








Similar




Text
И К0|ТСТРУКШ4Я-
ТАНК А
' ’’
4 ДЕСЯт1иГОМАХ'
JI
Под редакцией
д-ра техн, наук, проф. П. П. ИСАКОВА
Томб
ВОПРОСЫ ПРОЕКТИРОВАНИЯ
ХОДОВОЙ ЧАСТИ
ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН
Редакторы тома В. А. Иванов,
д-р техн, наук Б. А. Абрамов
Москва «МАШИНОСТРОЕНИЕ» 1985
УДК 623 438.3.001:629.11.012
р'
Теория и конструкция танка. —Т. 6. Вопросы про-
ектирования ходовой части военных гусеничных ма-
шин. М.: Машиностроение, 1985. 244 с.
Книга посвящена вопросам создания и исследования ходовой
части военных гусеничных машин (ВГМ). Рассматриваются кон-
структивные особенности ходовой части современных ВГМ, приво-
дятся методы расчетно-теоретического и экспериментального иссле-
дования их составных частей, обосновываются направления даль-
нейшего развития.
Книга предназначена для научных и инженерно-технических
работников, занимающихся вопросами создания и испытаний ходо-
вой части военных гусеничных машин, а также может быть реко-
мендована в качестве учебного пособия преподавателям, студентам
вузов, слушателям н курсантам военных академий и училищ соот-
ветствующего профиля.
Ил. 174, табл. 18, список лит. 38 назв.
В книге пронумеровано 244 страницы.
ПРЕДИСЛОВИЕ
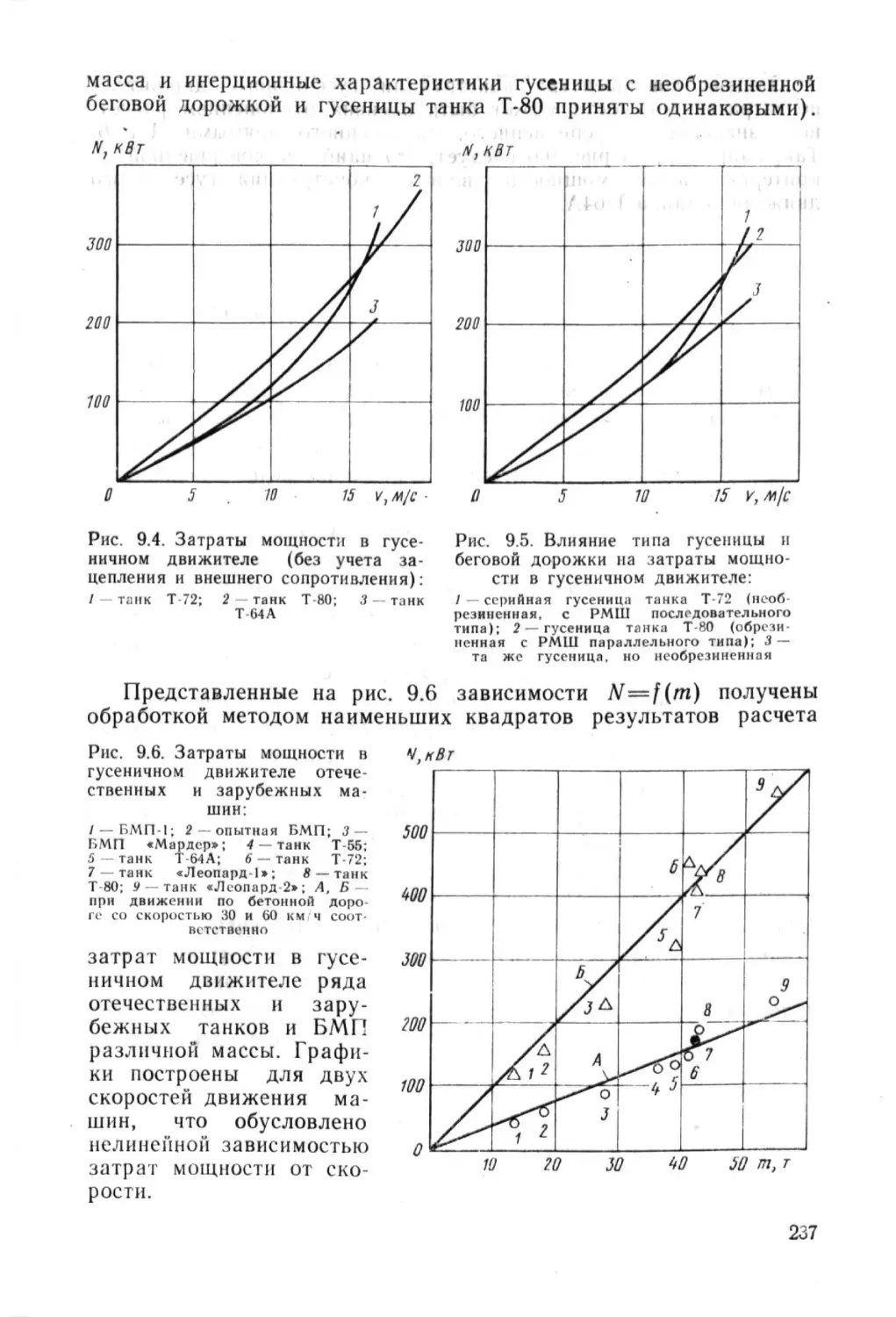
Ходовая часть военных гусеничных машин предназначена для
поддержания корпуса, осуществления движения машины, смяг-
чения и устранения колебаний корпуса при движении. Конструк-
ция ходовой части, в значительной мере определяющая проходи-
мость и быстроходность ВГМ, должна быть надежной, дешевой
в изготовлении, простой в обслуживании и ремонте, с минималь-
но возможной массой и незначительными потерями мощности при
движении.
Ходовая часть состоит из системы подрессоривания и гусенич-
ного движителя. Система подрессоривания связывает корпус ма-
шины с осями опорных катков, служит для смягчения ударов и
колебаний корпуса при движении. Она включает в себя подвеску,
амортизаторы, буфера. В зависимости от конструктивного испол-
нения к системе подрессоривания может быть отнесен и механизм
управления положением корпуса. От совершенства системы под-
рессоривания зависят скорость движения, меткость огня при
стрельбе с ходу, работоспособность экипажа, долговечность сбо-
рочных единиц и систем. Гусеничный движитель, непосредствен-
но взаимодействующий с внешней средой, обеспечивает создание
тяговой силы, движущей машину. Движитель состоит из гусениц,
опорных и поддерживающих катков, ведущих и направляющих
колес с механизмом натяжения гус.ениц.
Деление ходовой части на систему подрессоривания и гусенич-
ный движитель довольно условно, так как некоторые сборочные
единицы выполняют смежные или общие функции. Так, напри-
мер, гусеница, уменьшая толчки и удары при движении по неров-
ной местности, выполняет функции подвески, а система подрессо-
ривания, изменяя давление под гусеницами, влияет на проходи-
мость ВГМ.
Схема, компоновка и конструкция ходовой части (и ее сбо-
рочных единиц) определяются тактико-техническими требования-
ми к ВГМ в целом. Для изготовления отдельных деталей исполь-
1* 3
зуются конструкционные (углеродистые и легированные) стали,
сплавы алюминия и титана, а также полимерные материалы (ре-
зины и пластмассы).
Одним из требований, предъявляемых к современным танкам,
является повышение их подвижности за счет увеличения скоро-
сти движения по дорогам и местности. Выполнение этого требо-
вания обусловливает необходимость разработки новых конструк-
ций подвесок, новых технических решений по снижению потерь
мощности в гусеничном движителе, а также по повышению на-
дежности ходовой части при существенно возросших динамиче-
ских нагрузках.
Многообразие внешних факторов, воздействующих на машину,
сложность геометрических форм движителя, разнообразие приме-
няемых материалов осложняют проектирование ходовой части и
требуют, помимо расчета, проведения экспериментов на стендах,
а также натурных испытаний машин в различных климатических
условиях. I
В отечественной литературе рассмотрены вопросы расчета,
проектирования и испытаний деталей ходовой части [6, 12, 24, 28],
но многие из описанных конструкций в настоящее время устарели.
Существенное (в 1,5—2 раза) повышение скорости движения ма-
шин по пересеченной местности потребовало создания высокона-
пряженных торсионных валов, энергоемких телескопических и ло-
пастных амортизаторов, гусениц с резинометаллическим шарни-
ром и обрезиненной беговой дорожкой, а также устройств, повы-
шающих устойчивость гусениц на ведущем колесе (ограничитель-
ных дисков, механизмов автоматического натяжения гусениц и
т. д.). Совершенствование ходовой части танков осуществляется
также за, счет применения опорных катков с наружной шиной и
съемными дисками из алюминиевого сплава и механизма управ-
ления положением корпуса танка в зависимости от условий и ре-
жимов движения.
За последние 10 -15 лет накоплен определенный теоретиче-
ский материал по методам расчета функциональных характери-
стик и оценке долговечности сборочных единиц ходовой части
ВГМ, что позволило авторам данной книги более полно рассмот-
реть вопросы расчета и конструирования наиболее важных из
них.
Из-за ограниченного объема в книге рассмотрены лишь сов-
ременные конструкции сборочных единиц ходовой части без ана-
лиза промежуточных вариантов, хотя подобные материалы могли
4
бы быть весьма полезны специалистам, занимающимся вопросами
расчета и проектирования ходовой части. Материалы, касающие-
ся взаимодействия гусеничного движителя с грунтом, а также
вопросы проходимости, будут рассмотрены в последующих томах
монографии.
Данные, приведенные в книге, могут быть использованы при
расчете и конструировании ходовой части нс только ВГМ, но и
некоторых гусеничных тракторов и дорожно-строительных машин
на гусеничном ходу.
Авторами 6-го тома являются Б. А. Абрамов, Ю. И. Брагин,
| Е. В. Вавилов |, В. А. Варчев, Ю. С. Голованов, И. И. Грах,
Ю. Н. Истомин, Е. И. Колков, П. К. Марецкий, В. Б. Проскуря-
ков, В. Л. Решетов, В. М. Соловьев, Г. М. Терещенко, В. Ф. Юдкин.
Глава I РАСЧЕТ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
d JL UI 1 Ml .' ** I Л
1.1. ОБЩИЕ СВЕДЕНИЯ
Одним из главных требований, предъявляемых к системе под-
рессоривания В ГМ, является обеспечение высокой плавности хода,
характеризуемой уровнем динамического воздействия на корпус
и степенью реализации максимальной скорости прямолинейного
движения. Основные показатели плавности хода: скорость пря-
молинейного движения машины по горизонтальной грунтовой до-
роге с неровностями, оказывающими динамическое воздействие на
корпус, средний уровень которого не превышает заданного значе-
ния; проходная высота неровностей; ускорение колебаний (тряски)
корпуса. Проходной называется высота искусственных неровно-
стей, преодолеваемых при испытании ВГМ во всем диапазоне ско-
ростей без пробоя подвески и ударов направляющими, ведущими
колесами или деталями корлуса о дорогу. Высокая плавность хода
характеризуется в основном малыми вертикальными ускорениями,
передаваемыми на корпус машины, быстрым гашением свободных
колебаний корпуса, частотой линейных и угловых колебаний в
пределах, наиболее привычных для человеческого организма.
Основной задачей расчета си-
Рис. 1.!. Характеристика подвески
тельно корпуса машины. В
стемы подрессоривания является
определение характеристик под-
вески и амортизатора при проек-
тировочном расчете и проверка
соответствия показателей плав-
ности хода машины заданным
требованиям при поверочном
расчете.
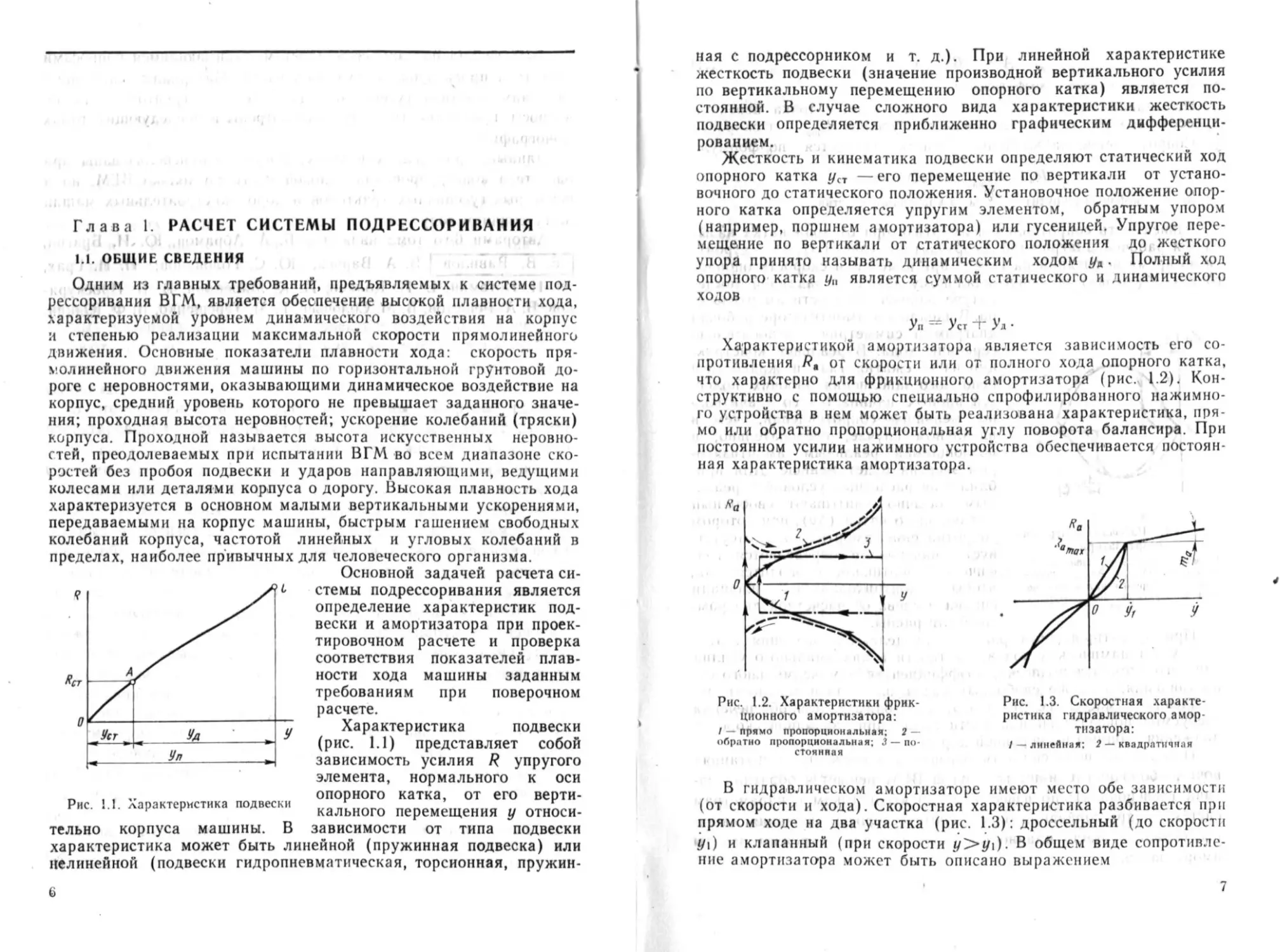
Характеристика подвески
(рис. 1.1) представляет собой
зависимость усилия R упругого
элемента, нормального к оси
опорного катка, от его верти-
кального перемещения у относи-
зависимости от типа подвески
характеристика может быть линейной (пружинная подвеска) или
нелинейной (подвески гидропневматическая, торсионная, пружин-
ная с подрессорником и т. д.). При линейной характеристике
жесткость подвески (значение производной вертикального усилия
по вертикальному перемещению опорного катка) является по-
стоянной. В случае сложного вида характеристики жесткость
подвески определяется приближенно графическим дифференци-
рованием.
Жесткость и кинематика подвески определяют статический ход
опорного катка t/rT —его перемещение по вертикали от устано-
вочного до статического положения. Установочное положение опор-
ного катка определяется упругим элементом, обратным упором
(например, поршнем амортизатора) или гусеницей. Упругое пере-
мещение по вертикали от статического положения до жесткого
упора принято называть динамическим ходом ул. Полный ход
опорного катка уп является суммой статического и динамического
ходов
Уп - Усг 4- У* •
Характеристикой амортизатора является зависимость его со-
противления /?, от скорости или от полного хода опорного катка,
что характерно для фрикционного амортизатора (рис. 1.2). Кон-
структивно с помощью специально спрофилированного нажимно-
го устройства в нем может быть реализована характеристика, пря-
мо или обратно пропорциональная углу поворота балансира. При
постоянном усилии нажимного устройства обеспечивается постоян-
ная характеристика амортизатора.
Рис. 1.3. Скоростная характе
ристика гидравлического амор-
тизатора:
/ — линейная; 2 — квадратичная
Рис. 1.2. Характеристики фрик
ционного амортизатора:
/ — прямо пропорциональная; 2 —
обратно пропорциональная; 3 — по-
стоянная
В гидравлическом амортизаторе имеют место обе зависимости
(от скорости и хода). Скоростная характеристика разбивается при
прямом ходе на два участка (рис. 1.3): дроссельный (до скорости
У\) и клапанный (при скорости у>у\). В общем виде сопротивле-
ние амортизатора может быть описано выражением
7
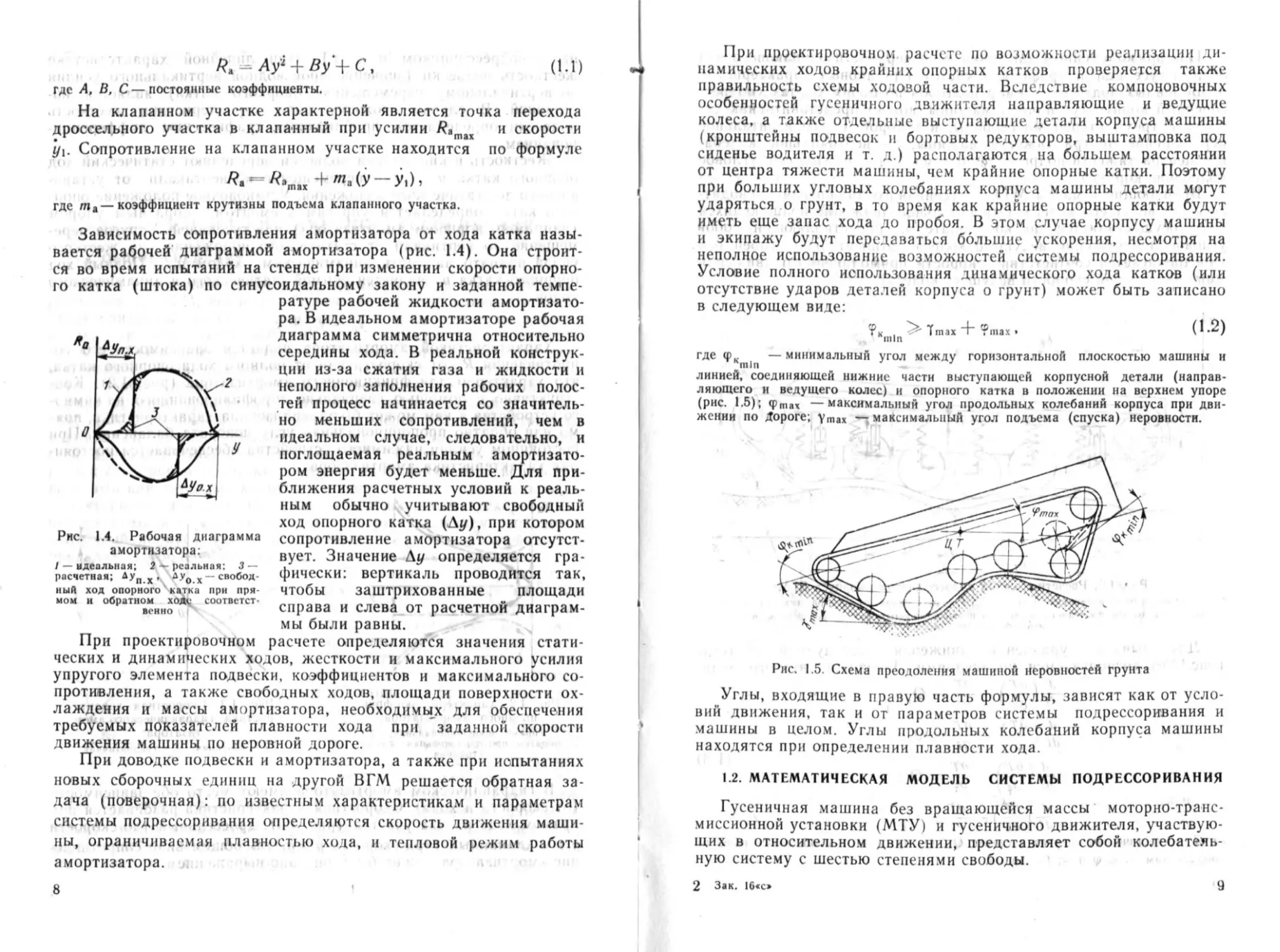
Рис. 1.4. Рабочая диаграмма
амортизатора;
I — идеальная; 1 *- реальная; Л —
расчетная; АУП.Х» АУо х — свобод-
ный ход опорного катка при пря
мом и обратном ход»; соответст-
венно
При проектировочном
/?а-ДуЧЯу'+С. (1.1)
где А, В, С—постоянные коэффициенты.
На клапанном участке характерной является точка перехода
дроссельного участка в клапанный при усилии ₽• и скорости
yi. Сопротивление на клапанном участке находится по формуле
+ та(у — у,),
где та— коэффициент крутизны подъема клапанного участка.
Зависимость сопротивления амортизатора от хода катка назы-
вается рабочей диаграммой амортизатора (рис. 1.4). Она строит-
ся во время испытаний на стенде при изменении скорости опорно-
го катка (штока) по синусоидальному закону и заданной темпе-
ратуре рабочей жидкости амортизато-
ра. В идеальном амортизаторе рабочая
диаграмма симметрична относительно
середины хода. В реальной конструк-
ции из-за сжатия газа и жидкости и
неполного заполнения рабочих полос-
тей процесс начинается со значитель-
но меньших сопротивлений, чем в
идеальном случае, следовательно, и
поглощаемая реальным амортизато-
ром энергия будет меньше. Для при-
ближения расчетных условий к реаль-
ным обычно учитывают свободный
ход опорного катка (Ду), при котором
сопротивление амортизатора отсутст-
вует. Значение Ду определяется гра-
фически: вертикаль проводится так,
чтобы заштрихованные площади
справа и слева от расчетной диаграм-
мы были равны.
расчете определяются значения стати-
ческих и динамических ходов, жесткости и максимального усилия
упругого элемента подвески, коэффициентов и максимального со-
противления, а также свободных ходов, площади поверхности ох-
лаждения и массы амортизатора, необходимых для обеспечения
требуемых показателей плавности хода при заданной скорости
движения машины по неровной дороге.
При доводке подвески и амортизатора, а также при испытаниях
новых сборочных единиц на другой ВГМ решается обратная за-
дача (поверочная): по известным характеристикам и параметрам
системы подрессоривания определяются скорость движения маши-
ны, ограничиваемая плавностью хода, и тепловой режим работы
амортизатора.
При проектировочном расчете по возможности реализации ди-
намических ходов крайних опорных катков проверяется также
правильность схемы ходовой части. Вследствие компоновочных
особенностей гусеничного движителя направляющие и ведущие
колеса, а также отдельные выступающие детали корпуса машины
(кронштейны подвесок и бортовых редукторов, выштамповка под
сиденье водителя и т. д.) располагаются на большем расстоянии
от центра тяжести машины, чем крайние опорные катки. Поэтому
при больших угловых колебаниях корпуса машины детали могут
ударяться о грунт, в то время как крайние опорные катки будут
иметь еще запас хода до пробоя. В этом случае корпусу машины
и экипажу будут передаваться большие ускорения, несмотря на
неполное использование возможностей системы подрессоривания.
Условие полного использования динамического хода катков (или
отсутствие ударов деталей корпуса о грунт) может быть записано
в следующем виде:
Ттах 4“ ?тах • (1-2)
"mln
где Фкт|п —минимальный угол между горизонтальной плоскостью машины и
линией, соединяющей нижние части выступающей корпусной детали (направ-
ляющего и ведущего колес) и опорного катка в положении на верхнем упоре
(рис. 1.5); фтах —максимальный угол продольных колебаний корпуса при дви-
жении по Дороге; ута|( —; максимальный угол подъема (спуска) неровности.
Рис. 1.5. Схема преодоления машиной неровностей грунта
Углы, входящие в правую часть формулы, зависят как от усло-
вий движения, так и от параметров системы подрессоривания и
машины в целом. Углы продольных колебаний корпуса машины
находятся при определении плавности хода.
1.2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
Гусеничная машина без вращающейся массы моторно-транс-
миссионной установки (МТУ) и гусеничного движителя, участвую-
щих в относительном движении, представляет собой колебатель-
ную систему с шестью степенями свободы.
2 Зак. 16<с»
9
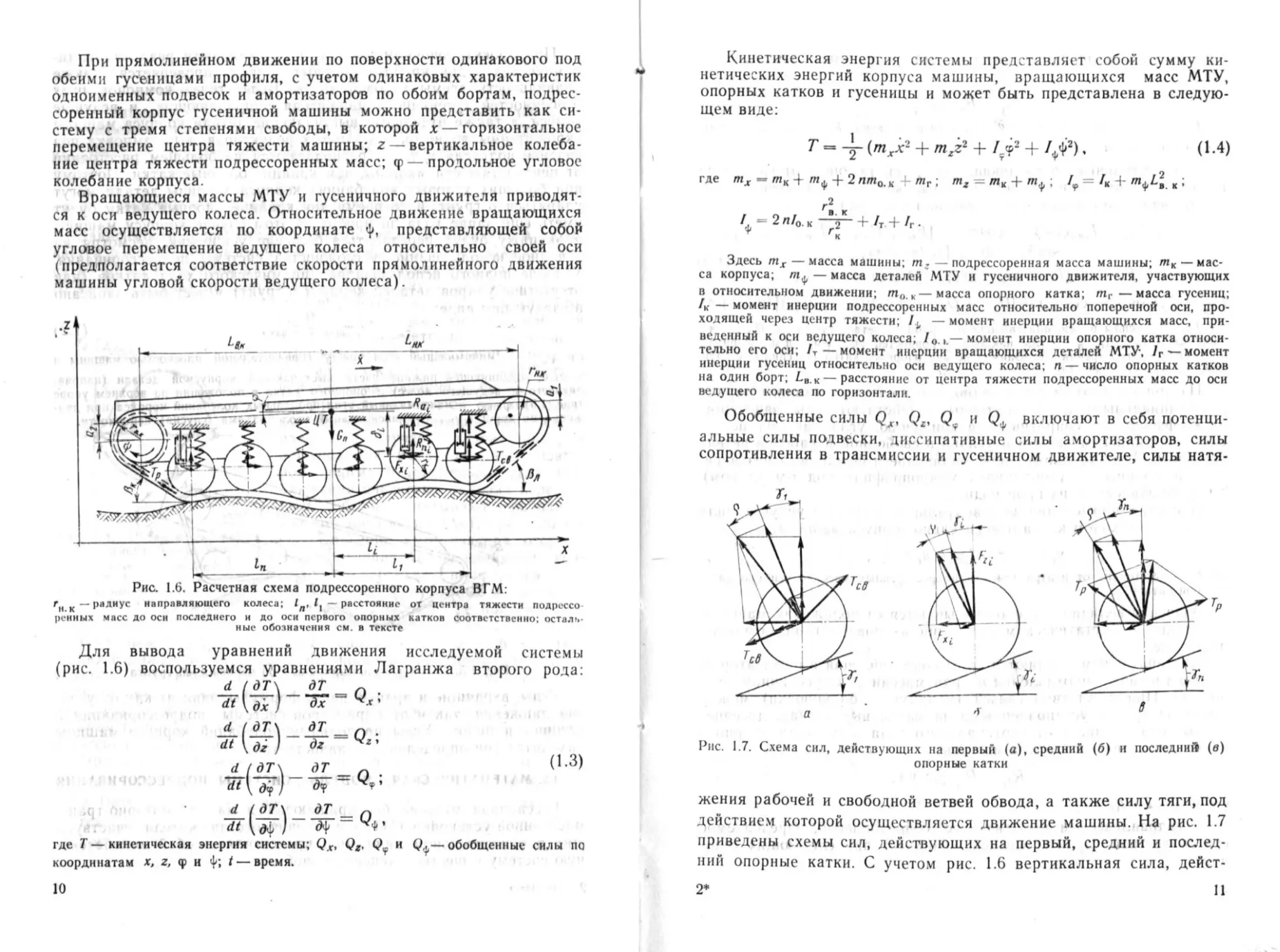
При прямолинейном движении по поверхности одинакового под
обеими гусеницами профиля, с учетом одинаковых характеристик
одноименных подвесок и амортизаторов по обоим бортам, подрес-
соренный корпус гусеничной машины можно представить как си-
стему с тремя степенями свободы, в которой х — горизонтальное
перемещение центра тяжести машины; г — вертикальное колеба-
ние центра тяжести подрессоренных масс; — продольное угловое
колебание корпуса.
Вращающиеся массы МТУ и гусеничного движителя приводят-
ся к оси ведущего колеса. Относительное движение вращающихся
масс осуществляется по координате ф, представляющей собой
угловое перемещение ведущего колеса относительно своей оси
(предполагается соответствие скорости прямолинейного движения
машины угловой скорости ведущего колеса).
Рис. 1.6. Расчетная схема подрессоренного корпуса ВГМ:
радиус направляющего колеса; I*, расстояние от центра тяжести подрессо
ренных масс до оси последнего и до оси первого опорных катков соответственно; осталч
ные обозначения см. в тексте
Для вывода уравнений движения исследуемой системы
(рис. 1.6) воспользуемся уравнениями Лагранжа второго рода:
d (дТ\ дТ п .
d (дГ\ дт -о -
d ( дТ\ дТ ~ О-3)
-L(lL\_dT -п
di \дф ) W
где Т — кинетическая энергия системы; Qx, Qa. и обобщенные силы по
координатам х, г, <р и Ф; i — время.
10
Кинетическая энергия системы представляет собой сумму ки-
нетических энергий корпуса машины, вращающихся масс МТУ,
опорных катков и гусеницы и может быть представлена в следую-
щем виде:
Т - -5- («Й2 + mtz2 + /д2 4- /фф2), (1.4)
где mx — тк 4 т* 4- 2пт0.к 4- тг ; тх тк -4 = 4 + ^в. м •
“ 2 *4. к f2 +.4. + 4 ♦
Здесь /лх — масса машины; м. подрессоренная масса машины; тк — мас-
са корпуса; /n^ — масса деталей МТУ и гусеничного движителя, участвующих
в относительном движении; гпо.»— масса опорного катка; тг — масса гусениц;
4 — момент инерции подрессоренных масс относительно поперечной оси, про-
ходящей через центр тяжести; /v — момент инерции вращающихся масс, при-
веденный к осн ведущего колеса, /0.,.—момент инерции опорного катка относи
тельно его оси; /т — момент инерции вращающихся деталей МТУ-, /г — момент
инерции гусениц относительно оси ведущего колеса; п — число опорных катков
на одни борт; K — расстояние от центра тяжести подрессоренных масс до оси
ведущего колеса по горизонтали.
Обобщенные силы Qx, Qz, и включают в себя потенци-
альные силы подвески, диссипативные силы амортизаторов, силы
сопротивления в трансмиссии и гусеничном движителе, силы натя-
Рис. 1.7. Схема сил, действующих на первый (а), средний (б) и последний (в)
опорные катки
жения рабочей и свободной ветвей обвода, а также силу тяги, под
действием которой осуществляется движение машины. На рис. 1.7
приведены схемы сил, действующих на первый, средний и послед-
ний опорные катки. С учетом рис. 1.6 вертикальная сила, дейст-
2* И
вующая от t-го опорного катка на корпус машины, определяется
зависимостью
F.I = R, + R.I.
где R(— усилие упругого элемента i-ro опорного катка; —усилие аморти-
затора t-го опорного катка.
Горизонтальные составляющие сил, действующих от грунта на
первый, средний и последний опорные катки, передающиеся на
корпус через направляющие подвесок, имеют вид:
Рж, = rc>(cos рл — cos 7,) - 1ГЖ1 + Оо ж - Гс, X
X (sin рл — stn 7i)] tg(7t-f-р); (l 5)
FXi = - 4- Go „) tg (t4 4- p) для n>l> 1;
= Гр (cos - cos 7Я) - ((F,n 4-Go к - 7p(sin p, - sin 7Я)] tgCi, 4-p),
где Гсв. Tp—силы натяжения свободной и рабочей ветвей гусеницы; Go. к—вес
опорного катка; *ц. 7Я —углы наклона неровностей под i-м и л-м опорными
катками; р — угол трения при взаимодействии опорного катка (гусеницы) с грун-
том; зк—см. рис. 1.6; Т|—см. рис. 1.7.
Из приведенных формул видно, что на корпус машины наряду
с потенциальными и диссипативными действуют силы, зависящие
от коэффициента сопротивления движению, угла наклона неров-
ности под каждым катком и усилий в свободной и рабочей ветвях
гусеницы. Потенциальные силы, являющиеся функциями независи-
мых переменных ht (координата микропрофиля под t-м катком),
z и <р, не зависят от их производных.
В случае применения индивидуальной подвески упругая сила
определяется ходом катка относительно корпуса машины:
У( = 4-4-Уст.
где li — расстояние от центра тяжести подрессоренных масс до осн i-ro катка
по горизонтали.
Значения величин z и ф отсчитываются от положения машины,
находящейся в статическом состоянии на ровной горизонтальной
площадке.
Диссипативными являются силы сопротивления амортизаторов,
сухого трения, сопротивления в трансмиссии и в гусеничном дви-
жителе. При отсутствии связей (например, блокировки) между
амортизаторами, установленными на различных катках, диссипа-
тивные силы зависят от вертикального хода и скорости опорного
катка относительно корпуса машины:
= (У Г, У,),
где у< = — it — Iff 4- ht.
В гидравлическом амортизаторе сопротивление, определяемое
его скоростной характеристикой, возникает при следующих усло-
виях:
12
при у > 0 (прямой ход) + дУп.х;
При у <0 (обратный ход) у<уо~ Ьуо х,
где у0—положение опорного катка, соответствующее его нулевой скорости.
Сопротивление вращению трансмиссии /?;, представим в сле-
дующем виде:
/?♦, = ₽,(! + W + О?.. <'-6>
где Рт —горизонтальная сила взаимодействия с грунтом в тяговом режиме
движения (сила тяги); — коэффициент нагрузочных потерь в трансмиссии
и гусеничном обводе; G — вес машины; — коэффициент скоростных потерь
в трансмиссии и гусеничном обводе.
Аналогично определяется сила, вращающая трансмиссию в
тормозном режиме:
«♦.-(Л.-ам/О + Р,). (••?)
где /?г —горизонтальная сила взаимодействия гусениц с грунтом в тормозном
режиме движения (сила торможения).
Силы натяжения рабочих и свободных ветвей гусеничного дви-
жителя можно представить в следующем
Т, = Р, + 2Т„-,
Г„—Рг,+2Г„,
виде:
(1.8)
где Го —сила предварительного натяжения одной гусеницы.
Сила торможения Rr, в тяговом режиме и сила тяги Рт в тормоз-
ном режиме принимаются равными нулю.
В соответствии со схемой сил, действующих на машину при
движении по неровностям, с учетом зависимостей (1.5) — (1.8),
получим следующие выражения для обобщенных сил:
л-1
Qx = Рт cos 7Я - /?г, cos 71 — 2 2 + Ga. к) tg (7/ 4- р) -
- [2(/\-г<70.,)- 7\»(sln рк f slD7.)]tg(7<l-f-p)-|2(F,1-|-C70.K)
- T'c.fsinPx- sin 7,)] tg(7i 4-р); (1.9)
Qz “ 2 2- Ga - 7P sin - 7CB sin ; (1.10)
= 22 Fz/, 2 2‘(F, + Oo. J tg (7, + P) 3/ - |2 (F,. + Go. .) -
r l-l * 1—2 1
- rcB (sin 9Л — sin 7t)l tg (7t -h p) 8, — 7'CB (cos 7t — cos рл) 8t -
- TtB (- at cos ₽л -f- £„ K sin ?л) -12 (f+ Go.M) - Гр(sin +
+ sin 7„)J tg (7„ + p) *„ + T'p (cos 7, - cos ?„) 3„ +
-f- Гр( — a2cosPK — £B. h slnpK) 4- Гргв.ж; (1.11)
13
I MK[)zTp——в тяговом режиме,
ЯфЛ.ж — Мт/тр — <МТ.т — в тормозном режиме.
Здесь 0п—вес подрессоренной части машины; б/ — расстояние от центра
тяжести подрессоренных масс до оси <-го опорного катка, зависящее от его
хода у; а,, аг — расстояние от центра тяжести подрессоренных масс до оси на-
правляющего и ведущего колес по вертикали; L ,,н— расстояние от центра тя-
жести подрессоренных масс до оси направляющего колеса по горизонтали: Л!гр
крутящий момент двигателя; <тр — передаточное отношение трансмиссии; М, —
тормозной момент двигателя; Мг. т— тормозной момент трансмиссии, приведен-
ный к.оси ведущего колеса.
Подставив выражение кинетической энергии (1.4) и обобщен-
ных сил из формул (1.9),— (1.12) в систему (1.3) и проведя соответ-
ствующие преобразования с учетом уравнения связи x = <J*rh lt, по-
лучим следующую систему уравнений движения машины в общем
виде:
х = -^-{[PTcos тл - /?,. cos 7, -2 V (Fz. -f- Go.к)] tg(it +
+ р) — [2 (Ftn -I- Go к) — Гр (sin Зк 4- sin тд)| tg (Tn 4- p) -
- (2 (Л, + Oo.« - r«(sln sin 7Я)| tg (it + p)};
z = (2 £ Tf sin - 7„ sin - G„) ;
? = -^-{2S/x/z-2 S^ + Go.Jtg^+p)^- (1J3)
- [ 2 (Z, 4- Go.k) - Tt9 (sin рл - sin T,)] tg (7, 4- P) 8, -
— Гс, (cos 7, — cos ₽л) 8, — Tce (— at cos ?л 4- Лн.к sin pj —
- [ 2 (F,n 4- Go.K) - Гр(sin 4- sin 7я)| tg (7. 4- p) 4-
4- Гр (cos 7Я - cos ?„) 8Я 4- ГД-n2cos₽K-
— Гв.к sin pn) 4" Гргв и|;
x — 46. к.
Для проектировочно.о расчета система уравнений (1.13) может
быть упрощена, если считать движение равномерным, т. е. не учи-
тывать ускорения по координате х, силы тяги и торможения. Это
приводит к увеличению погрешности расчета, которая по верти-
кальным ускорениям достигает примерно 10 %, а по угловым —
25 % при наиболее распространенных размерах неровностей на
трассах, что допустимо, поскольку результаты проектировочного
расчета используются для определения оптимальной зоны значе-
ний изменяемых параметров. В этом случае система уравнений
принимает вид:
14
(1.14)
При решении уравнений (1.13) или (114) необходимо учиты-
вать одностороннюю связь опорных катков с грунтом, следствием
которой может быть отрыв катка.
Отрыв первого рода происходит при достижении подвеской ее
установочного положения или положения, ограничиваемого ниж-
ним упором или другой деталью, препятствующей перемещению
опорного катка вниз. Например, гусеница не позволяет реализо-
вать статический ход свыше 100—130 мм. Условие начала отрыва
У/ 0, окончания — yt >0. При отрыве первого рода yt является,
как правило, отрицательной величиной и представляет собой рас-
стояние от грунта до ьго опорного катка по вертикали.
Отрыв второго рода начинается при равенстве сил, действую-
щих от подвески и амортизатора, весу опорного катка:
Ri “Ь R»t 4- Go. к = 0 •
(1.15)
Для определения скорости перемещения опорного катка в фор-
мулу (1.15) подставляется выражение (1.1) и рассматривается
несколько частных случаев.
Первый случай: А 0, тогда
-В У В* 4 Л (С - ^-(7о.к)
----------------21
Второй случай: Д=0, В 0,’тогда
У< = (^ + С7о.к-С)/5.
(1.16)
(1.17)
Третий случай: Д=0; fi = 0; С + 0; </=0. Отрыв катка от
грунта прекращается при превышении хода опорного катка, соот-
ветствующего равенству сил по уравнению (1.15).
Перемещение опорного катка при отрыве второго рода (At/0T₽)
определяется интегрированием уравнений (1.16) или (1.17). Окон-
чание отрыва катка от грунта (восстановление кинематического
взаимодействия) определяется условием:
Ун.о - ДУотр = - * - //? + *< + Уст.
где Ун. о положение катка в начале отрыва.
1.3. ХАРАКТЕРИСТИКА ДОРОЖНЫХ УСЛОВИИ
Эксплуатация ВГМ осуществляется в различных дорожных
условиях. Наиболее ограничена скорость движения (по плавности
хода) на наезженных танковых трассах. Статистические характе-
15
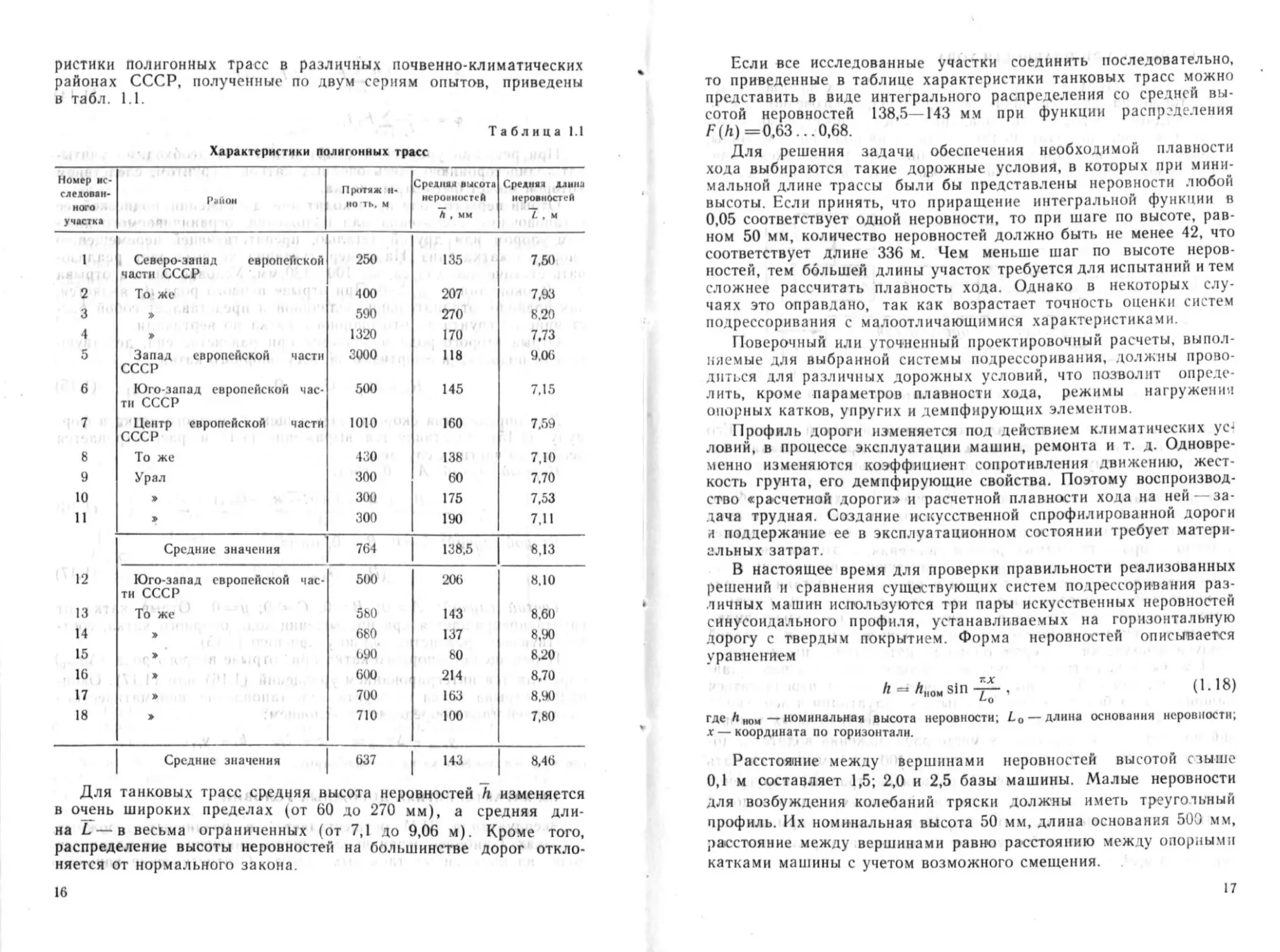
ристики полигонных трасс в различных почвенно-климатических
районах СССР, полученные по двум сериям опытов, приведены
в табл. 1.1.
Таблица 1.1
Характеристики полигонных трасс
Номер ис- следован- ного участка Раной Протяж н- ио тк, м Средний высота неровностей Л , мм Средний длина неровностей 7. м
1 Северо-запад европейской 250 135 7,50
части СССР
2 То же 400 207 7,93
3 » 590 270 8.20
4 » 1320 170 7,73
5 Запад европейской части 3000 118 9,06
СССР
6 Юго-запад европейской час- 500 145 7,15
ти СССР
7 Центр европейской части СССР 1010 160 7,59
8 То же 430 138 7,10
9 Урал 300 60 7,70
10 » 300 175 7,53
11 » 300 190 7,11
Средние значения 764 138,5 8.13
12 Юго-запад европейской час- 500 206 8.10
ти СССР
13 То же 5Ы) 143 8,60
14 » 680 137 8,90
15 » 090 80 8,20
16 » 600 214 8,70
17 > 700 163 8,90
18 > 710 100 7,80
Средние значения 637 143 8,46
Для танковых трасс средняя высота неровностей Л изменяется
в очень широких пределах (от 60 до 270 мм), а средняя дли-
на L — в весьма ограниченных (от 7,1 до 9,06 м). Кроме того,
распределение высоты неровностей на большинстве дорог откло-
няется от нормального закона.
16
Если все исследованные участки соединить последовательно,
то приведенные в таблице характеристики танковых трасс можно
представить в виде интегрального распределения со средней вы-
сотой неровностей 138,5—143 мм при функции распределения
F(h) =0,63... 0,68.
Для решения задачи обеспечения необходимой плавности
хода выбираются такие дорожные условия, в которых при мини-
мальной длине трассы были бы представлены неровности любой
высоты. Если принять, что приращение интегральной функции в
0,05 соответствует одной неровности, то при шаге по высоте, рав-
ном 50 мм, количество неровностей должно быть не менее 42, что
соответствует длине 336 м. Чем меньше шаг по высоте неров-
ностей, тем большей длины участок требуется для испытаний и тем
сложнее рассчитать плавность хода. Однако в некоторых слу-
чаях это оправдано, так как возрастает точность оценки систем
подрессоривания с малоотличающимися характеристиками.
Поверочный или уточненный проектировочный расчеты, выпол-
няемые для выбранной системы подрессоривания, должны прово-
диться для различных дорожных условий, что позволит опреде-
лить, кроме параметров плавности хода, режимы нагружения
опорных катков, упругих и демпфирующих элементов.
Профиль дороги изменяется под действием климатических ус-1
ловий, в процессе эксплуатации машин, ремонта и т. д. Одновре-
менно изменяются коэффициент сопротивления движению, жест-
кость грунта, его демпфирующие свойства. Поэтому воспроизвод-
ство «расчетной дороги» и расчетной плавности хода на ней — за-
дача трудная. Создание искусственной спрофилированной дороги
и поддержание ее в эксплуатационном состоянии требует матери-
альных затрат.
В настоящее время для проверки правильности реализованных
решений и сравнения существующих систем подрессоривания раз-
личных машин используются три пары искусственных неровностей
синусоидального профиля, устанавливаемых на горизонтальную
дорогу с твердым покрытием. Форма неровностей описывается
уравнением
й =» Л|10м sin -ц-, (1.18)
где Л нои — номинальная высота неровности; Lo — длина основания неровности;
х—координата по горизонтали.
Расстояние между вершинами неровностей высотой сзыше
0,1 м составляет 1,5; 2,0 и 2,5 базы машины. Малые неровности
для возбуждения колебаний тряски должны иметь треугольный
профиль. Их номинальная высота 50 мм, длина основания 500 мм,
расстояние между вершинами равно расстоянию между опорными
катками машины с учетом возможного смещения.
17
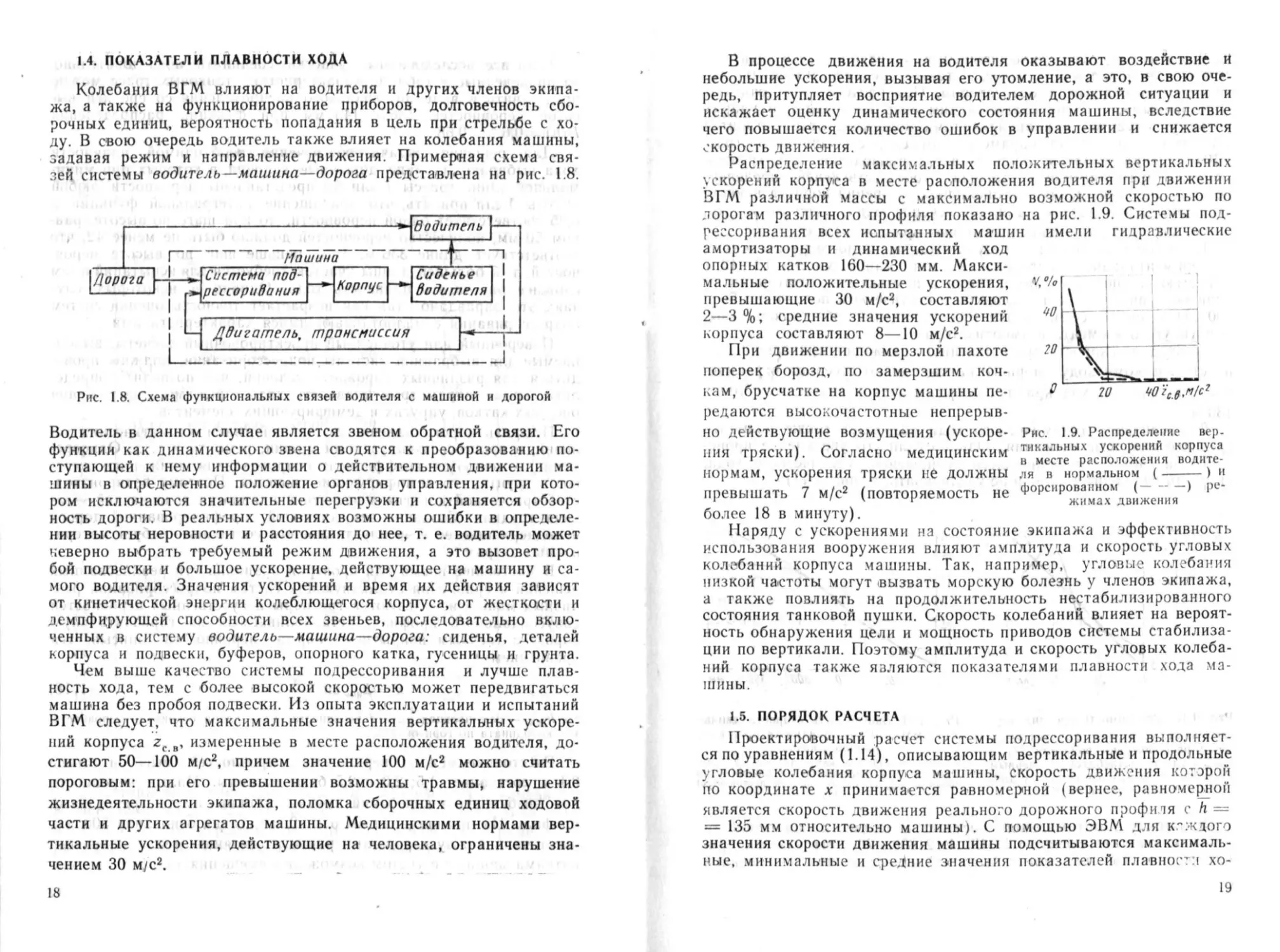
1.4. ПОКАЗАТЕЛИ ПЛАВНОСТИ ХОДА
Колебания ВГМ влияют на водителя и других членов экипа-
жа, а также на функционирование приборов, долговечность сбо-
рочных единиц, вероятность попадания в цель при стрельбе с хо-
ду. В свою очередь водитель также влияет на колебания машины,
задавая режим и направление движения. Примерная схема свя-
зей системы водитель—машина—дорога представлена на рис. 1.8.
Ряс. 1.8. Схема функциональных связей водителя с машиной и дорогой
Водитель в данном случае является звеном обратной связи. Его
функции как динамического звена сводятся к преобразованию по-
ступающей к нему информации о действительном движении ма-
шины в определенное положение органов управления, при кото-
ром исключаются значительные перегрузки и сохраняется обзор-
ность дороги. В реальных условиях возможны ошибки в определе-
нии высоты неровности и расстояния до нее, т. е. водитель может
неверно выбрать требуемый режим движения, а это вызовет про-
бой подвески и большое ускорение, действующее на машину и са-
мого водителя. Значения ускорений и время их действия зависят
от кинетической энергии колеблющегося корпуса, от жесткости и
демпфирующей способности всех звеньев, последовательно вклю-
ченных в систему водитель—машина—дорога: сиденья, деталей
корпуса и подвески, буферов, опорного катка, гусеницы и грунта.
Чем выше качество системы подрессоривания и лучше плав-
ность хода, тем с более высокой скоростью может передвигаться
машина без пробоя подвески. Из опыта эксплуатации и испытаний
ВГМ следует, что максимальные значения вертикальных ускоре-
ний корпуса ге в, измеренные в месте расположения водителя, до-
стигают 50—100 м/с2, причем значение 100 м/с2 можно считать
пороговым: при его превышении возможны травмы, нарушение
жизнедеятельности экипажа, поломка сборочных единиц ходовой
части и других агрегатов машины. Медицинскими нормами вер-
тикальные ускорения, действующие на человека, ограничены зна-
чением 30 м/с2.
18
тикальных ускорений корпуса
в месте расположения водите-
ля в нормальном ( -------) и
форсированном (—------) ре-
жимах движения
В процессе движения на водителя оказывают воздействие и
небольшие ускорения, вызывая его утомление, а это, в свою оче-
редь, притупляет восприятие водителем дорожной ситуации и
искажает оценку динамического состояния машины, вследствие
чего повышается количество ошибок в управлении и снижается
скорость движения.
Распределение максимальных положительных вертикальных
ускорений корпуса в месте расположения водителя при движении
ВГМ различной массы с максимально возможной скоростью по
дорогам различного профиля показано на рис. 1.9. Системы под-
рессоривания всех испытанных маш?
амортизаторы и динамический ход
опорных катков 160—230 мм. Макси-
мальные положительные ускорения,
превышающие 30 м/с3, составляют
2—3 %; средние значения ускорений
корпуса составляют 8—10 м/с2.
При движении по мерзлой пахоте
поперек борозд, по замерзшим коч-
кам, брусчатке на корпус машины пе-
редаются высокочастотные непрерыв-
но действующие возмущения (ускоре-
ния тряски). Согласно медицинским
нормам, ускорения тряски не должны
превышать 7 м/с2 (повторяемость не
более 18 в минуту).
Наряду с ускорениями на состояние экипажа и эффективность
использования вооружения влияют амплитуда и скорость угловых
колебаний корпуса машины. Так, например, угловые колебания
низкой частоты могут вызвать морскую болезнь у членов экипажа,
а также повлиять на продолжительность нестабилизированного
состояния танковой пушки. Скорость колебаний влияет на вероят-
ность обнаружения цели и мощность приводов системы стабилиза-
ции по вертикали. Поэтому амплитуда и скорость угловых колеба-
ний корпуса также являются показателями плавности хода ма-
шины.
1.5. ПОРЯДОК РАСЧЕТА
Проектировочный расчет системы подрессоривания выполняет-
ся по уравнениям (1.14), описывающим вертикальные и продольные
угловые колебания корпуса машины, скорость движения которой
по координате х принимается равномерной (вернее, равномерной
является скорость движения реального дорожного профиля с h =
= 135 мм относительно машины). С помощью ЭВМ для к.-ждого
значения скорости движения машины подсчитываются максималь-
ные, минимальные и средние значения показателей плавност:! хо-
19
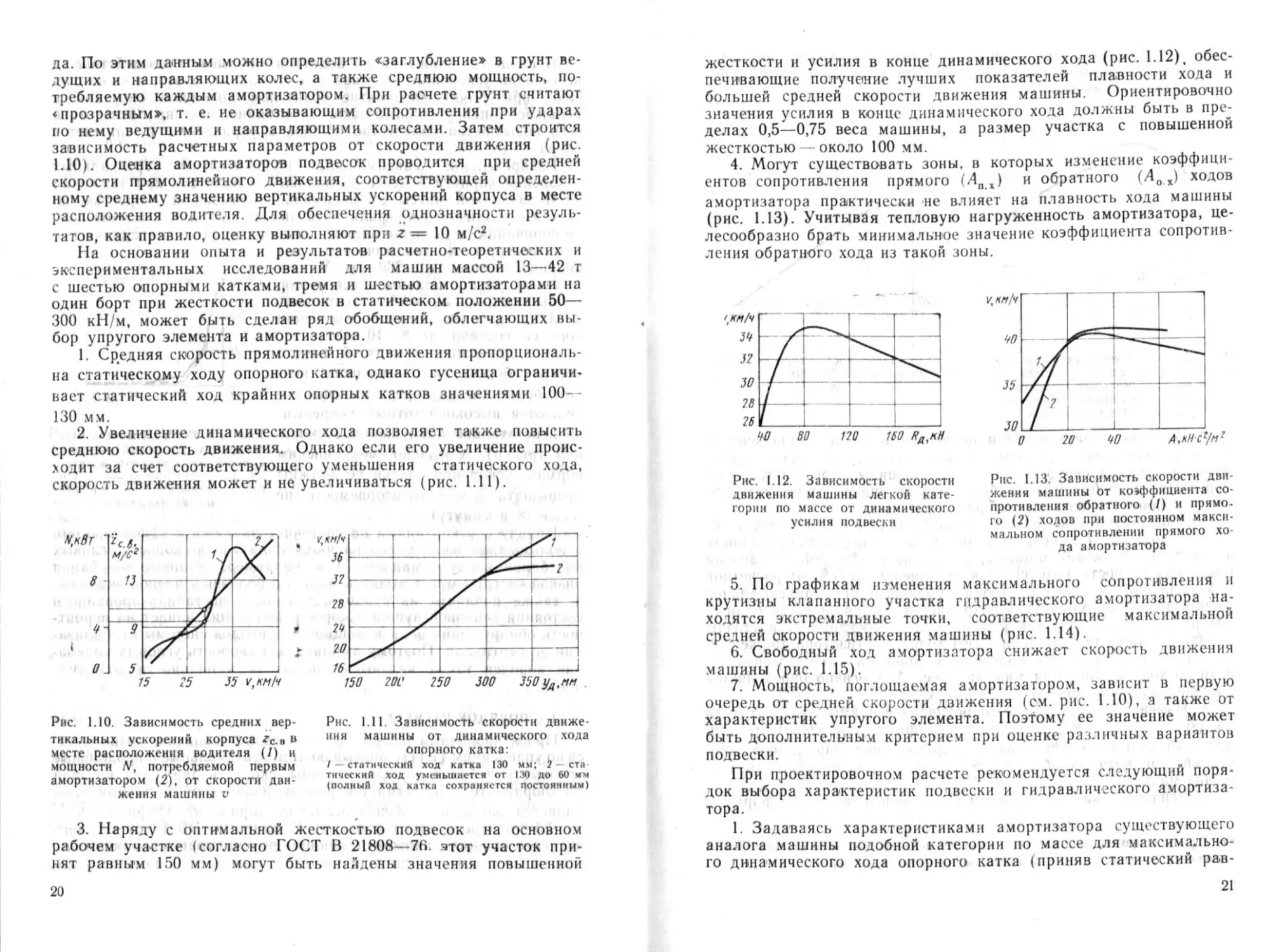
да. По этим данным можно определить «заглубление» в грунт ве-
дущих и направляющих колес, а также среднюю мощность, по-
требляемую каждым амортизатором. При расчете грунт считают
«прозрачным», т. е. не оказывающим сопротивления при ударах
по нему ведущими и направляющими колесами. Затем строится
зависимость расчетных параметров от скорости движения (рис
1.10). Оценка амортизаторов подвесок проводится при средней
скорости прямолинейного движения, соответствующей определен-
ному среднему значению вертикальных ускорений корпуса в месте
расположения водителя. Для обеспечения однозначности резуль-
татов, как правило, оценку выполняют при г = 10 м/с2.
На основании опыта и результатов расчетно-теоретических и
экспериментальных исследований для машин массой 13—42 т
с шестью опорными катками, тремя и шестью амортизаторами на
один борт при жесткости подвесок в статическом положении 50—
300 кН/м, может быть сделан ряд обобщений, облегчающих вы-
бор упругого элемента и амортизатора.
I. Средняя скорость прямолинейного движения пропорциональ-
на статическому ходу опорного катка, однако гусеница ограничи-
вает статический ход крайних опорных катков значениями 100-
130 .мм.
2. Увеличение динамического хода позволяет также повысить
среднюю скорость движения. Однако если его увеличение проис-
ходит за счет соответствующего уменьшения статического хода,
скорость движения может и не увеличиваться (рис. 1.11).
Рис. 1.10. Зависимость средних вер-
тикальных ускорений корпуса гс в в
месте расположения водителя (/) и
мощности N, потребляемой первым
амортизатором (2). от скорости дви-
жения машины г
Рис. 1.11. Зависимость скорости движе-
ния машины от динамического хода
опорного катка:
/ статический ход катка 130 мм; 2 ста
тнческий ход уменьшается от |:Ю до 60 мм
(полный ход катка сохраняется постоянным)
3. Наряду с оптимальной жесткостью подвесок на основном
рабочем участке (согласно ГОСТ В 21808—76 этот участок при-
нят равным 150 мм) могут быть найдены значения повышенной
20
жесткости и усилия в конце динамического хода (рис. 1.12), обес-
печивающие получение лучших показателей плавности хода и
большей средней скорости движения машины. Ориентировочно
значения усилия в конце динамического хода должны быть в пре-
делах 0,5—0,75 веса машины, а размер участка с повышенной
жесткостью около 100 мм.
4. Могут существовать зоны, в которых изменение коэффици-
ентов сопротивления прямого (ЛП1) и обратного (40х) ходов
амортизатора практически не влияет на плавность хода машины
(рис. 1.13). Учитывая тепловую нагруженность амортизатора, це-
лесообразно брать минимальное значение коэффициента сопротив-
ления обратного хода из такой зоны.
го (2) ходов при постоянном макси-
уенлня подвески
мальмом сопротивлении прямого хо-
да амортизатора
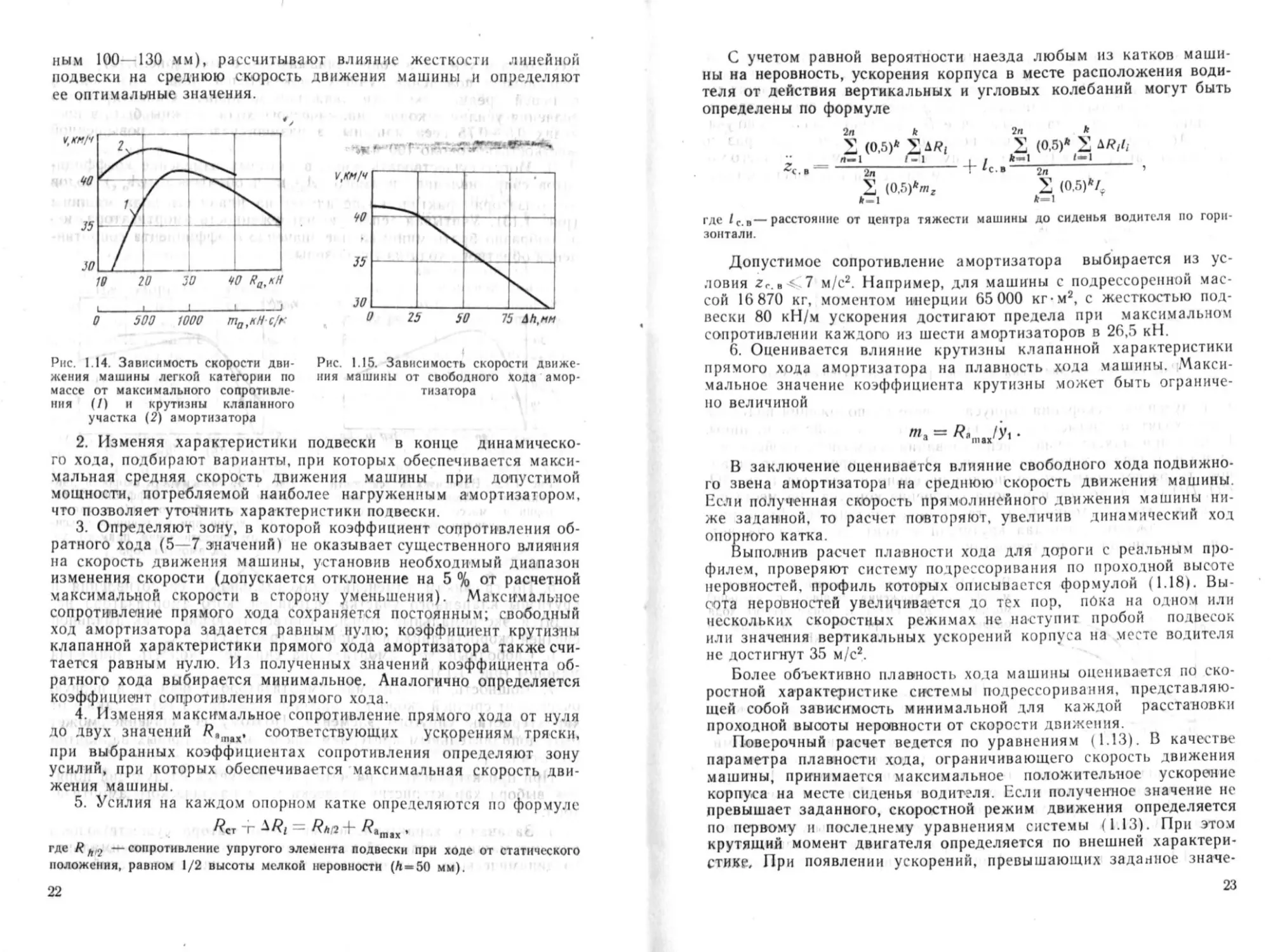
5. По графикам изменения максимального сопротивления и
крутизны клапанного участка гидравлического амортизатора на-
ходятся экстремальные точки, соответствующие максимальной
средней скорости движения машины (рис. 1.14).
6. Свободный ход амортизатора снижает скорость движения
машины (рис. 1.15).
7. Мощность, поглощаемая амортизатором, зависит в первую
очередь от средней скорости движения (ем. рис. 1.10), а также от
характеристик упругого элемента. Поэтому ее значение может
быть дополнительным критерием при оценке различных вариантов
подвески.
При проектировочном расчете рекомендуется следующий поря-
док выбора характеристик подвески и гидравлического амортиза-
тора.
1. Задаваясь характеристиками амортизатора существующего
аналога машины подобной категории по массе для максимально-
го динамического хода опорного катка (приняв статический рав-
21
ным 100—130 мм), рассчитывают влияние жесткости линейной
подвески на среднюю скорость движения машины и определяют
ее оптимальные значения.
Рис. 1.15. Зависимость скорости движе-
ния машины от свободного хода амор-
тизатора
Рис. 1.14. Зависимость скорости дни
жения машины легкой категории по
массе от максимального сопротивле-
ния (/) и крутизны клапанного
участка (2) амортизатора
2. Изменяя характеристики подвески в конце динамическо-
го хода, подбирают варианты, при которых обеспечивается макси-
мальная средняя скорость движения машины при допустимой
мощности, потребляемой наиболее нагруженным амортизатором,
что позволяет уточнить характеристики подвески.
3. Определяют зону, в которой коэффициент сопротивления об-
ратного хода (5—7 значений) не оказывает существенного влияния
на скорость движения машины, установив необходимый диапазон
изменения скорости (допускается отклонение на 5 % от расчетной
максимальной скорости в сторону уменьшения). Максимальное
сопротивление прямого хода сохраняется постоянным; свободный
ход амортизатора задается равным нулю; коэффициент крутизны
клапанной характеристики прямого хода амортизатора также счи-
тается равным нулю. Из полученных значений коэффициента об-
ратного хода выбирается минимальное. Аналогично определяется
коэффициент сопротивления прямого хода.
4. Изменяя максимальное сопротивление прямого хода от нуля
до двух значений Я»1Пах. соответствующих ускорениям тряски,
при выбранных коэффициентах сопротивления определяют зону
усилий, при которых обеспечивается максимальная скорость дви-
жения машины.
5. Усилия на каждом опорном катке определяются по формуле
^?ст т Rn 1 »
где R—сопротивление упругого элемента подвески при ходе от статического
положения, равном 1/2 высоты мелкой неровности (Л — 50 мм).
22
С учетом равной вероятности наезда любым из катков маши-
ны на неровность, ускорения корпуса в месте расположения води-
теля от действия вертикальных и угловых колебаний могут быть
определены по формуле
2л * 2л *
S (0.5)* S (0.5)* S Д*Л
*<•.“ ----—-----+1' -— ь ’
S S (05)4
где 1С. в—расстояние от центра тяжести машины до сиденья водителя по гори-
зонтали.
Допустимое сопротивление амортизатора выбирается из ус-
ловия Zc.g $ 7 м/с2. Например, для машины с подрессоренной мас-
сой 16 870 кг, моментом инерции 65 000 кг м2, с жесткостью под-
вески 80 кН/м ускорения достигают предела при максимальном
сопротивлении каждого из шести амортизаторов в 26,5 кН.
6. Оценивается влияние крутизны клапанной характеристики
прямого хода амортизатора на плавность хода машины. Макси-
мальное значение коэффициента крутизны может быть ограниче-
но величиной
т. = /?„ /у..
• '"max'-7’
В заключение оценивается влияние свободного хода подвижно-
го звена амортизатора на среднюю скорость движения машины.
Если полученная скорость прямолинейного движения машины ни-
же заданной, то расчет повторяют, увеличив динамический ход
опорного катка.
Выполнив расчет плавности хода для дороги с реальным про-
филем, проверяют систему подрессоривания по проходной высоте
неровностей, профиль которых описывается формулой (1.18). Вы
сота неровностей увеличивается до тех пор, пока на одном или
нескольких скоростных режимах не наступит пробой подвесок
или значения вертикальных ускорений корпуса на месте водителя
не достигнут 35 м/с2.
Более объективно плавность хода машины оценивается по ско-
ростной характеристике системы подрессоривания. представляю-
щей собой зависимость минимальной для каждой расстановки
проходной высоты неровности от скорости движения.
Поверочный расчет ведется по уравнениям (1.13). В качестве
параметра плавности хода, ограничивающего скорость движения
машины, принимается максимальное положительное ускорение
корпуса на месте сиденья водителя. Если полученное значение не
превышает заданного, скоростной режим движения определяется
по первому и последнему уравнениям системы (1.13). При этом
крутящий момент двигателя определяется по внешней характери-
стике, При появлении ускорений, превышающих заданное значе-
23
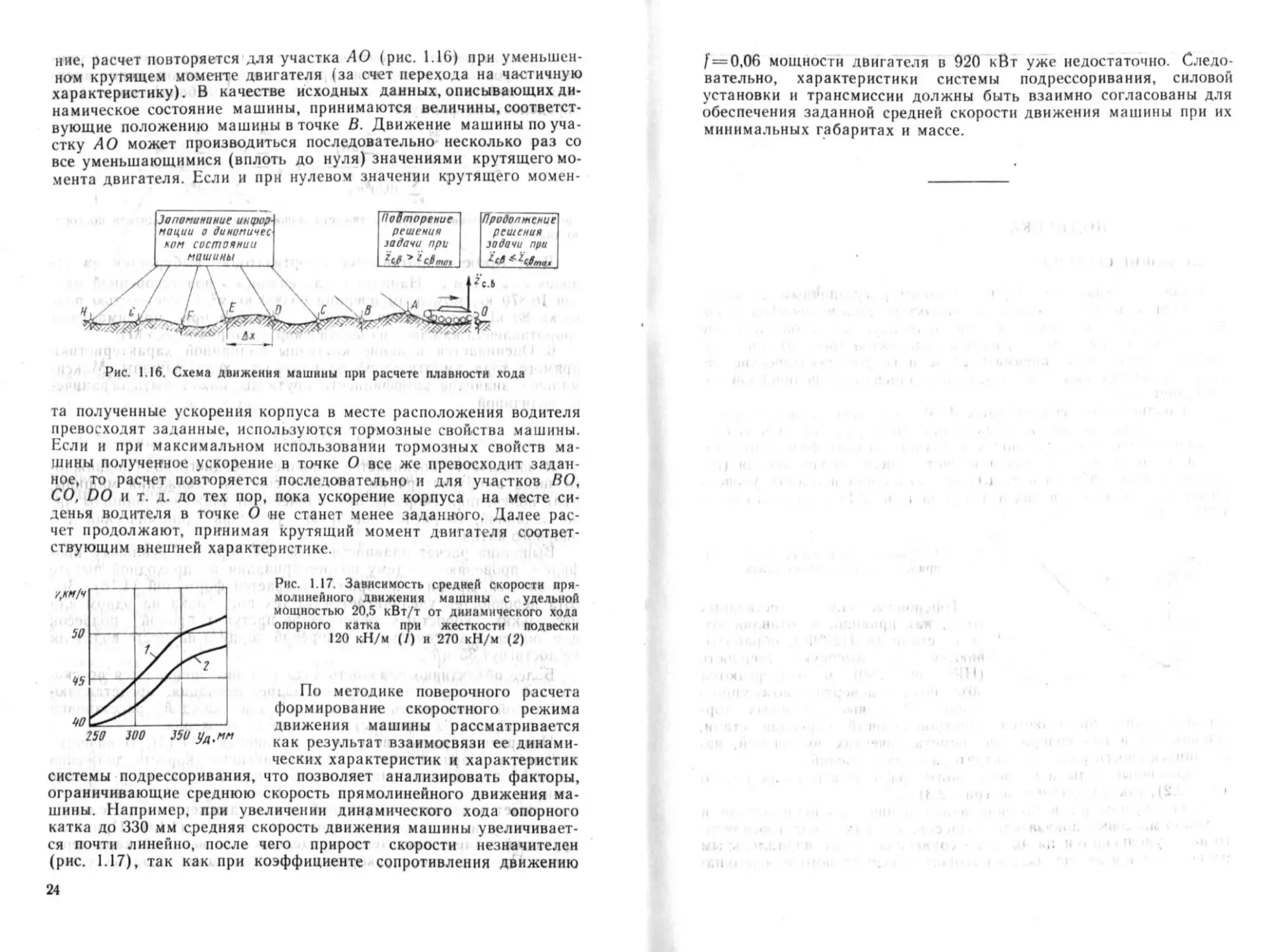
ние, расчет повторяется для участка АО (рис. 1.16) при уменьшен-
ном крутящем моменте двигателя (за счет перехода на частичную
характеристику). В качестве исходных данных, описывающих ди-
намическое состояние машины, принимаются величины, соответст-
вующие положению машины в точке В. Движение машины по уча-
стку АО может производиться последовательно несколько раз со
все уменьшающимися (вплоть до нуля) значениями крутящего мо-
мента двигателя. Если и при нулевом значении крутящего момен-
Повторение
решения
задачи при
ТТродолзкемие
решения
задачи при
Рис. 1.16. Схема движения машины при расчете плавности хода
та полученные ускорения корпуса в месте расположения водителя
превосходят заданные, используются тормозные свойства машины.
Если и при максимальном использовании тормозных свойств ма-
шины полученное ускорение в точке О все же превосходит задан-
ное, то расчет повторяется последовательно и для участков ВО,
СО, DO и т. д. до тех пор, пока ускорение корпуса на месте си-
денья водителя в точке О не станет менее заданного. Далее рас-
чет продолжают, принимая крутящий момент двигателя соответ-
ствующим внешней характеристике.
Рис. 1.17. Зависимость средней скорости пря-
молинейного движения машины с удельной
мощностью 20,5 кВт/т от динамического хода
опорного катка при жесткости подвески
120 кН/м (/) и 270 кН/м (2)
По методике поверочного расчета
формирование скоростного режима
движения машины рассматривается
как результат взаимосвязи ее динами-
ческих характеристик и характеристик
системы подрессоривания, что позволяет анализировать факторы,
ограничивающие среднюю скорость прямолинейного движения ма-
шины. Например, при увеличении динамического хода опорного
катка до 330 мм средняя скорость движения машины увеличивает-
ся почти линейно, после чего прирост скорости незначителен
(рис. 1.17), так как при коэффициенте сопротивления движению
24
f=O,OT> мощности двигателя в 920 кВт уже недостаточно. Следо-
вательно, характеристики системы подрессоривания, силовой
установки и трансмиссии должны быть взаимно согласованы для
обеспечения заданной средней скорости движения машины при их
минимальных габаритах и массе.
Глава 2. ПОДВЕСКА
2.1. ОБЩИЕ СВЕДЕНИЯ
Подвески связывают корпус машины с гусеничным движите-
лем. Они классифицируются по характеру кинематической связи
между катками и корпусом — на индивидуальные, балансирные
и смешанного типа; по типу упругих элементов (рессор) — на тор-
сионные, пружинные, пневматические и гидропневматические; по
виду характеристики на подвески с линейной и нелинейной ха-
рактеристикой.
На большинстве современных ВГМ применяются индивидуаль-
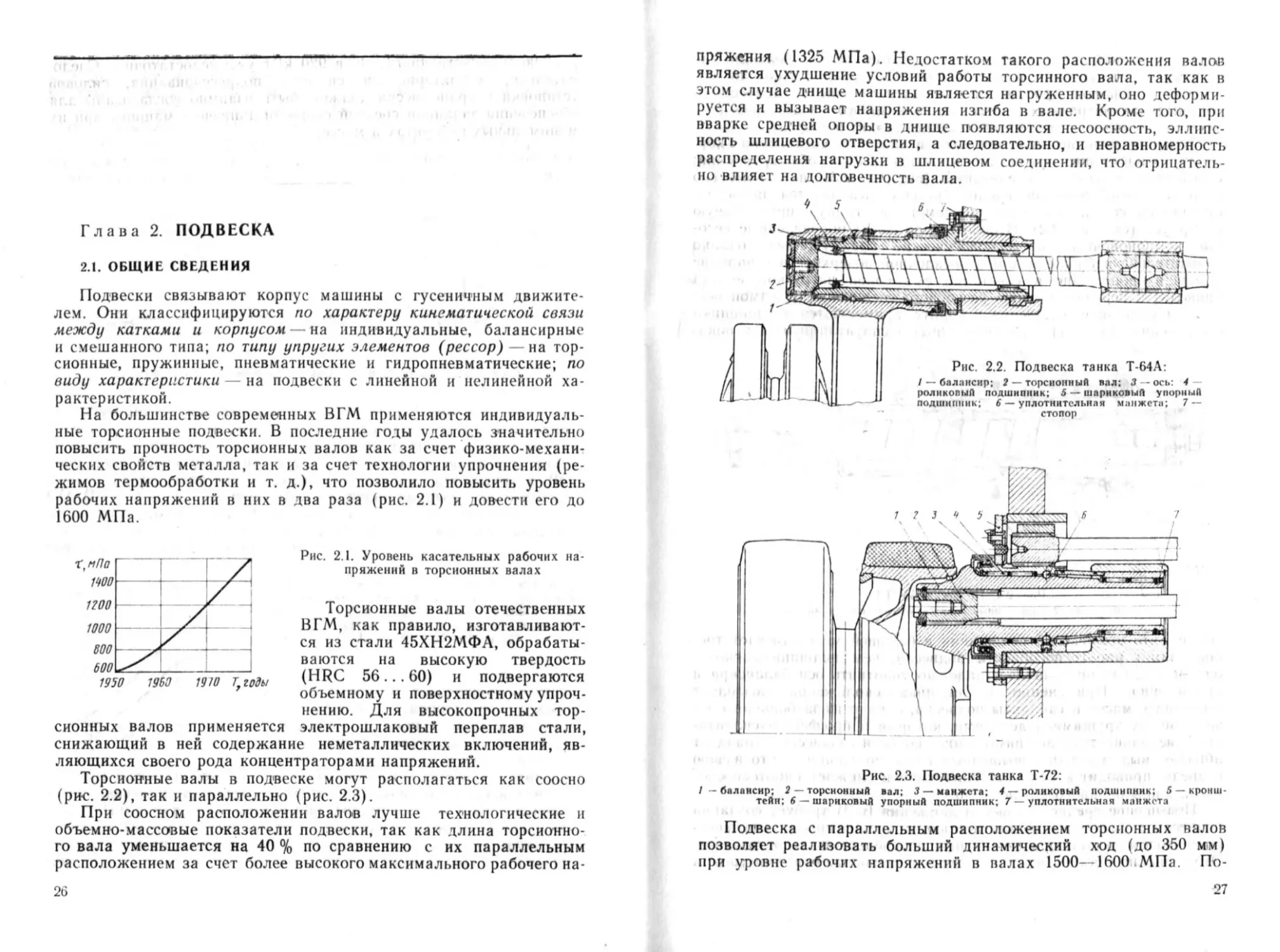
ные торсионные подвески. В последние годы удалось значительно
повысить прочность торсионных валов как за счет физико-механи-
ческих свойств металла, так и за счет технологии упрочнения (ре-
жимов термообработки и т. д.), что позволило повысить уровень
рабочих напряжений в них в два раза (рис. 2.1) и довести его до
1600 МПа.
Рис. 2.1. Уровень касательных рабочих на-
пряжений в торсионных валах
Торсионные валы отечественных
ВГМ, как правило, изготавливают-
ся из стали 45ХН2МФА, обрабаты-
ваются на высокую твердость
(HRC 56 ... 60) и подвергаются
объемному и поверхностному упроч-
нению. Для высокопрочных тор-
электрошлаковый переплав стали,
сионных валов применяется
снижающий в ней содержание неметаллических включений, яв-
ляющихся своего рода концентраторами напряжений.
Торсионные валы в подвеске могут располагаться как соосно
(рис. 2.2), так и параллельно (рис. 2.3).
При соосном расположении валов лучше технологические и
объемно-массовые показатели подвески, так как длина торсионно-
го вала уменьшается на 40 % по сравнению с их параллельным
расположением за счет более высокого максимального рабочего на-
26
пряжения (1325 МПа). Недостатком такого расположения валов
является ухудшение условий работы торсинного вала, так как в
этом случае днище машины является нагруженным, оно деформи-
руется и вызывает напряжения изгиба в вале. Кроме того, при
вварке средней опоры в днище появляются несоосность, эллнле-
ность шлицевого отверстия, а следовательно, и неравномерность
распределения нагрузки в шлицевом соединении, что отрицатель-
но влияет на долговечность вала.
Рис. 2.3. Подвеска танка Т-72:
/- балансир; 3 — торсионный вал; 3— манжета; 4 — роликовый подшипник; 5 —кронш-
тейн; 6 - шариковый упорный подшипник; 7- уплотнительная манжета
Подвеска с параллельным расположением торсионных валов
позволяет реализовать больший динамический ход (до 350 мм)
при уровне рабочих напряжений в валах 1500—-1600 МПа. По-
27
этому по такой конструктивной схеме выполнено большинство
подвесок отечественных и зарубежных ВГМ. Недостатком парал-
лельного расположения валов является смещение подвесок и
опорных катков разных бортов, из-за которого (вследствие раз-
ного сопротивления движению) машину уводит в сторону.
Торсионные подвески отличаются и способом соединения с кор-
пусом. В настоящее время применяются два способа крепления:
с помощью болтового соединения (см. рис. 2.3) и с помощью
фланца и резьбового соединения; резьба выполняется непосред-
ственно на самой оси, заворачиваемой в гайку, приваренную
к корпусу (см. рис. 2.2). Второй способ имеет определенные весо-
вые, компоновочные и технологические преимущества, однако
сравнительно небольшая длина посадочной поверхности и наличие
зазора в кронштейне в сочетании с высокой нагрузкой иногда
приводят к перенапряжению резьбового соединения и самой оси.
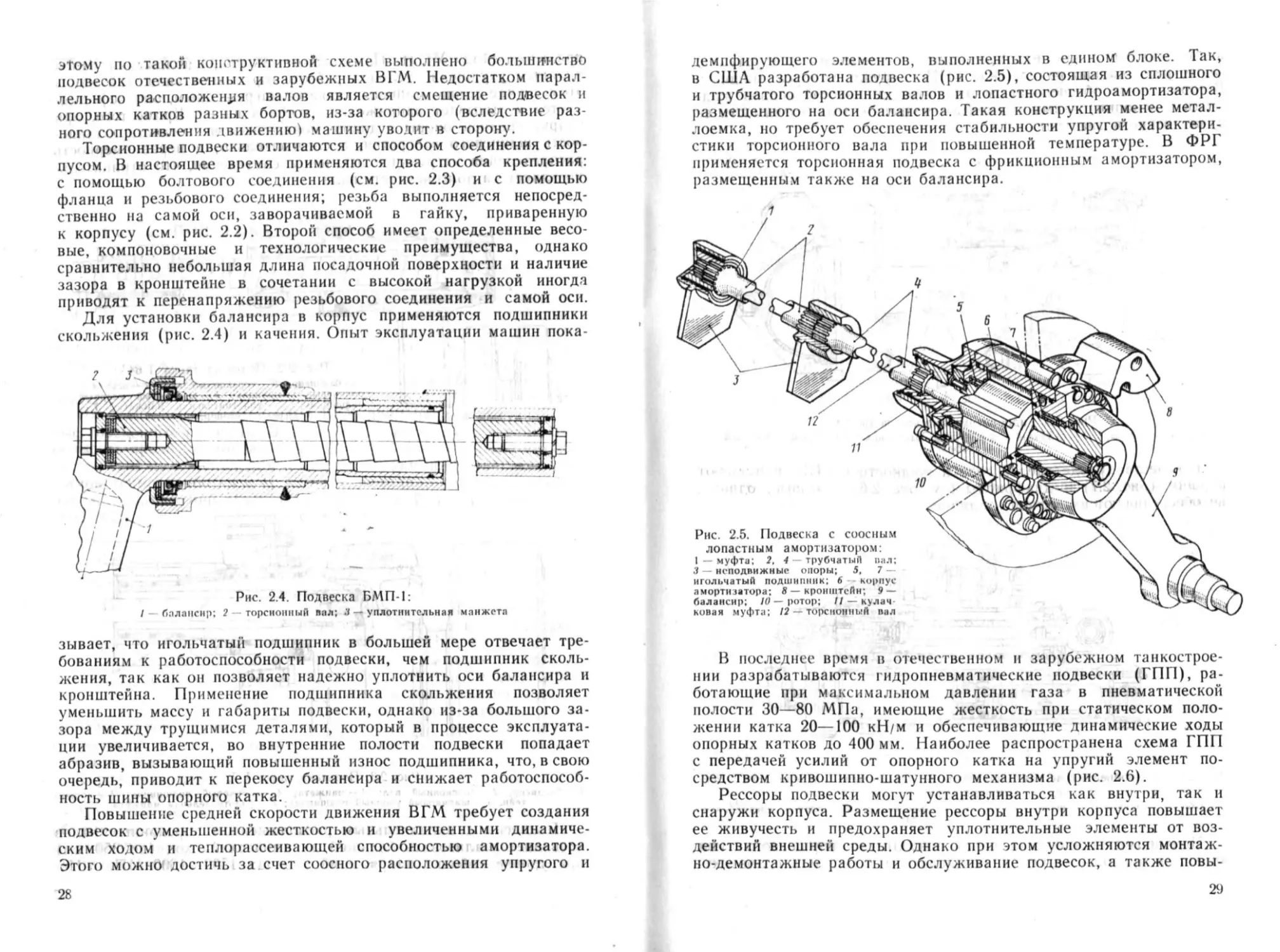
Для установки балансира в корпус применяются подшипники
скольжения (рис. 2.4) и качения. Опыт эксплуатации машин пока-
Рнс. 2.4. Подвеска БМП-1:
/ — балансир; 2 торсионный вал; J — уплотнительная манжета
зывает, что игольчатый подшипник в большей мере отвечает тре-
бованиям к работоспособности подвески, чем подшипник сколь-
жения, так как он позволяет надежно уплотнить оси балансира и
кронштейна. Применение подшипника скольжения позволяет
уменьшить массу и габариты подвески, однако из-за большого за-
зора между трущимися деталями, который в процессе эксплуата-
ции увеличивается, во внутренние полости подвески попадает
абразив, вызывающий повышенный износ подшипника, что, в свою
очередь, приводит к перекосу балансира и снижает работоспособ-
ность шины опорного катка.
Повышение средней скорости движения ВГМ требует создания
подвесок с уменьшенной жесткостью и увеличенными динамиче-
ским ходом и теплорассеивающей способностью амортизатора.
Этого можно достичь за счет соосного расположения упругого и
28
демпфирующего элементов, выполненных в едином блоке. Так,
в США разработана подвеска (рис. 2.5), состоящая из сплошного
и трубчатого торсионных валов и лопастного гидроамортизатора,
размещенного на оси балансира. Такая конструкция менее метал-
лоемка, но требует обеспечения стабильности упругой характери-
стики торсионного вала при повышенной температуре. В ФРГ
применяется торсионная подвеска с фрикционным амортизатором,
размещенным также на оси балансира.
В последнее время в отечественном и зарубежном танкострое-
нии разрабатываются гндропневматические подвески (ГПП), ра-
ботающие при максимальном давлении газа в пневматической
полости 30—80 МПа, имеющие жесткость при статическом поло-
жении катка 20—100 кН/м и обеспечивающие динамические ходы
опорных катков до 400 мм. Наиболее распространена схема ГПП
с передачей усилий от опорного катка на упругий элемент по-
средством кривошипно-шатунного механизма (рис. 2.6).
Рессоры подвески могут устанавливаться как внутри, так и
снаружи корпуса. Размещение рессоры внутри корпуса повышает
ее живучесть и предохраняет уплотнительные элементы от воз-
действий внешней среды. Однако при этом усложняются монтаж-
но-демонтажные работы и обслуживание подвесок, а также повы-
29
шается их тепловая напряженность в процессе эксплуатации.
Более рационально размещение ГПП снаружи корпуса машины.
В этом случае обеспечивается относительно простой подвод жид-
кости к исполнительным элементам подвески, хотя уязвимость ее
существенно возрастает.
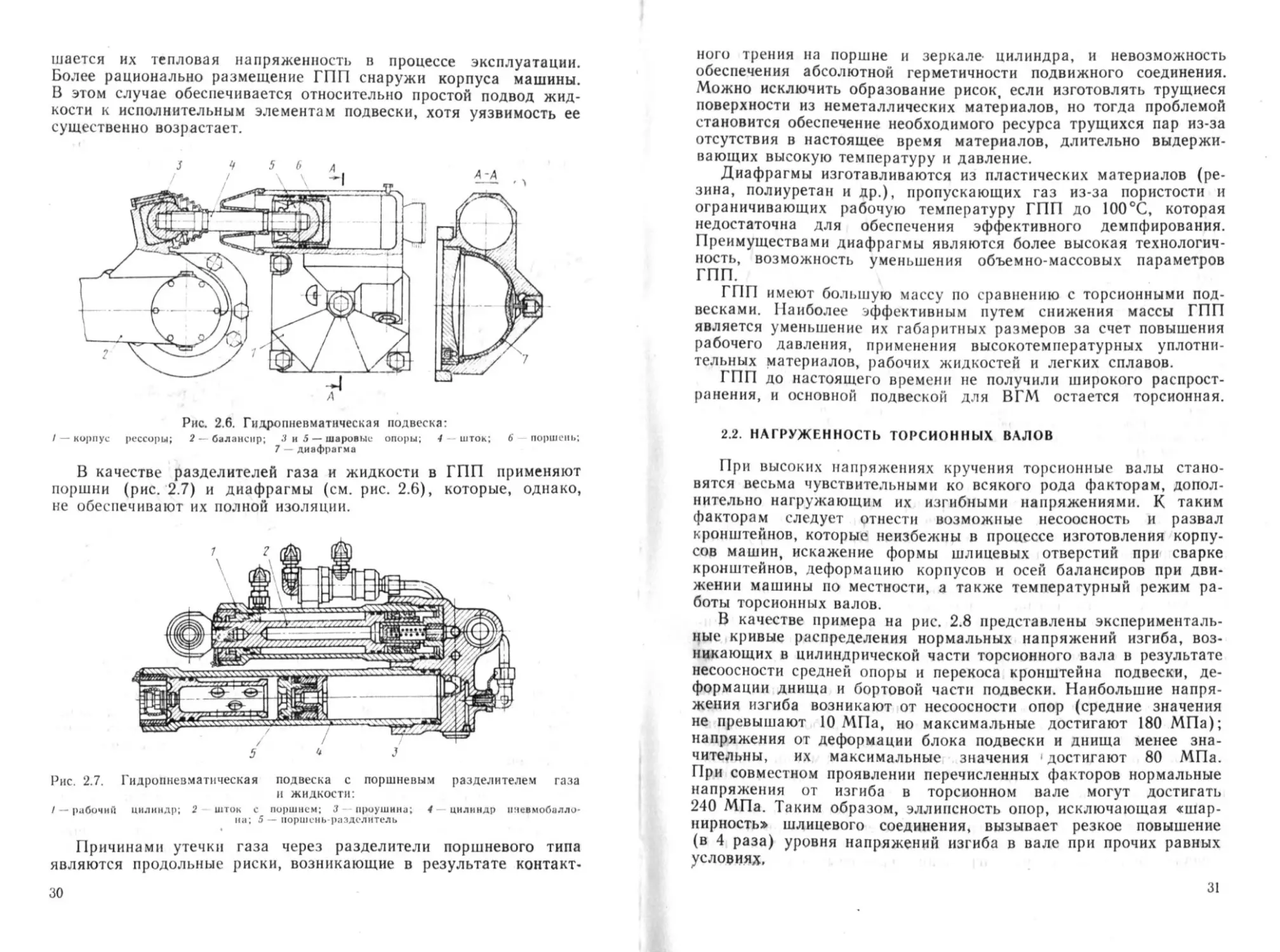
Рис. 2.6. Гндропневматнческая подвеска:
/ — корпус рессоры; 2 — балансир; .4 « J- шаровые опоры; 4 шток; 6 поршень;
7 - диафрагма
В качестве разделителей газа и жидкости в ГПП применяют
поршни (рис. 2.7) и диафрагмы (см. рис. 2.6), которые, однако,
не обеспечивают их полной изоляции.
Рис. 2.7. Гндропневматнческая подвеска с поршневым разделителем газа
и жидкости:
/ рабочий цилиндр, 2 - шток с поршнем; J проушина; Г цилиндр ипевмобалло-
нм; 5 — поршень разделитель
Причинами утечки газа через разделители поршневого типа
являются продольные риски, возникающие в результате контакт*
30
ного трения на поршне и зеркале цилиндра, и невозможность
обеспечения абсолютной герметичности подвижного соединения.
Можно исключить образование рисок, если изготовлять трущиеся
поверхности из неметаллических материалов, но тогда проблемой
становится обеспечение необходимого ресурса трущихся пар из-за
отсутствия в настоящее время материалов, длительно выдержи-
вающих высокую температуру и давление.
Диафрагмы изготавливаются из пластических материалов (ре-
зина, полиуретан и др.), пропускающих газ из-за пористости и
ограничивающих рабочую температуру ГПП до 100°С, которая
недостаточна для обеспечения эффективного демпфирования.
Преимуществами диафрагмы являются более высокая технологич-
ность, возможность уменьшения объемно-массовых параметров
ГПП.
ГПП имеют большую массу по сравнению с торсионными под-
весками. Наиболее эффективным путем снижения массы ГПП
является уменьшение их габаритных размеров за счет повышения
рабочего давления, применения высокотемпературных уплотни-
тельных материалов, рабочих жидкостей и легких сплавов.
ГПП до настоящего времени не получили широкого распрост-
ранения, и основной подвеской для ВГМ остается торсионная.
2.2. НАГРУЖЕННОСТЬ ТОРСИОННЫХ ВАЛОВ
При высоких напряжениях кручения торсионные валы стано-
вятся весьма чувствительными ко всякого рода факторам, допол-
нительно нагружающим их изгибнымн напряжениями. К таким
факторам следует отнести возможные несоосность и развал
кронштейнов, которые неизбежны в процессе изготовления корпу-
сов машин, искажение формы шлицевых отверстий при сварке
кронштейнов, деформацию корпусов и осей балансиров при дви-
жении машины но местности, а также температурный режим ра-
боты торсионных валов.
В качестве примера на рис. 2.8 представлены эксперименталь-
ные кривые распределения нормальных напряжений изгиба, воз-
никающих в цилиндрической части торсионного вала в результате
несоосности средней опоры и перекоса кронштейна подвески, де-
формации днища и бортовой части подвески. Наибольшие напря-
жения изгиба возникают от несоосности опор (средние значения
не превышают 10 МПа, но максимальные достигают 180 МПа);
напряжения от деформации блока подвески и днища менее зна-
чительны, их максимальные значения достигают 80 МПа.
При совместном проявлении перечисленных факторов нормальные
напряжения от изгиба в торсионном вале могут достигать
240 МПа. Таким образом, эллипсность опор, исключающая «шар-
нирность» шлицевого соединения, вызывает резкое повышение
(в 4 раза) уровня напряжений изгиба в вале при прочих равных
условиях.
31
В реальных условиях экстремальное сочетание этих факторов
маловероятно. При натурных испытаниях танка Т-64А на грунто-
вой дороге при движении со скоростью 25 км/ч максимальные
напряжения изгиба в торсионном вале пятой подвески составляют
100 МПа, а на бетонной дороге с искусственными неровностями
синусоидального профиля высотой 0,2 м—160 МПа.
Рис. 2.9 Распределение долгопеч
ности торсионных валов танка Т-55,
испытанных со смещением опоры на
10 мм (/) и при чистом круче-
нии (2)
Рис. 2.8 Распределение нормальных
напряжений изгиба в цилиндриче-
ской части торсионного вала в зави-
симости от несоосности (/), разва-
ла (2). перекоса (3), деформации
блока подвески (/) и днища ма-
шины (5)
Нормальные напряжения от изгиба снижают усталостную
прочность торсионных валов. Например, средний ресурс валов
танка Т-55, испытанных со смещением опоры на 10 мм (o„sr ~
= 100 МПа), снизился в 2,3 раза (рис. 2.9). При этом разрушение
валов произошло по шлицевым головкам, что свидетельствует об
их перегруженности.
Кроме того, торсионный вал подвергается тепловому воздейст-
вию как за счет гистерезисных потерь в нем, так и за счет нагре-
ва от расположенных рядом деталей и сборочных единиц. Наи-
большему тепловому воздействию подвержены торсионные валы,
находящиеся под моторно-трансмиссионным отделением, где тем-
пература достигает 130°C (403 К).
Предел пропорциональности при кручении торсионного вала
из стали 45ХН2МФАШ остается практически неизменным только
до температуры 60°C (333 К), повышение же рабочей темпера-
туры до 100 °C (373 К) приводит к снижению предела пропорцио-
нальности на 4 % и появлению остаточной деформации торсион-
ного вала порядка 5—6° (рис. 2.10, 2.11), что приводит к умень-
шению динамического хода опорного катка.
Таким образом, при выборе параметров торсионного вала со-
временной машины оценку нагруженности его элементов необхо-
димо проводить с учетом касательных и нормальных напряжений,
неравномерного характера нагружения шлицевых соединений, а
32
также температурного режима работы. Основные параметры
(диаметр и длина) выбираются по номограммам, приведенным в
соответствующем государственном стандарте.
Рис. 2.10. Влияние темпера-
туры на предел пропорциональ-
ности при кручении тор-
сионного вала из стали
45ХН2МФАШ
Рис. 2.11. Зависимость остаточной де-
формации торсионного вала от циклов
нагружения при различной температуре:
I - во °C (S33 К); 2 - 80 С (353 KJ ; л - >00 с
(373 К); ,mln - 380 МПа . .гаи - 1325 МПа
2.3. РАСЧЕТ ШЛИЦЕВЫХ СОЕДИНЕНИИ ТОРСИОННЫХ ВАЛОВ
Критерием оценки рациональности выбранных размеров пере-
ходной зоны от цилиндрической части вала к шлицевым головкам
является величина концентратора напряжения. Коэффициент кон-
центрации напряжений Кт в переходной зоне определяется по
формуле
1 Г 3(rfT + 2/?,)(rfT-r4/?,) , (D-rfT - 2/?,)(rfT-t- 12/?,)]
Af“ 2D L dT + b /?, J’
где dT— диаметр цилиндрической части (стержня) торсионного вала; Ri — ра-
диус сопряжения стержня вала с головкой; D —наружный диаметр головки
вала.
Рис. 2.12. Зависимость коэф-
фициента концентрации на-
пряжений в переходной зоне
от отношения радиуса сопря-
жения к диаметру шлицевой
головки
Возможность применения указанной формулы для расчета
коэффициента концентрации напряжений к торсионному валу под-
тверждается методом фотоупругости (рис. 2.12). При испытаниях
3 Зак. 16«с»
33
диаметр торсионных валов изменялся от 44 до 56 мм, радиус со-
пряжения от 75 до 200 мм. Из графика видно, что коэффициент
концентрации для /?|/О>-2 снижается незначительно и радиус
сопряжения 100 мм является оптимальным для валов суще-
ствующих машин.
Выбор параметров шлицевого соединения при чистом кручении
вала. Наиболее широко распространено мелкошлицевое соедине-
ние торсионного вала с опорой, имеющее треугольный профиль.
Это соединение позволяет достаточно точно выставить опорный ка-
ток, довольно просто регулируется и имеет хорошую надежность.
Существующие в общем машиностроении методы расчета пря-
моугольных шлицев не учитывают податливости соединения,
поэтому их нельзя полностью распространить на мелкошлицевое
соединение треугольного профиля, работающее при больших на-
грузках и деформациях самих шлицев и опор.
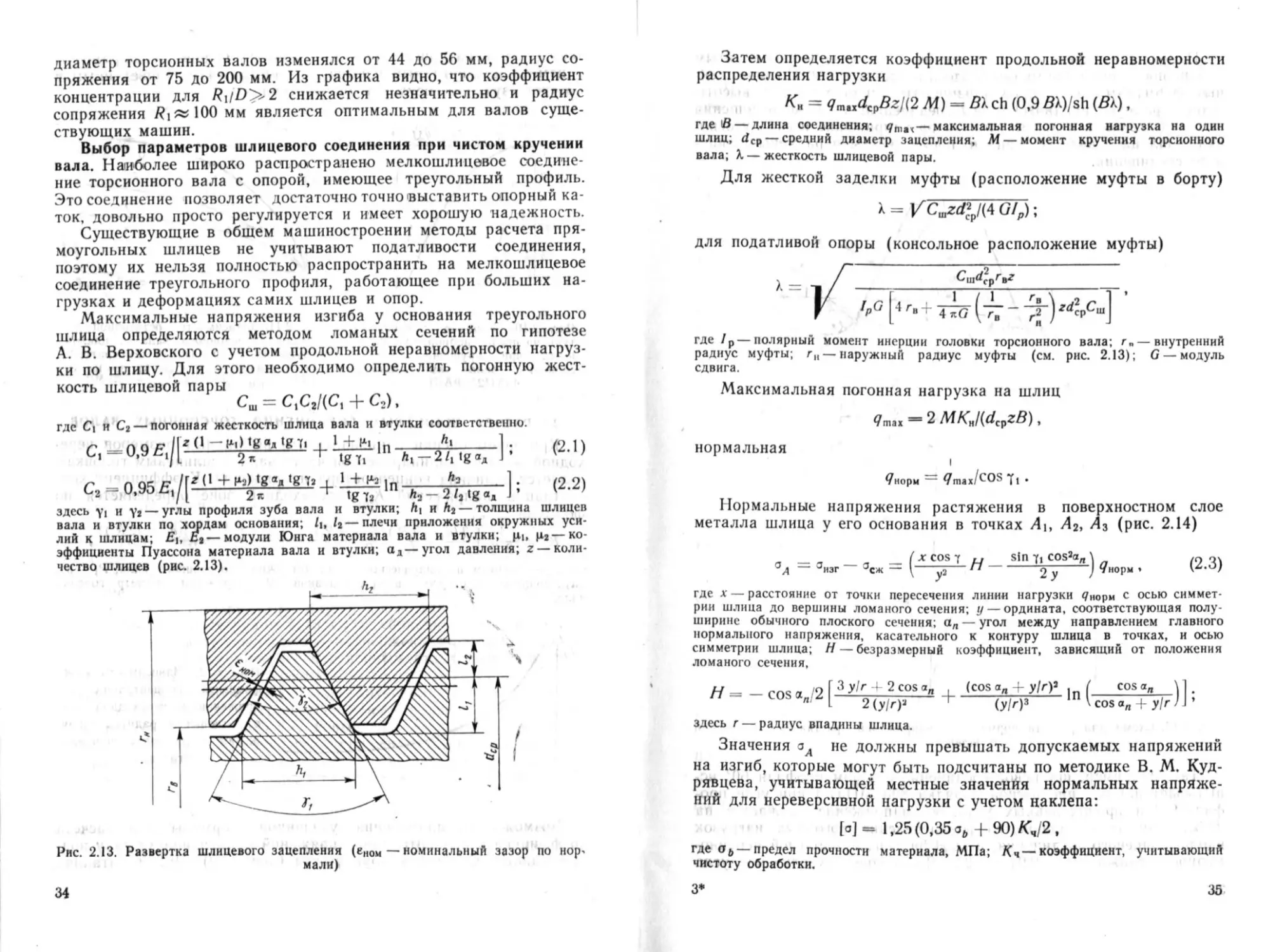
Максимальные напряжения изгиба у основания треугольного
шлица определяются методом ломаных сечений по гипотезе
А. В. Верховского с учетом продольной неравномерности нагруз-
ки по шлицу. Для этого необходимо определить погонную жест-
кость шлицевой пары
сш = с,с,/(с, + с2),
где Ci и Сг — погонная жесткость шлица вала н втулки соответственно.
C,-0,9A/['<|-"^<H. + ffiin ]; (2.1)
с, = 0.95£,/['<'In ; (2.2)
здесь Yi и у» —углы профиля зуба вала и втулки; Л, и Л, —толщина шлицев
вала и втулки по хордам основания; Zi, G—плечи приложения окружных уси-
лий к шлицам; £ь —модули Юнга материала вала и втулки; |хь — ко-
эффициенты Пуассона материала вала и втулки; аа—угол давления, z — коли-
чество шлицев (рис. 2.13).
Рис. 2.13. Развертка шлицевого зацепления (еном — номинальный зазор по нор-
мали) г
34
Затем определяется коэффициент продольной неравномерности
распределения нагрузки
К* = qmnd^z!{2 (0,9 5k)/sh (5k),
где В — длина соединения; максимальная погонная нагрузка на один
шлиц; dcp — средний диаметр зацепления; М — момент кручения торсионного
вала; X — жесткость шлицевой пары.
Для жесткой заделки муфты (расположение муфты в борту)
k=/C^p/(4G/p);
для податливой опоры (консольное расположение муфты)
__
Т ipg |4 r> + T^G (т? “ 7г)
где /р—полярный момент ннерцнн головки торсионного вала; г. — внутренний
радиус муфты; ги — наружный радиус муфты (см. рис. 2.13); G — модуль
сдвига.
Максимальная погонная нагрузка на шлиц
нормальная
<7нори = ^m.x/COS Т, .
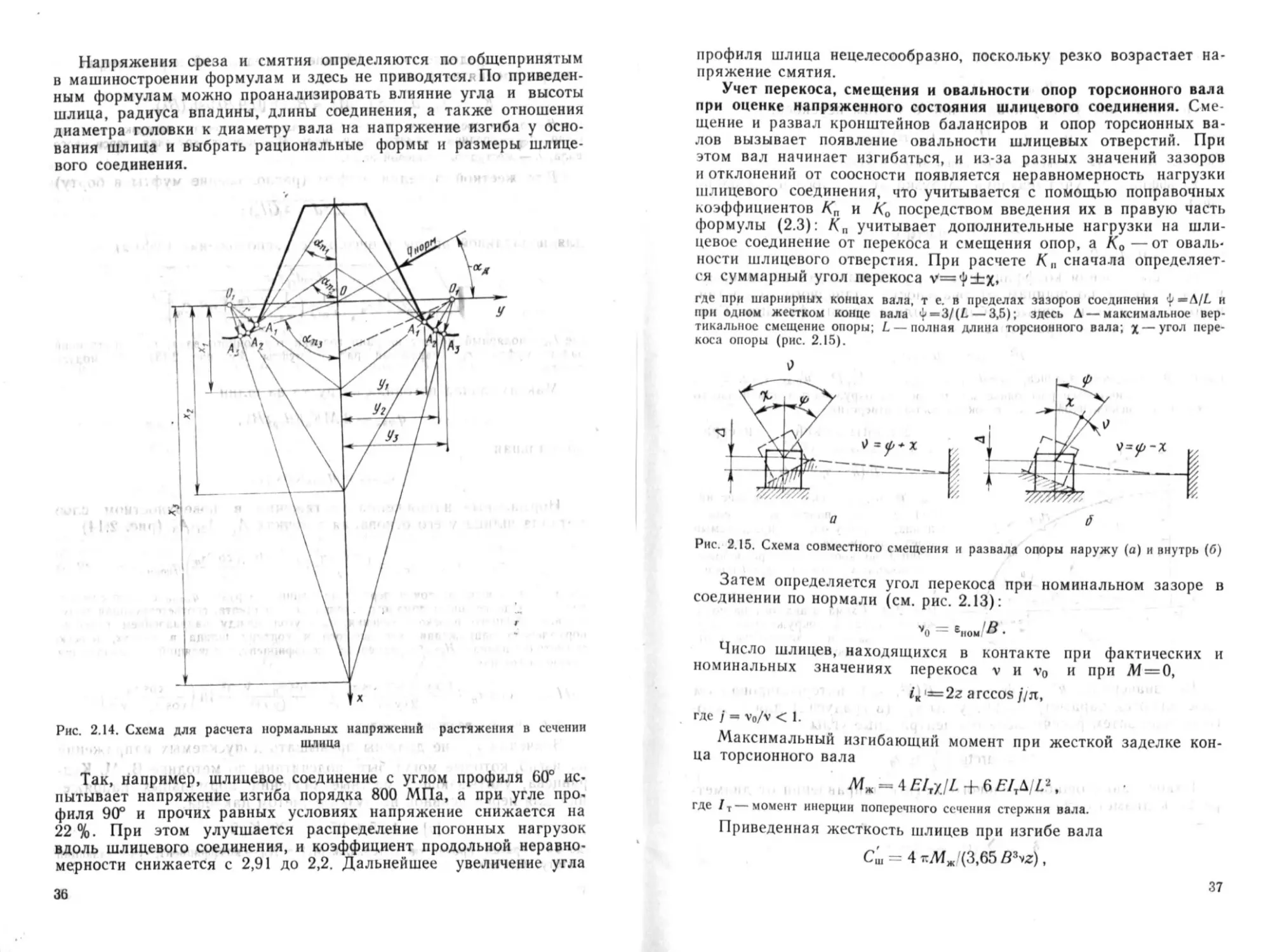
Нормальные напряжения растяжения в поверхностном слое
металла шлица у его основания в точках Ль Л2, Лз (рис. 2.14)
„ , — (-«COST о Sin Т, COS’a,! /О Q\
°д = °нзг — Зсж = (-у--П--------
где х —расстояние от точки пересечения линии нагрузки «/норм с осью симмет-
рии шлица до вершины ломаного сечения; у — ордината, соответствующая полу
ширине обычного плоского сечения; ая — угол между направлением главного
нормального напряжения, касательного к контуру шлица в точках, и осью
симметрии шлица; // — безразмерный коэффициент, зависящий от положения
ломаного сечения,
Н - - COSa 12 [Зу/Г ' 2cosa" + (cOSa" гУ,Г}* 1П (_C0Sa* -)]•
C0S I2(y/r)> r (y/r)« 1П 1 cos a„ + ylr) J ’
здесь r— радиус впадины шлица.
Значения зл не должны превышать допускаемых напряжений
на изгиб, которые могут быть подсчитаны по методике В. М. Куд-
рявцева, учитывающей местные значения нормальных напряже-
ний для нереверсивной нагрузки с учетом наклепа:
[а]= 1,25(0,35 ^ 4-90) К,/2.
где аь— предел прочности материала, МПа; Кч — коэффициент, учитывающий
чистоту обработки.
3*
35
Напряжения среза и смятия определяются по общепринятым
в машиностроении формулам и здесь не приводятся. По приведен-
ным формулам можно проанализировать влияние угла и высоты
шлица, радиуса впадины, длины соединения, а также отношения
диаметра головки к диаметру вала на напряжение изгиба у осно-
вания шлица и выбрать рациональные формы и размеры шлице-
вого соединения.
Рис. 2.14. Схема для расчета нормальных напряжений растяжения в сечении
шлица
Так, например, шлицевое соединение с углом профиля 60° ис-
пытывает напряжение изгиба порядка 800 МПа, а при угле про-
филя 90° и прочих равных условиях напряжение снижается на
22%. При этом улучшается распределение погонных нагрузок
вдоль шлицевого соединения, и коэффициент продольной неравно-
мерности снижается с 2,91 до 2,2. Дальнейшее увеличение угла
36
профиля шлица нецелесообразно, поскольку резко возрастает на-
пряжение смятия.
Учет перекоса, смещения и овальности опор торсионного вала
при оценке напряженного состояния шлицевого соединения. Сме-
щение и развал кронштейнов балансиров и опор торсионных ва-
лов вызывает появление овальности шлицевых отверстий. При
этом вал начинает изгибаться, и из-за разных значений зазоров
и отклонений от соосности появляется неравномерность нагрузки
шлицевого соединения, что учитывается с помощью поправочных
коэффициентов Кп и Ко посредством введения их в правую часть
формулы (2.3): Кп учитывает дополнительные нагрузки на шли-
цевое соединение от перекоса и смещения опор, а Ко —от оваль-
ности шлицевого отверстия. При расчете Кп сначала определяет-
ся суммарный угол перекоса v=^±x»
где при шарнирных концах вала, т е. в пределах зазоров соединения | —\IL и
при одном жестком конце вала y-3/(L —3,5); здесь Л — максимальное вер-
тикальное смещение опоры; /. — полная длина торсионного вала; % — угол пере-
коса опоры (рис. 2.15).
Q б
Рис. 2.15. Схема совместного смещения и развала опоры наружу (а) и внутрь (б)
Затем определяется угол перекоса при номинальном зазоре в
соединении по нормали (см. рис. 2.13):
*0 = ьном &
Число шлицев, находящихся в контакте при фактических и
номинальных значениях перекоса v и v0 и при М = 0,
ig '^2z arccos j/n,
где / v0/v < 1.
Максимальный изгибающий момент при жесткой заделке кон-
ца торсионного вала
Мж = 4£/тх/£ + 6£/тД/га.
где !т—момент инерции поперечного сечения стержня вала.
Приведенная жесткость шлицев при изгибе вала
Сш = 4 гМж (3,65 ЯЧг),
37
а максимальная погонная нагрузка у края шлица
Погонная нагрузка у края шлица с учетом перекоса:
7 ц = Фишах ^тах »
где / 1—/)/2 — максимальная длина пятна контакта.
Коэффициент, учитывающий нагрузки от перекоса и смещения
опор,
*«“1 + ФЛР
где 7ср 2ЛЦ</сргВ).
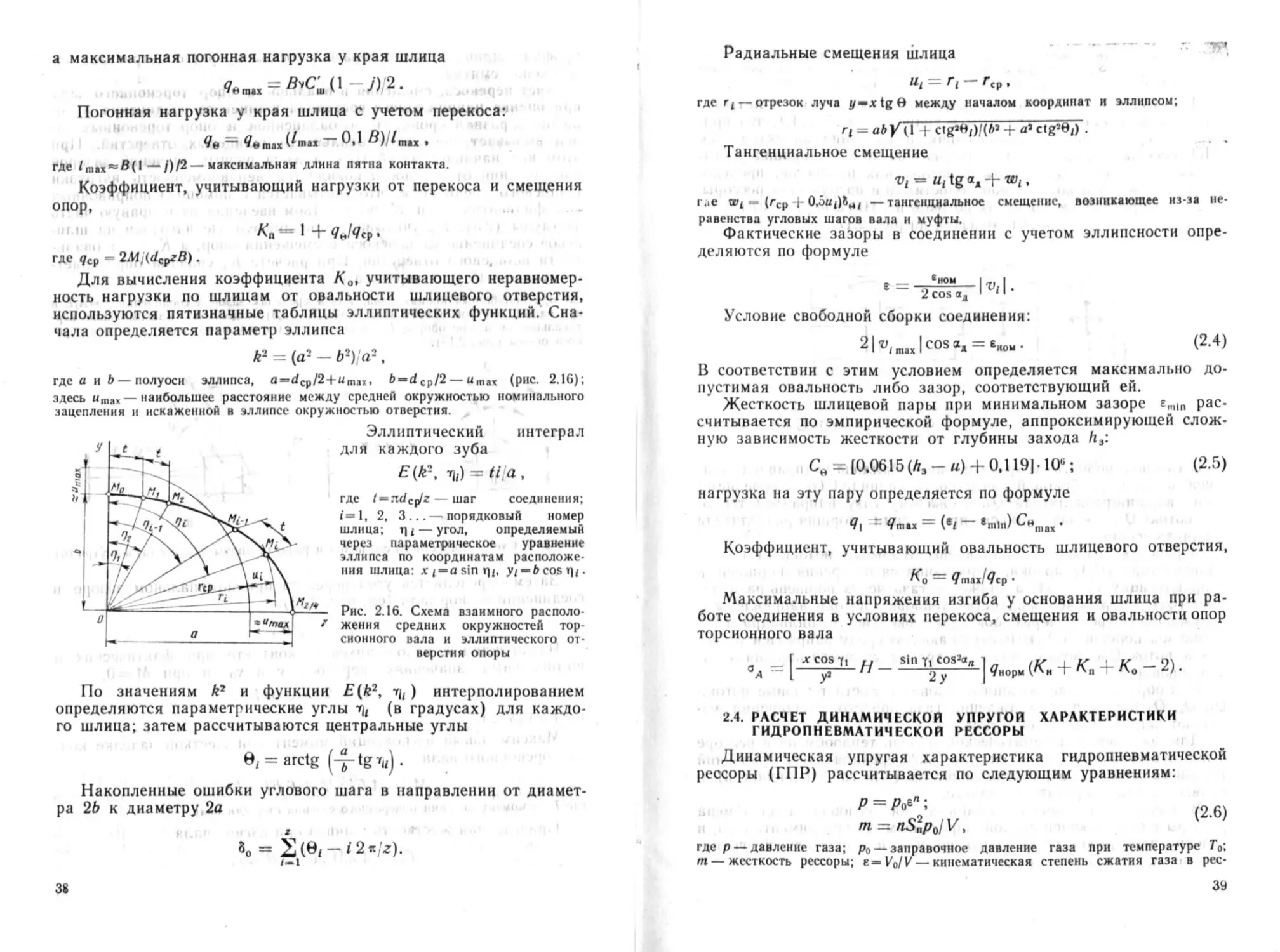
Для вычисления коэффициента Ко, учитывающего неравномер-
ность нагрузки по шлицам от овальности шлицевого отверстия,
используются пятизначные таблицы эллиптических функций. Сна-
чала определяется параметр эллипса
k2 = (а2 — Ь2) а2,
где а н Ь — полуоси эллипса, a—dcp/2 + umii, b-dCp/2 — «тк (рис. 2.16),
здесь umax — наибольшее расстояние между средней окружностью номинального
зацепления и искаженной в эллипсе окружностью отверстия.
Эллиптический интеграл
для каждого зуба
£ (Л2, = Н. а ,
где / —л(/ср/г-шаг соединения;
(-1, 2, 3... —порядковый номер
шлица; q <— угол, определяемый
через параметрическое уравнение
эллипса по координатам расположе
ния шлица: a sin щ, у/ —bcosqz.
Рис. 2.16. Схема взаимного располо-
жения средних окружностей тор-
сионного вала и эллиптического от-
верстия опоры
По значениям k2 и функции E(k2, ) интерполированием
определяются параметрические углы tj, (в градусах) для каждо-
го шлица; затем рассчитываются центральные углы
0z = arctg
Накопленные ошибки углового шага в направлении от диамет-
ра 2Ь к диаметру 2а
». = 2(в(-/2«/г).
/-1
38
Радиальные смещения шлица
ut = ri — rtf,
где rt — отрезок луча </-xtg8 между началом координат и эллипсом;
Q = aby (1 4 4- a»ctg»«,) .
Тангенциальное смещение
vi ~ ui *6 “а + »
Гае Wi«- (гср г О.За4)Ьмt —тангенциальное смещение, возникающее из-за не-
равенства угловых шагов вала и муфты.
Фактические зазоры н соединении с учетом эллипсности опре-
деляются по формуле
Условие свободной сборки соединения:
2|^т„1СО8вД = *«»•*• (2*4>
В соответствии с этим условием определяется максимально до-
пустимая овальность либо зазор, соответствующий ей.
Жесткость шлицевой пары при минимальном зазоре tmm рас-
считывается по эмпирической формуле, аппроксимирующей слож-
ную зависимость жесткости от глубины захода й,:
Сн = (0,0615 (й3 - и) + 0.119| • 10ь; (2.5)
нагрузка на эту пару определяется по формуле
Я\ : Чтлх — (•/ •mln) ’
Коэффициент, учитывающий овальность шлицевого отверстия,
А о = ^тах/^ср •
Максимальные напряжения изгиба у основания шлица при ра-
боте соединения в условиях перекоса, смещения и овальности опор
торсионного вала
°. = [Н- •'"У" ](К. + К. 4 К. - 2).
2.4. РАСЧЕТ ДИНАМИЧЕСКОЙ УПРУГОЙ ХАРАКТЕРИСТИКИ
ГИДРОПНЕВМАТИЧЕСКОЙ РЕССОРЫ
Динамическая упругая характеристика гидропневматической
рессоры (ГПР) рассчитывается по следующим уравнениям:
где р — давление газа; р0 — заправочное давление газа при температуре То;
т — жесткость рессоры; e—Volv— кинематическая степень сжатия газа в рес-
39
cope; Vo—исходный объем газа; Sn — пЛощадь силового поршня гндропневмо-
рессорЫ; V- Vo — 5niy~ текущее значение объема газа; i — передаточное отно-
шение подвески; у — ход опорного катка; п — показатель политропы.
Для упрощения расчетов значение показателя политропы
обычно принимается постоянным в диапазоне 1,25... 1,4, что при-
водит к существенным отклонениям в описании характеристик
ГПП, поскольку при этом не учитывается неустановившийся ха-
рактер теплообменных и термодинамических процессов, происхо-
дящих в газовой и жидкостной полостях при нагружении рессоры.
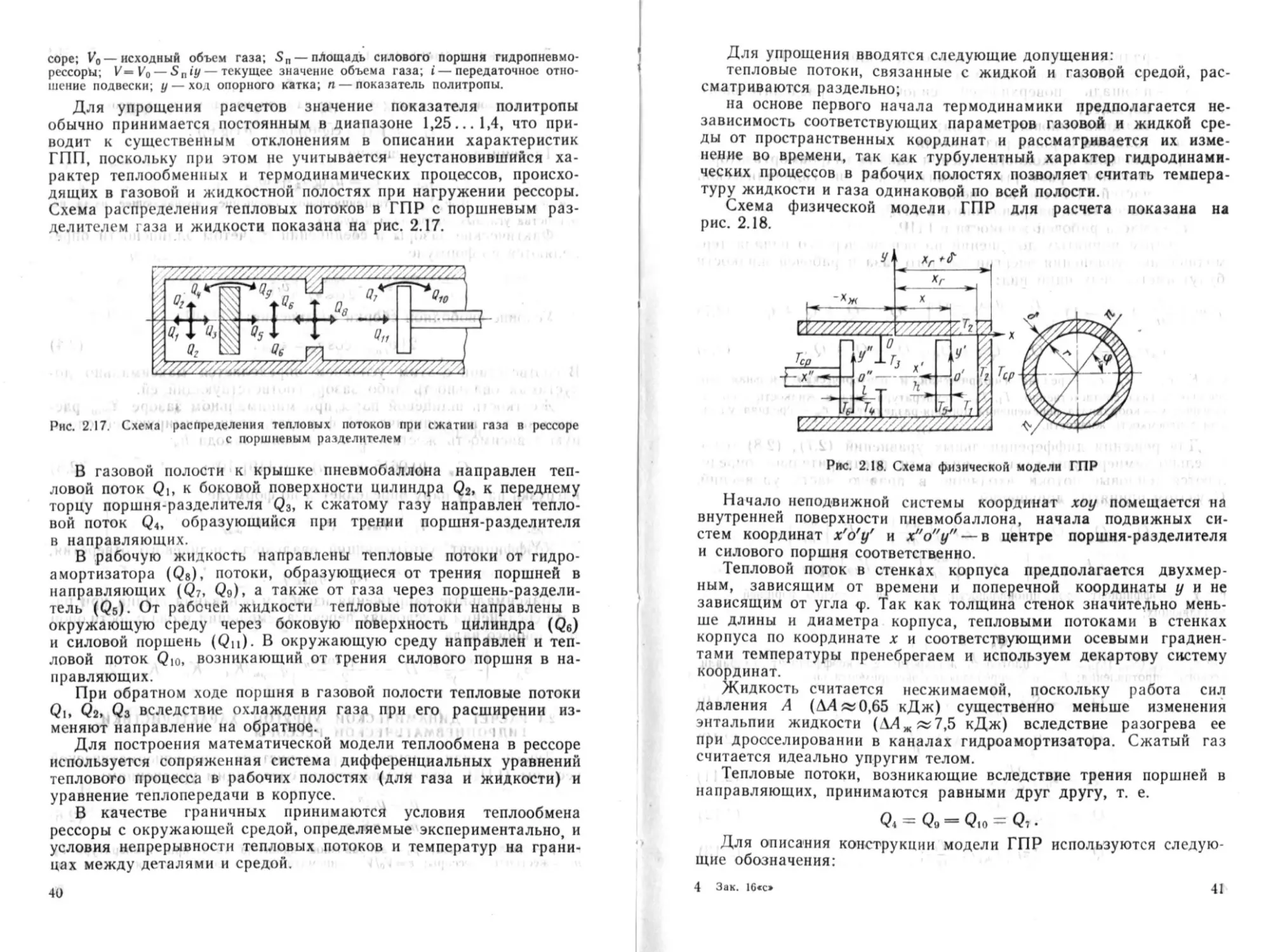
Схема распределения тепловых потоков в ГПР с поршневым раз-
делителем ;аза и жидкости показана на рис. 2.17.
Рис. 2.17. Схема распределения тепловых потоков при сжатии газа в рессоре
с поршневым разделителем
В газовой полости к крышке пневмобаллона направлен теп-
ловой поток Qi, к боковой поверхности цилиндра Q2, к переднему
торцу поршня-разделителя Q3, к сжатому газу направлен тепло-
вой поток Q4, образующийся при трении поршня-разделителя
в направляющих.
В рабочую жидкость направлены тепловые потоки от гидро-
амортизатора (Qi), потоки, образующиеся от трения поршней в
направляющих (Q7. Qv), а также от газа через поршень-раздели-
тель (Qi). От рабочей жидкости тепловые потоки направлены в
окружающую среду через боковую поверхность цилиндра (Q6)
и силовой поршень (Qn). В окружающую среду направлен и теп-
ловой поток Qio, возникающий от трения силового поршня в на-
правляющих.
При обратном ходе поршня в газовой полости тепловые потоки
Qi, Qi, Q3 вследствие охлаждения газа при его расширении из-
меняют направление на обратное.
Для построения математической модели теплообмена в рессоре
используется сопряженная система дифференциальных уравнений
теплового процесса в рабочих полостях (для газа и жидкости) и
уравнение теплопередачи в корпусе.
В качестве граничных принимаются условия теплообмена
рессоры с окружающей средой, определяемые экспериментально, и
условия непрерывности тепловых потоков и температур на грани-
цах между деталями и средой.
40
Для упрощения вводятся следующие допущения:
тепловые потоки, связанные с жидкой и газовой средой, рас-
сматриваются раздельно;
на основе первого начала термодинамики предполагается не-
зависимость соответствующих параметров газовой и жидкой сре-
ды от пространственных координат и рассматривается их изме-
нение во времени, так как турбулентный характер гидродинами-
ческих процессов в рабочих полостях позволяет считать темпера-
туру жидкости и газа одинаковой по всей полости.
Схема физической модели ГПР для расчета показана на
рис. 2.18.
Рис. 2.18. Схема физической модели ГПР
Начало неподвижной системы координат хоу помещается на
внутренней поверхности пневмобаллона, начала подвижных си-
стем координат х'о'у' и х?'о"у" — в центре поршня-разделителя
и силового поршня соответственно.
Тепловой поток в стенках корпуса предполагается двухмер-
ным, зависящим от времени и поперечной координаты у и не
зависящим от угла <р. Так как толщина стенок значительно мень-
ше длины и диаметра корпуса, тепловыми потоками в стенках
корпуса по координате х и соответствующими осевыми градиен-
тами температуры пренебрегаем и используем декартову систему
координат.
Жидкость считается несжимаемой, поскольку работа сил
давления А (ЛЛ»0,65 кДж) существенно меньше изменения
энтальпии жидкости (ЛЛЖ«7,5 кДж) вследствие разогрева ее
при дросселировании в каналах гидроамортизатора. Сжатый газ
считается идеально упругим телом.
Тепловые потоки, возникающие вследствие трения поршней в
направляющих, принимаются равными друг другу, т. е.
Qi = Qv — Qio ~ Qi •
Для описания конструкции модели ГПР используются следую-
щие обозначения:
4 Зак. 16<с*
41
г — радиус внутренней поверхности цилиндра ГПР;
6 —толщина стенок корпуса;
S„ — площадь поверхностей силового и разделительного
поршней;
/ — толщина силового поршня;
й —толщина поршня-разделителя;
f —площадь проходного сечения канала гидроамортизатора;
хт, д'* —линейные размеры пневматической и гидравлической
частей ГПР соответственно;
тт масса газа, заправленного в ГПР;
/иж—масса рабочей жидкости в ГПР.
С учетом принятых допущений на основе первого начала тер-
модинамики уравнения энергии сжатого газа и рабочей жидкости
будут иметь следующий вид:
Л/Пг[-^г + (У-1) (1 Q.-Qi + Qa+<?.: (2-Л
<•»»<« Q - Q. - Q,. + Q. + Q. + <?, + (2.8)
где К-'ср; ср. ср —средняя изобарическая и изохорическая удельная теп-
лоемкость газа соответственно; Гь — температура газа и жидкости соответ-
ственно; * — координата перемещения поршня-разделителя; сж —средняя удель-
ная теплоемкость жидкости.
Для решения дифференциальных уравнений (2.7), (2.8) отно-
сительно температуры газа и жидкости предварительно опреде-
ляются тепловые потоки, входящие в правую часть уравнений.
С учетом принятых допущений
Q. — Qi =. Q9 — Q10 = Xt^rp | | 7.->^тр | -^7-1 —
/лЛр I I = ХаЛрI -rfr| = “5" FTP l-rf/j,
где x — коэффициент пропорциональности; FTp —сила трения поршней в на
правляющих;
где = ;рж —плотность жидкости; £ — коэффициент гидравли-
ческого сопротивления; FT() и £ определяются экспериментально.
(2.9)
Q,»-2«-(xr-x)i,^-; (2.10)
Q> = SA-j£: (2.11)
Q. = -SA-jp-: (2.12)
0, = -2кг|хж|1.2-^-; (2.13)
42
Qh = -V2.^, (2.14)
где X* — теплопроводность стенки корпуса; Tt — температура корпуса пневмо-
баллона в зоне контакта со сжатым газом; — температура стенки рессоры
в зоне контакта с рабочей жидкостью; 75 — температура поршня разделителя;
Tt — температура силового поршня.
Для расчета тепловых потоков предварительно определяются
значения градиентов температуры-^- и -ду^-,для чего в каждом
конкретном случае решается уравнение теплопроводности.
В качестве примера решим уравнение теплопроводности для
поршня-разделителя:
где аг — температуропроводность материала поршня-разделителя.
Начальные условия:
П(А.0) = Тср,
где Тср — температура окружающей среды.
Граничные условия:
МО, /) = ГЛ);
(216)
где Oi — коэффициент теплообмена между торцом поршня-разделителя и жид-
костью.
Для решения уравнения (2.15) примем в первом приближении
характер изменения температуры по сечению поршня-разделителя
’близким к параболическому, определяемому выражением
Г,= Т, + Ау + Ву!. (2.17)
где А и В — коэффициенты, изменяющиеся во времени.
Используя граничные условия (2.16) и уравнение теплопровод-
ности (2.15), после ряда математических преобразований опреде-
лим выражения для расчета коэффициентов А и В, подставив
которые в уравнение (2.17), получим с учетом принятых допуще-
ний следующую формулу:
X
где т — переменная дифференцирования по времени.
4* 43
Тепловой поток от газа в стенку поршня-разделителя
ХЛ _ / а2^3 {’Г _ Т \____3 Ад (2 Ад 4~ ДдДР
^з-( X,4-«>*U1 /а' Л(Х,+ а3ЛМ4Ха + <чЛ)
* | ~dT~ еХР [ ~ 12 fl» (4 Хэ’+ <чЛ) Л» ~ 5"! •
Определив аналогичным образом значения остальных тепло-
вых потоков, подставим их в уравнения (2.7) и (2.8). Изменяя
амплитуду перемещения штока рессоры по синусоидальному за-
кону x=xosinwf и выражая действительные переменные через
безразмерные
Л — Тср Т3 — Гср - - - 2* - 2-
—-—Л = V-; —=—— = V.,; t = t — /0 = t--; - т---;
Гср ” Гср '* ш « ’
х = х0 sin ш/ = xosln2iJ = х«х; х() = х0/хг,
получим систему безразмерных уравнений:
~j— о, +1) Л,,, - + Л X
dt 1 — xQx dt
X j-^=-exp[ ak(t - - Д4хох j-^=-exp[ — a4(t - (2.19)
- t)] dt - + 4e f exp | а-л (f — x)| rfr - A7x0 I 1 = 0;
и dt I dt |
4> + Вл-B^, + ej^-expl -а,(7~;»Л + Л,х
dr о dt
xf-^-l-MZ-Olrft + fiJ-^-X (2.20)
o dt о dt
X expl-a5(7- т)1Л-5вх0|4г|-тт=0.
Постоянные коэффициенты в уравнениях (2.19) и (2.20) ха-
рактеризуют конструктивные особенности подвески и режимы ее
нагружения и определяются следующими выражениями:
* __ / Х»»|5П . 4 ^Хдя^р ХдЯд£п \ 2 г. д _ 4 г>Аэа1хЛ
1 ~ ' Х3 4- в|4 * Xj + a,6 ' Лдвдй/ шс^Пг ’ 2 (Л, 4- О|&) o>cvmr ’
л 12 я»Хд (2 К, 4- ai»)aSnrx0 Л _ 24 к»Хд(2 Хд 4-а1Ь)’х0
Лз & (А, 4- (4 X, + «iM a.fvwr ’ Л‘ 6 (Ха i в1В) (4 А, И a.i) «>сртг ’
» 2 лАдвд5п * 6 лХд (2 Ад 4- ajA)*Sn
5 (Aj 4" ®аЛ) •‘><’г/иг ’ в ft (Ад 4- *аЛ) (4 X3 -f- вдЛ) <'>ср/иг ’
А Гтрхг 24 код (Ад 4- в1й) 24 ка2 (Аа 4- а2Л)
7~2сг/ПгГср; °4 - (4 Хд.+.>»)«• ; & A»(4Al t-а,Л)ш ;
44
/ 2 "A^rхж ХдДдЗд \ 2 я . _ 2 кАдЯдЗц____.
\ Л2 - я,& <. 4-я,/ ’ л, 4-я/i/ш’гжтж ’ 2 (Аа 4- аЛ) ->ежтж *
12 ~;Aj (2 ?_> • «Л)>гхж . п бя).,(2Ха } «t/)»Sn .
б (Аа 4- (4 А3 4- a,i) <*>гж1Иж ’ * / (Аа 4" «10 0 4* ail) MCxmm *
g e бкАдЯд (2к}-?ягЛ)5д лтр*г
(Ад 4* азЛ) (4 Ла 4* ®jA) ш('ттж ’ '' ^ж^ж^ср '
fr>*»»Xo 24 ка^ (А, 4- «tM
‘ ~~ 4я»сжл|жГСр ’ 1 Л’ (4 Л, 4- ajft) ш
В уравнение (2.19) входят члены, характеризующие тепловую
инерцию газа и интенсивность внутреннего тепловыделения в про-
цессе его сжатия—расширения (первый и второй члены); тепло-
съем с поверхности гидропневморессоры, контактирующей со сжа-
тым газом (члены с коэффициентами At и Л2); инерционность
теплообмена газа с окружающими стенками (члены с коэффи-
циентами А3 и теплопередачу от жидкости к стенке поршня-
разделителя (член с коэффициентом Д5); инерционность тепло-
обмена газа с поршнем разделителем (член с коэффициентом
Л6) и интенсивность тепловыделения вследствие трения поршня-
разделителя в направляющих (с коэффициентом Л7). Массовые
параметры элементов конструкции рессоры определяются коэф-
фициентами а4, а5.
В уравнении (2.20) первый член характеризует тепловую инер-
ционность жидкости; второй — теплосъем с поверхности, контак-
тирующей с жидкостью (с коэффициентом fi|); третий — тепло-
съем от газа к стенке поршня-разделителя (с коэффициентом
В2); четвертый, пятый, шестой — тепловую инерционность процес-
са теплообмена жидкости с окружающими стенками (с коэффи-
циентами В3, В4, Въ)\ седьмой и восьмой члены характеризуют
тепловыделение вследствие трения поршней в направляющих и
работы гидроамортизатора (с коэффициентами и В7 соответ-
ственно).
Решив систему уравнений (2.19) и (2.20) с помощью ЭВМ от-
носительно температуры газа и жидкости Г| и Т3, можно проана-
лизировать влияние условий нагружения и конструктивных осо-
бенностей подвески на характер термодинамических процессов в
рабочих полостях гидропневморессоры и определить давление
газа:
р = f,RT, = т,ЦГ,/\(х, - л) $„),
где R — газовая постоянная; рг — плотность газа.
Установив на начальных стадиях проектирования основные осо-
бенности термодинамических и теплообменных процессов в рабо-
чих полостях ГПР, можно оценить теплонапряженность конструк-
ции. По данным испытаний опытного образца ГПР, можно уточ-
нить математическую модель рабочих процессов корректировкой
коэффициентов в уравнениях.
45
В качестве примера рассмотрим рабочий процесс ГПР, имею-
щий следующие параметры:
г = 0,0325 м ; 4 = 0,01 м ; S„ = 0.00332 м’; / = 0,05 м ; Л = 0,05 м ;
тт — 0,096 кг ; тж = 0,478 кг; хТ = 0,28 м ; хж = 0,16 м;
0,098 м; Х2 = 46,51 Вт/(м-К); а2 - 0,122-10"‘ м’/с;
а, -23,26 Вт/(м2К); а, 300Вт/(м2-К); с9 = 1000Дж/(кг-К);
сж - 1844 Дж/(кгК); Лтр = 1,4 кН; f— 0,16-10"4 м2.
На начальном этапе нагружения рессоры (в течение первых
нескольких циклов сжатия—расширения) наблюдается снижение
температуры газа (рис. 2.19). Это явление может быть объяснено
Риг. 2.19. Влияние циклов сжатия-
расширения (при частоте перемеще-
ния поршня 41 с_|) на температуру
газа и рабочей жидкости в полостях
ГПР;
I. 2 экспериментальная температура га-
за; J, 4 — температура газа, рассчитан-
ная по уравнениям (2.19). (2.20); 5, 6 —
температура гача, рассчитанная по урав-
нениям (2.21); 7, В — рассчитанная и экспе-
риментальная температура жидкости соот
ветствемно
нестационарным теплообменом между газом и стенками пневмо-
камеры, когда количество тепла, отведенного от газа в стенки,
больше подведенного к газу от стенок. Экспериментально уста-
новлено, что во всех случаях нагружения гидропневморессоры ха-
рактер изменения экстремальных значений температуры и давле-
ния газа в пневмобаллоне одинаков: сначала происходит сниже-
ние давления и температуры (I этап), затем наступает период их
временной стабилизации (II этап), после чего из-за тепловыде-
ления в амортизаторе наблюдается постепенное повышение зна-
чений (III этап).
Откорректировав коэффициенты в уравнении (2.19), получим
следующую систему дифференциальных уравнений, описывающих
рабочий процесс в гидропневморессоре:
---(» +1) + (43.5 Л, - 0,1 Л..х,л) +
4-(3,6 Л, -0,1 Д.)|-^-ехр|-а4(/-^)|Л-30Лл+ (2.21)
+ 6,6Л,J-^-ехр[-аД<-Лл, 1^1=0;
б dx u| dx |
46
- в,», + в, f -^-«р 1-а> С‘ - ;)J * + в< f -7г- х
Q d-C i «'
Х(-М* ')]^4-BJ-^exp| a[t(t — *)] dx - B*x0 ||
-^|4Г=°-
Погрешность расчета текущей температуры газа в ГПР по
уточненному алгоритму не превышает 10%.
По уравнениям (2.21) можно оценить влияние на температуру
газа (на I этапе нагружения ГПР) степени его сжатия и массы,
скорости перемещения штока, температуры окружающей среды,
условий теплообмена ГПР с окружающей средой, теплопровод-
ности материала стенок пневмобаллона и корпуса ГПР, мощнос-
ти внутренних источников тепловыделения.
Увеличение частоты нагружения ГПР, сопровождающееся по-
вышением внутренней энергии газа, приводит к увеличению теп-
ловых потоков в стенки пневмо-
баллона, что вызывает снижение
максимальной температуры газа
(рис. 2.20), наиболее интенсив-
ное при (о= 1,5... 8 с~*. Даль-
нейшее повышение частоты на-
гружения (до 12 с 1 ) практиче-
ски не влияет на температуру
газа.
Рис. 2.20. Влияние частоты нагружения
ГПР (/) и степени сжатия газа (2) на
его максимальную температуру при
ГСр-293 К. г = 2,08, ш-41 с”
При изменении степени сжатия газа в от 1,5 до 4,5 его макси-
мальная температура снижается на 43 К.
Изменение температуры ГПР от 240 до 360 К практически не
влияет на температуру газа в переходном процессе; незначитель-
ное влияние на температуру газа оказывают его масса и коэф-
фициент теплообмена гидропневморессоры с окружающей средой.
Так, увеличение массы газа с 0,05 до 0,1 кг сопровождается до-
полнительным снижением максимальной температуры газа только
на 3,5 К.
Изменение коэффициента теплообмена от 20 до 100 Вт/(м2-К),
что соответствует свободной конвекции при размещении ГПР
внутри корпуса машины и обдуву гидропневморессоры, располо-
женной снаружи корпуса, потоком воздуха при движении машины
47
со скоростью 40 км/ч, практически никакого дополнительного из-
менения температуры газа в рессоре не вызывает.
При изменении теплопроводности а2 материала стенок пневмо-
баллона от 20 до 50 Вт/(мК) максимальная температура газа
снижается на 17 К (рис. 2.21, а), что связано с уменьшением
теплоотдачи газа в окружающую среду. При А*->-0 рабочий про-
цесс в газовой полости ГПР будет приближаться к адиабатиче-
скому, поэтому максимальная температура газа будет сохранять-
ся постоянной.
Рис. 2.21. Влияние теплопроводности стенок корпуса (а) и мощности тепловы-
деления в рессоре (б) на максимальную температуру газа при Гср -293 К.
е —2,08, <о-4!с-|
Увеличение мощности внутреннего тепловыделения и демпфи-
рующем элементе (см. рис. 2.21, б), определяемое диаметром
дросселирующих отверстий и скоростью перемещения штока, по-
вышает стабильность работы ГПР, поэтому максимальная темпе-
ратура газа уменьшается.
Полученные результаты свидетельствуют о том, что лучшие
параметры рабочего цикла сжатия—расширения газа в переход-
ном тепловом режиме (на начальном этапе нагружения) будут
иметь ГПР, у которых степень сжатия газа и теплопроводность
материала стенок пневмокамеры ниже, а мощность внутренних
источников тепловыделения выше.
Глава 3 АМОРТИЗАТОРЫ
3.1. ОБЩИЕ СВЕДЕНИЯ
Амортизатор — устройство, предназначенное для гашения ко-
лебаний подрессоренного корпуса ВГМ. Амортизаторы, поглощая
энергию колебаний корпуса, т. е. в конечном итоге потребляя
часть мощности двигателя, превращают ее в теплоту и рассеи-
вают в окружающую среду. В современных ВГМ применяются
гидравлические и фрикционные амортизаторы (табл. 3.1).
Типичный телескопический гидравлический амортизатор пока-
зан на рис. 3.1. Их распространению на ВГМ (особенно на лег-
ких плавающих) способствовали небольшие масса и габариты,
простота конструкции, легкость получения требуемого сопротив-
ления, малая трудоемкость изготовления и низкая себестоимость.
Преимуществом телескопических амортизаторов, устанавливае-
мых снаружи машины, является высокое значение коэффициента
теплообмена а, а также простота конструкции уплотнения, позво-
ляющая применять теплостойкую резину типа ИРП-1287 и
ИРП-1316 на основе фтористого каучука СКФ-26 с рабочей тем-
пературой не менее 200°С. Недостатком таких амортизаторов
является сложность реализации большого хода опорного катка
и необходимой поверхности охлаждения в ограниченном про-
странстве между бортом и катком ВГМ. Кроме того, поршневая
группа телескопического амортизатора сильно нагружена инер-
ционными силами, возникающими при качении катка по беговой
дорожке гусеницы. Уплотнение штока при возвратно-поступатель-
ном движении подвержено действию постоянно обновляющегося
абразива, что вызывает повышенный износ уплотнительных ман-
жет. Поэтому в настоящее время наблюдается тенденция к герме-
тизации полости, окружающей шток, дополнительным тканевым
чехлом, уплотнительными устройствами в цилиндрическом кожухе
(рис. 3.2) и гофрированным чехлом. Во избежание возникновения
высокого давления, разрывающего чехол, его внутренняя полость
соединяется с дополнительной емкостью, размещенной, например,
в кронштейне жесткого упора (рис. 3.3). Следует отметить, что
кожух прикрывает значительную часть поверхности амортизатора
от потока охлаждающего воздуха и тем самым снижает примерно
49
8
ПАРАМЕТРЫ АМОРТИЗАТОРОВ
Таблица 3.1
Тип амортизатора ВГМ Масса, кг Ход, угол поворота рычага Диа- метр поршня, лопас- ти, дис- ка, мм Коли- чество Пере- даточ- ное число (сред- нее) Объем жидкости, СМ* Поверх- ность охлажде- ния, см* Коэффициент теплообмена а при скорости воздуха 6,2 м/с, Вт/(М>‘К) Тип защитного устройств >
Гидравлический: рычажно-поршневой ПТ-76 - 18.5 160 мм 65 4 1,40 900 1250 Не опреде-
лопастной Т-62 28.4 117° 170 4 0,71 * 1000 2010 лялся То же
Т-72 58 87е 250 6 1.0 2550 3800 58,2 Лабиринт
телескопический М-1 Т-64.А 26,1 229 мм 105 Hei 6 г сведс 1,42 ?ний 2450 2260 81,5 Гофриро-
Т-80 27 234 мм 90 6 1,52 2350 3390 80,4 ванный ко- жух
~ * МТС 19 181 мм 70 4 1,5 1900 1920 Не опреде- Жесткий
МТЛ-Б 11.5 150 мм 70 4 2,2 900 1300 лялся 84,5 кожух То же
- z . - - - БМП-1 14,3 164 мм 65 4 2,2 750 915 56,2**—80 »
АМХ-13 15,1 125 мм 65 4 2.2 570 1204 Нет сведе- >
«Леопард-1» 19,1 249 мм 65 10 *1,27 2400 1600 ний 43 »
М 46 16 180 мм 63,6 10 Нет сведени i 1553 Нет сведе- »
М-48 14,5 Нет сведении 10 То же 1262 ний То же »
Фрикционный * «Леопард-2» 100 5г530 мм |^250 10 » 5200 » Лабиринт
* Расчетные данные.
•* Для амортизаторов, изготовленных до 1975 г.
на 20 % его теплорассеивающую
менных конструкциях применяют
щие только шток и часть корпуса
и прямого воздействия абразива
Hl.fi I/ t >' | I
способность. Поэтому в совре-
эластичные чехлы, экранирую-
уплотнения от потока воздуха
Рис. 3.1. Телескопический гидравли-
ческий амортизатор:
/ — корпус; 2—шток с поршнем; 3 —
направляющая втулка; 4 — корпус уплот-
нения; 5 — защитный чехол; 6, 7, 8 — на-
порный, перепускной и всасывающий кла-
паны соответственно
Рис. 3.2. Телескопический гидравли-
ческий амортизатор французского
танка АМХ-13:
/ — рабочий цилиндр; 2 — щток с порш-
нем в сборе; 3 — направляющая втулка;
4 — корпус уплотнения; 5 — пружина; 6 —
сухарь; 7 — кожух; 8 — наружный ци-
линдр; 9—клапан прямого ходя; 10 —
клапан обратного хода; // — ссасываю
щий клапан
51
Амортизаторы БМП-1 первых выпусков, выполненные по типу
двухтрубных автомобильных с переменным направлением потока
рабочей жидкости, как и у французского танка ЛМХ-13, имели
низкий коэффициент теплообмена (см. табл. 3.1). Наличие воз-
душной камеры вокруг рабочего цилиндра, а также малый обмен
жидкости в компенсационной камере привели к тому, что наруж-
ная поверхность корпуса амортизатора нагревалась на 40 К мень-
Рнс. 3.3,. Варианты подсоединения внутренней полости чехла к дополнительной
емкости и кронштейнах поддерживающих катков и жестких упоров:
/—опора амортизатора; 2 — труба; .7 кронштейн поддерживающего катка; 4 - кронш
тейн жесткого упора
ше, чем рабочий цилиндр, что в сочетании с жестким кожухом
обусловливало пониженное значение а (на 45 % меньше, чем у
других гидравлических амортизаторов). Введение циркулирую-
щей рабочей жидкости через
компенсационную камеру позво-
лило повысить а до уровня коэф-
фициента прямоточных амортиза-
торов. Однако при циркуляции
рабочей жидкости в соответствии
с рис. 3.4, а в компенсационной
камере происходит интенсивное
механическое перемешивание
жидкости с воздухом и газожид-
костная смесь, засасываясь в ра-
бочие полости, вызывает свобод-
ный ход штока, тем больший, чем
меньше объем жидкости в ком-
пенсационной камере и чем боль-
Рнс. 3.4. Схемы циркуляции рабочей
жидкости в амортизаторах:
а прямоточных; б — прямоточных с допол
ннтельной воздушной полостью н компенса
пионной камере; в прямоточных с истече
нием жидкости по трубке из полости обрат
кого хода под уровень жидкости в коипен
сацнонноА камере; гс переменным направ-
лением потока
ше ее циркуляция. Одним из способов уменьшения свободного хо-
да штока является применение дополнительной воздушной полости,
омываемой жидкостью компенсационной камеры (см. рис. 3,4, б).
52
Другим способом, менее эффективным с точки зрения тепло-
обмена, но конструктивно более простым, является направление
жидкости из полости обратного хода под уровень жидкости в ком-
пенсационной камере с помощью трубки (рис. 3.4, в). Использу-
ются также амортизаторы с переменным направлением потока
рабочей жидкости (рис. 3.4, г).
Амортизаторы, устанавливаемые внутри машины (многоцеле-
вого транспортера и французского танка АМХ-13), имеют низкие
значения а, так как при свободной конвекции, в результате кото-
рой происходит теплоотдача внутри машины, эффективность
охлаждения почти в 2,5 раза ниже, чем при обдуве воздухом, дви-
жущимся со скоростью 6,2 м/с.
Аналогично происходит теплоотдача с части поверхности ло-
пастного гидравлического амортизатора (рис. 3.5), расположен-
ной внутри корпуса машины, например, в танке Т-72. Мощность,
Рис. 3.5. Лопастной гидравлический амортизатор танка Т 72:
/ корпус; 3 ротор в сборе; 3 - напорный клапан; 4 — перегородка; 5 всасывающий
клапан; 6 крышка; 7 — манжета; Л уплотнительные вкладыши
которую амортизатор может рассеять в окружающую среду, про-
порциональна произведению aS. Поскольку меньшие значения a
компенсируются в лопастном амортизаторе увеличенной поверх-
ностью охлаждения S, то в установившемся тепловом режиме
рассеиваемая мощность лопастного и телескопического амортиза-
торов практически одинакова (при прочих равных условиях). Уве-
личить теплорассеивающую способность лопастного амортизато-
ра без изменения его поверхности можно, улучшив условия отво-
да теплоты в корпус машины. Для этого целесообразно увеличить
площадь контакта амортизатора с кронштейном корпуса и увели-
чить толщину стенок самого кронштейна.
53
Сложная конструкция уплотнительных манжет в лопастном
амортизаторе затрудняет применение теплостойких резин. Время
нагрева амортизатора пропорционально массе. Так как лопаст-
ные амортизаторы обладают большей массой, а реальные условия
эксплуатации характеризуются в основном неустановившимися
тепловыми режимами, то в среднем температура их рабочей
жидкости будет меньше, чем у телескопических амортизаторов.
К недостатку лопастных амортизаторов следует отнести высо-
кую нагруженность их неподвижных соединений и стенок цилинд-
ров. Так, при давлении в 10 МПа (прямой ход) в конструкции
амортизатора танка Т-72 возникает результирующая осевая сила,
превышающая 250 кН: деформируются стенки корпуса, перегород-
ки, вытягиваются крепежные болты перегородки. В результате
упругих деформаций зазоры увеличиваются, и реализовывать вы-
сокие значения сопротивления становится затруднительно. Напри-
мер, для повышения сопротивления с 20 до 40 кН при окружной
скорости рычага 1 м/с потребовалось уплотнить планками пере-
городку по наружному диаметру и торцу, уменьшить торцовый
зазор между ротором и корпусом до 0,05 мм и использовать рабо-
чую жидкость с плотностью 1,13 г/см3 вместо 0,9 г/см3.
В танке «Леопард-2» применен фрикционный амортизатор
соосной конструкции (рис. 3.6).
Осевая сила, создаваемая та-
рельчатыми пружинами, слу-
жит для образования меж-
ду дисками трения давления,
пропорционального перемеще-
нию опорного катка.
Рис. 3.6. Фрикционный амортизатор
танка «Леопард-2»:
I — балансир; 2 — Подвижные диски; 3 —
неподвижные диски; 4 — корпус; 5 вра
щаюшееся поджимное кольцо; 6 — под-
жимное кольцо; 7 — тарельчатая пру
жнна
Установка фрикционных амортизаторов на пяти и более под-
весках по борту машины способствует их равномерной нагружен-
ности при более высокой средней скорости движения и такой же
мощности, какая потребляется наиболее нагруженными фрик-
ционным или гидравлическим амортизаторами.
3.2. РАСЧЕТ И ПОСТРОЕНИЕ ХАРАКТЕРИСТИК
ГИДРАВЛИЧЕСКОГО АМОРТИЗАТОРА
В методике расчета амортизатора учитывается влияние кон-
структивных параметров, а также свойств рабочей жидкости на
54
его характеристики. При расчете предполагается, что часть объе-
ма газа находится в механической смеси с жидкостью в соотно-
шении
(3.1)
Здесь Еж„ и Wm. —соответственно объемы жидкости и газа,
находящегося в механической смеси с жидкостью, приведенные
к заправочным условиям при давлении р0 и температуре То.
Остальная часть газа Игсв находится в компенсационной камере
и условно отделена от механической смеси газа и жидкости, что
правомерно для установившегося режима работы амортизатора,
который достигается уже после 3—5 полных ходов подвижного
звена.
Рассмотрим схему телескопического амортизатора (рис. 3.7)
с тремя полостями (две рабочие и одна компенсационная), кото-
рые соединены друг с другом
двумя дроссельными отверстия-
ми с перепускными клапанами.
Наличие дроссельных отверстий
позволяет, по-разному направляя
рабочую жидкость, получить пря-
моточный амортизатор (при на-
личии отверстий из полостей об-
ратного хода в компенсационную
камеру) и амортизатор с пере-
менным направлением потока ра-
бочей смеси (при отсутствии от-
верстий из полости обратного хо-
да).
Для имитации зазоров в кла-
панах и соединениях лопастного
амортизатора предусмотрены два ।
щелевых отверстия на поршне и
по одному между компенсацион-
. <
ной камерой и полостями прямо-
го и обратного ходов.
Рассмотрим прямой ход поршня.
пературе Т =const масса смеси в полости 1
Рис. 3.7. Схема телескопического
амортизатора с тремя полостями:
I - полость прямого хода; 2 — полость
обратного хода; 3, 5 «вредные» про-
странства в полостях обратного и поя
мого ходов; •/ — компенсационная камера
В момент времени t при тем-
а в момент времени t 4- Д/
"« + ><) = Л.(, + „/«(, + = <Р.., + ДР««) < % - 4 •
где р в У — плотность и объем смеси в соответствующие моменты времени.
55
Продифференцировав выражение уменьшения массы смеси за
время Д/ и отбросив бесконечно малый последний член, получим
rfm rfVzcM I/ ^Рсм /Q 9\
-dT -^-dT- V^~dF- №
Левая часть уравнения (3.2) представляет собой массовый расход
смеси из полости /, который может быть выражен через объемный
расход и плотность смеси, равную в момент времени t
mt _ rt
P’ - Sn (хюаж — x)-г A V, ’
где mr и л»ж — масса газа и жидкости в полости 1 при давлении pt ; AV| —
объем «вредного* пространства в полости 1, заполненного рабочей смесью при
крайнем положении поршня; Sn — площадь поршня.
Приведя плотность и объем газа и жидкости в текущий момент
времени t к заправочным условиям (ро, То) и учитывая равенство
(3.1), получим
Plc“r «я(хго„-х) + А^ •
Объем, который занимает жидкость в полости I, равен
V., = Км, - V,.«, S„ (х.„ - X) + Д V, - V,..
где Vr м —текущий объем газа, находящегося в механической смеси с жид-
костью при давлении ptt-
Полагая, что процесс сжатия газа происходит при постоянной
температуре, по уравнению Клапейрона—Менделеева объем газа
при давлении рч и температуре Т можно выразить через объем
газа при заправочных условиях:
= S, (х„„ - х) - V, + ДI/,. (3.3)
С другой стороны,
И., Кж.„(1 +МГ)[1 -«,(/>,,-А,)]. (3.4)
где Уж —объем жидкости в полости /, приведенный к заправочным усло-
виям; р — температурный коэффициент объемного расширения жидкости; ар-
коэффнциент относительного объемного сжатия жидкости.
Приравнивая правые части уравнений (3.3) и (3.4) и учитывая
формулу (3.1), получим
1/ _____________Sn (хГО1Ж — х) А ____________
(1 + Л (1 4- *рри - Ярр1() + ip.ТЦр}( Г.,) ’
откуда
5ti
Р,с“/ 6(t -hapPo-«p/’l/) alPit ’
где a-iTpJTo, 6-1 + рдТ.
Продифференцировав по времени выражение для определения
плотности смеси и подставив его в уравнение (3.2), после преобра-
зований получим дифференциальное уравнение для определения
давления в полости /. Аналогично выводятся урав-иения для поло-
стей 2 и 3, т. е. рабочий процесс амортизатора описывается си-
стемой трех нелинейных дифференциальных уравнений первого
порядка, каждое из которых в общем виде можно представить
следующим образом:
dpt
dt
где N — номер полости;
. Р№ + Р\ь О + арР° ~ арРн>
—-------------------------------’
a +
— условный объем полостей; QN —суммарный объемный расход рабочей
смеси в данной полости; dV^/dt — скорость изменения фактического объема
полости.
Условный объем полостей прямого и обратного хода равен их
фактическому объему:
Vfy» = SB(xin.x-x) + ДИ.;
^у.= ($я — 5ШТ) х + Д И2,
где S шт — площадь поверхности штока.
Условный объем компенсационной камеры:
6(1 + лрРо - 2«,/>3)
а + Ьарр*
где Vr cto —свободный объем газа в компенсационной камере, условно отде-
ленный от механической смеси газа и жидкости и приведенный к заправочным
условиям; — фактический объем компенсационной камеры.
Скорость изменения фактического объема полостей рассчиты-
вается по формулам
d И, 'dt - - Snx ; d V,/dt (Sa - $шт) x; d И, dt - 0.
При расчете лопастного амортизатора геометрические парамет-
ры рабочих полостей, ход и скорость рычага приводятся к средне-
му диаметру лопасти по следующим соотношениям:
SB = z£(D-d)/2; S№ = 0; х = (D + d) Т/2; х = (D + d) ? 2 ,
где z —число одноименных полостей; В—ширина лопасти. О —внутренний
диаметр цилиндра; d — наружный диаметр вала лопасти; ц> — угол поворота
лопасти; q> — угловая скорость поворота лопасти.
57
Суммарная подача рабочей смеси в полость определяется алге-
браическим суммированием подачи из других полостей, соединен-
ных гидравлически с рассматриваемой, и принимается со знаком
«4-», а расход из данной полости — со знаком «—».
Объемный расход определяется по формуле
Q
где |i — коэффициент расхода; f — площадь проходного сечения в направлении
потока рабочей смеем, Лр — разность давлений между полостями; Рем — плот
ность рабочей смеси в полости, из которой вытекает поток жидкости.
Без учета плотности газа
Рсм ~ * (I ± «рРо - <*рРк) + <*lpN ‘
Для определения потока, втекающего в данную полость, пода-
ча (объемный расход) умножается на отношение плотностей рабо-
чей смеси в соседней и рассматриваемой полостях. Это следует из
условия сохранения массы рабочей смеси.
Коэффициент расхода ц, учитывающий неравномерность рас-
пределения скорости по сечению потока и сжатие струи жидкости
в отверстии, в общем случае зависит от числа Рейнольдса. Указан
ная зависимость определяется экспериментально для различных
соотношений дроссельных отверстий и перепускных клапанов и
в полулогарифмических координатах имеет вид, показанный на
рис. 3.8 (здесь ReT - -f- 2 Др/р —теоретическое число Рей-
нольдса; dr— гидравлический диаметр щели).
Рис. 3.8. Зависимость коэффициента расхо-
да от теоретического числа Рейнольдса:
/ - по данным А. Д. Альтшуля; 2 — пример ап-
проксимации для расчета
Поскольку аналитически описать функцию для каждого дрос-
сельного отверстия невозможно, то задавать ее целесообразно пу-
тем кусочно-линейной аппроксимации (с числом участков до 5).
Коэффициент гидравлического сопротивления в щелевых от-
верстиях зависит от режима истечения и для ламинарного потока
определяется по формуле Хл = K\/Re,
а для турбулентных по формуле X, In Re - Кр'
где К,». K/f,К — экспериментальные коэффициенты.
Коэффициент расхода через щелевое отверстие
t*.=»//хД-4-е,
где / — длина щели; 5— коэффициент местных сопротивлений.
58
В реальной конструкции амортизатора истечение рабочей жид-
кости из одной полости в другую, как правило, происходит через
несколько параллельных дроссельных отверстий различного раз-
мера. Теоретическая скорость истечения для каждого из них оди-
накова, поскольку одинакова разность давлений. Суммарный рас-
ход рабочей жидкости через все отверстия определяется как сум-
ма расходов через каждое из них. Для определения коэффициен-
та расхода одного эквивалентного отверстия или нескольких
одинаковых отверстий используются следующие зависимости:
Re,t=^Rek,; (3.5)
i*. - ИЛИ |«,- ^ (•»/»/(<"/•). (3.6)
ft-1 ft-1 *— I
где n — количество дроссельных отверстии; m — количество эквивалентных от-
верстий; />, dT*. ReT*. fi* — площадь, гидравлический диаметр, теоретическое
число Рейнольдса и коэффициент расхода А-го дроссельного отверстия соответ-
ственно; dr ,, Re, ,, fi, — то же для эквивалентного отверстия.
Для построения зависимости — /»Re,T) задаются значения-
ми Re, т. По формуле (3.5) определяются соответствующие значе-
ния ReTjk для каждого из параллельных дроссельных отверстий.
По экспериментальным зависимостям (например, по кривой
А. Д. Альтшуля) определяют значения щ, соответствующие ReTjr
По формуле (3.6) определяются значения ц».
При последовательном расположении нескольких отверстий без
каких-либо ответвлений расход через каждое из них одинаков. При
замене нескольких последовательных отверстий эквивалентным
должно соблюдаться равенство
тЬг = ' (37)
Для построения зависимости р, /(Re, т) сначала задают не-
сколько значений Re, и для каждого отверстия определяют
Re^-^Re,.
fkdv. •
По экспериментальным данным подбирают значения соответ-
ствующие определенным ReA. Коэффициент расхода эквивалент-
ного отверстия определяется по формуле (3.7), а теоретические
числа Рейнольдса— по формуле Re, т - Re./р,- Расчет выполняет-
ся на ЭВМ.
По результатам расчета строятся рабочие диаграммы аморти-
затора, представляющие собой зависимость усилия сопротивления
подвижного эвена от его хода при заданных температуре и часто-
59
те перемещения. Сопротивление и скорость при прямом ходе от-
кладываются вверх по оси ординат графика, при обратном —
вниз (рис. 3.9).
Для лопастного амортизатора значения расчетного полного со-
противления (с учетом одноименных полостей), перемещения и
скорости подвижного звена являются приведенными к среднему
радиусу лопасти. Для приведения к оси рычага первый параметр
должен быть разделен, а остальные умножены на отношение ра-
диуса рычага к среднему радиусу лопасти.
Для построения скоростной характеристики с рабочей диаграм-
мы снимаются значения максимального усилия (точка /) и соот-
ветствующей ему скорости (точка Г). При этих значениях исклю-
чается влияние инерционных нагрузок и сопротивления сжимае-
мого газа (точка а на рис. 3.10).
Рис. 3.9. Расчетная рабочая дна
грамма амортизатора
Рис. 3.10. Скоростная характернстн
ка амортизатора на дроссельном
участке
Аналогичным образом, строя рабочие диаграммы для других
частот перемещения подвижного звена, получают дополнительные
точки, позволяющие построить скоростную характеристику амор-
тизатора.
Сопротивление в начале хода подвижного звена мало из-за
перемешивания газа с жидкостью и его хорошей сжимаемости.
Поэтому в расчетах плавности хода принимают усилие сопротив-
ления на этом участке равным нулю и определяют свободный ход
подвижного звена, при котором поглощенная энергия расчетного
и фактического амортизатора совпадают.
На рабочей диаграмме строят кривые рабочего процесса без
учета сжимаемости рабочей смеси (пунктирная линия на рис. 3.9),
для чего точки скоростной характеристики (см. рис. 3.10), соот-
ветствующие скорости перемещения подвижного звена до момента
60
возникновения максимального усилия, наносятся на рис. 3.9
(точки С, D, С', D'). Свободный ход определяется отрезком ОА
(О'А'} от начала движения подвижного звена О (О') до прямой
АС (Д'С'), проведенной таким образом, чтобы площадь ACDO'
(A'C'D'O) равнялась площади ОВ1О' (О'В'2О). Практически
удобнее отыскивать положение прямой АС (А'С') по равенству
заштрихованных площадей ОАВ и BCD1 (О'А'В' и B'C'D'2).
3.3. КОНСТРУКЦИЯ И РАСЧЕТ ОГРАНИЧИТЕЛЯ ТЕМПЕРАТУРЫ
В реальных условиях эксплуатации, особенно на учебных по-
лигонах, гидравлические амортизаторы могут нагреваться до тем-
пературы, предельно допустимой для рабочей жидкости. Для пре-
дохранения от перегрева устанавливаются ограничители темпера-
туры, снижающие сопротивление амортизатора при повышении
температуры. Ограничитель температуры должен сохранять рабо-
тоспособность при периодических нагревах — охлаждениях, иметь
минимальную инерционность, высокую надежность в любых кли-
матических условиях.
Основными составными частями ограничителя температуры
являются термодатчик и исполнительный механизм. Термодатчик
вырабатывает сигнал, пропорциональный температуре рабочей
жидкости, под действием которого исполнительный механизм
изменяет проходные сечения дроссельных отверстий амортизато-
ра. В настоящее время испытаны гидравлический, фторопласто-
вый и биметаллический термодатчики.
В гидравлическом термодатчике (рис. 3.11, а) используется
свойство жидкости расширяться при нагреве, за счет чего поршень
перемещается на расстояние
4р(Г-Г0)УЖд
Х ’
гдс объем рабочей жидкости при заправочных условиях (р0 = 0,1 МПа,
Г«Го); di, di— диаметр штока и поршня соответственно.
Рис. 3.11. Конструкция гидравлического (а), фторопластового (б) и биметалли-
ческого (в) термодатчиков:
./ — цилиндр; 2 дифференциальный поршень; 3 — заправочное отверстие; 4 поршень;
5 - фторопластовый стержень; 6 - биметаллическая пластина
61
Перемещение поршня датчика пропорционально изменению
температуры, однако в некоторых случаях (например, при заправ-
ке смесью турбинного и трансформаторного масел в соотноше-
нии 1:1) поршень при снижении температуры до 20°C не возвра-
щается в исходное положение, а при последующем нагреве до
200 °C перемещается больше, чем вначале.
Это объясняется тем, что давление внутри термодатчика
из-за разложения рабочей жидкости при повышении температуры
возрастает, следовательно, для заправки гидравлического термо-
датчика необходимо использовать термостойкую жидкость с рабо-
чей температурой, превышающей 250°С.
Фторопластовый термодатчик (рис. 3.11, б), принцип действия
которого основан на использовании линейного расширения фторо-
пласта, проще по конструкции,
так как не требует герметизации
внутреннего объема. Недостат-
ками термодатчика являются
скачкообразное изменение темпе-
ратурного коэффициента линей-
ного расширения фторопласта,
начало перемещения поршня тер-
модатчика при температуре бо-
лее 120 °C и появление гистере-
зиса при охлаждении (рис. 3.12).
Рис. 3.12. Экспериментальные характе-
ристики термодатчиков:
I — гидравлического; 2. 3 — биметаллического
с зазором и натягом между проушинами со-
ответственно; 4 — фторопластового
В биметаллическом, термодатчике используется способность
двухслойной пластины, выполненной из материалов с различными
коэффициентами линейного расширения, изгибаться при нагрева
ннн. Перемещение свободной части биметаллического датчика за-
висит не только от температуры, но и от его конструктивного ис-
полнения и свойств применяемых материалов. Для термодатчика,
показанного на рис. 3.11, в, характерна линейная зависимость из-
гиба от температуры:
4.72 ЦТ Т„)М
~-S
где/ —расчетная длина биметаллической пластины: S —толщина пластины.
М — коэффициент чувствительности термобнметалла (ГОСТ 110533—71); г ср
средний радиус.
При предварительном натяге между подвижной и неподвиж-
ной проушинами по наружному или внутреннему диаметру изме-
нение х начинается, когда усилие, возникающее за счет различ-
62
ного теплового расширения слоев пластины, превышает усилие
предварительного натяга.
В настоящее время для ограничителей температуры испытаны
исполнительные механизмы четырех типов: клапанный, дроссель-
ный с одним поворотным золотником, дроссельный с двумя пово-
ротными золотниками, кольцевой.
Исполнительный механизм клапанного типа (рис. 3.13) рабо-
тает следующим образом. При низком давлении в полости А зо-
лотник 3 и исполнительный клапан / закрыты. При определенной
разности давлений между полостями А и Б открывается задаю-
щий клапан 5. Жидкость, протекая через центральное отверстие
исполнительного клапана, создает разность давлений между поло-
стями А и В. На исполнительный клапан со стороны полости А
в этом случае будет действовать сила, стремящаяся его открыть,
и он откроется, когда будет преодолено сопротивление возвратной
пружины.
Рис. 3.13. Клапанный ограничитель температуры:
/ — исполнительный клапан; 2 возвратная пружина; / — золотник управления; 4 тер
модатчик; 5— задающий клапан; 6 — пружина; А, Б. 3 — полости прямого и обратного
ходов и исполнительного клапана соответственно
Аналогичный процесс происходит при соединении полостей В
и Б золотником управления 3, перемещаемым с помощью термо-
датчика 4, причем снижение сопротивления прямого хода аморти-
затора происходит резко (уже при повышении температуры на
1—3°C, а повышение температуры рабочей жидкости за один ра-
бочий ход может достигать 3—5°C). Следовательно, сопротивле-
ние амортизатора может снизиться при переезде даже через
одну неровность, что может привести к неожиданному воздействию
больших перегрузок на экипаж при пробое подвески. Ограничи-
63
тель температуры должен обеспечивать плавное снижение сопро-
тивления амортизатора, что может быть достигнуто за счет умень-
шения длины щели, открываемой золотником управления
(рис. 3.14). Недостатком ограничителей подобного типа является
зависание исполнительного клапана из-за попадания продуктов
износа в малые зазоры между посадочными поверхностями кла-
пана.
Рис. 3.14. Влияние избыточной температуры рабочей жидкости на сопротивление
прямого хода амортизатора:
I — с клапанным ограничителем; 2. 3 с дроссельным ограничителем при секторных и
круглых отверстиях; 4 — без ограничителя; 5, б — с клапанным ограничителем при
уменьшенной в 20 раз длине открываемой щели и полнокромочном золотнике соответсг
венно (сплошные линии — экспериментальные зависимости, штриховые — расчетные)
Дроссельный исполнительный механизм (рис. 3.15,а) состоит
из корпуса с крышкой, имеющего соосно расположенные круглые
отверстия, и золотника с таким же количеством овальных отвер-
стий. Золотник своей серьгой шарнирно присоединяется к подвиж-
ен
ной части термодатчнка так, что его отверстия несколько смс
щаются относительно отверстий в корпусе и крышке. При нагреве
подвижная часть термодатчика перемещается и поворачивает
золотник; кромки овальных и круглых отверстий при опреде-
ленной температуре начинают совмещаться. С увеличением угла
поворота золотника площадь открываемых отверстий плавно воз-
растает. Зависимость площади открываемых отверстий от окруж-
ного перемещения оси серьги имеет следующий вид:
где п — количество дроссельных отверстий в золотнике; гоп — радиус отвер-
стий; Ах — перемещение по окружности оси отверстия серьги золотника от
положения, в котором совпадают кромки отверстий; i—r/rc — передаточное
число (г — радиус окружности, на которой расположены дроссельные отверстия;
/с —радиус до оси отверстия серьги).
Полностью отверстия открываются при перемещении Дх=
Для исполнительного механизма с биметаллическим
термодатчиком прирост температуры к этому моменту
Д7'откр 2кг0ТН5/(4,72/Шгср).
Например, для ограничителя температуры с гота = 2,5 мм, 5=2,7 мм,
/=0,715, /=120 мм, гср = 26,5 мм и М = 26Ю-« 1/°, ЛГоткр —
«150 °C. Такой широкий интервал сужает диапазон нерегулируе-
мой рабочей температуры. Уменьшение ЛТоткр возможно за счет
уменьшения хода золотника, открывающего заданное проходное
сечение, а также за счет повышения чувствительности биметалли-
ческой пластины и изменения конструктивных параметров. Умень-
шить ход золотника (например, на 20%) можно, заменив круглые
и овальные отверстия секторными. В этом случае может быть
соответственно снижен температурный интервал открытия (см.
рис. 3.14). Увеличение чувствительности термодатчика также по
зволяет сузить температурный интервал полного открытия. Напри-
мер, применение термобиметалла ТБ2013 вместо ТБ1613 обеспе-
чивает уменьшение Д7*огмр примерно на 23 % за счет увеличения
коэффициента чувствительности.
С целью упрощения конструкции, уменьшения трудоемкости
изготовления и повышения надежности каждую проушину термо-
датчика можно соединить со своим плоским золотником
(рис. 3.15,6). Оба золотника могут перемещаться в осевом на-
правлении в пределах 0,5—1,0 мм и занимать любое положение
по окружности. Для подвода и отвода рабочей жидкости в крыш-
ке и корпусе имеются торцовые канавки.
Ограничители с дроссельными исполнительными механизмами
и биметаллическими термодатчика-ми показали высокую работо-
способность на стенде и при натурных испытаниях. Например,
после 300—550 циклов нагрева—охлаждения скоростные характе-
ристики амортизаторов изменились менее чем на 3%. При этом
5 Зак. 16<с> 65
обеспечивалось плавное изменение сопротивления амортизатора
(при сильном загрязнении рабочей жидкости продуктами износа
чугунных поршневых колец) при положительной и отрицательной
температуре окружающей среды.
В кольцевом исполнительном механизме (рис. 3.15, в) разрез-
ное кольцо из термобиметалла выполняет функции и термодатчи-
ка. Оно устанавливается в поршень с предварительным натягом
и прилегает к сопрягаемой поверхности. При нагреве сначала сни-
жаются напряжения изгиба в поперечных сечениях кольца, вы-
званные предварительным натягом, затем наружная поверхность
кольца образует с поршнем щель, через которую дросселируется
рабочая жидкость. Кольцевой ограничитель отличается простотой
конструкции и малыми габаритами, однако при испытаниях отме-
чено наличие зоны неустойчивой работы после его включения
(«всплески» усилий), а также повышенное сопротивление аморти-
затора при большой скорости перемещения поршня, т. е. при уве-
личенном расходе рабочей жидкости через дросселирующую щель.
Рассмотрим истечение жидкости в установившемся режиме по
кольцевой щели биметаллического кольца и его разрезу (замку).
Рис. 3.16. Схема распределения потоков и потерь давления в кольцевой щели
биметаллического кольца и в его замке:
а. 6 — потери по потокам Q, . « потери по потоку Q,: S , 5, , 5'- высота щели
между цилиндром и буртиком, цилиндром н кольцом, цилиндром н канавкой соответст-
венно; I, . I. - ширина кольца и буртика соответственно; Z, - ширина перекрытия кольца
буртиком;, 5,— радиальный и торцовый зазоры между кольцом и канавкой соответст-
венно ; рп ,рл — среднее давление на наружной и внутренней поверхностях кольца
Поток жидкости Qi (рис. 3.16, а) протекает по кольцевой щели
высотой Si и шириной В| между биметаллическим кольцом и ци-
линдром. Поток жидкости Q3 (рис. 3.16,6) проходит через канав-
ку шириной В2, равной ширине замка, а поток Q3— через торцо-
66
Таблица 3.2
Потери давления в местных сопротивлениях кольцевого ограничителя
Формула Значение коэффициента сопротивление A{j
Ари A.Q? 05 fl — ft 1 Р.
V sj 2B?S2
Лри —l.sps’B;
ЛаО? h _ ft r P
Ар и ' A ' 2B?S?
G₽
Ари
AaQ? p
Apis 2B?S’
Арп ^31^2
Ари 4 (S')3fl2 TaK KaK A . то Яи и
rt _ / - S \ p
Арп ^sj(Qj+Qj)2 °'5('- S' )2B>S>
^«(Qi+Qj)2 (1P
Ар« | 1,8 1g - 1.5 ]a4S3B^ P
Ар» 2B2Sa
A11Q3 P
Ари 2B?S^
ЛиРз 12»p/4
Ар» BjS’
ЛзэР1 P r л
Арм 2B?S‘
Лз<Рз 2 кургк
Ар« /4S’
Примечание, i — номер потока; / — номер сопротивления; р —плот
кость жидкости; V— кинематическая вязкость жидкости.
5* 67
вый зазор между стенками канавки и кольцом попадает во внут-
реннюю полость канавки и объединяется с потоком Qj на выходе
из нее. Размеры Si и В2 зависят от температуры.
Перепад давления между двумя соседними полостями аморти-
затора выразится через сумму потерь давления в местных сопро-
тивлениях (табл. 3.2).
Рис. 3.17. Расчетная схема по-
тока <?з
Выделим элемент канавки
da, расположенный под углом
а к разрезу кольца (рис. 3.17).
Через него протекает вся жид-
кость, поступившая через тор-
цовый зазор, т. е. поток
_ Qi (*- )
=----К---
Кроме того, через зазор расходуется жидкость
Учитывая, что в пределе dQ3-^0, потоком Q.3 можно пре-
небречь. Разность давлений при расходе Q,< по каналу длиной
rKda в ламинарном режиме истечения
^(«1= . (3.8)
после интегрирования получим
W=J2^(W_^), <39>
где 0<л.
Средние потерн давления в канавке ‘
Интегрируя правую часть формулы (3.10), получим
. 2 яургк л
Поскольку потоки Q2 и Q3 объединяются в разрезе кольца, то
Др21 = Д/>3, 4- Др32 4- Дрзз + Д/>34
68
или Q1A,, = QU31 + Q3Л32 + 4- QHn. (3.11)
откуда Q2-cQ», (3.12)
1/ 2 Л31 -r Mu + AulIQi
где с = у ----------т---------,
Л21
т. e. (?2+Q3= (l-|-c)Q3.
С помощью формулы (3.12), табл. 3.2, а также рис. 3.1 G
найдем
л) — Г) 1/ Апс* 4- (I 4- О8 (Лю ' Л3< ~Ь ЛЛ)
1 * ' Ли + Лц + Ли 4- Л|4 + Лц
Выразив потоки Q( и Q2 через Q3 и задавая значения Q3, можно
определить все потери давления, зная которые, можно определить
разность между средними давлениями, воздействующими на на-
ружную и внутреннюю поверхности кольца:
Д/’к - Р„ - Р. Ад., - (Д^и + ДРи/2 + Др3<)
или
Д^к — (ДРз1 4~ ДАз i ДРзз) — (ДА1 4 АРп/2) •
Если Арк>0, то давление на наружную поверхность кольца боль-
ше, чем на внутреннюю, а при Лр,с<0 давление с внутренней сто-
роны кольца превышает давление с наружной.
Из формулы (3.10) следует, что давление на внутреннюю по-
верхность кольца распределяется неравномерно, создавая резуль-
тирующую радиальную силу, направленную под углом 180° от раз-
реза кольца:
F = -^1..гАри.
Результирующая радиальная сила вызывает смещение кольца:
оно разжимается и перекрывает проходное сечение щели.
Кроме того, перекрытие щели происходит при отрицательном
значении Арк,так как момент сопротивления кольца в этом слу-
чае незначителен. Расчеты показывают, что это имеет место при
малых значениях Sb т. е. малой степени сжатия кольца
(рис. 3.18). При максимальном значении Sj = 0,5 мм и малом тор-
цовом зазоре (S3<0,05 мм) давление меняет знак, способствуя
сжатию биметаллического кольца. С увеличением расхода жидкос-
ти разность давлений Ар„ увеличивается, однако только при от-
сутствии торцового зазора S3 остается положительной, в осталь-
ных случаях она отрицательна и способствует разжатию кольца.
Давление на внутренней и наружной поверхностях кольца
можно уравновесить, например, с помощью радиальных отвер-
стий. Стендовые испытания показали, что суммарная площадь
равномерно распределенных по кольцу радиальных отверстий
69
должна составлять нс менее 6 % площади наружной поверхности.
Чтобы частицы грязи не попали в малый торцовый зазор и не
вызвали заклинивания кольца, следует обеспечивать чистоту внут-
ренних полостей при сборке и применять жидкости с повышенны-
ми противоиэносными свойствами.
ол
о
-ОЛ
-OJO
-0,0
-1,0
-1Л
Рис. 3.18. Зависимость разности давлений между наружной и внутренней по-
верхностями кольца от сжатия кольца Si(a) и расхода рабочей жидкости
через кольцо Qi (б) при различных значениях торцового зазора
/_S(_0:2 — — 0,05 MU ; J - S4 — 0,1 .. . 0,3 мм
3.4. РАСЧЕТ ПОВЕРХНОСТИ ОХЛАЖДЕНИЯ
И МАССЫ АМОРТИЗАТОРА
Температура рабочей жидкости амортизатора Та и время
нагрева А/ определяются по следующим формулам:
- аг *5 - а/
Г, = (-^- + Г.,) (1 - е г*") + 7',е ; (3.13)
= • (3.14)
где N — мощность, потребляемая амортизатором; Гер — температура окружаю
щей среды; Tt Т^ —температура рабочей жидкости в моменты времени и /»;
5 — площадь поверхности охлаждения амортизатора; т — масса амортизатора,
с,- средняя удельная теплоемкость амортизатора, а — коэффициент теплооб-
мена (теплоотдачи).
Средняя удельная теплоемкость приближенно может быть оп-
ределена из условия равномерного нагрева всех деталей и рабо-
чей жидкости по формуле
с, = (смтм + СжЯ/ж)//й ,
где сы н сж — теплоемкость металла и жидкости; тм и тм — их масса.
При длительном движении ВГМ по трассе с примерно постоян-
ным микропрофилем А/ достигает больших значений и
е с*т->0, т. е. устанавливается тепловой режим, при котором
70
мощность, поглощаемая амортизатором, равна тепловому потоку,
рассеиваемому им в окружающую среду. Максимальная темпера-
тура рабочей жидкости в установившемся режиме
+ (3.15)
Для расчета площади поверхности и массы амортизатора не-
обходимо знать мощность, поглощаемую им при различных до-
рожных условиях, коэффициент теплообмена и среднюю удель
ную теплоемкость амортизатора. Мощность определяется при ре-
шении задачи плавности хода.
Значения коэффициента теплообмена а зависят как от конст-
рукции амортизатора, так и от способа его охлаждения и могут
быть определены при расчете тепловых потоков или на основании
экспериментальных данных для аналогичного амортизатора. Вто-
рой путь более приемлем, так как на стадии расчета амортизато-
ра конструкция его еще не определена. При этом обычно прини-
мается, что скорости движения машины и воздушного потока,
охлаждающего амортизатор, равны.
Расчет амортизатора производят для установившегося и не-
установившегося тепловых режимов. Предельно допустимое зна-
чение разности температур &T=Tj—Тср выбирается исходя из
обеспечения работоспособности амортизатора при совпадении не-
благоприятных дорожных и климатических условий, т. е. при наи-
более напряженном тепловом режиме. Из опыта испытаний, а так
же из формулы (3.13) следует, что тепловой режим амортизатора
зависит от режима движения (JV) и способа охлаждения (а). Так,
максимальные значения температуры Г2, превышающие предель-
но допустимые для гидроамортизаторов БМП-1 и танка Т-64А,
наблюдались при движении по разбитым дорогам в сухую погоду
при температуре воздуха от —20 до 25 °C. Поэтому для облег-
чения расчетов можно принять в качестве расчетной Гср=°°С
(273 К), а ДТ=200К.
В установившемся тепловом режиме площадь поверхности
охлаждения амортизатора определяется из формулы (3.15):
S - ^/[«(7,- Тср)].
Для учета условий движения строится номограмма (рис. 3.19),
в I и IV квадрантах которой приводятся расчетные -Зависимости
мощности N и средней скорости движения машины и от средней
высоты неровностей h микропрофиля дорог для ВГМ определен-
ной категории по массе. Во П квадранте строятся зависимости
мощности от коэффициента теплообмена при определенных по-
верхностях охлаждения. Зависимости а от о для различных типов
амортизаторов приводятся в III квадранте. Задаваясь средней
высотой неровностей, находят поглощаемую мощность (точка Д),
затем соответствующую скорость движения машины (точка В),
71
по которой определяется коэффициент теплообмена для принятого
типа амортизатора (точка С). На пересечении характеристик N и
а получаем точку D. Совокупность подобных точек, построенных
для всего интервала высот неровностей, образует кривую N—
=/(а) (кривая 3 на рис. 3.19), ограниченную лучом постоянной
площади поверхности охлаждения, значение которой является ми-
нимальным для обеспечения допустимого теплового режима амор-
тизатора, в данном случае 0,35 м2.
Рис. 3.19. Номограмма для
расчета площади поверх-
ности охлаждения аморти-
заторов в установившемся
тепловом режиме:
I, i — кксперн ментальные кри-
вые для телескопического при
моточного амортизатора с гоф-
рнрпвпнным защитным чехлом
и лопастного амортизатора со-
ответственно; 9, 4, S— расчет-
ные кривые амортизаторов
ВГМ легкой категории по мас-
се ( ЗГ-200 К)
Для определения массы амортизатора можно воспользоваться
статистической зависимостью (рис. 3.20), отражающей определен-
ные соотношения между площадью поверхности охлаждения и
Рис. 3.20. Статистическая зависимость площа
ди поверхности охлаждения от массы амор-
тизаторов:
/ — телескопического; 2 - рычажно-поршневого,
лопастного и фрикционного
массой, сложившиеся в практике про-
ектирования. Так, отношение массы
к площади поверхности охлаждения
изменяется от 85 до 120 кг/м2 для те-
лескопического и от 150 до 185 кг/м2
для лопастного, рычажно-поршневого
или фрикционного амортизаторов. За-
даваясь значением S, по графику определяют массу, при кото-
рой эта поверхность может быть конструктивно реализована для
принятого типа амортизатора, например, S=0,35m2 можно реали-
зовать при ги=28кг для телескопического и т = 55кг для лопаст-
ного амортизаторов.
72
При проектировании амортизатора не всегда удается реализо-
вать требуемую площадь поверхности охлаждения на ВГМ. В этом
случае, а также при установке имеющегося амортизатора с другой
машины решают обратную задачу: по известной площади поверх-
ности охлаждения определяют пределы изменения сопротивления
амортизатора, обеспечивающие допустимый тепловой режим. Для
этого используется номо-
грамма (рис. 3.21), в I и
IV квадрантах которой
строятся_зависимости Лг и
v не от h, а от параметра
характеристик амортиза-
тора, например, коэффи-
циента сопротивления
прямого хода ЛПЛ, за
счет которого . предполаг
гается осуществить изме-
нение сопротивления. Эти
зависимости строятся для
наиболее напряженного
теплового режима. Пред-
варительно во II квадран-
те должна быть построе-
на зависимость N = f (а)
Рнс. 321. Номограмма для определения
допустимых характеристик амортизаторов:
1.2 телескопического и лопастного соотвстст
пенно (экспериментальные); Я, 4, 6 — расчетные
кривые для ВГМ средней кате: ори и по массе
(ЛГ-200 К)
для определенного пара-
метра, задаваясь значе-
нием которого находят N
(точка а), и (точка Ь) и
а (точка с), а по ним оп-
ределяется площадь по-
верхности охлаждения амортизатора (точка d). Повторение
указанных операций для других значений параметра
приводит к построению кривой 3. Для решения обратной задачи
во II квадранте берется точка D, соответствующая заданной пло-
щади поверхности (например, 0,22 м2), и определяются допусти-
мая поглощаемая мощность амортизатора (точка Д), а также ко-
эффициент сопротивления, который для указанного примера не
должен превышать 20 кН-с’/м2. При этом может быть реализова-
на скорость не выше 22,5 км/ч (точка В).
Следует отметить, что установившийся экстремальный тепловой
режим наблюдается в реальных условиях эксплуатации редко:
только при одновременном сочетании таких факторов, как одно-
родная по длине и высоте неровностей разбитая дорога достаточ
ной протяженности, отсутствие луж во впадинах неровностей и
снега, охлаждающих амортизатор, форсированный режим движе-
ния (как правило, одиночной машины). По данным ряда работ,
протяженность разбитых участков трасс составляет в среднем
5 км. Некоторые авторы предлагают оценивать теплонапряжен-
6 Зак. 16«с»
73
ность амортизатора по так называемой характеристике работоспо-
собности — зависимости пройденного пути от скорости безостано-
вочного движения при определенной температуре воздуха к мо-
менту нагрева рабочей жидкости амортизатора до максимально
допустимой температуры. При максимальной скорости движения
этот путь (Lp) должен превышать 5 км. Следовательно, время
нагрева (в с) до максимальной температуры
А/=-—3600. (3.16)
Решая совместно уравнения (3.14) и (3.16) при Г1 = ГЧ>,
3600 Лр 0$ 3600 £р А
v - In {N/^-«S(r,- rcp)| I - A
находим
(3.17)
Взаимозависимость массы и площади поверхности охлаждения
амортизатора может быть определена по этой формуле методом
последовательных приближений. Исходными данными здесь яв
ляются поглощаемая амортизатором мощность и скорость движе-
ния ВГМ, полученные по результатам расчета плавности хода на
дорогах с различной высотой неровностей (см. рис. 3.19). Удобнее
воспользоваться номограммой, приведенной на рис. 3.22, при
сл =0,55 кДж/(кг-К), Lp =5 км.
Рис. 3.22. Номограмма для определения массы н площади поверхности охлаж-
дения амортизаторов г ограничителем температуры (АГ--200 К);
/ — лопастного; 2 — прямоточного телескопического
В I квадранте строится зависимость величины А от поглощае-
мой мощности при постоянных значениях произведения aS, во
II — зависимость А от скорости движения машины при постояв-
74
ной массе амортизатора. В Ш квадранте приводится эксперимен-
тальная или расчетная кривая a=f(v), в IV — зависимость по-
глощаемой мощности от а при постоянных значениях произведе-
ния aS. Откладывая расчетные значения мощности в I квадранте,
находят ряд соответствующих значений произведения aS (в том
числе точку Е). Проводят горизонтали до пересечения с верти-
калью, соответствующей скорости движения при заданной мощ-
ности на определенной дороге (получают точку В). Продолжая
вертикаль вниз, находят значение а (точку С), по которому для
постоянных значений произведения aS определяют площади по-
верхности охлаждения (точка D), соответствующие заданной мас-
се амортизатора (например, точка В). Результаты графического
расчета заносят в табл. 3.3.
Таблица 3.3
Результаты расчета амортизатора для ВГМ легкой категории по массе
Л, мм N. и Вт V. км'ч «S, Вт/К т9 кг S, м»
10 10 0,15
15 Хм —
80 2,95 50 20 — —
25 — ---
30 — , ' —
10 21 0,09
15 18 0,13
135 6,4 40 20 15 0,18
25 12 0,22
30 8 0,28
10 25 0,1
15 21 0,14
162 36,5 20 18 0,2
25 14 0,23
6,5 30 10 0,29
10 27,5 0,1
15 24 0,15
183 32 20 20 0,21
25 16 0,25
30 11 0,31
10 34 0,12
15 29 0,18
245 5,5 20,5 20 25 0,24
25 14 0,30
30 — —
По данным таблицы строится зависимость площади поверхнос-
ти охлаждения от массы амортизатора для различных дорожных
6* 75
условий (рис. 3.23), показывающие, что требуемая работоспособ-
ность может быть получена при различном сочетании Зит, од-
нако некоторые из них не могут быть конструктивно реализованы
(расположенные за пределами заштрихованной эоны). На пере-
сечении кривой 4, характеризующей
5 Ю 15 20 т,кз
Рис. 3.23. Расчетная зависимость
площади поверхности охлажде-
ння от массы амортизатора для
дорог с различной высотой не-
ровностей:
/—135 мм: Т- 162 мм; 3 - IM мм:
4 — 215 мм; 5 — зона стэтнстическоП
записи мости (см. рис. 3.20>
наиболее напряженный тепловой
режим, с верхней границей зоны
статистической зависимости полу-
чают значения массы и площади
поверхности, которые реально могут
быть воплощены в конструкции
($>0,26 м2 при т С 21 кг). Этим
способом определяется приемлемый
тепловой режим амортизатора в
большинстве эксплуатационных ус-
ловий, и его следует признать наи-
более целесообразным.
Если в расчете ориентироваться
на форсированный режим движе-
ния одиночной машины по сухим
кольцевым дорогам, характерным
для учебных центров войсковых ча-
стей, испытательных полигонов и
приемо-сдаточных трасс, то полученные в этом случае зна-
чения массы и площади поверхности охлаждения не гаранти-
руют амортизатор от перегрева при эксплуатации, поэтому во мно-
гих из них применяются ограничители температуры. Для гаран-
тированного предохранения от перегрева характеристики аморти-
затора должны изменяться в таких пределах, при которых обес-
печивается установившийся тепловой режим при максимально до-
пустимой температуре, т. е. необходимо решить обратную задачу:
по известной площади поверхности охлаждения найти значения
характеристик, которые должны быть обеспечены предохранитель-
ным устройством. Следует иметь в виду, что при выходе на рас-
четную характеристику водитель не может сразу снизить скорость
движения, что приводит к увеличению вертикальных ускорений
(рис. 3.24). Например, пусть нормальная эксплуатация осуществ-
ляется при коэффициенте сопротивления прямого хода Лпх
= 100 кН-с2/м2, которому соответствуют скорость движения
v = 32 км/ч и мощность, поглощаемая амортизатором, N 9,4 кВт
(точки а и а') пригс в = 10 м/с2. При предельно допустимой тем-
пературе рабочей жидкости и данном ускорении достаточно бы-
ло бы для предохранения от перегрева снизить коэффициент со-
противления до Лп х 20 кН с2/м2; при этом скорость должна сни-
зиться до 21 км/ч, мощность —до 4 кВт (точки b и Ь'). Однако
водитель старается сохранить выбранный режим движения, ПО-
ТС
этому скорость машины при zCB =15 м/с2 снижается только до
28 км/ч, а мощность, поглощаемая амортизатором, до 8 кВт (точ-
ки с и с'), что выше предельно допустимого значения N (пря-
мая 4). Для гарантированного ограничения от перегрева необхо-
димо обеспечить коэффициент сопротивления прямого хода Ая х
= 10 кН-с2/м2, при котором поглощаемая мощность амортизатора
достигает значения меньше допустимого только при zt. в^15 м/с2
(кривые 3).
Рис. 3.24. Зависимость мощности,
поглощаемой первым амортизато-
рам, и скорости движения машины
от среднего вертикального ускорения
корпуса на месте сиденья водителя
zc., при различных коэффициентах
сопротивления прямого хода:
1.3, 3 — 100. 20, 10 кН -с’/м* соответст-
венно; 4 — мощность, рассеиваемая амор-
тизатором при О — 25 км/ч и АГ — 200 К
Следовательно, для определения характеристики амортизатора
с ограничителем температуры необходимо номограмму задачи, об-
ратной изображенной на рис. 3.21, строить при средних вертикаль-
ных ускорениях корпуса zc в, в 1,5 раза превышающих нормаль-
ный уровень.
3.5. УТОЧНЕННЫЙ ТЕПЛОВОЙ РАСЧЕТ
ДЕМПФИРУЮЩИХ ЭЛЕМЕНТОВ
Амортизаторы и гидропневматические подвески со встроенны-
ми в них демпфирующими элементами имеют сложную геометри-
ческую форму, поэтому их тепловой расчет не может быть выпол-
нен методами, применяемыми для теплового расчета тел правиль-
ной геометрической формы (цилиндр, шар, плоская стенка и т.п).
Тепловое состояние тела в любой момент времени можно
описать уравнением теплового баланса:
dQ = dQ„ + dQ. 4 dQ^ + dQ„ (3.18)
где dQ — количество теплоты, выделяемое внутренними источниками; (КА<—
количество теплоты, затрачиваемое на нагрев; dQ„ — количество теплоты, отво-
димое излучением; dQoa — количество теплоты, отводимое от тела через опоры;
dQK — количество теплоты, отводимое конвекцией.
77
Мощность источников тепла N=dQ{dt (где / — время) зави-
сит от целого ряда параметров, основными из которых являются
скорость движения машины, характеристики амортизатора и под-
вески, интенсивность дорожного воздействия. Обычно мощность
определяется при расчете плавности хода ВГМ на ЭВМ либо
экспериментально при пробеговых испытаниях на реальных доро-
гах. Количество теплоты, затрачиваемое на нагрев тела сложной
формы,
dQK ~ (скт* + G. «/8 ,
.-I
(3.19)
где гж, <м — удельно теплоемкость рабочей жидкости и металла; /яж, -
масса жидкости и Лх элементов тела; - коэффициент, характе-
ризующий неравномерность нагрева отдельных элементов; Н/ и Н—избыточ-
ная температура i-x элементов и рабочей жидкости.
Конструктивные схемы рассчитываемых
амортизаторов приведены на рис. 3.25 и 3.26.
Допустим, что рабочая жидкость аморти-
затора, благодаря интенсивному перемешива-
нию, равномерно прогрета, однако отдель-
ные детали, благодаря их массе, конфи-
гурации и т. п. нагреты меньше, чем жидкость;
тогда в уравнении (3.19)
Рис. 3.25. Конструктивная схема телескопического
амортизатора:
I — компенсационная камера; 1 — корпус уплотнения; 3 —
шток; 4- серьга. 5 — направляющая втулка (опора што-
ка); 6 рабочий цилиидр; 7 нижняя опора
Рис. 3.26. Конструктивная схема лопастного амортизатора:
/ — рычаг; Т —фланец цилиндра; 3 — кронштейн амортизатора на борту машины: 4
ротор; 5 — компенсационная камера; (—перегородка; 7 — цилиндр; 8 — лабиринт уплотне-
ния; Б —< внутренняя поверхность
78
„ V Л _ „ I _ 1^. 1 4* I + 1з I
См [™m 4“ "?0 ^Ц 9 2
+ »>. £££. + (т, + m.) ,
(3.20)
где тш — масса штока с поршнем или ротора; /п0— масса опоры или перего-
родки; /Пц—масса цилиндра; тк— масса компенсационной камеры; тв— масса
корпуса или лабиринта уплотнений; тп— масса нижней опоры или фланца,
те — масса серьги телескопического или рычага лопастного амортизатора;
— 0,95 ... 0,98* — отношение избыточной средней температуры поверхности ци-
линдра амортизатора к избыточной температуре рабочей жидкости;
— 0,9. .0,82*— отношение избыточной средней температуры нижней опоры
(фланца) н поверхности корпуса уплотнений к избыточной температуре рабо
чей жидкости; —0,7 ... 0,8* — отношение избыточной средней температуры
верхней опоры (рычага) к избыточной температуре рабочей жидкости.
Количество теплоты, отводимое излучением с поверхности
амортизатора,
dQ^a^T^SdT,
где Оо—5,67-10 8 Вт/(м2 К') —постоянная Стефана—Больцмана; Люи— тем-
пература поверхности; S— площадь поверхности теплообмена; ем —0,08 — ко-
эффициент, учитывающий отношение излучения серого тела к излучению чер-
ного тела; / — время излучения.
Расчет амортизаторов машин средней и легкой категории по
массе показал, что мощность излучения при избыточной темпе-
ратуре поверхности 6=200 К не превышает 0,02—0,03 кВт, что
составляет менее 1 % мощности источников тепловыделения, по-
этому потерями на излучение можно пренебречь.
Количество теплоты, отводимое с поверхности амортизатора
конвекцией (за счет обдува воздухом), равно
dQK aSQndt, (3.21)
где а — средний по поверхности коэффициент^ теплоотдачи; вп = Тпо» ?ср —
избыточная температура поверхности. Здесь а характеризует тепловой поток
только конвективного теплообмена поверхности с окружающей средой.
С учетом теплоотдачи от жидкости к стенке рабочего цилинд-
ра, теплопроводности через стенку и теплоотдачи с поверхности
уравнение (3.21) может быть представлено в виде
dQK - } kHdtdS « У kJS&dt.
(3.22)
Здесь —элементарная поверхность теплообмена; k; — коэффициент теплопе-
редачи, определяемый по формуле
* Экспериментальные данные.
. •-лп . -
79
где а ж — коэффициент теплоотдачи от жидкости к стенке; Х^— теплопровод-
ность »-го элемента; « — коэффициент теплоотдачи с поверхности в воздух;
толщина стенки f-го элемента.
Для телескопического и лопастного амортизаторов уравнение
(3.22) имеет следующий вид:
Н 2 *iS,dl Hdt ( j + + |(а + + + 1/а +
+ i/«« t v* 11/« + 1/.;+ цА’+Т"’+ aS‘w’'+ Т"S“a"+
U.---------------) /
где SBH. Зам — площадь поверхности и толщина стенки амортизатора, обра-
щенной внутрь корпуса машины и не контактирующей с ним (остальные индек-
сы при S и о см. формулу (3.20)); b — коэффициент, учитывающий неполное
заполнение компенсационной камеры (для большинства конструкций д—1,2);
«о — коэффициент теплоотдачи свободной конвекцией.
Для телескопического амортизатора SBH =0. Для лопастного
амортизатора 5Ш =0.
Общими исходными данными для расчета амортизаторов лю-
бых конструкций являются б и оо, для лопастного амортизатора
рассматривается также толщина бв1|.
Уравнение (3.23) справедливо только для стационарного теп-
лового состояния, при этом Z^.rsconst, В неустановившемся тепло-
вом режиме с целью учета влияния скорости распространения
тепла через стенку амортизатора необходимо решить следующее
уравнение для его элементов
*т 4 JL2L - о
(3.21)
где а — температуропроводность.
Решение этого уравнения с учетом граничных условий
а{Т - 0 при п 0 ;
X, а2Г - 0 при п S,
где ai, X! — коэффициент теплоотдачи и теплопроводность внешней поверхности
элемента амортизатора; а», Хе— коэффициент теплоотдачи и теплопроводность
внутренней поверхности элемента; — символ дифференцирования вдоль внеш-
ней нормали к поверхности,
показывает, что неустановившнйся режим с точностью, достаточ-
ной для инженерных расчетов (до 10%), можно описать урав-
нением (3 23), если в выражении коэффициента теплопередачи Л,-
теплопроводность X умножить на выражение
1 е + (3.25)
где t— время нагрева; У/ — мощность тепловыделения.
80
Зависимость Wi=j(t) задается ступенчатой кривой. На ьм
участке кривой мощность постоянна и равна тепловыделению в
амортизаторе при движении машины по трассе (с определенными
й, L) с постоянной скоростью v; интервал времени t соответствует
продолжительности движения ВГМ по выбранному участку. Вы
ражение (3.25) может применяться для элементов массой не более
20 кг с площадью поверхности теплообмена не более 0,5 м2.
Количество теплоты dQon, отводимое от элемента в корпус
машины, в общем виде характеризуется уравнением
dQ^dQ^+dQ'.b,
где dQH 6 — количество теплоты, затраченное на нагрев борта машины; dQK(l
количество теплоты, отводимое с поверхности борта конвекцией.
Амортизаторы (лопастной, телескопический, рычажный) кон-
тактируют с корпусом машины одной опорой, а второй непосред-
ственно или через систему рычагов соединены с балансиром. Из
практики известно, что значительно
нагревается одна из опор: у аморти-
заторов телескопического типа —
это нижняя, у лопастного и рычаж-
ного — фланец крепления к корпу-
су машины.
Поскольку теплоотвод через вто-
рую (менее нагретую) опору незна-
чителен, то в расчете им можно
пренебречь и для амортизаторов
различного конструктивного испол-
нения принять единую конструктив-
ную схему (рис. 3.27). При этом
кронштейн крепления можно пред-
ставить как неограниченную пласти-
ну постоянной толщины. Количест-
во теплоты, отводимое через поверх-
ность контакта с кронштейном
амортизатора, можно определить
по формуле
Рис. 3.27. Обобщенная схема
амортизатора:
I — амортизатор; 2 кронштейн
амортизатора или Ворт машины
2 T.rjidt, (3.26)
где X —теплопроводность материала корпуса машины; 0| — избыточная темпе-
ратура борта; го—радиус отверстия в кронштейне крепления амортизатора
(у телескопического амортизатора соответствует радиусу нижней опоры), Л —
толщина корпуса машины или кронштейна амортизатора.
Уравнение теплового баланса для корпуса толщиной й имеет
следующий вид:
81
2 rrhdt — Арс2к(г + dr)d&\dr -f- 2it(r + dr)dr X
X (« — «о)dt — X-^-2 «ft(r J- dr) dt
Г/ ж л*'\ ан' i
или AXIv5F w)r ~liTdr\ r?ch ~аГ dr 4 ^)dr,
где p, с— плотность и теплоемкость материала корпуса.
После соответствующих преобразований получим:
а»н, ан. ,. , ан, о .
Алг 4- Ал rpch—~ + 9tr(ct ] а0).
Окончательно дифференциальное уравнение теплопередачи в
борт имеет вид
a’Hj । 1 ан, рс ан, а + «о u ,q О7Х
+ ------7—dt-——Н>- <3-27)
При этом предполагается, что температура равномерно распре-
делена по толщине кронштейна; коэффициенты теплоотдачи как с
наружной, так и с внутренней сторон корпуса — постоянные вели-
чины; толщина кронштейна А постоянна на достаточно большом
удалении от гндроамортизатора; ширина контакта амортизатора
с кронштейном равна толщине кронштейна.
Для решения уравнения (3.27) зададимся начальными и гра-
ничными условиями.
Начальные условия характеризуют температурное поле амор-
тизатора до начала движения машины:
0 при t — 0;
в, = /(JV, t) при t >0. (3,28)
Граничные условия характеризуют значения температуры на
границах контакта амортизатора с корпусом:
Н. НАК при />0, г-гл,
Н, =0 при />0, г-оо, (329)
где Лж ~ 0,9... 0,98—температурный коэффициент при контакте амортизатора
с корпусом, определяемый экспериментально по термическому сопротивлению
контакта.
Исходное уравнение теплового баланса (3.18) с учетом выра-
жений для составляющих имеет следующий вид:
Ndt - | сжтж 4- сы /п0 : та *—уЬ 4- тк -H.+.t»... 4-
+ 4. (дц + dfi 4-
+ ( !/«« + &+ 1/« + 1^/«ж + М + 1/« + 1/«ж + *нМ + 1/« +
82
C I
+ V««+ ».'* + I/. + *5‘’1’Л + Ts^«
+ ) + XI I 2 ГГ.ЛЛ. (3.30)
1/«и+*аиЧ + I Л |r«G °
Совместное решение системы уравнений (3.27) и (3.30) с на-
чальными (3.28) и граничными (3.29) условиями позволяет найти
температуру рабочей жидкости амортизатора с учетом всех со-
ставляющих теплопередачи. Расчеты, выполненные на ЭВМ с ис-
пользованием приведенного алгоритма, дают результаты, удовлет-
ворительно совпадающие с экспериментальными.
3.6. ЭКСПЕРИМЕНТАЛЬНАЯ ОЦЕНКА ТЕПЛОНАПРЯЖЕННОСТИ
АМОРТИЗАТОРОВ
Условия эксплуатации амортизатора разнообразны как по ре-
жимам нагружения, так и по взаимодействию с окружающей сре-
дой. Средний коэффициент теплоотдачи с поверхности амортиза-
тора принимает минимальные значения при движении машины в
летний период по сухим дорогам, при этом перегрев и выход из
строя амортизаторов наиболее вероятны.
Для оценки теплонапряженности амортизаторов в стендовых
условиях выбирается не менее пяти установившихся тепловых
режимов их работы. На каждом режиме амортизатор нагревается
до определенной температуры (последовательно при трех значе-
ниях скорости обдува воздухом о,, имитирующих скорости дви-
жения машины при отсутствии ветра). В процессе исследования
через определенные интервалы времени регистрируется темпера-
тура рабочей жидкости. По полученным данным строится зависи-
мость T=f(i, ц,).
При установившейся температуре рабочей жидкости на ленту
осциллографа производится запись хода у опорного катка и уси-
лия сопротивления амортизатора /?,, строятся диаграммы рабо-
чего процесса, по которым определяется тепловая мощность
NK=^Rady!ta,
где ус — ход катка в стендовых условиях; /ц—время цикла нагружения.
По полученным данным строятся зависимости тепловой мощ-
ности от избыточной установившейся температуры В при опреде-
ленных значениях скорости обдува воздухом. В установившемся
режиме вся энергия, выделяемая внутренними источниками тепла,
рассеивается с поверхности амортизатора, поэтому точки пересе-
чения линии максимально допустимой температуры с кривыми
WK=f(0) определяют теплорассеивающую способность амортиза-
тора.
83
Тепловая напряженность амортизатора характеризуется отно-
шением мощности, поглощаемой им при эксплуатации машины в
реальных дорожных условиях, к его теплорассеивающей способ-
ности. Определение мощности, поглощаемой амортизатором при
эксплуатации, основано на предположении, что при достаточно
хорошей теплоизоляции поверхности амортизатора вся тепловая
энергия расходуется на повышение его энтальпии и, следователь-
но, темп нарастания температуры рабочей жидкости прак-
тически линейно зависит от мощности источников тепловыделения.
Предварительно в стендовых условиях определяется градуиро-
вочная зависимость &T/bt=sf(N) (рис. 3.28) для амортизатора,
закрытого теплоизоляционным чехлом. Режимы работы стенда вы-
бираются таким образом, чтобы получить не менее пяти значений
мощности из диапазона, который может иметь место при реальном
движении машины по дорогам и местности.
движения машины. Исходными
градуировочной зависимости
Рис. 3.28. Градуировочная зави-
симость температуры от мощнос-
ти, поглощенной амортизатором
танка средней категории по массе
Для учета возможных
утечек тепла через изоля-
цию амортизатора на ма-
шине испытания на стенде
проводятся при обдуве
амортизатора воздухом со
скоростями, соответствую-
щими реальным скоростям
данными для построения
является осциллографиче-
ская запись изменения температуры жидкости, хода катка и
усилия сопротивления амортизатора.
По темпу нарастания температуры термоизолированных амор-
тизаторов определяют поглощаемую мощность.
Мощность тепловыделения в амортизаторах зависит от дорож-
ных условий, параметров плавности хода и средней скорости
прямолинейного движения .машины. Натурные испытания прово-
дятся, как правило, на четырех-пяти прямолинейных участках
грунтовых дорог протяженностью 600—800 м, имеющих следую-
щие значения средней высоты неровностей продольного микро-
профиля: Л = 80. .100; НО... 130; 140... 160; 170... 190;
200...250 мм. Продольный микропрофиль дороги измеряется до
и после испытаний с целью учета его возможного изменения в про-
цессе эксплуатации. Данные замеров обрабатываются методом
математической статистики.
Рабочая жидкость амортизаторов предварительно разогревает-
ся до получения температуры 50—60°C при непрерывном движе-
84
нии ВГМ по разбитой грунтовой дороге. Движение машины на
каждом участке дороги осуществляется с заданной средней ско-
ростью, причем скорость заездов изменяется от минимальной до
максимально возможной с интервалом До=3...5 км/ч (при при
ближении и подходе к итах интервал изменения скорости может
уменьшаться). Максимальная скорость движения ВГМ опреде-
ляется из условия обеспечения безопасности экипажа.
Запись контролируемых параметров в течение каждого заезда
на ленту осциллографа или другую регистрирующую аппаратуру
осуществляется в одном направлении движения. Возвращение на
исходную позицию для выполнения следующего заезда произво-
дится со скоростью предыдущего заезда.
После выполнения всех заездов теплоизоляционные чехлы сни-
маются и осуществляется разогрев амортизаторов до температуры,
установившейся в процессе непрерывного движения машины.
В результате статистической обработки результатов испыта-
ний для различных участков строятся зависимости B=f(v)
и N n=f(v), где Лгп—мощность, поглощаемая амортизатором.
Если на график зависимости N„=f(v) (рис. 3.29) нанести
максимальную мощность, которую может рассеять амортизатор в
окружающую среду, то в точках пересечения с кривыми Mn=f(v)
получим значения предельных по тепловой напряженности средних
Рис. 3.29. Зависимость мощности, поглощаемой передним амортизатором,
от скорости движения машины на различных участках дороги (1—5)
скоростей движения на трассах неограниченной протяженности.
Поскольку выбранные участки дорог отличаются как высотой не-
ровностей, так и расстоянием между ними, то конечной целью
комплексной оценки тепловой напряженности амортизаторов яв-
ляется построение зависимости мощности, поглощаемой (рассеи-
85
ваемой) амортизатором, от обобщенного параметра дорожного
воздействия при постоянном уровне средних вертикальных ускоре-
ний корпуса в месте расположения водителя.
В качестве обобщенного параметра продольного микропрофи-
ля трасс принят интегральный статистический показатель интен-
сивности дорожного воздействия /, (в см’/м). представляющий
собой произведение среднеквадратичного отклонения высот не-
ровностей ст4 и среднеквадратичного отклонения производной мик-
ропрофиля о* или произведение дисперсии высот неровностей и
частоты их расположения ш:
/4 — ИЛИ /а — 3JW .
Наиболее удобна для практического применения формула
/4 = кЛ»/(4£),
где S’—средняя высота неровностей; L — среднее расстояние между вершинами
неровностей.
По результатам натурных испытаний строится номограмма, от-
ражающая зависимость полученных значений скорости от интен-
сивности дорожного воздействия при определенных постоянных
уровнях ускорений zc „= const (рис. 3.30, IV квадрант). По зна-
чениям скорости Р|, и2, ...ия, соответствующим принятому уров-
ню вертикальных ускорений zcg, определяется мощность по-
глощаемая амортизатором, после чего строится зависимость
=/(/*) (I квадрант).
Рис. 3.30. Номограмма для комплексной оценки теплонапряжепиостн аморти-
затора
В HI квадранте строится зависимость мощности, которую
может рассеять амортизатор, от скорости движения машины (или
эквивалентной ей скорости обдува амортизатора на стенде).
Сравнение мощности тепловыделения в амортизаторе Nn с мощ-
ностью NK, которую он может рассеять, позволяет оценить воз-
можность нагрева рабочей жидкости свыше допустимой темпера-
туры в установившемся тепловом режиме. На номограмме стрел-
ками показан порядок операций при сравнении. Тепловая напря-
женность оценивается отношением Vn/^« • Если >1 (об-
ласть /), возможен перегрев и выход из строя амортизаторов,
если же (область 2), то перегрева не будет.
Глава 4 МЕХАНИЗМ УПРАВЛЕНИЯ
ПОЛОЖЕНИЕМ КОРПУСА
4.1. РАСЧЕТ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ ВГМ
ПРИ УПРАВЛЕНИИ ПОЛОЖЕНИЕМ КОРПУСА
С появлением новых видов вооружения к некоторым ВГМ
предъявляются специфические требования: обеспечение возможнос-
ти отключения системы подрессоривания, изменения клиренса,
горизонткрования платформы, повышения проходимости по основа-
ниям с низкой несущей способностью и т. д.
Обеспечить выполнение этих требований можно с помощью ме-
ханизма управления положением корпуса (МУПК), который при-
меняется как с торсионной, так и с гидропневматической подвес-
ками (ГПП). Наибольшее количество операций по управлению по-
ложением корпуса при минимальных массе и объеме, занимаемом
в корпусе приводами и исполнительными органами, можно выпол-
нить с помощью МУПК с ГПП.
Управление положением корпуса ВГМ, осуществляемое измене-
нием количества жидкости в ГПП (или поворотом головки тор-
сионного вала), сопровождается изменением параметров ходовой
части: характеристик подвесок, углов наклона ветвей гусениц,
положения центра опорной поверхности относительно центра тя-
жести, расстояния между осями опорных катков, базы, давления
на грунт и т. д. Для расчета этих параметров представим ходо-
вую часть вместе с корпусом в виде схемы, симметричной относи-
тельно бортов ВГМ (рис. 4.1). На машину в статике действуют
следующие силы: реакция грунта под опорными катками /?,. и вес
машины Gv Для определения Rt условно разобъем гусеницу на
участки, приложим силу предварительного натяжения /?н и за-
пишем условие равновесия внешних сил и моментов, действую-
щих на машину:
2 2 Ri G, ;
. (41)
2^/?,Д, = 0Л,
i-1
88
где Lt — расстояние от оси опорного катка i-й подвески до оси ведущего коле-
са по горизонтали, п — количество подвесок на борт, L "₽ж — продольное рас-
стояние от оси ведущего колеса до центра тяжести машины по горизонтали.
Рис. 4.1. Схема сил, действующих на ходовую часть ВГЛ\ при произвольном
положении корпуса
Исходными данными для расчета являются: расстояние от цент-
ра тяжести подрессоренного корпуса до оси ведущего колеса L, к;
кратчайшее расстояние от осей балансиров подвесок до оси веду-
щего колеса по горизонтали х6 и вертикали у6 ; радиусы на
правляющего гн к и ведущего гв к колес, а также опорного катка
Гк; длина балансира /6 ; расстояние от плоскости днища до осей
направляющего колеса умк и ведущего сила предваритель-
ного натяжения гусеницы R,,. Если выразить составляющие урав-
нений (4.1) через длину балансира /б и угол его наклона от
вертикали <pz, за положительное направление которого примем
перемещение балансира в сторону сжатия упругого эле-
мента рессоры, то уравнение моментов относительно оси балан-
сира l-й подвески (<=2, 3..., п —1) может быть записано в сле-
дующем виде:
Л1, (ф,)«(/?, Go. к) /6 sin (7, l).
где Go к— вес опорного катка, части балансира и гусеницы; 7 —угол наклона
базовой плоскости днища к горизонту (дифферент корпуса), за положительное
направление которого принят наклон на корму машины; К 6 — ± I — коэффн-
89
цист, учитывающий положение балансира в схеме ходовой части (АЦ 1,
если балансир в схеме ходовой части расположен против направления движе-
ния машины); 4- «р; ?о4““установочный от вертикали угол балансира
1-й подвески; <р— текущее значение угла наклона балансира от установочного.
После преобразования получим:
Для определения нагрузок, действующих на грунт под осями
крайних опорных катков, запишем уравнение моментов сил отно-
сительно оси балансира первой подвески, испытывающей влияние
силы предварительного натяжения гусеницы:
М, - (Я» - Ge.« 4- /?н sin k) /в sin (?1
- Кад) + ЯХД1 — cos?J/6cos(ft—Кб,?)
Аналогично определяется нагрузка на грунт под осью послед-
него опорного катка. В общем виде можно записать
*>- (4-2)
Г „ 1 — cos pj, 1
где
ДА?/ Rn X
О.............................для i - 2, 3,
[, I — COS 1
., n — I
Для торсионной подвески
**(?)“ С?. (4.3)
где С « — угловая жесткость торсионного вала; rfT, О, /т — диаметр,
модуль упругости второго рода материала и рабочая длина торсионного вала.
При этом изменение хода опорного катка в зависимости от угла
поворота балансира определяется по формуле
= -т) cos (<р4 7)|. (4.4)
Для гидропневматической подвески определение Л4(<р) связано
с некоторыми трудностями.
Наиболее общая кинематическая схема ГПП представлена на
рис. 4.2, из которого следует, что
Af (?)•=- F(kx sin а — fcjcosa), (4.5)
уо
где F — сила, действующая на шток рессоры; 4|, kt — расстояние от нижней
точки крепления рессоры до осн балансира по вертикали и горизонтали соот
ветственно.
Сила, действующая на каждую рессору,
<4-6>
где Sп — площадь поверхности гидравлического поршня рессоры; р0 —давление
газа в пневматической полости при установочном положении балансира под-
вески; Vo — объем, занимаемый газом
в установочном положении баланси-
ра; ЛИ — — уменьшение объема
пневматической полости рессоры за
счет сжатия газа после перемещения
балансира из установочного положе-
ния в текущее.
Ход поршня рессоры из ус-
тановочного положения в теку-
щее
л «/р, /р, (4.7)
где /рв— длина рессоры при устано-
вочном положении; /₽ — длина рессо-
ры в текущем положении (см.
рис. 4.2);
_____________ZP~_______________
=У(Н’-ЬВ»)+2(//*1+В*3)+(Л?+^).
Здесь Н, В — расстояние от верх-
ней точки крепления рессоры до осн
балансира по вертикали и горизонта-
ли соответственно;
Рис. 4.2. Кинематическая схема ГПП
Л, - г, cos (Г( - J) - r3 sin (Т4 - T) :
- rt sin (ft — 7) 4- rt cos (ft - 7).
После соответствующих преобразований получим
/р — + С’ cos (?t - 7) — С? sin (<pz — 7),
где С] - //’ + S’ + г? + г\;
Cl = 2 (Л/Г1 4- Вг3);
С’ = 2(//г3-Вг,).
Подставив /р в уравнение (4.7), получим
-V = /р„ -V С* н- cl cos (?t т) CisIn (<?,— 7).
Из рис. 4.2 следует, что
slna—кг)Цр,
cos a = (H 4 kt) 'lp .
Таким образом определяются все составляющие момента
упругих сил ГПП, действующего относительно оси балансира
(если пренебречь сжимаемостью жидкости в рессоре).
Управление положением корпуса с помощью подвески (напри-
мер, увеличение клиренса) большинства ВГМ осуществляется на-
гнетанием дополнительного количества рабочей жидкости в гид-
равлическую полость рессоры, что приводит к возникновению в
ней большого давления (например, на экспериментальном аме-
риканском танке МВТ-70 до 80 МПа), при котором начинает про
являться эффект сжимаемости рабочей жидкости, сопровождаю-
щийся уменьшением максимального усилия, воспринимаемого под-
веской, и ее жесткости.
Рнс. 4.3. Статическая характеристика
ГПП при различных значениях клирен-
са машины:
I. г-ЗЮ; 3. <-450; 5, 6- 6Э0 мм; *шт-ход
штока; ----- —расчетная (без учета сжн
мп г мости жидкости); экспернмен
Сжимаемость рабочей жидко-
сти характеризуется коэффици-
ентом относительного объемного
сжатия «р, относительным изме-
нением объема жидкости, проис-
ходящим при повышении давле-
ния на Ар — 0,1 МПа. Сжимае-
мость рабочей жидкости сущест-
венно влияет на характеристику
рессоры, начиная с давления
р > 45.. .50 МПа (рис. 4.3).
Для определения характеристик ГПП с учетом степени сжатия
рабочей жидкости воспользуемся уравнениями политропического
сжатия газа
Р Mv'ft-Av)
(4.8)
и сжатия рабочей жидкости в замкнутом объеме
(4-9)
где ЛVж — изменение объема жидкости за счет сжимаемости ее в рессоре,
объем жидкости, заправленной в рессору при атмосферном давлении.
V Уж(1 4- «рРо): Иж — объем жидкости, заправляемой в рессору при уста-
новочном давлении Рп.
Учитывая, что в существующих ГПП установочное давление
газа невелико, можно принять = Кж.
92
Изменение объема газа и жидкости в текущем положении
балансира
AV" —ДУЖ4-ДУ.
Так как в процессе работы ГПП наблюдается равновесие
жидкости и газа, то, приравняв правые части уравнений (4.8) и
(4.9) и выполнив соответствующие преобразования, получим:
Обозначим = V, XV' fr,; tУДУв ДУ)-
Подставив новые переменные в предыдущее выражение и вы-
полнив соответствующие преобразования, получим трансцендент-
ное уравнение вида
,—*,г+‘). (4.Ю)
Необходимые для решения этого уравнения значения ар опре-
деляются для каждой конкретной рабочей жидкости эксперимен-
тально или по справочной литературе.
Определив кинематическую степень сжатия е, с помощью
формулы (4.6) находят F и по формуле (4.5) момент упругих
сил для каждой t-й ГПП. Используя формулу (4.4) для опреде-
ления хода катка, можно построить характеристику подвески.
Для определения реакции грунта под i-м опорным катком по
формуле (4.2) необходимо знать значения углов наклона ветвей
гусеницы Р, и
Из рис. 4.1 можно определить:
расстояние по вертикали от осн опорного катка до осн веду-
щего колеса
\ cos 7 \ sin 7 f cos (?, ;
расстояние по вертикали от оси ведущего колеса до оси на-
правляющего колеса
а<>= Уи.«cos Т ^oSln?;
расстояние от оси »-го опорного катка до оси ведущего колеса
по горизонтали
£, = лб со8т + уб sin7 — K6lbsln(<ft
расстояние от оси ведущего колеса до оси направляющего по
горизонтали
L”p == Z.o cos 7 + уи< к sin 7 ;
расстояние от оси направляющего колеса до оси первого опор-
ного катка по горизонтали
93
расстояние от точки касания гусеничного обвода с направляю-
щим колесом до аналогичной точки на опорном катке по горизон-
тали
(1Л = СЛ — (гв - ги ж) sin?, ; (4.11)
расстояние от оси направляющего колеса до оси опорного кат-
ка по вертикали
= т flo;
расстояние от точки касания направляющего колеса с гусенич-
ным обводом до аналогичной точки на первом опорном катке по
вертикали
S,— ая + (г„ г, ж) cos .
Разделив 5Д на выражение (4.11), найдем
С (^К Ги. к) ft Л /I 1П\
Из формулы (4.12) для угла наклона передней ветви гусеницы
можно получить следующее квадратное уравнение:
з1п,£д 2 Л sin ?д Б —Q, (4.13)
. С,(с, - г, ,) «2
где Л- с, + а, ;В_
Корни уравнения (4.13)
(Sin ?a)i.a —Л ±
Из двух корней этого уравнения используется положитель-
ный, так как реально 0Л отрицательным быть не может.
Подобным же образом можно получить квадратное уравнение
для угла наклона задней ветви гусеницы:
з1п*рж;- 2Bsln₽e— D = 0, (4.14)
r“e" t’K -------------------
Корни уравнения (4.14)
(•inyM-s±r*, + a.
Следует отметить, что в формулах для определения углов рл
и рж не учитывается влияние степени провисания наклонных вет-
вей гусеницы на первоначальное значение этих углов, так как
оно не оказывает существенного влияния на перераспределение
нагрузки на грунт под опорными катками.
Для определения п неизвестных реакций Rt двух уравнений
равновесия (4.1) мало. Недостающие (л —2) уравнения найдем,
94
используя зависимости между перемещениями катков по борту,
выраженные через углы поворота балансиров и дифферент кор-
пуса машины:
Уб,cos 7 — *в,sln 7 4* cos — *в.7) = Ув, X
X cos т х^ sin 7 4-16 cos («а ;
У a, cos 7 ~ sin 7 4- Z6 cos (?, - K^) — y6>cos 7 —
•— хй> sin 7 4- Z6 cos (?3 - K6j) и т. д.
или в общем виде
(v6 — у.) cos т — (х6 — х. ) sin 7
cos(?(- *М)=СО8(Т,-Кб,7)4-----------------------J. (4.15)
где /-2, 3...., n.
Совместное решение системы уравнений (4.1) — (4.5), (4.10),
(4.13), (4.14) и (4.15) позволяет найти углы поворота балансиров,
а следовательно, и ход опорных катков, определить значения
сил, действующих на катки и на грунт под катками с учетом
силы предварительного натяжения гусеницы и управления поло-
жением корпуса ВГМ.
Клиренс в кормовой (Кж) и носовой (К.,) частях можно опре-
делить, воспользовавшись следующими уравнениями, вытекающи-
ми из геометрических соотношений элементов корпуса и схемы
ходовой части (см. рис. 4.1):
^ = G4 ал + аг [^4-81п7(/.я-уи Jg7) ];
К,« К, — sin 7 [До - (£. 4- £«)] ♦
где er —толщина гусеницы; унж—расстояние от оси направляющего колеса
до днища машины.
База машины в зависимости от положения корпуса и с учетом
расположения балансиров подвесок определяется из выражения
— х,) cos 1 +(Уб1 — У,л)з1пт—
K.j)!. (4.16)
а расстояние от центра опорной поверхности до оси ведущего коле-
са — по формуле
Дж — 4* 1 <Х6, cos 7 + (Уб, Убя) sin 7
Z6 [Кб, sin («, Кб,7) 4- Кб„ sin (?„ - Кбя7)| 1 • (4.17)
Если Доп T.Bitcos7, то центр опорной поверхности после
изменения положения корпуса находится на одной вертикали
с центром тяжести машины.
95
При Лоп < £в cos у центр опорной поверхности смещен отно-
сительно центра тяжести в сторону кормы, а при ЛО1|>ЛВ к cosy —
в сторону носа машины.
Среднее давление, действующее на грунт при изменении поло-
жения корпуса машины,
*P<-OT/(2W),
где b — ширина гусеницы.
Таким образом, изменение и т при управлении положением
корпуса машины вызывает изменение параметров ходовой части
ВГМ*.
Характер изменения параметров ходовой части исследовался
на ходовом макете с массой и расположением балансиров, как
у БМП-1, с системой подрессоривания, жесткость подвесок кото-
рой (торсионных и гидропневматических) в зоне наиболее вероят-
ного использования хода опорного катка составляла 40—50 кН/м.
Рис. 4.4 Характеристики торсионной (а) и гидро
пневматической (б) подвесок при различных значе-
ниях клиренса машины:
/ - 300; 2 — за»; 4—450; 4 — 520 им (сплошные линии
А* , пунктирные — Л)
Влияние клиренса машины на характеристики подвесок пока-
зано на рис. 4.4. Так, например, увеличение клиренса машины в
1,4 раза привело к уменьшению статического хода торсионной
подвески примерно в 2,5 раза, повышению динамического и пол-
ного ходов на 63 и 3 % соответственно, возрастанию упругой
силы в конце динамического хода опорного катка на 15%. Стати-
* Приведенный метод расчетного определения параметров ходовой части
при управлении положением корпуса ВГМ предложен Ю. И. Брагиным н
А. П. Софияном.
96
ческий ход ГПП уменьшился в три раза, динамический увеличил-
ся на 63 %, а упругая сила возросла в четыре раза.
Жесткость торсионной подвески, начиная с установочного по-
ложения балансира, интенсивно уменьшается, в середине динами-
ческого хода стабилизируется, а в конце — возрастает; жесткость
ГПП резко возрастает пропорционально ходу и клиренсу. Объяс-
няется это тем, что способность упругих элементов торсионной и
гидропневматической подвесок деформироваться — различна.
Из формулы (4.16) следует, что при увеличении клиренса
может наблюдаться некоторое изменение базы машины. Посколь-
ку разность установочных углов ?01 и <р0 , как правило, не пре
вышает 3—5°, соответствующее изменение базы практически не
влияет на среднее давление q(P.
Передний и задний углы наклона ветвей гусеницы с уве-
личением клиренса растут (рис. 4.5), но по-разному: так, с уве-
личением клиренса в 1,5 раза угол ?л увеличивается также в
1,5 раза, а угол при этом возрастает всего на 25%. Объяс-
няется это тем, что при увеличении клиренса расстояние от на-
правляющего колеса до первого катка уменьшается, а от ведуще-
го колеса до последнего — увеличивается.
Л7 -------1-------------
500 ЧОО 500 К, МИ
Рис 4.5. Изменение пс-
реднего (/) н заднего
(2) углов наклона вет-
вей гусеницы в зависи-
мости от клиренса ма
шины
Рис. 4.6. Схема ходовой
части БМП-1 при номи-
нальном (а) и повышен
ном (б) клиренсе
Расстояние Л011 от центра опорной поверхности до осп веду-
щего колеса, как следует из выражения (4.17), при увеличении
клиренса увеличивается, т. е. центр опорной поверхности переме-
щается в сторону носа машины на величину Д (рис. 4.6). Для
7 Зак. 16«с» 97
современных ВГМ это смещение при максимальном клиренсе мо-
жет достигать 100—150 мм. Давление на грунт под осями опор-
ных катков с увеличением клиренса (рис. 4.7) изменяется по-
разному в зависимости от расположения опорных катков: первый
каток почти не опирается на грунт, под последним нагрузка прак-
Рис. 4.7. Распредели
ние нагрузки под опор-
ными катками при но-
минальном (/) и повы-
шенном (2) клиренсе
тически не изменилась, а под вторым и
третьим значительно увеличилась. Увеличе-
ние клиренса на 50 % может вызвать
уменьшение нагрузки под первым опорным
катком в 5 раз, а под вторым и третьим —
увеличение на 30 и 20 % соответственно.
Резкое уменьшение нагрузки под первым
опорным катком при увеличении клиренса
машины (когда все балансиры в схеме хо-
довой части направлены по ходу) объясня-
ется тем, что момент, создаваемый силой
предварительного натяжения гусеницы от-
носительно оси балансира первой подвески,
становится соизмеримым с моментом упру-
гих сил самой подвески, т. е. они уравнове-
шивают друг друга, и поэтому первый опор-
ный каток оказывает несущественное дав-
ление на грунт; вес машины распределяет-
ся на десять катков вместо двенадцати.
При минимальном клиренсе среднее давление q^ машины на
грунт практически не изменяется, углы наклона ветвей гусеницы
и расстояние от центра опорной поверхности до оси ведущего
колеса (рис. 4.8, а) уменьшаются, нагрузка на грунт под первым
опорным катком незначительно возрастает. Так, уменьшение кли-
ренса на 30—35 % приводит к увеличению нагрузки под первым
опорным катком на 10 %; нагрузка на грунт под последним кат-
ком остается практически неизменной.
При дифференте корпуса на нос за счет подъема кормовой
части на значение статического хода последнего опорного катка
происходит, как следует из уравнения (4.16), уменьшение опор-
ной поверхности, поэтому увеличивается среднее давление на
грунт. При этом угол наклона задней ветви гусеницы увеличи-
вается незначительно, а центр опорной поверхности смещается
в сторону носа (для современных ВГМ ДС 100 мм). Нагрузка под
катками с первого по пятый (рис. 4.9) практически не меняется,
но под последним опорным катком увеличивается примерно на
20%.
98
При дифференте корпуса на корму за счет подъема носовой
части на значение статического хода первого опорного катка про-
исходит увеличение опорной поверхности и, следовательно, умень-
шение среднего давления примерно на 5%. Угол наклона перед-
Рис. 4.8. Схема ходовой части БМП-1 при мини-
мальном клиренсе (в), дифференте на нос (б)
и на корму (в)
Рис. 4.9. Распределение
нагрузки под опорными
катками при дифферен-
те корпуса на нос (/) и
при номинальном кли-
ренсе (2)
Рис. 4.10. Распределение
нагрузки под опорными
катками при дифферен
те корпуса на корму (/)
и при номинальном кли-
ренсе (2)
ней ветви гусеницы в этом случае значительно увеличивается
(примерно в 1,5 раза), центр опорной поверхности смещается в
сторону носа на 100—150 мм. Нагрузка под первым опорным кат-
ком (рис. 4.10) уменьшается примерно в 1,5 раза, под вторым —
возрастает на 7—10%, под третьим, четвертым и пятым — прак-
тически не меняется, а под последним — возрастает на 25%.
7*
99
4.2. ВЛИЯНИЕ ПОЛОЖЕНИЯ КОРПУСА НА ПЛАВНОСТЬ ХОДА
И ПРОХОДИМОСТЬ ВГМ ПО ОСНОВАНИЯМ
с низкой несущей способностью
Влияние клиренса на плавность хода ВГМ исследовалось с по-
мощью макета с ГПП, выполненного на базе БМП-1, движущего-
ся по дороге с волнообразным профилем, составленным из трех
пар стандартных неровностей длиной 4 м при наиболее неблаго-
приятном расстоянии между их вершинами (от 1,5 до 2,5 базы
машины), при котором значения вертикальных ускорений корпуса
в месте расположения водителя были максимальными. Высота
неровностей принималась равной 150 мм; скорость движения ма-
шины v от 15 до 70 км/ч с шагом До = 5 км/ч.
Расчетная зависимость средних значений вертикальных уско-
рений в месте расположения водителя гс в, размаха ф1+ф2 и
скорости ф продольных угловых колебаний корпуса, а также реа-
лизуемых ходов первого опорного катка у\ от клиренса маши-
ны К приведена на рис. 4.11, из которого видно, что наименьшие
значения i’CB, Ф1Н-Ф2 и ф и наибольшее использование хода пер-
вого опорного катка имеют место при движении машины на номи-
нальном клиренсе (380 мм). С увеличением клиренса процент
6
Рис. 4.11. Расчетная зависимость средних вертикальных ускорении (а) и ско-
рости продольных угловых колебаний корпуса (б) от клиренса машины
использования хода первого опорного катка уменьшается, а плав-
ность хода ухудшается, что объясняется увеличением жесткости
подвески при подходе балансира к упору и уменьшением стати-
ческого хода при неизменном общем ходе опорного катка. Резуль-
таты расчета подтверждены экспериментально (рис. 4.12 и 4.13).
Данные о влиянии отдельных параметров ходовой части (кли-
ренса, давления На грунт, смещения центра тяжести вдоль про-
дольной оси корпуса и т. д.) на проходимость гусеничной маши-
100
ны по основаниям с низкой несущей способностью изложены в
работе [4]. С целью изучения комплексного влияния изменения
параметров ходовой части на проходимость ВГМ были выполнены
специальные экспериментальные исследования на снежной целине
и болоте.
Рис. 4.12. Экспериментальная за-
висимость параметров плавности
хода от скорости движения маке-
та при различных значениях кли-
ренса:
/-81»; 2 -370; 3-450; 4 - 530 мм
Рис. 4.13. Эксперименталь-
ная зависимость средних
параметров плавности хода
от клирелса машины
В качестве оценочного показателя эффективности влияния
управления положением корпуса на проходимость ВГМ по осно-
ваниям с низкой несущей способностью принимался критерий
проходимости
/7—(I »)/♦.
где в — коэффициент буксования гусеничного движителя; 'у — коэффициент от-
носительного сопротивления движению (отношение коэффициента сопротивле-
ния движению машины по грунту /гр к коэффициенту сопротивления движению
по бетону /0).
Критерий П обеспечивает комплексный учет коэффициентов 6
и ф, обобщающих результат взаимодействия ВГМ с несущим
основанием.
Испытания на снежной целине проводились как для одиночной
машины, так и для колонны, имитирующей движение роты ВГМ
по одной колее. Результаты испытаний одиночной машины осред-
нялись по 3—5 заездам.
101
Установлено, что увеличение клиренса машины или придание
корпусу дифферента на корму приводит к снижению проходи-
мости (рис. 4.14, 4.15). Так, увеличение клиренса с 370 до 580 мм
(т. е. в 1,6 раза) снизило проходимость машины примерно на 10 %.
Однако дифферент корпуса на нос на 4° 10' позволил повысить
проходимость машины на этом же участке на 10%.
Рис. 4.14. Зависимость прохо-
димости машины по снежной
целине от клиренса:
/ — по открытой местности; 2 —
в лесу
Рис. 4.15. Зависимость прохо
ди мости машины по снежной
целине от дифферента корпуса
Как уже отмечалось ранее, увеличение клиренса приводит к
смещению центра опорной поверхности в сторону носа машины,
возрастанию угла наклона передней ветви гусеницы, к росту
перегрузки отдельных опорных катков, что вызывает повышение
давления и, как следствие, увеличение глубины колеи (при дан-
ных исследованиях с 450 до 550 мм). Увеличение угла наклона
передней ветви гусеницы и глубины колен даже при отсутствии
трения между днищем и несущим основанием приводит к тому,
что машина при максимальном клиренсе встречает большое со-
противление движению, которое и вызывает снижение показателя
проходимости.
При дифференте корпуса на корму за счет выбора статиче-
ского хода первого опорного катка угол наклона передней ветви
гусеницы увеличивается почти в 1,5 раза, нагрузка на грунт
первого опорного катка существенно уменьшается, но увеличи-
вается нагрузка остальных катков, что приводит к возрастанию
сопротивления движению машины. Кроме того, под влиянием
тягового усилия машина касается кормовой частью днища несу-
щего основания, частично уплотняя его, а частично протаскивая
снежную массу за собой. Все это приводит к тому, что машина
с дифферентом корпуса на корму, несмотря на некоторое сниже-
ние среднего давления, встречает большое сопротивление движе-
нию (рис. 4.16), а следовательно, имеет худшую проходимость.
При дифференте корпуса на нос, создаваемом за счет выбора
статического хода последнего опорного катка, эпюра сосредото-
102
ценных нагрузок на грунт под осями опорных катков и угол на-
клона передней ветви гусеницы остаются практически такими же,
как и у машины с номинальным клиренсом, среднее давление
несколько возрастает за счет перемещения последнего опорного
катка в сторону носа, но поднятая над несущим основанием кор-
мовая часть корпуса и меньшее фактическое давление не создают
дополнительного сопротивления движению (см. рис. 4.16). Поэто-
му проходимость машины при движении
по снежной целине с дифферентом кор-
пуса на нос выше, чем проходимость ма-
шины с номинальным и максимальным
клиренсом.
Рис. 4.16. Зависимость сопротивления движе-
нию машины по снежной целине от дифферента
корпуса на нос (отрицательные значения) и на
корму (положительные)
Качественно то же наблюдается и
шин по снежной целине (рис. 4.17),
"5 -!,5 О
при движении колонны ма-
т. е. увеличение клиренса
Рис. 4.17. Зависимость проходи-
мости машин по снежной целине
от количества проходов по одной
колее:
/ — дифферент корпуса иа корму; 2
максимальный клиренс; Л, 4 ном и
пильный клиренс; 5, 6 - дифферент
корпуса на нос (------движение по
открытой местности.------по лесу)
ухудшает проходимость ко-
лонны машины, а придание
корпусу дифферента на нос
ее улучшает.
Исследование проходи-
мости одиночной ВГМ по
болоту выполнялось анало-
гично исследованию движе-
ния по снежной целине.
Увеличение клиренса маши-
ны или создание дифферен-
тами* проходимость машины,
рейса в 1,4 раза привело
по моховому болоту на 40%,
Дифферент корпуса на корму
та корпуса на корму ухуд-
Так, например, увеличение кли
к снижению ее проходимости
по травяному—на 20 % (рис. 4.18).
на 4° снижает проходимость маши-
103
ны по травяному болоту примерно на 20 % (рис. 4.19). При диф-
ференте корпуса на нос на 4°10' проходимость машины по мохо-
вому болоту’ возрастает примерно на 45%, а по травяному —
на 9 %.
Рис. 4 18. Зависимость прохо-
димости машины от клиренса
при движении по мохово-
му (/) и травяному (2) бо-
лотам
Рус. 4.19. Зависимость прохо-
димости машины от диффе-
рента корпуса при движении
по моховому (/) и траняио
му (2) болотам
Таким образом, установлено, что повышение проходимости
ВГМ с МУПК. по основаниям с низкой несущей способностью до-
стигается при дифференте корпуса на нос.
4.3. ОСОБЕННОСТИ КОНСТРУИРОВАНИЯ МЕХАНИЗМА
УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОРПУСА ВГМ
С ГИДРОПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ
На характеристики гидропневматических подвесок существен-
но влияет температура сжатого газа.
Вследствие охлаждения (в зимних условиях) и разогрева
ГПП (при движении машины) упругие характеристики и жест-
кость рессор могут существенно отличаться от исходных, выбран-
ных при проектировании из условий обеспечения заданных пара-
метров плавности хода. В общем случае рабочая температура
рессор является переменной и зависит от порядка их располо-
жения на борту машины. Допустим, что рабочая температура
одинакова для всех рессор; нижняя ее граница определяется отри-
цательной температурой окружающего воздуха, а верхняя обус-
ловливается нагревом рессор в процессе движения ВГМ по неров-
ным дорогам.
В соответствии с законом Гей-Люссака для изохорического
процесса
в А/ 7® в Кт» . (4.18)
где До. ро—давление газа в пневмобаллоне при исходной температуре То н
эксплуатационной температуре Г* соответственно; К/ —температурный коэффн
циент.
101
С учетом формулы (4.18) статическая упругая характеристика
и жесткость рессоры при температуре То определяются по сле-
дующим зависимостям:
р>~Ктр<,-^-Ктр. (4.19)
/п* = ЛГу.—р— “ /Су/я , (4.20)
где р, m — текущие давление газа и жесткость рессоры при температуре Т0-
Изменение давления газа в пневмобаллоне в установочном
положении опорного катка при действии на него статической на-
грузки вызывает изменение объема пневмополости рессоры:
-V„-Kr^— V„- V„(/Cr-1), (4.21)
Pct
где l'CT, —объем газа в рессоре при температуре То и Т*} соответственно;
Рет — давление газа, соответствующее статической нагрузке при температу-
ре Го.
Нагрузка на опорный каток и жесткость подвески в статиче-
ском положении при постоянном передаточном числе i опреде-
ляются следующим образом:
R„ = S„p„i, (4.22)
&-Р. (4.23)
VctKT
После преобразований уравнения (4.21) с учетом формул (4.22)
и (4.23) получим уравнение изменения статического хода опорно-
го катка при изменении объема газа в диапазоне рабочей темпе-
ратуры ГПР:
Д/,-- \<Кг7--- . <4.24)
«•ст. It'v Г
Одновременно изменяется объем рабочей жидкости в рессоре:
ДУЖ-Р(Г; Го) Уж. (4.25)
где р — температурный коэффициент объемного расширения жидкости;
объем рабочей жидкости в рессоре.
Общее изменение статического хода опорного катка с учетом
формул (4.24) и (4.25)
дУст—(4.26)
оп< тст. п*' т
Из формулы (4.26) следует, что с изменением температуры
рессоры происходит перераспределение хода опорного катка. С по-
вышением температуры уменьшается статический и увеличивается
8 Зак. 16«с»
105
динамический ход опорного катка и одновременно возрастает
максимальная упругая сила, что влечет за собой некоторое улуч-
шение плавности хода и повышение средней скорости прямолиней-
ного движения машины по неровной дороге (рис. 4.20). Когда ста-
тический ход становится равным нулю, максимальная упругая
сила возрастает настолько, что ухудшается плавность хода и
уменьшается средняя скорость движения (при температуре, пре-
вышающей 350 К).
вследствие чего ухудшается
Рис. 4.20. Расчетная зависимость средней
скорости движения ВГМ от температуры
ГПП при номинальном клиренсе:
/ — вез МУПК; 2-С МУПК-1; J-С МУПК 2
(* - 135 мм , Же в - 10 М/С1)
Понижение температуры рессор
приводит к увеличению статичес-
кого и уменьшению динамического
хода опорного катка. Однако из-за
ограничения гусеницей используе-
мый статический ход опорного
катка не может превышать 130 мм,
1авность хода и снижается средняя
скорость движения машины при низкой температуре рессор (на
35 % при температуре ниже 290 К).
Практически все существующие кинематические схемы ГПП
имеют переменное передаточное число, что вызывает необходи-
мость обеспечения переменного статического давления газа при
изменении клиренса и соответствующего заправочного объема
газа и жидкости. Влияние переменного передаточного числа мо-
жет быть весьма существенным. В некоторых подвесках (см.
рис. 2.6) при большом клиренсе возможно неустойчивое статиче-
ское равновесие; в этом случае жесткость подвески либо равна
нулю, либо имеет отрицательное значение. Исключить неустойчи-
вое равновесие можно увеличением площади поршня и степени
сжатия газа. Возможна также корректировка кинематики за счет
изменения точки приложения нагрузки на поршне, как, например,
в танке МВТ-70.
В подвесках с малой статической жесткостью и с переменным
передаточным числом незначительный нагрев газа и жидкости
(на 10—15 К) может привести к полному исключению статиче-
ского хода опорного катка.
Более плавная зависимость средней скорости движения от тем-
пературы рессор получается при корректировке клиренса с по-
мощью механизма управления положением корпуса. В МУПК-1
(рис. 4.21) при изменении положения корпуса гидравлические
полости нескольких рессор объединяются в группы, в которых
происходит перераспределение жидкости до тех пор, пока не бу-
106
дет получено необходимое расстояние между одним из опорных
катков, входящих в группу, и корпусом машины. Контроль этого
расстояния осуществляется регуляторами клиренса, установлен-
ными на крайних подвесках. Кинематическая связь распредели-
теля с балансирами этих подвесок обеспечивает изоляцию гид-
равлических полостей рессор от насосной установки при стати-
ческом положении опорного катка. При смещении опорного катка
вверх или вниз полости рессор соединяются соответственно с ма-
гистралью давления или слива и корпус возвращается в перво-
начальное положение.
К /ругону Шругону
Рис. 4.21 Структурная схема МУПК 1:
/—гндроцнлиндр; 2 пневмобаллон; 3 механизм натяжения гусениц; 4. 5 — гидро замки;
«регулятор клиренса; 7 — трехпоэицнонный распределитель
При движении машины по ровной горизонтальной площадке
МУПК-1 обеспечивает изменение объема жидкости, компенсирую-
щее изменение объема газа из-за колебаний температуры. Объем
и давление газа в каждой рессоре в установочном положении
определяются по следующим формулам:
V5-V'„(Kr-l)+V.;
р-н I-
Давление газа в промежуточном положении опорного катка и
жесткость рессоры при изменившейся температуре То опреде-
ляются по формулам:
(4.27)
Если, например, корректировка клиренса машины производи-
лась при температуре 228 К, то при степени сжатия е= VC1/V=2
(в конце динамического хода опорного катка) давление газа и
жесткость рессоры будут отличаться от рассчитанных при темпе-
ратуре 293 Кв 1,4 и 2,65 раза соответственно (рис. 4.22). Посколь-
ку статическое положение опорного катка и, следовательно, стати-
ческий и динамический ходы опорного катка за счет МУПК-1 со-
храняются, сглаживается кривая зависимости параметров плав-
Рис. 4.22. Относительное изменение давления газа (а) и жесткости рессоры (б)
в зависимости от степени сжатия газа при установке номинального клиренса
с помощью МУПК-2 (--------------------------) и МУПК-1 (----------):
/, 2 — яри температуре 228 и 293 К соответственно
Аналогичные результаты дает корректировка клиренса маши-
ны и с помощью МУПК-2 (рис. 4.23), отличительной особен-
ностью которого является индивидуальное дозирование жидкости
в каждой рессоре. Установка номинального клиренса начинается
Рис. 4.23. Структурная схема МУПК-2:
I — гидроцилиндр, 2 — пневмобаллон; 3 - двухпозиционный распределитель; < механизм
натяжения гусениц; S — гидрозамок
108
из положения минимального клиренса, при этом пневмобаллон и
гидроцилиндр разобщаются распределителем. За счет подачи
жидкости в гидроцилиндры осуществляется подъем корпуса ма-
шины, ограничиваемый упорами обратного хода опорных катков.
Соединением пневмобаллона с гидроцилиндром выравнивается
давление в них, и корпус машины при этом занимает положение,
близкое к статическому. При однократном срабатывании механиз-
ма объем жидкости не зависит от температуры рессоры, а кли-
ренс больше номинального, если То>То» и меньше, если То <Tq.
При многократном подъеме корпуса машины происходит увеличе-
ние клиренса (уст->0) из-за накапливания жидкости в пневмо-
баллоне в процессе срабатывания МУПК-2. Параметры газа в
установочном положении определяются следующим образом:
lzo = УстКу.; ро ~ Pct •
Давление в рессоре и жесткость ее в промежуточном положе-
нии определяются по формулам:
гле « V'cr/'’ И «ст Vol V'ct-
При высокой температуре, когда Кт > «ст и ро > р„ , упругая
характеристика рессоры определяется формулами (4.19) и (4.20),
а параметры плавности хода машины такие же, как и при не-
управляемой рессоре (см. рис. 4.20, кривые 3 и 1 совпадают при
Г*>330 К).
Из формул (4.27) и (4.28) следует, что давление и усилие на
оси опорного катка зависят от температуры и могут значительно
превышать оптимальные значения. Высокая нагруженность тре-
бует обеспечения большого запаса прочности деталей ГПП, что
ухудшает их объемно-массовые параметры. Для стабилизации
упругой характеристики целесообразна сезонная регулировка
давления газа в пневмобаллоне.
Установка номинального клиренса с помощью МУПК на ров-
ной горизонтальной площадке является идеальным случаем, кото-
рый в эксплуатации встречается редко; чаще один или несколько
опорных катков машины поджаты (рис. 4.24). Разность использо-
ванных опорными катками ходов соответствует высоте неровнос-
тей, на которых стоит машина:
(рис. 4.24. а, б);
*: 4-24-«• г>-
где Гст/16 — степень сжатия газа в первой рессоре до установки номи-
нального клиренса; —объем газа в первой рессоре до установки номиналь-
ного клиренса, соответствующий поджатию оиорного катка на величину у\.
109
’ При включении МУПК-1 на неровностях давление газа и
жидкости в рессорах каждой группы выравнивается, а жидкость
перераспределяется между рессорами в зависимости от поджатия
опорных катков. Так как одна часть катков может быть поджата
выше статического положения, а другая — ниже его, гидравличе-
ские полости рессор соединяются через регуляторы клиренса с
магистралью давления или слива. Например, в случае, изобра-
женном на рис. 4.24, а, в группы рессор подается рабочая жид-
кость, и корпус поднимается всеми подвесками до тех пор, пока
средние опорные катки не оторвутся от грунта вследствие посадки
на обратные упоры. Дальнейший подъем корпуса будет происхо-
дить за счет крайних подвесок.
•i/ih >/и« Lu»/! .. * ii’i.'.'zj. _un > •*•••».
Рис. 4.24. Возможные варианты положения машины при установке номиналь-
ного клиренса на неровной поверхности
Ни |' И pH.J 'J. BL l I) 'Д/ ИС 1 ) Н (Vlk ’ ) > £ <>ф il’
Формулы для расчета относительного изменения давления га-
за р*/р в ГПП при установке клиренса с помощью МУПК-1 на
неровностях приведены в табл. 4.1.
Изменение жесткости рессоры может быть определено по фор-
муле
т*/т = .
Анализ приведенных в табл. 4.1 зависимостей показывает, что
только при высоте неровностей меньше статического хода опорных
катков у части ГПР возможно сохранение исходных характерис-
тик (р*/р>=1).
На неровностях большей высоты изменение характе-
ристик рессор зависит от давления жидкости в гидросистеме, а
также от степени сжатия е (рис. 4.25), причем с их увеличением
относительное изменение давления газа также возрастает (в не-
которых случаях более чем в 4 раза).
Если установка клиренса производится с помощью МУПК-2,
то в случае, приведенном на рис. 4.24, а, корпус будет подниматься
всеми рессорами до тех пор, пока 2, 3, 4 и 5-й опорные катки не
110
Таблица 4.1
Формулы для расчета р*/р при установке клиренса с помощью МУПК-1
Максимальное к- 11 'И U J (•I \ Номер опорного катка
Высота неровностей давление жидкости в 1, 6 2. 3. 4. 5~ 1.3. 4. 6 | 2. 5
МУПК рм Рис. 4.24. а, б РИС. 4.24. в. г
Л < Уст > Gn 1 1 ] 1
12 5П/ .3(4-1) 6i (3 — «1) 1 — g 3 1) £» (3 — 26,)
>_2п_ 1 1 1 1
4 5п/ 1-гЕстц-^) \ рГ) \ рг ]
Л > Усу X
Gn *'{’ + •[•" (тг- -iU3(.,-nn > q(3-El)Jl 1 1/ /1 — £ 17 Р» — 11 4. 1
4 S„i 1-.,„(1—£l) \ рт / мг 1\ Рт ’/ + ЗО,-1> 11 «1(3-2Ч) JI 1 --££„(1 Рг >
достигнут ограничителей обратного хода. Дальнейший подъем
корпуса возможен только на 1-й и 6-й подвесках при условии
обеспечения гидросистемой необходимого давления жидкости
Ртах ^/«/(4 *-*п0 •
Рис. 4.25. Относительное изменение дав-
ления газа в зависимости от степени
сжатия е при установке с помощью
МУПК-1 номинального клиренса на не-
ровности высотой 200 мм:
/—для 2,3,4 и 5-й рессор; 2 — для 1й и
6 й рессор (см, рис. 4.24, а) и 1, 3, 4 и 6 Л
рессор (см. рис. 4.24, в)
После однократного срабатывания МУПК-2 во все рессоры
будет заправлен одинаковый объем жидкости, соответствующий
исходному. При недостаточном давлении в гидросистеме крайние
опорные катки не достигнут обратных ограничителей хода, в эти
рессоры будет заправлено меньшее количество жидкости, и в зоне
ходов подвесок < hH давление жидкости, а следовательно, и уси-
лие на опорном катке, будет отсутствовать.
При многократном срабатывании механизма объем жидкости
в полостях рессор пропорционален использованным ходам опор-
ных катков.
Формулы для расчета относительного изменения давления газа
при установке номинального клиренса с помощью МУПК-2 приве-
дены в табл. 4.2 и 4.3. Отрыв опорных катков от грунта не про-
исходит при соблюдении следующих условий:
—— < е, < 3----— (рис. 4.24, а, б),
6СТ 6СТ
1<е.<1,5—(рис. 4.24, в, г).
Z ССТ
При использовании МУПК-2 на небольших неровностях харак-
теристики всех рессор отличаются от исходных, а на неровностях
большой высоты часть рессор имеет исходные характеристики.
Отклонение от исходных характеристик пропорционально уве-
личению степени сжатия газа (рис. 4.26). На неровностях типа
Рис. 4.26. Относительное изменение давле-
ния в зависимости от степени сжатия газа
при установке с помощью МУПК-2 номи-
нального клиренса (рис. 4.24, а для 1-й и
6-й рессор):
оп
1 - Р > ; 2 - h - ± 200 мм
4
112
Формулы для расчета р*/р при установке клиренса с помощью МУПК-2
(на неровностях без отрыва опорных катков от грунта)
Таблица 4.2
Максимальное давление жидкости в МУП К Рис. 4.24 Номер опорного катка Риг. 4.21 Н»мер опорного катка
1. 6 2. 3. 4. 5 1. 3, 4, 6 2, 5
> °" 4 5П/ а. 6 1 1 в. г 1 1
G„ б 1 - s ( - _!_) ф 1 1 г 1 1-Е| 1 I
" 3 —2«! ’
К зу а 1 - “ п 1 । } 1 г 1 V [1-«[‘ет +
а 1 -.(«„-1) г 1 U<CT-1) . о («1 - 1) _ | 1 | «1(3 — 2ч) Ь
б 1 1/(1 — * + + 3<у-п^|]} «1(3 — S|) J/ в 1 ' 11 Е ЕСТ — _1|1 «,(3-2«>) 1» 1
1 -«(««-1) 1 -НЧт-1)
Таблица 4.3-
Формулы для расчета р*/р при установке клиренса с помощью МУ ПК-2
(на неровностях при отрыве опорных катков от грунта)
Максимальное давле- ние жидкости в МУПК Рис. 4.24 Номер опорного катка X Номер опорного катка
1. 6 2, 3, 4. 5 1, 3, 4. 6 2, 5
> °" a 1 1 z 1 1
' 4 i-.L- 1 1 1 j
vCT «, ) ' ст 3 — 2 ч1
б 1 1 в 1 1
1 —
2» < ри < 8Sn ' 3-tJ ’ ст t ,)
< On 4 Sni a -3(‘--'> -||| (3 — ч) J г 1 1/ | 1 — ' | S£T + + -1 И «,(3-2.,) У
1 - £ («Ст — 1) 1 -Н = ст-1)
< On б 1 Р (1_£|е _j_ в _ 3(«,- 1) . ,п 1
1 ' 1 | ст _j_ 3<*1 ~ !>.. — ! 11 1-«(«ст-1)
£|(3 — £j) Л »|(3-2Ч) И
выступ, как и при создании клиренса с помощью МУПК-1, полос-
ти рессор неполностью заполняются жидкостью (кривая 2), что
устраняется увеличением давления жидкости в гидросистеме. При
этом после однократного срабатывания МУПК-2 объем жидкости
во всех рессорах будет соответствовать исходному, поэтому отпа-
дает необходимость повторного срабатывания механизма, которое
может привести к переполнению рессор.
Рис. 4.27 .Зависимость _средней скорости
движения машины (при zc.b=10 м/с2) от
высоты неровностей при установке номи-
нального клиренса с помощью МУПК-1 (/)
и МУПК-2 (2) из положений, изображен-
ных на рис. 4.24:
--------а : — •----б ;--------в : • • • — г
П<’
При анализе табл. 4.1, 4.2, 4.3 видно, что на неровностях, мень-
ших статических ходов опорных катков, изменение давления в
рессорах, обеспечиваемое МУПК-1 и МУПК-2, практически оди-
наково, а на больших неровностях МУПК-2 обеспечивает меньшее
отклонение характеристик рессор от исходных. При прямолиней-
ном движении машин со средней скоростью, ограничиваемой плав-
ностью хода, оба механизма после установки номинального кли-
ренса не обеспечивают постоянства скорости (рис. 4.27), особен-
но при неровностях типа выступа или впадины.
Для нормальной работы ГПП и МУПК необходима постоян-
ная гидравлическая связь между газом в пневмобаллоне и порш-
нем рессоры при различной температуре, для чего должен быть
предусмотрен компенсационный объем жидкости, составляющий
40—50 % полного объема пневмобаллона.
Глава 5. ГУСЕНИЦЫ
Б.1. ОБЩИЕ СВЕДЕНИЯ
Гусеница (одна из основных сборочных единиц движителя)
предназначена для передачи тяговой силы от ведущего колеса
на грунт,распределения веса машины по опорной поверхности,
а также для обеспечения сцепления и проходимости в различных
условиях движения.
Различают гусеницы бесшарнирные (ленточные) и шарнирные
(звенчатые), состоящие из отдельных звеньев (траков), соединен-
ных между собой шарнирами внешнего и внутреннего трения.
Внешнее трение имеет место в открытых или закрытых шарнирах
скольжения (качения), внутреннее —в резинометаллических шар-
нирах (РМШ).
Гусеницы с открытым шарниром скольжения отличаются кон-
структивной простотой, технологичностью, низкой стоимостью, ма-
лой массой и легкостью замены поврежденных звеньев в процессе
эксплуатации, что обусловливает их широкое распространение.
Такие гусеницы состоят всего из двух деталей: трака и пальца
(иногда применяется дополнительно стопорная пружинная шайба
или шплинт с шайбой для предотвращения осевых перемещений
пальца), сопряжение которых не требует высокой точности. Кон-
структивная простота деталей позволяет автоматизировать их про-
изводство. Высокая жесткость гусеницы при растяжении и про-
дольном скручивании обеспечивает хорошую устойчивость ее в об-
воде. Недостатком данных гусениц является их малая долговеч-
ность (особенно на высокоабразивных грунтах), обусловленная
интенсивным износом шарнира. Так, в условиях Белоруссии и
Прибалтики ресурс гусениц с открытым шарниром для основных
танков составляет около 1500 км, а для ВГМ легкой категории по
массе — 1200 км. Дальнейшая эксплуатация таких гусениц стано-
вится невозможной из-за чрезмерного увеличения шага и наруше-
ния вследствие этого зацепления с ведущим колесом.
Попытки увеличить износостойкость шарниров технологически-
ми методами (например, хромированием, цементированием и др.)
не дали ощутимых результатов. Борирование поверхности пальца
116
на глубину 0,12—0,25 мм в начальный период эксплуатации уве-
личивает противоизносную стойкость шарнира в 5—10 раз. Одна-
ко и это увеличивает ресурс гусениц в указанных выше условиях
всего на 800—1200 км, так как эффект полностью исчезает после
износа борированного слоя, а дальнейшее увеличение его толщины
снижает до опасных пределов усталостную прочность самих паль-
цев. Поэтому применение гусениц с открытым шарниром в совре-
менных ВГМ весьма ограничено.
У гусениц с закрытым шарниром (рис. 5.1) трущиеся поверх-
ности защищены от попадания абразивных частиц грунта уплот-
нениями различного типа, но для их размещения требуется почти
двукратное увеличение рабочего диаметра шарнира, что приводит
к увеличению массы гусеницы и момента трения в шарнире. Для
уменьшения потерь мощности на трение рабочие поверхности шар-
ниров смазываются или покрываются антифрикционными износо-
стойкими материалами.
Рис. 5.1. Конструкция гусеницы с за-
крытым шарниром:
/ трак; 2 — палец; 3 — уплотнения
Рис. 5.2. Конструкция гусеницы с
РМШ последовательного типа:
/ релиновые кольца; ?- втулке; .4
гайка; 4 — палец; 5 - звено трака
Долговечность гусениц с закрытым шарниром, как правило,
определяется надежностью уплотнительных элементов, разруше-
ние или износ которых (из-за высоких динамических нагрузок,
осевых перемещений, непосредственного контакта с грунтом и т. д.)
117
приводит к прогрессирующему износу шарнира. Из-за большого
количества уплотняемых соединений (около 1000 в одной гусе-
нице) суммарная надежность их недостаточна: ресурс гусениц
с закрытым шарниром лишь в два раза превышает ресурс гусе-
ниц с открытым шарниром. Гусеницы с закрытым шарниром на-
ходят применение в настоящее время главным образом на гусе-
ничных транспортерах-тягачах.
Рис. 5.3. Конструкция гусеницы с
РМШ параллельного типа:
/ — скоба; 2 — болт; 3 — стопорная шаЛ
ба; 4 обрезиненная беговая дорожка.
5 резиновые кольца; 6 — палец; 7 — звено
трака; 8 - съемный гребень; 9 болт.
10 — башмак
Рис 5.4. Конструкция гусеницы с
РМШ параллельного типа и съемны-
ми асфальтоходными башмаками:
/—обрезиненная беговая дорожка; 2 —
звено трака; 3 — пружинная защелка;
4 асфальтоходныП башмак; 5 — резнно
вые кольца; 6 палец; 7 — съемный гре-
бень; в болт; 9 — башмак; 10 — скоба;
// -стопорная шайба; It— болг
В гусеницах с игольчатым (или резиноигольчатым) закрытым
шарниром используется трение качения игольчатого подшипника,
118
однако высокая стоимость и технологическая сложность препят-
ствуют их широкому распространению.
В гусеницах с резинометаллическими шарнирами (рис. 5.2—
5.4) относительное перемещение пальца и трака осуществляется
за счет упругой деформации кручения резиновых элементов. РМШ
с другим видом деформации, в частности сжатия, не нашли при-
менения из-за конструктивной сложности и недостаточной долго-
вечности.
Гусеницы с РМШ имеют большую массу, чем гусеницы с от-
крытым шарниром, изготовление их более трудоемко, но долго-
вечность в четыре раза больше. Кроме того, они имеют и другие
преимущества: высокую стабильность шага, позволившую суще-
ственно увеличить долговечность зацепления с ведущим колесом;
пониженный демаскирующий шум при движении машины; умень-
шенные потери мощности, а следовательно, пониженный расход
топлива; меньшую динамическую нагруженность трансмиссии за
счет упругой связи между ней и грунтом, сглаживающей влияние
рывков от колебаний корпуса при разгоне и торможении; мень-
шую трудоемкость технического обслуживания ходовой части за
счет сокращения числа подтягиваний гусениц и исключения опера-
ций по периодическому удалению траков из-за удлинения гусени-
цы по мере износа ее шарниров. В настоящее время большинст-
во современных ВГМ оснащены такими гусеницами.
Бесшарнирные ленточные гусеницы деформируются за счет из-
гиба упругой основы резинотканевой или резинотросовой ленты,
на которой закреплены металлические звенья, обеспечивающие
сцепление с грунтом, зацепление с ведущим колесом (ВК) и
удержание гусениц под опорными катками. Ленточные гусеницы
применяются на машинах особо высокой проходимости. В танках
и других ВГМ ленточные гусеницы не применяются из-за легкой
повреждаемости и низкой ремонтопригодности (при разрыве необ-
ходимо менять либо всю ленту, либо значительную по длине
часть—секцию). Кроме того, обладая большой податливостью при
продольном скручивании и изгибе в плане, ленточные гусеницы
имеют повышенную склонность к спаданию.
5.2. ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ ГУСЕНИЦ
С РЕЗИНОМЕТАЛЛИЧЕСКИМИ ШАРНИРАМИ
У гусениц с РМШ последовательного типа проушины смежных
траков с запрессованными в них резинометаллическими элемента-
ми чередуются на одной общей оси (последовательно одна за
другой) так же, как в гусеницах с открытым шарниром, что опре-
деляет последовательную передачу скручивающего момента и рас-
тягивающего усилия от проушины одного трака через палец
к проушине другого трака.
У гусениц с РМШ параллельного типа оси проушин смежных
траков расположены параллельно на некотором расстоянии друг
119
от дру^а, при этом скручивающий момент и растягивающее уси-
лие передаются всеми резиновыми кольцами в проушине одной
стороны трака также параллельно.
Каждый трак гусеницы с РМШ параллельного типа имеет два
пальца; соседние пальцы смежных траков связаны между собой
двумя или более соединительными элементами. Крайние соеди-
нительные элементы (скобы) используются обычно для зацепле-
ния с ведущим колесом, выполняя роль цевок; иногда на соеди-
нительные элементы (средние или крайние) устанавливаются
гребни, удерживающие гусеницы от бокового смещения.
Появление РМШ параллельного типа вызвано стремлением
повысить долговечность и радиальную жесткость гусениц за счет
снижения давления на резину от растягивающих усилий: при рав-
ной ширине гусеницы длина обрезиненной части у шарнира па-
раллельного типа в 1,5—1,8 раза больше, чем у шарнира после-
довательного типа. Экспериментально установлено, что из-за из-
гиба пальца давление на резину распределяется неравномерно по
длине шарнира, причем коэффициент неравномерности, т. е. коэф-
фициент перегрузки (отношение максимального давления к сред-
нему), у шарниров параллельного типа 1,5—2,0, а у последова-
тельного 1,1 —1,3. Эта разница обусловлена большей длиной изги-
баемых участков пальца в шарнире параллельного типа и подат-
ливостью соединительных элементов (малой жесткостью заделки).
РМШ обоих типов имеют свои преимущества и недостатки.
Так, гусеницы с РМШ параллельного типа имеют меньшую массу,
более высокие сцепные свойства и лучшую самоочищаемость;
у гусениц с РМШ последовательного типа выше безотказность,
они более ремонтопригодны и обладают лучшей устойчивостью в
обводе.
Для уменьшения износа и снижения давления в месте контакта
с опорным катком беговая дорожка гусеницы может быть обре-
зинена. Применение обрезиненной беговой дорожки позволяет
уменьшить диаметр опорных катков, что, в свою очередь, способ-
ствует увеличению динамического хода подвески и улучшению
общей компоновки ходовой части. Масса ходовой части при этом
снижается незначительно, так как снижение общей массы опор-
ных катков компенсируется неизбежным увеличением массы гусе-
ницы.
Для предохранения искусственного покрытия дорог от повреж-
дения за рубежом применяются съемные асфальтоходные баш-
маки на подошвенной части траков. На отечественных ВГМ (за
исключением некоторых типов транспортеров-тягачей) они не
нашли применения, так как увеличивают массу гусеницы прибли-
зительно на 40 % и не эффективны при движении по пересечен-
ной местности. Экспериментально установлено, что установка
обрезиненных башмаков увеличивает коэффициент сцепления
только на бетоне и сухом грунте (на 40 и 7 % соответственно).
120
Конструкция гусениц основных зарубежных ВГМ принци-
пиальных отличий от отечественных не имеет.
Представляет интерес применение на гусенице танка «Лео-
пард-2» и БМП «Мардер» жесткой связи обоих звеньев трака,
которая в 2,5 раза повышает жесткость гусеницы при продольном
скручивании, увеличивая тем самым устойчивость ее под опор-
ными катками. Направляющий гребень при этом выполняется как
единое целое со звеном, а средняя связь представляет собой две
перемычки, соединенные болтом. Связь между звеньями разгру-
жает палец шарнира от изгиба в вертикальной плоскости при
наезде кромками гусеницы на неровности грунта.
В табл. 5.1 приведены для сравнения конструктивные пара-
метры отечественных и зарубежных гусениц. Из таблицы видно,
что на зарубежных ВГМ предпочтение отдается гусеницам с па-
раллельным типом шарнира.
Опыт изготовления и эксплуатации гусениц ВГМ позволяет
сформулировать некоторые положения, которые следует учиты-
вать при проектировании новых образцов.
Проушины звеньев траков. Длину проушин рекомендуется вы-
бирать так, чтобы отношение ее к диаметру пальца не превышало
7 для шарнира параллельного типа и 3,5 для последовательного,
иначе из-за большого прогиба пальца чрезмерно вырастает коэф
фицнент перегрузки резины. Рабочая длина (с запрессованной
резиной крайних проушин) РМШ последовательного типа должна
быть в два раза меньше, чем средних проушин, длина всех средних
проушин одинакова. Так как диаметры шарниров с изменением
массы ВГМ меняются мало, обычно траки ВГМ средней категории
по массе выполняются с семью проушинами, траки остальных
ВГМ — с пятью. Для шарнира параллельного типа при моноблоч-
ном выполнении звена целесообразно применять три жесткие
связи.
Внутренний диаметр проушин для ВГМ средней категории по
массе обычно выбирается в пределах 38—42 мм, для промежуточ-
ной 34 —38 мм и для легкой 30—34 мм, Отверстия проушин изго-
тавливаются по 12-му (реже по 11-му) квалитету точности, шеро-
ховатость поверхности Rz 20—80 мкм. Так как у гусениц с РМШ
проушины практически не изнашиваются, толщина их стенок
может быть минимально возможной (6—7 мм для литых траков
и 3—5 мм для штампованных). На торцах проушин штампован-
ных траков предусматриваются усиливающие пояски шириной
8—12 мм и толщиной на 1—2 мм большей, чем толщина стенок
основной части проушины. Кроме того, заходные фаски шириной
0,5—2 мм предохраняют резину от повреждения при запрессовке.
Грунтозацепы. Общая опорная поверхность грунтозацепов (по
верхность контакта с грунтом при погружении примерно на 5 мм)
выбирается таким образом, чтобы среднее давление в контакте
с грунтом составляло 5—9 МПа при действии на звено статиче-
ской нагрузки от опорного катка. При меньших значениях давле-
Таблица 5.1
Конструктивные параметры гусениц
Параметр Отечественные ВГМ Зарубежные ВГМ
Т-80 ТЛ2 Т-64А МТС БМП-1 БМД М-1 М-60Д1 .Лео- пард-1* .Мар- дер* М-113 М-107
Масса комплекта, кг 2567 3446 2922 2852 2346 566 4100 5289 4224 Нетсве- деннй 2320 2241
Погонная масса, кг/м 135,9 131 113 99.2 57 24,7 140 188 157,1 64 71 74
Ширина гусеницы, мм 580 580 540 484 300 2.50 635 711 550 450 380 457,2
Шаг гусеницы, мм 164 137 164 125 140 109 178 176 160 147 152 152 4
Шаг скобы, мм 67 —' 67 а — г 46 — Нет све- дений 64 63 50 — —
Шаг звена, мм 97 137 97 125 94 109 То же 112 97 97 152 152,4
Число звеньев 80 96 79 115 84 95 76 80 84 85 64 75 и 76
Тип шарнира Парал- лель- ный После- дова- тель- ный Парал- лель- ный После- довав тель- ный Парал- лель- ный После- дова- тель- ный Парал- лель- ный Парал- лель- ный Парал- лель- ный Парал- лель- ный После- дова- тель- ный После- дова- тель- ный
Диаметр пальца, мм 30 30 30 30 25 14 — 32 30 25,4 22,5 28,6
Диаметр проушин, мм 38 38 40 38 34 19 — 41,2 38 34 30 38,1
Погонная жесткость:
продольная, кН/мм 19 15 12 11 3 — — 20 15,7 —- — 11
винтовая, Н м/® 870 1090 600 830 310 150 — — 830 — — 350
ния ухудшается сцепление с обледенелым и твердым грунтом, при
больших — увеличивается темп износа грунтозацепов. Высота
грунтозацепов обычно равна трети шага звена. При ее увеличе-
нии растут потери мощности на деформацию грунта и трение
при повороте звена на грунте, при уменьшении — снижаются
сцепные свойства. Для повышения устойчивости гусеницы к боко-
вому скольжению около 10 % общей длины грунтозацепов распо-
лагается по продольной оси гусеницы. С увеличением длины про-
дольно расположенных грунтозацепов растет момент сопротивле-
ния повороту. Толщина грунтозацепа у основания принимается
обычно 8—10 мм.
Гребень. Расположение и форма поперечного сечения направ-
ляющих гребней зависят от типа опорного катка: для двухрядно-
го применяется один центральный симметричный двусторонний
гребень, для однорядного — два боковых односторонних. Высота
гребня должна в 2—2,5 раза превышать толщину массивной шины
опорного катка; угол заострения гребня в поперечном сечении ра-
вен 5—8°. Угол заострения в продольном сечении определяется
необходимым перегибом гусеницы на ведущем и направляющем
колесах; при этом площадь боковой поверхности гребня (для сни-
жения износа) берется максимальной.
Скобы и цевки. В гусеницах с РМШ последовательного типа
наиболее нагруженным является место соединения цевки с осно-
вой трака; для усиления этого места в некоторых случаях умыш-
ленно увеличивают рабочую длину крайней проушины и вводят
дополнительное ребро жесткости.
Прогрессивным способом крепления скоб гусениц с РМШ па-
раллельного типа является клеммовое соединение. При проекти-
ровании таких скоб необходимо стремиться к максимальному
повышению их податливости за счет снижения высоты деформи-
руемых сечений на дуговых участках. Резьбовые соединения скоб
выполняются по 6-му квалитету точности.
Резиновые элементы шарнира. Резиновые элементы имеют
форму колец с прямоугольным или трапециевидным профилем.
Их толщина выбирается так, чтобы степень запрессовки (отноше-
ние свободной толщины кольца к деформированной после запрес-
совки) была равна 1,4—1,7. Для шарниров последовательного
типа количество колец в одной проушине не должно быть боль-
ше 2—3; в коротких крайних проушинах может быть одно кольцо.
Отношение высоты к ширине кольца с прямоугольным профи-
лем обычно равно 1,5—2; при меньшей ширине не обеспечивается
устойчивость колец при запрессовке, при большей — повышается
предварительная напряженность колец.
Для колец с трапециевидным профилем суммарная ширина
оснований трапеций должна быть равна общей длине проушины,
а коэффициент запрессовки 1,7—1,9. Ширина верхнего основания
трапеции выбирается из условия необходимости заполнения рези-
ной свободного объема проушины, при этом коэффициент запол-
123
нения объема (отношение свободного объема проушины к сум-
марному объему резиновых колец) должен быть не менее 0,95.
При больших значениях коэффициента резина выступает за торец
проушины, что усложняет сборку гусеницы и увеличивает вероят-
ность обрыва колец при запрессовке; при меньших значениях
коэффициента надает жесткость шарнира.
Расстояние между кольцами (шаг) должно обеспечить неко-
торый взаимный боковой подпор колец: отношение объема
одного кольца к свободному объему проушины на один шаг
должно составлять 1,03—1,05 для РМШ параллельного типа и
1,1 —1,2 для РМШ последовательного типа. Боковой подпор спо-
собствует уменьшению свободных объемов между кольцами и по-
вышает жесткость шарнира, однако при чрезмерном его увеличе-
нии повышается вероятность обрыва колец при запрессовке,
которая производится с применением смазки, состоящей из 30 %
касторового масла и 70 % этилового спирта.
Пальцы и втулки. Для изготовления пальцев и втулок исполь-
зуется круглый (РМШ параллельного типа) или профильный
(РМШ последовательного типа) калиброванный прокат без до-
полнительной механической обработки поверхностей. Точность
изготовления — по 1-1-му квалитету. Длина пальцев должна быть
на 1—3% меньше ширины гусеницы. Особое внимание следует
уделять взаимной параллельности торцов втулок (РМШ последо-
вательного типа) во избежание появления зазоров между ними
при сборке, в которые при эксплуатации может попасть грунт, за-
клинивающий палец. При сборке гусеницы шестигранная поверх-
ность пальца и втулок покрывается смазочным материалом.
Высокая нагруженность гусениц ВГМ и жесткие ограничения
их по массе, а также требования надежности вынуждают исполь-
зовать для их изготовления высоколегированную конструкцион-
ную сталь и высокопрочные марки резин. Наиболее широко при-
меняется сталь 38ХС, изотермически закаленная, с твердостью
НВ 341... 444. Применяются также литые траки из стали 110Г13Л
с твердостью НВ 170... 217 и 36СГМ с твердостью НВ 229 ... 269,
штампованные траки с приварными гребнями из стали 20ХГСНМА
с твердостью НВ 388...477; пальцы из стали 30ХГСНА с твер-
достью НВ 415...514 и шестигранные втулки из стали 40Х с
твердостью HRC 34 ... 44.
У гусениц со средней связью пальцы обычно дополнительно
подвергаются поверхностной упрочняющей обкатке для повыше-
ния усталостной прочности. Резьбовые детали гусеницы покры-
ваются антикоррозионным материалом методом кадмирования
или цинкования.
Резиновые элементы шарниров изготавливаются из резины ма-
рок ИРП-1392 (на основе натурального каучука) и ИРП-1393
(на основе изопренового синтетического каучука).
Для обрезинивания беговых дорожек и изготовления асфаль-
тоходнах башмаков применяется резина марки 51-3064 (на осно-
124
ве синтетического каучука). Формообразование резиновых эле-
ментов гусениц производится путем прессования, крепление их к
металлической основе осуществляется с помощью клея «Лейко-
нат». В настоящее время ведутся работы по замене прессования,
требующего больших затрат ручного труда, на более прогрессив-
ное формообразование литьевым способом, позволяющее автома-
тизировать процесс обрезинивания.
Контроль качества изготовления резиновых элементов шарни-
ра (пальцев и втулок) производится на заводах резинотехниче-
ских изделий выборочно по заданному числу циклов деформации
на заданный угол скручивания при постоянной радиальной на-
грузке на специальных стендах, имитирующих условия нагруже-
ния резиновых колец в гусенице.
5.3. РАСЧЕТ УСИЛИЛ, РАСТЯГИВАЮЩИХ ГУСЕНИЦУ
При движении танка по пересеченной местности гусеница под-
вергается сложному силовому воздействию. Принято делить рас-
тягивающие усилия на постоянные, считающиеся неизменными в
установившемся режиме движения (статическое натяжение, сила
тяги, натяжение от центробежных сил), и динамические, изменяю-
щиеся во времени (нагрузки от продольных и поперечных колеба-
ний ветвей, колебаний опорных катков и корпуса танка, от нерав-
номерности движения из-за наличия звеньев гусениц и т. д.).
Постоянные составляющие растягивающих усилий оказывают
большое влияние на нагруженность обвода и надежность гусенич-
ного движителя.
На долговечность элементов гусеничного зацепления влияет
также абразивность грунта. Например, на песчаном грунте, обла-
дающем высокой абразивной агрессивностью, зубчатые венцы ве-
дущих колес имеют наименьшую долговечность. При движении
танков по малоабразивному грунту с большой скоростью износ
деталей незначителен, несмотря на более высокий уровень удар-
ных нагрузок в зацеплении. Сброс гусениц, имеющий место в по-
давляющем большинстве случаев в тяжелых дорожных условиях
при повороте с малым радиусом, также связан с уровнем постоян-
ных составляющих растягивающих усилий.
Следует, однако, отметить, что в связи с возрастанием удель-
ной мощности, средней и максимальной скорости движения танков
роль динамических нагрузок в формировании общего уровня
нагруженное™ гусеничного движителя существенно возрастает,
что необходимо учитывать при расчете и проектировании движи-
телей.
Если считать, что танк движется по ровному участку мест-
ности с постоянной скоростью прямолинейно или по траектории
постоянной кривизны, то гусеницу можно рассматривать как мате-
риальную нить, сохраняющую при движении форму неизменной
замкнутой кривой.
125
При прямолинейном движении в тяговом режиме и при пово-
роте танка на забегающем борту набегающий на ведущее колесо
участок гусеницы принадлежит рабочей ветви гусеничного обвода,
находящейся под действием рабочего усилия (силы тяги), а сбе-
гающий участок относится к свободной ветви. Рабочая и свобод-
ная ветви нагружены постоянными составляющими растягиваю-
щих усилий:
Т'р.я-'Гр + П, Тс..я=Гс.+ Гр, (5.1)
где 7р> Гс, — статические составляющие растягивающих усилий в рабочей
и свободной ветвях; Tv — натяжение гусеницы от центробежных сил.
Если считать, что силы Гр и Г„ действуют на одинаковом
расстоянии от осн ведущего колеса, то из условия его равновесия
следует:
(5.2)
где P-t— сила тяги (рабочее усилие в гусенице).
Натяжение в гусенице от действия центробежных сил
(5.3)
где V — скорость движения танка, м/с; qr — погонный вес гусеницы, кН/м;
g — ускорение свободного падения.
На отстающем борту при повороте танка и при прямолиней-
ном движении накатом или с торможением набегающий на веду-
щее колесо участок гусеницы считается свободным, а сбегающий
является рабочей ветвью и нагружен рабочим (тормозным) уси-
лием.
Упругие деформации гусеницы и подвески, возникающие при
действии силы тяги, приводят к изменению и перераспределению
длины ветвей гусеничного обвода, что вызывает изменение пред-
варительного натяжения.
Если предположить, что продольная податливость гусениц и
угловая жесткость резинометаллических шарниров оказывают
незначительное влияние на растягивающее усилие в обводе, то
можно воспользоваться формулой В. Ф. Платонова
г«. = г"—ттаг- <5Л>
где Го —усилие предварительного натяжения; L„. £р —длина свободной и
рабочей ветвей обвода соответственно.
По мнению В. Ф. Платонова, податливость упругих элементов
системы подрессоривания целесообразно учитывать только при
заднем расположении ведущих колес и наличии поддерживающих
катков; тогда
— т р + 2КоГа sin^H.s/Ciroumn)
7 « “ 7 • £р + Дс. + 4 КАвт^н-э/Ио.К*М ’ 1‘7
126
где Ко—погонная жесткость гусеницы, кН/мм2; — деформируемая площадь
шарнира, мм2; mn—жесткость подвески (кН/мм); п0 в — число опорных кат-
ков (подвесок) на одном борту; аЙЭ — угол наклона заднего наклонного
участка гусеницы.
Упругая деформация гусеницы с РМШ под воздействием натя-
жения от центробежных сил способствует снижению предвари-
тельного натяжения. При аналитическом методе расчета растяги-
вающих усилий, предложенном А. А. Загудаевым, сначала опре-
деляется статическое натяжение с учетом центробежных сил при
движении танка в условном режиме с заданной скоростью при
Ру — 0 (движение по инерции), а затем определяются усилия Ги
и Т„ с учетом статического натяжения.
В. Ф. Платоновым получено следующее приближенное выра-
жение для расчета статического натяжения гусеницы Т„ с уче-
том скорости движения:
Т,+ Г„ Г,- (1/Г?,-!/^). (5.6)
где /п< — длина i-ro провисающего участка гусеницы.
Уравнение (5.6) решается методом последовательных прибли-
жений.
Результаты расчета, проведенного описанными выше метода-
ми, позволяют оценить нагруженность элементов гусеничного
обвода в тяговом режиме движения ВГМ. Однако зачастую необхо-
димо учитывать особенности работы движителя в тормозном ре-
жиме, а также проанализировать влияние упругости отдельных
элементов гусеничного обвода (что необходимо при выборе пара-
метров ходовой части на стадии ОКР) и представить результаты
расчета в наглядном виде.
Рассмотрим графоаналитический метод расчета растягиваю-
щих усилий в гусенице, основанный на представлении гусеничного
обвода в виде упругой системы, включающей в себя гусеницу, эле-
менты, формирующие обвод, н упругие элементы подвески. Не-
трудно показать, что при замене обычно используемой в расчетах
треугольной эпюры распределения растягивающих усилий по опор-
ной ветви на прямоугольную с эквивалентным упругим удлине-
нием под действием силы тяги последняя должна быть приложе-
на в средней точке опорной ветви. Считая, что сила тяги целиком
воспринимается первым зубом ведущего колеса, получим расчет-
ную схему гусеничного обвода (рис. 5.5), упругая модель которо-
го может быть представлена в виде системы, состоящей из четы-
рех последовательно соединенных упругих элементов (схема четы-
рех пружин, рис. 5.6). Система в целом растянута силой предва-
рительного натяжения То и нагружена в средней точке К силой
тяги Ру.
Податливость подвески проявляется при воздействии усилий
Гр и Г„ на крайние опорные катки и входит в общую податли-
вость обвода в виде составляющих 1/Сп р и \/Си св.
127
Для гусеничного обвода, приведенного к схеме рис. 5.6 и
представляющего собой статически неопределимую систему, кро-
ме условия статического равновесия ведущего колеса (5.2), нуж-
Рис. 5.5. Расчетная схема распределения растягивающих усилий по обводу
в тяговом (а) н в тормозном (б) режимах:
/. 2 - «торы распределения по опорной ветви гусеницы касательных сил реакции грунта и
растягивающих гусеницу усилий соответегвсино; 3. 4— свободная и рабочая ветви гусонич
кого обвода соответственно; К - средняя точка опорной ветви; .4 — точка входа гусеницы
в зацепление с ведущим колесом (ВК)
Lct + AlCa + Д1р
2
Рнс. 5.6. Упругая модель гусеничного обвода:
/, 2 - свободная и рабочей ветви обвода; Срр , C'r fв - жесткость рабочей и свободной
ветвей гусеницы при растяжении; <-’п р, Сп,св жесткость подвески, приведенная к рабочей
и свободной ветвям обвода
128
но записать условие совместности деформаций рабочей и свобод-
ной ветвей:
AZ,- А/р. + AZ,; AZ„ А/.% AZ,: AZ, '• AZ„ = Л1,- + AZ.... (5.7)
где Д/р». A/CJ<—приведенный начальные деформации рабочей и свободной
ветвей под действием усилия предварительного натяжения; Д/(>. А/с, — призе
денные текущие деформации рабочей н свободной ветвей обвода; Д/а дефор
майн я ветвей под действием силы Рт.
Условие совместности действительно при Д/(В^0.
Изменение формы опорной поверхности гусеницы, удлинение
гусеницы с РМШ под воздействием центробежных сил, измене-
ние положения звеньев на элементах, формирующих гусеничный
обвод, в том числе на ведущем колесе, при движении танка по
пересеченной местности вызывают дополнительную деформацию
обвода и соответствующее изменение растягивающих усилий. По-
этому уравнение (5.7) может быть записано в общем виде:
Д/р + А/с. Д/р.4-А/сц(^Д/д. (5.8)
где Д/ д —- дополнительная деформация гусеничного обвода.
Считая в первом приближении упругие характеристики гусе-
ницы и подвески линейными и выразив деформации через растя-
гивающие усилия н приведенные жесткости рабочей и свободной
ветвей обвода, с учетом (5.2) получим:
т„ - т, + C^AZ, - К'.Р, = Т„- К,.Р,; (5 9)
Т, - Та + Р, _ Г„ + (1 - К„) Л .
где Кся — коэффициент разгрузки обвода силой тяги от статического на-
тяжения,
Х’е. “ Сов./Ср = Ч ’ <5'10)
здесь СОбВ—приведенная жесткость гусеничного обвода,
Со6в==1/ср + (5,Н)
Из формулы (5.10) видно, что коэффициент Кс„ зависит от со-
отношения жесткостей рабочей и свободной ветвей обвода, т. е.
от асимметричности приложения силы тяги.
Статическое натяжение гусеницы (Тст) в общем виде пред-
ставляет собой сумму двух натяжений — предварительного и на-
тяжения от дополнительной деформации обвода:
Лт-Го | Со6вА/ж. (5.12)
Формулой (5.9) можно пользоваться при Г<в>0;при Та <0
следует принимать Гс> =0, Гр Рт.
Усилие Т„ охватывает весь обвод и является по сути дела
рабочим натяжением гусеницы, устанавливающимся при движе-
нии танка (Рт>0). При Рт «=0 Тсв ~TIV при Рт =0 и А/* =0
Л» — Т’ст — Л»-
8 Зак. 16«с>
129
Взаимосвязь между усилиями и деформациями в обводе как
упругой системе можно представить в виде диаграммы (рис. 5.7).
Прямые / и 4 представляют собой упругие характеристики рабо-
чей н свободной ветвей обвода. Знаки углов наклона противопо-
ложны и соответствуют знакам деформации ветвей под действием
силы Рг (см. рис. 5.6). Точка пересечения характеристик соответ-
ствует предварительному натяжению (Тст =Т0), одинаковому
для обеих ветвей. Отложив усилие Р, по вертикали между ли-
ниями I и 4 и обеспечив тем самым выполнение условий (5.2)
и (5.7), получим значения усилий 7*р и Та.
Рис. 5.7. Диаграмма упругого растяжения гусеничного обвода:
/, 1 — упругие характеристики ветвей гусеницы; J. 3 — эоны тормозного и тягового
режимов
При заднем расположении ведущего колеса в тяговом режиме
рабочей ветвью является короткая ветвь обвода (см. рис. 5.5,а),
а свободной— длинная ветвь, включающая в себя верхнюю. Не-
трудно заметить, что при переходе от тягового режима к тормоз-
ному (см. рис. 5.5,6) рабочая и свободная ветви (и соответствен-
но их упругие характеристики на диаграмме) взаимно меняются
местами, поэтому область тормозного режима располагается сле-
ва от точки пересечения характеристик.
При провисании гусеницы характеристики ветвей, построенные
посредством суммирования упругих деформаций и йриращения
длины за счет провисания участков, имеют в области малых рас-
тягивающих усилий нелинейный вид (рис. 5.8). Эти значения на-
ляжения ограничиваются некоторым минимальным усилием ТИ|П,
равным (0,5 ... 1,0) (где /и—длина наклонного участка гу-
сеницы).
130
Условие совместности деформаций ветвей обвода в этом слу-
чае имеет вид
Л/р + Д/с. + AST Д50 = А/р, + + Л/,, (5.13)
где AST — ASa — суммарное изменение длины провисающих участков гусеницы
при изменении растягивающего усилия от 7*тщ Д° Л» в свободной ветви и
до Г р в рабочей ветви.
Рис. 5.8. Диаграмма растяжения гусеничною обвода с учетом провисания
участков гусеницы танка средйсй категории по массе (обозначения см. на
рис. 5.7)
Условие совместности деформаций (5.13) сохраняется при
rfB>rroin. При 7’с,< Tmtn следует принимать Гга1п.
Диаграмма, приведенная на рис. 5.8, построена для танка
средней категории по массе, основные конструктивные параметры
гусеничного обвода которого приведены в табл. 5.2. При определе-
нии статического натяжения гусеницы по этой диаграмме необхо-
димо сместить характеристику свободной ветви вдоль оси абсцисс
на величину Д/д (с учетом знака деформации).
Для определения усилий в ветвях обвода по формуле (5.9)
необходимо выразить входящие в нее величины через исходные
параметры, перечисленные в табл. 5.2.
Можно записать очевидные соотношения:
С, р = = Сг с.- — --А-; = <5J4>
Лр >Г «с» 1-*г ' лг
где Ст—жесткость трака при растяжении: Ст— жесткость гусеницы при растя
женин; лг —число звеньев в гусенице; лр. лс,—число звеньев в рабочей и сво-
9*
131
бодной ветвях гусеницы; vr — коэффициент асимметричности нагружения гусе-
ницы силой тяги,
vr = Др/Лг. (5.15)
Таблица 5.2
Конструктивные параметры гусеничного обвода танка средней категории
по массе
Параметр Исходное значение Параметр Рас четкое
значение
Lon. мм 4265 D,. мм 628
/в, мм 5505 Лр 17
мм 850 62
'*(..«)• ““ 720 чг (тяговый режим) 0,215
% (М.К) • •• •“ 32,7 vr (тормозной режим) 0,785
’и (•«)••• •’ 33,5 Сг. р, кН/мм 5.88
Оо.к . ММ 670 Сг. св. кН/мм 1.61
Ом. к. мм 510 Сг, кН/мм 1.27
tr\ мм 104 Хт 1.2
«г 79 Сп.р. кН/мм 1.99
ПО. к '6 Ся.са, кН/мм 2,04
Пп- к 5 С„, кН/мм 1.01
Су, кН/мм 100 Ср, кН/мм 1,49
тп , кН/мм 0.22 Ссв, кН/мм 0,9
Сов., кН/мм 0,562
А'с» (тяговый режим) 0377
Ксв (тормозной ре- 0,624
жим)
9г. кН/м 1,33
Из рис. 5.5, а
0.5 Lo„ -f- /м. р «р — -t ~; яе,«««г — лр ж» (| — уг) лг, (5.16)
где /г — шаг гусеницы; Дм —длина опорной ветви гусеницы; /„ р — длина
наклонного участка рабочей ветви гусеницы.
При переднем расположении ведущего колеса
п = 4.0,5-^-т.;
с 'г ’ * (5.17)
Яр = Лг—Лс. = *гЯг.
где/яс, — длина наклонного участка свободной ветви гусеницы; 2 —число
зубьев ведущего колеса; у,—угол охвата ведущего колеса гусеницей.
132
Приведенные к ветвям гусеничного обвода жесткости подвески
равны отношению растягивающих усилий к суммарному измене-
нию длины наклонных участков каждой ветви гусеницы. Схема
изменения высоты обвода под действием растягивающего усилия
Теи на крайний опорный каток показана на рис. 5.9. Из схемы
mUnn. К И Р /и. р * гв Л|. сн
АЛ sin Лам„;
д/». „ “ ЛЛ sin «, „ + ,) А«„. „.
где “и.сг “и.р—углы наклона свободной и рабочей ветвей; Rotl, Rtit( — ра-
диусы окружностей, проходящих через центры PMIII звеньев гусеницы на дуго-
вых участках, охватывающих опорный каток и направляющее колесо; Rb.k
радиус делительной окружности ведущего колеса; ЛА — изменение высоты обвода
Рис. 5.9. Действие усилия Тел на опорный каток (а), формы провисания наклон-
ного участка гусеницы (б):
I — провисание при В > л»и ; 2 провис я пне при * < в,.
Общее изменение периметра обвода под действием силы Гс,
А/1.. 4 А/„ р = Г„ —X,,
где X, — коэффициент, учитывающий влияние угла наклона ветвей и диаметров
опорных катков, ведущего и направляющего колес,
R'o « - /?, ж
Хт - sin а 4- Sin Я ( , 4- —-——а- х
’ «<»•«> (518)
^о.к ^м.к
X COS Яи (В 4- ZM C0S в" (И. к) •
133
Для тягового режима: «н(в.ж) = «ир, ^<в.м-=^р, ви^ю“вн.«<
(К. к) ^н.с» ’
ДЛЯ тормозного: Н(в.к)""*ви. (я. к) * ^н. с» ’ “н (и.к) “ ®н Р *
(и. к) “* ^и.|р ’
Приведенные жесткости подвески
с...—’ <5-19>
•ln®M»CBAT »И1«и.рАТ
общая приведенная жесткость подвески одного борта
при- «,.«..=•«.=/<,
Приведенные жесткости рабочей и свободной ветвей гусеницы
соответственно равны:
с<" ' р!^ + —сгЧ
а приведенная жесткость гусеничного обвода
Натяжение гусеницы от центробежных сил Т9 вызывает ее
удлинение на величину ASP = /'jCr = Яг/’,/Ст. а также сниже-
ние статического натяжения от Гст —То (при Д/ж »=0) до 7’ет(2)
(при Д/ж<0, см. рис. 5.8) и соответствующее снижение растяги-
вающих усилий Тсп и Гр.
Если принять Д/ж = Д/ст 4-Д5„, где Д/ст — статическая со-
ставляющая дополнительной деформации обвода, то
Т„ - Го + Д/„ - Kv Tv, (5.24)
здесь Кр— коэффициент разгрузки обвода от статического натяжения центро-
бежными силами:
Кр=1Д1+Сг/Сп|. (5.25)
Формула (5.25) показывает, что статическое натяжение зави-
сит от соотношения жесткостей гусеницы и подвески: с увеличе-
нием жесткости гусеницы или с понижением жесткости подвески
влияние центробежных сил на натяжение уменьшается.
С учетом зависимости (5.24) выражение (5.9) для усилия
Гсв примет вид
Г„ - Т. + Со6.Д/1Т KvTt, . • (5.26)
134
Из этой формулы видно, что силы Т9 и Рг снижают статиче-
ское натяжение гусеничного обвода по-разному; различие, отра-
жаемое коэффициентами Kv и Ксв, определяется тем, что сила
Т9 распределена по всему гусеничному обводу, а сила тяги Р,
действует лишь на рабочую ветвь.
Графическая зависимость изменения длины провисающих уча-
стков AS от растягивающего усилия Т показана на рис. 5.10, а:
AS = S-/„=/(F),
где S —длина провисающего участка гусеницы; /п—расстояние между точками
его подвеса (длина пролета).
Рис. 5.10. Характеристика провисающих участков ветви:
a' 4S — / (Г) ; б — А/ *- / (Г) ; / упругая характеристика; 2 — суммарная характеристика
Характеристика провисающего участка ветви строится посред-
ством сложения упругой деформации и приращения длины за
счет провисания при одинаковом усилии Т* (см. рис. 5.10,6).
Пренебрегая влиянием упругих моментов в РМШ, для гори-
зонтальных участков (верхняя ветвь) с учетом малости стрелы
провисания можно записать:
-1/П-
(5.27)
При наличии поддерживающих катков пролеты между ними
можно принять одинаковыми и равными
(5.28)
где ппи—число поддерживающих катков на одном борту; — расстояние
между осями ведущего н направляющего колес по горизонтали.
135
При отсутствии поддерживающих катков верхняя ветвь гусе-
ницы состоит, в общем случае, из трех участков (рис. 5.Н) и ее
длина
= 5., + + (Z, - - /.,i — ,
где S_, —длине провисающих участков; /^ — расстояние по горизон-
тали от точек подвеса до точек касания гусеницей опорных катков.
Рис. 5.11. Схема провисания верхней ветви гусеницы в ВГМ без поддерживаю-
щих катков
Стрелы провисания можно принять равными между собой:
Л.-ДД)/2.
Тогда ZBi =ZB<—и, считая провисание происходящим по па-
раболе, получим
где Г— Гсв или Г—Гр в зависимости от режима работы (тягового или тор-
мозного).
В формуле (5.27) принимается /п==2/в ; при 2/,>£, верхняя
ветвь не касается опорных катков, поэтому /„ = £,.
Для наклонных участков .где ам, Лв—расстояние
между точками подвеса по горизонтали и вертикали (см. рис. 5.9, в).
С учетом этого получаем
(5.29)
Эта зависимость имеет смысл для формы провисания / наклонно-
го участка ветви (см. рис. 5.9, б) при
T',qt + ®и/2Ли.
Используя диаграмму растяжения гусеницы (см. рис. 5.8) и
задаваясь в необходимых пределах значениями Д/д, можно по-
строить статическую характеристику гусеничного обвода (рис.5.12),
а затем графики зависимости растягивающего усилия в свобод-
ной ветви (т. е. рабочего натяжения гусеницы) Тсв от силы тяги
Рт и статического натяжения (рис. 5.13).
136
Представленные зависимости показывают, что растягивающие
усилия в ветвях гусеничного обвода могут изменяться в широких
пределах. Наибольшее влияние на них оказывают сила тяги, пред-
варительное статическое натяжение и скорость движения. Так, в
приведенном примере при 7'о=0,098 Gt = 40kH (G, —вес танка)
с изменением скорости
от минимальной (Л/ж=
= —« 0) до
70 км/ч (Гр = 61 кН,
Д/ж=—Д5р = 40 мм)
статическое натяжение
уменьшается от Гст —
= То до Тст =19 кН,
т. е. на 21 кН (в 2,1 ра-
за).
Можно заметить,
что в тормозном режи-
ме увеличение силы тя-
ги вызывает более су-
щественное снижение
Рис. 5.12. Статическая ха-
рактеристика гусеничного
обвода танка средней кате-
гории по массе
усилия Тсв, чем в тяговом; это объясняется более высоким значе-
нием коэффициента разгрузки /Ссп-
Рис. 5.13. Зависимость растягивающего усилия в свободной ветви от силы тяги
и статического натяжения в тяговом (а) н тормозном (б) режимах
Ю Зак, 16<с»
137
Если принять Д/{Т = 0; Ro ж = R,,.к =*/?_к; alt,p ^<*н св и про-
дифференцировать зависимость (5.26) поочередно по Ст и Си, по-
лучим
ОТС, г Гр + Ьг-0.5)Рт .
дСг ~ " (Сг + Сп)> ’
дТсв г - Tt -К — 0.5)Рт
-д = Сг--------(Сг+Тп)’----
Полученные выражения показывают, что влияние жесткости
гусеницы (Сг) и подвески (С„) на нагруженность гусеничного
обвода различно и связано с режимом работы, что учитывается
коэффициентом асимметричности vr. В тяговом режиме *гс0,5,
поэтому знак производных может быть различным при различных
значениях Р, и Tv. Так, при скорости движения более 30 км/ч
обычно dT<.JdCr > 0, а дТеа/дСп < 0; следовательно, усилия Т{я
и Тр тем выше, чем больше жесткость гусеницы и меньше жест-
кость подвески. Особенно существенно влияние Сг и С„ при вы-
сокой скорости движения ВГМ
В тормозном режиме vr >0,5, поэтому при любых значениях
Рт и TjdTtJdCr > 0, дТ\а!дСп < 0. Следовательно, при Д/ж = 0
усилия Тсв и Тр возрастают с увеличением Сг и снижением Сп.
Различный характер влияния жесткости гусеницы и подвески
на нагруженность обвода связан с асимметричным нагружением
гусеницы силой тяги (пр^лсв, *г=/= 0,5), вследствие чего значе-
ния жесткости ветвей гусеницы Ст р и Сг св существенно раз-
личны, в то время как приведенные к этим ветвям жесткости
подвески Сп и Сп св близки по значению, так как в реальных
Гусеничных обводах ан р~»н'*-
При отсутствии дополнительной деформации обвода (Д/я = 0)
влияние жесткости целиком определяется значением коэффициен-
та разгрузки Хсв (рис. 5.14), изменяющегося приблизительно от
0,5 (при Сг = оо) до vr (при тп = со).
Рис. 5.14. Зависимость коэффициента разгрузки от жесткости звена гусени-
цы (а) и подвески (б) для танка средней категории по массе:
/ тяговый режим; 2 — тормозной режим; -- т — 0.1 кН,мм (а) , С — 50 кН «и (Л);
-----т - ОД кН, мм (о) , Ст - 15) кН/мм (<5)
138
Изложенный метод расчета позволяет с достаточной для инже-
нерной практики точностью оценить нагруженность гусеничного
обвода с учетом скорости движения и других факторов, вызываю-
щих его деформацию.
5.4. РАСЧЕТ НАГРУЖЕННОСТИ И ЖЕСТКОСТИ
РЕЗИНОМЕТАЛЛИЧЕСКИХ ШАРНИРОВ
Метод расчета нагруженности и жесткости резинометалличе-
ских шарниров с целью их сравнения на стадии проектирования
основан на теории изгиба балок на упругом основании, разрабо-
танной Л. Н. Крыловым.
Примем следующие допущения:
жесткость резинового основания постоянна по всей длине шар-
нира и подчиняется условиям Винклера (реакция основания в
любом сечении пропорциональна перемещениям в нем);
зазоры между торцами проушин сопрягаемых звеньев отсутст-
вуют;
упругие деформации металлических элементов звена пренебре-
жимо малы.
Рис. 5.15. Схема расчета РМШ последовательного типа:
/ — ОСЬ проушин первого трака; 2,6 распределенная нагрузки; 3 Мено первого трака;
4 — прогиб пальца) 5 - звено второго трака; 7 — ось проушин второю трака
В РМШ последовательного типа проушины нумеруются в по-
рядке расположения слева направо. Если поместить начало коор-
динат на наружной кромке первой проушины, ось абсцисс напра-
вить по оси нечетных проушин к середине шарнира, а ось орди-
нат— в сторону перемещений пальца в нечетных проушинах и
приложить к сопрягаемым тракам гусеницы растягивающее уси-
лие, то оси проушин вследствие упругой деформации резинового
основания сместятся на величину а (рис. 5.15). В этом случае
на палец будет действовать распределенная нагрузка, ннтенсив-
10* 139
ность которой определяется перемещением пальца в упругом осно-
вании и его жесткостью.
Для всех нечетных проушин изгиб пальца описывается одно-
родными дифференциальными уравнениями четвертого порядка
типа
а для всех четных — неоднородными уравнениями с постоянными
коэффициентами типа
где Е/— жесткость пальца при изгибе (Е—модуль упругости материала; / —
момент инерции пальца); k — погонная жесткость упругого (резинового) основа-
ния, определяемая экспериментально или аналитически.
Общий интеграл однородного уравнения можно записать в
безразмерном виде:
у = V, (В) С. + К (5) С. 4- V3 (£) С3 + V. (В) С., (5.30)
где С|, Cj, Ct, С<— неизвестные постоянные интегрирования; । *,(4Е/>
безразмерная абсцисса; Vi(£), V2(S)» Уз(£). V<(£) — фундаментальные функции
А. Н. Крылова; х — размерная (текущая) абсцисса.
Последовательно интегрируя предыдущие уравнения для всех
проушин, получим уравнение изогнутой оси пальца:
yC)-lK(0C,+ vJ(5)C,+ V',(0C1 +
+ V. (Е) С,]е „ „ + а V ( 1 у 11 И, (= ,
где i — порядковый номер проушины; п — общее число проушин; А,—безраз-
мерная абсцисса правого торца i-Л проушины.
Дифференцируя (5.30) по параметру g, получим уравнение для
определения угла поворота сечения в, изгибающего момента М и
перерезывающей силы Q на всей длине пальца.
Для левого конца пальца при £=0 изгибающий момент и пере-
резывающая сила также равны нулю, при этом обращаются в нуль
С3 и С4. Симметричность расчетной схемы позволяет вести расчет
половины шарнира. В середине шарнира угол поворота сечения
и перерезывающая сила равны нулю, что позволяет составить
два уравнения для определения неизвестных постоянных интегри-
рования. Третье уравнение для определения величины а получаем
из условия равенства суммы нагрузок, воспринимаемых четными
(или нечетными) проушинами, растягивающему гусеницу уси-
лию Т, т. е.:
СЛ,(Х,)—-W-0;
140
с, V, (X.) + С. Ua (X.) - а 2 ( 1У К. (X, X,.,) = 0;
/=2
С, v ( 1 )< V, (X,) + С . 2 ( IУ v, (X,) а 2 2 ( 1 )'w X (5.31)
‘ । 1 <-2 /-1
Допущение о равенстве погонной жесткости упругого основа-
ния (резинометаллических втулок) всех проушин трака приемле-
мо, если фактическое различие меньше 20%, в противном случае
расчет жесткости ведется по методу, применяемому для шарниров
параллельного типа.
Пример. Рассчитаем жесткость PMU1 для гусеницы танка Т-72 (для еди-
ничного растягивающего усилия Г—10 Н).
Исходные данные: Л-80 Н/см2 (определен экспериментально); /-3,97 см4
(момент инерции пальца вычисляется для стянутого концевыми гайками комп-
лекта палец—втулки по наружному диаметру нтулок); длина проушин в сан-
тиметрах: 6,7 + 8,9 + 7,9 4- 3,35 (половина шарнира).
Определим относительный коэффициент и постоянные, входящие в уравне
ния изгиба:
^==0,1245 см"’; Elm- 1,292 10°11;
Elm' 0,161 IO+I/cm.
Координаты правых торцов проушин (концов расчетных участков):
lt =6,7 см; М-0,85; /,— 15.6 см; 51,-19.5.
/,=23,5 см; Л,= 2,94; /<=27,45 см; М-3,43.
Система уравнений для определения постоянных интегрирования имеет вид:
- V'4(3,43)Ci + 4-V'1(3,43)C2-|-a[Vz4(2,58) V\(l,48) +
+ 1/4(0,51)| = 0;
Z.(3,43)Ci V'3 (3,43)С,-|-а( Г, (2,58) И2(1,48) +V2(O,51)|=O;
|1>2(0,85) И, (1,95) + V2 (2,94)J С, + (Vs(0,85) V, (1,95) +
+ Ия(2,94)| С2 + а|1/2(1,10) - И. (2,09) + V'2(0,92)J - Г- 0.
Подставив в уравнения фундаментальные функции для приведенных в
скобках значений аргументов н решив систему, получим
С, = 1,0567 10-6Г; С2 = 4,3383« 10гвГ; а = 10,5044 10 Т.
Параметры изгиба вычислим, приняв £-/п (что соответствует шагу 1 см),
из уравнений
y(0-lV’.(*)C. + V.(;)C2].>O1 а|1 - И,(5-0,83)], ою-
- оЦ - V, (Е - 1,94)|;, , м + а Ц - И, (5 - 2.92Д ,1Х;
Н (5) _ 4 т {[ - I/. (Е) С, + -2- У, (Е) Ц > о + а К, (5 0,83);.. w -
- “ У< (Е - 1.94>е =.,„ + <» V< С - 2.92); „ аЛ};
М (Е) - 4 f/m’ {[- V, (Е) С, - У, (;) С..|е , „ +
141
+ a V, (E - 0,83); > M1 - a V, (E - 1,94)s _, M + a V. (5 - 2,92)£ w|;
Q (E) = 4 L/m‘ 11— 4 V2 (E) C, - 4 У, (5) C,]t» „ +
+ а И, (E - 0,83)s . w-a V,(( - 1,94), > + a V.(E - 2,92);, .
Результаты расчета для единичного растягивающего усилия оформляются
в виде графика (рис. 5.16).
Рис. 5.16. Результаты расчета нагруженности РМШ танка Т-72:
/ прогиб пальца у; 3. 4, 6 распределенная нагрузка у; 3 — ось проушин одного из со-
прягаемых траков; 5 изгибающий момент
Степень конструктивного совершенства резинометаллического
шарнира оценивается коэффициентом перегрузки резины —отно-
шением максимальной распределенной нагрузки к средней:
^пер “ ~2~ 7шах^-ш »
где £ш —полная длина шарнира (обрезиненной части); — максимальная
распределенная нагрузка от единичного растягивающего усилия.
В нашем примере коэффициент перегрузки равен 1,32. Его
нельзя признать оптимальным. Понизить коэффициент можно, из-
менив длину отдельны?: проушин при практически той же ширине
гусениц: так, при сочетании 5,4+8,94-8,9+8,9+8,9+8,9+5,4 см
коэффициент перегрузки равен 1,22; при сочетании 4,6+9,2+9,2+
+9,2+9,2+9,2+4,6 см он снижается до 1,15.
Следует отметить, что равномерная нагруженность резины по
длине шарнира не обеспечивает равнопрочности резинометалличе-
ских втулок у всех проушин. Стендовыми испытаниями установ-
лено, что уменьшение длины втулки приводит к снижению ее цик-
лической долговечности при той же погонной нагрузке; жесткость
втулки основания при этом также падает. Кроме того, нужно
142
обеспечить одинаковую угловую жесткость обоих рядов втулок
(в четных и нечетных проушинах), для получения их одинаковой
прочности при скручивании шарнира, а экспериментально уста-
новлено, что угловая жесткость коротких втулок ниже, чем длин-
ных. Поэтому распределение длины проушин (разбивку) необхо-
димо проверять экспериментально.
Величина а определяет один из важнейших параметров гусени-
цы — упругое удлинение ее под действием растягивающего уси-
лия; у современных машин эта величина составляет 4—5 мм.
Правильность расчета проверяется сравнением полученного
значения а с экспериментальным. Так, экспериментальное зна-
чение удлинения одного шага гусеницы танка Т-72 при растяги-
вающем усилии 50 кН составляет 0,49 мм, а расчетное (см. вы-
ше) — 0,50 мм.
Соответственно изгибающему моменту в сечениях пальца у
стыков проушин выбирается момент затяжки концевых гаек шар-
нира, который предотвращает раскрытие торцов металлических
втулок при изгибе пальца и исключает попадание грунта через
зазоры стыков в сопряжение втулок с пальцем. Значение момен-
та затяжки подбирается так, чтобы сжимающие напряжения на
торцах втулок в любом случае превышали растягивающие напря-
жения от изгиба пальца:
л«э„> f„| герtg(а„+?,) +4-/ ] •
где ЛГИЗГ — изгибающий момент на стыке втулок при максимальном тяговом
усилии (в нашем случае МИ(Г — 0,4Ртаж); D„ — наружный диаметр втулки;
/'„—площадь поверхности торцевого контакта втулок (по металлу); гср —
средний радиус резьбы; цр —угол подъема резьбы; <рр — приведенный угол
трения в резьбе;; f — коэффициент трения на торцах втулок; d„ — внутренний
диаметр втулки.
Для гусеницы танка Т-72 получим Л1аат >300 Н м.
Результаты расчета позволяют оценить влияние допускаемой
техническими требованиями несоосности проушин звена трака и
остаточных деформаций звена, возникающих при эксплуатации,
на пагруженность и работоспособность шарнира.
У гусенице резинометаллическим шарниром последовательного
типа палец по всей длине свободно покоится на упругом резино-
вом основании, образованном проушинами сопрягаемых звеньев,
а для гусениц с шарниром параллельного типа характерно соеди-
нение пальцев жесткими элементами (скобами и средними связя-
ми). В этом случае палец рассматривается как балка, свободно
лежащая на основании из пяти участков с различной жесткостью
(рис. 5.17): скоба, звено (обрезиненный участок), средняя связь,
звено, скоба. Симметрия расчетной схемы позволяет вести расчет
для половины длины пальца, что сокращает число расчетных
участков до трех. Первым считается участок пальца в скобе, вто-
рым — обрезиненный участок и третьим — участок в средней свя-
143
зи. Схема нагрузки расчетных участков показана на рис. 5.18.
Изгиб пальиа на каждом участке может быть описан однородным
дифференциальным уравнением четвертого порядка.
Рис. 5.17. Расчетная схема нагруженности и жесткости РМШ параллель-
ного типа:
/. 1 — ось проушин сопрягаемых траков; 2 — скоба; 3 распределенная нагружа; 4 — сред-
няя сеять; э — звено трака; 6 прогиб пальца
Рис. 5.18. Схема нагрузки трех расчетных участков РМШ параллельного типа
Так как жесткость оснований на участках (а следовательно, и
относительные коэффициенты т) различна, то постоянные инте-
грирования уравнений изгиба пальцев на этих участках также
различны, и задача заключается в решении системы уравнений с
двенадцатью неизвестными (по четыре для каждого участка).
В уравнении (5.30) при £=0 (на левых концах участков) фун-
даментальные функции V2(fc)» и У4(£) равны нулю, а функ-
ция Vi(£) равна единице, поэтому
С,-у(0); С,- С, = ^М; с,—(5.32)
144
Граничные условия для определения постоянных интегриро-
вания следующие:
равенство нулю изгибающего момента и перерезывающей силы
в начале первого участка (на свободном конце пальца в скобе);
равенство суммы перемещений пальца на общих границах
смежных участков упругому удлинению шарнира под растягиваю-
щей нагрузкой;
равенство абсолютных значений углов поворота сечений, изги-
бающих моментов и перерезывающих сил на границах смежных
участков (условие неразрывности);
изменение знака рассчитываемых параметров при переходе на
соседний участок из-за противоположного направления оси
ординат;
равенство нулю угла поворота сечения и перерезывающей силы
в конце третьего участка (в середине шарнира) из-за симметрии.
С учетом граничных условий получим следующие уравнения:
с,,»=а и.(С|)с„-v;(et)c.,;
Сг..-^|-4И4(ч)Си+ V’.($()C,.,|:
С,.- -^(4 И3(У С„ +4
пг,
сп-Дг 14 И2 + 4 Г,(УС.,|;
С„ - а - V, (У С12 - К (У Ся - V, (У Си - I(:..) С„;
Ся- --^(-4 Г.(УС,2 + 1/,(УС„4- Ц(УС,2
+ МУС„1;
си= (4 С„ + 4 V, (У Си - V, (У С„ - V2 (У C..J;
Си=^-(4 У2(УС„4-4 V,(УСя+ 4 К,(УС,,-
т ,
- С,(УС„);
(5.33)
(5.34)
- 4 К, (У С„ + V, (У Си 4- с. (У С„ 4- V, (У С„ - 0; |
Иг(УС„+И,(УСи+ Н(УСи—i-V.ft.)C„-O; | ’
2 Е/ (m:]c,2 таС„) = Г. (5.36)
Здесь а — взаимное упругое смещение звеньев и соединитель-
ных элементов под растягивающей нагрузкой. Первой цифрой
индекса при С отмечен порядковый номер постоянной интегриро-
вания, второй — номер участка, которому принадлежит постоян-
на
пая; индекс прй т соответствует номеру участка. Фундаменталь-
ные функции вычисляются для значений аргумента, соответствую-
щего координате конца участка, указанного индексом при g.
В уравнении (5.36) использовано равенство половины растяги-
вающей силы интегральной сумме распределенной нагрузки на
втором участке:
У?(;)Л—i-7.
После вычисления постоянных интегрирования определяются
параметры жесткости шарнира в различных сечениях на протя-
жении всей его длины решением уравнений для каждого отдель-
ного участка.
При вычислении упругого удлинения гусеницы от растягиваю-
щей нагрузки необходимо учитывать, что величина а рассчиты-
вается для одного из шарниров звена, поэтому для получения ве-
личины, соответствующей шагу гусеницы, ее необходимо удвоить.
Для шарниров параллельного типа без средней связи решение
существенно упрощается, так как число расчетных участков со-
кращается до двух, и уравнение (5.36) имеет вид
Со=Г/(2 Е1п&-
Пример. Рассчитаем жесткость шарнира параллельного типа для гусеницы
тайка Т-64А (для единичного растягивающего усилия Т=10 Н).
Исходные данные: длина скобы /|-5 см, звена G>= 16 см, средней связи
li — 4 см (половина ширины); погонная жесткость скобы kt - 0,6/10® Н/см2,
звена Л»= 0.0925-10® Н/см2, средней связи Лз=2-10® Н/см2 (экспериментальные
значения); диаметр пальца (1=3 см; модуль упругости материала пальца
£=2.1-10® МПа.
Вычислим относительные коэффициенты J (mi 0.2059 см-1;
т, 0.1288 см-1; т3 0.2782 см1) и безразмерную длину участков £ = /Л|7/
(',= 1.0295; £1=2,0608; £з= 1,1128).
Определим значения фундаментальных функций для правых концов участ-
ков (можно применять табличные значения, округляя безразмерные коорди-
наты £):
I/, (;) =Ch;cos; (|/„ =0,8133; У|2 = - 1,8770; 1/|Я = 0,7453);
|/2(5)=2_(clK1sln$ + sh5cos;) (1/2, =0,9910; К.» = 0,8513;
Им = 1,0569); V'3(;) = 4’sh's,n5 °-52331 1,7040;
Г33 0,6086); l/4(5)=-|-(chBs!n5 -sh$cos=)
(l/41 =0,1809; 1/42— 1,3345; И48 = 0,2280).
146
Найдем постоянные интегрирования для второго участка:
С|,-а — 0.8133С,, — 0,9910С2|;
Си-1,1567Сц— 1,3001 Си;
С>г»5,3492С|| — 18,492С21;
Си-16,1940Сц + 8,55!ЗС«.
Подставив постоянные интегрирования, полученные для второго участка, в
уравнения (5.34), получим постоянные интегрирования для третьего участка:
С,а-2.8777а — 33,2378СП — 15,3168С21;
С23—2,4714а — 15,8883CU — 11.0544С,,;
С„- 1,4610а — 0,6668Сц — 3,7515С21;
С„ - 0,3379а + 6,3587Q । + 1,3587С21.
Подставив эти постоянные интегрирования в уравнение (5.35), получим
значения жесткости для первого участка:
Си ——0,0892а н С21-0,3717а,
а затем для второго и третьего: С«-1,7340а и С„-0,2757а.
Подставив в уравнение (5.36) четвертые постоянные интегрирования, вы-
числим смещение участка в виде функции растягивающего усилия а —
— 6,2111 • 10 " Т. Затем определяются перемещение пальца у(£), изгибающий
момент Л1(£), перерезывающая сила Q(|) и интенсивность распределенной на-
грузки ?(?)-—Лу(£) на всех участках с шагом m (для скобы и средней связи)
и с шагом 2гп (для звена), что соответствует шагу в 1 и 2 см при оформлении
результатов расчета в виде графика, показанного на рис. 5.19.
Рис. 5.19 Результаты расчета РМШ параллельного типа танка Т-64А:
/ — изгибающий момент; 2. 5. 7 — распределенная нагрузка; 3 перерезывающая сила;
< -прогиб пальца; 6 — «сь проушин
Максимальное значение распределенной нагрузки для шарнира
рассматриваемой гусеницы равно 48,6 Н/м, коэффициент перегруз-
ки резины Л „ер—^т,х 2/2= 1,55.
При одинаковой ширине гусеницы прогиб пальца и коэффи-
циент перегрузки снижаются за счет уменьшения ширины звена
трака и соответствующего увеличения ширины соединительных
элементов. Однако максимальное значение распределенной на-
147
грузки при этом может как снижаться, так и расти, поэтому при
проектировании новых гусениц следует выбирать оптимальное
соотношение ширины элементов шарнира с учетом их жесткости
(расчетной оценкой ряда вариантов).
Упругое удлинение шарнира на шаг гусеницы под действием
растягивающей нагрузки для рассматриваемого случая 2а—
= 12,4-10~‘>7’ (0,62 мм при растягивающем усилии 50 кН).
Изгибающий момент, действующий на палец, определяет на-
пряжения от растягивающего усилия в нем, а также в соедини-
тельных элементах. Практика эксплуатации показала, что разру-
шение пальцев, как правило, не связано с растягивающей нагруз-
кой, исключение составляют усталостные поломки пальцев в ско-
бе, где имеются дополнительные контактные напряжения.
По перерезывающей силе можно судить о распределении рас-
тягивающего усилия между соединительными элементами шарни-
ра. В нашем примере каждой скобой воспринимается по 19 %
растягивающей нагрузки, а средней связью —62%. Так как непо-
средственное измерение нагрузки на резину шарнира или изги-
бающего момента на пальце трудоемкое и сложное, оценить точ-
ность предлагаемого метода расчета можно по упругому удлине-
нию шага и углу поворота торцов пальца на скобах в собранной
гусенице. Для шарнира гусеницы танка Т-64А экспериментально
были получены значения а=6Ю" Т и 0=0,44-10 ъ Т (0,6 мм
и 0,0022 рад при Г=50 кН); по расчету а = 6,2-10 ъ Т и 0 =
= 0,47-10-6 Т.
Для расчета нагруженности шарниров необходимо знать по-
гонную жесткость элементов (резинометаллических втулок или
пальцев, запрессованных в проушины звеньев, средних связей и
соединительных скоб), которые рассчитываются или определяют-
ся экспериментально.
Полученная экспериментально погонная жесткость элементов
отечественных гусениц приведена в табл. 5.3.
Таблица 5.3
Погонная жесткость элементов гусениц некоторых отечественных машин (в Н/см2)
ВГМ Знеио (проушина) Скоба Средняя связь
Танк Т-72 (Т-55,Т 62) 0,080-10® —
Танк Т-64Л 0,092-1О6 0.6-104 2-10®
Танк Т-80 0,17 -10» 110» 5-10»
БМП-1 0,074-10® 0,7-10® —
14»
5.5. ПРОГНОЗИРОВАНИЕ НАДЕЖНОСТИ
РЕЗИНОМЕТАЛЛИЧЕСКИХ ШАРНИРОВ
Расчет долговечности и безотказности резинометаллических
шарниров основан на использовании стендовых зависимостей их
наработки N (в циклах) от растягивающего усилия Т, угла скру-
чивания а и установившейся температуры резиновых колец. Из-
вестно, что эти зависимости могут быть описаны уравнениями вида
lgV-^Л, Ал А3Т-Л4/уст 4- А.аг, (5.37)
где A t — постоянные коэффициенты, зависящие от конструктивных особеннос-
тей шарнира.
Функция распределения наработки РМШ на стенде описывает-
ся логарнфмически-нормальным законом:
где М. <т— математическое ожидание и среднеквадратичное отклонение лога-
рифма N.
Установлено, что отклонение п не зависит от средней наработ-
ки шарнира на стенде. Стендовые испытания позволяют оценить
влияние на долговечность гусениц с РМШ формы гусеничного
обвода, шага гусеницы, массы ВГМ, скорости движения и т. д.
Рассеивание ресурса шарниров при эксплуатации, вызванное
случайным характером дорожных условий, значительно меньше
рассеивания от случайных свойств материала резиновых колец,
поэтому при расчете дорожные условия принимаются постоянны-
ми, соответствующими прямолинейному движению с постоянной
средней скоростью при постоянном коэффициенте сопротивления
движению.
Прогнозирование ресурса и безотказности шарниров в различ-
ных условиях эксплуатации при переменной скорости движения
требует дополнительной статистической информации.
В основу предлагаемого метола расчета положена линейная
теория накопления повреждений, базирующаяся на предположе-
нии о том, что мера повреждения в любой момент времени не за-
висит от предыстории нагружения, поскольку линейно суммирует-
ся с предыдущими повреждениями. Степень (мера) повреждения
резины шарнира за один оборот гусеничного обвода может быть
выражена формулой
d'u = + X" ' "ЛТ ’ (5.38)
где \'i — наработка шарниров в режиме нагружения i-fi точки обвода; индек-
сы I. 2, 3, 4. 5 соответствуют точкам обвода па входе ведущего колеса, под опор-
ными катками, на направляющем колесе и при сходе с ведущего колеса
(рис. 5.20).
Надежность РМШ характеризуется количеством полных обо-
ротов гусеничного обвода до разрушения 50 % шарниров (AZ, об),
149
средним ресурсом шарниров (S, км) и 7-процентным ресурсом
(Sp, которые могут быть определены по формулам:
Д'- 1/rfu,; JT- Ю"вЛг/Л; (5.39)
где Лг— число траков в гусенице; tr — шаг гусеницы, мм; а — квантиль нор-
мального закона для вероятности 7; /л — 0,4343— коэффициент перехода от
натуральных к десятичным логарифмам.
Рис. 5.20. Схема гусеничного
обвода при расчете шарниров
на долговечность:
/, 7, 3, 4, 5 точки перегиба
шарнира при входе на ведущее
колесо, под задним опорным кат
ком. пол передним опорным катком,
на направляющем колес?, при схо
Де с ведущего колеса соответст-
венно
В качестве примера на рис. 5.21 приведены результаты рас-
чета надежности резинометаллических шарниров гусениц тан-
ка Т-72 с шагом 137 и 150 мм при различной вероятности безот-
казной работы. Полученные результаты показывают, что увеличе-
ние шага гусеницы со 137 до 150 мм привело к снижению 50-про-
центного ресурса РМШ в 1,5 раза.
150
5.6. РАСЧЕТ НАДЕЖНОСТИ КЛЕИМОВЫХ СОЕДИНЕНИИ
Как показала практика эксплуатации, надежность клеммовых
соединений гусениц определяется неподвижностью контактирую-
щих поверхностей, в противном случае соединения забиваются
грунтом и интенсивно изнашиваются.
Взаимная неподвижность контактирующих поверхностей скобы
и пальцев сохраняется, если момент скручивания резиновых эле-
ментов не превышает момента трения, создаваемого в контактной
зоне стяжным болтом. Поэтому конечной целью расчета надеж-
ности является рациональное назначение допусков и момента
затяжки стяжного болта, обеспечивающего выбор зазоров и со-
здающего в сопряжении палец—скоба необходимый момент
трения.
Расчет основан на вероятностном методе оценки надежности
клеммовых соединений, учитывающем распределение размеров
отверстий скоб и пальцев траков.
На рис. 5.22 представлена схема клеммового соединения, при
котором пальцы вставлены в отверстия скобы с зазорами 61
(в сечении I—I) и б2 (в сечении II—II), причем б|<б2 (^ =
- /л - <).
Рис. 5.22. Расчетная схема клеммового соединения:
I. 2 — пальцы; 3 — скоба
Процесс обжатия пальцев скобой при затягивании болта мож-
но разделить на три этапа.
1. При уменьшении зазоров в обоих сечениях и при некотором
значении усилия затягивания Qi = C|6i выбирается меньший за-
зор б), где — жесткость скобы.
2. При увеличении усилия затягивания Q2 выбирается и боль-
ший зазор в сечении II—II: Q2 = C2(62 — 6|), где С2 — жесткость
системы скоба—палец.
3. При дальнейшем росте усилия затягивания болта (до зна-
чения Qt) происходит одновременное обжатие обоих пальцев.
151
Возникающий между пальцем 2 и скобой 3 момент трения Л11р
препятствует проворачиванию пальца под действием внешнего
скручивающего момента Л1В; Л1тр =kQ3, где k — коэффициент
пропорциональности.
Для надежного защемления пальца и предупреждения его
проворачивания необходимо соблюдение неравенства:
MTp>Af„. (5.41)
Таким образом, полное усилие затягивания болта
Q6=Qi4-Q2+Q3. (5.42)
Усилие Q3 может быть увеличено посредством увеличения
и уменьшения Qj и Q2, что возможно за счет применения смазы-
вающих материалов, уменьшающих трение в резьбе и опорной
поверхности подголовника, уменьшения жесткости скобы и систе-
мы скоба—палец, назначения допусков, обеспечивающих меньшие
зазоры и разность зазоров в соединении.
Значения жесткости Cj и С2 могут быть определены экспери-
ментально при фиксированных значениях усилия затягивания Q {
Для определения коэффициента k измеряется момент проворачи-
вания пальца 2 при различных значениях усилия затягивания.
Величины Ci, С2 и k могут быть рассчитаны на ЭВМ, для чего
скоба представляется как замкнутая статически неопределимая
система, состоящая из ряда прямолинейных и криволинейных
брусьев переменного сечения. Расчет выполняется методом сил
с использованием формулы Максвелла—Мора.
Раскрывается статическая неопределимость системы, соответ-
ствующей скобе без пальцев, и определяется усилие затягивания
Qb обеспечивающее выбор зазора (в случае натяга — возмож-
ность сборки). Для увеличивающихся значений усилия Q6 вычис-
ляются соответствующие диаметры отверстий скобы и сравнивают-
ся с диаметрами устанавливаемых пальцев. При равенстве диа-
метров отверстия и пальца последний заменяется условным на-
бором недеформируемых стержней, препятствующих дальнейшему
уменьшению диаметра отверстия скобы, затем раскрывается ста-
тическая неопределимость системы в этом состоянии клеммового
соединения и определяется усилие в условно введенных стержнях.
Процесс последовательно повторяется до б2=0 при усилии Q2.
Момент трения между скобой и пальцем 2
где </а —диаметр пальца 2; /п—коэффициент трения пары палец—сКоба; xj —
усилие в /-м условном стержне (суммирование распространяется на все услов-
ные стержни, устанавливаемые в правом отверстии скобы).
Когда момент трения AfTp достигнет заданного значения М„,
определяется необходимое усилие затягивания болта Q(> или мо-
мент затягивания
м„ - Q„ [4 «В (а + ?') + 4/,
152
где а —угол подъема винтовой линии болта; ф'— угол трения, соответствую-
щий коэффициент трения в резьбе /р« 1,15/ (/—коэффициент трения между
болтом и скобой); / —коэффициент трения пары подголовник болта—скоба;
Ло. — диаметры подголовника болта н отверстия в скобс под болт; rfp
средний диаметр резьбы болта (см. рис. 5.22).
Значения Cj н С2 вычисляются по ранее приведенным фор-
мулам.
Расчетный метод позволяет также оценит^ прочность скобы
но максимальным напряжениям в опасном сечении.
В качестве примера на рис. 5.23 показаны результаты расчета
клеммовых соединений гусениц танков Т-64А и Т-80 при посадках,
указанных в табл. 5.4. Для сравнения на графики нанесены дан-
ные экспериментальных замеров.
В соединениях пальцев и скоб вследствие допусков на диа-
метры возможны случайные зазоры и разности зазоров, следова-
тельно, случайными будут и усилия затягивания Qi и Q2. обеспе-
чивающие их устранение. Случайными величинами будут также
величины Q3 и Л11р.
Допустим, что распределение отклонений диаметральных раз-
меров D и d (в пределах чертежного допуска), вызываемых раз-
нообразными, не зависящими друг от друга причинами, происходит
по закону нормального распределения. Распределение зазоров как
разности диаметральных размеров также подчиняется этому за-
кону.
153
Таблица 5.4
Посадки клеммовых соединений гусениц ВГМ (в мм)
ВГМ Варм4нг Лиаыетр Зазор
О а *1 й.
Т-64А 1 •1ЛГ0.21 <)7 ЗО_ол 0,51 0,51
2 0,07 0,51
3 m-0.U7 dU-B,2 ° .1 -0.2 0,24
Т 80 1 •Ю „ , 0.4 0.4
2 зо+**^ ЭО-0.2 0 0.4
3 30-«л -0,2 0
Если воспользоваться правилом трех сигм для определения
отклонений диаметральных размеров в пределах полей допусков,
то характеристики нормального распределения зазоров в соедине-
нии запишем следующим образом:
М (8) — М (О) - М (с/); (5.43)
(5.44)
м (О) -4- + О-щ); (d) - 4- (</... + d„,„).
где ДО, Ad. Dmax. dm*x. ^min. drain — ПОЛЯ допусков, максимальный и мини-
мальный диаметры отверстия скобы и пальца соответственно; М, о — матема-
тическое ожидание и среднеквадратичное отклонение.
Усилия затягивания Qi, Qi, Q3 и момент трения Мтр как ли-
нейные комбинации случайных величин также подчиняются нор-
мальному закону распределения; при некотором заданном значе-
нии усилия Qt, получаем:
Al(Q3)^Qe-C,W);
««Ы-/С?+2ф(»)>
3<Af„)-*»«?,). (5Л6)
Вероятность выполнения условия AfTp>Afe определяется фвр-
мулой
Р (Л*тр > Мл) = 0,5 - Фо (г), (5.47)
где Ф0(г) — интеграл вероятности.
Полученные данные позволяют решать следующие практиче-
ские задачи:
151
оценивать вероятность безотказной работы (по признаку не-
ироворачивания пальца) конкретных конструкций клеммовых
соединений, если известны Л1(б), а (б), Q6, Сь С2 и k\
при разработке конструкции соединения выбирать поля допус-
ков и усилие затягивания болта, обеспечивающие заданную ве-
роятность безотказной работы.
Рис. 5.24. Вероятность безотказной работы клеммовых соединений • гусениц
танков Т-64 А (---------------------------) и Т-80 (------):
/, 2, Л — варианты исполнения по сочетанию допусков (см. табл 5.4)
Рис. 5.25. Зависимость вероятности безотказной работы клеммового соединения
танка Т-80 от абсолютных значений допусков и типа сопряжения при А<в =
—350 Н м (------------------------) и 500 Н м (------):
4, Б - типы соединения с таран тированным затором; В, Г. Д — типы соединения с воз
можным натягом; /. i, 3. 4 типы соединения с сужением поля допусков
Результаты расчета по этой методике надежности клеммовых
соединений пальцев гусениц танков Т-64 А .и Т-80 представлены
на рис. 5.24. Анализ влияния типа сопряжения и абсолютных зна-
чений допусков на надежность соединения в гусенице танка Т-80
показал (рис. 5.25), что наибольшей надежностью обладают сое-
155
динеИия, в которых допускается натяг, например, соединение
типа Г, в котором Af(D)«=M(d). Сужение поля допусков положи-
тельно влияет на надежность соединения, а расширение — отрица-
тельно. Этот вывод следует из данных табл. 5.5, в которой приве-
дены значения Р(М гр > 135 Н м) для клеммовых соединений тан-
ка Т-80.
Таблица 5.5
Значения вероятности Р (Л1тр> 135 Н м) для различных типов клеммовых
соединений танка Т-80
Тип клеммового совлимемне (гм. |НК. 5.25^ АО. мм А</. ММ •»1л. н м > 1Л5 Н м)
д 0.1 0.2 350 0,9641
Б 0,1 0.2 350 0,9854
В 0,1 ф 350 0.9842
Г 6,1 О’,2 350 0,9981
Л. 0,1 0.2 350 0,9937
1 0,2 0.3 350 0,8133
2 0,2 0.2 350 0,9265
3 0,1 0.2 350 0,9867
4 0.1 0,1 350 6,9999
/ 0,2 0,3 500 0,9846
4 0,1 0.2 500 0.9999
Значения вероятности P(Afrp>135 Нм) для клеммовых сое-
динений, отличающихся от принятых в танке Т-80 вариациями
величин Ci и С2, приведены в табл. 5.6, из которой следует, что
уменьшение жесткости клеммового соединения при прочих равных
условиях положительно влияет на его надежность (особенно
уменьшение С2).
Статистическая обработка значений D и d клеммовых соеди-
нений различных гусениц показала, что правило трех сигм выпол-
няется не всегда. Поэтому для оценки надежности клеммовых
соединений по приведенной методике необходимо знать реальные
законы распределения Dud.
Покажем, как решается вторая из упомянутых выше задач.
Зададимся вероятностью безотказной работы Р(М,р>Л1,) =а.
Из уравнения (5.47)
мл - М (Л4тр)
3 (AfTp)
(5.48)
156
Таблица 5.6
Значения вероятности Р (AfTp> 135 Н м) для клеммового соединения гусеницы
танка Т-80 при изменении жесткости С| и С2
CtiC2 с„С|
0,5 . 0,75 1 1.25
0,5 0,909 0,999 0,999 0,999
0,75 0,998 0.998 0,997 0,997
1 0,985 0.984 0,984 0,983
1,25 0,958 0,957 0,957 0,955
Примечание. С], cj — принятые значения жесткости соединения в гу-
сенице танка Т-80.
Подставив (5.47) в (5.48), получим
z(a)A/c? | 2Ch(«)= Af,- СрИ0)|. (5.49)
По этим уравнениям могут быть определены либо поля допус-
ков сопрягаемых деталей клеммового соединения, либо усилие
затягивания болта.
ш
пэ
шд
эо
эг.э .г
Глава 6. ОПОРНЫЕ КАТКИ
6.1. ОБЩИЕ СВЕДЕНИЯ
Опорные катки относятся к числу основных сборочных единиц
ходовой части ВГМ. Их конструкция практически определяет
основные конструктивные параметры всей ходовой части ВГМ
(массу, базу, высоту гусеничного обвода, число и компоновку
подвесок), конструктивное исполнение беговой дорожки и гребня
гусеницы, необходимость наличия поддерживающих катков, харак-
тер соединения шасси с остальными составными частями машины.
Типоразмеры и число опорных катков существенно влияют на под-
вижность машины, особенно на скорость движения и проходимость
по слабым грунтам, а также иа устойчивость гусениц Под опор-
ными катками, уровень шума и вибрации, передающихся на кор-
пус, затраты мощности и т. д.
В зависимости от количества и расположения амортизирую-
щих элементов различают однорядные и двухрядные опорные
катки с наружными массивными шинами или с внутренними ре-
зиновыми амортизаторами. Наружные массивные шины обеспе-
чивают лучшую амортизацию, существенно снижая динамические
нагрузки на гусеницу и каток и повышая тем самым срок их
службы. Кроме того, катки с массивными шинами значительно
снижают шум при движении машины. Преимуществами катков
с внутренней амортизацией являются их малая масса и габарит-
ные размеры.
Двухрядные катки с массивными шинами, обладающие рядом
преимуществ, наиболее распространены как в отечественных, так
и в зарубежных ВГМ. В этих катках разделены очаги тепловыде-
ления и увеличена поверхность теплоотвода от шин, уменьшена
нагруженность траков и пальцев вертикальными усилиями, улуч-
шена самоочищаемость беговой дорожки, а также повышена
устойчивость гусеницы под катками.
Однорядные катки применяются в ВГМ легкой и особо легкой
категорий по массе, так как они лучше вписываются в общую
компоновку и меньше нагрузка массива шины при перекосе осей
катков.
Опорный каток современных ВГМ должен удовлетворять сле-
дующим требованиям:
158
обеспечивать надежное направление корпуса машины по гу-
сенице (устойчивость), заданный ресурс при эксплуатации в раз-
личных дорожных и климатических условиях, малое сопротивле-
ние качению;
быть достаточно живучим;
обладать хорошими амортизирующими свойствами, бесшум-
ностью;
иметь относительно малую массу и простую конструкцию;
быть достаточно удобным в обслуживании.
Устойчивость машины обеспечивается оптимальным соотно-
шением ширины катка и гусеницы и рациональным сопряжением
с его гребнями.
Ресурс опорного катка определяется ресурсом его элементов.
Опыт войсковой эксплуатации, а также результаты натурных и
стендовых испытаний показали, что основными элементами, огра-
ничивающими ресурс опорного катка в целом, являются наруж-
ная массивная шина или внутренний амортизатор и наружный
металлический обод для катка с внутренней амортизацией.
Динамические нагрузки, возникающие при качении опорного
катка по неровному профилю беговой дорожки гусеницы, могут
быть соизмеримы по амплитуде с нагрузками, действующими на
ось катка при больших колебаниях корпуса машины, а по часто-
те — на порядок выше. Эти нагрузки экспериментально наиболее
просто определяются по ускорениям на осях катков; они зависят
от частоты чередования траков и существенно возрастают с уве-
личением скорости качения.
Применение внутренней амортизации существенно уменьшает
вероятность отрыва катка от гусеницы и снижает уровень пере-
грузки его оси в 1,5—2 раза по сравнению с цельнометаллическим
катком. Уровень перегрузки катков с массивными шинами в 6—
7 раз ниже, чем у катков с внутренними амортизаторами.
Экспериментально установлено, что уровень динамической на-
груженности катка с внутренней амортизацией может быть значи-
тельно снижен посредством уменьшения массы наиболее нагру-
женного элемента — обода, а также за счет уменьшения жесткос-
ти амортизирующих элементов, однако последнее ограничивается
возможностями обеспечения допустимой тепловой напряженности
и работоспособности при максимальной скорости движения ма-
шины.
Коэффициент сопротивления качению катка по беговой дорож-
ке гусеницы определяется размерами массивной шины и типом
беговой дорожки гусеницы. Более высокие значения коэффициен-
та сопротивления качению имеет каток с шиной малого диаметра;
обрезинивание беговой дорожки увеличивает сопротивление каче-
нию катка на 25—50%. Влияние нагрузки и угла перекоса оси
катка менее существенно: так, повышение нагрузки в 2—3 раза
по сравнению со статической увеличивает коэффициент сопротив-
ления качению на 8—13 %.
159
Снижения массы и габаритных размеров можно достичь, изго-
тавливая опорные катки из высокопрочных легких сплавов с ис-
пользованием современной прогрессивной технологии производст-
ва, а также путем применения обрезиненной беговой дорожки
гусениц.
Существенно упростить обслуживание позволяют опорные
катки со съемными дисками.
Конструкция опорных катков основных современных ВГМ по-
казана на рис. 6.1—6.7, а их параметры приведены в табл. 6.1.
Диски двухрядного опорного катка с массивной шиной могут
отливаться из стали вместе со ступицей. Стальной обод в таком
случае изготавливается отдельно и приваривается к диску, шина
приклеивается к ободу через эбонитовую прослойку в процессе
вулканизации в пресс-форме. Для современных быстроходных
ВГМ созданы опорные катки, в которых шины крепятся непосред-
ственно к ободу из алюминиевого сплава типа В-93 или АК-6.
Рис. 6.1. Конструкция двухрядного
опорного катка с массивными ши-
нами танка Т-72Л:
/ — массивная шина; 3 — диск с ободом;
3 — ступица; 4 — реборда; 5 — подшипник
с уплотнением
Рис. 6 2. Конструкция двухрядного
опорного катка с массиинммм шинами
и съемными дисками танка Т-80:
/—массивная шина; 3 диск с ободом; 3
ступица; / - реборда; J- подшипник с уплот-
нением
В двухрядных опорных катках с массивными шинами совре-
менных ВГМ (см. рис. 6.1—6.4) два отдельных вместе с ободом
отштампованных диска закрепляются на ступице из высокопроч-
ной стали, например 38ХС. Съемные диски (см. рис. 6.2, 6.3) по-
160
ляют, не разбирая подшипника, силами экипажа заменять в по-
левых условиях только диски с поврежденными шинами. Для
машин средней категории по массе обод, диск и ступица
изготавливаются из легкого сплава как единое целое. Подшипни-
ки в этом случае устанавливаются в стальных стаканах или не-
посредственно в ступице (см. рис. 6.4), что способствует умень-
шению массы катка.
Рис. 6.3. Конструкция двухрядного
опорного катка с массивными ши
нами опытного образца БМП:
/ массивная шяна; 3 — диск с ободом;
3 ступица; 4 — реборда; 5 — подшипник
с уплотнением
Рис. 6.4. Конструкция двухрядного
опорного катка с массивными шинами
для машин промежуточной категории
по массе:
/—массивная шина; 2 — диск с ободом; 3
стакаЯ; 4 — реборда; 5 - подшипник с уплот-
нением
Для предохранения места приклейки шины от повреждения
гребнями гусеницы в диск из легкого сплава устанавливают сталь-
ное кольцо-реборду, торцовая поверхность которой выступает за
пределы основания шины. Размер выступа зависит от износостой-
кости и прочности применяемой стали и должен исключать кон-
такт гребней траков с основанием шины. Реборда изготавливается
из высокопрочной стали с объемной закалкой на высокую твер-
дость. Крепление реборды должно быть надежным, так как ее
выпадание может привести к быстрому разрушению шины. Это,
например, крепление методом запрессовки кольца с большим на-
тягом или при помощи нарезных штифтов. В зарубежных танках
11 Зак. 16<с>
161
Таблица 6.1
Основные параметры
Допускае- ма* стати- Максималь- ная ско- рость дви- 1 а
Категория ВГМ Тип опорного катка и его исполнение ческвя нагрузка жении ВГМ при допус- каемо* ста- 11 1. h
по массе на опорный каток, кН тической нагрузке, км,ч Нару ж катка. j э 11 is
Однорядный с массивной шиной 4,41 50,0 700 85 85 36,5
Особо легкая То же 10,80 45.0 515 132 132 50,0
> 5.39 50.0 500 70 70 36,5
» 8.04 50,0 550 100 100 40,0
Двухрядный с массивной шиной 7.84 61,0 500 143 60 30,0
Однорядный с массивной шиной 12.10 65,0 600 140 140 45,0
Легкая То же 10,97 61,5 670 140 140 50,5
» 8.62 45,5 700 120 120 40,0
» 12.99 45,0 670 140 140 50,5
Двухрядный с массивной шиной 17,15 40,0 750 284 120 50,0
То же 16,07 70,0 560 225 90 45,0
Промежу- точная Однорядный с массивной шиной 18,62 50,0 670 160 160 50.0
Двухрядный с массивной шиной 23,91 63,0 630 351 160 44,0
То же 32,83 65,0 630 382 170 47,5
> 31,40 44,4 830 353 150 70,0
Двухрядный с массивной шиной 42,73 56,0 810 423 185 61,5
То же 47,63 60.0 750 422 190 52,5
Средняя > 42,20 70,0 670 392 170 50,0
162 Двухрядный с внутренним амор- тизатором 41,16 65,0 555 145 54 5 —
и размеры опорных катков
h р. 8 if Посадочный размер под подшипник катка, мм Тип бсгоноЛ дорожки 2 Материал диска
Ширина торожкм Радиус ( 1О|ЮЖКИ •«2 = “S о2а в ступице на оси гусеницы а
75 600 3' 10' 80/85 40/40 Металличес- кая 36 Сталь
116 650 Г 30’ 100/110 45/50 То же 38 >
58 600 Г 35' 80/85 40/45 > — >
84 600 1 25' 80,100 35/45 > 38 »
51 ЗЛО 15’ 85/90 45/50 > 26 1 Магниевый сплав
120 800 10° 130/140 60/65 Металличес- кая 46 Сталь
112 600 12“ 40' 130/140 бо/бо То же 47 Алюминиевый сплав
102 400 3° 120/125 55/55 » 57 Сталь
112 600 — 130/140 60/65 > 60 в
100 400 6° 40' 140/140 53/65 » 133 »
80 400 10° 140/150 — Обрезинен- ная 57 Алюминиевый сплав
132 600 9J 40' 130/140 60/60 Металличес- кая 68 Сталь
137 — 140/150 65/70 То же 115 Алюминиевый сплав
154 850 10° 160/170 — > 125 То же
126 600 8 45' 170/170 80/80 » 223 Сталь
163 900 - 180/180 85/100 Металличес- кая 260 Сталь
163 750 10е 180/180 85/100 То же 178 Алюминиевый сплав
150 1000 10е 180/190 85/90 Обрезинен- ная 156 То же
11* 180 100 1 Металличес- кая 108 Сталь 163
(«Леопард-2» и М-1) вместо реборд используется износостойкое
покрытие достаточно большой толщины, которое наносится на-
плавкой или напылением. Такое покрытие упрощает конструкцию
и повышает надежность катка.
Функции защитных реборд могут выполнять торцы стальных
ободов, подвергнутые термообработке на соответствующую твер-
дость.
Однорядный опорный каток с массивной шиной (см. рис. 6.5
и 6.6) состоит из обода, двух штампованных боковин (дисков)
и ступицы, соединенных между собой сваркой. Каток изготавли-
вается из стали 38ХС или высокопрочного алюминиевого сплава.
При применении легких сплавов в обод катка для защиты от
гребней гусеницы устанавливают стальные реборды из высоко-
прочной стали; шину приклеивают к ободу после сварки деталей.
Рнс. 6.5. Конструкция однорядного
опорного катка с массивными шина-
ми БМП-1:
/ — массивная шина; 2 — обод; 3 диск;
4 — ступица; 5 — подшипник с уплотне-
нием
Рис. 6.6. Конструкция однорядного
опорного катка с массивными шина-
ми для специальных машин:
/ массивная шина: 2 — обод; 3 — диск;
4 — ступица; 5 — реборда: 6 — подшипник
с уплотнением
Для изготовления массивных шин применяются высоконапол-
ненные резины, например, марки 34РИ-12 или 34РИ-14, на основе
синтетического каучука. Крепление шин к дискам осуществляется
164
клеем «Лейконат» в процессе вулканизации в специальных пресс-
формах при температуре ~ 150°C.
Повышенная долговечность шин обеспечивается применением
гусениц с обрезиненной беговой дорожкой, эффективность кото-
рых определяется соотношением жесткости и конструктивных
параметров массивов шин и самой дорожки. Применение шин из
полиуретана с более высокой механической прочностью и износо-
стойкостью ограничено из-за его неудовлетворительных упруго-
гистерезисных и теплостойких свойств. Существенное повышение
долговечности катка может быть достигнуто посредством армиро-
вания резиновых массивов шин.
В двухрядном катке с внутренней амортизацией (см. рис. 6.7)
наружный обод и ступица стальные, нажимные диски штампован-
ные алюминиевые. Амортизаторы кат-
ка представляют собой два кольца из
резины 34РИ-12 или 34РИ-14, привул-
канизнрованные торцовыми поверх-
ностями к боковинам обода и нажим-
ным дискам. Для повышения надеж-
ности крепления амортизаторы при по-
мощи гайки и ступицы сжимаются
между ободом и дисками с большим
усилием (до 250 кН для основного
ганка). В связи с прогибом дисков
это сжатие по радиусу амортизаторов
распределяется неравномерно, что
приводит к ухудшению их работоспо-
собности.
Через амортизаторы и нажимные
диски обод катка опирается на конус-
ные поверхности стяжной гайки и
Рис 6.7. Конструкция двухрядного опорного
катка с внутренними амортизаторами тан-
ка Т-64А:
/ обод; 2 - к лжимной диск; 3 резиновый амор-
тизатор; 4 ступица; 5 ПОДШИПНИК
фланца ступицы. Предельный ход обола ограничивается разви-
тыми кольцевыми упорами на ступице и для катков основного
танка не превышает 10 мм, что соответствует радиальной нагруз-
ке 150 200 кН.
Обод из стали типа 38ХС подвергается объемной закалке
(изотермической и токами высокой частоты) по наружной поверх-
ности качения на глубину до 7 мм; нажимные диски для облегче-
ния катка изготавливаются штамповкой из высокопрочного алю-
миниевого сплава типа В-95.
В машинах особо легкой и некоторых типах легкой и проме-
жуточной категорий по массе катки устанавливаются на двух
165
шарикоподшипниках, в остальных ВГМ — на одном шариковом
и одном роликовом подшипниках, что при прочих равных усло-
виях обеспечивает большую их надежность. Для улучшения мон-
тажа и демонтажа катка применяются роликоподшипники с ци-
линдрическими короткими роликами. Для исключения случаев
поломки упорных буртиков внутренних обойм роликоподшипников
один из буртиков выполняется в виде приставного кольца.
Малогабаритный опорный каток с внутренней амортизацией
может устанавливаться на одном нерегулируемом двухрядном
подшипнике с коническими роликами. Осевой люфт такого под-
шипника должен быть меньше стандартного, а его сепаратор
должен иметь плотное обжатие по роликам. Тепловая напряжен-
ность подшипника такой конструкции на 20—30 % больше, чем
при установке шарикового и роликового подшипников.
Подшипник в ступице катка устанавливается неподвижно, а
на балансире—с зазором, что обеспечивает относительно легкий
монтаж и демонтаж катка. Гайка затягивается крутящим момен-
том, контролируемым после заводских пробеговых испытаний.
Для смазки подшипников в настоящее время применяются кон-
систентные смазочные материалы. Применение единого смазочно-
го материала существенно упростило бы эксплуатацию и обслу-
живание. Для высокоскоростных и тяжелонагруженных подшипни-
ков рекомендуются масла, обладающие более высокими смазы-
вающими и охлаждающими свойствами. Так, экспериментально
установлено, что применение жидкой смазки ЦИАТИМ-208 вместо
ЯНЗ-2 снижает температуру в подшипнике катка на 20—30%.
Однако при использовании масел сложнее обеспечить герметиза-
цию подшипника.
Уплотнение подшипников обычно выполняется с помощью ла-
биринта и уплотняющих элементов. При длине каждого лабирин-
та не менее 10 мм и минимальной площади кольцевой щели входа
в лабиринт необходимо не менее двух колец.
Применяется торцовое уплотнение (см. рис. 6.6), а также уп-
лотнение с помощью радиальных манжет с поджатием их рабочих
кромок кольцевыми винтовыми (или пластинчатыми) пружинами
(см. рис. 6.1 и 6.2).
При радиальном уплотнении консистентных смазочных мате-
риалов устанавливаются две однокромочные манжеты, направ-
ленные кромками наружу. При использовании масла обычно уста-
навливают одну двухкромочную манжету и одну однокромочную
так, чтобы две кромки их были направлены наружу.
Опорные катки современных ВГМ имеют высокий уровень ди-
намической нагруженное™, тепловой и механической напряжен-
ности.
По данным испытаний и опыту эксплуатации, ресурс опорных
катков ограничивается в основном механическим разрушением
амортизирующего элемента от повышенных нагрузок при движе-
нии с относительно невысокой скоростью по разбитым дорогам
166
и местности. Это разрушение характерно для массивных шин, не-
посредственно взаимодействующих с неровностями беговой до-
рожки гусениц и инородными предметами, от которых защищены
внутренние амортизаторы.
Длительное воздействие высоких температур при безостано-
вочных пробегах машин с максимальной скоростью, усугубляемое
высокой частотой деформирования (до 220 Гц), приводит к интен-
сивному накоплению необратимых структурных изменений в рези-
не амортизирующих элементов и существенно ухудшает ее меха-
нические (упругие и прочностные) свойства, что может привести
к тепловому разрушению амортизирующего элемента.
Многообразие и сложность воздействия на опорные катки им-
пульсного нагружения при существенно неравномерном темпера-
турном поле затрудняют априорное определение долговечности
резиновых амортизирующих элементов опорных катков. Поэтому
при разработке и модернизации ВГМ сравнивается работоспособ-
ность новых опорных катков с работоспособностью прототипов по
основным показателям механической и тепловой напряженности
резиновых амортизирующих элементов. Для массивной шины та-
кими показателями являются среднее давление в плоскости кон-
такта с опорным основанием и максимальная температура нагре-
ва, а для внутреннего кольцевого амортизатора — условное на-
пряжение сжатия и сдвига резинового кольца амортизатора и мак-
симальная температура его нагрева.
Возросший уровень тепловой и механической напряженности
амортизирующих элементов и динамической нагруженности опор-
ных катков при одновременном ограничении их габаритных раз-
меров требует повышения долговечности катков за счет улучше-
ния условий их взаимодействия с другими составными частями
движителя посредством придания эластичных свойств беговой
дорожке гусениц, снижения усилий их натяжения, уменьшения
перекоса осей опорных катков, а также за счет поиска новых ма-
териалов для амортизирующих элементов.
6.2. РАСЧЕТ РЕЗИНОВЫХ АМОРТИЗИРУЮЩИХ ЭЛЕМЕНТОВ
Основные геометрические параметры опорных катков опреде-
ляются долговечностью резиновых амортизирующих элементов,
расчет которой производится по средней статической нагрузке
на каток
р — h К (0’3 WT ~ 1*0, п7г) • 7*0 (6.1)
«о. к
где ki — эмпирический коэффициент, учитывающий неравномерность распреде-
ления нагрузки на катки по борту ВгМ (обычно Л| — 1,05); тт—масса маши-
ны; g — ускорение свободного падения; ?г—погонная масса гусениц; То — уси-
лие предварительного натяжения.
Расчет массивных шин опорных катков включает в себя опре-
деление среднего давления, максимальной радиальной деформа-
167
ции и максимальной температуры шины, а также оценку ее дол-
говечности по механической прочности.
Расчет деформации массивного резинового образца можно
производить с использованием коэффициента формы. Сила Рш.
необходимая для поджатия шины на величину /га, определяется
одноосным (в направлении действия силы) сжатием участка
Рис. 6.8. Расчетная схема для определения упругих характеристик шины
шины, ограниченного длиной отпечатка / (рис. 6.8). Тогда выра-
жения для расчета максимального (в середине пятна контакта)
значения и среднего давления q*w в зависимости от нагрузки
и конструктивных параметров шины и упругого основания имеют
следующий вид:
0,93
9 ^Лп^ст *|Лр
32 ’
(6.2)
(6.3)
3 Л I
-0Л6Л|/
*р^1И^Г А’п
где Яв—внешний радиус шины: Лш —ширина шины; Нш — высота массива
шины; *п — коэффициент перегрузки тин (для двухрядных катков 1,05—1,15,
для однорядных— 1,0—1,07); т — число шин в катие; Л р—поправочный коэф
фициеит, учитывающий изменение формы массива шины при изменении попе-
речного радиуса (зависимость эмпирическая); шЬшНшт1РС1; £ш
модуль сжатия шины (зависимость эмпирическая), £ш (2 -f- 0,7 j £р ш ;
в — безразмерный коэффициент, учитывающий влияние упругого основания, б —
Чу (вд + модУль сжатия беговой дорожки
(зависимость эмпирическая); £р1 — модуль сжатии резины беговой дорожки
трака; Н л — толщина беговой дорожки трака.
168
При /7Д = О получим 6»1, и приведенные формулы справед-
ливы для шины на нсдеформируемом основании, т. е.
-Is. — -ZL e 8, (6.4)
<7iu /ш
гае /щ —средние давление и деформация шины на нсдеформируемом осно-
вании.
Из выражения для Л следует, что этот коэффициент для упру-
гого основания конечной толщины Нл всегда меньше единицы, т. е.
< 0Ю, Поэтому применение обрезиненной беговой до-
рожки на траках гусеницы снижает средние давление и деформа-
цию массивных шин опорных катков; причем эффективность упру-
гого основания тем выше, чем меньше коэффициент 6 (рис. 6.9),
т. е. чем больше соотношения Н и £р ш/£р г Отсюда следует,
что материал упругого основания должен иметь более низкий мо-
дуль сжатия, чем материал шины. Поэтому применение полиурета-
нового основания для резиновых массивных шин нецелесообразно;
упругое основание более эффективно для шин с пониженной высо-
той массива и большим значением модуля сжатия.
Рис. 6.9 Расчетная зависи-
мость обобщенного коэффи.
цнентя Л от соотношения
НЛ!НШ при различных значе-
ниях £р.ш/£р.л:
/—0.5; 2 -1,0; 3—1.08; 4 2.25
Рис. 6.10. Зависимость среднего давле
ния к плоскости контакта шины с беги
вой дорожкой от ее ширины (Л.
диаметра D„ (2) и толщины //ш (5)
(----- металлическая беговая дорож-
ка, ------------- обрезиненная)
Анализ формул показывает также, что из конструктивных па-
раметров шины наиболее существенное влияние на упругие харак-
теристики оказывает ширина беговой дорожки (рис. 6.10). При ее
увеличении уменьшаются среднее давление и деформация шины.
В меньшей степени давление зависит от высоты массива, но при
ее увеличении существенно увеличивается деформация, а следо-
вательно, и теплонапряжепность шины. Увеличение диаметра кат
12 Зак. 16«с> 169
ка снижает давление и деформацию шины, но в меньшей степени,
чем увеличение ее ширины.
Расчет долговечности шин по механической прочности основан
на использовании эмпирической зависимости их наработки S
(в км) от среднего давления qnt в контакте с опорным основа-
нием. Зависимость получена экспериментально на стенде посред-
ством воспроизведения механического разрушения резинового
массива, идентичного наблюдаемому при натурных испытаниях,
при помощи специальных концентраторов, установленных на бего-
вой дорожке гусеницы, образующих на поверхности шин система-
тические трещины и обеспечивающих форсированное разрушение
резины.
Для шин с обычно применяемой в настоящее время симмет-
ричной трапециевидной формой поперечного сечения массива с
/9ш =810... 560 мм и HuJbw =0,2... 0,4 в полулогарифмической
системе координат существует линейная зависимость
$СТ=>1(Г"< (6.5)
где a. k — постоянные коэффициенты, а—5,25, 4—8.
Используя формулу (6.3), можно оценить влияние на долго-
вечность изменения основных геометрических параметров шины,
числа опорных катков и шип в катке (с учетом неравномерности
распределения нагрузок между ними), массы машины и пара-
метров движителя.
Для оценки долговечности новых или модернизируемых ВГМ
необходима информация о ресурсе прототипа. Используя линей-
ную теорию накопления повреждений в шине, можно определить
ожидаемый средний ресурс катка:
5(6.6)
где л —число уровней нагружения; —наработка при Лм уровне нагрузки
на шину, т. с. при рассчитанном по формуле (6.3) или определенном
экспериментально; Pi — частота i-ro уровня нагрузки; ks — коэффициент пере-
хода от результатов стендовых испытаний к результатам, полученным при
эксплуатации, предварительно определяется по прототипу, имеющему достаточ-
ный объем проверки в условиях эксплуатации; qw - Г(/?ш ) — рассчитывается
по формуле (6.3) или определяется экспериментально.
Для средней статической нагрузки ожидаемый средний ресурс
может быть найден по формуле
$“*ДТср. (6.7)
где SrT1.p— наработка шины на стенде (в км условного пути) при удельном
давлении дш, соответствующем средней статической нагрузке на шину.
Тепловой расчет амортизирующих элементов необходимо про-
водить прежде всего при максимальной скорости движения маши-
ны, т. е. при максимальной температуре в центре массива шины,
170
с помощью эмпирической зависимости, полученной на основе обоб-
щения результатов стендовых испытаний большого числа шин раз-
ных типоразмеров:
-rf., (6.8)
где о ,|11Х—максимальная скорость машины, км/ч; kT—коэффициент, учитываю-
щий форму и упруго-гистерезисные свойства шины (для шин из резины 34РИ-12
Аг—80); температура окружающего воздуха, °C; Д/— максимальная из-
быточная температура в шине; k — коэффициент, учитывающий влияние геомет-
рических размеров шины;
1 — а’ Г 2 а» 1
Л । [ 0,5 - (I | ; и — 1 — - е//ш J?1U; b = I — Нш /?ш .
е — 0,555 — коэффициент, учитывающий положение очага максимальной темпе-
ратуры.
Характер изменения максимальной избыточной температуры в
шине от ее геометрических параметров показан на рис. 6.11.
Рис. 6 11. Зависимость избы-
точной температуры в шине от
ее ширины (/), диаметра (2)
и толщины (3) при качении по
беговой дорожке (----- ме-
таллической. ----- обрези-
ненной)
Расчет внутренних
амортизаторов опорных
катков включает в себя
выбор толщины, опреде-
ление напряжений и уси-
лий сжатия резиновых
колеи амортизаторов и
их максимальной темпе-
ратуры.
Усилие сжатия амортизаторов опорного катка выбирается та-
ким, чтобы при предельном радиальном перемещении обода отно-
сительно ступицы катка исключить отрыв резины по месту при-
клейки. Это условие соблюдается, если исходная толщина аморти-
затора
-к Утях, (6.9)
где Ьл— толщина амортизатора в сжатом состоянии; р та х — предельное (до
упора в ступицу) перемещение обода катка.
Осевое усилие, необходимое для поджатия амортизатора на
величину bct — b„
+ (6.10)
где G — модуль сдвига резины; rh гг—внутренний и наружный радиусы амор-
тизатора.
12*
171
Условное напряжение осевого сжатия амортизатора
, =•;---(6.11)
где £ _ безразмерный коэффициент, учитывающий перегрузку слоев резины
из-за прогиба нажимного диска.
Максимальное напряжение среза в месте крепления амортиза-
тора к ободу и диску
(6.12)
где / — безразмерный коэффициент, учитывающий возрастание жесткости амор-
тизатора в результате его старения; т] — безразмерный коэффициент, характе-
ризующий динамическое увеличение жесткости.
Радиальную жесткость катка можно получить, используя вы-
ражение
Ск = mGr. (г| - г?)/£,, (6.13)
где tn — число амортизаторов в катке.
Напряжение сдвига амортизатора
х, Л»,—• <614>
г-(Г2-г\)т
Максимальная температура в резиновых амортизаторах катка
*„., = <, + +*.. (6.15)
где /р—максимальная избыточная температура резины амортизатора по отно
тению к температуре поверхностей, с которых происходит теплоеьем./щб —из-
быточная температура поверхностей, с которых происходит теплосъем; /в —тем-
пература окружающего воздуха.
Величина /р может быть определена по следующей формуле:
Ь 1 -*?*'':> Т. (6.16)
"I > + I
где q, — объемная плотность теплового потока (количество теплоты, выделяе-
мой единицей объема амортизатора в единицу времени); Лр — теплопроводность
резины, Лоб теплопроводность материала обода; &об — толщина боковины
обода; г — радиус, определяющий границу теплоизолированной поверхности
обода;
| ^2 + ^вб 4* ^Об^ОбМр
Комплекс, составленный из модифицированных функций Бесселя первого
и второго рода нулевого и первого порядков мнимого аргумента, I— R(V(A.
Г|, г) определяется по графику, приведенному на рис. 6.12.
172
Объемную плотность теплового потока от амортизаторов с уче-
том их высокочастотной деформации можно вычислить по форму-
ле, полученной с использованием модели Кельвина—Фохта для
описания связи между касательными напряжениями, деформацией
и скоростью деформации резины:
rlGV'nux I ^ст । я^о.кУж I (6 17)
где Ф — безразмерный коэффициент, характеризующий внутреннее трение в ре-
зине; /?0 <— наружный радиус опорного катка; ул— амплитуда динамической
составляющей радиальной деформации амортизаторов; /г—шаг гусеницы (для
гусениц с шарниром параллельного типа берется половина шага).
Рис. 6.12. График комплекса, со-
ставленного из модифицирован
пых функций Бесселя первого и
второго рода Нулевого и первого
порядков
Рис. 6.13. Зависимость коэффи-
циента теплоотдачи от скорости
качения опорного катка
Избыточная температура поверхностей, с которых происходит
теплосъем,
q„ (г} — г?) Ьл
f----------------- ;2> ,-------------Г- <6|8>
- [2 4 - г’ - г’ ( 2 ,А + 2 г, / /<3. г„ „>]
где а — коэффициент теплоотдачи (рис. 6.13); /(0, г», г») — комплекс, состав-
173
ленный из модифицированных функций Бесселя (рис. 6.14), ? Г '
1/ ^ов+2яг?
r3= V -------------- . Гоб площадь поверхности обода, с которой происходит
Рис. 6.14. График комплекса, составленного нт модифицированных функций Бесселя
Таблица 6.2
Рекомендуемые значения некоторых параметров, необходимых для расчета
тепловой напряженности резиновых амортизаторов опорных катков
Параметр Рекомендуемое значение Примечание
ф 1 Ар, Вт, (м-К) Лов. Вт (м К) г, МПа в, МПа 'max • Ml la q, МПа It, °C 1.1 —1.4 1.1—1.2 1,0-1,07 1.05—1,15 0,555 0,066 1 Д-1.5 0,373 38.38 He более 0,41 He более 3.0 He более 0,9 1.3—1.4 155-170 Для однорядного кат- ка Для двухрядного кат- ка Для резины типа 34РИ-12 Для резины типа 34РИ 12 Для резины 34РИ-12 Для стали Для резины типа 34РИ-12, 34РИ 14
174
Рекомендуемые значения остальных коэффициентов и парамет-
ров, необходимых для расчета, приведены в табл. 6.2.
6.3. ИСПЫТАНИЯ ОПОРНЫХ КАТКОВ
Лабораторные и стендовые испытания опорных катков позво-
ляют определить упруго-гистерезисные характеристики амортизи-
рующих элементов и механическую прочность массивных шин,
исследовать динамику взаимодействия катка с беговой дорожкой
гусеницы, тепловую напряженность амортизирующих элементов
и определить их работоспособность при максимальной скорости
качения катка (динамическую теплостойкость).
Располагая результатами всех этих испытаний (в комплексе),
разработчики ВГМ могут выбрать основные параметры катков,
окончательно отработав их на стенде.
Определение упруго-гистерезисных характеристик. Упруго-гис-
терезисные характеристики амортизирующих элементов являются
исходными для расчета их тепловой напряженности и динамиче-
ской нагруженности опорных катков. Для определения этих ха-
рактеристик катки подвергают лабораторным (так называемым
статическим) испытаниям, при которых измерение параметров
выполняется в условно-равновесном состоянии резинового масси-
ва (т. е. по истечении релаксации в резине).
Как показали исследования, в амортизирующих элементах
катков из разных резин условно-равновесное состояние наступает
после предварительной десятикратной «тренировки», заключаю-
щейся в выдержке испытуемого образца в течение трех минут
под нагрузкой (на 15—25 % превышающей максимальную) и по-
следующем «отдыхе» без нагрузки в течение того же времени.
При определении характеристики последовательно (ступенями)
нагружают каток на прессе до максимального значения, пол-
ностью разгружая (также ступенями) после трехминутной вы-
держки на каждом уровне нагрузки. Каждый цикл (нагрузка и
разгрузка) повторяется не менее трех раз, причем для каждого
уровня (раздельно для нагрузки и разгрузки) измеряется дефор-
мация шины и рассчитывается средняя деформация.
По упруго-гистерезисным характеристикам определяется коэф-
фициент гистерезисных потерь —отношение площади петли гисте-
резиса, ограниченной кривыми нагрузки и разгрузки, к площади
под кривой нагрузки.
Для массивных шин определяется также среднее давление в
контакте с опорной поверхностью. Для этого на каждом уровне
нагрузки Рш при помощи красящего материала, предваритель-
но нанесенного на поверхность шины, на опорной поверхности
воспроизводится пятно контакта. После определения планиметри-
рованием площади этого пятна Ft рассчитывается среднее дав-
ление
175
Для исключения податливости обода катков одновременно
с измерением радиальной деформации шины необходимо опреде-
лять также и его прогиб.
Рис. 6.15. Схема установки катка
на прессе для определения упру-
го гистерезисных характеристик:
1 — призма опорная; 2 — ось с пере
ходной втулкой; J — опорный каток
(шика); 4 — траверса пресса; 5 — трак
гусеницы
Для испытаний каток
(шина) выставляется по
опорной поверхности парал-
лельно или с заранее задан-
ным перекосом по отноше-
нию к поверхности стола
пресса с точностью до 0,1°
(рис. 6.15).
Результаты определения
радиальных упругих харак-
теристик опорных катков с
массивными шинами совре-
менных ВГМ приведены на
рис. 6.16. Характеристики
нелинейны. Давление и де-
формация шины (основные
показатели, определяющие ее долговечность) уменьшаются с уве-
личением ее ширины и наружного диаметра; при увеличении вы-
Рис. 6.16. Зависимость среднего давления qw (----) и деформации /ш (--------)
от нагрузки в плоскости контакта с опорным основанием шнн ВГМ легкой (а),
промежуточной и средней (б) категорий по массе:
I, 2 шина (560X90x45 мм) опытной БМП на недеформируемом основании н на обре-
зиненной беговой дорожке соответственно; 3 шмна (600x140x45 мм) серийной БМП-1;
4 —ШЯна (630X170x47.5 мм) зсннтно ракетного комплекса; 5 — шина (750X190 X 52.5 мм)
гайка T 72; 6. 7 - шина (670X170 x 50 мм) танка T 80 на недеформируемом основании и на
обрезиненной беговой дорожке соответственно
соты шины среднее давление уменьшается, а деформация увели-
чивается; на обрезиненной беговой дорожке гусеницы эти показа-
176
тсли меньше, чем на металлической, например, в танке Т-80 на
15—20%. Не изменяются эти показатели по сравнению с металли-
ческим основанием на беговой дорожке из полиуретана (рис. 6.17)
и обрезиненной, заключенной по наружному периметру в металли-
ческий контур, так как в этих случаях массив основания на траке
под воздействием шины практически не деформируется.
Рис. 6 17. Зависимость среднего давления qm (--) и деформаиий/ш (------)
от нагрузки для опытных шин 820X90X28,5 мм (а) и дли шни ганка Т 80
670 X 170X50 мм (б):
/ на недеформируемом основании; 2 — на траке с релиновой беговой дорожкой, массив
которой по наружному периметру «включен в металлический контур; 3 на траке с ио
лиурстановой беговой дорожкой; 1 на траке с обре«ииемиой беговой дорожкой
При изготовлении шин из опытных высокопрочных резин
(4Э-1422, 4Э-1386, П-7 и П-8) среднее давление несколько умень-
шается, но одновременно увеличивается их деформация.
Упругие характеристики шины из полиуретана значительно
хуже: среднее давление почти в три раза больше, а деформация
меньше, чем у резиновых шин. Армирование резиновых шин по-
вышает работоспособность, но при этом примерно на 10 % увели-
чивается среднее давление на опорное основание.
В результате деформации и люфтов в подвеске происходит
перекос оси катка в вертикальной плоскости, что вызывает нерав-
номерное распределение нагрузки между шинами двухрядного
опорного катка. Так, суммарный перекос оси двухрядного катка
танка Т-80, достигающий 35х, приводит к перегрузке внутренней
шины этого катка примерно на 36%, что повышает среднее дав-
ление в контакте шины с гусеницей на 17 %, а ее тепловую на-
пряженность — на 34 %.
Кроме того, эона максимального нагрева шин существенно
смещается в сторону более нагруженной части массива, а на ме-
таллической беговой дорожке дополнительно повышаются темпе-
ратура нагрева и среднее давление в контакте наружной шины
177
с гусеницей (рис. 6.18). Исключение перекоса осей двухрядных
опорных катков позволит существенно снизить нагруженность
внутренних шин и повысить их долговечность.
Результаты исследования упруго-гистерезисных характеристик
опорных катков с внутренними кольцевыми амортизаторами при-
ведены на рис. 6.19. Радиальная жесткость катка танка средней
Рис. 6.18. Влияние угла наклона ши-
ны на зависимость среднего давле-
ния от нагрузки н плоскости контак-
та шины 670X120X50 мм:
I, 3. 3, 4 — с нсдеформпруемым основанием
ори циклоне тины ня 0. I, 2. 3 соотвст-
CIпенно; 5 с упругим основанием при
тех же углах наклона
Рис. 6.19. Упруго-гистерезисные ха-
рактеристики резиновых амортизато-
ров катков танка Т-64А:
I, i радиальные: 3.4 — осевые; 5 на
жимных дисков
категории по массе с амортизаторами из резины на основе синте-
тического каучука составляет 11,8—14,8 кН/мм, а коэффициент
гистерезисных потерь —6—7 % (верхнему значению соответствует
резина марки 34РИ-12, а нижнему- более мягкие резины). Ра-
диальная жесткость резины катков из натурального каучука со-
ставляет 7,30—9,30 кН/мм, а коэффициент гистерезисных по-
терь— 7,5—12%. Модуль сдвига резины на основе синтетического
каучука составляет 3, 0—2,4 МПа, а резнны на основе натураль-
ного каучука 1,50—1,95 МПа.
Осевая жесткость внутренних кольцевых амортизаторов более
чем на порядок превышает радиальную, что объясняется большим
значением коэффициента формы для такого типа амортизаторов
(отношение площади опоры к площади боковой поверхности со-
ставляет 1,5—2).
На рис. 6.20 приведена зависимость радиальной жесткости кат-
ка от усилия осевого сжатия амортизаторов из резин с значи-
тельно отличающимися упругими свойствами (наибольшее услов-
ное напряжение сжатия при осевом усилии 294 кН составляет
3 МПа). Из рисунка видно, что радиальная жесткость внутрен-
них кольцевых амортизаторов мало зависит от осевого сжатия,
178
что свидетельствует о
бом, рекомендуемым в
нецелесообразности ее регулировки спосо-
р а ботах [25, 35].
Ск,кН1сн
Рис. 6.20 Зависимость
радиальной жесткости
опорного катка танка
Т-64А от усилия осево-
го сжатия амортизато-
ров:
/—из резины 34РИ-12; 2
из резины БЧ-25
При осевом сжатии амортизаторов происходит прогиб нажим-
ных дисков, величина которого прямо пропорциональна усилию.
При усилии 245 кН она составляет 1,3—1,5 мм, а неравномерность
сжатия амортизаторов при этом достигает 20%.
Вследствие релаксации в резине амортизаторов напряжения
сжатия со временем уменьшаются: в резине на основе синтетиче-
ского каучука на 10—12 %, а на основе натурального несколько
меньше.
Высокая температура саморазогрева (до 160—220 °C) и высо-
кочастотная циклическая деформация амортизирующих элемен-
тов ускоряют процессы релаксации и старения, в результате чего
их упругие свойства ухудшаются. Для количественной оценки из-
менения свойств испытывались внутренние амортизаторы, прошед-
шие предварительно динамические испытания на катковом стен-
де, где воспроизводились наиболее тяжелые условия эксплуата-
ции: скорость качения 43 км/ч, соответствующая средней скорости
движения ВГМ по грунтовым дорогам, и 65 км/ч, соответствую-
щая максимальной скорости движения по ровным дорогам с твер-
дым покрытием. Испытания показали, что после наработки на
стенде, эквивалентной 170 км безостановочного пробега машины
со скоростью 43 км/ч (температура в средней части поперечного
сечения кольца амортизатора 120—160 ^С), усилие осевого сжа-
тия внутренних амортизаторов уменьшается на 30—60%; после
наработки, эквивалентной 350 км пробега, усилие сжатия продол-
жает уменьшаться, но менее интенсивно, несмотря на более вы-
сокую температуру нагрева (140—190°C), что свидетельствует
о стабилизации релаксационных процессов.
Жесткость амортизаторов из резины на основе синтетического
каучука из-за релаксации и старения изменяется меньше, чем из
резин на основе натурального каучука. Так, после 900—1000 км
пробега машины со скоростью 65 км/ч, когда температура в
амортизаторах достигает 200 °C, жесткость амортизаторов из ре-
зины 34РИ-12 возрастает только на 17%, амортизаторов из дру-
179
гих резин нй основе натурального каучука — на 40 %. Гистерезис-
ные потери в амортизаторах после 800—1000 км наработки, экви-
валентной пробегу со скоростью 65 км/ч, увеличились на 20—40 %.
Стендовые испытания массивных шин на механическую проч-
ность. Экспериментально установлено, что до 80 % нагрузок, дей-
ствующих на опорные катки от подвески при движении ВГМ по
разбитым дорогам и местности со средней скоростью движения
17,0—28,0 км/ч, не превышают ЗРСТ. При этом среднее давление
в площади контакта шин достигает больших значений (до 2,7—
3,0 МПа), а температура нагрева в средней зоне поперечного
сечения резинового массива 90—160 °C.
В таких условиях долговечность катков определяется только
механической прочностью массива шин. В начале эксплуатации
(после 400—500 км пробега), вследствие высоких поверхностных
касательных напряжений, возникающих из-за неравномерного
распределения скоростей скольжения по пятну контакта шины и
беговой дорожки, наличия зазоров в гусенице и попадания под ши-
ны твердых инородных предметов, повышенных нагрузок, а также
проскальзывания шин на поворотах, на поверхности шины появ-
ляются мелкие трещины и надрывы. По мере развития начального
поверхностного разрушения происходят местные сколы резины;
увеличение их числа и размеров приводит к локальному разруше-
нию массива. Интенсивность механического разрушения шин за-
висит от сочетания и интенсивности воздействия всех перечислен-
ных факторов.
Рис. 6.21. Общий вид стенда для испытаний опорных катков на механическую
прочность:
I — махонин стенде; 2 -корпус нагружающего устройств?!; 3 — унифицированная Колам-
сиряая подвеска с горсиоиом; 4 — испытуемый каток
Механическое разрушение шин воспроизводится на стенде ба-
рабанного типа (рис. 6.21). Стенд состоит из вращающегося бара-
бана с бесступенчатым приводом и нагружающего устройства.
180
На наружной поверхности барабана закрепляется гусеница, а ис-
пытуемый опорный каток (шина) устанавливается на балансир-
ной подвеске и поджимается к беговой дорожке гусеницы. Перед
началом испытаний за счет изменения наклона нагружающего
устройства стенда ось вращения беговой дорожки шины выстав-
ляется параллельно оси вращения беговой дорожки гусеницы.
Стенд оборудован системой обдува испытуемого катка (шины)
потоком наружного воздуха.
Испытания шин на этом стенде показали, что для сокращения
продолжительности эксперимента, а также для интенсивного вос-
произведения и развития в лабораторных условиях механического
разрушения массивных шин необходимо применять искусствен-
ные концентраторы напряжений. С этой целью к беговой дорож-
ке траков привариваются полукруглые металлические планки,
обеспечивающие повышенные касательные напряжения по пятну
контакта шины. Для создания переменных по знаку напряжений
планки устанавливаются под углом 45’ к продольной оси трака и
чередуются по направлению.
Шины каждого типоразмера подвергаются последовательно
испытаниям до разрушения при трех нагрузках: Р| = РСг, Р?=
- 1,5РСТ и Р3=ЗРС1.
Для сравнения полученных результатов температуру шин при
каждой нагрузке необходимо сохранять одинаковой, что дости-
гается регулированием скорости принудительного обдува, измене-
нием температуры окружающего воздуха и скооости качения шин.
В качестве критерия оценки механической прочности шины
можно принять наработку S (в км) до образования первой тре-
щины, первого скола или сплошного разрушения 1/5—1/6 длины
окружности и половины высоты и ширины массива шины.
В процессе испытаний измеряются или контролируются сле-
дующие параметры: частота вращения барабана; температура
шины в центре поперечного сечения массива и на поверхности его
беговой дорожки, в первой трещине; температура окружающего
воздуха на расстоянии 100—150 мм от верхней точки шины; гео-
метрические размеры очагов разрушения.
При заданной нагрузке предварительно определяются необхо-
димая скорость качения и скорость принудительного обдува, при
которых температура в центре сечения массива на установившем-
ся тепловом режиме составляет 120°С.
Затем шина испытывается при заданной скорости качения до
разрушения массива с кратковременными остановками (не более
2 мин) через каждые 1—4 ч испытаний для осмотра и измерений.
Испытанию подвергается не менее 15 шин (по 5 при каждой
нагрузке).
Долговечность шины определяется средним давлением в кон-
такте с траком и возрастает с уменьшением этого параметра.
Сравнивая результаты испытаний нового катка и прототипа,
можно исследовать эффективность влияния конструктивных па-
181
раметров, размеров, материала и других факторов на долговеч-
ность опорных катков.
На основании испытания катков различных серийных и опыт-
ных ВГМ получена обобщенная зависимость наработки от
среднего давления для шин симметричной трапециевидной формы
(рис. 6.22). Эта зависимость в полулогарифмической системе коор-
Ргс 622. Обобщенная зависимость наработки шин на стенде от среднего дав-
ления в плоскости контакта с траком
динат линейна. Установлено, что долговечность шины возрастает
с увеличением ширины, высоты и диаметра ее массива, причем
наиболее существенное влияние оказывает изменение ширины
шины (рис. 6.23). Долговечность шины увеличивается при умень-
шении модуля упругости и увеличении прочности применяемой
резины, а также при использовании упругой обрезиненной дорож-
ки на траках гусениц, так как при этом снижается среднее дав-
ление в плоскости контакта шины.
Применение на траках полиуретановой или резиновой бего-
вой дорожки, заключенной по наружному периметру в металли-
ческий контур, не влияет на долговечность шин.
Стендовые испытания опорных катков на тепловую напряжен-
ность и динамическую теплостойкость амортизирующих элементов.
Расчетного метода определения работоспособности массивных ре-
182
зиновых шин при длительном воздействии температуры, близкой
к предельной, в настоящее время не существует. Но известно, что
температура неравномерно распределяется по сечению массива,
а тепловое воздействие на резину зависит от вида и уровня ме-
ханических напряжений.
Рис. 8.23. Относительное
изменение долговечности
шин (560X80X45 мм)
опытных опорных катков
при Рш—9,12 кН в зависи-
мости от ширины беговой
дорожки Ьш (/), наружно-
го диаметра Ош(2) н высо-
ты шины //ш (3)
На практике рабо-
тоспособность аморти-
зирующих элементов
катков определяют
экспериментально, по
средством испытаний
натурных образцов или
макетов на стенде, где
могут быть воспроизведены экстремальные условия их эксплуа-
тации (качение катка по беговой дорожке гусениц с макси-
мальной скоростью).
Опорные катки устанавливаются при помощи подвески ВГМ
(или ее имитатора), для которой они предназначены; гусеница
должна быть тоже от этой ВГМ.
Тепловая напряженность, как правило, оценивается темпера-
турой в характерных точках амортизирующих элементов и метал-
лической арматуры катка; точек должна быть не менее трех: в об-
ласти наибольшего нагрева резинового массива (как правило, в
центральной части), на его поверхности и на металлической арма-
туре катка Одновременно на расстоянии 100—150 мм от катка
измеряется температура окружающего воздуха. Измерения прово-
дятся периодически с помощью игольчатых термопар при останов-
ленном стенде или ведется непрерывная запись с помощью токо-
съемного устройства.
Для исследования зависимости тепловой напряженности от
скорости качения каток испытывается без перерыва при частотах
вращения барабана, соответствующих движению ВГМ со ско-
ростью 25, 35, 50 км/ч и максимальной. Установившийся тепловой
режим в амортизирующих элементах наступает практически после
2—3 ч испытаний, поэтому на каждой скорости шина испытывает-
ся в течение трех часов (измерение температуры и осмотр катка
производятся каждый час).
183
Для определения теплостойкости амортизирующего элемента
(шины или внутреннего амортизатора) проводятся длительные
испытания при максимальной скорости качения танка Тепло-
стойкость оценивается длиной условного пути, пройденного на
стенде до полной потери работоспособности катка.
Анализ поперечных срезов массивов на разной стадии их ис-
пытания показал, что разрушение амортизирующего элемента
Начинается с теплового в средней зоне (наиболее нагретой) в ви-
де местного расплавления (резина на основе натурального каучу-
ка) или обугливания (резина на основе синтетического каучука).
Затем развивается механическое разрушение остальной части
массива.
У шин с небольшой высотой массива, т. е. при более высоком
уровне напряжений (свыше 1,6 МПа), сразу идет механическое
разрушение массива, которое, как правило, начинается с образо-
вания поверхностных трещин, интенсивно развивающихся. Затем
в зоне трещин начинается тепловое разрушение резины, образуют-
ся сколы и, наконец, разрушается весь массив.
Иногда теплостойкость характеризуется наработкой до обра-
зования первой трещины, скола на массиве иЛи отслоения его от
металлической арматуры катка.
В процессе испытаний (через 1—4 ч) необходимо контроли-
ровать температуру в характерных точках катка и замерять очаги
разрушения амортизирующего элемента.
Тепловая напряженность и теплостойкость амортизирующего
элемента оцениваются посредством сравнения с данными анало-
гичных испытаний прототипа.
Результаты испытаний показывают, что тепловая напряжен-
ность амортизирующих элементов возрастает пропорционально
скорости качения и статической нагрузке, действующей на каток;
в области высоких скоростей качения шин (50—70 км/ч) темп
роста температуры может снижаться. Установлено также, что
уменьшение высоты, увеличение ширины и диаметра массивной
шины снижают ее тепловую напряженность.
При увеличении угла наклона оси вращения шин к оси вра-
щения барабана стенда на 3е тепловая напряженность шин, пере-
катывающихся по металлической беговой дорожке, возрастает
примерно на 20 % (рис. 6.24). Одновременно в зону большего
сжатия массива смещается и точка максимального нагрева. При
качении с максимальной скоростью по обрезиненной дорожке теп-
ловая напряженность шин от угла наклона оси вращения шины
почти не зависит. Перекос осн вращения шин в горизонтальной
плоскости относительно осн вращения барабана стенда (в этих же
пределах) на тепловую напряженность шин не влияет.
Результаты испытаний на теплостойкость массивных шин из
резины 34РИ-12 (табл. 6.3) показали, что максимальная темпе-
ратура в средней зоне амортизирующих элементов, при которой
длительно сохраняется работоспособность катка, достигает 190—
184
215°C. Отклонение максимальной температуры от среднего значе-
ния не превышает 10%, среднего давления — 5%, наработки--
35%. При этом наработка катка, движущегося по металличе-
ской беговой дорожке гусеницы со скоростью 60 -70 км/ч и испы-
тывающего давление в контакте с траком 1,3—1,4 МПа, состав-
ляет 6000—10 000 км; при качении по деформируемой обрезинен-
ной беговой дорожке гусениц наработка катков существенно вы-
ше (при температуре 200—220°С достигает 10 000 20000 км).
Рис. 6.24. Зависимость температуры нагрева в центре поперечного сечения шин
от продолжительности испытаний при качении по обрезиненной (--------------) и ме-
таллической (--------------------------) беговым дорожкам:
I. 2. 3. 4 — при наклоне оси вращения шин К оси вращения барабана 3, 2. !, О' соответ
ственно; I. II. Ill, IV скорость качения '№. 35. 50 и 70 км/ч соответственно
Испытания подтвердили высокую эффективность применения
обрезиненной беговой дорожки гусениц (рис. 6.25), что (по срав-
нению с металлической) позволяет в 1,2—1,5 раза снизить тепло-
I по обрезиненной беговой дорожке; 2 по металлической беговой дорожке; 3 по бе
говой дорожке с полиуретановым "окрытием; I. It. 111. IV скорость качения 25, 3S, 50.
70 км ч соответственно
185
Результаты стендовых испытаний
Типор пмгр шины, мм BI м Шири- на бе- гокои дорож- ки, мы Тип гусеницы Число испы- танных шин, шт. Макси- мальиаа ско- рость. КМ/Ч Статичес- ки нагруз- ка. кН
Легкая категория
810X185X61,5 Т-62 163 С металлической беговой дорожкой н последователь- ным РМШ 5 , 50 24.0
750X190X52.5 Т-72 163 То же 4 60 ‘22.0
750X190X47.5 Т-72 167 » 2 60 ‘22.0
630X170X47,5 Опытный танк 155 » 3 70 22.4
630X170 X 47Л То же 155 » 3 65 19,4
750Х 190X52.5 Т-72 163 С обрезиненной дорожкой и па - раллельным РМШ 3 60 25,7
670X170 X 50 Т 80 150 То же 3 70 24.5
670X170X50 Т 80 150 » 3 70 22.6
630X170X47,5 Опытный танк 153 > 3 70 22.6
Промежуточная
630X170X47.5 ЗРК-1 155 С металлической беговой дорожкой и последоаатель- ным РМШ 3 65 16,7
630X155 X 44 ЗРК-2 127 То же 3 65 16.7
С редн я я
560X80X40 Эксперимен- тальный об- разен 70 С обрезиненной беювой доро хкой и пос лед о на гс. н.- ным РМШ 3 70 9.4
560X80X40 БМП 70 То же 3 70 10.7
560 X 90 X 45 То же 80 > 3 70 9,4
560X90X45 > 80 » 3 70 103
186
массивных шин из резины 34РИ-12
Таблица 6.3
Среднее давле- ние по типо- размеру, МПа Средная макси- мальная темпе- ратура по 1 тнпора iM.'py, •с 1 Наработка ( средняя по | гипоразме- 1 РУ. км Состояние шины после испытаний
по массе
1.39 200 5770
1.35 196 7500
1.48 168 3025
""" 216 2590
— 213 7614
1.50 193 17300 11..
1.48 220 Более 10 ООО
138 205 Более 10С00
1,45 195 »
категория по массе
1,32 198 Более 9600
1,50 200 3550
категория по марсе
1.37 168 10 670
1.54 175 7800
— 14 500
1 о_ 10300
Тепловое разрушение
После 10 000 км на двух шинах нача-
лось разрушение в виде скола
Одна шина после 10 000 км в хоро
шсм состоянии, у остальных тепловое
разрушение
Шины в хорошем состоянии
Тепловое разрушение
Шины в хорошем состоянии
Тепловое разрушение
1Ь7
вую напряженность резиновых шин и более чем в два раза повы-
сить их теплостойкость. В то же время такая гусеница позволяет
на 10—18 % повысить несущую способность катка.
Испытания катка (670X170 мм) танка Т-80 показали, что
шины малой высоты существенно ухудшают работоспособность
резиновой беговой дорожки гусеницы. Так, после 3800 км пробега
шин высотой 40 мм 73 % траков имели трещины па поверхности
массива беговой дорожки, а у ряда траков произошло отслоение
и вырыв резины. Увеличение высоты шины в 1,25 раза (до 50 мм)
исключило отслоение и вырыв резины и существенно (в 2,5 раза)
снизило интенсивность образования трещин. Дополнительное
увеличение высоты массива дорожки траков (на 35%) полностью
исключило образование трещин, т. е. соотношение упругих
свойств шины и деформируемого основания на траках оказывает
существенное влияние на их работоспособность.
Долговечность катка, определяемая механической прочностью
шины, увеличивается при использовании резины повышенной
прочности. Однако проблемным является крепление шины к обо-
ду катка и обеспечение их работоспособности по теплостойкости.
Стендовые испытания показали, что тепловая напряженность
шин из резины 4Э-1422, имеющей повышенную прочность, нахо-
дится на уровне шин из резины марки 34РИ-12, а их работоспо-
собность ограничивается прочностью крепления резинового мас-
сива. При этом наиболее надежное крепление обеспечивается
через промежуточный слой из резины, имеющей высокую проч-
ность связи с металлом.
Применение резин 4Э-1386 и П7 вместо 34РИ-12 повышает на
15—20 % тепловую напряженность шин, что объясняется более
высокими показателями гистерезиса и эластичности этих резин.
Снизить тепловую напряженность шин из этих резин можно за
счет уменьшения их высоты, что позволит резко увеличить рабо-
тоспособность шины.
Прочность шин повышается также за счет армирования рези-
нового массива. При этом сложными являются вопросы обеспече-
ния надежной связи резины с кордом и сохранения исходного
положения и формы корда в процессе течения резины при вулка-
низации массива в пресс-формах. В НИИШП разработана шина,
армированная кордом на двух уровнях: по ободу катка и около
внешней цилиндрической поверхности массива. Чтобы избежать
смещения нитей корда при прессовании и вулканизации в пресс-
формах, профиль массива скошен под углом 1,5° на всю ширину
внешнего слоя корда.
Результаты стендовых испытаний армированных шин из ре-
зины 4Э-1386 (табл. 6.4) показывают, что армирование несколь-
ко снижает тепловую напряженность и может существенно повы-
сить работоспособность шины при максимальной скорости каче-
ния. После 3000- 4000 км пробега (на стенде) образуются трещи-
ны и сколы по боковой поверхности массива со стороны вершины
188
скоса и усталостные трещины на беговой дорожке шины. Полное
разрушение происходит в результате нарушения связи корда с ре-
зиной.
Таблица G.4
Результаты стендовых испытаний армированных шин (750x190x54,5 мм)
таима Т-72
Тип гусеницы 25 ih ih ТГ~ и: Натром, «ж Максимальная температура нагрева шн ны. °C Наработка, км Характер раз- рушения шины
С металличе- ской беговой дорожкой и по- следовательным РМШ 3 60 22.1 1.43 195,201,206 620, 7325, 5300 Отслоение резины от наружного корда
Испытания макетных образцов шин из полиуретана СКУ-ПФЛ
показали недостаточную его теплостойкость. Вместе с тем полу-
ченные результаты позволяют рекомендовать применение таких
шин на машинах специального назначения с ограниченной ско-
ростью движения, для которых необходима высокая стойкость
шин к механическим повреждениям.
Внутренние амортизаторы из резины (марок 120-С и Б4-25
на основе натурального каучука) имеют высокую эластичность,
но низкую теплостойкость. Температура (рис. 6.26) уже на ско-
рости 43 км/ч не стабилизируется и, как правило, интенсивно воз-
растает вплоть до разрушения резины через 1—3 ч испытаний.
Вместе с оплавлением резины происходит ее отслоение от дисков
и обода катка.
189
Работоспособность внутренних амортизаторов из резин на ос-
нове синтетического каучука сохраняется до более высоких тем-
ператур. При этом наибольший ресурс имеют амортизаторы из
менее эластичной резины типа 34РИ-12; при испытании катков
танка Т-64 на максимальной скорости 65 км/ч и нагрузке 40 кН
в амортизаторах из этой резины наступает тепловое равновесие
при температуре 190®С (максимального значения 205°C Темпе-
ратура достигает в начале испытаний). При снижении жесткости
амортизаторов в 1,3—1,5 раза посредством уменьшения площади
поверхности или увеличения высоты его тепловая напряженность
возрастает, и происходит интенсивное тепловое разрушение ре-
зины.
Амортизаторы из более эластичных резни АМ-4 и АМ-5 (ра-
диальная жесткость в 1,3—1,4 раза меньше, чем у резины
34РИ-12) имеют более высокую тепловую напряженность. Тепло-
вое равновесие на максимальной скорости 65 км/ч в этом случае
наступает при 200—225°C. В начале испытаний амортизаторов из
резины АМ-5 температура достигает 240 ®С, поэтому происходит
тепловое разрушение амортизаторов.
Рис. 6.27. Схема стенд* для
исследования динамики взаи-
модействия опорных катков с
беговой дорожкой гусеницы:
/ — барабан стенда: 2 — гусеница;
3 — каток; 4 — балансир; 5 — дат-
чик ускорений (перегруэок); * —
датчик перемещения обода относи-
тельно ступицы; 7 - датчик пере-
мещения оси катка; 8 — усилитель:
9 - теиэостаниня; /0 — эмнттерный
повторитель; II — осциллограф;
II — индуктивный отметчик поло-
жения
Результаты стендовых
испытаний амортизирую-
щих элементов из резин
различных марок под-
тверждаются данными
эксплуатации и пробего-
вых испытаний.
Экспериментальное ис-
следование динамики вза-
имодействия опорных кат-
ков с неровностями бего-
вой дорожки гусеницы.
С помощью расчета нель-
зя достаточно полно ис-
следовать динамику взаи-
модействия катков с беговыми дорожками гусениц, поэтому
проводятся специальные испытания на стенде, схема которого
показана на рис- 6-27. На этом стенде были испытаны катки тан-
190
ка Т-64А с внутренними амортизаторами из резни 34 Р И* 12,
АМ-4, 120-С, АМ-5 и Б4-25 (отличающихся упругими и гистере-
зисными свойствами), цельнометаллический каток и каток с на-
ружной массивной шиной одинаковой массы; использовалась гусе-
ница танка Т-64А с увеличенной шириной беговой дорожки (рав-
ной ширине звена трака). В процессе испытаний при установив-
шейся частоте вращения в течение трех оборотов барабана с по-
мощью осциллографа К-20-21 фиксировались: вертикальная
перегрузка на осн катка при помощи пьезокварцевых датчиков
типа ИС-312 и усилителя постоянного тока ИС-943А; вертикаль-
ное динамическое перемещение оси катка при помощи тиристор-
ного преобразователя и тензостаииии типа УТС-1-12/36; верти-
кальное динамическое перемещение обода катка с внутренней
амортизацией относительно ступицы при помощи тиристорного
рычажного преобразователя; кроме того, производилась отметка
момента прохождения под опорным катком стыка траков
при помощи индуктивного датчика и времени отрыва
обода катка от беговой дорожки гусениц при помощи пре-
рывателя, в котором контактами являлись обод катка и траки
гусеницы.
Исследования показали, что перегрузки на оси цельнометал-
лических катков возрастают с увеличением скорости качения
более интенсивно, чем на оси катков с массивными шинами. В
диапазоне скоростей 43,5—64,5 км/ч, характерном для современ-
ных ВГМ на дорогах с твердым покрытием, перегрузка катка с
внутренней амортизацией в 1,5—2 раза ниже, чем цельнометалли-
ческого, но в 6—7 раз выше, чем катка с наружной массивной
шиной.
Изменение жесткости подвески в диапазоне 123—750 кН/м
практически не оказывает влияния на уровень динамических на-
грузок, возникающих в результате качения опорных катков по бе-
говой дорожке гусениц.
Изменение статической нагрузки катков в диапазоне 20—
40 кН также не влияет на динамическую нагруженность катков.
Снижение уровня нагруженности катка с внутренними амор
тизаторами может быть обеспечено за счет уменьшения радиаль-
ной жесткости и увеличения коэффициента гистерезисных потерь.
Так, применение в амортизаторах низкомодульных резин с более
высоким гистерезисом (типа Б4-25 и 120-С) позволяет снизить
уровень нагруженности на 30—40%.
Анализ осциллограмм показывает, что частота колебаний эле-
ментов катков при качении по беговой дорожке гусениц зависит
от частоты чередования траков и возрастает пропорционально
скорости качения.
191
Высокий уровень и высокая частота динамических нагрузок
катка с внутренней амортизацией приводят к ухудшению его ра-
ботоспособности в результате повышения тепловой напряженности
резиновых массивов, что следует из формулы
' 2*2 ’
где (о —основная частота колебания обода относительно ступицы.
Из формулы видно, что тепловой поток в амортизаторах про-
порционален квадрату амплитуды колебаний и скорости качения.
Поэтому увеличение податливости амортизаторов при прочих
равных условиях приводит к увеличению их тепловой напряжен-
ности. Это обстоятельство необходимо учитывать при выборе
жесткости амортизаторов, чтобы обеспечить рациональное сочета-
ние их амортизирующих свойств и теплостойкости.
Глава 7 ВЕДУЩИЕ КОЛЕСА
7.1. ОБЩИЕ СВЕДЕНИЯ
Колеса, на которые от двигателя через трансмиссию подводит-
ся крутящий момент, преобразуемый в силу тяги движителя,
называются ведущими. Ведущие колеса, направляющие гусеницы
и формирующие гусеничный обвод, обычно устанавливаются на
ведомых валах бортовых передач. Они состоят из ступиц и двух
зубчатых венцов.
Ступицы ведущих колес выполняются из двух дисков, соеди-
няемых сваркой (рис. 7.1). Внутренний диск обычно отливается
из стали 32X06. Для обеспечения прочности наружного диска,
ослабленного окнами для выхода грунта, как правило, исполь-
зуется более прочный материал (например, броневая сталь). Для
Рис. 7.1. Конструкция ведущего колеса:
/ — наружный диск; 2 — внутренний диск; 3 — ограничительный диск; 4 — зубчатый венец
осевой фиксации гусениц на ведущем колесе и исключения их
сброса используются специальные ограничительные диски, пре-
пятствующие смещению гусеницы от борта в момент поворота
танка. Зубчатые венцы, как правило, съемные, литые. Для уклад-
13 Зак. 1б«с»
193
ки траков гусеницы на них выполняются специальные опорные
поверхности (так называемый радиальный подпор траков): для
гусениц с РМШ последовательного типа цилиндрические (рис. 7.2),
для гусениц с РМШ параллельного типа плоские либо профи-
лированные (рис. 7.3), со специальными опорными выступами.
Рис. 7.2. Схема зацепления гусеницы (с РМШ последовательного типа) с ци-
линдрической опорной поверхностью на зубчатом венце:
/ — зуб ведущего колеса; 2 — цевка; 3 — опорная поверхность; «>* частота вращения
ведущего колеса; />п — диаметр опорной поверхности на венце; Л — высота опорной
поверхности (остальные обозначения см. в тексте)
Рис. 7.3. Профиль опорных поверхностей на траке (/) и зубчатом венце (2)
в зацеплении с гусеницей (РМШ параллельного типа)
Зубчатые венцы отливаются из стали марок Г13Л, 50ХН,
кдлвт, ЗОХНМЛ.
Широкое распространение в настоящее время получила полу-
автоматическая наплавка зубьев твердыми износостойкими мате-
риалами (обычно порошковой проволокой ПП-АН170).
На современных танках применяется цевочное зацепление, об-
ладающее рядом преимуществ (по сравнению с гребневым и зу-
194
бовым). Цевки образуются поверхностями, охватывающими пол-
ностью или частично ось шарнира гусеницы. На мелкозвенчатых
танковых гусеницах цевки, как правило, выносятся на крайние
проушины траков, что исключает необходимость наличия прое-
мов в траке и обеспечивает рациональную геометри-
ческую форму цевок. Зацепление с ведущим колесом гусениц с
РМШ параллельного типа осуществляется с помощью концевых
соединительных скоб (рис. 7.4).
Рис. 7.4. Схема сил, действую-
щих на i-ю цевку в зацеплении
с зубом ведущего колеса:
Г,, — растягивающие усилия
в/-*• н (I — |)-м звеньях: —
сила нормального давления в
контакте
Широкое распространение получил толкающий способ переда-
чи усилия от зуба ведущего колеса к траку, обеспечивающий
более высокую долговечность элементов зацепления по сравнению
с тянущим способом.
Зацепление ведущего колеса с гусеницей характеризуется сле-
дующими основными параметрами: числом зубьев г, диаметрами
делительной (Од), наружной (£>н) и начальной (Do) окружнос-
тей; разностью (Af0) шагов гусеницы (/г) и зубьев ведущего
колеса по начальной окружности (fz# ), углом заострения профи-
ля зубьев на рабочем участке или углом давления 0.
На делительной окружности шаг зубьев /д равен номинально-
му шагу гусеницы tt, поэтому
DM-=7t/sln-£-, (7.1)
где а = 360/z — центральный угол зубьев.
Диаметр начальной окружности определяется положением оси
шарнира звена гусеницы, цевка (скоба) которого расположена на
минимально возможном расстоянии от оси ведущего колеса, опре-
деляемом формой и размерами впадины между зубьями или опор-
ных поверхностей.
Шаг зубьев по начальной окружности равен G. = DoSin-^-.
С целью некоторого снижения интенсивности проскальзыва-
ния цевок и более равномерного распределения усилий по зубьям
обычно обеспечивают отрицательную начальную разность шагов
гусеницы и зубьев по начальной окружности (так называемое
специальное зацепление):
Д£и=/Г—“ — (0.5... 3,0) мм .
13»
195
По мере износа впадин (или опорных поверхностей) и появ-
ления некоторой остаточной деформации в РМШ разность шагов
становится положительной, что является признаком так называе-
мого нормального зацепления, характеризующегося приспособ-
ляемостью зубьев ведущего колеса к шагу гусеницы и наиболь-
шей равномерностью ее перематывания.
В области теории гусеничного зацепления основополагающими
считаются работы А. М. Черяпина и М. И. Медведева.
А. М. Черяпин получил аналитическое условие предельного
равновесия цевок в зацеплении для Д/ь>0:
1Гс/ГЛ<Г<в/Гр^1Гс/Ги]., (7.2)
где Тм, Гс — растягивающие усилия в набегающем и сбегающем участках ту.
сеннцы; |/с/; н1в I'с/' я!н— верхнее и нижнее предельные отношения усилий при
равновесии цевок в момент начала скольжения их к основаниям или вершинам
зубьев соответственно.
При некоторых допущениях (центры шарниров гусеницы рас-
положены на одной окружности, моменты сил относительно цент-
ров шарниров пренебрежимо малы) зависимость предельных от-
ношений усилий от геометрических параметров зацеплений для
толкающего способа передачи усилий может быть записана в сле-
дующем виде:
Г_Гс 1 „ (0 4- • 4- /> 4 М Г 81*(0+/р) sin (0 4 р) - 3
| /н 1В Н sin (О 4-» +/р) Isln (0 + в+/р)1 sin (0 4- р -Г м ’
где в —угол давления (угол между нормалью к профилю зуба в точке контак-
та и осью звена, проходящей через центры шарниров звеньев). ри, - углы на-
бегания и сбегания (текущие углы перегиба набегающего и сбегающего звеньев',
р — угол трения (р « areig р, где р — коэффициент трения), п — число звеньев
гусеницы, находящихся в зацеплении с ведущим колесом; j — коэффициент, учи-
тывающий направление сил трения: f — +1 для верхнего (скольжение к осно-
ваниям), f — — 1 для нижнего (скольжение к вершинам) предельных отно
шеннй.
Верхнее и нижнее предельные отношения усилий отражают
свойства самого зацепления, так как их значения зависят от гео-
метрических параметров и коэффициента трения в точках кон-
такта. По существу они определяют уровень относительной нагру-
женности зацепления, при котором начинается скольжение цевок
к основаниям или вершинам зубьев. В связи с этим безразмерное
отношение
(7.4)
может быть названо критерием кинематического режима зацеп-
ления.
С другой стороны, фактическая относительная нагруженность
зацепления внешними силами в гусеничном обводе может быть
охарактеризована отношением растягивающих усилий в свобод-
ной и рабочей ветвях обвода:
t-7c.rp, (7.5)
196
которое зависит от сил сопротивления движению и параметров
гусеничного обвода.
Отсюда условие равновесия цевок в зацеплении (отсутствие
перемещения цевок по зубьям) может быть записано следующим
образом:
Кг (и) t Kt (в) *
где — [Гс/Гм]н , — |7*С/ГН|В ; при т < Кг(Ц)—скольжение цевок к
вершинам, при t > Кгщ —к основаниям зубьев
Угол охвата ведущего колеса гусеницей может быть выражен
через угол а (рис. 7.5):
Т: = иа4-Д, (7-6)
где m - I, 2, 3.—число целых углов а, содержащихся в угле у»; Д — угол
сдвига (0<Л < а).
Рис. 7.5. Кинематическая схема зацепления гусеницы с РМШ последовательного
типа:
/, 1 — набегающий и сбегающий участки гусеницы; 3, 4 — сбегающее и набегающее звенья
Число звеньев, находящихся в зацеплении (в контакте с веду*
щим колесом),
п — + « — (?н + ?с)1'«-
При угле охвата, кратном углу а, Д=0, 4- ?с = *• откуда
п = т = J/а.
Если угол не кратен углу а, число звеньев, взаимодейст-
вующих с ведущим колесом, периодически меняется. Цикл зацеп-
ления состоит в этом случае из двух периодов:
197
в первом периоде ри — (О...Д), рс = Д - £Н = (Д...О), ₽М4-{»С=-Д,
откуда л, ~ (т, -|- « -Ь Д)/« в m 4- 1;
во втором периоде ?> = (Д “ 4- Д — ?м = (а... Д),
₽н 4- = д + • »
откуда лн (ъ + “ — (Д + »)] в .
Была сделана попытка уточнить теорию зацепления втулочно-
роликовых цепей с учетом упругой податливости звеньев [37].
В работе показано, что вследствие прогрессивного изменении
шага звена в зацеплении происходит постоянное перемещение
шарниров цепи к основаниям зубьев, обусловленное их упругой
деформацией.
В. Ф. Платонов рассмотрел условия равновесия цевок с уче-
том действия моментов упругих сил в РМШ [24]. Предполагая,
что все моменты, действующие на звено в зацеплении, уравнове-
шиваются за счет смещения силы нормального давления от нор-
мали, проходящей через центр шарнира, он показал, что упругая
податливость РМШ незначительно влияет на распределение уси-
лий в зацеплении.
Имеются также аналитические зависимости для определения
перемещения цилиндрической цевки по прямому профилю зуба
при известной нагрузке.
Таким образом, существующая теория гусеничного зацепления
позволяет (при определенных допущениях и для некоторых част-
ных случаев, обычно для прямолинейного профиля зубьев и ци-
линдрической цевки) оценить распределение нагрузок по элемен-
там зацепления и их относительное скольжение, а также выбрать
угол давления в расчетной точке профиля зубьев.
Однако до настоящего времени отсутствуют методы расчета
зацепления в тормозном режиме.
Несмотря на большой опыт эксплуатации гусениц с РМШ па-
раллельного типа, получивших широкое распространение на со-
временных ВГМ, вопросы теории и рекомендации по выбору пара-
метров зацепления гусениц с ведущим колесом практически не
получили освещения в технической литературе.
7.2. ОСОБЕННОСТИ ЗАЦЕПЛЕНИЯ ГУСЕНИЦ С РМШ
ПАРАЛЛЕЛЬНОГО ТИПА
В гусенице с РМШ параллельного типа число шарниров вдвое
больше числа траков, поэтому число степеней свободы в зацепле-
нии гусеницы с ведущим колесом тоже удвоенное. Перегиб звеньев
во впадинах зубчатых венцов обеспечивают опорные поверхности
для концевых скоб гусеницы (рис. 7.6). Кахсдйя скоба двухопор-
ная: с двумя точками соприкосновения с ведущим колесом — на
зубе и во впадине.
198
Шаг зубьев по делительной окружности, равный хордальному
шагу трака (звено 4-скоба),
Г,-|/ <? + 4 + 2M,co» j-, (7Л)
где h, — шаги эвена и скобы соответственно.
Рис. 7.6. Кинематическая схема зацепления гусеницы с РМШ параллельного
типа:
/, а — набегающий и сбегающий участки гусеницы; 3. 4 — набегающее и сбегающее
звенья. I, II, HI, IV — периоды зацепления
Диаметр делительной окружности
= G/sin-J-. (7.8)
При нумерации звеньев индекс i присваивается составному
звену (траку), т. е. основному звену и скобе, идущей сзади него.
Процессы входа и выхода скобы из зацепления можно разбить
на этапы. На первом этапе входа (Вх. /) набегающая скоба
(t=l), войдя в контакт с ведущим колесом тыльной частью, по-
ворачивается вместе с набегающим участком гусеницы на угол е7|
до входа в контакт с зубом. На втором этапе входа (Вх. 2) про-
исходит поворот набегающего звена (i = 0) до момента входа в
199
контакт скобы с венцом. При выходе из зацепления скобы (i=n)
на первом этапе (Вых. /) сбегающее звено поворачивается относи-
тельно ведущего колеса вместе со сбегающим участком гусеницы.
На втором этапе (Вых. 2} происходит поворот сбегающей скобы.
С учетом формулы (7.6) и схемы зацепления, изображенной на
рис. 7.6, можно записать
(7.9)
где — углы перегиба звеньев в шарнирах pi и — углы набе-
гания — текущие углы поворота набегающего звена в шарнирах (Вх. /) и рл
(Вх. 2); . hp —углы сбегания — текущие углы поворота сбегающего звена
в шарнирах qc (Вых. 1) и р-_ (Вых. 2).
Наличие дополнительной степени свободы звеньев (за счет
шарнирной связи скобы с основным звеном) и большой угол за-
острения опорной поверхности во впадине венца (%>99°|
кинематически допускают возможность расположения скобы под
некоторым углом перекоса бГ/ (рис. 7.7) по отношению к опорной
поверхности венца. Несимметричность нагружения скоб растяги-
Рис. 7.7. Схема сил, действующих на i-to скобу в зацеплении
вающими усилиями вызывает их смещение к рабочей стороне
зубьев. При этом происходит перераспределение углов перегиба
звеньев — уменьшение углов в,. и увеличение . Увеличение
хордального шага звеньев компенсируется некоторым измене-
нием радиусов и Rqt , характеризующих расположение
центров РМШ на ведущем колесе.
С учетом углов перекоса
%, - “/2 + % - \: % - */2 + (7.10)
где 8^ — угол перекоса основного звена.
В зависимости от значения угла сдвига А набегающие и сбе-
гающие звенья в каждый момент времени могут быть одноимен-
200
ными (например, скоба—скоба) или разноименными (скоба—
основное звено). В общем случае возможны четыре комбинации
этапов входа и выхода: Вх. 1—Вых. 1, Вх. 1~Вых. 2, Вх. 2—Вых. 1
и Вх. 2—Вых. 2, что соответствует четырем различным периодам
зацепления.
Взаимосвязь кинематических параметров зацепления для слу-
чая R —R — const, Rn Rconst, •_ -ч — const
V/ v Pl f If Ч Pi r
= const, 4- = а при различных значениях А представлена в
табл. 7.1, из анализа которой можно сделать следующие выводы:
количество периодов зацепления может быть различным (от
двух до четырех), оно зависит от угла сдвига Л и соотношения
между А и углами и ;
в течение одного периода зацепления сумма углов набегания
и сбегания (2? = Ррн .+ I + Р?с) остается постоянной;
число скоб, находящихся в полном зацеплении (имеющих две
точки контакта с ведущим колесом),
пп ^т 4 (Д — Ер)/а; (7.11)
число скоб, находящихся в контакте с ведущим колесом,
д — яп4-2. (7.12)
Характерной особенностью рассматриваемого типа зацепления
является наличие в нем признаков и толкающего, и тянущего спо-
собов зацепления: взаимодействие скоб гусеницы с рабочей сторо-
ной зубьев осуществляется толкающим способом, а тыльной части
скоб с опорными поверхностями — тянущим, поворот входящей
в зацепление скобы (Г=1) на этапе Вх. 1 сопровождается сколь-
жением ее по опорной поверхности.
На рис. 7.7 представлена упрощенная схема сил, действующих
на Лю скобу в зацеплении. Составив уравнения равновесия в
проекциях сил на оси х и у, после преобразований получим:
Г., «'"<% + />> <%,-/!»
Г1,_, sln (вд, + Л) ’
Ч sin .р, cos р N sin.^cosp r,(
Ч, ’ Ч. sln(% /р| Ч,’
где Tq—растягивающее усилие в основном звене; Np. Ne — силы нормального
давления в точках контакта рабочей и тыльной сторон скобы с ведущим коле-
сом; — углы давления в этих же точках.
8 н = й — 8П (7.15)
Ч-i ’ «а «о
Нро' %“Угли Давления при 0. Н,^ равно: 4/2 - при контакте скобы
с рабочей стороной зуба (4—угол заострения зуба); л/2 — при контакте
тыльной части скобы с опорной поверхностью; ('4 + «)/2 при контакте скобы с
тыльной стороной зуба.
14 Зак. 16«с»
201
Взаимосвязь основных кинематических параметров
Угол сдвига А - 0
Периоды вацеплгиии 1 и 1 II
Этапы Вх. 1 Вых. 1 Вх. г Вых. 2 Вх. / Вых. 2 Вх 2 Вых. 1
Звено гусеницы: набегающее сбегающее Скоба Основное звено Основное звено Скоба ЧИН Скоба Скоба Основное звено Основное звено
Коэффициент f для звена набегающего сбегающего 1 ±1 ±1 1 1 -1 ±1
Углы набегания и сбе- гания: ^и ^и ч » > 1 0 0..ва o...tp — 1*/>н 0 0 0 ‘р
Сумма углов набега- ния и сбегания S? • а *ч . 1
Число скоб в полном зацеплении пП Ш —1 т— 1 т т — 1
Число точек контакта «к 2т+1 2m+1 2т+2 2т+ 2
202
зацепления гусеницы с РМШ параллельного типа
Таблица 7.1
А “ *Р
III 1 II 111
Вж. 2 Вых 2 Вж. / Выж. 2 Вж. 2 Выж. 2 Вж. 2 Выж. 1
Основное звено Скоба Скоба Скоба Основное звено Скоба Основное звено Основное звено
—1 1 1 1 ±1 1 ±1 ±1
0 0 *Р •" ?«и 0 0... 1р — lP — — t*Pn 0 1Р ~ £« • • • *Р ’ я ”
« р 1Р a -f- Ср
т—1 т т т—I
2т+1 2т+2 2m+3 2т+2
14*
203
Выражение (7.13) —это условие предельного равновесия ско-
бы, а по формулам (7.14) определяются относительные значения
сил нормального давления в этом случае.
Налравление сил трения для набегающих и сбегающих скоб
принимается противоположным направлению скольжения при их
повороте относительно ведущего колеса независимо от вида рас-
сматриваемого равновесия (см. табл. 7.1: f=-|-l).
Используя формулу (7.13), условие предельного равновесия
звеньев в зацеплении можно записать в виде
। тс I sln + Ч “ + fp) sln |Н<| + Х*(Ч~Ч
1I., „ sin (НР) 4- * /р) Sin
/-Л-1 Г sln (Нр + /» sln (Н + А;/р) I
х Д U.v'.,, + /,> smiv U, /,)|] X <716)
51п(0я-Ь/р> sin(H%+a + X,/p)
Х sin (Нр 4 Чс + Ы s,n 1\+2 + <4 + ’
где Ai - —1 — признак типа зацепления.
Для определения соотношения растягивающих усилий для / го
звена [TQl/T„] в формуле (7.16) общее число пар сомножите-
лей следует ограничить значением i.
Относительные значения сил нормального давления для 1-го
звена определяются по следующим формулам:
\ rt|[
/н Sln (Н 4- «с 4- /р) Ги ’
v . т <717>
Ч, 5|"ЧС°*|‘ _ г«,
1 н Sin 4- \г (еи -f /р)] / „
где ея "О, ес = ер для всех звеньев, кроме набегающего и сбегающего. Значе
ння некоторых параметров, входящих в формулы (7.16) н (7.17), задаются с уче
том табл. 7.2.
Таблица 7.2
Значения некоторых параметров для набегающих и сбегающих
звеньев гусеницы
Звено Этап '<И *н tp^ ’с T9i Гу('-П
Набегающее:
скоба (i—l) Вх. 1 v~4 0 7*1 Г„
основное зве- но (» “ 0) Сбегающее: Вх. 2 Ч 0 ч еА Г, Гя
основное зве- но (« — и) Вых. / ч 0 ". .. Т'с
скоба (» = п) Вых. 2 0 0 ‘Ч
204
При скольжении к основаниям зубьев часть скоб располагает-
ся во впадинах, взаимодействуя только с опорными поверхностя-
ми, при этом вР)) =(л — а)/2.
Тогда выражение (7.16), при условии tp = —а/2 (й, \
— 0) и Л=0(п = ш-Н), можно записать в виде
(718>
где с« — число скоб, взаимодействующих с рабочей стороной зубьев;
sin (Н^ | а/2 - -f- р) cos (а/2 - 4
Л/ (и) sin 4- а/2 4 pi cos (а/2 -f- р)
Sin (Н^ 4- р)______cosp cos (а/2 — р)
* ~ sln (Н₽ 4- а/2 -г р) COS (а 2 t р) ' оп cos (а/2 4- р) '
cosp
Лс sln (Нл г 4- р) cos (^ I- ?) •
Из (7.18) следует:
,‘Л /||>-4а-. (7.19)
Ис/1 и! лг
Рис. 7.8. Распределение отно-
сительных растягивающих уси-
лий по звеньям гусеницы, на-
ходящимся в зацеплении с ве-
дущим колесом (--------гусе-
ница с РМШ параллельного
Типа; —--------с РМШ после,
дователыюго типа):
7 - А’уу Г|( при гс тм - oja.
4‘ А> ГН1РИ Гс Г„-0.4.
* ~ \ Ги "₽« Гс' Гн - °’4 ’
5 - Л Г|,Ори)/Гс 711-О.22:
/ , I/ периоды эаиеиления
На рис. 7.8 представлено рассчитанное при указанных выше
условиях распределение относительных значений растягивающих
усилий и сил нормального давления по звеньям гусеницы при
следующих параметрах зацепления: z=12, уг = 150° (Д=0),
Нр =20° при коэффициенте трения ц = 0,4 и TnfTp^ TJTn~
= 0,22 и 0,4.
205
Для сравнения на график нанесены кривые Т/Тн и NiTlt для
гусеницы с РМШ последовательного типа.
Периодическое увеличение растягивающих усилий и сил нор-
мального давления при зацеплении гусеницы с РМШ параллель-
ного типа объясняется расклиниванием звеньев при взаимодей-
ствии тыльной части скоб с опорными поверхностями венца (угол
клина ф0 показан на рис. 7.7). Математически это выражается в
том, что вторые сомножители в выражениях дляЛХ(М), Аа и Д.
входящих в формулу (7.18), при ?<м = ?<с==а/2 больше единицы
(при заданных значениях параметров они равны 1,15), в связи
с чем среднее для всех звеньев относительное значение нагрузки
А^/Гн в 1,2, а максимальное в 1,1 раза выше среднего значения
нагрузки NfT* в зацеплении гусеницы с РМШ последователь-
ного типа
Следует отметить неодинаковую нагруженность зубьев и опор-
ных поверхностей ведущего колеса. Среднее для всех относитель-
ное значение сил А/р/7'и в 1,7 раза больше относительного значе-
ния сил . Такая неравномерность распределения нагрузок
определяется различными условиями взаимодействия скоб с
зубьями (0Р) =20°) и опорными поверхностями ( 0^=90°). При
повышении относительной нагруженное™ зацепления (например,
за счет увеличения натяжения гусеницы) с 0,22 до 0,4, т. е. в
1,8 раза, максимальное относительное значение силы /Ур|/7'и
снижается на 14 %, а средняя нагруженность опорных поверхно-
стей возрастает в 1,2 раза.
7.3. ПУТИ ПОВЫШЕНИЯ ДОЛГОВЕЧНОСТИ
ЭЛЕМЕНТОВ ЗАЦЕПЛЕНИЯ
Зацепление гусениц с РМШ отличается высокой нагружен-
ностью их растягивающими усилиями в тяговом режиме. Так,
для танка средней категории по массе при скорости движения
30—40 км/ч и наиболее вероятном значении силы тяги Рт =
=0,1Ют/2 т=7'с«/7р =0,4...0,55. В тормозном же режиме т
может иметь весьма низкие значения (при Pr =0,4GT2
0,02. ..0,05).
При малых углах заострения зубьев (фх =35... 40°) 80—90%
тяговой нагрузки воспринимается одним зубом венца. Скольжение
цевок по зубьям в этом случае происходит под высокой на-
грузкой.
Предельное состояние зацепления гусениц с РМШ опреде-
ляется максимально допустимым линейным износом зубьев веду-
щего колеса или цевок (скоб) гусениц.
Основными направлениями повышения долговечности зацепле-
ний являются:
применение радиальных опорных поверхностей для траков на
ведущем колесе;
снижение статического натяжения гусениц;
206
повышение износостойкости материалов и оптимальное соче-
тание свойств материалов трущихся пар.
Исследования и опыт эксплуатации гусениц с РМШ парал-
лельного типа показали, что зацепление их с ведущими коле-
сами (см. рис. 7.6) обладает рядом существенных недостатков,
ограничивающих работоспособность элементов зацепления.
Малая опорная база скобы, слабая нагруженность тыльной
се части вследствие большого угла заострения зубьев
(%„ >90°), а также скольжение тыльной части скобы по опор-
ной поверхности при входе в зацепление способствуют потере кон
такта скобы с ведущим ко-
лесом и перегрузке зубьев;
неустойчивое положение
скоб в зацеплении служит
причиной дополнительного
износа элементов зацепле-
ния.
Болес совершенным яв-
ляется зацепление с двух-
рядными зубчатыми венца-
ми (рис. 7.9), основной ряд
зубьев которого взаимодей-
ствует с концевыми соеди-
нительными скобами, а вто-
рой ряд состоит из профи-
лированных опорных по-
верхностей с зубьями ма-
лой высоты, взаимодейству-
ющими с основными звенья-
ми гусеницы (на танках
Т-64А, Т-80 и других отече-
ственных ВГМ).
Рис. 7.9. Схема зацепления гусе-
ниц с РМШ параллельного типа
с двухрядными венцами:
/ — основное звено; i~ скоба; 3 —
профилированные опорные поверхнос-
ти (второй ряд «яцепления)
Зацепление с подпором траков имеет следующие преимущества:
взаимодействие траков с ведущим колесом происходит при ма-
лых углах давления (0ffo =30... 40°) и по толкающему способу
зацепления;
обеспечивается возможность создания развитых поверхностей
трения;
207
исключается искажение профиля скоб прн износе (за счет
скольжения их по впадинам) и обеспечивается возможность при-
менения более рационального профиля зубьев и скоб.
Рис. 7.10. Схема нагружения звена в зацеп-
лении с профилированным подпором
На рис. 7.10 показана упрощен-
ная схема нагружения звеньев в
зацеплении с профилированным
подпором. Составив уравнения рав-
новесия. получим условие предель-
ного равновесия звеньев в зацепле-
нии и аналитические зависимости
для определения сил нормального
давления. При л4= 1 зависимости
преобразуются в формулы (7.16)
и (7.17).
На рис. 7.11 показано распределение относительных растяги-
вающих усилий и сил нормального давления при принятых выше
параметрах зацепления (г =*= 12, ;4 = 150°, 8Р() =20°); угол дав-
ления при контакте основных звеньев с дополнительным рядом
зубьев (67о ) принят равным 4(Г. Для сравнения на график нане-
сены кривые для однорядных венцов.
Рис. 7.11. Распределение уси-
лий по звеньям гусеницы, на-
ходящимся в зацеплении с
двухрядными ( ------) н одно-
рядными (—X —X —) венцами
при Те/Ти - 0,22:
I, II — периоды зацепления
При входе в зацепление набегающая скоба свободно повора-
чивается относительно центра шарнира при этом нагрузка
передается на дополнительный ряд зубьев через трак. Вследствие
малого угла давления нагрузки в зацеплении в этом случае
существенно отличаются от полученных в зацеплении с одноряд-
ными венцами. Растягивающие усилия Тд от звена к звену не-
208
уклоино снижаются, расклинивание звеньев на ведущем колесе
отсутствует (7^( <1), что свидетельствуете том, что каж-
дый зуб дополнительного ряда передает некоторую долю силы
тяги Рт; силы нормального давления на зубья Уя, достигнув
максимального значения в конце этапа Вх. 2, резко сни-
жаются.
При данном зацеплении нагрузка зубьев основного ряда си-
лами Np в среднем в 1,55 раза, а максимальное значение силы
в 1,58 раза ниже, чем в зацеплении без подпора. Следует от-
метить, что по кинематике и характеру распределения усилий это
зацепление близко к зацеплению гусениц, имеющих РМШ по-
следовательного типа. Малые углы давления в контакте траков
с ведущим колесом способствуют уменьшению нагруженности
зубьев и перекоса звеньев; распределение углов перегиба звеньев
между РМШ более равномерное.
Проведенные экспериментальные исследования и пробеговые
испытания подтвердили эффективность зацепления с профилиро-
ванными опорными поверхностями. Например, в танке Т-64 ресурс
скоб гусениц и венцов ведущего колеса (при зацеплении с двух-
рядными венцами) повысился в 1,5—1,8 раза.
Для гусениц с РМШ последовательного типа (танки Т-62,
Т-72) применяется зацепление с подпором, в котором зубчатые
венцы имеют цилиндрические опорные поверхности (см. рис. 7.2).
Экспериментально установлено, что применение опорных поверх-
ностей с относительной шириной Воп1 Вх « 1,4 приводит к повы-
шению ресурса венцов не менее чем в 1,5 раза.
В многозвенной шарнирной системе, подверженной динами-
ческому воздействию случайного характера, наличие моментов
сил, действующих относительно осей шарниров, является деста-
билизирующим фактором и способствует дополнительному пере-
мещению звеньев. Наибольшая устойчивость звеньев в зацепле-
нии достигается, если линия действия сил нормального давления
проходит вблизи центров шарниров. В связи с этим радиальные
опорные поверхности целесообразно выполнять в виде плоского
многогранника. В этом случае точка опоры звена при изменении
соотношения сил Т( и Г/+, смещается ближе к центру РМШ.
Увеличенная поверхность контакта способствует стабилизации
начальной окружности зацепления.
Расчет показывает, что во всем диапазоне возможного изме-
нения нагруженности зацепления имеет место интенсивное сколь-
жение цевок к основаниям зубьев и перемещение траков по опор-
ным поверхностям против направления действия тяговой силы.
Из этого следует, что передача опорными поверхностями какой-
либо части тяговой силы отсутствует. Снижение интенсивности
износа в этом случае достигается за счет разгрузки впадин от ра-
диальных составляющих статического натяжения, стабилизации
начальной окружности зацепления и лучшей устойчивости звеньев
209
в зацеплении, что способствует сохранению рабочего профиля
зубьев и цевок при износе и снижает относительное перемещение
цевок.
Одним из Путей повышения долговечности ведущих колес яв-
ляется покрытие опорных поверхностей износостойкими и проч-
ными эластичными полимерными материалами (резинами, поли-
уретаном), а также наплавка зубьев венцов твердыми материа-
лами. Например, наплавка зубьев порошковой проволокой
ПП-АН170 позволяет существенно повысить износостойкость не
только венцов ведущего колеса, но и сопряженных с ними скоб
гусеницы
Стендовыми испытаниями элементов зацепления на износо-
стойкость в абразивной среде установлено, что при наплавке
электродом Т-620 износ зубьев ведущего колеса и скоб гусеницы
из стали 38ХС с изотермической закалкой уменьшается соответст-
венно на 50 и 15%. Испытания показали хорошую связь наплав-
ленного слоя с основным металлом; несмотря на наличие трещин
в нем, сколов или отслаивания от основного металла не наблю-
далось.
При наплавке зубьев порошковой проволокой ПП-АН170 ско-
рость износа зубьев венцов и скоб гусеницы уменьшается допол-
нительно еще на 20 %.
Г л а в a 8. УСТОЙЧИВОСТЬ ГУСЕНИЦ
НА ВЕДУЩИХ КОЛЕСАХ
8.1 РАСЧЕТНАЯ ОЦЕНКА УСТОЙЧИВОСТИ ГУСЕНИЦ
НА ВЕДУЩИХ КОЛЕСАХ
Одной из проблем современного танкостроения является обес-
печение устойчивости (исключение сброса) гусениц в обводах,
обладающих повышенной упругой податливостью в результате
применения гусениц с РМШ и подвесок с малой жесткостью.
При повышенной податливости нарушается кинематическая
непрерывность зацепления: гусеницы проскакивают по зубьям ве-
дущего колеса в тормозном режиме (главным образом, на отстаю-
щем борту при повороте танка), для предотвращения чего
обычно увеличивают предварительное натяжение гусениц,
которое на современных танках составляет (0,07... 0,12) О'т
что в 3—4 раза выше, чем на танках Т-55, Т-10 и других
ВГМ, имеющих гусеницы с открытым металлическим шарни-
ром и более жесткие подвески. Так как по статистическим дан-
ным сила тяги составляет в среднем 0,055G(, то очевидно,
что существенное влияние на долговечность движителя и подвиж-
ность танка оказывает усилие предварительного натяжения гусе-
ниц Поэтому новые конструктивные решения предотвращения
сброса гусениц без увеличения усилия их предварительного натя-
жения и методы расчета устойчивост игусеницы в обводе на ста-
дии опытно-конструкторской работы.
Известно, что проскок гусеницы по зубьям ведущего колеса
происходит в результате набегания цевок на их вершины при не-
свободном входе в зацепление в тормозном режиме (рис. 8.1).
На зацепление в тормозном режиме действуют рабочее (тормозное)
усилие со стороны сбегающего участка гусеницы; относительная
нагруженность зацепления т, низкая из-за ослабления натяжения
набегающего на ведущее колесо участка гусеницы; при этом
цевки смещаются к тыльной стороне зубьев, уменьшается или
полностью исчезает зазор между ними и головками зубьев и про-
исходит набегание цевок на тыльную сторону у вершин зубьев.
Так как растягивающее усилие на набегающем участке гусеницы
оказывается недостаточным для перемещения цевок к основаниям
211
зубьев до полного входа в зацёплениё, цевки задерживаются на
тыльной стороне зубьев. Возникает и увеличивается разность
шагов гусеницы и зубьев ведущего колеса (центры РМШ распо-
лагаются выше делительной окружности) до полного упора одной
из цевок в головку зуба. Затем происходит проскок — переброска
лишнего звена, оказавшегося на ведущем колесе, на сбегающий
участок гусеницы.
Рис. 8.1. Схема входа цевки в зацепление при тормозном режиме;
а свободного; б — со скольжением но тыльной стороне зуба; / — набегающая цепка три
ка; 2 ведущего колеса. «•* — угловая частота вращении
Таким образом, скольжение набегающих цевок к основаниям
зубьев является условием нормального входа их в зацепление,
т. е. условием устойчивости гусеницы на ведущем колесе.
Направление перемещения цевок относительно зубьев опреде-
ляется критерием кинематического режима зацепления Кг, яв-
ляющимся функцией геометрических параметров зацепления и
коэффициента трения в точках контакта, и относительной нагру-
женностью зацепления т внешними силами.
Условие устойчивости гусениц на ведущем колесе в тормозном
режиме может быть записано в виде
(8.1)
где Кг — критерий кинематического режима зацепления в тормозном режиме.
Гусеничное зацепление представляет собой механическую си-
стему, замкнутую усилиями Гсв и /'р , растягивающими гусеницу.
Между гусеницей и ведущим колесом существуют неудерживаю-
щие связи, но в замкнутом обводе при отклонении какого-либо
звена в зацеплении от положения равновесия возникают стаби-
лизирующие силы, способствующие восстановлению равновесия.
Следовательно, существует тесная взаимосвязь кинематики и на-
груженности зацепления в гусеничном обводе. Эта взаимосвязь
отчетливо проявляется при набегании цевок на вершины зубьев,
которое сопровождается резким повышением натяжения за счет
перераспределения длины участков гусеницы, составляющих обвод.
Увеличение длины гусеницы от заднего опорного катка до выхо-
212
дящего из зацепления звена (рис. 8.2) на величину AS,.K может
рассматриваться как дополнительная деформация гусеничного
обвода Д/д — AS, к , вызывающая рост статического натяжения
гусеницы на величину
ДГсти.^С^ДЗ..,, (8.2)
что приводит к увеличению т.
Рис. 8.2. Схема расположения звеньев на ведущем колесе при набегании цевок
на вершины зубьев
Существует некоторое предельное положение цевок на веду-
щем колесе, допускаемое геометрией зацепления, при котором
возможно их проскальзывание от вершин к основаниям зубьев.
Дополнительное натяжение Д7\т(кМ , соответствующее измене-
нию положения звеньев от исходного до предельного, можно рас-
сматривать как запас устойчивости гусеницы по натяжению, обес-
печивающий некоторую приспособляемость зацепления к измене-
нию его нагруженности.
Удельный запас устойчивости рассчитывается по формуле
чт..к«ДГст,..в/От (8.3)
и для основных танков составляет 0,04—0,05. Поскольку удельное
предварительное натяжение Ta/Gr составляет 0,07—0,1, величину
запаса тст , к необходимо учитывать при расчете устойчивости
гусеницы-
213
Запас устойчивости зависит как от упругих свойств гусенич-
ного обвода, так и от параметров зацепления, ибо деформация
AS. м в предельном положении гусеницы определяется суммарной
высотой зубьев ведущего колеса и цевок гусеницы.
При изменении положения звеньев на ведущем колесе величи-
на Кг также изменяется.
Предельное положение звеньев на ведущем колесе опреде-
ляется следующими признаками (рис. 8.3):
точка контакта входящего в зацепление звена на рабочем уча-
стке тыльного профиля зуба максимально удалена от оси веду-
щего колеса;
ось зуба, взаимодействующего с звеном, перпендикулярна на-
правлению набегающего участка гусеницы при исходном положе-
нии звеньев на ведущем колесе.
Рис 8.3. Схема расчетного предельного положения звеньев, входящих в зацеп
ленне, гусениц с РМШ последовательного (а) и параллельного (6) типов
Положение остальных звеньев гусеницы определяется графи
ческим построением. Некоторое затруднение для построения поед-
ставляет гусеница с РМШ последовательного типа при толкаю-
щем способе зацепления и неконцентричной оси пальца цевке,
так как в этом случае положение каждого звена зависит от поло-
жения смежных звеньев. Построение в этом случае проводится
методом последовательных приближений.
Деформация обвода при положении звеньев, показанном на
рис. 8.2, рассчитывается по формуле
+ <80
где к(Н). Д'». K(cj — составляющие деформации, равные смещению от
исходного положения входящего в зацепление и выходящего из него звеньев
(в качестве исходного можно принять положение, при котором центры РМШ
находятся на начальной окружности зацепления, а все цевки — в контакте
с тыльной стороной зубьев).
Поскольку расчет устойчивости производится для гусеничного
зацепления с достаточно высокой относительной нагруженностью,
можно использовать упрощенную диаграмму усилий (рис. 8.4),
в которой характеристики ветвей обвода линейны, а асимптоти-
214
ческая зависимость в области низких значений Гсв заменена
примой, параллельной оси абсцисс на уровне Гсв = 7'mln—7г^н-
С учетом запаса устойчивости по усилию ДГетв.в характерис-
тика свободной ветви на диаграмме должна быть смещена на ве-
личину Д/д *-Д\ ж(р).
Рис. 8.4. Упрощенная диаграмма растяжения гусеницы при торможении
Нетрудно заметить, что при принятом положении звеньев пле-
чи Лсв и йр усилий Тсв и Гр (см. рис. 8.2) существенно отли-
чаются, поэтому условие статического равновесия ведущего коле-
са будет иметь следующий вид:
Грйр- Г„Лсв^РтйР. (8.5)
а формулы (5.10):
Л. - v, (Г„ + Со6вД5в. к (р) - К„Т9 - К"РГ); (8.6)
ГсвЛсв/Лр + Рт,
где 1Д1 - Ксл (Лсв Лр - 1)1.
Отсюда относительная нагруженность зацепления в тормоз-
ном режиме
, в ГСВ __ 1 _| I Лси
Тр \B,ftp •+• Р</>св ‘ Лр /Q 7^
_______________р,________________I ' '
1b. к ( А + £обвД$п. к (р) — ~ Ксв^тР
при ГСВ<<7Л принимается Гсв=Гт1п.
При использовании диаграммы следует учесть, что Тсв
— ^cbVb» где Гсв — усилие в свободной ветви, определяемое
по диаграмме.
215
Критерий кинематического режима зацепления в пре-
дельном положении звеньев на ведущем колесе с достаточной для
инженерной практики точностью может быть определен графоана-
литическим методом (рис. 8.5). Сначала определяется соотноше-
ние растягивающих усилий в двух смежных звеньях Гм/Тр
Рис. 8.5. Схема определения критерия кинематического режима К/т и предель-
ном положении звеньев для зацепления гусеницы с РМШ параллельного (а)
и последовательного (б) типов
Значение критерия кинематического режима зацепления опре-
деляется по формуле:
/с, (8.8)
т L zc(T) J (▼)
где Тсрастягивающие усилия в набегающем и сбегающем участках
гусеницы при торможении.
216
В связи с тем, что в каждой i-й точке разложения сил нас
интересует лишь отношение 7’,'_|/7'/ » для повышения точности
расчета одну из сил на графике, например Г,, следует оставлять
неизменной для всех точек.
При предельном положении звеньев на критерий К:т оказы-
вает влияние весь тыльный профиль зубьев.
Используя условие устойчивости гусеницы на ведущем колесе
(8.1) и выражения (8.6), можно определить усилие предваритель-
ного натяжения гусеницы, необходимое для нормальной работы
зацепления в тормозном режиме:
+'С<.)/’.-СЛЛА5.,к(и + ЛгГ. <8.9)
npi> А В/А|, = 1,1 .
Так, например, для танка с параметрами ходовой части, при-
веденными в табл. 5.1, при Д', =0,4 (ц = 0,4), Д5в к(р> =30 мм
и относительном радиусе поворота на песчаном грунте рп — 2,2
(Рт «0,4 6,/2) 7‘о=95 кН = 0,23бг.
Такое натяжение соответствует полной устойчивости гусеницы
на ведущем колесе, но на практике обычно применяется более
низкое натяжение 7’о= (0,07... 0,1) G , обеспечивающее удовлет-
ворительную устойчивость, при которой исключается сброс гусениц
в средних и легких дорожных условиях, например, на твердой
грунтовой дороге или на песчаном грунте при р4^3.
8.2. ФАКТОРЫ, ВЛИЯЮЩИЕ НА УСТОЙЧИВОСТЬ ГУСЕНИЦ
НА ВЕДУЩИХ КОЛЕСАХ
Общие тенденции развития ВГМ требуют поиска новых мето-
дов повышения устойчивости гусениц в обводах с повышенной
упругой податливостью при одновременном снижении статическо-
го натяжения гусениц и потерь мощности в них.
Классификация факторов, влияющих на устойчивость гусениц,
приведена на рис. 8.6, из анализа которого можно сделать вывод
о том, что повышения устойчивости можно добиться двумя спосо-
бами: предотвращением или снижением вероятности Нарушений
нормальной работы гусеничного зацепления (проскоков гусеницы
по зубьям ведущего колеса) и осевой фиксацией гусеницы на ве-
дущем колесе.
Предотвратить проскок гусениц по зубьям ведущего колеса
можно, уменьшая критерий кинематического режима зацепления
Ktj и повышая статическую нагруженность зацепления т при
торможении, а также с помощью радиальной фиксации гусеницы
на ведущем колесе.
Снизить критерий Кг можно, уменьшив средний угол за-
острения тыльного профиля зубьев (<pz ), увеличив число зубьев
или обеспечив положительную разность шагов гусеницы и зубьев
217
КЗ
оо
; Способы повышения устойчивости гусеницы на ведущем колесе |
I Предотвращение нарушений роботы зацепления (проскоков гусеницы по зубьям
ведущего колка)
2 Осевая фиксация гусеницы на ведущем колке |
Уменьшение критерия
кинематического режима
К.
Повышение или стодилизсцся
относительной нагруженности
зацепления г
Обеспечение
радиальной
фиксации
гусеницы
на ведущем
колесе
Применение
Установка
ограничителей
Установка
оградитель-
ных дисков
колеса
Снижение
угла
заострения
тыльного
профиля
зубьев Щг
Увеличение
числа
зубьев
Обеспечение
разности
шагов
6tg>0
Повышение
статического
натяжения
гусениц
Увеличение
натяжения
Автоматическое
повышение
натяжения
отстающей
гусеницы
Увеличение
г:-сг
устойчивости
CMI^lK(p)
Применение
двухсту-
пенчатого
НАН
Применение
бессту-
пенчатого
НАН
Стабилизация
апатического
натяжения
гусениц
Введение
подрксооенного
кулака-
-ограничителя
_______. ।
I Уменьшение коэффициента Лс<| [ Уменьшение коэффициента К, |
[увеличение^
Изменение фермы
обвода б процессе
движения
[ Увеличение за счет [
Увеличение
высоты
цевки
гусеницы
Увеличение
высоты
колеса
поддерживаю-
щих котков
Применение
лениксс
| Повышение жесткости обвода
Одгспечение
кинематической
связи
напродляюацих
или ведущих колес
С опорными
котками
________С. Д~ 1 1
I Увеличение С„ | | Увеличение Сг ।
Установка
- огранечиюепги
на зубья*
IM
Увеличение
Пая
Уменьшение
Увеличение
Ci
Уменьшение
Пг
Рис. 8.6. Классификация факторов, повышающих устойчивость гусеницы на ведущем колесе
ведущего колеса (Д/о). Однако в современных ВГМ эти парамет-
ры, как правило, не могут быть существенно изменены. Извест-
ны случаи применения зубьев несимметричного профиля
с целью уменьшения угла и обеспечения разности шагов
А/о>0 в тормозном режиме и Д/о^0 в тяговом (так называемые
двухшаговые звездочки), но такое зацепление не получило рас-
пространения из-за уменьшения долговечности и отсутствия воз-
можности взаимозаменяемости зубчатых венцов, а также из-за
невозможности переворота венцов для использования малоизна-
шиваемой тыльной стороны зубьев.
Повышение относительной нагруженности зацепления т в тор-
мозном режиме, как следует из зависимости (8.7), может быть
достигнуто при увеличении составляющих статического натяжения
гусеницы. Обычно этого добиваются, увеличивая предваритель-
ное натяжение То.
Наиболее эффективным методом повышения устойчивости гу-
сениц на ведущем колесе является изменение параметров обвода
в процессе движения, т. е. автоматическое управление натяже-
нием гусениц. Широко используется также повышение дополни-
тельного натяжения ДГСТ „ к , определяющего запас устойчивости
гусеницы на ведущем колесе. В связи с тем, что это натяжение
существует кратковременно (лишь в момент набегания цевок на
тыльную сторону зубьев), оно не создает заметной перегрузки
движителя.
Дополнительное натяжение определяется приведенной жест-
костью гусеничного обвода С,}бв и его предельной деформацией
Д^в.к(р) • Жесткость обвода Собв может быть повышена за счет
увеличения жесткости гусеницы Сг или жесткости подвески Сп,
а деформация обвода повышается с увеличением приведенной вы-
соты зубьев Нг(П) и цевок ht (р) (см. рис. 8.3). Возможности
увеличения высоты зубьев и цевок весьма ограничены. Существует
способ искусственного повышения рабочей высоты зубьев с по-
мощью так называемых боковых ограничителей (танк Т-64 пер-
вых выпусков), но эффективность этого технического решения
недостаточно велика, а увеличение наружного диаметра ведущего
колеса и нагруженности зубьев часто приводит к их поломке.
Снижение статического натяжения при возрастании силы тяги
или скорости движения определяется значениями коэффициента
разгрузки К в и Kv. При меньших значениях этих коэффициен-
тов статическое натяжение гусениц более стабильно. Из формул
(5.10) и (5.25) следует, что коэффициенты К в и Kv снижаются
при уменьшении отношения СобвСр и увеличении Сг/Сп.
При увеличении жесткости гусеницы повышается ее устойчи-
вость. Так, повышение жесткости звеньев гусеницы основного танка
в 2 раза увеличивает относительную нагруженность зацепления в
средних дорожных условиях в 1,5 раза- Влияние жесткости подвес-
ки неоднозначно и не столь существенно, так как от этой величины
219
отношение Ср/С(9 почти не зависит, а коэффициент Kv изме-
няется незначительно.
Более сложный характер влияния жесткости подвески на на-
груженность зацепления т отчетливо проявляется при дифферен-
цировании первого уравнения (8.6) по С„. При 1 и 7р = 0
д 7гв Cr |CrASB. к - К - 0.5) Рт|
оСа (СГ4-СП)«
С AS
Как следует из этого выражения, при Рт>—; J'os* про-
изводная становится отрицательной. Следовательно, повышение
жесткости подвески приведет к снижению нагруженности ведуще-
го колеса растягивающими гусеницу усилиями.
По расчетным данным, для основного танка практически во
всем диапазоне реально возможных значений силы тяги повыше-
ние жесткости подвески способствует некоторому повышению т и
соответственно улучшению процесса зацепления при торможении.
При средних значениях силы тяги, т. е. при Рт « (0,1... 0,15)GT,
повышение жесткости подвески в 2 раза способствует увеличению
т примерно в 1,2 раза.
Область положительных значений производной определяется
произведением СгД5„.г (Р> в числителе. Эта область тем шире, чем
выше жесткость гусеницы.
Заметная стабилизация статического натяжения в тормозном
режиме достигается с помощью поддерживающих катков, умень-
шающих провисание участков верхней ветви гусеницы, что ана-
логично повышению ее жесткости и приводит к уменьшению
коэффициента разгрузки К,в .
На некоторых зарубежных ВГМ стабилизация статического
натяжения гусениц осуществляется с помощью компенсирующих
устройств, обеспечивающих кинематическую связь направляюще-
го или ведущего колеса с балансиром крайнего опорного катка,
или с помощью дополнительного подрессоренного катка (ле-
никса),
Установка леникса равносильна введению в расчетную схему
обвода дополнительной податливости в свободную (при торможе-
нии) ветвь гусеницы. При этом вследствие уменьшения значений
коэффициентов разгрузки Кв и Kv нагруженность зацепления
т возрастает, однако одновременно снижается жесткость гусенич-
ного обвода С11бв , что приводит к уменьшению запаса устойчивос-
ти ДГСТ , к и свидетельствует о низкой эффективности лсникса.
Проскоку гусеницы по зубьям ведущего колеса предшествует
задержка одного из входящих в зацепление звеньев на вершине
зуба. Можно предотвратить проскок принудительным ограниче-
нием радиального смещения звеньев от их нормального положе-
ния (по дуге начальной окружности).
220
Радиальная фиксация звеньев на ведущем колесе может быть
осуществлена с помощью подрессоренного кулака-ограничителя
(рис. 8.7). Упругая связь кулака с корпусом танка обеспечивает
его перемещение в случае распора гусеницы грунтом или при по-
падании в зацепление посторонних предметов.
Рис. 8.7. Схема радиальной
фиксации звеньев на ведущем
колесе:
/ — кулак ограничитель; 2 — гусе-
ница; J — ведущее колесо
Кулак-огранич и т е л ь
устанавливается в месте
максимального прибли-
жения к зоне набегания
звеньев на ведущее коле-
со: это дуговой участок
гусеницы вверх от гори-
зонтальной осн ведущего
колеса на 30—40°. При-
менение кулака позволяет
практически полностью
исключить проскок гусе-
ниц и значительно снизить предварительное натяжение; в на-
стоящее время этот способ проверяется в условиях длительной
эксплуатации.
Наиболее эффективным способом осевой фиксации гусеницы
на ведущем колесе является установка ограничительного диска
(см. рис. 7.1). Сброс гусениц происходит потому, что при набега-
нии цевок на вершины зубьев наружные торцы звеньев гусеницы
выходят за пределы торцовой поверхности зубьев ведущего коле-
са, при этом ухудшается осевая связь гусеницы с ведущим коле-
сом и происходит ее смещение от борта машины при повороте.
Ограничительный диск увеличивает степень взаимного перекрытия
торцовых поверхностей гусеницы и ведущего колеса, что практи-
чески исключает сброс гусеницы.
Высокая эффективность применения ограничительного диска
подтверждается эксплуатацией танка Т-72 и других ВГМ. Этот
способ осевой фиксации диска позволяет также снизить усилие
предварительного натяжения гусениц и повысить долговечность
гусеничного движителя; недостатком его является сложность
очистки ступицы ведущего колеса от грунта.
Если машине (например, танку Т-64) свойствен значитель-
ный перекос опорной ветви гусеницы (узкие опорные катки, низ-
кая жесткость гусеницы, недостаточно высокие гребни), то на
ограничительном диске предусматривается заходный конус для
221
улавливания и направления гребней, набегающих на ведущее
колесо звеньев.
Существует метод осевой фиксации гусеницы с помощью уста-
новки двухрядных поддерживающих катков или однорядных с
внешней стороны по отношению к гребням гусеницы.
При осевой фиксации проскок гусениц не устраняется, но он
не приводит к их сбросу. Применение ограничительных дисков не
всегда достаточно эффективно, особенно на ВГМ легкой катего-
рии по массе, ввиду малой жесткости их гусеничных обводов и
малого радиального перекрытия гребней диском.
Проблему повышения устойчивости гусениц на ведущем колесе
нельзя считать решенной. Еще не найдены эффективные способы
предотвращения распора гусениц на рыхлых грунтах, способст-
вующего их сбросу.
Методы учета устойчивости гусениц в обводе, облегчающие
выбор соответствующих параметров гусеничного движителя (на
стадии ОКР), нуждаются в дальнейшем развитии.
8.3. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ НАТЯЖЕНИЕМ ГУСЕНИЦ
Для обеспечения нормального зацепления и предотвращения
сброса гусениц на отстающем борту при повороте ВГМ должно
быть обеспечено достаточно высокое натяжение их, а на забегаю-
щем борту при прямолинейном движении натяжение может быть
значительно меньше.
Снижение нагруженности гусеничного обвода статическими
составляющими растягивающих усилий является значительным
резервом повышения долговечности гусеничного движителя и под-
вижности машины.
Автоматическое управление натяжением гусениц позволяет
изменять его в зависимости от режимов и условий движения
ВГМ.
Подбирая соответствующие значения предварительного и по-
вышенного натяжения, можно практически исключить нарушения
процесса зацепления при сохранении или некотором снижении
среднего статического натяжения гусениц либо повысить устойчи-
вость гусениц на ведущем колесе при существенном снижении их
среднего статического натяжения.
Поскольку натяжение гусеницы зависит от силы тяги, целесо-
образно его изменение в зависимости от внешнего сопротивления
повороту танка, что очень сложно в связи с необходимостью
получения управляющего сигнала, пропорционального силам
сопротивления повороту-
Наиболее простым спосббом управления натяжением гусеницы
является применение двухступенчатого механизма, рассчитанного
на повышенное натяжение отстающей гусеницы в экстремальных
условиях; при этом на забегающем борту (на обоих бортах при
прямолинейном движении машины) сохраняется относительно
222
низкое предварительное натяжение гусениц. Такой метод позво-
ляет снизить среднее статическое натяжение гусениц и повысить
за счет этого долговечность изнашивающихся элементов зацепле-
ния в 1,1—1,4 раза, долговечность РМШ гусениц в 1,4—2 раза,
а также заметно увеличить грузоподъемность опорных катков.
Автоматическое управление натяжением гусениц позволяет
снизить трудоемкость обслуживания ходовой части за счет меха-
низации операции установки и контроля предварительного натя-
жения гусениц.
Для изменения усилий натяжения гусениц в процессе движе-
ния механизм автоматического натяжения (МАН) должен разви-
вать на оси направляющего колеса отстающего борта машины
силу, способную преодолеть нагрузки, возникающие в гусенице.
По экспериментальным данным, полученным на машине сред-
ней категории по массе, максимальное усилие Qmt , действующее
на ось направляющего колеса в момент входа машины в поворот,
достигает (0,54... 0,84) GT за промежуток времени tq
= 0,53...0,77 с от начала перемещения рычага управления пово-
ротом. Чтобы исключить сброс гусениц на начальной стадии по-
ворота, МАН должен обеспечить перемещение направляющего ко-
леса за то же время, т. е. он должен иметь высокое быстродей-
ствие.
В общем случае нагрузка Q™x складывается из двух состав-
ляющих— нагрузки Qmax(n) , создаваемой постоянными состав-
ляющими растягивающих усилий в гусенице, и динамических воз-
действий на гусеницу, возникающих в результате изменения ско-
рости и направления движения машины при входе в поворот.
Постоянная составляющая
<?»„м>2Г»-217'- г^«.д\..(Р>-Л'Л+(1 -К^РЛ.
где Г.— повышенное натяжение отстающей гусеницы, которое доджей создавать
МАН.
Из формулы видно, что механизм натяжения должен разви-
вать на оси направляющего колеса усилие QMAh, значительно пре-
вышающее нагрузку от натяжения Гв, т. е.
^млн > 2 Гв.
Расчет показывает, что для быстродействия целесооб-
разно использовать аккумулятор энергии, например, гидрогазо-
аккумулятор, который можно при ограниченной мощности приво-
да подзарядить в промежутках между поворотами машины.
Исходными параметрами для разработки МАН являются:
максимальное усилие QMAH, которое нужно обеспечить на оси
направляющего колеса отстающего борта при повороте машины;
усилие Го предварительного натяжения гусениц;
усилие Гв повышенного натяжения гусениц;
полный ход направляющего колеса SH.b;
223
дополнительный ход направляющего колеса Д5Н., , необходи-
мый для повышения натяжения от То до Г,;
радиус кривошипа МАН.
Значение QMAH принимается с учетом того, что QMAH >Qnax-
При отсутствии экспериментальных данных вместо Qmax мож-
но использовать статическую составляющую усилия в гусенице,
рассчитанную по формуле
0м*н>27-1Л.-2(Г. + С<лД5...(„-<-(1 (8.10)
где К» — 1,2... 1,3— коэффициент динамической перегрузки.
Значение повышенного натяжения рассчитывается по форму-
ле (8.9).
Полный ход направляющего колеса (в проекции на биссектри-
су угла охвата колеса гусеницей)
S„ ASB-Hr/2,
где Д50 — ход, необходимый для создания предварительного натяжения; AS, —
дополнительный ход для повышения натяжения от Го до Г,.
Ход Д5о может быть выбран с помощью диаграммы растяже-
ния гусеничного обвода (см. гл. 5) с учетом провисания гусеницы.
При этом характеристики ветвей обвода ограничиваются снизу
усилием Гт)п , которое может быть создано при соединении гусе-
ницы с помощью штатных стяжек (приблизительно 0,3 веса гусе-
ницы).
Необходимое для создания натяжения Г, дополнительное пе-
ремещенье направляющего колеса
Д5,«(Г,-Г0)/Со6в. (8.11)
Следует отметить, что при применении двухступенчатого МАН
с постоянным повышенным натяжением ход направляющего коле-
са должен быть ограничен величиной AS; в противном случае при
внешней нагрузке Q<QMAH возможна перегрузка отстающей гу-
сеницы усилием, приблизительно равным (Q4AH—Q)/2.
Радиус кривошипа выбирается минимально возможным из
условия обеспечения полного хода направляющего колеса с уче-
том допустимой погрешности значения натяжения, соответствую-
щего изменению положения кривошипа.
Принципиальная схема МАН. Силовая часть эксперименталь-
ного образца двухступенчатого МАН с постоянным уровнем по-
вышенного натяжения (рис. 8.8) включает в себя два силовых
цилиндра, соединенных с кривошипами, и два трехполостных
дозатора — гидроцилиндра с дифференциальным плавающим
поршнем, которые выполняют следующие функции:
обеспечивают дополнительный ход штока силовых цилиндров
и его возврат в исходное положение посредством подачи и воз-
врата определенной порции жидкости;
224
служат аккумуляторами давления;
разделяют жидкую и газовую среды системы;
согласуют давление газа в пневмосистеме с давлением жидко-
сти в силовом цилиндре при создании повышенного натяжения.
Рис. 8.8. Принципиальная схе-
ма МАН:
..... t-’ZZ. силовые цилиндры
РД, . РДХ реле давления; ГЗ, , ГЗ
— гидрозамки; ЗК — золотниковая
коробка; 3, — 3, - золотники; ПК.
ОК предохранительный и об
ратный клапаны; Д, . .7,—дозато-
ры; ГН — гидронасос; £// иопол
и и тельный бак: Ф фильтр; в .
Гидросистема МАН
включает в себя гидрона-
сос с приводом от элек-
тродвигателя, пополни-
тельный бак, фильтр, зо-
лотниковую коробку, ре-
ле низкого и высокого
давления. В золотинко
вой коробке размещены
четыре золотника с элек-
тромагнитным управлени-
ем, два гидрозамка, пре-
дохранительный и обрат-
ный клапаны.
Реле РД\ отключает
насос при повышении
давления до уровня, со-
ответствующего предва-
рительному натяжению
гусениц. Реле РД2 поддерживает постоянное давление в средней
полости дозаторов. В исходном состоянии контакты обоих реле
замкнуты. При включении насоса через золотники 3| и 32 подается
жидкость в средние полости дозаторов; при этом плавающие порш-
ни их перемещаются до упора в днище газовой полости. При повы-
шении давления до расчетного значения реле РД2 размыкает
силовую цепь.
Для создания предварительного натяжения гусениц рабочие
полости обоих силовых цилиндров с помощью золотника 3* сооб-
щаются с напорной магистралью. При повышении давления в ней
до соответствующего уровня реле низкого давления РД\ выклю-
чает электродвигатель, жидкость в силовых цилиндрах запирается
гидрозамками.
Для снижения натяжения гусениц включается электродвига-
тель, полости гидрозамков с помощью золотника З3 сообщаются
15 Зак. ]6«о
225
с напорной магистралью, гидрозамки открываются и соединяют
рабочие полости силовых цилиндров со сливом, а штоковые —с
нагнетающей магистралью.
При необходимости предварительное натяжение гусениц в
процессе движения можно поддерживать постоянным (режим по-
стоянного натяжения).
В автоматическом режиме обеспечивается повышение натяже-
ния отстающей гусеницы при входе машины в поворот При пе-
ремещении водителем одного из рычагов управления поворотом
на некоторый угол один из золотников (3| при повороте машины
вправо, 3t — при повороте влево) соединяет среднюю полость
соответствующего дозатора со сливом. Поршень дозатора под
давлением газа перемещается в другое крайнее положение —до
упора в днище малого цилиндра, вытесняя жидкость из средней
полости на слив, а из полости малого цилиндра — в рабочую по-
лость силового цилиндра, что обеспечивает дополнительное натя-
жение гусеницы на отстающем борту.
При выходе из поворота (после установки рычага в исходное
положение) разобщается цепь питания электромагнита золотника.
При этом средняя полость дозатора сообщается с напорной маги-
стралью. Вследствие падения давления в средних полостях обоих
дозаторов (их полости сообщены через золотники 31 и 32) проис-
ходит включение электродвигателя с помощью реле РДа и под
давлением жидкости поршни обоих дозаторов возвращаются в ис-
ходное положение.
Рис. 8.9. Экспериментальная зависимость
числа проскоков гусеницы на ведущем ко-
лесе в единицу времени от натяжения гу
сеницы при движении по песчаному (/)
и дернистому (2) грунтам
Испытания экспериментальных
образцов МАИ подтвердили воз-
можность обеспечения устойчиво-
сти гусениц на ведущем колесе по-
средством регулирования их натя-
жения в процессе движения танка.
На рис. 8.9 показана эксперимен-
тальная зависимость числа проско-
ков гусеницы на ведущем колесе в единицу времени
от натяжения гусеницы на отстающем борту при длительном
повороте (движении по кругу) танка средней категории по массе.
Экспериментальные точки аппроксимированы методом наимень-
ших квадратов. Из рисунка видно, что при повышении натяже-
ния отстающей гусеницы с помощью МАИ до (0,19... 0,22) От,
т. е. до 70—80 кН, проскоков гусеницы по ведущему колесу прак-
тически не было. Разброс значений параметра /С1|₽ и незначи-
тельная зависимость его от натяжения на влажном песчаном грун-
226
те связаны, очевидно, с влиянием распора гусеницы, который на
данном грунте носит нестабильный характер.
При пробеговых испытаниях ходового макета с эксперимен-
тальным образцом МАИ на кольцевой трассе (по проселочной
дороге) зарегистрировано снижение расхода топлива на 7—14 %
в автоматическом режиме работы МАН по сравнению с режимом
постоянного (нерегулируемого) натяжения, что является следст-
вием снижения нагруженностн движителя силами натяжения гу-
сеницы.
8.4. ПЕРСПЕКТИВЫ РАЗВИТИЯ МАН
Недостатками двухступенчатого МАН являются повышенное
натяжение гусениц в тяжелых дорожных условиях, применение
автономного привода, разместить который в танке весьма сложно
в связи с ограниченностью свободных объемов в корпусе, и отсут-
ствие резервов электрической мощности бортовой сети.
Как известно, в последнее время в ВГМ применяются меха-
низмы поворота с гидрообъемнымн передачами (ГОП МП), дав-
ление жидкости в которых пропорционально сопротивлению по-
вороту машины, что позволяет осуществлять непрерывное бес-
ступенчатое регулирование натяжения отстающей гусеницы в за-
висимости от дорожных условий и режимов движения.
Новую систему управления натяжением гусениц можно по-
строить по двум схемам:
с непосредственной гидравлической связью МАН с ГОП МП;
с использованием давления жидкости в ГОП МП в качестве
управляющего сигнала для усилителя мощности с автономным
питанием, вырабатывающего рабочее давление для подачи в си-
ловые цилиндры МАН.
Первая схема проще, так как исключает необходимость нали-
чия отдельного привода МАН.
По расчетным данным, при бесступенчатом регулировании
может быть обеспечено существенное (на 50%) снижение нагру-
женности движителя статическими составляющими натяжения.
Прежде всего необходимо осуществить сопряжение парамет-
ров МЛН и ГОП МП по силовому фактору.
На рис. 8.10 представлена зависимость относительных (по от-
ношению к весу машины) растягивающих усилий в рабочей и
свободной ветвях (Гр и 7\и) и натяжения То гусеницы от удель-
ной силы тяги в отстающей гусенице при Линейных упругих ха-
рактеристиках ветвей. Точка пересечения прямой Гр = (при
Т'в^Т’о) с вертикалью, соответствующей заданному значению си-
лы тяги, определяет растягивающее усилие в рабочей ветви, со-
здающее нагрузку на оси направляющего колеса Q = 2Tp. Так как
давление жидкости, подаваемой в МАН от ГОП МП, и соответст-
венно этому натяжение Ти зависят от сопротивления повороту
(силы тяги), то при возрастании силы тяги усилие в рабочей ветви
15*
227
будет возрастать по прямой 3, исходящей из точки, в которой
Гм = ГО(РТ =0). Таким образом, прямая 3 определяет нагружен-
ность механизма натяжения в зависимости от силы тяги и выра-
жает по существу закон регулирования усилия в отстающей гусе-
нице механизмом натяжения за счет давления рабочей жидкости.
Рис. 8.10. Диаграмма растяжения ра-
бочей и свободной ветвей гусенично-
го обвода при автоматическом регу-
лировании натяжения:
/ — Гв ; 2 —Гр при Гв — сопи > Г. ;
* — Гр при Т* — vir ; 4 — Гр при Г* — Г„;
5 ~ Гси при Ги “ • 6 ГСВ п₽и
7B«^con»t > Г,; 7 — Гс> при Гв— Г« —con»t
Из представленной диаграммы следует, что для получения за-
данной характеристики регулирования усилия МАН (при линей-
ных характеристиках гусеничного обвода) достаточно согласо-
вать параметры МАН и ГОП МП в одной точке, например, при
тяговом усилии, соответствующем наиболее тяжелым условиям
поворота (на песчаном или дернистом грунте при минимальном
расчетном радиусе поворота). С учетом формулы (8.10) при из-
вестном давлении жидкости в ГОП, соответствующем заданной
силе тяги, может быть определен диаметр силового цилиндра
МАН.
Быстродействие МАН зависит от подачи насоса ГОП и пло-
щади проходных сечений гидравлического тракта. В связи с не-
обходимостью дополнительного расхода жидкости для заполне-
ния полости силовых цилиндров МАН, длительность входа ма-
шины в поворот несколько возрастает. Однако, как показывает
расчет, влияние этого фактора на динамику поворота машины
относительно невелико и может быть компенсировано незначи-
тельным увеличением подачи насоса ГОП.
Глава 9 ЗАТРАТЫ МОЩНОСТИ В ГУСЕНИЧНОМ
ДВИЖИТЕЛЕ
9.1. ОБЩИЕ СВЕДЕНИЯ
Мощность, передаваемая трансмиссией на ходовую часть, рас-
ходуется как на преодоление внешних сопротивлений, так и в гу-
сеничном движителе и системе подрессоривания. В современных
ВГМ при движении с максимальной скоростью около 50 % раз-
виваемой двигателем мощности затрачивается в гусеничном дви-
жителе.
В работах Д. А. Чудакова, А. С. Антонова, Л. В. Сергеева,
Н. А. Забавникова, В. Ф. Платонова и других отмечено, что при
прямолинейном установившемся движении машины мощность в
гусеничном движителе затрачивается в основном на трение в шар-
нирах, на перекатывание опорных катков, в зацеплении ведущих
колес и гусениц, на удары траков об элементы, формирующие
обвод (опорные катки, направляющие и ведущие колеса).
Большинство известных формул для расчета затрат мощности
или КПД гусеничного движителя эмпирические. В применении
формул имеются различного рода ограничения, а также в них не
полностью отражается связь затрат с основными параметрами
гусеничного движителя и его сборочных единиц. Так, например,
потери мощности в резинометаллических шарнирах рассчиты-
ваются по формулам, учитывающим угловую жесткость, угол за-
кручивания шарнира, коэффициент гистерезисных потерь и ско-
рость перематывания гусениц. Неопределенность коэффициента
гистерезисных потерь (который рекомендуется принимать равным
0,15—0,35 и даже близким к единице) приводит к значительной
ошибке при оценке затрат мощности в шарнире.
Затраты мощности в зацеплении ведущих колес и гусениц счи-
таются связанными с преодолением трения скольжения и качения
при взаимном перемещении цевки трака и зуба ведущего коле-
са [17].
При перекатывании опорных катков по гусенице мощность
затрачивается на гистерезис (в шине, беговой дорожке, аморти-
зирующем элементе), проскальзывание катка и трение в подшип-
никовом узле:
229
где /к — коэффициент сопротивления качению катка, учитывающий указанные
выше затраты и определяемый методом выбега на стенде или при буксировке
машины по расстеленной гусенице со скоростью около 1,4 м/с; G* — суммарная
нагрузка на опорные катки; vT — скорость движения машины.
Коэффициент сопротивления качению изменяется в довольно
широких пределах: для катка с внутренней амортизацией при ка-
чении по металлической гусенице =0,011... 0,016; для катка
с массивной шиной при качении по металлической гусенице fK
= 0,013.. .0,019, а по обрезиненной гусенице = 0,022... 0,028.
Известные в настоящее время экспериментальные методы оп-
ределения затрат мощности в гусеничном движителе (холостое
перематывание гусениц на стенде, буксировка и выбег машины,
определение мощности по топливной экономичности машины при
движении ее в установившемся режиме по бетону и другие) не
позволяют дифференцировать затраты по сборочным единицам.
При этом разброс экспериментальных данных зачастую превы-
шает размер отдельных составляющих в общем балансе затрат.
По существующим формулам невозможно прогнозировать затраты
мощности в разрабатываемых конструкциях ходовой части и очень
трудно оценить эффективность мер по снижению их уровня в уже
существующих конструкциях. Поэтому большой интерес представ-
ляет исследование аналитической связи затрат мощности с основ-
ными конструктивными параметрами и физико-механическими
свойствами составных частей гусеничного движителя.
9.2. РАСЧЕТ ЗАТРАТ МОЩНОСТИ В ГУСЕНИЦЕ
При перематывании гусениц значительная часть мощ-
ности затрачивается на трение в шарнирах, а также на пре-
образование поступательного движения во вращательное при из-
менении кривизны обвода в местах установки направляющего ко-
леса, первого и последнего опорных катков и ведущего колеса.
Затраты мощности в гусенице складываются из затрат при про-
хождении траками всех участков перегиба (взаимодействие опор-
ной ветви с внешней средой не учитывается).
Рассмотрим механизм взаимодействия гусеницы с колесом
(или катком) в месте перегиба. Экспериментально доказано, что
при входе на колесо практически только один набегающий трак
отклоняется от первоначального положения в ветви гусеницы.
Движение двух соседних траков с шарниром последовательно-
го типа при входе на колесо аналогично движению кривошипно-
шатунного механизма (рис. 9.1).
Положение траков будем задавать в обобщенных координа-
тах а и ф, тогда в декартовых координатах получим:
X»-—(Zr- G)cosa + —^—COS?; Z,-/? г, sin а;
/?
X; — ---cos ъ - г2 cos ф; z-» -——г- sln v г, sin ф .
- COS (1 • ’ cos ,1 • - ‘
230
Обобщенные координаты выражаются через угол <р с помощью
следующих зависимостей: sin а —В — A sin <р; '> = ? - k ,
где А = Ri(tr cos ft), В - R,tr, * = х/2 - р. (9.2)
Рис. 9.1. Схема движения со-
пряженных траков (/, 2) по
ободу колеса:
R - сумма радиуса колеса и рас
стояния от беговой дорожки тра-
ка до оси шарнира; *г - шаг гу
сеянцы
Вычислив в выраже-
нии (9.1) производные по
времени, возведем их в
квадрат и подставим в
формулу дли вычисления
кинетической энергии
Ki ~ -у- (Xi 4- Х2 4- z? 4- dr• (9.3)
где р — mftr— погонная масса гусеницы; т — масса трака; /—номер колеса,
при прохождении которого определяются затраты,
получим
_у.2ЛЯ,М.!П> 1 (94)
cos ft — — D I
где /0. /с моменты инерции трака относительно осн шарнира и относительно
центра тяжести трака, S — статический момент трака относительно осн шарни-
ра; D — (В — A sin q:)2.
Как видно из выражения (9.4), кинетическая энергия зависит
от массы и шага траков и размеров формирующих обвод колес.
Изменение кинетической энергии в процессе движения траков по-
казано на рис. 9.2. При построении графика принято, что выход
трака с колеса происходит так же, как и вход на него, но в об-
ратной последовательности.
При ф<л/2 —р кинетическая энергия поступательно движу-
щихся траков -mu*; при л/2— Р0р<л/24-Р поступательное
движение переходит во вращательное, кинетическая энергия со-
пряженных траков К/п рассчитывается по формуле (9.4); при
Ф>л/2+р кинетическая энергия траков, вращающихся с колесом,
<Н1 = (™+W)^, где иг —скорость движения танка.
231
Динамические затраты мощности Nt=dKidl — это мгновенные
значения, которые следует осреднить в интервале /=/г/т\. При
выборе способа осреднения считаем, что динамические затраты
определяются положительными производными кинетической энер-
гии по времени и что с отрицательной производной связываются
поперечные колебания гусеницы и ее удары об элементы, форми-
рующие обвод.
Рис. 9.2. Изменение кинетической энергии сопряженных траков при прохожде
ннн через колесо (----- мгновенные значения кинетической энергии,--------
средине)
Тогда средние значения затрат мощности будут:
К.
на входе V?
на выходе 5'*“
По формуле (9.4) найдем
К
V1) *'1П
— f2 + ~2~ А») • (9-5)
Динамические затраты в гусенице с шарниром последователь-
ного типа можно определить по следующим формулам:
__ Vr г
(9.6)
где QT— погонный вес гусеницы, g — ускорение свободного падения.
Точек изменения кривизны гусеничного обвода обычно четыре,
т. е. л = 4. Принимается также, что масса трака равномерно рас-
пределена по длине шага.
232
Для гусеницы с шарниром параллельного типа следует в схе-
ме (см. рис. 9.1) и в уравнениях (9.1)—(9.3) учитывать разницу
в шагах и t2, массах тх и т2 и функционально связанных
с ними величин. Тогда формулы для определения динамических
затрат мощности примут вид:
N“ = —( Д-;
+ (9.7)
Эти формулы справедливы, если масса гусеницы равномерно
распределена по ее длине. В случае неравномерного распределе-
ния массы формула для расчета кинетической энергии сопряжен-
ных траков примет вид
Л/=-у [ i w+$ pi (иdr+1 рг (r)dr ] ’ * <9-8)
где pi (г), pj(r) — погонная масса сопряженных траков.
После интегрирования и соответствующих преобразований по-
лучим:
. )(4+4) Sl с,,, .,ly_L
= 2 U, + [ 4 ~ + /о‘ ,02J R2,
NF= _ Sj/j + /м + д, _ (9.9)
Формулы (9.9) содержат значения статических моментов и
моментов инерции звеньев, которые определяются эксперимен-
тально или посредством сложных и трудоемких вычислений,
оправданных лишь для конструкции траков с явно выраженной
«ажурностью», обусловливающей неравномерность распределе-
ния массы по длине звена.
Характерным примером «ажурной» конструкции является гу-
сеница танка Т-64А. Значения динамических затрат мощности,
рассчитанные по формулам (9.9) при скорости движения танка
16,7 м/с, на 12 % точнее, чем по формулам (9.7). Для конструк-
ции гусениц с меньшей неравномерностью распределения масс
уточнение будет менее заметным.
Затраты мощности в резинометаллическом шарнире опреде-
ляются работой внутренних сил на обобщенных перемещениях,
соответствующих углу закручивания шарнира. Если осредннть
эту работу по времени t =tr/v1t то на входе для шарнира после-
довательного типа
233
<9J0>
а для шарнира параллельного типа
<9.11)
1-1
где С — угловая жесткость шарнира.
Накопленная в шарнире энергия (за исключением потерь на
гистерезис) используется при выходе с колеса для распрямления
сопряженных траков; затраты мощности при этом для шарниров
обоих типов
• №. (9.12)
где т) — 0,15.. .0,30 — коэффициент гистерезисных потерь.
Уравнение затрат мощности для перематывания одной гусени-
цы имеет следующий вид:
Л4 = № + № + (9.13)
где ~ ПРИ < "Г*
I 0 при N™1 > A'f41
(неравенства выражают соотношение накопленной в шарнире энергии н энер-
гии. необходимой для распрямления сопряженных траков; при этом недостаток
энергии восполняется двигателем, а избыток рассеивается в гусенице, вызывая
ее колебания).
Для гусеницы с открытым шарниром уравнение затрат мощ-
ности на ее перематывание
ЛГг = № + №“ + №. (9.14)
где — затраты мощности на трение в шарнире.
Известно, что при перематывании гусениц часть мощности,
передаваемой ведущим колесом, затрачивается на трение в за-
цеплении. Эти затраты, определяемые силовыми и кинематически-
ми параметрами зацепления, могут быть рассчитаны по методике
М И. Медведева [17]. Однако ввиду громоздкости вычислений
целесообразно принимать (на основании обобщения эксперимен-
тальных данных), что в зацеплении затрачивается 8—10% пере-
даваемой ведущим колесом мощности.
Предлагаемая методика, учитывая геометрические и физико-
механические параметры основных составных частей гусеничного
движителя, позволяет определять затраты мощности в нем как
на стадии ОКР, так и в уже существующих конструкциях. Даль-
нейшее совершенствование методики расчета направлено на по-
234
полнен не аналитических зависимостей с целью повышения точ-
ности определения отдельных составляющих затрат.
9.3. АНАЛИЗ ЗАТРАТ МОЩНОСТИ В РАЗЛИЧНЫХ КОНСТРУКЦИЯХ
ГУСЕНИЧНЫХ ДВИЖИТЕЛЕЙ
Для сравнения ходовых частей танков Т-80, Т-64А и Т-72, дви-
жущихся по бетонной дороге, по изложенной выше методике
рассчитываются затраты мощности на перекатывание опорных
катков по гусеницам (jVJ, в шарнирах (А7„,), динамические за-
траты (А^), затраты в зацеплении (N3). Затраты мощности на
внешнее сопротивление (воздух и бетон) рассчитываются по фор-
мулам, приведенным в работе [12], при коэффициенте сопротив-
ления прямолинейному движению на бетоне =0,01.
Для расчета принимаются следующие эмпирические коэффи-
циенты:
для танка Т-80: ]* = 0,024; С =1,94 кН м/рад; q=0,20;
для танка Т-64А: f =0,013; С=1,53 кН-м/рад; п = 0,20;
для танка Т-72: f„ = 0,014; С = 0,90 кН-м/рад; т) = 0,20.
Результаты расчета и эксперимента представлены на рис. 9.3,
который подтверждает их удовлетворительную сходимость в пре-
делах реальных скоростей движения. Из рисунка видно, что за-
траты мощности в гусеничном движителе нелинейно изменяются
в зависимости от скорости, поэтому сравнивать ВГМ нужно при
одинаковой скорости движения При скорости машины менее
7 м/с динамическими затратами можно пренебречь, полагая, что
в этом случае мощность затрачивается в равной мере на перека-
тывание опорных катков и в шарнирах. При максимальной ско-
рости движения динамические затраты существенно возрастают,
и в некоторых конструкциях (Т-72) превышают затраты мощно-
сти в шарнирах и на качение опорных катков по гусеницам.
В танках Т-80 и Т-64А существенно различаются только затра-
ты мощности на качение опорных катков по гусенице. Это
объясняется большим сопротивлением качению катка с массив-
ной шиной по обрезиненной беговой дорожке по сравнению с ка-
чением катка с внутренней амортизацией по металлической бего-
вой дорожке.
При скорости движения до 15,8 м/с суммарные затраты мощ-
ности в танках Т-64А и Т-72 меньше, чем в танке Т-80 (рис 9.4),
при скорости же движения более 15,8 м/с затраты мощности в
танке Т-72 больше, что является следствием увеличения динами-
ческой составляющей затрат, определяемой шагом гусеницы и
массой трака.
Изложенная выше методика расчета затрат мощности в гусе-
ничном движителе позволяет не только прогнозировать их при
установке на танк гусениц различных конструкций, но и сравни-
вать ВГМ различной категории по массе.
На рис. 9.5 показана зависимость затрат мощности (танк Т-72)
от конструкции гусеницы и типа беговой дорожки (при сравнении
235
Рис. 9.3. Затраты мощности в гусеничных движителях танков Т-64А (а), Т 80 (б) и Т-72 (в):
/ — на качение опорных катков по гусенице; f — на качение катков и в шарнирах; 3- на качение катков, в шарнирах и ди-
намические; 4 — на качение катков, в шарнирах, динамические и на внешнее сопротивление; 5 — суммарные с учетом зацеплении;
— — расчет; * X »А—эксперимент с использованием топливно-экономических и динамических (разгонных и тормоз-
ных) характеристик соответственно
масса и инерционные характеристики гусеницы с необрезиненной
беговой дорожкой и гусеницы танка Т-80 приняты одинаковыми).
Рис. 9.4. Затраты мощности в гусе-
ничном движителе (без учета за-
цепления и внешнего сопротивления):
/ — танк Т-72; 2 — танк Т 80; 3 — танк
Т 64А
Рис. 9.5. Влияние типа гусеницы и
беговой дорожки на затраты мощно-
сти в гусеничном движителе:
/ — серийная гусеница танка Т-72 (необ-
резнненная, с РМШ последовательного
типа); 2 — гусеница танка T 80 (обрези
пенная с РМШ параллельного типа); 3 —
та же гусеница, но необрезнненная
зависимости N=f(m) получены
Представленные на рис. 9.6
обработкой методом наименьших квадратов результатов расчета
Рис. 9.6. Затраты мощности в
гусеничном движителе отече-
ственных и зарубежных ма-
шин:
/ —БМП-1; 2 — опытная БМП; 3 —
БМП «Мардер»; 4 — танк T 55;
5 — танк Т 64А; 6 — танк Т-72;
7 — танк «Леопард-1»; 8 — танк
Т 80; 9 — танк «Леопард-2»; А, Б
при движении по бетонной доро-
ге со скоростью 30 и 60 км ч соот-
ветственно
затрат мощности в гусе-
ничном движителе ряда
отечественных и зару-
бежных танков и БМП
различной массы. Графи-
ки построены для двух
скоростей движения ма-
шин, что обусловлено
нелинейной зависимостью
затрат мощности от ско-
рости.
237
Степень совершенства конструкции гусеничного движителя
по затратам мощности может быть оценена отклонением расчет-
ного значения от усредненного, выраженного прямыми А и Б.
Так, например, из рис. 9.6 следует, что наиболее совершенной по
критерию затрат мощности является конструкция гусеничного
движителя танка Т-64А.
ЗАКЛЮЧЕНИЕ
В настоящее время большое внимание в отрасли уделяется
отработке систем подрессоривания с элементами управления
упругими и демпфирующими характеристиками, а также с меха-
низмом управления положением корпуса машины, повышающих
подвижность, эргономичность и точность стрельбы с ходу.
Ограниченный объем книги не позволил рассмотреть взаимо-
действие ВГМ с внешней средой (проходимость) и противомин-
ную стойкость их ходовой части.
Совершенствование движителя направлено на уменьшение его
удельной массы, снижение затрат мощности па движение, повы-
шение безотказности, долговечности, противоминной стойкости и
восстанавливаемости в полевых условиях.
Совершенствование ходовой части ВГМ —сложный процесс,
включающий в себя не только разработку новых конструкторских
решений, создание новых материалов, но и применение более со-
временных методов конструирования. Использование вычислитель-
ных машин и систем автоматического проектирования (САПР)
позволяет проводить анализ и синтез различных конструкторских
решений, компоновочных схем ходовой части, выбирая при этом
оптимальные конструкции. Применение САПР при комплексном
подходе к разработке ходовой части ВГМ (с учетом предъявляе-
мых к ней требований, имеющих нередко противоречивый харак-
тер) позволяет быстрее и дешевле найти компромиссное решение.
В настоящее время отдельные программы САПР публикуются
в отраслевой печати.
234
СПИСОК ЛИТЕРАТУРЫ
I. Альтшуль А. Д. Расчетные зависимости при истечении жидкостей боль
шой вязкости. — Вестник инженеров и техников, 1951. № 4, с. 160—163.
2. Антонов А. С. Гусеничные тягачи. Ч. 1, 2. М.: Воениздат/Ч. 1, 1959.
356 с. Ч. 2. 1960 576 с.
3. Башта Т. М. Гидравлические приводы летательных аппаратов. М.: Ма
шиностроение, 1967. 495 с.
4. Беккер М. Г. Введение в теорию систем «Местность—машина». М.: Ма-
шиностроение, 1973. 520 с.
5. Быстроходность танков/А. А Благонравов, А. А. Дмитриев, Д. М. Ка-
минский, Ю. А. Конев и др. Под ред. Л. В> Сергеева. М.: ВАБТВ, 1965 189 с.
6. Буров С. С. Конструкция и расчет танков. М.: Изд. ВАБТВ. 1973. 602 с.
7. Виброударные воздействия на экипажи танков и БМП/Н. И. Бурлачен
ко и др. М.: ЦНИИ информации, 1981. 200 с.
8. Воробьев Н. В. Цепные передачи М.: Машиностроение, 1968 251 с.
9. Дербаремдикер А. А. Гидравлические амортизаторы автомобилей. М.:
Машиностроение, 1969. 236 с.
10. Динамика быстроходного танка/А. А. Благонравов. С. Е. Бурцев,
А А. Дмитриев, А. А. Загудаев и др. Под ред. Л. В. Сергеева. М.: Изд ВАБТВ.
1968. 505 с
II. Дмитриев А. А„ Чобнток В. А.. Тельминов А. В. Теория и расчет нели-
нейных систем подрессоривания гусеничных машин. М.: Машиностроение, 1976.
207 с.
12. Забавников Н. А. Основы теории транспортных гусеничных машин. М.:
Машиностроение. 1975. 448 с.
13. Износостойкость и структура твердых наплавок/М. М. Хрущов и др. М.:
Машиностроение. 1971. 95 с.
14. Козлов А. Г. Опорные катки гусеничных машин. Конструкция и расчет.
М.: Машгиз, 1947. 94 с.
15. Лукомская А. И., Евстратов В. Ф. Основы прогнозирования механиче-
ского поведения каучуков и резин. М.: Химия, 1975. 360 с.
18. Малиновский А. Н. Ходовая часть гусеничных машин. М.: Военнздат.
1963. 119 с.
17. Медведев М. И. Гусеничное зацепление тракторов. Киев: Машгиз, 1959.
249 с.
18. Медико-технические требования к обитаемости объектов бронетанковой
техники. М.: Военнздат, 1975. 38 с.
19. Некрасов Б. Б. Гидравлика и ее применение на летательных аппаратах.
М.: .Машиностроение, 1967. 368 с.
20. Нерсесян М. Г„ Каменцева Ю. В. Бронетанковая техника армий США,
Англии и Франции. М.: Военнздат, 1958. 367 с.
240
21. Несущая способность и расчет деталей машин на прочность/В. Н. Ка-
таев и др М.: Машиностроение, 1975. 488 с.
22. Определение напряжений в опасных сечениях деталей сложной формы/
А В Верховский и др. М.: Машгиз, 1958. 42 с.
23. Орлов П. И. Основы конструирования. Кн. 1. Мл Машиностроение, 1977
623 с.
24. Платонов В. Ф. Гусеничные транспортеры-тягачи Мл Машиностроение,
1978. 350 с.
25. Платонов В. Ф. Динамика и надежность гусеничного движителя. Мл
Машиностроение, 1973. 232 с.
26. Подшипники качения/Р. Д. Бейзельман, Б. В Цыпкин и др. Мл Маши-
ностроение, 1975. 572 с.
27. Попов В. М. Теплообмен в зоне контакта разъемных и неразъемных
соединений Мл Энергия, 1971. 194 с
28. Расчет и конструирование гусеничных машнн/Под ред. И. А. Носова.
Л л Машиностроение, Ленингр. отд-ние, 1972. 559 с.
29. Ратнер С. Б„ Коробов В. И. Механика полимеров. Рига: Зинатне, 1965,
№ 3. с. 93-100.
30. Резниковский М. М„ Л у коме кая А. И. Механические испытания каучу-
ка и резины. Мл Химия, 1968. 500 с.
31. Руководство по эргономическому обеспечению создания военной техни-
ки сухопутных войск (РЭО-СВ-80) Мл боеннздат. 1981. 240 с.
32. Сергеев Л. В. Теория танка. М : Изд. ВАБТВ, 1973. 493 с.
33. Синицын В. В. Подбор и применение пластических смазок. М : Химия.
1969. 376 с.
34. Скотт Дж. Физические испытания каучука и резины: Пер. с англ. Мл
Химия, 1968. 315 с.
35. Талу К. А. Конструкция и расчет танков. Мл Изд. ВАБТВ, 1963. 541 с.
36. Трелоар Л. Физика упругости каучука. Мл Иностранная литература,
1953. 23 с.
37. Цейтлин Н. И., Минц М. В. Вопросы теории зацепления втулочно-ролн
ковых цепей. — В кн.: О цепных передачах/Под ред. Г. Б. Столбина. Мл
Машгиз, 1955, с. 56-63.
38. Юдаев Б. Н. Теплопередача. Мл Высшая школа, 1973. 358 с.
ОГЛАВЛЕНИЕ Стр.
Введение ........................................................ 3
Глава I. Расчет системы подрессоривания........................... 6
1.1. Общие сведения............................................. 6
1.2. Математическая модель системы подрессоривания.............. 9
1.3. Характеристика дорожных условий........................... J5
1.4. Показатели плавности хода................................. 18
1.5. Порядок расчета .......................................... 1®
Глава 2. Подвеска.................................................. 26
2.1. Общие сведения............................................ 26
2.2. Нагруженность торсионных валов ........................... 31
2.3. Расчет шлицевых соединений торсионных валов............... 33
2.4. Расчет динамической упругой характеристики гидропневматнче-
ской рессоры................................................... 39
Глава 3. Амортизаторы.............................................. 49
3.1. Общие сведения............................................ 49
3.2. Расчет н построение характеристик гидравлического амортизатора 54
3.3. Конструкция и расчет ограничителя температуры ............ 61
3.4. Расчет поверхности охлаждения и массы амортизатора . . 70
3.5. Уточненный тепловой расчет демпфирующих элементов 77
3.6. Экспериментальная оценка теплонапряженности амортизаторов 83
Глава 4 Механизм управления положением корпуса..................... 88
4.1. Расчет параметров ходовой части ВГМ при управлении положе-
нием корпуса...................................................... 88
4.2. Влияние положения корпуса на плавность хода и проходимость
ВГМ по основаниям с низкой несущей способностью.................. 100
4.3. Особенности конструирования механизма управления положением
корпуса ВГМ с гндропневматнческой подвеской................. НМ
Глава 5. Гусеницы.................................................... 116
5.1. Общие сведения.............................................. 116
5.2. Принципы проектирования гусениц с резннометаллнческнмн шар-
нирами .......................................................... 119
5.3. Расчет усилий, растягивающих гусеницу .................... 125
5.4. Расчет нагруженности и жесткости резинометаллнческнх шарнн-
5.5. Прогнозирование надежности резинометаллнческнх шарниров 149
5.6. Расчет надежности клеммовых соединений................... 151
Глава 6. Опорные катки............................................... 158
6.1. Общие сведения.............................................. 158
6.2. Расчет резиновых амортизирующих элементов................... 167
242
6.3. Испытания опорных катков....................................
Глава 7. Ведущие колеса..............................................
7.1. Общие сведения.............................................
7.2. Особенности зацепления гусениц с РМШ параллельного типа
7.3. Пути повышения долговечности элементов зацепления . . .
Глава 8. Устойчивость гусениц на ведущих колесах
8.1 Расчетная оценка устойчивости гусениц на ведущих колесах
8.2. Факторы, влияющие на устойчивость гусениц на ведущих колесах
8.3. Автоматическое управление натяжением гусениц ...
8.4. Перспективы развития МАН...................................
Глава 9. Затраты мощности в гусеничном движителе . .
9.1. Общие сведения.............................................
9.2. Расчет затрат мощности в гусенице..........................
9.3. Анализ затрат мощности в различных конструкциях гусеничных
движителей...........................................................
Заключение...........................................................
Список литературы...........•........................................
Стр.
175
193
193
198
206
211
211
217
222
227
229
229
230
239
240
Замеченные опечатки
Страница Строка Напечатано Следует читать
48 11-я снизу тепловыделения и тепловыделения в
161 1-я сверху л я ют зволяют
176 Рис. 6.16 (а, б), по абсциссе 0, 1, 2...5 кН 0, 10, 20...50 кН
211 16-я снизу Поэтому новые... Поэтому необходимы новые...
Редактор В. Н. Быстрова
Технический редактор Н. Н. Скотникова Корректор Л. Е. Сонюшкина
Сдано в набор 28.03.85. Подписано в печать 14.10.85.
Формат 60х90‘/1«. Бумага типографская № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 15,25. Усл. кр.-отт. 15,25. Уч.-изд. л. 16,0.
Зак. 16«с»
Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер,, 4
Типография ведомственная