт'», НПП «Хартрон-Аркос», 2012.
ПРЕДИСЛОВИЕ
Издание учебника «Проектирование систем управления объектов ракетно-
космической техники» в трех томах вызвано, с одной стороны, отсутствием на
территории стран бывшего Советского Союза литературы, связанной с этим
научно-техническим направлением, а с другой, - проблемой естественного и все
более стремительного сокращения количества опытных специалистов в указанной
области и, как следствие, необходимостью своевременной передачи знаний
молодому поколению разработчиков.
Значительный исторический путь, пройденный предприятиями ракетно-
космической отрасли Украины по созданию систем управления (СУ) ракет-но-
сителей (PH) и различных космических аппаратов (КА), а также знания, накоп-
ленные многими поколениями сотрудников КБ «Электроприборостроения», НПП
“Хартрон-Аркос” и кафедры СУ летательных аппаратов Национального аэ-
рокосмического университета им. Н.Е. Жуковского «Харьковский авиационный
институт», под руководством Государственного космического агентства Украины
привели к возможности издания настоящего учебника.
В учебнике представлены все фазы разработки СУ с учетом технологии ее
создания от выдачи технического задания и исходных данных на проектирование до
разработки программно-алгоритмического обеспечения, аппаратуры бортовой и
наземной СУ, экспериментальной отработки этих систем в целом с учетом всех видов
испытаний, включая летно-конструкторские.
Корректность представленных материалов подтверждена многолетним
положительным опытом НПП “Хартрон-Аркос” по созданию СУ различных
объектов ракетно-космической техники, а именно:
- нескольких поколений баллистических ракет;
- трех поколений PH (8 типов, включая PH «Энергия»);
- конверсионных ракет «Днепр», «Рокот», «Стрела» и их модификаций;
- десяти типов КА, в том числе «Egyptsat-1», «Сич-1», «Сич-2»;
- модулей станций «Салют», «Мир» и «Альфа»;
- систем стыковки модулей, входящих в состав станций.
В настоящее время в Ш111 “Хартрон-Аркос” ведется полномасштабная
разработка СУ PH «Циклон-4», создаваемой по межгосударственному
соглашению между Украиной и Бразилией. Ведутся работы с институтами и
фирмами России, США, КНР, Египта и других стран.
Как следует из представленных материалов, при создании СУ объектов
ракетно-космической техники используются современные научно-технические
разработки, обеспечивается высокое качество и надежность, при этом
полученные тактико-технические и экономические показатели находятся на
уровне лучших мировых образцов.
Авторы книги старались в полном объеме изложить накопленные знания в
области разработки СУ PH и КА, надеясь, что они будут использованы в целях
укрепления позиций Украины как космической державы.
Председатель ГКА Украины / // / Ю.С. Алексеев
з -Г
ОГЛАВЛЕНИЕ
Список сокращений......’.............................................12
Введение.............................................................17
1 ТЗ на разработку СУ PH. Назначение и основные требования к СУ.....19
1.1 Тактико-технические требования...................................19
1.1.1 Состав СУ PH...................................................19
1.1.2 Общие требования к СУ PH.......................................19
1.1.3 Требования к бортовой аппаратуре СУ............................20
1.1.4 Требования к наземной аппаратуре СУ............................20
1.1.5 Требования к взаимодействию со смежными системами..............21
1.2 Требования к эксплуатации........................................22
1.3 Конструктивные требования........................................22
1.4 Требования к видам обеспечения...................................23
1.4.1 Требования к метрологическому обеспечению......................23
1.4.2 Требования к программно-математическому обеспечению............24
1.5 Дополнительные требования........................................24
1.5.1 Требования к живучести и стойкости к внешним воздействиям......24
1.5.2 Требования к радиоэлектронной защите...........................24
1.5.3 Требования к безопасности......................................25
1.5.4 Требования к транспортабельности...............................25
1.5.5 Требования к надёжности........................................25
1.5.6 Требования к технологичности...................................26
1.5.7 Требования к стандартизации и унификации.......................26
1.5.8 Требования к эргономике и технической эстетике.................26
1.5.9 Требования к патентной чистоте и патентоспособности............26
2 Исходные данные о PH для проектирования системы управления........27
2.1 Основные характеристики PH.......................................27
2.1.1 Компоновочная схема............................................27
2.1.2 Силы и моменты, действующие на PH в полете.....................27
2.1.3 Возмущения, действующие на PH в полете.........................32
2.1.4 Массово-инерционные и центровочные характеристики..............34
2.1.5 Аэродинамические характеристики................................34
2.1.6 Основные характеристики маршевых двигателей....................39
2.1.7 Основные характеристики рулевых двигателей.....................43
2.1.8 Основные характеристики ДМТ и их математические модели.........43
2.1.9 Баллистические характеристики..................................46
2.1.9.1 Характеристики атмосферы.....................................46
2.1.9.2 Модель гравитации............................................46
2.1.9.3 Модель фигуры Земли..........................................47
2.1.9.4 Системы координат......................................... 47
2.1.9.4.1 Определение систем координат...............................47
2.1.9.4.2 Относительная ориентация систем координат..................49
2.1.9.5 Характеристики точки старта..................................52
4
2.1.9.6 Схема полета PH..............................................53
2.1.9.7 Траектории выведения........................................ 53
2.1.10 ИД по элементам автоматики и пироэлементам PH.................55
2.1.11 Основные характеристики и математические модели датчиков и приводов
СУРТ.................................................................57
2.1.12 Изменение уровней компонентов топлива в полете................62
2.1.13 Основные характеристики и математические модели датчиков и приводов
СПД..................................................................63
2.1.14 Основные характеристики и математические модели рулевых приводов ..67
2.1.15 Циклограмма выдачи команд при пуске и полете РКН..............73
2.1.16 Общие уравнения движения PH...................................75
2.1.17 Линеаризация общих уравнений движения.........................78
2.1.18 Уравнения возмущенного движения PH с учётом колебаний жидкости
в топливных баках и упругих колебаний корпуса PH................... 81
2.1.18.1 Список условных обозначений.................................81
2.1.18.2 Уравнения возмущённого движения PH как абсолютно жесткого
твёрдого тела........................................................84
2.1.18.3 Уравнения возмущённого движения PH с учётом колебаний жидкости в
топливных баках......................................................86
2.1.18.4 Уравнения возмущённого движения PH с учётом упругих колебаний её
корпуса..............................................................91
2.1.18.5 Уравнения возмущённого движения PH с учётом взаимного влияния
колебаний жидкости в топливных баках и упругих колебаний корпуса PH..92
2.1.18.6 Особенности динамической схемы космических ступеней PH......94
2.1.19 Динамические характеристики изгибных колебаний PH на стартовом столе...96
2.2 ИД по сопряжению СУ и СИ.........................................97
2.3 ИД по системе безопасности полета................................99
Библиографический список.............................................100
3 Анализ ТЗ и ИД в целях выработки технических решений по проектированию
СУ PH...............................................................101
3.1 Анализ ТЗ и ИД..................................................101
3.2 Структурная схема СУ............................................104
3.3 Приборный состав СУ.............................................113
3.4 Требования к командно-измерительным приборам СУ.................115
3.4.1 ККП на базе гиростабилизатора..................................115
3.4.1.1 Основные свойства гироскопов.................................115
3.4.1.2 Назначение и технические требования.........................116
3.4.1.3 Состав и конструкция прибора................................117
3.4.1.4 Конструкция гиростабилизатора................................119
3.4.1.5 Технические характеристики гиростабилизатора.................120
3.4.1.6 Обмен информацией между гиростабилизатором и БЦВМ....‘.... 123
3.4.1.7 Условия эксплуатации гиростабилизатора................... 123
3.4.2 Блок датчиков угловых скоростей...............................125
3.4.2.1 Назначение БДУС.................................’...........126
5
3.4.2.2 Основные требования к БДУС.................................126
3.4.2.3 Технические характеристики и условия эксплуатации..........130
3.4.2.4 Первичное и вторичное электропитание.......................132
3.4.3 Комплекс командных приборов бесплатформенной инерциальной
навигационной системы..............................................132
3.4.3.1 Бесплатформенная инерциальная навигационная система........132
3.4.3.2 Технические характеристики ККП.............................134
3.4.3.2.1 Назначение...............................................134
3.4.3.2.2 Состав ККП и назначение основных его структурных единиц...134
3.4.3.2.3 Кинематические характеристики............................137
3.4.3.2.4 Точностные характеристики................................138
3.4.3.2.5 Основные технические характеристики......................139
3.4.3.3 Условия эксплуатации ККП...................................140
3.4.4Аппаратура потребителя информации от спутниковых навигационных
систем (АП СНС)....................................................142
3.4.4.1 Назначение АП СНС........................................ 142
3.4.4.2 Состав и принципы работы АП СНС.......................... 142
3.4.4.3 Точность измерения и технические характеристики АП СНС.....144
3.4.4.4 Взаимодействие АП СНС с аппаратурой системы управления РКН..146
3.4.4.5 Условия эксплуатации АП СНС................................147
3.4.4.6 Специальные условия........................................148
3.4.4.7 Конструкция АП СНС.........................................149
4 Проектирование подсистем СУ.....................................150
4.1 Система навигации..............................................150
4.1.1 Требования к системе навигации...............................150
4.1.2 Функциональная схема системы навигации.......................151
4.1.3 Синтез алгоритмов системы навигации..........................152
4.1.3.1 Модель гравитационного потенциала Земли....................152
4.1.3,2 Алгоритмы вычисления составляющих вектора скорости и координат PH. 158
4.1.3.3 Вычисление кватерниона ориентации PH.......................162
4.1.3.4 Вычисление проекций вектора кажущегося ускорения и интегралов
от проекций кажущегося ускорения на оси связанной СК PH............162
4.1.4 Моделирование алгоритмов системы инерциальной навигации......163
4.1.5 Анализ инструментальной погрешности..........................169
4.1.5.1 Описание основных систем координат.........................169
4.1.5.2 Математическая модель погрешностей БИНС....................171
4.1.5.3 Математическая модель погрешностей ИНС.....................178
4.1.5.4 Результаты моделирования погрешности ИНС...................179
4.1.6 Комплексная обработка информации ИНС и АП СНС................190
4.1.6.1 Математическая модель системы...............................191
4.1.6.2 Упрощение модели ИНС........................................193
4.1.6.3 Уравнения наблюдения по данным АП СНС......................199
4.1.6.4 Алгоритм оценивания погрешностей БИНС......................200
4.1.6.5 Алгоритм коррекции ИНС.....................................205
6
4.1.6.6 Результаты моделирования погрешностей интегрированной
навигационной системы................................................206
4.2 Система наведения.........................‘.....................219
4.2.1 Анализ ТЗ и ИД. Основные технические требования................219
4.2.1.1 Назначение ракеты-носителя...................................219
4.2.1.2 Требования к СУ по точности..................................219
4.2.1.3 Функциональные требования к системе наведения.................219
4.2.1.4 Требования к формированию угловых программ...................220
4.2.2 Функциональная схема системы наведения....................... 221
4.2.3 Синтез алгоритмов системы наведения.......................... 223
4.2.3.1 Функциональное наведение.................................... 223
4.2.3.2 Прямое наведение.............................................229
4.2.3.3 Формирование функциональных команд и меток...................251
4.2.4 Разработка математической модели...............................253
4.2.4.1 Модель PH........................................;...........253
4.2.4.2 Модель окружающей среды......................................256
4.2.4.3 Модель «Привод»..............................................257
4.2.4.4 Модель СУ....................................................257
4.2.4.5 Модель БИНС..................................................257
4.2.4.6 Модель АП СНС................................................257
4.2.5 Моделирование и выбор параметров системы. Анализ методической
погрешности..........................................................258
4.2.6 Совместное моделирование систем навигации, наведения и стабилизации 258
4.3 Система стабилизации......................................... 261
4.3.1 Технические требования к системе стабилизации. Функциональная
схема системы стабилизации...........................................261
4.3.2 Динамическая схема PH как объекта регулирования.............. 262
4.3.2.1 Объект регулирования..........................................262
4.3.2.2 Регулятор..........................:.........................264
4.3.2.3 Устойчивость и управляемость PH...................:..........266
4.3.2.4 Эффективность управляющих органов.......................... 269
4.3.3 Методы анализа и синтеза систем стабилизации...................271
4.3.4 Динамические характеристики PH.................................273
4.3.4.1 Расчетная схема..............................................273
4.3.4.2 Передаточные функции PH и их особенности.....................277
4.3.4.2.1 PH как абсолютно твердое жесткое тело..................... 277
4.3.4.2.2 Динамические характеристики PH с учетом колебаний жидкости в
топливных баках......................................................280
4.3.4.2.3 Динамические характеристики PH с учетом упругих колебаний корпуса.283
4.3.4.3 Построение годографа передаточной функции разомкнутой системы.285
4.3.5 Законы управления.......................................;......289
4.3.6 Синтез параметров системы стабилизации.........................293
4.3.6.1 Критерии устойчивости замкнутой системы ”РН + АС”............293
7
4.3.6.2 Определение требований к частотным характеристикам цифровых
корректирующих фильтров.......................................... 297
4.3.6.3 Синтез цифровых корректирующих алгоритмов...................298
4.3.6.4 Построение областей устойчивости системы стабилизации.......303
4.3.6.5 Проверка работоспособности системы стабилизации. Эксплуатационные
режимы.............................................................309
4.3.7 Моделирование системы стабилизации...........................315
4.3.7.1 Метод цифрового моделирования..............................315
4.3.7.2 Уточнение областей устойчивости с помощью гармонического анализа.316
4.3.7.3 Выбор настроек автомата стабилизации.......................318
4.3.7.4 Исследование вероятности устойчивости спроектированной системы 320
4.3.8 Разгрузка корпуса PH.........................................321
4.3.8.1 Основные задачи разгрузки корпуса РКН.................... 321
4.3.8.2 Законы управления..........................................321
4.3.8.3 Влияние контура разгрузки на устойчивость движения PH......325
4.3.8.4 Моделирование работы системы стабилизации с учетом контура разгрузки 331
4.4 Система успокоения, ориентации и стабилизации.................334
4.4.1 Требования к СУОС. Функциональная схема......................334
4.4.2 Особенности динамической схемы космических ступеней PH на
пассивных участках движения........................................336
4.4.3 Законы управления............................................339
4.4.4 Выбор параметров СУОС........................................347
4.4.5 Моделирование работы СУОС....................................349
4.5 Система поддержания давления в камерах сгорания ДУ.............351
4.5.1 Технические требования, предъявляемые к СПД..................351
4.5.2 Состав и функциональная схема СПД............................351
4.5.3 Логика работы СПД............................................352
4.5.4 Математическая модель СПД....................................353
4.5.5 Моделирование переходных процессов СПД.......................354
4.6 Система управления расходом топлива.............................358
4.6.1 Основные технические требования..............................358
4.6.2 Состав и функциональная схема СУРТ...........................358
4.6.3 Алгоритмы работы СУРТ........................................363
4.6.4 Математическая модель СУРТ...................................367
4.6.5 Моделирование работы СУРТ....................................368
4.7 Система управления элементами автоматики и пироэлементами PH....370
4.7.1 Требования к системе управления элементами автоматики и
пироэлементами PH..................................................370
4.7.2 Проектирование системы управления элементами автоматики и
пироэлементами PH..................................................370
4.7.3 Описание проверок автоматики пиросредств.....................380
4.8 Система электропитания бортовой аппаратуры.....................383
4.8.1 Требования к системе электропитания..........................384
4.8.2 Проектирование системы электропитания........................385
8
4.8.2.1 Токопотребление бортовой аппаратуры........................388
4.8.2.2 Определение требований к бортовой батарее..................390
4.8.2.3 Кабельные линии связи......................................393
4.8.2.4 Архитектура................................................394
4.8.3 Описание проверок системы электропитания бортовой аппаратуры..396
4.8.3.1 Режим «Включение шин +П1, +П2, +ПЗ от НИП».................396
4.8.3.2 Режим «Проверка системы электропитания».....................396
4.8.3.3 Режим «Выключение системы электропитания в случае нештатных
ситуаций»..........................................................397
4.8.3.4 Режим «Контроль исходного состояния элементов памяти СКПП»..397
4.8.3.5 Режим «Выключение электропитания СУ при ДПр»...............398
4.9 Система безопасности полета....................................398
4.10 Система сопряжения бортовой аппаратуры СУ с аппаратурой
космического аппарата..............................................401
4.10.1 Базовые команды.............................................401
4.10.2 Цифровая связь между БЦВМ аппаратуры СУ PH с аппаратурой КА..402
4.10.3 Транзитные цепи связи.......................................402
4.10.4 Режим проверки бортовой аппаратуры, сопрягаемой с космическими
аппаратами.........................................................402
4.11 Начальная выставка ИНС........................................403
4.11.1 Основные задачи начальной выставки..........................403
4.11.2 Начальная выставка ИНС в условиях неподвижного и подвижного
основания..........................................................407
4.11.3. Классификация существующих методов решения задач начальной
выставки...........................................................411
4.11.4 Математическая модель начальной выставки ИНС................417
4.11.5 Особенности начальной выставки бесплатформенных ИНС.........432
4.12 Системы калибровки бортовых гироскопических приборов..........439
4.12.1 Основные положения..........................................440
4.12.2 Модель погрешностей измерения...............................440
4.12.2.1 Маятниковые акселерометры (МА)............................441
4.12.2.2 Гироскопические блоки (ГБ)................................444
4.12.2.3 Датчики системы начальной выставки ГСП....................448
4.12.3 Эталонные воздействия на измерители ГСП.....................449
4.12.4 Особенности реализации СК...................................449
4.12.4.1 Калибровка МА.............................................450
4.12.4.2 Калибровка гироблоков.....................................450
4.12.4.3 Методика использования результатов калибровки.............451
4.12.5 Возможные варианты построения систем калибровок.............453
4.12.5.1 Заводские калибровки ГС...................................453
4.12.5.2 СК для ГС на неподвижном основании........................454
4.12.5.3 СК для ГС на колеблющемся основании.......................455
4.12.5.4 СК для ГС на подвижном основании..........................455
4.12.5.5 СК бесплатформенной инерциальной навигационной системы.....455
9
4.13 Разработка бортового и наземного программного обеспечения.
Сборочная технология проектирования программного обеспечения БЦВМ СУ
и ЦВМ СК. Компоненты поддержки сборочной технологии.................456
4.13.1 Состав программного обеспечения БЦВМ СУ и ЦВМ СК.............456
4.13.2 Назначение сборочной технологии проектирования программного
обеспечения БЦВМ СУ и ЦВМ СК........................................457
4.13.3 Состав и последовательность выполнения этапов сборочной технологии....462
4.13.4 Компоненты поддержки сборочной технологии....................463
4.14 Система телеметрических согласующих устройств.................467
Библиографический список........................................... 471
5 Проектирование бортовой аппаратуры................................476
5.1 Анализ ТЗ и ИД на БАСУ...................................J......476
5.1.1 Обоснование выбора элементной базы............................476
5.1.2 Оценка реализуемости функциональных требований ТЗ.............480
5.1.2.1 Одноканальные структуры с автоматом контроля и восстановления
информации (АКВИ)...................................................481
5.1.2.2 Многоканальные резервированные структуры с холодным и горячим
резервом каналов со встроенным АКВИ.................................482
5.1.2.3 Многоканальные структуры с автоматом межканального обмена,
программного контроля и восстановления информации в каналах (АМКВИ).484
5.1.2.4 Многоканальные структуры с аппаратным мажоритированием
входной и выходной информации каналов (I/O-HIFT)....................489
5.1.2.5 Многоканальные многоярусные структуры с аппаратным
мажоритированием сигналов каждого функционального узла БАСУ (ML-HIFT)...491
5.2 Выбор и обоснование структурной схемы...........................493
5.3 Анализ характеристик надежности трехканальных архитектур резервирования.497
5.4 .Анализ временного взаимодействия каналов для SIFT- и
HIFT- подходов в реализации отказоустойчивости БАСУ.................500
5.5 Структурные элементы бортового компьютера.......................502
5.5.1 Вычислительное ядро...........................................502
5.5.1.1 Структурная модель ядра первого поколения БЦВМ..............502
5.5.1.2 Структурная модель ядра среднего поколения..................504
5.5.1.3 Структурная модель ядра нового поколения....................505
5.5.1.4 Анализ функционирования однокристальных процессоров в
трехканальной структуре.............................................505
5.5.2 Модель интерфейсного взаимодействия БЦВМ с устройствами ввода-вывода508
5.5.3 Модель интерфейсного взаимодействия БЦВМ в системе и
межканально-асинхронной распределенной сетевой структуры БАСУ.......511
5.5.4 Модель БАСУ в технологическом режиме отладки программного
обеспечения.........................................................513
5.6 Построение структуры системы....................................516
5.6.1 Модель смешанной SIFT/HIFT структуры с HIFT реализацией по
выводам БИС.........................................................518
10
5.6.2 Модель аппаратно синхронизированной структуры с HIFT
реализацией по выводам БИС..................................;................. 520
5.7 Проектирование периферийных устройств БЦВМ............................... 521
5.7.1 Согласующее устройство связи по каналу MIL-STD-1553B.....................521
5.7.2 Вынесенное устройство обмена.............................................527
5.7.3 Модули приема (выдачи) релейных команд...................................529
5.7.4 Согласующее устройство СУРТ..............................................531
5.7.4.1УП СУРТ.................................................................531
5.7.4.2 ВИП СУРТ...............................................................535
5.7.5 Согласующее устройство управления исполнительными устройствами...........538
5.7.5.1 СУГП...................................................................538
5.1.52 СУЭК....................................................................547
5.7.6 Устройство контроля автоматики пиросредств...............................552
5.7.7 Блок согласования телеметрического кадра.................................555
5.7.8 Устройство формирования признака отказа БЦВМ.............................558
5.7.9 Устройство формирования сигналов аварийного отделения КА при
отказе БЦВМ....................................................................559
5.7.10 Система вторичного электропитания БЦВМ..................................561
5.7.11 Релейно-коммутационная аппаратура.......................................562
Выводы по разделу...................................................................................................570
Библиографический список.......................................................570
6. Особенности проектирования СУ РКН..........................................576
Послесловие.................................................................. 578
11
СПИСОК СОКРАЩЕНИЙ
ABM - аналоговая вычислительная машина;
АДХ - аэродинамические характеристики;
АИМ - амплитудно-импульсная модуляция;
АК - акселерометр;
АКВИ - автомат контроля и восстановления информации;
АМКВИ - автомат межканального контроля и восстановления информации;
АП СНС - аппаратура потребителя спутниковой навигационной системы;
АПП - аварийное прекращение пуска;
АПС - автоматика пиросредств;
АС - автомат стабилизации;
АФУ - антенно-фидерное устройство;
АФЧХ - амплитудно-фазочастотная характеристика;
АЦК - аналогово-цифровой комплекс;
АЧХ - амплитудно-частотная характеристика;
БАСУ - бортовая аппаратура системы управления;
ББ - бортовая батарея;
БДР - блок дежурного режима;
Б ДУ С - блок ДУС;
БИНС - бесплатформенная инерциальная навигационная система;
БИС - большая интегральная схема;
БКУР - блок контроля и управления реконфигурацией;
БМ - блок механики;
БП - бортовое питание;
Б ПИ - блок преобразования информации;
БРТС - бортовая радиотелеметрическая станция;
БС - боковая скорость;
БСК - базовая система координат;
БСТК - блок согласования телеметрического кадра;
БУГ - блок усилителей гиростабилизатора;
БЦВМ - бортовая цифровая вычислительная машина;
ВБР - вероятность безотказной работы;
ВИП - вторичный источник питания;
ВНС - выставляемая навигационная система;
Г - горючее;
ГБ - гироблок;
ГИ - гироинтегратор;
ГИМ - гидравлический источник мощности;
ГК - главная команда;
ГМХ - габаритно-массовые характеристики;
ГНВП - глобальное навигационно-временное поле;
ГО - головная организация;
ГО - головной обтекатель (по тексту);
12
ГС - гиростабилизатор;
ГСК - гироскопическая система координат;
ГСП — гиростабилизированная платформа;
ГУ - гидроусилитель;
ДАФЧХ - дискретная АФЧХ;
дд - датчик давления;
дис - доплеровский измеритель скорости;
дмт - двигатель малой тяги;
дос - датчик обратной связи;
дп - дистанционный переключатель;
ДПр - дистанционные проверки;
дс - динамическая спецификация;
ДУ - двигательная установка;
ДУГ - датчик уровня горючего;
ДУО - датчик уровня окислителя;
ДУС - датчик угловой скорости;
ЖРВ - жесткий регламент времени;
ЖРД - жидкостный ракетный двигатель;
ЖРД мт - ЖРД малой тяги;
ЖРС - жидкостная ракетная система;
ЗИП - запасные инструменты и приборы;
зис - замкнутый исследовательский стенд;
игк - искрогасящий контур;
ид - исходные данные;
идос - индукционный датчик обратной связи;
ИНС - инерциальная навигационная система;
ИПФ - импульсная переходная функция;
исз - искусственный спутник Земли;
иск - инерциальная система координат;
ИУМ - импульсный усилитель мощности;
иэ - исполнительный элемент;
КА - космический аппарат;
КД - кодовый датчик;
кис - контрольно-испытательная станция;
ККП - комплекс командных приборов;
клс - кабельная линия связи;
кмо - канал мультиплексного обмена;
КПА - контрольно-проверочная аппаратура;
КР - команда разделения;
КС - камера сгорания;
ЛА - летательный аппарат;
лг - лазерный гироскоп;
МА - маятниковый акселерометр;
МБР - межконтинентальная баллистическая ракета;
13
МД - маршевый двигатель;
мк - масштабный коэффициент;
МИК - метод наименьших квадратов;
МОБ - модуль обеспечения безопасности;
МП - многогранная призма;
НИИ - наземный измерительный пункт;
нип - наземный источник питания (по тексту);
НИС - нуль-индикатор скорости;
НППАСК - наземная проверочно-пусковая аппаратура стартового комплекса;
НС - нормальная скорость;
нсгск - начальная стартовая геоцентрическая система координат;
нсск - начальная стартовая система координат;
О - окислитель;
ОЗУ - оперативное запоминающее устройство;
онс - опорная навигационная система;
ОС - операционная система;
отп - окончание точного приведения;
04 - ось чувствительности;
04 - отделяемая часть (по тексту);
ПдО - подвижное основание;
пз - полетное задание;
ПК - предварительная команда;
плис - программируемая логическая интегральная схема;
пмко - программный межконтрольный обмен;
пмо - программно-математическое обеспечение;
пн - полезная нагрузка;
по - программное обеспечение;
пос - потенциометр обратной связи;
ПУ - пусковая установка;
ПУП - пульт управления пуском;
ПУС - поворотное управляющее сопло;
ПЭ - пироэлемент;
рд - реле давления;
рд - рулевой двигатель (по тексту);
рзд - режим «заданного движения»;
РИС - разомкнутый исследовательский стенд;
РК - ракетный комплекс;
РК - релейный коммутатор (по тексту);
РКА - релейно-коммутационная аппаратура;
РКН - ракета космического назначения;
РКС - регулирование кажущейся скорости;
PH - ракета-носитель;
РП - район падения;
РП - рулевой привод (по тексту);
14
РПС - реле электромагнитное поляризованное;
РПС - релейный преобразователь сигналов (по тексту);
РСУ - рабочая станция управления;
РТС - радиотелеметрическая станция;
РУ - режим «удержания»;
РЭС - реле электромагнитное;
САПР - система автоматизированного проектирования;
СБ - система безопасности;
СБИС -- сверхбольшая интегральная схема;
СВ - спецвычислитель;
СВИ - система внешней информации;
СВЭП - система вторичного электропитания;
СИ - система измерений;
СК - система калибровок (по тексту);
СК - система координат (по тексту);
СК - стартовый комплекс (по тексту);
СКПП - силовой коммутатор первичного питания;
СЯДУ - система линейных дифференциальных уравнений;
СН - самолет-носитель;
СН - система навигации (по тексту);
СНС - спутниковая навигационная система;
СП - стартовая позиция;
СПД - система поддержания давления;
Спр - система прицеливания;
СС - система стабилизации;
ССД - система сохранения данных;
ССК - связанная система координат;
СТИ - система телеизмерений;
СУ - система управления;
СУГП - согласующее устройство гидропривода;
СУОС - система успокоения, ориентации и стабилизации;
СУРТ - система управления расходованием топлива;
СУЭК - согласующее устройство электроклапанов;
СЭП - система электропитания;
ТА - технологическая аппаратура;
ТГ - требуемая грань;
ТГС -- трехосный гиростабилизатор;
ТЗ - техническое задание;
ТМ - телеметрический;
ТНА - турбонасосный агрегат;
ТОЙ - точностная исправность;
ТП - техническая позиция;
ТСУ - телеметрическое согласующее устройство;
ТТРД - твердотопливный ракетный двигатель;
15
ттт - тактико-технические требования;
УВВ - устройство ввода-вывода;
УКАПС - устройство автоматики пиросредств;
УМ - усилитель мощности;
УМКР - унифицированный малогабаритный контактный разъединитель;
УМРК - усилитель межрамочной коррекции;
УП - усилитель-преобразователь;
УПП - узел плавного пуска;
ФЧВ - фазочувствительный выпрямитель;
ФЧХ - фазочастотная характеристика;
цвк - цифровой вычислительный комплекс;
ЦВМ - цифровая вычислительная машина;
ци - цифровая информация;
ЦКА - цифровой корректирующий алгоритм;
цм - центр масс;
ЦФ - цифровой фильтр;
чэ - чувствительный элемент;
шд - шаговый двигатель;
ШИМ - широтно-импульсная модуляция;
ЭВМ - электронная вычислительная машина;
эгк - электрогидроклапан;
эгп - электрогидравлический привод;
ЭД - электродвигатель;
эк - электроклапан;
эк - электронный коммутатор (по тексту);
эмп - электромагнитный преобразователь;
эп -- электропривод;
эпк - электропневмоклапан.
16
ВВЕДЕНИЕ
Когда говоришь о системе управления (СУ) объектов ракетно-космической
техники и пытаешься пояснить решение задач, которые перед ней ставятся, то
невольно сравниваешь работу СУ с поведением человека за рулем движущегося
автомобиля. К такому сравнению прибегнул Генеральный директор H111L
Хартрон-Аркос Ю.М.Златкин при беседе с Президентом Украины
В.Ф.Януковичем в ходе его посещения г. Харькова и нашего предприятия. Ракету
или космический аппарат можно представить как движущийся автомобиль, а
СУ- как мозг водителя (бортовой компьютер с необходимым программно-
алгоритмическом обеспечением). Такой оригинальный подход в беседе этих двух
руководителей, на наш взгляд, привел к полному пониманию решаемых проблем.
Вот и мы, используя данное сравнение, постараемся вникнуть в ракетно-
космическую управленческую проблематику и коротко пояснить существо
решаемых задач.
Головная организация, как разработчик объекта управления, формулирует
ТЗ на создание СУ, в котором определены назначение и основные требования к
ней. В качестве приложения к этому документу она разрабатывает исходные
данные для проектирования СУ.
В исходных данных (ИД) приводятся основные характеристики объекта
управления и условий его эксплуатации:
- компоновочная схема;
- перечень используемых систем координат;
- управляющие силы и моменты, действующие на PH в полете;
- возмущения, действующие на ракету-носитель (PH) в полете;
- массово-инерционные и центровочные характеристики;
- аэродинамические характеристики;
- основные характеристики маршевых и рулевых двигателей;
- основные характеристики двигателей малой тяги (ДМТ) и их
математические модели;
- баллистические характеристики.
Кроме перечисленных выше, в книге представлены следующие материалы:
- ИД по элементам автоматики и пироэлементам PH;
- основные характеристики и математические модели датчиков и
приводов системы управления расходованием топлива (СУРТ);
- основные характеристики и математические модели датчиков и
приводов системы поддержания давления в камерах сгорания маршевых
двигателей (СПД);
- основные характеристики и математические модели рулевых приводов и
исполнительных элементов ДМТ;
- циклограмма выдачи команд при пуске и полете PH;
- динамические характеристики изгибных колебаний PH на стартовом
столе и в полете;
- характеристики колебаний топлива в баках маршевых двигателей PH
(при необходимости);
17
- ИД по сопряжении системы измерений (СИ) и СУ;
- ИД по системе безопасности полета.
Основное содержание типовых ТЗ и ИД для разработки СУ PH приведено в
разделах 1, 2 данной книги. В рамках представленного выше подхода - это
основные характеристики "автомобиля” и качества дороги, а также требования к СУ
(функции водителя). Особое место в книге занимает анализ ТЗ и ИД в целях
выработки технических решений по проектированию СУ PH. Это первый и очень
важный шаг на пути осмысливания задач, поставленных перед СУ, и начальные
шаги комплексного проектирования системы. В первую очередь освещены вопросы
разработки функциональной и структурной схем СУ. Определены предварительный
приборный состав и базовые требования к командно-измерительным приборам
(раздел 3): гиростабилизированным платформам (ГСП) или бесплатформенным
инерциальным навигационным системам (БИНС). Поскольку в последнее время в
мировой практике и практике предприятия НПП Хартрон-Аркос (СУ PH Циклон-4)
особое место занимают интегрированные инерциальные системы, то в данной книге
представлен раздел по разработке аппаратуры потребителя спутниковой
навигационной системы (АП СНС), как ее составной части.
Раздел 4 книги содержит научно-исследовательские материалы, посвящен-
ные созданию систем навигации, наведения, стабилизации, а также систем
управления ориентацией, поддержанию давления в камерах сгорания маршевых
двигателей, управления расходом топлива. Кроме перечисленного, в этом разделе
приведены материалы по проектированию систем управления элементами
автоматики и пироэлементами PH, электропитания бортовой аппаратуры,
обеспечения безопасности полета, сопряжения бортовой аппаратуры PH с
приборами космического аппарата.
Важное место занимают научно-технические материалы, которые освещают
решение задач начальной выставки и калибровки бортовых командных приборов.
Для того, чтобы в полном объеме представить цикл разработки программно-
математического обеспечения бортового вычислительного устройства, в книге
приведены сведения о методах его создания и представлены компоненты
поддержки сборочной технологии проектирования программного обеспечения
бортовой цифровой вычислительной машины (ПО БЦВМ) СУ и ЦВМ стартового
комплекса. Подразд. 4.13 по нашей концепции фактически посвящен разработке и
созданию интеллектуальной части - мозга водителя автомобиля.
Особое внимание в разделе 4 уделяется технологии отладки бортового
программно-математического обеспечения на исследовательском стенде
предприятия с использованием БЦВМ.
Как и на чём решать поставленные перед СУ задачи, определено в разделе
5 данной книги - проектирование бортовой аппаратуры СУ. Обоснован выбор
той или иной элементной базы, структурной схемы БЦВМ, надежность работы
данного вычислительного устройства и его приборного окружения.
Таким образом, приведенные в данной книге материалы позволяют
читателям, на наш взгляд, представить полный цикл работ по проектированию и
созданию СУ объектов ракетно-космической техники.
18
1 ТЗ НА РАЗРАБОТКУ СУ PH. НАЗНАЧЕНИЕ И ОСНОВНЫЕ
ТРЕБОВАНИЯ К СУ
В ТЗ указывают документы, на основании которых разрабатывают СУ PH.
Здесь же приводят перечень требований (государственные и отраслевые
стандарты, положения РК, правила космической деятельности в Украине),
которыми необходимо руководствоваться при разработке СУ PH.
Указывают назначение СУ и её основные задачи:
- проведение дистанционных периодических проверок (совместно с
другими системами ракетного комплекса);
- подготовка к пуску PH;
- пуск и выведение полезного груза.
При этом приводят перечень основных ИД для разработки СУ:
- место пуска (космодром);
- состав полезных нагрузок;
- базовые траектории или орбиты;
- при выведении КА. на базовые орбиты - точность на момент отделения
космического аппарата (КА);
- предельные отклонения точек падения отделяющихся частей по
дальности и боковому направлению из-за погрешностей СУ;
- погрешности стабилизации PH на момент отделения КА;
- ограничения при полёте PH по программной траектории;
- перечень ИД по PH для проектирования СУ (состав приложений к ТЗ на
разработку СУ).
Ниже приведены типовые основные требования, предъявляемые к СУ PH
на этапах её разработки и эксплуатации. При этом формулировка конкретных
требований носит общий характер. Численные данные требований, ссылки на
документы, используемые при разработке СУ, порядок уточнения требований в
процессе разработки и отработки СУ и т.д. оговаривают в ТЗ на разработку СУ
конкретной PH.
1.1 Тактико-технические требования
1.1.1 Состав СУ PH
1. Бортовая аппаратура СУ PH.
2. Наземная аппаратура СУ.
3. Программно-математическое обеспечение СУ.
4. Бортовая кабельная сеть.
1.1.2 Общие требования к СУ PH
1. Необходимость обеспечения начальной выставки навигационных
приборов, в том числе автономного автоматического прицеливания по
азимуту.
2. Выдача команды на запуск двигательной установки (ДУ).
3. Время автоматизированной предстартовой подготовки к пуску PH.
4. Задачи СУ при аварийном или плановом прекращении подготовки к пуску
19
и пуске до начала необратимых процессов.
5. Перечень документов при отработке СУ.
6. Уровень точности диагностики неисправностей СУ (до одного, двух
приборов, блоков).
1.1.3 Требования к бортовой аппаратуре СУ
Бортовая аппаратура СУ должна обеспечивать:
1. Управление движением PH при выведении полезной нагрузки с требуемой
точностью.
2. Формирование команд в PH, аппаратуру полезной нагрузки и систему
телеметрических измерении.
3. Выдачу информации в систему телеметрических измерений.
4. Выполнение программ тестового самоконтроля БЦВМ.
5. Автоматизированный контроль техническою состояния аппаратуры СУ PH
в целом и смежных систем в согласованном объеме.
6. Получение на борт PH заданного ПЗ СУ и проверку правильности ввода ПЗ.
7. Получение массивов программ подготовки к пуску, пуска и полёта в
запоминающее устройство БЦВМ и проверку правильности их ввода.
8. Совместно с наземной проверочно-пусковой аппаратурой стартового
комплекса (НППА СК) реализацию циклограшды подготовки к пуску и
пуска PH.
9. Автоматическое прекращение циклограммы предстартовой подготовки и
пуска при нерасчётной её реализации СУ или команды “Отмена пуска” от
автоматизированной системы управления подготовкой и пуском.
10. Автономное автоматическое прицеливание.
11. Приведение бортовой аппаратуры СУ и НППА СК в исходное состояние и
формирование команд НППА СК на снятие электропитания с PH при
автоматическом прекращении циклограммы подготовки к пуску и пуска.
12. Поддержание давления в камерах сгорания ЖРД.
13. Управление расходованием компонентов топлива ЖРД.
14. Обмен информацией между БК и аппаратурой полезной нагрузки.
15. Увод последней ступени с орбиты после завершения процесса отделения
полезной нагрузки.
16. Реализация функций системы безопасности PH.
17. Формирование команды на сброс головного обтекателя.
18. Максимальное время непрерывной работы СУ в полёте от момента ОТП.
19. Инвариантность к решаемым задачам, траекториям или орбитам, а также
схемам выведения.
20. СУ не должна накладывать ограничений на углы ориентации продольной
оси PH.
1.1.4 Требования к наземной аппаратуре СУ
НППА СК должна решать следующие основные задачи:
1. Обеспечение управления процессом предстартовой подготовки и пуска PH
в автоматическом режиме совместно с бортовой аппаратурой СУ.
20
2. Проведение электроиспытаний PH на стартовом комплексе (СК).
3. Документирование информации о процессе предстартовой подготовки и
пуска в реальном масштабе времени.
4. Исключение создания аварийных ситуаций при ошибочных действиях
обслуживающего персонала.
5. Ввод в бортовую аппаратуру СУ во время подготовки PH к пуску заранее
рассчитанного ПЗ и автоматический контроль его ввода с выводом на
средства отображения информации результатов контроля.
6. Организация электропитания бортовой аппаратуры СУ от наземного
источника питания (НИП).
7. Контроль исходного состояния бортовой аппаратуры СУ (состояние
дистанционных переключателей бортовой системы электропитания,
стыковки кабельной сети с приборами, отсутствие электрического
напряжения на корпусе PH, контроль разобщённости шин пиротехники).
8. Формирование и выдача директив выбора режимов работы.
9. Проведение автоматического контроля работоспособности аппаратуры СУ
при электроиспытаниях, в процессе подготовки к пуску и пуске PH.
10. Возможность выключения с пульта оператора электропитания СУ при
электроиспытаниях при возникновении аварийных ситуаций.
11. Переход на выполнение отбойных циклограмм при подготовке к пуску и
пуске PH при возникновении аварийных ситуаций.
12. Локализация неисправности с точностью до одного, двух приборов,
блоков.
13. Представление информации в виде индикационных сообщений на панели
пульта оператора.
14. Обмен электрическими сигналами и командами с наземными системами
(автоматизированная система управления подготовкой и пуском, система
телеметрических измерений).
15. Хранение информации.
1.1.5 Требования к взаимодействию со смежными системами
Бортовая аппаратура СУ должна обеспечивать взаимодействие со
следующими системами:
1. Электрооборудование PH (пироэлементы, электрогйдроклапаны,
электроприводы и т.д.).
2. Аппаратура полезной нагрузки (выдача в аппаратуру полезной нагрузки
базовых команд и организация обмена цифровой информации между
БЦВМ и аппаратурой полезной нагрузки).
3. Система телеметрических измерений PH.
4. НППА СК в части обмена командами и информацией при дистанционном
управлении электроиспытаниями, подготовке к пуску и пуске PH.
НППА СК должна обеспечивать взаимодействие со следующими
системами:
1. Бортовая СУ PH.
21
2. Автоматизированная система управления подготовкой и пуском PH.
3. Система электроснабжения технологического оборудования стартового
комплекса.
4. Система пристартовых измерений.
1.2 Требования к эксплуатации
К бортовой аппаратуре СУ предъявляют следующие эксплуатационные
требования и приводят следующие ИД:
1. Гарантийный срок эксплуатации, в том числе в составе PH.
2. Температура воздуха в приборной космической ступени при
электроиспытаниях, предстартовой подготовке и в полёте.
3. Температура воздуха в хвостовых отсеках 1-й и 2-й ступеней и приборном
отсеке 3-й ступени.
4. Температура корпуса PH при стоянке на стартовой позиции в местах
прокладки кабельной сети.
5. Текущие значения температур, действующих на кабельную сеть.
6. Допустимые температуры для кабелей МД и пневмогидросистем.
7. Температура обшивки в полёте в местах прокладки кабельной сети для
отдельных элементов PH (головной обтекатель, межступенчатый и
переходный Отсеки, топливные баки, хвостовые отсеки ступеней, корпуса
3-й ступени, адаптера полезной нагрузки).
8. Температура посадочных мест приборов СУ в течение полёта.
9. Условия проведения программы проверки полярностей управляющих
органов.
10. Требования к техническому обслуживанию аппаратуры СУ.
11. Гарантийная наработка наземной аппаратуры.
12. Наличие ЗИП.
13. Требования к комплектности, объёму и содержанию эксплуатационной
документации аппаратуры СУ.
14. Требования к корректировке эксплуатационной документации.
1.3 Конструктивные требования
К аппаратуре СУ предъявляют следующие конструктивные требования:
1. Аппаратура СУ должна соответствовать ГОСТу, указанному в ТЗ на СУ, с
учётом требований этого ТЗ.
2. Необходимо, чтобы конструкция приборов СУ предусматривала их замену
при выявлении неисправностей в процессе электроиспытаний на ступенях и
на PH в целом без дополнительных регулировок и замены других приборов.
3. В аппаратуре СУ следует реализовать схемно-конструктивные меры,
исключающие неадресную стыковку соединителей кабелей в пределах
одного прибора'
4. Конструкция бортовых приборов, требующих определённой ориентации
системы координат PH, должна исключать возможность неправильной их
установки на PH.
5. Необходимо, чтобы конструкция бортовых и наземных приборов позволяла
22
их удобную замену при эксплуатации.
6. Аппаратура бортовой СУ должна быть работоспособной в полёте без
термостатирования.
7. Следует указывать суммарную массу бортовой аппаратуры СУ и кабельной
сети на каждой из ступеней, а также вес кабелей головного блока и
межступенчатых отсеков.
8. Бортовая аппаратура СУ должна разрабатываться в виде отдельных
приборов (блоков).
9. Необходимо, чтобы конструкция приборов обеспечивала удобство доступа
к электросоединителям, удобство их стыковки и расстыковки с
применением стандартного инструмента, удобство монтажа и демонтажа
приборов.
10. В конструкции приборов, масса которых превышает указанную в ТЗ на
СУ, должны быть предусмотрены такелажные точки.
И. Необходимо обеспечивать амортизацию приборов, характеристики
системы амортизации.
12. Следует соблюдать требования к установке приборов СУ (к посадочным
местам под приборы), погрешностям ориентации, приборов, параметрам
колебаний (перемещений).
13. Кабельная сеть, соединяющая НППА стартового сооружения с PH, должна
состоять из нескольких комплектов: комплекта кабелей разового действия
и комплекта кабелей, прокладываемых стационарно от НППА стартового
сооружения до стартовой площадки.
14. Следует соблюдать требования к кабелям, прокладываемым в головной
блок (изготовление без применения смазки в составных частях
электросоединителей, стойкость к воздействию дегазации, изготовление с
применением антистатических не липких с внешней стороны
электроизоляционных материалов).
15. Бортовые приборы СУ должны быть выполнены в герметичном
исполнении.
1.4 Требования к видам обеспечения
1.4.1 Требования к метрологическому обеспечению
1. Метрологическое обеспечение разработки и эксплуатации СУ должно
соответствовать требованиям стандартов и (при необходимости)
национальной законодательной и нормативной документации в сфере
метрологии и метрологической деятельности, действующей на территории
государств-участников разработки СУ.
2. В эксплуатационную документацию на СУ следует включать перечни
средств измерительной техники с указанием порядка и периодичности их
метрологического обслуживания (или замены), а также методики
калибровки средств измерительной техники (при необходимости).
3. Конструкция аппаратуры СУ должна обеспечивать возможность
проведения периодической калибровки (проверки) встроенных средств
23
измерительной техники.
1.4.2 Требования к программно-математическому обеспечению
1. Структура и состав базового программно-математического обеспечения
(ПМО СУ) не должны зависеть от целей и задач пуска PH и могут
уточняться при увязке с конкретной полезной нагрузкой.
2. Программное обеспечение НППА пульта управления пуском необходимо
создавать на базе стандартного программного обеспечения. Оно должно
обладать гибкостью и адаптируемостью к наращиванию и видоизменению
задач.
3. Покупное программное обеспечение (ПО) должно сопровождаться
достаточной программной документацией разработчика ПО, быть
сертифицированным и иметь лицензию на эксплуатацию.
4. ПМО должно пройти комплексную отработку на моделирующем комплексе
и комплексном стенде организации - разработчика СУ.
5. Следует обеспечивать возможность замены массивов ПМО, ввода ПЗ и
данных на пуск с пульта оператора НППА с использованием современных
носителей информации. Должен быть обеспечен контроль правильности
записи ПМО, ПЗ и данных на пуск.
1.5 Дополнительные требования
1.5.1 Требования к живучести и стойкости к внешним воздействиям
1. Необходимо проводить предварительное ветровое зондирование и вводить
поправки на отклонение параметров атмосферы от расчётных.
2. Аппаратуру СУ следует разрабатывать с учётом обеспечения её стойкости
и прочности к воздействию механических, климатических, биологических
факторов, поражающих факторов грозовых разрядов и статического
электричества.
3. Бортовая аппаратура СУ, а также наземная аппаратура, развёрнутая в
условиях стационарного размещения, должны сохранять свои
эксплуатационные характеристики в течение всего срока эксплуатации и
проведения профилактических и регламентных работ.
4. Необходимо обеспечивать работоспособность бортовой аппаратуры СУ в
составе PH во время и после воздействия заданных вибрационных, ударных
и статических нагрузок.
5. Бортовая аппаратура СУ и электронная аппаратура НППА стартового
сооружения должны сохранять работоспособность при воздействии на неё
импульсных электромагнитных полей с заданными параметрами.
6. Необходимо, чтобы бортовая аппаратура СУ сохраняла свои
характеристики при изменении давления окружающей среды от
номинального до условий космического пространства.
1.5.2 Требования к радиоэлектронной защите
1. Требования к радиоэлектронной защите аппаратуры СУ ограничиваются
требованиями по обеспечению её электромагнитной совместимости с
24
аппаратурой смежных систем.
2. При разработке и изготовлении бортовой аппаратуры СУ должна быть
обеспечена внутрисистемная электромагнитная совместимость бортовой
аппаратуры СУ. Должна быть обеспечена электромагнитная совместимость
СУ с другими системами PH, полезной нагрузки, средствами космодрома
при проведении технологических операций по подготовке к запуску и при
выведении полезной нагрузки.
1.5.3 Требования к безопасности
1. Аппаратура СУ не должна являться источником взрыва или пожара.
2. Все применяемые неметаллические материалы, находящиеся в контакте с
атмосферой отсека, не должны в режиме штатной эксплуатации
возгораться и выделять токсичные вещества.
3. Необходимо обеспечить металлизацию приборов и кабельной сети.
4. Конструктивное исполнение высоковольтных элементов и кабелей должно
обеспечивать безопасность их эксплуатации.
5. Разработчиком приборов должны бьпъ предусмотрены конструктивные
решения для снятия статического электричества с кабельной сети перед
подсоединением её к приборам.
6. В аппаратуре СУ следует предусмотреть конструктивные, программно-
алгоритмические и схемные решения, исключающие возможность создания
аварийных ситуаций на всех этапах эксплуатации.
7. В бортовом компьютере СУ необходимо реализовать алгоритмические и
аппаратные методы защиты вычислительного процесса от сбоев при
выполнении программы управления полётом PH.
8. Схемные, конструктивные решения и правила безопасности при
эксплуатации аппаратуры СУ должны обеспечивать безопасность
обслуживающего персонала и выполнение требований по безопасности
пусковой базы.
1.5.4 Требования к транспортабельности
Аппаратура СУ должна сохранять свои технические и эксплуатационные
характеристики после транспортировки в штатной таре или в составе ступени PH
по железным дорогам, автомобильным, водным и воздушным транспортом и при
перегрузочных работах.
1.5.5 Требования к надёжности
Надёжность СУ в условиях и режимах эксплуатации должна
характеризоваться следующими показателями надёжности:
- вероятность безотказной работы СУ за время проведения подготовки к
пуску и пуска (от момента поступления в ШИТА стартового сооружения
команды “Пуск” до момента срабатывания контактов подъёма);
- вероятность безотказной работы СУ от момента срабатывания контактов
подъёма до момента выдачи последней команды, обеспечивающей увод
последней ступени PH.
25
1.5.6 Требования к технологичности
1. Конструкция аппаратуры СУ должна быть технологичной и
соответствовать требованиям ГОСТ, указанным ТЗ на СУ.
2. При проведении испытаний в составе PH на стартовом комплексе
' космодрома нельзя снимать приборы СУ и перестыковывать разъёмные
соединения бортовой и наземной кабельной сети.
1.5.7 Требования к стандартизации и унификации
В аппаратуре СУ должны быть в максимальной степени использованы
стандартные, унифицированные и ранее разработанные детали и узлы.
1.5.8 Требования к эргономике и технической эстетике
При разработке аппаратуры СУ следует руководствоваться системой
стандартов эргономических требований и эргономического обеспечения с учётом
документов, указанных в ТЗ на СУ.
1.5.9 Требования к патентной чистоте и патентоспособности
При создании СУ должна быть обеспечена защита интеллектуальной
собственности участников проекта от притязаний третьих лиц.
В дополнительные требования включаются также следующие требования:
- технико-экономические требования;
- требования к сырью, материалам и комплектующим изделиям;
- требования к консервации, упаковке и маркировке;
- требования по защите ракетных технологий и конфиденциальной
информации.
Примечание: целью настоящей книги является освещение вопросов
разработки бортовой системы управления полётом, поэтому вопросы разработки
наземной части СУ не рассматриваются.
26
2 ИСХОДНЫЕ ДАННЫЕ ПО PH ДЛЯ ПРОЕКТИРОВАНИЯ
СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Основные характеристики PH
2.1.1 Компоновочная схема
В этом подразделе приведены основные сведения по PH, а также компо-
новочные схемы PH в целом и отдельных ее частей:
1. Назначение PH.
2. Тип и характеристики траекторий или орбит при выведении одной или
группы полезных нагрузок.
3. Вес полезных нагрузок.
4. Место и тип старта PH.
5. Схема компоновки PH (тандемная или пакетная), количество ступеней
(обычно современные PH трехступенчатые).
6. Тип маршевых двигателей и вид используемого топлива.
7. Допустимое количество запусков двигателей космической ступени в невесомо-
сти.
8. Схема создания управляющих усилий на всех участках движения PH.
9. Схемы разделения ступеней и отделения полезных нагрузок.
10. Варианты полезных нагрузок и схема их размещения на PH.
11. Тип бортовой системы управления.
12. Наличие на борту PH системы телеметрических измерений.
13. Зона размещения приборов системы управления и системы телеметриче-
ских измерений.
14.Типы головных обтекателей (если их несколько).
На компоновочной схеме PH указаны:
- линейные размеры PH, отдельных отсеков и узлов;
- координаты осей вращения управляющих органов;
- конфигурация топливных баков;
- положение плоскостей стабилизации 1,11,Ш,IV.
2.1.2 Силы и моменты, действующие на PH в полете
Основными силами, действующими на PH в полете, являются:
- сила тяжести;
- тяга двигателей;
- аэродинамические силы;
- управляющие сипы.
Равнодействующая сил тяжести приложена в центре масс PH и направлена
по местной вертикали. Величина равнодействующей определяется формулой
G(t) = m(t)g(H), (2.1.1)
где m(t) - масса PH, изменяющаяся во времени; g(H) - ускорение земного при-
тяжения; Н - высота полета PH.
Вектор равнодействующей силы тяжести проходит через центр масс PH,
27
поэтому момент этой силы относительно центра масс равен нулю.
Сила тяги ракетного двигателя при постоянном секундном расходе зависит
от высоты и определяется формулой
P = Po + Sa(po-pH), (2.1.2)
где Ро - сила тяги двигателя у поверхности Земли; Sa - площадь среза сопла;
ро - статическое давление воздуха у поверхности Земли; рн - статическое давле-
ние воздуха на высоте Н.
Как видно из формулы (2.1.2), по мере набора высоты полета PH тяга дви-
гателя нарастает, достигая максимального значения в пустоте.
Аэродинамические силы возникают при движении PH в воздушной среде
как результат взаимодействия поверхности PH и среды. Равнодействующая R
распределенных по поверхности корпуса PH аэродинамических сил приложена в
точке, которая называется центром давления. Вследствие осевой симметрии PH
можно считать, что центр давления расположен на продольной оси PH.
Равнодействующая R аэродинамических сил обычно раскладывается по
осям скоростной СК на составляющие Xa,Ya,Za. Составляющая Ха направлена
против скорости PH и называется силой лобового сопротивления. Составляющая
Ya, расположенная в плоскости стрельбы и перпендикулярная вектору скорости,
называется подъемной силой. Составляющая Za, перпендикулярная плоскости
стрельбы, называется боковой силой.
Величины сил Ха, Ya,Za определяют по формулам
Ха = CxaqS; Ya = C^qS; Za — C^qS, (2.1.3)
pV2
где q = r------скоростной напор; p - плотность воздуха; V - скорость PH;
S - площадь миделева сечения корпуса PH.
Безразмерные коэффициенты Ска (коэффициент лобового сопротивления),
Суа (коэффициент подъемной силы) и Cza (коэффициент боковой силы) зависят от
числа Маха М, угла атаки, высоты полета, формы PH и других факторов.
Как видно из (2.1.3), аэродинамические силы существенно зависят от плот-
ности, которая является функцией давления и температуры воздуха. Эти характе-
ристики приведены в таблицах стандартной атмосферы (ГОСТ 4401-64).
Составляющие Xa,Ya,Za создают момент аэродинамических сил относи-
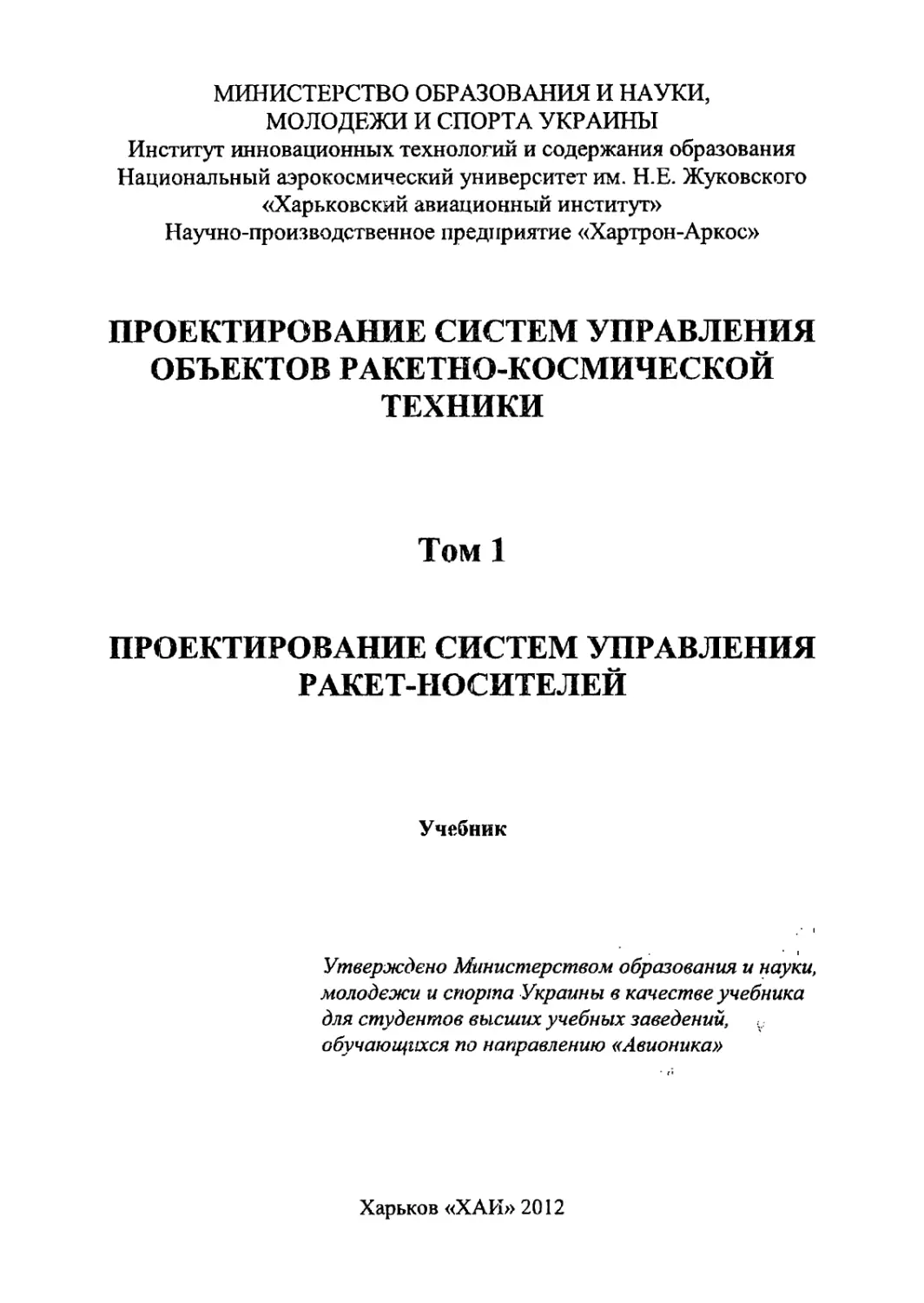
тельно осей Ozi и Oyi связанной СК (рис. 2.1.1).
М2| = Ya(xm -xd)cosa + X,(xm -xjsina;
(2-1.4)
Myl =Z„(xm-xd)cosp + Xa(xm-xd)smp,
где xd - координата центра давления; xm - координата центра масс PH.
При вращении PH относительно любой оси с угловой скоростью со возни-
кает демпфирующий момент. Этот момент состоит из двух составляющих - аэ-
родинамического демпфирующего момента и демпфирующего момента от ко-
риолисовых сил.
28
Рисунок 2.1.1- Аэродинамические силы,
действующие на PH в плоскости полета
Аэродинамический демпфирующий момент обусловлен появлением допол-
нительных углов атаки
(2Л.5)
в любом произвольном сечении PH с координатой х, отсчитываемой от носка PH.
Аэродинамический демпфирующий момент всегда направлен в сторону,
противоположную вращению корпуса PH, и определяется формулой
Md=qSL2c“p (2.1.6)
где L - длина PH; с“ - вращательная производная от коэффициента аэродина-
мического демпфирующего момента.
Причиной появления демпфирующего момента от кориолисовых сил явля-
ется поворот потока топлива, движущегося в баках и трубопроводах PH, а также
потока газов, движущихся по камере сгорания и соплу двигателя.
Демпфирующий момент от кориолисовых сил определяется суммированием
элементарных моментов по всем потокам в баках, из которых расходуется топливо.
ь
Mk=2a)£mcj J(x-xm)dx, (2.1.7)
(j) xoj
где mq - расход массы топлива через любое поперечное сечение потока от по-
верхности топлива в баке до среза сопла двигателя; x«j - расстояние от носка PH
до поверхности топлива в j-м баке; 1п - расстояние от носка PH до среза сопла
двигателя.
При х>хт момент Мк направлен против вращения корпуса PH, а при
х<хга-в сторону вращения корпуса, т.е. момент от кориолисовых сил может
29
быть как демпфирующим, так и раскачивающим. В целом при расположении
двигателей позади центра масс PH демпфирующие моменты от кориолисовых
сил преобладают над раскачивающими [6].
При полете PH в плотных слоях атмосферы момент от кориолисовых сил
значительно меньше аэродинамического демпфирующего момента [5]. За преде-
лами атмосферы момент от кориолисовых сил становится преобладающим.
Управляющие силы и моменты создаются органами управления PH по ко-
мандам системы управления.
Основные типы органов управления PH:
- воздушные или газовые рули;
- поворотные камеры сгорания или сопла основных двигателей;
- вдув генераторного газа или впрыск жидкости в сверхзвуковую часть
сопла основного двигателя;
- поворотные или неподвижные управляющие двигатели;
- поворотные или неподвижные сопла.
Оригинальным является способ управления PH с помощью отклонения го-
ловного отсека в плоскостях рыскания и тангажа [5].
Следует отметить, что не все указанные выше органы управления PH позволяют
создавать моменты крена. В этом случае применяют специальные управляющие двига-
тели, создающие управляющий момент относительно продольной оси PH.
В качестве основных управляющих органов у многих современных жидко-
стных PH используют рулевые поворотные двигатели, у твердотопливных - по-
воротное сопло основного двигателя. Иногда в качестве дополнительных органов
управления применяют аэродинамические рули, эффективность которых сущест-
венна лишь при больших скоростных напорах.
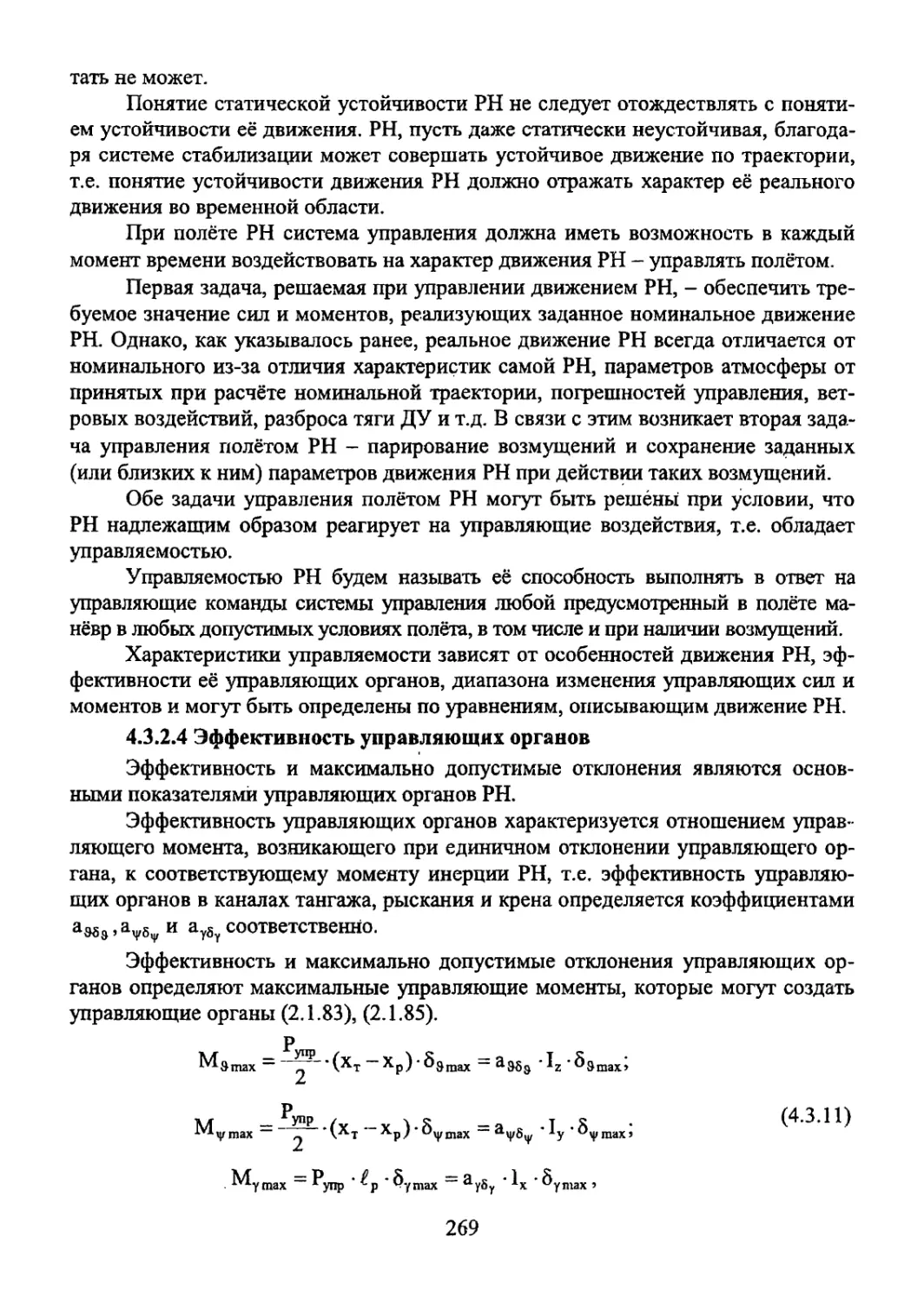
Рассмотрим случай создания управляющих сил и моментов с помощью че-
тырех рулевых двигателей, который чаще всего используют в настоящее время
(рис. 2.1.2, вид с хвоста PH).
Рисунок 2.1.2- Схема расположения КС РД
30
Положительным отклонением рулевого двигателя считается поворот его
против часовой стрелки, если смотреть со стороны соответствующей оси связан-
ной СК. В этом случае проекции управляющих сил, создаваемых всеми рулевыми
двигателями, на оси связанной СК будут1 следующими:
4
РХ1 =P£cos6j; = P(sin82+sm84);Pzl = -P(sin8j + sin83), (2.1.8)
i=l
где Р-тяга одного рулевого двигателя; 8i - соответственно углы отклонения
управляющих камер 1,П,Ш,1У.
Управляющие моменты в каналах тангажа М2Ь рыскания Myj и крена Mxi
определяются формулами:
4
= -Ply(sin32 +sin84); =-Ply(sin81 + sin83); Мя =PRd£sm8i, (2.1.9)
i=i
где ly=xra - хдв - расстояние от центра масс PH до оси вращения рулевого двига-
теля; Rd -расстояние от продольной оси PH до продольных осей управляющих
камер.
У твердотопливных PH основной двигатель обычно имеет одно централь-
ное сопло. Для создания управляющих моментов в каналах тангажа и рыскания
это сопло делают поворотным (рис. 2.1.3).
ПУС
Проекции тяги поворотного управляющего сопла (ПУС) на оси связанной
СК определяются формулами:
РХ1 ^мдСсОЗбф +cos8v), Ру| Рмд^^бф, P2i РццБшбц,, (2.1.10)
где Рид - тяга ПУС; 8^, 8^ - углы отклонения ПУС в каналах тангажа и рыска-
ния соответственно.
Вследствие отклонения ПУС в каналах тангажа и рыскания создаются
управляющие моменты:
31
P^ly sin 63, Myyj P^iySinSy, (2.1.11)
где ly- xm- к’пус расстояние от центра масс PH до оси вращения ПУ С.
Управляющий момент в канале крена при использовании ПУ С создается
отдельными управляющими органами (неподвижными двигателями малой тяги,
неподвижными соплами с газораспределителями и т.д.).
Следует отметить, что для PH с ЖРД, подвешенном в кардановом подвесе,
создание управляющих моментов осуществляется аналогично PH с твердотоп-
ливным двигателем.
Все указанные выше способы создания управляющих сил и моментов рас-
сматривались в основном применительно к изменению параметров углового дви-
жения PH или к движению ее центра масс в боковом или нормальном направле-
ниях. Изменение же величины продольной скорости центра масс PH требуемым
образом можно реализовать изменением тяги двигателя. На таком принципе
строится система регулирования кажущейся скорости (система РКС). В этом слу-
чае управляющая сила, направленная по продольной оси PH, равна изменению
тяги двигателя, что достигается его форсированием или дросселированием. В на-
стоящее время в связи с применением итеративного метода наведения необходи-
мость применения системы РКС отпала.
2.1.3 Возмущения, действующие на PH в полете
Параметры номинальной траектории PH определяются расчетным путем в
предположении, что характеристики PH и атмосферы являются номинальными.
Действительное же движение PH происходит при характеристиках PH и атмо-
сферы, несколько отличающихся от номинальных.
Все те факторы, которые при расчете номинальной траектории не учиты-
ваются и приводят к отклонению параметров действительного движения PH от
программного, рассмотрены как возмущения. Для того чтобы при расчетах оце-
нить величину указанных отклонений, необходимо зйать, как они связаны с воз-
мущающими силами и моментами, действующими на PH в полете.
Указанные силы и моменты в основном обусловлены следующими факто-
рами:
- отклонениями массово-инерционных характеристик PH от их номиналь-
ных значений;
- воздействием внешней среды;
- технологическими погрешностями изготовления и сборки PH, а также
двигательной установки;
- неточностью работы элементов и приборов системы управления.
Отклонения массово-центровочных характеристик PH могут быть вызваны
разными причинами - разбросами массы и моментов инерции PH, секундного
расхода топлива ДУ и т.д. Эти отклонения приводят к возникновению так назы-
ваемых ’’весовых возмущений”.
1 ’ Воздействие внешней среды сводится к появлению аэродинамических сил и
моментов, обусловленных действием ветра. В этом случае изменяется вектор
32
воздушной скорости VB ракеты
VB=V-W, ' (2.1.12)
где V - вектор путевой скорости PH, W - вектор скорости ветра.
Из (2.1.12) видно, что при действии ветра изменяются направление и мо-
дуль вектора воздушной скорости VB, т.е. появляется дополнительный угол атаки
PH, вследствие чего возникают дополнительные аэродинамические силы и мо-
менты.
В настоящее время разработана методика [И] задания ветровых возмуще-
ний от высоты Н для различных классов задач. В этой методике описаны харак-
теристики случайной составляющей скорости ветра, а также ее огибающей. Так
как характер переходных процессов стабилизации зависит не только от величины
скорости ветра, но и от скорости ее изменения (градиента), в методике [11] при-
ведены способы задания этих градиентов.
Как показано в [5], возмущающие силы и моменты, обусловленные техно-
логическими погрешностями, для первой ступени PH, движущейся в плотных
слоях атмосферы, играют несущественную роль по сравнению с аэродинамиче-
скими возмущениями. Технологические возмущения оказывают влияние главным
образом на динамику второй и последующих ступеней PH. В этом, случае основ-
ными причинами возникновения технологических возмущений являются сле-
дующие:
- смещение и перекос стыкующихся отсеков PH;
- смещение и перекос оси сопла двигателя относительно установочной
базы;
- смещение и перекос установочной базы двигателя относительно базовой
оси PH;
- упругая деформация рамы двигательной установки и т.д.
При проектировании СУ суммарные возмущения, обусловленные техноло-
гическими погрешностями, принимают как случайные величины, подчиняющие-
ся нормальному закону распределения.
Кроме технологических погрешностей часто на PH проявляется весовая
асимметрия (центр масс расположен не на геометрической оси симметрии PH). В
этом случае весовая асимметрия носит систематический характер, из-за чего воз-
никают дополнительные возмущающие силы и моменты.
Расчет номинальной траектории проводят в предположении, что система
управления работает идеально. Фактически в полете из-за неточности работы СУ
возникают дополнительные возмущения. К возмущениям, определяющим вариа-
цию модуля скорости PH и значительно влияющим на её направление, относятся
отклонения удельной тяги и секундного расхода двигателя, а также массы PH и
аэродинамического сопротивления от их расчётных значений. Так как система
управления в качестве регулируемого параметра использует величину секундного
расхода (и, как следствие, вариацию массы PH), то в качестве возмущений, обу-
словленных неточностью работы системы управления, следует, наряду с разбро-
сом удельной тяги двигателя, учитывать лишь начальные отклонения массы й ' се-
33
кундного расхода.
Кроме рассмотренных выше возмущений, на старте PH и на начальном уча-
стке второй и последующих ступеней возникают начальные возмущения, обу-
словленные неточностями стабилизации в конце предыдущей ступени и процес-
сом разделения ступеней. Эти. возмущения задают в виде начальных условий по
регулируемым параметрам движения на момент начала управляемого полета PH
(старт PH, разделение ступеней, отделение одного или группы КА).
Обычно в этом случае задают начальные условия по углам, угловым скоро-
стям и по боковым координатам и скоростям центра масс PH.
2Л14 Массово-инерционные и центровочные характеристики
В настоящем подразделе приведены массово-инерционные и центровочные
характерйстики:
- ступеней PH в полете;
- вариантов Полезной нагрузки, головных обтекателей и отделяющихся
частей РЙ при одиночном выведении;
- отделяющейся части 3-й ступени PH при групповом выведении.
Конкретно представлены следующие данные:
1. Изменение положения центра масс и моментов инерции ступеней PH в по-
лете по мере расходования топлива для весовых вариантов полезной на-
грузки (при одиночном выведении) и типов головных обтекателей.
2. Массово-инерционные и центровочные характеристики отделяющихся час-
тей ступеней по мере расходования топлива для всех весов полезной на-
грузки (при одиночном выведении). При этом указаны система отсчета ко-
ординат центра масс отделяющихся частей, их длина и условия расчета их
моментов инерции.
3. Массово-инерционные и центровочные характеристики PH и центровочные
характерйстики при групповом выведении:
- ступеней PH в полете;
- полезных нагрузок, головных обтекателей и отделяющихся частей сту-
пеней PH;
- отделяющейся части 3-й ступени в полете.
Для данных по пп. 1-3 указываются система отсчета координат хт,ут,2т
центра масс, полная длина L ступени и осевые центральные (собственные) мо-
менты инерции 1х, 1у, Iz. Обычно при расчете моментов инерции Iy, Iz предполага-
ют, что жидкость (топливо) ’’заморожена”, а при расчете момента инерции 1х
влияние жидкости для цилиндрических, конических и шаровых баков не учиты-
вают.
4. Разбросы центровочных характеристик Ахт, Аут и Azm и моментов инерции
AIX, Aly, AIZ.
2.1.5 Аэродинамические характеристики
Аэродинамические характеристики PH определяют в связанной с PH или
скоростной системе координат. Пересчет аэродинамических характеристик из
одной системы координат в другую приведен в [3].
34
Ниже представлены ИД по аэродинамическим характеристикам в связанной
с PH правой прямоугольной системой координат Oxyz (рис.- 2:1.4), оси которой
параллельны осям связанной с центром масс PH системы координат OxiyiZj.
Рисунок- 2.1.4 Система координат для расчета АДХ
до сброса ГО
Начало координат системы Oxyz расположено в носке PH. Ось Оу перпен-
дикулярна оси Ох и направлена в сторону плоскости стабилизации III, а ось Oz -
перпендикулярна плоскости хОу и направлена в сторону плоскости стабилизации
IV. Угол атаки а - угол между осью Ох и проекцией вектора скорости V на плос-
кость хОу, т.е. расположен в плоскости I - Ш. Положительное значение угла ата-
ки а лежит в плоскости стабилизации 1. Угол скольжения р - угол между векто-
ром скорости V и плоскостью хОу (расположен в плоскости II—IV), его положи-
тельное значение лежит в плоскости стабилизации IV.
Координату центра давления отсчитывают от носка PH в сторону донного
среза PH.
Аэродинамические силы и моменты определяют по следующим формулам:
1. Аэродинамическая продольная сила
Xn = CxqS, (2.1.13)
где q - скоростной напор; S - характерная площадь сечения миделя PH, приня-
тая при расчете АДХ; Сх - коэффициент продольной силы.
Положительное направление продольной силы - по оси Ох в сторону дон-
ного среза PH.
2. Аэродинамическая нормальная сипа
Y^CyqS, (2.1.14)
где Су - коэффициент нормальной силы.
35
, При положительном значении коэффициента Су направление вектора аэроди-
намической нормальной силы совпадает с положительным направлением оси Оу.
3. Координату приложения аэродинамической нормальной силы по оси Ох
отсчитывают от носка PH в сторону донного среза и определяют по формуле
Cd=^-, (2.1.15)
где Cd - относительная координата центра давления; L - характерная длина PH,
принятая при расчете АДХ.
4. Аэродинамическая поперечная сила
Zn = CzqS, (2.1.16)
где Cz - коэффициент поперечной силы.
При положительном значении коэффициента Cz направление вектора аэро-
динамической поперечной силы совпадает с положительным направлением оси
Oz.
5. Аэродинамический момент относительно продольной оси X] PH (аэроди-
намический момент крепа)
Мха=0. (2.1.17)
6. Аэродинамический момент относительно поперечной оси Oyi (аэроди-
намический момент рыскания)
Mya=(xm-xd)Zn. (2.1.18)
7. Аэродинамический момент относительно поперечной оси Ozj (аэродина-
мический момент тангажа)
Mza=(xm-xd)Yn. (2.1.19)
8. Аэродинамический демпфирующий момент относительно продольной
оси Oxi (демпфирующий момент крена)
Mxd=m?'qSR2
L V (2.1.20)
1 ’ 2V
где ш^1 - коэффициент аэродинамического демпфирующего момента относи-
тельно продольной оси PH по безразмерной угловой скорости шх1;
R - характерный радиус PH, принятый при расчёте АДХ.
9. Аэродинамический демпфирующий момент относительно поперечной
оси Oyi (демпфирующий момент рыскания)
Myd = m^1 qSL2 • ;
т (2.1.21)
36
где - коэффициент аэродинамического демпфирующего момента относи-
тельно поперечной оси Oyt по безразмерной угловой скорости соу1.
10. Аэродинамический демпфирующий момент огносительно поперечной
оси Ozi (демпфирующий момент тангажа)
Mzd = m^1 qSL2 •-у-;
L (2Л'22)
C0Z1 = CDZ,-,
1 zj 2v -
где mzz’ - коэффициент аэродинамического демпфирующего момента относи-
тельно поперечной оси Ozi по безразмерной угловой скорости G)Z1.
11. Аэродинамические демпфирующие моменты Mxd, Myd, действуют в
направлении, противоположном вращению PH.
Коэффициенты аэродинамических сил и моментов 1-й и 2-й ступеней на
атмосферном участке движения зависят от следующих параметров:
1. Коэффициент продольной силы СХ(М,Н) определяется формулой
Сх = Сх0 + АСХ(Н). (2.1.23)
Коэффициент продольной силы PH Сх0 зависит от числа М, углов атаки и
скольжения (а, р). Добавка ДСХ(Н) зависит от числа М и высоты Н. Оба слагае-
мых зависят от типа головного обтекателя.
2. Коэффициент нормальной силы Су зависит от числа М, угла атаки а и
типа обтекателя.
3. Коэффициент поперечной силы Cz зависит от числа М, угла скольжения
р и типа обтекателя.
4. Коэффициент центра давления Cd зависит от числа М, углов атаки и
скольжения (а, Р), а также от типа обтекателя.
5. Коэффициенты моментов демпфирования относительно продольной и попе-
речных осей mxX1, гПуУ1 , т^1 зависят от числа М и типа обтекателя.
Все указанные выше АДХ приведены для высот Н < 80км.
Обычно сброс головного обтекателя происходит на высотах Н~120... 130 км
и дальше 2-я ступень летит с открытым полезным грузом, т.е. резко меняется
конфигурация ступени. При этом для высот Н > 160 км АДХ определяют по ме-
тодике, основанной на теории свободномолекулярного взаимодействия. В диапа-
зоне высот 80 км < Н < 160 км АДХ определяют в соответствии с интерполяци-
онными соотношениями, основанными на экспериментальных данных.
До сброса обтекателя АДХ определяют в ранее описанной системе коорди-
нат Oxyz с началом в верщице головного обтекателя, а после сброса обтекателя -
в точке пересечения продольной оси PH с лобовой поверхностью полезной на-
грузки (рис. 2.1.5).
37
X
Рисунок 2.1.5 - Система координат для расчета
АДХ после сброса ГО
Ось Ох направлена вдоль продольной оси корпуса 2-й ступени. Ось Оу ле-
жит в плоскости пространственного угла атаки а, образованной осью Ох и векто-
ром скорости набегающего потока V, и направлена по проекции вектора V на
плоскость, перпендикулярную продольной оси. Ось Oz дополняет систему коор-
динат до правой.
Аэродинамические силы и моменты рассчитывают по формулам:
X = CxSq; Y = CySq; Mz = CyCdSLq, (2.1.24)
где S и L - характерные площадь миделя и длина 2-й ступени.
При 80 км < Н < 120 км коэффициенты Сх, Су, Cd зависят от высоты Н, чис-
ла М, пространственного угла атаки и типа обтекателя. Эти же коэффициенты
для высот 120 км < Н < 160 км зависят от высоты Н, числа М, угла атаки а, веса
полезной нагрузки и вида солнечной активности (минимальная, средняя или мак-
симальная).
В ИД по PH приводят также разбросы коэффициентов аэродинамических
сил и моментов.
В рассмотренных выше случаях с учетом характера изменения угла атаки
по траектории АДХ задают для сравнительно узкого диапазона углов атаки
(± 20 град). На начальном участке движения PH при действии приземного боко-
вого ветра величина угла атаки а может достигать 90°. При этом необходимо
учитывать изменение профиля набегающего ветрового потока, возмущенного
стартовыми сооружениями.
Для примера на рис. 2.1.6 показано расположение PH и стартового соору-
жения (вид сверху).
АДХ PH приведены в связанной с PH системе координат. Начало СК нахо-
дится в носике головного обтекателя. Ось Ох направлена по продольной оси PH в
сторону хвостового отсека, ось Оу - в сторону плоскости Ш. Ось Oz дополняет
СК до правой. Положение плоскости пространственного угла атаки относительно
плоскости симметрии стартовых сооружений определяется углом <pw. Высоту Н
отсчитывают от поверхности Земли. При Н > 100 м используют АДХ в невозму-
щенном потоке.
38
Рисунок 2.1.6- Схема расположения PH на старте: W - вектор
скорости ветра
Обобщенный профиль максимального приземного ветра (Н < 500 м) при-
нимают по формуле
W = Wo •(Н/Н0)к, (2.1.25)
где Wo - максимальная скорость ветра на высоте Но; Но - базовая высота
(Но = 10 м); к - коэффициент учёта приземного ветра (к = 0.1).
Коэффициенты Сх, Су, Cz, Са на начальном участке зависят от высоты Н,
угла атаки а, угла направления ветра <pw и типа обтекателя.
2.1.6 Основные характеристики маршевых двигателей
Основные характеристики маршевых двигателей PH, приведенные в ИД
по PH:
1. Номинальная тяга двигателя (с учетом тяги выхлопных патрубков турбона-
сосного агрегата (ТНА)) у Земли и в пустоте.
2. Номинальный удельный импульс тяги двигателя (отношение тяги двигате-
ля к суммарному весовому секундному расходу компонентов топлива через
двигатель) у Земли и в пустоте.
3. Отношение секундных весовых расходов окислителя и горючего через ТНА
(параметр Ki).
4. Номинальный весовой секундный расход окислителя и горючего через
ТНА.
5. Номинальное давление газов в камере сгорания (КС).
6. Расчетное давление газов на срезе сопел КС.
7. Коэффициент передачи двигателя KD (изменение давления газов в камерах
сгоранйя при повороте золотника дросселя СПД на угол, равный одному
радиану).
8. Пределы регулирования двигателя по параметру Ki при работе системы
управления расходованием топлива (СУРТ).
9. Пределы поддержания давления при работе на основном режиме от номи-
нального значения.
Ю.Разнотяговость камер сгорания на установившемся режиме.
39
1 l.Bec двигателя (сухого и залитого).
12 .Расход компонентов топлива через двигатель до набора 60% номинальной
тяги.
13 .Смещение геометрического положения осей КС на срезе сопел относитель-
но номинального положения.
14 .Неперпендикулярность геометрической оси каждой КС к плоскости сты-
ковки двигателя с PH.
15 .Суммарное выходное сечение сопел КС и выхлопных патрубков ТНА.
16 .Отклонение давления в КС для нерегулируемого двигателя от номинально-
го значения при номинальных условиях работы.
17 .Зависимость тяги двигателя от давления в КС.
18 .Зависимость суммарного весового расхода компонентов топлива двигателя
от давления в КС.
19 .Постояпная времени и чистое запаздывание тяги двигателя.
20 . Отклонение весового секундного расхода при номинальном давлении газов
в КС.
21 . Изменение тяги двигателя при запуске и выключении.
22 .Импульс последействия тяги при выключении двигателя.
23 .Допуски на характеристики двигателя.
24 . Для 3-й ступени - количество включений двигателя.
25 .Минимальное и максимальное время работы двигателя за одно включение.
26 . Если двигатель установлен в кардановом подвесе или используется ПУС:
* расстояние от среза сопла КС до оси качания двигателя;
- схема установки гидроприводов двигателя с привязкой к плоскостям
стабилизации;
- координаты центра масс и моменты инерции двигателя.
При моделировании необходимо учитывать особенности изменения тяги
при работе МД.
График изменения тяги ЖРД по времени условно можно разбить на три участка:
- набор тяги (запуск МД);
- участок “постоянной” тяги;
- спад тяги (выключение МД).
Время участка набора тяги обычно не превышает 2 с и характеризуется
большим градиентом изменения тяги.
На участке “постоянной” тяги её величина изменяется плавно в соответст-
вии с изменением давления на срезе сопла.
При выключении МД в течение времени t < 1 с наблюдается резкое измене-
ние тяги - до малой величины (~ 10%), после чего она плавно (за счёт выгорания
остатков топлива) за время ~ 10 с уменьшается до 0.
Графики изменения тяги ЖРД второй ступени одной из PH при его запуске
и выключении показаны на рис. 2.1.7 и 2.1.8.
На рис. 2.1.7 за нуль отсчёта времени принят момент подачи 1-й команды
на запуск МД. При этом порядок запуска МД следующий:
- подача команды на прорыв мембраны окислителя (1-я команда);
40
- через 0.5 с подача команды на прорыв мембраны горючего и запуск по-
рохового стартера ТНА (2-я команда);
- через 0.01 с после срабатывания сигнализатора давления в КС - подача
команды на открытие пускового клапана окислителя.
На рис. 2.1.8 за нуль отсчёта времени принят момент подачи предваритель-
ной команды на выключение МД.
Изменение тяги твердотопливного ракетного двигателя (ТТРД) по времени
существенно отличается от изменения тяги ЖРД.
На рис. 2.1.9 показан график изменения тяги ТТРД по времени второй сту-
пени одной из PH. Как видно из рис. 2.1.9, изменение тяти в этом случае является
нестационарным до конца работы ТТРД, что обусловлено процессом горения
твёрдого топлива и отсутствием процесса выключения двигателя. При этом время
участка набора тяги существенно меньше, чем у ЖРД, и составляет -0.2 с.
Рисунок 2.1.7- Изменение тяги ЖРД при запуске
41
Риом, %
Рисунок 2.1.8 - Изменение тяги ЖРД при выключении
Рисунок 2.1.9 - Изменение тяги ТТРД по времени
42
2.1.7 Основные характеристики рулевых двигателей
Основные характеристики рулевых двигателей; приведенные в ИД по PH:
1. Номинальная тяга двигателя (с учетом тяги выхлопных патрубков ТНА) у
Земли и в пустоте. 1
2. Отклонение тяги двигателя от номинального значения.
3. Удельный импульс тяги двигателя у Земли и в пустоте.
4. Отклонение фактического удельного импульса тяги двигателя на Земле и в
пустоте от номинального значения.
5. Весовой секундный расход компонентов топлива через двигатель.
6. Отклонение суммарного весового секундного расхода компонентов топли-
ва через двигатель от номинального значения.
7. Отклонение весовых секундных расходов компонентов топлива через дви-
гатель (параметр Ki).
8. Отклонение фактического параметра Ki от номинального значения.
9. Давление газов в КС.
10. Давление газов на срезе сопла КС.
11. Разнотяговость двух любых КС на установившемся режиме.
12. Углы поворота КС двигателя до механического упора.
13. Вес сухого и залитого двигателя.
14. Импульс последействия тяги двигателя в пустоте при выключении двигателя.
15. Смещение геометрической оси КС двигателя относительно номинального
положения опорных поверхностей хвостового отсека.
16. Перекос геометрической оси КС двигателя относительно установочной по-
верхности.
17. Площадь среза сопла КС.
18. Момент трения в осях подвески КС.
19. Момент в осях подвески КС, возникающий вследствие асимметрии тяги.
20. Изменение тяги двигателя при запуске и выключении двигателя.
2.1.8 Основные характеристики ДМТ и их математические модели
Обычно на пассивных участках движения 3-й ступени для создания управ-
ляющих сил и моментов используют двигатели малой тяги (ДМТ) с неподвиж-
ными соплами. Компонентами топлива для ДМТ являются окислитель и горючее,
подача которых в КС осуществляется с помощью соответственно двух электро-
гидроклапанов (ЭГК). ДМТ могут работать в двух режимах - импульсном и ре-
жиме длительных включений в зависимости от длительности и частоты управ-
ляющих сигналов СУ.
Основные характеристики ДМТ:
1. Номинальная тяга одного ДМТ.
2. Тяга ДМТ во всем диапазоне влияния внешних и внутренних факторов.
3. Номинальный удельный импульс тяги при определенном времени включе-
ния.
4. Минимальный импульс тяги.
5. Разнотяговость между двумя любыми одновременно работающими ДМТ.
43
6. Номинальное соотношение масс компонентов топлива.
7. Отклонение соотношения масс компонентов топлива от номинального зна-
чения во всем диапазоне влияния внешних и внутренних факторов.
8. Время Т] (рис. 2.1.10) от момента подачи команды на запуск до воспламе-
нения топлива в КС.
9. Время т2 выхода на 90 % тяги в установившемся режиме от момента подачи
команды на запуск в импульсном режиме.
10. Время т3 от момента подачи команды на выключение до начала спада тя-
ги.
11. Время Т4 спада тяги до 10% в установившегося режима от момента подачи
команды на выключение в импульсном режиме.
12. Максимальное время работы одного ДМТ в непрерывном режиме за одно
включение.
13. Время одного включения при работе в импульсном режиме.
14. Максимальная частота включения одного ДМТ.
15. Максимальная пауза между выключением и последующем включением
ДМТ (от снятия до подачи напряжения на ЭГК).
16. Суммарное время огневой наработки одного ДМТ.
17. Максимальное количество включений одного ДМТ:
- при поданном на вход давлении компонентов топлива;
- без подачи на вход компонентов топлива при проверках.
18. Линейное смещение геометрической оси ДМТ от номинального положе-
ния относительно стыковочных отверстий установочной базы.
19. Угловое отклонение геометрической оси ДМТ от номинального положе-
ния относительно установочной базы.
20. Электрические характеристики ЭГК:
- напряжение питания;
- . активное сопротивление каждой из обмоток ЭГК;
- индуктивность каждой из обмоток ЭГК;
- максимальная частота включений;
- ток, при котором происходит открытие ЭГК (ток срабатывания);
- ток, при котором происходит закрытие ЭГК (ток отпускания).
Типичный характер изменения тяги ДМТ по времени t при подаче управ-
ляющего сигнала показан на рис. 2.1.10, на котором приняты следующие обозна-
чения:
U - управляющий сигнал;
Ро - тяга ДМТ на установившемся режиме.
44
Рисунок 2.1.10 - График набора и спада тяги ДМТ
В качестве математической модели тяги ДМТ при проектировании СУОС
принимают закон изменения тяги ДМТ в виде, показанном на рис. 2.1.11.
Рисунок 2.1.11- Математическая модель набора и спада тяги
ДМТ
45
где t НБ - время набора тяги Ро; tHC - время начала спада тяги; t к - время
окончания работы ДМТ (Р = 0).
Текущее значение тяги ДМТ вычисляют по формулам:
т2-0.1т(_
1нс ~ту +тз!
(2.1.26)
10(т4--Сз)
't<x,
<t<tj
^НБ < * - ^НС
t>t
Р = 0;
P = 2^.(t_T);
Ь "Л
р=р0;
Р = 0.
(2.1.27)
Ч[С < t — tK
2.1.9 Баллистические характеристики
2.1.9.1 Характеристики атмосферы
Полет PH на начальном участке траектории происходит в атмосфере. Воз-
никающие при этом аэродинамические силы существенно зависят от параметров
атмосферы — плотности, давления и температуры воздуха. Эти параметры, в
свою очередь, зависят от высоты полета, географической широты места, времени
года и суток и ряда других факторов, например от степени активности Солнца.
Для определения конструктивных параметров ракеты, расчета траекторий и
других исследований обычно используют таблицы стандартной атмосферы, кото-
рые дают некоторые средние значения параметров невозмущенной атмосферы в
зависимости от высоты. Отклонения параметров атмосферы от стандартных зна-
чений, а также ветер представляют собой атмосферные возмущения, которые
влияют на полет PH.
Выбор той или иной модели стандартной атмосферы, как правило, диктует-
ся государственными или отраслевыми стандартами.
Кроме того, существуют методики определения случайных параметров
возмущенной атмосферы и ветра.
Степень сложности модели атмосферы зависит от требований, предъявляе-
мых к объекту управления в реальном полете.
2.1.9.2 Модель гравитации
Согласно закону всемирного тяготения каждое тело массой М притягивает
другое тело массой ш с силой гравитационного притяжения G, определяемой
следующей зависимостью:
46
где f - гравитационная постоянная; г - расстояние между телами.
При полете PH на нее действуют силы притяжения Земли и других небес-
ных объектов. Однако в связи с тем, что траектории полета PH проходят в непо-
средственной близости Земли, силами притяжения остальных небесных тел мож-
но пренебречь и рассматривать в дальнейшем только гравитационное поле тяго-
тения Земли.
При выводе уравнений движения удобно использовать следующие две со-
ставляющие ускорения силы притяжения:
- направленную к центру Земли - gr;
- направленную параллельно оси вращения Земли - .
В зависимости от требуемой точности выбираем необходимое представле-
ние нормального потенциала Земли в виде разложения в ряд. Например, если ог-
раничиться первыми членами разложения, выражения примут вид
г2 2 г4
'У а20 •
g<0=3—sin<pc,
где (рс-геоцентрическая широта; а00, а20 -коэффициенты разложения нор-
мального потенциала Земли.
2.1.9.3 Модель фигуры Земли
В качестве модели фигуры Земли принимают эллипсоид вращения (рефе-
ренц-эллипсоид) с соответствующими размерами, определенным образом ориен-
тированный относительно Земли и к поверхности которого относятся результаты
геодезических работ на рассматриваемой части земной поверхности. На ориенти-
ровку референц-эллипсоида налагаются следующие условия:
- наибольшая близость поверхности референц-эллипсоида к поверхности
геоида, лишь на рассматриваемой части земной поверхности;
- параллельности оси вращения референц-эллипсоида и оси вращения
Земли.
В настоящее время в отечественной практике в качестве модели фигуры
Земли принят эллипсоид Красовского. Кроме него известны также эллипсоиды
Кларка, Хейфорда, Эвереста и общеземной эллипсоид WGS-84.
2.1.9.4 Системы координат
2.1.9.4.1 Определение систем координат
Стартовая СК (xs, ys, zs) - начало координат задается географическими
координатами точки старта на уровне приборного отсека относительно Земного
эллипсоида: широтой <pgo, долготой Хо, высотой ho.
Ось 0xs - образует с направлением на Север угол, равный азимуту прице-
ливания Ао.
47
Ось Oys - направлена вверх по нормали к эллипсоиду.
Ось 0zs - дополняет систему до правой.
Начальная стартовая СК (xjS, yjS, ZiS) - в момент ОТП совпадает со старто-
вой СК. Далее ориентация осей начальной стартовой СК не изменяется в инерци-
альном пространстве.
Начальная стартовая геоцентрическая СК (хо, уо, Zo) - образуется из на-
чальной стартовой СК путем параллельного переноса осей последней в центр
Земного эллипсоида.
Гринвичская СК (xgr, Ygr3 zgr) - геоцентрическая, связана с Землей и вра-
щается вместе с ней.
Начало координат - центр Земли.
Ось Oxgr - пересечение экваториальной и гринвичской плоскостей, направ-
лена в сторону Гринвича.
Ось Ozgr направлена вдоль полярной оси Земли к Северному полюсу.
Ось OyGR дополняет систему до правой.
Экваториальная СК (xEq, Уеч, zEq) - геоцентрическая инерциальная СК, в
момент ОТП совпадает с Гринвичской СК.
Экваториальная СК, связанная с меридианом точки старта (х^, yms,
zms), - геоцентрическая, связанная с Землей и вращающаяся вместе с ней.
Начало координат в центре Земли.
Ось 0xms - пересечение экваториальной плоскости и плоскости меридиана
старта.
Ось Ozms направлена вдоль полярной оси Земли к Северному полюсу.
Ось Оупь дополняет систему до правой.
Звездная экваториальная СК (хЕ, Уе, zE) - геоцентрическая, инерциальная
СК
Начало координат 0Е - центр Земли.
ОсьОЕхЕ -пересечение экваториальной и эклиптической плоскостей,
направлена в точку весеннего равноденствия.
Ось 0EzE - вдоль полярной оси Земли, направлена в сторону Северного
полюса.
Ось 0ЕуЕ - дополняет систему до правой.
Опорная орбитальная СК (£0, Ло? Со) - опорная система координат, инерци-
альная, геоцентрическая.
Ось От]о - лежит в плоскости экватора и направлена в точку восходящего
узла орбиты.
Ось О£о находится в плоскости заданной орбиты, направлена перпендику-
лярно оси Оцо в сторону движения PH в точке восходящего узла.
Ось О£о дополняет систему до правой.
Орбитальная терминальная. СК Лт, Ст) - орбитальная система коорди-
нат, геоцентрическая.
Ось Оцт - совпадает с направлением радиуса-вектора PH.
Ось О£,т лежит в плоскости полета и направлена перпендикулярно оси Оцт
48
в сторону полета PH.
Ось О£т Дополняет систему до правой.
Связанная с PH СК (xi, yi, Z]) - начало системы, расположенное в центре
масс PH.
Ось Oxi направлена вдоль ракеты в сторону головного обтекателя.
Ось Оу 1 лежит в I-III плоскости стабилизации PH и направлена в сторону III
плоскости.
Ось Ozi лежит во П-IV плоскости стабилизации и дополняет систему до
правой.
Программно-связанная СК (х3, у3, z3) определяет протраммное положение
связанной СК в начальной стартовой СК.
2.1.9.4.2 Относительная ориентация систем координат
В настоящем подразделе приведены матрицы перехода между системами
координат.
От начальной стартовой СК к начальной стартовой геоцентрической СК
Координаты точки старта PH в начальной стартовой геоцентрической СК:
Хо = - (с - s) cos Ao cos q>go sin <pg0:
Уо = c • cos2cpgo + s • sin2cpgo + ho; (2.1.28)
zo = (c - s) sin Ao cos <pgo sin cpgo,
где
c=- -aE
-Jl-eE2sin2<pg0
s = (1 - eE2) c;
cpgo - геоцентрическая широта; Ao - азимут пуска; aE - большая полуось земного
эллипсоида; еЕ - первый эксцентриситет земного эллипсоида.
От начальной стартовой СК к стартовой СК
AjSS — (А(90о +Ао) ‘ A<pgO) * AfeE-t ’ (AfpgC * А(90О+а0)) -
(1 - cos(cde • t)) + b m(l - cos(o)E • t)) +
4- cos(ooE • t) n - sin((DE ’ t)
1 • m(l - cos(coE • t)) - in 2 (1 - cos(coE • t)) +
- n • sin(toE • t) + cos(coE • t)
1 • n (1 - cos((oE • t)) + m • n( 1 - cos((oE • t)) -
+m-sin(oE t) -l sin(coE t)
bn(l-cos(coE-t))- -m sin((BE t) m n(l-cos(o)E t)) + (2.1.29)
+ l-sin(coE -t) n2 (l-cos(coE t)) + + cos(coE • t) > J
где coE - угловая скорость вращения Земли; 1 = cosAoCOS(pg0; m = sincpgo,
n - - sinAocoscpgo-
49
От начальной стартовой СК к экваториальной СК
AeEq - А(90о_Хо) • A(_9g0) • А,до0+Ао)-
sinXo sin Ao - - cos Xo sin (pgо cos Ao cos Xosin Ao -- cos Xo cos <pg0 - sin Xo cos Ao + + cosX0 sin <pg0 sin Ao sinXoCOsqjgo cosX0cosA0 + (2.1.30)
- sin Xo sin(pg0 cos Ao 4- sin Xo sin (pg0 sin Ao »
cos(pg0 cosA0 sin (pg0 - cos (pg0 sin Ao )
где
Хо - долгота точки старта PH.
От экваториальной СК к Гринвичской СК
' cos(coE ’t)
AEqGR = ~sin(coE-t)
sin(coE • t)
cos(a>E • t)
0
(P
0
и
(2.1.31)
0
От экваториальной, связанной с меридианом точки старта, СК к началь-
ной стартовой геоцентрической СК
Ато - А_(90о+А0) • Афй0 • А( 5уО)-
^-cosAo sin(pg0
cos<pg0
smAosin<pgo
sinA0 cosA0cos<pg0
0 sm(pg0
cos Ao - sin Ao cos cpg0;
(2.1.32)
От звездной экваториальной СК к экваториальной СК
Аееч =
cosAQ sin Д£1 (Г
-sinAQ cosAQ О
О 0 1у
(2.1.33)
где AQ - угловое положение оси Oexqr Гринвичской СК относительно оси
ОеХе в момент старта
-i+l,
1*0
•3600*соЕ,
So - звездное время момента старта в часах, ко - постоянная перехода от звездно-
го времени к среднесолнечному, ко= 1.002738, tc-время старта по Гринвичу в
часах.
От начальной стартовой геоцентрической СК к опорной орбитальной СК
G = Gj • G(Ko_n) • G^go • G_(90o_Ao) , (2.1.34)
50
где
G-(90°-A0) —
' cos(90°-Az0)
О
^-8^(90° -Ай)
0 sin(90n-Az0) '
1 О
0 COS^OO-A^
fl О
= 0 cos<pg0 sintpgo
k0 -sintpgo cos<pg0>
^cos(X0 — Q) sin(X0 - fl)
G(xo-n) = - sin(X0 - Q) cos(X0 - Q)
0 '
0
b
cosi 0
Gi= 0 1
k sini 0
-sinP
0
cosi;
где
i - наклонение плоскости орбиты; Q - долгота восходящего узла.
От опорной орбитальной СК к орбитальной терминальной СК
'"coscp,. - sinq>T
Ф = sin<pT cos(pT
0"
0
(2.1.35)
0 0 1
где фт - угловая дальность от узла орбиты.
От начальной стартовой геоцентрической СК к орбитальной терминаль-
ной СК
К-Ф G.
От начальной стартовой СК к связанной с PH СК
Aoi cosy cos $ Аф * Ay * A3
cos ysin 3 -sin у
-cos (psin9 + cos <pcos9 + sincpcosy (2.1.36)
+ sincpsin\|/cosd + sin<psin\|/sin3
sin (psin& + -sin cpcos9 + costpcosvj/
+ cos(psinycosS + cos cp sin у sin & )
где & - угол тангажа; \j/ - угол рыскания; ср - угол вращения.
Кватернион ориентации связанной с PH СК относительно начальной стар-
товой СК:
51
^08(3/2)^ <cos(i]//2)> <cos(<p/2)>
0 0 sin(<p/2)
A = AS°AV° Ар = 0 о sin(y/2) О 0 (2.1.37)
^(3/2) ? < 0 ; < 0 >
От начальной стартовой СК к программно-связанной СК
A oipr— А<ррГ • рГ ’ Ад рГ. (2.1.38)
Кватернион ориентации программно-связанной СК относительно началь-
ной стартовой СК:
<cos(9pr/2)> 'созОИрт /2П <cos(<ppr/2)>
0 0 sin(<p„r/2)
Apr Agpr АфРГ Афрг 0 о sin(\|/Fr/2) °pr (2.1.39)
<sm(9pr/2)/ 1 о J < о
От программно-связанной СК к связанной СК
Ад - Адэ1 • Адц/i ’ АдУ1.
При малости углов A3i, Ayi матрица
А д - ' 1 sin A3! -sinA\|/1> -sinA3j 1 sin Ay j (2.1.40)
k sinA\|/! . -sinA/! 1 ,
Кватернион ориентации осей PH относительно программно-связанной СК
определяется уравнениями
2Л.9.5 Характеристики точки старта
В общем случае точка старта определяется следующими характеристиками
на принятой модели фигуры Земли:
- широта;
- долгота;
- высота приборного отсека над эллипсоидом;
- уклонение отвесной линии в плоскости меридиана;
- уклонение отвесной линии в .плоскости первого вертикала.
52
2.1.9.6 Схема полета PH
Полет PH существенным образом зависит от особенностей конкретного
участка траектории, при этом на каждом таком участке используется специально
разработанный закон управления. От правильного разбиения траектории на уча-
стки напрямую зависит оптимальность принятых законов управления и, как след-
ствие, эффективность всего ракетно-космического комплекса.
Вообше говоря, любую траекторию движения можно декомпозировать на
участки в соответствии со многими критериями. Обычно выделяют атмосферный
и безатмосферный, активный/пассивный (работают/не работают маршевые
двигатели) и др.
Как правило, типовая схема полета включает в свой состав следующие уча-
стки:
- старт;
- полет в плотных слоях атмосферы;
- полет вне атмосферы;
- орбитальный полет.
Типовая схема траектории выведения полезного груза на орбиту ИСЗ пока-
зана на рис. 2.1.12.
2.1.9.7 Траектории выведения
Траектория выведения (опорная) представляет собой некоторую идеализи-
рованную зависимость управляющих функций от кинематических параметров
движения. Однако при использовании реальных алгоритмов системы управления
абсолютно точное воспроизведение опорной траектории чаще всего не представ-
ляется возможным. Это связано с особенностями реализации законов управления
в алгоритмах СУ, особенностями взаимодействия алгоритмов СУ и бортовой
цифровой вычислительной машины, особенностями взаимодействия СУ и инер-
циальной навигационной системы и др.
Поэтому разработчики СУ моделируют траекторию движения PH на базе
опорной траектории с использованием моделей объекта управления и алгоритмов
СУ. Полученная в результате расчетов траектория будет лежать в ближайшей ок-
рестности опорной траектории и обеспечивать максимальное приближение к тра-
ектории полета PH в реальных условиях.
Под траекторией здесь понимается совокупность всех параметров, в той
или иной степени характеризующих движение PH в пространстве, В этом случае
параметры траектории можно условно разделить на управляющие и описываю-
щие движение.
Управляющими параметрами называются параметры, изменение которых
может быть формализовано в виде алгоритма управления и, как следствие, при-
водит к изменению положения PH в пространстве.
Описывающими параметрами называют параметры, которые не использу-
ются для управления, а только описывают текущее состояние PH и являются ис-
ходной информацией для расчета управляющих параметров.
53
Рисунок 2.L12 - Типовая схема траектории выведения полезного груза на орбиту ИСЗ
Принятая классификация существенно зависит от облика и технических ха-
рактеристик PH. Однако в современных PH в качестве управляющих параметров
чаще всего используют программные значения углов ориентации PH относитель-
но некоторой базовой системы координат. В этом случае траектория движения
может быть представлена в виде следующих взаимосвязанных функционалов:
»рГ = Ф(^,Х1Л):
Vpr = 0; (2.1.42)
Фрг=Ф(^,Х1Л)>
где Зрг, у рг, <ррг - управляющие параметры (углы ориентации PH относитель-
но некоторой базовой системы координат); X, - кинематические параметры дви-
жения PH (координаты, скорость и т.д.); %, - параметры, характеризующие со-
стояние PH (масса, тяга и т.д.); t - время полета.
Кроме того, одним из важнейших параметров, характеризующих траекто-
рию выведения, является циклограмма полета/Под циклограммой поЛета пони-
мают полный набор функциональных и временных команд, определяющих клю-
чевые (базовые) моменты полета PH. Более подробно циклограмма полета будет
рассмотрена в подразд. 2.1 Л 5.
2.1.10 ИД по элементам автоматики и пироэлементам PH
Указанные ИД выдаются Головной организацией - заказчиком разработки
системы управления элементами автоматики и пироэлементами PH. (Далее по
тексту - система АПС). ИД являются приложением к техническому заданию на
разработку СУ РКН и содержат диаграмму выдачи команд и данные об элементах
автоматики и пироэлементах.
Для примера ниже приведен перечень указанных ИД для одной из совре-
менных РКН.
Диаграмма выдачи команд содержит номера, наименования, последова-
тельность, условия, времена выдачи команд на элементы автоматики (ЭПК, РД) и
пироэлементы (ПЭ), требования по контролю [моменты времени, состояние РД
(разомкнут/замкнут)] за их исполнением при подготовке к пуску и полете PH. В
случае срабатывания хотя бы двух из трех контактов РД - штатная работа СУ
продолжается, в случае несрабатывания -- выход в автоматическое прекращение
пуска (АПП).
Данные по элементам автоматики содержат:
- состав элементов системы АПС 1-й, 2-й и 3-й ступеней и головного бло-
ка - наименования элементов, их количество, обозначения, типы эле-
ментов, места их расположения по отсекам PH;
- электрические характеристики элементов автоматики и пирравтоматики.
Основные электрические характеристики сигнализаторов давления:
- напряжение питания - от 24 до 32 В;
- допустимый ток через контакты - не более 5,0 А (тип 2С, 2С- М), не бо-
лее 2,0 А (тип ЗСД, ЗСД- 60АС - 10), не более 0,2 А (тип ПРМ-АР);
55
- типы соединителей;
схемы электрические.
Основные электрические характеристики ЭПК:
- напряжение питания - от 24 до 32 В;
- сопротивление обмотки при t = 20сС - от 24 до 32 Ом;
- время выдержки под напряжением (током) - 150 с, 500 с, 10 мин, 2,5 ч -
определяется типом ЭПК;
- индуктивность катушек при f = 100 Гц - 0,1 Гн, 210+50 мГн,
380+50 мГн - определяегся типом ЭПК;
- типы соединителей;
- схемы электрические.
Основные электрические характеристики ЭГК:
- напряжение питания - от 21,3 до 32,5 В;
- ток открытия клапана - 0,25 А;
- ток закрытия клапана - 0,08 А;
- температурный диапазон эксплуатации - от минус 5,0 до плюс 100°С;
- максимально допустимый выброс напряжения при выключении - не бо-
лее 100 В;
- максимально допустимое время достижения тока отпускания ЭГК от
момента подачи команды на его выключение - 0,01 с;
- активное сопротивление каждой из обмоток электроклапанов при тем-
пературе плюс 20°С -65+1 Ом;
- индуктивность каждой из обмоток электроклапанов при f= 100 Гц - не
более 0,48 Гн.
- типы соединителей;
- схемы электрические.
При отсутствии управляющих сигналов на ЭГК допускается в любом ре-
жиме работы системы управления при наличии бортового питания непрерывное
протекание тока величиной не более 0,01 А в течение времени не более 3,5 часа.
При регламентных проверках на ЭГК допускается подавать постоянный ток
напряжением (28+4) В не более 60 с. Допускаются последующие включения по-
сле паузы продолжительностью не менее 30 мин.
Основные электрические характеристики ПЭ:
- сопротивление каждого мостика накаливания - от 1 до 2 Ом (тип
15X568,15X571, 15X569), от 0,8 до 1,2 Ом (тип МПДО), от 0,2 до 0,6 Ом
(тип УДП2);
- безотказный постоянный юк срабатывания, подаваемый на один из мос-
тиков накаливания, не менее 1 А (тип 15X568, 15X571, 15X569), 1,5 А
(тип МПДО, УДП2), 2,0 А (тип ЭВП-19,ЭД-9);
.время подачи безотказного постоянного тока срабатывания, не менее
0,005 с (тип .15X568, 15X571, 15X569), 0,01 с (тип МПДО, ЭВП-19,
УДП2, ЭД-9);
- время срабатывания - 0,005 с (тип 15X568, 15X571, 15X569), 0,01 с (тип
“ ? ЭВП-19, УДП2, ЭД-9);
56
- допустимый постоянный ток проверки ПЭ - не более 0,05 А;
- время подачи постоянного допустимого тока проверки ПЭ - 30 мин (тип
15X568, 15X571, 15X569), не ограничено (тип МПДО, ЭВП-19, УДП2,
ЭД-9);
типы соединителей;
- схемы электрические.
2.1.11 Основные характеристики и математические модели датчиков и
приводов СУРТ
Датчики уровня СУРТ предназначены для измерения и выдачи информации о
прохождении зеркалом компонентов заданных уровней в топливных отсеках ракеты.
Задача определения объемов веществ, обладающих химически агрессивны-
ми или криогенными свойствами, с высокой точностью и надежностью до появ-
ления ракетной техники никогда не ставилась. Проведенные исследования и экс-
перименты по выбору принципа измерения уровней компонентов показали, что
реализация подобных измерений датчиками непрерывного действия невозможна.
Решение было найдено в использовании порогово-дискретного принципа управ-
ления и привело к созданию дискретных дачников уровня с точечными чувстви-
тельными элементами, различными по физическому принципу действия, снаб-
женными гидромеханической и электрической системами фильтрации сигналов
для снижения уровня помех.
Чувствительные элементы датчиков уровня
Чувствительные элементы датчиков уровня предназначены для индикации
границы жидкости и парогазовой среды наддува. Значительные различия в физи-
ческих и химических свойств компонентов и среды наддува не позволяют создать
единый чувствительный элемент для всех используемых в настоящее время ви-
дов топлива и условий эксплуатации.
Анализ физических свойств наиболее распространенных компонентов показы-
вает, что ракетные топлива с применением АТ, ТГ-02, РГ-1, О и Н являются хороши-
ми диэлектриками, АК-27И - электролитом с относительно высокой проводимостью,
а НДМГ в диапазоне условий эксплуатации на несколько порядков меняет свою про-
водимость и может рассматриваться и как проводник, и как диэлектрик.
Контактные датчики
Для дискретного измерения уровня компонентов-электролитов был разра-
ботан контактный чувствительный элемент, работающий на принципе разрыва
электрической цепи, образуемой двумя металлическими электродами и электро-
проводным компонентом. При этом металлическими электродами являются из-
мерительная труба и специальные Г-образные контакты, расположенные внутри
измерительной трубы на расчетных уровнях. Датчики с такими чувствительными
элементами применены для измерений уровня окислителя АК-27И.
Качество работы контактного датчика определяется отношением сопротив-
ления цепи, предшествующего моменту отрыва компонента от торца Г-образного
электрода, к сопротивлению утечки между электродами. Величины указанных
сопротивлений определяют экспериментально.
57
Контактные датчики, обладая рядом положительных качеств (простота
конструкции, отсутствие подвижных частей, высокий уровень сигнала полезной
информации, простота электрической схемы, не требующей специальных источ-
ников питания и др.), могут использоваться только для компонентов топлива с
относительно высокой электропроводимостью, что ограничивает их широкое
применение.
Емкостные датчики
Выбор чувствительного элемента датчиков для измерения уровня компо-
нентов-диэлектриков показал, что наиболее полно всем требованиям работы в
условиях полета отвечают емкостные чувствительные элементы, принцип работы
которых основан на изменении величины электрической емкости воздушного
конденсатора при заполнении межэлектродных промежутков компонентом-
диэлектриком.
Изменение емкости при расходе компонента определяется формулой
= (2.1.43)
at ан at4 7
где £ - диэлектрическая проницаемость измеряемой среды; Со - емкость чув-
ствительного элемента в воздухе; Н - уровень компонента топлива в баке.
Конструктивно чувствительный элемент представляет собой набор концен-
трично расположенных металлических колец высотой около 6 мм. Элементы же-
стко, через изоляторы, крепят к трубе успокоителя, что обеспечивает необходи-
мую жесткость и виброустойчивость.
Значение емкости такого элемента в воздухе составляет Со ~ 30 пФ.
Пластины конденсатора через специальные стеклометаллические гермовы-
воды соединяют с токонесущими коаксиальными проводами, заключенными в
металлическую трубу.
Измерительная электрическая схема на емкостных чувствительных элемен-
тах представляет собой симметричный электрический мост переменного тока, два
плеча которого образуют параллельно соединенные чувствительные элементы
(нечетных и четных номеров соответственно), а два других плеча - электриче-
ские конденсаторы постоянной емкости, встроенные в усилитель-
преобразователь. Питание моста осуществляется от статического преобразовате-
ля напряжением 50 В с частотой 50 кГц. Такие датчики, отличающиеся конструк-
тивной простотой, отсутствием подвижных элементов, высокой точностью и на-
дежностью, применяют в системе опорожнения на ракетах с холодным газобал-
лонным наддувом.
На ракетах с горячим газогенераторным наддувом использование емкостных
датчиков для измерения объемов компонентов типа НДМГ и АТ потребовало бы ко-
ренного пересмотра измерительной схемы со значительным ухудшением весовых ха-
рактеристик системы. Это вызвано изменением диэлектрических свойств верхнего
слоя НДМГ под действием рабочего тела системы газогенераторного наддува.
Таким образом, емкостные датчики для измерения уровня компонентов-
диэлектриков в условиях горячего газогенераторного наддува баков оказались
58
недостаточно приспособленными, что вызвало необходимость проведения работ,
связанных с созданием новых чувствительных элементов, не использующих
электрические свойства компонентов и не уступающих по точности, надежности,
агрессивной стойкости и простоте проведения измерений, рассмотренных ранее.
Индуктивные датчики
Наиболее распространенными дискретными датчиками уровня являются
датчики уровня индуктивного типа. Такой датчик представляет собой дискрет-
ный измеритель уровня с системой чувствительных элементов (катушек индук-
тивности), расположенных вдоль вертикальной оси датчика на расстояниях, со-
ответствующих расчетным объемам компонентов топлива в баке.
В сочетании со свободно плавающими на поверхности жидкости шестью
пустотелыми поплавками чувствительные элементы обеспечивают выдачу ин-
формации о положении уровня компонента топлива.
Восемь катушек индуктивности включены в мостовую схему (рис. 2.1.13).
В каждое плечо моста включены последовательно два чувствительных элемента.
В исходном состоянии мост сбалансирован и выходное напряжение моста прак-
тически равно нулю.
Рисунок 2.1.13 - Принципиальная электрическая схема
индуктивного датчика уровня
Принцип действия датчика основан на изменении индуктивности чувстви-
тельного элемента при приближении к нему магнитопроводящих поплавков, в ре-
зультате чего баланс моста нарушается и на измерительной диагонали моста по-
59
является напряжение разбаланса. Информацией о прохождении компонентом то-
плива расчетного уровня является появление сигнала разбаланса заданной вели-
чины. Форма выходного сигнала показана на рис. 2.1.14.
Рисунок 2.1.14 - Форма выходного сигнала индуктивного
датчика уровня
Общий вид датчика показан на рис. 2.1.15.
Конструктивно датчик выполнен в виде двух концентрических труб: трубы
успокоителя 1 и трубы гермовывода 2 с чувствительными элементами.
В кольцевом зазоре между трубами расположены шесть сферических по-
плавков.
Внутри трубы гермовывода 2 на трубе-штанге 3 помещены восемь чувстви-
тельных элементов 4.
Чувствительный элемент выполнен в виде цилиндрической катушки индук-
тивности с разомкнутой магнитной цепью, представляющей собой сердечник с
намотанными на него проводами.
В целях дублирования мест пайки начало и конец обмотки разделены на
две части и с помощью наконечников подпаяны к отдельным клеммам.
К выводам катушки подпаяны дублированные провода, собранные в жгут 5.
Один конец трубы гермовывода закрыт герметично вваренной втулкой 6,
другой - герметично соединен с мягкой алюминиевой трубкой 7, заканчиваю-
щийся штецселъной вилкой 8, к которой подпаян жгут.
60
Рисунок 2.1.15 - Общий вид индуктивного датчика уровня
Гермовывод 9 служит для герметичного вывода жгута через днище бака
или его боковую стенку.
Мягкая алюминиевая трубка? позволяет компенсировать возможные де-
формации бака, а также технологические погрешности изготовления бака и дат-
чика. . ч
В районе каждого чувствительного элемента снаружи трубы гермовывода
прикреплены втулки (калибраторы) 10, которыми она центрируется в трубе успо-
коителя и которые служат для обеспечения калиброванного зазора в момент про-
хождения поплавками зоны чувствительного элемента.
61
Поплавок 11 представляет собой шарик, сваренный из двух полусфер. Диа-
метр и вес поплавков выдерживают с большой точностью, чем обеспечивается
постоянное положение ватерлинии поплавков при постоянной плотности компо-
нентов топлива.
Винт 12 с накидной гайкой служит для крепления датчика к днищу бака.
Винт позволяет перемещать датчик по результатам тарировки в вертикальном
направлении, а шаровая опора винта дает возможность выставить ось датчика в
процессе монтажа параллельно оси бака.
По высоте трубы успокоителя расположены хомуты 13 для крепления дат-
чика к баку растяжками; в нижней части успокоителя расположены два штуцера
для подсоединения трубопроводов 14. Труба успокоителя с трубопроводами об-
разуют гидравлический фильтр, параметры которого выбраны такими, чтобы ко-
лебания жидкости в баке в диапазоне возможных частот практически не вызыва-
ли колебаний уровня жидкости в успокоителе датчика.
Математическая модель индуктивного датчика представляет собой релей-
ное звено. Выходной сигнал (-Upa36an?Hca, 0, иразбаланса) Определяет МОМСНТЫ ПрОХО-
ждения зеркалом компонента топлива чувствительных элементов датчика и опи-
сывается выражением
разбаланса
при прохождении зеркалом четного ЧЭ;
при нахождении зеркала между ЧЭ;
при прохождении зеркалом нечетною ЧЭ.
Электропривод и исполнительное устройство
Электропривод системы предназначен для преобразования электрических
управляющих команд, поступающих с выхода устройства управления приводами,
в механические управляющие воздействия на исполнительное устройство (дрос-
сель), и представляет собой агрегат электромеханического типа на базе электро-
двигателя постоянного тока.
Управляющие воздействия на электропривод подаются в виде импульсов
напряжения бортового источника постоянного тока требуемой длительности и
полярности. Механические управляющие воздействия электропривода реализу-
ются в виде поворота выходного вала электропривода. Электропривод оснащен
телеметрическим потенциометром угла поворота выходного вала и контактно-
ламельным устройством контроля и приведения вала в исходное положение по
командам системы управления. На выходной вал электропривода жестко посаже-
на подвижная заслонка дросселя, при перемещении которой изменяется коэффи-
циент соотношения расходов. Дроссель устанавливается в магистрали горючего и
является принадлежностью ЖРД.
2.1.12 Изменение уровней компонентов топлива в полете
Информацию об уровнях компонентов топлива представляют в виде кода,
изменяющегося в зависимости от измерения массы горючего и окислителя в ба-
ках по времени полета. Временные точки изменения кода соответствуют расчет-
ному моменту включения ДУ, проходу зеркалом компонентов измерительных то-
62
чек и расчетному моменту выключения ДУ на ступени, определенным по резуль-
татам моделирования полета PH в номинальном режиме. Поскольку скорости
расходования компонентов топлива в реальном полете являются случайной вели-
чиной, зависящей от многих факторов, то и временные моменты прохождения
зеркалом компонентов измерительных точек будут случайным образом отличать-
ся в ту или иную сторону от определенных по результатам моделирования полета
PH в номинальном режиме.
2.1.13 Основные характеристики и математические модели датчиков и
приводов СПД
Датчики и приводы системы поддержания давления (СПД) входят в состав
элементов автоматики двигательной установки ракетоносителя (ДУ PH). Датчики
являются чувствительными элементами системы СПД и предназначены для из-
мерения давления продуктов сгорания в КС.
Принципиальная электрическая схема используемых датчиков давления
показана на рис. 2.1.16.
Рисунок 2.1.16 - Принципиальная электрическая схема датчика давления
На рис. 2.1.16 обозначено:
А1(А1),Д,(Д;),Д2(Д'2),Ф1(Ф'1),Ф2(Ф2) - ламели датчика давления; Рном>
Рдрь Рдр2, Рф1, Рф2 - абсолютное значение давлений, на которые настроены ламе-
ли датчика давления (ДД), соответствующие номинальному, дросселированному,
глубокому дросселированному, форсированному, глубокому форсированному
режимам работы ДУ.
Тип датчика, ламели которого настроены на соответствующие давления,
63
определяется в результате конструкторской разработки ДУ.
При фщссировании датчиком СПД давления, отличного от номинального
значения с точностью до зоны нечувствительности, с выхода ДД выдается сигнал
в систему управления (релейный преобразователь сигнала - РПС) в соответствии
с релейной (дискретной) характеристикой датчика.
Основные характеристики датчиков давления на примере типичного PH
приведены в табл. 2.1.1.
Таблица 2.1.1 - Основные характеристики ДД
Наименование параметра, размерность Датчик давления 1-й ступени Датчик давления 2-й ступени Датчик давления 3-й ступени
Номинальное абсолютное дав- ление, кгс/см2 85±0.35 91±0.35 99+0.5
Давление, на которое настроена ламель Д2 67.3- (77±0.45) (71-78) - (81.9±0.4) (82-88) - (92±0.5)
Давление, на которое настроена ламель Ф2 88.8±0.45 95.15+0.45 106.5±0.5
Зона нечувствительности между ламелями Д1 - Фь кгс/см2 1±0.2 1.4±0.3 1±0.35
Зона нечувствительности между ламелями Ai - Д2, кгс/см2 0.9±0.4 0.9±0.4 0.9±0.4
Зона перекрытия между ламе- лями Д1 - Д2, кгс/см2 1-2.4 1-2.4 0.7-2.0
Зона перекрытия между ламе- лями Ф^ - Ф2? кгс/см2 Не менее 0.7 Не менее 0.7 Не менее 0.7
Постоянная времени, с 0.06±0.02 0.06±0.02 0.06±0.02
Математическая модель ДД представляет собой систему, состоящую из ли-
нейного и нелинейного звеньев последовательно соединенных между собой.
Линейное звено является апериодическим звеном первого порядка. Диффе-
ренциальное уравнение, связывающее отклонение давления в чувствительной по-
лости датчика с отклонением давления в камере сгорания (КС), имеет вид
5р‘(0 = у-(зрО + Зрду -8p*(t)), (2.1.44)
•*-ДД
где 8p*(t), 8p*(t) - скорость изменения и отклонение давления от номинально-
го значения в чувствительной полости ДД; Тдд - постоянная времени; 8p(t) - от-
клонение давления от номинального значения в КС; 8рду - суммарные возмуще-
нЙЯТто1 даёпению в КС ДУ из-за конструктивных погрешностей и погрешностей
йастр!оек^ДУ<'а также разбросов характерных параметров топлива.
Нелинейное звено представляет собой звено с релейной характеристикой,
имеющей зону нечувствительности. Уравнение, описывающее формирование
64
сигнала, поступающего на вход релейного преобразователя сигналов (РПС) в за-
висимости от давления, превышающего настроечные значения ограничительных
ламелей "Ф" или "Д" датчика давления, имеет следующий вид:
иад(0=
U0sign8p’(t),
О
5p’(t) > бРогр
8р*(0 <5?*^’
(2.1.45)
где UM(t) - текущее значение сигнала, формируемое ДД; Uo - значение сигна-
ла, коммутируемое ДД; 5р*гр - отклонение давления от номинального, соответст-
вующее зоне нечувствительности ДД, определяемое следующим образом:
^Рогр “ ^ном ~~ РдД огр » (2.1.46)
где Рном - поминальное давление; Рддогр - давление, на которое настроена ла-
мель ДД (Рдр], Рдр2, Рфрь РфР1).
При работе СПД в реальных условиях возникает эффект ’’подрабатывания”
ламелей ДД, который можно учесть следующим образом:
ида(0=
U0sign8p*(t)+ Uo sin cat,
О
5p‘(t)
5p‘(t) < ’
(2.1.47)
где co=2nf, f- частота ’’подрабатывания” ламелей ДД.
Приводы СПД являются исполнительными органами системы и предназна-
чены для преобразования электрических управляющих команд, поступающих с
выхода РПС, в механические управляющие воздействия на перемещение дроссе-
ля горючего, питающего газогенератор турбонасосного агрегата (ТНА). Исполь-
зуемые приводы аналогичны по устройству и принципу действия и отличаются
только величиной угла поворота вала привода до механических углов и скоро-
стью вращения вала.
Приводы оснащены телеметрическим потенциометром угла поворота вы-
ходного вала и контактно-ламельным устройством для контроля и приведения
выходного вала в исходное положение по командам РПС.
Принципиальная электрическая схема приводов, используемых на 1-й, 2-й
и 3-й ступенях типичного PH, показана на рис. 2.1.17.
На рис. 2.1.17 обозначено: ЭД - электродвигатель; Д, Ф, КК, О - контакты
контактно-ламельного устройства; П - потенциометр.
При поступлении управляющего воздействия требуемой длительности и
полярности, формируемого релейным преобразователем сигнала на форсирова-
ние (или дросселирование) маршевого двигателя, выходной вал вращается в одну
или другую сторону, замыкая при этом контакт "Ф" (или "Д") контактно-
ламельного устройства, размещенного на валу привода. При снятии управляюще-
го воздействия привод останавливается, сохраняя при этом устойчивое положе-
ние. Угол поворота выходного вала привода телеметрируется по сигналам, сни-
маемым с потенциометра.
65
Для примера основные характеристики приводов СПД одной из PH приве-
дены в табл. 2.1.2.
Таблица 2.1.2 - Основные характеристики приводов СПД
Наименование параметра, размерность Привод СПД 1,2-й ступени Привод СПД 3-й ступени
Напряжение питания постоянного тока, В 24-32 24-32
Максимальный пусковой ток при напряжении 28В, А 2.6 1.35
Угол поворота выходного вала из исходного положения до замыкания контактов Ф(Д) 2.5+0.5 2.5±0.5
Угол поворота выходного вала из исход- ного положения до механических упоров, град: - по часовой стрелке - против часовой стрелки -105+6 +137+6 ±138+2 ±138+2
Скорость поворота вала привода, град/с 21+4.5 9.2+1.5
Постоянная времени, с 0.06+0.02 0.06+0.02
Математическая модель привода СПД является интегрирующим звеном с
замедлением, которое можно представить как совокупность двух включенных
последовательно звеньев - идеально интегрирующего и апериодического первого
порядка. Дифференциальные уравнения, связывающие угол поворота вала с из-
менением скорости вращения выходного вала, имеют вид
y(t)= Ja(t)dt; (2.1.48)
о
66
a(t) = (knpUpnc (t) - a(t)); (2.1.49)
Anp
4=—, (2.1.50)
U.o
где y(t) - угол поворота выходного вала привода СПД;
d(t),a(t) - ускорение и скорость вращения выходного вала привода СПД;
Тпр - постоянная времени привода СПД;
Upnc (t) - релейный сигнал, поступающий с РПС на привод СПД;
кпр - коэффициент передачи привода;
Uo - значение сигнала, коммутируемое ДД;
- значение скорости выходного вала привода СПД.
2.1.14 Основные характеристики и математические модели рулевых
приводов
Почти на всех современных PH применяют электрогидравлические приво-
ды (ЭГП). Основные преимущества этих ЭГП следующие:
- большое быстродействие;
- малый вес и размеры при заданной мощности;
- широкая полоса пропускания частот;
- высокая точность отработки входного сигнала;
- надежность.
Основными элементами электрогидравлических систем, построенных на
базе ЭГП, являются гидравлические исполнительные механизмы и усилители
мощности, электромеханические управляющие устройства и усилители сигнала
ошибки (рис. 2.1.18).
Гидравлические исполнительные механизмы (ГИМ) могут быть трех типов:
дроссельного управления, объемного и струйного.
Дроссельное управление характеризуется тем, что в качестве управляющих
устройств ГИМ используют переменные дроссели, в основном золотниковые па-
ры. В этом случае скорость рулевого привода (РП) определяется площадью сече-
ния управляющего дросселя и перепадом давления на нем.
В ГИМ с объемным управлением скорость РП определяется количеством
(объемом) рабочей жидкости, подаваемой, например насосом, в единицу време-
ни.
В третьем типе ГИМ скорость РП определяется шириной щели между
кромками сопла и заслонкой [14].
В настоящее время большое распространение получили ГИМ с первым и
третьим типом управления, так как рабочей жидкостью РП является одна из ком-
понент топлива, отбираемая на выходе ТНА.
В качестве электромеханических управляющих устройств чаще всего ис-
пользуют электромагнитные преобразователи (ЭМП) и шаговые двигатели (ШД).
В случаях, когда требуется уменьшение мощности устройств, управляющих
67
ГИМ, применяют гидравлические усилители мощности, построенные на базе од-
но- или многощелевых переменных дросселей (золотниковых пар с несколькими
окнами) [14].
Сигнал ошибки усиливается с помощью электронных усилителей.
Так как РП является интегрирующим звеном, то для придания ему позици-
онных свойств РП охватывается электрической обратной связью. В качестве эле-
ментов обратной связи используют потенциометры или индукционные датчики
обратной связи. ИДОСы обычно запитываются переменным напряжением сину-
соидальной формы.
В случае, когда гидравлический привод имеет механическую обратную
связь, в качестве электромеханического управляющего устройства применяют
ШД (угол поворота выходного вала РП при этом вычисляется в БЦВМ путем со-
ответствующей обработки характеристик управляющего сигнала на ШД). При
этом привод должен обеспечивать отработку этого управляющего сигнала.
РП с датчиком обратной связи называют сервоприводом. Контур такого
сервопривода показан на рис. 2.1.18, на котором приняты следующие обозначе-
ния:
5У - управляющий сигнал на РП;
5 - перемещение выходного вала РП;
Z - суммирующий усилитель мощности;
ЭМП - электромеханический преобразователь;
ГУ - гидроусилитель;
ГИМ - гидравлический источник мощности;
ДОС - датчик обратной связи.
РП
Рисунок 2.1.18 - Функциональная схема сервопривода
Основные электрические характеристики, необходимые при проектирова-
нии, согласующих устройств между БК и РП, следующие:
1. Электромеханический преобразователь:
- тип ЭМП;
68
- количество обмоток управления;
- активное сопротивление каждой обмотки управления;
- рабочее значение тока управления;
- допустимое значение тока управления;
- индуктивность обмоток;
- материал обмоток;
- диапазон рабочих температур;
- электрическая схема ЭМИ
2. Шаговый двигатель:
- тип ШД;
- количество обмоток;
- частота поступления управляющих импульсов на обмотки ШД;
- активное сопротивление каждой обмотки управления;
- количество управляющих импульсов, обеспечивающих ход выходного
штока (вала) РП от упора до упора;
- электрическая схема ШД.
3. Потенциометр обратной связи (ПОС):
- тип ПОС;
- количество независимых рабочих обмоток;
- наличие телеметрической обмотки;
- сопротивление каждой обмотки (в том числе и телеметрической) во всех
условиях эксплуатации;
- разность сопротивлений между частями обмотки, разделенными средней
точкой;
- номинальное и допустимое напряжения питания обмоток;
- ток, проходящий через скользящие контакты;
- угол поворота вала (ход штока) датчика;
- расчетное значение крутизны характеристик обмоток при номинальном
напряжении питания;
• несовпадение электрического и геометрического нулей при номиналь-
ном напряжении питания для каждой обмотки;
- электрическая схема ПОС.
4. Индукционный датчик обратной связи:
- тип датчика;
- величина и частота напряжения питания;
- коэффициент искажения синусоидальной кривой напряжения;
- сопротивление нагрузки;
- крутизна выходной характеристики ИДОС;
- потребляемый ток;
- рабочий ход подвижной части от нулевого положения;
- электрическая схема ИДОС.
69
Если на PH предполагается использование разработанных ранее РП, то для
проектирования СУ в ИД по PH должны быть указаны их следующие характери-
стики:
1. Электрогидравлические приводы с ЭМП:
- тип ЭГП;
- количество приводов;
- гидропитание (при наземных испытаниях и в полете);
- рабочая жидкость (при хранении, наземных испытаниях и в полете);
- параметры гидропитания (давление нагнетания и давление слива);
- ход штока (угол поворота) выходного вала привода, соответствующий
максимальному углу поворота управляющего органа;
- зона нечувствительности скоростной характеристики;
- смещение нуля скоростной характеристики (алгебраическая полусумма
токов трогания);
- АФЧХ привода;
- скорость выходного вала (штока) при максимальном токе управления
без нагрузки и с максимальной нагрузкой;
- состав и величины нагрузок на выходном валу (штоке) ЭГП;
- командный ток компенсации самохода выходного вала (штока) ЭГП;
- температура окружающей среды;
- ресурс работы ЭГП;
- вес ЭГП;
- схема установки приводов на PH и кинематическая схема цепи ’’выход-
ной вал (шток) ЭГП - управляющий орган";
- кинематическая схема цепи "выходной вал (шток) ЭГП - вал ПОС
(ИДОС)";
- математическая модель ЭГП;
- место установки датчика обратной связи.
2. Электрогидравлические приводы с ШД:
- тип привода;
- количество приводов;
- гидропитание (при наземных испытаниях и в полете);
- рабочая жидкость (при хранении, наземных испытаниях и в полете);
- максимальная скорость привода при отработке одного управляющего
импульса;
- максимальная средняя скорость привода при подаче серии управляющих
импульсов с максимальной частотой;
- максимальный ход штока (угол поворота) выходного вала привода;
- статическая характеристика привода;
- зона нечувствительности статической характеристики привода;
- АФЧХ привода;
- состав и величины нагрузок на выходном валу (штоке) привода;
70
- температура окружающей среды;
- статическая погрешность отработки одного и серии управляющих им-
пульсов;
- точность приведения привода в "О”;
- ресурс работы привода;
- вес привода;
- схема установки приводов на PH и кинематическая схема цепи "выход-
ной вал (шток) привода - управляющий орган”;
- математическая модель привода.
В случае использования готовых приводов между их разработчиком и раз-
работчиком СУ должен составляться протокол применения приводов.
Если для PH проектируют новые приводы, ТЗ на разработку эгих приводов
должно быть согласовано с разработчиком СУ.
Ниже приведены математические модели некоторых типов ЭГП с ЭМП и
ШД.
1. Электрогидравлический привод вращательного действия с ЭМП и линейной ско-
ростной характеристикой
Математическая модель ЭГП с дроссельным управлением и электрической
обратной связью имеет вид
iy =Кп8у - К^З;
— K-jyiy,
15 + hS + (сж + Кю)8 + -d-(| M^l sign5) =
at
।----j--------------------------------------- (2.1.51)
= cMKv 1-----—- (18 + h5 + Кш8 + M +1 M„| sign5)signx3 • x3;
V PoAn
8 — J^max signS при 151> 5,^
[8 при|8|<8шах,
где 8y - управляющий сигнал с БЦВМ на привод; 8 - угол поворота выходного
вала привода; Зщах - максимальный угол поворота выходного вала приво-
да; iy- управляющий ток ЭМП; К„ - коэффициент усиления прямой цепи подачи
сигнала 8У; К^-коэффициент усиления цепи обратной связи; Тгу-постоянная
времени гидроусилителя; х3 - линейное перемещение золотника гидроусилителя;
Кгу-коэффициент усиления гидроусилителя; сж- жесткость столба жидкости,
заключенной в гидроцилиндре (до и после поршня); I - момент инерции подвиж-
ных частей гидроцилиндра и нагрузки, приведенный к выходному валу привода;
h - коэффициент вязкого трения нагрузки, приведенный к выходному валу при-
вода; Kv - крутизна скоростной характеристики холостого хода приво-
да; р0 - давление рабочей жидкости на входе привода; Ап - площадь поршня
гидроцилиндра; - коэффициент шарнирного момента; Мо - постоянный мо-
71
мент на валу привода; - момент трения на выходном валу привода.
2. Электрогидравлический привод вращательного действия с ЭМП и релейной скоро-
стной характеристикой
Математическая модель такого типа ЭГП, охваченного электрической об-
ратной связью, имеет вид
А8 = 8У-КОС8;
fl * sign 8 при | А8|>8Н;
F = <
[О при|А8|<8„;
.. . (2.1.52)
T18+8 = F-VPM+vp°.1;
g_f8maxsign6 при 18 [> 8max;
[8 при|8|<8т„х,
где 8у- управляющий сигнал с БЦВМ на привод; 8 - угол поворота выходного
вала привода; А8 - рассогласование между требуемым и действительным поло-
жением'выходного вала привода; Кос-коэффициент усиления цепи обратной
связи; 8Н - зона нечувствительности привода; - постоянная времени привода;
VpM - скорость привода; Vp°M - самоход привода; 8тах - максимальный угол пово-
рота выходного вала привода.
3. Электрогидравлический привод вращательного действия с ШД
Как указано выше, такой тип привода имеет механическую обратную связь,
т.е. является позиционным звеном.
В этом случае управление ЭГП осуществляется путем подачи на его вход
(на ШД) в каждом такте управления По "пачки” импульсов, которая может быть
гарантированно отработана ЭГП, т.е. такой привод является дискретным.
Математическая модель привода описывается уравнениями
1 1 •
3 = -(е[п0]-8); 8 =j8dt;
1 о
[б при|8|<8тах;
[8тах при|8|>8тах;
8* = J8’dt; 8т = 8* + 8ст signS’; (2.1.53)
О
g- _/8т при|8т-8l(-1)|<Al;
L [8га-ALsign[8m-8L(-l)] при|8т-8L(-1)|> Дь,
. IAl+До при 8<8тах;
0 = <
[5тах signS при 8>Зтах,
72
где 5 - угол поворота выходного вала привода; Т - постоянная времени приво-
да; а[п0] - управляющий сигнал ШД; 8* - угол поворота выходного вала привода
без учета статической погрешности; 8 - скорость отработки управляющего сиг-
нала на участке до насыщения скоростной характеристики ЭГП; 8тах - макси-
мальная скорость привода; 8Т - угол поворота выходного вала привода с учетом
статической погрешности привода; 8СТ - статическая погрешность отработки
управляющего сигнала ШД; 8L,8L(-1) - угол поворота выходного вала привода в
текущий и предыдущий моменты вычисления с учетом люфта в кинематических
соединениях; AL - люфт в кинематических соединениях; Ао -охпибка нулевого
положения выходного вала привода; 8тах - максимальный угол поворота выход-
ного вала привода.
2.1.15 Циклограмма выдачи команд при пуске и полете РКН
В ИД по РКН обычно вместе с циклограммой выдачи команд при пуске и
полете РКН выдаются ИД по составу и характеристикам элементов автоматики и
пиросредств всех ступеней РКН.
Типовая циклограмма выдачи команд на элементы автоматики и пирос-
редств при пуске и полете жидкостной РКН представляет собой временную по-
следовательность различных команд и процессов, контроля событий, задаваемую
в ТЗ на СУ в виде таблиц с координатами «номер», «наименование команды»,
«время выдачи, с».
Задачи циклограммы выдачи команд при пуске
Эта задача включает в себя управление всеми процессами, относящимися к
периоду от включения («Команда «Пуск») наземной и бортовой аппаратуры стар-
товой позиции до начала подъема РКН со стартового стола.
Основные команды и процессы включают в себя:
- пуск - начало предварительного наддува баков окислителя и горючего
1-й и 2-й ступеней РКН (подача напряжения на ЭПК наддува баков);
- контроль нормы предварительного наддува баков окислителя и горюче-
го 1-й и 2-й ступеней РКН по срабатыванию сигнализаторов давления,
установленных в баках окислителя и горючего;
- контроль исходного положения ламелей приводов системы поддержания
давления 1-й, 2-й и 3-й ступеней, системы управления расходованием
топлива 1-й и 2-й ступеней.
Наддув баков 1-й, 2-й и 3-й ступеней осуществляется на стартовом ком-
плексе азотом.
При несрабатывании любого из сигнализаторов давления или при отсутст-
вии исходного положения приводов СПД или СУРТ производится аварийное
прекращение пуска по специальной циклограмме, приводящей РКН в безопасное
состояние.
Задачи циклограммы выдачи команд в полете
Ниже для примера приведена циклограмма выдачи команд для одной из со-
временных РКН.
73
Циклограмма полета 1-й и 2-й ступеней одинакова для всех траекторий вы-
ведения КА И состоит из следующих типовых участков:
Участок полета 1-й ступени
- ФКО (ОТП), с - окончание точного приведения ГСП;
- (ФКО + Ati), с - включение РД 1-й ступени (подача напряжения на пи-
ропатроны прорыва мембран окислителя и горючего РД);
- (ФКО + At2), с - включение МД 1-й ступени (подача напряжения на пи-
ропатроны, пиромембраны, клапаны МД 1-й ступени, включение СПД
1-й ступени, включение СУРТ 1-й ступени);
- ФК1(КП), с - начало движения РКН. Команда формируется по замыка-
нию одного или двух датчиков «Контакт подъема», одновременно выда-
ется команда на выключение ЭПК предварительного наддува баков
окислителя и горючего 1-й и 2-й ступеней («горячий» наддув);
- ФК2, с - окончание форсирования МД 1-й ступени, начало дросселиро-
вания для перевода МД 1-й ступени на номинальный режим работы;
- ФКЗ, с - выключение МД 1-й ступени (подача напряжения на пиропа-
троны отсечных пироклапанов - выключение «горячего» наддува бака
окислителя 1-й ступени, окончание дросселирования 1-й ступени, вы-
ключение СПД 1-й ступени);
- (ФКЗ+А13), с - окончание дросселирования 1-й ступени, выключение
СПД 1-й ступени;
- (ФКЗ+Atf), с - включение РД 2-й ступени (подача напряжения на пиро-
патроны прорыва мембран окислителя и горючего, запуск пусковой ка-
меры РД);
- ФК4=(ФКЗ+А15), с - выключение РД 1-й ступени (подача напряжения
на пиропатроны пироклапанов окислителя и горючего - отсечка ЖГГ
двигателя РД1. Выключение СУРТ 1-й ступени);
- (ФК4+ДСб), с - КР1 - разделение 1-й и 2-й ступеней (подача напряжения
на пиропатроны отсечных клапанов - отсечка КС двигателя РД 1-й сту-
пени, подача напряжения на разрывные пироболты связи 1-й и 2-й сту-
пеней. Подача напряжения на пиропатроны запуска твердотопливного
ракетного двигателя торможения отделившейся 1-й ступени.
У часток полета 2-й ступени
- (ФК4+А17), с - включение МД 2-й ступени (подача напряжения на пиро-
патроны прорыва мембраны окислителя и горючего МД 2-й ступени, за-
пуска пусковой камеры);
- (ФК4+А18), с - включение СУРТ 2-й ступени, включение СПД 2-й сту-
. . пени;
- (ФК4+А t9), с - подача напряжения на ЭПК, поступление гелия из бал-
лонов системы наддува в топливный отсек бака 3-й ступени (подготови-
тельные операции к запуску МД 2-й ступени);
- ФК5, с - сброс обтекателя (подача напряжения на пиропатроны разде-
ления поперечного и продольного стыка створок обтекателя);
74
- ФК6, с - выключение МД 2-й ступени (подача напряжения на пиропа-
троны отсечки О и Г ЖГГ и КС двигателей МД 2-й ступени), выключе-
ние СПД 2-й ступени;
- ФК7, с - выключение РД 2-й ступени и разделение 2-й и 3-й ступеней
(КР2) - подача напряжения на пиропатроны отсечных О и Г камер сго-
рания РД 2-й ступени, на пиропатроны запуска твердотопливного ракет-
ного двигателя торможения отделившейся 2-й ступени, на пиропатроны
крепления 2-й и 3-й ступеней, выключение СУРТ 2-й ступени, включе-
ние системы стабилизации 3-й ступени. На участках полета 1-й и 2-й
ступеней работа ДУ осуществляется непрерывно. ДУ 1 -й и 2-й ступеней
- однократного запуска, МД 3-й ступени в условиях невесомости может
запускаться до пяти раз;
- ФК8, с - включение ДМТ.
Участок включения (выключения) МД 3-й ступени
- ФК9, с - первое включение МД 3-й ступени (подача напряжений на
ЭПК открытия клапанов заполнения окислителем и горючим трактов
МД 3-й ступени);
- (ФК4+А tw), с - включение СПД 3-й ступени;
- ФК10, с - первое выключение МД 3-й ступени (снятие напряжения с
ЭПК закрытия клапанов окислителя и горючего);
- ФК11, с - включение ДМТ ЖРС (подача напряжения на одновременное
открытие, а при выключении - на одновременное закрытие электрогид-
роклапанов тех ДМТ ЖРС, работа которых необходима в данный мо-
мент времени);
- ФК12, с - отделение КА (подача напряжения на электровоспламенители
пирозамков креплений КА, разрыв связей между адаптером 3-й ступени
(место размещения КА) и КА)).
Для некоторых траекторий после отделения КА осуществляется пассивация
(сброс оставшихся компонентов топлива и газа из топливных отсеков и газовых
баллонов наддува 3-й ступени) и увод 3-й ступени ДМТ ЖРС на орбиту утилиза-
ции.
Первый запуск МД 3-й ступени производится с минимальным временем от
команд на разделение 2-й и 3-й ступеней, обусловленным условиями безопасно-
сти разделения ступеней.
2.1.16 Общие уравнения движения PH
Рассматривая PH как абсолютно жесткое тело с достаточной для практики точ-
ностью, векторные уравнения движения центра масс PH можно записать в виде [7]
dV
m(t)—— = F + Р, (2.1.54)
dt
dVa
где ------- ускорение центра масс PH в инерциальнои системе координат;
dt
F - главный вектор внешних сил, приложенных к PH;
75
Р - главный вектор тяги ДУ.
В проекциях на оси полускоростной СК без учета вращения Земли уравне-
ние (2.1.54) принимает вид
mV = Pcosacosp-X-mgsin0;
mV0= P(sinacosyc + cosasinpsinyc) +
+ Ycosyc -Zsinyc -mgcosO;
-mVvPcos0 = P(sinasinyc -cosasinPcosyc) +
+ Ysinyc + Zcosyc; (2 155)
sin 0 = cos a cos p sin - (sin a cos P cos cp + sin 0 sin (p) cos 9;
sin T cos 0 = cos a cos p sin у cos 9 +
+ sin acos P(cos у cos ф + sin sin 9cos cp) -
- sinp(cos\|/coscp -sin\|/sin9cos<p);
sin у c cos 0 = cos a sin p sin - (sin asin 0 cos q> - cos p sin cp) cos 9.
Векторное уравнение вращательного движения PH относительно центра
масс имеет вид [9]
--J~ = Mp+Mp, (2.1.56)
где К - главный момент (относительно центра масс) количества движения
движения частиц "затвердевшей” PH относительно осей, проходящих через центр
масс и движущихся поступательно со скоростью va относительно инерциальной
системы;
MF - главный момент (относительно центра масс) всех внешних сил, дей-
ствующих на PH, за исключением сил атмосферного давления и давления газов в
выходном сечении сопла;
Мр - главный момент (относительно центра масс) сил тяги ДУ, а также
кориолисовых сил, вызванных движением топлива и газов внутри PH.
Уравнения вращательного движения PH, которые обычно записывают в
проекциях на связанные оси координат, имеют вид
Ki 0-7-1 “** lyi )®у| ®Z1 ^y|Z| (®Z] ~~ ^yj ) ~
~~ ^1У1 ®У1 ~ ®zi ~ ^x(Zf ®yf ) — ZMX1,
1у, ®У1 (IX1 ~~ IZI )®Xj^Z] “ ®Z1 ) ~
(2.1.57)
~^Х]У1®Х| “ ^yizi®zi + (lyjzi ®Х1 — Ixiyi ®Z1 )(Dyi =2^Му1,
Izi ^Z1 О-yi — ^Х] )й\]^У1 ^Х]У1 (®У1 — ®Х1 ) ~
~~ ^XjZl ®Х1 _ ^УРЧ ®У] + (^X]ZJ ®У1 I y]Zl ®Х| ’"S^Z]7
76
где £мк, £му|>LMz! - суммы проекций моментов внешних сил на связанные
оси;
1Х1,1у1 ,Izl - осевые моменты инерции PH относительно связанных осей;
соХ1,соУ1,сог1 -проекции угловой скорости вращения связанной системы ко-
ординат относительно земной СК на связанные оси;
Ixiyi ,IX1Z| Jyjzi - центробежные моменты инерции PH относительно связан-
ных осей.
В случае, если связанные оси совпадают с главными центральными осями
инерции, эти уравнения принимают вид
1х. ®Х| Ozj “ Iyi )®y|G)Z|
Iy|COyi + (Ijq — IZ1 )cOXj WZJ = 22 My], :(?-l-58)
^zi ®2] + (Iyl iX] )(oX]toyi — 22mzj •
Связь между производными углов Эйлера Э, ф, ф и проекциями угловых
скоростей ц)Х1,0)yi, O)Z1 описывается такими уравнениями:
& = соу1 sin<p4-(ozl coscp;
ф =—-—(<оУ1 coscp- (d2I sincp); (2.1.59)
cosS
ф = свХ1 -tg$(o)yi cos(p-ozi sincp).
К уравнениям (2.1.55) необходимо добавить уравнение связи, которое опи-
сывает изменение высоты полета Н со скоростью V и утлом наклона траектории
0, а также изменение координат х и z:
H = VsinO;
х = VcosGcos'P; (2.1.60)
z = —V cos Osin T,
где x, z - координаты PH в земной СК.
Уравнение, описывающее изменение массы PH, имеет вид
m = -mCCK, (2.1.61)
где тсек - секундный расход топлива.
В проекциях на оси связанной СК уравнение (2.1.55) принимает вид
rn(VX] + соУ1 VZ1 — coZ] Vyj) — 22 ’
m(Vyi + <oZ|V2| -co2,V21) = £Fyi; (2.1.62)
m(V2) + ®2] Vy| — oyi V„) = Fz (,
77
где m-масса PH; £Fxp£Fyi,£Fzl - сумма проекций внешних сил на связан-
ные оси.
2.1.17 Линеаризация общих уравнений движения
Хотя общие уравнения движения PH составлены исходя из некоторых уп-
рощений, они являются нелинейными и с переменными коэффициентами, т.е. ос-
таются довольно сложными. Поэтому на практике в зависимости от решаемой за-
дачи общие уравнения подвергаются дополнительным упрощениям.
Так как система общих уравнений является нелинейной, часто рассматри-
вают возможность её аппроксимации системой линейных уравнений, поскольку
методы исследования этих систем наиболее разработаны.
При этом аппроксимация считается достаточно точной, если в рассматриваемой
задаче влияние нелинейных свойств системы несущественно, т.е. относить систему
близкой к линейной можно только исходя из конкретных условий рассматриваемой за-
дачи. Например, при анализе устойчивости замкнутой системы “РН+АС” уравнения
движения PH и уравнения АС можно принять линейными, а при исследовании автоко-
лебаний в замкнутой системе необходимо учитывать нелинейность системы.
Если при расчёте траектории принимать параметры PH и СУ номинальны-
ми, параметры атмосферы - соответствующими стандартной атмосфере, пренеб-
речь угловыми колебаниями PH и остальными факторами, мало влияющими на
движение центра масс PH, получим некоторую упрощённую систему уравнений.
Интегрируя эту систему уравнений, получим так называемую невозмущённую
(номинальную) траекторию, при определённых условиях близкую к действитель-
ной. Движение PH по невозмущённой траектории принято называть невозмущён-
ным движением. Движения., полученные из невозмущённого при воздействии
различных возмущений, называют возмущёнными движениями, а траектории -
соответственно возмущёнными траекториями.
Близость возмущённых траекторий к номинальной траектории служит ос-
нованием для линеаризации общих уравнений движения PH.
Для линеаризации общих уравнений движения PH все кинематические па-
раметры движения представляют в виде суммы их значений в невозмущённом
движении и отклонений этих параметров от невозмущённых значений:
VB = VH + AV;
0В = Он + А0;
....................................... (2.1.61)
ав = ан + Аа;
^zib = toziH + AcoZl,
где индексом “н” обозначают кинематические параметры в невозмущённом дви-
жении, а индексом “в” - в возмущённом.
Величины AV, А0, Асо21 будем называть вариациями кинематических пара-
метров. В дальнейшем во всех случаях, когда рассматривают линеаризованные
78
уравнения движения (уравнения возмущённого движения), индекс Д для удобства
будем опускать.
Учитывая симметрию PH относительно продольной оси, будем считать
центробежные моменты нулевыми, т.е. связанные оси PH являются центральны-
ми.
Ниже изложены основные принципы линеаризации возмущённого движе-
ния [1,7].
Допустим, что возмущённые и невозмущённые движения описываются со-
ответственно системами уравнений:
Их
= (i = l,2,...,n); (2.1.64)
at
fi = fi(x1,x2,...,xn); (2.1.65)
Fj =Fi(xI,x2,...,xn), (2.1.66)
где fi5 Fj - нелинейные функции переменных xr
Невозмущённому движению соответствует одно из час тных решений (2.1.64):
Xi=x?(t), (i = l,2,...,n). (2.1.67)
Подставив это частное решение в (2.1.64), получим тождества:
= (2.1.68)
dt
fj0 = fi(x«,x»,...,x»); (2.1.69)
Fj0=Fi0(x1°,x»,...,xS). (2.1.70)
Рассмотрим линеаризацию i-ro уравнения (2.1.64). Отбросим для упроще-
ния индекс i:
dx
f^ = F. (2.1.71)
dt
Вычтем из (2.1.71) i-e тождество (2.1.68), соответствующее невозмущённо-
му движению:
fdx_fodXo. = F_Fo=AF (2.1.72)
dt dt
где AF - приращение функции F.
Левая часть уравнения (2.1.72) представляет собой приращение функции
Для вычисления этого приращения добавим и вычтем выражение f--:
79
f dx _ fо dx° + f dx° _ f dx° =
dt dt dt dt
dx _ dx^l + ff _ f0)dx° = f dAx + Д{. dx°
dt dt J dt dt dt
ЛГА<1Лх ..dx°
=(f0 + Af)—- -+Af~—;
dt dt
x = x° 4-Ax ;
(2.1.73)
Af = f-f0.
Для нахождения приращения нелинейной функции нескольких переменных
F (2.1.66) разложим её в ряд Тейлора по степеням приращений Ах, = Xj - х? в ок-
рестности переменных х? .
Ограничившись первыми членами разложения, получим
п Г 9F Y
F(Xi) = F(x?) + X Н- Axi+R23 (2.1.74)
i=i \дх{ J
где R2 - остаточный член, содержащий слагаемые разложения второго и более
( 5F У (<?F
высокого порядков малости; ---- - значения частных производных — , от-
^дх, J
вечающие невозмущённой траектории.
Тогда приращение функции F запишем как
П ( др У
AF = F(xJ-F(x?)^V — AXi+R2. (2.1.75)
i=i l.5xj J
Аналогичное выражение можно получить и для приращения Af:
n f df V
Af = Z --- Axi+r2. (2.1.76)
i=l V^Xi J
В выражениях (2.1.73), (2.1.75) и (2.1.76) отбросим члены
к г dAx „
Аг----, R2 и г2,имеющие порядок малости выше первого. В результате вместо
dt
уравнения (2.1.72) с учётом (2.1.73) получим уравнение возмущённого движения
с неизвестным Axj:
0 dAx dx0 Л ( df ( 0F
f° + —-Е — Ах;=У— Ах;.
dt dtSkSxJo H\dxJ
(2.1.77)
Проделав такие преобразования с каждым из уравнений (2.1.64), получим
систему уравнений возмущённого движения
80
dx?
dt
ДХ; + ...+
о
dx? Г dfj
dt ^5xnJ
(2.1.78)
Дхп; (i = l,2,...,n).
Система (2.1.78) является линейной относительно переменных Дх{. При
этом выражения в квадратных скобках и все f.0 являются известными функциями
только времени t, так как невозмущённое движение предполагается известным.
Выражением (2,1.78) удобно пользоваться при линеаризации нелинейных диффе-
ренциальных уравнений вида (2.1.64). Такой вид имеюг общие уравнения движе-
ния PH (2.1.64), (2.1.66), (2.1.67), (2.1.69).
Следует отметить, что, приступая к линеаризации уравнений движения PH,
прежде всего необходимо выяснить, от каких параметров зависят аэродинамиче-
ские силы и моменты, сила тяги ДУ, управляющие силы и моменты и т.д., а также
влиянием каких параметров можно пренебречь.
Опираясь на уравнения возмущённого движения (2.1.78), можно получить
эти уравнения в любой системе координат.
2.1.18 Уравнения возмущенного движения PH с учётом колебаний
жидкости в топливных баках и упругих колебаний корпуса PH
В настоящем подразделе приведены уравнения возмущённого движения
первой и второй ступеней PH с цилиндрическими топливными баками.
Особенности динамической схемы космических ступеней описаны в за-
ключительном подразделе 2.1.18.6.
2.1.18.1 Список условных обозначений
v> М - углы поворота связанной СК относительно программных значе- ний, рассогласования по рысканию, тангажу и крену соответст- венно;
z> У - боковое и нормальное отклонения центра масс PH в программ- но-связанной СК;
усп zrcn MSy) - угол рыскания, измеряемый датчиками ГСП; - боковое отклонение, замеряемое ГСП; - обобщённый угол отклонения управляющих органов по рыска- нию (крену);
Зуу L - управляющий сигнал на сервопривод канала рыскания; - полная длина PH; - расстояние от продольной оси PH до точки приложения управ- ляющей силы;
хр - координата точки приложения управляющей силы; - координата метацентра PH; 81
*d xc Хгсп tn V Пх g wz q C'a pa ^ynj^ya - координата центра давления; - координата среза сопел; ~ координата мест установки чувствительных элементов СУ; - масса PH; - относительная скорость PH; - перегрузка; - ускорение свободного падения; - скорость ветра; - скоростной напор; - производные коэффициентов нормальной и подъёмной сил по углу атаки;
- коэффициент аэродинамического демпфирующего момента от- носительно поперечной оси;
mx - коэффициент аэродинамического демпфирующего момента от- носительно продольной оси;
C“ R - коэффициент демпфирующей аэродинамической силы; - характерный размер PH, к которому отнесены аэродинамические моменты крена;
Ъп MyI1? Мун - приведенная возмущающая сила; - приведенные возмущающие моменты в каналах рыскания и тан- гажа;
p Pynp Пр Zp Pn N„ hn hn Xho Rn.Xn m,mn ®n - тяга ДУ; - тяга рулевого двигателя; - перекос вектора тяги ДУ относительно продольной оси PH; - смещение вектора тяги ДУ относительно продольной оси PH; - - плотность компонентов топлива в n-м баке; - количество баков ступени; - уровень компонентов топлива в n-м баке; - безразмерный уровень компонентов топлива в n-м баке; - координата уровня жидкости в п-м баке; - характерный размер и координата характерной точки n-го бака; - массовый суммарный расход и расход п-го бака; - частота дополнительного n-го колебательного звена в канале крена, обусловленного перегородками;
- обобщенные координаты, соответствующие колебаниям жидко- сти в n-м баке в каналах рыскания (тангажа) по 1-му тону;
- обобщённая координата n-го колебательного звена в канале кре- на, обусловленная установкой ребер-перегородок;
8n,(5Pn) - логарифмический декремент затухания колебаний жидкости в п - м баке в канале рыскания (крена);
82
zT - случайное поперечное смещение центра масс PH относительно
продольной оси;
zTchct - систематическое поперечное смещение центра масс PH относи-
тельно продольной оси,
I - момент инерции PH относительно поперечной оси, проходящей
через центр масс PH, в предположении, что жидкость в каждом
баке “затвердевшая”;
IG - момент инерции “жидконаполненной” PH относительно попе-
речной оси, проходящей через метацентр;
1Х - момент инерции “сухой” PH относительно продольной оси;
| - безразмерный присоединенный момент инерции жидкости п-го
бака относительно поперечной оси, проходящей через характер-
ную точку бака;
j - безразмерный момент инерции затвердевшей жидкости п-го ба-
ка относительно поперечной оси, проходящей через характер-
ную точку бака;
1П, 1Рп - присоединенный и приведешхый моменты инерции для п-го бака;
тп - безразмерный коэффициент инерционной связи (присоединённая
масса жидкости);
ajz - безразмерное значение квадрата круговой частоты собственных
колебаний жидкости;
q - безразмерная величина гидродинамической силы;
qj - обобщённая координата, соответствующая j-му тону упругих
колебаний корпуса PH в плоскости рыскания (тангажа);
f\ - собственная частота упругих колебаний, Гц;
aq. - приведенная масса PH при возбуждении j-ro тона упругих коле-
баний в плоскости рыскания (тангажа);
t]j(x) - форма в сечении х, соответствующая j-му тону упругих колеба-
ний корпуса в плоскости рыскания (тангажа);
T]j(x) - производная формы в сечении х, соответствующая j-му тону уп-
ругих колебаний корпуса в плоскости рыскания (тангажа);
Pq. - логарифмический декремент затухания упругих колебаний кор-
пуса j-ro тона;
тп - приведенная к штоку масса МД;
Rnp - плечо установки ЭГП;
хд - координата центра масс поворотной части МД;
хв - координата центра вращения МД;
Год - масса МД;
1Д - момент инерции МД относительно оси вращения.
83
2,1.18.2 Уравнения возмущённого движения PH как абсолютно
жесткого твёрдого тела
Так как законы управления системы стабилизации PH используют угловые
рассогласования между связанной и программной СК, в качестве невозмущённо-
го движения PH будем рассматривать её программное движение. Линеаризацию
общих уравнений движения PH проведем в программно-связанной СК OXnyuZu
(оси этой СК изменяют положение в пространстве по программе полёта, а начало
СК движется так же, как и центр масс PH в программном движении). Угловые
рассогласования показаны на рис. 2.1.19.
Вначале рассмотрим наиболее простой случай - PH представляет собой аб-
солютно твердое жесткое тело. Представим координаты, характеризующие воз-
мущённое движение PH в плоскостях стабилизации, в следующем виде:
А9 = 3-Э„; А\|/ = у-уп; Ау = у-у„; _ . _
Az = z-VZJ1; Ау = у-У^.
Кроме того, будем предполагать, что параметры 5п,ап,рп - малые величи-
ны.
В качестве управляющих органов рассмотрим случай использования четы-
рёхкамерного рулевого двигателя (рис. 2.1.2).
Рисунок 2.1.19 - Переход от программной к связанной
системе координат
84
Применив метод линеаризации, описанный в подразд. 2.1.17, получим
уравнения возмущённого движения PH как абсолютно твёрдого жесткого тела в
следующем виде [1] (для удобства индекс А при вариациях опустим):
Канал рыскания
z — ак * z 4- ' V + • у + az^ • 5^ + а^^ • W7 + Fzn,
V — ayz * z 4- aw • \|/4- a^y • \|/4- 4-a^w^ • Wz 4-(2.1.80)
Syy =Lv(v,z).
Канал крена
Y = a' -Y + as -8 +My„;
y (2.1.81)
8n=Lr(r);
5 = Ltb..
8 =Ь±5 4. (2182)
_ 63 —8] 4" 64 —62
ov =----------------------,
7 4
где 8j (i = 1,2,3,4) - углы отклонения управляющих камер I,II,III,IV;
Lv(\g,z), Ly(Y)- нелинейные операторы формирования управляющего сигнала.
Уравнения возмущённого движения PH в канале тангажа в силу симмет-
ричности PH имеют вид, аналогичный уравнениям (2.1.79), в которых индекс “Т”
необходимо заменить на a “z” - на “у”.
Коэффициенты уравнений (2.1.80) и (2.1.81) рассчитывают по формулам:
Канал рыскания (тангажа)
, . я' _ я' - cz-q-S 2-|m|-(xT-xc)
e " m-V ’ y m-V m
P + C^-qS _ Pw .
azy “ ay - m 5 az5v ay8 2-m ’
r _ , _ C^-q-S-(xT-xd)
avz - -a y - ^77 J- ’ (2.1.83)
_ _ Cjn • q • S • (xT — xd) _ _ Pynp * (xT xp)
aW “ a *" T ’ av8V ~ a 5 “ от
ly
85
_ р _ м
F _£“• эд _—??.. р -р.л •
xzn 9 iV±im т s А zi< А Чр>
m 1у
Муп — р|л^ Dip * (хт *“ хр)Р Zp + zt + ZTC[fCT |,
r '.r r f
^zwz “ ~^ZZ 5 ywz ~ iyz*
Kanaji крена
r m*-q-S-R2
Зуу “ j
17 VIX
_ Pynp ’ .
av»r~ j ’
Ax
(2.1.84)
(2.1.85)
(2.1.86)
Мул — Pr|p(.Jzj; 4" Zy + zT сист j.
2.1.18.3 Уравнения возмущённого движения PH с учётом колебаний
жидкости в топливных баках
Представление PH в виде абсолютно жесткого твёрдого тела является
слишком упрощённым и не позволяет учесть ряд особенностей её как объекта ре-
гулирования. К таким особенностям относится наличие больших жидких масс в
топливных баках PH.
Задача о динамическом взаимодействии жидкости, частично заполняющей
некоторые полости внутри твёрдого тела, возникла главным образом в связи с
бурным развитием ракетно-космической техники, когда оказалось, что подвиж-
ность топлива в баках часто оказывает решающее влияние на устойчивость дви-
жения PH.
Впервые движение твёрдого тела с полостями, целиком заполненными
жидкостью, исследовал Н.Е. Жуковский [4]. Он показал, что прямолинейное
движение такого тела ничем не отличается от прямолинейного движения абсо-
лютно твёрдого тела с массой, равной сумме масс тела и жидкости.
Вращательное же движение твёрдого тела с полостями, целиком заполнен-
ными жидкостью, эквивалентно вращательному движению абсолютно твёрдого
тела с некоторым эквивалентным моментом инерции, который всегда меньше
момента инерции тела с “затвердевшей” жидкостью. Это объясняется тем, что
частицы жидкости могут перемещаться относительно стенок бака и поэтому тра-
ектории их движения в инерциальной системе координат не совпадают с траекто-
риями движения частиц “затвердевшей” жидкости.
Уравнения движения PH как абсолютно жесткого твёрдого тела (2.1.80),
(2.1.81) записаны относительно её центра масс.
В [1, 8, 9, 10, 12,13] получены уравнения движения твёрдого тела с полос-
86
тями, частично заполненными жидкостью, для случая, когда центр приведения О
всех сил совпадает с центром масс невозмущённой жидкости (в этом случае дви-
жение жидкости в СК Ox.yz обладает потенциалом скоростей). Б.И. Рабиновичем
в [13] показано, что если центр приведения выбрать специальным образом, эти
уравнения движения имеют более компактный вид. Этот новый центр приведе-
ния сил называется метацентром системы (он расположен выше центра масс не-
возмущённой жидкости). Координаты метацентра определяются следующим об-
разом:
xG = xGo+AxG; yG = yGr); zG = zGo, (2.1.87;
где xGc, yGo, zGo - координаты центра масс системы “твёрдое тело- жид-
кость” при затвердевшей в невозмущённом состоянии жидкости; AxG- добавка,
зависящая от массы m0 PH как твёрдого тела (масса “сухой” PH), а также массы
m жидкости и экваториального момента инерции площади свободной поверхно-
сти ЖИДКОСТИ С ПЛОТНОСТЬЮ р ОТНОСИТеЛЬНО ОСИ OiZp
Если жидкость в баке имеет свободную поверхность, то поверхность де-
формируется - на ней возникают волны. Колебания жидкости описываются ря-
дом функций Бесселя [13]. Каждому члену ряда соответствует своя обобщённая
координата Sn(t) и своя частота собственных колебаний свп.
Причиной колебаний жидкости является движение стенок, бака. В результа-
те колебаний жидкости возникает дополнительная поперечна^. сила, представ-
ляющая собой сумму произведений приведенных масс жидкости шп на обобщён-
ные ускорения Sn. В результате действия этой силы появляется гидродинамиче-
ский момент, пропорциональный обобщённому ускорению Sn.
Кроме гидродинамического момента на PH действует ещё и гидростатиче-
ский момент, пропорциональный обобщённой координате Sn. Он возникает в ре-
зультате смещения свободной поверхности жидкости, й его можно считать мо-
ментом, возникающим от поперечного смещения центра масс жидкости по отно-
шению к оси бака.
Следует упомянуть ещё об одном моменте, возникающем при действии
гидродинамических сил, которые обусловлены вязкостью жидкости, проявляю-
щейся в пограничном слое. Этот момент является демпфирующим, и в баках без
перегородок он незначителен по величине.
Наибольшую скорость имеют частицы жидкости, расположенные в верхних
слоях. С увеличением глубины расположения слоёв скорость их уменьшается.
Вследствие этого приведенная масса жидкости, участвующей в колебаниях,
меньше общей массы жидкости в баке, и она быстро убывает с увеличением но-
мера тона колебаний. Поэтому, как правило, учитывают лишь первый тон коле-
баний жидкости. Из-за колебаний жидкости возникают дополнительные силы и
моменты, которые оказывают влияние на движение PH.
В заключение отметим, что обобщённая координата Sn представляет собой
угол между плоскостью, касательной к свободной поверхности жидкости, и
плоскостью, нормальной к оси бака (рис. 2.1.20).
87
Рисунок 2.1,20 - Форма свободной поверхности
жидкости при её колебаниях
Непосредственное исследование устойчивости движения PH с учётом коле-
баний жидкости в баках, полученных в [8, 9, 10, 12,13], весьма затруднительно
из-за наличия в этой системе дифференциальных уравнений в частных производ-
ных. В связи с этим уравнения движения PH с учётом колебаний жидкости в ба-
ках преобразуются в системы обыкновенных дифференциальных уравнений [13],
по отношению к которым можно применить обычные методы исследования ус-
тойчивости движения.
В этом случае уравнения возмущённого движения PH с учётом колебаний
топлива в баках имеют вид:
Канал рыскания
z=a'2Z-z + a,zv -у + а^ • у + а^ -ov +
+ S azSyn * + azwz *
n=l
v = a'vz-z + a^ -<j/ + a„ -V + a^ -5^, + (2.1.88)
k .. _
+ S (avsVn *SVn 4-avS^n •bVn) + aVWz
n=l
Sv„ +.8^ • S„n + • svn - a^z • z + a^nV • у ;
б^=Ц(у,2); n = l,2,...,k.
88
Канал крена
к .. _
Y = • у + ау5у 5Г + ^?.1а \ + Муп;
П=1
PY +£d -Ру +<о* -Ру +у-0 ;
тп Pyn (п Руп Уп • 9
. (2.1.89)
Vrcn = V + Ea"".(xra’) qj ,
где Sn,PYn - обобщённые координаты, соответствующие колебаниям жидкости
в каналах рыскания, крена.
Уравнения возмущённого движения в канале тангажа имеют вид, анало-
гичный уравнениям (2.1.88), в которых индекс “\|Л необходимо заменить на “9”,
a z — на у .
Коэффициенты уравнений (2.1.88) и (2.1.89) вычисляют по формулам:
Канал рыскания (тангажа)
1. Момент инерции относительно поперечной оси, проходящей через метацентр PH с
учётом подвижности жидкости:
к _
lG = Iy+Zpn-RL(I.'I -Im)-Nn, 11 = 1,2,....к;
П=1
i; =fn -=y-(2Cn-=L);
(On COn
wn n
c' = c - —
n n
2. Коэффициенты, характеризующие “отвердевшую” PH:
2 /О ем ' ' C“q-S_ 2'irilj-(xG-хс)
®qi =(2*-fj)2 ; azv =-aV3 =— Vr“ L------—-----------
4J m • V m
= =r]J(xren) ; = -ay5s =-^- ;
, _ , C^-qS-(xG-xd)
avz -a3y v ,Ig
, , m“q-S |rii|-(xG-xc)2
V•1g 1g
(2.1.90)
(2.1.91)
С» q-S(xc-xd)
AG
я — я — — Рупр ~ Xp-
89
3. Коэффициенты, характеризующие “жидконаполненную” PH:
azSVn aySa,
Pn'Rn-mn Ч. .
a4'SVn - -ayS8n -
— Pn ' Rn ' ' (R- ' ("T- )
IG
a4,sv„ - -ass8,
nx-g-p,-RJ-m11-Nl
«2-IG
a — —a a" -J _“n2 (Rn C;+xn-x0) .
W - as8„y - R - > asVnV as8„3 -
(2.1.92)
Канал крена
1. Момент инерции относительно продольной оси с учётом подвижности
жидкости:
Ib=Ix + £ln
П=1
(2.1.93)
2. Коэффициенты, характеризующие абсолютно жесткую “отвердевшую”
PH:
а' -_Шх Ч s R + У 5 - 1бп +^п Рп Шп * а - ?упр О 1 04^
агу~ VT ’ атбг ~ т • (2.1.94)
V • 1L п=1 Is * Рв • Л к
3. Коэффициенты, характеризующие “жидконаполненную” PH:
Т 5П • (Dn
а" =-Еа ; ер = — —-п- ; ®2 =(со‘)2 . (2.1.95)
1х Ргп Л Рг"
Приведенные возмущения (свободные члены уравнений):
_ р _______________ к 4
Рш =-— ; Mvn =-^-п- ; S<r> и Pn(r>; =Р-т|р ;
m v IG
— P {^/-[TipCxG — Xp)]2 + Zp + ZT 4"ZTCHCT| , (2.1.96)
Myn ~• P ‘ Пр( з/zp 4" ZT 4- ZTCHCT ) ,
azwz a^, ByWz avz .
R
90
2.1.18.4 Уравнения возмущённого движения PH с учётом упругих
колебаний её корпуса
Рассмотрение PH как абсолютно жесткого твёрдого тела с полостями, час-
тично заполненными жидкостью, не исчерпывает всех свойств PH как объекта
регулирования. В полёте корпус PH подвергается упругим деформациям под дей-
ствием нагрузок. Эти деформации необходимо учитывать при проектировании
СУ.
При изучении упругих поперечных колебаний PH её корпус рассматривают
как прямой неоднородный стержень, к которому приложена сила тяги Р
(рис. 2.1.21).
Рисунок 2.1.21 - Форма упругой линии корпуса PH при изгибе
На рис. 2.1.21 через q(x,t) обозначен прогиб, являющийся функцией длины
х стержня и времени t. Прогиб q(x,t) можно представить в виде ряда [6, 12, 13]:
q(x,t)=^r|j(x)-qj(t), (2.1.97)
j=i
где пДх) - форма колебаний j-ro тона упругости.
На практике рассматривают обычно лишь несколько г первых тонов упру-
гости qj(t),TaK как с увеличением номера тона частота cOj упругих колебаний
быстро растёт и выходит за полосу пропускания системы стабилизации.
Упругий прогиб PH приводит к тому, что датчик угла, установленный на
ГСП, измеряет угол, отличающийся от истинного на величину угла наклона кор-
пуса PH из-за прогиба:
к
9ГСП =» + Xn'j (xrcn)4j(t), (2.1.98)
j=i
t dn * (хгсп)
где т|: • (хгсп) = —— ------угол между касательной к оси изогнутого корпуса
dx
PH j-ro тона колебаний в месте установки ГСП и осью корпуса жесткой PH.
91
Как видно из (2.1.98), на полезный сигнал $ об угловом положении PH на-
кладывается помеха, обусловленная упругими колебаниями корпуса PH.
Для получения уравнений возмущённого движения упругой PH в виде,
наиболее пригодном для использования в инженерной практике, общие уравне-
ния упругой ракеты, полученные в [13] и содержащие частные производные, пре-
образуются в бесконечную систему обыкновенных дифференциальных уравне-
ний [6,13]. Как указывалось ранее, на практике рассматривают несколько первых
тонов упругости.
Уравнения возмущённого движения PH с учётом упругих колебаний её
корпуса в канале рыскания имеют следующий вид:
z = a^-z + a'24,-\j/ + aw-\|/ + azSv ч-а'^ • Wz + Fzn;
V = а'^ • z + а'^ vj/ + а„ -у + а^ -5Т +a'VWz Wz + М„И;
+ + Vrcn = 4' + g а™.(х™)4]: (2 j 99)
zrcn = z - (xrcn - xT) • V + 2 ач (xrcn) • <ij;
5yv = Lv-(V™,zra'); j = l,2,...,r.
Уравнения возмущённого движения PH с учётом упругих колебаний её
корпуса в канале тангажа аналогичны уравнениям (2.1.99) и получаются путём
замены индекса “ц/” на индекс “3”, a “г” - на “у”.
Коэффициенты уравнений (2.1.99) вычисляют по формулам:
1. Коэффициенты, характеризующие PH как абсолютно жесткое твёрдое
тело, - по формулам (2.1.83) - (2.1.84).
2. Коэффициенты, характеризующие PH как упругое тело:
а =_а = РупР -nj(Xp) . (2.1.100)
qj5y ’
Я ГСП __«ГСП — • О ГСП — я ГСП — 'Л fvrcn\
aVqj “ a3qj " ~ “ HjH )•
Упругие колебания PH вокруг продольной оси (крутильные колебания), ко-
гда PH представляют как стержень с большой крутильной жесткостью, обычно не
рассматривают. В этом случае уравнения возмущённого движения PH в канале
крена используют в виде (2.1.81), (2.1.85), (2.1.86).
2.1.18.5 Уравнения возмущённого движения PH с учётом взаимного
влияния колебаний жидкости в топливных баках и упругих колебаний
корпуса PH
При выводе уравнений возмущённого движения в основу динамической
92
схемы PH положен некоторый эквивалентный упругий стержень с присоединён-
ными к нему жесткими отсеками, частично заполненными жидкостью.
Полученные уравнения возмущённого движения [6, 12, 13] представляют
собой уравнения в частных производных, но их можно привести к системе обык-
новенных дифференциальных уравнений [13]. На практике, учитывая величины
собственных частот жидкости и упругих колебаний, как правило, рассматривают
взаимное влияние жидкости и первого тона упругих колебаний.
Уравнения возмущённого движения PH с учётом взаимного влияния коле-
баний жидкости в баках и первого тона упругих колебаний корпуса PH имеют
вид [12, 13]:
к
z — ап • z + а^ • 4- azv • \|/ 4- az^ 5^ 4- azsn *-Sn 4- aZWz Wz 4- Fzn,-
n=l
2 4~ 4~ • \|/ 4" a^g^ * 8^ т
к i
+ (a^Sn *‘ Sn) 4-aVWz • Wz 4- Myu,;
n=l
+ £SVn *’WSVn ‘ Syn “
= asv„z • z + aSi|Zn¥ • у + aSi|inq| - q, + aSi(inql • q,;
... vr-Д rj
к .. ’
4j+eqj‘4j+ coqj *4j “ S (aqisVn’Sn 4-aqisVn •S'n)4~aqj64F-8^; .
v™=v + £a™.qj;
>1
zrcn =z-(xrcn-xG)-y + £ a -qj;
j=i
8" =L“(vrcn,zrcn) ; n = l,2,...,k; j = l,2,...,r.
Уравнения возмущённого движения для канала тангажа аналогичны урав-
нениям (2.1.101) и получаются путём замены индекса “\|/” на “Э”, a “z” - на “у”.
Уравнения возмущённого движения PH в канале крена описываются урав-
нениями (2.1.79), (2.1.93)-(2.1.96).
Коэффициенты уравнений (2.1.101) вычисляют по формулам:
1. Коэффициенты, характеризующие “отвердевшую” PH, - по формулам
(2.1.90), (2.L91), (2.1.93), (2.1.94), (2.1.95), (2.1.96).
2. Коэффициенты, характеризующие “жидконаполненную” PH, - по форму-
лам (2.1.90), (2.1.92), (2.1.95).
3. Коэффициенты, характеризующие PH как упругое тело, - по формулам
(2.1.100).
4. Коэффициенты, характеризующие взаимное влияние колебаний жидкости в
баках и первого тона упругих колебаний корпуса:
93
" _ » .. CQn •П1-(ХЛ +-К.пс;),
sVn41 aSSnqi ’
^n ' Pn * mn ‘ Л1 ‘ (^n ' Cn )‘Nn _
_ _ я _ D» g-«n -Th.(Xn+hn) .
%„Ч1 dSSnql - p >
(2,1.102)
a4lSv„ a41s»n
n> g-Rn Pn mn lb -(xn + h„)-N„
Ч2 -a4i
2.L18.6 Особенности динамической схемы космических ступеней PH
Космические ступени PH (часто их называют доразгонными блоками) ха-
рактеризуются наличием двух типов участков движения:
- участков движения с работающим МД (активные участки);
- участков управляемого движения с неработающим МД (пассивные уча-
стки).
Большая часть полёта космических ступеней проходит на высотах
Н > 80 км. Часто на космических ступенях МД устанавливают в кардановом под-
весе, что позволяет путём поворота его в двух взаимно перпендикулярных плос-
костях создавать значительные управляющие моменты в каналах рыскания и тан-
гажа. При этом управляющий момент в канале крена создаётся с помощью ДМТ.
При неподвижном МД для управления используют ДМТ или рулевой двигатель.
На пассивных участках движения управление осуществляется с помощью
ДМТ, работающих в релейном режиме.
Важной особенностью космических ступеней является их небольшое удли-
нение, что обуславливает сравнительно высокие частоты упругих колебаний кор-
пуса.
Из-за малого удлинения космических ступеней их топливные баки по усло-
виям компоновки часто выполняют в виде тора со значительным наружным ра-
диусом и сравнительно небольшой высотой. Вследствие этого в таких баках вся
жидкость удалена от продольной оси и вся участвует в колебательном движении.
Это приводит к тому, что ступень как объект регулирования характеризуется су-
щественной собственной и структурной неустойчивостью на частотах колебаний
жидкости в баках.
Для устранения дестабилизирующего влияния 1-го тона колебаний жидко-
сти в топливных баках устанавливаю! г радиальных перегородок, которые разде-
ляют бак па г замкнутых отсеков небольшого объёма. Вследствие этого в каждом
отсеке возникают колебания жидкости в радиальном и тангенциальном направ-
лениях (2-й и 3-й тона колебаний жидкости) и в уравнениях (2.1.88) и (2.1.89) по-
ni+l 3 .. ni+1 3
являются соответствующие слагаемые вида V £
п=П[ г=2 п=П| г=2
94
S ayPn -pn(r), a уравнения колебаний жидкости записываются относительно
л=П| г-2
переменных и РцГ), где S„r) - обобщённая координата, соответствующая
колебаниям жидкости в канале рыскания в щ и П]+1 баках по r-му тону; щ - но-
мер первого тороидального топливного бака ступени; П]+1 - номер второго то-
роидального топливного бака ступени; Р<г) - обобщённая координата, соответст-
вующая колебаниям жидкости в канале крена в щ и пj-Ы баках по r-му тону.
На пассивных участках движения управление и стабилизация космической
ступени осуществляется с помощью системы управления, ориентации и стабили-
зации (СУОС), которая из-за принципов управления и характера работы ДМТ яв-
ляется чисто релейной системой и её нельзя линеаризовать указанным выше ме-
тодом. Кроме того, поведение жидкости в баках при очень незначительных пере-
грузках нельзя описать линейными уравнениями.
В связи с этим при исследовании динамики полёта космических ступеней
на пассивных участках в большинстве случаев используют уравнения Эйлера
(2.1.57) и (2.1.58).
Если управление и стабилизация осуществляется с помощью МД, установ-
ленного в кардановом подвесе, то инерционные характеристики этого двигателя
оказывают влияние на динамические свойства ступени [6].
В этом случае уравнения возмущённого движения (для простоты рассмот-
рим случай, когда топливные баки имеют форму шара и расположены на про-
дольной оси ступени, т. е. влиянием жидкости в канале крена можно пренебречь)
имеют вид [1]:
Какал рыскания (тангажа)
z = а'г1|/ • у + V + -5.,+а^ Л + 5 a*sVn
П=П]
V = a'w-V + a;6v-^+ai((6v-5v +
+ V Са’ S +а S UM • (2.1Л03)
n=nl
SVn + %п • Svn + Чп • Svn = z + • V + aSvnV • V ;
у™ - у - 2ГСП = z — (хгсп — xG)*\j/ ; 5уу =Lv(\|/rcn,zrcn).
Канал крена
у — а^§^ * 5уу + МуП, 5уу —Ly(y). (2.1.104)
В случае, когда отклонение МД осуществляется с помощью ЭГП, коорди-
ната 8V в уравнениях (2.1.103) поступает из уравнения (2.1.51) математической
модели ЭГП. При этом к сумме нагрузок в подкоренном выражении (2.1.51) не-
95
обходимо добавить инерционные моменты а^2 * z и aj v • \|/.
Коэффициенты уравнений (2.1.103) и (2.1.104) вычисляют по формулам:
1. Коэффициенты, характеризующие “отвердевшую” ступень, - по формулам
(2.1.90), (2.1.91), (2.1.93), (2.1.94), (2.1.96).
2. Коэффициенты, характеризующие “жидконаполненную” ступень, - по
формулам (2.1.90), (2.1.92), (2.1.93), (2.1.95).
3. Коэффициенты, характеризующие влияние инерционности поворотного
МД:
az«v - ау»9 “"" m
я’ __я’ тд-(хв-хд) .
a6vz а8зу “ т 9
• ’ _ [тд-(хв-хд)(хо-хв) + 1д] (2.1.105)
а^-ад5Э“ 7 9
, _ „ _ [гПд -(хв -Хд)(хс -Хв) + 1д ]
a5vy а8$Н г ’
хд
a8vz “ “’a5gy ~ a8vz ‘ I'-np * j a6vv ~ ~а5эЭ “ а5уу *^пр ’ •
2.1.19 Динамические характеристики изгибных колебаний PH на
стартовом столе
Проблема расчета изгиба, а также параметров, характеризующих колебания
мостов, балок и других объектов под действием постоянной или переменной на-
грузки, является одной из старейших в технике и строительстве, но даже сейчас
нельзя сказать, что она в полном объеме решена для общего случая. Именно этим
объясняется обилие в теории колебаний теорем и гипотез, применимых только в
конкретных условиях.
К сожалению, сказанное выше относится и к ракетной технике, поэтому
динамические характеристики изгибных колебаний ракет определяются голов-
ной организацией (ГО) в ходе длительных многоэтапных математических расче-
тов и экспериментальных исследований на специальных вибрационных стендах.
Процесс хорошо описан в книге ’’Ракета как объект управления" [5], изданной
коллективом авторов, работавших в КБЮ и знаюших всю сложность решения та-
кой задачи.
Из материалов, приведенных в упомянутой книге и в других доступных ис-
точниках информации, следует, что накопленный к настоящему времени опыт
позволяет использовать в качестве математической модели при расчетах изгиб-
ных колебаний представление о ракете, как о прямом неоднородном упругом
стержне с двумя плоскостями симметрии, длина которого значительно больше
диаметра поперечного сечения. Кроме того, в качестве первого приближения
принимают; изгибные колебания описываются уравнениями деформации такого
96
стержня при чистом изгибе (изгиб называется чистым при отсутствии в попереч-
ных сечениях стержня нормальных сил).
Исходя из этих допущений математическая модель поперечных колебаний
в каждой из двух плоскостей симметрии имеет вид
d2v 52v
— (El—) + pF— = qz(x,t), (2.1.106)
dx2 dx2 dt2
где qz(x,t) - погонная внешняя нагрузка; E - модуль упругости при растя-
жении (сжатии); I - экваториальный момент инерции; F - меняющаяся по длине
площадь поперечного сечения; v(t) - величина прогиба стержня: р-плотность
материала сечения.
Как правило, анализ динамики движения PH проводят с учетом только пер-
вых двух тонов упругих колебаний, так как амплитуды высших тонов малы и ими
можно пренебречь.
Уравнение (2.1.106) в частных производных преобразуется в бесконечную
систему обыкновенных дифференциальных уравнений. В решение этой системы
будут входить составляющие, характеризующие собственные и вынужденные ко-
лебания упругого корпуса PH. Соответственно к основным динамическим харак-
теристикам изгибных колебаний ракеты относят частоты собственных колебаний,
собственные формы и коэффициенты демпфирования упругих колебаний.
Все эти характеристики наряду с коэффициентами уравнений возмущенно-
го движения PH, учитывающими упругость корпуса, выдаются ГО в качестве ис-
ходных данных перед началом разработки системы управления.
Во время нахождения PH на стартовом столе считается, что упругие коле-
бания ее корпуса вызываются только ветровыми возмущениями, а ракету можно
рассматривать как вертикально стоящую консоль с закрепленным нижним кон-
цом и свободным верхним.
Для типичной PH расчет по такой модели дал следующие результаты: час-
тоты собственных колебаний могут быть 0.35 Гц и менее в зависимости от веса
полезной нагрузки, амплитуда поперечных колебаний- до 0.125 м. Ускорение
носка PH может достигать 1 м/с2, если скорость ветра у земли не более 15 м/с.
2.2 ИД по сопряжению СУ и СИ
Пуск любой ракеты-носителя является уникальным научно-техническим
мероприятием как по сложности протекающих процессов, так и по экономиче-
ским показателям.
Поэтому, несмотря на то, что поведение всех систем многократно отмоде-
лировано при всех крайних условиях, информация о всех протекающих процес-
сах крайне важна. При удачных пусках PH ее используют для набора статистики
в целях совершенствования алгоритмов управления, а при нештатных ситуаци-
ях - для принятия организационно-технических решений по исключению повто-
рений подобных событий.
Основным источником сведений о функционировании всех систем и агре-
гатов ракеты, а также параметров ее движения является телеметрическая инфор-
мация.
97
Все процессы подготовки к пуску, пуск и полет PH выполняются под не-
прерывным телеметрическим контролем.
Часть телеметрической информации подвергается оперативному анали-
зу (например, для ведения репортажа), а полный объем анализа проводят после
пуска независимо от его результатов.
Получение информации для анализа функционирования систем PH и изде-
лия в целом обеспечивает бортовая система измерений, одним из абонентов ко-
торой является система управления.
Система измерений традиционно состоит из бортовой радиотелеметриче-
ской станции (БРТС) и системы сбора и преобразования контролируемых сигна-
лов.
Типовая БРТС, как правило, представляет собой систему циклического оп-
роса нормализованных сигналов, построенного на базе трехступенчатого комму-
татора с суммарной информативностью 320 кбит/с.
Выходным сигналом основного коммутатора является последовательный
код, поступающий на модуляцию высокочастотного излучения радиопередатчи-
ка.
Основная масса контролируемых сигналов поступает на устройства второй
ступени коммутации - локальные коммутаторы.
Температурные датчики подключаются к специальным устройствам кон-
троляТемператур, которые являются третьей ступенью коммутации.
Таким образом, контролируемые сигналы должны удовлетворять требова-
ниям входного интерфейса устройств БРТС одной из ступеней коммутации.
В основном они заключаются в следующем:
- аналоговые параметры должны формироваться и выдаваться в систему
измерений напряжением постоянного тока в диапазоне (0 ... 6,2) В;
- сигнальные параметры представляются в виде замыкания/размыкания
контактной пары (оптрона; электронного ключа), при этом R3aMK < 5 кОм,
&разбмк> 100 кОм; либо в виде потенциала (0 ... 1) В для замкнутого со-
стояния датчика и (4... 6,5) В для разомкнутого состояния датчика при
Кшх < 5 кОм;
- цифровая информация выдается в СИ в виде последовательного четы-
1 рехпозиционного кода. В современных БРТС предусматривается прием
цифровой информации по стандартному последовательному интефейсу
типа RS-422, RS-485 и др.
Информационные цепи сопряжения аппаратуры СУ и СИ должны быть
гальванически развязаны от шин первичного питания СУ и СИ и «корпуса» изде-
лия.
Погрешность измерения любого телеметрируемого параметра не превыша-
ет 1% на весь тракт преобразования, передачи, приема и регистрации наземными
средствами системы измерений.
Как правило, современные БРТС обеспечивают опрос аналоговых и сиг-
нальных ТМ параметров в диапазоне частот (10 ... 400) Гц, что в основном удов-
летворяет требованиям, предъявляемым разработчиками систем и агрегатов к
98
точности измерений. Для дальнейшего увеличения частоты опроса требуется
применять специальные преобразователи сигналов и схемы их подключения.
Процесс выведения некоторых космических аппаратов требует выполнения
ракетой-носителем ряда маневров с многократным включением маршевого дви-
гателя, что занимает от нескольких часов до нескольких суток работы системы
управления PH. При этом связка PH + КА периодически выходит из зоны види-
мости наземных средств приема телеметрической информации.
Как следствие, в составе БРТС появились запоминающие устройства, за-
пись информации на которые обеспечивает непрерывность телеконтроля СУ.
В связи с ограниченным объемом ЗУ, как правило, информация записыва-
ется с прореживанием, т.е. с пониженной частотой.
Управление режимами работы системы измерений также осуществляется
системой управления, что находит отражение в едином полетном задании СУ,
содержащем циклограмму взаимодействия СИ и СУ.
2.3 ИД по системе безопасности полета
Система безопасности полета (СБ) ракет космического назначения (РКП)
предназначена для ограничения районов падения аварийных РКН по трассам по-
лета, повышения вероятности выведения космического аппарата (при одиночном
выведении) или группы космических аппаратов (при групповом выведении) на
орбиту в случае возникновения аварийных ситуаций на определенных участках
траектории полета РКН.
Система безопасности полета РКН обеспечивает:
- выявление аварийного состояния РКН в полете;
- реализацию операций прекращения активного аварийного полета РКН;
- выдачу в КА информации об аварийном состоянии РКН в полете;
- реализацию операций отделения 2-й или 3-й ступени или космического
аппарата Группы КА) для обеспечения выполнения дальнейшего полета
при аварийном движении 1-й, 2-й или 3-й ступени после достижения до-
пустимой области существования 2-й или 3-й ступени или КА (группы
КА).
Систему безопасности полета PH проектируют по исходным данным го-
ловной организации.
Исходные данные определяют способ построения системы безопасности
полета, ее аппаратурную реализацию, взаимодействие и обмен командами и сиг-
налами с системой управления, участки и условия ее задействования. Исходные
данные содержат требования по параметру «Потеря устойчивости движения
РКН», формируемому системой стабилизации СУ РКН, по параметру «Потеря
продольной перегрузки», формируемому системой навигации и наведения СУ
РКН, по контролю состояния бортовой вычислительной машины, по контролю
достижения допустимых областей существования ступеней РКН и КА, по алго-
ритму функционирования системы безопасности, предусматривающему выклю-
чение МД и прекращение полета или дальнейшее продолжение полета и отделе-
ние КА.
99
По способу построения система безопасности полета может быть выполне-
на в виде автономной системы или в варианте, когда ее функции реализуются
программно-аппаратными средствами системы управления.
Исходные данные определяют требуемые действия системы безопасности
полета от момента пуска РКН до завершения полета.
Библиографический список
1. Абгарян, К.А Динамика ракет [Текст] / К.А. Абгарян, И.М. Рапопорт.-
М.: Машиностроение. 1969. - 378 с.
2. Динамика систем управления ракет с бортовыми цифровыми вычислитель-
ными машинами [Текст] / В.Д. Аренс, С.М. Федоров, М.С. Хитрик,
С.В. Лучко. - М.: Машиностроение, 1972. - 232 с.
3. Механика полёта [Текст] / С.А. Горбатенко, Э.М. Макашов,
Ю.Ф. Полушкин, Л.В. Шефтель. - М.: Машиностроение, 1969. - 420 с.
4. Жуковский, Н.Е. О движении твёрдого тела, имеющего полости, наполнен-
ные однородной капельной жидкостью. Избранные сочинения. Том I
[Текст] / Н.Е. Жуковский. - М.: Гостехиздат, 1955. - 391 с.
5. Ракета как объект управления [Текст] / И.М. Игдалов, Л.Д. Кучма,
Н.В. Поляков, Ю.Д. Шептун. - Днепропетровск: АРТ-ПРЕСС, 2004. - 544 с.
6. Колесников, К.С. Жидкостная ракета как объект регулирования [Текст] /
К.С. Колесников. - М.: Машиностроение, 1969. - 298 с.
7. Лебедев, А.А. Динамика полёта [Текст] / А. А. Лебедев,
Л.С. Чернобровкин. - М.: Машиностроение, 1973. - 616 с.
8. Микишев, Т.Н. Динамика твёрдого тела с полостями, частично заполнен-
ными жидкостью [Текст] / Т.Н. Микишев, Б.И. Рабинович. - М.: Машино-
строение, 1968. - 532 с.
9. Моисеев, Н.Н. Исследования о движении твёрдого тела, содержащего жид-
кие массы, имеющие свободную поверхность [Текст] / Н.Н. Моисеев. -
Вестник АН СССР, 1956. - С. 17 - 23.
Ю.Нариманов, Г.С. О движении твёрдого тела, полость которого частично за-
полнена жидкостью [Текст] / Г.С. Нариманов. - ПММ. Изд. АН СССР,
1956, №1.-С. 17-23.
11.OCT В92-8633-75, OCT В92-8551-74. Методика задания ветровых воздей-
ствий.
12.Рапопорт, И.М. Динамика упругого тела, частично заполненого жидкостью
[Текст] / И.М. Рапопорт. - М.: Машиностроение, 1967. - 399 с.
13.Рабинович, Б.И. Введение в динамику ракет-носителей космических аппа-
ратов [Текст] / Б.И. Рабинович. - М.: Машиностроение, 1975. - 416 с.
14.Электрогидравлические следящие системы [Текст]/ В. А. Хохлов,
В.Н. Прокофьев, Н.А. Борисова, В.И. Гусаков, В.М. Чуркин. - М.: Машино-
строение, 1971. - 431 с.
100
3 АНАЛИЗ ТЗ И ИД В ЦЕЛЯХ ВЫРАБОТКИ ТЕХНИЧЕСКИХ
РЕШЕНИЙ ПО ПРОЕКТИРОВАНИЮ СУ PH
ЭЛ Анализ ТЗ и ИД
Разработку ракетного комплекса осуществляют в соответствии с директив-
ными требованиями, приведенными в документе, который называется «Тактико-
технические требования (ТТТ) на разработку ракетного комплекса». ТТТ разра-
батываются Генеральным Заказчиком комплекса, согласовываются с Генераль-
ным разработчиком комплекса и основными его соисполнителями по созданию
отдельных подсистем комплекса, а именно:
- разработчиком ракеты - носителя;
- разработчиком стартового комплекса;
- разработчиком двигательных установок;
- разработчиком системы управления PH.
На основании ТТТ Генеральный разработчик комплекса разрабатывает и
согласовывает с указанными выше соисполнителями технические задания (ТЗ) на
разработку отдельных подсистем. ТЗ по сравнению с ТТТ содержат развернутые
и конкретные требования, предъявляемые к подсистемам.
В частности, в ТЗ на разработку СУ РКН содержатся следующие основные
требования:
- задачи, решаемые СУ;
- основные характеристики СУ;
- состав СУ;
- эксплуатационные требования;
- этапы создания СУ;
- перечень нормативно-технической документации (ГОСТы, нормативы и
т.п.), в соответствии с которой создается СУ и т.п.
Полный перечень требований, содержащихся в ТЗ, перечень ИД и их со-
держание, приведены в разд. 1 и 2 настоящей книги.
С учетом важности предъявляемых требований, влияния их на облик и со-
став системы управления, согласованию ТЗ на разработку СУ между Генераль-
ным разработчиком комплекса и Головным разработчиком СУ уделяется особое
внимание. На этапе согласования находится разумный технически обоснованный
компромисс между техническими характеристиками отдельных подсистем ком-
плекса и их реализуемости, с одной стороны, а с другой - обеспечения безуслов-
ного выполнения требований, предъявляемых Генеральным заказчиком к ком-
плексу в целом. :i
Таким образом, техническое задание на разработку СУ РКН (в т.ч. ИД -
приложения к ТЗ) является основополагающим техническим документом, опре-
деляющим разработку, отработку и этапы создания системы управления.
Рассмотрим и проанализируем ниже влияние основных технических и экс-
плуатационных требований ТЗ и ИД на выработку и принятие технических реше-
ний по определению облика системы управления при ее проектировании.
101
Тип системы управления, точностные характеристики
Одной из основных характеристик СУ РКН является тип системы управле-
ния и ее точностные характеристики, которые определяют не только облик по-
строения СУ, но и облик всего комплекса в целом.
Различают следующие типы систем управления:
- автономная;
- неавтономная;
- комбинированная (комплексированная).
Аппаратура автономной системы размещается только на ракете и осущест-
вляет функционирование без использования внешней информации. Поэтому та-
кая система практически не подвержена воздействию помех.
Неавтономная бортовая система имеет прямую и обратную связь с внеш-
ними устройствами, размещенными как на земле, так и на других объектах. По-
мехи и возмущения могут действовать как на входы датчиков первичной инфор-
мации, так и на передающие каналы связи.
Комбинированная система, представляет собой комбинацию автономных и
неавтономных систем. Недостатки каждой из них частично компенсируются, а
основные преимущества сохраняются.
Достоинства автономной системы привлекают как разработчиков системы
управления, так и заказчиков. Однако автономные системы требуют применения
датчиков первичной навигационной информации (гиростабилизированные плат-
формы, бесплатформенные инерциальные навигационные системы - БИНС, дат-
чики измерения угловых скоростей) с высокими точностными характеристиками.
Такие датчики отличает, прежде всего, высокая стоимость, сложность производ-
ства, а в ряде случаев и невозможность технически обеспечить заданные точно-
стные характеристики.
Одним из наиболее заметных и практически важных научно-технических
достижений в навигации последнего двадцатилетия XX века стало создание гло-
бальных спутниковых навигационных систем (СНС). Такие системы предназна-
чаются для решения задач точного определения местоположения различных объ-
ектов. В основе принципа их работы лежит создание глобального навигационно-
временного поля (ГНВП). ГНВП создается аппаратурой, расположенной на не-
скольких десятков спутников (24-36 шт.). Орбиты спутников являются близкими
к круговым, с удалением от Земли на расстояние ~ 19-20 тыс. км. Аппаратура
потребителя (АП) СНС располагается на объекте, чье местоположение необхо-
димо определить. Более подробное описание аппаратуры потребителя рассмотре-
но в подразд. 3.4.4 настоящей книги.
Следовательно, ввод в эксплуатацию таких систем, как GPS (США) в нача-
ле 90-х годов XX века, ГЛОНАСС (РФ) в 2011г., создаваемых в настоящее время
GALILEO (Европейская система) и Compass (Китайская система), позволило пе-
рейти к практическому применению их для определения точного местоположе-
ния объектов.
Необходимо отметить, что высокоточное определение (несколько метров)
возможно как для стационарных, так и подвижных (в т.ч. высокодинамичных)
102
объектов. Использование в АП СНС помехозащищенных приемных каналов (ан-
тенна, входные элементы приемника и т. п.) позволило применять ее на РКН.
Использование в составе системы управления РКН аппаратуры потребителя
спутниковых навигационных систем позволяет значительно снизить точностные
требования, предъявляемые к инерциальным измерителям, улучшить габаритно-
массовые характеристики (ГМХ) бортовой аппаратуры в целом и обеспечить вы-
полнение заданных точностных требований.
Готовность
Наряду с точностными характеристиками готовность является одной из са-
мых важных и определяющих характеристик СУ и комплекса в целом.
Готовность (время готовности) - интервал времени от момента поступле-
ния в СУ команды ’’Пуск” до момента отрыва PH от стартового стола. Набор го-
товности отдельных подсистем СУ (например, ККП) и СУ в целом занимает зна-
чительное время в общей временной циклограмме предстартовой подготовки
РКН. Это связано с реально протекающими физическими процессами:
- механическим разгоном гиромоторов ККП;
- выходом на стационарный тепловой режим прибора;
- набором точностной готовности, которые по своей физической сущно-
сти нельзя уменьшить менее некоторых значений.
Поэтому приходится принимать ряд организационно-технических меро-
приятии, уменьшающих время до минимально возможного.
Надежность
Исходя из решаемых РКН задач определяют показатели надежности ком-
плекса и его составляющих. При этом показатели надежности СУ учитывают ус-
ловия ее эксплуатации на РКН:
- работоспособность при подготовке к пуску и пуск РКН;
- функционирование в полете.
С учетом важности решаемой РКН задачи - вывод полезной нагрузки (кос-
мического аппарата) в заданную точку все современные системы управления по-
строены с резервированием. Такая схема позволяет решить конечную задачу РКН
даже при появлении в аппаратуре СУ ряда неисправностей и отказов.
Первоначально аппаратура СУ строилась с поканальным резервированием.
Отказ одного или двух каналов в трехканальной системе не приводит к отказу
системы в целом.
При увеличении степени интеграции элементной базы появилась возмож-
ность резервирования аппаратуры на низком уровне, т. е. проводить выборку не
на уровне каналов, а на уровне нескольких десятков электронных элементов. Это
так называемое ’’мажоритирование на низком уровне" с накоплением неисправ-
ностей. Такой подход позволил значительно повысить эксплуатационную надеж-
ность аппаратуры СУ.
Габаритно-массовые характеристики
С учетом коммерческой направленности применения РКН, вопросы ГМХ
аппаратуры принимают повышенную актуальность. Так, стоимость вывода на
орбиту 1 кг полезной нагрузки составляет несколько тысяч долларов. Поэтому
103
уменьшение массы аппаратуры и, как следствие, увеличение массы выводимой
полезной нагрузки является важной задачей при ее разработке.
Основные направления улучшения ГМХ бортовой аппаратуры СУ:
- оптимальное распределение решаемых СУ задач между бортовой и на-
земной аппаратурой (максимальный перенос задач эксплуатации СУ с
«борта» на «землю»);
- выбор оптимального резервирования аппаратуры;
- применение современной элементной базы с высокой степенью интегра-
ции;
- оптимальная компоновка приборов, устанавливаемых на РКН;
- применение облегченных конструкционных материалов и т.п.
Эксплуатационные требования
Компоновка РКН определяет места (отсеки) расположения бортовой аппа-
ратуры. Требованиями ТЗ задаются условия эксплуатации аппаратуры в зонах ее
размещения. Условия эксплуатации бортовой аппаратуры в составе РКН опреде-
ляют ее исполнение. При наличии герметичного приборного отсека устанавли-
вают аппаратуру в негерметичном исполнении, в противном случае - аппаратуру
производят в герметичных корпусах.
Задание температуры в приборном отсеке, зонах размещения приборов и
точках их крепления определяет температурные режимы аппаратуры. Работоспо-
собность приборов (отвод тепла) можно обеспечить за счет как пассивных мето-
дов (наличие отводящих плит, радиаторов, экранов), так и активных (применение
внутриприборйых вентиляторов или вентиляторов внутри отсека, теплоотводя-
щйх трубок и т.д.). Необходимо отметить, что на принятие технических решений
по проектированию аппаратуры, кроме рассмотренных выше основных требова-
ний, оказывает влияние и ряд специальных требований:
- воздействие грозы и молнии;
- воздействие статического электричества;
- механические воздействия при транспортировке;
- обеспечение защиты от грызунов.
Схемно-технические и кбйкрётные конструктивные решения при разработ-
ке аппаратуры СУ РКН определяются заданными в ТЗ и ИД требованиями.
3.2 Структурная схема СУ
Проектирование любой сложной системы, в т.ч. системы управления РКН,
начинают с анализа решаемых задач, предъявляемых к ней основных тактико-
технических требований, результатом которого является разработка структурной
схемы.
Структурная схема определяет основные структурные единицы системы, их
взаимосвязи и взаимодействия, а также определяет основные характеристики
структурных единиц, возможность реализуемости их разработчиками.
К сожалению, несмотря на бурное развитие научно-технического прогрес-
са, в настоящее время отсутствуют как алгоритмы, программы, так и в целом
программно-аппаратный комплекс, позволяющий полностью автоматизировать
104
разработку структурной схемы РКН. Поэтому структурную схему разрабатывают
итерационным методом на основе анализа требований, имеющегося опыта разра-
ботки предыдущих систем различного назначения и класса, достижений науки и
техники в различных отраслях.
Рассмотрим общую топологию и этапы разработки структурной схемы СУ
РКН.
1. Основополагающими характеристиками СУ РКН являются точностные
характеристики входящих в нее систем. Исходя из заданных численных значений
и условий применения РКН выбирают информационные системы, а именно:
- командные приборы (гиростабилизированная платформа, бесплатфор-
менная инерциальная навигационная система, блок датчиков измерения
угловых скоростей и т.п.) и их характеристики;
- необходимость комплексирования командных приборов системами
внешней информации (СБИ), их тип (инфракрасными, телевизионными,
радиотехническими - например, аппаратурой потребителя спутниковых
навигационных сигналов и т.п.) и характеристики;
- необходимость дополнительной аппаратуры для функционирования
бортовых приборов СВИ (например, наличие бортовой системы термо-
статирования, наземных приборов, обеспечивающих работу бортовых
приборов, и т. п.).
2. Исходными данными по РКН определены и согласованы с разработчика-
ми СУ основные характеристики исполнительных органов ракеты.
Учитывая, что сигналы с БЦВМ слаботочные, а для управления исполни-
тельными Орх анами ракеты требуются значительные мощности (ток до единиц -
десятков ампер), необходимо применять согласующие элементы (блоки, прибо-
ры). В качестве их, например, применяют:
- блок управления рулевыми приводами;
- блок управления электроклапанами;
- блок управления и коммутации.
Необходимо отметить, что для разгрузки БЦВМ и с точки зрения оптими-
зации указанные выше блоки в большинстве случаев не только решают согла-
сующую функцию, но и выполняют ряд логических операций (например, обра-
ботку сигналов обратной связи с исполнительных элементов, управление элек-
тропневмоклапанами наддува баков ”0” и Т” с учетом фактического давления в
баках и т.п.).
3. Одним из наиболее важных этапов проектирования систем управления с
БЦВМ является выбор и обоснование основных характеристик БЦВМ (структура,
быстродействие, объем памяти, длина разрядной сетки, язык программирования).
Определение указанных характеристик проводят на основании комплексно-
го анализа режимов работы СУ, структуры и взаимодействия отдельных подсис-
тем (навигации, наведения, стабилизации и т.п.), предварительного анализа алго-
105
ритмов и их функционирования. Проведенный анализ позволяет определить со-
став оборудования и основные характеристики БЦВМ.
4. Особое внимание при разработке структурной схемы уделяется вопросам
надежности системы, которая обеспечивается как аппаратными, так и программ-
но-алгоритмическими методами.
5. На основании совокупности всего оборудования определяется бортовой
источник электропитания, требования к нему, а также требования к наземному
источнику электропитания.
6. Исходя из компоновки РКН, зон размещения аппаратуры определяются
предполагаемые места установки аппаратуры, а с учетом ее функционального
взаимодействия - каналы связи и их реализации (тип каналов, характеристики).
В качестве примера на рис. 3.3.1, 3.3.2 и 3.3.3 изображена структурная схе-
ма системы, управления трехступенчатой жидкостной РКН. Рассмотрим пред-
ставлецную структурную схему и ее основные элементы.
Система управления - распределенная, т.е. аппаратура СУ располагается на
каждой ступени ракеты. Так, на 1-й и 2-й ступенях расположена аппаратура, ко-
торая используется в контуре управления полетом только соответствующей сту-
пени. А основная аппаратура 3-й ступени (БЦВМ, ККП, АП СНС) применяется
для управления РКН на всех участках полета. Такое расположение позволяет
обеспечить максимально эффективное использование энергетических возможно-
стей РКН по выводу полезной нагрузки на заданные орбиты. Система управления
г- комбинированная, т.е. базовая инерциальная СУ с комплексированием навига-
ционной информацией, получаемой от аппаратуры потребителя СНС. Такое по-
строение, как указывалось выше (см. подразд. 3.1), позволяет компенсировать не-
достатки каждой из подсистем (инерциальной, АП СНС) с сохранением преиму-
ществ каждой из них. При этом обеспечиваются высокие точностные характери-
стики СУ РКН в целом при сравнительно невысоких точностных требованиях,
предъявляемых к ее инерциальной части. В качестве источника первичной нави-
гационной информации используют бесплатформенную инерциальную навига-
ционную систему на основе ККП с ЛГ и МА.
Центральным логическим и управляющим элементом системы является
БЦВМ. БЦВМ участвует во всех режимах работы СУ и функционирует на всех
участках полета РКН. Архитектура и характеристики БЦВМ определяют харак-
теристики не только системы управления, но и облик, возможности и характери-
стики ракеты и комплекса в целом.
106
к аппаратуре КА
к аппаратуре 2-й ступени
Рисунок 3.3.1 - Структурная схема СУ РКН (3-я ступень)
107
к аппаратуре 1-й ступени
Рисунок 3.3.2 - Структурная схема СУ РКН (2-я ступень)
108
Рисунок 3.3.3 - Структурная схема СУ РКН (1-я ступень)
109
Перечень сокращений к структурной схеме СУ РКН (1-я, 2-я, 3-я ступени)
АП СНС - аппаратура потребителя информации от спутниковых навига- ционных систем;
ББ БИНС БУЭ ДУ “Г”, “О” идос КА ККП БЦВМ ВИП ГП дд Дмт ДП кмо кп лг МА МБР МПР мэп пп пспд Рг РД СВ сд скпп СПД СУ ЭГП СУГП СУПР СУРТ СУЭК тм-станция ТСУ УК КП УНС УОБ УПСУРТ - бортовая батарея; - бесплатформенная инерциальная навигационная система; - блок управления электроавтоматики; - датчики уровня горючего, окислителя; - индуктивный датчик обратной связи; - космический аппарат; - комплекс командных приборов; - бортовая цифровая вычислительная машина; - вторичный источник питания; -гидропривод; - датчик давления; - двигатели малой тяги; - датчик положения; - канал мультиплексного обмена; - контакт подъема; - лазерный гироскоп; - маятниковый акселерометр; - модуль выходных регистров; - модуль приемных регистров; - магнитоэлектрический преобразователь; - пиропатрон; - прибор системы поддержания давления; - регистры; - реле давления; - специализированный вычислитель; - сигнализатор давления; ~ силовой коммутатор первичного электропитания; - система поддержания давления; - согласующее устройство электрогидроприводов; - согласующее устройство гидроприводов; - согласующее устройство приводов; - система управления расходом топлива; - согласующее устройство электроклапанов; - телеметрическая станция; - телеметрическое согласующее устройство; - устройство контроля контакта подъема; - устройство нормализации сигналов; - устройство обеспечения безопасности; - усилитель-преобразователь системы управления расходом то- плива; ПО
УФБККА -устройство формирования базовых команд для космического
аппарата;
ЭГК - электрогидроклапан;
ЭГП - электрогидропривод;
ЭПК - электропневмоклапан.
Для повышения надежности БЦВМ в состав СУ введено устройство обес-
печения безопасности (УОБ). Логика его функционирования заключается в сле-
дующем:
- БЦВМ в каждом такте формирует признак, характеризующий ее работу
(“Норма” или “Ненорма”);
- при получении признака ’’Норма работы БЦВМ” У ОБ не работает;
- при получении признака ’’Ненорма работы БЦВМ” УОБ блокирует вы-
дачу всех команд управления от БЦВМ и самостоятельно выдает на вы-
ходные регистры команды, реализующие аварийную циклограмму
функционирования РКН (например, выключение двигателей, отделение
полезной нагрузки).
Для оптимального расхода компонентов топлива (“Г” и “О”) на 1-й и 2-й
ступенях жидкостной РКН используют систему управления расходом топлива
(СУРТ). Это позволяет значительно сократить гарантийные запасы топлива, и,
как следствие, повысить энерговооруженность РКН. Суть ее работы заключается
в следующем. В полете по показаниям датчиков, расположенных в баках “Г” и
“О” ракеты, определяется фактический расход компонентов топлива. БЦВМ
сравнивает эти показания с программными значениями и, при их отклонении, ре-
гулирует подачу горючего в камеру сгорания двигателя. Тем самым достигается
оптимальный (в заданных пропорциях) расход компонентов топлива “Г” и “О”.
Устройства, входящие в состав СУРТ (усилитель - преобразователь системы
управления расходом топлива -УП СУРТ и согласующее устройство управления
приводом подачи горючего в магистраль - СУПР), выполняют согласующую
функцию между исполнительными элементами ракеты и БЦВМ.
Заданные режимы и устойчивая работа жидкостных двигателей обеспечи-
ваются системой поддержания давления (СПД). По показаниям датчиков давле-
ния (ДД), находящихся в камерах сгорания двигательных установок, определяет-
ся реальное давление. При его отклонении от программных значений БЦВМ
формирует управляющее воздействие на подачу горючего в газогенератор, выра-
батывающего рабочее тело (газ) для функционирования турбонасосного агрегата
(ТНА). В свою очередь ТНА регулирует подачу горючего и окислителя в камеры
сгорания двигательных установок (ДУ), что обеспечивает их устойчивую работу.
Приборы системы поддержания давления (ПСПД-3,2,1) обеспечивают согласую-
щие функции между ИЭ ракеты (ДД, приводами) и БЦВМ.
Устройство формирования базовых команд в космическом аппарате (УФБК
КА) по командам БЦВМ выдает в аппаратуру КА базовые команды (отрыв раке-
ты от стартового стола, отделение КА от последней ступени). По получении этих
команд вычислительное устройство КА реализует циклограмму автономной ра-
111
боты КА (например, раскрытие солнечных батарей, включение радиопередатчи-
ков и т. п.).
Элементы системы (согласующее устройство гидроприводов - СУГП, со-
гласующие устройства электрогидроприводов - СУ ЭГП-2, 1, согласующее уст-
ройство электроклапанов - СУЭК) осуществляют согласующую функцию между
БЦВМ и исполнительными элементами системы стабилизации ракеты (СУГП и
СУ ЭГП-2, 1 - между БЦВМ и приводами, СУЭК - между БЦВМ и электрокла-
панами системы успокоения, ориентации и стабилизации).
При этом такие устройства, как СУГП и СУ ЭГП-2, 1, выполняют не
только согласующие функции, но и логические операции по обработке сигналов
обратной связи с ИЭ, что позволяет ’’разгрузить” (программно) БЦВМ.
Блок управления электроавтоматики (БУЭ - 3,2,1) предназначен для согла-
сования входов/выходов БЦВМ с исполнительными элементами электроавтома-
тики ракеты (сигнализаторы давления, пиропатроны, клапаны и т. п.).
При отрыве РКН от стартового стола формируется команда "Контакт подъ-
ема”. Указанная команда через согласующее устройство (устройство контроля
контакта подъема - УК КП) поступает в БЦВМ, фиксируя в БЦВМ отрыв ракеты
от стартового стола.
Бортовые батареи (ББ-3,2,1) являются первичными источниками электро-
энергии на борту РКН, а силовые коммутаторы первичного питания (СКПП-3,2,1)
обеспечивают распределение и коммутацию первичного электропитания между
всеми потребителями.
Вторичные источники питания (ВИПы) обеспечивают потребителей необ-
ходимыми номиналами электропитания (напряжения, частоты и т. п.).
В целях минимизации объема бортового оборудования и, как следствие,
улучшения габаритно-массовых характеристик аппаратуры СУ приняты следую-
щие решения:
- связь БЦВМ с абонентами, которая осуществляется по цифровым кана-
лам связи, более экономичным (по количеству линий связи) по сравне-
нию с релейными трактами. Особенно это касается межступенчатых свя-
зей, длина которых составляет несколько десятков метров. Устройства -
канал мультиплексного обмена (КМО), расположенные на 1-й и 2-й сту-
пенях ракеты, предназначены для преобразования цифровых команд в
релейные и наоборот;
. - встроенные ТСУ с нормализированными электрическими выходами, что
позволяет осуществлять непосредственную стыковку приборов с борто-
вой телеметрической станцией (тм-станцией);
- применение, при возможности, прямых (соединитель- соединитель)
связей между отдельными приборами. Это позволяет обеспечить на-
глядность, простоту и технологичность изготовления кабельной сети.
Для оценки функционирования РКН и ее подсистем (в т.ч. системы управ-
ления) при испытаниях и эксплуатации комплекса используют систему измере-
ний (СИ). Система измерений состоит из бортового и наземного сегментов. На
борту РКН установлены сборщики информации (СБ) и радиопередатчик (тм-
112
станция). На сборщик информации поступает вся телеметрируемая информация
(в объеме, необходимом для последующего анализа работы РКН на всех участках
полета), которая преобразуется (уплотняется) и подается на вход радиопередат-
чиков. Радиопередатчики осуществляют передачу всей тм-информации на назем-
ные станции. Наземный сегмент системы измерений представляет собой сово-
купность наземных измерительных пунктов (НИП). Первый НИП расположен на
космодроме, а все последующие (как стационарные, так и, при необходимости,
подвижные НИПы) располагаются по всей трассе полета РКН. При этом зоны
приема соседних НИП работают с перекрытием, что исключает появление участ-
ков с “провалами” информации. НИПы осуществляют первичную обработку
принятой информации и передают ее в Центр управления полетами для после-
дующего ее анализа специалистами по направлениям.
Взаимодействие бортовой аппаратуры СУ РКН с наземной аппаратурой
осуществляется по следующим трактам:
- цифровой тракт (передает цифровую информацию в бортовую аппарату-
ру - режимы работы, ввод/коррекция, при необходимости, полетного за-
дания и т. п. Из бортовой аппаратуры - донесения о выполнении режи-
мов);
- релейный тракт (разовые команды - подтверждение разрешения на обра-
зование бортовых шин электропитания, приведение в исходное состоя-
ние коммутационных элементов);
- электропитание бортовой аппаратуры от наземных источников электро-
энергии (при проверках, предстартовой подготовке).
На основе структурной схемы выдаются технические задания (технические,
эксплуатационные и специальные требования) на разработку каждого структур-
ного элемента СУ.
Разработчики приборов согласно выданным ТЗ разрабатывают техниче-
скую документацию (электрические схемы, перечни элементов и т.п.), а также
исходные данные на проработку и определение конструкции отдельных блоков,
узлов, приборов. На этапе разработки электрических схем определяют также тре-
бования к линиям связи, соединяющим приборы. Указанные требования учиты-
вают при выдаче ТЗ на разработку кабельной сети.
3.3 Приборный состав СУ
По получении от разработчиков приборов исходных данных, а также с уче-
том условий эксплуатации аппаратуры (требования ТЗ и ИД) конструкторское
подразделение прорабатывает различные варианты конструктивного исполнения
отдельных узлов, блоков, приборов.
Основные принципы, которыми руководствуются при проработке:
- разделение аппаратуры на слаботочные и сильноточные приборы для
исключений их взаимного влияния;
- возможность размещения приборов в выделенных зонах;
- обеспечение условий эксплуатации аппаратуры (давления, температуры
и т. п.);
113
- обеспечение технологичности производства аппаратуры.
Результатом проработки является выбор конструкции приборов и кабель-
ной сети, определение габаритно-массовых характеристик аппаратуры и требова-
нии к ее установке в отсеках РКП, окончательное определение приборного соста-
ва РКН.
Приборный состав СУ РКН, соответствующий приведенной выше струк-
турной схеме (подразд. 3.2 настоящей книги), приведен в табл. 3.3.1.
Таблица 3.3.1 - Приборный состав СУ РКН
№ п/п Наименование прибора Условное обозначение прибора Коли- чество Примечания
3-я ступень:
1 Электронный контейнер - 3: эк-з 1
2 Релейный контейнер - 3: РК-3 1
3 Бесплатформенная инерциаль- БИНС 2 2 шт.-для
ная навигационная система обеспечения требований по надежно- сти
4 Аппаратура потребителя ин- формации от спутниковых на- АП СНС 2
вигационных систем
5 Бортовая батарея - 3 ББ-3 1
6 Кабельные линии связи - 3 КЛС-3 1
2-я ступень:
1 Электронный контейнер - 2: ЭК-2 1
2 Релейный контейнер - 2: РК-2 1
3 Бортовая батарея - 2 ББ-2 1
4 Кабельные линии связи - 2 КЛС-2 1
1-я ступень:
1 Электронный контейнер - 1: ЭК-1 1
2 Релейный контейнер - 1: РК-2 1
3 Бортовая батарея - 1 ББ-1 1
4' Кабельные линии связи - 1 КЛС-1 1
Аппаратуру СУ для данной РКН размещают в негерметичных отсеках. По-
этому все контейнеры и приборы выполнены в герметичном исполнении.
Подробное описание отдельных подсистем, схемно-технических и конст-
руктивных решений по аппаратуре СУ рассматрены ниже в соответствующих
разделах настоящей книги.
114
3.4 Требования к командно-измерительным приборам СУ
3.4.1 ККП на базе гиростабилизатора
3.4.1 ЛОсновные свойства гироскопов
Принцип работы гиростабилизаторов, предназначенных для построения на
борту PH инерциальной системы координат, основан на использовании свойства
гироскопа сохранять неизменное положение в пространстве.
Гироскопом называется быстровращающееся симметричное тело (ротор),
установленное в специальном подвесе, который позволяет ему изменять угловое
движение относительно основания. Вращение ротора происходит с угловой ско-
ростью, достигающей нескольких десятков тысяч оборотов в минуту. Такая осо-
бенность придает гироскопу ряд замечательных свойств, одно из которых назы-
вается прецессией. Это особый вид движения быстровращающегося тела под
действием момента внешних сил. Специфика движения состоит в том, что оно
происходит не в направлении действия силы, а в направлении, перпендикулярном
к линии действия силы, т. е. в направлении вектора момента этой силы. Отсюда
следует важное для практики правило прецессии: «Под действием момента
внешних сил ось вращения гироскопа поворачивается относительно неподвижно-
го пространства так, что вектор кинетического момента гироскопа Н стремится
совместиться с вектором момента внешних сил М по кратчайшему пути».
В векторном виде угловая скорость прецессии может быть определена из
формулы
шхН = М.
Из правила прецессии и формулы определения скорости прецессии следует
три важных в практическом отношении следствия:
1. Если на гироскоп не действуют моменты внешних сил, М = 0 и со = 0, то
это означает, что ось ротора гироскопа не изменяет своего направления относи-
тельно неподвижного пространства.
Такое свойство свободного гироскопа широко используют в технике для
задания определенной ориентации объектов в пространстве.
2. При необходимости изменить направление главной оси ротора гироскопа
какой-то оси следует приложить к нему момент внешних сил относительно пере-
крестной оси с помощью специального устройства - датчика моментов.
3. Прецессия безынерционна, т.е. она мгновенно возникает при приложении
момента сил и мгновенно прекращается, как только момент перестает действо-
вать.
С учетом изложенного выше широкое распространение в гироскопическом
приборостроении получили приборы на основе двухстепенных гироскопов с кар-
дановым подвесом, который содержит всего одну рамку. Кинематическая схема
такого гироскопа показана на рис. 3.4.1.
115
1
Рисунок 3.4.1 - Кинематическая схема двухстепенного гироскопа:
1 - ротор, 2 - рамка подвеса, 3 - основание
3.4.1.2 Назначение и технические требования
Точное автономное определение положения РКН в пространстве требует
привязки осей чувствительности интегрирующих акселерометров к инерциаль-
ной, а не связанной с РКН системе координат.
Устройства, которые реализуют инерциальную систему координат и позво-
ляют измерять проекции вектора кажущейся скороеги, а также углы поворота
РКН вокруг этих осей, называются гиростабилизаторами.
Основными требованиями, предъявляемыми к гиростабилизаторам, явля-
ются точность сохранения заданного положения гироплатформы в инерциальном
пространстве при действии на нее различных динамических возмущений (линей-
ных и угловых ускорений, скоростей, вибраций, ударов).
Эта точность характеризуется двумя видами похрешностей - вынужденны-
ми угловыми движениями гироплатформы под действием возмущений и собст-
венной скоростью прецессии. Как правило, точностные характеристики гироста-
билизатора являются одним из главных факторов, определяющих эффективность
выполнения поставленной задачи.
В данном разделе для примера приведены основные принципы и техниче-
ские решения, заложенные при разработке гиростабилизатора для систем управ-
ления PH ’’Днепр”, ’’Стрела”, "Энергия”, построенные на основе двухстепенных
гироскопов.
Требования к составу и конструкции гироитабилизатора формируют исходя
из требований к системе управления в части:
- прицеливания PH на любой угол без его разворота в стартовом сооруже-
нии;
- построения в точке старта инерциальной системы координат;
116
- сохранения ориентации инерциальной системы координат с заданной
точностью в течение полета PH;
- измерения и выдачи информации о линейном и угловом движении PH
вдоль и относительно заданной траектории.
3.4.1.3 Состав и конструкция прибора
Семейство траекторий указанных выше PH позволяет применить трехос-
ный гиростабилизатор с внешней схемой карданова подвеса, состоящей:
- из наружной рамы, ось вращения которой совпадает с осью тангажа PH с
углами прокачки +150° ...-200°;
- промежуточной рамы, ось вращения которой перпендикулярна оси на-
ружной рамы с углами прокачки -45° ... +45°;
- внутреннего подвеса, который перпендикулярен оси промежуточной ра-
мы.
На внутреннем подвесе устанавливают непосредственно гироплату с гиро-
скопами и акселерометрами.
Углы прокачки гироплатформы вокруг внутренней оси подвеса составляют
-200° ... +200°.
В начальном (предстартовом) положении оси карданова подвеса совпадают
с осями Т, В и Р ракеты-носителя соответственно.
Ограничение углов прокачки вокруг промежуточной оси позволяет исклю-
чить эффект сложения рамок, который приводит к потере одной из степеней свобо-
ды и, как следствие, к потере устойчивости системы стабилизации гироплатформы.
По способу парирования возмущающих моментов вокруг осей карданова
подвеса прибор относится к приборам индикаторного типа, в котором гироблоки
являются индикаторами отклонений гироплатформы, а двигатели стабилизации
парируют указанные возмущения.
С учетом изложенного выше в состав гиростабилизатора также входят:
- три измерителя кажущейся скорости ГИа, ГИр, ГИ7, оси чувствительно-
сти которых в целях минимизации погрешностей измерений составляют
косоугольную систему координат;
- три гироблока ГБ-Т, ГБ-Р, ГБ-В, которые являются чувствительными
элементами системы стабилизациии гироплатформы, а также исполни-
тельными органами при ее начальной выставке (приведении);
- два нуль-индикатора скорости как датчики отклонений гироплатформы
от плоскости горизонта и используемые в системе точного приведения
при начальной выставке гироплатформы;
- кодовые датчики углов, расположенные на осях карданова подвеса и
формирующие информацию об угловом отклонении гироплатформы от
требуемого положения при работе систем приведения при начальной
выставке прибора, а в полете - отклонение осей PH вокруг осей инерци-
альной системы координат;
- электронные устройства (усилители, преобразователи), обеспечивающие
функционирование гиростабилизатора;
117
- многогранная призма для предстартовой выставки гироплатформы в
азимут оптической системой прицеливания.
В ряде гиростабилизаторов для обеспечения пространственных поворотов
РКН без ограничений углов используют гиростабилизаторы с дополнительной
рамкой подвеса либо вокруг промежуточной оси, либо вокруг наружной оси.
Кинематическая схема ТГС изображена на рис. 3.4.2
Расположение гироинтеграторов и гироблоков на стабилизированной плат-
форме показано на рис. 3.4.3
Рисунок 3.4.2 - Кинематическая схема ТГС
Гироблоки ориентированы на платформе следующим образом: оси прецес-
сии гироблоков располагают параллельно плоскости прицеливания (ХОУ) и раз-
вернуты относительно оси Z на углы:
45° - гироблок тангажа S,
125° - гироблок рыскания у,
35° - гироблок вращения (р.
Векторы кинетических моментов Н гироблоков по оси вращения и рыска-
ния параллельны оси тангажа, а по направлению совпадают с положительным и
отрицательным направлениями оси тангажа соответственно.
Вектор кинетического момента гироблока тангажа направлен в отрицатель-
ном направлении оси вращения Y.
Ось чувствительности ГИа лежит в плоскости наведения ХОУ и составляет
с плоскостью XOZ угол 70°.
118
Рисунок 3.4.3 - Расположение гироинтеграторов и гироблоков
на ТГС
Оси чувствительности ГИр и ГИУ отклонены от плоскости XOZ на угол 20°
и лежат в плоскостях, повернутых относительно плоскости ХОУ на угол +20° и
-20° соответственно. Такая ориентация гироинтеграторов относительно плоско-
сти горизонта уменьшает влияние погрешностей интеграторов на точность рабо-
ты системы управления.
ТГС измеряет углы Эйлера.
Кинематическое соотношение между производными от углов Эйлера и уг-
ловыми скоростями относительно связанных с РКН осями координат следующее:
S= —(ш7 -coscp-co* sin<p);
COS\|/
Ф = coz • sin ф + • cos ф;
Ф = coy - tgy • (coz -созф-<ox • sinф).
3.4Л.4 Конструкция гиростабилизатора
Для выбора конструктивного исполнения гиростабилизатора руководству-
ются следующими требованиями:
119
- возможность размещения в приборном отсеке с заданной точностью;
- обеспечение оптической связи многогранной призмы с аппаратурой сис-
темы прицеливания;
- обеспечение монтажа и демонтажа прибора с PH при его замене;
- исключение неадресной стыковки соединителей прибора с бортовой ка-
бельной сетью и обеспечение возможности их многократной стыковки;
- обеспечение габаритно-массовых характеристик прибора, которые
должны быть ограничены и позволять его монтаж (демонтаж) либо
вручную, либо с использованием стандартных такелажных приспособ-
лений.
Для выполнения заданных требований конструктивно гиростабилизатор
разработан в виде двух раздельных приборов:
- блока механики (БМ);
- блока усилителей гиростабилизатора (БУГ).
В блок механики входит гироплатформа с установленными на ней гироско-
пами ГБ-Т, ГБ-Р, ГБ-В, гироинтеграторами ГИа, ГИр, ГИУ> нуль-индикаторами
скорости НИС-Т, НИС-Р. Гироплатформа помещается в карданов подвес.
Наружная и промежуточная рамы карданова подвеса выполнены в виде
сфер, что позволяет во всех диапазонах углов прокачки обеспечить равножест-
кость конструкции.
Для защиты конструкции прибора от воздействия вибраций и ударов блок
механики установлен в приборном отсеке PH на амортизаторы.
Прибор выполнен в герметичном исполнении, и при изготовлении его
внутренняя полость заполняется азотом, что позволяет исключить запотевание
оптических элементов и коррозию конструктивных элементов и применяемых
электро-, радиоизделий.
Масса прибора составляет ~ 56кг.
В блок усилителей гиростабилизатора входят усилители системы стабили-
зации, системы точного приведения гиростабилизированной платформы, усили-
тели межрамочной коррекции гироинтеграторов, релейный блок.
Прибор выполнен в герметичном исполнении, и его полость заполняется
азотом. Масса прибора ~ 15кг.
Блок механики и блок усилителей гиростабилизатора между собой и с ап-
паратурой СУ соединяются кабельной сетью с разнотипными соединителями в
целях исключения их неадресной стыковки при монтаже приборов.
3.4. L5 Технические характеристики гиростабилизатора
Основные технические характеристики гиростабилизатора позволяют дать
обобщенную оценку технического уровня прибора и включают в себя:
- инструментальные погрешности;
- габаритно-массовые характеристики;
- энергетические параметры;
- данные по готовности и ресурсу;
- надежность.
120
Инструментальные погрешности прибора состоят:
- из погрешностей начальной выставки гиростабилизированной платфор-
мы в плоскость горизонта и в азимут;
- погрешностей измерений проекций вектора кажущегося ускорения гиро-
скопическими интеграторами;
- случайных уходов гироплатформы;
- погрешностей установки гироичтеграторов на стабиплате.
При оценках влияния инструментальных погрешностей прибора на точ-
ность выведения PH полезной нагрузки принимают, что эти погрешности незави-
симы, носят случайный характер и распределены по нормальному закону.
Расчеты ожидаемой точности проводят с использованием математической
модели инструментальных погрешностей гиростабилизатора.
Габаритно-массовые характеристики гиростабилизатора включают в себя
данные о массе приборов, из которых он состоит, габаритные размеры, требова-
ния по монтажу приборов в приборном отсеке, моменты инерции приборов и ко-
ординаты их центра масс.
Энергетические параметры позволяют оценить энергопотребление прибора
в процессе его включения и работы в установившемся режиме, а также допусти-
мое качество напряжения первичного электропитания.
Немаловажное значение имеет также номенклатура требуемых источников
вторичного электропитания, обеспечивающих специальными напряжениями по-
стоянного и переменного тока электропитание электромеханических и электрон-
ных устройств гиростабилизагора.
Данные о готовности и ресурсе учитывают для разработки циклограмм вы-
ключения гиростабилизатора при его проверках в составе системы управления
при предстартовой подготовке и полете PH.
Надежность прибора оценивают расчетным путем и подтверждают данны-
ми его эксплуатации. При этом строят структурную схему надежности с извест-
ными характеристиками каждой составной части и вычисляют следующие пока^
затели надежности:
- вероятность безотказной работы прибора при подготовке его в составе
PH к пуску;
- вероятность безотказной работы прибора в полете.
Величины указанных показателей на практике составляют - 0,997 и 0,998
соответственно.
Большее значение показателя надежности прибора в полете обусловлено
более жесткими условиями его функционирования (перегрузки, вибрации, удары
и т. д.).
Основные технические характеристики рассматриваемых типов гиростаби-
лизаторов приведены в табл. 3.4.1.
121
Таблица 3.4.1 - Основные технические характеристики
Технические характеристики БМ, БУГ ГМХ, кг, см Готов- ность, с Ресурс, ч Надежность Потребляемая мощность, ВА
БМ БУГ БМ БУГ ВБРпп ВБРп
Значения 56, 47x24 х41 15, 70x45 х62 51 50 200 0.997 0,998 850
Перечень параметров первичного и вторичного электропитания и их харак-
теристики приведены в габл. 3.4.2.
Таблица 3.4.2 - Параметры первичного и вторичного электропитания
Источник элек- тропитания Напряжение электро- питания, В Частота электро- питания, Гц Запитываемые эле- менты Примечание
Переменный ток
1 .Трехфазный 221+иг от 80 до 950 Гироскопы гироблоков Форсированный разгон
40+2 1000+1 Рабочий режим
2.Трехфазный 40±2 1000±0,005 Гироскопы гироинтеп)аторов Форсированный разгон
+ 1,2 20 -0,5 1000+0,005 Рабочий режим
3.Трехфазный 40±2 1000+1 Усилители стаби- лизации, УМРК, двигатели НИСов, двигатели стабили- зации
4.Четырехфазный + 1,2 13,3 -0,5 41,6 Реверсивный ре- дукторный двига- тель гироинтегра- тора
5. Однофазный 40±4 1800±90 УК, усилители- дискриминаторы НИСов, датчики линейных переме- щений НИСов
6. Однофазный 6,3±0,6 1500±0,015 БПИ Два ортогональ- ных напряжения
7. Однофазный +0,3 6 -0,3 3200±0,256 БПИ, УМРК, дат- чики углов ГИ
8. Однофазный 4,5±0,675 1536000±15 БПИ, УМРК, дат- чики углов ГИ
122
Окончание табл. 3.4.2
Источник элек- тропитания Напряжение электро- питания, В Частота 1 электро- питания, Гц 1 Запитываемые эле- менты Примечание
Постоянный ток
1. Постоянный „ +4,5 27 -3 УСТ, УМРК, БПИ
2. Постоянный + 0,5 5 -0,4 БПИ
3. Постоянный + 1,26 12,6 -1,0 БПИ
4. Постоянный + 1,26 -12,6 -1,0 БПИ
Импульсный ток
1 .Импульсный п„ + 4,5 27 -3 f упр 5 Гц Двигатели шаговые ГБ
2.Импульсный + 4,5 27 10... 30 Двигатель шаго- вый механизма арретирования
3.4.1.6 Обмен информацией между гиростабилизатором и БЦВМ
Обмен информацией между гиростабилизатором и БЦВМ системы управ-
ления осуществляется по цифровым каналам связи.
Информация с гироинтеграторов поступает с преобразователей ’’угол пово-
рота наружной рамки - последовательность импульсов”. При этом частота следо-
вания импульсов пропорциональна кажущемуся ускорению. Цена каждого им-
пульса соответствует приращению скорости 0,025 м/с.
Импульсы с преобразователей поступают по двум линиям связи: отрица-
тельной и положительной в соответствии со знаком приращения скорости.
Информация об угловом положении гироплатформы относительно ее кор-
пуса формируется датчиками угла и через преобразователи ’’угол-код” поступает
параллельным 15-разрядным кодом в БЦВМ. Дискретность угла соответствует
л-2"14 рад.
БЦВМ к каждому преобразователю осей Т, Р и В обращается независимо.
Обращение выдается в виде параллельного четырехразрядного кода управления,
по приему которого обновляется выходная информация с прибора. Такт опроса
информации с гиростабилизатора БЦВМ зависит от режима работы прибора
(проверки, предстартовая подготовка или полет) и может составлять от 0,025 до
1 с.
3.4. L7 Условия эксплуатации гиростабилизатора
К условиям эксплуатации гиростабилизатора относятся механические воз-
действия, акустические нагрузки, воздействия климатических факторов, ионизи-
рующего излучения космического пространства, действующие на прибор при его
123
хранении в составе PH, функционировании при предстартовой подготовке PH к
пуску и при его полете.
При предстартовой подготовке PH к пуску в приборном отсеке, где уста-
новлен гиростабилизатор, искусственно поддерживается средствами стартового
сооружения температура воздуха от +5°С до +25°С и относительная влажность до
80% при t = 20°С.
Под действием ветра PH, а следовательно, и приборы, могуг совершать
низкочастотные колебания с параметрами, указанными, в табл. 3.4.3:
Таблица 3.4.3 - Низкочастотные колебания PH
Частота колебаний, Гц 0,1 3 5_ 10 20 40
Амплитуда колебаний, град 5 0,5 0,2 0,05 0,01 0,005
Изменение значений амплитуд колебаний между значениями частот- ли-
нейное.
Для закрытых стартовых сооружений влияние ветра исключается.
При полете PH на прибор действуют механические воздействия в виде:
- осевых до (7 ... 8) g перегрузок и поперечных до ±2g при времени дейст-
вия ~(140 ... 160)с;
- акустических перегрузок, характеризующихся интегральным уровнем
звукового давления до 140 дБ (относительно порогового значения звуко-
вого давления 2Ю’5Па) в полосе частот от 20 до 2000 Гц, длительностью
до 40 с;
- вибрационных нагрузок, описываемых гармоническими колебаниями с
частотами (8 ... 16)Гц и максимальными амплитудами до 0,42 g вдоль
продольной оси PH и до 1,5 g вдоль поперечных осей PH. Время их дей-
ствия - до 100 с;
- вибрационных случайных нагрузок с максимальной спектральной плот-
ностью 0,12g2/nj в диапазоне частот от 320 до 1300Гц. Время их дейст-
вия - до 640с;
- ударов, которые описываются импульсами в виде полуволны синусоиды
или равносторонним треугольником. Удары возникают от разрывов пи-
ротехнических болтов при отделении ступеней PH, сброса обтекателя и
т. п.
В зависимости от количества и мощности зарядов величины ударов могут
составлять от 40 до 150g, а их длительность составляет (1 ... 2)мс или (3 ... 5)мс.
Ионизирующие излучения космического пространства действуют на при-
бор в виде:
- интегрального потока нейтронов с энергией более 0,1 МэВ;
- у-излучения;
- рентгеновского излучения;
- потока электронов.
124
Уровни излучений зависят от траекторий PH и времени полета на опреде-
ленных высотах, конструкции приборного отсека. Так, для участка траектории
выведения PH величина интегрального потока нейтронов с энергией более
ОДМэВ составляет 8-109 нейтронов/см, а экспозиционная доза у-излучения -200Р.
Длительность полета указанных выше ракетоносителей составляет ~15 мин.
3 ,4.2 Блок датчиков угловых скоростей
В системах стабилизации ряда PH требуется знание информации об угло-
вых скоростях вокруг связанной с PH системы координат.
Такую информацию можно получить либо расчетным путем (численным
дифференцированием показаний с датчиков углов гиростабилизатора), либо ус-
тановкой приборов, непосредственно измеряющих проекции вектора угловой
скорости на связанные оси PH (датчиков угловой скорости).
Второй путь более приемлем, так как он не накладывает ограничений на
места установки ДУ С в PH. (Гиростабилизаторы ставят обязательно на послед-
ней, третьей ступени, а измерения упругих колебаний корпуса ракеты может по-
требоваться и на второй, и на первой ступенях).
На практике наиболее широкое распространение получили ДУС на основе
двухстепенных гироскопов с аналоговым или дискретным выходным сигналом.
Датчики угловой скорости рассматриваемого вида представляют собой
двухстепенной гироскоп, охваченный жесткой обратной связью по углу поворота
гироскопа относительно его корпуса.
Кинематическая схема такого прибора показана на рис. 3.4.4.
Рисунок - 3.4.4 - Кинематическая схема ДУС:
1 - ротор, 2 - основание, 3 - демпфер,
4 - датчик угла
При повороте гироскопа вокруг оси Y с угловой скоростью <о возникает ги-
роскопический момент, равный Мг-Но>.
Момент Мг стремится повернуть ротор гироскопа вокруг оси X, и, следова-
тельно, измеряя этот момент, можно судить о величине угловой скорости, по-
скольку кинетический момент гироскопа поддерживается постоянным.
125
Для измерения гироскопического момента Мг используют устройства, соз-
дающие противодействующий момент, зависящий от угла а поворота гироскопа
зокруг оси X.
Далее приводится состав, конструкция и основные характеристики трехос-
ного блока ДУС (БДУС), использовавшегося в системе стабилизации PH "Энер-
гия".
3.4.2.1 Назначение БДУС
Блок датчиков угловых скоростей входит в состав инерциальной системы
/правления ракеты-носителя и предназначен для определения величин и знаков
проекций вектора абсолютной мгновенной угловой скорости PH на оси связанной
з PH системы координат Ох,У/, и выдачи в СУ соответствующей информации.
3.4.2.2 Основные требования к БДУС
БДУС представляет собой блок гироскопических трехкомпонентных дат-
чиков, угловых скоростей, электромеханическая и электронная части которого
гроированы.
Основные требования к блоку ДУС включают в себя требования по обеспе-
чению заданных точностных характеристик в условиях действия механических
нагрузок и климатических факторов в приборном отсеке PH, а также сохранение
этих характеристик в процессе хранения и подготовки раке гы к пуску.
Структурная схема прибора показана на рис. 3.4.5.
БДУС - блок датчиков угловых скоростей
. Рисунок 3.4.5 - Структурная схема БДУС
126
Эти требования для каждого ДУ С можно сформулировать следующим об-
разом:
- прибор должен измерять проекцию вектора угловой скорости в диапазо-
не ±60 град/с и выдавать выходную информацию в виде напряжения по-
стоянного тока;
- крутизна выходной характеристики прибора должна быть 0,1В —-— ;
град/с
- порог чувствительности - не хуже ±0,06 град/с;
- смещение нуля - не более 0,4 град/с;
- неортогональность чувствительности каждого ДУ С должна быть не бо-
лее 40 дуг. мин;
- блок ДУС должен обеспечивать заданные характеристики в предстарто-
вой подготовке и полете PH при воздействии в месте установки перегру-
зок, ударов, вибраций, климатических факторов; напряжении первично-
го электропитания, изменяющегося в диапазоне от 32 до 24В и имеюще-
го пульсации до 6% с частотами 300 ... 3000 Гц.
Структурно прибор состоит из трех одинаковых каналов, каждый из кото-
рых представляет собой автономный однокомпонентный трехосный гироскопи-
ческий датчик угловой скорости, работающий независимо от двух других. Каж-
дый канал имеет свою электромеханическую и электронную часть.
Электромеханическая часть трехосного гироскопического датчика угло-
вой скорости (одного канала) конструктивно выполнена в виде законченного
прибора, который включает в себя:
- три бесконтактных гиромотора постоянного тока (на каждую ось X, Y, Z
по одному гиродвигателю);
- шесть шаговых двигателей (ДШ) для раскачки внешних колец подшип-
ников гироскопов (на каждый подшипник свой двигатель) в целях
уменьшения моментов сопротивления;
- шесть моментных двигателей постоянного тока (ДПМ) (по каждой оси
два двигателя);
- шесть датчиков угла (ДУ) (по каждой оси два датчика).
Конструкция гиромотора постоянного тока одностаторная, симметричная.
Два кольцевых постоянных магнита возбуждения создают магнитное поле в ци-
линдрическом зазоре Вне рабочего зазора магнитный поток замыкается по мате-
риалу роторов-магнитопроводов, изготовленных из роторной стали. Роторы на-
прессованы на валик из немагнитной стали. Кольцевые магниты посажены на не-
магнитные втулки из стали и вместе с ними - на роторы.
В рабочем зазоре находится статор. Каркас статора в целях уменьшения по-
терь на вихревые токи выполнен из титанового сплава, имеющего высокое
удельное сопротивление. В пазы, выполненные методом электроискровой обра-
ботки в цилиндрической части каркаса и покрытые электроизоляционной эма-
лью, уложена двухфазная обмотка. Крепление статора осуществляется вне корпу-
са гиромотора, непосредственно на корпусе блока ДУСов. Величина рабочих за-
127
зоров обеспечивает гарантированный угол прокачки чувствительного элемента
±1,5°. Чтобы исключить возможность касания вращающегося ротора за статор,
особенно за лобовые части обмотки, каркас имеет сферический поясок, входящий
в кольцевую канавку на корпусе.
Величина торцевых зазоров между пояском каркаса и корпусом в угловых
и линейных единицах меньше величин других зазоров, а величина радиального
зазора меньше величины рабочих зазоров между статором и роторами с магнита-
ми. Это предохраняет от трения обмотку статора о ротор при транспортировании
даже при незакрепленном статоре.
Корпус гиромотора состоит из двух частей, соединяемых по цилиндриче-
ской поверхности с посадкой на клей. Форма корпуса сферическая. В качестве
опор ротора применен неравножесткий шарикоподшипник.
В целях снижения радиальной жесткости подвеса ротора и уменьшения со-
ставляющей погрешности от неравножесткости в корпусе выполнены упругие
элементы. Для снижения момента от температурной разбалансировки и от разно-
жесткости введен подбор корпусных деталей и шарикоподшипников по осевой
деформации, а также комплектование корпусных деталей и шарикоподшипников
в одном приборе при неравенстве жесткостей: в корпус с большей жесткостью
ставится подшипник с меньшей жесткостью и наоборот.
Гиромотор имеет’ следующие технические характеристики:
кинетический момент - 22 Гсм-с;
скорость вращения ротора - 20000 об/мин;
потребляемая мощность (на воздухе) - 1 Вт;
потребляемый ток - 90 мА;
время разгона - 30 с.
В качестве исполнительного элемента "электрической пружины" применен
четырехполюсный моментный двигатель постоянного тока (ДПМ) с ограничен-
ным углом поворота ротора и возбуждением от постоянных магнитов.
Двигатель состоит из ротора и статора. Ротор представляет собой корпус из
сплава 49КФ, на который наклеена втулка из бериллия с четырьмя фрезерован-
ными пазами. В пазы вклеены четыре магнита. Торцевые потоки рассеяния для
исключения влияния внешних магнитных полей и тяжений ротора двигателя к
корпусу прибора экранированы: с одной стороны - корпусом двигателя, с другой
- экраном из сплава 49КФ. Замыкается магнитная цепь кольцевым магнитопро-
водом из сплава 49 КФ, который крепится к корпусу лазерной сваркой. Такая
конструкция магнитной системы двигателя позволяет экранировать потоки рас-
сеяния магнитов, а также уменьшить вероятность загрязнения ротора и повысить
качество промывки ротора после его изготовления.
Намагничивание магнитов ротора в целях повышения индукции в зазоре и
уменьшения вероятности попадания в зазор ферромагнитных частиц выполняется
после окончательного изготовления ротора импульсным магнитным полем с по-
мощью специального приспособления.
Технические данные двигателя моментного следующие:
- число пар полюсов Р=2;
128
- число витков: обмотка 1-2 (рабочая) - 80 (двойным проводом);
обмотка 3-4 (смещения) - 50;
- диаметр обмоточного провода - 0,07 мм;
- сопротивление постоянному току:
обмотка 1-2: (30,5±3) Ом;
обмотка 3-4: (30±3) Ом;
- коэффициент передачи двигателя - 100 гсм/А;
- температурный коэффициент изменения индукции aD в интервалах темпе-
ратур:
(-80 ... 20)°С ав =+0,025%/°С;
(+20 ... 200)°С ав =-0,008л/7°С;
- нестабильность АВ/В от изменения воздушного зазора при изменении
температуры на ±60°С от 20°С не более ±0,03%.
Для привода промежуточных колец опор подвеса чувствительного элемента
электромеханической части применен магнитоэлектрический шаговый двигатель
(ДШ) обращенного исполнения. Для устранения сколов магнитов и попадания
частиц магнита в рабочий зазор двигателя магниты закрыты обоймой из немаг-
нитного сплава. Управление шаговым двигателем осуществляется блоком управ-
ления БУДШ.
Технические данные двигателя шагового следующие:
- число фаз обмотки статора - 3;
- число пар полюсов - 3;
- вращающий момент - 10 гем;
- ток в обмотке статора - 84 мА;
- потребляемая мощность - 0,8 Вт;
- частота приемистости - 24 Гц.
Электронная часть прибора конструктивно объединена в виде блока аппа-
ратуры привода (БАЛ), осуществляющего питание и управление всеми двигате-
лями электромеханической части, в том числе моментными двигателями системы
обратной связи. Кроме того, БАП осуществляет формирование сигналов телемет-
рического контроля с трех параллельных каналов, выдает информацию об ис-
правности электроприводов роторов гироскопов, шаговых двигателей, а также по
команде аппаратуры СУ осуществляет имитацию угловой скорости и имитацию
неисправности отдельных каналов для осуществления проверки функционирова-
ния и параметров БДУС в процессе эксплуатации.
Структурно БАП состоит из функционально и конструктивно отдельных
субблоков:
а) преобразователей напряжения, являющихся вторичными источниками
электропитания (ВИП), преобразующих напряжение электропитания постоянного
тока 27В в стабилизированные напряжения 5, 10, 12,6, 16, 18В постоянного тока
и совместно с кварцевым генератором в напряжение 2,5 В 32 кГц для поканаль-
ного электропитания всех электронных блоков и приборов электромеханической
части;
129
б) генератора кварцевого (ГК), обеспечивающего эталонную частоту
512 кГц для стабилизации скорости вращения роторов гироскопов, частоту
32 кГц для электропитания датчиков углов в системе обратной связи и частоту
22 Гц для обеспечения электропитания шаговых двигателей;
в) блоков управления двигателями гироскопов (БУДГ), осуществляющих
разгон роторов гироскопов и обеспечивающих стабилизацию номинальной ско-
рости вращения, а также выдающих сигнал о вращении роторов гироскопов с но-
минально скоростью;
г) блоков управления шаговыми двигателями (БУДШ), обеспечивающими
вращение роторов шаговых двигателей с определенной скоростью в заданном на-
правлении;
д) блоков управления двигателями момента (БУДМ), являющихся состав-
ной частью системы обратной связи, задающих строго определенную величину
тока в обмотке управления моментных двигателей в зависимости от величины
сигнала с датчиков угла. Кроме того, по команде аппаратуры СУ блоки имити-
руют прканальную неисправность БДУС;
е) блока регламента и телеметрического контроля (БРТК), обеспечивающе-
го по команде аппаратуры СУ подачу калиброванных напряжений на обмотки
смещения моментных двигателей для имитации угловой скорости, формирования
сигнала контроля о нормальной работе гиродвигателей и шаговых двигателей, а
также формирующего сигнал телеметрического контроля с трех параллельных
каналов;
ж) платы, являющейся конструктивным элементом для установки масштаб-
ных резисторов системы обратной связи и элементов фильтра для уменьшения
пульсаций выходного напряжения. Плата не имеет самостоятельного функцио-
нального назначения.
В БДУСе вторичные источники электропитания и электронные блоки име-
ют только поканальную связь с приборами электромеханической части. Гальва-
нически все каналы не связаны между собой.
Конструктивно электромеханическая и электронная части БДУС выполне-
ны в общем корпусе из бериллия.
Соединение БДУСа с аппаратурой СУ обеспечивается с помощью четырех
штепсельных разъемов.
3. 4.23 Технические характеристики и условия эксплуатации
БДУС имеет следующие технические характеристики:
1. Диапазон измеряемых угловых скоростей по осям ±60 град/с
PH
2. Порог чувствительности 3. Нулевой сигнал 4. Масштабный коэффициент 5. Стабильность масштабного коэффициента 6. Собственная частота 7. Полоса пропускания < (0,01... 0,03) град/с <0,12 град/с 0,1 в с/град менее 2% более 200 Гц более 50 Гц
130
8. Время готовности менее 60 с
9. Потребляемая мощность 60 ... 80 Вт
10. Масса, не более 5 кг
И. Амплитудно-частотная (АЧХ) и фазочастотная
(ФЧХ) характеристики прибора
Таблица 3.4.4 - АЧХ и ФЧХ прибора
£Гц 1 5 7 10 20 30 50 100 200
АЧХ 1 1 1 1 0,94 0,87 0,72 0,48 0,31
Разброс АЧХ, % ±2 ±2 ±2 ±2 ±5 ±10 ±20 ±20 ±20
ФЧХ, град -1 -6 -9 -12 -22 -34 -57 -74 -98
Разброс ФЧХ, % ±15 ±15 ±15 ±20 ±20 ±20 ±20 ±20 ±20
12. Действующие значения пульсаций выходного напряжения на различных час-
тотах
Таблица 3.4.5 - Действующие значения пульсаций выходного напряжения
Диапазон частот, Гц Величина пульсации, мВ
0... 20 практически отсутствуют
20... 50 не более 10
50... 200 не более 50
свыше 200 не более 200
Задействование прибора в основном рабочем режиме происходит автома-
тически по подаче на него напряжения первичного электропитания без каких-
либо дополнительных команд. Подготовительных операций для задействования
БДУС в составе системы управления не требуется. Его готовность к полету опре-
деляется временем разгона роторов гироскопов, не превышающим одной минуты
с момента подачи напряжения первичного электропитания. Выходное напряже-
ние, пропорциональное угловой скорости, выдается с каждой оси по девяти неза-
висимым цепям.
БДУС сохраняет свои характеристики при следующих условиях эксплуата-
ции в герметическом приборном отсеке в среде воздуха:
- при давлении (240 ... 280) кПа;
- при температуре (работающая система терморегулирования) до +60°С;
- при влажности газа, заполняющего приборный отсек, которая соответст-
вует точке росы минус 40°С.
БДУС при всех видах эксплуатации сохраняет нормальную работоспособ-
ность в условиях воздействия следующих механических перегрузок в местах его
131
установки:
- максимальных вибрационных перегрузок в любом из направлений в те-
чение 40 с на частотах (40 ... 2000) Гц, составляющих (2,0 ... 15) ед.;
- максимальных вибрационных перегрузок на БДУС в любом из направ-
лений в течение 5760 с на частотах (200 ... 400) Гц, составляющих (4,0 ...
... 5,0) ед.;
- максимальных ударных перегрузок по оси X 6 ед. длительностью (0,1 ...
... 0,4) секунды с числом нагружений 1; по оси Y ±12 ед. длительностью
(0,07 ... 0,1) с с числом нагружений 3; по оси Z ±5 ед. длительностью
(0,03 ... 0,1) с с числом нагружений 10;
- импульсных перегрузок максимальной амплитудой (30 ... 150) ед. в час-
тотном диапазоне (1000 ... 2000) Гц с временем затухания (0,01 + 0,03) с
и числом нагружения 2;
- максимальных линейных перегрузок по оси X ±5 ед., по оси Y ±10 ед.,
по оси Z ±3 ед. Время действия нагрузок на участке разгона - 400 с, на
участке пикирования - 250 с.
ЗЛ.2.4 Первичное и вторичное электропитание
Для первичного электропитания БДУС необходим только источник посто-
янного тока с напряжением 27^ В.
Преобразователь напряжения (ВИП) предназначен для электропитания
схем блока аппаратуры привода (БАП) и вырабатывает следующие напряжения:
1. Стабилизированное (+5 ± 0,25) В для электропитания микросхем.
2. Стабилизированное (±12,6 ± 0,6) В для электропитания микросхем.
3. Стабилизированное (±10 ± 0,5) В для электропитания БУДШ.
4. Стабилизированное (±18 ± 1) В для электропитания усилителей БУДМ.
5. Стабилизированное (±16 ± 0,3) В для электропитания цепей смещения мо-
ментных двигателей и электропитания блока БУДМ.
6. Переменное 2,54 В прямоугольной формы частотой 32 кГц для электропи-
тания датчиков угла.
7. Постоянное (±17 ± 2) В для электропитания инвертора блока БУДГ
Электропитание преобразователя осуществляется от источника постоянно-
го тока напряжением 27^ В.
3.4.3 Комплекс командных приборов бесплатформенной инерциальной
навигационной системы
3.4.3.1 Бесплатформенная инерциальная навигационная система
Бесплатформенную инерциальную навигационную систему (БИНС) приме-
няют в составе систем управления (СУ) ракет космического назначения (РКН)
для определения информации о параметрах начальной стартовой системы коор-
динат и параметрах движения РКН при решении навигационной задачи.
Создание БИНС стало возможным благодаря интенсивному развитию циф-
ровой техники (увеличению вычислительной мощности цифровых вычислитель-
132
ных машин). Данный фактор позволил в ряде случаев отказаться от использова-
ния гиростабилизированных платформ, что дало возможность уменьшить габа-
ритно-массовые характеристики (ГМХ) инерциальной навигационной системы
(ИНС) в целом с сохранением достаточно высоких точностных характеристик.
В состав БИНС входят: ;<
- комплекс командных приборов (ККП) с обслуживающей электроникой и
вторичными источниками питания;
- специализированный вычислитель (СВ) с устройствами приема и пере-
дачи информации между ККП и СВ, СВ и БЦВМ СУ PH; .
- кабели соединения составных частей БИНС (СВ, ККП) и подключения
прибора к аппаратуре системы управления PH;
- программно-алгоритмическое обеспечение;
- эксплуатационная документация.
Основные задачи, решаемые БИНС:
- математическое определение начальной стартовой системы координат;
- измерение интегралов от проекций вектора абсолютной угловой скоро-
сти на оси чувствительных элементов (задача ККП);
вычисление кватерниона ориентации связанной с PH системы координат
относительно начальной стартовой системы координат;
- вычисление проекций кажущейся скорости PH на оси связанной с PH
системы координат;
- измерение интегралов от проекций вектора кажущегося ускорения нача-
ла приборной системы координат на измерительные оси ККП (задача
ККП);
- вычисление проекций кажущейся скорости PH на оси начальной старто-
вой системы координат;
- контроль функционирования БИНС;
- выдача телеметрической информации в систему телеизмерений PH.
Для обеспечения БИНС первичной информацией (интегралов от проекций
вектора кажущегося ускорения и интегралов от проекций угловой скорости) в со-
ставе ККП могут применяться разнообразные измерительные чувствительные
элементы (ЧЭ).
Наиболее часто используемые чувствительные элементы, на основе кото-
рых разрабатываются ККП:
- лазерные гироскопы (ЯГ);
- волоконно-оптические гироскопы (ВОГ);
- микромеханические гироскопы;
- маятниковые акселерометры (МА);
- струнные акселерометры.
В дальнейшем рассмотрим реально существующий ККП на основе ЛГ и
МА.
133
3.4.3.2 Технические характеристики ККП
3.4.3.2.1 Назначение
Комплекс командных приборов является составной частью бесплатформен-
ной инерциальной навигационной системы и предназначен для получения пер-
вичной информации о параметрах движения ракеты-носителя;
- измерения приращений углов поворота корпуса прибора вокруг осей
чувствительности лазерных гироскопов (интегралов от проекций угло-
вой скорости) и выдачи в СВ БИНС соответствующей информации в
проекциях на оси приборной системы координат;
- измерения приращений проекций вектора кажущейся скорости корпуса
прибора на оси чувствительности акселерометров (АК) (интегралов от
проекций вектора кажущегося ускорения) и выдачи в СВ БИНС соответ-
ствующей информации в проекциях на оси приборной системы коорди-
нат;
- записи и хранения паспортных параметров ККП;
- формирования и выдачи в СВ БИНС донесений о техническом состоя-
нии основных узлов и прибора в целом;
- формирования массива цифровых телеметрируемых параметров ККП и
передачи их как по цифровому каналу связи в СВ БИНС, так и непо-
средственно на бортовую телеметрическую станцию;
имитации выходных сигналов ККП о параметрах движения PH по ко-
мандам из СВ БИНС при проведении электроиспытаний СУ.
3.4,3.2.2 Состав ККП и назначение основных его структурных единиц
В состав ККП входят:
- блок инерциальных измерителей (БИИ);
- бйок'прёобразбвания данных (БПД);
- г система-виброударозащиты (СВУЗ);
- контрольный элемент (КЭ);
- кабели;
- эксплуатационная документация.
Конструктивно в БПД предусмотрены посадочные места для установки
платы СВ БИНС.
Структурная схема ККП показана на рис. 3.4.6.
Функционально в состав БИИ входят:
- лазерные гироскопы (3 шт.) с электронными блоками, обеспечивающими их
функционирование (блок поджига и накачки (БПН) и блок управления ги-
роскопами (БУГ));
- маятниковые акселерометры (3 шт.), объединенные в трехосный акселе-
рометр (ТАК);
- блок преобразования и обработки сигналов (БОС).
Гироскопы предназначены для измерения проекции вектора угловой скоро-
сти вращения корпуса ККП относительно инерциального пространства на его оси
чувствительности и выдачу сигнала о величине и знаке проекции.
134
БИИ - блок инерциальных измерителей;
БОС - блок обработки сигналов;
БПД - блок преобразования данны
БПН - блок поджига и накачки;
БУГ - блок управления гироскопом;
ИВП - источник вторичного питания;
КЭ - контрольный элемент
ЛГ - лазерный гироскоп;
ПК - персональный компьютер;
СВ - спецвычислитель;
СВУЗ - система виброударозащиты;
ТАК - трехосный акселерометр;
УВ/В - устройство включения/выключения;
УС - устройство согласования
Рисунок 3 .4.6 - Структурная схема ККП
Акселерометры осуществляют измерения проекции на его оси чувстви-
тельности вектора кажущегося линейного ускорения корпуса ККП выдачу соот-
ветствующей информации о величине и знаке проекции.
Блок поджига и накачки осуществляет преобразование низковольтного на-
пряжения бортовой электросети (27 В) в высоковольтные напряжения (1000 В,
2500 В), необходимые для работы лазеров.
Блок управления гироскопами обеспечивает управление работой лазерных
гироскопов, а именно:
- управление включением каналов ЛГ;
- обеспечение выхода на режим и поддержания на заданном уровне рабо-
чих токов гироскопов;
- управление датчиками температуры, входящими в состав гироскопов;
- контроль функционирования гироскопов;
- выдачу требуемой телеметрической информации о контролируемых па-
раметрах.
Блок обработки сигналов проводит оцифровку аналоговых сигналов, по-
ступающих от блока управления гироскопами и блока акселерометров, математи-
ческую обработку полученного цифрового кода (фильтрацию, преобразование к
приборной системе координат, учет паспортных параметров и т.д.), формирова-
ние и передачу в СВ БЙНС кадра выходной информации ККП и передачу ТМ-
параметров в бортовую телеметрическую станцию.
Для снижения влияния механических воздействий (вибрация, удары) на
чувствительные элементы ККП (ЛГ, АК) применяют систему виброударозащиты.
В упрощенном варианте данная система представляет собой резиновые или сили-
коновые амортизирующие вставки в местах крепления блоков, хотя во многих
случаях это конструктивно сложные системы крепления. Использование СВУЗ
позволяет значительно снизить уровни вибрационных и ударных воздействий на
БИИ до допустимых значений, что уменьшает погрешности измерения ЧЭ из-за
механических воздействий
На корпусе БИИ установлен контрольный оптический элемент (КЭ) - от-
ражатель, нормали к граням которого определяют приборную систему координат
ККП.
ЛГ и ТАК жестко закреплены в корпусе БИИ.
Согласующим устройством между БИИ и аппаратурой СУ PH является
блок преобразования данных, в состав которого входят:
- устройство включения (УВК);
- источники вторичного электропитания (ИВП);
- устройство согласования (УС).
УВК предназначено для коммутации (включения/выключения) первичного
электропитания бортовой сети PH (27В) на ККП по командам от СВ.
ИВП обеспечивают питающими напряжениями все блоки, входящие в со-
став ККП.
Преобразование цифровой информации для выдачи её в бортовую ТМ
станцию осуществляется устройством согласования.
136
Для соединения отдельных узлов в блоках используют внутрикорпусные
жгуты, а для соединения блоков между собой и подключения БИНС к аппаратуре
СУ применяют межблочные и внешние кабели.
Программно-математическое обеспечение ККП представляет собой сово-
купность программ, работающих как при проведении проверочных режимов, так
и при основной работе (предстартовая подготовка, пуск) в составе СУ PH.
ПМО является неотъемлемой частью ККП как встроенный программный
продукт.
Для обеспечения эксплуатации ККП на всех этапах его функционирования
(автономные испытания, комплексные испытания в составе СУ PH на стендах
СУ, наземные испытания в составе PH, эксплуатация в составе PH в полете) раз-
рабатывают эксплуатационную документацию (ЭД). Состав и содержание ЭД
(паспорт, технические условия, руководство по эксплуатации) должны обеспе-
чить работу с ККП на всех этапах его применения.
3.43.2.3 Кинематические характеристики
В качестве приборной системы координат обычно принимают правую ор-
тогональную систему координат OXnYnZn, образованную нормалями к трем
взаимно ортогональным базовым плоскостям контрольного элемента ККП.
В качестве установочной системы координат также принимают правую ор-
тогональную систему координат OXyYyZy, определяемую посадочными плоско-
стями прибора.
Одноименные оси систем координат OXnYnZn и OXyYyZy совпадают, а
фактическое взаимное положение одноименных осей этих систем координат пас-
портизируется. Например, погрешность паспортизации взаимного положения
осей составляет не более 30 угл.с (данный параметр зависит от технологических
возможностей изготовителя прибора и точностных требований, предъявляемых к
прибору в целом).
В приборе имеет также большое значение взаимное положение осей чувст-
вительности ЧЭ и осей приборной системы координат (кинематическая схема
прибора). Погрешность взаимного положения влияет на точностные характери-
стики прибора в целом. Одна из возможных кинематических схем прибора изо-
бражена на рис. 3.4.7.
В данной схеме в качестве ЧЭ используют три акселерометра и три лазер-
ных гироскопа, оси чувствительности которых попарно совпадают (Хак, лг; YaK,
лг; ZaK, лг) и расположены относительно осей приборной системы координат
(Хп, Yn, Zn) следующим образом:
- положительное направление ОЧ Хак, лг совпадает с осью +Хп;
- положительное направление ОЧ YaK, лг расположено между осями +Yn
и +Zn под углом 45 град относительно каждой из двух осей;
положительное направление ОЧ ZaK, лг расположено между осями +Zii
и -Yn под углом 45 град относительно каждой из двух осей.
137
Рисунок 3.4.7 - Кинематическая схема прибора
Погрешности взаимного положения ОЧ ЧЭ и осей приборной системы ко-
ординат паспортизируются при изготовлении прибора и заносятся в память при-
бора, а также в эксплуатационную документацию как паспортизированные пара-
метры прибора. Эти параметры совместно с другими паспортизируемыми пара-
метрами используют при пересчете выходной информации ЧЭ на оси приборной
системы координат в блоке обработки сигналов.
3.4.3.2.4 Точностные характеристики
Точность получаемой из прибора выходной информации напрямую зависит
от погрешностей ЧЭ. Оценку точности проводят с помощью математической мо-
дели погрешностей. Основные составляющие погрешностей приведены ниже.
Лазер ныйгир ос коп
1. Нестабильность смещения нуля ЛГ:
- от запуска к запуску, град/ч;
- в запуске, град/ч;
138
- в запуске за счет вибрации, град /ч;
2. Случайный уход ЛГ, град/7ч .
3. Относительная нестабильность масштабного коэффициента ЛГ (безраз-
мерная).
4. Нестабильность положения ОЧ ЛГ относительно приборной системы ко-
ординат (угл. с).
Акселерометр
1. Нестабильность смещения нуля АК:
- от запуска к запуску, м/с2;
- в запуске, м/с2;
- в запуске за счет вибрации, м/с*.
2. Относительная нестабильность масштабного коэффициента АК (безраз-
мерная).
3. Нестабильность положения ОЧ АК относительно приборной системы ко-
ординат, угл. с.
Для примера рассмотрим основные случайные погрешности реально суще-
ствующего ККП:
- нестабильность смещения нуля ЛГ в запуске - 0,05 град/ч;
- нестабильность масштабного коэффициента ЛГ - 110’5;
- нестабильность положения ОЧ ЛГ относительно приборной СК -
15 угл.с;
- нестабильность смещения нуля АК в запуске -ЗЮ"4 м/с2;
- нестабильность масштабного коэффициента АК - 1 * 1 О’4;
- нестабильность положения ОЧ АК относительно приборной СК -
15 угл.с.
3.4.3.2.5 Основные технические характеристики
К основным техническим характеристикам ККП помимо точностных ха-
рактеристик относятся:
- готовность;
- надежность;
- габаритно-массовые характеристики;
- энергетические параметры;
- диапазоны измеряемой выходной информации;
- данные о ресурсе.
Готовность - это время от подачи электропитания на прибор до готовности
прибора выдавать выходную информацию с заданной точностью.
Надежность прибора определяется расчетным путем и подтверждается дан-
ными его эксплуатации. Показатели надежности:
- вероятность безотказной работы прибора при подготовке его в составе
СУ PH к пуску;
- вероятность безотказной работы прибора в полете.
ГМХ ККП определяют массу, габаритные размеры прибора (объем, длина,
ширина, высота), а также требования по его монтажу в приборном отсеке.
139
Энергетические параметры (потребляемая мощность, напряжение электро-
питания и т.д.) позволяют оценить энергопотребление прибора в процессе его
включения и работы в установившемся режиме, а также допустимое качество
первичного электропитания как бортовой сети PH, так и наземных источников
электропитания.
Диапазоны измеряемой выходной информации (угловых скоростей, линей-
ных ускорений) дают оценку возможности применения данного ККП к конкрет-
ной PH.
Данные о ресурсе учитывают при разработке циклограмм работы прибора
во всех режимах его эксплуатации.
Основные характеристики существующего прибора ККП приведены в
табл. 3.4.6.
Таблица 3.4.6 - Основные характеристики прибора
Технические характеристики Готовность Надежность 1 ГМХ Диапазон измерений Ресурс
Значения 3 ч 0,9798 (при подго- товке к ра- боте), 0,978 (в полете) 33 кг 442 х 365 х 300 мм ±90 град/с ±70 м/с2 (ОХп), ±30 м/с2 (ОУп, OZn) 250 ч
Энергетические параметры ККП:
- диапазон рабочего напряжения электропитания - 24...32 В;
- допустимые всплески и провалы напряжения электропитания - до 4В;
- ток переходных процессов длительность не более 2 мс - не более 30 А;
- потребляемая мощность в установившемся режиме - не более 60Вт.
3.4.3.3 Условия эксплуатации ККП
На аппаратуру системы управления, установленную на ракете, действуют
различные внешние факторы. Основные факторы, воздействующие на ККП в
местах его установки на PH, а также величины воздействия для реально сущест-
вующих ККП приведены ниже.
Механические воздействия
К механическим нагрузкам относятся: линейные квазистатические, вибра-
ционные, ударные и акустические воздействия.
140
1. Максимальные линейные (квазистатические) перегрузки, действующие
на прибор в полете:
- осевая перегрузка - 6,8 (время воздействия 160 с);
- поперечная перегрузка - 2,0 (время воздействия 128 с).
Характеристики нагрузок, используемых при проведении испытаний при-
бора, выбирают с учетом коэффициента безопасности (расчет нагрузок проводит-
ся умножением эксплуатационных нагрузок на коэффициент безопасности). Ко-
эффициент безопасности принимают не менее 1,3.
2. Вибрационные нагрузки при старте и в полете PH, действующие на при-
бор в местах крепления, делят на синусоидальные (гармонические) и случайные
вибрации.
Максимальная амплитуда синусоидальных (гармонических) колебаний со-
ставляет:
- 0,42g в диапазоне частот (8 ... 16) Гц, время воздействия - 100 с (про-
дольное направление);
- 1,5g в диапазоне частот (8 ... 16) Гц, время воздействия 100 с (попереч-
ное направление).
Максимальная спектральная плотность случайных вибраций:
- 0,120g2/Tn в диапазоне частот (320 ... 1280)Гц, время воздействия -
640 с.
3. Максимальное значение спектра удара при ударных нагрузках:
- 2500g в диапазоне частот (500 ... 5000) Гц.
4. Акустические нагрузки, действующие на прибор в полете PH, характери-
зуются:
- уровнем звукового давления (от 120 до 130 дБ);
- интегральным уровнем звукового давления (порядка 142 дБ);
- длительностью действия (порядка 40 с).
Климатические условия
ККП обеспечивает заданные характеристики при воздействии и после него
следующих климатических факторов:
- изменения температуры посадочных мест (от 0 до +35)°С;
- изменения давления окружающей среды от номинального до условий
космического пространства (14 О’6 мм рт. ст.);
- относительной влажности до 80% при температуре 20°С;
- атмосферного давления от 630 до 800 мм рт. ст.;
- соляного (морского) тумана до 5,4340"3 мг/м3.
Специальные условия
На PH устанавливают различные системы, в т.ч. радиотехнические (напри-
мер, ТМ станция), в состав которых входят радиопередатчики различных диапа-
зонов.
В местах эксплуатации прибора в составе PH (например, на космодроме)
также используют различные радиоэлектронные средства. Поэтому обеспечение
электромагнитной совместимости радиоэлектронной аппаратуры является акту-
141
альной задачей в настоящее время. Аппаратура должна нормально функпиониро-
вать как при воздействии внешних излучений, так и сама она не должна превы-
шать заданные уровни излучений.
В качестве примера рассмотрим требования, предъявляемые к реально су-
ществующей аппаратуре:
а) напряженность электромагнитного поля, создаваемого ККП, на расстоя-
нии 1м не превышает 30 дБ относительно 1 мкВ/м в диапазоне частот от 1 до
40 ГГц;
б) ККП должен надежно функционировать при воздействии на него элек-
трических полей:
- 120 дБ относительно 1 мкВ/м в диапазоне частот от 10 кГц до 100 МГц;
- 146 дБ относительно 1 мкВ/м в диапазоне частот от 100 МГц до 40 ГГц.
3.4.4 Аппаратура потребителя информации от спутниковых
навигационных систем (АП СПС)
3.4.4.1 Назначение АП СНС
Введение в эксплуатацию в начале 90-х годов спутниковых радионавигаци-
онных систем позволило создавать системы управления на основе комплексиро-
вания информации с гироскопических командных приборов средней точности и
навигационных сообщений, формируемых аппаратурой потребителя от спутни-
ковых навигационных систем.
В мире существуют или находятся в стадии внедрения несколько навигаци-
онных систем, использующих искусственные спутники Земли и позволяющих
определять пространственное местоположение и вектор скорости потребителя.
В настоящее время АП СНС работает по сигналам СНС NAVSTAR (США),
ГЛОНАСС (Российская Федерация) или по сигналам указанных СНС одновре-
менно.
Навигационная система GALILEO (Европейская система) в настоящее вре-
мя находится на стадии развертывания.
Каждый спутник СНС непрерывно передает собственные навигационные
сообщения (альманах и эфемериды), содержащие информацию, на основе кото-
рой оборудование потребителей осуществляет измерения и вычисления, необхо-
димые для решения навигационной задачи.
Аппаратура потребителя на основании полученной со спутников информа-
ции определяет расстояние до каждого спутника, их взаимное расположение,
формирует навигационные параметры движения фазового центра антенн, уста-
новленных на РКН (точка пересечения продольной оси РКН с плоскостью распо-
ложения антенн), и передает вычисленную информацию в бортовую цифровую
вычислительную машину (БЦВМ).
3.4.4.2 Состав и принципы работы АП СНС
В данном разделе для примера приведены основные принципы и техниче-
ские решения, заложенные для систем управления некоторых отечественных
РКН.
142
Исходя из требований к СУ формируются требования к составу выходной
информации АП СНС и точности ее выдачи.
В состав АП СНС входят:
- приемные антенно-фидерные устройства (АФУ);
- малошумящие усилители (МШУ);
- два идентичных навигационных прибора, каждый из которых включает
в себя:
• устройство аналоговой обработки сигналов;
• устройство цифровой обработки сигналов;
• навигационный процессор (НП);
• интерфейс обмена с БЦВМ СУ;
• интерфейс обмена с телеметрической станцией (ТМС);
• генератор кварцевый;
• вторичный источник питания;
• программно-математическое обеспечение.
Структурная схема АП СНС изображена на рис.3.4.8.
Полукомплект 1
Рисунок 3.4.8 - Структурная схема комплекта АП СНС
143
В процессе функционирования АН СНС в составе СУ РКН осуществляет:
- прием и хранение альманахов или эфемерид СНС ГЛОНАСС или
NAVSTAR, обеих систем одновременно;
- определение видимых спутников СНС и планирование сеансов навига-
ционных определений;
- прием навигационных радиосигналов от СНС;
- определение текущих параметров движения РКН в Гринвичской системе
координат;
- выдача в аппаратуру СУ уточненных значений параметров движения
РКН, признака достоверности;
- формирование и выдачу в СУ РКН бортовой ’’секундной метки” - СМ (в
шкале UTC);
- формирование телеметрической информации и передачу ее в систему
телеизмерений (СТИ);
- прием от СУ координат и составляющих вектора относительной скоро-
сти, параметров угловой ориентации связанной системы координат РКН.
Функционирование АП СНС осуществляется следующим образом.
Навигационные сигналы, принятые АФУ и усиленные МШУ, поступают в
устройство аналоговой обработки сигналов (УАОС). В УАОС указанные сигналы
понижаются по частоте и подвергаются аналого-цифровому преобразованию.
Из УАОС навигационные сигналы НС поступают в цифровые корреляторы
(ЦКР), затем в навигационный процессор и интерфейс связи с СУ.
В корреляторах осуществляется поиск и обнаружение выбранных НС.
После завершения обнаружения НС в навигационном процессоре прово-
дится их первичная обработка, декодирование точных эфемерид навигационных
космических аппаратов и другой оперативной цифровой информации, после чего
в реальном масштабе времени решается навигационная задача. Эти данные фор-
мируются в кадре измерительной информации, который раз в секунду выдается в
БЦВМ СУ.
3.4.4.3 Точность измерения и технические характеристики АП СНС
Основные технические характеристики АП СНС позволяют дать обобщен-
ную оценку технического уровня прибора и включают в себя:
- точность выдачи навигационных определений;
- габаритно-массовые характеристики;
- энергетические параметры;
- данные о готовности и ресурсе;
- надежность.
На точность выдачи навигационных определений влияют следующие фак-
торы:
- геометрический фактор, характеризующий расположение АП СНС от-
носительно СНС (особенности геометрического расположения спутни-
ков);
144
- преломление радиоволн в ионосфере и атмосфере;
- высота полета РКН, в состав которого входит АП СНС;
- налитгие дифференциального режима;
- комбинирование приема навигационных сигналов от разных СНС
(NAVSTAR, ГЛОНАСС, GALILEO);
В целях обеспечения требуемой точности необходимо учитывать:
1. Наличие в зоне видимости АП СНС соответствующего количества спут-
ников, характеризующего влияние взаимного расположения АП СНС относи-
тельно СНС на результирующую точность навигационнных определений и оцен-
ку погрешностей измерений текущих навигационных параметров.
2. Влияние ионосферы при определении навигационных сообщений на ос-
нове специальных корректирующих поправок, так как орбиты спутников
NAVSTAR, ГЛОНАСС, GALILEO располагаются над ионосферой.
3. Возможности коррекции систематических погрешностей с помощью
дифференциальных спутниковых систем.
4. Комбинирование радионавигационных полей с применением комплекси-
рования систем NAVSTAR, ГЛОНАСС, GALILEO.
АП СНС, работающая по сигналам обеих систем - NAVSTAR и ГЛОНАСС,
обеспечивает требуемую точность навигационных определений при высотах по-
лета PH до 5000 км.
При больших высотах полета РКН навигационное поле СНС становится
разрывным, т.е. на отдельных участках траектории движения РКН может воз-
никнуть ситуация, когда из-за недостаточного числа ’’видимых” навигационных
спутников однозначное решение навигационной задачи по сигналам СНС невоз-
можно.
АФУ, входящее в состав АП СНС, обеспечивают прием сигналов не менее
четырех-шести навигационных спутников из верхней и нижней полусфер про-
странства с момента старта РКН и до момента отделения полезной нагрузки.
АП СНС обеспечивает следующие технические характеристики.
Предельные погрешности (Зст) определения АП СНС параметров движения
РКН в зависимости от высоты полета составляют:
- для высоты до 2000 км:
• по координатам - не более 47 м;
• по скорости - не более 0,1 м/с;
- для высоты от 2000 до 3000 км:
• по координатам - не более 37 м;
• по скорости -- не более 0,1 м/с;
- для высоты от 3000 до 5000 км:
• по координатам - не более 170 м;
• по скорости - не более 0,1 м/с;
- на высотах от 5000 до 10000 км, где навигационное поле становится раз-
рывным, для того, чтобы провести навигационные определения с тре-
буемой точностью, необходимо заранее планировать сеансы измерений;
145
- предельная погрешность привязки СМ к шкале времени UTC - не хуже
1 мкс.
Габаритно-массовые характеристики АП СНС включают в себя данные о
массе приборов, из которых она состоит, габаритные размеры, требования по
расположению приборов в приборном отсеке.
Масса приборов, входящих в состав АП СНС (без учета АФУ и кабельных
связей между ними и МШУ), - не более 8,5кг.
Энергетические параметры позволяют оценить энергопотребление прибора
в процессе его включения и работы в установившемся режиме, а также допусти-
мое качество напряжения первичного электропитания.
Мощность, потребляемая АП СНС, - не более 30 Вт.
Данные о готовности и ресурсе учитывают для разработки циклограмм
включения АП СНС при ее проверках в составе системы управления, при пред-
стартовой подготовке, в полете РКН и не более 180 с.
Надежность прибора оценивается расчетным путем и подтверждается дан-
ными его эксплуатации. При этом строятся структурные схемы надежности с из-
вестными характеристиками каждой составной части и вычисляются следующие
показатели надежности:
- вероятность безотказной работы прибора при подготовке его в составе
РКН к пуску (величина указанного показателя на практике составляет
~ 0,996);
- вероятность безотказной работы прибора в полете (величина указанного
показателя на практике составляет -0,995).
Для обеспечения заданного уровня надежности АП СНС приняты органи-
зационно-технические мероприятия, направленные на реализацию требований,
представленных выше:
- применение в составе АП СНС двух приборов навигационных, один из
которых работает в горячем резерве;
- выбор наиболее надежных ЭРИ;
- применение ЭРИ в облегченных режимах;
- принятие специальных конструктивных мер;
- введение резервирования;
- проведение комплекса отработочных и контрольных испытаний в усло-
виях, максимально приближенных к реальным;
- применение двух спутниковых навигационных систем- ГЛОНАСС и
NAVSTAR.
3.4.4.4 Взаимодействие АП СНС с аппаратурой системы управления
РКН
АП СНС осуществляет обмен информацией с БЦВМ СУ по трем независи-
мым цифровым каналам связи.
Обмен информацией между БЦВМ и АП СНС осуществляется в следую-
щих режимах работы СУ:
- набор готовности;
146
- предстартовая подготовка;
- полет РКН;
- дистанционные периодические проверки (ДПР) комплекта АП СНС (ав-
тономная проверка аппаратуры во всех местах эксплуатации);
- комплексные испытания в составе СУ (имитация полета при наземных
испытаниях).
АП СНС с тактом 1с обеспечивает выдачу в БЦВМ сигнала СМ (в соответ-
ствии с требованиями стандарта EIA-485).
АП СНС с БЦВМ во всех режимах работы осуществляют обмен информа-
цией в виде массивов К1 и К2:
К1 - массив выходных параметров НП1, НП2 в БЦВМ;
К2 - массив выходных параметров БЦВМ в НП1 НП2.
Массив К1 содержит следующую информацию:
- время формирования сигнала СМ (год, месяц, число, часы, минуты, се-
кунды);
- координаты РКН (мест установки АФУ) в Гринвичской системе коорди-
нат;
- проекции вектора относительной скорости РКН на оси Гринвичской СК;
- время UTC относительно команды ОТП - ’’Окончание точного приведе-
ния” измерения tH навигационных параметров ПН в секундах;
- донесения :
а) о достоверности выдаваемой информации;
б) самоконтроле цифровой части аппаратуры;
в) функционировании приемников;
г) функционировании МШУ 1,2.3;
д) наличии или об отсутствии альманаха;
е) функционировании СВЧ-трактов;
ж) решении навигационной задачи;
з) готовности ПН1 или ПН2.
Массив К2 содержит информацию:
- координаты РКН в Гринвичской системе координат;
- проекции вектора скорости РКН в Гринвичской системе координат;
- элементы кватерниона ориентации связанных осей РКН в Гринвичской
системе координат;
- время UTC (относительно ОТП) измерения навигационных параметров;
- признак выдачи ОТП.
3.4.4.5 Условия эксплуатации АП СНС
К условиям эксплуатации АП СНС относятся механические воздействия,
акустические нагрузки, воздействия климатических факторов и т.п., действую-
щие на аппаратуру при ее функционировании в режиме предстартовой подготов-
ке к пуску и в полете.
При предстартовой подготовке РКН к пуску в приборном отсеке, где уста-
новлена АП СНС, искусственно поддерживается средствами стартового соору-
147
жения температура воздуха от плюс 5°С до плюс ЗО°С, относительная влажность
до 80% при температуре плюс 20°С.
АП СНС может функционировать в полете в условиях герметичного при-
борного отсека при температуре от 0 до плюс 30°С в течение 3,5 ч, при измене-
нии давления окружающей среды от номинального до условий космического
пространства (14 О’6 мм рт. ст.).
При полете РКН на аппаратуру действуют механические воздействия в ви-
де:
- осевых до (7g ... 8g) перегрузок и поперечных до ±2g при времени дейст-
вия -(140 ... 160) с;
- акустических перегрузок, характеризующихся интегральным уровнем
звукового давления, до 140 дБ (относительно порогового значения зву-
кового давления 24 О’5 Па) в полосе частот от 20 до 2000 Гц, длительно-
стью до 40 с;
- вибрационных нагрузок, описываемых гармоническими колебаниями с
частотами (8 ... 16) Гц и максимальными амплитудами до 0,42g вдоль
продольной оси РКН и до 1,5g вдоль поперечных осей РКН. Время их
действия - до 100 с;
- вибрационных случайных нагрузок с максимальной спектральной плот-
ностью 0,12g2/Tn в диапазоне частот от 20 до 200Гц. Время их действия
- до 640 с;
- ударов, в местах крепления, возникающих от разрывов пиротехнических
болтов при отделении ступеней РКН, сброса обтекателя и т. п.
В зависимости от количества и мощности значения спектра удара могут
составлять от 10 до 2500g в диапазоне частот от 30 до 5000 Гц при количестве
воздействий до 3.
3.4.4.6 Специальные условия
АП СНС обеспечивает электромагнитную совместимость с аппаратурой
СУ, а также с другими системами РКН, средствами космодрома в процессе про-
ведения наземных электроиспытаний, при предстартовой подготовке, а также в
полете.
АП СНС по уровням создаваемых индустриальных помех соответствует
требованиям ГОСТ В 25803-91.
Напряженность электромагнитного поля радиопомех, создаваемых АП
СНС на расстоянии 1м в диапазоне частот от 1 до 40 ГГц, не превышает ЗОдБ от-
носительно 1 мкВ/м.
АП СНС функционирует при воздействии на нее электрических полей (за
исключением АФУ), при этом:
- в диапазоне частот от 10 кГц до 100 МГц уровень помех может состав-
лять 120 дБ относительно 1 мкВ/м (1 В/м);
- в диапазоне частот от 109 МГц до 40 ГГц уровень помех может состав-
лять 146 дБ относительно 1 мкВ/м (20 В/м).
148
Аппаратура СНС сохраняет работоспособность при воздействии на нее им-
пульсных электромагнитных полей с параметрами:
амплитуда импульса напряженности электрического поля - 25 В/м (на
АФУ 100 кВ/м);
амплитуда импульса напряженности магнитного поля - 14А/м (на АФУ
250 А/м);
длительность фронта импульсов - 0,1 мкс;
длительность полуспада - 1 мкс.
3.4.4.7 Конструкция АП СНС
Конструкция АП СНС обеспечивает ее стойкость, прочность к воздействию
механических, климатических и других факторов, приведенных в ГОСТ
В 2039.304-76.
Конструкция АП СНС защищена от внешних воздействий благодаря разне-
сению резонансных частот элементов конструкции по диапазону частот примене-
нием местной виброизоляции отдельных критичных устройств и элементов, ме-
ханическим креплением, а также общей виброизоляцией навигационных прибо-
ров, входящих в состав аппаратуры.
Защита конструкции АП СНС от внешних климатических воздействий пре-
дусматривает, прежде всего, защиту от влаги.
Для этого применены защитные покрытия корпусов МШУ и навигацион-
ных приборов, а также их герметизация.
149
4. ПРОЕКТИРОВАНИЕ ПОДСИСТЕМ СУ
При определении облика СУ PH необходимо учитывать следующие основ-
ные требования, вытекающие из общей идеологии проекта:
малый вес аппаратуры;
- низкая стоимость;
- достаточно высокая надежность;
- приемлемая точность выведения.
При этом правильный выбор приборов системы навигации СУ имеет опре-
деляющее значение.
4.1 Система навигации
4.1.1 Требования к системе навигации
Система должна обеспечивать:
. - измерение параметров движения PH;
- вычисление и выдачу в систему наведения координат, скорости и другой
навигационной информации, необходимой для управления PH.
В зависимости от требований к СУ необходимо проанализировать при по-
строении системы навигации следующие вопросы.
Инерциальные навигационные системы (ИНС), нашедшие применение в
системах управления (СУ) объектов РКТ, традиционно имеют в своем составе
гиростабилизированную платформу (ГСП). Функции, выполняемые ГСП, позво-
ляют, во-первых, обеспечить определенную просгранственную ориентацию трех-
гранника, образованного осями чувствительности инерциальных измерителей, и,
во-вторых, получить информацию об угловом движении объекта относительно
платформы, т. е. определить параметры ориентации. В качестве параметров, ха-
рактеризующих ориентацию объекта, используют определенную систему углов,
измерение которых осуществляется датчиками, установленными на осях карда-
нова подвеса платформы.
Однако платформенные ИНС обладают рядом недостатков, главным из ко-
торых является высокая стоимость прецизионной ГСП. При маневрировании
объекта рамки карданова подвеса ГСП имеют тенденцию к складыванию, что
при больших углах может сделать систему неработоспособной. Кроме того, пре-
цизионная ГСП имеет относительно большие массу и габаритные размеры, а
также сложную электромеханическую схему конструкции. В ее состав, кроме
точных гироскопов, входит еще ряд элементов (моментные датчики, двигатели
стабилизации, датчики углов и т. д.) с характеристиками, удовлетворяющими
весьма жестким требованиям. В силу своей сложности ГСП обычно уязвимы с
точки зрения надежности элементами ИНС.
В то же время перечисленные проблемы, возникающие при проектирова-
нии и поезроении ИНС на базе ГСП, не являются органически присущими инер-
циальным системам вообще. Принципиально ИНС можно построить без включе-
ния в ее состав стабилизированной платформы. Этот класс ИНС получил назва-
ние бесплатформенных инерциальных навигационных систем (БИНС).
В схеме БИНС источники первичной информации (гироскопы, акселеро-
150
метры) установлены не на ГСП, а непосредственно связаны с корпусом объекта,
навигационные параметры которого необходимо определять.
К числу потенциальных преимуществ БИНС по сравнению с платформен-
ными ИНС можно отнести: меньшие размеры, вес и энергоемкость, существенное
упрощение механической части и ее компоновки, отсутствие ограничений по уг-
лам разворота, повышение уровня универсальности системы.
С физической точки зрения основным отличием платформенной ИНС от
бесплатформенной является то обстоятельство, что в первом случае ГСП аппа-
ратно моделирует базовую навигационную систему отсчета, а в БИНС она долж-
на определяться аналитически. При этом на БЦВМ, помимо определения место-
положения и скорости, перекладывается и задача определения угловой ориента-
ции объекта. Решаются эти задачи алгоритмически при обработке информации,
поступающей от установленных в БИНС измерителей.
Ввиду перечисленных преимуществ, а также в связи с существенным про-
грессом в области разработки вычислительных и измерительных средств, в по-
следние годы БИНС активно внедряются в системы управления PH. При этом,
несмотря на значительный прогресс в их развитии, широкое распространение по-
лучают интегрированные навигационные системы, основанные на комплексном
использовании инерциальных и спутниковых данных.
Ниже рассмотрена система навигации PH, построенная на базе БИНС.
4.1.2 Функциональная схема системы навигации
Функциональная схема системы навигации изображена на рис. 4.1 Л.
Система навигации •
Рисунок 4.1.1- Функциональная схема системы навигации
151
На вход системы навигации от БИНС поступают следующие данные:
- псв - номер такта вычисления выходной информации БИНС;
- Л08 - кватернион ориентации PH относительно начальной стартовой СК;
- wCB - вектор кажущейся скорости в гироскопической СК.
По входной информации от БИНС система навигации формирует и выдает
в систему наведения и систему стабилизации следующие параметры:
- Л - кватернион ориентации связанной СК относительно началь-
ной стартовой СК;
- Awo ~ вектор приращения кажущейся скорости в инерциальной
НССК;
- wxi - продольная составляющая кажущейся скорости;
- wxl - продольная составляющая кажущегося ускорения;
- Vo - вектор абсолютной скорости PH в начальной стартовой гео-
центрической СК;
- Го - вектор координат PH в начальной стартовой геоцентрической
СК;
- go - вектор ускорения силы тяжести в начальной стартовой гео-
центрической СК;
- h - высота полета PH над земным эллипсоидом.
4.1.3 Синтез алгоритмов системы навигации
4.1.3.1 Модель гравитационного потенциала Земли
Для многих практических задач справедливо допущение об осевой симмет-
рии тел в Солнечной системе [37]. В этом случае потенциал силы притяжения
Земли записывают в виде
vz Gm
У(г,Ф) =----
г
/ х к
l-£jk -- Рк(СО8Ф) ,
к-2 \ Т )
(4-1.1)
где Gm = g - гравитационная постоянная;
req - экваториальный радиус Земли;
г - радиус-вектор точечной единичной массы, находящейся вне притя-
гивающего тела;
Рк - присоединенные функции Лежандра;
Jk - зональные гармонические коэффициенты;
к - степень разложения потенциала силы притяжения;
Ф= 90° - (рс;
фс - геоцентрическая широта;
cos Ф = ir • i^;
V» >© - единичные векторы, направленные соответственно вдоль радиуса-
вектора и вдоль оси симметрии.
Ориентация векторов ir, U относительно Гринвичской СК показана на
рис. 4.1.2.
152
^Gr
Рисунок -4.1.2 Ориентация векторов i,, L
OEXGrYGrZGr - Гринвичская СК,
Ше - угловая скорость вращения Земли,
Хо - географическая долгота.
Разложение гравитационного потенциала по ортогональным осям Грин-
вичской СК
Ускорение силы притяжения вычисляется как градиент потенциала V(r, Ф)
g = —Т1 «г - ЕJk| — [Рк+1(созФ) • ir - Рк(созФ) - iffl] •.
г k=2 V г }
(4.1.2)
Производные от полиномов Лежандра определяют по формуле
(к - 1) P'k(v) - (2к - 1) v P'k-i(v) + к P'k_2(v) = О,
где v = собФ; P'o(v) = 0; P'i(v) = 1.
Обозначив S = — и раскрыв сумму в формуле (4.1.2), получим
г
g = {[1 - J2 s2 P'3(v) - J3 S3 P'4(v) - J4 S4 P'5(v) - Js S5 P'6(v)] ir+
+ [J2 S2 P'2(v) + J3 S3 P'3(v) + J4 S4 P'4(v) + J5 S5 P'5(v)] Ц, <4-1 -3)
153
где P'2(v) = 3 • v;
3 ,
P'3(v)=-|(5v2-l);
P'4(v) = [^(5v2-1)-4]-v;
p-5(v)= l—(21v4 - 14v2 + 1);
8
P'e(v) = — (33v4 - 30v2 + 5) • v.
8
Принимая во внимание, что в Гринвичской СК
'Хсг/Г'
Sy Gt > If ~ Уог/г 0 , v = zOr/r,
<Sz=Gr ) <ZGr/r>
запишем выражения для проекций вектора g на оси Гринвичской СК:
= -“Г [! + gx(2) + gx(3) + gx(4) + gx(5)];
gyor = [1 + &(2) + gx(3) + gx(4) + gx(5)]; (4.1.4)
gzQ = “ [V -i- gz(2) + gz(3) + gz(4) + gz(5)],
где gx(2) = J2 S2 1.5(1-5v2);
gx(3) = J3 S3 • 2.5 (3 - 7v2) • v;
gx(4) = J4 S4 1.88 (- 1 + 14v2 - 21v4);
gx(5) = J5 S5 • 2.63 (- 5 + 30v2 - 33v4);
gz(2) = J2 S2 • 1.5 (3 - 5v2) • v;
gz(3) = J3 S3 • 1.5 (- 1 + 10v2 - у v4);
gz(4) = J4 S4 • 0.625 (- 15 + 70v2 - 63v4) • v;
gz(5) = J5 S5 0.375 (5 - 35v - 70v2 + 210v3 + 105v4 - 231v5).
Геодезические и геофизические параметры соответствуют гравитационной
модели Земли GEM-10 и модели эллипсоида WGS-84:
J2 = 0.001082626847;
J3 = -2.535634843 • 10'6;
J4 = - 1.62336 • IO-6;
J5=- 0.2275868- IO-6;
ц = 3.9860047 • 1014m3/c2;
req = 6378139 m;
coE = 7.292115 • IO-51/c.
154
Разложение гравитационного потенциала по косоугольным осям
В настоящем разделе получены формульные зависимости для проекций
вектора ускорения силы земного притяжения на радиус-вектор PH и вектор угло-
вой скорости 3емли[38] (рис. 4.1.3).
Рисунок 4.1.3- Проекция векторов ускорения
силы земного притяжения
В выражении (4.1.1), как показывает практика, можно ограничиться пятью
членами и записать гравитационный потенциал в виде функции радиусагвектора
и геоцентрической широты PH: .
V(r, <рс) = Н [1 - J2 S2 P2(v) - Jj S3 P3(v) - J4 S4 P4(v) - J5 S5 P5(v)j; (4.1.5)
где v ~ sin <pc;
P2(v)= |(3v2-l);
P3(v)=| (5v3-3v);
P4(v)= -(35v4-30v2 + 3);
8
Ps(v) = - (63 Vs - 70v3 + 15v).
8
Так как S = r^/r, a v = zGr/r> представим гравитационный потенциал (4.1.5)
функцией переменных г и zGr:
1 ^2Гед Г~ Zgr 1 __ S ZGr Ч Z°r
Г 2 Г5 Г3 J 2 Г7 Г5 J
4Гсд (4S zGr ZGr ! ___53 ZGr 7Q ।
8 I г9 г7 г5 J 8 I г11 г9 г7 J
V(r,zGr)=n
155
Принимая во внимание, что
= gV(r,zGr)
ёг дг
получим выражение для проекции вектора ускорения земного притяжения на ра-
диус-вектор PH
е = ц - — - ---2q-f-15—-+ —1- J—I 15 ZGr
[_ r2 2 L r6 r4) 2 r8 r6 )
J/iI*4 ( 7^ 7^ 1 S A
_35.9£gl + 30-7^gl-_ _
8 г10 г8 r6 J
_ _ 63.11 + 70 • 9 --- - — ,
8 I r12 r10 r8 J
или
(4.1.6)
gr = — ~ [1 — J2 S2 (5 sin2<pc - 1) - jj3 S3 siiupc(7 sm2<pc - 3) -
- — J4 S4 (21sin4<pc - 14sin2(pc + 1) -
8
21
-----J5 S5 sin(pc (33sin4tpc - 30sin2cpc + 5)].
8
Для определения проекции ускорения силы земного притяжения на касательную
к эллипсоиду по направлению Цс запишем гравитационный потенциал (4.1.5) с учетом
принятых обозначений в функции радиуса-вектора и геоцентрической широты:
V(r, фс) = у [1 - | J2 S2 (3 sin2<pc - 1).- | J3 S3 (5 sin3<pc - 3 sin<pc) -
- — J4 S4 (35sin4(pc - 30sin2<pc + 3) - --J5 S5 (63sin5q>c - 70sin3(pc +
8 8
+ 15 sincpc)]-
Принимая во внимание, что
E'"r a,.
получим формулу для проекции вектора ускорения силы земного притяжения на
направление ЬфС:
м, 2 ^32
-созфе [3 J2 S sinrpc+— J3 S (5sin<pc-l) +
r2 2
(4.1.7)
5 15
+ - J4 S4 sinq>c (7sin2<pc - 3) -H — J5 S5 (21 sin4ipc - 14sin2<pc + 1)].
1 2 8
156
Для вычисления проекции вектора ускорения силы земного притяжения на
направление вектора угловой скорости вращения Земли воспользуемся зависимо-
стью
g<o = g<p I СОЗфс,
тогда
g«, = - [3 J2 S2 sin<pc + - J3 S3 (5 sin2<pc - 1) +
5 Л Э
+ --J4 S sin<pc(7sm (pc- 3) +
(4.1.8)
+ - - J5 S5 (21sin4<pc - 14sin2<pc + 1)].
8
Проекции ускорения силы притяжения на оси ортогональной СК определим
из следующего векторного уравнения:
где
У/r .
z/r .
g gf * V gw ’
'(Оц/СОе?
С0у/®Е .
«z/coE
(4.1.9)
В частном случае в Гринвичской СК:
0 .
л.
*г~ Ус-г/г >
Воспользуемся формулами для вычисления проекций вектора ускорения
силы земного притяжения (4.1.6), (4.1.8) и применим следующие обозначения:
Ьо = ц;
Ь2 = ц • J2 • req2;
Ьз р • J3 ‘ fgq »
Ь4 Ц . J4 . TCq ,
Ь5 = -ц-J5-rcq5.
Тогда получим:
gr = -7 - ~ • “V(5 sin2(pc- 1) + f ~ sin(pc(7 sin2<pc- 3) +
г2 2 г4 2 г5
““ ’ [7sin2(pc(3sin2<pc~ 2) -г 1] -I-
8 г6
+ V sin(pc[3sin2<pc(llsin2<pc- 10)+ 5];
(4.1.10)
157
_ Ьэ . 3 Ьа z_ . О 5 Ьл . z . 2
goj = 3 • --- sintpc - -' --H5 sin <pc - 1) -- - • — smq)c(7 sm <pc- 3) -
r4 2 r5 2 r6
- -J- • Ь| [7sin2<pc (3sm2<pc - 2) + 1 ].
8 r'
(4.1.11)
Проекции ускорения силы притяжения на оси ортогональной СК опреде-
ляют из векторного уравнения
g = -gr-ir-g«-i<1>- (4.1.12)
Коэффициенты Ьо, Ьг, Ьз, Ь4, Ь5 получают по данным гравитационной мо-
дели Земли GEM-10 и модели эллипсоида WGS-84:
Ь® = 3.9860047 • 1014 м3/с2;
Ь2 = 1.755515055 • 1025м5/с2;
Ьз = 2.622445409 • 1029м6/с2;
Ь4= 1.070849814- 1036 м7/с2;
Ь5 = 9.575352577 • 1041 м8/с2.
4.1.3.2 Алгоритмы вычисления составляющих вектора скорости и
координат PH
Вычисление начальных условий, старта PH
В настоящем разделе получены формульные зависимости для вычисления на-
чальных условий движения PH [39]. Взаимная ориентация систем координат, исполь-
зуемых для описания формульных зависимостей, показана на рис. 4.1.4.
Рисунок 4.1.4- Взаимная ориентация систем координат
OpXiSyiSZiS - начальная стартовая система координат;
ОеХоУо2о ~ начальная стартовая геоцентрическая система координат;
158
OEXmsymsZms - экваториальная система координат, связанная с меридианом
точки старта;
ось Ое xms - пересечение экваториальной плоскости с плоскостью мери-
диана точки старта.
Координаты точки старта PH Ор в экваториальной системе координат
OEXmsymsZtns •
xms = (с + ho)-cosq>go; у™ = 0; zms = (s + ho)-sin<pgO, (4.1.13)
где с - радиус кривизны кривой, которая образуется при пересечении эллип-
соида и плоскости первого вертикала, проходящей через нормаль к эллипсоиду в
точке Ор и ортогональной плоскости меридиана.
аЕ ____ .
<1 2 • 7
^1-еЕ sin2^
s = (1 - еЕ2)с.
Представим функцию с в виде ряда Тейлора
с = *Е = аЕ (1 - еЕ2 sin2 <pg0 )"2 =
^l-eE"sin2 <pg0
Л. 1 2 • 7 3 4 . 4 А
= аЕ 1 + -еЕ sin2<pg0+-eE sm4<pg0+...
V 2 8 )
Ограничиваясь тремя членами разложения, получим
с0 = аЕ - (1 + 0.5 • еЕ2 • sin2 <pg0 • [1 + 0.75 • еЕ2 • sin2 cpg0 ]) •
Преобразование координат от экваториальной СК, связанной с меридианом
старта, к начальной стартовой геоцентрической СК
Х0
Уо
<z0>
-cosAz0sin(pg0 sin Az0
COS(pg0 0
sin Az0 sin <pg0 cos Az0
cosAz0 cos(pg0
sin(pg0
-sin А,о cos©
z0
X пк
У™
Координаты точки Op в начальной стартовой геоцентрической СК:
Хо = -(с - s)cosAzo -cos cpgo -sin <pgo = - eE2 -c0 cos A^ -cos (pgo -sin <Pgo;
yo = ho + c-cos2(pgo + s- sin2(pgo = ho + c0(l - eE2 sin2(pgo); (4.1.14)
z0 = (c - s)sin Azo -cos (pgo -sin <pgo = eE2 -c0 -sin A^ -cos q)go -sin cpgo.
Введем обозначение
lo = co- eE2 -sin (pgo cos q>go.
Окончательно получим начальные координаты точки старта PH в началь-
ной стартовой геоцентрической СК:
хо(О) = - Io • cos Azo;
iso
уо(О) = ho + со(1 - еЕ2 sin2(pgo);
zo(O) = 1q sin Azo.
Модуль вектора начальной скорости PH в точке старта
Vo = ( Со + ho)<BE-cos cpgo. (4.1.15)
Проекции вектора начальной скорости на оси начальной стартовой геоцен-
трической СК:
vxo(O) = Vo sinAzo;
М0)-0; (4.1.16)
Vzo(O) = Vo cosAzo,
Вычисление составляющих вектора скорости и координат PH
Проекции вектора абсолютной скорости PH в начальной стартовой СК в те-
кущий момент времени t определяются следующим уравнением [40]:
t t
Vio(t)=vio(t-At)+ Jgi0(r)dT+ Jwi0(-c)dT, i0 =
t-д. t-д. (4.1.17)
= x0,y0,z0f
где Vio(t) - проекции вектора скорости на оси начальной стартовой СК в теку-
щий момент времени;
vjo(t - At) - проекции вектора скорости на оси начальной стартовой СК в
предыдущий момент времени;
vi0(t - At) = Vio(O) при t = 0;
gio(t) - проекции вектора ускорения силы земного притяжения на оси на-
чальной стартовой СК;
Wio(t)- проекции вектора кажущегося ускорения PH на оси начальной
стартовой СК;
t
Jgi0(z)dT = Awiog(t) - проекции вектора приращения гравитационной
t-At
скорости за интервал At на оси начальной стартовой СК;
t
Jwi0(x)dT = Awi0(t) - проекции вектора приращения кажущейся скоро-
t-At
сти за интервал At на оси начальной стартовой СК.
Вектор приращения кажущейся скорости за интервал At в начальной стар-
товой СК вычислим по данным, поступающим в навигационную систему PH от
БИНС:
Awo(t) = Wo(t) - w0(t - to) - на активном участке полета PH;
Awo(t) = 0 - на пассивном участке полета PH,
160
где Wo(t) - измеренный БИНС вектор кажущейся скорости в начальной старто-
вой СК.
Проекции вектора приращения гравитационной скорости в начальной стар-
товой СК определим численным интегрированием функций gto(t) методом трапе-
ций
Получим значения gi0(t) методом экстраполяции
gio(t) = gio(t - At) + [gio(t - At) - gi0(t - 2At)] =
= 2gi0(t - At) - gi0(t - 2At).
С учетом последнего равенства и при условии gio(t) = gi0(t) получим фор-
мулу для вычисления проекций вектора приращения гравитационной скорости
PH в начальной стартовой СК
AwjOg(t) = 0.5 • [3gj0(t - At) - gi0(t - 2At)] At. (4.1.19)
Окончательно выражение для вычисления абсолютной скорости PH имеет
следующий вид:
vi0(t)= vi0(t - At)+ Awf0(t)+Awi0(t) - на активном участке полета PH;
(4.1.20)
Vio(t)=vio(t-At)+Awfo(t) - на пассивном участке полета PH.
Значения проекций радиуса-вектора PH r(t) в начальной стартовой геоцен-
трической СК получают численным интегрированием по формуле трапеций
уравнений движения PH
Гю(0 = ri0(t - At) + 0.5 • [vi0(t) + vi0(t - At)] At. (4.1.21)
Необходимые для вычисления проекций вектора ускорения силы земного
притяжения в текущий момент времени t модуль радиуса-вектора PH и синус уг-
ла <pc(t) определяются соотношениями
г(0=7^0+уо(1)+2о(0.
sin(<pc(t)) = zms(t)/r(t)= 1х0 • x0(t)+ 1у0 • y0(t)+ lz0 • z0(t)
/r(t)
Высоту полета PH над земным эллипсоидом вычисляют по формуле
_____________________h(t) = r(t)-RE(t),
I 1 — el
где RE(t)=aE------------------------радиус земного эллипсоида;
V l-el(l-sin2<pc(t))
аЕ - большая полуось эллипсоида;
е|- квадрат эксцентриситета эллипсоида.
161
4.1.3.3 Вычисление кватерниона ориентации PH
Кватернион ориентации связанных осей PH в начальной стартовой СК оп-
ределяют через половинные углы Эйлера, которые входят в состав информации,
поступающей из БИНС. Порядок пространственных переходов от начальной
стартовой СК к связанной с PH соответствует очередности поворотов на углы
тангажа, рыскания и вращения.
^(t) - тангаж,
V es(t) - рыскание,
<р gs(t) - вращение.
Компоненты кватерниона вычисляют согласно формуле перемножения ква-
тернионов:
LnQ »g5(tp COS 2 / COS
0
A(t) = 0 dn 0£S(t) sin I 2 ) О sin
VBS(tp
О
vgs(t)
2
О J
( ф^СО^
cos-5—--
2
. ФВ5(0
sin ——--
2
О
< 0 ,
4.1.3.4 Вычисление проекций вектора кажущегося ускорения и
интегралов от проекций кажущегося ускорения на оси связанной СК
PH
Среднее значение составляющих вектора кажущегося ускорения PH на оси
связанной СК определяется следующей формулой:
wH(t) = Awn(t)/At, (il = xl,yl,zl),
где At - длительность интервала;
Awii(t) = A0](t) • Awio(t), (iO = xO,yO,zO) - вектор приращений интегралов от
проекций кажущегося ускорения на оси связанной СК;
Aoi(t) - матрица пространственного перехода от начальной стартовой СК к
связанной;
Awi0(t) - вектор приращений кажущейся скорости в начальной стартовой
СК.
Элементы матрицы A0](t) выражают через компоненты кватерниона сле-
дующими формулами:
an(t) = 2 A?0(t) + 2ХН0-1;
a12(t) = 2(X1(t)X2(t) + Xo(t)X3(t));
ai3(t) = 2(k1(t)X3(t)-X0(t)X2(t));
a2i(t) = 2(^(0 X2(t) - X0(t) X3(t));
a22(t) = 2X^(t) + 2X22(t)-l;
a23(t) = 2(X2(t) X3(t) + X0(t) Ш);
162
a3i(t) = 2(X1(t)Mt) + X0(t) X2(t));
азг(0 = 2(X2(t) X3(t) - Xo(t) Xi(t));
a22(t)= 2X2(t)+2A?3(t)-l.
Интеграл от проекции кажущегося ускорения на продольную ось PH вы-
числяют по следующей формуле:
wxl(t) = wxi(t - At) +Awxl(t).
4.1.4 Моделирование алгоритмов системы инерциальной навигации
Анализ методической погрешности
Моделирование алгоритмов ИНС выполняют с использованием ПО задачи
совместного моделирования систем наведения, навигации и стабилизации, опи-
санной в подразд. 4.2.6. Исследуют влияние точности представления в алгорит-
мах навигации гравитационного потенциала, метода и шага интегрирования
уравнений движения на результаты решения навигационной задачи.
Результаты оценки влияния степени разложения гравитационного
потенциала на методическую погрешность алгоритмов навигации для траекторий
выведения КА на экваториальную (Нпр = 500км, i = 2,3°) и полярную солнечно-
синхронную (Н = 700км, i = 98,1°) орбиты показаны на рис. 4.1.5 и 4.1.6. Как
видно из представленных результатов, высокая точность навигационных
вычислений обеспечивается при учете четырех (Ьо, Ь2, Ь3, Ь4) членов разложения.
Результаты оценки погрешностей вычисления координат и проекций скорости PH
на оси начальной стартовой СК для принятой выше модели потенциала показаны
на рис. 4.1.7-4.1.10.
Как следует из подразд. 4.1.2.2, в алгоритмах навигации системы управле-
ния PH для интегрирования используют метод трапеций с экстраполяцией функ-
ции g(t) на текущий момент времени по значениям на двух предыдущих шагах.
Шаг интегрирования выбирают с учетом требований к точности й дискретности
выдачи навигационной информации в смежные системы: наведения и стабилиза-
ции, - и, как показал опыт разработок СУ различных PH, лежит в интервале
0.04... 1.0с.
Результаты анализа влияния погрешности метода и шага интегрирования
(Т = 0,04 с) на отклонение координат и составляющих скорости показаны на
рис. 4.1.11-4.1.14.
Как видно из приведенных результатов, при данном шаге погрешность метода
интегрирования практически не влияет на точность навигационных вычислений.
163
Рисунок 4.1.5- Модель гравитационного потенциала
Круговая орбита Н = 500 км, i = 2,3°
Рисунок 4.1.6- Модель гравитационного потенциала
Солнечная синхронная орбита
164
Рисунок 4.1.7- Модель гравитационного потенциала (AV, AVX, AVyi AVZ)
Круговая орбита Н = 500 км, i = 2,3°
Рисунок 4.1.8- Модель гравитационного потенциала (AR, Az, Ay, Ах)
Круговая орбита Н = 500 км, i = 2,3°
165
Рисунок 4.1.9- Модель гравитационного потенциала (AV, AVX, AVy, AVZ)
Солнечная синхронная орбита
Рисунок 4.1.10 - Модель гравитационного потенциала (AR, Ay, Ах)
Солнечная синхронная орбита
166
Рисунок 4.1.11 - Метод интегрирования (AV, AVX, AVy, AVZ)
Круговая орбита Н = 500 км, i = 2,3°
Рисунок 4.1.12 - Метод интегрирования (AR, Az, Ay, Ах)
Круговая орбита Н = 500 км, i = 2,3° .
167
Рисунок 4.1.13 - Метод интегрирования (AV, AVX, AVy, AVZ)
Солнечная синхронная орбита
Рисунок 4.1.14 - Метод интегрирования (AR, Az, Ay, Ах)
Солнечная синхронная орбита
168
4.1.5 Анализ инструментальной погрешности
4Л.5Л Описание основных систем координат
На рис. 4Л. 15 показано положение осей основных СК на момент перехода
БИНС в режим полета (момент ОТП) в исходном положении PH на стартовой по-
зиции [42].
Рисунок 4.1.15 -Положение осей основных СК
Nord - направление на Северный полюс Земли;
Хо, Уо, Zo - оси начальной стартовой СК;
xN, Yn, zn - оси навигационной СК БИНС;
X], Уь zi - оси связанной с PH СК;
Хбпу, Убпу, zEny - оси базовой СК пусковой установки;
Хп, Уп, zn - оси приборной СК БИНС;
хоч, Уоч, Zo4 - оси чувствительности акселерометров и гироскопов БИНС;
Ао - азимут начальной стартовой СК;
Абпу - базовый азимут ПУ;,
Фхо, Фуо, Фго - угловые погрешности ориентации навигационной СК отно-
сительно начальной стартовой СК.
Начальная стартовая СК ( Хо, Уо, Zq)
Начало координат задается географическими координатами точки старта на
уровне приборного отсека относительно земного эллипсоида: широтой фо, долго-
той Хо, высотой ho-
169
В момент ОТП ось ОХо образует с направлением на север угол, равный
азимуту прицеливания Ао, ось OYo направлена вверх по нормали к эллипсоиду, а
ось OZq дополняет систему до правой. После момента ОТП направление осей на-
чальной стартовой СК не изменяется в инерциальном пространстве.
Навигационная СК БИНС (xN, yN, zN) - с точностью до угловых погрешно-
стей ориентации (погрешностей начальной выставки) совпадает с начальной
стартовой СК.
Связанная СК ( Xi, Уь Zf)
Начало системы расположено в центре масс PH, ось OXi направлена вдоль
ракеты в сторону головного обтекателя, ось OYi лежит в I - III плоскости стаби-
лизации PH и направлена в сторону III плоскости, ось OZi лежит в II - IV плоско-
сти стабилизации PH и дополняет систему до правой.
Базовая СК пусковой установки (хБпу, Убпу, £бпу)
Начало координат задается географическими координатами точки старта,
ось ОХбпу образует с направлением на север угол, равный азимуту пусковой ус-
тановки Абпу, ось OYBny направлена вверх по нормали к эллипсоиду, ось OZ5ny
дополняет систему до правой.
Приборная СК БИНС (хп, уп, zn) - правая ортогональная СК, образованная
нормалями к трем взаимно ортогональным базовым плоскостям контрольного
элемента ККП.
Относительная ориентация систем координат характеризуется следующими
переходами.
От осей чувствительности акселерометров и гироскопов к приборной СК
БИНС (см. рис. 4.1.15)
Г1 0 О'1 Гп ~ Аоч_п * Гоч, (4.1.22)
где Аоч_п - 0 1 0
<0 0 b
От осей чувствительности акселерометров и гироскопов к связанной СК
(см. рис. 4.1.15)
0 О' 1*1 - Аоч_1 • Гоч, (4.1.23)
где Аоч_1 - 0 1 0
<0 0 1,
От связанной СК к приборной СК БИНС (см. рис. 4.1.15)
Гп = А1 п • Г!,
(4.1.24)
fl о (Л
где Ain =010
о и
170
От начальной стартовой СК к связанной СК
ri = А01 - г0,
'cos \|/ cos 3 cos \|/ sin &
(4.1.25)
- sin
cos \|/ cos 3
где Аоj =,
- coscpsin3 +
+ sinq>sin\|/cos&
sin<psinG +
cos(pcos9 +
+ sinq)sin\|/sin &
-sincpcos9 +
siii(pcos\|/
cos<pcos\|/
4 +cos(psin\|/cos& +cos(psin\|/sin$ ,
S, V, ср - баллистические углы Эйлера, тангажа, рыскания и вращения.
Порядок перехода: 3 —> у -»<р.
От начальной стартовой СК к навигационной СК БИНС
Tn - Ao n ’ 1*о,
(4.1.26)
' 1
где Aon= -Ф2о(О
< Фуо(0
Ф2о(О
-Фхо(О
-Фуо(ОЛ
Фхо(О
Фхо, Фуо, Фго - угловые погрешности ориентации навигационной СК отно-
сительно начальной стартовой СК.
От приборной СК БИНС к начальной стартовой СК в исходном положении
PH на стартовой позиции
Го = Ап о * гп,
0 — cos(A0 — АБПУ) sin(A0-Абпу)^
где Ап_о =10 0
(4.1.27)
<0 sin(A0-ABny) cos(A0-АБПУ)>
4.1.5.2 Математическая модель погрешностей БИНС
Ориентация осей чувствительности акселерометров
В качестве измерителей приращений кажущейся скорости в приборной СК
используют три акселерометра - АКХ, АКУ, AKZ.
Номинальное положение ОЧ АК показано на рис. 4.1.16
Погрешности Лад положений ОЧ АК показаны на рис. 4.1.17.
171
Рисунок 4.1.16- Номинальное положение ОЧ АК
относительно приборной системы координат
Рисунок 4.1.17 - Погрешности положения ОЧ АК
Ориентация осей чувствительности лазерных гироскопов
В качестве измерителей приращений углов поворота приборной СК отно-
сительно инерциального пространства используют три лазерных гироско-
па - ЛГХ, ЛГУ, ЛГг.
Номинальное положение ОЧ ЛГ показано на рис. 4.1.18.
172
Погрешности Далг положений ОЧ ЛГ показаны на рис. 4.1.19.
Рисунок 4.1.18 - Номинальное положение ОЧ ЛГ
относительно приборной системы координат
173
Модель погрешностей акселерометров
Модель погрешностей измерения составляющих кажущегося ускорения
представляется уравнениями:
SwxA(t) = Аих + 5тх + Aqx • wX11(t) +ДаАху -w^t)-
~Д^АХ2 *Wzn(t),
5w А (t) = Дт v + 5т + Aqy w w (t) - Да Аух - w xn (t) +
• / ч (4.1.28)
+ ДаАу2 • wzn (t),
=ATz+5Tz+Aqz-wzn(t)-hAaAzx -wxn(t)-
"“Д^-Azy *Wyn(t),
где wxn(t),wyn(t),wzn(t) - проекции вектора кажущегося ускорения на оси
приборной СК БИНС;
AtXiYjZ ~ составляющие нестабильности нуля АК от запуска к запуску Р);
fox,ул ~ составляющие нестабильности нуля (дрейфа) АК в запуске
AqX}y,z ~ составляющие погрешности МК акселерометров;
ДаА - составляющие погрешности углов ориентации ОЧ акселерометров.
Перечень и предельные (За) значения инструментальных погрешностей АК
приведены в табл. 4.1.1.
Модель погрешностей лазерных гироскопов
Модель погрешностей измерения составляющих вектора абсолютной угло-
вой скорости представляется уравнениями:
£Х<3 (t) = Д©х + 8©х + Ацх • ©xn(t) + ДаЛГху • (0 ~
-Аалгхг-сМО + АшЛО;
Syc (О = Аюу + 8©у + Дру • ©уп (t) - Далг • ©хп(t) +
~ (4 1 29)
+ AaJIryz-®zn(t) + A©y(t);
ezG (t) = + 8©z + Дцг • ©OT (t) + Далггх • “xn (t) -
-Aanrzy-“yn(t) + A“z(t),
где G)xn(t), a>yn(0, cozn(t) - проекции вектора абсолютной угловой скорости PH на
оси приборной СК БИНС;
Дсох> у, z - составляющие нестабильности нуля ЛГ от запуска к запуску Р);
5шх у, z - составляющие нестабильности нуля (дрейфа) ЛГ в запуске
ДЦх, у, z - составляющие погрешности МК ЛГ;
Далг - случайные составляющие погрешности углов ориентации ОЧ ЛГ;
Дсох>у2(1) - случайный дрейф ЛГ 3*\
Перечень и предельные (За) значения инструментальных погрешностей ЛГ
приведены в табл. 4.1.1.
174
Таблица 4.1,1- Инструментальные погрешности БИНС
№ п/п Наименование Обозначение Единица измерений величин Значение
1 Нестабильность смещения нуля ЛГ: - от запуска к запуску - в запуске АсоХ(У>2) 8© x(y,z) град/ч 0.05 0.05
2 Коэффициент случайного дрейфа по углу Kfc)x(y,z) град/7ч 0.01
3 Нестабильность масштабного коэффи- циента ЛГ Ац x(y,z) б.р. 1-Ю’5
4 Нестабильность положения ОЧ ЛГ относительно приборной СК Ad л г x(y,z) угл.с 15
5 Нестабильность смещения нуля аксе- лерометра: - от запуска к запуску - в запуске Ат x(y,z) 5т x(y,z) м/с2 110’3 ИО4
6 Нестабильность масштабного коэффи- циента акселерометра Aq x(y,z) б.р. 1-Ю-4
7 Нестабильность положения ОЧ аксе- лерометра относительно приборной СК A(XAx(y,z) угл. с 15
Примечания:
Погрешности АК и ЛГ от запуска к запуску определяются как отклоне-
ния среднего значения измеряемых величин за время начальной выставки
БИНС от паспортных значений, возникают при включении ККП и дейст-
вуют на участке начальной выставки БИНС и навигации (полета PH). По-
грешности представляются случайными постоянными величинами.
Погрешности АК и ЛГ в запуске определяются как отклонения среднего
значения измеряемых величин от значений, имевших место на участке
начальной выставки БИНС. Погрешности представляются случайными
постоянными величинами.
Случайный уход ЛГ возникает при включении ККП и действует на уча-
стке начальной выставки БИНС и навигации. Погрешность представляет-
ся случайным процессом типа "белого шума". Случайный дрейф гиро-
скопа характеризуется СКО смещения нуля ЛГ’ за время измерения Т
QA5=Rr(T)-1/2,
где R0 - коэффициент случайного дрейфа ЛГ.
175
Указанные в пп. 1 - 7 табл: 4'1.1 случайные погрешности независимы, рас-
пределены по нормальному закону с нулевым математическим ожиданием и пре-
дельным отклонением 3 а.
Учет погрешностей БИНС при расчете точности
Составляющие погрешностей ККП по-разному влияют на погрешности
БИНС на различных этапах ее работы в составе СУ PH.
При предстартовой подготовке учитывают следующие погрешности ККП:
ДтХ)У12 - составляющие нестабильности нуля АК от запуска к запуску;
Дадух и Аад^х - составляющие погрешности углов ориентации ОЧ АК;
Дсох> у, z ~ составляющие нестабильности нуля ЛГ от запуска к запуску;
Далг - случайные составляющие погрешности углов ориентации ОЧ ги-
роскопов;
Дсох у z(t) - случайный дрейф ЛГ.
В полете учитывают следующие погрешности ККП:
SRy,z - составляющие нестабильности нуля АК в запуске;
A^x,y,z - составляющие нестабильности нуля АК от запуска к запуску;
Aqx,y,z - составляющие погрешности МК АК;
ДаА - составляющие погрешности углов ориентации ОЧ АК;
8юх> у, z - составляющие нестабильности нуля ЛГ в запуске;
А®х, у, z - составляющие нестабильности нуля ЛГ от запуска к запуску;
АЦх, у, z - составляющие погрешности МК ЛГ;
Acoxyz(t) - случайный дрейф ЛГ;
Дплг - случайные составляющие погрешности углов ориентации ОЧ ЛГ.
Модель методической погрешности алгоритма инерциальной ориентации
Данная погрешность возникает при итерировании кинематических уравнений
ориентации в условиях действия на основание БИНС вибраций и обусловлена [43]:
полосой.,пропускания алгоритмов ориентации, величина которой огра-
ничена выбранным значением частоты опроса ЛГ;
- ограничением на порядок точности алгоритмов численного интегриро-
вания уравнений ориентации.
Как правило, погрешность представляется вычислительным уходом нави-
гационной СК БИНС и называется псевдоуходом кватерниона,.
Предельное (Зст) значение этой погрешности для алгоритмов БИНС, приме-
няемых в ракетной технике, находится в диапазоне 0.01 ... 0.05 град/ч. Погреш-
ность является случайной величиной, распределенной по нормальному закону с
нулевым математическим ожиданием.
Модель погрешностей начальной выставки
Погрешности начальной выставки навигационной СК БИНС относительно
начальной стартовой СК определяется действующими при начальной выставке
погрешностями чувствительных элементов ЛГ и АК, погрешностями установки
их осей и методическими погрешностями алгоритма инерциальной ориентации
(псевдоуход кватерниона), а также методической погрешностью алгоритма на-
чальной выставки.
176
При выставке навигационной СК БИНС в горизонтальной плоскости по
данным акселерометров, а в азимутальном направлении методом гирокомпасси-
рования погрешности начальной выставки определяются следующими формула-
ми [44]:
Фхо(0)=—z-°-(-U5<px;
g
Фуо(О) = [(£2o(0)+8Q2o)cosAo + (sxo(0)+5Qx0)sinAo]/<OECOs(pgo+89y; (4.1.30)
« /ЛЧ 8wx0(0) „
Фго(О) =-----—— + 8(pz,
g
где 8wo(O) = Ап_о ’ Аоч п • 8wn(0);
5wn(0) = AO4_n *5wa(0);
бо(О) == Ап_о • Аоч_п • еп(0);
£п(0)= Аоч_п * £g(0);
8wxA(0) Атх +Aqx- g;
8w уА(0) = Ату + Аа дух. • g; (4.1.31)
8w za(0) = Atz + Aocazx • g;
exG(0) = Ao\+ ASx(tHB);
8уо(0) = A(By 4- АОуОнв);
8zg(0) = A(DZ + Acoz(tHB);
Ao(tHB) = Re/TtHB ;
tHB ~ время начальной выставки в часах,
8Q0 = 6QN - псевдоуход кватерниона;
8фх, 8срх, 8(рх - методические погрешности алгоритма начальной выставки,
представляются случайной величиной, распределенной по нормальному за-
кону с нулевым математическим ожиданием и предельным (3 g) значением,
равным 8фх>г = 0.2', 8фу = 1
g - ускорение силы тяжести в месте проведения начальной выставки;
- угловая скорость вращения Земли;
Ф^ - географическая широта места проведения начальной выставки.
Модель погрешностей угловой ориентации навигационной СК БИНС
Погрешность ориентации навигационной СК БИНС относительно началь-
ной стартовой СК определяется зависимостью
177
Фо(0=Фо(0)+ Je0(T)dT, (4.1.32)
О
где Фо(О) - вектор погрешностей начальной выставки навигационной СК БИНС;
eo(t) - вектор угловой скорости ухода навигационной СК БИНС в началь-
ной стартовой СК;
8o(t) = ATo_i • Аоч_1 *8o(t), (4.1.33)
t - время полета относительно момента ОТП.
4.1.53 Математическая модель погрешностей ИИС
С точностью до коэффициента первого порядка в разложении гравитацион-
ного потенциала Земли уравнения движения PH в начальной стартовой геоцен-
трической СК записывают следующим образом [40]:
Vyo(t) = wyo(t)-^-- yo(t> (4.1.34)
vzo(t) = wz0 (t) - • z0 (t),
где vx0(t),vy0(t),vz0(t) - проекции вектора абсолютного ускорения PH на оси
начальной стартовой геоцентрической СК;
wx0(t), wy0(t),wz0(t) - проекции вектора кажущегося ускорения PH, вычис-
ленные по изменениям БИНС, в проекциях на оси начальной стартовой
геоцентрической СК;
xo(t), y0(t), z0(t) - координаты PH в НСГСК;
r(t) = Jxg (t) + у о (t) + (t) ~ модуль радиуса-вектора PH;
ц - гравитационная постоянная.
Проварьировав уравнения (4.1.34), получим математическую модель по-
грешностей ИНС
ДУхоМ = Фго(0-^уо(0-Фуо(0”Йгго(0-^у^-З^^ДХо(0 +
+ зцы) Mt)+ зццыо. AZo(t)+5^xo(t);
Г ‘ Г W (4.1.35)
ДУуо(0?.-Фм(0- wx0(t) + Фх0(1)- wz0(t)+ ЗИУ°5^°^ ’
" ж!’ ?7эд)Ау”<‘>+- ^(t) ♦ 6» (t);
"i If •» .
178
AvI0(t) = Oy0(t).w„0(t)-<l>,l){t)-wyC(t)+^^^^-Ax0(l)+
+ зц^ЫО. Ayo(t)-J^i -з||й]мо+Sw..(t),
где Avx0(t),AVy0(t),Avz0(t) - проекции вектора вариации абсолютного ускоре-
ния;
Фхо(О, Фуо(0, Фго(О - проекции вектора угловых погрешностей ориентации
навигационной СК БИНС в НССК. Модель погрешностей приведена в под-
разд. 4.1.5.2;
Ax0(t), Ay0(t), Azo(t) - проекции вектора ошибок местоположения;
Awx0(t), Awyo(t), Awi0(t) - проекции вектора погрешностей акселерометров
БИНС.
Модель погрешностей приведена в пар. 4.1.5.2.
Вариации координат и составляющих вектора скорости PH, обусловленные
погрешностями БИНС, получим в результате численного интегрирования урав-
нений (4.1.35)
Av0(t) = Avo(O)+ |Ду0(т)(1т, Ar0(t) = Дго(О)+ |Av0(r)dT. (4.1.36)
О о
4.1.5.4 Результаты моделирования погрешности ИНС
Приведем результаты анализа инструментальных погрешностей БИНС при
выведении КА на круговую орбиту (h = 500км, i = 2.3°) и солнечно-синхронную
орбиту (h = 700км, i = 98.1°).
В качестве примеров представим графики ошибок инерциальной системы
PH, вызванных действием основных инструментальных погрешностей БИНС (см.
табл. 4.1.1). На графиках приведены ошибки следующих параметров:
- ошибки ориентации навигационной СК БИНС относительно начальной
стартовой СК (Фх0, Фуо, Фго);
- ошибки составляющих вектора абсолютной скорости PH в орбитальной
СК (Avx, Avy, Avz);
- ошибки координат PH в орбитальной СК (Ах, Ay, Az).
На рис. 4.1.20 - 4.1.22 изображены графики ошибок из-за влияния погреш-
ности Act)z для круговой орбиты, на рис. 4.1.31 - 4.1.33 - для солнечной синхрон-
ной орбиты.
На рис.4.1.23 и 4.1.24 показаны графики ошибок из-за влияния погрешно-
сти Атх для круговой орбиты, на рис. 4.1.34 и 4.1.35 — для солнечной синхронной
орбиты.
На рис.4.1.25 и 4.1.26 изображены графики ошибок из-за влияния погреш-
ности Atz для круговой орбиты.
На рис.4.1.36-4.1.41 показаны графики ошибок из-за влияния погрешно-
стей Ату, Атх, Aqx для солнечной синхронной орбиты.
179
Ф.угл.мин
Рисунок 4.1.21 - Круговая орбига (Awz)
Проекции скорости Av
Рисунок 4.1.22 - Круговая орбита (Ao)z)
Проекции радиуса-вектора Аг
180
Av, м/с
Рисунок 4.1.23 - Круговая орбита (Дтх)
Проекции скорости Av
Рисунок 4.1.24 - Круговая орбита (Дтх)
Проекции радиуса-вектора Дг
181
Av, м/с
Рисунок 4.1.25 — Круговая орбита (Atz)
Проекции скорости Ду
Рисунок4.1.26 -Круговаяорбита(Дт2)
Проекции радиуса-вектора Дг
182
Av, м/с
Рисунок4J.27 -Круговая орбита (8тх)
Проекции скорости Av
Рисунок 4.1.28 - Круговая орбита (8тх)
Проекции радиуса-вектора Аг
183
Рисунок 4.1.29 - Круговая орбита (Aqx)
Проекции скорости Av
Аг, м
4000-1 2000 0 •
» 5 10 и 00 ^"44 Q0 2С Of» 2J 00 3( Az 00 33 00 44 00 43
-4000-
ЛЛЛЛП
-14000-
Рисунок 4.1.30 - Круговая орбита (Aqx)
Проекции радиуса-вектора Аг
184
Ф, утл. мин
Рисунок 4.1.31 - Солнечная синхронная орбита (Acoz)
Рисунок 4.1.32 - Солнечная синхронная орбита (Aoz)
Проекции скорости Av
Рисунок 4.1.33 -- Солнечная синхронная орбита (Acdz)
Проекции радиуса-вектора Аг
185
Рисунок 4.1.34 - Солнечная синхронная орбита (Атх)
Проекции скорости Av
Рисунок 4.1.35 - Солнечная синхронная орбита (Атх)
Проекции радиуса-вектора Аг
186
Av, м/с
Рисунок4.1.36 -Солнечная синхронная орбита (Ату)
Проекции скорости Av
Рисунок 4.1.37 - Солнечная синхронная орбита (Ату)
Проекции радиуса-вектора Аг
187
Av, м/ с
Рисунок 4.1.38 - Солнечная синхронная орбита (6тх)
Проекции скорости Av
Рисунок 4.1.39 - Солнечная синхронная орбита (5тх)
. . Проекции радиуса-вектора Дг
188
Рисунок 4. Il .40 - Солнечная синхронная орбита (Aqx)
Проекции скорости Av
Рисунок 4,1.41 - Солнечная синхронная орбита (Aqx)
Проекции радиуса-вектора Аг
189
На рис. 4.1.27 и 4.1.28 изображены графики ошибок из-за влияния погреш-
ности 5сх для круговой орбиты, на рис. 4.1.38 и 4.1.39 - для солнечной синхрон-
ной орбиты.
На рис. 4.1.29 и 4.1.30 показаны графики ошибок из-за влияния погрешно-
сти Aqx для круговой орбиты, на рис. 4.1.40 и 4.1.41 - для солнечной синхронной
орбиты.
Из анализа приведенных результатов следует, что ошибки инерциальной
системы представляют собой недемпфированные колебательные процессы, ам-
плитуда которых пропорциональна величине погрешности БИНС.
4.1.6 Комплексная обработка информации ИНС и АП СНС
В настоящее время почти все средства выведения полезных грузов на око-
лоземные орбиты оснащаются инерциальными системами, построенными на базе
БИНС. Эти системы являются полностью автономными системами и основаны на
использовании только инерциального способа навигации [45].
Обладая неоспоримыми преимуществами, такими, как автономность, гло-
бальность, чисто инерциальные системы имеют один очень важный недостаток,
заключающийся в постепенном росте погрешности навигационных измерений.
Накапливаясь, эти погрешности доходят до таких значений, которые заметно
влияют на отклонение параметров фактической орбиты выведения КА от требуе-
мых значений.
Наибольший вклад в погрешность выведения КА вносят погрешности на-
чальной выставки и инструментальные погрешности БИНС.
Сказываются ошибки инерциальной системы и на предельной массе полез-
ной нагрузки. Увеличивается расход топлива КА при маневрировании для орга-
низации требуемой орбиты, что выражается уменьшением гарантированного сро-
ка активного существования выводимого КА.
Отмеченные недостатки инерциальной навигации заставляют усовершенст-
вовать навигационную систему в целях достижения нового, более высокого
уровня точности доставки полезной нагрузки на орбиту назначения.
Возможными направлениями модернизации являются:
- разработка и создание точных и сверхточных датчиков первичной нави-
гационной информации БИНС;
- внедрение средств коррекции навигационной информации, в частности,
по данным спутниковой навигационной системы.
Первое направление является экономически невыгодным, так как ведет к
росту стоимости системы управления и тем самым к росту стоимости услуг по
выведению полезных нагрузок.
Второе направление основано на применении в составе системы управле-
ния PH интегрированной инерциально-спутниковой навигационной системы, со-
держащей недорогие датчики навигационной информации среднего класса точ-
ности. Основная идея комплексирования инерциальных и спутниковых данных
состоит в оценивании в реальном масштабе времени ошибок инерциальной сис-
темы. В то же время инерциальные данные могут использоваться для перекрытия
190
пропусков циклов измерения спутниковой информации во время потери захвата
радиосигнала, сохраняя при этом целостность навигационной информации в сис-
теме управления PH. Основным достоинством инерциально-спутниковой нави-
гационной системы является высокая точность определения координат и скоро-
сти PH в любой точке околоземного пространства, при этом отсутствует какое-
либо накопление ошибок.
Таким образом, отмеченные особенности инерциально-спутниковых нави-
гационных систем предопределили в настоящее время значительный интерес к
этим системам.
4.1.6.1 Математическая модель системы
Инерциально-спутниковая навигационная система PH строится на основе
алгоритма комплексной обработки информации, принцип работы которого пока-
зан на рис. 4.1.42.
Кватернион Координаты,
ориентации, скооость.
Рисунок 4.1.42 - Функциональная схема инерциально-спутниковой
навигационной системы
В соответствии с рисунком выходные данные БИНС, а именно:
- кватернион ориентации осей PH относительно навигационной СК БИНС
-ACB[t];
- кажущаяся скорость PH в проекциях на оси навигационной СК БИНС -
wCB[t]
поступают в алгоритм ИНС PH, где в результате решения основных навигацион-
ных уравнений определяются координаты и составляющие вектора абсолютной
скорости PH в проекциях на оси начальной стартовой СК.
Ввиду наличия угловых погрешностей в начальной ориентации навигаци-
онной СК БИНС относительно начальной стартовой СК (погрешностей началь-
191
ной выставки БИНС), а также погрешностей чувствительных элементов и мето-
дических ошибок ИНС значения полученных координат и составляющих вектора
скорости не будут соответствовать действительному положению PH в простран-
стве. Представим эти значения в следующем виде:
r0(t) = r0Yt) ч Aro(t);
(4.1.37)
v0(t) = vo(t) + Avo(t),
где ro^t), voE(t) - истинные значения координат и составляющих вектора скорости;
Ar0(t), Avo(t) - погрешности координат и составляющих вектора скорости PH.
Модель этих погрешностей приведена в подразд. 4.1.5.3 (формула (4.1.36)).
В таком же виде представим эталонные значения векторов выходной ин-
формации АП СНС в начальной стартовой СК:
roCHC(t) = r0'(t) + Ar0CHC(t);
v0CHC(t) = Vo'(t) + Av0CHC(t),
где Ar0CHC(t), AvoCHC(t) - погрешности координат и составляющих вектора ско-
рости PH, обусловленные погрешностями измерений АП СНС.
Предельное (За) значение погрешностей в Гринвичской СК приведены в
табл. 4.1.2
Таблица 4.1.2- Предельные значения погрешностей
Интервал высот PH Предельная (За) погрешность определения пространствен- ного положения PH, м Предельная (За) погрешность определения скорости PH, см/с
0 < h < 150км 18.7 ...46.7 5.4... 6.3
150 <h< 600км 11.6... 36.4 4.1 ... 9.0
600 < h 2000км 8.3 ... 26.4 2.9 ... 4.2
2000<h<3000км 11.5...36.6 4.0... 5.9
3000 < h <5000км 53.4— 170.0 18.5 ... 27.3
5000 <h< 10000км 55.0... 176.0 19.2... 28.2
Образуем разности (входные данные алгоритма комплексной обработки
информации)
OXt) = r0(t) - r0CHC(t) = Ar«(t) - Ar0CHC(t);
СНС CMC (4.1.39)
Ov(t) = v0(t) - v0CHC(t) = Av0(t) - Av0CHC(t).
Из (4.1.39) следует, что входные данные алгоритма КОИ являются функ-
циями погрешностей БИНС и АП СНС.
'Основную задачу алгоритма КОИ сформулируем следующим образом. Зная
априорную информацию о распределении погрешностей перечисленных систем,
о математических моделях этих систем, а также располагая наблюдениями, сле-
192
дует определить оценки погрешностей ИНС PH оптимальным образом. Критери-
ем оптимальности является минимум апостериорного среднеквадратического от-
клонения ошибок оценивания. Полученные таким образом оценки погрешностей
используют для коррекции навигационной задачи PH.
4.1.6.2 Упрощение модели ИНС
При упрощении модели исключаются ненаблюдаемые и слабо наблюдае-
мые параметры, что позволит синтезировать алгоритм КОИ минимальной раз-
мерности.
С учетом особенностей функционирования навигационной системы в ос-
новном на начальном участке траектории полета получим для кажущихся уско-
рений:
wyn(t) = wyA(t)«0;
wOT(t) = «о,
(4.1.40)
где w^t), wyn(t),wzn(t)~ проекции вектора кажущегося ускорения на оси при-
борной СК БИНС;
Wxa(t), wyA (t), w^O)- проекции вектора кажущегося ускорения на оси
чувствительности акселерометров БИНС;
wxl (t) - проекция вектора кажущегося ускорения на ось Xi связанной СК PH.
После старта PH в течение первых 10 ... 20 с СУ разворачивает ракету по
углу вращения на заданный азимут полета. При этом ненулевое исходное значе-
ние угла вращения отрабатывается на ноль. Поэтому можно считать, что для
t > 20 с ф = 0°. Тогда матрица направляющих косинусов ориентации связанной
СК относительно начальной стартовой СК (3.1.4) с использованием углов Эйлера
будет иметь вид
cos у cos 9 cos у sin 9 -simg
-sin9 cos9 0
sin у cos 9 sin у sin 9 cos\|/?
(4.1.41)
После завершения разворота PH по углу вращения на заданный азимут по-
лета проекции вектора угловой скорости на оси чувствительности гироскопов
БИНС и на оси приборной СК БИНС определяются формулами
<OxG(t) = ttxn(t)~0;
(ByG(t) = (Oyn(t)« oyl(t);
ozG(t) = <ozn(t) « wzl(t),
(4.1.42)
где cOyi(t), (ozi (t) - проекции угловой скорости PH на связанные оси.
Учитывая формульные зависимости для составляющих кажущегося уско-
рения (4.1.40), получим упрощенные выражения для составляющих погрешности
акселерометров (4.1.28):
193
SWka (t) = Атх + 8Tx + AQx • Wxl (t);
3wyA (0 = Aty + Sty - AaAyx • wxl (t); (4.1.43)
3wzA(t) = Ax2+8Tz+AaAzx-wxl(t).
В связанной СК эта модель погрешностей будет иметь вид
'''' 5wxl(t) = 8wxA(t);
8wyI(t) = 8wyA(t); (4.1.44)
8wzl(t) = 8wzA(t).
Применив формулу (4.1.41) для матрицы направляющих косинусов и при-
нимая во внимание, что
a12 я > al3
Ai_o A J j — a21 a 22 a23 , (4.1.45)
<a31 a32 a33>
(4.1.46)
определим погрешности измерения кажущегося ускорения в начальной стартовой
СК
8wx0(t) =(Атх +8тх + Aqx wxl(t))-an +
+ (Дту + Sty - Act Аух • wxl(t))- а12 +
+ (Atz -l-S^ + Aa^ -wxl(t))-a13;
5wyo(t) =(Atx + 8tx +Aqx • wxl(t))-a2I +
+ (Дту + 8ту-ДаАух-wxl(t))a22 +
+ (Axz + 8tz + Aa^ • wxl(t))-a23;
5wz0(t) =(Atx +8tx + Aqx • wxl(t)) a31 +
+ (Atz + 8tz + Aa^ • wxl(t))- a33.
Введем обозначения:
ДТХ — Дтх +
ДТУ = Дту + 5ту;
ДТг - Дтг + 8xz.
Учтем также, что проекции кажущегося ускорения PH на оси начальной
стартовой СК на начальном участке полета можно приближенно вычислить по
следующим формулам:
wx0(t)«Wxi(t)-a(i;
wy0(t)« wxl(t)-a21; (4.1.48)
Wzo(t)«Wxi(t)a3i.
(4.1.47)
194
Тогда получим
6wx0(t) = ДТХ • ап + ДТу • а12 + ATZ • а13 + Aqx wx0(t) -
-ДаАух -wxl(t)-al2 4-Да^ wxl(t)-a13;
8wyo(t) = ДТХ • a2I + ДТу • a22 + ДТг a23 + Aqx • wy0(t) -
-ДаАух wxl(t) a22 +Да Azx ,wxi(t)*a23>
5wz0(t) = ATX • a3l + ATZ • a33 + Aqx • wz0(t) +
+ AaAzx-wxl(t)a33,
(4.1.49)
где
ATX, АТУ, АТг, Aqx, AaAyx, AaAzx - погрешности акселерометров, постоянные
в запуске случайные величины, распределенные по нормальному закону.
Согласно (4.1.29), с учетом того, что
А 0 0^
Аоч j = 0 1 0
<0 0 1J
модель погрешностей измерения составляющих вектора абсолютной угловой
скорости в связанной СК представляем следующими уравнениями:
exi(t) = Асох + 8шх + Аалгху • a>yi(t) - Лалгхг • O)2i(t) + Ac6x(t);
8УI(0 = АсОу + 8озу + Ацу (Dyi(t) + Аалгуг • (Ozi(0 + ASy (t); (4.1.50)
e2i(t) = Aa>z + 8coz + Apz • ©zl(t) - Аадггу * ®yi(0 + Awz(t).
Введем обозначения:
AQX = A(ox + 8a>x + A<ox (t);
AQy = Aojy + 8coy + Ac5y(t);
AQZ = Acdz + 8coz + Acoz (t);
ДОху = ДаЛГху; <4-L51)
AGxz — Аосдгхг,
AGyz — АсХдгуг^
АСгу — АсХлГгу-
Тогда получим:
£xj(0 ~~ AQX + AGXy • C0yi(t) — AGXZ • <Dz1(0j
Eyi(t) = A£2y + Apy • a)yi(t) + AGyz • cozi(t); (4.1.52)
Ezi(0 АПд — AGZy • coyi(t) + Apz • cozi(t).
195
Спроектируем погрешности ЛГ на оси начальной стартовой СК и учтем,
что на начальном участке полета PH для модели погрешностей ЛГ можно при-
нять
CDyi(t) « 0; а32 « 0.
Окончательно получим
exo(t) = AQX ац + AQy aj2 +AQZ ав -
- AGXZ (Bzi(t) a] i + AGyz ®zI(t) an + Apz cozi(t) an;
Eyo(t) = AQX a2i + AQy a22 +AQZ a23 - (4.1.53)
- AGxz cozI(t) a21 + AGyz <ozI(t) a22 + Apz cozl(t) a23;
£z0(t) = AQX a3l + AQZ a33 - AGXZ <x>zl(t) a3i + A^ cozl(t) a33,
где AQX, AQy, AQZ, AGXZ, AG^, Apz - погрешности ЛГ, постоянные в запуске
случайные величины, распределенные по нормальному закону.
Подставив в уравнение модели погрешностей ИНС (4.1.35) формулы
(4.1.32), (4.1.49) и (4.1.53), получим:
Avx0(t) = [Ф2О(о)+A®zO(t)]wyO(t)-|0yo(o)+ АФуоОЖоСО"
- g» (0 • Ax0(t)+ g^ (t); Ay0(t)+ g„(t) • Az0(t)+
+ ATX • a,j(t) + ATy • a12(t) + ATZ • a13(t) + Aqx • wx0(t) -
-ДаАух •wxl(t) a12(t) + AaAzx -wxi(t)-al3(t);
Avyo(t) = -[Ф,.о(о)+ AOz0(t)]wx0(t)+ [фх0(0)+ AOx0(t)]wz0(t)+
+ gyx(t)-Ax0(t)-gyy(t)-Ay0(t)+gyz(t)Az0(t)+
+ ATx-a21(t) + ATy-a22(t) + ATz-a23(t) + Aqx-wy0(t)-
-ДаАух • w^CO-a^CO + AaA^ wxI(t)-a23(t);
AVzo(t)=l®yo(o)+AOy0(t)]wxo(t)-[®xo(0)+A®xo(t)]wyo(t)+
+ gzx (t) • Ax0(t)+gzy(t) • Ay0(t)~ gzz (t) • Az0(t)+
+ ДТХ • a31(t) + AT2 • a33(t) + Aqx • wz0(t) +
ч-Аа^ Wxi(t) a33(t).
Здесь:
t t
AOx0(t)= jEx0WdT= f(AQxan +AQya12 + AQza13 - AGxzco21(T)-an +
о 0
+ AG^a^Ct) • al2 + Дцг<в21(т) • a13)dr;
t t
АФуо(О = f£y0(T)dT= J(AQxa21 + AQya22 + AQza23 - AGxzgjz1(t) • a21 +
о о
+ AG^i (t) • a22 + Ap.z(ozl (t) • a23 )dr;
196
ДФгоМ = Jezo(T)dT= J(A£lxa31 + AQza33 - AGAW-a^ +
О о
+ Agz<ozI(T)a33)d-r;
g (t) = fi_32Sl(O ]_E_.
gxxW U r2 (t) J гз (t) ’
gyyW r2(t) Jr3(t) ,
gzzW C r2(t)jr3(t)
g.(t)=g„(t)= ;
r5(t)
Представим модель погрешностей ИНС (4.1.54) в пространстве вектора со-
l.Avx0(t)=[®20(0)+AOz0(t)]wy0(t)--[Oy0(o)+AOy0(t)Jw20(t)-
-gxx(t)-Ax0(t)4-gxy(t)-Ay0(t)+gxz(t)-Az0(t)+
+ ДТХ • а|j(t)+АТу • а12(t) + ATZ • а13(t) + Aqx • wx0(t) -
-ДаАух -wxl(t)aI2(t) +Aato wxl(t) a13(t)+5ax.
2 .Avy0(t) = -^z0(o)+A®z0(t)]wxB(t)+[®xo(o)+A®xo(t)]wz0(t)+
+ gyx (0 • Дхо(0- gw(t) - Ay0(t)+ gyz(t) • Az0(t)+
+ ATX •a2I(t) + ATy-a22(t) + ATz-a23(t) + Aqx wy0(t)-
- Л^Аух • wxI(t) • a22(t)+Aa^ • wxl (t) • аи (t)+5ay.
3 - Avz0(t) = |Фуо(0)+ AOy0(t)J^x0(t)-[ФхО(0)+ AOx0(t)]wy0(t)+
+ gzx (0 • Ax0(t)+ g^. (t) • Ay0(t)- gzz (t) • Az0(t)+
+ ATX • a31 (t) + ATZ • a33(t) + Aqx • wz0(t) +
+AaAzxwxl(t)a33(t)+5az.
197
4 .Дхо(О = Avx0(t).
5,Ay0(t) = Avy0(t).
6 .Az0(t) = Avz0(t).
7 .Фхо(0) = 0.
8,ФуО(0) = 0.
9 .^(0) = 0.
1О .ДТХ=О.
11 . ДТУ = 0.
12 .ДТг=0.
1з .д4х =0.
14-ДАух =0.
15 .ДА^ =0.
1б .ДФхо(О = ДОХ -an(t)+AQy-a12(t) +
+ AQZ a13(t) - AGxz<ozl (t) • a, ((t) +
+ ДО угЮ,, (t) • a12 (t) + AgzcoZ| (t) • a13 (t) + 5ex.
17 .ДФуо(О = Д£2Х -a21(t) + M2y -a22(t) +
+ AQZ • a 23 (t) - AGxzrozl (t) • a2l (t) +
+ AG^! (t) • a22 (t) + Дцгсо21 (t) • a 23 (t) + 5ey.
16 . A<t>z0(t) = ДПХ -a3i(t) + AQz -a33(t)-
- AG^m,, (t) • a3l(t) + Agz<ozl (t) • a 33 (t) + 5ez.
19 .дох = о:
2O .AQy=O.
21 .AQz=0.
198
22.AGxz=0.
23.AGyz=0.
24. Apz=O.
Здесь 5ax, 5ay, 5az, 5ex, 5ey, 5ez - источники погрешностей, не отмеченные в опи-
санной выше модели, но влияющие на погрешность измерения ускорения PH и
погрешность угловой скорости ухода навигационной СК БИНС.
Таким образом, вектор состояния динамической системы, отображающей
поведение модели погрешностей ИНС во времени, содержит 24 компоненты:
х = (Avx0, Avyo, Лу,о, Ахо, Луо, Az0, Фхо(О), Фуо(О), Фго(О), АТХ, АТУ, ATZ,
Aq.xj Д^Аух» Aocazx, АФхо, АФуо, АФго, А^х> Д^у5 A£2z, AGXZ, AGyz, Apz) ♦
4.1.6.3 Уравнения наблюдения по данным АП СНС
Как уже отмечалось ранее в подразд. 4.1.6.1, параметры наблюдения фор-
мируются по разностям кинематических параметров траектории полета PH, по-
лученным в результате измерений и вычислений в ИНС PH и в АП СНС. -
Ov(t) = v0(t)-v£HC(t);
Or(t) = r0(t)-r0CHC(t).
Эти же параметры наблюдения выражаются через погрешности кинемати-
ческих параметров траектории следующим образом:
Ov(t) = Av0(t) - Av сис (t);
Or(t) = Ar0(t) - Ar0CHC(t),
где Avo(t), Ar0(t) - погрешности кинематических параметров траектории, вы-
численных ИНС PH;
Av£IIC(t), Arocnc(t)- погрешности кинематических параметров траектории
по данным АП СНС;
Модель наблюдений в функции параметров вектора состояния системы за-
пишем в дискретном виде:
O(n) = H(n)x(n) + £(п),
где Oxy(n) = [vx0(n) - v™c (П), Vyfl(n) - v£0HC (n), v^n) - v^c (n);
x0(n) - x™c(n), Уо(п) - Уонс(п), Zo(n) - z£HC(n)]T;
x(n) - вектор состояния динамической системы.
Матрица Н(п) коэффициентов влияния вектора состояния на наблюдение в
блочном виде имеет следующий вид:
ГНн ! Н12
Н(П)=
lH2i ' Н22 >24x24
(4.1.55)
(4.1.56)
(4.1.57)
(4.1.58)
199
Q о о о о (Р
О1ОООО
0 0 1 0 0 0
где Нн = ;
0 0 0 1 0 0
0 0 0 0 1 0
ч0 О О О О 1,
Ии - нулевая матрица размерности 6x18;
Н21 -- нулевая матрица размерности 18x6;
Н22 - нулевая матрица размерности 18x18.
£(п) - вектор погрешностей измерения составляющих вектора скорости и
координат PH, вычисленных по информации от СНС. Погрешности представля-
ются в виде случайного процесса типа ’’белого” шума с математическим ожида-
нием, равным нулю, и корреляционной матрицей
я а о о о о <о >
0 Rvy 0 0 0 0
0 0 0 0 0
R(n) = M[!j(nKT(n)]== 0 0 0 Rx 0 0 (4.1.59)
0 0 0 0 Ry 0
k 0 0 0 0 0 Rz;
4.1.6.4 Алгоритм оценивания погрешностей БИНС
Модель погрешностей ИНС PH в пространстве вектора состояния опреде-
ляется следующим матричным уравнением [46]:
x(n)= Cx(n) + Su(n), (4.1.60)
где х(п) - вектор состояния системы;
u(n) - вектор шумов процесса.
Согласно (4.1.54)
u(n) = (8ах, 8ау, 8аг, 0,0,0,0,0,0,0,0,0,0,0,0, 8ех, 8еу, 8е2, 0,0,0,0,0,0)т.
Шумы процесса представляются в виде “белого” шума с нулевым матема-
тическим ожиданием и корреляционной матрицей
D(n) = fDn ! 0 , 0 I 24x24
Г"! ® c? ®! ® 1- — 1 О 1 о
ч о ! о ! о jo,
(4.1.61)
200
о "
о
fDax О
где Dn = О
1°
Day
о
rDex 0 0
D33 - 0 ^еу 0
ч 0 0 Dez j
Блоки матрицы D(n), обозначенные ”0”, - нулевые матрицы соответствую-
щих размерностей, Dax, Day, Daz, Dgx, Dey, Dez - дисперсии неучтенных в моделях
ИНС погрешностей.
Предполагаем, что на интервале интегрирования (п-1)Т < t < пТ компонен-
ты шумов процесса u(n) сохраняют свои значения.
С - матрица коэффициентов системы
' 0 с 12 С13 C14 C|5 0
C2i 0 0 0 0 0
0 0 0 0 0 0
С(п) =
0 0 0 0 0 0
0 0 0 0 0 C56
х 0 0 0 0 0 0 ) 24x24
( „ A
— gxx gxy gxz
С12 - gyx “gyy Syz >
к Szx. gzy ~Szz
* г 0 -Wz0 WyO
Св = WzO 0 -wx( ) i
ч wy0 wxo 0 )
(4.1.62)
аи
С14— а21
<а31
а12 а13 wx0 - wx0-aI2 wx0-a13^
а22 а23 Wy0 “Wx0*a22 Wx0-a23
аз2 азз wz0 0 wx0*a33>
Cis -- C]3;
<all a12
C56— a21 a22
<a31 a32
a13 -COzl*all
a23 “^zra21
a33 ~°>zra3i
®zl‘a12 ^zl^B^
^zl * a22 ^zl * a23
0 Wzl * a33 >
Блоки матрицы C(n), обозначенные "О", - нулевые матрицы соответствую-
щих размерностей;
201
S - матрица коэффициентов шума процесса
rsn о 0 0 0 O'
0 0 0 0 0 0
0 0 0 0 0 0
S(n) =
0 0 0 0 0 0
0 0 0 0 s5< i 0
< 0 0 0 0 0 oj
0 0Л
s П - S55 - 0 1 0
40 0 1J
(4.1.63)
Решение матричного дифференциального уравнения (4.1.60) получим в виде
x(n) = F(n, п-1) х(п-1) + А(п, п-1) u(n—1), (4.1.64)
где F(n, п-1) - фундаментальная матрица системы;
А(п, п-1) - матрица коэффициентов влияния шума процесса на вектор со-
стояния системы.
Фундаментальная матрица системы или переходная матрица переводит
систему из состояния в момент времени Vi = (п - 1) Т в состояние, соответст-
вующее моменту времени tn = пТ. Известно, что для дискретных линейных сис-
тем с постоянными или почти постоянными коэффициентами фундаментальную
матрицу можно определить следующим образом:
F(tn, ^) = ест
Ограничившись членами второго порядка малости относительно времени
разложения Т, получим
?Т2
F(tn, t„_i) = 1 + СТ+ С2 у, (4.1.65)
где T = tn - tn-i; I - единичная матрица.
Определим элементы фундаментальной матрицы
Fl2 f13 f14 fI5 F16>
f21 f22 f23 f24 f2S 0
0 0 F33 0 0 0
F(n,n-1) = 0 0 0 F^ 0 0 , (4.1.66)
0 0 0 0 f55 f56
4 0 0 0 0 0 F66y
где Fn = I + С12-Т2/2; F12 = С12-Т; F13 = Cl3-T; F14 = Cl4-T; F15 = Ci5 Т;
FI6 = С,s- C56-T2/2; F21 = C2t-T; F22 = I + Cn-T2^; F23 = Cu-T2/!;
F24 = C14-T2/2; F25 = C15-T2/2; F33 = T; F44 = I; F55 = I; F56= C56T; F66 = I.
202
Получим значения элементов матрицы коэффициентов влияния шума про-
цесса на вектор состояния А(п, п--1) (4.1.64). Известно, что при постоянном шуме
процесса на интервале интегрирования коэффициенты матрицы определяют по
формуле
т
А= jF(T-r)S(T)dT.
о
(4.1.67)
После перемножения матриц и интегрирования, пренебрегая величинами
второго порядка малости, получаем
<АП ООО
Ам О О О
0 0 0 0
0 0 0 0
0 0 0 0
0 О'
о о
о о
о о
^55 ©
0 0,
о о
где
о
т2
2
Алгоритм оценивания
погрешностей ИНС представляется
известными
уравнениями дискретного фильтра Калмана с обратной связью:
P(n|n - 1) = F(n - 1 )-P(n-l|n - l) FT(n - 1) +
+ A(n-1)-D(n-1)Ат(п-1);
К(п) = Р(п|п - 1)Нт(п - 1)-[Н(п)-Р(п|п - 1)Нт(п) + R(n)r*;
P(n|n) = [I - K(n) H(n)] P(n|n - 1);
x(n|n-l) = F(n-l)x(n-l)-B(n-l)x(n-l);
x(n) = x(n | n -1) + K(n) [O(n) - H(n) • x(n | n -1)],
где P(n|n - 1) - априорное значение корреляционной матрицы ошибок оценива-
ния;
К(п) - матрица весовых коэффициентов;
Р(п|п) - апостериорное значение корреляционной матрицы ошибок оцени-
вания;
х(п)- апостериорная оценка вектора состояния;
F(n-1) - фундаментальная матрица системы;
А(п-1) - матрица возмущений системы;
203
D(n-l) - корреляционная матрица шумов процесса;
Н(п) - матрица коэффициентов наблюдений;
R(n) - корреляционная матрица шумов наблюдения;
О(п) - вектор параметров наблюдений;
I - единичная матрица;
В(п-1) - матрица обратной связи.
Значения элементов матрицы обратной связи В(п-1) определяются приня-
тым способом коррекции инерциальной навигационной системы.
В рассматриваемой задаче предполагаем, что коррекция ИНС выполняется:
1) по навигационным параметрам путем непосредственного уточнения ко-
ординат и скорости PH на величину полученной оценки,
2) по измеренному БИНС значению кажущегося ускорения путем аналити-
ческого учета влияния оценок погрешностей начальной выставки БИНС и оценок
погрешностей чувствительных элементов на выходные параметры БИНС.
Как в первом, так и во втором случае коррекции состояние ИНС будет не-
прерывно улучшаться, однако внутреннее состояние БИНС при этом будет оста-
ваться неизменным. Поэтому, если записать решение для вектора состояния ди-
намической системы с обратной связью в виде
x(n) = F(n-1) x(n—1)- В(п-1)х(п-1) + A(n-1) u(n-l), (4.1.69)
то в соответствии с приведенными выше рассуждениями матрица обратной связи
В(п-1) будет иметь вид
В(п-1) = ₽!> ^12 ^13 ®15 ®21 ^22 ^23 F24 F25 0 0 0 0 0 0 0 0 0 0 0 0 0 (4.1.70)
Если подставить м; 0 0 0 0 0 0 ч 0 0 0 0 0 0 > атрицу В(п-1) в формульные : зависимости для фильтра
Калмана (4.1.69), то в случае коррекции координат и составляющих вектора ско-
рости ИНС (х(п)[1]...х(п)[6]), априорная оценка вектора состояния
х(п|п-1)=0, (4.1.71)
а апостериорная оценка вектора состояния по этим параметрам определяется сле-
дующим уравнением:
х(п)= К(п) О(п). (4.1.72)
Во втором случае коррекции, когда корректируют измеренные БИНС со-
ставляющие вектора приращения кажущегося ускорения, априорную опенку век-
тора состояния (х(п)[7]...х(п)[24]) вычисляют по следующей формуле:
x(n|n-l)=F(n-l)x(n-l), (4.1.73)
204
а апостериорная оценка вектора состояния по этим параметрам будет представ-
лять собой накопленные значения оценок (см. 5-е уравнение алгоритма фильтра
Калмана)
х(п) = х(п | п -1)+К(п)[о(п) - Н(п)х(п | п — 1)]. (4.1.74)
4.1.6.5 Алгоритм коррекции ИНС
В алгоритмах ИНС PH значения координат и составляющих вектора скоро-
сти определяются в результате решения следующих навигационных уравнений:
Vo(t) = Vo(t - Т) + jg0(t)dT + Awo(t) - Aw0(t);
(4-1.75)
ro(t) = r0(t - T) + р0(т)с1т,
t-T
где Awo(t) - измеренный акселерометрами БИНС вектор приращения кажущей-
ся скорости PH за такт Т;
go(t) - вектор ускорения силы земного притяжения;
v0(t), r0(t) - вектор абсолютной скорости и радиус-вектор PH;
Aw0(t)- оценки погрешностей БИНС, полученные в результате работы ал-
горитмов КОИ;
t - время полета;
Т - такт интегрирования уравнений навигации.
Фильтр Калмана с обратной связью обрабатывает разности между коорди-
натами и составляющими вектора скорости, полученными от ИНС PH и от АП
СНС. По данным разностей алгоритм фильтра Калмана оценивает ошибки ИНС
PH, т. е. вычисляет оценки составляющих вектора состояния системы x(n)[ij
i = 1 ... 24.
Полученные в алгоритме оценки передаются в алгоритм навигационной за-
дачи PH для коррекции основных навигационных параметров. Оценки погрешно-
стей координат и составляющих вектора скорости PH используют непосредст-
венно для коррекции начальных условий интегрирования в навигационной задаче
ИНС. Эти параметры уточняют следующим образом: »
Vo(t) = v0(t) - Av(t)= vj|(t) + Av0(t) - Av(t)= vj(t) + 5Av0(t);
(4.1.76)
ro(t) = r0(t) - Ar(t) = r0'(t) + Ar0(t) - Ar(t) = r<J(t) + 5Ar0(t).
Здесь Vg(t) - истинное значение вектора абсолютной скорости PH;
Av0(t) - погрешность вектора абсолютной скорости PH;
Av(t) - оценка погрешности вектора абсолютной скорости PH;
Iq (I) - истинное значение радиуса-вектора PH;
Ar0(t) - погрешность радиуса-вектора PH;
Ar(t) - оценка погрешности радиуса - вектора PH;
8Avo(t), 5Ar0(t) - остаточная погрешность оценивания скорости и координат PH.
205
Остальные оценки погрешностей ИНС, а именно:
- погрешностей начальной выставки БИНС,
- инструментальных погрешностей АК и ЛГ, -
используют для вычисления корректирующих поправок к измеренным БИНС со-
ставляющим вектора приращения кажущейся скорости PH:
Awx0(t) = {фгО(0)+ ДФгО(0} Wyo(t) - [фу0(0)+ АФуо(0]- wz0(t) +
+ ДТХ • ai!(t) + ДТу • a12(t) + ATZ • a,3(t) + Aqx • wxo(t)-
-AdA^-w^CO-anO+AaA^-w^O-aBCt)}-?;
Awy0(t) = {- [фх0(0)+ АФг()(0]- wx0(t) + |фх0(О)+ АФхО(0]- wz0(t) +
+ ATX a21(t)+ATy • a22(t)+ATZ • a23(t) + Aqx w^t)- (4.1.77)
-AaAyx -wxl(t).a22(t) +Дади -wxl(t)-a23(t)}-T;
Awx0(t) = |фуО(о)+ ДФ y0 (t)]- wx0(t) - [Фхо(о)+ АФхо(0]- wy0(t) +
+ATX a31(t) + ATZ a33 (t) + Aqx (t)+
+AaAzx-wxl(t)-a33(t)}-T,
где Aw0(t) - вектор оценок погрешностей приращения кажущейся скорости,
обусловленных погрешностями БИНС.
Значения полученных корректирующих поправок используют для уточне-
ния выходных параметров БИНС.
4.1.6.6 Результаты моделирования погрешностей интегрированной
навигационной системы
На рис. 4.1.43-4.1.53 и 4.1.56-4.1.66 приведены графики погрешностей
кинематических параметров траектории полета PH (Av, Аг), полученные по ре-
зультатам математического моделирования работы интегрированной навигаци-
онной системы. Проанализированы те же погрешности, что и в подразд. 4.1.5.
Для погрешности Acoz смещения нуля ЛГ от запуска к запуску, так как она корре-
лировала с погрешностью начальной выставки БИНС, дополнительно приведен
график угловой погрешности ориентации навигационной СК (Фх0, Фуо, Фхо)-
На рис. 4.1.54, 4.1.55, 4.1.67, 4.1.68 изображены графики погрешностей ин-
тегрированной навигационной системы, полученные по расчетным вариантам из
генеральной совокупности статистических испытаний по методу Монте-Карло.
Анализ полученных результатов и сравнение их с результатами, получен-
ными в подразд. 4.1.5 для чисто инерциальной навигационной системы, показы-
вает высокую эффективность применения в СУ PH методов комплексирования
информации нескольких навигационных систем. Погрешности интегрированной
системы на один-два порядка меньше погрешностей чисто инерциальной систе-
мы. В результате следует ожидать, что при этом погрешности выведения КА на
требуемую орбиту также будут минимальными.
206
Рисунок 4.1.43 - Круговая орбита (Afi)z)
Рисунок4.1.44 -Круговая орбита (Дшг)
Проекции скорости Av
Рисунок 4Л .45 - Круговая орбита (Atoz)
Проекции радиуса-вектора Дг
207
Av, м/с
Рисунок 4.1,46 - Круговая орбита (Дтх)
Проекции скорости Ду
Рисунок 4.1.47 - Круговая орбита (Дтх)
Проекции радиуса-вектора Дг
208
Av, м/с
Рисунок 4.1.48 - Круговая орбита (Дт2)
Проекции скорости Av
Рисунок 4.1.49 - Круговая орбита (Atz)
Проекции радиуса-вектора Аг
209
Av, м/ с
Рисунок 4.1.50 - Круговая орбита (8тх)
Проекции скорости Av
Рисунок 4.1.51 -Круговая орбита (5тх)
Проекции радиуса-вектора Дг
210
Av, м/с
Рисунок4.1.52 -Круговаяорбита(Aqx)
Проекции скорости Ду
Рисунок 4.1.53 - Круговая орбита (Aqx)
Проекции радиуса-вектора Дг
211
Рисунок 4.1.54 - Круговая орбита
Результаты статистического моделирования
Проекции скорости dv
Рисунок 4.1.55 - Круговая орбита
Результаты статистического моделирования
Проекции радиуса-вектора dr
212
Ф, угл. МКН
Av, м/с
о.ш -------
•ол«
Рисунок 4.1.57 - Солнечная синхронная орбита (Ag)z)
Проекции скорости Av
213
Рисунок 4.1.59 - Солнечная синхронная орбита (Дтх)
Рисунок 4.1.60 - Солнечная синхронная орбита (Дтх)
Проекции радиуса-вектора Лг
214
Av, м/с
Рисунок 4.1.61 - Солнечная синхронная орбита (Ату)
Проекции скорости Av
Рисунок4.1.62 -Солнечная синхронная орбита (Ату)
Проекции радиуса-вектора Аг
215
Av, м/ с
Рисунок 4.1.63 - Солнечная синхронная орбита (8тх)
Проекции скорости Ду
Рисунок 4.1.64 - Солнечная синхронная орбита (8тх)
Проекции радиуса-вектора Дг
216
Рисунок 4.1.65 - Солнечная синхронная орбита (Aqx)
Проекции скорости Av
Рисунок 4.1.66 - Солнечная синхронная орбита (Aqx)
Проекции радиуса-вектора Аг
217
Рисунок 4.1.67 - Солнечная синхронная орбита
Результаты статистического моделирования
Проекции скорости dv
Рисунок 4.1.68 - Солнечная синхронная орбита
Результаты статистического моделирования
Проекции радиуса-вектора dr
218
4.2 Система наведения
4.2.1 Анализ ТЗ и ИД. Основные технические требования
4.2.1.1 Назначение ракеты-носителя
PH предназначена для выведения одного КА или группы КА на различные
целевые орбиты:
- низкие и средние круговые орбиты;
- эллиптические орбиты;
- орбиту, переходную к геостационарной орбите;
- солнечно-синхронные орбиты;
- отлетную траекторию.
4.2.1.2 Требования к СУ по точности
Автономная инерциальная СУ PH должна обеспечивать точное выведение
ПН на базовые орбиты. Очевидно, что точность определяется неким .конкретным
набором параметров (имеющих смысл для данного типа орбиты) [49, 52] и по-
этому можно приблизительно специфицировать требования по точности на базе
физических параметров орбиты - элементов орбиты:
а) на круговую полярную орбиту
- по высоте орбиты ± 1 %,
- по наклонению плоскости орбиты б) на переходную к геостационарной орбиту ± 0.05 %;
- по высоте перигея +1 %,
- по высоте апогея ± 1 %,
- по наклонению плоскости орбиты в) на солнечно-синхронную орбиту ± 0.001 %;
- по высоте ± 1 %,
- по наклонению плоскости орбиты + 0.05%,
- по аргументу перигея ± 1 Оград.
Необходимо отметить, что все значения, определяющие требования по точ-
ности, приведены исключительно для справки и не применимы к конкретным
существующим системам управления ракетно-космическими комплексами. Для
каждой конкретной системы такие требования определяются отдельно Гбловной
организацией. '"
Предельные (За) отклонения точек падения отделяющихся частей по даль-
ности и боковому направлению из-за погрешности системы управления не долж-
ны превышать нескольких километров.
Требования по дальности должны выполняться при условии формирования ко-
манд на выключение МД и сброс ГО системой наведения по функционалу дальности.
4.2.1.3 Функциональные требования к системе наведения
В общем случае система наведения предназначена для выполнения сле-
дующих задач:
- вычисления программ управления, обеспечивающих выведение на тре-
219
буемую орбиту;
- формирования последовательности функциональных команд.
На начальном участке полета PH система наведения должна формировать
прохрамму по углу вращения для разворота PH на заданный азимут пуска.
На участках полёта I и П ступеней ракеты - носителя до выхода из плот-
ных слоев атмосферы система управления должна обеспечивать управление по-
летом PH по заданным в ПЗ программам углов тангажа, рыскания и вращения.
После выхода PH из плотных слоев атмосферы или по завершении азиму-
тального маневра перенацеливания после отделения 2-й ступени система наведе-
ния должна перейти на наведение PH терминальным способом.
Система наведения должна формировать команды на выключение двига-
тельных установок 1-й и 2-й ступеней PH в двух вариантах:
- по информации СУРТ об окончании компонентов топлива;
- по заданному в полетном задании значению функционала.
Вариант формирования команды для каждой ступени в отдельности опре-
деляется полётным заданием.
Система наведения должна формировать команду на сброс головного обтека-
теля на участке полета 2-й ступени PH по заданному в ПЗ значению функционала.
На участке полёта 3-й ступени PH система управления должна осуществ-
лять наведение PH терминальным (итеративным) методом путём выбора текущих
значений программных углов тангажа, рыскания и вращения PH и моментов вре-
мени включения и выключения маршевого двигателя для обеспечения заданных
краевых условий.
4.2.1.4 Требования к формированию угловых программ
Участок функционального наведения
Участок функционального наведения начинается в момент старта PH и за-
канчивается в момент сброса ГО или полного выгорания топлива 2-й ступени.
На этом участке программа угла тангажа вычисляется в функции времени.
Коэффициенты аппроксимирующего полинома задаются ПЗ.
Участок прямого наведения
Участок прямого (итеративного) наведения включает в себя участки работы
МД и РД 2-й ступени, участки работы МД 3-й ступени.
На участке итеративного наведения программы углов тангажа и рыскания вы-
числяются на борту PH из условия обеспечения требуемых параметров орбиты [53].
На пассивных участках полета 3-й ступени СУ должна обеспечивать воз-
можность выполнения программных разворотов относительно продольной оси.
Орбитальные маневры
Эти участки наведения включают в себя манёвры [51]:
- ориентации ПН,
- отделения ПН,
- манёвр избегания соударения,
- изменения орбиты (если требуется),
- манёвр увода 3-й ступени с орбиты.
220
СУ должна обеспечивать возможность выполнения программных разворо-
тов 3-й ступени на участке перед отделением КА.
На участке увода 3-й ступени с орбиты СУ должна обеспечивать возмож-
ность программных разворотов 3~й ступени перед включением МД или ЖРД МТ
в каналах тангажа и рыскания.
Маневр избегания соударения производится с помощью ЖРД МТ. СУ
должна обеспечивать возможность программных разворотов 3-й ступени перед
включением ЖРД МТ в каналах тангажа и рыскания.
4.2.2 Функциональная схема системы наведения
Структурная схема системы наведения показана на рис. 4.2.1.
Система навигации по входной информации БИНС формирует и выдает в
систему наведения [61]:
- Л - кватернион ориентации связанной СК относительно начальной
стартовой СК;
- Aw® - вектор приращения кажущейся скорости в инерциальной НССК;
- wxI - продольную составляющую кажущейся скорости;
- wxl - продольную составляющую кажущегося ускорения;
- v0 - вектор абсолютной скорости PH в начальной стартовой геоцентри-
ческой СК;
- г0 — вектор координат PH в начальной стартовой геоцентрической СК;
- go - вектор ускорения силы тяжести в начальной стартовой геоцентри-
ческой СК;
- h - высоту полета PH над Земным эллипсоидом.
В блоке «Вычисление угловых программ» рассчитываются угловые про-
граммы и на выходе формируется программный кватернион Apr, определяющий
требуемую ориентацию PH относительно начальной стартовой СК. Этот блок
функционирует на протяжении всего полета. На участке функционального наве-
дения (участки полета 1 -и и 2-й ступеней до сброса ГО) угловые программы рас-
считывают с помощью коэффициентов, задаваемых ПЗ, в функции времени. На
участках полета 2-й (после сброса ГО) и 3-й ступеней реализуется итеративный
метод наведения.
В блоке «Алгоритмы итеративного наведения» угловые программы тангажа
и рыскания вычисляются с использованием текущих координат и скорости PH, а
также параметров требуемой орбиты, задаваемых ПЗ. В результате работы блока
алгоритмов итеративного наведения определяются требуемые приращения про-
грамм тангажа ASpr и рыскания A\gpr, которые применяются в блоке вычисления
угловых программ.
На выходе системы наведения в блоке «Управляющие сигналы в систему
стабилизации» с использованием программного кватерниона Лрг, реализовавше-
гося кватерниона Л и приращения кажущейся скорости Aw® формируются:
221
Рисунок 4.2.1 - Структурная схема системы и наведения
- угловые рассогласования:
• Л$1 - в канале тангажа,
• А\|/1 - в канале рыскания,
• Ау! - в канале вращения;
- сигналы регулирования движения центра масс:
• Ау3, Ау3 - в канале НС,
• Az3,Az3 -в канале БС.
В блоке «Формирование функциональных команд и меток» с использова-
нием продольного ускорения wxl, текущих координат г0 и скорости v0 PH, а так-
же информации о требуемых параметрах движения формируются функциональ-
ные команды на отделение отработавших ступеней, запуск и выключение двига-
телей, начало и окончание маневров, отделение полезной нагрузки. Эти, команды
выдаются в виде временных меток в алгоритмы временных команд. , - .,
Кроме того, в блоке «Формирование функциональных команд и меток»
рассчитываются метки циклограммы функционирования систем навигации, наве-
дения, стабилизации, которые определяют временные интервалы работы различ-
ных блоков алгоритмов.
4.2.3 Синтез алгоритмов системы наведения
Как следует из предыдущего подраздела, наведение PH включает в себя два
основных участка:
- функциональное наведение;
- прямое наведение.
Соответственно, для каждого участка алгоритмы системы наведения синте-
зируются по специфическим правилам с учетом конкретных задач, которые необ-
ходимо решить.
Кроме того, одной из важнейших задач, стоящих перед системой наведе-
ния, является формирование функциональных команд и меток.
4.2.3.1 Функциональное наведение
На участке полета в плотных слоях атмосферы система наведения должна
обеспечивать выполнение следующих основных требований:
- для безопасного пуска со стартовой позиции должен быть реализован
вертикальный стартовый участок;
- поперечные нагрузки на конструкцию PH должны быть минимальными.
Для обеспечения этих требований на участке полета в плотных слоях атмо-
сферы обычно используют функциональный метод наведения.
Функциональный метод наведения основан на отслеживании опорной тра-
ектории, которая готовится заранее до пуска, а ее параметры задаются в полетном
задании. В классическом случае, когда число управляющих воздействий соответ-
ствует числу степеней свободы, опорная траектория задается в виде программы
кажущейся скорости w?r(t), программы угла тангажа 3pr(t) и программы угла рыс-
кания v|/pr(t) в функции времени. При этом движение PH условно разбивают на
три составляющие:
223
- продольную,
- нормальную,
- боковую.
Такой случай реализуется, например, когда на PH установлен жидкостный
реактивный двигатель с регулируемой тягой. Программы Spr(t) и w pr(t) определя-
ют опорную траекторию полета в вертикальной плоскости.
Для задания боковой составляющей движения специальным образом выби-
рается навигационная, начальная стартовая СК. Она задается так, чтобы боковая
составляющая движения на опорной траектории тождественно равнялась нулю.
При этом программа угла рыскания \|/pr(t) = 0 полностью определяет опорную бо-
ковую составляющую движения.
В полете в каждый момент времени система управления обеспечивает от-
слеживание опорной траектории. В современных ракетах обычно регулирование
тяги двигателя осуществляется не для управления траекторией, а для повышения
экономичности двигателя. При этом канал управления продольным движением
оказывается разомкнутым, а регулируются только нормальная и боковая состав-
ляющие.
Для отслеживания опорной траектории система наведения формирует угло-
вые программы, т.е. требуемые углы ориентации вектора тяги и сигналы управ-
ления движением центра масс у3, уз, z3, z3. Сигналы регулирования скорости оп-
ределяются путем интегрирования проекций кажущегося ускорения на плос-
кость, перпендикулярную опорному вектору скорости
Уз(0= JwY3(t)dt;
? (4-2.1)
z3(t)= jwZ3(t)dt,
О
где wY3(t), wZ3(t) - нормальная и боковая составляющие кажущегося ускорения.
С учетом того, что на большей часта опорной траектории PH угол атаки ра-
вен нулю и программный угол тангажа соответствует опорному углу наклона
вектора скорости, ускорения wY3(t), wZ3(t) могут быть определены по формулам:
W уз (О = -wx0(t)sin Sp,.(t) + wy0 (t)cos »рт (t); (4.2.2)
wZ3(t) = w x0(t) cos9pr(t) sinypr(t) + w yo(t) sin9pr(t) sim|/pr(t) + w zo(t) cosypr(t).
Сигналы по координате определяются интегрированием сигналов по скорости
Уз(0= ]уз(0*;
’ (4.2.3)
z3(t)= jz3(t)dt.
О
Программа угла тангажа при функциональном наведении
Программа угла тангажа при функциональном наведении подразделяется
224
на следующие участки:
- вертикальный участок,
- участок полета с заданным углом атаки,
- участок перехода к итеративному наведению.
Логика формирования угла тангажа следующая.
На участке вертикального полета при 0 < t < t$o Эрг = ах%,
где аэо - начальное значение угла тангажа при старте PH.
На активных участках полета 1-й и 2-й ступеней до момента сброса ГО
tao < t < t&i программа угла тангажа аппроксимируется кубическим сплайном в
функции времени [50]
Зрг = a&3i d3 + d2 + аЭн d + a$oi, (4.2.4)
где d = t - t&i;
аэзь аэ2ь asoi - коэффициенты аппроксимирующих полиномов;
t^i - моменты переключения коэффициентов.
При переходе с участка функционального на участок итеративного наведе-
ния в программах тангажа и рыскания возникают скачки, которые недопустимы
для системы стабилизации. Поэтому необходимо вводить специальный маневр
смены углового положения, на котором программы формируются без скачков как
по углу, так и по угловой скорости. При этом время разворотов At выбирается из
условия обеспечения качества переходных процессов регулирования как на раз-
вороте, так и после него [54, 57].
Оптимальный по времени разворот на угол АЗ за время At осуществляется с
максимальным угловым ускорением знак которого изменяется на середине ма-
невра. При этом производная по углу & и угол 3 определяются соотношениями
9(t-t0) npnt-t0Sy;
-9(t-t0 -Д1)при t-t0
&о+&-"-у)2
Э|> g(t-to-At)2
(4.2.5)
At
при t-t0 ;
At
при t-t0 >
В приведенных соотношениях не учитывается характер изменения угловой
программы (производная по углу) до начала и после окончания маневра, не учи-
тываются возможные ограничения по угловой скорости. Кроме того, БЦВМ фор-
мирует программы тактированно, периодически. Поэтому используют специаль-
ный алгоритм [59, 62] (алгоритм ускоренного разворота), позволяющий реализо-
вать оптимальный маневр в дискретной форме, обеспечить стыковку по углу и
угловой скорости с программами до начала и после окончания маневра, а также
учесть ограничение по угловой скорости (при необходимости).
Алгоритм ускоренного разворота пересчитывается с базовым тактом БЦВМ
(Т4) и формирует приращение угловой программы ASpr[t] за такт (что эквива-
225
лентно производной) и угловую программу Spr[t]. В качестве исходных для алго-
ритма ускоренного разворота задаются:
- аО - приращение угловой программы за такт до начала «ускоренного
разворота»;
- ак - требуемое приращение угловой программы за такт после окончания
«ускоренного разворота»;
- s - требуемое приращение угла за время маневра «ускоренного разворо-
та»;
- Дп4 - длительность (число тактов Т4) маневра;
- 8п4 - длительность (число тактов Т4) движения с ускорением (A3[t] * 0)
в начале и в конце маневра, Зп4я < Ащз/2.
Алгоритм ускоренного разворота включает в себя три участка. На первом и
третьем участках угол изменяется по квадратичному закону (движение с посто-
янным угловым ускорением), на втором участке - по линейному закону (движе-
ние с постоянной угловой скоростью). Второй участок может отсутствовать.
В соответствии с алгоритмом программа по углу и угловой скорости фор-
мируется в виде
где
A3pr[t] = A3pr[t - Т4] + A3[t];
МЧ ^pr[t т4] + AOpr[t],
do, при i<6n4
A9[t]=< 0, при 8п4<1<Дп4-8п4
db при Дп4 -8n4 <i < Дп4
(4.2.6)
s - Дп4 • a0 - 0.5(8n4 -l)(ak -a0)
(Дп4-8n4+l)8n4
s - An4 > aQ - 0.5(8n4 - l)(ak - a0) ak -a0
(Дп4 - Sn4 + l)8n4 8n4
(4.2.7)
i - номер такта, отсчитываемый от начала маневра (начинается с 0).
Последние соотношения получены из следующей системы алгебраических
уравнений, построенной на основе формулы суммы членов арифметической про-
грессии:
А9рг[О] = ао +dOb
ag + d.g0n4 ~ ак — dt8n4,
s = s, +s2 + s3,
s -8n a +(Sn4+l)8n4do
Sj — on 4 a0 i - ,
s2 =(a0 + d08n4)(An4 -28n4),
_ , , e . (3n4 + l)8n4 • d,
s3 = 8n4(a0 + d08n4) + -i—*—2—-—4
(4.2.8)
226
Первое уравнение определяет первый член арифметической прогрессии,
соответствующий приращению угловой программы на первом такте маневра.
Второе уравнение определяет требование стыковки по угловой скорости при пе-
реходе с участка на участок. Третье уравнение определяет суммарное прираще-
ние угла, которое включает в себя три составляющие по участкам.
Исходные параметры определяются соотношениями
sa ~ А&ргй = ^рг[п“Ь 1] — ЭрГ[1ц];
аоа = АЗрг[п4] akS 3 рг[п] Т4.
Параметр Ащ задается ПЗ. Значения &рг[п + 1] и Spr[n] рассчитываются в
блоке алгоритмов итеративного наведения.
На рис. 4.2.2 - 4.2.3 показаны примеры процессов «ускоренного разворота»
для различных вариантов начальных и конечных значений углов и угловых ско-
ростей; на рис. 4.2.2 - вариант с нулевыми значениями начальной и конечной уг-
ловой скорости ао = ак = 0; на рис. 4.2.3 изображен вариант с положительным зна-
чением начальной угловой скорости ао > 0 и отрицательным значением конечной
угловой скорости ак < 0; на рис 4.2.4 - вариант с положительными значениями
начальной и конечной угловой скорости ао > 0, ак > 0.
Рисунок 4.2.2 - Разворот с нулевыми начальными условиями
ао = О, ak = 0, s= 10 град, Ли = 25,5п= 12
227
Рисунок 4.2.3 - Разворот при ао = 0.04 град/с, а^ = - 0.04 7с,
s= 10град, Ап = 25,5п=12
ЗргМ Д3рт[п4]
Рисунок 4.2.4 - Разворот при ао = 0.04 град/с, а^ = 0.04 град/с, s = 10°,
Дп = 25,5п=12
Угловые рассогласования
Для ориентации вектора тяги в требуемом направлении и отслеживания
опорной траектории система наведения формирует угловые рассогласования, ко-
торые отрабатываются системой стабилизации. Для этого формируется про-
граммный кватернион
Apr Лфрг Лург
'cos(9pr /2)Л ^os(vPr /2)А 'cos^ /2/
Лфрг 0 0 О 0 SUl(Vpr О /2) sin(<ppr 0 /2) >
ksin(9pt /2)J I 0 J < o /
(4.2.10)
228
кватернион отклонения Л8
5о 1 1 1 1
А — А А — 8. 0 0 А<р]/2 Аф!/2 (4.2.11)
-**•3 ^*-рг 62 0 A\|/i /2 0 Аф!/2
А. _AV2_ 0 0 _АЗ,/2_
Угловые рассогласования определяются через элементы кватерниона Л$
ДЭч = 2 • 8о • 8j,
Д\|/1 = 2 • 8о * 82з (4.2.12)
Ду1 = 2 • 8о • 8].
Сигналы регулирования нормальной и боковой скорости
Сигналы регулирования нормальной и боковой скорости формируются по
формулам, приведенным в начале разделе, и затем перепроектируются с учетом
программы по углу вращения <ррг в программно-связанную СК
Дуз = Уз • cosq>pr + z3 ’ sin(ppr;
Az3 = -уз sin<ppr + z3 • coscppr;
(4.2.13)
Ду3 = Уз cos <ppr + Z3 sin cppr;
Az3 = - уз sin (ppr + z3 cos <ppr.
4.2.3.2 Прямое наведение
Типовые требования к прямым методам наведения следующие:
- малая методическая ошибка;
- определение программной траектории, близкой к оптимальной по энер-
гетике;
- формирование программ управления в функции реализовавшихся в по-
лете кинематических параметров v, г и заданных граничных условий;
- реализуемость с помощью БЦВМ.
Точное определение оптимального управления достаточно сложно и прово-
дится методами вариационного анализа. Расчеты выполняются в наземных усло-
виях при подготовке полетного задания. Решение подобной задачи в БЦВМ непо-
средственно в полете в режиме реального времени невозможно. В связи с этим
используют специальную схему построения математической модели итеративно-
го метода наведения [53, 55, 60].
Вначале вводится такое упрощающее предположение, при котором можно
получить аналитическое решение вариационной задачи. Это позволяет устано-
вить структуру управления, близкого к оптимальному, т. е. получить вид фор-
мульной зависимости, численные параметры которой требуется определить. Ос-
новным является предположение об однородности гравитационного поля, т. е.
g=const. При этом предположении для обеспечения заданного вектора скорости,
высоты и боковой координаты оптимальные программы тангажа 3 и рыскания vg
имеют вид
229
(4.2.14)
= аа + bs • t;
tg\|/ = av + bv • t.
Если необходимо обеспечить только требуемый вектор скорости, то соот-
ношение принимает вид
& = const;
(4.2.15)
у = const.
При формировании конкретной вычислительной процедуры может потре-
боваться введение дополнительных упрощений предположений, которые более
подробно рассмотрены ниже.
Вводимые упрощения неизбежно вносят погрешности в определение пара-
метров управляющих функций, что отражается на точности выполнения конеч-
ных условий.
Очевидно, что точность выполнения конечных условий тем выше, чем ко-
роче участок, на котором действует рассчитанная таким образом программа
управления.
Если в процессе управления полетом PH периодически с выбранным так-
том повторять расчет параметров программы управления (итеративная схема), то
точность выполнения конечных условий всякий раз будет повышаться. При этом
фактически на точность выполнения конечных условий будут влиять только по-
грешности задания программы при последнем цикле ее уточнения. На предыду-
щих циклах допустима увеличенная погрешность задания программы. Важно
только, чтобы итерационный процесс расчета программы управления был сходя-
щимся. В этом состоит принципиальное отличие итеративного метода наведения
от функционального, где высокие требования по точности выполнения програм-
мы управления должны выполняться на всем активном участке полета.
Постановка задачи. Принятые допущения
Параметры переходной (конечной) орбиты PH задаются полетным задани-
ем:
Q - долгота восходящего узла;
i - наклонение орбиты к плоскости земного экватора;
Шр - аргумент перигея;
е - эксцентриситет орбиты;
р - полуфокальный параметр.
Задача системы управления PH состоит в том, чтобы путем изменения ори-
ентации тяги двигателей обеспечить в прогнозируемый момент времени парамет-
ры движения, соответствующие заданной орбите:
где
v^[TT] - v^T; vn[TT] - vnT; vc[TT] - 0; (4 2 16)
П[Тт]-Пт; C[Tt] = O,
Tt - прогнозируемое время окончания фазы итеративного наведения, от-
считанное от текущего момента этой же фазы;
230
v^T, vnT - компоненты вектора требуемой абсолютной скорости в орбиталь-
ной системе координат;
т|т - требуемое расстояние от центра Земли.
Программную ориентацию вектора тяги в орбитальной системе координат
удобно задавать баллистическими углами тангажа ЗрГ и рыскания Vpr, которые
отсчитываются в соответствии с рис. 4.2.5.
Рисунок 4.2.5 - Программная ориентация вектора
тяги в орбитальной системе координат
Программы тангажа и рыскания вычисляют при следующих допущениях:
1. Начальная фаза итеративного наведения включает в себя следующие три
участка:
1 - участок работы МД2 и РД2;
2 - участок работы РД2;
3 - участок работы МДЗ.
Тяга двигателей на всех участках полета постоянна, т.е. кажущееся ускоре-
ние вдоль продольной оси определяется зависимостью вида
U.
wxi=-----тг, (4.2.17)
Ti - ti
иМД2 *^МД2 + Up ' Орд2
где щ = —-—:-----------------------средневзвешенная расчетная скорость ис-
ОмД2 + Орд 2
течения продуктов сгорания топлива маршевого и рулевого двигателя 2-й
ступени;
имд2 = IspMp 2 ’ go - расчетная скорость истечения продуктов сгорания топ-
лива маршевого двигателя 2-й ступени;
ц2 = Прд2 = 1зрРД2' go “ расчетная скорость истечения продуктов сгорания
топлива рулевого двигателя 2-й ступени;
231
u3 = 1мдз • g0 - расчетная скорость истечения продуктов сгорания топлива
маршевого двигателя 3-й ступени;
Ik (к = МД2, РД2, МДЗ) - номинальный удельный импульс тяги соответст-
вующих двигателей;
Gk (к = МД2,РД2,МДЗ) - номинальный секундный расход топлива соот-
ветствующих двигателей;
Ti - время полного выгорания суммарной массы 2-й и 3-й ступеней (i=l, 2)
и массы 3-й ступени (i=3);
ti - относительное время, отсчитываемое от момента расчета угловых программ;
go = 9,80665 м/с2.
Строго говоря, предположение о постоянстве тяги не является обязатель-
ным и введено для упрощения вычислений. В вычислительном плане наиболее
сложной является фаза итеративного наведения с момента включения на 2-й сту-
пени до выхода на переходную орбиту, так как необходимо учитывать параметры
траектории PH на разных участках траектории (рис. 4.2.6).
Итеративный метод наведения при доразгоне для вывода на конечную ор-
биту (после пассивного участка) представляет собой частный случай, когда весь
полет происходит при работе только одного двигателя.
Рисунок 4.2.6 - Параметры траектории PH на разных участках полета
На рис. 4.2.6 принято:
tH - время начала счета алгоритмов на 2-й ступени;
trnc ~ расчетное время предварительной команды ПК (выключение
маршевого двигателя 2-й ступени);
trx “ расчетное время главной команды ГК (выключение рулевого
двигателя 2-й ступени);
232
Tf - расчетная длительность участка полета 2-й ступени от момента
начала до команды ПК;
Т2 “ расчетная длительность участка ПК - ГК;
Т* - расчетная длительность пассивного участка (технологическая
пауза для организации запуска двигателя 3-й ступени);
Т3* - расчетная длительность участка прямого наведения.
2. Вектор ускорения силы притяжения Земли постоянный и равен среднему
значению текущего и конечного векторов для центрального поля:
gc= |(g[O] + gT[TT])> (4.2.18)
где g(o)=-^-r;
г=а,тъС)т;
г=л/^+П2'-*< ; (4.2.19)
gT(TT)=| 0, 4> о т;
< Пт J
|1 = 3,98600444014 м3/с2 - гравитационная постоянная Земли;
Тт - прогнозируемое время выхода PH на промежуточную (конечную) ор-
биту.
3. Программы тангажа и рыскания задаются в виде линейных функций време-
ни:
^pr[t] = 9+(-ki + k2-t*);
(4.2.20)
ЖргМ = Ф+(-кз + к4-1*),
где 3, ш - средние значения программных углов тангажа и рыскания;
(- ki + k2 • t*), (- k3 + кд • t*) - малые углы переменной составляющей.
Параметры угловых программ определяются из условия обеспечения тре-
буемых конечных условий. Для этого при сделанных допущениях уравнения
движения центра масс PH интегрируются в явном виде и по пяти конечным усло-
виям находятся пять неизвестных величин: (3- ki), k2, (у- кз), кд и конечное
время полета Ту.
Основные соотношения итеративного метода наведения приведены в сле-
дующем разделе.
Основные уравнения итеративного метода
Схема вычислительной процедуры
Краткое описание характерной последовательности вычислений представ-
лено ниже, а соответствующая структурная схема показана на рис. 4.2.7.
233
Рисунок 4.2.7 - Структурная схема алгоритмов итеративного наведения
234
Характерная последовательность вычислений
1. Вначале проводится идентификация вектора тяги. На участках с постоян-
ной тягой оценивается фактическое значение времени полного выгорания
текущей массы
(4.2.21)
wxi
где wxl - оценка модуля кажущегося ускорения по данным навигационной за-
дачи, которая может проводиться однократно или с периодическим уточне-
нием;
Ui - номинальное (расчетное) значение скорости истечения продуктов сго-
рания топлива.
2. С использованием полученных в предыдущем цикле вычислений значений
конечного времени и конечных условий осуществляется прогноз конечной
угловой дальности и вычисление требуемых конечных условий по компо-
нентам скорости v^T, vnT и модулю радиуса-вектора цт в орбитальной сис-
теме координат.
3. На основе спрогнозированного значения конечной угловой дальности те-
кущие параметры движения ракеты-носителя переводятся в орбитальную
систему координат.
4. Определяется уточненное время, оставшееся до момента выхода на проме-
жуточную (конечную) орбиту, и средние значения угловых программ из
условия обеспечения требуемой конечной скорости.
5. Вычисляются переменные составляющие угловых программ из условия
обеспечения требуемых конечных значений скоростей и координат.
6. Найденные угловые программы переводятся в начальную стартовую систе-
му координат и используются в системе угловой стабилизации.
Для дальнейших вычислений введем понятие некоторых стандартных инте-
гралов от кажущегося ускорения на каждом из характерных участков его измене-
ния (тяга постоянна):
1; = Г—Ui - • t’dt’ = Tj • Lj - Uj - Ть
Hi "ti
Ti „ пр 2
= J—Ч- - (t*)2dti = Ti • Ti ~ui ~;
0 Ti 4
Tjt*
s,= jf^-(dt-)2=Li-T1~I1;
0 0 Ti 4
(4.2.22)
235
Vi -г 2
Qi = JJ-A-- t*(dt')2 =Sj - Ti -Uj
т *
T‘ • n T3
Ui = i f---r-(t’)2(dt*)2 =Qi ti -Ui -d-,
oo^i-ti 6
где Tj - длительность i-го участка,
Li - спрогнозированное приращение кажущейся скорости,
Si - спрогнозированное приращение кажущегося пути.
При наведении на участке работы 2-й ступени PH постоянно уточняется
время выключения маршевого двигателя 3-й ступени, а времена команд ПК и ГК
принимают расчетными. Фактические команды ПК и ГК можно выдавать по на-
бору заданного значения модуля скорости, величина которого определяется алго-
ритмами прямого наведения.
Рассмотрим более подробно вывод основных зависимостей и необходимую
последовательность вычислений.
Прогноз терминальных параметров
Вначале определим значение полной угловой дальности прогнозируемой
точки выхода PH на промежуточную орбиту Фт.
Производная угловой дальности по времени
(1Ф _ VCOS0
dt г
где v - модуль абсолютной скорости;
О - угол наклона вектора абсолютной скорости к плоскости местного гори-
зонта;
г - расстояние от центра Земли до центра масс PH.
Сделаем допущение о постоянстве величин 0 и г и зададим их равными
конечным значениям:
(4.2.23)
0[t] = 0T;
r[t] = Пт.
В этом случае прогнозируемую угловую дальность от текущей точки до
точки выхода PH на заданную орбиту АФу можно приближенно найти так:
л тт
Дфу Lffidf. (4.2.24)
Пт о
Приближенное конечное время Т? получим, уменьшив соответствующее
значение из предыдущего цикла вычислений на величину такта счета алгоритмов
прямого наведения:
Т[ - Тт (t - At) - At; At - шаг итерационного цикла вычислений.
В момент начала прямого наведения на 2-й ступени величину Ту принима-
236
ют равной сумме расчетных значений длительности участков выхода на проме-
жуточную орбиту.
Модуль скорости v[t ] определим интегрированием приближенного уравне-
ния
v = wxl • cos а - g • sin 0, (4.2.25)
где a - угол атаки, при 1 - *пк,
U1
Tj-t;
при ^ПК < t 1гк,
WX1 = Т2 "" *2 0 при trx < t - *гк + Тп,
Из . * при t > *ГК +Тп,
Ti - вр емя полного выгорания текущей массы PH на i-м участке изменения
кажущегося ускорения;
t* - относительное время, отсчитываемое от момента расчета угловых про-
грамм на текущем участке или от расчетного времени начала после-
дующих участков наведения.
Необходимо отметить, что на текущем участке наведения величина Ti не-
прерывно уменьшается, а на последующих участках т, постоянно и равно величи-
не, задаваемой в полетном задании.
При выведении PH на орбиту, близкую к круговой, можно принять, что
cosa» 1,
g sinO » 0.
Эти же допущения можно принять и для случая эллиптической орбиты (в
том числе переходной), так как здесь выведение на орбиту осуществляется в ее
перигее.
В этом случае
t*
v[t*] » v[Q] + Jwxldt* = Vo + L[t*J. (4.2.26)
о
Здесь vo - модуль вектора абсолютной скорости в текущий момент расчета угло-
вых программ t;
L = Li + L2 + L3 - суммарная кажущаяся скорость, набираемая на интервале
времени от t до t +1*.
После окончания i-ro участка величину L, принимают равной нулю.
Для дальнейших вычислений определим значение суммарного кажущегося
пути S через введенные ранее стандартные интегралы (4.2.22):
237
Тт TTt* Til ,,
S= j Ldt’ = j Jwxl(df)2 = j j-“77 dt;2 +
0 0 0 0 0 T1 4
(T2+Tn+T3)Tj-^-dt; +
oJT,-t; (4.2.27)
T2f2 n , T2 и Тз‘з 11
+ J i~TFdt2 +(Tn +T3). J—^dt; + f Hhrdt? =
0 0 T2 t2 o T2 t2 0 0 T3 ^3
= Si 4- S2 4- S3 4- (T2 4- Tn 4- T3) • Lj + (Tn 4- T3) • L2,
где Tj - длительность i-го участка в интервале времени от t* = 0 до прогнози-
руемого момента выхода PH на заданную орбиту t* = Тт;
Тп - длительность пассивного участка полета в том же интервале времен.
После окончания i-ro участка значения величин Ti, Ц, Si принимают рав-
ными нулю.
Проинтегрировав уравнение (4.2.24), получим выражение для прогнози-
руемой угловой дальности до точки выхода PH на заданную орбиту:
Дфу а + (4.2.28)
Т|т
где Т т = Т2 4- Т3 4- Тп + Т'4;
S' = Sj + S2 + S'3 + (Т24-Тп + Т'з) L] + (Тп + Т'з) • L?;
Т3 - первое приближение для потребного времени работы маршевого дви-
гателя 3-й ступени PH.
В приведенной зависимости значком (') отмечены величины, для вычисле-
ния которых используют приближенное значение Т\
Учет (при необходимости) гравитационных потерь (0 ^-0) и отличия угла
атаки от нуля проведем введением эмпирического коэффициента kg, зависящего
от номинальной траектории выведения.
Запишем очевидное тождество
Тт Тт
Jv[t’]dt’ = vo • Т'т + S'=+ J(v[t*]—v0 -wxl[t‘])dt’.
0 0
Значение величины wxi[t ] при t* = Тт
wxi[t ] = Li 4 L2 4- L'3 = L'.
Величина подынтегрального выражения (v[t ] - v0 - wxi[t*]) изменяется от
нуля в текущий момент времени до величины (v - vo - L') в конечный момент Т'т-
Коэффициент kg можно подобрать таким образом, что по теореме Лагранжа о
среднем значении
Тт
f(v[t’]-v0 - wx)[t‘]dt* » - kg • Т'т • (v0 + L' - vT).
0
238
Значение kg выбирается по номинальной траектории для момента начала
прямого наведения и сохраняется до момента выхода на промежуточную орбиту.
С учетом сделанных допущений прогнозируемая угловая дальность до ко-
нечной точки оценивается следующим образом:
Дфу = coseT (v0 • Т'т + S' - kg • Т'т • (Vo + L' - vT)). (4.2.29)
Пт
В момент начала прямого наведения величины cos0T,r|T, vT определяют по
параметрам расчетной орбиты, приведенным в полетном задании:
ут = ф т —
kv = e(2cosvT + е);
VT-kv’^;
р
г , >
1 + ecosvT
(4.2.30)
л l+e-cosvT
COS 0*р —-.------,
kv
где Ф т - расчетное значение полной угловой дальности точки выхода PH на
орбиту, отсчитываемой от восходящего узла требуемой орбиты;
Vt - расчетное значение истинной аномалии точки выхода PH на заданную
орбиту.
На последующих тактах счета алгоритмов прямого наведения величины
созОт» Пъ vt берут с предыдущего цикла вычислений.
В дальнейшем полную угловую дальность прогнозируемой точки выхода
PH на заданную орбиту находят как сумму текущей утловой дальности Фо и про-
гнозируемой угловой дальности АФу:
ФТ = Ф0 + ДФУ. (4.2.31)
Текущую угловую дальность определяют по параметрам движения PH, ко-
торые переводят из начальной стартовой в опорную систему координат:
По =G Уо
Го=7^”+По ;
(4.2.32)
sinO0=—; сокФ0=— (0<Ф0<2л).
Го г«
Полученное значение полной конечной угловой дальности используют для
вычисления истинной аномалии, прогнозируемой точки выхода PH на заданную
орбиту и матрицы перехода от начальной стартовой к опорной системе коорди-
239
нат - К.
Требуемые конечные условия по скорости и координатам в орбитальной
системе координат определяем следующим образом:
Vt ” Фт “
kv - -yl+ е ‘ (2cosvT + е) ;
VT=kv‘^;
Р Р
Пт=—— -------; 8лт= —;
l + e-cosvT r|f
. Л e-sinvT Л l + e-cosvT
sm 0Т =-------; cos0T =----------;
kv kv
v^t = vt • cos0t> vnT = vt • sinOy; V;T = 0*
Здесь vT - истинная аномалия прогнозируемой точки выхода PH на заданную ор-
биту;
Vt - модуль вектора конечной скорости;
0Т - угол наклона вектора конечной скорости к плоскости местного гори-
зонта (угол между вектором конечной скорости и осью О£, орбитальной
системы координат).
Определение средних значений программ углов тангажа и рыскания
Средние значения программ тангажа и рыскания найдем из условия обес-
печения требуемого вектора конечной скорости.
При сделанных допущениях дифференциальные уравнения движения цен-
тра масс PH в орбитальной системе координат имеют вид
v^=wxi -cosG-cosy-g^;
vn =wxI -sin0-cos\j/-gnc;
(4.2.34)
v;=-wxl-smy-g^c.
Текущие значения координат, скорости и ускорения силы притяжения пе-
реводятся в орбитальную систему координат следующим образом:
(4.2.35)
240
rsxo'l
где
УО =
<ZO>
VyO
4VzO;
gy0 - текущие координаты и проекции векторов скоро-
<SzO )
сти и ускорения силы притяжения, определяемые при решении навигаци-
онной задачи.
Средние значения проекций ускорения силы притяжения
g^c 2^^’ ёлс 2 "i" 1g ,c ‘ ryg£#
Проинтегрировав систему уравнении (4.2.34) по времени от 0 до конечного
времени Тт, получим систему из грех уравнений для определения трех неизвест-
ных 3, v, Тт:
V^T - + g^c • Тт L cosS• cosф;
Vr»T ~ Vn + gnc Тт = L • sin 5 • cos \j/; (4.2.36)
-v^ + g£c-TT==-Lsiny,
где L — Lj + L2 + L3; Тт — Ti + T2 + Тп + T3; Lj = и. In-5— (i= 1,2, 3).
^i-Ti
Из составляющих величины Tf постоянно уточняется только время работы
маршевого двигателя 3-й ступени Т3. Значения Ti, Т2, Тп зависят лишь от текуще-
го времени
Т1=- tflK — t при 1 - 1пк >
0 при t > trK + Тп;
т2=- т2 При
0 при t>t‘rK+Tn*;
Тп =‘ т‘ Ln при t- 1пк ,
0 при t > trK + Trj.
Рис. 4.2.8 иллюстрирует решение системы уравнений (4.2.36) для двумер-
ного случая (рассматривается движение в плоскости орбиты).
Возведя в квадрат левые и правые части уравнений (4.2.36) и сложив их,
получим уравнение с одним неизвестным Гт:
(v£r - + g^c • Тт)2 + (улТ - vn + gnc Тт)2 + (- + g£C • Тт)2 = L2. (4.2.37)
Необходимо учитывать, что входящие в это уравнение проекции текущего
вектора скорости и среднего ускорения силы притяжения зависят от конечного
времени Тт.
Уравнение (4.2.37) не имеет решения в явном виде и может быть решено
путем итераций.
241
Рисунок 4.2.8 - Решение системы уравнений (4.236) для
двумерного случая
На рис.4.2.8:
В - прогнозируемая точка выхода PH на заданную орбиту;
v - текущий вектор скорости;
vt - требуемый вектор конечной скорости;
Aw- потребное приращение кажущейся скорости.
Итерации на борту PH нежелательны, поэтому будем искать решение в сле-
дующем виде:
Тт = Т'т + ДТ3,
где АТ3 - малая поправка.
Поправка АТ3 определяется с помощью линейного разложения составляю-
щих уравнения (4.237) в предположении-малого приращения величины Т'т
(v^t - V£ + g*c • (Т'т + АТ3))2 = (v£p - v< 4- g£C • Т'т)2 +
Г Sv. d
4-2 • (v^r-v^ + g^c • T'T) x -—7- +g^c+~~Tr -AT3;
olT oTT
(улт “ vn + gnc • (Т'т + АТ3))2 - (vnT - vn + gnc • Т'т)2 + 2 • (vnT - vn +
+ &1С-Гт)хС^- + ёпс+-^.тЛ-ДТ3;
у STp STp J
(~ V; + g^c • (Т'т + ДТ3))2 = (— V; + g(v Т'т)2 + 2 • (— V(; + g(;c • Т'т) х
( Sg?c Л
XI — 4* £rC 4* Тт * А Та ,
V этт атт т) 3
L2 = (L')2 + • ДТ2; L' = Ll + L2 + L'3.
х2-т;
(4.238)
242
При выводе системы уравнений (4.2.38) считалось, что проекции конечной
скорости в орбитальной системе координат не зависят от величины Тт.
Это предположение в точности справедливо для выведения на круговые
орбиты и в перигей эллиптической орбиты.
Принятое допущение можно использовать и при выведении в любую точку
орбиты, близкой к круговой, так как ошибка определения конечного времени бу-
дет незначительной.
Найдем производные компонент текущего вектора скорости и среднего
значения ускорения силы притяжения по времени Тт.
Учитывая, что при изменении времени Тт изменяется только матрица пере-
хода Ф, получим
5Тт Svn т г-зтФт -созФт 0^ fvx0>
атт чбТт j 1 ' ~'д'Тт" созФт -5тФт 0 G- vy0 < 0 0 oj (vz0; (4.2.39)
Произведение соответствующих матриц определяется уравнением
f- 8ШФТ -со^Фт 0Л -к21 -Ки -К2/
созФт -8Н1ФТ 0 G- Кн к12 Кв
< 0 0 0, 1 0 0 0 )
где Кц - элемент матрицы К.
Отсюда нетрудно показать, что выражения для производных текущего век-
тора скорости по времени имеют следующий вид:
ду> дФт
---2_ = _у------— -
5Тт ” ЗТт ’
dv ЭФТ
—L = vE--
ЭТТ s атт
(4.2.40)
^-0,
атт
5Фт 5ДФу COS 0т / т f\
где —«----------------- (v0 + L ).
йТт ЭТТ т|т
Производные среднего значения силы притяжения находят аналогично:
dg^c 1 _ 1 афт . dgnc 1 dgn = 1 дФт
атт 2 этт 2g” атт ’ атт 2 отт 285 атт
^=о.
этк
(4.2.41)
243
Подставив полученные производные в (4.2.38), найдем в итоге линейное
разложение составляющих левой части уравнения (4.2.37) для определения Тт:
(v^t - Vf + g£C ’ (Т'т + ДТз))2 - (v^t - + g^c • Т'т)2 + 2 • (v^t -v^ +
+ g^c • T'r) • g£-AT3;
(VqT - vn + gnc • (T'T+ ДТ3))2 = (vnT - vn + gnc • T'T)2 + 2 • (vnT ~vn +
+ &1с-Т'т)^’Г|-ДТз;
(- V(; + g^c • (Т'т + ДТз))2 = (- V4 + g?o • Т'т)2 +
+ 2 • (- vc + • Т'т) • g£ -ДТз,
* . ( 1 тг ^Фт ♦ ( 1 гр? А дФТ *
где g^=gtc+ vn--gn-TT •—-;gl|=g)1c- v^--grTT •—;g?=gCc.
\ 2 } о It \ 2 ) oTt
Для сокращения записи последующих формул введем понятие начального
приближения потребной кажущейся скорости:
Aw£= v^r - + gnc • Т'т;
Aw* = vnT - vn + gnc - T'T; (4.2.42)
Aw£= - + g^c • T'T.
Окончательно линейное уравнение для определения неизвестной поправки
АТз выглядит так:
(aw- У' + (Aw’ У + (Aw’ У +
+ 2 • (Aw • g^ + Awn • gn + Aw,. • g? )• ДТ3 = 0 2 43)
= (L')2 + 2H11L ,дтз '
т3 - r3
Решив это уравнение, найдем поправку к приближенному значению време-
ни, оставшегося до момента выхода PH на промежуточную орбиту:
дт = (Тз ~тз) ((Aw^y + (aw;)2 +(Aw;y - ду)
3 7^u3 • L' - (т3 - Тз) • (Aw^ g^ + Aw; • g* + • g*)) ’
Тт ~ Т'т + AT3;
T4 = T'4 + AT3.
Обычно максимальное значение поправки АТ4 получается в момент начала
прямого наведения на 2-й ступени. На последующих тактах счета алгоритмов
прямого наведения величина поправки уменьшается, т.е. процесс вычисления ко-
нечного времени Тт является сходящимся.
Учитывая, что
244
(4.2.45)
о *
— (vT —v +gc • Тт) = g ,
этт
получим уточненное значение потребной кажущейся скорости:
Aw^ -• Aw^ + • АТ3;
Awn=Aw‘ +g;-AT3;
Aw<- = Aw£ + g£ AT3.
После этого систему уравнений (4.2.45) можно записать в следующем виде:
Aw^ = L -COS&- cos\j/;
Awn = L sinS-cosvg;
Aw^ = -L • sin у,
где L = д/aw? + aw^ + aw^ .
Из третьего уравнения системы (4.2.46) найдем среднее значение програм-
мы угла рыскания:
(4.2.46)
\j/ = -arcsin
AW(T
^AWj +AW^ +AW^ j
(4.2.47)
71 ~ 71
— <w< —
2 Y 2
Среднее значение программы угла тангажа определяется из второго урав-
нения системы (4.2.46)
9 = arcsill
(4.2.48)
71 ~ П
---<$< —.
2 2
Определение переменных составляющих программ тангажа и рыскания
Сначала определим переменную составляющую программы по рысканию
из условия обеспечения заданных конечных условий по проекциям вектора ко-
нечной скорости и радиуса-вектора на ось в ранее определенное время Тт
vc(Tt)-0, С(Тт) = О.
С учетом разложения
sira|/0 = sin(\j/” k3 + • t*) ~ sinф + (- k3 + k4 • t) • cosxjr
245
уравнение для , аналогичное (4.234):
V; =-Wxlsin\|/o-g<;c,
приводится к виду
vc = -wxl(siny + (-k3 + k4 • t*) cosy) -g<c. (4.2.49)
Интеграл от правой части уравнения (4.2.49) находится отдельно на каждом
из участков изменения кажущегося ускорения:
Тт
J wxl (sin v + (-k3 + k4 • f) • cos =
о
Tj u
= J— ^(siny +(~k3+k4 • t*)-cos\j;)dti+
о
T2 u
J----(sin ф + (-k3 + k4 • T) + k4 • t^) • cos ф )dt J +
0 T2-t2
T3 u
+ J —U1— (sin у + (-k3 + k4 • (T2 + T2n )+k4 • t;) • cos у) dt;,
0 T3 " r3
где Т2п = Т1 + Т2 + Тп.
Используя стандартные интегралы (4.2.22) и группируя члены, получаем
первое уравнение для определения неизвестных к3 и к»
- L • sin\j7 - g^c • Тт + (к3 • L - кд • l)cos\j/ = 0. (4.2.50)
Здесь
Тт
L = Jwxldt* = L] + Ц + L3;
о
Тт
I => Jwxl • t*dt* = I] +12 +13 + Ti L2+ T2n L3.
о
Так как величина ф определялась решением системы уравнений (4.236), то
- L • зшф - * Тт = 0,
поэтому после упрощения получим
k3 ’ L-кд • I 0.
(4.2.51)
Второе уравнение для определения неизвестных к3 и кд найдем, проинтег-
рировав уравнение (4.2.49) дважды:
246
£+VcTT-|g<c-T|-(smy-k3-cosi|/)- J Jwxld(t’)2-
2 0 0
Тт t*
-k4 cos\jr j Jwxl-t*d(t*)2 =0.
о 0
Первый двойной интеграл был определен ранее (4.2.27):
Т t*
S = J jwxl(dt’)2 = S, + S2 + S3 4- (T2+Tn + T3) L, + (Tn + T3) • L2.
0 0
Второй двойной интеграл обозначим через Q и найдем следующим обра-
зом:
Тт е Ъ li
Q= J Jwxl f(dt‘)2= J j—Hl—. tTdt;2 +
00 0 0 T1
+ (Т2+ТП+ТЭ)- J-Hl—.t;dt7 +
0 T' “ti
T2tJ u T= n
+ I J--v (Ti + t;)dti+(Tn+T3)- J-^--(T1 + f2)dt*2 +
0 0Т2~Ч 0 T2-t2
+Tf f^-(T2n +t;xdtj)2 =
=Qi+Q2 +Q3+(т2+ТП ч-Тз)^ +1^ -s2 +
+ (Tn+T3)(Tt-L2+I2) + T2n-S3.
Для упрощения записи введем еще одно обозначение:
ASC = Q + vc Тт -уgCc --S • sinф.
В итоге систему двух уравнений с двумя неизвестными к3 и кд запишем так:
k3L~k4I = 0,
AS^ +(к3-S-k4 Q)-cosv = 0.
Решив эту систему, найдем коэффициенты к3 и кд в переменной состав-
ляющей программы по углу рыскания:
к ___________________.
3 (I-S-L Q) cosy ’
4 I ’
(4.2.52)
(4.2.53)
(4.2.54)
(4.2.55)
247
Переменную составляющую программы тангажа определим интегрирова-
нием дифференциального уравнения движения центра масс PH в проекции на ось
Он:
П = wxl -sm3pr -cosypr -gqc. (4.2.56)
Использовав разложения:
sin9'pr = sin(9- ki + k2 • t*) ® sin 9 + (-- ki -t- k2 • t*)) • cos 9,
siny'pr ~ cos(y- k3 + кд • t*)« cosy - (- k3 + кд • t )) • siny,
уравнение для q приведем к виду
Л - wxr (sin9+ (—kL + k2 • t*)) • cos9) •
* ~ (4.2.57)
• (cosy- (-k3 + кд • t)) • siny)-gnc,
где k3 и кд считаются уже известными величинами.
После перемножения запишем это уравнение так:
q = wxl • (sin 9 • cos у -(sin 9 -к, *cos 9)-sin у -(“k3 +k4 t*)-
-cos9 cosy k] + (4.2.58)
+ cos9-((cosy + k3 -siny)-t* -siny-k4 -(t*)2) k2)-gBC.
Интеграл от wxl (t*)2 находим следующим образом:
Тт Ti Т2
р= fwxr(f)2dt*= j--1--(t;)2dt; + J-^Г.(т1+ф2аг2 +
T
+ /-^(тги+Ф2а1; =
0 *3 - h
= Pj + P2 + P3 + Ti(2 f2 + TjL2) + T2n (2 I3 + T2n • L3).
Проинтегрировав (4.2.58), получим первое уравнение для определения не-
известных ki и к2:
vnT = Vn - gnc • Тт + L • sin9‘COsy +
+ (sin9 - ki • cos9) • siny • (k3 • L - кд • I) -
- L • cds9cosy • k] + cos9 • ((cosy + k3 • siny) • I -
- siny - P • кд) • k2.
С учетом соотношений, следующих из (4.2.36), (4.2.51):
vnT = vn - gnc • Тт + L • sin9-cosy:
k3L-k4 1 = 0,
248
это уравнение упрощается:
- L - cosy - ki + ((cosy -I- k3 - sinу) * I - sinxjz P - k4) - k2 0.
Второе уравнение для определения неизвестных kj и к2 получим, дважды
проинтегрировав (4.2.58).
Предварительно определим следующий двойной интеграл:
и= f fwxI (t*)2(dt*)2 =
о о
Ti tj Т]
= 1 • (О2 (at; у + (т2 + тп + Т3) J • (ф2 dt; +
oo’i-ti o^-ti
Т2 tj Г2
+ I РМ^Ж)2 +(т„+т3) f —2-r-(Ti +t;)2dt; +
о О T2 "к 0 Т2 Ч
т t*
+ f f-^-(T2n+t;)2(dt;)2 =
6 о x3-t3
= Ut + U2 + U3 +T1(2Q2 4-T1-S2) + T2-P2+T2n-(2Q34-T2n’S3) +
+ (Tn+T3)(PI+P2+Tl(2I2fTl.L2)).
После интетрирования второе уравнение для определения ki и к2 принимает
вид
Т2 ~
г|т = П +vn Тт - gnc • + sin9 • ((cosy +к3 • sin$) • S -
-кд • sin у - Q) “
- cos9* ((cosy + k3 • sinvj/) • S - кд • sinу • Q) ki +
+ cos&- ((cosy 4- k3 • sinу) • Q - кд • sin у • U) • k2.
Для упрощения дальнейшей записи введем следующие обозначения:
Lp = L • cos у;
Ip = (cosy 4-k3 • sinvf) 4- кд • sin у • P;
Sp = (cos v + k3 • siny) «S - кд • siny • Q; 2
Qp := (cosy 4- k3 • sin ф) Q - кд • sin у • U;
T2 ~
ASn = т]т - П - vn ‘TT + gnc Sp • sin9.
В итоге получим, систему уравнений для определения коэффициентов пе-
ременной составляющей программы тангажа:
249
Lp • kj + Ip • к2 — 0,
< z x (4.2.60)
(-SP -к! +Qp -k2)-cos3 = ASq.
В результате решения системы уравнений величины ki и к2 определяются
уравнениями:
__________• Ip_________
(ip SP -Lp -Qd) cos3 ’
(4.2.61)
, _ k] • Lp
k2-— .
ap
В необходимых случаях для компенсации последствий предположения о
малости переменой составляющей программы тангажа можно ввести эмпириче-
ский коэффициент кэ в зависимость для параметра кр
__________• Ip__________
(lp • Sp — Lp • Qp) • cos 3
= kj(l-k3-kf); (4.2.62)
к - ki_lk.p_
2 Ip
По мере приближения к конечной точке величина k*i становится близкой к
нулю и корректирующий член стремится к нулю, что не вносит дополнительной
методической ошибки.
Коэффициент кэ можно определить, построив зависимость времени работы
маршевого двигателя 3-й ступени для ряда значений величины к&. Выбор значе-
ния коэффициента к$, при котором достигается минимальное время работы дви-
гателя, позволяет обеспечить максимальную массу выводимой на орбиту полез-
ной нагрузки.
Таким образом, при сделанных допущениях найдены программы тангажа и
рыскания, обеспечивающие выход PH на заданную орбиту:
&грг= S— ki + k2 • t; (42 53)
у'рг= у-кз + кд • t*.
Прогнозируемые на время итерационного цикла At значения программных
углов тангажа и рыскания:
S'pr[t + At]= 5 - ki + k2- At,
V'pr[t + At] = ф - ki + k2 - At.
Соответствующий этим углам кватернион:
250
Apr [t + At] = A9[t + At] о Av[t + At] =
Le9^t+At]
cos—------
2
0
0
sinte±Al
I 2
f Vpr[t + A<n
cos — -------
2
0
sm4itt±A«l
2
I 0 J
Кватернион, определяющий ориентацию орбитальной СК относительно на-
чальной стартовой СК,
Ak[t] = Ag о Афр].
Кватернион, определяющий требуемую на момент (t+At) ориентацию век-
тора тяги в начальной стартовой СК,
Apr[t + At] = Ak[t] о A'pr[t + At].
Значение программного кватерниона в текущий момент времени Apr[t] оп-
ределяется соотношениями, приведенными в подразд. 4.2.3.1.
Кватернион и величины требуемых приращений программных углов за
время итерационного цикла рассчитываются с использованием соотношений
<S3[t])
A9prfAt] = 2-80[t] -83[t];
A\|/pr[At] = 2-50[t] -S2[t].
4.2.33 Формирование функциональных команд и меток
Система управления PH формирует в полете команды, предназначенные
как для организации работы агрегатов ракеты, так и внутреннего функциониро-
вания СУ. Значительная часть из них формируется системой наведения. В на-
стоящей книге принята следующая классификация команд, обеспечивающих реа-
лизацию требуемой циклограммы управления полетом:
- функциональные команды. Основное назначение - управление агрега-:
тами PH (запуск, выключение двигателей, отделение ступеней, обтека-
теля и т.д.). Как правило, по функциональным (базовым) командам за-
пускаются частные циклограммы, обеспечивающие реализацию требуе-
мых процессов;
- присоединенные команды. Назначение - реализация частных цикло-
грамм (запуск двигателей, разделение и т. д.). Выдаются команды на ис-
полнение по времени относительно функциональной (базовой) команды.
Присоединенные команды могут следовать за базовой (положительно
присоединенные) и опережать ее (отрицательно присоединенные). Во
251
втором случае эти команды формируются с использованием механизма
экстраполяции базовой команды;
- метки алгоритмов СУ. Назначение - переключения в алгоритмах нави-
гации, наведения, стабилизации.
Функциональные команды формируются с точностью до минимального,
базового такта работы бортового компьютера и обозначаются nFC. Для формиро-
вания каждой ФК, как правило, используется некоторый монотонно изменяю-
щийся во времени функционал. Момент времени, когда функционал достигает
заданного значения, принимается моментом выдачи ФК. Функциональные ко-
манды формируются последовательно, одна за другой.
При формировании команд моменты выдачи команд могут определяться
двумя способами:
- без экстраполяции,
- с экстраполяцией.
При первом способе выдача базовой команды происходит по достижении
функционалом требуемого значения. При втором способе прогнозируется время
достижения функционалом требуемого значения
Ate = MzlsG)
ls(t)
где 1st ~ требуемое значение функционала;
Is(t) - текущее значение функционала;
Is(t)— скорость изменения функционала.
Формульные зависимости расчёта функционалов выключения ДУ 1-й , 2-й
ступеней и отделения 1-й и 2-й ступеней и. ГО.
Команды на выключение ДУ 1-й, 2-й ступеней могут формироваться либо
из условия полного расходования топлива, либо из условия минимизации воз-
можного экологического ущерба от падения неуправляемых отделяемых частей.
Минимальный ущерб достигается минимизацией отклонения точки падения от
заранее выбранной наиболее безопасной точки на земной поверхности. В первом
случае выключение ДУ 1-й, 2-й ступеней осуществляется по функционалам,
формируемым системой управления расходом топлива; во втором случае - по
функционалу II, минимизирующему отклонение по дальности. Минимизация бо-
кового отклонения обеспечивается системой регулирования БС.
Дальность полета отделяемых частей PH является функцией кинематиче-
ских параметров движения и времени:
L = L(V,r,t).
Разложив данную функцию в ряд Тейлора в окрестности расчетного време-
ни отделение части PH с точностью до членов второго порядка малости, получим
:AL “ Lv AVo+ 1/гДгс + Lt At,
252
где Lv, Lr - частные производные дальности по кинематическим параметрам
траектории;
Lt - частная производная дальности по времени;
ДУо, Дг0- вариации кинематических параметров;
At - вариация времени отделения части PH.
Управление дальностью обеспечивается выдачей команды на отделение ОЧ
PH при выполнении условия
AL = L-L*-0,
и функционал формирования команд представляется в виде
IL(t) = Lv ’ Vo(t) + Lr • r0(t) + Lt • t.
Расчетные значения функционала Li* и частных производных LVj, Ln, Li
для каждой функциональной команды определяют через расчетные параметры
движения и задают в ПЗ:
Li Lvi * Vo (t ki) Li ’ Го (t ki) Li • t ki-,
Li = — Ui • goi Li ’ Voi .
4.2.4 Разработка математической модели
4.2.4.1 Модель PH
Модель PH включает в свой состав следующие программные модули:
- система дифференциальных уравнений,
- интегрирование,
- массово-инерционные и центровочные характеристики,
- силы и моменты тяги ДУ,
- аэродинамические силы и моменты,
- воздушные параметры,
- кинематические параметры.
Модуль «Система дифференциальных уравнений»
Динамическая модель PH описывается системой дифференциальных урав-
нений, включающей в свой состав уравнения движения центра масс и уравнения
углового движения. Ниже приведены формульные зависимости динамической
модели.
Вектор суммарной силы
F^Pi + Fab
Вектор суммарного момента
Ml =Мр1 +ма1.
Вектор кажущегося ускорения в связанной СК
W! = Fl / HL
253
Вектор ускорения силы тяжести в начальной стартовой СК
go = AEqT gEq.
Вектор кажущегося ускорения в начальной стартовой СК
w0 = A1 wr
Производная вектора скорости PH в начальной стартовой СК
Vo = w0 + go.
Производная радиуса- вектора PH в начальной стартовой СК
Го = V0.
Вектор производной угловой скорости PH в проекциях на оси связанной СК
wxi ““ (l/Ixi)[Mxi — (Izi — lyi) C0yi<Dzi];
(Oyl (l/Iyl)[Myl — (Ix] — Izj) COz]COxi]j
®zl ~ (lyl “ Ixl) G>xl<®yl]-
Производные параметров кватерниона ориентации PH относительно на-
чальной стартовой СК
Ао = 1/2(—Хг<ох] — А,2-соУ1 — Хз-cOzi);
Aq = 1/2(Хо-сс>х1 + A2-a)zi — Хз*о)у1);
А2 = 1/2(Хо-соУ1 — Хг<в21 + Аз-соХ1)>
A3 = l/2(Ao*cozi + Арфу] — A2*cl)xi).
Входные параметры:
Pi - вектор силы от тяги ДУ в проекциях на оси связанной СК;
Fai - вектор аэродинамической £илы в проекциях на оси связанной
СК;
МР1 - вектор момента от тяги ДУ в проекциях на оси связанной СК;
Mai - вектор аэродинамического момента в проекциях на оси связан-
ной СК;
m - масса PH;
gEq - вектор ускорения силы земного тяготения в проекциях на оси
экваториальной СК;
©! - вектор угловой скорости PH в проекциях на оси связанной СК;
А(Ао, А), Аг, Аз) - кватернион ориентации PH относительно начальной
стартовой СК;
11 - вектор главных моментов инерции;
А - матрица перехода от начальной стартовой к программно свя-
занной СК;
Apq - матрица перехода от начальной стартовой к экваториальной
СК.
254
Выходные параметры - массив производных фазовых параметров движения PH:
vx0 > vy0> vz0 - проекции вектора абсолютного ускорения на оси начальной
стартовой СК;
х0, у0, z0 — проекции вектора абсолютной скорости на оси начальной
стартовой СК;
<вх1, <оу1, (bzl - проекции вектора углового ускорения на оси начальной
стартовой СК;
Хо, ~ производная параметров кватерниона ориентации PH отно-
сительно начальной стартовой СК;
wx0, wy0, wz0 - проекции кажущегося ускорения на оси начальной старто-
вой СК;
wxl, wyl, wzl - проекции кажущегося ускорения на оси связанной СК.
Модуль «Интегрирование»
Программный модуль «Интегрирование» осуществляет интегрирование
системы дифференциальных уравнений, описывающих движение PH, методом
Рунге-Кутта.
Выходные параметры:
- вектор абсолютной скорости в проекциях на оси начальной стартовой
СК;
- радиус-вектор в проекциях на оси начальной стартовой СК;
- проекции вектора угловой скорости на оси связанной СК;
- кватернион ориентации PH относительно начальной стартовой СК;
- проекции кажущейся скорости на оси начальной стартовой СК;
- интегралы от проекций кажущегося ускорения на оси связанной СК.
Модуль «Массово-инерционные и центровочные характеристики»
В данном модуле рассчитывают:
- массу PH;
- моменты инерции;
- координаты центра тяжести.
Модуль «Силы и моменты тяги ДУ»
В модуле рассчитывают:
- векторы силы тяги МД, РД и ЖРД МТ;
- вектор момента силы тяги МД, РД и ЖРД МТ.
Выходные параметры:
- суммарный вектор тяги ДУ;
255
- суммарный вектор моментов тяги ДУ.
Модуль «Аэродинамические силы и моменты»
В модуле рассчитываются аэродинамические силы и моменты.
Входные параметры:
- число Маха,
- угол атаки,
- угол скольжения,
- углы отклонения управляющих органов,
- скоростной напор.
Выходные параметры:
- вектор аэродинамической силы в проекциях на оси связанной СК,
- вектор аэродинамического момента в проекциях на оси связанной СК.
Модуль «Воздушные параметры»
В модуле рассчитываются следующие воздушные параметры:
- угол атаки,
- угол скольжения,
- скоростной напор,
- число Маха.
Модуль «Кинематические параметры»
Модуль определяет кинематические параметры движения:
- матрицы преобразования СК,
- вектор относительной скорости в проекциях на оси начальной стартовой
СК,
- географические координаты и высоту.
4.2.4.2 Модель окружающей среды
Включает в себя:
- модуль «Стандартная атмосфера»,
- модуль «Возмущения параметров атмосферы»,
- модуль «Ветер»,
- модуль «Потенциал».
Модуль «Стандартная атмосфера»
Выходные параметры модуля:
- атмосферное давление,
- плотность воздуха, «
- скорость звука в воздушной среде.
256
Модуль «Возмущения параметров атмосферы»
В модуле задается разброс плотности атмосферы.
Модуль «Ветер»
В модуле формируются значения систематической и случайной состав-
ляющих ветра.
Модуль «Потенциал»
В модуле рассчитываются проекции вектора ускорения силы земного при-
тяжения на оси начальной стартовой СК.
4.2.4.3 Модель «Привод»
Модель предназначена для вычисления углов поворота сопел рулевых
(маршевого) двигателей.
Выходные параметры модуля:
- угол поворотов сопел РД 1-й и 2-й ступеней,
- угол поворота сопла МД 3-й ступени.
4.2.4.4 Модель СУ
Модель алгоритмов СУ включает в свой состав:
- алгоритмы системы навигации;
- алгоритмы системы наведения;
- алгоритмы системы стабилизации и СУОС.
Выходные параметры модели СУ:
- управляющие сигналы на приводы,
- команды.
4.2.4.S Модель БИНС
Модель БИНС включает в свой состав:
- модель выходного сигнала ЛГ,
- модель выходного сигнала акселерометров.
Выходные параметры:
- вектор кажущейся скорости PH на момент запроса информации БИНС,
- кватернион ориентации PH на момент запроса информации БИНС.
4.2.4.6 Модель АП СНС
В модели формируются значения координат и скорости1 PH, измеренное
АП СНС.
Выходные параметры:
- координаты PH,
- вектор абсолютной скорости PH.
257
4.2.5 Моделирование и выбор параметров системы. Анализ
методической погрешности
Для решения задач моделирования на базе информации, приведенной в под-
разд. 4.2.4, разрабатывается специализированный программно-алгоритмический
комплекс - задача моделирования движения PH. Программно-алгоритмический
комплекс включает в свой состав как программные модули из подразд. 4.2.4, так и
модель алгоритмов систем наведения, навигации, стабилизации и других подсис-
тем СУ, если это необходимо.
В соответствии с целями, стоящими перед исследователями, определяются
требования к сложности и адекватности программно-алгоритмического комплек-
са реальным условиям полета.
Поскольку на данном этапе основной задачей является анализ только мето-
дической погрешности согласно принятой технологии, моделирование и выбор
параметров системы наведения осуществляются с использованием задачи моде-
лирования движения центра масс (задача моделирования движения с тремя сте-
пенями свободы).
Данная задача, как правило, получается из обычной задачи моделирования
пространственного движения PH посредством следующих модификаций и ис-
пользует допущения:
- изменение угловой ориентации осуществляется с пршраммной угловой
скоростью;
- в контур управления включен идеальный привод;
- исключены алгоритмы системы стабилизации.
Структурная схема задачи моделирования движения центра масс показана
на рис. 4.2.9.
Используя данную задачу, моделируем движение центра масс PH для рас-
чета ожидаемых отклонений кинематических параметров траектории и элементов
начальных орбит, обусловленных методической погрешностью системы наведе-
ния.
4.2.6 Совместное моделирование систем навигации, наведения и
стабилизации
Совместное моделирование систем навигации, наведения и стабилизации
проводят для учета влияния динамической погрешности системы стабилизации
на методические погрешности системы управления в целом.
Для этого используют программно-алгоритмический комплекс в полном
объеме, т.е. включая реальный привод и алгоритмы системы стабилизации.
Структурная схема задачи моделирования пространственного движения PH пока-
зана на рис. 4.2.10.
При моделировании обязательно учитывают полный набор возмущений,
существенно влияющих на параметры углового движения.
258
Рисунок 4.2.9 - Структурная схема задачи моделирования движения центра масс PH
Рисунок 4.2.10 - Структурная схема задачи моделирования пространственного движения PH
4.3 Система стабилизации
4.3.1 Технические требования к системе стабилизации.
Функциональная схема системы стабилизации
Система стабилизации должна обеспечивать устойчивое угловое движение
PH, а также управление движением центра масс PH в боковом и нормальном на-
правлениях.
Угловая стабилизация обычно проводится раздельно в каждой из трёх
плоскостей - тангажа, рыскания и крена. Задача стабилизации центра масс PH -
сведение к минимуму отклонения ценгра масс PH от расчётной траектории.
Функциональная схема типовой современной системы стабилизации PH,
построенной на базе БЦВМ, показана на рис. 4.3.1.
Датчики служат для получения следующей информации, необходимой для
системы стабилизации:
- информации об угловом положении PH;
- информации об угловой скорости PH;
- информации о нормальной и боковой скоростях центра масс PH.
Информация об угловом положении PH может быть получена с датчиков
углов ГСП либо вычислена в спецвычислителе БИНС.
Для стабилизации большинства современных PH достаточно информации
об угловом положении PH, получаемой с датчиков углов ГСП. Однако в некото-
рых случаях, когда корпус PH представляет собой тонкостенную удлинённую
конструкцию, существенное влияние на динамику процессов стабилизации ока-
зывает не только 1-й, но и 2-й тон упругих колебаний корпуса.
При учёте двух тонов упругих колебаний и использовании только датчиков
углов часто, в зависимости от знака обратной связи между упругим корпусом PH
и системой угловой стабилизации, для стабилизации упругой PH [5,22] необхо-
димо создавать опережение по фазе как в низкочастотной области (на частотах
стабилизации PH как жесткого тела), так и в высокочастотной области (на часто-
тах упругих колебаний корпуса). Выполнить такие требования при существую-
щей достоверности априорной информации о частотах и формах упругих колеба-
ниях корпуса практически невозможно.
В [5,22] показано, что решить задачу упругих колебаний в этом случае
можно было бы правильным выбором места расположения датчиков углов ГСП
по длине корпуса с учётом координат пучностей форм упругих колебаний rjj(x).
Однако имеются ограничения конструктивного характера, связанные с возмож-
ностью размещения приборного отсека с ГСП только в определённых местах
корпуса.
С этой точки зрения проблему решают значительно проще - путем приме-
нения в контуре стабилизации одного или нескольких датчиков угловых скоро-
стей (ДУС), которые крепят непосредственно к корпусу PH. При этом выбор их
мест установки существенно облегчается.
261
Информация о нормальной и боковой скоростях центра масс PH формиру-
ется путём обработки информации с акселерометров, установленных на ГСП или
в ККП БИНС.
Согласующие устройства датчиков преобразуют информацию с датчиков к
виду, удобному для ввода в БЦВМ. В качестве согласующих устройств исполь-
зуют различные преобразователи: преобразователь фаза-код (ПФК) - для датчи-
ков углов ГСП, преобразователь напряжение-код (ПНК) - для ДУС, спецвычис-
литель (СВ) - для ККП БИНС и т.д.
Введенная в БЦВМ информация обрабатывается в соответствии с алгорит-
мами системы стабилизации, в результате чего вычисляются цифровые управ-
ляющие сигналы на сервоприводы. Для того, чтобы осуществить обмен с БЦВМ
и представить цифровые управляющие сигналы в форме, необходимой для
управления сервоприводами, служат согласующие устройства сервоприводов (см.
подразд. 5.7).
Рисунок 4.3.1 - Функциональная схема системы стабилизации
Задача сервоприводов - преобразование управляющих сигналов в переме-
щение (отклонение) управляющих органов. Отсюда видно, что сервоприводы яв-
ляются основным потребителем мощности, расходуемой системой управления в
полёте.
Совокупность чувствительных элементов, БЦВМ и сервоприводов называ-
ется автоматом стабилизации (АС).
4.3.2 Динамическая схема PH как объекта регулирования
4.3.2.1 Объект регулирования
PH является объектом регулирования. Её конструкция, компоновка и тип
управляющих органов определяют динамику и, следовательно, основные требо-
вания, предъявляемые к системе стабилизации.
При этом следует отметить основные принципиальные особенности PH как
объекта регулирования:
- наличие на борту PH с ЖРД больших масс жидкого топлива (до 90%
общей массы) со свободными поверхностями, колебания которых вызы-
вают значительные возмущения параметров движения PH;
- упругость корпуса и его отдельных элементов (PH представляет собой
пространственную тонкостенную конструкцию);
262
- нестационарность движения (существенное изменение по времени по
мере выгорания топлива массы, моментов инерции, центровки, скорости
полёта, скоростного напора и т.д);
- наличие в большинстве случаев осевой симметрии объекта, а также мас-
совой и геометрической симметрии;
- специфический характер истинного движения PH, представляющего со-
бой малые колебания относительно некоторого программного движения,
при этом частоты колебаний таковы, что параметры программного, дви-
жения мало изменяются на протяжении наибольшего из их характерных
периодов;
- наличие системы стабилизации, которая стремится парировать рассогла-
сования между истинным и программным движениями, так, чтобы соот-
ветствующие кинематические параметры, характеризующие эти рассо-
гласования всегда, оставались малыми величинами.
При анализе уравнений движения PH часто пользуются её различными ди-
намическими моделями, например в первом приближении PH рассматривается
как абсолютно жесткое твёрдое тело. Однако с увеличением диаметра и длины
корпуса PH такая модель становится очень грубой, так как большое значение мо-
гут иметь колебания масс жидкого топлива (для PH с большим диаметром баков)
или упругие колебания корпуса (при сильном удлинении корпуса PH). Уравнения
движения PH становятся очень сложными, и их анализ затрудняется. В связи с
этим приходится вводить обоснованные допущения для упрощения таких урав-
нений.
Разработке динамической схемы PH посвящено много работ
[1, 10,13, 14, 15,22,23]. В подразд. 2.1.18 приведены системы дифференциаль-
ных уравнений, описывающих движение PH с учётом основных особенностей
динамической схемы PH - упругости корпуса и подвижности топлива в баках.
Как видно из этих уравнений, объект регулирования состоит из набора взаимо-
связанных осцилляторов. Для практики важно, что каждая группа осцилляторов в
замкнутой системе стабилизации имеет свой спектр частот. Например, для ти-
пичной PH характерны следующие частоты [2]:
- движение центра масс - (0.01 ... 0.03) Гц;
- угловое движение “ - (0.1 ... 0.3) Гц;
- колебание топлива в баках - (0.5 ... 1.5) Гц;
- упругость корпуса - (2 ... 15) Гц.
Приведенный спектр частот является “хорошим” с точки зрения стабилиза-
ции PH, так как позволяет проводить исследования независимо для каждого диа-
пазона частот, благодаря чему на начальных этапах проектирования можно полу-
чить более точные результаты.
Для тяжелых PH спектр частот оказывается более плотным и указанный
выше приём не всегда удаётся применить.
263
4.3.2.2 Регулятор
Как видно из подразд. 4.3.1, автомат стабилизации является регулятором,
входной информацией для которого является рассогласование относительно про-
граммных значении обобщённых координат и скоростей некоторых сечений кор-
пуса PH, а выходной - отклонение управляющих органов.
При этом следует отметить, что сервопривод всегда является собственно
устойчивой системой. Принимают также, что АФЧХ системы стабилизации дос-
таточно гладкие, т. е. мало меняются при малом приращении частоты.
В этом случае автомат стабилизации как регулятор может быть описан сле-
дующими уравнениями:
Sg+S^L^ + L^y); =Lj(y)-L2(z);
_ . . , (4.3.1)
8t = L3(y),
где Lj (9), L] (v|/)5 L3 (y), L2 (y), L2 (z) - нелинейные операторы, допускающие
линеаризацию в некотором диапазоне частот;
9, v|/, у, у, z - угловые (в каналах тангажа, рыскания и крена) и линейные (в ка-
налах НС и БС) рассогласования между истинным и программным положением
корпуса PH в точке х1™ размещения датчиков углов и акселерометров;
8&,8у,8у -командные сигналы на отклонение управляющих органов в ка-
налах тангажа, рыскания и крена;
8§ - программное положение управляющих органов в канале тангажа.
Известно [1, 2, 5, 10, 22], что для того, чтобы застабилизировать PH как аб-
солютно жесткое твёрдое тело, для закона управления системы стабилизации
достаточно использовать угловые и линейные рассогласования и их производные.
В этом случае простейшие линеаризованные уравнения автомата стабили-
зации имеют вид
Т2 (8§ + 8Э) + ?! (8$ + 83) + (8$ + 83) = Кэ9+К^9+Куу+Куу;
T2SV + Ti8v + 8V = - Kzz - Kzz; (4.3.2)
Тд8у + T38y + 8y = Ку у + КуУ,
где Tj (i=l ,2,3,4) - постоянные времени управляющих органов;
Кj (j - 9,9, у, ф, у, у, у, у, z, z) - коэффициенты усиления регулятора;
.. 8s,8v,8y - углы отклонения управляющих органов в соответствующих ка-
налах регулирования.
Обычно процесс проектирования системы стабилизации начинается с ис-
следования устойчивости углового движения PH. Наиболее простой случай соот-
ветствует отсутствию системы стабилизации центра масс PH. Тогда в уравнениях
(4:3.2) операторы L2(y) = L2(z)=0 и уравнения (4.3.2) будут описывать только
264
автомат угловой стабилизации.
В этом случае [1,2,5,10,22] должны удовлетворяться два основных требова-
ния к частотным характеристикам автомата угловой стабилизации:
- автомат стабилизации должен обеспечивать фазовое опережение в опре-
делённом диапазоне частот (0 ... соо);
- коэффициент усиления автомата стабилизации должен быть ограничен
по величине и сверху, и снизу.
Типичная АФЧХ автомата угловой стабилизации, удовлетворяющая ука-
занным требованиям, показана на рис. 4.3.2, где соо (частота среза) соответствует
частоте, при которой фаза ф=0.
Рисунок 4.3.2 - Типичная АФЧХ автомата угловой стабилизации
Система стабилизации центра масс PH, как видно из уравнений (2.1.101),
265
должна компенсировать действие ветровых возмущений Wz и технологических .
Допустим, что при действии ветра возникла сила Zwh момент Mw. В этом
случае система угловой стабилизации отклонит рули на некоторый угол 5, чтобы
уравновесить возмущающий момент Mw и держать корпус PH в плоскости
стрельбы (v=0). При этом кроме поперечной силы Zw на корпус PH будет дейст-
вовать ещё и поперечная управляющая сила Z5. Под действием сил Zw и Z5
центр масс PH будет перемещаться в боковом направлении.
Для компенсации этого сноса система угловой стабилизации должна по-
вернуть корпус PH (вектор силы тяги Рмд двигательной установки) так, чтобы
сумма проекций сил Zw, Z5 и Рмд на ось z была равна нулю, т.е. чтобы скорость z
была нулевой.
Таким образом, система угловой стабилизации стремится держать ось PH в плос-
кости стрельбы, а система стабилизации центра масс - вывести эту ось из плоскости
стрельбы. В связи с этим закон управления центром масс PH имеет вид (4.3.1).
Более подробно формирование требований к системе угловой стабилизации
и стабилизации центра масс с учётом колебаний жидкости в баках и упругих ко-
лебаний корпуса PH приведен в подразд. 4.3.6.2.
43.2.3 Устойчивость и управляемость PH
Собственно PH характеризуют две важнейшие характеристики - устойчи-
вость и управляемость.
Под устойчивостью PH понимают её способность самостоятельно, без сис-
темы управления, сохранять заданный режим полёта и возвращаться к нему после
непроизвольного отклонения от него из-за действия внешних возмущений.
Следует различать понятие устойчивости PH по отношению к бесконечно
малым возмущениям - устойчивость “в малом” (т.е. малые воздействия приводят
к малым эффектам) и устойчивость к ограниченным, конечным возмущениям -
устойчивость “в большом”.
Обычно устойчивость движения PH исследуется “в малом”. При этом замк-
нутая система “PH + система стабилизации” описывается линеаризованной сис-
темой дифференциальных уравнений. В этом случае, используя метод “заморо-
женных” коэффициентов, вывод об устойчивости реальной системы по линеари-
зованным уравнениям можно сделать по следующим теоремам Ляпунова [12]:
1. Если характеристическое уравнение линеаризованной системы имеет все
корни с отрицательными вещественными частями, то действительная сис-
тема будет устойчивой, т.е. никакие добавки в виде членов второй и выше
степеней переменных и их производных не могут в этом случае нарушить
устойчивость системы.
2. Если характеристическое уравнение линеаризованной системы имеет хотя
бы один корень с положительной вещественной частью, то действительная
система будет неустойчивой, т.е. никакие добавки в виде членов второй и
высших степеней переменных и их производных не могут придать системе
устойчивость.
266
3. При наличии нулевых и чисто мнимых корней по линеаризованным урав-
нениям нельзя сделать заключение об устойчивости или неустойчивости
действительной системы. Отброшенные члены второй и высших степеней
переменных и их производных в некоторых случаях могут коренным обра-
зом изменить вид динамического процесса в системе.
В некоторых случаях при наличии нелинейностей в системе неустойчи-
вость “в малом” может перейти в устойчивость “в большом” (автоколебания).
Для исследования замкнутой системы “PH + система стабилизации” необ-
ходимо знать динамические свойства отдельных её звеньев и, в частности, дина-
мические свойства PH как объекта регулирования. Эти динамические свойства
определяются характером возмущённого движения при отклонении органов
управления или при воздействии возмущений.
Для примера рассмотрим движение PH в канале тангажа с неотклонёнными
(8=0) управляющими органами при малых отклонениях параметров движения от
их значений в равновесном состоянии, т.е. когда сумма всех внешних и реактив-
ных сил, действующих на PH, равна нулю. Допустим, что продольная ось PH и
скорость v центра масс расположены в одной вертикальной плоскости (рис.
4.3.3). Тогда суммарный момент относительно оси zi можно записать в виде
MZI = Mza+M2p, (4.3.3)
где Ми - аэродинамический момент;
- момент всех прочих сил, действующих на PH.
Согласно (2.1.19) момент Ма определяется уравнением
Ma=(xm-xd)-Yn, (4.3.4)
где Yn - нормальная аэродинамическая сила, (рис. 4.3.3).
Рисунок 4.3.3 -Схема аэродинамических сил и
моментов, действующих на PH
267
Тогда момент
M2I=(xm-xd).Yn+M2p. (4.3.5)
Сила
Yn =Ха sina-i-Ya-cosa = (Cx -sina + Cy «cosaj-q-S. (4.3.6)
Рассматривая малые углы атаки, когда можно принять sin a~a, cosa«l и
Су = Су • a, получаем
Yn = (Сх +C“)aqS. (4.3.7)
Как видно из выражения (4.3.7), при изменении угла атаки а изменяется
только нормальная сила Yn. Если момент не слишком велик, то при некото-
ром значении угла атаки a ~ «б наступает балансировка PH, когда сумма всех
моментов, действующих на PH, равна н:
(xm-xri)Yn|a=aB+M2p=0. (4.3.8)
Вычитая из (4.3.5) равенство (4.3.8), запишем
MZ1 = (хго-xd)-(Yn -Yn|a=aB), (4.3.9)
или с учётом равенства (4.3.7):
MZ1 = (xm -Xd).(Cz +C»)(a-aB)qS. (4.3.10)
Анализ выражения (4.3.10) показывает, что возможны следующие три слу-
чая:
1. xm < xd - центр давления расположен позади центра масс PH.
Если a > аБ, то М21 < 0 - т.е. на PH действует момент, уменьшающий раз-
ницу а-аБ (рис. 4.3.2.1).
Если а<аБ, то Mzl > 0 - и в этом случае момент Mzl стремится прибли-
зить а к аБ.
В обоих случаях при нарушении балансировки PH возникающие при этом
моменты уменьшают | а-аБ |. В этом случае принято называть PH статически
устойчивой.
2. xm = xd - центр давления совпадает с центром масс PH. При этом, как вид-
но из (4.3.10), при любом малом изменении угла атаки никакого момента не
возникает (Mzl = 0) и PH находится в состоянии безразличного равновесия.
В этом случае PH называют нейтральной.
3. xm > xd - центр давления расположен впереди центра масс PH.
В указанном случае знак момента Mzl совпадает со знаком разности
а-аБ, т.е. при отклонении оси PH от направления полёта аэродинамические си-
лы будут создавать момент, отклоняющий ось PH на ещё больший угол. PH при
этом называют статически неустойчивой. Такая PH без системы стабилизации ле-
268
тать не может.
Понятие статической устойчивости PH не следует отождествлять с поняти-
ем устойчивости её движения. PH, пусть даже статически неустойчивая, благода-
ря системе стабилизации может совершать устойчивое движение по траектории,
т.е. понятие устойчивости движения PH должно отражать характер её реального
движения во временной области.
При полёте PH система управления должна иметь возможность в каждый
момент времени воздействовать на характер движения PH - управлять полётом.
Первая задача, решаемая при управлении движением PH, - обеспечить тре-
буемое значение сил и моментов, реализующих заданное номинальное движение
PH. Однако, как указывалось ранее, реальное движение PH всегда отличается от
номинального из-за отличия характеристик самой PH, параметров атмосферы от
принятых при расчёте номинальной траектории, погрешностей управления, вет-
ровых воздействий, разброса тяги ДУ и т.д. В связи с этим возникает вторая зада-
ча управления полётом PH - парирование возмущений и сохранение заданных
(или близких к ним) параметров движения PH при действии таких возмущений.
Обе задачи управления полётом PH могут быть решены при условии, что
PH надлежащим образом реагирует на управляющие воздействия, т.е. обладает
управляемостью.
Управляемостью PH будем называть её способность выполнять в ответ на
управляющие команды системы управления любой предусмотренный в полёте ма-
нёвр в любых допустимых условиях полёта, в том числе и при наличии возмущений.
Характеристики управляемости зависят от особенностей движения PH, эф-
фективности её управляющих органов, диапазона изменения управляющих сил и
моментов и могут быть определены по уравнениям, описывающим движение PH.
4.3.2.4 Эффективность управляющих органов
Эффективность и максимально допустимые отклонения являются основ-
ными показателями управляющих органов PH.
Эффективность управляющих органов характеризуется отношением управ-
ляющего момента, возникающего при единичном отклонении управляющего ор-
гана, к соответствующему моменту инерции PH, т.е, эффективность управляю-
щих органов в каналах тангажа, рыскания и крена определяется коэффициентами
аэб3»Муи aY5Yсоответственно.
Эффективность и максимально допустимые отклонения управляющих ор-
ганов определяют максимальные управляющие моменты, которые могут создать
управляющие органы (2.1.83), (2.1.85).
р
М^щах ~~ ~ (Хт — Хр) • 5$гаах — а$$а • Iz •
ХЛ — Рупр / \ _ т 2 (4.3.11)
Мутах “ (*т “ Х-р) ' бущах — ^убу ’ 1у ’ бу max?
Мутах — Рупр * ^р " бутах “ ау8у * ^х ’ бутах ?
269
ГДе SsmaxJ^ynjaxjSymax - МаКСИМЯЛЬНО ДОПуСТИМЫС ОТКЛОНСНИЯ упраВЛЯЮЩИХ Ор-
ганов в каналах тангажа, рыскания и крена.
Весь момент, создаваемый управляющими органами в каждом канале, ус-
ловно можно представить в виде трёх составляющих:
Мупр=Мпр+Мв + Мсс, (4.3.12)
где Мпр - программный управляющий момент, необходимый для ведения PH
по программной траектории;
Мв - момент для парирования возмущений от ветра, технологических, аэ-
родинамических и других возмущений;
Мсс - момент, развиваемый управляющими органами при работе системы
стабилизаций' для обеспечения требований по качеству (быстродействие,
точность, колебательность) переходных процессов стабилизации.
: В лк)бой момент времени полёта PH максимальный момент М)Бр должен
быть больше потребного момента управления:
М^>(|МЧ,|+|МВ|+|МСС|)ПВХ, (4.3.13)
р
т.е. JL. (Хт _ Хр). §8max > (I Мир I+|МВ I + |МСС I )»„;
^•(хт-хр)-81(/1пах>(|Мпр| + |Мв| + |М1:с|)Х„; (4314)
Рупр ‘^р ’ ^утах (|мпр|+|мв|+|мсс| )U,
где в правой части неравенства (4.3.14) указаны максимальные управляющие мо-
менты, создаваемые системой управления в полёте в каналах тангажа, рыскания и
крена. Указанные моменты можно оценить из анализа возможных траекторий,
условий полёта, величин возмущений начальных условий при разделении ступе-
ней и т.д.
Углы определяются конструкцией управляющих органов
и их рулевых приводов. Тогда из (4.3.14) с учётом (4.3.11) можно определить ми-
нимальную эффективность управляющих органов:
аэа8 > j г .
Az * °Этах
(|Мпр| + |Мв|+|Мсс|)*вх
----------------------> (4.3.15)
Ау ’ ° у max
(|мпр|+|мв|+|мсс|)и
-------П--------------•
Xx vymax
Неравенства (4.3.15) должны выполняться в любой момент полёта.
270
Сигнал управления на рулевой привод в большинстве случаев “засорен”
шумами, вследствие чего на полезное отклонение управляющих органов накла-
дываются случайные отклонения. Поэтому эффективность управляющих органов
должна быть больше правой части неравенства (4.3.15) настолько, чтобы угол от-
клонения управляющих органов не превышал их максимально допустимое значе-
ние.
4.3.3 Методы анализа и синтеза систем стабилизации
При анализе и синтезе систем стабилизации PH в большинстве случаев
применяют следующие методы:
- частотный метод;
- метод фазовой плоскости;
- метод цифрового моделирования.
Реже для анализа и синтеза систем стабилизации используют методы кор-
невого годографа, гармонической линеаризации, методы статистической теории
автоматических систем регулирования, вероятностные и другие инженерные ме-
тоды.
Применение частотных методов для анализа и синтеза систем стабилизации
обусловлено высоким порядком системы линеаризованных дифференциальных
уравнений, описывающих возмущённое движение PH с учётом упругих колеба-
ний корпуса и колебаний жидкости в топливных баках. Кроме того, при исполь-
зовании частотных методов удаётся проследить достаточно далеко идущую ана-
логию в расчётах дискретных и непрерывных систем, что даёт возможность при-
менять опыт, приобретённый при исследовании непрерывных систем, для анали-
за и синтеза дискретных систем стабилизации.
Уравнения возмущённого движения PH описываются системой линейных
дифференциальных уравнений с переменными коэффициентами, являющимися
функциями времени t. Исследование таких уравнений, пусть даже линейных, яв-
ляется очень сложной задачей. Поэтому на практике решение задачи сводят к ис-
следованию системы линейных дифференциальных уравнений с постоянными
коэффициентами с помощью метода “замораживания” коэффициентов. Суть ме-
тода - исследование уравнений возмущённого движения, основанное на приёме
“замораживания” (фиксации) коэффициентов уравнений.
Коэффициенты уравнений (2.1.101) a^t) зависят от кинематических пара-
метров невозмущённого движения и параметров PH и являются известными
функциями времени. При “замораживании” коэффициентов на невозмущённой
траектории выбирают ряд характерных точек, так, чтобы интервалы между ними
не превышали максимального периода, характерного для свободного движения
системы, а погрешность замены на этом интервале должна быть технически при-
емлемой (не более 10 ... 15%) [2].
Основным достоинством приёма замораживания коэффициентов является
возможность использования инженерных методов исследования стационарных
систем автоматического регулирования при анализе и синтезе систем стабилиза-
ции PH. Применение метода замороженных коэффициентов позволяет построить
271
и исследовать передаточные функции PH и предварительно выбрать параметры
системы стабилизации на начальном этапе проектирования. Окончательная про-
верка устойчивости и управляемости PH должна проводиться на основе более
строгих методов с учётом переменности коэффициентов уравнений возмущённо-
го движения.
Метод замороженных коэффициентов нельзя использовать на участках рез-
кой переменности коэффициентов или возмущений: старта PH, разделения сту-
пеней, сброса массы, перехода ДУ или рулевых двигателей с одного режима на
другой (например, с режима форсирования на режим дросселирования и наобо-
рот).
В СУОС, работающей на пассивных участках полёта PH, применяют уси-
лительные устройства или исполнительные органы, обладающие характеристи-
ками релейного типа. Наличие в СУОС хотя бы одного такого элемента делает
невозможным использование рассмотренных выше частотных методов анализа и
синтеза линейных систем.
Для анализа и синтеза релейных систем стабилизации PH широко приме-
няют метод фазовой плоскости, обладающий хорошей наглядностью и высокой
точностью. Существенным недостатком этого метода является то, что метод фа-
зовой плоскости может быть использован для систем, описываемых нелинейным
дифференциальным уравнением не выше второго порядка.
Движение PH на высотах h>80 км обычно происходит с небольшими угло-
выми скоростями при небольших угловых рассогласованиях. С учётом этого уг-
ловые движения PH в каналах тангажа, рыскания и крена можно считать незави-
симыми. При этом система уравнений (2.1.57) распадается на три нелинейных
дифференциальных уравнения второго порядка, к исследованию которых можно
применить метод фазовой плоскости.
С помощью метода фазовой плоскости можно определить наличие в релей-
ной системе незатухающих колебаний (автоколебаний) и их параметров (ампли-
туды и периода), что позволяет оценить запасы рабочего тела СУОС.
Одним из эффективных методов исследования при проектировании систем
стабилизации PH является моделирование. Для этого используют аналоговые вы-
числительные машины (АВМ), аналого-цифровые комплексы (АЦК) и цифровые
вычислительные машины (ЦВМ).
Технология моделирования для всех указанных выше средств одинакова и
включает в себя разработку математической модели PH и системы стабилизации,
реализацию этой математической модели на выбранных средствах моделирова-
ния й- проведение исследований процессов стабилизации PH во всех условиях
Эксплуатации.
Однако, как бы ни была детально разработана математическая модель мо-
делируемой системы, она охватывает только основные её особенности, влияющие
на исследуемый круг вопросов, причём выбор этих особенностей в значительной
мере субъективен. Поэтому всегда существует опасность того, что какая-то из та-
ких существенных особенностей в математической модели упущена. Чтобы из-
бежать этого, при моделировании используют реальные узлы и приборы системы.
272
Такое моделирование должно проводиться в реальном масштабе времени. Это
предъявляет довольно жесткие требования к средствам моделирования.
Следует отметить, что в настоящее время современные ЦВМ позволяют
моделировать в реальном масштабе времени практически все системы управле-
ния PH.
Основным достоинством моделирования с реальной аппаратурой в реаль-
ном масштабе времени является возможность учёта всех неучтённых в математи-
ческой модели системы особенностей и нелинейностей реальной аппаратуры.
В последнее время для анализа и синтеза систем стабилизации PH широко
используют методы цифрового моделирования без реальной аппаратуры.
За прошедший период развития ракетной и космической техники накоплен
большой опыт в области создания математических моделей отдельных узлов и
приборов систем управления PH, что позволило проводить чисто цифровое моде-
лирование, без реальной аппаратуры. При этом достигается существенная эконо-
мия материальных и временных затрат за счёт отказа от различных физических
стендов моделирования, нагрузочных стендов, реальных приборов СУ или их ма-
кетов и т.д. Математические модели новых элементов, например РП, уточняются
на автономных стендах.
4.3.4 Динамические характеристики PH
4.3.4 Л Расчетная схема
В подразд, 2.1.18 приведена система линейных дифференциальных уравне-
ний (СЯДУ) возмущенного движения PH с учетом взаимовлияния колебаний
жидкости в топливных баках и упругих колебаний корпуса.
Очевидно, что рассматриваемая PH представляет собой многоконтурный
объект регулирования. Регулируемыми параметрами являются в общем случае
углы и угловые скорости в каналах рыскания, тангажа и крена, а также нормаль-
ная и боковая координаты и скорости (каналы регулирования НС и БС). Кроме
того, при движении 1 -й ступени PH для осуществления разгрузки корпуса может
быть реализовано управление по углам атаки и скольжения.
Анализ СЯДУ возмущенного движения PH показывает, что уравнения дви-
жения в каналах тангажа, рыскания и крена независимы (автономны).
Для определения динамических (частотных) характеристик PH необходимо
получить передаточные функции объекта управления по регулируемым парамет-
рам в каналах рыскания и крена.
В силу симметрии PH передаточные функции PH в канале тангажа будут
идентичными соответствующим передаточным функциям канала рыскания.
В общем случае передаточная функция k-го регулируемого параметра Хк по
управлению 8 есть отношение изображения по Лапласу параметра Хк к изображе-
нию по Лапласу параметра 8 и может быть представлена в виде отношения поли-
номов:
W(p)=—— =——, (4.3.16)
5(р) R(p) 1 '
273
где р - оператор дифференцирования.
Но в расчетных задачах с использованием частотных методов, таких, как по-
строение годографа передаточной функции разомкнутой системы, расчет границы
области устойчивости, более целесообразно определение динамических характери-
стик PH в виде их действительных и мнимых частей при подстановке р = j со:
W(jco)=Re(cu) + . (4.3 Л 7)
Расчетная схема получения W(jco) включает в себя два этапа. На первом
этапе необходимо преобразовать к форме Коши СЯДУ, приведенную в под-
разд. 2.1.18. В матричном виде для автономного канала эта система может быть
записана как
A2-y=B2-y+C2-y+D2-8, (4.3.18)
где у - вект ор-столбец переменных параметров;
А2, В2, С2 - соответствующие матрицы mxm (т - порядок системы уравне-
ний 2-го порядка), составленные из коэффициентов СЯДУ на фиксирован-
ной секунде;
D2 - матрица-столбец управления;
8 - отклонение управляющего органа (скаляр).
Разрешим эту систему относительно старших производных, умножив пра-
вую и левую части на А/1:
у=А2‘* хВ2-у+А2"' хС2у+А2"’ xD2 -8. (4.3.19)
Далее необходимо ввести дополнительные переменные и получить систе-
му n = 2m уравнений первого порядка в виде
x=A'i+D-8; (4.3.20)
где х - новый вектор-столбец переменных;
А - матрица Коши; —
D - матрица-столбец управления после преобразования.
Формально этот процесс заключается в формировании матриц A, D по оп-
ределенным правилам:
А2 *хВ2 А2 !хС2
1 0
n=2m, D = А2 'ХО2 и.
0
(4.3.21)
n=2m 1
. На втором этапе определения W(jco) проводится собственно расчет Re(co),
1т(щ) соответствующей динамической характеристики PH.
Этот расчет может быть выполнен различными способами. В качестве при-
мера можно привести способ определителей, при котором искомая передаточная
функция W(jcj)Xk/5 определяется посредством решения системы линейных ал-
гебраических уравнений.
Эта система получается из (4.3.20), если записать ее в виде
E-i=A’i+D-8,
или
X
6
х . х _
Е- —- р=А- — +D,
L5J L3J
[a_e-p]-W=-d,
о
(4.3.22)
где Е - единичная матрица;
- вектор-столбец передаточных функций PH.
По правилу Крамера искомое решение —-(jco) определяется как
о
xk z. . det|Ak -Е'- jo]
<43'23’
В этом выражении матрица Ак получена из матрицы А путем замены к-го
столбца столбцом D, матрица Е’ - это матрица Е, в которой обнулен элемент с
номером (к, к).
Как правило, для упрощения алгоритма вычисления определителей матри-
цы Ак и А предварительно приводятся к форме Хессенберга с помощью стан-
дартной процедуры.
S(p)
Другой метод вычисления W(p)=—— при р — jco носит название корнево-
R(p)
го и основан на вычислении корней разомкнутой и замкнутой передаточных
функций.
Замкнем передаточную функцию PH единичной обратной связью, как изо-
бражено на рис. 4.3.4.
275
(4.3.24)
(4.3.25)
£ = х + у;
S , ч S
У=£—=(х + у)-—;
УМ- —
A R; R
Тогда передаточная функция замкнутой системы
ur у S /Л S > S
х R/ < Rj R-S
где R - знаменатель передаточной функции разомкнутой системы W;
R-S - знаменатель передаточной функции замкнутой системы Wxc.
g
Искомую передаточную функцию W=— определяют как
£_R-(R-S) R-S
R~ R " R
Остается теперь только вычислить комплексные полиномы знаменателей
замкнутой и разомкнутой систем.
Для объекта управления, описанного СЛДУ в форме Коши п-го порядка
(4.3.20), алгоритм вычисления передаточной функции k-го параметра к управле-
нию выглядит следующим образом:
1. Образуем новую матрицу А1, отличающуюся от матрицы А тем, что к к-му
столбцу матрицы А прибавляются соответственно элементы столбца D:
для i,j=l,n
Al(ij) = A(i,j),
Al(i,k) = A(i,k) + D(i).
2. Проводится расчет корней матриц А и Al по стандартной процедуре. Мат-
рице А1 соответствуют корни оц + j0i, i =l,n.
Матрице А соответствуют корни с, + jdi5 i =1,п.
3. По формуле представления полинома в виде произведения Щр-pi), где
р = jco, получаем
_ ТТ Pi)
R i=i -Ci + jCfo-dj)
(4.3.26)
В настоящее время существует ряд программно-математических средств
(например, ’’MATLAB”), где пользователь имеет возможность, не программируя
алгоритм вычисления W(jo)), задать исходную СЛДУ и с помощью определен-
ных функций привести ее к форме Коши, определить динамические характери-
276
стики PH в любом интересующем его виде (как отношение полиномов, либо Re и
Im передаточной функции, либо в виде набора ее нулей и полюсов).
43.4.2 Передаточные функции PH и их особенности
Рассмотрим более подробно передаточные функции PH для различных рас-
четных случаев модели объекта управления.
43.4.2.1 PH как абсолютно твердое жесткое тело
Поскольку системы уравнений в каждом из каналов рыскания (тангажа) и
крена невысокого порядка (2.1.80), (2.1.81), то нахождение передаточных функций
PH не представляет сложности и может быть осуществлено достаточно просто.
Так, для канала крена, записав уравнение (2.1.81) в операторной форме, получим:
р2-у-а'п-р-у = аг6г -8У;
(4.3.27)
5У(Р) Р(р-а„)
Для большинства PH демпфирующий коэффициент а п < 0 и настолько
мал, что допущение а'п -0 можно считать практически строгим.
Тогда
а ..к
W(p)y/5y = (4.3.28)
Такая передаточная функция имеет два пулевых корня р 1>2= ± 0. Исследуем
устойчивость объекта управления с помощью амплитудно-фазового критерия
Найквиста. Необходимо отметить некоторую специфику применения этого кри-
терия к исследованию устойчивости PH. Суть ее в том, что знак эффективности
управляющих органов ау8у, аХ|,8^, az8y, aq.8^ учитывает отрицательность обрат-
ной связи по управляющему воздействию. Поэтому при исследовании разомкну-
той системы необходимо учитывать то обстоятельство, что ее замыкание прово-
дится через +1, а не через -1, когда знак обратной связи не учтен. Следовательно,
при исследовании устойчивости по частотному годографу в качестве критиче-
ской точки принимается точка (+1, Oj) комплексной плоскости, а не (-1, Oj), как
это обычно принято.
Годограф передаточной функции (4.3.28) при подстановке p=jco для
0< го <оо показан на рис. 4.3.5. Он начинается в точке (+оо, Oj), с увеличением со
приближается к началу координат и полностью лежит’ на действительной оси,
проходя через критическую точку (1, Oj). Это означает, что PH в канале крена
статически нейтральна и находится на границе устойчивости, что, естественно, не
может считаться приемлемым. Для того, чтобы задемпфировать движение PH,
необходимо частотный годограф W(j<o)yZ5 разомкнутой системы в окрестности
точки (1,0j) "приподнять”, т.е. обеспечить фазовое опережение на этом участке.
По аналогии с каналом крена определим передаточную функцию PH по уг-
277
лу рыскания и проанализируем ее:
(p-a^)-z + (-a^p-aZ4,)-v = az5-Sv;
(—ayZ) * z-4- (р — Э-цпу * р ~~ ) * V ~ axg6v * *
(43.29)
Рисунок 43.5 - Частотный годограф в канале крена
В результате решения системы (43.29) получаем
ww-'s- • <4-3-3»>
где Ay — , By = Яу2 - az5y — Зу§^
А — ~ ( а^у “Ь а^) , В — Зуу + a2J, * ауу ~~ Дуг • а^у,
С Яп • Зуу ау7 * aZy.
Если рассматривать только угловое движение PH без учета уравнения дви-
жения центра масс, что эквивалентно обнулению коэффициентов
а'и, a'Zy, aw, az5y, то с учетом малости демпфирующего коэффициента ауу пере-
даточная функция Wy/5v еще более упростится:
W(p)v/8v = — . (4.3.31)
p2-avv
Характеристическое уравнение исследуемой передаточной функции (ра-
зомкнутой системы)
р2=3уу (4332)
в зависимости от значения коэффициента ауу может иметь следующие решения:
1. = О (PH статически нейтральна), pj 2 = ± 0;
2. а'уу < О (PH статически устойчива), характеристическое уравнение имеет
два мнймыхкорня pj2 = ±Х/|ауу | ;
278
3. avjnj/>O(PH статически неустойчива), характеристическое уравнение
имеет один положительный и один отрицательный корень рц = ± \/aw •
Как видно из (2.1.83), знак коэффициента статической устойчивости (неус-
тойчивости) aw определяется взаимным положением центра тяжести хт и центра
давления x<i. —
Передаточная функция PH для случая 1 (а^ -0) аналогична уже рассмот-
ренной нами выше передаточной функции PH для канала крена.
Случай 2 (aw < 0) для PH рассматриваемого типа практически не встреча-
ется, поэтому анализировать его не будем, а остановимся более подробно на слу-
чае 3 (avv > 0).
Частотный годограф для этого случая показан на рис.4.3.6.
Рисунок 4.3.6 - Частотный годограф
для aw > 0 нескорректированный
/
Он начинается в точке W(0) =
Рисунок 4.3.7 - Частотный годограф
для avv > 0 скорректированный
, с увеличением со прибли-
жается к началу координат и полностью лежит на действительной оси, проходя
через критическую точку (l,0j) при | ауб^ |>avv или оставаясь левее ее при
I |<aw
Поскольку характеристическое уравнение (4.3.32) имеет’ один положитель-
ный корень, то по критерию Найквиста годограф разомкнутой системы должен
наполовину охватывать точку (1,0j). Очевидно, что в общем случае для обеспече-
ния устойчивого движения PH необходимо скорректировать годограф разомкну-
той системы (рис. 4.3.6) таким образом, чтобы система имела статический коэф-
фициент усиления Kv > :—г и фазовое опережение в окрестности точ-
I av5 |
ки (1,0j), как показано на рис. 4.3.7.
На рис. 4.3.8 изображен типовой годограф передаточной функции
W(p)v/5y (4.3.30) PH в угловом движении с учетом уравнения движения центра
масс, рассчитанный при конкретных значениях коэффициентов полиномов чис-
279
лителя и знаменателя. Эти коэффициенты соответствуют фиксированному мо-
менту времени полета 1-й ступени одной из PH.
Как видно из рис. 4.3.8, по сравнению с годографом передаточной функции
PH в изолированном угловом движении годограф рис. 4.3.8 претерпел изменения
на низких частотах (частотах движения центра масс). Кроме того, учет уравнения
z приводит к появлению еще одного положительного корня. Теперь по критерию
Найквиста требуется один целый охват годографом W(j<D)v/Sy точки (1,0j), сле-
довательно, PH как объект управления неустойчива. Но в целом задача СС такова
же, как и в предыдущем случае, - обеспечить требуемые запасы по коэффициен-
ту усиления Kv и но фазе в окрестности критической точки.
Рисунок 4.3.8 - Частотный годограф с учетом движения
центра масс
4.3.4.2.2 Динамические характеристики PH с учетом колебаний
жидкости в топливных баках
СЯДУ возмущенного движения PH для рассматриваемого случая приведена в
подразд. 2.1.18.3. Очевидно, что дополнительные уравнения для обобщенных коорди-
нат Syn (канал рыскания) и Р^ (канал крена) по сути являются математическими моде-
лями осцилляторов с собственными частотами со Sv|/n (со Руп) и малым демпфирова-
нием £ Svn (е Руп). Поэтому собственные колебания жидкости в n-м баке (когда пра-
вая часть уравнения равна нулю) являются медленно затухающими и особого интереса
280
не представляют. А вот вынужденные колебания жидкости могут оказывать сущест-
венное влияние на устойчивость PH.
Покажем, как изменится годограф передаточной функции PH при учете колеба-
ний жидкости. Для наглядности'рассмотрим упрощенную модель PH, состоящую из
уравнения углового движения в канале рыскания на безатмосферном участке полета и
уравнения колебаний жидкости в одном баке:
* Si + *^\|/S| ’Si 4- av5 •
" 9 (4.3.33)
Si + £S1 -Sj + <B2S1 «St = as 1V -V|/ ,
или в операторной форме:
p2-v -( а’ -р2 + avs)-S(=a 6- 5,,,
(4.3.34)
- as,v ’P2 • V + (P2+ e^ p + coM S^O.
*Р a^/si)]»
(4.3.36)
Ао — К (СО Sj ~ ) •
Тогда передаточная функция PH с учетом колебаний жидкости может быть
записана в виде
Д¥(р) а„5 р2 + ESJ • р + ©2S1 .
• Л<р, - 'к ( ’
А(Р) = Р2 К Р2 + «гл Р + ®2si) - asiv (
Av(p) = av5-(p2 + £sl-p + ®2s1),
ГДе К= i_ < ’ A,=K t:sl;
Как видно из (4.3.35), передаточная функция W(p)v/5v может быть пред-
ставлена в виде произведения двух передаточных функций, одна из которых яв-
ляется динамической характеристикой PH как статически нейтрального твердого
тела, а вторая обусловлена наличием бака с колеблющейся жидкостью:
W(p)Tr ; W(PK =К. (4337)
р2 p2+Ajp + A0
В [10] показано, что годограф Wfp^ представляет собой кривую, близкую к ок-
ружности (рис. 4.3.9). Основная особенность такой характеристики заключается в том,
что за пределами небольшой зоны собственных частот как на малых, так и на больших
частотах ее модуль близок к единице, а аргумент близок к нулю. Следовательно, на го-
дографе суммарной характеристики W(p)v/gv в этом узком диапазоне частот появится
так называемый круг жидкости. Если при проектировании СС жидкостной ракеты
учесть влияние колебаний жидкости во всех имеющихся N баках, то на частотном го-
дографе W(p)v/6v будут присутствовать N кругов жидкости. Эти круги в общем слу-
чае могут иметь различные размеры, расположение и направление обхода, что, в свою
281
очередь, обуславливает разнообразие расчетных случаев. Подробно эти случаи рас-
смотрены в работах [2, 10, 22]. Отметим лишь тот момент, что наличие на динамиче-
ской характеристике (годографе) PH кругов жидкости может приводить к появлению
дополнительных условий, которые значительно усложняют требования к частотной
характеристике автомата стабилизации.
Рисунок 4.3.9 - Годограф передаточной
функции W(p)*
Зачастую для обеспечения устойчивости PH на частотах, близких к собствен-
ным частотам колебания жидкости, используется способ фазовой стабилизации. И ес-
ли требования к фазочастотной характеристике автомата стабилизации, сформулиро-
ванные из условий устойчивости PH, можно реализовать, то фазовая стабилизация
осуществима. В этом случае регулируемый объект принято называть структурно ус-
тойчивым. Чем больше разнесены собственные частоты осцилляторов от частот твер-
дого тела и между собой, тем легче реализовать требуемые характеристики АС.
При наличии близких характерных частот обеспечение фазовой стабилизации
может оказаться невозможным, поскольку на одной частоте от автомата стабилизации
может требоваться опережение по фазе, а на другой близкой частоте - запаздывание
(рис. 4.3.10).
1тл
Рисунок 4.3.10 - Структурно неустойчивый
годограф W(p>R
В этом случае PH называют структурно неустойчивой.
282
Наличие структурной неустойчивости приводит к необходимости изменить
динамические свойства PH. Такая коррекция проводится с помощью конструк-
тивных способов, т.е. изменения конструкции топливных баков, которые пресле-
дуют три цели:
- увеличение рассеяния энергии колеблющейся жидкости;
- уменьшение приведенной массы;
- изменение частоты собственных колебаний жидкости.
Это может быть достигнуто установкой плавающих на свободной поверх-
ности жидкости демпферов, применением цилиндрических и радиальных перего-
родок и другими способами.
4.3.4.23 Динамические характеристики PH с учетом упругих
колебаний корпуса
Для того, чтобы показать влияние упругих колебаний корпуса PH на ее ди-
намические характеристики, воспользуемся СЛДУ возмущенного движения
(2.1.99). Считая для определенности количество учитываемых тонов упругих ко-
лебаний равным 2 (j = 1,2), определим передаточную функцию PH в угловом
движении W(p)vrcn /s . Ее структура может быть показана в виде рис. 4.3.11.
Рисунок 4.3.11 - Учет влияния упругости
Тогда искомая передаточная функция представляет собой сумму переда-
точных функций:
W(p)vrOT/6v= W(p),/8v+W1(p) + W2(p) , (4.3.38)
где W(p)v/5v - передаточная функция PH как твердого тела (4.3.30), опреде-
ляемая из первых двух дифференциальных уравнений системы и рассмот-
ренная нами ранее в подразд. 4.3.4.2.1;
Wj(p) = W(p)qj/6v а™ - передаточная функция, определяющая влияние j-
го тона (j = J, 2) на показания датчиков углов ГСП;
^(p)qj/sv “ передаточная функция j-ro тона по управлению, определяемая
из уравнения для j-ro осциллятора qj
283
W^/s = a^—- ; (4.3.39)
* p2 + eqi-p + ®2q,
- коэффициент влияния j-ro тона, определяемый производной формы
упругих колебаний в месте установки ГСП.
Годограф W(p)qj/54/ при p=j(D, а следовательно, и Wj(p), представляет со-
бой окружность [1], проходящую через точку (0, Oj). Модуль и аргумент
Wp)qi/sv (Wj(p) ) отличны от нуля только в узком диапазоне частот, близких к
собственной частоте <Oqj. Поскольку модуль передаточной функции PH как твер-
дого тела W(p)qj/Sv в этом диапазоне частот достаточно мал и близок к нулю, то
на годографе суммарной передаточной функции W(p)vrcnZ5 появятся круги уп-
ругости, .начинающиеся и заканчивающиеся в окрестности точки (0, Oj).
На.рис. 4.3.12 показан годограф W(p)virn/6^, соответствующий условиям
рис. 4.3.8 при наличии двух тонов упругих колебаний корпуса PH.
Рисунок 4.3.12 -Частотный годограф с учетом упругости
Поскольку знаменатель суммарной передаточной функции равен произве-
дению знаменателей ее составляющих, то для принятой модели возмущенного
движения PH учет упругих колебаний корпуса не дает дополнительных корней с
284
положительной вещественной частью. Это означает, что условие устойчивости
для упругой PH такое же, как для абсолютно жесткой, хотя наличие кругов упру-
гости в зависимости от их размеров и расположения может накладывать допол-
нительные требования к АС.
Для обеспечения устойчивости упругой PH применяет как фазовую, так и
амплитудную стабилизацию. На практике для стабилизации первого тона упруго-
сти, как более низкочастотного и характеристики которого определены достаточ-
но точно, как правило, применяют первый способ. Для остальных тонов, как бо-
лее высокочастотных с менее достоверно определенными характеристиками,
уместен второй способ.
43.4.3 Построение годографа передаточной функции разомкнутой
системы
PH как динамическое звено является существенным, но далеко не единст-
венным элементом системы стабилизации, динамику которого необходимо учи-
тывать при анализе устойчивости.
На рис. 4.3.13 показана структурная схема системы стабилизации PH для
расчета ее т.н. дискретной амплитудно-фазочастотной характеристики (ДАФЧХ).
Рисунок 4.3.13 - Структурная схема системы стабилизации PH в канале
рыскания (тангажа)
285
На схеме приняты следующие обозначения:
W.^ /«г-; /sv - передаточные функции PH по координатам z и у соот-
ветственно с учетом ее упругих колебаний;
Wx - передаточная функция звена "чистого” запаздывания, учитывающая
задержку выдачи управляющего сигнала по отношению к приему
входной информации с датчиков команд;
W3y - передаточная функция запоминающего устройства;
W*, - передаточные функции звеньев цифрового интегрирования;
W*S,W*D - передаточные функции цифровых корректирующих алгорит-
мов (фильтров) в угловом движении;
К2, К •, Kvs, Кур, Kvu - коэффициенты усиления автомата стабилизации по
соответствующим координатам;
Т - такт дискретизации.
Индекс(*) означает, что передаточная функция относится к цифровой части
СС.
Рассмотрим динамические звенья системы стабилизации.
1. PH как динамическое звено (Wiren/sv, W^/s?), достаточно подробно
проанализирована в подразд. 4.3.4.1, 4.3.4.2.
2. Сервопривод.
В общем случае сервопривод представляется нелинейной математической
моделью (2.1.52), которая для расчета частотных характеристик оказывается не-
приемлемой. Поэтому для задачи расчета ДАФЧХ эту модель необходимо заме-
нить эквивалентной линейкой моделью с передаточной функцией Wcn? которая
представляет собой аппроксимацию амплитудно-фазо частотной характеристики
(АФЧХ) нелинейного СП линейным звеном. Практически большинство серво-
приводов может быть представлено передаточной функцией звена второго по-
рядка типа
где Ti,Т2 - постоянные времени.
В случае, если АФЧХ сервопривода такова, чго приемлемую аппроксима-
цию невысоким порядком получить не удаётся, удобнее вместо линейной Wen
высокого порядка использовать непосредственно АФЧХ нелинейного СП в таб-
личном виде:
А; = А(<0|), <pi = <p(to,).
3. Передаточная функция запоминающего устройства с запоминанием на
период Т может быть определена как
1-е'рт
W3y =--------. (4.3.41)
Р
286
4. Передаточная функция элемента запаздывания имеет вид
W3y=e’pT . (4.3.42)
5. Интегрирование низкочастотного сигнала z осуществляется по методу пря-
моугольников, передаточная функция которого в z-плоскости выглядит как
W!= — Т, гдег = е₽т . (4.3.43)
z z —1
Интегрирование угловой информации обычно ведется по методу трапеции,
и выражение для имеет вид
Т 7 4-1
W;=--—• (4.3.44)
6. Передаточная функция цифрового корректирующего алгоритма задается в
виде
га
Lai-z4
Wka = , (4.3.45)
Zbrz'j
j=0
где m - число запоминаний величины, поступающей на вход корректирующего
алгоритма, ив- число запоминаний значений выходного сигнала; ai(i = 0,m)H
bj( j = 0,п) - масштабные коэффициенты.
Дня анализа устойчивости системы стабилизации с применением критерия
Найквиста необходимо построить годограф дискретной передаточной функции
разомкнутой системы, т.е. систему необходимо разомкнуть. Как показывает
практика, желательно иметь несколько точек размыкания и соответственно не-
сколько годографов. Так, для углового движения размыкание производится в
точках AvBvC (рис. 4.3.13).
Размыкание в точке А или В удобно на начальном этапе проектирования
СС, когда необходимо подобрать корректирующие алгоритмы (параметры т, п,
av, bj) в цепях статической (W*s ) и динамической ( W*D) составляющих угловой
стабилизации. Размыкание по суммарному сигналу (точка С) целесообразно на
более позднем этапе, когда корректирующие алгоритмы выбраны и необходимо
подобрать настройки АС для обеспечения требуемых запасов устойчивости по
амплитуде и фазе.
Для определенной точки размыкания, используя известные способы преоб-
разования структурных схем, несложно получить выражение для передаточной
функции разомкнутой системы, годограф которой необходимо построить. Так,
при размыкании в точке А оно будет иметь вид
___ K.s‘w;s-w;
F(A) i-wL-wj-wytK^-w^+K^-w;] ’ (4146)
287
где W^u.= K2+K2-W*; W‘, W* - z-преобразование соответствующих непре-
рывных частей схемы W2, W3:
Wi = Wjy-Wt-Wcn;
w2 = wr\viren/8,;
w3 = w1-wv„n/S¥)
которое может быть осуществлено по формуле
W‘(p) = -- • £w(p+n-cor). (4.3.47)
Т п=-2
Здесь сог - круговая частота (о)г = 2л/Т) включения импульсного элемента с
тактом дискретизации Т.
При размыкании системы в точках В и С передаточные функции разомкну-
той системы соответственно запишем как
KwD‘W*n -W*
Wp(B) " 1-W* ^W* -W* [К -W* +K -W* ] ’ (4.3.48)
1 VV ZAC VV 2 VV 3 vv vs yu J
w: • [kvS - w\ + kd • w’n + k„„ • w* ]
WP(C)= -i----------------------------—-2 . (4.3.49)
1 VV2 2 AC
На рис. 4.3,14 изображена структурная схема СС в канале крена.
Рисунок 4.3.14 - Структурная схема системы стабилизации PH в канале крена
288
Очевидно, что она идентична схеме канала рыскания (тангажа), за исклю-
чением того, что в ней отсутствует контур регулирования движения центра масс.
Поэтому выражение для передаточных функций разомкнутой системы в канале
крена легко могут быть получены из (4.3.46), (4.3.48), (4.3.49), если в них исклю-
чить член [ W* • W^c ] и индекс "у" заменить на "у"-
4.3.5 Законы управления
При исследовании возмущённого движения PH как объекта управления не-
обходимо к уравнениям, описывающим движения PH, добавить уравнения, опре-
деляющие закон формирования управляющего воздействия на объект.
Обычно входное воздействие (управляющий сигнал) на автомат стабилиза-
ции формируется как линейная комбинация регулируемых величин, их производ-
ных и интегралов (ПИД - регулятор). Коэффициенты усиления этих составляю-
щих управляющего сигнала могут быть как постоянными, так и зависящими от
времени полёта t.
Выходным сигналом автомата стабилизации может рассматриваться угол
отклонения управляющих органов PH.
Между управляющим и выходным сигналами в реальном автомате стаби-
лизации обычно имеет место нелинейная связь. Поэтому для упрощения анализа
часто автомат стабилизации рассматривают как идеальную (линейную) систему.
Современная система управления PH строится на базе БЦВМ. Применение
БЦВМ в контуре системы стабилизации делает её очень гибкой и позволяет пу-
тём внесения изменений в программное обеспечение БЦВМ полностью сохра-
нить приборный состав системы стабилизации при возникших в процессе проек-
тирования изменениях характеристик PH.
При использовании БЦВМ формирование управляющих сигналов на серво-
приводы осуществляется с помощью алгоритмов системы стабилизации.
Алгоритмы системы стабилизации обрабатывают информацию, поступаю-
щую с датчиков, систем навигации и наведения, а также других систем, в целях
формирования управляющих сигналов, которые обеспечивают устойчивое дви-
жение PH с заданной точностью регулируемых координат. Структура алгоритмов
стабилизации и их связь с другими алгоритмами показана на рис. 4.3.15.
Алгоритмы систем навигации и наведения формируют для системы стаби-
лизации траекторию программного движения PH, отклонения координат движе-
ния центра масс PH от их программных значений, функциональные команды для
коммутации параметров системы стабилизации (команды на разделение ступе-
ней, сброс головного обтекателя, изменение режимов работы ДУ и т.д.).
Алгоритмы коммутации формируют временные команды на изменение па-
раметров или режимов работы системы стабилизации и СУОС.
Алгоритмы обработки входной информации обрабатывают информацию с
датчиков, мажоритируют её, преобразуют информацию из гироскопической сис-
темы координат в программно-связанную, проводят компенсацию больших скач-
кообразных рассогласований и компенсируют систематические погрешности
датчиков.
289
Рисунок 4.3.15 - Структура алгоритмов стабилизации
Корректирующие алгоритмы обеспечивают устойчивость движения PH и
заданную точность стабилизации регулируемых координат относительно их про-
граммных значений.
Алгоритмы формирования управляющих сигналов на сервоприводы полу-
чают информацию с корректирующих алгоритмов и алгоритмов коммутации. С
их помощью осуществляется логическая обработка и кодирование управляющей
цифровой информации, поступающей на сервоприводы.
Все алгоритмы системы стабилизации, кроме алгоритмов коммутации, яв-
ляются циклическими, т.е. повторяются на каждом такте на значительных вре-
менных участках полёта PH. Такт решения различных алгоритмов может быть
разным. С минимальным тактом обычно решаются алгоритмы угловой стабили-
зации и формирования управляющих сигналов на сервоприводы. .Алгоритмы ста-
билизации центра масс PH в каналах НС и БС могут решаться с тактом большей
длительности.
Корректирующие алгоритмы (их часто называют цифровыми фильтрами)
являются центральными алгоритмами системы стабилизации, так как с их помо-
щью достигается требуемый запас устойчивости системы. Следует отметить, что
возможности коррекции цифровой системы стабилизации значительно шире, чем
аналоговой.
Корректирующие алгоритмы проводят такое перераспределение нулей и
полюсов передаточных функций разомкнутой и замкнутой систем, при которых
система стабилизации удовлетворяет не только условию устойчивости, но и оп-
ределённым показателям качества процессов стабилизации.
290
Корректирующие алгоритмы обычно представляют собой линейные алго-
ритмы, которые в общем случае могут быть описаны разностным уравнением ви-
да
u[n] = a0 х[п] + а! ’Х[п-1] + а2 -х[п-2] + ...ч-
+ а{ -х[п —iJ-bj -u[n-l]-b2-u[n-2]-...- (4.3.50)
-bj-u[n-j],
где x[n] - входной сигнал;
u[n] - выходной сигнал;
i - число запоминаемых значений входного сигнала, поступающего на вход
корректирующего алгоритма;
j - число запоминаемых значений выходного сигнала;
п - номер такта дискретизации Т.
Используя аппарат z - преобразования, передаточную функцию корректи-
рующего алгоритма (4.3.50) можно записать в виде
Dfzl = Ж = z- a0-Zi+a1-zi-1+... + ai
U U(z) bo zJ+b, zH + ...+bj
(4.3.51)
где b0=l.
В настоящее время в системах стабилизации PH на участках работы МД в
большинстве случаев управляющие сигналы в каналах тангажа, рыскания и крена
формируются следующим образом:
ЕЭ[п] = £3S[n] + ЕэпИ + £у [п] + ЕэиИ;
еДп] = Evs[n] + EvD[n] - Ez[n] + Еуц [п]; (4.3.52)
EY[n] = Mn] + £yD[n],
где £d[n],£v[n],£y[n] -управляющие сигналы в каналах тангажа, рыскания и
крена соответственно;
E3s[n]»sx|/s[n]?eys[n] -статические составляющие управляющих сигналов в
каналах тангажа, рыскания и крена;
еэо[пЬеч/о[п],еуо[п] - динамические составляющие управляющих сигналов
в каналах тангажа, рыскания и крена;
£y[n],£z[n] - составляющие управляющих сигналов в каналах регулирова-
ния нормальной и боковой координат соответственно;
£Su[n],evu[n] - интегральные составляющие управляющих сигналов в кана-
лах тангажа и рыскания.
Составляющие управляющих сигналов в каналах тангажа, рыскания и кре-
на вычисляют по формулам
291
e8s[n] = K.8S[n] • ( a0 • 9[n]+aj • 9[n -1] +... +
+ am afn-mD-bi e8s[n-l]-b2•E8S[n-2]-...-
-bk-69S[n-k];
EvS[n] = KvS[n] • (a0 • y[n] + aj • q/[n-1] +... + (4.3.53)
+ ara-v[n-m])-b1-evS[n-l]-b2-EvS[n-2]-...-
-bfE^tn-k];
8^[п]=К^[п].у[п];
£8D[n] = K8D[n] • (c0 • 9[n] + C[ - 9[n-l]+...+
+ cr • 9[n - r]) - d( E8D[n -1] - d2 • E8D[n -2]-...-
-drE8D[n-^];
E^n] = KvD[n] • (CO y[n] + Cj • \|/[n -1] +... +
+ cr • y[n -r]) - dj • svD[n -1] -d2 • EvD[n - 2] (4.3.54)
d£ • Eyjjfii £],
EvD[n] = KyD[n] • (go • y[n] + gj • y[n -1]+...+
+ gs -Ytn-sD-fj £TD[n-l]-f2 -EYD[n-2]-...-
-fiEYD[n-i];
Ey[n] = Ky[n] • y[n] + K^[n] • y[n];
EZ[D] = Kz[n] • z[n] + Kiln] • Z[n];
(4.3.55)
f.8u[n] = K8u[n]-I8[n];
8yu[n] Kyyfn] • Iy[n],
T
I8[n] = I8[n-l] + —-(9[n-l] + S[n]);
2 (4.3.56)
Цп] = Цп - Л + ~ ~ Ц + VW),
где 9{n], \g[n], y[n] - угловые рассогласования в программно-связанной СК;
у[п ], у[п] - нормальная координата и скорость центра масс PH;
z[n],z[n] - боковая координата и скорость центра масс PH;
Kas[n],KvS[n],KyS[n] - коэффициенты усиления статических составляю-
щих управляющих сигналов в каналах тангажа, рыскания и крена;
K3D[n],KvD[n],KyD[n] -коэффициенты усиления динамических состав-
ляющих управляющих сигналов в каналах тангажа, рыскания и крена;
292
am ,bk - коэффициенты цифровых фильтров статических составляющих
управляющих сигналов в каналах тангажа и рыскания;
cr,d€,gs,fj - коэффициенты дифференцирующих цифровых фильтров в ка-
налах тангажа, рыскания и крена;
Ку[п],Ку[п] - коэффициенты усиления системы стабилизации в канале НС;
Kz[n],Kz[n] - коэффициенты усиления системы стабилизации в канале БС;
K3u[n],Kw[n] -коэффициенты усиления интегральных составляющих
управляющих сигналов в каналах тангажа и рыскания.
Выражения (4.3.52)-(4.3.56) представляют собой ядро корректирующих
алгоритмов системы стабилизации PH на активных участках полёта. К ним по
мере необходимости могут добавляться различные линейные и нелинейные со-
ставляющие управляющих сигналов, например, по углам атаки и скольжения при
разгрузке корпуса PH (см. подразд. 4.3.8).
На пассивных участках движения PH используются нелинейные корректи-
рующие алгоритмы, представленные в подразд. 4.4.3.
4.3.6 Синтез параметров системы стабилизации
4.3.6.1 Критерии устойчивости замкнутой системы "PH + АС"
Под устойчивостью понимают способность системы автоматического регу-
лирования возвращаться к исходному состоянию после кратковременного внеш-
него воздействия или принимать новое установившееся значение при постоянном
внешнем воздействии.
Необходимым и достаточным условием устойчивости замкнутой непре-
рывной линейной системы автоматического регулирования является отрицатель-
ность вещественных частей всех корней ее характеристического уравнения. Од-
нако нет необходимости находить значения корней, поскольку для суждения об
устойчивости системы необходимо лишь знать, что все они расположены левее
мнимой оси на плоскости комплексного переменного р=з<о, где] - мнимая едини-
ца, о - круговая частота.
Условия, позволяющие судить о расположении корней в левой полуплоско-
сти без нахождения их значений, называются критериями устойчивости.
Существующие критерии устойчивости делят на две группы: алгебраиче-
ские (критерий Рауса, критерий Гурвица и т.д.) и частотные критерии (критерий
Найквиста, критерий Михайлова и т.п.).
Для PH рассматриваемого класса, динамическая схема которой описывает-
ся системой дифференциальных уравнений высокого порядка, наибольший прак-
тический интерес представляет использование частотных критериев устойчиво-
сти.
В основе частотных критериев устойчивости лежит известный в теории
функций комплексного переменного принцип аргумента. Согласно этому прин-
ципу приращение аргумента функции F(p)< комплексного переменного р при из-
менении его по замкнутому контуру в положительном направлении (против часо-
293
вой стрелки) составляет 2rc(N-S), где N - число нулей, aS- число полюсов функ-
ции F(p) внутри замкнутого контура.
Для исследования устойчивости замкнутой системы регулирования наибо-
лее часто используют частотный критерий Найквиста. Для применения критерия
необходимо знать амплитудно-фазовую частотную характеристику разомкнутой
системы, которую можно получить как аналитически, так и экспериментально, в
том числе и для отдельных звеньев системы. Экспериментально определенные
частотные характеристики линейной системы (или ее звеньев) могут быть ис-
пользованы для построения амплитудно-фазовой характеристики без перехода к
математической модели.
Критерий устойчивости Найквиста лежит в основе графического метода
анализа устойчивости. Согласно этому критерию для устойчивости замкнутой
системы автоматического регулирования необходимо и достаточно, чтобы час-
тотный годограф передаточной функции разомкнутой системы Wp(jo) при изме-
нении со от 0 до +со охватывал L/2 раз в положительном направлении точку
(1, jO), где L - число корней характеристического уравнения одноконтурной ра-
зомкнутой системы, лежащих в правой полуплоскости [7].
В отличие от классической граничной точки (-l,jO) для PH как объекта ре-
гулирования принимают граничную точку (1 ,j0), поскольку в значениях коэффи-
циентов динамической схемы PH (ауй, а^), характеризующих управляющие воз-
действия УО, учтен знак отрицательной обратной связи по регулирующему воз-
действию.
При использовании критерия Найквиста на первом этапе определяется чис-
ло полюсов передаточной функции системы в разомкнутом состоянии Wp(p), на-
ходящихся в правой полуплоскости, где р=дш - оператор преобразования Лапла-
са,- При расчете полюсов передаточной функции разомкнутой системы достаточ-
но учитывать только корни объекта управления, так как остальные звенья систе-
мы - ККП, сервопривод, автомат стабилизации - всегда устойчивы и не могут
внести корней в правую полуплоскость. Возмущенное движение PH описывается
СЛДУ, которую легко можно привести к матричному уравнению в форме Коши
(см. подразд. 4.3.4). Собственные числа матрицы Коши и есть полюса передаточ-
ной функции PH. Их определяют с помощью стандартной процедуры.
На втором этапе осуществляется построение частотного годографа переда-
точной функции Wp(jco) разомкнутой системы для значений частот 0<(о<+оо.
Третьим этапом является подсчет числа оборотов против часовой стрелки
частотного годографа Wp(ja>) вокруг критической (граничной) точки (1, jO).
На последнем этапе, используя формулировку критерия Найквиста, уста-
навливается факт устойчивости (или неустойчивости) замкнутой системы авто-
матического регулирования.
При невыполнении условий устойчивости замкнутой системы регулирова-
ния использование частотного критерия Найквиста позволяет определить необ-
ходимый характер деформации частотного годографа передаточной функции ра-
зомкнутой системы. Включение корректирующего устройства по последователь-
ной схеме в контур регулирования дает возможность реализовать принятую
, 294
структуру законов управления и для расчетных значений параметров АС обеспе-
чить требуемую деформацию частотного годографа разомкнутой скорректиро-
ванной системы.
Годограф разомкнутой скорректированной системы автоматического регу-
лирования Wp(jco) рассчитывают для динамических характеристик, соответст-
вующих фиксированному времени полета PH (метод “замороженных” коэффици-
ентов).
Параметры частотного годографа Wp(jco) позволяют определить такие час-
тотные характеристики замкнутой системы автоматического регулирования, как
запас по амплитуде, запас по фазе, резонансный пик, резонансная частота и т.д., а
также влияние разбросов параметров системы на указанные характеристики.
В настоящее время не имеется точных математических соотношений между
техническими требованиями к системе автоматического регулирования в частот-
ной и временной областях. Однако эмпирически установлено и в практике проек-
тирования систем стабилизации принято считать, что оптимальными с точки зре-
ния значений коэффициента демпфирования, колебательности, времени переход-
ного процесса и времени нарастания выходного сигнала являются системы, обес-
печивающие не менее чем двукратный запас по амплитуде и не менее 30 градусов
запас по фазе.
В случае исследования дискретных (цифровых) систем автоматического ре-
гулирования для анализа устойчивости замкнутых систем также применим час-
тотный критерий Найквиста. В этом случае для расчета дискретной передаточной
функции разомкнутой одноконтурной цифровой системы, например, в канале
рыскания может быть применено "преобразование со звездочкой" [25]
w„(j®) = £ w ,(j©+jn<Bs) Gh0(j<»+jna»s)xWjp(ja)+jnos), (4.3.57)
1 п--ло /5
где Wv/(]<b) - передаточная функция PH в тракте "датчик угла \|/ - угол откло-
/5
нения управляющего органа 5";
Т - такт дискретизации системы;
со5=2л/Т - частота прерывания;
GhoG®) - передаточная функция запоминающего устройства нулевого по-
рядка (фиксатора);
X^p(j(jj) - передаточная функция сервопривода.
Для скорректированной разомкнутой системы управления дискретная пе-
редаточная функция описывается выражением
W* (jco) = Dv(jco) • (jco), (4.3.58)
где Dy (jco) - дискретная передаточная функция цифрового корректирующего
алгоритма (ЦКА) (цифрового фильтра).
Поскольку система управления рассматриваемой PH обладает характери-
стикой типа фильтра нижних частот, то с точностью, достаточной для практиче-
295
ского использования, частотный годограф дискретной передаточной функции
Wy(ja>) рассматривается для п=0,-1,1,-2,2 из условия, что
по\ <сотах
>
где ©max - максимальная частота осциллятора, имеющегося в системе.
Так же, как и для непрерывных систем, критерий Найквиста позволяет ис-
следовать устойчивость замкнутой дискретной системы по частотному годографу
передаточной функции разомкнутой системы, рассчитанной с использованием
преобразования (4.3.57) и по полюсам характеристической матрицы. Но при этом
необходимо учесть, что система стабилизации PH представляет собой, как прави-
ло, двухконтурную систему регулирования, поэтому для анализа по критерию
Найквиста полюсы должны быть рассчитаны с учетом замыкания контура регу-
лирования боковой скорости выбранными коэффициентами усиления Kz и К2.
Для этого к столбцам характеристической матрицы с индексами z и z добавля-
ются соответственно векторы К2 U и Kz • U, где U - вектор управления.
В .качестве примера на рис.4.3.16 показан годограф и корни передаточной
функции нескорректированной системы стабилизации в канале рыскания одной из
PH для 40 с полета. СЯДУ, описывающая динамику PH, имеет в своем составе
уравнения твердого тела, уравнения колебаний жидкости в четырех баках, уравне-
ния двух тонов упругих колебаний корпуса и одно уравнение упругой подвески ру-
левого двигателя. Анализируя корни характеристического уравнения (два корня на-
ходятся в правой полуплоскости) и поведение годографа, можно сделать вывод, что
нескорректированная система неустойчива. Для ее устойчивости необходимо, чтобы
в данном случае годограф охватывал один раз критическую точку (1, +j0).
Im Параметры АС:
KS=1.00
KD=O.OOc
Kz = 0.0052 рад*с/м
К2=0.0013 рад/м
Корни
характеристической
матрицы:
-3.26223 ±j 81.50243
-0.41963 ±j 53.04935
-0.16998 ±j 20.31284
-0.01269 ±j 7.17958
-0.03534 ±j 5.15529
-0.02948 ±j 6.15176
-0.02933 ±j 5.90486
-0.20277
-1.56924
Re 1.18238
0.51923
Рисунок 4.3.16 - Годограф нескорректированной системы стабилизации
296
На рис. 4.3.17 изображен годограф разомкнутой скорректированной систе-
мы, для которой критерий устойчивости Найквиста выполняется.
Im
Re
Рисунок 4.3.17 - Годограф скорректированной системы стабилизации
4.3.6.2 Определение требований к частотным характеристикам
цифровых корректирующих фильтров
По построенному годографу передаточной функции разомкнутой системы
стабилизации PH, руководствуясь критерием устойчивости Найквиста, можно ус-
тановить необходимые ограничения на частотные характеристики системы ста-
билизации из условия устойчивости системы, т.е. определить желаемые дискрет-
ные амплитудно-фазовые частотные характеристики (ДАФЧХ) системы.
Существует множество [2,5] способов определения желаемых частотных
характеристик системы стабилизации PH. При этом все требования, предъявляе-
мые к ДАФЧХ, условно можно разделить на две группы:
- качественные, т.е. не определенные конкретными численными величи-
нами;
- количественные, выраженные конкретными численными величинами.
Первая группа требований к ДАФЧХ связана с тем, что в динамической
схеме PH может быть не учтена какая-нибудь существенная особенность реаль-
ной PH, например, осцилляторы. Так как характеристики этих осцилляторов за-
ранее неизвестны, то обычно принимают, что на вход системы стабилизации воз-
действует случайная помеха во всем спектре рабочих частот системы. Для увели-
чения помехозащищенности системы поэтому стремятся в этом диапазоне частот
уменьшить амплитудно-частотную характеристику цифрового корректирующего
алгоритма настолько, насколько позволяют другие требования.
Таким образом, требование помехозащищенности системы является каче-
ственным требованием к дискретной амплитудно-частотной характеристике
297
(ДАЧХ) корректирующего алгоритма.
Вторая группа требований к ДАФЧХ системы стабилизации - это требова-
ния, сформулированные по результатам анализа ДАФЧХ ракеты-носителя и ее
рулевых приводов. В большинстве случаев требования формируются в виде зна-
чений параметров амплитудно-частотной либо фазочастотной характеристик сис-
темы (амплитудные либо фазовые условия устойчивости), при этом для отдель-
ных интервалов частот значения могут противоречить друг другу. В таком случае
необходимо пересматривать требования, тем более, что разработка требований к
ДАФЧХ ЦКА в значительной мере является искусством и носит эвристический
характер. Как видно из сказанного выше, не существует единой методики форми-
рования требований к желаемой ДАФЧХ корректирующего алгоритма для обес-
печения устойчивости движения PH, особенно в случае наличия в динамической
схеме большого числа осцилляторов, появление которых обусловлено упругими
колебаниями корпуса PH и колебаниями топлива в баках.
Процесс формирования желаемых ДАФЧХ является итерационным, т.е. их
вид корректируется в зависимости от полученных в процессе проектирования на-
строек системы стабилизации, в результате анализа переходных процессов стаби-
лизации и точности регулирования и т.д.
43.63 Синтез цифровых корректирующих алгоритмов
После того, как проведен частотный анализ и на его основе сформулирова-
ны требования к ЦКА в частотной области, задачу синтеза ЦКА проще решать
также одним из частотных методов.
В литературе приведены самые разные методы нахождения оптимальных в
некотором смысле алгоритмов регулятора, например, метод пространства состоя-
ний [5,6], метод минимизации интегральных квадратичных критериев качества
[5].
Но когда речь идет о линейных импульсных или цифровых системах, зада-
ча синтеза сводится в конечном счете к нахождению импульсной передаточной
функции (ИПФ) вида
к
Eai,z-i
™цф[г] = -^-------, (4.3.59)
i + Xbj-z'j
j=i
где z = eJtoT;
T - такт дискретизаций.
Импульсной передаточной функции (4.3.59) в частотной области соответст-
вует во временной области корректирующий алгоритм
k ш
y[nT]=£aix[(n-i)r]-i;bj УК»-jffl, (4.3.60)
i=0 j=l
где п - порядковый номер такта;
х[пТ] - входная последовательность;
298
y[nT] - выходная последовательность.
При bj Ф 0 цифровой фильтр называется рекурсивным, а при bj = 0 - нере-
курсивным. Если корни полинома числителя и корни полинома знаменателя пе-
редаточной функции (4.3.59) по модулю меньше единицы, то цифровой фильтр
обладает свойством минимально-фазового звена, для которого характерна одно-
значная связь между амплитудной частотной и фазовой частотной характеристи-
ками. Исходя из этого свойства при синтезе цифровых корректирующих фильт-
ров системы стабилизации необходимо задать его желаемую амплитудную или
фазовую частотную характеристику на интервале (о, cos/2), где cos - частота пре-
рывания.
Поэтому процесс синтеза заключается в способе определения значений ко-
эффициентов цифрового фильтра а, и bj , обеспечивающих его желаемые частот-
ные характеристики.
В пределах данного раздела термины ЦКА и ЦФ будем считать синонима-
ми.
В зависимости от требований, предъявляемых к АЧХ цифрового фильтра,
одна из структур ЦФ (рекурсивная или нерекурсивная) может быть более пред-
почтительной.
Например, на участке полета 1-й ступени PH, динамическая схема которой
содержит в своем составе, кроме твердого тела жидкостные осцилляторы и ос-
цилляторы нескольких тонов упругих колебаний, к АЧХ корректирующего алго-
ритма предъявляют следующие требования:
- на частоте твердого тела и частоте жидкости до ~1.6 Гц должно быть
обеспечено опережение по фазе;
- на частоте первого тона упругости ~3 ... 5 Гц - запаздывание по фазе;
- на частотах второго, третьего тонов (более 6 Гц) должно быть ампли-
тудное подавление, а именно: модуль передаточной функции разомкну-
той скорректированной системы, рассчитанный по формуле (4.3.58),
должен удовлетворять условию |W* (jco)| < 1.
В случае, если АЧХ имеет большие градиенты, ЦФ рекурсивной структуры
обеспечивает лучшие возможности для выполнения заданных требований. Эту же
АЧХ можно реализовать и с помощью ЦФ нерекурсивной структуры, но для это-
го потребуется значительное увеличение количества элементарных звеньев [21].
На участках полета 2-й и 3-й ступеней PH, где динамическая схема имеет
более простой вид, предпочтительнее применять нерекурсивные алгоритмы, об-
ладающие очень важным достоинством - устойчивость от сбоев БЦВМ. Второе
важное достоинство нерекурсивного алгоритма состоит в том, что он сам по себе
всегда устойчив даже при ограниченной разрядной сетке БЦВМ.
Так как коэффициенты передаточной функции (4.3.59) связаны со значе-
ниями АЧХ нелинейными зависимостями, для задачи синтеза ЦФ в частотной
области применяют, как правило, методы нелинейного программирования.
Сначала рассмотрим некоторые методы синтеза по заданной АЧХ нерекур-
299
сивного ЦФ, ИПФ которого имеет вид
w(z)=Eai’z-i- (4.3.61)
1=0
Подставим в (4.3.61) вместо z его комплексный эквивалент
z = ej“T = cos О)Т + jsin соТ, в результате получим
W(jco)= -cos icoT-j ^a,-sin icoT. (4.3.62)
i=0 i=0
Из (4.3.62) следует, что для нерекурсивного КА имеют место соотношения
п
Re(co) = £ а, • cos icoT;
i=0
□
Im(co) = • sin icoT.
i=0
Линейная зависимость вещественной и мнимой частей ИПФ от коэффици-
ентов позволяет сформулировать задачу квадратичного программирования, в
которой ограничения на фазовый сдвиг выражаются линейными функциями, а
функция цели является квадратичной функцией относительно коэффициентов
синтезируемого ЦФ.
Методика приведения задачи синтеза к типовой задаче квадратичного про-
граммирования описана в [2]. Из большого числа методов решения задачи для
практического применения наилучшим оказался метод Хилдрета и Д'зопо, как
наиболее приспособленный для использования ЦВМ [11].
Достоинством этого метода является возможность одновременного задания
в различных точках по частоте требований как на амплитудную, так и на фазовую
частотные характеристики ЦФ. Правда, эти требования не должны противоречить
друг другу.
С точки зрения реализации ЦФ желательно, чтобы порядок и в (4.3.61) был
минимальным. Поэтому начальный порядок алгоритма выбирают наименьшим из
возможных в предположении, что синтезированный ЦФ всегда минимально-
фазовый. Если при таком п требования к АЧХ не выполняются, увеличивают по-
рядок на единицу и задачу синтеза повторяют до тех пор, пока будут удовлетво-
рены все требования к АЧХ.
Другой подход решения задачи синтеза нерекурсивного ЦФ (4.3.61) пока-
зан в [19]. В отличие от описанного выше метода, где минимальный порядок за-
дается интуитивно разработчиком и для каждой итерации решается задача нели-
нейного программирования, в предлагаемом методе [19] исходя из заданной точ-
ности реализации АЧХ в среднеквадратическом смысле сначала определяется не-
обходимый порядок п синтезируемого фильтра, а затем один раз решается систе-
ма из п+1 нелинейных уравнений. Там же показано, что если разложить функцию
квадрата амплитудной характеристики в ряд Фурье по косинусам
300
Вк = — ♦ p^-^cos(k0)d0, к = (о,п ) ,
тс о 2
то полученные коэффициенты Фурье связаны с коэффициентами синтезируемого
КА следующими зависимостями:
Вк=Еа;-а;+к, i + k<n ,
i=0
где n - необходимое количество членов ряда, определяющееся с заданной точ-
ностью равенством Ляпунова-Парсеваля
к-1 ТС oL
где А(0) -требуемая АЧХ на интервале (о,/2), g)s - круговая частота пре-
рывания.
В некоторых случаях доминирующим требованием к корректирующему ал-
горитму является соблюдение фазовых условий. ФЧХ дискретной системы есть
нечетная периодическая функция с периодом 2л, поэтому для синтеза ЦФ доста-
точно задать ее на интервале относительных частот 0е(о,л), что соответствует
интервалу частот (о,со3/2), где cos - круговая частота прерывания дискретной
системы [25].
Если требуемая фазовая характеристика <р(0), заданная таблично на интер-
вале (б,л), такая, что tg<p(0) в каждой точке интервала удовлетворяет условиям
Дирихле, то функцию tg<p(0) можно разложить в ряд Фурье по синусам и с напе-
ред заданной точностью заменить тригонометрическим многочленом
tg<p(9)«Zbksink0,
о
где bk - коэффициенты Фурье, полученные по формуле
bk = — • [tg(p(O)sin k0d0, k = (l,m),
л 0 „
где m - количество членов ряда, определяющееся с заданной точностью равен-
ством Ляпунова-Парсеваля
ш 9 я
Zb^«-f[tg<p(0)]2d9,
k=l ТС о
причем m должно быть четным, потому что порядок синтезируемой ИПФ
(4.3.61), как показано в [20], должен быть n-m/2. Там же показан алгоритм со-
ставления и решения системы линейных уравнений, связывающих п+1 коэффи-
циентов ИПФ с m коэффициентов Фурье.
Так как процесс поиска оптимальных коэффициентов ЦФ является итера-
301
ционным, потому что не сразу удается устранить противоречия в требованиях по
фазе и амплитуде, иногда быстрее можно прийти к цели, точнее - к компромисс-
ному решению, если решать задачу синтеза по заданным АЧХ и ФЧХ попере-
менно.
Теперь рассмотрим методы синтеза рекурсивных ЦФ вида (4.3.59). Для
решения таких задач чаще всего применяют различные методы динамического
программирования [28].
Задача динамического программирования заключается в том, чтобы найти
минимум оптимизируемой функции цели при наложенных ограничениях (в на-
шем случае - на ФЧХ и АЧХ) на заданных частотах.
Например, в [2] эта задача решена методом деформируемого многогранни-
ка. Искусство разработчика заключается в том, чтобы корректно задать ограни-
чения и весовые коэффициенты. Кроме того, ввиду многоэкстремальности целе-
вой функции метод имеет медленную сходимость. Для начала поиска оптималь-
ного решения необходимо задать начальный вектор искомого решения Х° таким
образом, чтобы заданные компоненты максимально приближали ДАФЧХ КА к
желаемой. Для этого можно воспользоваться методом номограмм для АЧХ и
ФЧХ элементарных звеньев [25]. Вследствие трудоемкости такой метод не нашел
широкого применения в инженерной практике.
Одним из методов синтеза ЦФ, применяющихся практически, является ме-
тод случайного поиска [28].
В качестве оптимизируемой функции цели принимают квадратичное от-
клонение действительной амплитудной частотной характеристики от желаемой,
т.е.
Q = Z[AgW-AW]\ (4.3.63)
j=0
где A(<Oj),Ag(o)j) -действительное и желаемое значения амплитудной частот-
ной характеристики ЦФ для ©=®j.
Функция цели (4.3.63) является многоэкстремальной функцией, и процесс
синтеза заключается в нахождении ее глобального минимума с точностью до за-
данного наперед числа г.
Для этого используют математический аппарат случайного поиска. Методы
случайного поиска являются развитием метода проб и ошибок. В этом случае
решение задачи оптимизации функции цели ищут случайно и при удаче прини-
мают, а при неудаче отвергают с тем, чтобы снова обратиться к случайности как
к источнику возможностей. Такое ’’случайное” поведение опирается на уверен-
ность, что случайность содержит в себе все возможности, в том числе и искомое
решение.
Рассматриваемый метод синтеза цифровых корректирующих фильтров
включает в себя процедуру глобального случайного поиска и процедуру локаль-
ного поиска методом покоординатного спуска с использованием методов случай-
ного поиска.
302
На каждом цикле процесса синтеза корректирующих ЦФ при очередном
изменении значений коэффициентов а; и bj (4.3.59) проверяют выполнение усло-
вия
М<1,
где Xs - корни полиномов числителя и знаменателя передаточной функции циф-
рового фильтра (4.3.59), т.е. выполнение условия минимальной фазовости и ус-
тойчивости дискретных звеньев (в процессе синтеза рассматривают варианты
только устойчивых цифровых фильтров).
Входными параметрами процедуры синтеза ЦФ являются значения желае-
мой частотной характеристики Ag((Oj) на интервале частот coj g (0,cos/2), где o)s -
круговая частота дискретизации.
Выходными параметрами программы синтеза ЦФ являются:
- значения коэффициентов ЦФ;
- массив значений АЧХ синтезированного фильтра А (со);
- массив значений соответствующей ФЧХ <р(со).
Программа синтеза ЦФ методом случайного поиска находится в библиоте-
ке стандартных программ предприятия Хартрон-Аркос.
Только в некоторых случаях, когда задаются требования исключительно к
АЧХ, а фазовые условия некритичны, можно воспользоваться типовыми цифро-
выми фильтрами. Для синтеза такого рода ЦФ имеется пакет программ
"NUMERI", разработанный профессором Е.Шрюфером в Мюнхенском техниче-
ском университете по алгоритмам, приведенным в [30]. При расчете ЦФ с помо-
щью этого пакета требуется задать следующие данные:
- частота дискретизации, Гц;
- границы диапазона пропускания;
- тип фильтра: фильтр нижних частот, фильтр верхних частот, полосовой
фильтр;
- прототип фильтра: Баттерворта, Кауэра, Бесселя,..:
В результате расчета выдаются параметры ЦФ, представленного в виде
произведения последовательно соединенных звеньев первого и второго порядков.
Необходимо отметить следующую особенность: если привести ЦФ к одному
многочлену (раскрыть произведение), то при вычислении в БЦВМ с фиксирован-
ной запятой и ограниченной разрядной сеткой корни реализованного многочлена
могут оказаться на границе единичного круга |Xj > 1, что приведет к потере устой-
чивости системы. В таких случаях для надежности необходимо последовательное
программирование цепочки звеньев с расчетными проквантованными коэффици-
ентами.
4.3.6.4 Построение областей устойчивости системы стабилизации
После выбора корректирующего алгоритма необходимо исследовать влия-
ние его параметров на устойчивость системы стабилизации. Такими параметрами
[61], как правило, являются статический коэффициент усиления Ks, находящийся
в прямом тракте "датчик угла - сервопривод", и динамический коэффициент KD,
303
находящийся перед форсирующим звеном корректирующего алгоритма. Выбран-
ные К§ и KD при соответствующих характеристиках ЦКА должны обеспечить
устойчивость при всех разбросах параметров объекта управления, сервопривода,
вычислительных устройств, а также внешней среды.
Проверка осуществляется построением областей устойчивости и анализом
места расположения выбранных коэффициентов относительно границ этих об-
ластей.
Так как процесс построения границ области устойчивости очень трудоем-
кий, то в этом разделе будут рассмотрены методы построения областей устойчи-
вости с применением ЦВМ.
Первый способ - по корням характеристического уравнения (характеристи-
ческой матрицы).
Предположим, что объект управления и регулятор описываются системой
линейных дифференциальных уравнений. Такая система легко приводится к мат-
ричному уравнению в форме Коши. По собственным числам (корням) матрицы
можно судить об устойчивости системы. Если вещественная часть какого-либо
корня равна нулю (располагается на мнимой оси плоскости р), это соответствует
границе области устойчивости. При изменении параметров и Кр корень мо-
жет смещаться либо в левую полуплоскость, что означает - система устойчива,
либо в правую полуплоскость, что означает - система неустойчива.
Для нахождения корней имеются стандартные процедуры, созданные на ба-
зе QR-метода [26,27]. Поэтому вся трудность при использовании метода корней -
в оптимизации вычисления приращений искомых параметров Ks и Ко.
Например, в [29, 9] предложен "гусеничный" способ построения границ об-
ласти устойчивости, предполагающий сначала выход с заданным шагом прира-
щений KS и KD на какую-либо граничную точку, а затем поиск вдоль границы
по контуру области.
Имеется еще один корневой способ поиска границы области, основанный
на том, что при выборе ЦКА уже построен годограф скорректированной устой-
чивой системы для заданных значений коэффициентов усиления Kg и К^. По-
скольку система устойчива, эти значения соответствуют внутренней точке об-
ласти устойчивости (на рис.4.3.18 она задана точкой С). Задавая начальный угол
направления поиска <рн и начальное приращение Ар = ^/AK|+AK^ , методом "ар-
тиллерийской вилки" можно выйти на границу области. Затем, начиная с той же
начальной точки, но изменяя угол на Аср, находим следующую точку. Процесс
продолжается, пока не будет достигнут конечный угол <рк- Чаще всего нас инте-
ресует сектор, включающий в себя I, II, III квадранты (<рн = -180°... 90°). За начало
системы отсчета <рн принята точка С.
Корневыми методами удобно пользоваться для аналоговых систем, описы-
ваемых СЛДУ. В случае дискретного регулятора необходимо путем конформного
1 + w г
преобразования z =----привести его к аналоговому, которое в области нижних
1-w
и средних частот дает достаточное для практики приближение.
304
Kd,c
Рисунок 4.3.18 - Область устойчивости
Наибольшее распространение при построении областей устойчивости по-
лучил частотный метод D-разбиения в области двух параметров - статического и
динамического коэффициентов усиления Ks и Kd.
Рассмотрим его подробнее.
Передаточная функция для двухконтурной системы стабилизации, разомк-
нутой в контуре датчика угла у и замкнутой в контуре боковой скорости z, име-
ет вид
1 + Wi(j«))-D^j(B)
где Wv(j(jo) и Wz(jco) -передаточные функции, полученные по формуле
(4.3.57);
D^Cjco) - передаточная функция корректирующего алгоритма в контуре уг-
ловой стабилизации;
Dz(jco) - передаточная функция алгоритма боковой стабилизации, которая
обычно представляется в виде изодромного звена, т.е. суммы статического
коэффициента и интегрального звена.
Представим Dv(jco) в виде суммы двух составляющих - статической и ди-
намической, т.е.
D v(j<°)=Ks+KD • D* (ja>),
где Dy(j<o) - форсирующая составляющая ЦКА.
В плоскости z Dz(j<o) может иметь вид
305
оД2)=Кг+кх---~1 =
v' z 2 2-1
+kz--l-z-l кг-kz —J
z-1
если интегрирование ведется по формуле трапеций, и
Dz(z)= Kz + Kz • Т • --- = fe
— Л\—/ -z --Z - 1 . »
z-1 z-1
если интегрирование ведется по формуле прямоугольников.
В частотную область о эти выражения переводят с помощью известного
преобразования
z = eJQ,T = coswT ч jsincoT .
Выражение (4.3.64) можно представить в виде комплексных чисел:
WZ. л = jRe(Wv(j<o))+ jlm(wjju))i]x [ks + K0(Re(p;(j(o))+jlm(p;(j<o)))]
l + Re[W^j©)-P^j®)]+jIm[W2(jra)P^©)] (4.3.65)
Условием нахождения замкнутой системы стабилизации на границе устой-
чивости является факт прохождения частотного годографа Wv(j(n) через точку
комплексной плоскости (IJ0) или
Re[W(»]=l,
Im[w(j(B)]=0. ( • • )
Из этих двух уравнений можно определить два неизвестных и KD, соот-
ветствующих границе области устойчивости для конкретней частоты ш.
Таким образом, в процессе расчета получаем совокупность значений па-
раметров Ks и KD, определяющих области устойчивости на всем интервале час-
тот (0, cos/2). На рис. 4.3.18 показана область устойчивости, которая соответствует
годографу, изображенному на рис. 4.3.17.
В случае, если в контуре угловой стабилизации кроме датчика угла приме-
няют и датчик угловой скорости (ДУС), в числителе выражения (4.3.64) появится
еще одна составляющая, т.е. передаточная функция будет иметь вид
w(j»)=_ 3
l+Wz(j<D)-D2(jco)
где Dv(ja>)n D^(jco) - ЦКА в цепи угла и угловой скорости соответственно.
Передаточную функцию Wy(jco) рассчитывают по формуле (4.3.57), если
вместо Wv/6(jco) подставить - передаточную функцию тракта "ДУС -
угол отклонения управляющего органа б".
Представив все составляющие выражения (4.3.67) в виде комплексных чи-
сел:
306
D„(jco)=Ks (Re|Df(jco)j+ jIm[Dv(jo)j};
D. (jco)=KD{Re[D. G®)]+ jlm^Qco)]};
4G®)= Re[W4,(jc>)]+ jIm[w„G®)];
W,G©)= Re[w. G®)]+ jIm[w,G<o)];
i+w,G<»)DiG®)=w;G®)-Re[w;Ge>)]+jim[w;G®)])
в этом случае из условия нахождения замкнутой системы на границе устойчиво-
сти (4.3.66) имеем два уравнения с двумя неизвестными Ks и KD:
ап • Ks + а12 • К„ = Im[w; G®)];
a21Ks + a22KD=Re[w;G®)],
где
a„=Re 4G®) •Im Dv(j®) + lm 4G®)] Re 40®)
aI2 =Re w.G®) Im D*0®). + Im 40®)] •Re 40®)
a21=Re 40®) •Re .40®) - Im 40®) • Im .40®)
a22=Re 40®) •Re .40®) -Im 40®) Im 40®)
Часто при работе с ДУ Сом передаточная функция ЦКА в цепи статического
угла равна единице, т.е.
d„G®)=ks-(i+jo).
Тогда выражения для вычисления ап и a2i упрощаются:
aH=Im|4G®)];
aM=Re[w„G®)..
В некоторых случаях требуется построение не просто областей устойчиво-
сти, а областей, внутри которых должны располагаться фактические показатели
качества функционирования системы. Один из методов построения таких облас-
тей - метод модифицированного D-разбиения [4,8]. Этот метод также является
беспоисковым и не требует дополнительной процедуры выхода на границу. На-
пример, при известном законе управления нужно определить предельные значе-
ния тех же коэффициентов усиления Ks и Kd, не выводящие заданные показате-
ли качества за границу области. Такими показателями могут быть: время пере-
ходного процесса, перерегулирование, колебательность, которые, в свою очередь,
связаны функционально с границей области в плоскости корней характеристиче-
ского уравнения замкнутой системы.
Предположим, что желаемый спектр корней замкнутой системы ограничен
окружностью радиуса (А-В)/2 с центром в точке [0, -j(A+B)/2], где А>0, В>0,
А>В. Пусть характеристический полином замкнутой системы имеет вид
D(A,) = CnXn +Сп_1Хп-1 + ... + С(Х + С0.
Выделим параметры К§ и KD, допустив, что они входят в Q линейно:
D(X)=KsP(A.)+KdQ(X)+R(X)== 0. (4.3.69)
307
Пользуясь двойным конформным преобразованием, переводящим мнимую
ось j© комплексной плоскости w в окружность единичного радиуса плоскости р:
w-1
W + 1 ’
а затем в окружность радиуса (А-В)/2 с центром [0, -j(A+B)/2], получим общее
преобразование
jcoB-A
л —--------.
jco+l
Подставив его в (4.3.69), получим систему двух уравнений, связывающих
искомые параметры Ks и KD с заданными параметрами А и В, откуда
Re[Q(<a)]lm R(co) -Re R(cd)] • Im ,Q(®)]
Re Q(®). -Re Q(co)]-Im И®)]
Re R(co)] Im -Re P(co)] Im[R(co)
Re Q(a>) -Re Q(®)]lm[p(co)
(4.3.70)
Если Ks и Kd входят в коэффициенты характеристического уравнения не-
линейно, то система будет состоять из двух нелинейных уравнений. Решаются
такие системы известными методами Ньютона и др.
Среди частотных методов построения областей устойчивости интересен
еще один метод, который позволяет с помощью градиента от действительной и
мнимой частей передаточной функции с применением критерия Найквиста вы-
делять области устойчивости как в двумерном, так и в многомерном пространст-
ве варьируемых параметров регулятора [18]. Метод универсален для любых ли-
нейных систем - как аналоговых, так и дискретных. Предполагается, что пара-
метры регулятора выбраны таким образом, что для САР выполняются условия
критерия Найквиста хотя бы в одной точке ее состояния и построен годограф
частотной характеристики W(jg>). Эти параметры будут начальными для процесса
поиска границы.
Уравнения, определяющие границу устойчивости, в этом случае имеют
вид:
f. =Uw(p,,p2 ,©)+1 = 0;
fi = Vw(p1,p2, ,<о)=0,
где Uw и Vw - действительная и мнимая части W(jco);
PbPiv-,Рп - независимые друг от друга параметры регулятора.
Варьируя параметры рьр2,...,рп при заданной частоте о таким образом, что-
бы удовлетворялись уравнения (4.3.71), можно определить их значения, соответ-
ствующие границе области устойчивости. Как уже было подчеркнуто, начальный
вектор Ро(рьР2>—>Рп) соответствует устойчивой точке. Обозначим расстояние от
критической точки (+1 ,j0) до годографа через
R(<d)=7(uW-1)2+V^ . • •
308
Очевидно, что границе устойчивости соответствует равенство R(oj)=0.
Для реализации процесса минимизации радиуса-вектора R(co) воспользу-
емся методом градиента [28]. Для этого определяют градиенты от функций f| и f2
выражения (4.3.71) по параметрам рьР2,- -,Рп
VTf, - aiJw dUw auw
dp, dp2 dpn
(4.3.72)
ATf, = 5VW ^Vw
±2 — 9pi 6p2 " dpn
и вектор-столбец F
F(1)=UW-1;
F(2)=VW. , (4.3.73)
Объединяя строки (4.3.72) в прямоугольную матрицу А размером. 2 хп, где и
- количество варьируемых параметров, можно составить линейное матричное
уравнение для нахождения вектора приращений параметров ДР(ЛР.5 ДР2 ..АРП)
ДР = (А х Ат)-1 х F х Ат. (4.3.74)
Вновь полученный вектор параметров
Pi =Pi-i - APi, (4.3.75)
где i - номер итерации.
Если область устойчивости определяется в пространстве двух параметров,
тогда матрица А будет квадратной размерностью (2x2) и выражение (4.3.74) уп-
рощается:
AP-A-’xF. (4.3.76)
Итерационные вычисления по формулам (4.3.71)-(4.3.76) проводят до тех
пор, пока значение радиуса-вектора R(gj) станет меньше наперед заданного по-
ложительного числа е.
Если Uw и Vw зависят линейно от двух параметров, то ДРЪ обеспечиваю-
щие сведение R(co) к нулю, определяют за одну итерацию, т.е. при таких услови-
ях этот метод сводится к описанному выше методу D-разбиения.
43.6.5 Проверка работоспособности системы стабилизации.
Эксплуатационные режимы
Проектирование системы стабилизации PH представляет собой сложный
итерационный процесс, специфика которого состоит в выборе параметров, обес-
печивающих не только устойчивость, но и заданные показатели качества работы
системы.
Существенное влияние на устойчивость и качество процессов стабилизации
оказывают разбросы параметров, характеризующих PH как объект управления, а
также разбросы параметров окружающей среды.
Характеристики любого физического объекта известны приближенно из-за
309
неидеальности процесса измерения или идентификации. Дополнительным ис-
точником отличия расчетных характеристик от действительных является неточ-
ность изготовления PH, отклонение от технологии изготовления, отклонение ха-
рактеристик конструкционных материалов от нормативных, предусмотренных
для изготовления, и т.д. Отсюда следует, что значения параметров управляемой
системы как объекта регулирования известны с некоторой неопределенностью.
Работоспособность системы автоматического регулирования, в том числе и
обеспечение ее устойчивости, проверяют в различных режимах, получивших в
практике проектирования название эксплуатационных.
Формирование эксплуатационных режимов при проектировании системы
стабилизации предполагает определенную систему учета разбросов параметров
объекта регулирования. Реализация режимов эксплуатации осуществляется ими-
тацией условий, приближающих систему стабилизации к границам устойчивости.
Эксплуатационный режим представляет собой формализованную совокуп-
ность разбросов параметров PH, сервопривода и окружающей среды.
При формировании эксплуатационных режимов в качестве критерия при-
нимают влияние разбросов указанных параметров на области устойчивости, по-
строенные в координатах статического и динамического коэффициентов усиле-
ния системы стабилизации в одном из каналцв регулирования угловой стабилиза-
ции (рыскания, тангажа, вращения).
Разбросы характеристик PH как объекта регулирования реализуются в
форме отклонения коэффициентов уравнений возмущенного движения от их но-
минальных значений. Учет разбросов коэффициентов линейной динамической
схемы PH приводит к деформации границ области устойчивости, соответствую-
щей номинальному (расчетному) режиму. Учет совокупности отклонений вели-
чин и знаков коэффициентов системы линейных дифференциальных уравнений
возмущенного движения от их номинальных значений лежит в основе формиро-
вания эксплуатационных режимов. -
Эксплуатационный режим, соответствующий расчетным динамическим ха-
рактеристикам PH как объекта регулирования, называется номинальным и обо-
значается "режим №".
В номинальном эксплуатационном режиме нижняя граница области устой-
чивости соответствует незатухающим колебаниям в замкнутой системе с часто-
тами, соответствующими частотам твердого тела.
Верхняя граница области устойчивости в этом режиме соответствует неза-
тухающим колебаниям в замкнутой системе с частотами, определяемыми пара-
метрами сервопривода, или колебаниями жидкого топлива, или же упругими ко-
лебаниями корпуса PH и упругого звена крепления рулевого привода. На верхней
границе возможны различные варианты сочетания указанных частот, определяе-
мые конкретными значениями параметров динамической схемы PH.
Эксплуатационный режим, соответствующий разбросам значений коэффи-
циентов линейной динамической схемы PH, уменьшающим запасы устойчивости
замкнутой системы стабилизации по нижней границе, условно называется пони-
женным и обозначается "режим N-".
310
В пониженном эксплуатационном режиме N- разбросы всех коэффициентов
динамической схемы PH, влияющих на нижнюю границу области устойчивости,
задаются таким образом, чтобы произошло смещение (деформация) нижней гра-
ницы области устойчивости в сторону ее повышения.
Эксплуатационный режим, соответствующий уменьшению запасов устой-
чивости замкнутой системы стабилизации по верхней границе, условно называ-
ется повышенным и обозначается ’’режим N4"”.
В повышенном эксплуатационном режиме N+ разбросы коэффициентов за-
даются в целях смещения (деформации) верхней границы области устойчивости в
сторону ее понижения.
Сочетание разбросов коэффициентов динамической схемы для повышенно-
го (N4) или пониженного (N“) эксплуатационных режимов, заключающееся в их
арифметическом сложении, является случаем, при котором запасы устойчивости
уменьшаются на максимальную величину.
Универсальным методом формирования эксплуатационных режимов для
рассматриваемого класса PH является метод использования функций чувстви-
тельности параметров области устойчивости. Этот метод предусматривает опре-
деление направления деформации границ области устойчивости при изменении в
отдельности каждого коэффициента системы дифференциальных уравнений на
величину допуска этого коэффициента. На расчетной области устойчивости,
’’возмущенной” по рассматриваемому коэффициенту, определяется влияние раз-
броса на нижнюю и верхнюю границы областей устойчивости. При этом влияние
разбросов необходимо исследовать как в сторону увеличения коэффициента по
модулю, так и в сторону его уменьшения для использования этих результатов при
формировании эксплуатационных режимов. На основании анализа проведенных
расчетных работ выделяются коэффициенты, разбросы которых влияют на де-
формацию нижней границы области устойчивости, и коэффициенты, разбросы
которых деформируют (смещают) верхнюю границу области устойчивость по
сравнению с границей в номинальном (расчетном) режиме в худшую сторону. С
учетом направления смещения границы области устойчивости для каждого' ко-
эффициента формируется совокупность разбросов (величины и знака) для экс-
плуатационных режимов N~ и ЬГ.
Проведенные исследования показали, что к уменьшению запасов устойчи-
вости по нижней границе приводит уменьшение по модулю коэффициента avs и
увеличение коэффициентов az§, aw, a,KV. Уменьшению запасов по нижней границе
также способствует увеличение фазового запаздывания сервопривода и увеличе-
ние коэффициента усиления в канале боковой (нормальной) стабилизации.
При рассмотрении верхней границы области устойчивости можно пренеб-
речь каналами регулирования нормальной координаты и нормальной скорости,
поскольку частота изменения этих параметров значительно ниже частот, опреде-
ляющих верхнюю границу области устойчивости.
К уменьшению запасов устойчивости по верхней границе приводит увели-
чение av§ и уменьшение aw.
311
Поскольку влияние на границы области устойчивости коэффициента а7<§
является более существенным, чем коэффициента а^, то знак разброса коэффи-
циента aZ5 в эксплуатационных режимах принимается таким же, как и для коэф-
фициента аЖ5.
Наихудшее сочетание знаков разбросов коэффициентов динамической схе-
мы PH как твердого тела для режима ЬГ приведено в табл. 4.3.1, а для режима
N4”-в табл. 4.3.2.
Таблица 4.3.1 - Знаки разбросов коэффициентов динамической схемы PH как
твердого тела в режиме ЪГ
Коэффициент ач»6 aV¥ az5 azy a а 2Л|/ a zz а
Знак разброса коэффициента N" - + - 4- + -1- + +
Таблица 4.3.2 - Знаки разбросов коэффициентов динамической схемы PH как
твердого тела в реяшме NT
Коэффициент ац/5 az5 az4/ а W a'z\p a zz a yz
Знак разброса коэффициента N+ + - + — - — - -
В указанных таблицах знак означает изменение соответствующего ко-
эффициента в сторону увеличения модуля этого коэффициента на величину мак-
симального разброса в соответствии с ТЗ, знак - изменение в сторону умень-
шения модуля.
Коэффициенты динамической схемы, характеризующие колебания жидкого
топлива для рассматриваемого класса PH, как показывают практические расчеты,
не оказывают существенного влияния па нижнюю границу области устойчивости.
На уменьшение запасов устойчивости по верхней границе влияет увеличе-
ние по модулю коэффициентов взаимного влияния твердого тела и жидкого топ-
лива avSv.,а*8^,,aSvjV иа^. Снижение коэффициента демпфирования eSv. и
увеличение частоты колебаний жидкого топлива cgSv. также приводят к умень-
шению запасов устойчивости по верхней границе. Коэффициенты eS4/. и
коррелированы между собой по своей физической сути. Так как влияние коэффи-
циента coSv. на границу области устойчивости более существенно, чем коэффи-
циентдрб^., то знак разброса по eSv.b эксплуатационных режимах принимают
таким же, как и для coSlj,..
312
Знаки разбросов коэффициентов, характеризующих колебания жидкого то-
плива в баках в эксплуатационных режимах N " и N*, приведены в табл. 4.3.3.
Знак в табл. 4.3.3 означает увеличение по модулю соответствующего
коэффициента на величину разброса, а знак ”0” - номинальное значение коэффи-
циента.
Таблица 4.3.3 - Знаки разбросов коэффициентов динамической схемы,
характеризующих колебания жидкого топлива в баках, в режимах ЬГй N*
Коэффициент £sVi (°sVi avSVi л” asvj v л” Sy, у
Знак разброса № 0 0 0 0 0 0
коэффициента № + + 4- 4- + 4-
Как показывает анализ, уменьшению запасов устойчивости системы стаби-
лизации по верхней границе способствует также увеличение по модулю коэффи-
циентов ач.б1)Г,а^ и уменьшение частоты упругих колебаний coq..
Знаки разбросов коэффициентов, характеризующих упругие колебания PH,
приведены в табл. 4.3.4. Знак "+" в табл. 4.3.4 означает увеличение по модулю со-
ответствующего коэффициента, а знак ”0” - номинальное значение коэффициен-
та.
Таблица 4.3.4 - Знаки разбросов коэффициентов динамической схемы,
характеризующих упругие колебания PH, в режимах № и N*
Коэффициент Eqi (П Я) aqj8y GP avqj
Знак разброса N- 0 0 0 0
коэффициента N+ - - + . +
Исследования функций чувствительности границ области устойчивости по-
зволили определить также сочетание знаков разбросов коэффициентов динамиче-
ской схемы, характеризующих инерционность управляющих органов
az5v >a8vz>av8vH а также коэффициентов взаимовлияния колебаний топлива
в баках и упругих колебаний корпуса PH для режимов N+ и №. Знаки разбросов
по указанным коэффициентам в эксплуатационных режимах приведены в
табл. 4.3.5 и 4.3.6. Знак "+’* в табл. 4.3.5 и 4.3.6 соответствует увеличению коэф-
фициента по модулю, знак ”0” соответствует его номинальному значению.
313
Таблица 4.3.5 - Знаки разбросов коэффициентов динамической схемы,
характеризующих взаимное влияние колебаний тошшва в баках и упругих
колебаний PH, в режимах и N*
Коэффициент а Sv4qi aSVjqi a41Syj
Знак разброса 0 0 0 0
коэффициента 4- + + +
Таблица 4.3.6 - Знаки разбросов коэффициентов динамической схемы,
характеризующих инерционность управляющих органов,
в режимах NT иЬГ
Коэффициент az5v п a5yZ ff a3yV
Знак разброса 0 0 0 0
коэффициента + + +
Работоспособность системы стабилизации с выбранными по описанной
методике коэффициентами проверяют численным интегрированием линейных
дифференциальных уравнений, описывающих динамическую схему PH, и анали-
зом результатов интегрирования.
Окончательный выбор параметров системы стабилизации осуществляется
на основании анализа расчетных материалов полета PH по программной траекто-
рии, получаемых путем численного интегрирования системы нелинейных диффе-
ренциальных уравнений движения в полных координатах. При этом соответст-
вующее математическое обеспечение реализует имитацию совместной работы
системы стабилизации, навигации и наведения.
При проведении исследований с использованием нелинейной задачи мате-
матического моделирования разбросы коэффициентов динамической схемы реа-
лизуются через разбросы первичных параметров, входящих в выражения для ко-
эффициентов динамической схемы (2.1.19).
Совокупность знаков разбросов первичных параметров для эксплуатацион-
ных режимов КГ и ФГ приведена в табл. 4.3.7.
Знак в табл: 4.3^7 обозначает увеличение по модулю соответствующего
параметра на величину разброса, а знакуменьшение его по модулю.
314
Таблица 4.3.7 - Знаки разбросов физических параметров PH и аэродинамических
коэффициентов в режимах N~ и N+
Коэффициент Ро о Я Q L Cd q Jz G XG
Эксплуата- ционный режим N" - + + 4- + + -
N* - - - - - - -
В табл. 4.3.7 обозначено:
Р^ф - тяга управляющих органов;
Ро - тяга маршевого двигателя;
Cd - коэффициент центра давления;
С“ - производная аэродинамического коэффициента нормальной силы
по углу атаки;
q - скоростной напор;
Jz - момент инерции PH относительно оси z;
G - масса PH;
Xg - координата центра тяжести по оси х.
4.3.7 Моделирование системы стабилизации
4.3.7Л Метод цифрового моделирования
Окончательно вывод о приемлемости выбранной структуры законов
управления и параметров системы стабилизации (коэффициентов усиления в со-
ответствующих каналах регулирования) делают на основании анализа характери-
стик переходных процессов стабилизации во временной области.
Для PH, динамическая схема которой описывается системой дифференци-
альных уравнений высокого порядка, основным методом получения переходных
процессов стабилизации является использование широко разработанных матема-
тических методов численного интегрирования.
Методы численного интегрирования и соответствующее ПМО для ЭВМ по-
зволяют проводить исследования не только линейных систем, но и систем,
имеющих в своем составе нелинейные звенья (типа люфта, зоны нечувствитель-
ности, зоны насыщения, гистерезиса и т.д.).
Цифровое моделирование процессов стабилизации осуществляют в два
этапа. На первом этапе исследуются процессы стабилизации интегрированием
математической модели PH, заданной системой дифференциальных уравнений,
описывающих возмущенное движение в отклонениях от программного.
На этом этапе анализируются переходные процессы стабилизации при раз-
личных условиях: отработка начальных условий по регулируемым параметрам;
компенсация возмущений, возникающих при разделении ступеней; воздействие
ветровых порывов и градиентов; возмущения из-за технологических погрешно-
315
стей установки двигателей. Анализ позволяет определить статическую и динами-
ческую точность регулирования, колебательность системы и максимальные от-
клонения управляющих органов. На основании анализа полученного материала
по переходным процессам стабилизации может быть проведена предварительная
коррекция как структуры законов управления, так и коэффициентов усиления в
соответствующих каналах регулирования.
ПМО данного этапа анализа устойчивости и исследования характеристик
переходных процессов стабилизации позволяет рассчитывать временные харак-
теристики системы автоматического управления как для фиксированной времен-
ной точки полета PH (метод “замороженных” секунд), так и для отдельных уча-
стков программного движения или по всей траектории полета.
На втором этапе моделируются процессы стабилизации с использованием
математической модели PH в виде системы дифференциальных уравнений, опи-
сывающих движение объекта регулирования в полных координатах.
В этом случае используется ПМО, разработанное для исследовательской
задачи моделирования совместной работы систем навигации, наведения и стаби-
лизации. Данная задача позволяет моделировать работу системы управления и
получать характеристики процессов регулирования для всей траектории движе-
ния PH и, если необходимо, уточнять области устойчивости.
На основании анализа характеристик переходных процессов стабилизации,
полученных на этом этапе исследований, принимается решение об окончатель-
ном выборе структуры законов управления и коэффициентов усиления системы
стабилизации в соответствующих каналах регулирования.
4.3.7.2 Уточнение областей устойчивости с помощью гармонического
анализа
При моделировании полета PH по гибким траекториям, когда в состав мо-
делирующей задачи входят алгоритмы навигации и наведения, не всегда удается
сразу выполнить все требования, предъявляемые к СУ, например, по энергетиче-
ским затратам на управление или по точности. В таком случае приходится изме-
нять настройки автомата стабилизации, выбранные при частотном анализе, а для
этого необходимо уточнить области устойчивости, теперь уже во временной об-
ласти. Следует не забывать, что требования к коэффициентам усиления для обес-
печения необходимых запасов устойчивости и требования к ним же для обеспе-
чения точности часто бывают противоречивыми.
Как правило, переходные процессы стабилизации PH содержат много час-
тот, поэтому анализ переходных процессов удобнее всего проводить с помощью
преобразования Фурье, используя аппарат гармонического анализа. Для этого на
“замороженной секунде” траектории получают переходный процесс по какой-
либо угловой величине при фиксированных значениях коэффициентов Ks и KD.
Пример типичного для рассматриваемого класса PH переходного процесса
показан на рис. 4.3'. 19.
316
Рисунок 4.3.19 - Фрагмент переходного процесса
Из общего массива данных переходного процесса F(t) формируется два
подмассива Fi(trto) и F2(t2-ii), где ti-to=t2-ti=T. Длительность периода
/ *min
определяется минимальной частотой, имеющейся в системе. Дискретность мас-
сива dt= . \ определяется максимальной частотой, где к - число точек за
/ Vmax м
период частоты fmaK(k=6 ... 10). Частотный спектр целесообразно анализировать
в диапазоне 0.2 ... 20 Гц с шагом df=0.2 Гц. Функции Fi(trt0) и F2(t2-t!) можно
разложить в ряд Фурье:
2л-п х , . 2п-п Л
S(t)=а0/2 + XI ап • cos - • t +• Ъц • sin -у- • 11.
Коэффициенты Фурье функции Fi(t) вычисляют по формулам:
, •" Г О Л O-3.77)
где n=l,2,...nmax,
^max — ^max/df •
Амплитуда соответствующей n-й составляющей сигнала определяется вы-
ражением
Al(n)=V^I+bf, (4.3.78)
где n=l,2,...nmax,
Аналогично по формулам (4.3.77) - (4.3.78) вычисляют составляющие
спектра А2(п) для функции F2(t) с пределами интегрирования от ti до t2. Функции
А1(п) иА2(п), которые соответствуют временным функциям Fi(ti-to) и F2(t2-ti),
показаны на рис.4.3.20.
317
Затем проводят анализ частотных спектров. Объект является устойчивым,
если площадь фигуры, ограниченной частотным спектром А1(п) (полученным
применением преобразования Фурье к функции Fi(tt-to) за интервал наблюдения
ti-to), больше, чем площадь, ограниченная частотным спектром А2(п) (получен-
ным из функции F2(l2-ti) за интервал наблюдения t2-t]).
В общем виде площадь частотного спектра определяют как интеграл от
огибающей спектра по частоте
SA="jA(f)df. (4.3.79)
Так как спектры А1(п) и А2(п) вычисляют дискретно с постоянным шагом
df, формулу интегрирования (4.3.74) можно привести к формуле интегрирования
методом трапеций: -
SA1= Al(l)+Al(niTO„)+ df.
2 d=2
(4.3.80)
Далее формируется признак устойчивости по соотношению SA1 и SA2 (ес-
ли (SA1/SA2)>1, то объект устойчив).
Варьируя коэффициенты Ks и KD , можно определить границы области ус-
тойчивости.
43.7.3 Выбор настроек автомата стабилизации
Как уже было сказано в предыдущих разделах, основными параметрами ав-
томата стабилизации, использующего БЦВМ, являются настройки корректирую-
щих алгоритмов и коэффициенты усиления в каждом тракте стабилизации: рыс-
кания, тангажа, вращения, нормальной и боковой стабилизации.
318
Процесс выбора и уточнения параметров автомата стабилизации - многора-
зовый и проводится на каждом этапе проектирования.
Первый этап - когда выбираются параметры корректирующего цифрового
фильтра и коэффициенты усиления при построении годографа скорректирован-
ной системы и определении области устойчивости в номинальном режиме. До-
пустим, мы имеем область устойчивости в режиме № (в координатах Ks и Kd),
изображенную на рис.4.3.21. Пусть Ks и Kd приведены к размерностям сквозных
коэффициентов [рад/рад] и [с] соответственно. Для начала рассмотрим отноше-
К
ние Тд - —-, которое имеет размерность [ с ] и называется постоянной времени
Ks
дифференцирования.
Рисунок 4.3.21 - Иллюстрационная область устойчивости для нахождения
рабочей точки АС
С точки зрения оптимальности переходных процессов Тд выбирается в пре-
делах 0.25 ... 0.5 на атмосферном участке, 0.5 ... 0.8 - на безатмосферном уча-
стке полета 2-й ступени, 0.7 ... 1.0 - на 3-й ступени. Из начала координат (точка
О) проведем луч под углом arctg(^), который пересекает нижнюю границу об-
ласти устойчивости в точке А и верхнюю границу в точке В. На отрезке АВ вы-
бираем рабочую точку С, которая должна обеспечить равновеликие запасы коэф-
фициента усиления по нижней и верхней границам. Для этого должно соблю-
даться соотношение
— = —, откуда ОС = л/ОА ОВ, (4.3.81)
ОА ОС
т.е. расстояние рабочей точки от начала координат является среднегебметриче-
319
ской величиной между верхней и нижней граничными точками.
Второй этап - когда сформированы эксплуатационные режимы N~ и N+. На
рис. 4.3.21 кривая ЬГ пересекается с лучом ОВ в точке D, кривая N+ - в точке Е,
Аналогичным образом по формуле (4.3.81) находим точку С’. Она может сов-
пасть, а может и не совпасть с точкой С.
Третий этап - при моделировании переходных процессов СЛДУ с учетом
всех приложенных возмущений и нелинейностей сервопривода. Проверяется ка-
чество переходных процессов, а также связанный с ними интегральный путь
управляющих органов, который в силу попятных причин не может быть безгра-
ничным.
Четвертый этап - при моделировании переходных процессов в полных ко-
ординатах с учетом влияния систем навигации и наведения на работу системы
стабилизации. На этом этапе проверяются все возможные траектории. Парал-
лельно ведется расчет коэффициентов линеаризованных дифференциальных
уравнений, чтобы, если будет необходимо, провести очередной цикл частотного
анализа для тех траекторий, где замечены какие-либо особенности.
43.7.4 Исследование вероятности устойчивости спроектированной
системы
Завершающим этапом проектирования системы стабилизации является ис-
следование вероятности устойчивости спроектированной системы. В под-
разд. 4.3.6.5 сформулирована методика оценки работоспособности системы ста-
билизации [63, 64, 65], в том числе и обеспечения ее устойчивости. Основой ме-
тодики является формирование эксплуатационных режимов N~ и N+ для линеари-
зованных дифференциальных уравнений, описывающих объект и работу системы
стабилизации, в целях дальнейшего анализа устойчивости в частотной области.
Считается, что если система работоспособна в этих режимах, то вероятность ус-
тойчивости практически равна единице^.Но при этом необходимо учесть сле-
дующее. Вариации области устойчивости определяются в режиме с помощью ча-
стных производных но каждому отдельно взятому параметру. Для линейных сис-
тем работает принцип суперпозиции, когда режимы формируются наихудшим
сочетанием разбросов. Другое дело - при интегрировании нелинейной задачи в
полных координатах совместно с системами навигации и наведения. Здесь может
сформироваться при задании разбросов случайным образом еще более неблаго-
приятный режим с точки зрения запасов устойчивости.
Поэтому в любом случае на последнем этапе проектирования необходимо
проводить статистические испытания. Наиболее достоверную оценку вероятно-
сти устойчивости спроектированной систехмы можно получить, используя хоро-
шо известный метод Монте-Карло. Суть его заключается в том, что испытаниям
(в нашем случае моделированию реального полета методом интегрирования не-
линейных дифференциальных уравнений) подвергается спроектированная систе-
ма в условиях, когда разбросы параметров системы задаются случайным образом,
как при реальной эксплуатации. Для этой цели используется датчик случайных
чисел, нормированных относительно единицы, которой соответствует уровень
320
вероятности Ру=0.997(Зс). В этом случае каждый из параметров системы, яв-
ляющийся случайной величиной, представляется в виде
а; =а® kj - Aaj,
где aj - номинальное (невозмущенное) значение параметра;
Aaj - случайный разброс параметра а,-, соответствующий, как правило,
уровню вероятности Р=0.997(3ст);
к, - нормированный относительно единицы коэффициент, выбранный
из датчика случайных чисел.
Как известно, чем больше число реализаций (интегрирований системы), тем
выше точность оценки вероятности устойчивости, полученной в результате ста-
тистических испытаний. Современное состояние вычислительной техники (с точ-
ки зрения быстродействия и мощности ЦВМ) позволяет определять вероятность
устойчивости Ру до четвертого - пятого знаков после запятой. Например, если из
10000 испытаний в двух случаях получился отрицательный результат, вероят-
ность устойчивости Ру=0.9998.
4.3.8 Разгрузка корпуса PH
4.3.8.1 Основные задачи разгрузки корпуса РКН
Традиционно основным содержанием задачи стабилизации является обес-
печение устойчивости движения РКН как упругого тела с полостями, частично
заполненными жидкостью. Однако при движении РКН в плотных слоях атмосфе-
ры с большими скоростными напорами на систему стабилизации дополнительно
возлагается задача снижения аэродинамического нагружения конструкции РКН,
обусловленного воздействием ветровых возмущений.
Особую актуальность задача разгрузки приобретает при модернизации ра-
кетной техники и проектировании новых РКН с увеличенными размерами голов-
ных обтекателей. Снижение аэродинамического нагружения конструкции РКН
позволяет:
- повысить надежность РКН в плотных слоях атмосферы;
- расширить диапазон приемлемых для старта погодных условий;
- снизить вероятность незапланированных (вынужденных) переносов и
отмен стартов из-за неблагоприятных погодных условий с исключением
сопутствующих дорогостоящих операций слива/заправки топлива и про-
ведения повторных предстартовых проверок.
4.3.8.2 Законы управления
Как известно, эффективность управления может быть существенно повы-
шена при введении в закон управления информации о возмущающих воздействи-
ях, в нашем случае - о скорости ветра или об угле атаки. К сожалению, надежно-
го прибора, позволяющего определить угол атаки набегающего потока на дви-
жущейся ракете и пригодного для использования в системе стабилизации, не бы-
ло создано. Однако с введением в состав системы управления ракеты БЦВМ поя-
вилась возможность по имеющейся информации о движении ракеты рассчитать
угол атаки (скольжения), ввести эту информацию в закон управления и тем са-
321
мым существенно повысить эффективность управления, снизить аэродинамиче-
ские нагрузки на корпус и соответствующие им противодействующие потребные
управляющие усилия.
Ввиду того, что для PH каналы тангажа и рыскания симметричны, то в дан-
ной главе все формульные зависимости будут приведены для канала рыскания.
В общем виде задача формулируется в виде ограничения на модуль произ-
ведения |qp| скоростного напора q на угол скольжения р и непосредственно вы-
текает из условий обеспечения прочности конструкции и управляемости объекта.
Для выполнения этого требования в состав системы стабилизации РКН дополни-
тельно вводится контур снижения аэродинамического нагружения (контур раз-
грузки), осуществляющий управление по оценочному значению угла скольжения
[3].
Возможны два способа управления по углу скольжения для снижения аэро-
динамических нагрузок на корпус РКН:
- путем поворота продольной оси РКН навстречу набегающему потоку,
что достигается законом регулирования
Ву-Куф + Ку-ф; (4.3.82)
- путем придания центру масс (ЦМ) РКН скорости в сторону действия
ветра.
В данной книге за основу принят первый способ. Для его реализации необ-
ходима информация об углах атаки и скольжения. Принципиальная схема реше-
ния задачи достаточно проста: на борту ракеты в реальном масштабе времени с
использованием информации с командных приборов о фактическом движении
ракеты рассчитывается текущее значение угла рыскания. Для этого система урав-
нений возмущенного движения ракеты как абсолютно жесткого твердого тела
(см. подразд. 2.1.19.2), которую для наглядности запишем в следующем виде [2]:
z = azP-₽+aZ4,-\|/ + azg-8v;
V- п в (4.3.83)
’ Р 5
разрешается относительно р, где
P = V+-~^; (4.3.84)
Р - искомый угол скольжения; Wz - боковая составляющая скорости ветра; V -
модуль скорости РКН относительно Земли; azP, а^, az5, avP, ац,6 - переменные
во времени коэффициенты, номинальные значения которых содержатся в памяти
БЦВМ.
Выражение для угла скольжения запишем в виде
0 = V + pz+Pw; (4.3.85)
где Pz = z/V - составляющая угла скольжения, обусловленная боковой скоро-
стью; pw - - Wz/V - ветровая составляющая угла скольжения (рис. 4.3.22).
322
Рисунок 4.3.22 - Общий случай определения
угла скольжения и его составляющих
Отметим, что традиционно применяемый закон управления по угловому
рассогласованию в установившемся режиме приводит к увеличению угла сколь-
жения. При управлении по угловому рассогласованию и отклонению центра масс
может быть достигнуто уменьшение суммарного аэродинамического возмущаю-
щего момента, обусловленного действием ветра, однако этот закон управления
неэффективен для снижения аэродинамических нагрузок при наличии градиент-
ных сдвигов ветра по высоте [2].
Работу СС на участке полета первой ступени РКН можно условно разбить
на несколько этапов согласно циклограмме, показанной на рис. 4.3.23.
На начальном участке полета (до включения контура разгрузки) СС реали-
зует управление по угловому отклонению. При этом закон управления имеет вид
=K1)Z-V4-Klj,-V + Kvu- Jydt. (4.3.86)
На участке разгрузки корпуса в закон управления дополнительно вводится
оценочное значение угла скольжения, определяемое в рамках закладываемой в
БЦВМ математической модели PH как твердого тела.
323
§
X
?
2
5
з
CQ
/ 1 Работа маршевого двигателя
/ 1 1 D R । j । । Работа рулевых двигате рей j
1 1 1 I I 1 1 t, с
1 1 1 । Работа автомата стабилизации ।
1 . J 1 1.
Угловая стабилизация 1 t Угловая стабилизация
Отработка
| Разгрузка корпуса |
Зона максимальных скоростньм
напоров
Рисунок 4.3.23 - Этапы работы СС на участке полета 1-й ступени РКН
При этом закон управления (4.3.82) принимает вид
Ч = Kv. V + Кф . V + Kv[(0w4) - Р^ф) + Kpz(pz - Р^)], (4.3.87)
где Pw>₽w “ текущее и программное значения ветровой составляющей угла
скольжения; pz,pzp - текущее и программное значения составляющей угла
скольжения, обусловленной боковой составляющей вектора скорости.
На последнем участке полета СС реализует программную отработку накоп-
ленной боковой скорости и управление по угловому отклонению. Отработка
нормальной и боковой составляющих скорости центра масс PH осуществляется
на участке от момента окончания разгрузки до момента подачи команды на вы-
ключение маршевого двигателя 1-й ступени.
Для оценивания угла скольжения запишем уравнения невозмущенного
движения РКН как твердого тела:
z = • (z - Wz)+а^, • V + • V + ай • 5V;
( V = a'¥Z-(z-Wz)4-a^,-v + a¥V-V4-a¥8-5v; (4 3 88)
\|/ГСП — yg.
Zrcn _ 2 - (хгсп - XG )• \j/.
Применяя метод замороженных коэффициентов на фиксированной секунде
324
полета PH и решая совместно уравнение (4.3.85) и систему уравнений (4.3.88) от-
носительно Pw, получаем
pw = ---+Ьгу V М 25 v , (4.3.89)
b2p v
где b2p = а'и • V + (хгсп - xG) • aw;
bzy (x n xG)2 • avz + (x xG) ^2z) >
bzs=-az5+(xrcn-xG)-av5;
bzy aH • V a.ZVp.
Следует отметить, что на входе СС имеются только сигналы у™, zrcn и V.
Поэтому при оценке ветрового угла скольжения составляющие угса и zrcn полу-
чаются после прохождения соответствующих сигналов через цифровые диффе-
ренцирующие фильтры. Использовав номинальные параметры находящейся в
БЦВМ упрощенной математической модели движения PH (а^а^, а^, а^,
а'^, aw , a'w , aU и xg ), запишем оценку ветровой составляющей угла сколь-
жения
«ГСП I и' , ll/ГСП J_ к . »уГСП 4- b с • 8 >7 ГСП
pw = £_ + D^ у +J> v + Drf °v _£_) (4з.90)
где - выходной сигнал находящейся в БЦВМ дискретной модели сервопри-
вода с передаточной функцией Wcn (z) = Z{Wcn(s)}.
Для уменьшения влияния колебаний присоединенных осцилляторов на зна-
чение оценки ветрового угла скольжения pw проводится ее фильтрация посред-
ством цифрового фильтра низких частот (ФНЧ) с передаточной функцией Wp(z):
Pfw(z) = Wp(z)-pw(z). (4.3.91)
Амплитудно-частотная характеристика фильтра показана на рис. 4.3.24.
4.3.83 Влияние контура разгрузки на устойчивость движения PH
Получив из системы уравнений (2.1.101) передаточные функции объекта
управления W^rcu/^(s) и W.rcn/6^(s), расчетную схему системы стабилизации
можно изобразить в виде, показанном на рис. 4.3.25.
Для обеспечения устойчивости системы целесообразно построить область
устойчивости в плоскости параметров Kv и К^. Следует отметить, что закон
управления (4.3.87) не обеспечивает полной устойчивости параметров состояния
объекта ни при каких значениях Kv и . Обеспечивается лишь так называемая
«неполная» устойчивость, когда стабилизируются все параметры состояния за
исключением отклонения боковой координаты. Однако благодаря этому проис-
ходит процесс, при котором PH «втягивается в ветер», тем самым уменьшая зна-
чение параметра аэродинамического нагружения. В данной работе области ус-
325
тойчивости определяются путем построения D-разбиения [16, 24]. При этом в за-
висимости от значения коэффициента Kpz в законе управления (4.3.87) изменяет-
ся положение особой прямой (при ш = 0) в плоскости параметров и
(рис. 4.3.26).
Ф, град
Рисунок 4.3.24 - Амплитудная и фазовая характеристики фильтра
326
Рисунок 4.3.25 - Расчетная схема для построения областей устойчивости
Рисунок 4.3.26-D-разбиение в плоскости параметров Kv и
327
Положение особой прямой определяется из выражения
1
izOC _
+ Wrcn'K (O)-fl + ^Kh!.-
I bz₽ J bz₽
(4.3.92)
При Kpz = 1 (считая, что цифровая фильтрация сигналов не вносит больших
искажений на низких частотах) закон управления (4.3.87) запишется в виде
E[n] = Kv •(y[n] + Mn] + Pz[n])+Klj, v[n]«Kv р[п] + Кф • v[n]. (4.3.93)
Однако, как видно из рис. 4.3.27, искомая область «неполной» устойчиво-
сти настолько мала, что выбор коэффициентов Ку и К,*, на практике (с учетом
возможных эксплуатационных режимов) не представляется возможным.
Рисунок 4.3.27 - D-разбиение в плоскости параметров
Kv и Ку при KPz = 1
Используя выражение (4.3.92) и задавшись значением К°с, можно опреде-
лить требуемое значение K£zc:
K£F=1-----------—
Р Wircn/5v(0)
bzq> I , bz8__1
к°ё
< V bzp J Ь*Р
(4.3.94)
328
Наиболее рациональным представляется такой выбор значения коэффици-
ента Kpzc, чтобы особая прямая ни в номинальном, ни в эксплуатационных ре-
жимах «не резала» искомую область. Таким образом, при = ±оо имеем
Г Г
• Wvrcn/6v(0). 1+-^
КХ=1-------------
₽ wircn/8v(0)
bzp
(4.3.95)
В данном случае область возможных параметров будет иметь вид, показан-
ный на рис. 4.3.28.
Рисунок 4.3.28 - Область возможных параметров
Kv и Кф npHKpz=Kjfz
Для выбора коэффициентов усиления АС можно задаться критерием опти-
мальности
J= jp2(t)dt,
to
минимизируя который получим оптимальные значения K“pt и K°pt (рис. 4.3.28).
Используя в качестве закона управления выражение
(4.3.96)
е[п] = к;₽‘ у[п]+К* •tfn]+K*(Mi)]+4z ₽z[nj),
(4.3.97)
получим реакцию системы при воздействии на нее трапециевидного порыва вет-
ра (рис, 4.3.29).
329
Рисунок 4.3.29 -Реакция системы на порыв ветра
Как видно из рис. 4.3.29, при наличии в составе СС контура разгрузки оп-
ределение угла скольжения и его составляющих проводится согласно схеме, изо-
браженной на рис. 4.3.30. Из схемы ясно видно, что корпус PH поворачивается
навстречу ветру.
Рисунок 4.3.30 - Определение угла
скольжения и его составляющих
при работе контура разгрузки
330
4.3.8.4 Моделирование работы системы стабилизации с учетом контура
разгрузки
В данном разделе приведен графический материал для иллюстрации эф-
фективности включения контура разгрузки в состав СС. Заметим, что при моде-
лировании за нулевую точку отсчета времени принята временная метка ОТП
(окончания точного приведения), при этом отрыв от стартового стола и срабаты-
вание КП (контакта подъема) происходит приблизительно на 9-й секунде.
На рис. 4.3.31 изображена зона максимальных скоростных напоров, которая
определяет временные метки включения и выключения контура разгрузки.
На рис. 4.3.32 показан профиль ветра, а на рис. 4.3.33 - соответствующие
ему реальное (пунктирная линия) и оценочное (сплошная линия) значения ветро-
вой составляющей угла скольжения. При моделировании в качестве профиля вет-
ра взята огибающая максимальных ветров с градиентным сдвигом по высоте в
районе 90-й секунды.
Как видно на рис. 4.3.33, реальное и оценочное значения ветровой составляю-
щей угла скольжения достаточно близки и отслеживают изменение профиля ветра.
На рис. 4.3.34 - 4.3.36 показаны переходные процессы для двух типов системы:
с контуром разгрузки (сплошная линия) и без него (пунктирная линия).
На рис. 4.3.34 изображен переходный процесс, связанный с отклонением
угла рыскания, из которого видно, что СС с контуром разгрузки при резком из-
менении профиля ветра «ослабляет» стабилизацию угла рыскания для уменьше-
ния величины угла скольжения.
На рис. 4.3.35 показан переходный процесс, связанный с отклонением ру-
лей, иллюстрирующий, что СС с контуром разгрузки в значительно меньшей ме-
ре загружает управляющие органы.
На рис. 4.3.36 изображен график изменения величины аэродинамического
нагружения |q0|, отчетливо демонстрирующий эффективность применения кон-
тура разгрузки (особенно при наличии градиентных сдвигов ветра по высоте).
Рисунок 4.3.31 - Зона максимальных скоростных напоров
331
Wz,m/c
Рисунок. 4.3.32 - Профиль ветра
t, с
Pw,Pw,rpafl
t, с
Рисунок 4.3.33 - Реальная ветровая составляющая Pw (пунктирная линия)
угла скольжения и ее оценочное значение Pw (сплошная линия)
332
у,град
..- Л V.
-2
Включение
контура
разгрузки
Выключение
контура
разгрузки
Выключение
МД
-5
20
40
60
80
100
120
140
5
2
t, с
Рисунок 4.3.34 - Отклонение угла рыскания при включенном (сплошная линия)
и выключенном (пунктирная линия) контуре разгрузки
t, с
Рисунок 4.3.35 - Отклонение рулей при включенном (сплошная линия)
и выключенном (пунктирная линия) контуре разгрузки
333
Рисунок 4.3.36 - Нагрузка на корпус РКН с разгрузкой (сплошная линия)
и без нее (пунктирная линия)
4.4 Система успокоения, ориентации и стабилизации
4.4.1 Требования к СУОС. Функциональная схема
Система успокоения, ориентации и стабилизации должна обеспечить ус-
тойчивое движение космической ступени на "пассивном" участке полета по тра-
ектории, когда отключен маршевый двигатель ступени. Высота над поверхно-
стью эллипсоида Земли на этом участке обычно больше 90 км.
В зависимости от задач, решаемых системой управления, СУОС обеспечи-
вает:
- отработку начальных возмущений;
- угловую переориентацию ступени, если это необходимо по схеме поле-
та;
- компенсацию спада тяги МД;
- стабилизацию углового положения ступени с заданной точностью.
Расход рабочего тела двигателя малой тяги (ДМТ) СУОС ограничен распо-
лагаемым на борту запасом.
Каждый участок работы СУОС имеет характерные особенности.
Участку отработки начальных возмущений соответствуют повышенные ве-
личины рассогласований по угловым координатам и скоростям, причиной появ-
ления которых является процесс разделения ступеней.
СУОС обеспечивает отработку рассогласований до допустимых величин.
Работа ДМТ СУОС при этом отличается от остальных участков большей динами-
кой включений-выключений, что приводит к необходимости выполнения требо-
ваний по частотным и тепловым режимам.
Переориентация выполняется СУОС, когда нужно поменять угловую ори-
ентацию ступени в пространстве. Режим работы ДМТ во время переориентации -
334
длительные включения, из-за чего требуется соблюдать требования по нагреву
элементов, обеспечивающих удержание ДМТ во включенном состоянии (радио-
электронные элементы согласующего устройства электроклапанов).
Участок компенсации спада тяги МД может быть введен, если в составе
ДМТ СУОС имеются сопла, тяга которых направлена параллельно продольной
оси ступени.
Стабилизация углового положения ступени с заданной точностью осущест-
вляется относительно задаваемого системой наведения программного положения.
Включения ДМТ СУОС при этом единичные, с частотами не более 0ТГц. Как
правило, длительность работы СУОС в режиме стабилизации составляет -90%
всей длительности ее работы.
Структурная схема СУОС показана на рис. 4.4.1.
Рисунок 4.4.1 - Структурная схема СУОС
На рисунке обозначено:
ККП - комплекс командных приборов;
БЦВМ ~ бортовая цифровая вычислительная машина;
СУЭК - согласующее устройство электрических клапанов;
ЭК - электроклапаны;
Cn - сопла ДУ СУОС.
Среди параметров, выдаваемых ККП, имеются параметры, содержащие ин-
формацию о текущем угловом положении объекта. В зависимости от типа уста-
новленных на борту командных приборов эта информация может выдаваться в
виде углов Эйлера (Крылова) - крена ср, рыскания у, тангажа 9 из гиростабили-
зированной платформы или параметров Родрига-Гамильтона X = [Х0,Х1,Х2Аз>]
из бесплатформенной инерциальной навигационной системы.
В БЦВМ помещены алгоритмы системы наведения и СУОС. Алгоритмами
СН задается программное положение объекта. Алгоритмы СУОС по информации,
поступающей из ГСП или БИНС, о текущем состоянии ступени и программным
значениям параметров определяют рассогласования и в соответствии с законом
управления формируют команды на СУЭК в виде посылок параллельного кода.
335
В СУЭК осуществляется преобразование посылок параллельного кода из
БЦВМ в напряжение постоянного тока, усиление управляющих команд по мощ-
ности и формирование управляющих сигналов, подаваемых на ЭК. Электрокла-
паны открывают магистрали подачи рабочего тела в соответствующие сопла
ДМТ, обеспечивая тем самым создание необходимых управляющих моментов и
сил.
На участке спада тяги маршевого двигателя алгоритмы СН по результатам
расчета функционала определяют время включения и выключения группы сопел,
обеспечивающих ’’дотягивание” значения кажущейся скорости ступени до тре-
буемого значения. При этом меняется логика формирования команд на исполни-
тельные органы СУОС.
При необходимости переориентации ступени алгоритмы СН выдают при-
ращения программных углов, а также время начала разворота. Алгоритмы СУОС,
учитывая эффективность исполнительных органов, решают две задачи:
- выбор оптимального закона регулирования;
- построение программного движения во время выполнения переориента-
ции, которое удовлетворяет условию оптимальности по быстродейст-
вию.
4.4.2 Особенности динамической схемы космических ступеней PH на
пассивных участках движения
Космическая ступень представляет собой твердое тело симметричной фор-
мы, движущееся в космическом пространстве и выполняющее программные эво-
люции для выхода в заданную точку пространства с заданными параметрами уг-
лового движения.
В качестве исполнительных органов используют сопла ДМТ, жестко уста-
новленные относительно осей связанной системы координат. Управление ступе-
нью осуществляется путем включения и выключения сопел. Эффективность ДМТ
зависит:
- от массово-центровочных характеристик ступени;
- параметров, характеризующих рабочее тело.
На выбор величины тяти при конструировании оказывают влияние харак-
теристики возмущений, наличие или отсутствие программных переориентаций,
необходимость выполнения требований, ограничивающих длительность вклю-
ченного состояния, и т.д.
Двигательная установка рассчитана на работу в условиях малых возмуще-
ний при жестких требованиях к точности поддержания программных значений
параметров, поэтому величины тяг сопел ее малы по сравнению с тягой сопел МД
ступеней.
Ввиду того, что сопла устанавливают на ступенях жестко, для изменения
знака управляющего момента включают различные сопла.
Управляющий момент от работающего сопла определяется местом уста-
новки сопла на ступени и ориентацией оси сопла (линии действия тяги) относи-
тельно осей связанной системы координат.
336
На рис. 4.4.2 показан вариант размещения управляющих сопел ДМТ, про-
дольные оси которых перпендикулярны осям . В этом случае сопла IB, 2В,
ЗВ, 4В обеспечивают создание управляющего момента относительно оси О^;
сопла IT. ЗТ - относительно оси ; сопла 2Р, 4Р - относительно оси О^. Со-
пла 2D, 4D включают (при необходимости) в режиме "дотягивания”.
Рисунок 4.4.2 - Схема расположения сопел ДМТ (вариант 1)
В другом варианте сопла (рис. 4.4.3) установлены на расстоянии хс от носка
ступени и продольные оси сопел (IT, ЗТ, 2Р, 4Р) составляют со связанной осью
OjXj прямой угол.
Управляющий момент от включения одного из этих сопел относительно
центра масс определяется уравнением
МуПрс=Р-(хс-хц), (4.4.1)
где хц - расстояние от ЦМ до носка ступени;
Р - тяга сопла.
Другой вариант размещения управляющих сопел показан на рис. 4.4.3. Со-
пла, обеспечивающие управление в тангаже (IT, ЗТ) и рыскании (2Р, 4Р), могут
включаться в режиме "дотягивания”.
337
ш I
Рисунок 4.4.3 - Схема расположения сопел ДМТ (вариант 2)
Оси сопел IT, 2Р, ЗТ, 4Р параллельны продольной оси ступени Орц и на-
ходятся на расстоянии hc от последней.
Управляющий момент одного сопла относительно ЦМ
Мупр^Р- he. (4.4.2)
СУОС осуществляет в основном управление угловым движением. Враща-
тельное движение ступени вокруг центра масс описывается нелинейными диффе-
ренциальными уравнениями Эйлера (2.2.17.4)
Работа СУОС происходит на больших высотах, где атмосфера разрежена,
поэтому влиянием аэродинамических сил на угловое движение объекта управле-
ния можно пренебречь. В случае совпадения связанных осей с главными цен-
тральными осями инерции и с учетом ^симметричности объекта относительно
продольной оси уравнения углового движения можно записать в виде
*^х1 ’ ®xl “ Muxl,
Jyi шу1 + (JX1 ~ Jzl) • <nxl • (Dzl = Muyl;, (4.43)
Jzl ' ^zl + (Jyt Jxl) * ®xl ‘ ®yl = ^uzb
где Muxi, Muyb Muzi - проекции вектора управляющего момента на оси связан-
ной системы координат.
При работе СУОС в режиме стабилизации величины проекций вектора уг-
ловой скорости на оси связанной системы координат малы и влиянием гироско-
пического момента на угловое движение в этом режиме можно пренебречь. В ре-
жиме программного разворота влиянием гироскопического момента также можно
пренебречь, так как разворот предполагается выполнять тремя последовательны-
ми плоскими разворотами вокруг осей связанной системы координат, вследствие
чего одновременно только одна из проекций вектора угловой скорости будет
иметь конечное значение, а две других - близки к нулю. Таким образом, уравне-
338
ния углового движения объекта управления на участке работы СУОС будут
иметь вид
®Х1 = М их 1 ф J X 1
COY1 : М иу! . . .. = — , (4.4.4) J yl
d>zi = М uzI Jzl
Для варианта расположения сопел, показанного на рис. 4.4.2:
MUXi=₽2b •Ьс-§2в(п)+ Р4в-Ьс-§4в(^) - PiB-hc-SieCn) ~ Рзв*Ьс-5зв(п);
м иу1=Р2Р'(Хс-Хц)-82р(п) - р4Р'(хС’Хц)-б4р(п); (4.4.5)
М и2]=Рзт-(хс-Хц)’6зт(п) - Р1Т(Хс-Хц)’81Т(п).
Для варианта расположения сопел, изображенного на рис. 4.4.3:
М uxi—Р2в Ьс’82в(п)+ Р4В‘Ьс-84в(п) - Р|в-Ьс-81в(п) ~ Рзв’Ьс^звСп);
Muyi= P4p-hc-84p(n) — P2phc-82p(n); (4.4.6)
Muzi=Pirhc-8ip(n) - Рзр‘ЬС‘8зт(п).
8it(h), 82р(п), 8зт(п), 84р(п), 8iB(n), б2в(п), 8зв(п), 84в(п) - команды на включе-
ние или выключение соответствующих сопел с тактом счета алгоритма СУОС.
4.4.3 Законы управления
Основные положения
Система успокоения, ориентации и стабилизации относится к существенно
нелинейным системам управления, так как исполнительные органы обладают ха-
рактеристикой нелинейного типа.
Между линейными и нелинейными системами имеются следующие основ-
ные отличия:
- к нелинейным системам не применим принцип суперпозиции;
- нелинейная система с сопротивлением может совершать незатухающие
периодические колебания (автоколебания) благодаря источнику энергии
неколебательного характера, входящего в состав системы, ,(в линейных
системах с сопротивлением, на которые не действует внешняя сила, ко-
лебания будут только затухающими);
- в нелинейных системах период собственных колебаний зависит от на-
чальных условий (в линейных - не зависит);
- при действии на нелинейную систему возмущающей силы в системе
возникают вынужденные колебания не только с частотой возмущающей
силы, но и с частотами, кратными ей (в линейной системе - только с
частотой возмущающей силы).
Параметры регуляторов в нелинейных системах управления рассчитывают,
исходя из общих требований, которые обычно предъявляют ко всем системам
339
управления:
- движение управляемого объекта должно быть устойчивым во всех экс-
плуатационных режимах;
- необходимо, чтобы система обеспечивала выполнение поставленных
при ее разработке задач;
- следует обеспечить быстродействие системы для решения поставленных
задач;
- затраты энергии на управление объектом должны быть минимальными.
В ходе проектирования исследуют устойчивость движения объекта, для чего:
- устанавливают возможные равновесные состояния и рассматривают их
устойчивость;
- устанавливают возможные периодические движения и рассматривают их
устойчивость;
- исследуют переходы системы из одного устойчивого состояния в другое.
Быстродействие и минимизация энергозатрат системы обеспечивается при-
менением методов теории оптимального управления.
Бурное развитие электроники и вычислительной техники позволяет бес-
платформенным инерциальным навигационным системам конкурировать с плат-
форменными гироскопическими системами, касающимися весовых и габаритных
характеристик, точности, времени готовности. Кроме того, параметры Родрига-
Гамильтона (кватернионы) могут быть легко пересчитаны в углы Эйлера или
Крылова. Поэтому в дальнейших выкладках будут использоваться параметры
движения в виде кватернионов.
Кватернионы определяют угловое положение связанной системы координат
относительно инерциальной. Помимо кватернионов в БИНС вычисляются проек-
ции вектора кажущейся скорости на оси связанной системы координат.
Кинематические уравнения в кватернионах имеют вид:
2Х0 =— — соуД2 —(ВгДз;
2A.J = (ох1Х0 + cozlX2 “ юуАз j Т)
2^2 ~ “Ь ,
2X3 ~ + (DyjXj coXjX2-
Рассмотрим задачу выбора закона регулирования на примере канала крена
системы (4.4.4), применяя для этого принцип максимума Понтрягина [17].
Так как при оптимизации закона регулирования рассматривают уравнения
динамики системы в отклонениях от программы, то, полагая
I = 0;
(4.4.8)
03х! “ tt>PRxl + 6cOxi,
получим
Я • _ Мих1
М. ®PRX1 +ОС0х1 “ C0PRxl — — -
J xl
340
Отсюда
Обозначая
запишем
и _ М цх 1
Jxl
X] = |8oxldt;
X 2 = 8<л
—- = Х2;
dt
dXn
—^=U.
dt
• ' (4.4.9)
Система стабилизации должна быть оптимальной по быстродействию при
переходе ее из произвольного начального состояния в равновесное состояние
(Xj-O, Х2=0) при наложенном на величину TJ ограничении
|и| = Ь. (4.4.10)
Применяя принцип максимума к данной задаче, получаем
H = v,X2+v2U; (4.4.11)
-d^=0;
,dt (4.4.12)
dy2
----= -
dt
Из (4.4.12) следует, что
\И1=СЬ\|/2=С2-С^.
Принцип максимума для данного случая будет формулироваться так: в слу-
чае синтеза закона регулирования, обеспечивающего оптимальность системы по
быстродействию, необходимо существование таких ненулевых непрерывных
функций Vi (t), v2(t) >410 всех tв заданном интервале t0 < t < t] функция Н от
переменной U в заданной области значений U достигает максимума:
Н = М(у1,у2;Х1,Х2), (4.4.13)
причем величина М постоянна во времени и М > 0.
Выражения (4.4,11), (4.4.13) и ограничение (4.4.10) дают следующий вид
закона регулирования:
U = bsigny 2 = bsign(c2 - qt),
так как положительный максимум функции Н по переменной U будет достигать-
341
ся при U = +Ь, если с2 — c1t>0> и при U = -Ь, если с2 -- с, t <0.
Для наглядности работы системы стабилизации при использовании такого
закона регулирования изобразим качественно процесс отработки отклонения от
равновесного состояния на фазовой плоскости. Исключив dt из уравнений (4.4.9),
получим при U = +Ь
bdXi=X2dX2,
X!
(4.4.14)
Аналогично при U = -Ь
Xi=-
X?
—+ с ,
2Ь
(4.4.15)
где (4.4.14) и (4.4.15) - уравнения парабол, симметричных относительно оси Oxj.
Переходные процессы в системе при отработке рассогласования по углу и
угловой скорости иллюстрируются рис.4.4.4.
Рисунок 4.4.4 - Траектория движения изображающей точки
на фазовой плоскости
Равенство нулю рассогласования по углу при равном нулю рассогласовании
по угловой скорости соответствует с = 0 и движение изображающей точки в этом
случае будет происходить по линии переключения (лилия АОВ). Если с отлично
342
(4.4.16)
(4.4.17)
(4.4.18)
от нуля, траектория движения изображающей точки по фазовой плоскости будет
более сложной: из произвольной начальной точки М(ХЬХ2) изображающая точка
дойдет по некоторой параболе MD при управлении U = -Ь до линии переключе-
ния, в точке D должно произойти переключение управления на U = + Ь, после че-
го изображающая точка пойдет по параболе DO и ее движение закончится в точке
О (где управление должно быть обнулено) за конечное время, которое согласно
принципу максимума является минимальным из всех возможных для перехода
данной системы из начального состояния в равновесное.
Соответственно оптимальный закон регулирования
+ b , ниже линии АОВ и на дуге АО,
- b , выше линии АОВ и на дуге ОВ.
Обозначив
|8coxldt =
5
получим уравнение линии АОВ (линии переключения ):
(5ci\i)aob = -sign(8axl)-,^2b8axI
Тогда условие (4.4.17) запишем в виде
+Ь, при 8®х1< (6®х1)А0В и
U при 8®х1= (8<ох1) А0В и (ЗсоХ1)АСВ < О,
-Ъ, при8®х1>(8®х1)А0В и
при 8юх1= (8<вх1)А03 и (8®jJaob > 0.
Как уже было сказано, уравнения углового движения вокруг осей Oiyi и
OiZj имеют структуру, аналогичную структуре рассмотренного уравнения угло-
вого движения вокруг оси OiXi, поэтому законы регулирования для этих каналов
системы стабилизации также будут аналогичными условиям (4.4.18).
Из (4.4.17) и (4.4.8) следует, что в качестве входной информации для борто-
вого алгоритма управления (4.4.18) необходимо будет иметь значения
8axl = J8coxldt = fcoxldt - J®PRxldt = ах1 -aPRxl;
(4.4.19)
8a)xi = coxl -coPRxI.
Соответствующие рассогласования должны быть получены и для двух дру-
гих каналов.
В реальных условиях равновесным, состоянием углового движения вокруг
некоторой оси считается не нулевая точка, а называемая зоной нечувствительно-
сти область на фазовой плоскости, ограниченная условиями
|5оц |<82
(i=xl,yl,zl). (4.4.20)
I o®i 6|
343
Значения £1э£2 выбирают исходя из требований к точности выхода объекта
управления в заданную точку пространства с заданными параметрами движения
центра масс и углового движения.
Введение зоны нечувствительности, нелинейные характеристики исполни-
тельных органов и нелинейность закона регулирования создают предпосылки для
возникновения в системе автоколебаний, особенно при движении изображающей
точки в пределах зоны нечувствительности.
В качестве средства, практически всегда позволяющего в рассматриваемом
случае избежать возникновения автоколебаний, а при возникновении - умень-
шить их амплитуду и увеличить период до приемлемых величин, выступает ме-
тод введения в систему корректирующих обратных связей.
Проиллюстрируем это на примере отработки некоторого начального воз-
мущения в канале углового движения вокруг оси Хь Движение объекта описыва-
ется системой (4.4.9). Исключая время, получаем
(8<йх1)2 (8®xi(0))2
—y----------2-----= U(8axl" 5ах1(0)) ’ (4.4.21)
Предположим, что движение изображающей точки на фазовой плоскости
происходит в соответствии с рис. 4.4.5 ( в этом случае U = - Ь)
Рисунок 4.4.5 - Пример отработки начальных условий
Если предположить, что
V = - ( W - AW),
с = а 4-Да,
то подставляя (4.4.22) в (4.4.21), имеем
344
(4.4.22)
. AW(AW-2W)
Да =-------------. (4.4.23)
2U 4
Процесс отработки начального возмущения будет сходиться при
| V | < | W |. (4.4.24)
Например, если исполнительные органы системы регулирования обеспечи-
вают выполнение требования, чтобы за одно их включение рассогласование по
угловой скорости уменьшилось в два раза, то
3W2
Да = -^-. (4.4.25)
Из (4.4.23) и (4.4.24) следует (с учетом того, что в этом случае U < 0):
- для исключения автоколебаний закон регулирования должен состоять из
двух линий - линии включения и линии выключения для каждого знака
управления;
- угол наклона линий выключения управления по отношению к оси абс-
цисс должен быть меньше, чем угол наклона линий включения по отно-
шению к оси ординат;
- для предотвращения появления автоколебаний при нахождении изобра-
жающей точки внутри зоны нечувствительности в закон регулирования
вводятся вертикальные линии (корректирующие обратные связи), как
изображено на рис. 4.4.5.
В целях упрощения бортовых алгоритмов и сокращения времени их счета
параболы в законе управления заменяют прямыми линиями.
Параметры объекта управления двигательной установки имеют разбросы,
определяемые погрешностями изготовления и сборки, из-за чего для вычисления
линии переключения с достаточной точностью нужно проводить идентификацию
параметров объекта и ДМТ. Процедура идентификации представляет собой
сложный алгоритм, требует затрат машинного времени бортового вычислителя,
что нежелательно. Поэтому заранее принимают, что линия переключения может
перемещаться по фазовой плоскости, т.е. ее вычисляют с погрешностью, тем
большей, чем больше параметры объекта и ДМТ отличаются от номинальных.
Это свидетельствует также о том, что можно заменить параболы прямыми без по-
тери точности регулирования, так как нет смысла применять точные формулы,
если величины, которые входят в них, вычисляют со значительной погрешно-
стью.
Участок полета, на котором работает СУОС, может быть довольно боль-
шим по длительности, поэтому в целях экономии рабочего тела двигательной ус-
тановки СУОС в закон регулирования вводится зона движения по инерции. На-
клон линий включения является из-за этого компромиссом между требованием к
быстродействию системы регулирования (минимизации времени приведения па-
раметров углового движения ступени из значений вне зоны нечувствительности в
зону) и требованием, чтобы суммарный расход рабочего тела ДМТ был меньше
располагаемого на борту ступени запаса рабочего тела или равен ему.
345
Кроме перечисленных выше требований к алгоритмам формирования
управляющих команд СУОС могут быть предъявлены дополнительные требова-
ния, вытекающие из необходимости соблюдения тепловых и частотных режимов
работы двигательной установки. При этом используют так называемый «режим
длительных включений», когда вычисляется количество тактов включенного со-
стояния сопел двигательной установки по расстоянию от положения изображаю-
щей точки на фазовой плоскости на текущем такте работы СУОС до точки, где
= 0 (i = Xi, уь zi), с помощью формулы
Qi =eI^-Uo.5|( i = xh уь zi),
I ni J
где Qi - количество тактов включенного состояния ДУ СУОС;
Di - максимальное из возможных в реализации во время реального полета
значений отношения управляющего момента вокруг i - й оси к осевому
моменту инерции, умноженное на длительность такта работы СУОС;
Е{...} - операция выделения целого числа.
Суммируя все сказанное выше, приходим к изображенному на рис. 4.4.6
виду закона регулирования.
Рисунок 4.4.6 - Линии переключения закона управления на фазовой
плоскости
Процесс регулирования по этому закону будет происходить так : из началь-
ной точки М, расположенной на линии включения, изображающая точка при
управлении U = -Ь по параболе дойдет до точки D, расположенной на линии вы-
ключения, затем по прямой DF войдет в зону нечувствительности. Когда изобра-
жающая точка пересечет вертикальную линию, произойдет включение ДМТ
346
(U = +b) и далее изображающая точка по параболе, не выходя из зоны нечувстви-
тельности, дойдет до следующей вертикальной линии (точка R ), где управление
будет выключено. При каждом таком цикле значение бсо, будет уменьшаться, а
участки движения по инерции - увеличиваться, что позволяет избежать возник-
новения автоколебаний и при выполнении требований по точности'регулирова-
ния параметров углового движения экономить рабочее тело ДУ.
Полученный таким образом закон регулирования будет, конечно, квазиоп-
тимальным по быстродействию. Поэтому для выяснения параметров углового
движения, которые он сможет обеспечить в реальном полете с учетом разбросов
массово-инерционных, центровочных характеристик объекта, разбросов характе-
ристик ДМТ СУОС, погрешностей определения рассогласований по углам и уг-
ловым скоростям, необходимо проведение расчетов по полной модели (4.4.3).
Если полученные в результате расчетов параметры не удовлетворяют заданным
требованиям, коэффициенты закона регулирования должны быть уточнены, а
расчеты по полной модели (4.4.3) - повторены. Процесс итераций выбора чис-
ленных значений закона регулирования должен быть повторен до тех пор, пока
не будут выполнены все требования, предъявляемые к СУОС. . -
4.4.4 Выбор параметров СУОС
Одним из основных этапов разработки СУОС является выбор параметров
закона регулирования. Поскольку законы регулирования качественно не отлича-
ются друг от друга для всех трех каналов угловой стабилизации, рассмотрим по-
следовательность выбора параметров закона регулирования в канале крена. Как
было показано ранее, закон регулирования имеет вид, показанный на рис. 4.4.7.
Рисунок 4.4.7 - Физический смысл параметров закона регулирования СУОС
347
Основными требованиями к СУОС являются удержание объекта управле-
ния возле программного углового положения и сведение к минимуму скорости.
Точность стабилизации углового положения определяется линиями включения
а3=8аХ1~а3; |33-баХ1+а5.
Параметр а3 задает амплитуду колебаний по угловому рассогласованию и
выбирается исходя из предъявляемых требований.
Во время выполнения переориентации параметр а3 существенно влияет на
величину запаздывания отработки изменяемого программного угла, что приводит
к затягиванию переходного процесса и дополнительному расходу рабочего тела.
Поэтому на участках переориентации ступени этот параметр коммутируется в
сторону уменьшения.
Точность по скорости задается линиями выключения
а2=ЗсоХ1-а2; ₽2 +а2-
Величину параметра а2 выбирают таким образом, чтобы при нахождении
изображающей точки, характеризующей состояние объекта, на линии а2 или р2
угловая скорость за такт включения исполнительного органа поменяла знак на
противоположный. Так как эффективность исполнительного органа зависит от
режима работы ДМТ и ее текущее значение в полете является случайной величи-
ной, то при вычислении а2 используют минимальное значение эффективности
а*2=|а”».Т.
Если скорость движения в канале угловой стабилизации меньше величины
а2, то объект управления будет двигаться по инерции, пока изображающая точка
не попадет в зону 1, определяемую линиями (скорость положительная):
а4=ЗаХ1 -а4; а3 -8аХ| - а;
или линиями (скорость отрицательная):
р4=ЗаХ) +сц; р3=8аХ( +сц.
При попадании изображающей точки в зону 1 законом управления форми-
руется команда включения исполнительных органов на один такт, что приводит к
изменению знака угловой скорости.
Линии включения оц и 01 определяют длительное включение исполнительных
органов при больших значениях угловой скорости (что возможно, например, при
отработке возмущений из-за разделения ступеней) и вычисляются по формулам
cij = 8аХ1 + Тв8соХ1 - а*; oq =8аХ1 + Тв8а>Х1 +а*.
Если предположить, что максимальные начальные условия по углу и угло-
вой скорости представлены точкой М(8ах(0), 8шх(0)), а также, что траектория
движения изображающей точки из этого положения к началу системы координат
известна, то можно выбрать параметр Тв и oq . При этом траектория движения в
348
повышенном режиме (N+) должна приводить изображающую точку в начало ко-
ординат. Значения Тв и а* могут корректироваться из условия, что траектория
движения в номинальном режиме (№) должна обязательно приводить изобра-
жающую точку на линию выключения аз фз). Это условие обеспечивает пере-
ходный процесс без перерегулирования.
Обычно линии включения а} (pi) являются касательными к траекториям
движения с повышенной эффективностью исполнительных органов в точках мак-
симальных начальных условий по углу и угловой скорости M(8axi(0), 8(вхi(0)).
Линии выключения as (ps) определяют выключение исполнительного орга-
на и перевод изображающей точки на движение по инерции. Данные линии пред-
ставляются выражениями
as = 8аХ1 + Тн8<ох. —а3;
J A I П A | J 7
р5 = баХ1 + Тн8соК; + а,з.
Параметр а3, как было указано выше, является зоной колебаний объекта
регулирования по углу.
Параметр Тн зависит от участка движения ступени. На участках отработки
начальных условий и стабилизации параметр Тн выбирается из условия минима-
лизации расхода рабочего тела с учетом допустимого времени на приведение
изображающей точки в зону автоколебаний.
На участке переориентации параметр Тн коммутируется в целях получения
удовлетворительного переходного процесса по угловому рассогласованию. В
этом случае параметр Тн уменьшается по сравнению с выбранным значением на
участке стабилизации, но при этом должно выполняться условие
т„>тв.
Невыполнение этого условия приводит к потере устойчивости.
4.4.5 Моделирование работы СУОС
Моделирование работы СУОС во временной области проводят для таких целей:
- уточнения параметров закона регулирования;
- проверки выполнения предъявляемых к СУОС требований по точности
удержания заданного углового положения;
- оценки максимальных величин перерегулирования в каждом из трех кана-
лов стабилизации, а также времени отработки возмущений.
Кроме того, выясняют значения периодов автоколебаний, минимального и
максимального расхода рабочего тела ДМТ.
Моделирование может быть проведено как на аналоговых моделирующих
устройствах, так и с помощью цифрового моделирования. Цифровое моделиро-
вание по сравнению с аналоговым имеет некоторые преимущества, так как осо-
бенностью работы СУОС по сравнению с работой АС PH является то, что контур
нОбъект-ККП-СУ ОС-ЭК-Объект" в случае отсутствия управляющей команды
оказывается разомкнутым по цепи "ЭК-Объект". Поэтому, если СУОС представ-
лена аналоговой схемой, то вследствие уходов нулей усилителей и интеграторов
349
за время отсутствия управляющей команды реальная картина динамики углового
движения будет искажена.
Аналоговое моделирование на современном этапе развития ракетной тех-
ники применяют редко, и в дальнейшем рассматриваться в качестве основного
варианта при моделировании работы СУОС будет цифровое моделирование.
Цифровое моделирование процессов стабилизации осуществляется в не-
сколько этапов.
На первом этапе работа СУОС моделируется отдельно от работы системы
наведения. Используется математическая модель ступени в виде системы диффе-
ренциальных уравнений (2.1.57), дополненной математической моделью ДМТ.
Математическая модель ДМТ учитывает:
- разбросы величины тяги каждого сопла;
- перекосы линий действия тяг сопел относительно продольных осей сопел;
- времена запаздывания срабатывания ЭК при включении и выключении;
- постоянные времени набора и спада тяг.
На этом этапе анализируют переходные процессы в различных условиях:
- отработку начальных возмущений;
- компенсацию взаимовлияния каналов стабилизации.
Исследуют и динамику углового движения объекта во время переориентации.
Анализ переходных процессов позволяет определить статическую и дина-
мическую точность регулирования, расход рабочего тела ДМТ в режимах стаби-
лизации и переориентации, периоды колебаний.
По результатам анализа (при необходимости) корректируют параметры зако-
на регулирования в соответствующем канале стабилизации, определяют предельно
допустимый такт счета алгоритмов СУОС и формируют требования к режимам ра-
боты системы стабилизации на отдельных участках траектории полета ступени.
На втором этапе моделируются процессы стабилизации в задаче совместно-
го моделирования работы систем наведения, навигации и стабилизации. Задача
позволяет моделировать работу системы управления и получить характеристики
процессов регулирования на всей траектории движения ступени. По результатам
анализа переходных процессов, полученных на данном этапе моделирования,
принимают решение о завершении выбора параметров закона регулирования.
Третий этап моделирования предполагает создание задачи замкнутого ис-
следовательского стенда (ЗИС). В состав ЗИС входит штатная БЦВМ, в которой
запрограммированы алгоритмы систем наведения, навигации и стабилизации. Ра-
бота БЦВМ обычно отличается от работы ЦВМ общего назначения наличием ог-
раничения разрядной сетки, ограничением быстродействия, необходимостью за-
щиты от сбоев и зависаний.
Кроме того, в схеме ЗИС можно получить оценку запаздывания при выдаче
управляющих команд на ЭК.
Моделированием в схеме ЗИС оканчивается проверка как работоспособности
системы управления во всех резкимах при любых сочетаниях разбросов характери-
стик объекта и ДМТ во время сквозного полета ступени по траектории, так и вы-
полнения предъявляемых к системе требований.
350
4.5 Система поддержания давления в камерах сгорания ДУ
4.5.1 Технические требования, предъявляемые к СПД
Система поддержания давления (СПД) предназначена для управления рабо-
той ДУ в целях стабилизации тяги относительно требуемых значений.
Как правило, СПД обеспечивает вывод ДУ в номинальный режим работы
путем поддержания давления в КС в области номинального значения. На разных
участках полета СПД может также применяться для формирования форсирован-
ного или дросселированного режима работы ДУ. Такие режимы обеспечиваются
заданием определенной логики работы СПД.
Важное значение имеет точность, с которой СПД обеспечивает требуемый
режим работы ДУ. С точки зрения проектирования СУ очевидно, что чем меньше
будет отличие реальной тяги от номинальной, тем лучше будут выбраны ее пара-
метры, обеспечивающие более высокие технические характеристики - точность,
экономичность.
Требования, предъявляемые к СПД, разрабатываются под каждый конкрет-
ный двигатель.
Существующие СПД обеспечивают отклонение тяги от номинального зна-
чения:
- для 1 -й и 2-й ступеней ±1.4% от номинального значения;
- для 3-й ступени ±4% от номинального значения.
4.5.2 Состав и функциональная схема СПД
СПД входит в состав ЖРД как автономный контур регулирования тягой.
Если ДУ ступени состоит из нескольких автономных блоков, СПД разбива-
ется на несколько по числу блоков независимых каналов.
Применяемые СПД идентичны по структуре и функционированию, но от-
личаются типом используемых элементов.
В состав СПД входят следующие элементы:
- датчик давления, являющийся чувствительным элементом СПД;
- релейный преобразователь сигналов, формирующий управляющие ко-
манды;
- электрический привод, являющийся исполнительным органом СПД;
- дроссель, регулирующий расход горючего в контуре питания газогене-
ратора ТНА.
На рис. 4.5.1 показана функциональная схема СПД.
Перед пуском, а в случае использования двигателя многократного включе-
ния в моменты его выключения РПС формирует команду на электроприводы
СПД для приведения выходных валов в исходное положение и удерживания их в
этом положении до момента включения в работу.
В момент включения СПД команда удержания ЭП в исходном положении
снимается. Электрический: сигнал, формируемый датчиком давления и соответст-
вующий давлению в КС с точностью до дискреты ламели, поступает в РПС. РПС
формирует команды, в соответствии с которыми привод вращает вал в нужном
351
направлении, перемещая дроссель, расположенный в магистрали питания газоге-
нератора.
Рисунок 4.5.1 - Функциональная схема СПД
На рис. 4.5.1 обозначено:
КС ДУ - камера сгорания двигате.ньной установки;
ДД - датчик давления;
РПС - релейный преобразователь сигналов;
ЭП - электрический привод дросселя;
Д - дроссель;
РР - регулятор расхода горючего;
БЦВМ - бортовая цифровая вычислительная машина.
4.5.3 Логика работы СПД
Включение СПД осуществляется после запуска и выхода ДУ на основной
режим работы по команде из БЦВК.
Логика работы в момент включения СПД заключается в формировании
РПС команды на принудительное форсирование.
В момент включения СПД РПС осуществляет контроль сигнала с ламелей
г f
Ф1(Ф1 ),Ф2(Ф2) датчика давления. При его наличии схема принудительного
форсирования отключается и РПС формирует команду ’’Дросс” на электропривод,
который, вращая дроссель, переводит ДУ в режим дросселирования, давление в
КС падает. Команда ’’Дросс” подается до момента размыкания ламели
Ф1(Ф1')ДД.
г t
При отсутствии сигнала с ламелей Ф1(Ф1 ),Ф2(Ф2 ) РПС формирует ко-
манду ’’Форс” на электропривод СПД, который, вращая дроссель, форсирует дви-
гатель, давление в КС возрастает. Команда на принудительное форсирование ДУ
г
подается до момента появления сигнала с ламели Ф|(Ф[ ).
352
После отключения схемы принудительного форсирования СПД переходит в
режим регулирования в соответствии с лошкой, заключающейся в стабилизации
давления в КС относительно номинального значения. При превышении величины
давления в камере сгорания допустимого диапазона регулирования (область до-
пустимых отклонений относительно номинального давления) замыкается одна из
ограничительных ламелей датчика давления (Ф1(Ф1)-при повышении давле-
t
ния, Д! (Д! ) - при понижении давления). Сигнал в виде постоянного тока посту-
пает с ламелей датчика давления в РПС. РПС преобразует этот сигнал в управ-
ляющую команду на электропривод, который, вращая вал дросселя, уменьшает
или увеличивает расход горючего на газогенератор, что приводит к изменению
давления в камере сгорания в сторону номинального значения. Команда РПС на
электропривод подается до момента прекращения сигнала с ламелей ДД.
f >
При отсутствии сигнала с ограничительных ламелей Ф](Ф] )или Д1(Д()
(давление в КС с учетом допустимых разбросов соответствует номинальному)
выходной вал электропривода не вращается.
4.5.4 Математическая модель СПД
Блок-схема математической модели СПД показана на рис. 4.5.2
Рисунок 4.5.2 - Блок-схема математической модели СПД
353
На рис. 4.5.2 приняты следующие обозначения:
5p(t) - отклонение давления от номинального значения в КС;
брду - суммарные возмущения по давлению в КС ДУ (суммарное отклоне-
ние давления от номинального) из-за конструктивных погрешностей и погрешно-
стей настроек ДУ, а также разбросов характерных параметров топлива;
5р (t) - отклонение давления от номинального значения в чувствительной
полости ДД;
5рогр - отклонение давления от номинального значения, соответствующее
зоне нечувствительности ДД (выдаче команд '’Дросс'* или "Форс");
U^(t) - текущее значение сигнала, формируемого ДД;
Upnc(t) -текущее значение управляющего сигнала (-1,0,+1), формируемого
РПС;
\|/(t) - текущее значение угла поворота выходного вала привода регулятора
расхода горючего.
Математические модели ДД и ЭП приведены в подразд. 2.1.13.
Математическая модель релейного преобразователя сигналов представляет
собой релейное звено. Сигнал (-1,0,+1), поступающий с РПС на привод регулято-
ра расхода горючего, определяет направление вращения выходного вала и опи-
сывается выражением
(4-5.1)
где — момент включения СПД;
1ф1 - момент окончания принудительного форсирования при включении СПД;
+1 - сигнал, формируемый РПС в режиме форсирования ДУ;
-1 - сигнал, формируемый РПС в режиме дросселирования ДУ;
0 - сигнал, формируемый РПС в номинальном режиме ДУ.
Математическая модель камеры сгорания ДУ представляет собой аперио-
дическое звено первого порядка. Описывается дифференциальным уравнением,
связывающим угол поворота вала привода регулятора с давлением в КС:
5p(t) = Z?- (kOTy(t) - 5p(t)), (4.5.2)
1дв
где кдв - коэффициент передачи ДУ; Тдв - постоянная времени ДУ;
V(t) _ текущее значение поворота вала ЭП;
Sp(t), 3p(t) _ СКОрОСТЬ изменения и отклонение давления от номинального
значения в КС.
4.5.5 Моделирование переходных процессов СПД
Численное интегрирование системы уравнений, представляющих собой со-
вокупность математических моделей реальных элементов СПД, позволяет полу-
чить переходные процессы, возникающие в системе в результате отработки от-
354
клонения от номинального значения давления в КС.
В качестве исследуемой рассмотрим СПД 1-й ступени типичной PH.
Технические характеристики элементов СПД приведены в табл. 4.5.1.
Таблица 4.5.1 - Технические характеристики элементов СПД
Наименование параметра, обозначение Размер- ность Величина
Отклонение давления в КС относительно номи- нального значения нерегулируемой ДУ 8pw % атм ±7 ±5.95
Коэффициент передачи двигателя кда кгс/с2/рад 9.0
Постоянная времени двигателя Тдв с 0.2
Постоянная времени датчика давления Тдд с 0.06
Коэффициент передачи привода кщ. град/с 21
Постоянная времени привода Тпр с 0.06
Номинальное давление в КС рном кгс/см2 85
Отклонение давления относительно номинального значения в чувствительной полости ДД 8p*(t) кгс/см2 0.5
На рис. 4.5.3, 4.5.4 показаны переходные процессы, полученные при дейст-
вии на систему возмущений, оговоренных в табл. 4.5.1.
На рис. 4.5.3, 4.5.4 изображены следующие трафики:
ЦддСО- текущего сигнала формируемого ДД;
Upnc(t) - текущего сигнала формируемого РПС;
\|/(t) - угла поворота выходного вала привода СПД;
8р (t) - отклонения давления от номинального значения в чувствительной
полости ДД.
При анализе результатов моделирования оценивались:
- угол поворота выходного вала привода, необходимый для перевода ДУ в
номинальный режим работы \|/тах;
- перерегулирование по давлению относительно номинального значения
^Pmaxj
- время окончания переходного процесса по давлению tycn;
- точность регулирования СПД в установившемся режиме и.
Результаты характерных параметров переходных процессов СПД приведе-
ны в табл. 4.5.2.
Таблица 4.5.2 - Результаты характерных параметров переходных процессов СПД
Возмущение Vmax ^Ртах tycn п
кгс/с2 град кгс/с2 С %
+6 -41.8 -0.5 3.35 0.15
—6 41.8 0.5 3.35 0.15
355
Рисунок 4.5.3 - График переходных процессов при 8pw= +6 атм
356
идд
Рисунок 4.5.4 - График переходных процессов при брду-^-б а;гм
357
Анализ результатов, показанных на рис. 4.5.3, 4.5.4 и приведенных в
табл. 4.5.2, показал, что СПД при заданных настройках системы и действующих
возмущениях обеспечивает поддержание давления в КС ДУ с точностью, удовле-
творяющей поставленным требованиям.
4.6 Система управления расходом топлива
4.6.1 Основные технические требования
Система управления расходом топлива (СУРТ) предназначена для оптими-
зации использования располагаемого запаса топлива на активном участке полета
ракеты и обеспечения безаварийного выключения двигателей.
Объектом регулирования СУРТ является динамическая система, состоящая
из двигательной установки (ДУ) ступени, баков компонентов топлива и связы-
вающих их трубопроводов.
Оптимизация использования располагаемого запаса топлива осуществляет-
ся обеспечением синхронного расходования компонентов топлива путем автома-
тического изменения в заданных пределах коэффициента соотношения весовых
расходов компонентов топлива и определением момента полной выработки рабо-
чих запасов топлива в баках на основе информации измерительной системы о
фактическом использовании компонентов топлива.
В соответствии с требованиями, предъявляемыми к современным PH,
СУРТ должна обеспечить:
а) конечные рассогласования объемов компонентов топлива, не превы-
шающие 0,5% от величины рабочих запасов соответствующих компонентов топ-
лива;
б) погрешность определения момента полной выработки компонентов топ-
лива, критерием чего служит достижение объема, не превышающего 0,3% от ра-
бочего запаса любого из компонентов;
в) отклонения значения коэффициента соотношения весовых расходов
компонентов топлива через двигатели, не превышающие 10 % от номинального.
Решение задач СУРТ осуществляется на основе применения БЦВМ систе-
мы управления ракетой.
4.6.2 Состав и функциональная схема СУРТ
Состав системы
Система СУРТ включает в свой состав следующую аппаратуру:
- датчики уровня, устанавливаемые в баках окислителя и горючего на
ступенях ракеты;
- приводы, устанавливаемые на маршевых двигателях ступеней ракеты;
- исполнительные устройства-дроссели, размещенные в магистралях го-
рючего двигателей ступеней ракеты;
- бортовую кабельную сеть (БКС).
Принципы построения СУРТ
Рациональные принципы построения СУРТ выбираются исходя из требова-
ний обеспечения системой максимальной точности при высокой надежности и
минимальном весе аппаратуры системы.
358
Наиболее целесообразным путем минимизации весовых характеристик ап-
паратуры СУРТ является функционально-конструктивная реализация преобразо-
вательной части системы с помощью БЦВМ. Система управления расходом топ-
лива функционирует по двум каналам: каналу одновременного опорожнения ба-
ков и каналу прогнозирования момента окончания компонентов топлива на сту-
пени.
Построение СУРТ ведется на основе принципа терминального порогово-
дискретного управления. Управляющая команда по каналу одновременного опо-
рожнения баков формируется на основании информации о рассогласовании запа-
сов компонентов топлива на паре измерительных точек в баках окислителя и го-
рючего. В соответствии с вычисленной командой изменяют коэффициент соот-
ношения расходов компонентов через двигательную установку таким образом,
чтобы свести рассогласование к нулю к концу работы СУРТ на ступени. Управ-
ляющее воздействие может быть вычислено в соответствии с двухчленным алго-
ритмом управления. Двухчленный алгоритм обеспечивает точностные характери-
стики, близкие к оптимальным, и достаточно прост для реализации на БЦВМ.
Рассмотрим возможные принципы построения канала прогнозирования
момента израсходования топлива на ступени. Момент, свидетельствующий об
окончании компонентов топлива в баках, может быть определен несколькими
способами:
во-первых, установкой специальных датчиков, фиксирующих окончание
компонентов топлива в баках. Датчики устанавливают на уровнях, соответст-
вующих минимально допустимому объему остатков компонентов. Система, реа-
лизующая этот способ, называется системой ОКТ. При практической реализации
такого способа из-за конструктивных ограничений часто невозможно установить
датчик достаточно близко к объему, соответствующему окончанию рабочих запа-
сов компонентов топлива. В этих случаях заранее назначают интервал времени от
момента срабатывания датчика СУРТ до момента окончания компонента топлива
на ступени в предположении о номинальности расхода компонента. В результате
реальная точность системы ОКТ оказывается сравнительно низкой;
во-вторых, прогнозированием момента времени окончания компонентов
топлива (ПОКТ) на основании имеющейся информации, поступающей от уста-
новленных в баках дискретных датчиков измерения уровней. Принцип работы
канала ПОКТ, реализующего такое прогнозирование, заключается в нахождении
среднего на сравнительно большом интервале времени расхода топлива и про-
гнозировании по этой информации момента времени выработки топлива, нахо-
дящегося под измерительной точкой.
Указанный способ обеспечивает высокую точность определения момента
окончания топлива, однако эффективность его значительно падает при наличии
принудительных, заранее непредвиденных изменений суммарного расхода в те-
чение полета ступени;
в-третьих, способ ПОКТ может быть дополнен прогнозированием кажу-
щейся скорости ракеты в момент окончания топлива на ступени на основе ин-
359
формации о текущих запасах компонентов топлива и данных о текущих значени-
ях кажущейся скорости.
Такой способ прогнозирования момента окончания компонентов топлива
не уступает по точности ПОКТ и оказывается нечувствительным к заранее неиз-
вестным изменениям суммарного расхода. Кроме того, он позволяет сформиро-
вать информацию о величине приращения кажущейся скорости, которое ракета
получит за время, оставшееся до момента выгорания топлива.
Анализ условий эксплуатации современных ракет и изложенных способов
построения системы ПОКТ даёт возможность принять способ прогнозирования,
при котором канал ПОКТ работает в режиме наблюдения и обработки текущей
информации, а также информации о предыстории процесса опорожнения баков.
В результате работа канала ПОКТ прогнозируются моменты окончания компо-
нентов топлива, которые используются при формировании команды на выключе-
ние двигателя.
В условиях нормального функционирования СУРТ, воздействуя на процесс
опорожнения баков, обеспечивает одновременную выработку окислителя и го-
рючего. Возможное рассогласование моментов окончания компонентов топлива в
этом случае определяется погрешностями регулирования. Такое рассогласование
не может быть выделено при прогнозировании, так как канал ПОКТ использует
ту же уровнемерную информацию, что и канал одновременного опорожнения
СУРТ. При этом момента окончания компонентов топлива, сформированные по
измерениям датчиков уровней с учетом вычисленных значений управляющих
воздействий по каналу одновременного опорожнения, оказываются одинаковы-
ми, равными моменту окончания суммарных запасов топлива. На основании из-
ложенного канал ПОКТ целесообразно строить по принципу црогнозирования
окончания топлива - суммарных запасов окислителя и горючего.
Тогда процесс прогнозирования оказывается нечувствительным к воздейст-
вию перекладок регулирующего органа СУРТ и может быть построен с высокой
точностью с помощью сравнительно простого алгоритма обработки входной ин-
формации.
Однако канал ПОКТ, построенный по принципу прогнозирования оконча-
ния компонентов топлива, обладает определенными недостатками, которые про-
являются в нерасчетных режимах работы системы.
Например, в случае отказа одного из уровнемерных каналов невозможно
использовать информацию, поступающую с другого, работоспособного канала.
Кроме того, при возникновении отказов в цепях исполнения вычисленной коман-
ды СУРТ моменты израсходования окислителя и горючего могут различаться. В
этом случае использование для выключения двигателя результатов прогноза по
суммарному топливу может привести к аварийной ситуации на ракете.
В целях повышения надежности функционирования СУРТ в основу по-
строения канала ПОКТ целесообразно положить принцип работы, при котором на
основе раздельной обработки уровнемерной информации прогнозируются про-
цессы расходования и моменты окончания каждого из компонентов. Путем ос-
реднения с соответствующими коэффициентами результатов раздельного прогно-
. 360
за формируется более точный прогноз процесса расходования и момента оконча-
ния запасов топлива.
Такой принцип наряду с высокой точностью прогнозирования в. режимах
нормальной работы обладает определенной гибкостью, позволяя # использовать
результаты раздельного прогнозирования в нерасчетных режимах работы СУРТ.
В качестве признака перехода канала ПОКТ на раздельное прогнозирование
можно принять превышение рассогласованием прогнозируемых моментов окон-
чания запасов окислителя и горючего заданного порогового значения, после чего
формирование признака окончания компонентов и команды на выключение дви-
гателя происходит с использованием момента времени, соответствующего тому
компоненту, который будет израсходован первым.
Функциональная схема СУРТ показана на рис. 4.6.1.
Рисунок 4.6.1 - Функциональная схема СУРТ
361
На рис. 4.6.1 приняты следующие обозначения:
О - текущее значение сигнала с датчика в баке окислителя на входе усили-
теля-преобразователя (УП);
Г - текущее значение сигнала с датчика в баке горючего на входе УП;
RG1 - текущее значение сигнала с УП для бака окислителя;
RG2 - текущее значение сигнала с УП для бака горючего;
Поткр, издкр - сигнал на реализацию управляющего воздействия «открытие
(закрытие) дросселя СУРТ»;
а - угол поворота привода СУРТ.
Используемый СУРТ принцип терминального управления иллюстрируется
на рис. 4.6.2. Рассмотрим его подробнее.
Рисунок 4.6.2 - Принцип терминального управления
В баках окислителя (БО) и горючего (БГ) установлены датчики уровня
окислителя (ДУО) и горючего (ДУГ) с одинаковым числом измерительных точек
(ИТ), которые реагируют на факт пересечения зеркалом компонента топлива
уровня, на котором установлены ИТ. При опорожнении баков в расчетно-
номинальных условиях пересечение ИТ одинаковых номеров в баках О и Г про-
исходит одновременно, разность времен их пересечения t0 - tr и рассогласова-
ния компонентов топлива равна нулю. При наличии возмущений истинные про-
цессы опорожнения баков отличаются от номинальных, и возникает неодновре-
менность пересечения ИТ одинаковых номеров в баках О и Г. Это приводит к по-
явлению временного рассогласования At = t0 - tr 0, характеризующего рассо-
гласование запасов окислителя и горючего. Результаты измерений преобразуются
в усилителе-преобразователе и являются входными сигналами для алгоритма
362
СУРТ, реализованного в БЦВМ. С выхода БЦВМ поступают управляющие сиг-
налы на согласующее устройство и далее на привод СУРТ, осуществляющий по-
ворот заслонки регулирующего органа СУРТ (дросселя) на угол а, что влечет за
собой изменение коэффициента к. Представленная схема повторяет свое дейст-
вие при срабатывании каждых из последующих пар ИТ.
Вычисление управляющей команды, определяющей расход топлива, а со-
ответственно и величины параметра к, проводится путем последовательных вы-
числений 8к по данным дискретных измерений временных рассогласоваййй. Для
этого в БЦВМ по двум смежным измерениям величины At формируется сигнал на
перекладку дросселя а:
Atj -Д1н
(4.6.1)
где Atj.j и Atj - временные рассогласования объемов топлива в баках соответ-
ственно при (j - 1)-м и j-м измерениях;
АТ, - интервал времени между (j - 1)-м и j-м измерениями;
38k
КдР =-----коэффициент, учитывающий характеристики дросселя.
да
4.6.3 Алгоритмы работы СУРТ
Управляющие воздействия системы вырабатываются в БЦВМ во время ра-
боты маршевых двигателей ступени, начиная с момента набора 90% тяги до мо-
мента выключения двигателей.
Блок формирования начальных состояний (БНС)
Операции по формированию начальных состояний реализуются в первом
такте после начала работы СУРТ соответствующей ступени.
При этом проводится обнуление рабочих ячеек и формируются следующие
величины:
L, G° — Gol, Gr - Gql, Groh ~ Gkohl-
Блок оценки текущих запасов топлива (БОТЗ)
Формирование величин G°, Gr, G, характеризующих текущие значения от-
носительных величин запасов окислителя, горючего и суммарных запасов топли-
ва на ступени:
G°[n0] = G°[n0 -1]-AGl (1 + X°[no - Ц);
Gr[n0] = Gr[n0 -1] - AGL • (1+Ar [n0 -1]);
G[n0] = G°fn0].k£+Gr[n0]-k[.
Формирование признака зе окончания запасов топлива на ступени:
G[n0], если |G°[no]-Gr[no]| < SL;
g[n0]=- G°[n0], если|G°[n0] -Gr[n0]| > S и G°[n0] < Gr[n0];
Gr[n0], если|Оо[п0]-Ог[п0]| > S и G°[n0] > Gr[n0],
363
Если g[n0]-GKon <0, то ае = 1.
Блок обработки входной информации (БОВИ)
Формирование условного номера п опрашиваемого датчика
если n[n0 -1] < 2, то п[п0 ] = п[п 0 -1] 4-1; иначе - п[п0 ] = 0.
Формирование информации о прохождении измерительных точек
Информация о прохождении зеркалом жидкости заданных контрольных
уровней поступает в БЦВМ от каждого из датчиков по каналам “ЧЕТ” и
“НЕЧЕТ” и характеризуется появлением значения 1 в соответствующих разрядах
входного слова опрашиваемого датчика (%чет(п), %нечет(п)). Правильной последо-
вательностью чередования сигналов для любого из датчиков считается: НЕЧЕТ,
ЧЕТ, НЕЧЕТ и т.д. Факт прохождения переднего фронта сигнала определяется по
изменению состояния соответствующего разряда входного слова с 0 на 1, а задне-
го фронта - по изменению состояния с 1 на 0. Для запоминания предшествующе-
го состояния входного слова каждого из датчиков используются признаки Р(п):
а) фиксация величины G в момент прохождения уровнем жидкости чувст-
вительных элементов п-го датчика переднего фронта сигнала Gn(n):
если Р(п) = 0 и хнечет (n) = 1 и j(n) - чет,
или Р(п) - 0 и %чст (п) -1 и j(n) - нечет,
то Gn(n) = G[n0], P(n) = 1, переход к п. 4;
б) фиксация величины G в момент прохождения уровнем жидкости чувст-
вительных элементов п-го датчика заднего фронта сигнала G3(n):
переход к фиксации сигнала G3(n) проводится с задержкой ЛОЗАД после
фиксации переднего фронта Gn(n).
Если G[n0]>Gn(n)-AG^(n),
то переход к п. 4;
иначе - если Р(п) -1 и хнечст = 0 и j(n) - чет,
или P(n) “ 1 и %чет = 0 и j(n) - нечет,
то G3(n) = G[n0], Р(п) = 0;
в) вычисление среднего значения Gj(n) величины G при прохождении
уровнем компонента j-й точки п-го датчика:
Gi(n>G°(n) + G»(n).
г) вычисление средних значений G° и G[ величин G0 и Gr соответствен-
но при прохождении уровнями компонентов j-x измерительных точек проводится
аналогично вычислению величины Gj(n) в соответствии с пп. а - в.
Причем среднее значение G^ величины G0 вычисляется при n= 1, а зна-
чение Gf - при п = 2;
д) формирование номера G°(r) точки, зафиксировавшей прохождение зер-
• 364
калом датчика в компоненте топлива j°[n0] = j°[n0 -1] + 1 и переход к п. 6, если
п= 1, и jr[n0] = jr[n0-1] + 1 прип=2.
Блок вычисления управляющих команд (БВУК)
Вычисление и ограничение рассогласования AG°(r- между измеренным и
номинальным значениями величины G0(r) при прохождении j-й точки:
a) AG'0(r)=G°(n-GjL;
б) если |ДО;О(Г)|<ДО^>,
то AG?(r) = AG'0(r);
иначе - AG°<r) = ДО?£) .sign(AG'0(n).
Вычисление и ограничение приращения АХ°(Г) корректирующей поправки,
характеризующей отклонение расхода компонента топлива:
а) ДХ7<Г>=АЛ(ВЛ-ДО^-ДО°<Г));
б) если |ДХ'®(г)|<ДХОфЬ,
то ДХ,°(Г>=ДХ'°<Г);
иначе - АХ°(Г) =А^огрЬ-(дГ°(Г)).
Вычисление и ограничение корректирующей поправки Х0^5:
a) Vo(r)=Xo(r)[n0-1] +АХ°(Г);
б) если |к'о(Г)| < Хогр,
то Х°<г> =Х'°(Г>;
иначе - ХО(Г) = Хогр -sign(x'°(r)).
Формирование номера i-й пары измерительных точек:
если j° = jr,
то i = j0(r);
иначе - переход к п.4.
В процессе безаварийной работы СУРТ в каждом такте работы БЦВМ
должно выполняться условие j° = jr.
Коррекция порога Groh окончания запасов топлива:
если i > iK0P,
т0 GKOh = GkoH2L’
Формирование и ограничение рассогласования AG1 запасов компонентов
топлива на i-й паре измерительных точек:
365
a) AGj = Gj(2)-Gj(l);
б) если | AG J | < AGorpi.»
to AGj = AGj;
иначе - AG; =AGorPL -sign(AGj)-
Вычисление и ограничение управляющего воздействия А5к^р на i-й паре
измерительных точек:
а) Д8кЬвы = AiL(BiL -AGi -ДОМ);
б) если | A8kjBBB1| < A8korpL,
то Д8к|щ = A8kiBBBI;
иначе - ДЗкщд = A8korpL -sign^Skj^).
Блок формирования управляющих воздействий (БФУВ)
Вычисление времени xioTp реализации управляющего воздействия и фор-
мирования и формирование сигналов U0TKp(U3aKp) на открытие и закрытие испол-
нительных органов:
а) вычисление Tioip:
"Чотр ~ ®ь|Д^кц(д|,
б) формирование U3aKp:
если АЗк^ >0 и TiOTp >0,
то изакр = 1 и переход к п. 13;
иначе - U3aitp = 0;
в) формирование UCTrKp:
если А6к1ДД <0 и Tiolp >0,
т°иот1ф=1;
иначе - иотер = 0;
г) корректировка TiOTp:
если xiOTp >0,
то Tioip [п01 = Tiorp[no -1] - *м и переход к выходу из программы СУРТ;
иначе - TiOTp = 0 и выход из программы СУРТ.
Управляющие команды, формируемые СУРТ, означают следующее:
а) = 1, формируемая при Абк^д <0, приводит к уменьшению коэффи-
циента соотношения расходов компонентов топлива;
б) изакр =1, формируемая при A5kiwi >0, приводит к увеличению коэффи-
циента соотношения расходов компонентов топлива.
Блок-схема работы алгоритмов СУРТ показана на рис. 4.6.3.
366
Рисунок 4.6.3 - Блок-схема алгоритмов СУРТ
4.6.4 Математическая модель СУРТ.
Блок-схема математической модели СУРТ показана на рис. 4.6.4.
Рисунок 4.6.4 - Блок-схема математической модели СУРТ
367
На рис. 4.6,3 приняты следующие обозначения:
Uo - выходное напряжение датчика уровня в баке окислителя;
Ur -- выходное напряжение датчика уровня в баке горючего;
At - временное рассогласование между моментами прохождения зеркалом
жидкости чувствительных элементов датчиков уровня в баках окислителя и го-
рючего;
Uotkp, Цзакр - управляющие сигналы, поступающие из БЦВМ на изменение
положения привода СУРТ;
AU - напряжение питания привода СУРТ;
а - угол поворота привода СУРТ;
Рн - давление наддува в баках компонентов топлива;
к - коэффициент весового расхода горючего и окислителя.
Математические модели датчиков окислителя и горючего представляют со-
бой релейные звенья (см. подразд. 2.1.11).
Усилитель-преобразователь выдает сигнал At при фиксации разницы мо-
ментов времени прохождения зеркалом компонентов топлива соответствующих
датчиков.
Выход алгоритмов СУРТ представляет собой релейные сигналы (0, 1) вели-
чин Uotkp, Usakp, соответствующих изменению положения регулирующего органа
(дросселя). Длительность сигналов пропорциональна модулю At.
Модель привода представляет собой апериодическое звено второго поряд-
ка.
Модель ДУ включает в себя последовательно модели дросселя, камеры
сгорания и турбонасосного агрегата, на выходе которой получаем величины дав-
ления наддува в баках и коэффициент весового расхода горючего и окислителя.
Составные части модели ДУ представлены как типичные апериодические звенья
первого порядка.
4.6.5 Моделирование работы СУРТ
Моделирование работы СУРТ и оценка результатов моделирования прово-
дятся с использованием задачи, имитирующей совместную работу систем, вхо-
дящих в состав СУ, а также включающей в себя математическую модель объекта
управления. Такая задача представляет собой систему дифференциальных урав-
нений, описывающих свойства реальных элементов PH. На этапе отработки алго-
ритмов для моделирования применяют ЦВМ общего назначения. При оконча-
тельной проверке алгоритмов и ПЗ на соответствующий пуск используют специ-
альные стенды, оснащенные ЦВМ, которые будут устанавливаться на борту PH.
На рис. 4.6.5 показаны результаты моделирования работы СУРТ типичной
PH с ЖРД на отрезке работы 1-й ступени. Рисунок иллюстрирует соотношение
сигналов с датчиков уровня и сигналов управления приводом на выходе алгорит-
мов СУРТ.
368
369
4.7 Система управления элементами автоматики и пироэлементами PH
4.7.1 Требования к системе управления элементами автоматики и
пироэлементами PH
В основу описания проектирования системы управления элементами авто-
матики и пироэлементами PH взята разработка системы управления для одной из
современных РКН.
Разработка системы управления исполнительными элементами (ИЭ) авто-
матики и пироавтоматики PH, в дальнейшем именуемая АПС, состоит из сле-
дующих этапов - анализ, проработка требований ТЗ, циклограммы работы PH в
части пневмогидросистемы (ПГС)- перечень, типы, электрические характери-
стики пироэлементов (ПЭ)э электропневмоклапанов (ЭПК), сигнализаторов и ре-
ле давления (СД, РД), последовательность и логика работы последних. Согласно
требованиям ТЗ и циклограммы рабогы PH система АПС решает следующие за-
дачи:
- обеспечение задействования ПЭ и ЭПК;
- подготовка, запуск рулевых и маршевых двигателей каждой ступени PH;
- разделение 1-й ступени со 2-й и 2-й с 3-й;
- сброс головного обтекателя;
- отделение космических аппаратов;
- осуществление контроля состояния реле и сигнализаторов давления в
баках окислителя и горючего 1-й и 2-й ступеней, в камерах сгорания
маршевого двигателя 1-й и 2-й ступеней, окислителя за насосом рулево-
го двигателя 1-й ступени, выключения двигателя по выработке окисли-
теля в МД 3-й ступени.
4.7.2 Проектирование системы управления элементами автоматики и
пироэлементами PH
На основании требований ТЗ и ЦТ определяется состав системы АПС.
Количество ПЭ, ЭПК, СД и РД, входящих в состав системы АПС, приведе-
но в табл. 4.7.1.
Таблица 4.7.1 - Наименования, принадлежность, общее количество ИЭ
Исполнительные элементы Ступень PH Обшее количе- ство Примечание
1 2 3
Пиросредства 61 55 31 147 С учетом максимального количества ПЭ на отделе- ние КА
370
Окончание табл. 4.7.1
Исполнительные элементы Ступень PH Общее коли* чество Примечание
1 2 3
Элек1ропневмоклапаны 3 1 7 11
Электрогидроклапаны 1 1
Реле давления 7 5 12
Сигнализаторы 1 1
Датчик давления СПД 1 1
Для решения приведенных выше задач по задействованию ПЭ, ЭПК, СД и
РД, контролю состояния агрегатов PH предлагается следующая архитектура (см.
Рисунок 4.7.1 - Архитектура системы управления исполнительными
элементами автоматики и пироавтоматики
371
Функциональные узлы, приведенные в архитектуре, обеспечивают:
ВУОГ, ВУО2 и УВВ- выдачу команд в соответствующий БУЭ релейного
контейнера (РК) и контроль состояния реле, сигнализаторов, датчика давления;
У К АПС - контроль схем управления автоматики и пироавтоматики;
У СЭК - сопряжение выходов ВУО и УВВ с ЭПК и ЭГК;
У ОШ - образование пиротехнических шин при подготовке РКН к пуску;
У ПКТ - подключение контрольных точек на каждой ступени к соответст-
вующему УК АПС при проверках;
У СПС - сопряжение выходов ВУО и УВВ с пиросредствами;
УССД- сопряжение входов и выходов ВУО и УВВ с реле и сигнализато-
рами давления;
ББ - обеспечение пиротехническим фидером соответствующего БУЭ.
Определение требований к блоку управления элементами автоматики и пи-
роавтоматики
В целях выполнения указанных выше задач с обеспечением безопасности
работ в составе каждого релейного контейнера используют БУЭ, к которым
предъявляют следующие технические требования.
В каждом из блоков БУЭ предусматривается унифицированная часть (по-
строение узлов УПКТ, УОШ и УСПС с отличием только в части выходов на ПЭ)
и в оригинальном исполнении узлов УСЭК и УССД с особенностями, связанны-
ми с управлением маршевыми двигателями и исполнительными элементами ПГС.
Фрагмент логики электрического построения унифицированной части БУЭ
показан на рис. 4.7.2^ на котором приведены следующие входные и выходные ко-
манды.
Входные команды с выполнением следующих функций:
Z1...Z8- управление вертикальными и горизонтальными шинами матрич-
ного дешифратора форматом «4x4». Матричный дешифратор обеспечивает защи-
ту от единичных сбоев при управлении СУ системой АПС, простоту диагностики
неисправных приборов СУ:
а) два прибора [ВУО(УВВ) и РК на каждой из ступеней]:
1) при включении первой горизонтальной, первой, второй, третьей
и четвертой вертикальных шин;
2) при включении второй, третьей и четвертой горизонтальных,
первой вертикальной шин;
6) один прибор (РК на каждой ступени) при включении второй, треть-
ей и четвертой горизонтальных, второй, третьей и четвертой верти-
кальных шин;
Z9, Z10 - шины электропитания из блока СКПП;
Z11... Z13 - управление силовым коммутатором пиротехнических шин при
наличии команды «Разрешение на образование пиротехнических шин» (РОПШ);
Z14 - отбой ДП образования пиротехнических шин +ПУ, ±ПУ, -ПУ от шин
+Б, ±Б и -Б бортовой батареи;
Z15 - управление коммутатором контрольных точек (подключение шин +Б,
±Б, +ПУ, ±ПУ, -ПУ, Т к УК АПС);
372
Z16 - разрешение на образование пиротехнических шин от наземной аппа-
ратуры системы управления;
Z17 - приведение в исходное состояние коммутатора пиротехнических шин
от наземной аппаратуры до подачи напряжения в аппаратуру PH.
Команды Z1...Z8, Z11...Z13 контролируются системой телеметрических из-
мерений.
Выходные команды предполагают выполнение следующих функций:
У17 - контрольные точки +Б, ±Б, +ПУ, ±ПУ, -ПУ, Т БУЭ, которые посту-
пают в УК АПС для проверки автоматики БУЭ;
Выходные команды в узлах У СПС для задействования пиросредств:
из БУЭ-1 -У1...У11;
из БУЭ-2-У 1...У 14;
из БУЭ-3 -У1...У12.
На рис. 4.7.3, 4.7.4 и 4.7.5 показаны фрагменты логики электрического по-
строения узлов УСЭК и УССД для БУЭ-1, БУЭ-2 и БУЭ-3.
Назначение входных и выходных команд для УСЭК и УССД БУЭ-1
(рис. 4.7.3)
Входные команды:
Z18 - подготовка опроса нормы наддува в баках «О» и «Г» 1-й ступени;
Z19 - включение в совместную работу реле давления РД5 с электропнев-
моклапаном ВО1. Работа входных команд Z19, Z20 БУЭ-1 осуществляется сле-
дующим образом - при размыкании двух или трех контактов РД соответствую-
щий ЭПК отключается, при замыкании -- включается. При отсутствии с момента
включения в совместную работу ЭПК с РД (команды Z19, Z20 БУЭ-1) хотя бы
одного срабатывания (размыкания контактов) сигнализатора давления РД авто-
матически прекращается пуск (АПП). Срабатывание РД фиксируется схемой с са-
моблокировкой в БУЭ-1 с последующей выдачей сигнала (донесения) в ВУО-1.
Z20 - включение в совместную работу реле давления РДЗ с электропнев-
моклапаном ВГ1;
Z21 - электрическое задействование в работу реле давления РД1 А, РД 1Б;
Z22 - электрическое задействование в работу реле давления РД2А, РД2Б,
РД2В;
Z23...Z29 - сигналы от реле давления РД 1 А, РД1Б, РД2А, РД2Б, РД2В, РДЗ,
РД5.
Команды Z18...Z28 контролируются СТИ (Z23...Z28 формируются «сухи-
ми» контактами).
Выходные команды:
У18...У20- контроль состояния реле давления РД1А, РД1Б, РДЗ, РД5 на
входном регистре ВУО-1 с формированием «сухими» контактами;
У23, У24 - подключение электропневмоклапанов ВО1 и ВГ1;
У26 - разрешение в БУЭ-2 на включение в совместную работу ВО5 с РД11.
Назначение входных и выходных команд для УСЭК и УССД БУЭ-2
(рис. 4.7.4)
373
Входные команды:
Z18 - подготовка опроса нормы наддува в баках «О» и «Г» 2-й ступени;
Z19- включение в совместную работу ВГЗ с РД8 и по результату опроса
РД8 определяется необходимость включения команды Z20. Работа входных ко-
манд Z19, Z20, Z21, Z22, Z23 БУЭ-2 аналогична работе входных команд Z19, Z20
БУЭ-1;
Z20 - включение в совместную работу ВГЗ с РД8а;
Z21 - включение в совместную работу ВО5 с РД10, по первому включению
РД10 поступает разрешение на команду Z19;
Z22 - включение в совместную работу реле давления РД11 с ЭПК ВО5;
Z23- разрешение из БУЭ-1 на включение в совместную работу РД11 с
ВО5.
Z24 - задействование в работу реле давления РД6;
. Z25...Z29 - сигналы от реле давления РД8, РД10, РД11, РД6, РД8а соответ-
ственно;
команды Z18...Z28 контролируются СТИ (Z24...Z28 формируются «сухими»
контактами).
Выходные команды:
У18, У19 - контроль состояния РД8, РД8а, РД10 на входном регистре ВУО-
2 с формированием сухими контактами;
У20, У21 - подключение электропневмоклапанов ВГЗ, ВО5.
Назначение входных и выходных команд для УСЭК и УССД БУЭ-3
(рис. 4.7.5)
Входные команды:
Z18...Z24- включение и выключение ЭПК подготовки и управления мар-
шевого двигателя 3-й ступени;
Z25 - управление ЭГК подачи горючего на охлаждение турбины МД;
Z26 - задействование в работу сигнализатора давления 2СД1;
Z27 - сигнал от сигнализатора давления 2СД1;
Z28 - сигнал от датчика давления 2ДД СПД;
Z29 - имитация датчика давления 2ДД при ДПр.
Команды Z18...Z29 контролируются СТИ (Z27 формируется «сухими» кон-
тактами).
Выходные команды:
У18- контроль в УВВ о состоянии 2СД1 (формируется «сухими» контак-
тами);
У19...У26- подключение ЭПК и ЭГК (2ЭКЗ, ЗЭК1, 2ЭК1.4, 2ЭК1.3,
2ЭК1.1, 2ЭК1.5, 2ЭК1.2, 2ЭК2).
Параметры всех входных и выходных команд БУЭ приводятся в техниче-
ских заданиях для БУЭ-1, БУЭ-2 и БУЭ-3.
Принятые технические решения по построению системы АПС позволяют
обеспечить выполнение поставленных задач с достаточными мерами безопасно-
сти проводимых работ на различных этапах испытаний.
374
Управление ИЭ осуществляется путем выдачи команд (сигналов) с выход-
ных регистров ВУО-1, ВУО-2 и УВВ в РК-1, РК-2, РК-3 соответственно (в зави-
симости от ступени PH), Количество выходных регистров (для удобства управле-
ния принят 16-ти разрядный формат) определяется количеством схем управления
ИЭ в РК-1, РК-2, РК-3.
Подключение шин ПУ, Т, +Б, +Б, "минус" к УК АПС осуществляется с по-
мощью коммутатора контрольных точек. Далее проводится проверка сообщения
и разобщения между указанными выше шинами путем электрической прозвонки
контрольных точек в УК АПС (R<1,4 кОм - сообщение, R>1,6 кОм - разобще-
ние).
Электрические связи между абонентами наземной и бортовой аппаратуры
СУ и ИЭ осуществляются с помощью кабельных линий связи (КЛС).
Сначала разрабатываются схемы общие (для штатной эксплуатации и ис-
пытаний на комплексном стенде) - СхО. СхО определяют архитектуру (структу-
ру) разводки КЛС по абонентам СУ и ИЭ исходя из конфигураций кабелей.
Следующий этап- разработка констрз'кторской документации (КД) на
КЛС - определение электрической распайки цепей, защиты (экраны, свивки) ка-
белей связи. После разработки КД на ВУО (УВВ), РК, КЛС и получения схем
электрической распайки приборов и ИЭ разрабатываются схемы функциональ-
ные, отражающие полное электрическое взаимодействие СУ с системой АПС в
части управления и контроля работоспособности ИЭ.
Далее проводится расчет режимов работы ИЭ (пироэлементов) путем опре-
деления и последующего обеспечения (при необходимости) минимально допус-
тимой величины тока через ИЭ, обеспечивающей его гарантированное срабаты-
вание при неблагоприятных технических условиях в работе СУ (отказ одного из
каналов А или В, при Umin на выходе бортового источника питания и при мак-
симальном сопротивлении нити накаливания ИЭ).
Эквивалентная схема для расчета режимов работы ИЭ (со "средней" точ-
кой) показана на рис. 4.7,6,
При недостаточной величине тока через ИЭ применяются меры по усиле-
нию сечения кабельной сети по участкам:
а) ББ-РК-1 (РК-2, РК-3);
б) РК-1 (РК-2, РК-3)-ИЭ.
По результатам расчетов и испытаний (в последующем) выпускается отчет.
375
9L£
Rt = 680 Ом
Rorp = 2,2 Ом
Контрольные точки УК АПС
Рисунок 4.7.2 - Фрагмент логики электрического построения унифицированной части БУЭ
У17
Вклю-
чение
в сов-
местную
работу
ВП с РДЗ
Вклю-
чение
В СОВ»
местную
работу
ВО1 с РД5
Под-
готов-
Конт- Эл. задействование
роль
РД1А, --------*--------<
РД1Б РД2А РД2Б РД2Б
Z22
Задействование ПЭ
Задействование ПЭ
Задействование ПЭ
ВО1
ВП
П25...П27
П13...П18
П19...П21
У24
Z20
219
Z21
опроса
РДЗ,
РД5
+ПУ -ПУ Т
БУЭ-1
К45 \ К46
Z28
Z27
РДЗ
РД2В
Контроль
Раэрвшение в БУЭ-2 на
включение
в совместную работу
ВО6сРД11
РД1А, рдз РД5 Общий
РД1В
Рисунок 4.7.3 - Фрагмент логики электрического построения узлов УСЭК и УССД для БУЭ-1
+ПУ -ПУ Т
УСЭК
УССД
А Я РД2Б
ПУ ±ПУ пу Т +ПУ ±ПУ -ПУ Т +ПУ ±ПУ
1 1 + 1 К42...К44 | 1 1 1 K42...K44 | 1 ) K42...K44
’ll Jl gn Ai i <2 J 1 J ' ' / S r-A 5 I 1 J J lid:
Задействование ПЭ
Задействование ПЭ
ВО5
ВГЗ
П209
Z22
Z18
Z24
Опрос
РД6
Вклю-
чение
ВО5с
РД10
Вклю-
чение
ВОбс
РД11
Вклю-
чение
ВГЗ с
РД8
Вклю-
чение
ВГЗ с
РДВа
Подго-
товка
опроса
П205, П207,
П239
721
ГкдП
+ПУ -ПУ 7
ЪУЭ-21
У Z27
Z29
# Z25
У17
РД11
Разрешение из БУЭ-1
на включение в
совместную
работу ВО5сРД11
----V----
Контроль
РД8. рдю Общий
РД8а
Рисунок 4.7.4 - Фрагмент логики электрического построения узлов УСЭК и УССД для БУЭ-2
+ПУ -ПУ Т
+ПУ ±ПУ
Т +ПУ ±ПУ -ПУ т
УСЭК
УССД
379
Рисунок - 4.7.5 Фрагмент логики электрического построения узлов УСЭК и УССД для БУЭ-3
Следующим этапом разработки СУ по управлению АПС является разработ-
ка и выдача ИД на перечень ТМ - параметров и инструкцию по анализу работы
подсистемы АПС на основании циклограммы работы ИЭ. С учетом перечня ТМ-
параметров разрабатываются телеметрические согласующие устройства (ТСУ)
для аппаратного контроля за работой системы АПС. На основании инструкции
разрабатывается математическая программа обработки ТМ - параметров для ана-
лиза работоспособности системы АПС.
Далее проводится разработка алгоритмического описания (АО) режимов
дистанционных проверок (ДПР) системы АПС:
- режима контроля разобщенности шин АПС 1-й, 2-й и 3-й ступеней;
- режима проверки автоматики пиросредств 1-й, 2-й и 3-й ступеней;
- режима проверки образования шин АПС 1-й, 2-й и 3-й ступеней.
Рисунок 4.7.6 - Эквивалентная схема для расчета режимов работы ИЭ
Описание указанных режимов приведено ниже.
4.7.3 Описание проверок автоматики пиросредств
Режимы контроля разобщенности шин АПС 1-й, 2-й и 3-й ступеней
Необходима проверка разобщенности шин АПС с шинами первичного пи-
тания по обеим полярностям, корпусом, между собой, а также выявление сооб-
щений при их наличии между упомянутыми шинами с последующей диагности-
кой параметров неисправной схемы.
Описание проверок
В релейных контейнерах (РК) 1-й, 2-й и 3-й ступеней находятся по шесть
шин АПС - +ПУ, минус ПУ, ± ПУ, Т, +Б, ±Б, шина питания аппаратуры СУ -
+ПЗ, общий «Минус» для всех трех РК.
380
Проверки проводятся поочередно по каждой из ступеней. Перед началом
проверки конкретной ступени включаются шина питания РК (+П1, +П2) и ком-
мутатор для подключения всех шин АПС к устройству контроля автоматики пи-
росредств (УКАПС), шины +ПЗ, «Минус». «Корпус» подключены непосредст-
венно к УКАПС. С помощью УКАПС проверяется разобщенность:
- шин АПС с шиной полярности «+27В»;
- шин АПС с шиной полярности «Минус 27В»;
- шин АПС с шиной «Корпус»;
- шин АПС между собой.
В процессе нормального прохождения режима на экран РСУ выдаются со-
общения, содержащие наименования проверяемых схем и признаки прохождения
текущей проверки по НОРМЕ. После окончания режима по НОРМЕ на экран
РСУ выдается сообщение «НОРМА РЕЖИМА» и вся проверяемая аппаратура
приводится в исходное состояние.
При получении НЕНОРМЫ все последующие проверки не проводятся, вся
проверяемая аппаратура приводится в исходное состояние, на экран РСУ выда-
ются сообщение «НЕНОРМА РЕЖИМА», наименование проверяемой схемы, в
которой зафиксирована НЕНОРМА, индексы неисправных приборов. Кроме того,
в архив НППА ПУП заносится дополнительная информация о неисправном узле
проверяемой схемы, позволяющая определить характер неисправности (напри-
мер, между какими шинами имеется сообщение).
Режим проверки автоматики пиросредств 1-й, 2-й и 3-й ступеней
Цель испытаний
Целью испытаний является проверка работоспособности схем включения
пироэлементов (ПЭ), электроклапанов (ЭК) и реле давления (РД) 1-й, 2-й и 3-й
ступеней.
Описание проверок
Проверки проводятся поочередно по каждой ступени. Перед началом про-
верок 1-й или 2-й ступени включается шина питания РК (+П1 или +П2) и комму-
татор для подключения шин АПС к УКАПС.
На 1-й и 2-й ступенях принята следующая очередность проверок:
- схем включения ПЭ; , ,
- схем включения РД;
- схем включения ЭК совместно с РД;
- схем включения горизонтальных шин матричного дешифратора;
- схем с самоблокировкой через РД.
Схемы включения ПЭ проверяются следующим образом: 7
1) из ВУО (УВВ) тремя каналами выдается в РК команда на приемные реле
включения горизонтальных шин матричного дешифратора;
2) из ВУО (УВВ) тремя, двумя, одним каналом выдается в РК команда на
приемные реле включения вертикальных шин матричного дешифратора;
3) с помощью УКАПС проверяются сообщения и разобщения между соот-
ветствующими шинами АПС в каждом такте пугем обтекания замкнувших-
381
ся контактов указанных выше реле через нити ПЭ и обмотки ЭПК током
величины не более 50мА.
При включении ПЭ в совместную работу с РД дополнительно проводятся
поканальные переборки команд включения РД из БЦВМ в каждом такте. Кон-
троль аналогичен действиям, описанным в 3.
Схемы включения РД проверяются путем выдачи на их задействование
тремя каналами соответствующих команд из БЦВМ с последующим контролем
их исполнения по входному регистру БЦВМ путем замыкания “сухих” контактов
реле-повторителей в РК. Схемы с самоблокировкой через РД проверяются анало-
гично.
Схемы включения ЭПК совместно с РД проверяются путем поканальной
переборки команд из БЦВМ в каждом такте. Контроль аналогичен действиям,
описанным в 3.
Схемы включения горизонтальных шин матричного дешифратора прове-
ряются следующим образом:
1) включаются вертикальные шины матричного дешифратора гремя кана-
лами по команде из БЦВМ;
2) поочередно включаются горизонтальные шины матричного дешифратора
с поканальной переборкой команд из БЦВМ в каждом такте;
3) с помощью УКАПС проверяются сообщения и разобщения между соот-
ветствующими шинами АПС в каждом такте.
Перед началом проверок 3-й ступени включается коммутатор для подклю-
чения шин АПС к УКАПС.
На 3-й ступени принята следующая очередность проверок:
1) схем включения ПЭ;
2) схем включения горизонтальных шин матричного дешифратора;
3) схемы включения РД;
4) схем включения ЭК;
5) схемы с самоблокировкой через ЭК.
Принципы построения проверок 3-й ступени аналогичны принципам построе-
ния проверок 1-й и 2-й ступеней.
В процессе нормального прохождения режима на экран РСУ выдаются со-
общения, содержащие наименования проверяемых схем и признаки прохождения
текущей проверки по НОРМЕ. После окончания режима по НОРМЕ на экран
РСУ выдается сообщение «НОРМА РЕЖИМА» и вся проверяемая аппаратура
приводится в исходное состояние.
При получении НЕНОРМЫ последовательность действий инженера-
испытателя аналогична проведению режима контроля разобщенности шин АПС.
Режим проверки образования шин АПС 1-й, 2-й и 3-й ступеней
Цель испытаний
Целью испытаний является проверка работоспособности схем образования
шин АПС 1-й, 2-й й 3-йступеней.
Описание проверок
Проверки проводятся поочередно по каждой ступени. Перед началом про-
382
верок каждой и?» ступеней включается коммутатор для подключения шин АПС к
УКАПС, перед проверками 1-й и 2-й ступеней дополнительно включается одна из
шин питания РК (+П1 или Н-П2).
На каждой ступени принята следующая очередность проверок:
- схемы включения шины +ПУ от шины +Б;
- схемы включения шины -ШУ от шины ±Б;
- схемы включения шины «Минус» ПУ от шины «Минус» ББ.
Эти схемы проверяются следующим образом:
- выдается команда из БЦВМ на включение (выключение) шины одним
либо двумя каналами в каждом такте;
- контроль исполнения команды осуществляется с помощью УКАПС пу-
тем проверки сообщения или разобщения между соответствующими
шинами в каждом чётном такте. При включении одним каналом - ра-
зобщение (схема не сработала), двумя каналами- сообщение (схема
сработала). При выключении - наоборот - сообщение при выдаче одним
каналом, разобщение при выдаче двумя каналами.
В процессе нормального прохождения режима на экран РСУ выдаются со-
общения, содержащие наименования проверяемых схем и признаки прохождения
текущей проверки по НОРМЕ. После окончания режима по НОРМЕ на экран
РСУ выдается сообщение «НОРМА РЕЖИМА» й вся проверяемая аппаратура
приводится в исходное состояние.
При получении НЕНОРМЫ последовательность действий инженера-
испытателя аналогична проведению режима контроля разобщенности шин АПС.
После разработки АО режимов ДПр проводится разработка программ отра-
ботки режимов (ПОР) для проверки правильности взаимодействия аппаратуры и
программно-алгоритмического обеспечения (ПАО). ПОРы содержат объем, по-
рядок, материально-техническое обеспечение, методические указания по испыта-
ниям системы АПС при работе по норме и при имитациях неисправностей.
После выпуска отчета по результатам отработки режимов ДПр проводится
разработка и выдача исходных данных для алгоритмов подготовки, пуска и ос-
новной работы (полета), отражающие последовательность, длительность, каналь-
ность, условия работы СУ по управлению системой АПС в соответствии с требо-
ваниями штатной циклограммы полета.
Далее выдаются исходные данные на разработку программы отработки ре-
жимов (алгоритмов) подготовки к пуску и полета в части АПС при имитации
нормального полета и в случае возможных неисправностей в системе АПС (спо-
собы имитации выходов в АПП).
По результатам испытаний выпускается отчет.
4.8 Система электропитания бортовой аппаратуры
Бортовая система электропитания (далее по тексту- СЭП) предназначена
обеспечивать бортовую аппаратуру системы управления электроэнергией посто-
янного тока 27В во всех режимах работы PH.
В настоящем подразделе первостепенное внимание уделено требованиям к
383
СЭП, приборной реализации, построению архитектуры, а также выбору бортовых
источников питания.
Задача определения принципов построения для каждой конкретной PH со-
стоит в анализе требований и ограничений, предъявленных к СУ, учета особен-
ностей, присущих заданному объекту управления. Принципы построения СЭП
бортовой аппаратуры проверены при создании и эксплуатации PH различных
классов.
Был предложен вариант построения СЭП для трехступенчатой ракеты-
носителя, рассмотрены требования к бортовым батареям и их выбор, варианты
схемной реализации релейных приборов для коммутации силовых шин электро-
питания, а также определены парамезры кабельных линий связи с минимальным
падением напряжения.
4.8.1 Требования к системе электропитания
Система электропитания бортовой аппаратуры совместно с наземной сис-
темой должна обеспечить электропитанием бортовую аппаратуру СУ PH при
проведении электроиспытаний как отдельных ступеней PH, так и PH в целом, при
подготовке к пуску, пуске и полете PH.
Подготовка к пуску и пуск начинаются с момента фиксации наземной ап-
паратурой команды на пуск PH и длятся до начала движения PH.
В режиме подготовки к пуску и пуска должна быть обеспечена организация
и распределение первичного электропитания от наземной системы электропита-
ния к бортовой аппаратуре PH.
При автоматическом прекращении пуска в процессе предстартовой подго-
товки к пуску вплоть до запуска маршевого двигателя 1-й ступени система элек-
тропитания должна обеспечить приведение в исходное состояние коммутацион-
ных элементов силовых коммутаторов первичного питания и снятие электропи-
тания с борта PH.
В случае устранения причин, вызвавших АПП, СЭП должна обеспечивать
возможность проведения повторного запуска.
Перед началом разработки СЭП бортовой аппаратуры PH необходимо про-
анализировать ТЗ на СУ PH. При анализе прорабатываются и согласовываются
требования к источникам питания, к параметрам электропитания, определяется
длительность работы бортовой аппаратуры СУ на каждой ступени.
При проектировании бортовой СЭП должны быть учтены следующие тре-
бования и ограничения к бортовой системе электропитания, заданные в ТЗ на СУ
PH, основными из которых являются:
- ограничение по весу, энергопотреблению и тепловыделению коммута-
ционных приборов на каждой из ступеней PH;
- ограничение по весу и габаритам бортовых источников питания на каж-
дой из ступеней PH;
- ограничение по конструктивному исполнению приборов СУ;
- требование по обеспечению заданной надежности;
< с--
384
- требование по обеспечению автономной проверки коммутационных
приборов и источников питания.
Основная трудность в создании современной системы электропитания для
отечественного разработчика заключается в том, что постоянно надо учитывать
возможные ограничения в поставке зарубежных комплектующих элементов и ис-
точников питания.
В качестве источников постоянного тока предлагается использовать акку-
муляторные батареи, которые имеют высокие характеристики и успешно экс-
плуатируются в настоящее время в таких комплексах, как КРК «Морской старт».
4.8.2 Проектирование системы электропитания
Для построения СЭП бортовой апапаратуры необходимо определить при-
борный состав СУ на каждой ступени PH, мощность потребления и длительность
работы каждого прибора и СУ в целом.
В состав СЭП бортовой аппаратуры на каждой ступени входят:
- силовой коммутатор первичного питания (СК1Ш);
- бортовая батарея (ББ);
- кабельные линии связи (КЛС).
Структурная схема бортовой аппаратуры на каждой ступени показана на
рис. 4.8.1.
БОРТОВАЯ БАТАРЕЯ
Фидеры питания по
шинами
СИЛОВОЙ КОММУТАТОР
ПЕРВИЧНОГО ПИТАНИЯ
ГТ i г
Команды и Силовые шины
донесения питания"+" и и-“
_1_1______________Ll_
| БОРТОВАЯ АППАРАТУРА СУ |
Рисунок 4.8.1 - Структурная схема СЭП
При разработке СКЩ1 необходимо учитывать следующие требования к па-
раметрам электропитания:
- СКПП должен быть работоспособным при подаче на его вход напряже-
ния постоянного тока (24...32)В в установившемся режиме. При пере-
ходных процессах в системе электропитания допускаются всплески и
провалы питающего напряжения длительностью до 0,05 с относительно
385
текущего значения величиной до 4 В, при этом напряжение не должно
превышать 34 В и снижаться ниже.22 В с учетом пульсаций;
- необходимо, чтобы амплитудное значение пульсаций питающего напря-
жения не превышало 1,5 В в диапазоне частот от 10 Гц до 10 кГц с даль-
нейшим снижением амплитуды пульсаций в диапазоне частот от 10 кГц
до 150 кГц по логарифмическому закону, на частоте 150 кГц амплитуд-
ное значение пульсации напряжения не должно превышать 0,015 В;
- входы СКПП по электропитанию следует выполнять по двухпроводной
схеме без электрического сообщения цепей электропитания с «корпусом»;
- при подаче на вход СКПП питающего напряжения ток в цепях электро-
питания не должен превышать 2,5 кратной величины от установившего-
ся тока потребления длительностью до 2 мс;
- СКПП не должен создавать помех в цепях электропитания;
- необходимо, чтобы несанкционированное снятие питающего напряже-
ния с СКПП в процессе его функционирования не приводило к выходу
его из строя;
- в случае появления в СКПП неисправности ток в цепях электропитания
не должен превышать 2,5 кратной величины от установившегося тока
потребления длительностью до 2 мс;
- СКПП должен нормально функционировать при появлении электриче-
ской связи с «корпусом» одной любой шины электропитания в случае
возникновения неисправности в оборудовании PH;
- энергопотребление СКПП должно быть минимально возможным.
СКПП предназначен:
- для организации включения (выключения) электропитания бортовых по-
требителей в соответствии с циклограммой включения (выключения)
СУ;
- переключения электропитания аппаратуры СУ с наземных источников
питания на бортовые батареи в процессе предстартовой подготовки;
- распределения электроэнергии от шин первичного питания по потреби-
телям.
В зависимости от количества шин электропитания определяется необходи-
мое количество команд управления коммутационными элементами включения и
отключения силового электропитания.
Логика построения СКПП показана на рис. 4.8.2.
При поступлении от наземной аппаратуры команды на включение шины +П
в СКПП срабатывает реле К1. В результате от фидера наземного источника пита-
ния образуется шина +П и осуществляется питание бортовой аппаратуры от на-
земного источника.
При поступлении от БЦВМ команды «Переход на бортовое питание» в
СКПП срабатывает реле К2, контакты которого подключают бортовую батарею к
шине +П. Для исключения переходного процесса питание бортовой аппаратуры
осуществляется одновременно от наземного и бортового источников питания в
течение не менее 1с, по истечении которого от БЦВМ в СКПП поступает команда
386
«Отключить шину +П от НИП». В результате срабатывает реле КЗ, которое реа-
лизует эту команду.
от БЦВМ
Питание Команда "Переход Команда Донесение о состоянии
от ББ на бортовое "Отключить реле К1, К2 (в БЦВМ)
/ Команда
Питание "Включить
от НИП питание
от НИП"
Питание
бортовой
аппаратуры
от наземной аппаратуры
Рисунок 4.8.2 - Логика построения СКПП
«Сухие» контакты реле KI, К2 предназначены для выдачи донесений в
БЦВМ о работоспособности силовых реле СКПП при дистанционных проверках.
Шина «-» не коммутируется и является общей для всех ступеней PH и на-
земной аппаратуры.
В связи с небольшим энергопотреблением и малым выделением тепла и
возможностью пропускать большие токи (до 50А) в СКПП для коммутации сило-
вых шин питания предпочтительно применять дистанционные переключатели
(ДО).
Для надежности предпочтительно строить схему СКПП в трехканальном
исполнении. При одноканальном построении СКПП необходимо применять до-
полнительные меры по обеспечению надежности, безопасности и помехозащи-
щенности при его работе.
На одной из современных трехступенчатых РКН разработаны СКПП для
каждой ступени, которые по назначению, схемному построению идентичны. Ка-
ждый из приборов отличается друг от друга числом коммутаторов шин первич-
ного электропитания (на 1-й и 2-й ступенях - 5, на 3-й - 3), интерфейсом с борто-
387
выми батареями, числом команд управления (формируемых модулями выходных
релейных сигналов БЦВМ 1-й, 2-й и 3-й ступеней) и донесений на модули приема
релейных сигналов БЦВМ 1-й, 2-й и 3-й ступеней.
По командам бортового компьютера СКПП подключает бортовую батарею
и шины наземного электропитания к шинам первичного электропитания уст-
ройств СКПП, приборов СУ.
Перечень команд и донесений в части системы электропитания бортовой
аппаратуры PH приведен ниже.
ВСКПП-1:
- команда «Переход на бортовое питание по шине +П1»;
- команда «Переход на бортовое питание ЭГШ-1, ЭГП 1-2»;
- команда «Переход на бортовое питание ЭГП1-3, ЭГП1-4»;
- донесение о срабатывании силовых реле.
В СКПП-2:
- команда «Переход на бортовое питание по шине +П2»;
- команда «Переход на бортовое питание ЭГП2-1, ЭГП2-2»;
- команда «Переход на бортовое питание ЭГП2-3, ЭГП2-4»;
- донесение о срабатывании силовых реле.
В СКПП-3:
- команда «Переход на бортовое питание по шине +ПЗ»;
- команда «Переход на бортовое питание по шине +П4»;
- команда «Переход на бортовое питание по шине +П5»;
- команда «Включение схемы контроля работы реле»;
- донесение о состоянии силовых реле.
Команды перехода на бортовое питание по шинам +ПЗ и +П4 короткие, ос-
тальные - длительные, что обусловлено применением типов реле (ДП или РЭС
соответственно).
4.8.2.1 Токопотребление бортовой аппаратуры
Для определения суммарного токопотребления бортовой аппаратурой СУ
необходимо знать мощность потребления отдельных приборов, на которые пода-
ется первичное электропитание.
Потребляемая мощность приборов разработки НПП «Хартрон-Аркос» и ор-
ганизаций-соисполнителей СУ, размещаемых на 1-й, 2-й и 3-й ступенях одной из
современных РКН, приведена в табл. 4.8.1,4.8.2, 4.8.3 соответственно.
Таблица 4.8.1 - Потребляемая мощность приборов СУ 1-й ступени
Прибор Потребляемая мощность, Вт
БЦВМ 1 -й ступени 169
СКПП 1 -й ступени 236
Суммарная потребляемая мощность 405
388
Таблица 4.8.2 - Потребляемая мощность приборов СУ 2-й ступени
Прибор Потребляемая мощность, Вт
БЦВМ 2-й ступени 169,0
СКПП 2-й ступени 126,2
Суммарная потребляемая мощность 295,2
Таблица 4.8.3 - Потребляемая мощность приборов СУ 3-й ступени
Прибор Потребляемая мощность, Вт
БИНС1,БИНС2 160
АП СНС 25
БЦВМ 3-й ступени 385
СКПП 3-й ступени 352
Суммарная потребляемая мощность 912
Потребителями СУ являются также электродвигатели электрогидроприво-
дов на 1-й и 2-й ступенях PH, суммарный ток потребления которых на 1-й ступе-
ни составляет 200 А, на 2-й ступени - 60 А.
Как отмечалось выше, одним из основных параметров при выборе бортовой
батареи является ток нагрузки, складывающийся из величин энергопотребления
отдельных потребителей, подключаемых к данному источнику, с учетом цикло-
граммы их включения в процессе полета PH.
На рис. 4.8.3, 4.8.4, 4.8.5 изображены графики суммарного токопотребления
во времени потребителей системы управления 1-й, 2-й и 3-й ступеней PH.
224,5
221,5
218,5
127 *’С
I
. 4- — _
0________________________10*15 10,6
Переход
на БП
Рисунок 4.8.3 - График суммарного токопотребления 1-й ступени PH
389
70
69
68
0
Переход
на БП
136,5 136,8
285,5
Рисунок 4.8.4 - График суммарного токопотребления 2-й ступени PH
Переход
на БП
Рисунок 4.8.5 - График суммарного токопотребления 3-й ступени PH
Поскольку бортовая батарея является химическим источником тока, ее
мощность определяется емкостью в ампер-часах и рассчитывается как произве-
дение величины разрядного тока на время разряда.
Представленные выше графики суммарного токопотребления во времени
потребителей 1-й, 2-й и 3-й ступеней позволяют определить следующую потреб-
ную емкость батарей:
- для бортовых батарей 1 -й ступени - 8 А-ч;
- для бортовых батарей 2-й ступени - 5,6 А-ч;
- для бортовой батареи 3-й ступени - 45 А-ч.
4.8.2.2 Определение требований к бортовой батарее
При выборе батарей необходимо учитывать следующие основные требова-
ния:
- после установки на PH батареи должны допускать неоднократные вклю-
чения на штатную нагрузку параллельно с наземным источником тока
напряжением (26...33)В длительностью до 5с в режиме проверок и в
390
процессе предстартовой подготовки при сохранении заданных выход-
ных характеристик;
- необходимо, чтобы батареи были постоянно готовыми к работе на на-
грузку;
- входной контроль, периодические проверки (при необходимости) и про-
верку батарей перед установкой на PH следует проводить аппаратурой
(пультом) предприятия-разработчика батарей;
- батареи не должны требовать контроля их параметров после установки
на PH (кроме телеметрического контроля);
- электрическая связь цепей батарей с «корпусом» не допускается. Сопро-
тивление изоляции электрических цепей батарей должно быть не менее
5 МОм при любых климатических условиях, оговоренных в ТЗ на СУ;
- батареи должны сохранять работоспособность при их включении на на-
грузку и последующей отмене пуска (до двух раз);
- в батареях необходимо реализовывать схемно-конструктивные меры,
исключающие неадресную стыковку соединителей кабелей в пределах
одной батареи;
- батареи должны быть работоспособными в полете без термостатирова-
ния;
- необходимо, чтобы конструкция батарей обеспечивала удобство доступа
к электросоединителям, их стыковки и расстыковки с применением
стандартного инструмента;
- батареи в составе PH должны быть работоспособными во время и после
воздействия вибрационных, ударных, акустических нагрузок, при воз-
действии на них в составе PH импульсных электромагнитных полей с
параметрами, оговоренными для конкретной PH;
- следует предусмотреть наличие в батареях средств защиты от статиче-
ского электричества в соответствии с ГОСТ 19005-81 и другой дейст-
вующей нормативной документацией;
- первичные элементы батарей должны быть герметичными;
- батареи должны иметь гарантийный срок до 6,5 лет;
- необходимо, чтобы батареи были работоспособный при температуре
воздуха окружающей среды при электроиспытаниях и предстартовой
подготовке, температуре посадочных мест батарей в течение полета, ко-
торые заданы в ТЗ на СУ PH;
- в соответствии с ГОСТ В21.697-83 надежность комплектов батарей для
каждой ступени в условиях и режимах эксплуатации должна характери-
зоваться показателями надежности, определенными ТЗ на СУ PH.
В последнее время одним из требований к батареям является наличие
встроенного телеметрического согласующего устройства, формирующего сле-
дующие телеметрические параметры:
- напряжение на выходе батареи (основные выводы);
- ток разряда батареи;
- расходуемая емкость батареи.
391
Кроме того, необходимо наличие в батареях средней точки ±(14...16)В для
обеспечения работоспособности схемы со «средней точкой» задействования пи-
роэлементов.
При отсутствии батареи-аналога выпускается техническое задание на бор-
товую батарею новой разработки или адаптацию ранее разработанной, в котором
должны быть учтены все приведенные выше основные требования.
Для выбора бортовых батарей необходимо определить токопотребление,
диапазон рабочего напряжения, длительность работы, требования к габаритно-
массовым характеристикам бортовой аппаратуры СУ.
Количество бортовых батарей для каждой ступени определяется их воз-
можностью обеспечить работоспособность бортовой аппаратуры СУ с заданными
характеристиками СУ.
Бортовые батареи характеризуются следующими параметрами:
- диапазоном напряжения на клеммах под нагрузкой;
- величиной тока нагрузки;
- длительностью работы на нагрузку;
- временем готовности источника к работе на нагрузку;
- массой;
- габаритными размерами.
Кроме основных указанных выше параметров бортовые батареи характери-
зуются следующими дополнительными факторами:
- необходимостью устройств для обеспечения работоспособности (термо-
статирование и т.п.);
- особенностью технологии работ с батареей при подготовке к установке
на объект и непосредственно перед использованием батареи.
Диапазоны выходного напряжения бортовых батарей в статическом и ди-
намических (набросы, сбросы нагрузки) режимах работы выбирают таким обра-
зом, чтобы их значения стыковались с допустимыми крайними значениями пи-
тающего напряжения потребителей с учетом потерь напряжения в кабелях пита-
ния и в СКПП. При этом за основу берут те потребители, которые имеют самый
высокий нижний предел питающего напряжения. Исходя из падения напряжения
в кабелях питания от ББ до СКПП и падения напряжения в СКПП, величина ко-
торого может составлять порядка 1В, нижний предел выходного напряжения ББ
должен быть не менее 27В.
Величина тока нагрузки бортовой батареи определяется циклограммой
суммарного токопотребления потребителей в процессе полета PH. Кроме того,
учитывается импульсная нагрузка при срабатывании пироэлементов (ПЭ) или в
моменты включения приводов, электронных приборов с емкостными фильтрами
на входе, которая определяет величину кратковременного снижения («провала»)
напряжения на выходе ББ и на шинах электропитания потребителей. Указанная
величина «провала» напряжения вносится в технические задания на разработку
всех потребителей.
Время работы ББ на нагрузку вычисляется от момента переключения элек-
тропитания бортовой аппаратуры с наземного источника на бортовые батареи в
392
процессе предстартовых операций до окончания функционирования СУ каждой
из ступеней PH в полете.
Время готовности ББ к работе на нагрузку определяется типом выбранного
источника и учитывается в построении циклограммы предстартовых операций.
Масса и габаритные размеры ББ определяются типом выбранного источни-
ка и зависят от требуемых выходных электрических параметров, указанных вы-
ше.
В соответствии с исходными данными поставщиком ББ выбирается источ-
ник, обеспечивающий требуемый диапазон напряжения питания при разряде на
заданную нагрузку. В зависимости от набора статистических данных по эксплуа-
тации данного источника тока и в целях обеспечения надежной его работы выбор
бортовой батареи, как правило, проводится с определенным запасом емкости, ве-
личина которой может составлять от 40% и более. Кроме того, дополнительный
запас емкости, как показывают испытания, образуется за счет завышенной рас-
четной величины энергопотребления аппаратуры на этапе выдачи технических
заданий.
Наиболее оптимальными источниками тока, которые по своим электриче-
ским параметрам могут отвечать требованиям аппаратуры СУ и потребителей
PH, являются химические источники тока (ХИТ).
Наиболее подходят к применению батареи на базе литиевых элементов,
удельная энергия которых составляет 300Вт-ч/кг, а среди перспективных разра-
боток ХИТ с литиевым анодом и электролитом на основе апротонных раствори-
телей может достигать порядка 1000 Вт-ч/кг.
При выборе источника тока для потребителей СУ одной из современных
РКН предпочтение отдано батареям на базе электрохимической системы «литий-
хлористый тионил», которые обеспечивают выходное напряжение под нагрузкой
в пределах (27...32)В.
Для разработки источников электропитания бортовой аппаратуры СУ вы-
пущено ТЗ на адаптацию бортовых батарей для 1-й, 2-й и 3-й ступеней PH с уче-
том всех требований, изложенных выше. Предприятием-разработчиком изготов-
лены бортовые батареи для 1-й и 2-й ступеней - 10ER14PS-20 (масса - 18 кг), для
3-й ступени - 9ER20P-20B (масса - 26 кг). При этом для электропитания потреби-
телей СУ 1-й ступени необходимо использование четырех батарей, 2-й ступени -
двух батарей, 3-й ступени - одной батареи.
Номинальная емкость батарей, устанавливаемых на 1-й и 2-й ступенях, со-
ставляет 80 А-ч, на 3-й ступени - 200 А ч при рабочем интервале температур от
0°С до +40°С. В штатном режиме разряда емкость батареи на 3-й ступени состав-
ляет 60 А-ч.
Батареи должны быть просты в эксплуатации, не требовать задействования
и позволять многократные подключения на нагрузку.
4.8.2.3 Кабельные линии связи
Кабельные линии связи обеспечивают физическую реализацию заданных
внутренних и внешних интерфейсов системы электропитания бортовой аппара-
393
туры, в т.ч. соединение приборов в части электропитания между собой, приборов
системы электропитания с соединителями, расстыковываемыми ходом PH, а так-
же связь бортовой СУ с наземной аппаратурой.
С помошью кабельной сети осуществляется подача электроэнергии от бор-
тового источника на силовой коммутатор первичного питания, от которого элек-
гроэнергия поступает на отдельные потребители СУ.
Цепи силового электропитания бортовой аппаратуры прокладываются с
максимальным сечением в контакт соединителей.
После определения токопотребления приборов СУ, суммарного сечения по
каждой из шин электропитания, длин кабельных линий связи рассчитывается па-
дение напряжения на участках от бортовой батареи до приборов-потребителей,
которое в результате не должно превышать 3 В при минимальном напряжении на
источнике питания 27 В.
4.8.2<4 Архитектура
По результатам проработки всех вопросов, рассмотренных выше, можно при-
ступить к построению архитектуры СЭП бортовой аппаратуры, которая определяет:
- количество бортовых источников тока, устанавливаемых на PH;
- количество силовых шин электропитания;
- количество коммутаций для подключения и отключения потребителей;
- количество коммутаций для переключения электропитания потребите-
лей с наземных источников на бортовые.
Архитектура системы электропитания бортовой аппаратуры СУ одной из
современных РКН показана на рис. 4.8.6.
Бортовая система электропитания выполняется по двухпроводной схеме без
электрического сообщения шин питания с «корпусом».
Коммутация проводится только по цепям полярности «плюс»; «минус»-
общий.
Исходя из функционального назначения и режимов работы аппаратуры СУ,
требований, предъявляемых потребителями СУ к качеству питающего напряже-
ния, а также режимов работы силовых коммутационных элементов шин питания
в СКПП 1-й, 2-й и 3-й ступеней предусмотрено количество силовых шин пита-
ния, приведенное ниже.
На 1-й ступени PH в СКПП-1:
- шина +П1 - для питания релейной аппаратуры СУ;
- коммутации для питания ЭД ЭГП1-1, ЭГШ-2, ЭГП1-3, ЭГП1-4.
На 2-й ступени PH в СКПП-2:
- шина +П2 - для питания релейной аппаратуры СУ;
- коммутации для питания ЭД ЭГП2-1, ЭГП2-2, ЭГП2-3, ЭГП2-4.
На 3-й ступени PH в СКПП-3:
- шина +ПЗ - для питания релейной аппаратуры СУ 3-й ступени и элек-
тронной аппаратуры 1-й, 2-й и 3-й ступеней;
- шина +П4 - для питания аппаратуры БИНС;
- шина +П5 - для питания аппаратуры АП СНС.
394
От наземной аппаратуры
Рисунок 4.8.6 - Архитектура бортовой системы электропитания
Бортовая батарея 3-й ступени (ББЗ) генерирует электроэнергию в виде на-
пряжения постоянного тока напряжением (27...32)В в течение всего полета PH
для всех устройств СУ 3-й ступени и БЦВМ 1-й и 2-й ступеней.
Бортовые батареи 1-й ступени (ББ1) и 2-й ступени (ББ2) по назначению и
395
интерфейсу аналогичны бортовой батарее 3-й ступени и отличаются от нее ми-
нимальным значением напряжения 28 В, характеристиками и их количеством.
Каждая из батарей соединена по “+” и по - с силовым коммутатором
первичного питания соответственно ступеням, а также на i-й и 2-й ступенях
по - с кабельными коммутаторами «минусовыми».
На основании разработанных приборов, кабельной сети, бортовых батарей
разрабатывается схема функциональной системы электропитания бортовой аппа-
ратуры PH, в которой показана распайка всех контактов кабельной сети к потре-
бителям СУ, функционирование релейных элементов электрических схем комму-
тационных приборов, связь БЦВМ с СКПП по командам и донесениям СУ, а так-
же связь с наземной аппаратурой.
4.83 Описание проверок системы электропитания бортовой
аппаратуры
4.83.1 Режим «Включение шин +П1, +П2, +ПЗ от НИП»
Данный режим предназначен для включения питания бортовых приборов
БЦВМ 1-й, 2-й и 3-й ступеней.
Шины Ш, П2, ПЗ включаются путем выдачи соответствующей команды
тремя каналами из наземной БЦВМ в СКПП «нулевой» ступени. Через
0,08...0,12с после этого приборы БЦВМ-1, БЦВМ-2, БЦВМ-3 готовы к работе.
4.83.2 Режим «Проверка системы электропитания»
При проведении режима осуществляется проверка работоспособности схем
перехода на бортовое питание по шинам +П1 - на 1-й ступени, +П2 - на 2-й сту-
пени, +ПЗ, +П4, +П5 - на 3-й ступени и ЭГП - на 1-й и 2-й ступенях.
Проверки выполняются поочередно по каждой ступени. Перед началом
проверок 1-й или 2-й ступени включаются шина питания СКПП-1 или СКПП-2
(+П1 или +П2) от НИП и шины питания ЭГП 1 -й или 2-й ступени от НИП.
На 1-й и 2-й ступенях принята следующая очередность проверок:
1) схемы перехода на бортовое питание по шине +П1 или по шине 4 П2;
2) схем перехода на бортовое питание по шинам ЭГП 1-й или 2-й ступени.
Эти схемы проверяются следующим образом:
1. Выдается команда из БЦВМ на подключение шины к ББ одним либо
двумя каналами в каждом такте.
2. Контроль исполнения команды осуществляется путем опроса в каждом
такте соответствующего входного регистра БЦВМ по замыканию “сухих”
контактов реле в СКПП. При выдаче команды одним каналом на входном
регистре - логический “0” (схема не сработала), при выдаче двумя канала-
ми - логическая “1” (схема сработала).
На 3-й ступени принята следующая очередность проверок:
1) схемы перехода на бортовое питание по шине +П5;
2) схемы перехода на бортовое питание по шине +ПЗ;
3) схемы перехода на бортовое питание по шине +П4.
Проверка схемы перехода по шине +П5 - аналогична проверкам шин +П1,
+-П2 и ЭГП 1-й и 2-й ступеней.
396
Схемы перехода по шинам +ПЗ и -MI4 проверяются следующим образом:
1. Выдается команда из БЦВМ на подключение (отключение из наземного
ЦВК) шины к (от) ББ одним либо двумя каналами в каждом такте.
2. Контроль исполнения команды осуществляется путем опроса в каждом
чётном такте соответствующего входного регистра БЦВМ по замыканию
“сухих” контактов реле в СКПП. При выдаче команды на подключение од-
ним каналом на входном регистре - логический “0” (схема не сработала),
двумя каналами -- логическая “1” (схема сработала). При отключении - на-
оборот- логическая “1” при выдаче одним каналом, логический “0” при
выдаче двумя каналами.
В процессе нормального прохождения режима на экран РСУ выдаются со-
общения, содержащие наименования проверяемых схем и признаки прохождения
текущей проверки по НОРМЕ. После окончания режима по НОРМЕ на экран
РСУ выдается сообщение «НОРМА РЕЖИМА» и вся проверяемая аппаратура
приводится в исходное состояние.
При получении НЕНОРМЫ последовательность действий инженера-
испытателя аналогична проведению режима контроля разобщенности шин АПС.
4.8.3.3 Режим «Выключение системы электропитания в случае
нештатных ситуаций»
Данный режим предназначен для экстренного выключения питания всей
аппаратуры СУ в тех случаях, когда невозможно выключение ни одним из штат-
ных способов.
Экстренное выключение питания СУ проводится по соответствующей ко-
манде тремя каналами из БДР. При этом происходит приведение в исходное со-
стояние всех элементов памяти «нулевой», 1-й, 2-й и 3-й ступеней (РПС, ДП об-
разования всех шин питания, всех шин ЭГП).
4.8.3.4 Режим «Контроль исходного состояния элементов памяти
СКПП»
Данный режим предназначен для проверки исходного состояния всех бор-
товых и наземных ДП, РПС перед включением питания наземной и бортовой ап-
паратуры СУ.
Проверка осуществляется следующим образом:
1) из БДР выдается команда тремя каналами для подготовки схемы опроса
состояния контактов элементов памяти наземной и бортовой аппаратуры
СУ;
2) проводится опрос состояния соответствующего входного регистра БДР
по замыканию в СКПП «сухих» контактов реле донесений. Наличие логи-
ческой «1» на входном регистре соответствует исходному состоянию всех
ДП и РПС (НОРМА РЕЖИМА), наличие логического «О» соответствует от-
сутствию «исходного» по конкретной ступени. В этом случае из БДР выда-
ется команда тремя каналами на приведение в «исходное» ДП и РПС с фик-
сацией факта выдачи данной команды. Если упомянутые элементы приве-
лись в «исходное» (появилась логическая «1» на входном регистре), то ре-
397
жим прошёл по НОРМЕ. Повторное наличие логического «О» является
НЕНОРМОЙ РЕЖИМА, проведение режима проверок, режима ОР не до-
пускается.
После окончания режима по НОРМЕ на экран РСУ выдается сообщение
«НОРМА РЕЖИМА».
При получении НЕНОРМЫ последовательность действий инженера-
испытателя аналогична проведению режима контроля разобщенности шин АПС.
4,8.3.5 Режим «Выключение электропитания СУ при ДПр»
Данный режим предназначен для выключения питания СУ после окончания
режима ДПр по НОРМЕ.
Выключение питания проводится в такой последовательности:
1) обнуление выходных регистров БДР, БЦВМ-0, включение шины +ПЗ от
НИП;
2) обнуление выходных регистров БЦВМ-1;
3) обнуление выходных регистров БЦВМ-2;
4) обнуление выходных регистров БЦВМ-3;
5) отключение шин +ПЗ, -Ш4 от ББЗ;
6) отключение шин питания +П1, -+-П2, +ПЗ, +П4, +П5 от НИП;
7) отключение шин ЭГП1-1, ЭГШ-2 от НИП;
8) отключение шин ЭГП2-1, ЭГП2-2 от НИП;
9) отключение шин ЭГП1-3, ЭГП1-4 от НИП;
10) отключение шины ЭГП2-3, ЭГП2-4 от НИП.
При НЕНОРМЕ в любой из проверок питание выключается в такой же по -
следовательности, как и по НОРМЕ. В этом случае операции по пунктам 1...10
реализуются унифицированным алгоритмом, входящим в состав данного режима.
4.9 Система безопасности полета
Задачи и требования к системе безопасности полета, способы ее реализации
определяются исходными данными Головной организации, приведенными в под-
разд. 2.3 настоящей книги.
Система безопасности полета может быть выполнена в двух вариантах.
В первом варианте СБ выполнена в виде отдельного аппаратного комплек-
са, бортовая аппаратура которого запитывается от отдельного источника энерго-
снабжения. Разработчиком СБ в этом варианте является, как правило, Головная
организация или другое предприятие, которое работает по ТЗ головной организа-
ции. В этом случае при выполнении своих функций СБ обменивается необходи-
мыми командами и сигналами (в согласованном объеме) с системой управления
РКН. Структурная схема этого варианта СБ показана на рис. 4.9.1, где МД - мар-
шевый двигатель, ИЭ - исполнительные элементы.
Во втором варианте функции системы безопасности реализуются про-
граммно-аппаратными средствами системы управления. В этом случае алгоритм
СБ должен реализовываться бортовой аппаратурой системы управления РКН, а
СБ является практически подсистемой в составе системы управления. Система
безопасности при этом контролирует состояние БЦВМ, устойчивость движения
398
РКН, потерю продольной перегрузки, достижение допустимых областей сущест-
вования ступеней РКН и КА.
Рисунок 4.9.1 - Структурная схема варианта СБ в виде отдельного
аппаратного комплекса
Структурная схема второго варианта изображена на рис. 4.9.2, где РКА-
релейно-коммутационная аппаратура, ЭА - электронная аппаратура, ККП - ком-
плекс командных приборов, ПОБ - прибор обеспечения безопасности, КА - кос-
мический аппарат (космические аппараты).
Рисунок 4.9.2 - Структурная схема совмещенного
варианта функций СБ и СУ
399
Контроль состояния БЦВМ осуществляется по параметру «Ненорма
БЦВМ» бортовой вычислительной машиной СУ РКН, контроль задействуется на
участке полета от момента формирования признака КП до окончания работы СУ
и осуществляется в каждом такте БЦВМ. В случае фиксации неисправного со-
стояния БЦВМ СУ РКН формирует признак «Ненорма БЦВМ». При появлении
признака «Ненорма БЦВМ» СУ РКН проводит действия согласно алгоритму ра-
боты СБ, как правило, это реализация циклограммы окончания работы СУ с вы-
ключением маршевого двигателя.
Контроль состояния БЦВМ осуществляется по параметру «Ненорма
БЦВМ» бортовой вычислительной машиной СУ РКН, контроль осуществляется
на участке полета от момента формирования признака КП до окончания работы
СУ и осуществляется в каждом такте БЦВМ. В случае фиксации неисправного
состояния БЦВМ СУ РКН формирует признак «Ненорма БЦВМ». При появлении
признака «Ненорма БЦВМ» СУ РКН выполняет действия согласно алгоритму ра-
боты СБ, как правило, это реализация циклограммы окончания работы СУ с вы-
ключением маршевого двигателя.
Контроль устойчивости движения РКН осуществляется по параметру «По-
теря устойчивости движения РКН» системой стабилизации СУ РКН, предусмат-
ривающей контроль предельных угловых рассогласований системы стабилизации
по каналам тангажа, рыскания и вращения по алгоритмам системы управления
РКН, разработанным в соответствии с исходными данными Головной организа-
ции. Контроль выполняется от момента включения системы стабилизации до мо-
мента формирования команды «Окончание работы СУ» и должен осуществляться
в каждом такте БЦВМ. В случае превышения угловыми рассогласованиями сис-
темы стабилизации допустимых значении СУ РКН формирует признак «Потеря
устойчивости движения РКН». При появлении признака «Потеря устойчивости
движения РКН» СУ РКН проводит действия, предусмотренные алгоритмом рабо-
ты СБ, - это реализация циклограммы окончания работы СУ с выключением
маршевого двигателя или циклограммы по отделению определенной ступени
РКН с тем, чтобы выполнить задачу отделения КА за счет увеличения времени
работы на последующих участках полета в пределах имеющихся запасов топлива.
Контроль спада тяги ДУ 1-й, 2-й и 3-й ступеней осуществляется по пара-
метру «Потеря продольной перегрузки» системой навигации и наведения СУ
РКН, предусматривающей контроль текущего значения модуля вектора прира-
щения кажущейся скорости за такт БЦВМ. На участках полета РКН, на которых
выполняются условия осуществления контроля продольной перегрузки, необхо-
димо осуществлять сравнение текущего значения продольной составляющей
приращения кажущейся скорости за такт БЦВМ с пороговыми значениями. Поро-
говые значения модуля приращения кажущейся скорости за такт БЦВМ опреде-
ляются Головной организацией и задаются в полетном задании. На участках по-
лета 1-й, 2-й и 3-й ступеней РКН существуют допустимые области существова-
ния 2-й, 3-й ступеней РКН, космического аппарата (группы КА), в которых при
фиксации признаков «Ненорма БЦВМ», «Потеря устойчивости движения РКН»
или «Потеря продольной перегрузки» имеется возможность выполнения задач,
400
связанных с одиночным или групповым выведением КА путем увеличения вре-
мени работы на последующих участках полета в пределах имеющихся запасов
топлива.
В исходных данных Головной организации приведен алгоритм функциони-
рования системы безопасности, в котором указаны участки полета РКН, где тре-
буется задействование определенных аварийных циклограмм. Алгоритм функ-
ционирования системы безопасности зависит от формирования. функционалов
достижения допустимых областей существования 2-й, 3-й ступеней и группы КА,
Fel, Fe2, Fe3n, где n - номер базовой орбиты группы КА.
Значение параметров Fel, Fe2, Fe3n рассчитывается для каждого конкрет-
ного типа КА (группы КА) и задается в полетном задании.
При фиксации признаков «Ненорма БЦВМ», «Потеря устойчивости движе-
ния РКН» или «Потеря продольной перегрузки» бортовая аппаратура СУ РКН
обеспечивает реализацию алгоритма системы безопасности посредством прове-
дения аварийных циклограмм. Выбор конкретных КА из группы КА, которым
присвоен признак «Разрешения на отделение», при фиксации оговоренных выше
признаков осуществляется через полетное задание к конкретному групповому
пуску.
4.10 Система сопряжения бортовой аппаратуры СУ с аппаратурой
космического аппарата
Космические аппараты размещают в зоне полезного груза под головным
обтекателем и устанавливают на переходнике ГБ с помощью адаптеров.
При подготовке к пуску, пуске и полете система управления РКН обеспечи-
вает:
- выдачу в КА базовых команд;
- организацию обмена цифровой ‘информацией между БЦВМ и аппарату-
рой КА;
- связь бортовой и наземной аппаратуры КА с использованием транзит-
ных цепей.
4.10.1 Базовые команды
При подготовке к пуску, пуске и полете СУ PH выдает в бортовую аппара-
туру КА по циклограмме, унифицированной для всех типов КА, следующие ба-
зовые команды:
- КП (контакт подъёма - команда о начале движения PH);
- КР2 (команда на разделение 2-й и 3-й ступеней);
- ВМДЗ (команда на выключение МД 3-й ступени перед отделением КА);
- ОКА (команда "Отделение КА");
- авария (команда "Авария PH").
Для выдачи базовых команд в КА между СУ PH и КА организована релей-
ная связь.
Базовые команды в СУ PH, кроме команды ОКА, формируются контактами
реле по схеме 2 из 3.
401
Команды формируются в аппаратуре системы управления либо нормально-
закрытыми "сухими контактами" реле, либо нормально-открытыми от источника
электропитания СУ PH. Реле управляются командами БЦВМ.
Команда ОКА формируется в аппаратуре СУ PH электрическими перемыч-
ками со стороны СУ на электросоединителе СУ--КА, запитанными от источника
электропитания КА.
4.10.2 Цифровая связь между БЦВМ аппаратуры СУ PH с аппаратурой
КА
Связь между БЦВМ и аппаратурой КА осуществляется по информационной
магистрали с протоколом обмена MIL-STD-1553 (ГОСТ 26765.52).
Непосредственный обмен БЦВМ с аппаратурой КА обеспечивает канал
мультиплексного обмена.
КМО осуществляет обмен массивами 16-разрядных слов между БЦВМ и
аппаратурой КА.
Скорость обмена равна 1 Мбод/с.
Управление КМО (настройка, запуск) осуществляет БЦВМ.
После окончания сеанса обмена по магистрали мультиплексного обмена
КМО вырабатывает сигнал прерывания, поступающий в БЦВМ.
БК обеспечивает аппаратурную синхронизацию сигналов прерывания, по-
ступающих в различные (А, Б, В) каналы.
4.10.3 Транзитные цепи связи
Электрическая связь КА с наземным оборудованием КА на стартовой пози-
ции осуществляется по цепям боковых плат и цепям, выведенным на торец PH, а
с PH - по транзитным цепям.
4.10.4 Режим проверки бортовой аппаратуры, сопрягаемой с
космическими аппаратами
Режим проводится с эквивалентом космического аппарата и предназначен
для проверки:
- схем формирования базовых команд в космический аппарат, располо-
женных в приборах системы управления PH;
- цифрового информационного канала между бортовым компьютером ап-
паратурой космического аппарата.
В первой части режима проводится последовательная поканальная провер-
ка схем "2 из 3", формирующих команды в космический аппарат.
Если в процессе проверки получено первое несравнение результатов про-
верки с ожидаемыми, проверка повторяется с места полученного несравнения.
Если при повторной проверке несравнение не получено, дальнейшие проверки
продолжаются.
При получении второго несравнения проверки прекращаются, и в режиме
формируется диагностический кадр:
- наименование режима КОНЕЦ - НЕНОРМА;
- код первого неисправного прибора;
- код второго неисправного прибора.
402
Одновременно в базу данных наземной аппаратуры заносится информация,
помогающая конкретизировать место неисправности:
- коды неисправных приборов;
- номер базовой команды;
- номер варианта проверяемой канальности, где было' зафиксировано не-
сравнение;
* проверочный код, посылаемый в модули выходных регистров;
- контролируемая информация из каждого канала модуля приёмного реги-
стра;
- эталонная информация;
- количество несравнений в каждом канале.
Если получена НОРМА в первой части проверок, переходят к проверке
второй части - проверке цифрового информационного канала между бортовым
компьютером и эквивалентом аппаратуры космического аппарата. Для этого бор-
товой компьютер посылает в эквивалент определенный код по трем каналам, а
затем проводит поканальный опрос выданного кода и сравнение его с эталоном.
При получении первого несравнения бортовой компьютер повторно посы-
лает тот же код. Если при повторе не получено несравнение, дальнейшие провер-
ки продолжаются.
При получении второго несравнения проверки прекращаются, и в режиме
формируется диагностический кадр:
- наименование режима КОНЕЦ - НЕНОРМА;
- код первого неисправного прибора;
- код второго неисправного прибора.
Одновременно в базу данных наземной аппаратуры заносится информация,
помогающая конкретизировать место неисправности:
- коды неисправных приборов;
- номер кода проверки при получении первого и второго несравнений;
- коды, выданные при получении первого и второго несравнений;
- информация из каждого канала, полученная при контроле выданного ко-
да;
- эталонный код;
- количество зафиксированных несравнений.
4.11 Начальная выставка ИНС
4.11.1 Основные задачи начальной выставки
Теоретические работы, связанные с разработками инерциальных навигаци-
онных систем (ИНС), включают в себя формирование уравнений инерциальной
навигации (уравнений идеальной работы), исследование уравнений ошибок и во-
просы сопряжения (комплексирования) с другими источниками навигационной
информации. Необходимым и весьма важным аспектом теоретических исследо-
ваний являются также вопросы подготовки ИНС к работе, которые в общем виде
могут быть сформулированы следующим образом.
403
Инерциальная навигация (определение текущих значений координат и ско-
рости) заключается в интегрировании уравнений идеальной работы системы. При
этом должны быть известными начальные скорость и местоположение.
Весьма важным начальным условием является также выставка чувстви-
тельных элементов ИНС относительно некоторых базовых направлений, опреде-
ляемых выбранной для навигации системой отсчета. Другими словами, целью
начальной выставки является приведение к моменту начала решения навигаци-
онной задачи измерительных осей приборного трехгранника ИНС в требуемое
заданное или расчетное положение.
Реализуемая в процессе подготовки к работе калибровка системы, необхо-
димая для определения и учета основных инструментальных погрешностей изме-
рителей ИНС, в общем случае также может рассматриваться как определение
части начальных установок системы.
Таким образом, подготовка к работе любой ИНС состоит из следующих ос-
новных операций [33]:
1. Установка измерительной системы отсчета с помощью начальной выставки
(ориентирования) осей инерциальных измерителей относительно базовой
системы координат.
2. Установка начальных условий по координатам и скорости в этой системе
отсчета.
3. Калибровка основных инструментальных погрешностей, входящих в состав
системы инерциальных измерителей (акселерометров, гироскопов).
Как следует из изложенного, в общем случае собственно понятие «начальная
выставка» можно определить как ориентирование осей, связанных с изме-
рителями ИНС, относительно некоторой базовой системы отсчета, выби-
раемой из соображений удобства. Эта формулировка подразумевает либо
аналитическое определение относительной угловой ориентации двух сис-
тем координат, либо методику, позволяющую привести эти две системы
осей в согласованное положение.
Как правило, базовая система отсчета представляет собой аналитически за-
данный идеализированный координатный трехгранник, относительно которого
принято решать задачи навигации и управления движением рассматриваемого
объекта.
В составе ИНС базовая система отсчета чаще всего материализуется по-
средством гиростабилизированной платформы (ГСП) с жестко установленными
на ней датчиками первичной информации - инерциальными измерителями. По-
следние включают в себя обычно три акселерометра и три управляемых гиробло-
ка со взаимно ортогональным направлением осей чувствительности, которые оп-
ределяют т.н. «приборную» (выставляемую) систему координат.
В настоящее время в составе ЛА все большее распространение находят
ИНС бесплатформенного типа -- т.н. БИНС [35].
Задача начальной выставки возникает при разработке всех без исключения
ИНС. В то же время инерциальные системы применяют на управляемых объектах
различных видов: космических аппаратах, самолетах, ракетах-носителях, надвод-
404
ных и подводных кораблях и т.д. Стоящие перед ними задачи, как правила, спе-
цифичны и характеризуются малой степенью общности. Поэтому их системы на-
вигации существенно отличаются принципами построения, типом и компоновкой
измерителей, располагаемыми средствами комплекс.ирования и коррекции и т.д.
Различны также конкретные средства и способы выполнения подготовки к работе
этих ИНС. Однако для всех способов начальной выставки необходим анализ двух
следующих общих факторов: систем координат и измерений.
Системы координат, используемые в качестве базовых, как правило, раз-
личны для объектов разных классов. Для конкретизации поставленных задач ог-
раничимся в дальнейшем рассмотрением навигационных систем, принятых, для
решения задач управления объектов крейсирующего типа, т.е. объектов, осуще-
ствляющих навигацию вблизи поверхности Земли в течение нескольких часов со
скоростями, меньшими первой космической. В качестве базовой системы отсче-
та, относительно которой должна быть выставлена система, связанная с инерци-
альными измерителями, в таких объектах чаще всего используется т.н. «сопрово-
ждающий» трехгранник одной из традиционных навигационных систем отсчета:
географической или ортодромической. В таких системах одна из осей направлена
вдоль местной вертикали, другая - по касательной к географическому (ортодро-
мическому) меридиану; третья ось направлена по касательной к географической
(ортодромической) параллели.
Выставляемый приборный трехгранник ИНС предназначен для физическо-
го моделирования сопровождающей базовой системы координат и в рассматри-
ваемом случае является построителем местной вертикали со связанной в азимуте
ГСП.
Следует отметить, что в некоторых задачах выставки на подвижном осно-
вании оси выставляемых инерциальных измерителей необходимо согласовать с
предварительно выставленными осями другой системы измерителей, являющих-
ся в этом случае носителями базовых направлений [32]. Такая промежуточная
система координат называется опорной. В то же время независимо от вида при-
меняемых систем координат суммарная сшибка начальной выставки всегда пред-
ставляет собой нежелательное угловое рассогласование между осями, жестко
связанными с инерциальными измерителями, и осями истинной базовой системы
отсчета.
С точки зрения проводимых измерений все способы выставки основаны на
возможности точного измерения естественных или задаваемых искусственно ве-
личин. Наиболее существенный фактор, определяющий возможность общего
подхода к исследованию различных методов выставки, состоит в следующем. Не-
зависимо от того, какими средствами (инерциальными, оптическими, электроме-
ханическими или другими) проводятся измерения этих величин, все способы из-
мерения имеют одну общую объединяющую их важную характеристику: каждая
величина, измеряемая для целей выставки, представляет собой по существу век-
торную величину, т.е. характеризуется модулем и направлением. В принципе для
получения условий, достаточных для выставки, определение модуля вектора не
является необходимым. И хотя на практике при реализации выставки часто при-
405
ходится измерять проекции вектора (т.е. его модуль), конечная цель заключается
в определении именно направлений этих векторов.
В общем случае для определения угловой ориентации инерциальных изме-
рителей с помощью векторных величин необходимо измерение не менее двух не-
коллинеарных векторов, ориентация которых относительно базовой системы ко-
ординат известна. Направление одного из них обычно позволяет фиксировать из-
мерительную плоскость приборного трехгранника ИНС в пространстве, а направ-
ление другого - определить угловую ориентацию этой плоскости.
Требование о двух неколлинеарных векторах нельзя удовлетворить двумя
векторами одной и той же физической природы, если измерения их проводятся
одновременно. В этом случае векторы просто суммируются и поступают к чувст-
вительным элементам в виде одной результирующей величины. Поэтому при од-
новременном измерении оба вектора должны быть различной физической приро-
ды. Неодновременные измерения позволяют использовать для решения задач на-
чальной выставки всего один переменный вектор, если значение его во времени
изменяется как в базовой, так и выставляемой системах отсчета.
В целях минимизации количества измерений желательно использовать из-
мерения, осуществляемые самими инерциальными элементами - акселерометра-
ми и гироскопами. Поскольку эти чувствительные элементы необходимы для на-
вигации при управлении движением объекта, то естественно применять их и в
процессе начальной выставки. Акселерометры и гироскопы позволяют осущест-
вить выставку относительно осей, связанных с Землей (сопровождающий трех-
гранник), так как они дают возможность определить составляющие проекций (а
значит, и направление) вектора ускорения силы тяжести g и вектора угловой
скорости суточного вращения Земли П. Эти векторы измеряются непосредст-
венно на неподвижном относительно Земли основании, чго позволяет решить за-
дачу определения начальной ориентации. При этом важно отметить, что если го-
ризонтирование ГСП может быть выполнено сравнительно быстро, то процесс
азимутальной выставки обычно достаточно продолжителен и его длительность
является одним из главных факторов, определяющих время готовности всей сис-
темы к работе.
Следует подчеркнуть, что при выполнении измерений другими, не инерци-
альными средствами (оптическими, электромеханическими) требование наличия
заданных в базовой системе координат не менее двух векторных величин остает-
ся в силе, поскольку оптические и механические измерения, не являясь в строгом
смысле векторными, тем не менее имеют векторную основу. Их реализация по-
зволяет определить эталонные направления без измерения составляющих проек-
ций.
Одна из задач, относящихся к начальной выставке ИНС, заключается в оп-
ределении на момент начала автономного функционирования системы начальных
условий по координатам местоположения и скорости. Ее решение не может быть
выполнено на основании средств только собственных инерциальных измерений.
Обработка информации акселерометров дает возможность определить лишь при-
ращение скорости и местоположения, а соответствующие начальные условия
406
должны формироваться за счет средств внешних измерений. В случае решения
задачи выставки на неподвижном основании начальные значения по скорости ну-
левые, а координаты местоположения соответствуют полученным с помощью
геодезической привязки географическим координатам точки базирования объек-
та. При выставке на подвижном основании начальные условия поступают от
предварительно выставленной опорной ИНС, входящей в состав системы управ-
ления носителя объекта.
Погрешности в решении задач начальной выставки являются одной из ос-
новных причин возникновения ошибок определения координат и скорости, по-
этому вопросам качественной реализации предстартовой подготовки уделяют
серьезное внимание. Особое значение приобретает также калибровка основных
погрешностей инерциальных измерителей, входящих в состав выставляемой ИНС
[36].
Калибровка проводится в целях учета или компенсации инструментальных
почетностей на этапе основной работы PH. К наиболее распространенным спо-
собам компенсации относятся: компенсация систематических уходов гироскопов
путем управления прецессией гироблоков; компенсация смещения нуля и мас-
штабных коэффициентов акселерометров и др. Все эти способы основаны на уче-
те систематических составляющих почетностей измерителей, который тем эф-
фективнее, чем меньше времени отделяет последние испытания по определению
почетностей от момента пуска управляемой PH.
Если обеспечивается стабильность систематических составляющих по-
четностей от запуска к запуску, то их значение может быть внесено в паспорт
ККП и использовано в дальнейшем в целях компенсации тем или иным способом.
При этом время предстартовой подготовки не будет зависеть от процесса выяв-
ления почетностей измерителей. Сама же процедура заблаговременного опре-
деления систематических почетностей называется паспортизацией.
В случае, если измерители характеризуются систематическими составляю-
щими почетностей, стабильными только в данном запуске, они должны опреде-
ляться непосредственно в ходе предстартовой подготовки ИНС. Такой процесс
определения систематических почетностей называется калибровкой, а продол-
жительность его зависит от объема оцениваемых почетностей.
4.11.2 Начальная выставка ИНС в условиях неподвижного и
подвижного основания
Начальная подготовка ИНС на объекте, неподвижном относительно Земли,
достаточно хорошо исследована и имеет примеры многочисленной практической
реализации. В последнее время усилия разработчиков направлены здесь в основ-
ном на увеличение точности и сокращение продолжительности выставки либо на
разработку методов выставки для новых технических приложений (системы с ис-
пользованием БИНС и др.).
Подготовка ИНС на движущемся основании представляет собой намного
более сложную задачу, в связи с чем техника ее решения предполагает примене-
ние особых методов и приемов. Проблемы, возникающие в этой связи при вы-
407
ставке, калибровке и определении начальных условий, обусловливают большую
часть различий между методами подготовки ИНС объектов, стартующих с под-
вижных или стационарных пусковых установок [32, 33].
Для ИНС объектов со стабилизированной гироплатформой в контуре сис-
темы управления процесс начального ориентирования на Земле сводится к по-
строению вертикали (приведению ГСП в плоскость местного горизонта точки
старта) и к обеспечению требуемой ориентации осей платформы в этой плоско-
сти (выставка в азимуте). Как указывалось выше, для этого необходимо измере-
ние автономными средствами составляющих проекций вектора ускорения силы
тяжести g и вектора угловой скорости суточного вращения Земли $2, что в усло-
виях неподвижного основания не вызывает затруднений. Однако движение объ-
екта, несущего выставляемую ИНС, существенно искажает эти важные входные
величины. При этом к векторам g и £2 добавляется соответственно ускорение и
угловая скорость основания, причем эти добавки выделить автономными средст-
вами невозможно. Когда искажения, вызываемые движением объекта, становятся
настолько значительными, что решать поставленные задачи методами, разрабо-
танными для неподвижного основания, уже невозможно, тогда и возникает зада-
ча выставки на подвижном основании.
Так, при решении задачи выставки на основе показаний опорной ИНС из-за
физического разделения мест установки на носителе гироплатформ двух систем
могут возникнуть заметные различия в измеряемых этими системами векторах
кажущегося ускорения и угловой скорости, как по величине, так и по направле-
нию.
Поскольку подход к калибровке погрешностей измерителей основан на тех
же принципах, которые применяют при определении начальной ориентации ги-
роплатформы ИНС, подвижность основания существенным образом усложняет
решение и этой задачи.
Формирование в ходе выставки начальных условий по координатам место-
положения и скорости тоже наталкивается на дополнительные трудности. В силу
взаимного перемещения мест установки опорной и выставляемой ИНС (из-за не-
жесткости конструкции или наличия вращательных движений) мгновенные зна-
чения составляющих проекций скоростей в местах крепления обеих систем могут
существенно отличаться.
Таким образом, термин «подвижное основание» означает, по существу,
объект, подверженный значительным перемещениям относительно Земли, что
серьезно усложняет выставку установленной на нем инерциальной системы.
В многочисленной литературе, посвященной проблемам начальной выстав-
ки на подвижном основании, описаны два основных инженерных подхода к ре-
шению этой задачи.
Первый из них (более общий) заключается в использовании методов, раз-
работанных для выставки на неподвижном основании, с некоторой их модифика-
цией.- При. этом информация, получаемая от инерциальных чувствительных эле-
ментов, выставляемой системы, обрабатывается таким образом, что после обра-
ботки, (компенсации и (или) фильтрации) она становится эквивалентной инфор-
408
мации, получаемой от этих чувствительных элементов на неподвижном основа-
нии, Почти всегда это требует дополнительных измерений параметров движения
объекта относительно Земли неавтономными (внешними) инерциальными или
неинерциальными средствами.
В качестве примеров такого подхода можно назвать рассматриваемые далее
методы векторного согласования измерений при горизонтировании выставляемой
ГСП, метод взаимной угловой увязки при согласовании положения опорной и
выставляемой систем по углу азимута и др.
Второй подход состоит в развитии группы специальных способов выставки
на подвижном основании. Практически всегда он определяется спецификой ре-
шения поставленных задач для вполне конкретных условий применения, хотя в
данном случае, как и выше, также необходимы измерения, поступающие от
внешних навигационных систем.
Здесь по своим практическим реализациям известны следующие методы:
векторное согласование измерений для азимутальной выставки ИНС при выпол-
нении носителем маневрирования в горизонтальной плоскости; определение ази-
мутальной ориентации выставляемой ИНС по известному азимуту взлетно-
посадочной полосы; определение пространственной ориентации ГСП путем од-
новременного визирования двух или более звезд с помощью астрокорректора;
определение взаимного углового положения опорной и выставляемой систем, ус-
тановленных на космическом аппарате (КА), с помощью последовательного из-
мерения двух конечных поворотов КА и др.
Как следует из изложенного, при многих рассмотренных способах выстав-
ки полагается, что на борту подвижного основания имеется система инерциаль-
ных измерителей, предварительно выставленная относительно принятой базовой
системы координат. С этой системой необходимо согласовать одну или болёе
других. Иными словами, необходимо передать ориентацию от выставленной сис-
темы к выставляемым. Такой подход является главной’отличительной особенно-
стью при решении задач выставки в условиях движущегося основания.
При ряде других способов вводятся средства неинерциальных измерений,
позволяющие обойти вызванные движением объекта искажения величин, изме-
ряемых инерциальными чувствительными элементами. Некоторые неинерциаль-
ные средства позволяют измерять величины, которые имеют априорную связь с
инерциальной системой координат (например, астроориентатор, определяющий
направление на звезды, системы спутниковой навигации). Другие позволяют из-
мерять параметры движения в привязке к поверхности Земли (например, опреде-
ление с помощью радионавигационных средств дальности до ориентиров с из-
вестными координатами; вычисление с помощью доплеровских измерителей ско-
рости относительно подстилающей поверхности). Примером неинерциальных
средств, которые служат только для передачи параметров, определяющих ориен-
тацию предварительно выставленной и выставляемой систем, являются оптиче-
ские измерительные приборы.
Таковы основные характерные особенности, отличающие в сторону7 повы-
шенной сложности выполнение начальной выставки в условиях подвижного ос-
409
нования.
Подробный анализ научно-технического состояния указанной проблемы, а
также накопленный опыт в решении задач предстартовой подготовки ИНС пока-
зывают, что, несмотря на ряд перечисленных отличий, начальная выставка на не-
подвижном и подвижном основании характеризуется значительной степенью
общности. При этом выставку на Земле и выставку на подвижном основании
можно рассматривать совместно, т.е. выставка на Земле будет являться частным
случаем более общего решения.
Трактовка задачи выставки, базирующаяся на методологически едином
подходе - векторном представлении измеряемых величин, позволяет свести ана-
лиз ошибок выставки к оценке точности определения направлений измеряемых
векторов. Ошибки определения направлений в ходе процесса измерений вызыва-
ются следующими основными источниками:
- собственными погрешностями измерительных приборов;
- влиянием движения основания на измеряемые величины.
Точность измерительных приборов считается заданной. Поэтому можно ут-
верждать, что результаты выставки во многом зависят от того, каким образом в
этом процессе учитывается движение основания, т.е. рассматривается ли это
движение как внешнее возмущение, имеются ли возможности измерения его в
целях учета и компенсации, применимы ли методы предварительной и оптималь-
ной фильтрации, какова эффективность использования перечисленных методов и
т.д.
Для случая базирования на Земле выставка проводится при точно извест-
ных значениях как эталонных векторов g и П, гак и начальных условиях по коор-
динатам местоположения и скорости. Поэтому уравнения ошибок ИНС здесь
формируются относительно истинных значений навигационных параметров (ус-
корений, кажущейся или угловой скорости, местоположения).
На движущемся основании эти же-задачи решаются относительно показа-
ний опорной системы, которая в данном случае является носителем информации
об эталонных векторных величинах. Уравнения ошибок при этом естественно
формировать в вариациях от навигационных параметров, счисленных опорной
ИНС. Управляемое угловое движение выставляемой ГСП в процессе выставки
организуется по результатам интегрирования уравнений идеальной работы, кото-
рое либо может быть реализовано на борту объекта, либо получено непосредст-
венно от опорной ИНС. Последний вариант предпочтительнее, поскольку при
этом упрощаются как уравнения ошибок выставляемой системы, так и алгоритм
начальной выставки в целом.
Компенсация движения основания, связанная с перемещением носителя,
проводится в уравнениях измерений, формируемых в виде разности соответст-
вующих навигационных параметров выставляемой и опорной систем. Влияние
возмущений из-за разнесенности мест установки двух ИНС может быть снижено
путем применения либо различных методов предварительной цифровой обработ-
ки, либо фильтрующих операторов оптимального типа.
410
Как указывалось ранее, при таком подходе ошибки решения поставленных
задач ограничиваются точностными показателями опорной ИНС, - д соответст-
вующие погрешности двух систем (ориентирование ГСП относительно базовой
системы координат, калибровка уходов гироскопов, определение начальных ус-
ловий) оказываются неразделимыми.
Учет и компенсация движения основания аналогично могут быть выполне-
ны и при использовании для выставки навигационных средств неинерциального
типа: спутниковые навигационные системы (СНС), радиолокационные системы
(РЛС), доплеровские измерители скорости (ДИС) и др,. Здесь на точностные ха-
рактеристики выставки оказывают влияние инструментальные погрешности при-
меняемых измерительных систем.
В целом, как свидетельствует накопленный опыт в разработках ИНС объек-;
тов различных типов и назначений, задача начальной выставки, в том числе и в
условиях подвижного основания, имеет вполне приемлемое практическое реше-
ние.
4.11.3, Классификация существующих методов решения задач
начальной выставки
Начальная выставка является одной из наиболее важных задач предстарто-
вой подготовки ИНС. Качество решения этой задачи определяющим образом
влияет на точностные характеристики системы, т.е. погрешности вычисления ко-
ординат и скорости на этапе полета PH. Поэтому из возможных методов выпол-
нения начальной выставки необходимо выбирать наиболее приемлемые с точки
зрения достижимой точности, а также практической реализуемости. В этой связи
желательна классификация существующих методов.
Конкретные средства и способы выполнения предстартовой подготовки
ИНС объектов, устанавливаемых на неподвижном или подвижном основании,
весьма разнообразны. В то же время можно выделить основные методологиче-
ские принципы, характерные для начальной выставки любых инерциальных сис-
тем [33]. К ним следует отнести уже упоминавшиеся ранее:
- принцип комплексирования измерений;
- принцип информативной достаточности.
В соответствии с принципом комплексирования решение задач начальной
выставки как в условиях неподвижного, так и в условиях движущегося основания
без привлечения средств внешних измерений невозможно.
Принцип информативной достаточности оговаривает необходимость опре-
деления в базовой системе координат не менее двух неколлинеарных векторов,
измеряемых с помощью располагаемых бортовых измерительных средств.
Кроме выделенных, общих принципов возможна также классификация по
наиболее характерным признакам в рамках отдельных задач начальной выставки.
При этом все известные методы начального ориентирования можно разделить на
две следующие группы:
- методы непосредственных измерений;
- методы передачи ориентации (косвенных измерений).
411
Общая особенность методов первой группы заключается в измерении век-
торных величин ускорения силы тяжести g и угловой скорости вращения Земли
£1, ориентация которых в базовой сисгеме координат точно задана. В соответст-
вии с этим методы первой группы включают в себя такие способы ориентирова-
ния:
- выставка вертикали (горизонтирование);
- выставка в азимуте (гирокомпасирование).
Для построения приборной вертикали используется информация о векторе
g, регистрируемая установленными на ГСП акселерометрами. Сущность такого
горизонтирования заключается в том, что выходные сигналы горизонтальных ак-
селерометров на фиксированном основании равны нулю при отсутствии состав-
ляющих вектора g в направлении их осей чувствительности. Наклон ГСП относи-
тельно горизонтальной оси приводит к появлению ложного сигнала ускорения в
одном или обоих горизонтальных акселерометрах. На рис. 4.11.1 показана схема
формирования такого сигнала ах, снимаемого с акселерометра I, установленного
на ГСП 2, в случае отклонения последней от плоскости местного горизонта на
угол а (сигнал акселерометра представляет собой реакцию опоры на действие
Рисунок 4.11.1 -- Схема формирования выходного сигнала акселерометра
при построении приборной вертикали ИНС
Если информация акселерометров используется в качестве сигналов обрат-
ной связи на датчики моментов, то ГСП автоматически реализует режим по-
строения вертикали. Основные принципы организации такого режима с введени-
ем в систему демпфирования рассмотрены в ряде работ по инерциальной навига-
ции, где предложены законы формирования сигналов обратной связи, реализация
которых обеспечивает решение задач горизонтирования с точностью до инстру-
ментальных ошибок акселерометров.
412
При соответствующей модификации законов управления можно добиться
также калибровки основных погрешностей гироскопов комплекса командных
приборов (ККП) - их систематических уходов.
Гирокомпасирование представляет собой способ ориентирования инерци-
альной системы посредством определения направления двух заданных величин:
векторов g и Q. Принцип гирокомпасирования заключается в определении с по-
мощью чувствительных элементов, установленных на выставленную в горизонт
ГСП, составляющей вектора ft, которая задает направление меридиональной ли-
нии. На неподвижном основании при известном местоположении и заданной
азимутальной ориентации управляющие сигналы прецессии удерживают ГСП в
требуемом направлении. Для случая, когда связанная с ГСП выставляемая систе-
ма координат XYZ (см. рис. 4.11.2) ориентирована по местному горизонту и в на-
правлении меридиана, т.е. совпадает с направлением осей XqYoZo базовой'систе-
мы отсчета, составляющие этих сигналов
Q°=0; Qy=Q-sin<p0; Qz=-Q-cos<p0 (4.11.1)
где <р0 - географическая широта точки старта.
Рисунок 4.11.2 - Иллюстративная схема принципа
гирокомпасирования ИНС
Если эти сигналы подаются на датчики моментов платформы, точно вы-
ставленной по горизонту и в азимуте, то они удерживают ее в этом положении.
Для малого угла отклонения платформы в азимуте ау составляющая угло-
вой скорости по оси Z в первом приближении равна значению, определяемому по
формуле (4.1.11). Составляющая же по оси X оказывается равной
Qj - -й • <^у * cos (р0, тогда как используемое расчетное значение этой проекции
равно нулю. Вследствие этого имеет место дрейф платформы вокруг оси X и ак-
413
селерометр, ось чувствительности которого направлена вдоль оси Z, воспринима-
ет обусловленную этим дрейфом составляющую ускорения силы тяжести. Вели-
чина полученного сигнала акселерометра пропорциональна азимутальной ошиб-
ке, а его знак определяет направление управляющего момента коррекции ГСП.
Если составляющая Qx обусловлена не только азимутальной ошибкой, а содер-
жит также неизвестную величину собственного ухода гироскопа ех , то погреш-
ность гирокомпасирования пропорциональна значению такого ухода. В общем
случае это требует либо прецизионного состава измерителей, либо проведения
гирокомпасирования в двух ориентациях ГСП, отличающихся друг от друга на
известный азимутальный угол. При этом можно устранить влияние ошибки в оп-
ределении угла азимута из-за наличия собственного ухода меридионального ги-
роскопа.
В целом способы ориентирования с использованием непосредственных из-
мерений достаточно просты и эффективны при выставке на неподвижном осно-
вании. Их характеризует общность принципа работы: ориентирование при этом
проводится в схеме следящей системы и его характеристики внутри некоторой
области варьируются выбором вида и параметров закона управления.
В последнее время появились различные варианты перечисленных спосо-
бов, отличающиеся средствами обработки поступающих измерений. При этом
чаще всего используются методы оптимальной фильтрации: метод наименьших
квадратов, фильтр Калмана и др., повышающие точность решения в условиях
вибрации основания.
Что касается использования методов непосредственных измерений для под-
готовки систем на подвижном основании, то в целом оно затруднительно. В этом
случае искажается очевидная связь между ориентацией осей чувствительности
акселерометров и гироскопов с направлением векторов g и Я. Устранение такого
недостатка требует точных априорных данных о характере движения основания,
что в большинстве случаев невозможно. Поэтому применимость методов непо-
средственных измерений ограничена случаем неподвижного основания.
При всех попытках решения задач выставки с подвижной схемой базирова-
ния применяют в основном методы второй группы. Общая их особенность за-
ключается в использовании косвенных измерений, проводимых в опорной нави-
гационной системе (ОНС). Обычно такая система реализуется посредством ИНС
подвижного основания, данные которой на этапе начальной выставки полагаются
эталонными для выставляемой навигационной системы (ВНС).
При реализации методов косвенных измерений информация о двух некол-
линеарных векторах задается одновременно в опорной и выставляемой ИНС, что
позволяет установить их взаимное положение Ориентация измеряемых векторов
относительно базовой системы может быть произвольной, и важна лишь принци-
пиальная возможность их измерения чувствительными элементами ККП.
Косвенные измерения не всегда могут быть выполнены в опорной системе
координат. Тогда вводятся в рассмотрение одна или несколько промежуточных
систем, ориентация которых относительно опорной известна. В любом случае
414
при этом осуществляется передача с помощью косвенных измерений ориентации
от опорной системы к выставляемой. Поскольку начальная выставка проводится
относительно базовой системы координат, то общая точность решения непосред-
ственно зависит от ошибок опорной и промежуточных систем. В этом заключает-
ся главный недостаток рассматриваемых способов выставки.
Методы косвенных измерений, ь свою очередь, можно классифицировать
исходя из различий в природе измеряемых векторных величин. При этом разли-
чают:
- способы дистанционной (оптической или электромеханической) переда-
чи ориентации;
- способы векторного согласования.
Способ оптической передачи часто применяют для азимутального ориенти-
рования ИНС взамен гирокомпасирования, от которого его выгодно отличает в
десятки раз меньшая длительность. Обычно он реализуется на неподвижном ос-
новании и дополняет систему автономного горизонтирования. Сочетание этих
систем позволяет эффективно решать задачу выставки приборного трехгранника
ИНС и является наиболее распространенным для объектов с неподвижным стар-
том.
При надлежащем построении измерений оптическая передача ориентации
может применяться и для движущегося основания в целях согласования взаимно-
го положения опорной и выставляемых систем одновременно в направлении од-
ной, редко - двух или трех осей. Для этого используют точечные источники света
и светочувствительные элементы, определяющие отклонения световых лучей от
номинально требуемых направлений. Как правило, это возможно для объектов,
на которых выставляемая и опорная ИНС установлены на жестком, практически
недеформируемом основании и в процессе перемещения фактически неподвижны
друг относительно друга. Так, на объектах морского варианта базирования, ха-
рактеризующихся незначительными взаимными угловыми деформациями мест
установки ИНС, оптимальными по точности решения и времени азимутального
ориентирования являются внешние оптические системы прицеливания.
Однако, несмотря на простоту принципа действия, в общем случае практи-
ческая реализация оптической передачи на подвижном основании сопряжена со
значительными трудностями, связанными с необходимостью:
- обеспечения оптической видимости в отсчетном направлении;
- сохранения пространственной ориентации линии визирования в ходе
подготовки ИНС.
Решение обеих задач для объектов авиационного варианта базирования в
условиях вибраций и взаимных упругих деформаций мест установки измерителей
весьма сложно. В реальных конструкциях опорная и выставляемая системы рас-
полагаются друг от друга на значительном расстоянии. При этом передача лучей
требует введения дополнительных оптических систем, устанавливаемых на де-
формируемой конструкции, что неизбежно нарушает пространственную ориента-
цию линии визирования и приводит к ошибкам ориентирования.
415
Способы, основанные на электромеханических измерениях, чаще всего со-
держат информацию об угловом положении ГСП относительно карданова подве-
са. Сравнение соответствующих показаний двух систем дает сведения об их вза-
имном положении и скорости его изменения, что в принципе позволяет решать
задачи ориентирования и калибровки измерителей.
В целом же применимость этих способов в условиях движущегося основа-
ния тоже существенно ограничена. Поскольку при монтаже ГСП на PH базы кар-
дановых подвесов устанавливаются относительно строительных осей PH, элек-
тромеханические измерения позволяют выполнять передачу ориентации, в ко-
нечном счете, по корпусу основания, несущего объект. Это пребует согласования
положения установочных баз опорной и выставляемой систем в условиях непред-
сказуемых деформаций из-за нежесткости движущейся конструкции. Высокочас-
тотные составляющие возмущенного углового движения можно отфильтровать
из выходных сигналов измерителей. Однако в ряде случаев измерения содержат
систематические или медленно меняющиеся ошибки, ухудшающие точностные
характеристики начальной выставки. Компенсация перечисленных ошибок тем
сложнее, чем больше расстояние между опорной и выставляемой системами.
Если ошибки деформирования конструкции изменяются в допустимых для
задач основной работы пределах, то одним из вариантов применения способа
электромеханической передачи ориентации является предварительная увязка по-
садочных баз опорной и выставляемой ИНС, осуществляемая с помощью внеш-
них оптико-электронных измерительных систем. Посадочные базы материализу-
ются в виде установленных на корпусе ГСП контрольных элементов, с которыми
известным образом увязаны оси приборной системы координат ИНС. Измеренное
между ними угловое рассогласование паспортизуется и учитывается затем при
начальном ориентировании системы. Такой подход требует дополнительных
проработок для конкретных случаев применения.
В целом же точность выставки, реализуемой способами электромеханиче-
ской передачи ориентации, невысока (порядка десятков дуговых минут) и в об-
щем случае неудовлетворительна. Для подготовки систем на подвижном основа-
нии эти способы применяют, как правило, на этапе предварительного (грубого)
согласования двух систем, предшествующего режиму точного решения.
В этой связи наибольшее распространение в схемах подготовки ИНС с под-
вижным стартом получили способы векторного согласования измерений. Прин-
цип векторного согласования состоит в приведении выставляемой системы в по-
ложение, при котором она имеет одинаковую с опорной системой ориентацию
относительно некоторых векторных величин. Чаще всего при этом используют
векторы, измеряемые инерциальными приборами - линейную или угловую ско-
рость (ускорение). Если оси двух приборных трехгранников имеют взаимно со-
гласованное направление, а ошибки измерений отсутствуют, соответствующие
составляющие векторов оказываются равными и не зависят от деформаций кон-
струкции.
Важным обстоятельством для' способов векторного согласования является
принципиальная возможность одновременного решения задач ориентирования и
416
калибровки. Другая важная особенность заключается в том, что движение осно-
вания приобретает полезные свойства как средство получения необходимой
входной информации. Это позволяет выбирать режимы движения, приемлемые с
точки зрения поставленных задач и минимально ограничивающие требуемый ха-
рактер работы движущегося объекта.
Так, например, для ВНС, устанавливаемых на самолетах-носителях (СН),
задача начальной выставки может быть решена при маневрировании СН в гори-
зонтальной плоскости в целях создания векторной нагрузки.
Для систем управления космических аппаратов задача выставки имеет ре-
шение, если движущийся по орбите аппарат одновременно осуществляет враща-
тельное движение вокруг своих осей.
В заключение можно отметить, что способы передачи ориентации с ис-
пользованием косвенных измерений в целом более приспособлены для решения
поставленных задач по сравнению со способами непосредственных измерений.
Проведенная выше классификация выполнена по основным отличительным
признакам, характерным для известных средств и способов начальной выставки.
Общий анализ ее показывает, что как для неподвижного, так и для подвижного
основания способы векторного согласования являются наиболее универсальным
средством решения задач предстартовой подготовки ИНС, в связи с чем они на-
шли широкое применение в практике работ по рассматриваемой тематике.
Предлагаемые далее методы алгоритмической реализации также основаны
на векторном согласовании измерений. Этот метод используют как для решения
задач горизонтирования, так и для азимутальной выставки ГСП.
На аналогичных принципах основана также выставка бесплатформенных
инерциальных навигационных систем (БИНС), которые в настоящее время нахо-
дят все более широкое ррименение в составе СУ ЛА различного назначения.
4.11.4 Математическая модель начальной выставки ИНС
В основу решения поставленных в настоящей книге задач положен прин-
цип векторного согласования измерений. Реализуется он посредством сравнения
на каждом такте вычислений соответствующих навигационных показаний опор-
ной и выставляемой систем.
Ниже рассмотрены методы алгоритмической реализации задач начальной
выставки для неподвижного и подвижного вариантов базирования ВНС. При
этом для неподвижного вариантов базирования в качестве показаний ОНС при-
нимают наперед известные фактические навигационные параметры: равные нулю
ускорение и относительная скорость движения; точные значения координат ме-
стоположения (широта, долгота) и составляющих угловой скорости вращения
Земли.
Для варианта подвижного основания полагается, что ВНС и ОНС одновре-
менно формируют соответствующие выходные навигационные параметры по-
средством решения задачи инерциальной навигации.
В общем случае алгоритмы инерциальной навигации определяют совокуп-
ность аналитических зависимостей, которые позволяют по входным данным сис-
417
темы (начальной выставки и показаниям чувствительных элементов - акселеро-
метров и гироскопов) определять ее выходные величины (координаты местопо-
ложения, компоненты скорости движения и ориентацию объекта в пространстве).
В качестве сопоставляемых при выставке величин могут применяться как вход-
ные, так и выходные параметры двух ИНС. В слбживпУбйск практике преимуще-
ственно реализуется последний вариант.
Математическое исследование задач начальной выставки может быть про-
ведено на основе анализа уравнений ошибок выставляемой навигационной сис-
темы, обусловленных неточностью ее начального ориентирования и инструмен-
тальными погрешностями входящих в ее состав измерителей [31].
В последующем изложении будем полагать, что к началу операций точной
выставки приборный трехгранник предварительно установлен в требуемую ори-
ентацию с точностью не хуже единиц градусов и дальнейшая выставка проводит-
ся вращением на малые углы. Если угловое рассогласование между рассматри-
ваемыми координатными системами мало, оно может быть представлено в виде
вектора, модуль которого равен угловому рассогласованию, а направление - пер-
пендикулярно к плоскости этого рассогласования. Представим текущее отклоне-
ние приборного трехгранника от его расчетной ориентации в виде вектора а,
проекции которого на оси базовой системы координат равны ах, ау, az. Таким об-
разом, поворот координатной системы XYZ относительно системы ХоУо^о на
векторный угол а эквивалентен ее повороту на скалярные углы
ax=lx» «; ay=lY0 «; ax=lz,-a
последовательно вокруг осей ХоУо2о. При этом составляющие ах и az соответст-
вуют отклонению ГСП от плоскости местного горизонта, а составляющая ау оп-
ределяет погрешность ориентирования в азимутальном направлении.
Матрица преобразования координат, задающая переход от базового трех-
гранника к приборному, с учетом малости угла а (т.е.
cos cq «1; sin cq « otj; sin2 a, » 0) может быть представлена в виде
(4.11.2)
Векторная ошибка определения кажущегося ускорения Аа, обусловленная
начальной невыставкой ГСП, может быть получена в виде разности измеренного
ускорения ап и его истинного значения а0, заданного в базовой системе коорди-
нат
Аа = ап-а0-Ма-а0-а0 =(Ма-1)а0 ,
где I - единичная матрица, а Ма определяется выражением (4.11.2).
Полученное соотношение можно представить в виде векторного равенства
Аа = -аха0. (4.11.3)
Формальное варьирование уравнения идеальной работы ИНС [1]
418
V0=a0+g,
где Vo - вектор скорости в инерциальной системе координат (ИСК); а0 - век-
тор кажущегося ускорения, измеренный в проекциях на оси базовой системы ко-
ординат (БСК); g - вектор градиента силы тяжести Земли, дает следующий ре-
зультат:
AV0=Aa0 + Ag. (4.11.4)
Здесь суммарная ошибка определения кажущегося ускорения Аа0 обуслов-
лена:
- погрешностями измерения ускорения а0 по повернутым на угол а при-
борным осям (учтены в (4.11.3));
- инструментальными погрешностями акселерометров.
К последним следует отнести:
- погрешность смещения нулевых сигналов акселерометров на величину
Ат;
- погрешность измерений из-за отклонения масштабных коэффициентов
акселерометров от их номинальных значений на относительную величи-
ну ка;
- погрешность измерений из-за рассогласования на малые углы установки
осей чувствительности акселерометров относительно рас-
четных направлений приборной системы координат.
Вводя в рассмотрение [36] диагональную матрицу к а погрешностей мас-
штабных коэффициентов
^ах 0 0 '
ка = 0 кау 0 (4.11.5)
0 0 kaz_
и матрицу Da учета перекосов осей чувствительности акселерометров
’ 1 0 О'
Da = «ух 1 8^ , (4.11.6)
.«XX 0 1
суммарную ошибку Аа0 можно выразить в виде
Аа0 = Аа +Ат + (ка +Da -1)а0. (4.11.7)
С учетом последнего равенства соотношение (4.11.4), определяющее ошиб-
ки формирования вектора скорости объекта, будет выглядеть следующим обра-
зом:
AV0 = Аа + Ат + (ка +Da-I)a0 + Ag. (4.11.8)
Для исследования задач начальной выставки оно должно быть дополнено
уравнением текущих ошибок ориентирования ГСП. Получим его исходя из сле-
419
дующих соображений.
Вектор малого углового рассогласования а задан проекциями на оси базо-
вой системы координат XoYoZq. Скорость изменения угла d, определяемая как
разность угловых скоростей выставляемой приборной сопи базовой ®0 систем
координат, в проекциях на базовые оси может быть представлена следующим об-
разом:
d = MaT -(оп -ш0 =оп -со0-0)о хa = Дсо0 -со0ха. (4.11.9)
Это известное дифференциальное уравнение ошибок пространственного
ориентирования ГСП, которое обычно записывается в виде
d + <о0 х a = Д(о0, (4.11.10)
где в соответствии с со0 = П + р
Дш0=ДП + Др. (4.11.11)
Здесь <о0 - вектор абсолютной угловой скорости вращения ИНС; £1 - век-
тор угловой скорости вращения Земли; р - вектор угловой скорости вращения
ИНС относительно Земли (для случая неподвижного основания р = 0).
В последних соотношениях учтены ошибки формирования угловой скоро-
сти прецессии ГСП До) и ошибки из-за ее вращения вокруг смещенных на угол
а приборных осей относительно требуемых номинальных направлений. Кроме
того, в (4.11.10) необходимо также учесть инструментальные погрешности ги-
роблоков, обусловленные:
- случайным собственным уходом гироскопов £ ;
- погрешностью скорости прецессии ГСП Д©1 из-за отклонения масштаб-
ных коэффициентов гироблоков ко от номинальных значений;
- погрешностью скорости прецессии ГСП Д«25 возникающей из-за эф-
фекта приложения управления ко входным осям гироблоков, смещенных
относительно расчетных направлений осей приборной системы коорди-
нат на малые установочные углы Дц (i, j = х; у; z);
- динамическим уходом гироскопов Даэ3 из-за наличия их осевой (oriH
радиальной copj- (i, j = х; у; z) разбалансировки.
Определив, как и выше, соответствующие матрицы учета:
- ошибок масштабных коэффициентов кш
(4.11.12)
- перекосов установки осей чувствительности гироскопов Do
420
0 Дху А^
Dw = А^ 0 Ay., ; (4.11.13)
А^ Ajy 0
динамических уходов Dpr
“гх 0 ®рх
Dpr 0 «>гу <Ору , (4.11.14)
_(0рг 0 С0га
выразим рассматриваемые ошибки Асо15 Асо2> А®3 в виДе
Д©! =кшсоо; Д(02 =DO-g>o; Аш3 = Dpr-(a0-g). (4.11.15)
Заметим, что вид матриц (4.11.6), (4.11.13) и (4.11.14) влияния инструмен-
тальных погрешностей измерений может быть, вообще говоря, разным, в зависи-
мости от технологии сборки и монтажа ККП в условиях производства, а также
фактического состава ошибок. Здесь приведены их выражения, часто встречаю-
щиеся в практике применения ИНС объектов рассматриваемого типа. Важен
только сам факт учета их в общих уравнениях погрешностей начальной выставки.
Уравнение (4.11.10) ошибок ориентирования ГСП с учетом
(4.11.12) - (4.11.15) окончательно можно представить следующим образом:
а + (оо х а = Дй + Др + £ + (k„ + DJo0 + Dpt(a0 - g). (4.11.16)
Вместе с полученным ранее соотношением (4.11.8) оно в достаточно общем
виде определяет динамику изменения ошибок начальной выставки ИНС.
Анализ показывает, что вариации угловой скорости Аш0 и вектора силы
тяжести Ag обусловлены погрешностями счисления координат местоположения
АХ0, Д(р0, АНои относительной скорости AV0 .Возникают они на выходах выстав-
ляемой ИНС при автономной реализации этой системой общего алгоритма инер-
циальной навигации. Однако, поскольку при решении задач начальной выставки
по опорной ИНС именно ее показания являются эталонными, естественно.эти по-
казания и брать в готовом виде, а не вычислять их по специальному алгоритму.
При этом значительно упрощаются вопросы программно-алгоритмического
обеспечения начальной выставки из-за обнуления целого ряда формируемых от-
носительно показаний опорной системы ошибок:
ДХ0 = Дсро = ДН0 = 0; А<о0=0; Ag = 0. (4.11.17)
Вариации относительной скорости AV0 в данном случае будут обусловле-
ны:
- ошибками начального ориентирования выставляемой ГСП а;
- инструментальными погрешностями измерителей;
Тогда уравнения ошибок для решения задач начальной выставки с учетом
соотношений (4.11.17) запишут в виде следующих векторных равенств:
AV0 =-аха0 + Ат + (ка+Da-I) а0; (4.11.18)
421
a = a x (Oq + с + (km + Djcoj, + Dpr • (a0 - g). (4.11.19)
Полученные в итоге соотношения определяют математическую модель
ошибок начальной выставки, которая должна быть положена в основу разработки
необходимого алгоритмического обеспечения.
Задача алгоритмов заключается в оценивании векторного угла а невыстав-
ки ИНС по измеренным рассогласованиям между одноименными навигационны-
ми параметрами в показаниях ВНС и ОНС ( AV, AV, А<о0 и т.п.).
К настоящему времени разработано много различных способов оценивания.
В целом их можно классифицировать по виду критерия, которому должен удов-
летворять тот или иной применяемый способ. При этом все известные способы
оценивания основаны на минимизации функционалов оптимальности, в качестве
которых обычно принимают средневзвешенное значение квадратов ошибок оце-
нивания. Известны различные варианты их алгоритмической реализации (фильтр
Калмана, метод наименьших квадратов, метод максимального правдоподобия и
др.) [34].
Рассмотрим способы построения алгоритмов оценивания векторного угла
а невыставки ИНС на основе дискретного фильтра Калмана.
Пусть имеется стационарный объект, описываемый уравнениями
х = .Ах + Ву и; (4.11.20)
z = Hx, (4.11.21)
где х - (nxl) вектор состояния; u - (mxl) вектор детерминированных (извест-
ных) входных сигналов; z- (€xl) вектор измеряемых выходных сигналов;
А, Ву, Н - матрицы состояния, управления и измерения соответственно размер-
ностью (nxn), (nxm) и ( / хп).
Поскольку не все переменные состояния х для большинства объектов мо-
гут быть измерены непосредственно, их следует определять с использованием ре-
гистрируемых параметров.
Предполагая, что в распоряжении имеются (известны как измеренные ве-
личины) векторный выходной сигнал z(t), векторный входной сигнал u(t) и мат-
рицы объекта А, Ву ,Н, можно провести синтез устройства для оценки вектора
состояния объекта x(t) при условии, что система (4.11.20) наблюдаема по изме-
рениям (4.11.21).
Пусть х обозначает оценочное значение вектора х. Тогда согласно
(4.11.21) оценочное значение выходного сигнала z = Hx. Оценка х содержит
ошибку, если z отличается от значения, полученного по реальным измерениям
сигнала z. Задача заключается в том, чтобы ошибку оценивания z-z = z-H x
свести к нулю.
Зная А, Ву, и и начальное значение х(0), можно оценить вектор х, если
подвести сигнал й к модели объекта вида
х = Ах + Вуи. (4.11.22)
422
Недостаток оценивающего устройства (4.11.22) состоит в том, что оно дей-
ствует по разомкнутому циклу. Чтобы при сохранении линейности данного уст-
ройства устранить отмеченный недостаток, формируется сигнал коррекции путем
введения в уравнение (4.11.22) обратной связи, пропорциональной сигналу
ошибки z = Н • х. Это соответствует переходу к оценивающему устройству
х = Ах + Ву -ii + K(z-H-x),
(4.11.23)
где К = (п х £) - матричный коэффициент усиления.
Уравнение (4.11.22) имеет решение
x(t) = eA(t“to) • x(t0) + jeA(t"T) • By • u(t) • dr.
to
Если управление и(т) кусочно-постоянно в пределах периода Т вычисле-
ний алгоритмов начальной выставки, то в конце этого периода (пусть начало его
соответствует моменту времени ti4) согласно последнему равенству имеем
ti-1+Т
x(tj_i + Т) = еА Т -iGi-O + wOi-j)* jeA (ti-l+T"x) Ву dx.
ti-i
Представив матричную экспоненту элементами ряда
еАТ =1 + АТ +—А2-Т2+ —А3-Т3+... (4.11.24)
2! 3!
и обозначив (пхп) матрицу перехода системы из состояния (i-1) в состояние (i)
как
фу-1
(4.11.25)
получим дискретный аналог уравнений оценивания (4.11.22); (4.11.23) для каж-
дого i-ro такта работы системы в виде
*.+ =Фц-1-*н+В-“н;
Х| = X; + К • (Z| - Н • х*),
(4.11.26)
где - прогнозированное значение оценки вектора состояния; В - (п хщ) мат-
рица управления для дискретного времени, определяемая из равенства
ti-1+Т
В = |ф (tj_!+Т — т)-Ву-dr. (4.11.27)
4-1
Здесь и выше: ti4 - момент времени, соответствующий (i-l)-My такту рабо-
ты системы; х - время интегрирования, непрерывно изменяющееся на интервале
такта, Т .
Аналоги уравнений состояния (4.11.20) и измерений (4.11.21) в дискретной
области запишем соответственно как
423
+ B-ui_l;
(4.11.28)
Xi =Фц-1 -X
z^H-Xj.
При э'йм оптимальное значение коэффициента определяем в виде
Kj = Р^НТ(Н • Pf - Нт + R)-1. (4.11.29)
Здесь Р+ - (п*п) априорная ковариационная матрица ошибок оценивания:
РГ=Фм-1Р1-1Фц_|+Р» (4.11.30)
вычисляемая по значениям апостериорной ковариационной матрицы
Pi=[I-KiH]-Pi+ (4.11.31)
при известных для матрицы Pi начальных условиях Ро (i =1).
Полагаются также заданными ковариационные характеристики шума про-
цесса ((пхп)- диагональная матрица Q) и шума измерений
((^ х £) - диагональная матрица R).
Соотношения (4.11.26) - (4.11.31) составляют общий алгоритм дискретного
фильтра Калмана.
Покажем далее варианты применения этого фильтра для решения задач на-
чальной выставки ИНС. Рассмотрим последовательно алгоритмы горизонтирова-
ния (построения вертикали) ИНС и алгоритмы выставки ИНС в азимутальной
плоскости. При решении первой задачи определяются ошибки отклонения при-
борной вертикали (составляющие ах и az векторного угла невыставки а)и ошиб-
ки формирования начальной скорости ИНС AVX, AV7°. При решении второй за-
дачи уточняется азимутальное положение ИНС относительно направления гори-
зонтальных осей БСК (угол ау).
1. Алгоритмы горизонтирования ИНС
Рассмотрим уравнение ошибок определения кажущейся скорости (4.11.18)
и ошибок ориентирования ИНС (4.11.19). С учетом алгоритмически формируе-
мых сигналов коррекции:
- показаний акселерометров u} = (иах ;иауju^),
- углового положения ИНС uJ = (ишх;ишу;u6dZ)
они приобретают следующий вид:
AV0 = -axa0 + Ат + (ка +Da - I) а0 +иа; (4.11.32)
а = ахш0+£ + (к(О4-Пш)ш0 +Dpr *(a0-и) + иш. (4.11.33)
Спроектируем (4.11.32) с учетом (4.11.5) и (4.11.6) на горизонтальные оси
базовой системы координат:
AVX = а® • а, - а® • av + Атх + • а® + ;
. У У (4.11.34)
AV® = а° -ay - а® ах + Дт2 +kaz - а® +8И - а® ч-и^.
424
Отметим, что для выставки на неподвижном основании или для выставки
при установившемся движении носителя наиболее важными в горизонтальных
каналах ИНС являются ошибки, обусловленные погрешностями ориентирования
ax,az горизонтальных осей. Аналогичные ошибки из-за погрешности ориенти-
рования по азимуту ау обычно становятся значительными лишь при наличии
существенных ускорений в горизонтальной плоскости.
Поэтому, полагая далее ах=0; az=0; ay=g, перепишем (4.11.34) в виде
AVX° = g • az + Атх + и •
7 (4.11.35)
AVZ° = -g • ax + Atz + ua7.
Обозначим теперь в (4.11.33) через г* вектор обобщенного случайного ухо-
да ИНС:
£* = е + (kw + D J • ш0 + Dpr • (а0 - g). (4.11.36)
Проектируя с учетом (4.11.12)-(4.11.14) и (4.11,36) векторное равенство
(4.11.33) на оси БСК X0Y0Z0, получим
ах =ш®-ау-(й®-az+8*+иЮх;
ау az -<о° ах + е*у +иШу; (4.11.37)
dz =со; ах -о? -ау +£* +иШз:.
kmx •co° ч-Аяу •a>° + ДИ <0»;
где Су = £у + kmy +A^ •coS+Ayz -co®; (4.11.38)
€z ~ ez + kQZ- ^zx ’ • Ц.
Отметим, что для современных инерциальных приборов значения инстру-
ментальных погрешностей таковы, что слагаемые вида Ац-оэ°
(i, j = х; у; г) в каждом из трех уравнений (4.11.38) на один-два порядка меньше
значений составляющих вектора е . Поэтому приложенный к ИНС обобщенный
случайный уход z с приемлемой для поставленных задач точностью совпадает с
собственным уходом г ГСП.
Соотношения (4.11.37) совместно с системой (4.11.35) составляют матема-
тическую модель погрешностей начальной выставки ИНС.
Сделаем некоторые упрощения полученной модели. В предположении,, что
во время выставки определяются и компенсируются составляющие ax,ay,az
векторного угла а, в системе (4.11.37) можно пренебречь перекрестными связями
о0 х а. Тогда упрощенная модель ошибок горизонтирования ИНС может быть
представлена для каждой из осей БСК Хо и Zo двумя независимыми между собой
системами равенств.
Если оцениваемые в процессе фильтрации ошибки составляющих относи-
тельной скорости AV®, AVZ° и угловой ориентации ax,az одновременно исполь-
зовать для коррекции вычисляемых ИНС соответствующих навигационных па-
425
раметров, то указанные две системы равенств можно записать следующим обра-
зом:
для оси Хо: AV® = g-a +Ат + u; . (4.11.39) <4=ez+uu>z;
для оси Zo: AV® = -g ax + Ат + ии; . (4.11.40)
Здесь: управляющие сигналы коррекции показаний акселерометров
ИНС, формируемые по правилу
AV® AV° М111П u«=—(4.11.41)
где ДУх°и ДУ7° - оценки составляющих ошибок по параметрам Vx° и Vz° соответ-
ственно, а и- управляющие сигналы коррекции углового положения ГСП,
которые определяются зависимостями
u0„=-^; (4.11.42)
ишг=-^, (4.11.43)
где ax,az - оценки составляющих ошибок угловой ориентации ГСП относитель-
но плоскости горизонта.
Для применения методов оценки состояния соотношения (4.11.41) и
(4 Л .42) необходимо дополнить уравнениями измерений. В качестве таковых
принимаются разностные сигналы составляющих скорости, поступающие с вы-
ходов выставляемой (V*; V*) и опорной (У®; Уг°) навигационных систем:
ДУХ° = V*-Ух°;
дуо=у;-уо?
(4.11.44)
причем для варианта выставки на неподвижном основании полагается
уо=уо=О.
В соответствии с принятыми выше обозначениями для уравнений (4.11.39)
могут быть определены:
- вектор состояния xj = [ДУ° az];
- вектор управления uj = [ии uwz];
- вектор неизвестных возмущений bj = [Дтх е*], обусловленных обоб-
щенными инструментальными потрешностями измерителей ГСП;
426
матрица состояния Ах =
матрица управления В
° S
0 °]’
Г1 0
’о
Скалярный сигнал измерений zx формируется при этом в соответствии с
первым уравнением из (4.11.44), так что матрица измерений будет иметь вид
Н = [1 о]. (4.11.45)
Таким образом, в терминах теории оценки состояний уравнения ошибок
горизонтирования ИНС в направлении оси Хо следует записать как
хх =АХ хх + BW ux +bх;
л л л ул Л Л *
zx = Н- хх,
(4.11.44)
1 0
0 1
причем для варианта выставки на неподвижном основании полагается
VX°=V7°=O.
В соответствии с принятыми выше обозначениями для уравнений (4.11.39)
могут быть определены:
- вектор состояния xj = [AVX° az];
- вектор управления и J = [iiax uQZ];
- вектор неизвестных возмущений bj = [Атх £*], обусловленных обоб-
щенными инструментальными погрешностями измерителей ГСП;
Гс
- матрица состояния Ах =
- матрица управления В^ =
Скалярный сигнал измерений zx формируется при этом в соответствии с
первым уравнением из (4.11.44), так что матрица измерений будет иметь вид
Н = [1 о]. (4.11.45)
Таким образом, в терминах теории оценки состояний уравнения ошибок
горизонтирования ИНС в направлении оси Хо следует записать как
ix - Ах -хх + Bw -их +Ь •
(4.11.46)
zx — Н - хх.
Аналогично для системы (4.11.40) (горизонтирование в направлении оси
Zo) справедливо
х_ = Az xz +BW a. + bz;
(4.11.47)
zz = Hxz,
где обозначено:
- вектор состояния xj = [ AV ® ax ];
427
- вектор управления u J = [ и и щх ];
- вектор возмущений bj = [Atz ех];
А Г0
- матрица состояния Az - ;
Г1 О'
- матрица управления В^ = .
Сигнал измерений z2 в этом случае определяется согласно второму уравне-
нию системы (4.11.44), а матрица измерений совпадает с (4.11.45).
Для реализации в БЦВМ дискретных алгоритмов оценивания необходимо
уравнения (4.11.46) и (4.11.47) выразить в форме, соответствующей (4.11.28). При
этом постоянные переходные матрицы Фх и Фг согласно (4.11.24) и (4.11.25) бу-
дут иметь вид
Ф
1 g-Tl Ji -g-T
О 1 ’ z 0 1
(4.11.48)
Дискретные аналоги матриц управления Вх и Bz по осям Хо и Zo можно
определить из (4.11.27) с учетом приведенных выше значений матриц В^ и В^:
Векторы состояния x,(t) систем (4.11.46) и (4.11.47) можно оценивать с
помощью фильтра Калмана (4.11.26)-(4.11.31) на каждом такте вычислений Т,
если известно уравнение измерений z(t) и должным образом выбран К - коэф-
фициент усиления фильтра. Уравнения измерений на i-м такте оценивания оши-
бок построения вертикали для систем (4.11.46) и (4.11.47) имеют согласно
(4.11.44) следующий вид:
Ш = Vx*[i] - Vxo[i]; zz[i] = Vz*[i] - Vz«[i]. (4.11.50)
Сами же составляющие скорости алгоритмически определяются рекур-
рентным суммированием спроектированных на оси БСК Хо и Zo приращений ка-
жущейся скорости AWX и AWZ за время i-ro такта Т вычислений, которые посту-
пают с выходов акселерометров горизонтальных каналов ОНС и ВНС:
zx[i] = Vx[i]-V°[i]; zz[i] = Vz*[i]-Vz°[i]. (4.11.50)
V x0[i] = V“[i-l] + AWx°[i];
V °[i] = Vz[i-1] +AWz[i];
V x’[i] = Vx-[i-l] + AWx-[i]; ( }
Vz*[i] = Vz-[i-l] + AWz‘[i].
Представленный перечень формульных соотношений (4.11.26) - (4.11.31) и
(4.11.45)-(4.11.51) реализует алгоритмы горизонтирования ИНС. Как показыва-
ет опыт разработки и применения аналогичных систем, приведенные алгоритмы
428
решают поставленные задачи с приемлемой для практических целей точностью.
2. Алгоритмы азимутальной выставки ИНС
Вопросы выставки азимутальных каналов ИНС при выполнении предстар-
товой подготовки занимают особое место и требуют специальных подходов. В
целом различают следующие способы начальной выставки:
- передача заранее известной ориентации на расстояние;
- векторное согласование измерений,
Дистанционная передача ориентации от ОНС к ВНС в случае выставки на
подвижном основании осуществляется с помощью оптических или механических
средств измерений.
Оптические системы (системы прицеливания) весьма эффективны в назем-
ных условиях выполнения предстартовой подготовки. Они обеспечивают высо-
кую точность азимутальной выставки ИНС за очень непродолжительное время
(единицы секунд). Однако установка оптических систем на подвижное основание
сопряжена со многими конструктивными и технологическими трудностями, и в
настоящей работе этот метод не рассматривается.
Способы механической передачи ориентации основаны на увязке угловых из-
мерений, одновременно выполняемых в ОНС и ВНС. По сути это означает, что на-
чальное значение угловой ориентации ВНС определяется с использованием извест-
ных по показаниям ОНС курсового или азимутального углов подвижного основа-
ния. Это требует предварительного согласования положения установочных баз
опорной и выставляемой систем и сохранения его стабильности в условиях случай-
ных деформаций ПдО. Обычно точность такого способа начальной выставки со-
ставляет десятки дуговых минут, что для практической навигации неприемлемо.
По этой причине для ПдО основным способом начальной выставки являет-
ся векторное согласование измерений. Выше были рассмотрены базирующиеся
на применении этого способа алгоритмы горизонтирования ИНС. При этом в ка-
честве сопоставляемых векторов принимались векторы относительной скорости
Vo и V*, одновременно регистрируемые в ОНС и ВНС по показаниям акселеро-
метров двух систем.
Для начальной выставки азимутального канала ИНС с этой целью исполь-
зуется метод т.н. «гирокомпасирования», заключающийся в сопоставлении век-
торов абсолютной угловой скорости ю0 и о*двух систем. Угловая скорость ©*
ВНС формируется по показаниям ее гироскопов, а соответствующий ей параметр
©о вычисляется с использованием навигационных данных ОНС.
Следует отметить, что в случае выставки на неподвижном основании в ка-
честве угловой скорости <о0 принимается точно известное значение угловой ско-
рости вращения Земли £1.
Ниже приведены алгоритмы начальной выставки, позволяющие определить
угол азимутального рассогласования ау выставляемой ИНС методов гирокомпа-
сирования. Алгоритмы основаны на математической модели погрешностей угло-
429
вой ориентации ИНС (4.11.37).
Анализ системы (4.11.37) показывает, что азимутальный угол невыставки
ИНС ау можно определить из первого или третьего уравнений ошибок. В целях
повышения информативности при одновременном снижении размерности векто-
ра состояния эти уравнения целесообразно просуммировать, что дает в итоге
ах +az =(а>о -а>°)-ау +со° -(ах -а2)-е; -e*z. (4.11.52)
Если ввести обозначения
60^ = dx + az;
+ ф (4.11.53)
^xz = + £Z3
то (4.11.51) совместно со вторым уравнением из (4.11.37) образуют модель со-
стояния системы, которая запишется в виде
бОхг — (®z ~ (рх ) ‘ (Ху + Шу * ((Хх — 0С2) + Ехг + П©^, (4 11 54)
ay =a>° az -ш® ах + 8* +ишу.
В терминах обозначений, принятых для (4.11.46) и (4.11.47), полученной
модели можно поставить в соответствие:
- вектор состояния xj -[80^ ay];
- вектор обусловленных инструментальными погрешностями гироскопов
ПОСТОЯННЫХ возмущений bj = [8XZ Еу];
матрицу состояния Ау -
0
0
0
- матрицу управления Вуу =
- вектор детерминированных управляющих воздействий - [и^ ишу],
в котором составляющие u0xz и иыу определяются с использованием
оцениваемых переменных состояния ax, ay, a2,30Х2так, что
uexz = fi>J-(ax-a,.)--—2-; (4.11.55)
uoy =ш° -dz -0)° -ax (4.11.56)
Для возможности применения методов линейной фильтрации необходимо
еще сформировать уравнение измерений по типу (4.11.21). Определим его исходя
из следующих соображений.
Как следует из анализа системы уравнений ошибок ориентирования, вектор
d соответствует угловой скорости вращения истинных осей БСК X0Y0Z0 отно-
сительно их неточности положения XYZ, в связи с чем справедливо
dY =со* -со° : a =со* -св®. (4.11.57)
Л Л. Л. J £л Lt L» \ /
430
Здесь со*, со* - составляющие проекций угловой скорости БСК, посчитан-
ные по показаниям ВНС, а со° и - те же составляющие, полученные по пока-
заниям ОНС.
Далее из (4.11.52) и (4.11.57) следует, что
80XZ = — 0
(4.11.58)
где
(4.11.59)
+fi>®)dx; 0^ = J(«>* +<)dt -
о о
соответственно суммарное приращение углов поворота истинных и выставляе-
мых осей БСК за время t начальной выставки.
Интегралы 0^ и ©^определяются в БЦВМ рекуррентным суммированием
спроектированных на оси БСК Хо и Zo элементарных углов поворота приборных
осей ИНС Д0Х и A0Z, поступающих с гироскопов двух систем с тактом Тработы
системы.
Таким образом, уравнение измерений для системы (4.11.53) будет иметь вид
(4.11.60)
zy = 8©^ =Н-ху,
где матрица измерений Н = [1 0] имеет то же, что и ранее, значение.
В дискретном времени системе (4.11.54) соответствуют:
- матрица перехода состояний
‘1 (щО-о^)’Т!
0 1
Ф
УМ-1
матрица управления
Т О.5 (со°-й)0) Т2
0
(4.11.61)
(4.11.62)
By[i] =
Т
Для применения процедуры оптимальной линейной фильтрации необходи-
мо определить также уравнения измерений, вектор коэффициентов усиления
фильтра Калмана и вектор управления.
В соответствии с изложенным выше дискретное уравнение измерений
можно выразить последовательностью рекуррентных равенств
zy[i]=0°xx[i]-0*o[i];
0?[i] = 0°x[i-l] + A0ox[i];
0°[i] = 0z°[i-l] + A0°[i]; (4.11.63)
е;ш=0;[1-1]+д0:ш;
е^ой-ц+декч.
431
Вектор коэффициентов усиления фильтра определяется равенствами
(4.11.29) - (4.11.31), а составляющие вектора управления - равенствами (4.11.55)
и (4,11.56). Приведенный перечень соотношений реализует процедуру азиму-
тальной выставки ИНС методом гирокомпасирования.
4.11.5 Особенности начальной выставки бесплатформенных ИНС
Инерциальные навигационные системы, применяемые в системах управле-
ния PH, могут быть платформенного либо бесплатформенного типов (БИНС).
Первые из них построены на базе гиростабилизированных платформ (ГСП).
Функции, выполняемые ГСП, позволяют обеспечить требуемую пространствен-
ную ориентацию трехгранника, образованного осями чувствительности инерци-
альных измерителей, и, кроме того, получить информацию об угловом движении
PH относительно платформы, т.е. определить параметры ориентации. В качестве
параметров, характеризующих* ориентацию PH, используется система углов, из-
мерение которых осуществляется датчиками, установленными на осях карданова
подвеса платформы.
В, системах второго типа (БИНС) источники инерциальных измерений (ги-
роскопы, акселерометры) устанавливаются не на ГСП, а непосредственно связа-
ны с корпусом PH, навигационные параметры которой необходимо определять. С
физической точки зрения основным отличием платформенной ИНС от бесплат-
форменной является то обстоятельство, что в первом случае ГСП физически мо-
делирует навигационную систему отсчета, а в БИНС она должна решаться анали-
тически. При этом задача определения угловой ориентации PH решается в спе-
циализированном вычислителе (СВ) БИНС алгоритмически при обработке ин-
формации, поступающей от инерциальных измерителей [35].
Вне зависимости от вида приборного оформления (ГСП или БИНС) общим
в обоих случаях является то, что к началу работы СУ должна быть осуществлена
т.н. ’’начальная выставка” ИНС. Она заключается в определении ориентации из-
мерительных осей системы относительно заданных направлений.
Как отмечалось ранее, целью начальной выставки ИНС является построе-
ние на борту PH к моменту завершения предстартовой подготовки системы от-
счета, в которой решаются задачи инерциальной навигации и управления поле-
том. При этом подразумевается либо аналитическое определение относительной
угловой ориентации двух систем координат - измерительной и базовой, либо фи-
зическое приведение двух этих систем в согласованное положение.
Рассмотренные выше способы начальной выставки ИНС на базе ГСП под-
разумевали формирование на выходах алгоритмов управляющих сигналов кор-
рекции, физически совмещающих ГСП. с плоскостью местного горизонта точки
старта и обеспечивающих требуемую ориентацию измерительных осей ГСП в
этой плоскости (выставка в азимут).
При работе с БИНС отсутствует возможность физического совмещения из-
мерительного и базового трехгранников. Поэтому здесь в процессе начальной
выставки должны быть вычислены параметры, характеризующие взаимную, ори-
ентацию трехгранника, связанного с PH, и трехгранника, принимаемого за базо-
432
вый. При этом можно считать, что трехгранник, образованный измерительными
осями инерциальных чувствительных элементов БИНС, совпадает с осями свя-
занной системы координат (ССК) PH либо их взаимное положение известно.
Вычисление в схеме БИНС параметров ориентации основано на использо-
вании кинематических соотношений и по существу предполагает решение в спе-
циализированном вычислителе БИНС задачи определения углового положения
твердого тела по его известной угловой скорости. В зависимости от выбора пара-
метров ориентации уравнения, решаемые в БИНС, будут иметь различный вид.
Так, направляющие косинусы между связанным трехгранником и неизменно ори-
ентированным инерциальным можно определить из матричного уравнения Пуас-
сона [5]
В = [<о]гВ, (4.11.64)
где В = [Ьу] - (3*3) матрица направляющих косинусов, а кососимметрическая
матрица [ш] t, именуемая матрицей вращения, имеет вид
(4.11.65)
(jfy О
Здесь сох1; coyl;<ozI - проекции вектора абсолютной угловой скорости объек-
та « на связанные оси. Нетрудно видеть, что для решения в СВ уравнений
(4.11.64) и (4.11.65) следует в момент начала работы системы ввести начальное
значение матрицы В(0) и затем в процессе работы вводить информацию о векторе
(О.
Если ориентацию определять в терминах алгебры кватернионов, то необхо-
димо иметь соотношения для вычисления параметров Родрига-Гамильтона
Они задаются следующей линейной системой дифференциальных
уравнений:
d Xq = 0.5- ' 0 <»xl 0 -fDyi -СОу) А-о V (4.11.66)
dt юУ1 -<»zl 0 ®Х1 ^2
_х3_ _®zl G)yl - <х>Х1 0 Лз_
Решение представленной системы возможно, если заданы соответствующие
начальные условия ио искомым параметрам Хо; А,1Д2;Х3, а также имеется ин-
формация о проекциях вектора абсолютной угловой скорости на оси связанной
системы координат <ох1, соу1, cozl.
Поскольку различные параметры ориентации характеризуют, в конечном
итоге, одно и то же вращение, они могут быть получены друг из друга по форму-
лам взаимного пересчета. Так, найденные значения параметров Родрига-
Гамильтона используют для вычисления указанной выше матрицы направляю-
433
щих косинусов В между осями связанной и инерциальной систем координат в
виде [5]
В =
А2 +1^ -Х22 -Ц 2 '(Х1 -Х2 +Х0 -Х3)
2-(VX2-V^)
2 • (Х| * Л-з + Xq * Х2) 2 • (Х2 • Х3—Xq*?v|)
2 • — Xg • X2)
2• (X2 * + Xq • A.^)
(4.11.67)
Приведенную матрицу взаимной ориентации двух координатных систем
применяют в СУ как на этапе начальной выставки БИНС, так и для решения за-
дач управления PH.
Таким образом, вне зависимости от принятого способа описания вращений
можно выделить следующих три существенных момента:
- задача определения параметров ориентации но известной угловой ско-
рости со может быть решена независимо от задачи определения навига-
ционных параметров;
- поскольку известна (измеряется) абсолютная угловая скорость связанно-
го трехгранника ш, ориентация (параметры вращения) этого трехгран-
ника будет определена относительно неизменно ориентированной в про-
странстве инерциальной системы координат (ИСК);
- к моменту начала работы системы должно быть известно взаимное по-
ложение неизменно ориентированного инерциального и связанного
трехгранников.
Последний из перечисленных моментов в рассматриваемом контексте име-
ет особую важность, поскольку составляет содержание основной задачи началь-
ной выставки БИНС.
Рассмотрим вариант решения поставленной задачи на основе оценки мат-
рицы углового рассогласования между априорно заданным в начальный момент
времени и ’’правильным’' (истинным) положением инерциального трехгранника
(т.е. систем координат X-YfZ* иХД^). Примем для дальнейших рассуждений
систему осей трехгранника XjYjZj в качестве БСК, а систему X*YfZf - в каче-
стве ВСК.
Состояние оцениваемой системы может быть представлено в данном слу-
чае на основе уравнений (4.11.64) и (4.11.65), которые описывают изменение ори-
ентации ССК (или приборных осей БИНС) относительно неподвижной ИСК.
Применительно же к практической реализации этих уравнений необходимо сде-
лать следующие уточнения.
Строго говоря, истинное значение матрицы В неизвестно. В СВ по выход-
ным сигналам гироскопов вычисляется оценка матрицы В* относительно некото-
рого ее начального априорно заданного значения В*(0). Пусть в СВ вычислена
ортогональная матрица В*, являющаяся решением дифференциального уравне-
ния
В* = [©],-В’, (4.11.68)
где [<d]i - кососимметрическая матрица вращения вида (4.11.65).
434
Поскольку матрица В* содержит неизвестное заранее рассогласование, ее
можно связать с матрицей истинной ориентации с помощью корректирующей
матрицы Ма :
В = В*Ма. (4.11.69)
Природу этой корректирующей матрицы можно понять, продифференциро-
вав уравнение (4.11.69) с учетом (4.11.64) и (4.11.68):
В = В*Ма+В*Ма =WrB*-Ma +В*-Ма
= [о]1-В + В*-Ма -В + В*<.
Отсюда следует, что В* • Ма = 0.
Поскольку матрица В* ортогональна и, следовательно, имеет обратную
матрицу, то выполняются условия
Ма =0; Ма = const. (4Л1.70)
Таким образом, элементы матрицы коррекции Ма являются постоянными
числами. Этот результат по существу отражает тот факт, что оси вычисленного в
СВ трехгранника будут повернуты относительно базового трехгранника на неко-
торый постоянный малый векторный угол.
В физическом смысле матрица Ма является постоянной потому, что она
описывает преобразование между двумя системами координат, фиксированными
на момент начальной выставки в инерциальном пространстве: истинной исход-
ной системой осей и ошибочной системой X*Y/Z*, определяемой оцен-
кой В*(0). Поскольку угол поворота а между этими системами можно принять
малым, то матрица Ма представима в виде, аналогичном (4.11.2). Обозначив
матрицу
0 az
-az 0
av -~ax
J A
(4.11.71)
из (4.11.70) можно получить
(4.11.72)
Здесь ax; ay; az - составляющие векторного утла невыставки а двух рас-
сматриваемых координатных систем, заданных проекциями на оси ИСК.
В рамках принятых допущений соотношение (4.11.72) представляет собой
уравнение состояния системы. Проиллюстрируем на его основе решение задачи
начальной выставки методами оптимальной линейной фильтрации. Для органи-
зации цикла оценивания полученное матричное равенство должно быть дополне-
но соответствующими уравнениями измерений. Их можно найти следующим об-
разом.
435
Ускорение а0 и угловая скорость <о0, определяемые в исходной инерци-
альной системе отсчета, связаны с аналогичными векторными величинами в ко-
ординатах ССК (а;со) следующими соотношениями:
а0=(В)т-а; (4.11.73)
= (В)т-<о. (4.11.74)
Для рассматриваемого здесь случая неподвижного основания величины а и
о в ССК априорно известны:
a = g; ш-П, (4.11.75)
где g и Q - соответственно векторы ускорения силы тяжести и угловой скорости
вращения Земли.
Значение матрицы В известно неточно; спецвычислитель располагает толь-
ко ее расчетным значением В*,
Измеряемые акселерометрами и гироскопами выходные параметры at и ©t
можно представить в виде сумм их истинных значений а, о и составляющих, ха-
рактеризующих случайные ошибки Ааь А со,. Тогда справедливыми будут равен-
ства
a, =a + Ai>q; (4.11.76)
©t = о + А<о1. (4.11.77)
Здесь ошибки Aat и А со, включают в себя в общем случае инструмен-
тальные погрешности, а также ошибки из-за внешних возмущений.
Полученные измерения совместно с матрицей В* используют для оценки
параметров, входящих в уравнения (4.11.73) и (4.11.74):
а0 = (В’)т-а,; (4.11.78)
©0 =(В’)Т в»,. (4.11.79)
Разница между величинами, вычисленными по двум последним уравнени-
ям, и их точными значениями, известными в исходной системе отсчета, дает ве-
личину измеряемого смещения:
Z. =а0 -»0 =(В-)Т а, -а0; (4.11.80)
2ш = о0-<»о^(в')Т (4.11.81)
Из равенств (4.11.12) и (4.11.71) следует, что
Ма=1 + [а], (4.11.82)
где I- единичная (3x3) матрица, а [а] - кососимметрическая (4.11.71) матрица
искомых начальных угловых рассогласований между ССК и ИСК, которые со-
гласно (4.1 Г.70) являются постоянными величинами.
После подстановки соотношений (4.11.82), (4.11.69), (4.11.73), (4.11.76) в
уравнение (4.11.80) получим
436
Za = (В‘)т • a, - (В)т • а = (В’)т [а + Да,]-[В* + В* -[а] ]т- а =
= [а]-(В‘)т а + (В*)т • Да,,
ИЛИ
Za = [а]*(В*)т-а +Да, (4.11.83)
где Да = (В*)т ♦ Да! - случайные ошибки измерений составляющих ускорения.
Аналогичное выражение можно получить и для измерений угловой скоро-
сти
~[а]«(В*)т о + Дш, (4.11.84)
где До) = (В*)т • Д©! - случайные ошибки определения составляющих угловой
скорости.
В силу свойств матрицы [а] величины Za и Z(0 являются линейными
функциями углов ax,ay,az. Действительно, если ввести в рассмотрение векторы
a, =[ах ау az]r; (4.11.85)
ha =(В’)Т a-[hax hay hazp; (4.11.86)
hu =(B*)T e>=[h,3X hmy (4.11.87)
то уравнения измерений можно переписать в виде
Za = Наа + Да; (4.11.88)
г^На-а + До, (4.11.89)
обычно используемом для применения методов оптимальной линейной фильтра-
ции. В последних соотношениях матрицы На и запишем следующим обра-
зом:
0 haz hay
на- haz 0 — hax ; (4.11.90)
~ Ьау hax 0
0 “ hoz h0)y 1 '1 *
hcoz 0 ЬШх (4.11.91)
_ “ hwy h(ox 0
Объединяя полученные соотношения в одно векторно-матричное уравнение
(Я.Н. 92)
измерений, приходим в итоге к равенству'
Z = H-a + §,
rza'
где (6x1) - вектор измерений Z =
437
(6x3) - матрица наблюдений Н -
(6x1) - вектор случайных ошибок § =
Неизвестным в (4.11.92) является вектор а углов невыставки БИНС.
Для возможности применения каких-либо методов оптимальной линейной
фильтрации необходимо иметь также уравнение состояния, которое обычно запи-
сывают в виде дифференциального равенства относительно вектора неизвестных
параметров:
а = Ачх + р,
где А - матрица состояния; р - векторный шум процесса.
Воспользовавшись выражением (4.1.80), установим, что
d = 0. (4.11.93)
Совокупность соотношений (4.11.80), (4.11.81), (4.11.88). (4.11.89) доста-
точна для организации цикла оптимального оценивания углов невыставки а, не-
обходимых при определении корректирующей матрицы Ма начального рассогла-
сования двух координатных систем БСК и ВСК.
В качестве оптимального наблюдающего устройства можно применить ли-
бо приведенный выше дискретный фильтр Калмана, либо рекуррентный алго-
ритм метода наименьших квадратов (МНК).
Если задачу начальной выставки БИНС решать, например, с использовани-
ем процедуры МНК, то алгоритм оценки вектора неизвестных ошибок сц будет
представлен в виде
«1 = «i-i + Кч • (Zi - Hi • aj-j);
К;=РГНТ; ' (4.11.94)
Pi = Рц - Pu • H? • (Hi • Pi.! H? +1)"1 • Hi P^.
Здесь a, - оценка (3x1) вектора состояния на i-м такте процесса;
Zj - (6x1) вектор текущих измерений; Hj - (6x3) матрица наблюдений; Ki - (3x6)
матричный коэффициент усиления; Р; - (3x3) корреляционная матрица системы.
Заметим, что случайные ошибки из-за влияния внешней среды алгоритмом
(4.11.94) обычно эффективно парируются. Однако наличие систематических инст-
рументальных погрешностей измерителей БИНС Да и Ай приводит к смещению
оценки угла а и некоторой неточности определения искомой матрицы невыставки.
После оценки углов а может быть найдена матрица Ма малого углового
рассогласования между истинным Xj^Z, и вычисленным X*Yi*Zt положением
ИСК в виде соотношения (4.11.82), а также - по формуле (4.11.69)- точное зна-
чение матрицы В, характеризующей мгновенное положение ССК относительно
осей истинной инерциальной системы.
Это и является решением задачи начальной выставки БИНС.
438
4.12 Системы калибровки бортовых гироскопических приборов
В начале 60-х годов прошлого столетия в СССР был дан старт созданию
межконтинентальных баллистических ракет (МБР). Их системы управления (СУ)
строились на базе инерциальных систем навигации (ИНС).
ИНС состояла:
- из измерительного прибора, в качестве которого использовали гироста-
билизатор (ГС) с установленными на его стабилизированной платформе
(ГСП) измерителями скорости и углового положения;
- обслуживающей электронной аппаратуры;
- счетно-решающего устройства.
Первые две компоненты составляли комплекс командных приборов (ККП).
В качестве счетно-решающего устройства применяли вначале электромехани-
ческий счетно-решающий прибор (скорость ракеты - угол поворота вокруг оси пре-
цессии гироскопического интегратора). Затем использовали дискретные счетно-
решающие приборы (скорость - сумма импульсов, поступивших с преобразователя
информации гироскопического инте1ратора).
С начала 70-х годов внедрена цифровая обработка с помощью бортовой
цифровой вычислительной машины (БЦВМ), что кардинально изменило ситуа-
цию с решением навигационной задачи.
Рассеивание (отклонения) точек падения головных частей относительно за-
данной точки прицеливания практически полностью определялось погрешностя-
ми ИНС. При этом закон распределения отклонений от точки прицеливания при-
нимался нормальным.
В качестве критериев оценки использовали различные характеристики
упомянутого закона распределения [54].
Следует иметь в виду, что высокая точность попадания должна обеспечи-
ваться в автоматическом режиме, без оптического контакта с целью, и поддержи-
ваться в течение всего времени эксплуатации.
Совершенно очевидно, что спроектировать и изготовить прибор, который
изначально обладал бы требуемыми точностными характеристиками, а также
обеспечивал их длительное сохранение, невозможно.
Многочисленные исследования показали, что любая погрешность измери-
теля имеет три составляющие:
- систематическую, медленно меняющуюся в функции времени;
- случайную, изменяющуюся от включения к включению;
- флуктуационную.
Влияние третьей составляющей пренебрежимо мало, так как в процессе по-
лета происходит естественное сглаживание информации.
Первая составляющая в 60-е годы была в 20 - 30 раз больше второй, а кро-
ме того, обладала некоторой стабильностью. Поэтому естественной стала задача
её определения (калибровка) и учета в полете.
Высокая эффективность указанного выше способа привела к созданию сис-
темы калибровок (СК), которая стала неотъемлемой составляющей системы
управления. Следует отметить, что применение СК позволило упростить конст-
Х 439
рукцию измерительных устройств путем исключения регулировочных узлов (при
этом допускается повышение соотношения между первой и второй составляю-
щими до 100:1).
Снижение остаточного влияния первой составляющей достигается с помо-
щью выбора периода проведения калибровок (обычно в диапазоне трех - шести
месяцев выбирается после накопления статистических данных при эксплуата-
ции).
Дальнейшего повышения точностных характеристик ИНС с ГС можно дос-
тичь путем исключения второй составляющей.
Для использования в различных ситуациях создаются свои системы калиб-
ровок, а именно:
- заводская (ГС);
- в условиях эксплуатации ГС на неподвижном основании;
- в условиях эксплуатации ГС на качающемся основании;
- в условиях эксплуатации ГС на подвижном основании;
- СК бесплатформенной инерциальной системы навигации (БИНС).
В настоящей главе рассмотрены вопросы создания систем калибровок с
подробным изложением особенностей СК ГС на неподвижном основании. В по-
становочном плане рассмотрены также другие СК.
4.12.1 Основные положения
Особенностью калибровок погрешностей ГС является невозможность их
непосредственного измерения (кроме ориентации нормали к грани оптической
призмы). Поэтому используется метод косвенных измерений, при котором опре-
деляется не сама интересующая нас величина, а некоторая функция от совокуп-
ности интересующих величин. Затем путем математической обработки опреде-
ляются искомые погрешности ГС.
При разработке системы калибровок необходимо выполнить следующие
операции:
- определить (принять) модель погрешностей измерения;
- определить способ создания требуемого эталонного воздействия на измери-
тели;
- разработать алгоритмическую схему обработки информации;
- создать соответствующее программное обеспечение для проведения ка-
либровок и учета их результатов в полете.
4.12.2 Модель погрешностей измерения
Гиростабилйзатор (ГС) предназначен для выдачи первичной информации о
движении ракеты в навигационную задачу, решаемую БЦВМ в палете. В практи-
ке создания СУ использовались ГС с различным числом и последовательностями
поворота карданных подвесов, типом измерителей линейных ускорений (акселе-
рометры, гироскопические интеграторы, датчики отвесной линии, нуль-
индикаторы скорости), типом гироблоков для обеспечения стабилизации ГСП.
Для рассмотрения принципов построения СК примем трехосный ГС, опи-
санный ниже.
440
На рис. 4.12.1 показана кинематическая схема ГС с последовательностью
поворотов вращение-рыскание-тангаж.
Рисунок 4.12.1. - Кинематическая схема ГС
На рис. 4.12.1 приняты обозначения:
ГСП - гиростабилизированная платформа,
КД - кодовый датчик,
В - ось вращения,
Р - ось рыскания,
Т - ось тангажа.
Допустимые углы поворотов (прокачки) составляют:
Т -200°,+ 150°;
Р ± 45°;
В ± 200°
Положительное значение углов КД соответствует вращению подвижных
частей ГС против хода часовой стрелки, если смотреть со стороны положитель-
ного направления соответствующей оси.
Рис. 4.12.1-4.12.6 дают представление о возможном варианте состава и
размещения измерителей на ГСП. Рассмотрим особенности их функционирова-
ния по группам.
4.12.2.1 Маятниковые акселерометры (МА)
Назначение - измерение интеграла от проекции кажущегося ускорения на
ось чувствительности [55].
Действующая сила обусловлена кажущимся ускорением, поэтому исполь-
зуются равноправные выражения: МА предназначен для измерения кажущегося
ускорения, а также для измерения интеграла от проекции кажущегося ускорения
на ось чувствительности (кажущейся скорости). Реально из МА на вход навига-
ционной задачи поступает приращение кажущейся скорости за выбранный такт.
Размещение МА показано на рис. 4.12.2.
441
Рисунок 4.12.2 - Размещение МА
На рис. 4.12.2 приняты обозначения:
oti, pi, у] - углы установки МА относительно плоскости ХгУг;
«2, Рг> Y2 - углы установки МА относительно плоскости xrzr;
хг, Уг5 zr - оси гироскопической системы координат.
Направления отсчета углов аь а2, рь Рг, Уг, указанные стрелкой, соответст-
вуют положительному значению. Для угла yt указанное направление соответст-
вует отрицательному значению.
Номинальные значения углов установки выбираются из конструктивных
соображений с контролем влияния погрешностей их реализации на отклонения от
цели. Методика такой оценки является предметом отдельного исследования и
здесь не рассматривается.
Погрешности измерения МА кажущейся скорости состоят из двух групп:
- собственные погрешности МА;
- погрешности установки.
В первую группу входят две основные составляющие, определенные из фи-
зических соображений:
- вариация масштабного коэффициента (погрешность определения кажу-
442
щейся скорости пропорциональна измеренному значению);
- смещение нуля или тяжение (погрешность определения кажущейся ско-
рости пропорциональна времени).
Физический смысл погрешностей установки ясен из рис. 4.12.2.
Учитывая изложенное, математическую модель погрешностей измерения
МА можно представить в виде
dW SW
8WAa =Wa -8ц + 8to + ——^Sa, +—^8a2;
da2
dW 5W
5WAp = Wp -8цр + 8тр + —^-8pi + —^8₽2; (4.12.1)
^P1 4^2
aw aw
8Wa = W • 8Иу + 8т + — -Sy, + ^8y2,
on
где 8- вариация параметра; цА - масштабный коэффициент МА; т-тяжение;
W - кажущееся ускорение.
Для расчета проекций кажущегося ускорения на оси чувствительности МА
имеем
WA=Ar_A«Wr,
(4.12.2)
где
WA, Wr - векторы кажущегося ускорения в проекциях на оси чувстви-
тельности акселерометров и оси гироскопической системы координат.
Матрица перехода имеет вид
или
г-А - 'coso^ cosa2 cosP]COsp2 ^cosy! cosy2 sina2 sin р2 siny2 -sin a,] cosa2^ -sin Pi cosp2 -siny]cosy2 ; , (4.12.3)
(Aa /Yr-A
Аг-а = аг-а > (4.12.4)
<АГ-А> -
где А“_а, а£. -А ’ ^Г-А “ матрицы-строки.
Расчет частных производных осуществляется по формулам
gwa=aA^.A w . awa^_A w
да{ дщ Г’ да2 да2 Г
(4.12.5)
и т.д.
Соотношения (4.12.1) ~ (4.12.5) позволяют определить влияние главных по-
грешностей акселерометров ГС на вариации измеренных значений. Для получе-
ния представления о численных характеристиках в табл. 4.12.1 и 4.12.2 приведе-
ны данные по одному из возможных ГС.
443
Таблица 4.12.1 - Углы установки акселерометров
Акселерометры Углы
1 2
а 20° 20°
р 0° 70°
Y -20° 20°
Таблица 4.12.2 - Предельные значения составляющих
погрешностей
Параметры Предельные (За) значения
Стабильные Случайные
8т 8-10'3м/с2 1,0-10" м/с2
8ц 3-10'2 1,010’5
5а|(рь у,) 2-10'3 рад 210’5 рад
8а2(р2, Уг) 210’3 рад 4-10’5 рад
4.12.2.2 Гироскопические блоки (ГБ)
Назначение - выдача управляющих сигналов для стабилизации ГСП в
инерциальном пространстве.
На рис. 4.12.3 показана схема расположения выходных осей ГБ независимо
от их конкретной конструкции.
Hj Zj
Рисунок 4.12.3 - Схема расположения выходных осей ГБ
На рис. 4.12.3 приняты обозначения:
Hj (j=T, Р, В) - вектор кинетического момента;
444
ОЧ, - ось чувствительности ГБ (х,);
у, - ось подвеса;
Др - осевая разбалансировка;
Дг - радиальная разбалансировка.
Ориентация осей ГБ относительно осей гироскопической системы коорди-
нат (ГСК) показана на рис. 4.12.4 и 4.12.5. Разнесение на два рисунка вызвано
удобством изображения.
zr
Рисунок 4.12.4 - Ориентация осей ГБ
На рис. 4.12.4 приняты обозначения:
8Т - угол разворота ГБТ,
§в = бр - углы разворота ГБв, ГБр.
445
Рисунок 4.12.5 - Расположение осей чувствительности
Функционирование ГБ основано на свойстве гироскопа сохранять неизмен-
ной свою ориентацию в инерциальном пространстве. Однако реально возникают
возмущающие факторы, приводящие к изменению этого положения (дрейф или
скорость ухода) и накоплению углового отклонения.
Уход происходит вокруг ОЧ из-за моментов, возникающих вокруг оси под-
веса. Таких моментов три: один - не зависящий от перегрузки и два - из-за разба-
лансировки.
Разбалансировка происходит из-за смещения центра масс Xj Аг вдоль оси
(радиальная разбалансировка) и вдоль оси Zj Лр (осевая разбалансировка).
В первом случае скорость ухода пропорциональна проекции вектора уско-
рения на ось Zj, а во втором - на ось Xj.
Из приведенного выше следует, что скорость ухода ГСП вокруг осей Р, В, Т
можно определить по формуле
W W
5<x>j = + AcOpj —-- + AcBrj —-, (4.12.6)
где A(oTj - уход, не зависящий от перегрузки; Acopj - уход из-за осевой разба-
лансировки (на единицу перегрузки); Ao)rj - уход из-за радиальной разбаланси-
ровки (на единицу перегрузки); j = Т, Р, В; g = 9,8 м/с2.
Для определения вектора кажущегося ускорения в проекциях на оси ГБ]
имеем
wj =
W •
XJ
w
yj
Wzi
= CjWr,
(4.12.7)
446
где СР = r cos8B -sin8B sin8B cos8B o' 0 - r-sin8B - cos 8B cos 8B - sin 8B O'' 0
< о 0 b 0 1>
0 0 Г
Ст = cos 8у sin8T 0
k-sin8T cos8T 0,
Погрешности угловой ориентации ГСК относительно начальной стартовой
системы координат (НССК) можно определить в соответствии с формулой
t
Ф(0 = Ф(0) + J8e>rdt, (4.12.8)
О
где Ф(0) - вектор погрешностей начальной выставки ГСП; 5<ог - вектор угло-
вой скорости ухода в проекциях на оси ГСК.
Вектор 8(вг представим в виде
^cosSg -sin8B O'1
8or = 8oy = sin8B cos8B 0 (4.12.9)
<.8coJ 0 L ^8©т у
Соотношения (4.12.6) -(4.12.9) позволяют определить погрешности ориен-
тации ГСП для оценки их влияния на решение навигационной задачи как в поле-
те, так и при наземных испытаниях.
Из рис. 4.12.4 следует, что оси кинематических моментов расположены:
ГБТ - в плоскости хгуг;
ГБв, ГБр - по нормали к плоскости хгуг;
а оси подвеса развернуты:
ГБт - относительно оси хг на угол 5Т;
ГБВ - относительно оси хг на угол 8В;
ГБр - относительно оси уг на угол 8р.
При этом 8в - 8р, т.е. сохраняется ортогональность осей чувствительности
(рис. 4.12.5).
Моделируя полет ракеты, можно убедиться, что составляющие уходов
Л WxB А Wxp Л WzT
ДсорВ —~, АйКр , ДсогТ —— существенно зависят от указанных выше уг-
g g g
лов. Их значения выбираются из условия минимизации влияния на отклонения от
цели для критического варианта использования (обычно при пуске МБР на мак-
симальную дальность). После выбора углы поворота реализуются конструктивно
и в эксплуатации не изменяются. В рассматриваемом варианте ГС принято
8В = 8р = 35°. 8Г = 45°.
Рассмотренный прием оказывается эффективным также при пусках PH.
Для получения представления о численных характеристиках в табл. 4.12.3
447
представлены данные о стабильных и случайных составляющих уходов.
Таблица 4.12.3 - Стабильные и случайные составляющие уходов
Уходы Размерность Предельные (Зег) значения
Стабильные Случайные
Не зависящие от перегрузки угл.мин мин 0,4 0,05
Из-за осевой разбалансировки угл.мин мин на 1g 0,4 0,15
Из-за радиальной разбалансировки угл.мин мин на 1g 0,4 0,1
4.12.2.3 Датчики системы начальной выставки ГСП
Как известно, начальная выставка ГСП осуществляется не менее чем в два
этапа -грубое приведение (по датчикам команд) и точное приведение (по ин-
формации специальных измерителей и системы прицеливания - Спр).
Задача грубого приведения - предварительное горизонтирование ГСП по
осям тангажа и рыскания, а также разворот вокруг вертикальной оси на угол, со-
ответствующий требуемой грани (ТГ) многогранной призмы (МП).
ТГ выбирается таким образом, чтобы плоскость хгУг (рис. 4.12.2) была мак-
симально близкой к плоскости полета.
Задача точного приведения:
- выставка горизонтальной плоскости ГСП по нормали к геодезической вер-
тикали (или, в другой терминологии, к линии отвеса) с максимально воз-
можной точностью;
- выставка нормали к ТГ по информации от Спр.
Схема расположения измерителей показана на рис. 4.12.6.
Хг
НИСТ
0 -я грань МП
НИСР
Рисунок 4.12.6 - Схема расположения измерителей
448
НИСТ, НИСР - нуль-индикаторы скорости в каналах тангажа и рыскания.
НИСТ, НИСР - акселерометры, имеющие малый диапазон измерения и вы-
дающие информацию об интеграле от проекции кажущегося ускорения на ось
чувствительности в аналоговом виде.
Многогранная призма содержит 48 граней. Стабильные погрешности ори-
ентации граней МП относительно нулевой грани определяются при изготовлении
и паспортизируются.
Оси чувствительности НИСТ, НИСР и нормаль к нулевой грани МП задают
базовую систему координат ГСП.
Процедуры грубого и точного приведения используют при проведении ка-
либровок.
4.12.3 Эталонные воздействия на измерители ГСП
СК в рассматриваемом варианте функционирует в наземных условиях при
неподвижном основании. При этом в качестве эталонных используются естест-
венные воздействия, известные с высокой точностью:
- сила тяжести;
- скорость вращения Земли.
Строго говоря, акселерометр измеряет ускорение из-за реакции опоры,
удерживающей МА неподвижным.
Однако в инженерной практике общепринятым является выражение: «аксе-
лерометр измеряет ускорение силы тяжести». С учетом изложенного будем ис-
пользовать именно это выражение.
Вектор ускорения, обусловленный силой тяжести g, в месте работы СК оп-
ределяется заблаговременно с помощью специальной аппаратуры.
Как известно, для решения навигационной задачи в полете g рассчитывает-
ся в виде двух слагаемых - для принятого эллипсоида вращения и аномальной
части. Такое представление обеспечивает интегрально требуемую точность, но
для определения эталонного значения не пригодно.
Отклонение геодезической вертикали от нормали к эллипсоиду вращения
достигает уровня 5 угл. с.
Точность определения модуля g должна соответствовать уровню случай-
ных погрешностей МА. Для данных табл. 4.12.2 необходимо
Ag < ЗЮ'3 гал,
где 1 гал = 1 см/с2.
Угловая скорость вращения Земли
о>з = 7,292115-Ю"5 рад/с.
4.12.4 Особенности реализации СК
В основе процесса калибровки лежит измерение кажущейся скорости с по-
мощью калибруемых измерителей, сравнение ее с эталонными значениями и
дальнейшая математическая обработка полученных вариаций в целях определе-
ния численных значений калибруемых параметров. Очевидно, что поставленная
задача может быть решена только при условии их наблюдаемости. Для этого тре-
буется, чтобы влияние на измеренную вариацию кажущейся скорости каждой из
449
погрешностей было отлично от влияния остальных погрешностей. Решить эту за-
дачу можно только специальным образом, последовательно ориентируя ГСП для
проведения подрежимов, и оптимизацией обработки информации. Рассмотрим
особенности практической реализации работы СК.
4.12.4.1 Калибровка МА
Математическая модель погрешностей акселерометров в части параметров,
подлежащих калибровке, представлена в виде соотношения (4.12.1). Следует от-
метить, что углы ориентации ОЧ МА относительно нулевой грани МП (8ab 8рь
5у1) определяются при заводских калибровках с использованием специальной оп-
тической аппаратуры и в дальнейшем считаются неизменными. Таким образом,
для каждого акселерометра калибруются три параметра.
Рассмотрим порядок решения задачи на примере калибровки МАа.
С использованием соотношений (4.12.1) - (4J2.5) получаем при исходной
ориентации ГСП:
SWAtx =gsina2 -8ца + 8та +gcosa2 *5а2 (4.12.10)
или 5WAa = (gsina2 -8ца +8та + gcosa2 - 8a2)-1, (4.12.11)
где t - время измерения.
Очевидно, что определить из (4.12.11) искомые составляющие невозможно.
Для решения проблемы необходимо провести два дополнительных измере-
ния при специально выбранных ориентациях ОЧ МА относительно гравитацион-
ного горизонта (плоскости, перпендикулярной гравитационной вертикали). Ука-
занный способ использовался уже при становлении ракетного приборостроения.
Рассмотрим его суть.
Проведем измерение при ориентации ОЧ под углом +90°, а затем под углом
-90°. В этом случае дополнительно к (4.12.11) получаем
8W^=(g-6p „+6ra)-t;
(4.12.12)
sw;a90=(-g-8Ha+8Ta)-t.
Нетрудно убедиться, что соотношения (4.12.11) и (4.12.12) позволяют опре-
делить искомые значения 8ца, 8та, За2. При измерениях в одном запуске они бу-
дут включать в себя стабильные составляющие и реализовавшиеся значения слу-
чайных составляющих.
Аналогично могут быть определены параметры МАр и МАУ.
Таким образом, для калибровок параметров акселерометров требуется про-
веста измерения в семи ориентациях ГСП (по два на каждый МА и одно общее).
4.12.4.2 Калибровка гироблоков
Как показано в предыдущем параграфе, калибровку стабильных погрешно-
стей акселерометров можно провести для каждого из них отдельно. Это обуслов-
лено отсутствием влияния на измеряемую величину двух других МА. Подобный
подход неприемлем для случая калибровки гироблоков. Рассмотрим этот вопрос
более подробно.
450
Информация со всех ГБ поступает в аналоговом виде в систему стабилиза-
ции ГСП. Ошибки углового положения ГСП приводят к соответствующим вариа-
циям кажущейся скорости, измеряемой МА. В одном положении ГСП вариация
кажущейся скорости содержит две составляющие - линейно изменяющуюся в
функции времени (из-за погрешностей начальной выставки) и изменяющуюся по
квадратичной зависимости (из-за уходов ГБ).
Указанное выше различие временных зависимостей может быть использо-
вано для разделения групповой вариации Aw на обусловленную начальной вы-
ставкой и уходами. Дальнейшее разделение на составляющие уходов всех ГБ
возможно только путем измерений в различных, специально подобранных ориен-
тациях ГСП, позволяющих обеспечить различные проекции вектора g на оси ГБ и
на оси чувствительности МА.
Полученный материал обрабатывается в два этапа. На первом этапе мето-
дом наименьших квадратов (МНК) определяются линейные и квадратичные со-
ставляющие. МНК при необходимости применяется для сглаживания флуктуа-
ций, обусловленных дискретностью информации.
На втором этапе путем оптимального оценивания, возможно, с применени-
ем методов многомерного статистического анализа, получают оценки состав-
ляющих уходов ГБ. Используемый математический аппарат достаточно громозд-
кий, требует дополнительных знаний из области статистической обработки, опе-
раций с матрицами и др. [56-58]. Поэтому в настоящем изложении формульные
зависимости не приведены.
Максимальное количество ориентаций для рассматриваемого варианта ГС
равно 16 (7 ориентаций для МА и 9 ориентаций для ГБ). Конкретное количество
выбирается в процессе проектирования путем математического моделирования.
При этом учитывается влияние погрешностей на параметры движения.
4.12.4.3 Методика использования результатов калибровки
Как показано выше, после проведения выбранных измерений и выполнения
соответствующей обработки полученной информации становятся известными
значения калибруемых погрешностей ГС в одном запуске. При их определении
учитываются результаты предыдущей калибровки (в случае первого включения
СК в эксплуатации - данные заводских калибровок). Для хранения этих результа-
тов используется система сохранения данных (ССД) о параметрах ГСП. В ССД
записываются значения стабильных составляющих погрешностей, которые мож-
но использовать для корректировки показаний измерителей при решении навига-
ционной задачи.
Отклонение любого калибруемого параметра от номинального значения
определяется выражением
5a = 5aJ-1+5а“, (4.12.13)
где а - калибруемый параметр (например, ца);
8aJJ-1 - значение, принятое в качестве стабильной составляющей rib резуль-
татам калибровки в (п-1)-м цикле (хранится в ССД);
451
За ” - измеренная вариация параметра в п цикле относительно За” 1.
Измеренная вариация включает в себя две составляющие:
За^За^+За^, (4.12.14)
где 8a„ - изменение стабильной составляющей за время между (п-1)-м и п-м
циклами;
За^ - случайная составляющая, реализовавшаяся в n-м цикле.
При пуске PH непосредственно после калибровки (без выключения ГС) бу-
дем иметь:
За” = 8а”~1+6а”. (4.12.15)
Для дальнейшего использования в полете в ССД необходимо заменить ва-
риацию За”"1 на За”, определенную по формуле (4.12.15).
При пуске после повторного включения ГС использование формулы
(4.12.15) может оказаться не оптимальным. Для этого случая требуется использо-
вать соотношение
За” = За”'1 + За^.. (4.12.16)
Однако разделение 8а„ и За^, невозможно.
Приемлемое решение задачи может быть получено путем эмпирически оп-
ределенной процедуры, описанной ниже.
I этап» Вводится понятие точностной исправности (ТОЙ) прибора. Для
оценки соответствия ГС требованиям к точности на I этапе принимается «широ-
кий» допуск Зш. Полученное значение За”'1 + За” сравнивается с 8Ш.. Если
|5аГ‘+8а“|^5ш> (4.12.17)
то прибор считается неисправным и подлежит замене.
Очевидно, что проверка (4.12.17) проводится для всех калибруемых пара-
метров. Физический смысл проверки (4.12.17) состоит в следующем.
В процессе проектирования ГС проводится оценка диапазона изменения
относительно номинального значения стабильной составляющей 8аст за весь пе-
риод эксплуатации (включая заводские калибровки). Эти оценки используются
для выбора масштаба хранения параметра в ССД и учета его в полете. Выполне-
ние неравенства (4.12.17) свидетельствует об увеличенной изменчивости ста-
бильной составляющей, вплоть до нарушения работоспособности бортовой про-
граммы. При практической реализации оказалось удобным Зш рассчитывать по
следующей формуле:
8u1 = 50gcji, (4.12.18)
где сгсл - среднеквадратическое отклонение случайной составляющей погреш-
ности параметра.
Процедуру (4.12.17) необходимо также проводить для случая пуска ракеты
без промежуточного выключения ГС.
452
Если выполняется неравенство
|3а"-1 + 8а^|<8ш, (4.12.19)
то появляется надежда «спасти» прибор.
II этап. Назначение этапа - проверка гипотезы о том, что неравенство
(4.12.19) обусловлено изменением стабильной составляющей (в рамках допусти-
мого), а не случайной составляющей.
Для проверки гипотезы вводится «узкий» допуск
8у=5пся. (4.12.20)
Проводятся два цикла калибровок (п+1) и( п+2). При этом используются
значения калибруемых параметров, определяемые по формуле
8а" = 8а"-1 + K„OD • 8а”, (4.12.21)
К 44 J4UJJ И J X /
где Ккор - коэффициент коррекции значения калибруемого параметра, опреде-
ленного в предыдущем цикле.
Для цели II этапа
Ккор =1,0.
После каждого проведенного цикла значение SaJJ'14 сравнивается с допус-
ком 8У.
Вывод по результатам сравнения:
За”+1 > 8у - ТОЙ отсутствует;
8a!!+l < 3V - ТОЙ обеспечивается,
и у
Во втором случае прибор исправен и результаты калибровки могут быть
использованы.
Ш этап. Проводится коррекция содержимого ССД. Уточненные значения
параметров определяются по формуле (4.12.21), но с коэффициентом Ккор = 0,5. В
этом случае приблизительно за три цикла учитывается изменение 8аст, а влияние
Засл усредняется.
Полученный новый набор значений калибруемых параметров используется
при решении навигационной задачи. Очевидно, что для этого применяется мо-
дель погрешностей измерителей с соответствующей коррекцией знаков погреш-
ностей.
4.12.5 Возможные варианты построения систем калибровок
В предыдущих подразделах на примере калибровки погрешностей ГС, на-
ходящегося на подвижном основании, показаны основные моменты функциони-
рования СК. В то же время конкретная реализация СК зависит от места проведе-
ния калибровок, состава измерителей, построения инерциальной системы (ГС
или БИНС). Кратко рассмотрим связанные с этим особенности.
4.12.5.1 Заводские калибровки ГС . z г
ГС находится на неподвижном основании.
В качестве начальных значений стабильных составляющих используются
453
паспортные данные измерителей. Для определения погрешностей привязки ОЧ
МА к нулевой грани МП требуется специальная оптическая аппаратура. Для оп-
тимизации процессов измерения и обработки информации количество ориента-
ций может быть увеличено.
Объем и порядок выполнения калибровок в заводских условиях определя-
ются специальной программой. После ее завершения значения калибруемых па-
раметров записываются в ССД и являются начальными для работы СК в процессе
эксплуатации ГС.
4.12.5.2 СК для ГС на неподвижном основании
Дополнительно к изложенному выше в постановочном плане отметим два
момента, связанных с составом измерителей, установленных на ГСП, и с управ-
лением ГСП в процессе калибровок.
Состав измерителей
Существуют ГС, на которых для измерения линейных ускорений исполь-
зуются гироскопические интеграторы (ГИ) вместо акселерометров. Угол поворо-
та выходной оси ГИ с помощью вращающегося магнитного датчика преобразует-
ся в последовательность импульсов, суммирование которых за выбранный интер-
вал времени дает приращение кажущейся скорости. Такому датчику присуща по-
грешность вида
SWA = Ад • sin [Фд(0 + (p/to)], (4.12.22)
где Ад - амплитуда погрешности;
Фд(0 ~ угол поворота выходной оси ГИ;
to - время начала измерения.
Зависимость (4.12.22) определяет изменение погрешности в течение одного
оборота, а в дальнейшем циклически повторяется. Эту зависимость перепишем в
более удобном для использования виде
8Wfl = Ад-cos фд(1о)-8т фд(1) + Ад-sin фд(1о)-со8 фд(1). (4.12.23)
Таким образом, в погрешность измерения ГИ приращений кажущейся ско-
рости входит дополнительная компонента (принятое название - синусная и коси-
нусная составляющие). Ее учет существенно усложняет алгоритмы калибровки,
но оказывается полезным при цене импульса скорости порядка 0,05 м/с.
Вариантность СК вызывает также использование в качестве измерителей
углового движения ГСП двух трехосных гироблоков вместо трех двухосных, рас-
смотренных в подразд. 4.12.2.2. Потребуется уточнение математической модели,
но подход к ее получению остается прежним.
Управление ГСП в процессе калибровок
В практике применения СК использовались два варианта управления.
В первом варианте применяются режимы «удержания» (РУ) и «заданного
движения» (РЗД).
В РУ осуществляется приведение ГСП в горизонт и по азимуту. Запомина-
ются управляющие токи, и с их использованием обеспечивается удержание за-
данной ориентации ГСП относительно Земли. Этот режим применяется для ка-
454
либровки акселерометров и гироинтеграторов.
В РЗД система приведения обеспечивает высокоточное вращение ГСП от-
носительно Земли с малой угловой скоростью (порядка 1...3 угл.с/с).
Данный режим используется для калибровки уходов. Точность этой калиб-
ровки напрямую зависит от точности работы системы приведения.
Во втором варианте система приведения выставляет ГСП в заданную ори-
ентацию относительно Земли, а на время проведения измерений выключается и
реализуется режим стабилизации (PC) относительно инерциального пространст-
ва. Все требуемые измерения можно проводить в PC.
Первый вариант использовался на ранее разработанных СК. Второй вари-
ант рекомендуется к применению в настоящее время как более точный, несмотря
на некоторое усложнение алгоритмов (имеется в виду необходимость учета пово-
рота вектора g относительно гироскопической системы координат из-за вращения
Земли).
4.12.53 СК для ГС на колеблющемся основании
При наземном старте и начальном весе PH Go= 100т... 140т (например,
PH Российской Федерации «Рокот», Go = 108 т; PH Европейского космического
агентства «Вега», Go = 138 т) применяется защитное сооружение, которое позво-
ляет проводить предстартовые операции в комфортных условиях, включая ка-
либровку на неподвижном основании в случае использования в СУ гиростабили-
затора.
Если отсутствует возможность защиты PH на стартовой позиции, то в из-
мерениях возникает помеха из-за ветрового воздействия. В этом случае проблема
обеспечения точности работы СК решается путем предварительной фильтрации
информации, поступающей на вход СК.
4.12.5.4 СК для ГС на подвижном основании
Периодически в практике разработки систем управления различных ракет
возникает необходимость проводить калибровки во время движения носителя
(например, морской платформы), на котором установлена пусковая установка PH.
В этом варианте дополнительно к парированию влияния колебательного движе-
ния места установки ГС необходимо решить проблему получения эталонного из-
мерения. Для этого требуется знать вектор g по трассе движения и результаты
решения навигационной задачи системой управления носителя, пересчитанные
для места установки ГС PH.
Главной причиной, из-за которой отсутствуют примеры реализации вари-
анта с подвижным основанием, является надуманность проблемы, так как всегда
можно провести калибровку на неподвижном носителе, находящемся в известном
месте.
4.12.5.5 СК бесплатформенной инерциальной навигационной системы
В настоящее время широкое распространение получили системы управле-
ния с использованием БИНС.
БИНС по сравнению с ИНС на базе ГС имеет преимущество по габаритно-
массовым характеристикам, сложности изготовления и возможности совершения
455
маневров (отсутствие ограничений по углам разворота). Однако имеет худшую
точность и менее удобна в эксплуатации в части обеспечения проведения калиб-
ровок.
В основе функционирования СК БИНС лежит та же идея, что и для СК ГС.
Проводятся измерения при требуемых ориентациях акселерометров и гироблоков
относительно векторов g и ©3. Полученная информация обрабатывается в целях
получения искомых значений калибруемых параметров. Однако в БИНС отсутст-
вует возможность изменения ориентаций измерителей относительно корпуса
прибора. Поэтому для реализации СК необходимо снимать прибор с ракеты и
обеспечивать требуемые ориентации с помощью специального поворотного
стенда. Очевидно, что в эксплуатации PH это не вызывает особых затруднений.
Если вес ракеты или съемного в эксплуатации ее отсека с системой управ-
ления составляет порядка 3 т, то имеется техническая возможность с помощью
специального стенда разворачивать их без демонтажа прибора БИНС.
В завершение рассмотрения особенностей СК БИНС отметим, что калиб-
ровка уходов гироблоков в отличие от СК ГС осуществляется путем измерения
составляющих вектора ©3. При этом идеи выбора ориентаций для калибровки ос-
таются такими же, как изложено выше, а конкретные формульные зависимости
необходимо соответственно скорректировать.
4.13 Разработка бортового и наземного программного обеспечения.
Сборочная технология проектирования программного обеспечения
БЦВМ СУ и ЦВМ СК. Компоненты поддержки сборочной технологии
4.13.1 Состав программного обеспечения БЦВМ СУ и ЦВМ СК
Программное обеспечение БЦВМ СУ и ЦВМ СК состоит:
- из системного ПО БЦВМ СУ и ЦВМ СК;
- ПО функциональных алгоритмов режимов СУ;
- ПО динамических спецификаций режимов СУ.
В состав системного ПО БЦВМ СУ и ЦВМ СК входят:
- операционная система БЦВМ СУ и ЦВМ СК;
- драйверы обмена БЦВМ СУ и ЦВМ СК с бортовыми и наземными або-
нентами и с наземной станцией по магистрали Mil STD 1553В;
- процедура обмена между каналами БЦВМ СУ и ЦВМ СК;
- библиотека стандартных подпрограмм;
- блок начальной инсталляции и установки системного и прикладного ПО
БЦВМ СУ и ЦВМ СК.
Состав функциональных алгоритмов любого режима определяется его на-
значением (электроиспытания бортовой и наземной аппаратуры, ввод полетного
задания, предстартовая подготовка, управление полетом).
Динамические спецификации (ДС)-это формальное описание последова-
тельности, приоритетности выполнения функциональных алгоритмов, условий их
коммутации и циклов (тактов) решения.
Динамические спецификации разрабатываются для каждого режима СУ и
представляют собой алгоритм организации вычислений в реальном масштабе
456
времени в координатах «события»-«процессы»—«функциональные алгоритмы».
4.13.2 Назначение сборочной технологии проектирования
программного обеспечения БЦВМ СУ и ЦВМ СК
Основной целью сборочной технологии проектирования программного
обеспечения БЦВМ СУ и ЦВМ СК является уменьшение трудоемкости разработ-
ки данного ПО вследствие следующих факторов:
- использования графического языка публикации динамических специфи-
каций режимов;
- совмещения процессов проектирования и программирования динамиче-
ских спецификаций программ режимов;
- сокращения объема отработки функциональных алгоритмов и программ
режимов БЦВМ СУ и ЦВМ СК в разомкнутой схеме (РИС-технология).
Публикация динамических спецификаций в графической форме удобна для
восприятия человеком и, как следствие, сокращает число ошибок, вносимых в ал-
горитмы динамических спецификаций на этапах их проектирования.
ДС имеют иерархическую структуру, содержащую следующие оси (уров-
ни):
- ось источников событий;
- ось стационарных событий;
- ось случайных событий;
- оси процессов.
В состав ДС любого режима входит библиотека структурированных функ-
циональных алгоритмов данного режима.
ДС имеют в своем составе одну ось источников событий, одну ось стацио-
нарных событий, одну ось случайных событий и несколько осей процессов.
Количество осей (уровней) процессов зависит от сложности режима.
Вверху ДС (над осью источников событий) и внизу ДС (ниже уровня про-
цесса с наименьшим приоритетом) размещаются комментарии.
Моменты появления событий являются активными точками динамической
спецификации.
Любое событие представляется на осях стационарных и случайных собы-
тий тремя параметрами:
- имя события (FCj, stabj, ACSj, и т.д.);
- расчетное время появления события (ruFCj, o^stabi, r^ACSj, и *т.д.);
- условие исполнения события.
Условием исполнения события является совпадение текущего времени ре-
жима с расчетным временем появления события, отсчитываемым от начала ре-
жима с дискретностью базового гакта.
При выполнении данного условия вырабатывается заявка операционной
системе БЦВМ СУ (ЦВМ СК) на изменение состава активных процессов и функ-
циональных алгоритмов в процессах.
Фрагмент динамической спецификации в графической форме показан на
рис. 4.13.1.
457
Рисунок 4.13.1 - Фрагмент динамической спецификации режима управления полетом PH
459
П4КП4 П^^^^4К)14
пЛППМ
'. Комментарии
4K11S
—
Литера
Литера
AU212U
А04105
Литера
процессов
М--
’чГг^
Выключение контроля
РД2А. РД2Б. РД2В
Включение СУРТ
1-й ступени
jii;% Фмы
'Л^^ИЯКЛОППНМи
Щ-rh полета
Рисунок 4.13.1 Продолжение
А0216(1
А’* *,<•£??«:
П4 П4К1!4
п^пЛППП
А04001, А04007, А04008
ф А07101
"!'~«3TT<rm'r,'AaiiiMoi5<>Moi5i>iJ А8ЛЗЗЛб11а1ЛН11УЛ0Ц<11,АДИШ.
,AaO41Q4, А04105.А02121. А02160 A A0410S, А02121,А0216П
X A07102,A07103A07104,A04031
N
Рисунок 4.13.1 Окончание
Совмещение процессов проектирования и программирования динамиче-
ских спецификаций программ режимов достигается за счет того, что графический
язык публикации ДС одновременно является языком их программирования. При
этом одновременно с набором и редактированием ДС в графической форме обес-
печивается автоматическое формирование пакетов настроек операционной сис-
темы БЦВМ СУ (ЦВМ СК) для каждой активной точки ДС и их занесение в файл
(таблицу) настроек ОС.
Отработка функциональных алгоритмов и программ режимов БЦВМ СУ и
ЦВМ СК в разомкнутой схеме (РИС-технология) является одним из наиболее
трудоемких этапов разработки ПО БЦВМ СУ и ЦВМ СК. РИС-технология бази-
руется на использовании тестовой (эталонной) информации, получаемой от гене-
раторов тестов - программ-аналогов, разрабатываемых независимыми коллекти-
вами программистов с использованием стандартных языков программирования
(типа С44" Builder) и выполняемых на технологических инструментальных ЭВМ
(ПЭВМ) под управлением штатных ОС ПЭВМ (WINDOWS). В составе генерато-
ров тестов функциональные алгоритмы работают в нереальном времени в замк-
нутой схеме с математическими моделями объектов управления и контроля.
Необходимость широкого применения РИС-технологии в проектах СУ РКН
70 - 80-х годов прошлого столетия обосновывалась следующими соображениями:
все БЦВМ СУ PH и ЦВМ СК, разработанные в 70-е, 80-е годы прошлого века,
строились на специализированной элементной базе. При разработке программ
данных ЦВМ использовались нестандартные языки программирования. При этом
исключалась возможность применения в штатном ПО БЦВМ СУ и ЦВМ СК про-
граммных модулей функциональных алгоритмов разработанных и отработанных
в составе генераторов тестов и требовалась их повторная полномасштабная отра-
ботка в составе штатного ПО БЦВМ СУ и ЦВМ СК с использованием
РИС-технологии.
Современные БЦВМ СУ PH, ЦВМ СК и ПЭВМ строятся на элементной ба-
зе (микросхемах), разрабатываемой фирмами США, Японии (Intel, Motorola и
т.п.).
При этом для всех современных микросхем на рынке программных продуктов
имеются технологические системы, поддерживающие стандартные языки программиро-
вания, что и делает возможным применение в штатном ПО БЦВМ СУ РКН и НЦВМ СК
программных модулей функциональных алгоритмов, разработанных и отработанных в
составе генераторов тестов, и, как следствие, позволяет значительно сократить объем ра-
бот, выполняемых с использованием РИС-технологии при разработке штатных программ
БЦВМ СУ и ЦВМ СК.
Исходные данные, необходимые для использования в сборочной техноло-
гии при проектировании ПО любого режима СУ:
- состав функциональных алгоритмов. Разработанные алгоритмы включе-
ны в общую библиотеку функциональных алгоритмов проекта СУ;
- состав процессов;
- порядок (приоритетность) выполнения функциональных алгоритмов в
каждом процессе;
461
- условия включения и выключения процессов и функциональных алго-
ритмов в каждом процессе (события);
- источники событий;
- циклы (такты) решения функциональных алгоритмов в каждом процес-
се.
Функциональные алгоритмы, входящие в библиотеку, отработаны в составе
генератора тестов.
4.13.3 Состав и последовательность выполнения этапов сборочной
технологии
Основными этапами проектирования ПО БЦВМ СУ и ЦВМ СК при исполь-
зовании сборочной технологии являются:
— .разработка динамических спецификаций режимов СУ;
г стыковка программных модулей функциональных алгоритмов с ОС
БЦВМ СУ (ЦВМ СК);
- сборка версии ПО БЦВМ СУ (ЦВМ СК);
комплексная динамическая отработка версии ПО БЦВМ СУ СУ (ЦВМ СК).
Разработка динамических спецификаций режимов СУ.
Результат данной работы: динамические спецификации режимов опублико-
ваны в графической форме, сформированы файлы настроек операционных систем
БЦВМ СУ и ЦВМ СК для каждого режима СУ.
Стыковка программных модулей функциональных алгоритмов с ОС БЦВМ
СУ (ЦВМ СК),
Цель данного этапа - обеспечить работу программных модулей функцио-
нальных алгоритмов в штатных условиях в РВ под управлением ОС БЦВМ СУ
(ЦВМ СК). Для стыковки программных модулей функциональных алгоритмов с
штатной ОС РВ БЦВМ СУ (ЦВМ СК) производится коррекция их паспортов. При
этом тела программных модулей, отработанных в составе генератора тестов, ос-
таются неизменными.
Сборка версии ПО БЦВМ СУ (ЦВМ СК)
Состав файлов, включаемых в сборку каждой версии ПО БЦВМ СУ (ЦВМ
СК):
- модули программ функциональных алгоритмов на исходном языке ав-
томатизации программирования (например, «С» стандарт ANSI), разра-
ботанные для генераторов тестов;
- файлы (таблицы) настроек операционных систем БЦВМ СУ и ЦВМ СК,
сформированные при разработке динамических спецификаций режимов
СУ.
Результат данного этапа - версия ПО, готовая к загрузке в ППЗУ БЦВМ СУ
(ЦВМ СК), исполнению под управлением ОС БЦВМ СУ (ЦВМ СК) в реальном
масштабе времени и проведению комплексной динамической отработки.
Комплексная динамическая отработка версии ПО БЦВМ СУ СУ (ЦВМ СК)
Цель данного этапа - отработка программ режимов СУ (ЦВМ СК) в замк-
нутой схеме (ЗИС-технология) с математическими моделями объектов управле-
462
ния и контроля, в условиях, максимально приближенных к реальным (штатным)
условиям эксплуатации
При использовании сборочной технологии программные модули функцио-
нальных алгоритмов отработаны в составе генераторов тестов, основное внима-
ние на данном этапе уделяется отработке ПО динамических спецификаций режи-
мов.
4.13.4 Компоненты поддержки сборочной технологии
Основными компонентами, поддерживающими сборочную технологию, яв-
ляются:
- генераторы тестов;
- графический редактор динамических спецификаций;
- «масочная» ОС РВ БЦВМ СУ ЦВМ СК.
В рамках сборочной технологии генераторы тестов являются основным ин-
струментом проектирования и отработки функциональных алгоритмов.
Назначение генераторов тестов:
- отработка функциональных алгоритмов режимов;
- формирование библиотеки отработанных структурированных функцио-
нальных алгоритмов для использования в составе штатных программ
режимов СУ;
- отработка математических моделей объектов управления и контроля для
использования в составе ЗИС-технологии при комплексной динамиче-
ской отработке штатных программ режимов СУ;
- формирование тестовой (эталонной) информации для РИС-технологии.
Графический редактор динамических спецификаций
Графический редактор динамических спецификаций обеспечивает выпол-
нение следующих задач:
- набор и редактирование динамических спецификаций режимов в графи-
ческой форме, показанной на рис. 4.13.1;
- программирование динамических спецификаций- интерпретация дирек-
тив графического редактора в процессе набора и редактирования ДС, ав-
томатическое формирование пакетов настроек операционной системы
БЦВМ СУ (масок) для каждой активной точки динамической специфика-
ции и занесение сформированных настроек в общий файл настроек ОС.
Поиск и выборку (чтение) из общего файла настроек пакета настроек ОС
для конкретной активной точки ДС выполняет операционная система БЦВМ СУ
(ЦВМ СК) в процессе выполнения программ режимов реальном масштабе време-
ни. Для обеспечения возможности быстрого поиска и выборки из файла настроек
ОС пакета настроек для конкретной активной ДС точки запись пакетов в файл
(таблицу) проводится с использованием метода хэширования (рандомизации).
Суть данного метода состоит в следующем: в состав каждого пакета на-
строек ОС, заносимого в файл (таблицу), включается специальный ключ к. Ана-
логичный ключ присваивается событию, для которого сформирован данный па-
кет настроек ОС. Занесение в файл (таблицу) осуществляется с помощью хэш-
463
функции, отображающей ключи на множество целых чисел (значений хэш-
функции), которые лежат внутри диапазона адресов (индексов) в таблице.
В типичном случае хэш-функция определяется как остаток от деления зна-
чения ключа к на простое число р:
f(k) = k(mod р),
где к - целое число, р - простое число.
Состав пакета настоек ОС для i-й (любой) активной точки ДС:
- ключ пакета настроек ОС для i-й активной точки ДС (ki);
- маска процессов для i-й активной точки ДС (Мщ);
- маски функциональных алгоритмов для всех процессов ДС (МфуУ);
- периоды выполнения функциональных алгоритмов в каждом процессе,
где i -- номер активной точки ДС, j - номер процесса для i-й активной точки
Маска процессов и маска функциональных алгоритмов для любого процес-
са - это бинарный код, за каждым разрядом которого закреплен конкретный про-
цесс или конкретный функциональный алгоритм процесса соответственно. При
значении разряда маски, равном «1», закрепленный за данным разрядом процесс
или функциональный алгоритм является активным, при значении разряда маски,
равном «О», - пассивным.
В том случае, если маска процессов для (i+Ц-й активной точки ДС совпа-
дает с маской процессов i-й активной точки ДС, в состав пакета настроек для
(i+l)-ft активной точки при программировании ДС автоматически включается
маска процессов i-й активной точки. Аналогично, если какие-либо маски функ-
циональных алгоритмов для (i+1 )-й активной точки ДС совпадают с теми же мас-
ками i-й активной точки ДС, в состав пакета настроек для (i+l)-fi активной точки
при программировании ДС автоматически включаются маски функциональных
алгоритмов i-й активной точки.
Для поиска и выборки из файла требуемого пакета настроек ОС БЦВМ СУ
(ЦВМ СК) использует аналогичный алгоритм. При появлении любого стационар-
ного или случайного события ОС вычисляет значение хэш-функции (индекс па-
кета настроек), извлекает из файла пакет настроек, находящийся по указанному
индексу, и проверяет его ключ. Если ключ данного пакета настроек согласуется с
ключом, закрепленным за данным событием, то считанный пакет настроек счита-
ется обнаруженным и используется для управления вычислительным процессом
БЦВМ СУ (ЦВМ СК) до появления следующего стационарного или случайного
события.
«Масочная» ОС БЦВМ СУ и ЦВМ СК
«Масочная» операционная система БЦВМ СУ (ЦВМ СК) обеспечивает
коммутацию масок процессов и масок функциональных алгоритмов в активных
точках динамических спецификаций и выполнение между соседними активными
точками размаскированных процессов и размаскированных функциональных ал-
горитмов в процессах.
Основные функции операционной системы:
464
- управление функциональными алгоритмами в процессах;
- управление процессами в режимах;
- управление службой времени БЦВМ СУ (ЦВМ СК);
- обработка сигналов внешних и внутренних прерываний БЦВМ СУ
(ЦВМ СК);
- организация синхронной работы различных блоков БЦВМ СУ (ЦВМ
СК);
- восстановление вычислительного процесса при сбоях БЦВМ СУ (ЦВМ
СК).
«Масочная» ОС спроектирована как приоритетная многозадачная система
массового обслуживания, работающая в реальном масштабе времени.
Заявки на обслуживание поступают в ОС в виде запросов двух типов:
- запросов на коммутацию пакетов настроек ОС в активных точках дина-
мических спецификаций режимов СУ (события);
- запросов на выполнение процессов и функциональных алгоритмов в
процессах между активными точками динамических спецификаций ре-
жимов.
Источниками запросов 1-го типа являются:
- события, вырабатываемые функциональными алгоритмами (функцио-
нальные или базовые запросы);
- сигналы прерывания, поступающие в БЦВМ СУ (ЦВМ СК) от внешних
и внутренних абонентов СУ. Данный тип запросов также относится к ка-
тегории базовых;
- запросы, вырабатываемые в заранее заданных точках динамической спе-
цификации (детерминированные запросы). Каждый детерминированный
запрос на ДС жестко «привязан» к соответствующему базовому запросу.
Источниками запросов 2 -го типа являются маска процессов и маски функ-
циональных алгоритмов в процессах, входящие в состав пакета настроек ОС для
любой активной точки ДС.
Запросы любого типа фиксируются операционной системой в том базовом
такте ДС, в котором они появились.
Все запросы, поступившие в ОС, должны быть обслужены. Потеря запро-
сов не допускается.
Базовые запросы, вырабатываемые по сигналам прерывания, и детермини-
рованные запросы обслуживаются ОС в том базовом такте, в котором они появи-
лись.
Момент обслуживания базовых запросов, вырабатываемых функциональ-
ными алгоритмами, вырабатывается с прогнозом, необходимым для подготовки
ОС и расчета моментов обслуживания присоединенных к ним детерминирован-
ных запросов.
Операционная система обеспечивает следующую приоритетность (после-
довательность) обслуживания запросов 1-го типа: запросы, вырабатываемые по
сигналам прерывания, - запросы, вырабатываемые функциональными алгорит-
мами, - детерминированные запросы.
465
Последовательность детерминированных запросов должна обслуживаться в
порядке их задания в динамической спецификации.
Обслуживание запросов 2-го типа выполняется ОС в соответствии с задан-
ными в ДС периодами выполнения функциональных алгоритмов в процессах.
ОС имеет блочную структуру и состоит из следующих блоков:
- диспетчер операций ОС,
- планировщик;
- блок обработки прерываний;
- информационный массив ОС (ИМОС);
- монитор ОС;
- алгоритм восстановления вычислительного процесса при сбоях БЦВМ
СУ (ЦВМ СК).
Структурная схема «масочной» ОС показана на рис. 4.13.2.
Рисунок 4.13.2 - Структурная схема «масочной» ОС
Диспетчер операций ОС предназначен для управления планировщиком и
монитором.
Планировщик включается диспетчером операций ОС в момент фиксации
запроса, вырабатываемого функциональными алгоритмами, либо в момент фик-
сации запроса, поступающего из блока обработки прерываний, а монитор - в ка-
ждом базовом такте режима.
При каждом включении планировщик обеспечивает:
- выборку из общей таблицы настроек ОС пакета настроек ОС для теку-
щей активной точки ДС;
466
- формирование таблицы адресов активных процессов в соответствии с
масками процессов;
- формирование таблиц адресов активных функциональных алгоритмов
для каждого активного процесса в соответствии с масками функцио-
нальных алгоритмов процессов;
- формирование таблиц периодов включения функциональных алгорит-
мов для каждого активного процесса;
- запись сформированных таблиц в информационный массив ОС (ИМОС).
Монитор ОС при каждом включении обеспечивает:
- включение активных процессов в соответствии с таблицей адресов ак-
тивных процессов, размещенной в ИМОС;
- включение активных функциональных алгоритмов в активных процес-
сах в соответствии с таблицами адресов активных функциональных ка-
ждого процесса и таблицами периодов включения функциональных ал-
горитмов в каждом активном процессе, размещенными в ИМОС;
- управление службой времени;
- управление сторожевым таймером;
- безусловное включение с высшим приоритетом в начале каждого базо-
вого такта блока ОС, реализующего алгоритм восстановления вычисли-
тельного процесса при сбоях БЦВМ СУ (ЦВМ СК).
4.14 Система телеметрических согласующих устройств
Система управления РКН как объект телеметрического контроля претенду-
ет на 30 ... 50% суммарной информативности БРТС.
Для системы управления РКН в абсолютных значениях это означает кон-
троль 50 - 120 аналоговых параметров и 200 - 400 - сигнальных При частотах оп-
роса в диапазоне 50 ... 200 Гц.
Объем контролируемой цифровой информации составляет 100-200'шест-
надцатеричных слов за такт решения задачи То = 40 ... 100 мс. 7
В зависимости от конструктивного исполнения грехканальной аппаратуры
СУ телеметрическая информация выдается в СИ либо каждым каналом, либо в
мажоритированном виде.
Это касается выдачи не только цифровой информации, но и сигнальных па-
раметров.
Сигнальные параметры СУ содержат информацию о дискретных во време-
ни событиях и передают лишь сам факт совершения события без его количест-
венной характеристики. Информативным параметром сигнала является факт про-
хождения сигнала в определенное время.
Сигнальные параметры формируются в виде функции включения, характе-
ризующейся скачкообразным изменением напряжения постоянного тока, либо
изменением выходного сопротивления источника сигнала.
Преобразование контролируемых сигнальных параметров к виду, соответ-
ствующему интерфейсу БРТС, выполняют специальные телеметрические согла-
сующие устройства - ТСУ.
467
Схемотехнически сигнальные ТСУ представляют собой:
- электромагнитное или магнитоуправляемое реле, обмотка которого
управляется контролируемым сигналом, а контакты опрашиваются
БРТС;
- электронный ключ на основе оптоэлектронной пары;
- электронный ключ с использованием ударного автогенератора с после-
дующим выпрямлением сгенерированного напряжения. В этом случае
контролируемый сигнал представляется либо в виде замыка-
ния/размыкания электронного ключа, либо формирования постоянного
напряжения, соответствующего «единичному» или «нулевому» логиче-
скому состоянию сигнала.
Для формирования сигнальных параметров может также использоваться
отдельный источник U = 4 ... 6,3 В, выходное напряжение которого поступает на
входы БРТС через контролируемые устройства (например - концевые контакты
приводов, ламели датчиков и пр.). Такая схема может применяться, если характе-
ристики контролируемого устройства не гарантируют протекание микротоков
опроса сигнальных параметров, т.е. достоверность контроля.
Все приведенные примеры сигнальных ТСУ выполняют еще одну из глав-
ных задач - обеспечивают гальваническую развязку шин электропитания, управ-
ленческих и информационных цепей системы управления от входных устройств
и электропитания системы измерений, а также «корпуса» изделия, что позволяет
исключить взаимовлияние СУ и СИ друг на друга даже в случае возникновения
каких-либо неисправностей в трактах регистрации ТМ параметров.
Аналогичную задачу выполняют и телеметрические согласующие устрой-
ства аналоговых сигналов.
Выходным сигналом аналоговых ТСУ является напряжение постоянного
тока в диапазоне 0 ... 6,2 В, мгновенное значение которого пропорционально ве-
личине контролируемого параметра.
Контролируемым сигналом может быть: напряжение постоянного либо пе-
ременного тока, величина тока управления каким-либо исполнительным органом
(например - РМ или ЭК), величина тока в шинах первичного или вторичного
электропитания, сдвиг фаз, угловое или линейное отклонение и др.
В общем случае аналоговое ТСУ выполняется по схеме “модулятор - уси-
литель - демодулятор”. Входное устройство ТСУ обеспечивает согласование ис-
точника контролируемого сигнала с входом ТСУ и преобразование его в сигнал
переменного тока.
Далее происходит усиление сигнала ьысокостабильным операционным
усилителем с дальнейшим преобразованием обычным или фазочувствительным
выпрямителем в выходное напряжение 0 ... 6,2 В.
Если входной сигнал принимает двуполярное значение, то в выходном на-
пряжении ТСУ искусственно вводится смещение нуля на уровень UCM = 3,1 В, от-
носительно которого и происходит измерение выходного сигнала.
Многие датчики для контроля условий эксплуатации аппаратуры в составе
РКН разрабатываются и поставляются комплектно с преобразователем и никаких
468
дополнительных устройств для их согласования с интерфейсом БРТС не требует-
ся. Это касается в первую очередь датчиков вибрации, линейных и ударных пере-
грузок, акустического давления, абсолютных значений и перепадов давления,
температур в местах установки аппаратуры и внутри приборов и др.
Отдельный крут задач решают телеметрические согласующие устройства
цифровой информации СУ.
Сопряжение БРТС с источником цифровой информации (в частности, с
БЦВМ) обеспечивается разработкой и введением в состав либо системы измере-
ний, либо специальных устройств, обеспечивающих преобразование цифровых
потоков БЦВМ для приема и регистрации их БРТС.
В составе СИ такие устройства разрабатываются под конкретный источник
цифровой информации, что нарушает принцип универсальности БРТС, приводит
к избыточности аппаратных средств, а следовательно, к дополнительным затра-
там. ' '
Намного технологичнее такие устройства разрабатывать в составе аппара-
туры СУ. БЦВМ СУ в каждом такте решения задачи формирует массив телемет-
рической информации, состав которой определяется перечнем выполняемый ал-
горитмов, а объем - техническими возможностями бортовой системы измерений
по приему и передаче массива цифровой информации. Такие устройства получи-
ли название БСТК - блок согласования телеметрического кадра.
Способ выдачи цифровой информации в БСТК определяется типом БЦВМ.
Используются магистрали передачи как последовательного, так и параллельного
кода информации.
Канал последовательного кода в общем случае состоит из следующих ма-
гистралей:
- командной магистрали, по которой передается признак начала (конца)
выдачи ТМ кадра;
- информационной магистрали передачи «1» й «О» значений разрядов Ин-
формационных слов;
- магистрали синхронизирующих сигналов. ?’
В некоторых БЦВМ используется магистраль выдачи параллельного
16-разрядного кода. В целях уменьшения количества связей может применяться
побайтовый обмен, т.е. каждое слово передается двумя посылками. -
Формированием структуры ТМ кадра, т.е. организацией жесткой последо-
вательности информационных слов, может заниматься как БЦВМ, выполняя ал-
горитм сбора и выдачи информации, так и БСТК. В этом случае каждоеинфор-
мационное слово сопровождается адресом ячейки ЗУ БСТК, в которую оно
должно записываться.
Входной информационный интерфейс бортовых РТС не столь разнообразен
и предполагает прием информации, представленной в виде двух- или четырехпо-
зиционного последовательного кода, либо в виде восьмиразрядного параллельно-
го кода, в зависимости от типа станции. Дисциплину обмена определяет система
синхроимпульсов, формируемых БРТС.
Но основной задачей БСТК кроме согласования интерфейсов является
469
обеспечение совместной работы двух независимых асинхронных тактированных
систем г-, БЦВМ ^системы управления и БРТС системы измерений.
Эта проблема решается разнесением во времени процессов записи и чтения
информации путем применения в БСТК двухстраничной «памяти»: в одну стра-
ницу проводится запись ЦИ из БЦВМ, а из другой - считывание ее в БРТС, по-
том они меняются местами.
Условием переключения страниц является наличие двух признаков - конца
записи в одну и окончания считывания из другой.
Такая схема реализуется в каждом канале БСТК, а при считывании инфор-
мация мажоритируется.
Таким образом, осуществляется переход от трехканальной структуры СУ к
одноканальной структуре системы измерений, и одновременно исключаются все
временные погрешности, в том числе и межканальные.
Кроме перечисленных задач БСТК решает и традиционные задачи ТСУ -
гальваническую развязку информационных цепей СУ и входов системы измере-
ний.
’ При разработке аппаратуры СУ новых РКП с использованием современных
систем измерений связь между бортовым компьютером и СИ осуществляется с
использованием стандартного канала обмена типа RS422/RS485.
В этом случае согласование процессов записи/чтения информации реализу-
ется программно в специально выделенном разделе ОЗУ, доступ к которому воз-
можен как со стороны как БЦВМ, так и БРТС.
Конструктивное исполнение телеметрических согласующих устройств оп-
ределяется принципами минимизации технико-экономических затрат и эксплуа-
тационных, расходов.
Как известно, аппаратура сбора и преобразования телеметрической инфор-
мации в процессе управления полетом РКН непосредственного участия не при-
нимает и ее массово - габаритные и энергетические характеристики являются
«накладными расходами» для аппаратуры системы управления.
Поэтому целесообразно разрабатывать ТСУ как составную часть штатной ап-
паратуры СУ. В этом случае не требуется создавать отдельные конструктивы, ис-
пользуется одинаковая элементная база и технология изготовления, исключаются
межприборные» связи, упрощается кабельная сеть, повышается помехозащищен-
ность и: др. Кроме того,, уменьшается номенклатура технологической аппаратуры,
применяемой при изготовлении приборов СУ и испытаниях СУ в составе PH.
К преимуществам такого исполнения ТСУ следует отнести тот фактор, что
на всех этапах создания СУ - от изготовления приборов до полета PH - исполь-
зуются одни и те же контрольные точки и тракты преобразования их сигналов.
При соответствующей организации технологии проверок фиксируются зна-
чения этих параметров на всех этапах создания СУ: заводе-изготовителе аппара-
туры, испытаниях СУ в составе PH на КИСе, ТП, СП, при пуске и полете PH.
Эти формулярные данные могут применяться как тарировочные характери-
стики трактов контроля ТМ параметров при проведении послеполетного» анализа
телеметрической информации.
470
Библиографический список
1 . Абгарян, К.А. Динамика ракет [Текст] / К.А. Абгарян, И.М. Рапопорт. - ML:
Машиностроение, 1969. -378 с.
2 . Айзенберг, Я.Е. Проектирование систем стабилизации носителей космиче-
ских аппаратов [Текст] / Я.Е. Айзенберг, В.Г. Сухоребрый. - М.: Машино-
строение, 1986, - 224 с.
3 . Управление по углам атаки и скольжения первых ступеней PH [Текст] /
Я.Е. Айзенберг, Ю.М. Златкин, А.Н. Калногуз, В.А. Батаев, А.И. Кузьмин //
Косм1чна наука i технолопя. - 2002, №1, Т. 8. -- С. 61 - 80.
4 . Анализ и оптимальный синтез на ЭВМ систем управления [Текст] / под ред.
А.А. Воронова и И.А. Орурка. - М.: Наука, 1984. - 344 с.
5 . Динамика систем управления ракет с БЦВМ [Текст]/ В.Д: Аренс,
С.М. Федоров, М.С. Хитрик, С.В. Лучко. - М.: Машиностроение, 1976. -
272 с.
6 . Барковский, В.В. Методы синтеза систем управления [Текст] /
В.В. Барковский, В.Н. Захаров, А.С. Шаталов. - М.: Машиностроение,
1969.-326 с.
7 . Бесекерский, В.А. Теория систем автоматического регулирования [Текст] /
В.А. Бесекерский, Е.П. Попов. - М.: Наука, 1966. - 752 с.
8 . Борушко, Ю.М. Построение областей заданного качества на основе моди-
фицированного D-разбиения [Текст] / Ю.М. Борушко, В.М. Вартанян //
Системы управления летательных аппаратов. - X.: ХАИ, 1985. - С. 29 - 34.
9 . Дидук, Г.А. Гусеничный адаптивный способ построения границ области
[Текст] / Г.А. Дидук. - Адаптация и обучение в СУ. - Новосибирск: Наука,
1982.-С. 164- 170.
10 .Колесников, К.С. Жидкостная ракета как объект регулирования [Текст] /
К.С. Колесников. - М.: Машиностроение, 1969. - 298 с.
11 .Кюнци, Т.П. Нелинейное программирование [Текст] / Г.П. Кюнци,
В. Крелле. - М.: Сов. радио, 1965. - 303 с.
12 .Ляпунов, А.М. Общая задача устойчивости движения [Текст] /
А.М. Ляпунов. - М.: Гостехтеориздат, 1950. —476 с.
13 .Микишев, Г.Н. Динамика твердого тела с полостями, частично заполнен-
ными жидкостью [Текст] / Г.Н. Микишев, Б.И. Рабинович. - М.: Машино-
строение, 1968. - 532 с.
14 .Моисеев, Н.Н. Исследования о движении твердого тела, содержащего жид-
кие массы, имеющие свободную поверхность [Текс1]7 Н:Н. Моисеев//
Вестник АН СССР, 1956. - С. 17 - 23.
15 .Нариманов, Г.С О движении твердого тела, попость которого частично за-
полнена жидкостью [Текст] / Г.С. Нариманов. // ПММ - М.: Изд. АН СССР,
1956, №1.-С. 21-25.
16 .Неймарк, Ю.И. Динамические системы и управляемые процессы [Текст] /
Ю.И. Неймарк - М/ Наука, 1976. - 336 с.
471
17 .Математическая теория оптимальных процессов [Текст] / Л.С. Понтрягин,
ВТ. Болтянский, Р.В. Гамкрелидзе, Б.Ф. Мищенко. - М.: Наука, 1969. -
328 с.
18 .Постолов, И.Т. Автоматизированный метод построения областей устойчи-
вости многоконтурных систем автоматического регулирования /
И.Т. Постолов [Текст] И Системы управления летательных аппаратов - X.:
ХАИ, 1985.-С. 21-25.
19 .Постолов, И.Т. Синтез цифровых фильтров по заданным частотным харак-
теристикам [Текст] / И.Т. Постолов И Автоматизация проектирования и на-
учных исследований. - X.: ХАИ, 1988. - С. 61 - 68.
20 .Постолов, И.Т. Синтез цифровых фильтров для стабилизации сложных ди-
намических систем [Текст] / И.Т. Постолов И Прикладные задачи динамики
и устойчивости механических систем. - К.: Ин-т математики АН УССР,
1987.-С. 96-99.
21 .Постолов, И.Т. К вопросу об эквивалентности рекурсивной и нерекурсив-
ной структур цифровых фильтров [Текст] / И.Т. Постолов И Математиче-
ское моделирование динамических процессов в системах тел с жидко-
стью. - К.: Ин-т математики АН УССР, 1988. С. 132 - 136.
; 22. Рабинович, Б.И. Введение в динамику ракет-носителей космических аппа-
ратов [Текст] / Б.И. Рабинович. - М.: Машиностроение, 1975. - 236 с.
23 .Рапопорт, И.М. Динамика упругого тела, частично заполненного жидко-
стью [Текст] / И.М. Рапопорт. - М.: Машиностроение, 1967. - 393 с.
2 4..Топчеев, Ю.И. Атлас для проектирования систем автоматического регули-
рования [Текст]: учеб, пособие для втузов / Ю.И. Топчеев. - М.: Машино-
строение, 1989. - 752 с.
25 .Ту, Ю. Цифровые и импульсные системы автоматического управления
[Текст] / Ю. Ту - М.: Машиностроение, 1964. - 703 с.
26 .Уилкинсон, Жд.Х. Алгебраическая проблема собственных значений
[Текст] / Жд.Х. Уилкинсон. - М.: Наука, 1970. - 564 с.
27 .Уилкинсон, Жд.Х., Райниш. Справочник алгоритмов на языке АЛГОЛ. Ли-
... нейная алгебра [Текст] / Жд.Х. Уилкинсон, Райниш. - М.: Машинострое-
(7;;ние, 1976.-390 с.
28 .Химмельблау, Д. Прикладное нелинейное программирование [Текст] /
Д. Химмельблау. - М.: Мир, 1975. - 534 с.
29 .Чернецкий, В.И. Математические методы и алгоритмы исследования авто-
матических систем [Текст] / В.И. Чернецкий, Г.А. Дидук, А.Л. Потапенко. -
Л.: Энергия, 1970. - 372 с.
ЗО .Шрюфер, Е. Цифрова обробка сигнал is: переклад з шмецько! [Текст] /
Е. Шрюфер. - К.: Либщь, 1992. - 429 с.
31 .Бромберг, П.В. Теория инерциальных систем навигации [Текст]/
П.В. Бромберг. - М.: Наука, 1979. - 295 с.
32 .Липтон, А. Выставка инерциальных систем на подвижном основании
[Текст] / А. Липтон - М.: Наука, 1971. - 168 с.
472
33 .Хлебников, Г.А. Начальная выставка инерциальных навигационных систем
[Текст] / Г.А. Хлебников. - М.: Изд. МОСССР, 1994. - 395 с.
34 .Кузовков, Н.Т. Инерциальная навигация и оптимальная фильтрация
[Текст]/ Н.Т. Кузовков, О.С. Салычев. - М.: Машиностроение, 1982.-
216 с.
35 .Бранец, В.Н. Введение в теорию бесплатформенных инерциальных навига-
ционных систем [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука,
1992.-278 с.
36 .Командно-измерительные приборы [Текст] / под ред. Б.И. Назарова. - М.:
Изд. МОСССР - 639 с.
37 .Беттин, Р. Наведение в космосе [Текст]/ Р. Беттин/ под ред.
И.А. Богуславского. - М.: Машиностроение, 1966. - 448 с.
38 .Баллистика и навигация ракет [Текст] / под ред. А.А. Дмитриевского. - М.:
Машиностроение, 1985. - 309 с.
39 .Грушинский, Н.П. Теория фигуры Земли [Текст] / Н.П. Грушинский. - М.:
Физ.-мат. лит., 1963. - 418 с.
40 .Кавинов, И.Ф. Инерциальная навигация в околоземном пространстве
[Текст] / И.Ф. Кавинов. - М.: Машиностроение, 1988. - 132 с.
41 . Бранец, В.Н. Применение кватернионов в задачах ориентации твердого те-
ла [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - 320 с.
42 .Лебедев, А.А. Баллистика ракет [Текст] / А.А. Лебедев, Н.Ф. Герасюта. -
М.: Машиностроение, 1970. - 244 с.
43 .Бранец, В.Н. Введение в теорию бесплатформенных инерциальных навига-
ционных систем [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука,
1992.-280 с.
44 , Фролов, В.С. Радиоинерциальные системы наведения [Текст] /
В.С. Фролов. - М.: Сов. радио, 1976, - 184 с.
45 .Степанов, О.А. Особенности построения и перспективы развития навига-
ционных инерциально-спутниковых систем. Интегрированные инерциаль-
но-спутниковые системы навигации [Текст]: сб. статей и докладов/
О. А. Степанов. - СПб, ГНЦ РФ-ЦНИИ "Электроприбор”, 2001. - 384 с.
46 . Степанов, О.А. Применение теории нелинейной фильтрации в задачах об-
работки навигационной информации [Текст] / О.А. Степанов. - СПб, ГНЦ
РФ-ЦНИИ "Электроприбор", 2003. - 369 с.
47 . Экспериментальная отработка систем управления объектов ракетно-
космической техники [Текст]: учеб, пособие / А И. Батырев, Б.И. Батырев,
Г.К. Бондарец и др. / под общ. ред. Ю.М. Златкина, В.С. Кривцова,
А.С. Кулика, В.И. Чумаченко. -- X.. Нац. аэрокосм, ун-т «Харьк. авиац.
ин-т», НПП «Хартрон-Аркос», 2008. - 501 с.
48 .Боднер, В.А. Системы управления летательными аппаратами [Текст] /
В.А Боднер. - М.: Машиностроение, 1973. - 504 с.
473
49 .Лебедев, А.А. Баллистика ракет [Текст] / А.А. Лебедев, Н.Ф. Герасюта. -
М.: Машиностроение, 1970. - 244 с.
50 .Лукьянович, А.Е. Применение метода сплайн -апроксимации для представ-
ления траектории движения летательного аппарата [Текст] /
А.Е. Лукьянович// Механтка та машинобудування.- 2002.- №1.-
С. 142 ~ 148.
51 . Мартенс, Г.Д. Концепция группового выведения [Текст] / Г.Д. Мартенс,
А.Е. Лукьянович, И.М. Филиппенко. //Материалы 8-th International ESA
conference on Guidance, Navigation and Control, Карловы Вары, Чехия,
5-10 июня 2011 г
52 .Сихарулидзе, Ю.Г. Баллистика летательных аппаратов [Текст] /
Ю.Г. Сихарулидзе. - М.: Наука, Гл. ред. физико-математ. лит., 1982. -
351 с.
53 .Чандлер, Смит. Итеративное наведение ракет [Текст] / Смит Чандлер // Во-
просы ракетной техники. - 1967. - № 12. - С. 55 - 67.
54 .Вентцель, Е.С. Теория вероятностей [Текст] / Е.С. Вентцель. - М.: Наука,
1964. - 576 с.
55 .Командно-измерительные приборы [Текст] / Б.И. Назаров и др. - М.: Мин.
обороны СССР, 1987.-435 с.
56 .Бронштейн, И.Н. Справочник по математике [Текст] / И.Н. Бронштейн,
К.А. Семендяев. - М.: Наука, 1981. - 608 с.
57 .Мудров, В.И. Методы обработки измерений [Текст] / В.И. Мудров,
В.Л. Кушко. -М.: Сов. радио, 1976. - 378 с.
58 .Андерсон, Т. Введение в многомерный статистический анализ [Текст] /
Т. Андерсон. - М.: Гос. изд-во физ.-мат. лит-ры, 1963. - 500 с.
59 .Калногуз, А.Н. Синтез алгоритмов оптимального разворота объекта управ-
ления с ненулевыми и конечными значениями фазовых параметров
[Текст] / А.Н. Калногуз, Г.Д. Мартенс // Механйка та машинобудування. -
X., 2002.-№1.-С. 25-31.
бО .Быков, А.М. Исследования влияния некоторых аспектов итеративного ме-
тода наведения при проектировании систем стабилизации [Текст] /
А.М. Быков, Г.Д. Мартенс. // Механпса та машинобудування. - X., 2002. -
№1. -С. 27-32.
61 .Чумаченко, А.В. Автоматизированный выбор "рабочей точки" внутри об-
ласти устойчивости в плоскости параметров управляющего контура систе-
мы стабилизации ракеты-носителя [Текст] / А.В. Чумаченко И Открытые
информационные и компьютерные интегрированные технологии: сб. науч,
тр. Нац. аэрокосм, ун-та им. Н.Е. Жуковского "ХАИ". - Вып. 18. - X.,
2003.-С. 57-68.
62 .Мальцев, А.И. Один метод пространственного разворота твердого тела
[Текст]/ А.И. Мальцев// Мехашка та машинобудування.- X., 2003.-
№ 1.-С. 16-19.
474
63 . Сухоребрый, В.Г. Применение стохастического подхода при анализе рабо-
тоспособности системы стабилизации летательного аппарата [Текст] /
ВТ. Сухоребрый, А.В. Чумаченко И Открытые информационные и компь-
ютерные интегрированные технологии: сб. науч. тр. Нац. аэрокосм, ун-та
им. Н.Е. Жуковского ”ХАИ”. - Вып. 11. - X., 2002. - С. 67 - 75.
64 .Сухоребрый, В.Г. Оценка вероятности работоспособности системы стаби-
лизации ракеты-носителя с использованием различных моделей линеариза-
ции максимумов фазовых координат [Текст] / В.Г. Сухоребрый,
А.В. Чумаченко. // Открытые информационные и компьютерные интегри-
рованные технологии: сб. науч. тр. Нац. аэрокосм, ун-та им.
Н.Е. Жуковского "ХАИ". - Вып. 19. - X., 2003. - С. 47 - 56.
65 .Калногуз, А.Н. Особенности оценки работоспособности систем стабилиза-
ции ракет различного назначения [Текст] / А.Н. Калногуз,
В.П. Московченко, А.В. Чумаченко // Мехашка та машинобудування. - X.,
2004.-№3.-С. 24 -32.
475
5 ПРОЕКТИРОВАНИЕ БОРТОВОЙ АППАРАТУРЫ СУ
5.1 Анализ ТЗ и ИД на БАСУ
Анализ требований технического задания на разработку показал, что БАСУ
должна обеспечивать выполнение следующих функций:
- реализацию программы тестового самоконтроля бортовых вычислитель-
ных систем при подаче первичного питания;
- ввод от наземных станций программ и данных, необходимых для вы-
полнения заданного режима работы системы управления, осуществляе-
мый резидентной программой - загрузчиком;
- автоматический контроль технического состояния СУ и смежных систем
для обеспечения требуемой надежности;
- ввод и контроль ввода полетного задания (ПЗ) от наземной станции;
- реализацию алгоритмов подготовки к пуску, пуска, выведения, стабили-
зации, ориентации и управления другими системами РКН;
- формирование цифрового телеметрического (ТМ) кадра параметров СУ
и выдачу его в наземную станцию;
- прием и хранение командно-программной информации, получаемой от
командной радиолинии.
Кроме того, необходимо выполнение следующих требований:
- по надежностным характеристикам нормированное значение вероятно-
сти безотказной работы (ВБР) БАСУ на этапе предстартовой подготовки
должно быть Р> 0,9999, ВБР БАСУ в процессе полета (до 10 часов)
Р > 0,9997, ВБР БАСУ в процессе полета (до 3 лет) Р > 0,999;
- БАСУ должна обеспечивать работу в широком диапазоне температур
окружающей среды, в условиях воздействия высоких механических на-
грузок и воздействия ионизирующего излучения космического про-
странства;
- одновременно с реализацией перечисленных выше функций БАСУ
должна обладать минимальными габаритно-массовыми и энергетиче-
скими характеристиками.
Из результатов анализа требований технического задания (ТЗ) на БАСУ в
части энергопотребления и габаритно-массовых показателей следует, что для по-
строения БАСУ необходимо использовать современную, высокоинтегральную
элементную базу, обладающую высоким показателем производитель-
ность/мощность потребления, высокой надежностью, которая выпускается в со-
ответствии с требованиями стандарта MIL-883.
5.1.1 Обоснование выбора элементной базы
Проблемы микроминиатюризации средств вычислительной техники специ-
ального назначения решаются путем комплексного подхода к разработке пер-
спективных ЦБК. Но превалирующее значение при выборе как схемотехниче-
ских, так и конструктивно-технологических решений имеет элементная база. Без-
условно, чтобы получить оптимальные технические характеристики БАСУ, необ-
ходимо делать ставку на элементную базу высокой степени интегральности, эле-
476
менты класса MILITARY и SPACE, стандартные БИС и СБИС и СБИС програм-
мируемой пользователем логики (FPGA), что позволит достичь высоких значений
надежности аппаратуры, минимальных значений потребляемой мощности и габа-
ритно-массовых характеристик за счет собственных качеств микроминиатюриза-
ции. Кроме того, высокие значения параметров быстродействия, производитель-
ности достигаются также с помощью математических характеристик процессора
и сопроцессора. Применение FPGA-элементов позволяет улучшить энергетиче-
ские и конструкторско-технологические характеристики БАСУ, а также исполь-
зовать системы автоматизированного проектирования (САПР) элементов FPGA
для проведения имитационного моделирования функционирования отдельных
узлов БАСУ.
Рост уровня интегральности БИС позволяет реализовать большинство
функций центрального процессора, БЦВМ и БАСУ в целом. Как показывает ана-
лиз состояния разработок стандартных БИС, наиболее совершенными как в тех-
ническом плане, так и с точки зрения стоимости являются SoC-технологии про-
ектирования на базе БИС фирм Aeroflex, Atmel, Actel, Xilinx, Texas Instruments,
Analog Devices, ST-Microelectronics и других, зарекомендовавших свою продук-
цию на рынках, как доя широкого потребления, так и для тяжелых условий экс-
плуатации.
При проектировании отказоустойчивых БЦВМ для летательных аппаратов
космического назначения существует ряд проблем, которые необходимо решать.
Это, с одной стороны, обеспечение повышенных требований к надёжности и жё-
сткого временного регламента работы систем управления БАСУ, а с другой, - по-
стоянного воздействия негативных факторов [1], в том числе и потока частиц вы-
соких энергий (табл. 5.1.1). Постоянное воздействие на элементы СУ негативных
факторов окружающей среды и радиационного фона вызывает локальные изме-
нения в структуре кристаллической решётки электронных компонент. Происхо-
дящее накопление повреждений от имеющих место воздействий ограничивает
стойкость электронных компонент БАСУ. Обратимые эффекты от постоянного
воздействия могут нарушать работу этих комплексов, а критические уровни или
длительности воздействий - вызывать необратимые эффекты [2].
Требование поддержания выполнения задачи управления в течение опреде-
лённого времени вызвало потребность в специфических подходах при разработке
электронных компонент специально для применения в условиях радиации [3, 4] и
в тяжелых условиях [5]. Помимо специфических подходов к проектированию
электронных компонент для аппаратуры БАСУ дополнительно применяют и спе-
циальные методы резервирования [6-11].
Выбор элементов БАСУ представляет собой особую задачу, прежде всего,
для ее основной части - компьютерного блока. С одной стороны, наблюдается
полное отсутствие конкурентоспособной радиационно стойкой элементной базы
отечественного производства [12-15]. С другой стороны, интегральные схемы во-
енного назначения (в том числе и класса SPACE) в странах дальнего зарубежья
помимо своей весьма высокой стоимости полностью находятся под контролем их
распространения и отсутствуют в свободной продаже.
477
Таблица 5.1.1 - Зависимость интегральной дозы от высоты орбиты
.Тип спутника Высота орбиты, км Поглощенная доза (по кремнию), крад
Геостациоцарные и межпланетные аппараты >10000 > 2000
Аппараты с высокой орбитой 5000 ... 10000 1000 ... 2000
Аппараты со средней высотой орбиты 1000 ... 5000 50... 1000
Низкоорбитальные аппараты <1000 0 ... 50
Возможность применения электронных компонент широкого использова-
ния при понижении стоимости, габаритных размеров и массы аппаратуры БАСУ
без ухудшения технических и эксплуатационных показателей, в том числе пока-
зателя надёжности, вызывает несомненный практический интерес. Исследования
в этой области иллюстрируют стремление специалистов использовать более де-
шёвые электронные компоненты при соблюдении мер обеспечения надёжности
СУ в целом [10].
В последнее время наблюдается интенсивное развитие технологии произ-
водства электронных компонент и стремительное увеличение функциональной
номенклатуры СБИС, представляющих собой полностью законченные аппара-
турные узлы в коммерческом и индустриальном исполнении с малой стоимостью.
Проведённые исследования позволили предложить технологии изготовления на
основе коммерческих элементов (Commercial-Off-The-Shelf (COTS))- [16-18] и
промышленных элементов (Industry-Off-The-Shelf (IOTS)) подходов [12-15,
19-22] для жёстких условий эксплуатации при проектировании БАСУ. Такие
подходы интересны как с финансовой стороны проекта, так и с учётом возмож-
ности использования электронных компонент, находящихся в свободной прода-
же.
Зависимость уровня радиационной стойкости полупроводниковых элемен-
тов от технологии (минимального размера элементарной ячейки) и качества ма-
териалов (максимального содержания примесей) при изготовлении, предположе-
ния о которых сформулированы в [23], подтверждается тестированием [17]. Дос-
тижения в технологии производства, а также топологические решения, заклады-
ваемые при проектировании и направленные на реализацию механизмов париро-
вания случайных сбоев, позволяют предположить, что БИС широкого примене-
ния могут обеспечить необходимый уровень радиационной стойкости даже без
специальных мер защиты. Относительно этих компонент отсутствует уверен-
ность в возможности их использования в условиях повышенного радиационного
фона.
Исследования в данном направлении [24-27] дают оптимистические про-
гнозы, хотя и существуют опасения [28]. но необходимость применения в проекте
компонент, не указанных в перечнях тестирования, порождает теоретические ги-
478
потезы о возможности расширения этого перечня на аналогичные по технологии
производства устройства [16]. Усреднённые параметры стойкости одинаковых по
функциональному назначению СБИС различных классов исполнения и их пока-
зателям относительной стоимости приведены в табл. 5.1.2.
Таблица 5.1.2 - Сравнительные характеристики однотипных больших
интегральных схем различных классов исполнения
Класс исполнения Показатель дегра- дации TID (Total Ionization Dose) крад. *n Показатель оди- ночных сбоев SEL (Single Event Latches), (MeV*sm“)/mg Средняя стой- мость, $ *3)
Коммерческие <3’” <30’” (1)_$
Промышленные > 30 ’° 20...80’” (5...10)_$
Военно- космические >100 *2) >40*Z) (30...>150)$
♦п .. -
' - усредненный показатель результатов испытании, приведенный в отчетах
[1, 4-7, 23];
*2) - типовой показатель продукции Space Electronics Inc;
*3) - приведенный показатель стоимости поставщиков электронных компонент в
Украине.
Сопоставление отношения максимальной общей ионизационной дозы и
стоимости, а также величины стойкости и одиночных сбоев для одинаковых по
функциональному назначению СБИС различных классов (рис. 5.1.1) показывает,
что наилучшее соотношение имеют компоненты INDUSTR Y для показателя
стойкости к сбоям SEL в пределах 40.. .80 (MeV*sm2)/mg [13].
Как отмечалось в [16], используя метод «аналогичных технологий», необ-
ходимо или вводить запасы при проектировании БАСУ, или проводить испыта-
ния компонент от производителя и далее использовать продукцию только этого
производителя, или проводить испытания модулей из поставляемой партии и да-
лее использовать продукцию только этой партии. Последнее замечание необхо-
димо учитывать при использовании продукции фирм-поставщиков готовых мо-
дулей, так как в модулях различных партий выпуска могут быть установлены
аналогичные элементы различных производителей. Контролируемое применение
элементов от выбранных производителей позволяет более гибко подходить к
процессу разработки БАСУ для конечного пользователя по показателям условий
эксплуатации, надёжности и стоимости всей СУ.
Необходимо отметить, что тестирование многих электронных компонент
класса INDUSTRY в части механических и климатических воздействий проходит
по методикам стандарта MIL-883 либо аналогичным данному стандарту, а время
наработки на отказ у всех классов исполнения составляет не менее десяти лет и
имеет тенденцию к увеличению.
479
Сопоставляя публикуемые данные результатов испытаний на радиацион-
ную стойкость, можно предположить правомерность использования компонент
INDUSTRY с учётом выбора оптимальной структуры БАСУ, допустимого време-
ни парирования сбоев, назначения СУ и толщины естественной радиационной
защиты корпуса прибора для аппаратуры БАСУ ракетоносителей (PH) и косми-
ческих аппаратов (КА) [9, 15, 18-22, 29].
Рисунок 5.1.1 - Распределение электронных компонент по показателям
стойкости и стоимости
5.1.2 Оценка реализуемости функциональных требований ТЗ
Структура БАСУ определяется назначением СУ и должна обеспечивать со-
хранение работоспособности в условиях одиночных сбоев и отказов. Функциони-
рование аппаратуры БАСУ в условиях обратимых дефектов требует таких реше-
ний, которые в течение активного рабочего цикла выполняемой задачи обеспечи-
вают парирование либо сбоев, либо их маскирование и восстановление процесса
управления на борту. Полное тестирование и реконфигурация аппаратной части
БАСУ может происходить только в течение пассивного цикла выполняемой зада-
чи [8]. Длительность активного рабочего цикла, соотношение его с пассивным и
степень риска воздействия внешних факторов на аппаратуру СУ. определяет тре-
бования при выборе структуры БАСУ и его компонент с COTS-подходом к про-
ектированию СУ [16-22]. Ниже проанализированы некоторые варианты структур
построения БАСУ для различных СУ с применением однокристальных процес-
сорных элементов.
480
5.1.2.1 Одноканальные структуры с автоматом контроля и
восстановления информации (АКВИ)
БАСУ с таким типом структуры могут быть построены на основе однока-
нальных процессорных модулей и контроллеров таких фирм, как Advantech,
Fastwell или Octagon Systems, неоднократно рекламируемых для космического
применения [19-22]. Простота, модульность, программная
IBM PC-совместимость последних позволяют затрачивать малое время для по-
строения СУ на данной основе. Подтверждение работоспособности в жёстких ус-
ловиях эксплуатации для некоторых типов модулей по стандарту MIL -883 в час-
ти механических воздействий, время безотказной работы, гарантируемое фир-
мой-изготовителем, - более 100 тыс. часов, а также данные по радиационной
стойкости [20,22-27] выглядят очень заманчиво при представлении процессор-
ных модулей INDUSTRY для использования в БАСУ. Базовая структура процес-
сорного модуля такого типа показана на рис. 5.1.2.
Рисунок 5.1.2 - Структурная схема процессорного модуля с АКВИ,
Автоматом контроля здесь служит сторожевой таймер (Watchdpg Timer) и
система обнаружения и коррекции ошибок информации (Error Detection And
Correction - ED AC) при чтении процессором из оперативной памяти RAM, по-
стоянной памяти (ROM) и модулей ввода-вывода (I/O units). Автомат восстанов-
ления информации при сбое возможен только при внедрении программных моду-
лей обработки ошибок, определяемых системой EDAC по алгоритмам, заданным
конечным пользователем после рестарта операционной системы (ОС) и перегруз-
ки основной программы.
Следует отметить, что в построенных на данном оборудовании СУ не опре-
делено время жизни скрытого состояния потенциального сбоя, его местоположе-
ние, а также количество и степень опасности каждого из них [30]. Различными
программными методами [30-32] можно достичь оптимального времени обнару-
жения и парирования сбоя в области данных RAM. В области программ, находя-
щихся в RAM, PC-совместимость в сочетании с применением
COTS-операционных систем накладывают ограничения на возможности обнару-
жения и парирования сбоев. Реакцией на сбой может служить только уход с про-
граммы и рестарт по сторожевому таймеру. Единственно возможное парирование
481
сбоя - перезагрузка COTS- ОС и программ пользователя, которое требует >10 се-
кунд потерь в системе управления.
Таким образом, СУ, построенные на основе таких структур, применимы
только либо для очень медленно изменяющихся процессов, либо для процессов,
которые можно временно приостановить и отложить их выполнение до восста-
новления работоспособности СУ. Очевидно, что применение таких решений при
построении СУ ракет-носителей недопустимо.
Альтернативным решением в части повышения надёжности одноканальных
БАСУ и уменьшения времени жизни скрытого потенциального сбоя является от-
каз от использования готовых плат модулей, а также COTS-OC и построение
БАСУ на отдельных IOTS-компонентах с полной разработкой программного
обеспечения элементов ОС и прикладных задач. Однако такие решения влекут за
собой увеличение как сроков готовности проектов, так и объёмов финансирова-
ния.
5.1.2.2 Многоканальные резервированные структуры с холодным и
горячим резервом каналов со встроенным АКВИ
В структурах БАСУ такого типа за основу берётся канал контроллерного
или процессорного модуля рассмотренного выше типа. Для управления модуля-
ми в данной резервированной структуре необходимо введение специального бло-
ка контроля и управления реконфигурацией (БКУР) (Monitoring and Redundancy
Control System). Блок контроля и управления реконфигурацией (Monitoring and
Redundancy Control System) может быть разработан той же фирмой, что и процес-
сорный модуль, как, например, модуль резервирования 1785-СНВМ фирмы
Allen Bradley для контроллеров семейства PCL-5 [33], либо быть уникально раз-
работан для проектируемой СУ. Такой блок контроля и управления реконфигу-
рацией (БКУР) должен функционировать как жёсткий автомат с идеально отра-
ботанными алгоритмами управления резервом при всех возможных ситуациях.
Структура резервированного БАСУ этого типа показана на рис. 5.1.3.
Общий показатель безотказной работы данной структуры БАСУ выше, чем
у одноканальной. Однако следует отметить сильную зависимость общего показа-
теля для БАСУ от показателя безотказной работы собственно БКУР (Monitoring
and Redundancy Control System), который должен быть выше, чем показатели для
остальных резервированных модулей БАСУ. Программно-алгоритмическое обес-
печение каналов БАСУ аналогично одноканальным, так как слежение за работо-
способностью частично перекладывается на аппаратуру БКУР.
Время жизни скрытого состояния потенциального сбоя в структуре с горя-
чим резервом может быть сведено к нескольким программным тактам системной
задачи СУ и зависит от построения алгоритмов работы канала процессора с
БКУР. Для случая с холодным резервом и аналогичными алгоритмами взаимо-
действия БКУР может позволить сократить по сравнению с одноканальной
структурой БАСУ время рестарта управляющей задачи СУ путём подключения
резервного канала сразу после отсутствия сигнала нормы от активного канала. В
обоих случаях управление передаётся на предварительно протестированный ре-
зервный канал, а подозреваемый канал переводится в режим тестирования с по-
482
следующей маркировкой пригодности; Здесь также существует риск попадания
на канал с неисправностью на момент включения [30].
Устройства сопряжения с внешними устройства ввода-вывода
Рисунок 5.1.3- Структурная схема резервированного БАСУ
на основе процессорного модуля с АКВИ
Сочетание IOTS-модулей, COTS-OC, энергоэкономичность БАСУ и про-
стота структуры с холодным резервированием подводят к мысли о возможном
использовании таких структур в длительно необслуживаемых системах с ограни-
ченным энергопотреблением, которые не связаны с задачами управления жёстко-
го регламента времени. Это могут быть системы для малых космических аппара-
тов коммерческого назначения [34, 35], в навигационные задачи которых не вхо-
дит постоянное и точное поддержание ориентации. Поочерёдные циклы включе-
ния-выключения каналов необслуживаемых БАСУ должны положительно ска-
заться при длительной эксплуатации аппаратуры в условиях радиации [16]. Вре-
мя разработки и отработки БАСУ с такой структурой сравнимо со временем, за-
траченным на проектирование аналогичных одноканальных вариантов. При этом
следует учесть неизбежную аппаратную избыточность оборудования готовых
процессорных модулей, замечания по стойкости, указанные выше, а также необ-
ходимость введения дополнительного оборудования сопряжения с БКУР и свя-
занных с этим накладных расходов.
Однако для выполнения задач, связанных с управлением процессами на ос-
нове быстро изменяющихся данных, например, постоянного и точного поддер-
жания ориентации, необходимо уменьшить время реакции на сбой или отказ в
оборудовании, что влечёт за собой дальнейшее усложнение структуры БАСУ как
в аппаратной, так и программной части. Кроме того, необходимость развития
функций БКУР, как, например, в проекте «EgiptSat-1», превращает его в само-
стоятельный модуль, аналогичный процессорному с более жёсткими требования-
ми по надёжности.
483
5.1.2.3 Многоканальные структуры с автоматом межканального
обмена, программного контроля и восстановления информации в
каналах (АМКВИ)
Введение межканального обмена в структуру БАСУ позволяет повысить
достоверность истинной работы каналов БАСУ и сократить до пределов такта за-
дачи время обнаружения сбоя в одном из каналов БАСУ Предложено множество
вариантов построения структуры с АМКВИ: SIFT [5, 31], MAFT [36], FTPP [37],
Delta-4 [38] и др.[4, 7,10, 19, 39]. В рассмотренных структурах за аппаратную ос-
нову взято два и более идентичных модулей с процессором прикладной задачи
(Application processor), связанных между собой коммуникационным оборудова-
нием (Interchannel communication) для организации межканального интерфейса
программного межканального обмена (ПМКО) (рис. 5.1.4), где каждый из кана-
лов процессора независимо через интерфейс внешней связи (I/O interface) и блоки
ввода-вывода собственного канала (I/O Units (channel j)) считывает входное со-
стояние (Input DATA) с датчиков (Sensors) и выдает команды (Output
COMMANDS) в исполнительные органы (ACTUATORS).
Рисунок 5.1.4 - Структурная схема БАСУ с АМКВИ
Общая особенность таких БАСУ состоит в практически полном переложе-
нии на ПО функций поддержания отказоустойчивости как бортового компьюте-
ра, так и всей БАСУ. Теоретический показатель надёжности оборудования высок,
но работоспособность БАСУ на практике начинает зависеть от правильности ал-
горитмов парирования сбоев и отказов, их программной реализации и глубины
отработки на стендовом оборудовании. БАСУ с такой структурой требуют выде-
ления в такте задачи, кроме времени на самотестирование оборудования канала,
дополнительных временных «щелей» (рис. 5.1.5) [40] для организации межка-
нального обмена оперативными данными входной информации, данных вычис-
лений, результатов самотестирования и обработки полученной информации.
484
Рисунок 5.1.5- Распределение загрузки такта задачи управления в БАСУ с
АМКВИ на примере взаимодействия двух каналов:
Clock time - время цикла функционирования диспетчера операционной сис-
темы;
Task А, В - задача управления, исполняемая соответственно в каналах А и
В;
Input А,В - время выполнения подпрограммы приема данных в каналах А и
В;
Process - время выполнения модулей прикладной задачи управления в
А,В каналах А и В;
Output А,В — время выполнения подпрограммы выдачи выходных данных в
каналах А и В;
А,В - время выполнения записи команд в каналах А и В;
wait time - время ожидания разрешения на исполнение программного мо-
дуля;
lag time - время отставания каналов;
Deadline - время после которого наступает срабатывание сторожевого
таймера (WDT).
Как результат такого построения системы время на выполнение приклад-
ной задачи управления (process) уменьшится, и вследствие, этого требуется, по-
вышение производительности процессорных модулей, для покрытия вынужден-
ных простоев и обслуживания задачи поддержания истинной работы БАСУ для =
сохранения системной вычислительной производительности СУ [13,29,41]. Ве-
485
личина выделяемого времени зависит от количества анализируемой информации
и пропускной способности интерфейса ПМКО [39, 40].
Однако ограниченная пропускная способность системной магистрали, ин-
терфейса ПМКО, а также объем оборудования канала БАСУ не обеспечивает ма-
лого времени на определение наличия дефекта.
Количество тактов времени t, занимаемое задачей и затраченное на опреде-
ление дефекта в СУ с к каналами, п внутренними параметрами, N входными и
выходными данными, пропускной способностью ПМКО v, определяется [29]
следующим выражением:
V
t = k(n + N)~. (5.1.1)
Необходимо отметить, что данное выражение применимо только при усло-
вии охвата всех параметров п и данных N за один цикл ПМКО. При возрастании
переменных п или N и сохранении прежней длительности такта задачи становит-
ся необходимым разделить функции управления и обеспечения надёжности
БАСУ, а количество каналов к, активно задействованных в ПМКО, желательно
иметь минимальным, но достаточным для определения факта наличия дефекта
(обычно к=3) [6,42, 43, 29,44, 45].
Уменьшение в такте управления времени на выполнение прикладной зада-
чи влечёт за собой необходимость соответствующего повышения производитель-
ности процессорных модулей для покрытия вынужденных простоев и обслужи-
вания задачи поддержания истинности функционирования БАСУ, что сказывает-
ся на энергопотреблении и тепловыделении [41]. Величина временных «щелей»
зависит от количества информации и пропускной способности интерфейса меж-
канального обмена [41, 46].
Оптимальное распределение времени в такте достигается использованием
высокоскоростных сетевых интерфейсов и определением минимального объёма
передаваемых данных, использованием особого распределения времён в загрузке
такта [39]. Такие решения применимы в БАСУ с достаточно простыми алгорит-
мами управления и тактом малой загрузки прикладной задачей.
В качестве канального процессорного модуля здесь допустимо применение
одноплатных компьютеров с интегрированным модулем связи Ethernet фирм
Octagon Systems или Advantech. Интересен в этом плане и модуль, построенный
на основе интегрированных контроллеров со встроенными высокоскоростными
интерфейсами ввода-вывода [9].
Однако при реализации сложных задач управления с большим объёмом об-
рабатываемой информации и требуемой длительностью такта системного време-
ни менее 100 мс возрастает потребность в повышении вычислительной мощности
процессора. При этом наблюдается недостаточная пропускная способность как
системной магистрали однопроцессорных модулей, так и магистрали межканаль-
ной связи. Кроме того, требуется разделение функций управления и обеспечения
надёжности БАСУ, что решается установкой дополнительного коммуникацион-
но-контролирующего процессора (например, как в аппаратуре СУ ориентации и
486
навигации КА [6, 8] или в контроллере SC300E фирмы ABB August Ltd) [47]. Та-
кое построение БАСУ показано на рис. 5.1.6.
Рисунок 5.1.6 - Структурная схема БАСУ с АМКВИ на основе двухпроцессорных
канальных модулей
Особенность БАСУ такой структуры состоит в двухуровневом построении
аппаратуры и программ [6, 8]. Задача управления исполняется в процессоре при-
ложения (application layer), а функции поддержания жизнеобеспечения БАСУ пе-
реложены на коммуникационно-контролирующий процессор, осуществляющий
межканальный обмен и контроль истинности работы приложений своего канала
по результатам работы остальных каналов (vital layer).
Разделение функций позволяет снизить загруженность тактов для задач как
прикладного приложения, так и контроля и обеспечения отказоустойчивости.
При этом появляется возможность понизить скорость межканального обмена и
провести более глубокий анализ поступающей и выдаваемой информации.
Одно из преимуществ двухуровневого построения БАСУ заключается в
возможности применить ПО прикладной задачи СУ в процессоре приложения
(application layer), используемого в одноканальных структурах и структурах с
«холодным» резервированием, заплатив за это дополнительной аппаратурой в
каждом из каналов и сопутствующими накладными расходами (vital layer). Дру-
гим преимуществом является автономность отработанного разработчиком БАСУ
межканального поддержания отказоустойчивости от конечного пользователя и,
таким образом, исключение привнесения ошибок ПО в процедуры межканально-
го обмена. Такой подход возможен при наращивании вычислительной мощности
разработанных одноуровневых БАСУ с АМКВИ.
487
Рисунок 5.1.7 - Структурная схема базового процессорного модуля Delta-4
Рисунок 5.1.8 - Структурная схема QPR-БАСУ с перекрёстными связями
Однако основными проблемами при построении таких структур становятся
синхронизация процессов в каналах [48] и поддержание планирования межка-
нальной передачи информации [6, 39, 40]. Частично решение этих проблем пред-
лагается на программно-аппаратном уровне. Для решения проблемы синхрониза-
ции функционирования процессоров в SIFT-структурах предложено вариантов: в
структуре Delta-4 [38] (рис. 5.1.7) синхронизация пары процессоров обеспечива-
ется единством службы времени (Common clock, Its, etc.), в QPR-архитектуре [7]
синхронизация четырех процессоров обеспечивается перекрёстными связями с
488
периферийным оборудованием (рис. 5.1.8), а в контроллере SC300E фирмы АВВ
и микроконтроллере для космических применений [10] - аппаратным мажорити-
рованием входной и выходной информации.
5.1.2.4 Многоканальные структуры с аппаратным мажоритированием
входной и выходной информации каналов (I/O-HIFT)
Аппаратные решения по синхронизации в каналах путём межканального
мажоритирования входной информации частично упрощают программную зада-
чу межканального планирования процессов.
К таким решениям был проявлен интерес [10], но реализация проектов
БАСУ с данной структурой вызывает необходимость проектирования уникально-
го межканального оборудования. При этом решения позволяют повысить надёж-
ность всей СУ, так как узел мажоритирования между БЦВМ и периферийным
оборудованием превращает надёжностную структуру СУ из одноярусной в, как
минимум, двухъярусную с возможностью наращивания ярусов по периферийно-
му оборудованию устройств ввода-вывода (УВВ) (рис. 5.1.9).
Рисунок 5.1.9 - Структура БАСУ SIFT-CPU-HIFT-I/O
Необходимо отметить, что в данной структуре БАСУ отсутствуют потери
времени на программное мажоритирование входной и выходной информации, а
также становится возможной реализация быстрого аппаратного межканального
сравнения информации. Время жизни скрытого состояния потенциального сбоя в
каналах СУ на срезе БЦВМ-УВВ составляет два-три такта задачи СУ [30]. При
этом проектирование СУ такой структуры влечёт за собой сложности примене-
ния готовых IOTS-процессорных модулей и необходимость разработки и изго-
товления дополнительного специфического оборудования.
Кроме того, неизбежно возникают сложности синхронизации при сопряже-
нии аппаратного мажоритирования при выдаче команд и, как следствие, асин-
489
хронизма поступления сигналов на мажоритарный элемент после межканальной
программной синхронизации процессоров, что может приводить к потерям вре-
мени при каждой выдаче информации по интерфейсу ввода-вывода [39].
Однако в данной структуре БАСУ отсутствуют потери времени на про-
граммное мажоритирование входной и выходной информации. Показатели на-
дёжности. и, особенно, продолжительности латентного периода (времени про-
должительности жизни скрытого состояния) потенциального сбоя в такой струк-
туре гораздо лучше по сравнению с ранее рассмотренными.
Становится возможной также реализация быстрого аппаратного межка-
нального сравнения информации (в модуле interchannel communication) и опреде-
ления наличия дефекта на момент приема или выдачи. Время жизни скрытого со-
стояния дефекта в каналах сокращается до
к2
t = n—, (5.1.2)
v
так как на срезе устройств ввода-вывода время обращения к внешним устройст-
вам меньше длительности такта (N/v—> 0). Соответственно на срезе БЦВМ t со-
кращается до нескольких тактов задачи СУ, определяемых количеством парамет-
ров п [46].
Показатели надёжности и времени обнаружения дефекта в такой структуре
гораздо лучше, особенно при большом количестве N внешних параметров СУ.
Следует отметить, что на этапе выдачи информации суммарная достоверность
SIFT-истинности выдаваемой информации подтверждается межканальным HIFT-
сравнением.
Интересное предложение по отказоустойчивости, как I/O-HIFT структура,
предложено в [9] для вычислительной системы на основе DSP ядер, где решение
вопросов отказоустойчивости состоит в аппаратном мажоритировании магистра-
ли межканального обмена и циклической передаче по каналам прямого доступа к
памяти предварительно подготовленной информации о ходе вычислительного
процесса и состоянии аппаратуры каждого из каналов.
Сочетание программно и аппаратно поддерживаемой отказоустойчивости
для высокопроизводительных однокристальных сигнальных процессоров должно
обеспечить время обнаружения возможных дефектов в пределах времени
Однако проблема синхронизации такого количества процессоров в [9] не
рассматривается, так как обеспечивается специфическим режимом включения
аппаратуры сигнальных процессоров, что для других классов процессоров не
приемлемо.
БАСУ с I/O-HIFT построением в структуре надёжности представляют собой
одноярусную структуру, и повышение показателя надёжности возможно только пу-
тём наращивания количества каналов аппаратуры. Это ведёт к соответствующим
накладным расходам в СУ с сохранением самотестирования и обеспечения отка-
490
зоустойчивости программными средствами. Кроме того, в таких структурах
БАСУ существуют сложности применения готовых IOTS-процессорных модулей
и требуется разработка элементов БАСУ на отдельных компонентах.
При наличии перспективы проектирования БАСУ и собственных разрабо-
ток на IOTS-компонентах вследствие опасений при использовании готовых про-
цессорных модулей, о которых идёт речь в [28], необходимо рассмотреть струк-
туры БАСУ на однокристальных процессорах и микроконтроллерах, предложен-
ные в [10, 40].
5.1.2.5 Многоканальные многоярусные структуры с аппаратным
мажорнтированием сигналов каждого функционального узла БАСУ
(ML-HIFT)
В отличие от одноярусных БАСУ, где мажоритирование информации осу-
ществляется (программно или аппаратно) только в единственной локализации и
только для одного пакета сигналов и данных, в многоярусной структуре БАСУ
мажоритированию подвергаются два и более пакетов сигналов с распределенной
локализацией, такие, как основные магистральные сигналы процессора, памяти,
блока сопряжения с УВВ и т.п. Применение многоярусноеги позволяет достичь
парирования сбоев и отказов на выходе каждого из узлов БАСУ, подвергаемых
мажоритированию.
Типовая структура ML-HIFT БАСУ показана на рис. 5.1.10. В данной
структуре на каждый функциональный блок поступает информация, выбранная
по принципу двух выходов из трех, проходящая через узел мажоритирования
(interchannel voting unit). Этим достигается снижение влияния возникшего ло-
кального сбоя или отказа на работу остального оборудования. Введение аппарат-
ного межканального сравнения позволяет достичь уменьшения времени опреде-
ления дефекта оборудования до времени менее такта задачи:
t<l. (5.1.4)
Такое время реально достижимо, поскольку при ограниченном числе пара-
метров (n+N) пропускная способность v МКО резко возрастает, а мажоритирова-
ние и межканальное сравнение происходит аппаратно в каждом цикле процес-
сорной шины.
Даже грубая оценка (рис. 5.1.11) показывает, что ML-HIFT БАСУ, постро-
енная по принципу двух выходов из трех без адаптации структуры сохранит своё
функционирование и без приостановок процесса управления закончит задачу
управления, находящуюся на активной фазе выполнения, при одном сбое или от-
казе в ярусе каждого из каналов.
491
ОЗУ А п к X Процессор ь к X I Блок ввода/
ПЗУ А /1_л 1 V га m о CL S Г! А •1. га со о s вывода А
1- н
О.
ОЗУ В /1 !\ 'ГТ о мажс и- Процессор О * га S о Блок ввода/
ПЗУ В j г: о х с Гк В •г. L. о X с; вывода В
га х га X
га X га X
ОЗУ с 1 Г. О * Ф 2 ic •1 L. Процессор Блок меж : \ Блок ввода/
ПЗУ с •и п С LQ П" С ‘•1 / вывода С
Рисунок 5.1.10- Структура ML-HIFT БАСУ
Рисунок 5.1.11 - Возможное накопление отказов блоков в ML-HIFT
БАСУ, не приводящее к приостановке задачи процесса управления
Для ранее рассматриваемых структур при одинаковом количестве каналов
аналогичное распределение возникших сбоев или отказов оборудования в соот-
ветствующих блоках и каналах БАСУ приведёт к необходимости приостановки
процесса управления, реконфигурации на рабочий канал и быстрому истощению
запасов резервного оборудования (сбои), приводящему к полной потере работо-
способности БАСУ (отказы), что отсутствует в рассматриваемой ML-HIFT струк-
туре. Применение многоярусного магистрального мажоритирования позволяет
аппаратно фиксировать, локализовать и парировать возникающие сбои не далее,
492
как к следующему циклу процессорной шины, а к концу такта задачи иметь чёт-
кую карту работоспособного состояния как БЦВМ, так и комплекса аппаратуры
СУ [42]. Такая высокая скорость обнаружения и парирования отказов с учётом
опасений, касающихся использования в системах управления цифровой обработ-
ки и применения элементов дальнего зарубежья [28], позволяет рекомендовать
данную структуру БАСУ для использования в необслуживаемых СУ с задачами,
требующими очень жёсткого регламента времени с тактом до единиц миллисе-
кунд.
Потребителями таких БАСУ могут быть также СУ жёсткого регламента
времени с высокой длительностью активной фазы задачи управления, где недо-
пустима ни приостановка процесса управления, ни потеря информации за преды-
дущий период, такие, как PH высокоточного выведения КА и космические транс-
портные челноки с функцией автоматической стыковки типа Hermes [8].
Показатели по массе, габаритным размерам, стоимости для структуры
ML-HIFT сравнимы по значению с показателями для БАСУ с АМКВИ и I/O-HIFT
аналогичной канальности. Показатели надёжности такой БАСУ можно повышать
(и создавать её требуемый запас), либо увеличивая число ярусов мажоритирова-
ния оборудования до оптимального количества, либо дополнительно, применяя
метод адаптивного мажоритирования [11,42]. При этом метод адаптивного ма-
жоритирования не приводит к увеличению каналов БАСУ и росту сопутствую-
щих накладных расходов, отмеченных в [13-15, 29].
Показатель прикладной вычислительной производительности данной
структуры БАСУ лучше по сравнению с АМКВИ-структурами [13]. Очень важно
отметить, что в БАСУ с такой структурой применимо ПО одноканальной струк-
туры, а также возможно использование COTS-операционных систем при условии
сохранения компьютерной архитектуры оборудования [40,42], так как обеспече-
ние надёжности происходит на аппаратном уровне и не зависит от скрытых де-
фектов в ПО.
Однако при проектировании ML-HIFT БАСУ существует необходимость в
жёсткой аппаратной синхронизации работы однокристальных процессоров или
микроконтроллеров в каналах [11, 13, 39, 42,43,48].
5.2 Выбор и обоснование структурной схемы
Целесообразность использования в проекте СУ структуры из какой-либо
группы определяется учётом интегральных показателей - радиационной стойко-
сти, отказоустойчивости, стоимости, массы, габаритных размеров, энергопотреб-
ления и прочих характеристик. Для детальной оценки целесообразности приме-
нения каждой из изложенных выше структур к рассмотрению представлены
БАСУ, построенные на однотипных элементах. Для каждой из структур рассчи-
тывают ключевые параметры, принимая во внимание замечание [13] о том, что
структуры БАСУ с преимущественно программным обеспечением отказоустой-
чивости (SIFT - software implement fault tolerant) по сравнению с одноканальными
структурами и структурами с преимущественно аппаратным обеспечением отка-
зоустойчивости (HIFT- hardware implement fault tolerant) требуют повышения
493
вычислительном производительности процессора пропорционально времени в
такте, выделенному для служебного пользования и достаточному для обеспече-
ния задачи истинности функционирования.
Полученные данные о характеристиках структур БАСУ приведены в
табл. 5.1.3. В‘качестве канальной основы взят базовый набор БИС для однока-
нальной БАСУ с АКВИ: Для реализации специфических блоков предложены
БИС программируемой логики с ёмкостью кристалла в 8000 - 25000 эквивалент-
ных вентилей.
Таблица 5.1.3 - Сравнительные характеристики БАСУ различных структур на од-
нотипных БИС
Структура типо- вой кайальности Количество каналов / процессоров Приведен- ные на БАСУ масса/ габаритные размеры/ стоимость Способ обес- печения отка- за-' устойчивости Минимальное количество так- тов времени жизни скрытого сбоя Прогнозированное количество затраченных тактов на восстановление после одного отказа Приведенная производитель- ность прикладной задачи 1 Мощность потребления типо- вой структуры БАСУ
1кан АКВИ 1/1 1,0/1,0/1,0 Аппаратно- программный 1...4 - 0,9 1
2-кан. АКВИ 2/2 2,7/2,6/2,8 Аппаратно- программный 1...4 >100 >8000* 0,9 2,3 1,3*
3-кан. 1проц. АМКВИ 3/3 3,0/3,0/3,0 Программный 1...3 9...24 0,5 3
4-кан. 2проц. АМКВИ 4/8 10,8/11,2/11 Программный 1...2 4...24 0,8 10
2-кан. Delta-4 2/4 3,6/3,5/3,7 Аппаратно- программный 0...2 2...8 0,7 5
2-кан. QPR-БАСУ 2/4 4,2/4,1/4,3 Аппаратно- программный 1...2 2...8 0,7 5
3-кан. SIFT-CPU- HIFT-I/O 3/6 6,8/7,0/7,5 Программно- аппаратный 1...3 2...6 0,85 7
9-кан. HPPS 9/9 10/12/11 Аппаратный 0...6 1...9 0,95 9
3-кан. ML-HIFT 3/3 3,4/3,3/3,5 Аппаратный 0...1 0...3 1,0 з,з
* Показатель для «холодного» резерва.
Вычисления проводят укрупнённо, принимая в качестве единицы измере-
ния одну БИС при минимальном количестве необходимых для реализации струк-
туры БАСУ блоков. Прогноз затрат времени составлен по результатам анализа
времени обнаружения скрытого сбоя или отказа в аппаратуре БАСУ [30] для слу-
чая истинности работы оборудования аппарата контроля и восстановления ин-
формации. Показатель производительности прикладной задачи учитывает время,
отводимое только для выполнения системной задачи управления.
Анализ полученных результатов показывает, на первый взгляд, явную не-
494
выгодность многоканальных структур БАСУ с четырьмя и более каналами осо-
бенно по стоимости, мощности потребления, массе и габаритным размерам. Ви-
димое преимущество однопроцессорных БАСУ дублированной структурь!;- осо-
бенно с холодным резервом, по показателям мощности потребления, массы, габа-
ритным размерам и стоимости, компенсировано очевидным отставанием по пока-
зателю времени восстановления работоспособности, особенно при отказе, что на-
кладывает серьёзные ограничения на применение структур такого типа в СУ с
требованием поддержания непрерывности процесса управления. Условию мак-
симальной скорости парирования сбоев и отказов и поддержания непрерывности
процесса управления наиболее всего удовлетворяют БАСУ с полностью аппарат-
ным способом поддержания отказоустойчивости, особенно ML-HIFT структуры.
Последняя также имеет максимальный показатель по производительности для
прикладной задачи СУ.
При анализе структуры БАСУ для большего удобства введены следующие
показатели через усреднение накладных расходов для БАСУ:
- отношение производительности БАСУ к мощности энергопотребления
типовой структуры как показатель эффективности использования по-
требляемой мощности;
- приведенные к одному каналу основные показатели габаритных разме-
ров, массы, стоимости и т.п.
Полученные характеристики структур БАСУ по этим показателям пред-
ставлены в табл. 5.1.4.
Таблица 5.1.4 - Сравнительные характеристики приведенных показателей БАСУ
Структура типовой канальности Эффектив- ность ис- пользования потребляе- мой мощно- сти типовой структуры БАСУ Эффективность использования потребляемой мощности БАСУ, приве- денная на один канал Приведен- ные на ка- нал масса/ габарит- ные раз- меры Приведен- ная на ка- нал по- требляе- мая мощ- ность Приведен- ная стои- мость од- ного кана- ла
2-кан. АКВИ 0,39 (0,69*) 1,95 (3,45*) 1,4/1,3 1,15 (0,65*) 1,4
3-кан. 1проц. АМКВИ 0,13 0,43 1,0/1,0 1,33 1,0
4-кан. 2проц. АМКВИ 0,08 0,2 2,7/2,8 2,5 2,7
2-кан. Delta-4 0,14 0,7 1,8/1,7 2,5 1,8
2-кан. QPR-БАСУ 0,14 0,7 2,1/2,0 2,5 2,2
3-кан. SIFT-CPU-HIFT-I/O 0,12 0,4 2,2/2,3 2,33 2,5
9-кан. HPPS 0,11 0,12 1.1/1,з 1 1,2
3-кан. ML-HIFT о,з 1 1,1/1,1 1,1 1,2
* Показатель для «холодного» резерва.
Лучший показатель эффективности использования потребляемой мощности
наблюдается в двухканальной АКВИ структуре, особенно с холодным резервиро-
ванием, что отмечается в характеристике как для канала, так и для всей структу-
ры. БАСУ с такого типа структурой применимы в СУ, где требование минималь-
495
ности энергопотребления является одним из основных, при этом не предъявляет-
ся жёстких требований к регламенту обеспечения управления в реальном време-
ни. При необходимости создания запаса избыточности в необслуживаемых СУ,
например для управления КА, многоканальная структура АКВИ с холодным ре-
зервированием может быть принята к рассмотрению перспективы использования.
Достаточно высокий показатель эффективности также имеет ML-HIFT-
структура, а повышение требования к жесткости регламента реального времени и
необходимости парирования сбоя или отказа «на лету» делает ML-HIFT- струк-
туру лидером среди структур БАСУ с горячим резервированием для необслужи-
ваемых СУ с задачами навигационного типа.
Низкие показатели эффективности трех и более канальных БАСУ скрывают
запас резервирования, который создаёт возможность более длительного истоще-
ния избыточности [40], что желательно при использовании COTS- и IOTS- ком-
понент. Кроме того, в обслуживаемых СУ такой подход позволяет проводить за-
мену канала БАСУ с наличием отказов на исправный в более мягком режиме
[30, 36] без приостановки процесса управления и с меньшей вероятностью воз-
никновения программно-аппаратного сбоя в СУ.
Таблица 5.1.5 - Характеристики БАСУ по допустимым отказам
Структура типовой канальности Допустимые отказы в аппаратуре ка- налов БАСУ Максимально допустимые отказы в аппаратуре обеспечения отказоустой- чивости
2-кан. АКВИ 1 отказ: процессор или память или канал ввода-вывода основного про- цессора Не допустим никакой отказ
3-кан. 1проц. АМКВИ 2 отказа: процессор в одном канале и какой-либо из блоков в другом Отказ в межканальной связи с одним из каналов
4-кан. 2проц. АМКВИ 4 отказа: отказ любого блока на при- кладном уровне в трех каналах и от- каз любого блока на жизненном уровне в одном канале Отказы в межканальной связи с двумя каналами или любого блока жизнен- ного уровня в двух из четырёх кана- лов
2-кан. Delta-4 2 отказа: отказ любого по одному на каждый канал из пары подканалов Отказ общего оборудования пары подканалов или отказ в межканаль- ной связи
2-кан. QPR-БАСУ 2 отказа: процессор в одном канале и какой-либо из блоков в другом Отказ в перекрёстных связях
3-кан. SIFT-CPU- HIFT-I/O 2 отказа: один в оборудовании про- цессоров или памяти одного из кана- лов, второй - в оборудовании вво- да-вывода Отказ в межканальной связи с одним из каналов или любого блока жизнен- ного уровня, один отказ на канал в мажоритарном элементе канала
9-кан. HPPS 5 отказов в пяти каналах Отказы в межканальной связи с пя- тью каналами
3-кан. ML-HIFT (без реконфигурации) N отказов: по одному из отказов на канал в каждом из N ярусов мажори- тирования По одному отказу на канал в каждом из N мажоритаров каждого канала
3-кан. ML-HIFT (с реконфигурациией) 2N отказов: по два отказа в каждом из N ярусов в трёх каналах По одному отказу на канал в каждом из N мажоритаров каждого канала
496
Рассмотренные структуры при использовании однотипных компонент
имеют различный расчётный показатель надёжности, который может либо огра-
ничить возможность применения этой структуры БАСУ, либо впоследствии для
обеспечения необходимого показателя потребовать внести изменения в проект
БАСУ, что неизбежно увеличит накладные расходы в как технической, так и в
финансовой части последующего образца БАСУ. Необходимо дополнительно от-
метить, что общий показатель надёжности структуры БАСУ сильно зависит от
местоположения дефекта. Так, сбой или отказ в аппаратуре БКУР двухканальной
структуры может сначала выключить основной, а затем и резервный каналы даже
без объективной информации об отказах или сбоях в каком-либо канале. Для трех
и более канальных структур с межканальными связями сбой или отказ в аппара-
туре межканального обмена одного из каналов парируется путем сопоставления
данных разных каналов.
Как следует из анализа данных, приведенных в табл. 5.1.5, наибольшее ко-
личество допустимых полных отказов блоков в любой части оборудования по-
зволяет парировать структура ML-HIFT, реализующую возможность накопления
отказов и адаптации путём перестройки ярусов в одноканальную конфигурацию.
5.3 Анализ характеристик надежности трехканальных архитектур
резервирования
Определив аналитические показатели надежности для ранее рассмотренных
трехканальных архитектур, оценим влияние применения различных схем обеспе-
чения отказоустойчивости, а также количества точек приложения мажоритарных
органов между структурными составляющими (количества ярусов мажоритиро-
вания) для обеспечения наиболее высокого показателя надежности БАСУ.
Для анализа взята система, включающая в себя часть базовой составляю-
щей компьютера: генератор, процессор, память (рис. 5.1.12), имеющую вероят-
ность безотказной работы (ВБР):
Pl = РоРсРиРмет (5.1.5)
где PG - ВБР схемы генератора, РСРи - ВБР процессорного модуля, РМст -
ВБР блока памяти.
Рисунок 5.1.12 - Структурная схема надежности канала базовой
части компьютера
Применяя подход общего мажоритирования, получаем одноярусную струк-
туру, показанную на рис. 5.1.13, где информация от трех независимых каналов
базовой составляющей проходит через мажоритарный орган.
497
j Рисунок 5.1.13 - Структурная схема надежности трехканальнэй одноярусной
структуры с общим мажоритированием
Для данной структуры ВБР будет определяться следующим образом:
P3sm МЗ(РсРсРиРмет)2 ~2(PGPCPUPMera)3) • PmjS, (5.1.6)
где PG - ВБР схемы генератора; Рсри - ВБР процессорного модуля; РМет -
ВБР блока памяти; PmjS - ВБР мажоритарного органа.
Следует отметить, что для данной структуры ВБР мажоритарного органа
при HIFT-реализации - это величина, которая определяется точностью данных
для конкретного элемента, однако при SIFT- реализации данная характеристика
зависит и от надежности программного обеспечения.
Подход узлового мажоритирования (рис. 5.1.14) есть применение подхода
общего мажоритирования к каждому из составляющих узлов (PmjG - ВБР мажо-
ритарного элемента для схемы генератора, PmjCpu ~ ВБР мажоритарного элемента
для процессорного модуля), который позволяет получить грехъярусную систему
с общей ВБР:
P33Unjj =« -2Pg)PmjG)-((3Pc2pu -2Pare)PrajCpU).((3P^ra-2P^in)PmjS). (5.1.7)
Рисунок 5.1.14 - Структурная схема надежности трехканальной структуры
с тремя ярусами узлового мажоритирования
При подходе сетевого мажоритирования обеспечивается идентичность ка-
налов, так как мажоритарные органы входят в состав канального оборудования
(рис. 5.15). ВБР такой системы трехъярусного сетевого мажоритирования описы-
вается следующим выражением:
498
P33Nmj = (3P<| -2Pg)-(3P^PUP<G -2P£PUP*jG)
(5.1.8)
* (ЗРмет-РпуСРи ^^Mcm^mjCPlO^mjS-
Рисунок 5.1.15 — Структурная схема надежности трехканальной структуры
трехъярусного мажоритирования с двумя ярусами сетевого и одним ярусом
узлового мажоритирования
Сравнительные характеристики абсолютных величин ВБР для рассмотрен-
ных случаев с идентичными ВБР узлов показаны на рис. 5.1.16.
Улучшение относительных показателей многоярусного сетевого мажорити-
рования по сравнению с многоярусным узловым (UtoN) и общим одноярусным
(SMtoN) показано на рис. 5.1.17.
Таким образом, аналитически подтверждается высказывание (рис. 5.1.11),
что с увеличением количества ярусов сетевого мажоритирования повышается
общая вероятность безотказной работы трехканальной системы за весь период
функционирования.
Рисунок 5.1.16 - Абсолютные величины вероятности безотказной работы для базо-
вой составляющей компьютера при различных подходах для реализации отказо-
устойчивости
499
Рисунок 5.1.17 - Улучшение относительных показателей многоярусного сетевого
мажоригирования по сравнению с многоярусным узловым (UtoN) и общим
одноярусным (SMtoN)
5.4 Анализ временного взаимодействия каналов для SIFT- и HIFT-
подходов в реализации отказоустойчивости БАСУ
Время исполнения глобальной задачи управления обычно распределяется
на элементарные такты функционирования операционной системы жесткого рег-
ламента времени (ОС ЖРВ) в зависимости от длительностей и периода исполне-
ния базовых локальных задач управления. Превышение времени исполнения ба-
зовых локальных задач и выход за пределы запланированного допустимого вре-
мени такта ОС ЖРВ грозит катастрофическим сбоем вычислительного процесса и
потерей процесса управления, что в конечном итоге завершается неудачей вы-
полнения миссии [40].
Анализ времени проведен для исполнения идентичной задачи в компью-
терном блоке трехканальной структуры, аналогичной показанной на рис. 5.1.13, и
различных подходов SIFT- и HIFT- реализаций мажоритарного органа. За основу
взят такт ОС ЖРВ [40] с задачами: определения исполняемых, задач (task
numerator), приема информации (input), блока исполнения запланированных про-
грамм для этого такта (task programs), выдачи информации (output). Прием и вы-
дача информации согласно структуре рис. 5.1.13 проходят соответствующий этап
мажоригирования (voting). Временная загрузка такта показана на рис. 5.1.18.
На временной оси наглядно представлено время распределения загрузки такта
ОС для единичной задачи, включающей в себя прием данных (Input), межканальный
обмен (XCHG) входной информацией, мажоритирование (VOTING) входных данных,
подпрограммы обработки данных и задачи управления (Task programs), подпрограмму
проверки готовности каналов (Ready for OUT), межканальный обмен (XCHG) выход-
ной информацией, мажоритирование (VOTING) выходных данных, выдачу команд
(OUTPUT) и запускаемой диспетчером (Task enumerator) ОС. В SIFT-реализации ком-
пьютера присутствуют затраты времени на осуществление межканального обмена
500
(XCHG), зависящего от пропускной способности канала обмена и объемов передавае-
мой информации, а также затрат времени на программное мажоритирования
(VOTING). При HIFT-реализации обмен и мажоритирование происходят на фоне
приема и выдачи информации, что исключает затраты времени на программное.мажо-
ритирование. Аппаратные затраты при HIFT-реализации компенсируют временные
потери программного взаимодействия, что и обеспечивает возможность повысить сис-
темную производительность БЦВК.
Рисунок 5.1.18- Заполнение такта ОС ЖРВ полезной программной нагрузкой для
трехканальной структуры с SIFT- и HIFT- реализациями мажоритарного органа
Наряду с этим при реализации одноярусной HIFT-структуры существует
проблема когерентности задающих канальных генераторов, так как при трех от-
дельных генераторах через малое время от синхронного старта происходит поте-
ря синхронизма сигналов на мажоритарных органах (рис. 5.1.19). На данном ри-
сунке иллюстрируется начальный этап после синхронной деактивации сигнала
RESET старта процессоров (START) и первые обращения (0, 1, 2, 3, 4) через ма-
501
жоритарный элемент. Видны дробления информации на выходе мажоритарного
элемента на обращении (3), причиной которых является отсутствие синфазного
сигнала от задающего генератора на процессор.
Для исключения распространения последствий асинхронных составляющих
необходимо предпринимать меры по их устранению в узлах, их порождающих.
1ЛЛЖЩШМ1
RESET Start
с
irtjS
mjG
п и[шадшш1шмпнпгшллпш,
i
RESET
Start | О
L______
Рисунок 5.1.19 - Реальное соотношение времен межканального взаимодействия в
трехканальной одноярусной архитектуре с общим мажоритированием (mjS) и меж-
канальное состояние фаз сигналов канальных генераторов на входе функции узло-
вого мажоритирования (mjG) яруса генератора при аппаратной реализации органа
мажоритирования
5.5 Структурные элементы бортового компьютера
5.5.1 Вычислительное ядро
5.5.1.1 Структурная модель ядра первого поколения БЦВМ
Характерной особенностью процессоров первого поколения является про-
странственное распределение структурных блоков, составляющих процессорное
ядро [42]. Каждая структурная составляющая представляет собой законченный
функциональный блок, который выполнен на основе набора соответствующих
интегральных схем. В структуре явным образом прослеживается ход процесса
прохождения информации по ядру (процессору) БЦВМ (рис. 5.1.20,а) и места ус-
тановки мажоритарных элементов (2/3).
502
a
б
Рисунок 5.1.20 - Структурная модель процессора первого поколения БЦВМ:
а - с расположением мажоритарных элементов; б - формированием
временной диаграммы блоком синхронизации
Движение информации по ядру задается блоком синхронизации, который
503
формирует последовательность импульсов разрешения на функционирование ка-
ждого блока. Время между фронтами импульсов последовательности соответст-
вует скоростным характеристикам выполнения операций для каждого блока
(рис. 5.1.20,6). Период импульсов задающего генератора, подключаемого к блоку
синхронизации, определяется быстродействием самого «медленного» блока.
Отказоустойчивость в такой структуре процессора обеспечивается на аппа-
ратном уровне (HIFT-структура) путем внедрения в межблочные интерфейсы
мажоритарных элементов, с одной стороны, а с другой - обеспечением мажори-
тирования при формировании тактовой последовательности в блоке синхрониза-
ции и задающего генератора.
5.5.1.2 Структурная модель ядра среднего поколения
Особенностью среднего поколения процессоров является однокристальная
реализация CISC-архитектуры ядра. Все функциональные составляющие предос-
тавлены пользователю «как есть», в виде законченной таблицы исполняемых ко-
дов (системы команд), при этом дополнить или изменить таблицу невозможно.
По представляемой в описании производителями информации о системе команд,
времени их выполнения и частным временным диаграммам становится возмож-
ным повременное разложение на фазы и представление хода выполнения команд,
исполняемых в ядре. Следует также отметить, что по количеству стробов часто-
ты, приходящиеся на выполнение одной команды, процессоры среднего поколе-
ния аналогичны их предшественникам и в обобщении фактически представляют
собой аналогичные устройства, только в однокристальном исполнении
(рис. 5.1.21,а). При этом блок синхронизации остается (как и у первого поколе-
ния) потребителем, как минимум, удвоенной частоты задающего генератора.
Блок
генератора
частот
Системная
частота
f/2
Ядро
процессора /I
Внешняя
шина
[2,...,16]
Рисунок 5.1.21 - Структурная модель процессора: а - среднего и б - нового
поколения
Однако входная частота для процессоров среднего поколения выше в
10-100раз относительно первого поколения, достигая величин 50...66 МГц. Дос-
туп к межблочным интерфейсам ядра полностью отсутствует, и обеспечение от-
504
казоустойчивости на аппаратном уровне возможно только установкой мажори-
тарных элементов на внешних интерфейсах и служебных сигналах. Кроме того,
частоты переключения сигналов на внешних интерфейсах также достигают вели-
чин значений в десятки мегагерц, что представляет технические трудности при
существующих подходах по аппаратному обеспечению отказоустойчивости.
5.5.1.3 Структурная модель ядра нового поколения
Особенностью процессоров нового поколения является кардинальное изме-
нение концепции построения ядра процессора, уход от CISC- архитектуры и ак-
тивное применение RISC-направления при построении ядра. Технологические
достижения в производстве элементов позволили увеличить как скоростные ха-
рактеристики, так и количество элементов в кристаллах.
Повышение производительности процессоров потребовало введения блока
умножения входной частоты, а также подключения между скоростной шиной яд-
ра и шиной внешней памяти оборудования двухпортовой сверхоперативной па-
мяти (кэш) как отображения рабочей зоны кодов и зоны данных (рис. 5.1.21,6).
Управление системой кэш непосредственно связано с планировщиком исполне-
ния программы и конвейеризации команд для обеспечения режима «трубопрово-
да» (piping) потоков команд и данных. Процессы внутри процессорного ядра и
вне кристалла на внешней системной шине асинхронны, а процессы обмена на-
целены на построение передачи информации по пакетному принципу.
Обеспечение отказоустойчивости на аппаратном уровне возможно только
установкой мажоритарных элементов на внешних интерфейсах и служебных сиг-
налах [10], а проблемы синхронизации при использовании аппаратного обеспече-
ния отказоустойчивости [48] аналогичны трудностям предшествующего поколе-
ния процессоров.
5.5.1.4 Анализ функционирования однокристальных процессоров в
трехканальной структуре
Для анализа функционирования процессоров в трехканальной структуре
(рис. 5.1.22), построенной аналогично [47], применяем методы логико-
временного моделирования процессов и экспериментальный метод реального ма-
кетирования.
Рисунок 5.1.22 - Структурная схема параллельного функционирования
трех каналов однокристальных процессоров [47].
505
В качестве моделей реакции процессоров применяли средства пакета
САПР, которые позволяют воссоздать (с точностью до наносекунд) временные
диаграммы для основных режимов и возможных реакций на входные воздейст-
вия, приведенные в технических описаниях микропроцессоров. Основные сред-
ства САПР также позволяют подключать в схему типовые модели элементов
внешнего окружения процессоров.
Макетные исследования проведены на базе кристаллов встроенных микро-
процессоров среднего поколения il86XL и 1386ЕХ фирмы Intel с использованием
типовой схемы включения задающих генераторов на примере исполнения «глад-
ких» программ, т.е. не содержащих операторов циклов, условных и безусловных
переходов, вызываемых синхронизированной подачей в три канала запроса на
прерывание.
Рисунок 5.1.23 - Временные диаграммы выполнения программы обработки преры-
вания, при независимых а) и когерентных б) источниках входной частоты процессо-
ров в каналах
На рис. 5.1.23:
tO - тактовая метка;
tl - внешнее прерывающее воздействие;
tW - время обработки внешнего прерывающего воздействия;
tS - время получения результата;
3 - время такта задачи;
Т - время ожидаемой девиации команд;
506
Т - запас времени до окончания такта.
Элементы генераторов в каналах применены с типовым отклонением час-
тоты ЮОрргп (100*1 О'6). Все однотипные элементы в каналах, включая генерато-
ры, применены с одних поставочных упаковок от фирм-производителей и при-
надлежат единым партиям изготовления.
Анализ фаз начала и окончания участков программ при параллельном
функционировании трех каналов макета (рис. 5.1.23,а) явно указывает на рассин-
хронизацию хода выполнения программы в каналах, первопричиной которой яв-
ляется девиация частоты задающих генераторов в зависимости от внешних усло-
вий функционирования.
Кроме того, свой вклад в процесс рассинхронизации вносит начальный раз-
брос в частотах генераторов. Логико-временное моделирование процессов позво-
лило выявить дополнительные источники привнесения рассинхронизации кана-
лов при использовании когерентной модели задающих генераторов
(рис. 5.1.23,6), а также определить точки возникновения лавинообразной цепи
нарастания рассинхронизации процессов в каналах, что нашло эксперименталь-
ное подтверждение при макетировании [29, 43,44].
Проводя оценку влияния параметров канальных генераторов применительно к
процессорам нового поколения [49,50], получаем кратное коэффициенту умножения
входной частоты увеличение девиации команд (табл. 5.1.6). При этом влияние меха-
низма кэш-памяти в части организации планировщиком исполнения программы и ре-
жима «трубопровода» потоков команд и данных за время исполнения программы об-
работки прерывания не учитывалось.
Таблица 5.1.6 - Отклонение характеристик в зависимости от разброса параметров
генераторов задающей частоты для процессоров разных поколений
Поколение процессоров Среднее | Новое
Исходная частота генератора F±Af
Типовая стабильность генератора (ЮОррш) А=10'4
Среднее количество команд в такте задачи N=2*106
Диапазон частот ядра процессора •/jFi'/zAf 4F±4Af
Количество стробов частоты ядра, приходящееся для исполнения одной команды 2...16 1
Девиация команд ±‘/4(AN) ±4(AN)
Разброс команд к концу такта задачи 100 1600
В результате проведенного анализа данных логико-временного моделиро-
вания процессов и экспериментальных исследований выявлены первопричины
рассинхронизации каналов параллельного функционирования однокристальных
ЦВМ, которые заключаются в следующем:
- различие частоты источников задающих генераторов в пределах пара-
метра нестабильности (начальные отклонения от номинального значения
и зависимость от условий эксплуатации);
507
- отсутствие синхронизма появления сигналов в каналах (отклонение от
типового значения времен переключения элементов);
- соотношение времен распространения сигналов по межканальным свя-
зям и времен срабатывания элементов;
- различие времен захвата и обработки однокристальными процессорами
принимаемых внешних и внутрикристальных сигналов в соседних кана-
лах.
Эти факторы диктуют более чем жесткий подход к вопросам синхрониза-
ции каналов ЦВМ [11, 42, 48] и требуют обеспечения полностью аппаратно коге-
рентного функционирования однокристальных микроЭВМ [29, 43], что возлага-
ется' на оборудование обеспечения отказоустойчивости.
5.5.2 Модель интерфейсного взаимодействия БЦВМ с устройствами
ввода-вывода
Базовым решением для организации обменов между процессором и устрой-
ствами ввода-вывода есть последовательный канал связи [51, 52]. При массогаба-
ритной оптимизации предпочтение отдается сетевым решениям построения то-
пологии связи (MIL-STD1553, EIA485) на базе программно поддерживаемого ло-
гического протокола обмена. Однако при практической реализации проектов, ба-
зирующихся на указанном выше решении, уже на стадии разработки прикладного
программного обеспечения проектирование наталкивается на необходимость
многократного повышения производительности процессоров относительно ранее
принятых по предварительным расчетам.
Модель интерфейсного взаимодействия БЦВМ с устройствами ввода-
вывода описывает временные соотношения в загрузке такта ОС ЖРВ между за-
дачами обработки и задачами получения-выдачи информации с применением се-
тевого протокола взаимодействия с периферийными устройствами по единому
информационному каналу с алгоритмом квитирования типа «запрос - ответ» при
различных построениях драйвера обмена между процессором (CPU) и преобразо-
вателем последовательного канала связи (SIO) (рис. 5.1.24).
Суммарное время исполнения всех запланированных задач для каждого
такта ОС ЖРВ должно быть не более длительности Т этого такта:
Т > Time instr + Time I/o, (5.1.9)
где TimeI/0 - время обслуживания, затраченное процессором для организации
обменов с периферийными устройствами; Timeinstr - время выполнения заплани-
рованного количества инструкций Instrtask, определяемого производительностью
процессора MIPSCPU (миллионов операций в секунду) следующим образом:
Timeinsrt
Instrusk
MIPScpu
(5.1.10)
При этом TimeI/0 зависит от типа и пропускной способности интерфейса,
от количества абонентов Na, алгоритмического построения протоколов обмена и
построения драйвера. Для программного построения драйвера время обслужива-
ния определяется суммарными затратами
508
Time[/0 - £(tn+Tn), (5.1.11)
n=l
где Na - количество обслуживаемых абонентов; ^-аппаратные затраты на
время прохождения информации по линии интерфейса п; Тп - затраты времени
процессора по реализации ожидании готовности ответов при обслуживании ли-
нии интерфейса n-го абонента.
(FPGA)
Управление
уровнем
целостности
а
а б
Рисунок 5.1.24 - Структурная схема модели интерфейсного взаимодействия БЦВМ
с устройствами ввода-вывода: а - при программном построении драйвера обмена;
б - при аппаратном построении драйвера обмена
При аппаратной реализации драйвера
Time j/о = NaTPAM, (5.1.12)
где Na - количество обслуживаемых абонентов; Tram - время доступа к масси-
ву данных драйвера с аппаратно реализованным обслуживанием.
Определяя заданную системную производительность БАСУ как
MIPSSjetem= —(5.1.13)
509
из выражений (5.8), (5.9), (5.12) получаем требуемое для системы быстродействие
процессора:
Т • MIPSSvslem
MIPSCPU =---------
T-Time,/O
(5.1.14)
Таким образом, при идентичных исходных данных в системной производи-
тельности БАСУ и построении интерфейсов с абонентами ввода-вывода умень-
шение времени тактирования ОС ЖРВ влечет за собой требование повышения
производительности процессора для покрытия накладных расходов обслужива-
ния ввода-вывода. При программном построении драйверов обслуживания ввода-
вывода (рис. 5.25,а) требуется многократное повышение производительности
процессора по сравнению с аппаратурным драйвером обслуживания ввода-
Рисунок 5,1.25 - Требуемое повышение производительности процессора MIPSCpu
для поддержания обменов с устройствами ввода-вывода и сохранения заданного
вычислительного уровня системы MIPSSystem‘ а - при программном и
б - при аппаратном построении драйверов
Потенциальное повышение системной производительности БАСУ при пе-
реходе от программного к аппаратному построению драйвера оценивается выра-
жением
1+Е(‘»+тп)
— n=l________
1 + NaTpAM
(5.1.15)
510
где tn - аппаратные затраты на время прохождения информации по линии ин-
терфейса п; Тп - затраты времени процессора по реализации ожиданий готовно-
сти ответов при обслуживании линии интерфейса n-го абонента; Na - количество
обслуживаемых абонентов; Tram- среднее время доступа к массиву данных
драйвера с аппаратно реализованным обслуживанием.
5.5.3 Модель интерфейсного взаимодействия БЦВМ в системе с
межканально-асинхронной распределенной сетевой структурой БАСУ
Как было указано выше, наиболее оптимальной архитектурой для инфор-
мационного обмена является сетевое построение топологии связи (MIL-STD1553,
EIA485). Существует зависимость между объемом информации, временем пере-
дачи, типом интерфейса и длиной линии связи. При необходимости увеличения
расстояния между абонентами (либо по другим причинам) применяется ретранс-
ляторное оборудование, устанавливаемое в сечении интерфейса. Практическая
реализация проектов, базирующихся на указанном выше решении, при использо-
вании трехканального оборудования БАСУ на стадии разработки прикладного
программного обеспечения сталкивается с наличием флуктуационных канальных
отказов оборудования при штатном функционировании на фоне нормального
тестирования в поканальном режиме.
Модель трехканальной трансляции (рис. 5.1.26) описывает разностные по-
канальные временные соотношения для всех стадий трансляции информационно-
го пакета: при взаимодействии процессора с контроллером приемопередатчика;
при взаимодействии буферной памяти приемопередатчика и транслятором* линии
передачи.
Рисунок 5.1.26 - Структурная схема модели интерфейсного взаимодействия БЦВМ
в системе с межканально- асинхронной распределенной сетевой структурой БАСУ
Стробирование информационного потока при трансляции происходит так-
товыми сетками: 1) контроллера при считывании данных с источника;
2) передатчика при получении данных от контроллера; 3) приемника при захвате
данных от передатчика; 4) контроллера при определении наличия данных в при-
емнике. Моменты стробирования определяются: 1) тактовой сеткой контроллера
при считывании данных с источника; 2) тактовой сеткой передатчика при полу-
чении данных от контроллера; 3) тактовой сеткой приемника при захвате данных
511
от передатчика; 4) тактовой сеткой контроллера при определении наличия дан-
ных в приемнике.
Модель учитывает межканальную разность времен стробирования инфор-
мации на каждом этапе, что позволяет оценить худший вариант временной рас-
синхронизации поканального состояния информации на приемном конце линии
связи.
—Л—отьа»<1 08)
—i£— dTsim jrtraic (%)
а б
Рисунок 5.1.27 - Расчетное время максимальной девиации времени получения
пакетов: а - в зависимости от количества сегментов сети;
б - от количества пакетов передачи
Разность времен прихода одного пакета информации к конечному абоненту
определяется суммарным временем межканального асйнхронизма
ATsum ~ ATstrobe + ATbaud ,
(5.1.16)
где ATstrobe - межканальная разность времен стробирования при рассинхрони-
зации информационного потока; ATbaud - межканальная разность времен распро-
странения сигнала. Для RISC ядер процессоров, у которых программа цикла оп-
ределения наличия флага готовности составляет пять команд, межканальная раз-
ность асинхронизма определяется выражениями
AT^obe =N-
5 1
MIPS Baud
Г 1 t 5
VBaud + MIPS
(5.1.17)
at* _ kbte____________
^Abaud ~ j ст? ’
Baud-8bB(Uld
(5.1.18)
512
где N - число сегментов сети; Baud - скорость передачи информации в бодах;
MIPS — быстродействие RISC контроллера; t - индекс оборудования передатчика;
г- индекс оборудования приемника; Lbits- полное количество битов в пакете;
5FBaud - относительное отклонение частоты генератора приемопередатчика (ти-
повое значение - 100 ppm).
Расчетное время максимального асинхронизма суммарного времени полу-
чения пакетов по сети ATsum согласуется с экспериментально установленным
временем ожидания «отставшего» канала. Графики расчета максимальной девиа-
ции получения информации ATsum в зависимости от количества сегментов сети и
количества пакетов передачи изображены на рис. 5.1.27.
5.5.4 Модель БАСУ в технологическом режиме отладки программного
обеспечения
Особой задачей при разработке и внедрении систем есть процесс контроля
хода выполнения программ. Особенно важен режим отладки при разработке сис-
темного программного обеспечения (ПО): операционной системы и элементов
поддержки программной отказоустойчивости, а также программ-драйверов внут-
реннего и внешнего оборудования, что становится дополнительной задачей в
системе поддержания когерентности функционирования SIFT-уровня каналов с
учетом специфики кэш-содержащих процессоров.
Рисунок 5.1.28 - Структурная схема подключения технологической аппаратуры
Модель построена на базе взаимодействия технологической аппаратуры
(DEBUG, TEST, Monitoring and control technological equipment) и БЦВМ во вре-
мени при типовом подключении по последовательному отладочному каналу
(Serial DEBUG LINK) при программно-аппаратной поддержке со стороны БЦВМ
513
(рис. 5.1.28). Технологическая аппаратура (ТА) представляет собой ПЭВМ со
специальным прикладным ПО ТА. ПО ТА включает в себя образ-модель процес-
са, выполняемого СУ под управлением БЦВМ, программные средства поддержки
и драйвера взаимодействия с бортовым ПО и ОС ЖРВ.
Модель описывает особенности режима отладки бортового ПО с учетом
дополняющих, друг друга факторов возникновения дополнительного асинхрониз-
ма в каналах SIFT-процессора, возникающего на этапах:
- приостановки основной выполняемой программы по какому-либо собы-
тию и переход на задачу взаимодействия с технологической аппаратурой
(ТА);
- включения механизма обмена между процессором и ТА;
- завершения технологических обменов и пуска основной программы по-
сле. приостанова.
Следует отметить, что режим отладки бортового ПО поддерживается про-
граммно-аппаратными средствами процессоров в каналах автономно и независи-
мо, от соседних каналов (рис. 5.29). Без применения дополнительного оборудова-
ния после старта процессора, успешной выдачи команды 1, останова с переходом
на программу обмена с ТА, продолжения процесса с последующей выдачей ко-
манды 2 из процессора и последующего аппаратного мажоритирования, начиная
с команды 2 выдачи будут потеряны.
Поэтому задача соблюдения когерентности функционирования каждого
участка штатной программы вычислительного (управляющего) процесса возлага-
ется на оборудование вне кристаллов процессоров. Для систем ОС ЖРВ необхо-
димо точно контролировать время начала и окончания выполнения каждого уча-
стка штатной программы внутри такта задачи. Следовательно, вход в этап приос-
танова программы режима отладки ПО для систем с ОС ЖРВ при взаимодейст-
вии должен сопровождаться также и остановом системного времени внутри так-
та, однако каждый из каналов процессора характеризуется собственным взаимо-
действием с общим HIFT-таймером системного времени (рис. 5.30).
Механизм обмена процессоров каналов с ТА при отладке ПО функциони-
рует по командному интерфейсу “запрос - ответ”. Инициатором обмена может
выступать как ТА, так и процессоры каналов вычислительной системы. В по-
следнем случае асинхронизм может быть достаточно высоким, особенно если
выход на обмен с ТА происходит не по системной метке времени, а по информа-
ционной готовности каждого канала вычислителя.
Время выдачи команды на останов и пуск системного таймера является
асинхронным в каждом из каналов по отношению к HIFT-таймеру и детермини-
рован только относительно вычислительного процесса и обменов с ТА. Как след-
ствие каждый вход в процесс обмена с ТА так же, как и выход из него, сопровож-
дается относительным прибавлением либо убыванием одного дискрета подсчета
системного таймера, что порождает систематическую погрешность флуктуаци-
онного характера подсчета времени внутри такта.
514
Видами тем-ямд из fiiiiiorsn-pti
to
пип
у/" 1 У"
: 0;в<«.их-1Ж
у,; №..ir^VL
ДО
пмплшишпллш
a
ш
П И ПШЙШ1ШЛЛЛЛЛЛЛЛЛП1 1ШМ1ПЛЛППШШПIIIIПП11.
3
по*
MAJ
i принята
Хймгнда Пняъзияь
Рисунок 5.1.29 - Лавинная рассинхронизация SIFT-каналов при режиме технологи-
ческих обменов с аннигиляцией последующих выдач в HIFT-уровне
видами кп-мииЛ ярли*елс₽а
Рисунок 5.1.30 - Синхронизация SIFT-каналов по данным таймера службы реаль-
ного времени (СРВ) в HIFT-уровне при режимах технологических обменов
Обмен с ТА включает в себя считывание и передачу информации не только
о состоянии регистров процессора, произвольных участков памяти и областей
515
ввода-вывода, но и текущего состояния периферийных устройств. Последние для
считывания истинного состояния требуют когерентности сигналов обращения,
определяемых программно флагами состояния каналов А, В, С.
Поскольку процессоры в каналах находятся в активном ожидании команды
от ТА, то в драйверах ожидания флагов необходимо учитывать особенности
функционирования ядра кэш-содержащих процессоров [53] при обеспечении
синхронизма. В алгоритме технологической части ПО следует ввести команду
очистки кэш («asm FLUSH») в циклах опроса адреса регистра флагов синхрони-
зации. Необходимо дополнительно отметить, что для процессоров со встроенной
системой поддержания процесса отладки DSU (Debug Serial Unit) [53] дополни-
тельный асинхронизм привносится автономными последовательными каналам
связи модуля изначально.
Особое внимание следует обратить на завершающий этап, когда по оконча-
нии технологических обменов пуск основной программы в каналах и системного
таймера необходимо обеспечить в пределах допустимого времени рассинхрони-
зации подключенного HIFT-уровня (рис. 5.30). Таким образом, при построении
вычислительных систем со структурой SEFT-ядро и HIFT-периферийное обору-
дование следует обеспечить когерентность функционирования SIFT-уровня.
Применение перспективных кэш-содержащих процессоров требует изменений в
подходах как при обеспечении внутритактового синхронизма каналов, так и при
построении обменов с периферийным оборудованием.
Синхронизацию функционирования на срезе SIFT/HIFT уровней наиболее
эффективно обеспечить на аппаратном уровне с обязательным привнесением до-
полнений в программные средства, что особенно необходимо при технологиче-
ских ’режимах отладки программного обеспечения. При отладке программ для
SIFT-HIFT структур наиболее сложно реализуемой функцией системы синхрони-
зации является старт-стопный режим, а в особенности пошаговый (покомандный)
в процессорах со встроенным модулем поддержания процесса отладки по асин-
хронному каналу связи DSU (Debug Serial Unit), что требует специальных реше-
ний на системном уровне.
Останов и пуск таймера канальными процессорами приводит к неизбежно-
сти привнесения систематической погрешности в программно-аппаратные сред-
ства подсчета временных интервалов внутри такта и потактовых замеров для рас-
пределенных во времени задач.
5.6 Построение структуры системы
Как было отмечено выше, время жизни скрытого состояния дефекта явля-
ется одним из ключевых параметров конечной архитектуры всего аппаратно-
программного управляющего комплекса, особенно в системах критичного при-
менения жесткого регламента времени. Время жизни скрытого состояния дефекта
зависит от структуры построения системы управления и особенно процессорного
блока [30], где наилучший показатель имеют ML-HIFT-структуры обеспечения
отказоустойчивости [14, 29]. Введение аппаратного межканального сравнения по
всем сигналам в ярусах мажоритирования ML-HIFT-структуры позволяет полу-
516
чить время обнаружения всевозможных дефектов как бортового компьютера, так
и всей системы управления, не превышающее одного такта прикладной задачи
[29]. Применение HIFT-структур также позволяет сочетать щадящий режим рабо-
ты элементов [13, 15] и обеспечивать высокий показатель надёжности много-
ярусной мажоритарной структуры с адаптацией.
Модели аппаратуры мажоритарных органов позволяют реализовать узлы
обеспечения отказоустойчивости между элементами практически во всех желае-
мых точках цифрового тракта разрабатываемого проекта, исключающие возник-
новение ложных сбоев и отказов при нормальном функционировании [44]. При
реализации проектов на базе процессоров среднего поколения применение мажо-
ритарных элементов с активной обратной связью, прилагаемой непосредственно
к процессорному элементу, позволяет получить полностью когерентное функ-
ционирование каналов во всем тракте прохождения сигналов и классическими
методами обеспечить ML-HIFT- структуру с необходимым количеством ярусов
мажоритирования [15,29,54].
Однако в структуре процессорных ядер старших поколений введены узлы,
позволяющие обеспечить увеличение производительности процессорного блока,
в том числе и пиковое, что приводит к тому, что процессы внутри процессорного
ядра и вне кристалла на внешней системной шине по скорости исполнения разли-
чаются. Программы исполняются из внутренней памяти с использованием кэш
или непосредственно FLASH, а процессы обмена нацелены на построение пере-
дачи информации по пакетному принципу. Аппаратное обеспечение отказо-
устойчивости таких процессоров возможно только по выводам, а с учетом того,
что точки приложения аппаратуры обеспечения отказоустойчивости возможны
лишь к шинам данных, частично управления и входным сигналам, то при нали-
чии времени внутрикристального кэшированного исполнения программы будут
присутствовать люфты времени для внешних обращений, что порождает асин-
хронизм функционирования каналов.
Вследствие этого обеспечение отказоустойчивости информационно-
вычислительного потока следует дополнительно поддерживать на программном
уровне с учетом допустимых временных интервалов, для чего необходимо иссле-
довать сочетание узлов в структуре SIFT- ядро -HIFT-окружение с детерминиро-
ванными временами фазовой, асинхронности для дальнейшей возможности обес-
печить ML-HIFT-структуру с нужным количеством ярусов мажоритирования в
оборудовании окружения.
Кроме того, для SIFT-уровня становится актуальной задача контроля про-
граммного функционирования каналов и обеспечения отказоустойчивости. С
этой целью необходимо обеспечить поддержку режима отладки программ не
только автономного узла процессора, но и при функционировании оборудования
компьютера, включая интерфейс межканального взаимодействия, а также обору-
дования всего комплекса периферийного оборудования БАСУ.
Рассмотрим две типовые структуры применяемых кристаллов:
517
1) кристалл контроллера, который включает в себя процессор, память, пе-
риферийные блоки, что для применения в системе только требует подключения к
его выводам нормализованных сигналов;
2) процессорный модуль без встроенной памяти и, частично, с элементами
периферийных устройств.
Первый тип-это полностью законченный кристалл SoC, предлагаемый
фирмами-изготовителями под конкретные задачи и устройства. Второй - это ли-
бо в базовой части универсальный контроллер или процессор как законченное
устройство, либо блок встраиваемого ядра кристаллов программируемой пользо-
вателем логики.
5.6.1 Модель смешанной SIFT/HIFT структуры с HIFT реализацией
по выводам БИС
Модель построена с ориентацией на применение SoC кристалла. Поскольку
аппаратная возможность установки мажоритарных органов для такого типа кри-
сталлов возможна только в сечении входных и выходных информационных сиг-
налов по выводам кристалла, то наиболее целесообразным в данных условиях
есть применение синхронизированных мажоритарных элементов (Sync 2/3) для
входных сигналов (рис 5.1.31).
Рисунок 5.1.31 - Модель смешанной SIFT-HIFT структуры с HIFT- реализацией по
выводам БИС
Целесообразно также функционально группировать сигналы и сформиро-
вать мажоритарную плоскость (Sync 2/3) параллельных интерфейсов для входных
и выходных сигналов. Программно потактовая синхронизация процесса управле-
ния обеспечивается выделением группы сигналов прерываний от таймеров служ-
518
бы времени, к которым целесообразно применить подход принудительного аппа-
ратного синхронизированного процесса мажоритирования (F-B 2/3).
Функционирование основано на внутритактовом планировании ОС ЖРВ.
Время включения выполняемых задач поддерживается таймером и предполагает
для времени tO считывание и аппаратное мажоритирование входной информации.
Далее при первичной обработке полученной информации на этапе tl рекомендо-
вано подключение межканального обмена и программного мажоритирования
промежуточных данных вычислений. Выдача информации на этапе tW также со-
провождается аппаратным мажоритированием. Все запланированные задачи для
этого такта должны завершиться ко времени tS - началу старта следующего цик-
ла ОС ЖРВ.
Структурная схема смешанной SIFT-HIFT структуры с HIFT- реализацией
по выводам БИС, построенная согласно данной модели, показана на рис 5.1.32 и
применена в реальных проектах БАСУ [29,49].
Рисунок 5.1.32 - Структурная схема смешанной SIFT-HIFT
структуры с HIFT- реализацией по выводам БИС
Использование данной модели при построении БАСУ ограничено следую-
щими условиями:
- память исполнения программ находится внутри кристалла процессора;
- время распространения сигнала по цепи обратной связи (F-В), включая
мажоритарный элемент и охваченное функциональное оборудование,
должно быть меньше, чем время смены процессов и сигналов, форми-
руемых. функциональным оборудованием;
- минимальная длительность импульса входного сигнала, допустимого
519
для мажоритирования, при соблюдении задержек по трассам просту-
пающих на мажоритарный элемент, сигналов и начального асинхронизма
фаз сигналов должна быть не менее половины длительности времени
срабатывания мажоритарного элемента;
- длительность строба tW должна компенсировать время межканальной
рассинхронизации;
- период стробирования мажоритарного узла синхронизации
“Sine 2/3’’должен быть больше времени срабатывания мажоритарного
элемента и меньше длительности удержания наиболее короткого пода-
ваемого на вход сигнала.
5.6.2 Модель аппаратно синхронизированной структуры с FTTFT
реализацией по выводам БИС
Модель ориентирована на применение отдельных кристаллов процессоров
либо процессорных ядер, внедряемых в FPGA кристаллы. Гибкость FPGA кри-
сталлов при выборе точек установки мажоритарных органов позволяет внедрять
ПАСПМ с применением непосредственно к узлам встраиваемых ядер.
Структурная модель показана на рис 5.1.33. Потактовая синхронизация
процесса обеспечивается блоком синхронизации посредством выдачи синхро-
частоты F , что применимо не только ко времени считывания tl, времени работы
с памятью и выдачи информации tW при исполнении программы, но и к функ-
Рисунок 5.1.33 - Модель аппаратно синхронизированной структуры с HIFT реали-
зацией по выводам БИС
520
Структурная схема синхронизированной HIFT структуры, построенная со-
гласно данной модели, изображена на рис 5.1.11 и применена в реальных проек-
тах БАСУ [29,42,43,45]. Использование данной модели при построении БАСУ
ограничено следующими условиями:
- память исполнения программ находится вне кристалла процессорного
ядра;
- цепь обратной связи, включая мажоритарный элемент и охваченное
функциональное оборудование, должна иметь время распространения
сигнала, меньшее, чем время смены процессов и сигналов, формируе-
мых функциональным оборудованием (кванта функционирования) по
отношению к процессорному элементу и FPGA окружения;
- минимальная длительность импульсного входного сигнала, допустимая
для мажоритирования, при соблюдении условия равенства задержек
распространения сигналов по межканальным связям и начального ка-
нального синхронизма должна быть более длительности времени сраба-
тывания мажоритарного элемента по отношению к сигналам шины с
устройствами памяти и ввода-вывода;
- период частоты стробирования tW должен компенсировать время меж-
канальной рассинхронизации;
- необходимо обеспечить выполнение условия равенства задержек рас-
пространения сигналов по линиям межканальных связей для исключе-
ния проявления кратковременных переключений сигналов («сколов») на
выходе мажоритарного элемента.
5.7 Проектирование периферийных устройств БЦВМ
5-7.1 Согласующее устройство связи по каналу MIL-STD-1553B
Обеспечение взаимодействия различных приборов как внутри одной ступе-
ни PH, так и между различными ступенями СУ PH осуществляется с помощью
информационных интерфейсов. Выбор конкретного интерфейса зависит от кон-
кретных требований к системе управления. В общем случае целесообразно для
взаимодействия цифровых устройств внутри одного прибора или нескольких
приборов при длине линии связи менее 1 м использовать параллельный интер-
фейс, обеспечивающий максимальную скорость передачи информации. При не-
обходимости минимизировать аппаратные затраты и уменьшить вес кабельной
сети, что очень важно при разработке БЦВМ, можно использовать последова-
тельные интерфейсы.
Наибольшее распространение для построения БЦВМ получил магистраль-
ный последовательный интерфейс MIL-STD-1553B.
Правильный выбор кодирования позволяет повысить достоверность пере-
дачи информации. От выбранного способа кодирования напрямую зависит также
сложность аппаратуры (узлы кодирования и декодирования). Код должен в идеа-
ле обеспечивать хорошую синхронизацию приема, низкий уровень ошибок, рабо-
ту с любой длиной передаваемых информационных последовательностей.
В качестве кода передачи интерфейса MIL-STD-1553В использован бипо-
521
лярный фазоманипулированный код (Манчестер П).
- Манчестерский код (или код Манчестер-П) относится к самосинхронизи-
рующимся кодам, имеет два логических уровня, что способствует его лучшей
помехозащищенности и упрощению приемных и передающих узлов. Единица пе-
редается как биполярный кодированный сигнал 1/0 (за положительным импуль-
сом следует отрицательный импульс). Нуль передается как биполярный кодиро-
ванный сигнал 0/1 (за отрицательным импульсом следует положительный им-
пульс). Переход через нулевой уровень осуществляется в середине интервала
времени т, в течение которого передается информационный разряд (рис. 5.1.34).
Импульсы частотой
1 МГц
Униполярный код
Биполярный фазо-
манипулированный
код
т - время передачи одного двоичного разряда
Рисунок 5.1.34- Кодирование информации
Обязательное наличие перехода в центре интервала передачи каждого бита
позволяет приемнику манчестерского кода легко выделить из пришедшего сигна-
ла синхросигнал и передать информацию без потерь из-за рассинхронизации ге-
нераторов различных абонентов.
Приемник легко может определить не только начало передаваемой после-
довательности битов, но и ее завершение. Если в течение битового интервала нет
перехода сигнала, то прием заканчивается.
Одним из достоинств манчестерского кода является отсутствие постоянной
составляющей в сигнале (половина времени сигнал имеет высокий уровень, дру-
гая половина - низкий). Постоянная составляющая равна среднему значению ме-
жду двумя уровнями сигнала, что позволяет применять для гальванической раз-
вязки импульсные трансформаторы. При этом не требуется дополнительного ис-
точника питания для линии связи (как, например, в случае использования оп-
тронной гальванической развязки), Трансформатор пропускает высокочастотные
информационные сигналы, но обеспечивает полную изоляцию по постоянному
току и снижает влияние низкочастотных помех.
Все кабельные соединения выполнены из кабеля с нормированными пара-
метрами, содержащего витую пару проводников с непрерывным круговым экра-
522
нированием в защитной оболочке.
Экранирование электрических линий связи применяется для снижения
влияния на кабель внешних электромагнитных полей. Экранирование также за-
метно уменьшает внешние излучения кабеля, что важно для обеспечения элек-
тромагнитной совместимости.
Электрическая емкость между проводами кабеля должна быть не более
100 пФ/м. Необходимо, чтобы число скруток проводников кабеля на 1 м его дли-
ны было не менее 13 (скрутка проводников - поворот пары проводников на 360°).
Экранирование кабеля должно быть непрерывным круговым и покрывать не ме-
нее 90% поверхности кабеля.
Кабель должен иметь действительное (измеренное) значение волнового со-
противления Zq при синусоидальном токе частотой 1 МГц от 70 до 85 Ом.
Затухание мощности сигнала в кабеле при синусоидальном токе частотой
1 МГц должно быть не более 0,05 дБ/м.
Применение витой пары позволяет использовать дифференциальную пере-
дачу сигнала. В этом случае передача идет по двум проводам, причем оба прово-
да являются сигнальными. Передатчик формирует противофазные сигналы, а
приемник реагирует на разность сигналов в обоих проводах. Если оба провода
имеют одинаковую длину и проложены рядом (в одном кабеле), то помехи дейст-
вуют на оба провода примерно одинаково, и в результате разностный сигнал ме-
жду проводами практически не искажается. Такой способ передачи обеспечивает
высокую устойчивость к синфазной помехе.
Согласование электрических линий связи применяют для обеспечения про-
хождения сигнала по длинной линии без отражений и искажений. Для согласова-
ния кабеля на его концах установлены согласующие резисторы. Согласующие ре-
зисторы шины имеют сопротивление, равное номинальному волновому сопро-
тивлению Zo кабеля шины с относительной погрешностью ±2 %.
Структурная схема технических средств интерфейса в ее основной (базо-
вой) конфигурации показана на рис. 5.1.35.
Рисунок 5.1.35 - Структурная схема технических средств интерфейса?
1 - магистральная шина; 2 - резервная магистральная шина; 3 - ответвитель;
4 - резервный ответвитель
523
Контроллер - устройство интерфейса, управляющее обменом информации
в интерфейсе.
Оконечное устройство (ОУ) - устройство интерфейса, функционирующее в
соответствии с командами контроллера шины.
Монитор- устройство интерфейса, осуществляющее отбор информации,
передаваемой по информационной магистрали.
Вся работа в сети проходит исключительно под управлением контроллера.
Он, и только он, инициирует любой обмен информацией в сети. Контроллер мо-
жет обращаться к любому из 31 оконечных устройств, каждому из которых при-
своен уникальный адрес (5 битов). У контроллера адреса может не быть. Мони-
тор - устройство, также подключенное к шине данных. Но он ведет себя абсо-
лютно пассивно и занимается только отслеживанием и записью передаваемой по
шине информации. Монитор зачастую совмещают с оконечным устройством.
Одновременно в магистрали должен быть только один активный контрол-
лер.
Интерфейс должен функционировать асинхронно, в режиме ’’команда-
ответ”. Передача информации должна осуществляться полудуплексным спосо-
бом. Инициирование обмена информацией и управление передачей должен осу-
ществлять, только один контроллер. .Поток информации, передаваемый по ин-
формационной магистрали (далее-магистраль), должен состоять из сообщений,
содержащих командное слово (КС), ответное слово (ОС) и слова данных (СД).
Содержание передаваемой информации может быть любым, при условии
совместимости с форматами сообщений и форматами слов, определенными в на-
стоящем стандарте. Неиспользованные информационные разряды слов должны
быть установлены в логический нуль.
Необходимо, чтобы каждое слово начиналось с сигнала пословной синхро-
низации (с синхросигнала) и имело 17 информационных разрядов, включая раз-
ряд контроля по четности. Командное слово КС должно содержать (рис. 5.1.36):
- синхросигнал;
- поле ’’Адрес ОУ";
- разряд ’’Прием-передача" (К);
- поле "Подадрес/Режим управления";
- поле "Число СД/Код КУ";
- разряд контроля по четности (Р).
Синхросигнал командного слова (разряды 1-3) должен иметь длительность,
составляющую три интервала времени передачи одного двоичного разряда.
Полярность первой половины синхросигнала должна быть положительной,
а второй - отрицательной.
Поле "Адрес ОУ" (разряды 4-8) должно содержать код адреса оконечного
устройства, которому предназначено командное слово.
Каждому оконечному устройству следует присвоить собственный адрес из
кодов от 00000 до 11110.
Оконечное устройство должно, как минимум, распознавать и контролиро-
вать собственный адрес на достоверность при включении электропитания. Око-
524
нечное устройство не должно отвечать на любое сообщение, если оно определило
свой собственный адрес как недостоверный.
Адрес с кодом 11111 нельзя применять в качестве собственного адреса око-
нечного устройства. Код 11111 может быть присвоен любому из оконечных уст-
ройств в качестве общего адреса в дополнение к собственным адресам. Команд-
ное слово с кодом адреса оконечного устройства 11111 называется групповой ко-
мандой, а сообщение, содержащее групповую команду, - групповым.
Разряд "Прием/передача” (разряд 9) должен указывать на действие, которое
должно выполнить оконечное устройство (принимать или передавать слова дан-
ных). Логический нуль означает, что оконечное устройство должно принимать
слова данных, а логическая единица - передавать слова данных.
Необходимо, чтобы поле "Подадрес/Режим управления” (разряды 10-14)
содержало код подадреса оконечного устройства или код признака режима
управления в соответствии с требованиями для конкретного оконечного устрой-
ства. Коды 00000 и 11111 в поле "Подадрес/Режим управления” следует исполь-
зовать только для идентификации командного слова режима управления В кон-
кретном оконечном устройстве должна быть предусмотрена возможность ответа
на командное слово режима управления как с кодом 00000, так и с кодом 11111.
Контроллер должен обеспечивать передачу названных командных слов как с ко-
дом 00000, так и с кодом 11111. Коды 00000 и 11111 функционально не различа-
ются.
Поле ‘’Число СД/Код КУ” (разряды 15-19) должно содержать код числа
слов данных, которые должны быть переданы или приняты оконечным устройст-
вом в связи с приемом адресованного ему командного слова, или код управления
КУ.
В одном сообщении может быть передано или принято не более 32 слов
данных. Числовое значение двоичных кодов, обозначающих число слов данных,
должно соответствовать их десятичным эквивалентам, за исключением кода
00000, который должен соответствовать числу 32.
Разряд контроля по четности (разряд 20) следует использовать для контро-
ля по четности предшествующих ему 16 разрядов командного слова. Разряд дол-
жен принимать такое значение, чтобы сумма значений всех 17 информационных
разрядов слова (включая контрольный разряд) была нечетной.
Слово данных (СД) должно содержать (рис. 5.1.36):
- синхросигнал;
- данные;
- разряд контроля по четности (Р).
Необходимо, чтобы синхросигнал слова данных (разряды 1-3) имел дли-
тельность, составляющую три временных интервала передачи одного двоичного
разряда. Полярность первой половины синхросигнала должна быть ртргщатель-
ной, а второй - положительной.
Поле данных (разряды 4-19) должно содержать передаваемые данные.
525
Ответное слово является словом состояния оконечного устройства и отве-
том на принятое оконечным устройством достоверное командное слово, опреде-
ляет установление связи между устройствами интерфейса.
Разрядная сетка 1 2 3 4 5 б\ 7 8 9 10 и 12 13 14 15 16 17 18 19 20
Синхро- сигнал Адрес ОУ । К 1 Подадрес Режим | управления Число СП Код КУ 1 Р 1
Командное слово 1-3 4 8 9 10 1.4 15 19 20
Синхро- сигнал Данные Р 1
Слово данных 1-3 4 19 20
Синхро- сигнал | । Адрес ОУ Пр из н аки 1 Р 1
Ответное слово 1-3 4 8 9 10 11 12-14 15 16 17 18 19 20
Ошибка в сообщении 1 1 & с 1 Запрос на обслуживание Резерв Принята групповая команда Абонент занят Неисправность абонента Принято управление интерфейсом Н еисправность ОУ
Рисунок 5 Л .36 - Форматы передаваемых слов: К - разряд признака “Прием-
передача”; Р - разряд контроля по четности
Ответное слово должно содержать (рис. 5.1.36):
синхросигнал;
поле ’’Адрес ОУ”;
поле; разрядов признаков состояния: ошибка в сообщении, передача ОС,
запрос на обслуживание, резервные разряды, принята групповая коман-
да, абонент занят, неисправность абонента, принято управление интер-
фейсом, неисправность ОУ;
разряд контроля по четности (Р).
Ответное слово должно содержать достоверную информацию о состоянии
оконечного устройства в течение всего времени функционирования, т. е. при
включении электропитания, во время инициализации и во время нормального
функционирования.
При групповой передаче сообщений нельзя передавать ответное слово.
Резервные разряды не используют, так как они предназначены для разрабо-
ток последующих версий настоящего стандарта.
526
Синхросигнал (разряды 1-3) должен быть аналогичен синхросигналу ко-
мандного слова.
Поле "Адрес ОУ" (разряды 4-8) должно содержать код собственного адреса
оконечного устройства.
Необходимо, чтобы сообщения, передаваемые по информационной магист-
рали, имели форматы, соответствующие форматам основных или групповых со-
общений. Форматы сообщений, отличные от форматов, указанных в настоящем
стандарте, применять не следует.
Устройство интерфейса должно обеспечивать передачу в магистраль слов,
удовлетворяющих следующим критериям достоверности:
а) началом слова должен быть синхросигнал, соответствующий типу пере-
даваемого слова;
б) информационные разряды слов следует передавать сигналами, соответ-
ствующими коду Манчестер II;
в) число информационных разрядов в слове должно быть 17, включая раз-
ряд контроля по четности;
г) сумма значений всех информационных разрядов слова должна быть не-
четной.
Слово, не удовлетворяющее хотя бы одному из данных критериев, считают
недостоверным.
Устройство интерфейса должно проверять непрерывность принимаемых
сообщений. Нарушения в правильности распределения во времени синхросигна-
лов слов рассматривают как ошибку в сообщении.
Устройство интерфейса должно самостоятельно блокировать непрерывную
передачу им сигналов в магистраль через 800 мкс после начала передачи. Аппа-
ратные средства блокировки не должны препятствовать правильной передаче в
ответ на принятую команду. Блокировку следует снимать после приема устройст-
вом интерфейса достоверного КС из магистрали, к которой подключен заблоки-
рованный передатчик.
Устройство интерфейса формирует признаки обнаруженных ошибок
(ошибка в сообщении, неисправность абонента, неисправность оконечного уст-
ройства), что позволяет оперативно отслеживать исправность канала связи.
5.7.2 Вынесенное устройство обмена
Вынесенное устройство обмена (ВУО) обеспечивает сопряжение последо-
вательного канала связи MIL-STD-1553В с исполнительными устройствами.
Вынесенное устройство обмена состоит (рис. 5.1.37):
- из управляющего модуля (УМ);
- согласующего устройства связи по последовательному каналу (СУС);
- модуля сопряжения с параллельной шиной (МСПШ).
Управляющий модуль может быть выполнен на базе микроконтроллера или
цифрового автомата и управляет работой ВУО.
Согласующее устройство связи по последовательному каналу обеспечивает
обмен с магистралью MIL-STD-1553B.
527
Модуль сопряжения с параллельной шиной обеспечивает формирование
внутренней параллельной шины прибора и обмен кодами между управляющим
модулем, согласующим устройством связи по последовательному каналу и або-
нентами параллельной шины.
Рисунок 5.1.37 - Структурная схема одного канала резервирования ВУО
После включения питания управляющий модуль выполняет следующие
действия:
- анализ исправности аппаратуры ВУО и абонентов внутренней парал-
лельной шины прибора (модуль приема (выдачи) релейных сигналов
(МВР/МПР) и устройство контроля автоматики пиросредств (УКАПС)) с
формированием результата теста включения;
- настройку согласующего устройства связи в режим оконечного устрой-
ства;
- настройку абонентов параллельной шины в исходное состояние;
- переход в режим ожидания сообщения по последовательному каналу
связи.
Для адресации в канале MIL-STD-1553B каждому ВУО присваивается свой
адрес оконечного устройства. Согласующее устройство связи по последователь-
ному каналу воспринимает только сообщения, содержащие необходимый адрес
оконечного устройства.
В режиме, оконечного устройства согласующее устройство связи по после-
довательному каналу без участия управляющего модуля может сохранять данные
сообщения в своем ОЗУ или в ответ на запрос передавать соответствующие дан-
ные из ОЗУ в последовательный канал.
528
После завершения сообщения согласующее устройство связи по последова-
тельному каналу формирует сигнал прерывания в управляющий модуль, который
проверяет достоверность сообщения. При этом анализируются служебная ин-
формация (флаги ошибок) от согласующего устройства связи по последователь-
ному каналу и коды в сообщении, что обеспечивает защиту от выполнения недо-
пустимых команд.
В случае достоверного сообщения управляющий модуль исполняет одно из
следующих действий:
- запись кода, считанного из ОЗУ согласующего устройства связи по по-
следовательному каналу, в регистры абонентов параллельной шины для
формирования управляющего воздействия на исполнительные устройст-
ва;
- чтение регистров абонентов параллельной шины и запись результатов
чтения в ОЗУ согласующего устройства связи для передачи по последо-
вательному каналу.
После обработки сообщения управляющий модуль восстанавливает на-
стройки согласующего устройства связи по последовательному каналу.
Для обеспечения необходимой надежности ВУО может выполняться с ка-
налами резервирования, например в трехканальном исполнений. При этом воз-
можно построение как синхронных (с магистральным мажоритированием) уст-
ройств, так и асинхронных устройств, где информационные каналы работают не-
зависимо, а мажоритирование осуществляется при выдаче команд (длительно-
стью более сотни милисекунд) в исполнительные устройства.
5.7.3 Модули приема (выдачи) релейных команд
Функциональный модуль приема релейных команд (МПР) содержит п-
разрядный регистр без запоминания. Каждая команда из релейной аппаратуры
поступает на соответствующий вход МПР. Состояние каждого приемного реги-
стра может быть считано по магистрали данных при выдаче соответствующего
адреса чтения. Приемные регистры представляют собой клапаны, управляемые
соответствующими адресами чтения, т.е. отображают состояние команд, посту-
пающих из релейной аппаратуры, без их запоминания.
Команды поступают из релейной аппаратуры, предварительно проходя ка-
ждая через свой усилитель-нормализатор сигнала (УНС) МПР. Усилитель-
нормализатор сигнала обеспечивает развязку по питанию сети 27 В релейной ап-
паратуры с входными сигналами регистров МПР.
На рис. 5.1.38 показана схема одного из усилителей-нормализаторов сигна-
лов. Источник 5В обтекает один из “сухих контактов” релейной аппаратуры. При
замкнутом “сухом контакте” светодиод включен (горит). При разомкнутом “су-
хом контакте” светодиод выключен (не горит), когда светодиод включен, на вы-
ходе УНС установлен высокий уровень. Когда светодиод выключен, на выходе
УНС установлен низкий уровень. Далее указанные уровни передаются в магист-
раль данных.
Функциональный модуль выдачи релейных команд (МВР) содержит ц-
разрядный регистр с запоминанием. Информация из магистрали данных может
529
быть записана в любой из регистров при выдаче соответствующего адреса запи-
си. Каждый регистр запоминает поступившую информацию и хранит ее неизмен-
ной до тех пор, пока не будет записана новая информация.
HCPL-2231
Рисунок 5.1.38 - Схема усилителя-нормализатора сигналов
в МПР
Далее информация с каждого из выходов регистров поступает на релейную
аппаратуру, предварительно проходя через усилители-нормализаторы сигналов
(УНС) МВР. Усилители-нормализаторы сигналов решают две задачи:
- усиление мощности для обеспечения необходимого тока на выходе
(<100 мА);
- обеспечение гальванической развязки по питанию выходных сигналов
регистров МВР с сетью 27 В релейной аппаратуры.
На рис. 5.1.39 изображена схема одного из усилителей-нормализаторов
сигналов.
-5В
Рисунок 5.1.39 - Схема усилителя-нормализатора сигналов
вМВР
•Информация, хранящаяся в одном из триггеров разряда МВР, через элемент
«не» управляет работой светодиода УНС. При записи в триггер единицы инфор-
маций1 выходной ключ элемента «не» открыт и светодиод включен (горит).
530
При записи в триггер нуля информации выходной ключ элемента «не» за-
крыт и светодиод выключен (не горит). Выходной каскад УНС (при включенном
светодиоде) открыт и обеспечивает ток в нагрузке <100 мА. Выходной каскад
УНС (при выключенном светодиоде) закрыт, что обеспечивает отсутствие тока в
нагрузке.
5.7.4 Согласующее устройство СУРТ
Согласующие устройства СУРТ предназначены для приема, преобразова-
ния и выдачи в БЦВМ сигналов о прохождении компонентами заданных уровней
в топливных баках, поступающих с датчиков. На согласующие устройства возла-
гаются также функции запитки датчиков уровней (при необходимости). Поэтому
в связи с возложенными на них функциями согласующие устройства СУРТ со-
стоят из усилительно-преобразовательной части (УП СУРТ) и вторичного источ-
ника питания (ВИП СУРТ).
Структура, элементная база, параметры УП СУРТ и ВИП СУРТ определя-
ются типом датчиков уровня, использованным в СУРТ ракеты. Поскольку кон-
тактные датчики применимы только для компонентов топлива с относительно
высокой электропроводностью, а емкостные датчики не используются на ракетах
с горячим газогенераторным наддувом, широкое распространение получили ин-
дуктивные датчики, применявшиеся при разработке СУРТ для целого поколения
космических ракет.
Более подробно принцип действия, конструкция и параметры индуктивных
датчиков приведены ранее в подразд. 2.1.11.
Рассмотрим реализацию УП СУРТ и ВИП СУРТ для индуктивных датчиков.
5.7.4.1 УП СУРТ
Усилитель-преобразователь системы управления расходом топлива предна-
значен:
- для усиления и преобразования сигналов с датчиков уровня компонен-
тов топлива в баках;
- выдачи преобразованных сигналов в БЦВМ.
Дополнительно на УП СУРТ могут возлагаться функции проверок и кон-
троля:
- имитация сигналов датчиков уровня для обеспечения дистанционных
периодических проверок;
- преобразование, формирование и выдача в систему телеизмерений ана-
логовой информации о напряжении питания датчиков выходных сигна-
лов с датчиков уровня, а также и сигнальных параметров о выдаваемой с
УП СУРТ в БЦВМ информации.
Для разработки УП СУРТ в техническом задании должна быть указана сле-
дующая информация:
- напряжение и частота запитки датчиков;
- потребляемый датчиком ток или его сопротивление и индуктивность;
- максимальная величина начального разбаланса датчика;
- диапазон выходного напряжения датчика;
- напряжение срабатывания УП СУРТ;
- напряжение отпускания УП СУРТ или разность между напряжениями
срабатывания и отпускания;
- сдвиг фазы выходного сигнала с датчика относительно напряжения за-
питки (опорного напряжения);
- задержка появления выходного сигнала УП СУРТ по отношению ко
входному сигналу;
_ - параметры выходных сигналов, выдаваемых в БЦВМ;
- параметры аналоговых и релейных сигналов, выдаваемых в системы те-
леизмерений.
Поскольку информацией о прохождении компонентов заданного уровня
является появление разбаланса моста при изменении индуктивности одного из
чувствительных элементов, включенных в мост, в момент прохождения мимо не-
го магнитопроводящего поплавка задача преобразовательной части СУРТ заклю-
чается в определении этого момента, формировании и выдаче в БЦВМ информа-
ции о прохождении зеркалом жидкости заданных измерительных ячеек и о по-
следовательности их прохождения. Правильной последовательностью чередова-
ния сигналов по любому из датчиков (окислителя или горючего) считается: не-
чет, чет, нечет, чет и т.д. Так как четные и нечетные элементы индуктивных дат-
чиков включаются в разные плечи моста (см. рис. 2.1.1 подразд. 2.1.11), то при
разбалансе моста сдвиг фазы выходного сигнала имеет разное значение относи-
тельно напряжения запитки моста (опорного напряжения) в одном или другом
случае. Тракты преобразования сигналов «О» и «Г» абсолютно идентичны.
Структурная схема одного канала УП СУРТ показана на рис. 5.1.40.
Рисунок 5.1.40 - Структурная схема канала УП СУРТ
Усилитель-преобразователь работает следующим образом.
Выходной сигнал с датчика (форма его приведена на рис. 5.1.41) поступает
532
на парафазный усилитель, собранный на операционных усилителях У1 и У2.
Сигнал с выхода У2 поступает на фазочувствительный выпрямитель (ФЧВ). В за-
висимости от фазы входного сигнала по отношению к опорному на выходе ФЧВ
формируются сигналы, определяющие момент прохождения поплавком датчика
уровня компонента топлива четной или нечетной точки.
Рисунок 5.1.41 - Выходной сигнал, поступающий с датчика
Опорный сигнал для ФЧВ формирует система управления (СУ). В качестве
исходного сигнала используется напряжение питания датчиков (НПД) 25В
1000Гц. Сигнал с ФЧВ через сглаживающие фильтры (Ф) поступает на один из
входов компаратора напряжения (КН). На второй вход КН подается опорное на-
пряжение с источника опорного напряжения (ИОН). При достижении входного
сигнала первого входа компаратора значения напряжения ИОН компаратор сра-
батывает и формирует управляющий сигнал на электронный ключ (ЭК), который
управляет выходным ключом (К). Выходной ключ К может быть выполнен как
электронным, так и на электромеханическом реле, если время задержки появле-
ния выходного сигнала, оговоренное в ТЗ, больше времени срабатывания реле.
Применение в качестве выходного ключа реле с двумя парами гальванически
развязанных контактов позволяет осуществлять выдачу в СТИ информацию о
выдаче с УП СУРТ в БЦВМ сообщений о прохождении уровнями заданных точек
без дополнительных аппаратных затрат, одновременно обеспечивая гальваниче-
скую развязку между СУ и СТИ.
В трехканальной системе управления УП СУРТ каждый канал резервиро-
вания состоит из двух идентичных независимых каналов для компонентов «О» и
«Г» и общего оборудования для этих двух каналов.
Переход от одноканальной схемы датчиков к трехканальной схеме обра-
ботки сигналов по трактам «О» и «Г» и гальваническая развязка датчиков от ап-
паратуры СУ могут осуществляться с помощью развязывающих трансформато-
ров. Эти же трансформаторы могут использоваться и в трактах формирования те-
леметрической аналоговой информации о выходных сигналах с датчиков
(рис. 5.1.42).
533
Рисунок 5.1.42 - Структурная схема организации формирования телеметрической
аналоговой информации и проверок УП СУРТ
Телеметрические согласующие устройства (ТСУ) сигналов уровня О (ДУО) и
Г (ДУГ) (рис. 5.1.42) могут строиться на узлах усилителей, фазочувствительных выпрями-
телей и фильтров, аналогичных используемым в каналах обработки сигналов с датчиков.
Для организации проверки нормального функционирования СУРТ при пе-
риодических испытаниях СУ в составе PH в УП СУРТ может входить провероч-
ное оборудование. При проверке имитируется прохождение четных и нечетных
измерительных точек путем шунтирования плеч моста контактами реле, которы-
ми управляет БЦВМ. Уровень выходного сигнала при срабатывании подбирается
резистором, включенным последовательно с контактами реле, шунтирующими
плечи моста (на рис. 5.1.42 реле KI, К2, резисторы Rm).
5Л.4.2 ВИП СУРТ
ВИП СУРТ предназначен для запитки датчиков уровня топлива и окисли-
теля аппаратуры СУРТ.
ВИП СУРТ является транзисторным инвертором, преобразующим постоян-
ное напряжение в переменное.
По принципу действия, назначению, условиям работы конкретные практи-
ческие схемы инверторов весьма разнообразны. При проектировании инвертора
решают две основные задачи, специфические для этого класса устройств:
- определение алгоритма формирования импульсного напряжения, ап-
проксимирующего выходное синусоидальное напряжение;
- выбор схемы и выбор параметров выходного фильтра, обеспечивающего
заданное подавление всех гармоник, кроме основной.
Возможны следующие законы формирования импульсного напряжения на
выходе силового каскада (на входе фильтра):
- инвертор со ступенчатым напряжением в режиме АИМ (амплитудно-
импульсной модуляции);
- инвертор в режиме ШИМ (широтно - импульсной модуляции)-
длительности импульсов пропорциональны или мгновенному, или сред-
нему значению эталонного напряжения на интервале аппроксимации. При
этом частота импульсов (несущая), как правило, постоянна и во много раз
превышает частоту эталонного модулирующего напряжения;
- инвертор в режиме ШИР - длительности всех импульсов одинаковы и
пропорциональны среднему значению эталонной функции за половину
периода основной частоты;
- инвертор в режиме кодовой широтно - импульсной модуляции
ШИР-КД - длительности всех импульсов одинаковы и пропорциональ-
ны среднему значению эталонной функции за половину периода основ-
ной частоты, а их взаимное расположение обеспечивает селективное по-
давление заданных гармоник во всем диапазоне регулирования;
- инвертор в третьем импульсном режиме - на выходе силового каскада
формируется один импульс за половину периода основной частоты.
Все перечисленные выше режимы требуют применения выходного LC-
фильтра, обеспечивающего заданное качество выходного напряжения [55].
Используемые в настоящее время датчики, определения уровня топлива и
535
окислителя СУРТ не предъявляют особых требований к качеству питающего на-
пряжения, что в, свою очередь, снижает требования к параметрам выходного на-
пряжения инвертора. В таких случаях выходным напряжением инвертора может
быть переменное напряжение формы «меандр». При этом не требуется примене-
ние выходного фильтра, что существенно улучшает габаритно-массовые характе-
ристики, инвертора, упрощает его схему и повышает надежность.
ВИП СУРТ преобразует постоянное напряжение первичного питания 27 В в
стабилизированное однофазное переменное напряжение формы ’’меандр” с ам-
плитудой 25В и частотой 1000Гц. Характер нагрузки- активно-индуктивный
(Кн<= 2,5 ± 0,25 Ом, L = 3 ± 0,5 мГн).
В заданном температурном режиме аппаратуры (-4О...+85)°С при измене-
нии напряжения первичного питания в диапазоне (16...40)В и указанных пара-
метрах нагрузки ВИП СУРТ обеспечивает:
- среднеквадратическое значение выходного напряжения (25 ± 3)В;
- частоту выходного напряжения (1000 ± 50)Гц;
- сопротивление изоляции между входными, выходными цепями и корпу-
сом ВИП СУРТ не менее 20 МОм в нормальных условиях;
, - КПД ВИП СУРТ не хуже 0,75.
Для обеспечения требований надежности (парирование одного отказа) ВИП
СУРТ выполнен двухканальным с ’’холодным” резервом [3].
Функциональная схема ВИП СУРТ показана на рис. 5.1.43.
Основной и резервный каналы ВИП СУРТ идентичны.
Для стабилизации входного напряжения первичного питания 27 В целесооб-
разно использовать DC/DC конверторы. Из большого количества выпускаемых
DC/DC конверторов для систем управления ракет-носителей, космических аппара-
тов и других изделий военного и аэрокосмического назначения должны использо-
ваться только DC/DC конверторы, обладающие высокими точностными, габарит-
но-массовыми и надежностными характеристиками, способные работать в жестких
условиях эксплуатации. Примером таких конверторов является DC/DC конвертор
MFL+2815D корпорации ’’Interpomt’’ (США). Корпорация является мировым лиде-
ром в области разработки преобразователей постоянного напряжения, предназна-
ченных для применения в военных и авиационно-космических системах [57].
На выходе DC/DC конверторов каждого канала ВИП СУРТ формируются
высокостабильные напряжения +30В для запитки двухтактного преобразователя
напряжения (ДПН) и +15В для запитки схемы управления (СУ) и импульсного
усилителя мощности (ИУМ). На входах и выходах DC/DC конвертора установле-
ны ВЧ-фильтры (Фвх), (Фвых1), (Фвых2), в которых используются безвыводные
керамические конденсаторы, предназначенные для подавления синфазных и
дифференциальных кондуктивных помех. Входные и выходные цепи DC/DC
конверторов гальванически развязаны между собой и корпусом ВИП СУРТ.
DC/DC конверторы основного и резервного каналов имеют вход дистанци-
онного управления (КВ1, КВ2), при соединении которого с шиной "-27В’’ или по-
даче на него сигнала лог. "0” DC/DC конвертор выключается. Это используется
при поканальном регулировании и контроле ВИП СУРТ.
536
Рисунок 5.1.43 - Функциональная схема ВИП СУРТ
Схема управления (СУ) выполнена на ШИМ-контроллере 1114ЕУЗ, работаю-
щем в двухтактном режиме. В качестве времязадающих элементов, определяющих
частоту преобразования, применяются высокостабильные резисторы и керамические
конденсаторы группы NPO. ШИМ-контроллер 1114ЕУЗ формирует выходные на-
пряжения со сдвигом по фазе 180°, причем между выходными импульсами имеется
гарантированная пауза, составляющая 10% периода. Это обеспечивает отсутствие
’’сквозных” токов в узле двухтактного преобразователя напряжения.
Импульсный усилитель мощности (ИУМ) выполнен на транзисторной
сборке 1НТ251. Для уменьшения времени рассасывания транзисторов сборки ис-
пользуется их активное запирание.
В каждом плече ДИН применены ИМС, реализующие схему Дарлингтона, с
активным запиранием для уменьшения времени рассасывания и импульсной
мощности при переключении.
В связи с индуктивным характером нагрузки выходы ИМС 286ЕП4 зашун-
тированы обратно включенными диодами.
Для уменьшения выбросов напряжения на выходах ИМС 286ЕП4, обуслов-
ленных индуктивностью рассеивания выходных трансформаторов ДПН, и сни-
жения цмпульсной мощности при запирании ИМС используются снабберные
DRC-схемы, включенные параллельно первичным обмоткам трансформаторов.
Для исключения одностороннего намагничивания и насыщения сердечни-
ков выходных трансформаторов каналов ВИП СУРТ при подаче первичного пи-
тания СУ снабжены узлами плавного пуска (УПП), обеспечивающими плавное
нарастание длительности выходных импульсов.
Выходные обмотки трансформаторов каждого канала имеют отводы, по-
зволяющие регулировать величину выходного напряжения.
При возникновении неисправности переключение с основного канала на ре-
зервный ^осуществляется автоматически с помощью релейного коммутатора (РК),
выполненного на реле РЭС-48А. Обмотки реле РК запитываются от выходных об-
моток трансформаторов поканально через мостовые выпрямители. В выходную
цепь первого канала включены нормально разомкнутые контакты реле первого ка-
нала, а в выходную цепь второго канала включены нормально разомкнутые кон-
такты реле второго канала и нормально замкнутые контакты реле первого канала.
При отсутствии неисправностей питание датчиков СУРТ осуществляется
первым каналом. При этом второй канал работает на холостом ходу с минималь-
ной потребляемой мощностью. Этим обеспечивается высокая надежность ВИП
СУРТ.
5.7.5 Согласующее устройство управления исполнительными
устройствами
5.7.5.1 СУГП
Согласующие устройства гидроприводов (СУГП) системы стабилизации
предназначены для преобразования выходных сигналов регистров УВВ в сигна-
лы управления рулевых приводов (РП) - токовые или в виде напряжения. В со-
став СУГП также могут входить средства дистанционной диагностики оборудо-
вания СУГП и гидропривода.
538
Основные типы рулевых приводов и их характеристик приведены в под-
разд. 2.1.14.
В качестве датчиков обратной связи могут применяться или индукционные
датчики обратной связи (ИДОС), или потенциометры обратной связи (ПОС).
Структурная схема одного тракта СУГП для РП с обратной связью по по-
ложению выходного вала привода показана на рис. 5.1.44.
Рисунок 5.1.44 - Структурная схема одного тракта СУГП
На рис. 5.1.44 обозначено:
МПР/МВР - модуль приёмных/выходных регистров УВВ;
ГР - гальваническая развязка канала цифровой информа-
ции;
ПКН - преобразователь код-напряжение;
ДОС - датчик обратной связи;
УН - усилитель-нормализатор;
ГП - гидропривод;
У/П - усилитель-преобразователь напряжение-ток;
МЭП - магнитоэлектрический преобразователь.
При отсутствии обратной связи по положению вала привода из структурной
схемы исключаются датчик обратной связи и усилитель-нормализатор.
Выбор ДОС определяется зачастую применением конкретного гидроприво-
да. В настоящее время существует ряд гидроприводов, имеющих встроенные
ДОС, что приводит к необходимости при запитке и обработке сигналов ДОС ис-
пользовать соответствующие технические решения.
Использование ИДОС требует от СУГП применения надежного источника
питания переменного напряжения, как правило, частотой 1000 Гц. При наличии в
СУ источника переменного напряжения для запитки других систем или датчиков
можно использовать его и для запитки ИДОС ГП.
Возможна запитка ИДОС и от внутреннего надежного трехканального ис-
точника питания, встроенного в СУГП. В зависимости от передаточной функции
ИДОС применяют различные усилители-нормализаторы, такие, как фазочувстви-
тельные выпрямители (ФЧВ) - если нулевому положению выходного вала при-
вода соответствует «нулевое» выходное напряжение датчика, а направлению из-
539
менения положения - изменение фазы сигнала; или синусно-косинусные преоб-
разователи - если «нулевому» положению привода соответствуют выходные на-
пряжения датчика (угол 45°), а направлению изменения положения вала соответ-
ствует изменение соотношения сигналов датчика.
При небольших диапазонах изменения угла поворота ИДОС предпочтитель-
нее применение синусно-косинусных преобразователей, так как они малочувстви-
тельны к изменению значений напряжения питания и частоты в отличие от ФЧВ.
Использование ПОС требует от СУГП применения надежного источника
питания постоянного напряжения. При небольших мощностях ПОС возможна за-
питка их от внутренних трехканальных источников питания стабилизированного
постоянного двуполярного напряжения.
Задачей усилителей-нормализаторов является приведение диапазона изме-
нения напряжения ДОС к диапазону изменения ПКН с заданной погрешностью.
Для выполнения требований надежности аппаратура СУГП выполняется по
принципу трехканального резервирования с мажоритированием выходов. При
этом согласующее устройство состоит из автономно законченных идентичных
узлов, количество которых соответствует количеству гидроприводов.
Функциональная схема одного резервированного узла показана на
рис. 5,1.45,
где МВР/МПР - модуль выходных регистров/модуль приемных регист-
УВВ ров устройства ввода-вывода;
УСВИ - устройство сопряжения с внешним интерфейсом;
УПГР - устройство питания и гальванической развязки;
УСПр - устройство самопроверки;
ПКН 1, ПКН 2 - преобразователь код-напряжение;
УП - усилитель-преобразователь;
ТМЭ - трехканальный мажоритарный элемент;
СБ - согласующий блок;
м - плечи трехканального мажоритарного элемента;
мэп - магнитоэлектрический преобразователь;
ДУ - дифференциальный усилитель;
дт - датчик тока.
Каждый узел выполнен по трехканальной структуре, каждый канал которо-
го состоит из устройства сопряжения с внешним интерфейсом (УСВИ), устройст-
ва питания и гальванической развязки (УПГР), устройства самопроверки (УСПр),
преобразователей код -напряжение (ПКН), усилителя-преобразователя (УП).
Информация, поступающая с выходных регистров МВР(УВВ), через устрой-
ство сопряжения с внешним интерфейсом УСВИ по последовательным или парал-
лельным шинам MDATA и ADR дифференцируется и преобразуется в параллель-
ный код управления DATA0... 12 и через устройство гальванической развязки УПГР
поступает на входы ПКН, где преобразуется в напряжение управления. С выхода
ПКН1 напряжение управления поступает на вход усилителя-преобразователя УП,
являющегося одним из входов трехканального мажоритарного элемента ТМЭ.
540
МВР/МПР увв
Рисунок 5.1.45 - Функциональная схема одного резервированного узла устройства СУГП
В усилителе-преобразователе напряжение управления суммируется с на-
пряжениями обратных связей Пдос, Ub которые являются усиленными значения-
ми напряжения датчика тока и напряжения датчика обратной связи. Результат
суммирования поступает на согласующий блок СБ, обеспечивающий линейный
режим работы транзисторов ключевых элементов мажоритара М [58] трехка-
нального мажоритарного элемента ТМЭ. Трехканальный мажоритарный элемент
выделяет среднее значение управляющего воздействия и в виде напряжения по-
дает его на магнитоэлектрический преобразователь МЭИ Приложенное к МЭП
напряжение вызывает протекание управляющего тока в его цепях [59].
Стабилизация управляющего тока, компенсирующая технологические и
температурные разбросы активного сопротивления МЭП, обеспечивается отрица-
тельной обратной связью по току с помощью датчика тока ДТ, включенного по-
следовательно с магнитоэлектрическим преобразователем МЭП в выходное пле-
чо трехканального мажоритарного элемента, выполненного на транзисторах раз-
ной проводимости. Сигнал обратной связи с датчика тока измеряется дифферен-
циальным усилителем ДУ, что позволяет избежать влияния токов, протекающих
по общему проводу питания.
Для проверки трактов управления СУГП может использоваться устройство
самопроверки, содержащее дополнительный технологический (ПКН2) и нуль-
орган (Н/О). При этом контролируемые точки тракта управления, в том числе и
выход ПКН 1, подключаются к нуль-органу через коммутатор (MUX), управле-
ние которым осуществляется разрядами параллельной шины ПКНов. Выход
коммутатора соединяется с позитивным входом компаратора, а выход ПКН2 - с
отрицательным.
Сигнал с выхода компаратора через гальваническую развязку поступает на
вход модуля приемных разрядов МПР УВВ, и по его значению ЦВМ анализирует
работу проверяемого оборудования, сравнивая измеряемое напряжение с задан-
ным в ПКН2, т. е. позволяет измерять напряжение в контролируемой точке узла
методом сравнения. Это обеспечивает проведение самодиагностики оборудова-
ния СУГП при периодических проверках.
Все узлы должны выполняться на элементной базе, обеспечивающей по-
вышенное качество изготовления и высокие эксплуатационные характеристики, а
режим работы ЭРИ в СУГП следует выбирать так, чтобы коэффициент их на-
грузки был не более 0,7.
Как указано в подразд. 2.1.14, в ГП, имеющих механическую обратную связь,
в качестве электромеханического управляющего устройства используют ШД.
Функциональный модуль управления шаговыми двигателями (ШД) форми-
рует требуемую последовательность запитки обмоток и обеспечивает выдачу
сигналов на усилители мощности, которые управляют четырьмя шаговыми дви-
гателями. Каждый сигнал управления на усилитель мощности поступает через
свою гальваническую развязку (ГР), ГР обеспечивает развязку по питанию сигна-
лов управления с сетью 27 В усилителей мощности ШД.
Необходимый закон управления запиткой обмоток ШД показан на
рис. 5.1.46,5.1.47.
542
1-я обмотка I ___ ______ _________________________
ад | Г" ‘
2-я обмотка
ШД
3-я обмотка
ШД
4-я обмотка
ШД
Рисунок 5.1.46 - Последовательность запитки обмоток ШД
при положительном значении Тг Зн
1-я обмотка |
ШД
Запитка обмоток
(И)
2-я обмотка
ШД
3-я обмотка
ШД
4-я обмотка
ШД
Рисунок 5.1.47 -- Последовательность запитки обмоток ШД
при отрицательном значении Тг Зн
При изменении последовательности запитки изменяется направление дви-
жения ротора ШД. Рабочая частота переключения обмоток ШД <125 Гц, Указан-
ный закон управления запиткой обмоток ШД обеспечивает электронный комму-
татор, входящий в состав фунционального модуля обмена с УМ ШД.
Структурная схема электронного коммутатора ШД изображена на
рис. 5.1.48. Электронный коммутатор ШД состоит:
- из регистра управления запиткой обмоток ШД (Рг У);
- регистра памяти (Рг П);
- триггера знака (Тг Зн);
- комбинационной схемы;
- схемы переписи;
- схемы записи.
543
Зобм
1 обм
4 обм 2 обм
Рисунок 5.1.48 - Структурная схема ЭКШД
Рг У обеспечивает выдачу на УМ ШД информации о необходимой запитке
ШД. РгУ представляет собой двухразрядный регистр.
РгП обеспечивает хранение информации о запитке обмоток ШД. По сигна-
лу “Перепись” состояние Рг У через схему переписи переписывается в Рг П, та-
ким образом, после сигнала “Перепись” состояние Рг У и Рг П одинаково.
Триггер знака (Тг Зн) хранит информацию о необходимом направлении
движения ШД.
Комбинационная схема:
- получает Информацию из Рг П о состоянии запитки обмоток ШД в дан-
ный момент времени;
- получает информацию из Тг Зн о необходимой последовательности пе-
реключения обмоток ШД.
Таким образом, на определенном выходе (одном из четырех) комбинацион-
ной схемы может быть выдан сигнал о необходимости переключения одного из
триггеров регистра Рг У. Выдача указанного сигнала на Рг У выполняется при
544
поступлении импульса на вход “Шаг”. При этом изменяется запитка обмоток
ШД, что и вызывает движение ротора ШД. После снятия сигнала “Шаг” происхо-
дит выдача сигнала “Перепись”. Сигнал “Перепись” выдается периодически (не-
сколько раз) между двумя соседними сигналами “Шаг”. После переписи в Рг П
комбинационная схема электронного коммутатора снова готова к выдаче очеред-
ного сигнала управления переключением запитки обмоток ШД.
Таким образом, каждый раз, когда поступает “Шаг” на электронный ком-
мутатор, этот шаг является i-м, а состояние Рг П при этом является (1-1)-м (т.е.
состоянием после предыдущего шага). Это обеспечивает правильное решение
комбинационной схемой в частности и электронным коммутатором ШД в целом
задачи управления запитки обмоток ШД.
Электронный коммутатор ШД является специфическим узлом аппаратуры, так
как не допускает периодического подтверждения исходного состояния, которое обыч-
но допускается в других узлах аппаратуры. Периодическое подтверждение исходного
состояния электронного коммутатора ШД вызывало бы “ложные” шаги по ШД.
В связи с этим при трехканальной структуре необходимо обеспечить син-
хронную работу электронных коммутаторов. Принцип обеспечения синхронизма
ЭК ШД реализован следующим образом.
Допустим, что состояние ЭК “А” и ЭК “В” одинаково, тогда схема синхро-
низации в канале “Б” готова выдать сигнал подтверждения состояния ЭК “Б”.
Этот сигнал выдается при поступлении импульса “Синхронизация”. Теперь, если
состояние ЭК “Б” не соответствует ЭК “А” и ЭК “В”, то в момент импульса
“Синхронизация” ЭК “Б” примет состояние, совпадающее с ЭК “А” и ЭК “В”.
Если же состояния ЭК “А” и ЭК “В” не совпадают, то схема синхронизации в ка-
нале “Б” не вырабатывает сигнала подтверждения состояния ЭК “Б”. Схемы син-
хронизации стоят по каждому входу (по каждой обмотке) регистра Рг У. Сигнал
“Синхронизация” подтверждает состояние по каждому входу регистра Рг У. Та-
кие же схемы стоят в каждом из каналов А, Б, В, что обеспечивает синхронизм
состояния ЭК ШД при работе.
Счетчик управления ШД обеспечивает выдачу на ЭК ПТД необходимого
числа “шагов”.
Счетчик управления ШД работает в режиме сложения и содержит четыре разряда:
- три разряда для управления количеством “шагов”;
- один разряд (Тг У пр) для управления работой счетчика.
Импульсы с выхода схемы “И” поступают на ЭК ШД.
Так как счетчик работает в режиме сложения, то количество импульсов на
выходе схемы “И” равно 8 - “Уставка”. Необходимое преобразование кода устав-
ки выполняется программно.
Например, задавая уставку, равную 3, получаем 8-3 = 5 шагов.
Делитель ШД обеспечивает понижение входной частоты с 1,25 МГц до
125 Гц. Указанное требование обеспечивается при модуле делителя М = 10000.
Регистр буферный ШД предназначен для буферизации вносимых из ЦВМ
уставок и для счетчиков управления ШД и электронных коммутаторов.
Кроме того, схемы дешифраторов по каждому ШД выдают:
545
- сигнал “О”;
- сигнал “14”.
Сигнал “О” блокирует выдачу сигнала Пуск в счетчики управления ШД, ес-
ли модуль уставки данного ШД равен нулю.
Сигнал “14” обеспечивает запитку первой и четвертой обмоток ШД в нача-
ле работы. Данный сигнал формируется при выдаче кода уставки ШД “минус О”.
Общая структурная схема управления ШД показана на рис. 5.1.49.
ТгУпр
ШД1...ШД4
Рисунок 5.1.49 - Структурная схема управления ШД
546
Уставка из магистрали данных записывается в буферный регистр ШД, и
происходит пуск счетчиков ИТД. Если хотя бы один счетчик ШД запущен, то от-
крывается делитель ШД. Когда все счетчики ШД завершат отработку шагов, де-
литель закроется. Сигналы “Шаг” поступают на вход электронных коммутаторов
ШД, которые с учетом “Знака” сформируют необходимую диаграмму запитки
обмоток ШД.
5.73.2 СУЭК
Согласующие устройства электроклапанов (СУЭК) системы успокоения,
ориентации и стабилизации предназначены для преобразования релейных управ-
ляющих сигналов, поступающих с выходных регистров БЦВМ в выходное на-
пряжение, достаточное для управления электроклапанами (ЭК), подающими в
ДМТ компоненты окислителя и горючего, а также для обеспечения временных
характеристик закрытия электроклапанов, т.е. заданного времени достижения то-
ка отпускания электроклапанов при снятии сигнала управления.
В резервированных системах управления па СУЭК возлагается функция
приема сигналов управления с трех каналов БЦВМ, мажоритация их и выдача на-
дежного сигнала управления на ЭК, которые обычно выполняются в нерезерви-
рованном варианте.
Кроме основного назначения на СУЭК могут возлагаться также дополни-
тельные функции:
- выдача при проверках СУ на входные регистры БЦВМ информации о
работоспособности СУЭК, о целостности цепей нагрузок (подключение
ЭК);
- выдача в систему телеметрических измерений информации о прохожде-
нии команд управления на ЭК.
Для выбора технических решений, элементной базы, разработки и расчета
СУЭК должны быть заданы следующие параметры:
- напряжение питания СУЭК;
- рабочее напряжение ЭК;
- активное сопротивление обмотки ЭК во всех условиях эксплуатации;
- индуктивность обмотки ЭК;
- ток срабатывания ЭК;
- ток отпускания ЭК;
- максимальная частота включения;
- допустимый ток в режиме контроля (без срабатывания ЭК);
- время запаздывания появления сигналов на нагрузке после появления
сигналов управления на входе СУЭК;
- время спада тока нагрузки от снятия сигнала управления до достижения
тока отпускания ЭК;
- допустимое обратное напряжение на ЭК при снятии сигналов управле-
ния;
- параметры входных и выходных регистров БЦВМ.
В СУЭК обычно входят несколько идентичных по электрическим характе-
ристикам функциональных узлов усилителей мощности (ФУ УМ) с мажоритиро-
547
ванными выходами, каждый из которых управляет работой одного ЭК. Количест-
во ФУ. УМ в СУЭК определяется количеством агрегатов, которыми управляет
СУЭК. Включение электроклапанов окислителя и горючего необходимо осуще-
ствлятьюдним усилителем мощности. В случае применения в СУОС нескольких
типов электроклапанов, сильно отличающихся по параметрам, для каждого из
них могут использоваться функциональные узлы, отличные друг от друга в части
электрических параметров.
Структурная схема типового функционального узла усилителя мощности
(ФУ УМ) показана на рис. 5.1.50.
Рисунок 5.1.50 - Структурная схема ФУ УМ
ФУ УМ состоит из трехканального предварительного каскада усиления
(ПУ), оконечного каскада усилителя мощности (УМ), искрогасящего контура
(ИГК), устройства формирования контрольных сигналов (УФКС), схемы форми-
рования донесений (СФД) в систему телеметрических измерений (СТИ).
Усилитель мощности представляет собой мажоритированный транзистор-
ный ключ, который обеспечивает управление обмотками электроклапанов в ре-
жиме выборки «два из трех» одновременно в трактах компонентов окислителя и
горючего одного агрегата двигателя. При необходимости в случае недостаточно-
го коэффициента усиления выходных транзисторов используют предварительные
усилители с расчетом усиления токов выходных регистров БЦВМ до уровня, дос-
548
таточного для управления обмотками ЭК. Для снижения мощности, потребляе-
мой от бортовой сети и рассеиваемой в СУЭК, предварительные каскады запиты-
ваются от отдельного источника +5В, одного на канал резервирования всех
функциональных узлов СУЭК.
Транзисторы выходного каскада УМ выбирают с рабочим током более
двойного максимального тока, который может протекать через электроклапан, с
необходимым коэффициентом нагрузки. Максимально допустимое напряжение
коллектор-эмиттер транзисторов должно быть не менее суммы максимального
напряжения питания и напряжения ограничения на искрогасящем контуре. Кроме
транзисторов в выходном каскаде УМ можно использовать и другие элементы,
обеспечивающие заданные временные и надежностные характеристики, напри-
мер оптореле. Для исключения взаимовлияния индуктивной нагрузки трактов
окислителя и горючего друг на друга применяют разделительные диоды, через
которые обмотки электроклапанов окислителя и горючего подключаются к выхо-
ду выходного каскада усилителя мощности. Взаимовлияние возникает в случае
большого разброса индуктивности и активного сопротивления обмоток катушек
электроклапанов трактов «О» и «Г». Клапан, где индуктивность и рабочий ток
ниже, достижение тока отпускания происходит раньше и клапан должен выклю-
читься. Но из-за того, что через обмотку начинает протекать ток удержания, по-
ступающий из параллельно включенной обмотки соседнего ЭК, отключения не
происходит. В случае, если на заводе-изготовителе двигателей проводится специ-
альный подбор электроклапанов трактов «О» и «Г» в одном агрегате, допускается
разделительные диоды не ставить, но это должно быть оговорено в техническом
задании на разработку СУЭК.
Важным узлом СУЭК является искрогасящий контур (ИГК). В его задачи
входит обеспечение форсированного снижения тока в обмотках ЭК для достиже-
ния заданного времени выключения ЭК. С другой стороны ИГК должен ограни-
чить выброс напряжения на выходном ключе СУЭК при отключении индуктив-
ной нагрузки, которой является обмотка ЭК. При этом, чем меньше выброс на-
пряжения на ключе, тем дольше протекает процесс «рассасывания» через ИГК
энергии, накопленной в индуктивности ЭК. Следовательно, при разработке
СУЭК необходимо уделять особое внимание выбору типов ИГК и выходного
ключа, чтобы обеспечить заданное время спада тока в клапане до тока отпуска-
ния, не превысив при этом допустимое напряжение коммутации ключом.
Известно много вариантов исполнения ИГК. Самым простым является
ИГК, выполненный на диоде, резисторе и конденсаторе (рис. 5.1.51, а). Его пара-
метры выбираются подбором номиналов резистора и конденсатора. Недостатком
данного ИГК является большой разброс его параметров, зависящих от разброса и
ухода номиналов элементов и тока нагрузки.
Более современным является ИГК, выполненный на ограничителе напря-
жения (супрессоре) и диоде (рис. 5.1.51, б).
549
Рисунок 5.1.51 - Варианты выполнения ИГ К
Супрессор можно заменить стабилитроном, в технических условиях на ко-
торый оговорена возможность работы элемента в импульсном режиме с соответ-
ствующими временными характеристиками (длительность импульса и скваж-
ность). Время спада тока до значения тока отпускания подбирается путем подбо-
ра необходимого количества супрессоров или стабилитронов, включенных по-
следовательно. Максимальный импульсный ток, протекающий через ИГК, равен
максимальному току через нагрузку - обмотку ЭК. Поэтому при выборе типа су-
прессора или стабилитрона надо это учитывать. При токах в нагрузке более 2,0А
трудно найти стабилитроны, в которых сочетается возможность работы в им-
пульсном режиме с большим током через него. Поэтому применяют более слож-
ную схему, включая в него транзистор, обеспечивающий необходимый ток. Один
из вариантов такого искрогасящего контура, защищенный патентом Украины
№90049 МПК H01F7/06, Н02Р8/00 [60], показан на рис. 5.1.52.
Рисунок 5.1.52 - Вариант ИГК с усилительным транзистором:
1 - блок управления; 2 - выходной ключ; 3 - нагрузка
Для повышения надежности устройства, работающего в резервированной
системе управления, проводится резервирование ИГК путем последовательно-
550
параллельного резервирования. Известны устройства, где функции ИГК могут
возлагаться на выходной ключ СУЭК (рис. 5.1.53), который, закрываясь посте-
пенно, за время, необходимое для «рассасывания» энергии, запасенной в индук-
тивности ЭК, обеспечивает нужное время отключения ЭК. Подробно устройство
описано в патенте Украины №93024 МПК H01F7/00, Н02Р8/00 [61].
Рисунок 5.1.53 - Использование силового ключа СУЭК
в ИГК: 1 - блок управления; 2 - выходной ключ;
3 - устройство стабилизации напряжения
(стабилитрон или супрессор)
Устройство формирования контрольных сигналов (УФКС) формирует сиг-
налы донесения о работоспособности УМ и выдает их на входные регистры
БЦВМ. В резервированной системе УФКС реализуется трехканальной схемой и
может быть выполнено как на транзисторах, так и на оптронах в случае необхо-
димости гальванической развязки между СУЭК и БЦВМ.
Схема формирования донесений (СФД) формирует донесения в систему те-
леметрических измерений (СТИ) о выдаче сигналов управления на обмотки каж-
дого ЭК. СФД выполняется на оптронах, обеспечивающих гальваническую раз-
вязку цепей ЭК и СТИ.
При необходимости контроля целостности цепей обмоток ЭК требуется та-
кая схема контроля, чтобы исключалось протекание тока через обмотку при от-
сутствии сигнала управления. Один из вариантов схемы, обеспечивающий фор-
мирование сигналов о работоспособности УМ и о целостности цепей нагрузки
показан на рис. 5.1.54 (а. с. СССР №1804691 кл. Н02Р5/16) [62].
Схема работает следующим образом. В исходном состоянии ключи 1 и 2
закрыты. При поступлении сигнала управления ключ 1 открывается, открывая
транзистор 3, на его коллекторе появляется сигнал, свидетельствующий об от-
крытии ключа.
551
Рисунок 5.1.54 - Устройство управления индуктивной
нагрузкой
При снятии сигнала управления ключ 1 закрывается и сигнал на коллекторе
транзистора становится равным нулю. При замыкании ключа 2 и отсутствии сиг-
нала управления ток протекает через обмотки нагрузки и базовые цепи транзи-
сторов 4 и 5, что приводит к их отпиранию и выдаче сигнала об исправности об-
моток ЭК. При поступлении на вход сигнала управления транзисторный ключ 1
открывается, закрываются транзисторы 4 и 5 и открывается транзистор 3, что
свидетельствует р целостности ключа 1 и выдаче напряжения на обмотки ЭК.
Ключом 2 может быть как отдельный транзистор, так и контакты реле, подающе-
го питание на прибор.
5.7.6 Устройство контроля автоматики пиросредств
Устройство контроля автоматики пиросредств (УКАПС) предназначено для
контроля элементов автоматики пиросредств.
УКАПС обеспечивает следующие проверки:
- контроль разобщенности (Rp >1,6 кОм) девяти контрольных точек;
- контроль сообщения (Rc < 1,4 кОм) девяти контрольных точек;
- самопроверка УКАПС.
УКАПС состоит из двух одинаковых частей: основного (УКАПСО) и ре-
зервного (УКАПСР) устройств контроля, параллельно подключенных к кон-
трольным точкам. На рис. 5.1.55 показана структурная схема УКАПС.
552
Рисунок 5.1.55 - Структурная схема УКАПС
УКАПСО (УКАПСР) содержит следующие узлы:
- устройство ввода-вывода (УВВ);
- устройство включения (УВ);
- коммутатор контрольных точек (ККТ);
- чувствительный элемент (ЧЭ);
- изолированный источник (ИИ).
УВВ предназначено для таких действий:
- приема из БЦВМ, запоминания и дешифрации сигналов управления ККТ;
- приема, запоминания и выдачи сигналов управления УВ;
- контроля сигналов управления ККТ и выдачи в БК в режиме самопро-
верки;
- выдачи в БЦВМ выходных сигналов УКАПС из ЧЭ.
У В служит для включения в работу УКАПСО (УКАПСР).
У В выполнено на оптоэлектронных реле PVG 612, представляет собой схе-
му выборки два из трех, управляется от трех каналов УВВ.
В УКАПС используется два УВ, управляются от разных разрядов УВВ,
причем в УВВ предусмотрено аппаратное исключение одновременного включе-
ния УКАПСО и УКПСР.
ККТ предназначен для подключения двух из девяти контрольных точек ко
входу ЧЭ, а также для подключения эталонных резисторов ко входу ЧЭ в режиме
самопроверки УКАПС. На рис. 5.1.56 показана схема ККТ.
ККТ выполнено на оптоэлектронных реле PVT 312.
553
Рисунок 5.1.56 - Структурная схема коммутатора контрольных точек
Реле КРС предназначено для проверки замкнутого состояния КР.
Управление ККТ в УКАПСО осуществляется от канала А УВВ, а в
УКАПСР - от канала В УВВ.
ЧЭ предназначен для допускового контроля сопротивления цепи обтекания
между шинами ША и ШВ, образованных с помощью ККТ.
ЧЭ представляет собой резистивный мост, одно из плеч которого образова-
но последовательным соединением ограничительного резистора Ro и контроли-
руемого сопротивления цепи, а в диагональ моста включен компаратор напряже-
ния, выходной сигнал которого зависит от полярности напряжения в диагонали
моста, которое зависит от сопротивления цепи между шинами ША и ШВ.
К выходу компаратора подключен элемент гальванической развязки, на вы-
ходе которого и образуется выходной сигнал УКАПС. Выходной сигнал
УКАПСО выдается в канал А УВВ, а выходной сигнал УКАПСР - в канал В
УВВ.
ИИ представляет собой DC/DC конвертор MGH 2812D с выходной мощно-
стью 1,5 Вт и обеспечивает гальванически развязанное от шины Ш питание рези-
стивного моста и компаратора номинальным напряжением 24 В на шинах ±ЕИ.
5.7.7 Блок согласования телеметрического кадра
Блок согласования телеметрического кадра (БСТК) является устройством
ввода/вывода, обеспечивающим передачу телеметрического кадра из БЦВМ в ра-
диотелеметрическую станцию (РТС).
БСТК предназначен для таких действий:
- приема и хранения телеметрического кадра, поступающего из БЦВМ;
- синхронизации процессов приема кадров из БЦВМ и выдачи их в РТС;
- согласования потока телеметрических кадров, поступающих из БЦВМ,
с пропускной способностью РТС в режиме реального времени;
- преобразования и гальванической развязки сигналов связи с РТС.
Обмен БЦВМ с БСТК осуществляется в соответствии с протоколом внеш-
него интерфейса БЦВМ.
РТС формирует для БСТК следующие сигналы:
- TIA, TIB, TIC-тактовые импульсы каналов А, Б, В соответственно.
Частота поступления в БСТК - 12,5 Гц;
- SIA, SIB, SIC - синхроимпульсы каналов А, Б, В соответственно. Часто-
та поступления в БСТК - 64 кГц;
БСТК формирует следующие сигналы:
- 1ИС, 2ИС - информационные слова первого и второго полукадров соот-
ветственно. Передаются четырехпозиционным кодом;
- ICC, 2СС - служебные слова первого и второго полукадров соответст-
венно. Передаются четырехпозиционным кодом.
Структурная схема БСТК показана рис. 5.1.57.
БСТК работает в трех режимах - начального считывания, записи входных
кадров и выдачи выходного кадра.
555
Канал A
MDAD
Канал Б
Or каша В ОтклгшмБ
Блок
синхронизации
записи кадра
Блок
управляющих
сигналов
Канал В
Блок
управляющих
сигналов
MDAD
Огкшеава А
Блок
синхронизации
записи кадра
Прсобра зова гель
выходных сигналов
Преобразователь
входных сигналов
Согласующее
устройство
входных сигналов
Согласующее
устройство
выходных сигналов
Рисунок 5.1.57 - Структурная схема БСТК
В режиме начального считывания БСТК выдает два полукадра тестовой ин-
формации, содержащей в своем составе маркеры - по три слова в начале каждого
полукадра, контрольные слова - по одному в конце каждого полукадра. Информа-
ция в тест-кадрах - код 27D8, позволяющий проверить тракт БСТК - РТС на всех
уровнях четырехпозиционного кода. Полукадры выдаются в РТС параллельно.
При включении питания прибора Ц43 счетчики адреса ОЗУ из состава адресного
устройства обнуляются. Схема ОЗУ 1 через буфер памяти подключается к магист-
рали MDAD и ожидает записи входного кадра, к выходному двигателю подключа-
ется регистр тест-кадра из состава буфера памяти. БСТК находится в режиме ожи-
дания прихода тактовых импульсов от РТС. Тактовые и синхроимпульсы каналов
проходят через преобразователь сигналов (LM293), оптическую развязку
(HCPL5231) и мажоритар (EPM7128STI100-10), после чего раздаются в каналы А,
Б, В. Попадая в блок управляющих сигналов, TI разблокируют входы по сигналам
SI, и запускается схема привязки по SI. После поступления 15 SI по отношению
к TI выполняется выдача информации в РТС по следующему алгоритму:
- в регистр выходного сдвигателя записывается слово тест-кадра, и фор-
мируются признак слова и контрольная сумма разрядов слова;
- по 16 SI по отношению к TI в буфер выходного сдвигателя записывают-
ся два старших бита из регистра выходного сдвигателя, признак слова и
контрольная сумма разрядов слова, после чего происходит сдвиг инфор-
мации в регистре выходного сдвигателя в сторону старших битов на два
разряда;
- по каждому последующему четному SI по отношению к TI происходит
запись двух старших битов из регистра выходного сдвигателя в буфер
выходного сдвигателя с последующим сдвигом информации В сдвигате-
ле на два разряда;
- после записи каждой восьмой пары разрядов из регистра выходного
сдвигателя в буфер по следующему нечетному SI по отношению к TI ал-
горитм повторяется.
Если на момент окончания выдачи 157-го слова тест-кадра не поступил
признак начала записи кадра из БЦВМ в БСТК, счетчики ОЗУ из состава адрес-
ного устройства обнуляются и указанный выше алгоритм повторяется.
Режим записи входного кадра устанавливается после записи любого слова
входного кадра из БЦВМ в БСТК. По окончании записи входного кадра в БСТК
БЦВМ выдает признак конца записи входного кадра, который, проходя через
блок синхронизации записи кадра, обеспечивает синхронизацию кадра между ка-
налами на время 120 мкс. Затем для обеспечения надежности работы БСТК при-
знак проходит через мажоритар. Данный режим может действовать в БСТК па-
раллельно режиму начального считывания и режиму выдачи выходного кадра.
Режим выдачи выходного кадра осуществляется следующим образом.
При записи в БСТК признака конца записи входного кадра во время режима на-
чального считывания по окончании выдачи тест-кадра счетчики адреса ОЗУ
из состава адресного устройства обнуляются, ОЗУ2 через буфер памяти подклю-
чаются к магистрали MDAD, к выходному сдвигателю подключается 03У1 и вы-
557
полняется алгоритм, описанный выше. Если на момент окончания 157 слова тест-
кадра в БСТК не поступил признак конца записи входного кадра, БСТК перево-
дится в режим ожидания, счетчики адреса ОЗУ из состава адресного устройства
останавливаются, на выходах БСТК держатся нулевые уровни сигналов. При по-
ступлении из БЦВМ признака конца записи входного Кадра счетчики адреса ОЗУ
из состава адресного устройства сбрасываются, ОЗУ1 и ОЗУ2 меняются местами,
и выполняется алгоритм, описанный выше.
5.7.8 Устройство формирования признака отказа БЦВМ
Для формирования сигнала «НЕИСПРАВНОСТЬ БЦВМ» в состав обору-
дования вычислительных средств каждого канала БЦВМ включается счетчик
контроля временного интервала. Длительность периода срабатывания счетчика
контроля временного интервала выбирается в зависимости от периода тестирова-
ния оборудования БЦВМ и допустимого времени в системе. Подача входной час-
тоты для работы счетчика контроля временного интервала обеспечивается путем
мажоритирования исходных источников частоты и не зависит от системной час-
тоты и входной частоты системных таймеров. Исправная БЦВМ обеспечивает
программное формирование команды реинициализации и приведения счетчика
контроля времени в исходное состояние за время не более чем 0,9 времени его
срабатывания. Если за это время счетчик контроля времени не будет реинициали-
зирован, то по истечении времени срабатывания сформируется сигнал «S-сброс»
в текущем канале (с записью признака в регистр состояния канала) и процессор-
ное оборудование этого канала будет зафиксировано в состоянии «Сброс».
При возникновении аналогичной ситуации еще в одном из каналов по сиг-
налам «Сброс» каждого из каналов специальным оборудованием в каждом канале
БЦВМ по мажоритарному принципу будет сформирован сигнал
«НЕИСПРАВНОСТЬ БЦВМ» (с фиксацией логического уровня) и выдан в обо-
рудование УВВ. При этом процессорное оборудование всех каналов будет зафик-
сировано в состоянии «Сброс».
Сигнал «НЕИСПРАВНОСТЬ БЦВМ» выдается посредством трансляции
через УВВ. Структурная схема формирования сигнала или «НЕИСПРАВНОСТЬ
БЦВМ» показана на рис. 5.1.58.
Рисунок 5.1.58 - Структурная схема формирования сигнала
«НЕИСПРАВНОСТЬ БЦВМ»
558
5.7.9 Устройство формирования сигналов аварийного отделения КА
при отказе БЦВМ
При фиксации признака «НЕИСПРАВНОСТЬ БЦВМ» в зависимости от до-
пустимой области существования КА реализуется циклограмма прекращения по-
лета PH и продолжения дальнейшего полета КА. Циклограмма реализуется моду-
лем обеспечения безопасности полета (МОБ), который работает автономно и от-
ключает выходные модули УВВ БЦВМ.
Количество каналов резервирования модуля МОБ - три канала с мажори-
тарными связями по входным и выходным командам.
Структурная схема одного канала модуля показана на рис. 5.1.59.
• На релейный прибор
Рисунок 5.1.59 - Структурная схема одного канала МОБ
Блок согласования входной информации предназначен для получения сиг-
налов с «сухих» электронных ключей УВВ БЦВМ, а также для согласования
электрических параметров входных сигналов со схемой логики модуля МОБ.
Схема построена на оптронах типа HCPL-5231, время срабатывания кото-
рых не превышает 2 мс. Обтекание выходных электронных ключей УВВ БЦВМ
обеспечивается напряжением питания МОБ.
Блок согласования выходной информации предназначен для согласования
559
по питанию внутренней схемы МОБ с абонентами модуля.
Схема построена на твердотельных реле типа HSSR-7112, время срабаты-
вания которых не превышает 6 мс.
Запитка выходных ключей согласующих элементов осуществляется от шины
питания МОБ, скоммутированной в блоке включения запитки МВР МОБ.
Блок включения запитки МВР МОБ предназначен для формирования сиг-
налов на включение запитки выходных согласующих устройств МОБ и выключе-
ние запитки выходных согласующих устройств УВВ БЦВМ.
Сигнал «Вкл. МВР МОБ» через твердотельное реле типа HSSR-7112 посту-
пает на рабочую обмотку электромеханического реле типа РПС-32, происходит
замыкание контактов реле, и на выходные устройства МВР МОБ подается на-
пряжение запитки с шины питания МОБ. Через 10 мс через твердотельное реле
типа HSSR-7112 в релейный прибор выдается команда на выключение запитки
МВР УВВ БЦВМ.
Схема логики МОБ построена на ПЛИС. В состав схемы логики входят
следующие составные части:
- блок фильтрации входной информации;
- блок формирования временной циклограммы;
- блок формирования частот;
- мажоритары входных и выходных сигналов МОБ.
Блок фильтрации входной информации предназначен для предотвращения
выдачи модулем МОБ аварийной циклограммы при возникновении на входе при-
бора помех и ложных срабатываний выходных ключей УВВ БЦВМ длительно-
стью до 10 мс.
Блок формирования временной циклограммы обеспечивает формирование
сигналов аварийной циклограммы, показанной на рис. 5.1.60.
Рисунок 5.1.60 - Аварийная циклограмма, формируемая МОБ
Блок формирования частоты обеспечивает формирование частот 1 кГц,
100 Гц, 0,2 Гц из входной частоты 10 МГц для обеспечения работы МОБ.
560
5.7.10 Система вторичного электропитания БЦВМ
Система вторичного электропитания (СВЭП) БЦВМ предназначена для
формирования ряда выходных напряжений различного значения с различной
мощностью нагрузки для запитки функциональных узлов БЦВМ. Основными
требованиями, предъявляемыми к СВЭП, являются высокие габаритно-массовые
и точностные характеристики, наличие гальванической развязки между входом,
выходами и корпусом БЦВМ, высокие КПД и надежность.
Для обеспечения указанных требований целесообразно строить СВЭП по
принципу трехканальной распределенной системы с использованием высокона-
дежных, конструктивно законченных модулей DC/DC конверторов военного и
аэрокосмического назначения серий MTR, MHF+, MSA, МСН, MGH корпорации
“Interpoint” (США). Основные мощностные и надежностные характеристики этих
серий приведены в табл. 5.1.7. При такой структуре СВЭП отказ какого-либо
элемента не приводит к отказу БЦВМ.
Таблица 5.1.7 - Мощностные и надежностные характеристики модулей DC/DC
конверторов
Технические характеристики Серии DC/DC конверторов
MTR MHF+ MSA МСН, MGH
Выходная мощность, Вт 25 12 5 1,5
Диапазон входного напряжения, В 16...40
Температура корпуса, °C минус 55 ... +125
Удельная мощность, Вт/дм3 1717 1700 1000 440
MBTF, ч 456000 при T^+SS’C 265000 при ТК=+125°С 668000 при Тос=+85°С 250000 при ТК=+125°С
Конструктивное исполнение модулей, при котором отвод тепла осуществ-
ляется через их основание, позволяет устанавливать их как на корпус БЦВМ, так
и на элементы конструкции корпуса, например на металлические основания пе-
чатных плат, имеющих тепловой контакт с корпусом. Это позволяет улучшить
отвод тепла и избежать появления локальных перегревов.
Все модули DC/DC конверторов имеют вход для включения -выключения
модуля маломощным логическим сигналом. Выключение модуля осуществляется
подачей на этот вход сигнала “лог. 0” или соединением его с отрицательной ши-
ной входного напряжения первичного питания. Это позволяет формировать при
необходимости временную диаграмму включения устройств БЦВМ, а также осу-
ществлять их локальную проверку.
Все модули имеют встроенные защиты от коротких замыканий и перегру-
зок на выходе с автовосстановлением. Для обеспечения требований к БЦВМ по
электромагнитной совместимости на входе и выходе каждого модуля устанавли-
561
ваются ВЧ-фильтры, предназначенные для снижения синфазных и дифференци-
альных кондуктивных помех. В ВЧ-фильтрах используются безвыводные высо-
кочастотные керамические конденсаторы, которые шунтируют кондуктивные
помехи, генерируемые DC/DC конвертором, на корпус БЦВМ.
Важнейшим требованием для снижения уровня синфазных кондуктивных
помех является выполнение цепей, соединяющих эти конденсаторы с корпусом
БЦВМ, минимальной длины с минимально возможными активным сопротивле-
нием и индуктивностью.
Снижение уровня электромагнитного излучения СВЭП обеспечивается
конструкцией модулей DC/DC конверторов, имеющих полностью замкнутый ме-
таллический корпус, и такими конструктивными мерами, как свивка и экраниро-
вание входных и выходных цепей СВЭП, прокладка этих цепей в печатной плате
друг над другом в разных слоях, использование электропроводных компаундов
для электромагнитной герметизации входных и выходных разъемов корпуса
БЦВМ [63].
При необходимости на входе СВЭП устанавливают дополнительный
LC-фильтр, подавляющий синфазные кондуктивные помехи. В связи с тем, что
такой фильтр является звеном как минимум 2 -го порядка, его АФЧХ имеет ре-
зонанс на частоте среза, что может привести к неустойчивой работе СВЭП. Для
исключения этого явления между фильтром и СВЭП необходимо устанавливать
блокирующий полярный конденсатор емкостью (50...200) мкФ с большим внут-
ренним активным сопротивлением (0,8...2) Ом. Такая RC-цепь снижает доброт-
ность входного фильтра и обеспечивает устойчивую работу СВЭП.
В температурном диапазоне работы БЦВМ при заданном диапазоне изме-
нения входного напряжения питания и мощности нагрузки СВЭП обеспечивает
следующие основные характеристики:
- суммарная нестабильность выходных напряжений с учетом пульсаций -
не.более±5%;
- размах ВЧ-пульсаций - не более ±0,5%;
- время готовности - не более 5мс;
- КПД - не менее 0,75.
Высокое быстродействие DC/DC конверторов (постоянная времени цепи
обратной связи - не более 0,1 мс) обеспечивает высокие динамические характе-
ристики СВЭП при импульсном характере нагрузки и в результате позволяет су-
щественно уменьшить количество полярных конденсаторов, устанавливаемых
параллельно нагрузкам.
Входы и выходы всех модулей DC/DC конверторов СВЭП гальванически
развязаны между собой и корпусом БЦВМ.
5.7.11 Релейно-коммутационная аппаратура
Релейно-коммутационная аппаратура (РКА) предназначена для решения
следующих задач по командам из БЦВМ:
- образования шин питания аппаратуры СУ;
- выдачи команд на исполнительные органы (ИО) соответствующих сту-
пеней PH;
562
- формирования донесений в БЦВМ о срабатывании датчиков давления
(ДД), реле давления (РД) и сигнализаторов давления (СД);
- управления в соответствии с логикой устройства релейной автоматики
работой приводов системы поддержания давления ступеней PH;
- управления приводами системы управления расходом топлива соответ-
ствующих ступеней PH.
Разработка релейно-коммугационной аппаратуры обусловлена выбором оп-
тимальных схемно-конструкторских решений исходя из заданных эксплуатаци-
онно-технических характеристик исполнительных органов PH.
В состав РКА входят следующие устройства:
- согласующее устройство системы поддержания давления (СПД) марше-
вых двигателей (МД) ступеней PH;
- силовой коммутатор первичного питания (СКПП ступеней PH);
- согласующее устройство электроавтоматики (СУЭ ступеней PH);
- согласующее устройство управления приводами системы управления
расходом топлива.
Архитектура связей устройств РКА с внешними абонентами и исполни-
тельными органами PH показана на рис. 5.1.61.
Надежная работа РКА обеспечивается следующими факторами:
- применением надежных ЭРИ серии «ОС» для построения всех функцио-
нальных узлов аппаратуры;
- выбором оптимальных режимов работы ЭРИ с учетом коэффициентов
нагрузки в пределах 0,5...0,8;
- построением функциональных узлов с резервированием по схеме «2 из
3» или дублированием;
- применением ЭРИ, удовлетворяющих требованиям ТЗ на аппаратуру в
части стойкости к внешним воздействиям космического пространства,
электромагнитных полей, механических и климатических нагрузок;
- подтверждением надежной работы аппаратуры путем проведения пе-
риодических проверок функционирования всех ЭРИ;
- проведением квалификационных испытаний (СОИа, СОИк) аппаратуры
в условиях работы, близких к реальным;
- образованием шин питания пироэлементов (ПЭ) +ПУ, - ПУ только при
наличии специальной разрешающей команды;
- подключением ИО к шинам +ПУ, - ПУ по двум полярностям.
Согласующее устройство системы поддержания давления обеспечивает ра-
боту приводов СПД в режиме подготовки к полету, полета PH по командам
БЦВМ и командам, формируемым согласующим устройством в соответствии с
состоянием датчиков давления.
В режиме предстартовой подготовки, связанной с образованием шины пи-
тания, согласующее устройство 1-й ступени PH (СПД-1) приводит и удерживает
электропривод (ЭП) в исходном положении до момента поступления команды из
БЦВМ на включение СПД-1. Ламели исходного положения (ЛИП) электроприво-
дов контролируются по приведению в исходное положение трех ЭП.
563
564
Рисунок 5.1.61 - Архитектура связей устройств РКА с внешними абонентами и исполнительными органами PH
По команде из БЦВМ «Включение СПД 1-й ступени» проводится электро-
задействование датчиков давления, согласующее устройство СПД-1 осуществля-
ет контроль сигналов с ламелей Фь (Ф*0, Ф2, (Ф’2) датчика давления в каждом ка-
нале. При наличии сигнала с ламелей Ф1, (Ф’1) или Ф2, (Ф’2) в каком-либо из ка-
налов СПД-1 формирует в этом канале команду на дросселирование соответст-
вующего двигателя. При отсутствии сигнала с ламелей Ф1, (Ф’1), Ф2, (Ф'2) в ка-
ком-либо из каналов устройство СПД-1 формирует в этом канале команду на
принудительное форсирование соответствующего двигателя. Команда на прину-
дительное форсирование в каждом канале удерживается до момента поступления
сигнала о замыкании щетками соответствующего датчика давления ламелей Фь
(ф’1).
После вывода системой СПД-1 двигателей 1-й ступени PH на режим (щетки
датчика давления находятся на ламелях Фь (Ф'О) согласующее устройство СПД-1
в каждом канале работает по следующему алгоритму:
- при получении сигнала о замыкании датчика давления ламелей Фь (Ф’1)
согласующее устройство СПД-1 выдает команду на дросселирование
двигателя до момента прекращения поступления сигнала с ламелей;
- при получении сигнала о размыкании датчика давления ламелей Дь (Д’1)
согласующее устройство СПД-1 выдает команду на форсирование дви-
гателя до момента прекращения поступления сигнала с ламелей;
- при отсутствии сигналов о замыкании щетками датчика давления ламе-
лей Фь (Ф’1), Дь (Д’1) команда на вращение вала привода СПД-1 не по-
дается (команды «Форс», «Дрос» снимаются).
По команде из БЦВМ «Начало форсированного режима работы МД 1-й
ступени» согласующее устройство СПД-1 осуществляет контроль сигналов с ла-
мели Ф2, (Ф’2) датчика давления в каждом канале. При наличии сигнала с ламелей
Ф2, (Ф’2) в каком-либо из каналов согласующее устройство СПД-1 формирует в
этом канале команду на дросселирование соответствующего двигателя. При от-
сутствии сигнала с ламелей Ф2, (Ф’2) в каком-либо из каналов согласующее уст-
ройство СПД-1 формирует в этом канале команду на принудительное форсирова-
ние соответствующего двигателя. Команда на принудительное форсирование в
каждом канале удерживается до момента поступления сигнала о замыкании щёт-
ками соответствующего датчика давления ламели Ф2, (Ф’2).
После вывода двигателей 1-й ступени PH на форсированный режим (щетки
датчика давления находятся в районе ламели Ф2, (Ф’2)) согласующее устройство
СПД-1 в каждом из каналов работает по следующему алгоритму:
- при получении сигнала о замыкании щетками датчика давления ламелей
Ф2, (Ф’2) согласующее устройство СПД-1 выдает команду на дроссели-
рование двигателя до момента прекращения поступления сигнала с ла-
мели;
- при получении сигнала о размыкании щетками датчика давления ламе-
лей Ф2, (Ф'2) согласующее устройство СПД-1 выдает команду на форси-
рование двигателя до момента поступления сигнала с ламели.
Работа СПД-1 на режиме форсирования двигателей 1-й ступени PH носит
565
автоколебательный характер относительно давления, соответствующего настрой-
ке ламели Фг, (Ф'г) датчика давления.
По команде из БЦВМ «Окончание форсированного режима» согласующее
устройство СПД-1 формирует в каждом канале команду на принудительное дрос-
селирование соответствующего двигателя. Команда на принудительное дроссе-
лирование удерживается до момента поступления сигнала о замыкании щетками
соответствующего датчика давления ламели Дь (Д*1)-
При получении сигнала о замыкании щетками датчика давления ламели Д],
(Д’1) согласующее устройство СПД-1 в каждом из каналов работает по следую-
щему алгоритму:
- при получении сигнала о замыкании датчика давления ламелей Дь (Д\)
согласующее устройство СПД-1 выдает команду на форсирование дви-
гателя до момента прекращения поступления сигнала с ламелей;
- при получении сигнала о замыкании датчика давления ламелей Фь (Ф’1)
согласующее устройство СПД-1 выдает команду на дросселирование
двигателя до момента прекращения поступления сигнала с ламелей;
- при отсутствии сигналов о замыкании щетками датчика давления ламе-
лей Фь (Ф’1), Дь (Д’1) команда на вращение вала привода СПД-1 не по-
дается (команды «Форс», «Дрос» снимаются).
По команде БЦВМ «Выключение СПД 1-й ступени» (снятие команды
«Включение СПД 1-й ступени») согласующее устройство СПД-1 выключается.
Частота следования полезного сигнала периодического характера с ламелей
Фь Ф2, Д1, (Ф’ь Ф2, Д’1) не превышает 3 Гц.
Схема управления двигателями СПД выполнена по мостовому принципу в
соответствии с рис. 5.1.62, где показан один из двух дублированных каналов.
Мостовая схема управления двигателями СПД выполнена на электромагнитных
реле с двойной перекрестной блокировкой входной команды, что исключает воз-
можность короткого замыкания по питанию при одновременном поступлении
команд «Форс» и «Дрос».
Согласующие устройства СПД 2-й и СПД 3-й ступеней работают аналогич-
но, за исключением того, что отсутствует режим принудительного форсирования
и дросселирования двигателей.
Силовой коммутатор первичного питания (СКПП) предназначен для ком-
мутации (включения, отключения), распределения питающего напряжения от
бортовых шин первичного питания и бортовой батареи по приборам СУ, пере-
ключения бортовых шин питания СУ с наземного источника на бортовой, выдачи
в СТИ параметров электропитания СУ.
В каждом из трех каналов СКПП входные команды образования шин пита-
ния поступают на обмотки электромагнитных реле, контакты которых, соединен-
ные по схеме резервирования «2 из 3», подключают дублированные обмотки си-
ловых дистанционных переключателей к источнику питания. Контакты силовых
дистанционных переключателей образуют шины питания абонентов и приборов
СУ. Тип дистанционных переключателей выбран исходя из параметров коммути-
руемой нагрузки.
566
От ламелей датчика давления
Рисунок 5.1.62- Схема управления двигателем СПД
Согласующее устройство электроавтоматики (СУЭ) предназначено для
управления ИО- пироэлементами (ПЭ) и электропневмоклапанами (ЭПК)-
подготовки, запуска и управления работой PH.
Прием команд управления ПЭ из БЦВМ осуществляется в каждом канале
СУЭ на обмотки электромагнитных реле, реализующих схему матричного де-
шифратора. Соответствующие командам пары выходных контактов реле каждого
из каналов подключают нить накаливания ПЭ к шинам питания но схеме «2 из 3»
для двух полярностей (требование безопасности работ с пиросредствами). В це-
лях обеспечения безопасности при проведении проверок все команды на группы
пиросредств разновременного срабатывания подключаются к специальным ши-
нам питания +ПУ, -ПУ, ±ПУ. Шины 4-ПУ, -ПУ, ±-ПУ образуются в СКПП по от-
дельным командам, которые могут быть выданы при подготовке к пуску только
при наличии специальной разрешающей команды. Для ограничения тока через
нити накаливания ПЭ до величины, заданной в ТУ, в целях защиты от короткого
замыкания после их срабатывания и снижения энергопотребления в цепи команд
пиросредств установлены низкоомные ограничительные резисторы. Для прове-
дения проверок узлов СУЭ используется УКАПС, подключаемое к шинам с по-
мощью регламентного коммутатора (РК). Схема управления пиросредствами для
одного ПЭ изображена на рис. 5,1.63.
Согласующее устройство управления электропневмоклапанами выполнено
на электромагнитных реле с током коммутации до 3 А. Команды управления
ЭПК так же, как и команды управления ПЭ, принимаются в каждом из трех кана-
лов на обмотки реле, контакгы которых реализуют по схеме «2 из 3» раздельную
коммутацию нагрузки к шинам +ПУ и -ПУ. Схема управления электропневмок-
лапанами показана на рис. 5.1.63.
Для обеспечения проверки разобщения команд управления ПЭ и ЭПК ис-
пользуется технологическая шина «Т».
Согласующее устройство управления приводами СУРТ обеспечивает при-
ведение и удержание приводов в исходном состоянии по образованию шины пи-
тания. По команде из БЦВМ «Включение СУРТ-1» согласующее устройство от-
ключает схему приведения и удержания приводов в исходном состоянии и обес-
печивает прием команд управления приводов «Открытие», «Закрытие». Команды
коммутации питания ламелей приводов «Включение СУРТ-1», «Открытие», «За-
крытие» выполнены на электромагнитных реле по схеме «2 из 3», обеспечиваю-
щей надежную работу согласующего устройства при одной возможной неисправ-
ности. Донесения о состоянии приводов с ламелей «ЛИП» ламель открытия
«ЛО», ламель закрытия «ЛЗ» поступают на МПР.
Отличие между СУ ПР 1-й и 2-й ступеней состоит в количестве управляе-
мых приводов.
568
Команды на включение ПЭ Команда на включение ЭПК
(канал А матричного дешифратора) канал А
Рисунок 5.1.63 - Схема управления ПЭ и ЭПК
569
Выводы по разделу
Процесс проектирования БАСУ включает в себя следующие этапы:
1. Анализ технического задания и выбор элементной базы. Построение ар-
хитектуры с разбиением проекта БАСУ на узлы. Определение базовых ярусов ре-
зервирования и способов межузлового сопряжения.
2. Вычисление времени базового такта задачи управления. Определение
временного распределения задач БАСУ внутри базового такта:
- выделение времени работы диспетчера задач;
- выделение времени обменов с периферийным оборудованием ввода-
вывода и определение необходимого объема транслируемой информа-
ции;
- выделение времени на оперативное тестирование оборудования в про-
цессе основной работы БАСУ и обеспечения парирования отказов;
- выделение запаса времени в базовом такте задачи управления и опреде-
ление реального времени исполнения алгоритмов управления.
3. Определение требуемой производительности процессора, исходя из не-
обходимой системной производительности, объемов памяти программ и памяти
данных, времени исполнения вычислений внутри базового такта задачи управле-
ния.
4. Формирование структурной схемы узлов БАСУ. Выбор допустимого
способа резервирования для каждого из узлов.
5. Нахождение временных характеристик узлов. Определение точек воз-
можного начала рассинхронизации каналов резервирования и оценка критично-
сти влияния асинхронности на функционирование последующего оборудования в
зависимости от величины рассинхронизации на выходе предшествующего обору-
дования:
- при прохождении сигналов от датчиков через устройства приема ин-
формации к центральному процессору;
- при обработке информации в каналах центрального процессора;
- при прохождении сигналов в процессе выдачи команд на исполнитель-
ные органы через устройства вывода.
6. Определение узлов, требующих специальных мер для компенсации асин-
хронизма каналов резервирования.
7. Коррекция временного распределения задач БАСУ внутри базового так-
та, требуемой производительности процессора, пропускной способности интер-
фейсов и типа интерфейсов.
8. Теоретические подтверждения обеспечиваемости требований техниче-
ского задания.
Каждый из этапов требует творческого подхода с учетом опыта предыду-
щих разработок, возможностей элементной базы и технологических особенно-
стей производства.
Библиографический список
1 . Стассинопулос, Э.Г. Радиационные условия работы электроники в косми-
570
ческом пространстве [Текст] / Э.Г. Стассинопулос, Дж.П. Реймонд И
ТИИЭР. - 1988. - Т. 76, № 11. - С. 23 - 43.
2 . Сраур, Дж. Р. Воздействие излучения на микроэлектронные устройства в
космосе [Текст] / Дж.Р. Сраур, Дж.М. Макгэррити // ТИИЭР. - 1988. -
Т. 76, № 11.-С. 44-74.
3 . Расмуссен, Р.Д Разработка радиационно стойкого оборудования космиче-
ских летательных аппаратов [Текст] / Р.Д. Расмуссен// ТИИЭР. - 1988. -
Т. 76,№ 11.-С. 146-159.
4 . Фильтрация случайных сбоев: Решение проблем обеспечения надежной ра-
боты будущих цифровых СБИС [Текст] / И. Сававрия, Н.С. Румин,
Дж.Ф. Хейес, В.К. Агарвал И ТИИЭР. - 1986. - Т. 74, № 5. -С. 58 - 75.
5 . Уэйкерли, Дж. Повышение надежности микро-ЭВМ путем тройного резер-
вирования модулей [Текст] / Дж. Уэйкерли И ТИИЭР. - 1976. - Т. 64, № 6. -
С. 65-78.
6 . David, Ph. Development of Fault Tolerant Computer System for the Hermes
Space Shuttle [Text] I Ph. David, CL Guidal H Fault-Tolerant Computing, 1993.
FTCS-23. Digest of Papers., The Twenty-Third International Symposium on,
Aug. 1993.-P. 641-646.
7 . High performance fault tolerant computer and its fault recovery [Text] I
T. Nakamikawa, Yu. Morita, Sh. Yamaguchi, S. Ishikawa, Y. Miyazaki// Fault-
Tolerant Systems, 1997. Proceedings., Pacific Rim International Symposium
on. - 1997.-P. 2-6.
8 . Roques, R. Fault-tolerant computer for the Automated Transfer Vehicle [Text] /
R. Roques, A. Correge, C. Boleat// Fault-Tolerant Computing, 1998. Digest of
Papers. Twenty-Eighth Annual International Symposium on. - 1998. - P. 414 -
419.
9 . A fault tolerant signal processing computer [Text] I K. Prager, M. Vahey,
W. Farwell, J. Whitney, J. Lieb I I Dependable Systems and Networks, 2000.
DSN 2000. Proceedings International Conference on. - 2000. - P. 169 - 174.
lO .Caldwell, D.W. FTSM: A Fault-Tolerant Spacebome Microcontroller [Text] /
D.W. Caldwell, D.A. Rennels H Department of Computer Science, 4731 Boelter
Hall University of California, Los Angeles, CA 90024 [Электронный ресурс]. -
Режим доступа: http://www.chillarege.com/fastabstracts/ftcs98/382.html.
11 . Структурно-алгоритмическая организация и модели надёжности мажори-
тарно-резервированных систем [Текст] / А.И. Кривоносов, Н.К. Байда,
А.А. Кулаков и др. И Косм1чна наука i технолога. - 1995. - № 1. - С. 69 -
77.
12 .Харченко, В.С. Оценка вариантов использования электронных компонентов
INDUSTRY при проектировании отказоустойчивых бортовых комплексов
(БК) [Текст] / В.С. Харченко, Ю.Б. Юрченко И Труды третьей международ-
ной научно-практической конференции СИЭТ-2002. - Одесса: ОНПУ. -
С. 40.
13 .Харченко, В.С. Реализация проектов отказоустойчивых бортовых компью-
теров космических аппаратов с использованием электронных компонент
571
INDUSTRY [Текст] / В.С. Харченко, Ю.Б. Юрченко, Н.К. Байда И Техноло-
гия приборостроения. - 2002. - №1. - С. 74 - 80.
14 .Харченко, В.С. Анализ структур отказоустойчивых бортовых комплексов
при использовании электронных компонент INDUSTRY [Текст] /
В.С. Харченко, Ю.Б. Юрченко. // Технология и конструирование в элек-
тронной аппаратуре. - 2003. - № 2. - С. 3 --10.
15 .Харченко, В.С. IOTS-подход: анализ вариантов структур отказоустойчивых
бортовых комплексов при использовании электронных компонент
INDUSTRY [Текст] / В.С. Харченко, Ю.Б. Юрченко И Chip News инженер-
ная микроэлектроника. - 2003. - № 7. - С. 28 - 39.
16 . Dale Commercial Microelectronics Technologies for Applications in the Satellite
Radiation Environment [Text] / Kenneth A. LaBel, Michele M. Gates,
Amy К Moran, Paul W. Marshall et al. / [Электронный ресурс]. - Режим дос-
тупа: http ://radhome. gsfc.nasa. gov/radhome/papers/aspen.htm.
17 .Synopsys V1.3 Proton Dose and Single Event Effects Testing of the Intel Pen-
tium III (P3) and AMD K7 Microprocessoes [Text] / Jim Howard, Evan Webb,
Ken LaBel, Marty Carts et al. / [Электронный ресурс]. - Режим доступа:
http://radhome.gsfc.nasa.gov/radhome/papers/i062100.pdf.
18 .Scott, J.A. Using Commercial-Off-The-Shelf (COTS) Software in High-
Consequence Safety Systems [Text] I J.A. Scott, G.G. Preckshot,
J.M. Gallagher// Lawrence Livermore National Laboratory, UCRL-122246,
1995. -C. 45-61.
19 .Тяпченко, Ю. ПЭВМ на борту пилотируемого космического аппарата
[Текст] / Ю. Тяпченко, В. Безродное // СТА. - 1997. - № 1. - С. 34 - 37.
20 .Гобчанский, О. Применение MicroPC в вычислительных комплексах специ-
ального назначения [Текст] / О. Гобчанский // СТА. - 1997. - № 1. - С. 38 -
41.
21 .Гобчанский, О. Проблемы создания бортовых вычислительных комплексов
малых космических аппаратов [Текст] / О. Гобчанский// СТА. - 2001.-
№4.-С. 28-35.
22 .Гобчанский, О. Повышение радиационной стойкости индустриальных
средств автоматики в составе бортовой аппаратуры/ О. Гобчанский,
В. Попов, Ю. Николаев И СТА. - 2001. -№ 4. - С. 36 - 40.
23 .Кернс, Ш. Э. Разработка радиационно стойких ИС космического назначе-
ния: обзор подходов [Текст] / Ш.Э. Кернс, Б.Д. Шейфер// ТИИЭР.-1988,
Т. 76,№11,-С. 75-125.
24 .Emerging Radiation Assurance (RHA) issues: A NASA approach for space flight
programs [Text] / K. A. LaBel, A.H. Johnston, J.L. Barth et al. // [Электрон-
ный ресурс]. - Режим доступа:
http://radhome.gsfc.nasa.gov/radhome/papers/RHA98.pdf.
25 .Recent radiation damage and single event effect results for microelectronics
[Text] / M.V. O'Bryan, K.A. LaBel, R.A. Reed et al. // [Электронный
. ресурс]. - Режим доступа:
http://radhome.gsfc.nasa.gov/radhome/papers/NSREC99.pdf.
572
26 .Radiation Damage and Single Event Effect Results for Candidate Spacecraft
Electronics [Text] / M.V. O'Bryan, K.A. LaBel, R.A. Reed et al. II [Электрон-
ный ресурс]. - Режим доступа:
http://radhome.gsfc.nasa.gov/radhome/papers/nsrec00_W21.pdf.
27 .Radiation Damage and Single Event Effect Results for Candidate Spacecraft
Electronics [Text] / M.V. O'Bryan, K.A. LaBel, R.A. Reed et al. // [Электрон-
ный ресурс]. - Режим доступа:
http://radhome.gsfc.nasa.gov/radhome/papers/nsrecO 1_W 15.pdf.
28 .Бурцев, В. Возможности использования зарубежной элементной базы в
системах военного применения [Текст] / В. Бурцев И Живая электроника
России 2002. - С. 33 - 36.
29 .Юрченко, Ю.Б. Повышение надежности бортовых управляющих комплек-
сов путем построения мажоритированных структур на основе аппаратной
синхронизации однокристальных микроконтроллеров [Текст] /
Ю.Б. Юрченко И Косм1чна наука i технолога. Додаток. - К., НАНУ. -
2004.-Т. 10, №1.-С. 41-49.
30 .Kim, Н. Evaluation of Fault Tolerance Latency from Real-Time Application's
Perspectives [Text] / Hagbae Kim, Kang G. Shin // IEEE Transactions on com-
puters. - 2000, vol. 49, No 1, January. - P. 55 - 64.
31 . Sift: Проектирование и анализ отказоустойчивой вычислительной системы
для управления полетом летательного аппарата [Текст] / Дж. X Уэнсли,
Л. Лэмпорт, Дж. Голдберг, М.У. Грин и др. И ТИИЭР. - 1978, Т. 66, № 10. -
С. 26-48.
32 .Melliar-Smith, Р.М. Formal Specification and Mechanical Verification of SIFT
[Text] / P.M. Melliar-Smith, R.L. Schwartz // A Fault-Tolerant Flight Control
System, IEEE Trans. Computers. - 1982, vol. 31, no. 7, July. - P. 616 - 630.
33 .ControlNet PLC-5 Hot Backup System (Including ControlNet PLC-5 Hot
Backup Cartridge, Cat. No. 1785-CHBM) [Электронный ресурс]. - Режим
доступа:
http ://literature.rockwellautomation.com/idc/groups/literature/documents/qs/l 7 8
5-qs001_-en-p.pdf
34 .KA “Египтсат” И http://photo.unian.net/rus/detail/! 17538.html
35 .«МС-2-8», Микроспутник дистанционного зондирования Земли с оптико-
электронными приборами многозонального наблюдения высокого разре-
шения [Электронный ресурс]. - Режим доступа:
http://www.yuzhnoye.com/?id= 13 5&
path=Aerospace Technology/Spacecraft/Remote Sensing/MS-2-8/MS-2-8
36 .The MAFT Architecture for Distributed Fault Tolerance [Text] I
R.M. Kieckhafer, C.J. Walter, A.M. Finn, P.M. et al. // IEEE Trans. Computers,
vol. 37, no. 4, Apr. 1988. - P. 398 - 405.
37 .Harper, R.E. Fault-Tolerant Parallel Processor [Text] I R.E. Harper, J.H. Lala //
Guidance, Control and Dynamics, vol. 14, no. 3, May-June 1990. - P. 554 - 563.
38 .Powell, D. Distributed Fault-Tolerance - Lessons from Delta-4 [Text] /
D. Powell // IEEE Micro, vol. 14, no. 1 Feb. 1994. - P. 36 - 47.
573
39 .Синхронизация каналов троированных каналов ПЛК жёсткого РВ [Текст] /
В.В. Афонин, В.А. Лисейкин, В.В. Милютин и др. И Промышленные АСУ и
контроллеры. - 2001. - № 6. - С. 58 - 60.
40 . GUARDS: a generic upgradable architecture for real-time dependable systems
[Text] / D. Powell, J. Arlat, L. Beus-Dukic et al. // Parallel and Distributed Sys-
tems, IEEE Transactions on, Vol.: 10 Issue: 6, June 1999. - P. 580 - 599.
41 .Юрченко, Ю.Б. Синхронные «алгоритм-в-аппаратуре» структуры в вычис-
лительных системах бортовых комплексов критического применения: про-
граммно-конструкторская необходимость и возможности аппаратурной
реализации [Текст] / Ю.Б, Юрченко // Радюелектронш i комп’ютерш сис-
теми. - 2006. - № 7(19). - С. 56 - 59.
42 .Эволюция отказоустойчивых БЦВК и направления их развития на однокри-
стальных микро-ЭВМ [Текст] / Н.К. Байда, А.И. Кривоносов, И.В. Лысенко
и др. И Системы обробкй шформаци. - X.: НАНУ, ПАНМ, ХВУ. - 2001. -
Вип. 4(14).-С. 217-225.
43 .Харченко, В.С. Повышение отказоустойчивости систем управления на ос-
нове мажоритированных вычислительных комплексов с аппаратной син-
хронизацией [Текст] / В.С. Харченко, Ю.Б. Юрченко И 1нформацшно-
керуюч! системи на зал!зничному транспорта - 2001. - № 4. - С. 122 - 123.
44 .Юрченко, Ю.Б. Модель синхронизации мажоритарных структур отказо-
устойчивых БЦВС на однокристальных микро-ЭВМ [Текст] /
Ю.Б. Юрченко И Труды 4-й международной научно-практической конфе-
ренции СИЭТ-2003. - Одесса: ОНПУ. - С. 168.
45 .Юрченко, Ю.Б. Бортовой компьютер мажоритированного управляющего
комплекса с аппаратной синхронизацией каналов [Текст] / Ю.Б. Юрченко И
N м!жнародна молод!жна науково-практична конференщя “Людина i кос-
мос”: зб. тез. - 2003. - С. 254.
46 .Prizant, J. High speed communicator for fault tolerant systems Digital Avionics
Systems Conference [Text] / J. Prizant// 1998. Proceedings., 17th DASC. The
AIAA/IEEE/SAE, Volume: 1, 1998 Page(s): D25/1 -D25/7 vol.l
47 .Triguard SC300E - тройной модульный контроллер безопасности с под-
держкой обеспечения безопасности от компании АВВ [Электронный ре-
сурс]. - Режим доступа:
http://www.abb.ru/product/seitp334/cl256ccb004e7bd7412567fd00715d03.aspx
?productLanguage=ru&country=RU
48 .Reinhardt, S.K. Transient fault detection via simultaneous multithreading
[Text] I S.K. Reinhardt, S.S. Mukherjee // Computer Architecture, 2000. Pro-
ceedings of the 27th International Symposium on, 2000. - P. 25 - 36.
49 .Юрченко, Ю.Б. Синхронизация каналов SIFT-HIFT структур бортовых вы-
числительных систем при отладке программно-аппаратного взаимодейст-
вия [Текст] / Ю.Б. Юрченко И Радюелектронш i комп’ютерш системи. -
2007.-№6(25).-С. 63-67.
50 .Юрченко, Ю.Б. Анализ взаимодействия каналов синхронных SIFT- HIFT
компьютеров в системе информационно-вычислительного комплекса с
574
межканально-асинхронной распределенной сетевой структурой оборудова-
ния [Текст] / Ю.Б. Юрченко // Радюелектронш i комп’ютерш системи. -
2008.-№7(34).-С. 38-42.
51 .Интегрированная модульная архитектура и технология сопряжения ком-
плексов бортового оборудования малых космических аппаратов [Текст] /
С.В. Горбачев, М.И. Кислицкий, В.И. Сапожников, Ю.Е. Шейнин// Труды
III Международной конференции-выставки ’’Малые спутники: новые тех-
нологии, миниатюризация. Области эффективного применения в XXI веке”,
г. Королев Московской области, 27-31 мая 2002 г. - Российская космиче-
ская ассоциация, ЦНИИМАШ. - С. 307 - 316.
52 .Масштабируемые архитектуры распределенных систем на технологии
SpaceWire на базе платформы ’’Мультикор” [Текст] / С.В. Горбачев,
Д.А. Рождественский, Е.А. Суворова, Ю.Е. Шейнин // Вопросы радиоэлек-
троники. Сер. ОТ. - 2006. - Вып. 2. - С. 69 - 80.
53 .Rad-Hard 32 bit SPARC V8 Processor AT697F [Электронный ресурс]. - Ре-
жим доступа: http://atmel.com/dyn/resources/prod_documents/doc7703.pdf
54 .Юрченко, Ю.Б. Задачи построения архитектуры отказоустойчивых инфор-
мационно-вычислительных комплексов реального времени с компонентами
«система-на-кристалле» [Текст] / Ю.Б. Юрченко // Радюелектронш i
комп’ютерш системи. - 2009. - № 6(40). - С. 227 - 230.
55 .Головацкий, В.А. Источники вторичного электропитания [Текст]/
В.А. Головацкий, Г.Н. Гулякович и др. / под ред. Ю.Н. Конева. - М.: Радио
и связь, 1990.
56 .Галас, С.И. Резервированный инвертор напряжения. Патент Украины
№95145 от 11.07.2011г.
57 .Жданкин, В. Вторичные источники электропитания фирмы Interpoint
[Текст] / В. Жданкин И Современные технологии автоматизации. - 1997. -
№4.-С. 6.
58 .Пат. 92402 (Украина) Трехканальный мажоритарный усилитель напряже-
ния/ Бейдин Г.В., Шуляк А.В., Либман Д.В.- Опубл. 25.10.2010, Бюл.
№20.
59 .Пат. 91877 (Украина) Трехканальный мажоритарный элемент / Бейдин Г.В.,
Шуляк А.В., Батюченко А.А. - Опубл. 10.09.2010, Бюл. № 17.
60 .Пат. 90049 (Украина) Устройство для управления индуктивной нагрузкой /
Бейдин Г.В., Шуляк А.В., Петров А.В. - Опубл. 25.03.2010, Бюл. № 6.
61 .Пат. 93024 (Украина) Устройство для управления индуктивной нагрузкой /
Бейдин Г.В., Шуляк А.В., Крячко А.В. - Опубл. 27.12.2010, Бюл. № 24.
62 .А.С. 1804691 (СССР) Устройство управления индуктивной нагрузкой / Бей-
дин Г.В., Панасенко С.Ф., Новожилова В.И. - Опубл. 23.03.1993, Бюл.
№24.
63 .Как снизить электромагнитные помехи при проектировании? - Электрон-
ные компоненты 2011. - № 3. - С. 10.
575
6 ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СУ РКН
Как видно из представленных в настоящей книге материалов, РКН пред-
ставляет собой сложную систему, управление которой требует решения многих
задач баллистики, стабилизации и управления. При этом решение таких задач
подчинено основному требованию - оптимизации характеристик РКН при выве-
дении полезного груза.
Так как СУ РКН является ее составной частью, к ней предъявляется такое
же требование, выполнение которого требует большого объема исследований в
различных областях науки и производства: механики, управления, динамики, вы-
числительной техники, технологии и т.д. Материалы, представленные в этой кни-
ге, подтверждают данный вывод.
При этом необходимо уделять большое внимание вопросам взаимодействия
РКН и СУ. Такое взаимодействие приводит к тому, что проектирование СУ явля-
ется сложным итерационным процессом, тесно связанным с процессом проекти-
рования РКН.
Сам процесс проектирования СУ РКН ведется поэтапно. Основные особен-
ности этих этапов представлены ниже.
1. Выданное разработчиком РКН техническое задание на создание СУ со-
держит требования к характеристикам СУ, объем и источники ресурсов на ее
создание, а также сроки разработки и производства СУ. Параллельно с согласо-
ванием выданного ТЗ между разработчиками РКН и СУ проводят различные ис-
следования в целях анализа возникших задач при проектировании новой СУ и
методов их решения с учетом последних достижений в области создания объек-
тов ракетно-космической техники. В процессе согласования ТЗ определяются
также принципы построения новой СУ. Этап заканчивается согласованием ТЗ на
разработку СУ.
2. Согласованное ТЗ служит базой для подготовки частных ТЗ на разработ-
ку приборов СУ. Особое внимание уделяется выбору командных приборов и дру-
гой аппаратуры СУ вследствие большой сложности их изготовления. При этом
большое значение имеет выбор места установки ККП на РКН, связанный с во-
просом обеспечения устойчивости упругой ракеты. Одновременно проводят ана-
лиз динамической схемы РКН с учетом колебаний жидкости в баках РКН (струк-
турная и динамическая неустойчивость колебаний жидкости и т.д.).
С указанных работ начинается этап предэскизного проектирования, на ко-
тором выбирается оптимальный вариант построения СУ, ее структурная схема и
приборный состав, На этом этапе часто выпускаются технические предложения
(ТП), в которых выявляются дополнительные (или уточняются) требования к СУ.
В это же время проводятся работы по предварительной оценке основных харак-
теристик СУ (точность выведения, устойчивость, габаритно-массовые характери-
стики и др.). Этап заканчивается выпуском аванпроекта (АП).
3. На следующем этапе - этапе эскизного проектирования (ЭП), выполня-
ются все работы, определяющие принципиальные (конструктивные, схемные и
др.) решения СУ, которые дают общее представление о принципах работы и уст-
576
ройстве разрабатываемой СУ, т е. на этом этапе осуществляется комплексное
проектирование СУ. При этом проводится цифровое и полунатурное моделиро-
вание, в процессе которого разрабатываются и отрабатываются алгоритмы под-
систем СУ (навигации, наведения, стабилизации и др.), оптимизация их парамет-
ров, оценка ожидаемой точности выведения, устойчивости движения РКН и т.п.,
а также разрабатывается их предварительное ПО.
Результаты эскизного проектирования должны подтвердить достаточность
принятых решений для обеспечения заданной точности выведения полезного гру-
за во всех режимах эксплуатации РКН.
На этапе ЭП для исследований важную роль играют разрабатываемые или
уже разработанные (см. настоящую книгу) математические модели объектов
управления (PH, ДУ, органы управления) и всех приборов СУ (ККП, РМ, согла-
сующих устройств, преобразователей и т.п.). Эти математические модели должны
быть достаточно сложными, чтобы получить правильный ответ на поставленный
вопрос, и в то же время достаточно простыми, чтобы трудовые и временные за-
траты на решение поставленной задачи были минимальными.
Кроме того, на этапе ЭП изготавливаются и испытываются макеты СУ или
ее составных частей для проверки основных принципов ее работы.
4. Этап рабочего проектирования предназначен для разработки полного
объема технической документации (ТД) на всю СУ, ее подсистемы и приборы, а
также разрабатывается технология их изготовления. Одновременно отрабатыва-
ется программно-алгоритмическое обеспечение (ПАО) СУ. Завершается этап из-
готовлением опытных образцов СУ и их испытаниями.
Подробно этап испытаний СУ как неотъемлемой части ее проектирования
приведем в томе 3 «Экспериментальная отработка систем управления объектов
ракетно-космической техники».
577
ПОСЛЕСЛОВИЕ
Представленные в книге научно-технические материалы позволяют
получить информацию в полном объеме о задачах, решаемых при
проектировании СУ для ракет-носителей. Описаны основные этапы создания СУ
начиная с получения ТЗ и ИД от Головной организации - разработчика PH до
решения задач разработки бортового программно-математического обеспечения
(ПМО) и аппаратуры СУ, а также представлены материалы, по которым можно
судить о некоторых технологических этапах их разработки.
По мнению авторского коллектива, приведенные материалы дают общее
представление о методах создания СУ PH и возможность разобраться с
решаемыми проблемами.
Книга может быть использована при подготовке специалистов по
проектированию и созданию СУ объектов ракетной техники в университетах и
как научно-техническое пособие на предприятиях космической отрасли.
578
Навчальне видання
За загальною редакщею
Алексеева Юры Сергшовича, Златкша Юры Михайловича,
Кривцова Володимира Станиславовича, Кушка Анатолш Степановича,
Чумаченка Валентина 1вановича
ПРОЕКТУВАННЯ СИСТЕМ УПРАВЛШНЯ
OB’CKTIB РАКЕТНО-КОСМГЧНО1 ТЕХН1КИ
Том 1
ПРОЕКТУВАННЯ СИСТЕМ УПРАВЛШНЯ РАКЕТ-НОСПВ
(Росшською мовою)
Редактор Т.Г. Кардаш
Комп’ютерний наб>р:
А.А. Мартинюк, О.Д. Панайотова
Комп’ютерний дизайн i верстка: О.Д. Кривоносова
Формат 60x84 1/8. Патр офс. №2. Офс. друк
Ум. друк арк. 32,1. Обл.-вид. арк. 36,18. Наклад 500 пр.
Замовлення 65. Цша вгпьна
Нащональний аерокосм!чний ушверситет им. М.С. Жуковського
«Хар к i в с ь к и й ав!ац1йний i н с т и т у т»
61070, Харюв-70, вул. Чкалова, 17
http://www.khai.edu
Вщдруковано ФОП Лисенко 1.Б.
61070, Харк1в - 70, вул. Чкалова 17, моторний корпус, к. 147
Свщоцтво про внесения суб’екта видавничо'Г справи до державного реестру видавц!в,
вигот1вник1в i розповсюджувач!в видавничо! продукцп ДК №2607 вщ 11.09.06 р.