





















































































































































































































































































































































































































































Text
М. М. АРХАНГЕЛЬСКИЙ
КУРС ФИЗИКИ
МЕХАНИКА
Допущено
Министерством просвещения РСФСР
в качестве учебного пособия
для педагогических институтов
ИЗДАНИЕ ВТОРОЕ, ИСПРАВЛЕННОЕ
И ДОПОЛНЕННОЕ
ИЗДАТЕЛЬСТВО «ПРОСВЕЩЕНИЕ»
МОСКВА 1965
Учителям моим, перед кото-
которыми я в неоплатном долгу
Автор.
ПРЕДИСЛОВИЕ
Эта книга в основе своей содержит изложение курса, который не-
несколько лет читался автором в Московском областном педагогическом
институте имени Н. К. Крупской для будущих учителей физики.
Содержание книги полностью охватывает круг вопросов, вхо-
входящих в программу для физических отделений педагогических ин-
институтов. При этом часть вопросов изложена с несколько большей
полнотой, чем принято обычно (отдельные разделы гидроаэроди-
гидроаэродинамики, колебательного и волнового движений).
При изложении курса автор старался показать, что основой реше-
решения всех задач в классической механике является единый метод, опи-
опирающийся на три закона динамики и их следствия. Как нам это уда-
удалось, пусть судят читатели Однако, на наш взгляд, эту мысль следу-
следует продолжать и в лабораторных работах, и при решении задач.
Иногда существует тенденция считать раздел «Механика» в кур-
курсе общей физики неким введением в курс теоретической механики
Это справедливо лишь отчасти. Раздел «Механика», являясь частью
курса общей физики, имеет свои самостоятельные цели. Главные
из них: сообщить учащимся основные экспериментальные факты,
относящиеся к изучению механического движения, научить раскры-
раскрывать и обобщать физические закономерности, которым подчиняются
наблюдаемые явления. Иными словами, основным в курсе общей
физики является ясность описания физических явлений, а не пого-
погоня за математической строгостью изложения Поэтому в ряде слу-
случаев автор сознательно отступил от математической строгости в
пользу более ясного и простого изложения физической сути дела.
Кроме того, в описании некоторых опытов, особенно демонстрацион-
демонстрационного типа, также сознательно опущены некоторые детали, чтобы
сосредоточить внимание читателя на одной стороне явления, ради
которой ставилась демонстрация.
Так как курс «Механика» читается во втором семестре, то в кни-
книге автор считал возможным использовать в необходимом объеме
аппарат высшей математики (понятие о производной, основы век-
векторной алгебры, операции дифференцирования и интегрирования).
При переработке первого издания автором изъяты из текста во-
вопросы, которые подробно изучаются в курсе теоретической механи-
ки и вместе с тем не имеют самостоятельного физического значения
(сложение и разложение сил, вывод формулы кориолисова ускоре-
ускорения). За счет этого введены параграфы, в которых рассмотрены по-
понятия веса и состояние невесомости, ряд примеров использования
законов механики в космонавтике. Без них трудно представить
себе современный учебник механики.
Автор глубоко признателен покойному Д. И. Сахарову, советы
которого, всегда полные ясного видения физической сущности яв-
явлений и блестящего методического мастерства, были использованы
автором при переработке книги. Автор благодарен коллективу
кафедры Московского областного педагогического института и за-
заведующему кафедрой профессору В. Ф. Ноздреву, которые своим
благожелательным отношением и советами способствовали выпол-
выполнению предпринятой автором работы.
ГЛАВА 1
(ВВОДНАЯ)
§ 1. МАТЕРИЯ И ДВИЖЕНИЕ
Все данные естествознания и вообще современной науки дока-
доказывают, что мир материален.
Материей мы называем все то, что существует вне и независимо
от нашего сознания «Материя есть то, что, действуя на наши орга-
органы чувств, производит ощущение; материя есть объективная реаль-
реальность, данная нам в ощущении...»1. Говоря «мир материален», мы
тем самым утверждаем, что различные тела, живые организмы и т. п.
существуют независимо от нашего сознания.
Материя вечно и непрерывно развивается, находясь в непрерыв-
непрерывном движении. Под движением в широком смысле слова понимаются
все изменения материи — от простого перемещения до сложнейших
процессов мышления.
Материя и движение неуничтожимы и несотворимы. В своих
превращениях они подчиняются единому закону сохранения, откры-
открытому М. В. Ломоносовым (гл. II, § 5).
Окружающие нас тела, вещество, из которого они состоят, элект-
электромагнитные поля, поля тяготения, межзвездное вещество, элемен-
элементарные частицы и т. д. представляют собой конкретные формы ма-
материи. Конкретным формам материи присущи конкретные формы
их развития, движения. Естественные науки всегда имеют дело с
изучением конкретных форм материи и конкретных видов ее дви-
движения... «материю и движение можно познать лишь путем изуче-
изучения отдельных веществ и отдельных форм движения; и поскольку
мы познаем последние, постольку мы познаем также и материю и дви-
движение как таковые»2.
Физика изучает строение неживой материи и наиболее общие
формы ее движения, а именно: механическое, молекулярно-тепловое,
электромагнитное, внутриатомное и внутриядерное движения. Прос-
Простейший вид движения материи — механическое движение.
'В И. Ленин, Сочинения, т. 14, стр. 133.
2Ф. Энгельс, Диалектика природы, Госполнтиздат, 1952, стр. 187
о
Механическим ' движением называется изменение со временем
положения тел в пространстве друг относительно друга. Законы
механического движения изучает раздел физики, называемый ме-
механикой.
Механическое движение в той или иной степени сопровождает
все другие, более сложные формы движения.
Так, например, доступные непосредственному изучению свой-
свойства вещества, скажем, свойства некоторого количества газа (дав-
(давление, объем, температура) определяются движением огромной со-
совокупности его молекул. Любая от-
отдельно рассматриваемая молекула
движется по ломаной линии (рис. 1).
Это сложное перемещение — резуль-
результат взаимодействия данной молекулы
с другими, встречающимися на ее пу-
пути. Взаимодействие пары молекул при
соударении подчиняется, с известным
приближением, механическим зако-
законам, управляющим упругим ударом
Рис. 1. Траектория молекулы тел> т е определяется скоростями и
газа" направлением удара данной пары мо-
молекул. Но от соударения к соударе-
соударению скорости и направления ударов молекул изменяются совершен-
совершенно случайно. Поэтому рассчитать состояние движения любой мо-
молекулы после ста, тысячи и более соударений или изменение вза-
взаимного положения всего множества, как говорят ансамбля, моле-
молекул — задача безнадежная по своей сложности. Но и не только
сложная, а и по существу бесполезная. Ведь хотя молекулы газа
все время движутся, т. е. состояние их непрерывно изменяется,
тем не менее макроскопические свойства газа — объем, давление,
температура — могут оставаться неизменными сколь угодно дол-
долго. Следовательно, одному и тому же состоянию газа как цело-
целого может соответствовать множество различных с механической
точки зрения состояний молекул.
Таким образом, молекулярно-тепловая форма движения не мо-
может быть сведена к механической, но изучение ее требует предвари-
предварительного представления о механическом движении и знания законов
механики.
§2. МАРКСИСТСКО-ЛЕНИНСКАЯ ФИЛОСОФИЯ — ОСНОВА
ПРАВИЛЬНОГО ПОНИМАНИЯ ФИЗИЧЕСКИХ ЯВЛЕНИЙ
В физике, как и в других науках, шла и идет борьба двух ми-
мировоззрений — материалистического и идеалистического.
Ученые-материалисты исходят в своих исследованиях из приз-
признания факта объективного существования мира и возможности поз-
познания законов его развития.
Ученые-идеалисты считают мир совокупностью наших ощуще-
ощущений. Они видят задачу науки в изучении этих ощущений и тем
самым отрицают достоверность знаний, полученных наукой о при-
природе.
Последовательное научно-материалистическое понимание яв-
явлений природы как движения материи было дано учением К. Марк-
Маркса и Ф. Энгельса — диалектическим материализмом. Развитие со-
современной физики и правильное истолкование открытых ею законов
немыслимо без овладения диалектическим материализмом.
Ярким примером тупика, в который может завести исследова-
исследователя забвение или незнание основ диалектического материализма,
может служить «кризис» физики на рубеже XIX и XX вв. Важ-
Важнейшие физические открытия того времени (радиоактивность, взаи-
взаимопревращаемость элементов, изменение массы электрона, закон
взаимной связи энергии и массы, принцип относительности и др.)
потребовали отказа от многих привычных физических представле-
представлений и понятий, например о неделимости атома, о неизменности мас-
массы тел, об «абсолютном» характере времени и пространства и т. п.
Часть физиков восприняла открытие новых свойств материального
мира как основание для отказа от признания его материальности:
раз наши представления о материи изменяются, утверждали эти
ученые, значит, они не отражают картину объективно существую-
существующего мира. Масса атома, пространство, время не существуют объек-
объективно, а являются «свободными изобретениями» человеческого ра-
разума.
В. И. Ленин в работе «Материализм и эмпириокритицизм» по-
показал, что смена наших представлений о материи есть естествен-
естественный процесс углубления наших знаний. Процесс познания челове-
человеком окружающей действительности так же бесконечен, как беско-
бесконечна вечно развивающаяся материя. То, что мы знаем сегодня,
есть лишь некоторое приближение к истинному, абсолютному зна-
знанию. На следующей ступени развития науки часть понятий потре-
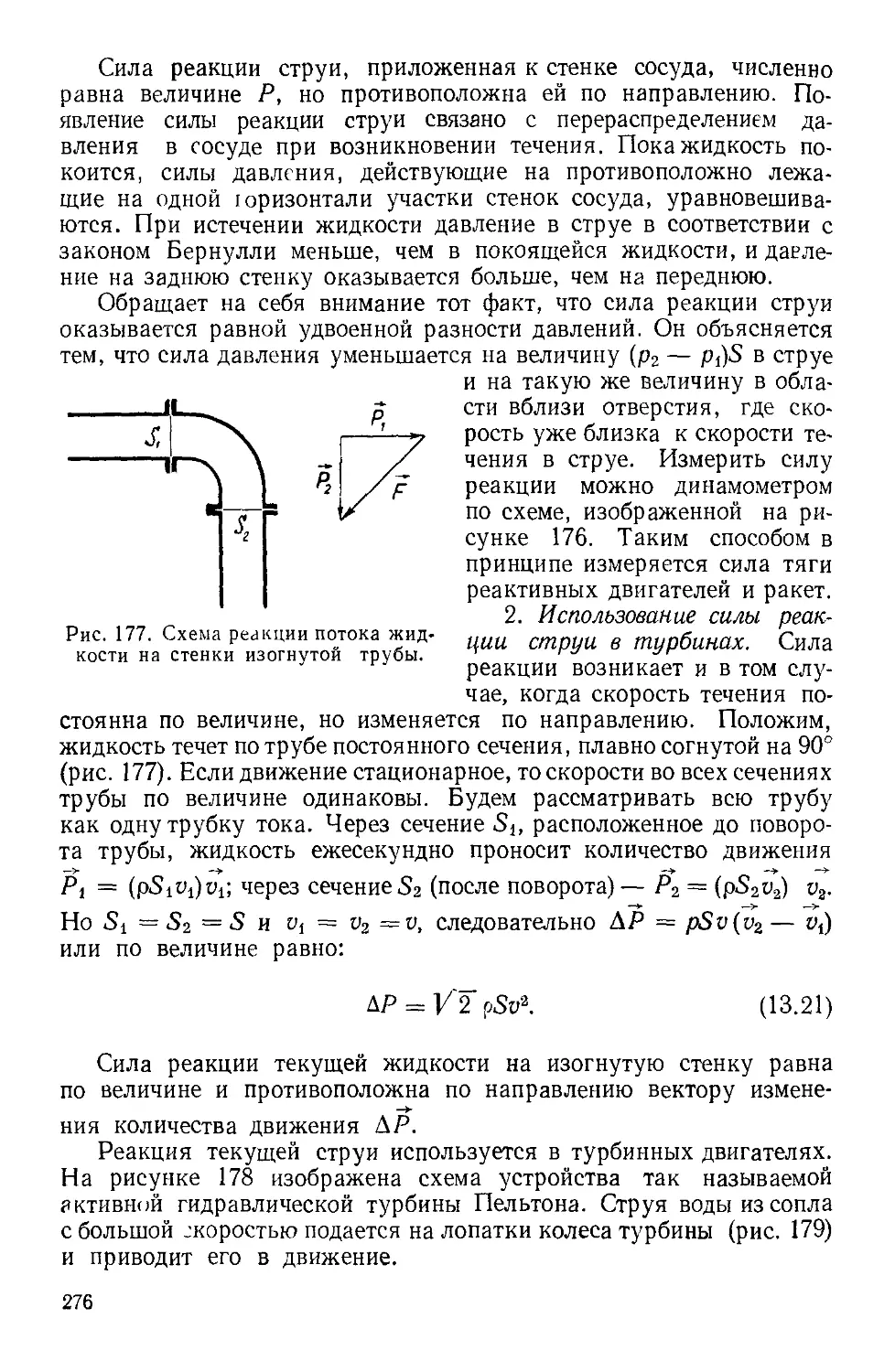
потребует уточнения, часть испытает коренную ломку или будет вовсе
отброшена. Но перестройка наших понятий произойдет не по про-
произволу того или другого исследователя, а возникнет как результат
открытия новых сторон действительности, как результат обогаще-
обогащения наших знаний. При этом изменение наших представлений о
свойствах материи отнюдь не отрицает ее существования, а являет-
является свидетельством того, что мы сделали новый шаг в познании ми-
мира. В. И. Ленин показал, что открытие сложного строения атома
не отрицает его материальности, что электрон тоже материален и
обладает неисчерпаемым многообразием свойств. Используя метод
Диалектического материализма, В. И. Ленин не только подверг унич-
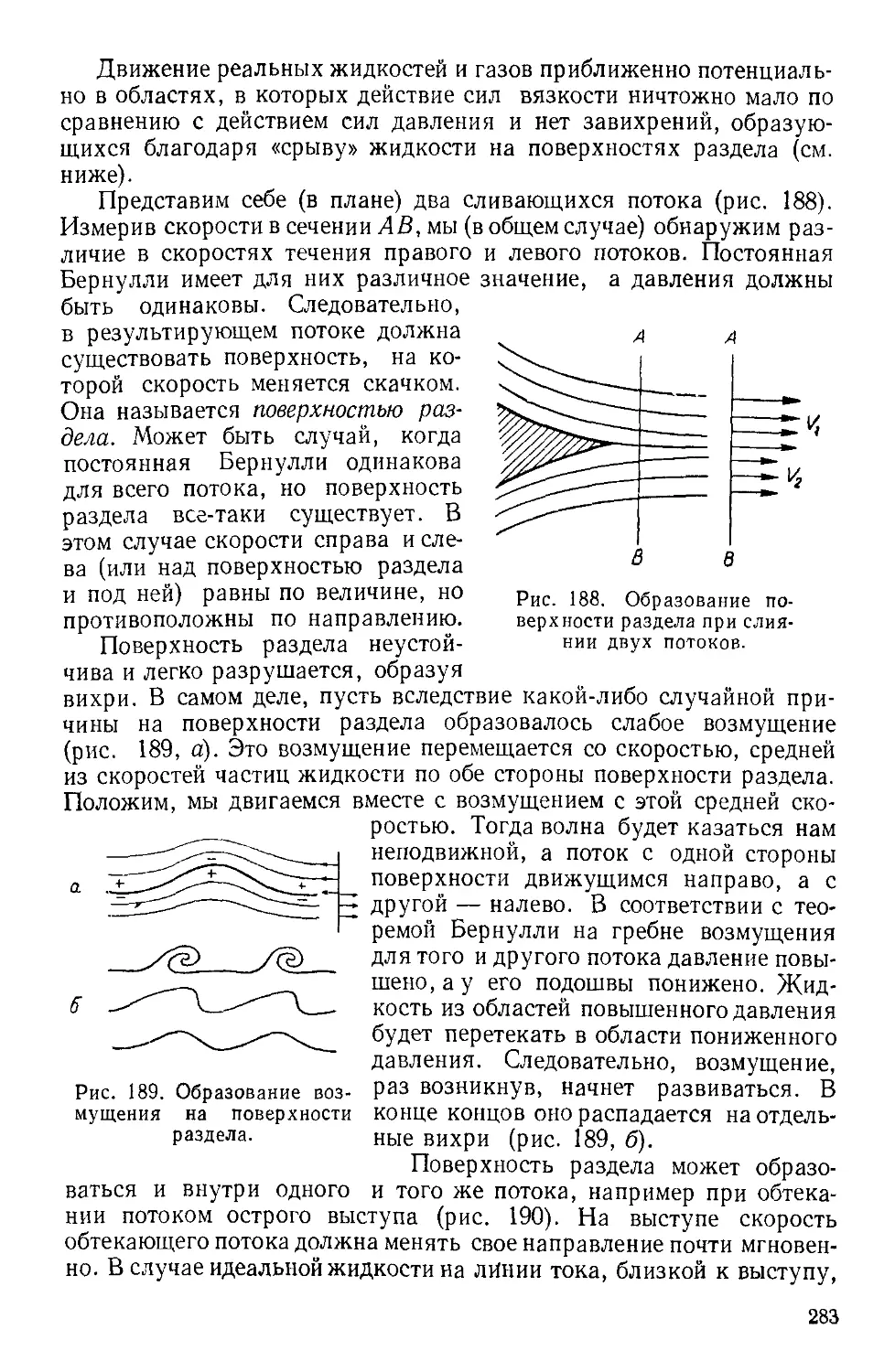
уничтожающей критике «физический» идеализм, но и указал путь, по
которому должна идти современная физика.
Диалектический материализм, обобщая данные всех наук, в
частности физики, утверждает, что все существующее беспрерывно
изменяется, что движение, понимаемое как развитие, свойственно
самой природе вещей;
любое явление происходит в органической, непрерывной связи
с другими явлениями;
развитие всегда происходит в результате борьбы внутренних
противоречий, свойственных предметам и явлениям;
развитие происходит как процесс постепенного накопления ко-
количественных изменений, который приводит к коренным качествен-
качественным изменениям, причем последние происходят внезапно в виде скач-
скачкообразного перехода от одного состояния к другому,
§ 3. ОСОБЕННОСТИ ФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ
При изучении физического явления мы не можем охватить в
одном исследовании всех его связей с другими явлениями. Однако,
наблюдая данное физическое явление, мы обнаруживаем, что одни
связи существенно сказываются на его развитии, а другие играют
второстепенную роль и практически не влияют на ход явления. Ка-
Какие связи определяющие, или главные, для данного явления, а ка-
какие второстепенные, устанавливается опытом. Например, наблю-
наблюдая падение стального шарика в воздухе и в трубе, из которой воз-
воздух откачен, мы видим, что в том и в другом случае шарик падает
практически одинаково. Следовательно, действие сопротивления
воздуха незначительно по сравнению с действием силы тяжести,
и движение шарика можно считать происходящим в результате толь-
только притяжения его Землей. Наблюдение за движением парашютиста
заставляет сделать иной вывод: действие сопротивления воздуха
при его падении сравнимо по величине с действием силы тяжести,—
и необходимо учитывать и то и другое. Но и в этом случае мы под-
подменяем изучение сложного явления изучением его упрощенной схе-
схемы, так как не принимаем во внимание, скажем, изменение веса
парашютиста с изменением расстояния от Земли.
Без такого упрощения задачи теоретические исследования фи-
физических явлений были бы вообще неразрешимы.
Однако, принимая ту или иную схему явления, мы обязаны пом-
помнить, что она должна отражать основные, главные связи между яв-
явлениями. Если это требование не выполнено, то исследование пой-
пойдет по ложному пути. Но даже выбрав схему, правильно учиты-
учитывающую основные взаимосвязи явлений, всегда надо помнить об
ее ограниченности, о правомерности ее применения только в опре-
определенных условиях. Мы получим, вообще говоря, правильное пред-
представление о траектории движения снаряда, рассматривая его как
материальную точку, движущуюся под действием силы тяжести и
силы сопротивления воздуха. Но если то же представление о сна-
снаряде как материальной точке мы используем для решения задачи
об устойчивости снаряда в полете, то мы не решим ее, так как при
этом существенное значение будет играть вращение снаряда вокруг
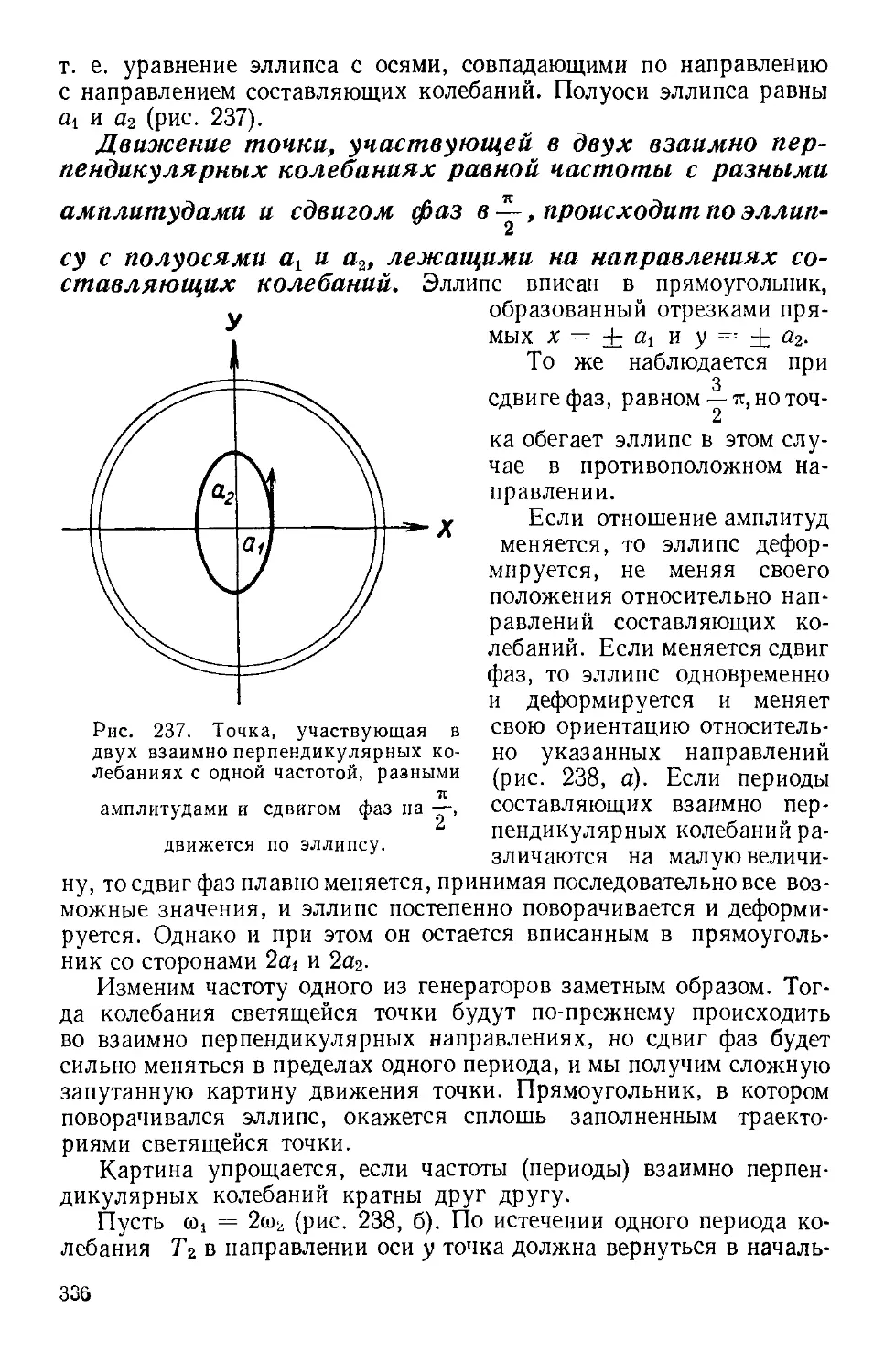
своей оси, а это движение зависит от распределения массы снаряда
относительно оси и для своего объяснения требует учета его конеч-
конечных размеров.
Расхождение между результатами теоретического анализа и
опыта должно заставить физика прежде всего проверить соответ-
соответствие принятой упрощенной схемы реальному явлению.
Физик обязан помнить, что явлениям природы свойственны
внутренние противоречия и что развитие процесса является разре-
разрешением этих противоречий. Так, диалектика утверждает, что дви-
движущееся тело одновременно находится в данной точке простран-
пространства и не находится в ней. Тело в каждый момент приходит в дан-
данную точку, находится в ней и уходит из нее. Непонимание единства
этих противоречивых свойств движения приводит к представлению
движения в виде ряда разобщенных последовательных положений
тела в различных точках пространства. Примером такого ложного
метафизического взгляда на движение служит рассуждение древ-
древнегреческого философа Зенона и том, что Ахиллес не может до-
догнать черепаху, хотя и движется быстрее ее. В начальный момент
времени Ахиллес находится на некотором расстоянии от черепахи,
в следующий момент времени Ахиллес прибежит в то место, где бы-
была черепаха в начальный момент, но черепаха к этому времени уйдет
вперед. Когда Ахиллес прибежит к новому местоположению черепа-
черепахи, последняя опять опередит его, и так далее. Таким образом, бес-
бесконечно уменьшая расстояние между Ахиллесом и черепахой и рас-
рассматривая в каждый момент времени того и другого как бы застыв-
застывшими в местах своего нахождения, Зенон пришел к выводу, что
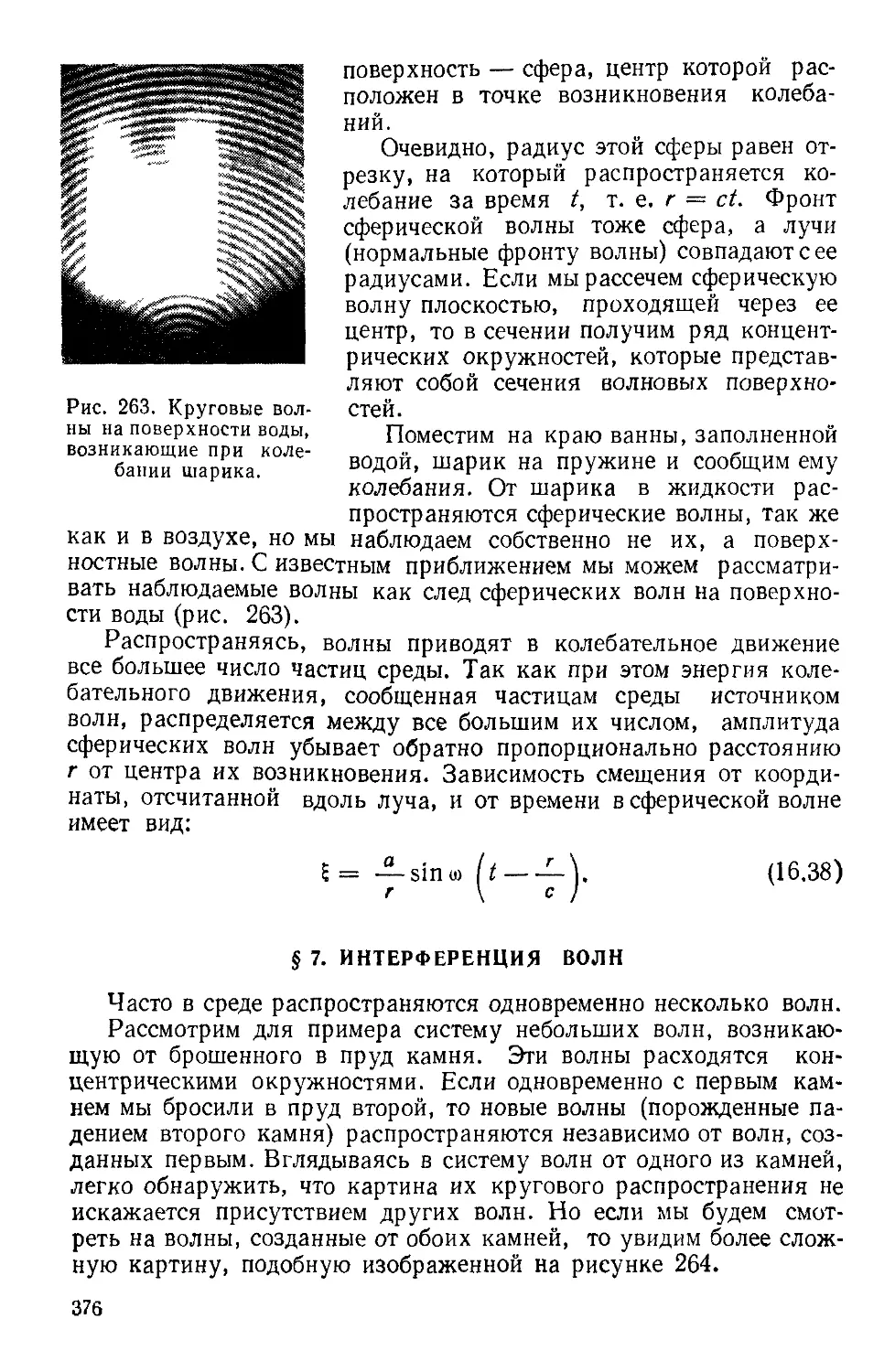
черепаха всегда будет находиться впереди Ахиллеса. Этот проти-
противоречащий всей нашей практике вывод Зенон сделал потому, что
Не знал о противоречивом характере движения В самом деле, если
Ахиллес не только находится в данный момент в данной точке, но
и покидает ее, то наступит момент, когда расстояние между Ахил-
Ахиллесом и черепахой станет настолько малым, что он одновременно
будет позади черепахи (в бесконечно близкой точке) и вместе с тем
нагонит ее.
Основные, объективно существующие связи, общие для группы
явлений, называются физическими законами.
Изучение физических процессов и явлений опирается на дан-
данные наблюдений и опытов.
Наблюдением называется изучение явления в естественных ус-
условиях при сохранении всего многообразия связей с другими яв-
явлениями. Так, например, наблюдая падения тел: листа с дерева,
капли с крыши, — мы не можем расчленить эффект воздействия на
них силы тяжести и сопротивления среды и обнаруживаем, что в
этих условиях тела движутся с различными ускорениями.
Физическим опытом называется воспроизведение явления в ис-
искусственных, лабораторных, условиях, исключающих второстепен-
ные связи, сказывающиеся на явлении. Исследуя влияние силы тя-
тяжести на падение тел, мы заставляем тело падать в трубке, из ке-
торой откачан воздух. При этом устанавливается в чистом виде
зависимость, скажем, ускорения, с которым падает камень, от ве-
величины силы тяжести. Сравнение результатов наблюдения и опы-
опыта позволяет сделать заключение, что в отсутствие сопротивления
воздуха ускорение, с которым падают тела на Землю, одинаково для
всех тел.
Характеристики процессов или свойств тел, которые могут быть
определены количественно с помощью тех или иных измерений,
называются физическими величинами.
При наблюдениях и опытах решающую роль играет правиль-
правильное и точное измерение физических величин, характеризующих
исследуемое явление.
Физические измерения могут быть произведены всегда лишь с не-
некоторой ограниченной точностью. Измеряя какую-либо величину,
мы получаем не истинное ее значение, а значение, в которое внесена
некоторая ошибка несовершенством измерительного прибора и
несовершенством наших органов чувств. Так, измеряя длину отрезка
/ с помощью линейки с миллиметровыми делениями, мы получим
измеряемую величину с точностью до миллиметра. Тренированный
глаз может отсчитать еще десятые доли миллиметрового деления.
Следовательно, мы измерим длину с точностью до 0,1 мм. Скажем,
I — а мм + 0,2 мм. Если истинная длина отрезка лежит между
/ = а мм + 0,1 мм и / = а мм + 0,3 мм, мы этого не заметим. С
помощью измерительного микроскопа можно значительно повы-
повысить точность измерения длины, однако ошибка, хотя и меньшая,
будет иметь место и в этом случае. Точность измерения физических
величин повышается по мере развития техники.
Физические законы обычно выражаются в виде количественных
зависимостей между физическими величинами. Математический
аппарат, используемый физикой, не только позволяет количествен-
количественно выражать найденные зависимости, но исследовать их и находить
новые.
Однако надо помнить, что математические формулы выражают
реальные закономерности физических явлений всегда с некоторым
приближением. Любое самое простое явление неизмеримо богаче,
чем математические формулы, с помощью которых его описывает
физик. Причина этого лежит, во-первых, в схематизации изучаемых
явлений, к которому вынуждена прибегать физика, во-вторых, в
несовершенстве наших измерений. Например, измеряя путь, прой-
пройденный бегуном от старта до финиша, мы считаем, что он бежит по
некоторой строго геометрической линии (по прямой или по овалу,
соответствующему средней линии беговой дорожки). Но спортсмен
во время бега слегка отклоняется то вправо, то влево от предпола-
предполагаемой линии. Меняется и скорость его движения (хотя и немного)
даже от шага к шагу. Поэтому когда мы найдем математическую
10
зависимость пройденного им пути от времени s = s (t), то она будет
отражать реальное движение бегуна лишь приближенно. И все
математические операции, которые мы с найденной зависимостью
будем проделывать (скажем, дифференцировать по времени, чтобы
найти скорость v = — V дадут нам характеристики явления лишь
dt )
с известным приближением.
§ 4. СИСТЕМЫ ЕДИНИЦ ИЗМЕРЕНИЯ И РАЗМЕРНОСТЬ
ФИЗИЧЕСКИХ ВЕЛИЧИН
Каждая физическая величина является либо мерой какого-то
одного свойства материи (масса — мера инертности поступательно
движущегося тела; момент инерции — мера инертности вращающе-
вращающегося тела и т. д.), либо мерой взаимосвязи между свойствами, мерой
их изменения (ускорение — мера изменения скорости тела, под дей-
действием силы; работа — мера передачи механического движения от
одного тела к другому и т. д.).
Численное значение физической величины определяется срав-
сравнением ее с однородной величиной, принятой за единицу. Однород-
Однородными физическими величинами называются такие, которые харак-
характеризуют одно и то же свойство материи и отличаются друг от друга
только численным значением. Например, измеряя расстояние меж-
между двумя пунктами на железной дороге, мы можем сравнить его с
единицами длины (метром, километром), измеряя промежуток вре-
времени между двумя событиями, мы сравниваем его с единицами вре-
времени (часом, минутой, секундой). Измеряя одну и ту же величину
двумя различными единицами, мы получим два численных значе-
значения этой величины, отличающиеся друг от друга во столько же раз,
во сколько одна единица отличается от другой.
Выбор единицы измерения произволен Возможно было бы для
каждой физической величины установить свою единицу измерения,
не зависящую от других единиц. Однако в 1832 г. немецкий мате-
математик Карл Гаусс показал, что достаточно выбрать произвольно и
независимо единицы измерения трех физических величин, характе-
характеризующих основные свойства материального мира.
В качестве независимых единиц Гаусс предложил: для измере-
измерения пространственной протяженности материи — единицу длины
(L), для измерения временной длительности — единицу времени
(Г) и для измерения количества материи — единицу массы (М).
Используя независимые единицы, с помощью физических зако-
законов можно установить единицы измерения всех остальных физичес-
физических величин.
Например, скорость равномерного движения тела v численно
равна расстоянию s, проходимому телом в единицу времени:
»= у. A.1)
11
Отсюда единица скорости определяется как отношение единицы
пути (длины) к единице времени (км/ч, км/сек, м/сек, см/сек и т. д)
в зависимости от того, как выбраны единицы длины и времени.
Совокупность единиц, образованных по принципу, сформули-
сформулированному выше, называется системой единиц.
Независимо и произвольно выбранные единицы системы назы-
называются основными Все остальные, выраженные через основные с
помощью физических законов, называются производными единица-
единицами системы. Очевидно, они зависят от выбора основных единиц. В
самом деле, допустим, мы приняли за единицу скорости скорость те-
тела, которое проходит расстояние в 1 см за 1 сек Если мы измеряем
длину в километрах, а время в секундах, то в уравнении A.1) поя-
появится численный множитель 105.
f = fey, A.2)
где k = 105... .
Если же единицей скорости будет километр за секунду, то чис-
численный множитель окажется равным единице.
Обычно производные единицы устанавливают таким образом,
чтобы в уравнение, на основании которого определяется новая еди-
единица (определяющее уравнение), не входил численный множитель
(был равен единице). Построенные с соблюдением этого условия сис-
системы единиц называются абсолютными.
В науке и технике используются наряду с единицами, входя-
входящими в ту или иную систему, единицы физических величин, не вхо-
входящие ни в одну из систем. Например, единицы длины — ангстрем,
парсек; единицы мощности — киловатт, лошадиная сила; еди-
единицы давления — миллиметр ртутного столба, техническая атмос-
атмосфера; единица количества теплоты — калория и др. Эти единицы
носят название внесистемных.
В качестве основных единиц системы могут быть выбрары еди-
единицы измерения любых физических величин, а число основных еди-
единиц может быть произвольным. Однако целесообразно ограничить-
ограничиться минимумом, который предложен Гауссом, так как на его основе
можно построить «универсальную» систему единиц для всех раз-
разделов физики. Техническая система, например, для этого непри-
непригодна.
Это не случайно. Физика изучает пространственно-временные
свойства и превращения материи, чему и соответствуют выбранные
Гауссом основные единицы.
Характер зависимостей между физическими величинами таков,
что при произвольном и независимом выборе трех основных вели-
величин (L, М, Т) все остальные (производные) могут быть выражены че-
через основные как произведения вида:
x=kD>M«Tr, A.3)
где х — производная физическая величина,
12
p, q, r — целые или дробные, положительные или отрицатель-
отрицательные, включая и нуль, числа,
к — коэффициент пропорциональности.
Если рассматривать формулу A.3) только как символическую
запись связи производной величины с основными, но без ее коли-
количественного выражения, то коэффициент k можно положить рав-
равным единице. Равенства вида
[x] = D'MiTr A.4)
называют формулами размерности физических величин.
Если в правой части равенства символы заменить наименова-
наименованиями соответствующих единиц, то получим формулы размерности
единиц:
[*] = тР кг9 секг в системе СИ,
[х] = смР г9 секг в системе СГС.
При этом говорят, что производная единица физической вели-
величины х имеет размер р относительно единицы длины, размер q
относительно единицы массы, размер г относительно единицы вре-
времени. Как следует из формулы A.4), это значит, что производная
единица физической величины х изменяется с изменением основ-
основных пропорционально единице длины в степени р, единице мас-
массы в степени q и единице времени в степени г.
Для построения системы единиц с помощью формул размерности,
т. е. для выражения производных единиц через основные, необхо-
необходимо уравнения, выражающие физические закономерности, распо-
расположить в ряд, удовлетворяющий двум условиям:
1. Первыми в ряду должны стоять уравнения, определяющие ве-
величины, которые выражаются только через основные.
2. Каждое последующее уравнение должно определять величину,
выражаемую через основные и те производные, которые уже опре-
определены предшествующими уравнениями.
Например:
Площадь S = fe/a, размерность [S] = Z.2 M*T° =Ll.
Объем V = ft/3, размерность [VI = L3 M°T° =L3.
Скорость линейная v~k—, размерность [о) = Z.1 JM°T-1=Z.T~1.
Ускорение j=k —, размерность [/] =Ll MoT-1=LT~i
Сила F — km], размерность [F\ = Z.1 M1T-i=LMT~a.
Плотность p=ft —, размерность [р| = L-W^T0 =L~3M.
Работа A=*kFs, размерность И]=Ш'Т-1=Ш1Т-'.
Количество движения P = kmv, размерность \Р\= D MxT~l—LMT~l.
Подставив в формулу размерности значения основных единиц
данной системы, получим размерности производных единиц. Фи-^
13
зические связи, с помощью которых определяются производные
единицы, могут быть различными. Например, для единицы силы мы
выбрали в качестве определяющего уравнение второго закона Нью-
Ньютона. Но могли бы принять за определяющее уравнение закона Гука
или закона всемирного тяготения (г = k— о или г = k —^-s- I.
Очевидно, единицы силы, полученные на основе этих уравне-
уравнений, в той же системе основных единиц, отличались бы по величине
и размерности от определенных по уравнению второго закона Ньюто-
Ньютона. Поэтому в подобных случаях условились определять производ-
производную величину по какой-либо одной зависимости.
Уравнение физического закона, по которому устанавливается
единица производной величины, называется определяющим. Ко-
Коэффициент пропорциональности в нем полагают равным единице.
При этом, как увидим ниже, коэффициенты пропорциональнос-
пропорциональности в других уравнениях, которые могли быть, но не стали опреде-
определяющими, отличны от единицы и обладают размерностью.
Хотя универсальная система единиц, построенная по методу
Гаусса, и получила распространение в физике (СГС, СГСЭ, СГСМ),
она оказалась не всегда удобной и в научных исследованиях, и в
технике.
В области механических явлений неудобство системы СГС сво-
сводилось к тому, что единицы ее были слишком малы. Поэтому появи-
появились системы, в которых за основные единицы принимали метр, ки-
килограмм, секунду (МКС) или метр, тонну, секунду (французская
система МТС).
Но главное неудобство системы Гаусса проявилось при распро-
распространении ее на отделы физики, изучающие более сложные формы
движения материи, чем механическое.
Например, сущность молекулярно-теплового движения, как
мы видели, не может быть сведена к механическому движению.
Поэтому в число основных единиц потребовалось ввести по крайней
мере одну единицу, характеризующую специфические особенности
молекулярно-тепловых процессов. В качестве таковой обычно при-
принимают единицу для измерения температуры.
При распространении системы на область электромагнитных
явлений оказалось необходимой основная единица, которая харак-
характеризует специфические особенности этих явлений. Практикой ус-
установлено, что наиболее удобной основной единицей для количест-
количественного описания электромагнитных явлений служит единица си-
силы тока и т. д.
В настоящее время Комитетом стандартов мер и измерительных
приборов при Совете Министров СССР установлены в качестве Го-
Государственного стандарта следующие системы единиц:
1. Международная система единиц (СИ), основными единицами
в которой приняты: метр, килограмм массы, секунда, градус Кель-
Кельвина, ампер, свеча.
14
2. Система СГС, основными единицами которой являются: сан-
сантиметр, грамм массы, секунда, градус Кельвина, свеча.
3. Система МКГСС, основными единицами которой являются:
метр, килограмм силы, секунда.
В соответствии с ГОСТ 9867—61 преимущественно должна при-
применяться система СИ.
Значение формул размерности не ограничено только тем, что с
их помощью можно составить систему единиц. Они обладают рядом
свойств, которые делают полезными их использование в вычисли-
вычислительной и в исследовательской практике. Вот некоторые из этих
свойств.
Формулы размерности показывают, как выражается зависимость
производных единиц от основных, как изменяется производная еди-
единица с заменой одних основных единиц на другие.
Из формулы размерности площади [S] = L2 видно, что единица
площади пропорциональна квадрату единицы длины. Если заме-
заменить единицу длины м единицей длины см, то единица площади
уменьшится в 10 000 раз, так как 1 см — 0,01 м, а длина входит
в формулу размерности площади в квадрате. Следовательно,
1 см2 = I — я | = м?
10000
Г 1 I2
= —м =
Lmo J
Из формулы размерности силы
[F] = LMT-*
следует, что если мы перейдем от системы единиц СГС к системе еди-
единиц МКС, то единица силы возрастет в A00)-A000) = 10° раз,
т. е. ньютон = 105 дин.
По размерности физической величины или ее единицы в подав-
подавляющем большинстве случаев можно однозначно установить, какая
это величина, так как, за очень малыми исключениями, каждая фи-
физическая величина имеет индивидуальную размерность .
Очевидно, левые и правые части всякого уравнения, выражаю-
выражающего действительно существующую физическую связь, должны иметь
одну размерность. В самом деле, две равные физические величины
останутся численно равными при переходе к новым единицам, если
при этом численные переходные множители в левой и правой частях
уравнения будут одинаковыми, а это возможно только при равен-
равенстве их размерностей.
Из этого свойства физических связей следует, что если выбрано
определяющее уравнение (например, F = та для единицы силы),
то в других уравнениях, которые могли бы быть определяющими
\F=E — S, F=y 12a ), коэффициенты Е и у должны быть отлич-
отличными от единицы и иметь размерность. Последняя определится,
если мы приравняем правые части определяющего и данного урав-
15
нений и подставим в них размерности величин, входящих в то и
другое:
LMT~% = [Е] U,
откуда
[Е] = L~lMT-\
В системе МКС [Е] = лГ1 ¦ кг • сек~2.
Это же свойство физических связей используется при отыскании
новых зависимостей между физическими величинами с помощью
так называемого анализа размерностей.
§ 5. ФИЗИКА И ТЕХНИКА
Цель физических исследований — открытие объективных за-
законов природы для использования и преобразования ее в интере-
интересах человека. Использование в человеческой практике, в технике
результатов научных исследований, в частности физических, являет-
является решающим доказательством истинности наших знаний — пра-
правильного отражения в нашем сознании объективной действитель-
действительности. Энгельс пишет: «В тот момент, когда сообразно воспринима-
воспринимаемым нами свойствам какой-либо вещи, мы употребляем ее для
себя,—мы в этот самый момент подвергаем безошибочному испыта-
испытанию истинность или ложность наших чувственных восприятий.
Если эти восприятия были ложны, то и наше суждение о возможности
использовать данную вещь необходимо будет ложно, и всякая попыт-
попытка такого использования неизбежно приведет к неудаче. Но если
мы достигнем нашей цели, если мы найдем, что вещь соответствует
нашему представлению о ней, что она дает тот результат, какого мы
ожидали от ее употребления, — тогда мы имеем положительное дока-
доказательство, что в этих границах наши восприятия о вещи и ее свой-
свойствах совпадают с существующей вне нас действительностью1».
Физические законы лежат в основе технических наук. Маши-
Машиностроение использует законы механики, теории теплоты, элек-
электромагнитных явлений. Теплотехника, электротехника, радиотех-
радиотехника, светотехника и другие технические дисциплины теснейшим
образом связаны с физикой. Новые открытия физики эффективно
используются техникой. Например, открытие способа получения
и использования атомной энергии привело к развитию новой облас-
области техники — атомной энергетики. Но, обогащаясь по мере раз-
развития физики новыми способами удовлетворения человеческих по-
1 К. Маркс и Ф. Энгельс, Избранные произведения, т. II, Госпо-
литиздат, 1952, стр. 90.
16
требностей, техника сама способствует дальнейшему развитию фи-
физики: во-первых, ставя перед физикой новые задачи и, во-вторых,
снабжая физиков новыми материалами, все более точными измери-
измерительными приборами, необходимыми приспособлениями и устройст-
устройствами. Например, советское приборостроение обеспечило исследо-
исследователей атомных ядер установками, представляющими собой целые
индустриальные комплексы (циклотроны, синхрофазатроны), снаб-
снабдило физиков и геофизиков искусственными спутниками Земли и
космическими кораблями.
ГЛАВА II
ОСНОВНЫЕ ПОНЯТИЯ КИНЕМАТИКИ
§ I. ПРОСТРАНСТВО И ВРЕМЯ—ОБЪЕКТИВНЫЕ ФОРМЫ
СУЩЕСТВОВАНИЯ МАТЕРИИ. СИСТЕМЫ ОТСЧЕТА
Кинематикой называется раздел механики, изучающий пере-
перемещение тел без учета взаимодействий между ними. Кинематика
ограничивается разработкой способов описания движения тел, отка-
отказываясь от выяснения причин, которые изменяют состояние движе-
движения.
Раздел механики, изучающий связи кинематических характе-
характеристик движения данного тела с взаимодействиями, изменяющими
состояние его движения, называется динамикой.
Все изменения в окружающем нас мире происходят в извест-
известной последовательности, обладают большей или меньшей длитель-
длительностью. Ни одно явление не может произойти мгновенно. Непре-
Непрерывное и бесконечное развитие материи проявляется во времени.
Время — форма существования материи. Говоря «прошло столько-то
времени —день, год, два...», мы тем самым отмечаем какое-то со-
событие или явление как начало счета времени и выделяем последо-
последовательность изменений, происшедших после него в природе, в об-
обществе или в жизни отдельного человека. Если бы перестали про-
происходить изменения в окружающем мире, время остановилось бы,
оно попросту перестало бы существовать. Более того, современная
физика доказала, что длительность процессов, протекающих в теле,
зависит от скорости его движения. Продолжительность процессов,
которая определяет интервалы времени, меняется с изменением ско-
скорости тела.
«Абсолютное время», оторванное от реальных процессов эволю-
эволюции материи, есть всего лишь бессодержательная и бесполезная
абстракция.
Развитие материи происходит не только во времени, но и в про-
пространстве. Все материальные тела обладают пространственной про-
протяженностью, каким-то образом расположены друг относительно
друга. Два тела не могут одновременно находиться в одном и том
18
же месте1. В процессе развития меняется и взаимное расположение
тел, и их протяженность. Пространство, как и время, есть форма
существования материи.
Ньютон в работе «Математические начала натуральной фило-
философии» сделал попытку разделить пространство на «относительное»,
которое определяется относительным положением материальных
тел, и «абсолютное», не связанное ни с временем, ни с материей,
существующее независимо от них. Однако он был вынужден ого-
оговориться, что, вероятно, мы не сможем определить места тел в «аб-
«абсолютном» пространстве.
В дальнейшем была установлена ложность, метафизичность пред-
представления об абсолютном пространстве. В XIX в. великий русский
математик Лобачевский указал, что геометрические свойства про-
пространства определяются свойствами материальных тел. Это откры-
открытие Лобачевского легло в основу учения о пространстве в общей тео-
теории относительности, созданной А. Эйнштейном. Физика второй
половины XIX в. опровергла представление Ньютона (логически
связанное с предположением существования «абсолютного» простран-
пространства) о возможности взаимодействия тел через пустое пространство
(дальнодействие). Она показала, что всякое действие одного тела на
другое передается с конечной скоростью и только через материаль-
материальные макро- и микротела. В XX в. физика доказала, что так называе-
называемая «пустота» есть состояние особой «полевой» формы материи, что
она способна влиять на состояние материальных тел, а материаль-
материальные тела в свою очередь изменяют физические свойства «пустоты».
Открытия химии и кристаллографии обнаружили зависимость фи-
физико-химических свойств вещества от пространственного располо-
расположения молекул и атомов. Теория относительности показала изме-
изменение протяженности тел в зависимости от скорости их движения.
Представив себе пространство вне материи, мы должны были бы счи-
считать его не обладающим никакими свойствами. А нечто, не обладаю-
обладающее свойствами, есть ничто, голая выдумка.
Время и пространство неотделимы от материи и являются взаи-
взаимосвязанными формами ее существования. В частности, эта взаимо-
взаимосвязь проявляется и в механическом движении, когда тела пере-
перемещаются друг относительно друга со временем в пространстве.
Знать движение тела — значит уметь для любого момента вре-
времени указать его положение относительно других тел. Следователь-
Следовательно, для того чтобы изучить движение тела, необходимо, во-первых,
выбрать тела, по отношению к которым можно отметить перемеще-
перемещение данного тела (выбрать тела отсчета); во-вторых, последователь-
последовательно произвести определение ряда положений тела относительно тел
отсчета и одновременно отметить моменты времени, соответствую-
соответствующие этим положениям.
1 Это утверждение, которое в рамках «классической» физики кажется
самоочевидным, нуждается в уточнении, которое будет дано в дальнейшем.
19
г
-*-
—\
Я/
\
—
Рис. 2. Падение тела в системе отсчета, связанной с движущимся вагоном
и в системе отсчета, связанной неподвижно с Землей.
Приступая к изучению конкретного движения, надо решить,
какие тела следует в данном случае выбрать за тела отсчета. По-
Положим, мы хотели бы изучить движение стального шарика, упав-
упавшего из окна равномерно и прямолинейно перемещающегося ваго-
вагона. Мы можем в качестве тела отсчета выбрать, например, стенки ва-
вагона. Так как шарик в момент падения имел ту же скорость, что и
вагон, то (если сопротивление воздуха мало) он падает, оставаясь
под той точкой подоконника, которую пересек в начале падения.
Проекция следа шарика на стенку вагона — вертикальная прямая.
Если мы выберем в качестве тел отсчета неподвижно связанные
с землей рельсы и телеграфный столб, то относительно них шарик
движется по кривой (рис. 2). Он сохраняет некоторое время движе-
движение в горизонтальном направлении, которым обладал относитель-
относительно столба вместе с вагоном, и одновременно падает по вертикали к
рельсам.
Значит, интересующее нас движение относительно различных
тел отсчета может быть описано по-разному.
Не учитывая реальных причин движения тел, нельзя отдать
предпочтения тем или другим телам отсчета, решить вопрос о том,
относительно которых из них объективные свойства движения,
его характер раскрываются наиболее полно и точно. Но это мож-
можно сделать, выйдя за пределы кинематики, рассматривая задачу
динамически, учитывая реальное расположение взаимодействующих
тел, анализируя причины движения, рассматривая объективные ус-
условия физической задачи.
В своей практической деятельности человек обычно легко вы-
выбирает тела отсчета, опираясь на опыт, полученный в процессе этой
деятельности.
Так, переходя улицу перед движущимся автомобилем, пешеход
выбирает безопасный для себя путь, принимая за тело отсчета Зем-
Землю и рассматривая движение свое и автомобиля относительно «не-
«негр
подвижной» Земли. Шофер, чтобы не наехать на пешехода или не
столкнуться с другой машиной, рассматривает их движение отно-
относительно своего автомобиля.
Для описания движений на Земле в качестве тел отсчета чаще
всего принимают систему тел, неподвижно связанных с Землей (на-
(например, ребро лабораторного стола, стены аудитории, геодезические
пункты на поверхности Земли и т. п.). При этом условно тела отсче-
отсчета считают неподвижными, хотя известно, что исследования про-
проводятся нами на гигантском «волчке», который, вращаясь, движет-
движется по замкнутой орбите со скоростью 29,3 км/сек. В ряде случаев
за тела отсчета принимают центр масс солнечной системы и соот-
соответствующим образом выбранные звезды.
Для раскрытия наиболее общих кинематических особенно-
особенностей движения тела мы прибегаем к изображению тел отсчета в виде
некоторой геометрической абстракции, отвлекаясь от их конкрет-
конкретных свойств.
Для движений, которые изучаются так называемой «клас-
«классической» механикой и которым посвящена эта книга, простран-
пространство можно считать однородным (одинаковым во всех своих, частях)
и изотропным (со свойствами, не зависящими от направления). Ма-
Математически такое пространство может быть описано геометрией Ев-
Евклида.
В однородном и изотропном пространстве в качестве абстракции
тел отсчета может быть принята система трех взаимно перпендику-
перпендикулярных плоскостей. Такую геометрическую абстракцию называют
системой отсчета или системой координат. Три взаимно перпен-
перпендикулярные Прямые, образованные пересечением плоскостей и свя-
связанные с телом отсчета, называют декартовыми осями координат.
Для изучения движений в выбранной системе отсчета мы долж-
должны располагать способами измерения расстояний и времени. При
этом способы измерения длин и времени должны быть пригодны
для измерений как в системе неподвижных тел, так и движущихся
друг относительно друга.
В «классической» механике, которая имеет дело со скоростями
движения, значительно меньшими, чем скорость распростране-
распространения света, результаты измерения длин и времени можно считать
независимыми от величины скорости тела. Те уточнения, которые
необходимо внести в результаты измерений при скорости движения,
приближающейся по величине к скорости света, рассматриваются так
называемой теорией относительности, и здесь мы их касаться не
будем. Можно считать, что способы определения положения тела
в пространстве и во времени, которыми мы располагаем, дают пра-
правильнее отображение объективных свойств движения для любых
исследуемых классической механикой видов и скоростей движения.
Чтобы определить местоположение тела в пространстве, надо
измерить расстояния его точек от тел отсчета или от во-
воображаемых плоскостей координат (найти координаты точек
21
тела), т. е. измерить соответствующие длины. Измерение дли-
длины производится путем сравнения измеряемого отрезка с от-
отрезком, принятым за единицу и остающимся неизменным
при всех измерениях. XI генеральная конференция по мерам
и весам A960 г.) утвердила следующее определение единицы длины:
«Метр •— длина, равная 1 650 763, 73 длин волн в вакууме излу-
излучения, соответствующего переходу между уровнями (энергетически-
(энергетическими. — М. А.) 2р10 и 5 йъ атома криптона 86». Эталон (прототип)
метра выполнен из высокоустойчивого сплава платины с иридием,
хранится в Международном бюро мер и весов в г. Севре (Франция).
Платино-иридиевые копии с него находятся в палатах мер и весов
других государств. В качестве единицы измерения времени может
быть использован какой-либо повторяющийся всегда с одной и той
же длительностью физический процесс (например, колебания оп-
определенного маятника; время, в течение которого протекают не-
некоторые, обладающие большим постоянством, внутриатомные про-
процессы).
§2. ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ.
ВЕКТОР ПЕРЕМЕЩЕНИЯ
В одних случаях тело движется как целое, в других при движе-
движении взаимное положение частей тела меняется.
Чтобы охарактеризовать движение тела в общем случае, необ-
необходимо описать движение каждой его точки. Поэтому изучение ки-
кинематики мы начнем с рассмотрения движения материальной точки.
Материальной точкой называют абстракцию реального тела,
которое в данной задаче может рассматриваться как геометрическая
точка, обладающая массой, равной массе тела. Тело можно при-
принять за материальную точку, если все его части перемещаются прак-
практически одинаковым образом и расстояния, проходимые телом, вели-
велики по сравнению с его размерами. Например,изучая движение
планет по орбитам вокруг Солнца, мы можем принять их за мате-
материальные точки.
Если различные части тела движутся по-разному, то за материаль-
материальные точки принимаются элементы тела, на которые мысленно его
расчленяют с таким расчетом, чтобы размеры элементов были малы
по сравнению с размерами тела и каждый элемент двигался практи-
практически как целое.
Материальная точка, таким образом, в реальных задачах пред-
представляет собой тело, имеющее конечные размеры и лишь условно
считающееся геометрической точкой.
Линия, которую описывает материальная точка, перемещаясь
в пространстве, называется траекторией. Если траектория —
прямая линия, то движение называют прямолинейным, если точка
движется по более сложной линии (окружность, парабола, любая
произвольная кривая), движение называют криволинейным.
22
Зафиксируем положение Л материальной точки на траектории
для момента времени t0 , принятого за начальный (рис. 3). Пусть
за интервал времени t — t0 точка переместилась из положения А
в положение В. Отрезок прямой, имеющий длину АВ и направлен-
направленный от Л к В, называется перемещением точки.
Если точка переместилась из положе-
положения Л в В и затем из В в С, то легко ви-
видеть (рис. 4), что результат этих двух
перемещений АС может быть получен
геометрическим сложением перемещений
АВ и ВС (по правилу параллелограмма).
Рис. 3. Траектория
и перемещение точки.
Рис. 4. Сложение переме-
перемещений.
Следовательно, перемещения — векторные величины (они характе-
характеризуются величиной, направлением и подчиняются правилу сло-
сложения векторов).
Отрезки АВ, ВС, АС называют векторами перемещения.
При прямолинейном движении вектор перемещения совпадает
с отрезком траектории. В случае криволинейного движения он
представляет собой отрезок секу-
секущей, проходящей через две точки
траектории, соответствующие двум
разным моментам времени.
Рассмотрим движение точки
вдоль некоторой кривой (рис. 5).
Пусть точка за конечный промежу-
промежуток времени перешла из положе-
ния Л в положение В. Вектор пере- Aj
мещения АВ по длине отличает-
отличается от длины дуги АВ и по направ-
направлению отличается от перемещения
на отдельных участках этой дуги.
Если мы возьмем меньший проме-
промежуток времени (с прежним начальным положением точки в Л),
то концу его будет соответствовать точка Ви лежащая между Л и
В. Вектор ABi точнее характеризует по величине и направлению дви-
движение точки на дуге траектории ^jAB^. Продолжая уменьшать
промежуток времени, разделяющий два положения точки на траекто-
Рис. 5. Предельное поло-
положение вектора перемеще-
перемещения.
23
рии, мы будем рассматривать все более короткие перемещения
> —*¦ ->¦
АВ2, АВ3 и т. д. и придем к такому вектору перемещения As,
длина которого с любой заданной точностью совпадает с длиной ду-
дуги, пройденной точкой, а направление как угодно близко совпадает
с направлением касательной в точке А. В пределе при бесконеч-
бесконечно малом интервале времени dt бесконечно малый
вектор перемещения ds сливается с бесконечно малым
отрезком траектории.
Выберем для изучения конкретного случая движения материаль-
материальной точки в качестве системы отсчета прямоугольную систему коор-
координат.
Как известно из векторной алгебры, вектор может быть опреде-
определен тремя составляющими по осям координат.
Если вектор перемещения As образует с осями координат углы
а, р и y. то его составляющие по осям:
ksx = As cos a; Asy = As cos %
B.1)
где
As =
As2 -f- As2
B.2)
Рис.
s
Радиус-вектор движущейся
точки.
численная величина, или
модуль вектора As.
Рассмотрим еще один
способ, которым можно за-
задать вектор перемещения.
Положение точки мо-
может быть определено радиу-
радиусом-вектором, проведенным
к ней из некоторой фикси-
фиксированной точки, принятой
за полюс. Положим, полюс
совпадает с началом коор-
координат нашей системы отсче-
отсчета. Тогда положение А точ-
точки на траектории в началь-
начальный момент времени t0 бу-
будет определено радиусом-
вектором г0 (рис. 6). Пусть
к моменту t точка переме-
переместилась в положение В, ра-
радиус-вектор которого обоз-
обозначим г. Как легко видеть
из чертежа, вектор переме-
24
щения AB — As равен разности радиусов-векторов г и г0.
As=?-?0. B.3)
В силу непрерывности движения материальная точка, переме-
перемещаясь из положения А в положение В, последовательно проходит
все точки отрезка тректории, заключенного между А и В. Если мы
сопоставим каждому положению точки на траектории свой радиус-
вектор, то последний можно рассматривать как переменную вели-
величину (как функцию положения точки или, если каждому положению
сопоставить время, в которое точка его достигает, как функцию вре-
мени).Тогда вектор перемещения равен приращению ра-
радиуса-вектора движущейся точки:
д;=д;_;о. B.4)
Из чертежа (рис. 6) видно, что указать перемещение точки мож-
можно, определив составляющие ее радиуса-вектора для положения
А (х0; у0; z0) и В (х; у; г). Вектор перемещения численно равен:
AB=\fr\ = V{x- хоу + (у - у0J + (z - zo)\ B.5)
Положение точки в любой момент времени относительно систе-
системы отсчета известно, если даны три ее координаты х, у, г.
Определив для ряда моментов времени координаты перемещаю-
перемещающейся точки, мы можем затем графически или аналитически (в виде
уравнений) сопоставить каждому моменту времени соответствующие
значения координат точки. Тогда мы получим координаты матери-
материальной точки, заданные как функции времени:
x = x(ty, у = у@;
z = z(t). B.6)
Эти уравнения называются кинематическими уравнениями движе-
движения тонки.
Чтобы получить уравнение траектории, достаточно исключить
из системы уравнений B.6) время.
Если форма траектории известна, то положение точки на ней в
любой момент времени может быть найдено следующим образом.
Зафиксируем положение А, в котором точка находилась в начальный
момент времени. Затем разобьем траекторию на такие малые участ-
участки, чтобы каждый из них, с заданной точностью, можно было за-
заменить прямолинейным перемещением As. Перемещения, направ-
направленные от начальной точки, обычно считают положительными, на-
направленные к ней — отрицательными. Алгебраическая сумма пере-
перемещений As, совершенных точкой к данному моменту времени от
начального положения, называется расстоянием. Если для каждого
момента времени указано расстояние, пройденное точкой вдоль траек-
25
тории от начального положения, то тем самым расстояние задано
как функция времени. Уравнение s=s(t) называется законом дви-
движения точки на заданной траектории.
Бесконечно малое перемещение равно приращению
расстояния за бесконечно малый интервал времени.
Сумма абсолютных величин перемещений As, совершенных
точкой к данному моменту времени, называется длиной пути L.
Длину пути измеряет, например, счетчик километров на спидомет-
спидометре автомобиля. Путь, так же как и расстояние, может быть выражен
функцией времени. Однако нельзя смешивать эти две величины.
В самом деле, если движущаяся точка прошла от начала отсчета не-
некоторый отрезок длиной /дважды (от начала отсчета и обратно), то
за время t — t0, которое точка затратила на это движение, пройден-
пройденный путь равен 21, а расстояние равно нулю.
Кинематически характеризовать движение точки только формой
траектории, расстоянием или длиной пути и направлением движе-
движения, или, что то же, задавая вектор перемещения, недостаточно. На
различных участках траектории точка может двигаться то быстрее,
то медленнее, причем изменение быстроты движения также может
происходить в разном темпе. Поэтому для полной кинематической
характеристики движения надо знать скорость и ускорение, с ко-
которыми движется точка.
§ 3. СКОРОСТЬ
Если при движении точки расстояние в одинаковые произволь-
произвольно выбранные промежутки времени получает одинаковые прира-
приращения, то движение называется равномерным (независимо от того,
происходит ли оно по криволинейной или прямолинейной траекто-
траектории).
Если приращения расстояния в равные промежутки времени
неодинаковы, движение называется неравномерным.
Положим, точка движется вдоль плоской кривой (рис. 7). В не-
некоторый момент времени t0, который мы принимаем за начальный,
точка находилась в положении Ао. Измерим расстояния, которые она
прошла к соответствующим моментам времени tu t2, t3, tit tb. По най-
найденным значениям времени и расстояний s постреим график (рис. 8)
зависимости расстояния s от времени t. Этот график носит название
графика расстояний. Разобьем интервал времени от t = О до t = th
на равные промежутки At. На
А« . рисунке легко видеть, что при-
приращения As, соответствующие
одной и той же величине проме-
промежутка времени At, в начале и в
конце интервала различны, т. е.
движение точки неравномерно.
Рис. 7. Траектория точки. Быстроту, с которой матери-
26
альная точка движется в пределах каждого промежутка време-
времени, характеризует расстояние, проходимое точкой за единицу
времени. Эту физическую величину называют скоростью. При
равномерном движении скорость постоянна во все время дви-
движения, при неравномерном движении она со временем из-
изменяется. Если мы наблюдаем движение в пределах конеч-
конечного промежутка времени At, <,
то в его пределах быстрота дви-
движения характеризуется средней $s
скоростью — , где As — прира-
приращение расстояния за время А^.
Средняя скорость не- *
равномерного движения
равна такой скорости рае- $>
номерного движения, при $г
которой точка проходит s,
за время М отрезок тра-
траектории, который она про-
прошла за то оке время, дви-
двигаясь неравномерно.
Средние скорости, соответствующие разным промежуткам At,
взятым в пределах одного интервала времени, в общем случае бу-
будут различными. Если промежутки взяты достаточно большими,
то и внутри каждого из них в разные моменты времени точка может
двигаться с различными скоростями, то больше, то меньше отличаю-
отличающимися от средней.
As ,
—- для промежутка времени ts — t2
^
/
/
1
»¦
t, U t3 tt ts
Рис. 8. График расстояний.
Вычислим отношение
(рис. 8), которому соответствует участок кривой АгА3 (рис. 7). Бу-
Будем промежуток At уменьшать, считая начальным момент вре-
времени t2. При этом точка А3 будет приближаться к точке А2.
т- As
Ьеря каждый раз отношение -—¦, мы увидим, что вначале с умен-
шением At оно меняется значительно, затем все меньше и
меньше. Наконец, начиная с некоторого малого значения А^ при
дальнейшем его уменьшении, изменения —становятся меньше ве-
личины, которую задает точность наших измерений. Другими сло-
словами, отношение — становится (с заданной точностью) постоян-
постоянным.
Следовательно, при неограниченном уменьшении промежутка
At отношение — стремится к некоторому пределу. Предел, к ко-
которому стремится отношение — при неограниченном уменьшении
27
промежутка времени Д?, называется величиной скорости в данный
момент (t2), или мгновенной скоростью:
o = lim -. B.7)
Как известно, в математике такой предел вычисляется как про-
производная от расстояния по времени:
v=?. B.8)
Алгебраическое значение мгновенной скорости равно
величине производной от расстояния (заданного как функ-
функция времени) по времени.
Если мы хотим найти скорость движения, скажем, бегуна, мы
должны измерить расстояния, которые он пробегает за первую се-
секунду, вторую и т. д. Если в пределах секунды он движется с раз-
разной быстротой, мы можем взять для измерения интервалы времени
в полсекунды, в одну десятую секунды и т. д. Однако чаще измере-
измерение ведется иначе: траекторию разбивают на участки, в пределах
которых скорость бегуна (приближенно) постоянна. Измерив время,
за которое он проходит отдельные участки, вычисляют среднюю
скорость для каждого участка. Очевидно, она тем ближе к истинной
скорости движения бегуна, чем меньше взяты участки.
Следовательно, в пределах достаточно малого промежутка вре-
времени мы можем любое движение приближенно рассматривать как
равномерное. Величина достаточно малого промежутка времени
определяется быстротой изменения скорости и точностью расчета.
Чем быстрее изменяется скорость и чем точнее мы хотим вычислить
значение мгновенной скорости, тем меньшим должен быть взят ин-
интервал времени At.
Здесь уместно подчеркнуть, что понятие бесконечно малой ве-
величины, в том числе и промежутка времени, есть некоторая мате-
математическая абстракция. Вместе с тем в физике мы всегда имеем де-
дело с конечными величинами. Однако введение этой абстракции пло-
плодотворно. Практически мы можем конечный промежуток времени
считать сколь угодно мало отличающимся от нуля, если в его пре-
пределах переменная величина (в данном случае скорость) сохраняет,
с наперед заданной нами точностью, постоянное значение. Это зна-
значение мы и считаем равным мгновенному.
Если расстояние, пройденное бегуном, выражено аналитиче-
аналитически как функция времени s = s (t), то величина его скорости может
быть найдена для любого момента времени как ( —- j = vt.
Если зависимость s = s (t) задана графически (рис. 8), то чис-
численное значение скорости в данный момент времени может быть
найдено как тангенс угла, образованного касательной к кривой в
соответствующей точке и осью времен. Впрочем, надо заметить, что
28
графически значение скорости •
вычисляется довольно грубо.
Вспомним, что бесконечно
малое приращение расстоя-
расстояния совпадает с бесконечно
малым перемещением. Но пе-
перемещение As—векторная ве-
личина. Отношение-^г так-
также, очевидно, вектор, совпа-
совпадающий по направлению с
вектором As, ибо направле- Рис 9 Траектория полета искр с то.
ние вектора не изменится, чильного камня направлена по каса-
если его умножить на скаляр- тельной к траектории его поверхност-
1 ных частиц,
ную величину—г—.
Скорость есть вектор v, равный производной от век-
вектора перемещения по времени и совпадающий с напра-
направлением касательной к траектории в данной точке.
В последнем можно убедиться, рассматривая полет раскаленных
частиц, которые отделяет от точила затачиваемый инструмент
(рис. 9).
В прямоугольной системе координат вектор скорости может быть
задан составляющими по координатным осям. Численное значение
скорости определяется выражением:
v = Vv2 4- v2 4- v2 B 9)
x ' у i г ' \ • /
где 1\ = у cos a, vy — v cos p\ vz = v cos y— проекции вектора
на соответствующие координатные оси.
Так как
ds
— COS '
dt
ds cos a = dx,
ds cos [J = dy, ds cos f = dz,
то
dx
dv
dt
dt
B.10)
Составляющие вектора скорости по координатным
осям равны первым производным по времени от одно-
одноименных координат движущейся тонки.
Величина перемещения измеряется в сантиметрах, метрах и
т. п.
2Э
Интервалы времени измеряются в секундах, часах и т. п. Еди-
Единица скорости зависит от выбора единиц длины и времени. Она оп-
определяется формулой размерностей, которая вытекает из установлен-
установленной нами связи:
и
B.11)
где L — некоторая длина, принятая за единицу, t — время, при-
принятое за единицу. Соответственно скорость измеряется в см/сек,
м/сек, и т. д.
§ 4. УСКОРЕНИЕ
Скорость механического движения в большинстве случаев не
остается постоянной, а со временем меняется либо по величине,
либо по направлению, либо и по величине, и по направлению однов-
одновременно.
Примером движения с изменяющейся по величине скоростью
может служить свободное падение тел на Землю, движение поезда,
подходящего к станции на прямолинейном участке пути, и т. п.
Равномерное обращение точки по окружности — пример дви-
движения, при котором скорость меняется только по направлению.
Примеров, когда скорость меняется и по величине, и по направ-
направлению, можно привести множество: движение Земли по своей ор-
орбите, движение искусственных спутников Земли, падение парашю-
парашютиста, движение точек автомобильного колеса при торможении,
при повороте автомобиля и т. д.
Пусть тело в момент ^ двигалось со скоростью vu а к моменту
t2 стало двигаться со скоростью v2 (рис. 10). Перенесем вектор v2
параллельно самому себе в начало вектора vv Разность векторов
v2 и vit очевидно, и даст нам вектор приращения скорости:
Дц= щ — v^ B.12)
Если мы возьмем отношение векто-
вектора приращения скорости А у к интер-
интервалу времени Д/, за который скорость
получила данное приращение, мы по-
Рис. 10. Приращение
вектора скорости.
лучим также векторную величину~тг,
характеризующую изменение скорости
в единицу времени.
Предел, к которому стремится отно-
отношение приращения скорости к соответ-
соответствующему интервалу времени, когда
30
последний неограниченно убывает, называется ускорением.
/=lim ^-, B.13)
ИЛИ
7- 4- (».14,
Ускорение есть вектор, равный производной от век-
вектора скорости по времени и совпадающий по направ-
направлению с вектором изменения скорости dv за малый ин-
интервал времени dt.
В случае неравномерного прямолинейного движения вектор
приращения скорости может быть направлен либо в сторону дви-
движения (когда скорость возрастает), либо против движения (когда
скорость убывает). Во втором случае ускорение не совпадает по на-
направлению со скоростью, а противоположно ей. При движении по
криволинейной траектории направление приращения скорости не
совпадает с направлением скорости, что и делает возможным осу-
осуществление криволинейного движения.
Если вектор изменения скорости задан составляющими по осям
координат: Avx, Avy, Avz, то составляющие вектора ускорения бу-
будут соответственно:
^ ^ =lim ^ ^
/, lm
г д<~0 At dt
ИЛИ
. d2x. . day . .
l h h
M dt y At-.о Д< dt
B.15)
Составляющие вектора ускорения по координатным
осям равны производным первого порядка по времени
от соответствующих составляющих скорости или
производным второго порядка по времени от коорди~
наш движущейся точки. Численная величина ускорения:
\=УЦ + )\+Ц- B-17)
Величина ускорения может быть определена двояким образом.
В первом случае измеряют пути, проходимые телом в последова-
последовательные, достаточно малые промежутки времени. Для этого ис-
используют какие-либо приспособления, позволяющие отмечать по-
положения тела на траектории через определенные промежутки вре-
времени. На рисунке 11 изображена тележка с капельницей, из кото-
которой через равные промежутки времени падают капли. На рисунке
12 показано приспособление для измерения расстояний, проходи-
проходимых свободно падающим телом. Для измерения расстояний может
31
быть использован также метод фотографирования и др. По измерен-
измеренным значениям отрезков траектории и промежутков времени могут
быть вычислены соответствующие им значения величины скорости.
Зная эти значения, можно найти изменение скорости в любые про-
промежутки времени и вычислить ускорение. Можно решить задачу и
графически. Для этого, построив
график расстояний (рис. 8), надо
в достаточном числе точек найти ве-
величины скоростей, вычисляя тан-
тангенсы углов, которые составляют с
осью времени касательные в этих
точках. По найденным значениям
скорости и соответствующим мо-
моРис. 11. Капельница,
применяемая для отсче-
отсчета времени при движе-
движении тела.
Рис. 12. Устройство для
измерения расстояний,
проходимых падающим
телом:
а — мотор с пером; б — пада-
падающий цилиндр с бумагой.
ментам времени построить график скорости (рис. 13) и по нему
найти величины ускорения, используя соотношение:
B.18)
t-0 btt tl) t
Pwl. 13. График скорости.
Однако надо иметь в виду, что гра-
графическое дифференцирование — опе-
операция довольно грубая и, будучи при-
применена дважды, дает мало точ'ный ко-
конечный результат.
Во втором случае непосредственно
измеряют скорость с помощью соответ-
соответствующего прибора (спидометра и
т. п ) и по изменению ее значений на-
находят ускорение. Вычисление здесь
также проводится либо аналитически,
либо графически.
32
В последнем случае (если точность измерения величины скорости
больше, чем при вычислении ее по графику пути) результат расчета
ускорения точнее, поскольку графическое дифференцирование при-
применяется лишь один раз. Ниже, в разделе динамики, мы получим
возможность более точно находить ускорения тел.
Размерность ускорения:
[/] = М = Ж = UT-2. B.19)
В системе СИ за единицу длины принят метр, за единицу
времени — секунда. Следовательно, в системе СИ единица ускоре-
ускорения — 1 м/сек*.
В системе СГС за единицу ускорения принимают 1 см/сек2. В
некоторых технических расчетах (ракетодинамика, перегрузка
самолета, вибрация и т. п.) за единицу ускорения принимают уско-
ускорение свободного падения тела, равное 981 см/сек2.
§ 5. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ
Движение называется прямолинейным и равномерным, если
точка движется вдоль прямой с постоянной скоростью. В этом слу-
случае путь, расстояние и результирующее перемещение совпадают
по величине, а расстояние, перемещение и скорость совпадают также
и по направлению. Поскольку скорость постоянна, то движение
может происходить по прямой только в одном направлении, так
как для изменения направления на обратное скорость должна в
некоторый, хотя бы малый, интервал времени измениться от + v
до — v, пройдя через нуль.
Для вычисления скорости прямолинейного равномерного дви-
движения мы вправе выбирать любой интервал времени. А так
как все интересующие нас векторы лежат на одной прямой, то, при-
приняв ее за ось отсчета, получим проекции векторов на ось, равными
их модулю, а направления векторов учтем с помощью знаков. По-
Поэтому при расчетах сможем обращаться с ними как со скалярными
величинами.
Если в начальный момент времени материальная точка находи-
находилась на прямой в положении, принятом за начало отсчета, т. е.
L = 0 при t = 0, то
v = -. B.20)
Из равенства B.20) получим:
L = vt, B.21)
т. е. при равномерном движении путь и расстояние, пройденные
точкой, есть линейные функции времени.
2М М Архангельский 33
График расстояний прямолинейного равномерного движения
представляет собой прямую линию (рис. 14), отсекающую на оси
L отрезок Ln
_.о и образующую с осью времени угол:
а = arc tg — = arc tg v.
B.22)
Скорость может быть вычислена по графику пути как тангенс
угла а, образованного прямой с осью времени. Чем скорость боль-
больше, тем больше угол а.
В случае прямолинейного неравномерного движения траектория
точки — прямая линия, вдоль которой в разные моменты времени
она движется с различной скоро-
скоростью. График расстояний представ-
представляет собой кривую, вид которой
определяется видом функции s =
= s(t).
Движение с постоянным по ве-
величине и направлению ускорением
называется равнопеременным дви-
движением.
Если вектор ускорения совпа-
совпадает по направлению с вектором
скорости, ускорение считают по-
положительной величиной (/ > 0)
и движение называют равноускоренным. Если векторы скорости и
ускорения направлены противоположно, ускорение отрицательно
(/ < 0) и движение называют равнозамедленным.
При равнопеременном движении ускорение — величина постоян-
постоянная. Обозначим эту постоянную величину / = а. Тогда
Рис. 14. График расстояний пря-
прямолинейного равномерного
движения.
ИЛИ
dt
dv — a dt.
B.23)
B.24)
Это равенство справедливо для любого бесконечно малого проме-
промежутка времени dt. Для того чтобы найти изменение скорости за
конечный интервал времени / — t0, надо просуммировать измене-
изменения скорости dv по всем промежуткам времени dt, на которые раз-
разбит интервал. Такое суммирование в математике выполняется опера-
операцией интегрирования:
Uv = \а dt,
B.25)
Наличие в последнем уравнении произвольной постоянной объ-
объясняется тем, что интегрирование равенства B.24) дает лишь из-
изменение скорости за время t — t
0.
34
Чтобы найти значение скорости в момент t, надо изменение ско-
скорости добавить к значению скорости в момент t0, т. е., как говорят,
надо знать начальное условие.
Пусть в момент t — /0 скорость v = и0. Равенство B.25) спра-
справедливо для всех значений / иа, следовательно, и для значений
t0 и v0. Подставим их в равенство B.25):
откуда
Заменим значение
d = v0 — at0.
в B.25) только что полученным:
B.26)
При равнопеременном
движении скорость линейно
зависит от времени.
Рассчитаем по найденному
значению скорости расстояние,
проходимое точкой при равно-
равнопеременном движении. Поло-
Положим' для простоты выкладок,
что скорость у0 точка имела в
момент начала отсчета времени,
т. е. при t0 = 0.
Как легко видеть из форму-
формулы B.26), график зависимости v
от/—прямая линия (рис. 15), отсекающая на оси скорости отрезок,
равный в выбранном масштабе скорости v0, и наклоненная к оси
времени под углом а = arc tg —. Расстояние, пройденное точкой за
время t, изобразится площадью фигуры О ABC.
В данном случае площадь равна:
Рис. 15. График скорости
равнопеременного движения.
Но v = v0 -f- at, следовательно,
B.27)
B.28)
Если в начальный момент (t = 0), vQ = 0, то s = — -.
Li
Расстояние, проходимое при равнопеременном движе-
нии, пропорционально квадрату времени.
Этот же результат может быть получен аналитически с помощью
интегрирования:
ИЛИ
ds = (v0 -f- at) dt.
2*
35
Интегрируя это выражение, получим:
s = J (at + v0) dt = ^ + V + С2. B.29)
В выражение B.29) входит произвольная постоянная, так как,
интегрируя, мы нашли расстояние, которое тело прошло за время
t, но не указали, от какого положения тела это расстояние отсчиты-
валось нами.
Чтобы сделать условие задачи определенным, надо задать вто-
второе начальное условие. Положим, при / = 0, s = 0, т. е. в момент
начала отсчета времени точка находилась в начале отсчета расстоя-
расстояний. Подставив начальное условие в формулу B.29), получаем:
Сг = 0 и, следовательно,
Таким образом, зная зависимость расстояния от времени, мож-
можно дифференцированием (аналитическим или графическим) вычис-
вычислить скорость и ускорение, с которыми движется точка; и обратно,
получив измерением ускорение или скорость, как функции вре-
времени, интегрированием (аналитическим или графическим) вычислить
расстояние. В последнем случае необходимо задать начальные усло-
условия, т. е. при вычислении скорости необходимо знать ее значение в
какой-то определенный момент времени, а для вычисления расстоя-
расстояния — величину расстояния, пройденного точкой к определенному
моменту. (Обычно момент времени берется совпадающим с началом
счета времени. Поэтому и данные эти называются начальными ус-
условиями.) Необходимость задания начальных условий обусловлена
вечностью и непрерывностью движения. Наши наблюдения или
расчеты могут обнаружить изменение состояния движения тела лишь
начиная с некоторого момента, который мы только условно счи-
считаем началом движения. Задавая начальные условия, мы тем самым
фиксируем это начальное состояние движения.
§ 6. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ.
НОРМАЛЬНОЕ И ТАНГЕНЦИАЛЬНОЕ УСКОРЕНИЯ
В общем случае криволинейного неравномерного движения ско-
скорость изменяется как по величине, так и по направлению.
Полное ускорение, которым обладает движущаяся точка, опреде-
определяет оба вида изменения скорости. Попытаемся найти его составля-
составляющие, одна из которых характеризует изменение только направле-
направления скорости, а другая — изменение величины ее.
Рассмотрим криволинейное движение, при котором скорость по-
постоянна по величине, но изменяется по направлению. Пример
36
такого движения — равномерное движение точки по окружности
(рис. 16).
Пусть в двух близких точках Л4 и А2 скорость имеет значения
у, и v2, которые отличаются только направлением (vi = v2). Век-
Векторы Vi и v2 направлены по касательным к окружности, т. е. пер-
перпендикулярны радиусам 0Ах и 0А2, про-
проведенным к точкам касания.
Перенесем вектор v2 параллельно са-
самому себе в точку Л4 и, соединив концы
векторов vi и v2, получим приращение ско-
скорости Ду„. Угол, образованный векторами
скорости при точке Аи как видно из чер-
чертежа, равен центральному углу Да, обра-
образованному радиусами ОАг и ОА2. Из подо-
подобия треугольников BiAyB2 и Л1ОЛ2 следует:
BiB2 AiBt Рис. 16. Центростре-
. . — , мительиое ускорение
AiA2 VAi ПрИ равиомерном дви-
ИЛИ жении точки по ок-
а„ .. ружности.
откуда
Д/
B.31)
Перейдем к пределу, уменьшая промежуток времени А/. При
уменьшении At точка Аг приближается к Л,, ив пределе они сли-
сливаются. Так как величина (модуль) скорости по условию постоянна,
так же как и радиус данной окружности R, то правая часть равен-
равенства B.31) — величина постоянная и, следовательно,
77=/»= ?• B-32)
Вектор Ду„ составляет с направлениями Vi и v2 некоторый неиз-
неизвестный угол. Однако в пределе (когда точки сливаются) угол
180°
Да -» 0, a ZAiBiB2 -» -г- = 90°. Следовательно, в пределе уско-
~*. ¦*¦
рение jn, совпадающее по направлению с Avn, перпендикулярно
вектору скорости и4 в точке Л4, или, что то же, направлено по ра-
радиусу окружности OAi. Вектор /„ всегда направлен внутрь окруж-
окружности, так как направление движения меняется в сторону вогну-
вогнутости кривой.
37
Рис. 17. Ускорение при криволи
нейном движении.
Таким образом, при равномерном движении точки по окружности
изменение направления скорости происходит при наличии ускоре-
ускорения /„, направленного перпендикулярно вектору скорости по ра-
радиусу к центру окружности. Это ускорение носит название центро-
центростремительного или нормального (радиус окружности совпадает
с нормалью кривой).
Рассмотрим движение по произвольной плоской кривой. Выде-
Выделим на траектории (рис. 17) малую дугу ЛИ2, которую точка про-
проходит за время А^. Построим век-
векторы v% и v2, которые теперь от-
отличаются не только направлени-
направлением, но и абсолютной величиной:
Перенеся вектор иг в точку Аи
построим вектор приращения ско-
скорости Aw. На отрезке А^В^ изо-
изображающем вектор vu отложим
отрезок AiB3, равный по длине
вектору Vz. Отрезок ВуВ3 равен
изменению величины модуля ско-
скорости за промежуток времени &f,
т. е. ВгВ3 = v2— Vi. Разложим вектор А у на две составляющие
Avz и Ду„ , из которых первая совпадает по направлению со ско-
скоростью ?>i и равна отрезку BiB3 (изменению величины скорости),
а вторая, равная разности векторов Av — Дут, совпадает с отрез-
отрезком В3 В2- Так как AiB3 = Л1В2, то легко видеть, что построение
составляющей Ау„ аналогично проделанному выше для случая рав-
равномерного движения по окружности.
В математике доказывается, что весьма малую дугу любой плавной
кривой можно заменить дугой окружности некоторого радиуса г.
Окружность, которая в
пределе совпадает с беско-
бесконечно малой дугой произ-
произвольной кривой, называет-
называется кругом кривизны этой
кривой в данной точке (име-
(имеется в виду точка, в кото-
которую в пределе стягивает-
стягивается малая дуга). Радиус
Рис. 18. Круг и радиус кривизны этой окружности называет-
различны в разных точках кривой, ся радиусом кривизны и
38
центр окружности — центром кривизны. Очевидно, в разных точ-
точках кривой круг кривизны, его радиус и центр различны (рис. 18).
Вернемся к нашему чертежу. Будем уменьшать промежуток
времени At, за который точка описывает дугу АХА2. При этом дуга
стягивается в точку, векторы vi и v2 сближаются. По достижении
некоторого, достаточно малого значения At дуга АУА2 станет на-
настолько малой, что ее можно заменить дугой круга кривизны. С
этого значения At отношение Avn к At станет приближенно равным
Ах)» Viv* i
—— = —- (что легко получить, рассматривая треугольники
Д< г
AfiA2 и B2AiB3). С переходом к пределу, когда точки At и А2 ели-
ваются, скорость v2 —> vlt угол а->0и угол AiB3B2 —>- 90 °:
Ш % = /, = % B.33)
Направлено центростремительное ускорение по радиусу кривиз-
кривизны в данной точке к центру круга кривизны. Так же как и при рав-
равномерном движении по окружности, центростремительное ускоре-
ускорение изменяет направление скорости, но теперь величина его зави-
зависит от радиуса кривизны и меняется вдоль траектории от точки к
точке.
Вторая составляющая изменения скорости Аут, направленная
вдоль vu в пределе равна разности величин скоростей vi и v2 в двух
сливающихся точках At и А2. Разделив Аут на Af и перейдя к пре-
пределу, получим:
Нп, *?-=/, - * B.34)
At -> 0 Д< at
/т— ускорение, направленное по касательной в данной точке траек-
траектории и численно равное производной от величины вектора скорос-
скорости по времени, называется тангенциальным.
~>
Таким образом, вектор полного ускорения / при криволиней-
криволинейном движении может быть разложен на центростремительное уско-
рение, численно равное /„ = —, направленное к центру кривизны
и изменяющее направление скорости, и тангенциальное ускорение,
численно равное /, = —, направленное по касательной к траек-
dt
тории и изменяющее величину скорости.
Численное значение полного вектора ускорения:
Из рисунка 17 видно, что вектор полного ускорения в криволи-
криволинейном движении всегда направлен внутрь траектории, так как
39
Рис. 19. Вектор полного ускорения
при криволинейном движении
тангенциальная составляю-
составляющая ускорения направлена по
касательной, а центростреми-
центростремительная — в сторону вогнуто-
вогнутости траектории вдоль радиу-
радиуса кривизны. Если скорость
со временем возрастает, век-
вектор / составляет острый угол
с направлением движения,
если скорость уменьшается—
тупой.
Направление вектора пол-
полного ускорения может быть
задано углом, который он образует либо с касательной, либо с ра-
радиусом кривизны (рис. 19):
tga= к; tgB= il. B.36)
h in
В заключение отметим, что только при равномерном обращении
по окружности полное ускорение всегда направлено к одной
точке — к центру кривизны и всегда нормально к траектории. Ес-
Если движение происходит по какой-то иной кривой, а полное уско-
ускорение все-таки направлено все время к одной и той же точке, то
оно уже не во всех точках траектории нормально к ней, так как
каждой точке кривой соответствует свой круг кривизны. На неко-
некоторых участках траектории обязательно возникнет тангенциаль-
тангенциальная составляющая ускорения, которая изменит величину ско-
скорости.
Например, искусственный спутник Земли, двигаясь по эллип-
эллиптической орбите, должен проходить ее с переменной по величине
скоростью, так как ускорение его всюду направлено к центру
Земли.
§7. КИНЕМАТИКА ТВЕРДОГО ТЕЛА.
УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
Произведем следующий опыт. Зажмем вертикально в тиски
стальной брусок а толщиной 10 мм и длиной 150—200 мм (рис. 20).
На бруске укрепим два зеркальца б на разных расстояниях от его
верхнего конца. Луч света, пройдя вертикальную щель и отражаясь
от зеркал, как показано на рисунке, падает на дальнюю стенку ауди-
аудитории. Закрутим верхний конец бруска пальцами. Зайчик на стене
сместится от своего первоначального положения и разделится на
две части. Для части, отраженной верхним зеркальцем, смеще-
смещение больше, для части, отраженной нижним, — меньше.
Мы обнаружим при этом, во-первых, что стержень, который ка-
казался нам весьма твердым, можно закрутить сравнительно неболь-
40
V////////////////////////A
Рис. 20. Закручивание стального
бруска рукой.
шим усилием, во-вторых, что части стержня закручиваются различ-
различно, т. е. стержень деформируется. Следовательно для изучения
того, как движется стержень, надо изучитьдвижение всех его точек.
Все окружающие нас тела способны при соответствующих условиях
в большей или меньшей степени деформироваться. Однако для зна-
значительного класса тел и задач оказывается возможным отказаться
от учета деформаций и рассмат-
рассматривать перемещение тела как це-
целого. Так, если освободить ниж-
нижний конец бруска и повернуть
брусок, то световая черта пере-
переместится без заметного искрив-
искривления. Хотя и в этом случае,
как увидим ниже, брусок должен
деформироваться, но деформа-
деформация чрезвычайно мала, и опти-
оптическая установка ее не обнару-
обнаруживает. В ряде задач мы можем
вместо реального тела рассмат-
рассматривать некоторую физическую
абстракцию — абсолютно неде-
формируемое, или абсолютно
твердое, тело.
Абсолютно твердое тело —
воображаемое тело, в котором расстояние между любыми двумя
точками остается постоянным во все время движения.
При поступательном движении абсолютно твердого тела все его
точки испытывают одинаковые перемещения, обладая одинаковы-
одинаковыми скоростями и ускорениями. Прямая, соединяющая две произволь-
произвольные его точки, перемещается параллельно самой себе. Надо заме-
заметить, что поступательное движение не обязательно прямолинейно.
На рисунке 21 показан пример поступательного криволинейного
движения.
Существенно, что для характеристики поступательного дви-
движения твердого тела в целом достаточно знать движение какой-
либо одной его точки. Поэтому для кинематического изучения
поступательного движения абсолютно твердого тела мы можем поль-
пользоваться методами, разработанными в кинематике материальной
точки.
При вращательном движении тела его точки описывают окруж-
окружности, центры которых лежат на одной прямой, являющейся осью
вращения. Точки, лежащие на оси вращения, остаются неподвиж-
неподвижными.
В общем случае тело может участвовать одновременно в двух
движениях: поступательном и вращательном. Сложное движение
совершают, например, точки колес экипажа, ступня велосипедиста,
нажимающего педаль, и т. п. (если движение рассматривается в сие-
41
теме отсчета, связанной с Землей; относительно системы отсчета,
жестко связанной с экипажем, точки колес или ступни велосипе-
велосипедиста участвуют только во вращательном движении).
В этой главе мы изучим вращательное движение абсолютно твер-
твердого тела.
Примем во внимание, что в результате отсутствия деформаций
все точки абсолютно твердого тела, лежащие в некоторой плоскости,
проведенной через ось вра-
вращения, во все время дви-
движения остаются в той же
плоскости.
Зафиксируем в момент
времени t = О положение
Рис. 21. «Чертово» колесо (криволинейное
поступательное движение).
Рис. 22. Угловое переме-
перемещение.
некоторой плоскости, в которой лежат ось вращения и произволь-
произвольная точка тела А (рис. 22).
Угол ф, на который поворачивается вместе с телом плоскость
за время t, называется угловым перемещением тела. Так как недефор-
мирующееся тело вращается как целое, то величина углового пере-
перемещения не зависит от выбора точки А и является кинематической
характеристикой движения тела в целом.
Если угловые перемещения тела Дф за произвольные равные
промежутки времени At одинаковы, то вращение называется рав-
равномерным. При неравномерном вращении угловые перемещения
тел Аф в произвольные одинаковые промежутки времени At раз-
различны.
Дер
Предел, к которому стремится отношение~тт~ при безграничном
42
уменьшении промежутка времени А*, называется мгновенной угло-
угловой скоростью тела или просто угловой скоростью:
И=лЙ^ = Л' B'37)
где ф задано как функция времени.
В случае равномерного вращения тела угловая скорость:
<•> = -j , B.38)
где ф — угловое перемещение, совершенное телом за любой конеч-
конечный промежуток времени t.
Величина угловой скорости, как и угловое перемещение, —
характеристика движения тела как целого. Очевидно, понятия уг-
углового перемещения и угловой скорости имеют смысл только для те-
тела конечных размеров и неприменимы к материальной точке. Ког-
Когда же говорят «угловое перемещение», «угловая скорость точки»,
то имеют в виду перемещение и скорость поворота радиуса, прове-
проведенного от оси вращения к данной точке, т. е. системы точек, лежа-
лежащих на этом радиусе.
За единицу угловой скорости принимают такую скорость враще-
вращения, при которой тело за одну секунду поворачивается на угол в
один радиан. Эту единицу обозначают так: —, или сек.
свк
Найдем связь между угловой скоростью вращения тела и ли-
линейной скоростью его отдельных точек. Возьмем произвольную точ-
точку тела. Пусть радиус окружности, которую точка описывает вокруг
оси, равен г. За промежуток времени А^ радиус повернется на угол
Аф, который можно измерить дугой окружности As, пройденной при
этом точкой:
As = гД<р. B.39)
Разделим правую и левую части равенства B.39) на А^. При
переходе к пределу (при А^ -» 0) получим:
г-'2- <2-40>
или v = re>. B.41)
Линейная скорость точки вращающегося тела про-
пропорциональна радиусу окружности, описываемой дан-
данной точкой, и угловой скорости вращения тела.
При неравномерном вращательном движении быстрота измене-
изменения угловой скорости характеризуется угловым ускорением:
е = lim ^L = ^Lt /2.42)
4I-II 4l й
или
s=g. B.43)
43
Единица углового ускорения определяется в соответствии с урав-
уравнением B.42) как отношение единицы угловой скорости к единице
времени. Ее обозначают: —2, или сект-2.
Найдем связь между линейным ускорением произвольной точ-
точки вращающегося тела и характеристиками вращательного движе-
движения.
Как мы установили ранее, каждая материальная точка, дви-
движущаяся по окружности радиуса г, обладает центростремитель-
ным ускорением /„="". Подставив в это выражение значение
линейной скорости из формулы B.41), получим:
/„ = «в'г. B.44)
Величина тангенциального ускорения:
dv d , >
,,= -=-К).
Так как для данной точки г = const, то
/,=r*L = «. B.45)
Величина полного ускорения:
/ = VfTT = r VV+T». B.46)
п х
О)ставим отношение /т к /„ :
^ i ()
In «2
Оно не зависит от г, т. е. угол, который образует вектор полного
ускорения с радиусами, проведенными от оси вращения к различ-
различным точкам тела, имеет в данный момент времени одно и то же зна-
значение для всех точек тела.
§8. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ КАК ВЕКТОРЫ.
СВЯЗЬ МЕЖДУ ВЕКТОРАМИ УГЛОВОЙ И ЛИНЕЙНОЙ СКОРОСТЕЙ
И УСКОРЕНИЙ ДЛЯ ТЕЛА, ВРАЩАЮЩЕГОСЯ ВОКРУГ
НЕПОДВИЖНОЙ ОСИ
Для полной характеристики вращательного движения тела
недостаточно знать величины углового перемещения, угловой ско-
скорости и ускорения. Необходимо указать еще положение в про-
пространстве оси вращения. Так как все точки тела вращаются в пло-
плоскостях, перпендикулярных оси вращения, то тем самым будет
определено положение траекторий (окружностей), по которым дви-
движутся точки тела. Наконец, должно быть указано направление
вращения.
44
Зададим угловую скорость в виде вектора, численно равного
величине угловой скорости и отложенного по оси вращения в та-
таком направлении, что, глядя с его конца на какую-либо точку
вращающегося тела, мы увидим ее движущейся против хода
часовой стрелки.
Другими словами, направление вектора угловой скорости свя-
связано с направлением вращения правилом буравчика: вектор уг-
ловой скорости откладыва-
откладывается по оси вращения в нап-
направлении поступательного
движения острия буравчи-
буравчика, когда рукоятка его вра-
вращается в направлении вра-
вращения тела (рис. 23).
Начало вектора а» может быть
помещено в любой точке оси
вращения, т. е. вектор угловой
скорости — скользящий вектор.
Для проверки предположения
о векторном характере угловой
скорости произведем следующий
опыт. На центробежной машине
(рис. 24) установим шар, ось
которого наклонена к оси вра-
вращения центробежной машины.
Шар может одновременно участво-
участвовать во вращении вокруг собственной оси 00 и вокруг оси центро-
центробежной машины О'О'. Для того чтобы сделать видимым положение
плоскостей, в которых происходит вращение, на шаре нанесены
а,
t
Рис. 23. Вектор угловой
скорости.
Рис. 24. Демонстрация сложения угловых скоростей
на центробежной мьшнне.
45
крупные точки. При вращении они прочерчивают линии, лежащие
в плоскости вращения и перпендикулярные оси вращения. Последо-
Последовательно приводя шар во вращение вокруг оси 00 и О'О', а затем
одновременно вокруг обеих осей, мы увидим, что в последнем слу-
случае ось результирующего вращения занимает положение между ося-
осями 00 и 0 0'. Конечно, этот опыт дает лишь некоторое качествен-
качественное подтверждение того,
в
что угловая скорость —
векторная величина. Стро-
Строго говоря, необходимо убе-
убедиться в возможности сло-
сложения векторов угловой
скорости, заданных вы-
вышеуказанным способом,
по правилу параллелограм-
параллелограмма.
Положим, точка участ-
участвует в двух вращатель-
вращательных движениях с угловы-
угловыми скоростями «1 и оJ (рис. 25). За малый промежуток вре-
времени At точка переместится, участвуя в первом вращении, на от-
отрезок дуги АБ, участвуя во втором, — на отрезок дуги БВ. Оче-
Очевидно, эти два перемещения эквивалентны перемещению по малой
дуге АВ. Если промежуток времени At достаточно мал, то дуговые
перемещения настолько малы, что их можно приближенно заменить
отрезками хорд АБ = Aslt БВ = As2, АВ = Asa и считать (так-
(также приближенно) лежащими в одной плоскости, т. е. достаточно
малые дуговые перемещения, и только малые, могут считаться век-
векторами (так как в указанном приближении они подчиняются пра-
правилу сложения векторов). Отложим на осях вращения ОА' и ОБ'
векторы угловых скоростей Оа = щ и Об — щ. Длины этих отрез-
отрезков, очевидно, пропорциональны длинам перемещений Asj и As2,
Рнс. 25.
Схема сложения угловых
скоростей.
р
так как со,= ——, и„= ——, г — О А — ОБ =ОВ. Треуголь-
ники АБВ и Оав подобны, так как их углы (/.Оав и /.ВБА) с
пропорциональными сторонами (Оа и АБ, ав и БВ) равны. Сле-
Следовательно, OS =—— = ——-, и угловая скорость результи-
r\t
рующего вращения ш3 =
нием скоростей (о4 и ш2.
получается геометрическим сложе-
Таким образом, вектор угловой скорости ш численно
равен величине угловой скорости, лежит на оси враще-
вращения, и направление его связано с направлением вращения
правилом буравчика.
46
Вектор со в известном смысле условен, его направление зависит
от нашего выбора. Если условиться откладывать вектор угловой ско-
скорости в противоположную сторону, то изменится только порядок
математических операций с ним. Поэтому его называют псевдовек-
псевдовектором. При векторных вычислениях всегда нужно помнить о при-
принятом его направлении.
Поскольку угловая скорость — вектор, то приращение ее так-
также вектор и, следовательно, вектором является угловое ускорение:
е =
dt
B.48)
Если ось вращения не изменяет положения в пространстве, то
вектор углового ускорения лежит, как и вектор со, на оси. При этом
изменяется только величина вектора угловой
скорости, а направление его остается неизмен-
неизменным. Если угловая скорость возрастает, то
векторы Лео и г направлены так же, как и век-
вектор угловой скорости со, а если скорость враще-
вращения убывает, векторы Лео и е направлены про-
противоположно вектору угловой скорости.
Найдем связь между векторами угловой и
линейной скоростей (рис. 26).
Определим положение точки на траектории
(окружности) радиусом-вектором г, проведенным
от центра вращения О (как полюса) к вращаю-
вращающейся точке. Как видно из чертежа, вектор v
связан с векторами со и г правилом буравчика.
Величина линейной скорости равна:
v — шг — шг sin 90°.
Если векторы со и г взаимно перпендикулярны, то модуль век-
векторного произведения г на а»:
| [ ш г ] | = юг sin 90°.
Сравнивая эти два равенства, видим, что
v = [ш г]. B.49)
Вектор линейной скорости точки при вращательном
движении равен векторному произведению вектора уг-
угловой скорости на радиус-вектор точки.
В виде векторов можно представить нормальное и тангенциаль-
тангенциальное ускорения.
Нормальное ускорение /„ = — и>* г—вектор, направленный
от точки к центру вращения (противоположно радиусу-вектору,
47
Рис. 26. Связь век-
векторов угловой и
линейной скоро-
скоростей.
поэтому знак минус в формуле) и больший, чем радиус-вектор точки
в со2 раз.
Чтобы установить связь между векторами /,н е, обратимся к
формуле B.49).
Если линейная скорость точек теса возрастает, тангенциальное
ускорение ; совпадает по направлению со скоростью v. Направ-
Направление углового ускорения совпадает с направлением угловой скорости
(так как она увеличивается). И чтобы получить связь между вектора-
ми /i ,e и г, надо в выражении B.49) векторы и и ft) заменить на
}* и t:
7х = [«г]. B.50)
Если угловая скорость уменьшается, то вектор е направлен в
сторону, противоположную вектору со, а вектор /т направлен в
сторону, противоположную линейной скорости, т. е. порядок со-
сомножителей в выражении B.50) не изменится и в этом случае.
ГЛАВА III
ОСНОВНЫЕ ЗАКОНЫ ДИНАМИКИ
МАТЕРИАЛЬНОЙ ТОЧКИ
§ 1. ЗАДАЧИ ДИНАМИКИ. ЗАКОНЫ НЬЮТОНА
В кинематике мы изучали общие свойства механического дви-
движения. Дальнейшее познание механического движения состоит
в выяснении причин, которые вызывают и изменяют состояние дви-
движения, в изучении закономерных связей между количественными
характеристиками причин движения и его кинематическими харак-
характеристиками.
Динамика изучает состояние движения материальных тел как
результат взаимодействий между ними. Основа решения динами-
динамических задач в классической механике — три закона движения,
сформулированные И. Ньютоном в книге «Математические начала
натуральной философии» A686 г.).
Доньютоновская механика представляла собой собрание реше-
решений отдельных задач о различных частных случаях движения.
Поэтому решение вновь возникающих задач требовало каждый
раз специального экспериментального или теоретического исследо-
исследования и было под силу лишь опытным и одаренным людям.
И. Ньютону удалось разглядеть в частных случаях механиче-
механического движения то общее, что свойственно всем его видам, и разра-
разработать единый метод исследования задач о механическом движении.
Тем самым ученым и инженерам было дано в руки средство, позво-
позволявшее исследовать и решать как известные, так и вновь встающие
задачи механического движения.
Дальнейшее развитие механики шло главным образом на основе
этого метода. В результате механика получила развитый матема-
математический аппарат, был выведен целый ряд следствий из законов
Ньютона, следствий, которые сами по себе представляют весьма
общие законы природы, в ряде случаев выходящие за пределы нью-
ньютоновской механики. К концу XIX в. основы ньютоновской меха-
механики получили свое завершение. Открытые ею законы и разрабо-
разработанные методы охватывают широчайший круг явлений природы и
49
их технических использований. Почти вся современная практичес-
практическая деятельность человека, связанная с сооружением и использо-
использованием зданий, машин, транспортных устройств, включая совре-
современную реактивную технику и т. п., опирается на ньютоновскую,
или, как ее часто называют, классическую, механику.
Бесчисленные практические применения и теоретические исследо-
исследования подтверждают механику Ньютона, доказывают применимость
ее основных законов для описания всех явлений земного и косми-
космического масштабов. И в условиях микромира, где господствуют за-
законы квантовой механики и теории относительности, остается спра-
справедливым ряд фундаментальных законов классической механики,
отражающих основные свойства материи, пространства и времени.
Классические законы (сохранение массы, энергии, векторов импуль-
импульса и момента импульса) получили подтверждение во всех известных
современной физике явлениях.
Классическая механика возникла и развилась на основе изу-
изучения движения тел макроскопических (небесные тела, земные тела,
состоящие из большого числа атомов), происходящих со скоростями,
малыми по сравнению со скоростью света. Поэтому следовало ожи-
ожидать, что применение классической механики к движению микроско-
микроскопических тел и к движению с большими скоростями может привести
к противоречиям между теорией и экспериментальными фактами.
Так и произошло в действительности. Классическая механика ока-
оказалась недостаточной уже для описания движения множества мо-
молекул, которое подчиняется особым законам статистической механи-
механики. Особенности элементарных частиц, на которых мы здесь не
будем останавливаться, делают классическую механику неспособной
достаточно полно описать их движение.
Отклонения от решений, которые дает классическая механика,
обнаружились также при исследовании движений, происходящих
со скоростями, сравнимыми со скоростью света. Для их объяснения
потребовалась разработка так называемой теории относительности,
которая была создана немецким ученым Альбертом Эйнштейном в
начале нашего века.
Но тем не менее практическое и познавательное значение клас-
классической механики никогда не будет исчерпано.
§ 2. ВЗАИМОДЕЙСТВИЕ ТЕЛ. СИЛА
Наблюдение и опыт указывают, что изменение движения тела
происходит всегда как результат передачи движения от одного те-
тела к другому в процессе их взаимодействия. Камень, лежащий на
поверхности Земли, покоится относительно нее, пока человек не
толкнет его носком сапога или не поднимет рукой. Железнодорож-
Железнодорожные вагоны не тронутся с места, пока их не начнет тянуть паровоз.
Скатившись по наклонному желобу на гладкую (стеклянную) го-
горизонтальную поверхность (рис. 27), стальной шарик движется
50
Рис. 27. Искривление траектории шарика
в результате взаимодействия с магнитом.
прямолинейно и некоторое время практически с постоянной ско-
скоростью. Но если установить в стороне от желоба сильный магнит,
то траектория шарика изогнется в сторону магнита.
Можно провести бесчисленное множество опытов и наблюдений,
которые будут свидетельствовать о том, что изменение скорости
движения тел, или приобретение ими ускорения, — всегда резуль-
результат взаимодействия тел, в процессе которого происходит передача
движения от одного тела к другому.
Изменение состояния движения тела может происходить как за
счет передачи ему другим телом механического движения, так и за
счет передачи и преобразования в механическую других форм дви-
движения материи. Например, в двигателе паровоза происходит преоб-
преобразование молекулярно-тепловой формы движения в механическую.
Через сцепки механическое движение передается от паровоза сос-
составу1.
На основе законов только механики нельзя вскрыть физическую
сущность всех случаев передачи и преобразования движения. Это
задача физики в целом. В механике нам необходимо знать, при ка-
каких условиях возникают взаимодействия между телами, ведущие
к изменению состояния механического движения тел, и как они его
изменяют.
Взаимодействия тел, в результате которых тела сообщают друг
другу ускорения, называются силами. Существование силы всегда
связано с наличием по крайней мере двух материальных объектов.
Поэтому, определяя силу, необходимо указывать тела, со стороны
которого и на которое сила действует.
Данное выше определение силы неполно. Положим, мы поста-
поставили ладонь на пути камня, падающего под действием силы притя-
притяжения Земли. Упав на ладонь, камень останавливается, его уско-
ускорение относительно Земли становится равным нулю, хотя нет ни-
1 Строго говоря, передача механического движения от тела к телу всегда
происходит с промежуточным преобразованием в другие виды движения ма-
материи.
51
каких оснований полагать, что Земля перестала его притягивать.
На первый взгляд это противоречит данному выше определению си-
силы; однако заметим, что сила притяжения Земли, не сообщая кам-
камню ускорения, видимо, обусловила как-то изменение формы поверх-
поверхности ладони под камнем и ощущение давления, которое он произ-
производит на ладонь.
Опустим стоймя на стол мягкую пружину. Она взаимодействует
с двумя телами: с Землей, притягивающей ее вниз, и крышкой сто-
стола, действующей снизу вверх. Пружина не приобретает ускорения,
но оказывается сжатой.
Таким образом, взаимодействие тел может проявляться не толь-
только в сообщении ускорений, но и в изменении формы или объема тел.
Изменение формы или объема тела всегда сопровождается переме-
перемещением его частей друг относительно друга, т. е. также порождается
движением. Перемещение частей тела друг относительно друга на-
называется деформацией тела.
Расширим определение силы. Силами называются взаимо-
взаимодействия тел, в результате которых тела приобре-
приобретают ускорения или деформируются, или имеет мес-
место то и другое одновременно.
Следовательно, о наличии и действии силы мы можем судить:
1) по динамическому ее проявлению, т. е. по тем ускорениям, ко-
которые сила сообщает взаимодействующим телам; 2) по статическому
проявлению силы — по деформациям, которые возникают во взаи-
взаимодействующих телах (сжатие или растяжение пружины, прогиб
поверхности, на которую давит тело, и т. п.).
§ 3. ИЗМЕРЕНИЕ СИЛ
Чтобы измерить силу, т. е. найти ее величину, надо выбрать
единицу силы, а затем сравнить с ней данную силу, измеряемую по
статическому или динамическому проявлению. Заметим, что непо-
непосредственно можно сравнивать силы лишь по одному и тому же их
проявлению. В данном параграфе мы изучим измерение сил по их
статическому проявлению. За единицу силы в этом случае принимают
вес определенного тела.
Весом называется сила, с которой тело, притягиваемое Зем-
Землей, действует на другое тело, не позволяющее ему двигаться к
Земле (на опору, на подвес и т. п.). Если со временем не изменяются
свойства тела (тело не крошится, не выветривается, на нем не обра-
образуется коррозия и т. д.), то его вес остается постоянным и определяет-
определяется взаимодействием тела с Землей. За единицу веса принят по меж-
международному соглашению вес определенного тела (эталона), изго-
изготовленного из сплава платины и иридия и хранящегося в Междуна-
Международном бюро мер и весов в г. Севре (около Парижа).
Для сравнения действия измеряемой силы с действием единицы
веса в качестве опоры или подвеса может быть выбрано любое тело.
52
Но, чтобы измерения были точнее, тело должно при действии сил,
близких по величине к интересующей нас, испытывать заметные де-
деформации; кроме того, деформации, которые испытывает тело, дол-
должны однозначно определяться величиной этой силы (в пределах точ-
точности измерений).
Вес — векторная величина (это следует из факта направления
веса всегда к определенной точке земного шара). Поэтому способ
измерения должен допускать геометрическое ело- „,„....
жение измеренных сил.
Для измерения сил в статике применяют обыч-
обычно пружинные динамометры, или пружинные весы
(рис. 28).
Пружину динамометра (материал и диаметр про-
проволоки, из которого она свита) подбирают так, что-
чтобы удлинение ее Ал: было прямо пропорционально
прикладываемым силам F (рис. 29). С помощью
динамометра можно измерять силы по их статичес-
статическому проявлению, т. е. по деформациям пружины
неподвижного динамометра.
Кроме пружинных динамометров, в современ-
современной лабораторной практике используются динамо-
динамометры, преобразующие механическое действие силы
в электрические, магнитные и другие проявления ее действия.
С помощью набора пружинных динамометров можно легко об-
обнаружить векторный характер сил при их статическом проявлении.
Для этого, очевидно, надо показать, что силы складываются геомет-
геометрически.
Возьмем стойку с двумя блоками (рис. 30). К небольшому кольцу
прикрепим динамометры ОА и ОВ, к подвижным концам которых
Рис. 28.
Пружинный
динамометр.
¦ ьх
Рис. 29. Линейная зависимость
величины деформации от силы:
Длг — удлинение пружины, F — сила.
Рис. 30. Опыт, показывающий вектор-
векторный характер сил при их статическом
проявлении.
53
подвесим на нитях, перекинутых через блоки, грузы известного ве-
веса <5i и G2. Если кольцо не удерживать, то под действием веса гру-
грузов С?! и G2 оно придет в движение. Чтобы удержать его в равнове-
равновесии, надо приложить к кольцу силу, равную и противоположно
направленную равнодействующей двух первых сил. Равнодейству-
Равнодействующая сил Gj и G2 направлена вверх и равна их геометрической сум-
сумме. Подвесим к кольцу на динамометре ОС груз Gg, подобранный
так, чтобы сила его веса удерживала кольцо в равновесии. Теперь,
измерив углы а и (J и проведя простые вычисления, можно обнару-
обнаружить, что показания динамометра ОС получаются из показаний ди-
динамометров О А и ОВ по правилу геометрического сложения. Уело-
вие равновесия кольца под действием трех сил, равных Gv G2, G3,
можно записать в виде следующего векторного равенства:
+ G3=0. C.1)
§4. ПЕРВЫЙ ЗАКОН ДИНАМИКИ (ЗАКОН ИНЕРЦИИ)
Сформулируем вначале законы динамики для движения ма-
материальной точки, т. е. для таких видов механического движения,
при которых не играют роли размеры и форма тел.
Движение будем изучать в системе отсчета, связанной с Землей,
условно считая ее неподвижной. (Ниже покажем, как в законах,
полученных при изучении движения тел относительно условно не-
неподвижной Земли, учесть движение ее вокруг Солнца и собственное
вращение.)
Мы видели, что изменение состояния движения тел законо-
закономерно связано с действием сил. Общность этой связи вскрыта
Ньютоном в первом законе динамики. „Всякое тело1 продол-
продолжает удерживаться в своем состоянии покоя или рав-
равномерного и прямолинейного движения, пока и посколь-
поскольку оно не понуждается приложенными силами изме-
изменить это состояние^.
На первый взгляд закон этот вызывает у читающего некоторое
недоверие, поскольку он явно противоречит повседневному опыту.
В окружающей действительности мы постоянно наблюдаем замедле-
замедление движения и остановку тел при прекращении действия сил, вы-
вынуждающих их двигаться. Это объясняется тем, что в реальных дви-
движениях мы не можем избавиться от сил трения, которые заставляют
тела в отсутствие других сил двигаться с отрицательным ускоре-
ускорением — замедленно.
1 Под телом понимается материальная точка.
8 А. Н. Крылов, Собрание трудов (И. Ньютон, Математические
начала натуральной философии, перевод), изд. АН СССР, 1936.
54
Опыт показывает, что, чем меньше трение, тем незначительнее
изменяется скорость тела.
Естественно предположить возможность равномерного прямо-
прямолинейного движения в предельном случае исчезающе малого тре-
трения и вообще весьма слабых убывающих взаимодействий. (Изуче-
(Изучение таких предельных условий часто приводит к обнаружению ка-
качественно новых, неочевидных свойств явлений и поэтому представ-
представляет особый интерес.)
Рассматривая статические проявления сил, мы видели, что под
действием нескольких сил, которые удовлетворяют векторному урав-
нию C.1), тело остается в покое.
В ряде случаев тело под действием нескольких сил движется
равномерно и прямолинейно. Например, трактор тянет плуг, на
который действуют сила тяги трактора и в противоположном на-
направлении сила сопротивления разрезаемой лемехами земли, трение
лемехов и колес о землю и т. д. При некотором соотношении между
силами плуг движется равномерно и прямолинейно.
При равномерном и прямолинейном движении первый закон
Ньютона позволяет считать комбинацию действующих сил динами-
динамически эквивалентной их отсутствию, или, другими словами, считать,
что сумма этих сил равна нулю.
Согласно первому закону динамики силы не являются первопри-
первопричиной движения. И в отсутствие сил тела движутся. (На относи-
относительности понятий покоя и равномерного прямолинейного движе-
движения мы остановимся несколько ниже.)
Первый закон динамики говорит о том, что если отсутствует об-
обмен механическим движением между телами и нет перехода механи-
механического движения в другие виды движения материи и обратно, то
состояние механического движения тел не изменяется.
В формулировке закона нет указания на то, относительно какой
системы отсчета рассматривается движение тел.
Однако если бы тела, с которыми связана система отсчета, на-
находились под действием сил, то они двигались бы с переменной ско-
скоростью. Исследуемое тело относительно такой системы отсчета так-
также двигалось бы неравномерно. Следовательно, закон предполагает,
что тела отсчета свободны от действия сил и системы отсчета, связан-
связанные с ними, движутся равномерно и прямолинейно.
Поскольку механическое движение — движение относительное
(оно состоит в перемещении тел со временем друг относительно друга,
и мы изучаем движение конкретных тел всегда относительно каким-
то образом выбранных тел отсчета), то, формулируя закон механи-
механики, мы обязаны указать, для каких относительных движений он
применим. Сохраняется ли справедливость закона при переходе от
одного относительного движения к другому, может быть подтвер-
подтверждено лишь опытной проверкой.
Наконец, первый закон утверждает, что любое материальное тело
независимо от своей природы и состояния обладает свойством сох-
55
Медленно
быстро
ранять в отсутствие действия сил состояние покоя или равномер-
равномерного и прямолинейного движения. Это свойство материальных тел
носит название инерции. Поэтому первый закон динамики часто
называют законом инерции. Инерция тел проявляется также в том,
что изменение движения тела под действием сил происходит не
мгновенно, а протекает во времени.
Обратимся к опыту, изображенному на рисунке 31.
В зависимости от продол-
продолжительности действия силы
на нить, привязанную к ша-
шару, результат опыта оказы-
оказывается различным. Если ко-
коротким рывком потянуть ниж-
нижнюю нить, она оборвется,
а шар останется висеть на
верхней нити. Если за ниж-
нижнюю нить тянуть медленно,
обрывается верхняя нить. В
первом случае, потянув ниж-
нижнюю нить, мы деформируем ее
31. Проявление инерции массив- (незаметно для глаза). В де-
ного шара. формированном состоянии она
действует на шар упругой си-
силой, которая сообщает ему ускорение, направленное вниз. Но так
как действие силы сказывается не мгновенно, то раньше, чем шар
придет в движение, деформация нижней нити достигает такой ве-
величины, при которой нить разрушается (рвется). Когда же мы тя-
тянем медленно, шар успевает приобрести ускорение и верхняя нить
тоже деформируется. При этом на нее, кроме упругой силы, дей-
действует еще вес шара. Поэтому деформация верхней нити нарастает
быстрее и раньше, чем у нижней, достигает величины, при которой
нить разрушается.
Нетрудно сообразить, что, если бы материальные тела не об-
обладали инерцией, действие силы определяло бы не ускорение тела
в данный момент, а его скорость. Инерцией обладают как макроско-
макроскопические, так и микроскопические тела. Это свойство тел суще-
существует объективно, независимо от способов изучения движения.
В настоящее время физика не знает ни одного вида движения ма-
материи, при котором не проявлялась бы инерция тел. Даже световое
излучение обладает инерцией.
Рис.
§ 5. МАССА
Все материальные объекты, в том числе и те, которые изучает
физика (тела, поле, молекулы, атомы, элементарные частицы и т. п.),
представляют собой конкретные виды материи.
56
Многообразие видов материи, различие в их свойствах не
исключает существования общей меры количества материи.
Материя едина. Единство всех конкретных видов материи
проявляется в их общем свойстве — существовать независимо от
сознания человека, а также в том, что одни виды материи могут
превращаться в другие. Вода при некоторых условиях превращает-
превращается в лед, при других может быть разложена на водород и кисло-
кислород. Электрон и позитрон при столкновении могут образовать два
или более фотонов. Фотон в определенных условиях порождает
пару электрон-позитрон.
Материя неуничтожаема. Если мы возьмем, например, неко-
некоторое количество (измеренное хотя бы по объему) чистой воды,
то, охлаждая ее, мы получим вполне определенное количество
льда. При таянии этого льда получим то же количество воды,
что имели первоначально. И сколько бы раз мы ни превращали
воду в лед и обратно, если устранены возможности потери воды
из сосуда, в котором она заключена (испарение, выплескивание
и т. п.), мы всегда будем получать одно и то же количество воды
и льда.
В 1766 г. великий русский ученый М. В. Ломоносов на много-
многочисленных опытах доказал справедливость закона сохранения ко-
количества материи. Он писал: «Но все встречающиеся в природе
изменения происходят так, что если к чему-либо нечто прибавля-
прибавляется, то это отнимается от чего-либо другого. Так, сколько мате-
материи прибавилось к какому-либо телу, столько же теряется у дру-
другого.
... Так как это всеобщий закон природы, то он распространяет-
распространяется и на правила движения...»1.
Материя вечно претерпевает изменения, превращается из од-
одного вида в другой, но количество ее всегда сохраняется.
Превращения материи, ее вечное движение (в смысле изме-
изменений вообще) подчиняется общему закону перехода количества
в качество и обратно, открытому Ф. Энгельсом.
Формулируя его, Ф. Энгельс писал:
«В природе качественные изменения точно определенным для
каждого отдельного случая способом могут происходить лишь пу-
путем количественного прибавления или количественного убавления
материи или движения (так называемой энергии)»2.
Если мы будем делить каким-либо образом некоторое тело на
все более мелкие части, то сначала, указывает Энгельс, никакие
качественные изменения его не наступают. Однако, в конце кон-
концов, тело распадается на молекулы. Молекула еще сохраняет ха-
характерные свойства вещества, из которого состоит тело, но вместе
1 М. В. Ломоносов, Полное собрание сочинений, т. 2, М. — Л.,
1951, стр. 183.
2 Ф. Энгельс, Диалектика природы. Госполитиздат. 1946, стр. 4.
57
с тем уже качественно от тела отличается (она, например, находит-
находится в непрерывном тепловом движении и тогда, когда тело в целом
покоится).
Дальнейшее расчленение приводит к распаду молекул на ато-
атомы. При этом свойства вещества коренным образом изменяются.
Если мы отнимем у атома электрон или несколько электронов,
то это поведет к новым изменениям в его качестве (он приобретет
заряд). Изменение числа нейтронов в атомном ядре также изменит
его свойства (в частности, устойчивость ядра) и т. д.
Во вселенной рассеяны огромные облака материи в виде газа
или твердых частиц. Если в силу каких-либо причин в одном из
таких облаков возникает сгущение, то вследствие взаимного грави-
гравитационного притяжения частиц газ уплотняется. При этом в цен-
центре образования повышается температура и возникает звезда, спо-
способная излучать материю в виде полей и частиц.
При достаточно высокой плотности и температуре столкнове-
столкновение между ядрами приводит к ядерным реакциям, которые проте-
протекают с высвобождением огромной энергии. В первую очередь такие
реакции идут между ядрами атомов водорода с образованием гелия
(на этой стадии развития звезды находится наше Солнце).
Продолжающееся сгущение материи доводит температуру звез-
звезды до температуры порядка 100 миллионов градусов. Плотность
вещества в такой звезде в 10 000 раз больше плотности воды. При
этих условиях возникает реакция синтеза ядер гелия, которая при-
приводит к образованию углерода и сопровождается выделением боль-
большого количества энергии.
После израсходования гелия сжатие звезды продолжается, тем-
температура возрастает, и звезда приобретает новое качество. В ней
начинаются ядерные реакции с образованием ядер, обладающих
средними атомными весами.
Когда процесс достигает ступени, на которой образуются ядра
атомов с массами, превышающими некоторое значение F0), видимо,
происходит разрушение звезды (появление так называемой сверхно-
сверхновой звезды), сопровождающееся выделением огромного количества
энергии, после чего звезда быстро охлаждается и исчезает как све-
светящееся тело на небесном своде.
Можно было бы приводить бесчисленное множество примеров
законов перехода количества в качество и обратно.
Оба приведенных выше закона, как открытый М. В. Ломоно-
Ломоносовым, так и Ф. Энгельсом, являются незыблемыми всеобщими за-
законами природы, без признания которых невозможно материалисти-
материалистическое мировоззрение. Их признание в физике требует признания
того, что конкретные виды материи должны обладать общей коли-
количественной мерой. В случае отсутствия такой меры эти законы ста-
становятся бессодержательными, ибо нельзя говорить о количестве
материи (и вообще чего-либо), если оно не измеримо. Что же являет-
является универсальной мерой количества материи?
58
Весь опыт естественных наук, и прежде всего физики, говорит
о том, что, когда происходит превращение материи, всегда выполня-
выполняется закон сохранения особой физической величины — массы1.
Масса всех взаимодействующих тел до взаимодейст-
взаимодействия равна их массе после взаимодействия.
Например, образование молекулы СО2 происходит в результате
соединения одного атома углерода с двумя атомами кислорода и со-
сопровождается излучением светового кванта. При этом сумма масс
одного атома углерода и двух атомов кислорода равна массе моле-
молекулы СО2 плюс масса светового кванта.
Превращения материи всегда происходят не только с сохране-
сохранением массы, но и при определенных количественных соотношениях
между массами, участвующими в превращении.
Сколько бы раз мы ни повторяли указанную реакцию или упо-
упомянутое выше превращение воды в лед, если не изменяются условия
опыта, мы для каждого из них получим определенное и всегда одно
и то же соотношение как между массами, входящими в процесс прев-
превращения, так и между выходящими из него. А так как все явления
в окружающем нас мире суть превращения материи, и только ма-
материи, то, следовательно, величина массы однозначно определяется
количеством материи. Закон сохранения массы — проявление все-
всеобщего закона сохранения материи. Следовательно, величина мас-
массы может служить мерой количества материи как сохраняющей-
сохраняющейся при взаимодействии тел, так и переходящей при этом из одной
формы в другую.
Масса—универсальная мера количества материи. Мас-
Масса тел проявляется через бесконечное многообразие свойств материи.
И в принципе каждое из них может быть использовано для измере-
измерения величины массы. Наиболее общими проявлениями массы тел
являются два свойства: гравитация — свойство тел притягивать
к себе другие тела и притягиваться ими и инерция тел. Более мас-
массивные тела сильнее притягивают к себе другие тела и притягивают-
притягиваются ими и медленнее под действием данной силы изменяют состояние
движения, чем менее массивные тела. Гравитация и инерция —
свойства, присущие всем видам материи.
В повседневной жизни мы часто сравниваем массы тел по силе,
с которой они притягиваются Землей. Покупая некий продукт, мы
сравниваем на весах его массу с массой гири. Мы, конечно, инте-
интересуемся не весом данного продукта, а количеством конкретного
вида материи, содержащейся в нем. Записывая в план добычи угля
на шахте число тонн, мы опять-таки имеем в виду количество кон-
конкретного вида материи, заключенной в этом угле, которую мы можем
использовать, например, как топливо. И в этом случае нас интере-
интересует масса не как мера притяжения угля к Земле и, конечно, не как
мера инерции.
1 Одновременно выполняется закон сохранен-ия энергии (см. ниже).
59
Мы будем считать массы двух тел равными, если они в одинако-
одинаковых условиях с равной силой притягиваются третьим телом1. В ка-
качестве третьего тела может быть выбрана Земля.
Измерение силы притяжения тела Землей можно произвести
двояким образом :1) сравнивая веса тел на пружинном динамометре;
2) сравнивая веса тел на рычажных весах.
Внимательное изучение результатов измерения силы притяже-
притяжения тем и другим способом выявляет их неравноценность для срав-
сравнения масс тел. Сила притяжения тела Землей меняется с измене-
изменением географической широты места нахождения тела (при переме-
перемещении тела с полюса на экватор вес изменяется на 0,005 своей вели-
величины), а также с изменением расстояния до тела от поверхности
Земли (с изменением расстояния на 1 км вес изменяется на 0,0003).
Поэтому чувствительный динамометр, проградуированный в месте
хранения эталона веса, покажет в глубокой шахте или на аэростате
различный вес для одного и того же тела. Результат же взвешивания
на рычажных весах одинаков для одного и того же тела при изме-
изменении места его взвешивания, так как и тело, и уравновешивающий
ejo эталон при перемещениях теряют или приобретают одинако-
одинаковую долю своего веса. Таким образом, рычажные весы позволяют
сравнивать массы двух тел независимо от того, какое тело мы
выбираем за третье (притягивающее) — Землю, Луну и т. д.
За единицу массы принимается масса эталонного тела из сплава
иридия и платины, хранящегося в Международном бюро мер и ве-
весов в г. Севре. Единица эта носит название килограмм-масса {кг).
Если на одну чашку рычажных весов положить тело в две или
три и т. д. единицы массы, то, для того чтобы удержать весы в рав-
равновесии на другую чашку весов надо положить два тела, содержа-
содержащие по единице массы, или соответственно три и т. д. тела. Следо-
Следовательно, массы тел складываются арифметически и масса — скаляр-
скалярная величина.
В классической механике масса тел считается не меняющейся
при изменении скорости их движения.
§ 6. ВТОРОЙ ЗАКОН ДИНАМИКИ
Второй закон Ньютона устанавливает связь между силой F,
массой тела т, на которое действует сила, и ускорением /, приоб-
приобретенным телом под действием силы.
Для того чтобы экспериментально найти эту связь, надо уметь:
1) измерять независимо друг от друга все три указанные величины
(мы это умеем) и 2) поставить опыт так, чтобы, оставив одну из ве-
величин постоянной, задавать другой разные значения, одновременно
измеряя, как меняются третьи.
1 Измерение массы по ее инерциальному проявлению и связанной с мас-
массой энергии будут рассмотрены дальше.
60
Для исследования движения тела используем установку, изоб-
изображенную на рисунке 32. К тележке, стоящей на горизонтальных
рельсах, приложена сила натяжения нити F, которая возникает,
когда на противоположный конец нити, перекинутой через блок,
действует вес груза G. Трение колес тележки на осях и по рельсам
постараемся свести до минимума. Силу натяжения нити измерим
динамометром. Ускорение
вычислим, зная (измеряя)
расстояния, которые те-
тележка проходит за равные
интервалы времени. Массу
тележки с приспособлени-
приспособлением, а также массы добавоч-
добавочных грузов предварительно
определим с помощью ры-
рычажных весов.
1
Рис. 32. Схема установки для исследования
связи между силой, массой и ускорением.
I. Исследуем связь между силой F и ускорением /, оставляя в
этой серии опытов массу т движущегося тела одной и той же .
Приведем тележку в движение, подвесив на нить груз. Изме-
Измерим динамометром силу во время движения (показание динамометра
постоянно), а также ускорение. Приобретает ли тележка ускорение
из состояния покоя или сила начинает действовать, когда тележка
движется со скоростью и, — сообщенное тележке силой F* ускоре-
ускорение оказывается одним и тем же. Следовательно, действие силы
не зависит от того, находится ли тело в покое или в
движении.
Ускорение, которое получает тело под действием постоянной
силы, постоянно. Под действием постоянной силы движе-
движение тела равнопеременное.
Изменяя силу, приложенную к тележке (перекидывая по частям
' груз Она тележку), измерим ускоре-
ускорения /ь/а, /3 и т. д. Построим график,
откладывая на осях координат F и ]
(рис. 33). Соответствующие опыту
точки с некоторым разбросом ло-
ложатся на прямую. Следовательно,
мы можем сделать вывод: уско-
ускорение прямо пропорциональ-
пропорционально величине действующей
силы:
U
C.2)
Рнс. 33. Зависимость ускорения
/ от силы F при постоянной массе
тела.
В проведенном опыте и в дру-
других опытах, которые мы могли бы
61
поставить (в том числе самых простейших, например, сообщая толч-
толчки шарику, лежащему на горизонтальном листе стекла), направле-
направление ускорения всегда совпадает с направлением действия силы.
Можно поставить опыты, которые покажут, что при одновре-
одновременном действии на тело нескольких сил оно получает
такое же ускорение, какое приобретает под дейст-
действием одной силы, равной векторной сумме приложенных
сил. Следовательно, и в динамическом проявлении сила — вектор.
Из сформулированного положения можно сделать важный вывод,
который называется принципом независимости действия сил и со-
состоит в том, что:
если к телу приложено несколько сил, то каждая
из них сообщает телу ускорение так, будто другие си-
силы отсутствуют.
Укрепим на тележке второй динамометр и нить в направлении,
противоположном направлению первой. На нити подвесим грузы
равной величины. Пока нити направлены прямо противоположно,
тележка покоится. Если направление одной из них составит не-
некоторый угол со второй, тележка приходит в движение. Мы можем
утверждать, следовательно, что две силы равны по величине (урав-
(уравновешиваются), если, будучи приложены к одному телу в прямо
противоположных направлениях, не сообщают ему ускорения.
II. Произведем вторую серию опытов. Оставляя силу постоян-
постоянной, будем менять массу тележки (добавляя на нее грузы) и изме-
измерять ускорения, которые она приобретает в этом случае.
Примечание. Мы измерили массы дополнительных грузов на рычаж-
иых весах, т. е. измерили их тяжелую массу, прн этом мы сравнивали коли-
количества материи, содержащейся в телах, используя свойство взаимного при-
притяжения материальных тел. Отыскивая связь между силой, ускорением и мас-
массой тел, мы, вообще говоря, имеем дело не со свойством тяготения, а со свой-
свойством инертности, которым обладают материальные тела. Apriori нельзя
утверждать, что существует однозначная связь между тяжелой массой н
ускорением, которое получает тело под действием данной силы. Более того,
если даже такая связь существует, мы заранее ие можем сказать, будут ли
полученные соотношения, установленные между тяжелой массой тела и уско-
ускорением, те же, что и соотноошения между мерой количества материи, опреде-
определенной по свойствам инертности (назовем эту меру инертной массой тела),
и ускорением, т. е. между инертной массой и ускорением. Имеем ли мы право
отождествлять, хотя бы численно, тяжелую н инертную массы, может сказать
только опыт.
Чем больше масса грузов, лежащих на тележке, тем меньшее
ускорение приобретает она под действием данной силы. Следователь-
Следовательно, ускорения, сообщаемые одной и той же силой различным телам,
обратно пропорциональны их массам:
i=?-a. C.3)
/г ОТ1
Сопоставляя равенства C.2) и C.3), заключаем, что ускорение,
приобретаемое телом, прямо пропорционально силе,
62
действующей на него, и обратно пропорционально его
массе.
Это и есть одна из формулировок второго закона динамики:
/=*-, C-4)
т
где / — вектор ускорения, F — вектор силы, т — масса, k — чис-
численный коэффициент, зависящий от выбора единиц.
Выберем единицы так, чтобы коэффициент k был равен единице.
Тогда равенство C.4) перепишется в виде:
?=-, C.5)
т
или
F = т}. C.6)
И второй закон динамики часто формулируют так: сила равна
произведению массы на ускорение.
Так как ускорение тела, полученное под действием несколь-
нескольких сил, равно ускорению, получаемому телом под действием их
результирующей, то уравнение C.6) можно записать в виде:
ИЛИ
где F — вектор результирующей сил, действующих на тело.
Векторное равенство C.7) эквивалентно трем скалярным, свя-
связывающим составляющие ускорения и сил по трем осям координат
(х, у, г):
F* = ix, )
C.9)
*
Эта система уравнений носит название уравнений движения
материальной точки. Чаще ее записывают в виде:
dp dt
d2y dvy
m -тж = m —rr >
dt2 dt
m dl*~ ~di'
C.10)
63
Произведя измерения.^мы убедились, что тяжелая масса тела
действительно однозначно связана с силой в ее динамическом про-
проявлении и с ускорением, которое получает тело под действием силы.
Кроме того, и численно тяжелая и инертная масса оказываются рав-
равными, т. е. количество материи проявляется через тяготение и через
инертность численно одинаково.
В самом деле, каждый раз сравнивая измеренную на весах т я-
желую массу и вычисленное отношение силы к ускорению из данных
динамического опыта, мы обнаружим равенство их значений. Ко-
Конечно, можно утверждать, что численное совпадение значений тя-
тяжелой и инертной масс есть результат неточности наших измере-
измерений (как было сказано, довольно грубых). Однако справедливость
сделанного утверждения проверялась неоднократно методами много
более точными: сначала Ньютоном, затем Бесселем и, наконец,
Этвешем. Бессель получил, что различие тяжелой и инертной масс
не может быть больше 1 : 20 000, а по данным Этвеша, различие не
может быть больше 1 : 10 000 0001. В ньютоновской механике точ-
точное совпадение численных значений тяжелой и инертной масс при-
принимается как опытный факт. Физическое содержание этого совпа-
совпадения вскрыто общей теорией относительности.
§ 7. ЕДИНИЦЫ ИЗМЕРЕНИЯ СИЛЫ И МАССЫ
Чтобы полученные на основе второго закона динамики соотно-
соотношения между численными значениями величин не зависели от вы-
выбора единиц их измерения, зададим произвольно две единицы, а
третью получим из соотношения C.4), положив k = 1.
В физике обычно произвольно устанавливают единицы массы
и ускорения. Тогда единица силы получается как производная из
равенства C.6).
Так, в системе СИ за единицу массы принят 1 кг, за единицу
ускорения — 1 м/сек2. Тогда единицей силы служит сила, сооб-
сообщающая массе в 1 кг ускорение в 1 м/сек2. Эта единица носит наз-
название ньютон («).
В системе СГС единица силы называется «дина» (дин). Она равна
силе, которая массе в 1 г сообщает ускорение в 1 см/сек2.
1«= 105дм«.
Пусть выбраны единицы силы — кГ и единица ускорения —
м/сек2 (так поступают при составлении технической системы еди-
единиц — МКГОС). За единицу массы в технической системе единиц
выбирается масса тела, приобретающего под действием силы в 1 кГ
ускорение в 1 м/сек2.
1 Недавно опыты, поставленные в Принстонском университете (США)
на усовершенствованной установке Этвеша, подтвердили тот же результат с
точностью до 10~10.
64
Так как масса в 1 кг под действием силы в 1 кГ приобретает
ускорение 9,81 м/сек2, то единица массы в технической системе
должна быть в 9,81 больше установленной нами ранее единицы мас-
массы в 1 кг, т. е. 1 техническая единица массы (т. е. м.) равна 9,81 кг.
§8. КОЛИЧЕСТВО ДВИЖЕНИЯ. ИМПУЛЬС СИЛЫ
Ньютон формулировал второй закон динамики иначе, чем это
было сделано в предыдущем параграфе. «Изменение количества дви-
движения пропорционально приложенной силе и происходит по на-
направлению той прямой, по которой эта сила действует»1.
Количеством движения называют вектор, совпадаю-
совпадающий по направлению с вектором скорости и численно
равный произведению массы тела на его скорость:
Р = ту. C.11)
Второй закон динамики можно сформулировать следующим об-
образом:
Изменение вектора количества движения, отнесенное
к промежутку времени, за который оно произошло,
прямо пропорционально приложенной силе и происхо-
происходит в направлении вектора силы.
В условиях каждого из наших опытов с тележкой сила, масса
и ускорение были постоянными. Следовательно, уравнение C.6)
мы можем записать в виде:
C.12)
Откуда
At
Последнее уравнение является математической записью вто-
второго закона динамики в формулировке Ньютона для постоянной
силы.
Вектором импульса постоянной силы называется
произведение вектора силы на время ее действия:
Если сила в процессе движения меняется со временем, то мы
должны разбить время действия силы на элементарные промежут-
промежутки времени Д^, в течение которых можно считать силу постоянной
1 А. Н. Крылов, Собрание трудов, т. VII (И. Ньютон, Матема-
Математические начала натуральной философии, перевод), иэд. АН СССР, 1936.
3 М. М. Архангельский 65
(с точностью, требуемой от нашего опыта), и равенство C.12) вы-
выразить следующим образом:
^ C.13)
(З.Н)
Im
д< ~ о Д/
ИЛИ
F.
dt
Произведение вектора силы на элементарный промежуток вре-
времени ее действия Fdt называется вектором элементарного импульса
силы.
Второй закон динамики можно записать так:
Fdt = d(mv) C.15)
и дать ему еще одну формулировку:
Изменение количества движения за элементарный
промежуток времени равно элементарному импульсу
силы.
Если мы хотим подсчитать изменение количества движения под
действием переменной силы за конечный интервал времени, мы дол-
должны просуммировать (векторно) элементарные импульсы сил за
все промежутки времени, на которые разбит интервал. Такое сум-
суммирование можно произвести, вычислив интегралы от левой и пра-
правой частей равенства C.15):
о, t2
J d(mv) = $Fdt, C.16)
У, ts
где Vi — скорость в момент tlt a v2 — скорость в момент t2,
или
. b ,
mv2— mvx = ) Fdt. C.17)
<i
Для нахождения интеграла правой части этого равенства надо
знать, как зависит сила F от времени t.
В случае, если на тело действует несколько сил, изменение ко-
количества движения определяется импульсом равнодействующей
этих сил.
Если в начальный момент времени тело покоится (vi = 0), то
количество движения, приобретаемое телом за время t, равно им-
импульсу силы. Поэтому в современной физической литературе (осо-
(особенно по теоретической физике) импульсом иногда называют коли-
количество движения. Понятие импульса силы используют в задачах,
требующнх анализа кратковременного действия сил (толчок, удар).
Понятие импульса позволяет анализировать и рассчитывать дей-
66
Стань
Рис. 34. Взаимодействие магнита и стального тела.
ствие таких приборов, как баллистический маятник, служащий для
определения скорости пули, снаряда; баллистический гальванометр,
служащий для исследований кратковременных импульсов тока, и т. д.
Во всех предыдущих рассуждениях мы считали массу тела по-
постоянной, поэтому запись второго закона динамики в виде уравне-
уравнения C.8) и уравнения C.14) эквивалентна. Однако с развитием сов-
современной реактивной техники мы все чаще встречаемся с движением
тел, масса которых меняется со временем (ракеты). В задачах о дви-
движении этих тел равенство C.14) сохраняет свой смысл, а равенство
C.8) утрачивает. Поэтому формулировка второго закона динамики,
данная Ньютоном, обладает большей общностью, чем формулиров-
формулировка, соответствующая равенству C.8).
§ 9. ТРЕТИЙ ЗАКОН ДИНАМИКИ
Действия между телами всегда носят характер взаимодействий.
Если тело А действует с какой-то силой на тело В, то и тело В обя-
обязательно действует 'с некоторой силой на тело А.
Когда неопытный шофер быстро трогает с места автомашину, то
пассажир чувствует давление на спину со стороны сиденья. При
этом мягкая спинка сиденья вдавливается под действием сил, с ко-
которой на нее в это же время действует тело пассажира.
Магнит притягивает стальное тело, а тело притягивает к себе
магнит, в чем легко убе-
убедиться, создав условия,
при которых они могут
свободно двигаться навстре-
навстречу друг другу (рис. 34).
Тело, погруженное в воду,
подвергается действию вы-
выталкивающей силы и в свою
очередь оказывает давле-
давление на жидкость (рис. 35).
Третий закон динами-
динамики определяет характер
взаимодействия тел. В фор-
МУЛиппякр Ньютпняпнгпя Рнс 35 На тело, погруженное в жидкость,
мулировке^ньютона он гла- действует выталкивающая сила со стороны
сит- „Действию всегоа жидкости, тело оказывает давление на
есть равное и проти- жидкость.
з*
67
воположное противодействие, другими словами, дейст-
действия двух тел друг на друга всегда равны и направлены
в противоположные стороны.
Силы «действующая» и «противодействующая» одного и того же
происхождения. Деление сил иа «действующие» и «противодейству-
«противодействующие» условно. Оно имеет смысл лишь поскольку в условиях меха-
механических задач мы часто интересуемся, как изменится состояние дви-
движения определенного тела в результате действия на него другого
тела или системы тел. Тогда воздействие на интересующее нас тело
мы называем силой действующей, а действие интересующего нас
тела на тела, меняющие состояние его движения, — силой проти-
противодействующей .
Итак, если взаимодействуют два тела, то сила Fi2, действующая
на первое тело со стороны второго, равна и противоположна по
направлению силе F2U действующей на второе тело со стороны пер-
первого:
В соответствии со вторым законом Ньютона первое тело приоб-
приобретает ускорение:
? _ F»
/l *
а второе:
Откуда
Ji==_^/2# C.19)
т. е. два взаимодействующих тела приобретают уско-
ускорения, направленные в противоположные стороны и
обратно пропорциональные их массам. Поэтому, например,
при взаимном притяжении камня и Земли мы отмечаем движение
камня к Земле и не можем зафиксировать «падение» Земли навстре-
навстречу камню. Оно несомненно существует, но слишком мало, чтобы" мы
его обнаружили.
При использовании законов динамики иногда допускают сле-
следующее ошибочное рассуждение: если действующая сила всегда
вызывает равную по величине и противоположную по направлению
силу противодействия, то, следовательно, их результирующая дол-
1 А. Н. К р ы л о в, Собрание трудов, т VII (И. Ньютон, Матема-
Математические начала натуральной философии, перевод), изд. АН СССР, 1936.
68
жна быть равна нулю, и тела не могут приобрести ускорения. На-
Например, вызывает затруднение следующий вопрос- человек тянет
груз, т. е. действует на него с некоторой силой, но груз с такой же
силой действует на человека; почему же человек перемещает груз^
Чтобы не прийти к ложному заключению о противоречии второго
и третьего законов динамики, надо помнить, что во втором законе
говорится об ускорении, которое приобретает тело под действием
сил, приложенных к нему. Равенство нулю ускорения тела есть
результат равенства нулю результирующей сил, приложенных к од-
одному и тому же телу. А третий закон динамики говорит о равенстве
сил, приложенных к различным телам: первая, «действующая», при-
приложена к одному из взаимодействующих тел, а вторая, «противодей-
«противодействующая», — к другому. Так что каждое из тел находится под
действием одной силы, которая, не будучи уравновешена, сообщает
ему ускорение. Однако вопрос о движении человека и груза сказан-
сказанным не исчерпывается. Раз действующая и противодействующая си-
силы равны и направлены противоположно, то два взаимодейству-
взаимодействующих тела не могут двигаться в одну сторону Если два взаимодей-
взаимодействующих тела (человек, груз) приходят в движение с ускорением,
направленным в одну и ту же сторону, следовательно, есть третье
тело (в нашем случае поверхность земли), взаимодействие с которым
одного или обоих тел сообщает им ускорение относительно этого
третьего тела.
Когда человек тянет груз, движение его и груза изменяется в
результате его взаимодействия с Землей (сила F13) и с грузом (сила
Fit), груза с Землей (Fla) и с человеком (F2i), поверхности Земли с
человеком (Fal) и с грузом (F,2) (рис. 36)
Груз и человек приобретают ускорение в горизонтальном направ-
направлении, следовательно, вертикальные проекции сил уравновешивают-
Рис. 36 В обозначении сил первый индекс указывает тело, на которое
Действует сила, а второй — тело, со стороны которого она действует
69
ся. Поэтому, используя принцип независимости действия сил, даль-
дальше мы рассматриваем только проекции сил на горизонтальное
направление.
В соответствии с третьим законом динамики
Г21 — * 12>
р р
Чтобы найти условие, при котором груз и человек будут обладать
dv
ускорением -~т—, направленным в одну сторону, мы должны приме-
применить к каждому телу отдельно второй закон динамики. По-
Полагая связь (трос) между человеком и грузом нерастяжимой и неве-
невесомой, получим:
р р _ dv
г и •''аз — тт ~>
р р _ m dv
ris ri2 — тч Т. '
где mc — масса груза и тч — масса человека.
Чтобы тела двигались в одну сторону, сила, действующая на
груз со стороны человека, F2i должна быть больше, чем сила, дей-
действующая на груз со стороны Земли, Fn, и сила, действующая со
стороны Земли на человека, F13 должна быть больше, чем сила Fi2,
действующая на человека со стороны груза: F2i>- F23 и /713> Лг-
Используя третий закон динамики, заменим первое неравенство
следующим:
и, сравнив его со вторым неравенством, получим:
т. е. сила, действующая со стороны Земли на человека, должна быть
больше силы, действующей с ее стороны на груз.
По третьему закону динамики действие не существует без проти-
противодействия, поэтому ни одна машина не может привести сама себя
в движение, так как всякая машина представляет собой систему пар
взаимодействующих тел.
Чтобы машина начала перемещаться, необходимо взаимодей-
взаимодействие ее по крайней мере с одним внешним по отношению к ней телом.
Подвешенный над полом мотоцикл, сколько бы мотор ни вращал
его колеса, не движется, пока его не опустят и колеса не придут во
взаимодействие с полом.
Основа количественного исследования механического движения—
уравнения движения тел C.11), C.17), C.18) и эквивалентные
70
им. Они позволяют решить два типа задач. Прямая, или основная,
задача динамики — нахождение по заданным силам состояния дви-
движения тела. Обратная задача динамики состоит в нахождении сил
по заданному движению тела.
Пример прямой задачи—вычисление ускорения и скорости тела,
соскальзывающего с наклонной плоскости в результате его взаимо-
взаимодействия с Землей (сила тяжести) и поверхностью наклонной пло-
плоскости (реакция плоскости, сила трения), или вычисление скорости
и траектории ракеты как результата ее взаимодействия с выбрасы-
выбрасываемыми газами (реактивная сила), с Землей (сила тяжести) и атмос-
атмосферой (сила сопротивления). Яркий пример решения обратной за-
задачи — открытие Ньютоном силы всемирного тяготения по законам
Кеплера, связывающим кинематические характеристики движения
планет.
ГЛАВА IV
СИЛЫ, ВОЗНИКАЮЩИЕ ПРИ КОНТАКТЕ ТЕЛ
§ 1. СИЛЫ УПРУГОСТИ
В природе и технике мы часто встречаемся с передачей движе-
движения от одного тела к другому при их непосредственном соприкосно-
соприкосновении. Такая передача движений связана с возникновением между
телами взаимодействий самой различной природы, зависящих от
величины деформаций, возникающих в телах, от скоростей измене-
изменения деформаций, от молекулярных и атомных свойств вещества и т. д.
Поэтому взаимодействия между реальными телами носят, как пра-
правило, весьма сложный характер.
Однако из множества тел можно выделить такие, у которых при
обмене движением преобладают взаимодействия, зависящие от ве-
величины их деформации (силы упругости). Рука со свободно рас-
расслабленной мышцей не может сдвинуть пушинку; сжатая, она при-
приводит в движение тела с массой более сотни килограммов. Растя-
Растянутая пружина сообщает ускорение грузу, укрепленному на ее кон-
конце. Сжатые газы выталкивают из орудия снаряд, сообщая ему ог-
огромные ускорения.
Мы иногда просто не замечаем, что взаимодействующие при кон-
контакте тела деформированы, так как их деформации очень малы. Па-
Паровоз передает движение вагону вследствие того, что деформиро-
деформирована сцепка; трос на подъемном кране удерживает висящий груз
потому, что, будучи деформирован, действует на груз с некоторой
силой, которая уравновешивает силу притяжения его Землей, и т. д.
Чтобы выяснить причину и процесс возникновения деформаций,
рассмотрим два примера.
На абсолютно гладкой поверхности лежит легкий, удлиненной
формы, однородный брусок массы т. В горизонтальном направле-
направлении на него силы не действуют, поэтому он находится в покое и по
длине не деформирован.
Приложим нормально к одному из крайних сечений бруска гори-
горизонтальную постоянную силу F, равномерно действующую на все
сечение (рис. 37). Принцип независимости действия сил позволяет
72
нам не рассматривать силу тяжести и реакцию крышки стола, урав-
уравновешивающие друг друга в вертикальном направлении. Как толь-
только сила F подействует на крайнее сечение бруска, частицы, распо-
расположенные в этом сечении, приобретут ускорение в сторону дейст-
вия силы: /' = -т—, где Am — масса частиц в крайнем сечении. Но
так как вещество бруска обладает инерцией, то действие силы не
может сразу передаться всему
бруску и частицы в сечении,
соседнем с крайним, первое
время движутся с меньшим
ускорением. Брусок деформи-
деформируется (сжимается). Сжимая
или растягивая, например,
пружину или резиновый
шнур, легко убедиться, что
в деформированном теле меж-
между смещенными Друг ОТНО- рис. 37. Деформация бруска, движу-
СИТельно друга Частями ВОЗ- щегося ускоренно под действием силы
никают внутренние СИЛЫ (свя- (динамическая деформация),
занные с межмолекулярны-
межмолекулярными и атомными взаимодействиями), направленные против смеще-
смещения (в растянутом теле эти силы стремятся сблизить его части,
В сжатом — раздвинуть), и тем большие, чем более деформировано
тело.
Поэтому в деформированном бруске между частицами, лежа-
лежащими в соседних сечениях, действуют внутренние силы. Частицам,
лежащим в крайнем сечении, эти силы сообщают ускорение про-
против внешней силы, а частицам соседнего сечения — в сторону ее
действия. Следовательно, ускорение /', приобретенное частицами
крайнего сечения под действием внешней силы, в результате дей-
действия внутренних сил уменьшается, а ускорение частиц в соседнем
сечении увеличивается. Деформации и внутренние силы нарастают,
пока ускорения частиц в том и другом сечении не уравняются.
Такой процесс происходит между любыми сечениями бруска до
Тех пор, пока весь брусок не придет в движение с ускорением:
} т
Под действием постоянной силы брусок движется
с постоянным ускорением, находясь в неизменном де-
деформированном состоянии. При этом деформации и силы
внутри бруска вдоль его длины различны по величине. Действи-
Действительно, в сечении /—/ для передачи движения от частиц, лежащих
левее сечения, частицам, лежащим правее его, деформации и выз-
73
ванные ими силы должны быть больше, чем в сечении 2—2, так
как они должны сообщать одинаковые ускорения в первом случае
массе, заключенной между сечениями /—/ и 3—3, а во втором —
меньшей массе, заключенной между сечениями 2—2 и 3—3. Сле-
Следовательно, деформации и внутренние силы больше вблизи сече-
сечения, на которое действует внешняя сила, и убывают по мере уда-
удаления от него. По мере приближения .к сечению, на которое дей-
действует внешняя сила, величи-
на внутренней силы прибли-
приближается к величине внешней,
в непосредственной близости
этого сечения становится рав-
равной ей, а по направлению,
?_ очевидно, противоположной.
^ Рассмотрим случай, когда
на покоящийся брусок одно-
Рис. 38. Деформация бруска под дей- временно действуют две по-
ГГ/рТньЛоГлГиОнГсОИлН(с"атИ: СТ0Янные силы' приложенные
ческая деформация). с противоположных КОНЦОВ
бруска (рис. 38). Крайние се-
сечения бруска одновременно
получают ускорения навстречу друг другу. Так как брусок одно-
однородный, то скорость распространения деформаций и их нарастание
справа и слева от среднего сечения бруска одинаковы. Среднее
сечение остается в покое сначала потому, что вследствие инерции
движение ему еще не передается, а затем потому, что действующие
на него справа и слева силы в каждый момент времени уравнове-
уравновешиваются. Крайние сечения бруска приближаются к среднему до
тех пор, пока вызванные деформацией силы не уравновесят друг
друга в любом сечении. Брусок будет находиться в покое в неизмен-
неизменном деформированном состоянии. Деформации постоянны по ве-
величине вдоль всей длины бруска; в каждом сечении внутренние
силы равны по величине силе внешней, а направлены противопо-
противоположно ей.
Деформации в теле, движущемся ускоренно, называются ди-
динамическими деформациями. Если тело, после того как в нем уста-
установились неизменные деформации, покоится, деформации называют-
называются статическими.
Приведенные примеры показывают, что возникновение тех и
других деформаций — результат движения частей тела с различ-
различными ускорениями при передаче движения от одного тела к другому.
Причина возникновения динамических деформаций — инерция,
которой обладает вещество тела. В отсутствие инерции движение пе-
передавалось бы мгновенно всем частицам тела, которое под действием
сил двигалось или покоилось как целое.
Так как всякое ускоряемое или покоящееся под действием сил
тело оказывается деформированным, то оно в свою очередь действует
74
на деформирующие его тела. В рассмотренных примерах мы заме-
заменили тела, передающие движение бруску, силами. В первом случае
таким телом мог быть, например, стержень, во втором случае на
брусок мог с одной стороны действовать стержень, а с другой сторо-
стороны — упор, как это изображено на рисунках.
Происхождение силы, действующей при контакте тел согласно
третьему закону динамики со стороны ускоряемого тела на ускоря-
ускоряющее, связано с возникновением деформаций в первом из этих тел.
Если брусок не испытывает ускорения, но деформирован так же,
как и движущийся ускоренно, то он действует на стержень с такой
же силой F.
Мы рассмотрели возникновение деформаций и сил упругости
при прямолинейном движении тел. Те же выводы можно получить,
рассматривая процесс передачи движения телу, движущемуся кри-
криволинейно.
§ 2. ДВИЖЕНИЕ ПО ЗАДАННОЙ ТРАЕКТОРИИ ТЕЛ,
РАССМАТРИВАЕМЫХ КАК МАТЕРИАЛЬНЫЕ ТОЧКИ
В природе и технике мы встречаем большое число явлений, в ко-
которых свобода перемещения тела ограничена. Например, автомо-
автомобиль, движущийся по поверхности Земли, лишен возможности дви-
двигаться к центру земного шара, куда он должен был бы двигаться
под действием силы тяготения; тело, соскальзывающее под действием
силы тяжести по гладкой наклонной плоскости, все время находится
в соприкосновении с ней. Условия, налагающие ограничения на дви-
движение тела, называют связями.
Так как изменение состояния механического движения всегда
происходит в результате взаимодействия тел, характеризующегося
действием определенных сил, то наличие связей так же проявляется,
как действие некоторой силы. При скольжении по наклонной пло-
плоскости тело приобретает ускорение вдоль ее поверхности, так как,
помимо силы тяжести, на него действует сила со стороны деформи-
деформированной плоскости. Сила, действующая на тело со стороны связи
(поверхности полотна дороги—на паровоз или автомобиль, наклон-
наклонной плоскости — на груз, спиц маховика — на частицы его обода
и т. д.), называется реакцией связи.
Реакции связи в подавляющем большинстве практически инте-
интересующих нас случаев возникают при деформации тел, ограничи-
ограничивающих движение данного тела. Вследствие малости деформаций
ими обычно можно пренебречь и считать траекторию движения тела
заданной. В таком случае заранее неизвестные силы реакции входят
в число величин, подлежащих определению из уравнений движе-
движения.
При исследовании несвободного движения тела составляют урав-
уравнения его движения, используя второй и третий законы динамики,
75
-II-
( ) О
о о
U С)
Рис 39 Движение паровоза с вагонами на горизонтальном
участке пути.
и решают их совместно с дополнительными уравнениями, опреде-
определяющими физические условия, заданные наличием связей.
Рассмотрим несколько конкретных задач.
1 Положим, паровоз массы М тянет состав из двух вагонов
массой Мг и М2 с постоянной силой F на горизонтальном участке
пути (рис. 39). Надо найти величину ускорения, с которым дви-
движется состав.
Введем следующие упрощающие задачу предположения* сила
трения между рельсами и колесами поезда мала, и ею можно пре-
пренебречь, сцепка между вагонами и паровозом обладает весьма малой
массой по сравнению с массой вагонов и паровоза, сцепка не дефор-
деформируется при движении.
Состав движется под действием силы тяги F. Кроме того, в вер-
вертикальном направлении на паровоз и вагоны действует сила тяжести
G и реакция рельсов R. Связи накладывают на движение два усло-
условия. 1) так как движение в вертикальном направлении отсутствует,
то G — R = О, или G — R1, и 2) так как сцепки не деформируются
(нерастяжимы), то скорости движения паровоза и вагонов, а также
их ускорения одинаковы.
Таким образом, если нас интересует только ускорение, то в за-
задаче — одно неизвестное. Оно может быть найдено непосредственно
из уравнения движения. Сила тяги F, развиваемая паровозом, сооб-
сообщает ускорение паровозу (масса М) и вагонам (масса М\ и Мг),
dv
(is
dv
или
dv F
dt ~~ M + Ml + .
1 При отсутствии трения сила реакции R направлена вертикально, и ее
полное значение уравновешивает силу тяжести.
76
Однако, помимо силы F, в данной системе действуют силы на-
натяжения сцепок между паровозом и вагонами /ч и F2, Fs и F^ Си-
Сила F2 действует через сцепки на первый вагон, сила А со стороны
вагона — на паровоз и сила Ft со стороны первого вагона — на вто-
второй, сила Fs со стороны второго вагона — на первый Так как по
третьему закону Ньютона Ft — F2n Fs = — Ft, то при составле-
составлении уравнения для поезда как целого они оказались взаимно урав-
уравновешенными. Для нахождения их величины мы должны составить
уравнения движения каждого тела системы отдельно Этих урав-
уравнений будет три.
для паровоза.
F — F-, — М —\
1 dt
для первого вагона:
для второго вагона:
Или, используя третий закон Ньютона:
г. г. ц, dv
F — F,= M — ,
1 dt
— F — м —
1 3 ~~ х dt'
„ .. dv
F з = М2 — .
Решая систему, можем найти ускорение (конечно то же, что и
найденное выше) и неизвестные силы Ft и F2.
2. Через блок перекинута абсолютно гибкая, нерастяжимая нить,
на концах которой подвешены два груза: массы Ш\ и т2 (рис. 40).
На груз массой т2 положен перегрузок массы т. Найти ускорение
а, с которым движется система, силу натяжения нитей Т и силу
давления р, с которой перегрузок давит на груз. Масса блока пре-
пренебрежимо мала по сравнению с массами грузов. Трением на оси
блока и сопротивлением воздуха движению грузов можно пренеб-
пренебречь по сравнению с другими силами, действующими на грузы.
Так как блок можно считать невесомым, то его вращательное
движение мы не будем учитывать и задача сведется к задаче о систе-
системе трех тел, движущихся поступательно.
Поскольку форма и размеры грузов не влияют на характер дви-
движения (сопротивление воздуха отсутствует) и грузы заметно не
деформируются, то они могут рассматриваться как материальные
точки.
77
UIIIIIIIIIIII
Наконец, свойства нити позволяют считать, что для огибания
ею блока не требуется действия силы и что все грузы движутся с оди-
одинаковым ускорением.
Так же как и в предыдущем примере, можно найти это ускоре-
ускорение, написав уравнение движения системы грузов. Однако при этом
мы лишим себя возможности найти силу натяжения нити и силу дав-
давления перегрузка. В самом деле, по третьему закону динамики си-
сила натяжения нити, действую-
действующая на груз, взаимно уничто-
уничтожается с силой, действующей со
стороны груза на нить, а сила
давления перегрузка на груз с
противодавлением, которое ока-
оказывает груз перегрузку. В урав-
уравнении движения системы грузов
они будут отсутствовать.
Для того чтобы найти силы
натяжения нити Т и давления р
перегрузка, составим уравнение
движения каждого груза в от-
отдельности.
На первый груз действуют
силы притяжения к земле m1 g
и натяжения нити Т, на второй
груз — сила притяжения к земле
mzg, натяжение нити Т и давле-
давление перегрузка р; на перегру-
перегрузок— сила притяжения к земле
mg и сила противодавления гру-
mzq
Р
Рис. 40. Схема к примеру 2.
за т2. равная р. Под действием этих сил грузы приобретают ус-
ускорение а.
Так как все силы направлены по вертикали, то достаточно рас-
рассмотреть движение вдоль вертикальной оси. Проекции сил и уско-
ускорения на эту ось равны соответствующим модулям, а направление
их можно учесть знаками. Силы будем считать положительными,
если их направление совпадает с направлением приобретаемого те-
телом результирующего ускорения. Положим, система движется в
сторону груза с перегрузком.
Составим уравнение движения:
для первого груза (ускорение а направлено вверх)
для второго груза (ускорение направлено вниз)
для перегрузка (движется вместе со вторым грузом вниз)
та = mg — р.
78
В результате получена система трех уравнений с тремя неизвест-
неизвестными (а, Т, р), т. е. система уравнений, как говорят математики,
замкнута и позволяет однозначно решить задачу.
Складывая левые и правые части всех уравнений, найдем:
а =
-f- ота -f- tn3
Знак ускорения определяется соотношением между внешними
силами, или, в нашем случае, между массами. Если (т2 + т) g >
> triig, то ускорение положительно, как принято нами, при движе-
движении в сторону груза с перегрузкой. Если (m2 + т) g < m^g, to
а<0и система будет двигаться в сторону первого груза. Если mi =
= щ, то
mg
а =
-\-т
т. е. результирующая сила будет просто равна силе притяжения
перегрузка к Земле. Ускорение будет направлено в сторону ее дей-
действия.
Из первого уравнения видно, что сила натяжения нити равна
весу груза только в отсутствие ускорения (когда мы застопорили
блок или вся система движется равномерно).
Если а>0, т. е. система перемещается в сторону груза с перегруз-
ком и груз я?! поднимается, то сила Т больше triig. Если а < О,
груз mt опускается и сила натяжения нити меньше m^g.
Найдем силу натяжения нити для нашего случая, подставив вы-
выражение для ускорения в первое уравнение:
Щ -J- Щ + т
Из третьего уравнения можно сделать аналогичные заключения
относительно давления перегрузка р. Значение силы давления пе-
перегрузка:
р = 2mg .
Такой прием вообще следует рекомендовать для решения задач
о движении системы тел с помощью уравнений движения. Для его
осуществления нужно: 1) установить силы, действующие на каждое
тело системы; 2) установить направление приобретенного телом ус-
ускорения и соответственно знаки сил; 3) составить уравнения движе-
движения для каждого тела в отдельности и убедиться, что число уравне-
уравнений соответствует числу неизвестных; 4) решить систему относи-
относительно неизвестных. Ниже мы увидим, какие усложнения вносит
в задачу учет массы блока, на котором подвешена система грузов.
3. Массивный шарик массы т движется на нити по окружности
в горизонтальной плоскости. Найдем силу F, с которой нить дей-
действует на шарик (реакцию связи).
79
Связь заставляет шарик двигаться по окружности радиуса R.
Положим, линейная скорость шарика постоянна, центростреми-
и3
тельное ускорение его равно ^", и согласно второму закону дина-
динамики деформированная (растянутая) нить (связь) действует на шарик
с силой F, численно равной т ~п. В соответствии с третьим зако-
законом динамики шарик действует на нить с такой же по величине си-
силой, направленной от центра вращения.
Происхождение силы, сообщающей шарику
центростремительное ускорение, шарик по инерции стре-
стремится двигаться по касательной к окружности Удаляясь от центра, он рас-
растягивает нить до тех пор, пока упруга» сила, с которой ннть действует на ша-
шарик, не станет равной OTT5~-
Происхождение силы, действующей на ннть:
частицы шарика непосредственно у места прикрепления нити начинают кри-
криволинейное движение раньше, чем частицы, более удаленные от нити. Шарнк
деформируется И, когда деформация н движение установятся, будет денство-
v%
вать на нить с силой — т W'
Если материал, нз которого сделана ннть, таков, что допустимые дефор-
деформации его по величине меньше, чем те, прн которых развивается сила, чнс-
леино равная т—,то нить рвется
R
Если материал, нз которого сделан шарик, также не допускает дефор-
деформаций, при которых развивается сила т—-, действующая на ннть, нли сила,
}\
действующая между частицами самого шарика, то разрушается шарик.
В этом причина того, что иногда неправильно рассчитанные маховики разры-
разрываются при больших скоростях вращения.
4. Мост, по которому дви-
движется автомобиль, несколько
прогибается, и автомобиль
движется по кривой (рис. 41).
Следовательно, при движении
автомобиль должен обладать
центростремительным ускоре-
Рис. 41. Движение автомобиля по нием, направленным к центру
вогнутому мосту. кривизны моста. Это ускоре-
ускорение создает равнодействую-
равнодействующая силы тяжести G, направленной вертикально вниз, и реакции
связи F (деформированной поверхности моста), направленной по ра-
радиусу к центру кривизны. Реакция связи должна быть больше со-
составляющей силы тяжести вдоль радиуса на величину, обеспечива-
обеспечивающую автомобилю центростремительное ускорение:
р q __ ffi !L
80
Так как согласно третьему за-
закону динамики сила, с кото-
которой автомобиль давит на по-
поверхность моста, по величине
равна силе реакции, то авто-
автомобиль, проезжающий по вог-
вогнутому мосту, давит на него
с силой, превышающей вес
автомобиля на величину^-:
Рис 42 Движение автомобиля по
выпуклому мосту.
Обычно мост делают выпуклой формы (рис. 42). Давление движуще-
движущегося по мосту автомобиля меньше статического давления. Сила
давления в этом случае равна:
§ 3. СИЛЫ ТРЕНИЯ
При механических процессах всегда происходит в большей или
меньшей степени преобразование механического движения в дру-
другие формы движения материи (чаще всего в тепловую форму дви-
движения). В последнем случае взаимодействия между телами носят
названия сил трения.
Положим на горизонтальный диск два одинаковых бруска (рис.
43). Торцовые стороны брусков соединим нитями с неподвижно зак-
закрепленными динамометрами и
приведем диск во вращение с
постоянной скоростью. Брус-
Бруски несколько сместятся в сто-
сторону вращения диска и оста-
остановятся. Ппужины динамомет-
динамометров, связанные сторцами брус-
брусков, обращенными навстречу
вращению диска, несколько
растянутся. Поскольку брус-
бруски покоятся, очевидно, силы
F, с которыми действуют на
D ,, л них пружины динамометров,
Рис. 43. Демонстрация внешнего v: v '
трения. уравновешивают силы тре-
трения FTp, возникающие меж-
между соприкасающимися поверхностями брусков и диска. Направлены
силы трения противоположно скорости брусков относительно диска.
Меняя направление движения диска, увидим, что при той же величи-
величине скорости вращения динамометры отмечают наличие сил FTp той же
Величины, что и в первом случае, но направленных противоположно.
81
Опыты с движением различных соприкасающихся тел (твер-
(твердых по твердым, твердых в жидкости или газе, жидких в газе и т. п.)
с различным состоянием поверхностей соприкосновения показы-
показывают, что силы трения проявляются при относительном перемещении
соприкасающихся тел и направлены против вектора относительной
скорости тангенциально к поверхности соприкосновения. При этом
всегда происходит нагревание взаимодействующих тел.
Силами трения называются тангенциальные взаимо-
взаимодействия между соприкасающимися телами, возникаю-
возникающие при их относительном перемещении. Силы трения
возникающие при относительном перемеще-
перемещении различных тел, называются силами внеш-
внешнего трения.
Силы трения возникают и при относитель-
относительном перемещении частей одного и того же
тела.
Возьмем два полых цилиндра с разными
диаметрами оснований. Меньший цилиндр
укрепим на центробежной машине, а боль-
больший подвесим на упругой нити коаксиально с
первым (рис. 44). Приведем внутренний ци-
цилиндр во вращение. Спустя известное время
внешний цилиндр повернется на некоторый
угол в направлении вращения внутреннего
цилиндра и останется в этом положении.
Причина этого явления состоит в том, что
внутренний цилиндр приводит в движение
слой воздуха, непосредственно прилегающий
и прилипший к нему благодаря силам молеку-
молекулярного сцепления. Следующий за ним по-
покоящийся слой испытывает перемещение от-
относительно прилипшего слоя. При этом воз-
возникает сила трения, которая приводит в дви-
движение покоящийся слой, затем следующий и т. д., пока не придет
в движение слой, прилегающий к внешнему цилиндру, и не приведет
его в движение. Когда сила упругости, возникающая в закрученной
нити, уравновесит силу трения, внешний цилиндр остановится.
Трение между слоями одного и то же тела (в данном случае воз-
воздуха) называется внутренним трением.
В реальных движениях всегда возникают силы трения большей
или меньшей величины. Поэтому при составлении уравнений дви-
движения, строго говоря, мы должны в число действующих на тело сил
всегда вводить силу трения F^p.
Уравнение второго закона динамики с учетом сил трения запи-
запишется в виде:
Рис. 44. Демонстра-
Демонстрация внутреннего
трения.
dv
т— =
dt
тр
D.1)
82
Иногда силу трения в расчет не вводят, что допустимо, если им-
импульс ее Frfdt много меньше импульса результирующей других сил.
Из равенства D.1) следует, что для равномерного движения тела
в реальных условиях к нему должна быть приложена сила F, урав-
уравновешивающая силу трения FTp.
Тело движется равномерно и прямолинейно, когда
внешняя сила уравновешивает возникающую при дви-
движении силу трения.
Для измерения силы трения, действующей на тело, достаточно
измерить силу, которую необходимо приложить к телу, чтобы оно
двигалось без ускорения.
§ 4. СУХОЕ ТРЕНИЕ
Внешнее трение твердого тела по твердому телу называется су-
сухим трением.
Величина трения зависит от состояния поверхности соприкос-
соприкосновения и скорости относительного перемещения тел.
В возникновении сил трения существенную роль играют силы
молекулярного притяжения, действующие между молекулами со-
соприкасающихся тел, и механические силы, которые возникают в за-
зацеплениях отдельных выступов, всегда имеющихся даже на хорошо
отшлифованных поверхностях. Действительное соприкосновение
тел происходит при этом на отдельных участках, общая площадь
которых значительно меньше видимой площади соприкосновения.
На этих участках даже малые нагрузки создают высокие местные
давления, вызывающие деформации поверхностного слоя и взаим-
взаимное внедрение отдельных микрочастей тел.
Таким образом, сила сухого трения обусловлена следующими
основными факторами: упругой и пластической деформациями не-
неровностей при сцеплении и действием молекулярных сил. Строгой
теории сил трения до сих пор не существует.
Различают два вида сухого трения:трение скольжениям.трение
качения. Первое возникает при движении груза по плоскости, оси
колеса во втулке, гвоздя, вбиваемого в доску. Второе — при дви-
движении колеса автомобиля, велосипеда по поверхности Земли, ша-
шариков шарикоподшипника в оправе. (Трение качения мы рассмотрим
в главе о вращательном движении твердых тел.)
Поместим на горизонтальную
поверхность стола брусок, при-
прикрепим к его торцу нить и переки-
перекинем ее через блок (рис. 45). К ви-
висящему концу нити будем прикла-
прикладывать последовательно возраста-
возрастающие нагрузки. Брусок останет-
останется в покое при любых нагрузках, _. .. D
меньших по весу некоторого зна- Рис" ^ГяТоГГ
83
чения Сшах. Следовательно, на брусок, пока он покоится, действу-
действует в направлении, противоположном приложенной силе, сила тре-
трения: FTp — G < Gmax. Сила трения, действующая между соприкаса-
соприкасающимися телами в состоянии покоя, называется силой трения по-
покоя. Она равна по величине и противоположна по направлению си-
силе, понуждающей тело к движению, и меняется по величине при
ее изменении.
Существование сил трения покоя, видимо, связано с проявле-
проявлением сил межмолекулярного взаимодействия и с наличием еще до
начала скольжения малых обра-
обратимых деформаций неровностей
поверхности.
При достижении внешней силой
предельного значения силы тре-
трения покоя Fm№ возникает скольже-
скольжение тел. Законы трения скольже-
скольжения были сформулированы француз-
французским ученым Амонтоном A699 г.)
и независимо от него Кулоном
^личина максимальной силы
трения покоя пропорциональна
силе реакции Rn, действующей нормально к поверхностям сопри-
соприкосновения тел:
/W = V>R«, D-2)
где ji — коэффициент трения покоя, зависящий только от свойств
поверхностей соприкасающихся тел. Выражение D.2) называют
законом Амонтона.
Значение коэффициента трения проще всего найти методом пре-
предельного угла. Для этого измеряют угол наклона плоскости, при
котором начинается скольжение тела, лежащего на ней (рис. 46).
Тело и плоскость изготовляют из материалов, для которых хотят
найти значение р,. В момент начала скольжения тела по плоскости
сила трения равна тангенциальной (направленной параллельно
плоскости) составляющей силы тяжести: /\р = mg sin ап. Реакция
плоскости: Rn = mg cos ап, где т — масса тела.
Отсюда в соответствии с формулой D.1)i
mg sinan = ptng cos а„,
или
D.3)
т. е. коэффициент трения покоя численно равен тангенсу предель-
предельного угла (ап). В таблице 1 приводятся значения коэффициента
трения покоя для некоторых материалов.
Строго говоря, коэффициент трения покоя не постоянен, он
меняется в зависимости от давления между телами, от температуры
84
Таблица 1
Материал
Дерево но дереву . .
Сталь по стали . . .
Сталь по чугуну . . .
Коэффициент трения
0,34 — 0,48
0,14—0,16
0,15 — 0,18
и т. п. Поэтому закон Амонтона можно рассматривать лишь как
приближенный.
Если сила, действующая на тело, больше предельного значения
силы трения покоя F > Fma, то тело приобретает ускорение и сила
трения покоя переходит в силу трения скольжения. В некоторых
специальных случаях (трение металлических тел с очищенной по-
поверхностью и т. п.) сила трения скольжения для сравнительно не-
небольшого интервала скоростей примерно равна предельной силе тре-
трения покоя и не зависит от скорости движения. График зависимости
силы трения FTp от скорости v для этого случая дан на рисунке 47.
Эта зависимость называется законом Кулона. Для относительной
скорости, равной нулю (и = 0), сила трения F?p не однозначна и
может принимать любые значения от + Fmiyi до—FmiX- Следователь-
Следовательно, для кулоновских сил трения коэффициент трения определяет
величину не только максимальной силы трения покоя, но и величину
силы трения скольжения.
В общем же случае сила трения скольжения зависит от относи-
относительной скорости тел. Характер этой зависимости изображен на
рисунке 48. При скорости v = 0 сила трения может принимать
любые значения, по абсолютной величине меньшие или равные FmttyL.
Для некоторого весьма малого интервала значений скорости сила
трения приближенно постоянна, а затем уменьшается, достигает
минимума и начинает возрастать.
Измерение сил трения скольжения производят с помощью при-
приборов, называемых трибометрами. Принцип действия трибо-
Ft
-Fhox
Fnai
i
Рис. 47. График зависимости ку-
кулоновских сил трения от скорости.
Рис. 48. График зависимости силы
трения скольжения от скорости
85
метра: одно из испытуемых тел А (рис. 43) приводится в движе-
движение относительно второго Б, к телу Б (контртело) прикрепляется
динамометр, который измеряет тангенциальную силу, необходи-
необходимую для удержания контртела в покое.
§ 5. ЖИДКОЕ ТРЕНИЕ
Трение о жидкую или газообразную среду называется жидким
или вязким трением. Причины возникновения сил вязкого трения
мы рассмотрим в главе, посвященной гидродинамике. Здесь же отме-
отметим их некоторые характерные
особенности.
При вязком трении отсутствует
сила трения покоя. Достаточно
слегка дунуть на плавающее в ван-
ванне с водой тело, чтобы оно приш-
пришло в движение. Человек, отталкива-
отталкиваясь шестом от дна реки, легко зас-
заставляет двигаться лодку с боль-
большим грузом.
В отсутствие относительной ско-
скорости сила жидкого трения равна
нулю. При возникновении относи-
относительной скорости величина жид-
жидкого трения с увеличением скоро-
скорости растет сначала линейно, а за-
и
Рис. 49. График зависимости
силы жидкого трения
от скорости
тем пропорционально квадрату скорости. При скоростях, боль-
больших скорости звука в данной среде (сверхзвуковая скорость), сила
трения пропорциональна примерно кубу скорости. Характер за-
зависимости силы жидкого трения от скорости для обычных (дозвуко-
(дозвуковых) скоростей иллюстрирует рисунок 49. Для малых скоростей:
F = -rlV> D.4)
для больших скоростей:
F=±r2v*. D.5)
Значения коэффициентов пропорциональности rd и г2 зависят от
свойств среды, размеров и формы тела и состояния поверхности тел.
Знак в формуле D.5) выбирается противоположным знаку скорости.
Возрастание силы жидкого трения при увеличении скорости обус-
обусловливает существование предельной скорости, с которой тело может
двигаться в сопротивляющейся среде под действием постоянной
силы. Уравнение движения в этом случае запишется в виде:
tn-^F — Fv, D.6)
dt
где F — постоянная сила, действующая на тело, Fv — сила трения
(функция скорости), т — масса тела.
86
При свободном падении в воздухе или воде F = G3, где G9—
эффективный вес тела (разность между весом тела в пустоте и вы-
выталкивающей силой, действующей на тело в жидкости или газе в
соответствии с законом Архимеда):
m-? = G3 — Fv. D.7)
В первый момент падения (v = 0) сила Fv = 0 и ускорение тела
имеет максимальное значение, соответствующее действию силы Сэ.
Затем, так как эффективный вес тела постоянен, а сила трения Fv
с увеличением скорости возрастает, то разность G3 — Fv умень-
уменьшается, в конце концов обращаясь в нуль. При этом ускорение ста-
становится равным нулю, и скорость падения тела принимает некото-
некоторое «установившееся» значение, которое не меняется вплоть до дос-
достижения телом поверхности Земли или дна водоема (если при этом
не меняются свойства среды, в которой происходит движение, — ее
плотность и вязкость). Значение скорости установившегося движе-
движения в данной среде под действием данной силы зависит от вида за-
зависимости силы трения, от скорости движения тела и значения ко-
коэффициента пропорциональности г, т. е. в конечном счете от свойств
среды, формы и размеров тела, состояния его поверхности. Так,
для человека среднего веса, падающего в воздухе с закрытым пара-
парашютом, скорость установившегося падения примерно 60 м/сек,
а при падении с раскрытым парашютом — 5 — 6 м/сек.
§ 6. ДЕЙСТВИЕ СИЛ ТРЕНИЯ. СМАЗКА
В повседневной жизни мы на каждом шагу сталкиваемся с дей-
действием сил трения. Вытаскивая гвоздь из стены, мы преодолеваем
силу трения. При движении автомобиля или другого экипажа с
постоянной скоростью по горизонтальной ровной дороге мощность,
развиваемая его двигателем, расходуется на преодоление разных
видов трения в механизме автомобиля и между его колесами и полот-
полотном дороги. Колоссальное количество бензина, угля и нефти идет
на то, чтобы восстановить потери механического движения, связан-
связанные с преодолением сил трения в машинах, самолетах и наземных
экипажах различного типа. Поэтому уменьшение трения дает эко-
экономию огромных материальных ценностей.
Борьба с трением в машинах, на транспорте сводится к Замене
сухого трения скольжения трением других видов. В частности,
наиболее распространенный способ уменьшения трения — смазка—
состоит в замене сухого трения трением жидким. Смазка заполняет
углубления, выемки, трещины поверхностей твердых тел и образует
между ними жидкий слой, разъединяющий эти поверхности и пре-
препятствующий взаимодействию их молекул. При движении тел про-
происходит скольжение слоев жидкости друг относительно друга.
87
Замена сухого трения внутренним трением смазки уменьшает тре-
трение в 8—10 раз,
Теория смазки была создана русским ученым Н. П. Петровым.
Наиболее строгая теория смазки была разработана Н. Е. Жуков-
Жуковским и С. А. Чаплыгиным.
Второй весьма эффективный способ снижения трения — заме-
замена скольжения качением (в шарикоподшипниках) — мы разберем
ниже.
В измерительной технике для повышения чувствительности и
точности измерительных приборов имеет большое значение борьба
с явлением «застоя». В разного рода стрелочных приборах об из-
измеряемой величине судят по смещению стрелки от нулевого положе-
положения. Благодаря наличию трения покоя это смещение начинается,
когда измеряемая величина уже достигнет некоторого значения. Это
явление приводит к тому, что чувствительность таких приборов (в
которых движение указателя осуществляется со скольжением) не
может превзойти некоторого предела. Величина силы трения покоя
сказывается и на точности прибора, так как стрелка может остано-
остановиться на делении, не соответствующем действительному значению
измеряемой величины. Поэтому в прецизионных измерительных при-
приборах указатели укрепляются не в подшипнике, а на подвесе, что
позволяет избежать сухого трения.
Однако полное исчезновение трения повлекло бы за собой весьма
неприятные последствия. Ни человек, ни автомобиль, ни какой-ли-
какой-либо механизм, как мы знаем, не могли бы двигаться под действием
внутренних сил, так как эти силы лишь сближают или раздвигают
отдельные части тел. Трение служит той внешней силой, которая
ослабляет или уравновешивает действие одной из внутренних сил
и позволяет другой силе перемещать тело. Человек при ходьбе,
занося ногу вперёд, отрывает ее от земли, а другой ногой опирается
о землю. Нога, стоящая на земле, испытывает на себе действие двух
сил: мускульной, толкающей ее назад, и силы трения покоя, урав-
уравновешивающей эту силу. В результате эта нога остается на месте,
в то время как приподнятая, испытывая лишь небольшое сопротив-
сопротивление со стороны воздуха, перемещается вперед. При движении теп-
тепловоза сила трения колес о рельсы является движущей силой, не
позволяя им скользить; благодаря трению не проскальзывает по
шкиву ремень, передающий движение от двигателя к станку. Во всех
рассмотренных случаях проявляется сила трения покоя. Поэтому
трение покоя иногда называют ведущим трением.
В отсутствие силы трения гвоздь не удержался бы в доске; вин-
винтовые, шпоночные соединения распались; любая машина, едва при-
придя в движение, рассыпалась бы на составные части.
Многим знакомо явление «заноса» автомобиля при резком тор-
торможении на скользкой дороге. При торможении колеса автомобиля
начинают с большой скоростью vt скользить по льду (рис. 50). Сила
88
Рис 50 К объяснению явления «заноса» при
торможении автомобиля.
трения скольжения /\р направлена в сторону, противоположную
скорости движения Положим, под действием силы F возникло
скольжение колеса с малой скоростью и2 в направлении, перпен-
перпендикулярном к vu и одновременно возникла направленная проти-
противоположно скорости v2 сила трения F"^p. Результирующая скорость
скольжения v =- vt + v2. Сила трения направлена против v и имеет
значение FTp. Можно считать, что /\р~ /Чр, так как силы трения
с изменением скорости меняются мало. Тогда составляющая силы
трения в направлении, противоположном v2, равна: F" — F
Но если v2 С °ь Уг°л а мал и
V,
sin a;
или
F zl F
^тр - v/ тр.
Сила трения в направлении, перпендикулярном скольжению,
зависит от скорости движения е>2 в этом направлении. Трение в на-
направлении, перпендикулярном движению, приобретает характер
жидкого трения, так как если и2 —*¦ 0, то и сила FTp—*• 0: доста-
достаточно небольшой силы, чтобы возникло движение вбок. Вследствие
этого же явления приводные ремни слетают со шкива при резком
уменьшении скорости его движения; вращающееся сверло или бур
легко входит в металл, дерево или землю и вытаскивается из них
(чтобы вытащить неподвижное сверло из металла или бур из земли,
часто требуются значительные усилия).
ГЛАВА V
СИЛЫ ВСЕМИРНОГО ТЯГОТЕНИЯ
§ 1. ЗАКОН ВСЕМИРНОГО ТЯГОТЕНИЯ
В начале XVII в. Иоганн Кеплер A571—1630) после двадцати-
двадцатилетней обработки данных наблюдений астронома Тихо Браге за
движением планет установил законы их движения.
1-й закон. Планеты обращаются вокруг Солнца по плоским кри-
кривым, представляющим собой эллипсы, в одном из фокусов которых
находится Солнце.
2-й закон. Радиус-вектор, проведенный от Солнца к планете,
в равные времена описывает равные площади.
3-й закон. Квадраты времен обращения планет относятся как
кубы больших полуосей их орбит.
Открытие законов Кеплера поставило определенную механиче-
механическую задачу: найти силы, под действием которых совершается движе-
движение планет (как мы знаем, такого типа задача называется обратной
динамической задачей). Галилей, открыв закон инерции и устано-
установив независимость действия сил, дал начальные принципы, на ос-
основе которых эта задача могла быть решена. Гюйгенс, найдя выра-
выражение для центростремительной силы и решив ряд других динами-
динамических задач, дал примеры простейших приемов их решения. В
1666 г. итальянец Борелли высказал мысль, что движение планет
есть результат «уравновешивания» некоторого естественного «стрем-
«стремления» небесных тел к соединению друг с другом (в данном случае
Солнца и планеты) и обусловленного вращательным движением
«стремления» тел к движению от центра вращения. В период с 1666
по 1680 г. Гук в нескольких работах и письмах высказал (хотя и без
доказательств) мысли об отклонении траекторий небесных тел от пря-
прямолинейных в результате действия сил:
все небесные тела притягивают к центрам не только свои части,
как это мы наблюдали на Земле, но и другие небесные тела, нахо-
находящиеся в сфере их действия;
притяжение тел друг другом обратно пропорционально квадра-
квадрату расстояния между ними.
90
Рис. 51. Круговая и эллип-
эллиптическая орбиты Марса,
вычерченные в одном
масштабе.
Не будучи вооруженным необ-
необходимым математическим аппара-
аппаратом, Гук не сумел доказать и отсто-
отстоять свои утверждения. И только
Ньютону, обладавшему гениальной
физической интуицией и наряду
с этим в совершенстве владевшему
математическим методом, удалось
открыть всеобщий закон тяготения.
Он показал, что законы Кеплера и
основные законы динамики без ка-
каких-либо дополнительных предпо-
предположений позволяют сделать заклю-
заключение о притяжении планет Солн-
Солнцем с силой, прямо пропорциональ-
пропорциональной массам планет и обратно про-
пропорциональной квадрату их рассто-
расстояний от Солнца.
Чтобы упростить рассуждения, положим, что планеты движутся
по круговым орбитам. Это предположение близко к действительно-
действительности, так как эксцентриситет1 е планетарных орбит мал: у Плуто-
Плутона е = 0,248; у Марса е = 0,093; у Земли е = 0,0167. На рисун-
рисунке 51 приведены для сравнения орбита Марса и окружность с
радиусом, равным длине большой полуоси его орбиты, вычерчен-
вычерченные в одном масштабе. Расхождение кривых, как видно, неве-
невелико.
По третьему закону Кеплера:
-4=-|-, E.1)
где T"i и Г2 — периоды обращения, a Ri и /?2 — радиусы круго-
круговых орбит планет.
При движении по круговой орбите тело обладает центростреми-
центростремиE.2)
тельным ускорением: /„ =©27?, или /„ = .
Отношение ускорений для двух различных планет:
h __ ^2 ^i
h ' 1 ^а
Подставив выражение E.1) в формулу E.2), получим:
h r\
1% Ri
1 Эксцентриситетом называют отношение расстояния от центра эллип-
эллипса до фокуса к величине большой полуоси. Для окружности е = 0, так как
фокус совпадает с центром.
91
Но ускорения планет в соответствии со вторым законом динамики
прямо пропорциональны действующим на них силам и обратно про-
пропорциональны их массам:
~F I?2'
ИЛИ
E.3)
F2 "" R\ '¦ R2
т. е. сила, действующая на планету со стороны Солнца (в данном
случае она и сообщает центростремительное ускорение), обратно
пропорциональна квадрату расстояния планеты от Солнца и прямо
пропорциональна ее массе. Так как это уверждение справедливо
для всех планет, то для любой из них
Лк = ?-^. E.4)
где т — масса планеты, R — ее расстояние от Солнца и k — коэф-
коэффициент пропорциональности, который не зависит от массы планеты,
так как он имеет одно значение для всех планет.
Согласно третьему закону динамики планеты должны действовать
на Солнце с равной по величине силой той же природы:
'сп — «1 ~ > E.5)
где М — масса Солнца, a kt — коэффициент пропорциональности,
не зависящий от массы Солнца.
Уравнения E.4) и E.5) написаны для силы взаимного притяже-
притяжения двух тел — силы, пропорциональной одновременно массе и
того и другого тела. Они и лежат в основе сформулированного Нью-
Ньютоном закона всемирного тяготения.
Между любыми двумя телами действует сила вза-
взаимного тяготения, пропорциональная массам тел и об-
обратно пропорциональная квадрату расстояния между
ними:
F =
где m,Hfflj — массы взаимодействующих тел, г — расстояние меж-
между их центрами, -\ — коэффициент пропорциональности, называе-
называемый гравитационной постоянной (от латинского слова gravitas —
тяжесть).
В законе всемирного тяготения Ньютоном был обобщен ряд част-
частных экспериментальных фактов (сравнение величины ускорений
92
Луны и предметов у поверхности Земли, особенности движения пла-
планет). Затем Ньютон показал, что в соответствии с теми же законами
Кеплера, а следовательно, под действием сил этого же типа движут-
движутся спутники планет Юпитера и Сатурна. Это позволило ему пред-
предположить, что закон тяготения обладает всеобщей применимостью.
Проверку этого предположения он произвел, исследовав движение
комет, а также движение Луны вокруг Земли, осложненное влия-
влиянием на нее Солнца. Многочисленные приложения закона всемир-
всемирного тяготения к задачам небесной механики показали его справед-
справедливость для взаимодействия звезд, планет, туманностей и других
небесных тел.
Многочисленные проверки в земных условиях показали, что
он справедлив для всех случаев взаимодействия тел.
Применяя закон всемирного тяготения, нельзя забывать, что
он установлен для тел, принимаемых за материальные точки, т. е.
для тел, размеры которых весьма малы по сравнению с расстоянием
между ними.
Если расстояние между телами сравнимо с их размерами, то мы
должны мысленно расчленить тела на малые элементы и найти ре-
результирующую силу тяготения между всеми попарно взятыми эле-
элементами. Это — сложная математическая задача, методы решения
которой разработаны математической физикой в так называемой
теории потенциала.
Однако для расчета сил тяготения между двумя шарообразны-
шарообразными однородными по плотности телами конечных размеров можно
применить формулу E.6), считая, что их масса сосредоточена в гео-
геометрических центрах. То же допустимо, если плотность сферических
тел меняется концентрическими слоями.
На вопрос о происхождении сил тяготения физика пока не может
дать ответа.
Ньютон считал, что способность тел, находящихся в разных точ-
точках пространства, притягивать или отталкивать друг друга есть
свойство, которое присуще самим телам (так же как, скажем, их
протяженность) и проявляется на расстоянии независимо от свойств
материи, заполняющей пространство между телами (гипотеза даль-
дальнодействия). Однако современная физика показала, что простран-
пространство между телами или частицами заполнено особой материальной
средой (абсолютно пустое пространство в мире отсутствует) и дейст-
действие тел друг на друга осуществляется в результате их взаимодей-
взаимодействия с промежуточной средой. Эта, пока детально неизвестная нам
по своей природе и структуре материальная среда, заполняющая
мировое пространство между частицами и телами, называется по-
полевой формой материи.
Если в пространство, заполненное материей в полевой форме,
внести частицу или тело, то среда приходит в особое состояние и сама
воздействует на тело. Если в ту же область пространства внести
второе тело, то оно в свою очередь будет взаимодействовать со сре-
93
дой. Характер воздействия среды на оба тела определяется суммой,
возмущений, созданных в ней этими телами. Таким образом, возни-
возникает как бы цепочка взаимодействий: первое тело — среда — второе
тело — среда — первое тело. Изучая действие одного тела на дру-
другое, мы фактически изучаем действие, обусловленное возмуще-
возмущением среды, которое создают эти тела, но говорим, что одно тело
действует на другое. Так, например, мы считаем, что два массив-
массивных тела действуют друг на друга по закону всемирного тяготения,
что два электрических заряда взаимодействуют по закону Кулона
и т. д. При этом мы не рассматриваем неизвестные нам взаимодей-
взаимодействия среды и тел, изучая лишь их результат.
Но можно поступить иначе: считать, что свойства среды, запол-
заполняющей пространство, зависят от наличия в нем тел, и приписать
каждой точке пространства определенную количественную харак-
характеристику этого свойства. Так, пространство, в каждой точке ко-
которого на тело действует некоторая сила, называется динамическим
полем. В частности, пространство, в котором действует сила тяго-
тяготения, созданная телом или системой тел, называется гравитацион-
гравитационным полем или полем тяготения. Поле тяготения Земли часто назы-
называют полем силы тяжести. Каждая точка динамического поля ха-
характеризуется величиной, которая носит название напряженности.
Напряженностью поля тяготения называется сила, которая дейст-
действует на тело с массой, равной единице, помещенное в данную точку
поля.
В соответствии с законом всемирного тяготения, если масса ша-
шарообразного однородного тела, создающего поле, равна М (ска-
(скажем, масса Земли), то напряженность поля тяготения:
? = 7—. E.7)
где г — расстояние от центра масс тела до данной точки простран-
пространства. Напряженность — векторная величина.
Поле, в котором напряженность при переходе от точки к точке
остается постоянной, называется однородным. Вблизи поверхности
Земли сила тяжести практически постоянна, поэтому в некоторых
пределах изменения высоты тела над Землей поле силы тяжести
можно считать однородным.
§ 2. ГРАВИТАЦИОННАЯ ПОСТОЯННАЯ
Легко видеть, что если считать гравитационную постоянную f
в выражении E.6) безразмерной величиной, то размерности правой
и левой частей равенства E.6) не совпадут. Действительно, раз-
размерность левой части равенства^] = [MLT~2], а правой \4hHh.\ —
I г2 I
= [M2L 2]. Следовательно, чтобы равенство E.6) было справед-
справедливо независимо от выбора единиц входящих в него величин, или,
94
что то же, размерность обеих частей равенства была бы одинаковой,
гравитационная постоянная т должна быть величиной размерной,
а именно:
т. е. размерность
[¦[] = м-чзг-2.
Рнс. 52. Опыт Кавендиша.
Если положить trii = 1. т2 = 1» г ~ 1. то -f = Л т. е. гравита-
гравитационная постоянная f численно равна силе, с которой два тела еди-
единичной массы притягиваются, на-
находясь на расстоянии, равном еди-
единице.
Численное значение -\ было впер-
впервые найдено Кавендишем A798г.).
Чтобы определить значение гра-
гравитационной постоянной, надо из-
измерить силу притяжения двух тел,
массы которых известны, а также
известно расстояние, их разделя-
разделяющее. Трудность такого 'метода
в том, что силы, практически дей-
действующие между телами, в любом
эксперименте очень малы. Опыт
Кавендиша состоял в следующем
(рис. 52). В ящике, установленном на прочном фундаменте и за-
защищенном от колебаний воздуха, на легко вращающейся в его крыш-
крышке оси укреплялся горизонтальный стержень. На концы стержня
были насажены два одинаковых свинцовых шара с массами М4 =
== М2 = 158 кг. Под стержень на неподвижной головке укреплялась
упругая нить, несущая тонкий стержень с двумя небольшими свин-
свинцовыми шариками на концах массой nil = т2 = 730 г. Большие
шары приближались к малым; вследствие их взаимодействия (при-
(притяжения) нить закручивалась на некоторый угол, при котором си-
сила тяготения уравновешивалась силой упругости закрученной
нити. Угол закручивания измерялся с помощью оптических отсчет-
ных трубок Bi и В2. Зная харак-
характеристики упругих свойств под-
подвеса, можно по измеренному уг-
углу поворота стержня найти воз-
возникающие силы притяжения.
Зная массы и силу тяготения,
нетрудно определить значение-f.
Опыт Кавендиша неоднократ-
неоднократно повторялся в различных ва-
вариантах. Более точное значение
Рис. 53. Опыт Жоли-Рихарда. f определено методом Жоли —
95
Рихарда A898 г.) (рис. 53). На коромысле весов, установленных на
массивной свинцовой плите (как показано на рисунке), подвеши-
подвешиваются шарик и груз равной массы. Они должны уравновешивать
друг друга, но один из них (груз) находится над свинцовой плитой,
а другой (шар) — под ней. Поэтому коромысло весов отклоняется —¦
гири перевешивают. По величине отклонения можно найти ве-
величину силы притяжения грузов к плите и величину f.
Найдено, что в системе СГС
т = 6,670- Ю-8 см3 г-1 сект";
возможная абсолютная ошибка + 0,01 • 10~8.
§ 3. НЕКОТОРЫЕ ПРИМЕНЕНИЯ ЗАКОНА ВСЕМИРНОГО
ТЯГОТЕНИЯ
Используя закон всемирного тяготения, можно определить мас-
массу Земли. Впервые идея измерения массы Земли путем сравнения
ее с известной массой горы бы-
была предложена Ньютоном, а осу-
осуществлена Буге в 1736 г.
Более точные данные о мас-
массе Земли были получены мето-
методом Жоли. Для этого рычажные
весы устанавливаются на краю
шахты (рис. 54) и уравновеши-
уравновешиваются на верхних чашках те-
телами равной массы т. Правый
груз из верхней чашки перено-
переносится затем на нижнюю. Так как
при этом расстояние до него от
центра Земли уменьшается, то
сила тяготения возрастает, и,
чтобы вновь уравновесить весы, надо на левую чашку добавить
перегрузок. Если вес груза р, а вес перегрузка q, то
Mm _ о
. E.8)
¦т.,
Рис. 54. Определение величины
массы Земли методом Жоли.
R, приближенно
Mm
или, так как AR
Для нахождения i к нижнему грузу приближают массивный шар
(масса mi). Если расстояние между центрами масс d, то, чтобы
вновь уравновесить весы, надо добавить на левую чашку перегрузок
весом п:
п =
96
Отсюда
7
Подставив в равенство E.8) найденное значение f, получим,
решая его относительно массы Земли:
М= (Р + Ч)^\ E.9)
nd2
Масса Земли М оказывается равной 6 • 1027 г.
Зная массу Земли и ее объем, можно найти среднюю плотность
Земли:
м м
р
рср = 5,52 г/см*.
Плотность верхних слоев Земли, определенная по плотностям
пород, слагающих эти слои, равна 2,8 г/см3. Плотность центрального
ядра земного шара ря = 11 — 13 г/см3.
На тело, находящееся у поверхности Земли, действует сила при-
притяжения со стороны Земли и сила притяжения со стороны ближайших
космических тел (Луна, Солнце). Но вследствие значительного уда-
удаления этих тел сила притяжения Луны составляет менее ,а
Солнца доли земного притяжения.
16000000 v
Сила притяжения, если считать Землю однородной, должна
изменяться от полюса к экватору. Это вызвано некоторой сплющен-
сплющенностью Земли по меридиану и, как увидим ниже, ее вращением. Но
в Земле, и в частности в верхних доступных исследованиям слоях,
масса распределена неравномерно (плотности пород, слагающих
эти слои, различны), и местные значения силы притяжения тел
Землёй сильно отличаются от теоретических. Расхождение между
фактическим значением силы тяжести и вычисленным для так назы-
называемого нормального сфероида в данном месте Земли носит назва-
название аномалии.
Измерение аномалий позволяет судить о скоплениях в коре Зем-
Земли тяжелых или легких пород и вести гравитационную геологиче-
геологическую разведку.
Из закона всемирного тяготения следует, что все тела у поверх-
поверхности Земли должны падать с одинаковым ускорением и что вес
тела должен меняться с высотой.
В самом деле, согласно второму закону динамики ускорение
тела массы т под действием силы F равно:
/= —•
т
4М. М. Архангельский 97
По закону тяготения сила притяжения тела Землей:
n Mm
и, следовательно,
м
E.10)
Ускорение свободного падения в данном географичес-
географическом пункте Земли при отсутствии сопротивления среды
для всех тел одно и то же.
Сила, с которой тело притягивается к Земле, зависит от расстоя-
расстояния между центрами Земли и тела. Если тело находится на высоте
h над поверхностью Зещи, то сила притяжения (и вес тела) равна:
Вес тела на поверхности Земли:
^ Mm
Следовательно,
Go ~~ (R + h)* '
или, так как R > h,
Gfi R% 1 ^^ , q Л
"ё» ~ К» + 2ЯА ~ ft ~ ~ Т*
Полагая # ^; 6000 /еж, a h = 6 /елг, получим:
^ = 1 — 0,002, E.11)
т. е. на высоте Эльбруса вес уменьшается примерно на 0,002 своей
величины на уровне моря.
Г Л А В А VI
МЕХАНИЧЕСКИЕ СИСТЕМЫ
§ 1. МЕХАНИЧЕСКИЕ СИСТЕМЫ. ЦЕНТР МАСС
До сих пор мы изучали взаимодействие двух тел и часто, рас-
рассматривая движение одного тела, заменяли другое, с которым пер-
первое взаимодействует, соответствующей силой. Но изучение законов
движения одного или двух тел не исчерпывает всех возможных за-
задач о механическом движении, с которыми мы сталкиваемся при изу-
изучении природы или в технике. Нередко приходится иметь дело
с движением совокупности взаимодействующих между собой тел
или с движением, как говорят, механической системы. Пример
механических систем: любая машина, тепловоз с вагонами, Солнце
и планеты, ракетный поезд и т. п., а также любое тело, если в дан-
данной задаче его приходится рассматривать как совокупность час-
частиц.
Если движение таково, что размеры и форма отдельных тел,
образующих систему, не играют роли, то рассматривается задача о
движении системы материальных точек.
Силы, действующие между телами системы, называются внут-
внутренними для данной системы силами, например сила взаимодейст-
взаимодействия ракеты и газов, силы взаимного тяготения планет и Солнца.
Силы, действующие на тела системы со стороны тел, не входя-
входящих в данную систему, называются внешними силами, например
сила притяжения к Земле, действующая на ракету и газы, сила сцеп-
сцепления колес трактора и плуга с Землей и т. п. Одна и та же сила в
зависимости от постановки задачи может быть внутренней или внеш-
внешней. Силы взаимного притяжения планет и Солнца — внутренние
силы, если мы рассматриваем солнечную систему как целое, и внеш-
внешние по отношению к каждой отдельно взятой планете, когда, скажем,
мы решаем задачу о движении Земли и Луны, о приливных явле-
явлениях на поверхности Земли и т. п.
Под воздействием сил каждая из материальных точек системы,
вообще говоря, как-то изменяет состояние своего движения, пере-
перемещаясь относительно других точек. Чтобы исследовать движе-
4* 99
ние системы в целом, надо, очевидно, исследовать движение каждой
ее точки. Мы могли бы воспользоваться для этого законами Ньютона,
составить уравнения движения каждой точки системы и решить их.
Но такой путь решения задачи о движении системы часто оказывает-
оказывается весьма сложным либо вследствие того, что трудно определить
внутренние силы в виде известной функции (например, при быстро
протекающих взаимодействиях тел типа удара), либо потому, что
исследуемая система состоит из очень большого числа материаль-
материальных точек (например, при исследовании дви-
М жения некоторого объема жидкости). Однако
^^-9''"т!'г в ряде случаев, как увидим дальше, оказыва-
^-''" \ ется возможным обойти эти затруднения.
*s} \ Введем понятие центра масс системы тел. В
\ элементарной физике вводится понятие центра
© тяжести как точки приложения равнодейству-
\ ющей сил тяжести, действующих на элементы
т1 = п* тел. Введем более общее понятие, не завися-
р , „ щее от силы тяжести, — центр масс системы,
нию центра масс^ма- Центром масс двух материальных
териальных точек: точек называется точка, делящая
о-центрмасст», m,-,<g>- расстояние между ними в отноше-
центр масс т„ т2 и т,. HUU, ОбрптНО ПрОПОрЦпОНпЛЬНОМ UX
массам (рис. 55).
Пусть имеем две материальные точки массой т1 и т2, коорди-
координаты которых в неподвижной системе отсчета соответственно а, уь
г{ и х2, уг, г2. По известному правилу аналитической геометрии
координаты точки х, у, г, делящей отрезок в заданном отношении
—-, связаны с координатами концов отрезка следующим соотно-
соотношением:
-?2 — * mi t Уг — У mi ^ z% — z tn±
х — Xi m2 у — yx m2 ' z — zl m.z
Решая эти равенства относительно х, у, г, получим:
Tt%\ Xi —\~ tflnXn ttt\ У* —\— fft<>y л
~ т -L-m ' ^ ~~ п
FЛ)
г— тл + т2?г . F 2)
т1 -f- m2
Центром масс трех материальных точек называ-
называется точка, которая делит расстояние между цен-
центром масс двух из них и третьей точкой в отноше-
отношении, обратно пропорциональном сумме масс двух пер-
первых точек и массе третьей из них (рис. 55).
100
Легко получить координаты центра масс трех материальных
точек подобно тому, как это сделано выше для двух точек:
mlyl -f m2y2 + т3у3
;
х = ; у =
/7Z| -j- /722 -f- tTlA ttl^ -}- /7Z2 -j-
Z —
m1 + /n2 + m3
Прибавляя к системе четвертую, пятую и т. д. точки, получим,
что координаты центра масс системы п материальных точек:
_ mLX! + щх2 + ¦ ¦ • + т„хп _ ZirijXt .
+ + S
fity -}- /?Z2 ~f" ' '
yc = ^-; F.4)
Hi fit [ZI
2 == __ #
§ 2. КОЛИЧЕСТВО ДВИЖЕНИЯ СИСТЕМЫ ТЕЛ.
ЗАКОН СОХРАНЕНИЯ КОЛИЧЕСТВА ДВИЖЕНИЯ
Рассмотрим действие друг на друга двух изолированных тел,
не взаимодействующих с другими телами. Будем считать силы во
все время взаимодействия постоянными. В соответствии со вторым
законом динамики изменение количества движения первого тела
A(mv)i равно импульсу силы Fi2, действующей на него со стороны
второго тела:
Д (ml), = FnMv F.5)
где At — интервал времени взаимодействия.
Изменение количества движения второго тела:
Д(туJ = Ftl&tt, ¦ F.6)
где F2i — сила, действующая со стороны первого тела на второе.
Согласно третьему закону Ньютона:
'12 = '21
и, кроме того, очевидно,
Д^ = At2 = At.
Следовательно,
Д (my)j = — Д {mv).2, F.7)
или
Д (ту)! + Д (тиJ = 0. F.8)
Независимо от природы сил взаимодействия и дли-
длительности их действия общее количество движения
двух изолированных тел остается постоянным.
101
Полученный результат может быть распространен на силы, ме-
меняющиеся со временем, и на любое число взаимодействующих тел.
Для этого интервал времени At, в течение которого происходит вза-
взаимодействие тел, разобьем на столь малые промежутки dt, в тече-
течение каждого из которых силу можно с заданной степенью точности
считать постоянной. В течение каждого промежутка времени будет
выполняться соотношение F.8). Следовательно, оно будет справед-
справедливо и для всего интервала времени At.
Для обобщения вывода на п взаимодействующих тел введем по-
понятие замкнутой системы.
Замкнутой называется система тел, для которой результирующая
внешних сил равна нулю.
Пусть п материальных точек с массами /пь /п2, ..., тп образуют
замкнутую систему. Изменение количества движения каждой из
этих точек в результате взаимодействия ее со всеми остальными точ-
точками системы соответственно:
d(mv){, d(mvJ; ...; d{mv)n.
Обозначим внутренние силы, действующие на точку с массой т1
со стороны других точек, через Fi2, Fi3, ..., Fin, на точку с массой
™>i — F2u -^2з> •••> F2Л и т. д. (Первый индекс обозначает точку, на
которую действует сила, второй индекс указывает точку, со стороны
которой действует сила.)
Запишем в принятых обозначениях второй закон динамики для
каждой точки в отдельности:
= (Fn + /lg + ...+ Fln) dt;
= (F21 + F2S +... + F2n) dt;
d Й, = (Fai + F3, + • •. + ?„) dt; F.9)
d (mv)n = {Fnl + Fn2 -f... + Fnt „_!) dt.
Число уравнений равно числу п тел системы. Чтобы найти общее
изменение количества движения системы, нужно подсчитать геоме-
геометрическую сумму изменений количества движения всех точек систе-
системы. Просуммировав равенства F.9), мы получим в левой части пол-
полный вектор изменения количества движения системы за время dt,
а в правой части — элементарный импульс результирующей всех
сил, действующих в системе. Но так как система замкнута, то ре-
результирующая сил равна нулю. В самом деле, по третьему закону
динамики каждой силе Flk в равенствах F.9) соответствует сила
Fki, причем
Fik = — Fk,, т. е. F12 = — Fn, F23 = — /32, F1S = — F31 и т. д.,
и результирующая этих сил равна нулю. Следовательно, во всей
102
замкнутой системе изменение количества движения равно нулю:
п п
Yid{mv)l=dYi{mv)l = O, F.10)
или
п
^] (mv)l = const. F.11)
Полное количество движения замкнутой системы—
величина постоянная во все время движения (закон
сохранения количества движения).
Закон сохранения количества движения — один из фундамен-
фундаментальных законов физики, справедливый как для систем макроско-
макроскопических тел, так и для систем, образованных микроскопическими
телами: молекулами, атомами и т. п.
Если на точки системы действуют внешние силы, то количество
движения, которым обладает система, изменяется.
Напишем уравнения F.9), включив в них результирующие
внешних сил/ч, F2, F3, ..., Fn, действующих соответственно на
первую, вторую и т. д. до n-й точки:
d (mu\ = (F12 + /„ + ...+ /1Я) dt + h dt;
d (mvJ = {F21 + Л» + • • • + Л„) dt + Fa dt;
d{mvK = {F31 + F32 + ... + Fsn)dt + Fa dt; F.12)
d (mv)n = {Fnl + f „a + ... + f B> „_,) dt + Fn dt.
Сложив левые и правые части уравнений, мы получим: слева
полный вектор изменения количества движения системы; справа
импульс результирующей внешних сил:
d 2j (mv)i =
или, обозначая результирующую внешних сил F:
п
d Yi {mv)l = Fdt, F.13)
т. е. изменение полного количества движения системы
тел равно импульсу результирующей внешних сил.
Равенство F.13) может быть записано в другом виде:
Л V inw\\ = F F-14)
dt ^ к и\ '
i=\ )
т. е. производная по времени от общего количества дви-
103
жения системы точек равна результирующей внешних
сил, действующих на точки системы.
Проецируя векторы количества движения системы и внешних
сил на три взаимно перпендикулярные оси, вместо векторного ра-
равенства F.14) получим три скалярных уравнения вида:
I'-1
А.
dt
р
* V
р
F.15)
Если вдоль какой-либо оси, скажем оу, составляющая резуль-'
тирующей внешних сил равна нулю, то количество движения вдоль
этой оси не изменяется, т. е. , будучи вообще незамкнутой, в направ-
направлении оу система может рассматриваться как замкнутая.
Мы рассмотрели передачу механического движения от одних
тел к другим без перехода его в другие формы движения материи.
Величина чти оказывается здесь мерой просто перенесенного, т. е.
продолжающегося, движения...»1.
Применение закона изменения количества движения к задаче
о движении системы тел позволяет исключить из рассмотрения все
внутренние силы, что упрощает теоретические исследования и ре-
решения практических задач.
m,v,
a S
Рис. 56. Сохранение количества движения в системе
человек—тележка.
1. Пусть на покоящейся тележке неподвижно стоит человек
(рис. 56, а). Количество движения системы человек—тележка рав-
равно нулю. Замкнута ли эта система? На нее действуют внешние силы—
сила тяжести и сила трения между колесами тележки и полом.
Вообще говоря, система не замкнута. Однако, поставив тележку
1 Ф. Энгельс, Диалектика природы, Госполитиздат, 1946, стр. 68.
104
на рельсы и соответствующим образом обработав поверхность рель-
рельсов и колес, т. е. значительно уменьшив трение между ними, мож-
можно силой трения пренебречь.
Сила тяжести, направленная вертикально вниз, уравновеши-
уравновешивается реакцией деформированных рельсов, и результирующая этих
сил не может сообщить системе горизонтального ускорения, т. е.
не может изменить скорость, а следовательно, и количество дви-
движения системы1. Таким образом, мы можем с известной степенью
приближения считать данную систему замкнутой.
Положим теперь, что человек сходит с тележки влево (рис. 56, б),
имея скорость и4. Чтобы приобрести эту скорость, человек должен,
сократив свои мышцы, подействовать ступнями ног на площадку
тележки и деформировать ее. Сила, действующая со стороны дефор-
деформированной площадки на ступни человека, сообщает телу человека
ускорение влево, а сила, действующая со стороны деформированных
ступней человека (в соответствии с третьим законом динамики), сооб-
сообщает тележке ускорение вправо. В результате, когда взаимодействие
прекратится (человек сойдет с тележки), тележка приобретет не-
некоторую скорость v2.
Для нахождения скоростей и4 и v2 с помощью основных зако-
законов динамики надо было бы знать, как меняются силы взаимодей-
взаимодействия человека и тележки со временем и где приложены эти силы.
Закон сохранения количества движения позволяет сразу найти от-
отношение скоростей человека и тележки, а также указать их взаим-
взаимную направленность, если известны значения масс человека т{ и
тележки т2.
Пока человек неподвижно стоит на тележке, общее количество
движения системы равно нулю. С точностью, позволяющей пре-
пренебречь действием внешней силы трения, после того как человек
сходит с тележки со скоростью иь количество движения системы
остается равным нулю:
m1v1 -f- tn2v2 = 0.
Отсюда
Щ щ
или
Скорости, приобретенные человеком и тележкой, обратно про-
пропорциональны их массам. Знак минус указывает на их противопо-
противоположную направленность.
1 Так как массы тел, образующих систему, постоянны, то количество
движения системы может меняться только при изменении скоростей тел.
105
2. Если человек, двигаясь со скоростью vu вбегает на неподвиж-
неподвижно стоящую тележку и останавливается на ней, то тележка прихо-
приходит в движение, так что общее количество движения ее и человека
оказывается равным количеству движения, которым обладал рань-
раньше человек один:
m1v1 = (tn1 -f- щ) Щ-
3. Человек, движущийся со скоростью vit вбегает на тележку,
перемещающуюся ему навстречу со скоростью v2, и останавливается
на ней. Далее система человек — тележка движется с общей ско-
скоростью v. Общее количество движения человека и тележки равно
сумме количеств движения, которыми они обладали каждый в от-
отдельности:
4. Использовав то обстоятельство, что тележка может переме-
перемещаться только вдоль рельсов, можно продемонстрировать вектор-
векторный характер изменения количества движения. Если человек вхо-
входит и останавливается на неподвижной до этого тележке один раз
вдоль направления возможного ее движения, второй раз — под уг-
углом 45°, а третий — под углом 90° к этому направлению, то во вто-
втором случае скорость, приобретенная тележкой, примерно в полтора
раза меньше, чем в первом (cos 45°;^0,7), а в третьем случае те-
тележка неподвижна (cos 90°=0).
§ 3. ДВИЖЕНИЕ ЦЕНТРА МАСС МЕХАНИЧЕСКОЙ СИСТЕМЫ
Покажем, что поступательное движение механической системы
как целого можно характеризовать движением одной точки — цент-
центра масс системы, считая, что в ней сосредоточена масса всех тел,
входящих в систему.
Перепишем равенства F.4) в виде:
хс Sm; = Е (mxjt'y
ус1т, = Е(ту),; F.16)
гс Т,т1 — Е
продифференцируем по времени:
(Em,) SSL = E mt Sfi .
1 dt \ ' dt J
В равенствах F.17) слева стоит произведение суммарной массы
dxc dyc dzc
dt ' dt ' ~d~t '
представляющих собой слагающие скорости движения центра масс
тел Zml = М, образующих систему, и компонент
dt dt dt
106
системы по осям координат, а справа — компоненты вектора пол-
полного количества движения тел системы:
Mvc=
F.18)
Полное количество движения механической системы
равно количеству движения материальной точки с мас-
массой, равной массе тел системы и движущейся, как дви-
движется ее центр масс.
Продифференцируем равенство F.18) по времени и сравним с
выражением F.14). В равенстве F.18) после дифференцирования
справа, а в равенстве F.14) слева стоит одна и та же величина —
производная от вектора полного количества движения тел системы.
Следовательно,
^; F.19)
at
где (Mv )— количество движения центра масс системы, F — век-
вектор результирующей внешних сил, действующих на тела системы.
Центр масс механической системы движется так
же, как двигалась бы материальная точка, в которой
сосредоточена масса всех тел системы, под действием
результирующей внешних сил, приложенных к телам,
образующим систему.
Если механическая система замкнута, т. е. F = 0, то
Mvc = const.
Центр масс замкнутой механической системы нахо-
находится в покое или движется равномерно и прямолинейно.
Закон движения центра масс механической системы не дает пол-
полной картины движения отдельных ее тел, но позволяет установить
некоторые важные особенности движения системы в целом.
Рассмотрим, например, движение солнечной системы. С боль-
большой степенью точности ее можно считать
замкнутой, пренебрегая взаимодействием с
другими космическими телами. Следова-
Следовательно, центр масс солнечной системы мож-
можно считать движущимся прямолинейно и
равномерно.
Рассмотрим твердое тело, находящееся
в покое. Положим, на него одновременно
подействовали двумя силами, равными по
величине, но противоположно направлен-
направленными и приложенными в двух точках А и
В, не совпадающих с центром масс (рис. 57.) Рис- 57- Тело П°Д Дейст-
Такая система сил называется парой сил. То
Каков характер движения тела? масс.
107
Результирующая приложенных к телу внешних сил равна нулю.
Следовательно, центр масс тела должен остаться в покое. Тело,
одна точка которого неподвижна, может, очевидно, только вращать-
вращаться вокруг этой точки. -И, следовательно, тело под действием при-
приложенной пары сил будет поворачиваться вокруг центра масс С.
Иногда, руководствуясь только интуицией, приходят к ошибоч-
ошибочному заключению, что в описанном случае тело должно вращаться
вокруг точки О, расположенной между точками приложения пары
сил.
§ 4. ДВИЖЕНИЕ ТЕЛ ПЕРЕМЕННОЙ МАССЫ.
ТРУДЫ МЕЩЕРСКОГО
В природе и в современной технике мы нередко сталкиваемся
с движением тел, масса которых меняется со временем. Масса Земли
возрастает вследствие падения на нее метеоритов, масса метеорита
при полете в атмосфере уменьшается в результате отрыва или сго-
сгорания его частиц, масса дрейфующей льдины возрастает при намер-
намерзании и убывает при таянии и т. д. Движение якоря с якорной цепью
когда все большее число звеньев цепи сходит с лебедки, — пример
движения тела переменной массы, ракеты всех систем, реактивные
самолеты, реактивные снаряды и мины также являются телами,
масса которых изменяется во время движения.
Общие законы динамики тел с переменной массой были открыты
и исследованы И. В. Мещерским и К- Э. Циолковским. Циолков-
Циолковским были разработаны фундаментальные проблемы реактивной
техники, которые в наши дни служат основой для штурма человеком
межпланетных пространств.
Для вывода основного уравнения движения тела переменной
массы рассмотрим конкретный случай движения простейшей ра-
ракеты (рис. 58).
Мы будем рассматривать ракету как достаточно малое тело,
положение центра тяжести которого не меняется по мере сгорания
пороха. В этом случае мы можем считать ракету материальной точ-
точкой переменной массы, совпадающей с центром тяжести ракеты.
Не рассматривая физико-химическую природу сил, возникаю-
возникающих при отбрасывании от
У ~ ) ракеты газов, образованных
при сгорании пороха, сде-
сделаем такое упрощающее
вывод предположение: бу-
будем считать, что отбрасы-
Рис. 58. Схема ракетного порохового ваемая ОТ ракеты частица
снаряда: газа dM взаимодействует
А — взрыватель; В — граната со взрываемым С рЭКеТОЙ М ТОЛЬКО В МО-
веществом; ^-лорохов- реактивная камера; MeHJ их непосредственного
С
108
контакта. Как только частица dM приобретает скорость относитель-
относительно точки М, ее воздействие на нее прекращается. Предположим
далее, что изменение массы ракеты М происходит непрерывно,
без скачков. (Это значит, что мы не рассматриваем многоступен-
многоступенчатые ракеты, масса которых меняется скачкообразно.) Это пред-
предположение позволяет считать, что существует производная от мас-
массы по времени.
Пусть в момент t масса ракеты М, а ее скорость относительно
неподвижной системы координат v (рис. 59). Положим, за время dt
от ракеты отделилась частица массы (— dM)
со скоростью (относительно той же неподвиж-
ной системы координат), равной и. онак минус
перед приращением массы указывает на то, что
приращение это отрицательное, масса ракеты
убывает.
Положим, равнодействующая внешних сил,
действующих на ракету (силы тяжести и соп-
сопротивления среды), F. Как сказано выше, в
момент отделения частицы массы (— dM) меж-
между ней и ракетой действует неизвестная нам ре- Рнс 59. К выводу
активная сила Fp. Сила Fp для системы раке- Уравнения движе-
та — частица является внутренней. Чтобы ис- ""^о^масхы?16""
ключить ее из рассмотрения, воспользуемся за-
законом изменения количества движения. Количество движения си-
системы ракета — частица в момент t, т. е. перед отделением частицы:
Ро = Mv.
Количество движения системы в момент t -\- dt (после отделения
частицы) складывается из количества движения массы [М —
— (dM) ], получившей скорость (и + dv), и количества движения
массы частицы — dM, летящей со скоростью и:
Р х= [М — (— dM)] (v -f dv) -f (— dM) . и. F.20)
Изменение количества движения системы за время dt:
др = [М + AM] (v -f dv) — dMu — Mv= vdM — ~u dM -f M dv
(мы отбросили член второго порядка малости dM • dv) Величина
АР должна быть приравнена импульсу равнодействующей внешних
сил: -
Mdv — udM-\-vdM = Fdt. F.21)
Отсюда, перегруппировав члены и разделив на dt, получим ос-
основное уравнение движения точки переменной массы:
= F 4- (и — v) —. F.22)
dt ] ' dt к '
109
Это уравнение иначе называют уравнением Мещерского. Для ра-
кеты — < 0, так как при полете масса ее убывает. Если масса те-
dt
ла во время движения увеличивается, то > 0. При ¦— = 0,
dt dt
уравнение F.22) переходит в уравнение C.6) второго закона
Ньютона для случая постоянной массы. Величина и — v есть ско-
скорость выбрасываемых ракетой частиц относительно системы коор-
координат, движущейся с ракетой. Эту скорость называют обычно просто
относительной скоростью V. Тогда равенство F.22) запишется в
виде:
F + ?^. F.23)
dt dt
Второй член правой части равенства F.23) представляет Собой реак-
реактивную силу, действующую на массу М со стороны вылетевшей час-
частицы dM.
Для любого момента времени произведение массы
тела на его ускорение равно векторной сумме равно-
равнодействующей приложенных к телу внешних сил и ре-
реактивной силы. При движении ракеты вблизи Земли равнодейству-
равнодействующая внешних сил представляет собой сумму силы тяжести и силы
сопротивления воздуха. Ускорение ракеты зависит еще и от реак-
реактивной силы, изменяя величину и направление которой можно уп-
управлять полетом ракеты.
Если относительная скорость отбрасываемых частиц равна нулю:
V = « — и = 0, то из формулы F.22) следует:
М ^ = F, F.24)
т. е. если относительная скорость отбрасываемых частиц равна нулю,
то уравнение движения точки переменной массы имеет формально
тот же вид, что и для точки постоянной массы, но в этом случае мас-
масса М — функция времени t.
Г Л А В А VII
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
§1. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ. МЕХАНИЧЕСКИЙ ПРИНЦИП
ОТНОСИТЕЛЬНОСТИ
До сих пор мы рассматривали механическое движение относи-
относительно тел отсчета, жестко связанных с Землей, которую считали
неподвижной.
Естественно поставить вопрос: будут ли законы динамики, полу-
полученные для систем отсчета, связанных с неподвижными телами, спра-
справедливы для систем отсчета, связанных с движущимися телами?
Какие поправки и когда мы должны ввести в эти законы, чтобы
учесть вращение Земли и движение ее по орбите?
Рассмотрим наиболее простой случай: движение тела относи-
относительно равномерно и прямолинейно движущихся систем отсчета.
На палубе равномерно и прямолинейно движущегося вдоль берега
корабля перемещается известным образом тело. Различается ли
(и как) его движение относительно системы отсчета, связанной с
палубой корабля, и системы, связанной с Землей?
Первую систему принято называть «подвижной», вторую —
«неподвижной» или «основной». Выбор той или иной системы в ка-
качестве неподвижной, конечно, условен, и с кинематической точки
зрения любая из этих двух систем может быть принята за непод-
неподвижную. Однако в условиях нашей задачи именно корабль, а не
берег — то тело отсчета, которое получает и расходует энергию
для поддержания неизменным состояния механического движения.
Естественно поэтому считать связанную с ним систему подвижной.
Движение тела в подвижной системе отсчета (палуба корабля)
называют относительным движением, а в условно неподвижной
(линия берега) — абсолютным движением; наконец, движение тела
относительно неподвижной системы отсчета, которым оно обладало
бы, будучи жестко связано с одной из точек подвижной, называется
переносным.
Обозначим координаты точки в неподвижной системе х, у, г;
ее координаты в подвижной системе х', у', г''. Положим, подвиж-
111
ная система перемещается прямолинейно относительно неподвиж-
неподвижной с постоянной скоростью v0.
Для простоты рассуждения будем считать, что в момент t = О
оси обеих систем отсчета совпадают и оси абсцисс направлены
вдоль скорости v0 (рис. 60). Тогда в любой момент времени коор-
координаты движущейся точки в
системах х, у, г и х', у', г'
связаны соотношением:
x = *4-v, y=y'; z=z', G.1)
где х0 = vot.
Эти соотношения называ-
называются галилеевыми преобразо-
преобразованиями координат. Они поз-
позволяют перейти от координат
движущейся точки в одной
системе к ее координатам в
другой системе, если системы
движутся друг относительно
Рис. 60. Инерциальные системы друга равномерно И прямо-
отсчета. линейно со скоростью и0.
Чтобы найти связь между
составляющими скоростей точ-
точки в той и другой системах (между составляющими скоростей аб-
абсолютного, относительного и переносного движений), надо продиф-
продифференцировать выражения G.1) по времени. Так как х, у, z я х',
у', г' — функции времени, a v0 от времени не зависит, то после диф-
дифференцирования получим:
vx = v'x-{-v0\ vy = vy\ vt = v't. G.2)
Продифференцировав по времени еще раз, получим связь
между составляющими ускорения:
; ;' . ; ;' . ; ;' /7 Ч\
1х ~ }х • )у ~ ly 1z— h- \'-6)
Уравнения G.2) и G.3) в векторной форме запишутся так:
и = и'+и0) G.4)
' ] = I'. G.5)
1. Абсолютная скорость v движущейся точки равна векторной
сумме относительной скорости v' и переносной скорости v0.
2. Абсолютное ускорение равно относительному. Следовательно,
ускорение одного и того же тела в каждый момент времени одина-
одинаково во всех системах отсчета, движущихся равномерно и прямо-
прямолинейно друг относительно друга.
Первый вывод вполне подтверждается нашим повседневным опы-
опытом. Например, абсолютная скорость перемещения человека,иду-
112
щего по палубе движущегося вдоль берега парохода, складывается
из относительной скорости перемещения человека по палубе и пере-
переносной скорости вместе с пароходом относительно берега. Второй
вывод не так самоочевиден, но легко понять, что поскольку ско-
скорость движения парохода постоянна, то некоторое изменение ско-
скорости относительного движения человека вызовет такое же изме-
изменение его скорости в абсолютном движении.
Во всех системах отсчета, перемещающихся друг относительно
друга равномерно и прямолинейно, первый и второй законы Ньюто-
Ньютона справедливы в полученных нами ранее формулировках.
Системы отсчета, движущиеся друг относительно друга равномер-
равномерно и прямолинейно, называются инерциальными или галилеевыми.
Как мы видели (гл. 6, § 3), общий центр масс тел, образующих зам-
замкнутую систему, движется равномерно и прямолинейно. Следова-
Следовательно, инерциальные системы отсчета связаны с телами отсчета
(точнее, с центрами масс), образующими в данных условиях замкну-
замкнутую систему.
Значение таких систем отсчета для изученья механического дви-
движения определяется тем, что в них ускорения тел однозначно опре-
определяются взаимодействиями между телами. В системе отсчета, дви-
движущейся ускоренно, тело, находящееся под действием сил, будет
двигаться с ускорением, которое зависит не только от этого дейст-
действия, но также и от ускорения системы отсчета. Последнюю зависи-
зависимость мы рассмотрим в следующем параграфе.
Строго говоря, инерциальные системы отсчета представляют со-
собой абстракцию, поскольку в природе нет тел, абсолютно изоли-
изолированных от внешних воздействий. Системы отсчета, связанные с
реальными телами, могут рассматриваться как инерциальные лишь
приближенно. Так практически с большой степенью точности можно
считать инерциальной систему отсчета, связанную с центром масс
солнечной системы, поскольку воздействием космических масс
на тела солнечной системы можно пренебречь. Вследствие бесконеч-
бесконечности вселенной нет основания выделять какие-то преимуществен-
преимущественные направления, по которым распределение космических масс от-
отлично от распределения по другим. Влияние же ближайших к солнеч-
солнечной системе скоплений массивных тел (звездных систем), неодно-
неоднородность в распределении которых могла бы сказаться на движении
нашей системы, невелико, так как они очень удалены.
Систему отсчета, связанную с солнечной системой, называют
гелиоцентрической или «системой неподвижных звезд». Начало коор-
координат гелиоцентрической системы совмещают с геометрическим цент-
центром Солнца (так как масса Солнца в 750 раз больше массы всех пла-
планет и спутников, вместе взятых, то смещением центра масс всей сис-
системы относительно центра Солнца можно пренебречь), а оси коор-
координат направляют на соответственно выбранные звезды.
Решение задач о движении космических аппаратов иногда ведет-
ведется в системе координат, связанной с Землей, но не участвующей в ее
ИЗ
суточном вращении. Такая система называется геоцентрической.
Центр ее совмещается с центром Земли, ось г — с земной осью, а
оси х и у располагаются взаимно перпендикулярно в экваториаль-
экваториальной плоскости. Геоцентрическая система движется поступательно
с ускорением движения Земли по орбите. Так как последнее неве-
невелико, то геоцентрическую систему можно считать инерциальной.
Система координат, жестко связанная с Землей, вследствие вра-
вращения Земли и притяжения ее Солнцем, Луной и другими планета-
планетами гораздо менее точно удовлетворяет требованиям инерциальности.
Однако для большого класса практически важных задач механики
отклонениями ее от инерциальности можно пренебречь и считать
системы тел, неподвижных относительно поверхности Земли, за
приближенно инерциальные системы тел отсчета. В некоторых зада-
задачах за инерциальные могут быть приняты системы, связанные с те-
телами, движущимися относительно Земли равномерно и прямолиней-
прямолинейно (корабль, поезд).
Из равенств G.3) и G.5) следует так называемый механический
принцип относительности, или принцип относительности Галилея:
Никакими механическими опытами, произведенными
внутри инерциальной системы отсчета, нельзя уста-
установить, находится ли она в покое или движется рав-
равномерно и прямолинейно.
Например, чтобы прыгнуть на расстояние, равное 1 м,ъ направ-
направлении кормы корабля (против хода) или в направлении носа
(по ходу) при равномерном и прямолинейном его движении, нужно
усилие, равное усилию при прыжке на покоящемся корабле.
Создатель теории относительности А. Эйнштейн обобщил прин-
принцип относительности Галилея, указав, что вообще никакими опы-
опытами (электрическими, оптическими и т. п.), произведенными в инер-
инерциальной системе, нельзя обнаружить факта ее равномерного и пря-
прямолинейного движения.
§2. НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ. СИЛЫ ИНЕРЦИИ
Перейдем к рассмотрению более сложного случая движения тел.
Системы отсчета, движущиеся ускоренно относительно одной «из
инерциальных систем, называются неинерциальными. Они связаны
с телами отсчета, находящимися во взаимодействии с внешними (по
отношению к системе ) телами.
Рассмотрим, как различается характер движения тел относи-
относительно инерциальной системы и системы неинерциальной, пере-
перемещающейся прямолинейно и ускоренно относительно первой.
Как и в случае инерциальных систем:
х = х' + х0; y = /; 2 = 2', G.6)
где х0 = vot.
Но теперь v0 — некоторая функция времени.
114
Дифференцируя по t, получим:
vx = v'x + v0; vy = v'y, vz = v'z G.7)
/* = ? + /0; /, = /,; /* = & G-8)
где
io dt'
В этом случае не только скорости тела, но и ускорения его
в обеих системах различны:
v = v'-{-la, G.9)
l=l'+h. G.Ю)
Абсолютная скорость равна геометрической сумме
относительной и переносной скоростей.
Абсолютное ускорение равно геометрической сумме
относительного и переносного ускорений.
Вернемся к нашему примеру. Пусть теперь корабль движется
параллельно линии берега с ускорением /0. Если тело покоится на
палубе корабля, то относительно берега оно движется с переносной
скоростью, равной скорости движения корабля, и0 и, поскольку
эта скорость изменяется, обладает переносным ускорением /0.
Если само тело перемещается по палубе со скоростью v' и ускоре-
ускорением /', то перемещение относительно берега происходит со ско-
скоростью а — v' + v0 и ускорением j = /' + /0.
Этот результат, полученный для прямолинейного поступатель-
поступательного переносного движения, справедлив для любого поступатель-
поступательного переносного движения, поскольку перемещение в этом случае
может быть заменено суммой элементарных прямолинейных пере-
перемещений.
Составим уравнение движения точки массой т относительно
подвижной системы отсчета х', у', г'. Положим ускорение точки
относительно неподвижной системы равным /, а действующую силу
равной F. Тогда для неподвижной системы в соответствии со вто-
вторым законом Ньютона
mf=F, G.11)
но
/=Р+7о
И
т(/7+/о) = ? GЛ2)
Поэтому
mjf = F—mj0. G.13)
115
Второй закон Ньютона в системах отсчета, дви-
движущихся с ускорением, в число сил, действующих на
тело, включает взятое с обратным знаком произведе-
произведение массы тела на переносное ускорение.
Это произведение, учитывающее ускоренное движение системы
отсчета, носит название силы инерции. Для составления уравне-
уравнений движения тела относительно системы отсчета, движущейся с ус-
ускорением, к результирующей сил, приложенных к телу, надо доба-
добавить силу инерции.
Уравнения G.11) — G.13) указывают два пути, которыми могут
изучаться движения тел относительно системы отсчета, движущей-
движущейся ускоренно.
Первый путь: составляются уравнения движения тела относи-
относительно инерциальной системы координат G.11). Затем, используя
кинематическое соотношение G.10), уравнение G.11) преобразует-
преобразуется в уравнение вида G.12), разрешается относительно /' и интегри-
интегрируется.
Второй путь: составляется уравнение движения тела сразу от-
относительно неинерциальной системы отсчета G.13), для этого к си-
силам, приложенным к телу, добавляются силы инерции. Полученное
уравнение интегрируется.
Рассмотрим несколько конкретных примеров движения тел.
На тележке, покрытой гладким стеклом, лежит шарик. Сооб-
Сообщим тележке ускорение /'„ (рис. 61). Что произойдет с шариком?
-г ^^ 1
(О
Рис. 61. Шарик на гладкой поверхности
движущейся тележки.
В системе координат, связанной с Землей1, шарик остается в по-
покое, ибо на него в направлении движения тележки не действуют ни-
никакие силы (сила трения мала, и ею можно пренебречь), т. е. / =
= 0. Относительно тележки шарик перемещается с ускорением
—/0 (так как /' + /0 = 0 и /' ~ — /„).
В системе координат, связанной с тележкой, шарик приобре-
приобретает ускорение, хотя на шарик при этом никакие силы не действуют.
Наблюдение за движением шарика позволяет нам сделать заклю-
1 Неподвижно связанные с Землей системы отсчета с точки зрения наших
опытов могут рассматриваться как инерциальные.
116
чение, что система отсчета движется с ускорением, и при составле-
составлении уравнения движения шарика необходимо считать, что на него
действует сила инерции: F = — mj0, откуда ускорение шарика от-
относительно тележки: /'= — = — /0.
т
Положим, что в лифте на пружинных весах подвешен груз мас-
массы т. На него действует сила тяжести mg, направленная вниз,
и упругая сила R со стороны растянутой пружины, направленная
вверх. Так как векторы сил направлены по одной прямой, то,
приняв ее за ось координат, мы можем оперировать с модулями ука-
указанных векторов. Под действием уравновешивающих друг друга
сил G = mg и R груз находится в покое.
Если лифт начал двигаться с ускорением /0, направленным вверх,
то точка прикрепления пружины начнет двигаться вверх с тем же
ускорением. Вследствие инерции витки пружины и груз движутся
вначале с ускорением меньшим, чем ускорение лифта. Поэтому
пружина несколько растянется, груз сместится вниз, после чего
приобретет ускорение, равное ускорению лифта. В инерциальной
системе отсчета, связанной с Землей (скажем, относительно стенок
шахты лифта), груз приобретает ускорение / под действием раз-
разности возросшей упругой силы пружины R, тянущей ее вверх, и
силы тяжести G, направленной вниз. С учетом знаков сил второй
закон динамики запишется в виде: Rt — G = mj или Rt — G —
— mj0 = mj'.
Когда груз приобретет то же ускорение, что и лифт, то
/' = 0 и /?1-G = m/0.
Сила натяжения пружины: Ri = G -\- mj0.
В системе отсчета, движущейся вместе с лифтом, на груз 'дей-
'действует сила тяжести G и упругая сила растянутой пружины Ri.
причем теперь Ri > G, что мы обнаруживаем по показаниям ди-
динамометра. Но хотя равенство между Ri и G нарушено, груз, когда
растяжение пружины достигает некоторой максимальной величи-
величины, остается в покое. Следовательно, в условие равновесия груза
мы должны ввести силу инерции — jom с учетом знаков:
Откуда сила натяжения пружины опять равна:
R1 = G -f m/0.
Если ускорение лифта /„ направлено вниз, то в начале движения
точка подвеса приближается к грузу, который некоторое время пе-
перемещается с ускорением / < /0, и сила R2, действующая со сто-
стороны пружины на груз, уменьшается (так как уменьшается дефор-
деформация пружины). Возникшее превышение величины силы тяжести
G над величиной упругой силы R2 сообщает грузу ускорение j0,
равное ускорению лифта.
117
Уравнение движения относительно неподвижной системы от-
отсчета запишется на основании второго закона динамики в виде:
G — R2 = ту, G — R2 — mja = mj'.
Когда груз приобретет то же ускорение, что и лифт, уравнение
движения примет вид:
так как /' = 0.
Натяжение пружины равно:
Относительно системы отсчета, связанной с лифтом, груз нахо-
находится в покое, хотя вес его теперь не уравновешен упругой силой.
Следовательно, вес груза частично уравновешивается силой инер-
инерции:
G — R2 — m/0 = 0.
Откуда сила натяжения пружины равна:
Заметим, что в случае, если лифт движется с ускорением, рав-
равным ускорению свободного падения /0 = g, сила натяжения пру-
пружины обращается в нуль (тело становится невесомым). Так как
в неподвижной системе отсчета лифт, пружина и груз движутся с
одинаковым ускорением, то не возникает их перемещений друг
относительно друга, а следовательно, и взаимодействий.
В системе, связанной с лифтом, наступление состояния невесо-
невесомости свидетельствует о том, что переносное ускорение стало равно
ускорению силы тяжести.
Таким образом, задача о движении тела относительно неинер-
циальной системы отсчета решается и первым и вторым способом.
Принципиальной разницы между ними нет.
Отметим следующую особенность сил инерции в неинерциаль-
ных системах, особенность, которая только и отличает их от всех
других сил: силы инерции не имеют противодействующей силы, так
как нельзя указать тела, со стороны которого они приложены. Воз'
никновение сил инерции также результат передачи движения, но не
данному телу, а телам отсчета, относительно которых изучается дви-
движение тела.
§ 3. ВРАЩАЮЩИЕСЯ СИСТЕМЫ ОТСЧЕТА
Изучение движения относительно вращающихся систем от-
отсчета мы ограничим случаем, когда неинерциальная система вра-
вращается относительно инерциальной вокруг неизменной оси с по-
постоянной угловой скоростью.
118
Заметим, что в случае вращательного (и вообще непоступатель-
непоступательного) движения системы отсчета скорости отдельных точек неинер-
циальной системы относительно инерциальной различны.
Переносная скорость телавточках около оси вращения меньше,
чем скорость в точках, лежащих вдали от нее. Однако перемеще-
перемещение тела относительно инерциальной системы (абсолютное пере-
перемещение) и в этом случае равно геометрической сумме его относи-
относительного и переносного перемещений. Поэтому абсолютная ско-
скорость движущегося тела складывается из относительной скорости
тела и переносной скорости, равной скорости той точки движущей-
движущейся системы отсчета, в которой находится в данный момент тело.
Изменение абсолютной скорости при перемещении тела во вра-
вращающейся системе отсчета происходит вследствие: во-первых, из-
изменения относительной скорости тела; во-вторых, изменения пе-
переносной скорости с той точкой вращающейся системы, в которой
находится тело в данный момент; в-третьих, изменения перенос-
переносной скорости при переходе тела из одной точки вращающейся сис-
системы в другую:
До = До' -f- Дип -f- Док.
Очевидно, и абсолютное ускорение слагается соответственно из
трех составляющих:
7= г+7п+/к. G.14)
которые носят названия: относительного ускорения (/'), перенос-
переносного ускорения (/п) и поворотного, или кориолисова, ускорения (/к).
Для того чтобы найти величину переносного ускорения, можно
рассмотреть случаи, когда j = ук = 0. Очевидно, /'= 0, когда
тело покоится относительно вращающейся системы отсчета или
движется равномерно и прямо-
прямолинейно. Ускорение /к возника-
возникает в результате перехода тела из
одной точки системы отсчета в
другую (хотя бы и при равно-
равномерном движении). Следователь-
Следовательно, тело будет обладать только
переносным ускорением /п лишь
в случае, когда оно покоится
относительно вращающейся сис-
системы отсчета.
Чтобы моделировать такой
случай, мы можем воспользо-
воспользоваться простой установкой
(рис. 62). Горизонтальная пло-
площадка вращается на жестко
связанной с ней вертикальной
Рис. 62. Тело, которое покоится
относительно вращающейся систе-
системы, обладает переносным
ускорением.
119
оси. Вдоль одного из радиусов расположена горизонтальная штанга,
на которую надет металлический шарик. Шарик без трения перемеща-
перемещается вдоль штанги и связан с осью вращения мягкой пружиной. При-
Приведем систему во вращение. Шарик, растянув несколько пружину, бу-
будет обращаться вокруг оси, оставаясь над одной и той же точкой вра-
вращающейся площадки. Точка площадки, над которой расположен
шарик, описывает окружность некоторого радиуса г. Поскольку
шарик относительно этой точки покоится, он обращается по той
же окружности и, следовательно, обладает переносным ускорением
—ш2 г (знак минус указывает на то, что ускорение направлено по ра-
радиусу к центру, в то время как расстояние отсчитывается по радиу-
радиусу от центра). Таким образом, переносное ускорение во вращающей-
вращающейся системе отсчета равно центростремительному ускорению, которым
обладает та точка вращающейся системы, в которой находится в
данный момент тело (все равно покоящееся или движущееся отно-
относительно системы).
Поворотное, или кориолисово ускорение появляется только в
случае, если тело движется относительно вращающейся системы.
В теоретической механике показано, что если тело обладает отно-
сительной скоростью и', а система отсчета вращается с угловой
скоростью со, то тело, помимо переносного ускорения, обладает
кориолисовым ускорением:
G.15)
Поворотное ускорение /к во всех случаях направлено перпендику-
перпендикулярно относительной скорости и' и угловой скорости вращения сис-
системы отсчета со. Напомним, что вектор угловой скорости направлен
по оси вращения.
Три вектора /', v' и ш связаны правилом буравчика. Если
поворот головки буравчика происходит от и к и', то направление
его движения совпадает с /к.
Тогда выражение G.15) будет иметь вид:
/= \' — »*г + 2 [т&]. G.16)'
В общем случае модуль ускорения Кориолиса:
/к = 2wv' sin a, G.17)
—>¦ —»-
где а — угол между направлениями векторов со и v''.
Составим уравнение движения тела относительно системы от-
отсчета, вращающейся с постоянной угловой скоростью ш.
В неподвижной системе справедлив второй закон динамики,
и уравнение движения в ней имеет вид:
tnj = F,
120
Заменим абсолютное ускорение / его значением G.22):
m\j'—
2 [
= F,
или
mj'= F-\- тш2г -J- 2m
G.18)
G.19)
(здесь мы приняли во внимание, что— [сои'] = [у'ю]). Следова-
Следовательно, уравнение движения, происходящего относительно вра-
вращающейся системы отсчета, в число действующих на тело сил вклю-
включает две силы инерции.
Первая сила mcoV, направленная от оси вращения системы от-
отсчета, называется центробежной силой инерции.
Вторая сила FK = 2m[v'(o], направленная противоположно
ускорению Кориолиса, носит название силы Кориолиса.
Для составления уравнений движения тела относи-
относительно равномерно вращающейся системы отсчета
к результирующей сил, приложенных к телу, надо
добавить центробежную силу инерции и силу Корио-
Кориолиса.
Положим, на вращающейся с
постоянной угловой скоростью
площадке расположены вдоль ра-
радиуса маятники (рис. 63). Они
отклоняются от вертикальной ли-
линии на некоторый угол, который
тем больше, чем дальше маятник
расположен от оси вращения.
Маятник, расположенный по на-
направлению оси вращения, не откло-
отклоняется.
Рассмотрим это явление от-
относительно неподвижной системы
отсчета. В начале вращения подвес, жестко связанный с площад-
площадкой, приходит в движение, груз маятника вследствие инерции от-
отстает от него. Нить отклоняется от вертикали и растягивается. В
результате появляется горизонтальная составляющая силы натя-
натяжения нити, сообщающая грузу ускорение вслед за точкой подвеса.
В момент, когда отклонение станет постоянным, грузы маятников
будут двигаться по окружности с такой же скоростью, с какой дви-
движутся точки площадки, над которыми находятся грузы. Значит,
на шарики будет действовать сила mcoV, которая может возникнуть
только как результат взаимодействия с растянутой нитью. Следо-
Следовательно, горизонтальная составляющая натяжения нити Т sin a
должна быть равна пно2г. Вертикальная составляющая натяжения
mg
Рис. 63. Отклонение маятни-
маятников от вертикали на вращаю-
вращающейся площадке.
121
нити Т cos а будет уравновешивать силу тяжести mg, действую-
действующую на груз. Угол отклонения а определится соотношением:
{g%=4^L = ^L, G.20)
mg g
Рассмотрим движение маятников во вращающейся системе от-
отсчета. В отклоненном положении грузы маятников находятся в покое
относительно площадки. Следовательно, сумма сил, действующих
на каждый груз, должна быть равна нулю, т. е. результирующая
сил натяжения нити и притяжения Земли, численно равная mcoV,
должна уравновешиваться противоположно направленной силой
инерции m/o = тоо2г. Когда тело покоится относительно вращаю-
вращающейся системы отсчета, сила инерции равна центробежной силе
инерции mcoV.
Рассмотрим равномерное и прямолинейное движение тела от-
относительно подвижной системы отсчета: /' = 0. В этом случе аб-
абсолютное ускорение / равно сумме переносного и поворотного уско-
ускорений:
/= — ooV + 2[ »4 G.21)
а сила инерции:
+ 2m [v'Z]. G.22)
На стержне, жестко укрепленном вдоль радиуса вращающейся
площадки, движется без трения равномерно и прямолинейно шарик
(рис. 64). Пусть масса шарика т, скорость его движения вдоль
стержня v' = const, угловая скорость вращения площадки со =
= const.
Рассмотрим движение шарика в системе отсчета, связанной с
Землей. Абсолютное ускорение / равно геометрической сумме пе-
переносного ускорения /0 — — соV и кориолисова /к = 2 сои' (так
как угол между со и и' составляет 90° и sin (сои) = 1 (см. G.17).
Поскольку шарик движется равномерно и прямолинейно вдоль
стержня, очевидно, нить, которая пе-
перемещает шарик, натянута с силой —
mcoV, направленной к центру, так как,
вращаясь по окружности вместе со
стержнем, шарик обладает ускорени-
ускорением — coV.
Таким образом, компоненту абсолют-
абсолютного ускорения, направленную вдоль
радиуса (вдоль стержня), тело получит
под действием деформированной (нити).
Рис. 64. Возникновение каково происхождение кориолисова
СИЛТеИлаеР„аИврХаюТеи<сяНИИ ускорения? Положим для определен-
площадке. ности, что тело движется от оси вра-
122
щения площадки. Находясь в точке, расположенной вблизи
оси, и вращаясь вместе со стержнем, шарик обладает линейной ско-
скоростью Uj. Переходя в точку, расположенную дальше от оси и вра-
вращающуюся со скоростью о2 > vit шарик некоторое время сохраняет
по инерции прежнюю скорость yt. При этом он несколько изгибает
стержень назад. В результате со стороны деформированного стерж-
стержня на него действует сила, сообщающая ему ускорение в сторону
вращения. Деформация стержня такова, что возникающая сила дав-
давления на шарик сообщает ему ускорение, равное кориолисову: /к =
= 2(оv'. При изменении направления v' на обратное (тело движется
к центру вращения) изменяется и направление кориолисова уско-
ускорения, так как при этом тело переходит от точек, где скорость боль-
больше, к точкам, где она меньше, и стержень изгибается в сторону вра-
вращения.
Рассмотрим движение шарика относительно вращающейся сис-
системы координат. Относительно площадки шарик движется равно-
равномерно и прямолинейно.Следовательно, сумма приложенных к телу
сил и сил инерции должна быть равна нулю. Сила, действующая со
стороны нити, — mcoV уравновешивается центробежной силой инер-
инерции пг(й2г. Сила 2т [сои'], действующая в направлении движения
со стороны деформированного стержня, уравновешивается кориоли-
совой силой 2/п[и'со] (направленной против кориолисова ускоре-
ускорения).
§ 4. ПРОЯВЛЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ЗЕМЛИ
Система отсчета, связанная с земным шаром, строго говоря, не-
инерциальная. Если сравнить решения уравнений движения для
какого-либо конкретного тела, полученные в предположении, что
система отсчета, связанная с Землей, инерциальная, и решения этих
же уравнений с учетом сил инерции, можно обнаружить их расхож-
расхождение. Сравнивая те и другие решения сданными опыта, можно уста-
установить, является ли выбранная нами система инерциальной или
же движется ускоренно. Такие проверки показали, что система коор-
координат, связанная с Землей, для большого класса механических за-
задач может рассматриваться как инерциальная. Оценим возмож-
возможное проявление инерционных сил, вызываемых вращением Земли
вокруг собственной оси.
Угловая скорость вращения Земли:
^ = 0,0000729 тс-1.
24.60-60
Квадрат угловой скорости:
Центростремительное ускорение на экваторе:
/э = и,2# = 5. Ю-9.6360.10* = 3,37 см/сек2,
что составляет около 0,4% от ускорения силы тяжести.
123
Ускорение Кориолиса /к = 2сои sin(p, где ф — широта места.
Для автомобиля, едущего со скоростью v = 100 км/час, или v =
— 3,6 • 104 см/сек, по горизонтальной дороге на широте ф = 60°,
ускорение /к = 7,3 • Ю5 • 3,5 • 104 • 0,87 = 2,4 см/сек2, или око-
около 0,3% от ускорения силы тяжести.
Заметно изменить количество движения тела относительно сис-
системы отсчета, связанной с Землей, силы инерции могут, очевидно,
лишь при достаточно длитель-
длительном воздействии на тело (когда
импульс Ft достигнет доста-
достаточно большого значения).
Изменение веса тела с изме-
изменением широты места. Поло-
Положим, тело массой т покоится
на поверхности Земли в точке
М (широта места ф) (рис. 65).
Так как относительная скорость
тела в системе отсчета, связан-
связанной с Землей, v' = 0, то из сил
инерции на тело действует толь-
только центробежная сила F = /псо2г,
где г — расстояние от оси вра-
вращения Земли до тела. Направ-
Направлена эта сила перпендикуляр-
Рис. 65. Влияние вращения земли но оси вращения Земли. Разло-
на величину веса тела. г ,
жим центробежную силу инер-
инерции на две составляющие: одну
в направлении вертикали /ч = mcoV cos ф и вторую в горизон-
горизонтальном направлении F2 = /ncoV sin ф, или, так как г = R cos ф,
где R — радиус земного шара:
F1 = /им2/? cos2 <p;
Р2 = tnu>2R cos <p sin «p.
G.23)
G.24)
Можно считать, что действие составляющей F4 сказывается только
на величине силы тяжести, a F2 — только на ее направлении. Тогда
кажущийся вес тела на широте ф будет:
G.25)
где Go — сила тяжести,
или
бф = G0 A—0,004 cos2 <p). G.26)
Горизонтальная составляющая центробежной силы, действие
124
которой сказывается в отклонении направления кажущегося веса
тела от вертикали, может быть представлена в виде:
F2= -jtn^R sin2 ср. G.27)
Она равна нулю на полюсе и на экваторе. Наибольшего значения
сила достигает на широте 45°.
Маятник Фуко. Представим себе маятник, помещенный над
Северным полюсом Земли (рис. 66) на длинном, свободно вращаю-
вращающемся подвесе. Отведем его от положения равновесия и дадим воз-
возможность свободно качаться. Маятник движется под действием силы
тяжести и силы натяжения подве-
подвеса. Обе они лежат в плоскости ка-
качания маятника, следовательно,
плоскость качания должна сохра-
сохранять свое положение в простран-
пространстве. Земля же поворачивается под
маятником. Проекция плоскости
качания на поверхность Земли у
полюса поворачивается в нап-
направлении, противоположном враще-
вращению Земли, со скоростью 15° в
час. Таким образом, в неподвижной
Рис. 66. Схема опыта Фуко.
системе отсчета поворот проекции плоскости качания маятника есть
результат постоянства положения плоскссти качания и вращения
относительно нее Земли.
Рассматривая движение маятника в системе координат, связан-
связанной с Землей, мы к указанным выше силам должны добавить силу
Кориолиса. На полюсе скорость маятника v' при большой длине
подвеса можно считать перпендикулярной оси вращения Земли и,
следовательно, вектору угловой скорости со. Сила Кориолиса,
действующая на маятник, будет равна FK = 2mv'u>.
Будучи перпендикулярна к плоскости, включающей векторы v'
и w, она лежит в горизонтальной плоскости и в соответствии с пра-
правилом буравчика направлена
вправо от направления движения
маятника. Плоскость качания
маятника должна поворачивать-
поворачиваться по часовой стрелке (так как
сила Кориолиса никакой дру-
другой силой не уравновешена) и
совершать один оборот в сут-
при ки. На рисунке 67 показана ро-
розетка, которую очерчивает на
а
Рис. 67. Розетка, полученная
записи качаний маятника во вращаю-
вращающейся системе:
а — запись начинается при движении маят-
маятника от положения равновесия; б—запись
начинается при движении от положения наи-
наибольшего отклонения.
горизонтальном листе бумаги пе-
перо, прикрепленное к маятнику.
Если опыт производится не
125
на полюсе, а на широте ф, то, чтобы получить горизонтальную
составляющую силы Кориолиса, надо взять составляющую угло-
угловой скорости в направлении вертикали данного места: (оф =
со sin ф. Тогда
Fкф = mu'0) sin ?•
В этом случае плоскость качания повернется за сутки на угол
2л sirup радиан.
Опыт Фуко, произведенный им в 1850 г. в Париже, явился не-
непосредственным доказательством вращения Земли вокруг своей оси.
Другие проявления вращения Земли. Рассмотрим как наиболее
простой случай движение поезда. Положим, поезд движется с юга
на север вдоль меридиана в северном полушарии. Он переходит
от точек Земли, имеющих большую окружную скорость и4 (слева
направо по движению поезда), к точкам, имеющим меньшую ско-
скорость v2. Сохраняя по инерции некоторое время скорость vu поезд
ребордой колеса давит на правый рельс и этим способствует быстро-
быстрому его снашиванию.
В системе отсчета, связанной с Землей, на поезд действует сила
Кориолиса. Величину ее горизонтальной составляющей мы найдем,
взяв проекцию угловой скорости вращения Земли на вертикаль
данного места:
FK — 2tnv'm sin <р.
Направлена сила всегда вправо по ходу поезда. Поэтому на
двухколейных железных дорогах износ правого рельса происходит
быстрее, чем левого. Заметим, что сила Кориолиса проявляется
при движении и под углом к меридиану или вдоль параллели. При
движении вдоль параллели кориолисова сила направлена от оси
вращения Земли, если поезд движется на восток, и к оси, если он
движется на запад. Проекция силы на горизонтальную плоскость
в этом случае:
FK — 2/вд/ ев sin «p.
Отклоняющее влияние кориолисовой силы заставляет мощное
океаническое течение Гольфстрим, выходящее из Мексиканского
залива через Флоридский пролив в направлении, близком к мериди-
меридиональному, отойти от берегов Америки, пересечь Атлантический
океан и выйти в Баренцево море у берегов Скандинавии.
Так называемые дрейфовые (ветровые) течения вследствие откло-
отклоняющего влияния силы Кориолиса всегда образуют некоторый угол
с направлением вызвавшего их ветра.
Сильно нагретый в зоне экватора воздух поднимается вверх и
движется к полюсам. Охлаждаясь на высоте, воздух на широтах
25—30° устремляется вниз, образуя так называемые субтропические
области высокого давления. От этих областей по направлению к
экватору дуют постоянные ветры, называемые пассатами. Под влия-
влиянием силы Кориолиса они отклоняются от меридионального нап-
126
равления и дуют в северном полушарии с северо-востока на юго-за-
юго-запад, а в южном — с юго-востока на северо-запад.
Во всех приведенных выше примерах мы рассматривали влия-
влияние на движение тел в системе отсчета, связанной с Землей, вра-
вращения Земли вокруг собственной оси. Строго говоря, мы должны
были рассмотреть и влияние движения Земли по орбите вокруг Солн-
Солнца. Однако это влияние настолько мало, что им вполне можно пре-
пренебречь даже в описании явлений таких масштабов, как атмосфер-
атмосферные и океанические течения.
§ 5. ВЕС И НЕВЕСОМОСТЬ
Весом мы назвали силу, с которой тело, притягиваемое Землей,
действует на опору или подвес (гл. III, § 3). Рассмотрим некоторые
особенности этой силы.
Положим, Земля имеет форму шара и плотность ее возрастает
с глубиной концентрическими слоями. В этом случае, как мы уже
указывали (гл. V, § 1), поле тяготения Земли эквивалентно полю
тяготения материальной точки, имеющей массу, равную массе
Земли и совпадающую с ее центром. Такое поле тяготения называет-
называется центральным. Сила тяготения, действующая на тело массой т,
помещенное в любую точку земной поверхности, равна: F = f —- ,
где М — масса Земли, R — ее радиус,
Мы будем рассматривать тела, размеры которых достаточно малы,
чтобы при любом их положении относительно Земли поле силы тя-
тяжести, хотя бы в ограниченной области окружающего их простран-
пространства, можно было считать однородным. Явления будем изучать в
геоцентрической системе координат. Это позволит нам не учиты-
учитывать влияние ускорения Земли, возникающее при ее движении по
орбите, которое на изучаемые нами явления пренебрежимо мало.
Как мы видели (гл. V, § 3), ускорение свободного падения в дан-
данной точке для всех тел одно и то же. Очевидно, и части одного тела
в однородном поле тяготения движутся с одинаковым ускорением.
Ведь ускорение не изменится от того, будут ли две половины тела
падать раздельно или будут соединены вместе. Если на телоле дей-
действуют никакие другие силы, кроме силы тяготения, то в нем не
могут возникнуть деформации. Для возникновения деформаций
надо, чтобы части тела в течение некоторого времени двигались с
разными ускорениями.
Если два и более тел, участвующих в свободном падении, сопри-
соприкасаются, то между ними не могут возникнуть взаимодействия
(кроме сил взаимного тяготения, которые мы считаем пренебрежи-
пренебрежимо малыми по сравнению с силой тяготения Земли).
Следовательно, тела не могут ни изменить состояние движения
друг друга, ни деформировать одно другое. Иначе будет обстоять
127
дело, если одно из тел приобретает под действием силы тяжести
ускорение свободного падения, а другое покоится или движется с
ускорением, отличным от ускорения свободного падения. Мы видели
это (гл. VII, § 2) на примере движения груза, подвешенного в лиф-
лифте. Когда точка подвеса пружины двигалась с ускорением, отлич-
отличным от ускорения свободного падения, пружина и груз действовали
друг на друга с некоторой силой R, т. е. были деформированы. И
только с приобретением лифтом ускорения свободного падения
силы, действовавшие между пружиной и грузом, а следовательно,
и деформации в них исчезли.
Происходящие при этом явления мы рассмотрим на примере
тела, взаимодействующего непосредственно с Землей. Линейные раз-
размеры тела будем считать много меньшими радиуса Земли.
Поместим мысленно тело сначала на полюс. Сила тяготения сооб-
щает телу ускорение g = f —, направленное по оси вращения Зем-
Земли к ее центру.
Помещенное на поверхности Земли тело покоится на ней, так
как возникшая сила реакции со стороны опоры (земной поверхности)
уравновешивает силу тяжести. При этом тело оказывается деформи-
деформированным. Для того чтобы установить распределение деформаций
в теле, выделим в нем три горизонтальных тонких слоя с массой dm.
Нижний — прилегающий к основанию тела, средний — у сечения,
делящего тело на верхнюю и нижнюю половины, и верхний слой,
граничащий с верхней плоскостью (рис. 68). После того как в теле
установятся статические деформации, нижний слой окажется де-
деформированным сильнее всего. Возникающая в нем упругая сила
должна уравновесить полное значение силы тяжести, действующей
на массу, расположенную выше слоя, т. е. силу g{m — dm).Упру-
dm).Упругая сила, возникшая вследствие деформации среднего слоя, должна
уравновешивать силу g ——. Наконец, в верхнем слое упру-
гая сила уравновешивает силу тяжести, равную gdm. Уменьшая
толщину слоев, а вместе с тем массу dm, в пределе получим значе-
значение силы тяготения, которая уравновешивается упругими силами
на нижней плоскости тела Ft = mg, в среднем сечении F2= — м
на верхней плоскости F3 = 0.
Следовательно, упругие силы и соответствующие им деформации
будут возрастать от верхней плоскости тела к нижней по линей-
линейному закону.
Сила тяготения, в случае когда тело покоится на полюсе, про-
проявляется целиком статически, создавая в теле деформации. Будучи
деформированным, тело давит на опору с силой, равной полному
значению силы тяготения. Очевидно, по третьему закону Ньютона
деформированная телом поверхность Земли с такой же по модулю
128
силой действует на тело. Это и есть сила реакции, направленная
противоположно силе тяготения. Результирующая сила, действу-
действующая на тело, равна нулю.
Можно обобщить наши рассуждения.
Если из двух соприкасающихся тел одно приобретает в поле сил
тяготения ускорение, а второе покоится, то действие сил тяготения
проявляется полностью статически и создает давление на опору
или подвес (рассмотреть распределение деформаций в последнем
случае предоставляется читателю), равное полному значению силы
тяготения.
На полюсе вес тела равен значению силы тяжести.
Перенесем тело на экватор. Если бы отсутствовало вращение
Земли вокруг собственной оси, то ничто в состоянии тела не изме-
изменилось по сравнению с состоянием на полюсе. Однако точки земной
поверхности у экватора в геоцентрической системе описывают ок-
окружности радиуса R с круговой скоростью со. Вместе с ними будет
также двигаться тело, покоящееся на экваторе относительно Зем-
Земли. Так как размеры тела вдоль направления радиуса R Земли ма-
малы (lR С /?), то все его точки будут обладать одинаковым центро-
центростремительным ускорением со2/?.
Для того чтобы все частицы тела двигались с центростремитель-
центростремительным ускорением со2/?, тело должно быть деформировано. Причем
деформации, так же как и возникшие под действием силы тяжести,
линейно нарастают от поверхности к основанию тела.
Действительно, для сообщения одинакового ускорения (a2R
всем частям тела упругая сила должна быть пропорциональна мас-
массе, которой она сообщает ускорение Fn = со2 Rm = /цт, следова-
следовательно, на поверхности тела она должна обращаться в нуль, в сред-
среднем сечении быть равной is— и у основания тела /ц т. Но знак
Z
деформаций должен быть противоположным знаку деформаций,
возникающих под действием силы тяготения (для сообщения цент-
центростремительного ускорения связь, т. е. слои тела, расположенные
ближе к оси вращения, должны быть растянуты).
Поскольку деформации, возникшие как следствие действия силы
тяжести и как следствие вращения Земли, частично уничтожаются,
то тело на экваторе будет деформировано слабее, чем на полюсе
(рис. 68). Следовательно, на экваторе оно будет давить на опору
или подвес с силой G,y—m(g — со2 R). Так как единственной силой,
действующей на тело в направлении к центру Земли, является сила
тяжести, то, следовательно, она частично проявляется статически,
создавая в теле деформации, которые и обусловливают возникнове-
возникновение веса тела, а частично проявляется динамически, сообщая телу
ускорение a>2R = — , где v0 — скорость тела в геоцентрической
R
системе отсчета.
5М, М. Архангельский 129
Вес тела будет меньше силы тяжести на ту ее часть, которая необ-
необходима для сообщения телу центростремительного ускорения, т. е.
„2
G.28)
Можно аналогичным рассуждением найти значение веса для тела
на любой широте. Мы придем, конечно, к тем же равенствам G.25)
и G.27), которые вывели в § 4, но, рассматривая движение в геоцент-
Рис. 68. Деформации в теле, находящемся под действием силы
тяготения и реакции опоры:
а—в покоящемся; в—во вращающемся вместе с опорой; с—результирующие
деформации.
рической системе координат, мы получили физически более ясную
картину явлений, чем в неинерциальной системе, связанной с Зем-
Землей .
Нетрудно подсчитать, что если на полюсе вес тела равен 75 кГ,
то на экваторе он уменьшается на 250 Г (R = 6378 км, v0 = — ,
Т = 24 ч).
Допустим, мы сообщили на экваторе телу скорость ит в гори-
горизонтальной плоскости, совпадающую с направлением вращения
130
Земли. Скорость движения тела относительно геоцентрической сис-
системы отсчета складывается из скорости тела fT относительно Земли
и скорости и3 той точкой Земли, в которой находилось тело. Тело
будет в этот момент двигаться по окружности радиуса R и обладать
центростремительным ускорением:
R
Если бы мы в момент приобретения телом относительной скорости
vz = 8 км/ч взвесили его, то получили бы значение веса уменьшен-
уменьшенным еще на 0,6 Г, а при скорости, скажем, 800 км/ч на 60 Г.
Найдем величину скорости, двигаясь с которой у экватора тело
станет невесомым. Для этого надо найти из G.28) орбитальную ско-
скорость, при которой вся сила тяжести будет проявляться динами-
динамически, сообщая телу центростремительное ускорение, равное уско-
ускорению силы тяжести:
и отсюда
vK = VgR- G-29)
Состояние невесомости движущегося тела возникает не в резуль-
результате того, что сила тяготения перестала действовать или уравнове-
уравновешена некоторой другой силой, а имеет динамическую природу.
В самом деле, после сообщения телу скорости оно движется под
действием только силы тяготения. В каждый момент времени тело
обладает постоянной скоростью в направлении касательной к кру-
круговой траектории и падает с ускорением g вдоль радиуса к центру
тяготения. В результате сложения этих двух движений оно все вре-
время остается на круговой траектории. Как мы выяснили выше, тело
при свободном падении, т. е. когда на него действует только сила
тяжести, недеформировано. В этом состоянии ни между частями
тела, ни со стороны тела, на соприкасающееся с ним, силы не дей-
действуют. В частности, тело не будет оказывать давление на опору
или подвес.
Состояние тела, когда оно движется только под действием силы
тяжести, называется состоянием невесомости.
Если в момент, когда система тел (скажем, космический корабль
и космонавт) приобрела состояние невесомости, тела двигались с
общей скоростью vK, то они и далее будут двигаться с общей ско-
скоростью. Ведь единственная действующая на них сила сообщает им
одинаковые ускорения, не создавая в телах деформаций и не вызы-
вызывая относительного движения тел.
Для того чтобы космонавт начал перемещаться в кабине корабля,
он должен оттолкнуться от его стенок. В короткий момент соударе-
соударения в телах возникнут деформации и силы, создающие ускорения.
5* 131
Рис. 69. Состояние невесомости.
Но как только соударение закончится, силы исчезнут и космонавт
будет двигаться, как будто сила тяготения отсутствует, как бы плыть
внутри кабины (рис. 69).
В состоянии невесомости тела движутся под действием силы —
силы тяготения, но без деформаций, так как эта сила целиком прояв-
проявляется динамически, полностью «расходуется» на сообщение телу
ускорения.
Подставив в формулу G.29) значение ускорения свободного па-
падения на поверхности Земли у экватора и величину земного радиуса,
получим, что, для того чтобы тело могло облететь Землю, т. е. стать
спутником Земли, оставаясь на нулевой высоте, ему надо сообщить
скорость vK zz 7,8 км/сек. Эта скорость носит название первой
космической скорости. Практически она неосуществима вследствие
сопротивления, которое оказывает движущемуся телу земная ат-
атмосфера.
Как следует из главы V, § 3, с удалением тела от земной поверх-
поверхности ускорение свободного падения убывает обратно пропорцио-
пропорционально квадрату расстояния от центра Земли. На высоте h уско-
ускорение свободного падения равно:
°" (R + hJ DU
Если тело на этой высоте движется с круговой скоростью со,
то центростремительное ускорение его меньше, чем у поверхности
Земли, и равно:
R + А *
132
Приравнивая правые части обоих выражений, найдем скорость
при которой наступает состояние невесомости на высоте h:
R2
G.30)
Подсчитанные по формуле G.30) скорости искусственных спут-
спутников Земли для различных высот и соответствующие им периоды
обращения даны в таблице 2.
Таблица 2
Характерные космические скорости
Высота орбиты
над поверхностью
Земли, км
250
1000
200Э
6379
35870
59000
Орбитальная
скорость
1>к. км 1 сек
7,759
7,354
6,901
3,593
3,073
1,021
Время пол-
полного оборо-
оборота спутни-
спутника Т, ч
1,49
1,75
2 12
3,98
24,00
654,00
Скорость уч вы-
высвобождения из
поля тяготения
Земли, км/сек
10,973
10,400
9,760
7,909
4,343
1,444
С удалением от Земли орбитальная скорость спутника убывает,
а период обращения растет. Для спутника с высотой орбиты 35870 км
период обращения точно равен периоду обращения Земли вокруг
своей оси. Будучи запущен на такую высоту и обращаясь по орбите
в направлении, противоположном вращению Земли, спутник все
время будет находиться над одной и той же точкой земной поверх-
поверхности. С такой «башни» видно немногим менее половины земной
поверхности.
Для спутника на орбите, отстоящей от поверхности Земли на рас-
расстоянии 59 R, время полного оборота равно лунному месяцу. Луна
как раз движется на таком расстоянии.
Мы рассмотрели случай, когда одно тело приобретает ускорение
свободного падения g, а другое покоится или движется в том же нап-
направлении, но с ускорением /, меньшим g, и случай движения системы
тел с ускорением свободного падения (/ = g).
Рассмотрим случай, когда ускорение одного из двух тел проти-
противоположно ускорению силы тяжести.
Такой случай реализуется, когда тело, скажем, поднимается в
лифте и вообще движется с ускорением от центра Земли. Такое же
состояние будет приобретать тело, если оно движется по кривой,
обращенной выпуклостью к Земле (например, летчик в самолете вы-
выходит из пикирования или переходит с нисходящей ветви мертвой
петли на восходящую). В этих случаях на тело должна действовать,
помимо силы тяжести, сила R, направленная противоположно ей
и большая по величине. Это может быть сила натяжения пружины,
133
на которой подвешено тело в лифте, сила давления газов на дно
ракетного снаряда, тяга самолетного винта, давление кресла, на ко-
котором сидит летчик, и т. п.
Если сила R = mg, то тело покоится, так как силы (тяготения
и R), действующие на него, уравновешены. Тело деформировано.
Распределение статических деформаций подобно распределению
динамических, обусловленных движением с ускорением / = g под
действием упругой силы.
Если ускорение / = — g, то
т. е. тело движется с ускорением 2g. Деформации в нем возрастают
так, что сила давления со стороны тела на опору (вернее, на тело,
сообщающее ему ускорение /) будет равна 2 mg. Вес тела возрастет
в два раза. Вследствие этого тело в поле силы тяжести испытывает
перегрузки.
Полет любого космического аппарата обычно разделяют на два
этапа. Первому соответствует так называемый участок траектории
выведения аппарата. На этом участке космическая ракета или ра-
ракета-носитель сообщает аппарату необходимую скорость в заданном
направлении. На втором участке, так называемом орбитальном,
движение происходит под действием только сил тяготения со сто-
стороны окружающих небесных тел.
На участке выведения спутник или космический корабль за
счет силы тяги реактивных двигателей ракеты-носителя приобре-
приобретает ускорение против ускорения силы тяжести и набирает верти-
вертикальную скорость. В это время на них действуют направленные вниз
сила тяжести и сопротивление атмосферы, а также направленная
вверх сила тяги.
Ускорение / значительно превосходит ускорение свободного па-
падения g. Допустимыми считают ускорения до 9—10 g. При этом
вес тела в кабине корабля и корпус корабля находятся под действием
сил в ^ii раз больших, чем когда они покоились относительно Земли.
g
Эти силы и вызвавшие их деформации обусловлены тем, что, поми-
помимо земного тяготения, на них действуют силы давления со стороны
газов или корпуса ракеты.
Когда корабль достиг скорости vK или другой, необходимой для
его полета, двигатели выключаются. Обычно при этом корабль уже
оказывается на высоте, где плотность атмосферы мала и сопротив-
сопротивление движению практически отсутствует.
Корабль и находящиеся в нем тела дальше движутся только под
действием сил тяготения (Земли, Луны или других планет и Солнца).
Вследствие этого наступает состояние невесомости. Тела перестают
давить на опоры и «повисают» в воздухе, если из-под них убрать
опору; отвесы покоятся в положении, в котором их установили; вода
не выливается из наклоненной бутыли, ее надо «выдавливать», что-
134
бы перелить в стакан; спичка не горит, так как газообразные продук-
продукты сгорания не поднимаются «вверх» (ведь направление «вверх» и
«вниз» в состоянии невесомости отсутствует) и не освобождают дос-
доступ кислороду; тела, которым сообщена начальная скорость отно-
относительно кабины космического корабля, движутся прямолинейно
и равномерно в любом направлении, пока не столкнутся с другими
телами; космонавт легко «поднимает» груз весом в сотни килограм-
килограммов и перемещает его в кабине.
ГЛАВА VIII
ЭНЕРГИЯ. РАБОТА. МОЩНОСТЬ
§ 1. ЭНЕРГИЯ. РАБОТА
Выше мы ввели в качестве меры механического движения тела
количество движения. Применение такой меры допустимо, если
передача механического движения от одного тела к другому про-
происходит без превращения в другие формы движения материи (точ-
(точнее, когда такими превращениями можно пренебречь).
Допустим, два одинаковых шарика из пластилина движутся
с равными по абсолютной величине скоростями навстречу друг дру-
другу. После столкновения шарики останавливаются. До удара они
двигались, после удара покоятся. Закон сохранения количества
движения при этом выполнен: до удара сумма количеств движения
была равна нулю (mv — mv = 0) и после удара осталась равной
нулю (т ¦ 0 + т -0=0). Но до удара шары двигались, а после удара
они неподвижны. Рассматривая количество движения как универ-
универсальную меру движения, мы должны были бы сделать ложный вывод
об исчезновении движения, которым обладал каждый шар в отдель-
отдельности. Однако если произвести измерение температуры шаров до и
после столкновения, то можно обнаружить, что их температура в
результате удара повысилась. Другими словами, механическое
движение шаров не исчезло, а перешло в молекулярную форму дви-
движения вещества, из которого изготовлены шары.
В результате трения механическое движение также «исчезает»,
переходя в теплоту. При вращении ротора электрического генератора
механическое движение преобразуется в электромагнитное движе-
движение. Это преобразование легко показать на простом опыте. Положим,
электрический генератор, в цепь которого включена электрическая
лампа, приводится в действие падающей гирей. При разомкнутой
цепи гиря движется с некоторой скоростью Vy под действием ре-
результирующей двух сил: тяжести и трения. Но стоит замкнуть
электрическую цепь, как скорость падения гири уменьшается до v2.
Следовательно, часть механического движения действительно преоб-
преобразуется в электромагнитное.
136
Быстро летящий электрон при известных условиях излучает
свет и при этом тормозится и т. д.
Механическое движение не исчезает, а переходит в эквивалент-
эквивалентное количество других видов движения материи. Существенно важ-
важно то, что эти переходы осуществляются в строго определенных коли-
количественных соотношениях. Количественная определенность соблю-
соблюдается и для любых других переходов одного вида движения мате-
материи в другой: теплового в механическое, электромагнитного в све-
световое и т. д.
Естественно предположить, что должна существовать общая
мера количества движения для всех видов движения материи.
Такая мера носит название энергии. Энергия есть универсаль-
универсальная мера количества любых видов движения материи.
Весь опыт науки, обобщенный материалистической диалекти-
диалектикой, говорит, что материя и движение вечны и нерасторжимы.
Единство материи и движения нашло наиболее общее выражение
в формуле Эйнштейна Е = с2т, где Е — энергия, т — масса,
с — скорость света. Это соотношение говорит о том, что увеличение
или уменьшение энергии, т. е. количества определенной формы
движения, всегда происходит одновременно с увеличением или
уменьшением массы, т. е. количества соответствующей формы
материи.
Состояние, в котором находится система тел, может быть опре-
определено заданием ряда величин. Чтобы описать состояние механи-
механического движения системы тел, достаточно знать их взаимное рас-
расположение и скорости; чтобы характеризовать состояние газа, надо
указать его объем, давление и температуру и т. д.
Величины, с помощью которых может быть полностью охаракте-
охарактеризовано состояние системы, называются параметрами.
Поскольку энергия — мера движения, т. е. изменения состояния
материальной системы, естественно предположить, что она может
быть количественно выражена через параметры состояния, т. е.
энергия есть функция состояния.
Ниже мы получим количественное выражение энергии через
характеристики состояния механического движения. Предвари-
Предварительно введем еще одно важное понятие — понятие работы.
Обмен механическим движением между телами или переход ме-
механического движения в другие его формы происходит всегда в ре-
результате взаимодействия тел. Опыт показывает, что во всех про-
процессах такого рода величина переданного движения пропорциональ-
пропорциональна произведению силы на величину перемещения. Количество теп-
теплоты, которое выделяется в результате падения камня с высоты h
на Землю, прямо пропорционально произведению величины силы
тяжести на высоту; количество электричества, которое может быть
получено на гидростанции, пропорционально произведению веса
воды, падающей на лопатки турбины, на высоту падения воды (на-
(напор) и т. д.
137
Мерой передачи движения, или мерой энергии, переданной от
одного тела к другому, является физическая величина, называемая
работой. «Работа — это изменение формы движения, рассматри-
рассматриваемое с его количественной стороны»1.
Работа измеряется произведением силы, действующей на тело
в направлении перемещения, на величину перемещения точки при-
приложения силы.
Таким образом, энергия — мера количества любых ви-
видов движения, которым обладают тела некоторой си-
системы, а работа — мера передачи механического дви-
движения от одного тела к другому или превращение его
в другие виды движения в процессе взаимодействия.
Очевидно, работа и энергия должны измеряться в одних и тех
же единицах.
§2. ВЫЧИСЛЕНИЕ РАБОТЫ. МОЩНОСТЬ
Если материальная точка под действием постоянной силы F
совершила перемещение s, то работа силы
А = Fcos (Fs).s. (8.1)
Так как F cos (Fs) есть проекция Fs силы F на направление переме-
перемещения, то
А = Fss. (8.2)
Легко видеть, что
A = Fs cos (Fs) = (Fss), (8.3)
т. е. работа силы равна скалярному произведению век-
вектора силы на вектор перемещения. Работа — величина ска-
скалярная. —
Если угол между направлениями силы и перемещения (Fs) =
= а < 90 °, то cos а > 0. Сила или ее составляющая F cos а сов-
совпадает с направлением перемещения тела и увеличивает скорость
его движения. При этом энергия от тела, со стороны которого сила
действует, передается телу, на которое она действует. Сила совер-
совершает в этом случае положительную работу.
Если а > 90 °, то cos а < 0 и энергия передается от тела, на
которое действует сила, телу, со стороны которого сила действует.
Сила при этом совершает отрицательную работу. Например, сила
трения, будучи направлена против перемещения, совершает отри-
отрицательную работу, или говорят: работа совершается движущимся
телом против силы трения.
Если сила направлена перпендикулярно перемещению, то cosa=
=0 и работа силы равна нулю, передачи энергии в этом случае нет.
1 Ф. Энгельс, Диалектика природы, Госполитиздат, 1946, стр. 72.
138
Если сила F на конечном отрезке пути изменяется, то для рас-
расчета работы путь следует разбить на элементарные перемещения
As такой величины, чтобы с заданной степенью точности в пределах
каждого элемента силу можно было считать постоянной. Вычислив
работу на каждом элементарном перемещении и подсчитав алгеб-
алгебраическую сумму элементарных работ, получим полную работу
переменной силы F на пути s:
А = X
<cos
(8.4)
i=i
Переходя к пределу при As, стремящемся к нулю:
(8.5)
A = Hm У
As -> 0 ^_i
(интеграл берется по всему пути s). Для вычисления интеграла (8.5)
надо знать зависимость силы F от s.
Работу можно вычислить также графически, если вспомнить
геометрическое представление определен-ного интеграла.
По оси абсцисс (рис. 70) отложим длины путей s, по оси ординат
соответствующие значения со-
составляющих силы Fs. Соединив
точки непрерывной линией, по-
получим график зависимости F. от
s Разобьем путь на достаточно
малые отрезки As (так, чтобы в
пределах отрезка составляющая
силы Fs менялась линейно).
Элементарная работа АЛ, со-
совершенная силой при перемеще-
перемещении на отрезок As, изобразит-
изобразится площадью столбика с основа-
основанием As и высотой, равной сред-
среднему значению силы Fs в пре-
пределах отрезка:
А = Fs&s.
Полная работа на пути s равна сумме всех элементарных работ,
т. е. площади всех столбиков, заключенных между осью абсцисс,
ломаной А В и ординатами, соответствующими начальной и конеч-
конечной точкам пути. При безграничном уменьшении длины элементар-
элементарных отрезков As сумма площадей столбиков будет стремиться к ве-
величине площади, заключенной между осью абсцисс, кривой АВ
и ординатами кривой в начальной и конечной точках пути.
Если на тело действует несколько сил, то работа резуль-
результирующей силы равна алгебраической сумме работ со-
составляющих сил.
F
1
1
1
1
I
уу
1
I
1
1
в
S
S
Рис. 70. Графическое вычис-
вычисление работы переменной силы.
139
ds
dt
= V И,
dA
N =
следовательно,
—
Практически бывает важно знать не только работу произведен-
произведенную силой, но и время, в течение которого она произведена. Для
сравнения механизмов по их способности совершать большую или
меньшую работу за единицу времени вводят величину, называемую
мощностью.
Мощность — величина, численно равная работе, со-
совершаемой силой в единицу времени:
N = ^-. (8.6)
Так как
то
но
dt
N = Fsv, (8.7)
т. е. мощность в каждый данный момент времени рав-
равна произведению проекции силы на направление пере-
перемещения на скорость движения.
Для того чтобы установить единицу работы, возьмем равенство
(8.1) и положим в нем cos (Fs) = 1.
В системе СИ за единицу силы принят 1 н, за единицу пути 1 м,
за единицу работы в этой системе принимается работа, совершаемая
силой в 1 н на пути в 1 м при условии, что сила действует в направ-
направлении перемещения. Эта единица работы носит название джоуль
{дж).
В системе СГС за единицу работы принимают работу силы в 1 дин
на пути в 1 см. Эта единица называется эрг (э).
Размерность работы: [А] = L2MT~2.
При переходе от единицы работы в системе СИ к единице работы
в системе СГС единица длины уменьшается в 100 раз, единица массы
в 1000 раз, единица времени остается неизменной. Следовательно,
единица работы в системе СГС меньше единицы работы в системе
МКС в
ШОМООО раз= 107 раз.
В технической системе (МКГСС) за единицу работы принимают
работу, совершаемую силой в 1 кГ на пути 1 м. Единица эта назы-
называется килограммометр (кГм).
При переходе от системы СИ к системе МКГСС единица массы
изменяется в 9,81 раза, остальные единицы остаются неизменными:
1 кГм = 9,81 к = 9,8Ы07э.
140
В системе единиц СИ единица мощности 1 дж'сек. Эта единица
называется ватт (вт). В системе СГС единица мощности 1 э/сек.
1 вт — 1 дж/сек = W э/сек
100 вт — 1 гвт,
1000 em = 1 кет.
В технической системе единица мощности 1 кГ-м/сек.
\кГ'М = 9,81 вт.
Человек, мигая, совершает работу, примерно равную 2,5—3 э.
Лошадь весом 500 кГ при прыжке на высоту в 2 м совершает работу
в 1000 кГ • м или 9,81 • 103 дж. Пороховые газы, выбрасывая из ство-
ствола артиллерийского орудия снаряд весом 900 кГ со скоростью
500 м/сек, совершают за сотую долю секунды работу около 11
млрд. дж.
§ 3. ЭНЕРГИЯ МЕХАНИЧЕСКОГО ДВИЖЕНИЯ
Состояние механического движения системы тел может быть пол-
полностью охарактеризовано, если для некоторого момента времени
заданы относительное расположение тел и их скорости.
В механике различают два вида энергии: энергия, зависящая
от скоростей тел, носит название кинетической энергии, а зависящая
от их взаимного расположения (от координат) — потенциальной
энергии.
Для того чтобы получить выражение энергии в виде функции
параметров состояния механического движения, надо найти, как
изменяется величина энергии с изменением величины параметров.
Изменение состояния движения системы всегда связано либо
с процессами, происходящими внутри нее, либо с воздействиями
внешних сил, приложенных к системе и совершающих работу, т. е.
передающими системе энергию от внешних по отношению к ней тел.
Из предыдущего параграфа следует, что если работа внешних сил
положительна, то энергия системы возрастает. Если работа внеш-
внешних сил отрицательна, то энергия системы убывает. В последнем
случае система совершает работу над внешними телами. Работа
сил, приложенных со стороны системы к внешним телам, совершает-
совершается за счет энергии системы. Поэтому иногда энергию определяют
как «запас» работы, которую может совершить система тел.
Для подсчета изменения кинетической энергии системы выделим
в ней любое тело. Действие на него тел, принадлежащих системе
и внешних по отношению к ней, заменим результирующей соответ-
соответствующих сил. Вычислим работу, которую должна произвести ре-
зультирующая сила F, чтобы тело массы т изменило скорость своего
движения от значения у4 до значения v2.
141
Запишем уравнение движения тела массы т под действием силы/7:
7^= т — . (8.8)
dt
¦>¦ -*¦
Умножим обе части равенства скалярно на vdt = ds:
dt
ИЛИ
(8-9)
Чтобы вычислить полную работу А на конечном пути s2 — sit
при прохождении которого скорость тела меняется от vt до v2,
надо проинтегрировать левую и правую части равенства (8.9):
s, vt
j dA = J mvdv.
S, V,
Слева получим полную работу силы F. Правый интеграл запишем,
считая массу тела постоянной, в виде:
2
f my; mv\
m vdv — .
I 2 2
Следовательно,
Изменение кинетической энергии тела численно рав-
равно работе, которую должны произвести действующие
на него силы, чтобы изменить скорость его движения
от vt до v2.
Если на тело, кроме силы F, действует еще сила трения, то не-
некоторая часть механического движения, переданного телу, перейдет
в молекулярно-тепловое движение и изменение кинетической энер-
энергии тела будет меньше работы, совершенной силой.
Обозначим в равенстве (8.10) величину ^- = Ек,
тогда
При vi = О
?K = ^f- (8.12)
142
Тело массы т, двигаясь со скоростью v, обладает кинетической
энергией, численно равной -^-.
Li
Работа, которую производит движущееся тело при торможении
до полной остановки, не зависит от траектории движения, от того,
каким образом производится торможение (какой силой, как быстро).
Она равна кинетической энергии тела. Кинетическая энергия адди-
аддитивна, т. е. кинетическая энергия системы тел равна
сумме кинетических энергий тел, составляющих си-
стему:
П 2
\т m-.v,
EK=L~~. (8.13)
Так, например, работа, которую совершает тормозящая сила, чтобы
остановить два одинаковых вагона, движущихся со скоростью и,
в два раза больше работы, нужной, чтобы остановить один из них.
Потенциальная энергия системы тел может быть определена,
если указаны взаимное расположение тел в системе и силы, дей-
действующие между ними.
Изменение потенциальной энергии численно равно
работе, которую производят внешние силы, переводя
систему без изменения скорости из одного положения
в другое.
Когда мы поднимаем на некоторую высоту h над землей камень
массы т, потенциальная энергия системы Земля — камень изме-
изменится на величину, численно равную работе силы тяжести mg на
пути h, т. е. At/ = mgh. Величина пути 1г, который проходит тело
при подъеме, зависит от его начального h\ и конечного 1г2 положе-
положений. Для сравнения потенциальной энергии различных тел, под-
поднятых над землей, мы должны условиться, от какого общего на-
начального положения (уровня) мы будем отсчитывать высоту 1г.
В зависимости от условий задачи это может быть уровень стола,
пола, поверхности моря и т. д. Условность выбора начального уров-
уровня не играет роли в расчете потенциальной энергии, так как мы оп-
определяем не абсолютную величину потенциальной энергии, а ее из-
изменение.
Заметим, что в рассмотренном случае потенциальная энергия принадле-
принадлежит, строго говоря, системе Земля — камень; ее наличие — результат их
взаимного притяжения. При сближении движением Земли навстречу камню
можно пренебречь, и только поэтому мы обычно говорим о потенциальной
энергии камня, поднятого над землей (т. е. о потенциальной энергии одного
тела).
Выберем за уровень сравнения поверхность земли. По мере уда-
удаления камня от поверхности земли потенциальная энергия систе-
системы Земля — камень возрастает. При этом внешняя сила совершает
работу против внутренних сил системы, или внутренние силы, дей-
143
ствующие в системе, производят отрицательную работу (так как
направление действия их противоположно перемещению тел).
Если внешние силы производят работу против внутренних сил
системы, или, что то же, действующие в системе силы производят
отрицательную работу, взаимное положение тел системы меняется
так, что потенциальная энергия системы возрастает. Если, наобо-
наоборот, силы, действующие в системе, производят положительную ра-
работу (камень падает на землю под действием силы притяжения), то
происходит такое изменение взаимного положения тел системы,
при котором потенциальная энергия системы убывает:
dA = — dU, (8.14)
где dA — работа внутренних сил системы, di/ — изменение потен-
потенциальной энергии.
Положим, нами выбрано некоторое начальное положение систе-
системы В, в котором она обладает потенциальной энергией UB. В поло-
положении С потенциальная энергия Uc определяется работой, совер-
совершаемой при переходе системы из положения В в положение С:
Но перевести систему из Б в С можно различными путями, и, сле-
следовательно, вообще говоря, значение работы Авс может быть различ-
различным.
Потенциальная энергия системы в положении С будет определе-
определена однозначно, если работа по перемещению тел системы из одного
положения в другое не зависит от формы пути перехода.
Подсчитаем работу, совершаемую при движении тяжелого тела
с постоянной скоростью по некоторой кривой (рис. 71) в однород-
однородном поле силы тяжести. (Поле называется однородным, если сила,
действующая на тело, не меняется при перемещении тела из одной
точки поля в другую.) Для поля силы тяжести условие однородности
выполняется при перемещении те-
тела вдоль направления радиуса
Земли, на сравнительно неболь-
небольшое расстояние.
Разобьем кривую BtB2 на эле-
ментарные перемещения As, на-
настолько малые, чтобы каждый из
них можно было считать прямо-
прямолинейным. Элементарная работа
АА, совершаемая внешней силой
F при движении по отрезку As:
ДЛ = Fks cos % = — tng As cos a,
где F = — mg, a — угол, состав-
ленный силой F с направлением
перемещения. Но As cos a = Ah —
пеИрСемещениюаСтелТаВРаодОнТороПд°
ном поле силы тяжести.
144
изменение высоты тела над землей, происходящее при переме-
перемещении на As. Если число интервалов пути As безгранично уве-
увеличивать, то
&А — — mg dh.
Для подсчета работы на конечном перемещении тела от Bt до
В2 проинтегрируем последнее выражение:
А = — j tngdh, (8.15)
л,
где hi — высота тела, соответствующая положению Bi тела на кри-
кривой, и Л2 — положению В2. Так как сила F = G постоянна, то
— h.2) = Gh, (8.16)
т. е. работа в поле силы тяжести не зависит ни от
формы пути, ни от его длины, а только от того, на-
насколько в результате движения изменяется высота те-
тела относительно начального уровня.
Если мы из точки Si перейдем в точку В2 сначала по пути su
а затем по пути s2, то (по доказанному) работа на пути st равна ра-
работе на пути s2:
Легко сообразить, что работа на пути s2 от точки Bt к В2 равна
по величине, но противоположна по знаку работе А'$2 потому же
пути от точки В2 к Bi'.
Отсюда если тело перемещается по замкнутому пути, пройдя от точки
Bi к В2 по пути su а затем от В2 к Bt по пути s2, то работа силы
тяжести равна нулю:
A = AS +A' =4 — As =0.
При движении в поле силы тяжести по замкнуто-
замкнутому пути суммарная работа равна нулю.
Такой же вывод мы получим для работы любой силы, величина
которой зависит от расстояния между взаимодействующими телами
(сила упругости, сила взаимодействия двух электрических зарядов
и т. п.)- При этом величина работы определяется по формуле типа
(8.15).
Определим потенциальную энергию растянутой пружины. Си-
Сила, растягивающая пружину, прямо пропорциональна ее удлине-
удлинению (закон Гука):
F=ks, (8.17)
где k — коэффициент жесткости пружины, s — удлинение ее.
145
Так как сила меняется с изменением s, то разобьем удлинение
s на элементарные участки, в пределах каждого из которых силу F
можно считать постоянной. Элементарная работа:
dA = F ds = ks ds.
Полное значение работы получим, подставив в формулу (8.15)
значение Fds и проинтегрировав в пределах от начальной длины
пружины Si до конечной s2:
2 2
k S2~S'. (8.18)
На такую же величину изменится потенциальная энергия рас-
растянутой пружины.
Этот результат можно получить и графически. Предоставляем
сделать это читателям.
Если мы положим, что в нерастянутом состоянии (sj = 0) по-
потенциальная энергия пружины равна нулю, то потенциальная энер-
энергия пружины, растянутой на величину s, будет, очевидно,
U = ~. (8.19)
Потенциальная энергия растянутой пружины является одним
из примеров энергии упругой деформации.
Если пружина абсолютно упругая, то работа сил упругости на
замкнутом пути равна нулю.
Силы, работа которых на замкнутом пути равна нулю, назы-
называются консервативными или потенциальными.
Силы тогда консервативны, когда в системе нет перехода меха-
механического движения в другие формы движения материи или пре-
превращения других форм движения в механические.
Этому условию не удовлетворяют, например, силы трения.
Легко видеть, что работа силы трения на замкнутом пути отлична
от нуля. В самом деле, сила трения всегда направлена противопо-
противоположно скорости движения. Поэтому работа силы трения и на пути
S[ (рис. 71), и на пути s2 имеет один и тот же знак, и, следовательно,
сумма этих работ не может обратиться в нуль.
Силы, работа которых возрастает по величине при увеличении
пути независимо от того, замкнут путь или нет, называются дис-
сипативными. В этом случае механическая энергия переходит во
внутреннюю и работа этих сил конечным и начальным положения-
положениями тела определяется неоднозначно.
§ 4. ЗАКОН СОХРАНЕНИЯ И ПРЕВРАЩЕНИЯ
МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Рассмотрим, как изменяется энергия в механической системе,
находящейся под действием консервативных сил. Положим, в системе
из п материальных точек, обладающих массами ти т2 тп,
146
действуют внутренние силы F12, F13 и т. д., кроме того, внешние си-
силы Fu F2 и т. д.
Уравнения движения для точек системы имеют вид:
тп ^ = (FM + Fn2 + • • • + К п-г) + К- (8.20)
Пусть точки системы под действием всех сил перемещаются соот-
соответственно на отрезки dxu dx2 dxn. Умножим каждое из урав-
уравнений (8.20) на соответствующее перемещение и учтем, что — = vt:
dt
т1 (vy dvj — (Fi2 + /13 + • • • + Fin) dxi = ^i dxi,
mn (vn dvn) - (Fnl + Fn2 +... -f Fn, n_x) dxn = Fndxn.
Складывая почленно правую и левую части уравнений, получим:
mt (щ dvt) - J (Fn + Fn + . •. + Fin) dxt = j^F, dxt. (8.21)
Первое слагаемое левой части равенства (8.21) есть элементарное
изменение кинетической энергии всех точек системы:
m, (v, du7) = dEK,
второе — взятая с обратным знаком элементарная работа внутрен-
внутренних сил системы, т. е. элементарное изменение потенциальной энер-
энергии системы:
w
Правая часть равенства представляет собой элементарную работу
п
внешних сил, действующих на систему ^^.Л^ = dA:
i — l
dEK + dU = dA. (8.22)
Для подсчета изменения энергии при конечном перемещении
тел системы надо вычислить интеграл от выражения (8.22) в преде-
147
лах от состояния, которое мы обозначили Si, до состояния S2:
A, (8.23)
т. е. изменение полной энергии механической системы
равно работе внешних сил, действующих на нее. Это
выражение общего закона сохранения и превращения энергии
для механической системы, находящейся под действием консерва-
консервативных сил.
Если на систему не действуют внешние силы, то уравнение (8.22)
принимает вид:
d(EK + U) = 0, (8.24)
т. е. в случае замкнутой системы изменение полной энергии систе-
системы равно нулю, или
?к + ?/ = const. (8.25)
Для замкнутой механической системы сумма кине-
кинетической и потенциальной энергии есть величина по-
постоянная.
Энергия может перераспределяться между телами системы или
переходить из кинетической в потенциальную и наоборот, но сум-
суммарное значение ее остается постоянным.
Положим, мы подняли над землей тело массы т с высоты /г4
до высоты h2. На него действует сила тяжести mg (внутренняя
сила системы тело — Земля) и сила F, внешняя по отношению к
системе и сообщающая телу ускорение, направленное против уско-
ускорения силы тяжести. Напишем уравнение движения тела, пренеб-
пренебрегая трением его о воздух:
F — mg^m -^. (8.26)
at
Умножим выражение (8.26) на величину бесконечно малого пе-
перемещения dh и проинтегрируем от hi до /г2 левую его часть и от vt
(начальной скорости) до и2 (конечной скорости) правую часть:
F
Г dh — mg Г dh — т Г vdv,
ft, ft, i>.
или
mv\
F{h2-hx) = \mgh2 +-f] - \mgh1-\- ~f\. (8.27)
Когда на тело не действуют никакие силы, кроме силы тяжести,
то равенство приобретает вид:
mvt mvi
тё'\ -\ L = тйК Л • (8-28)
2 2 '
148
Если за начальное положение принять положение тела на поверх-
поверхности земли (hi = О, Vi = 0), то
tngh^^. (8.29)
Если в числе внутренних сил системы действуют силы трения,
то часть механического движения переходит в молекулярно-тепловое.
В уравнениях, которые написаны выше, этот переход не учтен. При
наличии сил трения они должны быть учтены и в уравнении (8.20)
и далее аналогично внешним силам.
Проведя рассуждение, подобное изложенному выше, получим:
d(EK+U) = AT?, (8.30)
где Лтр— работа сил трения. Работа сил трения всегда отрицатель-
отрицательна (Лтр < 0), т. е. связана с убыванием энергии механического
движения системы.
В замкнутой системе, в которой действуют силы
трения, энергия механического движения убывает, пе-
переходя в энергию теплового движения.
Механическое движение может переходить в другие формы дви-
движения не только при действии сил трения, но, например, при дви-
движении проводника в магнитном поле или магнита в электрическом
поле проводника и т. п. Всякий раз при переходе одной формы дви-
движения в другую убывает энергия одной формы движения и настоль-
настолько же возрастает энергия другой. Энергия никогда не исчезает и
не появляется вновь, а лишь переходит от одного тела или системы
тел к другому телу или системе тел. Или: энергия при всех
изменениях форм движения материи, остается посто-
постоянной. Это один из наиболее общих законов природы. Наряду с
законом сохранения массы он есть проявление всеобщего закона
сохранения материи и движения.
§ 5. УДАР
В качестве примера применения законов сохранения рассмотрим
явление удара, широко распространенное в природе и технике.
Ударом называется кратковременное взаимодействие соприка-
соприкасающихся тел, приводящее к значительному изменению состояния
их движения.
Удар имеет место при столкновении движущихся макроскопи-
макроскопических тел, при шквальных порывах ветра, при падении лавины.
Удар широко используется в технике при штамповке, ковке и
дроблении материалов. Используя явление удара, вгоняют молот-
молотком гвоздь в стену, водяной струей размывают горные породы,
вбивают сваи в землю и т. п. В измерительной технике удар при-
применятся для измерения скорости быстродвижущихся тел (например,
измерение скорости полета снаряда или пули баллистическим маят-
149
ником), для исследования быстропротекающих процессов (баллис-
(баллистический гальванометр для исследования кратковременных импуль-
импульсов тока) и т. д.
Явление удара протекает обычно в сотые, тысячные и миллион-
миллионные доли секунды. Время соударения тем меньше, чем меньше де-
деформации тел. Так как при этом количество движения тел изменяется
на конечную величину, то в месте соударения развиваются огром-
огромные силы. Так, при соударении двух одинаковых стальных шаров
диаметром 10 см, сближающихся со скоростью 5 м!сек, явление
протекает 0,0005 сек. Средняя сила, действующая в период соуда-
соударения, составляет более 4000 кГ.
Поднимая тяжелый молот весом в 1 Т на высоту 1 м за 2 сек,
мы можем воспользоваться механизмом мощностью в
N = 500 ^?^4900 em.
сек
Средняя мощность удара этого молота о наковальню (время удара
0,001 сек) равна запасенной молотом энергии, деленной на время
соударения:
0,001 сек
Удар — эффективное средство трансформации величины мощ-
мощности.
Процесс удара обычно разделяют на две фазы. Первая фаза —
с момента соприкосновения тел до момента, когда их относительная
скорость становится равной нулю. Вторая фаза — от этого послед1
него момента до момента, когда соприкосновение тел прекращается.
С момента возникновения деформаций в месте соприкосновения
тел начинают действовать силы, направленные противоположно от-
относительным скоростям тел. Если, скажем, два шара движутся на-
навстречу друг другу, то сила, возникшая в результате деформации
первого шара, направлена против движения второго шара, а сила,
действующая со стороны второго шара на первый, направлена против
движения первого. Возникшие в результате действия сил ускорения
уменьшают скорости тел до тех пор, пока они не станут одинако-
одинаковыми, или, что то же, пока относительная скорость тел не станет рав-
равной нулю. При этом происходит переход энергии механического
движения шаров в энергию упругой деформации.
С момента, когда относительная скорость стала равной нулю,
начинается частичное или полное восстановление деформаций. Силы,
продолжая действовать в прежнем направлении, сообщают теперь
телам положительные ускорения. Скорости шаров возрастают по
абсолютной величине, направление же их меняется на противопо-
противоположное по сравнению с первоначальным. Наконец, тела расходятся,
и удар заканчивается. В этой фазе кинетическая энергия системы
растет за счет положительной работы упругих сил.
150
У реальных тел относительная скорость после удара не дости-
достигает той величины, которую она имела до удара, так как часть ме-
механического движения необратимо переходит в молекулярно-теп-
ловую и другие формы.
Различают два предельных типа удара:
а) удар абсолютно неупругий; б) удар абсолютно упругий.
Абсолютно неупругий удар (точнее, близкий к нему) возникает
при столкновении тел из пластических материалов (например,
глина, пластилин, свинец и т. п.), форма которых не восстанавли-
восстанавливается после прекращения действия внешней силы. Абсолютно
неупругим ударом называется удар, после которого
возникшие в телах деформации полностью сохраняю-
сохраняются. В момент, когда скорости пластичных тел в результате уда-
удара станут равными, деформации прекращаются и тела, не восста-
восстанавливая формы, двигаются далее с общей скоростью.
После абсолютно неупругого удара тела движутся
с общей скоростью.
Абсолютно упругий удар (точнее, близкий к нему) возникает
при столкновении тел из упругих материалов (например, слоновая
кость, пластмасса-полистирол, сталь), форма которых после прек-
прекращения действия внешней силы полностью (почти полностью) вос-
восстанавливается.
После первой фазы удара (на которой заканчивается неупругий
удар) при ударе упругом начинается восстановление формы тел
и величины их кинетической энергии. После удара тела опять дви-
движутся с разными скоростями.
Абсолютно упругим ударом называется удар, после
которого возникшие в телах деформации полностью
исчезают (кинетическая энергия тел до удара равна их кине-
кинетической энергии после удара).
Прямая, совпадающая с нормалью к поверхности тел в точке их
соприкосновения, называется линией удара.
Удар называется центральным,
\/г /"ТГч если линия удара проходит через
¦""¦—Г"~* ) центры тяжести тел.
^—^ Если векторы скоростей шаров до
удара лежали на линии удара, то удар
называется прямым, в случае если
они не лежат на этой линии — косым
(рис. 72).
Рассмотрим задачу о нахождении
скоростей двух однородных шарооб-
шарообразных тел после удара по заданным
скоростям до удара и известным мас-
., „ „ сам тел. Удар будем считать цент-
Рис. 72. Виды уда- J
pa: a - прямой; б - ральным и прямым, систему соударя-
косой. ющихся тел — замкнутой.
151
Для того чтобы решить задачу с помощью уравнений движения
тел, нам необходимо было бы знать, как силы, развивающиеся при
ударе между шарами, меняются со временем. Вообще говоря, при
современных измерительных средствах, например при наличии пье-
зокварцевых динамографов, можно получить эти сведения. Однако
такой путь решения задачи сложен, а использование законов сох-
сохранения позволяет получить решение весьма просто.
Законы сохранения количества движения и энергии дают воз-
возможность написать два уравнения/в которые входят (в случае уда-
удара двух тел) две неизвестные величины — скорости тел после удара:
(8.31)
(8.32)
Решая систему этих уравнений, можно найти (зная начальные
условия) скорости тел после удара.
Абсолютно неупругий удар. При абсолютно неупругом ударе
двух тел массой ту и т2, двигавшихся со скоростями Vi и v2, оба
тела движутся дальше с
общей скоростью v (рис.
73). Следовательно, до-
достаточно одного уравне-
уравнения, чтобы найти вели-
величину неизвестной ско-
скорости v. Часть энергии
механического движе-
движения переходит при неуп-
неупругом ударе во внутрен-
внутреннюю энергию тел. По-
Поэтому для определения
неизвестной величины
используем закон сохранения количества движения. Количество
движения шаров до удара равно количеству движения после удара:
m^vi + тгщ = (mi + m2)v. (8.33)
В нашем случае векторы скоростей шаров лежат на прямой ли-
линии, соединяющей их центры. Проекции векторов скорости на эту
линию равны модулям скоростей, а направления их учтем знаками.
Поэтому уравнение (8.33) мы можем рассматривать как скалярное.
Из него получим:
v = т^ + т»»« , (8.34)
+
Рис. 73. Неупругий удар шаров.
Если шары движутся навстречу друг другу (знаки скоростей
разные), то после удара они будут двигаться в сторону, в которую
двигался шар, имевший большее количество движения. Если ко-
количества движения шаров перед ударом равны, то шары остановят-
152
ся. Если оба шара двигались в одну сторону (знаки одинаковые),
то и после удара будут двигаться в ту же сторону. Зная скорость
движения шаров после удара, нетрудно найти ту часть их кинети-
кинетической энергии, которая пошла на работу деформации.
* \
Кинетическая энергия до удара: —1-\ , после удара:
m2) v2 т i
—-—. Их разность и дает ту часть энергии, которая соот-
Li
(т,
—
ветствует работе деформации:
*v 2 ' 2 2(тл+та)
Если до удара одно из тел неподвижно (положим, v% = 0), то
(8.36)
2
где Ек = -1- — кинетическая энергия системы до удара. Ки-
Кинетическая энергия, которой обладают тела после удара и которая
может быть использована для совершения некоторой работы, оче-
очевидно, равна разности начальной кинетической энергии и работы
деформации:
?0СТ = ?к-Лдеф. (8.37)
Если до удара покоилось тело массы mti
Для получения в результате удара значительной деформации
(ковка, штамповка, дробление тел) массу ударяющего тела надо
брать значительно меньше массы ударяемого. Наковальня должна
быть гораздо массивнее молотка.
Если мы хотим обеспечить возможно большее перемещение тела
после удара, масса ударяющего тела (копер, молоток, струя воды,
ударяющая в лопасти турбины, и т. д.) должна быть больше массы
ударяемого (свая, гвоздь, лопасти турбины и т. д.).
Абсолютно упругий удар. При абсолютно упругом ударе выпол-
выполняется как закон сохранения количества движения, так и закон
сохранения механической энергии.
Преобразуем уравнения (8.31) и (8.32):
тх(и[ — Dj) = m2(i>2 — v'2)\ (8.39)
tn1(v'2l~vb = mi(v22-v'l). (8.40)
Умножим уравнение, полученное после деления уравнения
(8.40) на уравнение (8.39) , один раз на т2 и другой раз на т4.
153
Сложим полученные выражения поочередно с (8.39) и, разрешив
результат вычитания относительно неизвестных, получим:
v .= ¦ ; (о.41)
1 m1-Jrm2
v' __ (m2 — mi) "a + 2т1 (8 42)
Если один из шаров до удара покоится (v2 = 0):
2m,
Щ
¦fil
¦fi.
Второй шар движется после удара в ту же сторону, в которую двигал-
двигался первый шар до удара. Если т4 > т2, первый шар после удара
движется в ту же сторону, что и до удара, и v'2 > Vi.
Если mi <C m2) то после удара первый шар отскочит обратно.
Если nti = т2 = tn, то
v[ = v2 и v'2 = 1>х
и шары обмениваются скоростями.
Мы рассматривали соударяющиеся шары как замкнутую си-
систему. Поэтому для опытной проверки сделанных выводов надо обес-
обеспечить условия, при которых внешние силы имели бы минималь-
минимальное значение. Внешними силами в данном случае будут, очевидно,
силы трения и сила тяжести. Чтобы свести к минимуму силы тре-
трения, удар шаров можно производить на гладкой стеклянной поверх-
поверхности (поверхности шаров также должны быть гладкими) или ис-
использовать бифилярный подвес (рис. 74). Уменьшить величину силы
тяжести, очевидно, нельзя, но если линия удара горизонтальна,
то действие силы тяжести не скажется существенно на резуль-
результате опыта. (Направле-
(Направление силы тяжести пер-
перпендикулярно направле-
направлению скорости, и величи-
величина скорости не изменит-
изменится. В силу кратковре-
кратковременности явления и ма-
малости импульса силы тя-
Рис. 74. Упругий удар шаров. жести Gdt ее действие не
будет существенно ска-
сказываться и на направлении скорости.)
Законы сохранения количества движения и энергии позволяют
решать большое число задач механики значительно проще, чем с по-
помощью уравнений движения. Поэтому, приступая к решению ка-
какой-либо динамической задачи, полезно прежде всего посмотреть,
нельзя ли решить ее, применяя законы сохранения.
154
§6. ДВИЖЕНИЕ ТЕЛА, БРОШЕННОГО ВЕРТИКАЛЬНО ВВЕРХ,
В ПОЛЕ СИЛЫ ТЯЖЕСТИ
В качестве еще одного примера применения закона сохранения
энергии решим задачу о высоте подъема в поле силы тяжести
тела, брошенного вертикально. Будем считать Землю неподвиж-
неподвижной, высоту полета тела сравнимой с радиусом Земли; начальную
скорость, с которой брошено тело вверх, равной v0; сопротивлением
воздуха пренебрежем. Тело движется в поле силы тяжести за счет
сообщенной ему кинетической энергии, совершая работу^против дей-
действующей на него силы притяжения Земли, которая зависит от вы-
высоты подъема тела (или его расстояния L от центра Земли). Сила
притяжения по закону Ньютона:
/^Т —. (8-43)
L2
где у — постоянная тяготения, т — масса тела, М — масса Земли.
На поверхности Земли (при L = R) сила F = mg — весу тела.
Тогда -{М = gR2 и, следовательно,
F = mg ~ .
Изменение кинетической энергии тела равно работе силы тяжести,
взятой с обратным знаком (сила тяжести в данном случае перемен-
переменная величина):
о 9 L L п„
ИЛИ
mv* mv2Q
Полагая Lmax = R + #max и принимая во внимание, что при
L = Lmax v = 0, получим:
v2
Г 1 1 1
,
mv0
Г
или
-1—4- = —!—. (8.44)
К 6gK" К -j- Пшах
Отсюда
«8
2gR
R g
155
или
ffn,ax= ^Цг- (8-45)
2
Если начальная скорость мала, то отношение —°-много меньше
R
2g, и в этом случае получим известную формулу Галилея:
2
(8.46)
Если в формуле (8.45) знаменатель обращается в нуль, то #тах
неограниченно растет, т. е. тело покидает поле тяготения Земли.
Найдем скорость, при которой тело выйдет из поля силы тяжести;
V2
2*-^ = О,
откуда
vo=V2gR. (8.47)
Эта скорость носит название скорости освобождения или второй
космической скорости. Полагая g0 = 9,81 м/сек2, R = 6,37 х
X Ю4 м, из равенства (8.47) получим:
ио = 11 180 м/сек.
Скорость освобождения является важной характеристикой дви-
движения ракеты при проектировании межпланетных полетов.
§ 7. ДВИЖЕНИЕ В ЦЕНТРАЛЬНОМ ПОЛЕ ТЯГОТЕНИЯ.
ИСКУССТВЕННЫЕ СПУТНИКИ И РАКЕТЫ
Предположим, что во всем мировом пространстве находятся
только два взаимодействующих тела с массами М и т. Например,
Солнце и планета или Земля и искусственный спутник Земли и т. п.
Поле тяготения тел будем считать центральным (гл. VII, § 5). Тогда
тела взаимно притягиваются как материальные точки с массами М
и т, с силами, равными по величине F = у ——. Задача о том, ка-
ково будет в этих условиях движение тела с массой т, называется
задачей двух тел. Эта задача подробно рассматривается в курсе тео-
теоретической механики. Решение ее показывает, что тело должно дви-
двигаться по плоским кривым, один из фокусов которых совпадает с
центральным телом. В зависимости от начальных условий траекто-
траекторией тела будут либо эллипсы, либо гиперболы. Кривой, отделяющей
156
замкнутые эллиптические траектории от незамкнутых гиперболи-
гиперболических, является парабола.
Мы ограничимся тем, что рассмотрим, как влияют началь-
начальные условия на приобретение телом траектории того или иного
типа.
Предварительно еще упростим задачу, полагая, что М ^> т.
Тогда центральное тело можно считать неподвижным или движущим-
движущимся равномерно и прямолинейно, так как ускорение, приобретенное
им под действием силы тя-
тяготения, действующей со
стороны тела массы т,
мало.
Тело т в поле тяготе-
тяготения центрального обладает
некоторой кинетической и
потенциальной энергией.
При движении тела в от-
отсутствие сопротивления ок-
окружающей среды слагаемые
(кинетическая и потенци-
потенциальная энергия) могут из-
изменяться, но так, что сумма
их остается неизменной.
Рассмотрим подробнее из-
изменение потенциальной
энергии с изменением вза-
взаимного расположения тел.
В центральном поле тяготения сила, действующая на тело т,
направлена к центру тела М и зависит только от их взаимного рас-"
положения. Если из центра тела М описать сферу радиуса г, то
в любой ее точке сила тяготения будет одинакова по величине и
направлена вдоль радиуса сферы.
Когда тело перемещается в поле тяготения, силы, действующие
на него со стороны поля, совершают работу. Величина работы опре-
определяется величиной радиусов сфер, на которых лежат начальная
и конечная точки перемещения. Рассуждениями, подобными при-
приведенным в § 3, можно показать, что величина работы в неоднород-
неоднородном поле силы тяготения, так же как и в однородном, не зависит
от пути, по которому тело перемещается, а зависит только от началь-
начального и конечного положения тела (рис. 75). В самом деле, работа
при перемещении по поверхности сферы равна нулю, так как угол
между перемещением и направлением действия силы в этом случае
90 °. Но любое элементарное перемещение между сферами можно
представить как сумму перемещения по поверхности сферы и пе-
перемещения вдоль радиуса. Так как работа на первом участке равна
нулю, то остается только работа при перемещении вдоль радиуса.
Следовательно, работа перемещения тела любым путем с одной сферы
Рис.
75. К расчету работы сил централь-
центрального поля тяготения.
157
на другую равна работе по перемещению тела вдоль отрезка радиуса
между ними:
Л= Г Fdr = - Г т^р- dr. (8.48)
Знак минус появился перед интегралом потому, что для увеличе-
увеличения расстояния между телами (dr > 0) необходимо, чтобы внешние
силы произвели работу против сил тяготения.
Выполняя интегрирование, получим:
-I
(8.49)
величину работы по перемещению тела со сферы радиуса rt на
сферу радиуса г2. Если тела удаляются друг от друга (г2 > г\),
то внешние силы совершают положительную работу и потенциаль-
потенциальная энергия возрастает на величину работы против сил тяготения
АТ <С 0. Если тела сближаются (г2 < г^), силы тяготения совершают
положительную работу Лт > 0.
Для двух тел, поля которых удовлетворяют условию централь-
центральности, минимальное возможное значение потенциальной энергии
будет при их соприкосновении:
. ^oi гог.
где г oi и г20 — радиусы тел.
При п -* 1л значение потенциальной энергии стремится к ко-
конечному пределу:
t/:=1MA (8.50)
так как уменьшение силы происходит с квадратом расстояния, т. е.
значительно быстрее, чем растет расстояние. На достаточно боль-
большом, но еще конечном, расстоянии от центрального тела действие
силы тяготения практически перестает сказываться.^Следовательно,
работу при перемещении тела эти силы совершают не до бесконеч-
бесконечности, а до конечного расстояния, начиная с которого потенциаль-
потенциальная энергия практически уже перестает изменяться.
Величину потенциальной энергии можно подсчитывать относи-
относительно любого начального уровня, поскольку в механических зада-
задачах нас интересуют только разности значений потенциальных энер-
энергий при различных положениях тел.
Для того чтобы иметь возможность сравнивать потенциальные
энергии тел в полях тяготения, созданных различными телами за
общий нулевой уровень, принимается уровень, находящийся в бес-
бесконечности (f/co—> 0 при г2 -* о~>).
158
При таком выборе нулевого уровня выражение (8.49) перейдет в
U,
(8.51)
т. е. потенциальная энергия в данной точке (при г = г4) относитель-
относительно бесконечно далекого нулевого уровня отрицательна.
Отрицательное значение потенциальной энергии связано с вы-
выбором нулевого уровня в бесконечности. Совершая работу против
сил тяготения (перемещая тело из точки г — г4 в точку г = оч), мы
увеличиваем энергию системы. Следовательно, энергия в точке
г = оо будет больше, чем в точке г = гь а поскольку в точке
г = сп мы приняли UOa> = 0, то в точке ri Uijt будет меньше нуля.
Существенно то, что абсолютная величина потенциальной энер-
энергии в поле тяготения тела М ограничена. Поскольку кинетическая
энергия монотонно растет с ростом скорости, то оказывается воз-
возможным сообщить телу кинетическую энергию и меньшую, и рав-
равную, и большую абсолютной величины потенциальной энергии поля
тяготения данного центрального тела.
В силу закона сохранения и превращения механической энер-
энергии при отсутствии сил сопротивления
mv*
Mm ,
= const
г
(8.52)
и в силу сказанного постоянная может быть больше или меньше ну-
нуля, или равна нулю. Вернемся к нашей задаче.
Положим, тело массы т находится на расстоянии h0 от центра
тела М. Сообщим ему некоторую скорость v0 в направлении, пер-
перпендикулярном к линии, соединяющей центры обоих тел.
Если величина скорости v0 в
точности равна круговой скорости
vK и правильно выдержано ее нап-
направление, то тело начнет движе-
движение по круговой орбите (рис. 76)
с центром, лежащим в центре при-
притягивающего тела.
Так как в этом частном случае
центростремительное ускорение
/ц = -я- в точности равно уско-
м
рению силы тяготения g = -f ¦— ,
о
то
,-*-V~i
Если начальная скорость v0 не
Рис. 76. Круговая и эллиптиче-
эллиптические орбиты:
/—внутренняя эллиптическая орбита;
2—круговая орбита; 3—внешняя эллипти-
эллиптическая орбита.
159
удовлетворяет написанному равенству, то орбита не может быть
круговой и в одних условиях будет оставаться замкнутой—эллипти-
замкнутой—эллиптической, в других может оказаться разомкнутой — гиперболической.
Для орбит космических аппаратов или небесных тел, движущих-
движущихся в поле тяготения Солнца, точка орбиты, ближайшая к Солнцу,
называется перигелий, а наиболее удаленная от Солнца —¦ афелий.
Для орбит космических аппаратов, движущихся в поле тяготения
Земли, соответствующие точки называются перигей и апогей.
Скорость в перигее (перигелии) должна быть больше скорости
в апогее (афелии), так как момент количества движения относитель-
относительно оси, проходящей через центр притягивающего тела перпенди-
перпендикулярно орбите, в плоскости которой лежит вектор силы, должен
быть постоянным.
По свойствам эллипса радиусы кривизны р в апогее и в пери-
перигее одинаковы. Сила тяготения в этих точках направлена нормаль-
нормально к орбите, так как тело обладает только центростремительным ус-
V,2
корением уц = —.
Если мы сообщим скорость v0, перпендикулярную линии, сое-
соединяющей тела, то, очевидно, точка, в которой в этот момент нахо-
находилось тело, может стать только либо перигеем, либо апогеем.
В любой другой точке на круговой орбите скорость образует с
направлением линии центров угол, отличный от 90°.
Если скорость в точке А окажется меньше круговой, то радиус
кривизны орбиты в этой точке будет меньше, чем круговой радиус
h0, и орбита будет лежать внутри круговой. Следовательно, в своем
движении по орбите тело будет приближаться к центральному телу.
При этом потенциальная энергия тела будет уменьшаться, переходя
в кинетическую, т. е. скорость его будет расти.
В некоторой точке, наиболее близкой к центральному телу, ско-
скорость тела на орбите станет наибольшей. Из этого рассуждения сле-
следует, что начальная точка в данном случае будет апогеем. В перигее
тело будет обладать скоростью vn, превосходящей местную круговую
vm, и начнет удаляться от Земли.
В самом деле, скорость в перигее vn и скорость в апогее иа
могут быть определены соотношениями:
л2 М р2 М
— = Т—; — = Т~> (8-54)
Р 'п Р 'а
где гп — расстояние от перигея до центра притягивающего тела;
га — расстояние от апогея до центра притягивающего тела.
С другой стороны, в любой точке орбиты выполняется равенство
(8.52). Можем написать для перигея и апогея:
mv2 Mm mv« Mm
—i —т =_Л_Т (8.55)
160
Заменив скорости vn и уа в (8.55) из (8.54) и решив относитель-
относительно р, получим:
Га + г„
Откуда
Р= —^—. (8.56)
Отношение — < 1 и, следовательно,
'а
Откуда
»¦¦ > »пк. (8-57)
При удалении от Земли кинетическая энергия снова переходит
в потенциальную и в начальной точке скорость становится равной v0.
Тело описывает замкнутую, так называемую внутреннюю эллипти-
эллиптическую орбиту.
Запуская искусственные спутники Земли, стараются избегать
внутренних замкнутых орбит. В результате неизбежных случай-
случайных ошибок в величине и направлении скорости внутренняя орби-
орбита может войти в атмосферу или пересечь поверхность Земли. Спут-
Спутник не совершит даже одного оборота.
Если начальная скорость v0 превышает скорость круговую, то
тело будет двигаться по внешней эллиптической орбите с радиусом
кривизны в начальной точке р > ha. Тело сразу начинает удаляться
от притягивающего, и кинетическая энергия его переходит в потен-
потенциальную.
В точке орбиты, наиболее удаленной от Земли, скорость наи-
наименьшая (меньше местной круговой скорости), и оно снова начнет
приближаться к Земле.
К исходному положению тело возвращается с начальным зна-
значением кинетической энергии и скорости. Начальная точка в этом
случае является перигеем, а апогеем — наиболее удаленная точка
орбиты.
Притягивающееся тело находится в ближнем фокусе орбиты.
Если увеличивать начальную скорость, апогей орбиты, а вместе с
тем и второй фокус будут все более удаляться от начальной точки.
Внешняя эллиптическая орбита принимает все более вытянутую
форму (рис. 77). При начальной скорости 10 и 11,1 км/сек удаление
апогея орбиты спутника от центра Земли будет соответственно рав-
равно 4,3 и 62 радиусам Земли.
При движении по замкнутым орбитам кинетическая энергия,
сообщенная телу, остается меньшей абсолютной величины предель-
предельного значения потенциальной. При некотором значении начальной
6 М, М. Архангельский 161
скорости кинетическая энергия станет равной предельной потен-
потенциальной энергии:
Mm
(8.58)
Легко видеть, что полученное из этого равенства значение ско-
скорости совпадает с найденной нами скоростью высвобождения или
второй космической скоростью (гл. VIII, §6).
vl = V2gR (8.59)
при h = R, т. е. если начальная скорость сообщена телу у поверх
ности Земли.
Мы получили значение второй
§6), рассматривая движение тела,
62 Ra
Рис. 77. Траектория снаряда при
различных начальных горизонталь-
горизонтальных скоростях:
/—окружность при у0 = 7,8 км]сек\ 2—эллипс
при v0 = 10 км/сек; 3 — эллипс прн У» =
=11,1 км/сек; 4—эллипс при у„ >11,1 км/сек;
5—парабола при оь=11,8 км/сек; 6—гипер-
6—гипербола при ио=12 км/сек; 7—направление оа.
космической скорости (гл. VIII,
которому сообщена начальная ско-
скорость вертикально вверх (вдоль
направления земного радиуса),
а выражение (8.59) получено для
случая начальной скорости, пер-
перпендикулярной этому направ-
направлению.
Совпадение выражения для
начальной скорости, которая
обеспечивает выход тела из поля
тяготения Земли, в том и в дру-
другом случае объясняется тем, что
работа против силы тяжести в
центральном поле не зависит от
пути, а лишь от расстояния, от-
отсчитанного вдоль радиуса меж-
между сферами равного значения
силы тяжести.
Если телу сообщена скорость,
удовлетворяющая равенству
(8.59), то оно уже не вернется в
начальную точку. Тело будет
двигаться по параболической
орбите, безгранично удаляясь
от Земли.
При запуске с поверхности
Земли, в условиях отсутствия
атмосферы, величина второй кос-
космической скорости составляет
11 180 м/сек (гл. VIII, § 6).
Естественно, что при отлете
тела с удаленной от поверхнос-
поверхности Земли точки пространства,
162
например, с орбиты уже летающего искусственного спутника Земли,
вторая космическая скорость должна быть меньше.
В самом деле, значение потенциальной энергии относительно
бесконечности, подсчитанное для точки, находящейся на высоте h,
будет меньшим, а следовательно, меньшей и начальная скорость,
необходимая для выхода на параболическую траекторию.
Для подсчета можно не повторять интегрирования, проделан-
проделанного в § 6, а воспользоваться выражением (8.59), заменив в нем
значение ускорения силы тяжести на поверхности Земли, значе-
значением, полученным в главе V, § 3:
Отметим, что в любой точке пространства
va=VTvK. (8.61)
Рассчитанные по формуле (8.60) параболические скорости для
отлета с разных высот приведены в столбце четвертом таблицы 2.
Данные эти показывают, что энергетически выгоднее начинать
полет на другие планеты не с поверхности Земли, а с ее спутников.
При этом еще надо учесть, что корабль, находящийся на спутнике,
уже имеет круговую скорость, следовательно, для выхода из сферы
тяготения Земли ему остается сообщить скорость, равную разности
параболической и круговой на данной высоте. Вот почему старт
советской межпланетной автоматической станции, запущенной
12 февраля 1961 г. в сторону Венеры, был произведен с тяжелого
искусственного спутника Земли, выведенного на орбиту, близкую
к круговой.
Сообщение аппарату начальной скорости, точно равной парабо-
параболической, практически неосуществимо. Если же начальная скорость
превышает вторую космическую, то аппарат будет удаляться от Зем-
Земли по гиперболической траектории. Кинетическая энергия его будет
больше предельного значения потенциальной энергии:
mv2 ^ Mm
2 >Т~Г-
Снаряд, запущенный с гиперболической скоростью при выходе
из сферы действия силы тяжести, будет иметь какую-то остаточ-
остаточную скорость. Выйдя из сферы действия Земли, он начнет двигать-
двигаться под действием силы тяготения Солнца и никогда не возвратится
на Землю.
Для Земли практический радиус сферы действия равен 146 ра-
радиусам Земли. Это очень малая величина по сравнению с космически-
космическими расстояниями1.
1 Строго говоря, сферой действия Земли по отношению к Солицу назы-
называют область вокруг Земли, в которой отношение силы, с которой Солнце
возмущает движение тела в геоцеитрической системе коордииат к силе при-
6* 163
При переходе космическими аппаратами границы сферы дей-
действия расчеты дальнейшего движения его производятся в новой
системе координат, связанной с тем небесным телом, в сфере дей-
действия которого происходит дальнейшее движение космического ап-
аппарата (Луна — при полете к Луне, Солнце — при полете к Солнцу).
Для этого параметры состояния движения аппарата на гра-
границе сферы действия, пересчитываются в новую систему коор-
координат. Такой приближенный способ изучения движения космичес-
космических аппаратов, по отдельным участкам, несмотря на простоту, поз-
позволяет получить ряд основных характеристик траектории и уста-
установить основные закономерности полета.
Скорость космического аппарата на границе сферы действия
Земли v' определяется однозначно начальной скоростью v0 и вы-
высотой h в конце участка выведения (разностью между предельным
значением потенциальной энергии и начальной кинетической энер-
энергией).
Например, при скорости в конце участка выведения, равной
параболической при высоте h = 200 км, скорость на границе сферы
действия v' = 0,8 км/сек. Увеличение v0 на 1 км/сек по отношению
к параболической приводит к возрастанию v' = до 4,9 км/сек.
Скорость космического аппарата в гелиоцентрической системе
vc может быть получена суммированием вектора скорости и' и
вектора скорости и3 центра Земли относительно гелиоцентрической
системы в соответствующий момент времени.
Если vc = v' + v3 < ипС , где упС — параболическая скорость
относительно Солнца, то движение космического аппарата будет
происходить по эллиптической орбите. Аппарат превратится в ис-
искусственную планету. Если же vc> vnC, то движение космическо-
космического аппарата будет происходить по параболе или гиперболе и он
навсегда покинет солнечную систему.
Подсчитаем, какая минимальная скорость должна быть сооб-
сообщена для этого космическому аппарату при отлете с Земли. Сред-
Средняя скорость движения Земли по орбите v3 — 29,75 км/сек. Если
принять орбиту Земли за круговую, то параболическая скорость
тяжения этого тела Землей, меньше, чем отношение силы, с которой Земля воз-
возмущает гелиоцентрическое движение тела к силе притяжения его Солнцем,
т. е. выполняется условие:
^воз-С ^воз-3
гз Fc
гдеРв03-СИ FBo3-3— соответственно возмущенная сила притяжения к Солицу
и сила притяжения к Земле при движении тела относительно геоцеитрической
системы, Fs и fc—возмущающая сила притяжения к Земле и сила
притяжения к Солицу в гелиоцентрической системе.
164
относительно Солнца на расстоянии среднего радиуса земной орбиты
упс = П V3 = 42 км/сек.
Положим, что вектор скорости космического аппарата на гра-
границе сферы действия Земли совпадает по направлению с вектором
скорости движения Земли по орбите. Космический аппарат будет
двигаться в гелиоцентрической системе с параболической скоростью,
если скорость его в геоцентрической системе будет:
v' = Упс — vз = 12,25 км/сек.
Следовательно, чтобы покинуть солнечную систему, корабль
должен в момент вылета с поверхности Земли обладать кинети-
кинетической энергией, равной или большей суммы энергии, необходимой
для выхода из сферы действия поля тяготения Земли и для сохра-
сохранения остаточной скорости.
Минимальная скорость отлета с поверхности Земли, обеспечи-
обеспечивающая выход космического аппарата за пределы поля тяготения
Солнца, называется третьей космической скоростью:
"—^Г— = —^г^—I ' (8.62)
2 2 2
откуда
Уосв. с= 1/uocb.3 +И2 = 16,7 км/сек. (8.63)
Надо отметить, что эта начальная скорость не дает возможности
достичь на космическом корабле других миров. Выйдя за пределы
сферы тяготения Солнца, корабль будет двигаться по траектории,
мало отличающейся от траектории Солнца. Вероятность встречи
его с какой-либо звездой будет не больше, чем вероятность встречи
с ней Солнца или Земли. Межзвездные полеты потребуют скоростей
во много раз больших, чем третья космическая скорость.
ГЛАВА IX
ДИНАМИКА ТВЕРДОГО ТЕЛА
§1. ТВЕРДОЕ ТЕЛО КАК СИСТЕМА МАТЕРИАЛЬНЫХ ТОЧЕК
В задачах этого раздела механики реальные тела заменяют мо-
моделью — абсолютно твердым телом.
Движение абсолютно твердого тела можно рассматривать как
движение системы большого числа материальных точек, сохраня-
сохраняющих неизменное положение друг относительно друга.
Для каждой материальной точки справедлив второй закон ди-
динамики. Если масса /-й точки т1 и скорость ее vt, то
А (тД) = /,+ ?„,, (9.1)
где FlB — внутренние силы, действующие на данную точку со сто-
стороны других точек тела, a F t — действующие на нее внешние силы.
Напишем уравнения, аналогичные уравнению (9.1), для каждой
п
точки тела и просуммируем их. Так как ^ FlB — 0, то
<= 1
. (9-2)
или
т. е. производная от полного количества движения те-
тела равна сумме внешних сил, действующих на тело.
166
Равенство (9.2) можно записать в виде:
,. (9.4)
Если тело движется только поступательно, то ускорения всех
его точек одинаковы и, учитывая,что Ътх — М (масса тела), по-
получим:
М |- = F, (9.5)
где
Уравнение (9.5) носит название уравнения поступательного
движения твердого тела.
Вектор F называется главным вектором внешних сил или вектором
результирующей внешних сил.
Сравнивая выражение (9.5) с уравнением движения материаль-
материальной точки C.8), видим, что поступательное движение твердого тела
можно рассматривать как движение материальной точки с массой,
равной массе тела и находящейся под действием силы, равной ре-
результирующей внешних сил. Для случая непоступательного дви-
движения сделать такое заключение нельзя, так как в выражении (9.4)
каждая точка будет иметь свое ускорение -^.
dt
Поскольку взаимное расположение элементов, на которые мы
расчленили твердое тело, не изменяется, для изучения его движения
достаточно изучить движение одной его точки.
Сравнив уравнение (9.5) с уравнением F.19) для системы ма-
материальных точек, приходим к выводу, что точка, движение кото-
которой эквивалентно движению твердого тела массы М под действием
результирующей внешних сил F, является центром масс тела.
Центр масс твердого тела движется так, как дви-
двигалась бы материальная точка, масса которой равна
массе тела, под действием результирующей внешних
сил, действующих на тело.
По аналогии с системой материальных точек количество дви-
движения твердого тела равно его массе, умноженной на скорость дви-
движения центра масс.
Выше (гл.VI, § 3) было показано, что под действием пары сил
тело может только вращаться вокруг центра масс и не может дви-
двигаться поступательно. Можно показать, что если на тело действует
167
произвольная система сил, то она всегда может быть приведена к
одной равнодействующей силе и паре сил.
Если система сил приводится только к равнодействующей,
тело движется поступательно; если система приводится только к
паре сил, тело вращается.
Мы различаем равнодействующую системы сил и результирую-
результирующую. Система сил, приложенных к телу, может иметь равнодейст-
равнодействующую силу (т. е. действие системы сил может быть полностью за-
заменено действием одной силы), если линии действия сил пересекают-
пересекаются в одной точке или силы параллельны (но не являются парой сил).
Результирующая сила, равная сумме всех сил, перенесенных в одну
точку тела, существует для любой системы (хотя бы линии действия
сил и лежали в разных плоскостях).
Вспомним, что производная от полного количества движения
тела равна результирующей внешних сил (см. гл. IX, § 1). Следо-
Следовательно, изменение количества движения тела определяется только
величиной и направлением внешних сил, приложенных к телу, и не
зависит от того, в каких точках тела эти силы приложены. (Этим
положением мы пользовались, когда при изучении поступательного
движения тела все силы, включая, например, и силу трения, при-
приложенную к поверхности тела, считали приложенными в одной точ-
точке — в центре тяжести тела.)
Если внешняя сила F действует по линии, проходящей через
центр масс тела, то количество движения тела изменится на вели-
величину
d {mvc) = F dt, (9.6)
где vc — скорость движения центра масс.
-j Если линия действия параллельна линии, проходящей через центр
масс, то тело движется поступательно и одновременно вращается.
Изменение количества движения его центра масс равно вычисленному
по формуле (9.6) и по направлению совпадает с направлением дейст-
действия силы.
Наконец, мы можем обосновать введенное нами ранее в значи-
значительной степени формально понятие центра масс.
Силы, действующие на каждую частицу тела и по величине про-
пропорциональные массе частиц, называются массовыми силами (на-
(например, сила тяжести).
Положим, на частицы тела действуют массовые силы Д = kmu
\г — km2, направления которых параллельны.
mi, т2,... и т. д. — массы частиц, на которые нами мысленно
расчленено тело. Величина равнодействующей параллельных сил,
направленных в одну сторону, равна их сумме:
t = kM. (9.7)
168
Координаты точки ее приложения, как доказывается в теорети-
теоретической механике, будут:
_
ИЛИ
_
(9.8)
м с м
Сравним эти формулы с выражением F.4).
Следовательно, центр масс есть точка приложения
равнодействующей внешних параллельных массовых
сил, действующих на тело.
В частном случае, когда тело находится в однородном поле силы
тяжести, центр масс совпадает с центром тяжести.
§ 2. ОБРАЩЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ ВОКРУГ
НЕПОДВИЖНОЙ ОСИ
Пусть мы хотим привести во вращение небольшой маховик.
Для того чтобы преодолеть инерцию маховика и силы трения, а
также сообщить ему угловое ускорение, приложим силу F к ободу
маховика вдоль диаметра (рис. 78, а). Как бы мы ни увеличивали
приложенную силу, маховик не вращается. Сила, направление ко-
которой проходит через ось, деформирует последнюю и уравнове-
уравновешивается упругой силой, возникшей в результате деформации.
Установим одну из спиц маховика горизонтально и сообщим ма-
маховику ускорение, действуя в средней точке спицы силой F, нап-
направленной вертикально вниз (рис. 78, б). По мере того как спица
опускается, ускорение уменьшается, и, когда спица займет верти-
вертикальное положение, ускорение обратится в нуль. В начальном по-
0 6
Рис. 78. Вращение маховика различно приложенными силачи.
169
ложении сила направлена по касательной к траектории частиц ма-
маховика. Как только спица сместится из горизонтального положе-
положения, возникнет составляющая силы в направлении, проходящем
через ось вращения (радиальная составляющая). Составляющая,
направленная по касательной к траектории движения частиц ма-
маховика (тангенциальная составляющая), станет меньше полного
значения силы F. По мере опускания спицы радиальная составляю-
составляющая (которая не поддерживает вращения, а лишь деформирует ось)
растет, а тангенциальная составляющая убывает. И когда спица
располагается вертикально, сила F целиком оказывается направ-
направленной вдоль радиуса.
Изменение величины скорости вращательного дви-
движения вызывает тангенциальная составляющая силы,
действующей на тело.
Приложим силу F не в середине спицы, а на ободе маховика
(рис. 78, в). Мы обнаружим пр*и этом, что угловое ускорение, которое
приобретают частицы маховика при том же значении силы, больше,
чем в предыдущем случае. Следовательно, динамический эффект
действия силы при вращательном движении зависит не только от
величины силы, но и от расстояния между осью вращения и точкой
приложения силы.
Рассмотрим движение шарика массы т, укрепленного на лег-
легкой нити, по окружности радиуса г в вертикальной плоскости.
При длине нити г, значительно большей радиуса шарика, его мож-
можно рассматривать как материальную точку.
Шарик движется под действием двух сил: силы упругости, дей-
действующей со стороны деформированной нити, и силы тяжести. Пер-
Первая направлена все время вдоль радиуса окружности, а вторая сос-
составляет с ним переменный угол. Направление и величина результи-
результирующей этих сил меняется во время движения, поэтому меняется
ускорение, с которым движется
шарик.
Рассмотрим движение шарика
на малом участке окружности,
в пределах которого силу можно
считать постоянной по величине
и направлению. Обозначим угол
между результирующей сил, дей-
действующих на шарик, и направ-
направлением касательной к траектории
через а (рис. 79).
Шарик приобретает тангенци-
тангенциальное ускорение ;т, под действием
тангенциальной составляющей си-
Рис. 79. Обращение точки лы р равной:
по окружности под действи- г
ем сил F. Fx — F cos х.
170
По второму закону динамики:
F cos х = m/x .
Как известно, угловое ускорение е = — и, следовательно,
г
F cos х — т&г. (9.9)
Умножая обе части равенства (9.9) на г, получим:
Fr cos a = тгЧ. (9.10)
Слева в равенстве (9.10) стоит величина, которая носит название
момента силы относительно центра вращения.
Момент силы М относительно центра вращения чис-
численно равен произведению силы на длину перпендикуляра,
опущенного из центра вращения на направление силы.
Величина г cos а = I носит название плеча. Поэтому иногда мо-
момент силы определяют как произведение силы на плечо.
Величина / = /иг2 называется моментом, инерции.
Момент инерции I материальной точки относи-
относительно центра вращения численно равен произведе-
произведению массы точки на квадрат ее расстояния от центра
вращения.
Таким образом,
М = 1*. (9.11)
Равенство (9.11) свидетельствует о том, что инерционные свойства
материальной точки при движении по окружности определяет не
только величина массы точки, но и ее положение относительно
центра вращения.
Равенство (9.11) мы получили, полагая, что сила (в пределах
интервала времени изучения движения) постоянна по величине и
направлению. Если сила со временем меняет свою величину (или
направление), то формально связь между моментом силы М и угло-
угловым ускорением е имеет тот же вид, но величины Мие — функции
времени.
Угловое ускорение, как мы знаем (гл. II, § 8), — величина век-
векторная, момент инерции — величина скалярная. Следовательно,
момент силы — величина векторная и совпадает по направлению о
вектором углового ускорения.
Рассмотрим, как связано направление вектора момента силы с
радиусом-вектором точки и вектором силы.
Пусть положение материальной точки на окружности определяет-
определяется радиусом-вектором г, проведенным из центра вращения к дан-
данной точке (рис. 80). Положим, точка движется вокруг оси против
часовой стрелки. Тогда вектор угловой скорости со направлен вверх.
Если скорость обращения со возрастает, то, очевидно, тангенциаль-
тангенциальная составляющая силы направлена по вращению (совпадает
171
с линейной скоростью Ь). Вектор углового ускорения, а следователь-
следовательно и вектор момента силы (9.11), так же должен быть направлен
вверх. В случае убывания скорости вращения тангенциальная сос-
составляющая силы направлена против вращения, а вектор момента
силы направлен вниз. Таким образом, направление момента силы
связано с направлением силы правилом буравчика.
Вектор момента силы от-
откладывается по оси вращения
в сторону поступательного дви-
движения буравчика, у которого
ручка вращается в направле-
направлении действия силы.
Из определения момента силы сле-
следует, что по величине он равен площа-
площади параллелограмма, построенного на
радиусе-векторе точки приложения
силы и векторе силы, или удвоенной
площади треугольника OAF на ри-
рисунке 79. В самом деле,
Рис. 80. Вектор момента
силы связан С Направ-
Направлением действия силы
правилом буравчика.
М = rF cos a = rF sin ( а -j—— V
(9.12)
Но а + - = rF — углу, образованному направлениями векто-
ров г и F. Следовательно,
rF sin (rF) = 2S0AF. (9.13)
Сопоставив выражения для модуля вектора момента силы (9.13)
и правило определения направления его, видим, что вектор момента
силы равен векторному произведению радиуса-вектора точки при-
приложения силы на вектор силы:
М = [rF\.
(9.14)
§3. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Положим, твердое тело может без трения вращаться вокруг не-
неподвижной оси 00 (рис. 81). Чтобы ось не изменила своего положе-
положения в пространстве, концы ее должны быть помещены в подшипники.
(Дверь на петлях, ротор турбины, часовой маятник, коромысло
весов могут быть схематически представлены в виде такого тела,
вращающегося вокруг неподвижной оси.) _^
Пусть к телу приложена результирующая внешних сил F. Кроме
нее, на тело действуют силы реакции со стороны связей (подшип-
172
ников). Если силы трения отсутствуют, то силы реакции связей
проходят через ось вращения и момент их относительно оси равен
нулю. Подсчитаем момент равнодействующей внешних сил относи-
относительно оси вращения.
Для этого расчленим тело на достаточно малые элементы, чтобы
расстояния от всех точек отдельного элемента до оси можно было
считать одинаковыми. Пусть масса элемен-
элемента — mt, внешняя сила, действующая на
него, — Fit угол между направлением си-
силы и касательной к траектории элемента—
аг Положим (для определенности), что
угол а, острый. При вращении тела каждый
элемент его описывает окружность с цент-
центром на оси вращения. Для каждого эле-
элемента можно написать равенство вида (9.10):
Firi cos at = mf\ elt
где e i — угловое ускорение элемента с мас-
массой /Л;.
Просуммируем равенства по всем эле- рис 81_ хело, вра-
ментам: щающееся вокруг непо-
1 л ДВИЖНОЙ ОСИ.
2 Ftr, cos х, — 2
Так как для абсолютно твердого тела угловое ускорение всех эле-
элементов одно и то же, то
, cos a, = s
(9.15)
Слева в равенстве (9.15) стоит сумма моментов сил, действующих
на все элементы тела. В теоретической механике доказывается тео-
теорема о том, что момент суммы сил относительно какой-
либо оси равен алгебраической сумме моментов этих
сил относительно той же оси (теорема Вариньона).
Следовательно, слева в равенстве (9.15) стоит величина вектора
полного момента М сил, действующих на тело, относительно оси
вращения.
Величина 2/и/2 равна сумме моментов инерции отдельных
элементов относительно оси вращения и называется моментом инер-
инерции I тела относительно оси.
Таким образом, основное уравнение вращательного движения
тела можно записать в виде:
M = h. (9.16)
Так как векторы всех моментов сил, действующих на элементы
тела, откладываются на одной оси, то вектор полного момента сил
173
также лежит на этой оси и связан с направлением результирующей
силы правилом буравчика.
Вектор полного момента сил, действующих на те-
тело, относительно некоторой оси лежит на этой оси
и равен векторному произведению радиуса-вектора
точки приложения результирующей сил на вектор ре-
результирующей силы:
= [rF].
(9.17)
Угловое ускорение е, приобретаемое телом под дей-
действием силы F, прямо пропорционально моменту силы
и обратно пропорционально моменту инерции тела:
S =
М
(9.18)
Для опытной проверки полученной связи может служить так называе-
называемый крестообразный маятник Обербека (рис. 82).
Два стержня скреплены крестообразно и свободно вращаются вокруг
горизонтальной оси. По стержням могут перемещаться четыре груза, масса
которых такова, что моментом инерции стержней можно пренебречь по срав-
сравнению с моментом инерции грузов (для качественной проверки закона; при
количественной проверке надо учитывать и постоянный момент инерции стер-
стержней). На оси креста прикреплено несколько шкивов разного радиуса. На
один из них наматывается нить, к свободному концу которой подвешивается
груз. Сила натяжения нити создает момент, сообщающий кресту угловое ус-
ускорение. Грузы на стержнях располагаются симметрично, вследствие чего
момент силы тяжести равен нулю.
Изменяя массу или расстояние грузов от оси вращения, можно изменить
момент инерции. Меняя груз на иити или перенося нить с одного шкива на
другой, можно менять момент силы. С
увеличением момента силы угловое ус-
ускорение креста возрастает, а с увеличе-
увеличением момента инерции уменьшается.
Легко сообразить, что мы не могли
привести во вращение маховик, дейст-
действуя силой вдоль одного из его диамет-
диаметров, так как момент силы, проходящей
через ось вращения, был равен нулю.
Сравнивая равенства (9.16) и
(9.5), видим, что уравнение вра-
вращательного движения твердого те-
тела имеет формально такой же вид,
как уравнение поступательного
движения твердого тела, но вместо
линейного ускорения стоит угло-
угловое ускорение, вместо силы — ее
момент относительно оси враще-
Рис 82. Крестообраз- ния- а вместо массы — момент
ный маятник Обербека. инерции.
174
Из равенства (9.16) следует, что если момент внешних сил дей-
ствующих на тело, равен нулю (М = 0), то тело вращается без уг-
углового ускорения (е =0), т. е. с постоянной угловой скоростью
(при условии, что момент инерции тела остается постоянным).
В динамике поступательного движения равными силами мы счи-
считаем силы, которые сообщают телам равной массы одинаковые ус-
ускорения.
При вращательном движении одна и та же сила сообщает телу
различные угловые ускорения в зависимости от того, как далеко
направление действия силы лежит от оси вращения. Поэтому махо-
маховик легче привести во вращение, прикладывая силу к его ободу,
чем к середине спицы. Угловое ускорение, приобретаемое данным
телом под действием разных сил, будет одно и то же, если равны
моменты сил.
Силы называются эквивалентными в смысле созда-
создаваемого ими вращения, если равны их моменты.
Существует большое число различных приспособлений, позво-
позволяющих увеличивать момент прилагаемых к телу сил. Для того что-
чтобы перекатывать тяжелый груз, пользуются рычагом; чтобы сооб-
сообщить вручную необходимое для запуска автомобильного двигателя
вращение коленчатому валу, пользуются длинной рукояткой; руль
автомобиля снабжают баранкой; части станка, приводимые от руки
во вращение, снабжают маховиками и ручками и т. д.
Разные тела получают под действием сил, имеющих одинаковые
моменты, одинаковые угловые ускорения, если равны их моменты
инерции.
Тела эквивалентны в смысле приобретаемого ими
вращения, если равны их моменты инерции.
Так как угловое ускорение, приобретаемое телом под действием
силы, обладающей моментом данной величины, обратно пропорцио-
пропорционально моменту инерции тела, то тело легче привести в движение,
если масса его сосредоточена ближе к оси вращения, а сила прило-
приложена возможно дальше от нее. Поэтому рычаг, поворачивающий
груз, заводные рукоятки и т. п. делают возможно более легкими и
и длинными. С этой точки зрения, казалось бы, основная масса ма-
маховика должна быть расположена ближе к оси вращения. Обыч-
Обычно же поступают наоборот: спицы маховика делают сравнительно
небольшой массы, а основную массу сосредоточивают на ободе.
Объяснение этой особенности конструкции маховика будет дано
ниже, в § 6 этой главы.
Найдем значение вектора момента пары сил.
Положим, к телу приложена пара сил Fi и F2. Рассечем
тело плоскостью, в которой лежат силы (рис. 83). Возьмем
произвольную точку О, лежащую в этой плоскости. Момент си-
силы Fi относительно этой точки М4 = FfiA cos at и направлен
перпендикулярно плоскости чертежа к нам. Момент силы F2
175
Рис. 83. Момент пары сил.
равен Mz^FzOB cos a2 и направ-
направлен перпендикулярно плоскости
чертежа от нас. Суммарный мо-
момент пары сил равен алгебраиче-
алгебраической сумме моментов Mi и М2'-
М=FfiA cos aj—F2OB cos oc2.
Но поскольку Fi = F2 = F,
M*=F {OA cos ях — OB cos a2).
Выражение, стоящее в скобках, представляет собой расстояние
между линиями действия сил. Обозначим это расстояние через d.
Тогда
М = Fd, (9.20)
где d — плечо пары сил.
Вектор момента пары сил численно равен произве-
произведению величины одной из сил пары на плечо пары. Он
направлен в сторону поступательного движения бу-
буравчика, рукоятка которого вращается по направле-
направлению сил пары.
§ 4. ВЫЧИСЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛ
Для вычисления момента инерции мы должны мысленно рас-
расчленить тело на достаточно малые элементы, точки которых можно
считать лежащими на одинаковом расстоянии от оси вращения,
затем найти произведение массы каждого элемента на квадрат его
расстояния от оси и, наконец, просуммировать все полученные про-
произведения. Очевидно, это весьма трудоемкая задача. Для подсчета
моментов инерции тел правильной геометрической формы можно
воспользоваться в ряде случаев приемами интегрального исчисле-
исчисления.
Нахождение конечной суммы моментов инерции элементов тела
заменим суммированием бесконечно большого числа моментов
инерции, вычисленных для бесконечно малых элементов:
\\т
(9.21)
Вычислим в качестве примера момент инерции однородного дис-
диска или сплошного цилиндра высотой h относительно его оси сим-
симметрии (рис. 84).
Расчленим диск на элементы в виде тонких концентрических
колец с центрами на оси его симметрии. Полученные кольца имеют
внутренний диаметр г и внешний г + dr, а высоту h. Так как dr <g
176
<$; r, то можем считать, что расстояние всех точек кольца от оси рав-
равно г. Для каждого отдельно взятого кольца момент инерции / =
= 2 Дтг2 = г2 2Дт, где 2Дт— масса всего кольца. Объем
кольца 2izrh dr. Если плотность материала диска р, то масса коль-
кольца p2r.rh dr. Момент инерции кольца i = 2wphr3 dr. Чтобы подсчи-
подсчитать момент инерции всего диска, надо просуммировать моменты
инерции колец от центра диска (г = 0) до
края его (г = R), т. е. вычислить интеграл: ^
R
%
или
Но масса диска
т = pnhR*, следовательно,
(9.22)
Рис. 84. Вычисле-
Вычисление момента инер-
инерции однородного
диска.
Приведем (без вычисления) моменты инер-
инерции для некоторых тел правильной геометрической формы, выпол-
выполненных из однородных материалов (рис. 85).
1. Момент инерции тонкого кольца относительно оси, проходя-
проходящей через его центр перпендикулярно его плоскости (или тонко-
тонкостенного полого цилиндра относительно его оси симметрии):
/ = mR2. (9.23)
5 0 ? о f0.
Рис. 85. К расчету моментов инерции различных тел:
/—кольца относительно оси, проходящей через центр перпендикулярно его плос-
плоскости; 2—полого цилиндра относительно оси симметрии, параллельной образующим;
3—тонкого диска относительно оси, совпадающей с диаметром; 4—сплошного цилиндра
относительно оси симметрии, перпендикулярной образующим; 5—однородного стержня
относительно оон, проходящей через середину перпендикулярно к нему; 6—тоже, от-
относительно оси, проходящей через конец стержня; 7—шара относительно осн, совпада-
совпадающей с диаметром.
177
2. Момент инерции толстостенного цилиндра относительно оси
симметрии:
/= ±т(Щ-\-Щ), (9.24)
где Rt — внутренний и R2 — внешний радиусы.
3. Момент инерции диска относительно оси, совпадающей с од-
одним из его диаметров:
/= — mR\ (9.25)
4
4. Момент инерции сплошного цилиндра относительно оси, пер-
перпендикулярной к образующей и проходящей через ее середину:
/ = /л (±-R* + ±h*y (9.26)
где R — радиус основания цилиндра, h — высота цилиндра.
5. Момент инерции тонкого стержня относительно оси, прохо-
проходящей через его середину:
7 = IIт/2' (9>27)
где I — длина стержня.
6. Момент инерции тонкого стержня относительно оси, прохо-
проходящей через один из его концов:
/ = ~ ml2. (9.28)
О
7. Момент инерции шара относительно оси, совпадающей с одним
из его диаметров:
1= ~ т#2- (9.29)
о
Если известен момент инерции какого-либо тела относительно
оси, проходящей через его центр масс, то момент инерции относи-
относительно любой другой оси, параллельной первой, может быть най-
найден на основании так называемой теоремы Гюйгенса.
Момент инерции тела I относительно любой оси
равен моменту инерции тела /с относительно оси,
параллельной данной а проходящей через центр масс
тела, плюс масса тела т, умноженная на квадрат
расстояния I между осями:
/ = /с + ml2. (9.30)
В качестве примера подсчитаем момент инерции шара (рис. 86)
радиуса R и массой т, подвешенного на нити длиной /, относитель-
относительно оси, проходящей через точку подвеса О. Масса нити мала по
сравнению с массой шара. Так как момент инерции шара относн-
2
тельно оси, проходящей через центр масс Ic = — mR2, а расстояние
О
178
между осями (/ + R), то момент инерции относительно оси, прохо-
проходящей через точку подвеса:
/= _Lm#«_j_m(/_|_я)«. (9.31)
О
Размерность момента инерции:
О
Возвратимся к примеру 2 главы IV, § 2. Дополним исходные
данные задачи: масса блока М сравнима с массой грузов и ею уже
нельзя пренебречь. Радиус блока R. Кроме того,
положим, что нить движется на блоке без сколь-
скольжения.
По-прежнему составим уравнения поступатель-
поступательного движения грузов:
'dv ~
Щ — = Т1 — т&,
~
dv
Р-
Эти уравнения отличаются от составленных при
решении задачи без учета массы блока тем, что си-
силы натяжения нити слева и справа блока различны.
Вращение блока возникает в результате действия
моментов сил натяжения нитей. При равенстве
плеч той и другой сил вращение может возник-
возникнуть только, если сами силы по величине раз-
различны.
Но теперь система уравнений не замкнута, так
как уравнений три, а неизвестных четыре
(? р, т„ г.;
Рис. 86.
К расче-
расчету момен-
момента инер-
инерции ма-
маятника.
Напишем уравнение моментов для вращательного движения
блока относительно его оси. Положительным будем считать момент,
действующий в направлении вращения (по часовой стрелке):
Добавив уравнение, мы вместе с тем ввели новое неизвестное:
d(x>
Hi'
Для того чтобы замкнуть систему, нужно еще одно уравнение,
в которое входили бы введенные ранее неизвестные. Используем ус-
условие отсутствия скольжения нити, чтобы получить связь между
179
угловым ускорением вращательного движения блока и ускорением
поступательного движения центров масс грузов.
Эту связь легко получить с помощью следующего простого
рассуждения. При повороте блока на угол Дф с него (при отсутствии
скольжения) сбегает отрезок нити As. Следовательно, расстояние,
проходимое центрами масс грузов и угловое перемещение блока
связаны равенством:
As =
Продифференцировав один раз по t, получим связь между ско-
скоростью перемещения грузов и угловой скоростью вращения блока:
v =
Дифференцируя еще раз по t, получим связь между ускорениями
(линейным груза и угловым блока):
dv
Теперь в нашем распоряжении пять уравнений для нахождения
пяти неизвестных:
dv rr
ml — = T1—m1g,
dv
т Yt^mg'~
dot „ dv
dt ~ dt '
Решая эту систему, найдем все неизвестные величины.
§5. МОМЕНТ КОЛИЧЕСТВА ДВИЖЕНИЯ.
ЗАКОН СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
Положим, как и ранее, что твердое тело вращается вокруг не-
некоторой оси, неподвижной в пространстве и относительно тела.
Расчленим тело на малые элементы. Выделим произвольный
элемент с массой mlt положение которого определим радиусом-век-
радиусом-вектором rt, проведенным от оси в плоскости вращения элемента
(рис. 87). Будем считать выбранный элемент материальной точкой.
Двигаясь по окружности (или в более общем случае по какой-
либо плоской кривой), точка обладает некоторой линейной скоростью
vt и количеством движения тр^
180
Вектором момента количества движения относи-
относительно некоторой оси называют вектор, направлен-
направленный вдоль оси и равный векторному произведению ра-
радиуса-вектора точки на вектор ее количества движе-
движения: _ ^
/<\ = \rlml vt]. (9 32)
Модуль вектора момента коли-
количества движения, следовательно,
равен:
п(ЙГ) (9.33)
Рис. 87. Вектор момен-
момента количества движе-
движения К.
Как легко видеть из рисунка 87,
в общем случае криволинейного дви-
движения, при котором радиус-вектор
точки и вектор количества движения
лежат в одной плоскости:
rlmpl sin {rft;) = mplrl cos я, (У. 39)
где а — угол между направлением
радиуса-вектора точки и перпенди-
перпендикуляром, опущенным из точки, лежа-
лежащей на оси в плоскости вращения,
на направление вектора количества
движения.
Следовательно, вектор момен-
момента количества движения точ-
точки относительно некоторой оси численно равен про-
произведению модуля вектора количества движения
точки на длину перпендикуляра, опущенного на этот
вектор из точки, лежащей на оси в плоскости вра-
вращения.
При движении по окружности радиус-вектор точки и вектор
количества движения не только лежат в одной плоскости, но и сос-
составляют угол 90°. Следовательно, модуль вектора момента количест-
количества движения равен rlmlvl, так как sin {rtv^ = 1.
Вектор момента количества движения твердого тела относи-
относительно данной оси равен сумме векторов моментов количества дви-
движений всех его элементов относительно той же оси.
Модуль суммарного вектора момента количества движения
твердого тела равен алгебраической сумме модулей векторов момен-
моментов количества движения точек тела. В рассматриваемом случае
К = 2 rpip^
(9.34)
181
Так как vt = cor,, то
или
/С - /ш. (9.36)
Момент количества движения тела относительно
оси вращения численно равен произведению момента
инерции тела относительно этой оси на угловую ско-
скорость его вращения.
Перепишем основное уравнение динамики вращающегося тела
(9.16) в виде:
М = 1 — . (9.37)
dt v '
Так как величина момента инерции твердого тела относительно
данной оси, сохраняющей свое положение в теле, постоянна, то
равенство (9.37) можно записать в виде:
М = ^М. (9.38)
dt K '
или, учитывая равенство (9.36):
М= —. (9.39)
Это уравнение называется уравнением моментов.
Производная от момента количества движения те-
тела относительно оси вращения равна моменту внеш-
внешних сил, действующих на тело, относительно той оке
оси.
Или, иначе:
dK = d (Ло) = Mdt. (9.40)
Изменение момента количества движения твердого
тела относительно оси вращения равно импульсу мо-
момента (относительно той оке оси) приложенных к те-
телу внешних сил.
Если момент силы — величина постоянная, то для конечного
интервала времени А^:
Ка — К1. (9.41)
Уравнение (9.40) связывает изменение момента количества дви-
движения тела с действием на тело внешних сил. Если момент сил сов-
совпадает по направлению с моментом количества движения тела, то
он увеличивает момент количества движения (вектор dK направ-
182
лен в ту же сторону, что и вектор К). Если же момент сил направлен
противоположно моменту количества движения, то последний умень-
уменьшается (вектор dK направлен противоположно К). Вообще вектор
изменения момента количества движения dK. совпадает по направ-
направлению с вектором момента внешних сил М, действующих на тело.
Из соотношения (9.40) следует, что при отсутствии момента внеш-
внешних сил (М=0) момент количества движения тела остается посто-
постоянным (dK = 0, К =const). Этот закон называется законом сох-
сохранения момента количества движения. Он охватывает более
широкий круг явлений, чем закон сохранения количества дви-
движения.
Конечно, для замкнутой системы условие равенства нулю сум-
суммы моментов внешних сил выполняется всегда. Но может оказать-
оказаться, что результирующая внешних сил отлична от нуля, однако мо-
момент ее относительно некоторой оси равен нулю (направление ре-
результирующей проходит через ось). Тогда общий момент количества
движения тела или системы тел относительно этой оси постоянен.
Так, например, у частиц тела, движущегося по окружности с
постоянной скоростью, вектор скорости все время изменяет свое
направление, следовательно, меняется по направлению и вектор
количества движения. Это изменение является следствием того, что
тело, двигаясь по окружности, находится под действием внешней
силы, сообщающей ему центростремительное ускорение, и не может
поэтому рассматриваться как замкнутая система материальных
точек.
Однако если за ось моментов принять ось, проходящую через
центр вращения, относительно которой момент силы, создающей
центростремительное ускорение, равен нулю, то момент количества
движения относительно этой оси остается постоянным. Действи-
Действительно, направление вектора момента количества движения все
время совпадает с осью, а модуль его равен произведению двух
постоянных величин г и mv, так как угол между ними остается
прямым.
Конечно, если мы за ось моментов выберем другую, не проходя-
проходящую через центр вращения, момент количества движения относитель-
относительно этой оси окажется непостоянным.
Таким образом, в частном случае движения материальной точ-
точки по окружности при равенстве нулю момента сил (М= 0) вы-
выполняется равенство mvr = const.
В общем случае криволинейного движения материальной точки
вокруг неподвижного центра при М = 0
/\
rmv sin (rmv) = const. (9.42)
183
И"»
-J.,11)!
Для вращательного движения твердого тела вокруг неподвижной
оси согласно формуле (9.40) при М =* 0
/u) = const.
При неизменном моменте инерции тела (в отсутствие момента
внешних сил) угловая скорость вращения тела постоянна. Если мо-
момент инерции тела меняется, то одновременно изменяется и угловая
скорость таким образом,
что произведение /со ос-
остается неизменным. В
этом случае перемещение
масс в теле, которое соз-
создает изменение момента
его инерции, происхо-
происходит в результате дейст-
действия внутренних сил.
Качественным под-
подтверждением закона сох-
сохранения момента коли-
количества движения может
служить опыт со скамь-
скамьей Жуковского (рис.
88). Демонстрационная
скамья, предложенная
Н. Е. Жуковским, пре^д-
Рис. 88. С изменением момента инерции угло- ставляет собой метал-
вая скорость изменяется так, что их произ- лический
ведение остается постоянным. ющийся с
трением вокруг верти-
вертикальной оси. Человек с гантелями в руках садится на скамью.
Момент внешних сил равен нулю (моментом сил трения
можно пренебречь, так как силы невелики и, кроме того,
приложены вблизи оси; центр тяжести системы человек —
площадка лежит на оси вращения, т. е. момент силы тяжести
равен нулю). Скамью приводят во вращение с угловой скоростью со,
когда человек держит гантели на вытянутых в стороны руках. Если
человек поднесет гантели к груди, угловая скорость заметно воз-
возрастет; при разведении рук — вновь уменьшится. Изменяя поло-
положение гантелей, человек изменяет момент инерции.
Фигурист на коньках для сообщения своему телу быстрого вра-
вращения при начальном толчке отбрасывает в сторону руки и ногу,
а затем приближает руки к телу и сближает ноги. При этом момент
инерции тела уменьшается и возрастает скорость вращения. Подоб-
Подобным образом поступает балерина, желая сделать пируэт.
Закон сохранения момента количества движения справедлив
и для системы твердых тел. При суммировании уравнений движения
184
и уравнений моментов внутренние силы (в соответствии с третьим
законом динамики) и моменты внутренних сил взаимно исключают-
исключаются. Поэтому если момент внешних сил, действующих на систему,
равен нулю, то общий момент количества движения системы остает-
остается неизменным.
Так, сила тяготения, действующая со стороны Солнца, не мо-
может изменить скорость обращения Земли вокруг оси. Влияние
ее на скорость обращения Луны вокруг Земли исчезающе мало.
Поэтому сумма моментов обращения Луны вокруг Земли и вращения
Земли вокруг оси подчиняется закону сохранения моментов. Тре-
Трение приливов в земном океане и земной коре, которые возникают
под действием притяжения Луны, непрерывно замедляют вращение
Земли. Действие закона сохранения моментов обусловливает уско-
ускорение обращения Луны вокруг Земли. Ускорение движения Луны
на орбите сопровождается некоторым отдалением ее от Земли (около
1,5 км в столетие). Когда-то, в весьма отдаленном будущем, периоды
обращения Луны вокруг Земли и Земли вокруг оси станут равными.
Уже из этого примера видно, что применяя закон сохранения мо-
момента количества движения к системе тел, надо помнить, что при этом
тела часто нельзя рассматривать как материальные точки. Твердое
тело может вращаться вокруг оси, проходящей через него, и, рассмат-
рассматривая тело как точку, мы не учтем его момент количества движения.
Так, например, рассматривая центральный прямой удар неупру-
неупругих шаров, мы принимали шары за материальные точки. Это было
возможно, так как при ударе указанного типа происходит обмен
между шарами поступательным движением.
В случае нецентрального удара (рис. 72, б) разложим скорости
шаров на составляющие в направлении линии центров и в перпенди-
перпендикулярном к ней направлении. В направлении составляющих vcl<
и vc% обмен движением протекает так же, как и в случае централь-
центрального удара. Изменение тангенциальных составляющих скоростей
v4 и уТ2 происходит под действием силы трения, которая обуслов-
обусловливает вращательное движение шаров. Если мы и в случае нецент-
нецентрального удара будем рассматривать шары как материальные точки,
то не учтем возникновения вращения шаров и связанный с этим мо-
момент количества движения, что может привести нас к ошибочному
заключению о неприменимости закона сохранения количества дви-
движения к этому случаю. Однако, рассматривая шары как тела конеч-
конечных размеров и учитывая преобразование части поступательного
их движения во вращательное, можно убедиться, что закон сохра-
сохранения действует и здесь с той же необходимостью, как и во всех рас
смотренных ранее случаях.
Из закона сохранения момента количества движения следуе!
что внутренние силы не могут изменить момент количества движе-
движения тела или системы тел. Однако это не значит, что внутреннее
силы не могут вызвать вращения частей внутри системы. Если ка-
18S
ная «2 = vXi — УТ1,
на противоположно
кая-то часть системы придет во вращение в одном направлении, то
другая, эквивалентная ей часть начнет вращаться в противополож-
противоположном направлении так, что в целом для системы закон сохранения
момента количества движения будет выполнен.
Так, если при нецентральном ударе шаров (рис. 72, б) танген-
тангенциальная составляющая ут скорости первого из них больше тан-
тангенциальной составляющей vx , скорости второго (v^> vtJ,
то относительная скорость первого шара, равная Ui = v — ут ,
^_ направлена в сторону этих сос-
составляющих. Сила трения, на-
направленная противоположно от-
относительной скорости шара, за-
заставляет его вращаться по ча-
часовой стрелке. Для второго ша-
шара относительная скорость, рав-
направле-
тангенци-
альным составляющим. Поэтому
сила трения обусловливает его
вращение против часовой стрел-
стрелки. Моменты количества движе-
движения шаров равны по величине,
но противоположно направ-
направлены.
Если человек стоит на поко-
*щейся скамье Жуковского В
держит над ГОЛОВОЙ насаженное
на палку (рис. 89) велосипед-
велосипедное колесо, которое также не-
неподвижно, то момент количества движения этой системы от-
относительно вертикальной оси равен нулю. Если человек при-
приведет велосипедное колесо во вращение, то сам он вместе со скамь-
скамьей начнет вращаться в противоположную сторону, так что момент
количества движения системы по-прежнему оказывается равным
нулю. На этом же опыте легко показать векторный характер момента
количества движения. Если перевернуть палку вращающимся ко-
колесом вниз, то направление вращения человека на скамье также
изменится на обратное.
Интересным примером учета закона сохранения момента коли-
количества движения в технике служит вертолет, особенности конструк-
конструкции которого обусловлены действием этого закона.
Пока не начал вращаться несущий винт в вертолета (рис. 90),
система винт — корпус вертолета обладает моментом количества дви-
движения, равным нулю. Когда под действием двигателя винт прихо-
приходит во вращение, корпус вертолета согласно закону сохранения мо-
момента количества движения вращается в противоположную сторону
во вращение, вращается в противопо-
ложную сторону.
186
б, так как момент количества движения системы должен остаться
равным нулю. Чтобы устранить вращение корпуса, ставят на конце
хвостовой балки вертолета рулевой винт а, который, помимо функ-
функции управления, создает тяговое усилие, направленное в сторону,
противоположную той, куда несущий винт разворачивает корпус.
В ряде случаев для проведения тех или иных научных исследо-
исследований или наблюдений с космических аппаратов необходимо, что-
чтобы аппарат был определенным обра-
образом ориентирован по отношению к
окружающим небесным телам (Земле,
Солнцу или звезде). Так, для фото-
фотографирования облаков, для измере-
измерения излучения Земли с метеороло-
метеорологических спутников необходимо, что-
чтобы одна из осей аппарата, соответ-
соответствующая направлению установки
чувствительных элементов измери-
измерительной аппаратуры или объективов
фотоаппаратов, была длительное вре-
время ориентирована на Землю; в других
случаях требуется направление ее на
Солнце и т. д.
К. Э. Циолковским был пред-
предложен способ управления ориента-
ориентацией ракеты, основанный на законе сохранения момента количества
движения.
На космическом аппарате располагают три маховика с взаимно
перпендикулярными осями вращения.
Маховики и тело космического корабля образуют систему, мо-
момент количества движения которой равен нулю. Если каким-либо
механизмом начать вращать один из маховиков (рис. 91), то, для
3
Рис. 90. Рулевой винт верто-
вертолета препятствует развороту
корпуса в направлении, про-
противоположном вращению не-
несущего винта.
Рис. 91. Способ поворота спу-
спутника, предложенный К. Э. Ци-
Циолковским.
Рис. 92. Схема управления по-
положением спутника с помощью
трех маховиков.
187
того чтобы момент количества движения системы остался неизмен-
неизменным, корабль должен прийти во вращение вокруг оси, параллель-
параллельной или совпадающей с осью маховика, но в обратном вращению
маховика направлении.
При этом условии скорости вращения и углы поворота махови-
маховика и космического аппарата будут обратно пропорциональны их мо-
моментам инерции.
Имея три маховика (рис. 92), можно управлять движением ко-
корабля относительно его центра масс.
Момент количества движения относится к важнейшим понятиям
современной физики. Каждая элементарная частица (протон, ней-
нейтрон и др.) обладает моментом количества движения. Этот момент
количества движения частицы называют снином. Сумма собствен-
собственных моментов количества движения частиц (спинов) и моментов ко-
количества движения частиц, одной относительно другой, должна
сохраняться при всех ядерных реакциях, сопровождающих пре-
превращение одних частиц и фотонов в другие. При этом выполняется
и закон сохранения импульса (количества движения).
Закон сохранения момента количества движения позволяет
при изучении конкретных видов движения полностью исключить
из рассмотрения внутренние силы, а соответствующим выбором
оси моментов — исключить и ряд внешних сил, моменты которых
относительно данной оси равны нулю. Поэтому он широко приме-
применяется не только в теоретических исследованиях, но и в техниче-
технических расчетах.
§ 6. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩАЮЩЕГОСЯ
ТВЕРДОГО ТЕЛА
Кинетическая энергия твердого тела конечных размеров равна
сумме кинетических энергий элементов, на которые расчленено
тело. В общем случае тело может двигаться поступательно и однов-
одновременно вращаться. Рассмотрим частный случай вращения тела
вокруг неподвижной оси.
Кинетическая энергия каждого элемента тела:
ЬЕ* = ~, (9.43)
где т1 — масса 1-го элемента тела, vt — линейная скорость
его.
Если расстояние центра элемента от оси вращения /-,, то, при-
принимая во внимание, что vt = юг1У равенство (9.43) перепишем
в виде:
Д?к = «2 ~ (9.44)
188
и, просуммировав по всем элементам, получим:
Но так как
выбранной оси, то
= / — моменту инерции тела относительно
?к=—. (9.45)
Формула (9.45) отличается от соответствующей формулы для
поступательного движения тем, что вместо линейной скорости
в ней стоит угловая скорость, а вме-
вместо массы — момент инерции.
Рассмотрим изменение кинетичес-
кинетической энергии вращающегося тела под
действием сил. Положим, тело вра-
вращается вокруг неподвижной оси 00.
Пусть результирующая сила F, при-
приложенная в точке А тела, отстоящей
от оси на расстоянии г, лежит в плос-
плоскости траектории точки и направлена
по касательной к ней (рис. 93).
При повороте тела на угол Аф точ-
точка приложения силы переместится
на длину дуги As. Если угол достаточно мал, то дугу ds мож-
можно считать равной перемещению ds. Тогда элементарная работа
силы F на пути ds:
A
Рис. 93. К расчету работы при
вращательном движении.
но ds = r dtp,
dA = Fr dtp.
Так как Fr = М,
то dA = M dtp.
Полная работа при повороте на угол tp:
А = | М dtp. (9.46)
Если момент равнодействующей внешних сил— величина посто-
постоянная, то из соотношения (9.46) получим:
А = М<р. (9.47)
При вращательном движении работа измеряется про-
произведением момента силы на угол поворота тела.
Если момент силы меняется со временем, то работа измеряется
интегралом от момента силы по углу поворота.
189
Напишем основное уравнение динамики вращательного движе-
движения:
dt
Для подсчета работы умножим обе части равенства на угол
поворота dtp = cod/, где со — угловая скорость вращения и Л —
весьма малый интервал времени, в пределах которого можно счи-
считать М = const:
udtId () (9.48)
dtI
Проинтегрировав левую и правую части равенств (9.48), получим:
f ?)_?-'f. (,49,
т. е. изменение кинетической энергии тела при враща-
вращательном движении равно работе сил, момент кото-
которых сообщает телу угловое ускорение.
Можно показать, что если тело вращается относительно оси,
проходящей через центр масс, и одновременно перемещается пос-
поступательно так, что ось смещается параллельно самой себе,
то полная кинетическая энергия твердого тела равна
сумме кинетической энергии поступательного движе-
движения центра масс тела (считая сосредоточенной в нем массу
тела) и кинетической энергии вращения тела:
?к=~у- + Т, (9.50)
где vc — скорость поступательного движения центра масс, / —мо-
—момент инерции тела относительно оси вращения, проходящей через
центр масс, со — угловая скорость вращения тела вокруг той же
оси.
Условиям сформулированным в данной теореме, удовлетворяет
например, качение цилиндра по наклонной или горизонтальной
плоскости, качение колеса в системе отсчета, связанной с Землей,
и др.
В заключение отметим, что энергия вращательного движения
тела при данной угловой скорости существенно зависит от распреде-
распределения в теле масс — от момента инерции.
Теперь мы можем ответить на вопрос, оставленный нами открытым в
§ 3 данной главы: зачем маховики делают с большим моментом инерции? Оче-
Очевидно, чтобы увеличить при данной угловой скорости его кинетическую энер-
энергию. Значительный запас кинетической энергии необходим, скажем, для
сохранения равномерности хода двигателя или механизма при внезапно ме-
меняющейся нагрузке. Конечно, сообщение маховику, обладающему большим
190
моментом инерции, угловой скорости w требует больше времени, чем при
разгоне до той же скорости маховика с малым моментом инерции, и двига-
двигатель производит в первом случае большую работу, но зато при внезапном
уменьшении или увеличении нагрузки маховик в течение некоторого времени
сохраняет скорость вращения за счет большого запаса энергии и механизм
нли двигатель плавно переходит на новый режим работы.
Для удобства запоминания характеристик вращательного дви-
движения твердого тела сведем в таблицу некоторые характеристики
и уравнения, определяющие поступательное движение и вращение
тела вокруг неподвижной оси.
Таблица 3
Поступательное движение
Масса точки т
Перемещение точки s
п ds
Скорость точки v = —
dt
., г dv
Ускорение точки ; = —
Результирующая сил F
Количество движения Р — mv
Работа Fds
Кинетическая энергия
Основное уравнение движения
-fir dv -r» dP
t = т— , или F => —
dt dt
Вращение тела вокруг оси
Момент инерции /
Угловое перемещение <р
Угловая скорость вращения
^ dt
Угловое ускорение г —
dt
Полный момент сил М
Момент количества движения
К= Га
Работа Щ
Кинетическая энергия —
Основное уравнение движения
М=1—, или/И= **
dt dt
§ 7. ПЛОСКОЕ ДВИЖЕНИЕ. МГНОВЕННЫЕ ОСИ ВРАЩЕНИЯ
Плоским называется движение, при котором все
частицы тела движутся в параллельных плоскостях.
Примеры плоского движения: качение цилиндра по горизон-
горизонтальной или наклонной плоскости, качение колес автомобиля, по-
поезда и т. п., качение шариков в шарикоподшипнике, движение пло-
плоского груза по поверхности пола и т. д.
С некоторыми закономерностями и приемами изучения плос-
плоского движения познакомимся на конкретных примерах.
191
По горизонтальной плоскости катится однородный круглый ци-
цилиндр (рис. 94). Его движение плоское, так как все точки цилиндра
движутся в параллельных вертикальных плоскостях. Ось цилинд-
цилиндра и лежащий на ней центр масс движутся поступательно со ско-
скоростью vc, в то же время цилиндр вращается вокруг оси с угловой
скоростью со.
Полагая цилиндр абсолютно твердым, мы должны считать, что
каждая точка его обладает скоростью поступательного движе-
движения, равной скорости центра масс
vc, и общей для всех точек угловой
скоростью со. Следовательно, в не-
неподвижной системе координат линей-
линейная скорость любой точки цилиндра
равна сумме:
v = ve-\-[ur], (9.51)
Рис. 94. Качение цилиндра без где * _ скорость поступательного
скольжения по горизонтальной с v , }
плоскости. движения точки (равная скорости
центра масс), [cor] — линейная ско-
скорость точек цилиндра, отстоящих от оси на расстоянии, равном
длине радиуса-вектора г, и вращающихся с угловой скоростью со.
Слагаемые правой части равенства (9.51) в общем случае каче-
качения — величины переменные. Однако для каждого данного момен-
момента времени первое слагаемое имеет единственное, определенное
значение, а второе слагаемое для разных точек тела различно.
Среди множества точек (частиц) тела могут быть такие, для кото-
которых результирующая линейная скорость равна нулю:
vc + \^r] = 0. (9.52)
Но если в твердом теле существует хотя бы одна точка, для кото-
которой скорость равна нулю, то тело не может обладать поступатель-
поступательным движением, так как при поступательном движении все точки
тела имеют одинаковые скорости (§ 7, гл. II).
Сложное движение (качение) в каждый момент времени можно
представить как вращение вокруг линии, проходящей через точ-
точки тела, находящиеся в данный момент в покое.
Рассмотрим качение цилиндра по плоскости без скольжения.
Если цилиндр катится без скольжения, то перемещение его
центра масс равно длине дуги, на которую поворачивается
цилиндр:
#<p, (9.53)
где R — радиус цилиндра, \js—длина дуги, соответствующая уг-
углу «р, на который повернулся цилиндр.
192
Продифференцировав равенство (9.53) по времени, получим:
vc = Rw. (9.54)
Продифференцировав еще раз, получим:
/, = Re. (9.55)
Любое из трех равенств (9.53), (9.54), (9.55) представляет собой
условие отсутствия скольжения.
Вернемся к равенству (9.51). При качении цилиндра радиус-
*- ¦>
вектор г всегда перпендикулярен вектору со и, следовательно, вели-
величина линейной скорости любой точки
так как
sin (^Trf= sin 90°= 1.
Применим это равенство к точкам, лежащим на образующих ци-
цилиндра. Для них
v = vc -j- wR,
где R — радиус основания цилиндра.
Если скольжения нет, то в соответствии с равенством (9.54)
|0г|=|ю/?|.
Из рисунка 94 легко видеть, что в точке касания цилиндра и плос-
плоскости векторы vc и [a>R, ] направлены прямо противоположно. Сле-
Следовательно,
i>c + u)# = 0. (9.56)
Таким образом, точки касания цилиндра и плоскости, по ко-
которой цилиндр катится без скольжения, имеют скорость, равную
нулю, и являются осью вращения цилиндра. Но как же тогда осу-
осуществляется поступательное перемещение при качении цилиндра?
Легко сообразить, что точки, для которых выполняется условие
(9.56), не закреплены в теле, а все время меняются. Они лежат на
образующей цилиндра, и от одного момента времени к другому эти
точки заменяются новыми. Линия, соединяющая точки тела, ко-
которые в данный момент остаются в покое, называется мгновенной
осью вращения.
Качение тела может быть представлено как вращение вокруг
мгновенных осей вращения.
Мгновенная ось вращения перемещается по боковой
поверхности цилиндра со скоростью, равной скорости
поступательного движения его оси.
Чтобы яснее представить себе конкретный смысл понятия мгно-
мгновенной оси, положим, что мы перекантовываем по столу четырех-
четырехгранную правильную призму (рис. 95). Ребра ее А, В, С и D по-
7 М. М. Архангельский 193
очередно становятся осями, вокруг которых точки призмы описы-
описывают дуги, измеряемые углом в 90°. Положим, происходит поворот
вокруг ребра А. Все точки призмы опишут дуги окружностей с
центрами на ребре А. Центр масс перейдет из положения Oi в по-
положение О2 также по дуге OiO'O2.
Если вместо четырехгранной призмы мы возьмем восьмигран-
восьмигранную, то число мгновенных осей удвоится, а угол, на который по-
в с
АО АН А
Рис. 95."Мгновенные оси вращения для призм и цилиндра.
ворачивается тело вокруг каждой оси, уменьшится. Центр масс
переместится по меньшей дуге 0^0'0г, более близкой к хорде Ofi2,
чем в случае четырехгранной призмы. Безгранично удваивая чис-
число граней призмы, мы в пределе получим цилиндр. Ребра призм,
которые являлись осями вращения, в пределе переходят в образую-
образующие цилиндра. Относительно каждой из них цилиндр поворачива-
поворачивается на бесконечно малый угол в течение бесконечно малого интер-
интервала времени. Центр масс цилиндра перемещается по прямой, т. е.
поступательно.
Рассмотрим теперь конкретную задачу о плоском движении.
Положим, с наклонной плоскости, образующей с горизонтом угол
а, скатывается без скольжения тяжелый цилиндр весом G и радиу-
радиусом R (рис. 96).
На цилиндр действуют внешние силы: сила тяжести G, сила
трения F и сила реакции со стороны плоскости N. Найдем ускоре-
ускорение, которое приобретает цилиндр под действием сил, и неизвест-
неизвестные нам величины сил тре-
трения и реакции плоскости.
'Л' Возьмем неподвижную си-
систему координат, ось х ко-
которой направлена вдоль
наклонной плоскости, ось
у — ей перпендикулярно.
Напишем уравнение дви-
движения центра масс цилинд-
цилиндра вдоль выбранных осей:
-Л (9.57)
Рис.
96. Качение цилиндра без скольжения » '
с наклонной плоскости. о ,
__ д, q cqs я (9.58)
194
В этих двух уравнениях четыре неизвестные величины. Допол-
Дополним систему уравнений. Во время движения цилиндр не покидает
плоскость. Следовательно, —- =0. Подставив это выражение в
уравнение (9.56), получим:
A/ = Gcosa. (9.59)
Составим основное уравнение вращательного движения отно-
относительно оси, проходящей через центр масс тела. Моменты сил тя-
тяжести и реакции плоскости относительно этой оси равны нулю.
Угловое ускорение определяется только моментом силы трения и
моментом инерции тела:
/ *L = FR. (9.60)
dt
Согласно равенству (9.57) ускорение поступательного движе-
движения центра масс цилиндра:
^= -L(Gsm«_F). (9.61)
at Q
Ускорение вращательного движения из уравнения (9.60):
^- = ™. (9.62)
dt I K
Примечания. 1) Уравнение моментов (9.60) мы могли составить
не только отиосительно оси, проходящей через центр масс, но и относитель-
относительно любой другой, в частности мгновенной оси. Однако это осложнило бы
задачу (пришлось бы вычислять момент количества движения отиосительно
оси, перемещающейся в теле).
2) Система уравнений (9.61) и (9.62) указывает на существенное значе-
значение при качении тел сил треиия. В задачах о качении тел нельзя пренебре-
пренебрегать треиием (даже малым). Без учета сил трения уравнения описывают толь-
только поступательное движение. Это надо помнить, так как наибольшее число
ошибок при решении задач о плоском движении связано с недоучетом сил
трения.
3) Уравнение (9.61) или (9.62) не содержит условия отсутствия скольже-
скольжения и потому справедливо независимо от того, происходит движение со сколь-
скольжением или без него. Однако при дальнейшем решении задачи нам придется
уточнить, как происходит движение.
Уравнения (9.61) и (9.62) содержат три неизвестных: F; — и — .
dt dt
Определив характер движения, мы получим третье уравнение, ко-
которое позволит найти решение.
Положим, цилиндр катится без скольжения, тогда
7* 195
Решая совместно уравнения (9.62) и (9.63), получим:
/=•= dt
Подставив в формулу (9.61) найденное значение F, определим —:
at
dv G sin a g sin a
g R2 mi?3
G
где m = — — масса цилиндра.
Сила трения:
Gsin a
F-
Ускорение тела тем больше, чем меньше момент инерции. Сила
трения тем больше, чем больше момент инерции.
Зависимость величины ускорения от момента инерции можно
показать на опыте с двумя (полым и сплошным) цилиндрами одина-
одинаковой массы и одного радиуса, скатывающихся с одной наклонной
плоскости. Момент инерции полого цилиндра больше, чем сплош-
сплошного, так как частицы его при той же массе расположены дальше
от оси. Сплошной цилиндр скатывается быстрее.
В рассмотренном нами случае качения без скольжения между
цилиндром и плоскостью действует сила трения покоя. В самом
деле, сила трения действует по линии касания цилиндра и пло-
плоскости, т. е. по линии, на которой относительная скорость частиц
цилиндра и плоскости в каждый момент равна нулю. Если величи-
величина сил трения F (необходимая, чтобы скольжение не возникало)
не достигает максимальной величины силы трения покоя Fm^, то
цилиндр скатывается без скольжения. Если же окажется, что F>Fm№
возникнет скольжение.
При скольжении условие — = R — не выполняется.
^ ' dt dt
Для решения уравнений (9.61) и (9.62) надо либо вместо усло-
условия (9.63) задать аналогичное условие, учитывающее скользящее
движение тела, либо значение силы трения скольжения.
Ускорение —- может быть найдено и иным путем, например,
dt
используя выражение (9.50) для кинетической энергии плоского
движения тела:
19G
Изменение кинетической энергии равно работе внешних сил,
действующих на цилиндр. Элементарная работа сил трения и ре-
реакции плоскости равна нулю, так как они приложены на мгновен-
мгновенной оси (и = 0). Следовательно, изменение кинетической энергии
тела происходит только за счет работы силы тяжести G dx sin а (ко-
(конечно, если отсутствует скольжение).
Следовательно,
\ =
или
Откуда, продифференцировав, получим:
mvc dvc-j—I—vcdvc = Gdx sin a,
dx
или, заменяя vc= —:
At
m —dvc4-~ —dvc=Gdxsina.
At c ' R* At
Меняя порядок дифференцирования и сокращая правую и левую
части равенства на dx, получим:
Avc , / Avr n .
т — А = G sin a.
dt ' Я2 d/
Откуда
dvc G sin a gsina
d7 ~ T ~ T '
§1. ТРЕНИЕ КАЧЕНИЯ. ШАРИКОПОДШИПНИКИ
Сила трения покоя работы не производит. Однако катящийся
без скольжения (а следовательно, и без действия сил трения сколь-
скольжения) по горизонтальной плоскости цилиндр постепенно теряет
скорость и останавливается. Механическое движение переходит
в тепловое, на что указывает нагревание поверхностей плоскости
и цилиндра. Следовательно, на катящееся тело действует сила тре-
трения, отличная от трения покоя и трения скольжения. Эта сила на-
называется силой трения качения. Разработанной теории происхож-
происхождения сил трения качения пока нет. Качественное и не претендую-
претендующее на глубину объяснение причин, вызывающих появление сил
трения качения, следующее.
197
Во-первых, на поверхности тел всегда существуют неровности,
выступы, о которые катящееся тело все время испытывает удары,
при этом совершается работа деформации; во-вторых, при качении
тело и плоскость деформируются и на тело действует со стороны
деформированной плоскости сила, которая имеет составляющую,
направленную против движения. Момент силы трения качения по
направлению противоположен моменту количества движения ци-
цилиндра и замедляет его движение.
Кулон опытным путем нашел, что при качении сила трения
приближенно прямо пропорциональна силе, прижимающей каток
к плоскости, и обратно пропорциональна радиусу катка:
F* = V*-j' (9'64)
где |хк — коэффициент пропорциональности, который называют
коэффициентом трения качения.
Коэффициент рк зависит от свойств трущихся поверхностей и
в первом приближении не зависит от скорости их относительного
движения.
Примерные значения [ак даются в таблице 4.
Таблица 4
Материал
Дерево по дереву
Мягкая сталь по мягкой стали
Закаленная сталь по стали
Коэффициент трения
качения ;хк (в см)
0,05 — 0,06
0,03—0,04
«0,001
Сила трения качения (при одина-
одинаковых условиях) значительно меньше
силы трения скольжения. Поэтому в
современных машинах получили ши-
широкое распространение шарико- и ро-
роликовые подшипники.
Рис. 97. Различные типы подшипников качения.
198
Если, для того чтобы сдвинуть груз весом в тонну на подшип-
подшипниках скольжения, надо приложить силу около (зОкГ, то на шарико-
шарикоподшипниках достаточно ^ 4 кГ. Без шарикоподшипников были бы
невозможны сверхскоростные машины, которые делают более
100 тыс. об/мин. Подшипники скольжения в этих условиях пла-
плавятся. На рисунке 97 приведены некоторые типы подшипников ка-
качения, предназначенные для работы в разных условиях.
§ 9. СВОБОДНЫЕ ОСИ
Неподвижность оси, относительно которой вращается твердое
тело, обеспечивается обычно приспособлениями типа * подпятни-
подпятников, подшипников или сферических шарниров, в которые поме-
помещаются концы оси.
Силы реакции опор, действующие на ось при вращении и в его
отсутствие, в общем случае различны. В самом деле, рассмотрим силы
реакции, действующие при вращении тела вокруг вертикальной
неподвижной оси, составляющей некоторый угол с осью его сим-
симметрии (рис. 98). Положим, что ось вращения проходит через центр
масс тела и трение в подпятниках мало (им можно пренебречь).
Пока тело неподвижно, на его частицы действует сила тяжести,
равнодействующая которой приложена в центре масс и направле-
направлена вдоль оси вниз. Следовательно, на ось действует сила
реакции только нижней опоры, направленная вдоль оси вверх. Она
деформирует ось, но не создает вращения, так как ее момент
относительно оси вращения равен нулю. Положим, тело пришло во
вращение вокруг оси 00 с угловой скоростью со. Теперь на каж-
каждую частицу массой т, отстоящую от оси вращения на расстоянии
г, кроме силы тяжести, действует центростремительная сила, нап-
направленная к оси в плоскости враще-
вращения частицы и равная tmaP-r. Проис-
Происхождение этой силы обусловлено де-
деформацией оси и частиц, лежащих
между осью и рассматриваемой части-
частицей. На ось со стороны частиц дейст-
действует такая же по величине, но проти-
противоположно направленная сила.
Рассечем тело плоскостью, про-
проходящей через ось вращения 00 и
перпендикулярной плоскости черте-
чертежа. Частицы, находящиеся справа
от плоскости, создают на оси рав-
равнодействующую сил Fu направлен-
направленную вправо, а лежащие Слева — рав- Рис. 98. Возникновение ди-
-* намических реакций опор при
нодействующую F2, направленную вле- вращении тела.
199
во. Пара сил Fi и F2 стремится повернуть ось по часовой стрелке,
вследствие чего в подпятниках возникают равные по величине и
противоположно направленные силы реакции Д и /г- Этих сил,
когда тело покоилось, не было, они возникли как следствие вра-
вращения, поэтому их называют динамическими реакциями в отли-
отличие от статических, действующих на покоящееся тело.
При постоянной угловой скорости вращения дина-
динамические реакции перпендикулярны к оси вращения
(в отсутствие сил трения) и пропорциональны квадрату уг-
угловой скорости (так как они получаются суммированием слага-
слагаемых вида m/,uJ).
В современных механизмах угловые скорости вращения отдельных дета-
деталей и узлов достигают весьма больших значений. Барабан молотильного
аппарата комбайна (сравнительно тихоходной машины) делает свыше тысячи
оборотов в минуту, при этом развивается центростремительное ускорение,
в 2000 раз большее ускорения силы тяжести; гирокомпасы, применяемые на
кораблях, имеют роторы, вращающиеся со скоростью около 20 000 об/мин,
причем центростремительное ускорение в 25 000 раз превышает ускорение
силы тяжести; изготовленные для специальных целей вентиляторы вра-
вращаются со скоростями до 150 000 об/мин, при этом центростремительное
ускорение в 1 200 000 раз больше ускорения в поле силы тяжести. Поэтому
определение динамических реакций и условий, при которых они имеют мини-
минимальное значение, — важная задача современной механики.
Предоставим телу возможность свободно вращаться в верти-
вертикальной плоскости. Тогда под действием пары сил Fi и F2 тело по-
повернется. Его большая ось симметрии будет перпендикулярна оси
вращения (рис. 99). Центр масс не изменит своего положения на оси
вращения ОО'. В этом положении силы /ч и F2 находятся в плоско-
плоскости, перпендикулярной оси вращения, и момент этих сил отно-
относительно центра масс тела равен нулю. Эти силы растягивают тело,
но не создают вращения в вертикальной плоскости.Если мы убе-
уберем верхний подшипник, то положение оси никак не изменится. Ди-
Динамические реакции опор в этом случае те же, что и статические.
о Связанные с телом оси, при
вращении относительно кото-
которых динамические реакции опор
равны статическим, называ-
называются свободными, осями.
Теоретическое исследование пока-
показывает, что в любом теле про-
произвольной формы существуют
три взаимно перпендикуляр-
перпендикулярные оси, проходящие через
центр масс тела, которые мо-
могут служить свободными ося-
осями вращения. Их называют глав-
главными осями инерции.
Рис. 99. Уравновешенные ди-
динамические реакции.
200
Для тел правильной формы эти оси находятся легко. Скажем,
для прямоугольного параллелепипеда (папиросной коробки) глав-
главные оси инерции — это оси, проходящие через центры противопо-
противоположных граней (рис. 100). Для однородных тел вращения главные
оси инерции представляют собой оси геометрической симметрии.
Для эллипсоида вращения сво-
свободными осями будут большая и
малая оси и ось, перпендику-
перпендикулярная к ним.
Тело, вращающееся вокруг
свободной оси, в отсутствие мо-
момента внешних сил относитель-
относительно центра тяжести должно вра-
вращаться неограниченно долго,
сохраняя неизменным положе-
положение оси. Однако создать вра-
вращение точно вокруг главной
>
Рис. 100. Главные оси инерции
параллелепипеда.
оси практически не удается, так
как центр масс оказывается, хо-
хотя и ненамного, смещенным от-
относительно оси вращения. При больших скоростях вращения даже
небольшое смещение может создать значительные динамические
нагрузки.
Поэтому существенным является вопрос об устойчивости вра-
вращения вокруг главных осей, т. е. вопрос о том, будет ли возникшее
малое уклонение от вращения вокруг свободной оси в дальнейшем
возрастать или тело будет стремиться под действием возникших ди-
динамических реакций вернуться к вращению вокруг главной оси.
Устойчивость того или другого конкретного вида движения — слож-
сложнейший вопрос механики, для поисков ответа на который пока еще
не существует единого метода.
В теоретической механике показано, что в отсутствие внеш-
внешних сил устойчиво вращение относительно главных
осей, соответствующих наибольшему и наименьшему
моментам инерции тела. Вращение вокруг главной оси,
соответствующей среднему моменту инерции, неустой-
неустойчиво.
Это утверждение можно проиллюстрировать, приводя во вра-
вращение в воздухе пустую коробку из-под папирос вокруг главных
осей инерции / и /// (рис. 100). Коробка вращается, сохраняя не-
неизменным положение оси. При вращении вокруг оси //, соответст-
соответствующей среднему моменту инерции, ось вращения коробки раска-
раскачивается в пространстве.
Устойчивость вращения вокруг главных осей инерции можно
продемонстрировать, вращая различные тела с помощью центробеж-
центробежной машины. Например, подвешенная за один из концов палочка
при малых скоростях вращается в вертикальном положении
201
Рис. 101.
Вращение вокруг главных
инерции.
(рис. 101), т. е. вокруг оси с наименьшим моментом инерции. При воз-
возрастании скорости палочка вопреки действию силы тяжести распола-
располагается горизонтально и устойчиво вращается вокруг оси с наиболь-
наибольшим моментом инерции.
Вообще, практически оказывается, что вращение устойчиво
вокруг оси с наибольшим моментом инерции. Это связано
с влиянием внешних сил, в
частности сил трения, ко-
которые создают момент от-
относительно центра тяже-
тяжести. Действие этого мо-
'v мента в случае вращения
\ вокруг оси с наибольшим
'v моментом инерции оказы-
i вается меньшим.
J Ось с наименьшим мо-
6. '.-Д'"""" ментом инерции интересна
./Д.. тем> что относительно нее
С13 * В легче всего создать враще-
вращение.
Падающая кошка, на-
осей пример, как известно, из
любого положения встает
на лапки. Для этого кошка
в воздухе вращает хвостом и лапками так, чтобы в силу закона
сохранения момента количества движения повернуться вокруг го-
горизонтальной оси, относительно которой у кошки наименьший
момент инерции. Акробат, совершающий сальто в воздухе, наобо-
наоборот, использует вращение вокруг оси с наи-
наибольшим моментом инерции. Это надежнее
(рис. 102).
Выше мы подчеркивали, что в машинах с
быстро вращающимися частями важно обеспе-
обеспечить их вращение вокруг свободных осей.
Для этого вращающиеся части делают в виде
тел вращения, геометрическая ось которых
возможно более точно совмещается с осью
вращения. Однако абсолютно точно совмес-
совместить оси не удается, и при больших скоро-
скоростях вращения возникают значительные ди-
динамические нагрузки в подшипниках. Поэ-
Поэтому в ряде случаев для быстро вращающих-
вращающихся деталей (например, рабочее колесо паро-
паровой турбины типа турбины Лаваля, делаю-
делающее 30 000 об/мин) применяют насадку их
на гибкий вал. При больших скоростях вра-
вращения вал изгибается так, что центр тяжести
Рис. 102. Акробат,
совершающий
сальто, поворачи-
поворачивается вокруг оси
с наибольшим мо-
моментом инерции.
202
турбины.
рабочего колеса турбины прибли-
приближается к геометрической оси вра-
вращения (колесо автоматически цент-
центрируется). Модель этого устройства
изображена на рисунке 103. На
тонкий стальной прут насажен ме-
металлический цилиндр, центр тяже-
тяжести которого слегка смещен отно-
относительно геометрической оси прута
(рис. 103, а). Прут закреплен в
подшипниках. Приведя его во
вращение с небольшим числом
оборотов в минуту, наблюдаем
(рис. 103, б), что вал сильно
«бьет». Увеличив число оборотов Рис- 103- М°Д!ЛЬ гибкого вала
и слегка успокоив биения рукой,
получаем устойчивое вращение при
слегка изогнутом вале (рис. 103, в).
§ 10. ГИРОСКОП
Вернемся к рисунку 99. Поло-
Положим, что изображенное на нем тело
может вращаться только вокруг
оси ОО'. Освободим верхний конец
оси от подшипника. Тело будет
вращаться вокруг оси, и в то же
время сама ось будет каким-то об-
образом перемещаться, оставаясь за-
закрепленной в точке О'. Движение
тела, имеющего одну неподвижную
точку (которая может и не лежать
на оси вращения тела), весьма
сложно.
Исследуем частный, сравнитель-
сравнительно простой случай движения тела,
у которого закреплена одна точ-
точка (рис. 104).
Положим, тело вращается с уг-
угловой скоростью а>! вокруг оси ОО',
проходящей в теле, и одновременно
ось ОО' вращается относительно
неподвижной точки О, принадле-
принадлежащей оси, с угловой скоростью со2.
В § 8 (глава II) было выясне-
выяснено, что одновременное вращение
Рис. 104. Вращение тела
вокруг оси, закрепленной в
одной точке:
00 —ось тела, 00 —ось враще-
вращения, вокруг которой вращается
ось тела; 00 — мгновенная ось;
IV
00 —ось момента количества дви-
движения.
203
вокруг осей 00' и 00" с разными угловыми скоростями может
быть заменено вращением с угловой скоростью со, равной геометри-
геометрической сумме coj + №2, вокруг оси, положение которой определя-
определяется положением вектора со. Так как положение оси 00' и лежаще-
лежащего на ней вектора cot со временем меняется, то меняется и положе-
положение оси 00'". Эта ось — мгновенная ось вращения.
Найдем компоненты вектора момента количества движения
К = /со, которыми обладает тело при вращении вокруг осей 00' и
00". Пусть момент инерции тела относительно оси 00' равен /ь а
относительно оси 00" — /2. Интересующие нас компоненты век-
вектора К соответственно равны /^ и /2со2, а вектор момента количе-
количества движения результирующего вращения относительно мгновен-
мгновенной оси найдем, отложив эти произведения на соответствующих осях
и геометрически сложив их. Как видно из рисунка, вектор момен-
момента количества движения, или, как иногда говорят, ось момента ко-
количества движения, не совпадает с мгновенной осью, а составляет
с ней некоторый угол.
Таким образом, при изучении вращения твердого тела, имею-
имеющего закрепленную точку, следует различать не совпадающие друг
с другом: 1) ось вращения тела; 2) мгновенную ось вращения;
3) направление, или ось момента количества движения. Даже
рассматриваемый частный случай движения тела, имеющего непод-
неподвижную точку, довольно сложен. Мы ограничимся приближен-
приближенным изучением одного, еще более частного, но имеющего широкое
научное и техническое применение случая. Рассмотрим приближен-
приближенную теорию гироскопа.
Гироскопом называют массивное однородное тело
вращения, быстро вращающееся относительно одной
из главных осей инерции.
Из определения следует, что гироскоп обладает осью симметрии
(поскольку он является телом вращения), которая служит одной из
главных осей инерции (поскольку материал гироскопа однороден).
Обычно за ось вращения гироскопа выбирается главная ось инерции,
которой соответствует максимальный момент инерции. Эту ось
будем называть осью гироскопа.
Допустим, ось гироскопа при его вращении остается неподвиж-
неподвижной. Следовательно, вектор мгновенной угловой скорости со лежит
на этой оси. Вектор момента количества движения К = /со также
направлен вдоль оси гироскопа. Таким образом, ось гироскопа,
мгновенная ось вращения и ось момента количества движения в
этом случае совпадают. В реальных условиях ось гироскопа лишь
приближенно может считаться главной осью инерции, так как
центр масс гироскопа всегда хоть немного смещен относительно
оси симметрии. Кроме того, как мы увидим ниже, ось не может
204
оставаться неподвижной, не будучи закрепленной в подшипниках,
так как мы не в силах полностью избавиться от трения.
Положим, гироскоп имеет очень большую угловую скорость
вращения coj вокруг собственной оси 00' и в то же время ось мед-
медленно вращается с угловой скоростью со2 вокруг неподвижной вер-
вертикальной оси 00" (рис.105). Направление мгновенной оси враще-
вращения определяется вектором мгновенной угловой скорости результи-
результирующего вращения со = о^ + со2. Как видно из чертежа (вследствие
того, что ш^сог), мгновенная ось вращения лежит вблизи оси ги-
гироскопа.
Построив вектор момента количества движения К = /icoi -f-
+ /2со2, где It и /2 — моменты инерции гироскопа относительно
соответствующих осей, можно убедиться, что и ось момента коли-
количества движения лежит вблизи оси гироскопа (рис. 105). (При по-
построении вектора К надо иметь в виду, что хотя h и /2 имеют раз-
разную величину, однако порядок их величины одинаков.)
Таким образом, при вращении реального гироскопа ось его,
мгновенная ось вращения и ось момента количества движения хотя
и не совпадают, но расхождение их направлений незначительно.
В основу приближенной теории гироскопа, которую мы рас-
рассмотрим ниже, кладется допущение, что все три указанные оси сов-
совпадают и неизменно связаны друг с другом. Другими словами,
если мы видим, что ось гироскопа как-то изменяет свое положе-
положение в пространстве, мы считаем себя вправе сделать заключение,
что также меняется в пространстве направление
мгновенной угловой скорости вращения гироскопа qM
и оси его момента количества движения. /
И, обратно, установив, что в силу каких-то
причин (о них будет сказано ниже) вектор момен-
момента количества движения должен изменить свое по-
положение, мы будет считать, что вместе с ним изме-
изменит свое положение и ось гироскопа.
Уравнение (9.40), полученное нами для случая
вращения тела вокруг неподвижной оси, справед-
справедливо и для движения гироскопа. Доказательство
этого утверждения можно найти в курсе теорети-
теоретической механики.
Из равенства (9.41) следует, что вектор момента
Рис. 105. Вращение тела вокруг оси, закрепленной в од-
одной точке, когда скорость вращения етла много больше
скорости обращения оси. Для гироскопа ось тела [00 ) ,
Мгновенная ось [00 Jh ось момента количества движе-
движения [00 J практически совпадают.
205
количества движения изменяется только при действии на гирос-
гироскоп момента внешних сил. И так как мы допускаем, что ось гирос-
гироскопа и ось момента количества движения жестко связаны, мы
можем утверждать, что и перемещение оси гироскопа проис-
происходит, пока действует момент внешних сил.
Рассмотрим движение свободного гироскопа. Чтобы сделать
вращение гироскопа свободным от влияния внешних сил, необхо-
необходимо свести к минимуму силы трения, действующие на гироскоп,
\
Рис. 106. Гиро-
Гироскоп, имеющий
форму «колоколь-
«колокольчика».
Рис. 107. Гироскоп
иа кардановом под-
подвесе.
и устранить действие силы тяжести. Уменьшение силы трения дос-
достигается особой конструкцией и обработкой опорных подшипни-
подшипников, в которые помещается ось гироскопа. Для устранения дейст-
действия силы тяжести гироскоп заставляют вращаться вокруг оси, про-
проходящей через центр масс. Тогда результирующая силы тяжести
все время лежит на оси вращения, и момент ее равен нулю.
Свободный гироскоп может иметь форму «колокольчика» с утя-
утяжеленным краем (рис. 106). Центр тяжести такого гироскопа на-
находится внутри «колокольчика», и с ним совмещается конец оси
00. В технике чаще всего при создании свободного гироскопа ис-
используется карданов подвес (рис. 107). Схема его следующая:
массивное тело гироскопа закреплено на оси А А, которая с ма-
малым трением вращается в подшипниках, укрепленных на кольце.
Кольцо вращается вокруг оси ВВ, концы которой опираются на
подшипники во внешнем кольце, которое может вращаться вокруг
оси СС, опирающейся на подшипники в подставке. Ось ВВ перпен-
перпендикулярна осям АА и СС.
Благодаря такому подвесу точка пересечения всех трех осей
совпадает с центром масс гироскопа и ось гироскопа может прини-
принимать любое направление в пространстве.
Для демонстрационных целей часто употребляется карданов
подвес несколько иной конструкции (рис. 108). Стержень А может
вращаться вокруг стойки В в горизонтальной и вертикальной пло-
206
Рис. 108. Демонстрационный
гироскоп.
скостях (в вертикальной плоскости с некоторым ограничением).
Кольцо, в котором укреплена ось вращения С тела гироскопа, на-
насажено на конец стержня А. Для того чтобы центр тяжести системы
совместить с точкой О пересечения всех трех осей, на противопо-
противоположном конце стержня имеется противовес в виде груза G, который
можно перемещать по стержню.
Пока гироскоп неподвижен, его оси можно придать любое
направление без особых усилий (если трение в подшипниках мало).
Если же мы сообщим гироскопу
быстрое вращение и будем пово-
поворачивать его подставку, то ось
гироскопа сохранит неизменным
свое положение в пространстве.
Это явление нетрудно объяс-
объяснить. Так как моментами сил
трения на осях можно пренеб-
пренебречь, а момент силы тяжести
относительно центра вращения
равен нулю, то из равенства
—>-
(9.41) следует, что вектор К =
=const, т. е. сохраняет свою ве-
величину и направление в прост-
пространстве. Вместе с ним сохраняет свое положение в пространстве
и ось гироскопа.
Подействуем на гироскоп силой, момент М которой относитель-
относительно точки О не равен нулю (рис. 109). Тогда в соответствии с равен-
равенством (9.41) вектор момента количества движения приобретет при-
приращение А/С = Mdt, по направлению совпадающее с вектором мо-
мента силы М. Новое положение оси момента количества движе-
движения найдем, сложив геометрически вектор начального значе-
значения момента количества движения К и вектора А/С- Таким образом,
приближенно будет определено и положение оси гироскопа, нахо-
находящегося под действием внешней силы.
Движение оси момента количества движения гироскопа в ре-
результате действия на него внешних сил называется прецессией. Имея
в виду приближенное совпадение оси гироскопа с осью момента ко-
количества движения, иногда прецессию определяют как движение
оси гироскопа. Это определение неудачно, так как ось гироскопа
под действием внешних сил приобретает собственное движение, су-
существование которого в рамках приближенной теории показать
нельзя.
Рассмотрим несколько конкретных случаев возникновения пре-
прецессии.
В случае, изображенном на рисунке 109, гироскоп обладал посто-
постоянным вектором К момента количества движения, направленным
207
м |
вправо по оси вращения. Сила F, с которой мы подействовали на
гироскоп, направлена вниз. Следовательно, вектор ее момента М
относительно точки О направлен от нас на чертеж. В этом же нап-
направлении получает приращение А/С вектор момента количества
движения. Следовательно, новое значение вектора К направлено
за чертеж. В ту же сторону переме-
перемещаются ось момента количества дви-
tK жения и ось гироскопа. Гироскоп «не
*" слушается» нас: вместо того чтобы
двигаться по направлению силы F
вниз, он поворачивается в перпенди-
F кулярной ей горизонтальной плоско-
плоского .„„ „ сти (в данном случае против часовой
Рис. 109. Схема возникнове- .„.Л Г\ у F
ния прецессии оси гироскопа ^'н^лли/.
под действием момента внеш- На рисунках 109 и 110 изобра-
ней силы. жены еще несколько случаев пре-
прецессии оси гироскопа под действием
моментов внешней силы разного направления. Они могут быть
разобраны по чертежу без дополнительных объяснений. (Для оп-
определения направления прецессионного движения оси гироскопа
надо помнить, что: 1) ось момента количества движения и ось ги-
гироскопа совпадают по направлению (приближенно); 2) изменение
направления указанных осей происходит в направлении момента
внешней силы, приложенной к гироскопу.
Определим угловую скорость прецессии.' Положим, что ось мо-
момента количества движения под действием момента сил М за время
dt поворачивается на угол afcp (рис. 109).
F
а <Г 6
Рис. ПО. Схема возникновения прецессии оси гироскопа под действием
момента внешних сил, имеющих различные направления.
Приращение dK лежит в плоскости, перпендикулярной векто-
вектору К, и, следовательно, изменяет только его направление, а не ве-
величину. Из рисунка видно, что dK = Kdf, подставив в равенство
(9.40) это значение dK, получим:
dt
Но —¦ — шп — угловая скорость вращения оси момента количест-
208
ва движения, или искомая угловая скорость прецессии. Отсюда
или
м
(9.65)
/ — момент его
где со — угловая скорость вращения гироскопа,
инерции.
Угловая скорость прецессии прямо пропорциональ-
пропорциональна величине действующего момента внешней силы М и
обратно пропорциональна величине момента количе-
количества движения гироскопа К.
Интересна прецессия оси гироскопа, подвешенного на нити за
один конец оправы (рис. 111). Гироскоп не опускается вниз, а опи-
описывает конус вокруг нити,
так как сила тяжести созда-
создает момент относительно точки
подвеса, лежащий в горизон-
горизонтальной плоскости.
Рис. 111. Прецессия оси под-
подвешенного гироскопа.
Рис. 112. Прецессия оси
волчка.
У обычного волчка (рис. 112) центр тяжести лежит выше точки
опоры. Поэтому составляющая силы тяжести G, действующая на
наклоненный волчок, стремится увеличить его наклон. Но так как
момент этой составляющей лежит в горизонтальной плоскости,
волчок начинает прецессировать и ось его описывает коническую
поверхность. Угловая скорость прецессии оси волчка:
*-=?. (9.66)
где / — расстояние от точки опоры до центра масс волчка.
Гироскоп, у которого точка опоры смещена по его оси относи-
209
A —
8
==^-- A
В
тельно центра масс, называется гироскопическим маятником. Обыч-
Обычный волчок представляет собой гироскопический маятник, у которо-
которого точка опоры лежит на оси ниже центра масс.
§ II. ГИРОСКОПИЧЕСКИЕ СИЛЫ.
ПРИМЕНЕНИЕ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА
Гироскоп чаще всего представляет собой быстро вращающееся мас-
массивное тело, концы оси вращения которого помещены в подшипники.
Рассмотрим взаимодействие оси волчка с подшипниками.
Если к вращающемуся гироскопу (рис. 113) приложить пару
сил FiF2, стремящуюся повер-
повернуть его вокруг оси А А, пер-
перпендикулярной к оси собствен-
собственного вращения гироскопа 00, то
он будет поворачиваться около
третьей оси ВВ, перпендикуляр-
перпендикулярной к первым двум.
Пусть сила Ft направлена от
нас за чертеж, а сила F2 — к
нам от чертежа.
Момент пары сил лежит в
плоскости вращения гироскопа
и направлен влево. В ту же
сторону направлен вектор при-
приращения момента количества
движения А/С, т. е. верхний
конец оси гироскопа перемеща-
перемещается влево, а нижний — вправо;
гироскоп будет поворачиваться
вокруг оси ВВ.
Можно на основе сказанного сформулировать следующее прави-
правило: ось гироскопа под действием пары сил вращается та-
таким образом, чтобы угол, образуемый ею с осью вы-
вынужденного вращения, был наименьшим и чтобы оба
вращения происходили в одном направлении.
Если какие-либо силы побуждают ось гироскопа, находящуюся
в подшипниках, отклоняться от первоначального положения, то
она оказывает давление на связи (подшипники). Силы давления
оси гироскопа на связи носят название гироскопических сил. Мо-
Момент гироскопических сил равен и противоположен по направле-
направлению моменту приложенных к гироскопу внешних сил. Можно по-
показать, что он равен векторному произведению вектора момента ко-
количества движения гироскопа (/со) на вектор угловой скорости (со'),
с которой поворачивается поддействием внешних сил ось гироскопа:
МГ= Ц шиГ'1 = Л ш ш']. (9.67)
рис. 113. Вращение оси гироскопа
под действием пары сил.
210
в
Рис. 114. Возникновение пикирования
самолета под действием гироскопичес-
гироскопических сил.
Возникновение гироскопических сил при вынужденном пово-
повороте оси быстро вращающегося тела играет важную роль в технике.
Так, например, винтомоторные самолеты несут на себе мощные
гироскопы — роторы двигателей и воздушные винты.
В изображенном на ри-
рисунке 114 случае вектор А
угловой скорости вращения
двигателя и винта направ-
направлен по оси самолета впе-
вперед. Допустим, самолет по-
поворачивает вправо. Возни-
Возникающий при этом гирос-
гироскопический момент направ-
направлен вниз и вызывает пи-
пикирование самолета.
На рисунке 115 схема-
схематически изображена уста-
установленная на корабле па-
паровая турбина Т, приводящая в движение гребной винт. Допустим,
турбина расположена вдоль корпуса корабля и вращение ее,
если смотреть с носа, происходит против часовой стрелки.
Килевая качка заставляет корабль поворачиваться с угловой
скоростью со2 около горизонтальной оси А А, перпендикулярной
оси вала. Следовательно, в соответствии с правилом, сформулиро-
сформулированным выше, ось турбины
вращается в горизонталь-
горизонтальной плоскости вокруг оси
ВВ. В результате возника-
возникает давление в горизонталь-
горизонтальном направлении на под-
подшипники, в которых лежит
ось турбины. Реакции
Рис. 115. Возникновение гироскопических ПОДШИПНИКОВ образуют па-
сил в паровой турбине на корабле. ру сил F1F2, которая урав-
уравновешивает гироскопичес-
гироскопический момент. Так как при килевой качке вектор момента сил пери-
периодически изменяет свое направление, то и реакции в подшипниках
турбины направлены то в одну сторону, то в другую. Заметная вели-
величина этих сил (порядка 1000 кГ) даже при сравнительно неболь-
небольшой качке (до 5 °) требует учета при расчетах прочности подшипни-
подшипников и вала.
Широкое использование гироскопа в технике связано с исполь-
использованием: 1) гироскопических сил, 2) устойчивости вращения оси
гироскопа.
Примером использования гироскопических сил служит так
называемый мельничный бегун дробилок у дисковых мельниц (рис.
116). «Бегун» / вращается на оси т, которая в свою очередь может
211
m
I
вращаться на ведущем валу t. Катясь по опорной плите р, «бегун»
подминает под себя и размельчает материал. Валы т и t соедине
ны шарниром g. Легко сообразить, что гироскопический эффект
создает дополнительную силу давления Р «бегуна» на опорную
плиту, которая при известных услови-
Р ^ ях может быть в несколько раз боль-
больше силы тяжести.
Свойство оси гироскопа сохранять
свое направление в пространстве ис-
используется в технике самым различным
образом, например для придания устой-
у-Щ-ч чивости в воздухе снарядам и ракетам
—/ ' V—1..цшг^?ч некоторых конструкций. Брошенное под
углом к горизонту тело движется по
параболе. Касательная к траектории на
восходящей ее ветви постепенно при-
приближается к горизонтальной линии, а
Рис. 116. Мельничный на нисходящей — к вертикальной. В ре-
«бегун». зультате действия силы сопротивления
воздуха тело (снаряд) двигалось бы
кувыркаясь. Если же придать снаряду быстрое вращение вокруг
его продольной оси, то сила сопротивления лишь создает пре-
прецессию его оси вокруг направления касательной к траектории.
Вращательное движение снарядов в нарезном оружии создается
винтовыми нарезами, нанесенными внутри ствола орудия, а реак-
реактивных снарядов иногда (в неуправляемых снарядах, предназна-
предназначенных для стрельбы на небольшие дистанции) — при помощи
ракет, установленных на фюзеляже снаряда, а чаще — с помощью
гироскопа, помещенного в корпусе.
Еще один пример технического использования свойств гироско-
гироскопа — гирокомпас. Теоретически ось свободного гироскопа должна
сохранять свое положение в пространстве и, будучи направлена,
скажем, вдоль меридиана, должна постоянно указывать его напра-
направление.
Представим себе, что внешнее кольцо карданового подвеса ги-
гироскопа расположено точно в вертикальной плоскости и может по-
поворачиваться вокруг вертикали, а внутреннее кольцо расположе-
расположено перпендикулярно внешнему и жестко закреплено. Тогда ось
гироскопа окажется расположенной в горизонтальной плоскости и
сможет перемещаться только в этой плоскости. На гироскоп будет
оказывать влияние лишь горизонтальная составляющая угловой
скорости вращения Земли (направленная к северу):
шс = ш cos <f,
где <р — широта места (рис. 117).
Гироскопический момент, соответствующий этой составляю-
составляющей, стремится совместить ось гироскопа с направлением на север.
212
(О
На рисунке 118 изображен морской гирокомпас, устанавливае-
устанавливаемый на кораблях. Гироскоп с электрическим приводом подвешен в
корпусе / на проволоке 3 в рамке 4. Отклонения продольной оси
корабля относительно гироскопа передаются на корпус / с катуш-
катушкой. Так как ротср гироскопа 7 рас-
расположен в плоскости географического
меридиана, то его корпус показывает
отклонение курса корабля от мери-
меридиана. Скорость вращения ротора в
гирокомпасе 20 000 — 30 000 об/мин.
Часто используют устойчивость оси
гироскопа для того, чтобы связанная
с ним система сохраняла определен-
определенное направление в пространстве (са-
(самолет, ракета, управляемый снаряд
и т. п.). Для этих целей применяют
уравновешенные (астатические) гирос-
гироскопы на кардановом подвесе. При от-
отклонении системы от направления,
заданного осью гироскопа, особое устройство (электрическое, ме-
механическое или пневматическое) передает «команду» рулям и вы-
вызывает их поворот, обеспечивающий возвращение системы на за-
заданный курс.
На рисунке 119 изображен гирополукомпас, показывающий от-
отклонение самолета от заданного курса. Маятник а удерживает в
горизонтальном положении рамку Ъ ротора с. При этом конец
маятника скользит по реостату d. Электрические сигналы в цепи
Рис. 117. Схема действия
гирокомпаса.
Рис. 118. Внешний вид и схема гироскопического узла морского
гирокомпаса.
213
реостата, пропорциональные отклонению маятника от заданного
положения, передаются на привод е, вращающий вертикальную
рамку g. Движение самолета относительно неподвижной рамки Ь,
в которой закреплена ось гироскопа, лежащая по направлению
курса самолета, наблюдается на шкале h. Отсчет по шкале и дает
величину отклонения самолета от
заданного курса.
Для стабилизации мощных ра-
ракет на них устанавливают несколь-
несколько гироскопов, а в необходимых
случаях создают в них гиростаби-
лизированные платформы.
Если в ракете размещены ги-
гироскопы, оси которых сохраняют
заданное направление, то можно
обнаружить отклонение корпуса ра-
ракеты от заданного курса — угол
рассогласования а (рис. 120). Элект-
Электрический сигнал с датчика, анало-
аналогичного установленному на гиро-
полукомпасе, усиливается до вели-
величины, позволяющей привести в дей-
действие рули управления. Рулевые
органы ракеты повернут ее корпус
и уничтожат угол рассогласования я.
Гироскопический автопилот может вести летательный аппарат
в одном заданном направлении. Для изменения курса аппарата
используются системы наведения.
Рис. 119. Гирополукомлас,
указывающий отклонение са-
самолета от заданного курса.
Ось снаряда
Ось гироскопа
Рис.120. Возникновение угла рассогласования при полете ракеты.
214
Система стабилизации непрерывно уничтожает угол рассогласо-
рассогласования и поддерживает на входе датчика сигнал, равный нулю. Си-
Система наведения создает на входе системы стабилизации сигнал
мнимого рассогласования, смещая нуль датчика.
Стремясь сохранить входной сигнал, равный нулю, рули управ-
управления разворачивают ракету, и она летит уже в новом направле-
направлении.
Рис. 121. Вывод искусственного спутника на орбиту.
На рисунке 121 изображена траектория вывода на ©рбиту искус-
искусственного спутника Земли с помощью двухступенчатой ракеты. При
старте с Земли гиростабилизированная платформа установлена го-
горизонтально. Свое первоначальное положение платформа сохранит
во все время полета ракеты. На старте ось ракеты составляет с
платформой угол <р = 90°. При старте ракета под действием силы
реакции мощной газовой струи устремилась вертикально вверх
(стартовую скорость сообщают ракете в вертикальном направлении,
чтобы скорее уйти за пределы плотных слоев атмосферы). Чтобы
вывести спутник на круговую орбиту, ракета должна выйти в рас-
расчетную точку орбиты, обладая скоростью, равной круговой для вы-
высоты h и направленной строго по горизонтали.
При выходе из тропосферы1 программное устройство по радио-
радиосигналу, посланному с Земли, начинает постепенно разворачивать
ракету из вертикального положения в горизонтальное. Угол по-
1 Тропосферой называется прилегающий к Земле слой атмосферы тол-
толщиной 11—16 км.
215
ворота ф измеряется на ракете относительно гиростабилизирован-
ной платформы.
В точке С, к моменту достижения которой выгорело все топливо
в первой ступени ракеты, первая ступень отделяется. Ракета не-
некоторое время летит по инерции, набирая высоту, но теряя ско-
скорость. В точке D по команде с земли или автоматически включа-
включается двигатель второй ступени. На втором участке траектории вы-
выведения программный механизм выводит ракету на горизонталь-
горизонтальный полет и удерживает ось в положении, перпендикулярном ли-
линии, соединяющей ракету с центром Земли. При достижении раке-
ракетой расчетной скорости двигатель выключается. Спутник выходит
на орбиту.
ГЛАВА X
РАВНОВЕСИЕ ТВЕРДОГО ТЕЛА
§ 1. СТЕПЕНИ СВОБОДЫ
Степенями свободы в механике называются независимые дви-
движения, которые возможны для данного тела или системы тел.
Числом степеней свободы называется число незави-
независимых движений, которые одновременно возможны для
данного тела или системы тел.
Так, например, любое перемещение материальной точки может
быть представлено как результат ее поступательного движения
в трех независимых направлениях. Материальная точка обла-
обладает тремя степенями свободы.
Если мы для изучения движения точки выбрали прямоуголь-
прямоугольную декартову систему координат, то мы можем представить ее дви-
движение как результат перемещения вдоль трех координатных осей
и определить его тремя координатами х, у, z. В сферической систе-
системе координат движение точки может быть представлено как пере-
перемещение вдоль радиуса-вектора и по двум ортогональным окруж-
окружностям и соответственно определено тремя координатами г, ср, К.
Движение механической системы из п материальных точек опреде-
определено, если известны перемещения каждой ее точки. Следовательно,
чтобы иметь полное представление о положении системы в прост-
пространстве, надо задать Зп координат.
Числом степеней свободы называется также число
независимых координат, которые полностью определя-
определяют положение тела или системы тел.
Если на движение тела наложены ограничения теми или иными
связями, то уже не все координаты независимы, часть из них опре-
определяется из условий, ограничивающих свободу движения тела.
Если движение материальной точки ограничено связями так,
что, перемещаясь, она остается на некоторой поверхности F (х, у, z) =
= 0, то в этом случае произвольно (независимо друг от друга) мож-
можно задать только две ее координаты, а третья должна быть найдена
217
из написанного уравнения. Точка, вынужденная двигаться, оста-
оставаясь на поверхности, имеет две степени свободы.
Примером связи, допускающей движение точки по поверхности,
служит подвес маятника Фуко (шарнирный подвес массивного ша-
шара на легком стержне (рис. 122). При таком подвесе маятник может
двигаться по сфере заданного радиуса г с центром
в точке подвеса и положение его может быть опре-
определено заданием либо углов в горизонтальной и
вертикальной плоскостях, либо проекцией радиуса
вектора на горизонтальную и вертикальную плос-
плоскости.
Если материальная точка по каким-либо при-
причинам (скажем, благодаря подвесу, изображен-
изображенному на рисунке 123) вынуждена перемещаться
по линии, то независимым у нее является лишь
одна ее координата, а две другие найдутся из
системы двух уравнений Ft(x, у, z) ~ О и
Fz{x, у, z) = О, определяющих линию. Действитель-
Действительно, положение точки на линии вполне определя-
определяется либо длиной отклонения точки от началь-
начального положения, отсчитанной вдоль траектории,
либо углом отклонения от начального положения.
Свободное абсолютно твердое тело может со-
совершать шесть независимых движений: три по-
поступательных вдоль трех взаимно перпендикулярных направле-
направлений (осей координат) и три вращения вокруг тех же направлений.
Свободное твердое тело обладает шестью степеня-
степенями свободы. Положение тела в пространстве
для некоторого момента времени можно опре-
определить, если задать, скажем, координаты какой-
либо точки тела и углы поворота относительно
трех взаимно перпендикулярных осей.
Можно определить положение твердого
тела и в том случае, если заданы координа-
координаты трех его точек, не лежащих на одной пря-
прямой. Всего при этом надо задать девять ко-
координат, но независимыми из них будут толь-
только шесть. В самом деле, задав координаты трех
точек, мы закрепляем в теле жесткий треу-
треугольник, расстояние между точками которого
(взятыми попарно) выражается определен-
определенным образом через их координаты.
Как известно из аналитической геомет-
геометрии, расстояния АВ, ВС, СА связаны с координатами точек А,
В и С выражениями вида:
Рис. 122. Точ-
Точка, имеющая
возможность
двигаться по
поверхности,
имеет две сте-
степени свободы.
Рис. 123. Точка,
движущаяся по
линии, обладает
одной степенью
свободы.
- xAf + (ув -
zB - zA)K
A0.1)
218
Следовательно, три координаты определяются решением систе-
системы трех уравнений вида A0.1).
Вращение твердого тела, имеющего одну неподвижную точку,
может быть всегда представлено как вращение вокруг трех взаимно
перпендикулярных осей. Следовательно, твердое тело, закрепленное
в одной точке, имеет три степени свободы. Чтобы определить его
положение в пространстве, надо задать, скажем, углы, которые об-
образуют три взаимно перпендикулярные оси в теле с начальным нап-
направлением этих осей. Твердое тело, в котором закреплены две точки,
может вращаться лишь вокруг прямой, соединяющей эти точки.
Оно имеет одну степень свободы.
§ 2. УСЛОВИЯ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Как было сказано, свободное твердое тело имеет шесть степе-
степеней свободы. Для описания поступательного движения его центра
масс и вращения тела вокруг трех осей, проходящих через центр
масс, мы можем составить шесть уравнений. Три из них, получен-
полученные на основе закона движения центра масс твердого тела:
т1* F" mdT*= fy> m^"= z> @>2)
связывают координаты x, </, z центра масс тела с составляющими
результирующей внешних сил 2FX, "ZFy, HFZ по осям х, у, г.
Другие три уравнения, полученные из основного закона дина-
динамики вращающегося твердого тела:
1
у
d2(fy - EAf г^?г-
связывают углы поворота тела вокруг осей х, у, z с моментами
внешних сил относительно тех же осей.
Для того чтобы тело находилось в равновесии, т. е. не переме-
перемещалось вдоль осей и не вращалось вокруг них, необходимо выпол-
выполнение следующих шести условий:
S^ = 0; Sfy = 0; ZFZ = 0;
Шх = 0; Шу = 0; Шг = 0. A0.4)
Для равновесия твердого тела, находящегося под
действием произвольной системы сил, необходимо, что-
чтобы сумма проекций всех сил на оси координат и сумма
моментов этих сил относительно осей координат были
равны нулю.
219
Рис.
124. Устойчивое
равновесие.
§3. УСТОЙЧИВОЕ И НЕУСТОЙЧИВОЕ РАВНОВЕСИЕ
Если в данный момент тело находится в равновесии, то это не
служит гарантией того, что оно останется в таком состоянии как
угодно долго. В реальных условиях на всякое тело действуют слу-
случайные толчки, устранить которые принципиально невозможно.
Чтобы выяснить, могут ли эти толчки вывести тело из состояния рав-
равновесия или нет, надо исследовать, как изменяется результирующая
сил, действующих на тело, при малом его отклонении от положения
равновесия.
Положим, тело (шарик) находится в покое на дне гладкой ямы
(рис. 124), в нижней точке которой на него действуют равные и про-
противоположно направленные силы mg и R
(их результирующая равна нулю). Откло-
\ "k\ / ним шарик от положения равновесия. Те-
V 1!\ / перь на него действует результирующая F
сил mg и R', уже не равная нулю. Она на-
направлена к положению равновесия, куда
и возвратит шарик, когда перестанет
действовать отклоняющий фактор. Если
при малом отклонении тела от положе-
положения равновесия результирующая внешних
сил не вызывает увеличения начального от-
отклонения, то тело находится в устойчивом равновесии.
Положим, шарик находится в равновесии на вершине гладкого
купола (рис. 125). При этом силы mg и R опять уравновешивают
друг друга и их результирующая рав-
равна нулю. При малейшем отклонении ша-
шарика от положения равновесия возни-
возникает результирующая F, отличная от
нуля и удаляющая шарик от положе-
положения равновесия.
Если результирующая сила, возни-
возникающая при отклонении тела от поло-
положения равновесия, увеличивает началь-
начальное отклонение, равновесие тела на-
называется неустойчивым.
И наконец, если при смещении тела
от положения равновесия результирующая внешних сил остается
равной нулю, равновесие называется безразличным. В безраз-
безразличном равновесии находится, например, покоящийся на гладкой
горизонтальной плоскости шарик.
В различного рода технических конструкциях допустимы толь-
только устойчивые положения равновесия деталей, поэтому исследова-
исследование характера равновесия тел — весьма важная задача статики.
Состояние равновесия системы тел, на которую действуют
внешние консервативные силы, устойчиво только в том слу-
220
Рис. 125. Неустойчивое
равновесие.
чае, если ему соответствует минимум потенциальной энер-
энергии.
Допустим, что система, находящаяся под действием консерва-
консервативных сил в состоянии равновесия, обладает минимумом потен-
потенциальной энергии. Значит, при любом отклонении от этого поло-
положения ее потенциальная энергия возрастает. Но в соответствии с
законом сохранения энергии полная энергия консервативной сис-
системы, равная сумме кинетической Ек и потенциальной U энергий,
остается постоянной:
Ек -f U = const.
Следовательно, если в начальный момент времени все тела систе-
системы находились в покое, то движение может возникнуть лишь как
результат перехода части потенциальной энергии в кинетическую
(так как всегда ?к> 0). Если же в начальный момент потенциаль-
потенциальная энергия минимальна, то движение возникнуть не может и сис-
система находится в состоянии устойчивого равновесия.
При безразличном равновесии потенциальная энергия одина-
одинакова для близких положений тел системы.
В поле силы тяжести тело обладает минимумом потенциальной
энергии, когда его центр тяжести занимает наинизшее положение.
Таким образом, состояние устойчивого равновесия тела в поле си-
силы тяжести соответствует наинизшему^положению его центра тя-
тяжести .
§ 4. ВЕСЫ
Весы — один из наиболее древних и распространенных изме-
измерительных приборов. В основе устройства весов всех систем (за
исключением пружинных динамо-
динамометров) лежит условие равнове-
равновесия твердого тела. На рисунке 126
изображены современные анали-
аналитические весы, применяемые в ла-
лабораториях.
Весы должны обладать опреде-
определенной точностью и чувствитель-
чувствительностью. Чтобы весы были точны-
точными, оба плеча их коромысла долж-
должны быть равны между собой, а
центр тяжести его должен лежать
на одной вертикали с точкой опо-
опоры коромысла и ниже ее. Выпол-
Выполнение последнего требования обес-
обеспечивает устойчивость равнове-
равновесия весов. Любые весы имеют
ограниченную точность, так как Рис. 126. Аналитические весы.
221
в
Рис. 127. Схема
весов (к выводу условия равно
весия).
невозможно достичь абсолютной их равноплечности и избежать
трения в опорах механизма. Для всех весов устанавливают мак-
максимально возможные погрешности и считают весы точными, если
погрешности не превышают допустимых.
Чувствительностью весов называется величина отклонения
конца их стрелки, отнесенная к единице добавочного груза. Чув-
Чувствительность должна быть воз-
возможно большей и независимой от
нагрузки весов.
В На рисунке 127 изображена
схема равноплечных весов. Ко-
Коромысло А В может свободно пово-
поворачиваться вокруг точки опоры О',
f» находящейся посередине рычага. В
точках А и В подвешены чаш-
^¦р| ки для взвешиваемого груза и раз-
разновеса. Точки А, В и О лежат на
равноплечных °ДНОЙ прямой. В середине коро-
коромысла укреплена стрелка, нижний
конец которой перемещается вдоль
шкалы. Если коромысло урав-
уравновешено, стрелка находится против нуля шкалы О. При этом (на
основе правила равновесия рычага)
G1l1 = GJ2, или (так как 1г = /2 = /)
Определим чувствительность этих весов. Добавим на правую
чашку перегрузок р. Коромысло весов отклонится при этом на угол а.
Рассмотрим условие равновесия весов в таком положении. Обоз-
Обозначим вес коромысла со стрелкой Go, расстояние отточки опоры О'
до центра тяжести коромысла и стрелки С (который лежит на стрел-
стрелке ниже точки О') — %.
При равновесии сумма моментов сил относительно точки опо-
опоры коромысла весов согласно условию A0.4) равна нулю:
(G2 -\-p)l cos % — Gj/ cos % — G0X sin % = 0,
или
p/cos % — G0X sin a = 0.
Откуда
tg*=7rr. (Ю.5)
Отклонение стрелки от нулевого деления шкалы равно 5 =
— г tga, где г — длина стрелки. Подставив в это выражение зна-
значение tg а из формулы A0.5), получим:
222
Чувствительность весов равна:
s _ н
Р Go\ '
¦%
т. е. чувствительность весов прямо пропорциональна длине коро-
коромысла и длине указателя (стрелки) и обратно пропорциональна
весу коромысла и расстоянию между точкой опоры коромысла и его
центром тяжести. Для повышения чувствительности весов необ-
необходимо делать длинными коромысло и стрелку. Однако при слиш-
слишком большой длине коромысло и стрелка изгибаются, если не при-
придать им необходимую в этом случае массивность. Практически ока-
оказывается более рациональным строить весы с короткими и легки-
легкими коромыслами.
Для регулирования чувствительности весов в некоторых пре-
пределах на их коромысле (или на стрелке) помещают грузик, кото-
который можно перемещать вверх или вниз с помощью винта. При этом
меняется величина Я,, а с ней и чувствительность весов.
Пользоваться равноплечными весами для взвешивания боль-
больших грузов неудобно, так как масса гирь, равная массе взвешивае-
взвешиваемого груза, при этом велика. В этих случах применяют неравно-
плечные весы различной конструкции.
ГЛАВА XI
МЕХАНИКА УПРУГИХ ТЕЛ
§ 1. СПЛОШНЫЕ ТЕЛА. ЭЛЕМЕНТ СПЛОШНОГО ТЕЛА
Все реальные тела под действием внешних сил в большей или
меньшей степени деформируются. Детальное исследование дефор-
деформаций, которые возникают в телах под действием внешних сил,
требует учета их внутренней (атомной и молекулярной) структуры.
Однако большой класс задач, объединенных так называемой ме-
механикой сплошных сред (в которую входят механика упругих тел,
гидро- и аэромеханика), позволяет рассматривать тела как сплош-
сплошные.
Исследуя деформации, т. е. взаимные перемещения частей тела,
его расчленяют на элементы. К отдельному элементу применяют
известные нам законы механики; силы, действующие на выделен-
выделенный элемент со стороны соседних элементов, считают внешними.
Аналогичным приемом мы уже пользовались, когда исследо-
исследовали движение абсолютно твердого тела. Единственным признаком,
по которому определялась при этом величина элемента, было ус-
условие малости его размера по сравнению с некоторыми характер-
характерными для данной задачи размерами (например, расстоянием от эле-
элемента до оси вращения).
В случае сплошного деформируемого тела размеры элемента
должны быть достаточно малыми, чтобы можно было (с требуемой
точностью) считать внешние силы, действующие в пределах дан-
данного элемента, постоянными. Казалось бы, что, чем меньше раз-
моры элемента, тем точнее выполняется требование постоянства
силы. Однако уменьшению элемента ставит предел дискретная струк-
структура вещества (атомная, молекулярная).
В первом приближении можно считать атомы или ионы в кри-
кристаллической решетке твердого тела, молекулы в жидкости и газе
колеблющимися или движущимися независимо друг от друга. Если
мы возьмем элемент тела настолько малый, что в нем окажется все-
всего три-четыре молекулы, то, совершая хаотическое тепловое дви-
224
жение, молекулы то сближаются, то удаляются друг от друга по
самым различным направлениям. Соответственно этому объем выб-
выбранного элемента то уменьшается, то увеличивается независимо от
того, действуют ли на него внешние силы или нет. К такому эле-
элементу, содержащему малое число молекул, законы динамики,
выведенные на основе исследования макротел (т. е. тел, содержа-
содержащих большое число молекул или атомов), явно не пригодны. Оче-
Очевидно, элементарный объем должен быть достаточно большим,
содержащим большое число молекул, чтобы мы могли пренебречь
их индивидуальными свойствами, а пользоваться для всего эле-
элемента характеристиками, усредненными по всем молекулам.
В частности, если молекул будет много, мы сможем считать,
что в отсутствие внешних сил в сторону любой грани элементар-
элементарного параллелепипеда и от нее одновременно летит одно и то же
число молекул. При этом в среднем собственное количество движе-
движения, которое несут молекулы в сторону каждой грани, одинаково,
а следовательно, элемент тела находится в относительном покое.
Если же он движется как целое, мы вправе считать, что коли-
количество движения получено им под действием импульса внешних
сил.
Таким образом, выделенный нами в сплошном деформирован-
деформированном теле элемент должен быть: 1) достаточно малым, чтобы внеш-
внешние силы в его пределах могли считаться постоянными; 2) достаточ-
достаточно большим, чтобы число молекул или атомов в нем позволяло про-
производить усреднения величин, характеризующих состояние эле-
элемента.
Убедимся, что два таких противоречивых требования могут
быть удовлетворены. Для этого произведем следующий простой
расчет. Наиболее разреженная сплошная среда — газ. В воздухе
при нормальном давлении в 1 см} содержится 2,7 • 1019 молекул
{число Лошмидта). Если мы возьмем в качестве элемента тела ку-
кубик, ребро которого равно 0,01 мм, то и в нем еще будет 2,7 • 1010
молекул.
Для жидкости и для твердого тела это число еще больше.
Количество вещества, заключенного в данном объеме сплош-
сплошного тела, характеризуется, как обычно, массой. Масса, содержа-
содержащаяся в единице объема тела, называется плотностью:
Am
Рср~ W
Уменьшая объем ДУ (стягивая его в точку), получим в пределе,
Am
к которому стремится отношение —, величину, называемую плот-
AV
ностью вещества в данной точке:
1 • Д"* dm ,,, ,.
AV~o AV dV v '
8 M. M. Архангельский 225
Однако здесь «бесконечно малый» объем нельзя понимать ма-
математически. Уменьшение AV может продолжаться лишь до ве-
величины, удовлетворяющей выше сформулированному требованию,
предъявляемому к элементу сплошного тела. В этом случае раз-
различие между математическим и физическим пониманием бесконеч-
бесконечно малой величины, пожалуй, наиболее наглядно.
Вес единицы объема сплошного тела называется объемным весом:
7 =
(П.2)
/
/S
/8*
/3
/*~
¦/
зх
a
X
—„ ¦-
¦p/
—^
—-ffi
=&
§ 2. ТИПЫ ДЕФОРМАЦИЙ
Под действием внешних сил твердые тела изменяют свою форму:
удлиняются, сжимаются, изгибаются и т. д. Чтобы представить
себе различные типы де-
деформаций, воспользуемся
следующей грубой моделью
твердого деформируемого
тела (рис. 128): скрепим
параллельно друг другу
ряд деревянных пластин с
помощью одинаковых пру-
пружинок (рис. 128, а). Пла-
Пластины изображают элемен-
элементарные слои, на которые
разбито тело, а пружин-
пружинки— силы, действующие
между ними.
Удерживая нижнюю
пластинку на столе и при-
прикладывая внешнюю силу
перпендикулярно верхней
пластинке в направлении
от тела, получим деформа-
деформацию растяжения (рис.
128, б), в направлении к
телу — деформацию сжа-
сжатия (рис. 128, б). При этом
если точки пластин, лежа-
лежащие на одной вертикали,
не смещаются с нее, а рас-
расстояния между смежными
слоями (пластинами) оста-
остаются во всех точках одинаковыми, то деформации называются
однородным растяжением или однородным сжатием.
Если действующая сила лежит в плоскости верхней пластины,
а нижняя удерживается в покое, то отдельные части модели сдви-
Рис.
Модель деформируемого тела:
о—модель в недеформированном состоянии; б—одно-
б—однородное растяжение; в—однородное сжатие; г—одно-
г—однородный сдвиг; д— изгиб; е—кручение
226
гаются параллельно самим себе (рис. 128, г). Если точки в слое
сдвинутся на одну и ту же величину, то деформация называется
чистым или однородным сдвигом. Из рисунка 128, г видно, что де-
деформация сдвига может быть представлена в виде деформаций рас-
растяжения в направлении диагонали АВ и сжатия в направлении
диагонали CD.
Надавливая на один из краев верхней пластины, получим де-
деформацию изгиба (рис. 128, д). При этом расстояние между плас-
пластинами с одной стороны увеличивается, а с другой стороны умень-
уменьшается. В средней части модели должен существовать слой, кото-
который только изгибается, но не меняет свои размеры, слой этот
называется нейтральным. Таким образом, деформация изгиба
сводится к деформациям неоднородного растяжения и сжатия.
Наконец, поворачивая верхний слой в его плоскости, получим
деформацию кручения (рис. 128, ё). При этом точки пластин, лежа-
лежащие на одной вертикали, сдвигаются друг относительно друга, при-
причем точки у края пластин оказываются сдвинутыми наиболее силь-
сильно. Точки, лежащие на оси вращения, не смешаются вовсе. Таким
образом, деформация кручения может быть сведена к деформации
неоднородного сдвига.
В теории упругости доказывается, что все типы деформаций мо-
могут быть сведены (при условии, что они достаточно малы) к одно-
одновременно происходящим деформациям сжатия или растяжения и
сдвига.
Абсолютная величина деформации под действием данной силы
(скажем, удлинение тела А/) практически малопоказательна. При
удлинении на 1 мм тел длиной в 10 мм и в 10 м в первом случае де-
деформация весьма заметна, во втором настолько мала, что ею можно
пренебречь. Поэтому величину деформации оценивают отношением
изменения размеров тела Ад; в результате деформации к размерам
тела до деформации. Это отношение называют относительной де-
деформацией:
е= —. A1.3)
х
При деформациях растяжения и сжатия (которые объединяют
названием продольных) тело измен-яет свою длину на +А/. Знак
плюс соответствует растяжению, знак минус — сжатию. Относи-
Относительная продольная деформация:
« = ±у-, (П.4)
где / — длина тела до деформации.
На рисунке 129 видно, что при сдвиге абсолютная величина пе-
перемещений слоев аа', ЪЬ' и т. д. различна. Возьмем отношение
абсолютной величины смещения в слое к расстоянию до слоя от
8* 227
точки О, которая при деформации остается неподвижной,
ношения:
66 ~ Оа ~ ОЬ ~~ "' ~~
одинаковы для всех слоев.
Угол 9, образованный направлениями одной и той же
недеформированном и в деформирован-
деформированном теле, называется углом сдвига.
Если деформация мала:
бе = tg6^9;=J —, A1.6)
Эти от-
(П.5)
грани в
1-в'
Рнс. 129. Деформация
сдвига.
Рис. 130. Дефор-
Деформация кручения
цилиндра, закреп-
закрепленного в верхнем
сечении.
где Ах — абсолютный сдвиг в данном слое. При сдвиге вправо по-
полагают Ах > 0, при сдвиге влево Ах <. 0.
Величина ее называется относительным сдвигом.
Возьмем стержень в виде кругового цилиндра длиной L и ра-
радиусом R (рис. 130). Верхнее сечение стержня закрепим, а к нижне-
нижнему приложим пару сил, под действием которой произвольно выбран-
выбранный радиус нижнего сечения О А повернется на некоторый уголф.
Относительной деформацией кручения называется величина
- _ f mi 74
т. е. отношение угла закручивания к длине стержня.
Из закона сохранения массы следует, что при растяжении или
сжатии должна меняться не только длина тела, но и его попереч-
поперечный размер. Плотно наденем на резиновый шнур металлическое
кольцо и расположим шнур вертикально. Силами трения кольцо
удерживается на шнуре. Но если шнур растянуть, кольцо тотчас
соскользнет, диаметр шнура уменьшится. Изменение поперечных
размеров тела при его растяжении или сжатии характеризуется
228
е- =
A1.8)
соответственно относительным поперечным сжатием или растяже-
растяжением
Ad
d '
где d—поперечный размер тела до деформации, Ad—абсолют-
Ad—абсолютная величина изменения поперечного размера тела.
Абсолютная величина частного от деления относительной по-
поперечной деформации тела на его относительную продольную дефор-
деформацию называется коэффициентом Пуассона (ц):
1*= -**-. A1.9)
Для тел, изготовленных из одного и того же материала, коэф-
коэффициент Пуассона имеет одно и то же значение. Для многих метал-
металлов коэффициент Пуассона близок по величине к 0,25; для мате-
материалов типа резины он равен примерно 0,5.
Вследствие продольной деформации и сопровождающей ее по-
поперечной изменяется объем тела. Так как объем V пропорциона-
пропорционален Id2, то для малых деформаций относительное изменение объема:
AV _ (I + AQ (d + AdJ - Id3
Пренебрегая величиной второго порядка малости, получим:
T = -f-lf =7"A~~2|i) = 8lA~~2|i)- A1Л0)
По определению ц не может быть отрицательной величиной,
а из соотношения A1.10) следует, что \i не может быть более 0,5,
так как у всех реальных тел относительные продольные деформа-
деформации и деформации объема одного знака.
Для измерения деформа-
деформаций наиболее распространен
зеркальный прибор Мартенса
(рис. 131), принцип действия
которого следующий. К ис-
испытуемому образцу прижи-
прижимается конец планки, несу-
несущей острый нож. Между вто-
вторым концом планки и образ-
образцом зажимается призмочка с
укрепленным на оси зерка- х /\2л
лом. Когда образец деформи-
деформируется, призма поворачива-
поворачивается. Падающий на зерка-
зеркало луч света смещается
вдоль шкалы, причем его
Рис. 131. Схема прибора Мартенса для
измерения деформаций на образцах.
229
смещение тем больше, чем больше расстояние от зеркала до
шкалы.
Угол поворота а призмы, пропорциональный удлинению А/,
измеряется по шкале с помощью зрительной трубы. Точность из-
измерения порядка 0,002 мм. В других типах приборов, для того что-
чтобы сделать возможным отсчет величины малой деформации, при-
применяют приспособления (рычаги, зубчатые передачи, специаль-
специальные измерительные микроскопы и т. д.), увеличивающие смещение
стрелки измерительного прибора. В других случаях деформация
измеряется по изменению емкости, индуктивности и других вели-
величин, которые благодаря деформации происходят в соответствую-
соответствующем приборе.
Чтобы сделать видимыми местные деформации, применяют на-
накатку на поверхность испытуемого тела металлической сетки, по-
покрытие его поверхности растрескивающимся при деформации ла-
лаком и т. д. Внутренние деформации в прозрачных материалах мож-
можно сделать видимыми, освещая образец поляризованным светом.
Тела, в которых после прекращения действия внешней силы
деформация полностью исчезает и восстанавливается первоначаль-
первоначальная форма тела, называются абсолютно упругими телами.
Тела, которые не восстанавливают свою первоначальную фор-
форму после прекращения действия внешней силы, называются не-
неупругими или пластичными.
В природе нет абсолютно упругих или абсолютно неупругих
тел. При сравнительно небольших деформациях многие твердые
тела (в частности, металлические) ведут себя как тела почти абсо-
абсолютно упругие (остаточные деформации в них возникают, но они
весьма малы).
Целый ряд тел (влажная глина, смолы и др.) уже при малых де-
деформациях ведут себя как пластические тела, но вместе с тем у них
частично (в незначительной степени) восстанавливается первона-
первоначальная форма.
Физическая природа процессов в деформируемых телах до сих
пор во многом неясна. Построение теории этих процессов — задача
молекулярной и атомной физики. Отметим здесь следующее. Твер-
Твердые и жидкие тела могут рассматриваться как состоящие из неко-
некоторых атомных или молекулярных структур. Отдельный кристалл
(монокристалл) состоит из атомов, расположенных симметрично
друг относительно друга и образующих пространственную решет-
решетку (рис. 132). Металлы состоят из мелких, совершенно хаотически
ориентированных друг относительно друга кристаллов (поликрис-
(поликристаллические тела). Наконец, в аморфных телах (стекло, смолы и т. п.)
ближайшие между собой атомы расположены в известном порядке,
но порядок этот не повторяется периодически как в кристалле (рис.
133). Нечто подобное имеет место в жидкостях.
Атомы удерживаются на определенных местах пространствен-
пространственной решетки кристалла силами взаимодействия с соседними части-
230
? ONO «Cl
0 / 2 J 4 5 /1
Рис. 132. Пространственная
решетка кристалла пова-
поваренной солн.
Рис. 133. «Ближний
порядок» расположе-
расположения атомов аморфных
тел.
цами. Расстояния между соседними атомами решетки таковы, что
силы отталкивания и притяжения, действующие между ними, урав-
уравновешиваются. Кристаллы в поликристаллических телах удержи-
удерживаются друг около друга молекулярными силами.
Внешние силы, приложенные к телу, сдвигают его атомы или
кристаллы со своих мест. Межатомные и межмолекулярные силы
взаимодействия препятствуют этому, их результирующая в любом
внутреннем сечении тела становится отличной от нуля. Направле-
Направлена она против смещения частиц. Если сдвиг атомов или молекул
внешней силой невелик, так что они остаются в окружении тех час-
частиц, с которыми взаимодействовали до деформации, то после пре-
прекращения действия внешней силы частицы вернутся к прежнему
взаимному положению. Если же в результате смещения атомы и
молекулы сменят «соседей» и начнут взаимодействовать с другими
структурными элементами, то после прекращения действия внеш-
внешней силы они уже не вернутся к прежнему положению. В первом
случае деформация упругая, во втором пластичная.
Закономерности пластичных деформаций аналогичны законо-
закономерностям внутреннего трения в том смысле, что возникающие в
деформированном теле силы взаимодействия между элементами за-
зависят от скорости деформации. В результате работы внешней силы,
перемещающей части тела друг относительно друга, возрастает
внутренняя энергия тела.
§ 3. НАПРЯЖЕНИЕ
Внешние силы, действующие на тело, могут быть разделены на
два типа:
1. Массовые, или объемные, силы, действующие на каждый эле-
мент тела и пропорциональные его массе. Если F — сила, действу-
действующая на единицу массы, то на элемент Дт действует массовая си-
231
ла F* Am, но Д/п = рДУ, где р — плотность тела, Д V — объем
элемента тела. Тогда массовая сила равна .РрДУ, а ее компонен-
компоненты по осям координат — Fx рД1Л Fy рДУ, Fz рДУ.
2. Поверхностные силы, действующие на каждый элемент
поверхности тела и пропорциональные площади его поверх-
поверхности.
Если ~р — сила, действующая на единицу поверхности тела в
направлении нормали к ней, то на элемент поверхности Д5 дейст-
действует сила р Д5.
Пусть к телу приложена внешняя сила, деформирующая его.
При этом нарушается равновесие внутренних сил (межатомных,
межмолекулярных). В каждом сечении тела появляются отлич-
отличные от нуля результирующие внутренних сил, направленные про-
против внешней силы. Величина этих сил возрастает до тех пор, пока
они не станут равными силе внешней. В момент уравновешивания
внешних сил внутренними деформация тела достигает опреде-
определенной величины и больше не изменяется. Следовательно, при
установившейся деформации величина внутренних упругих сил
может быть измерена величиной внешних сил, приложенных к
телу.
Внешняя сила, действующая на единицу площади по-
поверхности тела, называется усилием.
Внутренние силы, действующие на единицу площади
сечения, проведенного внутри тела, называются напря-
напряжением.
Внешняя сила в общем случае может быть ориентирована как
угодно относительно поверхности тела. Но ее всегда можно раз-
разложить на составляющие: в направлении нормали и в направлении
касательной к поверхности тела в точке приложения силы. При ус-
установившейся деформации результирующая внутренних сил, воз-
возникших в теле, очевидно, уравновешивает в любом сечении обе сос-
составляющие внешней силы, т. е. сама
имеет нормальную и касательную со-
составляющие.
Составляющие напряжения р в
направлении нормали и касательной
к сечению называют нормальным р„ и
касательным pt напряжениями.
Для определения напряжений
пользуются так называемым методом
сечений или разрезов.
Рис 134 Нормальные и Положим, деформируемое дело
касательные напряжения находится в равновесии под действием
(метод сечений). приложенной к нему системы сил
232
(рис. 134, а). Разделим его мысленно на две части произвольным
сечением S, в котором мы хотим найти величину напряжения, и
отбросим часть В. Чтобы часть А осталась в равновесии, необходи-
необходимо к сечению приложить поверхностную силу Fs, заменяющую
силу, с которой часть В действовала на часть А. Сила Fs равна
результирующей сил взаимодействия между частями тела А и В.
Величина напряжения в рассматриваемом сечении равна:
P-Ff. A1.11)
Если деформация однородна, то напряжения равномерно рас-
распределены в сечении S и величина напряжения, полученная в соот-
соответствии с выражением A1.11), характери-
характеризует внутренние силы, действующие на. лю-
любой элемент площади сечения. Если деформа-
деформация неоднородна, то значения силы в разных
местах сечения различны. И, определяя нап-
напряжение, надо взять настолько малые эле-
элементы сечения AS, чтобы для каждого из них
сила AF была постоянной. Величина ——
s AS
называется средним напряжением на площад-
площадке AS. Уменьшая величину AS, в пределе
получим напряжение 'в точке:
Si
lm
AS-.0 AS
dS
A1.12)
Рис. 135. Зависимость
величины напряже-
напряжения от ориентировки
площадки.
Величина напряжения в данном сечении зависит от того, как
оно ориентировано в теле. Пусть, например, закрепленный прямо-
прямоугольный брусок (рис. 135) подвергнут однородной деформации
растяжения. Когда деформация установится, напряжение в сече-
сечении, заключающем точку А, определится отношением -^—, где F —
^ А
внешняя сила. Но сечение, содержащее точку А, может быть различно
ориентировано в пространстве. Напряжение в сечении SA, прове-
проведенном перпендикулярно к направлению силы F, и в сечении S'A,
проведенном к силе F под углом, отличным от 90°, различно:
так как F одна и та же, a SA Ф S'A.
Следовательно, для полной характеристики напряжения в дан-
данном сечении должно быть указано его расположение в теле отно-
относительно направления деформирующей силы.
233
§ 4. СВЯЗЬ МЕЖДУ ДЕФОРМАЦИЕЙ И НАПРЯЖЕНИЕМ
Английский физик Р. Гук в 1675 г. на основе большого числа
измерений установил, что для малых деформаций напряжения,
возникающие в деформированном, теле, прямо пропор-,
циональны величине относительной деформации;
р = &—. A1.13)
Коэффициент пропорциональности k называется модулем упру-
упругости (величина его различна для разных материалов, разных ти-
типов деформаций, разного состояния материала и т. д.).
Величина, обратная модулю упругости а = — , называется коэф-
k
фициентом упругости.
Связь между деформацией и напряжением графически изобра-
изображается так называемой диаграммой напряжения. Для ее построения
р специальными приборами изме-
измеряют деформации и соответствую-
соответствующие им величины внешних сил.
Если при измерении обеспечено
медленное нарастание деформаций
и сил, то можно считать, что из-
измерение производится при устано-
установившейся деформации и напряже-
напряжение в теле равно усилию. Для по-
построения диаграммы напряжений
по одной оси координат отклады-
откладывают значения относительной де-
деформации, а по другой — величи-
величину напряжения.
На рисунке 136 изображена диаграмма напряжений для дефор-
деформаций растяжения и сжатия металлического образца.
Как видно на графике, линейная зависимость р от eL, установ-
установленная Гуком, выполняется лишь в весьма узких пределах изме-
изменения деформаций и напряжений (для eL порядка тысячных долей
единицы). Предельное значение напряжения, при котором еще соб-
соблюдается линейная зависимость напряжения от деформации, назы-
называется пределом пропорциональности (рп) (на графике — ордината
точки А).
При превышении этого значения напряжения деформация (до
точки В на графике) еще носит характер упругой (практически за-
заметные остаточные деформации не возникают), но зависимость р
от eL уже не линейна. Предельное напряжение, при котором еще не
возникают остаточные деформации, называют пределом упругости (ру)
(на графике — ордината точки В).
Рис J36. Диаграмма напря-
напряжений.
234
Участок кривой АВ очень мал, и обычно (в инженерных расче-
расчетах) пределы пропорциональности и упругости считаются совпада-
совпадающими. Так как в сооружениях и машинах, особенно в частях,
подвергающихся переменным нагрузкам, нельзя допускать оста-
остаточных деформаций, то предел упругости — очень важная (для
техники) характеристика вещества. В строительном проектирова-
проектировании, например, размер балок выбирается так, чтобы напряжения
в материале не превышали 0,5 ру.
За пределом упругости в теле возникают деформации, сохраня-
сохраняющиеся и после снятия внешней силы, так называемые остаточные
деформации. В этом случае график, описывающий возвращение
тела после прекращения действия внешней силы в первоначальное
состояние, изображается уже не кривой ВО, а параллельной ей
(на чертеже пунктир). Напряжение, при котором появляется за-
заметная остаточная деформация (около 0,2%), называют пределом
текучести рт. На кривой ему соответствует точка С. Как видно на
графике, в области CD деформация возрастает без увеличения на-
нагрузки, тело как бы «течет». Эта область называется областью пла-
пластичных деформаций. Целый ряд способов обработки материалов:
ковка, чеканка, прессование, волочение, прокат — основан на ис-
использовании деформаций этого типа. Область упругих деформаций
в телах, как мы видели, невелика, поэтому наибольшие деформации,
которые может выдержать материал, не разрушаясь, определяются
в значительной степени величиной области текучести.
Материалы, для которых область текучести значительна, на-
называются вязкими (глина, асфальт и т. п.); материалы, у которых
область текучести практически отсутствует, называются хрупкими
(кирпич, бетон, стекло, фарфор и т. п.). Надо иметь в виду, что при
изменении условий, в которых находится деформированное тело,
свойства его меняются. Скажем, свинец при комнатной температуре
пластичен, а при температуре жидкого воздуха становится хрупким.
При дальнейшем растяжении (на диаграмме — за точку D) те-
тело вновь оказывает сопротивление деформации — кривая опять
поднимается. Максимальное напряжение (точка Е), возникающее в
теле до разрушения, называется пределом прочности или временным
сопротивлением (рв). При напряжении, превышающем временное
сопротивление, в одном из сечений тела образуется сужение, на-
называемое шейкой. В дальнейшем деформация сосредоточивается в
этом сечении и возрастает даже при уменьшении растягивающей
силы. Это и приводит к разрушению материала (точка 5 графика).
Отношение величины конечной разрывающей силы к поперечному
сечению шейки называется истинным сопротивлением разрыву.
В технических расчетах за характеристику прочности обычно при-
принимают временное сопротивление, измеряя его отношением разрыв-
разрывной силы к первоначальной площади сечения образца.
Характер деформаций в теле зависит также от длительности
действия внешней силы. На рисунке 137 приведена кривая изме-
235
Рис, 137. Зависимость деформа-
деформации от времени действия силы.
нения деформации со временем при действии постоянной силы. В мо-
момент приложения силы быстро устанавливается деформация АВ,
затем она медленно нарастает по кривой ВС, в момент снятия си-
силы деформация резко уменьшается на величину CD, а затем уже
медленно спадает по кривой DE. Для резины, например, длитель-
длительность изменения деформаций, соответствующая нарастанию по ВС
и спаду по DE, может быть несколь-
несколько суток. Это явление носит назва-
название упругого последействия. Мате-
Материалы с заметными упругими пос-
последействиями не пригодны для
изготовления измерительных при-
приборов с упругими элементами,
струн музыкальных инструментов
и т. д.
При повторных деформациях,
переходящих предел упругости,
происходит изменение механичес-
механических свойств твердых тел (глав-
(главным образом металлических).
Остаточные деформации (хотя бы и
очень малые), накапливаясь в те-
теле, повышают его прочность, одновременно увеличивая область
упругости и уменьшая область пластичности, характерные для
данного тела. Это явление называется наклепом.
На рисунке 138 изображена диаграмма напряжений для слу-
случая, когда в теле созданы деформации, выходящие за предел упру-
упругости. Затем действие внешней силы на тело прекращено (первый
пик). После чего тело вновь деформировано, но уже из положения,
содержащего остаточную деформацию (второй пик). Как видно на
графике, одно и то же напряжение возникает
во втором случае при большей деформации,
чем в первом. Предел упругости увеличен
(точки D и F).
Явление наклепа широко используется в
технике для упрочения металлических изде-
изделий. Наклеп в поверхностном слое изделия
создается обкаткой его роликами или удар-
ударной обработкой струей быстро летящей чу-
чугунной или стальной дроби, которую выбра-
выбрасывает колесо центробежной машины со ско-
скоростью 70—75 м/сек.
Первоначальные упругие свойства на-
наклепанному материалу можно вернуть путем
отжига, т. е. нагрева до высокой температу- P
ры и последующего медленного охлаж- торных деформациях
дения, (наклеп).
pkf/en'
iOOO
3000
2000
WOO
/
D
/
If
У
1
1
236
§ 5. МОДУЛИ УПРУГОСТИ ПРИ РАЗЛИЧНЫХ ДЕФОРМАЦИЯХ
и связь между ними
Во всех рассуждениях этого параграфа мы будем полагать, что
деформации не выходят за пределы применимости к ним закона Гука.
Рассмотрим деформацию продольного растяжения. Пусть к од-
однородному стержню длиной / и площадью поперечного сечения 5
приложена сила F, равномерно распределен-
распределенная по сечению и направленная перпендику-
перпендикулярно ему (рис. 139). Предположим, что сила
F значительно больше веса тела. Под действием
силы длина стержня увеличивается на А/. Ког-
Когда сила F уравновесится возникшими в теле
напряжениями, установится статическая де-
деформация, которой будет соответствовать опре-
определенное значение силы, действующей между
любыми двумя частями стержня, разделенными
поперечным сечением.
По закону Гука напряжение в сечении 5:
p = k^-. (П.Н)
Сила, действующая на всю площадь сечения:
Рис. 139. Дефор-
Деформация растяжения
под действием
силы F.
Модуль упругости для продольного удлинения называется мо-
модулем Юнга и обозначается буквой Е. Размерность модуля Юнга:
Так как
то
_ F _ р
A1.15)
A1.16)
Модуль Юнга численно равен отношению напряжения к относи-
относительному удлинению. Он зависит только от материала стержня и
является постоянной величиной для данного вещества.
Величины модуля Юнга и коэффициента Пуассона имеют одно
и то же значение для данного материала и при растяжении, и при
сжатии. Если eL = — = 1, то из формулы A1.16) Е = р= —, т. е.
модуль Юнга численно равен нагрузке, при которой длина образ-
образца с поперечным сечением, равным единице, возрастает вдвое. Та-
Такие нагрузки выдерживает, не разрушаясь, только каучук.
237
Удлинение при продольном растяжении или сжатии,
равное
Д/ = ± ~, (П.17)
прямо пропорционально действующей силе, длине образ-
образца и обратно пропорционально поперечному сечению об-
образца и значению модуля Юнга.
Поперечное сжатие (расширение) в результате продольного рас-
растяжения (сжатия) прямо пропорционально напряжению, возни-
возникающему в результате продольной деформации:
~ = ?Р. (П.18)
Величина р называется коэффициентом поперечного сжатия при
продольном растяжении:
Поперечное сжатие при продольном растяжении равно произ-
произведению коэффициента Пуассона на коэффициент упругости и на-
напряжение. Из формул A1.18) и A1.19) следует:
р=1«. A1.20)
При деформации сдвига величина тангенциального напряжения
прямо пропорциональна относительному сдвигу:
pt=G% A1.21)
Ft
где pt — -д отношение силы к величине сечения, параллельно-
параллельного направлению действия силы, a G — коэффициент пропорцио-
пропорциональности, называемый модулем сдвига.
Модуль Юнга, модуль сдвига и коэффициент Пуассона связаны
между собой соотношением (приводим без вывода):
G= - . A1.22)
2A +|х) '
Перейдем к деформации кручения.
Возьмем однородный стержень в виде кругового цилиндра (рис.
130) высотой L и радиусом R. Верхнее сечение стержня закрепим
неподвижно, а к нижнему сечению приложим пару сил, закручи-
закручивающую стержень. Положим, момент этой силы относительно оси
стержня равен М.
В пределах применимости закона Гука
-*-, A1.23)
где /— модуль кручения.
238
Из чертежа видно, что кручение на угол <р можно представить
как сдвиг на угол %. Модуль кручения связан с модулем сдвига за-
зависимостью:
Из формул A1.23) и A1.24) получаем:
ИЛИ
9 =
2 I
2MI
¦nGR*'
A1.24)
A1.25)
A1.26)
Угол закручивания пропорционален моменту силы, длине стерж-
стержня и обратно пропорционален модулю сдвига и радиусу образца
в четвертой степени. Момент силы М прямо пропорционален ра-
радиусу в первой степени, следовательно, угол <р обратно пропорцио-
пропорционален третьей степени радиуса. Беря тонкую проволоку, можно,
прилагая малые усилия, получить большой угол закручивания.
Это свойство подвеса из тонкой проволоки используется в изме-
измерительных приборах (весы Кавендиша, зеркальные гальвано-
гальванометры).
Таблица 5
Средние значения некоторых упругих постоянных
Материал
Чугун
Сталь
Медь
Стекло
Каучук
Дерево (вдоль слоев)
Модуль
Юнга
1,1
2,05
0,72
1,2
0,55
0,00008
0,12
Модуль
сдвига
0,45
0,805
0,27
0,45
0,22
0,000027
Коэффициент
Пуассона
0,24
0,27
0,34
0,34
0,47
0,1 —0,2
§ 6. ЭНЕРГИЯ УПРУГОЙ ДЕФОРМАЦИИ.
УПРУГИЙ ГИСТЕРЕЗИС
Внешняя сила, перемещая части деформируемого тела, совер-
совершает некоторую работу против внутренних сил, возникающих в те-
теле во время деформации. При исчезновении деформации внутрен-
внутренние силы могут совершать работу против сил внешних. Если тело
239
абсолютно упруго, то работа внешней силы равна работе сил внут-
внутренних. При деформации абсолютно упругого тела (достаточно мед-
медленной, чтобы пренебречь изменением кинетической энергии) по-
потенциальная энергия его возрастает на величину работы, совер-
совершенной внешними силами. В реальных телах часть внутренних сил
носит характер сил внутреннего трения. Поэтому работа деформи-
деформирующей силы частично идет на необратимое увеличение внутрен-
внутренней, а не потенциальной энергии тела. Однако при деформациях,
для которых справедлив закон Гука, можно считать, что вся рабо-
работа внешних сил и для реальных тел идет на увеличение только их
потенциальной энергии.
В главе VIII (§ 3) мы подсчитали потенциальную энергию, ко-
которую приобретает пружина, растянутая на величину Ах силой F,
пропорциональной удлинению:
,, k (Ах)'
и —,
где k — коэффициент пропорциональности между силой и вызван-
вызванным ею удлинением Ах.
Так как в пределах применимости закона Гука коэффициент k
для данного материала — величина постоянная и не зависит от ве-
величины деформации, то можно написанное равенство переписать в
виде:
у ^feAxA* =fA^ A127)
Если закон Гука не выполняется, то и в этом случае элементар-
элементарная работа силы F, вызывающей деформацию Ах, равна:
AA = Fbx, A1.28)
где Ах — достаточно малая величина деформации, при которой
можно считать силу F постоянной в пределах изменения деформа-
деформации от х до х -f- Ax.
Выделим в деформируемом теле куб, ребро которого рав-
равно /. Тогда независимо от вида связи F ~ F (х) элементарная
работа:
ДЛ = F Дх = pS ~ I = рР — = р/3Дг.
Полная работа силы F, вызвавшей деформацию е:
X I
A =.f Fdx = P J>de. A1.29)
о о
Построим график зависимости относительной деформации от
напряжения, откладывая по оси ординат величину ±р, по оси абс-
240
цисс +е (рис. 140). Положим, мы сообщили стержню относитель-
относительное удлинение ел , причем изменение напряжения р с изменением е
происходило по кривой О А. Когда действие внешней силы прекра-
прекратится и напряжения станут равными нулю, то деформация в реаль-
реальном теле полностью не исчезнет. При р = 0 остаточная деформация
равна е0 (точка В). Если мы теперь сожмем тело, то де-
деформация исчезнет, когда напряжение в теле приобретет некото-
некоторое значение —р0 (точка С). Это явление называется упругим гисте-
гистерезисом. Сжимая тело далее, мы достигнем некоторых значений нап-
напряжения и относительной деформации, соответствующей точке А'.
После прекращения действия сжимающей тело силы напряжение
становится равным нулю при относительной деформации — е0 (точ-
(точка В'). Теперь деформация тела исчезнет, если в теле возникнет нап-
напряжение-j-p0 (точка С). Вновь растя-
растягивая тело, мы попадем в точку А.
При периодически повторяющихся
деформациях графическая зависи-
зависимость р от е изображается, таким
образом, замкнутой кривой, которая
носит название петли упругого гисте- •€ е„- В '/]/&,/ +?
резиса. Внешние силы, соответствую- ' уд /g ?Л
щие участку графика В'С А, со-
совершают работу, пропорциональную
площади, заключенной между кри-
кривой В'С А, ординатой точки А и
осью абсцисс. На участке кривой АВ
работу совершают внутренние силы. рИс. НО. Петля упругого ги-
Она пропорциональна площади, за- стерезиса.
ключенной между кривой АВ, орди-
ординатой точки А и осью абсцисс. Разность этих площадей, равная
площади верхней части петли гистерезиса, пропорциональна раз-
разности работ внешних и внутренних сил. Нижняя часть петли
гистерезиса также дает разность работ внешних и внутренних
сил. Таким образом, площадь петли гистерезиса пропорциональ-
пропорциональна той части механической энергии, которая за каждый цикл
изменения напряжения в образце переходит во внутреннюю
энергию.
Чем больше петля гистерезиса для данного материала, тем быст-
быстрее и сильнее нагревается деталь, выполненная из него, под дейст-
действием переменных нагрузок. Поэтому ответственные детали машин,
подвергающиеся периодическим нагрузкам (например, пружи-
пружины клапанов автомобильного или авиационного двигателя), дела-
делают из специальных сортов стали, для которых петля гистерезиса
мала.
Явление гистерезиса используется для ограничения величины
колебаний при вибрациях. Например, для того чтобы в случае ре-
резонанса амплитуда колебаний лопаток турбин под действием уда-
~Р
241
ров струи не возрастала до опасной величины, лопатки изготавли-
изготавливаются из материалов с большой петлей гистерезиса (например,
хромистые стали). Амплитуда колебаний стабилизируется и пере-
перестает расти, как только расход энергии вследствие наличия гисте-
гистерезиса становится равным ее поступлению.
Большое значение имеет гистерезис в процессе трения. Повто-
Повторяющиеся при трении удары поверхностей тела создают в них пе-
периодически меняющиеся деформации. Так как во всех реаль-
реальных телах возникают остаточные деформации (а вместе с тем и
упругий гистерезис), то последний и обеспечивает при трении ме-
механизм превращения механической энергии во внутреннюю энер-
энергию тела.
ГЛАВА XII
ГИДРОАЭРОСТАТИКА
§ 1. ЖИДКИЕ И ГАЗООБРАЗНЫЕ ТЕЛА
В жидкости силы, действующие между молекулами, значительно
меньше, чем в твердых телах, и быстрее убывают с расстоянием.
Поэтому в жидкости некоторая упорядоченность в расположении
молекул наблюдается лишь вблизи каждой данной молекулы и в
течение короткого времени, пока молекула колеблется у некоторого
положения равновесия. Затем под действием импульсов соседних
молекул она покидает это положение и свободно движется до ка-
какого-то нового положения равновесия, около которого опять колеб-
колеблется короткое время («время оседлости»), а далее перемещается
вновь и т. д.
В газах при обычных условиях силы молекулярного взаимо-
взаимодействия настолько малы, что молекулы свободно и беспорядочно
перемещаются, время от времени соударяясь друг с другом по за-
законам, близким к законам упругого удара.
В твердых телах силы притяжения и отталкивания уравнове-
уравновешивают друг друга; в жидкостях равновесие между силами выпол-
выполняется в среднем для множества молекул, но для отдельных моле-
молекул то нарушается, то восстанавливается; в газах при обычных ус-
условиях силы взаимодействия между молекулами проявляются лишь
при их сближении.
Если на некоторый объем жидкости действуют внешние силы,
стремящиеся сообщить ему деформацию всестороннего сжатия, то
силы отталкивания оказывают противодействие сближению моле-
молекул уже при обычных условиях. В газе силы отталкивания начи-
начинают проявляться лишь, когда газ сжат и расстояния между его
молекулами достаточно малы. В обычных условиях газы легко сжи-
сжимаемы, а жидкости можно считать практически несжимаемыми.
Если к поверхности некоторого объема жидкости или газа при-
приложена хотя бы бесконечно малая сила, смещающая их части друг
относительно друга, то в силу легкоподвижности частиц за конеч-
конечное время она создает их конечное перемещение. Поэтому говорят,
243
что в обычных условиях жидкости не оказывают сопротивления
изменению формы, но сохраняют свой объем, а газы не сохраняют
ни формы, ни объема. Для задач механики различие между жидкос-
жидкостями и газами, за исключением особых случаев движения, несущест-
несущественно. Поэтому в дальнейшем мы будем применять термин «жидкости»
к тем и другим. В случае необходимости будем различать жидкости
капельные, практически несжимаемые и образующие в,поле силы тя-
тяжести поверхность раздела на границе с другой средой (например, с
газом), и жидкости газообразные, сжимаемые и целиком заполняю-
заполняющие ту часть пространства, в которую они помещены.
Раздел механики, изучающий состояние равновесия и движе-
движения жидкостей под действием внешних сил, называется гидроаэро-
гидроаэромеханикой. Равновесие жидкостей и газов рассматривается в раз-
разделе, называемом гидроаэростатикой.
§ 2. НАПРЯЖЕНИЕ В ЖИДКОСТИ. ДАВЛЕНИЕ
Жидкости и газы рассматривают в механике как сплошные сре-
среды, непрерывно заполняющие часть пространства. Так же как и
твердые тела, жидкости и газы принимают за систему материаль-
материальных точек, каждая из которых является элементарным объемом.
Размеры элементарного объема определяются условиями, кото-
которые сформулированы в начале предыдущей главы.
Представление жидкости или газа в виде системы неизменно свя-
связанных между собой элементов допустимо, если жидкость покоит-
покоится или движется как целое. В этом случае мы можем часть объема
жидкости (или весь объем) рассматривать как твердое тело и при-
применять к нему законы механики твердого тела. Этот прием носит
название принципа отвердения.
Выделим внутри жидкости произвольный элемент и рассмотрим
действующие на него силы. Их можно разделить на внутренние
(действующие между частицами элемента) и внешние (действую-
(действующие со стороны соседних элементов). Внутренние силы взаимно
уравновешиваются, потому мы вправе их действия не учитывать.
Внешние силы, как и в случае твердого тела, разделим на мас-
массовые (действующие на каждую материальную частицу элемента)
и поверхностные (приложенные к поверхности элемента). Вооб-
Вообще говоря, было бы важно знать и внутренние силы, чтобы характе-
характеризовать напряженное состояние внутри выделенного элемента
жидкости. Однако в гидромеханике ограничиваются указанием не-
некоторого среднего напряженного состояния для объема в целом.
В самом деле, если в выбранном элементе находится большое чис-
число молекул, движущихся хаотически, то установить детальную
картину распределения взаимодействия между ними практически
невозможно.
На первый взгляд определение среднего напряженного состояния
внутри выделенного элемента тоже невозможно, так как внутрен-
244
ние силы при суммировании уравнений, составленных для отдель-
отдельных элементов, взаимно уничтожаются. Однако это затруднение
можно обойти, если с помощью какого-либо приема внутренние
силы сделать внешними. Для осуществления этой операции при-
прибегают к методу сечения (гл. XI, § 3).
Как и для сплошного твердого тела, результирующую внутрен-
внутренних сил, отнесенную к единице площади сечения, называют напря-
напряжением.
В покоящейся жидкости напряжения могут быть направлены
только нормально к поверхности элемента. Это свойство обуслов-
обусловлено легкоподвижностью частиц
жидкости. Если возникнет хотя
бы малая составляющая внут-
внутренних сил в направлении, ка-
касательном к поверхности эле-
элемента, частицы жидкости при-
придут в движение.
Возникновение внутренних
напряжений в жидкости легко
установить на опыте. Поместим
жидкость в замкнутый сосуд с
поршнем (рис. 141). Положим,
на поршень действует сила F.
Если при этом некоторый слой
жидкости, непосредственно при-
прилегающий к поршню, находится
в равновесии, то, следователь-
следовательно, на него со стороны соседних
слоев жидкости действует сила,
результирующая которой уравновешивает силу, действующую со
стороны поршня.
В большинстве случаев силы, действующие на поверхность эле-
элемента жидкости, сжимают его, т. е. направлены внутрь элемента.
Силы, направленные по нормали к поверхности объема внутрь его,
называются силами давления.
Давление имеет размерность силы, деленной на площадь. За
единицу давления принимают в системе СИ—н/м2, в системе СГС —
дин/см2, в системе МКГСС — кГ/м2.
Давление на малой площадке, определяющей точку в покоя-
покоящейся жидкости, одинаково при любой ориентации площадки.
Выделим внутри жидкости произвольную трехгранную приз-
призму (рис. 142). Силы давления, действующие на противоположные
основания призмы, равны по величине и противоположны по
направлению.
Силы давления Flt F2, F3 на боковые грани призмы перпенди-
перпендикулярны к ним.
Р«.
245
Рис. 142. Давление в покоящейся
жидкости не зависит от ориентации
площадки.
Построим на этих силах
силовой треугольник аЬс
(рис. 142). Его стороны пер-
перпендикулярны сторонам тре-
треугольника ABC, полученного
сечением призмы плоскостью,
параллельной основанию и
>-
проходящей через векторы Fu
F2, Fs. Следовательно, тре-
треугольники ABC и abc подоб-
подобны:
F,
ВС
A2.1)
АС АВ ВС '
Напряжение на гранях призмы мы получим, если разделим си-
силы Fu F2, F3 на площади соответствующих граней. Но площади гра-
граней равны АС ¦ /г, А В • /г, ВС ¦ /г, где h — высота призмы. Следо-
Следовательно,
АС
p2ABh _ p3BCh
АВ ~ ВС
A2.2)
или pi= рг= р3.
Таким образом, давление в покоящейся жидкости (статическое
давление) одно и то же на всех трех гранях. Так как призма была
выбрана произвольно, то условие A2.2) будет выполняться для лю-
любой призмы (любой величины и любым образом ориентированной).
Уменьшая размеры призмы, мы придем к малым площадкам,
различно ориентированным около некоторой точки. Как следствие
этого положения, может быть получен закон Паскаля: давление
в любой точке покоящейся жидко-
жидкости одинаково по всем направлениям
и одинаково передается во все сто-
стороны.
Закон Паскаля используется в так на-
называемых гидравлических прессах. Схема
такого пресса изображена на рисунке 143.
Он состоит из двух сообщающихся между
собой цилиндрических полостей С и Е, за-
закрытых поршнями К и D, которые могут
перемещаться вверх и вниз. Когда на пор-
поршень D действует сила Fu приложенная к
рычагу Н, то создаваемое ею давление пе-
передается жидкостью из цилиндра Е через
вентиль В в цилиндр С. Сила Flt действую- Рис< ]4з. Схема ги-
щая на поршень D, относится к силе F2, дравлического пресса.
246
действующей со стороны жидкости на поршень К, как площадь
сечения поршня D к площади сечения поршня К. При большой
разнице размеров поршней (площади их сечений) можно получить
большой выигрыш в силе, который и используется в гидравличес-
гидравлическом прессе. Гидравлические прессы широко применяются в техни-
технике (при штамповке изделий, при подъеме тяжестей, например
гидравлические подъемники автомобилей и т. д.).
§ 3. ДАВЛЕНИЕ В ОДНОРОДНОЙ ЖИДКОСТИ,
ПОКОЯЩЕЙСЯ В ПОЛЕ СИЛЫ ТЯЖЕСТИ
В предыдущих рассуждениях мы полагали жидкость невесомой.
Такое предположение допустимо, если величина силы давления
велика по сравнению с силой тяже-
тяжести. Рассматривая условие равнове-
равновесия тяжелой жидкости, мы должны,
помимо поверхностных сил, учесть си-
силу тяжести (массовую силу).
Выделим в однородной покоящей-
покоящейся жидкости элемент (рис. 144) в виде
прямоугольного параллелепипеда с
площадью основания AS и гранями,
параллельными направлению силы
тяжести и имеющими высоту Дг. Так
как жидкость, а вместе с ней и выде-
выделенный элемент покоятся, то, следо-
следовательно, давления на его боковые
грани уравновешиваются. Для того
чтобы найти условие равновесия па-
параллелепипеда в вертикальном нап-
направлении, надо учесть давления р2 и
pi, действующие на нижнее и верхнее
основания, и силу тяжести, действующую на параллелепипед. К
верхнему основанию приложена сила pi AS, направленная вниз.
Сила тяжести, действующая на весь параллелепипед, равна pgAS Дг,
где р — плотность жидкости, g — ускорение силы тяжести.
На нижнее основание действует сила p2AS, направленная вверх.
Применив принцип отвердения для равновесия выделенного эле-
элемента жидкости в вертикальном направлении, напишем условие,
аналогичное условию равновесия твердого тела:
p^-fpgASAz —p,AS = 0, A2.3)
или
(рх — р2) AS + pg AS Дг = 0. A2.4)
Уменьшая параллелепипед и полагая высоту и площадь его ос-
основания в пределе бесконечно малыми, получим из формулы A2.4):
O A2.5)
Рис. 144. К выводу рас-
распределения гидростатиче-
гидростатического давления.
247
(знак минус, так как для равновесия элементарного параллелепи-
параллелепипеда dp должно быть направлено противоположно силе тяжести).
Чтобы найти закон распределения давления в жидкости по вы-
высоте конечной величины, проинтегрируем правую и левую части
этого уравнения:
Р г
dp = — ?g ) dz,
A2.6)
где р0 — давление на высоте z0 над условной горизонтальной плос-
плоскостью, р — давление в данной точке, находящейся на высоте z.
Получим:
P — Pa = pgb. A2.7)
где h = z — zo\ pgh — давление на нижнее основание призмы, со-
создаваемое весом столба жидкости высотой h. Введя объемный вес ¦[.
перепишем уравнение A2.7) в виде:
A2.8)
Это уравнение называется гидростатическим уравнением.
В уравнении A2.8) h отсчитывается от некоторой горизонталь-
горизонтальной нулевой плоскости по направлению силы тяжести. Положение
нулевой плоскости, вообще говоря, может быть взято произволь-
произвольным, нас интересует разность высот h = z — z0. Поверхность,
соединяющая точки, в которых давление одинаково, называется
поверхностью равного давления или изобарической поверхно-
поверхностью.
В уравнении A2.8) величины р0 и f постоянные. Следовательно,
для
р — const h = const, A2.9)
т. е. поверхность равного давления в тяжелой покоящейся жидкос-
жидкости — горизонтальная плоскость.
Рис. 145. Гидростатический парадокс:
давление жидкости на дно не зависит
от формы сосуда, а только от высоты ее
поверхности над дном.
Рис. 146. Давление на 5ле-
мент боковой поверхности со-
сосуда тем больше, чем глубже
находится элемент под по-
поверхностью жидкости.
248
Поверхностью равного давления является, очевидно, также и
свободная поверхность жидкости. Свободная поверхность покоя-
покоящейся жидкости для сравнительно небольшого ее объема в сосуде,
в озере — горизонтальная плоскость. В однородном по плотности
океане поверхность равного давления и свободная поверхность
представляла бы собой выпуклую поверхность, во всех точках нор-
нормальную направлению силы тяжести (поверхность геоида).
Если, кроме силы тяжести, на
жидкость действуют другие силы
или жидкость неоднородна, то по-
поверхность равного давления может
быть самой различной формы.
Следствием закона гидростати-
гидростатического давления являются изве-
известные из курса элементарной фи-
физики факты.
Давление жидкости на дно не
зависит от формы сосуда, а только от высоты ее по-
поверхности над дном (рис. 145). Давление на элемент
боковой стенки сосуда зависит от его глубины под
поверхностью жидкости (рис. 146).
Свободная поверхность однородной жидкости в
сообщающихся сосудах устанавливается на одной вы-
высоте (рис. 147). В случае неоднородных жидкостей Рис- 148-
высоты их свободных поверхностей в сообщающихся
б
Рис. 147. Сооб-
Сообщающиеся со-
сосуды.
р ^Сообщаю-
сосудах над нулевой плоскостью обратно пропорцио- щихся труб-
нальны плотностям жидкостей (рис. 148). ках.
§ 4. ИЗМЕРЕНИЕ СТАТИЧЕСКОГО ДАВЛЕНИЯ
Положим, что давление на свободную поверхность жидкости
в сосуде отлично от атмосферного (р0) и равно pt (рис. 149). На глу-
глубине h под свободной поверхностью жидкости к сосуду присоедине-
присоединена трубка, другой конец которой сообщается с атмосферой. Такая
трубка носит название пьезометра.
Давление в горизонтальной плоскости АА, проводящей через
отверстие пьезометра:
где h — высота свободной поверхности жидкости в сосуде над пло-
плоскостью А А. Это давление уравновешивается суммой атмосферно-
атмосферного давления и веса столба жидкости в пьезометре:
A2.10)
249
Высота hn называется пьезометрической высотой.
Приравнивая правые части равенств, получим:
ha-h=
Разность высот уровней жидкости в пьезометре и в сосуде пря-
прямо пропорциональна разности между давлением на свободную по-
поверхность жидкости, заключенной в сосуд, и атмосферным давле-
давлением и обратно пропорциональна объемному весу жидкости.
Пусть два пьезометра присоединены к сосуду на разных глуби-
глубинах (рис. 149). Жидкость установится в них на одной высоте. Вы-
Высоты уровней жидкости в пьезометрах над плоскостями, проходя-
проходящими через точки их сообщения с сосудом: hA = — и hB = — .
Если отсчет высот уровней жидкости в пьезометрах произведен от
общей, условно выбранной за
начальный уровень горизонталь-
горизонтальной плоскости О — О, то, как
видно из чертежа:
H = — A-z ~?M--i-z A2 Ш
В этом равенстве все вели-
величины имеют размерность длины.
Величина Н называется пье-
пьезометрическим напором. Высо-
Высота z точек подключения пьезо-
пьезометров над начальным уровнем—
геометрической высотой и — =
<
р
о
N
А~
— J-
—
?
—
н
]
-Я
-А
и
Рис. 149. Измерение давления
жидкости с помощью пьезометра.
=АП—пьезометрической высотой.
Для заданного положения свободной поверхности
жидкости и заданного давления на нее величина пьезо-
пьезометрического напора постоянна.
Подсчитаем величину удельной (отнесенной к единице объемно-
объемного веса) потенциальной энергии частицы жидкости, находящейся в
равновесии на высоте zA над начальным уровнем. Если масса части-
частицы т, то, чтобы поднять ее на высоту zA, внешняя сила должна со-
совершить работу против силы тяжести mgzA. Обладая в точке А со-
соответствующей потенциальной энергией, частица находится еще под
давлением, способным поднять ее на высоту hA = —. Работа дав-
Ра
ления при этом равна mg—.
Таким образом, полный запас потенциальной энергии частицы
в точке А:
U = mgzA + mg
Pa
Удельная потенциальная энергия частицы:
V - , ра
W —
— zA
л
mg
A2.12)
250
Сравнив выражения A2.11) и A2.12), видим, что пьезометричес-
ский напор равен полной удельной потенциальной энергии час-
частицы жидкости.
Для всех точек покоящейся жидкости ее удельная
потенциальная энергия относительно выбранного на-
начального уровня — величина постоянная.
Для измерения гидростатического давления применяются мано-
манометры, которые представляют в сущности пьезометры различных
конструкций. Простейший тип ма-
манометра — dZ-образная трубка,
один конец которой присоединен к
сосуду, где измеряют давление.
Второй конец трубки либо соеди-
соединен с атмосферой, либо запаян и
воздух из него удален. По разно-
разности уровней жидкости в коленах ма-
манометра измеряют давление в со-
сосуде. Наполняя трубку жидкостью
с тем или иным объемным весом, можно изменять чувствительность
такого манометра в довольно широких пределах.
Измеряя небольшие разности (перепады) давлений, применяют
манометры с наклонной трубкой.
На рисунке 150 изображен один из таких манометров. Одно ко-
колено и -образной трубки заменено широким сосудом, изменением
уровня жидкости в котором с изменением давления можно пренеб-
пренебречь, а второе колено расположено наклонно. Перемещение стол-
столбика жидкости в наклонной трубке на величину Д/ соответству-
соответствует изменению высоты уровня на Ah = A/ sin а. Разность дав-
давлений:
Рис. 150. Наклонный манометр
с расширенным концом.
р2 — р1 = 1 Д/sina.
A2.13)
Для уменьшения влияния мениска на положение уровня жид-
жидкости в трубке манометра в нее наливается слабо смачиваю-
смачивающая жидкость (например, керосин).
Для измерения больших давлений
применяются металлические манометры
(рис. 151). Металлическая упругая
трубка (трубка Бурдона) открытым кон-
концом присоединяется к сосуду, в кото-
котором измеряют давление, другой конец
трубки наглухо запаян. При измене-
изменении давления трубка сгибается или раз-
разгибается. Движение запаянного ее кон-
ца передается с помощью рычажка и
3УбчаТ0Й НаРеЗКИ СТРеЛКе ПРиб°Ра'
на. Очень малые и очень большие дав-
манометр с
251
ления измеряются приборами, действие которых основано либо на
зависимости электрического сопротивления манганиновой проволо-
проволоки от давления, под которым она находится (тензометры), либо
на изменении электрических свойств кварцевой пластинки при
изменении давления (пьезоэлектрический эффект, см. гл. XVII, § 7).
§ 5. ПЛАВАНИЕ ТВЕРДЫХ ТЕЛ. ЗАКОН АРХИМЕДА
Архимед (около 287—212 гг. до н. э.) установил, что кажущий-
кажущийся вес тела, погруженного в жидкость, меньше действительного на
столько, сколько весит вытесненная телом жидкость.
Выделим мысленно объем жидкости такой же поверхности, как
и поверхность данного твердого тела. Вообразим, что выделенная
нами жидкость затвердела, сохраняя неизменной свою плотность.
Равновесие в жидкости при этом, очевидно, не нарушится. Следо-
Следовательно, вес отвердевшей части жидкости равен силе давления, с
которой на него действует окружающая жидкость. Другими слова-
словами, результирующая давлений покоящейся жидкости на произ-
произвольную замкнутую поверхность равна по величине и противопо-
противоположна по направлению весу жидкости, заключенной внутри этой
поверхности.
Следовательно, если мы поместим в жидкость твердое тело,
которое займет тот же объем, что и «отвердевшая» часть жидкости,
то на него будет действовать выталкивающая сила, равная весу вы-
вытесненной им жидкости.
Закон Архимеда используется при оценке плавучести и остой-
остойчивости кораблей.
Условием плавания тела в жидкости, очевидно, является равен-
равенство его веса весу вытесненной им жидкости. В кораблестроении
объем вытесненной кораблем воды называется водоизмещением ко-
корабля и служит мерой его плавучести при заданной осадке. Объем
вытесненной кораблем воды должен оставаться постоянным при
различных положениях корабля.
Давление жидкости распределено по всей подводной поверх-
поверхности днища корабля. На каждый элемент поверхности AS действует
сила pAS. Равнодействующая этих сил называется плавучестью ко-
корабля Р (рис. 152). Точку А приложения этой силы называют центром
величины. Центр величины совпадает с центром тяжести, вытесненной
телом жидкости. При изменении положения корабля центр величины
смещается. Чтобы положение корабля было устойчивым, или, как го-
говорят, корабль сохранял остойчивость, центр величины А и центр
тяжести С корабля должны лежать на одной вертикали. Для ха-
характеристики остойчивости корабля вводится понятие метацентра.
Метацентр М — точка пересечения линии, по которой действует
выталкивающая сила при наклоне корабля, с плоскостью его сим-
симметрии (рис. 153). Если метацентр лежит выше центра тяжести,
252
Рис. 152. Плавучесть
корабля Р и центр
величины А.
Рис. 1оЗ. Плавучесть
Р и вес корабля G
создают пару сил,
сохраняющую кораб-
кораблю остойчивость.
то вес и выталкивающая сила при наклоне корпуса корабля обра-
образуют пару, которая возвращает корабль в начальное положение.
Так как момент пары пропорционален_ отрезку СМ, то последний
принимается за меру остойчивости корабля.
Современная теория плавучести и остойчивости кораблей разви-
развита в трудах А. Н. Крылова, создавшего русскую научную школу
кораблестроения. Им был разработан эффективный метод борьбы
за непотопляемость кораблей. Раньше в случае пробоины вода из
затопленных отсеков корабля откачивалась насосами, которые ча-
часто оказывались недостаточно мощными, и корабль из-за большого
крена опрокидывался, хотя обладал еще запасом плавучести.
Рис. 154. Схема, поясняющая выравнивание крена поврежденного корабля
по методу А. Н. Крылова.
253
Для устранения опасности опрокидывания А. Н. Крылов пред-
предложил затоплять неповрежденные отсеки в противовес отсекам,
заполненным водой. В этом случае корабль выпрямляется и с не-
несколько увеличенной осадкой может удерживаться на плаву (рис.
154).
§ 6. СЖИМАЕМОСТЬ ЖИДКОСТЕЙ И ГАЗОВ
Давление в жидкости или газе зависит от степени их сжатия.
Упругие свойства жидкостей и газов характеризуются объемной
упругостью, т. е. зависимостью изменения давления в них от из-
изменения объема. Если объем жидкости при некотором давлении,
принятом за нормальное, равен
У, а при изменении давления на
Ар изменяется на AV, то связь
между ними будет:
_д1=аДр, A2.14)
где а — коэффициент объемной
упругости, или коэффициент
сжимаемости. Отсюда модуль
сжатия:
Рис. 155. Схема установки k= —=V——-. A2.15)
Эрстеда для измерения ежи- <* AV
маемости жидкостей. Коэффициент сжимаемости
жидкостей очень мал, и измере-
измерение его требует особых приборов. На рисунке 155 приведена схема
установки, использованной Эрстедом. В сосуде В находится сосуд
А, в который наливают испытуемую жидкость. Сосуд А снабжен
капилляром, погруженным в ртуть. Сосуд В заполняют водой и
присоединяют к гидравлическому прессу, при включении которо-
которого давление воды на ртуть заставляет ее подниматься в капилляре.
Объем сосуда А практически остается неизменным, давление на не-
него одинаково с внутренней и с внешней сторон. По высоте подня-
поднятия ртути в капилляре можно судить об изменении объема жидко-
жидкости в сосуде А. Манометром измеряют величину давления. Зная
V, Ар и AV, можно найти коэффициент сжимаемости.
Коэффициент и модуль сжатия при обычных давлениях посто-
постоянны для данной жидкости, но зависят от температуры. При боль-
больших давлениях сказывается также зависимость этих коэффициен-
коэффициентов от величины давления.
Таблица 5
Модуль сжатия жидкостей при атмосферном давлении
и комнатной температуре, кГ/см*
Вода 2,2-10-1
Ртуть 2,5-10-5
Бензол Ы0-*
254
Малая сжимаемость жидкостей позволяет считать их в случае
движения со скоростями, меньшими скорости звука, практически
несжимаемыми.
Для газов зависимость давления от объема подчиняется закону
Бойля—Мариотта (для малых изменений объема):
pV = const. A2.16)
На основании закона Бойля — Мариотта напишем:
Отбрасывая величину второго порядка малости (произведение
Ар AV), получим:
-^-L = -L. A2.17)
V Др р К '
Сравнивая формулы A2.14) и A2.17), получим коэффициент
сжимаемости газов равным:
*= —. A2.18)
р
Сжимаемость газов уменьшается о ростом давления. При дав-
давлении р — 1 кГ/см2 коэффициент сжимаемости газов а = 1 см2/кГ.
Для воды коэффициент сжимаемости при том же давлении
а = 5- КГ5 см?/кГ, т. е. сжимаемость воды примерно в 20 000 раз
меньше сжимаемости газов.
ГЛАВА XIII
ГИДРОАЭРОДИНАМИКА
§ 1. ЗАДАЧИ И МЕТОДЫ ГИДРОАЭРОДИНАМИЧЕСКОГО
ИССЛЕДОВАНИЯ
Задачей гидроаэродинамики является отыскание связей, поз-
позволяющих по заданным силам найти состояние движения жидко-
жидкости (прямая задача) или по заданному состоянию движения найти си-
силы, его вызвавшие (обратная задача).
Чтобы полностью характеризовать состояние движения жидко-
жидкости, надо для момента времени, выбранного за начальный, указать
положение каждой частицы жидкости, а затем проследить за ее
перемещением в пространстве со временем. Найдя для каждой
частицы траекторию движения и умея указать положение частицы на
траектории в любой момент времени, мы можем найти все кинематиче-
кинематические характеристики движения (перемещение, скорость, ускорение).
Такой метод изучения состояния движения жидкости называется
методом Лагранжа. Практически его можно реализовать, если пу-
пустить в поток окрашенные частицы с плотностью, близкой к плотно-
плотности жидкости, и сфотографировать их с длительной выдержкой непо-
неподвижным фотоаппаратом (рис. 156) или киноаппаратом, движущим-
движущимся со скоростью, равной скорости течения в потоке.
Вследствие больших математических трудностей, встающих
на пути применения метода Лагранжа к получению законов дина-
динамики жидкости, более распространен другой метод изучения состо-
состояний движения жидкостей, разработанный впервые Эйлером и на-
называемый методом Эйлера.
Вместо того чтобы прослеживать движение каждой отдельной
частицы, в потоке жидкости выделяются фиксированные в простран-
пространстве элементарные объемы и прослеживается изменение скоростей
и ускорений, которыми обладают частицы, сменяющие друг друга
в этих объемах. В этом случае говорят о скоростях и ускорениях по-
потока (а не частиц) жидкости.
Если мы для некоторого момента времени в конечном объеме дви-
движущейся жидкости укажем значения скорости и ускорения в каж-
каждой точке, то получим так называемые поля скоростей и ускорений
256
Рис 156 Фотография траекторий окрашенных частиц в волне
(длительная экспозиция).
для данного момента времени Полем скорости (ускорения) назы-
называется область пространства, каждой точке которой поставлен в со-
соответствие вектор скорости (ускорения). Если мы построим указан-
указанные поля для ряда последовательных моментов времени и найдем
зависимость распределения в них скоростей и ускорений от времени,
то тем самым движение будет полностью определено. Метод Эйлера
Рис. 157 Фотография окрашенных частиц в волне,
снятая с короткой экспозицией (линии тока)
9ММ Архангельский 257
практически можно реализовать, фотографируя взвешенные в по-
потоке частицы неподвижным фотоаппаратом с короткой выдержкой
(рис. 157) или снимая частицы, проходящие перед неподвижным ки-
киноаппаратом.
§ 2. ВЯЗКОСТЬ
Мы уже видели, что при движении жидкостей и газов в них воз-
возникают силы внутреннего трения. Рассмотрим упрощенную схему
опыта, описанного в главе IV, § 3. Возьмем две расположенные друг
над другом горизонтальные стеклянные обезжиренные пластинки
со слоем воды или другой жидкости между ними. Верхнюю пластин-
пластинку приведем в движение. Слой жидкости, прилегающий непосред-
непосредственно к верхней пластинке, благодаря силам молекулярного сцеп
ления прилипает к ней и движется вместе с пластинкой. Слой жид-
жидкости, прилипший к нижней пластинке, остается вместе с ней в покое.
Промежуточные слои движутся так, что каждый верхний из них
обладает скоростью большей, чем
тшпупт, 1Г = (Г под ним лежащий (рис. 158). По-
/ г этому каждый верхний слой об-
ufl
*Z_
— ладает относительно соседнего
~ vj= о нижнего слоя скоростью, на-
4 ч -v правленной в сторону движе-
Рис. 158. Послойное движение вяз- ния верхней пластинки, в то
кой жидкости между пластинами, время как нижний относительно
имеющими различные скорости дви- верхнего — скоростью противо-
жения (vi = 0 н vi = v). положного направления. По-
Поэтому со стороны нижнего
слоя на верхний действует сила трения, замедляющая движение
второго из них, и обратно, со стороны верхнего на нижний—ускоряю-
нижний—ускоряющая движение. Силы, возникающие между слоями жидкости, испы-
испытывающими относительное перемещение, называют внутренним
трением. Свойства жидкости, связанные с наличием сил внутрен-
внутреннего трения, называют вязкостью.
Если слои жидкости движутся с различными скоростями, то,
помимо того, что возникают силы взаимодействия между слоями мо-
молекул, смещающимися друг относительно друга, дополнительно
возникает обмен количеством движения между ними в результате
беспорядочного движения молекул. Молекулы, переходящие из
слоя, обладающего большей скоростью, в слой, перемещающийся
медленнее, увеличивают суммарное количество движения во втором
слое и, наоборот, молекулы, переходя из второго слоя в первый,
уменьшают его суммарное количество движения. Взаимный обмен
количествами движения и взаимодействие молекул и создают внут-
внутреннее трение в жидкости. В газах внутреннее трение создается гла*в-
ным образом благодаря обмену количествами движения.
Ньютон впервые предположил, что сила внутреннего трения меж-
между двумя слоями жидкости прямо пропорциональна разности ско-
258
ростей слоев Av, площади их соприкосновенияS и обратно пропор-
пропорциональна расстоянию между слоями ДА:
= i\S — ,
A3.1)
где л — коэффициент пропорциональности, называемый коэффи-
коэффициентом вязкости. Для двух бесконечно близких слоев:
FB = lim i]S — = ~qS — . A3.2)
дл - о Ah dh
Касательное напряжение, которое возникает в движущейся жид-
жидкости как результат вязкости,равно:
A3.3)
dv
—
dh
Величина — называется градиентом скорости и характеризует
dh
быстроту изменения величины скорости в направлении нормали к
поверхности трущихся слоев жидкости.
Из соотношения A3. 2) следует, что размерность коэффициен-
коэффициента вязкости [т]] = ML~lT~l.
В системе СИ единица измерения коэффициента динамической
, н • сек 1 1 »
вязкости 1 • , т. е. коэффициент динамической вязкости та-
кой жидкости, в которой 1 м2 поверхности слоя испытывает силу
\н при градиенте скорости 1
м/сек
В системе СГС коэффициент динамической вязкости измеряется
в г/см ¦ сек. Эта единица носит название пуаз в честь французского
физика Пуазейля.
Величина коэффициента вязкости меняется в зависимости от тем-
температуры. Вязкость газов с ростом температуры увеличивается,
жидкостей — уменьшается. Это и понятно, с ростом температуры
увеличивается подвижность молекул и обмен количеством движения
между слоями газа. В жидкости этот обмен играет относительно мень-
меньшую роль, а межмолекулярное взаимодействие при повышении тем-
температуры и увеличении подвижности молекул ослабевает.
Таблица 6
Коэффициент вязкости для некоторых жидкостей и газов
(в пуазах)
Вещество
Вода
Глицерин
Эфир
Кислород ....
Воздух
Водород
0°С
0,018
46
0,0029
0,000187
0,000171
0,000086
18°С
0,011
11
0,0025
0,000204
0,000180
0,000091
99°С
0,0029
0,000220
0,000106
259
Вязкость в движении реальной жидкости сказывается двояко:
во первых, она создает передачу движения от слоя к слою, благо-
благодаря чему скорости в потоке от точки к точке меняются непрерывно;
во-вторых, переводит часть механической энергии потока в его внут-
внутреннюю энергию, т. е. создает рассеяние механической энергии.
Принципиально возможно любую задачу о движении жидко-
жидкости под действием заданных сил решить, составляя уравнения дви-
движения для элементарного объема жидкости и интегрируя их в за-
заданных граничных и начальных условиях. Однако существующие
математические методы позволяют решить эти задачи лишь для более
или менее упрощенных моделей движения жидкости. В большом чис-
числе практически важных задач оказывается возможным пренебречь
сжимаемостью и вязкостью жидкостей (теория водяных двигателей,
волнового движения, некоторые задачи теории авиации и т. п.).
Модель жидкости, сжимаемостью и вязкостью которой пренебрегают,
называется идеальной жидкостью.
При решении задач о движении жидкости со скоростями,
близкими к звуковым, оказывается возможным пренебречь вяз-
вязкостью, но необходимо учитывать сжимаемость. Модель невязкой
жидкости, обладающей сжимаемостью, называется идеальной
сжимаемой жидкостью.
Жидкость, вязкостью которой нельзя пренебречь, но которую
можно считать несжимаемой, называется вязкой, несжимаемой жид-
жидкостью. Эта модель жидкости используется при расчетах характе-
характеристик течения жидкости в трубах, в реках, каналах, морских и
воздушных течений и т. п.
Всякая реальная жидкость обладает и сжимаемостью, и вязко-
вязкостью; для решения задач о движении реальных жидкостей гидро-
гидроаэродинамика пока не имеет общих теоретических методов.
§ 3. ПОЛЕ СКОРОСТЕЙ. ТЕОРЕМА НЕРАЗРЫВНОСТИ
Положим, в некоторый момент времени нам известно поле ско-
скоростей в потоке, т.е. для достаточно большого числа точек простран-
пространства, занятого текущей жидкостью, известны векторы скоростей,
которыми обладают частицы жидкости, находящиеся в этих точках.
Проведем мысленно в потоке линии,
которые во всех точках были бы каса-
тельны к вектору скорости (рис. 159).
Линии, в каждой точке которых ско-
скорости направлены по касательной, на-
называются линиями тока. В общем
случае течения жидкости поле скоро-
скоростей изменяется со временем, т. е. век-
вектор скорости в каждой точке меняет-
меняется по величине и направлению. Сле-
Следовательно, изменяются и линии тока.
Рис. 159. Линии тока.
260
Рис. 160. Скорости и отрез-
отрезки мгновенных линий тока
для двух различных мо-
моментов времени в точке не-
нестационарного потока.
Поток, в котором распреде- рис> ]6, Линии тока и траектории в03му.
ление скоростей изменяет- щеиНых частиц воздуха, построенные -по
СЯ СО временем, называется данным метеорологических наблюдений в
нестационарным потоком. зоне Ла-Манша.
Если поле скоростей в
потоке остается во времени постоянным, то поток называется
стационарным. Скорость отдельных частиц и в стационарном потоке
изменяется со временем, так как частицы, двигаясь, переходят из
точки поля, обладающей одной скоростью, в точку поля, обладаю-
обладающую другой скоростью, но последовательность частиц, приходящих
в одну и ту же точку пространства, заполненного стационарным по-
потоком, приобретает в ней одну и ту же скорость. В соответствии
с методом Эйлера в этом случае говорят не о зависимости скоро-
скорости частиц от времени, а о зависимости ее от координат точки.
Частный случай стационарного потока — равномерный поток, в
котором скорости во всех точках пространства одинаковы и, следо-
следовательно, все частицы движутся все время с одинаковой скоростью.
Частица, раз оказавшаяся на линии тока стационарного течения,
все время движется вдоль нее, в противном случае вектор скорости
в какой-то точке потока должен был бы не совпадать с касательной
к линии тока, что невозможно. Линия тока в стационарном
потоке совпадает с траекторией частиц.
В нестационарном потоке линии тока в разные моменты времени
проходят через разные частицы жидкости и не совпадают с их траек-
траекториями. В самом деле, в момент t частица в точке А потока (рис. 160)
имеет скорость vx и отрезок линии тока, ей соответствующий, /, а
частица, которая сменит первую в точке А, приобретает в ней иную
скорость v2 и отрезок линии тока 2, ей соответствующий,не совпа-
совпадет с отрезком /. Следовательно, если первая частица покинет точ-
точку Л в направлении /, то вторая покинет ее в направлении 2,
т. е. по другой линии тока и т. д.
На рисунке 161 изображены линии тока и траектории не-
нескольких частиц воздуха, построенные по данным метеорологи-
метеорологических наблюдений в зоне Ла-Манша. Как видно из рисунка
261
Рис. 162. Прибор для демонстра-
демонстрации линий тока в стационарном
потоке жидкости.
Рис. 163. Линии тока в стацио-
стационарном потоке жидкости
(по фотографии).
траектории частиц и линии то-
тока, вследствие нестационарного
характера поля скоростей раз-
различаются весьма сильно.
Линии тока в стационарном потоке можно сделать видимыми.
Для этого в плоском сосуде укрепляется колодочка с тонкими тру-
трубочками (рис. 162). В сосуде тонким слоем течет вода, в которую
из трубочек медленно поступает краска (нигрозин). Струи краски,
двигаясь вместе с жидкостью, очерчивают траектории частиц, кото-
которые в случае стационарного течения совпадают с линиями тока. На
рисунке 163 изображены линии тока для нескольких случаев ста-
стационарного течения.
Линии тока как для стацио-
стационарного, так и нестационарного
течений можно получить, фото-
фотографируя окрашенные частицы в
жидкости фотоаппаратом, дви-
движущимся вместе с жидкостью
(рис. 164, а). Если фотографи-
фотографирование производить неподвиж-
неподвижным аппаратом, то на фотогра-
фотографии получим траектории частиц
(рис. 164, б). Сравнивая эти фо-
фотографии, видим существенное
различие между теми и другими
линиями в зоне, где благодаря
нарушению течения внесенным
телом поток приобретает неста-
Рис. 164. Стационарный поток жид-
жидкости, обтекающий тело
(по фотм рафии).
262
ционарный характер.
Представим себе в жидкости
трубку, боковая поверхность ко-
торой составлена из приле-
прилегающих друг к другу ли-
линий тока (рис. 165). Если
течение стационарно, то все
частицы жидкости, заклю-
заключенные внутри этой поверх-
поверхности, останутся внутри
нее во все время движения.
Таким образом, поверх- Рис. 165. Трубка тока
ность, образованная лини-
линиями тока в жидкости, представляет собой как бы непроницаемую
трубку. Часть жидкости, ограниченная линиями тока, пронизы-
пронизывающими замкнутый контур, называется трубкой тока. Размеры
и положения контура выбираются такими, чтобы в его пределах
скорость течения можно было считать постоянной и направленной
по нормали к контуру.
Очевидно, всякое движение жидкости, происходящее без раз-
разрывов сплошности (без пузырьков и «пустот»), должно удовлетво-
удовлетворять закону сохранения массы. Масса Am жидкости, прошедшей
за время At через какое-либо поперечное сечение трубки тока S,
равна:
Дт = puS Ы,
где v — скорость частиц, постоянная в данном сечении, р — плот-
плотность жидкости в том же сечении.
При стационарном потоке за один и тот же интервал времени
At через два разных сечения трубки тока St nS2 должны проходить
одинаковые массы жидкости. В противном случае масса жидкости,
заключенной в объеме трубки между выбранными сечениями, изме-
изменялась бы, и течение перестало быть стационарным. Поэтому для
стационарного течения:
PA-Si = P2P2S2. A3.4)
Для капельных жидкостей и для газов, когда сжимаемость
последних роли не играет, можно считать плотность постоянной.
Тогда уравнение A3.4) запишется в виде:
уД = v,S2, A3.5)
или
vS = const. A3.6)
Произведение величины скорости течения несжимае-
несжимаемой жидкости на величину поперечного сечения трубки
тока есть величина постоянная для данной трубки то-
тока (теорема неразрывности).
263
Из соотношения A3.5) следует:
Vy S.
A3.7)
Там, где сечение трубки тока больше, скорость частиц жидко-
жидкости меньше, и наоборот. Мы можем весь поток представить себе со-
состоящим из трубок тока с одинаковым значением произведения vS.
Если мы проведем в каждой трубке осевую линию тока, то там, где
скорости течения потока больше и трубки тока уже, осевые линии
тока сгущаются, где скорости меньше — они расходятся. Таким
образом, изменение густоты линий тока характеризует изменение
величины скорости течения.
Для того чтобы иметь право считать скорость течения жидкости
постоянной в данном сечении трубки тока, мы строили их на конту-
контурах достаточно малой площади. Но если течение в потоке таково,
что скорости во всех точках данного поперечного сечения потока
мало отличаются друг от друга или условия задачи позволяют рас-
рассматривать только средние скорости для каждого сечения, то мож-
можно весь поток считать за одну трубку тока и относить полученные
выше зависимости ко всему потоку в целом. Так поступают обычно
в гидравлике.
§ 4. ТЕОРЕМА БЕРНУЛЛИ
Рассмотрим участок трубки тока, ограниченный двумя попе-
поперечными сечениями А В и CD, площади которых соответственно
равны Si и 52 (рис. 166). Площади сечений возьмем достаточно ма-
малыми, чтобы скорости ча-
А А' стиц и давления в пределах
каждого из сечений можно
было считать постоянными.
Перемещаясь отсечения
А В к сечению CD, жид-
жидкость переходит в сужен-
суженную часть трубки и, как
следует из уравнения не-
неразрывности, движется
ускоренно. Значит, на
жидкость, находящуюся в
данный момент в суженной
части трубки, действует со стороны жидкости, находящейся в бо-
более широкой ее части, некоторая сила, которая может возник-
возникнуть только вследствие разности давлений в различных сечениях
трубки. Сила направлена в сторону узкой части трубки, следо-
следовательно, в местах сужений давление меньше, чем в местах рас-
расширений.
Установим связь между давлением и скоростью жидкости в раз-
Рис. 166. К. выводу теоремы Бериулли.
264
ных сечениях трубки, ограничиваясь рассмотрением идеальной
жидкости (не учитывая вязкость и сжимаемость жидкости), что
позволит нам считать работу внутренних сил в жидкости равной
нулю. Трение между жидкостью и стенками сосуда будем считать
отсутствующим (это позволит нам выбрать трубку в произвольном
месте потока); движение — вполне установившимся (стационар-
(стационарным, при этом масса и энергия идеальной жидкости, заполняющей
некоторый объем трубки тока, остаются постоянными во все время
движения); линии тока слабо искривленными (что позволит пре-
пренебречь центростремительным ускорением частиц жидкости и свя-
связанным с ним изменением давления в поперечном сечении трубки
тока).
К жидкости, заключенной в рассматриваемом объеме, можно
применить второй закон динамики и написать для нее уравне-
уравнение движения. Но так как в идеальной жидкости нет рассеяния
механической энергии, то результат проще получить, применяя за-
закон сохранения энергии.
В соответствии со сказанным в главе XII, § 4, покоящаяся жид-
жидкость массой т обладает потенциальной энергией:
U = mgz-\-tng -??-. A3.8)
Если жидкость движется со скоростью v, то она обладает еще
кинетической энергией, и полное значение энергии будет:
E = mgz + mg-?- + ??-. A3.9)
В выражении A3.9) давление р отлично от давления рс, входящего
в формулу A3.8), так как жидкость могла приобрести кинетическую
энергию только за счет преобразования потенциальной энергии.
При соблюдении первых трех из перечисленных выше ограни-
ограничений энергия жидкости, заключенной в выделенном объеме, оста-
остается неизменной. Следовательно, энергия Л?\ жидкости массы Ami,
втекающей в объем за время At через сечение 5Ь должна быть рав-
равна энергии АЕ2 жидкости массы Ат2, вытекающей за то же время
через сечение 52. Если плотность жидкости р, то
Д?2 = PS2t>2 btgzt + р52и2 tog &- + ^А<°2 .
Приравнивая правые части этих равенств и деля их на
pS1v1 М — р52и2 & = Дт1 = Д/П2 = Дт>
265
получим:
или, учитывая, что f =
2 2
= Pffz + p2 + y2 . A3.1
Так как сечения Sj и S2 взяты произвольно, то вообще для лю-
любого сечения данной трубки тока:
— + r?z + /? = const. A3.12)
Это уравнение, полученное Д. Бернулли A738 г.), связывает
изменение давления в стационарном потоке идеальной жидкости
с изменением скорости течения и геометрической высоты.
Сравнивая выражения A3.10) и A2.12), видим, что закон Бер-
Бернулли представляет собой закон постоянства полной удельной энер-
энергии частиц движущейся идеальной жидкости при стационарном те-
течении. Формулы A3.11) и A3.12) выражают тот же закон сохра-
сохранения энергии для единицы объема жидкости: — кинетическая
энергия единицы объема жидкости, pgz — его потенциальная энер-
энергия в поле силы тяжести, р — работа силы давления при подъеме
единицы объема на единицу высоты.
В выражении A3.10) все члены имеют размерность длины:
Z\ и 22 — геометрические высоты, — и —— пьезометрические вы-
Y 1
соты и скоростной, или динамический, напор.
Таким образом, в теореме Бернулли отражены два физических
факта: 1) сумма потенциальной энергии и кинетичес-
кинетической энергии на всем протяжении данной трубки то-
тока — величина постоянная; 2) сумма трех высот: пьезо-
пьезометрической, геометрической и скоростной — остается
постоянной в каждом сечении трубки.
Отметим в заключение, что постоянная Бернулли (численное
значение правой части равенства 13.12) сохраняет свое значе-
значение, вообще говоря, лишь для данной трубки тока. Но если выпол-
выполняются условия, при которых весь поток можно рассматривать
как одну трубку тока, то теорему Бернулли можно применить и к
потоку в целом. При этом надо помнить, что при выводе уравне-
уравнения Бернулли мы считали скорости всех частиц в сечениях АВ и
CD параллельными между собой. Поэтому его можно применять
266
не к любым сечениям трубки или по-
потока, а только к тем, которые удов-
удовлетворяют этому условию. Например,
для трубки, изображенной на рисунке
167, к сечениям 1, 2, 3, 4, 5, 6. Огра-
Ограничение это несущественно, и в нем
есть свое преимущество: применяя Рис- 167_ уравнение Бернул-
уравнение мы можем не интересо- ли можно применять к сечени-
ваться структурой потока на участ- ям 1, 2, 3, 4, 5, 6.
ках между сечениями 1—2, 2—3
и т. д., где вследствие резкого расширения или сужения потока
течение сложное и запутанное.
§ 5. СЛЕДСТВИЯ ИЗ ТЕОРЕМЫ БЕРНУЛЛИ
Из уравнения A3.10) следует, что если скорости в разных се-
сечениях трубки тока одинаковы, то
Pa —ft = T(Zi —za)> A3ЛЗ)
т. е. разность давлений в двух сечениях равна весу столба жидко-
жидкости, заключенной между уровнями сечений. В равномерном потоке
давление подчиняется гидростатическому закону.
Если скорость в разных сечениях различна, то распределение
давлений отличается от его распределения в покоящейся жидко-
жидкости:
Pi — Pi = T Bi — zi) +
о о
A3.14)
Давление возрастает, когда скорость потока, уменьшается, и
наоборот.
При горизонтальном потоке Zi — z2 = 0
и
Pi-
7Г~ = Pi + ТГ '
A3.15)
т. е. в местах сужений, где скорость возрастает, статическое давле-
давление уменьшается, и наоборот.
Это связано с проявлением инерции жидкости. Элемент жидко-
жидкости, перемещаясь из расширенной части сосуда в суженную, не
может мгновенно увеличить свою скорость, поэтому его тыльная
часть отстает от передней и элемент растягивается. Пройдя суже-
сужение, он движется некоторое время по инерции со скоростью, боль-
большей, чем скорость впереди лежащих частиц, и сжимая их, теряет
скорость в результате их противодействия. Поэтому в сужениях
элементы жидкости растянуты и давление понижено, а в местах рас-
расширения они сжаты и давление повышено.
267
Справедливость равенства A3.15) можно проверить качествен-
качественно, установив пьезометрические трубки в ряде сечений потока.
В принципе статическое давление надо измерять с помощью пьезо-
пьезометра, движущегося со ско-
скоростью, равной скорости те-
течения жидкости. В этом слу-
случае скорость частиц относи-
относительно трубки v=0 и трубка
измеряет только статическое
давление. Однако в потоке,
близком к параллелоструй-
ному, оказывается достаточ-
достаточным поместить пьезометр так,
отверстие его было
Рис, 168. Изменение давления с измене
нием скорости жидкости в стационарном чтобы
потоке, сечение которого переменно. параллельно линиям тока.
На рисунке 168 изображен
опыт с пьезометрами, подключенными к трубке в разных сечениях.
Он дает лишь качественную картину изменения давлений, так как
явление осложняется затратой части энергии потока жидкости
на преодоление сил внутреннего трения.
Рассмотрим несколько практически важ-
важных применений теоремы Бернулли.
а) Скорость истечения из отверстия.
Рассмотрим задачу, решенную еще Д. Бер-
Бернулли, об истечении жидкости из открытого
сосуда через малое отверстие под действием
силы тяжести. Пусть имеется широкий со-
сосуд с жидкостью (рис. 169), уровень которой
стоит на высоте zt над дном сосуда. На высоте
г2 имеется малое (по сравнению с сечением
сосуда) отверстие с плавно закругленными
краями. На свободную поверхность ЖИДКОСТИ Рис. 169. Истечение
в сосуде действует атмосферное давление pit жидкости через от-
такоеже давление действует и на поверхность верстие.
вытекающей струи (сосуд невысок). Так как
площадь сечения сосуда велика по сравнению с площадью сечения
отверстия, то скорость движения частиц свободной поверхности
1>1 мала по сравнению со скоростью частиц в отверстии о2, и ею
можно пренебречь.
Линии тока в отверстии можно считать параллельными и нап-
направленными перпендикулярно плоскости его сечения. Все линии
тока начинаются на поверхности жидкости, которая медленно сни-
снижается по мере вытекания жидкости из сосуда. Тогда для каждого
момента времени мы можем написать уравнение Бернулли:
-
N
-
If
2g
268
где величины с индексом / относятся к сечению, совпадающему со
свободной поверхностью жидкости в сосуде, а с индексом 2 — к се-
сечению струи в отверстии.
Но по условию р1 — р% и—issO. Тогда
Откуда
ot = V2gh, A3.16)
т. е. скорость частиц в отверстии такова, как если бы частицы под
действием собственного веса падали с высоты h. Формула эта носит
название формулы Торичелли..
Решая задачу с помощью теоремы Бернулли, мы пренебрегали
вязкостью жидкости и считали линии тока перпендикулярными к
плоскости сечения отверстия. На самом же деле частицы подходят
к отверстию по криволинейным траекториям и не могут в отвер-
отверстии внезапно изменить направление движения, вследствие чего
струя оказывается несколько сжатой и площадь ее сечения меньше
площади отверстия (рис. 170).
а о
Рис. 170. Сжатие струи:
а — отверстие без насадки; б — цилиндрическая насадка;
форме струи,
в — насадка по
Для проверки формулы Торичелли проще всего измерить
объем жидкости, вытекающей из отверстия за время At, и, разде-
разделив его на время, получить величину расхода жидкости Q, которая
должна удовлетворять равенству:
Q = S VW,
где S — площадь сечения отверстия.
При сравнении фактического и вычисленного расхода жидкости
первый оказывается меньше второго. Коэффициент пропорциональ-
пропорциональности между ними ц называют в гидравлике коэффициентом исте-
истечения или коэффициентом расхода:
= VQ = V-S \ 2gh.
269
Коэффициент \i различен для разных жидкостей (зависит от их
вязкости) и отверстий разной формы (зависит от степени сжатия
струи).
Для истечения через круглое отверстие в тонкой стенке (рис.
170, а) коэффициент ц = 0,61 — 0,64; для истечения через цилинд-
цилиндрический насадок, входящий внутрь
сосуда (рис. 170, б), ц = 0,514; для
внешнего насадка с краями, закруг-
закругленными по форме струи так, что
сжатие почти отсутствует (рис. 170, в),
ц = о,9б —0,98.
б) Hetzomopbie приборы для изме-
измерения давлений и скоростей в жид-
жидкости. Положим, поток движущейся
жидкости встречает на пути осе-
симметричное тело (рис. 171). Линии
тока будут со всех сторон плавно
обтекать его. Вокруг точки пересе-
пересечения оси симметрии тела с его
поверхностью образуется область,
в которой скорость потока обращает-
обращается в нуль. Трубка тока как бы «упи-
«упирается» в этом месте в тело. Точка О,
вблизи которой скорость потока об-
обращается в нуль, называется крити-
критической точкой. Напишем уравнение
Бернулли A3.11) для трубки тока
бесконечно малого сечения, «упирающейся» в критическую точку.
Первое сечение возьмем в достаточно удаленной от тела области,
где течение еще не нарушено присутствием тела. Пусть давление в
этом сечении р0, скорость v0 и плотность о0. Второе сечение
возьмем касающимся критической точки. Так как в нем скорость
равна нулю, то
2
Рис. 171. Трубка
Пито—Прандтля.
где Pi — давление в критической точке.
Полагая z0 = zt, имеем:
(Ш7)
Если мы поместим в поток жидкости две пьезометрические труб-
трубки, плоскость отверстия одной из которых параллельна линиям
тока, а второй перпендикулярна им, то первая трубка практически
не нарушит структуру течения потока и поэтому в ней столб жид-
жидкости уравновесит давление р0. Перед второй трубкой характер дви-
движения жидкости изменится: скорость ее частиц перед отверстием
270
будет обращаться в нуль, т. е. неподвижная пьезометрическая трубка,
обращенная отверстием навстречу потоку, измерит давление р\,
равное сумме давления рд и динамического напора i!°. Динамиче-
ский напор обязан своим происхождением тому, что частицы жид-
жидкости, подходя к сечению трубки, уже заполненной жидкостью,
останавливаются и кинетическая энергия их при этом затрачивается
на увеличение потенциальной энергии столба жидкости в трубке.
Разность высот столбов жидкости в трубках:
Откуда Uo==
Обычно обе трубки монтируются в одном обтекаемой формы ко-
кожухе (рис. 171). Трубка, измеряющая давление р„ в ненарушенном
присутствием тела потоке, соединена с отверстиями на боковой
поверхности кожуха параллельными линиями тока, а отверстие
трубки, измеряющей давление pi + р0, расположено вблизи кри-
критической точки. Обе трубки соединяются с манометром, позволяю-
позволяющим сразу найти разность пьезо-
пьезометрических высот h.
Описанный прибор носит назва-
название трубки Пито — Прандтля. Он
широко используется в аэродинами-
аэродинамических исследованиях. Для измере-
измерения скоростей течения жидкости он
применяется редко, так как обра-
образование в трубках менисков силь-
сильно Снижает чувствительность при- '
бора. Для измерения малых скоро-
скоростей течения воды пользуются чаще
трубкой Орлова1. Трубка Орлова
построена на принципе уравнива-
уравнивания скорости течения в трубке со
скоростью в потоке (рис. 172). Для
этого измерительная трубка /, об-
обращенная отверстием навстречу
потоку, соединена с сифоном 2.
Кран 3 на сифоне позволяет ме-
менять расход и скорость воды, протекающей через трубку. Внутри
трубки на боковой ее поверхности имеется отверстие 8, соединен-
соединенное трубкой 4 с бачком 6. С этим же бачком соединена трубка 5,
сообщающаяся с потоком через отверстие 9, расположенное парал-
параллельно линиям тока. Если скорости жидкости в трубке /ив потоке
1 Орлов К. К-—талантливый молодой гидродинамик, погибший в Ве-
Великую Отечественную войчу.
Рис. 172. Трубка Орлова.
271
одинаковы, то давления в трубках 4и5должны быть равны. В
самом деле, если пренебречь малой разностью их высот, то по те-
теореме Бернулли:
2
2 2
Pi + P J- = Рг + Р "у •
Индекс / относится к сечению отверстия в трубке /, а индекс 2 —
к сечению в отверстии, соединенном с трубкой 5. Если vt = v2, то
Pi = Рг-
Меняя краном 3 скорость жидкости в трубке /, отмечают, когда
давления в трубках 5 и 4 станут равными. Момент этот фиксируют
по прекращению движения краски, поступающей в бачок 6 через
воронку 7. С этого момента измеряют объем жидкости V, натекаю-
натекающей в мензурку 10 за время t. Если площадь сечения входного от-
отверстия трубки 5, то скорость потока:
V
v =
St
в) Использование в технике зависимости давления в жидкости от
величины ее скорости. Понижение давления в жидкости при уве-
увеличении скорости лежит в основе принципа действия многих тех-
технических устройств.
Поскольку сумма давления и динамического напора в потоке
жидкости постоянна, то в струе давление всегда меньше, чем в по-
покоящейся жидкости, и при больших скоростях может стать значи-
значительно меньше атмосферного. Жидкость, протекающая по узкой
части трубки, находится поэтому в состоянии
всестороннего растяжения, и так как проч-
прочность ее на разрыв весьма велика (для воды
до 105 кГ/см2), то отрицательное давление
может достичь весьма большой величины.
Это явление используется в пульверизаторах,
карбюраторах, водоструйных насосах и т. п.
На рисунке 173 изображен простейший
пульверизатор. Струя, выходящая из сопла
горизонтальной трубки, засасывает в верти-
вертикальную трубку краску, воду и т. п. и рас-
распыляет их.
Прибор, питающий двигатель внутренне-
внутреннего сгорания рабочей смесью (горючего и воз-
воздуха), называется карбюратором. На ри-
рисунке 174 изображена его схема. Атмосферный воздух по впускной
трубке А засасывается в цилиндр двигателя. В суженной части
трубки (в начале диффузора) создается пониженное давление, и го-
горючее из бака Б по наклонной трубке Ж с калиброванным отвер-
отверстием (жиклер) устремляется в диффузор и смешивается с возду-
воздухом. В воздухе мелкие частицы горючего быстро испаряются.
272
Рис. 173. Пульвери-
Пульверизатор.
Часть впускной трубки, где расположен диффузор, называется
смесительной камерой. Внизу ее устанавливается дроссельная зас-
заслонка 3, с помощью которой регулируется скорость воздуха и ко-
количество смеси, поступающей в цилиндры. В топливной камере Е,
из которой бензин поступает в смесительную камеру, размещен за-
запорный механизм К, поддерживающий
постоянный уровень топлива в камере. "°
У
А
воздух
L
з-
(П
\
1
J.
Т1
ш
\
ж
Рис 174 Схема устройст-
устройства карбюратора
\
Вода +
боздух
Рис. 175. Водо-
Водоструйный насос.
Водоструйные насосы (рис. 175) применяются для создания не-
небольших разрежений. Давление в струе на выходе из насоса равно
атмосферному, а в суженной части струи и в резервуаре А созда-
создается разрежение, благодаря чему засасывается воздух из сосуда,
в котором желают понизить давление.
§ 6. ПРИМЕНЕНИЕ ЗАКОНА СОХРАНЕНИЯ КОЛИЧЕСТВА
ДВИЖЕНИЯ И МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
К СТАЦИОНАРНОМУ ПОТОКУ
Найдем изменение количества движения некоторого элемента
жидкости, находящейся под действием внешних сил.
Рассмотрим стационарное движение идеальной жидкости. Что-
Чтобы иметь право применить закон сохранения количества движения
в его простой форме, мы должны проследить движение элемента
жидкости, состоящего из одних и тех же частиц. Выделим в жидко-
жидкости объем, ограниченный «стенками» трубки тока и двумя нормаль-
нормальными к направлению скорости сечениями St и S2 Изменение коли-
количества движения указанного объема при установившемся течении
происходит только благодаря перемещению «концевых» масс жид-
жидкости (рис. 166)
273
В самом деле, пусть в начальный момент выделенный объем за-
занимает положение ABCD. За время At частицы из сечения АВ
пройдут путь ViAt и переместятся в сечение А'В', частицы из
сечения CD, пройдя путь v2At. перейдут в сечение CD'. Коли-
Количество движения начального объема жидкости A BCD можно пред-
представить как сумму количеств движения объема жидкости ABA В'
и A'B'CD. Количество движения той же массы жидкости спустя
время At равно количеству движения объемов A'B'CD и C'D'CD.
Количество движения объема жидкости A'B'CD входит как в на-
начальное, так и в конечное значение количества движения всего
объема.'Так как движение жидкости установившееся, то значение
его в том и другом случае одно и то же. Следовательно, изменение
количества движения рассматриваемой массы жидкости при пере-
перемещении ее из положения ABCD в положение A'B'CD' равно раз-
разности количеств движения масс жидкости в объемах А В А'В' и
CD CD'.
Сквозь левое сечение St за время dt в выбранный объем будет
перенесена жидкость массой:
dm1 = pSi?! dt.
Сквозь праиое сечение 52 за это же время из объема вытечет жидкость
массой:
dm2 = pS2Vz dt.
Вследствие несжимаемости и неразрывности жидкости:
dml = dtn2 = dm.
Изменение количества движения благодаря поступлению жидко-
жидкости через сечение 5f равно:
dm{or — pSxvx dt vv
Аналогично изменение количества движения, обусловленное выте-
вытеканием жидкости через сечение S2:
dm2v2 = pS2v2dtv2.
Общее изменение количества движения в объеме должно быть рав-
равно импульсу результирующей внешних сил:
(pS2v2v2 — pSjVj^ vt) dt — F dt.
Ho pS^ = pS2u2 и, следовательно:
Р5Л (u, - vt) =F. A3.18)
В написанном равенстве справа стоит результирующая внеш-
внешних сил, приложенных к объему жидкости (массовых и поверхно-
поверхностных). В соответствии с третьим законом Ньютона она равна и
274
противоположно направлена результирующей сил реакции, при-
приложенных со стороны текущей жидкости к внешним телам.
Закон сохранения количества движения можно применять
к системе, включающей весь поток или некоторую часть движущей-
движущейся жидкости и граничащее с ней твердое тело или, наконец, твер-
твердое тело, находящееся в жидкости, и ту ее часть, в которой телом
создано возмущение. При этом оказывается возможным, не вдава-
вдаваясь в детали структуры потока
жидкости, решить весьма прос-
просто целый ряд задач о взаимодей-
взаимодействии движущейся жидкости и
твердых тел.
Рассмотрим несколько при-
примеров.
1. Реакция струи, вытека-
вытекающей из сосуда. Когда струя
жидкости вытекает через отвер-
отверстие из сосуда, то она уносит с
собой некоторое количество дви-
движения. Если на систему со-
сосуд — жидкость внешние силы не действуют, то изменение коли-
количества движения в системе должно быть равно нулю, т. е. сосуд
должен двигаться в направлении, обратном направлению скоро-
скорости жидкости в струе.
Положим, площадь поперечного сечения струи 5, скорость ис-
истечения v. Тогда в единицу времени струя уносит с собой из сосуда
количество движения
Р = pSv\
Для расчета скорости истечения применим уравнение Бернулли
к горизонтальной трубке тока, проходящей от противоположной
стенки сосуда к центру отверстия (рис. 176). Если р4 — давление
в сосуде на уровне центра отверстия, а рг — давление в струе, то
W///////////////////////////
Рис. 176. Возникновение реактивной
силы при неучений струи из сосуда.
2
= р.+ т-
Полагая, что скорость частиц у стенки
ния в отверстии:
2 (Pi— Рг)
= 0, скорость тече-
A3.19)
Y Р
Отсюда
P=2S(Pl-pa), A3.20)
т. е. количество движения, уносимое струей в единицу времени,
численно равно удвоенной силе давления, действующей на площадь
сечения струи, и направлено в сторону истечения.
275
Сила реакции струи, приложенная к стенке сосуда, численно
равна величине Р, но противоположна ей по направлению. По-
Появление силы реакции струи связано с перераспределением да-
давления в сосуде при возникновении течения. Пока жидкость по-
покоится, силы давления, действующие на противоположно лежа-
лежащие на одной юризонтали участки стенок сосуда, уравновешива-
уравновешиваются. При истечении жидкости давление в струе в соответствии с
законом Бернулли меньше, чем в покоящейся жидкости, и давле-
давление на заднюю стенку оказывается больше, чем на переднюю.
Обращает на себя внимание тот факт, что сила реакции струи
оказывается равной удвоенной разности давлений. Он объясняется
тем, что сила давления уменьшается на величину (р2 — Pi)S в струе
и на такую же величину в обла-
области вблизи отверстия, где ско-
скорость уже близка к скорости те-
течения в струе. Измерить силу
реакции можно динамометром
по схеме, изображенной на ри-
рисунке 176. Таким способом в
принципе измеряется сила тяги
реактивных двигателей и ракет.
2. Использование силы реак-
S,
Рис. 177. Схема реакции потока жид-
жидкости на стенки изогнутой трубы.
ции струи в турбинах. Сила
реакции возникает и в том слу-
случае, когда скорость течения по-
постоянна по величине, но изменяется по направлению. Положим,
жидкость течет по трубе постоянного сечения, плавно согнутой на 90°
(рис. 177). Если движение стационарное, то скорости во всех сечениях
трубы по величине одинаковы. Будем рассматривать всю трубу
как одну трубку тока. Через сечение Sb расположенное до поворо-
поворота трубы, жидкость ежесекундно проносит количество движения
Pi = {pSiVi)vi, через сечение 52 (после поворота)— Р2 = (pS2v2) v2.
Но Si = S2 = 5 и vt = v2 =v, следовательно АР = pSv(v2 — vf)
или по величине равно:
АР = V~2 pSv2.
A3.21)
Сила реакции текущей жидкости на изогнутую стенку равна
по величине и противоположна по направлению вектору измене-
изменения количества движения АР.
Реакция текущей струи используется в турбинных двигателях.
На рисунке 178 изображена схема устройства так называемой
активной гидравлической турбины Пельтона. Струя воды из сопла
с большой скоростью подается на лопатки колеса турбины (рис. 179)
и приводит его в движение.
276
Рис 178. Схема устройства активной гидра-
гидравлической турбины Пельтона
На рисунке 180 изображен разрез лопатки и схема движения
на ней струи. Струя, падающая из сопла, разделяется средним реб-
ребром лопатки на две части, скользит по поверхности лопатки, сте-
стекая в направлении, прямо противоположном направлению пада-
падающей струи. Форма лопаток подбирается так, чтобы не возникал
удар струи о лопатки, ведущий к частичной потере энергии струи.
Сила, действующая на ло-
лопатки турбины, равна:
F = -[Sv(v'-v[), A3.22)
Рис, 179. Колесо турбины Пельтоиа.
Рис. 180. Разрез
лопатки турбины
Пельтона и схема
движения на ней
струи жидкости
где v — скорость воды в неподвижной системе отсчета; v' — ско-
скорость падающей воды относительно лопатки:
v' = v - v2,
277
где v% — скорость движения лопатки; v± — скорость воды, сте-
стекающей с лопатки vi = v2 — v, подставим значение v' и и/ в фор-
формулу A3.22);
F = 2PSv (v - v2).
Мощность, развиваемая турбиной:
N = Fv%di = 2pSv (v — Vi) va.
dt
Турбина развивает максимальную мощность при полной передаче
струей кинетической энергии своего движения лопаткам турбины.
Это возможно, если абсолютная скорость воды, стекающей с лопат-
лопатки, равна нулю:
v[ -J- w2 = 2wa — v = 0.
Турбина развивает максимальную мощность, когда ее лопатки
имеют скорость, равную половине скорости струи: v2 = —.
В реактивных турбинах вода поступает под давлением, большим
атмосферного, из многолопаточного направляющего аппарата в
закрытое пространство, в котором помещено колесо турбины (рис.
181). При течении между сужающимися лопатками колеса скорость
Рис. 181. Колеса реактивных турбин.
течения воды относительно лопаток возрастает, а давление падает;
изменение количества движения воды при этом создает реактивную
силу, приводящую турбину во вращение. Для получения максималь-
максимальной мощности относительная скорость, с которой частицы сходят
с колеса, должна быть возможно меньше, а давление близким к ат-
атмосферному.
3. Парение тяжелого тела в воздухе. Тяжелое тело может парить
в неподвижной (воздушной или водной) среде, если оно все время
отбрасывает вниз некоторую массу среды со скоростью v (рис. 182).
278
Тогда со стороны части среды, приходящей в движение, на него
действует сила реакции, направленная противоположно силе тя
жести. При подходящих условиях (определенной скорости и) тело
неподвижно висит в воздухе, поднимается или опускается. На этом
принципе работает винт вертолета.
Примем для простоты расчета, что в потоке воздуха, который от-
отбрасывает винт вертолета, на некотором расстоянии от него уста-
устанавливается постоянная скорость v. Положим сечение отбрасы-
отбрасываемой вниз струи S. Тогда винт приводит
ежесекундно в движение массу воздуха:
Mc=pSv. v 13.23)
Разностью давлений в движущейся вниз
струе воздуха можно пренебречь, поэтому
количество движения, приобретаемое воз-
воздухом, равно:
pSvv =Mcv.
В случае неподвижного парения тела,
очевидно:
Mcv = G,
где G —вес тела.
Таким образом, реакция со стороны
струи воздуха на винт равна:
F = G = — Mcv. A3.24)
Она и создает направленную вверх силу тяги винта вертолета. Не-
Несмотря на простоту, расчет по этой формуле для винта, находяще-
находящегося на значительном расстоянии от Земли, оказывается весьма
точным.
4. Возникновение подъемной силы крыла самолета. Применение
закона сохранения момента количества движения позволяет просто
объяснить возникновение подъемной силы крыла самолета.
Рис. 182. К возникнове-
возникновению подъемной силы вин-
винта вертолета.
Рис. 183. К возникновению подъемной силы крыла
самолета (фотография линий тока).
279
В момент начала движения самолета на задней кромке крыла
возникает мощный вихрь (рис. 183), так называемый разгонный,
в котором воздух движется против часовой стрелки. Достаточно
развившись, он отрывается от крыла и уносится воздушным пото-
потоком. Масса воздуха, унесенная вихрем, имеет некоторый момент
количества движения, а так как момент количества движения кры-
крыло — воздух должен остаться постоянным, то вокруг крыла воз-
возникает замкнутое циркуляционное течение в направлении, противо-
противоположном движению воздуха в вихре. Циркулярное течение
Подъемная сила
Пониженное
дабленив
Рис. 184. К возникновению
подъемной силы крыла самоле-
самолета (теоретическая схема).
быоое
дабленив
Рис. 185. Распределение давлений
на поверхности крыла.
складывается с движением воздуха навстречу крылу. Над крылом
скорости того и другого движения по направлению совпадают, а под
крылом направлены противоположно (рис. 184). По закону Бернул-
ли давление больше там, где меньше скорость. Поэтому под крылом
возникает область повышенного давления, а над крылом понижен-
пониженного. Результирующая сил давлений, действующих на поверхность
крыла, направлена вверх и образует подъемную силу. На рисунке
185 изображено распределение давлений на поверхности крыла.
§ 7. РЕАКТИВНОЕ ДВИЖЕНИЕ
Сила реакции вытекающей струи жидкости или газов исполь-
используется в качестве движущей силы в реактивных аппаратах. Лю-
Любой реактивный двигатель соединяет в себе тепловую машину,
преобразующую химическую энергию топлива в кинетическую энер-
энергию струи, и двигатель, создающий силу тяги вследствие реакции
выбрасываемого из сопла газа или жидкости.
Реактивные двигатели могут быть разделены на две группы:
ракетные и воздушно-реактивные. В ракетных двигателях горю-
горючее и окислитель, при сгорании которых создается струя газа, тран-
транспортируются вместе с двигателем. Сила тяги в ракетном двига-
двигателе определяется ежесекундным расходом массы отбрасываемой
струи QM и скоростью частиц в струе vc, и равна QM vc независимо
от скорости движения ракеты и от состояния окружающей среды.
280
Это же значение сила тяги ракетного двигателя сохраняет в безвоз-
безвоздушном пространстве.
В ракетах с твердым топливом используются обычно особые
сорта пороха в виде шашек. При горении пороха в камере продук-
продукты сгорания находятся под повышенным давлением (от нескольких
десятков до сотен атмосфер), истечение их через сопло создает реак-
реактивную силу, движущую ракету в сторону, противоположную на-
направлению истечения газов.
Рис. 186. Схема ракетного снаряда с двигателем на жидком
топливе:
/—боевая часть; 2—автопилот; 3—бак с горючим- 4—бак с окислителем;
5—турбоиасосная установка; в—камера сгорания; 7—сопло; 8—газовые рули;
9—радиооборудование.
Ракетные двигатели с жидким топливом (ЖРД) (рис. 186) рабо-
работают по тому же принципу, что и ракетный двигатель с твердым
топливом. Горючее (бензин, керосин, этиловый спирт) подается
через форсунки в камеры сгорания, где смешивается с окислителем
и воспламеняется. Продукты сгорания выбрасываются наружу
через реактивное сопло. ЖРД используются в ракетах дальнего
действия для посылки аппаратов за пределы земной атмосферы,
в частности для запуска искусственных спутников Земли и Солнца.
Жидкостный ракетный двигатель был впервые предложен выдаю-
выдающимся русским ученым К- Э. Циолковским, им же были разработаны
научные основы теории ракетных полетов.
Направление полета
Вход
воздуха
| Форсунки
Камера
сгорания
Рис, 187. Схема устройства воздушно-реактивного
двигателя.
28)
Принцип работы воздушно-реактивных двигателей состоит в
следующем: встречный воздушный поток поступает в двигатель,
сжимается п попадает в камеру сгорания, где в нем сжигается топ-
топливо. Продукты сгорания с большой скоростью выбрасываются дви-
двигателем назад. Принципиальная схема такого двигателя приведена
на рисунке 187.
Положим, самолет или другой аппарат летит со скоростью v,
при этом двигатель забирает через диффузор D ежесекундно массу
воздуха QB. В диффузоре скорость воздуха падает, а давление воз-
возрастает. При повышенном давлении воздух поступает в камеру сго-
сгорания, где смешивается с топливом (бензин). После возгорания го-
горючей смеси двигатель выбрасывает через реактивное сопло 5 (со
скоростью vc) воздух и газы, образовавшиеся за счет сгорания топ-
топлива, ежесекундный расход которого равен QT. Так как воздух
в атмосфере покоится, то при поступлении его в двигатель на само-
самолет действует реактивная сила QB v, направленная против его дви-
движения. При выбросе струи воздуха и газов, образовавшихся от сго-
сгорания топлива, действует реактивная сила, направленная по дви-
движению и равная (QB + QT)vc.
Следовательно, результирующая реактивная сила, создающая
тягу самолета, равна:
Так как обычно QT < QB, то приближенно можно считать, что сила
тяги равна:
Т. е. сила тяги воздушно-реактивного двигателя возникает при
скорости отбрасываемых назад частиц газа большей, чем скорость
полета аппарата. На таком же принципе работает двигатель реак-
реактивного судна, в котором насос засасывает воду в носовой части
судна и выбрасывает за корму в направлении, противоположном
движению судна.
§ 8. ВИХРЕВОЕ ДВИЖЕНИЕ
В общем случае движение частиц жидкости может складываться
из поступательного движения, вращения и деформации частиц.
Если при движении элементарные объемы жидкости перемещают-
перемещаются без вращения, движение называется потенциальным.
Движение жидкости или газа, которое сопровождается враще-
вращением частиц около некоторых мгновенных осей, называется вих-
вихревым течением. Примерами вихревого движения могут служить
смерчи, дымные кольца у краев выхлопных труб двигателей внут-
внутреннего сгорания, водяные вихри, наблюдающиеся в реках за ус-
устоями мостов, и т. п.
282
e
Рис. 188. Образование по-
поверхности раздела при слия-
слиянии двух потоков.
Движение реальных жидкостей и газов приближенно потенциаль-
потенциально в областях, в которых действие сил вязкости ничтожно мало по
сравнению с действием сил давления и нет завихрений, образую-
образующихся благодаря «срыву» жидкости на поверхностях раздела (см.
ниже).
Представим себе (в плане) два сливающихся потока (рис. 188).
Измерив скорости в сечении А В, мы (в общем случае) обнаружим раз-
различие в скоростях течения правого и левого потоков. Постоянная
Бернулли имеет для них различное значение, а давления должны
быть одинаковы. Следовательно,
в результирующем потоке должна
существовать поверхность, на ко-
которой скорость меняется скачком.
Она называется поверхностью раз-
раздела. Может быть случай, когда
постоянная Бернулли одинакова
для всего потока, но поверхность
раздела все-таки существует. В
этом случае скорости справа и сле-
слева (или над поверхностью раздела
и под ней) равны по величине, но
противоположны по направлению.
Поверхность раздела неустой-
неустойчива и легко разрушается, образуя
вихри. В самом деле, пусть вследствие какой-либо случайной при-
причины на поверхности раздела образовалось слабое возмущение
(рис. 189, а). Это возмущение перемещается со скоростью, средней
из скоростей частиц жидкости по обе стороны поверхности раздела.
Положим, мы двигаемся вместе с возмущением с этой средней ско-
скоростью. Тогда волна будет казаться нам
неподвижной, а поток с одной стороны
поверхности движущимся направо, а с
другой — налево. В соответствии с тео-
теоремой Бернулли на гребне возмущения
для того и другого потока давление повы-
повышено, а у его подошвы понижено. Жид-
Жидкость из областей повышенного давления
будет перетекать в области пониженного
давления. Следовательно, возмущение,
раз возникнув, начнет развиваться. В
конце концов оно распадается на отдель-
отдельные вихри (рис. 189, б).
Поверхность раздела может образо-
образоваться и внутри одного и того же потока, например при обтека-
обтекании потоком острого выступа (рис. 190). На выступе скорость
обтекающего потока должна менять свое направление почти мгновен-
мгновенно. В случае идеальной жидкости на линии тока, близкой к выступу,
Рис. 189. Образование воз-
возмущения на поверхности
раздела.
283
должны возникать бесконечно большие ускорения. Однако в реаль-
реальной жидкости в результате влияния вязкости этого не происходит.
Позади выступа образуется круговое течение, в одной части кото-
которого жидкость движется в направлении движения всего потока,
а в другой части — в противоположном. В результате возникает
постепенно развивающаяся поверхность раздела. Образующийся
на ней вихрь оттесняется от выступа повышенным давлением в зоне
Рис. 190. Вихреобразо-
вание на остром выступе.
Рис. 191. К парадок-
парадоксу Эйлера.
встречного течения и, наконец, отрывается и уносится потоком. На
его месте развивается новый и т. д. Такой процесс вихреобразова-
ния наблюдается при обтекании любого острого ребра или выступа.
Гельмгольц, пользуясь уравнениями движения для идеаль-
идеальной жидкости, показал, что вихрь в идеальной жидкости, раз
возникнув, не может исчезнуть, он может оканчиваться либо на
границе жидкости, либо замкнуться в кольце.
В реальной жидкости вихрь постепенно затухает, так как бла-
благодаря трению его энергия со временем диссипирует.
Возникновение вихрей играет существенную роль в сопротивле-
сопротивлении движению тела в жидкости. Если бы обтекание тела происхо-
происходило так, как изображено на рисунке 191 с совершенно симметрич-
Рис. 192. Действительная картина обтекания тела жид-
жидкостью (по фотографии).
284
ным распределением линий тока, то в соответствии с теоремой
Бернулли распределение давлений должно быть тоже симметрич-
симметричным. Значит, жидкость действовала бы на переднюю и заднюю
поверхности тела с равными и противоположно направленными
силами. В этом случае тело, движущееся в жидкости, не должно
испытывать сопротивления движению (парадокс Эйлера). Но этот вы-
вывод находится в полном противоречии с результатами опытов да-
даже в чрезвычайно маловязких жидкостях. Истинная картина обте-
обтекания тела жидкостью носит совершенно иной характер (рис. 192).
На поверхности раздела, созданной кромкой пластины, возникает
скачок скорости, приводящий к вихреобразованию. Область поза-
позади тела заполняется быстро вращающимися вихрями, давление
в ней снижается, и возникает результирующая сил давления на тело,
направленная против его движения.
§ 9. ГИДРОДИНАМИЧЕСКОЕ СОПРОТИВЛЕНИЕ
Рассмотрим влияние вязкости жидкостей на их движение.
Внутри движущейся реальной жидкости всегда возникают ка-
касательные напряжения. В соответствии с законом Ньютона A3.2)
их величина пропорциональна быстроте изменения скорости вдоль
нормали к поверхности соприкасающихся слоев. Эти напряжения
отсутствовали бы в жидкости лишь в случае, если бы она двигалась
с общей для всех частиц скоростью, т. е. как твердое тело. Но жид-
жидкость прилипает к твердым поверхностям, ограничивающим поток
или находящимся в нем, что создает изменение скорости по направ-
направлению от твердой границы (на границе v = 0; в слоях жидкости,
удаленных от границы, v Ф 0).
Таким образом, внутри движущегося потока жидкости всегда
возникают силы внутреннего трения, связанные с пространствен-
пространственным изменением скоростей течения.
Внешние силы, под действием которых жидкость перемещается,
совершают работу по преодолению сил внутреннего трения, которая
переходит во внутреннюю энергию.
При движении твердого тела в жидкости часть его энергии,
как установлено выше, тратится на образование вихрей, можно
добавить, и волн. Эти возмущения в окружающей среде (вихри,
волны) постепенно затухают под влиянием сил вязкости, т. е. часть
энергии движущегося в жидкости твердого тела также переходит
во внутреннюю энергию жидкости.
Передвижение твердого тела, например корабля в море или са-
самолета в воздухе, требует приложения к нему некоторой силы (тя-
(тяги винта, приводимого в движение соответствующим двигателем).
При равномерном движении сила, движущая тело, равна силе сопро-
сопротивления. Вся энергия, получаемая от двигателя, почти полностью
идет на образование различных возмущений в окружающей среде,
возникающих вблизи корабля и постепенно затухающих. Поэтому,
например, для оценки величины сопротивления, оказываемого жид-
285
Рис. 193. Падение давления вдоль
трубы с постоянным сечением.
костью движению корабля, нет надобности отдельно рассчитывать
затрату энергии на преодоление вязкости, на создание вихрей, волн
и т. д. Достаточно знать мощность двигателя при равномерном дви-
движении корабля. Разделив мощность (за вычетом доли, идущей на
преодоление сил трения внутри двигателя) на скорость движения
корабля, мы получим суммарную силу сопротивления, с которой
жидкость действует на движущий-
движущийся корабль. Суммарное сопротив-
сопротивление обусловлено в основном сила-
силами вязкости, образованием вихрей
и волн.
Образование вихрей за движу-
движущимся телом ведет к перераспре-
перераспределению на его поверхности сил
давления жидкости и возникнове-
возникновению результирующей этих сил, нап-
направленной против скорости тела
относительно жидкости. Поэтому эту часть сопротивления часто на-
называют сопротивлением давления.
Часть сопротивления, обусловленную образованием волн, на-
называют волновым сопротивлением.
Движение жидкости внутри твердых стенок (течение в трубе,
в ложе речного русла и т. п.) также происходит с затратой части
энергии потока на преодоление сил вязкости и образование вихрей.
Проведем следующий опыт. По длине горизонтальной трубы
постоянного сечения расположим ряд пьезометров (рис. 193). В
соответствии с законом неразрывности скорости в различных сече-
сечениях трубы одинаковы. Следовательно, давления согласно теоре-
теореме Бернулли в разных сечениях должны быть одинаковы и высота
столбов жидкости в пьезометрах постоянна по длине трубы. На
самом деле опыт указывает, что давление вдоль трубы падает. Сле-
Следовательно, энергия движущейся жидкости от сечения к сечению
уменьшается. Очевидно, при выводе теоремы Бернулли мы не пре-
предусмотрели какого-то расхода энергии. Естественно предположить,
что мы не учли расхода энергии на преодоление сил внутреннего
трения.
С учетом этих сил теорема Бернулли должна быть записана в
виде:
2
—
Pa ) =
A3.25)
где hw — величина диссипации механической энергии единицы
объема жидкости в единицу времени.
Сопротивление, которое оказывает жидкость движущемуся в
ней телу (или которое оказывают твердые границы потока движу-
движущейся в них жидкости), называется гидродинамическим сопротив-
сопротивлением.
286
§ 10. ТЕЧЕНИЕ ЖИДКОСТИ В ТВЕРДЫХ ГРАНИЦАХ.
ЛАМИНАРНЫЙ И ТУРБУЛЕНТНЫЙ РЕЖИМЫ ТЕЧЕНИЯ
Рассмотрим течение смачивающей жидкости по горизонтальной
трубе круглого сечения радиуса г. Жидкость считаем несжимаемой
и вязкой. Предположим, что течение стационарное и происходит
цилиндрическими слоями, параллельными стенкам трубы.
Обозначим скорость течения в некоторой точке поперечного се-
сечения трубы v, расстояние этой точки от оси трубы у.
Выделим внутри жидкости
элементарный цилиндрический
объем с осью, совпадающей с
осью трубы, и боковой поверхно-
поверхностью, параллельной стенкам тру-
трубы и проходящей через точку с
координатой у. Высоту цилинд-
цилиндра вдоль течения обозначим Ах
(рис. 194). Так как движение ста-
стационарное и равномерное, то си-
силы давления, действующие на
основание цилиндрического
у
*.\
}
ш у
. /
ГГГГи 1/ >
Рис. 194. К выводу распределения
скорости в цилиндрической трубе при
параллелоструйном течении.
го трения,
т) — S = —
dy
но,
ИЛИ
объема Дряу2, и сила вязко-
вязкодействующая на боковую поверхность цилиндра
т) — 2яуДлг, должны уравновешиваться. Следователь-
dy
dy
dv= —
Ар
ydy.
A3.26)
После интегрирования, полагая, что у стенок имеет место при-
прилипание жидкости, т. е. скорость на расстоянии г от оси равна нулю
(vr = 0), получим:
Ар
V =
(г2-у2).
A3.27)
Это соотношение устанавливает закон распределения скоростей
течения в данном сечении трубы. Считая падание давления на еди-
единицу длины трубы постоянным ( — = const) и объединяя постоян-
постоянные получим:
v = k (r> — у2) A3.28)
т. е. скорость частиц жидкости распределяется в сечении трубы
287
по параболическому закону. Вершина параболы лежит на оси тру-
трубы (рис. 194). Непосредственную опытную проверку этого закона
провести трудно, так как любой измеритель скорости, помещен-
помещенный в трубу, искажает распределение скоростей в месте измерения.
Поэтому подсчитаем расход жидкости (количество жидкости, про-
протекающей через сечение тру-
трубы за единицу времени) в
предположении, что выраже-
выражение A3.27) справедливо, а за-
затем сравним его с фактически
измеренным расходом. Так
как скорость частиц жидко-
жидкости зависит от их расстояния
от стенки трубы, то мы под-
подсчитаем элементарный рас-
расход жидкости через кольце-
Рис. 195. К выводу закона Гагена—
Пуазейля.
вое сечение радиуса у и тол-
толщиной dy (рис. 195), в преде-
пределах которой скорость течения
можно считать постоянной. За единицу времени через площадь
кольцевого сечения вытечет объем жидкости:
dQ = u2uydy A3.29)
или с учетом равенства A3.27):
dQ--
A3.30)
Интегрируя по всем кольцевым сечениям от 0 до г, получим рас-
расход жидкости в трубе:
Q = * Др г1 = Рд ~~
8т, Д* Да:
8т,
A3.31)
Разделив расход жидкости на площадь сечения трубы S =
пг, получим среднюю скорость в сечении:
v = JL =
ф S
A3.32)
Эта зависимость называется законом Гагена — Пуазейля: сред-
средняя скорость параллелоструйного течения жидкости
в трубе прямо пропорциональна падению напора на
единицу длины трубы, квадрату радиуса трубы и об-
обратно пропорциональна коэффициенту вязкости жид-
жидкости.
288
Движение жидкости параллельными слоями называется ла-
ламинарным течением.
Величина ——нравна потере давления на единицу длины тру-
трубы. Так как труба горизонтальна (/г4 = h2) и сечение ее постоянно,
то vi = v2. Следовательно, по формуле A3.25):
Р\ — Рг _ hw _ 8-г) ,. „ --
—I "~ 1— ~~ ~Т"<:р' {10.00)
Ах Ах г2
т. е. сила сопротивления при ламинарном течении пря-
прямо пропорциональна первой степени скорости.
Проверка закона Гагена — Пуазейля осуществляется легко.
При этом получается неожиданный результат. Уравнение A3.32)
оказывается справедливым лишь при малых скоростях течения жид-
жидкости и малых размерах труб. Точнее говоря, при малых значениях
безразмерного числа:
# = *??!, A3.34)
е Ti
где vcp — средняя скорость, р — плотность жидкости, г — радиус
трубы, т) — коэффициент вязкости жидкости. Число Re носит наз-
название числа Рейнольдса.
При выводе закона Гагена — Пуазейля нами были использо-
использованы: второй закон динамики, применимость которого к движению
жидкости не вызывает сомнения, закон Ньютона для вязкости,
справедливость которого многократно проверялась. Следователь-
Следовательно, ошибочно какое-то из предположений, которыми мы пользова-
пользовались при выводе. Осборн Рейнольде в 1883 г. впервые обнаружил,
что условие параллельности скоростей жидкости выполняется при
данных размерах трубы и для данной жидкости лишь до некото-
некоторого значения скорости (критическая скорость), выше которого
течение теряет ламинарный характер.
Рейнольде пускал в трубу с текущей жидкостью окрашенную
струю'(рис. 196). При достаточно малых значениях скорости тече-
течение было ламинарным и крас-
краска двигалась резко очерчен- ,
ной струей. Но как только JL
скорость достигала критичес- Лкнмвв^ннв^внш^ам^мв
кого значения, струйка крас- ¦—*¦ W>—~—— —
ки быстро расходилась по
всему сечению трубы в виде
вихревых образований — тра-
траектории частиц переставали —.
быть параллельными, а их
скорости беспорядочно1 меня- „.„с ^ п . ,-,
F F Рис. 196. Опыт Рейнольдса. Подкрашен-
лись как по величине, так и ная струЯ до и после достижения скоро-
ПО направлению. егью критического значения.
Ю М М Архангельский 289
Наше представление (которое кажется самоочевидным) о том,
что цилиндричность стенок трубы вынуждает все частицы жидкости
двигаться им параллельно, в действительности, для скоростей, боль-
больших критических, не оправдывается
При ламинарном движении: жидкость движется слоями,
и скорости в каждом сечении параллельны друг другу;
скорости частиц жидкости меняются от твердых гра-
границ внутрь потока по параболическому закону; сопро-
сопротивление движению жидкости или твердого тела в ней
прямо пропорционально первой степени скорости, при-
причем сопротивление обязано своим происхождением дей-
действию сил вязкости.
Если траектории частиц жидкости искривляются, то на них
должна действовать некоторая сила, сообщающая им центростре-
центростремительное ускорение. В потоке вязкой жидкости на каждую части-
частицу действуют сила давления р и сила вязкости FB. Эти силы и обус-
обусловливают возникновение ускорения частиц.
По второму закону Ньютона:
, с- dv
н~ в dt
Если система отсчета связана с движущейся частицей, то в этой
^ dv
системе на частицу будет действовать сила инерции, равная т—.
dt
Можно предположить, что степень устойчивости ламинарного
течения характеризуется отношением сил инерции к силам вязкости,
так как силы инерции, видимо, тем больше, чем больше отклонение
траекторий частиц в потоке от прямолинейного направления, а сила
вязкости препятствует возникновению этих отклонений.
Силы инерции выражаются через произведение плотности жид-
жидкости на объем и на производную скорости по времени.
Производную от скорости по времени можно представить как
величину, пропорциональную отношению:
где v0 — некоторая скорость, характерная для данной задачи,
10 — некоторая характерная длина. Масса, т. е. произведение плот-
плотности на объем, пропорциональна р/$. Тогда сила инерции:
V2
Fti = const pll — = const
Сила вязкости пропорциональна производной скорости по рас-
расстоянию — , некоторой шощади 1\ и коэффициенту вязкости.
'о
290
const
—-
_ const r(y0/0.
Найдем отношение Z7,, к /•"„. Легко видеть, что оно равно с точ-
точностью до постоянного множителя безразмерному числу, которое
мы назвали числом Рейнольдса:
=, JsEL , A3.35)
где v называется коэффициентом кинематической вязкости.
В число Рейнольдса A3.35) входит некоторая скорость v0,
размер /0 и коэффициент кинематической вязкости. Коэффициент
вязкости определен, если известна жидкость в потоке, для которого
вычисляется значение Re. Скорость v0 есть скорость, характерная
для данного случая течения жидкости, например, для течения жид-
жидкости в длинной трубе — это средняя скорость в сечении трубы,
для случая обтекания жидкостью шарика — это скорость его дви-
движения относительно жидкости и т. д. Характерным размером в
случае течения жидкости в трубе служит диаметр трубы, при обте-
обтекании малого по сравнению с размерами потока шарика — диаметр
шарика и т. д.
Пока число Рейнольдса мало, силы вязкости преобладают над
силами инерции и всякое возмущение, случайно возникшее в жид-
жидкости, гасится.
При возрастании скорости и размеров потока (или убывании
вязкости) силы инерции становят-
становятся при прочих равных условиях
близкими по величине к силам
вязкости. Случайные искривления
траекторий частиц жидкости воз-
возникают легче и существуют доль-
дольше. Этому режиму течения жид-
жидкости соответствует некоторая об-
область значений числа Рейнольд-
Рейнольдса, которая называется крити-
критической.
Наконец,если число Рейнольд-
Рейнольдса больше критического значения,
силы инерции значительно превы-
превышают силы вязкости и случайно
возникшие возмущения развива-
развиваются в толще потока. На рисунке
197 изображено развитие возмуще-
возмущения, возникшего на выступе твер-
твердой границы. Со временем весь по-
поток оказывается заполненным воз- р, ,,„ „
1Т Рис 197. Развитие случайного
мущениями. Частицы жидкости возмущения в потоке жидкости
движутся по искривленным, слу- (по фотографии).
10*
291
Рис. 198. Фотография траекторий мелких
окрашенных частиц в турбулентном потоке воды.
чайно изменяющимся во времени траекториям (рис. 198). Такое
движение называется турбулентным.
Переход от ламинарного к турбулентному режиму течения наб-
наблюдается для всех жидкостей при одном и том же значении числа
Рейнольдса Re . Следовательно, критическая скорость vK, при ко-
К
торой осуществляется этот переход, меняется в зависимости от раз-
размеров потока и вязкости таким образом, что критическое значение
числа Рейнольдса для всех жидкостей остается постоянным.
Ламинарному течению соответствуют значения чисел Рейнольдса
примерно до Re = 1000. Переход от ламинарного к турбулентному
течению происходит в области значений Re от 1000 до 2000. При
значениях Re > 2000 течение турбулентное.
Величина критического значения числа Рейнольдса в заметной
степени зависит от характера входа потока жидкости в трубу и ше-
шероховатости ее стенок. При гладких стенках и плавном входе в тру-
трубу критическое значение Re может достичь величины 20 000. Если
входное отверстие не обеспечивает спокойного втекания жидкости
в трубу и стенки шероховатые (имеют выступы), то критическое
число Рейнольдса может иметь значение 800—1000.
Критическое значение числа Рейнольдса характеризует пере-
переход от ламинарного течения к турбулентному не только в случае
потока в трубе, но и в любых потоках жидкости и газа, а также пе-
переход от ламинарного обтекания тела к турбулентному. От числа
Рейнольдса зависит величина сопротивления в движущейся жид-
жидкости. Можно показать, что равенство чисел Рейнольдса для двух
различных потоков является одним из условий их механического
подобия, что особенно важно для исследования на моделях течений
жидкости в различных условиях (или обтекания различных тел).
В турбулентном потоке частицы жидкости движутся со своими
индивидуальными скоростями. Скорости отдельных частиц могут
отличаться и по величине, и по направлению. Измеряя скорость в
некоторой фиксированной точке пространства, мы обнаружим в
ней смену скоростей, так как в данную точку приходят частицы с
различными скоростями. Это явление называется пульсацией ско-
скорости. На рисунке 199 приведена запись колебаний скорости со
292
v 9 см/сек
Рис. 199. Пульсации скорости в фикси-
фиксированной точке турбулентного потока.
временем в некоторой точке водяного потока. Следовательно, тур-
турбулентный поток по существу нестационарен. Однако в случае дви-
движения жидкости под действием постоянных сил пульсация скорости
происходит около некоторых средних значений, и оказывается воз-
возможным считать такой турбулентный поток в среднем стационарным.
Рассмотрим схему возникновения и развития турбулентности
потока. Положим, жидкость находится в состоянии стационарного
течения. При нарастании скорости и достижении критических зна-
значений числа Рейнольдса движение потока становится неустойчи-
неустойчивым. В нем легко возникают вихри (на случайных выступах твер-
твердых стенок потока; внутри потока вследствие малых колебаний плот-
плотности и т. п.). Вихри крупного размера, получающие энергию от
основного осредненного (стационарного) движения, неустойчивы
и дробятся на более мелки^ вплоть до мельчайших вихрей, которые
оказываются уже устойчивыми, так как число Рейнольдса для них
будет меньше критического. Энергия этих вихрей благодаря вяз-
вязкости перехрдит во внутреннюю энергию.
Таким образом, турбулентное движение представляет собой на-
набор (спектр) вихрей различной величины, начиная от крупных (близ-
(близких по размеру к поперечным размерам потока) и кончая мельчай-
мельчайшими вихрями. На рисунке 200 приведены фотографии турбулент-
турбулентного потока, на них отчетливо видны отдельные его вихри.
Смена во времени в некоторой точке потока подобных вихрей
и создает пульсацию скорости. Обычно рассматривают средние ско-
скорости в данной точке, полученные как результат осреднения зна-
значений скоростей, сменяющих друг друга за время Т:
j
v= -у j" vdt. A3.36)
В турбулентном потоке распределение средних скоростей имеет
вид, изображенный на рисунке 201.
293
Вблизи твердых границ скорость в тонком слое (пограничный
слой) резко возрастает до значения, близкого к средней скорости в се-
сечении, а дальше изменяется сравнительно мало. В пограничном слое
течение может быть как ламинарным,
так и турбулентным в зависимости от
__^__^________^ величины скорости течения.
При турбулентном движении сопро-
сопротивление жидкости оказывается пропор-
пропорциональным не первой, а второй степени
скорости:
Pi—Pi __ ) Л7,2
B3.37)
Рис. 200. Турбулент-
Турбулентный поток (по фото-
фотографии).
Рис. 201. Распределение средних ско-
скоростей в турбулентном потоке.
Коэффициент Я называется коэффициентом сопротивления. Он
зависит от числа Рейнольдса. На рисунке 202 приведены кривые
зависимости коэффициента сопротивления от числа Рейнольдса.
0.2
' 2S2.S 3.0 3,2 3,4 З.в 3,3 4,0 4.2 4,4 4,6 4,8 5,0 5,2 5,4 5,6 5,86,0
Рис. 202. Зависимость коэффициента сопротивления
от числа Рейнольдса.
294
Итак, при турбулентном движении: 1) частицы жидкости
движутся по случайным хаотически изменяющимся
траекториям; 2) их средняя скорость резко возраста-
возрастает в пограничном слое и почти не меняется вдали от
границ потока; 3) сопротивление движению жидкости
или движению твердого тела в ней прямо пропорцио-
пропорционально второй степени скорости.
Основы современной теории турбулентности созданы советскими уче-
учеными А. А Фридманом и Л. В. Келлером в 1925 г. Наиболее важные теоре-
теоретические результаты получены советским >ченым А Н. Колмогоровым и его
учениками Экспериментальному изучению турбулентности посвящены ра-
работы М. А. Великанова и др. За рубежом над изучением турбулентности
работали Прандтль, Карман и др. Однако создание физически ясной теории
турбулентности пока продолжает оставаться делом будущего.
§ И. ОБТЕКАНИЕ ТЕЛ. ЛОБОВОЕ СОПРОТИВЛЕНИЕ
При движении тела в жидкости оно испытывает сопротивление.
Сила, с которой жидкость действует на тело, в общем случае направ-
направлена под некоторым углом к направлению движения (рис. 203). Она
создается двумя составляющими: од-
одной, направленной вдоль потока, Fn,
и второй, перпендикулярной к нему,
Fn. Первая составляющая носит на-
название лобового сопротивления, вто-
вторая — подъемной силы.
Воздействие потока жидкости на
твердое тело зависит от относитель-
относительной скорости движения тела и частиц
жидкости, причем безразлично —тело Рис. 2оз. Силы, действую-
ЛИ ДВИЖеТСЯ С Некоторой СКОрОСТЬЮ щие на пластину, движу-
относительно покоящейся жидкости щуюся в жидкости,
или неподвижное тело обтекается дви-
движущейся жидкостью. В дальнейшем мы не будем различать эти
два случая и назовем их общим термином — обтекание тел.
Изучим силы, возникающие при обтекании тела, движущегося
с малой скоростью так, что число Рейнольдса Re = — (где в дан-
V
ном случае v — относительная скорость движения тела и жидкости,
/ — характерный размер тела, v — кинематический коэффициент
вязкости жидкости) имеет значение, меньшее критического. При
этом жидкость, обтекая тело, движется слоями. Если тело симмет-
симметрично и ось его симметрии совпадает с направлением скорости, то
линии тока изгибаются также почти симметрично (рис. 204). Си-
Сила сопротивления должна быть направлена прямо противоположно
скорости потока. В этом случае на тело действует только лобовое
сопротивление. Так как линии тока симметричны, то сечения тру-
295
бок тока, а следовате пьно, скорости и давления, скажем, в точках 4
и В примерно одинаковы. Результирующая сит цавления, действу-
действующих на тело, почти равна нулю, и лобовое сопротивление обязано
своим происхождением главным образом вязкости жидкости.
При обтекании тела в любом сечении, проходящем через или
вблизи него поперек потока, скорость меняется от и = 0 у поверх-
поверхности тела до v = v0 в невозмущенной области потока (рис. 204).
Наличие градиента скорости
»¦ обусловливается существованием
сил внутреннего трения в жид-
жидкости.
Для тел разной формы и
размера величина градиента ско-
скорости в разных сечениях, пер-
перпендикулярных оси тела, может
быть различна, а следовательно,
и сила вязкого трения на раз-
разных единичных площадках, по
которым соприкасаются слои
жидкости, будет разной. Изме-
Изменение положения данного тела
Рис. 204. Возникновение силы ло-
лобового сопротивления за счет вяз-
вязкости при ламинарном обтекании
тела. Пунктиром обведена область
существования градиента скорости,
обусловленного обтекаемым телом.
тоже может вызвать изменение
градиента скорости.
В случае обтекания те-
тела при числах Рейнольдса,
меньших критического,
сопротивление прямо пропорционально первой степени
скорости:
F = Cxv, A3.38)
где Сх — зависит от вязкости жидкости, размеров и формы тела
и его ориентации в потоке.
Для обтекания шара при малых значениях числа Рейнольдса
Re — — {v — скорость невозмущенного потока жидкости отно-
v
сительно шара, й — диаметр шара). Стоке теоретически вычислил
значение коэффициента Сх = 6шт/ и для силы сопротивления полу-
получил выражение-
7^л = Ы-цп. A3.39)
Формула Стокса применяется для вычисления скорости падения
тел в вязких средах, для расчетов скорости падения пылинок и во-
водяных капелек в воздухе, скорости осаждения мелких речных на-
наносов (ила, глины) в водохранилищах и отстойниках и т. д. Если
скорость падения частиц измерена, то можно вычислить вязкость
среды или размер частиц. Для подобных расчетов измеряется ско-
скорость установившегося падения тела При этом сила сопротивления,
296
очевидно, уравновешивает результирующую выталкивающей силы
и силы тяжести. Для сферической частицы.
= —-r'gi^ — Pi),
О
где Pi — плотность тела, р2 — плотность среды.
Откуда скорость равномерного падения тела в среде:
11 9 т
A3.40)
При возрастании относительной скорости течения жидкости око-
около тела возникает пограничный слой, в котором скорость резко воз-
возрастает от нуля у поверхности тела до значений, близких к скорости
невозмущенного потока или близких к средней скорости течения у
границы прилипшего слоя. Толщина и форма пограничного слоя зави-
зависит от свойств жидкости, формы тела и скорости движения потока. На
рисунке 205 пограничный слой
около шара виден в виде свет-
светлого ореола Он слегка утол-
утолщен в задней части тела вслед-
вследствие тормозящего влияния
вязкости. У пластинки, распо-
расположенной вдоль потока, погра-
пограничный слой имеет плоскую
форму, также слегка утолщен-
утолщенную в направлении к задней
кромке пластинки. Толщину
h пограничного слоя можно
подсчитать по формуле-
— = -)=, A3.41)
I VRe
где / — характерная длина
тела.
При относительно неболь-
небольших числах Рейнольдса
{Re^\) движение в погранич-
пограничном слое ламинарное (лами-
(ламинарный пограничный слой).
При значениях числа Рей-
Рейнольдса Re
1 толщина по- ~
граничного слоя имеет вели-
величину порядка размеров тела.
В этом случае пограничный
слой занимает почти весь по-
поток или его значительную
часть. Это и понятно, так
Рис. 205. Обтекание цилиндрт В1Т<ой
жидко тью при больших скоростях
течения (по фотографии).
297
как движение во всем потоке носит ламинарный характер.
При- числах Рейнольдса порядка 10" толщина пограничного
слоя приблизительно 0,12 см, он резко выделяется в общем потоке
жидкости.
Пограничный слой резко меняет картину обтекания тела потоком.
На рисунке 206 изображены линии тока при обтекании тела реаль-
реальной жидкостью.
а 6
Рис. 206. Схема образования вихрей за обтекаемым телом.
Предположим, что при малых скоростях течение жидкости в
пограничном слое было вполне симметричным (рис. 206, а), тогда
в «критической» точке А частицы жидкости имели скорость, равную
нулю, а давление было наибольшим. В точках С и D, где линии то-
тока искривлены и сечения трубок тока уменьшены, скорость частиц
жидкости достигает максимума, а давление — минимума. В точке
В скорость снова равна нулю, а давление максимально. Частица
жидкости, попав в пограничный слой у точки А, движется в сторону
понижения давления к точке С; приобретя здесь некоторый запас
кинетической энергии, она перемещается далее против возраста-
возрастающего давления как раз до точки В, затем «выталкивается» за пре-
пределы пограничного слоя в поток, движущийся со скоростью, отлич-
отличной от нуля. Однако такая картина течения в пограничном слое
могла бы длительно существовать только в идеальной жидкости.
В реальной жидкости движение в пограничном слое от точки А
происходит, как и в рассмотренном случае, в сторону падения дав-
давления — к точкам С и D. Однако часть кинетической энергии,
приобретаемой частицей в результате работы сил давления, расхо-
расходуется на преодоление сил вязкости.
Позади точек CwD частицы пограничного слоя постепенно теря-
теряют скорость и начинают возвратное движение, не достигнув точки В.
Поэтому в некоторой области пограничного слоя, сдвинутой от-
относительно точек С и D в сторону движения потока, сталкиваются
два встречных течения и на пограничном слое образуются выступы,
ведущие к образованию вихря. Вихрь с течением времени развивает-
развивается, захватывается и относится потоком (рис. 206, б).
Образованию вихревого движения частиц у выступа погранич-
пограничного слоя способствует следующее обстоятельство. В пограничном
298
1
1
1
1
1
о'
.'/
слое, как указывалось, существует заметный градиент скорости
(рис. 207). Поэтому любой элемент жидкости, выделенный в погра-
пограничном слое, находится под действием пары сил, создающей момент
количества движения относительно оси, которая проходит через
центр выделенного элемента. Если представить себе этот элемент
мгновенно затвердевшим, но сохранившим прежнее распределение
скоростей, то, очевидно, наряду с поступательным движением он
обладал бы и вращением вокруг оси
О, т е. участвовал бы в вихревом
движении (заметим, что вихрь мо-
может существовать, следовательно,
и в ламинарном потоке). Таким об-
образом, образование вихрей у выс-
выступа пограничного слоя облегча- Рис. 207 Распределение ско-
ется существованием тенденций к ростей в пограничном слое и
их возникновению уже в самом возникновение вращения час-
пограничном слое. тиц-
За телом возникает область,
заполненная вихрями, давление в которой понижено. Результи-
Результирующая сил давления на тело со стороны обтекающей жидкости
(сопротивление давления) оказывается направленной в сторону
движения потока.
Лобовое сопротивление, которое испытывает тело, движущееся
в вязкой жидкости, складывается из сопротивления вязкости и
сопротивления давления. При сравнительно малых числах Реинольд-
Реинольдса, когда пограничный слой достаточно велик и вихреобразование
неинтенсивно, преобладающее значение имеет сопротивление вяз-
вязкости; с ростом числа Реинольдса толщина пограничного слоя резко
убывает A3.41), а интенсивность вихреобразования растет, при этом
преобладающее значение приобретает сопротивление давления.
Лобовое сопротивление при значениях числа Реинольдса, боль-
больших критического, может быть вычислено по формуле:
/^ = C^S ?j , A3.42)
где р — плотность жидкости, 5 — так называемое миделево сече-
сечение тела, или площадь проекции тела на плоскость, перпендикуляр-
перпендикулярную направлению скорости течения, v — скорость невозмущенно-
невозмущенного потока, Сх — безразмерный коэффициент, являющийся функцией
числа Реинольдса и учитывающий вязкие свойства жидкости и фор-
форму тела. Сх называется коэффициентом лобового сопротивления.
Уменьшения лобового сопротивления тела можно достичь умень-
уменьшением зоны вихреобразования. Очевидно, для этого надо телу при-
придать такую форму, при которой поток плавно смыкался бы за ним
и вихревая зона была бы минимальной. При одном и том же попереч-
поперечном сечении наименьшее лобовое сопротивление испытывает обтека-
299
Рис 208 Обтекание тел различной формы:
а—обтекаемой, б— сферической, а—конической
емое тело с тупым, округлым носом и плавно заостренным хвостом
(рис. 208, а). Если для шара (рис. 208, б) коэффициент сопротивле-
сопротивления принять равным 1, то для обтекаемого тела он будет примерно
ОД, а для конического тела, обращенного основанием навстречу
потоку (рис. 208, в), — 5—6.
В заключение заметим, что при обтекании тел со скоростями,
близкими к скорости звука и сверхзвуковыми скоростями, лобовое
сопротивление прямо пропорционально кубу скорости.
§ 12. ПОДЪЕМНАЯ СИЛА. ТЕОРЕМА Н. Е. ЖУКОВСКОГО
Как было показано в главе XIII, § 6, подъемная сила Fn воз-
возникает в результате существования циркуляционного движения
жидкости вокруг тела.
Строгая математическая теория подъемной силы разработана
великим русским механиком Н. Е. Жуковским Он показал, что
течение вблизи крыла можно рассматривать как два одновременно
существующих течения идеальной жидкости: непрерывного обтека-
обтекания с плавно изогнутыми линиями тока и циркуляционного тече-
течения вокруг крыла (рис 184). Частицы жидкости при этом деформи-
деформируются, но не вращаются, т. е. движение удовлетворяет условию
потенциальности. При потенциальном движении особая физическая
величина — циркуляция скорости по любому замкнутому геометри-
геометрическому контуру, охватывающему тело, — величина постоянная
301
Для уяснения физического смысла понятия циркуляции рассмот-
рассмотрим плоский потенциальный поток (рис. 209). Проведем в нем
линии тока (для простоты рассуждения они изображены в виде па-
параллельных прямых. Однако ниже приведенные рассуждения спра-
справедливы и в случае сходящихся или расходящихся линий тока).
Поместим мысленно в плоскости течения замкнутый контур (опять-
таки для простоты контур взят в виде окружности. Вообще говоря,
может быть взята любая замкнутая выпуклая кривая). Каждая пара
смежных линий тока вырезает на контуре две симметрично распо-
расположенные малые дуги As. Центру каждой дуги поставим в соответ-
соответствие вектор ds, модуль которого равен длине дуги As, а направле-
направление совпадает с вектором внешней нормали к дуге. Очевидно, такой
вектор полностью определит дугу, так как укажет ее длину и ориен-
ориентацию в пространстве. Образуем теперь для каждой дуги скаляр-
скалярное произведение:
(v ds) = vds cos (v ds) = vt ds,
где vs— проекция вектора скорости на направление нормали к пло-
площадке. Произведение, как нетрудно сообразить, vsAs — q, где q—
расход жидкости, протекающей через дугу As.
Если смежные линии тока проведены настолько близко, что выре-
вырезают на контуре бесконечно малые дуги ds, то, просуммировав элемен-
элементарные расходы жидкости по всему контуру, получим выражение:
(vds) = r, A3.43)
которое и носит название циркуляция скорости. Знак § означает
интегрирование по замкнутому контуру. Циркуляция скорости —
скалярная величина, численно равная расходу жидкости через зам-
замкнутый контур.
В случае, изображенном на рисунке 209, величины расходов
жидкости через каждую из пары дуг, вырезанных двумя смежными
линиями тока на контуре, будут в силу уравнения неразрывности
равны по модулю, а знаки их будут различны, так как для дуги,
/\
расположенной слева от вертикального диаметра А В, cos (vds)<C 0,
а для расположенной справа
/\
cos (uds)> 0. В силу симметричности
распределения скоростей (и давле-
давлений) на контуре суммарный расход
. i r х. через контур, равный величине цир-
4-.^J_>/-—Z~ куляции, равен нулю (Г = 0). Если
в распределение скоростей (и давлений)
Рис. 209. к расчету циркуля- на контуре асимметрично, ГФ 0. Вели-
ции скорости. чина циркуляции скорости — характе-
302
ристика неравномерности распределения скоростей по контуру
обтекаемого тела.
Так как подъемная сила обязана своим происхождением неравен-
неравенству давлений на противоположных сторонах крыла, то она сущест-
существует, если Г ф 0. В сложной картине обтекания крыла (рис. 210)
Н. Е. Жуковский сумел разглядеть и сказать, какой характер долж-
должна иметь циркуляция (гипотеза Жуковского). Заменим крыло тон-
тонкой пластинкой (рис. 211), сто-
стоящей под углом а к горизонту
(угол атаки). Длину пластинки
в направлении, перпендикуляр-
перпендикулярном плоскости чертежа, считаем
бесконечной. При обтекании
пластинки идеальной жидкостью
без циркуляции картина линий
тока была бы симметрична; кри-
критические точки находились бы в
точках А\ и А2, подъемная сила
отсутствовала, а существовала
Рис. 210.
обтекания
Картина
крыла.
бы пара сил, стремящаяся по-
повернуть пластину по часовой стрелке.
Н. Е. Жуковский показал, что циркуляция при обтекании плас-
пластинки (тонкого крыла) должна быть такой, чтобы критические точ-
точки смещались в точки А\ и А'г Величина циркуляции скорости
при этом может быть подсчитана теоретически, она равна:
Г
—- ud да,
A3.44)
где d— хорда крыла, а — угол атаки (рис. 211).
Найдем подъемную силу. Пусть поток обтекает крыло, располо-
расположенное под углом атаки а к направлению скорости v0 в невозмущен-
невозмущенном потоке; давление в не-
Вез циркуляции возмущенном потоке р0.
С циркуляцией ПОЛОЖИМ, СКОрОСТИ ЦИрКу-
ляционного течения в точ-
точках сверху и снизу крыла,
отстоящих на расстоянии
х от передней кромки, со-
соответственно Vi и v2 и дав-
давление р, и р2- Напишем
Рис. 211. Схема циркуляции уравнение Бернулли для
по Жуковскому. двух трубок тока, прохо-
проходящих одна сверху, дру-
другая снизу крыла. Сечение возьмем одно в невозмущенной части
потока, второе на расстоянии х от передней кромки.
303
2 2
Тогда ро+— =Pi + — Для верхней трубки токаи
z z
-| ° = рг-\ для нижней трубки тока.
Отсюда рг — рх = — р (и^~ и2) = — р(их + и2) (ui — иг)-
2 Z
Так как при малых углах атаки vt и v2 мало отличаются от v0,
положим:
Тогда
Выделим около точки с координатой х полоску шириной dx
вдоль хорды крыла и длиной в направлении размаха крыла /. Ре-
Результирующая сила давления на выделенную полоску:
(р2 — pj) dxl = pv0 (vt — v2) I dx.
Значение результирующей, действующей на всю поверхность
крыла:
A3.45)
Но интеграл
представляет собой циркуляцию скорости по контуру, проведенному
вокруг крыла. Таким образом,
С* п '- Г. A3.46)
Fn =
Рис. 212. Поляра.
Эта формула носит название фор-
формулы Жуковского — Кутта. Сопоста-
Сопоставляя выражения A3.44) и A3.46),
можно сделать заключение, что подъ-
подъемная сила прямо пропорцио-
пропорциональна плотности среды, квад-
квадрату скорости и углу атаки.
Полученные выводы для небольших
углов атаки, с которыми обычно ле-
летит самолет, хорошо согласуются с
опытом.
Для оценки величины лобового
сопротивления и подъемной силы мы
считали размах крыльев бесконечно
304
большим. Учет конечной длины крыльев приводит к следующему.
Так как под крылом давление выше, чем над ним, то на концах
крыльев происходит перетекание воздуха с нижней поверхности
на верхнюю. В результате сложения этого течения с циркуляцией
сзади крыла возникают так называемые вихревые жгуты, умень-
уменьшающие его подъемную силу и увеличивающие лобовое сопротив-
сопротивление. Влияние эффекта вихреобразования на концах крыла (при
прочих равных условиях) тем больше, чем меньше его размах.
При расчетах крыла самолета подъемная сила обычно выражает-
выражается аналогично лобовому сопротивлению:
гп — ц,о — , {юл/)
Z
где Су — безразмерная величина, которую называют коэффициен-
коэффициентом подъемной силы. Су зависит от числа Рейнольдса, отношения
длины крыла к его хорде и от угла атаки.
Отношение — = k называется качеством крыла. Качество кры-
* л
ла характеризует отношение полезной подъемной силы к вредной
силе лобового сопротивления. На рисунке 212 изображена так на-
называемая поляра—кривая, изображающая изменения коэффициен-
коэффициентов Сх и Су в зависимости от изменения угла атаки. Подобные
кривые строятся по данным испытания крыла или его модели в
аэродинамической трубе. Наивыгоднейший угол атаки, при кото-
котором качество крыла наибольшее, определяется с помощью поля-
поляры, если провести из начала координат касательную к кривой.
В точке касания угол атаки соответствует наибольшему значению
качества крыла.
Г Л А В А XIV
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ
§ 1. ГАРМОНИЧЕСКОЕ КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ.
МАТЕМАТИЧЕСКИЙ МАЯТНИК
Изменения состояния движения, обладающие той или иной сте-
степенью повторяемости, называются колебаниями.
В природе и в технике мы часто встречаемся с тем, что состояние
движения тела регулярно повторяется через определенные проме-
промежутки времени. Движения маятника настенных часов, корабля на
волнах, молекул в твердом теле — примеры таких движений. Ка-
Качающийся маятник в известных пределах повторяет свое движение
через определенные промежутки времени. Некоторые части машин
(вращающиеся колеса и валы, поршни, клапаны и т. п.) также совер-
совершают подобного вида движения.
Колебания, при которых состояние движения тела
точно повторяется через равные промежутки време-
времени, называются периодическими.
Интервал времени между двумя смежными одинаковыми состоя-
состояниями движения колеблющегося тела называется периодом Т.
Периодические движения математически описываются с помощью
функций, для которых выполняется равенство:
где Т — период.
Часто мы сталкиваемся с движениями, только напоминающими
периодические, но не обладающими их основным свойством Дви-
Движение ветки дерева, которую выводят из состояния равновесия
порывы ветра, движение упругой пластинки, один конец которой
закреплен, скажем, в тисках, а другой ударом приведен в движе-
движение, — примеры колебательных непериодических движений.
Колебательные движения лежат в основе целого ряда явлений—
звука, света, возникновения и распространения радиоволн,
сейсмических волн, вибраций разного происхождения и т. п Общие
для всех этих и многих других явлений закономерности изучает
особый отдел физики — учение о колебаниях.
ЗОЬ
¦////////////////.
Начало развитию учения о колебаниях положили исследования
Галилеем и Гюйгенсом движения маятников.
Длительное время учение о колебаниях развивалось в связи
с изучением частных видов колебательного движения в различных
разделах физики. Большой вклад в изучение колебаний в связи
с решением механических задач, в частности задач о вибрации, был
сделан Лагранжем; в связи с изучением электромагнитных явле-
явлений — У. Томсоном (Кельвиным), Максвеллом и Герцем; в связи
с изучением акустических явлений — Рэлеем. Как особая само-
самостоятельная область физики учение о колебаниях развивалось
уже в XX веке. Толчком к этому послужило в значительной сте-
степени развитие радиотехники, связанное с открытием А. С. Попорым
способа передачи электромагнитной энергии на расстояние. В раз-
развитии учения о колебаниях большую роль сыгра-
сыграли исследования русских и советских ученых
П. Н. Лебедева, Б. Б. Голицына, Н. Е. Жуков-
Жуковского, А. Н. Крылова, Л. И. Мандельштама и др
Советские физики в настоящее время удерживают за
собой ведущее положение в развитии учения о ко-
колебаниях.
Среди многообразия колебательных движений
особое место занимают гармонические колебания,
изучение которых существенно потому, что к ним
может быть сведен большой класс колебательных
движений.
Простейший пример гармонического колеба-
колебания — движение так называемого математиче-
математического маятника.
Строго говоря, математический маятник пред-
представляет собой абстракцию колеблющихся, практически неде-
формируемых тел, размеры которых малы по сравнению с рас-
расстоянием от точки подвеса до центра тяжести тела Ближе всего
по своим свойствам к идеальному математическому маятнику под-
подходит система из практически нерастяжимой очень легкой нити
и подвешенного к ней груза, размеры которого малы по сравне-
сравнению с длиной нити, а масса велика по сравнению с ее массой
(рис. 213). Центр тяжести такой системы мы можем считать сов-
совпадающим с центром тяжести груза.
Когда система находится в покое, сила тяжести, действующая
на шарик, уравновешивается натяжением нити. Легко проверить
что состояние равновесия математического маятника является сос-
состоянием устойчивого равновесия. Если мы выведем груз из состоя-
состояния равновесия, то возникает результирующая сил тяжести и на-
натяжения нити (влиянием сопротивления воздуха движению груза
пренебрегаем), стремящаяся вернуть тело к прежнему положению.
Отпустим груз. Маятник колеблется около положения равновесия,
так как груз, двигаясь к положению равновесия, проходит его и от-
Рис. 213.
тематический
маятник.
307
клоняется в сторону, противоположную первоначальному смеще-
смещению. Маятник переходит положение равновесия вследствие инерции
груза.
Так как сила тяжести и сила натяжения нити лежат в одной пло-
плоскости, маятник совершает колебания в той же плоскости. Очевид-
Очевидно, положение маятника для любого момента времени может быть
определено, если задать величину смещения груза от положения рав-
равновесия (при этом смещения в разные стороны от положения рав-
равновесия надо считать обладающими различными знаками). Коле-
Колебательное движение одного маятника может отличаться от колеба-
колебательного движения другого амплитудой а и периодом Т. Амплитуда
колебания маятника — величина наибольшего отклонения его от
положения равновесия. Период — интервал времени, в течение ко-
которого маятник дважды достигает смещения данной величины, про-
проходя его в одну сторону, или, короче, время полного колебания. Ве-
Величина, обратная периоду, называется частотой колебаний. Ча-
Частота, очевидно, равна числу полных колебаний, совершаемых те-
телом в единицу времени:
*=jr. A4-1)
Размерность периода [Г] = [сек], размерность частоты Ы =
= I—] = [сек-1]. Единицу частоты, равную одному колебанию
в одну секунду, называют герц.
Напишем уравнение движения для математического маятника,
находящегося в поле силы тяжести и отклоненного от состояния
равновесия на угол «р. Система, выведенная из состояния устойчи-
устойчивого равновесия и предоставленная самой себе, совершает коле-
колебания, называемые свободными.
На маятник в отклоненном состоянии действует возвращающая
сила:
GT = mgsincp, A4.2)
где т — масса шарика, ср— угол отклонения. Она направлена по
касательной к траектории груза в сторону положе! ия равновесия.
Легко видеть, что возвращающая сила всегда направлена в сторону,
противоположную направлению возрастания смещения х. Поэтому
знак ускорения противоположен знаку смещения:
— т -^f = mgsincp. A4.3)
Полученное уравнение называется уравнением движения мате-
математического маятника. В общем случае решение уравнения A4.3)
сложно. Мы рассмотрим случай, когда отклонения маятника от по-
положения равновесия малы настолько, что синус угла можно считать
308
пропорциональным величине угла. Для этого угол отклонения не
должен превышать 3 — 5°.
Тогда можно смещение по дуге считать приближенно равным
смещению вдоль горизонтальной хорды и синус угла ср заменить
отношением смещения х к длине нити /, переписав уравнение A4.3)
в виде:
^ = --?-х. A4.4)
dt2 I
Заметим, что малые свободные колебания маятника происходят
под действием силы, возвращающей его к положению равновесия
и пропорциональной величине смещения х.
Обозначим
-?- = ">г. A4.5)
Тогда уравнение A4.4) примет вид:
— = - - «>2*. A4.6)
dt2
Величина © называется круговой или циклической частотой.
Как нетрудно убедиться простой подстановкой, решением урав-
уравнения A4.6) является функция:
Xl(t) = x = asm(*t+ <p0). A4.7)
Решением уравнения A4.6) служит также функция:
x2(t)=x = a cos («rf -f <Po)- 04-8)
В чем разница решений A4.7) и A4.8), мы покажем ниже.
Колебания, происходящие со временем по закону синуса или
косинуса, называются гармоническими колебаниями.
Уравнение A4.6) — дифференциальное уравнение гармоническо-
гармонического колебания.
Так как — 1 < sin (at + <р0) <. 1, то наибольшее смещение маят-
маятника от положения равновесия + хтах = а, т. е. а — амплитуда
колебаний. Величину (at -\- ср0) называют фазой колебаний и ве-
величину <р0 — начальной фазой.
Амплитуда и начальная фаза определяются первоначальным
отклонением маятника от положения равновесия и скоростью v0,
которая сообщается системе (в данном случае маятнику) в началь-
начальный момент времени. В самом деле, положим, в момент / = 0 сме-
смещение равно х = х0, а скорость тела v = v0.
Подставив эти значения в равенство A4.7) и в равенство для
скорости движения математического маятника, полученное из урав-
уравнения A4.7) дифференцированием по времени, найдем:
v0 = u> a cos <p0. A4.9)
309
Откуда
шх0
A4.10)
"о
В частности, если маятник только смещен от положения равнове-
равновесия, а отпущен без толчка (v0 = 0), то
ТС j /1 л 1 1 %
. у • со —¦ М V ——; Л fO^l (О/ 114 111
Z
Если телу сообщена начальная скорость v0, а л;0 = 0 (маятник
ударом выведен из положения равновесия), то
ао=-^-; <ро = О и *=-^-sinw* = asinu>*. A4.12)
A) CD
В первом случае отсчет времени начинается с момента, когда
тело находится в положении наибольшего отклонения (в этот мо-
момент скорость меняет знак на обратный, т. е. становится равной ну-
нулю). Во втором случае отсчет времени начинается, когда тело про-
проходит положение равновесия. Если начало отсчета времени не сов-
совпадает с указанными моментами, начальная фаза и амплитуда могут
быть определены по уравнениям A4.10).
Гармонические колебания представляют собой периодический
процесс, так как, если фаза at + ф0 изменится на величину 2л,
значения величины х и v ~ — повторятся:
a sin (Wj -f- <р0) = a sin (ш/а + cp)
и
a id cos (ш^ -(- <p0) = acu cos (u>/a -)- cp),
если
ш(/я-/1) = 2«.
Но если смещение и скорость приобрели прежнее значение, то
по определению интервал времени t2 — tx равен периоду колеба-
колебания Т. Следовательно, за время, равное периоду, фаза колебания
изменяется на 2те:
шТ = 2«,
или
cu = 2itv. A4.13)
Для гармонических колебаний математического маятника из форму-
формулы A4.5) и A4.13) получаем:
Г = 2« т/—• A4-14)
310
Из этого выражения следует, что период колебаний математи-
математического маятника зависит только от ускорения силы тяжести в дан-
данном месте Земли и от длины маятника. Период не зависит от ампли-
амплитуды колебания и от массы груза, что легко проверить на опыте.
Надо только помнить при этом, что размеры груза должны быть
малы по сравнению с длиной подвеса и что должен
быть мал также угол отклонения маятника.
Частота гармонических колебаний математиче-
скрго маятника
-. A4.15)
Рассмотрим еще случай возникновения гармо-
гармонических колебаний. Положим, груз массы т под-
подвешен на упругой пружине (рис. 214), причем масса
пружины мала по сравнению с массой груза. Если
мы выводим груз из положения равновесия, то
со стороны деформированной пружины на груз
действует сила, направленная к положению равно- Рис 2н
весия и пропорциональная (при условии, что из- Пружинный
менение длины пружины невелико и выполняется маятник,
закон Гука) величине смещения.
Вообще говоря, выведенный из положения равновесия груз дви-
движется под действием двух сил — силы упругости пружины и силы
тяжести:
F = kx1-\-mg. A4.16)
Если в положении равновесия пружина растянута на величину х0,
то —kx0 = mg. Тогда
Г = кХ^ -j— кХ0 = к (Х± | Хо) — кХ,
где
X = Хх -j- Хо
смещение от положения равновесия.
Уравнение движения груза:
m~^ = -kx. A4.17)
х. A4.18)
или
d*x k
dt2 m
Уравнение это имеет формально тот же вид, что и уравнение A4.4).
Полагая — = со2, получим закон гармонических колебаний:
т
311
где
- i/X.
Г т
Период колебаний
Т = 2«]/3- A4.19)
и частота
v= — l/X. A4.20)
2п У п
Частота собственных колебаний пружинного маятника прямо про-
пропорциональна корню квадратному из отношения коэффициента
жесткости пружины к массе груза.
Гармонические колебания пружинного маятника возникают под
действием упругой возвращающей силы. Период его колебаний не
зависит от веса тела, а только от его массы и жесткости пружины.
Данный маятник будет совершать колебания с одинаковым перио-
периодом в любой точке земной поверхности, на другой планете или в
межпланетном корабле. Это свойство пружинного маятника может
быть, очевидно, использовано для сравнения масс различных тел.
Оба случая возникновения колебаний, рассмотренных нами,
позволяют сделать заключение, что малые колебания систе-
системы около положения устойчивого равновесия под дей-
действием возвращающей силы, прямо пропорциональной
смещению, будут гармоническими.
Типичный пример силы, величина которой прямо пропорциональ-
пропорциональна смещению, — упругая сила. Поэтому принято силы, прямо про-
пропорциональные смещению, но по своей природе не являющиеся
упругими, называть квазиупругими силами (от латинского quasi —
«якобы», «мнимый»). Таким образом, гармонические колебания
возникают в системах с упругими и квазиупругими возвращающи-
возвращающими силами.
Колебания, зависящие только от параметров системы, называют-
называются собственными колебаниями, а их частота — собственной часто-
частотой.
§ 2. ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ И ЗАПИСЬ КОЛЕБАНИЙ
Положим, материальная точка массы т равномерно движется
по окружности радиуса а с круговой скоростью ю. Как мы знаем,
такое движение возможно, если на точку действует сила, направлен-
направленная в любой момент к центру окружности и равная /пю2а (рис. 215).
Примем за оси координат два взаимно перпендикулярных диамет-
диаметра окружности, а начало координат поместим в ее центр. Найдем
закон движения точки в направлении выбранных осей координат.
312
Очевидно, силами, заставляющими точку смещаться вдоль на-
направления осей, будут составляющие силы F = — пка2а. Найдем
их:
Fx — — тш2а cos cp, )
2 • A4.21)
Fy = — тш2а sin <p. J v '
Но
a cos <p = x
a sin <p = y,
где x и у — смещения точки от начала координат. Тогда
A4.22)
Так как выражения для сил Fх и Fy формально совпадают, рассмот-
рассмотрим движение точки лишь в на-
направлении, скажем, оси х. Уравне-
Уравнение движения точки вдоль направле-
направления оси х:
т — = — тш2х
т dt2 ~ '
или
?± = —ш*х. A4.23)
Сравнивая это уравнение с урав-
уравнением A4.6), видим их полную ана-
аналогию. Следовательно, движение про-
проекции материальной точки, равно-
равномерно обращающейся по окружно-
окружности, на диаметр этой окружности
по гармоническому за-
Рис. 215. Движение проекции
точки, обращающейся по ок-
окружности, как колебательное
движение.
происходит
кону.
В то время когда точка сделает
один полный оборот по окружности
с круговой скоростью ю, ее проекция совершит полное колебание
вдоль диаметра.
Так как круговая скорость точки в радианах:
а>=^-, A4.24)
то число колебаний в секунду проекции точки (частота ее колебаний)
равно:
2тс
A4.25)
313
Следовательно, круговая Скорость Характеризует число пол-
полных колебаний за время 2 я сек, которые совершает проекция обра-
обращающейся по окружности точки на диаметр окружности.
Поэтому круговую скорость и называют круговой или цикли-
циклической частотой.
Положим, система колеблется под действием квазиупругой си-
силы. Пусть в момент начала счета времени система находится в по-
положении, которое определяется радиусом-вектором О А. Угол, сос-
составленный начальным положением радиуса с фиксированным диа-
диаметром, обозначим ф0, тогда для любого момента времени t угловое
расстояние точки от данного диаметра а = at -f- ср0. Таким обра-
образом, фаза колебания характеризует положение точки на окружности
в данный момент времени. Фаза выражается в радианах. Угол ф0
характеризует положение точки в момент, соответствующий нача-
началу отсчета времени (t = 0), почему его и называют начальной фа-
фазой. Угол ф0 может быть как положительным, так и отрицательным.
Смещение проекции точки от центра окружности вдоль диаметра
О А':
х = х0 cos И + %)¦
Если начальня фаза ф0 = 0 и х0 = а, то
t. A4.26)
Если начальная фаза ф0 = —, х = а, то
x=—asmut A4.27)
Решение A4.7) отличается от решения A4.8) уравнения A4.6)
лишь тем, что начальная фаза одного отличается на — от начальной
фазы другого:
a sin/u>tf +<Р0+ -^-) =
Начальная фаза определяется выбором начала отсчета времени.
В колебательном процессе, который по существу своему есть процесс
многократно повторяющийся, выбор начала отсчета времени без-
безразличен. Поэтому мы можем при исследовании одного и того же
гармонического колебания начать отсчет времени, когда ф0 = 0,
или когда ф0 = —, или в любой другой момент. При этом закон
данного колебательного движения будет иметь соответственно вид
A4.26), A4.27) или A4.7) и A4.8).
То, что движение проекции точки, равномерно обращающейся
по окружности, представляет собой гармоническое колебание, поз-
позволяет любое гармоническое колебание условно представлять как
314
результат некоторого вращательного движения и строить так назы-
называемые векторные диаграммы колебательного движения.
Для векторного изображения колебания, происходящего с ам-
амплитудой аь частотой ю и начальной фазой фо1 на горизонтальной
прямой, изображающей условно выбранный диаметр, возьмем
произвольную точку О (рис 216). В направлении, составляющем
с горизонтальной линией угол, равный начальной фазе ф0), отло-
отложим вектор, длина которого равн! в выбранном масштабе амплиту-
амплитуде колебания а^. Тогда, оче
видно, начальное смещение
изобразится проекцией век-
вектора #1 на горизонтальную
прямую: х0 = Oi созф01. От-
Откладывая вектор длиной а^ в
направлении, которое опреде-
определяется фазой Ю)/ + ф01, по-
получим смещение хх в любой
момент времени t:
*1 = o1cos((V + <p0l )• U4.28)
Вращая вектор с угло-
угловой скоростью (о и проецируя
его конец на горизонтальную
ось, получим колебание про-
проекции с амплитудой аи ча-
частотой coj и начальной фазой
фо1. На том же чертеже можем аналогично изобразить любое дру-
другое гармоническое колебание, например, происходящее с амплиту-
амплитудой а2, частотой ю2 и начальной фазой фо2. Для него закон коле-
колебания будет:
х2 = а2 cos (w2t -\- cp02). A4.29)
Разность фаз (u>it + ф0,) — (ю2/ -f- ф„2) двух колебаний называет-
называется сдвигом фаз. Величина разности фаз, т. е. угол между векторами
ai и а2, в случае разных круговых частот изменяется. Если же час-
частоты колебаний равны ((Oj = ю2), то сдвиг фаз равен разности на-
начальных фаз колебаний фо1 — фо2 и остается неизменным во все
время колебаний (так как векторы вращаются с одинаковой угло-
угловой скоростью). При сравнении двух и более колебаний, очевидно,
начало отсчета времени должно быть выбрано общим, и его уже нель-
нельзя задавать произвольно для каждого отдельно взятого колебания.
Для изображения хода колебательного процесса во времени стро-
строят так называемые графики колебаний. По горизонтальной оси в
выбранном масштабе откладывают время или пропорциональную
времени величину ю/, выраженную в радианах, а по вертикальной
оси — величину смещения. Полученные кривые в зависимости от
Рис. 216. Векторная диаграмма двух
колебаний с амплитудами а\ и а?, и
начальными фазами ф01 и ф02.
315
закона колебания A4.7) или A4.8) соответственно представляют со-
собой синусоиду или косинусоиду.
Положим, колебание происходит по закону
A4.30)
A4.31)
A4.32)
тогда скорость колеблющейся точки
с,- *L=_
dt
и ускорение
d^x
j = -— = — аш2 cos u>t.
1 dt2
На рисунке 217 приведены графики смещения, скорости и ус-
ускорения колеблющейся точки. Следует помнить, что эти графики
4-
3-
2-
7 -
0-
-/-
-2 ¦
-з-
/Л /
/ Л
ч л
/K=acosujt
J
yj=u> a cosut
v=(jjasinut \
\ / V
\T
Рис. 217. Графики изменения во времени величии
смещения, скорости и ускорения
колеблющейся точки.
изображают зависимость изменения соответствующих величин со
временем, а не их изменение в пространстве.
Если мы начали отсчет времени не в момент достижения точкой
максимального отклонения (<р0 = 0), а в момент, когда начальная
фаза была отлична от нуля, то
х —
и все кривые на графике сдвинутся вправо на величину <р0 радиан.
На графике легко видеть, что скорость имеет сдвиг фаз относи-
к
тельно смещения на —. Когда точка проходит положение равнове-
равновесия <р = —, х — 0, скорость достигает максимума v = am; когда
точка достигает максимального отклонения ф = 0, х = а, то v =
= 0. Ускорение сдвинуто по фазе относительно смещения на п.
Когда смещение достигает максимума, ускорение также имеет мак-
максимальное значение / = йю2, но все время направлено в сторону,
противоположную смещению. В последнем случае говорят, что ко-
колебания происходят в противофазе.
Ркс. 218. Изображение колебаний сдвинутых по
фазе на векторной диаграмме и с помощью графика.
На рисунке 218 изображены на векторной диаграмме колебания,
имеющие начальные фазы ф„ = 0, ф0 = а и ф0 = ~ и графики этих
колебаний. Говорят, что первое колебание опережает по фазе вто-
второе и третье колебания, а тре-
третье отстает от первого и второ-
второго по фазе.
График смещений колеб-
колеблющегося тела можно легко
записать. Положим, у нас
имеется маятник на бифиляр-
ном подвесе. Из груза маят-
маятника тонкой струйкой высы-
высыпается песок на бумажную
ленту (рис. 219).
Если маятник колеблется
в постоянной плоскости (че-
(чему способствует бифилярный
подвес) с малой амплитудой
о и лента неподвижна, то пе-
песок откладывается на ленте в
виде отрезка прямой, длина
которого 2а. Выберем плос-
плоскую систему координат, СВЯ- рИс. 219. Временная развертка (запись)
занную с лентой. Начало ее колебаний маятника.
п местам в точку, находя-
находящуюся под маятником в состоянии равновесия, ось у возьмем ле-
317
жащей в плоскости качания маятника, а ось s ей перпендикуляр-
перпендикулярной. Будем протягивать ленту (рис. 219) с постоянной скоростью
v под качающимся маятником в направлении оси s (перпендику-
(перпендикулярно плоскости качания маятника). Тогда колебания маятника
как бы «развернутся» в направлении оси s, на которой в некото-
некотором масштабе отложено время. В самом деле, пусть в направле-
направлении оси у маятник испытывает смещение:
у = a cos u>/,
в направлении оси s:
vt.
Траектория маятника относительно системы координат, связан-
связанной с лентой:
у = a cos — s,
V
A4.33)
т. е. косинусоида, у которой горизонтальные смещения изобра-
изображают время в масштабе — s.
v
Эта косинусоида, прочерченная в нашем случае струйкой песка,
называется временной разверткой колебания.
Рис. 220. Временная развертка колебаний ножек камертона
с помощью зеркальной призмы.
Способов пол-учения временной развертки и записи колебаний
в физике разработано весьма много. Например, (рис. 220) на коле-
колеблющееся тело (камертон) укрепляют легкое зеркальце. Луч света,
падающий на него от точечного источника света, отражается и по-
попадает на вращающуюся зеркальную призму, отразившись от ко-
которой достигает экрана. Пока призма неподвижна, луч смещается
на экране по вертикальной прямой. При равномерном вращении
призмы угол отражения луча от ее грани меняется пропорциональ-
пропорционально времени, а вместе с ним меняется и горизонтальное смещение
луча на экране. Если плоскость колебания ножки камертона пер-
318
пендикулярна плоскости вращения точек призмы, на экране полу-
получается развертка колебания. Благодаря способности глаза сохра-
сохранять некоторое время зрительное впечатление мы увидим на экра-
экране всю траекторию пробегающего по нему светового зайчика. В
момент, когда при вращении одна грань призмы сменяет другую,
зайчик, очевидно, скачком возвращается на вертикальную линию
ab, соответствующую началу временной развертки. Если время t
поворота призмы на угол, соответствующий одной грани, точно равно
периоду колебания Г, то зайчик прочерчивает на экране за время
/развертку одного полного колебания и, когда грани сменятся опять,
окажется в той же точке экрана на линии ab, от которой он дви-
двигался в предшествовавший пе-
период. Таким образом, мы все
время видим изображение раз-
развертки одного полного колеба-
колебания.
Если скорость вращения
призмы такова, что время кратно
целому числу периодов / = 2пТ,
где п = 1, 2, 3, ..., то мы уви-
увидим на экране соответственно
один, два, три и т. д. разверну-
Рис. 221. Движение электрона
в плоском конденсаторе.
тых периода колебаний ножки
камертона. Если время t выра-
выражается не целым числом пе-
периодов, то после смены граней
зайчик начинает движение каждый раз от новой точки линии ab
и кривая развертки кажется ползущей по экрану. Если экран за-
заменить фоточувствительной бумагой, то можно получить запись
развертки, или, как чаще говорят, запись колебания.
Наиболее распространенный современный прибор для изучения
колебаний — электронный осциллограф. В нем используется свой-
свойство заряженных частиц (электронов) приобретать ускорение под
действием электрического или магнитного полей. В большинстве
конструкций электронных осциллографов используется электриче-
электрическое поле. Если электрон движется в электрическом поле с напря-
женностью Е, то на него действует сила еЕ, где е — заряд электрона.
Как известно из элементарной физики, электрическое поле пло-
плоского конденсатора достаточных размеров можно считать однород-
однородным и направленным перпендикулярно от пластины с положитель-
положительным зарядом к пластине с отрицательным зарядом (рис. 221). Элек-
Электрон, влетая по оси конденсатора с некоторой скоростью и0, нап-
направленной перпендикулярно вектору напряженности Е, приобре-
приобретает ускорение в направлении, противоположном вектору Е (к
положительно заряженной пластине).
319
Если выбрать ось х в направлении движения электрона, а ось у
в перпендикулярном направлении, совпадающем с направлением
вектора Е, то на основании второго закона динамики:
dVx " dVv =—eE. A4.34)
dt
т
dt
Движение электрона подобно движению горизонтально бро-
брошенного тела в поле силы тяжести. Следовательно, в конденсаторе
электрон движется по параболе. Легко показать (мы предоставляем
возможность решить эту задачу читателю), что угол отклонения
электрона от оси выражается равенством:
tga= — Ц-, A4.35)
т и^
где т — масса электрона, L — размер пластин конденсатора вдоль
оси, е — заряд электрона.
Миновав пластины конденсатора, электрон движется по инерции
прямолинейно в направлении, которое определяется углом а. Если
на заданном расстоянии d от пластин установить экран, то при неиз-
неизменной скорости v0 и размере конденсатора L отклонение электро-
электронов в направлении оси у от точки пересечения оси конденсатора с
экраном пропорционально напряженности поля Е.
Отклоняющие
пластины
Рис. 222. Электроннолучевая трубка.
Основная часть электронного осциллографа — электроннолу-
электроннолучевая трубка (рис. 222). Она состоит из стеклянного баллона, воз-
воздух из которого откачан, и смонтированный в нем так называемой
электронной пушки, предназначенной для получения узкого пуч-
пучка быстролетящих электронов. Из накаленного электрическим то-
током металлического катода К вылетают электроны. Между катодом
и сеткой С, к которой приложено постоянное высокое напряжение,
электроны ускоряются электрическим полем и расходящимся пучком
вылетают за сетку к двум анодам Ai и А2 Подбором формы элект-
электродов между ними создается поле такой конфигурации, что оно фо-
320
кусирует электроны в узкий луч (подобно тому, как оптические
линзы фокусируют световой луч) и направляет их на поверхность
экрана Э, покрытого изнутри особым флуоресцирующим составом.
При ударе электрона на экране возникает светящаяся точка.
Минуя анод А2, электронный луч проходит между двумя парами
пластин, попарно перпендикулярных друг другу Xi и х2 и yL и у2.
Если к пластинам приложено напряжение, то возникающее между
ними поле отклоняет электронный луч. Пластины z/i и у2 отклоняют
луч вверх или вниз, а пластины Х\ и х2 — влево или вправо. Соот-
Соответственно пластины у1 и у2 на-
называются вертикальными или
F-пластинами; а пластины Xi
и х2 — горизонтальными или
Х-пластинами. Испытав во вре-
время движения между пластина-
пластинами два взаимно перпендикуляр-
перпендикулярных отклонения, луч может пе-
переместиться в любую точку эк-
экрана, причем положение светя-
светящегося пятна на экране одно-
однозначно определяется напряже-
напряжением, приложенным к пласти-
пластинам, и зависит от его знака. На
рисунке 221 изображен случай,
когда электроны отклоняются
электрическим полем вверх.
Рис. 223. След светящейся точки на
экране осциллографа, когда на вер-
вертикальные пластины подано перемен-
переменное напряжение.
Если на отклоняющие вер-
вертикальные пластины подано пе-
переменное напряжение, то прак-
практически безынерционный электронный луч смещается по эк-
экрану «мгновенно», следуя за всеми изменениями напряжения.
Увеличение или уменьшение напряжения приводит к изме-
изменению величины смещения светящейся точки от центра экрана
лишь в одну сторону. Если же меняется и знак напряжения, то точ-
точка движется то в одну сторону от центра экрана, то в другую. Если
напряжение на вертикальных пластинах меняется, скажем, по гар-
гармоническому закону, то след электронного луча на экране в один
полупериод смещается вверх (когда положительно заряжена верх-
верхняя пластина), а во второй полупериод перемещается вниз (поло-
(положительно заряжена нижняя пластина). При достаточно большой
частоте переменного напряжения A5 гц и выше) вследствие способ-
способности глаза сохранять некоторое время зрительные впечатления
мы увидим на экране вертикальную светящуюся линию. Длина этой
линии пропорциональна амплитуде напряжения на пластинах
(рис. 223).
Чтобы сделать «видимыми» изменения напряжения со временем,
на горизонтальные пластины от специального генератора электри-
Ц М. М Архангельский 321
ческих колебаний подается переменное напряжение так называе-
называемой пилообразной формы (рис. 224). Длительность t1 повышения
напряжения и длительность t2 его понижения резко различны. В
течение интервала времени tt напряжение возрастает постепенно и
пропорционально времени. Так как смещение луча пропорциональ-
пропорционально величине напряжения, то светящаяся точка в течение времени
ti смещается в горизон-
V тальном направлении на
отрезки, пропорциональ-
пропорциональные времени (с постоянной
скоростью).
В момент, соответствую-
соответствующий концу интервала tu
напряжение и смещение
точки достигают максиму-
максимума. С этого момента вели-
величина напряжения в тече-
течение весьма короткого интервала времени t2 падает до нуля и све-
светящаяся точка возвращается в начальное положение. Интервал t2
составляет обычно доли процента от ^.
Если теперь подать на вертикальные пластины какое-либо пе-
переменное напряжение, которое мы хотим исследовать, а на горизон-
Рис 224 Форма пилообразном развертки.
Рис. 226. Прямой и обратный
светящейся точки.
ход
тальные — пилообразное, то, по-
подобно тому, как это было при
протягивании бумаги под маятни-
маятником или при вращении вертикаль-
вертикальной призмы перед лучом света,
отраженным от колеблющегося
зеркала, мы получим временную
развертку исследуемого напря-
напряжения.
При изменении исследуемого
напряжения по гармоническому
закону на экране получаем синусоиду или косинусоиду. Если период
развертки равен периоду исследуемых колебаний, то на экране вид-
видна одна полная синусоида (рис. 225). На рисунке 226 показан пря-
прямой и обратный ход светового пятна в этом случае. Если же период
пилообразной развертки Тр кратен целому числу периода Т иссле-
Рис. 225. Ход светящейся точки при
наложении на Х-пластины перемен-
переменного напряжения и на У-пластины
пилообразного напряжения.
322
дуемых колебаний, то на экране будет столько синусоид, во сколько
раз период Тр больше периода Т (рис. 227). Для того чтобы изоб-
изображение на экране было неподвижным, отношение периодов Тр и Т
должно быть строго постоянным. Для этого в осциллографе сущест-
существует особый элемент, называемый синхронизатором, который уста-
устанавливает период развертки строго равным целому числу периодов
Т изучаемого колебания.
§ 3. ФИЗИЧЕСКИЙ МАЯТНИК
Тяжелое тело, свободно колеблющееся вокруг оси, не проходя-
проходящей через центр тяжести, называется физическим маятником
(рис. 228).
Рассмотрим колебание абсолютно твердого тела в вертикальной
плоскости относительно горизонтальной неподвижной оси О. Так
Рис. 227. Временная развертка ко-
колебаний на экране осциллографа,
когда период развертки в девять раз
больше периода колебаний.
Рис 228. Физичес-
Физический маятник.
как ось вращения не проходит через центр тяжести, то момент силы
тяжести, действующей на тело в состоянии, отклоненном от равно-
равновесия, отличен от нуля. Если центр тяжести лежит в точке А на
расстоянии / от оси вращения, то момент силы тяжести относитель-
относительно оси:
М = mg I sin 9,
A4.36)
где 9 — угол, на который отклонена линия О А от вертикальной
линии.
Момент силы направлен так, что тело движется к положению
равновесия, в котором момент М становится равным нулю. Напи-
11*
323
шем уравнение моментов, полагая, что трение на оси отсутствует:
или
mgl
sin?.
dt2 I
Ограничиваясь случаем малых отклонений
_ _ mgl
dt2
= 7~9-
A4.37)
;ф), найдем:
A4.38)
Это равенство вполне аналогично уравнению A4.4). Обозначив
через со2, мы приведем уравнение A4.38) к
виду, совпадающему с A4.6):
= — со2ср.
A4.39)
Решение этого уравнения дает гармониче-
гармонический закон изменения ф со временем
Выведенный из равновесия физический
маятник совершает колебания с круговой
частотой:
Рис. 229. К опреде-
определению центра кача-
качания.
и с периодом:
mgl
A4.40)
A4.41)
Период колебания физического маятника тем боль-
больше, чем больше его момент инерции и чем меньше рас-
расстояние от оси до его центра тяжести.
Сравнивая выражение для периода физического маятника A4.41)
с выражением A4.14)для периода математического маятника, мы ви-
видим, что физический маятник колеблется с тем же периодом, что и
математический, имеющий длину — = /п. Длина математическо-
ml
го маятника /п, имеющего тот же период колебания, что и дагный
физический, называется приведенной длиной данного физического
маятника.
Если к оси качания физического маятника подвесить на нити
длиной /п небольшой груз и отклонить оба маятника на один угол,
то они колеблются вместе так, что грузик остается все время напро-
напротив одной и той же точки физического маятника (рис. 229).Этаточ-
324
ка, лежащая на прямой, соединяющей точку подвеса О и центр тя-
тяжести А, на расстоянии /п от точки подвеса, называется центром
качания физического маятника. Центр качания всегда лежит даль-
дальше от оси вращения, чем центр тяжести (/п> /). Это нетрудно пока-
показать. В соответствии с теоремой Гюйгенса момент инерции маятника
относительно оси качания:
/ = /„ + ml2,
где /0 — момент инерции относительно оси, проходящей через центр
тяжести.
Откуда приведенная длина:
/ '0 '
in —
ml
= -mJ+'
A4.42)
и, следовательно, /п> /.
§ 4. ОБОРОТНЫЙ МАЯТНИК
Так как период колебаний физического маятника зависит от
ускорения силы тяжести, то с его помощью можно измерять вели-
величину g. Ньютон, впервые наблюдая качания маятников, сделанных
из различных материалов, установил, что ускорение силы тяжести
в данной точке земной поверхности для
всех тел одно и то же.
Для разных научных и технических
целей необходимо знать ускорение силы
тяжести с точностью до 0,001 см/сек2 и
выше, т. е. с относительной ошибкой по-
порядка 0,000001. Этими измерениями за-
занимается специальный раздел геофизики,
называемый гравиметрией — наукой об из-
измерении силы тяжести. Для обеспечения
указанной точности ни один реальный ма-
маятник не может рассматриваться как ма-
математический. Для расчета g надо пользо-
пользоваться уже формулой периода физическо-
физического маятника, причем время должно изме-
измеряться с точностью до 0,0000001 сек, а
приведенная длина — с точностью до 1 ми-
микрона. Однако расчет (или измерение) мо-
момента инерции маятника даже самой про-
простейшей формы не может быть произве-
произведен с точностью, обеспечивающей указан-
указанную выше точность расчета приведенной длины. Поэтому ускоре-
ускорение силы тяжести измеряется особым оборотным маятником (рис.
230), обладающим следующим свойством. Если перенести точку
st
с
<
<
0
В
>Р
—
0
—•-
А
•—
В
Рис. 230. Оборотный
маятник.
а—внешний вид; б—схема к
расчету центра качания.
325
подвеса физического маятника в центр качания, то прежняя точка
подвеса станет центром качания.
Пусть точка подвеса некоторого физического маятника О, центр
тяжести А и центр качания В (рис. 230, б). Тогда ОВ = /п, ОА =
1АВ 1 I
п
Обозначим момент инерции маятника относительно оси кача-
качания /; относительно оси, проходящей через центр тяжести, 10 и
относительно оси, проходящей через центр качания, /'. В соответ-
соответствии с теоремой Гюйгенса:
/ = /0 + т/2, A4.43)
7' = /0 + т(/п-/J = / + т/п(/„-2/). A4.44)
Из выражения для приведенной длины физического маятника сле-
следует mln ~ —. Подставив в предыдущее равенство, получим:
/'=/ + -J-(/n-2/) = / ^1. A4.45)
Найдем приведенную длину /„ для случая, когда точка подв«И
помещена в центр качания:
/п'= '- = 'в--*) = JL. A4.46)
ml(ln — l) lm{ln — l) ml K '
Правая часть равенства A4.46) представляет собой приведенную
длину данного маятника при старой точке подвеса.
Следовательно,
/; = /». A4.47)
Приведенная длина не изменяется при переносе точ-
точки подвеса в центр качания, а следовательно, период
качания физического маятника в этом случае остает~
ся неизменным.
Простейший оборотный маятник состоит из стержня с двумя
чечевицами (одной полой и другой сплошной, тяжелой) и двух упо-
упоров с ножами, на которых подвешивается маятник. В процессе из-
измерения находят такое положение чечевиц, при котором маятник,
подвешенный на одном и другом упоре, колеблется с одинаковым
периодом. Тогда расстояние между ножами упоров как раз равно
приведенной длине маятника. Оно измеряется с большой точностью.
Зная приведенную длину и период колебаний маятника, можно вы-
вычислить ускорение силы тяжести. Хотя существующие теперь методы
измерения величины g с помощью оборотного маятника не требуют
нахождения положений чечевиц, при которых периоды маятника,
подвешенного на одном и другом упоре, точно совпадали, тем не
менее измерение это сложно.
Для того чтобы обеспечить требуемую высокую точность из-
измерений, необходимо учесть влияние разных причин, так или иначе
326
искажающих период колебаний или приведенную длину маятника
(температура и др.). Поэтому так называемые абсолютные измерения,
при которых непосредственно измеряется величина ускорения силы
тяжести, представляют большие трудности и производятся лишь в
немногих пунктах земной поверхности (на территории СССР в Моск-
Москве, Пулкове, Тбилиси и немногих других). В других же пунктах
измерение производят с помощью приборов, называемых грави-
гравиметрами. Величина ускорения силы тяжести в этом случае полу-
получается сравнением периода колебаний маятника в данном месте с
известным значением периода в месте абсолютного измерения, где
g определено.
§ 5. ЭНЕРГИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ
Положим, система совершает собственные гармонические коле-
колебания. При отсутствии сил трения гармонические колебания про-
продолжаются неограниченно долго, так как полная энергия замкну-
Рй системы постоянна (гл. VIII, § 4). Полная энергия механической
ртемы складывается из энергии кинетической и потенциальной,
процессе колебания величина каждой из них периодически меня-
меняется. В самом деле, в положении наибольшего отклонения величина
кинетической энергии равна нулю, так как скорость движения сис-
системы в этот момент обращается в нуль, а потенциальная энергия
имеет максимальное значение. В положении равновесия потенциаль-
потенциальная энергия приобретает минимальное значение, а величина кине-
кинетической энергии при этом достигает максимума.
Пусть система колеблется по закону:
)/ + tp0). A4.48)
Кинетическая энергия системы равна:
?к= ^- A4.49)
Потенциальная энергия системы, находящейся под действием.
силы вида F = kx, равна (см. гл. VIII, § 3):
t/=—. A4.50)
Подставляя значения х и v в формулы A4.49) и A4.50), получим:
Е _ та2™2 sin2 (со/ -(- ?о) _ ka2 sin^ (<¦>< + 90) A4 5П
к 2 2 '
где
k = т^
и
327
Сравнивая выражения A4.51) и A4.52), видим, что величина
кинетической и потенциальной энергии колеблется со сдвигом фаз,
равным —. Следовательно, минимуму кинетической энергии в по-
положении максимального отклонения соответствует максимум потен-
потенциальной энергии.
Выражения A4.51) и A4.52) могут быть переписаны в виде:
A4.53)
t/ = T + TcosBu)/+cp«)- A4l54)
Таким образом, кинетическая и потенциальная энергии колеб-
ka2
лютея около некоторого среднего значения — g частотой, вдвое
ka2
большей, чем частота колебания системы, изменяясь от нуля до —-
в течение каждого полупериода колебания системы.
Сложив выражения A4.53) и A4.54), получим значение полной
энергии системы:
Е = EK-\-U = — = —— = const. A4.55)
Так как величины, входящие в правую часть выражения A4.55),
для данной системы постоянны, то мы получаем математическое
подтверждение того, что полная энергия системы, колеблющейся
по гармоническому закону, постоянна.
Полная энергия гармонического колебательного дви-
движения прямо пропорциональна квадрату амплитуды
и квадрату частоты колебания.
Итак, гармонические колебания, возникшие в системе, устой-
устойчивы и продолжаются сколь угодно долго, если на систему не дей-
действуют внешние силы (за счет работы которых энергия системы мог-
могла бы возрастать) и в системе отсутствуют силы трения и другие си-
силы, которые могли бы привести к рассеянию энергии.
Как мы указывали (гл. VIII, § 1), энергия может быть выражена
через параметры, характеризующие состояние системы. По отно-
отношению к определенным физическим явлениям она выражается че-
через те параметры, которые специфичны для данных явлений. Вы-
Выражение A4.55) представляет собой запись формы закона сохране-
сохранения и превращения энергии для колебательного движения (в случае
отсутствия потерь механической энергии).
ГЛАВА XV
СЛОЖЕНИЕ КОЛЕБАНИЙ
§ 1. СЛОЖЕНИЕ КОЛЕБАНИЙ ОДНОГО НАПРАВЛЕНИЯ
Тело может участвовать в нескольких колебательных движениях
одновременно. Например, пружинный маятник, находящийся на
корабле, совершает, кроме собственных, еше колебания вместе с
кораблем на морских волнах. Относительно неподвижной системы
координат маятник совершает сложное, но опять-таки колебатель-
колебательное движение.
Результирующее смещение тела, участвующего в
нескольких колебательных движениях, получается как
геометрическая сумма независимых смещений, которые
тело приобретает, участвуя в каждом из слагающих
колебаний. (Принцип суперпозиции, или наложения, колебаний.)
Положим, тело участвует одновременно в двух гармонических
колебательных движениях, происходящих в одном направлении с
одинаковой частотой, но с различными начальными фазами иампли-
тудами:
x1 = a1cos(«)/ + ?oi) ) 5
Построим векторные диаграммы этих колебаний (рис. 231).
Результирующее смещение х тела, участвующего одновременно в
обоих колебаниях, равно сумме проекций Ху и хг на ось х векторов
ai и а2, или, что то же, проекции вектора а — a4 + a2.
Так как векторы at и а2 вращаются с одинаковой угловой ско-
скоростью и, то сдвиг фаз (уголфо2 — <poi) между ними остается постоян-
постоянным. Изображенный на рисунке 231 треугольник вращается как
жесткий, его стороны вращаются с той же угловой скоростью, что
и векторы а4 и а2.
Очевидно, уравнение результирующего колебания будет:
х = х, + *2 = а c°s (">/ + <р0), A5.2)
ГДе a* = a\ + al\2aacosi$4) A3.3)
329
а начальная фаза ф0 определяется соотношением:
\_ О m
A5.4)
% cos ?01 + a2 cos ?02
Таким образом, тело, участвуя в двух гармонических
колебаниях, происходящих в одном направлении с оди-
одинаковой частотой, совершает гармоническое колебание
в том оке направлении и с той оке частотой, что и
составляющие колебания.
При этом величина амплитуды результирующего колебания за-
зависит от сдвига фаз фО2 — фо1 составляющих колебаний. Если сдвиг
фаз между составляющими колебания-
колебаниями равен нулю или 2шт, где п — це-
целое число, то
а\ + 2аха2 = (а, + я2J.
Откуда
а — ai
A5.5)
т. е. при сдвиге фаз ф02 —<ро1=2пя, где
п = 0, 1, 2, 3 амплитуда резуль-
результирующего колебания равна сумме
амплитуд составляющих колебаний. О
Если ai = а2, то амплитуда ре-
результирующего колебания а — 2a,i =
= 2а2,Т. е. амплитуда В результате рис_ 231. Векторное сложение
сложения колебании удваивается. Так ДВуХ колебаний одного направ-
как энергия колебаний пропорцио- ления и частоты,
нальна квадрату амплитуды A4.55),
то в этом случае происходит увеличение энергии в четыре раза.
Если сдвиг фаз равен нечетному числу я, т. е. фО2 — фС1 =
= Bл + 1)я, где п = 0, 1, 2, 3, ..., то
или
а = К-ail, A5.6)
так как по смыслу а> 0.
При разности фаз ф„2 — q>oi = Bп + 1)я, где п = 0, 1, 2, ...,
амплитуда результирующего колебания равна абсолютному зна-
значению разности амплитуд составляющих колебаний. Колебания
ослабляют друг друга.
Если ai = а2, то амплитуда результирующего колебания а — 0.
В этом случае тело остается в покое, колебания гасят друг друга.
Так как
— 1 < cos (ср2 — ф,) < 1,
то
\ai — аг\ <а<а2-\-а1. A5.7)
330
При сдвиге фаз, равном нечетному числу
^Ь!я, где п = 0, 1, 2,...,
т. е. <ро2 — <poi =
Г+аг- A5.8)
В этом случае энергия результирующего колебания равна сум-
сумме энергий составляющих колебаний.
На рисунке 232 изображены графики составляющих и результи-
результирующего (утолщенная линия) колебаний для случаев сложения
двух колебаний одного направления и одинаковой частоты с раз-
различными сдвигами фаз Д<р. Графики результирующих колебаний
получены путем алгебраического суммирования смещений в состав-
составляющих колебаниях, соответ-
соответй(р=0
ствующих одному моменту
времени.
Если составляющие гар-
гармонические колебания имеют
одинаковые направления, но
Рис. 232. Графики сложения двух
колебаний одного направления и
частоты.
Рис. 233. Векторная диаграм-
диаграмма сложения двух гармоничес-
гармонических колебаний с разной часто-
частотой и разными амплитудами.
различные периоды, то результирующее колебание негармоничес-
негармоническое. При сложении негармонических колебаний с разными пери-
периодами результирующее движение может быть в общем случае не-
непериодическим.
Рассмотрим случай сложения двух гармонических колебаний
одного направления, но разного периода.
331
Построим на диаграмме векторы а^. и а 2 для начального момента
времени (рис. 233) и для момента времени /. Как можно видеть из
—>- —>¦
чертежа, угол между векторами а4 и а2 со временем меняется, так
как угловые скорости вращения векторов различны. Значит, ампли-
амплитуда результирующего колебания меняется со временем. Угловая
скорость ее вращения непостоянная, и, следовательно, колебание
происходит по закону, отличному от гармонического.
Пусть амплитуды колебаний одинаковы и начальные фазы равны:
Тогда
откуда
= а2=а0 и cpoi = <Рог=
= а0 cos
х = 2а0 cos
-?„) + «
— t COS
cos
-?o).
A5.9)
Амплитуда результирующего колебания периодически изменяет-
изменяется по абсолютной величине. Период ее изменения:
Т —
Период изменения смещения:
A5.10)
A5.11)
Очевидно, Га> Г.
Если частота а>2 мало отличается от a»i, то возникает явление,
которое носит название биений. Чтобы представить себе процесс
возникновения биений, поло-
положим, что два колебания рав-
равной амплитуды и почти одной '
частоты в начальный момент
совпадают по фазе. В этот мо-
момент колебания происходят с г
удвоенной амплитудой. Затем
фазы колебаний медленно рас-
расходятся и через некоторое вре-
время сдвиг фаз между колебани-
колебаниями достигает величины п. В 3
этот момент колебания гасят
друг друга и амплитуда ре-
результирующего колебания
Рис. 234. Сложение двух колебаний
с близкими частотами. Нижняя кри-
кривая изображает результирующее ко-
колебание (биение).
равна нулю. Продолжая рас-
расти, сдвиг фаз достигает 2л
и амплитуда результирующего
колебания опять оказывается
равной удвоенной амплитуде составляющих колебаний. На рисунке
234 изображено возникновение биений, т.е. периодического измене-
332
ния амплитуды при сложении двух колебаний близкой частоты. Если
амплитуды составляющих колебаний не равны, то амплитуда ре-
результирующего колебания не спадает до нуля, а проходит при сдви-
сдвиге фаз я через минимум.
В случае биений мы можем колебание A5.9) рассматривать как
гармоническое, но происходящее с переменной амплитудой:
о = 2а0 cos -
¦t.
A5.12)
Частота биений равна полуразности частот составляющих ко-
колебаний. Кривая изменения амплитуды со временем представляет
собой огибающую кривой 3 на рисунке 234.
Для демонстрации биений можно использовать электронный
осциллограф, на вертикальные пластины которого подается напря-
напряжение от двух генераторов электрических колебаний. Если часто-
частоты электрических колебаний, посылаемых генераторами, слегка
рлзличаются, то на экране осциллографа возникает характерная
картина биений.
Рис. 235. Сложение двух колебаний с кратными периода\-и
Если складываются несколько колебаний одного направления,
частоты которых кратны частоте наиболее медленного из них, то,
очевидно, периоды всех колебаний укладываются целое число раз
в периоде наиболее медленного колебания. Результирующее коле-
колебание имеет тот период, что и наиболее медленное, но форма его бо-
более сложная (рис. 235).
§2. СЛОЖЕНИЕ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ КОЛЕБАНИЙ
Рассмотрим движение точки, участвующей одновременно в двух
колебаниях, направления которых взаимно перпендикулярны.
Этот случай колебаний можно наблюдать на электронном осцилло-
осциллографе, если, создав переменное напряжение от одного генератора
333
электрических колебаний на вертикальных пластинах, отключим
генератор развертки с горизонтальных пластин (что возможно в
подавляющем большинстве современных осциллографов) и пода-
подадим на них напряжение со второго генератора электрических коле-
колебаний. Пока генераторы не включены, электронный луч проходит
по оси отклоняющих пластин и создает светящуюся точку в центре
экрана. В этой точке мы поместим начало координат, а за оси возьмем
горизонтальный (ось х) и вертикальный (ось у) диаметры (рис. 236).
у Включим генератор, соединенный
с вертикальными пластинами. Час-
Частота колебаний напряжения этого
генератора со. Светящаяся точка
смещается по вертикальной оси,
совершая колебания по гармоничес-
гармоническому закону:
x = a1cosutf. A5.13)
Подключая генератор, дающий
ту же частоту колебаний, к гори-
горизонтальным пластинам при отклю-
отключенных вертикальных пластинах,
мы заставим светящуюся точку сме-
смещаться по экрану в горизонталь-
Рис. 236. Результат сложения ном направлении по закону:
двух взаимно перпендикулярных
колебаний, происходящих с оди- y = a2COSto^. A5.14)
наковой частотой при сдвиге фаз, лг .._ 1О. /1Г . .
равной нулю. Уравнения A5.13) и A5.14) пред-
представляют собой в сущности ки-
кинематические уравнения движения точки. Если мы из них исклю-
исключим время, то получим уравнение траектории, по которой движется
светящаяся точка, участвуя одновременно в двух взаимно перпен-
перпендикулярных колебаниях:
или
X
у
х =
A5.15)
т. е. светящаяся точка движется по прямой, проходящей через по-
положение равновесия (начало координат) и составляющей с осью х
угол, тангенс которого определяется соотношением:
Результирующее смещение, отсчитанное вдоль этой прямой:
A5.16)
A5.17)
334
Длина отрезка, пробегаемого точкой, равна удвоенной ампли-
амплитуде результирующего колебания:
? + «2- A5.18)
Таким образом, точка, участвующая одновременно в двух взаим-
взаимно перпендикулярных колебаниях одной частоты при сдвиге фаз
между ними, равном нулю, совершает гармоническое колебатель-
колебательное движение вдоль отрезка прямой, который служит диагональю
прямоугольника, образованного отрезками прямых х = ± а^
и у=± а2, отсекающих на осях х и у отрезки длиной 2а4 и 2а2.
Нетрудно показать, что при сдвиге фаз составляющих колеба-
колебаний на я колебание светящейся точки происходит по другой диаго-
диагонали прямоугольника.
Рассмотрим случай, когда составляющие колебания сдвинуты
по фазе на —. Для определенности положим, что колебание вдоль
оси х опережает по фазе колебание по оси у и отсчет времени произ-
производится от момента, когда светящаяся точка находится в начале
координат:
х = a sin to^.
Тогда в момент возникновения колебаний по оси х вдоль оси у
смещения отсутствуют. Светящаяся точка получает смещение, рав-
равное а, т. е. совершает четверть колебания и оказывается в крайнем
правом положении, после того она участвует уже в двух движениях,
возвращаясь к положению равновесия по оси х и отклоняясь по
оси у вверх. Колебания происходят по закону:
=acos<j A5.19)
y = asinv>t. I
Траектория светящейся точки в этом случае — окружность
хг + уъ=а\ A5.20)
которую точка обходит против часовой стрелки. Если сдвиг фаз
равен — п, то траектория также окружность, но точка обегает ее по
часовой стрелке. (Точка начинает двигаться вверх, находясь в край-
крайнем левом положении.) Если амплитуды колебаний A5.19) не равны,
то легко видеть, что точка движется по эллипсу:
-— = cos со^; — = sin to/,
а: a2
Исключая время, получим:
335
т. е. уравнение эллипса с осями, совпадающими по направлению
с направлением составляющих колебаний. Полуоси эллипса равны
ai и а2 (рис. 237).
Движение точки, участвующей в двух взаимно пер-
перпендикулярных колебаниях равной частоты с разными
амплитудами и сдвигом фаз в —, происходит по эллип-
эллипсу с полуосями а1 и а2, лежащими на направлениях со-
составляющих колебаний. Эллипс вписан в прямоугольник,
образованный отрезками пря-
прямых х — ±: «! и у = ± а2-
То же наблюдается при
, з
сдвиге фаз, равном —я, но точ-
точка обегает эллипс в этом слу-
случае в противоположном на-
направлении.
Если отношение амплитуд
меняется, то эллипс дефор-
деформируется, не меняя своего
положения относительно нап-
направлений составляющих ко-
колебаний. Если меняется сдвиг
фаз, то эллипс одновременно
и деформируется и меняет
свою ориентацию относитель-
относительно указанных направлений
(рис. 238, а). Если периоды
составляющих взаимно пер-
перпендикулярных колебаний ра-
различаются на малую величи-
Рис. 237. Точка, участвующая в
двух взаимно перпендикулярных ко-
колебаниях с одной частотой, разными
амплитудами и сдвигом фаз на —-,
движется по эллипсу.
ну, то сдвиг фаз плавно меняется, принимая последовательно все воз-
возможные значения, и эллипс постепенно поворачивается и деформи-
деформируется. Однако и при этом он остается вписанным в прямоуголь-
прямоугольник со сторонами 2ai и 2а2.
Изменим частоту одного из генераторов заметным образом. Тог-
Тогда колебания светящейся точки будут по-прежнему происходить
во взаимно перпендикулярных направлениях, но сдвиг фаз будет
сильно меняться в пределах одного периода, и мы получим сложную
запутанную картину движения точки. Прямоугольник, в котором
поворачивался эллипс, окажется сплошь заполненным траекто-
траекториями светящейся точки.
Картина упрощается, если частоты (периоды) взаимно перпен-
перпендикулярных колебаний кратны друг другу.
Пусть a>i = 2ыЛ (рис. 238, б). По истечении одного периода ко-
колебания Tz в направлении оси у точка должна вернуться в началь-
336
0° 4S° 90" 135° 1S0'
a 1:1
б иг
в из
Рис. 238. Фигуры Лиссажу при отношении час-
частот 1:1, 1:2, 1 : 3, 9 : 3, изображенные через
45 с сдвига фаз.
ное положение, так как оно равно двум целым периодам колеба-
колебания Ti вдоль оси х. Поэтому траектория точки должна быть замк-
замкнутой кривой. Вместе с тем точка за время Ti два раза достигает
крайних положений + сц и —at и один раз —а2 и +а2. Следователь-
Следовательно, она один раз коснется сторон прямоугольника, отстоящих от
оси у на расстоянии аг, и дважды сторон, отстоящих от оси х на рас-
расстоянии а4.
Вид траекторий зависит от фаз составляющих колебаний, а число
точек касания определяется отношением частот. Эти траектории
называют фигурами Лиссажу, по имени французского ученого
их впервые наблюдавшего.
На рисунке 238 изображены фигуры Лиссажу для разного соот-
соотношения частот и разных сдвигов фаз.
§3. ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
Всякое реальное колебание происходит с постепенным расходо-
расходованием энергии движения на работу против сил трения и на излу-
излучение, т. е. отдачу энергии во внешнюю среду, которую возмущает
колеблющееся тело. При этом амплитуда и скорость колебательного
движения убывают. Происходит затухание колебаний (рис. 239).
Затухающие колебания, строго говоря, уже не будут гармонически-
гармоническими и даже периодическими, так как характеристики колебания че-
через период в точности не повторяются. Однако если расходование
энергии происходит медленно, то их можно рассматривать прибли-
приближенно как периодические.
337
Периодом затухающих колебаний называют время, в течение ко-
которого система дважды проходит положение равновесия в одном и
том же направлении.
Амплитудами затухающих колебаний называют наибольшие
значения смещения, скорости и ускорения, которых они достигают
в пределах одного периода.
Закон убывания амплитуды затухающих колебаний зависит
от характера сил сопротивления.
Практически наиболее интересен случай малых колебаний,
при которых обычно скорость тела невелика и сила сопротивления
пропорциональна первой степени скорости.
Положим, система колеблется под действием квазиупругой воз-
возвращающей силы в среде, сопротивление которой линейно зависит
от скорости. Тогда второй закон
динамики для системы запишется в
виде:
m kxr A5.22)
df- dt
где г — коэффициент сопротивле-
сопротивления.
Это уравнение носит название
Р 239 г т дифференциального уравнения сво-
ИС' щих коРлебаний.аТУ ™' бодных колебаний в среде с линей-
линейным сопротивлением.
Решением уравнения A5.22) является следующая функция вре-
времени:
x(t) = aoe 2m cos(u)/-J-?o)« A5.23)
Величина
называется показателем затухания.
Значение а0 cos <р0 = х0, которое принимает функция в момент
t = О, называется начальной амплитудой.
Частота колебания:
Последнее выражение можно переписать, введя показатель за-
затухания:
ш= У~и% — р2, A5.26)
где (оо — частота свободных колебаний той же системы в среде без
трения, т. е. собственная частота.
388
Как следует из равенства A5.23), амплитуда колебаний, про-
происходящих в среде с линейным законом сопротивления, убывает
по экспоненциальному закону:
а = сое-Р'. A5.27)
Графически изменение амплитуды со временем изображается
огибающей кривой затухающих колебаний (пунктир на рис. 239).
Частота затухающих колебаний и показатель затухания опреде-
определяются свойствами системы и среды, в которой происходит колеба-
колебание. Величины а0 иф0 определяются, как и для свободных незату-
незатухающих колебаний, начальными условиями.
Период затухающих колебаний в соответствии с A5.25):
^^. A5.28)
/;
m 4m f m
Таким образом, период затухающих колебаний несколько боль-
больше периода колебаний той же системы в отсутствие затухания, что
связано с некоторым замедлением движения, которое обусловливают
силы сопротивления.
Вычислим отношение амплитуд, отстоящих друг от друга во вре-
времени на один период:
Оно
или
равно:
at
at+T
о »
а
at
at+T
at+т ¦¦
= const
1
о—p/
i
A5.29)
т. е. отношение амплитуд затухающего колебания, от-
отстоящих друг от друга на интервал времени, равный
периоду, постоянно во все время колебаний.
Натуральный логарифм этого отношения называется логариф-
логарифмическим декрементом затухания:
5 = In -^_ = йГ, A5.30)
at+T
или
8= —Т. A5.31)
Логарифмический декремент затухания, который харак-
характеризует быстроту убывания амплитуды, прямо пропорциона-
пропорционален величине коэффициента сопротивления и обратно
пропорционален массе системы.
339
Теоретически амплитуда колебания, убывающая по экспонен-
экспоненциальному закону, обращается в нуль (т. е. колебания полностью
затухают) через бесконечно большой промежуток времени. Но прак-
практически величина их становится равной нулю спустя конечный про-
промежуток времени. Обычно считают, что колебание затухло, если
амплитуда стала меньше 0,01 начальной величины.
Если коэффициент сопротивления среды достаточно велик, то
движение системы теряет черты колебательного движения. Система
просто медленно движется к положению равновесия. Колебания,
при которых вследствие большого трения система не колеблется,
а лишь медленно движется к положению равновесия, называются
апериодическими. Переход от колебательного движения системы к
апериодическому происходит (как легко получить из выражения
A5.28), приравняв его знаменатель нулю)
при г =2 V k. На рисунке 240 приведен
график апериодического движения.
Затухание колебаний связано с расхо-
расходованием энергии колебательного движе-
движения. Легко показать, что отношение энер-
энергий, соответствующих двум значениям ам-
амплитуды, отстоящим во времени на период:
F
Рис. 240. График апе- Т^ = е~ Т' A5.32)
риодического движения.
Для поддержания колебании, очевидно,
необходимо восполнить убыль энергии в
системе. Ниже мы рассмотрим закономерности, на которых основы-
основываются методы, позволяющие осуществить это восполнение.
Нередко возникает необходимость в гашении возникающих ко-
колебаний, т. е. в создании условий, при которых расход энергии
колеблющейся системы искусственно увеличивается.
Паровая машина, газовые и паровые турбины, электрические
машины и двигатели часто приходят в колебание из-за наличия не-
неуравновешенных вращающихся частей (валов, роторов, дисков
и т. п.), из-за наличия частей, движущихся возвратно-поступатель-
возвратно-поступательно (шатунов, поршней и т. п.). Причиной возникновения колеба-
колебаний могут быть переменные давления газа, выхлопы и т. п. Подоб-
Подобного рода колебания (вибрации) ведут к преждевременному износу
машин в целом и отдельных деталей, а иногда могут служить и при-
причиной аварий. Образование и срыв вихрей на частях самолета так-
также порождает вибрации, которые могут достичь опасных размеров.
В измерительных приборах указатели (стрелки, зеркало на нити
и т. п.) иногда совершают длительное время колебания около поло-
положения, соответствующего измеренному значению величины, что
затрудняет точный отсчет.
Разного рода приспособления, позволяющие искусственно уве-
340
Рис. 241. Схема автомобильного амортизатора.
личивать затухание колебаний в системе, носят название демпферов
или демпфирующих устройств.
Примером может служить автомобильный амортизатор (рис. 241),
предотвращающий раскачивание кузова на рессорах при езде по
неровной дороге. Он работает следующим образом. Когда колесо
попадает на неровность и рессора сжимается, расстояние между
кузовом и осью колеса уменьшается. Рычаг амортизатора / пово-
поворачивается, как указано стрелкой, и кулак 2 передвигает поршень
3 в цилиндре амортизатора влево. Полость цилиндра амортизатора
залита вязкой жидкостью. Поэтому движение поршня возможно
лишь по мере продавливания жидкости из левой полости 5 цилиндра
через клапан 6 в правую полость 4. После сжатия рессора стремит-
стремится подбросить кузов, что при отсутствии амортизатора возбудило
бы его колебания. При «отдаче» рессоры кулак амортизатора пово-
поворачивается вправо и, перемещая поршень, продавливает жидкость
через клапан 7 в обратном направлении. При этом неизбежные ко-
колебания автомобиля на неровностях сильно ослабляются. Анало-
Аналогичен принцип устройства воздушных демпферов на микроанали-
микроаналитических весах. В некоторых измерительных приборах связанные
с указателем металлические пластинки движутся между полюсами
постоянного магнита. Возникающие в них так называемые вихревые
токи вызывают появление сил, которые тормозят движение.
§ 4. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Система, выведенная из равновесия и предоставленная самой
себе, совершает, как мы видели, свободные затухающие колебания,
зависящие только от параметров системы и сопротивления среды.
341
Для поддержания колебаний такой системы необходимо воспол-
восполнить убыль энергии в ней за счет работы тех или иных внешних сил.
Колебания системы, которые совершаются за счет работы периоди-
периодически меняющейся внешней силы, называются вынужденными.
При этом, очевидно, система колеблется, в какой-то степени повто-
повторяя колебания внешней силы.
Вынужденные колебания совершают под действием перемен-
переменных аэродинамических сил здания, мосты и т. п. сооружения, кор-
корпус и фундамент машин при вращении неуравновешенного ротора,
мембрана громкоговорителя под действием магнитною поля, воз-
возбуждаемого переменным током, и т. д.
Допустим, что система в начальный момент времени находилась
в покое. При действии на нее переменной внешней силы она приоб-
приобретает энергию и постепенно раскачивается. Часть передаваемой
ей энергии расходуется на преодоление сопротивлений. Поэтому
колебания достигнут заданной величины, если работа внешней си-
силы превышает убыль энергии в системе. Так как убыль энергии рас-
растет с ростом скорости колеблющегося тела, которая в свою очередь
возрастает с увеличением амплитуды, то в конце концов потери
энергии станут равными ее поступлению (т. е. равными работе внеш-
внешней силы). С этого момента колебания можно считать установив-
установившимися. Установившиеся вынужденные колебания происходят по
тому же закону, по которому колеблется внешняя сила, и период
их равен периоду колебаний внешней силы.
Рассмотрим установившиеся колебания системы, на которую
действует внешняя сила, меняющаяся по гармоническому закону:
F = F0cosu>t. A5.33)
Возвращающую силу в системе будем считать квазиупругой, а
сопротивление среды — линейным. Запишем уравнение второго
закона динамики для движения системы:
т ?j -j- r — -f kx = FQ cos arf. A5.34)
Так как установившиеся колебания должны происходить также
по гармоническому закону и с той же частотой, что и колебания
внешней силы, то решение уравнения A5.34) в общем случае долж-
должно иметь вид:
A5.35)
В выражение A5.35) мы ввели сдвиг фаз <р из следующих сообра-
соображений.
Допустим, в начальный момент времени система находилась
в покое, а затем на нее подействовала внешняя сила. Внешняя си-
сила в течение четверти периода нарастает, совершая при этом поло-
положительную работу и отводя систему от положения равновесия. В
конце четверти периода и сила, и смещение системы достигают мак-
342
симума. Далее внешняя1 сила убывает, и система под действием воз-
возвращающей силы движется к положению равновесия. Однако ко-
колебание системы, на которую действует сила сопротивления, с вре-
временем замедляется и отстает постепенно по фазе от колебания силы.
Таким образом, даже если вначале колебания силы и системы про-
происходят без сдвига фаз, то в дальнейшем такой сдвиг фаз возникает.
Величину сдвига фаз и амплитуды колебания, выраженные через
параметры системы и характеристики вынуждающей силы, мы най-
найдем, если подставим решение A5.35) в уравнение A5.34)
а= , F° ===- A5.36)
tg<P= —г . A5.37)
Ш0 —0J
где со„ — собственная частота колебаний системы,
Р — показатель затухания.
. Из последних равенств видно, что амплитуда и фаза вынужден-
гых колебаний зависят от разности квадратов частот собственных
и вынужденных колебаний и от показателя затухания системы. Из
соотношения A5.37) следует, что сдвиг фаз между вынуждающей
силой и колебаниями системы равен нулю, если затухание в систе-
системе отсутствует (Р = 0). Во всех других случаях моменты наступле-
наступления максимума силы и максимума смещения системы не совпа-
совпадают.
Равенство A5.36) показывает, что амплитуда вынужденных ко-
колебаний пропорциональна амплитуде вынуждающей силы. Если
затухание в системе весьма мало ф ss 0), то амплитуда колебания
данной системы зависит от частоты вынуждающей силы со. Пусть
а» <? (оо, тогда приближенно
т. е. амплитуда примерно равна статическому смещению, кото-
которое может создать постоянная сила Fo. По мере увеличения часто-
частоты вынуждающей силы разность Юд — а»2 убывает и амплитуда
вынужденных колебаний растет. Когда со = (о0, амплитуда теоре-
теоретически должна возрасти до бесконечно большой величины, но так
как во всякой реальной системе непременно имеет место затухание,
то она приобретает лишь некоторое максимальное значение. Усло-
Условие наступления максимума амплитуды найдем, приравняв нулю
производную подкоренного выражения в знаменателе равенства
A5.36) и решив относительно со:
«рез = Y<-^2' A5-39)
343
5
3
I
a
Fo
-
-
I
1
i
//¦
к
i
и
л
\\
\
Рис. 242. Амплитудные резонансные кривые для систем
с различным затуханием.
Наступление максимума амплитуды вынужденных колебаний
при значении частоты вынуждающей силы, близком к частоте соб-
собственных колебаний системы, называется явлением резонанса или
просто резонансом.
Частота вынуждающей силы, при которой возникает резонанс,
называется резонансной частотой (сорез)» а величина максимальной
амплитуды называется резонансной амплитудой. Она, очевидно,
равна:
арез= q_0JV=. A5.40)
В системе, для которой затухание мало, так что можно считать
Р = 0, резонанс наступает при частоте вынуждающей силы, равной
собственной частоте системы:
<V3 = <V A5.41)
Однако надо помнить, что для реальных систем это равенство
всегда является приближенным.
Если частота вынуждающей силы становится больше собствен-
собственной частоты системы, то квадрат разности квадратов частот (ш20—
— со2J возрастает, а амплитуда колебаний опять убывает, стремясь
с ростом а» к нулю. Графическое изображение зависимости амплиту-
амплитуды колебаний данной системы от частоты вынуждающей силы на-
называется амплитудной резонансной кривой (рис.242).
При изменении частоты вынуждающей силы изменяется и сдвиг
фаз ф. Если со < соо, то из соотношения A5.37) следует, чтоф близ-
близко к нулю. Фаза вынужденных колебаний практически совпадает
с фазой вынуждающей силы. Когда со принимает значение, близ-
близкое (о0, сдвиг фаз достигает ¦, т. е. сила опережает по фазе коле-
Li
бания на —. При дальнейшем увеличении частоты со сдвиг фаз воз-
растает и когда га > соо становится близким к —я, т. е. фаза коле-
колебаний почти противоположна фазе внешней силы. Кривые, изобра-
344
Рис. 243. Фазовые резонансные кривые для систем
с различным затуханием.
жающие изменение сдвига фаз ф при изменении частоты со вынуж-
вынуждающей силы, называются фазовыми кривыми резонанса (рис. 243).
Сдвиг фаз на — при резонансе имеет существеннейшее значение
для этого явления. Для уяснения роли сдвига фаз рассмотрим прос-
простой случай колебания пружинного маятника под действием вынуж-
вынуждающей силы (скажем, силы притяжения электромагнита, распо-
расположенного под маятником). Частота колебаний маятника и частота
вынуждающей силы совпадают, а сила опережает смещение как раз
на— (или четверть периода).
Пусть груз маятника находится в верхнем положении, пружина
сжата и возвращающая сила начинает толкать груз к положению
равновесия. Так как вынуждающая сила опережает смещение на —,
то она, пройдя через нуль, действует в том же направлении, что
и возвращающая сила, т. е. в направлении движения груза. Когда
груз пройдет положение равновесия, вынуждающая сила хотя и
начинает убывать по величине, но направление ее по-прежнему сов-
совпадает с направлением движения груза. При достижении грузом
крайнего нижнего положения вынуждающая сила вновь проходит
через нулевое значение и, переменив направление, опять совпадает
с направлением движения маятника под действием возвращающей
силы. Таким образом, в случае резонанса благодаря сдвигу фаз
на — вынуждающая сила на всем пути колеблющейся системы,
it
345
совершает положительную работу, т. е. система все время получает
энергию.
Если частота вынуждающей силы и собственная частота системы
не совпадают и сдвиг фаз отличен от —, то на некоторых участках
пути системы вынуждающая сила направлена против смещения,
т. е. совершает отрицательную работу, и условия пополнения энер-
энергии системы менее выгодны, чем при резонансе.
§ 5. РЕЗОНАНС
Амплитуда и фаза вынужденных колебаний зависят от величины
сопротивления среды и сил трения в системе. Чем больше показа-
показатель затухания р, тем меньше при прочих равных условиях ампли-
амплитуда вынужденных колебаний. Но сила сопротивления зависит от
скорости движения колеблющейся системы, которая в свою оче-
очередь зависит от амплитуды A4.31). Поэтому затухание сравнитель-
сравнительно невелико в областях частот, далеких от резонансных, и резко воз-
возрастает при резонансе. Так как с увеличением показателя затуха-
затухания амплитуда вынужденных колебаний уменьшается, то крутиз-
крутизна резонансных кривых сглаживается (рис. 242). Участки кривой,
где амплитуды малы (крайние участки), почти не испытывают из-
изменения, а в области резонанса заметно опускаются. Поэтому кри-
кривая резонанса с увеличением затухания становится менее острой.
При значительном затухании резонансный пик совсем исчезает и
явление резонанса практически не наблюдается. Более пологими
становятся и фазовые кривые резонанса (рис. 243).
Резонанс широко распространен в природе, часто используется
он в технике (человеческое ухо воспринимает звуки вследствие ре-
резонанса колебаний в ушной раковине, в радиотехнике резонанс поз-
позволяет отделить сигналы данной радиостанции от сигналов других,
одновременно работающих станций, резонанс используется для из-
измерения частот и для анализа сложных колебаний и т. д.). Если
в той или иной системе используется явление резонанса, то она
должна конструироваться таким образом, чтобы затухание в ней
было возможно меньшим.
В ряде случаев резонанс оказывается нежелательным и даже
опасным явлением. Академик А. Н. Крылов приводит следующий
пример возникновения вследствие резонанса вибраций опасного
масштаба.
«...В нашем флоте был крейсер «Громовой» в 14 000 Т, сравни-
сравнительно легкой постройки, стремя поршневыми машинами; когда
он вышел... на первые ходовые испытания, то оказалось, что при
105 оборотах машин вибрация достигала наибольшей величины,
именно полная амплитуда (т. е. 2а. — М. А.) колебаний в оконеч-
оконечностях и посередине судна составляла, как мною было измерено,
346
около 30 мм; при такой вибрации наво-
наводить орудия было невозможно, мина, вло-
вложенная в кормовой аппарат, на моих
глазах каким-то образом сбила стопора,
сама ушла из аппарата и была потеря-
потеряна...»
Роторы машин, турбин и т. п. прак-
практически невозможно центрировать абсо-
абсолютно точно. Поэтому при вращении ро-
ротора сила, действующая на вал, меняет
свое направление относительно оси вала
и действует как периодическая сила, воз-
возбуждающая его колебания. Если частота
изменения направления силы совпадает
с собственной частотой колебаний вала,
то амплитуда может возрасти настолько,
что это приведет к разрушению ва-
вала. Скорость вращения вала соответст-
соответствующая резонансу, называется крити-
критической.
Основные меры предупреждения ре-
резонанса: 1) обеспечение такого режима ра-
работы системы, при котором частота вы-
вынуждающей силы и собственная частота
системы сильно различаются по величине.
Например, скорость вращения совре-
современных паровых турбин
превышает критическую скорость; 2)
увеличение затухания колебательной
системы (способы увеличения затухания колебаний рассмотрены в
предыдущем параграфе).
Рассмотрим в качестве примера предупреждение резонанса в
газораспределителе автомобильного двигателя (рис. 244), в котором
частота ударов по «толкателям» клапанов меняется с изменением
скорости вращения распределительного вала (т. е. с изменением
скорости движения автомобиля). При совпадении частоты ударов
с собственной частотой клапанов создается опасность разрушения
клапанов вследствие резонанса. С целью предупреждения резонанса
пружины клапанов подбирают так, чтобы при увеличении амплитуды
колебания клапана часть витков прекращала свою работу, бла-
благодаря чему меняется коэффициент жесткости пружины, а с ним
и собственная частота клапана. Поэтому резонанс не возникает при
любой скорости вращения вала.
Рис. 244. Схема устройства
механизма газораспредели-
значительно теля в автомобильном дви-
двигателе.
347
§ 6. ГАРМОНИЧЕСКИЙ АНАЛИЗ СЛОЖНЫХ КОЛЕБАНИЙ
Рассматривая сложение двух гармонических колебаний с раз-
разными частотами, мы отмечали, что иногда результирующее коле-
колебание не может быть представлено в виде простого гармонического
колебания (например, биения). В реальных системах колебания вооб-
вообще лишь с известной степенью приближения могут рассматривать-
рассматриваться как гармонические, они носят более сложный характер. Наблю-
Наблюдаются колебания настолько сложные по форме, что описать каж-
каждое из них одним гармоническим законом не представляется возмож-
возможным. Однако естественно поставить вопрос: если в результате сложе-
сложения простых гармонических колебаний возникают сложные, раз-
разнообразные по форме результирующие колебания, то нельзя ли
представить сложные колебания как сумму простых гармонических?
Рис. 245. Разложение сложного колебания на два гармонических.
Например, на рисунке 245 изображено сплошной линией колеба-
колебание явно негармоническое. Но его можно получить, суммируя гар-
гармонические колебания с частотами cu4 и со2, причем со2= 2<Di. Та-
Таким образом данное сложное колебание может быть представлено
в виде суммы «основного тона», соответствующего частоте ©i, и «обер-
«обертона», соответствующего частоте 2coi.
На рисунке 246 изображено колебание, которое может быть пред-
представлено в виде суммы трех колебаний с частотами, относящимися
как 1 : 2 : 3, т. е. в виде суммы «основного тона>- и двух «обертонов»
С02 = 2@i И С03 = 3(Oj.
Оказывается, разложение сложного колебания на ряд простых
гармонических колебаний с частотами, кратными частоте сложного
колебания, называемой основной частотой, возможно всегда. При-
Притом для каждого конкретного вида колебания разложение можно
сделать единственным образом. Законы такого разложения сфор-
сформулированы знаменитой теоремой Фурье, играющей огромную роль
в современной науке и технике. Теорема Фурье позволяет матема-
348
6 а -Л \
\ _ /
Рис. 246. Разложение сложного колебания на три гармонических.
тически рассчитать для любой функции f(t) с периодом Т, заданной
на промежутке от t до t + Т, ряд гармонических функций с опре-
определенными амплитудами и фазами, частоты которых кратны основ-
основной частоте и сумма которых дает функцию / (t):
f (mt) = а0 + «i sin (urf -f ft) -f- a2 sin Butf -f- cp2) -}-a3 sin {ЗЫ -f- <?3) -f-
-\-.. .-{-ans\n(nwt-\-yn). A5.42)
Разложение произвольной периодической функции на сумму
гармонических называется гармоническим анализом.
Результат гармонического анализа часто представляют в виде
так называемого спектра сложного колебания. Для этого на гори-
горизонтальной оси откладывают частоты составляющих гармоничес-
гармонических колебаний, а вертикальными черточками обозначают соответ-
соответствующие им амплитуды. На спек-
спектре нельзя изобразить фазы коле-
колебаний, но нередко бывает достаточ-
достаточно знания частот и амплитуд. '
Разложение на простые гармо °>s
нические колебания оказывается 0,6
возможным не только для периоди- о,4
ческих, но и типично непериодичес
ких процессов (отдельный импульс,
затухающие колебания и т. п.).
Непериодический процесс мо- рис.
жет быть представлен как сум-
сумма бесконечно большого числа
гармонических колебаний с ампли-
амплитудами, меняющимися непрерывно по всем частотам. На рисунке
247 приведен спектр прямоугольного импульса, при котором сме-
смещение мгновенно достигает некоторой величины и спустя время Т
также мгновенно падает до нуля. Такой спектр носит название не-
-Т/2 О Т/2
f 2/ 3f 4f
247. Сплошной спектр пря-
прямоугольного импульса продол-
продолжительностью Т.
349
прерывного и ему соответствует уже не ряд Фурье A5.42), а так
называемый интеграл Фурье.
Разложение сложного колебания на ряд гармонических состав-
составляющих отнюдь не является чисто математической операцией. Если
располагать набором резонаторов, т. е. колебательных систем, от-
отзывающихся на внешнее воздействие лишь в случае совпадения
частоты воздействия с их собственной частотой, то можно с их по-
помощью установить, какие гармонические колебания составляют дан-
данное сложное колебание. При воздействии на набор таких резона-
резонаторов периодического колебания сложного состава сильно возбуж-
возбуждаются те резонаторы, собственные частоты которых соответствуют
частотам гармонических составляющих сложного колебания.
Мы видели, что энергия колебательного движения зависит от квадрата
частоты и амплитуды A4.55). В сложном колебании энергия распределена по
частотам в соответствии со спектром. Резонатор получает энергию от той
составляющей сложного колебания, которая обладает частотой, совпадающей
с собственной частотой резонатора, и в очень слабой степени от других состав-
составляющих. Таким образом, резонанс есть способность колебательной системы
к преимущественному «восприятию» энергии колебаний определенной часто-
частоты (избирательное восприятие). Эта сторона явления резонанса весьма сущест-
существенна для объяснения процессов поглощения энергии, для изучения особен-
особенностей внутреннего (молекулярного и атомного) строения вещества.
Наиболее распространенный прибор для измерения частот —
так называемый язычковый частотомер. Основная его часть — на-
набор плоских пружин, укрепленных
на общем держателе. Концы пружин
для лучшей видимости либо утолще-
утолщены, либо снабжены маленькими плас-
пластинками. Собственные частоты пру-
пружин подбираются так, чтобы они обра-
образовывали ряд целых чисел. Пружины
на держателе помещаются в кожух
(рис. 248). Под пружинами распола-
располагают электромагнит, и через его об-
обмотку пропускают ток. Если ток
меняется во времени по гармоничес-
гармоническому закону, скажем, с частотой в
50 сек-1, то начинает колебаться один
язычок частотомера, т. е. пружина,
собственная частота которой равна
50 сек'1. Если быстро прерывать и вновь включать ток с помощью вык-
выключателя, например по два раза в секунду, то колебания приобретут
сложный вид (рис. 249). Основная частота их v=2 сек*1. Спектр коле-
колебания должен включать частоты, кратные этой частоте. И действи-
действительно, в колебание приходят язычки с частотами 48, 50, 52 сек-1.
В заключение заметим, что создано большое число приборов,
позволяющих записать и изучить различные колебания вплоть до
весьма сложных. Основная часть таких приборов — легкий подвиж-
Рис.
248. Язычковый
томер.
350
rv/w—[\/\Aj—rw
Рис. 249. График пульсирующего тока.
ный элемент, представляющий собой колебательную систему, кото-
которая под воздействием изучаемого колебания совершает вынужден-
вынужденные колебания. Запись колебания (механическая или оптическая)
происходит без искажения его формы, если амплитуды вынужден-
вынужденных колебаний сохраняют то же соотношение, что и амплитуды вы-
вынуждающей силы, и если не возникает сдвига фаз между отдельны-
отдельными составляющими колебаниями. Это осуществляется: 1) когда вос-
воспринимающая система легкая и подвижная и не оказывает обратно-
обратного влияния на тело, колебания которого изучаются; 2) когда она
обладает значительным затуханием, так как иначе возможно вслед-
вследствие резонанса искажение (увеличение) амплитуд тех составляю-
составляющих колебания, которые по частоте близки к собственной частоте
системы; 3) когда собственная частота системы больше всех частот,
входящих в изучаемое колебание, так как только при этом условии
не будет заметного сдвига фаз между составляющими колебаниями,
что легко видеть из рисунка 243.
§ 7. КОЛЕБАНИЯ СВЯЗАННЫХ СИСТЕМ
До сих пор мы рассматривали колебания, которые совершают
груз на длинной нити (модель математического маятника), физи-
физический маятник, маятник пружинный, электронный луч, проходя-
проходящий в переменном электрическом поле перпендикулярно направ-
направлению последнего, и т. п. Чтобы знать движение каждой отдельной
системы, достаточно было знать закон изменения только величины
смещения, т. е. мы рассматривали системы с одной степенью свобо-
свободы. Заметим, что собственные колебания каж-
каждой ИЗ ЭТИХ СИСТеМ ПРОИСХОДИЛИ С ОДНОЙ СОб-//////////////////////У,
ственной частотой.
Однако в природе и в технике нередко
приходится иметь дело с колебательными сис-
системами, так или иначе связанными между1
собой. В качестве простейшего примера рас-
рассмотрим два математических маятника одина-
одинаковой длины и массы. Маятники обладают
одинаковыми собственными частотами, пока
колеблются независимо друг от друга. Уста-
Установим между ними связь, укрепив между под- LJ) LJ)
весами легкую пружину (рис. 250). Рассмот- рис 250_ Связанные
рим колебания системы перпендикулярные
плоскости, проходящей через оба маятника.
системы из двух
маятнлков.
351
Нетрудно обнаружить, что маятники воздействуют через связь друг
на друга. Достаточно заставить колебаться один из них, чтобы спус-
спустя некоторое время начал колебаться и второй.
Если между колебательными системами имеется связь, через ко-
которую они воздействуют друг на друга, они называются связанными
системами. Оказывается, что наличие связи существенным обра-
образом меняет свойства самих систем. Отклоним один из маятников,
задержав второй на месте. Получим колебательную систему с од-
одной степенью свободы1. Но частота колеблющегося маятника от-
отлична от его собственной частоты, так как возвращающая сила состо-
состоит теперь из двух слагаемых: из составляющей силы тяжести и
упругой силы, деформируемой при колебаниях пружины.
Системы с одной степенью свободы, на которые может быть рас-
расчленена связанная система, называются парциальными системами,
а частота, с которой колеблется каждая парциальная система, в
то время как все остальные закреплены, называется парциальной
частотой. Система, изображенная на рисунке 250, имеет две одина-
одинаковые парциальные частоты.
Рассмотрим характер собственных колебаний такой связанной
системы. Она может быть приведена в колебание двумя различными
способами, для которых собственные частоты колебаний различны.
Первый из них состоит в том, что маятникам сообщаются оди-
одинаковые отклонения в одну сторону от положения равновесия. Оба
маятника колеблются в одинаковой фазе, с одинаковыми амплиту-
амплитудами и частотами. Частота колебаний маятников меньше, чем их
парциальные частоты, так как связь при этом способе возбуждения
колебаний не деформируется и возвращающая сила меньше, чем
в случае возбуждения парциальных колебаний.
При втором способе маятники смещаются в разные стороны от
положения равновесия. Связывающая их пружина растягивается.
Возвращающая сила одинакова для обоих маятников, которые со-
совершают гармонические колебания в противоположных фазах,
но с равной частотой. Частота их колебаний больше, чем парциаль-
парциальная, так как пружина деформируется сильнее, чем в случае воз-
возбуждения парциальных колебаний. Таким образом, в рассматри-
рассматриваемой системе можно возбудить два гармонических колебания с
различными частотами, одна из которых меньше парциальных
частот связанной системы, а другая больше. Данная система обла-
обладает двумя степенями свободы, так как ее движение определяется
одновременным движением обоих маятников (двумя перемещения-
перемещениями).
1 Строго говоря, при наличии связи маятники на нитях перестают быть
системами с одной степенью свободы. Помимо колебаний в направлении на-
начального отклонения, они под действием связи совершают колебания в пер-
перпендикулярном к нему направлении. Чтобы не осложнять явления, мы будем
рассматривать маятники из грузов, подвешенных на тонких легких, но жест-
жестких спицах.
352
m,
A\
Ч--
Гармонические коле- ,„„„„„„„„„„„„„„.
бания, возникающие в
связанной системе, на-
а зываются нормальными
колебаниями, а соответ-
д ствующие им частоты на-
называются нормальными
частотами.
Система с двумя сте-
степенями свободы обладает
только двумя нормаль-
нормальными колебаниями. В са-
О О
Рис. 252. Связанная
система, обладаю-
обладающая тремя парциаль-
парциальными и тремя нор-
нормальными частотами.
ление произвольного мом Деле> всякий ДРУГ0Й
колебания системы из способ возбуждения ко-
двух маятников (пц лебаний системы, отлич-
и т2) как суммы двух HbIg 0T описанных выше
нормальных колеба- /
v ний_ (когда, например, один
маятник отклонен в одну
сторону на величину а, а другой— в противо-
а \
положнуюсторону на величину— , приве-
приведет к возникновению колебаний, которые
представляют собой сумму двух нормаль-
нормальных колебаний: одного, возникающего при
отклонении маятников в одну сторону, и
второго, возникающего при их отклонении в
разные стороны (рис. 251). Сумма двух коле-
колебаний, происходящих с разными частотами, как мы видели ранее (§1,
гл. XV), будет негармоническим колебанием типа биений. Возник-
Возникновение в связанной системе того или иного типа колебаний опре-
определяется начальными отклонениями (начальными условиями).
Если связанная система состоит из трех парциальных систем,
скажем трех маятников, соединенных пружинами (рис. 252), она об-
обладает тремя степенями свободы и тремя нормальными частотами.
Способы возбуждения нормальных колебаний такой системы изоб-
изображены на рисунке 252. Если число парциальных систем равно п,
то связанная система обладает п степенями свободы. Система с п
степенями свободы имеет п нормальных частот.
Когда мы изучаем колебания на участке упругой сплошной
среды, мы должны мысленно разбить ее на бесконечно малые эле-
элементы. Множество таких элементов, связанных между собой упру-
упругими взаимодействиями, может рассматриваться как связанная ко-
колебательная система. В пределе она имеет бесконечно большое чис-
число степеней свободы и неограниченное число нормальных частот.
Вернемся к рассмотрению системы двух связанных маятников.
Отклоним один маятник и в момент начала его движения к положе-
12 М. М. Архангельский
353
Рис. 253. Развертка колебания двух связанных систем с одина-
одинаковыми частотами.
нию равновесия освободим второй, оставив его в покое. Запишем
каким-либо способом развертку их колебаний. На рисунке 253 при-
приведена такая запись.
При колебаниях первого маятника пружина, растягиваясь и
сжимаясь, действует на второй маятник, который тоже начинает
раскачиваться. Энергия, сообщенная первому маятнику при на-
начальном отклонении, постепенно расходуется на возбуждение коле-
колебаний второго маятника. Амплитуда первого из них убывает, а вто-
второго — возрастает. Спустя некоторое время первый маятник пере-
передаст всю энергию второму и остановится, а второй в это время бу-
будет раскачиваться с максимальной амплитудой. Затем второй маят-
маятник начнет раскачивать первый и процесс повторится. На записи
обнаружится типичная картина биений с частотой соб, равной раз-
разности нормальных частот.
Если мы отклоним маятники одним из способов, соответству-
соответствующих возбуждению нормальных колебаний, то запись даст нам
два гармонических колебания с одинаковыми амплитудами и час-
частотами, в одном случае (отклонение в одну сторону) совпадающие
по фазе, в другом случае происходящие в противофазе.
Если мы отклоним маятники произвольным образом, то коле-
колебания имеют характер биений с той же частотой со6, но амплитуда
колебаний каждого маятника меняется от некоторого максимума
до некоторого минимума, величины которых определяются соотно-
соотношением между начальными смещениями. Частота биений или часто-
частота, с которой происходит передача энергии, равна разности нормаль-
нормальных частот, т. е. зависит от степени связи между системами.
Мы рассмотрели собственные колебания связанных систем. В
заключение отметим, что внешняя (вынуждающая) периодическая
354
сила, действующая на связанные системы, может вызвать явление
резонанса, если ее частота совпадает с одной из нормальных частот.
Изучение колебаний связанных систем существенно не только
для техники, но и для ряда теоретических задач. В частности, при
решении некоторых вопросов теории твердого тела атомы в кристал-
кристаллах рассматриваются как колеблющиеся связанные системы.
§ 8. АВТОКОЛЕБАНИЯ
Собственные колебания любой системы в результате расходова-
расходования энергии на работу против сил трения постепенно затухают. Для
поддержания собственных колебаний системы при отсутствии внеш-
внешних сил в ней должен находиться источник, восполняющий убыль
энергии. Таким образом, для осуществления собственных колеба-
колебаний (в отсутствие внешних воздействий) система должна включать
источник энергии и управлять поступлением энергии из него. Та-
Такие системы называются автоколебательными, а возникающие в
них колебания — автоколебаниями. Автоколебательные системы
весьма широко распространены в технике и природе. Примерами авто-
автоколебательных систем могут служить часовые механизмы, духовые
музыкальные инструменты, ламповый генератор электрических ко-
колебаний, легкие и сердце и др.
Рис. 254 Часовой механизм
а — схема, б — анкерный механизм.
12*
355
В автоколебательных системах (независимо от их конструкции)
обычно различают три основные части: собственно колебательную
систему; клапан, управляющий поступление энергии из источника,
и источник энергии.
Рассмотрим в качестве примера простейшей автоколебательной
системы механизм обычных часов-ходиков (рис. 254). Гиря /,
поднятая над землей, обладает известным запасом потенциальной
энергии. Она висит на нити, которая намотана на горизонтальный
вал. Натяжение нити создает вращающий момент, в результате чего
вал, поворачиваясь, вращает зубчатое колесо, которое через систему
других зубчатых колес заставляет вращаться стрелки. Вообще го-
говоря, гиря должна опускаться ускоренно, следовательно, стрелки
часов — вращаться неравномерно. Чтобы устранить эту неравно-
неравномерность, еще Гюйгенс создал специальный регулятор хода часов,
так называемый анкерный шнек. На валу, вращаемом гирей, укреп-
укрепляется храповое колесо 2. С зубцами этого колеса сцеплены зубцы
согнутого равноплечего рычага, называемого анкером 3, который
соединен с маятником и качается с ним на общей оси. При качании
маятника зубцы анкера (то правый, то левый) попадают в выемки
между зубцами храповика. Маятник в крайнем правом и левом поло-
положениях получает периодические толчки от храповика и некоторые
порции энергии из запаса, которым обладает поднятая гиря. При
этом амплитуда колебаний маятника поддерживается постоянной.
Таким образом, в ходиках источником энергии служит поднятая
над землей гиря, клапаном, регулирующим поступление энергии
к колебательной системе, — храповой механизм и колебательной
системой — маятник.
Для автоколебательной системы характерна так называемая
обратная связь, которая (в данном случае) проявляется в том, что,
с одной стороны, колебания маятника управляют движением хра-
храпового механизма и регулируют поступление энергии, а с другой
стороны, храповой механизм управляет колебаниями маятника,
так как обеспечивает подвод к нему энергии.
Другая характерная особенность таких систем состоит в следу-
следующем. Поступление энергии через клапан при установившихся
колебаниях в точности равно ее убыли. Если в начальный момент
амплитуда колебаний такова, что расход энергии больше, чем ее
приход через клапан, то амплитуда убывает до тех пор, пока не
установится равенство расхода и прихода энергии. Наоборот, если
амплитуда мала и приход энергии превышает ее расход, то
амплитуда возрастает. Таким образом, амплитуда и частота
установившихся автоколебаний определяется только па-
параметрами самой системы. Это отличает автоколебания
от собственных, для которых амплитуда задается начальным от-
отклонением.
С этим свойством связана третья характерная особенность боль-
большинства автоколебательных систем. Если под влиянием какого-
356
либо случайного толчка система приобретет хотя бы и очень малое
отклонение от состояния равновесия, это отклонение будет возрас-
возрастать — происходить так называемое самовозбуждение колебаний.
Так как во многих автоколебательных системах вероятность воз-
возникновения таких случайных толчков велика, то самовозбуждение
колебаний также можно считать характерной особенностью авто-
автоколебательных систем.
Если потери на трение в автоколебательной системе малы, то
поступление энергии, необходимой для поддержания колебаний
неизменными, также мало. Автоколебания происходят почти так
же, как собственные колебания. Они близки по форме к гармони-
гармоническим, а частота их почти совпадает с собственной частотой коле-
колебательной системы.
F ::
ГЛАВА XVI
ВОЛНОВОЕ ДВИЖЕНИЕ
§ 1. РАСПРОСТРАНЕНИЕ КРАТКОВРЕМЕННОГО ИМПУЛЬСА
В ТВЕРДОЙ СПЛОШНОЙ СРЕДЕ
Рассмотрим некоторый элемент, мысленно вырезанный в сплош-
сплошной упругой среде, скажем длинный упругий стержень (рис. 255).
Пусть на крайнее сечение стержня подействовал кратковременный
импульс силы, перпендикулярный сечению (удар молотком). Части-
Частицы среды, находящиеся в крайнем сечении, приобретают ускорение
в направлении действия силы и
смещаются. Соседний слой вслед-
вследствие инерции оказывается де-
деформированным и в нем возни-
возникают упругие силы, стремящие-
стремящиеся восстановить первоначальный
объем. Под действием упругих
сил, направленных против ско-
скорости частиц первого слоя, эти
частицы останавливаются, но
зато приобретают скорость частицы второго слоя. Это приводит к
исчезновению деформации во втором слое и к возникновению ее в
третьем. Смещение частиц и деформация передаются далее от слоя
к слою.
Найдем скорость распространения импульса. Положим, что
в момент t импульс сжатия достиг сечения вг. В этот момент на се-
сечение вг действует сила F, равная силе, с которой был нанесен удар
по сечению аб (если силы внутреннего трения в среде малы и ими
можно пренебречь). Под действием силы F частицы, лежащие перед
сечением вг, были сжаты. Положим, что величина относительного
сжатия равна е. Так как стержень однороден, то изменение плот-
плотности можно считать пропорциональным сжатию Ар= ер. где р —
плотность недеформированного стержня.
а
¦ ~-\
6 —
9
I 1Г
|[
Рис. 255. Движение импульса в
сплошном упругом теле.
358
Сжатие и уплотнение, очевидно, распространяются с общей ско-
скоростью, которую обозначим с. За время Д^ через сечение вг будет
перемещена масса:
Дт = S Дл: Др, где Дх == с Ш.
Количество движения, соответствующее ей:
Дтс = Sc М Дос = S Дрс2 U. A6.1)
Это количество движения равно импульсу силы, действующей на
сечение:
Ftt^kpSM. A6.2)
Приравнивая правые части равенства A6.1) и A6.2), получим:
Дрс2 = Др,
или
с2 = ^-. A6.3)
Др
Заметим, что мы не накладывали никаких ограничений на ха-
характер среды, в которой вырезан стержень (кроме того, что она уп-
упругая и сплошная). Таким образом, соотношение A6.3) справед-
справедливо для твердых, жидких и газообразных сред.
Так как Др = — и Др = ер, то
а
-ут,
Г ар
ар
т. е. скорость распространения импульса в твердой уп-
упругой среде обратно пропорциональна корню квадрат-
квадратному из коэффициента упругости и плотности среды.
Если импульс распространяется в изолированном элементе среды,
продольные размеры которого значительно больше поперечных
(стержень, проволока и т. п.), то коэффициент упругости а связан
с модулем Юнга известным нам соотношением — = Е. Следова-
а
тельно, скорость распространения продольных волн в стержне:
Если же элемент, в котором распространяется импульс, не
изолирован от окружающих участков среды, а лишь мысленно вы-
вырезан в ней, то связь между а и ? более сложная.
Дело в том, что мы измеряем модуль Юнга в условиях, когда
ничто не препятствует возникновению поперечных деформаций,
являющихся следствием деформаций продольных. Если же про-
продольные деформации испытывает лишь ограниченный участок прак-
практически неограниченного объема изолированной среды, то в окру-
окружающей участок среде возникают напряжения, препятствующие
359
поперечным деформациям (расширению при продольном сжатии и
сжатию при продольном растяжении). В этом случае, как можно
показать:
= С + и) О - 2f*)
где ^ _ коэффициент Пуассона. Отсюда скорость распространения
импульса в неограниченной изолированной среде:
ОлЛИ . A6.5а)
Но так как коэффициент Пуассона по величине близок к 0,25, то
множитель \[ ' ~ ^ близок к единице, и в первом приб-
V A + ц)A—2ц)
лижении можно скорость распространения импульса в сплошной
среде полагать равной скорости распространения его в стержне,
т. е. скорость распространения продольного импульса
в упругой среде прямо пропорциональна корню квад-
квадратному из модуля Юнга и обратно пропорциональна
корню квадратному из плотности среды.
Если скорость распространения импульса зависит только от
свойств среды и не зависит от формы импульса (т. е. не зависит от
того, как сила, создающая импульс, меняется со временем или как
меняется со временем сжатие в деформируемой части стержня) и
от величины сжатия, то говорят, что среда не обладает дисперсией.
Ниже мы везде будем рассматривать среды без дисперсии.
Распространение импульса можно пронаблюдать на достаточно
длинной, свитой из легкой проволоки пружине, которая подвеши-
подвешивается на нитях к стойке (рис. 256). Эта модель наглядно демон-
демонстрирует, что скорость распространения импульса не есть скорость
движения частиц тела, а есть скорость распространения в нем дефор-
деформаций или уплотнений. Однако каждый раз при прохождении им-
импульса частицы среды в сечении смещаются в направлении движе-
движения импульса. Импульс, при прохождении которого частицы среды
смещаются вдоль направ-
направления его распространения,
называется продольным им-
импульсом.
Если мы сообщим стер-
стержню импульс растяжения,
подействовав на крайнее
сечение силой, направлен-
направленной от стержня, то он рас-
распространяется подобно им-
импульсу сжатия. При этом
Рис. 256. Демонстрация распространения частицы среды движутся в
импульса. направлении, противопо-
360
ложном движению импульса, но тоже вдоль этого направле-
направления. Поэтому импульс растяжения тоже называется продольным.
Вследствие возникновения в твердом теле при сдвиге упругих
сил в нем могут распространяться импульсы, сообщенные не-
некоторому сечению перпендикулярно оси тела.
Импульс и в этом случае рас-
распространяется вдоль стержня,
но смещение частиц стержня пер-
перпендикулярно к направлению
распространения импульса. Та- Рис. 257. Схема распространения по-
кой импульс называется попе- перечного импульса.
речным.
Скорость распространения поперечного импульса в неограни-
неограниченной упругой среде:
¦-/?.
<16-6>
где G — модуль сдвига.
Распространение поперечного импульса (рис. 257) можно про-
продемонстрировать, нанося короткий удар по натянутому резиновому
шнуру. Картина распространения будет лишь качественной, так
как величина скорости импульса в этом случае зависит не от моду-
модуля сдвига, а от силы натяжения шнура.
§ 2. ОТРАЖЕНИЕ ИМПУЛЬСА НА ГРАНИЦЕ ДВУХ СРЕД
В предыдущем параграфе мы считали стержень, в котором рас-
распространяется импульс, неограниченно длинным. Однако на прак-
практике мы имеем дело с ограниченными участками среды.
Пусть концевое сечение стержня свободно, т. е. граничит со
средой, которая не оказывает сопротивления смещению частиц кон-
концевого сечения стержня (например, с воздухом). В момент, когда
импульс сжатия достигает концевого слоя стержня, частицы этого
слоя приобретают некоторую скорость в направлении распростра-
распространения импульса. Так как граничащая среда не оказывает сопротив-
сопротивления движению частиц стержня, то концевой слой смещается из
начального своего положения, а предшествующий ему слой стерж-
стержня оказывается растянутым. В нем возникают напряжения, нап-
направленные против скорости частиц концевого слоя. В результате час-
частицы концевого слоя теряют скорость, а частицы растянутого слоя
приобретают скорость в том же направлении, в котором они смеща-
смещались при прохождении первоначального (падавшего на границу
стержень — воздух) импульса. Слой, предшествующий концевому,
смещается вслед за ним, и растянутым оказывается следующий слой.
Таким образом, импульс сжатия при отражении от свободной гра-
границы преобразуется в импульс растяжения и распространяется
361
в направлении, противоположном первоначальному. Однако ско-
скорость частиц и их смещение в отраженном импульсе направлены
в ту же сторону, что и в падающем. Деформация же изменяет знак
(сжатие переходит в растяжение).
Аналогично обстоит дело и с импульсами растяжения и сдвига.
При отражении импульса от менее плотной среды
знак деформации изменяется, а направления скоростей
и смещения частиц остаются неизменными.
При отражении импульса от закрепленного конца стержня имеет
место обратное явление. Когда к концевому сечению подходит им-
импульс сжатия, он не может сообщить частицам смещения в сторону
своего движения. Поэтому он должен отразиться к соседнему участ-
участку и пойти вдоль стержня в обратном направлении. При этом нап-
направления скоростей частиц изменяются на противоположные. Если
в падающем импульсе они направлены к границе, то после отраже-
отражения — от нее. При отражении импульса от более плот-
плотной среды знак деформации сохраняется, а направле-
направления скоростей и смещения частиц изменяются на
противоположные.
Если отражение осуществляется непрерывно на обоих концах
стержня, то в стержне возникают колебания.
§ 3. РАСПРОСТРАНЕНИЕ ИМПУЛЬСА В ЖИДКОСТЯХ И ГАЗАХ
Допустим, что большой пластине, помешенной в жидкость или
газ, сообщено быстрое перемещение, перпендикулярное ее плоскости.
В слое среды, прилегающем к пластине, в направлении ее переме-
перемещения возникает сжатие (и повышение давления), а с противопо-
противоположной стороны — разрежение (и понижение давления).
Под влиянием возросшего давления впереди пластины частицы
последующих слоев приобретут скорости в направлении распро-
распространения импульса; а с противоположной стороны пластины в зо-
зону пониженного давления частицы устремляются, имея скорость,
противоположную по направлению скорости распространения им-
импульса. Таким образом, в разные стороны от пластины в среде рас-
распространяются импульсы сжатия и разрежения. Оба импульса
продольные. Распространение их обусловлено наличием упругих
сил, возникающих при деформации объема жидкости или газа. Так
как жидкости и газы (при обычных условиях) не обладают упруго-
упругостью в отношении сдвига, то в них поперечные импульсы распро-
распространяться не могут.
Найдем скорость распространения продольного импульса в жид-
жидкости или в газе.
Положим, импульс сжатия увеличил в некотором объеме среды
плотность на величину Др и давление на Ар по сравнению с покоя-
покоящейся средой.
362
В соответствии с A6.3)
т. е. скорость распространения импульса определяется зависи-
зависимостью плотности от давления в среде. В сплошных средах
скорость распространения импульса (независимо от его
формы) является константой, характерной для данной
среды.
Надо иметь в виду, что зависимость между давлением и плот-
плотностью меняется с температурой. При быстром сжатии передача
теплоты соседним объемам среды произойти не успевает. Поэтому
возникновение и распространение кратковременного импульса от-
относится к так называемым адиабатическим процессам, т. е. про-
процессам, происходящим без теплообмена с окружающей средой.
Особенно существенно это для распространения импульса в газах.
При адиабатическом сжатии связь между изменением давления
и соответствующим изменением объема определяется так называе-
называемым уравнением Пуассона:
pV1 = const, A6.8)
где ? = — (отношение теплоемкости газа ср при постоянном дав-
cv
лении к теплоемкости газа cv при постоянном объеме. Для воздуха
f = 1,4). Так как в однородной среде плотность обратно пропор-
пропорциональна объему, то
Откуда
dP = 'IPo -^rr dp.
Если изменение плотности мало, то -— ^ 1:
^=T—• A6.9)
d? po
Сопоставляя соотношения A6.9) и A6.3), найдем:
с =
Так как в газах отношение — с повышением температуры растет,
Ро
то скорость распространения импульса с повышением температу-
температуры увеличивается.
363
В жидкостях скорость распространения кратковременного им-
импульса:
= ул., (i6.li)
где k — объемный модуль адиабатической сжимаемости,
или
с= ]/Х, A6.12)
где Р — адиабатический коэффициент объемного сжатия.
В вышеизложенных рассуждениях мы предполагали, что де-
деформация пропорциональна величине действующей упругой силы
(давлению). Следовательно, полученные зависимости характери-
характеризуют импульсы достаточно малых амплитуд. Импульсы с большими
амплитудами, порожденные, например, взрывами, распространяют-
распространяются с иными скоростями.
§ 4. РАСПРОСТРАНЕНИЕ КОЛЕБАНИЙ В ОДНОРОДНОЙ
СПЛОШНОЙ СРЕДЕ. БЕГУЩИЕ ВОЛНЫ
В природе и технике мы встречаем огромное разнообразие волн:
волны и зыбь океанов; волны землетрясений; сейсмические волны,
волны звука; волны в натянутой струне или в кристалле кварца,
который используется для излучения или приема ультразвука;
электромагнитные волны — свет, радио и даже волны вероятности (!),
которые рассматривает квантовая механика при изучении по-
поведения электронов, атомов и т. п.
При всех различиях в происхождении и проявлении волн они
обладают целым рядом общих свойств. Эти свойства могут быть выяв-
выявлены и математически описаны в общем виде, одинаковом для раз-
различных физических систем. Установив, что явление определяется
волнами, мы можем предсказать многие особенности явления, не-
независимо от механизма возбуждения и передачи волн.
Наша задача — выяснить некоторые общие свойства волн на
примере волн механических. Как можно возбудить механические
волны?
Система, помещенная в какую-либо среду (например, в воздух
или воду), колеблясь, взаимодействует с частицами, находящимися
в прилегающем слое среды. Она создает непрерывный ряд импуль-
импульсов деформаций, следующих один за другим и распространяющих-
распространяющихся в среде. Если скорость распространения каждого отдельного
импульса не зависит от их амплитуд и формы (пока импульсы дос-
достаточно малы), то они распространяются, следуя в порядке их воз-
возбуждения колеблющейся системой, сохраняя свою первоначальную
форму.
364
Положим, система колеблется по гармоническому закону, тогда
вынуждающая сила, с которой она действует на прилегающие час-
частицы среды, заставляя их колебаться, также меняется по гармо-
гармоническому закону. Частицы среды колеблются с частотой вынуж-
вынуждающей силы, т. е. с частотой колебания системы.
Будем считать границу среды настолько удаленной от источ-
источника колебаний, что возмущения не успевают за время наблюдения
отразиться от нее, и затухание колебаний настолько малым, что им
можно пренебречь.
Частицы среды, прилегающие к колеблющейся системе, прихо-
приходят в колебание одновременно с возникновением колебаний систе-
системы. Очевидно, частица, отстоящая от системы на расстоянии х в
направлении распространения колебаний, начнет колебаться, когда
до нее дойдет начало распространяющегося в среде возмущения.
Пусть скорость распространения возмущения в среде с.
Если колебания системы происходят по закону:
A6.13)
то точка среды, отстоящая от нее на расстоянии х, колеблется по
тому же закону, но в момент t она имеет смещение, которое имела
частица, прилегающая к возмущающей системе, в момент t — —.
с
Таким образом, частицы среды смещаются по закону:
X
t . A6.14)
Это уравнение носит название уравнения бегущей волны. Оно оп-
определяет величину смещения частицы от положения равновесия как
функцию времени t и ее расстояния х от источника возмущения.
Введем в уравнение A6.13) вместо частоты период |и> =
Если зафиксировать определенное значение времени t, то уравне-
уравнения A6.13) и A6.14) дадут нам распределение смещений частиц
вдоль направления распространения волн в зависимости от рас-
расстояния х. Смещения точек, отстоящих друг от друга на расстоянии
х = сТ, в один и тот же момент времени tx будут, как следует из
равенства A6. 15), одинаковы. Следовательно, распростране-
распространение колебаний в среде — периодический в пространстве
процесс.
Если в уравнении A6.13) зафиксируем значение х = Х\, т. е.
выделим в среде определенную частицу, отстоящую на х% от источ-
источника колебаний, то закон ее колебания:
61 = asin(arf —?0), A6.16)
365
где <р0 = ~ .
Колебания в каждой точке среды — процесс перио-
периодический во времени.
Процесс распространения колебаний в сплошной среде, перио-
периодический во времени и в пространстве, называется волновым про-
процессом.
Расстояние между двумя частицами среды, испытывающими в
один и тот же момент времени одинаковое смещение, называется
длиной волны X. Как мы видели выше, длина волны равна расстоя-
расстоянию, которое проходит волна за один период:
Х = сТ. A6.17)
Равенство A6.15) можно записать в виде:
) О6-18)
X
Частицы среды колеблются с одинаковой амплитудой, но точка,
отстоящая на х от начальной, имеет относительно нее сдвиг фаз-^-i.
На расстоянии одной длины волны фаза колебания изменяется на 2тс.
Величину k = — называют волновым числом. Оно показывает,
А
сколько волн укладывается на отрезке длиной 2я. Вводя волновое
число, уравнение бегущей волны можно записать в виде:
% — asin(wt — kx). A6.19)
Уравнения A6.14), A6.16), A6.18) и A6.19) совершенно равноправ-
равноправны. Они описывают один и тот же волновой процесс.
Как и в случае распространения импульса, частицы среды не
перемещаются вслед за волной. При прохождении волны они лишь
колеблются около положения равновесия. Еще в XV веке Леонардо
да Винчи, гений, соединявший в себе наблюдательность худож-
художника и интуицию ученого, писал: «Волнения гораздо подвижнее во-
воды, поэтому часто случается так, что волна ускользает от места ее
возникновения, а вода остается на том же месте, подобным же обра-
образом ведут себя волны, создаваемые ветром на некощенном поле:
волны бегут по полю, а стебли злака остаются на месте».
Скорость распространения волны с — это скорость распростра-
распространения возмущения, вызывающего смещение частиц от положения
равновесия. Если на поверхность озера положить в направлении
распространения волн веревку с пробковыми поплавками, отстоя-
отстоящими друг от друга на равных расстояниях, то легко заметить, что
поплавки и веревка в целом не перемещаются в направлении дви-
движения волны. Они лишь поднимаются и опускаются, причем в из-
известной и постоянной последовательности.
366
Мы видели, что точки, отстоящие друг от друга на расстоянии,
равном длине волны К = сТ, колеблются в одинаковой фазе. Мож-
Можно сказать, что фаза за время одного периода «пробегает» расстоя-
расстояние % или движется со скоростью с. Поэтому скорость распростра-
распространения волны называют фазовой скоростью. Если в данной среде
скорость распространения импульса не зависит от его величины и
формы, фазовая скорость совпадает со скоростью распространения
отдельного импульса1.
Как следует из уравнения 16.17:
c=vX. A6.20)
За время одного полного колебания фиксированной частицы сре-
среды A6.16) волна A6.14) распространяется на расстояние, равное
длине волны. Если частица в секунду совершает v колебаний, то
волна проходит vK длин волн.
Если смещения частиц среды от положения равновесия в волне
параллельны направлению ее распространения, волна называется
продольной, если перпендикулярны — поперечной.
1 t-o
¦ . t-i
t-T
Рис. 258. Схема распространения
поперечной волны.
Рассмотрим подробнее процесс распространения поперечных
волн (рис. 258). На горизонтальных линиях будем откладывать
расстояние от начальной точки О, а в направлении, перпендикуляр-
перпендикулярном к ней, — смещение частиц для нескольких моментов времени,
разделенных интервалом в четверть периода волны. В начальный
момент времени (t = 0) все частицы среды находятся в равновесии,
частица, находящаяся в точке О, только что получила ускорение, нап-
направленное вверх. Отклоняясь от положения равновесия, частица увле-
кает за собой соседние. Через четверть периода t = — частица, на-
1 Если в данной среде фазовая скорость зависит от частоты волн, гово-
говорят, что среда обладает дисперсией. В средах, обладающих дисперсией, фа-
фазовая скорость и скорость распространения отдельного импульса не совпада-
совпадают.
367
ходящаяся в точке О, достигнет максимального отклонения, а час-
т
тица А, отстоящая от нее на расстоянии х — с —, только еще полу-
4
Т
чит ускорение, направленное вверх. В момент t = — первая части-
ца вернется в положение равновесия О, имея ускорение, направлен-
направленное вниз, частица А достигнет максимального смещения вверх, а
т
частица В, отстоящая от О на расстоянии х = с —, лишь начнет
3 Т
движение вверх. Спустя время t = — частица О достигнет наиболь-
наибольшего смещения книзу, частица А пройдет положение равновесия,
двигаясь вниз, частица В переместится в крайнее верхнее положе-
зт
ние, частица С, находящаяся на расстоянии х = с— от точки О,
4
начнет двигаться кверху. Наконец, спустя время t = Т первая
частица вернется в точку О, имея ускорение вверх, точка А дос-
достигнет крайнего низшего положения, точка В пройдет линию рав-
равновесия, двигаясь вниз, частица С достигнет максимального от-
отклонения вверх и частица D, находящаяся на расстоянии х =
— сТ от точки О, приобретет ускорение вверх. Дальше процесс пов-
повторяется.
0
\
\
r
I
a/
7
/
/
I
\ ,
\
A
\
\
ь
1
I
*!
I
\
s
* В
\
\
j
/
JO IS
с
\
\
-I
Рис. 259. Схема распространения продольной
волны.
На рисунке 259 изображено аналогичное построение для про-
продольных волн. В волне наблюдается чередование разрежений и сжа-
сжатий.
Если условиться по направлению оси х откладывать расстоя-
расстояние от начальной точки, а по оси у величину смещения, то можно
и продольную волну изобразить графиком, аналогичным графику
поперечной волны (рис. 260). Только надо помнить, что реальное
368
t » t t
Рис. 260. График продольной волны.
смещение частиц в ней происходит не перпендикулярно распростра-
распространению волн, как чисто условно показано на графике, а в направле-
направлении распространения волны.
Чтобы найти скорость, с которой смещается в волне колеблющая-
колеблющаяся частица среды, мы должны взять производную по времени от
равенства A6.16) или (что то же) от равенства A6.14), считая х
постоянным:
v = — = wa cos
dt
или
о = a»sin <¦>(/ — —-f —), A6.22)
\ с 2 I
т. е. скорость частиц в волне меняется по тому же закону, что и
смещение, но сдвинута по фазе относительно смещения на —. Когда
смещение достигает максимума, скорость частицы меняет знак, т. е.
на мгновение обращается в нуль. При прохождении положения рав-
равновесия частица имеет максимальную скорость.
Дифференцируя A6.21) по времени, получим закон изменения
со временем ускорения частиц:
i=^==~(fl2asin@(^T)' A6'23)
или
/ = —о)8Е, A6.24)
т. е. ускорение меняется также по закону изменения смещения, но
везде направлено против смещения, т. е. сдвинуто по фазе относи-
относительно него на я. Ускорение обращается в нуль при прохождении
частицей положения равновесия и достигает максимума, равного
j0 — co2a, в момент достижения максимума смещением, т. е. в мо-
момент, когда скорость частицы меняет свой знак. На рисунке 261
построены графики смещений, скоростей и ускорений частицы вол-
волны. Легко видеть, что распространение волны в среде обусловлено
действием упругих сил:
F = т\ = — т<&4 = — kl,
где т. — масса частицы.
369
1
V/
Рис. 261. Графики смещения, скорости и ускорения частиц
в волне.
В твердых телах, поскольку в них возникают упругие силы при
продольных и поперечных деформациях, распространяются как
продольные, так и поперечные волны. В жидкостях и газах, которые
не оказывают сопротивления деформациям сдвига, возникают и рас-
распространяются только продольные волны.
Для того чтобы найти распределение в волне деформаций, рас-
рассмотрим две частицы, отстоящие друг от друга на расстоянии Ах
(рис. 262). Если смещение одной частицы |ь а второй \i, то длина
участка Ах изменится на А\ ~ \% — \i. Относительная деформа-
деформация участка Ах при этом — (или между двумя бесконечно близ-
близкими частицами —), т. е. для нахождения закона распределения
dx
в волне деформаций надо взять производную по х от функции, вы-
выражающей закон распределения смещений A6.14):
d\ и>а I ,
е= — — COS со \ t — ¦
dx
A6.25)
COS (u I l X
с \ с
Таким образом, деформации меняются по тому же закону, что
и смещения, но сдвинуты по фазе на —. В самом деле, величина
Li
а*
—
Рис. 262. К расчету относительной деформации при
распространении волны.
370
деформаций зависит не от абсолютных величин смещений, а от раз-
разности смещений близких частиц.
Разность смещений оказывается наибольшей в области, где час-
частицы проходят положение равновесия (так как одни частицы имеют
положительное смещение, а близкие к ним — отрицательное). В
области, где частицы достигли максимального смещения, эта раз-
разность минимальная, а для бесконечно близких частиц равна нулю.
Сравнивая выражения A6.21) и A6.25), видим, что скорость и дефор-
деформация в бегущей волне меняются со сдвигом фазы на я. Волна дефор-
деформаций и волна скоростей сдвинуты друг относительно друга на —.
В сечениях, где скорость направлена вверх (у> 0), сдвиг направ-
направлен влево, если смотреть по направлению распространения волны
(е < 0). В сечениях, где скорость направлена вниз, сдвиг происхо-
происходит вправо (е> 0). В продольной волне слои, которые движутся
по направлению распространения волны (у> 0), оказываются сжа-
сжатыми (е < 0), слои, которые движутся в противоположном направ-
направлении (v < 0), — растянутыми (е>» 0). Кроме того, v и е связаны
соотношением:
v = сг,
т. е. не могут быть произвольными. Коэффициент пропорциональ-
пропорциональности между ними — скорость распространения волны.
Продифференцируем A6.25) еще раз по х:
?L = =? sin» (*--?-). A6.26)
дх2 с2 \ с ]
Сопоставив A6.26) и A6.23), получим:
<^ = _^<!!1 A6.27)
дх2 с dt* х '
дифференциальное уравнение волнового движения.
Решением его служат уравнения A6.14), A6.15), A6.16), A6.19),
описывающие синусоидальные или косинусоидальные волны.
Кроме указанных продольных и поперечных волн, распростра-
распространяющихся в сплошных средах, в природе существует целый ряд
других волновых процессов.
Важным примером волнового процесса являются так называе-
называемые поверхностные волны, возникающие на поверхности раздела
двух сред с разной плотностью. Например, к волнам этого типа
относятся волны на поверхности воды (на границе вода —
воздух).
Законы распространения поверхностных волн сложнее, чем
волн в сплошной среде. На рисунке 157 приведена фотография
линий тока в поверхностной волне, полученная фотографирова-
фотографированием с короткой экспозицией взвешенных в воде легких ча-
частиц, На рисунке 156 дана фотография траекторий частиц, сде-
371
данная с длительной выдержкой (примерно — Т) в тех же усло-
условиях, что и предыдущая. Движение частиц жидкости в волне по
существу своему нестационарно. Поэтому, как легко видеть при
сравнении фотографий, траектории частиц не совпадают с ли-
линиями тока. Частицы в поверхностной волне колеблются не по
прямолинейным траекториям, а по замкнутым эллиптическим
или круговым орбитам. Форма волн при этом приближается
к трахоиде1. Простые синусоидальные волны возникают на по-
поверхности среды лишь в случае, если длина волны много больше
ее высоты. Например, приливные волны, высота которых Bа)
равна нескольким метрам, а длина измеряется сотнями кило-
километров.
Поверхностные волны возникают и внутри среды, если в ней
имеются границы между слоями различной плотности. Такие
волны можно наблюдать в атмосфере по характерным грядооб-
разным облакам, которые образуются на гребнях волн, на гра-
границе двух слоев воздуха с разной температурой, а следова-
следовательно, и плотностью.
§ 5. ЭНЕРГИЯ ВОЛНОВОГО ДВИЖЕНИЯ.
ПОТОК ЭНЕРГИИ. ВЕКТОР УМОВА
Источник волнового движения в среде — колебательная си-
система. За счет ее энергии возникают колебания частиц среды, сосед-
соседних с колеблющимся телом. Эти частицы передают энергию сле-
следующим за ними и т. д. Передача энергии от колеблющегося
тела к частицам окружающей среды называется излучением.
Возбужденная за счет излучаемой энергии волна осуществляет
передачу энергии в среде. В этом случае мы имеем дело с волновой
передачей механической энергии.
Общая задача о движении энергии в среде была решена про-
профессором Московского университета Н. А. Умовым A874 г.).
Рассмотрим волновую передачу механической энергии. Для
этого найдем закон распределения энергии в волне.
Выделим в области среды, возмущенной распространяющейся
волной, малый участок, объем которого V и масса т. Если плот-
плотность среды р, то объем V = — = 5 Ах, где 5 — площадь се-
Р
чения, перпендикулярного направлению распространения волны,
Ах — расстояние между двумя близкими сечениями. При про-
прохождении волны благодаря разности смещений At частиц, ле-
лежащих в сечениях, отстоящих друг от друга на расстоянии Ах,
1 Трахоида — кривая, которую описывает точка катящегося диска,
отстоящая от его центра на расстоянии R, равному радиусу диска.
372
возникает относительная деформация участка между сечениями,
равная —, и упругая сила:
Ах
AF = — k —5. A6.28)
Бесконечно малый участок волны обладает потенциальной энер-
энергией:
B)' A6-23>
Или, приняв во внимание A6.25), найдем:
LJ — cos2 ш [t 1. A6.30)
2 2 \ с } V ;
2
Кинетическая энергия этого участка:
Ек = — =—pVa2a>2cos2u>(V -V A6.31)
22^ \ с } '
Сравнивая выражения для кинетической и потенциальной
энергий участка волны, видим, что они меняются в одной фазе.
Этим энергия волнового движения отличается от энергии колеблю-
колеблющегося изолированного тела, для которого максимум кинетической
энергии соответствует минимуму потенциальной и обратно. Пол-
Полная энергия колеблющегося тела — величина постоянная.
Найдем полную энергию участка волны:
A6.32)
Это равенство показывает, что значение полной энергии волны есть
величина переменная. При распространении волны энергия из од-
одного участка среды переходит в другие.
В упругой волне перенос кинетической энергии связан с рас-
распространением волны скоростей, а потенциальной—с распростра-
распространением волны деформаций.
Деформированные участки среды в волне движутся и при этом
передают свою (потенциальную и кинетическую) энергию соседним
участкам среды. Энергия течет в среде со скоростью распростране-
распространения волны. Хотя движение частиц в среде дважды за период ме-
меняет направление, но так как вместе с тем меняется и знак деформа-
деформации, то энергия течет все время в направлении распространения
бегущей волны.
Энергия, которой обладал некоторый участок среды в момент t,
через период перейдет по направлению распространения волны в уча-
участок, расположенный на расстоянии, равном длине волны от пер-
первого и т. д. Поэтому полная энергия данного участка среды изме-
373
няется с периодом, равным периоду волны. Энергия как бы «течет»
в среде. Так как скорость распространения волны в упругой среде
то
Е = paWcos2») It — —V A6.33)
т. е. энергия участка волны прямо пропорциональна
плотности среды и квадратам амплитуды и частоты
колебаний частиц среды.
Умовым было введено понятие плотности энергии и потока
энергии. Плотностью энергии называется энергия, приходящаяся
на единицу объема среды:
е = Л. == paV cos2 ш (t — — V A6.34)
V V с /
Плотность энергии в волне непрерывно меняется со временем.
Для того чтобы найти среднее значение плотности энергии за пе-
период, надо вычислить определенный интеграл по времени от плот-
плотности энергии в пределах от t — 0 до t=T и разделить на величи-
величину периода Т:
= -L Г
о о
г
НО - Г COS2» \t — —\ =-
т.
X
я, следовательно, средняя плотность
б
энергии волны в пределах периода:
е~= — paV. A6.35)
Li
Потоком энергии называется количество энергии, проходящее
в единицу времени через площадку S, проведенную в среде пер-
перпендикулярно направлению распространения волны.
Очевидно, если скорость распространения волны с, то за время,
равное одному периоду, через сечение 5 будет пронесена волной
вся энергия, которой обладает столбик длиной вдоль направления
распространения волны сТ. Следовательно, за период через сече-
сечение 5 пройдет энергия:
Qn=e~cTS.
Среднее значение потока:
q = ecS,
374
или ?= — ра2ш2с5. A6.36)
Количество энергии, протекающее за единицу времени через
единицу поверхности S, называется плотностью потока энергии (Q):
ф=—ра2ш2с. A6.37)
2
-У
Так как скорость распространения волны с —вектор, то и плот-
плотность потока энергии может рассматриваться как вектор, направ-
направление которого совпадает с направлением распространения волны.
Вектор этот носит название вектора Умова. Выводя формулу по-
потока энергии, мы считали, что волна распространяется в неподвиж-
неподвижной среде. При распространении в подвижной среде мы должны
были бы еще учесть перенос энергии средой (конвективный поток
энергии).
§ 6. ПЛОСКИЕ И СФЕРИЧЕСКИЕ ВОЛНЫ
Рассматривая распространение волн, мы полагали, что в плос-
плоском слое среды, прилегающем к источнику волн, состояние дви-
движения всех частиц в один момент времени одно и то же и что вол-
волна распространяется таким образом, что в любой плоскости, парал-
параллельной начальной, состояние движения частиц в любой момент
времени так же одно и то же. Это позволило нам рассматривать
движение волны вдоль прямой линии, считая, что вдоль всех ли-
линий, параллельных выбранной, движение происходит одинаково.
Поверхность, соединяющая в данный момент точки волны,
колеблющиеся в одной фазе, называется поверхностью равной
фазы или волновой поверхностью. Для волн, которые мы рассмат-
рассматривали, волновая поверхность представляет собой плоскость.
Волны, у которых волновая поверхность плоская, называют плос-
плоскими волнами.
Геометрическое место точек, до которых в некоторый момент
времени дошло колебание, называется фронтом волны. В плоской
волне фронт ее также плоскость. Прямые, проведенные от источ-
источника волн в направлении их распространения, называются лучами.
Для плоской волны лучи представляют собой совокупность
множества параллельных прямых, проведенных перпендикулярно
фронту волны.
Если среда, в которой распространяются волны, не ограничена,
то волны от источника могут распространяться во все стороны. При-
Причем если упругие свойства среды во всех направлениях одинаковы
(среда изотропна), то колебания распространяются во все стороны
с одной скоростью.
Положим, источником колебания в изотропной среде служит
пульсирующий шарик малых размеров. В этом случае волновая
375
поверхность — сфера, центр которой рас-
расположен в точке возникновения колеба-
колебаний.
Очевидно, радиус этой сферы равен от-
отрезку, на который распространяется ко-
колебание за время t, т. е. г = ct. Фронт
сферической волны тоже сфера, а лучи
(нормальные фронту волны) совпадают с ее
радиусами. Если мы рассечем сферическую
волну плоскостью, проходящей через ее
центр, то в сечении получим ряд концент-
концентрических окружностей, которые представ-
представляют собой сечения волновых поверхно-
поверхностей.
Поместим на краю ванны, заполненной
водой, шарик на пружине и сообщим ему
колебания. От шарика в жидкости рас-
распространяются сферические волны, так же
как и в воздухе, но мы наблюдаем собственно не их, а поверх-
поверхностные волны. С известным приближением мы можем рассматри-
рассматривать наблюдаемые волны как след сферических волн на поверхно-
поверхности воды (рис. 263).
Распространяясь, волны приводят в колебательное движение
все большее число частиц среды. Так как при этом энергия коле-
колебательного движения, сообщенная частицам среды источником
волн, распределяется между все большим их числом, амплитуда
сферических волн убывает обратно пропорционально расстоянию
г от центра их возникновения. Зависимость смещения от коорди-
координаты, отсчитанной вдоль луча, и от времени в сферической волне
имеет вид:
Рис. 263. Круговые вол-
волны на поверхности воды,
возникающие при коле-
колебании шарика.
—sinm [t-~\
A6.38)
§ 7. ИНТЕРФЕРЕНЦИЯ ВОЛН
Часто в среде распространяются одновременно несколько волн.
Рассмотрим для примера систему небольших волн, возникаю-
возникающую от брошенного в пруд камня. Эти волны расходятся кон-
концентрическими окружностями. Если одновременно с первым кам-
камнем мы бросили в пруд второй, то новые волны (порожденные па-
падением второго камня) распространяются независимо от волн, соз-
созданных первым. Вглядываясь в систему волн от одного из камней,
легко обнаружить, что картина их кругового распространения не
искажается присутствием других волн. Но если мы будем смот-
смотреть на волны, созданные от обоих камней, то увидим более слож-
сложную картину, подобную изображенной на рисунке 264.
376
Рис. 264. Интерференция двух
систем сферических волн от ко-
когерентных источников.
Если в среде одновременно
распространяются несколько волн,
то частицы среды совершают
колебания, являющиеся резуль-
результатом сложения колебаний, созда-
создаваемых в данной точке каждой
волной.
Результирующее смещение ча-
частицы среды в любой момент
времени равно геометрической
сумме смещений, которые полу-
получает частица, участвуя в каж-
каждом из слагающих волновых про-
процессов. Этот принцип суперпози-
суперпозиции волн в сущности говорит о
том, что при распространении
в среде нескольких систем волн
каждая из них распространяется так, как будто другие волны от-
отсутствуют.
Явление, возникающее при сложении волн, называется интер-
интерференцией.
Рассмотрим случай, когда в среде распространяются две волны,
имеющие в каждой точке среды одинаковую частоту и постоянный
сдвиг фаз. Для этого надо располагать двумя источниками, которые
колеблются с одинаковой частотой и постоянным сдвигом фаз. Та-
Такие источники называются когерентными (cohaerere — латинское—
находиться в связи), а создаваемые ими волны — когерентными
волнами. Когерентные волны можно получить в ванне от двух ша-
шариков, насаженных на одну и туже пру-
пружину. Получим две системы когерент-
когерентных сферических волн. Картина их ин-
интерференции изображена на рисунке
264.
Плоские когерентные волны проще
всего получить от плоского источни-
источника колебаний, использовав отражение
волн от плоской границы. Картина ин-
интерференции двух плоских когерентных
волн — падающей и отраженной — изоб-
изображена на рисунке 265. Первая систе-
система волн может быть возбуждена гори-
горизонтальной палочкой, колеблющейся
на пружине и ударяющей по поверх-
поверхности воды; вторая — при отражении
первой системы волн от погружен-
погруженной вертикально в воду плоской пла-
пластинки. В поле, где происходит сло-
Рис. 265. Интерференция
двух систем плоских волн—
падающей и отраженной.
377
жение волн, наблюдается чередование зон усиления и ослаб-
ослабления волн.
Пусть в среде распространяются две плоские волны (рис. 266),
имеющие частоту со. Возьмем на плоских источниках точки Oi и О2
и проведем из них два луча. Вдоль лучей распространяются волны,
в которых смещение меняется, например, по закону:
t
= a2 cos u) (t —
A6.39)
До точки В пересечения лучей волны
пройдут, вообще говоря, разные расстоя-
расстояния dt и с?2- В точке В складываются ко-
колебания:
Рис. 266. К условию воз-
возникновения интерферен-
интерференции плоских волн.
?3 = a2 cos
_ A
с
I d^
где
Введем в уравнения A6.40) начальные фазы:
?2 = а2 cos (wt -j- <pa), J
и cp2 = — ">W"
A6.40)
A6.41)
A6.42)
с с
Сложение колебаний gj и |2 дает результирующее колебание:
$ = acos(u)^ -j-cp). A6.43)
в котором амплитуда
a? = a\-\-al-
или
cos
¦Фг).
а= л/ а\ -\- а\ -j-
, COS-
A6.44)
где d = di — dt.
Величина d, равная разности расстояний, проходимых волнами
от источников колебаний до данной точки среды, называется раз-
разностью хода волн.
Амплитуда результирующего колебания зависит от сдвига фаз
между интерферирующими волнами: Ду = ух — <р2 = ^
Л
или,
378
что то же, от разности хода интерферирующих волн. Результи-
Результирующая амплитуда достигает максимума при сдвиге фаз, равном:
где п = 0, 1, 2, 3 ,
и разности хода:
d = 2n
A6.45)
A6.46)
фаз:
Минимум результирующей амплитуды наблюдается при сдвиге
2-d
= B/1+1) ic
A6.47)
и разности хода:
A6.48)
В первом случае амплитуды колебаний складываются: а =
+ а2, и если а, = а2, то результирующее колебание происходит
с удвоенной амплитудой. Во вто-
втором случае а = at — а2 и при ai =
= а2 колебания взаимно уничто-
уничтожаются.
Рассматривая исходящие из
источника колебаний лучи, мы
видим, что они последовательно
пересекаются друг с другом, при-
причем разность хода между ними
непрерывно меняется, вследствие
чего и наблюдается картина че-
чередования интерференционных по-
полос.
Рассмотрим случай, когда два когерентных источника излучают
в среду сферические волны с одинаковой частотой и одинаковой
фазой (рис. 267). Так как обе волны проходят до данной точки А
среды, вообще говоря, разные расстояния di и d2, то между ними
возникнет сдвиг фаз, равный Л? = , где d = d2 — dt. В
Рис. 267. К условию возникнове-
возникновения интерференции сферических
волн.
точках среды, отстоящих от источников на равных расстояниях, а
также во всех точках, для которых
d = 2n~, A6.49)
2 ' '
волны имеют одну и ту же фазу и, складываясь, усиливают друг
друга.
379
В точках, для которых
A6.50)
волны складываются, имея противоположные фазы, и ослабляют
друг друга. В результате образуются чередующиеся линии, вдоль
одних из них результирующая волна имеет максимумы амплитуды,
вдоль других — минимумы. Линии эти представляют собой гипер-
гиперболы с фокусами, совпадающими С источниками колебаний.
В точках, удовлетворяющих условию A6.50), результирующая
амплитуда равна нулю, если обе волны доходят к ним, имея рав-
равные амплитуды. Но амплитуда сферической волны убывает с рас-
расстоянием. Поэтому если источники и возбуждают волны равной
амплитуды, то результирующая амплитуда обращается в нуль
лишь в случае, если разность хода мала по сравнению с расстоя-
расстоянием, проходимым волнами. Отчетливая интерференционная кар-
картина наблюдается только вблизи прямой, проходящей посредине
между источниками, при этом ярко выражен лишь средний макси-
максимум, удовлетворяющий условию d = 0, и несколько соседних мак-
максимумов и минимумов. Если источники не когерентны или среда
обладает дисперсией, то положение максимумов и минимумов со
временем меняется и интерференционная картина «расплывается».
§ 8. ПРИНЦИП ГЮЙГЕНСА
В 1690 г. Гюйгенсом был предложен метод построения фронта
волны в момент / -Ь Д/, если известно положение фронта в мо-
момент t и скорость распространения волн в данной среде. Идею мето-
метода подсказывает следующий опыт (рис. 268). На пути сферической
волны поставлена сферическая стенка с отверстиями. Тонкая ли-
линия справа очерчивает фронт волны, распространяющейся в сво-
свободной среде. Как видно на рисунке,
когда фронт волны достигает отвер-
отверстий, каждое из них становится источ-
источником сферических волн. Если про-
продолжить линию свободно распрост-
распространяющегося фронта, то она окажет-
окажется огибающей сферических волн, ис-
исходящих от маленьких отверстий в
преграде.
Опыт подсказывает, что каждую
точку среды, до которой дошел
волновой фронт, можно рас-
рассматривать как новый источ-
источник сферических волн (принцип
Гюйгенса).
Сущность метода Гюйгенса состоит
в следующем. Положим, фронт
Рис. 268. Опыт, подсказы-
подсказывающий идею метода Гюй-
Гюйгенса. Образование вторич-
вторичной сферической волны при
падении волны от источника
на стенку с отверстиями.
380
волны в момент t занимает положение АВ (рис. 269); нап-
направление его движения известно. Для построения фронта волны
в момент t-\- А/надо каждую точку фронта АВ принять за центр
распространяющихся вперед сферических волн, построить из каж-
каждой точки волновую поверхность с радиусом г== с At и провести
огибающую всех элементарных поверхностей. Эта огибающая и бу-
будет фронтом волны в момент t + At.
Принцип Гюйгенса позволяет легко получить законы отраже-
отражения и преломления волн. Пусть плоская волна падает на границу
двух сред KL и отражается от нее (рис. 270).
Луч падающий лежит в плоскости чертежа пер-
перпендикулярно А В. Положим, фронт волны зани-
занимает последовательно положения А В, CD , EF,
GH. Точки А, С, Е, G в соответствии с принципом
Гюйгенса можно рассматривать как источники от-
отраженных волн. Пока падающая волна распро-
распространяется от точки А до точки М, от точки С до
точки Мит. д., возникшие в точках А, С, E,G эле-
элементарные сферические волны пройдут расстояния
AN, CR, ES, GT. Так как скорости распростра-
распространения падающей волны и элементарных волн от
точечных источников одинаковы (среда одна), то
AM = AN, CM = CR, ES = EM, и т. д. Огибаю-
Огибающая окружностей с центрами в Л, С, ? и т. д.
представляет собой фронт отраженной волны. Эта
прямая лежит в плоскости чертежа, т. е. луч пада-
падающий и луч отраженный находятся в одной плос-
плоскости, перпендикулярной к поверхности раздела
сред. Из построения видно, что угол падения волны равен
углу отражения.
Подобным построением моя но получить фронт преломленной
волны АВ, падающей из среды, в которой скорость распростра-
распространения волн d, на границу со средой, в которой скорость распростра-
распространения волны Сг (рис. 271).
При этом, очевидно, пока точка В волны дойдет до точки В'
Рис. 269. По-
Построение фрон-
фронта волны по ме-
методу Гюйгенса.
Фронт
отраженной
болны
Фронт
падающей
волны
К М G ? С A L
Рис. 270. Построение отраженной волны по методу Гюйгенса.
381
на границе раздела сред, волна, возникшая в точке А, пройдет
во второй среде путь АА', причем АА' = c2t, a ВВ' = с4/, но по
теореме синусов
АА' ВВ'
sin г
или
sin ( Cj _
sin r с
A6.51)
Отношение синуса угла падения волны к синусу угла
преломления есть постоянная величина, равная отно-
отношению скоростей волн в
соприкасающихся сре-
средах. Величина п = — назы-
вается показателем прелом-
преломления на границе двух сред.
Отражение волн можно
продемонстрировать в волно-
волновой ванне.
Для этого на пути поверх-
ностной волны надо поло-
жить нд да0 ванны гладкую
стеклянную пластинку с тем,
чтобы произвести местное уменьшение глубины. Так как скорость
распространения поверхностных волн над пластинкой меньше, чем
над «глубокой» частью ванны, то граница стеклянной пластинки явит-
явится как бы границей раздела между двумя средами с разной скоростью
распространения волн и на ней будет наблюдаться преломление. На
Рис. 271. Построение преломленной
волны по методу Гюйгенса.
Рис. 272. Преломле-
Преломление волн на плоской
границе.
273. Водяная
линза.
Рис. 274. Отражение
плоских волн.
382
рисунке 272 изображено преломление волн на плоской границе
На рисунке 273 чечевицеобразная стеклянная пластинка действует
как собирающая линза. Рисунок 274 показывает отражение пло*
скои волны от плоской границы вода - твердое тело
§ 9. СТОЯЧИЕ ВОЛНЫ
Особый случай интерференции представляет результат сложения
двух встречных волн с одинаковой частотой и амплитудой. Допус
тим, что бегущая волна достигает границы данной среды. Как и
в случае распространения отдель-
ного импульса, на границе происхо- | Р
дит отражение волны. Отражен-
ОтраженПадающая Отраженная
ная волна распространяется в
обратном направлении, складыва-
складываясь в каждой точке среды с па-
падающей волной. Если затухание
в среде мало, то амплитуды па- дающеГи отражен^ вол-
дающеи и отраженной волн прак- нами,
тически одинаковы. Поскольку
путь, проходимый падающей волной до данной точки среды по
величине отличается от пути, проходимого волной отраженной
фис. lib), то между волнами в данной точке должен возникнуть сдвиг
фаз. Кроме того, дополнительный сдвиг фаз может появиться, если
отражение волны на границе среды происходит с изменением фазы.
Ьсли граница со средой, от которой происходит отражение за-
закреплена, то отражение происходит, как и в случае закрепленного
конца стержня1. Волна отражается с изменением фазы на л те
направление смещений при отражении изменится на противо-
противоположное. Это явление иногда называют «потерей полуволны» пои
отражении. F
Если волна падает на свободную границу, за пределами которой
упругая среда отсутствует, то отражение происходит так же, как
и от свободного конца стержня, т. е. фаза волны при отражении
не изменяется и потери полуволны не происходит.
Предположим, что падающая и отраженная плоские волны
распространяются в среде без затухания, обладая одинаковой ам-
амплитудой а0. Выберем ось х совпадающей с одним из лучей. Начало
координат поместим в точке, в которой обе волны имеют одну фазу,
и начнем счет времени от момента, когда фазы обеих волн равны
нулю. Тогда уравнение падающей волны:
A6.52)
383
и отраженной, распространяющейся в направлении, противополож-
противоположном направлению положительного отсчета х:
y A6.53)
Результирующее смещение:
? = &n-Ho = 2aosin Bтг—1)cos2^ = 2a0sin f 2« — \cosmt.
A6.54)
Из равенства A6.54) видно, что если мы зафиксируем некоторую
точку, имеющую координату xit то получим для частицы, нахо-
находящейся в этой точке, уравнение гармонического колебания с ам-
амплитудой А = 2а0 sin-^-1 и с фазой 2jtv/. Если мы будем пере-
Л
ходить от одной точки к другой, то амплитуда будет меняться по
закону:
а — 2а0 sin 2тс —.
К
В точках, где sin 2л— =0, амплитуда результирующего ко-
лебания в любой момент времени равна нулю. Такие точки назы-
называются узловыми точками. В эти точки падающая и отраженная
волны приходят в противоположных фазах. В точках, где cos 2л—=
= 1, амплитуда результирующего смещения имеет максимум, рав-
равный удвоенной амплитуде смещения в падающей волне. Эти точки
носят название пучностей. В точки, соответствующие пучностям,
падающая и отраженная волны приходят в одной фазе. Положе-
Положение узлов определяется условием:
где п = 0, 1, 2 . . .
Следовательно, координаты узловых точек:
A6.55)
A6.С6)
Расстояние между соседними узловыми точками:
_ х
*у.л+1 — *у. л— -?"•
Положение пучностей определяется условием:
2*JL = ±B«-|-1) —. A6.57)
384
и координаты пучностей:
Расстояние между соседними узлом и пучностью:
ХУ
A6.58)
A6.59)
Изобразим полученную волну графически. Для этого по го-
горизонтальной оси отложим координаты точек х, а перпендику-
перпендикулярно ей соответствующие амплитуды частиц, находящихся в
этих точках. Если в среде
распространяется попереч- _i_
ная волна, такое изобра-
изображение дает нам действи-
действительную картину движения
частиц в волне, в случае
распространения продоль-
продольной волны полученное гра-
Рис. 276. График стоячей волны.
у
фическое изображение ее носит условный характер. (Фактичес-
(Фактическое смещение частиц в продольной волне происходит вдоль
оси х.)
Нанесем на оси узловые точки А, В, С..., отстоящие друг от
друга на A,ty = — (рис. 276), и посредине между ними — точки
пучностей и соответствующие им амплитуды. Все частицы волны
в данный момент времени колеблются в одной фазе, так как cos 2 nvt
(см. 16.54) для всех точек общий. Но значение амплитуды при пе-
переходе через условную точку меняет знак, так как изменяет знак
при переходе через нуль множитель sin 2 я—. Следовательно, в
\
один и тот же момент времени смещение с одной стороны узла по-
положительно, а с другой — отрицательно, при переходе через узел
фаза скачком меняется на я. Между узлами точки колеблются в
одной фазе, но амплитуда их меняется по гармоническому закону,
от нуля в одном узле до максимума в пучности и опять до нуля в
соседнем узле.
Такие волны, возникающие как результат сложения двух встреч-
встречных волн одинаковой амплитуды и частоты, носят название стоя-
стоячих волн.
На рисунке 276 сплошной линией изображены положения
Т
частиц в волне в момент t, а пунктиром — в момент t + —, где
Т — период волны. На рисунке 277 изображено сложение па-
падающей и отраженной волн и результирующая стоячая волна
(утолщенная линия).
13 М М Архангельский
385
тт
Рис. 277. Образование стоячей волны в результате
сложения двух встречных волн.
Образование стоячей волны просто демонстрируется на резино-
резиновом шнуре, один конец которого закреплен, а другому сообщены
колебания в поперечном направлении, хотя бы рукой.
Стоячая волна смещений сопровождается образованием стоя-
стоячих волн скоростей и деформаций. Узлы и пучности в волне ско-
скоростей, очевидно, совпадают с узлами и пучностями в волне сме-
смещений, поскольку в узле смещений частицы среды все время по-
покоятся, а в пучности проходят за период наибольший путь Bа0).
Наибольшего значения деформация достигает в узлах смещений и
обращается в нуль в пучностях, т. е. узлы стоячей волны дефор-
деформаций совпадают с пучностями смещений и скоростей, а пучности
деформаций — с узлами в волнах смещений и скоростей.
В стоячей волне в отличие от бегущей не происхо-
происходит течения энергии, так как падающая и отраженная вол-
волны одинаковой амплитуды несут одинаковую энергию в проти-
386 %
воположных направлениях. Поэтому полная энергия результи-
результирующей стоячей волны, заключенной между узловыми точками,
остается постоянной. Происходит лишь переход энергии из потен-
потенциальной в кинетическую и обратно. Через узловые точки, кото-
которые все время находятся в покое, энергия не переносится.
Течение энергии происходит при перемещении деформаций.
Следовательно, ни через узлы скорости, где частицы среды все
время покоятся, ни через узлы деформаций, где деформация среды
отсутствует, энергия течь не может. Происходит лишь превра-
превращение энергии, заключенной на участке длиной —, между сосед-
4
ними узлами смещений и деформаций из кинетической в потенциаль-
потенциальную и обратно. Период превращения энергии вдвое меньше перио-
периода стоячей волны.
Если амплитуды падающей at и отраженной а2 волн неодина-
неодинаковы, например а^ > а2, то падающую волну можно представить
состоящей из двух волн: одна из них с амплитудой, равной ампли-
амплитуде отраженной волны, а вторая — g амплитудой а4 — а2. Сло-
Сложение первой волны с отраженной дает стоячую волну, на которую
налагается бегущая волна с амплитудой a.i — а2. Максимум ам-
амплитуды результирующей волны равен at -f- a2; в узлах амплитуда
не равна нулю, а имеет величину а4 — а2. В этом случае происхо-
происходит течение энергии вдоль стоячей волны, соответствующее пе-
переносу энергии бегущей волной с амплитудой а4 — а2.
В месте отражения волны на границе сред может образоваться
либо узел, либо пучность в зависимости от того, на границе с ка-
какой средой происходит отражение (в зависимости от краевых ус-
условий). Если граница закреплена, образуется узел. Если граница
свободна, возникает пучность. Действительно, в первом случае
концевые частицы среды, в которой распространяется падающая
волна, в любой момент времени должны обладать смещением,
равным нулю. Это возможно при их смещении в отраженной вол-
волне, равном по величине и противоположном по фазе смещению в
падающей волне, для любого момента времени, т. е. на границе
возникает узел. Во втором случае частицы могут свободно колебать-
колебаться, поэтому они испытывают результирующее смещение, равное
сумме смещений в падающей и отраженной волнах. Амплитуда
смещений равна сумме амплитуд, т. е. в месте отражения возни-
возникает пучность.
Если участок среды, в котором распространяется волна, огра-
ограничен с двух сторон закрепленными границами, то стоячая волна
должна иметь на обеих границах узлы. Следовательно, стоячие
волны образуются на участке с закрепленными границами, когда
на нем укладывается целое число полуволн.
В случае, если обе границы свободны, на них образуются пуч-
пучности. Стоячие волны образуются на участке среды со свободными
границами, когда на нем укладывается целое число полуволн.
13* 387
И наконец, если одна граница участка закреплена, а вторая сво-
свободна, то на первой образуется узел, а на второй пучность. Стоячие
волны образуются на участке среды, одна граница которого закреп-
закреплена, а вторая свободна, когда на участке укладывается нечетное
число четвертей волн.
На рисунке 278 изображены стоячие волны в трех указанных
случаях.
Образование стоячих волн тесно связано с явлением резонанса
в ограниченных участках сплошной упругой среды. Воздушные
столбы, заключенные в духо-
духовых инструментах, наполнен-
наполненные воздухом, резонансные
ящики камертонов, струны,
упругие стержни могут рас-
рассматриваться как простые
колебательные системы. Но
так как столб воздуха или
стержень представляет собой
систему множества связан-
связанных материальных частиц, то,
очевидно, число степеней сво-
свободы такой системы беско-
бесконечно велико. Бесконечно
велико и число собственных
¦К X X
XX
X X X
Рис. 278. Образование стоячих волн
при разных условиях на границе:
а—обе границы закреплены; б—обе границы сво-
свободны; в—закреплена одна граница.
частот в такой системе. Рас-
Рассмотрим для примера возникновение свободных колебаний в трубе,
закрытой с обоих концов. Волна смещения, возникнув в некоторой
точке, доходит до конца трубы, отражается с потерей полуволны,
доходит до другого конца, вновь отражается с потерей полуволны и
возвращается в начальную точку; затем процесс повторяется. В
результате в трубе при подходящих условиях устанавливается
стоячая волна, имеющая узлы на закрытых концах. Длина хода
волны, очевидно, равна удвоенной длине трубы. И если на удвоен-
удвоенной длине трубы укладывается целое число волн, то в результа-
результате сложения падающей и отраженной волн возникает стоячая
волна.
Таким образом,
X = — , A6.60)
п
где п = 1, 2, 3, ...
Частота свободных колебаний в трубе:
2/
A6.61)
Как видим, в трубе свободные колебания происходят с беско-
бесконечно большим числом частот.
388
Строго говоря, уменьшение длины волны и возрастание частоты
ограничены дискретным строением вещества среды. Поэтому п
хотя и велико, но конечно.
Колебания с частотой
\ = jf A6.62)
называются основным тоном. Тона, определяемые равенством
A6.61) для п ф 1, называются гармоническими обертонами.
В трубе, открытой с обоих концов, условия возникновения сво-
свободных колебаний те же. В трубе, открытой с одного конца и зак-
закрытой с другого, отражение волны происходит в первом случае
(открытый конец) без потери полуволны, во втором — с потерей.
Для учета сдвига фаз, возникающего благодаря отражению на
закрытом конце, надо добавить к длине хода полволны (если зак-
закрыты оба конца, то этого делать не надо, так как изменение фаз
на концах происходит в противоположных направлениях). Тогда
5*A6.63)
и собственные частоты
Предположим, что волны на ограниченном участке среды (с
закрепленными границами) создаются и поддерживаются внешней
периодической силой. В этом случае колебания участка среды будут
вынужденными.
Волна, возникнув у источника колебаний, распространяется
по участку вплоть до границы раздела, на которой происходит
ее отражение. Границы между реальными средами всегда в боль-
большей или меньшей степени проницаемы для волны. Поэтому при
падении волны на границу лишь часть ее энергии отражается,
а часть проходит сквозь границу и поглощается отражающей сре-
средой. Следовательно, амплитуда отраженной волны в общем случае
меньше амплитуды волны падающей. При их наложении воз-
возникают явления, описанные выше (для случая сложения волн
противоположного направления и разной амплитуды), т. е. нало-
наложение на стоячую бегущей волны. Значит, если на границе нет
каких-то особых условий, которые препятствуют «утечке» через нее
энергии, на участке не установятся стоячие волны. Не возникнет
и явление резонанса, так как энергия, доставляемая внешним ис-
источником среде участка, все время частично теряется. Условием,
препятствующим потере энергии в отражающую среду, является
образование на границе узла стоячей волны. В самом деле, течение
энергии через узел отсутствует, и, следовательно, если на участке
389
укладывается целое число полуволн и на границе образуется узел
стоячей волны, т. е. выполняются условия A6.60) и A6.61), то вся
энергия, доставленная внешним источником среде участка, остает-
остается в его пределах. В этом случае условия накопления энергии наи-
наиболее благоприятны и амплитуда колебания частиц среды макси-
максимальная. Таким образом, условие возникновения резонанса в огра-
ограниченном объеме среды с закрепленными границами совпадает с
условием возникновения в нем стоячих волн.
При возбуждении колебания струн, закрепленных стержней
и т. п. на нормальных частотах возникает явление резонанса.
Аналогично можно объяснить возникновение резонанса на
участке среды со свободными границами. Для этого надо рассмот-
рассмотреть волну деформаций.
§10. КОЛЕБАНИЯ ОГРАНИЧЕННЫХ УЧАСТКОВ СПЛОШНЫХ
И ДИСКРЕТНЫХ СРЕД. «ОДНОМЕРНЫЙ» КРИСТАЛЛ
Тела состоят из молекул и атомов. Изучая распространение в
среде упругих волн, мы можем считать среду сплошной, если дли-
длина волны много больше расстояния между частицами (если, выде-
выделяя элемент среды в волне, мы не нарушаем условия, сформули-
сформулированные в § 1, гл. XI). Но если длина волны сравнима с между-
междумолекулярными или междуатомными промежутками, необходимо
рассматривать распространение колебаний в дискретной (преры-
(прерывистой) среде.
Мы видели (гл. XV, § 7 и гл. XVI, § 9), что сплошную одно-
однородную среду можно рассматривать как связанную колебатель-
колебательную систему с бесконечно большим числом степеней свободы и
соответственно с бесконечно большим числом нормальных частот.
Реальная среда, состоящая из атомов, разделенных междуатом-
междуатомными промежутками, по существу неоднородна. Свойства среды
(плотность, упругость и т. п.) меняются скачками при переходе от
атома к промежутку. Число степеней свободы такой связанной
системы равно числу независимых движений каждого атома, ум-
умноженному на число атомов. Оно велико, но всегда конечно. Ко-
Конечно и число нормальных частот в системе.
Рассмотрим вынужденные колебания, возникающие в огра-
ограниченном участке сплошной однородной среды. Как мы видели,
в предыдущем параграфе такой участок является резонатором, от-
отзывающимся на бесконечный ряд частот, удовлетворяющих гра-
граничным условиям. Если колебательная система посылает в среду
чисто гармоническое колебание одной частоты, то в случае совпа-
совпадения последней с одной из нормальных частот участка на нем уста-
установится стоячая волна именно этой частоты. Такое явление возмож-
возможно, если посылаемый импульс представляет собой бесконечно для-
длящуюся синусоидальную или косинусоидальную волну. Однако
реальные колебательные системы посылают импульсы, которые,
390
как правило, отличны от синусоидальных и всегда обладают ко-
конечной длительностью. Вместе с тем мы установили (гл. XV, § 6),
что любое колебание представляет собой суперпозицию гармони-
гармонических колебаний и может быть разложено на составляющие с
помощью набора резонаторов, каждый из которых отзывается на
одну из частот гармонических колебаний, содержащихся в им-
импульсе.
Ограниченный участок среды можно рассматривать как набор
таких резонаторов. Если мы пошлем в него сложный импульс, то
спустя некоторое время в нем установятся разонансные явления
на тех частотах, которые содержатся в импульсе и совпадают с
частотами нормальных колебаний. Мы не будем рассматривать про-
процесс установления резонанса, слишком сложный для элементар-
элементарного изложения. Когда резонансные колебания установятся, на
участке возникнут стоячие волны соответствующих длин. Часто-
Частоты гармонических волн определяются, с одной стороны, частотой,
исходной негармонической волны, и, с другой стороны, нормаль-
нормальными частотами участка. Амплитуды и фазы гармонических волн
определяются формой исходной волны. Энергия, которую нес им-
импульс, распределится между возникшими стоячими волнами (за
вычетом энергии, пошедшей на работу против сил внутреннего
трения в среде). В импульсе конечной длительности энергия рас-
распределена непрерывно по колебаниям с непрерывным спектром.
Это проявляется в том, что конечный импульс представляется не
рядом, а интегралом Фурье (гл. XV, § 6). Стоячие же волны, воз-
возникшие в стержне, обладают частотами, образующими дискретный
спектр. И распределение энергии по частотам также будет диск-
дискретным.
Найдем уравнение стоячих волн, которые возникнут в ограни-
ограниченном участке однородной сплошной среды. Распределение ам-
амплитуд по длине стержня в каждой из стоячих волн (в каждой гар-
гармонике) является синусоидальным или косинусоидальным.
Допустим, что в п-й гармонике смещение в сечении, отстоящем
на расстоянии х от начала стержня, меняется со временем по за-
закону синуса:
Sn = Aa{x)sin<aJ, A6.65)
где Ап (х) — меняющаяся вдоль участка среды амплитуда п-й
гармоники:
An{x)^2aOnsin2K * A6.66)
Тогда скорость частиц в той же гармонике:
vn = Bn{x)cosmnt, A6.67)
391
Изменение деформации на участке, обусловленной данной гар-
гармоникой, должно происходить в одной фазе со смещением. Дей-
Действительно, когда в A6.65) sin ant = 0, то смещение во всех точках
участка равно нулю, очевидно, должна быть равна нулю и дефор-
деформация:
д^Л D х) sjn v_ A668)
с
дх
Но на участке заданной длины / могут установиться стоячие вол-
волны только удовлетворяющие граничным условиям. В случае, если
оба конца участка закреплены или оба свободны, эти условия при-
приводят к соотношению A6.60).
Подставляя его в A6.65) с учетом A6.66), получим:
^ = 2aonsin ~-
- Ап sin — sin mnt, A6.69)
оя = Вя5т —coso,,/, A6.70)
C^cos^-sin^. A6.71)
Для стержня с одним свободным и одним закрепленным кон-
концами:
\k = Ak sin ~ sin mkt, A6.72)
t>ft = Bftsin —coscoj/, A6.73)
Cft = Dftcos—sinu)^, A6.74)
где
k = 2n—l.
Распределение в гармониках амплитуд скоростей и деформаций
для обоих случаев дано на рисунке 279.
Найдем частоты гармоник. В соответствии со сказанным в § 6,
глава XV, частоты всех гармоник должны быть кратными частоте
основного тона. В случае закрепленных границ участка:
" 2/
и круговая частота
шл = теп — = пш1. A6.75)
392
На участке с одной закрепленной границей:
u)ft = «Brt—1)— = *k — = *^. A6.76)
* v ' 2/ 2/2 v '
Следовательно, круговые частоты всех гармоник спектра, воз-
возникших на участке с одной закрепленной границей, будут в два раза
ниже круговых частот гармоник тех же порядков для участка с
обеими закрепленными границами. Соответственно период стоячих
Рис. 279. Волны скоростей и деформаций на ограниченных
участках сплошной среды:
а—обе границы закреплены; б—закреплена одна граница.
волн на участке с несимметричными граничными условиями в два
раза больше, чем на участке с симметричными.
Чтобы проверить правильность этого заключения, обратимся
к случаю, когда импульс сообщается, скажем, свободному с обеих
сторон стержню, коротким ударом по одному из концов. Тогда из
сказанного в § 1 и 2 следует, что в стержне возникнет продольный
импульс деформации, который будет перемещаться без изменения
формы (если дисперсия отсутствует) до противоположного его кон-
конца. Спустя время 1± = J. = / I/EL импульс достигнет его и отра-
2 с Ц V Е
зится. Знак деформации при отражении от свободного конца изме-
изменится на обратный (сжатие перейдет в растяжение и наоборот). Че-
т
рез время — после отражения импульс вернется к начальному
концу стержня. Так как здесь деформация при отражении снова
изменит знак, то через время Тг после удара характер деформаций
393
в стержне станет таким же, как и в момент удара. Одновременно
с импульсом деформаций в стержне распространяется с той же
скоростью импульс скоростей. Отражение его происходит в нашем
случае без изменения знака скорости. Поэтому спустя время Ti пос-
после сообщения импульса повторяются не только деформации в стерж-
стержне, но и скорость (если отсутствует затухание, то не только по зна-
знаку, но и по величине). Таким образом, в стержне возникнут про-
продольные колебания с периодом 7Y
Сравним их с продольными колебаниями, которые возникнут в
стержне с одним закрепленным концом. Положим, по свобод-
свободному концу нанесен удар. Дойдя до закрепленного конца, импульс
деформации отразится не изменяя знака, но, возвратясь к свобод-
свободному концу, отразится с изменением знака. Следовательно, через
время Т( состояние в стержне не повторится. Только после того
как импульс еще раз пробежит по стержню туда и обратно, пос-
после вторичного отражения от свободного конца, состояние в стержне
станет тем же, что и в момент удара. Так как импульс скорости
будет изменять знак лишь при отражении от закрепленного кон-
конца и не изменит на свободном, то и для него повторение состояния
будет происходить спустя время 2Т(. Следовательно, период про-
продольных колебаний, которые возникнут в стержне с несимметрич-
несимметричными граничными условиями, Т2 = 2Ti = —.
Суперпозиция гармонических колебаний, удовлетворяющих
равенствам A6.69), A6.70) и A6.71), образует то собственное коле-
колебание, которое может возникнуть в стержне с симметричными гра-
граничными условиями. Множество гармонических колебаний, ко-
которые описываются этими уравнениями, охватывает все нормальные
колебания, свойственные такому стержню. Уравнения A6.72),
A6.73) и A6.74) описывают собственные колебания, возникающие на
участке среды с несимметричными граничными условиями.
Колебания, возникающие в дискретной среде, представляют
фундаментальное значение для изучения, например, такой системы,
как кристалл.
Рассмотрим «одномерный? кристалл, т. е. линейную цепочку из
N + 1 атомов, разделенных друг от друга промежутками длиной
d. Его можно представить себе как неоднородную среду с периоди-
периодически повторяющимися свойствами: N + 1 одинаковых масс т,
связанных между собой невесомыми, упругими пружинами, под-
подчиняющимися при деформациях закону Гука с коэффициентом
пропорциональности между силой и смещением а. Рассмотрим
продольные волны, возникающие в такой линейной цепочке. Сов-
Совместим начало отсчета с левым крайним грузом. Грузы пронумеру-
пронумеруем слева направо, начиная с 0 и кончая N -\- I.
Будем считать, что груз совершает колебания под действием
сил со стороны пружин, связывающих его только с соседними гру-
грузами. Это предположение равносильно предположению, что атомы
394
в кристаллической решетке взаимодействуют только со своими со-
соседями. Смещение масс вправо от положения равновесия будем
считать положительным. Сила, действующая между / и i + 1
грузами при их смещении из положений равновесия a (xin — *,).
Тогда для 1-го груза уравнение движения будет:
т & = " [ {Xin ~~ Х'] +(X;-1 ~~ Xi) ]> A6J7)
где i = 0,1, 2, ..., N + 1.
Как можно убедиться подстановкой, решение этого уравне-
уравнения имеет вид:
Xi = Ansin — sinw,^, A6.78)
если
con = 2-i/lCsin———, A6.79)
где i—номер груза, «—номер нормального колебания (я=1,2, ...).
Длина одномерной цепочки / = (N + 1) d, расстояние от на-
начала «решетки» до г-го груза равно id. Амплитуда Ап=АОп sin '""-
N + 1
при i = 0 и i = N + 1 для всех гармоник обращается в нуль,
т. е. х0 = 0 и xN+1 = 0. Цепочка наша аналогична стержню с
закрепленными концами. При N-*°o и d -» 0 распределение ам-
амплитуд совпадает с распределением для участка сплошной среды
с закрепленными границами. Для N конечного, т. е. для дискрет-
дискретной среды, решение A6.78) имеет смысл только для дискретных зна-
значений аргумента синуса 1ПЖ , соответствующего целочислен-
целочисленным значениям i.
Таким образом, в дискретной системе, обладающей N степе-
степенями свободы, возможны N нормальных колебаний, частоты ко-
которых определяются равенством A6.79). Как видно, они не явля-
являются кратными наименьшей частоты coj основного тона, как это
имело место в сплошной однородной среде.
В области низких частот я <^ N:
аГ пл _ у
тN+1~ р
Условие п -С N равносильно условию — ^> d.
В самом деле, для «-го нормального колебания на длине цепоч-
2/
ки / укладывается п полуволн. Следовательно, п — —, а, с дру-
другой стороны (при N ^> 1 ), jV ^к — и, следовательно, X ^> 2d.
d
395
При увеличении п частоты гармоник в сплошной системе
неограниченно возрастают. У дискретных систем частоты не могут
быть выше, чем
«л, = 2 l/jLsin ——— « 2l/iL (при n = N » 1) или X = 2d.
N V m 2 (ЛГ + 1) V m K F ;
Нормальные колебания сплошного стержня и линейного крис-
кристалла совпадают, пока длины волн, соответствующие этим нор-
нормальным колебаниям, велики по сравнению с расстоянием между
соседними атомами.
Легко видеть, что даже для самых высоких ультразвуковых
частот дискретная структура тел не будет сказываться на распро-
распространении упругих волн. Расстояние между атомами в твердом теле
порядка 1 • 10~8 см. При скорости распространения продольных
упругих волн с |1 = 5 • 105 — длине волны К = 10~8 см соот-
сек
ветствовала бы частота v = 5 • 10~13 сект1. Это значительно вы-
выше ультразвуковых частот (см. гл. XVII, § 9).
Но, например, при изучении тепловых колебаний в твердом теле
его уже нельзя рассматривать как сплошное. В тепловом движе-
движении соседние атомы колеблются беспорядочно около положения
равновесия. Амплитуды и фазы меняются быстро и случайно. По-
Поэтому в спектре тепловых колебаний должны быть гармоники, для
которых длина волны сравнима с междуатомными расстояниями.
Если бы длины волн всех гармоник были больше этого расстояния,
то соседние атомы или несколько близких совершали согласные
колебания.
Рассмотрим последовательность колебаний, соответствующих
21
п = 1, 2, 3, ... Для них К = — бесконечно уменьшается. Будем
п
интересоваться лишь значениями смещений для атомов решетки.
Координаты атомов xt = id, где xt — координата г-го атома.
Преобразуем выражение A6.78), для чего умножим и разде-
21
лим аргумент синуса на 2d и заменим п через —. В результате по-
лучим:
К = К sin t/^V = Ап sin ^ - An sin Izikx, A6.80)
где kn — —, так называемое оптическое волновое число, которое
отличается от введенного нами ранее множителем 2я.
Когда п станет больше 2N, т. е. К станет меньше d,
или k > —, для каждого из этих колебаний с волновым числом k
d
смещения xt атомов в решетке будут иметь точно такую же вели-
величину, как и для колебаний с волновым числом k . В самом де-
d
396
ле, если волновое число вырастет на —, то аргумент синуса в вы-
d
ражении A6.80) увеличится на
2я ах
. Значение синуса также изме-
изменится. Но в точках х = id аргумент изменится на 2лш, целое крат-
кратное от 2л. Значит, в таких точках синус и смещение не изменятся.
Длина волн для k > — меньше d, а для k больше d.
d d
На рисунке 280 показана цепочка длиной / = 1 см, образованная
L = 9см 11 частиц
ЧГ
Рис. 280. Колебания линейной цепочки:
при п = 4, k = 2, Х= - см; б — при п = 24, fe = 12Д = — см;
в — при п — 16, k = 8, Я = — еж.
8
= 2(я =
и
одиннадцатью материальными точками для
= 12 (я = 24).
Если рассматривать только величину смещений, то для дискрет-
дискретной цепочки такие два колебания тождественны. Каждое колебание
с k > — тождественно колебанию с [k ] < —. Если k > 2 —,
d d d d
то колебание тождественно соответствующему k — 2 — и т. д.
d
397
Следовательно, мы можем ограничиться рассмотрением коле-
колебаний соответствующих волновым числам меньшим—, что соог-
d
ветствует значениям п, меньшим 2N.
Но в этом интервале также имеются тождественные пары колеба-
колебаний.
Колебание с волновым числом k тождественно колебанию с вол-
волновым числом k. В самом деле, для ?4 = k аргумент
d d
синуса равен — 2nkx; в узлах решетки он принимает значение
d
Чм — 2nkx. Синус этого аргумента равен синусу— 2nkx, т. е. по
абсолютной величине равен начальному значению. На рисунке 280
показано два колебания с волновыми числами k, равными 2 и
d
— 2 = 10 — 2 = 8. Если отвлечься от различия в фазе на 180°,
то можем считать тождественными любые два колебания в интервале
от 0 до —, волновые числа которых лежат симметрично относи-
d
тельно значения k = —. Следовательно, мы можем ограничиться
рассмотрением таких видов колебаний, для которых волновое число
меньше — или для которых п<. N.
2d
Интервалы, на которые мы разделили значения k, называют
зонами Бриллюэна.
Из сказанного следует, что мы можем ограничиться изуче-
изучением колебаний, происходящих только в первой зоне Брил-
Бриллюэна.
В этой зоне число независимых колебаний точно равно общему
числу частиц N, а длина волны меняется от 21 до 2d.
Длина волны колебания в дискретной цепочке, соответству-
соответствующего границе первой зоны Бриллюэна, равна удвоенной постоян-
постоянной решетки. При этом колебании атомы в соседних узлах решет-
решетки колеблются с разностью фаз 180°.
В отличие от стоячих волн на ограниченном участке сплошной
однородной среды в дискретной среде число стоячих волн равно
числу частиц N. Энергия колебаний распределяется не непрерыв-
непрерывно, а дискретно между этими гармониками.
К таким же выводам можно прийти, рассматривая колебания
двумерной решетки из N атомов или колебания пространственной
решетки с тем же числом атомов.
398
§ 11. ЯВЛЕНИЕ ДОППЛЕРА
Во всех предыдущих параграфах мы молчаливо предполагали,
что источники и приемники волнового движения неподвижны
друг относительно друга. Однако движение источника влияет
на некоторые свойства волн. Так, например, стоя на перроне вок-
вокзала, мы слышим, как тон гудка поезда повышается по мере его
приближения к платформе и понижается при удалении. Как мы
увидим дальше, высота звука определяется частотой волн, излу-
излучаемых источником. Следовательно,
движение источника (гудка) к при-
приемнику (нашему уху) меняет часто-
частоту принимаемых волн. Эффект изме-
изменения частоты волн при относи-
относительном движении излучателя и при-
приемника был впервые исследован Доп-
плером A847 г.), почему и носит на-
название явчения Допплера.
Пусть некоторый источник, излу-
излучающий волны с частотой v, движет-
движется К приемнику со скоростью V. За Рис. 281. Волны движущегося
1 источника звука,
время — секунд источник посылает
одну волну, распространяющуюся со скоростью с. Будем счи-
считать, что последняя не зависит от движения источника и прием-
приемника. За это время источник приблизится к приемнику на
расстояние v—. Следовательно, конец следующей волны отделен
от конца первой не расстоянием X. = —, как это было бы в случае
неподвижного источника, а меньшим (рис. 281):
Таким образом, приемник воспримет колебание как бы меньшей
длины волны (или большей частоты):
V
Г
1 __
С
Если источник удаляется от приемника, то частота волн
v' = ——,
A6.65)
A6.66)
т. е. при приближении источника к приемнику частота
волн возрастает, а при удалении убывает.
399
Предположим, что источник волн неподвижен, а к нему при-
приближается или удаляется от него приемник. Очевидно, движущий-
движущийся к источнику приемник чаще встречает гребни или впадины волн,
чем когда он неподвижен. Скорость волн относительно приемника
равна с -j- v. За единицу времени приемник примет v' волн:
v' =
и так как v = —, то
При движении приемника от источника
Если v много меньше с и отношение
С
для обоих случаев выглядят одинаково:
A6.67)
A6.68)
1, то все формулы
где знак плюс соответствует сближению, а минус удалению из-
излучателя и приемника волн друг от друга. Однако если v по вели-
величине близко к с, как например при излучении звука самолетом,
летящим со скоростью, близкой к звуковой, то эффект Допплера
различен для движения источника относительно приемника и дви-
движения приемника относительно источника.
Эффект Допплера наблюдается для любого вида волнового дви-
движения.
ГЛАВА XVII
ЭЛЕМЕНТЫ АКУСТИКИ
§ 1. ПРИРОДА ЗВУКА. ЗВУКОВОЕ ПОЛЕ
Упругие волны, распространяющиеся в сплошных средах, на-
называются звуковыми волнами. Собственно звуком называются
волны, частоты которых лежат в пределах восприятия человече-
человеческим органом слуха. Ощущение звука возникает у человека, если
на его слуховой аппарат воздействуют волны с частотой примерно
от 16 до 20 000 гц. Волны с частотой, лежащей за пределами этих
границ, не слышны, так как не создают слуховых ощущений.
Упругие волны с частотой ниже 16 гц называются инфразвуком,
а с частотой от 20 000 гц до 103 — 109 гц — ультразвуком. Область
физики, которая изучает способы возбуждения звуковых волн,
их распространение и взаимодействие со средой, называется акус-
акустикой.
Полученные нам-и в предыдущих главах общие закономерности
колебательного и волнового видов механического движения приме-
применимы и к изучению акустических явлений. Однако ряд специаль-
специальных вопросов, связанных с особенностями восприятия звука и его
технического использования, привел к выделению акустики в осо-
особую область физики.
Для возникновения и распространения звуковых волн необ-
необходимо наличие упругой среды (твердое тело, воздух, вода). Чтобы
убедиться в этом, поместим обычный электрический звонок под
воздушный колокол. Пока из-под колокола воздух не откачан,
звонок отчетливо слышен. По мере откачивания воздуха звук ос-
ослабевает и наконец пропадает вовсе. Воздушная среда под коло-
колоколом становится настолько разреженной, что уже не может пе-
передавать звуковые колебания. Разряжение должно быть таким,
чтобы молекулы газа находились друг от друга на расстояниях боль-
больших, чем расстояния, на которых проявляются силы молекуляр-
молекулярного взаимодействия. Тогда молекулы, получившие от молоточка
звонка некоторое количество движения, не могут передать его нап-
401
равленно соседним молекулам, а рассеивают при случайных соуда-
соударениях, которыми обмениваются в тепловом движении.
Как мы видели, возникновение волн возможно, если среда
оказывает упругое сопротивление деформациям и обладает инер-
инерцией. Твердое тело оказывает сопротивление деформациям как
продольным — растяжению и сжатию, так и сдвигу. Поэтому
в твердом теле звуковые волны могут быть и продольные, и попереч-
поперечные. В жидкостях и газах, которые не оказывают в обычных усло-
условиях сопротивления сдвигу, звуковые волны только продольные.
Рис. 282. Поле ультразвуковых волн (снято теневым методом).
Звуковые волны в среде создаются колеблющимся телом.
Например, колебание мембраны телефона создает в прилегающем
слое воздуха последовательно сжатия и разрежения, распростра-
распространяющиеся во все стороны. На рисунке 282 приведена фотография
поля ультразвуковых волн, возбуждаемых колеблющейся квар-
кварцевой пластинкой.
Для изучения состояния среды, в которой распространяется
звуковая волна, можно прибегнуть к способу, который мы исполь-
использовали при изучении движения жидкости. В каждой точке про-
пространства, заполненного средой, находящейся в состоянии звуко-
звукового движения, происходят периодические изменения: а) положе-
положения частицы относительно равновесного, б) скорости смещения
частицы, в) величины давления (сжатия и разрежения) относи-
относительно среднего их значения, существующего в невозмущенной
среде. Изменение давления в этом случае называется избыточным
или звуковым давлением. Если мы представим себе, что в каждой
точке среды находятся миниатюрные датчики приборов, измеряю-
измеряющих эти величины, то их одновременные показания дадут нам мгно-
мгновенную картину состояния среды. Ряд следующих друг за другом
таких мгновенных картин даст изменение состояния среды со вре-
временем. Поскольку волновое движение периодично и во времени,
402
и в пространстве, то, зная скорость распространения звуковой вол-
волны и пронаблюдав изменение указанных выше характеристик в
одной точке изотропной среды с малым затуханием, можно найти
их для всего пространства, занятого средой, в которой распростра-
распространяются звуковые волны.
Пространство, заполненное средой в состоянии звукового дви-
движения, называется звуковым полем.
§ 2. СКОРОСТЬ ЗВУКА И ЕЕ ИЗМЕРЕНИЕ
Многочисленные измерения скорости звука в различных газо-
газообразных, жидких и однородных твердых телах показывают, что
она не зависит от частоты (или длины волны), т. е. для звуковых
волн дисперсия отсутствует. Лишь для многоатомных газов и
жидкостей при ультразвуковых частотах была обнаружена дис-
дисперсия. Мы ограничимся изучением распродтранения звуковых
волн в средах без дисперсии. Тогда для расчетов скорости распро-
распространения звуковой волны мы можем пользоваться зависимостя-
зависимостями, полученными нами для скоростей распространения в упругих
средах отдельных импульсов (§ 1, 3, гл. XVI).
Для твердых сред:
В жидких и газообразных средах распространение звука про-
происходит адиабатически, так как вследствие быстрой смены сжатий
и разрежений теплообмен между возмущенной и невозмущенной
частями среды не успевает установиться.
Для жидких сред:
где k — модуль объемного сжатия, ($ — адиабатический коэффи-
коэффициент объемного сжатия.
Для газообразных сред:
где у- = fp — адиабатический модуль объемного сжатия. В жид-
жидких и газообразных телах скорость звука меняется с изменением
температуры.
Для газа имеет место известный из элементарной физики за-
закон Бойля — Мариотта, Гей-Люссака:
где v — объем газа, р — давление, а — коэффициент термического
расширения.
403
Если масса газа при изменении объема остается постоянной,
то плотность его обратно пропорциональна объему. И тогда
Ро Ро
Вместо соотношения A7.3) получим:
-?-(l+a/). A7.4)
Зависимость скорости звука от температуры для жидкостей
более сложная.
Скорость звука в некоторых средах:
Таблица 7
Среда
Окись углерода
Кислород . . .
Воздух (сухой)
» »
Вода (пресная)
Бензин ....
Ртуть ....
Температу-
Температура, °С
О
О
О
20
17
20
20
Скорость
звука, м/сек
258
317
331,5
344
1430
1320
1407
Таблица 8
Среда
Сталь
»
Чугун
»
Свинец
»
Дерево
Вид волны
Продольная
Поперечная
Продольная
Поперечная
Продольная
Поперечная
Продольная
Скорость звука
(в м/сек) при 0°С
6100
3300
4500
2400
2200
700
4000
Как видно из таблицы, наибольшие скорости звука — в твер-
твердых телах, наименьшие — в газах1. Скорость звука в твердых телах
для продольных и поперечных волн резко различается. (Это об-
обстоятельство используется, в частности, при обработке сейсмограмм,
для нахождения эпицентра землетрясения и для исследования
внутреннего строения Земли.)
1 Исключением являются гелий и водород, в которых скорость звука то-
того же порядка, что и в жидкостях.
404
Измерение скорости звука в воздухе может быть произведено
с помощью эхо. Для этого измеряют интервал времени t между
посылкой сигнала (крик, выстрел и т. п.) и его возвращением по-
после отражения от препятствия (горы, опушки густого леса, берега
реки и т. п.).
Зная расстояние / от места посылки сигнала до препятствия,
легко подсчитать скорость звука:
с A7.5)
Достаточно точно определяется скорость звука в воздухе и
в воде, если одновременно со звуковым послать из пункта А и све-
световой сигнал—вспышку, видимую из пункта В, где производится
прием звука. Так как скорость света имеет порядок 3 ¦ 108 м/сек,
а скорость звука 3-Ю2 м/сек, т. е. составляет 0,0001% от скорости
света, то в таком опыте можно считать свет распространяющимся
мгновенно. Тогда, измерив в пункте В время t между приходом в
него светового и звукового сигналов и зная расстояние 1АВ, легко
вычислить скорость звука:
с= -^-. A7.6)
Если мы располагаем источником звука, посылающим волны
с известной частотой v, и можем каким-либо способом измерить
длину волны л в среде, то скорость распространения звука легко
подсчитать по формуле:
с = Ь. A7.7)
Скорость звука в воздухе может быть измерена с помощью ус-
установки, изображенной на рисунке 283. Часть стеклянного ци-
цилиндра, соединенного с резервуаром, заполнена водой, уровень
которой можно менять. К открытому концу цилиндра подносят
телефонную трубку, мембрана которой колеблется с известной час-
частотой. Частота колебаний мембраны задается электрическим ге-
генератором звуковых частот (ламповый прибор, вырабатывающий
переменные токи с частотами звукового диапазона). Волна, идущая
от мембраны, и волна, отраженная от поверхности воды, интер-
интерферируют в столбе воздуха над водой. Если высота столба воздуха
такова, что на ней укладывается нечетное число четвертей волн,
то в нем возникают стоячие волны с узлом на поверхности воды и
с пучностью у открытого конца цилиндра. В этот момент столб в
цилиндре звучит наиболее интенсивно, так как у открытого конца
лежит пучность смещений и скоростей частиц и условия отдачи
энергии в окружающее пространство наивыгоднейшие. При из-
изменении уровня воды в трубке звук ослабляется. Звук вновь уси-
усиливается до максимума, когда уровень воды смещается на расстоя-
расстояние полуволны и в воздушном столбе опять укладывается нечетное
405
нения ультразвуковых волн.
излучающей звуковые волны,
Рис . 283. Схема установки для измерения скорости звука
в воздухе.
число четвертей волн. Зная частоту колебаний мембраны, заданную
генератором, и длину полуволны / = —, находим по уравнению
A7.7) скорость с = 2 vl.
На рисунке 284 изображен так называемый звуковой интер-
интерферометр со стоячей волной для измерения скорости распростра-
Между кварцевой пластинкой и,
и металлической отражающей плас-
пластинкой Т интерферируют пада-
падающие и отраженные волны.
Расстояние между пластинкой и
отражателем можно плавно ме-
менять с помощью микрометричес-
микрометрического винта. Звуковая волна ока-
оказывает на пластинку кварца на-
наибольшее давление, если на рас-
расстоянии между излучателем и
отражателем укладывается це-
целое число полуволн и между
ними возникает стоячая волна.
В этом случае на пластинках
лежат узлы смещений, а следо-
следовательно, пучности деформаций
и давлений.
\\
Рис. 284. Зв5'ковой интерферо-
интерферометр со стоячей волной.
406
16$A
157 158 159 WO 161 мм
Расстояние между рефлектором иквдрцем
Рис. 285. Кривая зависимости силы анодного тока от положения
отражателя.
Изменение давления, оказываемого волной на кварц, вызывает
изменение напряжения на электродах, присоединенных к пластин-
пластинке, и силы тока в цепи (пьезоэлектрический эффект). Меняя поло-
положение отражателя, можно по показаниям электрических прибо-
приборов найти места смежных пучностей давления, т. е. найти длину
полуволны и вычислить скорость звука (рис. 285). Интерферомет-
Интерферометры со стоячей волной позволяют измерить скорость распростране-
распространения ультразвука в газах и жидкостях с точностью до 0,0Н6.
Поле звуковых волн можно сделать видимым, применяя так
называемый метод Теплера. Установка для этих целей изображена
на рисунке 286. Щель 5 освещается источником света / через лин-
линзу L, фокус которой совпадает с 5. Линза Оь фокус которой также
совпадает с 5, посылает параллельный пучок лучей; в плоскости
А с помощью объектива О2 получают изображение щели. Изобра-
Изображение щели закрывают шторкой D так, чтобы свет не попадал на
экран. Если теперь в кювете К создать неоднородность среды,
то лучи, проходя ее, отклонятся от первоначального пути и, прой-
пройдя мимо шторы, дадут на экране изображение неоднородности.
Если неоднородность среды создана чередованием сжатий и раз-
разрежений в стоячей звуковой волне, то на изображении звукового
поля отчетливо видны светлые и темные полосы. На рисунке 282
дана фотография звукового поля, полученная этим методом. Имея
Рис. 286. Метод визуализации звукового поля по Теплеру.
407
Генератор
электр о
импульсов <?-
Образец— | j
нипульсы, отражен-
отраженные от нижней стен-/
ки образца *—
Посылаемый
импульс
Синхронизация
Усилитель
j
Кбарцевая
пластинка
Рис. 287. Схема установки для измерения скорости ультразвука
импульсным методом.
подобную фотографию, можно рассчитать длину волны и по из-
известным v и Я, вычислить с.
Измерение скорости звука с помощью эхо используется в од-
одном из так называемых импульсных методов. Впервые ультраакус-
ультраакустические импульсы в практике исследований применил С. Я. Соко-
Соколов для изучения распространения звука в твердых телах. Колеба-
Колебание кварца возбуждается генератором, посылающим не непрерыв-
непрерывную волну, а кратковременный импульс, состоящий из нескольких
быстрозатухающих электромагнитных волн. Импульс, поданный
на кварц, одновременно подается на вертикальные пластины осцил-
осциллографа Е, и в момент возникновения колебаний кварца на экра-
экране осциллографа появляется резкий «всплеск». Импульс распро-
распространяется от кварца через исследуемую среду до отражателя
(рис. 287) и возвращается обратно к кварцу. Работа генератора
рассчитывается так, чтобы к моменту возвращения отраженного
импульса кварц находился в покое. Тогда вернувшийся импульс
возбуждает колебания кварца, который в этот момент соединяется
с осциллографом, и на экране появляется второй «всплеск». На экра-
экране, таким образом, видны два «всплеска»: один, соответствующий
моменту посылки импульса, другой — моменту возвращения его
после отражения. На пластины осциллографа подаются от специаль-
специального генератора импульсы высокой частоты, создающие на экра-
экране осциллографа невысокие «всплески», отстоящие друг от друга
на равных расстояниях. Они служат отметками времени. Зная их
частоту, можно отсчитать время t пробега импульса. Тогда ско-
408
рость звука рассчитывается по формуле A7.5), где / — расстояние
между кварцем и отражателем.
Измерение скорости звука производится и другими способами,
которые мы здесь не описываем. Желающие познакомиться с ними
могут найти их описание в научно-популярной или специальной
литературе.
§ 3. ХАРАКТЕРИСТИКА ЗВУКОВОГО ПОЛЯ
Пусть в некотором объеме среды распространяется плоская
звуковая волна, в которой смещения частиц происходят по зако-
закону:
A7.8)
Тогда скорость, с которой смещаются частицы в звуковой волне,
или акустическая скорость v равна:
v = — = aw cos и) 11
dt \ с
Как известно, средний за период поток волновой энергии:
Q = -Lpa2co2c. A7.10)
Эту величину в акустике называют интенсивностью звука
или силой звука I. Следовательно, интенсивностью, или си-
силой звука, называют количество энергии, переносимой
в единицу времени через единицу площади поверхности,
перпендикулярной к распространению волны (или поток
энергии через единицу площади фронта волны). Размерность ин-
интенсивности звука:
I м3 сек \ \_м2сек\ (_ м2 J
/ = A-oaWc, A7.11)
где р — плотность невозмущенной среды, а — амплитуда волны
смещений, со — циклическая частота, с — скорость звука. Вели-
Величина асо — амплитуда волны скоростей A7.9).
Ниже мы получим еще одно выражение для интенсивности
звука, связывающее ее с звуковым давлением. Сначала получим
связь звукового давления с характеристиками звуковой волны и
среды.
Выделим в среде, через которую распространяется плоская вол-
волна, элемент в виде параллелепипеда с гранью, параллельной фрон-
фронту волны и равной dS. Сила, действующая на эту грань в момент
достижения ее фронтом волны, равна взятому с обратным знаком
409
приращению звукового давления dp, умноженному на площадь
грани dS:
F = —dpdS. A7.12)
Если эта сила смещает грань dS на отрезок dx, то элементар-
элементарная работа равна dA — — dpdSdx, но dSdx = dV, следо-
следовательно:
dp = ——. A7.13)
И dV K '
В соответствии со вторым законом динамики сила
dv
dt
n dv
F = m —
и работа ее
Деля левую и правую части равенства A7.14) на объем dV, получим:
dA т dv j 1
dV ~~ dV ~dl ~~~ P "
Из соотношений A7.15) и A7.13) получим:
dA = Fdx = m — dx. A7.14)
dt v '
dA m dv * dv , ,., ...
— = dx = р — dx. A7.15)
dV dV dt ' dt v '
dv
чение —, i
dt
нения A7.9), получим:
Подставляя сюда значение — , взяв производную по t от урав-
dt
—\dx. A7.17)
с !
Проинтегрируем правую и левую части равенства A7.17),
Т
полагая, что Ар = 0 и t = —:
4
Г dp = Г ГРсо2а sin со U j
мы получим закон изменения звукового давления:
Др = pcoaccosс» (t -), A7.18)
\ с /
т. е. звуковое давление прямо пропорционально амплитуде ско-
скорости частиц в волне, скорости волны и плотности среды. Величина
рсоас называется амплитудой звукового давления:
Др0 = рсоас. A7.19)
410
Сравнивая выражения A7.19) и A7.11), можем равенство A7.11)
записать в виде:
(А? A7-20)
Величина рс называется акустическим сопротивлением среды.
Акустическое сопротивление в системе СГС измеряется в еди-
единицах, которые носят название акустический ом.
, [дин см 1 , . „ _,-
1 : == 1 [см~2-г.сек х].
[ см? сек \
В системе СИ единица измерения акустического сопротивления:
[н м , „ ,,
—¦ : — = [м '-кг-сек~х\.
м2 сек J
Единица измерения акустического сопротивления в системе СИ
равна 10 акустическим омам.
Приведем значения акустического сопротивления для некоторых
сред.
Воздух 43
Вода 1 ,46 . 105
Кварц (вдоль оси) 1,44 • 10*
Сталь 4 . 10»
Алюминий 1,39. 10е
Каучук 0,003 • 10»
Интенсивность звука прямо пропорциональна квад-
квадрату амплитуды звукового давления и обратно про-
пропорциональна акустическому сопротивлению среды.
Измерение интенсивности звука производится обычно не непос-
непосредственно. Сначала измеряют звуковое давление или акустическую
скорость среды, а затем по формуле A7.20) или A7.10) вычисляют
интенсивность. Так поступают, например, используя для опреде-
определения интенсивности звука диск Релея, измеряющий акусти-
акустическую скорость (рис. 288). В звуковое поле под углом 45 ° к нап-
направлению распространения волны по-
помещается легкий слюдяной кружок,
подвешенный на тонкой кварцевой ни-
нити (диаметр диска должен быть ма-
малым по сравнению с длиной волны).
При прохождении волны диск обте-
обтекается воздушным потоком и линии
тока у краев диска с одной стороны
сгущаются, а с другой — расходятся.
В соответствии с законом Бернулли
давление в различных точках поверх- рис. 288. Диск Релея
411
ности диска различно в зависимости от скоростей обтекания.
Полное торможение потока, а следовательно, наибольшее дав-
давление, будет в двух точках, в которых поток разделяется (линии то-
тока упираются в поверхность диска). Возникшая пара сил стремит-
стремится установить диск перпендикулярно потоку. Так как картина
линий тока симметрична, то перемена направления воздушного по-
потока не вызывает изменения направления крутящего момента, он
направлен все время в одну сторону. С помощью светового луча,
падающего на зеркальце, укрепленное на нити, можно найти
угол поворота диска и вычислить пропорциональ-
пропорциональный ему крутящий момент, который, как показы-
показывает теория, зависит от акустической скорости.
Вычислив акустическую скорость, нетрудно найти
звуковое давление и интенсивность звука. Диск
Релея обладает сравнительно малой чувствитель-
чувствительностью и легко подвержен влиянию посторонних
потоков воздуха. Поэтому он теперь применяется
главным образом для градуировки микрофонов,
с помощью которых и измеряется звуковое дав-
давление и интенсивность звука.
—~*—J Звуковая волна, распространяясь, несет с со-
Рис. 289. Зву- бой энергию. Это можно обнаружить на таком
ковая вер- простом опыте. На острие опирается легкая же-
тушка. стяная вертушка (рис. 289). Если к покоящейся
вертушке поднести микрофон, соединенный со зву-
звуковым генератором, вертушка начинает вращаться. Меняя часто-
частоту звуковой волны, можно обнаружить заметное на глаз изме-
изменение скорости вращения вертушки. Этот опыт показывает собст-
собственно существование звукового давления и зависимость его от
частоты. Впервые звуковое давление было обнаружено русскими
физиками П. Н. Лебедевым и В. Я- Альтбергом.
Плоская волна переносит энергию только в одном направлении.
Обычно источники звука излучают волну, фронт которой представ-
представляет собой криволинейную поверхность и интенсивность звука ко-
которой в разных направлениях различна. Если мы мысленно про-
проведем вокруг источника замкнутую поверхность (скажем, сферу)
и вычислим полный поток звуковой энергии, протекающей через
нее в единицу времени, то получим полное значение энергии, излу-
излучаемой источником в единицу времени. Величина эта носит назва-
название мощности источника.
§ 4. ОТРАЖЕНИЕ И ПРЕЛОМЛЕНИЕ ЗВУКА НА ГРАНИЦЕ
ДВУХ СРЕД
Звуковые волны имеют длины волн порядка от нескольких сан-
сантиметров до десятков метров. Волна с частотой 20 гц имеет в воз-
воздухе длину примерно 16 м, с частотой 10 000 гц — 3,3 см, поэтому
412
отражение по законам, полученным нами
для отражения волн в главе XVI, §8 воз-
возможно лишь при достаточно больших раз-
размерах предметов, на которые падают зву-
звуковые волны. В противном случае проис-
происходит так называемое явление дифракции,
волны огибают препятствия и заходят в об-
область геометрической тени.
Отражение от больших препятствий
(для частот порядка 5— 10 кгц от предме-
предметов с площадью поверхности 0,5 — 1 м1)
происходит с соблюдением равенства углов
падения и отражения.
При падении на фаницу раздела двух сред,
скорости распространения звука в которых
различаются, часть звуковой энергии от-
отражается, а часть проходит во вторую среду (рис. 290),
при этом лучи падающий, преломленный и отраженный
лежат в одной плоскости и синус угла падения так от-
относится к синусу угла преломления, как скорость зву-
звука в первой среде относится к скорости во второй
среде:
sini' Cl - - A7.21)
Рис. 290. Отражение и
преломление ультразву-
ультразвука на границе вода —
масло.
= П.
sin г
Величина п называется показателем преломления.
Если интенсивность звука в первой среде /ь а во второй /2,
то
h
A7.22)
где р — коэффициент проникновения. Как показал один из со-
создателей теоретической акустики, английский ученый Релей:
1= 4
A7.23)
Коэффициент проникновения зависит от отношения акустических
сопротивлений сред.
Если
Ctfv то Э~4—. A7.24)
Если
> с2р2, то ряв4-^. A7.25)
Коэффициент отражения, очевидно, равен R = 1 — р.
413
Следовательно, интенсивность преломленного звука:
/e = p/i. A7.26)
а интенсивность отраженного:
/3 = A — $IV A7.27)
Из воздуха в воду проникает всего около 0,1 % падающей зву-
звуковой энергии. Ослабление звука при проникновении его в воду
легко проверить летом. Стоит опустить голову под воду, чтобы,
скажем, звук гудка тепловоза, шум голосов на пляже стал
неслышим.
§ 5. ЗАТУХАНИЕ ЗВУКА
В среде, не обладающей вязкостью, плоская волна должна тео-
теоретически распространяться бесконечно далеко (если она не рас-
расходится в стороны, а передает энергию
jx только в направлении, перпендикуляр-
*_ ном к плоскости мембраны). Однако в
====ь. ' реальных условиях звуковые плоские
'-?^^__' волны быстро затухают. Воздух и лю-
1=*- _И бая другая реальная среда обладают
- вязкостью, поэтому кинетическая энер-
гия частиц в волне переходит благодаря
_ вязкому трению в теплоту.
: »~х Положим, на слой вязкой среды тол-
толщиной х падает плоская звуковая вол-
Рис. 291. К выводу закона на Благодаря вязкости происходит дис-
ослабления звуковой волны. r r
* сипация энергии волны, которая прояв-
проявляется в убывании амплитуды1. Разобьем
среду на элементарные слои, параллельные фронту волны, толщи-
толщиной dx (рис. 291). Допустим, что уменьшение амплитуды в пре-
пределах слоя пропорционально величине амплитуды и толщине слоя:
A7.28)
где da — уменьшение амплитуды в слое толщиной dx, a — ам-
амплитуда волны на границах слоя, а — коэффициент пропорциональ-
пропорциональности.
Разделим переменные в уравнении A7.28):
da___ _ ,
a
и проинтегрируем левую часть от а0 до а, правую часть— от 0 до х,
где а0— амплитуда при х = 0 и а— амплитуда при смещении,
равном х:
1 При ультразвуковых частотах вязкость среды обусловливает изме-
изменение скорости распространения и, следовательно, фазы волны.
414
или
In a — In a0 = — %х.
Отсюда
In — = — ах A7.29)
и, потенцируя, получим закон убывания амплитуды:
а = аое~". A7.30)
Амплитуда звука в вязкой среде убывает по экспо-
экспоненциальному закону.
Величина а носит название коэффициента поглощения звука.
1 —а— 1 1
Если х = —, то е а = е~ =—. Подставив х = — в A7.30), по-
а е а
лучим:
JL = JL~o,37,
а0 е
т. е. коэффициент поглощения численно равен обратной величине
расстояния, на котором амплитуда звука убывает до 37% от пер-
первоначальной величины.
Убывание интенсивности звука прямо пропорционально квад-
квадрату амплитуды (поскольку энергия волны пропорциональна квад-
квадрату амплитуды). Поэтому
/ = /0<га«. A7.31)
Коэффициент поглощения зависит от величины кинематической
вязкости среды. Поэтому поглощение звука в воде значительно мень-
меньше, чем в воздухе.
Опыт показывает, что поглощение в большой степени зави-
зависит от частоты звука. Теоретически можно показать, что поте-
потери энергии звуковой волны обратно пропорциональны
квадрату ее длины и, следовательно, прямо пропорцио-
пропорциональны квадрату ее частоты. Поэтому звуки, предста-
представляющие сумму волн различной частоты (например, звук выст-
выстрела), резкие вблизи источника своего возникновения, становятся
по мере удаления от него более глухими и низкими, так как высокие
тона, которым соответствуют большие частоты, быстро затухают.
На величину поглощения влияет также теплопроводность среды
(чем она больше, тем больше поглощение).
В сферической волне ослабление звука происходит как вследствие
распределения энергии на больший объем среды, так и вследствие
415
поглощения. Окружим источник сферических волн сферой радиу-
радиуса R. Если мощность источника звука /, то через поверхность
сферы проходит в единицу времени энергия:
A7.32)
поверх-
/„ =
где / — энергия, проходящая через единицу площади
ности сферы в единицу времени, и, следовательно,
/ =
A7.33)
т. е. интенсивность сферической звуковой волны убыва-
убывает обратно пропорционально квадрату расстояния от
источника звука.
Примечание. Плоская волна, как и сферическая, распростра-
распространяясь, вовлекает в движение вследствие вязкого трения слои воздуха, при-
прилегающие к области, возмущенной волной, и ослабление звука тем интенсив-
интенсивнее (при прочих равных условиях), чем больше расхождение волны в стороны.
Для передачи звука на сравнительно большие расстояния концентрируют его
в нужном направлении, посылая плоскую волну с возможно меньшим рас-
расхождением. Расхождение плоской волны характеризуется обычно синусом
половины угла, который образуют лучи, ограничивающие область распро-
распространения волны. К этому вопросу мы еще вернемся в параграфе, посвящен-
посвященном источникам звука.
§ 6. РАСПРОСТРАНЕНИЕ ЗВУКА
Расчеты поглощения звука в воздухе показывают, что волна
с частотой 1000 гц при 20° С ослабевает в е раз на расстоянии при-
примерно 115 км. Учет влияния теплопроводности снижает эту ве-
величину до 81 км. Однако в действительности звук в атмосфере
затухает много быстрее. Причина этого в том, что на его распро-
распространение влияют ветер, температура и влажность воздуха, на-
наличие слоев различной плотности. Рисунок 292 поясняет влияние
ветра.
Направление и
скорость ветра
Фронт ёолны
Рис. 292. Влияние ветра на распространение звука.
416
Источник збука.
Рис. 293. Ход звуковых лучей, когда температура воздуха убывает
с высотой.
Сферическая волна от точечного источника в однородной атмос-
атмосфере должна распространяться с одинаковой скоростью во всех
направлениях. Но если имеет место ветер, скорость его и скорость
волны складываются геометрически. Так как скорость ветра у зем-
земли меньше (вследствие трения о ее поверхность), а с высотой воз-
возрастает, то отдельные части фронта волны движутся относительно
земли с разной скоростью.
Если волна распространяется под некоторым углом навстречу
ветру, то лучи, как можно усмотреть из построения на чертеже,
загибаются вверх, а с противоположной стороны от источника
прижимаются к земле. Поэтому звук слышен на большем рас-
расстоянии от источника g подветренной стороны, чем с наветренной.
На рисунке 293 изображено распространение звуковой волны,
когда температура воздуха убывает с высотой. В теплом воздухе
звук распространяется (при прочих равных условиях) быстрее,
чем в холодном (см. равенство 17.4). В звуковой волне лучи заги-
загибаются вверх. Если температура слоев воздуха, прилегающих к
земле, ниже, чем на некоторой высоте (что бывает в ясные ночи,
когда земля и прилегающие к ней слои воздуха быстро остывают
вследствие излучения), лучи прижимаются к земле. Поэтому в
жаркий день, когда земля и нижние слои воздуха сильно нагреты,
расстояние, на котором слышен звук, заметно меньше, чем в ясную
ночь. Если в слое, лежащем на какой-то высоте над землей, тем-
температура воздуха меняется скачком (а следовательно, вместе с из-
изменением скорости звука меняется и акустическое сопротивление
среды), то звук, дойдя до него, отражается к земле, отразившись
от ее поверхности, он испытывает вновь отражение от слоя темпе-
температурного скачка и т. д. При этом дальность распространения звука
может сильно возрасти, так как энергия звуковой волны концент-
концентрируется в границах некоторого сравнительно ограниченного слоя
(звуковой канал).
Движение воздуха в атмосфере всегда турбулентно. Поэтому
скорость и температура в каждой точке воздушного потока пуль-
пульсируют по величине, а скорость, кроме того, и по направлению.
Это приводит к возникновению мелких неоднородностей в атмос-
14 М. М. Архингельский
417
300 к»
Рис. 294. Зоны аномальной
слышимости при сильном
взрыве.
фере и к рассеянию на них звуковой энергии, а следовательно, к
значительному увеличению затухания звука.
Многие источники звука излучают волны низких частот: ин-
фразвуковые и близкие к ним. Источниками таких звуковых ко-
колебаний являются, например, взрыв, шум двигателя, ветер и т. п.
Благодаря своей низкой частоте эти звуки могут распространяться
на сравнительно большие расстояния. На высоте 50—70 км в атмос-
атмосфере имеется слой озона, который сильно поглощает тепловые лу-
лучи, благодаря чему температура этого
слоя резко повышена E0 — 70° С). Звук
сильного взрыва, доходя до этого слоя,
отражается и возвращается к поверх-
поверхности земли. Звук, идущий вдоль по-
поверхности земли, сильно затухает благо-
благодаря рассеянию на неровностях поверхно-
поверхности, на турбулентных неоднородно-
стях в прилегающих к земле слоях воз-
воздуха. Поэтому вокруг источника взры-
взрыва на поверхности земли образуется
чередование зон, в которых звук слы-
слышен, с зонами, в которых он не слы-
слышен. На рисунке 294 изображено че-
чередование зон слышимости и «молча-
«молчания» для мощного взрыва. В зону А
звук пришел непосредственно от места взрыва, в зоне В
взрыв не слышен, так как звук, распространявшийся вдоль
поверхности земли, затух, а отраженный звук в эту зону
не попал. В зону С звук дошел после отражения от слоя темпера-
температурного скачка.
В воде звук распространяется, как было сказано, на значитель-
значительно большее расстояние, чем в воздухе. Так как световые и радиовол-
радиоволны затухают в воде весьма быстро, практически на расстоянии не-
нескольких десятков метров, то единственным способом сигнализа-
сигнализации под водой остаются звуковые и ультразвуковые волны. Поэтому
за последнее время сильно развилась подводная акустика,или, как
ее чаще называют, гидроакустика. Большую роль в развитии
гидроакустики сыграли работы советских ученых Н. Н. Андреева,
Д. И. Блохинцева, А. М. Бреховских, В. В. Шулейкина и др.
На распространение звука в воде, так же как и в воздухе, влия-
влияют наличие течений, температурных градиентов, турбулентных
неоднородностей. Но влияние их сказывается значительно сильнее,
чем в воздухе. Кроме того, благодаря различному содержанию
солей плотность морской воды может сильно меняться от слоя к
слою, что так же, как и изменение температуры, вызывает изги-
изгибание (рефракцию) лучей. Скачкообразное изменение температуры
или солености воды обусловливает многократные отражения
звука, образование звуковых каналов. На распространение звука
418
в воде сказывается наличие в ней мельчайших пузырьков воздуха,
мелких животных и водорослей. Все это чрезвычайно усложняет
картину распространения звука в естественных водоемах.
§ 7. ИСТОЧНИКИ ЗВУКА
Простейший опыт, изображенный на рисунке 295, показы-
показывает, что звуковые волны возникают как результат колебания тела
в упругой среде. Легкая бусинка, поднесенная к звучащему камер-
камертону, начинает отскакивать от него под действием
импульсов, сообщаемых ей колеблющимися нож-
ножками камертона.
Всякое тело, колеблющееся со звуковой
частотой, будучи помещенным в упругую
среду, становится источником звуковых
волн. В струнных инструментах источник звука —
струна,соединенная с корпусом инструмента; в
свистках, духовых трубах, в голосовом органе
человека — некоторый объем воздуха. В громко-
громкоговорителях звук излучает упругая колеблющая-
колеблющаяся поверхность той или иной формы.
Струнами называются твердые тела, попереч-
поперечные размеры которых ничтожно малы по сравне-
сравнению с их длиной.
Если мы элементу струны, закрепленной на
обоих концах, сообщим импульс, перпендикуляр-
перпендикулярный ее направлению, то он распространится вдоль
струны. Возникнув в некоторой точке струны, им-
импульс смещений дойдет до ее конца, отразится с Рис 295. Прос-
потерей полволны, достигнет противоположного т°й опыт, пока-
конца, снова отразится, потеряв полволны, и на-
наконец, вернется в исходное положение. Далее
процесс повторяется.
В результате наложения последовательно па-
падающих и отраженных волн возникает стоячая
волна в узлами на концах. При этом на длине струны укладыва^
ется целое число полуволн:
-f, где л = 0, 1, 2, 3, ....
зывающий, что
звук есть ре-
результат колеба-
колебания тела в упру-
упругой среде.
или
A7.34)
Принимая во внимание, что X = —, получим:
v
A7.35)
14*
419
Сказанное справедливо и для продольных волн.
Свободные колебания струны возникают, следовательно, в виде
стоячих волн, возможные собственные частоты которых определяют-
определяются формулой A7.35). Колебания струны возможны g бесконечно
большим количеством собственных частот. На рисунке 296 изоб-
изображены колебания струны с различными частотами, относящими-
относящимися как 1:2:3:4.
Частота
с
17
A7.36)
называется основной частотой, а соответствующий ей тон звука,
излучаемого струной, называется основным тоном. При основном
тоне на струне укладыва-
укладывается одна полуволна. Ча-
Частота основного тона v0
связана с длиной струны /,
массой единицы длины
струны mt и силой натя-
натяжения струны F зависимо-
зависимостью:
¦4Vsr A7-37)
Рис. 296. Струна, колебающаяся с частота-
частотами, относящимися как 1:2:3:4.
Схождение
ножек
Расхожденщ
ножек
Тона звуков, соответ-
соответствующих более высоким
частотам, называются обер-
обертонами.
Струна, обладая малыми размерами, не может возбудить в ок-
окружающем воздухе мощные звуковые волны. Поэтому в музы-
музыкальных инструментах
струны натягивают на
деки (плоские деревян-
деревянные пластинки) или де-
деревянные ящики, спо-
способные резонировать на
частоте струны. Излу-
Излучение звука при этом
происходит с
поверхности
тора.
Камертон (рис.
297, а) представляет со-
собой изогнутый U-образ-
большой
резона-
Движение воздуха
5
a
но прямоугольного се-
сечения упругий стер-
стержень. Приведя его в
Рис. 297. Движение воздуха вокруг но-
ножек колеблющегося камертона: a —колеба-
—колебания камертона; б — направление движения
воздуха.
420
колебание ударом по одной из ножек резиновым молоточком,
мы возбудим стоячие волны. На свободных концах ножек камер-
камертона возникают пучности, а вблизи ручки, несколько ближе к кон-
концам, лежат два узла. Колеблющиеся ножки камертона излу-
излучают в окружающую среду продольные звуковые волны какой-
либо одной частоты, зависящей от их массы и упругих свойств.
Так же как и струна, камертон — слабый источник звука.
Колеблясь, ножки камертона создают с противоположных сто-
сторон волны давления, различающиеся по фазе на я. Так как импуль-
импульсы давлений распространяются со скоростью звука, то выравнивание
их происходит при малых размерах ножек камертона весьма быст-
быстро, сжатие и разряжение, обегая ножки, почти компенсируют
друг друга. При этом большая часть энергии тратится просто на
«перекачку» воздуха с одной стороны камертона на другую. Кроме
того, и сами ножки камертона колеблются в противофазе, а по-
поэтому излучения от них ослабляют друг друга. Камертон излу-
излучает звук, лишь поскольку ослабление волн не происходит пол-
полностью (рис. 297, б). Если поместить около одной ножки камертона
пластинку перпендикулярно направлению ее колебаний, циркуля-
циркуляция воздуха уменьшается и звук усиливается. Для усиления зву-
звука камертон обычно укрепляется на резонатопном ящике.
. . i I Hi I . . . 6 И I t . . . i H t i . . . a H t i . . . i 11 ,\ i ¦
Q/ ттмииня^-ивввви^™ ^]" "
Рис. 298. Демонстрация образования стоячей волны в трубе с
помощью газового пламени.
В трубах музыкальных инструментов, так же как и на стру-
струне, образуются стоячие волны, причем только продольные, так
как колеблющимся телом служит воздушный столб. Возникно-
Возникновение стоячей волны в трубе можно продемонстрировать на сле-
следующей установке (рис. 298). По трубе с большим числом ма-
маленьких отверстий пропускают светильный газ. Один конец ее за-
закрыт наглухо, ко второму вплотную подносят громкоговоритель
или обычный телефон, соединенный со звуковым генератором. Пока
телефон не включен, зажженный над отверстиями газ горит языка-
языками одинаковой высоты. При включении микрофона возникают
стоячие волны, язычки пламени увеличиваются в местах образова-
образования пучностей. Изменяя частоту колебаний микрофона, можно по-
получить стоячие волны разной длины.
Обычно используемые для получения звука трубы делаются от-
открытыми с обоих концов (флейта), либо с одного конца (ящик ка-
камертона).
Соотношения A7.35) и A7.36) справедливы и для волн в трубе,
закрытой или открытой с обоих концов. В случае, если труба с од-
421
ного конца открыта, а с другого закрыта, на ее длине должно уло-
уложиться нечетное число четвертей волн и, следовательно:
где п = О, 1, 3, 5, ...
Отсюда
A7.38)
41
или соответствующие частоты:
Частота основного тона:
с
~41
41
A7.39)
A7.40)
Мембраны способны совершать колебания либо вследствие
собственной упругости (упругие твердые пластинки), либо вслед-
вследствие натяжения (резиновые и т. п. пластинки).
На мембране (и вообще на какой-либо колеблющейся пластин-
пластинке) волна распространяется не по линии, а по поверхности. По-
Поэтому возникающие на них стоячие волны имеют не узловые точки,
а узловые линии. При звучании мембраны на основном тоне она
колеблется по всей поверхности в одной фазе. Узловая линия при
этом лежит на контуре закрепления мембраны. При возбуждении
более высоких тонов поверхность мембраны (или пластины) оказы-
оказывается разделенной узловыми линиями на отдельные зоны. Все
точки одной и той же зоны колеблются в одной фазе, а точки сосед-
соседних зон колеблются в противофазе.
Узловые линии можно сделать видимыми, если посыпать пла-
пластинки песком, а затем заставить их колебаться, скажем, проведя
по краю смычком. Песок с пучностей будет сброшен и соберется
в узловых линиях. Полученные фигуры носят название фигур
Хладни, по имени впервые их получившего немецкого ученого.
На рисунке 299 изображены фигуры Хладни, образующиеся
на пластинке, закрепленной в центре.
Мембраны — более совершенные излучатели, чем струны или
камертон, так как для них выравнивание давлений, которое мы от-
Рис. 299. Фигуры Хладни.
422
мечали выше, сказывается меньше. Выравнивания давления,
очевидно, не произойдет, если импульс за время, малое по сравне-
сравнению с периодом, не распространится на противоположную сторону
колеблющегося тела. За период импульс пробегает расстояние
X = сТ, следовательно, излучение будет тем более полным, чем
размеры излучателя больше по сравнению с длиной волны. Соз-
Создание излучателей с мембранами, размеры которых были бы срав-
сравнимы с длиной волны, возможно лишь для достаточно высоких
частот.
Если размеры мембраны велики по сравнению с длиной волны,
то, пренебрегая краевой зоной, можно считать, что мембрана
излучает плоскую волну (точнее, участок плоской волны). Распро-
Распространяясь в среде, волна расходится, и энергия ее постепенно рас-
рассеивается. Кроме того, благодаря трению на краях о покоящуюся
среду отрезок плоской волны постепенно искривляется.
При размерах мембраны, малых по сравнению с длиной волны,
расхождение и искривление волны начинается почти от самого
излучателя. Волна при данных размерах мембраны тем ближе к
плоской (тем меньше расхождение и тем, следовательно, «направ-
ленней» звуковой луч), чем выше частота. Однако мембраны, ко-
которые мы рассматривали (металлические пластины, пленки и т. п.),
нельзя заставить колебаться с частотами выше некоторого пре-
предела.
Ускорение частиц колеблющейся мембраны прямо пропорцио-
пропорционально квадрату частоты (см. 16.24). Поэтому для «раскачки» мем-
мембраны с высокой частотой надо к ней приложить очень большую
силу, что приводит к разрушению мембраны.
Мембраны находят широкое применение при возбуждении
звуковых волн, когда нет особых требований к направленности из-
излучения. Тонкостенные корпуса струнных музыкальных инстру-
инструментов (скрипок, гитар) являются пластинами сложной формы,
большой пластиной является дека рояля. Используются колеба-
колебания мембраны и в телефонах, в громкоговорителях и в других слу-
случаях.
Источниками ультразвуковых колебаний служат чаще всего
пьезоэлектрические и магнитострикционные излучатели.
Если из кристалла (кварца, сегнетовой соли и некоторых дру-
других) вырезать определенным образом пластинку, то при ее сжатии
или растяжении на поверхности появляются электрические заряды.
С одной стороны пластинки положительные, с другой — отрица-
отрицательные. Это явление называется прямым пьезоэлектрическим эф-
эффектом. Если пластинку поместить между электродами и присое-
присоединить к ним источник переменного напряжения, то пластинка
сжимается и растягивается, ее поверхности колеблются и излуча-
излучают в среду волны. Изменение размеров пластинки под действием
электрического поля называется обратным пьезоэлектрическим эф-
эффектом,
423
На рисунке 300 схематически изображен кристалл кварца и
его так называемые кристаллографические оси х, у и г; показано,
как вырезается из кварца пластинка так называемого Х-среза (плос-
(плоскости которой перпендикулярны оси х), а также положение плас-
пластинки между электродами (металлические пластины или нанесен-
нанесенный на поверхность кварца слой серебра).
Если сжать пластинку вдоль оси х, то с одной ее стороны воз-
возникнут положительные заряды, с другой — отрицательные.При
растяжении заряды поменяются ме-
местами. Величина заряда на пластин-
пластинке прямо пропорциональна прило-
приложенной силе.
~У Прямой пьезоэлектрический эф-
эффект используется в приемниках
ультразвуковых и звуковых колеба-
Рис. 300. Получение пластинки Х-среза.
ний. Если подать напряжение, возникающее под действием зву-
звукового давления на кварце, через усилитель на соответствующий
электроизмерительный прибор (скажем, на осциллограф), то мож-
можно измерить давление, действующее на кварц, и сделать видимы-
видимыми или даже записать колебания давления.
Для получения ультразвука используется обратный пьезо-
пьезоэлектрический эффект. Если частота колебаний напряжения, при-
приложенного к пластинке, совпадает с собственной частотой ее коле-
колебаний, то наступает резонанс и амплитуда вынужденных колебаний
пластинки достигает максимума (примерно 10~4 мм). В пластинке
устанавливаются продольные стоячие волны (рис. 301).
На рисунке 302 схематически изображено положение волн
в кварцевой пластинке и расположение зарядов. На концах пла-
пластинки образуются узлы, поэтому внутри нее должно укладываться
целое число полуволн. Колебания, как видно из схемы, возникают,
когда в пластине укладывается нечетное число полуволн, так как
при четном числе полуволн на обеих сторонах пластины был бы
один знак электрического заряда. Следовательно, частоты, которые
может излучать пластинка, определяются из соотношения:
>= 2n+1 с, A7.41)
где п - 0, 1, 2, . . .
424
__ —
,-'" Сжатие
,' Сжатие^-^*
- — - *
Рис. 301. Стоячие волны в
кварце (фотография
теневым методом).
Рис. 302. К расчету собственной
частоты пластинки.
И собственная частота пластинки:
V= If
A7.42)
Так как скорость распространения упругих волн в кварце с =
= 5600 м/сек, то
v= ~кгц. A7.43)
Предел получению высоких ультразвуковых частот на основ-
основной частоте пластинки ставит ее практически возможная толщина.
Пластинка тоньше 0,05 мм легко разрушается. Поэтому час-
частоты выше 5,7 • 105 гц получают не на основной частоте, а на так
называемых гармониках, соответствующих обертонам. При этом
интенсивность излучения резко уменьшается. На гармониках
удалось возбудить колебания пластинок с частотой порядка 10" гц.
Кварцевые пластинки создают волны сравнительно небольшой ин-
интенсивности. Например, пластинка 10-10*1,6 см при частоте 40кгц
излучает в жидкость или в твердое тело около 1 кет энергии.
Для получения ультразвука большей интенсивности (порядка 10 кет
с 1 см2 площади пластинки) используют магнитострикционные
излучатели (ряд металлов и сплавов — железо, никель и др. —
обладает свойством сжиматься и растягиваться под действием маг-
магнитного поля; это явление называется магнитострикцией).
§ 8. АКУСТИЧЕСКИЙ РЕЗОНАНС
При передаче колебаний источников звука для увеличения их
мощности используется явление резонанса.
Если привести в колебание натянутую нить, звук ее почти не
слышен, но, если один конец нити закрепить в крышке спичечной
коробки, звук становится отчетливо слышен. Камертон в руке
425
звучит едва слышно, но, если его поставить ручкой на деревянную
крышку стола, звук также становится достаточно громким, чтобы
его слышать на расстоянии нескольких метров. Резонаторами слу-
служат, например, для камертонов деревянные ящики — подставки,
для музыкальных инструментов — их корпуса.
Условие резонанса было установлено ранее: это совпадение соб-
собственных частот источника звука (камертоны, струны) и резона-
резонатора.
Остановимся еще на одном применении резонанса. В большин-
большинстве случаев колебания источников звука негармонические и гра-
график звуковых волн не синусоида. На рисунке 303 приведены кри-
кривые давления в звуковой
волне разного происхож-
происхождения. Но негармоничес-
негармонические колебания, как нам
известно, могут быть пред-
представлены в виде суммы
гармонических колебаний,
происходящих с кратными
частотами. Явление акусти-
акустического резонанса позво-
позволяет опытным путем нахо-
находить гармонические состав-
составляющие звуковых колеба-
колебаний сложной формы. Для
Рис. 303. Колебания давления в звуковых такого анализа впервые был
волнах: использован Гельмгольцем
о — взрыва; Ь — шума; с — звона; d — чистого звука. Набор реЗОНЭТОрОВ, ПОЛу-
чивших в дальнейшем наз-
название резонаторов Гельмгольца. Резонатор Гельмгольца
представляет собой полый металлический шар с узким входным
«горлом» (рис. 304). Так как диаметр «горла» значительно мень-
меньше диаметра сосуда, то скорость воздуха при колебаниях в нем
много больше, чем в сосуде. Поэтому воздух в «горле» резонатора
работает в качестве поршня или колеблющейся массы, а воздух
в сосуде играет роль пружины. Собственная частота колеба-
колебаний резонатора Гельмгольца:
w
A7.44)
где с— скорость звука, 5 — площадь входного
отверстия «горла», / — его длина, V — объем
резонатора.
Входящие в состав сложного звука прос-
простые тона сильно возбуждают те резонаторы,
собственная частота которых близка к час-
Рис 304. Резона-
Резонатор Гельмгольца.
426
тоте данного тона. Современные анализаторы сначала преобразуют
звуковые колебания в электрические (с помощью, например, мик-
микрофона), а затем уже анализируют полученные электрические ко-
колебания.
§ 9. ИСПОЛЬЗОВАНИЕ УЛЬТРАЗВУКОВ
Направленность излучения звука зависит, как мы уже зна-
знаем, от соотношения между размерами излучателя и длиной
волны.
D С В
Рис. 305. Получение характеристики направленности
телефона.
Можно проделать следующий несложный опыт (рис. 305). Возь-
Возьмем телефон, соединенный со звуковым генератором, и микрофон,
связанный через усилитель с осциллографом или другим электро-
электроизмерительным прибором. Возбудим колебания мембраны телефона
сначала на низкой частоте. Смещая микрофон по окружности так,
чтобы он был все время обращен к телефону, увидим на осциллогра-
осциллографе, что колебания имеют максимальную амплитуду, когда ось, пер-
перпендикулярная мембране телефона, совпадает с соответствующей
осью микрофона. Амплитуда уменьшается с увеличением угла меж-
между указанными осями, но звук попадает на микрофон, даже когда
оси составляют угол 90°. Следовательно, телефон излучает полу-
полусферическую волну. Если мы резко увеличим частоту колебаний,
что соответственно уменьшит длину звуковой волны, то на осцил-
осциллографе колебания перестают быть заметными при значительно мень-
меньших углах между осями, т. е. звуковая волна становится направ-
направленной.
427
Отложим на графике из общей точки направление от центра
мембраны телефона к центру мембраны микрофона при их различ-
различных взаимных положениях. На полученных прямых в общем мас-
масштабе нанесем отрезки, пропорциональные величине амплитуде
колебаний луча осциллографа (которая пропорциональна звуко-
звуковому давлению в точках нахождения микрофона). Соединив кон-
концы нанесенных отрезков плавной кривой, получим так называемую
Рис. 306. Характеристики направленности излучателя:
27? I 27? 1 2Н
о—0—точечный источник, /—;- =—, 2—г-=—, 3—— = 1;
л 4 X 2 Л
характеристику направленности излучателя. При повыше-
повышении частоты (уменьшении длины волны) угол расхождения лучей
уменьшается, направленность излучения возрастает. На рисун-
рисунке 306 приведены характеристики направленности, полученные
при различных соотношениях размеров излучателя и длины
волны.
Использование ультразвуков, обладающих высокой частотой
и малой длиной волны, позволяет получить при небольших разме-
размерах излучателя острую характеристику направленности, т. е. сос-
сосредоточить в узком конусе всю мощность излучаемых источником
упругих волн. На рисунке 307 приведена фотография фонтана, ко-
который возникает в масляной ванне над кристаллом кварца, излу-
излучающим ультразвук.
Основной недостаток ультразвуковых колебаний — быстрое
их затухание, которое, как нам известно, при прочих равных усло-
условиях прямо пропорционально квадрату частоты и кинематической
вязкости среды. В воздухе ультразвуки затухают настолько быстро,
что практически для целей сигнализации и связи не применяются.
Зато в воде вследствие ее малой кинематической вязкости затухание
ультразвука значительно меньше. Поэтому ультразвуки находят
широкое применение в гидроакустике.
428
Можно показать, что мощность зву-
звука, излучаемая с пластины в среду,
обратно пропорциональна звуковому
сопротивлению среды.
С помощью источника электрической
энергии в кварцевой пластинке возбужда-
возбуждаются волны ультразвуковой частоты, мощ-
мощность которых определяется соотношением
N = IKS, где /к — интенсивность волн в
кварце, 5 — сечение пластинки.
Падая на границу кварц — вода или
кварц — воздух, волны частично отража-
отражаются, а частично проходят сквозь границу.
Соотношение между интенсивностью пада-
падающей и преломленной волн даны приб-
приближенным равенством A7.24). Мощность,
излучаемая кварцем в воду или воздух:
N = $IKSzz4c-^IKS, A7.45)
Рис. 307. Масляный
фонтан, созданный
ультразвуком.
где Cipi — акустическое сопротивление кварца, с2р2 — акусти-
акустическое сопротивление воздуха или воды.
Так как акустическое сопротивление воздуха примерно в 3500 раз
меньше акустического сопротивления воды, то, следовательно, в
воду излучается с кварца при прочих равных условиях мощность
значительно большая, чем в воздух.
Звуковыми волнами малой амплитуды или малой мощности счи-
считаются настолько слабые волны, которые практически не изменяют
физических свойств среды.
К широко распространенным в народном хозяйстве примене-
применениям ультразвуков малой интенсивности относятся гидролокация
и ультразвуковая дефектоскопия.
Используя явление эхо, можно измерять расстояния, если
известна скорость звука в среде. Для этого достаточно измерить
интервал времени между посылкой звукового импульса и приходом
его после отражения от предмета, до которого измеряется расстоя-
расстояние:
1 = -^-. A7.46)
Глубина морей и рек измеряется эхолотом. В эхолотах при-
применяются обычно ультразвуковые колебания с частотами 20—40 кгц.
На рисунке 308 приведена схема распространения волн от звукового и
ультразвукового эхолотов, из которой сразу становится ясным преимущество
второго из них. Так как технически невозможно создать звуковой эхолот с
мембраной, размеры которой много больше звуковой волны, то такой эхолот
излучает сферическую волну. Если сбоку от корабля, с которого посылают
звуковой нмпульс, есть подводная скала или крутой подъем дна, то отражен-
429
Рис. 308. Сравнение работы звукового и
ультразвукового эхолотов.
ный сигнал может раньше прийти сбоку, чем от дна под корабельным килем,
и эхолот покажет неверную глубину. В ультразвуковом эхолоте, излучение
которого направленно, такая ошибка исключена.
На рисунке 309 приведена схема морского эхолота. На днище
судна укреплен излучатель 4 и приемник 5 ультразвука (обычно
магнитострикционные). В записывающей части эхолота имеется
приспособление, отмечающее на специальной ленте момент посыл-
посылки ультразвукового сигнала и момент его возвращения. Зная ско-
скорость распространения ультразвука, можно найти глубину. На
эхолоте по заранее установленному масштабу глубина отсчиты-
вается непосредственно в метрах. Эхолот позволяет измерять глу-
глубину при движении судна быстро и достаточно точно (рис. 310).
Впервые ультразвук для измерения глубин применил француз-
французский ученый Ланжевен, разработав способ получения ультразвука
с помощью пьезокварцевого излучателя.
С помощью эхолота можно обнаружить затонувший корабль,
лежащую на грунте подводную лодку. При помощи эхолотов
находят в море косяки промысловых рыб (ультразвуковой импульс
отражается от плавательных пузырей рыб, которые содержат воз-
Дух). F-
Эхолоты, посылающие импульс в горизонтальном направлении
и позволяющие обнаружить подводные лодки, корабли, айсберги
и т, п., называются гидролокаторами (рис. 311). Дальность дей-
действия гидролокатора в зависимости от условий колеблется от не-
нескольких сот метров до нескольких километров.
Ультразвуковые приборы, предназначенные для обнаружения
дефектов в различных промышленных изделиях, называются уль-
ультразвуковыми дефектоскопами.
Принцип работы ультразвуковых дефектоскопов подобен прин-
принципу работы гидролокатора.
Наиболее удобный и распространенный метод (импульсный)
ультразвуковой дефектоскопии был разработан советским физиком
С. #. Соколовым. Посланный в изделие импульс ультразвука при
430
наличии дефекта (ракови-
(раковины, трещины или неодно-
неоднородности) отражается от
него и, вернувшись к при-
приемнику, подается на осцил-
осциллограф (рис. 312). Чтобы
дефект дал заметное отра-
отражение, необходимо исполь-
использовать длины волн мень-
меньшие, чем размеры дефекта.
Поэтому в дефектоскопах
применяют высокие ультра-
ультразвуковые частоты порядка
1—10 мгц.
Чтобы на экране осцил-
осциллографа «пик» от отражен-
отраженного импульса не наклады-
накладывался на «пик» от послан-
посланного, продолжительность
импульса должна состав-
составлять всего несколько мик-
микросекунд или даже доли
микросекунды (так как ско-
скорость распространения им-
импульса в твердых телах,
скажем в металлических
деталях, весьма велика,
тысячи м/сек, а расстояния,
которые проходит импульс,
измеряются часто сантимет-
сантиметрами и миллиметрами).
Развертка времени в дефектоскопе также
частотой значительно более высокой, чем,
каторе.
Современные дефектоскопы позволяют
Рис. 309. Схема морского эхолота.
должна происходить с
например, в гидроло-
контролировать метал-
юоо
Рис. 310. Профиль участка Атлантического океана, снятый эхолотом.
431
Геиератор/в нижнем отсеке гидроакустика)
I л г
I
Генератор
электрических,
колебаний
A5-30 кг ц)
-»-
Мощньш
усилитель
Магнитострикционный
излучатель в обтекателе
под килем корабля. Он же
служит приемником отра-
отраженных сигналов
«СМ
I
Приемник и 5/10к управле-
управления (на мостике)
Громкоговори- '
-НЦ I
Гетеродин
усилитель
Осциллогроср -
указатель
расстояния
Управляющее реле;
переключение на
излучение или прием
Зхоимпульс
Рис. 311. Схема гидролокатора.
лические детали размерами до 10 м и более, обнаруживая дефекты
порядка миллиметра, находящиеся как в глубине, так и на рас-
расстоянии в несколько миллиметров от поверхности.
Ультразвук малой интенсивности уже сейчас используется
для целей комплексной автоматизации технологических процессов.
В частности, ультразвуковые приборы, позволяющие измерять ско-
скорость и поглощение ультразвука, используются в нефтеперераба-
нефтеперерабатывающей промышленности для контроля режима производства.
Если состав исходных продуктов меняется, отклоняясь от задан-
заданного режима, или в жидкой нефти появляются твердые частицы
парафина, прибор сигнализирует об этом. В химической и горно-
горнорудной промышленности нашли применение так называемые уль-
ультразвуковые газоанализаторы, автоматически измеряющие по из-
изменению скорости ультразвука концентрацию взрывоопасных при-
примесей и т. д.
Изучая взаимодействие волн со средой, можно проникнуть в
тайны строения вещества.
Например, известно, что
ультразвук, проходя через
такие вещества, как бен-
бензол, сероуглерод и другие,
поглощается в сотни и ты-
тысячи раз сильнее, чем
обычные слышимые звуки.
Такое явление свидетель-
свидетельствует об интенсивном вза-
взаимодействии ультразвуко-
ультразвуковых волн с молекулами ве-
Ракодина щества. Если удастся
Рис. 312. Схема работы дефектоскопа, вскрыть механизм ЭТОГО
432
а б
Рис. 313. Диспергирующее действие ультразвука:
я — до облучения; б — после облучения.
взаимодействия, то откроются новые возможности в изучении
строения жидкостей. (В Советском Союзе в этой области фи-
физики работают А. С. Предводите лев, Б. Б. Кудрявцев,
В. Ф. Ноздрев и др.)
Малые длины волн ультразвука позволяют изучать на моделях
распространение звука в проектируемых помещениях, распростра-
распространение сейсмических волн в земле; изучить структуру турбулент-
турбулентности в воздухе и воде (И. Н. Андреев, Д. И. Блохинцев, В. А.
Красильников и Др.).
Если ультразвуковые волны обладают большой интенсивностью,
они могут изменить структуру вещества, разрушить крупные
молекулы, создать тем самым вещества с новыми свойствами. Этому
способствует то, что длины ультразвуковых волн сравнимы с раз-
размерами крупных, скажем полимерных, молекул.
а 6
Рис. 314. Обезгажнвание жидкости!
я — до облучения; б — после облучения.
433
Поэтому ультразвук оказывается возможным использовать
для дробления вещества и получения эмульсий (диспергирующее
действие ультразвука), необходимых в ряде производств и в меди-
медицине (рис. 313). Этот же эффект используется в промышлен-
промышленности для очистки на конвейере мелких деталей сложной формы
(например, частей часовых механизмов).
При известных условиях ультразвук вызывает коагуляцию
(слипание) мелких частиц, взвешенных в жидкой или газообраз-
газообразной среде, в крупные частицы. Это свойство ультразвука исполь-
используется для улавливания дымов от вредных производств, для обез-
гаживания жидких и твердых тел (рис. 314).
В медицине ультразвук используется для обнаружения зло-
злокачественных опухолей, в которых звук распространяется иначе,
чем в здоровой ткани, для уничтожения некоторых видов бактерий
и т. д.
§ 10. РЕЧЬ И ЗАКОНЫ ВОСПРИЯТИЯ ЗВУКА
Голосовой орган (рис. 315) человека состоит из легких, которые
являются резервуаром воздуха с повышенным давлением и источ-
источником энергии звуковых колебаний; голосовых связок, создающих
колебания воздуха определенной частоты; воздушных полостей
глотки, рта и носа. Воздух, посы-
посылаемый легкими, попадает к голо-
голосовым связкам, которые в момент
звукообразования плотно сжаты
и натянуты. Воздух раздвигает
их. Затем связки вновь сходятся,
воздух их опять раздвигает и т. д.
Связки приходят в состояние ав-
автоколебаний, и объем воздуха над
ними колеблется с частотой ко-
колебания связок. В воздушных
полостях благодаря резонансу и
усилению обертонов, соответству-
соответствующих собственным частотам ко-
колебаний воздуха в полостях, зву-
звуки, порожденные связками, приоб-
приобретают индивидуальную окраску,
свойственную голосу данного
человека. Возбуждение звука го-
голоса связками называется фона-
фонацией. Для того чтобы речь была
понятной (звуки раздельно вос-
воспринимались слуховым органом
человека), длительность фонации
Рис. 315. Голосовой должна быть не более 0,02 сек.
аппарат человека. Слуховой орган человека
Носоглотка
Мягков нёдо
Надгортань
Связки
Трахея
Бронхи
л
и
О
Рис. 316. Слуховой орган человека.
(рис. 316) состоит из ушной раковины Р, слухового прохода 0, ба-
барабанной перепонки П, сопряженных косточек К, ушного лаби-
лабиринта Л, заполненного жидкостью, основной мембраны М и те-
кториальной мембраны. Звуковая волна, подойдя к ушной рако-
раковине, попадает в слуховой проход и возбуждает колебания
барабанной перепонки, колебания которой через систему косточек
(«молоточек», «наковальня» и «стремячко») передаются так назы-
называемому овальному окну, за-
закрывающему вход в полость
ушного лабиринта. Через
жидкость, заполняющую ла-
лабиринт, колебание передается
основной мембране, состоя-
состоящей из нескольких тысяч во-
волокон, имеющих разные соб-
собственные частоты (органы Ко-
рти). В зависимости от частот-
частотного состава звука соответ-
соответствующая группа волокон
вследствие резонанса прихо-
приходит в движение, при этом
нервные элементы на волок-
волокнах соприкасаются с текто-
риальной мембраной, вызывая нервное раздражение, передавае-
передаваемое мозгу.
Ухо отличает три качества звука: громкость, высоту и тембр.
Субъективной характеристике — ощущение громкости — зву-
звука соответствует его объективная характеристика — интенсивность.
Эти характеристики неравнозначны, так как при субъективной оцен-
оценке громкости звука играет роль высота его, так что звуки равной
интенсивности, но разной высоты вызывают различное ощущение
громкости.
Для оценки громкости звука в акустике вводится величина,
называемая децибелл. Если интенсивность одного звука /1( а дру-
другого /2, то считают, что первый звук громче второго на D децибелл
(дб), причем
D = *J±-. A7.47)
'2
Сравнение громкостей звуков различной интенсивности про-
производят от условного нулевого уровня (в качестве которого при-
принята интенсивность звуков 10~в эрг/см2*сек или 10в вт/см2).
Величина D носит название уровня силы звука. Единица уро-
уровня силы звука называется белл (в честь изобретателя телефона
Белла):
P=lg-r- A7-48)
'о
435
Децибелл — одна десятая белла.
Субъективное ощущение громкости возрастает с ростом ин-
интенсивности, вообще говоря, по более сложному закону, чем воз-
возрастает уровень силы звука. Как показали опыты (в частности, уче-
ученика П. Н. Лебедева физика Ржевкина С. Н.), так называемый
закон Вебера — Фехнера, устанавливающий зависимость силы
ощущения громкости от логарифма отношения энергий сравни-
сравниваемых звуков (т. е. пытающийся свести сложные физиологические
процессы к простому механическому), неудовлетворительно пере-
передает явление.
Мы уже говорили, что человеческое ухо воспринимает звук
в известных границахчастот: от 16 до 20 000 кгц. Также существует
0«
Частота {гц)
Рис. 317. Диаграмма слышимости звуков.
и граница силы воспринимаемых ухом звуков. Минимальное зна-
значение интенсивности воспринимаемых звуков называется порогом
слышимости и равно примерно 10~1в в/я/ow2, максимальное зна-
значение интенсивности, превышение которого вызывает в ухе болевое
ощущение, называется порогом болевого ощущения и соответ-
соответствует приблизительно 10~2 вт/см2. Значения обоих порогов раз-
различны для различных частот.
Исследуя громкость звука при различных частотах, можно
построить кривые равной громкости звука (рис. 317). Кривая
порога слышимости для звуков разных частот и кривая болевого
ощущения ограничивают область восприятия звука человеческим
ухом. Наиболее чувствительно ухо в области частот 1000—3000 гц.
Тон, соответствующий частоте 1000 гц, выбран для сравнения тональ-
тональности всех других звуков. Уровень силы тона 1000 гц, равногром-
кого с данным звуком, называется уровнем громкости данного
звука. Уровни громкости фактически должны выражаться в тех
же единицах, что и уровни силы звука, но для того чтобы подчерк-
подчеркнуть, что речь идет об уровне громкости, а не об уровне силы, еди-
единицы громкости называют фон, а не децибелл.
Субъективному ощущению высоты звука соответствует объ-
объективно его частота. Чем больше частота, тем выше звук. За-
436
висимость высоты звука от его частоты легко продемонстрировать,
возбуждая звучание упругой пластинки с помощью зубчатого
колеса, вращаемого с разной скоростью. Изменение частоты просто-
простого звука (тона) в одинаковом отношении (независимо от абсолют-
абсолютного значения сравниваемых частот) создает одинаковое изменение
ощущения высоты. Отношение частот тонов, применяемых в му-
музыке, называется интервалом. При удвоении частоты получается
интервал, называемый октавой, отношение частот 1 : 3 дает квин-
квинту, 3:4 — кварту, 4:5 — большую терцию и
т. д. Если раздельно или одновременно звучат с ^
тона, которые отстоят на интервалы, выражае-
выражаемые отношением малых целых чисел A : 2,
2:3, 5 : 4 и т. д.), то звук воспринимается как
благозвучный, спокойный. Такие интервалы но-
носят название консонансов.
Интервалы, в которых отношения частот от-
отклоняются от простых целочисленных значе-
значений (интервал, например, 8:9; 13:9; 11 : 7
и т. п.) или выражаются иррациональными от-
отношениями, звучат негармонично. Такие интер-
интервалы называются диссонансами. Слабые диссо-
диссонансы, умело использованные, придают музыке
особую, оригинальную окраску (например, в не-
некоторых произведениях Прокофьева). Злоупот-
Злоупотребление диссонансами, использование силь-
сильных диссонансов портит музыку, превращая ее в
хаотический набор звуков, в шум.
Человеческое ухо отличает разность в частоте двух звуков
до 0,1 гц.
Тембр — оттенок сложного звука, которым отличаются друг
от друга звуки одинаковой силы и высоты. Объективно тембр опре-
определяется набором частот простых колебаний, входящих в состав
звука. Чем сложнее звуковое колебание, чем больше в нем обер-
обертонов, тем богаче тембр звука.
Наличие у человека парного слухового органа создает так назы-
называемый биноуральный эффект. Если линия АВ, соединяющая
оба уха, проходит под углом к направлению на источник звука
(рис. 318), то волны от источника попадают в уши с некоторой
разностью фаз, которая обусловлена наличием разности хода d.
Если источник звука лежит на перпендикуляре, восстановленном
в средней точке линии АВ, волна приходит в оба уха в одной фазе.
Слуховой орган человека способен по разности фаз отмечать откло-
отклонение направления на источник звука от средней плоскости головы
примерно на 2,5—3°. Влияние сдвига фаз волн на восприятие звука
называется биноуральным эффектом.
^ О Ъ
Рис. 318. Схе-
Схема возникнове-
возникновения биноураль-
ного эффекта.
437
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютно твердое тело 41, 166
Автоколебания 355
Автопилот гироскопический 214
Акустика 401
Амплитуда автоколебаний 356
— волн скоростей 409
— звукового давления 410
— колебания 308
вынужденного 343
затухающего 338
начальная 338
резонансная 344
Анализ колебаний гармонический
349
Аномалия 97
Апогей 160
Афелий 160
Вектор внешних сил главный 167
— момента пары сил 176
— полного момента 174
— Умова 375
Величина диссипации механической
энергии 286
— физическая 10, 11
однородная 11
численное значение 11
Вес тела 52
, изменение с изменением ши-
широты места 124
Весы 221
—, чувствительность 222, 223
Водоизмещение 252
Волна звуковая 401
— когерентная 377
Волиа плоская 375
— поперечная 367
— продольная 367, 368, 369
— стоячая 383, 385, 386, 387
— сферическая 376
Высота геометрическая 250, 266
— звука 437
— пьезометрическая 248, 250, 266
Вязкость 258
Газоанализатор ультразвуковой 432
Гидроакустика 418
Гидроаэромеханика 244
Гидроаэростатика 244
Гидролокация 429, 430
Гипотеза Жуковского 303
Гирополукомпас 213
Гироскоп 204, 206, 207
Гистерезис упругий 241
, петля 241
Гравиметр 327
Гравитация 59
Градиент скорости 259
Давление звуковое или избыточное
402
Двигатель воздушно-реактивный
280
— ракетный 280
— реактивный 280
Движение абсолютное 111
— в центральном поле тяготения 156
— вихревое 282
— внутриатомное 5
— внутриядерное 5
— вращательное вокруг неподвиж-
неподвижной оси 172
Движение колебательное 306
непериодическое 306
периодическое 306
— механическое 5, 6
— молекулярно-тепловое 5, 6, 13
— неравномерное 26
— относительное 111
— переносное 111
438
— плоское 191
— потенциальное 282, 290
— прямолинейное 32
— равнозамедлеиное 34
— равномерное 26
— равнопеременное 34
— равноускоренное 34
— реактивное 280
— тела, брошенного вертикально
вверх 155
• переменной массы 108
— электромагнитное 5
Декремент затухания логарифми-
логарифмический 339
Демпфер 341
Дефектоскопия ультразвуковая
429, 430
Деформация 52, 72, 75
— абсолютная 225
продольная 228, 238
— динамическая 74
— изгиба 227
— кручеиия 227
— остаточная 235
— относительная 227
кручения 228
поперечного сжатия или рас-
растяжения 229
Деформация относительная продоль-
продольная 228
сдвига 228
— продольная 227
— растяжения 226
— сдвига 227
— сжатия 226
— статическая 74
Диаграмма' векторная колебатель-
колебательного движения 315
— напряжений 234
Динамика 18
— , обратная задача 71
— , прямая задача 71
Диск Релея 411
Дисперсия воли 367, 403
Диссонанс звуковой 437
Дифракция воли 413
Длина приведенная физического
маятника 324, 326
Единица измерения акустического
сопротивления 411
внесистемная 11
времени 11
, выбор 10
длины 11
массы 11, 63
мощности 140
производная 11, 12, 13
работы 140
силы 64
звука 435, 436
тока 14
, система 10, 11
Единица измерения скорости 11
¦ температуры 14
ускорения 33
частоты колебания 308
Жидкость газообразная 244
— идеальная 260
вязкая несжимаемая 260
сжимаемая 260
— капельная 244, 263
Закон Амоитона 84
— Бойля — Мариотта, Гей-Люс-
сака 403
— Бриллюэна 398
— Вебера — Фехнера 436
— всемирного тяготения 92
, гравитационная постоян-
постоянная 92, 94
, , размерность 95
— Гагеиа — Пуазейля 288, 289
— Гука 233
— Кеплера I 90
II 90
III 90
— Кулоиа для треиия 85
— Ньютона I 54, 55, 56
II 60, 62, 63
III 67
— отражения звука 413
— Паскаля 246
— преломления звука 413
— сохранения и превращения энер-
энергии 146, 148, 328
¦ количества движения 101,
136, 272
массы 59
момента количества движения
183, 186, 187, 272
— убывания амплитуды 414
— физический 9, 11, 16
«Занос» автомобиля 88
Затухание звука 414
Излучатель ультразвука пьезоэлект-
пьезоэлектрический 423, 424
— — магиитострикциоииый 423,
425
Излучение 372
Измерение силы 52
— скорости распространения звука
в воздухе 405
— , точность Ю
439
— физическое 9
Импульс силы 65
— — элементарный 66
— поперечный 361
— продольный 360
Инерция 56, 59
— , закон 56
Интенсивность, или сила звука 409,
411, 416
Интервал музыкальный 437
Интерференция воли 377, 378, 379
Интерферометр звуковой 406, 407
Инфразвук 401
Источник волн когерентный 377
— звука 419
, камертон 420
, мембрана 422
-, струна 419
, труба 421
Карбюратор 273
Качество крыла 305
Кинематика 18
Колебание апериодическое 340
— вынужденное 342, 390
— гармоническое 307, 309, 312
¦— затухающее 337
Колебание нормальное 353
— свободное 308, 341
— связанных систем 351
— собственное 312
Количество движения 65
.закон сохранения 101, 136
замкнутой системы 103
, изменение 66
системы, изменение 103
тел 101
Консонанс звуковой 437
Коэффициент вязкости 259
— истечения, или расхода 269
— кинематической вязкости 291,
295
— лобового сопротивления 299
— объемного сжатия адиабатический
364, 403
— объемный упругости нли сжимае-
сжимаемости 254
— отражения 413
— поглощения звука 414
— подъемной силы 305
— поперечного сжатия при про-
продольном растяжении 238
— проникновения 413
— Пуассона 229, 237
— сопротивления 294
при колебаниях 338
— термического расширения 404
— треиия качения 198
— упругости 234, 359
Кристалл «одномерный» 394
Круг кривизны 38
Линия тока жидкости 260, 261
— удара 151
Луч при волновом движении 376
Масса И, 59
—, закон сохранения 59
—, мера количества материн 59
Материальная точка 22
Материя 6, 57
—, полевая форма 93
Маятник гироскопический 210
— математический 307
— Обербека 174
— оборотный 325
— физический 323, 324
— Фуко 125
Метацентр 252
Метод импульсный, измерения ско-
скорости ультразвука 408
— Лаграижа 256
— Темплера, наблюдения звуко-
звукового поля 407
— Эйлера 256
Модуль кручения 238
— объемного сжатия 403
— объемный, адиабатической сжи-
сжимаемости 364, 403
— сдвига 238
— упругости 234
— Юнга 237, 360
Момент инерции 11, 171
¦ .вычисление 176, 177, 178
Момент количества движения 181
, закон сохранения 183,
184
, изменение 182
тела 182
точки 181
— силы 171
, направление вектора 172
Мощность 140
— источника звука 412, 428
Наблюдение 9
Наклеп 236
Напор пьезометрический 250, 251
— скоростной, или динамический
266, 271
Напряжение 232, 234, 245
— в точке 233
— касательное 232, 284
— нормальное 232
— среднее 233
440
Напряженность гравитационного
поля 94
Насос водоструйный 272, 273
Невесомость 127, 131
Обертон гармонический 389, 420
Обращение точки вокруг осн 169
Обтекание тел 295
Объемный вес 226
Ом акустический 411
Опыт физический 9
Орбита гиперболическая 160
— круговая 159
— параболическая 162
— эллиптическая 159
Остойчивость корабля 262
Ось вращения мгновенная 193
свободная 200
— гироскопа 204
— инерции главная 200, 201, 202
— момента количества движения 204
Отжиг 236
Отражение волн 381
— импульса на границе двух сред
361, 362
Парадокс гидростатический 249
— Эйлера 283
Параметр 137
Парение тяжелого тела 278
Перемещение, вектор 23
— точки 23, 33
— угловое 42, 43, 44
Перигей 160
Перигелий 160
Период колебания 307
затухающего 337
Плавучесть корабля 252
Плотность вещества в данной точке
225
средняя 225
— потока энергии 375
— энергии 374
Поверхность изобарическая 248
— равной фазы, или волновая по-
поверхность 375
— раздела 283
Показатель затухания 338
— преломления 382, 413
Поле гравитационное 94
— динамическое 94
— звуковое 403, 407
— однородное 94
— скоростей 256, 257, 260
— тяготения 93
— ультразвуковых волн 402
— ускорений 256
Поляра 305
Порог слышимости 436
Последействие упругое 236
Поток нестационарный 260
— стационарный 260, 266, 272
равномерный 261
— энергии 374
Предел пропорциональности 234
— прочности, или временное соп-
сопротивление 235
— текучести 235
— упругости 234
Преломление волн 382, 383
Преобразование координат галлиле-
ево 112
Пресс гидравлический 246
Прецессия 207
Прибор Мартенса зеркальный 229
Принцип Гюйгенса 381, 382
— независимости действия сил 62
— отвердения жидкости 244
— относительности Галилея 114
— суперпозиции, илн наложения
колебаний 329, 377
Пространство абсолютное 18
— относительное 18
Процесс адиабатический 363
Пуаз 258
Пульверизатор 272
Путь 26, 33
Пучность 384, 385
Пьезометр 249, 286
Работа 11, 138
— в поле силы тяжести 145, 146
—, вычисление 138, 139
—, единицы измерения 140
Работа прн вращательном движения
189
—, формула 12
Равновесие безразличное 220
— неустойчивое 220
— твердого тела 219
— устойчивое 220
Радиус кривизны 39
Разведка гравитационная 97
Развертка колебания временная 318
Размерность физической величины
11, 15
Разность хода волн 378, 379
Расстояние 26, 33
—, вычисление 36
—, график 26
— прн равнопеременном движении
35
Распространение импульса в жид-
жидкостях и газах 362
в твердой сплошной среде 358
Реакция связи 75
441
Резонанс 344, 345
— акустический 425, 426
Резонатор 350
— Гельмгольца 426
Рефракция луча прн распростране-
распространении звука 418
Связь механическая 75
— обратная 356
Сдвиг фаз 315
Сечение миделево 299
Сжатие адиабатическое 363
Сила 51, 52
— внешняя 99, 232
— внутренняя 99, 232
— гироскопическая 210
— давления 245
Сила диссипативная 146
— инерции 116, 122
— квазиупругая 312
— консервативная, или потенциаль-
потенциальная 146
— Кориолиса 121, 125, 127
— массовая или объемная 168, 231
— поверхностная 232
— подъемная 279, 295
— реакции струи 275, 276, 280
— тангенциальная 169
— трення 82
внешнего 82
внутреннего 82
вязкого 86
жидкого 86
качения 83, 197
покоя 84
скольжения 83
сухого 83
— тяжести 9
— упругости 72, 75
— центробежная 121, 124
— центростремительная 80, 81
Синхронизатор 323
Система автоколебательная 355
— единиц 11
абсолютная 12
международная 14
техническая 12
универсальная 12
Система координат 21
— материальных точек 99, 107
— механическая 99
— отсчета вращающаяся 118
гелиоцентрическая 113
геоцентрическая 114, 129
инерциальная 113, 114
неинерциальная 115
неподвижная 111
подвижная 111
— парциальная 352
— связанная колебательная 352
— тел замкнутая 102, 107
Скамья Жуковского 184
Скорость абсолютная 112, 115
—, вектор 29
—, —, составляющие по осям коор-
координат 29
— вторая космическая, или высво-
высвобождения 133, 156
—, вычисление 36
— истечения из отверстия 268
— линейная 43, 48
, вектор 47
— орбитальная 133
— первая космическая 132, 133
— переносная 119
— равномерного движения 12
— равнопеременного движения 35
— распространения волны 366
звуковой волны в твердых сре-
средах 403, 404
в жидких средах 403, 404
импульса в жидкости или газе
363
Скорость распространения импуль-
импульса в твердой упругой среде 359
поперечного импульса 361
продольного импульса 360
продольных волн 359
— третья космическая 165
— угловая 43, 44
, вектор 45, 46
прецессии 208, 209
— фазовая 367
Сложение колебаний 328, 332
Смазка 87
Сопротивление акустическое 383, 411
— волновое при движении тел в
жидкостях 286
— гидростатическое 284, 286
— давления 286
— лобовое 295
— разрыву 235
Спектр сложного колебания 349
Среда дискретная 390
— сплошная 390
Степень свободы 217
Тело абсолютно иеупругое, или
пластичное 230
упругое 230
— отсчета 21
Теорема Бернулли 264, 266, 267
— Вариньона 173
— Гюйгенса 324
— неразрывности 263
Тембр звука 437
442
Течение ламинарное 287, 289, 290
— турбулентное 287, 292, 295
Тон основной 389, 420
Точка критическая скорости потока
270
— узловая волны 384, 385, 387, 388
Траектория движения 22
криволинейная 22
прямолинейная 22
Трение внутреннее 258
Трибометр 86
Трубка Бурдона 251
— Орлова 271
— Пито — Прандтля 271
— пьезометрическая 268, 270, 271
— Torfa жидкости 262
Турбина Пельтона (активная) 275
— реактивная 278
Угол атаки 303
— рассогласования 214
Удар 149, 150
— косой 151
— неупругнй 151, 152
— нецентральный 186
— прямой 151
— упругий 151, 153
— центральный 151
Ультразвук 401
Упругость объемная 254
Уравнение бегущей волны 365
— Бернулли 266, 268, 270
— волнового движения 371
— вращательного движения тела 173
— гидростатическое 248
— движения математического маят-
маятника 308
Уравнение движения материальной
точки 63
пружинного маятника 310
— Мещерского ПО
— моментов 182
— поступательного движения твер-
твердого тела 167
— Пуассона 363
— свободных колебаний 338
Уровень громкости 436
— силы звука 435
Усилие 232, 234
Ускорение 11, 30
— абсолютное 112, 115
—, вектор 31
—, —, составляющие по осям коор-
координат 31
—, вычисление 36
— Кориолиса 119, 120, 121, 122, 124
—, определение по графику ско-
скорости 32
— переносное 122
— полное 35
— равнопеременного движения 34
—, размерность 33
— тангенциальное, нли касательное
39, 48
— угловое 43, 44, 174
— —, вектор 47
— центростремительное, или нор-
нормальное 38, 39, 123
Установка Эрстеда 254
Фаза колебания 308
вынужденного 343
Фигуры Лиссажу 337
— Хладни 422
Фонация 434
Формула Жуковского — Кутта 304
Формула Стокса 296
— Торичелли 269
Фронт волны 375
Характеристика направленности
излучателя 428
Центр величины 252
— качания физического маятника
324
— кривизны 39
— масс 100, 169
— — , движение 106
— — замкнутой механической сис-
системы 107
— — механической системы 107
твердого тела 167, 168
Циркуляция скорости 300, 302,
304
Частота автоколебаний 356
— вынуждающих колебаний 342,
343
— колебания 308
, единица измерения 308
основная 348, 420
резонансная 344
— круговая, или циклическая 308,
313°
— нормальная 353
— парциальная 352
— собственных колебаний 312, 338
Частотомер язычковый 350
Число волновое 366
оптическое 396
— Рейнольдса 289, 291, 292, 296
критическое 291
— степеней свободы 217
Чувствительность весов 222, 223
443
Эквивалентность сил 175
— тел 175
Эксцентриситет 91
Электроннолучевая трубка 319
Элемент сплошного тела 224
Энергия 137, 138
— кинетическая 141, 142, 143
вращательного движения 190
колебательного движения 326
полнаи 190
твердого тела 188
участка волны 373
— полная колебательного движения
327
— потенциальная 141, 143, 144
деформированного тела 145, 240
колебательного движения 326
участка волны 373
частицы удельная 250
Эффект биноуральный 437
Эхолот 429, 430, 431
Явление Допплера 399, 400
ОГЛАВЛЕНИЕ
Преди5ловие 3
Глава I. (Вводная.)
§ 1. Материя и движение 5
§ 2. Марксистско-ленинская философия — основа правильного по-
понимания физических явлений 6
§ 3. Особенности физических исследований 8
§ 4. Системы единиц измерения и размерность физических величин. 11
§ 5. Физика н техника 16
Глава II. Основные понятия кинематики
§ 1. Пространство и время — объективные формы существования ма-
материи. Системы отсчета 18
§ 2. Движение материальной точки. Вектор перемещения 22
§ 3. Скорость 26
§ 4. Ускорение 30
§ 5. Прямолинейное движение 33
§ 6. Ускорение при криволинейном движении. Нормальное и тан-
тангенциальное ускорения 36
§ 7. Кинематика твердого тела. Угловая скорость и угловое ускорение. 40
§ 8. Угловая скорость и угловое ускорение как векторы. Связь меж-
между векторами угловой и линейной скоростей и ускорений для тела,
вращающегося вокруг неподвижной оси 44
Глава 111. Основные законы динамики материальной точки
§ 1. Задачи динамики. Законы Ньютона 49
§ 2. Взаимодействие тел. Сила 50
§ 3. Измерение сил 52
§ 4. Первый закон динамики (закон инерции) 54
§ 5. Масса 56
§ 6. Второй закон динамики 60
§ 7. Единицы измерения силы и массы 64
§ 8. Количество движения. Импульс силы 65
§ 9. Третий закон динамики 67
Глава IV. Силы, возникающие при контакте тел
§ 1. Силы упругости 72
§ 2. Движение по заданной траектории тел, рассматриваемых как
материальные точки 75
§ 3. Силы трения 81
§ 4. Сухое трение 83
§ 5. Жидкое трение 86
i§ 6. Действие сил трения. Смазка 87
445
Г л а в а V. Силы всемирного тяготения
§ 1. Закон всемирного тяготения 90
§ 2. Гравитационная постоянная 94
§ 3. Некоторые применения закона всемирного тяготения 96
Глава VI. Механические системы
§ 1. Механические системы. Центр масс 99
§ 2. Количество движения системы тел. Закон сохранения количества
движения 101
§ 3. Движение центра масс механической системы 106
§ 4. Движение тел переменной массы. Труды Мещерского 108
Глава VII. Относительное движение
§ 1. Инерциальные системы. Механический принцип относительности. 111
§ 2. Неинерциальиые системы. Силы инерции 114
§ 3. Вращающиеся системы отсчета 118
§ 4. Проявления вращающегося движения Земли 123
§ 5. Вес и невесомость 127
Глава VIII. Энергия. Работа. Мощность
§ 1. Энергия. Работа , 136
§ 2. Вычисление работы. Мощность 138
§ 3. Энергия механического движения 141
§ 4. Закон сохранения и превращения механической энергии. . . . 146
§ 5. Удар 149
§ 6. Движение тела, брошенного вертикально вверх, в поле силы тя-
тяжести 155
§ 7. Движение в центральном поле тяготения. Искусственные спут-
спутники и ракеты 156
Глава IX. Динамика твердого тела
§ 1. Твердое тело как система материальных точек 166
§ 2. Обращение материальной точки вокруг неподвижной оси. ... 169
§ 3. Вращение твердого тела вокруг неподвижной оси 172
§ 4. Вычисление момента инерции тел 176
§ 5. Момент количества движения. Закон сохранения момента коли-
количества движения 180
§ 6. Кинетическая энергия вращающегося твердого тела 188
§ 7. Плоское движение. Мгновенные оси вращения 191
§ 8. Трение качения. Шарикоподшипники 197
§ 9. Свободные оси 199
§ 10. Гироскоп 203
§ 11. Гироскопические силы. Применение гироскопического эффекта 210
Глава X. Равновесие твердого тела
§ 1. Степени свободы 217
§ 2. Условия равновесия твердого тела 219
§ 3. Устойчивое и неустойчивое равновесие 220
§ 4. Весы 221
Глава XI. Механика упругих тел
§ 1. Сплошные тела. Элемент сплошного теля 224
§ 2. Типы деформаций 226
§ 3. Напряжение. 231
446
§ 4. Связь между деформацией и напряжением. , 234
§ 5. Модули упругости при различных деформациях и связь между
ними. 237
§ 6. Энергия упругой деформации. Упругий гистерезис 239
Глава XII. Гидроаэростатика
§ 1. Жидкие и газообразные тела 243
§ 2. Напряжение в жидкости. Давление 244
§ 3. Давление в однородной жидкости, покоящейся в поле силы
тяжести 247
§ 4. Измерение статического давления. 249
§ 5. Плавание твердых тел. Закон Архимеда 252
§ 6. Сжимаемость жидкостей и газов 254
Глава XIII. Гидроаэродинамика
§ 1. Задачи и методы гидроаэродинамического исследования 256
§ 2. Вязкость 258
§ 3. Поле скоростей. Теорема неразрывности 260
§ 4. Теорема Бернулли 264
§ 5. Следствия из теоремы Бернулли. 267
§ 6. Применение закона сохранения количества движения и момента
количества движения к стационарному потоку 273
§ 7. Реактивное движение 280
§ 8. Вихревое движение 282
§ 9. Гидродинамическое сопротивление 285
§ 10. Течение жидкости в твердых границах. Ламинарный и турбулент-
турбулентный режимы течения 287
§11. Обтекание тел. Лобовое сопротивление 295
§ 12. Подъемная сила. Теорема Н. Е. Жуковского 301
Глава XIV. Колебательное движение
§ 1. Гармоническое колебательное движение. Математический маят-
маятник 306
§ 2. Геометрическое представление и запись колебаний 312
§ 3. Физический маятник 323
§ 4. Оборотный маятник 325
§ 5. Энергия колебательного движения 327
Глава XV. Сложение колебаний
§ 1. Сложение колебаний одного направления 329
§ 2. Сложение взаимно перпендикулярных колебаний. . ... 333
§ 3. Затухающие колебания 337
§ 4. Вынужденные колебания. 341
§ 5. Резонанс 346
§ 6. Гармонический анализ сложных колебаний 348
§ 7. Колебания связанных систем. 351
§ 8. Автоколебания 355
Глава XVI. Волновое движение
§ 1. Распространение кратковременного импульса в твердой сплошной
среде. 358
§ 2. Отражение импульса на границе двух сред 361
§ 3. Распространение импульса в жидкостях и газах 362
§ 4. Распространение колебаний в однородной сплошной среде. Бе-
Бегущие волны. 364
§ 5. Энергия волнового движения. Поток энергии. Вектор Умова. . 372
447
§ 6. Плоские и сферические волны 375
§ 7. Интерференция волн. 376
§ 8. Принцип Гюйгенса 380
§ 9. Стоячие волны 383
§ 10. Колебания ограниченных участков сплошных и дискретных сред.
«Одномерный» кристалл 390
§ П. Явление Допплера 399
Глава XVII. Элементы акустики
§ 1. Природа звука. Звуковое поле 401
§ 2. Скорость звука и ее измерение 403
§ 3. Характеристика звукового поля 409
§ 4. Отражение и преломление звука на границе двух сред 412
§ 5. Затухание звука. 414
§ 6. Распространение звука 416
§ 7. Источники звука. 419
§ 8. Акустический резонанс 425
§ 9. Использование ультразвуков 427
§ 10. Речь и законы восприятия звука 434
Предметный указатель 438
Михаил Махайлошч АРХАНГЕЛЬСКИЙ
КУРС ФИЗИКИ (МЕХАНИКА)
Редактор В. Л. Климонтович. Художник обложкн И. В. Царевич.
Художественный редактор А. В. Сафонов. Технический редактор Т. В. Павлова.
Корректор И. М. Данковцева
Сдано в набор 7/IX-1964 г. Подписано к печати 25/III-I965 г. 60х907и- Печ. л. 28. Уч.-изд.
л. 25,92. Тираж 25 тыс. экз. А03755 Т. п. 1965 г. № 33.
Издательство «Просвещение» Государственного комитета Совета Министров РСФСР по печати.
Москва. 3-й проезд Марьиной рощн, 41.
Саратовский полиграфический комбинат Росглавполиграфпрома Государственного комитета Со-
Совета Министров РСФСР по печати, г. Саратов, ул. Чернышевского, 59. Заказ №t 149.
Цена без переплета 78 коп., переплет 15 коп.