



































































































































































































































































































































































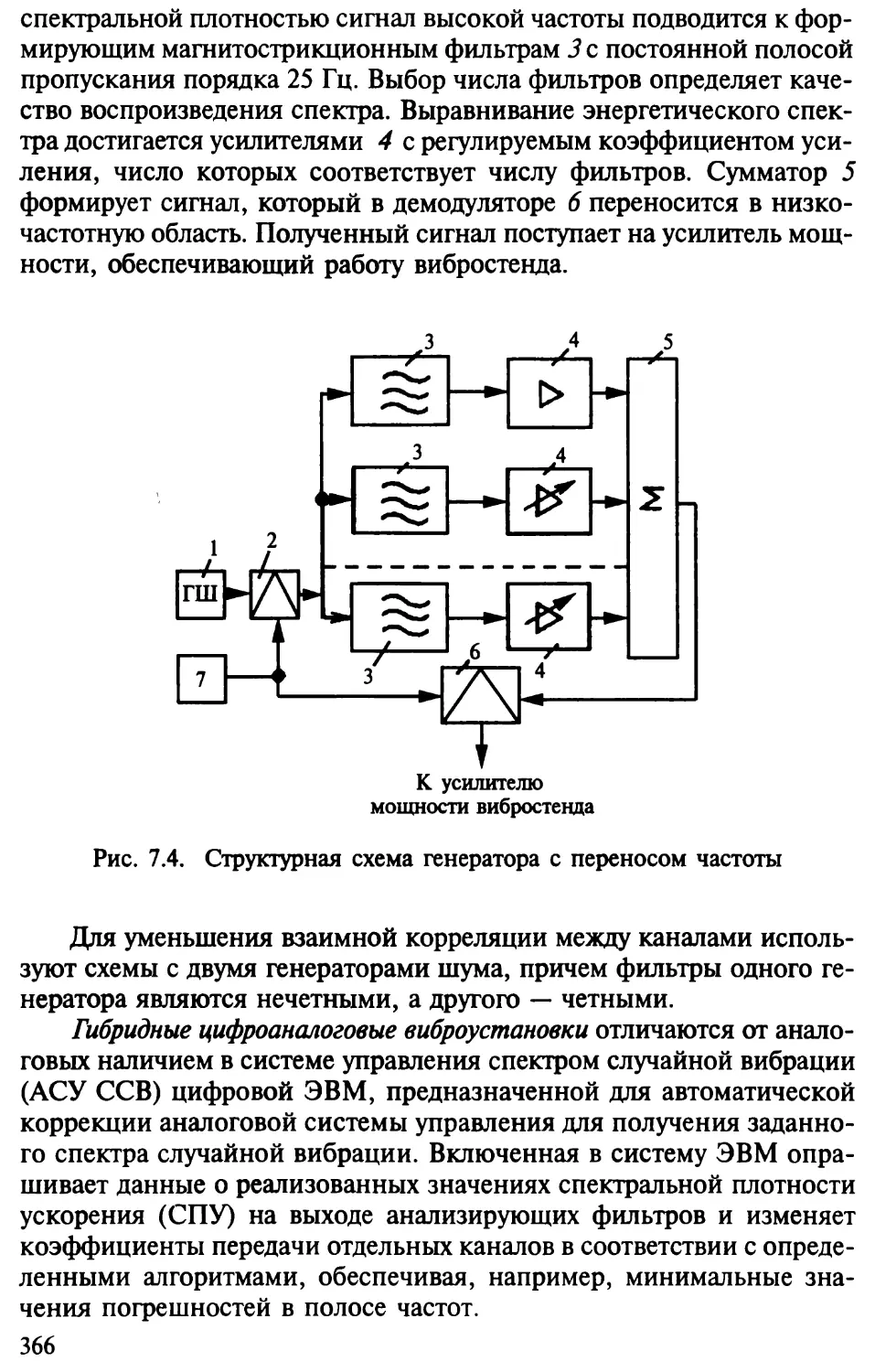





































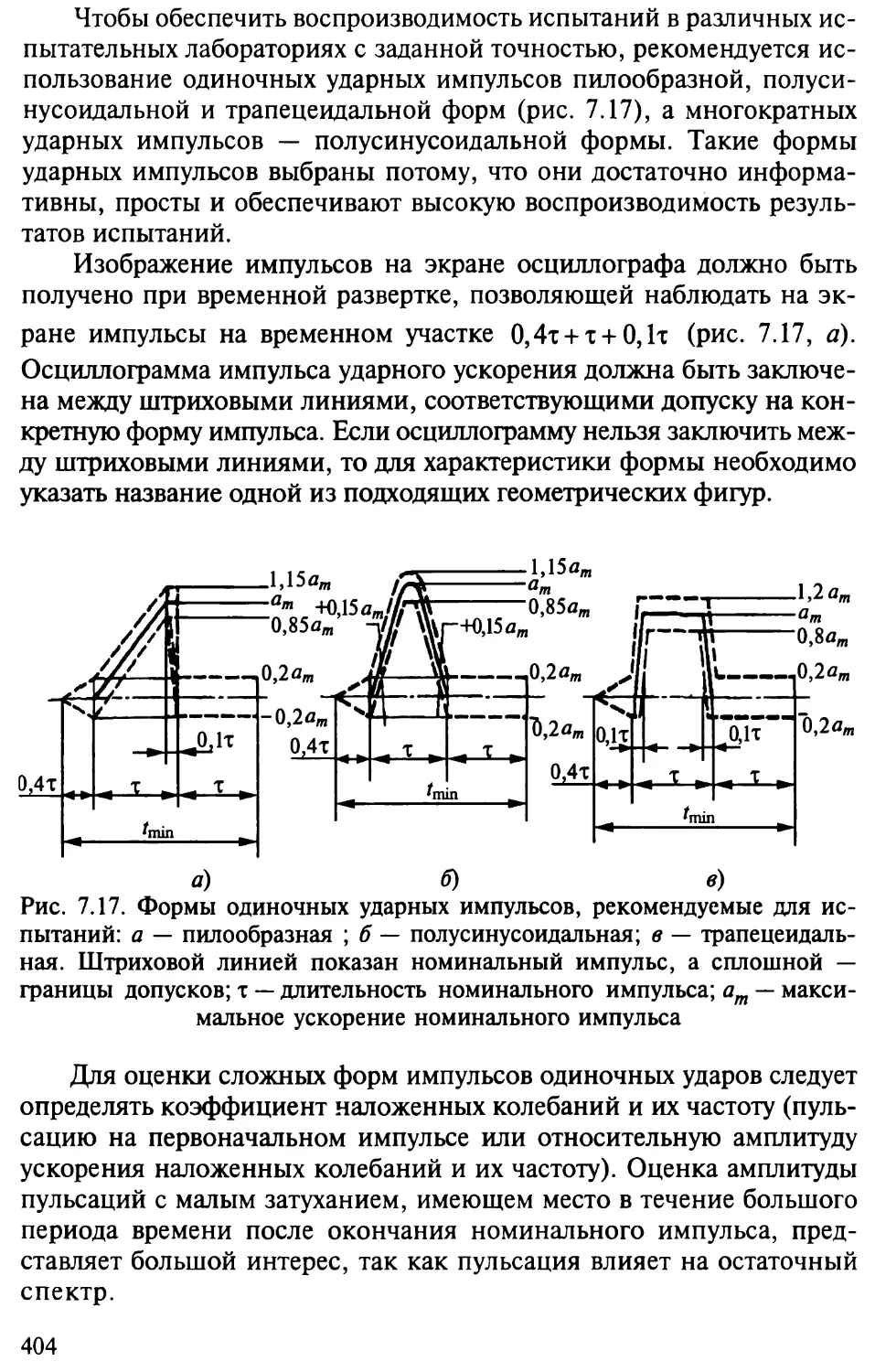



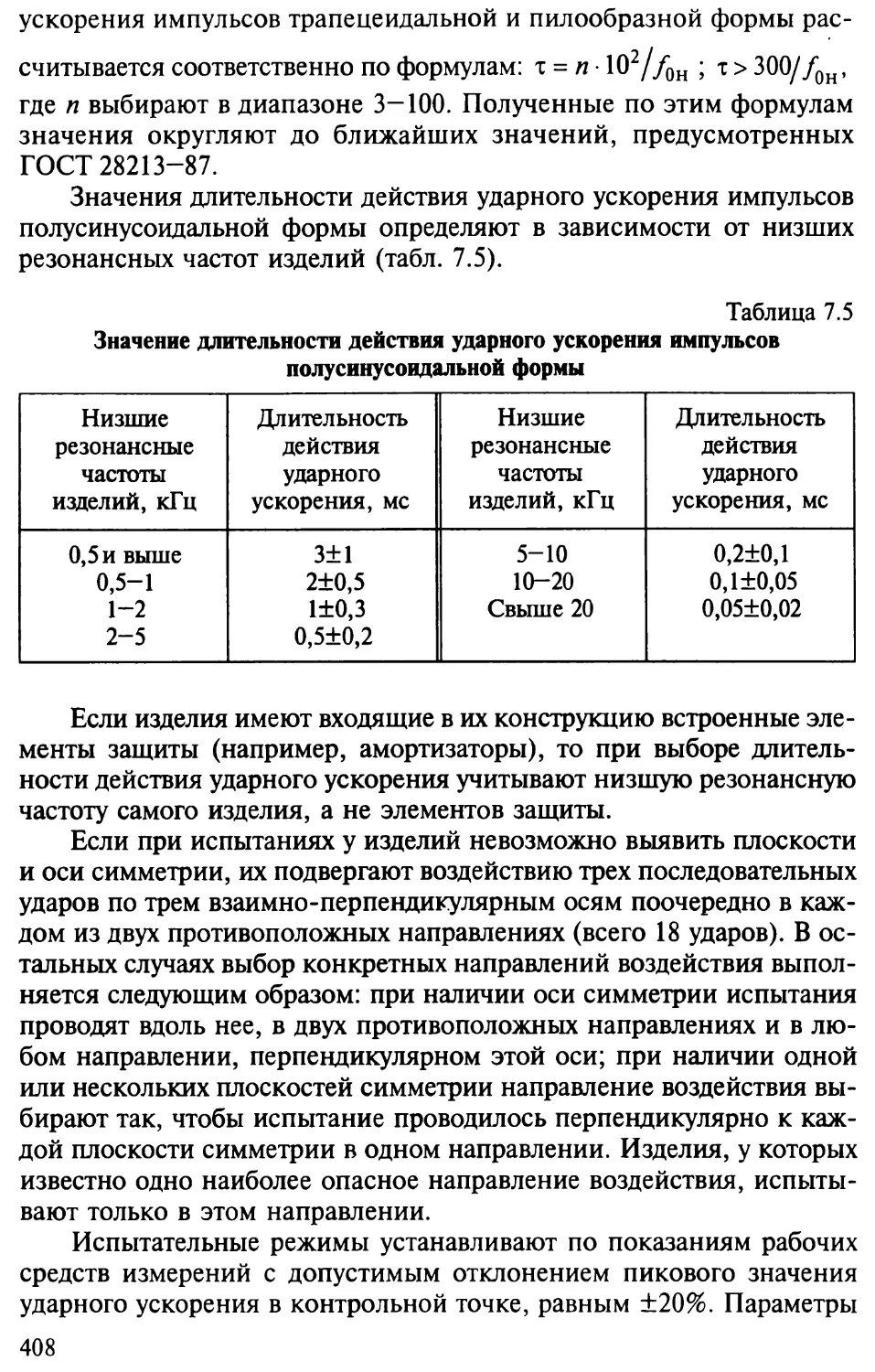


































































































































































































































































































































Author: Кузнецов В.А. Александровская Л.Н. Круглов В.И. Кузнецов А.Г. Кутин А.А. Шолом А.М.
Tags: инженерное дело техника в целом воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиация авиационное оборудование
ISBN: 5-94010-145-3
Year: 2003




Теоретические основы
испытаний
и экспериментальная отработка
сложных технических
систем
Теоретические основы
испытаний и экспериментальная
отработка
сложных технических систем
Допущено Министерством образования Российской Федерации
в качестве учебного пособия для студентов высших
учебных заведений, обучающихся по направлению 552000 -
«Эксплуатация авиационной и космической техники» и
специальности 652700 - «Испытания и эксплуатация
авиационной и ракетно-космической техники»
Москва • «Логос» • 2003
УДК 62.001.4
ББК 39.53
ТЗЗ
Рецензенты:
докт. техн, наук, профессор В.А. Васильев (МАТИ)
докт. техн. наук7£3. Аронов (ВНИИС)
канд. техн, наук, доцент О.Б. Андрейчук (МАИ)
канд. техн, наук, доцент М.Я. Гофин (ОАО НПО «Молния»)
Авторы:
Л.Н. Александровская, В.И. Круглов, А.Г. Кузнецов,
В. А. Кузнецов, А. А. Кутин, А.М. Шолом
ТЗЗ Теоретические основы испытаний и экспериментальная отработка
сложных технических систем / Л.Н. Александровская, В.И. Круглов,
А.Г. Кузнецов и др.: Учеб, пособие. - М.: Логос, 2003. - 736 с.: ил.
ISBN 5-94010-145-3
Рассмотрены основы теории и практики испытаний изделий авиационной
и ракетно-космической техники. С позиций системного подхода показаны роль
и место испытаний в процессе создания сложных и наукоемких изделий. Даны
сведения об испытаниях на воздействие естественных и искусственных фак-
торов жизненного цикла изделий. Освещены вопросы планирования и прак-
тические методики формирования результатов определительных, конт-
рольных и повторных испытаний. Видное место отведено методам повыше-
ния точности и достоверности результатов испытаний путем их комплекси-
рования и сближения имитируемых и реальных эксплуатационных условий.
Для студентов вузов, обучающихся по инженерно-техническим направ-
лениям и специальностям. Представляет интерес для широкого круга специ-
алистов, занимающихся испытаниями, сертификацией и производством слож-
ных технических систем.
ББК 39.53
ISBN 5-94010-145-3
© Л.Н. Александровская, В.И. Круглов,
А.Г. Кузнецов, В. А. Кузнецов,
А.А. Кутин, А.М. Шолом, 2003
© «Логос», 2003
ОГЛАВЛЕНИЕ
Введение................................................11
Часть 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ КОНТРОЛЯ
И ИСПЫТАНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ.......................17
Глава 1. Роль испытаний в процессе проектирования
и создания ЛА....................................... 19
1.1. Этапы жизненного цикла сложных технических
систем.............................................19
1.2. Задачи и организация экспериментальной
отработки ЛА.......................................22
1.2.1. Этапы создания ЛА.........................22
1.2.2. Задачи и содержание наземной отработки ЛА.27
1.2.3. Задачи и содержание летных испытаний ЛА...32
1.3. Основные принципы построения систем контроля
и испытаний ЛА.....................................34
1.4. Экспериментальная отработка как элемент
системы управления качеством.......................38
1.5. Роль испытаний в процессе создания ЛА.........44
Глава 2. Основные понятия и классификация контроля
и испытаний сложных технических систем................48
2.1. Испытания и контроль. Основные термины
и определения......................................48
2.2. Взаимосвязь измерений, контроля и испытаний...53
2.3. Классификация контроля и испытаний............57
2.3.1. Классификация технического контроля.......57
2.3.2. Классификация испытаний...................60
2.4. Обобщенная схема экспериментальной отработки
сложных технических систем.........................84
2.5. Классификация отказов и дефектов сложных
технических систем.................................87
3
Глава 3. Оптимальное планирование
экспериментальной отработки ЛА.........................92
3.1. Современный подход к организации
комплексных программ испытаний ЛА...................92
3.2. Критерий эффективности испытаний.
Математическая модель испытаний.....................95
3.3. Метод оптимального планирования
экспериментальной отработки ЛА......................108
Глава 4. Испытания сложных технических систем
с использованием моделей..............................120
4.1. Цели и задачи моделирования при создании
сложных технических систем..........................120
4.2. Общие сведения об испытаниях
с использованием моделей............................123
4.3. Испытания на основе физического моделирования ..129
4.3.1. Физическое моделирование
объектов испытаний.............................. 129
4.3.2. Физическое моделирование
воздействий на объект испытаний..................132
4.4. Испытания на основе математического
моделирования......................................133
4.4.1. Математические модели.....................133
4.4.2. Основные принципы построения
математических моделей...........................137
4.4.3. Модификация математических моделей........144
4.4.4. Испытания на основе математического
моделирования объектов испытаний.................146
4.5. Комбинированные и другие виды моделей.........150
4.6. Имитационное моделирование сложных систем......156
4.6.1. Формализация сложной системы..............156
4.6.2. Сущность имитационного моделирования......162
4.6.3. Принципы построения универсальной
автоматизированной имитационной модели...........167
4.6.4. Имитация процесса функционирования
сложной системы..................................170
4.6.5. Состав математического обеспечения пакета
прикладных программ АИМ..........................177
Часть II. ИСПЫТАНИЯ НА ВОЗДЕЙСТВИЕ
ФАКТОРОВ И УСЛОВИЙ ЖИЗНЕННОГО ЦИКЛА
ИЗДЕЛИЙ АВИАЦИОННОЙ
И РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ...........................181
Глава 5. Характеристика факторов и условий
жизненного цикла изделий авиационной
и ракетно-космической техники........................183
5.1. Классификация эксплуатационных факторов
по источнику их возникновения......................183
5.1.1. Роль информации об эксплуатационных условиях
в создании летательных аппаратов ...............183
5.1.2. Естественные эксплуатационные факторы....184
5.1.3. Искусственные эксплуатационные факторы...203
5.2. Возмущающие факторы реального полета ЛА.......234
5.3. Стимулирующие и дестабилизирующие
эксплуатационные факторы...........................237
Глава 6. Наземная отработка изделий авиационной
и ракетно-космической техники на воздействие
естественных факторов................................239
6.1. Испытания на воздействие
климатических факторов..............................239
6.1.1. Испытания на воздействие повышенной
температуры внешней среды...................... 239
6.1.2. Испытания на воздействие пониженной
температуры внешней среды........................254
6.1.3. Испытания на воздействие изменения
температуры внешней среды........................265
6.1.4. Испытания на воздействие повышенной
влажности.......................................275
6.1.5. Испытания на воздействие солнечного
излучения.......................................293
6.1.6. Испытания на воздействие пониженного
атмосферного давления...........................302
6.1.7. Испытания на статическое и динамическое
воздействие пыли (песка)........................311
6.1.8. Испытания на воздействие воды............316
6.1.9. Испытания на воздействие атмосферы
с коррозионно-активными агентами................324
5
6.2. Испытания на воздействие
космических факторов..................................333
6.2.1. Испытания на воздействие глубокого
вакуума и пониженной температуры...................333
6.2.2. Испытания на воздействие
микрометеоритных потоков...........................337
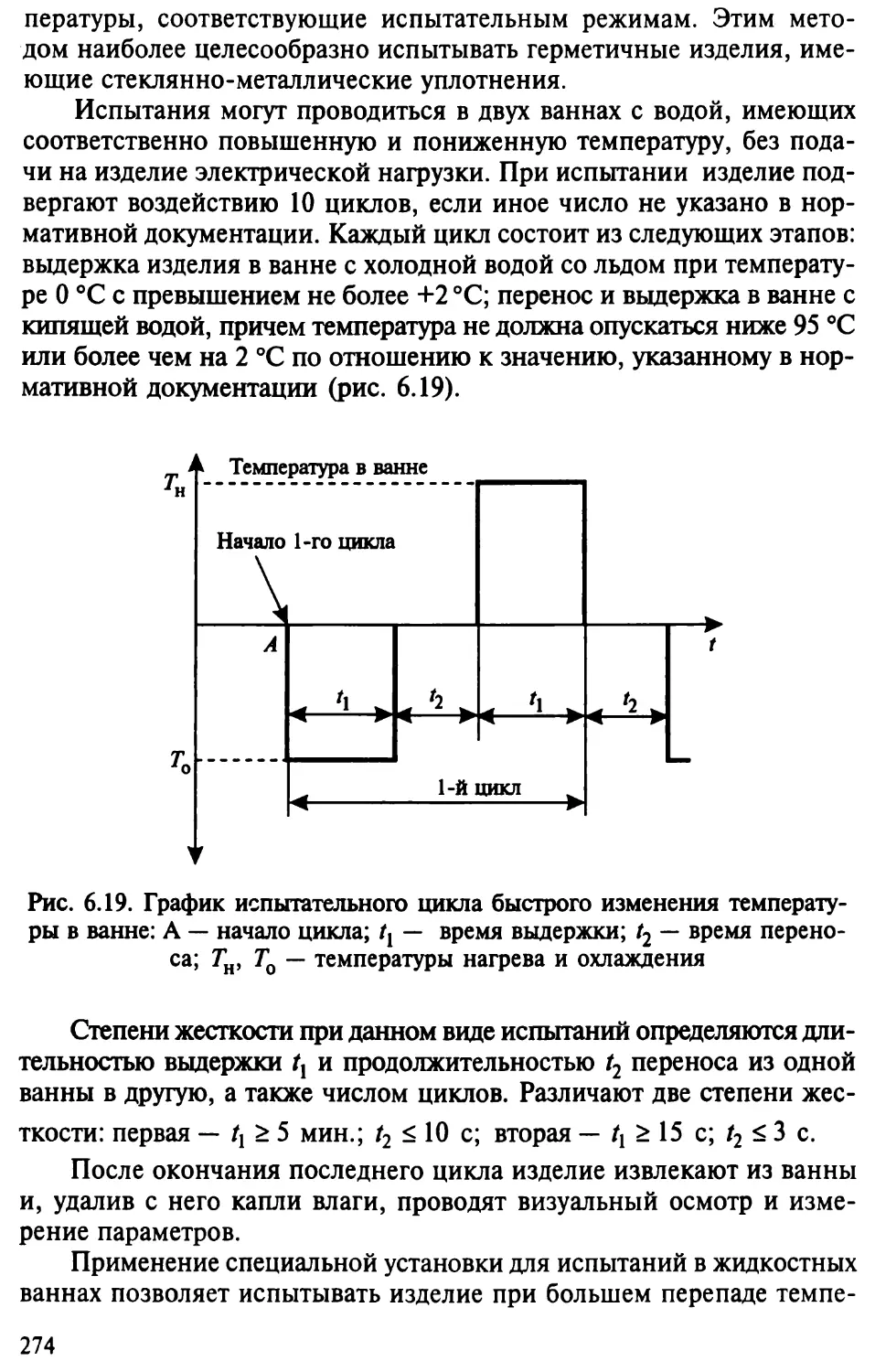
6.2.3. Испытание на невесомость....................339
6.2.4. Испытания на комбинированное
воздействие факторов космического пространства.....342
Глава 7. Наземные испытания изделий авиационной
и ракетно-космической техники на воздействие
искусственных факторов..................................349
7.1. Испытания на воздействие вибрации................349
7.1.1. Условия испытаний
и применяемое испытательное оборудование...........349
7.1.2. Анализ методов и видов виброиспытаний
изделий............................................370
7.2. Испытания на ударные воздействия.................391
7.2.1. Условия испытаний
и применяемое испытательное оборудование...........391
7.2.2. Методы испытаний на ударные воздействия.....399
7.3. Испытания на воздействие
линейных ускорений....................................409
7.3.1. Условия испытаний
и применяемое испытательное оборудование...........409
7.3.2. Методы испытаний на воздействие
линейных ускорений.................................416
7.4. Испытания на воздействие акустического шума......420
7.4.1. Условия испытаний
и применяемое испытательное оборудование...........420
7.4.2. Методы испытаний на воздействие
акустического шума.................................429
7.5. Комбинированные испытания........................433
7.5.1. Условия испытаний на комбинированное
воздействие внешних факторов и применяемое
испытательное оборудование.........................433
7.5.2. Методы проведения комбинированных
испытаний..........................................442
6
Глава 8. Летные испытания авиационной
и ракетно-космической техники...........................452
8.1. Летные испытания изделий
авиационной техники.................................452
8.1.1. Краткий исторический обзор развития
методов летных испытаний самолетов...............452
8.1.2. Методологические основы
летных испытаний самолетов........................457
8.1.3. Методическая подготовка летных испытаний...471
8.1.4. Организация и планирование летных
испытаний опытного самолета.......................480
8.1.5. Управление летным экспериментом
и автоматизация процесса испытаний
опытного самолета.................................487
8.1.6. Сертификационные летные испытания самолета.493
8.2. Летные испытания изделий
ракетно-космической техники..........................501
8.2.1. Содержание задач баллистико-навигационного
обеспечения управления изделий РКТ на этапах летных
испытаний и применения............................501
8.2.2. Летно-технические характеристики ЛА........506
8.2.3. Общие условия летных испытаний
и особенности задач экспериментальной
баллистики ЛА.....................................509
8.2.4. Измерения характеристик состояния
и геофизических условий целевого применения ЛА...511
8.2.5. Характеристика задач баллистического
обеспечения летных испытаний......................513
Часть III. ФОРМИРОВАНИЕ
РЕЗУЛЬТАТОВ ИСПЫТАНИЙ.....................................517
Глава 9. Точностные характеристики
результатов испытаний...................................519
9.1. Обобщенная структурная схема формирования
результатов испытаний................................519
9.2. Точностные характеристики
результатов испытаний...............................524
7
Глава 10. Формирование результатов
определительных испытаний............................536
10.1. Оценивание одномерных стационарных
детерминированных параметров единичного образца.....536
10.1.1. Основные определения и свойства оценок..536
10.1.2. Определение точности оценок одномерных
стационарных детерминированных параметров.......539
10.1.3. Основные понятия статистических гипотез.548
10.2. Робастное оценивание параметров........«.....552
10.3. Сравнительные характеристики и рекомендации
по использованию различных методов получения
результатов определительных испытаний..............558
10.4. Многомерные задачи оценивания..................561
10.5. Методы определения оценок нестационарных
параметров.........................................565
10.6. Учет объема партии продукции.................571
10.7. Оценивание случайных параметров
в партии продукции.................................572
10.8. Принятие решение по результатам
определительных испытаний......................... 575
10.8.1. Проверка гипотез о параметрах нормального
распределения....................................575
10.8.2. Интервальное задание требований
к параметру................................... 581
10.8.3. Подтверждение требований к случайному
параметру........................................582
10.9. Сравнение объемов выборки при оценивании
и проверке статистических гипотез..................584
Глава 11. Формирование результатов
контрольных испытаний............................... 587
11.1. Допусковый контроль..........................587
11.1.1. Основные понятия допускового контроля...587
11.1.2. Показатели достоверности
результатов контроля............................589
11.1.3. Контроль функциональных параметров......590
11.1.4. Контроль сигнальных параметров
и групповой контроль............................608
8
11.1.5. Оценка эффективности допускового контроля.611
11.2. Методы выборочного контроля....................614
11.2.1. Контроль методом однократной выборки......616
11.2.2. Контроль методом двукратной выборки.....620
11.2.3. Контроль надежности методом
последовательного анализа.........................623
Глава 12. Формирование результатов
повторных испытаний...................................627
12.1. Сравнение результатов двух повторных испытаний.. 627
12.2. Сравнение результатов нескольких повторных
испытаний..........................................636
Глава 13. Формирование результатов
испытаний на надежность...............................642
13.1. Основные показатели безотказности............642
13.2. Оценивание показателей надежности............643
13.3. Подтверждение требований к интенсивности
отказов или среднему времени безотказной работы
при автономных испытаниях..........................650
13.4. Подтверждение требований к интенсивности
отказов или среднему времени безотказной работы
при комплексных испытаниях...........................652
13.5. Выбор плана испытаний на надежность............654
13.6. Подтверждение требований к вероятности
безотказной работы...................................656
13.7. Подтверждение требований к вероятности
безотказной работы партии изделий....................659
Глава 14. Методы повышения точности
результатов испытаний..........,......................664
14.1. Системный подход к планированию объемов
испытаний подсистем................................664
14.2. Использование априорной информации
для сокращения объема испытаний....................668
14.2.1. Байесовский метод оценивания............668
14.2.2. Метод линейного объединения оценок......681
14.2.3. Обобщение байесовской оценки
при учете неоднородности объединяемых данных....684
9
14.2.4. Метод параметрических функций...........687
14.2.5. Метод коррелированных процессов.........689
14.2.6. Выбор комбинированного метода оценивания
и рекомендации по его использованию.............691
14.2.7. Планирование объема испытаний
при использовании байесовского метода...........691
Глава 15. Примеры использования точностных
характеристик испытаний при формировании
результатов сертификационных испытаний самолетов......701
15.1. Сертификация авиационной техники
и ее производства..................................701
15.2. Анализ методов подтверждения соответствия
точностных характеристик систем управления
самолетов нормам летной годности...................704
15.3. Анализ методов проверки адекватности
математической модели возмущенного движения
самолета результатам сертификационных
летных испытаний...................................720
Библиографический список................................730
ВВЕДЕНИЕ
Процессы управления характерны для всех этапов жизненного цикла техни-
ческих систем. Основными этапами этого цикла являются научно-исследова-
тельские работы, опытно-конструкторские работы, серийное производство и
эксплуатация. Очевидным является стремление решать все управленческие
задачи на каждом из указанных этапов оптимальным образом. Но для этого
необходимо иметь определенные научно обоснованные рекомендации, ме-
тоды и методики, учитывающие специфику каждого из этапов жизненного
цикла. Последнее означает, что должны быть созданы методологические
основы и соответствующий теоретический аппарат, на которых могли бы
базироваться конструктивные приемы и решения, принимаемые на этапах
жизненного цикла технической системы.
Более детальный анализ жизненного цикла технической системы пока-
зывает, что среди основных событий цикла важное место занимают испыта-
ния. Испытания (ГОСТ 16504-81) — это экспериментальное определение
количественных и (или) качественных свойств объекта испытаний как ре-
зультата воздействия на него при его функционировании.
В процессе производства авиационной и ракетно-космической техни-
ки проводится большое количество различных по сложности испытаний,
начиная от самых простейших — контрольных, затем лабораторных, стен-
довых и наконец до самых сложных — летных.
По мере повышения требований к характеристикам летательных аппа-
ратов (ЛА) и связанного с этим их технического усложнения роль испыта-
ний в процессе изготовления объектов становится все более значительной.
При разработке современных ЛА из-за невозможности получения адекват-
ного теоретического описания примерно до 40% всех возникающих проблем
решаются при помощи испытаний. При этом большая стоимость испыта-
ний и длительность их проведения становятся определяющими в общих зат-
ратах и сроках, необходимых для создания ЛА. Поэтому решение основной
проблемы сокращения сроков создания и стоимости разработки авиацион-
ной и ракетно-космической техники сводится в основном к рациональной
организации процесса ее экспериментальной отработки. Для решения этой
задачи необходимо провести оптимальное планирование испытаний.
В настоящее время можно с определенной степенью уверенности кон-
статировать, что разработаны и существуют теоретические основы оптималь-
ного проектирования технических систем, позволяющие выбирать наилуч-
шие в определенном смысле конструктивные параметры, законы управления
и другие характеристики систем. Но, к сожалению, еще отсутствует прием-
11
лемая теория испытаний и эксплуатации, позволяющая оптимизировать эти
весьма важные этапы жизненного цикла сложной системы.
Вопрос о создании в ближайшие годы теории испытаний сложных тех-
нических систем является чрезвычайно проблематичным. Испытания в це-
лом представляют собой весьма сложный процесс, характеризующийся ог-
ромной разнородностью решаемых задач, многоуровненностью этапов
испытаний, неоднородностью информационных потоков, циркулирующих
в самой системе испытаний, многообразием оцениваемых характеристик
испытываемых систем, наличием ограниченного числа образцов, выделяе-
мых на проведение испытаний, и т.п.
Различают испытания в широком и узком смыслах. Очевидно, что уз-
кий смысл испытаний определяется теми конкретными задачами, которые
решаются с использованием информации, полученной в процессе проведе-
ния испытаний. Такими задачами могут быть доработка системы, уточне-
ние ее математической модели, сдача системы заказчику, контроль состоя-
ния системы, диагностика, оценка характеристик надежности и т.д. Поэтому
можно говорить об испытаниях, связанных с доработкой системы и уточне-
нием ее математической модели, о приемосдаточных испытаниях, об испы-
таниях в целях контроля и т.д.
Основная цель испытаний в широком смысле заключается в получении
информации о состоянии испытываемого объекта или системы. Эта инфор-
мация в дальнейшем может использоваться для решения самых различных
задач.
В любом испытании можно выделить следующие четыре этапа (фазы):
планирование испытания, его проведение, обработка результатов испыта-
ний, анализ полученных результатов и выработка решения. При испытании
сложных дорогостоящих систем анализ результатов испытаний и выработка
решений могут быть разбиты на два самостоятельных этапа.
Планирование является неотъемлемым важнейшим этапом выполнения
любых работ, любых действий. В результате планирования необходимо по-
лучить ответ на вопрос: что, когда и как делать. Планирование предшеству-
ет организации и проведению работ. Оно заключается в составлении про-
граммы действий в пространстве и во времени. Планирование характерно
для всех целенаправленных действий и связано, по существу, с предвари-
тельным принятием решений.
Планирование начинается с уяснения целей и задач, которые необхо-
димо достигнуть и решить в процессе выполнения данной операции (сово-
купности целенаправленных действий системы). Затем разрабатывается ком-
плекс мероприятий, правило выбора способов действий, направленных на
достижение и решение поставленных перед системой целей и задач. При
этом предусматривается и решение вопросов, связанных с распределением
и использованием материальных, временных, финансовых и людских ре-
сурсов. Естественным является требование, чтобы план функционирования
системы был в каком-то смысле наилучшим, оптимальным.
Система испытаний в общем случае является организационной систе-
мой. Основные ее элементы — люди, испытываемые объекты, испытатель-
ное оборудование с соответствующим математическим обеспечением.
12
На этапе планирования испытаний составляется программа, которая
должна включать в себя цель и задачи испытаний, описание объекта испы-
таний, порядок их проведения и обеспечения, объем, последовательность
и методики испытаний, порядок обработки полученных результатов, форму
и порядок отчетности.
Программа испытаний должна создаваться параллельно с созданием
объекта. Более того, в конструкции объекта, в его компоновке должны
быть учтены требования, выдвигаемые испытаниями. При проектировании
уникальных объектов параллельно должно производиться проектирование и
создание специального испытательного оборудования.
Проведение испытаний связано с реализацией во времени и простран-
стве программы испытаний. При этом вследствие ряда причин возможны
«возмущения» программы. Поэтому испытатели должны быть готовыми к
необходимости выработки и принятия обоснованного оперативного реше-
ния для коррекции программы или компенсации влияния возмущающих
воздействий. Как правило, оптимальность этих мероприятий в значитель-
ной мере определяется наличием временных, людских и материальных ре-
зервов (испытываемые объекты, испытательное оборудование), которые
должны быть предусмотрены на этапе планирования испытаний.
Между этапами обработки и анализа результатов испытаний не всегда
можно провести четкую границу. Порой разделение этих этапов является
весьма условным и во многом определяется характером испытаний и слож-
ностью испытываемого объекта. Общим для обоих этапов является то, что
на них производится преобразование информации. На этапе проведения
испытаний информация получается (добывается), на двух последующих эта-
пах она преобразуется (обрабатывается).
Во многих испытаниях этап обработки полученных результатов можно
увязать с первичной (предварительной) их обработкой, при которой произ-
водится предварительное осреднение данных, исключение из обработки
аномальных измерений и т.д. В общем случае под первичной обработкой
можно понимать процесс получения и представления (интерпретации) ста-
тистических характеристик результатов прямых измерений, получаемых при
испытаниях. Такими характеристиками могут быть математические ожида-
ния, дисперсии, среднеквадратические отклонения (СКО), корреляцион-
ные моменты или функции, законы распределения, показатели, отражаю-
щие свойства точечных и интервальных оценок статистических характеристик
и т.д. Все эти характеристики могут быть представлены в виде массивов
чисел в памяти ЭВМ, таблиц, графиков.
Полученные таким образом результаты первичной обработки использу-
ются на этапе анализа для решения задач вторичной обработки. При вто-
ричной обработке находятся оценки интересующих испытателей характери-
стик и параметров объекта или процесса его функционирования и
вырабатываются решения, рекомендуемые администрации. Обычно эти ха-
рактеристики и показатели связаны с измеряемыми переменными извест-
ными соотношениями. При вторичной обработке эти соотношения исполь-
зуются для нахождения искомых величин. Примерами таких величин могут
быть показатели надежности или эффективности функционирования, струк-
тура и параметры математической модели объекта и т.д.
13
По результатам вторичной обработки с учетом требований, предъявля-
емых к характеристикам объекта, испытатели рекомендуют администрации
те или иные решения.
Иногда испытательный режим объекта совмещается с рабочим. Это
характерно для мелкосерийных или уникальных объектов, например для
искусственных спутников Земли. В этих условиях различают оперативную
(экспресс) и полную обработку информации. Как оперативная, так и пол-
ная обработка включает в себя первичную и вторичную обработки. В этом
случае трудно выделить во времени этапы сбора и анализа результатов испы-
таний. Этап анализа завершается выработкой решения, т.е. обоснованных
предложений руководителям (администрации) испытаний, которые учиты-
вают эти предложения при принятии административных решений.
Теория испытаний изучает закономерности построения и функциони-
рования системы испытаний. Основные научные проблемы этой теории
связаны с разработкой и исследованием моделей объектов, средств и про-
цесса испытаний.
В настоящее время в основу планирования любой операции, как пра-
вило, закладывается принцип оптимальности. Для реализации этого прин-
ципа необходимо иметь показатель эффективности функционирования сис-
темы и модель. При решении задач планирования работы сложных систем,
какой является система испытаний, приходится использовать математичес-
кую модель. В связи с указанным выше на этапе планирования испытаний
следует в первую очередь выбрать и обосновать показатели и критерии эф-
фективности испытаний, а также построить математическую модель испы-
таний. Данная проблема является достаточно сложной, и пока еще должно-
го освещения в научно-технической литературе не получила. Кроме того,
на этом этапе должна быть построена математическая модель и испытывае-
мого объекта.
Модель испытываемого объекта используется для определения и обо-
снования видов, объемов и последовательности испытаний, для выбора
измеряемых и контролируемых переменных и параметров, для обоснования
вида и характеристик тестовых (испытательных) сигналов и т.д.
Методы решения перечисленных задач в значительной мере определя-
ются типом модели и объемом имеющейся априорной информации о харак-
теристиках объекта.
На этапе планирования испытаний, кроме перечисленных, решается
масса других научно-технических, научно-организационных проблем и за-
дач, к числу которых можно отнести: сбор априорной информации и обо-
снование методов ее учета в процессе проведения испытаний и обработки их
результатов; определение форм отчетной документации; предварительный
выбор методов обработки информации, получаемой при испытаниях; под-
готовка вариантов принятия решений при типовых ситуациях.
При проведении испытаний начинается реализация их программы, осу-
ществляется сбор информации об испытываемом объекте и его функциони-
ровании. Вполне естественным является требование получения максимума
информации при затрате ограниченных материальных и временных ресур-
сов. В процессе испытаний в основном решаются организационные вопро-
14
сы. Система испытаний при этом функционирует как некоторая система
управления производственной и организационной деятельностью коллекти-
вов людей. С этих позиций процесс выполнения испытаний может рассмат-
риваться как система организационно-технического управления.
Научная проблематика и теория организационно-технических систем еще
только формируются в рамках общей теории управления. Некоторые подси-
стемы указанной системы могут быть рассмотрены и описаны как системы
массового обслуживания.
Многие научные проблемы, возникающие при исследовании системы
испытаний, связаны с наличием в этой системе людей. Функции людей
при испытаниях могут быть весьма разнообразными (от оператора до руко-
водителя испытаниями). Построение модели поведения каждого человека,
каждой человеко-машинной (эргатической) подсистемы и всей организаци-
онно-технической системы — весьма сложная задача, решение которой не-
возможно без привлечения усилий специалистов различных научных направ-
лений (теории управления, кибернетики, психологии, медицины).
Для испытаний, как правило, характерны динамичность, ограничен-
ность временных ресурсов, оперативность. В то же время, как уже было
отмечено выше, оптимальная запланированная программа испытаний на
практике непрерывно возмущается. В этих условиях эффективной является
та система испытаний, которая вовремя компенсирует влияние возмущаю-
щих воздействий или корректирует программу испытаний за счет выработки
оперативных управленческих решений.
Научные проблемы, решаемые на этапах обработки результатов изме-
рений, связаны с выбором математических моделей объекта испытаний,
тракта передачи и обработки измерительной информации, с обоснованием
оптимальных методов обработки информации, соответствующего математи-
ческого обеспечения вычислительной техники и средств отображения ин-
формации и т.д.
На этапе анализа и выработки решения первостепенными задачами яв-
ляются определение показателей и критериев оценки результатов испыта-
ний, выбор методов идентификации, технической диагностики, методов
прогнозирования технического состояния объекта.
Таким образом, идеальным вариантом книги был бы вариант, в кото-
ром бы последовательно описывались теоретические и организационные ос-
новы всех этапов испытаний. Авторы поставили перед собой более скром-
ную задачу: показать роль испытаний в процессе создания изделий
авиакосмического комплекса, описать две основные группы испытаний —
наземные и летные, предложить математическую модель и сформулировать
понятие эффективности испытаний, наметить пути повышения эффектив-
ности испытаний — оптимальное планирование испытаний и повышение
точности и достоверности их результатов путем комплексирования результа-
тов отдельных вычислительных и физических экспериментов.
Учитывая, что объекты авиационной и ракетно-космической техники и
их системы в процессе разработки проходят ряд различных по сложности
взаимосвязанных испытаний, планирование их должно быть комплексным,
охватывающим полный цикл испытаний, проводящихся на всех этапах из-
15
готовления объекта. Используя такой подход, представляется возможным
определить объем каждого испытания, установить критерий его закончен-
ности и готовности объекта для перехода к последующим испытаниям.
Испытания авиационной и ракетно-космической техники, проводящи-
еся в процессе ее экспериментальной отработки, можно разбить на две ос-
новные группы — наземные и летные. Для каждой из этих групп характерны
свои специфические особенности как организации испытаний, так и мето-
дики их проведения.
В результате комплексного планирования испытаний устанавливаются
необходимые объемы наземной и летной отработки, обеспечивающие полу-
чение требуемой оценки эффективности разрабатываемого объекта при наи-
меньших затратах средств и времени.
Из-за сложности и высокой стоимости авиационной и ракетно-кос-
мической техники изготавливать большие партии объектов для летных ис-
пытаний нецелесообразно. Это обстоятельство ограничивает возможность
определения эффективности объекта путем статистической обработки экс-
периментального материала, полученного только при летных испытаниях,
и требует разработки комбинированных методов, учитывающих информа-
цию об объекте, накопленную в процессе предшествующих испытаний и
теоретических расчетов. От полноты и достоверности этой априорной ин-
формации зависит число летных испытаний, необходимое для определения
требуемого показателя эффективности объекта.
Таким образом, из всего сказанного выше следует, что основной це-
лью книги является изложение основ системного подхода к испытаниям
изделий авиакосмического комплекса.
Данная работа была выполнена в рамках Программы «Научные исследо-
вания высшей школы по приоритетным направлениям науки и техники»
(раздел «Менеджмент качества, безопасность и конкурентоспособность про-
дукции») Министерства образования Российской Федерации при финансо-
вой и научной поддержке Московского института электромеханики и авто-
матики.
ЧАСТЬ I
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
КОНТРОЛЯ И ИСПЫТАНИЙ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Глава 1
РОЛЬ ИСПЫТАНИЙ В ПРОЦЕССЕ
ПРОЕКТИРОВАНИЯ И СОЗДАНИЯ ЛА
1.1. Этапы жизненного цикла
сложных технических систем
Создание таких больших и сложных технических систем (СТС), как
изделия авиационной и ракетно-космической техники, неразрывно
связано с совершенствованием и развитием методов обеспечения тре-
буемого уровня их безопасности и надежности, начиная от разработ-
ки тактико-технических требований, технических условий на проек-
тирование и производство и кончая их комплексными испытаниями
и эксплуатацией.
Несмотря на разнообразие назначения, состава и условий ис-
пользования, все сложные технические системы обладают некоторы-
ми основными общими свойствами, позволяющими объединять их в
один класс. К таким общим свойствам относятся целостность, эмер-
джентность, иерархичность и конечность.
Целостность подразумевает целенаправленную работу всех ком-
понентов СТС как единого целого для выполнения системой ее на-
значения.
Эмерджентность определяет появление у СТС свойств, которые
не присущи ее компонентам. Эти свойства вызваны нелинейностью
как характеристик самой системы, так и связей между этими харак-
теристиками и характеристиками ее компонентов.
Иерархичность структуры СТС понимается как возможность пред-
ставления системы как части суперсистемы более высокого уровня
иерархии, а любой ее части — как системы более низкого уровня.
Конечность СТС указывает на конечность потребных для ее созда-
ния ресурсов, т.е. принципиальную ее реализуемость.
Помимо указанных свойств СТС присущи высокая стоимость и
многоцелевой характер. В стоимость СТС включаются затраты на ее
19
создание, производство и эксплуатацию. Многоцелевой характер СТС
приводит к необходимости описывать ее свойства рядом показате-
лей, требования к которым нередко оказываются противоречивыми.
Общий характер свойств СТС определяет универсальность разра-
ботанных в настоящее время методов системного проектирования и
возможность их использования при разработке конкретных систем.
Жизненный цикл СТС протекает в рамках организационной струк-
туры — НИИ, КБ, промышленных предприятий и эксплуатирующих
организаций.
Формирование концепции (общего замысла системы) производит-
ся в НИИ. Основой его является внешняя информация, задаваемая
директивно на основании анализа развития отрасли.
В ходе формирования концепции формулируется назначение
СТС, общая идея возможной ее организации, определяются харак-
теристики среды и необходимые ресурсы, формируется понятие эф-
фективности системы и устанавливаются показатели эффективнос-
ти. Этап заканчивается разработкой технического задания (ТЗ),
являющегося основанием для начала проектирования системы.
Проектирование осуществляется в КБ. Цель проектирования со-
стоит в разработке оптимального варианта организации СТС, техни-
ческой документации, необходимой для производства системы на
предприятиях, в создании опытных образцов подсистем и подготовке
технической документации для серийного производства.
На этапе проектирования определяется возможность реализации
принятых при формировании решений (моделирование, макетирова-
ние и испытания макетов подсистем), а также разрабатывается мето-
дика испытаний и выбирается испытательная аппаратура.
По разработанной технической документации опытное производ-
ство КБ осуществляет выпуск опытной партии. В процессе опытно-
го производства все подсистемы подвергаются тщательным испыта-
ниям как в цехах опытного производства, так и на специальных
испытательных полигонах в условиях, максимально приближенных к
реальным эксплуатационным условиям. Цель этих испытаний — об-
наружение возможных несоответствий СТС технической документа-
ции и экспериментальная отработка как самой системы, так и техни-
ческой документации на соответствие требованиям ТЗ.
Этап серийного производства начинается с внедрения техничес-
кой документации на заводы промышленности. При этом вносятся
изменения, отражающие конкретные особенности серийного завода.
По откорректированной технической документации на серийном
заводе осуществляется выпуск установочной партии. Ее назначение
— проверка качества откорректированной для серийного производ-
ства технической документации и выявление «нестыковки», которая
20
может отразиться на качестве серийных образцов. Выпуск установоч-
ной партии завершается ее испытаниями в условиях испытательного
полигона или эксплуатации. Техническая документация, откоррек-
тированная по результатам испытаний установочной партии, исполь-
зуется для серийного выпуска систем. Серийные системы проходят
цикл лабораторных (стендовых и полигонных) испытаний. При удов-
летворительных результатах испытаний принимается решение о при-
нятии системы в эксплуатацию, после чего она транспортируется к
месту ее эксплуатации.
Основная задача этапа эксплуатации состоит в достижении целей
создания системы, что обеспечивается поддержанием ее параметров
на уровне, определенном технической документацией. В ходе эксп-
луатации проводятся эксплуатационные испытания, текущий ремонт
и модернизация. Информация, получаемая в процессе эксплуата-
ции, поступает в разрабатывающие организации и на серийное про-
изводство, где она используется для создания новых и модернизации
существующих систем с целью улучшения их качества.
Таким образом, функции основных этапов создания новых из-
делий в настоящее время распределяются следующим образом:
• заказчик задает требуемый уровень безопасности и надежности
изделия в тактико-технических требованиях и технических ус-
ловиях на его проектирование;
• конструкторы закладывают требуемый уровень безопасности и
надежности в проектируемое изделие, используя при этом со-
временные принципы и методы рационального конструирова-
ния, методы обеспечения высокого уровня технологичности
проектируемых объектов, а также проводя комплекс наземных
и летных испытаний для экспериментального подтверждения
правильности выбранных технических решений при создании
изделий;
• опытное производство обеспечивает уровень безопасности и на-
дежности, заложенный в конструкцию изделия с использова-
нием современных достижений (в области разработки и реали-
зации технологических процессов изготовления, контроля и
заводских испытаний изделия), повышающих точность и ста-
бильность производства;
• эксплуатация (включая транспортирование, хранение, запуск
и управление полетом) сохраняет заданный заказчиком, зало-
женный конструкторами и обеспеченный в процессе производ-
ства уровень безопасности и надежности изделия, с использо-
ванием современных методов технического эксплуатационного
обслуживания по фактическому состоянию и др.
21
1.2. Задачи и организация
экспериментальной отработки ЛА
1.2.1. Этапы создания ЛА
С появлением новых задач, которые должны решаться с помощью
ЛА, а также ростом технических возможностей промышленности воз-
никает необходимость в создании принципиально новых или модер-
низации старых образцов летательных аппаратов. В связи с возмож-
ностью относительно быстрой реализации достижений
научно-технической революции существенно возрастают требования,
предъявляемые к ЛА рассматриваемого класса, а это в свою очередь
приводит к моральному старению образцов еще до наступления их
физического износа. В связи с этим, при проектировании ЛА ре-
сурс вновь создаваемых образцов обычно не превышает существенно
период морального старения, составляющий примерно десять лет.
Таким образом, раз в десять лет приходится разрабатывать новый
образец каждого типа ЛА. Однако его создание и использование свя-
зано с заменой большого количества оборудования, сооружений,
средств управления и других элементов, составляющих вместе со все-
ми ЛА данного типа сложную систему. В такой системе летательные
аппараты могут быть даже не самой сложной и дорогостоящей частью.
Поэтому при создании системы, способной выполнять новые
задачи, стремятся модернизировать ее основную часть — летатель-
ный аппарат, сохраняя, по возможности, без изменений вспомога-
тельное оборудование, сооружения и технологию эксплуатации. Та-
кой подход позволяет в короткие сроки при сравнительно малых
затратах создавать системы с ЛА, способные решать более сложные
задачи.
Модернизация ЛА обычно производится через несколько лет,
причем для вновь разрабатываемого (базового) образца должна пре-
дусматриваться возможность проведения двух-трех модернизаций.
Процесс создания нового образца техники состоит из следующих
этапов: разработки технического задания; оформления технических пред-
ложений; эскизного проектирования; технического проектирования. Та-
кое деление процесса в основном учитывает специфику производства
изделий крупными сериями. При сложившейся практике разработки
сложных ЛА, выпускаемых мелкими партиями, главными являются
не только вопросы производства, но и опытной отработки первых
образцов, а также введение в эксплуатацию всей системы. В связи с
этим содержание, а следовательно, и названия этапов создания ЛА
несколько изменяются.
22
Так, принято различать периоды разработки, производства и
эксплуатации системы ЛА. Первые два периода часто объединяют
понятием «создание системы ЛА». Процесс разработки состоит из
ряда этапов: тактико-технического задания (ТТЗ); эскизного и техни-
ческого проектирования; наземной и летной отработки. Иногда пер-
вые два этапа называют периодом проектирования образца, а после-
дние два — экспериментальной отработкой.
Совместные исследования и проработки заказывающих и проек-
тирующих организаций позволяют определить круг задач и способы
их решения системами, включающими ЛА определенного типа. Ана-
лиз принципов и условий использования ЛА позволяет определить
требования к характеристикам образца, а также их примерное необ-
ходимое количество.
На этой основе предполагаемая головная организация (как пра-
вило, фирма, разрабатывающая ЛА и всю систему в целом) прово-
дит проектные разработки, оформляемые в виде аванпроекта или тех-
нических предложений. Обычно, если позволяют возможности,
аванпроекгы выполняются двумя-тремя организациями на конкурс-
ных началах. После рассмотрения и экспертизы аванпроекгов окон-
чательно утверждается ТТЗ или тактико-технические ц
назначаются головная и смежные организации, отвечающие за со-
здание нового или модернизируемого образца (системы) в требуемые
сроки при определенных затратах средств и времени.
Систему ЛА, как и всякую сложную систему, можно представить
рядом иерархических уровней. В качестве примера рассмотрим струк-
туру системы ракетных ЛА (рис. 1.1). К первому уровню относят
саму систему в целом или один комплекс системы, включающий сле-
дующие составные части (входящие в состав второго уровня): один
или группу летательных аппаратов; комплекты наземного оборудова-
ния и вспомогательных технических систем; сооружения и средства
управления, необходимые для обслуживания, подготовки и проведе-
ния пусков ЛА. Как правило, при создании системы сначала отраба-
тывают один опытный комплекс, который, кроме перечисленных
выше составных частей, содержит системы телеметрических и внеш-
нетраекторных измерений, необходимые для проведения летных ис-
пытаний.
На третьем уровне располагаются основные элементы, представ-
ляющие системы и агрегаты составных частей комплекса. Основные
элементы могут проектировать и отрабатывать специализированные
фирмы. Так, ракетный летательный аппарат обычно разбивают на
следующие основные элементы: корпус, двигательные установки,
систему управления, полезный груз. К четвертому уровню относят
составляющие элементы, т.е. агрегаты, узлы, приборы, стойки и
Система ЛА (комплекс)
Рис. 1.1. Структура системы ракетных летательных аппаратов
т.п., формирующие основные элементы. Наконец пятый уровень —
это комплектующие элементы, т.е. детали и мелкие сборки, входя-
щие в составляющие элементы.
На этапе эскизного проектирования головная проектная органи-
зация на основе аванпроекта и ТТЗ разрабатывает для смежных фирм
технические задания на составные части системы и основные эле-
менты ЛА. В соответствии с ТЗ проводятся анализ и выбор конст-
руктивных схем, необходимые проектные расчеты. Решения обосно-
вываются в ходе имитации рабочих процессов узлов, агрегатов и систем
в лабораторных условиях, а также математического моделирования
на ЭВМ. Одновременно подготавливается документация на произ-
водство макетов ЛА и опытных образцов двигателей, на системы уп-
равления, отсеки (ступени). На этом заканчивается собственно про-
24
ектирование, т.е. выполнение в основном расчетных работ. Таким
образом, этап эскизного проектирования завершается подготовкой
первых опытных образцов составных частей комплекса для наземной
отработки.
Вся система экспериментальной отработки строится на последо-
вательных испытаниях изделий все более высоких иерархических уров-
ней. Так, после успешной отработки комплектующих и составляю-
щих элементов (например, клапанов двигателей, приборов системы
управления, конструкций отсеков) переходят к испытаниям основ-
ных элементов (двигателей, системы управления, корпуса ступени).
На завершающих этапах испытывают целиком ЛА и опытный комп-
лекс.
В ходе экспериментальной отработки ЛА осуществляется боль-
шое количество испытаний, отличающихся задачами, объектами и
условиями (режимами) проведения. Наземная отработка состоит из
наземных автономных испытаний (НАИ) основных элементов на спе-
циальных стендах, наземных комплексных испытаний (НКИ) летатель-
ного аппарата и наземных полигонных испытаний (НПИ) комплекса.
Летная отработка ЛА, как правило, включает два этапа: летно-кон-
структорские испытания (ЛКИ) и зачетные летные испытания (ЗЛИ).
В процессе экспериментальной отработки изготовление образ-
цов основных элементов ЛА, предназначенных для испытаний, вы-
полняют по документации, разработанной в эскизном проекте. На
основании информации, получаемой в ходе испытаний, конструк-
цию ЛА совершенствуют, что находит отражение и в рабочих черте-
жах опытных образцов. После окончания ЛКИ, по существу, завер-
шается корректировка эскизного проекта. Однако для сокращения
сроков создания нового образца уже в ходе ЛКИ готовится техничес-
кая документация на серийное производство (технического проекта)
всех составных частей комплекса. Одновременно завершается отра-
ботка эксплуатационной документации, разворачивается строитель-
ство сооружений, необходимых для функционирования системы,
проводится подготовка специалистов-эксплуатационщиков.
Результаты ЗЛИ вместе с данными, полученными в ходе ЛКИ,
позволяют решить вопрос о пригодности вновь созданного комплекса
для использования по назначению. Комиссия, проводящая летные
испытания, определяет перечень замечаний, после устранения кото-
рых отработанная система передается в серийное производство.
По завершении летной отработки, как правило, в течение сро-
ка, согласованного заказывающими и проектирующими организаци-
ями, опытный комплекс находится в эксплуатации. Недостатки,
вскрываемые в этот период, устраняются за счет проведения дорабо-
ток конструкции и документации на серийное производство, а также
25
внесения изменений в технологию эксплуатации. Решение о прове-
дении доработок введенных в эксплуатацию комплексов принимают
с учетом целесообразности и возможности выполнения таких работ.
Серийное производство ЛА обычно организуется на заводах,
имеющих значительно большие мощности, чем опытное производ-
ство. Для отладки технологического процесса на серийном заводе
назначается выпуск установочной партии изделий, качество которых
тщательно контролируют. После успешных летных испытаний образ-
цов, отобранных из установочных партий, окончательно отрабатыва-
ют технологию производства И методы контроля серийной продук-
ции, включающие обычно и летные испытания изделий от каждой
партии ЛА.
Серийно выпускаемая продукция вводится в эксплуатацию по
специальным планам, учитывающим необходимость расширения со-
здаваемой системы, а также возможности промышленности по ее
производству.
В процессе эксплуатации системы возможна доработка конст-
рукции и технологии использования комплексов, а также проведе-
ние плановых и внеплановых регламентных работ, направленных на
поддержание или улучшение характеристик изделий. В этих работах
наряду со специалистами по эксплуатации участвуют представители
проектных организаций и заводов-изготовителей продукции.
Рассмотренные выше этапы создания системы ЛА с точки зре-
ния затрат средств и времени далеко не равноценны. Так, если рас-
смотреть расходы, связанные с выполнением программы по созда-
нию и эксплуатации (в течение 5—10 лет) системы ЛА, то на
разработку ТТЗ и эскизное проектирование расходуется не свыше не-
скольких процентов средств, на наземную и летную отработку — до
20—40% и на эксплуатацию — 10—20%. Для некоторых программ,
связанных с созданием нескольких уникальных комплексов, длитель-
ная эксплуатация которых не предусмотрена, расходы на экспери-
ментальную отработку составляют до 90%. Соответственно и дли-
тельность экспериментальной отработки ЛА существенно превышает
продолжительность этапа проектирования.
В методах создания новых образцов сложных ЛА явно наметилась
следующая тенденция. Углубленное исследование физической сущ-
ности процессов, происходящих при работе ЛА, быстрый рост воз-
можностей моделирования и вычисления характеристик этих процес-
сов на ЭВМ, разработка и использование стохастических методов
описания основных физических явлений — все это способствует улуч-
шению качества проектирования и, следовательно, сокращению объе-
мов экспериментальной отработки.
26
Однако практика показывает, что с увеличением сложности об-
разца или системы неуклонно растет доля расходов средств и время
на их экспериментальную отработку, что заставляет более подробно
анализировать процесс экспериментальной отработки, искать его
аналитические или логические модели, определять возможности уп-
равления процессом и на этой основе оптимизировать его ход.
Рассмотрим задачи и содержание экспериментальной (наземной
и летной) отработки на примере ЛА ракетного типа.
1.2.2. Задачи и содержание наземной отработки ЛА
Как указывалось выше, наземная отработка включает в себя: назем-
ные автономные испытания (НАИ) основных элементов; наземные
комплексные испытания (НКИ) летательного аппарата или групп
основных элементов; наземные полигонные испытания комплекса
(НПИ).
Основная задача НАИ — качественная проверка работоспособно-
сти и оценка надежности основных агрегатов и систем ЛА. Успешное
завершение НАИ позволяет считать системы подготовленными к ком-
плексным испытаниям в составе ЛА или его ступени. Автономным
испытаниям подвергаются двигатели, системы управления, конст-
рукции отсеков, системы питания топливом летательных аппаратов с
жидкостными ракетными двигателями (ЖРД), системы разделения
ступеней и т.д. Испытания проводят на натурных опытных образцах,
при этом условия их работы в составе ЛА моделируются неполнос-
тью. Для проведения испытаний
рудуют специальные лаборато-
рии и стенды, представляющие собой иногда уникальные дорогосто-
ящие сооружения. В связи с этим НАИ и НКИ, для проведения
которых также строят специальные стенды, называют стендовыми
испытаниями.
Автономные испытания обычно разделяют на конструкторско-
доводочные (КДИ) и зачетные. В ходе КДИ проводят доработку
конструкции агрегата или системы. Вскрывая и устраняя причины
отказов или неисправностей изделия, добиваются его стабильной
работоспособности за счет изменения конструкции или технологии
изготовления. В этот период, как правило, используют нештатные
опытные натурные образцы (например, двигатели с повышенным за-
пасом прочности конструкции или ресурсом работы, системы управ-
ления с заимствованными или приспособленными приборами и т.д.).
После завершения отработки изделия принимают решение о про-
ведении серии зачетных испытаний, которые носят приемосдаточ-
ный характер. В процессе этих испытаний, как правило, изменения
27
в конструкцию и технологию не вносятся и на испытания допускают-
ся только штатные изделия.
На этапе наземной отработки конструкция ЛА испытывается в
специальных лабораториях на действие статических и динамических
нагрузок. В процессе проектирования проводят большой объем мо-
делирования работы элементов корпуса в различных условиях, что
позволяет выбрать схемы нагружения и определить характеристики
конструкции. Однако только стендовые испытания натурных отсе-
ков, а иногда и всего корпуса ЛА позволяют обеспечить его высокую
надежность.
Задача статических испытаний — определение напряженно-де-
формированного состояния, жесткости конструкции, а также ее не-
сущей способности по различным предельным состояниям. Для оп-
ределения напряженно-деформированного состояния конструкции
проводят измерение ее деформаций, линейных и угловых перемеще-
ний при постепенном нагружении до расчетных значений. В зависи-
мости от типа установки и объекта испытаний нагружение можно
производить непрерывно или ступенчато.
Для определения несущей способности конструкции проводят
нагружение до разрушения с фиксацией разрушающих нагрузок.
Конструкцию, как правило, фотографируют до и после разрушения.
Остановимся на некоторых особенностях испытаний основных
отсеков корпуса ракетного ЛА. Клепаные конструкции хвостовых,
переходных и приборных отсеков летательного аппарата нагружают
сжимающей осевой силой и изгибающим моментом. Топливные от-
секи испытывают на действие внутреннего давления, осевой и пере-
резывающей силы, а также изгибающего момента. Корпус и днища
ракетного двигателя на твердом топливе (РДТТ), сопловые блоки
двигателей и трубопроводы для подачи компонентов топлива нагру-
жают внутренним давлением.
Устойчивость топливных, хвостовых и приборных отсеков прове-
ряют нагружением равномерно распределенным внешним давлени-
ем. Если критическое внешнее давление не превышает одной атмос-
феры, то нагрузку можно имитировать вакуумированием внутренних
полостей. При испытаниях топливных отсеков, корпусов РДТТ и
трубопроводов внутреннее нагружение создают подачей воды под оп-
ределенным давлением. Если топливные отсеки имеют большую дли-
ну, то такие испытания можно проводить по отдельным секциям.
Это позволяет точнее имитировать действие инерционного гидроста-
тического давления при больших перегрузках в полете. Секции гер-
метизируют технологическими днищами. Осевые нагрузки создают
прессами с помощью гидравлических силовозбудителей и прикладыва-
28
ют через соседние отсеки или приспособления, имитирующие жест-
кость этих отсеков.
При пуске и в полете корпус ЛА испытывает воздействие высо-
ких температур, поэтому при статических испытаниях часто создают
равномерный или направленный прогрев конструкции. Такие испы-
тания характерны для определения несущей способности топливных
баков, хвостовых и приборных отсеков.
Динамические испытания проводят для того, чтобы определить
частоты и формы собственных колебаний, коэффициенты демпфи-
рования, а также проверить вибропрочность конструкции. Для про-
ведения испытаний изготавливают специальные макеты корпуса ЛА
или его отсеков. Эксперименты выполняют на специальных динами-
ческих стендах — сложных и дорогостоящих сооружениях.
Частоты и формы собственных колебаний изделия чаще всего
определяют резонансным методом на вибростендах или с помощью
мощных вибраторов, крепящихся на корпусе. Размещенные на кон-
струкции вибропреобразователи позволяют измерить параметры про-
цесса колебаний, установить природу возникновения резонансов. Как
правило, незначительные доработки конструкции (увеличение жес-
ткости, изменение формы некоторых элементов) позволяют суще-
ственно повысить вибронадежность изделия. Например, увеличе-
ние жесткости платы, на которой в приборном отсеке размещают
гироскопические приборы, может заметно улучшить условия работы
системы управления и повысить точность доставки полезного груза.
Для определения вибронадежности ЛА при транспортировке мо-
гут быть использованы специальные стенды, имитирующие подпры-
гивание, галопирование, виляние, боковую качку. Однако более
полно эти нагрузки отрабатываются в ходе натурных транспортиро-
вочных испытаний.
Наземные автономные испытания системы управления полетом
обычно проводятся на специальных стендах, позволяющих имитиро-
вать работу ЛА при пуске и в полете. Часто такие условия полета
имитируют с помощью ЭВМ. При испытаниях, как правило, ис-
пользуются натурные опытные образцы основных приборов системы
управления, приспособленные к условиям стенда. После заверше-
ния конструкторско-доводочных испытаний, в ходе которых уточня-
ют характеристики и дорабатывают схемы основных приборов и под-
систем, проводят несколько ресурсных (до отказа) испытаний штатных
комплектов бортовой аппаратуры. Эти испытания — зачетные и слу-
жат для оценки надежности системы управления.
Наземные комплексные испытания ЛА выполняются с целью
всесторонней проверки совместного действия автономно отработан-
ных агрегатов и систем в условиях, близких к летным. Эти испыта-
29
ния позволяют наиболее полно подготовить новый образец к самому
ответственному, сложному и дорогостоящему этапу эксперименталь-
ной отработки — летным испытаниям.
Программа НКИ во многом определяется назначением летатель-
ного аппарата. Для рассматриваемого класса, например, ракетного
ЛА основным содержанием таких испытаний является проверка на-
дежности совместной работы двигателей, системы управления и кон-
струкции корпуса. Как правило, для испытаний используют ступени
ракеты.
В ходе испытания организуют работу двигателей, системы уп-
равления, систем питания топливом, органов управления в течение
времени, близкого к продолжительности полета. Испытания прово-
дятся на огневом стенде, позволяющем включать двигательную уста-
новку. При этом проверяется работа системы управления с элемен-
тами автоматики двигателя при его запуске и выключении, точность
действия систем опорожнения баков (СОБ) и регулирования кажу-
щейся скорости (РКС), а также работа органов управления по задан-
ной программе. На стенде можно смоделировать условия работы дви-
гателя на большой высоте при низком атмосферном давлении, запуск
двигателя при отсутствии перегрузок и т. п. В ходе испытаний изме-
ряют те параметры, которые обычно контролируют при огневых ис-
пытаниях двигателей и автономных систем. Кроме того, фиксируют
прохождение команд от системы управления, моменты срабатыва-
ния элементов автоматики, угловые перемещения и скорости пово-
рота органов управления, показания датчиков СОБ, РКС, темпера-
туры и давления в топливных баках, деформации конструкций,
частоты и амплитуды колебаний элементов основных отсеков и т.д.
В ряде случаев не представляется возможным или целесообраз-
ным проводить НКИ с запуском двигателей. При этом основное вни-
мание уделяется проверке совместной работы системы управления с
органами управления (проверка устойчивости полета), СОБ, РКС,
автоматикой двигателей. Возмущения, которые могут воздействовать
на эти системы в полете, моделируют на стенде с помощью специ-
альных приспособлений (например, постановкой вибраторов), а также
аналоговыми и цифровыми вычислительными машинами.
После завершения НКИ первые опытные образцы ЛА и других
составных частей комплекса поступают на полигон, где проводится
наземная полигонная отработка комплекса. В подготовленных со-
оружениях практически впервые в процессе создания стыкуют и со-
вместно дорабатывают ЛА, заправочное, проверочно-пусковое,
подъемно-транспортное и другое вспомогательное оборудование, спро-
ектированное разными фирмами.
30
Процесс наземной полигонной отработки заключается в выполне-
нии нескольких циклов подготовки ракетного ЛА к пуску и имитации
пуска, в ходе этого устраняются вскрывающиеся просчеты и неисп-
равности. Попутно корректируют эксплуатационную документацию и
контролируют разработанные ранее графики подготовки изделия к пус-
ку. Заканчиваются испытания заправкой изделия и подготовкой ком-
плекса к первому пуску.
По согласованию заказывающих и проектирующих организаций
могут быть организованы транспортировочные испытания ЛА. Зада-
ча таких испытаний — проверка вибронадежности ЛА и наиболее пол-
ная отработка транспортных средств. Обычно транспортировочные
испытания проводят на железных, шоссейных и грунтовых дорогах.
Режимы и длительность испытаний определяют предполагаемыми
условиями эксплуатации ЛА (например, доставка по железной доро-
ге с завода-изготовителя на базу, перевозка в специальных транспор-
тных средствах от базы до стартовой позиции по шоссейным и грун-
товым дорогам или движение в процесс эксплуатации между группой
стартовых позиций).
В ходе испытаний измеряются деформации, перемещения, час-
тоты и амплитуды колебаний элементов конструкции ЛА и транспор-
тных средств. После завершения испытаний некоторые изделия от-
правляют на завод-изготовитель для разборки и полной дефектации,
а одно-два направляют на полигон и запускают для проверки надеж-
ности в реальных условиях.
Во время проведения летной отработки или после ее заверше-
ния, когда организуется опытная эксплуатация комплекса, могут
проводиться его наземные полигонные испытания с целью определе-
ния возможных сроков эксплуатации и хранения (долговечности и
сохраняемости), а также испытания при предельных метеорологи-
ческих условиях (так называемые климатические испытания).
Цель испытаний на долговечность — оценка надежности ЛА и
всего комплекса в течение полного, гарантированного заводом-изго-
товителем срока его эксплуатации. Проведение таких испытаний по-
зволяет вскрыть ряд недостатков в конструкциях и режимах эксплуа-
тации, устранение которых обеспечивает повышение надежности всей
системы ЛА.
Цель испытаний при предельных метебрологических условиях —
отработка режимов эксплуатации комплекса при низких и высоких
температурах, повышенной влажности воздуха, сильном приземном
ветре, грозе, а также оценка надежности ЛА в этих условиях. Кли-
матические испытания заключаются в проведении при указанных выше
условиях нескольких циклов подготовки ЛА к пуску и его запуске.
31
Пуски ракетных изделий, прошедших транспортировочные и кли-
матические испытания, а также проверку длительным хранением,
осуществляют в ходе их летной отработки.
1.2.3. Задачи и содержание летной отработки ЛА
Летные испытания — наиболее полные и сложные натурные ис-
пытания всего комплекса. В ходе летной отработки проверяют рабо-
тоспособность комплекса в условиях полигона при подготовке ракет-
ного ЛА к пуску, проведении пуска и в полете; вскрывают и устраняют
причины отказов или неисправностей путем доработки конструкций,
технологии производства и эксплуатации составляющих элементов
комплекса; оценивают степень соответствия основных характеристик
комплекса требованиям ТТЗ.
Суть летных испытаний заключается в подготовке и запуске ракет-
ного ЛА В зависимости от конкретных задач, решаемых при пуске,
выбирают условия и программу движения изделия, что также обуслав-
ливает некоторые особенности наземной подготовки комплекса.
Для осуществления перечисленного выше в процессе полета из-
делия необходимо получить опытную информацию о его движении,
работе систем и агрегатов на борту, т.е. провести измерения большо-
го числа параметров. При натурных наземных и в особенности лет-
ных испытаниях невозможна регистрация измеряемых величин в мес-
те измерения. Поэтому процесс получения опытной информации
включает ряд характерных этапов, разделенных во времени и про-
странстве: измерение, передачу сигнала, регистрацию и дешифриро-
вание измеренных значений (так называемую первичную обработку).
Полученную опытную информацию обычно подвергают автоматизи-
рованному анализу. Этот этап часто называют вторичной обработкой
результатов испытаний.
При опытном пуске измерения в полете, как правило, выполня-
ют на активном участке и на нисходящем атмосферном пассивном
участке траектории. Это связано с тем, что при движении на внеат-
мосферном пассивном участке не работают двигатели и бортовая ап-
паратура, а также на ЛА практически не действуют возмущения,
поэтому параметры движения центра масс могут быть с высокой точ-
ностью рассчитаны аналитически.
На активном и атмосферном пассивном участках траектории осу-
ществляются внешнетраекторные измерения (ВТИ), обеспечивающие
контроль параметров движения ракетного ЛА. Это позволяет опреде-
лить траекторию полета, которая интегрально характеризует действие
тяги двигателей, силы земного притяжения, аэродинамических сил
и различных возмущений.
32
Для контроля работы конструкции, агрегатов и бортовой аппара-
туры ЛА организуют систему телеметрических измерений (СТИ). Если
предполагается спасение отработавших ступеней изделия или его по-
лезного груза, то часть информации о работе агрегатов и систем мо-
жет быть зафиксирована бортовыми автономными системами изме-
рения, например, на магнитную ленту и обработана на Земле после
завершения пуска.
Для проведения ВТИ в районе старта ракетного ЛА и падения его
полезного груза создают по два-четыре измерительных пункта, раз-
мещаемых на некотором удалении от предполагаемого пункта пус-
ков. Если район падения расположен в акватории, то измеритель-
ные пункты организуют на кораблях. На пунктах размещают
аппаратуру для определения параметров движения ЛА и приема теле-
метрической информации с борта изделия.
В предполагаемых районах падения полезного груза и отработав-
ших ступеней размещаются специальные подразделения, в задачу
которых входят поиск, осмотр, дефектация остатков конструкций и
сбор информации бортовых измерительных систем.
Для выполнения бортовых и телеметрических измерений на ра-
кетном ЛА устанавливаются датчики, телеметрическая и записываю-
щая аппаратура. Тарировку датчиков и телеметрических каналов, а
также другие измерения, необходимые для анализа характеристик ЛА,
осуществляют при подготовке к пуску. Так, например, для опреде-
ления удельной тяги двигателей и максимальной прицельной дально-
сти пуска можно производить взвешивание доз заправки компонен-
тов топлива или заправленного ЛА, контрольные запуски бортовой
аппаратуры системы управления полетом и т.д.
Для более полного учета возмущений, действующих на ракетный
ЛА в полете, в районах старта и падения проводят метеорологические
зондирования атмосферы. Запуски радиозондов на высоты до 40—80
км позволяют определить давление, температуру и влажность возду-
ха, а также оценить направление и скорость ветра. Обычно парамет-
ры воздуха измеряются с малой погрешностью и позволяют суще-
ственно уточнить действующие в полете аэродинамические силы.
Скорость и направление ветра удается определить с меньшей точнос-
тью, в особенности на больших высотах. К тому же резкие измене-
ния этих параметров во времени существенно затрудняют их учет при
анализе аэродинамических нагрузок, действующих на ЛА в полете.
Таким образом, при каждом опытном пуске измеряется большое
количество характеристик ракетного ЛА в удаленных друг от друга
районах. Для привязки во времени всех этих работ создают службу
единого времени (СЕВ), включающую в себя обычно центральный
пункт, который имеет проводные и радиоканалы связи с измери-
33
тельными пунктами. Часть аппаратуры СЕВ располагают на измери-
тельных пунктах, что позволяет объединять с отметками единого вре-
мени результаты внешнетраекторных и телеметрических измерений.
В качестве основных отсчетов обычно используются сигналы, пере-
даваемые по радиовещательной сети. По этим сигналам контролиру-
ется работа кварцевых генераторов высокой частоты, обеспечиваю-
щих текущие отсчеты времени. На измерительные пункты сигналы
единого времени приходят с центрального пункта СЕВ, который на-
ходится в районе старта. Вся опытная информация по каждому пуску
поступает в вычислительный центр.
Для организации летных испытаний необходимо создание не толь-
ко сложнейших взаимосвязанных систем внешнетраекторных и теле-
метрических измерений, но и мощных автоматизированных систем
обработки этой дорогостоящей информации. Построение таких сис-
тем должно основываться на комплексах алгоритмов и программ,
обеспечивающих определение по опытным данным основных харак-
теристик ЛА.
1.3. Основные принципы построения
систем контроля и испытаний ЛА
Общей целью испытаний и контроля является обеспечение высокой
(заданной) надежности летательного аппарата, т.е. его способности
выполнить в полном объеме заданные функции в течение определен-
ного времени как в наземных условиях (имеющих место при транс-
портировке, подготовке, запуске и т.д.), так и в условиях полета.
Контроль и испытания проводятся на всех этапах создания аппа-
рата. Неограниченное увеличение числа контрольно-испытательных
работ не обеспечивает роста надежности. Во-первых, контроль и ис-
пытания, кроме увеличения стоимости аппарата, сами могут вносить
дополнительные дефекты и повреждения в конструкцию. Во-вторых,
при контроле и испытаниях вырабатывается ресурс работы отдельных
элементов, узлов, аппаратуры, агрегатов, что иногда заставляет вы-
полнять некоторые виды испытаний на моделях и макетах, не под-
вергая этим испытаниям летные образцы аппаратов. Вследствие этого
вся совокупность контроля и испытаний аппарата требует оптимиза-
ции, определения оптимального сочетания видов испытаний, их объе-
ма, количества и места в ходе технологических процессов, исходя из
необходимости обеспечения требуемой надежности, стоимости и дли-
тельности цикла изготовления и других факторов. Таким образом,
контрольные и испытательные работы при создании ЛА составляют
34
взаимосвязанную в своих частях единую систему, требующую опти-
мизации по ряду параметров.
Система контроля и испытаний ЛА строится согласно определен-
ным принципам, учитывающим специфику их конструкции, усло-
вия эксплуатации, условия производства, стоимость и т.д. Сформу-
лируем основные из них.
1. Испытания должны обеспечивать достоверную информацию и
выпуск аппарата с требуемой надежностью.
2. Все испытания должны проводиться на объектах, изготовлен-
ных по принятым для данного аппарата технологиям и операциям
контроля, применяемым и для летных образцов.
3. Контроль и испытания должны быть построены таким обра-
зом, чтобы имеющиеся дефекты выявились на более ранних этапах
изготовления, на более низких уровнях сборки, т.е. операции конт-
роля и испытаний целесообразно проводить по времени как можно
ближе к тем сборочным операциям, при которых возможно возник-
новение ожидаемых дефектов.
4. Программа должна содержать испытания на все виды нагру-
зок, которым аппарат подвергается при наземной подготовке и в по-
лете. Ряд воздействующих факторов создается имитацией (например,
вакуум, радиационное воздействие, невесомость и т.д.). Испытания
могут проводиться при воздействии как одного, так и комбинации
нескольких факторов (например, сочетание вакуума, теплового воз-
действия, излучений и т.д.). Последовательность приложения вне-
шних воздействий при испытаниях должна соответствовать последо-
вательности их приложения при функционировании летного изделия
на земле и в полете.
5. В тех случаях, когда испытания связаны с выработкой ресур-
са или опасностью повреждения испытуемого объекта, параллельно
с летными по той же технологии изготовляются специальные образ-
цы для испытаний. Подобным испытаниям подвергаются как мини-
мум два объекта: один — предельно максимальным, разрушающим
нагрузкам с целью определения запаса по данному типу нагрузки (на-
пример, запаса прочности), а второй — при почти эксплуатацион-
ных нагрузках в длительном режиме (до разрушения) для определе-
ния запаса по ресурсу. Такая методика обеспечивает при наименьших
затратах наибольшую вероятность выпуска изделия с определенными
запасами по ресурсу и прочности.
6. Все летные и испытательные образцы аппаратов проходят кон-
трольно-технологические испытания по программе, составленной для
летных образцов, после чего испытательные образцы испытываются
на предельные нагрузки.
2*
35
7. Уровень испытательных нагрузок (температур, числа термо-
циклов, вибраций, давлений и др.) должен обеспечивать необходи-
мый запас по данному типу воздействия, но не слишком превышать
реальные условия. Отказы при неоправданно жестких, завышенных
условиях испытаний могут привести к ненужным переделкам конст-
рукции, ее утяжелению, к необходимости повторных более широких
испытаний и в конечном счете к неоправданной потере времени и
средств.
8. Хотя принципиально время испытаний должно быть равным
длительности подготовки на земле и работы аппарата в полете, во
многих случаях оно отличается в ту либо другую сторону. В некото-
рых случаях длительность испытаний принимают равной длительнос-
ти одного цикла работы аппарата на земле и двух циклов работы его в
полете. При испытаниях аппаратов, рассчитанных на очень длитель-
ный срок существования, длительность их, как правило, меньше
цикла работы аппарата. Если к длительности испытаний модельных
(испытательных) образцов не предъявляются строгие требования, то
длительность испытаний штатных образцов строго регламентирована
и должна быть минимальной.
9. Испытания на надежность должны проводиться при предель-
ных нагрузках на испытательные образцы, что позволяет определить
предельные возможности конструкции по различным воздействую-
щим факторам. Оценка готовности (годности) аппарата к полету
определяется при специальных приемочных испытаниях с нагрузка-
ми, равными эксплуатационным либо немного превышающими их.
Таким образом, в основе системы испытаний лежит принцип анало-
гии летных образцов с модельными, который обеспечивается одина-
ковостью не только конструкции, но и технологии изготовления и
контрольно-технологических испытаний. Поэтому если после оди-
наковых условий изготовления и приемочных испытаний модельные
образцы в результате усиленных испытаний на надежность покажут
положительные результаты, то эти результаты переносятся и на лет-
ные образцы, которые испытаний на надежность не прошли.
10. Испытания на комплексное воздействие факторов эксплуата-
ции должны проводиться на возможно более высоком уровне сбор-
ки, желательно на полностью собранном ЛА. К этому времени в
результате предыдущих контроля и испытаний дефектные элементы
уже выявлены и заменены годными и при испытаниях на комплекс-
ное воздействие выявляются дефекты, появляющиеся в результате
взаимного влияния отдельных элементов друг на друга. Такие испы-
тания обязательно включаются в программу приемочных испытаний
летных образцов.
36
11. Испытания, особенно пилотируемых ЛА, должны проводиться
при всех возможных режимах работы.
12. Результаты предыдущих испытаний должны использоваться
или учитываться при проведении испытаний на более высоком уров-
не, т.е. не должно быть дублирования.
13. Испытания на функционирование и целостность коммуника-
ций бортовой аппаратуры и автоматики проводят по принципу после-
довательно нарастающих повторных испытаний. Это позволяет наи-
более быстро выявить дефектные элементы (или группы элементов)
и сократить цикл и стоимость испытаний, а также уменьшить число
переборок аппарата и количество отказов и дефектов при более слож-
ных испытаниях собранного аппарата.
14. При выявлении дефектов все они должны анализироваться,
устраняться (исправлением дефекта или заменой элемента), а объект
испытаний должен пройти после этого повторные испытания в уста-
новленном объеме. Повторные испытания по полной программе про-
водятся также при внесении принципиальных изменений в конструк-
цию, технологию или оборудование.
15. Испытания в необходимых случаях должны дополняться рас-
четами, что часто, не снижая надежности аппарата, приводит к зна-
чительному сокращению объема испытаний. Например, при про-
верке надежности посадочных агрегатов для посадки на другие планеты
может возникнуть огромное число вариантов посадки (по сочетанию
скорости посадки, высоты, угловой скорости, числа точек сопри-
косновения, положения центра тяжести по отношению к точке каса-
ния и т.д.). Все эти варианты могут быть проиграны на ЭВМ (машин-
ный эксперимент), но наиболее тяжелые или сомнительные должны
быть проверены испытаниями натурных образцов.
16. Основными критериями эффективности контроля и испыта-
ний являются надежность ЛА, стоимость и длительность цикла испы-
таний, которые и должны учитываться в первую очередь при состав-
лении программы испытаний и ее оптимизации.
17. Все наземные испытания должны быть закончены, а резуль-
таты обработаны и обобщены до проведения летных.
18. Для достижения высокой эффективности контроля и испыта-
ний необходимо обеспечить подробную и детальную разработку мето-
дики всех испытаний, тщательную по установленной форме регист-
рацию результатов, своевременный анализ и обобщение результатов
испытаний, подготовку всех испытателей на высоком уровне и стро-
гое соблюдение регламента и методики испытаний.
Следует отметить, что в настоящее время нет единой общепри-
нятой системы контроля и испытаний ЛА, а существует большое раз-
37
нообразие систем, зависящих от особенностей и назначения данной
конструкции ЛА (или группы ЛА), условий производства, имеющихся
традиций, уровня отработанности технологических процессов и т.д.
Более того, пока нет даже единой терминологии для отдельных эта-
пов и видов контроля и испытаний. Это приводит к необходимости
отработки самих систем контроля и испытаний в каждом конкретном
случае, проверки их эффективности и достоверности, т.е. к выпол-
нению различного рода оценок надежности, калибровок, сравнения
с элементарными испытаниями, тарировок непосредственно перед
испытаниями, а также других работ, часто включаемых в методику
проведения испытаний. Результатом этого являются удорожание ис-
пытаний, различная степень надежности и достоверности испыта-
ний, увеличение длительности испытаний и т.д. Создание единой
унифицированной (базовой) системы испытаний космических и дру-
гих ЛА — в настоящее время актуальная и важная задача. Системы
испытаний конкретных аппаратов должны строиться на основе по-
добной базовой с сохранением общей методологии, принципов, тех-
нологии испытаний, методики обработки результатов и т.д. и отли-
чаться лишь включением или исключением каких-то конкретных видов
испытаний и контроля или режимами проведения отдельных испыта-
ний, вытекающих из специфики данного ЛА.
1.4. Экспериментальная отработка
как элемент системы управления качеством
В широком смысле экспериментальная отработка любого сложного
технического объекта — один из важнейших компонентов обеспече-
ния и контроля заданных уровней его качества. Именно на этой
стадии создания новой техники можно получить эксперименталь-
ные показатели, определяющие действительный технический уровень
объекта. Совершенно очевидно, что достижение высоких показате-
лей качества возможно только в случае, если организационно-мето-
дические принципы отработки сформулированы на начальной ста-
дии создания изделия и последовательно реализуются на всех его
стадиях.
Качество — совокупность свойств продукции, обусловливающих
ее пригодность удовлетворять определенные потребности в соответ-
ствии с ее назначением. Качество формируется на всех стадиях со-
здания продукции: от определения ее необходимости до периода эксп-
луатации. Показатели качества закладываются в процессе конструк-
торских и технологических разработок, обеспечиваются в процессе
38
производства, проявляются и проверяются в процессе отработки и
эксплуатации.
Показатель качества продукции — количественная характеристи-
ка одного или нескольких свойств продукции, рассматриваемая при-
менительно к определенным условиям ее создания и эксплуатации
или потребления.
Уровень качества продукции — относительная характеристика ка-
чества продукции, основанная на сравнении значений показателей
качества оцениваемой продукции с базовыми значениями соответ-
ствующих показателей.
Необходимость в определении уровня качества возникает при сле-
дующих операциях:
• планировании уровня качества;
• выборе оптимального варианта изделия;
• контроле качества продукции при отработке;
• передаче изделия в серийное производство;
• эксплуатации изделия;
• снятии с производства и при эксплуатации устаревшего изде-
лия.
Показатели качества продукции характеризуют:
• эффективность применения изделия по назначению (показатель
назначения);
• способность изделия сохранять значения эксплуатационных по-
казателей на определенном уровне в заданном интервале вре-
мени (показатель надежности);
• годность изделия к эксплуатации человеком (эргономический
показатель);
• способность изделия к перемещению — транспортабельность;
• оптимальность затрат материалов, средств, оборудования, тру-
да и времени на подготовку и изготовление изделия (техноло-
гичность);
• особенности конструктивного выполнения изделия, обуслов-
ленные возможностью реализации его функциональных свойств
(конструктивный показатель);
• затраты на разработку, изготовление и эксплуатацию изделия и
экономический эффект эксплуатации (экономический показа-
тель).
Качество — понятие относительное, поэтому для оценки его уров-
ня необходимо базовое изделие, с уровнем качества которого срав-
нивается рассматриваемое изделие. За базовые показатели качества
могут быть приняты:
• показатели качества, содержащиеся в ТЗ;
39
• перспективные технико-экономические показатели изделий дан-
ного вида, определенные методами технического прогнозиро-
вания;
• уровень качества гипотетического изделия, превышающий уро-
вень качества лучших современных образцов.
При этом показатели качества должны отражать свойства изделия
и изменения его качества во времени, а также обеспечивать условия
сопоставимости изделий одного назначения.
Показатель качества К сложного изделия зависит от показателя
качества а элементов, составляющих это изделие:
т
кMiaif
/=1
где Mi — коэффициент весомости z-ro элемента, характеризующего
в количественном отношении степень влияния показателя качества z-ro
элемента az, на качество изделия; т — число элементов в изделии.
На стадии разработки, изготовления, отработки и эксплуатации
изделия на его качество влияет огромное число факторов различного
характера. Вот перечень основных организационных, технических и
информационных факторов:
• качество технических решений;
• качество конструкторской и технической документации;
• качество применяемых материалов и комплектующих изделий;
• полнота использования возможностей стандартизации и уни-
фикации;
• структура и полнота экспериментальной отработки изделия;
• состояние экспериментальной и испытательной базы, уровень
средств измерительной и обрабатывающей техники;
• технический уровень производственного оборудования, оснас-
тки, средств контроля;
• квалификация персонала;
• уровень информационного обеспечения;
• обеспеченность информацией о конструкции и качестве анало-
гичных изделий;
• обеспеченность информацией о методах их производства и усло-
виях отработки и эксплуатации;
• обеспеченность информацией о свойствах материалов и комп-
лектующих изделий;
• планомерность и ритмичность работы;
• качество техобслуживания и ремонта оборудования;
• обеспеченность производственным оборудованием, оснасткой,
инструментом, технической документацией;
40
• обеспеченность средствами контроля, измерения, вычислитель-
ной техникой;
• обеспеченность материалами и комплектующими элементами.
В рамках производственного предприятия обеспечение и конт-
роль заданного уровня качества изделий осуществляются системой
качества (СК). Система качества — это совокупность управляющих
органов и объектов управления, взаимодействующих с помощью ин-
формационных и материально-технических средств. При управлении
качеством продукции СК является частью системы управления пред-
приятием и охватывает все стадии жизненного цикла изделия и все
стороны деятельности предприятия, в частности:
• прогнозирование и формирование качества изделия на стадии
разработки;
• разработку методов и поддержание порядка контроля качества
технической документации, порядка внесения изменений в нее;
• обеспечение установленного уровня качества при изготовлении
изделия;
• экспериментальную отработку изделия;
• контроль и оценку качества изделия на всех стадиях жизненного
цикла;
• повышение технического уровня производственной и испыта-
тельной баз;
• материально-техническое обеспечение;
• хранение, транспортирование, эксплуатацию и ремонт про-
дукции;
• подбор, расстановку и повышение квалификации кадров.
Организационно-методической основой СК являются стандарты
предприятия, выпущенные на основе действующих государственных
и отраслевых стандартов и определяющие работу всего механизма
управления качеством продукции, а также регламентирующие нор-
мы и правила в области управления и организации производства.
Одним из важнейших показателей качества ЛА является надеж-
ность — свойство объекта сохранять во времени в установленных пре-
делах значения всех параметров, характеризующих способность вы-
полнять требуемые функции в заданных режимах и условиях при-
менения, технического обслуживания, ремонтов, хранения и транс-
портирования.
В рамках СК при разработке и создании нового изделия на ста-
дии эскизного проекта основным документом, определяющим комп-
лекс конструктивных, научно-методических и организационно-тех-
нических мероприятий, направленных на получение требуемых
значений показателей надежности, является программа обеспечения
41
надежности (ПОН), которая в конечном счете определяет структуру
процесса отработки. При составлении ПОН учитываются:
• требуемый уровень надежности разрабатываемого изделия;
• его новизна и сложность;
• характер и объем производства, условия эксплуатации изделия;
• возможность определения степени соответствия фактического
уровня надежности изделия предъявляемым требованиям на эта-
пах проектирования, производства, отработки и эксплуатации.
Следует отметить, что ПОН основывается на достигнутых ранее
результатах по надежности и должна содержать:
• перечисление задач по обеспечению надежности, методов их
решения, объектов испытаний, а также сроки решения каж-
дой задачи;
• порядок документирования и контроля состояния работ, пере-
чень мероприятий по обеспечению выполнения работ в плано-
вые сроки.
На этапе проектирования и отработки к ПОН
предъявляются следующие требования:
1. В программе должны быть определены основные требования
по надежности к комплектующим элементам и изделию, соответ-
ствующие ТЗ, приведены и обоснованы основные показатели надеж-
ности, определена номенклатура объектов для экспериментальной
проверки или подтверждения показателей надежности.
2. В программе должна предусматриваться реализация меропри-
ятий по обеспечению надежности уже на этапе разработки и согласо-
вания ТЗ на проектирование изделия путем анализа конструктивных
решений с точки зрения обеспечения заданных требований по на-
дежности.
3. В программе должны быть изложены требования к програм-
мам испытаний комплектующих изделие опытных образцов и самих
изделий, обеспечивающие получение данных, необходимых для оп-
ределения соответствия характеристик надежности спроектированного
изделия техническому заданию.
Техническое задание и программы испытаний должны обеспе-
чивать возможность подтверждения уровня надежности на отдель-
ных этапах испытаний, что вообще характерно для изделий мелко-
серийного производства, в котором на начальных этапах испытаний
оценка истинного уровня надежности не представляется возможной,
а повышение показателей надежности происходит по мере перехода
на последующие этапы и уточняется по данным эксплуатации изде-
лия. Кроме того, ТЗ и программы испытаний должны устанавли-
вать необходимое число образцов для испытаний и критерии оценки
надежности.
42
Результаты испытаний должны содержать:
• сведения о наработке образцов и отказах с выявлением наибо-
лее ненадежных элементов и интенсивности отказов;
• оценку влияния отказов на надежность изделия;
• характеристики ремонтопригодности;
• сведения о предельных возможностях образцов и условиях безо-
пасного их использования;
• характеристики работы в системе «оператор-машина».
4. В ПОН должно быть указано, что ТЗ и программы испытаний
опытных образцов следует планировать с учетом воздействия наибо-
лее неблагоприятных сочетаний условий окружающей среды и рабо-
чих режимов, установленных ТЗ на разработку. Желательно проведе-
ние дополнительных испытаний на ресурс для выявления типичных
отказов, установления пределов безопасности применения изделий.
С учетом результатов этих испытаний может быть произведена оценка
уровня надежности (определена интенсивность отказов или ожидае-
мая вероятность отказа) в неблагоприятных условиях эксплуатации.
При этом исходные требования по надежности всех комплектующие
элементов изделия должны включать: показатели надежности; пре
дельные характеристики функционирования образца; критерии отка-
зов; продолжительность и другие условия эксплуатации.
5. В программе должно быть предусмотрено применение на из-
делии максимально возможного числа унифицированных образцов.
6. В программу должны быть включены мероприятия по выявле-
нию критических элементов изделия, требующих повышенного вни-
мания при проектировании и отработке.
Основные признаки критичности:
• новизна и сложность конструкции, утяжеленность режимов эк-
сплуатации;
• влияние отказов на безопасность применения изделия или не-
возможность выполнения задачи из-за отказа;
• необходимость специальных способов обращения;
• потребность в длительной подготовке к действию;
• сложность ремонтных работ при отказе;
• высокая стоимость.
На этапе производства к ПОН предъявляются следую-
щие требования:
1. В программе должны быть предусмотрены мероприятия, обес-
печивающие улучшение методов управления процессом производства
и его контроля, а также повышение квалификации личного состава.
2. В программе должны быть указаны методы анализа и контро-
ля уровня надежности на этапе производства и технологических про-
цессов; намечены мероприятия по оценке степени влияния хране-
43
ния, консервации, транспортировки, ремонта на надежность изде-
лия; перечислены мероприятия по сбору и обработке информации о
дефектах и отказах.
На этапе эксплуатации к ПОН предъявляются следу-
ющие требования:
1. В программе должны быть отражены основные требования к
эксплуатационной документации, особенно к ее качеству.
2. В программе должны быть намечены мероприятия по изуче-
нию персоналом правил эксплуатации, обеспечению точности со-
блюдения инструкций по эксплуатации, по автоматизации обслужи-
вания изделия и контролю его параметров, по сбору и анализу
информации об отказах.
Подводя итог всему изложенному выше, сформулируем роль
испытаний в процессе создания ЛА.
1.5. Роль испытаний
в процессе создания ЛА
Современные ЛА — это сложные и дорогостоящие инженерные кон-
струкции, эффективность использования которых во многом опреде-
ляется их надежностью.
Обеспечение надежности в процессе создания ЛА заключается в
выявлении и устранении допущенных при разработке причин, при-
водящих к отказам, а также в организации условий производства и
эксплуатации ЛА, которые исключили бы появление новых причин
отказов. Таким образом, отказы в функционировании ЛА и его эле-
ментов связаны с ошибками проектно-конструкторских разработок,
технологии изготовления и эксплуатации.
Устранение ошибок и недоработок проектно-конструкторского ха-
рактера осуществляется в процессе различных испытаний агрегатов и
систем, отсеков и ракетных блоков ЛА.
Экспериментальная отработка полностью собранного аппарата в
ходе летно-конструкторских испытаний (ЛКИ) является наиболее
информативной операцией, но и наиболее дорогостоящей. Поэтому
ЛКИ дополняются большим объемом наземных комплексных и авто-
номных испытаний отдельных узлов, агрегатов, отсеков ЛА, причем
эти испытания выполняются на всех этапах разработки конструкции
и конструкторской документации.
Экспериментальные исследования и отработка конструкций имеют
своей целью разработку и уточнение методик расчета, их экспери-
ментальное подтверждение. Эти исследования обычно выполняются
44
на моделях в широком диапазоне варьируемых параметров конструк-
ции. Модели изготавливают в уменьшенном масштабе, конструк-
тивно подобными натурной конструкции. Элементы, не существен-
ные для прочности и жесткости, не воспроизводятся.
Указанные испытания нужны при разработке и внедрении новых
конструктивно-силовых схем, конструкционных материалов, техно-
логических процессов и т.д. В результате экспериментальных иссле-
дований подтверждаются фактические характеристики и работоспо-
собность отсеков и агрегатов. Обязательным условием при испытаниях
конструкций является обеспечение реальных условий заделки торцов.
В экспериментальной сборке должны быть установлены все конст-
руктивные элементы, влияющие на прочность и жесткость (привар-
ные элементы., местные вырезы, конструктивные надстройки). Дан-
ная группа исследований включает статические и динамические
испытания отдельных узлов, агрегатов и отсеков, испытания тепло-
изоляционных и теплозащитных покрытий.
В процессе статических испытаний:
• определяют истинные значения прочностных и жесткостных
характеристик с учетом всех особенностей конструкции, тех-
нологии и материалов;
• подтверждают принятые в расчетах значения коэффициентов
безопасности и результаты расчета напряженного состояния и
жесткости конструкции при эксплуатационных нагрузках или
указывают на ошибочность используемых в конструкции узлов
и агрегатов решений;
• выявляют на основании анализа результатов разрушающих ис-
пытаний истинные причины разрушения конструктивных эле-
ментов;
• выявляют в результате анализа напряженного состояния и де-
формаций элементы и узлы недостаточной и избыточной проч-
ности.
Динамические испытания проводят для различных конструктив-
ных элементов с целью получения значений обобщенной жесткости
и коэффициентов демпфирования, проверки усталостной прочнос-
ти, исследования поведения конструкций в условиях нестационарно-
го нагружения.
В результате выполненного комплекса исследований уточняется
конструктивное исполнение, корректируется конструкторская доку-
ментация, определяются фактические значения массовых характери-
стик отсеков и агрегатов и дополняются или изменяются требования
к производству.
После завершения разработки конструкторской документации
продолжают экспериментальную отработку конструкций ЛА и техно-
45
логии их производства. Для этого изготавливается определенное чис-
ло натурных отсеков и агрегатов для прочностных испытаний, отра-
ботки технологии, проверки отдельных систем на функционирова-
ние и т.д. Задачи отработки на этом этапе те же, что и на
предшествующем, но носят контрольный характер (конструкторско-
доводочные испытания — КДИ). По результатам КДИ вносятся из-
менения в конструкторскую документацию, корректируются харак-
теристики отсеков и ЛА в целом, уточняется технологическая
документация на изготовление летных образцов ЛА.
Летно-конструкторские испытания — завершающий этап созда-
ния ЛА, на котором окончательно устраняются все недоработки и
уточняют тактико-технические характеристики ЛА. Анализ данных
ЛКИ не только подтверждает правильность принятых решений и вы-
являет слабые места, но и позволяет оценить резервы, заложенные
на предшествующих этапах работы.
В условиях серийного производства качество изготовления кон-
струкций обеспечивается выполнением требований чертежа. Однако
прямой контроль не всегда возможен или весьма затруднен. Кроме
того, в процессе изготовления агрегатов и отсеков могут появиться
скрытые дефекты в результате воздействий, не оговоренных техноло-
гическим процессом. Поэтому для ответственных и сильно нагру-
женных узлов и отсеков в процессе их изготовления предусмотрены
методы контроля прочности: опрессовка каждого отсека и контрольно-
выборочные испытания до разрушения узла или отсека.
Опрессовочные испытания характеризуют работоспособность кон-
струкции без ее разрушения при нагрузке, несколько превышающей
эксплуатационную (рэ): prviJ^ = (1,15... 1,25)рэ, где р^^ — давление
гидроопрессовки герметичных отсеков (приборных отсеков, топ-
ливных баков).
При контрольно-выборочных испытаниях (КВИ) отдельные экзем-
пляры узлов (отсеков) доводятся до разрушения, поэтому при этих
испытаниях можно оценить запас прочности. Данные испытания не
являются непосредственной проверкой прочности каждого конструк-
тивного элемента, но они гарантируют, что при стабильном техно-
логическом процессе коэффициент безопасности, заложенный в кон-
струкции, будет реализован.
Различают контрольно-выборочные испытания от партии, пери-
одические и установочные. Испытаниям от партии подвергаются от-
дельные детали и простые сборки (болты, тяги и т.д.) от одной до
нескольких штук из партии. Периодическим испытаниям подвергают-
ся сравнительно сложные конструктивные элементы (узлы, отсеки)
для подтверждения стабильности технологического процесса во вре-
мени. Установочные испытания проводят в том случае, когда произ-
46
водство изделия возобновляется после продолжительного перерыва
либо принципиальных изменений технологии изготовления, а также
если изготовление конструкции осуществляется по документации и
технологическим процессам, освоенным на другом предприятии.
Контрольные вопросы
1. Сформулируйте основные общие свойства сложных технических си-
стем, позволяющие объединить их в один класс.
2. Перечислите основные этапы жизненного цикла сложных техничес-
ких систем и сформулируйте их цели и задачи.
3. Перечислите функции основных этапов создания новых изделий.
4. Что включает в себя наземная отработка ЛА?
5. Что является общей целью испытаний и контроля летательного аппа-
рата?
6. Каковы цели и задачи автономных испытаний (конструкторско-до-
водочных и зачетных)?
7. Каковы цели и задачи комплексных испытаний?
8. Каковы цели и задачи полигонных испытаний?
9. Каковы цели и задачи летных испытаний?
10. Сформулируйте основные принципы построения систем контроля
и испытаний ЛА.
Глава 2
ОСНОВНЫЕ ПОНЯТИЯ И КЛАССИФИКАЦИЯ
КОНТРОЛЯ И ИСПЫТАНИЙ
СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
2.1. Испытания и контроль.
Основные термины и определения
При создании летательного аппарата особо важное место занимают
процессы испытания и контроля, цель которых состоит в обеспече-
нии его высокой надежности, способности выполнять в полном объеме
заданные функции. В настоящее время трудоемкость испытательных
и контрольных процессов составляет 20—40% общей трудоемкости из-
готовления ЛА и постоянно возрастает. Контроль и испытания про-
водятся на всех этапах жизненного цикла ЛА, начиная с проверки
исходных свойств материалов и кончая запуском и эксплуатацией.
Под испытаниями понимается экспериментальное определение
количественных и (или) качественных характеристик свойств объек-
та: а) в процессе различного вида воздействий на него; б) при его
функционировании; в) при моделировании объекта и (или) воздей-
ствий. Таким образом, при любых испытаниях должны быть уста-
новлены характеристики свойств продукции (объекта испытаний),
т. е. параметры или (и) показатели качества: назначения, надежно-
сти, эргономические, технологические, экологические, безопасно-
сти и др. Номенклатура показателей качества продукции детально
представлена в ГОСТ 22851. При этом различают два вида парамет-
ров и показателей качества объекта испытаний (ОИ):
• измеряемые — физические величины и производные от них;
• неизмеряемые (например, плотность компоновки, удобство
пользования, рациональность формы и др.).
Измеряемыми, контролируемыми и управляемыми являются па-
раметры следующих видов: температура и тепло, давление и вакуум,
влажность, линейные и угловые, световые и оптические, акустичес-
кие, электрические и магнитные, электромагнитные и радиотехни-
ческие; уровень, объем, расход, состав и концентрация физико-хи-
мических свойств вещества; сила, масса, скорость и ускорение;
ионизирующее излучение; аэродинамические и комбинированные па-
раметры и др. (см. ГОСТ 26001).
48
В широком смысле под измерением понимают алгоритмическую
операцию, которая ставит в соответствие наблюдаемому состоянию
объекта, процесса, явления определенное обозначение (число, но-
мер или символ). Наиболее распространены при испытаниях техни-
ческих изделий статистические измерения, под которыми понимают
нахождение значения физической величины опытным путем с помо-
щью специальных физических средств. Необходимая информация при
этом получается из результатов измерений с помощью обработки эк-
спериментальных данных.
Параметры объекта испытаний могут быть: постоянной или слу-
чайной величиной; детерминированной или случайной функцией.
Характеристики свойств объекта при испытаниях могут оценивать-
ся, если задачей испытаний является получение количественных или
качественных оценок, или контролироваться, если задача испыта-
ний заключается только в установлении соответствия характеристик
объекта заданным требованиям. В последнем случае испытания сво-
дятся к контролю. Поэтому ряд видов испытаний являются конт-
рольными.
Для контроля характеристик необходимо задать их требуемые зна-
чения. Последние указывает разработчик объекта в документации (чер-
тежах, технологии, технических условиях и т.п.). Проверка соответ-
ствия объекта (продукции или процесса) установленным техническим
требованиям называется техническим контролем. Анализируя данное
определение технического контроля, можно заключить, что для вся-
кого контроля характерно осуществление двух основных этапов:
1) получение информации о фактическом состоянии объекта, о
признаках и показателях его свойств;
2) сопоставление этой информации с заданными требованиями
и установление соответствия фактических данных требуемым значе-
ниям.
В основном эти этапы разграничены. Однако в ряде случаев гра-
ница неразличима во времени. В таких случаях первый этап может
быть выражен нечетко или вообще не наблюдаться. Характерным при-
мером является контроль размера калибром, заключающийся в сопо-
ставлении фактического значения размера с предельно допустимым.
Информация второго этапа используется для выработки соответ-
ствующих управляющих воздействий на контролируемый объект. В
этом смысле всякий контроль всегда активен. Первичная информа-
ция сопоставляется с техническими требованиями, записанными в
нормативной документации, с признаками контрольного образца, с
данными, зафиксированными при помощи калибров, и т.д.
На стадии разработки продукции технический контроль зак-
лючается, например, в проверке соответствия опытного образца и
49
(или) разработанной технической документации правилам оформле-
ния и техническому заданию.
На стадии изготовления техническому контролю подвергают-
ся качество, комплектность, упаковка, маркировка и количество
предъявляемой продукции, ход (состояние) производственных про-
цессов.
На стадии эксплуатации продукции технический контроль зак-
лючается, например, в проверке соблюдения требований эксплуата-
ционной и ремонтной документаций.
Объектами технического контроля являются предметы труда (из-
делия, материалы, техническая документация и т.п.), средства труда
(например, оборудование предприятий) и трудовые (например, про-
изводственные) процессы. Контроль осуществляется различны-
ми методами. Последние основаны на физических, химических, био-
логических и других явлениях и зависимостях (законах, принципах),
применяемых при получении первичной информации об объекте кон-
троля.
Как правило, кроме объекта контроля и исполнителя (контроле-
ра) для первого этапа контроля, т.е. получения первичной инфор-
мации об объекте контроля, необходимо привлечение дополнительных
изделий и (или) материалов, главным образом для преобразования ин-
формации, поступающей от объекта контроля. Эти дополнитель-
ные изделия и материалы называются средствами контроля. К ним
относятся соответствующее оборудование, измерительные приборы,
приспособления, инструмент, реактивы и т.д.
Для контроля должна быть определена контрольная точка, кото-
рая может быть частью (элементом) контролируемого объекта или
находиться на некотором удалении от него (например, при контроле
суммарной герметичности). В контрольной точке обычно размеща-
ют датчик или производят отбор пробы вещества.
Для получения результата контроля, т.е. оценки качества изде-
лий, их годности или негодности, сортности и т.д., требуется опре-
деление параметров отдельных показателей качества продукции
(ПКП). При этом возможны два вида контроля. В первом из них
предполагается необходимым контролировать соответствие значений
ПКП (физических величин) установленным требованиям. Иначе го-
воря, в процессе такого контроля можно (нуж-но) использовать из-
мерительные процедуры. Такой контроль называют измерительным
{количественным). При втором виде контроля требуется лишь фик-
сировать наличие отдельных ПКП в определенном поле допуска, ог-
раниченном его верхней и нижней границами, т.е. по существу, осу-
ществлять качественную оценку продукции. Подобный контроль
называют качественным. В процессе измерительного (количествен-
50
ного) контроля используются средства измерений (СИ), а при каче-
ственном контроле — индикаторные средства.
К объектам испытаний (ОИ) помимо изделий (отдельных дета-
лей, соединений, агрегатов, изделий в целом, их моделей) относят-
ся также материалы и процессы. Главная цель испытаний объекта
состоит в том, что по их результатам принимается то или другое ре-
шение относительно объекта: о его годности или браковке, о предъяв-
лении на следующие испытания, о возможности серийного выпуска
и пр.
В зависимости от вида продукции и программы испытаний объек-
тами последних могут быть единичное изделие или партия изделий,
подвергаемая сплошному или выборочному контролю, отдельный об-
разец или партия продукции. Объектом испытаний может также быть
макет, или модель изделия. Решение по полученным результатам
будет относиться в данном случае непосредственно к макету, или
модели. Однако если при испытании какого-либо изделия приходит-
ся некоторые его элементы заменять моделями или отдельные харак-
теристики изделия определять на моделях, то ОИ остается само изде-
лие, хотя оценку его характеристик получают на основе испытаний
модели.
По определению испытания предполагают наличие двух основ-
ных элементов: воздействия на объект и определения характеристик,
которое может производиться как при функционировании объекта,
так и при отсутствии такового.
Условия испытаний — совокупность воздействующих факторов и
(или) режимов функционирования объекта при их проведении. К
условиям испытаний относятся внешние воздействующие факторы
(ВВФ) как естественные, так и искусственно создаваемые, а также
внутренние воздействия, возникающие при функционировании объек-
та (например, нагрев, вызываемый трением или прохождением элек-
трического тока), режимы функционирования объекта, способы и место
его установки, монтажа, крепления, скорость перемещения и т.п.
Нормальные условия испытаний — условия, указанные в норма-
тивной документации (НД) на данный вид продукции. Нормальные
условия испытаний (значения воздействующих факторов, режимы
функционирования) должны быть указаны в НД на методы испыта-
ний конкретных видов продукции. Так, например, устанавливаются
нормальные климатические условия испытаний для различных видов
технических изделий.
Испытания технических изделий классифицируются по видам и
категориям.
Вид испытаний — классификационная группа испытаний по кон-
кретному признаку. Вид испытания определяется местом его проведе -
51
ния, масштабом интервала времени, а также воздействием соответ-
ствующих факторов, проверяемыми параметрами. При этом различ-
ные виды испытаний проводятся в рамках тех или иных категорий.
Категория испытаний — группа испытаний, характеризуемая оди-
наковыми организационными признаками их проведения и принятия
решений по результатом оценки ОИ в целом.
Широкий круг видов испытаний, объединяемых в категории,
характеризуется организационными признаками их проведения, а
именно: уровнем (государственные, межведомственные, ведомствен-
ные испытания), этапами разработки (предварительные, приемоч-
ные), различными видами испытаний готовой продукции (квалифи-
кационные, приемосдаточные, периодические, типовые и т.д.).
По результатам всех этих испытаний производится оценка объек-
та в целом и принимается соответствующее решение о возможности
предъявления изделия на приемочные испытания, постановки изде-
лия на производство, об окончании освоения серийного производ-
ства или его продолжении, о присвоении изделию той или другой
категории качества и т.д.
Проведению испытаний предшествует разработка их программы.
Программа испытаний — организационно-методический документ,
устанавливающий объект и цели испытаний, виды, последователь-
ность и объем осуществляемых экспериментов, порядок, условия,
место и сроки выполнения испытаний, отчетность по ним, а также
ответственность за обеспечение их проведения. Программа испыта-
ний должна содержать методы и методики испытаний или ссылки на
них, если они оформлены как самостоятельные документы.
Метод испытаний — правила применения определенных принци-
пов и средств испытаний.
Методика испытаний — организационно-методический документ,
включающий метод испытаний, средства и условия их проведения,
отбор проб, алгоритмы выполнения операций по определению од-
ной или нескольких взаимосвязанных характеристик свойств объек-
та, формы представления данных и оценивания точности, достовер-
ности результатов, требования техники безопасности и охраны
окружающей среды.
Методика испытаний, определяющая, по существу, технологи-
ческий процесс их проведения, может быть оформлена в самостоя-
тельном документе или в программе испытаний, или в нормативном
документе на продукцию (стандарты, технические условия). Мето-
дика испытаний должна быть аттестована. Для реализации техноло-
гического процесса испытаний технических изделий используют сред-
ства испытаний.
52
Средство испытаний — техническое устройство, вещество и (или)
материал для проведения испытаний. Понятие «средство испытаний»
охватывает любые технические средства, применяемые при испыта-
ниях, и прежде всего испытательные стенды. Испытательным стен-
дом называется техническое устройство для установки объекта испы-
таний в заданных положениях, воздействия на объект, получения
информации и управления процессом и (или) объектом испытаний.
Следовательно, испытательный стенд позволяет не только воздей-
ствовать на объект, но и контролировать характеристики объекта и
его свойства, определять их качественно и (или) количественно.
Совокупность средств испытаний, исполнителей и определенных
ОИ, взаимодействующих по правилам, установленным соответству-
ющей нормативной документацией, составляет систему испытаний.
Главным характерным признаком любой системы испытаний являет-
ся наличие некоторой организованной совокупности исполнителей
(организаций или отдельных лиц), располагающих необходимыми для
этого средствами и взаимодействующих с определенными объектами
испытаний по установленным правилам. В этом смысле говорят,
например, о системе государственных испытаний СИ, базирующей-
ся на метрологических институтах и регламентируемой соответствую-
щими государственными стандартами.
Технологический процесс любого вида испытаний завершается
анализом полученных данных и формированием их результатов.
Данные испытаний — регистрируемые значения характеристик
свойств объекта и (или) условий испытаний, наработок, а также дру-
гих параметров, являющихся исходными для последующей обработки.
Результат испытаний — оценка характеристик свойств объекта,
установление соответствия объекта заданным требованиям, данные
анализа качества функционирования объекта в процессе испытаний.
Рассмотрим более детально взаимосвязь понятий «измерения»,
«контроль» и «испытания».
2.2. Взаимосвязь измерений, контроля и испытаний
Если рассматривать понятия «измерения», «контроль» и «испытания»
на основе оценки их внутренней сущности, то необходимо делать это
с двух позиций.
1. Указанные понятия формально характеризуют автономные про-
цедуры, выполнение которых обеспечивает решение той или иной
задачи. Так, например, из приведенного выше определения поня-
тия «измерение» видно, что измерение — это некоторая техническая
53
операция, имеющая целью количественное определение физической
величины. По своей сути измерение — это экспериментальный про-
цесс, при котором с помощью вспомогательных средств сравнивают
неизвестное значение измеряемой величины с принятой единицей
измерения и определяют, какое число раз эта единица содержится в
измеряемой величине. Для этого единицу величины воспроизводят в
удобном для сравнения виде — в так называемой мере.
Понятие «контроль» не ограничивается приведенными сообра-
жениями. Контроль (технический контроль) определяется как про-
верка соответствия показателей изделия установленным техничес-
ким требованиям. Это относится к контролю как по количественному
признаку (измерительный контроль), так и качественному или аль-
тернативному признаку. Особо отметим, что в последнем случае также
требуется применение процедуры сравнения с мерой, т.е. проведе-
ние измерений. Ведь в конечном счете индикаторы, используемые в
процессе качественного или альтернативного контроля, также явля-
ются измерительными средствами, в них также заложен процесс срав-
нения с мерой (на этапе градуировки). Из данных положений следу-
ет, что контроль сводится к процедуре разбраковки изделий по
сортности, группам, номиналам, качеству и т.д. с обязательным
использованием измерительных процедур. Однако измерительный
контроль отличается от собственно измерений тем, что вместо чис-
ленного значения величины его результатом является заключение вида
«да» либо «нет», т.е. «годен» или «не годен».
При неизмерительном контроле, в отличие от измерительного,
отсутствуют количественные оценки. Один из наиболее распростра-
ненных видов неизмерительного контроля — визуальный (часто при
помощи средств так называемого технического зрения). Целью неиз-
мерительного контроля является проверка соответствия определен-
ных качественных свойств контролируемого объекта (например, фор-
мы, цвета, герметичности емкости и др.) заданным требованиям.
И, наконец, из приведенного выше определения понятия «ис-
пытание» видно, что основная цель испытаний заключается в оцен-
ке качества изделия при его функционировании в тех или иных усло-
виях, как правило, отличающихся от нормальных.
Таким образом, исходя из данных определений, можно (в неко-
тором смысле) рассматривать процедуры измерений, контроля и ис-
пытаний как автономные, выполняющие самостоятельные задачи.
2. Указанные процедуры функционально связаны. Действитель-
но, достаточно очевидно, что основным источником сведений о
качестве продукции, характере производства и других показателях
являются измерения. Именно в процессе их проведения и возникает
та информация, которая обеспечивает решение задач по оценке по-
54
казателей качества продукции (ПКП). Отсюда следует, что измере-
ния входят как составной элемент в процедуры и контроля, и испыта-
ний.
Сравнивая приведенные выше определения испытаний и конт-
роля, выявим их сходство и различие. Сходство состоит в том, что и
то и другое позволяет определять характеристики объекта и его свой-
ства. Это сходство объясняется тем, что процесс испытания, состо-
ящий из ряда операций, включает в себя операцию контроля, кото-
рая, как правило, является заключительной операцией испытаний.
Контроль всегда является частью испытаний. При этом контроль мо-
жет быть даже упрощенный, например визуальный, только органами
зрения, но испытания обязательно заканчиваются им. Различие со-
стоит в том, что испытание всегда предполагает воздействие на объект,
контроль же может проводиться без воздействия. Это имеет место
при самостоятельном автономном контроле, не предусматривающем
экспериментальное определение характеристик, а предполагающем
только качественную оценку или измерение. Таким образом, испы-
тания всегда включают в себя контроль, контроль же может осуще-
ствляться самостоятельно, автономно, без испытаний.
Различие процедур измерения, контроля и испытаний заключа-
ется также и в том, что качество измерений характеризуется погреш-
ностью получаемого результата, качество контроля — достовернос-
тью его результата, а качество испытаний — погрешностью и
достоверностью результата испытаний.
В заключение рассмотрим суть и содержание обобщенной про-
цедуры «сертификационные испытания», которая сводится, во-пер-
вых, к получению информации о некотором процессе или изделии
при проведении измерений в определенных, заранее установленных
условиях (при конкретных внешних воздействующих факторах) и,
во-вторых, к математической обработке получаемой информации по
определенному алгоритму с целью установления реальных показате-
лей качества продукции.
В зависимости от определяемых групп показателей качества про-
дукции различают три вида испытаний: на функционирование, на
безопасность и на надежность. Сертификационные испытания, как
видим, не входят в этот перечень. Определение данным испытаниям
можно дать исходя из сущности понятия «сертификация» как проце-
дуры, обеспечивающей подтверждение сертифицируемой продукции
установленным требованиям. Из данного положения следует, что под
сертификационными испытаниями можно понимать процесс экспери-
ментального нахождения ПКП при конкретных, заранее установлен-
ных ВВФ с целью определения соответствия продукции установлен-
ным требованиям. Как видим, понятие «сертификационные
55
испытания» является обобщающим, что и позволяет говорить и о дан-
ной процедуре как обобщающей, т.е. включающей не только конт-
роль, но и различные виды испытаний.
Таким образом, с одной стороны, можно говорить о различном
содержании, задачах и подходах при проведении измерений, контро-
ля и испытаний, а с другой стороны, эти процедуры можно оценивать
с единых, общих понятий (применительно, в частности, к задачам
оценки качества изделий при сертификационных испытаниях).
В литературе в ряде случаев обращается внимание на отличие
различных видов испытаний от контроля. В частности, в [75] указы-
вается, что испытания на фукционирование осуществляются при ус-
ловии воздействия на продукцию определенных ВВФ (реальных или
моделируемых), а контроль — при нормальных климатических усло-
виях. Тут же отмечается, что испытания на безопасность и надеж-
ность могут проводиться как при нормальных условиях, так и при
воздействии ВВФ. Поскольку нормальные условия входят в интер-
вал изменения ВВФ, т.е. являются их частным случаем, то отличие
носит не принципиальный характер, а лишь позволяет определять
ПКП в тех условиях, которые оговариваются в технических условиях
на изделие.
Далее указывается, что испытаниям подвергается выборка про-
дукции, а контролю — чаще всего вся продукция, что также не прин-
ципиально. Обычно объем контролируемой выборки определяется
видом продукции, ее назначением, стоимостью, характером умень-
шения ресурса и т.д. Массовая дешевая продукции, для которой сто-
имость браковки годной продукции примерно одинакова со стоимос-
тью пропуска негодной продукции (критерий идеального наблю-
дателя), как правило, подвергается выборочному контролю. В то
же время дорогая, ответственная продукция, для которой пропуск
брака недопустим (точнее, не должен превышать допустимого уров-
ня), почти всегда подвергается сплошному контролю.
Приводятся и другие соображения, но они также не имеют прин-
ципиального значения, а определяют лишь техническую сторону про-
ведения процедур контроля и испытаний. Главное же, и это призна-
ется в большинстве технических источников, «...для доказательства
соответствия продукции ... конкретному стандарту... необходимо осу-
ществление количественных контроля и испытаний, сопровождаю-
щихся измерениями...» [56]. Таким образом, несмотря на приводи-
мые отличия, прямо указывается на то, что процессы контроля и
испытаний должны сопровождаться измерениями. Налицо проявле-
ние внутреннего единства в понятиях измерений, контроля и испы-
таний.
56
Рассмотрим теперь классификацию контроля и испытаний слож-
ных изделий авиационной и ракетно-космической техники.
2.3. Классификация контроля и испытаний
2.3.1. Классификация технического контроля
Существует большое число видов и методов контроля продукции на
различных стадиях ее жизненного цикла. Их можно классифициро-
вать по следующим признакам.
1. По этапам жизненного цикла продукции различают кон-
троль:
• процесса проектирования — проверка конструкторской и (или)
технологической документации на стадии разработки продук-
ции;
• производственный — проверка производственного процесса и его
результатов на стадии изготовления продукции. Этот вид кон-
троля, как правило, включает вспомогательные, подготови-
тельные и технологические операции;
• эксплуатационный — проверка на стадии эксплуатации продук-
ции. Объектами эксплуатационного контроля могут быть эксп-
луатируемые изделия и процесс эксплуатации.
2. По влиянию на изделие контроль может быть:
• разрушающим — проверка качества продукции с нарушением ее
пригодности к использованию по назначению. Он применяет-
ся тогда, когда трудно (невозможно) учесть большое количе-
ство единичных ПКП. Иногда по экономическим соображени-
ям оказывается целесообразным для контроля разрушить
определенное количество изделий. Такие процедуры проводят
часто при всестороннем анализе качества сложных (специаль-
ных) систем при выполнении, например, больших (БКИ) или
малых (МКИ) контрольных испытаний;
• неразрушающим — проверка качества продукции без нарушения
ее пригодности к использованию по назначению. Ведущую роль
среди средств неразрушающего контроля играют СИ, исполь-
зующие оптические, электромагнитные, ультразвуковые, теп-
ловые и другие методы.
3. По полноте охвата изделий различают контроль:
• сплошной — проверка каждой единицы продукции с одинаковой
полнотой. Таким образом, при сплошном контроле исследуют
все детали (изделия) партии (100%-ный контроль);
57
• выборочный — проверка выборок или проб из партии или потока
продукции. Данный контроль, процедуры и правила которого
основываются на законах математической статистики, часто на-
зывают статистическим контролем качества продукции.
4. По цели оценки качества изделий различают контроль:
• приемочный — проверка соответствия качества исходных мате-
риалов, полуфабрикатов, изделий (деталей, сборочных еди-
ниц, комплектов и комплексов) требованиям, установлен-
ным НД. По результатам этого контроля принимается решение
о пригодности изделий к поставке и использованию по назна-
чению.
• статистического регулирования технологического процесса — ре-
гулярная проверка параметров технологического процесса с це-
лью оценки их состояния и наладки.
5. По стадиям производственного процесса различают кон-
троль:
• входной — проверка продукции поставщика, поступившей к по-
требителю (заказчику) и предназначенной для использования
при изготовлении, ремонте или эксплуатации продукции. Вход-
ной контроль комплектующих изделий весьма необходим, так
как на их долю приходится до 70% всех отказов готовых изделий
при их эксплуатации.
• операционный — проверка продукции или процесса при выпол-
нении или после завершения определенной операции. Опера-
ционный контроль обеспечивает непрерывность проверки на всех
технологических операциях, определяющих качество изделий.
При этом технологический процесс какой-либо операции кон-
тролируется и корректируется на протяжении всего времени ее
выполнения. Наиболее полно эту задачу решают статистичес-
кие методы выборочного контроля, когда по результатам конт-
роля (измерений) элементов выборки ведут наблюдение за двумя
основными характеристиками хода процесса: уровнем надежнос-
ти и точностью;
• приемосдаточный — проверка готовой продукции, по результа-
там которой принимается решение о ее пригодности к поставке
и (или) использованию. Приемосдаточный контроль проводится
на выходе технологического производства, когда выполняется
комплексная проверка готового изделия. По результатам этого
контроля принимается решение о его пригодности к поставке и
использованию по назначению.
6. По характеру исполнения контроль может быть:
• инспекционным — специально уполномоченные исполнители
проверяют эффективность ранее выполнявшегося контроля.
58
Инспекционный контроль не всегда сводится к повторению в
том или ином объеме ранее произведенного контроля. Эффек-
тивность уже проведенного контроля проверяется также оцен-
кой, например, правил выполнения контроля.
• летучим, который также носит инспекционный характер, но
может быть распространен на весь ход технологического про-
цесса и конструкторско-технологическую документацию. Ле-
тучий контроль осуществляют в случайные моменты времени,
выбираемые в установленном порядке. Эффективность его обус-
ловливается внезапностью, правила обеспечения которой дол-
жны быть специально разработаны. Летучий контроль, как пра-
вило, выполняется непосредственно на месте изготовления,
ремонта, хранения и т.п.
7. По принимаемым решениям различают контроль:
• пассивный — осуществляется проверка на годность, т.е. брак
только выявляется (фиксируется);
• активный — позволяет установить причину появления тех или
иных отклонений значений параметров изделий от нормы.
8. По характеру поступление продукции на проверку раз-
личают контроль:
• непрерывный— изделия подвергаются проверке непрерывно;
• периодический — изделия проверяются через установленные про-
межутки времени.
9. В зависимости от характера определяемого парамет-
ра различают контроль:
• по количественному признаку — определяют числовые значения
важнейших ПКП и по их соотношению с заданными нормами
судят о качестве изделия.
• по качественному признаку — определяют, укладывается ли кон-
тролируемый ПКП в заданные допуски, т.е. проводится до-
пусковый контроль.
• по альтернативному признаку — частный случай контроля по
качественному признаку, когда вся продукция состоит из двух
групп: годной и дефектной. Решение об объеме контролируе-
мой продукции принимается в зависимости от числа дефектов,
приходящихся на определенное число единиц продукции.
10. В зависимости от используемых средств контроля техничес-
кий контроль можно разделить на следующие виды: а) электрический;
б) механический; в) физико-химический; г) контроль по контрольно-
му образцу; д) органолептический; е) визуальный; ж) технический
осмотр. х
59
Каждый из данных видов контроля определяется видом исполь-
зуемого СИ или соответствующего органа чувств человека. Так, на-
пример:
• контроль по контрольному образцу — это проверка качества про-
дукции методом сравнения ее признаков с признаками конт-
рольного образца;
• органолептический контроль — это проверка только органами
чувств. Этот контроль основывается на восприятиях органами
зрения, слуха, обоняния, вкуса и осязания такой информа-
ции, которая не представима в численном выражении. Реше-
ние относительно объекта контроля принимается в таком слу-
чае лишь по результатам анализа чувственных восприятий
(например, оценка шума, запаха и т.д.). При органолептичес-
ком контроле можно применять средства контроля не измери-
тельные, а увеличивающие разрешающую способность или вос-
приимчивость органов чувств. Особенность применения средств
контроля в этом случае заключается в отсутствии информации
об объекте контроля в численном выражении;
• визуальный контроль — контроль только органами зрения;
• технический осмотр — контроль в основном при помощи орга-
нов чувств и, в случае необходимости, средствами контроля,
номенклатура которых установлена соответствующей докумен-
тацией.
11. По степени участия человека в проверочных опера-
циях различают контроль: а) ручной; б) полуавтоматический; в) ав-
томатический.
Данные виды контроля характеризуются отношением времени,
затрачиваемого на проведение ручных операций, первоначальную
установку контролируемого изделия, его снятие и выключение, к
общей длительности контроля. Если это отношение более 0,5, конт-
роль считается ручным, если оно находится в интервале от 0,02 до 0,5 —
полуавтоматическим, а если оно менее 0,02 — автоматическим.
12. По уровню проведения контроля различают контроль:
• ведомственный — проверка качества продукции органами мини-
стерства или ведомства;
• государственный — проверка (надзор) качества продукции спе-
циальными государственными органами.
2.3.2. Классификация испытаний
Для оценки качественных свойств и количественных значений
параметров изделий на стадиях разработки, производства и эксплуа-
тации широко используются различные виды испытаний. В ГОСТ
60
16504—81 «Испытания и контроль качества продукции. Основные тер-
мины и определения» испытания классифицируются по следующим
признакам: уровню проведения; цели проведения; месту проведения;
характеру внешних воздействий; продолжительности испытаний; вли-
янию на объект испытаний; определяемым характеристикам; стадиям
жизненного цикла изделия (табл. 2.1).
Испытания по уровню проведения подразделяются на три
вида: государственные, межведомственные и ведомственные. Госу-
дарственные испытания — это испытания установленных важнейших
видов продукции, проводимые головной организацией по этим ис-
пытаниям, или приемочные испытания, выполняемые государствен-
ной комиссией или соответствующей организацией, которой предо-
ставлено право их проведения.
Важные виды продукции, на которые деятельность головных орга-
низаций не распространяется, проходят приемочные испытания, про-
водимые государственной комиссией и возможно организациями, ко-
торым такое право предоставлено.
Межведомственные испытания — это проверка продукции комис-
сией из представителей нескольких заинтересованных министерств и
(или) ведомств или приемочные испытания установленных видов
продукции для приемки составных частей объекта, разрабатываемого
совместно несколькими ведомствами.
Для отдельных видов продукции понятие «межведомственные
испытания» по решению заинтересованных министерств может отно-
ситься лишь к определенным категориям испытаний (например, к
приемочным) независимо от того, что в комиссиях по проведению
испытаний других категорий также могут участвовать представители
разных министерств.
Ведомственные испытания — испытания, проводимые комиссией
из представителей министерства или ведомства.
Испытания по цели проведения подразделяются на иссле-
довательские, контрольные, сравнительные и определительные.
Исследовательские испытания — испытания, проводимые для изу-
чения определенных характеристик свойств объекта. В основном они
характерны для этапа разработки объектов и осуществляются их раз-
работчиками (сотрудниками НИИ и КБ). Следует отметить, что с
развитием техники ОИ несколько усложняются, поэтому часть воп-
росов исследовательского характера может быть решена только на этапе
подготовки производства, в то же время заводы располагают такими
интеллектуальными силами, которые нельзя не использовать для ре-
шения этих вопросов. Исходя из этого исследовательские испытания
во все возрастающем объеме проводятся и на заводах.
61
Таблица 2.1
Классификация испытании продукции
Классификационный признак Вид испытаний
Уровень проведения Г осударственные Межведомственные Ведомственные Заводские
Цель проведения Исследовательские Определительные Оценочные Доводочные Сравнительные Предъявительские Приемочные Квалификационные Контрольные Приемосдаточные Периодические Типовые (проверочные) Аттестационные Сертификационные Специальные Дополнительные
Место проведения Лабораторные Стендовые Эксплуатационные Подконтрольная эксплуатация Опытная эксплуатация Натурные Полигонные
Характер внешних воздействий Механические Климатические Биологические Радиолокационные Электромагнитные Специальных сред Термические Испытания при комплексном воздействии
Окончание табл. 2.1
Прод олжител ьность испытаний Нормальные Ускоренные Форсированные Сокращенные
Влияние на объект испытаний Неразрушающие Разрушающие Испытания на прочность Испытания на устойчивость Испытания на стойкость
Определяемые характеристики Функциональные Испытания на надежность Испытания на безопасность Граничные Технологические
Стадии жизненного цикла Испытания на этапе разработки Испытания готовой продукции
Цели исследовательских испытаний — получение информации о
показателях качества функционирования испытуемых изделий в усло-
виях воздействия различных внешних факторов, определение из них
наиболее сильно влияющих на показатели качества, а также выбор
наилучших режимов применения изделия.
Исследовательские испытания позволяют решить следующие за-
дачи:
• определения или оценки показателей качества функционирова-
ния испытуемого объекта в определенных условиях его исполь-
зования;
• выбора наилучших режимов применения объекта или наилуч-
ших характеристик его свойств;
• сравнения множества вариантов реализации объекта при проек-
тировании и аттестации;
• построения математической модели функционирования объек-
та (оценки параметров математической модели);
• отбора существенных факторов, влияющих на показатели каче-
ства функционирования объекта;
• выбора вида математической модели объекта (среди заданного
множества вариантов).
Контрольные испытания — это испытания, проводимые для про-
верки качества объекта на всех стадиях жизненного цикла изделия.
63
По результатам этих испытаний могут приниматься решения о запус-
ке вновь разработанных изделий в производство, о возможности при-
емки выпускаемых изделий или их эксплуатации.
При контрольных испытаниях осуществляется логическая опера-
ция сравнения измеренных величин контролируемых параметров с их
номинальными значениями. Эта операция носит название допуско-
вого контроля.
Результаты контрольных испытаний изделий представляются в
виде качественных показателей ОИ, которые в свою очередь выдают-
ся в виде качественных двухальтернативных («годен — негоден») или
трехальтернативных («больше — норма — меньше») оценок и др.
Сравнительные испытания — испытания аналогичных по характе-
ристикам или одинаковых объектов, которые осуществляются в иден-
тичных условиях с целью сравнения характеристик их свойств.
Определительные испытания — испытания, целью которых явля-
ется определение значений характеристик объекта с заданными точ-
ностью и (или) достоверностью. В процессе этих испытаний изде-
лий математически и (или) физически моделируют (имитируют)
эксплуатационные условия функционирования ОИ, определяют (на-
блюдают, измеряют, вычисляют, строят зависимости одних контро-
лируемых параметров от других) количественные и качественные
признаки, характеризующие те или иные его свойства.
При компьютерной автоматизации определительных испытаний
изделий результаты представляются либо в виде чисел — оценок ха-
рактеристик свойств ОИ, полученных после компьютерной первич-
ной обработки данных измерений контролируемых параметров, либо
в виде зависимостей одних параметров от других, например ампли-
тудно-частотных характеристик (АЧХ). Эти числа и зависимости яв-
ляются количественными показателями качества ОИ, полученными
при определительных испытаниях.
Испытания по месту проведения подразделяются на два вида:
эксплуатационные и лабораторные.
Особенностью эксплуатационных испытаний является одновремен-
ное воздействие различных внешних и внутренних факторов, харак-
теризуемых случайными их сочетаниями и значениями параметров,
изменяющимися во времени. Однако проведение эксплуатационных
испытаний в ряде случаев технически трудно выполнимо, а иногда и
нецелесообразно по следующим причинам: не все интересующие нас
параметры могут быть измерены; точность и полнота информации ока-
зывается недостаточной вследствие невозможности использования
точных средств измерений; получаемая информация может относить-
ся к морально устаревшим изделиям; осуществление испытаний на
начальных этапах разработки практически невозможно.
64
Эксплуатационные испытания являются, по существу, опытной
эксплуатацией. Иногда некоторые изделия подвергают подконтроль-
ной эксплуатации. В этом случае применяются специальные сред-
ства измерения, эксплуатируемые обслуживающим персоналом, и
руководствуются специальной документацией, предназначенной для
сбора, учета и первичной обработки информации, получаемой в про-
цессе подконтрольной эксплуатации.
Лабораторные испытания, в отличие от эксплуатационных, ха-
рактеризуются тем, что они осуществляются в лабораторных услови-
ях. При этом изделие подвергается воздействию ограниченного чис-
ла внешних факторов, характеризуемых заданными значениями
параметров и находящихся в определенных соотношениях.
Часто в процессе лабораторных испытаний изделие подвергается
более интенсивному воздействию, чем при реальной эксплуатации.
Это позволяет сократить время испытаний и выдать ускоренную оценку
качества изделия. Однако эти испытания весьма условны, поскольку
в большинстве случаев не установлено соответствие между лабора-
торными и эксплуатационными воздействиями. Таким образом, ре-
зультаты лабораторных испытаний могут отличаться от результатов,
получаемых в процессе эксплуатации.
Помимо указанных видов испытаний находят применение и дру-
гие, сочетающие в себе их особенности. К таким в первую очередь
следует отнести натурные испытания, при которых изделия находят-
ся в условиях, соответствующих их использованию по прямому на-
значению. Эти испытания отличаются от эксплуатационных тем, что,
во-первых, испытуемое изделие, находясь в естественных условиях
эксплуатации, может не устанавливаться на объект, в комплекте с
которым оно должно использоваться и взаимодействовать в процессе
эксплуатации; во-вторых, при этих испытаниях может имитировать-
ся работа изделия с сохранением всех внешних воздействующих фак-
торов.
Кроме того, возможно проведение испытаний на испытательном
полигоне, т.е. на территории, специально оснащенной испытатель-
ными сооружениями, средствами измерения и обработки результа-
тов испытаний. Такие испытания, называемые полигонными, осуще-
ствляются при внешних воздействиях, в значительной степени
приближенных к эксплуатационным.
Некоторой разновидностью лабораторных испытаний являются
стендовые испытания, которые проводятся как с применением уни-
версального испытательного оборудования и средств измерения зна-
чений параметров испытуемого изделия, смонтированных в единую
комплексную систему, называемую испытательным стендом, так и с
применением специальных стендов для испытаний конкретных изде-
65
лий. Испытательный стенд может быть предназначен для испытаний
изделий какого-либо одного типа или различных типов, близких по
конструктивному оформлению и входным/выходным параметрам.
Желательно, чтобы испытательные стенды обеспечивали автомати-
зацию управления испытаниями, съема и регистрации всей необхо-
димой информации.
Испытания по характеру внешних воздействий. Извест-
но, что качество изделий закладывается на стадии разработки, обес-
печивается в процессе производства и поддерживается на стадии экс-
плуатации. Разрабатывая изделия, необходимо учитывать условия их
эксплуатации, хранения и транспортирования, характеризующиеся
воздействием внешних факторов.
К внешним факторам относятся: действие окружающей среды и
особенности эксплуатации, связанные с местом установки изделия и
(или) условиями его транспортирования. Указанные внешние воз-
действия могут вызвать ограничение или потерю работоспособности
изделия или его составных частей в процессе эксплуатации.
ГОСТ 21964—76 делит все внешние воздействующие факторы на
следующие классы: механические, климатические, биологические,
радиационные, электромагнитные, специальных сред и термические.
В свою очередь каждый класс подразделяется на группы, а каждая
группа на виды, которым соответствуют конкретные испытания. На-
пример, класс климатических воздействий делится на группы: ат-
мосферное давление, температура среды, влажность воздуха или других
газов и т.д.; эти группы подразделяются на такие виды: атмосферное
(повышенное или пониженное) давление, изменение атмосферного
давления или температуры среды (повышенная/пониженная), изме-
нение температуры среды и т.д.
Некоторые виды, группы и классы воздействий определяются
назначением изделий и их взаимодействием со средами, создаваемы-
ми человеком в процессе его деятельности. К таким классам отно-
сятся классы ВВФ: специальных сред, радиационные, электромаг-
нитные и термические. Освоение космоса привело к необходимости
выделения еще одного класса (не предусмотренного стандартами), в
который вошли все виды так называемых космических воздействий.
В соответствии с группами ВВФ предусматриваются определен-
ные виды лабораторных испытаний, проводимых для проверки рабо-
тоспособности изделий или определения их способности нормально
функционировать после воздействия внешних факторов, а также спо-
собности изделий выдерживать хранение и транспортирование.
К испытаниям изделий на воздействие механических факторов в
основном относятся испытания на воздействие синусоидальной и слу-
чайной широкополосной вибрации, механического удара многократ-
66
ного и одиночного действия, удара при падении, линейного ускоре-
ния и акустического шума.
К испытаниям изделий на воздействие климатических факторов
относятся испытания на воздействие пониженного (повышенного)
атмосферного давления, изменения атмосферного давления, повы-
шенной (пониженной) температуры внешней среды, изменения тем-
пературы внешней среды, повышенной (пониженной) влажности,
атмосферных выпадаемых осадков (дождя, снега, измороси, града),
атмосферных конденсированных осадков (росы, инея и т.д.), соля-
ного (морского) тумана, солнечного излучения, статического (или
динамического) воздействия пыли (песка), атмосферы с коррозион-
но-активными агентами. Некоторые изделия, предназначенные для
работы в тропических условиях или подвергающиеся внешним воз-
действиям при хранении, испытываются на воздействие биологичес-
ких факторов, в частности плесневых грибов. Конкретные изделия
могут проходить и другие виды испытаний, необходимость проведе-
ния которых вызывается спецификой их назначения.
Значительное число видов испытаний изделий на воздействие ме-
ханических, климатических, биологических, радиационных и дру-
гих внешних факторов в лабораторных условиях приводит к необходи-
мости установления способов (последовательности) их выполнения.
Стандартизировать единую последовательность испытаний для всех
изделий практически невозможно. В общем случае последователь-
ность проведения испытаний зависит от стадии жизненного цикла
изделия и определяется целью испытаний, назначением изделия,
местом его установки и условиями эксплуатации. Поскольку изделия
авиационной и ракетно-космической техники должны проходить боль-
шое количество видов испытаний на воздействие внешних факторов,
то помимо установления конкретных видов испытаний для изделия,
нужно решить, каким способом это осуществлять.
Введением понятия «способ проведения испытаний» подчерки-
вается, что не все изделия выборки подвергаются последовательно
различным видам испытаний. Наряду с последовательным способом
может быть и параллельный, когда изделия выборки подвергаются
одновременно (параллельно) различным видам испытаний. Возмо-
жен и так называемый параллельно-последовательный способ, при
котором все виды испытаний разбиваются на определенное число групп
и соответственно на такое же число групп разбивается выборка изде-
лий; группы изделий испытываются параллельно, в то время как в
группах испытания изделий проводятся последовательно. И наконец
возможен способ комбинированных испытаний, при котором испы-
туемое изделие подвергается одновременно воздействию двух или бо-
лее определенных внешних факторов.
67
Последовательный способ проведения испытаний предполагает по-
очередное раздельное испытание изделий на воздействие внешних
факторов при определенной длительности интервала времени между
ними.
На стадии разработки изделия, когда известен наиболее критич-
ный ВВФ, ставится задача получения в первую очередь данных об
отказах при испытаниях на его воздействие. Однако после этих испы-
таний уменьшается способность изделий выдерживать другие виды
испытаний. Поэтому для получения возможно большего объема дан-
ных о качестве изделий (при их ограниченном числе) полезно начи-
нать с проведения наименее жестких испытаний. В тех случаях, ког-
да результат воздействия одного вида испытаний на изделие зависит
от предшествующих условий, в которых оно находилось, необходи-
мо воспроизводить внешние воздействия в определенной последова-
тельности.
На стадии производства изделий целесообразно установление та-
кой последовательности, которая даст наиболее эффективные резуль-
таты за счет того, что предшествующие испытания будут создавать
предпосылки для отказов при последующих воздействиях. Так, на-
пример, если после испытаний на воздействие быстрой смены тем-
ператур проводить все или часть предусмотренных механических ис-
пытаний, то они будут способствовать выявлению отказов, обуслов-
ленных испытаниями на быструю смену температур, а также могут
вызывать новые отказы, такие как трещины, течи и т.д. Наконец
можно имитировать последовательность воздействия внешних факто-
ров, наиболее часто встречающуюся в условиях эксплуатации.
При последовательном способе проведения испытаний необхо-
димо, чтобы интервалы времени между воздействиями отдельных фак-
торов имели соблюдаемую длительность, исключающую их взаимное
влияние. При этом значения параметров изделий измеряются перед
началом и после воздействия каждого фактора. Установление единой
последовательности проведения испытаний для различных изделий
вряд ли возможно.
Недостатками данного способа испытаний являются большая про-
должительность, трудность определения причин отказов вследствие
накопления в изделиях необратимых изменений после последователь-
ного выполнения ряда видов испытаний, а также несоответствие ре-
альным условиям эксплуатации и т. д.
Параллельный способ проведения испытаний предполагает, что раз-
личным видам испытаний одновременно (параллельно) подвергается
определенное число испытуемых изделий. В данном случае за крат-
чайший интервал времени и с минимальным изнашиванием изделий
можно определить их свойства при конкретном внешнем воздействии
68
и в случае отказов принять соответствующие меры. Такой способ может
быть применен на стадии разработки изделия. Основными недостат-
ками способа являются: потребность в большом количестве средств
испытаний и несоответствие реальным условиям эксплуатации.
Параллельно-последовательный способ испытаний, предполагающий
наличие ряда параллельно испытуемых групп, в которых изделия ис-
пытываются последовательно, основан на том, что изделия в разных
группах подвергаются различным видам испытаний. При объедине-
нии видов испытаний изделий в группы руководствуются следующи-
ми соображениями. В одну группу включают виды испытаний, пре-
дусмотренные «климатической последовательностью», дополняя их
некоторыми видами механических испытаний. В другие группы мо-
гут быть включены испытания на воздействие: акустических шумов,
повышенной влажности воздуха, солнечного излучения, соляного
тумана, плесневых грибов и т. д. Испытания на воздействия соляно-
го тумана и плесневых грибов рекомендуется проводить на отдельных
выборках для каждого вида.
Комбинированные испытаний выполняютя в условиях, наиболее
близких к условиям при реальной эксплуатации. Отличие заключает-
ся, однако, в том, что комбинация воздействия внешних факторов и
значения характеризующих их параметров предопределены техничес-
кой документацией, а не являются случайными. Проведение комби-
нированных испытаний требует применения специального испыта-
тельного оборудования с большой степенью автоматизации. Их целе-
сообразно осуществлять на заключительных этапах исследований и
проектирования для определения возможности предъявления опыт-
ных образцов (партии) на приемочные испытания, а также на стадии
производства для установления возможности их применения.
Разновидностью комбинированных испытаний можно считать со-
ставные испытания, при которых изделие подвергается воздействию
двух и более внешних факторов, следующих непосредственно друг за
другом через строго определенные интервалы времени, исключаю-
щие время на восстановление или стабилизацию изделия. При этом
измерения значений параметров изделий проводятся перед началом
воздействия первого фактора и по окончании воздействия последнего.
Внедрение комбинированных испытаний на стадии производства
позволяет сократить общую продолжительность испытаний и повы-
сить качество изделий. Недостатки комбинированных испытаний —
высокая стоимость испытательного оборудования и усложнение ана-
лиза причин отказов изделий.
Испытания по продолжительности воздействия и значени-
ям воздействующих нагрузок подразделяют на нормальные, ускорен-
ные и сокращенные лабораторные .
69
Нормальные лабораторные испытания проводятся в течение сро-
ка, установленного технической документацией, при воздействии
одного или нескольких внешних факторов, соответствующих услови-
ям реальной эксплуатации. Продолжительность механических, кли-
матических и других определенных видов испытаний может устанав-
ливаться в зависимости от длительности реальной эксплуатации,
однако она не должна быть меньше длительности процесса установ-
ления стационарного режима работы изделия.
Ускоренные испытания обеспечивают получение необходимого
объема информации за более короткий срок, чем при нормальных
испытаниях. Ускорение процесса испытаний достигается за счет уже-
сточения испытательных режимов (повышения температуры, увели-
чения влажности и т.д.), а также форсирования режимов работы ис-
пытуемого изделия. При жестких условиях испытаний необходимо,
чтобы значения параметров испытательных режимов не превышали
предельные нормы. Основная трудность в оценке результатов уско-
ренных испытаний заключается в ^становлении соответствия между
значениями параметров, характеризующих более жесткие испытатель-
ные режимы при меньшей продолжительности, с нормальными ре-
жимами и продолжительностями. При этом представляет интерес ус-
тановление соответствия распределения отказов при ускоренных
испытаниях законам нормальной эксплуатации.
Сокращенными называются лабораторные испытания, проводи-
мые по сокращенной программе.
Испытания по влиянию на объект подразделяют на нераз-
рушающие и разрушающие. Неразрушающими называют такие испы-
тания, после проведения которых параметры и свойства объекта не
ухудшаются и он может использоваться по прямому назначению. При
разрушающих испытаниях (проводимых по полной программе) в ис-
пытуемом объекте возникают необратимые изменения, ухудшающие
значения его параметров и ускоряющие возможность появления по-
степенных случайных отказов.
Если испытания продолжаются до момента достижения разруше-
ния испытуемого изделия или до момента, когда значения его пара-
метров выходят за установленные пределы, их называют испытания-
ми на прочность. При этом виде испытаний воздействие внешних
факторов увеличивается постепенно до возникновения отказа испы-
туемого изделия. Значения воздействующего фактора фиксируются
как в процессе их увеличения, так и в момент отказа изделия.
После успешного прохождения испытаний на прочность выпол-
няют испытания на устойчивость с целью определения способности
изделия выполнять свои функции и сохранять значения параметров в
70
пределах установленных норм во время действия на него конкретных
факторов.
Очевидно, что если изделие подвергается комплексу различных
видов испытаний на воздействие внешних факторов, то в нем возни-
кают необратимые изменения, увеличивающие вероятность отказов
и существенно сокращающие технический ресурс его работы. По-
этому комплекс испытаний на воздействия внешних факторов следу-
ет рассматривать как разрушающее воздействие. К неразрушающим
можно отнести, с некоторыми ограничениями, испытания на воз-
действие ряда видов электромагнитных внешних факторов.
Испытания по определяемым характеристикам изделий
подразделяются на функциональные, испытания на надежность и на
безопасность.
Функциональные испытания проводятся для определения значений
показателей назначения изделия, т.е. его технических характерис-
тик.
Испытания на надежность предусматривают определение значе-
ний показателей безотказности, долговечности, ремонтопригоднос-
ти, сохраняемости и транспортабельности. Испытания могут быть
определительными и контрольными. Цель определительных испытаний
изделий на надежность — выявление соответствия фактических пока-
зателей надежности изделий требованиям НД или внесения их значе-
ний в НД. Контрольные испытания изделий на надежность позволяют
установить соответствие значений показателей надежности установ-
ленным требованиям.
Испытания на безопасность проводят для проверки качества кон-
струкции и изготовления изделия, обеспечивающего его потребите-
лю безопасную работу даже в случаях небрежного с ним обращения.
При этом должна обеспечиваться защита потребителя от поражения
электрическим током; воздействия высоких температур, приводящих
к самовозгоранию; воздействия рентгеновского излучения или взры-
ва; последствий механической неустойчивости изделия, вызванной
наличием в нем движущихся частей, и т. д. Испытания изделия дол-
жны проводиться как в нормальных условиях, так и в условиях воз-
никновения неисправности.
К данной классификационной группе относятся также гранич-
ные и технологические испытания.
Граничные испытания проводятся для выявления областей рабо-
тоспособности изделий при воздействии определенных внешних фак-
торов. Границами областей работоспособности являются предельно
допустимые значения параметров изделий. В результате устанавли-
ваются зависимости между предельно допустимыми значениями па-
раметров объекта и режимом эксплуатации.
71
Технологические испытания служат для оценки влияния процессов
изготовления изделий (или входящих в них узлов и деталей) на их
качество.
Испытания по стадиям жизненного цикла. Всякий новый
объект (продукция) до того, как он будет готов к эксплуатации, про-
ходит три основных этапа: разработку, производство и специальные
исследования, сопровождающие и разработку и производство. Для
проверки соответствия изделий предъявляемым к ним требованиям
на указанных этапах выполняются следующие виды исследовательс-
ких, определительных и контрольных испытаний.
На стадии разработки исследовательские испытания выпол-
няются с использованием математических моделей функционирова-
ния изделия и воздействия на него внешних факторов. Для оценки
степени соответствия показателей качества изделия установленным
требованиям (после внесения изменений в его конструкцию с целью
достижения заданных значений показателей качества) осуществляют
исследовательские доводочные испытания.
После изготовления опытных образцов или опытных серий изде-
лий их подвергают контрольным предварительным испытаниям с тем,
чтобы установить возможность предъявления их на приемочные ис-
пытания. Контрольные приемочные испытания опытных образцов или
опытных партий изделий проводят для решения вопроса о целесооб-
разности постановки этих изделий на производство и (или) исполь-
зования по назначению.
На стадии производства выполняют контрольные квалифика-
ционные испытания установочной серии или первой промышленной
партии изделий для определения готовности предприятия к их выпус-
ку в требуемом объеме.
Прежде, чем предъявлять изделия для приемки представителем
заказчика, потребителя или других органов приемки, служба техни-
ческого контроля предприятия проводит контрольные предъявительс-
кие испытания. После этого представитель заказчика в присутствии
представителя изготовителя выполняет контрольные приемосдаточные
испытания.
В целях контроля стабильности качества готовых изделий за оп-
ределенный период и решения вопроса о возможности продолжения
их выпуска проводят контрольные периодические испытания в объемах
и в сроки, установленные НТД на данное изделие. Если предприя-
тие вносит изменения в конструкцию, рецептуру или технологичес-
кий процесс изготовления изделий, то для оценки эффективности
вносимых изменений осуществляют типовые контрольные испытания.
Их рекомендуется проводить до и после внесения изменений.
72
Иногда для контроля стабильности качества изделий специально
уполномоченные организации выполняют в выборочном порядке ин-
спекционные испытания.
Развитие международной торговли и стремление обеспечить кон-
курентоспособность изделий привели к необходимости установления
соответствия значений параметров изделий не только национальным,
но и международным нормативным документам. С этой целью введе-
на система сертификации, предусматривающая участие третьей сто-
роны. Первая сторона — поставщик, вторая сторона — покупатель,
третья сторона — орган, признаваемый независимым от участвую-
щих в рассматриваемом вопросе. Наличие сертификата является до-
казательством, что идентифицированная должным образом продук-
ция соответствует конкретному стандарту или другому нормативному
документу.
Главным элементом идентификации продукции при ее сертифи-
кации являются сертификационные испытания, которые могут про-
водиться указанным выше органом или осуществляться другими орга-
нами по его поручению при надзоре за их деятельностью.
Сертификационные испытания — контрольные испытания продук-
ции с целью установления соответствия характеристик ее свойств
национальным и (или) международным нормативным документам.
Сертификационные испытания продукции на соответствие тре-
бованиям государственных и международных стандартов, а также на-
циональных стандартов других стран осуществляются, как правило,
в независимых сертификационных испытательных центрах. Порядок
и условия выполнения этих испытаний устанавливаются в документа-
ции по сертификации. Результаты испытаний позволяют установить
соответствие качества продукции требованиям национальных или меж-
дународных стандартов.
Сертификация может осуществляться в масштабе страны (госу-
дарства) и в рамках международного сообщества. В любом из ука-
занных случаев предполагается, что гарантируется качество выпуска-
емых изделий, отвечающих уровню мировых стандартов. При этом
оно соответствует: для предприятий — определенным ТУ, для стра-
ны — национальным стандартам и ТУ, для международного сообще-
ства — согласованным международным стандартам, принятым всеми
странами-участниками системы сертификации. Сертификация пред-
полагает, что покупаемые разными странами изделия не требуют про-
ведения дополнительных испытаний.
Завершая анализ терминов и определений, регламентированных
ГОСТ 16504—81, следует особо отметить, что каждый вид испыта-
ний, проводимых при разработке, производстве и эксплуатации тех-
нических систем, обладает рядом классификационных признаков.
73
Поэтому в общем случае не существует единой классификации испы-
таний, одинаково пригодной для различных типов изделий. Так,
для больших сложных технических систем может быть введен еще один
характерный для их испытаний классификационный признак — прин-
цип осуществления.
Испытания по принципу осуществления подразделяют на
физические и испытания с использованием математических, физи-
ческих и физико-математических моделей ОИ, позволяющих выпол-
нять испытания методами моделирования. Все рассмотренные выше
испытания по принципу их осуществления принято называть физи-
ческими, поскольку для их проведения требуются макеты, опытные
образцы или готовые изделия, а также специальные испытательное
оборудование и средства измерений. Кроме того, проведение ука-
занных испытаний требует больших затрат времени и работы высоко-
квалифицированного обслуживающего персонала.
Моделирование тесно связано с физическими испытаниями (ла-
бораторными, эксплуатационными и т.д.). Оно основывается на ап-
риорной информации, полученной из анализа теоретических дан-
ных об ОИ, и на экспериментальных исследованиях аналогичных
объектов или их прообразов. Важным является определение степени
соответствия моделируемого объекта реальному образцу, что может
быть установлено по результатам физических испытаний.
Математическое моделирование основано на построении и изуче-
нии математических моделей, которые представляют собой матема-
тическое описание физических процессов, происходящих в ОИ при
воздействии на него внешних факторов или при его работе в нор-
мальных условиях. Математические модели исследуются аналитичес-
кими методами, или методами с применением ЭВМ. Исследование
модели численными методами путем решения задачи на ЭВМ связа-
но с проигрыванием как вариантов взаимодействия изделия с внеш-
ней средой, так и вариантов его работы. Для реализации модели с
помощью ЭВМ часто используют случайные и псевдослучайные чис-
ла. Информацию о работе изделия извлекают методами математи-
ческой статистики. Таким образом осуществляют так называемые
статистические испытания (методом Монте-Карло), заключающие-
ся в том, что путем многократных вычислений, производимых над
случайными числами, характеризующими значения параметров вне-
шних воздействий и входных сигналов, определяют вероятность попа-
дания значений выходных параметров в область работоспособности.
Возможно проведение матричных испытаний, которые основаны
на том, что значения параметров внешних воздействий и входных
сигналов не являются случайными. Для моделирования диапазон воз-
можных значений указанных параметров разбивают на одинаковые
74
участки (кванты) и берут для расчетов значения параметров, соот-
ветствующие серединам участков. В процессе расчетов осуществля-
ют перебор ряда возможных сочетаний указанных значений в преде-
лах рабочей области. Матричный метод обеспечивает достоверные
результаты, однако он значительно более трудоемкий и требует боль-
ших затрат времени.
Математическое моделирование испытаний изделий позволяет
решать вопросы оптимизации режимов работы, обеспечивающих по-
лучение заданных значений выходных параметров (характеристик)
изделий при воздействии внешних факторов, а также помогает выя-
вить возможности изделий при ужесточении внешних воздействую-
щих факторов вплоть до аварийных ситуаций.
Физическое моделирование предусматривает воспроизведение про-
цессов, происходящих в исследуемых ОИ, при условии сохранения
их физической природы или использовании подобных физических
явлений. Физическое моделирование целесообразно применять, когда
экспериментальное определение значений параметров ОИ сопряже-
но со значительными трудностями и затратами, а математическое
моделирование невозможно из-за отсутствия моделей, описывающих
с достаточной точностью процессы в ОИ.
Цель физического моделирования — изучение физических про-
цессов в моделируемом ОИ и установление математических зависи-
мостей его выходных параметров от входных. При этом под входны-
ми параметрами понимают воздействие соответствующих входных
сигналов и внешних факторов.
Физическое моделирование основано на воспроизведении про-
цесса воздействия внешних факторов с сохранением его физической
природы при использовании объекта, подобного испытуемому изде-
лию. Объекты называют подобными, если между ними можно уста-
новить такие соответствия, при которых известны функции перехода
от параметров, характеризующих один объект, к параметрам, харак-
теризующим другой объект, а математические описания объектов
можно преобразовать в тождественные. Физическое моделирование
испытаний целесообразно применять в случаях, когда нельзя матема-
тически описать функционирование изделия и внешние воздействия
на него, а проведение лабораторных испытаний связано с большими
трудностями и затратами (необходимы создание опытного образца,
использование сложного испытательного оборудования и т.д.).
Следует отметить, что для получения достаточно достоверных
результатов испытаний методами моделирования требуется разработ-
ка процессов их автоматизации, позволяющих рассмотреть большое
число вариантов решения задач и сократить время физических испы-
таний. Очевидно, что основными источниками необходимой инфор-
75
мации для моделирования испытаний являются результаты лабора-
торных и натурных испытаний изделий, похожих на испытуемые, а
также априорная информация, полученная в процессе теоретических
разработок.
Возможно осуществление так называемого физико-математичес-
кого (смешанного) моделирования, при котором используют одновре-
менно физические и математические модели. Моделирование испы-
таний целесообразно применять на стадии разработки изделий, а также
в процессе их усовершенствования.
Результаты лабораторных испытаний опытных образцов (серий),
созданных с учетом информации, полученной в процессе проведе-
ния испытаний на математических и физических моделях, позволяют
проверить адекватность указанных испытаний, а также усовершен-
ствовать модель.
С учетом данного признака (принципа осуществления) предста-
вим классификацию испытаний продукции в виде схемы, приведен-
ной на рис. 2.1. Следует, однако, отметить, что в настоящее время
не существует еще единой классификации испытаний, одинаково
пригодной для разработки и изготовления различных типов ЛА. В
ряде случаев характер проводимых испытаний и их последователь-
ность на разных предприятиях различны, определяются принятой тех-
нологией изготовления и зависят от конкретного типа проектиру-
емого ЛА и его систем. Так, в отечественной практике создания
ракетно-космической техники сложилась следующая типовая класси-
фикация испытаний.
Фактический уровень качества автоматических и пилотируемых
ЛА и их бортовых систем подтверждают с помощью наземных и лет-
ных испытаний, В связи с весьма высокой стоимостью и опасностью
летных испытаний естественно стремление к их сокращению за счет
увеличения объема и всестороннего совершенствования существенно
менее дорогостоящих и практически безопасных для жизни людей
наземных испытаний. Поэтому объем этих испытаний на основных
этапах создания и производства ракетно-космической техники непре-
рывно возрастает.
Опытному и серийному производству отечественной ракетно-кос-
мической отрасли соответствуют различные категории и виды испы-
таний (рис. 2.2).
Целью отработочных испытаний в условиях опытного производ-
ства является отработка конструкции ЛА и технологических процес-
сов его изготовления, а также проверка соответствия всех параметров
и характеристик заданным в ТЗ.
Определение объема, программы и технологии отработочных ис-
пытаний — достаточно сложная задача, решаемая в каждом конкрет-
76
Классификация испытаний
Рис. 2.1. Классификация испытаний продукции
Опытное производство
Рис. 2.2. Категории и виды испытаний в условиях опытного и серийного производства
ракетно-космической техники
ном случае. Несмотря на значительные отличия испытаний различ-
ных сборочных единиц и изделия в целом, они составляют опреде-
ленную систему, состоящую из отдельных, логически увязанных меж-
ду собой этапов, выполняемых по специальным программам при
проектировании, изготовлении и эксплуатации ЛА.
Наземные отработочные испытания подразделяют на автономные
и комплексные.
При автономных испытаниях объектом проверки являются узлы и
агрегаты ЛА. Эти испытания — естественное продолжение проектно-
конструкторской разработки и технологической отработки изделий,
агрегатов, систем, входящих в состав ЛА. В ходе испытаний экспе-
риментально проверяется правильность принятых проектных, схем-
ных, конструкторских, технологических решений и соответствие за-
данным требованиям полученных технических характеристик и уровня
надежности изделий. При этом определяются истинные запасы ра-
ботоспособности изделий, выявляются дефекты конструкторского и
производственного характера, отрабатывается конструкторско-техно-
логическая документация.
Автономные испытания включают в себя три этапа: конструктор-
ские, доводочные и чистовые.
При конструкторских испытаниях проверяется правильность выб-
ранной схемы агрегатов, узлов и отсеков ЛА и соответствие их харак-
теристик заданным в ТЗ. Доводочные испытания проводятся для под-
тверждения работоспособности выбранной конструкции. На этом
этапе допускается изменение конструкции элементов изделия и уточ-
няется технологический процесс испытаний. Чистовые испытания
проводятся для подтверждения необходимой работоспособности сбо-
рочной единицы в соответствии с корректировкой по результатам кон-
структорских и доводочных испытаний.
Комплексные испытания ЛА проводятся с целью отработки функ-
ционирования всего комплекса систем, узлов, агрегатов и отсеков и
определения соответствия эксплуатационно-технических характерис-
тик ЛА заданным в ТЗ. В процессе комплексных наземных испытаний
опытных образцов ракет-носителей (PH) и космических аппаратов
(КА) проверяется функционирование бортовых систем в условиях,
близких к реальным, выявляются и устраняются дефекты на стыках
систем, агрегатов, приборов. При этом определяется работоспособ-
ность изделий при имитации нештатных ситуаций, которые могут
возникнуть в полете, и отрабатываются способы выхода из них. Про-
веряется выполнение требований к надежности (составных частей и
объекта в целом) в объеме, достаточном для перехода к летным ис-
пытаниям. Наземные отработочные испытания проводятся как на
опытном производстве ОКБ, так и на заводе-изготовителе.
79
После освоения на производстве технологии изготовления узлов,
агрегатов, элементов автоматики и др. выполняются контрольно-тех-
нологические испытания, включающие испытания установочной
партии, приемосдаточные, контрольно-выборочные, периодические
и типовые.
Испытания установочной партии проводятся при постановке в
производство новых изделий для небольших партий (3—5) объектов
одного наименования, изготовленных по разработанной технологии
и прошедших обычные приемочные испытания. Программа испыта-
ний установочной партии для PH включает в себя испытания на проч-
ность, герметичность, вибро- и ударные испытания, испытания на
функционирование, циклические испытания на повторную нагруз-
ку, определение фактического давления разрушения и т.д. При по-
ложительных результатах испытаний установочной партии дается раз-
решение на производство штатных сборочных единиц изделия.
Приемосдаточные испытания распространяются на все изготавли-
ваемые детали, сборочные единицы и изделия в целом и имеют це-
лью проверку их соответствия техническим условиям. Программы ис-
пытаний составляются для каждой изготавливаемой сборочной
единицы или изделия и могут содержать следующие виды контроля и
испытаний: контроль выходных геометрических параметров, опре-
деление массы, центра масс, прочностные испытания, контроль гер-
метичности, определение объемов и невырабатываемых остатков топ-
лива в емкостях, проверку функционирования, контроль чистоты
внутренних полостей, контроль бортовых кабельных сетей и т.д. Пол-
ностью собранные изделия проходят заводские приемосдаточные ис-
пытания на специальном испытательном участке (контрольно-испы-
тательная станция — КИС).
Контрольно-выборочные испытания осуществляются с целью пе-
риодической проверки стабильности технологического процесса и ка-
чества сборочных единиц и изделия в целом. Эти испытания прово-
дятся выборочно для небольшого (до 10%) числа узлов от каждой
предъявляемой партии. При неудовлетворительных результатах ис-
пытаний их выполняют повторно на удвоенном количестве узлов (из-
делий). Если результаты вновь будут неудовлетворительными, партия
предъявленных узлов (изделий) бракуется. Изготовление и предъяв-
ление новой партии узлов (изделий) возможно лишь после выявле-
ния и устранения причин возникновения брака.
В отличие от приемосдаточных испытаний контрольно-выбороч-
ные испытания проводятся на предельных нагрузках и режимах.
При определенном перерыве в изготовлении рассматриваемых
изделий и в ряде других случаев, предусмотренных технической до-
80
кументацией, проводятся периодические испытания, а при коррек-
тировке конструкторско-технологической документации — типовые.
Периодические испытания выполняются с целью контроля стабиль-
ности технологического процесса изготовления сборочных единиц ЛА
и подтверждения возможности продолжения их изготовления. Пери-
одические испытания должны проводиться не реже 1 раза в год на
сборочных единицах от любой партии, принятой по контрольно-вы-
борочным испытаниям в течение данного года.
Типовые испытания осуществляются при внесении изменений в
конструкцию или технологию изготовления агрегата, узла, системы
или отсека КА, которые могут повлиять на их характеристики, и имеют
целью оценку эффективности и целесообразности этих изменений.
Виды и содержание контрольно-технологических испытаний опре-
деляются конструктивными особенностями объекта испытаний. Так,
для изделий, содержащих пневмогидравлическую систему (что ха-
рактерно для изделий авиационной и ракетно-космической техни-
ки), основу контрольно-технологических испытаний составляют гид-
равлические (пневматические) и гидрогазодинамические испытания.
Гидравлические (пневматические) испытания подразделяют на три
класса: испытания на прочность, герметичность и тарирование емко-
стей.
Испытания на прочность — это испытания, позволяющие опре-
делить прочностные свойства объекта. О прочности объекта судят по
деформациям и несквозным дефектам, которые или не допускают-
ся, или указывается их допустимая величина.
Испытания на герметичность — это испытания по определению
наличия и величины утечек жидкостей и газов через сквозные дефек-
ты в материале или соединениях объекта.
Тарирование емкостей — процесс определейия объема емкости в
целом и по уровням.
Из перечисленных видов контрольно-технологических испытаний
наибольший объем (до 80%) занимают испытания на герметичность
и гидрогазодинамические.
Основными документами для проведения испытаний на этапе
опытного производства являются «Программа и методика испытаний»,
а для категорий испытаний, проводящихся на этапе серийного про-
изводства, — «Технические условия». В них устанавливаются объект
и цели испытаний, виды, последовательность и объем проводимых
экспериментов, порядок, условия, место и сроки испытаний, их
обеспечение и отчетность по ним. В этих документах указаны метод
испытаний, средства испытаний, требования техники безопасности
и охраны окружающей среды.
81
Следует отметить, что система контроля и испытаний ЛА стро-
ится исходя из определенных принципов, учитывающих специфику
их конструкции, условия эксплуатации и производства, стоимость
и т.д.
Все испытания должны обеспечивать выпуск аппарата с требуе-
мой надежностью и проводиться на изделиях, изготовленных по при-
нятой для данного аппарата технологии. Необходимо, чтобы конт-
роль и испытания были построены таким образом, чтобы имеющиеся
дефекты выявились на более ранних этапах изготовления и на более
низких уровнях сборки. Операции контроля и испытаний целесооб-
разно располагать возможно ближе к тем сборочным операциям, где
могут возникать ожидаемые дефекты.
Программа должна содержать испытания на все виды нагрузок,
которым аппарат подвергается при наземной подготовке и в полете.
Ряд воздействующих факторов (вакуум, невесомость, радиация) со-
здается имитацией. В тех случаях, когда испытания связаны с выра-
боткой ресурса или опасностью повреждения ОИ, параллельно с лет-
ными по той же технологии изготавливаются специальные образцы
для испытаний. Подобным испытаниям подвергаются как минимум
два объекта: один — предельным максимальным разрушающим на-
грузкам с целью определения запаса по данному типу нагрузки (на-
пример, запаса прочности), а второй — при почти эксплуатацион-
ных нагрузках в длительном режиме (до разрушения) для определения
запаса по ресурсу. Все летные и испытательные образцы аппаратов
проходят контрольно-технологические испытания по программе, со-
ставленной для летных образцов, после чего испытательные образцы
испытываются на предельные нагрузки. Уровень испытательных на-
грузок должен обеспечивать необходимый запас по данному типу воз-
действия, но не слишком превышать реальные условия, так как от-
казы при завышенных условиях испытаний могут привести к ненужным
переделкам конструкции, ее утяжелению, повторным испытаниям.
Длительность испытаний летных образцов строго регламентирована и
должна быть минимальной. В некоторых случаях ее принимают рав-
ной длительности одного цикла работы аппарата на земле и двух цик-
лов работы его в полете.
Важным принципом испытаний является определение предель-
ных возможностей конструкции на испытательных образцах, а год-
ности аппарата к полету — на рабочих образцах при нагрузках, рав-
ных эксплуатационным. Рабочие и испытательные образцы изго-
тавливаются по одинаковой технологии.
Испытание на комплексное воздействие эксплуатационных фак-
торов желательно выполнять на полностью собранном ЛА, когда ра-
нее выявленные дефекты устранены, а появившиеся новые дефекты
82
являются результатом взаимного влияния отдельных элементов друг
на друга. Такие испытания обязательно включаются в программу при-
емочных испытаний летных образцов. Результаты предыдущих испы-
таний должны учитываться при проведении испытаний более высо-
кого уровня (не должно быть дублирования).
Испытания на функционирование и целостность коммуникаций бор-
товой аппаратуры и автоматики должны осуществляться по принци-
пу последовательно нарастающих повторных испытаний, что позво-
ляет наиболее быстро выявить дефектные элементы. При выявлении
дефектов все они должны анализироваться и устраняться, а ОИ дол-
жен пройти после этого повторные испытания в установленном объе-
ме. Такие испытания по полной программе проводятся также в слу-
чае внесения принципиальных изменений в конструкцию, технологию
или оборудование.
Основными критериями эффективности контроля и испытаний
являются надежность ЛА, стоимость, длительность цикла испыта-
ний, что и должно учитываться в первую очередь при составлении
программы испытаний и ее оптимизации.
Все наземные испытания должны быть закончены до летных ис-
пытаний. Из партии изделий в целом, прошедшей заводские при-
емосдаточные испытания, одно изделие подвергается летным испы-
таниям. Для получения максимально возможной информации о работе
систем ЛА (например, ракеты) в процессе полета она дооборудуется
дополнительными датчиками (телеметрический вариант). Летные
испытания являются решающим этапом отработки ЛА, после кото-
рого окончательно определяют его основные характеристики.
Летные испытания проводятся с целью подтверждения (в реальных
условиях) заданных технических характеристик и надежности ракет-
но-космического комплекса (РКК), его составных частей и систем. В
процессе этих испытаний решаются те задачи экспериментальной от-
работки, которые было невозможно или технически (и экономичес-
ки) нецелесообразно решать на стадиях наземной отработки.
При подготовке летных испытаний одной из основных задач яв-
ляется определение необходимого состава и числа измеряемых пара-
метров, а также рациональное размещение датчиков и аппаратуры
системы измерений. Реализация этой задачи начинается с этапа пред-
варительных проработок выбранной компоновочной схемы, прово-
дится на всех этапах разработки и основана на анализе предполагае-
мого функционирования систем и агрегатов ЛА на всех этапах работы
в штатных и аварийных ситуациях. Особое внимание обращают на
аварийные ситуации, так как в процессе летной отработки вероят-
ность появления таких ситуаций достаточно велика, а выявление и
устранение их причин — одна из главных задач летных испытаний.
83
Моделируя функционирование ЛА, его систем и агрегатов на раз-
личных участках полета при штатных ситуациях, а также возможные
аварийные ситуации, вероятные процессы их развития и работу сис-
тем и агрегатов ЛА в этих условиях, определяют места установки пер-
вичных преобразователей, диапазон измерений и перечень измеряе-
мых параметров, позволяющих с достаточной степенью достоверности
судить как о параметрах ЛА в целом, так и о процессах, протекающих
на его борту во всех этих ситуациях.
Летные испытания, особенно при их неблагоприятном исходе,
выявляют возможные доработки тех или иных элементов конструк-
ции или систем ЛА, после реализации которых необходимы допол-
нительные стендовые испытания, испытания на прочность и т.д.,
подтверждающие правильность принятых решений. В результате этих
доработок возможно изменение выходных параметров ЛА, которые в
процессе первых пусков, как правило, ухудшаются. Однако задача
летных испытаний состоит не только в подтверждении правильности
принятых конструкторско-технологических решений и выявлении
слабых мест, но и в определении запасов, заложенных на предше-
ствующих этапах разработки. Поэтому в ходе летных испытаний, по
мере накопления информации о фактических характеристиках ЛА и
уточнения расчетных методов и схем, появляется возможность умень-
шить эти запасы и улучшить летные характеристики ЛА.
2.4. Обобщенная схема экспериментальной отработки
сложных технических систем
Рассмотрим еще одно обобщающее понятие — «экспериментальная
отработка». Поясним суть данного понятия в его смысловой взаимо-
связи с такими понятиями, как «эксперимент», «контроль», «диаг-
ностирование» и «испытание». Эта взаимосвязь показана в виде схе-
мы на рис. 2.3.
Эксперимент (процесс воспроизведения, моделирования неко-
торых внутренних и/или внешних условий функционирования объек-
та и определения количественных и качественных характеристик его
свойств) как самостоятельная процедура проводится над объектами с
неустановленными заранее номинальными характеристиками свойств
и является составной частью каждого испытания впервые разрабаты-
ваемых объектов. Данный этап экспериментальной отработки, по
сути, состоит из исследовательских испытаний, выполняемых для
изучения конкретных характеристик свойств объекта, и определи-
84
ОС
СП
К следующим испытаниям
ОИ
Воспроизведение
(моделирование)
внутренних
и внешних
эксплуатационных
факторов
Определение
(наблюдение,
измерение,
вычисление)
количественных и
качественных
признаков свойств
Эксперимент
Контроль
Сравнение Выяснение Устранение
величин причин причин
признаков отклонения отклонений
(параметров) параметров (разработка
с номинальными от номинальных корректирующих
значениями значений (диагностирование) мероприятий и доработка ОИ или технологии)
Испытание
Экспериментальная отработка
Рис. 2.3. Обобщенная схема экспериментальной отработки
ОИ
тельных испытаний, проводимых для установления значений харак-
теристик объекта с заданными показателями точности и достоверно-
сти. Третьим этапом экспериментальной отработки (см. рис. 2.3)
является сравнение величин признаков с их номинальными значени-
ями. Совокупность этих трех этапов составляет суть контроля. Отно-
сящиеся к контролю термины приведены в разд. 2.1 и 2.3.1.
Если в результате контроля признаков свойств (параметров, ха-
рактеризующих способность объекта выполнять заданные функции)
установлено, что произошел отказ и объект перешел в неработоспо-
собное состояние, то проводят следующий (четвертый) этап испыта-
ний — диагностирование. Диагностирование — это процесс опреде-
ления технического состояния неработоспособного объекта с поиском
и указанием места, вида и причин возникновения дефекта, вызвав-
шего отказ, из-за которого объект перешел в неработоспособное со-
стояние.
Отметим, что техническое диагностирование СТС в настоящее
время осуществляется автоматизированными системами контроля и
диагностики (АСКД), входящими в состав компьютерного оснаще-
ния современных испытательных стендов и комплексов.
Все перечисленные четыре этапа экспериментальной отработки
составляют сущность термина «испытания» как экспериментального
определения количественных и качественных характеристик свойств
объекта испытаний в результате поданных на него воздействий (при
его функционировании, моделировании объекта и (или) воздействий).
Наконец, на заключительном этапе экспериментальной отработ-
ки осуществляется устранение причин отклонений, выявленных в
процессе испытаний, путем разработки и реализации необходимых
корректирующих мероприятий.
Обобщая вышеизложенное, можно дать следующее определение:
экспериментальная отработка — это экспериментальная проверка за-
данной конструктором совокупности свойств объекта (характеризую-
щихся соответствующими признаками), проявляемых в необходимых
условиях его функционирования, и доработка конструкции и техно-
логии изготовления объекта с целью обеспечения заданной совокуп-
ности его свойств. При этом процедура отработки объекта является,
по существу, непрерывным процессом управления качеством объек-
та по показателям надежности.
Рассмотрим классификацию отказов и дефектов, проявляющих-
ся при экспериментальной отработке изделий авиационной и ракет-
но-космической техники.
86
2.5. Классификация отказов и дефектов
сложных технических систем
Главная цель экспериментальной отработки СТС — достижение тре-
буемого уровня их надежности.
Надежность определяется как свойство объекта сохранять во вре-
мени в установленных пределах значения всех параметров, характе-
ризующих способность выполнять требуемые функции в заданных ре-
жимах и условиях применения, технического обслуживания, хранения
и транспортирования. Таким образом, надежность характеризуется
свойством объекта сохранять во времени свою работоспособность.
При этом работоспособное состояние объекта определяется как состо-
яние, при котором значения параметров, характеризующих способ-
ность выполнять заданные функции, соответствуют требованиям нор-
мативно-технической и (или) конструкторской (проектной) доку-
ментации.
Событие, заключающееся в нарушении работоспособного состо-
яния, называется отказом. Основными причинами отказов являют-
ся дефекты конструкции в целом, отдельных ее деталей (являющихся
первичными структурными единицами практически любой техничес-
кой системы) и соединений.
Под термином «дефект» понимается каждое отдельное несоответ-
ствие конструкции установленным требованиям, которое может при-
вести к отказу или повреждению при ее эксплуатации. Дефекты со-
здаются в основном на этапах конструирования, разработки
технологии, а также изготовления деталей, сборки и монтажа изде-
лия и его элементов.
Отказы элементов СТС классифицируются на первичные, вто-
ричные и ошибочные команды. Отказы всех этих категорий могут
иметь различные причины.
Первичный отказ элемента определяется как его нерабочее состо-
яние, причиной которого является он сам. Необходимо выполнить
ремонтные работы для возвращение элемента в рабочее состояние.
Основными причинами первичных отказов являются в основном кон-
структивные, производственные (технологические) и так называе-
мые деградационные дефекты.
Причинами дефектов конструкции (конструкторских недоработок)
элементов (систем, узлов, агрегатов) и изделия в целом являются:
неполное соответствие технических характеристик изделий предъяв-
ляемым требованиям, связанное с нерациональным выбором прин-
ципиальной, структурной, конструктивной схем изделий и всего
комплекса; неправильный выбор комплектующих изделий, материа-
лов и полуфабрикатов; недостаточный учет возможностей разработ-
ки, экспериментальной отработки и ожидаемого качества изготовле-
ния изделий; недостаточный учет реальных условий эксплуатации и
применения; ошибки при проектировании, конструировании, экс-
периментальной отработке изделий.
Производственные (технологические) дефекты возникают по сле-
дующим причинам: неполное соответствие качества изготовления из-
делий требованиям конструкторской документации, недостаточное
качество исходных материалов, неправильный выбор технологии,
ошибки в технологической документации, нарушения (при изготов-
лении) требований технологии и системы контроля качества продук-
ции.
Причинами деградационных дефектов являются естественные про-
цессы старения, изнашивания и усталости, которые имеют место
при соблюдении всех установленных правил и (или) норм проекти-
рования, изготовления и эксплуатации и возникают на заключитель-
ной стадии эксплуатации изделий.
Отметим, что в соответствии с причинами, их вызывающими,
первичные отказы могут быть названы конструктивными, производ-
ственными (технологическими) и деградационными.
Вторичный отказ такой же, как первичный, за исключением того,
что сам элемент не является причиной отказа. Вторичные отказы
объясняются воздействием предыдущих или текущих избыточных на-
пряжений на элемент и другими причинами. Основные причины этих
отказов: избыточные (выходящие за пределы допустимых значений)
напряжения электрического тока и другие нежелательные возмуще-
ния, источниками возникновения которых могут быть:
• сопряженные (соседние) элементы (системы, узлы, приборы,
агрегаты и т. д.);
• окружающая среда (например, метеорологические и геологи-
ческие условия, связанные с районом расположения стартово-
го комплекса, искусственные или естественные факторы кос-
мического пространства в процессе полета);
• персонал ракетно-космического комплекса, если его действия
приводят к выходу элементов из строя вследствие нарушения
правил (эксплуатации изделий), предусмотренных конструктор-
ской документацией (при этом первоначальной причиной воз-
никновения вторичных отказов могут быть также дефекты экс-
плуатационной документации).
Следует отметить, что устранение влияния источников повышен-
ных напряжений на элемент не гарантирует возвращение его в рабо-
чее состояние, так как предыдущая перегрузка могла вызвать в нем
необратимое изменение.
88
Ошибочные команды представляются в виде элемента, находяще-
гося в нерабочем состоянии из-за неправильного сигнала управления
или помех, например — оператор не нажал аварийную кнопку (оши-
бочная команда от аварийной кнопки).
Отказы также подразделяют на общие и конкретные. К общим
отказам относят: преждевременное срабатывание, невключение в
назначенное время, невыключение в назначенное время, отказ во
время работы. К конкретным отказам относят такие отказы, как ко-
роткое замыкание (электрическое), внешняя или внутренняя утечка
тока, ошибочное срабатывание, ошибочная индикация и т.д.
По природе возникновения отказы могут быть внезапными и
постепенными.
Внезапные отказы носят случайный характер. Этому виду отказов
может не предшествовать постепенное накопление повреждений —
он возникает внезапно. Технология создания современных изделий
столь сложна, что не всегда удается проследить за скрытыми дефек-
тами проектирования и производства, которые проявляются на ста-
дии испытаний и эксплуатации. В процессе эксплуатации могут со-
здаться условия, при которых скрытый дефект приводит к отказу
изделия (пиковые нагрузки, вибрация, удары, линейные и угловые
ускорения, температурный скачок, помехи и т.д.). При большом
уровне случайных неблагоприятных воздействий внезапный отказ
может произойти даже при отсутствии скрытых дефектов.
Постепенный отказ возникает в результате постепенного накоп-
ления повреждений, главным образом вследствие износа и старения
материалов. Такие отказы называют также параметрическими, по-
скольку они связаны с изменением параметров, характеризующих
техническое состояние изделия.
Изделия авиационной и ракетно-космической техники являются
высоко компьютеризированными объектами. Отказы компьютерно-
автоматизированной системы управления полетом ЛА разделяются на
аппаратные и программные.
Аппаратным отказом принято считать событие, при котором та
или иная компьютерно-автоматизированная система утрачивает ра-
ботоспособность и для ее восстановления требуется ремонт или заме-
на отказавшей аппаратуры (компьютерного оснащения) на исправ-
ную. Программным отказом считается событие, при котором та или
иная система изделия утрачивает работоспособность по причине не-
доработки программы (несовершенство алгоритма решения задачи,
отсутствие программной защиты от сбоев, отсутствие программного
контроля за состоянием изделия и т.д.).
Отказ может быть кратковременным, самоустраняющимся. В
этом случае он называется сбоем. Характерный признак сбоя заклю-
89
чается в том, что восстановление работоспособности после его воз-
никновения не требует ремонта аппаратуры. Причиной сбоя может
быть кратковременно действующая помеха, дефекты программы, при-
водящие к неблагоприятным временным характеристикам работы ап-
паратуры, и т.д.
По стохастическим свойствам отказы разделяются на две груп-
пы. К первой группе относятся отказы, которые проявляются детер-
минированы) и устраняются также детерминированно путем доработ-
ки конструкции при принятии нового технологического решения,
полностью исключающего повторение подобного отказа. К таким от-
казам относятся грубые ошибки в конструкторской или технологи-
ческой документации или незнание условий функционирования.
Ко второй группе относятся отказы, связанные со случайной при-
родой проявления и (или) случайным характером их устранения. К
этой категории относятся отказы изделий, при доработке которых
невозможно по каким-либо причинам существенно повысить запасы
работоспособности и всегда остается некоторая вероятность их появ-
ления. Это — отказы, вызываемые случайным характером протека-
ния физико-химических процессов; отказы, причины которых не оп-
ределяются однозначно; отказы, вызываемые нестабильным качеством
изготовления комплектующих элементов и т.д.
Отказы также можно разделить на фактические и потенциаль-
ные. Отказы, которые проявляются на стадии испытаний изделия и
его элементов, а также в процессе эксплуатации, называют факти-
ческими. Возможные отказы, которые выявляются в результате экс-
пертных оценок безопасности и надежности на первоначальных эта-
пах проектирования изделия с целью их предотвращения, называют
потенциальными. Отметим, что в процессе рассмотрения отказов (в
том числе ошибочных команд) и причин их возникновения важно
определить значимость каждого вида отказа с тем, чтобы правильно
оценить необходимость исключения или уменьшения негативных по-
следствий их появления.
В соответствии с делением отказов на потенциальные и факти-
ческие мероприятия, направленные на обеспечение безопасности и
надежности сложных технических изделий, также принято подразде-
лять на две основные группы. Первая из них планируется и разраба-
тывается на ранних стадиях опытно-конструкторских работ и направ-
лена на устранение причин различных несоответствий, допущенных
при разработке схемных и конструкторских решений, приводящих к
возникновению отказов и нештатных ситуаций (нештатная ситуация
определяется как состояние объекта, не предусмотренное програм-
мой штатного функционирования объекта). Мероприятия, состав-
ляющие первую группу, называются предупреждающими. Вторая груп-
90
па мероприятий разрабатывается на более поздней стадии опытно-
конструкторских работ и направлена на устранение причин дефектов
и отказов, обнаруженных в результате контроля и испытаний уже
изготовленных первых образцов элементов (агрегатов, узлов, систем)
и изделия в целом. Мероприятия, составляющие вторую группу, на-
зывают корректирующими.
Мероприятия первой группы разрабатываются на основе каче-
ственного анализа с применением специально разрабатываемых экс-
пертных методик. Мероприятия второй группы разрабатываются на
основе количественного анализа, осуществляемого по результатам кон-
троля и испытаний.
Следует также особо отметить, что наряду с рассмотренными
группами мероприятий важную роль в обеспечении качества проек-
тируемого изделия играют общие организационные и научно-техни-
ческие мероприятия, проводимые в сфере проектирования, произ-
водства, испытаний и эксплуатации. Они включают мероприятия по
совершенствованию и внедрению: систем автоматизированного про-
ектирования (САПР), а также современных достижений в области
информационных технологий; методов и средств контроля качества;
методов автоматизации испытательных стендов и комплексов; систем
обеспечения адекватности условий наземных испытаний полетным
условиям; эффективных методов и средств диагностирования; мероп-
риятий по совершенствованию методов и средств эксплуатации (по-
вышения готовности к полету, повышения качества наземного об-
служивания, ремонта и т.д.).
Контрольные вопросы
1. Что понимается под испытанием?
2. Что понимается под техническим контролем?
3. Что понимается под условиями испытаний?
4. Что понимается под видом и категорией испытаний?
5. Что устанавливает программа испытаний?
6. Что понимается под методом испытаний?
7. Что включает в себя методика испытаний?
8. Перечислите виды испытаний продукции (по ГОСТ 16504—81) в
соответствии с их классификацией по следующим признакам: цели проведе-
ния, условиям и месту проведения, виду воздействия, продолжительности
воздействия и значению воздействующих нагрузок, принципу осуществле-
ния, влиянию на объект испытаний, определяемым характеристикам, ста-
диям жизненного цикла.
9. Перечислите категории и виды испытаний в условиях опытного и
серийного производства авиационной и ракетно-космической техники.
10. Дайте определение понятию «экспериментальная отработка».
Глава 3
ОПТИМАЛЬНОЕ ПЛАНИРОВАНИЕ
ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ ЛА
3.1. Современный подход к организации
комплексных программ испытаний ЛА
Итак, системы авиационной и ракетно-космической техники в про-
цессе разработки проходят от простейших контрольных испытаний до
наиболее сложных — стендовых и, наконец, летных. Все эти испы-
тания, проводящиеся на различных уровнях конструктивной сборки,
взаимосвязаны, так как направлены на достижение единой цели —
обеспечению требуемых характеристик проектируемого изделия. По-
этому планирование испытаний должно быть комплексным, т. е.
охватывать цикл испытаний, проводящихся на всех этапах разработ-
ки систем. Определение объема и содержания отдельных частных видов
испытаний необходимо производить исходя из условия, что весь про-
цесс отработки в целом будет обладать оптимальными свойствами,
т. е. обеспечивать экспериментальную отработку изделия с наилуч-
шим качеством при минимальных затратах средств и времени.
В результате комплексного планирования представляется возмож-
ным рационально разбить общую программу испытаний на частные
программы, определить цели и объем частных испытаний, устано-
вить критерии их законченности и готовности изделия для перехода к
высшим уровням испытаний. Эта задача трудная, поскольку про-
цесс испытаний систем авиационной и ракетно-космической техни-
ки является сложным комплексным процессом, объединяющим боль-
шое число разнородных испытаний. При этом цели испытаний,
проходящих на различных этапах разработки системы, бывают часто
различны, а собираемая информация разнородна.
Перечисленные особенности процесса испытаний являются ха-
рактерными для категории сложных технических систем и предопре-
деляют использование для комплексного планирования процесса ис-
пытаний системотехнического подхода. Наиболее рациональными
методами при этом представляются методы анализа проблемы слож-
ности, развитые в общей теории систем и базирующиеся на иерархи-
92
ческом подходе. Использование последнего целесообразно потому,
что он является наиболее естественным, отображающим объектив-
ное свойство иерархической упорядоченности сложных систем, т.е.
возможности разделения сложной системы на ряд подсистем, бло-
ков, элементов.
Так как процесс испытаний органически связан с процессом раз-
работки, то естественно принять для него ту же декомпозицию, что
и для самого объекта. В этом случае комплексная программа испы-
таний объекта иерархически разделяется на частные программы ис-
пытаний соответственно подсистем, блоков, элементов.
В практике проектирования авиационных и ракетно-космичес-
ких систем можно выделить следующие специфические задачи раз-
личных уровней структурной иерархии испытаний:
• для комплексной системы — оценивание взаимодействия подси-
стем, влияние их характеристик на характеристики изделия, влия-
ние установки и состыковки оборудования, проверка выполнения ло-
гических задач;
• для подсистемы — оценивание взаимодействия блоков и совер-
шенства конструкции, проверка дополнительного оборудования;
• для блоков — оценивание взаимодействия элементов и выявле-
ние отказов, вызванных особенностями конструкции блоков;
• для элементов — оценивание влияния факторов внешних усло-
вий, средних значений и дисперсии параметров, а также ошибки
эксперимента; установление допустимых пределов физических пара-
метров.
Основное преимущество испытаний на низших уровнях иерар-
хии, т.е. в составе подсистем, блоков и элементов, — это простота
обнаружения дефекта, обусловленная возможностью использования
различных методов активного эксперимента, позволяющих наиболее
быстро и точно определять интересующие нас характеристики. Кро-
ме того, имеется возможность более глубокой проверки не только на
действие отдельных факторов, но также в случае их определенной
последовательности и взаимодействия. Это является важным обстоя-
тельством для гарантии качества функционирования и надежности.
Испытательное оборудование и измерительная аппаратура, ис-
пользуемые при проверках на низших уровнях, обычно наиболее про-
стые и дешевые. Однако для гарантии качества и надежности всей
системы таких испытаний недостаточно, так как они не позволяют
оценить взаимодействие и влияние отдельных составляющих на каче-
ство функционирования системы в целом. Отсюда вытекает необхо-
димость проведения испытаний на уровне изделия. Недостатком та-
ких испытаний является сложность, а в ряде случаев и невозможность
93
определения места отказа и проверки качества функционирования
системы при совместном действии различных факторов.
Большая сложность систем, характерная для высших уровней
иерархии испытаний, препятствует постановке активного экспери-
мента. На этих уровнях иерархии основным видом эксперимента яв-
ляется пассивный, при котором характеристики системы оценива-
ются по ее реакции на реальные воздействия.
При проведении такого эксперимента возникает ряд трудностей,
связанных с необходимостью согласования методов получения и об-
работки информации и уменьшения искажений, вызванных наруше-
нием условий оптимальности проведения эксперимента.
При разработке комплексной программы испытаний должна быть
учтена специфика каждого их уровня и проведено рациональное рас-
пределение общего объема испытаний между различными уровнями.
В настоящее время комплексные программы испытаний ЛА на-
правлены на увеличение объема наземных и сокращение летных ис-
пытаний. Это требует повышения достоверности информации о ха-
рактеристиках изделия, получаемой на различных уровнях иерархии
наземных испытаний, проводящихся в имитируемых условиях реаль-
ной эксплуатации.
Повышение технических требований к объектам усложняет со-
ставление эффективной комплексной программы испытаний, по-
скольку трудно проверить все возможные комбинации логических со-
стояний, большое количество схем и ситуаций в условиях, близких к
реальным. Поэтому в настоящее время принято считать, что наи-
большую эффективность испытаний может обеспечить программа, пре-
дусматривающая проверку важнейших характеристик изделия при
крайних пределах внешних нагрузок на самых низких уровнях иерар-
хии испытаний. Подобная программа испытаний была принята и
реализована при разработке космического корабля «Apollo» и показа-
ла хорошие результаты.
Как установлено, расходы на проведение одной доработки на
стадиях проектирования, наземной отработки и летных испытаний
можно приблизительно характеризовать соотношением 1:10:100. Это
также подтверждает целесообразность иерархического построения
программ испытаний и особо тщательной отработки на ее низших
уровнях. Такой подход целесообразен не только технически, но и
экономически, так как стоимость обнаружения дефекта на более вы-
соких уровнях иерархии испытаний возрастает приблизительно по
экспоненте.
94
3.2. Критерий эффективности испытаний.
Математическая модель испытаний
Как уже отмечалось ранее, комплексная программа испытаний, про-
водимых в процессе проектирования изделия, обладает всеми свой-
ствами, определяющими понятие сложной системы. Поэтому для
оценки качества испытаний могут быть использованы все основные
характеристики, принятые в общей теории систем. Наиболее общей
характеристикой сложных систем принято считать эффективность,
под которой понимается степень соответствия сложной системы сво-
ему назначению.
Анализ роли испытаний на каждом этапе проектирования, про-
веденный в разд. 1.5, позволяет рассматривать их в виде своеобраз-
ных обратных связей, направленных на корректировку текущей эф-
фективности изделия.
Исходя из такой интерпретации процесса испытаний, в качестве
технического критерия эффективности испытаний можно принять
выходной эффект Q испытаний, равный разности Д W между задан-
ным W3 и текущим Означениями эффективности объекта (рис. 3.1).
Однако такой критерий не учитывает затрат, необходимых для дости-
жения требуемого значения эффективности, причем под затратами
может пониматься как время, так и стоимость испытаний. Для учета
затрат следует использовать обобщенные критерии эффективности вида
Q = W/S, где S — затраты на достижение выходного эффекта.
Рис. 3.1. Схема управления
процессом проектирования
В рамках рассматриваемого подхода процесс оценивания ресурс-
ных затрат на отработку изделия в наиболее общем виде описывается
следующей системой уравнений:
C = f (Coz+AC,),
/=1
ДС/ — ДС/ (л/) 5
95
N
i=\
где С, T — суммарная стоимость и длительность реализации комп-
лексной программы испытаний соответственно; N — число этапов
отработки; — время Z-го этапа; ni — число испытаний на /-м этапе;
W] — эффективность на /-м этапе; — параметры, зависящие от
структуры процесса испытаний и характеризующие изменение эф-
фективности на z-м этапе; Со/,ДС, — соответственно базовые и теку-
щие затраты на /-м этапе.
Выбор критерия эффективности производится в зависимости от
класса изделий. Так, для серийных изделий авиационной и ракетной
техники в качестве критерия эффективности выбирают стоимость.
Задача оптимизации комплексной программы испытаний при этом
формулируется следующим образом:
С = min,
и
WN>W3,
(3.1)
где И^з, Т3 — соответственно заданные значения эффективности и вре-
мени на разработку. Ограничение по времени часто снимается.
Оптимизационными параметрами и в зависимости от постановки
задачи могут являться базовые Со/ и текущие АС, ~ гц затраты, от-
дельные параметры моделей изменения эффективности а также
сами значения эффективности , определяющие момент перехода
на следующий уровень отработки.
Практика проектирования показывает, что при применении оп-
тимальных программ экспериментальной отработки затраты на раз-
работку удается сократить на 10—20%. При проектировании уникаль-
ных объектов космической техники стоимость разработки обычно не
является жестким ограничением. Так, расходы, связанные с выпол-
нением некоторых космических программ, превышали первоначаль-
но намеченные суммы в 10 раз. В то же время сроки разработки
выдерживаются достаточно строго и составляют: для космических
аппаратов 3—4 года, для баллистических ракет дальнего действия и
ракет-носителей 5—6 лет.
Для изделий данного класса наиболее рациональной является сле-
дующая постановка задачи оптимизации:
Т = min, WN > W3, С <С3,
и
(3.2)
96
причем ограничение по стоимости в ряде случаев может не учиты-
ваться.
Для определения количественных оценок эффективности необ-
ходимо получить зависимости, связывающие текущую эффективность
со временем и стоимостью испытаний. Для этого необходимо прежде
всего определить понятие эффективности разрабатываемой системы.
Как известно, под эффективностью понимается степень приспособ-
ленности системы к выполнению соответствующих ей функций в оп-
ределенных условиях в течение заданного времени. Вследствие не-
полной идентичности отдельных изделий, изменения условий функ-
ционирования, влияния дефектов и ряда других случайных факторов
эффективность системы ЛА является, как правило, случайной вели-
чиной, или функцией времени.
Часто в качестве показателя технической эффективности прини-
мают вероятность выполнения системой поставленной перед ней за-
дачи. Любое испытание, проводящееся в процессе разработки изде-
лий, направлено на выявление дефектов. Устранение дефектов
приводит к повышению эффективности изделия. Степень повыше-
ния эффективности в процессе экспериментальной отработки может
быть различной и зависит как от специфики проектируемой систе-
мы, так и от конкретного содержания испытательных программ, при-
нятой методики испытаний, совершенства испытательного оборудо-
вания и ряда других факторов.
При экспериментальной отработке новых изделий встречается
большое количество конструктивных отказов, требующих для их уст-
ранения проведения различного вида доработок. Успешно проведен-
ные доработки повышают эффективность разрабатываемых изделий.
Таким образом, надежность и эффективность изделий в процессе их
экспериментальной отработки не остаются постоянными, они повы-
шаются. Это целенаправленное повышение эффективности необхо-
димо учитывать при оценивании показателей надежности и эффек-
тивности.
В настоящее время в практике обработки данных испытаний встре-
чаются два упрощенных подхода к учету конструктивных отказов. Пер-
вый заключается в исключении из выборки конструктивных отказов и
расчете показателей надежности по оставшимся экспериментальным
данным. Такой подход не учитывает повышения надежности и приво-
дит к заниженным оценкам. Второй подход базируется на допуще-
нии, что устраненный отказ не является отказом и может быть заме-
нен успешным испытанием. Этот подход не учитывает возможности
неудачных доработок и приводит к завышенным оценкам. Объектив-
ную оценку можно получить, используя модели роста надежности или
эффективности в процессе экспериментальной отработки.
97
Учитывая целенаправленный характер деятельности при экспе-
риментальной отработке изделия, можно ожидать, что повышение
эффективности описывается некоторой регулярной функцией затрат.
Исходя из физических ограничений, модели роста эффективности
должны удовлетворять перечисленным ниже условиям.
Пусть Wf) — затраты, связанные с повышением эффек-
тивности от до W,. Тогда 5/(^_i,W9>0. При этом:
• Hf) не убывает по Wj при фиксированном и не рас-
тет по WI-i при фиксированном И/. Если < И/ < , то
ЭД_ь
• 5/(0,И/_1) обладает производной УДИ/-1), причем
строго возрастает в интервале 0 < < 1;
• ton 5/(»<_1,»;) = оо.
Данные ограничения, накладываемые на вид искомой функции,
настолько слабы, что им удовлетворяет бесконечное множество не-
прерывных функций.
При решении ряда практических задач планирования и управле-
ния процессом экспериментальной отработки изделий наиболее час-
то используется экспоненциальная модель роста эффективности:
W = a-(a-fF0)exp {-0/},
где 0 — интенсивность обнаружения дефектов.
Как показала практика статистической обработки информации,
полученной при испытаниях, эта модель достаточно хорошо согласу-
ется с экспериментальными данными. Она может быть получена пу-
тем проведения аналогии между понятиями теории надежности и ос-
новными характеристиками, определяющими процесс обнаружения
дефектов при испытаниях. Такой подход позволяет достаточно про-
сто построить модель динамики эффективности сложных систем по
результатам испытаний отдельных ее компонентов. Простота зависи-
мостей, связывающих показатели модели динамики эффективности
системы с соответствующими показателями составляющих систему
компонентов, делает экспоненциальную модель особенно удобной
для решения задач организации процесса экспериментальной отра-
ботки.
98
Обоснование структуры математической модели роста эффектив-
ности основано на свойствах процесса обнаружения дефектов. Опыт
показал, что дефекты выявляются на самых различных этапах комп-
лексной программы испытаний, что можно объяснить как специфи-
ческими характеристиками самого дефекта, так и характером про-
граммы испытаний. Так, например, можно ожидать, что дефекты,
чувствительные к термовакуумным условиям, выявляются именно на
этапе термовакуумных испытаний и т.д.
Таким образом, процесс обнаружения дефектов носит случай-
ный характер, подобный тому, который рассматривается в теории
надежности. Так, время до обнаружения дефекта является аналогом
времени до отказа и т.д. Применяя разработанный в теории надеж-
ности математический аппарат, можно получить модель динамики
эффективности системы в процессе экспериментальной отработки.
При этом предполагается, что все дефекты являются одинаковыми с
точки зрения возможности их обнаружения. В общем случае это не
так, потому что вероятность перехода дефекта в отказ и, следова-
тельно, вероятность его обнаружения зависят от условий испытаний.
Предполагается также, что дефекты являются независимыми, т.е.
вероятность обнаружения дефекта не зависит от числа и вида других
дефектов, имеющихся в системе. В ряде случаев, когда один дефект
маскирует присутствие другого, это предположение не выполняется.
Экспоненциальная модель динамики эффективности системы на
/-м уровне экспериментальной отработки имеет вид:
= ai - (а, - ^oz)exp{-e/T/}, (3.3)
где at — предельное для данного /-го уровня испытаний значение
эффективности; Wfo — значение эффективности к началу/-го уровня
испытаний.
Из уравнения (3.3) видно, что изменение эффективности при
испытаниях на /-м уровне подчиняется закону с постоянным тем-
пом. При этом скорость роста эффективности пропорциональна об-
наруженной в процессе испытания ненадежности в данный момент
времени: И/* = ОДя, -Щ).
Таким образом, основную информацию, необходимую для до-
работки системы, несут неудачные испытания. Так как в системе
имеется ограниченное число дефектов, то скорость роста эффектив-
ности с течением времени (вследствие уменьшения числа оставшихся
в изделии дефектов) монотонно убывает (рис. 3.2, а).
99
Рис. 3.2. Зависимость скорости роста эффективности
от времени испытаний при единичных (а)
и комбинированных (б) испытаниях
Реальная программа испытаний состоит из некоторой комбина-
ции частных видов испытаний, причем последние располагаются обыч-
но в порядке возрастающей интенсивности условий испытания. В
данном случае следует ожидать, что осредненная скорость роста эф-
фективности системы будет сначала увеличиваться из-за более жест-
ких условий, способствующих выявлению дефектов, а затем убывать
за счет уменьшения числа оставшихся в системе дефектов (рис. 3.2,
б). Этим условиям отвечает логистическая модель динамики эффек-
тивности системы:
+ (а, - ) exp } •
(3.4)
Для этой модели скорость роста эффективности определяется соотно-
шением Wj = (сц - И/) и имеет максимум в точке W* = щ /2.
я/
Логистическая модель хорошо описывает процесс обнаружения
дефектов при прочностных испытаниях сложных конструкций в резер-
вированных системах. Однако для описания динамики эффективнос-
ти в таких случаях успешно используются более простые экспоненци-
альные модели с переменными интенсивностями Or, ОГ2, ..., Qtm.
Обе модели динамики эффективности — экспоненциальная и
логистическая — известны также в общей теории систем, где они
применяются для описания процессов развития сложных систем.
Остановимся на особенностях моделей динамики эффективности,
характерных для отдельных уровней иерархии испытаний (рис. 3.3).
100
Испытания системы
Предельные значения эффективности ai системы, которые могут
быть получены в результате проведения испытаний, определяются
степенью адекватности условий испытаний реальным эксплуатаци-
онным режимам. На низших уровнях иерархии испытаний величина
ai меньше, чем на более высоких. Это объясняется тем, что при
переходе на высшие уровни испытаний появляются специфические
дефекты, присущие только данным уровням. Эти дефекты обуслов-
лены взаимодействиями в сложной системе и не могут быть выявле-
ны на низших уровнях. Поэтому испытания на низших уровнях дают
сравнительно низкую гарантию безотказной работы системы.
Интенсивность обнаружения дефектов также различна для раз-
личных уровней иерархии. При испытаниях на уровне системы она
более низкая, чем при испытаниях составляющих, так как на выс-
ших уровнях испытаний сложнее обнаружить дефекты.
Отмеченные выше специфические особенности, характерные для
различных уровней иерархии испытаний, могут быть записаны в виде
следующих неравенств: сц_\ < я,, 0,_i > 0/.
Все основные положения, полученные теоретически на основа-
нии изложенного выше метода, достаточно хорошо согласуются с
экспериментальными данными. Так, например, на рис. 3.4 приведе-
ны кривые зависимости вероятностей отказов от времени разработки
системы и проведения летных испытаний, полученные при разработ-
ке новых самолетов. На рис. 3.5, а представлена кривая зависимости
надежности ракетных двигателей от числа испытаний. Как видно из
101
Рис. 3.4. Кривые зависимости вероятности отказов от времени
разработки (а) и летных испытаний (б)
рис. 3.4 и 3.5, характер зависимостей близок к экспоненциальному
закону.
Приведенная на рис. 3.5, б кривая зависимости надежности ра-
кетных двигателей от коэффициента сложности испытуемого изделия
подтверждает увеличение надежности при повышении уровня иерар-
хии испытаний. Так, например, при проведении стендовых испыта-
ний, коэффициент сложности которых был принят 0,5, надежность
двигателя получена значительно меньше, чем при летных испытани-
ях. Такие же результаты были получены и при испытаниях космичес-
кого аппарата «Apollo».
Рис. 3.5. Кривые зависимости надежности ракетных двигателей от числа
испытаний (а) и коэффициента сложности (б)
102
Приведенные на рис. 3.6 данные свидетельствуют о значительно
большей интенсивности обнаружения дефекта в наземных испытани-
ях по сравнению с летными испытаниями. Однако предельно дости-
жимая надежность при наземных испытаниях оказывается ниже, чем
надежность, достигнутая при летных испытаниях.
Рис. 3.6. Кривая зависимости числа отказов
от времени испытаний
Формулы (3.3) и (3.4) позволяют связать текущую эффективность,
достигнутую при экспериментальной отработке изделия, со време-
нем отработки. Так, для экспоненциальной модели динамики эф-
фективности время испытаний на z-м уровне иерархии испытаний
определяется выражением
X/.=lln^L
0/ at-Wr
Суммируя время по всем уровням иерархии при i = 1, 2, Nh
учитывая, что время к началу первого уровня испытании равно нулю,
получим выражение для общего времени испытаний, необходимого
для достижения объектом заданной эффективности:
/Г1 6/ О/ -
(3.5)
где И<з;- — требуемая для /-го уровня испытаний эффективность, яв-
ляющаяся одновременно начальной эффективностью для (/ +1 )-го
уровня.
103
Число необходимых уровней испытаний N определяется из усло-
вия ап > Ж3, т.е. из условия того, чтобы предельная эффективность
последнего л-го уровня испытаний была больше, чем требуемая для
системы эффективность .
Из соотношения (3.5) видно, что время, необходимое для про-
ведения испытаний, определяется параметрами математической мо-
дели процесса испытаний, которые могут быть определены путем ста-
тистической обработки результатов испытаний систем-аналогов.
Таким образом, параметры моделей динамики эффективности
точно неизвестны, они определяются их средними значениями и дис-
персиями. Поэтому в качестве критерия эффективности в постанов-
ке задачи оптимизации (3.2) целесообразно принять среднее время
испытаний. Для определения среднего времени разложим нелиней-
ную функцию (3.5) в многомерный ряд Тейлора относительно векто-
ров средних значений параметров
. При этом элементами
вектор-строки Д, являются параметры модели динамики эффектив-
ности (3.3), (3.4): а/, 0/, . Разложение проведем до членов
второго порядка включительно. В результате для функции, опреде-
ленной формулой (3.5), получим:
/ ЭД*
^эд^эд,^
(3.6)
При условии, что параметры Д* некоррелированы, запишем вы-
ражение (3.6) для среднего времени испытаний в виде
Г = У — In ~ ^°' +1V V ) (3 7)
i*i 5,-Жз/ 2^ЭД1 (3'7)
Для определения точности оценки среднего времени испытаний
вычислим его дисперсию:
(3.8)
i к \ал1к ) i к ^*"4* ДоДл I
104
В большинстве практических случаев вторым членом в (3.8) мож-
но пренебречь и для определения дисперсии среднего времени испы-
таний использовать формулу
’WZxfe1 И4*’-
(3.9)
Аналогично могут быть рассчитаны третий и четвертый моменты:
i к V*"™ )
(3.10)
МП = £2(^14 (4*)+
i k{dAik J
/ к I Х^Чк ) \dAil J
к*1
(З.Н)
Поскольку средние значения параметров моделей динамики эф-
фективности и их дисперсии точно неизвестны, а оцениваются путем
обработки экспериментальных данных, использование выражений
(3.7)—(3.11) возможно при условии несмещенности этих оценок.
Как видно из формулы (3.7), среднее время испытаний опреде-
ляется двумя составляющими. Первая составляющая определяет сред-
нее время, необходимое для достижения заданной эффективности;
вторая — затраты времени, обусловленные неточностью оценки те-
кущего значения эффективности. Таким образом, сокращение сред-
него времени испытаний может быть обеспечено за счет увеличения
точности оценки параметров Д, определяющих текущее значение
эффективности проектируемого изделия.
Для формирования критерия эффективности при постановке за-
дачи оптимизации (3.1) необходимо получить зависимости, связыва-
ющие затраты с техническим показателем эффективности, а именно
с текущей эффективностью разрабатываемого изделия.
Стоимость разработки изделий авиационной и ракетно-космичес-
кой техники зависит от множества факторов как технического, так и
организационного характера. Такими факторами являются основные
технические характеристики проектируемого изделия (масса, слож-
ность аппаратуры), новизна разработки, уровень производства, опыт
участвующих в проекте организаций и т.д. Учесть все эти факторы
105
строго не удается, поэтому в качестве математических моделей сто-
имости обычно используется ряд эмпирических зависимостей, осно-
ванных на анализе статистического материала. Наиболее часто для
описания зависимости эффективности от затрат используется экспо-
ненциальная модель вида
Wi (ДС,- ) = bj- (bi - WOi )ехр{-АГ,ДС,}.
(3.12)
Остановимся на особенностях моделей динамики эффективности
(3.12), характерных для отдельных этапов испытаний.
Предельные по стоимости значения bj определяются возможнос-
тями современной техники имитировать на данном i-м этапе реаль-
ные эксплуатационные условия. Чем ниже уровень, на котором про-
водится испытание, тем меньше соответствующие значения Ь,, так
как более высокие уровни сборки характеризуются более полной ими-
тацией эксплуатационных условий. Показатель роста эффективности
Kj уменьшается при переходе на более высокие уровни, что объясня-
ется большими затратами, необходимыми на устранение дефектов на
этих уровнях.
Таким образом, указанные особенности мы можем записать в
виде неравенств: Ь, > Ь,_\, Л,- < К,_\.
Общая стоимость разработки определяется суммой базовых и те-
кущих затрат: С = Q + ДС.
Базовые затраты Со также оказывают влияние на эффективность
разрабатываемого изделия, однако математическая модель этого вли-
яния более сложная. Остановимся подробнее на зависимости эффек-
тивности от базовых затрат. Так, для экспоненциальной модели
W (т,) = а,- - (а,- - ) exp {-0,-т,-}
параметры а,-, 0, определяются техническими возможностями испы-
тательного оборудования, применяемого на конкретном предприятии.
В общем случае значения параметров а, и 0, не больше значений
аналогичных параметров А, и А", модели стоимости эффективности.
Равенство достигается в том случае, если предприятие применяет наи-
более совершенное для данного уровня развития техники испытатель-
ное оборудование.
Приведенные эмпирические зависимости эффективности от сто-
имости могут быть проиллюстрированы экспериментальным матери-
алом.
Как известно, коэффициент сложности пропорционален затра-
там. Таким образом, приведенная выше зависимость надежности от
коэффициента сложности (см. рис. 3.5, б) может быть использована
106
также для анализа функции стоимости надежности и подтверждает ее
экспоненциальный характер и повышение предельных стоимостей по
мере увеличения уровня иерархии.
Также установлено, что расходы, необходимые для устранения
дефекта, при увеличении уровня иерархии возрастают приблизитель-
но по экспоненте, что подтверждает уменьшение показателя роста
при переходе на более высокий уровень испытаний (рис. 3.7). Пара-
метры модели динамики эффективности в зависимости от стоимости
так же, как в случае зависимости от времени, точно неизвестны и
могут быть определены, если зафиксировать значения текущей эф-
фективности и суммы затрат к рассматриваемому моменту и провести
статистическую обработку полученных результатов.
Испытания
систем
Испытания
узлов
Испытания
блоков
Рис. 3.7. Зависимость затрат на отказ от уровня иерархии испытаний
В качестве критерия эффективности в постановке задачи опти-
мизации (3.1) использовано среднее значение общей стоимости ис-
пытаний. Для определения среднего значения запишем стоимость z-ro
уровня испытаний:
Общую стоимость комплексной программы испытаний получим
суммированием стоимостей испытаний на отдельных уровнях иерар-
хии при i = 1, ..., N :
(3.13)
107
Среднее значение стоимости общей программы испытаний полу-
чим, применяя описанный выше метод разложения нелинейной фун-
кции (3.13) в многомерный ряд Тейлора относительно вектора сред-
них значений параметров:
. При этом элементами
Bjk
вектор-строки являются параметры модели эффективности (3.12):
bi, Kh J^Oi, .
Выражения для средней стоимости и ее дисперсии имеют вид:
1п«
bi -
(3.14)
o2(C) = W^Lfa2(^)-
i к yd^ik )
(3.15)
Выражения (3.14), (3.15) показывают, что средняя стоимость так
же, как и среднее время, имеют две составляющие, одна из которых
определяет стоимость испытаний при средних значениях параметров
модели стоимости, а другая — характеризует увеличение стоимости,
обусловленное неточностью определения параметров.
3.3. Метод оптимального планирования
экспериментальной отработки ЛА
Анализ выражений (3.3), (3.4), (3.12), связывающих эффективность,
достигнутую в процессе экспериментальной отработки, со временем
и стоимостью испытаний, показывает, что время, стоимость и эф-
фективность зависят от большого числа факторов: ai,bi,Qi, Kt (i =
= 1,..., N). Поэтому решение задачи оптимизации в общей постанов-
ке сопряжено с рядом вычислительных трудностей и может быть по-
лучено приближенно численными методами.
При решении практических задач планирования опытной отра-
ботки целесообразно производить декомпозицию общей задачи на ряд
частных с последующей координацией полученных решений. Такой
подход является рациональным с организационной точки зрения.
Действительно, опытная отработка на различных уровнях сборки ве-
дется обычно различными предприятиями. Централизованное пла-
нирование всего процесса экспериментальной отработки, начиная с
108
элементов и кончая изделием в целом, затруднительно и не обеспе-
чивает возможности гибкого управления этим процессом. Поэтому
целесообразно определить некоторые узловые точки, обеспечиваю-
щие оптимальные свойства комплексной программы испытаний в це-
лом и являющиеся исходными данными для более детального плани-
рования отдельных этапов этой программы.
Для нахождения таких контрольных точек используем метод иерар-
хической оптимизации, основанный на анализе динамики эффек-
тивности. На основе этого метода при заданных моделях динамики
эффективности для каждого уровня испытаний и общей требуемой
эффективности изделия определим оптимальные требования к эф-
фективности для каждого уровня испытаний. При этом в качестве
моделей динамики эффективности при проведении оптимизации бу-
дем использовать различные модели, такие как экспоненциальная,
логистическая и др.
Приведенный выше анализ иерархической модели испытаний
позволяет записать модели динамики эффективности по времени и
стоимости на каждом z-м уровне испытаний в виде
(ъ ) = Oi- («/ - ^0/ )ехр{-0,т,};
Wt (Д Ci) = bi- (bi - Woi) exp {-Ki Д Ci},
где /о/ - *о/+ь ^CQi < &Cj < ACqM; ai9 — предельные значения
эффективности для z-го уровня испытаний; — начальное значе-
ние эффективности на z-м уровне испытаний; 0Z, Kj — показатели
роста эффективности соответственно по времени и стоимости на z-м
уровне испытаний; t$i9 — соответственно время и стоимость к
началу z-го уровня испытаний.
При этом в соответствии с приведенной в тексте спецификой
различных уровней испытаний выполняются условия:
ai > 9/ <
Af > Л/-1, Ki < .
Рассмотрим постановку задачи оптимизации, когда для каждого
уровня определены модели динамики эффективности. При таком
подходе задача ставится следующим образом. Пусть к началу прове-
дения испытаний, т.е. при = 0, изделие обладает некоторой на-
чальной эффективностью Wq . Пусть в результате проведения испы-
таний за счет выявления и устранения дефектов проектирования
необходимо повысить эффективность изделия до некоторого задан-
ного значения . Известно также, что переход из состояния Wq в
109
состояние FF3 осуществляется в N этапов, соответствующих N уров-
ням иерархии испытаний. На каждом i-м этапе испытаний эффек-
тивность изделия повышается от начального значения Wq, до
> которое в свою очередь является начальным значением
эффективности для следующего этапа.
Повышение текущей эффективности изделия в процессе испыта-
ний происходит в соответствии с моделью динамики эффективнос-
ти, характерной для данного этапа.
Будем предварительно считать, что оценки параметров модели
динамики эффективности a,, Qj, bj, К, для каждого этапа являются
известными. Тогда время и стоимость, необходимые для перевода
изделия из состояния Wq в состояние при заданных параметрах
модели динамики эффективности будут определяться только положе-
нием точек перехода от одного уровня испытаний к другому, т. е.
начальными значениями эффективности Ид, при i = 2,..., N. Следо-
вательно, для достижения оптимальности всего процесса испытаний
в целом нужно найти такие точки перехода, которые обеспечивали
бы минимум общего времени (или стоимости) испытаний, необхо-
димых для перехода изделия из состояния Wq в состояние
Как следует из (3.5), (3.13), общее время и стоимость складыва-
ются из времени и стоимости на отдельных уровнях иерархии испыта-
ний, т.е. время и стоимость являются аддитивными критериями оп-
тимальности. Кроме того, из выражений (3.3), (3.12) легко видеть,
что состояние изделия на i-м уровне зависит только от состояния
на (i-1 )-м уровне и не зависит от того, каким образом изделие
пришло в состояние Й^-.
Таким образом, выполняются условия для применения к задаче
оптимизации метода динамического программирования. В соответ-
ствии с этим методом оптимизацию процесса испытаний начнем с
конца испытаний, т.е. с л-го этапа. Обозначим критерий оптималь-
ности на последнем л-м этапе Фл. Обычно в качестве этой величины
принимают значение частного критерия на этом шаге, например
Значение критерия Фл на последних i шагах равно х„ +... + т,-.
Величина Фл при заданных параметрах ап, в„ и заданном значении
зависит от Иол, которое является в данной задаче управлением.
Из выражения (3.5) очевидно, что наименьшее значение
Ф* = т* = 0 достигается, когда = W,
ll ft \Jl9 чЭ
Переходя к минимизации величины Фя,л-1 при найденном опти-
мальном , определяем оптимальное значение , которое
НО
также будет равно . Продолжая пошаговую оптимизацию, нахо-
дим решение для любого /-го шага: Фл / при Ид* = i = 2,...,л •
Таким образом, в результате проведенного процесса оптимиза-
ции имеем тривиальное решение: минимальное общее время испыта-
ний равно нулю в том случае, если система после проведения испы-
таний на первом уровне иерархии повышает свою эффективность с
^0 Д° К
Однако из приведенного анализа иерархической структуры про-
цесса испытаний очевидно, что при начальной эффективности Ид
система за один шаг не может быть переведена в состояние И^.
В рассмотренном случае на область допустимых значений не на-
кладывалось никаких ограничений. Однако такое ограничение суще-
ствует, а именно — должно принадлежать кривой динамики эф-
фективности на (i-I)-m уровне. Это ограничение можно учесть,
если в качестве функции Фл принять
ап Won
*Л-^з
। 1 In Д/1~* ^Ол-1
®л-1 ап-\ “ ^Оп
(3.16)
При заданных параметрах 0Л, 0Л_i, ап, ап_х, W3 функция за-
висит только от значений И^л, Иол-Ь т.е. Фл=Ф(^ол> ^Ьл-1)-
В соответствии с методом динамического программирования
проводим условную оптимизацию Фл в предположении, что состоя-
ние И/дл_1 известно. Дифференцируя выражение (3.16) по Идл и при-
равнивая производную нулю, получаем условие оптимального пере-
хода от (п -1 )-го уровня к л-му уровню:
®Л (Дл “ ^Оп ) = 9Л-1 (ДЛ-1 — ff^Qn j. (3.17)
Проанализируем это условие. Выражение в левой части является
. dWn „ „ dWn_x
производной “з— , а в правой — производной —-----
х =g dxn-\ х 1=х* ,
тл и гЛ-1 гл-1
Таким образом, точкой оптимального перехода является точка
равенства скоростей роста эффективности на (i -1 )-м уровне в точке
перехода и на /-м уровне в начальной точке (рис. 3.8).
Для подтверждения того, что определенный экстремум является
минимумом, проведем исследование соотношения (3.17). При
И/о„ < справедливо неравенство 0Л (а„ -Won)< ел-1 («л-1 - ^Ол)-
В этом случае величина производной ЭФЛ /ЭИо„ < 0. При И^Оя > '
соответственно ЭФЛ /Э Wq„ > 0, 0Л (ап - ) > 0Л_! (ал_[ - И^л) •
111
Рис. 3.8. Иллюстрация физической интерпретации точки оптимального
перехода от одного уровня к другому
Таким образом, определенный экстремум соответствует мини-
муму величины Фл. Перейдем к условной оптимизации Фл,л-1 при
найденном оптимальном значении HnZ = — ^л-~1Дл~1 и в предпо-
0Л - 0л-1
ложении, что значение ff^on-2 известно:
фл Л J = _L In а» ~ + _L In ~ _L in ?л-2 ~ и/°л~2.
0л ап — ®л-1 ап-\ ~ ^0л 0л-2 ап-2 ~ ^0л-1
Дифференцируя Фл,л-1 по И^л_1 и приравнивая полученную про-
изводную к нулю, находим условие оптимального перехода от (л - 2)-
го к (п -1 )-му уровню, аналогичное условию (3.17):
0л-1 (^л-1 — ^0л-1) = 0л-2 (^л-2 ” ^0л-1 )•
В результате решения поставленной задачи получим условие опти-
мального перехода от любого (i -1 )-го уровня к /-му уровню при i = 2,
..., N:
0/ ~ ^0i ) = 0/-1 — PKqj ),
112
откуда
0, - 0/-1
(3.18)
Соотношения (3.17) и (3.18) имеют четкий физический смысл.
Действительно, заданный отрезок траектории (W3 - ) можно прой-
ти за минимальное время, если скорость роста W при этом макси-
мальна. Условие (3.18) как раз и обеспечивает максимальную ско-
рость движения (рис. 3.8). Если движение начинается с некоторой
точки Wq/ < Wq! , в которой скорость движения по (i-1 )-й кривой
динамики эффективности выше, чем скорость движения по /-й кри-
вой, то на отрезке траектории Нл*/ - ffd. происходит потеря времени.
Аналогичная картина наблюдается, когда .
Величина оптимального времени
/ / Vj (Ц - Ид/
Условие оптимального перехода в виде равенства производных
текущей эффективности предыдущего и последующего уровней по-
лучается и в том случае, когда все уровни описываются логистичес-
кими моделями роста эффективности или часть уровней иерархии
испытаний описывается экспоненциальными моделями, а часть —
логистическими, а также, когда показатели роста эффективности эк-
споненциальных моделей являются произвольными функциями вре-
мени 0/(/). Приведем условие оптимального перехода от (/-1)-го
уровня к /-му уровню испытаний для случая, когда оба уровня опи-
сываются логистическими моделями. Тогда условие равенства про-
изводных в точке перехода запишется:
— а/ - f^bi = — k-i - Wo, I
ai' > ai-i' >
откуда WOi' = • — ' 1---.
^ildj Qj-i/aj-i
В случае, если модели динамики эффективности описываются
экспоненциальными моделями с показателями роста эффективности
в виде произвольных функций времени, условие оптимального пере-
хода примет вид:
113
ъ (')(«,• - *о7)=0,-i - ^о7),
откуда
^о7 = [0/ (Ф, - е,_1 (г)о/_1 ]/[0,- (0 - 0,-1 (/)] •
Рассмотрим теперь задачу определения оптимальных точек пере-
хода с учетом случайного характера параметров модели динамики
эффективности. Для этого заменим случайную модель динамики эф-
фективности осредненной неслучайной моделью и будем решать де-
терминированную задачу динамического программирования. Крите-
рием оптимальности выберем среднее значение времени испытаний
Т (3.7), а в качестве частного среднего критерия Фл будем рассмат-
ривать функцию
о2 (дл-1) +
2 taj(5>) + 2 ta«,- - *».-1 „2(5я ,)
0Л ап ^3 0Л-1 ал-1 ^Ол
(3.19)
Найдем условный минимум функции Фл, предполагая, что зна-
чения ап, ап^, 0Л, 0Л_Ь И'ол-Ь W3, а также <^(ап), ст2^.]),
о2(0л), о2(0л_1), ст2 (Й70л_1), ^(iTon), o2(^3) известны. В этом
случае функция фп будет зависеть только от среднего значения .
114
Дифференцируя выражение (3.19) по Идл и приравнивая полу-
ченную производную нулю, получим условие оптимального перехода
от (п -1 )-го уровня к л-му уровню с учетом случайных характеристик
параметров модели динамики эффективности. Это условие имеет вид:
— И*ол) Дл-1 = 0л-1 — jДл,
где
о2(ая-</) о2(ёя)
(^-С) е”
, О2 (ал-1 - ) (^(Vi)
Л"-1 1+ / -ч\2 + ё2
(«л-1-ИЬл) 0л-‘
Полученное условие легко обобщить для перехода от любого
(i -1 )-го уровня к /-му уровню. В результате найдем условие опти-
мального перехода от (/ -1 )-го к /-му уровню иерархии испытаний в
виде
0, (а, - Й?')д'_, = 0,-! (а,.! - )д<, (3.20)
где
откуда Йо/ = (0/а(Д/-1 ~ 0/-15/-1 А/)/(ё/Д/_1 - 6/-1Д/) и при равной точ-
ности оценивания параметров моделей динамики эффективности на
/-м и (/ -1 )-м уровнях совпадает с выражением Wq- для детермини-
рованного случая.
Применяя метод динамического программирования для оптими-
зации средней стоимости испытаний (3.14), находим аналогичные
соотношения, определяющие оптимальную точку перехода с (/ -1 )-го
на /-й уровень иерархии испытаний:
115
где
(3.21)
o2(A-FKo?) <?(£)
Af = 1 + —i+ L-7
C c2(^-i-^o7) oV(_i)
Д'-1-1+ Л + p2
Ki~'
откуда
Можно показать, что условие оптимального по стоимости пере-
хода (3.21) в общем случае отличается от условия оптимального по
времени перехода (3.20). Для этого рассмотрим несколько наиболее
интересных частных случаев. Для простоты и наглядности изложения
предположим, что на каждом уровне иерархии предельные по сто-
имости значения эффективности равны предельным по времени зна-
чениям эффективности: а,- =д/, =Л,-1- Это означает, что при
испытаниях применяется самое совершенное испытательное обору-
дование.
Предположим также, что точность оценки параметров модели ди-
намики эффективности на всех уровнях одинакова. Тогда стоимость
испытаний на каждом уровне иерархии может быть связана со време-
нем проведения испытаний пропорциональной зависимостью:
ДС/=(О/Т/, (3.22)
где со, — коэффициент пропорциональности.
Действительно, время испытаний можно определить как
т/ = т-л, (3.23)
где т- — время, затраченное на проведение одного испытания; п —
число испытаний.
Стоимость также пропорциональна числу испытаний:
АС,- = С}п, (3.24)
где С/ — стоимость одного испытания.
Время, затраченное на проведение одного испытания, склады-
вается из времени, необходимого на подготовку испытания, собствен-
но испытания и анализа полученных результатов. Стоимость одного
испытания складывается из затрат на амортизацию испытательного
116
оборудования, стоимости испытуемого образца, оплаты труда обслу-
живающего персонала и т.д.
Выражения (3.23) и (3.24) объясняют соотношение (3.22), где
со, = С} /т} — удельные затраты на единицу времени при проведении
одного испытания.
Подставляя условие (3.22) в выражения эффективности (3.20),
(3.21), получим зависимость между показателем роста эффективнос-
ти 0/ и Ki: 0/ = ^Ki.
Теперь пусть коэффициент пропорциональности со/ одинаков для
всех уровней иерархии, т.е. удельные затраты постоянны для всей
комплексной программы испытаний. При этом, как следует из (3.20),
(3.21), выбор обеспечивает одновременно минимум среднего
времени испытаний и минимум стоимости испытаний.
Рассмотрим далее ситуацию, когда удельные затраты на (i -1 )-м
уровне испытаний выше, чем на /*-м. Тогда условие минимума по
стоимости требует уменьшения величины по сравнению с вели-
чиной WqI и определяет, таким образом, необходимость увеличения
продолжительности отработки на z-м уровне испытаний.
Если удельные затраты на ( / -1 )-м уровне испытаний ниже, чем
на /-м, то для обеспечения минимума стоимости необходимо увели-
чить продолжительность отработки на (i -1 )-м уровне.
И наконец рассмотрим случай, когда точность оценки парамет-
ров на (i -1 )-м и /-м уровнях неодинакова. При такой ситуации так-
же происходит перераспределение продолжительности отработки в за-
висимости от точности оценки параметров: если точность на (i -1 )-м
уровне ниже, чем на z-м, то предпочтение следует отдавать /-му уровню
и наоборот.
Пример определения оптимального объема наземных и летных испыта-
ний, Для более наглядной иллюстрации методики оптимизации рассмотрим
конкретный пример по определению оптимального объема летных испыта-
ний. Разделим всю иерархию испытаний на два уровня: наземной и летной
отработки изделия. Считаем, что изменение эффективности на каждом уров-
не иерархии подчиняется экспоненциальному закону. Считаем также, что
законы динамики эффективности для каждого уровня испытаний полнос-
тью определены, т.е. заданы средние значения и дисперсии параметров,
определяющих динамику эффективности на каждом уровне иерархии.
На рис. 3.9 кривая 1 соответствует росту эффективности при назем-
ных, а 2 — при летных испытаниях. Если бы вся отработка изделия до
заданного значения эффективности W3 проводилась бы только в летном эк-
сперименте, то для этого потребовалось бы время Т. При наземной отра-
117
ботке скорость роста эффективности выше, чем при летном эксперименте,
однако предельное значение эффективности ан меньше заданного значения
И'з. Поэтому для сокращения общего времени и стоимости испытаний от-
работку ЛА до определенного значения эффективности , соответствую-
щего точке А, необходимо проводить на земле, а окончательную отработку до
заданного значения эффективности W3 — в летном эксперименте. Опреде-
лим точку перехода от наземных испытаний к летным испытаниям, соответ-
ствующую минимуму среднего времени или средней стоимости испытаний.
Рис. 3.9. Схема оптимального разделения наземной и летной отработки
В соответствии с формулами (3.20), (3.21) получим условие оп-
тимального по времени перехода:
0л (дл " = (^н " Wo л ) Ад >
где
откуда
^0п = (^л^дАн “ ®н^нАл )/(0дАн “ ®нАд ) >
и условие оптимального по стоимости перехода
(3.25)
(^л ^0л )ан - *н (Ьи И^од)Ал,
118
где
откуда
^Ол - (^Л^н ” ^Н^л) •
(3.26)
Условия (3.25), (3.26) совпадают, когда
ал = ^л ’ ан = ’ юл = > Ад = Ад = Ад = Ад .
При (Од < ©н экономически выгодно увеличение объема летной
отработки, однако общее время испытаний при этом несколько уве-
личивается. Данный случай имеет место, например, при отработке
сравнительно недорогих образцов одноразового действия, когда сто-
имость эксплуатации наземного испытательного комплекса больше
стоимости летных испытаний этих изделий. При испытании дорогого
уникального ЛА, например космического аппарата, сол < ©н и ос-
новной является наземная отработка.
Таким образом, знание моделей динамики эффективности по-
зволяет наиболее целесообразно распределить время и средства меж-
ду наземной и летной отработками изделий.
Контрольные вопросы
1. Какова роль испытаний в создании изделий авиакосмической техники?
2. Как связаны между собой критерии эффективности изделий и испы-
таний?
3. Сформулируйте современный подход к организации комплексных
программ испытаний ЛА.
4. Что понимается под эффективностью сложной технической системы?
5. Сформулируйте два упрощенных подхода к учету конструктивных
отказов в практике обработки данных испытаний.
6. Сформулируйте понятия дефекта и отказа.
7. В чем заключаются достоинства экспоненциальной модели динами-
ки эффективности сложной системы?
8. В чем заключаются достоинства логистической модели динамики
эффективности сложной системы?
9. Какими составляющими определяется среднее время испытаний?
Глава 4
ИСПЫТАНИЯ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
С ИСПОЛЬЗОВАНИЕМ МОДЕЛЕЙ
4.1. Цели и задачи моделирования
при создании сложных технических систем
В настоящее время моделирование является неотъемлемым элемен-
том процесса создания любой сложной технической системы.
Первоначально методы моделирования получили широкое рас-
пространение при решении сравнительно несложных задач. С появ-
лением сложных систем роль моделирования при оценке параметров
исследуемых процессов существенно возросла. Это объясняется осо-
бенностями исследуемых объектов, вытекающими из сложности
функциональных связей между параметрами системы, изменяющи-
мися условиями внешней среды и оцениваемыми показателями. Обычно
при моделировании СТС сталкиваются с ситуацией, когда исследуе-
мые процессы в системе и условия внешней среды имеют вероятнос-
тный характер, число факторов, влияющих на оцениваемые показа-
тели, значительно и оценки искомых параметров нужно получить для
широкого диапазона изменений условий функционирования системы.
Моделирование (как метод исследований) широко применяется
не только при подготовке технических предложений и формировании
технических требований к создаваемому образцу, но и на этапах эс-
кизного и технического проектирования, при отработке образцов в
замкнутых системах, в составе которых предполагается их использо-
вание, а также на этапе различных видов натурных испытаний, опре-
деляющих характеристики объектов, их отработанность и возможность
перехода от данного этапа испытаний к последующему или служащих
основанием для передачи объектов в серийное производство.
В соответствии со сложившейся практикой обычно применяют
три основных вида моделирования: математическое, полунатурное и
физическое.
Конечной целью математического моделирования является полу-
чение необходимой точности оценок выбранных количественных по-
казателей. Наибольшее распространение при этом моделировании по-
лучили методы статистических испытаний, эквивалентных возмущений
и интерполяционный метод, представляющие собой прямые методы
120
расчета вероятностных характеристик систем. При этом оценки вы-
числяются в один этап без учета результатов предшествующего моде-
лирования. В действительности же между оценками, найденными
на различных этапах моделирования, существует определенная ста-
тистическая зависимость, учет которой во многих случаях позволяет
существенно сократить число экспериментов.
Так как материальный вклад в объем моделирования для слож-
ных систем велик, то сокращение общего числа экспериментов при-
обретает важное значение. Поэтому разрабатываются комбинирован-
ные методы использования разнородных статистических оценок, при
которых на каждом очередном этапе моделирования используется ра-
нее полученная информация.
Вычислительные методы, используемые для определения оценок
параметров как при полунатурном, так и при физическом моделиро-
вании, в большинстве случаев аналогичны применяемым при мате-
матическом моделировании.
Методами моделирования обычно решается следующий основ-
ной круг задач:
• обоснование технических требований к создаваемому объекту и
его отдельным частям;
• сравнительная оценка эффективности существующих образцов
и их частей, подобных разрабатываемым;
• выбор рациональных технических решений по построению со-
здаваемого объекта, его систем и подсистем и проверка соот-
ветствия полученных характеристик заданным на стадии как про-
ектной разработки, так и испытаний;
• отработка систем, подсистем, блоков и их элементов, уточне-
ние технических решений и требований к объектам в процессе
их создания;
• выбор и отработка алгоритмов функционирования объектов в
реальных условиях применения;
• предварительная оценка ожидаемой эффективности создавае-
мого объекта;
• отработка объекта в целом перед проведением натурных испы-
таний;
• обоснование программ и методов проведения различных видов
испытаний объекта, его систем, подсистем, блоков и элемен-
тов;
• решение задач, связанных с эргономическим обеспечением как
функционирования объекта, так и его испытаний;
• получение характеристик, которые не могут быть определены
(из-за возможных экономических, технических, организаци-
онных и других видов ограничений) в натурных испытаниях, а
121
также статистических характеристик, необходимых для оценки
испытываемого объекта;
• определение соответствия характеристик объекта заданным тре-
бованиям и контрольная проверка этих характеристик с учетом
натурных испытаний;
• оценка эффективности объекта во всем диапазоне реальных ус-
ловий его применения и т. п.
При решении перечисленных задач математическое моделирова-
ние используется, когда известно достаточно достоверное математи-
ческое описание моделируемого процесса. Полунатурное моделиро-
вание применяется для оценки аппаратурных решений, эргономи-
ческой оценки и при отработке образцов для уточнения технических
решений, получения объективных оценок для принятия решений о
проведении натурных испытаний и возможности перехода от одного
этапа испытаний к последующему. Физическое моделирование при-
меняется при отсутствии достаточно достоверного математического
описания процесса и невозможности выполнения полунатурного мо-
делирования.
Сложность современных испытываемых систем и комплексов,
средств, обеспечивающих экспериментальную отработку объектов,
организационной структуры экспериментов и связанные с этим труд-
ности перестройки экспериментов в процессе их реализации делают
необходимым проведение ряда мероприятий по повышению эффек-
тивности данного этапа создания СТС.
Один из путей решения указанной задачи — широкое привлече-
ние методов моделирования к натурным экспериментам с целью по-
лучения в ограниченное время результатов из минимального объема
экспериментальных данных.
Из рис. 4.1 видно, что увеличение объема сопровождающего мо-
делирования позволяет в 1,5—2 раза сократить число натурных экспе-
риментов при отработке СТС.
Одной из особенностей сложных систем натурного эксперимента
является то, что при их реализации не всегда возможно провести
необходимый объем экспериментальных исследований функциони-
рования объекта в целом или отдельных его систем и подсистем в
реальных условиях применения. Поэтому в натурных испытаниях при-
ходится создавать некоторую имитационную обстановку. В этих слу-
чаях полнота и достоверность получаемого экспериментального мате-
риала могут быть гарантированы, если к исследованиям привлечены
методы моделирования. Вне зависимости от вида моделирования и
помимо работ, связанных с постановкой задачи, выбором критериев
оценки и методов оптимизации, реализации моделей в виде программ
или схем моделирования, их отладки и проведения моделирования
122
1,0 1,5 2
Относительная сложность
объекта испытаний
Рис. 4.1. Взаимосвязь объемов моделирования и натурных испытаний:
1 — объем моделирования; 2,3 — относительное число натурных экспери-
ментов без моделирования и с моделированием соответственно
важнейшей задачей является разработка моделей, объективно отра-
жающих подлежащие изучению процессы.
4.2. Общие сведения об испытаниях
с использованием моделей
Моделирование— это метод исследования объекта испытаний (ОИ) и
протекающих в нем физических процессов. В основе метода лежит
замена ОИ и реальных процессов, проходящих в нем, моделью, струк-
тура и способ реализации которой могут изучаться путем математи-
ческого, физического и физико-математического моделирования. Как
указалось выше, моделирование позволяет сократить объем, продол-
жительность и стоимость испытаний по сравнению с лабораторными
и эксплуатационными методами.
Испытания с использованием моделирования являются важным
средством изучения свойств ОИ. Они позволяют быстро и эффек-
тивно оценить поведение ОИ на всех стадиях от проектирования до
эксплуатации путем имитации поведения реального ОИ другим, бо-
лее удобным для испытателя методом. Особенно важное значение
приобретает испытание с использованием моделирования в аварий-
ных ситуациях для уточнения процессов потери работоспособности
ОИ при различных эксплуатационных условиях и режимах работы, а
также при выборе контролируемых параметров ОИ в процессе его
разработки.
123
С помощью моделирования можно воспроизводить работу ряда
систем, практически не прибегая к натурным испытаниям, оптими-
зировать их характеристики, осуществлять краткосрочный или глубо-
кий прогноз. Основное назначение моделирования — выбор опти-
мальной стратегии поиска наилучшего из возможных вариантов.
Однако на практике этим проблема моделирования не ограничивает-
ся. Выбранная в процессе моделирования стратегия исследования
будет оптимальной для совокупности рассматриваемых условий. Но
она может оказаться и неоптимальной, если в ходе исследования рас-
кроются новые, до того неизвестные свойства системы. В этом слу-
чае должно измениться соответственно и направление поиска.
Допустим, что условиями технического задания на разработку
двигательной установки (ДУ) космического корабля сформулирова-
ны основные требования: уровень надежности, значения основных
параметров, масса конструкции и т.п. Благодаря проведенной отра-
ботке поставленная цель оказалась достигнутой. Однако с помощью
моделирования были выявлены некоторые новые свойства и приня-
тая схема конструкции ДУ и ее параметры оказались неоптимальны-
ми. Тогда в результате проведенного исследования наметилась новая
стратегия поиска, позволяющая решать поставленную задачу уже при
значительно облегченной конструкции. В этом и заключается эври-
стический смысл идеи моделирования, благодаря которому выявле-
ние новых свойств процесса при анализе полученных результатов оп-
ределяет новые пути решения комплексной задачи. С учетом этого
моделирование физических процессов позволяет решать задачи как
бы двух планов: во-первых, определять оптимальным образом путь
решения задачи при заранее известном составе факторов и, во-вто-
рых, благодаря выявлению новых свойств и особенностей исследуе-
мого процесса осуществлять эвристически стратегию поиска.
Исследование методом моделирования начинается обычно с об-
работки априорной информации по испытаниям натурных объектов,
выбора вида модели, разработки специальной рабочей модели, пред-
назначенной для конкретных исследований. Затем уже производится
экспериментирование на данной модели с последующим уточнением
ее вида и самих результатов моделирования. В ряде случаев модели-
рование заканчивается серией контрольных испытаний натурных си-
стем с целью подтверждения достоверности полученных результатов.
По назначению различают два основных вида моделей, исполь-
зуемых при проведении испытаний: физические и математические.
Физическая модель позволяет воспроизвести ОИ с сохранением его
физической природы и происходящих в нем процессов при соответ-
ствующих воздействиях внешних факторов. Математическая модель
124
представляет собой математические соотношения, описывающие ОИ
и происходящие в нем процессы при внешних воздействиях.
Физическое моделирование применяют при исследовании и оценке
характеристик О И, а также процессов их функционирования, когда
получение экспериментальных характеристик по результатам испыта-
ний реальных О И связано с большими трудностями и затратами и не
представляется возможным осуществить математическое моделирова-
ние. В этих случаях физическая модель позволяет обнаружить зави-
симость между различными параметрами непосредственным измере-
нием. Затем, опираясь на теорию подобия или используя метод
аналогий, результаты испытаний переносятся на оригинал (модели-
руемый объект или процесс).
В зависимости от свойств ОИ физические модели могут исполь-
зоваться при проведении исследовательских испытаний для оценки
некоторых (например, наиболее трудно измеряемых на ОИ) характе-
ристик, при испытаниях на надежность с целью определить «слабые»
звенья и оценить показатели надежности по поведению слабого звена.
Математическое моделирование применяют в тех случаях, когда
имеется возможность рассчитать (с использованием ЭВМ) измене-
ние (в процессе внешних воздействий) параметров, определяющих
поведение ОИ. Математические модели представляют собой матема-
тические соотношения, использующие дискретные значения исход-
ных данных и отражающие результаты расчета также для дискретных
моментов времени. Расчет значений параметров на выходе ОИ по
известным для дискретных моментов времени значениям входных
параметров, в том числе внешних воздействий, называется цифровым
моделированием.
Цифровое моделирование сложных ОИ на ЭВМ осуществляется
путем «проигрывания» как различных вариантов описаний самого ОИ,
так и его взаимодействия с окружающей средой. Такое направление
принято называть имитационным моделированием.
Разработка математических моделей может вестись на основе об-
работки статистических данных. Однако если исследуется совершен-
но новое явление, то на ранних этапах исследователь не располагает
достаточным объемом информации, что позволяет с помощью со-
здаваемой модели увидеть не сам процесс, а «нащупать» лишь его
схему. Такое приближенное отображение процесса фиксируется с
помощью так называемых концептуальных моделей. Концептуальные
модели определяют наше условное представление об исследуемом
процессе, а точнее — дают только скелетную схему.
Одна из наиболее важных задач моделирования — это изучение в
процессе совершенствования отрабатываемых систем их характерис-
тик и выявление скрытых свойств. К числу этих свойств относятся:
125
оптимальные конструктивные и технологические характеристики;
фактические значения основных параметров при любых сочетаниях
внешних и внутренних факторов; значения параметров, определяю-
щих экстремальные условия испытаний, распределение характерис-
тик надежности систем при заданных условиях эксплуатации. Важным
вопросом является обеспечение научной основы для планирования
испытаний и прогнозирования основных параметров. Последнее дол-
жно предшествовать всякому внедрению систем в производство.
В своей теоретической и практической основе разработка слож-
ных систем зиждется на методах математического и физического мо-
делирования, которые являются исходным началом для оптимиза-
ции поиска. Подход к обоим методам различен. Если математические
модели — это отображение реального процесса при помощи условных
математических символов, то физические модели — это упрощенные
или уменьшенные «макеты» реальных систем. Каждая из видов моде-
лей не исключает, а дополняет другую и в рациональной программе
участвуют вместе.
Чтобы можно было распространить результаты, полученные при
испытаниях с использованием моделирования, для оценки поведе-
ния реальных ОИ, необходимо обеспечить определенное соответствие
между моделью и ОИ. Это соответствие может выражаться в виде
адекватности (т. е. одинаковости поведения в одинаковых условиях)
или подобии модели и ОИ. В большинстве случаев испытаний ОИ с
применением моделирования трудно обеспечить адекватность модели
и ОИ, поэтому используются модели, подобные ОИ.
Процесс испытаний с помощью моделей ОИ (в дальнейшем —
процесс моделирования) независимо от их вида (физическая или ма-
тематическая) состоит из одинаковых основных этапов: сбора дан-
ных, необходимых для построения модели; построения модели; про-
ведения испытаний на модели; анализа полученных результатов. На
рис. 4.2 приведено более детальное раскрытие этих этапов примени-
тельно к математическому моделированию
Этап 1 — построение содержательного описания модели, в которое
вносят всю информацию об ОИ. Если ОИ является вновь разрабаты-
ваемым изделием, то в содержательное описание включают данные
из ТЗ, условия работы объекта, данные о его структуре и функцио-
нировании отдельных элементов. Эти данные получают из литера-
турных источников, документов, отчетов о результатах исследова-
ний, сведений об аналогичных объектах.
Этап 2 — построение формализованного описания, заключающееся
в отборе из содержательного описания тех независимых переменных
параметров, которые необходимы для построения модели и расчетов
126
Рис. 4.2. Схема процесса моделирования
127
по ней. Эти параметры должны описывать режимы работы ОИ и про-
цессы, протекающие в нем при внешних воздействиях.
Этап 3 — построение модели путем нахождения ее блочной струк-
туры. Каждый блок описывается уравнениями своего функциониро-
вания, а взаимодействие между блоками — соответствующими пара-
метрами.
Этап 4 — обработка модели осуществляется путем программиро-
вания математической модели на ЭВМ или настройкой физической
модели.
Этап 5 — эксперименты на модели реализуются при математичес-
ком моделировании путем соответствующих расчетов на ЭВМ.
Этап 6 — проверка адекватности модели включает накопление ре-
зультатов моделирования и их обработку с сопоставительным анали-
зом точности полученных результатов моделирования с результатами
лабораторного эксперимента. Критерии адекватности определяются
на основе теории подобия.
Этап 7 — использование результатов моделирования для следующих
целей: а) при разработке ОИ — для совершенствования его структу-
ры и функционирования, оптимизации процедур испытаний и конт-
роля; б) моделирования работающего ОИ, когда требуется более пол-
ная информация о его свойствах, чем полученная при лабораторных
испытаниях; в) моделирование сложного работающего ОИ, когда тре-
буется определение степени нагружения отдельных блоков его струк-
туры или эффективности их взаимосвязей.
Изложенные соображения позволяют в общем плане определить
роль испытаний при использовании методов моделирования. Воз-
можность математического моделирования определяется наличием со-
ответствующих соотношений и трудоемкостью расчетов, которая во
многом зависит от характеристик используемых ЭВМ.
Возможность применения физического моделирования определя-
ется свойствами ОИ и видами испытательных воздействий. Если ОИ
является сложной технической системой, состоящей из большого чис-
ла отдельных звеньев (блоков, узлов), имеющих существенно раз-
личную прочность (устойчивость) к разным видам испытательных воз-
действий, то испытания могут проводиться с помощью физических
моделей.
В тех случаях, когда ОИ обладает свойствами, при которых слож-
ные внешние воздействия могут быть заменены воздействиями более
простыми или с меньшей интенсивностью, испытания осуществля-
ются на основе физического моделирования воздействий на ОИ.
128
4.3. Испытания на основе физического моделирования
4.3.1. Физическое моделирование объектов испытаний
Принцип физического моделирования достаточно широко использу-
ется в практике опытно-конструкторской отработки СТС для выявле-
ния наиболее важных свойств данной конструкции, выбора оптималь-
ных критериев, определяющих ее качество, и т.д. Суть физи- ческих
моделей заключается в том, что исследование некоторого физичес-
кого процесса производится не на натурном объекте, а на его умень-
шенных или упрощенных до некоторой степени моделях. В данном
случае сами модели должны быть подобны натуре в смысле точного
копирования изучаемых явлений. Моделирование может быть пол-
ным, если система полностью заменяется моделью или моделями, и
частичным, если в ней заменяются моделью один или несколько эле-
ментов. Физические модели используются для изучения внутренней
структуры сложных физических процессов, для определения не толь-
ко выходных, но и промежуточных параметров, для выбора и про-
верки критериев подобия, различных физических констант, а также
для прогнозирования и объяснения различного рода явлений с доста-
точной степенью точности.
Физическая модель должна не только отражать изучаемый реаль-
ный процесс, но быть менее сложной, чем сам натурный объект, в
противном случае теряется смысл ее использования. Физическая мо-
дель отличается от других видов моделей прежде всего тем, что она
сохраняет самые существенные, определяющие свойства натурного
объекта, представленные, как правило, в ином масштабе. Внешне
она может быть похожей на натурный объект и отличаться от него
только размерами. Физические модели сохраняют специфику реаль-
ного объекта, они конкретны и также сложны в эксперименте, а в
ряде случаев и сложнее, чем на натурном объекте.
Испытание СТС — дорогостоящий эксперимент, однако с помо-
щью моделей дорогое, а в ряде случаев уникальное оборудование
может быть исключено из программы отработки. Так, например,
при отработке системы питания двигателя совместно с турбонасос-
ным агрегатом камеру сгорания можно заменить физической моде-
лью — дроссельными шайбами, настроенными на заданный секунд-
ный расход компонентов топлива. Благодаря этому дорогое огневое
испытание двигателя может быть заменено практически гидроиспыта-
нием и перенесено со стенда огневых испытаний в гидролабораторию.
Испытания на основе физического моделирования ОИ состоят
из следующих этапов: определение цели и задачи испытания; постро-
129
ение физической модели объекта испытания; проведение испытания
путем внешних воздействий на физическую модель ОИ и получение
ее реакции на это воздействие; анализ, обработка и интерпретация
результатов испытаний. Основные цели и задачи испытаний физи-
ческих моделей ОИ сведены в табл. 4.1.
Таблица 4.1
Выбор цели и задач проведения испытаний
с использованием физических моделей объектов
Цели испытания Задачи проведения испытаний
1. Выявление наименее стойко- го или наиболее чувствительного к данному воздействию звена. 1.1. Получение данных, необходи- мых для проведения последующих доработок в целях обеспечения воз- можно большей степени равнопроч- ное*™ различных звеньев к воздей- ствующим факторам. 1.2. Получение данных для выбора (оптимизации) защиты от внешних воздействий.
2. Оценка ресурсных характери- стик (в том числе долговечности и сохраняемости). 2.1. Получение сравнительных дан- ных для сопоставительного анализа ресурсных характеристик звеньев одинакового целевого назначения, имеющих конструктивно-технологи- ческие различия. 2.2. Проверка соответствия ресурс- ных характеристик требованиям ТЗ, ТУ и других НД.
3. Определение предельных ха- рактеристик (интенсивности и длительности воздействия), при которых сохраняется работоспо- собность ОИ. 3.1. Получение исходных данных для расчета защиты от экстремальных воздействий. 3.2. Оценка запасов устойчивости по отношению к экстремальным воздей- ствиям. 3.3. Получение информации, необ- ходимой для создания рекомендаций обслуживающему персоналу по дей- ствиям в нештатных ситуациях.
4. Определение видов, причин и механизмов отказе®. Получение информации, необходи- мой для устранения и предотвраще- ния отказов.
130
Проведение рассматриваемых испытаний в процессе разработки
ОИ позволяет:
• определить наиболее слабые элементы ОИ для каждого из видов
внешних воздействий, чтобы в процессе последующей дора-
ботки обеспечить относительную равнопрочность элементов и
тем самым повысить устойчивость изделий к установленным
видам воздействий;
• получить предварительную информацию о различии в устойчи-
вости ОИ к раздельному и комплексному воздействиям вне-
шних факторов, что необходимо для оптимизации системы ис-
пытаний.
При анализе результатов испытаний физических моделей необ-
ходимо учитывать следующее:
• реальные значения устойчивости моделируемого объекта к ус-
тановленным видам воздействий оказываются тем ниже, чем
больше элементов реального изделия было исключено из рас-
смотрения при построении физической модели;
• виды, причины и механизмы отказов, установленные по ре-
зультатам испытаний физических моделей, не учитывают отка-
зов тех элементов, которые были исключены при построении
моделей.
Непременным условием применимости физических моделей яв-
ляется обеспечение подобия натурному процессу. Степень соответ-
ствия модели и ОИ выражается с помощью критериев подобия.
Под критерием подобия понимается словесная или математичес-
кая формулировка условий, при которых модель может считаться от-
ражающей в заданном смысле ОИ. Соответствие модели и ОИ в про-
стейшем случае представляется безразмерными параметрами самих
процессов и той системы, в которой они протекают. Основное поло-
жение теории подобия гласит, что процессы, в которых критерии по-
добия равны, подобны. Однако критерии подобия не всегда и не для
всех процессов могут быть выражены в явном виде — в виде безразмер-
ных комплексов. Возможны случаи, когда эти критериальные соот-
ношения между моделью и ОИ могут быть представлены только в
неявной форме (например, для сложных информационно-измеритель-
ных комплексов).
Требование соблюдения адекватности или подобия модели и ОИ
распространяется на все виды моделей и методов моделирования.
5*
131
4.3.2. Физическое моделирование воздействий
на объект испытаний
Целью проведения испытаний с физическим моделированием воз-
действий на ОИ является изменение вида или характеристик воздей-
ствия с тем, чтобы сократить затраты на испытания, в том числе
путем использования одного и того же вида оборудования для раз-
личных испытаний. Испытания с применением физического моде-
лирования воздействий на ОИ можно представить в виде трех групп
методов, учитывающих особенности их использования.
Первая группа методов при повышенной интенсивности воздей-
ствия и, соответственно, сокращенном времени воздействия исполь-
зуется для ускоренной оценки прочности, устойчивости к внешним
воздействиям, надежности, а также сравнительной оценки различных
конструктивно-технологических решений на этапе разработки.
При пониженной интенсивности воздействий и увеличенном вре-
мени воздействия испытания преследуют исследовательские цели.
Параметры воздействия режимов обычно выбираются такими, чтобы
можно было записать в память ЭВМ весь процесс дефектообразова-
ния (деградации соответствующих параметров). Полученная при этом
запись дает одну реализацию случайного процесса. Полагая этот про-
цесс стационарным случайным, можно осуществить статистическую
обработку данной и последующей реализации и установить необходи-
мые характеристики процесса. Такими характеристиками, в частно-
сти, могут быть энергия (интенсивность) воздействия, при которой
образуется минимально различимый дефект, и скорость роста разме-
ров дефекта.
Вторая группа методов с заменой видов воздействий, но с сохра-
нением физических процессов дефекгообразования и деградации па-
раметров ОИ используется, как правило, только в исследовательских
целях, в частности при отработке системы испытаний. При проведе-
нии таких испытаний важно учитывать, что замена вида воздействия
может привести к несопоставимости результатов испытаний, в част-
ности из-за изменения в широких пределах начальных энергий и ско-
ростей дефекгообразования, распределения дефектов по времени,
месту расположения в изделии и интенсивности воздействия. Поэто-
му определение характеристик моделирующих воздействий проводит-
ся, как правило, экспериментальным путем.
Третья группа методов с заменой природы воздействующего фак-
тора используется для тех же целей, что и первая группа, если отсут-
ствует оборудование, необходимое для проведения испытаний на ре-
альные воздействия. К проведению таких испытаний надо подходить
с большой осторожностью, поскольку при замене природы воздей-
132
ствия изменяются виды и характеристики дефектообразования, а оп-
ределение коэффициентов эквивалентности весьма затруднительно.
При оценке результатов испытаний с применением физического
моделирования воздействий, как правило, используется нижняя до-
верительная граница, т. е. считается, что прочность (устойчивость,
надежность) ОИ, определенная по результатам испытаний с моде-
лирующими воздействиями, не ниже прочности (устойчивости, на-
дежности) при моделируемых воздействиях.
4.4. Испытания на основе
математического моделирования
4.4.1. Математические модели
Идея физического моделирования не исчерпывает весь арсенал мето-
дов и средств отработки СТС и повышения ее эффективности. Все
чаще в практику их отработки внедряются математические модели.
Естественно, это справедливо для условий, когда известен оператор
исследуемого процесса. С учетом этого в общем виде математическую
модель можно представить как
Y = AX,
где Y, X — два вектора, первый из которых характеризует выход, а
второй — вход системы; А — оператор. Тогда из сферы исследования
непосредственно исключается не только физическая модель, но и
сам объект. Они становятся лишь источником информации, исполь-
зуемой для определения и уточнения вида модели.
Математическая модель описывает структуру функциональных
связей между варьируемым составом значимых факторов и выходным
качеством процесса. При этом вход и выход модели должны нахо-
диться в математическом равновесии, состояние которого может быть
как статическим, так и динамическим.
Успех моделирования определяется удачным выбором характери-
стики, определяющей выходное качество процесса, состава значи-
мых факторов и формы функционально-логических связей между
ними. Проводя анализ различных видов модели, определяют степень
влияния вносимых в модель изменений на качество ее функциониро-
вания.
Весьма важно при моделировании выявить состав значимых фак-
торов и установить условия, влияющие на характеристику, подлежа-
щую оптимизации. Состав значимых факторов обусловлен свойства-
133
ми самой системы и его необходимо выявлять самым тщательным
образом, так как поспешность в этих вопросах всегда приводит к
ошибкам. Однако чем больше факторов включается в модель, тем
сложнее ее решение. Поэтому важно также своевременно исключить
из программы испытаний факторы, влияние которых на исследуе-
мый процесс пренебрежимо мало или их эффект соизмерим с ошиб-
кой аппроксимации.
Основные вехи на пути создания математических моделей заключа-
ются в том, что путем анализа априорных данных изучаются основные
свойства и характер поведения системы, возможность применения
аналитических методов или законов, устанавливающих совокупность
структурных связей между всеми переменными исследуемого процес-
са. Затем на основе накопившейся информации строится предвари-
тельная модель, результаты исследования которой должны находить-
ся в непосредственном соответствии с поведением натурного объекта.
Всякое заметное несоответствие их свойств устраняется путем моди-
фикации модели, ее совершенствования. Практически этот процесс
должен идти непрерывно. Если для физических моделей важно со-
хранить физическое подобие натуре, касаясь не только выходных ха-
рактеристик, но и основных внутренних свойств системы, то для
математических моделей, как правило, важно сохранить только по-
добие реакции «выхода» на «вход».
При разработке математических моделей необходимо:
• выявить состав управляемых и неуправляемых переменных;
• определить границы изучаемого процесса;
• определить глубину детализации процесса;
• установить физические ограничения на разработку;
• установить характер управления процессом (в статическом или
динамическом режиме работы);
• определить требуемую точность моделирования;
• наметить пути дальнейшего совершенствования моделей.
Моделирование развивается по пути создания детерминирован-
ных и вероятностных моделей, для которых структурные связи могут
быть стохастическими и детерминированными. Детерминированные
и вероятностные процессы в свою очередь могут быть описаны соот-
ветственно детерминированными и вероятностными моделями и на-
оборот.
К недостаткам моделей можно отнести следующее: во-первых,
они всегда являются приближенными и, во-вторых, при разработке
моделей требуется весьма точная и достоверная информация. При-
чина этих недостатков может заключаться в следующем:
• неудачно выбрана выходная характеристика, определяющая ка-
чество исследуемого процесса;
134
• выбор состава значимых факторов строится на приближенных
методах, не учитывающих физические особенности процесса;
• оценка адекватности разрабатываемой модели может быть недо-
стоверной;
• некоторые из значимых факторов могут оказаться качественны-
ми, не имеющими количественного выражения;
• не всегда удается подобрать приемлемую математическую фор-
му связи, отражающую без существенных упрощений реаль-
ный процесс;
• в ряде случаев по тем или иным причинам разработчик модели
и сам не стремится к обеспечению высокой точности, руко-
водствуясь решением, скажем, только первоочередных задач
и т.д.
Например, если рассмотреть некоторые уравнения из теории
жидкостно-ракетных двигателей (ЖРД), устанавливающие критерии
физического состояния жидкости или газа, а также зависимости для
основных параметров, то можно придти к выводу, что это и есть
математические модели. Однако их точность зависит от степени иде-
ализации исследуемого процесса и точности измерения самих пара-
метров, включенных в модель. Дело в том, что в ряде случаев пара-
метры аналитических моделей не всегда удается измерить, а на
реальных объектах ими сложно или невозможно управлять. Это и
составляет основную трудность использования аналитической моде-
ли в факторном эксперименте. При этом необходимо отметить, что
рассматриваемые модели, как правило, не учитывают конструктив-
ные особенности исполнения изделия, условия его эксплуатации. В
числе этих особенностей можно указать на всевозможные потери по
газодинамическим трактам, а также неточность определения коэф-
фициента полезного действия (КПД) насосов и турбин расчетным
путем. То же самое можно сказать о влиянии внешней среды, орга-
нов управления и т.п.
Поэтому на практике аналитические модели обычно используют
для соответствующих расчетов и моделирования в процессе проекти-
рования при выборе нескольких исходных вариантов двигателя. Но
когда решается вопрос совершенствования штатной конструкции в
ходе экспериментальной отработки, аналитические модели могут
оказаться непригодными. Для того чтобы аналитическая модель слу-
жила указанным целям, она должна учитывать конструктивные ре-
шения и влияние внешних и внутренних факторов. А это пока удает-
ся осуществить лишь на основе обработки экспериментальных данных.
Если речь идет о разработке математической модели, удовлетво-
ряющей основным требованиям практики, то важно отметить следу-
ющее. В качестве выходной характеристики исследуемого процесса
135
необходимо использовать параметры, определяющие качество СТС
или ее надежность. В целом степень конструктивного совершенства
СТС оценивается достигнутым уровнем надежности, величинами ос-
новных параметров, технологичностью исполнения, минимальными
массами конструкции и высокими эксплуатационными свойствами.
Поэтому, когда требуется оценить данные показатели, то в качестве
выходной характеристики следует использовать не одну, а несколько
видов моделей, каждая из которых служит определенным целям. В
ряде случаев с достаточной степенью точности модель может выра-
жаться уравнением регрессии:
п п
y=Y^Xi + '^bijXiXj+E,
/=1 i<j
где bf, by — коэффициенты регрессии; х\,...,хп — варьируемые фак-
торы; е — средняя ошибка аппроксимации.
В данном случае варьируемыми факторами, например для ЖРД,
могут быть давления на входах в двигатель по трактам горючего и окис-
лителя, температуры компонентов топлива, давление в камере сго-
рания, коэффициент соотношения компонентов топлива, секунд-
ный расход компонента, впрыскиваемого в закритическую часть
сопла, и другие факторы. Представленная модель будет справедлива
для некоторой определенной конструктивной схемы двигателя. При
этом особенности конкретного ЖРД будут определяться соответству-
ющими коэффициентами регрессии. При изменении конструкции
некоторых агрегатов должны изменяться соответствующим образом и
коэффициенты модели. В некоторых случаях могут появиться новые
переменные, их взаимодействия, а также может измениться сама фор-
ма связи и т.д.
Достоинство таких моделей заключается в учете особенностей
конкретной конструкции и самого исследуемого процесса, в учете
факторов, определяющих условия испытаний. Все факторы управля-
емы и регистрируются средствами измерений. Иногда в процессе
отработки двигателя для каждой конструктивной схемы разрабатыва-
ются свои модели, сопоставление и анализ которых позволяют опти-
мизировать исследуемый процесс. Если же необходимость в натур-
ных экспериментах существует, то математические модели позволяют
разрабатывать оптимальные планы и программы испытаний, осуще-
ствлять текущий прогноз основных характеристик и т.д.
В математических моделях совокупность свойств и критериев од-
ного плана используется для отражения совокупности свойств и кри-
териев совершенно иного плана. При этом совокупность физических
свойств может представляться символически в виде набора цифровых
136
знаков, буквенных обозначений и т.п. Модели такого рода принято
называть символическими.
Символические модели представляются, как правило, совокуп-
ностью условно записанных систем уравнений и неравенств, описы-
вающих математическую структуру исследуемого процесса. В отличие
от символических моделей, аналоговые модели позволяют исследо-
вать реальный процесс с помощью моделей другого аналогового про-
цесса, подобного натурному. Например, гидравлический поток мо-
жет характеризовать поток электронов. Соответственно модель,
описывающая траекторию полета одной ракетной системы, прини-
мается за аналоговую при моделировании другой и т.п. Однако пере-
несение аналоговой модели на исследуемый процесс может потребо-
вать изменения соответствующих коэффициентов. В целом аналоговые
и символические модели составляют основу математического моде-
лирования.
При условии разработки достаточно точных моделей исследуе-
мых процессов реализация любого вычислительного эксперимента не
составляет особого труда в сравнении с теми затратами средств и време-
ни, которых требует натурное испытание. Сложность моделирования
состоит в разработке соответствующих моделей и отладке вычисли-
тельных программ, достаточно точно отражающих реальный процесс.
Математические модели делятся на конструктивные и описательные,
т. е. на модели первого и второго родов. Модели первого рода явля-
ются средством постановки активного эксперимента. На практике
при моделировании физических процессов чаще всего используются
символические конструктивные модели, обладающие достаточной
эффективностью и простотой в операционном отношении.
Большое практическое значение в процессе проектирования и на
начальных этапах разработки сложных технических систем приобрели
аналитические символические конструктивные модели в комплексе с
так называемыми эмпирическими моделями. Под эмпирическими мо-
делями в данном случае понимают всякого рода зависимости, полу-
ченные на основании анализа и обработки экспериментальных дан-
ных.
4.4.2. Основные принципы построения математических моделей
Рассмотрим основные принципы построения математических моде-
лей, не касаясь пока вопросов формализации физических процессов
в математическом плане. Применительно к СТС моделирование чаще
всего начинается с построения концептуальных моделей и изучения
статистических данных, определяющих вход и выход системы. Пос-
леднее применяется в тех случаях, когда внутренняя структура про-
137
межуточных процессов мало исследована и не ясна или не поддается
аналитическому выражению. Задачи такого плана часто встречаются
на практике и получили символическое название задач «черного ящи-
ка». С точки зрения изложения самих принципов построения матема-
тических моделей необходимо отметить следующее.
Общим элементом для всех принципов является определение со-
става значимых факторов, влияющих на исследуемый процесс. Ис-
пользование того или иного принципа обусловлено степенью слож-
ности системы или исследуемого процесса и глубиной раскрытия
внутренних связей. Существует несколько принципов построения ма-
тематических моделей, но использование из них того или иного оп-
ределяется прежде всего наличием априорной информации, степе-
нью понимания физических особенностей исследуемых процессов,
знанием и оценкой предполагаемых функциональных связей между
элементами системы и т. п. Рассмотрим основные принципы пост-
роения математических моделей сложных технических систем.
Иерархический принцип построения математических моделей СТС.
Основная трудность, с которой приходится сталкиваться при разра-
ботке математических моделей СТС, заключается в преодолении про-
тиворечия между требованием возможно большей простоты описа-
ния (без него трудно понять и решить задачу) и необходимостью учета
многочисленных параметров, закономерностей, ограничений и вза-
имосвязей, определяющих работу системы. Сложную техническую
систему практически невозможно полно и детально описать в рамках
единой математической модели. Поэтому при описании таких сис-
тем обычно используется модульный принцип, предусматривающий
разработку не одной, а семейства взаимосвязанных и взаимодейству-
ющих между собой моделей.
Использование единой модели СТС нецелесообразно и по мето-
дическим соображениям. Различные части системы (подсистемы)
изучены в разной степени, поэтому их математические описания об-
ладают разной точностью, а непрерывное накопление физической
информации приводит к систематическому совершенствованию опи-
саний отдельных элементов. При использовании единой модели точ-
ность моделирования целиком определяется точностью описания наи-
менее изученных подсистем, а любая новая информация требует
полной переделки модели. Разумеется, переход к модульному опи-
санию сам по себе не приведет к увеличению точности. Однако в
этом случае появляется возможность более достоверного моделирова-
ния, по крайней мере некоторых из подсистем. Изменение пред-
ставлений об отдельных процессах или элементах системы при мо-
дульном описании не требует полной переделки модели и затрагивает
лишь отдельные ее модули.
138
Таким образом, применение модульного принципа при описа-
нии СТС позволяет:
• разрешить проблему больших объемов информации за счет рас-
пределения ее между отдельными блоками модели;
• «развязать» изучение отдельных подсистем между собой, так
как каждый из модулей модели может быть исследован в квази-
автономном режиме.
Вместе с тем переход к системе моделей приводит к необходимо-
сти исследования связывающих их взаимодействий. Возникает зада-
ча координации подсистем и их моделей между собой.
Наиболее эффективные результаты при описании и изучении
сложных систем дает иерархический подход, предусматривающий раз-
биение системы на вертикально соподчиненные подсистемы разных
уровней, разработку модульных моделей каждой из подсистем, вве-
дение приоритетов (т.е. права преимущества) для подсистем стар-
ших уровней по отношению к подсистемам младших уровней, извес-
тную автономность каждой из подсистем. Поскольку каждая из
подсистем в свою очередь может быть разбита на новые подсистемы,
возникает многоуровневая иерархическая система моделей (рис. 4.3).
Реальный процесс
Рис. 4.3. Уровни иерархического описания СТС
При иерархическом описании СТС на верхних уровнях рассмат-
риваются их общие характеристики, а на нижних — характеристики
отдельных узлов и элементов. Очевидно, изучение СТС на каждом из
уровней требует специфических знаний и методов и зачастую ведется
специалистами различного профиля.
На каждом уровне описания вводится свой набор переменных,
принципов и представлений, позволяющий в значительной степени
ограничиться изучением только этого уровня. При этом наблюдается
известная асимметрия представлений. Понимание физических про-
цессов и точность описания объекта растут с переходом к нижним
139
уровням иерархии. Общие же цели и задачи функционирования сис-
темы, ее место в материальном мире более полно раскрываются на
верхних уровнях.
Принцип установления причинно-следственных связей. Построе-
ние математической модели ведется на основе логики установления
причинно-следственных связей между управляемыми и неуправляе-
мыми факторами. Практическое использование данного принципа
можно показать на следующем примере.
Допустим, что для работы испытательного стенда регулярно за-
казывается тонн жидкого кислорода. Неизрасходованный в тече-
ние рабочего цикла компонент практически испаряется. При этом
затраты на каждую реализованную тонну компонента составляют Ср
а затраты на неиспользованную — С2. В свою очередь потребное
количество кислорода, которое может израсходовать испытательный
стенд, составляет N2 тонн. Помимо этого существует условие, что
JVi S У2. Вероятность того, что в случайно выбранное время факти-
ческие потребности стенда составляют N2 тонн, равна P(N2). Тре-
буется установить, какова взаимосвязь между перечисленными фак-
торами и суммарными затратами D.
Модель исследуемого процесса может быть построена на основе
простейшего анализа. Управляемым фактором в данном случае сле-
дует считать количество ввозимого кислорода Nv Выходная характе-
ристика D — критерий качества функционирования стенда при усло-
вии, что исключены нерациональные потери, проливы и т.п.
Если в какое-либо время потребности стенда в кислороде превы-
шают заказанное количество (N2 > Nl), то суммарные затраты со-
ставят
Dn2>Ni =
Если же потребности стенда в кислороде не превышают заказан-
ное количество (N{ > N2), то затраты будут равны
= ~c2)+n{c2.
Ожидаемые затраты в один рабочий цикл
N.
D= X Р(Л2)[ЛГ2(С1-С2) + ^С2]+ А^2)ВД.
#2=0 ^1+1
Для его решения необходимо задать вид функции распределения
вероятности P(N2) при изменении N2 в пределах от нуля до беско-
нечности (0 < N2 < оо). К числу таких распределений можно отнести
140
нормальный закон, распределение Вейбулла и другие статистичес-
кие распределения. В случае необходимости вид функции вероятно-
сти достаточно точно может быть определен путем обработки пред-
шествующей информации. Конечной целью решения поставленной
задачи следует считать оптимизацию выходной характеристики моде-
ли для отыскания условий, обеспечивающих минимизацию финан-
совых затрат стенда на потребление жидкого кислорода.
Принцип использования однофакторных экспериментов. Зачастую
причинно-следственные связи между выходным качеством процесса и
значимыми факторами в функциональном виде неизвестны. Данный
принцип позволяет получить некоторые математические зависимости
с помощью простейших экспериментов. Проиллюстрируем сказанное
на примере реализации двух схем, представленных на рис. 4.4.
Схема на рис. 4.4, а позволяет установить форму связи для ли-
нейных эффектов, зависящих от отдельных факторов. В этом случае
выборочно могут быть реализованы некоторые однофакгорные экс-
перименты. Число экспериментов, порядок их проведения и про-
грамму испытаний устанавливают интуитивно или путем экспертного
опроса.
Рис. 4.4. Принцип использования однофакторных экспериментов для
определения вида модели
В соответствии со схемой на рис. 4.4, б для линейного эффекта
у(хп) управляемым фактором является хп. С практической точки зре-
ния такие эксперименты могут быть завершающими для какой-либо
экспериментальной программы, проводимой в соответствии с пла-
ном отработки.
Полученные результаты отработки определенной системы уста-
навливают частные зависимости. Каждая из зависимостей характе-
ризуется соответствующей формой связи — экспоненциальной, сте-
пенной, линейной и т.п. В итоге установленные частные зависимости
могут быть введены в общее уравнение вида
у = /Сч; х2;...; х„),
141
но с соответствующими весовыми коэффициентами. Если для отдель-
ных факторов установленные формы связи имеют вид Я*/) = ,
тогда в общем случае многомерная функция отклика может быть пред-
ставлена для л-го числа факторов суммой частных функций:
п
у(х) = £\<pGq).
1=1
Если этого окажется недостаточно, тогда может быть аналогич-
ным образом реализована схема, представленная на рис. 4.4, б, по-
зволяющая установить частные формы связи для взаимодействий фак-
торов и их эффектов. Такие факторы вводятся в эксперименты попарно
и группами по известным исследователю соображениям. Творчество
и инициатива в данном случае являются одним из главных атрибутов
качества разрабатываемой модели.
Принцип эмпирико-статистических исследований. Принцип можно
назвать эмпирико-статистическим, если для определения формы связи
при оценке влияния линейных факторов и их взаимодействий на вы-
ходную характеристику используются статистические данные в виде
априорной информации.
Результаты статистических исследований в некоторых случаях сле-
дует дополнить проведением отдельных экспериментов. В остальных
вариантах повторяется принцип использования однофакторных экс-
периментов.
Принцип математической аппроксимации. В качестве аппрокси-
мирующих функций при реализации данного принципа для обеспече-
ния выбора рациональной формы связи априори принимаются ранее
апробированные виды моделей. К таковым могут быть отнесены по-
линомы первой, второй и реже третьей степеней, дифференциаль-
ные и интегральные уравнения, линейные, степенные, экспонен-
циальные и другого рода математические зависимости. Принцип
аппроксимации широко применяется при решении частных задач с
помощью так называемых моделей «черного ящика».
Данный метод является одним из наиболее часто встречающихся
методов формализации исследуемых процессов, когда их описание с
помощью аналитических моделей вызывает серьезные трудности.
Определение вида модели, как правило, осуществляется путем пере-
бора нескольких видов апроксимирующих функций, с помощью ко-
торых делается попытка увязать наиболее рациональным образом «вход»
процесса с его «выходом». При этом в качестве оптимального на-
правления тренда функции принимается вектор, проходящий через
максимально возможное число точек реализаций.
142
Множественная регрессия является одним из методов практичес-
кого развития рассматриваемого принципа.
Принцип аналитических исследований. Математическая модель
исследуемого процесса устанавливается на основании использования
соответствующих законов физики, химии и других прикладных наук,
описывающих происходящие процессы. В данном случае модель и
программа дополняются соответствующей логической подмоделью,
которая включает в расчет или исключает из него определенную сис-
тему уравнений в соответствующие моменты времени, вводит огра-
ничения на параметры и т.д.
Этот принцип широко применяется на практике при проектиро-
вании СТС и конкретно — при выборе основных проектных парамет-
ров. Вследствие некоторой идеализации исследуемого процесса с
помощью теоретических функций реализуемые аналитические моде-
ли не всегда обладают требуемой точностью. Часто из-за сложности
математического выражения отдельных функций, описывающих не-
которые особенности исследуемого процесса, эти модели сознательно
упрощаются, что также ведет к снижению точности исследований.
Существует еще одна особенность аналитических моделей, ис-
пользуемая при реализации других принципов. Как правило, анали-
тический вид применяемых при моделировании законов и уравнений
позволяет заранее определить рациональные формы связей между вход-
ными и выходными параметрами процессов.
Принцип уточнения аналитических моделей экспериментальным
путем. Реализуемые аналитические модели на практике уточняют по
экспериментальным данным, которые в свою очередь используются
для повышения точности моделирования. В соответствии с этим
можно записать общий вид такой уточненной с помощью экспери-
ментов аналитической модели:
КО = fa (*1 > Х2, ...,хп ) + Afl (Х1, Х2,...»хп ) + Д<2 (хп+1, Хп+2 ,...,Хп+к).
В аппроксимирующей функции данного вида первый член пра-
вой части характеризует эффект, определяемый самой аналитичес-
кой моделью; второй член — эффект от влияния учтенных факторов
путем реализации некоторого числа экспериментов и наконец третий
определяет эффект факторов, не учтенных в аналитическом виде мо-
дели. Опыт показывает, что использование аналитических методов
построения математических моделей, базирующихся на применении
физических законов, вносит новый вид информации в разрабатывае-
мую модель, что значительно сокращает объем экспериментальных
исследований. Этим, собственно, и объясняется рациональность
сочетания в одном виде вычислительной программы элементов ана-
литической и экспериментальной моделей.
143
Модели такого вида называют экспериментально-аналитическими.
Они с успехом применяются при исследовании динамических про-
цессов. Рациональным методом использования данных моделей сле-
дует считать их сочетание с логическими моделями, позволяющими
наилучшим образом осуществлять цикл вычислительных работ. По
мере проведения экспериментальных исследований ряд аналитичес-
ких функций, дающих приближенные результаты, заменяются апп-
роксимирующими зависимостями, позволяющими повысить точность
моделирования.
При исследовании динамических процессов экспериментально-
аналитические модели являются эффективным средством для про-
гнозирования ряда важных с точки зрения надежности характеристик
СТС. По мере накопления экспериментальных данных точность мо-
делирования повышается. В этом отношении возможности экспери-
ментально-аналитических моделей почти безграничны.
4.4.3. Модификация математических моделей
Управляемые факторы математических моделей могут выражаться как
количественными, так и качественными переменными. При этом
сложность решения может состоять в том, что качественные пере-
менные не всегда могут иметь однозначность выражения. Например,
уровень научной квалификации некоторого коллектива трудно пред-
ставить каким-либо определенным показателем. В ряде случаев ко-
личественные переменные, входящие в структуру модели, не всегда
могут быть измерены. Так, например, в процессе выхода двигателя
на режим очень трудно представить в динамике изменение полноты
сгорания топлива в камере. Однако эта характеристика может быть
выражена через другие, зависящие от нее переменные. Чтобы избе-
жать дополнительных ошибок при моделировании, модели такого рода
обычно модифицируют, включая в состав значимых факторов пере-
менные, имеющие количественное выражение и достоверную инфор-
мацию.
Проблема моделирования, как правило, решается на стыке двух
задач. Первая задача — разработка вида модели и отладка вычисли-
тельной программы. Вторая задача — обеспечение исходной инфор-
мацией. Причем эта задача во многр раз сложнее первой как в орга-
низационном, так и техническом отношении. Последнее объясняется
необходимостью реализации сложных экспериментальных программ,
решения ряда конструктивных мероприятий, постановки специаль-
ных средств измерения, модернизации существующего оборудования
и т.п. Все эти вопросы имеют первостепенную важность, так как
решение задачи, связанной с разработкой адекватной модели, под-
144
чинено обеспечению ее исходными данными. Сама модель, по воз-
можности, должна быть простой, в то же время не должна снижаться
ее точность. Упрощение модели достигается несколькими способами.
Первый способ — исключение из состава значимых факторов пе-
ременных, имеющих, по мнению разработчика, второстепенное или
неопределяющее отношение к решаемой задаче. При этом несколько
снижается точность, но в целом такой подход можно считать рацио-
нальным, особенно тогда, когда информация по составу значимых
факторов является неполной или отсутствует вообще. Как правило,
исключение той или иной переменной должно подвергаться строгому
анализу с точки зрения прогнозирования возможных последствий.
Степень влияния исключаемой переменной на исследуемый процесс
в ряде случаев устанавливается путем постановки специальных экспе-
риментов.
Второй способ упрощения моделей — использование различных
форм связи с оценкой точности по каждому из видов модели, при-
чем движение осуществляется в направлении от самого простого к
сложному. В конечном итоге выбирается модель, которая, будучи
достаточно простой, удовлетворяла бы исследователя с точки зрения
ее точности. Задача решается с помощью алгоритма перебора.
Третьим способом упрощения моделей можно считать замену уп-
равляемой переменной некоторым постоянным уровнем, например
ее математическим ожиданием. Это может быть достигнуто в тех слу-
чаях, когда в процессе испытаний варьируемый фактор имеет малый
диапазон изменения. Например, речь идет об изменении давления в
баке ракеты в предпусковой период, когда сам наддув контролирует-
ся системой датчиков высокой точности.
Цели упрощения моделей служит замена дискретных форм связи
линейными зависимостями. Так, например, часто в процессе про-
граммирования допускается линейная аппроксимация нелинейных
функций. В некоторых случаях нелинейная функция аппроксимиру-
ется последовательным рядом прямолинейных участков. Однако,
упрощая тот или иной вид модели, нужно стремиться к оценке по-
следствий применения этого шага. Существенное упрощение вида
модели может быть достигнуто путем снятия некоторых ограничений
на условия решения задачи, а также требования, предъявляемого к
составу значимых факторов. Допустим, решается задача по оптими-
зации некоторого процесса при известном составе факторов, в кото-
рый входят такие переменные, как давление в камере сгорания ЖРД
и коэффициент соотношения компонентов топлива. И, следователь-
но, «вход» процесса содержит переменные, строго говоря, завися-
щие друг от друга. При наличии этих предпосылок модель должна
строиться на основе корреляционного анализа с помощью, напри-
145
мер, импульсных переходных функций. Такая форма связи достаточ-
но сложна, скажем, в сравнении с уравнением регрессии. Однако,
зная физический смысл этой зависимости между факторами, можно
установить, что существует некоторый оптимум.
Следовательно, если ввести ограничение на диапазон варьирова-
ния факторов, то можно обоснованно применить допущение о неза-
висимости этих двух переменных. При этом условии решение задачи
значительно упрощается.
Опыт решения подобного вида задач показал, что в некоторых
случаях, если и существует в физическом смысле некоторая форма
корреляции между варьируемыми факторами, то ею можно пренеб-
речь, если поиск ведется в зоне, близкой к экстремальным услови-
ям.
4.4.4. Испытания на основе математического моделирования
объектов испытаний
Методы испытаний ОИ на основе их математических моделей по ре-
шаемым задачам можно разделить на две группы.
Первую группу составляют исследовательские доводочные испы-
тания, когда необходимо оценить достигнутые при разработке пока-
затели надежности, прочности или устойчивости ОИ к внешним воз-
действиям, а также предварительно оценить техническую совмес-
тимость узлов (блоков), в один из которых были внесены определен-
ные конструктивные или технологические изменения.
В эту группу входят расчетные (функциональные и статистичес-
кие) методы: максимума-минимума, квадратичного сложения, ве-
роятностный и статистических испытаний. Они позволяют аналити-
ческим путем получить количественную оценку изменения выходного
параметра ОИ при наличии его математической модели и данных по
изменению ее параметров с течением времени (в том числе статисти-
ческих данных по разбросу параметров) или вследствие воздействия
внешних факторов (климатических, механических и др.) и входных
параметров ОИ. Результаты расчетов позволяют определить оценку
надежности, прочности и устойчивости ОИ к внешним воздействиям.
Вторую группу составляют четыре вида методов, позволяющих
имитировать изменение параметров математической модели по задан-
ному закону:
1. Метод физического аналога состоит в том, что в качестве моде-
ли ОИ используется физическое устройство, аналогичное ОИ по со-
ставу и структуре, искусственное изменение параметров которого
отражает их изменения в реальных условиях. Такой физический ана-
лог может строиться с использованием реальных блоков или в виде
146
специальных вычислительных алгоритмов. Если модель ОИ представ-
лена физическим устройством, то испытания сводятся к изменению
параметров его блоков и контролю за соответствующим изменением
выходных параметров модели ОИ. Если модель ОИ представлена в
виде специального вычислительного алгоритма, то изменяются урав-
нения, описывающие работу соответствующих блоков, и фиксирует-
ся изменение выходных параметров модели ОИ. Рассматриваемый
вид испытаний используется главным образом на этапе разработки
ОИ в качестве исследовательских, а также для отработки действий в
нештатных ситуациях или оценки схемной защищенности от экстре-
мальных нагрузок.
2. Метод граничных испытаний преследует цель определения за-
висимостей между предельно допустимыми значениями параметров
ОИ и режимом эксплуатации и имеет те же области применения, что
и первый метод. Если модель ОИ представлена физическим устрой-
ством, то в процессе моделирования его параметры изменяются так,
чтобы отразить воздействия, соответствующие экстремальным режи-
мам эксплуатации. При этих режимах проводятся измерения значе-
ний параметров устройства. Результаты измерений используются как
контрольные точки, по которым отлаживается математическое моде-
лирование зависимости параметров модели от режима эксплуатации.
Если модель ОИ реализуется в виде программы для ЭВМ, то указан-
ные воздействия отражаются путем изменения исходных данных или
корректировки программы. Отличие второго метода от первого со-
стоит в том, что на его основе оценивается только предельная на-
грузка, соответствующая границе работоспособности ОИ.
3. Метод матричных испытаний является дальнейшим развитием
метода граничных испытаний. Сущность его заключается в матема-
тическом моделировании рабочей области объекта испытаний и со-
поставлении ее с областью работоспособности ОИ. Это моделирование
осуществляется следующим образом. Диапазон возможных значений
каждого входного параметра 9/min-4/max разбивается на интервалы
(кванты), «представителями» которых являются средние значения
параметров в середине кванта . Выбираются определенные сочета-
ния значений квантов, их представители вводятся в модель, расчет
по которой дает значение выходного параметра. Перебором сочета-
ний значений квантов различных входных параметров обеспечивают
реализацию процесса массовых испытаний.
Если реализация оказывается работоспособной или неработоспо-
собной при значении параметра , то эту реализацию относят ко
всем значениям параметра , лежащим в данном кванте.
147
Все реализации записывают в виде матрицы, которая учитывает
возможные несовместные комбинации представителей квантов. Об-
щее число реализаций будет определяться числом возможных сочета-
ний величин матрицы
4ц 412 - 4ц - 4i f
421 422 - 42i ••• 42f
••• ••• ••• J
4nl 4n2 4ni 4nf
где 9ц,Qif — кванты допуска на/-параметры.
Упорядоченную матричным построением последовательность воз-
можных ситуаций обозначим а1,а2,...,0Су,...,а^. Перебор ситуаций
{Оу} в модели позволяет учесть влияние всех факторов и определить
некоторую упорядоченную последовательность Q отказов, обознача-
емую Р1,₽2, -.Рц....Рр •
При обработке результатов достаточно знать положение ситуации
в матрице, чтобы определить, какими квантами каждого параметра
образуется данная ситуация.
В процессе матричных испытаний (они обычно выполняются с
использованием специальных автоматов) исследуется переходная ха-
рактеристика каждой реализации модели ОИ и в соответствии с выб-
ранным критерием отказа делается заключение о работоспособности
или неработоспособности данной реализации. По результатам испы-
таний строится л-мерная область работоспособности. По изменению
формы и положения этой области можно давать качественную оценку
изменения надежности, прочности или устойчивости к внешним воз-
действиям модели ОИ. Количественная оценка определяется как ве-
роятность нахождения выходного параметра модели ОИ в границах
области работоспособности.
Метод матричных испытаний используется для предварительной
оценки работоспособности с учетом законов распределения произ-
водственных погрешностей значений параметров элементов ОИ и при
учете влияния дестабилизирующих факторов (температуры, влажно-
сти, давления, радиации и др.), значений погрешностей параметров
элементов и процессов их старения; показателей надежности, проч-
ности и устойчивости ОИ, влияния технологических допусков (по-
грешностей) на работоспособность ОИ. Кроме того, по результатам
матричных испытаний могут определяться допустимые значения по-
грешности измерения параметров элементов, узлов и блоков, при
которых не нарушается их техническая совместимость.
148
4. Метод статистических испытаний (метод Монте-Карло) со-
стоит в построении искусственного случайного процесса, реализуе-
мого с использованием ЭВМ. Искусственный случайный процесс в
виде последовательности случайных чисел имитирует изменение со-
ответствующих внутренних параметров математической модели ОИ
или внешнего воздействия, что позволяет оценить статистические
характеристики процесса изменения выходных параметров ОИ, т. е.
оценить надежность, прочность и устойчивость к внешним воздей-
ствиям.
Способы реализации метода статистических испытаний весьма раз-
нообразны, поэтому рассмотрим его общий принцип. Датчик случай-
ных чисел генерирует случайные числа, равномерно распределенные в
йнтервале 0,...,1. Эти случайные числа поступают в преобразователь,
на выходе которого получаются случайные числа, принадлежащие к
генеральной совокупности {Л}, имеющей заданную функцию плот-
ности распределения /(ф. Преобразование выполняется путем реше-
ния относительно величины Л уравнения
Модель ОИ представляется в виде алгоритма, описываемого в
общем случае зависимостями вида
j = \,k\ i = 1,/и; Aj < Nj < Bj,
(4.2)
где Nj — значения выходных параметров ОИ; — значения парамет-
ров входящих в ОИ элементов; A.-, Bj — предельно допустимые по ТУ
значения выходных параметров.
Для нахождения выходных параметров в уравнение (4.2) подстав-
ляются значения ?/сл параметров элементов q\,>,...,qm, опреде-
ленные случайным образом для любого значения нагрузки (воздей-
ствия) при оценке прочности и устойчивости или времени при оценке
надежности:
?1СЛ(/) = 0/0 + Д*(ф) + /[МФН] > (43)
где (fto+A?( ) — математическое ожидание параметра qj при нагруз-
ке (времени) Ф; /Го?/(Ф)г|| — случайная величина, зависящая от
вида закона распределения q, , среднеквадратического отклонения
149
Gqi(&) и случайного числа Т|/, имеющего плотность распределения
/(т|). Для нормального закона распределения Т|/ выражение (4.3)
приобретает вид
9, сл (Ф) = mqi (Ф) + (Ф), (4.4)
где от9/(Ф) — математическое ожидание qf в зависимости от Ф.
Сравнивая значения Nj, полученные при подстановке (4.3) и (4.4)
в (4.2), с предельно допустимыми значениями Aj, В: по числу отка-
зов (здесь Ф = Т — время наблюдения), получим одну из характери-
стик надежности — вероятность безотказной работы:
Р(Г) = \-l!L,
где / — число реализаций, при которых наблюдается выход хотя бы
одного из параметров Nj за нормы ТУ; L — заданное число реализа-
ций, выбираемое исходя из требуемой точности расчета.
Аналогично решением уравнения (4.5) относительно Ф—, могут
быть определены значения предельной нагрузки Фщ,, которые соот-
ветствуют отказу с заданной вероятностью 1 - ^(Фпр).
Подробное изложение метода статистических испытаний приве-
дено в [99].
4.5. Комбинированные и другие виды моделей
Физические и математические модели обладают каждая своей специ-
фикой с точки зрения практического использования, поэтому они
могут быть реализованы лишь для определенных условий. Кроме того,
они обладают различной степенью точности. Например, сравнительно
трудно создать математическую модель для изучения распыла топлива
форсуночной головкой, гораздо проще данный процесс изучать на
физической модели. Для этого может быть использована отдельная
сота форсуночной головки, одна или несколько штатных форсунок и
т.п. При этом точность физического моделирования будет значитель-
но выше точности математической модели. В то же время, если изу-
чается степень влияния комплекса факторов на выходную характери-
стику двигательной установки (ДУ), например на надежность, то
указанный процесс можно исследовать, притом более рационально,
на математических моделях. Физические модели в данном случае ма-
лоэффективны. Однако, когда речь идет об отработке сложной сис-
темы или комплекса, малоэффективными могут оказаться оба вида
моделей. На практике в таких случаях применяют комбинированное
моделирование.
150
Допустим, отрабатывается система коррекции полета космичес-
кого корабля в составе корректирующих двигательных установок и
системы управления. При испытаниях такой комплексной системы
одна часть блоков может быть представлена натурой, другая — физи-
ческими моделями, а остальные — заменены математической моде-
лью.
На рис. 4.5 в качестве примера приведена последовательность
операций по созданию комбинированной модели ЖРД, достаточно
точно отражающей свойства объекта, т.е. удовлетворяющей требова-
нию адекватности моделирования. Верхний контур структуры отра-
жает путь аналитического моделирования, нижний — обеспечивает
получение необходимой экспериментальной информации для уточ-
нения исходной аналитической модели. Обычно это касается опреде-
ления параметров, которые зависят от режимных и конструктивных
факторов конкретной схемы ЖРД, таких как времена преобразова-
ния компонентов топлива в энергоузлах, приведенные скорости рас-
пространения звука в топливных магистралях, коэффициенты в урав-
нениях движения регулирующих органов и т.д. Такое уточнение
исходной аналитической модели принято называть операцией кор-
рекции. Естественно, что она может выполняться до тех пор, пока
не будет достигнута заданная степень адекватности.
Структура комбинированного моделирования, приведенная на
рис. 4.5, может быть использована для составления моделей как ста-
А2э АЗэ Л4э
Рис. 4.5. Структура комбинированного моделирования
151
тических, так и динамических свойств двигателя. Рассмотрим под-
робнее представленную структуру моделирования. Анализируя пнев-
могидравлическую схему ДУ и имея результаты газодинамического,
термодинамического и энергетического расчетов, составим структу-
ру математических зависимостей, описывающих взаимосвязь между
интересующими параметрами двигателя. В зависимости от решаемой
задачи они могут быть выражены в виде алгебраических сумм прираще-
ний параметров (для анализа статических свойств двигателя) или сис-
темы дифференциальных уравнений в относительных или абсолютных
приращениях параметров (для анализа динамики двигателя).
На этом этапе моделирования уже вносится погрешность Д1а, ко-
торая связана со схематизацией реальных явлений, введением опре-
деленных допущений, неучетом части действующих факторов и свя-
зей. Эта составляющая погрешности моделирования является в
большинстве случаев наибольшей, и последующая операция коррек-
ции исходной аналитической модели касается уточнения именно в
этой части.
Следующий этап создания аналитической модели связан с упро-
щением исходной математической структуры, так как в большинстве
случаев полученная нелинейная система уравнений довольно высо-
кого порядка трудно поддается решению. В связи с этим упрощение
структуры обычно подразумевает проведение операции по линеари-
зации исходной системы уравнений. Это также вносит погрешность
Д^, существенно уменьшить которую можно путем совершенствова-
ния методов вычислений.
В результате выполнения этих двух операций фактически пост-
роена модель объекта, исследование которой может быть проведено
во временной или частотной области для получения соответствующих
характеристик процессов. Для этого достаточно один из параметров
модели, представляющий в этом случае действующее возмущение,
задать в виде соответствующего тестового отклонения.
Решение полученной совокупности математических моделей,
описывающих зависимость процессов в двигателе от применяемого
вычислительного алгоритма, характеризуется еще одной составляю-
щей погрешности — Д3а.
Так как факторы, обусловливающие состав погрешностей Д1а,
Д2а, Дза, практически некоррелированы и содержат множество вхо-
дящих компонент, то
^Еа = V^la + ^2а + ^За >
где о^д — суммарная среднеквадратическая погрешность исходной
аналитической модели.
152
Получение экспериментальной информации, необходимой для
уточнения исходной аналитической модели и уменьшения , свя-
зано с проведением испытаний СТС и отдельных ее компонентов.
Очевидно, что в этом случае экспериментальные оценки также обла-
дают конечной точностью. Составляющие погрешности связаны с
искажением информации первичным преобразователем (А 1а), в тракте
преобразования сигнала в усилительном устройстве и фильтре (А^),
при регистрации (А3а) и обработке на ЭВМ (Д4а). Таким образом,
суммарная погрешность экспериментальных характеристик определит-
ся как
Надо отметить, что для каждого конкретного случая экспери-
ментальной оценки той или иной характеристики СТС надо диффе-
ренцированно подходить к оценке величины погрешности а^. В
некоторых случаях она может быть очень незначительной и составлять
десятые доли процента (например, при измерении установившегося
давления в камере сгорания ЖРД). При экспериментальном же оп-
ределении частотных характеристик двигателя значение погрешности
может достигать десятков процентов и быть при этом вполне при-
емлемым.
В каждом испытании необходимо тщательно анализировать мет-
рологические свойства тракта получения экспериментальной инфор-
мации и стремиться сводить величину к минимуму. Существен-
ное значение в снижении oa, кроме увеличения точности канала
измерения, имеет оптимизация алгоритмов обработки информации.
В настоящее время наибольшее применение в технике испытаний
ЖРД или его элементов нашли алгоритмы осреднения параметров,
приведения выходных параметров двигателя к номинальным внешним
факторам, оценки точности настройки двигателя на заданный ре-
жим, а также алгоритмы, основанные на методах гармонического и
спектрального анализа.
Использование полученной экспериментальной информации по-
зволяет провести операцию коррекции исходной аналитической мо-
дели двигателя, т.е. реализовать операцию во внутреннем контуре
схемы моделирования (см. рис. 4.5). При комбинированном моде-
лировании уменьшение погрешности моделирования статических
свойств двигателя составляет 0,1—0,5%, а его динамических характе-
ристик 5—30%. Такой подход позволяет достичь требуемой адекват-
ности математической модели и использовать ее для получения необ-
ходимой информации о свойствах ЖРД.
153
Описанный выше комбинированный (экспериментально-анали-
тический) метод моделирования нашел широкое распространение в
практике создания ракетных двигателей и других сложных техничес-
ких систем и показал его высокую эффективность.
Следует отметить, что наряду с рассмотренным выше комбини-
рованным методом в последнее время в практике создания сложных
изделий авиационной и ракетно-космической техники все большее
применение находят и другие методы моделирования, ставящие сво-
ей целью воспроизведение той или иной нештатной или аварийной
ситуации в процессе испытаний. Эти методы используются с целью,
например, выяснения причин аварии, отказа соответствующей сис-
темы при недостаточном объеме необходимой для их выяснения ин-
формации. Такие модели в свою очередь делятся также на физичес-
кие и математические. Первые чаще всего применяются при
испытаниях натурных объектов, когда для проверки одной из воз-
можных гипотез в систему искусственно вводятся дефекты, с тем
чтобы воспроизвести первоначальную картину возникновения аварии,
разрушения, отказа и т.д. и выяснить истинные причины отказов в
наиболее сложных случаях их проявления.
Модельные испытания такого рода сложны и дороги, но они столь
же и необходимы, поскольку любые другие методы оказываются не-
эффективными. Математические модели этого плана имеют доволь-
но конкретную цель — определение причины и вида отказа или дефек-
та по аналитическим зависимостям, описывающим характер поведения
параметров системы при нештатной или аварийной ситуации.
Опыт отработки и эксплуатации СТС показывает, что установле-
ние причин аномального изменения параметров или аварийного ис-
хода испытания в каждом конкретном случае требует проведения спе-
циальных исследований результатов измерений, осмотра и дефектации
материальной части, расчетных работ, проведения специальных экс-
периментов с целью воспроизведения характера аварийной ситуации
для определения ее первопричин. На основании анализа результа-
тов измерений делаются предположения о причине аномалии. Ос-
мотр материальной части помогает сузить круг возможных причин.
Важным звеном при выяснении причин аварийного исхода испыта-
ния являются расчетные методы, особенно в случае значительных
потерь материальной части. Рассмотрим основные принципы реали-
зации данного вида моделирования на примере двигательных устано-
вок с ЖРД.
Один из методов моделирования нештатных и аварийных ситуа-
ций двигательных установок с ЖРД основан на том, что в систему
нелинейных дифференциальных уравнений, описывающих динамику
154
процессов в узлах и магистралях ДУ, вносятся изменения, учитыва-
ющие специфику физических процессов в каждой конкретной ава-
рийной ситуации и выражающиеся в изменении отдельных коэффи-
циентов в уравнениях движения, видоизменении некоторых урав-
нений, введении новых уравнений. Например, разрушение подшип-
ников ротора турбонасосного агрегата (ТНА) приводит к увеличению
момента сопротивления насоса, что можно смоделировать уменьше-
нием их КПД, т.е. этот вид неисправности требует изменения значе-
ний коэффициентов в уравнениях, содержащих численные выраже-
ния для КПД насосов. Разрушение бандажа колеса турбины вызывает
резкое торможение ротора ТНА. Этот вид неисправности можно учесть
или понижением КПД турбины, или введением дополнительного
члена в уравнение движения ротора ТНА, учитывающего возможную
потерю мощности турбины.
Имитация негерметичности магистрали пневмогидравлической
подачи топлива требует рассмотрения места разрушения как нового
узла в структуре двигателя, т.е. в исходную систему уравнений необ-
ходимо введение дополнительного уравнения, описывающего исте-
чение жидкости при негерметичности. Таким образом, метод подра-
зумевает предварительное внесение в систему исходных уравнений
динамики двигателя изменений, которые могут учесть возможно боль-
шее число предполагаемых неисправностей.
При моделировании нештатных ситуаций и аварий возможно также
использование метода, который основан на получении информации
с помощью линеаризованной математической модели динамики дви-
гателя. Данный метод применяется для анализа нештатных ситуаций
и аварий, когда длительность сопровождающих их переходных про-
цессов ограничивается частотным диапазоном модели (обычно более
0,05 с), а отклонения параметров не превышают ±20% их установив-
шихся значений. Практика показывает, что этим ограничениям удов-
летворяют более 80% всех аномалий, проявляющихся в двигателе при
работе в установившемся режиме. В процессе развития аварийной
ситуации, если двигатель не остановлен системой аварийной защи-
ты, параметры изменяются в значительно большем диапазоне, но
для анализа по выяснению первопричины неисправности главную
роль играют первоначальные отклонения (в пределах ±(10—20)%),
так как дальнейшие изменения параметров обычно связаны с разру-
шением двигателя, нарушением функциональных связей между уз-
лами. При этом может быть нарушена и нормальная работа элемен-
тов системы измерения, т.е. зарегистрированная информация будет
недостоверной.
Таким образом, используя методы комбинированного (экспери-
ментально-аналитического) моделирования, можно создать расчет-
155
ные математические модели, представленные в виде алгебраических
или дифференциальных уравнений, достаточно точно отражающих
как статические, так и динамические свойства ДУ с ЖРД. Для обес-
печения достаточной адекватности моделей, как правило, можно ог-
раничиться двумя-тремя факторными экспериментами на двигателе,
чтобы провести операции по коррекции исходных математических
моделей ЖРД или отдельных его элементов, после чего можно с ус-
пехом использовать модели для решения различных задач исследова-
ния статических или динамических характеристик как самого двига-
теля, так и комплекса «ракета—двигатель», а также для моделирования
нештатных или аварийных ситуаций.
В заключение рассмотрим основные подходы и принципы еще
одного, находящего все более широкое применение метода модели-
рования сложных систем, получившего название имитационного.
4.6. Имитационное моделирование сложных систем
4.6.1. Формализация сложной системы
Изучение процессов функционирования крупных производственных,
энергетических и других сложных технических комплексов с автома-
тизированным управлением, систем обработки информации и управ-
ления, создаваемых на базе автоматики, электроники и вычисли-
тельной техники, обусловило возникновение понятия сложной
системы и привело к постановке целого ряда специфических проблем
математического и технического характера, привлекающих в после-
дние годы внимание широкого круга исследователей.
Для понимания принципов формализации сложных систем и сущ-
ности их имитационного моделирования рассмотрим суть понятия
сложной системы и сформулируем их основные отличительные при-
знаки.
Понятие сложной системы. Концепция сложной системы состо-
ит в следующем:
• рассматриваемая система (объект материального мира) может
быть расчленена (необязательно единственным образом) на ко-
нечное число частей, называемых подсистемами сложной сис-
темы; каждая подсистема в свою очередь может быть расчлене-
на на конечное число более мелких подсистем и т.д. — до
получения в результате конечного числа шагов таких частей,
называемых элементами сложной системы, относительно кото-
рых имеется договоренность, что в условиях данной задачи они
не подлежат дальнейшему расчленению на части;
156
• элементы сложной системы функционируют не изолированно
друг от друга, а во взаимодействии, при котором свойства од-
ного элемента в общем случае зависят от условий, определяет
мых поведением других элементов;
• свойства сложной системы в целом определяются не только свой-
ствами элементов, но и характером взаимодействия между эле-
ментами.
Рассмотрение изучаемого объекта материального мира как систе-
мы, состоящей из взаимодействующих элементов, построение мате-
матической модели для него и исследование его свойств методом мо-
делирования составляет сущность системного подхода, а совокупность
методов и приемов исследования входит в арсенал самостоятельного
научного направления, получившего название системный анализ.
Понятие сложной системы интуитивно ассоциируется с объек-
том, состоящим из большого числа элементов и подсистем с развет-
вленными многоуровневыми связями и сложным взаимодействием
между ними. К сложным системам обычно относят производствен-
ные процессы крупных предприятий (в частности, процесс испыта-
ний сложных технических систем), автоматизированные системы уп-
равления и др.
Для того чтобы задать сложную систему, необходимо (и доста-
точно) представить описания всех ее элементов и взаимодействия
между элементами. В большинстве случаев характер функциониро-
вания сложных систем (за исключением так называемых автономных)
зависит от условий внешней среды. Поэтому одной из основных за-
дач исследования таких систем является изучение взаимодействия их
с внешней средой. Для простоты математического описания удобно
представлять внешнюю среду в виде совокупности элементов, анало-
гичных элементам системы, с той только разницей, что полная мо-
дель поведения этих элементов не требуется. Достаточно задать ее
лишь в той части, которая относится к формированию соответствую-
щих воздействий на элементы системы.
Использование унифицированного математического описания для
элементов системы и объектов внешней среды, а также для взаимо-
действия элементов системы между собой и внешней средой способ-
ствует упрощению моделей, реализуемых на ЭВМ. Кроме того, по-
являются условия для создания единых приемов исследования сложных
систем. В связи с этим в области имитационного моделирования на
первый план выдвигается разработка унифицированных моделей и
типичных математических схем первичной формализации объектов
материального мира, являющихся элементами сложных систем.
Элемент как динамическая система. Все явления и процессы
материального мира мы привыкли рассматривать в пространстве и во
157
времени. В простейшем случае механического движения речь идет о
перемещении, которое интерпретируется как изменение положения тела
за некоторый интервал времени. Несмотря на естественность таких
рассуждений, они уже носят на себе черты формализации. А имен-
но, в каждый момент времени t из некоторого множества Т тело на-
ходится во вполне определенном положении z, описываемом его ко-
ординатами в пространстве. В рассматриваемом случае перемещение
является переходом тела из одного положения в другое. Разность - /1
есть время перехода. В механике перемещение происходит под дей-
ствием сил, т.е. носит динамический характер.
Эта концепция в основных своих чертах верна и за пределами
механики. В настоящее время она понимается очень широко. Вмес-
то «положение» говорят «состояние»: zt — состояние системы в мо-
мент t. В электротехнике характеристикой состояния системы может
служить величина тока или напряжения в цепи, в термодинамике —
температура тела или количество выделяемого тепла. В современной
системотехнике состояние системы zt может характеризоваться доста-
точно большим числом «координат»: Zt - •
Вместо «перемещение» говорят «движение». Движение является
переходом системы из одного состояния в другое. Оно характеризу-
ется отображением z(t) множества Тв множество Z, где Z—множе-
ство состояний системы z- Совокупность точек z, е Z, соответству-
ющих в силу данного движения z(t) всем teT, называется траекторией
этого движения. В таком понимании движение системы охватывает
всевозможные формы движения материи. Движение в общем случае
происходит вследствие причин, более общих, чем сила. Поэтому в
современной интерпретации «динамический» означает причинный.
Таким образом, под динамической системой понимается объект,
находящийся в каждый момент времени t (из множества 7) в одном
из возможных состояний Zt (из множества 2) и способный перехо-
дить (во времени) из одного состояния в другое под действием вне-
шних и внутренних причин (совершая при этом движение z(f) ).
Чтобы учесть внешние причины, необходимо рассмотреть взаи-
модействие динамической системы с внешней средой. Оно осуще-
ствляется посредством воздействий внешней среды на динамическую
систему и динамической системы на внешнюю среду. Такого рода
воздействия принято называть сигналами, а процесс взаимодействия
динамической системы с внешней средой рассматривать в рамках
механизма обмена сигналами.
Входной сигнал xt, поступающий из внешней среды в динами-
ческую систему в момент t, характеризуется координатами xi, х^, • •, хт
и является элементом множества X входных сигналов. Аналогично
158
выходной сигнал yt, поступающий из системы во внешнюю среду в
момент t, описывается координатами У\,У2,--,УГ и является элемен-
том множества Yвыходных сигналов динамической системы.
Динамическая система (в широком смысле) как математический
объект содержит в своем описании механизмы:
1) изменения состояний под действием внутренних причин (без
вмешательства внешней среды);
2) приема входного сигнала и изменения состояний под действи-
ем этого сигнала;
3) формирования выходного сигнала (как реакции динамичес-
кой системы на внутренние и внешние причины изменения состоя-
ний).
Обычно эти механизмы описываются так называемыми операто-
рами переходов Н (в новое состояние) и выходов G, реализующими
отображения
Н: TxZxX^Z,
G: TxZxX->Y.
Однако такое задание динамической системы оказывается слиш-
ком общим и недостаточно определенным (пока на рассматриваемые
множества и операторы не накладываются никакие ограничения).
Для формального описания элементов сложной системы целесо-
образно использовать математическую схему динамической системы
в широком смысле, в том числе стохастической, учитывающей дей-
ствие случайных факторов. Это неизбежно приводит к хорошо разви-
тому аппарату теории случайных процессов. Наибольшее примене-
ние для формального описания элементов сложной системы нашел
класс так называемых случайных процессов с дискретным вмешатель-
ством случая.
Процесс функционирования динамической системы с дискрет-
ным вмешательством случая состоит из перемещений точки Zt внут-
ри области Z, перемежаемых скачками состояний при выходе на гра-
ницу и поступлении входных сигналов.
Чтобы задать конкретный пример общей динамической системы
с дискретным вмешательством случая, необходимо указать:
• уравнения границы области Z;
• уравнения движения точки Z/ внутри области Z,
• соотношения для расчета распределения вероятностей скачка
состояния при выходе на границу;
• соотношения для расчета координат выходных сигналов;
• соотношения для расчета распределения вероятностей скачка
состояния при поступлении входного сигнала.
159
Эти уравнения и соотношения называют характеристиками об-
щей динамической системы с дискретным вмешательством случая.
Важным обстоятельством является возможность выбора характе-
ристик динамической системы (уравнений и соотношений) из задан-
ных классов аналитических выражений. Например, уравнения можно
выбрать линейными, вероятности скачков не зависящими от предыс-
тории и т.д. В этом случае (при фиксированных типах характеристик)
динамическая система полностью определяется набором числовых па-
раметров. Возможность описания динамической системы набором
числовых параметров создает исключительные удобства для ее приме-
нения в качестве математической модели сложной системы.
Общая динамическая система с дискретным вмешательством слу-
чая может служить математической моделью для исключительно ши-
рокого класса объектов материального мира, являющихся элемента-
ми сложных систем. Для этого достаточно, чтобы данный объект по
условиям задачи требовал описания в виде динамической системы и,
кроме того, была проведена его специфическая формализация. С прак-
тической точки зрения даже дискретность вмешательства случая не
является существенным ограничением общности модели.
В самом деле, обратимся к одному из факторов, заметно испы-
тывающих влияние дискретности. Пусть входной сигнал является рас-
пределением во времени и задается на интервале времени не-
прерывной функцией х(1) (входной процесс). С достаточной для
практики точностью функцию х(/) можно представить в виде некото-
рой кусочно-постоянной (ступенчатой) функции, меняющей свои
значения через заранее заданные равные промежутки времени (кван-
тование сигнала). Весь входной процесс х(/) на интервале
отнесем теперь к единственному моменту времени (или любому
другому из упомянутого интервала) и будем рассматривать как диск-
ретный сигнал, поступающий в момент и имеющий в качестве
координат числа, описывающие величины ступенек кусочно-посто-
янной функции. Легко видеть, что переход к дискретным сигналам
(в пределах требуемой точности) изменяет лишь форму задания ин-
формации о входном сигнале, и не затрагивает сути дела.
Если для решения соответствующих задач имеет значение глад-
кость функции х(0, механизм приема сигнала данной динамической
системы необходимо снабдить алгоритмом сглаживания (например,
представления функции х(/) в виде интерполяционного полинома).
Аналогичные рассуждения можно привести и относительно дру-
гих факторов, связанных с проблемой дискретности вмешательства
случая. Ведь описание динамической системы, построенной по дан-
ным эксперимента, всегда является приближенным.
160
Взаимодействие элементов в сложной системе. Под взаимодей-
ствием элементов сложной системы понимают режим совместного
функционирования элементов, при котором поведение или свойства
одного элемента в общем случае зависят от условий, определяемых
поведением или свойствами других элементов. Взаимодействие пред-
ставляется как результат влияний, оказываемых элементами сложной
системы друг на друга.
Пусть рассматривается система 5, состоящая из элементов
CbC2,...,CN. Влияние элемента Cj системы S на элемент Ск той же
системы определяется сигналами, поступающими от элемента Cj к
элементу Q. Выходной сигнал элемента Cj, сформированный с уче-
том условий функционирования этого элемента, трансформируется,
вообще говоря, при передаче его по реальному каналу связи и посту-
пает к элементу Ск в качестве входного сигнала, вызывающего изме-
нение поведения этого элемента.
При формализации взаимодействия элементов сложной системы
обычно придерживаются предположения, согласно которому взаи-
модействие достаточно полно и точно описывается в рамках механиз-
ма обмена сигналами. Поэтому для формального описания взаимо-
действия элементов Cj и Ск сложной системы достаточно иметь
следующие четыре модели:
1) формирования выходного сигнала элемента Cj,
2) сопряжения элементов сетью каналов связи, обеспечивающих
передачу сигналов между ними;
3) трансформации сигнала в процессе прохождения через реаль-
ный канал связи;
4) приема входного сигнала и поведения элемента Ск под воздей-
ствием этого сигнала.
Для того чтобы модель трансформации сигнала в процессе его
передачи по каналу связи с достаточной точностью отражала реаль-
ные условия прохождения сигнала через канал (перекодирование,
селекцию, запаздывание, искажения, сбои, помехи и т.д.), обычно
реальные каналы связи, а также кодирующие и селектирующие уст-
ройства рассматривают как самостоятельные элементы сложной сис-
темы. Эти элементы описывают динамическими системами с соот-
ветствующими характеристиками (формализованный канал), моде-
лирующими процесс трансформации. Тогда процесс трансформа-
ции превращается в процесс функционирования динамической сис-
темы (формализованного канала), на вход которой поступает вы-
ходной сигнал элемента Cj, а с выхода — выдается входной сигнал
элемента Ск.
161
Необходимо отметить, что теоретические и экспериментальные
исследования процессов трансформации сигналов при прохождении
их через каналы связи различных типов (которые дают исходные све-
дения для формального описания каналов как динамических систем)
относятся не к методике моделирования сложных систем, а пред-
ставляют собой, скорее, предмет теории передачи сообщений и тех
конкретных областей техники, к которым относятся рассматривае-
мые сложные системы.
Остается последняя модель — модель сопряжения элементов слож-
ной системы с сетью идеальных каналов связи, обеспечивающих пере-
дачу сигналов между элементами. Эта модель отражает структурный
аспект взаимодействия элементов такой системы в процессе ее функ-
ционирования. С практической же точки зрения цель построения мо-
дели сопряжения состоит в том, чтобы каждому сигналу, поступаю-
щему из внешней среды или возникающему как выходной сигнал
элемента системы, указать адрес, по которому он должен поступить
как входной сигнал элемента системы или объекта внешней среды.
4.6.2. Сущность имитационного моделирования
Как было сформулировано выше, под сложной системой понимают
многоуровневую конструкцию из взаимодействующих между собой
элементов, являющихся динамическими системами. Чтобы задать
сложную систему, необходимо описать ее элементы, а также пред-
ставить схему их сопряжения.
Функционирование элемента как динамической системы пред-
ставляется последовательностью перемещений состояния (изобража-
ющей точки) в пространстве состояний, перемежаемых случайными
скачками состояния при выходе на границу или при поступлении вход-
ных сигналов. Как известно, оно может быть задано пятью группами
характеристик, представляющих собой соотношения для: 1) опреде-
ления границы пространства состояний; 2) описания перемещений
изображающей точки; 3) расчета распределения вероятностей скачка
состояния при выходе на границу; 4) расчета распределения вероят-
ностей скачка состояния при поступлении входного сигнала; 5) рас-
чета координат выходного сигнала.
Выходные сигналы, выдаваемые одними элементами, поступая
к другим элементам как входные сигналы, приводят к изменению
поведения элементов. Получающееся при этом переплетение пере-
мещений и случайных скачков состояний различных элементов мно-
гоуровневой конструкции составляет процесс функционирования
сложной системы во всем многообразии происходящих событий и
явлений.
162
Несмотря на сложность процесса функционирования многоуров-
невой системы и необозримость всевозможных сочетаний общесис-
темных ситуаций, путь для количественного и качественного матема-
тического исследования систем не является полностью закрытым.
Правда, если в рамках традиционного подхода иметь в виду уравне-
ния для достаточно богатого набора общесистемных характеристик
(функционалов), описывающих свойства изучаемого объекта, то при
сколько-нибудь сложной модели мы неизбежно столкнемся с трудно-
стями в составлении и решении уравнений. Основным препятствием
здесь оказывается сложность непосредственной формализации и ма-
тематического описания общесистемных ситуаций на базе умозри-
тельного анализа взаимозависимости составляющих их событий и яв-
лений, тем более что не всегда для этой цели имеются подходящие
математические средства.
Однако возможен другой путь, не требующий составления урав-
нений относительно характеристик системы и не возлагающий на
человека непосильного бремени разложения сложного процесса фун-
кционирования системы в целом в последовательность простых явле-
ний и событий, доступных непосредственному математическому опи-
санию. Умозрительный анализ остается инструментом, помогающим
формализовать процессы функционирования лишь элементов систе-
мы как объектов, заведомо более простых, а также средством описа-
ния схем сопряжения элементов в сложных системах. Конструирова-
ние же общесистемных ситуаций как взаимно обусловленных сочетаний
перемещений и скачков состояний элементов многоуровневой слож-
ной системы возлагается на ЭВМ.
Если заданы начальные состояния в момент всех элементов,
то в соответствии с алгоритмами, построенными на базе соотноше-
ний, входящих в упомянутые выше пять групп характеристик, мож-
но вычислить координаты состояний элементов для t > • В самом
деле, решая совместно уравнения движения изображающей точки и
уравнения границы пространства состояний, можно определить мо-
мент f выхода на границу и координаты состояния г* в этот момент.
Как известно, в момент t* элементы системы выдают выходные сиг-
налы. Сформировав координаты выходных сигналов и определив «ад-
рес» передачи сигналов по схеме сопряжения, их подают на входы
элементов-адресатов уже как входные сигналы. Исходя из t* и г* или
t и z, где t — момент поступления входного сигнала, a z — состоя-
ние в этот момент, вычисляются распределения вероятностей для
случайных скачков состояния. Новые состояния, в которые перехо-
дит система после скачка, определяются по жребию в соответствии с
этими распределениями вероятностей. Другими словами, векторы
6»
163
состояния после скачка формируются с использованием случайных
величин, распределения которых зависят от состояний системы пе-
ред скачком и поступающих входных сигналов.
Из приведенного описания следуют две особенности рассматри-
ваемого способа моделирования сложных объектов.
Во-первых, имеет место определенное сходство процесса, вос-
производимого ЭВМ, и реального процесса функционирования мо-
делируемой системы. Это сходство возникает за счет идентичности
строения возможных сочетаний перемещений и скачков состояния.
Конструируя общесистемные ситуации, ЭВМ как бы имитирует яв-
ления и события моделируемого процесса. Отсюда происходит на-
звание имитационное моделирование.
Во-вторых, процесс имитации включает огромное число опера-
ций, связанных с формированием, преобразованием и использова-
нием реализации случайных событий, случайных величин и случай-
ных процессов, обеспечивающих случайные скачки состояний.
Поэтому траектории движения сложной системы в пространстве со-
стояний, получаемые путем имитации, являются случайными функ-
циями времени.
Случайный характер также носят любые результаты моделирова-
ния, если они получены при воспроизведении на ЭВМ единствен-
ной реализации моделируемого процесса. Такие результаты не могут
объективно характеризовать исследуемый процесс — они отражают
лишь случайные сочетания действующих факторов, складывающихся
в процессе моделирования. Искомые величины при исследовании
сложных систем методом имитационного моделирования обычно оп-
ределяют как средние значения по данным некоторого числа реализа-
ций процесса. Совокупность реализации выступает в роли «статисти-
ческого материала» при машинном эксперименте, а оценка параметров
исследуемой системы по результатам моделирования — в роли обра-
ботки экспериментальных данных. Поэтому рассматриваемый метод
иногда называют методом статистического моделирования. Впрочем,
последний термин постепенно исчезает из обихода.
Исходным материалом для построения любых случайных объектов
в ЭВМ служат так называемые случайные числа, вырабатываемые спе-
циальной программой — датчиком случайных чисел. Случайные числа
можно рассматривать как возможные значения х,, случайной величи-
ны £ , приближенно подчиняющейся равномерному закону распреде-
ления в интервале (0,1). Способы конструирования из случайных чисел
различных более сложных случайных объектов в настоящее время дос-
таточно развиты и носят название преобразования случайных чисел.
164
Пусть требуется реализовать случайное событие А, наступающее
с вероятностью р. Определим А как событие, состоящее в том, что
выбранное значение х/ случайной величины £ удовлетворяет нера-
венству х, < р. Легко видеть, что вероятность
р
P(A) = \dx=p
О
Для моделирования испытаний этого вида выберем случайное
число X/ и сравним его с р. Если х, < р, то исходом испытаний
считается событие Л; в противном случае, когда > р , исходом
испытания считается событие А, вероятность которого 1 - р.
s
Если задано распределение вероятностей а X pi =1 и
/=1
случайное число х, удовлетворяет неравенству Zw_i < xz- < 1т, где
г
1= Е о,, то исходом испытания считается событие Ат, имеющее
г /=1 '
вероятность рт.
Если требуется получить возможные значения у,- случайной вели-
чины т|, имеющей функцию плотности f (у), исходя из случайных
чисел Xj с равномерным распределением в интервале (0, 1), то нуж-
но решить относительно у,- уравнение
У/
—ОО
Например, если идет речь о показательном распределении f (у) =
= , то у,- = - — In Xj. Если рассматривается функция плотности
Л
’ ’ то У‘, = и тд-
Пользуясь аналогичными приемами, можно сформировать так
называемые марковские процессы, характеризующие функционирова-
ние вероятностных автоматов, систем массового обслуживания и т.д.
В частности, чтобы получить реализацию случайного потока одно-
родных событий, достаточно сформировать ряд моментов /у поступ-
ления заявок:
165
где Kj — возможные значения случайных величин с заданным совме-
стным законом распределения. С использованием этих алгоритмов
были решены актуальные практические задачи, связанные с иссле-
дованием широкого класса сложных систем. Метод имитационного
моделирования становится мощнейшим инструментом системотехни-
ки, системного анализа и исследования операций.
До недавнего времени основные ограничения на сложность реа-
лизуемых моделей определялись характеристиками используемых
ЭВМ. Современные ЭВМ, обладающие мультипрограммным режи-
мом работы, независимой передачей информации между различны-
ми видами памяти и другими особенностями организации вычисли-
тельного процесса, в принципе позволяют реализовать модели весьма
большой сложности. Вместе с тем по мере увеличения сложности
моделируемых объектов значительно возрастает трудоемкость постро-
ения моделей (формального описания элементов системы и взаимо-
действия между ними, программирования моделирующих алгорит-
мов и др.) и их использования для решения практических задач (ввода
данных о системе в ЭВМ, обработки и анализа результатов модели-
рования и Т.Д.).
Созданные к настоящему времени большие имитационные моде-
ли потребовали для построения моделирующего алгоритма, програм-
мирования и отладки многих месяцев (а иногда и лет) работы много-
профильных коллективов высококвалифицированных специалистов.
Это обстоятельство уменьшает оперативность использования резуль-
татов имитационного моделирования. При изменениях, вносимых в
модель в процессе исследования, требовалась обычно весьма тромоз-
дкая работа по перепрограммированию задачи. Опыт моделирова-
ния, а также отдельные фрагменты имитационных алгоритмов слабо
использовались при построении новых моделей. Рост трудоемкости
заметно снижает оперативность и рентабельность моделирования и,
таким образом, сужает реальную сферу практического применения
имитационных моделей сложных систем. Поэтому построение моде-
лей на базе традиционных методов уже не удовлетворяет изменив-
шимся требованиям практики. Со всем этим можно еще было в ка-
кой-то степени мириться, пока возможности ЭВМ не позволяли
строить имитационные модели для действительно сложных реальных
объектов.
С внедрением в практику современных ЭВМ, допускающих муль-
типрограммную организацию вычислительного процесса и имеющих
внешнюю память большого объема с быстрым считыванием, появи-
лась принципиальная возможность разместить в памяти и реализовать
на ЭВМ модели для систем, представляющих собой многоуровневые
166
иерархические структуры (задаваемые сложными схемами сопряже-
ния) из сотен или тысяч элементов, описываемых динамическими
системами в широком смысле слова (обыкновенными дифференци-
альными уравнениями, конечными и вероятностными автоматами,
системами массового обслуживания и т.д.). В свете этого проблема
сокращения сроков построения моделей и уменьшения трудоемкости
ручных работ становится исключительно актуальной.
4.6.3. Принципы построения универсальной автоматизированной
имитационной модели
Радикальный способ снижения трудоемкости при увеличении слож-
ности моделируемых объектов — автоматизация процедур, охватыва-
ющих построение и реализацию моделей.
В настоящее время реальным средством достижения желаемого
эффекта является применение специализированных языков модели-
рования. Однако до сих пор использование существующих языков
моделирования позволяло преодолеть лишь часть возникающих труд-
ностей, а снижение трудоемкости оказалось недостаточным для того,
чтобы коренным образом изменить ситуацию в области имитации
сложных систем. Запись моделирующего алгоритма при помощи лю-
бого из применяемых языков опирается на представление процесса
функционирования системы в некотором специальном виде (напри-
мер, в виде последовательности событий, упорядоченных в соответ-
ствии с характерными для данной системы закономерностями изме-
нений состояний во времени). Вручную такое представление можно
построить в обозримое время для сравнительно простых систем. Ког-
да же моделируемый объект формализуется как многоуровневая иерар-
хическая структура из элементов, которые сами являются достаточно
сложными системами, упомянутое представление по мере роста слож-
ности системы становится все менее доступным и в конечном счете
выходит за пределы возможностей человека. Даже для систем сред-
ней сложности подготовка имитационных моделей с помощью суще-
ствующих языков моделирования требует немало времени и сил, осо-
бенно на отладку получаемых таким способом программ, которые, к
тому же, оказываются обычно далеко не оптимальными с точки зре-
ния реализации их на ЭВМ.
В рамках каждого из существующих языков моделирования фор-
мализация объектов опирается на математические схемы определен-
ного класса. Когда речь идет об объектах большой сложности, требу-
ется охватить системы, отдельные части которых описываются
различными математическими схемами. В этом случае использова-
ние какого-нибудь одного языка моделирования может привести к
167
потере точности описания реальных объектов или усложнению про-
грамм. Наконец применение языков требует от пользователей неко-
торых специальных знаний и известных практических навыков.
Языки моделирования (как и вообще языки программирования)
являются и будут оставаться весьма эффективным инструментом спе-
циалистов, разрабатывающих программное обеспечение ЭВМ. Для
пользователя же должны быть разработаны более простые средства
подготовки задач и общения с ЭВМ.
Все это подчеркивает необходимость дальнейшего совершенство-
вания средств автоматизации имитационного моделирования, кото-
рое, помимо основной цели — уменьшения трудоемкости ручных ра-
бот и охвата систем, представляющих собой сложные структуры из
разнородных элементов, — должно иметь в виду также снижение тре-
бований к подготовке пользователя по программированию, форма-
лизации и методам решения задач на ЭВМ.
Для создания имитационных моделей в рамках традиционных
методов ранее приходилось составлять программы моделирования от-
дельно для каждого варианта системы с учетом различия по составу,
структуре и типам элементов. Такой подход приводил к недопустимо
большим затратам времени и вытекающему отсюда снижению опера-
тивности имитационного моделирования.
Программа имитации должна быть построена по модульному прин-
ципу, при котором все элементы системы описываются единообраз-
но в виде некоторой стандартной математической схемы — модуля.
В качестве модуля следует выбирать динамическую систему доста-
точно общего вида, охватывающую как детерминистические, так и
стохастические объекты, функционирующие в непрерывном и диск-
ретном времени.
Схема сопряжения, содержащая множества входных и выходных
контактов всех элементов системы и внешней среды и операторы со-
пряжения на всех уровнях иерархии, может быть приведена к заранее
определенному стандартному виду. Отсюда следует, что необходимо
построение универсальной программы имитации, пригодной для все-
возможных систем рассматриваемого типа.
Различие систем по составу, характеру и параметрам элементов,
а также структуре их сопряжения не оказывает влияния на вид про-
граммы имитации, а учитывается в исходных данных для моделиро-
вания (значениях параметров и начальных состояний элементов в таб-
лицах сопряжения и т.д.). Поскольку реальные элементы системы
описываются математическими схемами, в общем случае отличаю-
щимися от выбранного модуля, предусматривается возможность ав-
томатического преобразования математических моделей элементов к
стандартному виду, определяемому выбранным модулем.
168
Все процедуры обслуживания модели, связанные с вводом в ЭВМ
исходных данных, их расположением в памяти, преобразованием
элементов системы и схем сопряжения к стандартному виду, настрой-
кой модели на реальный объект и конкретную задачу, фиксацией,
обработкой и анализом результатов моделирования и т.д., которые
могут быть формализованы, программируются для выполнения при
помощи ЭВМ. Таким образом, речь идет о создании весьма универ-
сального пакета прикладных программ, называемого далее автома-
тизированной имитационной моделью (АИМ) и способного настраиваться
на имитацию любых реальных объектов из заранее определенного
класса.
Построение АИМ требует формализованных схем трех уровней
общности: 1) для описания реальных элементов системы (схемы фор-
мализации моделируемого объекта); 2) более общих схем для имита-
ции процесса функционирования системы (модули); 3) еще более
общих схем для обработки и анализа результатов моделирования (схе-
мы анализа). Увеличение числа схем формализации позволяет охва-
тить более широкий класс реальных объектов (расширить проблем-
ную ориентацию АИМ) и делает АИМ более удобной, более гибкой
при практическом применении. Вместе с тем оно, естественно, тре-
бует увеличения числа программ преобразования математических мо-
делей элементов системы к стандартному виду.
Стандартный вид математических моделей элементов системы и
схем сопряжения, обеспечивая возможность построения универсаль-
ных программ имитации процесса функционирования системы, тем
самым приводит к единой форме выдачи результатов моделирования.
Это существенно для построения библиотеки стандартных программ
обработки и анализа результатов моделирования, которая является
одной из неотъемлемых частей АИМ.
Изложенное позволяет заключить, что АИМ должна осуществ-
лять по крайней мере следующую совокупность операций:
• ввод и формирование массива исходных данных для моделиро-
вания;
• преобразование элементов системы и схем сопряжения к стан-
дартному виду;
• имитацию модуля и взаимодействие элементов системы;
• обработку и анализ результатов моделирования;
• управление моделью.
Естественно, что эта совокупность функций может пополниться
по мере автоматизации новых процедур, входящих в подготовку или
эксплуатацию модели. При решении задач на АИМ (в том числе и
при переходе к моделированию новых объектов) практически отпа-
дает необходимость в программировании, за исключением, быть мо-
169
жет, развития библиотек анализа результатов моделирования и стан-
дартных процедур имитации.
Имитация функционирования элемента системы заключается в
настройке модуля на данный элемент (поиске в архиве во внешней
памяти строки, соответствующей данному элементу, и считывании
содержимого в участке оперативной памяти, отведенного для хране-
ния параметров имитируемого элемента) и реализации полученной
модели на ЭВМ. Последняя обеспечивается основными подпрограм-
мами: определения момента выхода на границу пространства состоя-
ний, реализации скачка состояния в момент выхода на границу или в
момент поступления входного сигнала. Имитация взаимодействия
между элементами сводится к определению адреса и содержания сиг-
нала и передаче его в соответствии с адресом. Важную роль играет
установление строгой очередности событий в процессе функциони-
рования системы, которая в масштабах всей системы автоматически
обеспечивается специальным построением алгоритма моделирования
(регистровый метод). Сбор сведений, позволяющих получить харак-
теристики моделируемого процесса, заключается в фиксации состоя-
ний элементов системы в так называемые опорные моменты времени
(в моменты скачков), так как в силу принятой кусочной линейности
движения мы можем легко вычислить любые состояния между скач-
ками.
4.6.4. Имитация процесса функционирования сложной системы
Одним из основных средств проблемной ориентации АИМ является
выбор модуля для описания элемента сложной системы. Модульный
принцип и регистровый метод построения АИМ предполагают, что
элементы моделируемой системы имитируются последова- тельно на
небольших интервалах времени, что дает возможность свести взаимо-
действие элементов к упорядоченной совокупности событий в рамках
механизма обмена сигналами. К такому режиму взаимодействия эле-
ментов сложной системы хорошо приспособлена стохастическая ди-
намическая система с дискретным вмешательством случая, функци-
онирующая в непрерывном времени. Движение ее включает случайные
скачки состояния в некоторые «опорные» моменты времени, проис-
ходящие под влиянием вмешательства внешних (входной сигнал) или
внутренних случайных факторов, а также вполне детерминирован-
ные фрагменты движения между опорными моментами времени.
В настоящее время широко применяется построение имитаци-
онных моделей на базе простейших типов систем массового обслу-
живания, конечных и вероятностных автоматов. Исключительный
интерес представляет выбор в качестве модуля кусочно-линейного
170
агрегата, который охватывает как системы массового обслуживания
различных типов, так и вероятностные автоматы. Кроме того, при
помощи кусочно-линейного агрегата могут быть точно или прибли-
женно описаны некоторые объекты, не принадлежащие ни одному
из этих типов систем.
Привлекательность кусочно-линейного агрегата как модуля для
ДИМ объясняется не только широтой охвата типичных математичес-
ких схем, используемых для формализации реальных объектов. Нема-
ловажное значение имеет и то обстоятельство, что система из кусоч-
но-линейных агрегатов может быть сама описана как кусочно-линейный
агрегат с характеристиками, выражающимися через характеристики
элементов и параметры сопряжения. Это позволяет построить удоб-
ные процедуры обработки и анализа результатов моделирования и со-
ответствующие им программы.
На первом этапе построения АИМ целесообразно ограничиться
по возможности более простым модулем. Накопление опыта эксплу-
атации АИМ более удобно выполнить на известных, хорошо изучен-
ных, типичных математических схемах формализации реальных объек-
тов. С этой точки зрения использование в качестве модуля даже
кусочно-линейного агрегата общего вида представляется излишне
сложным. Заслуживает тщательного рассмотрения класс кусочно-ли-
нейных агрегатов (называемый далее KJIAj), охватывающий как час-
тные случаи конечные и вероятностные автоматы, системы массово-
го обслуживания различных типов, разностные схемы решения
дифференциальных уравнений и т.д. Применение их в качестве мо-
дуля существенно упрощает реализацию АИМ.
В отличие от общего случая кусочно-линейного агрегата KJIAj
выдает выходные сигналы только в момент выхода на границу (обра-
щения в нуль одной из координат zw ), а в моменты поступления
входных сигналов выходные сигналы не выдаются. Это ограничение
позволяет существенно упростить процедуры моделирования KJIAj на
ЭВМ и не сужает класса моделируемых объектов. В самом деле, без
упомянутого ограничения в момент t поступления входного сигнала
элемент Сj сложной системы выдавал бы выходной сигнал, который
в тот же самый момент t поступал бы как входной сигнал к некото-
рым элементам С^С^—уС^ (согласно схеме сопряжения), а эти
элементы в свою очередь выдавали бы выходные сигналы, которые в
тот же самый момент t поступали бы как входные сигналы к другим
элементам (также согласно схеме сопряжения) и т.д. Необходимость
учитывать лавинообразный рост числа выдаваемых в системе сигна-
лов в один и тот же момент времени усложняет процедуры формиро-
вания системных событий и сам процесс имитации. Вместе с тем
171
если по смыслу задачи иногда потребуется обеспечить выдачу выход-
ного сигнала в момент поступления входного сигнала, это можно
сделать при помощи дополнительной координаты zv/, которая обра-
щается в нуль в момент поступления входного сигнала.
Если все упомянутые здесь ограничения выполнены, алгоритмы
имитации модуля KJIAj на ЭВМ оказываются действительно значи-
тельно проще и удобнее, чем в общем случае кусочно-линейного аг-
регата.
Основная идея построения имитационной программы вытекает
из того обстоятельства, что использование в качестве модуля дина-
мической системы с дискретным вмешательством случая и сведение
взаимодействия элементов сложной системы к их сопряжению позво-
ляют имитировать элементы системы в интервалах времени между мо-
ментами выдачи и приема сигналов независимо друг от друга. Таким
образом, сведения о моделируемом объекте (архив элементов) мож-
но располагать во внешней памяти ЭВМ, что практически снимает
ограничения на число элементов моделируемой системы. Благодаря
мультипрограммному режиму работы современных ЭВМ удается эф-
фективно организовать загрузку процессоров и снизить потери за счет
работы с внешней памятью.
Имитацию процесса функционирования сложной системы мож-
но представить как совокупность следующих частей: имитации функ-
ционирования элемента системы, имитации взаимодействия между
элементами и управления очередностью системных событий.
Имитация функционирования элемента системы (благодаря модуль-
ному принципу построения АИМ) сводится к настройке модуля на
данный элемент системы и реализации на ЭВМ полученной таким
образом модели элемента. Настройка осуществляется путем считы-
вания в оперативную память соответствующей строки архива элемен-
тов. Далее производятся определение момента выхода состояния KJIAj
на границу и имитация поступления входного сигнала (очередной
опорный момент времени).
Имитация взаимодействия между элементами состоит в определе-
нии адресов передачи и содержания выходного сигнала имитируемого
элемента и выдаче его в соответствии с адресами другим элементам
системы. Для управления моделью важную роль играет установление
строгой очередности системных событий, происходящих в процессе
имитации (регистровый метод). Модуль настраивается на тот элемент
системы, очередной опорный момент функционирования которого
наиболее близок к рассматриваемому моменту модельного времени.
Получение результатов моделирования, позволяющих определить
характеристики исследуемого процесса, состоит в фиксации коорди-
172
нат состояний всех элементов системы, а также соответствующих
выходных сигналов в опорные моменты времени. В силу линейнос-
ти движения между скачками при помощи линейной интерполяции
можно определить любые промежуточные состояния элементов. Рас-
полагая состояниями системы и выходными сигналами для любого
момента времени из заданного интервала, мы можем вычислить лю-
бые интересующие нас характеристики исследуемого процесса.
Для реализации на ЭВМ перечисленных здесь имитационных про-
цедур программа моделирования должна иметь соответствующие бло-
ки (подпрограммы), приведенные на рис. 4.6. Прежде чем рассмат-
ривать их работу в динамике, остановимся вкратце на тех массивах
информации, которые нужны для обеспечения имитации.
Регистр элемента (В). Строка архива элементов, вызванная для
настройки модуля на данный элемент системы, фиксируется в спе-
циально отведенных ячейках оперативной памяти — регистре В (см.
рис. 4.6). Информация здесь располагается в стандартном порядке,
удобном для последующего использования. С течением модельного
времени (при переходе к следующим опорным моментам) содержи-
мое регистра В обновляется.
Регистр времен (Т). В этом регистре для каждого элемента систе-
мы хранится ближайший предполагаемый момент выхода на границу
Рис. 4.6. Блоки программы имитационного моделирования
173
t*. Содержимое регистра с течением времени обновляется. Если для
какого-нибудь элемента системы становится известным очередной мо-
мент /*, то он заносится в регистр Т вместо предыдущего.
Регистр выходного сигнала (Y). Служит для хранения компонент
сформированного сигнала до их передачи по конкретным адресам.
Выходной сигнал, выдаваемый данным элементом сложной систе-
мы, может быть предназначен для передачи нескольким элементам
системы. Поскольку элементы имитируются последовательно (един-
ственным модулем), то компоненты выходного сигнала хранятся в
регистре У до окончания выдачи их адресатом. В процессе имитации
содержимое регистра меняется; новые сформированные сигналы за-
писываются, устаревшие сигналы вычеркиваются.
Регистр адресатов (N). В нем хранятся номера элементов, кото-
рые необходимо вызвать для имитации реакции на входные сигналы,
извлекаемые из регистра Y. Номера элементов подаются поочередно
в подпрограмму считывания строк архива элементов с внешней па-
мяти.
Управляющий регистр (U). Содержит набор управляющих при-
знаков, помогающих обеспечить правильное течение процесса ими-
тации. К ним относятся признаки управления имитацией элемента
системы (например, признак вида скачка: при выходе на границу
8 = 1, при поступлении входного сигнала 8 = 0 и т.д.), признаки уп-
равления имитацией системы в целом (например, признак, управля-
ющий выбором варианта схемы сопряжения), а также признаки, опре-
деляющие переход к очередной реализации процесса имитации,
переход к другому варианту исходных данных и т.д.
Кроме того, предполагается, что в нашем распоряжении имеют-
ся архив элементов и библиотека стандартных процедур.
Работу программы имитации сложной системы можно себе пред-
ставить следующим образом. Пусть в начальный момент времени все
элементы системы находятся в заданных начальных состояниях. На-
страиваем последовательно модуль на элементы системы и определя-
ем для них моменты Г* предполагаемого выхода на границу. Эти мо-
менты располагаем в регистре Т. Определение последовательности
системных событий состоит в выборе из регистра Т наименьшего I* и
вызове из архива элементов строки, соответствующей элементу сис-
темы с наименьшим t*.
Информация об элементе, содержащаяся в вызванной строке
архива, размещается в регистре В (модуль настраивается на соответ-
ствующий элемент системы). Блок имитации элемента системы рас-
шифровывает содержимое регистра В. В результате расшифровки
определяются имена процедур (микрооператоров), адреса парамет-
174
ров этих процедур, а также адреса компонентов состояния элемента
системы. По именам процедур и адресам параметров производится
вызов процедур из библиотеки и реализация их на ЭВМ. В каждый
опорный момент времени реализуется полный набор макрооперато-
ров (перемещение, скачок, сигнал), за тем исключением, что в мо-
мент поступления входного сигнала выходной сигнал не выдается. В
результате реализации этих операторов мы получаем новый момент
выхода t* на границу (записываем в регистр Т), значения координат
выходного сигнала (записываем в регистр Y), а также координаты
КЛА| после скачка (записываем в регистр В).
Следующий шаг в работе имитационной программы (рис. 4.7) —
имитация взаимодействия между элементами системы. Здесь суще-
ственно ответить на два вопроса:
1. Какие элементы системы получают сигналы от данного эле-
мента (т.е. какие строки архива элементов потребуется вызвать из
внешней памяти)?
2. Как скомпоновать входные сигналы элементов системы, по-
лучающих сигналы от данного элемента, зная компоненты его вы-
ходного сигнала (т.е. каким образом компоненты выходного сигна-
ла, содержащиеся в регистре Y, сопоставить входным контактам
элементов, принимающих сигналы)?
Ответы на эти вопросы могут быть получены по информации,
содержащейся в схеме сопряжения. Для этой цели наиболее удобной
оказывается одноуровневая схема сопряжения в натуральной форме.
Эта информация содержится в той части строки архива элементов,
которая отводится для хранения сведений о сопряжении элементов
сложной системы.
Ответ на первый вопрос — номера элементов, получающих сиг-
налы от данного элемента, помещаются в регистр N. По данным
этого регистра в регистр В поочередно вызываются соответствующие
строки архива элементов.
Ответ на второй вопрос формируется после вызова строки архи-
ва, соответствующей конкретному элементу, получающему сигнал.
После того, как все элементы-адресаты получили свой сигнал,
управление опять передается управляющей программе для определе-
ния минимального t* в регистре Т.
Окончание данной реализации имитационного эксперимента про-
исходит в тот момент, когда очередное минимальное t* оказывается
больше верхнего предела интервала моделирования. В этом случае
вступают в действие блоки управляющей программы, организующие
переход к новой реализации процесса или новому варианту расчета,
а возможно, и переход к обработке результатов моделирования. Уп-
175
Рис. 4.7. Алгоритм имитационной программы
равляющие этим процессом признаки располагаются в регистре U.
В настоящее время успешно эксплуатируются программы имитации
сложных систем, построенные с учетом изложенных здесь принци-
пов и подходов. Заметим, что эти программы, являясь программами
176
многоразового использования, должны быть тщательно отшлифова-
ны и написаны на машинно-ориентированном языке.
4.6.5. Состав математического обеспечения пакета
прикладных программ АИМ
Автоматизированная имитационная модель АИМ может быть оформ-
лена в виде пакета прикладных программ с локальной операционной
системой, реализованного на современной ЭВМ третьего поколения.
Весь пакет программ можно разбить на следующие основные под-
группы, функционирование которых не зависит по времени друг от
друга (рис. 4.8).
Рис. 4.8. Состав пакета прикладных программ АИМ
177
1. Программы формирования базы данных об объекте. Эта группа
программ обеспечивает все работы по созданию в АИМ базы сведе-
ний о моделируемом объекте. Сведения хранятся уже в стандартной,
принятой в АИМ форме и непосредственно готовы для решения со-
ответствующих задач. Информация в базе данных об объекте может
корректироваться по мере накопления новых сведений об объекте.
Для формирования базы данных об объекте потребуются следующие
программы:
• Ввод данных об объекте — программы ввода в ЭВМ сведений об
элементах системы; программы ввода в ЭВМ сведений о схемах
сопряжения; программы наглядного отображения введенной
информации и ее корректировки.
• Перевод данных в стандартную форму — программы преобразо-
вания математических моделей элементов в стандартную фор-
му; программы преобразования схем сопряжения в стандарт-
ную форму; программы наглядного отображения и
корректировки информации; программы выдачи справочных
сведений о наличии информации в памяти, диспетчеризация
процедур ввода.
• Формирование базы данных — программы расположения инфор-
мации во внешней памяти.
2. Программы формирования базы данных о задаче. В результате
работы этой группы программ в АИМ формируется база данных зада-
чи, т.е. все сведения, необходимые и достаточные для решения кон-
кретной задачи моделирования. Информация для решения задачи в
основном переписывается из базы данных об объекте и частично до-
полняется соответствующими параметрами, вариантами расчета и
сведениями об искомых результатах. Для формирования базы данных
об объекте необходимы следующие группы программ:
• Ввод данных о задаче — программы ввода задания на имитацию
(сведений об искомых величинах); программы ввода сведений о
стратегии решения задачи; программы ввода дополнительных
значений параметров, начальных состояний и вариантов рас-
чета.
• Формирование базы данных о задаче — программы выделения ча-
сти сведений банка об объекте необходимых и достаточных для
решения задачи; программы пополнения данных о задаче до-
полнительными значениями параметров; программы формиро-
вания стратегии решения задачи; программы наглядного ото-
бражения и корректировки введенной информации; программы
расположения информации в соответствующих архивах во внеш-
ней и оперативной памяти.
178
3. Программы решения задачи имитации процесса функционирова-
ния системы. Эта группа программ обеспечивает решение поставленной
задачи. Она осуществляет проведение имитационных экспериментов,
обработку промежуточных результатов, корректировку исходных дан-
ных (задание вариантов расчетов), реализацию стратегии решения
задачи (т.е. проверку выполнения логических условий, диктующих
переходы к той или иной ветви процедуры решения задачи), вызов
программ окончательной обработки результатов, а также программ
выдачи и отображения информации о результатах решения задачи.
Для решения задачи требуются следующие группы программ:
• Программы имитации — программа имитации модуля (элемен-
та); программа адресации выданного сигнала (сопряжение эле-
ментов); программы считывания информации из внешней па-
мяти, накопление информации в оперативной памяти и записи
ее во внешнюю память; программы управления имитацией (дис-
петчеризация вызовов и контроль за временем); программы ре-
ализации стратегии решения задачи.
• Программы обработки и выдачи результатов — программы спе-
циальной обработки информации о результатах (обусловленные
спецификой используемого модуля); программы статистичес-
кой обработки информации; программы выдачи и отображения
результатов решения задачи.
4. Программы расширения пакета. Эта труппа реализует более тес-
ный контакт пакета с пользователем: позволяет расширять библиоте-
ку стандартных процедур (введение новых типов элементов,), библио-
теку программ перевода в стандартную форму из новых исходных форм
схемы сопряжения и описания элементов, программ специальной и
статистической обработки, программ выдачи и т.д.
Необходимо иметь следующие программы расширения пакета:
программы ввода, трансляции и помещения в библиотеку процедур
новых вариантов; стандартных процедур имитации элементов; проце-
дур перевода элементов в стандартную форму; процедур перевода схем
сопряжения в стандартную форму; процедур стратегии решения за-
дач; процедур специальной и статистической обработки результатов;
процедур ввода и вывода информации; прочих сервисных процедур
пакета.
5. Программы организации различных режимов работы пакета.
Наличие большинства этих программ является обязательным лишь для
достаточно мощной версии АИМ. Кроме основной организацион-
ной работы по диспетчеризации процесса функционирования пакета
АИМ необходимо организовать работу пакета в режиме диалога с
пользователем в основном на этапе ввода данных о системе и коррек-
179
тировки банков данных об объекте и задаче, а также диалоговый ре-
жим при самом решении задач. Так как этот пакет в принципе обес-
печивает одновременную обработку нескольких баз данных о разных
объектах с возможностью одновременного решения по каждой базе
данных нескольких разных задач, организация работы пакета в режи-
ме коллективного пользования (разделения времени) является весьма
насущной. Возможны также различные варианты распараллеливания
процессов ввода, приведения к стандартной форме, формирования
баз данных и решения задач, которые можно рационально организо-
вать на ЭВМ, имеющей несколько параллельно работающих процес-
соров.
Контрольные вопросы
1. Каковы цели и задачи моделирования при создании сложных техни-
ческих систем? Назовите три основных вида моделирования.
2. Какой эффект достигается с ростом объема математического моде-
лирования при отработке СТС?
3. Какое моделирование называется имитационным?
4. Перечислите, в чем заключаются основные недостатки моделирова-
ния, и укажите их причины.
5. Сформулируйте основные принципы построения математических
моделей.
6. Что позволяет обеспечить применение модульного принципа при опи-
сании СТС?
7. Что понимается под динамической системой в широком смысле?
Какие механизмы в своем описании содержит динамическая система как
математический объект?
8. Какие модели необходимы для формального описания взаимодей-
ствия элементов сложной системы?
9. Сформулируйте суть метода статистического моделирования.
10. Какие массивы информации необходимы для осуществления имита-
ционного моделирования сложной системы?
ЧАСТЬ II
ИСПЫТАНИЯ НА ВОЗДЕЙСТВИЕ
ФАКТОРОВ И УСЛОВИЙ
ЖИЗНЕННОГО ЦИКЛА
ИЗДЕЛИЙ АВИАЦИОННОЙ
И РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
Глава 5
ХАРАКТЕРИСТИКА ФАКТОРОВ И УСЛОВИЙ
ЖИЗНЕННОГО ЦИКЛА ИЗДЕЛИЙ АВИАЦИОННОЙ
И РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
5.1. Классификация эксплуатационных факторов
по источнику их возникновения
5.1.1. Роль информации об эксплуатационных условиях
в создании летательных аппаратов
Современные изделия авиационной и ракетно-космической тех-
ники являются сложными и дорогостоящими инженерными соору-
жениями. Эффект их использования во многом определяется надеж-
ностью, т.е. способностью собственно летательных аппаратов работать
безотказно в течение требуемого периода времени при определенных
условиях эксплуатации. Спектр условий и факторов, воздействующих
на ЛА в полете, чрезвычайно широк и многообразен. Их изучению
уделяется исключительно большое внимание, так как эта информа-
ция необходима для научно обоснованного выбора проектно-баллис-
тических, массово-энергетических и летно-технических характерис-
тик ЛА. Эти же сведения необходимы и для проведения наземных
испытаний агрегатов, бортовых систем и ЛА в целом в условиях ис-
кусственного воздействия факторов и условий полета с помощью спе-
циальных испытательных стендов и комплексов.
Проведем классификацию эксплуатационных факторов и их воз-
действий на конструкционные материалы и функционирование бор-
товых систем ЛА на всех этапах их жизненного цикла.
Эксплуатационные факторы, действующие на ЛА в процессе его
эксплуатации, по источнику их возникновения можно разделить на
две большие группы [124]:
183
1) естественные, определяемые непосредственным воздейст-вием
на ЛА (в процессе его эксплуатации) сил природы;
2) искусственные, порождаемые функционированием самого ЛА
в процессе его эксплуатации.
5.1,2. Естественные эксплуатационные факторы
К естественным можно отнести следующие факторы: климати-
ческие; биологические; земной атмосферы; космического простран-
ства; силы земного тяготения; электромагнитное поле Земли; сейс-
мические удары.
Климатические факторы. Классификация климатических и дру-
гих внешних влияющих факторов (ВВФ) приведена на рис. 5.1 [14,
124]. Дадим краткую характеристику воздействия указанных факто-
ров и их влияния на функционирование и надежность ЛА.
Рис. 5.1. Классификация климатических и других природных факторов
Колебания атмосферного давления вследствие изменения погоды
составляют ±7%, а при тропических бурях превышают 10%. Изделия
работают в условиях как повышенного, так и резко пониженного ат-
мосферного давления. Изменение давления вызывает изменение ди-
аграммы направленности и мощности излучения антенн, нарушает
герметичность изделий и т.п.
184
Температура для различных климатических зон Земли колеблется
от —75 до +50°С. При резком изменении температуры определенной
среды на поверхности и внутри конструкции ЛА конденсируется вла-
га. Периодические расширения и сжатия соприкасающихся деталей
вызывают нарушения герметичности и разрушение деталей, приво-
дят к расслоению и растрескиванию покрытий, появлению утечки
наполнителей и др.
Повышенная температура окружающей среды является одним из
основных климатических воздействий, обуславливающих нестабиль-
ность и деградацию параметров элементов и их отказы. Существен-
ное влияние повышенной температуры на стабильность параметров
элементов обусловлено сильной температурной зависимостью основ-
ных электрофизических параметров материалов. С повышением тем-
пературы изменяется удельная электропроводность металлов, полу-
проводников и диэлектриков, изменяется диэлектрическая прони-
цаемость. Эти изменения обычно учитываются соответствующими
температурными коэффициентами сопротивления резисторов, емко-
сти конденсаторов, температурной зависимостью обратных токов р-п
переходов, коэффициентами передачи тока транзисторов. Даже в слу-
чаях, когда возникновение тепловой неустойчивости исключено, дли-
тельное воздействие повышенной температуры (особенно в сочета-
нии с электрической нагрузкой) может приводить к деградации
параметров элементов. Последнее объясняется экспоненциальной
зависимостью от температуры скоростей большинства физико-хими-
ческих процессов, приводящих к деградации параметров элементов.
Определенную опасность для элементов представляют резкие ко-
лебания температуры окружающей среды вследствие наличия в кон-
струкции сопряжений материалов с различными температурными
коэффициентами линейного расширения (ТКЛР), например окись
кремня (кремний) — алюминий, металл — стекло, металл — поли-
мер и т.д. Особенно опасны воздействия температурных изменений
для элементов в монолитных пластмассовых корпусах, так как разни-
ца в ТКЛР пластмасс и металлов довольно значительна, что приво-
дит к появлению перемежающихся отказов элементов вследствие воз-
никающих деформаций проволочных выводов.
Изменение параметров элементов обусловлено различными де-
фектами в них, особенно наличием зарядов в пленке окиси крем-
ния. Причин нестабильности этого заряда много: одна из основных —
миграция ионов щелочных металлов в слое окисла, а также разделе-
ние краевым полем р-п перехода различных ионов, присутствующих
на поверхности пленки окиси кремния и образование инверсионных
слоев и каналов.
185
Влажность — один из наиболее опасных ВВФ. При работе изде-
лия влага обволакивает его и проникает внутрь. Она ускоряет корро-
зию материалов, изменяет электрические характеристики диэлект-
риков, вызывает тепловой распад материалов, гидролиз, рост плесени
и многие другие повреждения изделия.
Опыт эксплуатации элементов показывает, что значительный
процент отказов и нестабильность работы элементов обусловлены
воздействием повышенной влажности окружающей среды, что объяс-
няется исключительно агрессивным характером воздействия паров
воды на большинство используемых в технике материалов.
Наиболее существенное влияние оказывают пары воды на метал-
лизацию и резистивные пленки элементов, вызывая процессы элек-
трохимической и электрической коррозии. Скорость указанных про-
цессов возрастает при повышении температуры, наличии ионных
загрязнений и электрического поля. Особенно опасна электролити-
ческая коррозия, в результате которой образуются продукты с элект-
роизолирующими свойствами (например, гидроокись аммония), при-
водящие к постепенному разрушению и обрыву металлизации или
резистивного слоя в месте контакта, находящегося под положитель-
ным электрическим потенциалом. Коррозия металлизации и прово-
лочных выводов приводит к снижению механической прочности со-
единений и обрывам верхних обкладок тонкопленочных конденсаторов.
Процессы деградации протекают ускоренно в местах дефектов защит-
ных покрытий, особенно при наличии ионных загрязнений.
В процессе транспортировки и работ на технической позиции
ЛА подвергаются также воздействию атмосферных осадков, пыли и
солнечного излучения.
Атмосферные осадки выпадают при понижении температуры ниже
точки росы (если абсолютная влажность равна 100%) в виде воды,
снега, росы, инея, тумана. Осадкам в 1 мм соответствует 1 л воды,
распределенной на S = 1 м2 (1 см снега соответствует 1 мм воды).
Осадки и туман действуют на изделие так же, как и повышенная
влажность воздуха. Особенно сильное воздействие оказывает морс-
кая вода и морской туман, резко ускоряющие коррозию вследствие
содержащихся в них хлора, магния и других элементов.
Пыль (естественная) состоит из космической и земной частей. В
свободную атмосферу осаждается 120—150 мм пыли за 100 лет. Тех-
ническая пыль образуется при износе, обработке деталей и сжигании
топлива. Пыль изменяет режим теплообмена, вызывает коррозию и
механические повреждения.
Солнечное излучение представляет собой электромагнитные вол-
ны с длинами Х = 0,2—5 мкм. На ультрафиолетовую область (X <0,4
186
мкм) приходится 9% энергии, видимую (Х= 0,4—0,7 мкм) — 41%,
инфракрасную (1= 0,7—5 мкм) — 50% солнечной энергии. Под его
воздействием происходит окисление материалов, разложение поли-
меров с хлором, расщепление молекул, старение и т.п.
Биологические факторы. Классификация биологических факто-
ров приведена на рис. 5.2 [14, 124].
Рис. 5.2. Классификация биологических факторов
Биологические воздействия в сильной степени влияют на надеж-
ность и работоспособность изделий, причем это в большей степени
относится к грибковым образованиям. Оптимальными условиями
развития плесени являются влажность воздуха более 85%, t = 20—30°С
и застой воздуха. Наибольшие разрушения пластмасс, дерева, рези-
ны, кожи возникают под действием плесени. Плесень образует на
поверхности материала водную пленку, которая способствует его хи-
мическому разложению и потере важнейших свойств. Поражению
изделий плесневыми грибами способствует также создаваемый для
них микроклимат.
Другим видом биологических факторов являются насекомые,
особенно термиты. Прожорливость термитов делает их одним из наибо-
187
лее опасных насекомых для оборудования. Определенную опасность
для изделий, особенно кабелей и проводов, представляют грызуны —
крысы и мыши, — которые повреждают изоляционные материалы,
кабели, провода и несущие конструкции, в результате чего ухудша-
ются электрические характеристики изделий, а электротехнические
и радиоэлектронные могут выйти из строя.
Факторы земной атмосферы. К факторам земной атмосферы
относятся [14, 88, 101, 124]:
• понижение атмосферного давления с высотой;
• турбулентность атмосферы: ветер, его порывы, струйные тече-
ния и др.
Условия работы конструкции ЛА в полете во многом зависят от
состояния окружающей атмосферы, простирающейся обычно до очень
больших высот. Значения аэродинамических сил, действующих на
ЛА в атмосфере, определяются скоростью его движения и высотой
полета, в частности плотностью воздуха и его температурой. Совме-
стное влияние плотности воздуха р и истинной воздушной скорости
полета v на эти силы характеризуется величиной скоростного напора
q = pv2/2. Так как плотность р воздуха сильно уменьшается с высо-
той, то скоростной напор q может достигать сравнительно больших
значений только в приземном слое атмосферы толщиной около 20—
30 км, который обычно называют плотным слоем атмосферы, ибо в
нем содержится основная масса воздуха. Температура влияет на на-
грев оболочки корпуса ЛА, на скорость распространения звука а,
т.е. на полетное число Маха (Мж = v/а), и на плотность воздуха.
Ввиду непрерывных колебаний значений параметров атмосферы
при расчете номинальной траектории пользуются некоторыми сред-
ними зависимостями плотности воздуха и скорости распространения
звука от высоты, которые задаются обычно в виде таблиц так называ-
емой стандартной неподвижной атмосферы (см. ГОСТ 4401). Откло-
нение действительных значений атмосферы от стандартных учитыва-
ется путем введения дополнительных аэродинамических нагрузок
(возмущающих сил). Во многих случаях эти дополнительные нагруз-
ки, в частности от ветра, оказываются определяющими для прочно-
сти конструкции тяжелого летательного аппарата.
Действие ветра на ЛА в полете сводится к изменению величины и
направления вектора его скорости относительно воздуха. Прибли-
женно его влияние оценивают изменением углов атаки и скольжения
на величины Да = uy/v и Д0 = uz/v и соответствующим изменением
скоростного напора 0,5р (v + wY)2 + u2v + и2
А У 4*
где и и и — составляю-
✓
188
щие скорости ветра, перпендикулярные воздушной скорости v поле-
та, а их — составляющая, параллельная v.
Величина скорости ветра зависит от географической широты ме-
ста старта, времени года и даже суток, а в основном от высоты h
полета. С увеличением последней она сначала возрастает, достигая
своего максимального значения в районе тропопаузы, а затем умень-
шается.
В широких пределах изменяются и значения сдвигов скорости
ветра по высоте. Величину этих сдвигов принято оценивать отноше-
нием разности скоростей ветра на двух сравнительно близко располо-
женных высотах (300—500 м) и толщины этого слоя (йв = Див / ДЯ).
Наиболее часто (с вероятностью 40—50%) встречаются сдвиги поряд-
ка 0,015—0,025 с-1. В некоторых ветреных районах отмечаются (с ве-
роятностью 2—3%) значения йв порядка 0,07-0,08 с-1. Имеются пред-
положения, что большим скоростям ветра соответствуют и
значительные сдвиги. Данные по сдвигу являются важной характе-
ристикой ветрового потока, ибо они определяют его профиль, а сле-
довательно, и характер его воздействия на ЛА.
Наряду с установившимися перемещениями огромных масс воз-
духа в атмосфере существуют местные вихревые течения небольшой
протяженности, но со значительными скоростями, которые получи-
ли название порывов ветра. Наличие сильных турбулентностей отме-
чено во всех слоях атмосферы в зоне кучево-дождевых облаков, над
пересеченной местностью и особенно на флангах струйных течений.
Параметры этих вихрей до настоящего времени очень мало изучены.
Факторы космического пространства, К факторам космическо-
го пространства относятся [14, 18, 64, 68, 88, 101, 120, 124]:
• тепловое состояние космоса (космический холод), характеризуе-
мое средними статистическими температурами 77—100 К на орбитах
Земли, 20 К в Солнечной системе, 4 К — за ее пределами и черно-
той космического пространства за пределами телесных углов планет и
Солнца, связанной с поглощением космическим аппаратом (КА) всех
видов излучений: излучений в оптическом диапазоне, тепловых из-
лучений, излучения в радиотехническом диапазоне электромагнит-
ных волн;
• глубокий вакуум, характеризуемый статическим (от 10~4 Па на
орбите Земли до 10"12 Па в Солнечной системе и до 10-14 Па за ее
пределами) и динамическим (на два порядка ниже статического)
давлениями среды;
• солнечное электромагнитное излучение с параметрами: энергетичес-
кая плотность (постоянная Солнца) на орбите Земли Sc = 1396 Вт/м2,
диапазон длин радиоволн 4 мм—10 м, световое давление 4,3—4,5 мкПа;
189
корпускулярное излучение солнечного ветра, состоящее из потоков
плазмы (ионы, протоны — 92%, электроны, а-частицы — 5%); соб-
ственное излучение планет и их альбедо (отраженное от планеты из-
лучение Солнца) с энергетической плотностью для Земли соответ-
ственно 420 Вт/м2 и 280 Вт/м2 на длинах волн от 4,5 до 50 мкм;
космическое излучение (протоны — 85%, а-частицы или ядра гелия
— 15%) со средней энергией 10’—1010 эВ на нуклон, что сравнимо с
энергией магнитного поля Земли, которое отклоняет большинство
частиц излучения;
• потоки заряженных частиц (Н+, Не+) и микрометеоритов с
относительными скоростями 12—72 км/с и массой 10-8—10~14 г, где
воздействие ионов в основном определяется составом верхних слоев
атмосферы планеты и их массовыми и кинетическими характеристи-
ками;
• невесомость (при наличии малых ускорений от силы тяжести)
или уменьшенная (увеличенная) сила тяжести по сравнению с зем-
ной для планет Солнечной системы.
Рассмотрим воздействие факторов космического пространства на
конструкцию КА.
Тепловое состояние космоса. Поверхности КА обычно имеют Т »
= 300 К, что обеспечивается соответствующим подбором их оптичес-
ких характеристик и соответствующей ориентацией на Солнце. Из-
менение теплового потока, падающего на рассматриваемый элемент
КА, приводит к соответствующим изменениям температуры его по-
верхностей. Так, при заходе КА в тень планеты (или изменении его
ориентации) поверхности, ранее значительно нагревшиеся, могут
столь же сильно остывать. Диапазон изменения их температур может
достигать ±(100—200) К.
На тепловой режим КА влияет и коэффициент альбедо А^, ко-
торый характеризует долю солнечного излучения, отраженного пла-
нетой. Для Земли Леф = 0,40 , а для Венеры А^ = 0,76 . Тепловое
излучение Земли зависит от многих факторов: состояния атмосферы,
времени года, широты и т.д. Тепловой поток от собственного излу-
чения Земли на ИСЗ равен 0,21—0,28 кВт/м2, т.е. составляет по отно-
шению к падающему солнечному излучению 15—20%.
В условиях космического пространства, когда практически от-
сутствует ускорение силы тяжести, отсутствует и конвективный теп-
лообмен между телами. Вследствие вакуума в негерметичных отсеках
КА отсутствует также заметное влияние на теплопередачу молекуляр-
ного теплопереноса. Поэтому в теневой части КА температура его
поверхности может стать «глубоко» отрицательной. Воздействие кос-
мического холода на конструкционные материалы приводит к тому,
190
что они становятся хладоломкими, т.е. теряют пластичность. Поэто-
му при выборе материалов для конструкции КА необходимо учиты-
вать требование обеспечения высокой удельной прочности при низ-
ких температурах.
Кроме того, при криогенных температурах существенно изменя-
ются основные свойства материалов. Теплопроводность в большой
степени зависит от чистоты материалов и температуры. Для Ag она
имеет максимум в диапазоне 10—50 К и уменьшается с дальнейшим
ростом температуры, для ряда технических материалов (медь, латунь,
дюралюминий, манганин, коррозионно-стойкая сталь, фторопласт,
нейлон, кварц, стекло, оловянно-свинцовый припой) — практичес-
ки монотонно ростет в диапазоне 2—100 К. Теплопроводность твер-
дых тел падает с понижением температуры примерно пропорционально
Г3. Коэффициент линейного расширения твердых тел снижается с
уменьшением температуры, и при температурах, близких к 4 К, он
становится практически равным нулю для большинства материалов.
Прочностные характеристики металлов и сплавов повышаются с по-
нижением температуры, а пластические показатели снижаются. Но
для цветных металлов (медь, никель, алюминий), высоколегирован-
ных хромоникелевых сталей и титановых сплавов ударная вязкость
при низких температурах остается высокой.
Космический вакуум. Понятие «космический вакуум» условное,
так как в космосе сосредоточено огромное количество массы веще-
ства. Однако она рассеяна в большом пространстве и концентрация
ее в единице объема значительно меньше, чем в самых лучших совре-
менных вакуумных приборах.
В атмосфере Земли давление воздуха с увеличением высоты убы-
вает по закону, близкому к экспоненциальному. Представляют ин-
терес параметры атмосферы на тех высотах, где КА функционируют
в течение длительного времени. Приведенные в табл. 5.1 данные ха-
рактеризуют состояние атмосферы начиная с высоты 200 км, кото-
рая принимается за нижнюю границу орбитальных полетов. Указан-
ные значения температуры характеризуют лишь кинетическую энергию
частиц газа и не определяют температуру поверхности КА из-за нали-
чия разреженной среды. На высотах в десятки тысяч километров, на
которых функционируют искусственные спутники Земли, давление
и концентрация частиц газа уже мало отличаются от значений соот-
ветствующих параметров межпланетного пространства.
Глубокий вакуум обуславливается сильной разреженностью сре-
ды и характеризуется длиной свободного пробега молекул газа. Даже
на высотах 100—160 км эта длина соизмерима с линейными размера-
ми космического объекта (КО) или испытательной вакуумной каме-
ры, на высотах около 200 км длина свободного пробега молекул газа
191
Таблица 5.1
Параметры атмосферы Земли
Высота, км Давление, Па Плотность, г/см3 Температура, К Концентрация частиц, см-3
Уровень моря 1,33105 1,2 10-3 293 2,7 -1019
200 8,5 10“5 3,0 Ю*13 1200 7,0 109
500 4,0 -10’7 3,0-10“16 1600 2,5 Ю7
1000 4,0-10-9 1,5 10-18 1600 1,5 Ю5
5000 4,0-1О~10 4,0-1О’20 3000 4,0-103
10000 2,5-10'10 1,0 10-20 15000 1,0-103
50000 1,5 IO'11 2,5 • 10"22 2-Ю5 3-4
становится равной десяткам метров. На высотах около 500 км часть
молекул, приобретая скорость больше второй космической, уходит в
межпланетное пространство. Это явление называется диссипацией.
В результате солнечной активности и диссипации состав газов с ро-
стом высоты существенно меняется: исчезают главным образом водо-
род и гелий, на высотах более 2000 км все газы полностью ионизиру-
ются.
В соответствии с вышеизложенным различают три вида косми-
ческих сред:
• межзвездную, состоящую из межзвездного (ионизированного)
газа, равномерно перемешанного с межзвездной пылью;
• межпланетную (вблизи Солнца и между планетами Солнечной
системы), состоящую из вещества солнечной короны (ионизирован-
ные атомы водорода 90%, гелия 9%);
• атмосферу планет и их спутников, состав которой приведен в
табл. 5.2.
Воздействие глубокого вакуума на изделия обуславливается про-
цессами, основными из которых являются следующие.
1. Газовыделение и потеря летучих компонентов, что приводит к
изменению теплофизических (теплопроводность, теплостойкость) и
диэлектрических (электропроводность, проницаемость) характерис-
тик полимерных и композитных материалов; оптических характерис-
тик поверхностей; характеристик трения соприкасающихся материа-
лов вследствие удаления смазки, красителей, защитных покрытий.
192
Таблица 5.2
Состав атмосферы планет и спутников
Планета Состав атмосферы Давление у поверхности, Па
Луна Концентрация, частицасм-3: водород — 6,5-104; гелий — 4-104; неон — 8104; аргон — (1,1-4)Ю4 8•10-8
Марс Углекислый газ примерно 95% по составу: концентрация у поверхности — 1014 частица см-3, на высоте 200 км — приближается к нулю 6,55 102
Венера Углекислый газ — примерно 97,4% 1,19 107
Юпитер Водород, гелий, аммиак
Титан Азот, аммиак, метан
Этот процесс связан с тем, что глубокий вакуум способен к по-
глощению в неограниченном количестве выделяемых материалами ОИ
газов, паров, примесей и добавок, адсорбированных на поверхнос-
ти, или атомов и молекул, диффундировавших к поверхности; глубо-
кий вакуум способен к их поглощению в неограниченном количе-
стве. Кроме того, в глубоком вакууме происходят испарения и
сублимация поверхностных слоев материалов (например, для кадмия
при 100°С до 0,1 мм в год), а также разложение полимерных соедине-
ний на более простые летучие вещества с последующими их сублима-
цией и испарением (массопотери могут составить ЗЮ-6 в сутки).
2. Отсутствие конвективного теплообмена и теплопроводности
среды (обмен тепла с космической средой осуществляется только за
счет излучения), что затрудняет передачу теплоты через соприкасаю-
щиеся поверхности аппаратуры, так как между ними (в микронеод-
нородностях) образуются вакуумные промежутки. Это приводит не
только к общему перегреву изделий, но и к локальным перегревам,
вызывающим, например, тепловые пробои мощных полупроводни-
ковых приборов.
3. Газовыделение и сублимация материалов в вакууме. Газы и твер-
дые частицы, попадающие из космоса и из отсеков КО за счет уте-
чек, а также продукты выхлопа двигателей создают собственную вне-
шнюю атмосферу КО, на которую воздействуют гравитационные
силы, давление света, силы аэродинамического торможения и т.д.
193
Собственная внешняя атмосфера воздействует на материалы и эле-
менты аппаратуры, что приводит к следующим эффектам:
• загрязнению поверхности осаждающимися продуктами, отри-
цательно влияющими на оптические устройства, солнечные батареи,
терморегулирующие покрытия и т.п.;
• увеличению светового фона за счет рассеяния света на частицах
собственной внешней атмосферы и люминесцентного свечения, при-
водящего к свечению отдельных крупных частиц в газовом облаке,
которые могут служить ложными ориентирами для астронавигацион-
ных приборов;
• возрастанию токов утечки в высоковольтных устройствах и сни-
жению их электрической прочности за счет уменьшения вакуума, что
может вызывать кратковременные электрические разряды, нарушаю-
щие работу устройств за счет электромагнитных помех.
Низкие давления космоса вызывают ускоренную сублимацию
конструкции (испарение) поверхностных слоев материалов конструк-
ций КА (металлов, неметаллов и т.п.). Сублимация приводит к поте-
ре массы материала, нарушению его поверхностных свойств и дру-
гим эффектам. Состояние поверхности (поверхностные напряжения,
загрязнения) могут изменять скорости сублимации.
В космическом пространстве одновременно с вакуумом действу-
ют также электромагнитные и корпускулярные излучения. Так как
энергия связи атомов (молекул) в материале может быть более низ-
кой, чем энергия соответствующих видов излучений (квантов или час-
тиц), то совместное действие вакуума и излучений может усиливать
эффект сублимации. Это особенно существенно для материалов, ко-
торые весьма интенсивно поглощают излучения (например, для Fe2O3
и ZnO, интенсивно поглощающих ультрафиолетовое излучение).
Существенное влияние на функционирование КА и его бортовых
систем оказывают также следующие явления, обусловленные косми-
ческим вакуумом:
• Утечка хранящихся на борту КА газов. Утечка газов в вакууме
происходит не только из-за мельчайших зазоров в арматуре и уплот-
нениях, но и непосредственно через стенки заключающих их сосу-
дов. Так, гелий, имеющий t = 600° С и р = 60 МПа проникает сквозь
стенку трубы из нержавеющей стали в вакуум со скоростью 10-5 л/м2-с.
Утечка водорода при тех же условиях больше в 106 раз и составляет
6,3 л/м2-с, а утечка азота примерно в 3 раза меньше, чем водорода.
Однако такое сравнение не означает, что гелий сохраняется лучше
других газов. Дело в том, что атомы гелия имеют очень малый раз-
мер, благодаря чему он интенсивно вытекает через мельчайшие щели.
У водорода размеры молекул больше, чем у гелия, поэтому он не так
интенсивно проникает через щели, однако очень интенсивно диф-
194
фундирует через стенки материала вследствие высокой химической
активности.
• Разгон истекающих и стравливаемых газов до предельных скорос-
тей. Истекающие в вакуум газы разгоняются до сверхзвуковых ско-
ростей. Поэтому создаются возмущающие усилия и моменты, кото-
рые необходимо компенсировать органами ориентации и управления,
затрачивая на это бортовой запас топлива. Возникает требование —
располагать стравливающие сопла и предусматривать утечку газов та-
ким образом, чтобы усилия и моменты, возникающие при их исте-
чении, по возможности, взаимно уравновешивались или использо-
вались полезно.
• Изменение коэффициента аккомодации. Коэффициент обмена
энергии между газом и твердой поверхностью (коэффициент терми-
ческой аккомодаций) существенно зависит от состояния поверхности
КА. Наличие или отсутствие поверхностных пленок (адсорбирован-
ных, окисных) может существенно изменить величину коэффициен-
та аккомодации. Так, коэффициент аккомодации для гелия на «чис-
том» вольфраме а, = 0,017, а на вольфраме с адсорбированной
пленкой at = 0,5. Коэффициент аккомодации может существенно
влиять на тепловой режим КА при движении его в плотных слоях
атмосферы.
• Распыление материалов. При движении КА в плотных слоях ат-
мосферы, а также под действием бомбардировки заряженными час-
тицами в космосе происходит распыление материала поверхностей
КА рлой распыленного материала обычно мал (максимально до 50—
100 А в год). Кроме того, при движении КА в «солнечном ветре» или
в водородной короне Земли происходит диффузия ионов водорода в
поверхностные слои материала, в результате чего поверхностные слои
материала обогащаются водородом (насыщение примерно до 10%).
Эти явления приводят к изменению оптических характеристик мате-
риалов.
• Изменение механических (поверхностных и объемных) свойств ма-
териалов. При предельно низких давлениях космоса наружные или
внутренние поверхности раздела в материалах нарушаются, в резуль-
тате чего изменяются их механические свойства. Это происходит из-
за возникновения либо микроскопических поверхностных трещин,
либо развития интеркристаллитной коррозии. Отсутствие окисных и
других поверхностных защитных пленок оказывает ощутимое воздей-
ствие на механические свойства материалов. Кроме того, из-за из-
менения свойств поверхностных слоев материала изменяются и их
объемно-механические свойства (прочность при ползучести, устало-
стная прочность и др.).
7«
195
• Возрастание адгезии (когезии) в вакууме, усиление трения и изно-
са. При нормальных атмосферных условиях поверхности материалов
защищены оксидными пленками, а последние, в свою очередь, по-
крыты адсорбированными газовыми слоями. В вакууме поверхност-
ные адсорбированные газовые слои улетучиваются, а оксидные пленки
разрушаются. Вследствие этого адгезия (когезия), т.е. прилипание
материалов, возрастает и трение усиливается. Это может вызывать
эффект «холодной вакуумной сварки», что нередко уже приводило к
аварийным ситуациям.
• Нагрузка от перепадов давления. Эта нагрузка в космосе доволь-
но значительна. Любое абсолютное давление в замкнутых объемах
(баках, кабине экипажа и др.) является избыточным. Давление внут-
ренних полостей не только нагружает конструкцию, но может ис-
пользоваться как положительный фактор при отбрасывании элемен-
тов, организации работы газовых турбин и т.д.
Все рассмотренные выше явления относятся к негативным воз-
действиям космического вакуума на конструкцию КА.
Воздействие электромагнитного и корпускулярного солнечного из-
лучения, собственного излучения планет и их альбедо, космического
излучения. Классификация внешних воздействующих факторов элект-
ромагнитных полей представлена на рис. 5.3 [14, 124]. Спектр элек-
тромагнитных волн, а также источники и основные методы их воз-
буждения приведены в табл. 5.3 и 5.4. Видимая область спектра и
часть инфракрасной области (0,4 < X < 40 мкм) образуют область теп-
лового излучения тел. Область более коротких длин волн представля-
ет интерес с точки зрения воздействия на стабильность оптических и
теплофизических характеристик материалов.
На тепловое состояние КА определенное влияние оказывает и
излучение планет. Уходящую от планеты радиацию можно условно
разбить на две составляющие:
Рис. 5.3. Классификация ВВФ электромагнитных полей
196
Таблица 5.3
Спектры электромагнитных волн
Частота, Гц Длина волны, м Название диапазона Источники. Основные методы возбуждения
103 -1012 ЗПР-ЗОЛО"4 Радиоволны Переменные токи в проводниках (генераторы радиочастоты, СВЧ)
1012-3,75 Ю14 30Л0^-8Л0’7 Инфракрасное излучение Излучение молекул и атомов при тепловых и электрических воздействиях
3,75-7,5 1014 8 10-7-4 10-7 Видимый свет —
7,5 1014-3-1017 4 • 10-7 -10-9 Ультрафиолетовое излучение Излучение атомов при воздействиях ускоренных электронов
ЗЮ^-ЗЛО20 10"9 -10“12 Рентгеновское излучение Остальные процессы при воздействии ускоренных заряженных частиц, ядерные процессы: радиоактивный распад, космические процессы
Таблица 5.4
Диапазоны радиоволн
Волны Длина волны в вакууме, м Частота, Гц
Сверхдлинные (СДВ) Ю5 - ю4 ЗЮ3-ЗОЮ3
Длинные (ДВ) 104 -103 ЗЮ4-ЗОЮ5
Средние (СВ) ю3 - ю2 ЗЮ6
Короткие (КВ) 102 -10 ЗЮ7
Ультракороткие (УКВ): метровые дециметровые сантиметровые миллиметровые субмиллиметровые о о о _ . U Г© 5 1 1 I । | М» из Ю Н- ЗЮ8 ЗЮ9 ЗЮ10 ЗЮ11 ЗЮ12
1. Собственное инфракрасное излучение, источником которого
в основном является поглощенная часть солнечной энергии, переиз-
лученная планетой в длинноволновом диапазоне спектра. Внутрен-
нее тепловыделение планет также дает свой вклад в данный вид излу-
чения. Однако для малых планет теплопщ
л: •
д к поверхности от горячих
недр невелик и в ряде случаев им можно пренебречь.
2. Отраженное от планеты солнечное излучение, зависящее от
отражательной способности, простейшей количественной характери-
стикой которой является сферическое альбедо.
Кроме теплового воздействия на КА электромагнитное излуче-
ние Солнца вызывает фотоэлектронную эмиссию, ведущую к элект-
рической зарядке КА или, наоборот, к утечке заряда, если аппарат
заряжен до высоких потенциалов. Явление фотоионизации считается
вредным фактором. Плотность фототока, вызываемого электромаг-
нитным излучением Солнца (на орбите Земли), для обычных конст-
рукционных материалов составляет /ф = 2,5 • 10"* А/см2. Это означа-
ет, что КА приобретает положительный электростатический заряд,
скапливающийся на выступающих частях (например, на антеннах) и
создающий помехи для радиосвязи. В целом заряды, возникающие
на объектах вследствие фотоионизации, соответствуют простран-
ственным потенциалам этих объектов, доходящих в некоторых слу-
чаях до 100 В.
198
Как указывалось выше, в верхних слоях атмосферы Земли за счет
фотоионизации образуются свободные электроны и ионы, создающие
радиационную опасность (классификация радиационных ВВФ приве-
дена на рис. 5.4). Ионизация происходит главным образом под дей-
ствием ультрафиолетового и корпускулярного излучения Солнца.
Ионосфера находится в непрерывном изменении, обусловленном
деятельностью Солнца. Она обладает способностью отражать и рас-
сеивать радиоволновое излучение.
РАДИАЦИОННЫЕ ВВФ
Ионизирующие излучения:
• альфа-излучение
• бета-излучение
• гамма-излучение
• рентгеновское:
мягкое
жесткое
• нейтронное
• электронное
• протонное
• излучение многозарядных частиц
Рис. 5.4. Классификация радиационных ВВФ
Кроме этого космическое пространство пронизывается космичес-
кими лучами галактического и солнечного происхождения. Космичес-
кие лучи солнечного происхождения генерируются Солнцем во время
вспышек, когда в космическое пространство выбрасывается солнеч-
ная плазма {солнечный ветер). Периодичность вспышек составляет
примерно 1,6 года. Воздействие этих корпускулярных потоков на кос-
мические объекты приводит к возникновению некоторых физических
явлений, которые отрицательно сказываются на характеристиках ис-
кусственных космических объектов. Наиболее важными являются
следующие явления.
1. Вторичная электронная и ионная эмиссия — явление, сопро-
вождающее ионную и электронную бомбардировку материалов в ва-
кууме, заключающееся в том, что падающий на поверхность элект-
рон или ион выбивает из нее так называемые вторичные ионы или
электроны. Вторичный электронный или ионный ток называют ка-
тодным распылением. Это явление приводит к эрозии материалов по-
верхности КА.
2. Возникновение проникающего излучения (вторичных рентгено-
вских и у-квантов) следует рассматривать как крайне нежелательный
199
эффект, так как в конструкции КА необходимо предусматривать био-
логическую защиту (для безопасности полета в зоне радиационных
поясов и при солнечных вспышках), которая может оказаться до-
вольно значительной.
3. Активация поверхности при ее бомбардировке заряженными
частицами происходит из-за образования радиоактивных изотопов.
Количество образовавшихся изотопов, их активность и вид радиоак-
тивного излучения определяются материалом поверхности, а также
энергией и другими характеристиками налетающих на эту поверхность
частиц. Для предотвращения активации рассматривается возмож-
ность создания электромагнитной защиты, отклоняющей заряжен-
ные частицы.
Наконец, воздействие корпускулярных потоков приводит к вы-
ходу из строя или ухудшению характеристик панелей солнечных бата-
рей, вакуумной и электронной аппаратуры, фотоматериалов и дру-
гих приборов. Поэтому необходима организация защитных
мероприятий: дублирование, секционирование или заключение в спе-
циальные кожухи указанных и других технических средств.
4. Воздействие микрометеоритов — частиц твердой материи (кос-
мическая пыль и метеориты), возникающих в процессе распада ко-
мет и дробления астероидов. При распаде комет образуются рыхлые,
пористые частицы с плотностью р < 1 г/см3, при дроблении астерои-
дов — более плотные частицы, средняя плотность которых р = 3—
7,8 г/см3. Подавляющее большинство твердых частиц движется вок-
руг Солнца по замкнутым эллиптическим орбитам со скоростью v —
= 42 км/с. Средняя скорость движения Земли по орбите v3 = 30 км/с,
поэтому в зависимости от того, «нагоняет» ли частица Землю или
движется ей навстречу, относительная скорость встречи составляет
12—72 км/с.
Микрометеориты до начала широкого исследования космоса счи-
тались одним из главнейших факторов, препятствующих выполне-
нию продолжительных космических полетов. В настоящее время ус-
тановлено, что вероятность пробоя обшивки КА довольно низка, так
как вероятность столкновения с крупным твердым телом невелика.
Зато столкновения с мелкими частицами, образующими космичес-
кую пыль, — явления более частые. Длительная бомбардировка мел-
кими частицами может вызвать эрозию элементов КА. Метеоритная
эрозия поверхности КА особенно опасна для оптических устройств,
солнечных батарей, сопел двигателей и др.
Для определения работоспособности изделий при воздействии
микрометеоритных потоков учитывают два вида последствий: образо-
вание кратеров и испарения из них вещества. Кроме того, результаты
200
ударов микрометеоритных частиц могут проявляться в пробивании
стенок приборов и появлении повреждений от волны давления, воз-
никающей в материале изделия под действием ударов микрометеори-
тов. При ударах микрометеоритов может также возникать стимулиро-
ванное (экзоэмиссионное) излучение электронов, фотонов и
ультразвуковых фононов. Потоки электронов и рентгеновских фото-
нов могут создавать ионизацию поверхности и образовывать электро-
статические заряды, вызывающие электрические пробои высоковоль-
тных устройств, элементов полупроводниковой электроники и
оптоэлектроники, сбои бортовых ЭВМ. Потоки ультразвуковых фо-
нонов приводят к дополнительным акустическим шумам, вибрациям
и потере усталостной прочности микровыводов. В местах ударов мик-
рометеоритов образуются микрократеры, за счет чего происходит
постепенное удаление вещества с поверхности, эрозия поверхности.
При этом происходит снижение эффективности солнечных батарей,
потеря прозрачности и окрашивание стекол, зеркал, призм оптичес-
ких приборов, затемнение и образование вуали на стеклах иллюми-
наторов.
5. Воздействие невесомости — динамического явления, возника-
ющего при свободном движении тел в поле только одних гравиаци-
онных сил. В состоянии невесомости сила взаимодействия с опорой
отсутствует, а перегрузка равна нулю.
Положительным свойством невесомости является то, что она
допускает применение в космосе ажурных, тонкостенных и очень
легких конструкций. Однако в настоящее время это преимущество в
достаточной мере не используется из-за силовых факторов активного
участка выведения КА на орбиту.
Главной физической проблемой, вызываемой воздействием не-
весомости, является проблема обеспечения работоспособности цело-
го ряда бортовых систем, в первую очередь двигательных установок,
работающих на жидких и особенно на криогенных компонентах топ-
лива. Указанные проблемы обуславливаются специфическими осо-
бенностями межмолекулярного взаимодействия на границах раздела
«жидкость—пар» и «жидкость—твердая стенка». В результате в со-
стоянии невесомости любая порция жидкости, окруженная со всех
сторон паром, принимает форму сферы, ибо только в этом случае
оказываются минимальными ее внутренняя энергия и площадь разде-
ляющей фазы поверхности. Такое состояние возможно лишь в том
случае, если угол краевого смачивания 0 = 180°, т.е. при полной
несмачиваемости жидкостью стенок емкости. При 0 = 0 (полная сма-
чиваемость) жидкость окружает сферический паровой объем и пол-
ностью обволакивает стенки сосуда.
201
На практике эти идеальные случаи практически не встречаются,
поскольку реальные углы смачивания лежат в пределах 0 < 0 < 180°.
При этом стабильное равновесие фаз соответствует пересечению сфе-
рической поверхности раздела фаз «жидкость—пар» с твердыми по-
верхностями конструкций сосудов под углом 0 < 0 < 180°.
Указанная специфика устойчивых положений жидкости в усло-
виях невесомости вызывает необходимость разработки и всесторон-
ней наземной и летной отработки систем обеспечения запуска двига-
тельных установок, призванных обеспечивать сплошность потока
подаваемых в камеру компонентов. Ее нарушение вызывает кавита-
ционный срыв и поломку насосных агрегатов ТНА, неустойчивость
функционирования двигателя или его нештатный останов. Указан-
ные проблемы приходится преодолевать при отработке и прочих бор-
товых гидрогазовых систем ЛА (систем терморегулирования, систем
жизнеобеспечения и др.)
Воздействие невесомости может вызывать отказы электромеха-
низмов, пневмо- и гидроэлементов вследствие изменения характери-
стик жидких, газообразных и сыпучих сред, а также перегрев аппара-
туры из-за ухудшения конвективного тепл
•Ж»
мена.
Для аппаратуры КА, расположенной в гермоотсеках, ухудшение
конвективного теплообмена будет сказываться на увеличении интен-
сивности отказов X по сравнению с его значением Хо в наземных
условиях при тех же значениях температуры окружающей среды и элек-
трической нагрузки.
Воздействие невесомости на поведение жидких, газообразных и
сыпучих тел проявляется в образовании «застойных» зон (например,
в виде жидких капель, «висящих» в газовой среде), отсутствии рас-
пределения в потоках или смесях по массе частиц (что не позволяет
осуществлять их массовую сепарацию), отсутствии направленного (по
силе тяжести) движения перечисленных сред, что требует их механи-
ческого, пневматического или гидравлического «проталкивания» под
действием избыточного давления. Все перечисленное вызывает два
вида последствий, снижающих надежность аппаратуры:
• нарушение смазки (как жидкостной, так и с использованием
порошков), что приводит к «заклиниванию» элекгромеханизмов;
• отказы гидро- и пневмоэлементов вследствие образования ка-
пель, пузырьков и т.п.
Кроме того, невесомость сказывается на тепловом режиме изде-
лий косвенным образом, в том числе за счет изменения гидро- и
аэродинамики теплоносителей (их прохождения по соответствующим
каналам), процессов кипения и конденсации хладагентов. По этой
причине происходит большинство отказов в системах жидкостного
202
охлаждения аппаратуры, если жидкие хладагенты не полностью за-
полняют охлаждаемые объемы. В условиях невесомости жидкости
стремятся принять сферическую форму, при которой поверхностная
энергия имеет минимальное значение. Если материал поверхности
охлаждаемого объема не полностью смачивается жидкостью, то бу-
дет отсутствовать тепловой контакт, условия теплопередачи (следо-
вательно, охлаждения) будут ухудшены, и температура объекта по-
высится, что может привести, в частности, к тепловым пробоям
интегральных схем.
Поскольку в условиях невесомости капли, пузырьки и твердые
частицы не тонут или всплывают в жидкости (газе), это затрудняет
очистку жидкостей. Микрочастицы могут перекрывать капиллярные
каналы, что, в частности, приводит к отказам в работе охлаждаемых
жидким азотом бортовых систем тепловидения. Ухудшается вырав-
нивание температур жидкости по ее объему, вследствие чего возни-
кают тепловые перегревы и отказы изделий микроэлектроники. Для
очистки жидкостей от микрочастиц используются сменные объемные
фильтры, но они не позволяют устранять образование «кипящих» уча-
стков жидкости и удалять из них пузырьки пара, которые также могут
перекрывать капиллярные каналы систем жидкостного охлаждения
аппаратуры КА.
5.1.3. Искусственные эксплуатационные факторы
К искусственным факторам, порождаемым функционированием са-
мого летательного аппарата в процессе его эксплуатации, можно
отнести: механические (статические и динамические), гидромехани-
ческие (гидростатические, гидродинамические, газостатические, га-
зодинамические, аэродинамические), термические, электрические
и электромагнитные факторы, воздействие специальных сред (топ-
лива, масел, смазочных жидкостей и т.д.), излучение в радиотехни-
ческом диапазоне электромагнитных волн, специальные виды излу-
чения и др.
Механические искусственные факторы. На этапах жизненного цик-
ла изделий авиационной и ракетно-космической техники на борто-
вые системы и их элементы воздействуют различие виды механичес-
ких нагрузок. Классификация механических факторов представлена
на рис. 5.5 [29, 56, 88, 101, 124].
В строительной механике ЛА механическими нагрузками называ-
ются силовые воздействия, вызывающие изменения напряженно-
деформированного состояния силовых конструкций и других элемен-
тов аппарата [26, 29, 56, 71].
203
ГРУППЫ МЕХАНИЧЕСКИХ ВВФ
Рис. 5.5. Классификация механических ВВФ
По характеру приложения и распределения механические нагруз-
ки естественного и искусственного происхождения, воздействующие
на ЛА, можно разделить на три категории:
1. Объемные или массовые силовые воздействия, распределенные
по всему объему ЛА и пропорциональные плотности его материала.
К ним относятся сила тяжести, инерционные силы и др.
2. Поверхностные силовые воздействия, распределенные по по-
верхности ЛА. К этой категории относятся аэродинамические, гид-
родинамические силы и др.
3. Сосредоточенные силовые воздействия сравнительно большой
величины, распределенные по относительно малой поверхности.
Теоретически — это силовые воздействия, приложенные в точке.
Примером сосредоточенных силовых воздействий могут служить кон-
тактные силы, возникающие в месте передачи на корпус (через стер-
жни рамы двигательной установки) силы тяги.
Механические нагрузки могут быть постоянными (статическими)
и переменными (динамическими). Статические нагрузки связаны с
приложением к испытуемому объекту системы уравновешенных, а
динамические — системы неуравновешенных сил. Решение вопроса о
том, какой характер носит нагрузка, зависит также от скорости из-
менения воздействующей силы и механических свойств объекта.
Принято считать, что если нагрузка меняется в течение времени, не
204
превышающего два-три периода свободных колебаний объекта, то
такая нагрузка будет динамической. Если же продолжительность из-
менения нагрузки велика и превышает три-пять периодов свободных
колебаний объекта, то такую нагрузку считают статической (они мо-
гут быть постоянными либо медленно изменяющимися) [30—32, 152].
К динамическим нагрузкам, воздействующим на изделия авиа-
ционной и ракетно-космической техники (РКТ) на этапах их жиз-
ненного цикла, относятся: инерционные нагрузки, возникающие в
процессе движения ЛА, а также вибрационные и ударные нагрузки,
возникающие при транспортировке объекта с завода-изготовителя, а
также на этапах выведения, орбитального полета и стыковки модулей
на монтажной орбите. Принципиальное различие двух последних ви-
дов динамических нагрузок заключается в том, что при ударах воз-
действие нагрузок носит дискретный характер, а при вибрации —
непрерывный (последующий физический процесс начинается, когда
еще не полностью закончен предыдущий). Особое место в классифи-
кации динамических нагрузок, воздействующих на изделия, занима-
ют кратковременные динамические нагрузки (КДН), которым при-
сущи основные характерные свойства вибрационных и ударных
нагрузок (например, удары с затухающим последействием в виде гар-
монической, широко- или узкополосной вибрации). С такими на-
грузками приходится сталкиваться при стыковке КА, срабатывании
пиросредств и в ряде других случаев на различных этапах жизненного
цикла изделий РКТ [31, 32, 106, 151, 152].
Рассмотрим воздействие статических механических нагрузок [88,
101].
Статические нагрузки от тяги ракетного двигателя. Сила тяги
по своей природе является поверхностной силой. Однако на корпус
она передается либо в виде сосредоточенных сил (в местах присоеди-
нения стержней рамы двигательной установки), либо в виде распре-
деленной по контуру поперечного сечения корпуса нагрузки (при на-
личии сравнительно большого числа опорных точек у рамы или при
использовании вместо стержневой системы подкрепленной
болочки).
Если не учитывать газодинамические отклонения вектора тяги,
то линия ее действия совпадает с продольной осью сопла и камеры
сгорания. Тогда точность совпадения направления действия тяги с
продольной осью ЛА, проходящей через центр масс, определяется в
основном погрешностями монтажа самой двигательной установки и
отсеков корпуса ЛА. Таким образом, в общем случае приходится
считаться с наличием как поперечной составляющей тяги Ry\ = ДрЯ,
так и статического возмущающего момента (относительно попереч-
ной оси, проходящей через центр масс ЛА), равного:
205
Л/рв - К [ AXi Д? (*in _ х1т)],
где Ду], др — эксцентриситет и угол наклона вектора тяги; х1п — аб-
сцисса места крепления рамы двигательной установки к корпусу; xtT —
абсцисса центра масс.
При использовании нескольких двигательных установок возмож-
но появление как статических (на рабочем режиме), так и динами-
ческих (на переходных режимах) возмущающих моментов, обуслов-
ленных разбросом значений тяги отдельных двигателей.
Статические нагрузки от массовых сил. Прежде чем приступить к
определению массовых нагрузок, составляются эпюры распределе-
ния массы по длине корпуса для всех случаев нагружения. На стадии
эскизного проектирования по приближенным формулам оценивается
общая масса ЛА, масса компонентов топлива и лимиты масс для
основных его узлов: двигательной установки, системы управления,
полезного груза и всех отсеков корпуса. В процессе разработки про-
екта и выполнения расчетов на прочность эти массы уточняются и
более ясно вырисовывается характер их распределения. На стадии
подготовки рабочих чертежей конструкции проводится точный рас-
чет масс всех элементов корпуса, положения центра масс аппарата и
его моментов инерции относительно продольной (Jx) и поперечных
осей, проходящих через центр масс.
Весовые эпюры для каждого отсека строятся с учетом характера
воздействия на силовую часть корпуса. Так как обычно многие грузы
крепятся к корпусу в продольном и поперечном направлениях раз-
личными конструктивными элементами, то и распределение состав-
ляющих веса по этим направлениям также будет различным. Напри-
мер, масса жидкости у аппаратов баллистического типа с несущими
баками вызывает на корпусе в продольном направлении (в месте при-
соединения нижнего днища бака к обечайке) распределенную по кон-
туру поперечного сечения нагрузку, в поперечном направлении —
поверхностную нагрузку (гидростатического давления), распределен-
ную по части длины бака ниже зеркала жидкости. У ракет с подвес-
ными баками как в поперечном, так и продольном направлении мас-
са жидкости и конструкции самих баков вызывает на корпусе систему
сосредоточенных сил (в местах крепления баков к корпусу). Способ
построения эпюр распределения массы зависит от потребной точнос-
ти исходных данных.
Посредством численного или графического интегрирования ука-
занных эпюр определяются поперечная Q? и продольная Nq силы в
любом сечении ЛА.
206
Масса ЛА в полете определяется как сумма массы конструкции
Мк (с полезным грузом) и текущей массы топлива Мт:
M(t) = МК+ MT(t) = МК + Мт0 - \^dt,
о ш
где AfT0 — начальная (стартовая) масса топлива, которая в общем
случае зависит от способа заправки и температуры топлива; dMT /dt —
секундный массовый расход топлива.
Удобно вместо времени t пользоваться относительным временем
t = t/T, где Т — некоторое фиктивное время, равное времени, в те-
чение которого сгорела бы вся стартовая масса Мо = (Мк + AfT0) ЛА,
с указанным секундным расходом топлива dM^/dt:
т = _
dM^/dt
В этом случае при постоянном секундном расходе топлива фор-
мула текущей массы ЛА на активном участке полета может быть запи-
сана в более простом виде:
M(t) = Мк+Мт0
t dM.
dt
Очевидно, что при t = 0 Af(O) = М$, а при Г = 7К (в конце уча-
стка активного полета) М(7К) = М0(1-7к). Обычно конечная масса
ЛА зависит не только от массы самой конструкции Мк, но и от массы
остатков топлива в баках, и лишь в предельном случае М(7К) = Мк.
Параметр 7К — важная характеристика конструкции ЛА, особен-
но баллистического типа. Он связан простой формулой с относи-
тельной конечной массой цк = (1 - 7К), которая в соответствии с из-
вестной формулой Циолковского определяет конечную скорость
ракеты. Иными словами, параметр 7К является своего рода критери-
ем качества конструкции, ее массовой «культуры». Чем больше 7К,
тем более совершенна (при заданном значении конструкция ЛА.
Массовые моменты инерции ЛА относительно осей связанной
системы координат, например Z[, вычисляются по формулам вида:
где Х|Т. — абсцисса центров масс сосредоточенных грузов.
207
Моменты инерции, масса и положение центра масс характери-
зуют динамические свойства ЛА и во многом определяют режимы
нагружений при стендовой отработке изделий.
Рассмотрим теперь основные параметры и характеристики раз-
личных видов динамических механических нагрузок (вибрации, удар-
ных и инерционных нагрузок) [23, 26, 29, 56, 88, 124].
Вибрацией принято называть движение точки или механической
системы, при котором происходят колебания характеризующих его
скалярных величин.
Характерные особенности изделий авиационной и ракетно-кос-
мической техники как колебательной системы следующие:
• наличие свойств абсолютно жесткого тела (в частности, нали-
чие шести степеней свободы), так как в полете они не имеют опор-
ных устройств;
• наличие источников энергии, двигательных установок, гидро-
и электроприводов и других энергосистем, обуславливающих потен-
циальную колебательную неустойчивость.
При эксплуатации изделий авиационной и ракетно-космической
техники наиболее часто проявляются два типа колебаний:
• траекторные, вызванные изменением параметров траектории
(высота, скорость, ускорение), т.е. это колебания аппарата как же-
сткого тела, которые связаны с проблемой устойчивости и управляе-
мости ЛА. Частоты траекторных колебаний в зависимости от типа ЛА
имеют величину f= 0,01—3 Гц;
• упругие колебания, вызывающие изменения напряженно-де-
формированного состояния конструкции вследствие собственных ко-
лебаний или вибраций, которые могут привести к возникновению
опасных напряжений вплоть до разрушения, ухудшению условий ра-
боты аппаратуры и дискомфорту космонавтов. Эти частоты колеб-
лются от 1 до 100—200 Гц, а в ряде случаев значительно выше (для
более легких аппаратов частота колебаний больше, чем для более тя-
желых).
Источниками вибрации изделий авиационной и ракетно-косми-
ческой техники, как известно, являются:
• акустическое воздействие на ЛА струй продуктов сгорания,
истекающих из сопла ракетного двигателя со сверхзвуковой скорос-
тью;
• пульсации давления в пневмогидросистемах и в пограничном
слое потока воздушной среды;
• несбалансированность вращающихся элементов двигателей, аг-
регатов и др.
Основными параметрами вибрации являются виброперемещение,
виброскорость, виброускорение и частота. Виброперемещением s(t)
208
называют составляющую перемещения, описывающую вибрацию.
Первая производная v(t) = ds(t)ldt виброперемещения является виб-
роскоростью, а вторая — виброускорением a(t) = d2 s(t)/dt2.
В зависимости от траектории перемещения рассматриваемой точ-
ки тела вибрация может быть прямолинейной, плоскостной и про-
странственной. При прямолинейной вибрации точки тела движение
совершается по прямолинейной траектории, при плоской — по плос-
кой и при пространственной — по пространственной траекториям.
В зависимости от характера движения твердого тела вибрация
может быть линейной (поступательной) и угловой. Кроме того, раз-
личают детерминированную и случайную вибрацию.
Детерминированной вибрацией называют колебания, при которых
значения колеблющейся величины (характеризующей вибрацию) из-
меняются во времени по фиксированному закону. Различают гармо-
ническую и периодическую детерминированную вибрацию.
Гармонической вибрацией называют колебания, при которых зна-
чения колеблющейся величины (характеризующей вибрацию) изме-
няются во времени по закону:
U(t) = A sin (со/ + <р),
где t — время; А, со, ф — постоянные параметры (А — амплитуда;
(со/ + ф) — фаза; ф — начальная фаза; со — угловая частота).
Для гармонической вибрации виброперемещение, виброскорость
и виброускорение определяются выражениями:
5(/) = 5д,8т(со/ + ф);
у(/) =
dt
= (oSm cos (со/ + ф);
а(/) =
dt1
= -wSm sin (со/+ф).
Из этих выражений следует, что виброускорение и вибропереме-
щение находятся в противофазе, а амплитуды виброскорости и виб-
роускорения определяются соотношениями
У_ = и а =в>У = qtS .
Учитывая, что динамический диапазон измеряемых энергетичес-
ких величин и значений параметров вибрации весьма большой, пользу-
209
ются логарифмическим уровнем колебаний, характеризующим срав-
нение двух одноименных физических величин, пропорциональных
десятичному логарифму отношения оцениваемого и исходного значе-
ний величин. Например, для виброускорения уровень, измеряемый
в белах, составляет Z = 21gM/4j)> а измеряемый в децибелах —
Z = 201g(^/4)).
Периодической вибрацией называют колебания, при которых каж-
дое значение колеблющейся величины (характеризующей вибрацию)
повторяется через равные интервалы времени:
u(f) = u(t + mT),
где т — любое целое число; Т — период колебания.
При рассмотрении периодической вибрации различают колеба-
ния с основной частотой, равной частоте анализируемых периоди-
ческих колебаний, и колебания с кратными ей частотами (гармони-
ки), из которых складывается периодическая функция u(t).
Совокупность соответствующих гармоникам значений величины,
характеризующей вибрацию, в которой указанные значения распо-
лагаются в порядке возрастания частот гармонических составляющих,
образует спектр вибрации. Периодической вибрации соответствует
дискретный (линейчатый) спектр. Для характеристики вибрации
наиболее часто пользуются амплитудным спектром, в котором вели-
чинами, характеризующими гармоники, являются их амплитуды.
Известно, что любое периодическое колебание можно предста-
вить в виде комбинации простых составляющих путем разложения его
по определенной системе. Наиболее широкое применение получило
разложение в ряд Фурье, который представляет сумму слагаемых сле-
дующего вида:
или
£(') = у + Ё 4 cosfk +<Рл1
2 <t=i k 1 У
где а0, ak, bk, Ak и <pfc — коэффициенты, вычисляемые по формулам:
2 Т/2 2 ТП
вк=т J g(t) cos katdt; bk=— J g(t) sin ka>t dr,
1 -T/2 1 -T/2
210
Ак = 7аЛ + bk< Фл = -arct8 (bk /ак ) •
Случайной вибрацией называют колебания, представляющие со-
бой случайный колебательный процесс, при котором колеблющиеся
точки могут совершать нерегулярные и неповторяющиеся циклы дви-
жения в пространстве. Для теоретического описания процессов слу-
чайной вибрации пользуются теорией вероятностей и, в частности,
теорией случайных процессов.
При проведении множества испытаний на воздействие случай-
ной вибрации каждому из них соответствует запись изменения вибро-
ускорения в процессе эксперимента (/) (где к — номер экспери-
мента). Отдельные реализации хЛ(/) случайной функции X(t)
отличаются друг от друга в соответствии с законом статистического
распределения мгновенных значений случайной величины, так как в
каждый фиксированный момент времени / функция X(t) представля-
ет собой величину, случайным образом изменяющуюся при измене-
нии номера реализации к. Таким образом, случайная функция X(t)
является функцией двух переменных — t и параметра к, пробегающе-
го номера всех реализаций, а случайный процесс является совокуп-
ностью выборочных функций Хк (/), где к -> « м. . Реаль-
ный случайный вибрационный процесс является, таким образом,
совокупностью реализаций х^ (/), где к и t ограничены.
Для описания основных свойств случайных вибрационных про-
цессов используются, как известно, следующие статистические ха-
рактеристики.
1. Среднеквадратическое значение виброускорения. Данная харак-
теристика, дающая представление об интенсивности процесса, оп-
ределяется извлечением квадратного корня из среднего значения квад-
рата виброускорения Yx рассматриваемой реализации x(f):
Vx = lim ijx2
T^1 0
где T — длительность реализации x(t); x2 (/) — квадрат текущего зна-
чения виброускорения в бесконечно малом промежутке времени dt.
Часто удобнее рассматривать физический процесс в виде суммы
статической (т.е. не зависящей от времени) составляющей и дина-
мической, или флуктуационной составляющей. Статическую состав-
ляющую можно получить, вычисляя среднее значение процесса:
211
Динамическая составляющая определяется дисперсией процесса:
1г 2
Dx =о‘ = lim -J[x(/)-mx] Л =
0
где ох — среднеквадратическое отклонение виброускорения.
Для случайных вибропроцессов, имеющих нулевое среднее зна-
чение процесса тп = 0, дисперсия равна среднему значению квадра-
та случайного виброускорения процесса Dx
2. Плотность распределения случайного виброускорения. Эта ха-
рактеристика определяет вероятность того, что значения виброуско-
рения процесса в произвольный момент времени будут заключены в
определенном интервале.
Рассмотрим некоторую реализацию xk(t). Вероятность Р того,
что значения х^(/) попадают в интервал [х, х + Дх]
Р[х £ xk(t) < х + Дх]= lim
к
где Тх = Mi — суммарная продолжительность нахождения значе-
/=1
ний процесса в интервале [х, х + Дх] за время наблюдения Т Тогда
плотность распределения
ш(х) = lim Р-------—----------= lim lim — ——
дх->0 Дх Лх—>0 Т"—7"*
Эта характеристика устанавливает, таким образом, вероятност-
ные законы распределения мгновенных значений виброускорения.
3. Автокорреляционная функция. Основным приложением данной
характеристики является исследование того, в какой степени значе-
ния процесса в некоторый данный момент времени влияют на значе-
ния процесса в некоторый момент в будущем, т.е. она характеризует
степень изменчивости реализации случайного процесса и быстроты
его изменения при изменении аргумента t.
Рассмотрим некоторую реализацию х* (О. Оценку величины ав-
токорреляционной функции, связывающей значения х^(/) в момент
времени t и t + т можно получить, вычисляя произведение этих орди-
нат и осредняя величину произведения в пределах времени наблюде-
ния Т. Найденное среднее значение произведения приближается к
точному значению автокорреляционной функции Ях(т) при Т \
212
1 г“т
(Х) = Jim J Хк (t)xk (( + x)dt-
4. Спектральная плотность мощности. Чтобы полностью описать
стационарные случайные колебания теоретически, необходимо бес-
конечное количество данных об их происхождении. Для упрощения
анализа пользуются такими понятиями, как распределение вероят-
ности амплитуды в виде плотности вероятности и непрерывные час-
тотные спектры колебаний в виде средних квадратических спектраль-
ных плотностей (спектральных плотностей мощности — СПМ). Эта
характеристика описывает общую частотную структуру процесса че-
рез спектральную плотность среднего значения квадрата виброуско-
рений:
Gx (/) = СПМ = lim = ton ton -J- J x2
T —>°O oo AM i
где х(/,/,ДГ) — составляющие функции x(t), имеющие частоты в ин-
тервале [/, f + ДГ ].
Физически спектральную плотность мощности можно определить
как предел отношения мощности, приходящейся на участок шири-
ной ДГ при условии, что Д /" -»0. Практически рассматривают не
предел отношения мощности, а предел отношения ускорения, кото-
рый называют спектральной плотностью ускорений (СПУ) случайной
вибрации:
Gx(f) = СПУ = Нто(о2/д/),
где а — среднеквадратическое значение ускорения, м/с2; V “ поло-
са частот, Гц.
Важное свойство спектральной плотности заключается, как из-
вестно, в ее связи с автокорреляционной функцией через преобразо-
вание Фурье.
Прямое преобразование:
Gx (/) = 2 J Rx (т) e~21^xdx = 4 J Rx (т) cos 2я/т Jt.
—oo 0
Обратное преобразование:
oo oo
Rx (t) = 2 J Gx (f)e2n^df = 4 J(7X (f)cos2^xdf.
—oo 0
213
Из определения спектральной плотности также следует, что сред-
нее значение квадрата виброускорения рассматриваемой реализации
равно общей площади под кривой Gx(f):
Г, = И (Ж-
—со
Основным применением спектральной плотности физического
процесса является исследование его частотной структуры, которая в
свою очередь дает важную информацию об основных характеристиках
исследуемых физических систем.
В основе определения статистических характеристик случайных
функций по результатам опытов лежит закон больших чисел, соглас-
но которому при большом числе опытов вероятности событий могут
быть заменены соответствующими частотами появления этих собы-
тий, а математические ожидания случайных величин — их средними
значениями.
Однако получение необходимых реализаций случайных вибраци-
онных процессов связано с дорогостоящими экспериментами. В связи
с этим приходится ограничиваться сравнительно небольшим числом
опытов. Следовательно, возникает необходимость нахождения таких
характеристик результатов опытов, которые можно было бы принять
за искомые вероятности событий и характеристики случайных вели-
чин. Всякая функция результатов опытов, которая может быть при-
нята за искомую вероятностную характеристику, называется оценкой
этой характеристики.
Один из основных способов, используемых для получения оце-
нок статистических характеристик случайной функции (/) на осно-
ве N независимых измерений, заключается в вычислении оценок по
следующим формулам [12, 13, 23, 24, 88, 124]:
Z (*/• - т*х )2 = )2 ’
7V /=1
214
j N-r
Rx =x‘x‘+r (при m*x = 0)’
" r /=1
m-\
(f) = 2h R*(0) + 2^R*(rh)cos
nmf
(при rn* =0),
где /и* — оценка среднего значения данной случайной функции; i —
номер измеренного значения; Z)* — оценка дисперсии; о* — оценка
среднеквадратического отклонения; у* — оценка среднеквадратичес-
кого значения; R* — оценка автокорреляционной функции; Gx(f) —
первичная оценка спектральной плотности; N — число замеров слу-
чайной функции; г — номер сдвига функции при определении оце-
нок автокорреляционной функции; т — максимальный сдвиг; h —
величина интервала времени между соседними замерами; f3 — верх-
няя частота вибропроцесса.
Эти формулы получены из соответствующих интегральных фор-
мул путем замены в них интегралов от непрерывной функции х^(У)
на сумму дискретных значений х,- /-х замеров функции (У) через
равные промежутки времени At на конечной длительности Треализа-
ции.
Оценку Gx(f) рекомендуется рассчитывать только для (/и+1) дис-
кретных частот: f s = 0,1, 2,..., т. Таким образом:
т-1
= 2h R* (°) + 2 У R* (zrt)cos
/И .1
ltrs
т
В зависимости от свойств характеристик случайной вибрации ее
подразделяют на стационарную и нестационарную. Особенностью
стационарной случайной вибрации является независимость ее характе-
ристик от времени, в то время как у нестационарных случайных вибра-
ций статистические свойства изменяются во времени. Стационарная
случайная функция с постоянной спектральной плотностью называ-
ется стационарным белым шумом. С теоретической точки зрения мож-
но считать, что все встречающиеся в технике случайные колебания
являются нестационарными. Нестационарный характер имеют и мно-
гие физические процессы.
215
Изучение свойств стационарного случайного процесса по един-
ственной реализации возможно только тогда, когда реализации обла-
дают так называемым эргодическим свойством. Эргодический случай-
ный процесс — такой процесс, вероятностные характеристики
которого могут быть получены с вероятностью, сколь угодно близкой
к 1, в результате некоторой операции усреднения по времени одной
реализации достаточно большой (теоретически бесконечной) длитель-
ности вместо усреднения по вертикали в данный момент времени t
множества реализаций х^(/). Это означает, что любая из реализа-
ций, составляющих ансамбль, должна нести в себе все основные черты
процесса, т.е. быть достаточно представительной. Такое свойство
позволяет определять статистические характеристики вибрации по од-
ной реализации, полученной в летном эксперименте, а не проводить
множество дорогостоящих экспериментов. Если несмотря на стацио-
нарность процесса никакая из его реализаций не является представи-
тельной, т.е. результаты вычислений, полученные по совокупности
реализации и по одной из них, не совпадают, то такой процесс на-
зывается неэргодическим.
На рис. 5.6 представлены четыре примера реализаций стацио-
нарных эргодических случайных процессов, наиболее часто исполь-
зуемых в практике виброиспытаний изделий ракетно-космической
техники (на нем также приведены их корреляционные функции и
спектральные плотности). При рассмотрении этих реализаций следу-
ет отметить их различие, связанное с тем, что в случайном процессе
на рис. 5.6,в существует некоторая средняя частота, а в процессе на
рис. 5.6,г такую частоту указать не представляется возможным. Оче-
видно, что спектр случайного процесса на рис. 5.6,г богаче различ-
ными частотными составляющими, чем спектр процесса на рис. 5.6,в.
Если средняя частота просматривается уже на осциллограмме, то
можно утверждать, что спектральная плотность такого процесса (см.
рис. 5.6,в) имеет максимум на этой частоте и нельзя этого утверждать
относительно случайного процесса на рис. 5.6,г. Случайный виброп-
роцесс вида, представленного на рис. 5.6,в, характеризующийся на-
личием в спектре средней частоты, называют узкополосным, а вида,
приведенного на рис. 5.6,г, — широкополосным.
В заключение отметим, что вибрационные нагрузки приводят к
дополнительному динамическому нагружению ЛА, его бортовых сис-
тем и их элементов и существенно снижают их работоспособность,
надежность и ресурс. Поэтому испытаниям на воздействие вибраци-
онных нагрузок, реализуемым с применением широкого спектра ме-
тодов, подвергают практически все функциональные и технологи-
ческие элементы систем, а в ряде случаев и ЛА в целом.
216
Рис. 5.6. Примеры реализаций случайных вибропроцессов x(t), их корреляционных функций /^(т) и спект-
ральной плотности мощности G^f): а — гармонический процесс; б — гармонический процесс плюс случай-
ный шум; в — узкополосная вибрация; г — широкополосная вибрация
На этапах жизненного цикла ЛА (при транспортировании, взле-
те, старте, посадке, при разделении ступеней, срабатывании пиро-
средств, стрельбе бортового вооружения и др.) возникают удары.
Ударом принято называть такое движение, при котором имеет место
взаимодействие движущихся тел, сопровождающееся частичным или
полным переходом кинетической энергии соударяющихся тел в по-
тенциальную энергию упругой деформации и в так называемую внут-
реннюю энергию тел, увеличение которой приводит к нагреву. Ука-
занный процесс происходит в малом (ограниченном) пространстве
за время, значительно меньшее периода собственных колебаний со-
ударяющихся тел.
В реальной жизни ЛА воспринимают следующие значения удар-
ных нагрузок:
• при транспортировке — л < 5 (/ = 5 —10 Гц);
• при разделении ступеней — л = 3 — 9 (/ = 3 — 30 Гц);
• при срабатывании пиросредств — л = 100 —150 (/ = 1 - 2 кГц).
В большинстве случаев в процессе соударения возникает упру-
гопластическая деформация. Процесс удара можно разделить на два
этапа. Во время первого (активного) этапа происходит нагружение
тел, контактная сила соударяющихся тел возрастает, деформация в
зоне контакта носит упругопластический характер, а центры энергии
соударяющихся тел при этом сближаются. Во время второго (пассив-
ного) этапа контактная сила уменьшается, и при равенстве ее нулю
нарушается контакт соударяющихся тел и происходит их разгрузка.
При этом восстанавливается свойство упругой деформации и рассто-
яние между центрами инерции соударяющихся тел увеличивается.
На первом этапе в различных конструкциях и их элементах могут
возникать резонансные явления, затухания которых продолжаются и
после окончания второго этапа. Процесс затухания колебаний назы-
вается ударным последействием, или откликом. Для анализа процес-
сов, происходящих при ударе, целесообразно пользоваться поняти-
ем амплитудно-частотного спектра. На практике удары могут быть
одиночными и многократными, повторяющимися периодически.
Для характеристики одиночных ударов, являющихся непериоди-
ческими функциями, пользуются интегралом Фурье
/(О = тМ
2я J
который представляет функцию f(t) в виде суммы (интеграла) бес-
конечно большого числа гармонических колебаний, близких по час-
218
тоте, с бесконечно малыми амплитудами. При этом частотный ин-
тервал между двумя соседними колебаниями бесконечно мал и равен
t/co. Величину F(cd) называют спектральной плотностью, или комп-
лексным спектром непериодической функции, а ее абсолютное зна-
чение (модуль) просто спектром. Особенностью интеграла Фурье яв-
ляется то, что он представляет непериодическую функцию суммой
периодических составляющих, образующих непрерывный спектр без
дискретных частотных составляющих, называемый сплошным.
Если рассматривать воздействие многократных ударов и предпо-
лагать, что они периодические, то следует воспользоваться разложе-
нием в ряд Фурье, позволяющим представить сложную периодичес-
кую функцию в виде дискретного (линейчатого) гармонического
спектра, состоящего из равноотстоящих спектральных линий, часто-
ты гармоник которых находятся в простых кратных соотношениях.
В зависимости от характера процессов ударного воздействия раз-
личают простые (рис. 5.7, а, б) и сложные (рис. 5.7, в) формы
ударных импульсов.
Рис. 5.7. Формы ударных импульсов: а, б — простые, в — сложная
Простой удар может вызвать разрушения вследствие возникнове-
ния сильных, хотя и кратковременных, перенапряжений в материа-
ле изделия. Возникающие под действием ударов резонансные коле-
бания могут приводить к повреждению отдельных конструктивных
элементов, поскольку при этом они получают наивысшие ускорения.
Сложный удар, сопровождающийся циклическими или знако-
переменными перенапряжениями, может привести к накоплению
микродеформаций усталостного характера. Если изделие обладает ре-
зонансными свойствами, то даже простой удар может вызвать коле-
219
бательную реакцию в элементах конструкции, которая также сопро-
вождается усталостными явлениями.
Ударное движение характеризуется системой параметров физи-
ческих величин, знание которых позволяет сформулировать требова-
ния к процессу испытаний и оценить его результаты. Установлены
следующие основные параметры физических величин, характеризу-
ющие ударное движение:
• пиковые ударные ускорения ап, скорость vn, перемещение 5П
или деформация, оценивающие соответственно наибольшие аб-
солютные значения указанных параметров;
• длительности действия ударного ускорения, скорости, переме-
щения и деформации, оценивающие интервал времени, в те-
чение которого действуют мгновенные значения ускорения а,
одного знака, удовлетворяющие условию а, >0,1 ат = ап ;
• длительности фронтов ударного ускорения, скорости, переме-
щения и деформации, определяющие интервал времени от
момента появления до момента достижения пикового значения
соответствующего процесса ударного движения;
• импульс ударного ускорения — интеграл от ударного ускорения
за время, равное длительности его действия;
• коэффициенты наложенных колебаний ударных ускорений,
скорости, перемещения или деформации, оценивающие от-
ношение полной суммы абсолютных значений проекций на
ось ординат участков кривой ударных ускорений, скорости, пе-
ремещения или деформации между соседними экстремальны-
ми точками к удвоенному пиковому значению соответствующе-
го параметра (рис. 5.8).
Рис. 5.8. Иллюстрация определения коэффициента
наложенных колебаний
220
Для ударного ускорения коэффициент наложенных колебаний
определяется по формуле:
^нк
1 л+1
=5—£(д/+1 - Л/)
2ап ,=о
где п — число экстремальных точек.
В стандарте МЭК Публикация 68-2-27 вместо понятия коэффи-
циента наложенных колебаний пользуются понятием «пульсация на
первоначальном импульсе»:
8 = (^Нк/^/п)’ 100%,
где — амплитуда наложенных колебаний, или амплитуда пульса-
ций; ат — максимальная амплитуда импульса. При этом указываются
частота пульсаций и затухание после импульса. В ГОСТ 20.57.406—81
пульсации называются относительной амплитудой ускорения наложен-
ных колебаний.
Существенное влияние на характер ударного воздействия оказы-
вают формы импульсов, определяющие характеры амплитудно-час-
тотных спектров, которые в реальных условиях могут быть различны-
ми, и им будут соответствовать различные амплитудно-частотные
спектры, позволяющие количественно оценить воздействие удара.
Изделия авиационной и ракетно-космической техники представляют
собой сложные системы с затуханием, состоящие из конструктив-
ных элементов, обладающих большим числом степеней свободы.
Колебания указанных элементов системы, вызванные воздействием
удара, могут привести к повреждению других элементов за счет воз-
никновения связанных резонансных явлений. Эти явления могут быть
представлены системой спектров удара. Ускорение получается мак-
симальным, когда во время воздействия ударного импульса возбуж-
даются резонансы и возникающие при этом колебания накладывают-
ся на ударный импульс.
Установлено, что наибольшая опасность повреждения возникает
при наименьшей длительности нарастания импульса. Опасность по-
вреждения вследствие удара обычно меньше для системы с затухаю-
щими колебаниями, чем для систем с незатухающими колебаниями,
особенно для системы с большим числом степеней свободы.
При движении летательных аппаратов возникают инерционные
нагрузки. Линейные ускорения могут появляться при прямолиней-
ном, криволинейном и вращательном движениях. Криволинейное и
вращательное движения могут быть равномерными и с ускорением.
При равномерном криволинейном движении точки по окружности
221
она проходит путь по дуге, равный Д5, или поворачивается на угол
д<р = &S/R, где R — радиус окружности, по которой движется точ-
ка. Возникающее при указанном перемещении точки приращение
вектора скорости приводит к возникновению нормального (центро-
стремительного) ускорения, вектор которого направлен к центру ок-
ружности, а модуль определяется формулой а„ =V2 /R.
Очевидно, что чем больше искривлена траектория движения, т.е.
чем меньше R, тем больше ап при неизменной скорости. При криво-
линеййом движении точки с ускорением (рис. 5.9,о) за время Д/
вектор скорости у получает приращение Ду . Разложив вектор Ду при-
ращения скорости на две составляющие (нормальную Дул и танген-
циальную Дут), вектор полного ускорения выразится как:
,. Ду ,. Ду„ ,. Ду, _ _
а = Inn — = пт —- + lim —- = а„+ а.
д/-»0 Д/ д/-»о Д/ д/->0 Д/
Произвольное вращательное движение характеризуется угловой
скоростью тела, векторная величина которой определяется выраже-
нием ю = dy/dt.
а)
Рис. 5.9. Движение точки в плоскости по криволинейной траектории (а)
и векторная диаграмма полного ускорения (б)
При постоянной угловой скорости имеет место равномерное вра-
щение, при котором со = <р//. Учитывая, что угловая скорость одно-
го оборота ш = 2п/п и выражая его числом оборотов п в минуту, по-
лучим со = лл/30 Гц.
222
При неравномерном вращении изменение вектора угловой ско-
рости со временем характеризуется величиной р = dw/dt, которая
называется угловым ускорением. Модуль углового ускорения р = со/Г.
При вращении отдельные точки вращающегося тела имеют различ-
ную касательную скорость vx, которая зависит от угловой скорости со
и расстояния R данной точки от оси вращения. Линейная скорость
точки, находящейся на расстоянии R от оси вращения, выражается
формулой v = Rdq/dt = Ro), а нормальное ускорение — ал = ш2 /R.
Аналогично модуль тангенциального (касательного) ускорения опре-
деляется как 0^=7$ = &R/T, из чего следует, что нормальное и тан-
генциальное ускорения растут линейно с увеличением радиуса R.
Вместо условного тела (точки) рассмотрим изделие, установлен-
ное на вращающемся диске. Оно испытывает воздействие двух про-
тивоположно направленных сил: одна направлена вдоль радиуса к
центру диска и вызвана центростремительным (нормальным) уско-
рением а„ = со2 /R; вторая, называемая центробежной силой инер-
ции /цб = nus?R, направлена от центра диска (рис. 5.9, б). При пере-
ходе от со к числу оборотов п получим
2 2
Г я « п
цо 9QQ
Центробежная сила инерции действует на изделие во вращаю-
щейся системе отсчета независимо от того, находится ли оно в не-
подвижном состоянии или движется относительно нее с некоторой
скоростью. В случае, если изделие или его конструктивные элемен-
ты совершают движение относительно вращающейся системы отсче-
та, они подвергаются воздействию не только центробежной силы
инерции, но и так называемой силы Кориолиса, или кориолисовой силы
инерции. Такая сила может возникнуть, например, при движении
изделия в радиальном направлении с постоянной скоростью, пер-
пендикулярной оси вращения, или при движении его по окружнос-
ти, лежащей в плоскости, перпендикулярной оси вращения с цент-
ром окружности на этой оси.
Различные точки изделия во вращающейся системе отсчета обла-
дают различными по значению и направлению ускорениями по отно-
шению к инерциальной системе, в результате чего в них под действи-
ем линейного ускорения возникают перегрузки:
N _ а _ л2л2Л _ n2R
g 900g 90g ’
где g — ускорение свободного падения.
223
В практике чаще пользуются не полной перегрузкой N, а ее про-
екциями на оси выбранной системы координат:
• продольной перегрузкой Nx - Fx /G \
• поперечной перегрузкой Nу = Fy / G;
• боковой перегрузкой Nz = Fz / G ,
где Fx, Fy, Fz — проекции равнодействующей силы на оси X, Y, Z.
Полную перегрузку в этом случае определяют по формуле
N = JnI + N* + N1.
у/ у
Воздействие перегрузок приводит к интенсификации напряжен-
но-деформированного состояния элементов конструкции ЛА, что вы-
зывает необходимость их упрочения и, как следствие, приводит к
утяжелению конструкции. Оптимальная перегрузка современных PH,
в частности, в осевом направлении, лежит в пределах Nx от 1 до 4,5.
Для ограничения Nx на конечных участках работы ступеней применя-
ют дросселирование или выключение части РД.
Таким образом, получается, что верхние ступени и полезный
груз необходимо рассчитывать на максимальные перегрузки Nx = 4,
хотя в космосе перегрузка редко превышает Nx= 1.
Особенно значительны и опасны поперечные и боковые перегруз-
ки Ny и Np действующие на полезный груз. Эти перегрузки возни-
кают при совместном воздействии ветровых порывов, которые на мак-
симальных скоростных напорах (q^ =30000 - 40000 Н/м2) создают
пульсации угла атаки до ±12’. Эти перегрузки, таким образом, име-
ют случайный характер. Они приводят к колебаниям топливных ком-
понентов в баках, к нежелательной нагрузке приборов и агрегатов.
Продольные перегрузки в работе систем подачи топлива играют и
положительную роль, так как увеличивают давление на входе в тур-
бонасосные агрегаты (ТНА). Перегрузки Nx выполняют и другую по-
ложительную функцию — создают (особенно в криогенных баках)
сепарацию пузырьков и нагретых масс жидкости, отдаляя их посред-
ством гидростатической силы от заборных горловин.
Для воспроизведения линейных ускорений, действующих на раз-
личные изделия в условиях реальной эксплуатации, целесообразно
при проведении лабораторных испытаний осуществлять вращатель-
ное движение с помощью центрифуг. При этом целью лабораторных
испытаний является проверка способности изделий выполнять свои
функции в процессе воздействия линейных ускорений или выдержи-
вать условия испытаний.
Искусственные гидрогазомеханические факторы. К гидрогазоме-
ханическим факторам, которые, в отличие от механических, пред-
224
полагают непосредственное воздействие на летательный аппарат, его
бортовые системы и элементы жидкости или газа, можно отнести
[28, 88, 101, 124]:
• гидростатические и газостатические факторы, например воз-
действие постоянного медленно меняющегося внутреннего дав-
ления жидкости в топливных баках, газа в шаробаллонах и т.д.;
• гидродинамические факторы', воздействие пульсирующих пото-
ков жидкости (в пневмогидросистемах) с гармоническими ко-
лебаниями, колебаниями со сложным спектром, описываемым
аппаратом случайных функций, а также гидравлические удары
в системе ПГСП маршевых двигательных установок с ЖРД при
их включении и выключении;
• газодинамические факторы, и в первую очередь акустические
воздействия, источником которых является акустическая энер-
гия, генерируемая реактивной струей ракетного двигателя,
имеющая широкий частотный спектр, а также работающие аг-
регаты насосной подачи топлива маршевых ДУ с ЖРД, пере-
мещение топлива в баках, атмосферные потоки и турбулент-
ность атмосферы и др. К газодинамическим факторам относятся
также аэродинамические удары при преодолении ЛА звукового
барьера, которые в свою очередь также являются источником
акустических воздействий.
Рассмотрим воздействие аэродинамических искусственных фак-
торов.
Статические аэродинамические нагрузки. Как и всякое тело, дви-
жущееся в воздухе, газе или жидкости, ракета испытывает со сторо-
ны среды действие сил трения и давления на поверхности. Силовое
воздействие сводится к непрерывно распределенным по поверхности
тела силам Рп от нормального и силам Д от касательного напряже-
ний.
Нормальное давление можно представить в виде суммы статичес-
кого атмосферного давления воздуха р^ и некоторого избыточного
аэродинамического давления Др^, пропорционального скоростному
напору q:
Рп = Ph+^Ph-
Значение этого избыточного давления зависит от угла атаки а,
числа Мж и формы корпуса. Характер распределения по контуру
поверхности корпуса и закон изменения его по Мж и а обычно уста-
навливают экспериментально путем продувок в аэродинамических
трубах специальных дренированных моделей. Только для некоторых
форм тел, например конической поверхности при малых углах ата-
225
ки, стационарные значения ДрА с достаточной точностью могут быть
определены теоретическим путем. В частности, при а = 0 это давле-
ние, одинаковое для всех точек конуса, зависит только от числа
набегающего потока и угла 0К полураствора конуса.
Обычно на передней (конической) части корпуса рп значительно
превосходит ph. На цилиндрической части корпуса нормальное дав-
ление при сверхзвуковых скоростях мало отличается от атмосферно-
го. Большие отрицательные значения ДрА (при М„ > 1) наблюдают-
ся только на днище корпуса и особенно при свободном полете
аппарата. Наличие струи выходящих из сопла газов существенно из-
меняет донное давление рдон. В некоторых случаях оно может даже
превосходить рп. Зависимость рдон от числа М„ с учетом взаимодей-
ствия внешнего потока со струей двигателя определяется в каждом
конкретном случае экспериментально. При высоких дозвуковых ско-
ростях полета большие отрицательные значения Д/>А появляются и за
угловыми точками контура корпуса (в местах стыков конических час-
тей с цилиндрическими). В зоне 0,7 < М„ < 1,1 в местах сочленения
цилиндрической поверхности с конической наблюдается резкое из-
менение местного статического давления. Это давление характеризу-
ется в основном углом полураствора конической части корпуса и уг-
лом атаки аппарата. Для сравнения сравнительно малых значений
указанных параметров максимальное местное статическое давление
определяется формулой:
Ртах ~ Ph 25 + >/2 (sin 0А + ct cos 0А )
В большинстве случаев для уменьшения объема дорогостоящих
дренажных аэродинамических продувок ограничиваются определени-
ем относительного избыточного давления ДрА = bphlQ Для одного или
нескольких значений , предполагая, что шах Лр/, совпадает с
Это предположение является справедливым для сравнительно боль-
ших чисел >1,5). Статистика показывает, что характер из-
менения q = ?/?max = /(0 Для аппаратов баллистического типа на
участке активного полета примерно одинаков. При этом обычно мак-
симум скоростного напора наблюдается в области 2,5 > М„ > 1,5 при
t =0,3-0,5
Касательная составляющая рх элементарной аэродинамической
силы практически одинакова для всех точек поверхности корпуса. Ее
значение зависит только от скорости и высоты полета. При расчетах
на прочность элементов конструкции, воспринимающих аэродина-
226
мические силы, влиянием этой составляющей можно пренебречь почти
во всех случаях (исключение, в частности, составляют элементы кон-
струкции, перемещающиеся в полете в плоскостях, образующих ма-
лые углы с направлением полета).
При исследовании прочности конструкции приходится чаще все-
го оперировать с суммарными усилиями от аэродинамических сил.
Имея графики распределения давления Лрь (Х[; <р) для различных кон-
туров, вычисляют погонные значения составляющих аэродинамичес-
ких нагрузок (продольной и поперечной сил), пользуясь приближен-
ными выражениями:
M(Xl)
ЭХ]
2я
= 2rta(Xj )д + a(Xi) J Aph (X]; <p) tg <p(xi) <Z<p;
о
ЭП^) . д , ...
1 =o(x1)| ApA(x1;<p)sm<pd<p,
IT
где a(X]) — радиус корпуса в сечении с абсциссой х^ <p(xi) — угол
между осью ОХ] и касательной к образующей оболочки корпуса в том
же сечении.
Учитывая зависимость ДрА от а и q, эти формулы записывают в
виде:
ЭХ1 4 ЭХ] ’
Эх, Эх,
где S — некоторая характерная площадь (например, площадь миделя
корпуса); С,, — коэффициент лобового сопротивления С?; (или С“ )
— производная по углу атаки от коэффициента поперечной аэроди-
намической силы, так что:
ЭС“ в(Х|)2?._. .
-Vs- = —с I
vXj aS q
Основная часть аэродинамической нагрузки действует на голов-
ную (коническую) часть корпуса. На расстоянии двух-трех диамет-
ров от места стыка конической части с цилиндрической подъемная
сила при малых углах атаки практически уже не действует. Роль ци-
линдрической части при расчете У](Х]) существенно возрастет лишь
при больших углах атаки.
8*
227
Интегрируя приведенные выше выражения по хр можно найти
значения продольной Na и поперечной Qa составляющих силы и
изгибающего момента Ма в любом сечении с абсциссой Xj корпуса,
обусловленных статической аэродинамической нагрузкой:
дСх. (Xi)
Na (^i) = <1$ J 1 dxl;
о
В донной области ЛА могут появляться как эффекты дополни-
тельного разрежения, так и донного поднапора (в многодвигатель-
ных установках). В основе возникновения дополнительного разре-
жения лежит эффект эжекции истекающими газами воздушной
подушки в донной части ЛА, а дополнительного поднапора — эф-
фект расширения струи газов, истекающих в среду с малой плотнос-
тью, и взаимодействия струй {интерференция). В результате этого на
площади донного среза ЛА, не занятой двигателями, возникает из-
быточное давление. Интенсивность этих воздействий зависит от со-
отношений между внешним давлением, характеристиками струи и
скоростью ЛА Оба эффекта появляются только при работе двигате-
ля. В основе их возникновения лежат чисто газодинамические явле-
ния, и потому соответствующие силы должны быть отнесены к раз-
ряду аэродинамических. Заметим, что если головное сопротивление
возрастает со скоростью полета неограниченно, то донное сопротив-
ление не может быть больше той силы, которая соответствует полно-
му донному вакууму. Донное сопротивление зависит к тому же от
размещения сопел и режима их работы.
Сила донного сопротивления
дон ~ (/^дон Ра)Д^дон
где Д^Удон — площадь днища корпуса, свободная от воздействия струй
двигателя.
При герметичном корпусе двигательного отсека донное сопро-
тивление прикладывается в концевом сечении с абсциссой = L.
При негерметичном корпусе двигательного отсека, т.е. при малом
отличии давления внутри отсека от внешнего донного давления, ме-
228
стом приложения силы А"дон можно считать место присоединения к
корпусу ближайшего к хвосту днища гермоотсека.
Сумма Na (Z) и АцОН равна полному лобовому сопротивлению X
летательного аппарата. Обычно оно достигает своего максимального
значения в области больших скоростных напоров. В большинстве
случаев изменение относительной величины X = Х/Хт?^ = f(t) для
ЛА баллистического типа подобно изменению q(t).
Для ЛА пакетной схемы, оснащенных боковыми ускорителями,
расчет продольных и поперечных составляющих сил и изгибающих
моментов, обусловленных аэродинамическими нагрузками, прово-
дится отдельно для каждого ускорителя (с учетом соответствующих
реакций в местах их соединения).
Характер приложения поперечных стационарных аэродинамичес-
ких сил к корпусу в основном определяется законом изменения углов
атаки по времени.
В заключение отметим, что весь спектр статических аэродина-
мических нагрузок подразделяют на следующие виды:
• продольные, возникающие от распределенного воздействия ло-
бового сопротивления X;
• поперечные, появляющиеся из-за подъемной силы Y на углах
атаки;
• донные, обусловленные разницей давлений />дон в донной обла-
сти и отсеке, примыкающем к днищу;
• оболочечные, возникающие из-за разницы давлений внутри от-
секов и давления, действующего на оболочку снаружи;
• местные, возникающие на плохообтекаемых выступах, изломах
образующей, обтекателях.
Все нагрузки, исключая донные, действуют только в плотных
слоях атмосферы.
Динамические (псевдоакустические) нагрузки возникают:
• при воздействии движущихся потоков газа или воздуха, кото-
рые содержат вихревые компоненты (турбулентность)',
• при срыве потока с элементов конструкции ЛА и особенно из-
за перестройки течения при М = 1 (бафтинг).
Наибольшая проблема создается бафтингом при околозвуковых
скоростях, когда взаимодействие скачка уплотнения с оторвавшимся
потоком увеличивает колебания давления. Как правило, наиболь-
шие нагрузки от бафтинга создаются в тех же местах и при тех же
условиях, при которых местные статические нагрузки являются мак-
симальными.
Динамические нагрузки при полете ЛА в плотных слоях атмосфе-
ры могут возникать и при взаимодействии вибрирующей от акусти-
229
ческого воздействия обшивки с пограничным слоем, который может
эту вибрацию усилить (флаттер обшивки). Изучение флаттера сво-
дится к исследованию задачи о динамической устойчивости конст-
рукции ЛА. В определенных условиях она становится динамически
неустойчивой: при некотором случайном ее отклонении от состояния
равновесия возникают высокочастотные колебания, которые поддер-
живаются энергией пульсационных составляющих скорости турбулент-
ного пограничного слоя. При этом амплитуда этих колебаний может
возрастать вплоть до разрушения конструкции. Флаттер обшивки яв-
ляется чрезвычайно сложной и не полностью изученной проблемой.
Поэтому анализ динамической устойчивости конструкции на этапе
ее проектирования проводится с обязательным учетом безопасности
по условиям флаттера.
Воздействие акустических нагрузок. На границе газовой струи,
истекающей из сопла реактивного или ракетного двигателя со сверх-
звуковой скоростью, обычно образуется зона турбулентного потока,
которая генерирует в окружающее воздушное пространство звуковые
волны различной частоты. Толщина этой турбулентной зоны (а сле-
довательно, и предельные масштабы распространяющихся вниз по
потоку вихрей) непрерывно увеличивается по мере удаления от среза
сопла. Соответственно изменяется и спектр частот пульсации излу-
чаемого точками струи акустического давления. В области, распо-
ложенной вблизи среза сопла, находятся источники высокочастот-
ных звуковых волн, а в области струи, расположенной ниже по
потоку, — источники в основном низкочастотных звуковых волн. В
области смещения, в которой поток остается сверхзвуковым, воз-
можно генерирование дополнительных пульсаций давления, обуслов-
ленное взаимодействием ударных волн с турбулентностью.
Интенсивность шума, создаваемого такой струей, пропорцио-
нальна средней скорости в степени от 6 до 8. При этом ее акустичес-
кая мощность составляет 0,4—0,8% механической мощности двигателя.
Отсюда следует, что с увеличением силы тяги двигателя летательных
аппаратов возможно пропорциональное увеличение суммарного уровня
акустической нагрузки на поверхности корпуса их конструкции. В
тех случаях, когда эти уровни имеют порядок 150—160 дБ и более,
воздействие акустических нагрузок оказывает существенное влияние
на режимы вибраций элементов конструкции ЛА, на функциониро-
вание различных приборов и усталостную долговечность отдельных
частей корпуса аппарата, расположенных вблизи струи двигателя. В
некоторых случаях, например при кольцевом расположении сопел
многокамерного двигателя (когда имеются сравнительно большие сво-
бодные площади днища корпуса ЛА между соплами), пульсация аку-
стического давления внутри этой области может приводить к вынуж-
230
денным продольным упругим колебаниям конструкции в целом.
Иными словами, она может оказывать влияние и на прочность даже
тех узлов конструкции, которые находятся внутри корпуса ЛА.
В результате акустического воздействия на ЛА возникают следу-
ющие нежелательные явления:
• рост нагрузок на ЛА из-за «динамической добавки», вызванной
акустическим нагружением;
• появление нежелательных механических резонансов в электрон-
ной аппаратуре, элементах автоматики и приборах;
• влияние акустики на процессы теплообмена;
• влияние акустической прозрачности баков на процессы переме-
шивания холодных (нижних) и горячих (верхних) слоев жид-
кости (особенно криогенных);
• акустический нагрев криогенных жидкостей в баках вследствие
поглощения звука этими жидкостями;
• акустическая кавитация жидкостей на входе в насосы двигате-
лей.
Наиболее опасными явлениями следует считать акустические ре-
зонансы, которые могут возникать как при взаимодействии струй со
стартовым устройством, так и между собой. Акустический резонанс
проявляется в периодическом нагружении ЛА в направлении его про-
дольной оси или в поперечных направлениях, что вызывает (при сов-
падении частот) продольный или поперечный резонанс конструк-
ции, а это почти неизбежно ведет к ее разрушению.
Теоретический расчет указанных явлений представляет огромную
сложность, и пока еще нет теоретических методов расчета акустичес-
кого нагружения ЛА. Поэтому большое внимание сейчас уделяется
огневым и летным натурным испытаниям.
Акустические вибрации конструкции уменьшают с помощью глу-
шителей шума, выбора формы панелей (чтобы собственная частота
была больше или меньше частотного диапазона шума), а также уве-
личения толщины обшивки и ее дополнительного демпфирования
(соты).
Термические искусственные факторы. Классификация термичес-
ких факторов представлена на рис. 5.10 [14, 68].
К термическим факторам, порождаемым функционированием
ЛА, которые в сочетании с естественными факторами определяют их
тепловое состояние, можно отнести [14, 68, 88, 101]:
• конвективный, радиационный и кондукгивный нагрев, а так-
же нагрев трением, порождаемый работой двигателей и неко-
торых бортовых систем;
• циклическое изменение температуры КА при его полете на ор-
бите Земли, вызывающее термическую усталость материалов,
231
из которых он изготовлен, и приводящее к усталостному разру-
шению в результате знакопеременных деформаций;
• термоударные нагрузки, связанные с резким возрастанием тем-
пературы за короткий промежуток времени, главным образом
при включении двигателей ракет-носителей и двигателей КА
при его спуске, а также за счет аэродинамического нагрева.
Так, тепловые потоки на стадии выведения космического ко-
рабля «Апполон» составляют 1,0 МДж/(м2 с), а на спуске — до
100 МДж/(м2 с).
Рис. 5.10. Классификация термических ВВФ
Наиболее существенную роль для прочности конструкции играет
нагрев несущих баков и сухих отсеков (переходников и обтекателей).
Температура нижней части бака вследствие интенсивного отвода теп-
ла в находящуюся в баке жидкость практически не поднимается. Наи-
более высокого значения (порядка 100—200°С) достигает температура
верхней части бака. Эта температура не настолько велика, чтобы
возникла необходимость тепловой изоляции, но для алюминиево-
магниевых сплавов она приводит к вполне ощутимому снижению ме-
ханических характеристик.
Аэродинамический нагрев — результат того, что налетающие на
тело молекулы воздуха тормозятся вблизи него. Если полет осуще-
ствляется со сверхзвуковой скоростью, то торможение происходит
прежде всего в ударной волне, возникающей перед телом. Дальней-
шее торможение молекул воздуха происходит непосредственно у са-
мой поверхности тела, в так называемом пограничном слое.
Из областей газа с повышенной температурой теплота переда-
ется телу конструкции, в результате чего происходит аэродинами-
ческий нагрев. Существуют две формы аэродинамического нагре-
ва: конвективная и радиационная. При конвективном теплообмене
qk =а(Те -Tw), где а — коэффициент теплоотдачи, зависящий от
232
режима обтекания (ламинарного или турбулентного); Те — предель-
ная температура, до которой нагрелось бы тело, если бы не было
отвода тепла; Tw — температура стенки.
При v > 5000 м/с температура за ударной волной достигает зна-
чений, при которых газ начинает излучать энергию. Вследствие лу-
чистого переноса энергии из областей с повышенной температурой к
поверхности тела происходит радиационный нагрев. При этом наи-
большую роль играет излучение в видимой и УФ частях спектра. При
у = 11,2 км/с (вторая космическая скорость) конвективный теплооб-
мен равноценен радиационному. При v > 11,2 км/с превалирует ра-
диационный нагрев.
В особенно тяжелых температурных условиях находятся спуска-
емые аппараты (СА) при входе в плотные слои атмосферы. Количе-
ство тепла, которое получает при этом его конструкция, пропорцио-
нально, грубо говоря, потерянной кинетической энергии и зависит
от аэродинамических характеристик, в основном от отношения со-
противления трения к полному лобовому сопротивлению. Поэтому
СА придается форма плохо обтекаемого тела, впереди которого обра-
зуется мощная ударная волна, с которой связана потеря основной
части его кинетической энергии. Так или иначе, но температура по-
тока при обтекании СА достигает нескольких тысяч градусов и это
требует обязательного принятия мер тепловой защиты в виде термо-
стойких покрытий.
Совместное действие высокой температуры и аэродинамических
сил на поверхности теплозащитного покрытия приводит к его час-
тичному поверхностному разрушению. В результате неизбежен унос
массы, вызванный целым рядом физических и химических процес-
сов на поверхности: сублимация, оплавление, химическое разложе-
ние и окисление составляющих элементов. Поэтому для наружной
части покрытия применяются керамические и органические материа-
лы с термостойкими наполнителями. Они должны обладать высокой
теплотой фазовых превращений и одновременно иметь низкую тепло-
проводность. Для этой цели используются материалы на основе кар-
бида кремния, графита, которые термически разлагаются с образо-
ванием кокса, догорающего в потоке воздуха.
Воздействие специальных сред. Классификация специальных сред,
воздействующих на элементы изделий авиационной и ракетно-кос-
мической техники, представлена на рис. 5.11.
Изделия работают, как правило, в условиях спецсред. Поэтому
они должны обладать повышенной стойкостью к воздействию этих
сред, и для проверки их стойкости проводятся соответствующие ис-
пытания. Для сокращения времени испытаний увеличивают кон-
233
ГРУППА СПЕЦИАЛЬНЫХ СРЕД
Масла и смазки:
Кислотно-щелочная среда:
• неорганические и органические
соединения
Топливо:
• на основе нефтепродуктов
• компоненты ракетного топлива
на основе нефтепродуктов
и синтетические
специальные среды:
• испытательные
• среды заполнения
• контрольные
• специальные жидкости
• рабочие растворы
• рабочие тела
• рабочие среды
• отравляющие вещества
Рис. 5.11. Классификация специальных сред
центрацию химически активных компонентов среды воздействия, по-
вышают температуру и влажность. Длительность испытаний должна
соответствовать длительности воздействия на изделие спецсред, а ус-
ловия испытаний — условиям эксплуатации. Для борьбы с воздей-
ствием спецсред предусматривают специальные конструктивные ис-
полнения изделий, применяют специализированные покрытия,
создают такие условия эксплуатации, при которых воздействие этих
сред становится наименее заметным.
Специальным важным вопросом является исследование взаимо-
действия эксплуатационных факторов друг с другом. Таблица 5.5 ил-
люстрирует взаимодействие ряда эксплуатационных факторов [97].
В заключение отметим, что в действительности (по многим при-
чинам) реальное движение ЛА отличается от номинального. Номи-
нальная траектория существует лишь как некоторый расчетный эта-
лон, с которым можно сравнивать фактическое движение.
5.2. Возмущающие факторы реального полета ЛА
Среди возмущающих факторов можно выделить систематические и
случайные. Систематическими являются возмущения, связанные с
неточным знанием средних или номинальных характеристик ЛА (на-
пример, аэродинамических), неточным учетом в уравнениях движе-
ния внешних условий полета (например, потенциала Земли, средних
параметров атмосферы).
234
Взаимодействие эксплуатационных факторов
Таблица 5.5
Взаимо- действую- щие факторы Аэродина- мический нагрев Ударные нагрузки Пере- грузки Вибрация Шумы Метеор- ные частицы Заряжен- ные частицы Солнечная радиация Низкая темпе- ратура Высокая темпе- ратура
Вакуум — — — — _ —
Высокая темпе- ратура 4~ 4* 4" 4- _ —
Низкая темпе- ратура — — — —
Солнечная радиация — — — — 4* +
Заряжен- ные частицы — — — —• —
Метеор- ные частицы — — — — — —— —
Шумы — —
Вибрация 4* 4*
Перегрузки “Ь 4*
Ударные нагрузки
ю
Условные обозначения: ++ сильное; + умеренное; - слабое;
---факторы несовместимы или взаимодействия нет.
Большая часть возмущений носит случайный характер. Слу-
чайными возмущениями являются, как правило, отклонения мас-
сово-инерционных характеристик, параметров ДУ, атмосферы и др.
Следовательно, отклонения движения каждого конкретного ЛА от-
носительно номинальной траектории также являются случайными.
Случайными являются отклонения координат точек падения баллис-
тической ракеты (БР), параметры орбиты, на которую выведен объект
носителем, и т.д. Совокупность множества случайных отклонений
интересующей нас величины дает представление о рассеивании.
Приведем перечень возмущающих факторов, объединив их в не-
сколько групп [88, 91].
Массовые характеристики: отклонение сухой массы (или массы
конструкции) каждого ракетного блока (РБ) в отдельности; отклоне-
ние массы полезного груза; отклонение массы заправляемого топлива
каждой РБ в отдельности и покомпонентно (окислителя, горючего и
других компонентов) за счет погрешности измерительных систем в
процессе заправки, разброса удельного веса компонентов топлива и
других причин.
Характеристики ДУ: отклонение удельной тяги РД; отклонение
секундного массового расхода топлива каждым РД; отклонение соот-
ношения расходуемых компонентов каждого ракетного двигателя; в
случае наличия систем регулирования расхода топлива и соотноше-
ния расходуемых компонентов — погрешности этих систем; отклоне-
ние импульса последействия тяги при выключении ДУ; отклонение
д©стартового расхода топлива (с момента запуска до момента старта).
Аэродинамические силы и моменты: отклонение аэродинамичес-
ких коэффициентов из-за погрешностей изготовления ЛА; отклоне-
ние плотности и давления атмосферы; ветровые возмущения.
Система управления: погрешность реализации заданной програм-
мы угла тангажа из-за неточной начальной установки осей гиропри-
боров в полете и зон нечувствительности при изменении рассогласо-
вания углов; погрешности регулирования движения центра масс из-за
погрешностей измерительных систем; погрешности задания программ-
ных значений регулируемой величины; погрешности приборов, вы-
дающих команду на выключение ДУ.
Система отделения полезного груза: погрешность величины и на-
правления дополнительной скорости, сообщаемой грузу при отделе-
нии от носителя; отклонение начальных условий движения полезного
груза вокруг собственного центра масс.
Конструктивно-технологические возмущения: смещение центра
масс ЛА от базовой продольной оси (по которой должен проходить
вектор R тяги) из-за искривления действительной оси ЛА вследствие
236
погрешностей изготовления отсеков РБ; смещение центра масс ЛА
относительно вектора R тяги вследствие асимметричного расположе-
ния отдельных масс; линейное и угловое смещения вектора тяги R
относительно базовой оси ЛА из-за неточности изготовления РД и
его установки относительно базовой оси ЛА, а также из-за газодина-
мического эксцентриситета вектора R тяги.
Все перечисленные выше возмущающие факторы приводят к ко-
лебаниям кинематических параметров движения ЛА, а следователь-
но, и количественных мер результатов воздействий на него всех есте-
ственных и искусственных факторов полета. Воспроизведение всей
этой сложной гаммы условий с помощью испытательных стендов и
комплексов не представляется возможным, что обуславливает в ко-
нечном счете необходимость этапа летных испытаний по завершении
лабораторно-стендовой отработки изделий авиационной и ракетно-
космической техники.
5.3. Стимулирующие и дестабилизирующие
эксплуатационные факторы
Приведенное выше разделение эксплуатационных факторов на естествен-
ные и искусственные позволило рассмотреть нагрузки, действующие на
ЛА в процессе эксплуатации, с точки зрения их происхождения. Те-
перь рассмотрим классификацию эксплуатационных факторов еще по
одному признаку, определяемому как отношение той или иной сис-
темы ЛА к тому или иному эксплуатационному фактору. По этому
признаку эксплуатационные факторы можно разделить на две группы
[124]:
• основные, на которые та или иная система ЛА должна реагиро-
вать в соответствии со своим назначением (например, система
терморегулирования (СТР) должна в первую очередь реагиро-
вать на изменение температуры ЛА). Такие полезные эксплуа-
тационные факторы называются стимулирующими и способству-
ющими функционированию объекта;
• негативные (вредные), на которые та или иная система ЛА не
должна реагировать, т.е. должна достаточно эффективно про-
тивостоять воздействию этих факторов. Вредные, не способ-
ствующие нормальному функционированию той или иной сис-
темы ЛА факторы называют дестабилизирующими.
Такое разделение эксплуатационных факторов определяется не
источником возникновения и не физической природой фактора, а
отношением к этому фактору различных систем ЛА, так как воздей-
237
ствие одного и того же фактора для одной системы ЛА может рас-
сматриваться как полезное действие, а для другой — как вредное,
дестабилизирующее ее работу. Так, повышение температуры являет-
ся основным стимулирующим фактором для СТР и в то же время
оказывает вредное дестабилизирующие воздействие на другие систе-
мы КА. Тем не менее такое разделение факторов важно с точки зре-
ния установления очередности наземных испытаний систем ЛА. Оче-
видно, что в первую очередь необходимо испытать и оценить качество
работы той или иной системы ЛА при воздействии основных факто-
ров и только затем испытывать и выявлять характер поведения испы-
тываемой системы при воздействии негативных (вредных) дестаби-
лизирующих факторов.
Контрольные вопросы
1. В чем состоит роль информации об эксплуатационных условиях в
создании ЛА?
2. На какие две группы подразделяются действующие на ЛА эксплуата-
ционные факторы по источнику их возникновения?
3. На какие классы подразделяются естественные эксплуатационные
факторы, действующие на ЛА?
4. На какие классы подразделяются искусственные эксплуатационные
факторы, действующие на ЛА?
5. Приведите и кратко охарактеризуйте факторы космического простран-
ства.
6. Сформулируйте три категории силового воздействия на летательный
аппарат.
7. Сформулируйте виды динамических механических нагрузок, действу-
ющих на ЛА.
8. В чем заключаются особенности изделий авиационной и ракетно-
космической техники как колебательной системы?
9. Сформулируйте основные характеристики вибрации.
10. Сформулируйте основные характеристики удара.
11. Что понимается под перегрузкой, действующей на ЛА?
12. Приведите группы возмущающих факторов, действующих на ЛА.
13. Дайте формулировку стимулирующих и дестабилизирующих эксплу-
атационных факторов.
Глава 6
НАЗЕМНАЯ ОТРАБОТКА ИЗДЕЛИЙ
АВИАЦИОННОЙ И РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ НА ВОЗДЕЙСТВИЕ ЕСТЕСТВЕННЫХ
ФАКТОРОВ
6.1. Испытания на воздействие климатических факторов
6.1.1. Испытания на воздействие повышенной температуры
внешней среды
Условия испытаний и применяемое оборудование. Повышение темпе-
ратуры изделий происходит под воздействием внешних и внутренних
факторов, причем это воздействие может быть непрерывным (стаци-
онарным), периодическим и апериодическим.
Действие внешних факторов определяется климатическими усло-
виями, местом установки и назначением изделия. Климатические
условия характеризуются, в частности, температурой окружающей
среды и интенсивностью солнечной радиации, которые могут изме-
няться в широких пределах. Температура и скорость нагрева изделий
под действием солнечной радиации зависят от размеров и цвета по-
верхности изделий, теплопроводности и теплоемкости материалов
конструкций. Указанные факторы определяют предельную темпера-
туру нагрева, по достижении которой поверхность изделий начинает
переизлучать принятую теплоту. В зависимости от места установки
изделий на температуру и скорость нагрева может оказывать влияние
и скорость ветра.
Действие внутренних факторов определяется схемой и конструк-
цией изделия. Непрерывному тепловому воздействию подвергаются
изделия, эксплуатирующиеся или хранящиеся в стационарных тем-
пературных условиях (в помещении). Длительность установления ста-
ционарного режима определяется назначением изделия и принятым
схемно-конструкторским решением и составляет 0,5—2,5 ч. Периоди-
ческому тепловому воздействию подвергаются транспортируемые из-
делия или изделия, эксплуатируемые на открытом воздухе. Такой
вид воздействия связан с быстрыми изменениями условий эксплуата-
ции (взлет и посадка самолета, работа в полевых условиях и т.д.), а
также с суточным изменением температуры (циклическое воздействие
температуры).
239
Периодические изменения температуры приводят к многократ-
ным деформациям различных элементов. Причем интенсивность воз-
действия тем больше, чем больше перепад между повышенной и по-
ниженной температурами, а также чем выше скорость и частота их
изменений. Для изделий, эксплуатирующихся в наземных условиях
на открытом воздухе, перепады температуры за время их прогрева
могут превышать 60°С. Продолжительность прогрева зависит от на-
значения изделия и его схемно-конструкторского решения и колеб-
лется в диапазоне от 10 мин. до 3 час. При эксплуатации изделий
авиационной техники перепады температуры могут достигать 80°С при
скорости изменения температуры до 50°С/ мин.
Апериодическому тепловому воздействию подвергаются изделия,
устанавливаемые на ракетах (в моменты запуска и вхождения в плот-
ные слои атмосферы), и в ряде других случаев. Резкое изменение
температуры может приводить к внезапному возникновению отказов,
вызванному изменением электрофизических, физико-химических и
механических свойств материалов и элементов.
Таким образом, повышение температуры изделий при эксплуа-
тации, хранении и транспортировании может вызывать появление
постепенных и внезапных отказов изделий. Поскольку повышение
температуры происходит под воздействием внешних и внутренних
факторов, то важное значение приобретает состояние изделия. Со-
стояние изделия определяется тем, является ли оно тепловыделяю-
щим (теплорассеивающим) или нетепловыделяющим (нетеплорассеива-
ющим). Температура тепловыделяющего изделия зависит не только
от условий окружающей среды, но и от количества рассеиваемой им
теплоты, что следует учитывать при испытании.
В качестве основы для проектирования и разработки норматив-
ной документации на проведение испытаний пользуются стандартны-
ми условиями окружающей среды. Воспроизведение условий испыта-
ний, близких к реальным, возможно в климатических испытательных
камерах, габаритные размеры которых во много раз превышают габа-
ритные размеры изделия. В этом случае в камере создаются усло-
вия, примерно аналогичные свободному обмену воздуха в простран-
стве. Однако реализация таких испытаний весьма затруднительна,
поэтому широкое распространение получили камеры с принудитель-
ной циркуляцией воздуха, что существенно облегчает установление и
поддержание определенного температурного режима. Для оценки
возможности воспроизведения в термокамерах различных испытатель-
ных режимов необходимо ввести ряд специфических параметров для
термокамер.
1. Неравномерность распределения температуры в полезном объеме
камеры, определяемая разностью температур:
240
^нер “ tj max tj min ,
где (/max, (/min — температуры в экстремальных точках полезного
объема камеры.
Неравномерность распределения температуры в полезном объеме
камеры зависит от способа нагрева или охлаждения (термостатирова-
ния), расположения нагревателей (охладителей), системы циркуля-
ции воздуха, теплоизоляции и ряда других конструктивных особен-
ностей камеры.
2. Колебание температуры в экстремальных точках полезного объема
камеры, вычисляемое по формулам
max = ((/ max — (/ max ) ^1 > &J min = (tj min “ (/ min ) ^2 •
Здесь Qj — амплитуда колебаний температуры; (/max, (/min — макси-
мальное и минимальное значения температуры в экстремальных точ-
ках:
(/max = гпах(/zymax)> (/min = (б/min), * =
4*2 — коэффициенты, учитывающие динамическую погрешность
измерений (/max и 0min соответственно:
4*1 = 71 + 4л2е21 /'к ; Ч'г = 71 + 4л2е22 / 'к >
где еС1 > ес2 — показатели тепловой инерции термопреобразователей,
учитывающие скорость воздушного потока в экстремальных точках;
tK — температура в камере.
Указанные коэффициенты зависят от тепловой инерционности
датчиков, которая не должна превышать 10 с, а также от работы
регулирующего устройства, определяющего период колебаний тем-
пературы tK в камере, под которым понимают минимальное время
между двумя включениями регулирующего устройства камеры, най-
денное не менее чем из трех циклов автоматического регулирования:
tK = min (to |
K g \g f>
где q — число циклов автоматического регулирования (q = 1, Q);
tq — длительность одного цикла.
3. Отклонение температуры в полезном объеме камеры от заданно-
го значения, определяемое разностью между максимальным значени-
ем температуры в экстремальной точке (tj max) и температурой в кон-
трольной точке, принимаемой за заданное ((д):
241
Д4 — tj max tjk~ ^нер / 2 + (/ — tjk J
^2 —tjk (/min-^нер/2 \t tjk)>
где T — среднее арифметическое значение температуры в экстремаль-
ных точках:
t =
у max
Максимальное и минимальное мгновенные отклонения темпера-
туры в полезном объеме камеры от заданного значения определяются
формулами:
Англах = aJmax +^1> ^2 min =fl/min + ^2-
4. Относительная разность между температурой стенки и темпе-
ратурой воздуха в полезном объеме камеры, зависящая от способа на-
грева (охлаждения), %:
= max
g=l,...,m
•100,
- lv
где /в = ~ z, tj — среднее арифметическое значение температуры в
точках полезного объема; — значение температуры стенки рабо-
чего объема камеры, определяемое как среднее арифметическое зна-
чение результатов измерений:
1 k
тот _ 2. V /Ст
lg ~irZ^4g>
* »=1
где g — номер стенки (g = 1, 2,..., /и); т — число стенок; / — номер
измерения; к — число измерений; — значение температуры в гео-
метрическом центре g-й стенки при i-м измерении.
Температуру стенок измеряют с помощью термопреобразовате-
ля, закрепляемого в геометрическом центре каждой стенки любым
способом, обеспечивающим его тепловой контакт со стенкой (на-
пример, с помощью теплопроводящей замазки).
Нагрев (термостатирование) камер может осуществляться двумя
основными способами: прямым (непосредственным) и косвенным.
242
Прямой нагрев воздуха в камере может происходить за счет расположе-
ния электронагревателей за внутренней стенкой (рубашкой) каме-
ры, окружающей ее рабочий объем со всех сторон (рис. 6.1), а также
путем принудительной циркуляции воздуха, предварительно нагре-
того электронагревателями, расположенными внутри камеры за спе-
циальным экраном (рис. 6.2).
Сигнал
Рис. 6.1. Испытательная камера тепла и холода с прямым нагревом и ох-
лаждением за счет электронагревателей и испарителей, размещенных за
внутренней металлической стенкой (рубашкой) камеры: 1 — контрольный
датчик температуры; 2 — рубашка камеры; 3 — вентилятор; 4 — регулятор
температуры; 5 — холодильная установка; 6 — электронагреватель
Сигнал
на охлаждение
Рис. 6.2. Испытательная камера тепла и холода с прямым нагревом и ох-
лаждением за счет циркуляции воздуха: 1 — контрольный датчик температу-
ры; 2 — вентилятор; 3 — регулятор температуры; 4 — охладитель (испаритель);
5 — электронагреватель; 6 — канал циркуляции воздуха; 7 — холодильная
установка
243
Хорошие результаты дает нагрев воздуха при расположении элек-
тронагревателей за рубашкой камеры, окружающей ее рабочий объем
со всех сторон (см. рис. 6.1). В этом случае обеспечиваются равно-
мерность пространственного распределения температуры и ее высо-
кая стабильность при сравнительно небольшой скорости движения
воздуха, что создает условия, близкие к свободному обмену воздуха
в камере. Высокая равномерность нагрева достигается за счет боль-
шой поверхности нагрева и достаточно значительной мощности элек-
тронагревательных элементов, обеспечивающих получение высокой
температуры.
К достоинствам данных камер можно отнести минимальное вре-
мя достижения предельных температур и восстановления температур-
ного режима камеры после помещения в нее испытуемых изделий.
Однако необходимость при большом объеме иметь значительную мощ-
ность нагревателей ограничивает применение этого способа нагрева,
в связи с чем используются камеры с принудительной циркуляцией
воздуха.
Осуществление прямого нагрева за счет циркуляции воздуха,
предварительно нагретого электронагревателями, расположенными
внутри камеры (см. рис. 6.2), несколько упрощает конструкцию ка-
меры. В этом случае для получения однородного потока воздуха вен-
тилятор, создающий повышенное давление, размещают в форкаме-
ре, откуда воздух может выходить через фильтр (например, из
стекловолокна). В форкамере могут также размещаться нагреватель-
ные элементы. Предусматривается одновременная регулировка на-
грева и скорости воздушного потока.
В некоторых конструкциях электронагревательные элементы и
фильтры конструктивно объединяются в один узел в виде стеклотка-
ни с вплетенными в нее обогревательными элементами. Принуди-
тельная циркуляция воздуха, предотвращающая перегрев тепловыде-
ляющих изделий, не должна приводить к чрезмерному их охлаждению.
Практически достаточная для всех случаев скорость воздушного пото-
ка составляет 0,5 м/с. Однако при одновременном испытании груп-
пы изделий в одной камере следует уделять большее внимание выбо-
ру скорости и направления воздушного потока. Так, для уменьшения
влияния конвекции на однородность воздушного потока предусмат-
ривают его вертикальную принудительную циркуляцию.
К недостаткам данной конструкции камеры можно отнести боль-
шую продолжительность нагрева и значительный потребляемый объем
воздуха.
Существуют камеры, сочетающие циркуляцию и нагрев воздуха
в пространстве за рубашкой камеры.
244
К преимуществам камер с прямым способом нагрева относятся
их относительная простота и невысокая стоимость. Однако у них име-
ются и существенные недостатки: наличие больших колебаний тем-
пературы за счет ее скачков при включении и выключении нагрева
регулятором; необходимость частых включений, вызванная низкой
теплоемкостью воздуха; трудность точной установки заданной темпе-
ратуры.
В камере с косвенным нагревом (рис. 6.3) (термостатированием)
для осуществления интенсивного теплообмена, при котором проис-
ходит передача тепла от одной среды к другой, используется специ-
альная промежуточная среда, обеспечивающая перенос теплоты от
нагревателя к нагреваемому телу или от охлаждаемого тела к охлади-
телю, называемая термоносителем (в камерах теплоты — теплоноси-
телем, а в камерах холода — холодоносителем).
Сигнал
. на охлаждение
Рис. 6.3. Испытательная камера тепла с косвенным нагревом за счет цирку-
ляции термоносителя в «зарубашечном пространстве»: 1 — контрольный дат-
чик температуры; 2 — вентилятор; 3 — регулятор температуры; 4 — нагрева-
тель; 5 — циркуляционный насос; 6 — нагреватель; 7 — термостат (емкость с
термоносителем)
Термоносители могут быть жидкими и газообразными вещества-
ми. В испытательных камерах в основном применяются жидкие тер-
моносители. В камерах теплоты или комбинированных нагреватель
располагается в теплообменном аппарате — термостате, в котором
происходит нагрев термоносителя.
245
Термостат представляет собой бак с расположенным в нем ради-
атором нагревателя. В термостате также могут быть смонтированы:
насос, обеспечивающий подачу нагретого термоносителя; термодат-
чики (терморезисторы) регулировочного устройства; предельное реле
температуры, отключающее нагрев при температуре термоносителя,
превышающей допустимое для него значение. При подаче команды
на нагрев термоноситель нагревается в термостате, подается насосом
в каналы рубашки камеры, а затем обратно в термостат. После дос-
тижения заданной температуры нагреватель отключается и нагрев пре-
кращается. Предусматривается возможность нескольких фиксирован-
ных скоростей нагрева.
В современных термокамерах кожух изготовляют из коррозион-
ностойкой стали. Внутренние стенки (рубашка камеры) также могут
изготовляться из коррозионностойкой стали или из чистого алюми-
ния. Применяемый способ изготовления внутренних стенок камер с
косвенным нагревом обеспечивает образование в них системы кана-
лов, служащих теплообменником для термоносителя и создающих хо-
рошее распределение температуры в рабочем объеме камеры. Наруж-
ную поверхность стенок камеры часто полируют.
Для поддержания определенного температурного режима внутри
камеры и для исключения влияния окружающей температуры на ее
работу между стенками камеры располагают термоизоляционный ма-
териал с малым коэффициентом теплопроводности (1 = 0,035 —
—0,14 Вт • м-1 • К-1) и малой плотностью (р = 25 — 300 кг/м3 ). Тер-
моизоляционный материал должен удовлетворять следующим требо-
ваниям: быть химически инертным, морозоустойчивым, обладать не-
горючестью, сопротивляемостью проникновению грызунов, действию
грибов и микроорганизмов. В качестве термоизоляционных матери-
алов находят применение органические пластмассы (пенополистирол,
пенополиуретан), а также неорганические пластмассы (пеностекло,
минеральная вата и т.д.). Сверху термоизоляционный материал по-
крывают гидроизоляционным слоем.
Принудительная циркуляция воздуха в камере зависит от ее аэроди-
намики, определяемой местом расположения вентилятора и конструк-
цией воздуховодов. В камерах с прямым нагревом вентилятор чаще
всего располагается в задней части рабочего объема камеры (рис. 6.4,
а). Всасываемый из камеры воздух проходит через нагреватель 2 (ох-
ладитель) и вновь поступает в камеру. При этом воздух из нижней
части камеры устремляется вверх. В камерах с косвенным нагревом
возможны два расположения вентилятора 1: в задней стенке и на по-
толке камеры. Вентилятор, расположенный на потолке камеры, вса-
сывает воздух из рабочего объема камеры и направляет его вдоль стен
246
с расположенными в них теплообменниками (рис. 6.4, б). Можно
прогонять воздух по специальным воздуховодам, в которых располо-
жены теплообменники, и далее через перфорированные донные ли-
сты в рабочий объем камеры (рис. 6.4, в). Иногда в камерах на пути
циркуляции воздуха ставят специальные жалюзи, позволяющие из-
менять направление его потока.
Рис. 6.4. Системы циркуляции воздуха в камерах с различным располо-
жением вентилятора: а — в задней части камеры; б — на потолке камеры;
в — на потолке камеры с воздуховодами; 1 — вентилятор; 2 — нагрева-
тель; 3 — испаритель; 4 — экран
Сравнивая камеру прямого нагрева с расположенным в ней элек-
тронагревателем (рис. 6.5,а) с камерой косвенного нагрева, обеспе-
чивающей нагрев за счет циркуляции термоносителя в ее рубашке
(рис. 6.5,6), и имея в виду, что нагрев зависит от теплопотерь, опре-
деляемых теплопередачей стенок камер, можно оценить распределе-
ние температуры в стенке камеры. В первом случае (рис. 6.5,а) имеет
место большая неравномерность температуры в камере, вызванная
более низкой температурой стенок камеры по сравнению с темпера-
турой воздуха, так как теплоизоляция не может покрыть потери теп-
ла в воздухе. Во втором случае (рис. 6.5,6) разность температуры
воздуха в камере и стенки незначительна.
Приведенные соображения позволяют сделать вывод, что для
имитации условий свободного обмена воздуха нецелесообразно рас-
полагать нагревательные элементы в рабочем объеме камеры, посколь-
ку изменение их температуры в процессе регулирования будет приво-
дить к неравномерности ее распределения в камере. Лучшие результаты
дают камеры косвенного нагрева, обеспечивающие нагрев стенок ка-
меры. Следует обращать внимание на состояние поверхности стенок
камеры, от которого зависит излучение теплоты.
247
а) б)
Рис. 6.5. Распределение температуры в камерах с прямым и косвенным
нагревом за счет: а — электронагревателей в камере; б — циркуляции термо-
носителя в теплообменнике за рубашкой камеры: /н — температура нагрева-
теля; /в — температура воздуха в камере; /внс — температура внутренней
стенки; /н с — температура наружной стенки; /н п — температура наружно-
го пространства; А/ — разность температур
В конструкциях камер предусматривается внутреннее освещение,
а также специальные проходные отверстия для подведения по прово-
дам (кабелям) сигналов и питающих напряжений к испытуемым из-
делиям.
В камере размещаются чувствительные элементы (ЧЭ) — термо-
преобразователи, сигналы с которых подаются к системе автомати-
ческого регулирования (САР) температуры воздуха (рис. 6.6). В ос-
новном САР состоит из объекта управления (ОУ) и управляющего
устройства (УУ). К объекту регулирования относится нагреватель (Н)
климатической испытательной камеры (К), а в некоторых камерах
нагреватель с воздуховодом, обеспечивающим подведение нагретого
воздуха в камеру. К управляющим устройствам относятся: конт-
рольные датчики температуры; элементы сравнения заданной и кон-
тролируемой температур; сигнальное устройство для подачи сигналов
о достижении заданной температуры; программное и исполнитель-
ное устройства.
Возможны три основных типа САР температуры воздуха в камере:
1) при установке контрольного термопреобразователя (ЧЭ) воз-
духа в камере (после теплообменника) — замкнутая система регули-
рования (рис. 6.6,а);
248
б)
U(t)
е)
Рис. 6.6. Структурные схемы САР температуры воздуха в испытательной
камере: а — замкнутая; б — разомкнутая; в — комбинированная с алгебраи-
ческим суммированием
2) при установке контрольного термопреобразователя в воздухо-
воде — разомкнутая система регулирования, так как изменение тем-
пературы в камере не вызывает изменений в управляющем устрой-
стве (рис. 6.6,6);
3) при установке двух контрольных термопреобразователей в мес-
тах, соответствующих указанным в рассмотренных выше системах, —
комбинированная система с последующим алгебраическим суммировани-
ем воздействий (рис. 6.6,в). В некоторых современных камерах такая
контрольно-измерительная система с регулированием включает в себя
ПЭВМ.
Методы испытаний на воздействие повышенной температуры
внешней среды. Целью испытаний является определение пригодности
изделий к эксплуатации или хранению при воздействии повышенной
температуры. В условиях воздействия повышенной температуры и
249
(или) после пребывания в указанных условиях проводят проверку
значений параметров и (или) внешнего вида изделий для установле-
ния их соответствия требованиям. Метод испытаний зависит от того,
является изделие тепловыделяющим или нет, а также от того, нахо-
дится ли оно под электрической нагрузкой.
Испытания нетепловыделяющих изделий без электрической нагруз-
ки. После выдержки нетепловыделяющего изделия в нормальных кли-
матических условиях проводят его визуальный осмотр и первоначаль-
ные измерения значений параметров. Изделие помещают в камеру,
в которой устанавливают заданную повышенную температуру. В за-
висимости от требований стандартов, ТУ и ПИ повышенная темпе-
ратура в камере может быть установлена заранее или в процессе пос-
ледующего нагрева. Продолжительность выдержки изделия при
заданной температуре определяется с момента установления стацио-
нарного температурного режима в камере. После достижения тепло-
вого равновесия изделие выдерживают в камере при заданной темпе-
ратуре в течение установленного времени. По окончании выдержки
проводят заключительные измерения значений параметров нетепло-
выделяющих изделий.
Указанные измерения можно проводить непосредственно в каме-
ре, а если это невозможно, то изделие извлекают из камеры и вы-
полняют измерения. В ряде случаев оговаривается время, в течение
которого должны быть проведены указанные измерения, или темпе-
ратура изделия, при которой они должны быть выполнены. Возмож-
ны случаи, когда визуальный осмотр и измерение значений парамет-
ров осуществляют после выдержки изделия в течение 1—2 ч в
нормальных атмосферных условиях восстановления.
Испытания тепловыделяющих изделий без электрической нагрузки
проводят при несколько другом порядке установки температуры в
камере. В приведенную методику вводятся изменения, связанные с
тем, что температура контролируемого участка (узла) изделия опре-
деляется не только температурой окружающей среды, но и тепло-
той, выделяемой изделием. В связи с этим при испытаниях в камере
устанавливают температуру, которая была бы у контролируемого уча-
стка при условии тепловыделения испытуемого изделия, находящего-
ся в условиях свободного обмена воздуха при заданной температуре.
В качестве контролируемого участка изделия выбирают участок
с наибольшей температурой или с температурой, наиболее критич-
ной для работоспособности изделия. Температуру контролируемого
участка изделия определяют путем предварительного испытания из-
делия. В камеру, имитирующую условия свободного обмена возду-
ха, помещают одно или несколько изделий и повышают температуру
до заданного значения. Устанавливают режим, обеспечивающий но-
250
минальную или максимально допустимую электрическую нагрузку.
В стационарном тепловом состоянии изделия определяют контроли-
руемый участок. Реализация указанных методов измерений темпера-
туры встречает определенные трудности, поэтому если повышенная
рабочая температура изделия не превышает 100°С и температура пере-
грева изделия, равная разности температур контролируемого участка
(узла) изделия и окружающей среды, не превышает 80°С, то тем-
пературу контролируемого участка можно определить в нормальных
климатических условиях. Изделие устанавливают в помещении (вне
камеры), исключающем воздействие солнечного излучения и сквоз-
няков, подают электрическую нагрузку и после достижения издели-
ем стационарного теплового состояния измерением температуры в ряде
предполагаемых критичных точек определяют контролируемый учас-
ток. Для измерения температуры следует воспользоваться перенос-
ным термометром. Причем в случае, если габаритные размеры и масса
изделия малы, целесообразно воспользоваться бесконтактным тер-
моизмерительным прибором.
Испытания тепловыделяющих изделий под электрической нагрузкой
могут проводиться в двух режимах: при контроле температуры в каме-
ре или на поверхности изделия. Указанные испытания могут осуще-
ствляться в камере, позволяющей имитировать условия свободного
обмена воздуха, или в камере с принудительной циркуляцией возду-
ха. Известно, что воспроизведение условий свободного обмена воз-
духа в камере при испытаниях весьма затруднительно, так как даже в
очень больших камерах циркуляция воздуха и распределение темпера-
туры вокруг изделия не соответствуют условиям реальной эксплуата-
ции. Однако экспериментально установлено, что при выполнении
определенных офаничений возможно воспроизведение в камере ус-
ловий, близких к условиям свободного обмена воздуха.
В первом случае указанные ограничения заключаются в том, что
полезный объем камеры после размещения в нем испытуемого изде-
лия должен обеспечить указанные в нормативной документации ми-
нимально допустимые расстояния между испытуемыми изделиями, а
также между изделиями и стенками камеры. Во втором случае накла-
дывают ограничения на величину перегрева объекта испытаний отно-
сительно указанного в его нормативной документации значения по-
вышенной рабочей температуры. Как правило, разность этой
температуры с температурой нормальных климатических условий ис-
пытаний не превышает 35°С.
Метод определения минимально допустимого расстояния между
тепловыделяющими изделиями и стенкой камеры. Для изделий с объе-
мом не более 10~3 м3, у которых рассеиваемая мощность не превыша-
ет 50 Вт, рекомендуемое минимально допустимое расстояние между
251
поверхностью изделия и стенкой камеры должно составлять 0,1 м.
Для изделий того же объема, но с большей рассеиваемой мощностью
(50—100 Вт) рекомендуемое минимально допустимое расстояние между
любой поверхностью изделия и соответствующей стенкой камеры
должно быть не менее 0,2 м.
Если размеры камеры по сравнению с размерами изделия недо-
статочно велики и теплорассеивание изделия нарушает тепловой ре-
жим камеры, то следует применять камеры с принудительной цирку-
ляцией воздуха. При испытаниях изделий в камере с принудительной
циркуляцией воздуха со скоростью воздушного потока, не превыша-
ющей 2 м/с, распределение температуры по испытуемому изделию
зависит не только от системы нагрева, но и от скорости воздушного
потока, а также от расположения изделия по отношению к направле-
нию циркуляции воздуха. В связи с этим целесообразно помимо
контроля температуры камеры, осуществляемого термодатчиками,
входящими в ее конструкцию, помещать в камеру измерительные
термодатчики. Их располагают в точках на условной горизонтальной
плоскости, находящейся ниже изделия на расстоянии, не превыша-
ющем 5 см, посередине между изделием и боковой стенкой камеры,
что уменьшает влияние на них восходящих конвективных потоков.
Минимально допустимое расстояние между тепловыделяющими из-
делиями и стенками камеры выбирают в соответствии с изложенны-
ми выше рекомендациями.
Определение минимально допустимого расстояния между тепло-
выделяющими изделиями основано на учете зависимости теплообме-
на от одновременно протекающих процессов конвекции и теплового
излучения. Рекомендуется следующая методика определения указан-
ного расстояния. Изделия устанавливают в камеру, как при испыта-
ниях. Включают принудительную циркуляцию воздуха без системы
обогрева, если это позволяет конструкция камеры. Включают пита-
ние и выдерживают изделия до установления стационарного теплово-
го режима, при котором температура поверхности изделий остается
неизменной. Измеряют температуру поверхности изделий в идентич-
ных точках. Изменяя расстояние между изделиями, измеряют раз-
ность температур между идентичными точками на поверхностях изде-
лий. За минимально допустимое расстояние между тепловыделяющими
изделиями принимают расстояние, при котором эта разность темпе-
ратур не превышает 5°С.
Особенностью метода испытаний тепловыделяющих изделий под
электрической нагрузкой в камере с принудительной циркуляцией
воздуха является необходимость измерения температуры в определен-
ных точках на поверхности изделия, а иногда даже внутри него. В
связи с этим оказывается целесообразным, во-первых, устанавли-
252
вать в камере измерительные термопреобразователи на расстоянии 5 см
от контрольного участка (узла) изделия, а во-вторых, осуществлять
такую регулировку температуры в камере, при которой рабочая тем-
пература контролируемого участка изделия определяется совместным
нагревом, вызванным работой камеры и электрической нагрузкой
изделия.
Если в изделиях имеются узлы, которые при испытании на воз-
действие повышенной рабочей температуры приобретают температу-
ру ниже, чем некоторая предельная опасная для них температура, то
проводят испытания на воздействие повышенной предельной темпе-
ратуры среды. Указанные испытания осуществляют в камере под элек-
трической нагрузкой или без нее по рассмотренным выше методи-
кам, проводя нагрев до установления предельных температур,
предусмотренных нормативной документацией. Выполнение указан-
ных испытаний позволяет проверить способность изделия и опреде-
ленных узлов выдерживать воздействие опасной для них повышенной
предельной температуры.
Особенностью метода испытаний является то, что после дости-
жения заданной предельной температуры изделие выдерживают при
этой температуре до достижения теплового равновесия в течение вре-
мени, установленного в нормативной документации, но не менее
30 мин.
При эксплуатации или хранении некоторых видов авиационной,
ракетной и другой аппаратуры (например, крупногабаритной) воз-
никают условия, когда время ее нахождения при повышенной (по-
ниженной) температуре оказывается меньше, чем это необходимо
для достижения температурной стабильности. В связи с этим во из-
бежание тепловой нагрузки аппаратуры продолжительность испыта-
ний сокращается. Однако требование достижения повышенной (по-
ниженной) температуры контролируемого участка (узла) сохраняется.
В этом случае температура в камере при испытаниях может задавать-
ся соответственно выше (ниже) температуры окружающей среды в
условиях эксплуатации, однако следует предусмотреть меры предос-
торожности. Известно, что эффективность теплообмена зависит от
скорости движения воздуха, поэтому желательно воспроизвести ско-
рости, соответствующие реальной эксплуатации, что вследствие ог-
раниченности информации и трудности имитации выполнить прак-
тически невозможно. В связи с этим устанавливают самые жесткие
условия испытаний.
При испытаниях нетепловыделяющих изделий рекомендуется за-
давать высокую скорость воздуха в испытательной камере (не менее
2 м/с), что вызывает повышение (понижение) температуры изде-
лия, а в случае тепловыделяющих изделий — снижать скорость возду-
253
ха или, если это возможно, проводить испытания в условиях свобод-
ного обмена воздуха, что обеспечит повышение температуры самых
горячих точек испытуемого изделия.
6.1.2. Испытания на воздействие пониженной температуры
внешней среды
Условия испытаний и применяемое оборудование. Понижение темпе-
ратуры изделий в основном происходит под воздействием внешних
факторов, которому изделия могут подвергаться в процессах эксплу-
атации, хранения и транспортирования.
Для проведения испытаний на воздействие пониженной темпе-
ратуры применяют испытательные камеры холода или комбиниро-
ванные камеры — тепла и холода; тепла, холода и пониженного ат-
мосферного давления; тепла, холода и влаги и т.д.
Конструктивно камеры холода бывают двух видов: шкафные и сун-
дучковые. Особенностью сундучковых камер является расположение
двери в верхней части камеры (как бы в потолке), что облегчает ее
загрузку изделиями больших габаритных размеров и масс.
Комбинированные камеры позволяют испытывать изделия на раз-
дельное и одновременное воздействие ряда воспроизводимых факто-
ров (холода и пониженного атмосферного давления), а также на воз-
действие постепенного изменения температуры (циклическое
воздействие температур).
Требования к пределам воспроизводимых температур (диапазону
изменения температур) в основном определяются стандартами на
испытания различных изделий. Наиболее часто камеры холода ха-
рактеризуются диапазоном температур от +25 до —65°С.
Получение пониженной температуры в камере достигается ис-
кусственным охлаждением находящегося в ней воздуха двумя спосо-
бами: непосредственным и косвенным. Оба способа могут быть ос-
нованы на использовании одного из следующих физических процессов:
испарения или кипения, плавления или таяния и сублимации. Все
указанные процессы протекают с поглощением тепла из окружаю-
щей среды. Кроме того, искусственное охлаждение может быть ос-
новано на таких физических явлениях, как термоэлектрический эф-
фект (эффект Пельтье) и адиабатическое (без теплообмена с внешней
средой) расширение газа.
Охлаждение при испарении или кипении за счет поглощения внеш-
ней теплоты характеризуется тем, что воспринимаемая извне теплота
расходуется на преодоление сил молекулярного сцепления летучих
жидкостей и их расширение. Данный способ осуществляется с помо-
щью холодильных машин.
254
Охлаждение при таянии реализуется с помощью естественного льда
за счет затрат теплоты извне на его таяние, сопровождающееся изме-
нением связей между молекулами вещества и ослаблением сил моле-
кулярного сцепления.
Охлаждение в процессе сублимации, т.е. непосредственного пере-
хода тела из твердого состояния в газообразное, имеет место при ох-
лаждении так называемым сухим льдом, причем теплота расходуется
на преодоление сил сцепления молекул вещества и внешнего давле-
ния, препятствующего этому процессу.
Охлаждение за счет адиабатического расширения сопровождается
работой, совершаемой расширяющимся телом за счет уменьшения
его внутренней энергии, приводящей к понижению температуры.
Например, адиабатическое расширение воздуха от 0,4 до 0,1 МПа
сопровождается понижением температуры от +20 до —75°С.
Охлаждение за счет использования эффекта Пельтье заключается
в том, что пропускание постоянного электрического тока через цепь,
состоящую из разнородных проводников (полупроводников), приво-
дит к возникновению разности температур в месте их соединения,
т.е. к более высокой температуре одного спая по отношению к друго-
му (холодному) спаю. Количество энергии, переносимое от холод-
ного спая к теплому, пропорционально силе тока в цепи термоэле-
мента. Разность температур, получаемая с помощью термоэлементов,
зависит от материалов ветвей. Достоинством данного способа явля-
ется непосредственное использование электрической энергии для пе-
реноса тепловой энергии низкого температурного уровня на более
высокий (теплая ветвь) без промежуточных устройств.
Наибольшее применение получил способ машинного охлажде-
ния, основанный на процессах испарения и кипения. Известно, что
согласно второму началу термодинамики для охлаждения теплота дол-
жна быть перенесена из охлаждаемой среды в теплую путем затрат
извне механической или тепловой энергии. Это достигается с помо-
щью так называемых холодильных (термодинамических) циклов, в
процессе которых теплота переносится с помощью рабочего тела (ве-
щества). На рис. 6.7 в общем виде представлен термодинамический
цикл в виде р- Vдиаграммы (давление-объем).
В процессе 1-а-2 рабочее вещество расширяется и нагревается,
затрачивая теплоту окружающей среды и вызывая ее охлаждение, в
процессе 2-А-1 рабочее вещество сжимается, а выделяющаяся при
этом теплота отводится в окружающую среду (воздух). Осуществле-
ние цикла требует внешней механической работы, изображаемой на
р-И диаграмме площадью, ограниченной линиями 1-а-2-б-1. Если за
время цикла рабочее вещество воспринимает от охлаждаемой среды
255
—--—---- ---- ►
V
Рис. 6.7. Обратный
термодинамический
цикл в р- V диаграмме
теплоту в количестве qQ, а на его сжатие
затрачивается количество / работы, то в со-
ответствии с законом сохранения энергии
от него должна отводиться теплота в коли-
честве q = q$+l.
Комплекс технических устройств,
осуществляющий холодильный цикл, на-
зывают холодильной машиной. В качестве
рабочего тела используются различные ве-
щества, которые могут находиться в со-
стоянии газа или пара. В связи с этим раз-
личают газовые и паровые холодильные
машины. В газовых холодильных машинах
в качестве рабочего вещества применяют
только воздух, который во время всего холодильного цикла не изме-
няет своего агрегатного состояния. В испытательных камерах газо-
вые холодильные машины практически не используются из-за боль-
ших размеров, низкого механического КПД, малой теплоемкости
воздуха и ряда других недостатков.
В паровых холодильных машинах в процессе холодильного цикла
рабочее вещество переходит из парообразного состояния в жидкое
или наоборот. В принципе паровые холодильные машины основаны
на переносе теплоты из холодной среды в теплую за счет затраты
энергии. В них восприятие теплоты из охлаждаемого помещения
происходит в результате кипения рабочего вещества, а отвод теплоты —
вследствие его конденсации. Для охлаждения окружающей среды с
помощью паровой холодильной машины используют систему метал-
лических труб или змеевиков, называемую испарителем. В испари-
теле рабочее вещество в процессе кипения переходит в парообразное
состояние при низких температуре и давлении.
Последующей операцией холодильных машин является отсасы-
вание рабочего вещества, находящегося в парообразном состоянии,
из испарителя. Оно может реализовываться двумя путями: с помо-
щью компрессоров и абсорбционных машин с поглотителями. В ис-
пытательных камерах используются паровые компрессионные холодиль-
ные машины, в которых одним из главных элементов является
компрессор, служащий для отсасывания паров рабочего вещества из
испарителя, сжатия и нагнетания его в систему охлаждения. Для ха-
рактеристики холодильных компрессионных машин пользуются по-
нятием холодопроизводительности (удельной массовой и объемной).
Холодопроизводительностью называют количество теплоты £?д, ко-
торое холодильная машина отнимает за единицу времени от охлажда-
емой среды. Она измеряется в ваттах.
256
Удельной массовой холодопроизводительностью называется ко-
личество теплоты в джоулях, отнимаемое от охлаждаемой среды мас-
сой рабочего тела в 1 кг при осуществлении холодильного цикла.
Удельная объемная холодопроизводительность ^рабочего тела по-
казывает, сколько теплоты отводится от охлаждаемой среды объемом
паров рабочего тела V= 1 м3, образующихся в процессе кипения.
Энергетическую оценку холодильного цикла можно дать с помо-
щью холодильного коэффициента е, представляющего собой отноше-
ние к работе I, затрачиваемой на адиабатическое сжатие рабочего
тела массой 1 кг: е = qR/l.
Как указывалось, охлаждение достигается применением рабоче-
го вещества — холодильного агента (хладагента), который должен удов-
летворять следующим требованиям:
1) иметь достаточно низкую температуру кипения (процесс бур-
ного парообразования при нормальном атмосферном давлении), что-
бы при работе холодильной машины не было разрежения в испарите-
ле. Температура кипения и конденсации жидкости является функцией
давления, причем чем меньше давление, тем ниже температура кипе-
ния. В камерах находят применение хладагенты, легко превращаю-
щиеся в жидкость при высоком давлении и температуре окружающей
среды. Однако их испарение происходит при низком давлении и тем-
пературе ниже окружающей среды. Испарение всегда сопровождается
отводом теплоты. Происходящее при испарении увеличение объема
хладагента и кинетической энергии молекул при переходе из жидкого
состояния в парообразное приводит к изменению внутренней энергии
вещества;
2) не иметь высокого давления при температуре конденсации,
что потребует повышения прочности холодильной машины, а следо-
вательно, увеличит ее массу и стоимость;
3) обладать достаточно большой удельной объемной холодопро-
изводительностью, что позволит уменьшить объем цилиндра комп-
рессора, а значит, и его размеры;
4) иметь возможно более высокую критическую температуру, при
которой он переходит из парообразного состояния в жидкое, с тем
чтобы исключить самопроизвольный переход на любом этапе холо-
дильного процесса. В первую очередь эта температура должна быть
выше температуры охлаждающей воды или воздуха в конденсаторах
холодильных машин. Чем выше критическая температура хладаген-
та, тем меньше образуется пара;
5) обладать низкой температурой замерзания, исключающей его
замерзание в испарителе при определенных температурах кипения;
6) иметь малую плотность, что уменьшает гидравлическое со-
противление в трубопроводах и клапанах при его движении, а также
потери давления;
257
7) обладать хорошими теплопередающими свойствами, характе-
ризуемыми коэффициентами теплоотдачи и теплопроводности.
Как известно, коэффициент теплоотдачи а зависит от гидроди-
намической картины, режима течения и теплофизических свойств
хладагента. Коэффициент теплопроводности 1 главным образом оп-
ределяется свойствами хладагента. Он является коэффициентом про-
порциональности в формуле, определяющей тепловой поток ^то,
распространяющийся вдоль некоторого направления z с изменяющей-
„ . dt „ dt „
ся температурой: =-1—S, где ------градиент температуры; У —
dz dz
площадь поверхности, расположенной перпендикулярно оси Z-
Знак «-» означает, что направление, в котором возрастает тем-
пература, и направление, в котором распространяется теплота, про-
тивоположны, т.е. теплота распространяется в направлении убыва-
ния температуры;
8) обладать большой скрытой теплотой парообразования и высо-
кой удельной теплоемкостью паров. Известно, что при переходе
жидкости в газообразное состояние (при испарении) тело покидают
наиболее быстрые молекулы, вследствие чего средняя энергия остав-
шихся молекул уменьшается и тело охлаждается. В связи с этим
желательно, чтобы хладагент обладал большой скрытой теплотой
парообразования, т.е. чтобы на парообразование (испарение) затра-
чивалось больше теплоты, в результате чего тело сильнее охлажда-
лось. При этом пары должны обладать высокой удельной теплоемко-
стью, т.е. для повышения их температуры необходимо затратить
большое количество теплоты, что также будет способствовать охлаж-
дению.
Кроме того, к хладагентам предъявляется ряд дополнительных
требований: они должны быть безвредными для здоровья человека; не
быть горючими, взрывоопасными; обладать химической стойкостью
и инертностью к смазочным маслам и металлам. Хладагенты также
должны хорошо растворять воду, поскольку, если влага окажется не-
растворенной, то при отрицательной температуре она может замерз-
нуть, образовав в системе ледяные пробки, которые могут нарушить
циркуляцию хладагента. Помимо этого в присутствии воды многие
хладагенты могут оказывать корродирующее действие на металлы.
Поставленным требованиям в наибольшей степени отвечают следую-
щие хладагенты: аммиак NH3 и фреоны.
Фреоны представляют собой группу фтористых и хлористых про-
изводных предельных (насыщенных) углеводородов. Большое раз-
нообразие фреонов и их относительно сложные названия привели к
внедрению условной системы обозначения. Каждый хладагент в за-
258
висимости от его химической формулы имеет свое числовое обозна-
чение, в котором последняя цифра означает число атомов фтора в
молекуле данного хладагента; предпоследняя цифра на единицу боль-
ше числа атомов водорода в молекуле; третья цифра от конца на еди-
ницу меньше числа атомов углерода в молекуле. Для производных
метана третья цифра равна нулю, и поэтому они имеют двузначные
числовые обозначения. Перед окончательным числовым обозначе-
нием хладагента пишут слово «фреон» или только первую букву, на-
пример: фреон-12 (дифтордихлорметан CFjC^); Ф-12; фреон-22, Ф-22
(дифтормонохлорметан HF2C1) и т.д.
Нормальная температура кипения различных хладагентов приве-
дена в табл. 6.1.
Таблица 6.1
Нормальная температура кипения хладагентов
Агент Химическая формула Нормальная температура кипения (испарения), К
Аммиак Окись углерода Хлористый метил Фреон-12 Фреон-22 Кислород Азот NH3 СО2 СН3С1 CF2C12 chf2ci О N 239,9 194,7 249,5 243,35 232,35 90,2 78,8
По способу охлаждения различают камеры с непосредственным и
косвенным охлаждением.
Непосредственное охлаждение может осуществляться введением
твердого или жидкого хладагента в рабочий объем камеры. В каче-
стве твердого хладагента применяют углекислоту, имеющую темпе-
ратуру (сублимации) точки замерзания —78,5°С. Поглощая теплоту
из окружающего пространства, твердая углекислота нагревается и пре-
вращается в безвредный, не вызывающий коррозии газ. Указанный
способ охлаждения целесообразно применять при редких и кратков-
ременных испытаниях. Недостатками данного способа охлаждения
являются непостоянство температуры в камере вследствие плохой теп-
лопередачи путем конвекции, а также зависимость температуры в
камере от количества, габаритных размеров и масс загруженных в
нее изделий. Установка в камеру вентилятора несколько уменьшает
эти недостатки. Достоинства такого способа охлаждения — его про-
стота, быстрая установка температуры, бесшумность и т.д.
Из жидких хладагентов наиболее широко используют азот, кото-
рый может вводиться в камеру вручную и автоматически. В камерах
9*
259
Рис. 6.8. Камера непосред-
ственного охлаждения с автома-
тической регулировкой введения
жидкого хладагента (азота)
с автоматической регулировкой вве-
дения жидкого хладагента (азота) в
рабочий объем (рис. 6.8) в зависи-
мости от установленных на задающем
устройстве значений пониженной
температуры, а также температуры
в камере вырабатывается сигнал,
подводимый к пусковому устройству
9. Из пускового устройства он по-
ступает на реле <?, которое включает
нагреватель азотного испарителя 1 и
открывает соленоидный вентиль 5.
Жидкий азот проходит к воздухоох-
ладителю 6, расположенному в ра-
бочем объеме камеры. Подача жид-
кого азота осуществляется за счет
увеличения давления в сосуде Дьюара 2, вызванного его нагревом.
Давление контролируется манометром 4. Для ручного дозирования
расхода азота служит ручной вентиль 3. Предохранительный клапан 7
предназначен для сброса давления из сосуда Дьюара при аварийном
состоянии.
Для обеспечения однородности температуры в любой точке ра-
бочего объема камеры и максимального приближения к условиям,
существующим в непосредственной близости от контрольных тер-
мопреобразователей регулирующих устройств, осуществляют непрерыв-
ную циркуляцию воздуха с помощью вентилятора. Для рационального
распределения потоков воздуха в рабочем объеме могут использоваться
регулируемые жалюзи.
К камерам с непосредственным охлаждением относятся и такие,
в которых испарители располагаются во внутренних стенках (рубаш-
ке), а также в рабочем объеме. Примером камеры с испарителем,
расположенным во внутренней металлической стенке, может служить
камера сундучкового типа (рис. 6.9), позволяющая получить макси-
мальную минусовую температуру (до —85°С) за относительно корот-
кое время. Реализация указанных условий с помощью одноступенча-
той холодильной машины оказывается нецелесообразной, так как она
должна работать с большой разностью температур конденсации и ки-
пения, а следовательно, с большим отношением давления р конден-
сации к давлению р0 кипения, что экономически невыгодно. При
большом отношении р/р$ снижается холодопроизводительность ма-
шины, повышаются потребление энергии, температура хладагента и
ухудшаются условия эксплуатации компрессора. Поэтому при р/р$ >9
260
3 4 5 6 7 8
13 12 11 10 9
Рис. 6.9. Сундучковая камера с непосредственным охлаждением за счет
расположения испарителя во внутренней металлической стенке с двухсту-
пенчатой холодильной машиной: 1 — сундук с теплоизоляцией; 2 — испари-
тель; 3 — двойное уплотнение крышки; 4 — крышка; 5— регулятор темпера-
туры; 6 — рабочий объем камеры; 7 — вентиль; 8 — маслосборник; 9 —
холодильная установка 1-й ступени глубокого охлаждения; 10 — магнитный
вентиль; 11 — промежуточный охладитель; 12 — холодильная установка 2-й
ступени; 13 — конденсатор с воздушным охлаждением
целесообразно применять двух- или многоступенчатое сжатие хлада-
гента. В этом случае хладагент сжимается от давления кипения до
давления конденсации последовательно по ступеням с промежуточ-
ным охлаждением частично сжатых паров. Отношение давления на-
гнетания к давлению всасывания хладагента в каждой ступени холо-
дильной машины меньше отношения давлений p/pQ, между которыми
осуществляется цикл двух- или многоступенчатой машины.
При двухступенчатом сжатии пары хладагента из испарителя 2
засасываются в цилиндр 9 первой ступени холодильной машины,
сжимаются в нем по адиабате до промежуточного давления, нагнета-
ются в водяной охладитель 77 и далее направляются во вторую сту-
пень, где холодильная машина (компрессор) 12 сжимает их до давле-
ния конденсации. После этого пары хладагента, попав в конденсатор
75, конденсируются и в жидком состоянии, пройдя дросселирую-
щий вентиль 7, подводятся к испарителю 2.
В камерах с непосредственным охлаждением или нагревом за
счет циркуляции холодного или теплого воздуха (рис. 6.10) испари-
261
Рис. 6.10. Камера с непосредственным охлаждением или нагревом за счет
циркуляции холодного или нагретого воздуха: 1 — рабочий объем; 2 — окно;
3 — дверь; 4 — теплоизоляция; 5 — регулятор температуры; 6 — компрессор;
7 — конденсатор; 8 — термометр сопротивления; 9 — нагреватель; 10 —
вентилятор; 11 — терморегулирующий вентиль; 12 — магнитный вентиль;
13 — испаритель
тель, нагреватель и вентилятор располагаются так, чтобы при прину-
дительной циркуляции воздух проходил вдоль стен камеры, а затем
попадал в пространство за специальной стенкой с отверстиями, где
восстанавливал бы свои свойства.
В камерах с косвенным охлаждением испаритель помещают в
специальный объем, который называют хладообменником. В нем осу-
ществляется охлаждение промежуточной среды (в общем случае на-
зываемой термоносителем, а в частном случае хладоносителем), пред-
назначенной для переноса теплоты от охлаждаемого тела к кипящему
в испарителе хладагенту.
В качестве жидких термоносителей в камерах применяют веще-
ства, удовлетворяющие требованиям, аналогичным тем, которые
предъявляются к хладагентам: низкая температура замерзания (Г3),
малая вязкость, большая теплоемкость и теплопроводность, неток-
сичность, взрывобезопасность, нейтральность к конструкционным
материалам и т.д. В качестве термоносителей могут использоваться
водные растворы солей (рассолы): хлорида натрия (Г3<—15°С), хло-
рида магния (/3<-27°С), хлорида кальция (/,3<-45°С). В низкотем-
пературных камерах могут применяться антифризы и фреоны, такие
262
как водные растворы пропиленгликоля (Г3<47°С), этиленгликоля
(Г3<-60°С), фреон-30 (/3<—90°С) и фреон-11 (/3<-100°С).
Хладообменник представляет собой бак, заполненный жидким
хладоносителем, в который помещен испаритель, обеспечивающий
охлаждение жидкого хлад о носителя. Для термической изоляции бак
хладообменника окружен слоем термоизоляции (например, пенопла-
стом). Измерение и регулировка температуры хладоносителя осуще-
ствляются с помощью термометров сопротивления и специальных тер-
мореле. Регулировка температуры и давления хладагента, подводимого
к испарителю, осуществляется с помощью терморегулирующего вен-
тиля, а также соленоидных вентилей. Соленоидный вентиль (рис. 6.11)
Рис. 6.11. Соленоидный вентиль: 1 — корпус катушки; 2 — катушка; 3 —
направляющая втулка; 4— якорь; 5— тарелка клапана; 6— мембрана; 7—
главное сопло
обеспечивает поддержание постоянства давления в трубопроводах. В
зависимости от подаваемой команды (наличия или отсутствия тока в
обмотке) соленоидный вентиль оказывается открытым или закрытым.
При подаче команды мембрана перемещается вверх, открывается ком-
пенсационное отверстие и давление в трубопроводе снижается.
Методы испытаний на воздействие пониженной температуры и
инея. Испытаниям на воздействие пониженной температуры подвер-
263
гаются как тепло-, так и нетепловыделяющие изделия. Целью испы-
таний является определение пригодности изделий к эксплуатации,
транспортированию или хранению при воздействии пониженной тем-
пературы. В условиях воздействия пониженной температуры, а так-
же после пребывания в указанных условиях проводят проверку значе-
ний параметров и (или) внешнего вида изделий для установления их
соответствия требованиям. Если некоторые узлы имеют более высо-
кую температуру, чем испытуемые изделия, то целесообразно про-
водить испытания на воздействие предельной пониженной темпера-
туры. При испытании в этом случае тепловыделяющих изделий
перенос теплоты происходит от изделия через монтажное приспособ-
ление к стенкам камеры. Наихудшим вариантом охлаждения тепло-
выделяющего изделия в камере является тот, при котором теплооб-
мен монтажного приспособления со стенками камеры за счет высокой
теплопроводности наиболее интенсивен.
При выборе объема камеры и определении расположения изделий
в ней необходимо учитывать, являются ли эти изделия тепловыделяю-
щими или нет. Очевидно, что при испытании тепловыделяющих из-
делий их тепловое рассеяние будет влиять на процесс охлаждения.
Испытания аппаратуры и средств измерений осуществляют без упа-
ковки в готовом для эксплуатации состоянии.
Аппаратура, имеющая температуру окружающей среды, поме-
щается в камеру с той же температурой. Затем в камере устанавлива-
ется температура, равная заданной. Скорость понижения температу-
ры не должна превышать ГС мин"1, причем она определяется как
среднее значение за период не более 5 мин. Рекомендуемая продол-
жительность испытаний аппаратуры на хранение 16 или 72 ч, если в
нормативной документации не оговаривается другой период времени.
При испытании аппаратуры для оценки ее работоспособности в
процессе эксплуатации она подвергается воздействию пониженной
температуры до наступления температурного равновесия, после чего
аппаратуру включают и проверяют значения параметров, предусмот-
ренные нормативной документацией. Затем аппаратуру отключают и
подвергают воздействию пониженной температуры в течение после-
дующих двух часов. По завершении указанной выдержки находящая-
ся в камере аппаратура включается вновь, и после достижения состо-
яния установившегося режима проводятся измерения ее электрических
параметров, проверка механических свойств и внешнего вида.
В заключение аппаратура выключается и подвергается восста-
новлению. Температура постепенно повышается до значений, соот-
ветствующих нормальным атмосферным условиям. Аппаратура дол-
жна оставаться в камере до момента, когда температура в ней не
превысит точки замерзания. Далее с аппаратуры любым способом
264
(встряхиванием, обдуванием воздухом и т.д.) удаляются капли воды.
После этого аппаратура находится в нормальных атмосферных усло-
виях в течение времени, необходимого для достижения температур-
ного равновесия.
Указанные испытания допускается совмещать с испытанием на
воздействие изменения температуры среды.
Для конкретных типов аппаратуры могут оговариваться опреде-
ленные отклонения от данной методики, касающиеся установления
времени восстановления, проверки электрических параметров и ме-
ханических свойств после периода восстановления и т.д.
Испытания на воздействие инея проводят в целях проверки спо-
собности изделий выдерживать приложение номинального электри-
ческого напряжения при конденсации на них инея. Испытания про-
водят в камере холода, обеспечивающей возможность установления
температуры (-20 ± 5 )°С. Продолжительность испытаний составляет
2 ч, если в нормативной документации не указано иное время. Пос-
ле извлечения изделия из камеры его помещают в нормальные кли-
матические условия, подают на него электрическое напряжение и
выдерживают до полного оттаивания инея. Время выдержки, питаю-
щие напряжения, методы контроля и другие параметры предусмат-
риваются нормативной документацией на соответствующие изделия.
Если в процессе выдержки изделия под электрическим напряжением
в нем не произошло пробоя или поверхностного перекрытия, а вне-
шний вид соответствует требованиям, то его признают выдержавшим
испытание.
6.1.3. Испытания на воздействие изменения температуры
внешней среды
Условия испытаний и применяемое испытательное оборудование. Из-
менение (смена) температуры может происходить по разным при-
чинам, зависящим от условий окружающей среды в период эксплуа-
тации, а также от условий транспортирования и хранения. При этом
возможны следующие случаи: постепенное изменение температуры,
соответствующей природным явлениям (суточному циклу); быстрое
изменение температуры, вызванное переносом из комнатных усло-
вий на холодный открытый воздух или эксплуатацией изделий вне
комфортных условий на самолете или в космическом пространстве;
резкое изменение температуры в результате охлаждения дождем, по-
гружением в холодную воду и т.д.
Результаты испытаний различных изделий на изменение темпе-
ратуры существенно зависят от таких свойств изделий, как теплоем-
кость, теплопроводность и тепловое расширение; от применяемых в
265
их конструкциях материалов; от системы охлаждения, определяющей
распределение теплоты внутри изделия и ряда других факторов.
Основными параметрами, характеризующими процесс испытаний
на изменение температуры, являются: исходная (нормальная) темпе-
ратура, повышенная и пониженная температура, скорость измене-
ния температуры, длительность выдержки при различных температу-
рах, интервал между выдержками при двух крайних температурах,
число циклов. Под циклом испытания понимают выдержку от исход-
ной температуры до первой испытательной температуры, затем до вто-
рой испытательной температуры и снова до исходной температуры.
Одним из важных параметров является длительность выдержки,
которую следует связывать с температурной постоянной времени из-
делия или входящих в него элементов (деталей). Температурная по-
стоянная времени изделия зависит от свойств и подвижности окру-
жающей среды. При этом для некоторых конструкций изделий
температурные постоянные времени наружных и внутренних деталей
будут различными. В связи с этим следует определять температур-
ную постоянную времени деталей, расположенных на большом рас-
стоянии от поверхности изделия и требующих на нагрев больше вре-
мени, а также деталей, наиболее критичных к изменению
температуры.
Для определения температурной постоянной времени необходи-
мо снять зависимость изменения температуры изделия от изменения
температуры окружающей среды во времени. Критерием прекраще-
ния снятия указанной характеристики является достижение стацио-
нарной температуры изделием.
Значение температурной постоянной времени т определяется точ-
кой пересечения касательной к экспериментально определенной ха-
рактеристике, проведенной из точки начального значения темпера-
туры /н0, с линиями, ограничивающими диапазон температур
испытания /в и При этом будут получены два значения постоян-
ной времени Т] и т2 соответственно для повышенной и пониженной
температур (рис. 6.12).
Таким образом, при выборе длительностей выдержки и /2 соот-
ветственно /в и /н исходят из следующих условий: если d < 0,OLD, где
d — разность между температурами испытательной среды и издели-
ем, a D — разность между повышенной (/в) и пониженной (/н) тем-
пературами испытаний, то длительность выдержки t > 5т, если же
d < 0,1D, то />2,5т.
Воспроизведение условий испытаний на воздействие изменения
температуры осуществляют с помощью различных испытательных ус-
тановок.
266
Для испытания изделий на постепенное изменение температуры на-
ходят применение комбинированные термокамеры (тепла и холода) с
прямым (непосредственным) и косвенным термостатированием. Луч-
шие результаты дает применение камер с косвенным термостатиро-
ванием, оснащенных аналоговыми или цифровыми средствами авто-
матического регулирования температуры.
Для испытаний изделий на тепловой удар используются одно- и
двухкамерные установки. Однокамерные установки обеспечивают по-
очередную подачу в зону испытаний камеры нагретого или охлажден-
ного воздуха с помощью специальной заслонки или цилиндрической
вращающейся камеры. Однокамерная установка с заслонкой (рис. 6.13)
может работать в двух- и трехзонном режимах.
В двухзонном режиме (рис. 6.13, а, в) изделие поочередно под-
вергается воздействию воздушной среды с повышенной и понижен-
ной температурами, а в трехзонном режиме оно при переходе от воз-
действия одной температуры к другой находится некоторое время в
условиях воздействия нормальной температуры (рис. 6.13, б).
В однокамерной установке с вращающейся цилиндрической ка-
мерой в зависимости от ее угла поворота зона испытаний соединяется
с источниками нагретого или охлажденного воздуха (рис. 6.14). При
этом также возможно осуществление двух- или трехзонного режима
работы.
Двухкамерные установки для испытаний на тепловой удар в зави-
симости от направления перемещения камер могут быть горизонталь-
ными и вертикальными.
267
в)
Рис. 6.13. Схема работы однокамерной установки с заслонкой: 1 — камера
тепла; 2 — камера холода; 3 — корзина для изделий; 4 — зона испытаний;
5 — заслонка
а)
б)
Рис. 6.14. Схема работы однокамерной установки с вращающейся цилинд-
рической камерой: а — трехзонный режим; б — двухзонный режим; 1 —
камера тепла; 2 — камера холода; 3 — корзина для изделий; 4 — цилиндри-
ческая камера
Двухкамерная установка с горизонтальным перемещением камер
тепла и холода (рис. 6.15) отличается от рассмотренных тем, что
последние подводятся к стационарно расположенным в специальной
корзине изделиям. Возможно осуществление двух- (рис. 6.15, б) и
трехзонного (рис. 6.15, а) режимов испытаний.
268
V/M7//A
Ш/М.
V/Ш/А
Рис. 6.15. Схема работы двухкамерной установки с горизонтальным пере-
мещением камер: а — трехзонный режим; б — двухзонный режим; 1 — каме-
ра тепла; 2 — камера холода; 3 — корзина для изделий
Двухкамерная установка с вертикальным перемещением корзины
с испытуемым изделием из камеры холода в камеру тепла обеспечи-
вает возможность двухзонного режима испытаний (рис. 6.16).
Рис. 6.16. Двухкамерная установка с вертикальным перемещением испыту-
емого изделия: 1 — камера тепла; 2 — камера холода; 3 — корзина для испы-
туемых изделий
Для компенсации повышения температуры в камере холода за
счет накопления теплоты в изделиях, подвергавшихся в предыдущем
цикле нагреву, осуществляют интенсификацию охлаждения. Резкое
охлаждение может достигаться впрыскиванием с помощью инжекто-
ров жидких хладагентов (азота или углекислоты); применением акку-
мулятора холода, накапливающего холод, вырабатываемый холодиль-
ной машиной. В момент перехода к циклу испытаний на воздействие
пониженной температуры включаются синхронно аккумулятор холо-
да и холодильная машина, которые охлаждают камеру за минималь-
269
но короткое время. Специальное контрольное устройство предвари-
тельного охлаждения позволяет аккумулятору холода накапливать хо-
лод с запасом. Наличие аккумулятора холода исключает необходи-
мость использования жидких хладагентов (азота или углекислоты),
расходуемых в процессе проведения испытаний.
Установка обеспечивает воспроизведение температур при нагре-
ве в диапазоне +(60—200)°С и при охлаждении в диапазоне —(10—65)°С.
Время выхода на режим от комнатной температуры до +200’С состав-
ляет 15 мин., а до — 65°С — 90 мин. Наличие в камерах вентиляторов
обеспечивает принудительную циркуляцию воздуха. Нагрев камеры
тепла осуществляется ленточными или проволочно-ленточными элек-
тронагревателями.
Охлаждение в камере холода достигается с помощью каскадной
паровой холодильной машины. В камерах холода применяются испа-
рители панельного типа, выполняющие функции внутренних стенок
камеры. Имеющийся в установках вентилятор обеспечивает быстрое
восстановление нормальных условий при воздействии нормальной
температуры в трехзонном режиме. Предусмотрен автоматический
удалитель инея.
При проведении испытаний в рассмотренных камерах испытуе-
мое изделие помещается в специальную стальную корзину, которая
остается неподвижной в процессе испытаний, что позволяет испы-
тывать изделия под электрической нагрузкой. Для обеспечения под-
держания заданного температурного режима с минимальными коле-
баниями температуры термодатчик устанавливается непосредственно
в зоне испытаний, что позволяет повысить качество контроля и сле-
жения за температурой. Быстрое установление повышенной темпе-
ратуры в зоне испытаний достигается автоматическим дефростером,
являющимся устройством, обеспечивающим дополнительный нагрев
и циркуляцию воздуха.
Для испытания изделий на резкое изменение температур находит
применение установка с двумя ваннами (рис. 6.17), заполненными
жидким термоносителем (хлорированное или силиконовое масло).
Использование жидкой термопередающей среды позволяет обеспечить
более сильное температурное воздействие на испытуемое изделие.
Особенностью установки является наличие специального, регу-
лируемого во времени механизма с поворотным устройством 4, обес-
печивающим плавное перемещение двух корзин 2 из коррозионно-
стойкой стали с изделиями из одной ванны в другую. Механизм состоит
из пневмомоментного двигателя, совершающего плавное перемеще-
ние по окружности, и пневматического цилиндра, совершающего
перемещение по вертикали. При этом обеспечивается минимальное
разбрызгивание жидкой среды. Время перемещения из одной ванны
270
Рис. 6.17. Схема работы с установками с двумя ваннами:
1 — ванна холода; 2 — корзина для изделий; 3 — ванна тепла;
4 — поворотное устройство
в другую составляет 3—8 с, что уменьшает примешивание теплопро-
водящей среды из ванны тепла в ванну холода и наоборот. Обеспече-
ние равномерности температуры в ваннах достигается перемешива-
нием жидкости пропеллерной мешалкой. Охлаждение от 0 до - 60°С
осуществляется паровой холодильной машиной с змеевиковым испа-
рителем, охватывающим ванну холода. Нагрев от +50 до +200°С осу-
ществляется электронагревателем в специальной оболочке.
Методы испытаний на воздействие изменения температуры. Ис-
пытания на воздействие изменения температуры окружающей среды
проводят для определения способности изделий сохранять свой внеш-
ний вид и значения параметров в пределах установленных норм после
воздействия изменения температуры среды в пределах значений, ус-
тановленных в НТД на изделие. Следует различать три разновиднос-
ти данного вида испытаний:
• на постепенное изменение температуры;
• на быстрое изменение температуры, или тепловой удар;
• на резкое изменение температуры.
Испытание на постепенное изменение температуры проводят в тер-
мокамере (камера тепла и холода), обеспечивающей воспроизведе-
ние заданных режимов с отклонениями, не превышающими уста-
новленных значений. Испытания проводят без электрической
нагрузки, если другое не предусмотрено НТД. При испытаниях теп-
ловыделяющего изделия не под электрической нагрузкой в камере
устанавливают положительную температуру, равную максимальной
температуре контролируемого участка изделия.
271
Особенностью испытаний на постепенное изменение температу-
ры является то, что изделия подвергают воздействию непрерывно сле-
дующих друг за другом циклов (рис. 6.18), различающихся тем, что
скорость охлаждения или нагрева камер, усредненная за период не
более 5 мин., выбирается из ряда 1 ±0,2; 3±0,5 или 5±1 °С/мин. Дли-
тельность выдержки согласуется с длительностью суточного (24 ч) цикла
при целом числе циклов с учетом восстановления и заключительных
измерений.
Рис. 6.18. График испытательного цикла постепенного изменения темпе-
ратуры в камере: Тн, То — температуры нагрева и охлаждения; — время
выдержки
Степень жесткости испытаний на изменение температуры выби-
рают в зависимости от свойств испытуемого изделия и возможного
процесса их ухудшения. Она определяется разностью температур (их
крайними значениями) и числом циклов.
Испытаниям на тепловой удар подвергают изделия, которые в ус-
ловиях эксплуатации испытывают быстрые изменения температуры.
Испытания на тепловой удар проводят для определения электричес-
ких характеристик изделий и их механической прочности при экстре-
мальных температурных воздействиях. При этом оценивают качество
контактов, выявляют дефекты, возникающие в полупроводниковых
приборах, растрескивание пластмасс. Испытания на тепловой удар
могут осуществляться с применением двух раздельных камер тепла и
холода, двух- и однокамерных установок. Испытательное оборудова-
ние должно обеспечивать воспроизведение испытательных режимов,
предусмотренных нормативной документацией.
272
Испытания на тепловой удар характеризуются определенными па-
раметрами, значения которых соответствуют установленным степеням
жесткости. Важное значение имеет знание температурной постоянной
времени т, определяющей длительность выдержки при воздействии
повышенной и пониженной температур. Физически длительность вы-
держки при каждой из двух температур зависит от теплоемкости испыту-
емых изделий (иногда ее рекомендуют брать равной 3 ч или 30 мин.).
Изделия подвергают воздействию 3—5 циклов, если другое число не
предусмотрено нормативной документацией.
Как правило, испытания проводят без электрической натрузки.
Однако при испытаниях в специализированных установках, допуска-
ющих подведение питающих напряжений, испытательных сигналов и
их измерение, возможно испытание изделий в рабочем состоянии.
После выдержки изделия в нормальных климатических условиях, ви-
зуального осмотра и измерения значений параметров его подвергают
воздействию установленного числа циклов изменения температуры.
При испытаниях изделий с применением двух раздельных камер
тепла и холода в каждом цикле испытаний предусмотрены следую-
щие этапы:
• после установления в камере холода пониженной предельной
или рабочей температуры (в зависимости от того, которая из
них ниже) в нее помещают изделие и выдерживают его до дос-
тижения теплового равновесия в течение времени, указанного
в нормативной документации;
• после выдержки в камере холода и установления в камере тепла
повышенной предельной или рабочей температуры (в зависи-
мости от того, какая из них выше) изделие переносят в камеру
тепла и выдерживают до достижения теплового равновесия в
течение времени, указанного в нормативной документации.
Рекомендуется, чтобы время установления заданного темпера-
турного режима в камере после помещения в нее изделия не превы-
шало 10% времени выдержки или 5 мин. (в зависимости от того,
какое из этих значений меньше). Время переноса изделия из камеры
в камеру не должно превышать 3 мин. Применение для испытаний
двух- и однокамерных установок позволяет существенно сократить вре-
мя установления заданного температурного режима и время переноса
(перехода) изделия.
Испытание некоторых изделий на резкое изменение температуры тре-
бует применения в качестве термоносителя жидкости, позволяющей
оказать более сильное воздействие на изделие, чем при использовании
воздуха для передачи температуры. При испытании используют две
ванны с жидкостями, имеющими пониженную и повышенную тем-
273
пературы, соответствующие испытательным режимам. Этим мето-
дом наиболее целесообразно испытывать герметичные изделия, име-
ющие стеклянно-металлические уплотнения.
Испытания могут проводиться в двух ваннах с водой, имеющих
соответственно повышенную и пониженную температуру, без пода-
чи на изделие электрической нагрузки. При испытании изделие под-
вергают воздействию 10 циклов, если иное число не указано в нор-
мативной документации. Каждый цикл состоит из следующих этапов:
выдержка изделия в ванне с холодной водой со льдом при температу-
ре 0 °C с превышением не более +2 °C; перенос и выдержка в ванне с
кипящей водой, причем температура не должна опускаться ниже 95 °C
или более чем на 2 °C по отношению к значению, указанному в нор-
мативной документации (рис. 6.19).
Рис. 6.19. График испытательного цикла быстрого изменения температу-
ры в ванне: А — начало цикла; — время выдержки; /2 — время перено-
са; Тн, То — температуры нагрева и охлаждения
Степени жесткости при данном виде испытаний определяются дли-
тельностью выдержки /j и продолжительностью /2 переноса из одной
ванны в другую, а также числом циклов. Различают две степени жес-
ткости: первая — tx > 5 мин.; /2 < 10 с; вторая — > 15 с; /2 < 3 с.
После окончания последнего цикла изделие извлекают из ванны
и, удалив с него капли влаги, проводят визуальный осмотр и изме-
рение параметров.
Применение специальной установки для испытаний в жидкостных
ваннах позволяет испытывать изделие при большем перепаде темпе-
274
ратур, поскольку низкотемпературная ванна обеспечивает пониже-
ние температуры до -65-0 °C, а высокотемпературная ванна — повы-
шение температуры до +(50-200) °C.
Автоматическое перемещение изделий из одной ванны в другую
за время 3-8 с позволяет сократить общую продолжительность испы-
таний.
6.1.4. Испытания на воздействие повышенной влажности
Условия испытаний и применяемое испытательное оборудование. Воз-
действие повышенной влажности воздуха на различные изделия сле-
дует рассматривать во взаимосвязи с основными внешними воздей-
ствующими факторами — температурой и атмосферным давлением,
которые в существенной степени определяют состояние воды. Воз-
можные формы взаимодействия воды с материалами различных изде-
лий зависят от ее состояния в процессах эксплуатации, хранения и
транспортирования.
При одной форме вода, проникая во все трещины, зазоры и
капилляры или находясь на поверхности элементов конструкций из-
делий, удерживаясь на его мелкодисперсных частицах, взаимодей-
ствует с материалами указанных элементов и в зависимости от степе-
ни этого взаимодействия изменяет значения механических и
электрических параметров, характеризующих испытуемое изделие.
При другой форме вода оказывает химическое воздействие на мате-
риалы элементов и конструкций, которое также приводит к ухудше-
нию значений электрических и механических параметров изделий.
Воздействия повышенной влажности на различные изделия мо-
гут быть постоянными (непрерывными) и циклическими, цикл действия
которых определяется суточными колебаниями температуры и вла-
ги. Примером постоянного воздействия повышенной влажности (98—
100%) при температурах 30—40 °C являются их эксплуатация, хране-
ние и транспортирование в странах с тропическим климатом. Так,
при постоянном воздействии влаги на электроизоляционные матери-
алы какого-либо изделия, находящегося в определенных условиях
влажности и температуры, через достаточно большое время наступа-
ет «равновесное» состояние влажности (рис. 6.20). В случае поме-
щения относительно «сухого» изделия во влажный воздух наблюдает-
ся постепенное в течение времени х поглощение им влаги из воздуха
и, как следствие, его увлажнение. При этом влажность изделия асим-
птотически приближается к равновесному значению <рр. Если же теп-
ловыделяющее изделие после пребывания во влажном воздухе вклю-
чается под электрическую нагрузку, то его влажность будет
уменьшаться, асимптотически приближаясь к значению равновесной
275
Рис. 6.20. Изменение абсолютной влажности электроизоляционного мате-
риала изделия при постоянных значениях относительной влажности и тем-
пературы: а — при увлажнении; б — при сушке
влажности фр, и в этом случае имеет место подсушка изделия. При-
веденные соображения следует учитывать при испытаниях.
Для испытаний на воздействие повышенной влажности необхо-
димо применять камеры с одновременным воздействием повышен-
ной температуры и влажности (термовлагокамеры), причем в этих
камерах должны обеспечиваться воспроизведение постоянного и цик-
лического режимов, а также соответствующая регулировка значений
их основных параметров.
Специфическими для камер влажности являются следующие па-
раметры:
1. Значение относительной влажности воздуха в установленной
точке объема камеры, определенное с помощью средства измерений:
где Фу — значение относительной влажности воздуха в у-й точке при
z-м измерении.
2. Значение относительной влажности воздуха в камере, получен-
ное с помощью измерительного прибора:
<РП₽-|£ч>7р.
к i=l
где ф?р — значение относительной влажности воздуха в камере при /*-м
измерении.
276
3. Отклонение относительной влажности воздуха в полезном объе-
ме камеры от нормированного значения'.
A(pi — фу тах фн
Аф2 = фу min - фн
где фн — нормированное значение относительной влажности воздуха.
4. Стабильность поддержания температуры в камере:
= max /н -
где /н — нормированное значение температуры, °C; значение
температуры в камере или в термостатируемом помещении, °C.
5. Стабильность поддержания повышенной влажности в камере:
Афт = max фн - ф^Р
Помимо перечисленных параметров для оценки работы камеры
пользуются еще рядом параметров, к которым, в частности, отно-
сятся:
• температура воздуха в установленной точке объема камеры, оп-
ределенная с помощью средств измерений;
• скорость циркуляции воздуха в установленной точке полезного
объема камеры;
• отклонение температуры от нормированного значения.
Температура и относительная влажность в полезном объеме каме-
ры должны быть соответственно в диапазонах от +25±3 до 55±2 °C и
от 80 до 100%. Для поддержания требуемой влажности необходимо,
чтобы кратковременные колебания температуры находились в преде-
лах ±0,5 °C. Поскольку большинство камер влажности являются ком-
бинированными, обеспечивающими одновременные нагрев или ох-
лаждение, то для исключения конденсации влаги на стенках и потолке
камеры желательно, чтобы их температура была равна температуре
воздуха в камере или превышала ее на 1—2 °C.
По способу получения влажного воздуха в испытательных каме-
рах различают камеры двух типов: инжекционные и неинжекцион-
ные.
Инжекционными называют камеры, повышение влажности в ко-
торых создается путем введения (инжектирования) в их рабочий объем
влажного воздуха. В инжекционных камерах реализуется закрытый
способ увлажнения, основанный на циркуляции воздуха, прошед-
шего через увлажняющее устройство.
277
Неинжекционными называют камеры, повышение влажности в
которых создается за счет испарения влаги с открытой поверхности.
В неинжекционных камерах реализуется открытый способ увлажне-
ния, основанный на испарении влаги с открытой свободной поверх-
ности воды или насыщенных солевых растворов.
Наибольшее применение получили инжекционные камеры, в ко-
торых увлажнение воздуха происходит за счет его непрерывного про-
сасывания (барботирования) через специальную ванну с водой и на-
сыщения влагой (рис. 6.21). При выходе из ванны воздух имеет
100%-ную относительную влажность и температуру точки росы. Ув-
лажняющая ванна снабжена нагревателем 12 и охладителем <?, что
позволяет в зависимости от требуемой температуры точки росы регу-
лировать ее температуру с помощью специальною электронного уст-
13
12
м
10
Сигнал
о на нагрев
о Сигнал
на охлаждение
Рис. 6.21. Инжекционная камера влажности с увлажнением за счет барбо-
тирования: 1, 14— термодатчики; 2 — регулятор температуры; 3 — вентиля-
тор; 4— канал циркуляции воздуха; 5— селикагелевый осушитель; 6— регу-
лирующий вентиль; 7— холодильная установка; 8— испаритель холодильной
установки; 9 — измеритель количества воздуха; 10 — воздушный фильтр;
11 — воздушный насос; 12 — нагреватель; 13 — ванна
14
278
ройства 2. Если необходимо обеспечить повышенную влажность в
камере при температурах точки росы, близких или ниже +2 °C, то
поток влажного воздуха пропускается через селикагелевый осушитель
5, обеспечивающий его обезвоживание в соответствии с установлен-
ной температурой точки росы. Применение селикагелевого осушите-
ля позволяет существенно расширить рабочий диапазон температур
при повышенной относительной влажности.
Иногда увлажнение и обезвоживание достигаются путем пропус-
кания воздушного потока через сыпучую массу керамических напол-
нителей 5, имеющую большую внутреннюю поверхность (рис. 6.22).
При этом вода с определенной температурой под давлением, задава-
емым насосом орошает сверху вниз керамическую массу, в то вре-
мя как воздух проходит через нее в противоположном направлении
(снизу вверх). Увлажненный или обезвоженный воздух вновь направ-
ляется в испытательную камеру. При таком устройстве увлажнения
температура водяной ванны 3 и температура точки росы влажного воз-
3 4
Рис. 6.22. Камера влажности с увлажнением за счет применения сыпучей
массы керамических наполнителей: 1 — регулирующий вентиль; 2 — нагре-
ватель; 3 — водяная ванна с керамическими наполнителями; 4 — водяной
насос; 5 — испаритель холодильной установки; 6 — холодильная установка;
7 — измеритель количества воздуха; 8 — воздушный фильтр
279
духа не столь тесно связаны, как в предыдущем случае, поэтому в
данной системе регулировка влажности воздуха определяется его со-
стоянием в испытательной камере.
Для получения более низких температур точки росы используется
система, отличающаяся от рассмотренных тем, что водяная ванна
только нагревается, а для обезвоживания влажного воздуха создается
вспомогательный контур, в который включены два переключаемых
испарителя би 12 от одной холодильной машины 7 (рис. 6.23). В
процессе работы используется только один испаритель, на котором
излишняя влага либо конденсируется, либо вымораживается, а дру-
т
Рис. 6.23. Инжекционная камера с обезвоживанием за счет охлаждения
(камера тепла, влаги, холода): 1 — вентилятор циркуляции воздуха в каме-
ре; 2 — вспомогательный насос увлажнителя; 3 — магнитный клапан; 4 —
увлажнитель; 5, 6, 12 — испарители холодильной установки; 7 — холодиль-
ная установка; 8 — клапан воздуха; 9 — насос воздуха; 10 — измеритель
количества воздуха; 11 — воздушный фильтр; 13 — термостат термоносителя;
14 — нагреватель; 15 — насос термоносителя; 16 — канал циркуляции ув-
лажненного воздуха
280
гой в это время оттаивает. Система автоматики камеры позволяет при
переключении испарителей за счет соответствующего управления кла-
панами часть воздушного потока направлять на обезвоживание.
Возможны способы, обеспечивающие относительно быстрое из-
менение влажности в испытательной камере, в которой увлажнение
происходит за счет распыления нагретой воды (рис. 6.24) или введения
в камеру паровоздушной смеси. Распыление воды может осуществлять-
ся с помощью специальных форсунок 6 или механическим путем
(например, применением специальной центрифуги). Распыленная
вода нагревается электронагревателем 7 и с помощью вентилятора 4
нагнетается в камеру. Образовавшаяся паровоздушная смесь, рецир-
кулируя и обогащаясь влагой, обеспечивает заданный режим увлаж-
нения. Использование явления рециркуляции позволяет отказаться
от предварительного нагрева воздуха перед его увлажнением.
Рис. 6.24. Инжекционная камера влажности с увлажнением паром и пря-
мым термостатированием: 1 — датчик влажности; 2 — термодатчик; 3 —
канал циркуляции воздуха; 4 — вентилятор; 5 — испаритель системы охлаж-
дения; 6— форсунка увлажнения; 7 — нагреватель; 8— сток конденсата; Р —
холодильная установка
Недостатками способов распыления воды и введения в камеру
паровоздушной смеси являются наличие водяных капель и неопреде-
ленное аэрозольное состояние.
Если в процессе испытаний на воздействие повышенной влажнос-
ти ее значение должно оставаться постоянным, то целесообразно при-
менение неинжекционных камер. Наиболее простым способом явля-
ется использование испарения влаги с открытой водной поверхности.
281
Известно, что для поддержания определенной относительной
влажности необходимо обеспечить постоянство разности температур
влажного воздуха и воды при неизменном давлении. Для испытаний
малогабаритных и миниатюрных изделий могут находить примене-
ние эксикаторы, а для испытаний изделий больших габаритных раз-
меров — гигростаты.
Недостатком данного способа получения повышенной влажнос-
ти является необходимость поддержания с высокой точностью темпе-
ратуры, так как понижение температуры более чем на 0,5 °C при вы-
сокой относительной влажности может привести к выпадению росы.
Для получения требуемой постоянной влажности воздуха можно
использовать камеры с принудительной циркуляцией влажного воздуха,
принцип действия которых основан на закономерности равновесного
состояния между насыщенным солевым раствором и окружающей ат-
мосферой. Относительная влажность воздуха в камере регулируется с
помощью насыщенных растворов солей, а также смесей глицерина с
водой. Насыщенные соляные растворы обладают способностью по-
глощать или отдавать влагу, не оказывая влияния на относительную
влажность воздуха.
Воздух над насыщенным соляным раствором при постоянной тем-
пературе сохраняет определенную относительную влажность, харак-
терную для данного раствора соли и данной температуры, что позво-
ляет не измерять относительную влажность во время испытаний.
Насыщенный раствор должен иметь избыток соли, при котором он
может отдавать и поглощать большое количество влаги, что не влияет
на его способность регулировать относительную влажность воздуха.
Соляной раствор можно использовать без замены в течение длитель-
ного времени.
Применяемые для испытаний насыщенные соляные растворы не
должны создавать коррозионную атмосферу, опасную для испытуе-
мых изделий. Следует избегать использования загрязненных раство-
ров, а также выкристаллизования или выползания соли на стенки
сосуда. Таким образом, поскольку раствор и воздух имеют одинако-
вую температуру, в камере устанавливается постоянная, определен-
ная для каждого раствора, относительная влажность воздуха.
К достоинствам солевого гигростата относится обеспечение им
высокого постоянства относительной влажности во времени и по
объему.
В тех случаях, когда применение соляных растворов недопусти-
мо, используют смесь глицерина с водой, от концентрации которой
зависит относительная влажность. Смесь может находиться, как и
соляной раствор, в специальном резервуаре — кассете. Однако боль-
шая вязкость глицерина приводит к неравномерности концентрации
282
раствора на поверхности и в толще смеси, поэтому рекомендуют обес-
печивать циркуляцию с помощью насоса смеси по большей части сте-
нок камеры. При этом смесь должна также покрывать пол камеры.
В связи с непостоянством концентрации раствора, обусловлен-
ным его быстрым старением, а также способностью некоторых изде-
лий поглощать воду необходимо систематически измерять и регули-
ровать относительную влажность в камере и плотность смеси.
Таким образом, испытания с использованием смеси глицерина с
водой требуют большого внимания к измерениям и процессу регули-
рования. К недостаткам следует также отнести возможность роста
грибов и водорослей в растворе. Однако добавление в состав смеси
около 0,1% (по массе) сульфата меди предотвращает указанный рост.
Увлажнение камер больших габаритных размеров (камер комнат-
ного типа) может осуществляться открытым способом с применени-
ем подогрева воды электронагревателями или паром, а также закры-
тым способом путем непосредственного введения водяного пара в
объем камеры. Однако испытание изделий введением водяного пара
является наиболее жестким, так как пар при конденсации влаги на
поверхности испытуемых изделий отдает большое количество тепло-
ты, что ведет к их перегреву.
Конструкция термовлагокамеры отличается от термокамеры вве-
дением в нее увлажнителя, устройства удаления конденсированной
влаги, более сложных измерительных устройств и систем автомати-
ческого регулирования, обеспечивающих поддержание заданных тем-
пературы и влажности.
Возможны лее основные системы автоматического регулирования
(САР) влажности и температуры воздуха. В первой системе (рис.
6.25) прямого, или непосредственного, увлажнения воздуха датчик 5
относительной влажности воздуха устанавливается в камере 3 и уп-
равляющее (регулирующее) устройство 6 обеспечивает воздействие
на систему 7 увлажнения воздуха. В то же время в зависимости от
сигнала датчика температуры 4 управляющее устройство (УУ) 2 обес-
печивает либо нагрев, либо охлаждение.
Во второй системе (рис. 6.26) с косвенным регулированием от-
носительной влажности воздуха, когда стабилизация или изменение
относительной влажности воздуха происходит по заданной програм-
ме относительно точки росы, воздух на выходе увлажнителя насы-
щен на 100% и имеет температуру точки росы. Увлажненный воздух
смешивается с воздухом испытательной камеры и определяет точку
росы в ней. Таким образом, регулируя температуру в камере, можно
обеспечить необходимую относительную влажность.
Для обеспечения заданных режимов испытаний в климатических
испытательных камерах предусматриваются устройства программного
283
2
Рис. 6.25. Схема САР влажности и температуры воздуха в испытательной
камере прямого увлажнения: 1 — система нагрева; 2 — УУ (te); 3 —
испытательная камера; 4 — датчик температуры; 5 — датчик влажности; 6 —
УУ (ф, %); 7 — система увлажнения; 8 — трубопроводы подогревающей или
охлаждающей среды
регулирования температуры и влажности воздуха, обеспечивающие
реализацию различных методов испытаний. В связи с развитием
вычислительной техники системы программного регулирования пре-
терпели существенные изменения. Если раньше устройства управле-
ния температурой и точкой росы в камере строились с применением
электроконтактных часов, программных позиционных или реостат-
ных задатчиков, то сегодня им на смену приходят цифровые измери-
тельно-управляющие устройства, использующие микроЭВМ, встра-
иваемые в конструкции камер или оформляемые в виде
самостоятельных конструкций.
В современных камерах используются цифровые задатчики про-
грамм с системой ввода команд задания температуры, влажности и
времени с помощью клавиатуры. Внедряется вывод всей информа-
ции о возможных программах испытаний с графической иллюстраци-
ей их проведения, о содержании операций, о числовых характерис-
тиках процесса испытаний, о системе проверки и обслуживания работы
камеры на встроенный в конструкцию камеры дисплей.
Методы испытаний на воздействие повышенной влажности. Ис-
пытания изделий на воздействие повышенной влажности проводят с
284
7
Рис. 6.26. Схема САР влажности и температуры воздуха в испытательной
камере косвенного охлаждения: 1 — система увлажнения; 2 — датчик влаж-
ности; 5 — датчик температуры, 4 — испытательная камера; 5 — нагреватель;
6 — УУ (t °); 7 — УУ (ф, %); 8 — трубопроводы подогревающей или охлажда-
ющей среды
целью оценки их пригодности для эксплуатации и хранения в указан-
ных условиях. Пригодность определяется сохранением внешнего вида
и значений параметров в пределах установленных норм.
По характеру воздействия различают постоянный и циклический
режимы испытаний. При постоянном режиме испытуемые изделия
подвергаются постоянному действию температуры и относительной
влажности или парциальному давлению водяных паров. При цикли-
ческом режиме испытаний имитируется суточное изменение влажнос-
ти и температуры, сопровождающееся конденсацией влаги и выпаде-
нием росы.
По длительности воздействия различают длительные, кратковре-
менные и ускоренные испытания. Длительные испытания проводят для
проверки качества влагозащиты и коррозионной защиты. Ускорение
процесса испытаний достигается за счет повышения температуры,
которое приводит к насыщению влажного воздуха, его конденсации
и выпадению росы. При этом увеличивается абсолютная влажность
воздуха и растет парциальное давление водяных паров, что способ-
ствует их проникновению во все трещины и капилляры изделия.
285
На основании изложенных соображений предусмотрено осуще-
ствление следующих методов испытаний:
• при длительных воздействиях — циклические режимы (16+8 ч)
и (12+12 ч), а также постоянный режим без конденсации вла-
ги;
• при кратковременных воздействиях — циклический режим и
постоянный режим без конденсации влаги.
Воспроизводимость указанных методов испытаний существенно
зависит от постоянства значений параметров испытательных режи-
мов во времени. Для изделий радиоэлектроники особый интерес пред-
ставляет анализ проникновения и диффузии водяных паров в изоля-
ционные материалы, которые зависят от парциальных давлений. В
связи с этим при специальных исследованиях воспроизводимости ре-
зультатов испытаний в качестве критерия оценки пользуются измене-
нием парциальных давлений водяных паров с течением времени при
изменениях температуры.
Анализ показывает, что для достижения хорошей воспроизводи-
мости испытаний необходимо обеспечивать по возможности более
резкое снижение температуры с верхнего предельного значения до
нижнего. Однако при этом не должно быть резкого снижения отно-
сительной влажности, поскольку в таком случае это может привести
к подсушиванию испытуемого изделия. Одновременно необходимо в
зависимости от предельных значений температуры поддерживать оп-
ределенные значения парциальных давлений водяного пара, соответ-
ствующие поглощению влаги изделием.
Воспроизводимость испытаний зависит также от метода проведе-
ния испытаний. С учетом установленных допусков на парциальное
давление водяного пара можно определить предельные значения тем-
пературы и относительной влажности, которые будут служить мерой
воспроизводимости испытаний. С учетом того, что время нарастания
температуры достаточно мало, был проведен расчет для определения
широких и узких допусков на парциальное давление для периодов
времени 12 и 16 ч и верхнего значения температуры. Если поддержи-
вать верхнее значение температуры в течение 16 ч, то время возраста-
ния парциального давления водяного пара уменьшается. Кроме того,
принципиально сохраняются все преимущества циклических испыта-
ний по сравнению с испытаниями при постоянных климатических
воздействиях и улучшается их воспроизводимость по сравнению с
циклом длительностью 12 ч. Однако верхняя предельная температура
должна поддерживаться более жестко. Часть цикла, в течение кото-
рого температура с нижнего предельного значения возрастала до верх-
него, характеризуется выпадением росы, количество которой зави-
сит от размеров прибора.
286
Анализ и расчеты показывают, что при установлении как широ-
ких, так и узких допусков на парциальное давление водяного пара
испытания длительностью 16 ч при высокой предельной температуре
дают более воспроизводимые результаты, чем при длительности 12 ч.
При этом испытания с узкими допусками дают более воспроизводи-
мые результаты, чем с широкими допусками. Сравнение цикли-
ческих испытаний при принятых допусках на парциальное давление
водяного пара с испытаниями при постоянном климатическом воз-
действии показывает, что циклические испытания при выдержке
изделия в течение 16 ч в условиях предельной температуры 40 °C и
относительной влажности 95±3%, соответствующей парциальному дав-
лению 139 кПа, равноценны постоянным климатическим воздействи-
ям в течение 24 ч при температуре 40± 1 °C и относительной влажности
воздуха 95±3%, соответствующей парциальному давлению 129 кПа. С
повышением предельной температуры допуск на парциальное давле-
ние водяного пара повышается.
В заключение отметим, что длительное испытание с постоян-
ным климатическим воздействием более воспроизводимо, чем цик-
лическое испытание. Однако циклическое испытание с длительнос-
тью воздействия относительной влажности в течение 16 ч при более
высокой температуре воспроизводится лучше, чем испытание с дли-
тельностью воздействия 12 ч.
При разработке программы испытаний на воздействие повышен-
ной влажности одним из главных вопросов является выбор степени
жесткости, которая зависит от условий эксплуатации и исполнения
изделия.
При испытаниях в циклическом режиме в зависимости от вида
изделия и цели испытаний оно может находиться под электрической
нагрузкой или без нее. Если целью испытаний является определение
разрушающего действия электролиза или электрохимической корро-
зии, то изделие должно находиться под электрической нагрузкой.
При испытаниях тепловыделяющих изделий, вызывающих недопус-
тимую подсушку, препятствующую их увлажнению, целесообразно
выборку изделий разделить на две группы и испытывать одну группу
под напряжением, а другую без подачи напряжения.
Прежде чем приступить к непосредственному воздействию повы-
шенной влажности на изделие, его выдерживают в нормальных кли-
матических условиях для осуществления температурной стабилизации
(рис. 6.27). Температура изделия должна быть стабилизирована при
25±3 °C путем его выдержки в специальной камере (комнате) с нор-
мальными климатическими условиями или в испытательной камере с
указанной температурой. Продолжительность периода стабилизации
указывается в нормативной документации, но она должна быть не
287
Рис. 6.27. Период стабилизации: 1 — время, требуемое для достижения
Ф = 95-100% (не более); 2 — начало первого цикла
менее 1 ч. Рекомендуется, чтобы в течение последнего часа относи-
тельная влажность была повышена до 95%.
В процессе циклических испытаний (цикл 16+8 ч) изделия под-
вергают воздействию непрерывно следующих друг за другом циклов,
состоящих из двух частей:
а) в первой части цикла (рис. 6.28) температура в камере повы-
шается за 1,5—2,5 ч от уровня температуры лаборатории (25± 10 °C) до
установленного значения, указанного в табл. 6.2. При этом относи-
тельная влажность должна составлять 80—100%. В течение этого пе-
риода на изделиях должна конденсироваться влага. Затем в любой
точке полезного объема камеры в течение 16 ч должна поддерживать-
ся заданная температура, но не менее 4 раз в час она должна периоди-
чески колебаться на 2—3 °C, при этом оставаясь в пределах 53—57 °C.
В течение этого периода необходимо, чтобы относительная влаж-
ность составляла 95—100% и на изделиях появилась влага;
б) во второй части цикла изделие в камере охлаждают до уровня
температуры лаборатории, но не менее чем на 5 °C ниже указанной в
табл. 6.2. Относительная влажность при этом должна быть 80—100%
вплоть до окончания цикла длительностью 24 ч. В течение этого пе-
риода на изделиях не должны появляться капли воды.
288
Рис. 6.28. Циклические испытания изделий с циклом 16+8 ч
Время выдержки отсчитывается с момента включения камеры.
Скорость повышения температуры и влажности при проведении каж-
дого цикла должна обеспечивать конденсацию влаги на изделиях.
Число испытательных циклов выбирают по табл. 6.2 в зависимости от
установленной степени жесткости.
Таблица 6.2
Значения параметров при длительных н ускоренных цнклнчес
испытаниях с циклом 16+8 ч для различных степеней жесткости
Параметр испытаний Длительное испытание для степеней жесткости Ускоренное испытание для степеней жесткости
Ш, IV, VII, XII, XIII V, VI, VIII, XI IX, X V, VI, VIII, XI IX, X
Продолжительность выдержки (число испытательных циклов) 4 9 21 4 9
Температура в первой части цикла, °C 40±2 40±2 40±2 55±2 55±2
Особенностью испытаний в циклическом режиме (цикл 12+12 ч)
является некоторое отличие временных изменений значений пара-
метров, характеризующих процесс испытаний. Период стабилиза-
ции заканчивается выдержкой изделия в испытательной камере в те-
чение последнего часа при температуре окружающей среды 25±3 °C и
относительной влажности не менее 95%. Значения параметров испы-
289
тательных режимов выбираются по табл. 6.3 в зависимости от степе-
ни жесткости испытаний, установленной для изделия.
Цикл испытаний 12+12 ч начинается с постепенного повышения
температуры в течение 3 ч ± 30 мин. до значения, указанного в
табл. 6.3. Скорость повышения температуры может быть определена по
заштрихованным участкам графиков, приведенных на рис. 6.29,а Во
время повышения температуры на изделиях должна конденсировать-
ся влага. Условием выпадения росы является то, что температура
поверхности изделий должна быть ниже точки росы воздуха в каме-
ре. Далее температура в камере поддерживается в пределах заданного
значения (±2°) до истечения 12 ч ± 30 мин. с начала цикла. При
этом относительная влажность должна быть равна 93±3%, за исклю-
чением первых и последних 15 мин., когда она должна находиться
между 90 и 100%. В течение последних 15 мин. на изделиях не долж-
на конденсироваться влага. Затем температуру в камере понижают в
соответствии с одним из двух вариантов (рис. 6.29, а или б).
Таблица 6.3
с циклом 12+12 ч для различных степеней жескости
Параметр испытаний Длительное испытание для степеней жесткости Ускоренное испытание для степеней жесткости
IV, XII V IX V IX
Общая продолжительность выдержки (число циклов) 4 12 21 4 9
Верхняя температура, °C 40±2 40±2 40±2 55±2 55±2
Вариант 1. Температура понижается до 25±3 “С за время от 3 до 6 ч.
Понижение температуры должно производиться со скоростью, опре-
деляемой графиком, рис. 6.29,а. При этом относительная влажность
должна быть не менее 95%, исключая первые 15 мин., когда она дол-
жна быть не менее 90%.
Вариант 2. Отличие его от варианта 1 состоит в том, что в нем
не предусмотрены дополнительные требования понижения темпера-
туры в течение первых полутора часов, а также в том, что относи-
тельная влажность должна быть не ниже 80% (рис. 6.29,6). Затем тем-
пература поддерживается равной 25±3 ’С при относительной влажности
не ниже 95% до завершения 24-часового цикла.
В соответствии с нормативной документацией во время выдерж-
ки могут проводиться измерения значений электрических и (или)
290
100
90
80
10
60
I часть цикла
х! 96%
II часть цикла
| 2 (1"й вариант)
90%
15 мин
15 мин —►
95%
15 мин
II часть цикла
2 (2-й вариант)
15мш
Верхнее значение I
температуры +2 ’С |
+40
или
+55
+28 °C
+22 ’С
а)
Рис. 6.29. Циклические испытания изделий с циклом 12+12 ч
Верхнее
значение
темпера-
туры -2 ’С
1/2ч 1 1/2ч
85%
95% ]
механических параметров изделий. Однако выполнять измерения при
наличии на изделиях конденсированной влаги не рекомендуется.
По аналогичной методике осуществляют кратковременные испы-
тания в циклическом режиме, целью которых является выявление тех-
нологических дефектов, а также дефектов, возникающих при прове-
дении других испытаний. Испытания проводят при повышенной
температуре 55±2 °C, а также при числе циклов, равном 1, 2, 6.
Далее изделия восстановливают в нормальных климатических услови-
ях или в регулируемых условиях. В последнем случае (рис. 6.30)
изделия могут быть перенесены в другую камеру на время восстанов-
ления или могут оставаться в испытательной камере. Время переноса
изделия в другую камеру не должно превышать 5 мин.
При восстановлении в испытательной камере относительная влаж-
ность снижается до 75±2% за время не более 30 мин., после чего в
течение времени не более 30 мин. температуру в камере доводят до
Уровня температуры лаборатории с точностью ± 1 °C. Временные ин-
тервалы восстановления определяются габаритными размерами и свой-
ствами изделий.
ю*
291
Рис. 6.30. Период восстановления в регулируемых условиях
Испытания изделий на воздействие повышенной влажности воздуха
в постоянном режиме (без конденсации влаги) характеризуются тем,
что изделия находятся в камере влажности при относительной влаж-
ности воздуха 93±3% и повышенной температуре в течение общей
продолжительности выдержки (при длительном или ускоренном ис-
пытаниях), зависящей от установленной степени жесткости испыта-
ний (табл. 6.4).
Таблица 6.4
Значения параметров при длительных и ускоренных испытаниях
в постоянном режиме (без конденсации влаги)
Условия испытаний Длительные испытания для степеней жесткости Ускоренные испытания для степеней жесткости
I II Ш, IV V, VI, VIII IX, X III, IV, VII, XIII V, VI, VIII, XI IX, X
Общая продол- жительность выдержки, сут. 2 4 10 21 56 4 7 14
Температура, °C 25±2 25±2 25±2 40±2 40±2 55±2 55±2 55±2
Допускается предварительно нагревать изделия до температуры,
превышающей испытательную на 2—3 °C, и вносить их в камеру с
292
заранее установленным испытательным режимом. При кратковремен-
ных испытаниях продолжительность составляет 2, 4, 6 и 10 суток.
По окончании испытаний, проводимых по любому из рассмотренных
методов, проводят оценку коррозионных разрушений изделий в со-
ответствии с установленными требованиями.
6.1.5. Испытания на воздействие солнечного излучения
Условия испытаний и применяемое испытательное оборудование. Ос-
новными параметрами, характеризующими воздействие солнечной
радиации, являются: спектральное распределение энергии излучения, а
также интенсивность излучения, или поверхностная плотность пото-
ка энергии излучения. Интенсивность солнечного излучения, характе-
ризуемая солнечной энергией, приходящейся на единицу поверхнос-
ти, перпендикулярной солнечным лучам на среднем расстоянии от
Солнца вне земной атмосферы, называют солнечной постоянной Ео.
Она зависит от степени поглощения и рассеяния радиации в атмос-
фере. Рекомендуется значение суммарной радиации у земной поверх-
ности при нахождении Солнца в зените принимать равным 1,12 кВт/м2.
Отсюда следует, что для обеспечения эквивалентного теплового воз-
действия необходимо скорректировать интенсивность искусственного
источника Ет таким образом, чтобы Ет = 1,12аии/аис , где ат —
коэффициент поглощения изделием излучения искусственного ис-
точника, зависящий от его спектрального распределения энергии
излучения; аИС — коэффициент поглощения изделием излучения сум-
марной солнечной радиации, зависящей от ее спектрального распре-
деления энергии. При этом аИИ и аИС зависят от спектрального коэф-
фициента отражения изделия.
Для проведения испытаний на воздействие солнечной радиа-
ции необходимо в заданной плоскости измерения обеспечить излу-
чение, воспринимаемое испытуемым изделием, с интенсивнос-
тью 1,12 кВт/м2 и определенным спектральным распределением
энергии (табл. 6.5). В указанное значение интенсивности должны
также входить излучения, полученные за счет отражения от стенок
камеры, однако не должны входить инфракрасные излучения от на-
греваемых стенок камер.
Наряду с рассмотренными к параметрам камер солнечной радиа-
ции относятся: температура, скорость циркуляции воздуха и его от-
носительная влажность. Температура воздуха в камере при облуче-
нии во время темной фазы должна достигать 40 или 55 °C в зависимости
от метода испытаний, воспроизводящего предполагаемые условия эк-
сплуатации. Поскольку для испытаний применяются камеры с при-
293
Спектральное распределение энергии излучения
Таблица 6.5
Интервал спектра Длина волны, мкм Поверхностная плотность потока излучения, Вт/м2 Допустимое отклонение, %
Ультрафиолетовый 0,28-0,32 5 <35
0,32-0,4 63 <25
Видимый 0,4-0,52 200 <10
0,52-0,64 186 <10
0,64-0,78 174 <10
Инфракрасный 0,78-3,0 492 <20
нудительной циркуляцией воздуха, необходимо учитывать возмож-
ность охлаждения изделий и термопреобразователей под действием
воздушного потока. Даже столь малая скорость циркуляции воздуха,
как, например, 1 м/с, может вызвать уменьшение температуры пе-
регрева более чем на 20%. Вследствие этого при осуществлении на-
грева (охлаждения) термоэлементами, расположенными в стенках
камер, должно обеспечиваться более равномерное распределение тем-
пературы в камере при относительно небольшой скорости воздушно-
го потока.
В качестве искусственных источников солнечного излучения исполь-
зуются одна или несколько специальных ламп, а также ряд оптичес-
ких элементов (рефлекторов, светофильтров и т.д.), обеспечиваю-
щих получение требуемого спектра и заданной интенсивности
излучения. Источники излучения различаются по физической при-
роде излучения. Они могут быть основаны на нагревании, на прин-
ципе электролюминесценции, на одновременном использовании на-
грева и электролюминесценции.
К источникам излучения, основанным на нагревании, относят-
ся вольфрамовые лампы. Вакуумные или газонаполненные вольфрамо-
вые лампы большую часть своей энергии излучают в области коротко-
волновых инфракрасных лучей и почти не излучают ультрафиолетовых
лучей, что ограничивает их применение. Так, например, вакуумная
лампа при температуре вольфрамовой нити Т = 2500 К имеет макси-
мум излучения в области X = 1,15 мкм, а газонаполненная лампа при
температуре нити Т= 3000 К — в области X = 0,96 мкм. Если принять
всю энергию, излучаемую вакуумной лампой, за 100%, то только 7—
12% приходится на видимую часть спектра, а остальная часть, за ис-
ключением небольших потерь, излучается в виде инфракрасных лучей.
294
Лампы с вольфрамовой нитью в колбе из кварцевого стекла с
галогенным наполнителем обладают лучшей стабильностью рабочих
характеристик на протяжении всего срока службы. Поскольку в сол-
нечном спектре приблизительно 50% энергии приходится на види-
мую и ультрафиолетовую части спектра, что соответствует длинам
волн короче 0,7 мкм (рис. 6.31), использование вольфрамовых ламп
целесообразно только в случаях, когда необходимо воспроизведение
инфракрасного и теплового воздействий.
Рис. 6.31. Спектральное распределение излучения: 1 — вольфрамовой лам-
пы накаливания; 2 — солнечной радиации, когда Солнце находится в зени-
те; 3 — солнечной радиации при слабой облачности
В отличие от источников излучения, основанных на нагревании
и дающих сплошной спектр, электролюминесцентные излучатели имеют
прерывистый спектр. Они характеризуются высокоинтенсивным се-
лективным излучением в очень узкой области спектра, зависящей от
газового заполнения. Люминесценция представляет собой свечение,
возникающее в процессе перехода различных видов энергии в энер-
гию излучения вне зависимости от теплового состояния излучающего
вещества, и поэтому люминесцентные излучатели называют источ-
никами холодного света. Явление холодного свечения (электролюми-
несценция) возникает при прохождении электрического тока через
разреженный инертный газ или через пары ртути, при этом происхо-
дят столкновения электронов и ионов в процессе их движения в элек-
295
трическом поле. Указанное явление используется в газоразрядной труб-
ке, представляющей собой стеклянный или кварцевый баллон, на-
полненный под давлением газом или парами некоторых металлов. В
баллон впаиваются металлические электроды, к которым подводится
напряжение, необходимое для возникновения разряда.
В испытательных камерах используются также ртутные лампы,
называемые иногда ртутно-паровыми лампами, так как дуговой раз-,
ряд происходит в парах ртути. В них наряду с электронным током
возникает ионный ток, проходящий от анода к катоду. Однако, по-
скольку скорость электронов значительно больше скорости ионов,
плотность электронного тока больше, чем ионного, и поэтому об-
щий разрядный ток ртутной дуги определяется в основном электрон-
ным током. При возрастании плотности тока возникает ионизация.
В зависимости от давления паров ртути, при котором происхо-
дит ртутно-дуговой разряд, различают лампы трех видов: низкого,
высокого и сверхвысокого давления. Ртутные лампы низкого давле-
ния являются электролюминесцентными излучателями, они обеспе-
чивают излучение в ультрафиолетовой части спектра. В ртутных лам-
пах высокого и сверхвысокого давления излучение происходит за счет
ртутно-парового разряда, нагрева кварцевого стекла баллона, а так-
же люминесценции. Эти лампы излучают главным образом в длин-
новолновой инфракрасной (ИК) части спектра. Причем с ростом
давления линейчатый спектр переходит в сплошной, что сопровож-
дается относительным возрастанием излучения коротковолновых ин-
фракрасных лучей. Ртутные лампы (особенно сверхвысокого давле-
ния) характеризуются большим КПД, доходящим до 75%, малыми
эксплуатационными расходами и большим сроком службы (до 8000 ч).
К недостаткам можно отнести ограниченную возможность регулиро-
вания режимов возникновения отказов вследствие конденсации па-
ров при понижении температуры и т.д.
К люминесцентным относятся также и ксеноновые излучатели,
обеспечивающие получение спектра, наиболее приближающегося к
солнечному (рис. 6.32). Спектр излучения зависит от длины разряд-
ных промежутков, мощности ламп, их геометрической формы и раз-
меров. Так, при коротких разрядных промежутках относительная
энергия излучения больше, чем при длинных, и она в большей сте-
пени сосредоточена в ИК части спектра. Потребляемая мощность
ксеноновых излучателей и эксплуатационные расходы весьма значи-
тельны. Теоретический срок службы порядка 5000 ч.
Дуговые лампы основаны на использовании дугового разряда, об-
разующегося между двумя угольными или графитовыми электрода-
ми. Они позволяют получить спектр излучения, имеющий максимум
296
Рис. 6.32. Спектральное распределение излучения: 1 — ксеноновой газораз-
рядной лампы высокого давления; 2 — солнечной радиации, когда Солнце
находится в зените; 3 — солнечной радиации при слабой облачности
в области коротковолновой части инфракрасного излучения (0,7—
0,8 мкм) и пик в начале ультрафиолетовой части спектра. Недостат-
ками дуговых ламп являются постепенное затухание вольтовой дуги,
приводящее к ограниченному времени непрерывной работы, а также
недостаточная локализация и фиксация источника излучения.
Сравнение спектра солнечного излучения со спектрами ламп,
применяемых для его имитации, показывает их недостаточное совпа-
дение. В то время как солнечный свет дает приблизительно непре-
рывный (сплошной) спектр, все искусственные источники имеют
определенные спектральные линии. В связи с этим для получения
необходимого спектра излучения применяют светофильтры, которые
могут быть стеклянными и жидкостными, абсорбционными и интерфе-
ренционными. Выбор светофильтра зависит от источника излучения и
его использования. Предпочтение отдается стеклянным фильтрам.
К недостаткам стеклянных фильтров можно отнести неодинаковую
оптическую плотность стекол, тенденцию к изменению спектраль-
ных характеристик под воздействием интенсивного ультрафиолетово-
го излучения.
Стеклянные адсорбционные фильтры основаны на способности ряда
оптических материалов к избирательному поглощению в одной или
нескольких областях спектра излучения. Примерами таких фильтров
297
являются фильтры из цветных оптических стекол, окрашенных плас-
тмасс, а также ряда других оптических материалов. Недостатки ука-
занных фильтров — малая контрастность и крутизна фронтов спект-
ральной характеристики.
В ряде случаев находят применение многослойные стеклянные ин-
терференционные светофильтры, действие которых основано на ин-
терференции лучей, многократно отражающихся и проходящих через
тонкие слои прозрачных материалов. Подбирая показатели прелом-
ления, толщины и число этих слоев, можно получать различные све-
тофильтры с почти произвольными спектральными свойствами. Ин-
терференционные фильтры меньше нагреваются и обычно более
стабильны, чем абсорбционные.
Хорошие результаты дает комбинация интерференционных и абсор-
бционных светофильтров. Таким образом, спектр излучения ксено-
новой лампы может быть откорректирован с помощью комбинации
абсорбционных светофильтров для инфракрасной и ультрафиолето-
вой областей.
Большая удаленность Солнца от Земли приводит к тому, что сол-
нечные лучи падают на земную поверхность параллельно, в то время
как искусственные источники излучения находятся на сравнительно
близком расстоянии от поверхности испытуемого изделия и не обес-
печивают аналогичного направления лучей. Вследствие этого для
обеспечения равномерного распределения интенсивности излучения
в плоскости измерения необходимо применение рефлектора в виде
параболического вогнутого зеркала. При этом важное значение име-
ет конструкция используемой лампы. Так, при использовании ксе-
ноновой лампы возможно образование теней от ее электродов и опор.
Иногда для обеспечения равномерности облучения используют ксе-
ноновую лампу с длинным разрядным промежутком, укрепленную в
желобообразном параболическом рефлекторе (рис. 6.33).
Источники излучения в камерах солнечной радиации рекоменду-
ется размещать вне их рабочего объема, за специальным остеклени-
ем, с одной стороны, исключающим воздействие на изделие боль-
шого количества теплоты, выделяемой лампами, и загрязнение
испытуемых изделий озоном, образующимся в результате ультрафио-
летового (УФ) излучения ксеноновых, дуговых и других ламп, а с
другой стороны, уменьшающим воздействие повышенной влажнос-
ти в испытательной камере на оптические элементы. Попадание озо-
на и других газов в рабочий объем камеры может оказывать значи-
тельное влияние на процессы деградации некоторых материалов.
Методы испытаний на воздействие солнечного излучения. Испы-
тания на воздействие солнечного излучения проводят для определения
298
Рис. 6.33. Излучатель, имитирующий солнечное излучение: 1 — излучения
ультрафиолетового и видимого спектра; 2 — ИК излучение; 3 — ксеноновая
лампа; 4 — зеркало УФ излучения; 5 — зеркало излучения видимого спектра;
6 — оболочка из кварцевого стекла с избирательно отражающим слоем ИК
излучения; 7— дополнительный фильтр УФ излучения; 8— параболический
рефлектор; 9 — образцовая поверхность
его влияния на тепловые, механические, химические, электрохими-
ческие и другие явления, происходящие в испытуемых изделиях.
В нормативной документации на изделие необходимо указывать
способы установки его в камеру (на опорных стойках либо на основа-
нии, обладающем определенной теплопроводностью), обеспечива-
ющие необходимое положение относительно направления излучения.
Хорошие результаты дает использование в качестве материала для
основания бетона заданной толщины или слоя песка. Действие сол-
нечного облучения на испытуемое изделие существенно зависит от
состояния его поверхности, определяющего характер поглощения,
поэтому необходимо, чтобы оно отвечало требованиям испытаний,
например отсутствию загрязнений поверхности (масляных пленок,
пыли и Т.Д.).
После стабилизации изделия в нормальных климатических усло-
виях в течение заданного времени его тщательно осматривают и из-
меряют значения определенных параметров, стабильность которых
зависит от воздействия солнечной радиации.
Изделие устанавливают в камеру в положение, при котором наи-
более уязвимые элементы его конструкции будут обращены к источ-
никам излучения. При этом должна исключаться возможность экра-
нирования излучения источника или отраженного излучения.
299
В зависимости от цели испытаний находят применение три ме-
тода их проведения (рис. 6.34).
Метод А (рис. 6.34, а) применяется, когда основной интерес
представляют результаты теплового воздействия. Метод характеризу-
ется 24-часовым циклом, состоящим из 8-часовой фазы облучения и
16-часовой темновой фазы. За указанный период времени обеспечи-
вается получение изделием дозы облучения 8,96 кВт/м2, что прибли-
жается к наиболее жестким естественным условиям. Температура воз-
духа в камере должна повышаться за 2 ч до начала фазы облучения.
Увеличение фазы облучения свыше 8 ч ускоряет воздействие радиа-
ции по сравнению с естественными условиями. Продолжительность
Рис. 6.34. Режимы облучения и температуры при трех методах испытаний
на воздействие солнечной радиации
300
испытаний (число циклов) зависит от габаритных размеров и массы
испытуемых изделий. В общем случае рекомендуются три цикла ис-
пытаний, однако при испытаниях крупногабаритных изделий требу-
ется увеличить число циклов для достижения максимальной внутрен-
ней температуры и выявления процессов деградации.
Метод В (рис. 6.34,6) применяется, когда основной интерес пред-
ставляют процессы деградации. Метод характеризуется 24-часовым цик-
лом, который состоит из 20-часовой фазы облучения и 4-часовой тем-
новой фазы. При этом доза облучения составляет 22,4 кВт/м2 за цикл.
Известно, что фотохимические процессы деградации материа-
лов, красок, пластмасс зависят также от влажности окружающей
среды, поэтому иногда в начале 20-часовой фазы облучения возмож-
но одновременное воздействие влажного тепла (относительная влаж-
ность 93±3% при t = 40±2 °C).
Метод С (рис. 6.34,в) применяется, когда необходимо оценить
только фотохимический эффект, а циклические тепловые нагрузки
не имеют значения. Метод характеризуется непрерывным 24-часо-
вым облучением и считается упрощенным. При этом методе могут
быть не выявлены процессы деградации, обусловленные цикличес-
кими тепловыми нагрузками.
При реализации всех трех методов интегральная поверхностная
плотность потока излучения должна быть равна 1,120 кВт/м2 + 10% (в
том числе поверхностная плотность потока ультрафиолетовой части
спектра 68 Вт/м2). Спектральное распределение должно соответство-
вать данным, указанным в табл. 6.5.
Во время фазы облучения температуру воздуха в камере повыша-
ют приблизительно с постоянной скоростью и поддерживают на уровне
40 или 55 °C с точностью ±2 °C. При проведении испытаний с одно-
временным воздействием влажности необходимо указывать период,
в течение которого она должна поддерживаться: а) во время фаз об-
лучения; б) в период темновых фаз; в) в течение всей продолжитель-
ности испытаний.
Продолжительность испытаний (число циклов) зависит от цели
испытаний, ее рекомендуют выбирать из следующего ряда: 3, 5, 10,
56 циклов. Сокращать продолжительность испытаний за счет увели-
чения поверхностной плотности потока (интенсивности) излучения
не рекомендуется.
В нормативной документации на изделие следует указывать, дол-
жно ли оно функционировать в процессе испытаний и значения ка-
ких параметров необходимо измерять.
В случаях, когда требуется проводить испытания солнечных ба-
тарей, систем слежения за Солнцем и других изделий, предназна-
ченных для космических исследований, необходимо обеспечение точ-
301
ной коллимации лучей от излучателя (т.е. оптическая ось рефлектора
должна составлять прямой угол с поверхностью изделия).
6.1.6. Испытания на воздействие пониженного
атмосферного давления
Условия испытаний и применяемое испытательное оборудование. Ис-
пользование изделий на различных высотах приводит к необходимос-
ти проведения испытаний в условиях пониженного атмосферного дав-
ления и различных температур.
Атмосферное давление, иногда называемое барометрическим,
обусловлено воздействием слоев атмосферы, находящихся над точ-
кой измерения. При этом пренебрегают действием инерционных сил,
вызванных движением масс воздуха. Поскольку с увеличением вы-
соты изменяются барометрическое давление и плотность, то одина-
ковым приращениям высоты соответствуют все меньшие изменения
давления воздуха, т.е. с высотой давление убывает тем быстрее, чем
тяжелее газ (больше ц) и чем ниже температура. С ростом высоты
атмосферное давление уменьшается, и его называют вакуумметри-
ческим или разреженным. Разреженный воздух (газ), с которым
имеют дело в процессе испытаний на пониженное атмосферное дав-
ление, по своим свойствам мало отличается от идеального газа, по-
этому для характеристики происходящих при испытании процессов
можно пользоваться уравнением состояния следующего вида:
pV =
NmRT^
м
где р — давление; V — объем; N — число молекул; т — масса одной
молекулы; М — масса газа; R — универсальная газовая постоянная;
Т — абсолютная температура.
В основу определения степени разрежения (степени вакуума)
положено сравнение средней длины X свободного пробега молекул
газа с характерным линейным размером d (объема камеры). Различа-
ют следующие степени вакуума: низкая при X « d; высокая при X
» d; средняя, когда X и d различаются незначительно; сверхвысо-
кая, характеризующаяся предельно низкими абсолютными значени-
ями.
Ниже приводятся предельные значения атмосферных давлений,
соответствующие определенным степеням вакуума:
Низкий .......................... 101,5 кПа—133,3 Па
Средний ......................... 133,3 Па—133,3 мПа
Высокий.......................... 133,3 мПа—13,3 мкПа
Сверхвысокий................... 1,33 мкПа
302
Под действием пониженного атмосферного давления возникают:
• тепловые повреждения, вызванные ухудшением условий охлаж-
дения;
• электрические повреждения, такие как снижение электричес-
кой прочности воздуха, приводящие к опасности возникнове-
ния дугового и поверхностного коронного разрядов с образова-
нием озона;
• механические повреждения вследствие образования перепадов
давления между воздухом внутри и снаружи изделия, наруше-
ния герметичности, появления течи и т.д.
Таким образом, изменяются характеристики, влияющие на бе-
зопасность изделий, вызванные изменениями диэлектрических свойств
воздуха (плотности воздуха и подвижности ионов).
Воздействие холода или теплоты при пониженном атмосферном
давлении увеличивает изменение характеристик материалов (хрупко-
сти, пластичности), вызывающих деформацию или появление тре-
щин в герметичных уплотнениях аппаратуры или корпусов некоторых
изделий. Одновременное воздействие температуры и пониженного
атмосферного давления способствует испарению пластификаторов и
продуктов расщепления из пластмасс, что приводит к изменению их
механических и электрических свойств, а также к конденсации этих
продуктов испарения на поверхностях соседних изделий, вследствие
чего изменяются их свойства или возникает коррозия. Указанное воз-
действие вызывает испарение смазочных материалов, что увеличива-
ет трение и торможение движущихся частей. Таким образом, анализ
воздействия внешних факторов указывает на ряд причин, вызываю-
щих возникновение отказов.
Для испытаний на воздействие пониженного атмосферного дав-
ления и температуры используют термобарокамеры, воспроизводя-
щие пониженное атмосферное давление при нормальной, повышен-
ной или пониженной температурах. Основными параметрами,
характеризующими термобарокамеры, являются: диапазон значений
(пределы изменения) атмосферного давления; точность поддержа-
ния давления; скорость откачки газа из рабочего объема камеры
S = ДИ0/(Д/), где ДИ0 — объем воздуха, поступающий в единицу
времени Д/ из камеры в трубопровод при давлении р в ней; время
выхода на режим; состав остаточных газов. Помимо указанных пара-
метров для оценки работы камеры пользуются параметрами, харак-
теризующими температурные режимы.
Для создания пониженного атмосферного давления в рабочем
объеме камеры используются вакуумные насосы. Перед включением
камеры давление в системе «камера-соединительный трубопровод-
303
насос» одинаковое и воздух неподвижен. При включении насоса на-
чинается откачка, воздух из рабочего объема камеры перемещается в
насос, который непрерывно выбрасывает его в окружающее простран-
ство. Поскольку объем системы и температура остаются неизменны-
ми, давление понижается. При этом у конца трубопровода, обра-
щенного к насосу, впускное (входное) давление р2 падает быстрее,
чем выпускное давление у конца трубопровода в рабочем объеме
камеры. Следовательно, на концах трубопровода создается разность
давлений р[ - , которую называют движущей разностью давлений,
причем рх > р2.
Насосы характеризуются следующими основными параметрами:
• скоростью откачки 50;
• начальным впускным (входным) давлением насоса, определяемым
давлением, начиная с которого обеспечивается его нормальная
работа;
• предельным остаточным давлением насоса, при котором впуск-
ное (входное) давление достигается после достаточно длитель-
ной откачки системы, не имеющей ни натекания извне, ни
газовыделения внутренних стенок. Нижнее предельное давле-
ние насоса определяется тем, что в процессе работы системы
наступает момент, когда воздушный поток, поступающий из
камеры в насос, становится равным обратному потоку газооб-
разных веществ, поступающих из насоса в камеру, и насос
начинает работать вхолостую. Обратный поток определяется
газоотделением внутренних стенок насоса, недостаточной гер-
метичностью, выделением газов из рабочих жидкостей;
• наибольшим выпускным (выходным) давлением вакуумного насо-
са, определяемым давлением у его выпускного отверстия, при
превышении которого насос прекращает нормальную работу
ввиду прорыва газа с выпускной стороны;
• подачей Qn насоса, оцениваемой произведением номинальной
скорости 5Н откачки насоса на впускное (входное) давление:
Он = $нР2 •
Помимо указанных параметров для характеристики насосов пользу-
ются также следующими параметрами: потребляемой мощностью элек-
тродвигателя, количеством заливаемой рабочей жидкости (если она
используется в насосе), размерами насоса, числом ступеней и т.д.
Помимо насоса в вакуумную систему термобарокамеры входят
клапаны, предназначенные для выполнения следующих функций:
• выравнивания давления на входном и выходном патрубках на-
соса с рабочей жидкостью во время его остановки;
304
• отключения испытательной камеры от насоса после достиже-
ния в ней рабочего давления;
• обеспечения дросселирования процесса откачки для предотвра-
щения перегрева насоса;
• напуска воздуха в испытательную камеру;
• подключения течеискателя, предназначенного для определе-
ния наличия натекания воздуха, и т.д.
Возможны два принципа построения термобарокамер: с распо-
ложением теплоизоляции снаружи или внутри стенок камеры. При
наружном расположении теплоизоляции вне вакуумированной части
уменьшаются требования к производительности систем нагрева и ох-
лаждения, поскольку уменьшаются потери теплоты на нагрев тепло-
изоляции, обладающей большой массой и хорошей теплоемкостью.
При внутреннем расположении теплоизоляции возможны такие отри-
цательные явления, как загрязнение воздуха в камере испарениями,
выделяемыми теплоизоляцией, ее увлажнение и ряд других. Вслед-
ствие этого первая конструкция является предпочтительней.
Важным является выбор толщины стенок вакуумированной час-
ти, которая при разрежении, соответствующем 133 Па, должна
выдерживать воздействие внешнего атмосферного давления не ме-
нее 101 кПа. Необходимость в минимальной толщине стенок объяс-
няется тем, что нагрев (охлаждение) осуществляется с помощью тер-
морубашки, так как термовоздействие на испытательное пространство
при вакууме в камере практически невозможно. Принудительная цир-
куляция воздуха в термобарокамерах затруднена, поэтому использу-
ются мощные аксиальные вентиляторы. Время снижения давления
на 99,6 кПа составляет около 20 мин. Современные термобарокаме-
ры имеют задающие устройства, обеспечивающие воспроизведение
определенного закона изменения давления и температуры.
Для испытания изделий под электрической нагрузкой в стенке
камеры монтируют герметичные вводы (соединители), расстояние
между которыми выбирают из условия, исключающего возникнове-
ние ионизационных процессов при пониженном давлении и задан-
ных напряжениях, подаваемых на изделия.
Методы испытаний на воздействие пониженного атмосферного
давления. Целью испытаний изделий на воздействие пониженного
атмосферного давления является определение их пригодности для эк-
сплуатации в наземных или летных условиях на больших высотах при
атмосферных давлениях не ниже 1,33 кПа. Испытания на воздействие
пониженного атмосферного давления, действующего в пределах стра-
тосферы, осуществляются одним из методов, определяемых темпе-
305
ратурой окружающей среды. Различают испытания при нормальной,
повышенной или пониженной рабочих температурах.
Испытаниям на воздействие пониженного атмосферного давле-
ния при нормальной температуре подвергают тепло- и нетепловыделя-
ющие изделия, находящиеся в рабочем состоянии, для которых тем-
пературные воздействия не являются критичными, так как не влияют
на их тепловой режим.
Испытаниям на воздействие пониженного атмосферного давле-
ния при повышенной (пониженной) температуре подвергают тепловы-
деляющие изделия, для которых температурное воздействие при элек-
трической нагрузке является критичным. Одним из важных условий
обеспечения воспроизводимости результатов испытаний тепловыде-
ляющих изделий является правильный выбор соотношения площади
поверхности, окружающей изделия, и общей площади поверхности
изделия.
Испытания на воздействие пониженного атмосферного давления
и повышенной (рис. 6.35) или пониженной температуры проводятся
с соблюдением приводимых ниже методик, различных для тепло- и
нетепловыделяющих изделий. Разница заключается в том, что теп-
ловыделяющие изделия предпочтительно испытывать в камере без при-
нудительной циркуляции воздуха, а нетепловыделяющие изделия —
в камере с принудительной циркуляцией воздуха. Испытания следу-
ет проводить при комбинациях значений атмосферного давления, тем-
пературы и длительности их воздействия, приведенных в табл. 6.6.
Рассмотрим метод испытаний на воздействие пониженного ат-
мосферного давления при нормальной температуре, для реализации
которого используются барокамеры или термобарокамеры. Процесс
испытаний складывается из приводимых ниже операций, отличаю-
щихся от показанных на рис. 6.35 постоянством нормальной темпе-
ратуры.
Операция I. Процесс испытаний начинается с предварительной
выдержки в нормальных атмосферных условиях (если другое не пре-
дусмотрено нормативной документацией), завершающейся первона-
чальными измерениями, предусматривающими внешний осмотр,
измерение значений электрических параметров и проверку механи-
ческих характеристик.
Рис. 6.35. Режим испытаний на воздействие повышенной температуры №
и пониженного атмосферного давления: а — нетепловыделяющих изде-
лий; б — тепловыделяющих изделий; t — время, в течение которого тем-
пература в камере достигнет значения, лежащего в пределах, уста-
новленных для нормальных атмосферных условий
306
Операция
1. Температура
Заданная
температура
испытания-1
Температура
в лаборатории
2. Атмосферное
давление
Атмосферное
давление в
лаборатории
Заданное
атмосферное *
давление при
испытании
VII
VI
3. Питание
включено
4. Проверка
работо-
способности
и (или)
внешний
осмотр
III
Температура в камере
Температура образца
Давление в камере
Длительность выдержки
Питание может быть выключено
* Только для случая, когда образец испытывается в рабочем состоянии
«* Промежуточные измерения
00000
'//////,
Операция
1. Температура
Заданная
температура
испытания 1
Температура
в лаборатории
2. Атмосферное
давление
Атмосферное
давление в
лаборатории
Заданное
атмосферное *
давление при
испытании
3. Питание
включено
4. Проверка рабо-
тоспособности
и(или)
внешний
осмотр
III
VII
Температура в камере
Температура образца
Давление в камере
Длительность выдержки
УМ \fSSSM '//////////////////////////J
I Питание может быть выключено
ымы ы г
J * Промежуточные измерения
307
Таблица 6.6
Предпочтительные комбинации минусовой или плюсовой температуры,
атмосферного давления и длительности
Температура, °C Атмосферное давление, кПа Длительность, ч
минусовая плюсовая
55 85, 155 4,4 2
55 55, 85, 155 15,0 2
55 55 30,0 2
25 55 53,3 2,16
40 — 53,3 2,16
40 60,0 2
40 55 70,0 2,16
Примечание. Допустимый разброс предельных отклонений плюсо-
вых температур ±3 до 100 °C и ±5 до 200 °C.
Операция II. Изделие без упаковки, в готовом для эксплуатации
состоянии помещают в камеру и устанавливают в рабочем или другом
особо оговоренном положении. Однако если предусмотрено одно-
временное испытание группы тепловыделяющих изделий, то для их
установки определяют минимально достижимые расстояния между
ними. Включают питание тепло- и нетепловыделяющего изделия или
включают их под электрическую нагрузку. По достижении изделием
теплового равновесия проводят контроль его работоспособности, после
чего нетепловыделяющие изделия могут быть выключены.
Операция III. В камере устанавливают пониженное атмосфер-
ное давление, предусмотренное нормативной документацией, за-
висящее от условий реальной эксплуатации. Значение давления оп-
ределяется по табл. 6.6 в соответствии с известным пониженным
атмосферным давлением и повышенной температурой. Давление в
камере снижают до определенного значения со скоростью, не пре-
вышающей 10 кПа-мин-1. В процессе понижения давления прове-
ряют параметры изделий, зависящие от электрической прочности.
Операция IV Это операция выдержки, в течение которой давле-
ние поддерживается неизменным. Во время выдержки нетепловыде-
ляющие изделия могут оставаться в рабочем состоянии или быть вык-
лючены в соответствии с требованиями нормативной документации.
Для оценки работоспособности или промежуточных измерений зна-
чений параметров изделия, испытуемого в нерабочем состоянии, оно
включается на необходимое время. Во время выдержки тепловыделя-
ющие изделия могут оставаться во включенном состоянии или вклю-
308
чаться в соответствующее время перед измерениями. Оценка их ра-
ботоспособности или промежуточные измерения проводятся только
после достижения изделием теплового равновесия. Последние про-
межуточные измерения должны выполняться в течение последнего
часа выдержки.
Операция V. Давление в камере восстанавливается до значения,
соответствующего нормальным атмосферным условиям. Давление по-
вышается со скоростью, не превышающей 10 кПа-мин”1.
Операция VI. Восстановление.
Операция VII. Заключительные измерения.
При испытаниях на одновременное воздействие пониженного
атмосферного давления и температуры (повышенной или понижен-
ной) следует внести в операции II, IVи Гряд изменений (рис. 6.35,
6.36). В операцию II необходимо добавить включение системы на-
грева (охлаждения) камеры для установления в ней температуры,
соответствующей заданной в нормативной документации степени же-
сткости. Скорость изменения температуры в камере не должна пре-
вышать 1 °С-мин.“1. При выполнении данной операции изделие вы-
держивают при заданной температуре до установления теплового
равновесия, после чего оно включается и проверяется его работоспо-
собность. Во время операции III в камере снижается давление со
скоростью, не превышающей 10 кПа-мин."1, до значения, соответ-
ствующего заданной степени жесткости. При этом изделие должно
быть включено и находиться в рабочем состоянии. Во время выпол-
нения операции IVследует поддерживать одновременно с давлением
и заданное значение температуры. Рекомендуемые длительности вы-
держки 5 мин., 30 мин., 2 ч, 4 ч и 16 ч. В процессе восстановления
нормальных атмосферных условий (операция V) следует одновремен-
но с повышением давления изменять температуру до нормальной со
скоростью, не превышающей 1 ’С мин.”1.
При проведении рассмотренных испытаний состав атмосферы в
испытательной камере не соответствует естественным условиям. Он
в значительной степени определяется типом насосов, применяемых
для понижения атмосферного давления, содержанием водяных па-
ров, приводящих к конденсации влаги, что недопустимо. При необ-
ходимости влажность может быть измерена прибором, определяю-
щим температуру точки росы. Таким образом, различие в составе
естественной и искусственной атмосферы может приводить к погреш-
ности коэффициента конвекции ак , которая не должна превышать
10%. Необходимо учитывать, что к отрицательным побочным воз-
действиям на испытуемые изделия могут также приводить следующие
факторы:
309
Операция
HI
V VI VII
1. Температура
Температура
в лаборатории Заданная температура испытания - Температура образца Температура в камере
2. Атмосферное давление Атмосферное —► давление в лаборатории Заданное —► атмосферное давление при испытании s Давление в камере
Яг
Длительность выдержки
3. Питание включено 4. Проверка рабо- тоспособности и (или) внешний осмотр
4^1 WSSSSA
J ^"‘"^'^Питание может быть выклк а . Т 1 )ЧСНО 1
121 l±*J
♦* Промежуточные измерения |
а)
Операция J и к IV V VI VII
1. Температура Температура в лаборатории Заданная температура испытания * - Температура образца
Температура в камере
2. Атмосферное давление Атмосферное давление в лаборатории Заданное —► атмосферное давление при испытании —Давление в камере
! >1/
Длительность выдержки ►
3. Питание включено 4. Проверка рабо- тоспособности и (или) внешний
//// ы Г///Л
^^7 Питание должно быть выключено, 1 если это указано в ЧТУ д J
town м 2а» * гм * ! 1 441 £444
осмотр
•• Промежуточные измерения
310
• загрязнение воздуха в камере испарениями рабочей жидкости
насоса и испарениями, выделяемыми вспомогательными час-
тями камеры (вентилями, теплоизоляционными материалами
и т.д.);
• загрязнение пылью или водой, содержащейся в нагнетаемом
воздухе при восстановлении давления до нормального.
Особое внимание следует обратить на измерения температуры в
термобарокамере. Наличие пониженного атмосферного давления сни-
жает эффективность теплообмена между испытательной средой и чув-
ствительным элементом термометра за счет уменьшения коэффици-
ента теплоотдачи (конвекции) ак, что приводит к увеличению времени
реакции термометра на изменение температуры. Кроме того, при
испытании тепловыделяющих изделий появляется или возрастает по-
грешность измерения, вызванная уменьшением коэффициента теп-
лоотдачи ак воздушной среды в камере. При пониженном давлении
термометр будет в меньшей мере подвержен воздействию тепловой
энергии, что приведет к росту погрешности измерений. Примене-
ние экранов, защищающих термометр от излучения, может снизить
данную погрешность.
6.1.7. Испытания на статическое
и динамическое воздействие пыли (песка)
Условия испытаний и применяемое испытательное оборудование. В
некоторых условиях эксплуатации изделия подвергаются воздействию
пылевых смесей различных составов, в результате чего могут изме-
няться значения электрических и механических параметров изделий.
Абразивное воздействие пыли проявляется в основном в оптических
и трущихся конструктивных элементах. Из-за возникновения элект-
рических зарядов у различных комбинаций пылевой смеси пыль при-
тягивается к неподвижным поверхностям. Наличие пыли влияет на
электрическую прочность изделий.
Воздействие пыли связано с действием ветра, который активи-
зирует ее проникающее и разрушающее действие. Таким образом,
требования к стойкости изделий на воздействие пыли для разных ус-
ловий эксплуатации оказываются различными, что приводит к двум
видам испытаний — на статическое и динамическое воздействие пыли.
Для воспроизведения воздействия пыли с определенными скоростя-
с©| Рис. 6.36. Режим испытаний на воздействие пониженной температуры
и пониженного атмосферного давления: а — нетепловыделяющих изде-
лий; б — тепловыделяющих изделий
311
ми циркуляции воздуха используют специальные камеры. Основны-
ми параметрами, характеризующими камеры пыли, являются: ско-
рость циркуляции воздуха в камере, температура воздуха, относи-
тельная влажность, временной режим. Кроме того, вид и режим
испытаний зависят от параметров пылевой смеси: ее состава, разме-
ра частиц, концентрации пыли в воздухе, плотности пыли.
В основном находят применение две конструкции камер: для
испытаний на статическое и динамическое воздействие пыли. В ка-
мере для испытаний на статическое воздействие пыли (рис. 6.37) пыль
завихряется и с помощью постоянной циркуляции воздуха удержива-
ется во взвешенном состоянии. Поскольку длительность падения ча-
стиц пыли разных размеров различна, необходимо, чтобы ее состав
поддерживался постоянным.
Рис. 6.37. Камера для испытаний на статическое воздействие пыли: 1 —
испытательная камера; 2 — подача пыли; 3 — сетка для установки изделий;
4 — лента конвейера; 5— вентилятор для отсоса пыли; 6 — вентиляторы для
завихрения пыли
Камера для испытаний на динамическое воздействие пыли (рис. 6.38)
представляет собой ветровой канал с замкнутой воздушной циркуля-
цией. Собственно испытательной камерой является средняя верхняя
секция трубопровода. Циркуляция воздуха осуществляется с помо-
щью осевого вентилятора 4, который вращается от электродвигателя
5, закрепленного на амортизирующих прокладках для уменьшения
шума и вибрации. Для создания определенной формы потока (лами-
312
1 2 J +
11 10 0 8 7
Рис. 6.38. Камера для испытаний на динамическое воздействие пыли: 7 —
щит для частичного изменения направления потока воздуха; 2 — стол для
установки испытуемого изделия; 3 — испытательная камера; 4 — вентиля-
тор; 5, 9 — электродвигатели; 6 — магнитные пускатели; 7 — каркас уста-
новки; 8 — воздухопровод; 10 — шибер (заслонка) для изменения скорости
воздушного потока; 77 — редуктор
нарной или турбулентной) в ветровом канале (воздухопроводе) 8 рас-
положен специальный направляющий щит 7. В нижней части возду-
хопровода расположена заслонка (шибер) 10, позволяющая регули-
ровать скорость воздушного потока. Регулирование формы и скорости
воздушного потока осуществляется рукоятками, выведенными на
переднюю панель камеры. Для установки испытуемых изделий и их
равномерного обдува со всех сторон в камере расположен вращаю-
щийся в горизонтальной плоскости стол 2, закрепленный на верти-
кальном валу редуктора 77. Частота вращения стола 9 мин”1. Пре-
дусмотрена возможность выдвижения стола из камеры для установки
на него испытуемых изделий. На передней стенке камеры сделан
проем, закрываемый дверью с резиновым уплотнением и со смотро-
вым окном. В камере имеется внутреннее освещение.
Заданная концентрация пыли в камере достигается вводом в нее
определенного количества пылевой смеси и циркуляцией воздуха.
Для этого камера оборудована специальным дозатором, обеспечива-
ющим введение пылевой смеси. Постоянство концентрации пыли
контролируется измерителем концентрации через определенные ин-
тервалы времени. Заданный температурный режим достигается с по-
мощью электроподогревателя. Постоянство температурного режима
может поддерживаться ручным и автоматическим регулированием.
313
В современных пылевых испытательных камерах осуществляется
полная автоматизация поддержания заданных значений: временных
параметров режимов, концентрации или плотности пылевой смеси,
а также температуры,
Методы проведения испытаний на воздействие пыли. Для прове-
дения испытаний на воздействие пыли изделия помещают в камеру и
располагают так, чтобы воздействие пыли максимально соответство-
вало эксплуатационным условиям. В частном случае способ уста-
новки определенного изделия указывается в нормативной документа-
ции. Минимальное расстояние от изделий до стенок камеры и между
изделиями должно быть не менее 10 см.
Выбор состава пылевой смеси, размеров ее частиц и концентра-
ции зависит от цели испытаний, определяемой местом и продолжи-
тельностью эксплуатации изделия. Повышение концентрации позво-
ляет сократить продолжительность испытаний. В любом случае для
исключения образования комков пыли и нежелательного ее прилипа-
ния необходимо, чтобы относительная влажность воздуха в камере не
превышала 30—50% (в зависимости от состава пылевой смеси), что
достигается повышением температуры до +55 °C. Для определения
размеров частиц пыли ее просеивают через специальные сита; при
этом остаток на сите не должен превышать 3%.
Испытания изделий на динамическое воздействие пыли (песка) про-
водят для оценки их устойчивости к разрушающему (абразивному)
воздействию пыли, а также для проверки их пыленепроницаемости и
работоспособности в среде с повышенной концентрацией пыли. Осо-
бенность испытаний на динамическое воздействие пыли (песка) —
обязательная циркуляция воздуха с повышенной скоростью (табл. 6.7).
Таблица 6.7
Параметры видов испытаний на воздействие пыли
Вид воздей- ствия Состав пылевой смеси, % Размер частиц пыли, мкм Продолжи- тельность обдува, ч Скорость циркуляции воздуха, м/с Концент- рация, г/м3, или количество пылевой смеси в воздухе
Дина- мичес- кое Кварцевый песок — 70; мел — 15; каолин — 15 <200 2 10-15 2±1 или 0,1% полезного объема камеры
Стати- ческое Кварцевый песок — 60 мел — 20 каолин — 20 <50 2 (оседание пыли 2 ч) 0,5-1 То же
314
При проверке на устойчивость к абразивному действию пыли из-
делия считают выдержавшими испытания, если их внешний вид удов-
летворяет требованиям нормативной документации. При испытании
изделий на работоспособность они должны находиться в камере в ра-
бочем состоянии. Необходимость проверки значений параметров из-
делий устанавливается в нормативной документации.
Основной целью испытаний на пыленепроницаемость является вы-
явление способности конструкции изделия препятствовать проник-
новению пыли внутрь его оболочки (кожуха). Чем меньшие отвер-
стия в оболочке необходимо выявить, тем меньше должны быть
размеры частиц пыли. Для распознавания проникновения пыли же-
лательно применение флуоресцирующего порошка в количестве 10%
общего объема смеси. Размер частиц порошка должен быть порядка
50 мкм, что определяется с помощью специальных сит. При выборе
флуоресцирующего порошка необходимо учитывать, что некоторые
материалы (пластмассы, пропиточные средства и т.д.) могут также
обладать люминесцентными свойствами, что может затруднять рас-
шифровку результатов испытаний.
Для выявления проникновения пыли внутрь изделий можно ис-
пользовать ультрафиолетовое облучение вскрытых изделий в затем-
ненном помещении. Известно, что различные материалы, облучае-
мые ультрафиолетовым светом, обладают характерными оттенками
свечения: мел химический — светло-синий; мел молотый — светло-
коричневый; окись цинка — желто-зеленый; бумага из чистой целлю-
лозы — светло-желтый; хлопчатобумажное волокно не светится и т.д.
Для эффективного проникновения пыли через отверстия внутрь
испытуемого изделия необходимо наличие разности давлений возду-
ха между испытательной камерой и внутренней полостью изделия.
Очевидно, что предварительный нагрев испытуемого изделия приве-
дет к созданию внутри изделия избыточного давления, способствую-
щего выходу воздуха из него наружу. При помещении изделия в ка-
меру с более низкой температурой в нем создается разрежение, которое
будет способствовать проникновению пыли внутрь изделия.
В случае испытаний тепловыделяющего изделия эффект засасыва-
ния пыли можно осуществить периодическим включением и выклю-
чением изделия в процессе испытаний. Однако для осуществления
процесса засасывания пыли желательно понизить температуру в каме-
ре до +35 °C. Важную роль при этом играет соотношение продолжи-
тельности циркуляции воздуха с пылевой смесью и ее осаждением.
Испытания на статическое воздействие пыли (песка) проводят в
соответствии с условиями, указанными в табл. 6.7.
Перед размещением изделия в камере должна быть установлена
температура 55±3 °C и относительная влажность не более 50%. Испы-
315
тания на статическое воздействие пыли в ряде случаев имитируют
эксплуатацию изделий в помещении, поэтому целесообразно, чтобы
в состав пылевой смеси, кроме неорганической части, которая со-
ставляет до 70% (по массе), входила бы еще и органическая часть, в
качестве которой используют волокна целлюлозацетатного шелка (хло-
пья диаметром 20—60 мкм и длиной 0,1—0,5 мм).
После проведения испытаний обоих видов изделия извлекают из
камеры, удаляют пыль с наружных поверхностей кисточками или
лоскутами мягкой материи, если нормативной документацией не
предусмотрены другие методы (обдув или всасывание пыли могут ис-
казить результаты испытаний). Затем осуществляют визуальный ос-
мотр. При испытании изделий в рабочем состоянии нормативная
документация может предусматривать измерения значений электри-
ческих параметров.
6.1.8. Испытания на воздействие воды
Условия испытаний и применяемое испытательное оборудование. В
условиях транспортирования, хранения и реальной эксплуатации из-
делия, предназначенные для работы на открытом воздухе в наземных
условиях или на кораблях, под навесами, в крытых транспортных
средствах, в открытых производственных помещениях и т.д., могут
подвергаться воздействию дождя различной интенсивности, струй и
брызг воды, а в отдельных случаях и находиться в воде. Некоторые
изделия специального назначения могут подвергаться действию гид-
ростатического давления воды при их погружении на заданную глу-
бину. Все это приводит к необходимости проведения различных ви-
дов испытаний изделий на воздействие воды. Основной целью этих
испытаний является определение способности кожуха и уплотнений
сохранять компоненты, аппаратуру и средства измерений в рабочем
состоянии при воздействии воды и после него. Воздействие может
быть в виде падающих капель (дождь), воды под напором (дождь вы-
сокой интенсивности, струи воды, ударяющие по испытуемому из-
делию с определенной силой или падающие под любым углом по
отношению к изделию), давления воды при погружении в воду на
заданную глубину или с эквивалентным давлением. Основными па-
раметрами дождя являются: диаметр капли, объем капли, интенсив-
ность, конечная скорость дождевой капли, скорость падения дожде-
вых капель.
Различают дождевые капли, диаметр которых более 0,5 мм, и
капли мелкого дождя с диаметром 0,2—0,5 мм. Для характеристики
количества осадков пользуются понятием интенсивности R (мм - ч-1)
дождя, определяемой количеством воды в мерном цилиндрическом
316
стакане, которое выпало в единицу времени. Также введены поня-
тия среднего диаметра капли Оуи среднего объемного диаметра D50.
Под средним диаметром капли Dv, мм, понимают диаметр капли,
равный отношению общего объема воды, падающей на землю, к числу
капель: Dy =[6И/(лл)]^3 = 1,71Л0,25.
Средний объемный диаметр капли Д50, мм, определяется как
диаметр капель, составляющих 50% объема воды, в то время как дру-
гие 50% объема воды составляют капли меньших и больших диамет-
ров: Д50 = 1,21Л0Д9.
Приняты два параметра, характеризующие скорость дождевых
капель, м/с:
• конечная скорость дождевых капель, определяемая при их па-
дении в неподвижном воздухе при условии, что гравитацион-
ная сила капель уравновешена сопротивлением воздуха:
vt = 5,3Z°’12,
где L = 0,42R — содержание жидкой воды в воздухе, г/м3;
• скорость дождевых капель в потоке с учетом действия ветра, м/с:
vr =(v2 +v2)0’5,
где vw — скорость ветра. Установлено, что ветер со скоростью 9 м/с
почти не влияет на скорость капель.
Рассмотрим различные виды оборудования для воспроизведения
указанных воздействий. Оборудование для воспроизведения дождя
может быть реализовано в виде камеры дождя, камеры с душевыми
головками, качающейся трубы и ручного душа.
Камера дождя имеет резервуар с водой, расположенный в верх-
ней ее части, площадь основания которого должна быть примерно в 2
раза больше площади изделия. В дне резервуара расположены со-
пла, обеспечивающие образование капель со средним размером диа-
метра от 3 до 5 мм. Размер ячеек расположения сопл 20—25 мм. Ин-
тенсивность дождя 200—300 мм • ч-1. Расстояние между поверхностью
расположения сопел и верхней частью изделия должно быть не менее
0,2 м. Для установки изделий в камере имеется поворотный стол,
совершающий поворот на 360+15° без остановок и с остановками
через 90±10°.
В камере с восемью душевыми головками (душ-разбрызгиватель)
последние расположены так, чтобы расстояние до углов или сторон
испытуемого изделия было равно 500—750 мм, если другое не огово-
рено в нормативной документации. Вода из четырех головок должна
317
быть направлена вниз под углом 45° к каждому из четырех верхних
углов изделия. Вода из остальных четырех головок должна быть на-
правлена в соответствии с требованиями нормативной документации.
Часто ее направляют горизонтально к наиболее опасным точкам по-
верхности каждой из четырех сторон изделия. Производительность
душевых головок 450 л • ч-1 при давлении воды 2 кПа.
Качающаяся труба должна обеспечивать прямой поток из рас-
пылительных сопел диаметром 0,4 или 0,8 мм, расположенных под
углом 60 или 90° от центральной части в любую сторону. Возможны
два варианта использования качающейся трубы. В первом она зак-
реплена в вертикальном положении, а испытуемое изделие смонти-
ровано на перфорированной подставке (столе), вращающейся с ча-
стотой, обеспечивающей равномерное воздействие воды на изделие.
Во втором, когда нет возможности для вращения изделия, оно ус-
танавливается в центре подставки, а труба совершает колебательное
движение в пределах указанного угла (до ±90°) со скоростью 60° в
секунду в течение половины указанной в нормативной документа-
ции длительности. После этого изделие поворачивают на угол 90° и
испытания продолжаются в течение второй половины длительнос-
ти. Радиус дуги трубы выбирается в зависимости от габаритных раз-
меров изделия, но он не должен превышать 1600 мм. Возможно
совместное применение душа-разбрызгивателя с качающейся тру-
бой (рис. 6.39).
Давление воды в трубе должно обеспечивать заданную интенсив-
ность дождя. Продолжительность и режим испытаний могут зада-
ваться с помощью таймера, включаемого в схему автоматического
управления.
Ручной душ представляет собой распылительное сопло с углом
распыления 78° и движущийся экран, обладающий способностью
ограничивать верхнюю часть конуса струи воды на 30° от горизонта.
Для определения скорости расхода воды ручной душ должен иметь
специальный счетчик. Скорость расхода при напоре воды 80—100 кПа
должна составлять 10±0,5 дм3/мин.
Для проверки интенсивности дождя используют мерные цилинд-
рические стаканы с внутренним диаметром 200 мм и высотой 100
мм. Проверка интенсивности дождя может проводиться для оценки
работы камеры дождя и для оценки интенсивности в месте располо-
жения изделия. Для оценки работы камеры рекомендуется устанав-
ливать четыре стакана по углам, а один в середине полезной площади
пола камеры. Включают камеру, задают минимальную интенсивность
дождя и выполняют три замера через каждые 5 мин. Измерения по-
вторяют при максимальной интенсивности. Действительную интен-
318
Рис. 6.39. Камера для испытаний на воздействие дождя:
1 — качающаяся (поворотная) труба; 2 — вращающийся диск-подставка;
3 — испытуемое изделие; 4 — душ-разбрызгиватель; 5 — таймер; 6 — привод
качающейся трубы; 7 — манометр; 8 — измеритель количества воды; 9 —
привод вращающегося диска-подставки; 10 — магнитный вентиль; 11 — го-
родской водопровод; 12 — система рециркуляции
сивность дождя определяют по формуле: / = H/t, где Н — высота
столба воды в стакане, мм; t — длительность дождя, мин.
Точность поддержания интенсивности дождя: Ду = у -1', где у —
заданная интенсивность дождя.
Оборудование для воспроизведения действия воды под напором мо-
жет реализовываться в виде качающейся трубы, ручного душа и шлан-
га со стандартными соплами. Если размеры изделия достаточно ве-
лики и применение качающейся трубы невозможно, используют
ручной душ — распылительное сопло с углом распыления 78°. Распы-
лительное сопло должно иметь скорость расхода 10+0,5 дм3 • мин.-1
при напоре воды 80—100 кПа. Используемые для обливания шлан-
ги должны иметь сопла, обеспечивающие сплошную струю воды
диаметром на выходе (струи) 6,3 мм (сопло I) и 12,5 мм (сопло II).
Расход воды для сопла I: 12,5 дм3 - мин.-1 ±5% при давлении 30 кПа
или 75±5 дм3-мин.-1 при давлении 1000 кПа, а для сопла II:
100 дм3 - мин.-1±5% при давлении 100 кПа.
Для установки изделий необходимо зажимное устройство, по-
зволяющее имитировать условия реальной эксплуатации изделия. Оно
319
должно иметь основание меньше по размеру, чем основание изде-
лия, и обеспечивать возможность поддерживать изделие в нормаль-
ном рабочем положении, а при необходимости наклонять его от вер-
тикального положения на 45—90°. Используемая для испытаний
пресная вода должна быть профильтрована, чтобы не засорять со-
пла, а также может быть деминерализована. Верхняя температура
воды должна быть равна температуре изделия, а нижняя на 5К ниже.
В качестве оборудования для испытаний на воздействие погруже-
нием используют специальный водяной бак и контейнер, в который
помещают изделие. Размеры бака определяются глубиной погруже-
ния, которая доходит до 5 м. Испытания могут проводиться с приме-
нением пресной или морской воды.
Для испытаний на воздействие повышенного гидростатического дав-
ления используется камера (бак) гидростатического давления, в ко-
торой глубина погружения имитируется созданием избыточного дав-
ления воздуха. Для облегчения обнаружения течи в воду добавляют
флуоресцирующую краску. Температура воды не должна превышать
+35 °C.
Методы проведения испытаний на воздействие воды. Общим для
всех видов испытаний на воздействие воды является предварительная
выдержка в нормальных климатических условиях и проведение пер-
воначальных измерений, включающих визуальный осмотр, проверку
значений электрических и механических параметров на соответствие
нормативной документации. Главное внимание при осмотре следует
обращать на состояние обработки поверхности, покрытие и герме-
тичность. Далее изделие монтируется в соответствующее зажимное
устройство и подвергается воздействию воды. В зависимости от тре-
бований нормативной документации изделие во время выдержки дол-
жно функционировать (при этом его параметры периодически конт-
ролируются) или только выдерживать воздействие воды. В обоих
случаях в заключение испытаний изделие осматривают и проверяют
значения его параметров.
Целью испытаний на воздействие падающих капель является ими-
тация естественного дождя, а также капель, возникающих вследствие
конденсации и просачивания. Испытания могут проводиться двумя
методами, использующими различное оборудование: методом искус-
ственного дождя, воспроизводимым в камере с душевыми головками
(соплами), и методом падающих капель, воспроизводимым в камере
дождя.
Значения параметров испытательных режимов, указываемых в
нормативной документации, должны выбираться по табл. 6.8. В нор-
мативной документации также должны указываться продолжитель-
ность выдержки для каждой стороны и режим.
320
Таблица 6.8
Рекомендуемые значения параметров искусственного дождя
для испытаний на воздействие падающих капель
Интенсивность, дождя, ммч1 Размер капель, мм Продолжитель- ность выдержки, мин. Угол наклона падения капель, град
10 ±6 1,9 ± 0,2 10; 30; 60; 120 0; 15; 30; 60; 90
100 ±20 2,9 ± 0,3
400 ±50 3,8 ± 0,4
При испытании методом падающих капель в камере дождя значе-
ния параметров испытательных режимов выбирают из данных, при-
водимых ниже:
Высота падения капли, м............ 0,2±0,1; 2,0±0,5
Угол наклона падения капель, град ... 15; 30; 45
Продолжительность выдержки, мин.- ... 3; 10; 30; 60
Интенсивность дождя, мм ч"1.......... 200—300
При испытании в камере дождя зона действия дождя должна пе-
рекрывать габаритные размеры изделия не менее чем на 30 см.
Целью испытаний на воздействие воды под напором является ими-
тация воздействия ливня, обложного проливного дождя, разбрызги-
вания от колес, брызг волн и т.д. Данному виду испытаний целесо-
образно подвергать изделия, эксплуатируемые под открытым небом в
странах с тропическим климатом. Указанные испытания могут осу-
ществляться следующими методами: созданием зоны капель с высо-
кой интенсивностью с помощью камер с душевыми головками, ка-
чающейся трубы, ручным душем, а также распылением воды из
шланга. При выборе метода исходят из условия, что изделия должны
подвергаться самому жесткому воздействию. При этом также необхо-
димо учитывать размеры и форму испытуемого изделия. В случае
испытаний изделий больших габаритных размеров, когда радиус ка-
чающейся трубы превышает 1,6 м, рекомендуется использовать руч-
ной душ. Важным является принятие решения относительно монта-
жа и способа установки испытуемого изделия.
При испытаниях в камере с душевыми головками (соплами) зна-
чения параметров испытательных режимов следует выбирать по дан-
ным табл. 6.9, а при испытаниях методом качающейся трубы — по
данным табл. 6.10.
При использовании ручного душа выдержка при испытании вы-
ражается в мин. м2 площади поверхности изделия при минимальной
длительности испытания. Выражение выдержки в мин. м2 показы-
321
Таблица 6.9
Рекомендуемые значения параметров при испытании в камере
с душевыми головками (соплами)
Интенсивность дождя, ммч-1 Продолжительность выдержки, мин Угол наклона изделия, град
1000 ± 150 10 0; 15; 30; 60; 90
2000 ± 300 30
4000 ±600 60
Таблица 6.10
Рекомевдуемые значения параметров при испытании
методом качающейся трубы
Угол распыли- тельного сопла, град Диаметр отверстия сопла, мм Угол колебания трубы, град Скорость потока воды, дм3 /мин. Давление воды, кПа Длитель- ность воздей- ствия, мин
60 0,4 ±60 0,10 ± 0,005 80 3; 10
90 0,8 0 ± 180 0,6 ± 0,03 400 30; 60
вает, что площадь поверхности изделия в 1 м2 следует подвергать воз-
действию воды из ручного душа в течение предусмотренного времени
выдержки при установленной общей минимальной длительности рас-
пыления воды.
Рекомендуемые значения параметров воздействия воды под на-
пором при испытании методом ручного душа:
Выдержка, мин. м2........................ 1; 3; 6
Минимальная длительность, мин............ 5; 15; 30
На изделие должна падать струя воды практически по всем на-
правлениям с расстояния 0,4±0,1 м.
Испытание на воздействие воды под напором методом обливания
из шланга целесообразно осуществлять для оценки водозащищеннос-
ти изделий, определяемой способностью оболочек (кожухов) не про-
пускать воду при накате волн, разбрызгивании воды колесами и в
других подобных условиях.
Испытание проводят путем распыления на изделие с заданных
направлений потока воды из шланга со стандартными испытательны-
ми соплами. При этом испытуемое изделие, будучи смонтированным
322
на перфорированном зажимном приспособлении, должно вращаться.
Режимы обливания через указанные сопла приведены в табл. 6.11. При
этом выдержка и длительность обливания определяются по табл. 6.12.
Таблица 6.11
Рекомендуемые значения параметров при испытании методом
обливания из шланга с заданной скоростью потока
Скорость потока, дм3/мин-1 12,5 ± 1 75±5 100 ±5
Давление воды, кПа 30 1000 100
Размер сопла, мм 6,3 6,3 12,5
Таблица 6.12
Рекомендуемые значения параметров при испытании методом
обливания из шланга с заданной длительностью испытаний
Выдержка, мин. м-2 0,3* 1 3 10
Длительность, мин. !♦ 3 10 30
* Только для сопла 0,3 мм и давления 1000 кПа.
При расстоянии от сопла до изделия 2,5±0,5 м струя воды должна
быть в пределах круга диаметром 40 мм для сопла размером 6,3 мм и
100 мм для сопла размером 12,5 мм. В случае необходимости это
расстояние может быть уменьшено.
Целью испытаний на воздействие погружением является имитация
полного или частичного погружения изделия в воду, позволяющая
оценить его водонепроницаемость. При этом необходимо определить,
способно ли изделие функционировать под водой или только выдер-
живать условия погружения в воду. Обычно используют пресную воду,
но возможно проведение испытаний и в морской воде, что должно
быть указано в нормативной документации.
Различают методы водяного бака и камеры повышенного гидро-
статического давления. При испытании методом водяного бака изде-
лие подвергают воздействию определенного давления путем погруже-
ния в бак с водой на заданную глубину, причем вместо слова глубина
пользуются термином «напор воды», выраженным в метрах. Значе-
ния параметров, характеризующих рассматриваемый метод испыта-
ний, приведены в табл. 6.13.
Заданный напор воды должен быть измерен в самой высокой точ-
ке изделия, полностью погруженного в бак с водой.
11*
323
Таблица 6.13
Рекомендуемые значения параметров при испытании методом погружения
Напор воды, м 0,15 0,4 1 2 5
Длительность воздействия, ч 0,5 2 24 24 24
При испытании методом повышенного гидростатического давления
определяют возможные места проникновения воды и изменения элек-
трических и механических характеристик изделия. Особое внимание
обращают на конструктивные элементы изделия, влияющие на его
герметичность. В обоих методах для облегчения обнаружения утечки
в воду добавляют водорастворимую флуоресцирующую краску.
Значения параметров, характеризующих данный метод испыта-
ний, приведены в табл. 6.14.
Таблица 6.14
Рекомендуемые значения параметров при испытании погружением
методом повышенного гидростатического давления
Давление, кПа 20 50 100 200 500 1000 2000 5000 10000
Эквивалентная высота напора воды, м 2 5 10 20 50 100 200 500 1000
Длительность воздействия, ч 2 24 168
6.1.9. Испытания на воздействие атмосферы
с коррозионно-активными агентами
Условия испытаний и применяемое испытательное оборудование. Ла-
бораторные испытания на воздействия атмосферы с коррозионно-
активными агентами осуществляются с помощью специальных уста-
новок, которые в зависимости от целей испытаний могут быть
предназначены для воспроизведения газообразной атмосферы и сре-
ды, содержащей соляной (морской) туман. Получение в установках
газообразной атмосферы может достигаться путем смешивания необ-
ходимых газовых компонентов, сжигания соответствующих газов и
другими методами.
Установка, обеспечивающая образование испытательной атмосфе-
ры путем смешивания необходимых газовых компонентов (рис. 6.40),
состоит из воздухоочистителя 12 и кондиционера воздуха 77, осуще-
ствляющих очистку, поддержание определенной температуры и влаж-
324
J
Рис. 6.40. Установка для испытаний на воздействие промышленной
атмосферы, содержащей двуокись серы
ности; устройства для подачи газа 9 и дозировочного насоса 7б> сосу-
да газоуловителя 7, который посредством промывки газа устраняет
остатки коррозионно-активных агентов из выбросов газов; расходо-
мера (ротаметра) воздуха 3 и всасывающего насоса 2 Теплоизолиро-
ванная слоем изоляции 5 испытательная камера 4 оснащена системой
нагрева и (или) охлаждения 6 и рассекательными пластинами 7. Газ,
вызывающий коррозию, с помощью напорного редукционного кла-
пана <?, дозатора 10 и инжектора 13 вводится в трубопровод, где он
смешивается с потоком воздуха, поступающим от кондиционера. При
этом должна поддерживаться массовая концентрация агрессивной
среды ±25%.
Для создания испытательного режима необходимо, чтобы в ка-
мере была равномерная концентрация коррозионно-активных аген-
325
тов. С этой целью в ней нужно обеспечить взаимное перемещение
образцов (изделий) и окружающей их испытательной среды, что мо-
жет быть достигнуто перемещением образцов или циркуляцией испы-
тательной среды. При этом все образцы должны находиться в одина-
ковых условиях в течение всего периода испытаний. Указанное
требование чаще всего реализуется путем циркуляции непрерывного
потока газа со скоростью 6—17 мм-с-1 и правильным размещением
образцов в камере. В испытательной камере газ равномерно распре-
деляется благодаря рассекательным пластинам 7. Рекомендуется,
чтобы общий поток газов через камеру обеспечивал не менее чем
трехкратный и не более чем пятикратный обмен газа в час. При этом
испытуемые изделия должны быть защищены от прямого попадания
входящего газового потока. Газ удаляется из испытательной камеры
с помощью всасывающего насоса и проходит через сосуд газоулови-
теля 7, в котором задерживаются коррозионно-активные агенты.
Между сосудом газоуловителя и всасывающим насосом помещается
вымораживающая ловушка.
Испытательные камеры должны быть изготовлены из материа-
лов, стойких к воздействию соответствующих видов агрессивных сред.
Они должны иметь: устройства для измерения параметров среды и
для отбора ее проб; электрические вводы для измерения параметров
испытуемых изделий; устройства для установки и крепления изделий.
В камере в месте расположения изделий должна поддерживаться тем-
пература с точностью до ±2 °C. При этом допускаются отдельные крат-
ковременные отклонения до ±5 °C, но не более чем на 15 мин. за 6 ч
испытаний. Также должна поддерживаться относительная влажность
с точностью не хуже ±2%, исключающая конденсацию влаги на стен-
ках камеры.
Камера для испытаний на воздействие соляного тумана отличается
от камер влажности тем, что соляной туман получается распылением
соляного раствора. При этом степень распыления раствора должна
обеспечивать получение соляного тумана с определенными свойства-
ми. Для характеристики свойств соляного тумана пользуются двумя
основными параметрами: дисперсностью и водностью. Дисперсность
тумана оценивает степень раздробления вещества на частицы. Чем
мельче частицы, тем больше дисперсность. Нормальный туман в
камере должен обладать дисперсностью, характеризуемой содержа-
нием в полезном объеме камеры 95% частиц тумана (капелек) разме-
ром 1—10 мкм. Под водностью тумана понимают число капель жид-
кой влаги в единице объема.
Важным требованием, предъявляемым к камере, является ее
высокая коррозионная стойкость. В связи с этим необходимо изго-
товлять камеры из соответствующих материалов: коррозионностой-
326
кой стали, жесткого полихлорвинила, полиэтилена, стекла и других
материалов, не требующих специальных покрытий. Так, например,
камера может быть выполнена из полимера, армированного стекло-
волокном, а снимающаяся крышка (колпак) — из оргстекла. При
использовании в конструкции металлов целесообразно, чтобы они
имели близкие электродные потенциалы, что уменьшало бы вероят-
ность возникновения коррозии. Имеются попытки изготовления ма-
логабаритных камер и их отдельных элементов (включая форсунку
распылителя) из стекла. Таким образом, камеры и все ее вспомога-
тельные элементы должны быть изготовлены из материалов, исклю-
чающих попадание продуктов их коррозии на испытуемые изделия.
Камера должна надлежащим образом вентилироваться для обеспече-
ния равномерного распределения соляного тумана, что позволяет ему
свободно циркулировать вокруг испытуемых изделий. Конструкция
выпускного отверстия вентилятора должна исключать возникновение
сильных воздушных потоков в камере.
Для получения влажного густого тумана высокой дисперсности
можно использовать распылители, которые размещаются в камере
таким образом, чтобы исключить возможность непосредственного
попадания распыляемой жидкости на изделия (образцы) во время
испытаний.
Распыление соляного раствор осуществляют с помощью аэро-
зольного аппарата или по принципу инжектора пульверизатора (фор-
сунки).
Методы испытаний на воздействие коррозионно-активных агентов.
Указанные испытания проводятся при предварительных или приемоч-
ных испытаниях, а иногда и при типовых испытаниях. Их рекоменду-
ется проводить в случаях, когда материалы, покрытия и технологичес-
кие процессы изготовления изделий отличаются от ранее испытанных
или эксплуатирующихся аналогичных изделий, а также когда изделия
не предназначены для размещения в герметичных объемах.
Испытания изделий на стойкость к воздействию коррозионноак-
тивных агентов в зависимости от требований к конкретным изделиям
могут проводиться как при электрической нагрузке, так и без нее.
Испытания изделий при электрической нагрузке целесообразно про-
водить в случаях, когда это соответствует условиям эксплуатации и
способствует разрушающему действию электролиза или электрохи-
мической коррозии. Для исключения возникновения ошибочных вы-
водов по результатам испытаний и «ужесточения» воздействия данно-
го испытания рекомендуется изделия, испытываемые на воздействие
коррозионно-активных агентов, не подвергать другим видам испыта-
ний. Если изделия имеют специальные посадочные места, то они
Должны быть защищены временным покрытием от коррозии. Не ре-
327
комендуется для испытаний в различных средах использовать одни и
те же изделия.
Под воздействием коррозионно-активных агентов на радиоэлект-
ронные и электротехнические средства измерений может возникать
коррозия кожухов, элементов конструкций и, в частности, контак-
тов и соединений, непосредственно определяющих значения элект-
рических параметров. У коммутационных, присоединительных и ус-
тановочных изделий усилие, обеспечивающее временный контакт
между деталями, слабое, и поскольку большинство металлов, из
которых изготовлены контакты, подвержены действию коррозии, то
их контактное сопротивление возрастает. У неразъемных соедине-
ний, выполненных накруткой или обжатием, внешнее усилие, обес-
печивающее соединение, велико, и оно вызывает деформацию ме-
таллов, а иногда и местную холодную сварку, обеспечивающую
хороший контакт. Однако в случаях, когда усилие накрутки или об-
жатия недостаточно, соединения могут быть низкого качества и при
естественном термоциклировании они ослабляются, что приводит к
усилению воздействия коррозионно-активных агентов, а следователь-
но, к увеличению контактного сопротивления в результате коррозии.
Испытания на воздействие коррозионно-активных агентов могут
быть нормальными, ускоренными и проводимыми на климатических
испытательных станциях. При проведении нормальных испытаний
значения параметров испытательного режима и продолжительность
испытаний изделий на стойкость к воздействию специальных сред
(ГОСТ 24682-81) устанавливают в соответствии с условиями и дли-
тельностью их воздействия при эксплуатации.
Испытания на атмосферную коррозию могут проводиться на так
называемых климатических испытательных станциях. Предусмотре-
ны испытания на общую, контактную, щелевую коррозию и кор-
розию при действии механических напряжений. Указанным видам
испытаний подвергают не изделия, а специальные образцы, изго-
товленные из соответствующих металлов, сплавов или имеющие ме-
таллические и неметаллические неорганические покрытия. Очевид-
но, что реализация таких испытаний потребует весьма значительного
времени и не всегда технически и экономически целесообразна. В
связи с этим широкое применение получили ускоренные испытания
на атмосферную коррозию, осуществляемые за счет изменения зна-
чений одного или нескольких параметров, определяющих скорость
коррозии. К таким параметрам относятся: относительная влажность,
степень конденсации влаги, температура, концентрация коррозион-
но-активных агентов, продолжительность испытаний и чередований
условий их проведения, состояние поверхности изделий, электри-
ческие напряжения и сила токов, механические напряжения и т.д.
328
Скорость коррозии также существенно зависит от конструкции изде-
лия: от степени экранирования контактирующей поверхности изде-
лия с окружающей средой, определяемой конструкцией корпусов; от
электродных потенциалов металлов, из которых изготовлены отдель-
ные элементы конструкций, и т.д.
Выбрать единый параметр, определяющий ускорение процесса
испытаний, не представляется возможным, поскольку ускорение за-
висит от конструкции, элементной базы и материалов, из которых
изготовлено изделие, а также от условий эксплуатации.
Процесс коррозии может быть ускорен различными способами,
основными из которых являются следующие:
1. Увеличение относительной влажности выше 85%. Однако при
этом вид коррозионной пленки может быть отличен от получаемой в
естественных условиях. При относительной влажности менее 70%
процесс коррозии заметно замедляется. Увеличение относительной
влажности до 95% при определенных условиях может приводить к
конденсации влаги, что вызывает изменение условий испытаний.
2. Увеличение конденсации влаги для изделий, имеющих шеро-
ховатую поверхность большой теплоемкости. В последнем случае
конденсация может возникнуть при температуре ниже точки росы.
Слишком обильная конденсация влаги приводит к увлажнению по-
верхности изделия и снижению скорости коррозии. Таким образом,
увеличение скорости коррозии за счет возрастания степени конден-
сации имеет место при определенных оптимальных условиях.
3. Изменение температуры относительно оптимального зна-
чения 25±2 °C. При температуре выше +30 °C изменяется природа
механизма коррозии, а при более низкой температуре значительно
увеличивается время коррозии. Установлено, что повышение темпе-
ратуры на 10 °C ускоряет химические реакции. Однако многие фак-
торы, влияющие на скорость коррозии, изменяются с изменением
температуры. Так, с повышением температуры уменьшается раство-
римость газов в воде и при определенных условиях конденсации это
может замедлить скорость коррозии, а может и ускорить ее вслед-
ствие ухудшения условий для образования защитного слоя окислов.
Возможно возникновение точечной или внезапно увеличивающейся
неравномерной коррозии, изменение порядка «благородства» метал-
ла, т.е. менее благородный обеспечивает защиту более благородного
(например, менее благородный цинк обеспечивает защиту железа при
комнатной температуре).
4. Увеличение концентрации коррозионно-активных агентов,
приводящее к сокращению времени испытаний (при неизменной тол-
щине пленки или неизменном времени испытаний) и к росту толщи-
ны пленки.
329
5. Выбор для испытаний коррозионно-активных агентов. Обыч-
но их выбирают из числа наиболее часто встречающихся в атмосфере
(например, хлористый натрий в морской атмосфере и двуокись серы
в городской и промышленной атмосферах).
6. Увеличение концентрации коррозионно-активных агентов,
которое может полностью изменить природу коррозии, вызывая то-
чечную или неравномерную коррозию. Возможен случай, когда боль-
шая концентрация может привести к снижению активности коррози-
онного процесса, так как растворимость других коррозионно-активных
веществ может уменьшиться (например, увеличение концентрации
хлористого натрия при высоких температурах снижает растворимость
кислорода).
7. Изменение продолжительности чередования естественных или
искусственных условий воздействий. Возможен случай, когда про-
цесс коррозии изделия из железа может быть ускорен путем чередо-
вания воздействия промышленной атмосферы и конденсации влаги.
При испытаниях на воздействие соляного тумана можно вместо дли-
тельной выдержки изделия в тумане осуществить режим, в котором
короткий период времени воздействия соляного тумана чередуется с
длительной выдержкой в условиях влажности без наличия хлорида
при относительной влажности ниже значения, соответствующего на-
сыщению.
Существенное влияние на процесс коррозии оказывает состоя-
ние поверхности изделий. Для характеристики состояния поверхнос-
ти используют такие понятия, как шероховатость, чистота, пассив-
ность, адсорбирующие слои. Кроме того, на коррозию влияют
условия, в которых изделие находилось до начала испытаний. Так,
если изделие из железа с чисто обработанной поверхностью, хранив-
шееся в чистой атмосфере с низкой относительной влажностью без
агрессивных газов и твердых частиц, подвергается испытаниям на воз-
действие повышенной влажности, то оно корродирует значительно
медленнее, чем аналогичное изделие, испытываемое сразу после очи-
стки. Другим примером может служить более быстрое возникнове-
ние коррозии при испытании на воздействие повышенной влажности
изделия из никеля, хранившегося до испытания в атмосфере с низ-
кой относительной влажностью, но содержащей двуокись серы SO2.
В случае, когда на изделие воздействуют поочередно две группы
коррозионно-активных агентов в различных условиях, существенным
является то, какая из них будет действовать первой. Например, ни-
кель, подвергающийся сначала воздействию атмосферы, содержа-
щей сероводород, а затем атмосферы, содержащей двуокись серы,
корродирует медленнее, чем при воздействии указанных сред в об-
ратном порядке.
330
При необходимости ускорения процесса испытаний электричес-
ких контактов из металлов платиновой группы на воздействие атмос-
феры, содержащей органические испарения, следует изменять отно-
шение длительностей периодов замыкания и размыкания, так как за
счет этого можно ускорить образование угольного слоя на поверхнос-
ти контакта.
Установление общей продолжительности испытаний в основном
определяется выбранным фактором их ускорения. При выборе уста-
новки для проведения испытаний необходимо, чтобы она обеспечи-
вала получение заданного режима испытаний и чтобы общий объем
изделий, ограниченный условными оболочками, не превышал 40%
полезного объема камеры.
Методы испытаний на воздействие среды с коррозионно-актив-
ными агентами включают в себя проведение следующих основных
работ: подготовку испытательного оборудования, средств измерения
режимов испытания и испытуемых изделий; проведение первоначаль-
ных измерений; размещение изделий в камере; выдержку, в процессе
которой собственно проводятся испытания; заключительные измере-
ния. Подготовка испытательного оборудования и средств измерения
режимов испытания может предусматривать осуществление перед про-
ведением испытаний предварительной отработки (прогона) испыта-
тельного режима камеры без размещенных в ней испытуемых изде-
лий. При этом корректируют значения параметров испытательных
режимов: концентрацию, температуру, относительную влажность
среды и скорость потока (при испытаниях на воздействие коррозион-
но-активных газов).
Установленный испытательный режим поддерживают не менее
24 ч, периодически (но не реже трех раз в сутки) контролируя значе-
ния его параметров. При положительных результатах камеру отклю-
чают и устанавливают испытуемые изделия. Перед помещением из-
делий в камеру их выдерживают в нормальных условиях в течение
времени, необходимого для достижения стационарного температур-
ного режима. Затем проводят визуальный осмотр и, если это предус-
мотрено нормативной документацией, измеряют первоначальные
значения параметров изделий, критичных к воздействию коррозии.
После этого изделия устанавливают в камеру в положение, соответ-
ствующее эксплуатационному. При установке изделий в камеру не-
обходимо предусмотреть, чтобы они не соприкасались друг с другом
или с другими металлическими деталями, а также чтобы к ним обес-
печивался свободный доступ коррозионно-активной среды. Мини-
мальное расстояние от стен камеры и между одновременно испытуе-
мыми несколькими изделиями должно быть не менее 0,1 м. Изделия
Располагают так, чтобы они не экранировали друг друга от воздей-
331
ствия коррозионно-активной среды. В зависимости от степени за-
щиты изделий по ГОСТ 14254—80 определяют требуемую степень раз-
герметизации изделий в агрессивных средах.
Испытание на воздействие соляного тумана проводят для опреде-
ления коррозионной стойкости изделий и их пригодности к эксплуа-
тации во влажной атмосфере в присутствии солей. Испытания могут
проводиться одним из следующих методов: выдержкой изделий в со-
ляном тумане с периодическим распылением соляного раствора или
при непрерывном распылении с последующей выдержкой в чистой
влажной атмосфере при повышенной температуре. Изделия устанав-
ливают в камеру так, чтобы их основная поверхность располагалась
поперек потока солевого тумана. Продукты коррозии или распыляе-
мого раствора не должны попадать с одного испытуемого изделия на
другое. Испытуемая поверхность изделия должна быть наклонена на
15—30° по отношению к вертикали.
При испытании выдержкой изделий в соляном тумане с перио-
дическим распылением соляного раствора в камере устанавливают
температуру 27±2 °C и подвергают изделие воздействию соляного ту-
мана, получаемого распылением соляного раствора. Раствор приго-
товляется путем растворения в дистиллированной или деминерализо-
ванной воде 33±3 гл-1 хлористого натрия (NaCI), содержащего в
сухом виде не более 0,1% йодистого натрия и не более 0,3% всех при-
месей. Значение pH соляного раствора должно быть в пределах 6,5—
7,2. Оно измеряется каждый раз при приготовлении нового раство-
ра. При этом объем раствора, собираемый коллектором за время не
менее 24 ч, должен составлять в среднем 0,1—0,3 мл • ч”1. Продолжи-
тельность испытаний 2, 7 и 10 суток.
Испытание изделий при непрерывном распылении с последующей вы-
держкой в чистой влажной атмосфере может проводиться с примене-
нием одной камеры, если ее конструкция позволяет осуществить за-
данный режим испытаний, или с применением двух камер (соляного
тумана и влаги). Испытание проводится циклами. Один цикл вклю-
чает помещение изделия в камеру соляного тумана, установление в
ней температуры 15—35 °C и воздействие соляного тумана с водород-
ным показателем pH = 6,5—7,2 и водностью, при которой коллектор
собирает 0,75—1,5 мл раствора в один час. Через два часа в камере
изменяют режим или изделие переносят в камеру влаги. В обоих
случаях изделие выдерживают еще 22 ч при температуре 40±2 °C и
относительной влажности 95±3%. Время переноса не более 5 мин. В
процессе испытаний изделие подвергают воздействию в течение 1, 3
или 6 подобных циклов.
Контроль значений параметров соляного тумана должен осуще-
ствляться в пределах полезного объема в процессе испытаний или
332
перед ними во вр>емя 16 или 24-часового прогона камеры. После окон-
чания испытаний в зависимости от конструкции изделия и требова-
ний, предъявляемых к нему нормативной документацией, изделие
промывают дистиллированной или деминерализованной водой при
температуре, не превышающей +35 °C, и сушат. Изделия выдержи-
вают в нормалькых условиях восстановления в течение 1—2 ч, после
чего осуществляют визуальный контроль и, если это необходимо,
измерение электрических параметров и проверку механических свойств.
6.2. Испытания на воздействие космических факторов
6.2.1. Испытания на воздействие глубокого вакуума
и пониженной температуры
Испытания на воздействие космического глубокого вакуума и пони-
женной (криогенной) температуры могут проводиться совместно
(обычно они называются воздействием термовакуумных факторов)
или раздельно. Особенности этих испытаний определяются свойствами
окружающей космический аппарат (КА) среды и ее воздействиями
на материалы угзлов (блоков) аппаратуры, размещенных на поверх-
ности или в негерметизированных отсеках КА.
Испытание на воздействие глубокого вакуума проводят для изде-
лий в целом в диапазоне давлений 10“5—10”12 Па в зависимости от
параметров орбиты КА, на котором они устанавливаются (табл. 6.15).
Испытания проводят, чтобы оценить работоспособность КА (при ис-
следовательских., периодических или квалификационных испытаниях).
Кроме того., испытания на воздействие глубокого вакуума необ-
ходимы для оценки воздействия космической среды на отдельные узлы
(блоки, элементы) изделий и проверки правильности принятых схем-
ных и конструктивных технологических решений (при исследователь-
ских и квалификационных испытаниях). При этом диапазон давле-
ний выбирается в зависимости от того, какое свойство проверяется у
данного узла (блока, элемента) (см. табл. 6.15).
Для провед ения испытаний на воздействие глубокого вакуума и
пониженной температуры используются термовакуумные испытатель-
ные установки- В состав такой установки входят: термовакуумная
камера, насосы, измерительные системы контроля температуры,
давления, расхода охлаждающих жидкостей и устройства анализа со-
става атмосфергы в камере (обычно масс-спектрометры).
Термовакуулмную установку для проведения испытаний выбира-
ют исходя из у* словий работы, давления, температуры в камере, га-
баритных размеров объекта испытаний (ОИ), требуемой производи-
333
Таблица 6.15
Рекомендуемое давление при испытании отдельных групп узлов (блоков)
в условиях глубокого вакуума
Проверяемый узел (блок) Проверяемый параметр Давление, Па
Корпус, конструктивные (крепящие) неподвижные детали Механическая прочность и герметичность 103
Отсутствие воздушного демпфирования при вибрациях и ударах ю-‘
Параметры конструктивных материалов (прочность, ползучесть) 10~4
Подвижные узлы Диффузия, приводящая к холодной сварке io-5
Отсутствие смазки, вызывающее сухое трение IO-’-1(Г12
Функциональные узлы Тепловой режим и эффективность теплопередачи излучением 10-2
Наличие и влияние на работоспособность электрических разрядов, утечек, ионизации КН
Наличие и влияние на работоспособность сублимации и испарения вещества КГ2
Наличие и влияние на работоспособность деструкции материалов io-1
Наличие и влияние на работоспособность абсорбции и химического взаимодействия остаточных газов с поверхностью узла 10-5-10"12
334
тельности и метрологических характеристик (стабильности поддер-
жания давления и температуры в течение времени испытаний) и по-
грешностей их измерения.
Термовакуумные испытательные установки могут поставляться
комплексно для определенных видов ОИ или монтироваться из от-
дельных, серийно изготовляемых составных частей, и имеют следу-
ющие характеристики (данные приведены для комбинированных ус-
тановок):
Рабочий объем, м3.............................0,2-100 000
Диапазон значений давления
или минимальное давление, Па..................до 10~12;
Быстрота откачки (время откачки всего объема
камеры до заданного давления) или время выхода
на рабочий режим по давлению и температуре ... до суток
Скорость откачки, м3 с-1.................... до 105
Минимальная температура, К:
в испытательных камерах, не более..........10
в специальных исследовательских камерах, менее 1
Для создания в камерах давлений, соответствующих глубокому
вакууму, используются предварительная (форвакуумная) и основная
откачка. При предварительной откачке (механическими насосами
поршневого или ротационного действия) давление в камере снижа-
ется до 10”1—10”3 Па. Затем насосы предварительной откачки отклю-
чаются и включаются насосы основной откачки, снижающие давле-
ние в камере до 10“9—10“12 Па.
Рассмотрим основные особенности применяемых в термовакуум-
ных стендах вакуумных насосов.
Сорбционные насосы, охлаждаемые жидким азотом, предназначе-
ны, главным образом, для создания предварительного безмасляного
вакуума в диапазоне давлений 105-10”1 или 10”3-10“4 Па. Принцип их
действия основан на поглощении газа из камеры охлажденным сор-
бирующим узлом (газопроницаемым термическим экраном, защи-
щающим камеру от попадания пыли сорбирующего элемента, и сор-
бирующим элементом из активированного угля). Затем сорбирующий
узел отключается от камеры и от устройства подачи охлаждающей жид-
кости. При этом поглощенный газ выделяется и откачивается вспомо-
гательным насосом. Данный процесс многократно повторяется.
Сорбционные крионасосы, охлаждаемые твердым азотом, предназ-
начены главным образом для откачки вакуумных установок с боль-
шой газовой нагрузкой, в том числе плазменных и плазмохимичес-
ких. Они могут откачивать большие потоки (до 1 м3 Па-с”1) любых
газов (гелия, химически активных и агрессивных) в широком диапа-
зоне рабочих давлений (102—10”6 Па). Такой насос содержит сорби-
335
рующий узел, охлаждаемый сосудом с азотом, температура которого
снижена до 50±5 К, путем откачки паров жидкого, затем затвердев-
шего азота. Наружная поверхность сорбирующего узла и охлаждаю-
щего его сосуда с твердым азотом окружена экраном, охлаждаемым
другим сосудом с жидким азотом при температуре 77,4 К.
Конденсационно-сорбционные крионасосы, охлаждаемые жидким ге-
лием, имеют самые низкие предельные давления (ниже 10“и Па),
самую высокую удельную скорость откачки всех газов, в том числе
водорода и гелия.
Эти насосы имеют следующие особенности:
• сорбирующий элемент очень активно поглощает газ из камеры,
поскольку сорбирующий узел имеет двойное охлаждение — сор-
бирующий элемент охлаждается жидким гелием, а сосуд, в
котором находится жидкий гелий, — жидким азотом;
• хладагент практически не попадает в вакуумную камеру, так
как поверхность сорбирующего узла, обращенная в камеру,
отполирована и покрыта пленкой, обеспечивающей крайне ма-
лую испаряемость хладагента.
Методика испытаний состоит в следующем. Очищенный от заг-
рязнений ОИ помещают в вакуумную камеру и включают насосы пред-
варительной откачки. После снижения давления до 10”1 Па эти на-
сосы отключают и включают насосы для основной откачки до давлений
10“3—10“12 Па. Затем изделие выдерживают в камере установленное
время, осуществляют медленную разгерметизацию и извлекают из
камеры.
Время испытания выбирается таким, чтобы в результате пере-
численных выше физических процессов произошли такие изменения
значений параметров изделий, которые могут быть проконтролиро-
ваны сравнением результатов их измерений до и после испытаний. В
процессе испытаний осуществляется непрерывный контроль давле-
ния с помощью вакуумметров с датчиками, характеристики которых
приведены в табл. 6.16.
Испытание на воздействие криогенных температур проводится
только для узлов (блоков и элементов) изделий, расположенных на
внешней поверхности или в негерметизированных отсеках КА. Цель
испытаний — оценить правильность выбора материалов, схемотехни-
ческих и конструктивных решений (исследовательские, типовые и
квалификационные испытания) или оценить сохранение полученной
при разработке надежности изделий в процессе серийного производ-
ства (периодические испытания).
Изменение значений параметров изделий при криогенных темпе-
ратурах связано с изменением тепловых процессов (в частности, с
336
Таблица 6.16
Характеристики вакуумных датчиков-преобразователей
Вид преобразователя Тип вакуумметра Давление, Па
Термопарный тепловой GMT-6-3 105—10~5
Электроионизационный ПМИ-10-2 102—10-®
Магнитный электроразрядный ПММ-14М До КГ11
Квадрупольный масс-спектрометр К-М2 1O-2-1O-10
ростом градиента температур между «теплой» и «холодной» частями
изделия) и с изменением свойств материалов.
Для проведения испытаний используются специальные криоген-
ные камеры, стенки которых имеют повышенную теплоизоляцию,
или криотермовакуумные испытательные установки с многоступен-
чатой откачной системой. Выход на рабочий режим в такой установ-
ке, соответствующий давлению 10“4 Па и температуре до 50 К, до-
стигается за 24 ч. Процесс испытаний аналогичен испытанию на
воздействие глубокого вакуума.
6.2.2. Испытания на воздействие
микрометеоритных потоков
Работоспособность элементов изделия, расположенных на внешней
поверхности космического аппарата, оценивается временем сохране-
ния их параметров в нормах ТУ, определяемым главным образом тра-
екторией КА. При высоте апогея Яа < 400 км все элементы (включая
солнечные батареи) сохраняют свою работоспособность не менее года.
Рассмотрим особенности испытаний на воздействие микромете-
оритных частиц.
Работоспособность изделия может оцениваться при опытной экс-
плуатации КА. Для этого изделие размещается на его внешней по-
верхности и подвергается воздействию микрометеоритных потоков в
период орбитального полета. С использованием систем бортовой те-
леметрии на командно-измерительные пункты передаются данные об
энергетическом и временном распределении микрометеоритных по-
токов и об изменениях параметров функционирования испытуемого
изделия. Данные об энергетическом и временном распределениях мик-
рометеоритных потоков фиксируются с помощью пьезодатчиков, от-
мечающих каждый удар микрочастицы об их поверхность. При ис-
337
пользовании возвращаемых блоков поверхность КА, испытывающая
воздействие, после возвращения на Землю подвергается геометри-
ческому (измерение размеров и числа микрократеров) и физикохи-
мическому анализам. Эти испытания носят характер исследовательс-
ких, позволяющих получить необходимые данные для расчетов, а
также контрольных, проводимых после совершенствования элемен-
тов (например, панелей солнечных батарей, астроориентаторов и др.).
Лабораторные испытания носят характер приемочных (для новых
разработок) или определительных (для получения количественных
значений параметров работоспособности аппаратуры). Они прово-
дятся в лабораторных условиях с использованием ускорителей на сжа-
тых газах, электромагнитных и водородных источников, взрывных
ускорителей с кумулятивными зарядами, плазменных и лазерных ус-
корителей, электростатических ускорителей разных типов.
В электростатическом ускорителе микрочастицы разгоняются
электрическим полем. При потенциале 3 мВ скорость твердых час-
тиц с массой 10”13—10"9 г при удельной плотности 0,5—8 г/см3 дости-
гает 10—30 км/с. Общая плотность потока составляет 103—104 части-
ца- м“2- с"1.
В космосе метеоритные частицы имеют различную плотность:
железоникелевые — около 7,8 г/см3, каменные — 3 г/см3, частицы
пыли — 0,3 г/см3; более крупные частицы имеют более рыхлую струк-
туру. Плотность потока метеоритных частиц убывает с ростом их мас-
сы. Для микрометеоритов с диаметром в десятые доли микрометров
и массой 10"13 г плотность потока близка к 10'2 частица-м“2 -с-1, а
для микрометеоритов диаметром в десятые доли миллиметра плот-
ность потока составляет 10~8—10-9 частица м”2 -с”1. В связи с этим
вероятность столкновения КА с крупными метеоритами весьма мала.
При ударе микрочастицы в кратере за счет тепловыделения проис-
ходит расплавление материала бомбардируемой поверхности объекта
испытания, образуются капельки жидкости (расплава), при застыва-
нии которых на стенках кратера оседает пленка. Именно оседание этой
пленки вызывает необратимые изменения свойств поверхности ОИ.
При правильном выборе режима ускорителя время формирова-
ния пленки должно быть значительно меньше • времени остывания,
тогда будут имитироваться условия процесса, вызывающего измене-
ния свойств поверхности ОИ: обратимый процесс нагрева и необра-
тимый процесс осаждения пленки
В последнее время для имитации микрометеоритных потоков при
лабораторных испытаниях используют воздействие мощных импуль-
сов лазерного излучения, дающих те же эффекты.
338
6.2.3. Испытание на невесомость
Обычно предусматриваются испытания по проверке влияния невесо-
мости на свойства безотказности и долговечности (исследовательские
испытания) или по оценке соответствия этих свойств требованиям
ТУ (в категории периодических испытаний).
Для исследовательских испытаний по безопасности могут исполь-
зоваться полеты самолетов по специальным траекториям или полеты
КА. На самолетах проводятся испытания на кратковременное воз-
действие невесомости, позволяющее оценить безотказность ОИ. Для
проведения таких испытаний изделия вместе с измерительными при-
борами, фиксирующими значения параметров, предусмотренных ТУ,
размещаются в контейнерах, крепящихся к бортам самолета с помо-
щью специальных растяжек. Эти растяжки обеспечивают «плавание»
контейнера в процессе полета и «зависание» при достижении невесо-
мости при полете самолета по заданной траектории.
Если ОИ предназначен для установки на внешней поверхности
КА, то контейнер вакуумируется (для устранения конвективного теп-
лообмена). При размещении ОИ в условиях эксплуатации в гермети-
зированном отсеке контейнер заполняется инертным газом, обеспе-
чивающим конвективный теплообмен.
Самолет в процессе испытания выполняет полет по кеплеровс-
ким траекториям. При движении по одной из траекторий со скорос-
тью 465 км/ч полная невесомость длится в течение 12—15 с. При ско-
рости 800 км/ч невесомость длится 34 с, при сверхзвуковых скоростях —
примерно 4 мин.
Важными элементами подготовки к проведению описываемых
испытаний является обеспечение правильности крепления изделия и
его термоизоляции, соблюдения специфических условий регистра-
ции. Крепление изделия должно обеспечивать:
• необходимую амортизацию вибраций на все время до и после
достижения невесомости и полное «отключение» амортизации
и механической связи с бортами самолета при достижении не-
весомости;
• реальное ухудшение охлаждения за счет нарушения конвектив-
ного теплообмена, поэтому изделие в тепловом отношении дол-
жно быть «отключено» от теплопроводящих масс (в частности,
нежелательно использование металлических опор или растяжек).
Специфика условий регистрации состоит в том, что параметры
изделия, по значениям которых судят о его годности, должны фик-
сироваться с момента перехода изделия в состояние невесомости и в
течение всего времени нахождения в этом состоянии. В связи с этим
начало и окончание фиксации параметров проводят тогда, когда бор-
339
товые акселерометры фиксируют нулевые ускорения по всем осям
координат.
Кратковременное состояние невесомости может достигаться
сбрасыванием контейнера с изделием в шахту или с башни. Перед
сбросом контейнер должен длительное время находиться в состоя-
нии покоя, чтобы не вызвать ложные отказы в каналах жидких тепло-
носителей. Например, он может помещаться на платформу, «плава-
ющую» в ртутной ванне. Высота падения выбирается такой, чтобы
компенсировать влияние аэродинамического торможения. В неко-
торых случаях контейнер сбрасывают в трубу с предварительно отка-
чанным воздухом, чтобы уменьшить влияние силы аэродинамичес-
кого торможения.
Длительность пребывания изделий в состоянии невесомости оп-
ределяется: временем срабатывания или отпускания элементов, пе-
реходящих из одного состояния в другое под действием силы тяжести
полностью или частично (реле, подвижные контакты, клапаны и т.п.);
постоянной времени тепловых переходных процессов наиболее теп-
лонагруженных частей изделий, охлаждение которых достигается в
основном за счет конвективного теплообмена (мощные транзисторы
и тиристоры, жидкокристаллические индикаторы и т.п.).
Исследовательские испытания на долговечность проводятся путем
установки изделий на КА с измерением параметров в состоянии не-
весомости при движении КА по орбите (при этом измерения не про-
водятся при маневрах КА на орбите, переходах с одной орбиты на
другую, стыковках КА друг с другом и в других случаях появления
линейных или вращательных ускорений).
При длительных испытаниях на воздействие невесомости (несколь-
ко суток) наличие даже небольших ускорений, например при враще-
нии КА, может вызвать большие погрешности в оценке результатов.
В связи с этим обычно ведутся непрерывные записи значений уско-
рений по показателям бортовых акселерометров (например, в виде
кольцевых лазерных гироскопов) и измеряемых параметров ОИ. Со-
поставление этих записей позволяет исключить погрешности, выз-
ванные изменением значений параметров изделий при появлении
ускорений.
Моделировать воздействие невесомости ухудшением конвектив-
ного теплообмена можно при оценке работоспособности только наи-
более теплочувствительных узлов, блоков и элементов изделий. Ухуд-
шение теплообмена достигается установкой «тепловых преград»
(например, в виде лабиринтов из теплопроводящих металлов или пе-
регородок из композитов с плохой теплопроводностью) или сниже-
нием эффективности обдува (уменьшением частоты вращения двига-
340
теля вентилятора, поворотом его лопастей и т.п.) теплочувствитель-
ных составных частей изделий.
При монтаже объектов испытаний особое внимание должно быть
уделено тепловым потокам и тепловым контактам. Тепловые потоки
должны в точности соответствовать реальным эксплуатационным ус-
ловиям, поэтому их необходимо контролировать путем измерения
температуры корпуса, печатной платы или выводов интегральных схем
для наиболее термочувствительных блоков и узлов изделий. Тепло-
вые контакты осуществляются главным образом между корпусом
объекта испытаний и крепящим кронштейном (стойкой, панелью).
Здесь важно соблюсти соответствие реальным условиям — равенства
площади теплового контакта, массы теплоотвода, его охлаждающей
поверхности и градиента температуры. В частности, наличие плен-
ки между поверхностями теплового контакта приводит к большим
погрешностям в оценке результатов испытаний.
При испытаниях на воздействие невесомости в качестве измеряе-
мых параметров изделий используются записываемые в ТУ парамет-
ры функционирования (при проведении приемочных испытаний) и
(или) дополнительные диагностические параметры (для исследова-
тельских и квалификационных испытаний). В качестве диагности-
ческих параметров для оценки влияния невесомости используют гра-
диенты температуры по поверхности изделия, усилие перемещения,
коэффициент трения (для электромеханизмов), скорость, давление
или расход газа или жидкости (для каналов теплоносителей и анало-
гичных каналов другого назначения). Для всех ОИ с перемещающи-
мися массами важными параметрами являются: скорость перемеще-
ния, наличие гистерезиса кривых «перемещение-время воздействия
усилия», «перемещение-усилие» и т.п.
Погрешности испытательного режима определяются «остаточным»
ускорением в моменты выхода на невесомость и отклонением темпе-
ратуры ОИ от установленной в нормативной документации на прове-
дение испытаний. Считается, что «остаточное» линейное и угловое
ускорения в состоянии невесомости не должны превышать 5% земно-
го ускорения (g) для сравнительно малогабаритных изделий (линей-
ный размер не более 100 мм). Для крупногабаритных изделий (ли-
нейный размер более 100 мм) угловое ускорение для наиболее
Удаленной от центра вращения точки в момент невесомости должно
быть не более 0,05 g.
Если в нормативной документации не заданы допустимые откло-
нения температуры, то для всех составных частей ОИ при всех испы-
таниях оно не должно превышать 0,1 °C, кроме особо термочувстви-
тельных частей при испытаниях на долговечность, где отклонение (в
связи с длительным воздействием) должно быть не более 0,05 °C.
341
6.2.4. Испытание на комбинированное воздействие
факторов космического пространства
В ряде случаев (особенно для изделий, располагаемых на внешних
поверхностях КА) физические процессы в материалах, протекающие
в реальных условиях эксплуатации, создают такие изменения свойств
и значений параметров изделий, которые не могут быть оценены по
результатам испытаний на воздействие каждого фактора космическо-
го пространства (ФКП) в отдельности. К таким случаям, в частно-
сти, относятся:
• изменение свойств диэлектриков, обусловленное одновремен-
ным воздействием космической радиации, глубокого вакуума,
пониженной температуры и собственной атмосферы КА; в за-
висимости от соотношения интенсивностей воздействий эти из-
менения вызывают генерацию или взаимную компенсацию
объемных и поверхностных зарядов, возникновение или пре-
кращение соответствующих токов;
• воздействие космической радиации и ультрафиолетового излу-
чения Солнца на терморегулирующие покрытия, что приводит
к ускорению или замедлению деградации их теплопроводности;
• повреждение солнечных батарей и фотоприемников астроориен-
таторов высокоэнергетичным протонным излучением радиаци-
онных поясов Земли при одновременном воздействии понижен-
ной температуры, что вызывает быстрое снижение токоотдачи у
батарей и повышение уровня шумов у фотоприемников только
при определенных соотношениях потока протонов и температуры.
Для рассматриваемых и подобных им случаев проводят испыта-
ния на комбинированное воздействие ФКП, целью которых является
более достоверная оценка эксплуатационной надежности ОИ и выяв-
ление их наиболее слабых узлов, требующих доработок при исследо-
вательских и квалификационных испытаниях, а также сопоставление
причины отказов изделий в эксплуатации с отказами на испытаниях,
проводимых на комбинированное и раздельное воздействие ФКП для
установления критических значений параметров этих воздействий и
причин отказов изделий (в том числе по результатам периодических
испытаний).
Испытания на комбинированное воздействие ФКП проводят с
использованием сложных установок, которые можно разделить на три
группы: установки комбинированного воздействия различных видов
радиации, установки комбинированного воздействия нерадиацион-
ных факторов; «камеры космоса», в которых изделие подвергается
совместному воздействию различных видов радиационных и неради-
ационных факторов.
342
Установки для проведения испытаний на комбинированное воздей-
ствие радиационных факторов решают поставленные выше задачи в
ходе исследовательских, квалификационных и периодических испы-
таний, а также следующие специфические задачи.
1. Разделение и выявление в изделиях радиационных дефектов,
зависящих в основном от дозы или мощности дозы излучения. Так,
радиационное повреждение кремниевых фотопреобразователей в пер-
вом приближении не зависит от мощности дозы, а радиационная
проводимость и радиолюминесценция диэлектриков являются функ-
цией этого параметра. Выявление таких эффектов позволяет значи-
тельно упростить методику испытаний и выбор необходимого комп-
лекта моделирующего оборудования.
2. Обоснование в процессе испытаний возможности замены из-
лучений со сплошными энергетическими спектрами подобными кос-
мическими моноэнергетическими излучениями, получаемыми на ус-
корителях заряженных частиц или от радиоактивных изотопов.
3. Обоснование возможности замены в процессе испытаний ком-
плекса радиационных воздействий (электронов, протонов, тяжелых
ионов, вторичных нейтронов, рентгеновских и у-квантов) на воз-
действие какого-либо одного вида радиации (электронов или прото-
нов от ускорителей и изотопных источников, нейтронов от ядерных
реакторов, у-квантов от бетатронов и т.п.).
Типичным оборудованием, используемым при проведении радиа-
ционных испытаний, могут служить ускорители и источники заря-
женных частиц, применяемые Годдардским научно-исследовательс-
ким центром космических полетов NASA для всестороннего изучения
влияния радиации на устройства аппаратуры КА. Лаборатория на-
считывает три ускорителя и одну кобальтовую пушку, которые могут
облучать испытуемые объекты как одновременно от нескольких уско-
рителей, так и раздельно. В качестве ускорителей протонов и элек-
тронов используются два электростатических генератора, позволяю-
щих ускорить электроны в энергетическом диапазоне 0,5—3 МэВ и
протоны в диапазоне 0,5—4 МэВ. Для одновременного ускорения про-
тонов и электронов спроектирован протонно-электронный инжектор
на энергию 0,1—1 МэВ. Площадь облучения дефокусированными пуч-
ками протонов и электронов составляет около 0,1 м2. Что касается
кобальтовой пушки, то ее активность составляет 30 000 Ки, а пло-
щадь облучения достигает 7 м2.
Установки для проведения испытаний на комбинированное воздействие
нерадиационных факторов предназначены для испытаний аппаратуры
при экстремально низких давлениях (~10-6 Па) и экстремальных тем-
пературах цикла (обычно от —70 до +90 °C), определенных ранее в
ходе термовакуумных испытаний функционирующих подсистем.
343
В установке, описанной в [6], ОИ подвергался воздействию виб-
рации и ударов, соответствующих нагрузкам при маневрировании и
стыковке космического объекта (КО) в сочетании с воздействием
пониженных температур (охлаждение жидким азотом) и солнечного
ультрафиолета.
При испытаниях в камере космоса изделие помещается в вакуум-
ную камеру, в которую через окно вводится излучение. Вакуум в
камере может создаваться с помощью безмасляной криогетгерной
откачки, обеспечивающей разрежение 10”1 Па. Корпускулярное из-
лучение (электроны, протоны, а-частицы) воспроизводится элект-
ростатическим генератором в диапазоне энергий 10—500 кэВ. Элект-
ромагнитное излучение Солнца моделируется двумя имитаторами,
воспроизводящими область спектра 1050—40 000 А.
Пучки протонов и а-частиц с непрерывным спектром и с энер-
гиями от сотен килоэлектрон-вольт до нескольких десятков мегаэлек-
тронвольт могут быть получены с помощью пластины переменного
сечения, устанавливаемой на пути первичного пучка. Такая пласти-
на в принципе позволяет получить из моноэнергетического пучка про-
тонов и а-частиц непрерывный спектр частиц с энергиями от до
Дпах с любым заранее заданным законом изменения спектральной
плотности. Энергетический спектр протонов после пластины имеет
почти аналогичную зависимость от толщины в приповерхностной об-
ласти в пределах 10“2— 1 кг/м2 как для межпланетного полета, так и
для орбиты в зоне внутреннего радиационного пояса.
Описанная методика находит применение в имитационных облу-
чениях различных элементов аппаратуры КА (терморегулирующего
покрытия, кремниевых фотопреобразователей и т.п.).
Для преобразования моноэнергетических пучков в пучки энерге-
тических спектров вторичных излучений используются согнутые под
углом 60° танталовые пластины. Толщина пластин зависит от энер-
гии пучка. Коэффициент преобразования электронных пучков опи-
санным методом составляет несколько процентов.
Задача имитации электронного воздействия значительно упроща-
ется, если для этой цели использовать ^-излучение соответствующих
радиоактивных изотопов. Применение радиоактивных источников
имеет ряд преимуществ по сравнению с использованием ускорите-
лей: спектр излучения изотопов непрерывен так же, как и спектр
электронов радиационных поясов Земли.
Имеется возможность из всего многообразия изотопов выбрать
такой, который по своей спектральной характеристике был бы наи-
более близок к энергетическим спектрам электронов радиационных
поясов Земли. Так, при полетах на высотах 10 000 км средняя энер-
344
гия электронов радиационного пояса составляет 0,8—0,9 МэВ, а сред-
няя энергия p-излучения источника Sr90—}90 равна 0,8 МэВ.
Интенсивность электронных потоков на высотах 10 000 км не
превышает 1012 м2' с-1. Такую интенсивность можно получить с по-
мощью сравнительно небольших изотопных источников. Для имита-
ции воздействия электронов радиационных поясов Земли на работо-
способность изделий используется изотопный источник Sr90—!90 в
вакуумных установках, имитирующих космические излучения при
комплексном воздействии потока электронов до 108 см2 • с”1, раздель-
ном и циклическом изменении температуры в интервале 170—420 К и
пониженном давлении 10“3—10“5 Па. Кроме того, эти установки по-
зволяют воспроизводить электрический режим работы изделий и
измерять их параметры в процессе испытаний. В установке для обес-
печения циклического изменения температуры используется устрой-
ство, исключающее тепловое взаимодействие в вакууме изделий при
нагреве и охлаждении, а для создания вакуума до 10”5 Па использует-
ся сорбционный насос.
Исследуемые изделия или устройства аппаратуры помещаются на
специальной плате, выполненной из изоляционного материала с
низкой теплопроводностью. Изотопный источник Sr90—!90 активно-
стью до 1011 Бк (несколько кюри) вводится в специальное гнездо,
изолированное от вакуумной камеры алюминиевой фольгой — мемб-
раной. Толщина фольги, при которой можно пренебречь некоторым
изменением высокоэнергетической части спектра изотопного источ-
ника за счет торможения электронов в алюминии, составляет 10”4 м.
Тепловой режим внутри вакуумных камер регулируется путем ох-
лаждения жидким азотом внутренних стенок камер и нагревания дву-
мя цилиндрическими нагревателями, расположенными над платой с
изделиями. Температура исследуемых изделий контролируется с по-
мощью термопар.
Распределение интенсивности электронов стронций-иттриевого
источника на поверхности платы с изделиями определяется плоски-
ми стеклянными дозиметрами. По степени радиационного потемне-
ния стекла можно оценить распределение интенсивности облучения.
В качестве другого примера можно привести установку для моде-
лирования ФКП, принятую в исследовательской лаборатории фир-
мы «Simens» (Германия), где были проведены испытания материалов
и комплектующих аппаратуру изделий, электронных схем для проек-
тируемых космических аппаратов AZUR (параметры орбиты: перигей
300 км, апогей 3 000 км, склонение 102°, продолжительность полета
1 год) и SYMPHONI (синхронная орбита, высота 35 600 км, продол-
жительность полета 5 лет). В качестве стандартных видов излучения
были выбраны электроны с энергией 1—2,5 МэВ и протоны с энер-
345
гией 3 МэВ. Испытания проводились на электростатическом генера-
торе Ван де Граафа. Сила тока пучка при облучении выбиралась в
пределах 0,1-100 мкА. Путем сканирования перекрывалась площад-
ка 0,1 • 0,1 м2 (типовой размер устройства аппаратуры).
Рассмотрим также устройство одной из современных зарубежных
установок Европейского космического агентства (ESA), предназна-
ченной для моделирования воздействия ФКП [52]. Она состоит из
двух соединенных между собой цилиндрических отсеков: вертикаль-
ного (основной камеры) и горизонтального — для размещения сис-
темы откачки, а также из имитатора Солнца — дополнительной ка-
меры. Установка изготовлена целиком из коррозионно-стойкой стали
с небольшим содержанием углерода. Все отсеки имеют цилиндри-
ческие крышки. В цилиндрах и днищах много отверстий различных
диаметров для присоединения вспомогательной системы откачки,
ввода пучка солнечного излучения, питания тепловых экранов жид-
ким и газообразным азотом, элекгровводов и др. Все внутренние
поверхности отсеков целиком закрыты тепловыми экранами, состоя-
щими из плоских или изогнутых волнистых криопанелей из коррози-
онно-стойкой стали. Каждая панель состоит из двух гофрированных
листов, сваренных между собой по периметру и по поверхности гофр.
По образованным таким образом каналам циркулирует жидкий азот,
который обеспечивает изменение температуры стенок экрана в ши-
роком диапазоне. В точках крепления экранов обеспечивается теп-
ловая изоляция от стенок камеры.
Одной из особенностей установки является подвижная часть с
вертикальными поворотными створками, разделяющая экраны двух
отсеков, что позволяет изолировать их друг от друга во время вакуум-
но-температурных испытаний, т.е. без действия имитатора Солнца.
При этом экран дополнительной камеры используется как азотный
криоконденсационный насос с температурой 80 К, которая достига-
ется путем прокачки через него жидкого азота.
Температура экрана основной камеры в ходе этих испытаний мо-
жет изменяться от 100 до 360 К. Точная ориентация створок позво-
ляет преградить передачу излучения от испытуемого КА на холодные
экраны дополнительного отсека при сохранении достаточной прово-
димости для вакуумной откачки.
Система вакуумной откачки является полностью безмасляной.
Предварительная откачка осуществляется двумя параллельными фор-
вакуумными линиями — воздуходувкой типа Рутса производительнос-
тью 1200 л - ч-1 с прогреваемыми цеолитовыми ловушками и отсекаю-
щими вентилями. При достижении давления порядка 10 Па начинается
охлаждение жидким азотом экранов дополнительной камеры. После
достижения давлений примерно 10-1 Па насосы предварительной от-
346
качки отсекаются вентилями и отключаются. При достижении давле-
ния 5-10-1 Па включают криогенный насос, дающий охлаждение до
20 К, и турбомолекулярный насос. Насосы располагаются снаружи
дополнительной камеры. При давлении 5 • 10”2 Па запускают титано-
вые насосы основной откачки. Титан напыляется на панели суммар-
ной площадью 20 м2. При этом получают суммарную скорость основ-
ной откачки ~ 2 • 103 л • с-1. Рабочее давление 5 • 10-4 Па достигается
за 12 ч. Предельное давление в вакууме равно 10-5 Па.
Имитатор Солнца, входящий в состав установки, представляет
собой сложную оптическую систему, предназначенную для воспро-
изведения в рабочей зоне моделирующей установки потока излуче-
ния, имеющего спектр, приближающийся к спектру естественного
Солнца. Имитатор считается совершенным, если неоднородность поля
лучистого потока во всем объеме рабочей зоны не превышает ±5%,
расхождение лучей — не более ±2°.
В камеру можно вводить корпускулярные или электромагнитные
излучения от изотопных источников, проводя испытания наиболее
критичных к этим воздействиям элементов аппаратуры (стекол, по-
крытий, полупроводниковых приборов и т.п.). Кроме того, могут
создаваться условия, имитирующие совместное воздействие радиа-
ции и собственной атмосферы на внешнюю поверхность КА, что не-
обходимо для испытаний критичных к этим воздействиям покрытий,
солнечных батарей, фотоприемников, пьезодатчиков и т.п.
Анализ результатов испытаний на комбинированное воздействие
проводится путем их сопоставления с результатами натурных (лет-
ных) испытаний и испытаний на раздельное воздействие тех же фак-
торов. Главная цель такого сопоставления состоит в выявлении тех
факторов или их комбинаций, которые оказывают наибольшее влия-
ние на работоспособность аппаратуры. Это позволяет не только ре-
шать перечисленные выше оценочные задачи, но и сокращать объе-
мы натурных испытаний или использовать наиболее эффективные виды
испытаний на раздельное воздействие вместо более дорогих испыта-
ний на комбинированное воздействие.
Контрольные вопросы
1. Сформулируйте специфические параметры термокамер, с помощью
которых производят оценку возможности воспроизведения в них различных
испытательных режимов.
2. Какая термокамера (с прямым или косвенным нагревом) обеспечива-
ет большую неравномерность распределения температуры в камере и почему?
3. В чем отличие методики испытаний на воздействие повышенной
температуры внешней среды тепло- и нетепловыделяющих изделий?
4. На каких физических эффектах основано охлаждение в камерах холода?
5. Что понимается под холодопроизводительностью холодильной ма-
шины?
6. Каким требованиям должен удовлетворять хладагент холодильной
машины?
7. Сформулируйте основные специфические параметры камеры влаж-
ности.
8. На какие типы подразделяют камеры влажности по способу получе-
ния влажного воздуха?
9. Сформулируйте основные параметры, характеризующие воздействие
солнечной радиации.
10. Какие источники излучения используют в камерах солнечной радиа-
ции?
11. Назовите предельные значения атмосферных давлений, соответству-
ющих низкой, средней, высокой и сверхвысокой степени вакуума.
12. Какими основными параметрами характеризуют вакуумные насосы?
13. Сформулируйте основные параметры, характеризующие камеру пыли.
14. В чем отличие методик испытаний на статическое и динамическое
воздействие пыли?
15. Сформулируйте основные специфические параметры вакуумных ис-
пытательных установок.
16. Какие типы вакуумных насосов применяют в термовакуумных стен-
дах и каковы их особенности?
17. Каким образом в земных условиях имитируют невесомость?
Глава 7
НАЗЕМНЫЕ ИСПЫТАНИЯ ИЗДЕЛИЙ
АВИАЦИОННОЙ И РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ НА ВОЗДЕЙСТВИЕ
ИСКУССТВЕННЫХ ФАКТОРОВ
7.1. Испытания на воздействие вибрации
7.1.1. Условия испытаний
и применяемое испытательное оборудование
Воздействие различного характера вибраций на изделия авиационной
и ракетно-космической техники на этапах ее жизненного цикла часто
приводит к возникновению в них механических дефектов и (или) ухуд-
шению значений параметров (характеристик). В связи с этим пре-
дусматривается проведение лабораторно-стендовых испытаний на воз-
действие вибрации с помощью специальных средств испытаний.
Основные требования, предъявляемые к виброиспытаниям различ-
ных изделий и средствам испытаний, сформулированные в рекомен-
дациях МЭК, отечественных государственных и зарубежных стандар-
тах, следующие:
• возможность проведения испытаний на гармоническую (сину-
соидальную и полигармоническую), случайную (узко- и широ-
кополосную) и смешанную (гармоническую и случайную) виб-
рации;
• обеспечение воспроизводимости результатов испытаний, ис-
ключающей неоднозначность заключения;
• возможность учета особенностей характеристик испытуемого из-
делия и способов его крепления;
• простота и удобство в управлении заданным испытательным
режимом; возможность ручного и автоматического управления;
• обеспечение точности измерения: частоты ниже 50 Гц ±(1-2)%
и выше 50 Гц ±(2—3)%; перемещения ±(10-20)%; ускорения
±(10-20)%; спектральной плотности ускорения ±(1,5-3,0) дБ;
• обеспечение точности (0,5-2 дБ) поддержания ускорения (пе-
ремещения) постоянным при динамическом диапазоне регули-
рования 10-60 дБ;
• обеспечение допусков искажающих факторов: нелинейных ис-
кажений не более 30%; уровня поперечных составляющих виб-
349
рации 25%; неравномерности амплитуды колебаний в точках
крепления ±25%;
• обеспечение толкающих усилий до нескольких сотен тысяч нью-
тон и грузоподъемности до нескольких тонн.
Кроме того, соответствующие требования предъявляют к мес-
там установки и способам крепления виброизмерительных преобра-
зователей (ВИП) и к конструкции приспособлений для крепления
изделия.
Для выполнения указанных требований используются вибраци-
онные установки — сложные комплексы, включающие в основном
подсистемы задания, воспроизведения, управления и измерения,
анализа и регистрации параметров вибрации. Основным звеном та-
кой установки является вибратор — исполнительный элемент, пред-
назначенный для воспроизведения заданных колебаний. В зависи-
мости от принципа действия вибратора в установке используют
различные способы задания испытательного режима. Самое широ-
кое распространение в практике виброиспытаний получили электро-
динамические, электрогидравлические и механические вибраторы.
Первые два типа вибраторов применяют в вибрационных системах,
реализующих все современные методы испытаний. В этом случае в
качестве задающего устройства используют генераторы электричес-
ких сигналов. Электродинамические вибраторы позволяют созда-
вать колебания более высокочастотные (5-10 000 Гц), чем электро-
гидравлические (0-1000 Гц). Механические вибраторы применяют
в системах, предназначенных для испытания методом фиксирован-
ных частот.
Основным недостатком всех типов вибраторов является зависи-
мость их передаточной функции от частоты и нагрузки, что суще-
ственно усложняет задачу воспроизведения заданных параметров виб-
рации при испытаниях в широком диапазоне частот. Поэтому для
реализации любого метода испытаний требуются специальные спосо-
бы компенсации изменений передаточной функции при изменении
частоты и нагрузок.
Структурная схема виброустановки приведена на рис. 7.1. В ее
состав входят: вибростенд (вибровозбудитель) 4, преобразующий
энергию любого вида в энергию механических колебаний (в вибра-
цию); генератор 2 испытательных (управляющих) сигналов, создаю-
щий управляющее воздействие на вибростенд, соответствующее за-
данному характеру вибрации и режиму испытаний; усилитель
мощности 5, предназначенный для получения требуемого значения
вынуждающей силы.
В конструкцию вибростенда входит как неподвижная часть, так
и подвижная система, совершающая вибрационное Движение. Ус-
350
Рис. 7.1. Структурная схема вибрационной установки
тойчивое равновесие и ориентацию подвижной системы относитель-
но неподвижной части обеспечивает система подвески. Испытуемое
изделие устанавливается и закрепляется для передачи ему вибрации
на конструктивной части подвижной системы, называемой виброс-
толом 5.
Для получения информации о воздействии вибрации в процессе
испытаний используют виброизмерительные преобразователи, раз-
мещаемые в двух или более специфических точках. Различают две
основные точки: контрольную и измерительную. Контрольная точка 6
располагается в том месте, относительно которого должно проводиться
измерение значений параметров вибрации испытуемого изделия (на
столе вибростенда, на приспособлении, на самом изделии), причем
она должна находиться как можно ближе к одной из точек крепления
и быть с ней жестко связанной. Сигнал с ВИП 7, расположенного в
контрольной точке, используется в системе управления 1, обеспечи-
вающей поддержание значений параметров вибрации на определен-
ном уровне.
Возможно использование нескольких контрольных точек (жела-
тельно не более четырех). В этом случае сигналы, снимаемые с них
с помощью ВИП, подвергаются непрерывному арифметическому
усреднению или обработке специальной сравнивающей аппаратурой.
Измерительная точка 8 располагается в том месте испытуемого
изделия 9, где значения параметров вибрации определяют исход ис-
пытаний. В точку 8 помещают ВИП 10, сигнал с которого подво-
дится к средствам измерения, анализа и обработки полученных дан-
ных 11. Таким образом, результаты испытаний оцениваются
значениями параметров вибрации, полученными в измерительной
точке при условии обеспечения заданных значений в контрольной
точке.
В ТУ на изделие должен оговариваться вид управления: сигна-
лом с одной точки или с нескольких; в последнем случае для управ-
351
ления используется усредненный сигнал или сигнал, имеющий мак-
симальную амплитуду. Рекомендуемый допуск на значение управля-
ющего сигнала в контрольной точке составляет ±15%.
Классификация виброустановок производится по ряду признаков:
1. По принципу действия вибростенда (вибровозбудителя) разли-
чают механические, электродинамические, электро гидравлические,
пьезоэлектрические и другие виды виброустановок. Применение раз-
личных вибростендов определяется требованиями к характеру (виду)
вибрации и значениям ее параметров.
2. По системам управления виброустановки подразделяют на ра-
зомкнутые и замкнутые. В разомкнутых виброустановках поддержа-
ние значений параметров вибрации на заданном уровне осуществля-
ется вручную, а в замкнутых — автоматически. Автоматическое
управление достигается за счет использования сигналов контрольно-
го ВИП 7 (см. рис. 7.1), снимаемых с контрольной точки 6 и подво-
димых к системе управления 1.
3. По характеру воспроизводимой вибрации, т. е. по значению
колеблющейся величины, изменяющейся во времени, различают
виброустановки гармонической и случайной вибрации, а также ком-
бинированные, воспроизводящие оба вида вибрации.
4. По направлению приложения силы механических воздействий раз-
личают виброустановки для воспроизведения линейной вибрации:
прямолинейной — вертикальной или горизонтальной (однокомпонен-
тной); плоскостной — одновременно горизонтальной и вертикальной
(двухкомпонентной) и пространственной (трехкомпонентной); угло-
вой. У вибростендов, воспроизводящих прямолинейную вибрацию,
плоская поверхность столов может быть расположена горизонтально
и вертикально. Возможны конструкции вибростендов с изменяющим-
ся положением стола в пространстве (поворотные).
5. По назначению виброустановки подразделяют на испытатель-
ные и калибровочные, используемые для калибровки ВИП.
Для оценки функциональных свойств виброустановок пользуют-
ся рядом параметров и характеристик, значения которых приводятся
в стандартах или ТУ на установки конкретных типов.
Рассмотрим основные параметры и характеристики виброустано-
вок (вибростендов).
1. Диапазон воспроизводимых виброускорений (виброперемещений,
виброскоростей), определяемый областью значений параметров, в
пределах которой нормированы точностные характеристики. Преде-
лы воспроизведения характеризуются наименьшим и наибольшим
значениями воспроизводимого параметра.
Для определения нижних пределов диапазонов воспроизводимых
ускорения и перемещения с помощью соответствующего виброметра
352
измеряют среднеквадратическое значение вибрационного шума на
столе вибростенда. За нижние пределы номинальных диапазонов вос-
производимых ускорения и перемещения принимают значение уско-
рения и перемещения, превышающие значение вибрационного шума
на столе вибростенда не менее чем в 4 раза.
Верхние пределы номинального диапазона ускорения и переме-
щения определяют виброметрами, устанавливая возможность воспро-
изведения верхних пределов, указанных в нормативно-технической
документации (НТД), в номинальном диапазоне частот. За верхние
пределы номинальных диапазонов ускорения и перемещения прини-
мают наименьшие значения ускорения и перемещения из воспроиз-
водимых в номинальном диапазоне частот при параметрах возбужде-
ния, не превышающих допустимых значений, установленных в НТД
на установку.
За номинальный диапазон частот принимают интервал, в кото-
ром обеспечивается воспроизведение ускорений и перемещений в их
номинальных диапазонах.
2. Диапазон воспроизводимых частот виброускорения (виброскоро-
сти, виброперемещения) характеризуется областью значений, в ко-
торой нормированы точностные характеристики виброустановки. Для
наглядной оценки указанного диапазона пользуются амплитудно-ча-
стотной характеристикой (АЧХ), представляющей собой зависимость
амплитуды основной гармоники измеряемого параметра в контрольной
точке от частоты гармонического возбуждения с постоянной ампли-
тудой. Неравномерность АЧХ зависит от принципа действия вибро-
возбудителя (вибростенда), его конструктивного исполнения, а так-
же от собственных резонансов подвижной системы и подвески.
3. Резонансные частоты определяют по АЧХ ускорения или пере-
мещения, снятым при постоянном значении параметра возбуждения.
При этом поддерживаемый постоянным параметр возбуждения уста-
навливается таким, чтобы ускорение и перемещение не превышали
предельно допустимых значений, а для электромеханических виброс-
тендов перемещение было бы минимальным.
Резонансная частота подвески определяется ее жесткостью вдоль
рабочей оси и приведенной массой подвижной системы вибростен-
да. Резонансная частота подвески соответствует первому по частоте
пику ускорения, не менее чем в 1,5 раза превышающему ускорение
на частоте 400 Гц для электродинамических вибростендов; на часто-
те, равной приблизительно для электромеханических вибростен-
дов, и на частоте, равной приблизительно 7/н/в , для других видов
вибростендов — нижняя и верхняя частоты номинального диа-
пазона).
353
Резонансная частота подвижной системы определяется ее ос-
новными конструктивными элементами, зависящими от принципа
действия вибростенда. Резонансная частота подвижной системы со-
ответствует первому после резонансной частоты подвескй пику уско-
рения, не менее чем в 5 раз превышающему ускорение на частоте 400
Гц для электродинамических вибростендов; на частоте, равной при-
близительно fn для электромеханических вибростендов и на частоте,
равной приблизительно «У/н/в , для других видов вибростендов.
Допускается определять резонансные частоты по АЧХ параметра
возбуждения, снятого при постоянном ускорении, равном 0,3 верх-
него предела номинального диапазона ускорения. При этом пикам
ускорения соответствуют впадины параметра возбуждения. Переме-
щение и параметр возбуждения в этом случае не должны превышать
предельно допустимых значений.
Для электродинамических вибростендов допускается определять
резонансную частоту подвески по минимальному значению тока в
подвижной катушке при постоянном значении напряжения на ее входе.
4. Номинальная вынуждающая сила вибростенда FH0M определяет-
ся произведением номинального ускорения лном на приведенную массу
подвижной системы
Люм = ^пр^ном •
Под приведенной массой подвижной системы принято понимать
массу подвижной системы вибростенда с учетом массы подвески,
обеспечивающей движение вдоль рабочей оси. Приведенную массу
подвижной системы определяют на заданной для данного вибростен-
да частоте вибрации в контрольной точке стола.
5. Номинальная нагрузка вибростенда определяется значени-
ем, при котором обеспечивается верхний предел диапазона ускоре-
ния без компенсации статического смещения подвижной системы
вибростенда с помощью внешних устройств. Масса номинальной
нагрузки
^ном - Люм !а ~ ^пр >
где а — заданное ускорение (рекомендуются ускорения 100, 200 или
400 м/с2).
6. Коэффициент гармоник виброускорения (виброскорости, вибро-
перемещения) характеризует отклонение закона изменения виброус-
корения от гармонического. Независимо от принципа действия виб-
ростенда его подвижная система представляет собой многомассовую
354
систему, конструктивные элементы которой обладают различной уп-
ругостью. Такие системы являются нелинейными, и поэтому при
возбуждении гармонических колебаний возникают не только колеба-
ния основной частоты, но и ряда гармонических составляющих. Для
оценки влияния гармоник на форму кривой ускорения проводят их
измерения с помощью ВИП, сигналы с которого подаются на изме-
ритель коэффициента гармоник или анализатор спектра.
Коэффициент гармоник в контрольной точке на заданной часто-
те вычисляется (в относительных единицах) как отношение средне-
квадратичного значения амплитуд всех гармоник, входящих в спектр
сигнала (за исключением первой), к эффективному значению амп-
литуды первой гармоники:
KT=J(al+al +... + а2п)/а1-
За коэффициент гармоник в точке крепления объекта к виброс-
толу принимают наибольшее из значений, полученных по результа-
там измерения виброускорения в трех точках крепления.
7. Коэффициент неравномерности распределения виброускорения в
точках крепления характеризует отклонение движения вибростола от
плоскопараллельного. Указанная неравномерность обусловлена нека-
чественным исполнением системы подвески, что приводит к отклоне-
нию значений ускорений в различных точках крепления относитель-
но ее значения в контрольной точке. Коэффициент неравномерности
распределения виброускорения в данном режиме работы определяет-
ся по формуле
0 = max (а, - ак )/ак,
где — ускорение в /-й точке крепления; ak — ускорение в конт-
рольной точке.
8. Коэффициент поперечных составляющих виброускорения харак-
теризует наличие ускорения в направлениях, перпендикулярных к
заданному. В связи с тем, что система подвески стола вибростенда не
обеспечивает строго однонаправленных колебаний, появляются пара-
зитные поперечные составляющие колебания и возникает необходи-
мость их оценки. Поперечные составляющие ускорения и ускорение
вдоль рабочей оси вибростенда измеряют с помощью виброметров с
трехкомпонентным преобразователем или однокомпонентными пре-
образователями, установленными в трех взаимно-перпендикулярных
направлениях.
12*
355
По результатам измерений определяют коэффициент поперечных
составляющих по формуле
где ах и ау — ускорения в двух взаимно-перпендикулярных направле-
ниях, поперечных рабочей оси вибростенда; az — ускорение вдоль
рабочей оси вибростенда.
Коэффициент поперечных составляющих следует определять в
номинальном диапазоне частот при постоянных значениях ускорения
и (или) перемещения составляющих не менее 0,3 их верхних преде-
лов. За коэффициент поперечных составляющих виброустановки при-
нимают наибольшее из значений, полученных по результатам изме-
рений виброускорений в трех точках крепления.
9. Погрешность воспроизведения значений виброускорения (виброс-
корости, виброперемещения) оценивается разностью между номиналь-
ным и действительным значениями указанных параметров, воспроиз-
водимых вибрационной установкой. При этом под номинальными
понимают значения параметров, относящиеся к номинальным диа-
пазонам, указанным в НТД, регламентирующей требования на виб-
рационные установки, а под действительными — значения парамет-
ров, найденные экспериментальным путем. Однако на практике
погрешность воспроизведения ускорения и перемещения в конт-
рольной точке оценивается пределом допускаемой погрешности, ха-
рактеризующим наибольшую погрешность средства измерений, при
которой изделие может быть признано годным и допущено к приме-
нению. Указанная погрешность определяется в номинальном диапа-
зоне частот и амплитуд.
Пределы допускаемых погрешностей воспроизведения ускорения
оценивают с доверительной вероятностью 0,9 по формуле, %:
5 = ±0,95^ + 52+52+5^
где 5Г — предел дополнительной погрешности измерения от наличия
высших гармоник, определяемый при измерении среднеквадратичес-
кого значения параметра по формуле, %:
-1 100;
Kj. к — наибольшее значение коэффициента гармоник в контрольной
точке в рассматриваемом диапазоне частот; 5П — предел дополни-
356
тельной погрешности измерения от наличия поперечных составляю-
щих, определяемый по формуле, %:
= ^П.К^О.П,
/Гп к — наибольшее значение коэффициента поперечных составляю-
щих в контрольной точке в рассматриваемом диапазоне частот при
соответствующей нагрузке, %; /Гоп — относительный коэффициент
поперечного преобразования ВИП; 8, — предел дополнительной по-
грешности измерения от изменения температуры стола вибростенда,
определяемый по формуле, %:
5, =^ДТ;
Kt — коэффициент температурной чувствительности ВИП, % /°C; 8В —
предел погрешности виброметра:
8В = 80 +8ачх;
80 — предел основной относительной погрешности виброметра; 3АЧХ
— предел неравномерности АЧХ виброметра.
10. Нестабильность ускорения и частоты виброустановки характе-
ризует отклонение ускорений и частоты от заданных в зависимости от
времени.
Определение нестабильности ускорения и частоты следует про-
водить или на частоте, равной 7/н/в , где н/ъ — нижняя и верхняя
границы номинального диапазона частот установки, или на частоте
перехода от воспроизведения перемещения к воспроизведению ско-
рости или ускорения, или на частоте 400 Гц при ускорении (переме-
щении), равном 0,7 верхнего предела номинального диапазона уско-
рения (перемещения).
По истечении времени прогрева установки следует через каждые
15-20 мин. (если иное не указано в НТД на установку) в течение
первого часа работы и далее через каждый час в течение максимально
допустимого времени непрерывной работы установки измерять уско-
рение и частоту. С помощью электронно-лучевого осциллографа, под-
ключенного к выходу виброметра или его согласующего усилителя,
наблюдают форму кривой ускорения.
Если в установке предусмотрен режим работы с автоматической
разверткой частоты и поддержанием ускорения и перемещения, то
нестабильность ускорения следует определять в данном режиме. При
этом диапазон качания частоты устанавливают равным номинально-
му диапазону частот, а ускорение и перемещение — равными 0,7
верхнего предела их номинальных диапазонов. При фиксированной
357
скорости качания частоты от 0,5 до 1,0 октавы/мин. в течение макси-
мально допустимого времени непрерывной работы установки изме-
ряют ускорение на частоте перехода или на частоте 400 Гц через про-
межутки времени, указанные выше.
Нестабильность ускорения (<ра) и частоты (<рЛ определяют по
формулам, %:
<ра = max——— • 100;
аз
Фу = тах^ 100,
/з
где at — текущее значение ускорения, м/с2; а3 — заданное значение
ускорения, м/с2; ft — текущее значение частоты, Гц; f3 — заданное
значение частоты, Гц. При этом кривая ускорения не должна иметь
дополнительных высокочастотных составляющих («дребезга») или дру-
гих видимых на экране осциллографа искажений, отсутствующих в
начале проверки.
Частоту ускорения, воспроизводимого электромеханической виб-
роустановкой, следует измерять тахометром, определяя число оборо-
тов ведущего вала вибростенда, или частотомером, используя фильтр
нижних частот или полосовой фильтр с полосой пропускания, вклю-
чающей измеряемое значение частоты.
11. Предел погрешности воспроизведения (установки) частоты
(5а Ду) определяют на фиксированных частотах в требуемом диапа-
зоне при значениях ускорения или перемещения не менее 0,3 верхних
их диапазонов по формуле, %:
8у = max ~ ~^3 • 100
Л/
или
Ду = max I ft - f3i I,
где ft — измеренное значение частоты, Гц; f3i — заданное значение
частоты, Гц.
Помимо рассмотренных параметров вибростендов в ряде случаев
представляет интерес оценка функционирования виброустановок в
условиях, когда нагрузка не симметрична рабочей оси вибростенда,
а смещена относительно нее на расстояние е, называемое эксцентри-
ситетом нагрузки. Очевидно, что при таком расположении нагрузки
коэффициент гармоник изменится, поэтому целесообразно оценить
358
его. В НТД на вибростенд должно быть указано допустимое значе-
ние Кг при наибольшем допустимом моменте М от эксцентриситета
нагрузки. Таким образом,
е = М/Р,
где Р — вес эквивалента нагрузки.
Электродинамические виброустановки основаны на преобразова-
нии электромагнитной энергии в механическую с помощью электро-
динамического вибростенда. Они широко применяются для динами-
ческих испытаний изделий авиационной и ракетно-космической
техники благодаря целому ряду таких серьезных достоинств, как: по-
лучение высоких частот колебаний (до 25 кГц) и значительной вы-
талкивающей силы (в том числе и на верхних пределах частотного
диапазона); возможность плавного регулирования колебаний в про-
цессе испытаний (без дополнительного усложнения конструкции); вы-
сокие износостойкость и надежность; возможность создания вибрато-
ров для испытаний объектов большой массы (при испытаниях объектов
малой массы на платформы устанавливают дополнительные грузы);
возможность получения как гармонических, так и случайных колеба-
ний. Основным преимуществом электродинамической виброустановки
является способность воспроизведения случайных вибраций в широ-
ком диапазоне частот.
Принцип действия электродинамического вибростенда заключа-
ется в образовании переменной вынуждающей силы Д/), возникаю-
щей при взаимодействии переменного электрического тока, проте-
кающего по проводнику, с постоянным магнитным потоком, в
котором он находится:
F(t) = В • /(/) • L,
где В — магнитная индукция; /(/) — сила переменного тока; L —
общая длина проводника.
Под действием этой силы проводник (подвижная катушка) 1 пе-
ремещается перпендикулярно направлению магнитных силовых ли-
ний 2 постоянного поля (рис. 7.2, а). Для получения большой вы-
нуждающей силы Д/) увеличивают магнитную индукцию в зазоре за
счет применения электромагнита, т. е. введения в конструкцию ка-
тушки подмагничивания 3.
Таким образом, мощные вибростенды можно создать, увеличи-
вая силу переменного тока /(/) и силу постоянного тока подмагничи-
вания Однако при этом большое переменное и постоянное магнит-
ные поля оказывают вредное влияние на испытуемое изделие.
Снижение вредного действия переменного магнитного поля может
быть достигнуто экранированием конструкции, в которой стол виб-
359
ростенда и подвижная катушка располагаются с противоположных
торцов магнитопровода (рис. 7.2, б), что позволяет устранить воз-
действие полей рассеяния на испытуемое изделие, а также создать
подвижную систему, уменьшающую поперечные колебания. Для
уменьшения вредного влияния больших постоянных магнитных по-
лей рассеяния на испытуемые изделия над магнитопроводом разме-
щают компенсационную катушку 4, по которой проходит постоян-
ный ток противоположного току подмагничивания направления.
Наиболее совершенной является конструкция вибростенда (рис.
7.2, в), в которой применены две одинаковые катушки подмагничи-
вания, выполненные так, что создаваемые ими постоянные магнит-
ные потоки равны и вне магнитопровода направлены навстречу друг
к другу, в результате чего происходит их компенсация. В то же вре-
мя в воздушном зазоре они складываются и совместно воздействуют
на подвижную катушку. При этом потеря мощности уменьшается
почти в 2 раза, а поток рассеяния в плоскости стола практически
отсутствует. Увеличение силы как переменного, так и постоянного
тока подмагничивания приводит к нагреву всей системы и, как след-
ствие, к необходимости применения воздушного или жидкостного ох-
лаждения. Получение большей вынуждающей силы за счет увеличе-
ния общей длины L проводника подвижной катушки ограничено ростом
его активного и индуктивного сопротивлений; последнее заметно про-
является при воспроизведении вибрации на высших частотах.
Одной из важнейших характеристик электродинамического виб-
ростенда является его АЧХ, неравномерность которой можно оце-
нить на основании анализа его конструкции.
Рис. 7.2. Схемы принципов построения конструкций электродинамических
вибростендов: а — с рабочим столом и подвижной катушкой, расположен-
ными с одной стороны подвижной системы; б — с рабочим столом и подвиж-
ной катушкой, расположенными в противоположных концах подвижной си-
стемы; в — с подвижной катушкой, расположенной между двумя системами
катушек подмагничивания
360
В области самых низких частот (1—3 Гц) возможен установочный
резонанс всего вибростенда, приводящий к подъему характеристи-
ки. При этом определенную роль могут играть резонансы конструк-
ций самого здания, в связи с чем необходима изоляция вибростенда
от конструкции здания. Возможны два решения указанной техничес-
кой задачи: создание фундамента глубокого заложения, изолирован-
ного от фундамента здания (для вибростендов большой грузоподъем-
ности), и применение эластичных качающихся опор.
Поскольку подвижная система вибростенда представляет собой
пространственную конструкцию, то при воздействии вибрации про-
являются ее упругие свойства, вызывающие резонансные явления,
причем значения резонансных частот могут находиться в диапазоне
1000—1500 Гц. Другой причиной резонансных колебаний являются
упругие свойства системы подвески, приводящие к резонансам в ди-
апазоне частот 50—300 Гц. С ростом частоты возрастает индуктивное
сопротивление подвижной катушки, что вызывает уменьшение уско-
рения и завал АЧХ в области высоких частот.
К недостаткам можно отнести также наличие паразитных посто-
янного и переменного магнитных полей, возможность возникнове-
ния поперечных колебаний стола вибростенда и некоторую неравно-
мерность распределения виброускорений (виброперемещений) на
вибростоле.
Несмотря на указанные выше недостатки, электродинамические
вибростенды, как указывалось выше, обеспечивают воспроизведе-
ние широкого диапазона рабочих частот вибрации, позволяют полу-
чить большую вынуждающую силу, а также воспроизводить не толь-
ко синусоидальную, но и случайную вибрации.
В целях расширения возможностей использования вибростенда
и обеспечения оптимальных условий для различных изделий в неко-
торых конструкциях предусматривают применение сменных виброс-
толов, конструкция которых различается в зависимости от рабочего
диапазона частот, ускорений, размеров и массы испытуемых изде-
лий. Вибростолы для испытаний крупногабаритных изделий в широ-
ком диапазоне частот имеют крупные и прочные монтажные поверх-
ности. Для испытаний изделий малых размеров и массы на воздействие
больших ускорений в диапазоне высоких частот используют виброс-
толы малых габаритных размеров и массы.
Итак, для обеспечения работы электродинамического вибростенда
необходимы: генератор испытательных (управляющих) сигналов,
предназначенный для генерации переменного напряжения в рабочем
диапазоне частот; усилитель мощности, обеспечивающий получение
заданной вынуждающей силы; блок питания электромагнита стаби-
лизированным постоянным током.
361
Гидравлические виброустановки основаны на использовании гид-
равлических вибростендов (вибровозбудителей), создающих колеба-
ния стола за счет управляемого потока рабочей жидкости (гидравли-
ческой жидкости, масла) с помощью золотникового устройства. В
свою очередь золотниковое устройство (называемое иногда сервокла-
паном) управляется внешним приводом, в качестве которого часто
используется электродинамический преобразователь. В гидравличес-
ких виброустановках наиболее широкое применение получили вибро-
возбудители, основанные на принципе возбуждения исполнительно-
го органа пульсирующим давлением (пульсаторные вибровозбудители),
создаваемым рабочей жидкостью.
Возможно применение вибровозбудителей одно- и двусторонне-
го (двойного) действия, различающихся тем, что в первых рабочая
жидкость совершает работу только во время прямого хода, а обрат-
ный ход осуществляется под действием упругой системы, в то время
как у вторых обратный ход также происходит под действием рабочей
жидкости. В пульсаторных возбудителях гидрораспределение чаще
достигается с помощью золотника, имеющего внешний привод.
Частота колебаний регулируется скоростью возвратно-поступа-
тельного движения гидрораспределителя (золотника), а амплитуда за-
висит от изменения давления рабочей жидкости.
В гидравлической виброустановке на рис. 7.3 в качестве внеш-
него привода используется электродинамический преобразователь
Рис. 7.3. Схема гидравлической виброустановки
362
(ЭДП) 3, содержащий катушку постоянного намагничивания, запи-
тываемую от источника 14, и катушку переменного магнитного поля.
Последнее создается электрическим входным сигналом от задающего
генератора 1, который совместно с сигналами обратных связей от
индуктивных преобразователей перемещений 10 подводится к усили-
телю мощности 2, обеспечивающему получение мощности электри-
ческого сигнала, достаточной для работы ЭДП, создающего механи-
ческую силу, под действием которой перемещается управляющий
золотник сервоклапана 5. При этом сервоклапан обеспечивает по-
очередную подачу рабочей жидкости под определенным давлением к
гидравлическому усилителю мощности 6. В зависимости от положе-
ния управляющего золотника сервоклапана напорная рабочая жид-
кость из магистрали 13 под давлением, образуемым гидравлическим
aiperaroM (насосом), поступает по присоединительным каналам (А
или Б) к гидравлическому усилителю мощности.
Одновременно рабочая жидкость, находившаяся в системе, от-
качивается по возвратным каналам в сливную магистраль 12 и обрат-
но в бак. Под давлением рабочей жидкости, поступающей по кана-
лам А' или Б', перемещается шток с поршнями гидравлического
усилителя мощности. При этом открывается один из возвратных ка-
налов, увеличивается разность давлений между напорной и возврат-
ной (сливной) рабочей жидкостями, что обеспечивает подачу напор-
ной жидкости, нагнетаемой гидравлическим агрегатом, по каналам
А' или Б' к исполнительному механизму (ИМ) 7. Для улучшения
динамических свойств сервоклапан и гидроусилитель мощности ос-
нащены успокоителями 4 и 11 соответственно.
Исполнительный механизм представляет собой гидравлический
усилитель двустороннего действия, преобразующий энергию входно-
го сигнала сервоклапана в механическую энергию стола вибростен-
да. Скорость поршня ИМ пропорциональна выходному потоку рабо-
чей жидкости сервоклапана, а усилие на выходе пропорционально
разности давлений масла в каналах А' и Б'.
Анализ работы системы показывает, что поскольку рабочая жид-
кость обладает сжимаемостью и создает определенную упругость сис-
темы, то в результате взаимодействия с массами поршня и вибросто-
ла возникает возможность появления резонансных колебаний
(масляный резонанс). Однако наличие у большинства подобных сис-
тем сильного демпфирования обеспечивает относительную равномер-
ность АЧХ до частот 100-1000 Гц.
С целью уменьшения неравномерности АЧХ вводится обратная
связь для управления ИМ. В качестве источников сигналов исполь-
зуются индуктивные вибропреобразователи 10.
363
Рассмотренную систему иногда называют трехкаскадным сервок-
лапаном. Виброустановкой управляет ЭДП, который определяет ча-
стоту вибрации и амплитуду перемещения, меняющуюся за счет из-
менения давления гидравлической жидкости. Для нормальной работы
гидравлической виброустановки необходимо, чтобы вся система была
рассчитана на определенный максимальный расход масла, а ЭДП и
ИМ обеспечивали определенное значение максимального переме-
щения.
Гидравлические виброустановки позволяют генерировать колеба-
ния, форма которых описывается различными функциями времени,
соответствующими нагрузке, встречающейся в реальных условиях.
Для уменьшения поперечных колебаний поршневого ИМ, его изна-
шивания и неравномерности движения используют так называемую
гидростатическую опору 8. Подача гидравлического масла к после-
дней осуществляется по каналам 9.
К достоинствам гидравлических вибростендов относятся: возмож-
ность получения большой вынуждающей силы (до десятков тонн) и
широкого диапазона амплитуд перемещений (от долей миллиметров
до десятков сантиметров), малые паразитные электромагнитные из-
лучения. Недостатками являются: ограниченный диапазон воспроиз-
водимых частот виброускорений в области высоких частот (до 1000—
1500 Гц), обусловленный сжимаемостью масла и возможностями
сервоклапана; большие по сравнению с электродинамическими виб-
роустановками нелинейные искажения; худшие энергетические пока-
затели и невозможность применения в режиме случайной вибрации.
Одним из путей получения горизонтальной вибрации является ис-
пользование электродинамических и гидравлических вибростендов, у
которых вибростолы при приложении к ним возбуждающей силы сколь-
зят по специальным направляющим — полированным и смазанным
маслом поверхностям. В качестве таких поверхностей могут исполь-
зоваться полированные гранитные плиты. В вибростендах с изменя-
емым положением стола, предназначенных для работы в вертикаль-
ном и горизонтальном положениях, особо жесткие требования
предъявляются к конструкции системы подвески.
Для приближения к реальным условиям эксплуатации целесооб-
разно обеспечить широкополосную случайную вибрацию (ШСВ), позво-
ляющую лучше моделировать статистический характер вибрации, воз-
буждать одновременно все механические резонансы испытуемого
изделия и выявлять их взаимные влияния в более короткий срок по
сравнению с испытаниями на воздействие синусоидальной вибрации.
Наиболее приемлемым для возбуждения ШСВ является электро-
динамический вибростенд. Однако, как отмечалось выше, АЧХ виб-
ростенда неравномерна и может изменяться с изменением нагрузки.
364
В связи с этим оборудование для испытаний на ШСВ должно иметь
систему управления, обеспечивающую формирование заданного
спектра. При этом возможно применение как разомкнутых, так и
замкнутых систем. Разомкнутые системы предусматривают ручное
формирование заданного спектра. Однако эти системы требуют пред-
варительного снятия АЧХ вибростенда для ее последующего вырав-
нивания за счет специальной настройки узкополосных фильтров, де-
лящих спектр на ряд параллельных частотных каналов.
Лучшие результаты дают замкнутые системы. Находят примене-
ние аналоговые, гибридные и цифровые системы управления ШСВ.
Аналоговая замкнутая система управления автоматически вырав-
нивает частотную характеристику при возбуждении широкополосно-
го спектра. В данной системе спектр генератора шума также разде-
ляется узкополосными фильтрами на ряд параллельных частотных
каналов и в каждом из них осуществляется автоматическая регули-
ровка усиления.
Определенную сложность в создании автоматизированной систе-
мы ШСВ представляет реализация большого числа полосовых задаю-
щих и анализирующих фильтров, способных выделять узкие полосы
низкочастотного шумового спектра. Возможны два способа построе-
ния систем фильтров: с непосредственной фильтрацией и фильтра-
цией с переносом частоты в высокочастотную область (гетеродинный
метод).
Достоинством непосредственной фильтрации является возмож-
ность использования активных RC-фильтров, обеспечивающих рав-
номерную разрешающую способность управления и анализа за счет
неравномерного распределения полос пропускания по частоте. Не-
достатками непосредственной фильтрации являются трудность обес-
печения стабильности системы и малое значение коэффициентов пря-
моугольное™ АЧХ фильтров.
При фильтрации с переносом частоты в высокочастотную область
генератор шума генерирует шумы в области частот 100—102 кГц.
Высокочастотный сигнал фильтруется гребенкой узкополосных вы-
сокодобротных пассивных кварцевых, магнитострикционных, LC- и
других фильтров с одинаковой полосой пропускания и несколько
пересекающимися АЧХ соседних каналов. Наличие взаимной корре-
ляции между каналами является недостатком, поскольку приводит к
искажению генерируемого спектра шумов.
Подобный генератор ШСВ (рис. 7.4) с переносом частоты в
высокочастотную область состоит из генератора шума 1, работающе-
го в диапазоне низких частот (например, 20—2000 Гц), и генератора 7
высокой частоты (гетеродина), работающего на частоте 100 кГц. Про-
модулированный в модуляторе 2 напряжением шума с равномерной
365
спектральной плотностью сигнал высокой частоты подводится к фор-
мирующим магнитострикционным фильтрам 3 с постоянной полосой
пропускания порядка 25 Гц. Выбор числа фильтров определяет каче-
ство воспроизведения спектра. Выравнивание энергетического спек-
тра достигается усилителями 4 с регулируемым коэффициентом уси-
ления, число которых соответствует числу фильтров. Сумматор 5
формирует сигнал, который в демодуляторе 6 переносится в низко-
частотную область. Полученный сигнал поступает на усилитель мощ-
ности, обеспечивающий работу вибростенда.
К усилителю
мощности вибростенда
Рис. 7.4. Структурная схема генератора с переносом частоты
Для уменьшения взаимной корреляции между каналами исполь-
зуют схемы с двумя генераторами шума, причем фильтры одного ге-
нератора являются нечетными, а другого — четными.
Гибридные цифроаналоговые виброустановки отличаются от анало-
говых наличием в системе управления спектром случайной вибрации
(АСУ ССВ) цифровой ЭВМ, предназначенной для автоматической
коррекции аналоговой системы управления для получения заданно-
го спектра случайной вибрации. Включенная в систему ЭВМ опра-
шивает данные о реализованных значениях спектральной плотности
ускорения (СПУ) на выходе анализирующих фильтров и изменяет
коэффициенты передачи отдельных каналов в соответствии с опреде-
ленными алгоритмами, обеспечивая, например, минимальные зна-
чения погрешностей в полосе частот.
366
Генератор шума 1 (рис. 7.5) генерирует белый шум, и в блоке
формирования 2 формируется спектр. Анализатор спектра 7 состоит
из набора анализирующих фильтров. Среднеквадратические значе-
ния (или дисперсии при квадратичном детектировании) контролиру-
емых параметров вибрации с анализирующих фильтров подводятся к
аналого-цифровому преобразователю 9, с выхода которого они вво-
дятся в ЭВМ 12. Одновременно в ЭВМ вводится заданное значение
спектра 14. Рассчитанные в ЭВМ значения коэффициентов усиления
заносятся в специальные регистры и используются для цифрового
управления усилителями. Будучи преобразованными с помощью циф-
роаналогового преобразователя 8 в аналоговую форму, они использу-
ются для управления значениями параметров вибрации, полученны-
ми в блоке формирования спектра 2.
Рис. 7.5. Структурная схема гибридной
цифроаналоговой виброустановки
Гибридная система позволяет улучшить перераспределение энер-
гии между каналами системы, формирующими спектр, и прибли-
зить его к заданному. Приближение анализируемого спектра к бело-
му шуму достигается за счет многократного повторения образования
новой функции управления, а также введения в алгоритм коэффици-
ентов, учитывающих «веса» каналов. При этом спектр сигнала, ис-
пользуемый для механического возбуждения испытуемого изделия,
оказывается более обогащенным спектральными составляющими.
В виброустановках с цифровой системой управления задача полу-
чения заданного спектра и обработки информации решается с помо-
щью единой алгоритмической базы, что экономит память ЭВМ и
увеличивает быстродействие. Цифровой метод воспроизведения ШСВ
с заданной спектральной плотностью ускорения складывается из гене-
рирования случайного процесса, отождествления (идентификации) мо-
дуля передаточной функции изделия | Я(/) |2= СПУв(/)/сПУ0(/),
используемой в процессе управления, и расчета СПУ скорректиро-
ванного процесса преобразования аналоговых процессов в цифровые
данные и наоборот.
Наибольшее применение находят два варианта генерирования.
В первом генерируемая последовательность ограничена емкостью
памяти ЭВМ, поэтому при воспроизведении прибегают к ее цикли-
ческому повторению с периодом, равным длине синтезированного
отрезка. Получаемый при этом псевдослучайный процесс имеет ли-
нейчатый спектр. Во втором варианте генерируются два-три процес-
са с разными фазовыми спектрами, которые затем «сшиваются» вое-
дино (рис. 7.6).
x{(t) Время генерации
*£)
“Г* у/
t
’’Сшитый процесс"
Рис. 7.6. Устранение периодичности
в генерируемом случайном процессе
Задачей осуществляемого далее спектрального анализа является
осреднение ординат выборочных спектров по некоторым полосам ча-
стот и использование их для управления. Скорректированный по за-
368
данной спектральной плотности белого шума процесс воспроизво-
дится на вибростенде с изделием, и вновь проводится оценка спект-
ральной плотности. Таким образом, путем указанной итерационной
(неоднократно повторяющейся) процедуры осуществляется настрой-
ка спектра случайной вибрации с заданной точностью.
Итак, заданный алгоритм генерирования спектра случайной виб-
рации 1 воспроизводится с помощью ЭВМ, и полученный код пре-
образуется в цифроаналоговом преобразователе 2 в непрерывное из-
менение напряжения, которое подводится к усилителю мощности 3,
а затем к вибростенду 4, возбуждающему колебания испытуемого
изделия 5 (рис. 7.7).
Рис. 7.7. Структурная схема цифровой системы
Сигналы с контрольного ВИП 6 преобразуются аналого-цифро-
вым преобразователем 7 в коды ЭВМ 10 и поступают в ее память или
на промежуточный накопитель. Реализация выходного случайного
процесса, представляющая собой массив чисел, подвергается в ЭВМ
спектральному анализу. В соответствии с алгоритмом спектрального
анализа 8 проводятся вычисления, позволяющие оценить получае-
мый спектр. По заданному алгоритму управления 9 определяется рас-
согласование между фактическим и заданным спектрами и рассчиты-
ваются корректирующие воздействия на алгоритм генерирования
случайного процесса, приводящие к изменению спектральных харак-
теристик. Циклы расчетов повторяются до тех пор, пока вычислен-
ные оценки спектров не совпадут с заданными. Полученный в ре-
зультате алгоритм генерирования случайного процесса преобразуется
в цифроаналоговом преобразователе 2 в аналоговый сигнал, кото-
рый после усиления в усилителе мощности 3 подводится к вибро-
стенду 4.
369
Создание цифровых систем управления требует разработки алго-
ритмов генерирования случайного процесса с управляемыми спект-
ральными характеристиками и спектрального анализа.
В последнее время для синтеза и анализа случайных процессов
находят применение методы цифровой фильтрации, основанные на
алгоритмах прямого и обратного быстрого преобразования Фурье (БПФ
и ОБПФ), использующие спецпроцессоры, которые обеспечивают
управление в реальном масштабе времени.
Основными недостатками систем ШСВ являются их высокая тех-
ническая сложность и стоимость. Поэтому было предложено при ис-
пытаниях использовать системы узкополосной случайной вибрации
(УСВ). Для осуществления испытаний, эквивалентных ШСВ, про-
водят качание (развертывание) полосы частот Д/в пределах заданного
диапазона. Ширина полосы УСВ ДСдолжна быть меньше эквивален-
тной ширины полосы частот резонирующих элементов конструкции.
Желательно использовать ширину полосы ДС= 3 Гц.
7.1.2. Анализ методов и видов виброиспытаний изделий
При испытаниях на воздействие вибрации наибольшее распростране-
ние получили методы фиксированных частот и качающейся частоты
при воздействии гармонической (синусоидальной) вибрации и мето-
ды широкополосной и узкополосной случайной вибрации. Иногда в
лабораторных условиях проводят испытания на воздействие смешан-
ной (гармонической и случайной) вибрации. Все методы испытаний
характеризуются определенными значениями параметров, зависящими
от степени жесткости испытаний.
Метод испытаний на фиксированных частотах вибрации. Метод
позволяет выявить резонансы изделия, механические дефекты и ухуд-
шение заданных характеристик на стадии разработки и выпуска изде-
лия. Суть его заключается в последовательном воздействии гармони-
ческой вибрации определенной частоты и амплитуды на испытуемое
изделие в требуемом диапазоне частот. Испытания могут осуществ-
ляться на одной частоте, на заранее определенной частоте механи-
ческого резонанса или на ряде заданных частот.
Испытания на одной фиксированной частоте f (z) в течение задан-
ного времени t с определенной амплитудой ускорения (перемеще-
ния) малоэффективны. Действительно, вероятность того, что изде-
лие в процессе эксплуатации или транспортирования подвергается
воздействию вибрации на одной частоте, весьма мала. Возможность
случайного совпадения fi с собственной резонансной частотой из-
делия или какого-либо его конструктивного элемента также незначи-
370
тельна. Данный вид воздействия вибрации иногда применяется в тех-
нологическом процессе производства для выявления некачественных
паяных и резьбовых соединений, а также других дефектов.
Испытания на заранее определенной частоте механического резонан-
са испытуемых изделий требуют предварительного выявления указан-
ной частоты, что для сложных многоэлементных конструкций пред-
ставляет некоторую сложность. Испытуемое изделие последовательно
подвергают воздействию вибрации на частотах резонанса, выдержи-
вая его в каждом режиме в течение некоторого времени. Достоин-
ством указанного метода испытаний является то, что он проводится
на наиболее опасных для испытуемого изделия частотах вибрации. К
недостаткам можно отнести сложность автоматизации процесса испы-
таний, поскольку при их проведении резонансные частоты могут не-
сколько изменяться.
Испытания на ряде заданных частот в рабочем диапазоне прово-
дятся при необходимости снятия характеристик изделия по точкам
для определения их виброустойчивости. Теоретически интервал между
двумя соседними фиксированными частотами и fk выбирается не
больше ширины резонансной характеристики конструктивного эле-
мента (в предположении возникновения резонанса) на основе извес-
тной добротности Q:
А+1 ~ fk — fk - fk/Q •
На практике весь рабочий диапазон частот разбивают на ряд под-
диа пазонов и для каждого из них в зависимости от степени жесткости
устанавливают амплитуды перемещения или ускорения. Рекоменду-
ется выбирать частоты из следующего ряда: 10; 12,5; 16; 20; 25; 31,5;
40; 50; 63; 80; 100; 125; 160; 200 Гц. При испытаниях, как правило,
указанные частоты изменяют в пределах третьоктавных диапазонов.
В каждом третьоктавном диапазоне частот поддерживают постоян-
ной амплитуду перемещения (5^), определяемую по формуле
Sm=25Qam/f2,
где ат — амплитуда ускорения, g',f— средняя частота третьоктавно-
го диапазона, Гц.
Особое внимание при этом следует обращать на резонансные ча-
стоты, при которых амплитуда колебаний испытуемого изделия (или
отдельных его элементов) будет в 2 раза и более превышать амплиту-
ду колебаний точек крепления. В случае обнаружения резонансных
частот или частот, на которых наблюдается ухудшение контролируе-
мых параметров, рекомендуется дополнительная выдержка изделия в
условиях вибрации на данной частоте для уточнения и выявления при-
371
чин нарушения. Продолжительность выдержки в обоих указанных слу-
чаях устанавливается в соответствии с требованиями программы ис-
пытаний (ПИ) и технических условий. При испытаниях на виброус-
тойчивость выдержка должна быть не менее 5 мин., а при испытании
на вибропрочность — от 1 до 10 ч при длительном воздействии и от
20 до 50 мин. при кратковременном. Погрешность установки частот
не должна превышать +0,5%. Если за время испытаний не было об-
наружено никаких нарушений и все параметры соответствовали тре-
бованиям ПИ и ТУ, изделие признается выдержавшим испытания.
Метод фиксированных частот имеет следующие недостатки: слож-
ность контроля перемещения, скорости, ускорения и частоты вибра-
ции и регулирования этих параметров вручную из-за значительной
неравномерности АЧХ тракта испытательного комплекса при испы-
таниях в широком диапазоне частот; неспособность выявления пара-
метрических резонансов; возможность пропуска резонанса отдельных
элементов; последовательное возбуждение резонансов в изделии (а
не одновременное, как это происходит в реальных условиях). Тем не
менее этот метод до настоящего времени широко используют при
заводских испытаниях серийно выпускаемых изделий, так как он по-
зволяет применять простейшее оборудование и отработанные про-
граммы испытаний для изделий каждого типа.
Метод испытания качающейся частотой вибрации. При реали-
зации данного метода частоту вибрации плавно изменяют (разверты-
вают — сканируют) в заданном диапазоне от нижней до верхней ча-
стоты и обратно при постоянстве заданных параметров вибрации в
течение определенного времени.
В программе испытаний на вибропрочность методом качающей-
ся частоты необходимо указывать диапазон частот амплитуду ус-
корения время прохождения диапазона частот /д и продолжи-
тельность испытания tw Согласно рекомендациям МЭК, скорость
качания частоты должна быть приблизительно равна одной октаве в
минуту.
Доказано, что получаемая в режиме качающейся частоты резо-
нансная кривая, называемая динамической, отличается от статичес-
кой резонансной кривой (рис. 7.8), снятой методом фиксированных
частот. Во-первых, максимальная амплитуда колебаний при резо-
нансе в динамическом режиме меньше, чем в статическом (стацио-
нарном) режиме. Во-вторых, максимум динамической характерис-
тики наблюдается позднее, чем статической, т. е. он смещается по
шкале частоты в сторону качания (смещение максимума 5). В-треть-
их, амплитуды колебаний при подходе к резонансу плавно нараста-
ют, а при удалении от него скоротечно убывают. Это объясняется
372
Рис. 7.8. Статическая С и динамическая Сд
резонансные кривые
биениями, возникающими между свободными колебаниями изделия
и вынужденными колебаниями, создаваемыми вибростендами. В ре-
зультате динамическая резонансная кривая получается асимметрич-
ной — левый скат оказывается более пологим. В-четвертых, полоса
пропускания при динамической резонансной кривой оказывается
шире, чем при статической, на величину $2 - 5j, при том тем боль-
ше, чем быстрее изменяется частота. Причинами указанных отличий
являются нелинейность испытуемых изделий и наличие переходных
процессов, происходящих в них.
Важным показателем рассматриваемого метода является скорость
качания частоты. При выборе большой скорости качания динами-
ческая резонансная кривая в большей степени отличается от стати-
ческой, а, следовательно, оценка свойств испытуемого изделия бу-
дет проводиться с большими погрешностями. Амплитуда резонансных
колебаний изделия достигает меньших значений, чем при малой ско-
рости, а также возможны пропуски (необнаружение) резонансов,
возникающих в изделии. При выборе малой скорости качания дли-
тельное прохождение диапазона рабочих частот может вызвать по-
вреждение испытуемого изделия на частотах резонанса и увеличение
длительности испытаний.
При оценке резонансных свойств испытуемых изделий представ-
ляет интерес определение частот резонансов и добротности резони-
рующих элементов конструкций или изделий. Очевидно, что указан-
ные параметры будут определяться с наименьшими погрешностями
при минимальных смещении S и изменении ширины полосы пропус-
кания 62 " *51 •
373
Из условия сохранения постоянного сдвига максимума резонанса
S в зависимости от собственной частоты со0 и добротности Q скорость
качания частоты
vktS = const = Sg£/(2Q2).
Выражение для vk s _s в зависимости от собственной частоты
со0 и добротности Q при заданном значении изменения ширины по-
лосы пропускания - 51 имеет вид
Vk,s2-Sl = const = °-23 ^2^ Юо •
Полученное для vk выражение справедливо при условии измене-
ния частоты синусоидальной вибрации по линейному закону, т.е.
при vk = const.
Из анализа приведенных выражений, а также исходя из того,
что диапазон высоких частот вибрации (1000—5000 Гц) значительно
шире диапазона низких частот вибрации (20—1000 Гц), следует, что
при качании частоты с постоянной скоростью в пределах рабочего
диапазона область низких частот будет проходить за меньшее время,
чем высокочастотная область. В результате обнаружение резонансов
на низких частотах будет затруднено. Поэтому желательно, чтобы
изменение частоты в пределах диапазона рабочих частот осуществля-
лось не по линейному, а по экспоненциальному и логарифмическому
законам, обеспечивающим увеличение скорости качания с ростом
частоты.
При реализации экспоненциального закона изменения частоты
вибрации
f = н™ f = /н • 2^° ’
где f — частота вибрации в момент времени /, Гц;^ — нижняя часто-
та рабочего диапазона, Гц; к — показатель, характеризующий ско-
рость качания; — время прохождения диапазона частот, равного
одной октаве.
Полагая vk = 1 окг./мин., получим к = ±1п2. В этом случае вре-
мя одного цикла качания частоты может быть определено по форму-
ле, с:
374
120 . /в г
ц=т-^----In^y- или 7L=1731n —
1п2 vk Jh ц f
В соответствии с рекомендацией МЭК (Публикация 68-2В), ка-
чание частоты должно осуществляться по логарифмическому закону,
причем рекомендуемая скорость vk = 1 окт./мин. Время цикла кача-
ния Тц должно определяться в зависимости от заданной степени же-
сткости испытаний, а также по специальному графику (рис. 7.9),
позволяющему найти время изменения частоты в диапазоне.
Рис. 7.9. Зависимость времени
цикла качания от частоты
При линейном законе изменения частоты время одного цикла
качания частоты Тц =2F/vk , где F — диапазон рабочих частот виб-
рации: F = /в “ /н •
Проведение испытаний методом качающейся частоты может быть
реализовано в двух вариантах: все элементы конструкции испытуемо-
го изделия нагружают в течение одинаковых интервалов времени; число
циклов качания (т.е. изменений механической нагрузки) для всех
элементов одинаково. Если исходить из теории накопления механи-
ческих напряжений в конструктивных элементах изделий (деталях),
то при проведении испытания по второму варианту следует полагать,
что все детали испытывают постоянное число циклов изменений на-
грузки для любой резонансной частоты. Это означает, что в пределах
ширины полосы различных резонансных частот необходимо иметь раз-
375
личную скорость качания частоты. Однако технически проще прово-
дить испытания по первому варианту, когда длительность механичес-
ких воздействий на все элементы конструкции в рабочем диапазоне
частот одинакова.
Стабилизация параметров вибрации (a, s) в процессе качания
частоты осуществляется таким образом, чтобы при увеличении амп-
литуды колебаний, фиксируемой контрольным вибропреобразовате-
лем, автоматически уменьшалась мощность, подводимая к вибро-
стенду, до установления исходного уровня. Очевидно, что время
регулировки должно зависеть от добротности резонирующих механи-
ческих систем, определяющих скорость нарастания резонанса, а так-
же от скорости развертки частоты. Поскольку скорость регулировки
зависит от частоты вибрации, то она должна быть переменной. Не-
обходимое изменение скорости регулирования обеспечивается испы-
тательным генератором.
Наличие нелинейных механических элементов в конструкциях
испытуемых изделий приводит к тому, что хотя данное изделие воз-
буждают чисто синусоидальной вибрацией, колебания возникают на
частотах гармоник и, следовательно, сигнал управления, используе-
мый для регулирования уровня вибраций, будет содержать гармони-
ки, приводящие к ослаблению колебаний на основной частоте. В
связи с этим в цепь обратной связи системы управления иногда вклю-
чают так называемый сопровождающий фильтр, обеспечивающий
подведение к схеме обратной связи сигнала на основной частоте,
возбуждаемой вибростендом (рис. 7.10). При этом достигается синх-
ронная фильтрация сигнала управления, исключающая попадание на
генератор напряжения частот вибрации помех и высших гармоник.
Сопровождающий фильтр является узкополосным, средняя час-
тота полосы пропускания его автоматически сопровождает основную
Рис. 7.10. Структурная схема испытаний методом качающейся частоты с
сопровождающим фильтром: 1 — контрольный ВИП; 2 — согласующее уст-
ройство; 3 — сопровождающий фильтр; 4 — управляемый генератор; 5 —
усилитель мощности; 6 — вибростенд
376
частоту или одну из гармоник периодического сигнала. Средняя час-
тота полосы пропускания, на которую настраивается фильтр, может
находиться в диапазоне 2-2- 103 Гц. Эффективная фиксированная
относительная ширина полосы пропускания фильтра определяется в
процентах частоты настройки во всем рабочем частотном диапазоне.
Для реализации разных испытательных программ в цепь обратной связи
испытательного генератора может быть включено программное уст-
ройство.
Достоинство метода качающейся частоты — возможность опреде-
ления собственных частот и амплитуд перемещения или ускорения
при механических резонансах испытуемых изделий в рабочем диапа-
зоне частот, знание которых позволяет принять необходимые меры
для повышения надежности изделия.
Испытания на виброустойчивость рекомендуется проводить ме-
тодом фиксированных частот, а испытания на вибропрочность — ме-
тодами фиксированной или качающейся частоты. Основным недо-
статком указанных методов является то, что в каждый конкретный
момент времени на изделие воздействуют одночастотные синусои-
дальные колебания, а не спектр частот, как это происходит в реаль-
ных условиях эксплуатации.
Метод испытаний на полигармоническую вибрацию. Суть метода
заключается в одновременном воздействии на изделие нескольких
гармонических вибраций с различными фазами. При этом предус-
матривается воспроизведение полигармонических вибрационных воз-
действий, наиболее часто встречающихся в условиях эксплуатации
изделий.
Метод основан на том, что любой периодический полигармони-
ческий процесс можно представить рядом Фурье. Такой процесс мож-
но воспроизвести, задаваясь значениями амплитуд, частот и фазовых
сдвигов синусоидальных составляющих. Метод достаточно прост и
отличается от метода испытаний на синусоидальную вибрацию в ос-
новном числом задающих генераторов синусоидальных сигналов и не-
обходимостью регулировки фазовых сдвигов между этими сигнала-
ми. Испытания этим методом являются переходным этапом между
испытаниями на синусоидальную и случайную вибрации. Однако во
многих случаях (турбомашины, насосы, генераторы и т.д.) реальная
вибрация имеет детерминированный периодический характер. По-
этому испытания проводят методом полигармонической вибрации.
Метод испытания на широкополосную случайную вибрацию. Как
указывалось выше, реальные вибрации в большинстве случаев явля-
ются случайными. Спектры реальной вибрации непрерывны, мгно-
венные значения амплитуд спектральных составляющих могут быть
описаны только статистическим путем. Поэтому с целью приближе-
377
ния условий виброиспытаний к реальным условиям эксплуатации
изделий в последнее время резко повысился интерес к разработке
испытательной техники, позволяющей воспроизводить случайные
вибрации.
Современный уровень развития теории и техники виброиспыта-
ний характеризуется описанием реальных вибропроцессов в рамках
корреляционной теории. Такой подход отражает типичное состояние
многих областей техники, в которых намечается отказ от детермини-
рованных моделей, а реальные случайные процессы принимаются
нормальными. Поэтому широкополосные случайные процессы с за-
данным энергетическим спектром получили широкое распростране-
ние в качестве физических моделей реальных вибропроцессов. Опи-
сание моделей реальных вибропроцессов в рамках корреляционной
теории позволяет характеризовать эквивалентность воспроизводимых
и реальных вибраций степенью близости их энергетических спектров.
При этом тракт воспроизведения вибрации виброиспытательного ком-
плекса должен обеспечивать воспроизведение в контролируемой точ-
ке или в совокупности контролируемых точек исследуемого объекта
механических колебаний с требуемым энергетическим спектром.
Таким образом, испытания на воздействия широкополосной слу-
чайной вибрации позволяют лучше, чем при синусоидальной вибра-
ции, моделировать статистический характер воздействия и выявлять
механизмы разрушения и повреждения различных изделий. Кроме
того, одновременное возбуждение механических резонансов отдель-
ных элементов изделия позволяет учитывать их взаимное влияние и
сокращать срок испытания, приближая их к условиям реальной экс-
плуатации.
Основной целью испытаний является определение способности
изделий выдерживать воздействие случайной вибрации заданной сте-
пени жесткости, выявлять возможные механические повреждения и
(или) ухудшение заданных характеристик изделий, использовать по-
лученные сведения для решения вопроса о годности изделий. Осо-
бенностью указанных испытаний является необходимость тщатель-
ной подготовки к их проведению и установления соответствия значений
параметров испытуемого изделия заданным требованиям в связи с
более сложным механизмом его реакции.
При испытаниях на воздействие широкополосной случайной виб-
рации задают спектральную плотность ускорения и спектр, опреде-
ляющий закон изменения спектральной плотности ускорения (СПУ)
в пределах частотного диапазона. Числовые значения указанных па-
раметров могут устанавливаться по результатам эксплуатационных ис-
пытаний. Известно, что для всех методов испытаний требуется опре-
378
деленная степень воспроизводимости, под которой понимают полу-
чение аналогичных результатов испытаний, проводимых в различных
лабораториях различными испытателями.
МЭК рекомендует пользоваться тремя воспроизводимостями (вы-
сокой, средней и низкой), характеризуемыми различными допуска-
ми на истинное значение СПУ в основном направлении в измери-
тельных точках, не являющихся контрольными, и в поперечном
направлении в одной или нескольких выбранных точках при конкрет-
ном уровне жесткости и обеспечении достоверности испытаний. Каж-
дой воспроизводимости должен соответствовать конкретный метод под-
тверждения (метод контроля) полученных результатов. Требование
обеспечения воспроизводимости предусматривает контроль за уров-
нем вибрации в пределах узкой полосы частот, так как выравнивание
СПУ в узкой полосе дает лучшую воспроизводимость, чем в широ-
кой полосе. В этом случае в меньшей мере учитывается влияние
окружающей среды на испытуемые изделия, что практически имеет
место в реальных условиях эксплуатации.
Выбор воспроизводимости и метода подтверждения существенно
зависит от технических возможностей испытательного оборудования
и измерительных приборов, которые обеспечивают приблизительно
эквивалентные результаты для ряда измерений. Зависимость воспро-
изводимости от технического уровня оснащенности различных испы-
тательных лабораторий приводит к необходимости оговаривать при
составлении ТУ на изделие наряду с параметрами испытательных ре-
жимов и меру воспроизводимости.
Проведение испытаний на широкополосную случайную вибра-
цию предполагает предварительное снятие АЧХ и определение соб-
ственных частот механического резонанса изделий при воздействии
синусоидальной вибрации. При снятии АЧХ амплитуда синусоидаль-
ного возбуждения берется в зависимости от заданной степени жест-
кости испытания на случайную вибрацию (табл. 7.1).
Метод испытания на воздействие широкополосной случайной
вибрации предусматривает одновременное возбуждение всех резонан-
сных частот объекта. Правильное воспроизведение вибрации связано
с трудностями, обусловленными искажающим влиянием средства
возбуждения вибрации. Поэтому перед проведением испытаний из-
делия необходимо скорректировать или выравнять АЧХ вибростенда.
При испытаниях в контрольных точках изделия возбуждаются стацио-
нарные случайные вибрации. Их числовые характеристики должны
быть близки к заданным, которые определяют по результатам натур-
ных испытаний.
Испытания на обнаружение резонансных частот проводят до и
после испытаний на воздействия случайной вибрации для выявления
379
Таблица 7.1
Зависимость амплитуды синусоидального возбуждения
от заданной степени жесткости на случайную вибрацию
Степень жесткости Требуемый уровень СПУ Амплитуда синусоидальной вибрации (пиковые значения)
(мс 2)/Гц £/Гц мс-2 g
I < 4,8 < 0,05 9,8 1,0
II 4,8-19,2 0,05-0,2 14,7 1,5
III > 19,2 >0,2 19,6 2,0
вызванных ими остаточных явлений, приводящих к изменению резо-
нансных частот конструкции изделия.
До и после испытаний на воздействие случайной вибрации про-
водят первоначальные и заключительные измерения параметров ис-
пытуемых изделий и проверку их механических свойств. Выдержка
изделия под воздействием случайной вибрации может проводиться в
условиях нахождения изделия в рабочем положении или поочередно
в трех взаимно-перпендикулярных положениях, или в положении,
при котором выявляются все основные дефекты изделия. В зависи-
мости от вида испытаний и предъявляемых требований во время вы-
держки могут проводиться измерения электрических параметров из-
делий.
Метод испытания на широкополосную случайную вибрацию по-
зволяет воспроизвести те числовые вибрационные характеристики
условий эксплуатации, которые влияют на надежность испытуемого
изделия. За критерий подобия принята спектральная плотность виб-
рационных ускорений, так как вероятность выхода изделия из строя
или нарушение его режима работы возрастают с повышением уровня
спектральной плотности вибрации.
В процессе испытаний методом широкополосной случайной виб-
рации распределение СПУ по спектру может не соответствовать ре-
альной вибрации, поэтому оно задается в программе испытаний. На-
стройка выполняется по уровню ускорения или СПУ для заданной
полосы частот.
Программу испытаний задают в виде графика, по оси ординат
которого откладывают значения спектральной плотности, а по оси
абсцисс полосы частот, в которых проводят эти измерения. Данная
программа воспроизводится вибростендом в контрольной точке изде-
лия с помощью формирователей энергетического спектра, которые в
380
общем случае представляют собой источник широкополосного слу-
чайного сигнала или белого шума и набор регулируемых полосовых
фильтров.
К достоинствам испытаний на широкополосную случайную виб-
рацию можно отнести: близость к механическим воздействиям при
реальной эксплуатации; моделирование статистического характера
вибрации; возможность выявления всех эффектов механического вза-
имодействия различных элементов конструкции; наименьшую про-
должительность испытаний. К недостаткам относятся: высокая сто-
имость и сложность используемого оборудования, трудоемкость
проведения испытаний.
Метод испытания на узкополосную случайную вибрацию. Для за-
мены дорогостоящих испытаний в режиме широкополосной случай-
ной вибрации предлагались различные методы испытаний с изменя-
ющимся синусоидальным сигналом. Однако все они не позволяют
воспроизводить такое же распределение амплитуд ускорения для ис-
пытуемого объекта, как при режиме широкополосной вибрации, по-
этому не были ему эквивалентны. Режим меняющейся узкополосной
случайной вибрации является промежуточным между режимом ши-
рокополосной случайной вибрации и режимом с изменяющимся си-
нусоидальным сигналом. Он основан на замене возбуждения широ-
кополосной плотности ускорения малой величины возбуждением
узкополосной плотности ускорения большой величины, медленно
изменяющейся на некотором участке частотного диапазона.
Системы, воспроизводящие узкополосную случайную вибрацию,
менее дорогие и позволяют имитировать широкополосную вибрацию.
Критерием замены испытаний на широкополосную случайную виб-
рацию испытаниями на узкополосную с переменной средней часто-
той (сканирование узкополосного сигнала по частоте) является иден-
тичность распределений пиковых ускорений и напряжений на изделии.
Установлено, что идентичности в распределении ускорений и на-
пряжений можно добиться в том случае, если средняя частота скани-
рующего узкополосного сигнала изменяется по логарифмическому за-
кону и среднеквадратическое значение ускорения узкополосного
спектра возрастает как корень квадратный из величины частоты. При
постоянной полосе сканирования шумового сигнала это увеличение
будет соответствовать 3 дБ/окт. При этом необходимо поддерживать
постоянным закон изменения первоначального заданного уровня ус-
корения от частоты. Контролировать и поддерживать постоянным
закон изменения ускорения на вибростоле неудобно и трудно. Для
удобства вводят параметр — градиент ускорения который опре-
деляют как частное от деления величины ускорения, вызванного уз-
381
кополосным спектром возбуждения, на корень квадратный из часто-
ты в радианах:
^град = •
Заданный режим контролируют не по спектральной плотности
ускорения, а по градиенту ускорения который поддерживают
постоянным.
К наиболее важным преимуществам метода испытаний на узко-
полосную вибрацию по сравнению с методом испытаний на широко-
полосную случайную вибрацию относятся:
• возможность снижения уровня возбуждения приблизительно в
Зраза;
• значительно более низкая стоимость приборов контроля и сис-
темы усиления сигнала до требуемого уровня возбуждения виб-
раций;
• возможность быстрого установления и измерения полосы час-
тот, в которой возможны повреждения объекта, поскольку при
возбуждении узкополосным спектром с переменной частотой
резонансы объекта наступают последовательно.
Основной недостаток испытания при возбуждении узкополосным
спектром состоит в медленном изменении средней частоты спектра,
что приводит к возбуждению последовательных резонансов испытуе-
мого изделия, тогда как в случае возбуждения широкополосным спек-
тром эти резонансы возникают одновременно. Кроме того, увеличи-
вается продолжительность испытаний.
Метод многокомпонентных испытаний, В общем случае свой-
ства исследуемого изделия как среды, в которой распространяются
вибрационные возмущения в условиях эксплуатации, не являются
изотропными. Испытуемое изделие, как правило, представляет со-
бой совокупность различных узлов и блоков, отличающихся моду-
лями упругости, жесткостями, массами и т.д. В процессе эксплуа-
тации между отдельными элементами происходят виброударные
процессы, которые носят нелинейный характер, в результате чего
вибрация оказывается многомерной. Поэтому для воспроизведения
таких вибраций применяют многокомпонентные вибростенды или
отдельные вибростенды, воздействующие на испытуемое изделие в
трех взаимно-перпендикулярных направлениях. Для таких испыта-
ний требуется дорогостоящее оборудование, поэтому они проводят-
ся редко.
Методы ускоренных испытаний на вибропрочность и виброустой-
чивость. Эти методы являются наиболее перспективными, так как
позволяют значительно сократить время испытаний при тех же харак-
382
теристиках вибропрочности и виброустойчивости. Различают следу-
ющие методы ускоренных испытаний на вибропрочность:
а) качающейся частоты при повышенных ускорениях;
б) качающейся частоты или фиксированных частот для изделий,
у которых резонансные частоты свыше 200 Гц;
в) качающейся частоты в области резонансов для изделий, у ко-
торых низшая резонансная частота превышает верхнюю частоту диа-
пазона, соответствующего заданной степени жесткости.
При действии вибраций в широком диапазоне частот разработать
такую конструкцию, чтобы ее собственные частоты находились вне
заданного диапазона, практически невозможно. Поэтому при работе
объекта в условиях воздействия вибрации и наличия собственных ча-
стот изделия в заданном диапазоне необходимо определить способ-
ность конструкции выдерживать заданную вибрационную нагрузку,
которая возникает на резонансных частотах. При этом определяю-
щим фактором вибропрочности является допустимое время выдерж-
ки испытания на резонансной частоте при заданной перегрузке.
Для оценки вибропрочности реальных конструкций, испытывае-
мых на резонансных частотах при различных ускорениях вибрации,
дополнительным критерием может служить изменение (уход) собствен-
ной частоты элемента конструкции в зависимости от времени испы-
тания и перегрузки.
В большинстве случаев конструктивный элемент при испытании
на резонансной частоте разрушается не мгновенно. Поскольку каж-
дый элемент конструкции обладает способностью сопротивляться виб-
рационным нагрузкам, то в течение определенного времени собствен-
ная частота остается стабильной в заданных пределах. По истечении
этого времени и продолжении испытаний на резонансе собственная
частота элемента начинает монотонно убывать, а затем резко снижа-
ется до нуля, что соответствует разрушению.
Приведенные выше методы позволяют осуществлять различные
виды виброиспытаний.
Виды виброиспытаний изделий, В практике наземной и летной
отработки изделий авиационной и ракетно-космической техники и
их составных частей используют следующие виды вибрационных ис-
пытаний: стендовые (лабораторные), полунатурные и натурные в ус-
ловиях эксплуатации.
Стендовые (лабораторные) вибрационные испытания проводят на
вибростендах, которые приближенно воспроизводят реальные дина-
мические механические нагрузки, действующие на объект испыта-
ний при транспортировании и эксплуатации. При таких испытаниях
проверяют качество изготовления, работоспособность и долговечность
изделий.
383
Нормы стендовых испытаний должны соответствовать парамет-
рам динамических механических нагрузок, полученным в реальных
условиях эксплуатации изделий. Если таких данных нет, то при стен-
довых испытаниях принимают ориентировочные, несколько завышен-
ные нормы, которые определяют по прототипам, исходя из условий
эксплуатации изделий, аналогичных разрабатываемому. Например,
стендовые виброиспытания базового модуля «Заря» космической стан-
ции третьего поколения проводились по нормам, характерным для
тяжелых модулей орбитальной станции «Мир» второго поколения.
Порядок проведения стендовых вибрационных испытаний следу-
ющий:
• определяют резонансные частоты в заданном диапазоне и про-
водят испытания ОИ на вибропрочность на фиксированных ча-
стотах (контрольные испытания);
• проводят испытания ОИ на вибропрочность в диапазоне час-
тот, а затем на виброустойчивость. После конструкторской
доработки ОИ, цель которой заключается в устранении выяв-
ленных дефектов, изделие вновь подвергают вибрационным
испытаниям.
Испытания по определению резонансных частот конструкций не-
обходимы для оценки механической прочности и устойчивости изде-
лий и их элементов, так как на этих частотах наиболее вероятна де-
формация конструктивных элементов, приводящая к поломке или
изменению значений параметров изделий. Поскольку конструкции
изделий можно представить состоящими из ряда соединенных между
собой элементов, характеризуемых различными значениями жестко-
сти и коэффициента затухания, то число резонансных областей зави-
сит от числа этих элементов изделия. Так как жесткость и коэффици-
ент затухания являются нелинейными функциями воздействующей
гармонической вибрации, то колебания возникают не только на ос-
новной частоте, но и на частотах гармоник. В этом случае для суж-
дения о резонансных явлениях помимо АЧХ изделия необходимо ис-
пользовать данные анализа спектра полученных колебаний.
При определении резонансных частот ОИ подвергают воздействию
гармонической вибрации при пониженных ускорениях, как прави-
ло, не превышающих 20 м/с2, в диапазоне частот 10—150 Гц. Резо-
нансные частоты регистрируются, а затем составляется график их спек-
тра. После нахождения спектра резонансных частот, исходя из
требований к испытаниям, назначают одну или несколько нерезо-
нансных частот, при которых производят контрольные испытания ОИ
на воздействие ускорения при различной длительности испытания.
Так как испытания на фиксированной частоте предусматривают выяв-
ление производственных дефектов изготовления изделия, то при кон-
384
трольных испытаниях изделие не следует испытывать на резонансной
частоте. Если испытания проводились на резонансной частоте, то в
случае обнаружения какого-либо дефекта трудно установить причину
разрушения, так как при длительных испытаниях разрушение может
быть вызвано действием резонансных эффектов, а не дефектом изго-
товления ОИ. Поэтому испытания рекомендуется начинать с опреде-
ления резонансных частот при пониженных воздействующих ускоре-
ниях гармонической вибрации.
Указанные испытания могут проводиться на стадиях проектиро-
вания и производства изделия. Испытания на стадии проектирова-
ния выполняются с целью выявления степени устойчивости к воз-
действию вибрации в заданном рабочем диапазоне и определения
предельно допустимых значений механических воздействий, уточне-
ния норм на механические испытания и выбора метода испытаний на
виброустойчивость, выявления частот механических резонансов для
включения в нормативную документацию и расчетов параметров дем-
пфирующих устройств, а также выбора амортизаторов. Испытания
на стадии производства проводят с целью установления соответствия
выпускаемых изделий заданным требованиям.
При испытаниях на определение резонансных частот используют виб-
роустановки, воспроизводящие вибрацию в диапазоне 40—20 000 Гц.
Если резонансная частота изделия 7^ определена расчетным путем
или по результатам испытаний изделий аналогичной конструкции,
то можно использовать виброустановки, воспроизводящие колеба-
ния в диапазоне частот (0,2— 1,5)7^. Амплитуда ускорения при испы-
таниях должна быть минимально возможной, но достаточной для
выявления резонанса. При испытаниях изделий, масса и габаритные
размеры которых менее чем в 10 раз превышают массу и габаритные
размеры контактных виброизмерительных преобразователей (ВИП),
необходимо использовать бесконтактные ВИП. Они должны иметь
чувствительность, обеспечивающую выявление амплитуд колебаний
изделий или его элементов, в 2 раза и более превышающих соответ-
ствующие амплитуды колебаний, измеряемые контрольным ВИП в
точках крепления изделия.
Для более точного определения резонансных частот в схему изме-
рений целесообразно включать фазометр, обеспечивающий измере-
ние изменения фазы колебаний на 90° при прохождении резонанса.
Желательно, чтобы погрешность определения частоты при этом не
превышала 0,5% или 0,5 Гц.
Частоты механического резонанса находятся методом качающей-
ся частоты при поддержании постоянной амплитуды ускорения и ско-
рости качания, обеспечивающей обнаружение и регистрацию резо-
нансов (но не более одной октавы в минуту). Допускается проводить
385
испытания и на широкополосную случайную вибрацию, однако в
этом случае анализ получаемых результатов усложняется.
По результатам испытаний оценивают механические свойства
изделий, получают исходную информацию для выбора методов про-
ведения испытаний на вибропрочность, виброустойчивость и ряд дру-
гих механических воздействий.
При испытании на вибропрочность изделие подвергается воздей-
ствию гармонической вибрации с плавной разверткой частоты, а также
широкополосной, узкополосной или смешанной вибраций. При этом
общее время испытаний разделяют на равные промежутки, в течение
которых осуществляют испытания на каждой выбранной частоте. Не
рекомендуется проводить испытания на вибропрочность на резонанс-
ных частотах, за исключением некоторых случаев, которые оговари-
ваются особо.
На практике проводят как нормальные, так и ускоренные испы-
тания на вибропрочность.
При нормальных испытаниях методом качающейся частоты рабо-
чий диапазон частот вибрации, значения перемещения и ускорения,
время цикла качания частоты, количество циклов и общую продолжи-
тельность испытаний определяют по нормативной документации в за-
висимости от выбранной или заданной степени жесткости. Установив
заданный режим вибрации, проводят испытания путем непрерывного
изменения частоты в рабочем диапазоне частот вибрации. Продолжи-
тельность испытаний определяют по графику на рис. 5.39.
При ускоренных испытаниях длительность процесса может быть
сокращена за счет увеличения испытательного ускорения или уста-
новления качания частоты в области механического резонанса.
При увеличении испытательного ускорения, выбираемого из ус-
ловия луск « (1,5 - 2)а0 , продолжительность испытаний определяется
по формуле
^уск = (дуск /) ^0 >
где а0 и Го — соответственно ускорение и продолжительность нор-
мального испытания.
Увеличение испытательного ускорения должно находиться в пре-
делах линейности прочностной характеристики испытуемого изделия,
чтобы при проверке не возникало отказов, физика процессов кото-
рых не соответствовала бы условиям реальной эксплуатации. Жела-
тельно, чтобы при ускоренных испытаниях испытательное ускорение
и длительность процесса не превышали допустимых воздействий и
времени работы изделия при повышенных нагрузках в период эксплу-
атации.
386
Продолжительность испытаний при установлении качания часто-
ты в области механического резонанса в диапазоне частот (0,5—1,5)7q,
где /0 — собственная частота механического резонанса испытуемого
изделия, определяется по формуле
Т '= 2tpn,
где /р — время испытаний, определяемое по графику (см. рис. 7.9);
л — число циклов качания, зависящее от установленной степени же-
сткости испытаний.
Испытания методом фиксированных частот также могут быть нор-
мальными и ускоренными. При нормальных испытаниях весь диапа-
зон частот разбивают на поддиапазоны, в пределах которых частоту
плавно изменяют в течение 1 мин. с последующей выдержкой на
верхней частоте поддиапазона при ускорении (амплитуде перемеще-
ния) и продолжительности, предусмотренными нормативной доку-
ментацией. При ускоренных испытаниях сокращение времени дос-
тигается за счет уменьшения диапазона частот в области до 200 Гц, в
пределах которого испытания не проводят.
Возможно выполнение испытаний на вибропрочность на одной
фиксированной частоте, если собственная частота механического ре-
зонанса в 1,5 раза превышает верхнюю частоту рабочего диапазона, и
методом широкополосной случайной вибрации в тех случаях, когда:
• требуются кратковременные испытания изделий сложной мно-
гоэлементной конструкции, механические напряжения в эле-
ментах которой могут превышать предел прочности;
• собственные частоты механического резонанса изделий оказы-
ваются в диапазоне возбуждаемых колебаний.
Испытания на виброустойчивость проводят во включенном состо-
янии испытываемой аппаратуры. Поэтому к ней должны быть под-
ключены измерительные приборы, с помощью которых контролиру-
ют работоспособность и изменение параметров аппаратуры при
воздействии на нее вибрации с заданной перегрузкой в конкретном
диапазоне частот.
Перед проведением стендовых испытаний изделия осматривают
и измеряют параметры, указанные в технических условиях. Время
испытаний и требования к изменению параметров в условиях вибра-
ционных испытаний установлены в НТД. Для проведения испыта-
ний изделия закрепляют на платформе (столе) вибростенда так, что-
бы вибрация передавалась с минимальными потерями. Выбирая
способы закрепления, необходимо учитывать положение изделия при
эксплуатации, а также особенности закрепления на столе вибростен-
да его составных элементов. Возможны случаи, когда отдельный эле-
13*
387
мент, установленный на специальной плате, нормально выдержива-
ет испытательный режим, но отказывает при испытаниях уже самого
изделия. Это объясняется тем, что некоторые конструкции могут
усиливать вибрационные нагрузки. Особую опасность представляют
случаи, при которых возникают резонансные явления. Для повыше-
ния эффективности испытания проводят в условиях, приближенных
к реальным условиям эксплуатации, или элементы испытывают при
увеличении нагрузки в 1,5 раза.
Иногда элементы, установленные на специальных платах, не
выдерживают испытаний из-за увеличения нагрузки вследствие резо-
нансных явлений. Поэтому изделия (элементы), работающие в ка-
ком-либо комплексе, целесообразно испытывать в сочлененном со-
стоянии. При этом если изделие эксплуатируется под нагрузкой, то
и испытания следует проводить под нагрузкой.
При наличии резонансных эффектов изделия рекомендуется до-
полнительно испытывать на виброустойчивость на резонансных час-
тотах. Если испытуемое изделие представляет собой сложную много-
массовую систему, то оно обладает несколькими резонансными
частотами. В процессе испытания надо определять и фиксировать в
документации все резонансные частоты до 20 000 Гц, так как эти
данные могут быть использованы при конструкторской доработке из-
делия. В зависимости от демпфирующих свойств конструкции, за-
тухания вибрации в элементах конструкции, свойств материала, из
которого изготовлена конструкция, амплитуды колебаний при резо-
нансе имеют то или иное конечное значение. Если амплитуда коле-
баний не превышает заданного значения, например удвоенной амп-
литуды вибрации, воздействующей на изделие, то резонанс считают
допустимым.
В практике стендовых испытаний на виброустойчивость наиболь-
шее применение находит прямой способ определения частоты соб-
ственных колебаний конструкций, который заключается в выявле-
нии резонанса и фиксировании частоты возмущающих колебаний.
Однако этот способ несовершенен, так как из-за демпфирующих
свойств конструкции резонансная частота элементов может отличать-
ся от частоты возбуждения вибрации. Возможно также появление
параметрических резонансов. Кроме того, на высоких частотах амп-
литуды колебаний имеют малые значения и выявить резонансы пря-
мыми методами оказывается весьма затруднительно. Тем не менее,
несмотря на малые амплитуды колебаний, механические напряже-
ния в опасных местах крепления элементов или в самих элементах
при резонансе могут значительно превысить предел выносливости и
вывести изделие из строя.
388
Испытания на виброустойчивость могут проводиться методами
фиксированных частот и качающейся частоты. Однако предпочтение
отдается последнему методу, при котором частота плавно изменяется
в заданном диапазоне со скоростью, достаточной для проверки и ре-
гистрации контролируемых параметров изделий. Рекомендует-
ся, чтобы скорость изменения частоты не превышала 2 окт./мин.
Если изделия испытываются в диапазоне низких частот (от 10 Гц),
когда ускорение зависит главным образом от перемещения, которое
может быть весьма значительным, то испытания рекомендуется про-
водить при постоянной амплитуде перемещения. Постоянство амп-
литуды перемещения при изменении частоты поддерживают до так
называемой частоты перехода, начиная с которой (до верхней часто-
ты рабочего диапазона) обеспечивают постоянство значения ускоре-
ния (рис. 7.11).
Если в процессе испытаний изделий на виброустойчивость на не-
которых частотах обнаруживается несоответствие значения установ-
ленных параметров требуемым, то проводят дополнительную выдер-
жку объекта испытаний на этих частотах в течение времени, указанного
в нормативной документации, но не менее 5 мин.
Испытания на виброустойчивость, осуществляемые методом ка-
чающейся частоты, могут быть нормальными и ускоренными. Мето-
ды ускоренных испытаний могут реализовываться для изделий с из-
вестными частотами механического резонанса. Ускорение процесса
испытаний достигается за счет проведения их в наиболее опасной ре-
зонансной зоне. При испытаниях сложных многоэлементных конст-
рукций возможно использование методов случайной вибрации.
Испытаниям на вибрационные нагрузки подвергают одни и те же
изделия, причем вначале их испытывают на вибропрочность, а затем
на виброустойчивость. Положение изделия при испытаниях определя-
ется нормативной документацией. Рекомендуется проводить испы-
тания изделий при установке их в трех взаимно-перпендикулярных
направлениях по отношению к воздействующей вибрации. Продолжи-
тельность испытаний в каждом положении равна 1/3 общей продолжи-
тельности. Иногда изделия испытывают в одном наиболее опасном
положении. При необходимости допускаются перерывы в испытани-
ях, но с условием сохранения их общей продолжительности.
В заключение отметим, что наиболее адекватными являются на-
турные виброиспытания изделий, однако при их проведении должны
быть решены сложные вопросы, связанные с передачей информации
с объектов и высокой стоимостью таких испытаний.
Выявить резонансные явления в элементах конструкции изделий
при натурных испытаниях без знания параметров возбуждающих сил
объекта прямыми способами невозможно. Поэтому применяют полу-
389
40
О
Ускорение,
Рис. 7.11. Амплитуды параметров вибрации (ат, sm) в зависимости от частоты (все уровни указаны
в амплитудных значениях)
Гц
натурные испытания, используя магнитофонные записи натурных ис-
пытаний на объекте, а также данные, переданные по каналам теле-
метрии, для дальнейшего воспроизведения этих условий при стендо-
вых испытаниях.
Все рассмотренные выше особенности различных видов виброис-
пытаний должны оговариваться в программе испытаний и техничес-
ких условиях на проверяемое изделие.
7.2. Испытания на ударные воздействия
7.2.1. Условия испытаний
и применяемое испытательное оборудование
Ударные испытания осуществляются с помощью специальных удар-
ных установок, в которых воздействие достигается за счет соударения
тел. При этом наиболее часто соударения осуществляются через уп-
ругий элемент сопротивления, нелинейный элемент сопротивления
безгистерезисного типа (пара «сфера-плоскость»), элемент сопро-
тивления, работающий в зоне пластической деформации (жесткий
конический наконечник через свинцовую прокладку).
Структурная схема ударной установки приведена на рис. 7.12. В
общем случае в нее входят: средство разгона — ускоритель 5; подвиж-
ной стол; платформа или контейнер 6 вместе с испытуемым изделием 4;
измерительный преобразователь 7; контрольный преобразователь 8;
тормозное устройство 7(соударяющиеся элементы); система управле-
ния и регулирования режима испытаний 9; средства измерения 2 и
регистрации 3, позволяющие определять значения некоторых пара-
метров и регистрировать характер ударной перегрузки.
Ударные установки классифицируются по следующим основным
признакам:
1. По структурно-конструктивному решению различают средства
разгона и торможения, применяемые для получения заданного удар-
ного нагружения.
Разгон может осуществляться принудительно или в результате
свободного падения с определенной высоты. При принудительном
разгоне ускорение зависит от длины пути и скорости движения изде-
лия, создаваемой ускорителем за счет дополнительной энергии. При
разгоне за счет свободного падения платформа с испытуемым изде-
лием фиксируется на определенной высоте Н, где перегрузка равна
единице; затем платформа освобождается и, падая, приобретает к
391
Рис. 7.12. Структурная схема ударной установки
моменту соударения скорость v0 = y/2gH • Потери на трение в данном
случае не учитываются.
Кинетическая энергия ударной нагрузки, приобретаемая плат-
формой совместно с испытуемым изделием при разгоне, гасится в
процессе взаимодействия с тормозным устройством. Таким образом,
заданные параметры ударной нагрузки зависят от условий воспроиз-
ведения, т.е. скорости v0 в момент начала взаимодействия с тормоз-
ным устройством и пути торможения до остановки.
Заданное ударное нагружение за счет торможения (с помощью
тормозных устройств) может быть получено с использованием нео-
братимых или упругих деформаций. Эффект торможения достигается
двумя способами. В первом случае используют подвергающиеся смя-
тию при ударе необратимо деформируемые тормозные устройства
одноразового действия. Упругопластические деформируемые элементы
в виде пластин, изготовляемые, например, из стали, латуни, меди,
свинца и резины, обеспечивают получение ударных ускорений от
100 м/с2 (при падении на резину) до 1 000 000 м/с2 (при падении на
сталь, латунь) с длительностью фронта ударного импульса от десятков
микросекунд до нескольких миллисекунд. Во втором случае пласти-
чески деформируемый элемент используется в совокупности с вне-
дряющимся в него жестким наконечником. Это позволяет моделиро-
вать закон изменения ускорения с большой длительностью фронта
ударного импульса, доходящего до десятков миллисекунд. Необра-
тимо деформируемые тормозные устройства целесообразно исполь-
зовать в установках с разгоном, осуществляемым в результате сво-
бодного падения с конкретной высоты.
392
Недостатком рассматриваемых тормозных устройств является воз-
можность воспроизведения только одного ударного импульса с опре-
деленными характеристиками.
Упругодеформируемые тормозные устройства многоразового при-
менения выполнены на таких элементах, которые при соударении
изменяют свою форму в пределах упругих деформаций, а по оконча-
нии ударного процесса восстанавливают ее.
В качестве упругодеформируемых элементов используют проклад-
ки из резины или пластиков и пневматические, гидравлические,
пневмогидравлические устройства. В зависимости от конструкции и
материалов, применяемых для изготовления прокладок, указанные
тормозные устройства позволяют воспроизводить ударные нагрузки
симметричных форм, изменять максимальное ударное ускорение и
длительность ударного импульса, а в некоторых случаях и его форму.
Недостатками этих устройств являются их конструктивная сложность
и определенная трудность управления ударным процессом. Для пре-
дотвращения повторных ударов, возникающих в установках, исполь-
зуют специальные пневматические и электромагнитные тормозные
устройства, а также механические пружинные захваты.
2. По принципу действия ускорителя, создающего принудитель-
ный разгон, различают установки: механические (эластичные, пру-
жинные, ротационные и т.д.), пневматические, электрогидравли-
ческие, электродинамические и др. Возможно обеспечение разгона
с помощью баллистического маятника.
Для качественной работы установок необходимо, чтобы в про-
цессе разгона перегрузка была минимальной и не превышала 10%
ускорения, возникающего при взаимодействии платформы с тормоз-
ным устройством.
3. По системе управления различают установки с неуправляемым
и управляемым ударным воздействием. Управление ударными уста-
новками может быть ручным, дистанционным и автоматическим.
К установкам с неуправляемым ударным воздействием относятся
механические (эластичные, маятниковые) и пневматические, а к ус-
тановкам с управляемым ударным воздействием — электродинами-
ческие и элекгрогидравлические. Отметим, что воспроизведение удар-
ного воздействия в электродинамических установках может достигаться
с помощью синтеза амплитудного спектра ^(со) аналоговым и циф-
ровым методами.
4. По характеру воспроизводимых ударных воздействий различают
ударные установки, воспроизводящие многократные и одиночные
удары, транспортную тряску и комбинированные нагрузки, а также
имитирующие падения и столкновения.
393
Основным элементом измерительного тракта являются измери-
тельные преобразователи, служащие источниками сигналов измери-
тельной информации. Для индикации, регистрации и анализа этих
сигналов используются электронные радиоизмерительные приборы
общего назначения (осциллографы, анализаторы спектра и АЧХ и
др.). Основные параметры ударных установок и их возможные значе-
ния приведены в табл. 7.2.
Установки одиночных ударов могут быть с разгоном принудитель-
ным и за счет свободного падения. Среди установок с принудитель-
ным разгоном наиболее распространены электродинамические, пнев-
матические, гидравлические и ротационные ускорители. Кроме того,
применяются копры маятникового (баллистического) типа. В уста-
новках со свободным падением используется вертикальное сбрасыва-
ние по направляющим. Определенные формы импульсов обеспечи-
ваются механическими, пневмогидравлическими, пневматическими
тормозными устройствами. Установки данного типа могут быть не-
управляемыми и управляемыми.
Установки с вертикальным сбрасыванием конструктивно выполня-
ют в виде каретки, свободно перемещающейся вверх и вниз между
вертикальными стальными стойками по роликам. Испытуемое изде-
лие закрепляется болтами на каретке и потом вручную или подъем-
ником с приводом поднимается вверх. Форма ударного импульса
определяется свойствами соударяющихся поверхностей, которые мо-
гут изменяться в зависимости от их материала и формы, а также ис-
пользования специальных тормозных приспособлений. Так, напри-
мер, на нижней стороне каретки может быть смонтировано тормозное
приспособление в виде пневматического плунжера, состоящего из
цилиндра и поршня с регулируемым клапаном. Изменяя объем воз-
духа в цилиндре, можно регулировать интенсивность удара. Чем боль-
ше воздуха, тем меньше сила удара. Наличие пневматического плун-
жера позволяет изменять ударное ускорение и длительность импульса.
Высота сбрасывания обычно изменяется в пределах 0,3—1,5 м. Отре-
гулировав плунжер на заданную перегрузку, освобождают поднятую
вверх каретку с испытуемым изделием и они падают на стальную плиту
основания — наковальню. Этим методом могут быть созданы удар-
ные импульсы с ускорением 800 000 м с“2.
Преимуществами данной установки являются ее относительная
простота, возможность контроля положения до и во время удара.
Основной недостаток — заедание каретки при ее перемещении, что
приводит к ложным эффектам.
Действие установок, основанных на гидравлических или пневмати-
ческих принципах, не зависит от силы тяжести для создания ударной
силы. Недостатки пневматических ударных установок: трудность по-
394
Таблица 7.2
Основные параметры установок для воспроизведения ударов
Параметр Установка, воспроизводящая удары
одиночные многократные
Форма ударных импульсов Полусинусоидаль- ная, пилообразная с резким спадом и трапецеидальная Полусинусои- дальная
Диапазон пикового ударного ускорения, м/с2 15-1 000 000 30 -10 000
Диапазон длительности действия ударного ускорения, мс 0,5-120 0,5-20
Коэффициент наложенных колебаний ударного ускорения (в зависимости от формы импульса), % 10-15 10-15
Ударное ускорение в поперечном направлении Не более 30% значения пикового ускорения. Желательно иметь значение не более 6%
Допустимые отклонения: • ударных ускорений во времени, % • длительностей действия ударного ускорения, % + 10 ± 15 + 10 ± 15
Число ударных импульсов в 1 с (по МЭК) 1-3 1-3
Число ударных импульсов в 1 мин. (по ГОСТ) 40-120 40-120
Допустимое отклонение по числу ударов, % ±5 ±5
лучения импульсов заданной формы, ограниченные диапазоны амп-
литуд ускорений и длительностей ударных импульсов.
Копры маятникового типа основаны на использовании силы инер-
ции массы молота, прикладываемой через наковальню к испытуемо-
395
му изделию. Работа копра маятникового типа заключается в том, что
молот поднимается на угол 160—180° в верхнее исходное положение и
удерживается там защелкой фиксирующего устройства. После осво-
бождения защелки молот падает на наковальню, которая передает
силу удара изделию. Запасенная молотом энергия Е, определяемая
его массой и расстоянием от оси качания до центра тяжести, частич-
но расходуется при ударе по наковальне с изделием, а частично зат-
рачивается на отскок молота. Энергия удара, воздействующего на
изделие, определяется как разность между первоначальным запасом
энергии Е и фиксируемой энергией отскока Д: £уд = Е - Е{.
В процессе удара наковальня перемещается незначительно; бла-
годаря ее гибкой связи со станиной обеспечивается хорошая форма
кривой ударного импульса, на которую не накладываются посторон-
ние колебания. Параметры и характеристики ударного импульса мо-
гут изменяться в зависимости от изменения скорости v0 молота в мо-
мент соударения, отношения масс наковальни и молота, а также
механических характеристик деформируемого элемента — проклад-
ки, помещаемой в зоне контакта молота и наковальни.
Преимущество маятниковых копров заключается в отсутствии
направляющих, которые искажают результаты измерений. Основ-
ными недостатками являются сложность конструкции и невозмож-
ность получения больших ускорений.
Маятниковый копер (баллистический маятник) может применять-
ся как для испытаний, так и для динамической тарировки преобразо-
вателей ударных ускорений.
Установки многократных ударов могут быть основаны на принципе
либо принудительного разгона, либо свободного падения. Распрост-
ранение получили электродинамические и механические ускорите-
ли. Большинство используемых установок — управляемые. Рассмот-
рим принципы действия и конструкции установок многократных
ударов.
В механических установках многократных ударов ускорение в вер-
тикальном направлении создается при ударе свободно падающего стола
об упругие элементы прокладки. Подъем и сброс рабочего стола ус-
тановки могут осуществляться с помощью профильного кулачка, кри-
вошипно-шатунного механизма и копра.
Форма кривой изменения ускорения за время ударного импульса
зависит от средств торможения, определяющих нарастание ускорения
с момента соприкосновения рабочего стола с упругими элементами
до максимального значения и последующий спад. Следует отметить,
что максимальное ударное ускорение соответствует наибольшему про-
гибу наковальни.
396
Механические средства торможения основаны на соударении спе-
циальных элементов, выполненных из различных материалов (сталь,
свинец, фетр, резина и др.).
Достоинствами механических ударных установок являются их от-
носительная простота и невысокая стоимость. К недостаткам (по срав-
нению с электродинамическими установками) следует отнести не-
сколько худшую повторяемость формы ударных импульсов, большие
нелинейные искажения и невозможность осуществления автомати-
ческого управления.
В электродинамических установках, широко применяемых для
воспроизведения как одиночных, так и многократных ударов, необ-
ходимое ускорение при ударе достигается за счет взаимодействия двух
магнитных полей: переменного, создаваемого импульсным током, и
постоянного — в кольцевом зазоре электромагнита. В результате ука-
занного взаимодействия возникает сила, выталкивающая подвижную
систему с переменной скоростью.
Электродинамический стенд состоит из электромагнита, подвиж-
ной катушки, стола со штоком и пневматического демпфера. Элек-
тромагнит содержит магнитопровод и бескаркасную катушку под-
магничивания.
При подаче импульса тока требуемой амплитуды в подвижную
катушку и постоянного тока с пульта в обмотку электромагнита со-
здается импульс силы, приводящий в движение подвижную систему
(подвижную катушку, стол со штоком и поршень пневматического
демпфера), которая начинает перемещаться вверх с переменной ско-
ростью. В момент, когда магнитодвижущая сила подвижной катуш-
ки прекращает действовать, приращение скорости подвижной систе-
мы становится равным нулю или изменяет знак. Подвижная катушка
под действием силы тяжести возвращается на амортизационную ре-
зиновую прокладку. Стол со штоком, испытывая сопротивление пнев-
матического демпфера, плавно опускается на верхний выступ под-
вижной катушки. Сопротивление пневматического демпфера
регулируется в некоторых пределах, что обеспечивает уменьшение
(исключение) соударения подвижной системы при движении ее вверх
и вниз.
Получение импульса тока требуемой амплитуды достигается с
помощью емкостного модулятора, обеспечивающего заряд и разряд
конденсаторной батареи. Длительность ударных импульсов регулиру-
ется ступенями путем изменения индуктивности разрядной цепи. Ам-
плитуда ускорения ударных импульсов регулируется плавным изме-
нением напряжения конденсаторной батареи. Электродинамическая
установка может работать в режиме одиночных ударов, обеспечивая
получение ударных импульсов полусинусоидальной формы.
397
Достоинствами электродинамического ударного стенда являют-
ся: возможность получения ударных импульсов заданной формы; от-
носительная простота конструкции механической части; удобство ре-
гулирования основных параметров ударных импульсов. Основной
недостаток — трудность получения ударных импульсов с большими
ускорениями (более 3 000 м/с2).
Представляет интерес проведение испытаний на удар путем воз-
действия на испытуемое изделие синтезированным ударным спектром.
В данном случае оказывается возможным использование для испы-
таний электродинамического вибростенда в соединении со специаль-
ными электронными приборами управления (рис. 7.13).
Рис. 7.13. Структурная схема установки для синтеза ударного спектра: 1 —
генератор импульсов; 2 — фильтры (третьоктавные) и формирователи спек-
тра (аттенюаторы); 3 — усилитель мощности; 4 — вибростенд; 5 — испытуе-
мый объект
Особенность испытательного оборудования этого вида состоит в
том, что спектр ударного импульса формируется с помощью набора
специальных фильтров. В простейшую схему синтеза ударного спек-
тра входит генератор, обеспечивающий получение одинарного им-
пульса, который одновременно возбуждает ряд третьоктавных филь-
тров, предназначенных для формирования ударного спектра. Процесс
формирования осуществляется вручную. О качестве сформирован-
ного импульса судят по спектру, получаемому с помощью узкопо-
лосного анализатора.
Анализ функции времени синтезированного удара третьоктавны-
ми фильтрами показывает, что пиковое значение ударной характери-
стики может существенно превышать амплитуду возбуждающего не-
установившегося колебания. Таким образом, при использовании
метода синтеза удара для возбуждения в испытуемом изделии некото-
рого «отклика» на ударное воздействие в определенном диапазоне ча-
стот требуется более низкая «входная сила», чем в случае примене-
ния обычной ударной установки, создающей ударный импульс. Кроме
того, известно, что большинство движений, вызываемых ударным
воздействием в испытуемом изделии, представляют собой колеба-
тельные процессы, характеризуемые широким распределением час-
398
тот в спектрах Фурье. Весьма вероятно, что колебательные процессы
возникают в результате преобразования ударных импульсов простых
форм при их распространении в сложных конструкциях. Следует так-
же помнить, что ударные импульсы простых форм весьма редко встре-
чаются в процессе эксплуатации.
Рассмотренная структурная схема установки синтеза ударного
спектра имеет ряд недостатков: во-первых, относительно широкая
полоса пропускания третьоктавных фильтров не обеспечивает доста-
точного выравнивания узких резонансных участков частотной харак-
теристики испытательного оборудования и испытуемых объектов; во-
вторых, ручная настройка фильтров — трудоемкая и продолжительная
операция. Эти недостатки могут быть устранены автоматической вы-
равнивающей системой.
Автоматическое выравнивание осуществляется за счет использо-
вания эффектов изменения частотной характеристики, вызываемых
в процессе испытаний системой, воспроизводящей ударное движе-
ние.
Автоматическое спектральное выравнивание достигается приме-
нением анализатора-выравнивателя, управляющего комплектами
фильтров. В установку входят комплекты из 60, 120 и 240 фильт-
ров, причем любой фильтр в одном комплекте может заменяться двумя
фильтрами из следующего по числу фильтров комплекта. Таким об-
разом, за счет разнообразного сочетания фильтров возможна регули-
ровка ширины частотной полосы и СПУ в требуемом диапазоне час-
тот (приводимые данные относятся к системам, разработанным
датской фирмой «Брюль и Къер»).
7.2.2. Методы испытаний на ударные воздействия
Анализ ударных воздействий (см. разд. 5.1) позволяет сформулиро-
вать цели различных видов испытаний. Целью испытаний изделий на
ударную прочность путем воздействия одиночных и многократных
ударов является проверка способности изделий противостоять разру-
шающему действию механических ударов и сохранять после их дей-
ствия значения параметров в пределах норм, установленных норма-
тивной документацией. При проведении испытаний на воздействие
механических ударов многократного действия проверяют способность
изделия выполнять свои функции после воздействия этих ударов.
В соответствии с рекомендациями МЭК помимо приведенных
предусматриваются также испытания на воздействие падения и опро-
кидывания.
Особым видом испытаний, предназначенным для имитации ус-
ловий случайных ударных воздействий, возникающих при перевозке
399
незакрепленных изделий колесным транспортом по пересеченной
местности, являются испытания на транспортную тряску.
В обоснование программы испытаний на ударные воздействия вхо-
дит выбор: вида испытаний испытательного оборудования, приспособ-
ления для крепления изделий, способа крепления приспособления к
столу установки, места расположения контрольной и измерительной
точек, измерительного преобразователя, средства измерения и реги-
страции, а также метода измерения параметров.
Выбор вида испытаний на ударные воздействия зависит от харак-
тера ударных нагрузок, которым подвергается испытуемое изделие.
Процесс удара можно условно представить как «воздействие» и «от-
клик». Воздействие определяется ударной установкой, а отклик за-
висит от механических свойств изделия. В связи с этим желательно
оценить параметры ударов в двух точках, называемых контрольной и
измерительной.
Контрольная точка используется для получения контрольного
сигнала, характеризующего процесс воздействия, а измерительная
— для получения сигнала, характеризующего отклик изделия на воз-
действие. Кроме того, контрольный сигнал может быть использован
для поддержания заданного испытательного режима на столе уста-
новки.
При креплении изделия непосредственно на платформе ударного
стенда, а также на приспособлении или амортизаторах контрольную
точку следует выбирать рядом с одной из точек крепления изделия
или амортизатора. Если выбор контрольной точки на приспособле-
нии оказывается затруднителен, а система «стол—приспособление-
изделие» настолько жесткой, что отклонение ускорения в точке креп-
ления приспособления не превышает ±25% ускорения на столе и
длительность действия ударного ускорения больше 1 мс, то возможна
установка измерительных преобразователей (ИП) непосредственно
на столе установки.
Недостаточная жесткость крепления ИП, особенно при его зна-
чительной массе, может заметно (в 2—3 раза) снизить низшую соб-
ственную резонансную частоту /и системы. Если при этом ИП кре-
пится на конструктивной детали изделия, собственная резонансная
частота То изд которой близка кТ^ и конструктивная связь достаточно
велика, то происходит дальнейшее усложнение системы. Удовлетво-
рительная для большинства случаев точность измерения имеет место
при условии /о1 - 5/о изд - 30/тф , где Тф — длительность фронта удар-
ного ускорения.
В случае, когда подлежащий исследованию кратковременный
процесс содержит высокочастотные составляющие, близкие к часто-
400
те собственного резонанса ИП, возникают наложенные колебания,
которые иногда называют «звоном» (рис. 7.14). Для ограничения
возможности возникновения указанного эффекта необходимо, что-
бы собственная резонансная частота fQ колебаний закрепленного на
изделии ИП была равна или превышала значение 10/т, где т — дли-
тельность ударного импульса. В этом случае погрешность измерения
амплитуды ударного ускорения не превысит +5%.
Рис. 7.14. Реакция измерительного преобразователя на воздействие
высокочастотных составляющих
Несмотря на целесообразность измерений параметров удара в кон-
трольной и измерительной точках на практике они определяются толь-
ко в контрольной точке с помощью контактных ИП.
Качественное воспроизведение всех составляющих спектра изме-
ряемого ударного импульса в широком частотном и динамическом
диапазонах существенно зависит от способа закрепления контактного
ИП. На практике в основном применяются следующие способы: при-
винчивание ИП при наличии резьбы на наружной поверхности кор-
пуса; с помощью шпильки, ввернутой в основание корпуса ИП; вин-
тами (болтами) при наличии фланца на корпусе ИП; приклеивание.
Измерительный преобразователь с резьбовым креплением должен быть
ввернут до упора с моментом затяжки, указанным в нормативной
документации, или 1,5—2 Н м для резьб диаметром до 6 мм, а для
резьб диаметром более 6 мм момент затяжки на каждый последую-
щий миллиметр увеличивается на 1,5—2 Н м. Для ИП, рассчитан-
ных на измерение параметров ударных ускорений длительностью 1 мс,
целесообразно разрабатывать калибры для контроля качества поса-
дочного места преобразователя.
Подготовка мест крепления (сверление, нарезка резьбы, вырав-
нивание поверхности) должна выполняться весьма тщательно. За-
вышение внутренних и средних диаметров резьбовых гнезд, отклоне-
401
ния от заданной нормы неплоскостности или допуска на угол кони-
ческой резьбы недопустимы. Крепление ИП с помощью изолирую-
щих переходных втулок, магнитного держателя и других промежуточ-
ных деталей сужает рабочий диапазон частот.
Испытание на воздействие одиночных ударов проводят для провер-
ки способности изделия выполнять свои функции после прекраще-
ния этого воздействия. В ряде случаев проверяется работоспособ-
ность изделий в процессе воздействия одиночных ударов.
При выборе измерительных и анализирующих средств необходи-
мо решить, какая информация считается достаточной для описания
движения, вызванного ударом. Для качественного воспроизведения
формы импульса средства измерений совместно с ИП должны иметь
равномерную АЧХ (рис. 7.15) в широком частотном диапазоне, что-
бы обеспечить правильные фазовые соотношения между частотными
составляющими.
По зафиксированной осциллограмме (рис. 7.16, а) возможно
определение пикового ударного ускорения N, длительности п дей-
ствия ударного ускорения, длительности фронта ударного ускоре-
ния, формы импульса ударного ускорения и т. д. Ударное ускоре-
ние вычисляется по формуле
ат = ™ср А >
где Р — чувствительность осциллографа по вертикальной оси, мВ/мм
(деление сетки); — амплитуда усредненного импульса, мм (деле-
ние сетки осциллографа), зависящая от характера импульса; к — ко-
эффициент преобразования ИП (может определяться совместно с
согласующим усилителем).
Если импульс не содержит наложенных колебаний, то в качестве
N следует принимать максимальное отклонение по вертикали (рис.
7.16, б). Если импульс ударного ускорения содержит наложенные
колебания, то для определения Ncp необходимо соединить точки,
соответствующие серединам участков осциллограммы, заключенных
между двумя соседними экстремумами, плавной линией и макси-
мальное значение на этой линии принять за Ncp. Коэффициент пре-
образования к при измерении амплитуды ускорения ат = 10 000 м/с2
(1 000g) и длительности т = 0,5 мс определяется при градуировке в
ударном режиме, а при измерении ат = 10 000 м/с2 (1000g) и дли-
тельности т > 0,5 мс — в вибрационном режиме.
Длительность действия ударного ускорения определяется по ос-
циллограмме (рис. 7.16, б) на уровне 0,1 А: т = тп , где т' — масштаб
горизонтальной оси на осциллографе; п — горизонтальное отклоне-
ние луча. Для импульсов с крутыми фронтами, большим ускорени-
402
+ 1 дБ
О дБ
-1 дБ
-10 дБ
Рис. 7.15. Амплитудно-частотная характеристика измерительной системы
для оценки качества воспроизведения одиночного удара
Рис. 7.16. Осциллограммы одиночных ударных импульсов: а — с крутым
фронтом и наложенными колебаниями; б — с пологим фронтом
ем и малой длительностью время действия ударного ускорения допус-
кается определять по основанию импульса. Длительность фронта ус-
корения рассчитывается по формуле тср = т'лср, где — горизон-
тальное отклонение луча от начала ударного процесса до момента,
соответствующего амплитуде усредненного импульса Ncp. Форма
импульса ударного ускорения определяется путем сравнения с фор-
мами импульсов, рекомендуемыми для проведения испытаний.
403
Чтобы обеспечить воспроизводимость испытаний в различных ис-
пытательных лабораториях с заданной точностью, рекомендуется ис-
пользование одиночных ударных импульсов пилообразной, полуси-
нусоидальной и трапецеидальной форм (рис. 7.17), а многократных
ударных импульсов — полусинусоидальной формы. Такие формы
ударных импульсов выбраны потому, что они достаточно информа-
тивны, просты и обеспечивают высокую воспроизводимость резуль-
татов испытаний.
Изображение импульсов на экране осциллографа должно быть
получено при временной развертке, позволяющей наблюдать на эк-
ране импульсы на временном участке 0,4т + т + 0,1т (рис. 7.17, а).
Осциллограмма импульса ударного ускорения должна быть заключе-
на между штриховыми линиями, соответствующими допуску на кон-
кретную форму импульса. Если осциллограмму нельзя заключить меж-
ду штриховыми линиями, то для характеристики формы необходимо
указать название одной из подходящих геометрических фигур.
а) б) в)
Рис. 7.17. Формы одиночных ударных импульсов, рекомендуемые для ис-
пытаний: а — пилообразная ; б — полусинусоидальная; в — трапецеидаль-
ная. Штриховой линией показан номинальный импульс, а сплошной —
границы допусков; т — длительность номинального импульса; ат — макси-
мальное ускорение номинального импульса
Для оценки сложных форм импульсов одиночных ударов следует
определять коэффициент наложенных колебаний и их частоту (пуль-
сацию на первоначальном импульсе или относительную амплитуду
ускорения наложенных колебаний и их частоту). Оценка амплитуды
пульсаций с малым затуханием, имеющем место в течение большого
периода времени после окончания номинального импульса, пред-
ставляет большой интерес, так как пульсация влияет на остаточный
спектр.
404
Частоту наложенных колебаний f рассчитывают по формуле,
Гц: /нк где Пп ~ число периодов наложенных колебаний на
учитываемом отрезке осциллограмм; t — время, соответствующее дли-
не учитываемого отрезка.
Определение относительной амплитуды ускорения наложенных
колебаний проводят по осциллограмме импульса: 8НК = NHKP 1{кат),
где — отклонение луча осциллографа от линии усредненного про-
филя импульса, соответствующее амплитуде наложенных колебаний
(в миллиметрах или делениях сетки).
Воздействие многократных ударов предусматривает проведение
двух видов испытаний: на ударную прочность и ударную устойчивость.
Основными параметрами испытательных режимов и в том и в другом
случае являются: форма импульса, которая должна быть близкой к
полусинусоиде; пиковое ударное ускорение ап; длительность действия
ударного ускорения т; общее число ударов п. Значения таких пара-
метров, как аП и п, зависят от выбранной или установленной степе-
ни жесткости (ГОСТ 28215-89).
При выборе длительности действия ударного ускорения исходят
из того, что спектр отклика и низшая резонансная частота изделия
зависят от максимальной амплитуды и длительности воздействия удар-
ного импульса. Поскольку любое изделие можно представить в виде
совокупности отдельных конструктивных элементов (в некоторых из
них в результате воздействия удара возникает резонанс), необходимо
выделить наиболее слабый из элементов, определяющий механичес-
кую прочность всего изделия. Реакция такого элемента на воздей-
ствие ударных механических нагрузок зависит от нагрузки и его низ-
шей собственной частоты. Зависимость длительности действия
ударного импульса от низшей резонансной частоты изделия приведе-
на в табл. 7.3.
Значения резонансных частот изделия могут быть определены в
процессе испытаний на воздействие вибрации или взяты из справоч-
ных данных.
В случаях, когда испытательное оборудование по своим техни-
ческим характеристикам не обеспечивает требуемой длительности
действия ударного ускорения (обозначены «*»), величину т допуска-
ется определять по формуле т > 300//Он, где /он ~ низшая резонанс-
ная частота изделия. Частота повторения ударных импульсов обычно
выбирается от 1 до 3 в секунду. При этом исходят из условия, что
ускорение в контрольной точке должно быть в пределах допусков,
показанных на рис. 7.17.
Выбор степени жесткости зависит от назначения, места установ-
ки и условий эксплуатации изделия, а также размеров и массы испы-
405
Таблица 7.3
Значение длительности действия ударного воздействия
в зависимости от низшей резонансной частоты изделия
Низшая резонансная частота изделия, Гц Длительность действия ударного ускорения, мс Низшая резонансная частота изделия, Гц Длительность действия ударного ускорения, мс
Не свыше 60* 18±5 200-500 3±1
60-100* 11±4 500-1000 2±0,5
100-200* 6±2 Свыше 1000 1±0,3
туемого изделия. В соответствии с международным стандартом МЭК
(Публикация 68-2-29) для испытания радиоэлементов и изделий ма-
лых габаритов предпочтительной степенью жесткости является 4000± 10
ударов при ускорении 390 м/с2 и длительности импульса 6 мс. Воз-
можные степени жесткости приведены в табл. 7.4.
Таблица 7.4
Степени жесткости при многократных ударах
Степень жесткости Пиковое ускорение, м/с2 Длительность импульса, мс Изменение скорости, м/с
I 100 16 1,00
II 150 6 0,6
III 250 6 0,9
IV 400 6 1,5
V 1000 2 1,2
Примечание. Рекомендуется осуществлять 1000±10 и 4000±10 ударов.
При испытаниях крупногабаритных многоэлементных изделий,
когда увеличивается возможность возникновения резонансов и нало-
женные колебания затрудняют оценку формы импульса ударного ус-
корения по осциллограмме, допускается осуществлять контроль ис-
пытательного режима в процессе настройки установки с контрольным
грузом, масса которого равна массе изделия с приспособлением. При
этом отклонение массы контрольного груза не должно превышать 5%.
После настройки испытательной установки на заданный режим кон-
трольный груз заменяется испытуемым изделием и далее испытания
проводятся при неизменной настройке установки.
406
Во время транспортировки механические удары могут действо-
вать в разных направлениях, поэтому при испытаниях необходимо
обеспечивать воздействие ударов поочередно в каждом из трех взаим-
но-перпендикулярных направлений по отношению к изделию. При
этом общее число ударов должно распределяться поровну между на-
правлениями, при которых проводят испытания.
Изделия, имеющие ось симметрии, испытывают в двух взаимно-
перпендикулярных направлениях (вдоль оси симметрии и перпенди-
кулярно к ней) при сохранении общего числа ударов. Изделия с
известным наиболее опасным направлением воздействия испытыва-
ют только в этом направлении при сохранении общего числа ударов.
При испытании на ударную устойчивость изделие подвергают воз-
действию 20 ударов по каждому из направлений. Поскольку в про-
цессе испытаний должен проводиться контроль параметров изделий,
то частота следования ударных импульсов должна обеспечивать эти
измерения. При выборе контролируемых параметров испытуемого
изделия нужно учитывать степень их информативности об ударной
устойчивости изделия.
Иногда возможно совмещение испытаний на ударные прочность
и устойчивость. В этом случае контроль параметров изделия прово-
дят в конце испытаний при числе ударов не менее 20 по каждому
направлению воздействия.
Как отмечалось выше, при воспроизведении ударов имеют место
не только продольные, но и поперечные воздействия, поэтому в ряде
случаев представляет интерес использовать трехкомпонентный аксе-
лерометр, чувствительный к механическим колебаниям и ударам в
трех взаимно-перпендикулярных направлениях и раскладывающий
колебания и удары на три взаимно-перпендикулярных вектора. В
измерительном приборе электрические сигналы суммируются для
определения действительной амплитуды механического удара и на-
правления вектора воздействия.
Форма импульса и степень жесткости должны выбираться с уче-
том конструкции изделия, целей испытаний, места установки изде-
лия или условий транспортирования, а также условий эксплуатации.
Целесообразность выбора одной из рекомендуемых форм импульсов
для испытаний на воздействие одиночных ударов наиболее наглядно
обнаруживается при анализе их спектров.
Для выбранной формы импульса степень жесткости определяется
комбинацией максимального ускорения и длительности номиналь-
ного импульса.
При выборе длительности действия ударного ускорения руковод-
ствуются соображениями, сформулированными при рассмотрении
испытаний на многократные удары. Длительность действия ударного
407
ускорения импульсов трапецеидальной и пилообразной формы рас-
считывается соответственно по формулам: т = п • 102//Он ; т > зоо//Он,
где п выбирают в диапазоне 3—100. Полученные по этим формулам
значения округляют до ближайших значений, предусмотренных
ГОСТ 28213-87.
Значения длительности действия ударного ускорения импульсов
полусинусоидальной формы определяют в зависимости от низших
резонансных частот изделий (табл. 7.5).
Таблица 7.5
Значение длительности действия ударного ускорения импульсов
полусинусоидальной формы
Низшие резонансные частоты изделий, кГц Длительность действия ударного ускорения, мс Низшие резонансные частоты изделий, кГц Длительность действия ударного ускорения, мс
0,5 и выше 0,5-1 1-2 2-5 3±1 2±0,5 1±0,3 0,5±0,2 5-10 10-20 Свыше 20 0,2±0,1 0,1±0,05 0,05±0,02
Если изделия имеют входящие в их конструкцию встроенные эле-
менты защиты (например, амортизаторы), то при выборе длитель-
ности действия ударного ускорения учитывают низшую резонансную
частоту самого изделия, а не элементов защиты.
Если при испытаниях у изделий невозможно выявить плоскости
и оси симметрии, их подвергают воздействию трех последовательных
ударов по трем взаимно-перпендикулярным осям поочередно в каж-
дом из двух противоположных направлениях (всего 18 ударов). В ос-
тальных случаях выбор конкретных направлений воздействия выпол-
няется следующим образом: при наличии оси симметрии испытания
проводят вдоль нее, в двух противоположных направлениях и в лю-
бом направлении, перпендикулярном этой оси; при наличии одной
или нескольких плоскостей симметрии направление воздействия вы-
бирают так, чтобы испытание проводилось перпендикулярно к каж-
дой плоскости симметрии в одном направлении. Изделия, у которых
известно одно наиболее опасное направление воздействия, испыты-
вают только в этом направлении.
Испытательные режимы устанавливают по показаниям рабочих
средств измерений с допустимым отклонением пикового значения
ударного ускорения в контрольной точке, равным ±20%. Параметры
408
испытательного режима рекомендуется измерять в процессе настрой-
ки стенда на режим; дальнейшие испытания выполняются при неиз-
менной настройке стенда.
7.3. Испытания на воздействие линейных ускорений
7.3.1. Условия испытаний
и применяемое испытательное оборудование
Воздействие линейных ускорений на различные изделия в процессе
проведения лабораторных испытаний обеспечивается с помощью спе-
циальных центрифуг, создающих в горизонтальной плоскости ради-
ально направленные ускорения. В зависимости от режима испыта-
ний, а также габаритных размеров и массы испытуемых изделий
применяют различные центрифуги, входящие в конструкцию соот-
ветствующих установок. Следует иметь в виду, что структурные схе-
мы установки могут различаться в зависимости от выбора привода,
построения системы автоматического регулирования, используемого
преобразователя и т.д.
Структурная схема, приведенная на рис. 7.18, отражает общий
принцип построения установок линейного ускорения. Основным уз-
лом центрифуги является привод 7, который совместно с редуктором
2 определяет ряд значений параметров установки. Полученное вра-
щательное движение передается столу (платформе) 4 центрифуги, на
котором крепится испытуемое изделие. Для проведения испытания
на устойчивость изделия, которое находится под нагрузкой, исполь-
зуется токосъемное устройство 5. Линейные ускорения контролиру-
Рис. 7.18. Структурная схема установки линейного ускорения
409
ются с помощью средства измерений 6, состоящего из преобразова-
теля 3 и измерительного прибора 7. Сигналы с измерительного при-
бора могут подводиться по цепи обратной связи к системе автомати-
ческого управления 8, поддерживающей постоянство заданных
режимов испытаний путем воздействия управляющих сигналов на
источник питания 9.
Классификацию центрифуг можно проводить по следующим при-
знакам:
• по назначению — для испытаний на линейные перегрузки и на
комбинированное воздействие факторов окружающей среды;
• по типу привода — с электрическим приводом и с гидравличес-
ким приводом;
• по развиваемому линейному ускорению'. А — до 200, Б — до 500,
В — до 1000, Г — 2000, Д — свыше 2000 м/с2;
• по конструкции — открытого и камерного типа, с неповорот-
ным и поворотным столом;
• по грузоподъемности малые — до 10 кг, средние — до 50 кг,
тяжелые — до 100 кг и сверхтяжелые — свыше 100 кг.
Основными параметрами, характеризующими центрифуги, яв-
ляются следующие:
1. Максимальное линейное ускорение.
2. Диапазон линейных ускорений на заданном радиусе вращения
(табл. 7.6).
Таблица 7.6
Типичные линейные ускорения
для различных областей применения
Ускорение Примечание
м/с2 g
49 < а < 98 о VI VI Уровень испытаний для изделий, установленных на самолетах.
49 < а < 196 5 < а < 20 Структурный или предельный уровень для изделий, установленных на самолетах, а также для испытаний качества крепления.
98 < а < 980 10 < а < 100 Уровень испытаний для изделий космического назначения.
4900 <а< 29400 500 <а< 30000 Уровень испытаний на структурную прочность изделий электронной техники.
410
3. Отклонение линейного ускорения от заданного значения. При
линейных размерах изделия менее 10 см оно не должно превышать
10%. В других случаях ускорение должно находиться в пределах от
-10 до +30% заданного значения. Следует иметь в виду, что для из-
делий больших габаритных размеров воспроизводимость испытаний
имеет более низкий порядок и зависит от относительных размеров
изделия и центрифуги.
4. Допустимая величина тангенциального ускорения. В процессе
разгона центрифуги наряду с центростремительным ускорением ап
возникает и тангенциальное ускорение лт, отсутствующее в большин-
стве случаев при реальной эксплуатации. Силы инерции от танген-
циальных (касательных) ускорений могут исказить картину испыта-
ний, оказывая влияние на функционирование испытуемых изделий.
Поэтому установлено, что а. не должно превышать 10% заданного
ускорения, т.е. ах<0,1а„.
5. Длительность (или продолжительность) воздействия линейных
ускорений в процессе испытаний. При испытаниях наиболее критично
действие во время нарастания ускорения тн, поэтому сама длитель-
ность т воздействия с заданным линейным ускорением может быть
небольшой. В зависимости от условий эксплуатации целесообразно
предусматривать форму (закон) изменения линейного ускорения во
времени. Наиболее распространены трапецеидальная (рис. 7.19, а)
и колоколообразная (рис. 7.19, б) формы. При воспроизведении
нагрузки трапецеидальной формы с резким нарастанием (тн) и спа-
дом (тс) импульса возникают определенные трудности по обеспече-
нию быстрого разгона и торможения.
Рис. 7.19. Формы изменений линейного ускорения
6. Длительность разгона (нарастания) тн и торможения (спада)
фронта нагрузки. Она должна удовлетворять условию:
411
тн = тс = О, Зд/Я/лд или тн = тс > 100/л ,
где ап — линейное ускорение; R — расстояние от центра вращения
центрифуги до контрольной точки, см; п — частота вращения цент-
рифуги, мин.-1.
Однако на практике возможны случаи, когда значение тн должно
быть существенно меньшим. Тогда для воспроизведения линейных
ускорений используют специальные ударные установки, позволяю-
щие воспроизводить импульсы длительностью менее 100 мс.
Особенностью испытаний с применением ударных стендов явля-
ется невозможность воспроизведения трапецеидального импульса боль-
шой длительности с малым временем нарастания и спада. Поэтому в
случае, когда (тн+тс)<100 мс, на ударном стенде воспроизводят
импульс, имитирующий только эти части формы импульса линейно-
го ускорения, а длительное воздействие воспроизводят с помощью
центрифуги. В случае, когда сумма времени (тн + тс) > 100, на удар-
ном стенде трудно воспроизвести импульс линейного ускорения за
один удар и тогда осуществляют два ударных воздействия ударными
импульсами, воспроизводящими время нарастания и время спада.
Недостатком испытаний с применением ударного стенда являет-
ся невозможность полного воспроизведения формы изменения ли-
нейного ускорения на одной установке, что приводит к искажению
реальной картины воздействия линейных ускорений при эксплуата-
ции изделия из-за его перегрузки, а также увеличивает стоимость и
продолжительность самих испытаний за счет дополнительного монта-
жа и демонтажа изделий на испытательном оборудовании и средств
измерений.
Помимо указанных выше параметров центрифуги в ряде случаев
необходимо определять дополнительные ее параметры, значения ко-
торых зависят от конструктивного исполнения и качества реализации
центрифуги. К таким параметрам относятся: допустимая неравно-
мерность ускорения по столу (платформе) центрифуги; допустимое
отклонение поверхности стола центрифуги от горизонтальной плос-
кости; допустимая вибрация стола; допустимое изменение длины плеча
стола при изменении скорости вращения; допустимая неуравновешен-
ность в горизонтальной и вертикальной плоскостях относительно цен-
тра вращения стола; время непрерывной работы с заданным постоян-
ным ускорением; максимальная грузоподъемность, размеры стола.
Кроме перечисленных параметров обычно приводится еще ряд
других, характеризующих условия эксплуатации, установочные раз-
меры.
412
Рассмотрим основные конструкции применяемых центрифуг.
Простейшая установка для воспроизведения линейных ускорений
имеет центрифугу открытого типа с неповоротным столом. В комп-
лект установки помимо самой центрифуги входит также стойка 1 с
блоками, выполняющими указанные выше функции (рис. 7.20). Стол
(платформа) 3 центрифуги приводится во вращение электродвигате-
лем 6 через редуктор 5. Стол имеет резьбовые отверстия 4, обеспе-
чивающие крепление изделий или приспособлений. Столы должны
обладать высокой механической прочностью и жесткостью, исклю-
чающей их вибрацию. Для уменьшения аэродинамического сопро-
тивления плоскость стола должна быть горизонтальной. Иногда он
имеет обтекатели, уменьшающие аэродинамическое сопротивление.
Для обеспечения испытаний изделий в рабочем состоянии под элек-
трической нагрузкой предусмотрено токосъемное устройство, в кон-
струкцию которого входит коллектор 2 с токоподводами, оканчива-
ющимися штепсельными колодками. Центрифуги должны иметь
приспособления для статической и динамической балансировок.
Рис. 7.20. Установка с центрифугой открытого типа для испытаний
на воздействие линейных ускорений
413
Для испытаний изделий электронной техники наибольшее при-
менение получили установки с центрифугами камерного типа, харак-
теризующиеся тем, что в них стол (в дальнейшем ротор) размещается
в рабочей камере центрифуги. Конструктивно установки с центрифу-
гами камерного типа (рис. 7.21) могут быть выполнены совместно и
раздельно со стойкой управления приводом. Особенностью указанных
центрифуг является необходимость воспроизведения больших значе-
ний ускорений, а следовательно, больших чисел оборотов. В связи
с этим для уменьшения трения ротора о воздух (в результате чего
ротор нагревается) в рабочей камере создается вакуум, а также пре-
дусматривается охлаждающий агрегат 3. При выполнении центрифу-
ги с приводом и системы управления в едином корпусе (рис. 7.21)
изменение линейного ускорения достигается регулированием числа
оборотов ротора центрифуги 2 путем изменения частоты питающего
напряжения с помощью преобразователя частоты, состоящего из
управляемого выпрямителя 1 и автономного инвертора 4.
Пульт
Рис. 7.21. Установка с центрифугой камерного (закрытого) типа
для испытаний на воздействие линейных ускорений
414
При раздельном выполнении в стойке привода размещены: блок
питания 5, блок управления выпрямителем и инвертором 6, усили-
тель мощности и задающий генератор. Установки могут иметь авто-
матическое и ручное управление частотой вращения ротора, а также
приспособления для проведения испытаний в трех взаимно-перпен-
дикулярных направлениях.
Установки линейного ускорения, содержащие центрифуги с по-
воротными столами, в основном применяются для имитации быст-
рого нарастания импульса и синусоидального всплеска перегрузки.
Указанные центрифуги позволяют воспроизвести перегрузки без уче-
та действия сил инерции, обусловленных касательным ускорением,
что достигается с помощью специальных инерционных тел.
Возможно создание программных центрифуг, в которых вращение
вала, изменяющееся по заданному закону, воспроизводит входное
(управляющее) воздействие. Одним из основных узлов такой цент-
рифуги является следящий привод с электродвигателем постоянного
тока, имеющий широкий диапазон регулирования угловой скорости
и относительно высокий КПД, обеспечивающие плавную регулиров-
ку угловой скорости в определенных пределах с заданной точностью.
Система автоматического управления центрифугой включает про-
граммирующее устройство, промежуточный и оконечный усилите-
ли, элементы обратных связей и приводный (исполнительный) дви-
гатель. Такая система позволяет изменять частоту вращения стола
центрифуги в соответствии с заданным законом.
Для испытаний изделий в рабочем состоянии под электрической
нагрузкой центрифуга должна иметь токосъемное устройство (токосъем-
ник), обеспечивающее подведение к испытуемому изделию напряже-
ния питания и входных электрических сигналов, а к средствам измере-
ния — входных электрических сигналов. В используемых токосъемных
устройствах контакт подвижного элемента взаимодействует с неподвиж-
ным. Получили применение также трущиеся коллекторные и ртутные
токосъемники.
Современные токосъемники должны удовлетворять следующим
основным требованиям:
• цепи передачи сигналов и питающих напряжений должны вы-
полняться с минимальным числом паек для уменьшения влия-
ния контактной термоЭДС;
• при передаче сигналов в нормальных климатических условиях
контактная термоЭДС должна быть не более 3 мкВ, а суммар-
ное сопротивление контактов не должно превышать 1 Ом; при
отклонении температуры на 1°С от нормальной термоЭДС не
должна изменяться более чем на 2 мкВ;
415
• сопротивление изоляции между контактами и корпусом, между
соединительными проводами и корпусом должно быть не менее
5 109 Ом;
• емкость между соседними контактами должна быть не более
30 пФ;
• все цепи передачи сигналов к испытуемому изделию и от него к
средствам измерения необходимо выполнять экранированным
проводом.
К недостаткам контактных коллекторных токосъемников «отно-
сятся: нестабильность сопротивления в цепи передачи сигнала, иска-
жения сигналов, изменение параметров токосъемников в процессе
эксплуатации и т.д. Несколько лучшими характеристиками обладают
ртутные токосъемники, обеспечивающие высокую точность и надеж-
ность работы при самых разнообразных измерениях. Однако их при-
менение ограничивается возможностью испарения ртути.
Для испытаний изделий, требующих воздушного охлаждения,
необходимо предусматривать подвод воздуха, а для испытаний СВЧ
устройств — подключение волноводного или коаксиального тракта.
Расположение трубопроводов, кабелей, волноводных и коаксиаль-
ных трактов не должно увеличивать массы испытуемого изделия и
влиять на результаты испытаний.
В ряде случаев для проведения испытаний необходимо создание
специальных приспособлений для крепления изделий на столе цент-
рифуги. При этом следует учитывать ряд требований:
• суммарная масса приспособления и изделия не должна превы-
шать грузоподъемности центрифуги;
• жесткость конструкции приспособления должна обеспечивать
неискаженную передачу ускорения и исключать возможность
возникновения паразитных колебаний;
• центр тяжести приспособления должен совпадать с центром тя-
жести изделия;
• приспособление должно обеспечивать возможность испытания
при приложении линейного ускорения по трем осям (в соответ-
ствии с требованиями ТУ на изделие).
Специфическим для некоторых центрифуг является приспособ-
ление, предназначенное для их статической и динамической балан-
сировки.
7.3.2. Методы испытаний на воздействие линейных ускорений
Испытаниям на воздействие линейных ускорений в целях определе-
ния прочности или устойчивости подвергаются те изделия, которые
не испытываются на воздействие одиночных ударов с ускорением,
416
равным или большим, чем линейное. Эффект воздействия при дан-
ных условиях испытаний оказывается одинаковым. Однако если в
конструкцию изделия входят подвижные детали и узлы, то при оди-
ночных ударах возникают силы, направление которых не совпадает с
силами, вызванными линейными ускорениями. Вследствие этого
указанные испытания проводятся самостоятельно.
Испытательное оборудование выбирают в зависимости от габа-
ритных размеров и масс испытуемого изделия, а также требуемого
значения линейного ускорения. При этом необходимо, чтобы при
испытании центрифуга обеспечивала минимальный разброс линей-
ных ускорений в разных точках изделия. Измерения линейных уско-
рений проводят в точке, положение которой определяется конструк-
цией центрифуги или приспособления для крепления изделия. Радиус
вращения изделия определяется относительно центра стола центри-
фуги.
Испытания чаще всего проводят в нормальных климатических
условиях, однако возможны случаи комбинированных механических
и климатических воздействий. При испытаниях в центрифугах ка-
мерного типа необходимо учитывать, что в них создают пониженное
давление окружающей среды, которое не должно быть ниже указан-
ного в нормативной документации на испытуемое изделие. Крепле-
ние изделий зависит от цели испытания и конструктивного исполне-
ния изделия.
При проверке структурной прочности изделий их крепят за кор-
пус или фланец (при его наличии), принимая меры, предохраняю-
щие выводы от разрушения. При проверке устойчивости изделий их
крепление к столу должно соответствовать условиям реальной эксп-
луатации. Изделия крепятся к столу центрифуги либо непосредствен-
но, либо с помощью крепежных приспособлений, которые должны
обеспечивать возможность воздействия сил линейного ускорения во
всех заданных направлениях. Изделия, предназначенные для работы
с амортизаторами, крепят вместе с ними.
В общем случае используемые способы крепления должны обес-
печивать возможность испытаний изделий при воздействии ускоре-
ний в двух противоположных направлениях по трем взаимно-перпен-
дикулярным осям или в любом другом допускаемом эксплуатацией
положении с реальными механическими (статистическими) нагруз-
ками или их эквивалентами. Иногда при креплении изделий требует-
ся с помощью специально подбираемых балансов устанавливать ди-
намическое равновесие стола центрифуги. Расстояние от центра
вращения стола до центра тяжести баланса-противовеса подсчитыва-
ется по формуле
417
где Р — масса испытуемого изделия; Q — масса противовеса; —
расстояние от центра вращения платформы до геометрического цент-
ра изделия или его центра тяжести. Вместо балансов-противовесов
можно устанавливать аналогичные изделия, что повышает вдвое про-
изводительность испытаний.
При разработке или выборе приспособлений для крепления из-
делий на столе центрифуги необходимо учитывать, что суммарная
масса приспособления и изделия не должна превышать грузоподъем-
ности центрифуги.
Конструкция приспособления должна обладать достаточной жес-
ткостью для обеспечения правильности передачи ускорения на изде-
лие и исключать возникновение паразитных колебаний (вибраций),
вызванных набегающим воздушным потоком и колебаниями стола на
его резонансной частоте. Кроме того, она должна обеспечивать воз-
можность испытаний изделия при воздействии ускорений по любому
из трех заданных направлений. Необходимо, чтобы при установке
изделия на приспособление их центры тяжести совпадали. Центр тя-
жести приспособления определяется экспериментально или расчет-
ным путем.
При установке на стол центрифуги изделия с габаритным разме-
ром менее 100 мм необходимо обеспечивать разброс ускорения по
изделию относительно его центра тяжести или геометрического цен-
тра не более ±10% ускорения в контрольной точке, а для изделий с
габаритными размерами 100 мм и более — в пределах от 10 до 30%.
Линейное ускорение, направление его воздействия, характер
изменения, продолжительность испытаний и ряд других специфи-
ческих для испытуемого изделия параметров оговариваются в ПИ и
ТУ. Выбор параметров зависит от назначения испытуемого изделия,
места его установки и условий эксплуатации. Определяющими при
выборе линейного ускорения являются требования к прочностным
характеристикам изделия и стабильности электрических параметров.
Стандарт устанавливает степени жесткости испытаний, которым со-
ответствуют конкретные значения линейных ускорений. При испы-
таниях следует выбирать линейные ускорения из рекомендованных
стандартных значений. Возможен выбор следующих направлений воз-
действия линейных ускорений по отношению к изделию:
• поочередно в каждом из двух противоположных направлений по
трем взаимно-перпендикулярным осям изделия, если у изде-
лия невозможно выделить плоскости и оси симметрии;
418
• вдоль оси симметрии в двух противоположных направлениях и в
любом направлении, перпендикулярном к оси симметрии при
ее наличии;
• перпендикулярно к каждой плоскости симметрии в одном на-
правлении при наличии одной или нескольких плоскостей сим-
метрии.
Изделия, для которых известно наиболее опасное направление
воздействия, рекомендуется испытывать только в этом направлении,
сохраняя продолжительность испытания лишь для данного направле-
ния. Исходя из заданного значения линейного ускорения и расстоя-
ния от центра вращения стола до центра тяжести изделия определяют
расчетным путем число п оборотов стола центрифуги. Иногда в тех-
нической документации на центрифугу приводятся тарировочные кри-
вые зависимости линейного ускорения, создаваемого центрифугой,
от числа оборотов.
Следует помнить, что время разгона стола центрифуги зависит
от ее грузоподъемности. Скорость разгона и торможения стола может
быть от 5 до 500 м/ч.
Рекомендуемые продолжительности испытаний зависят от линей-
ных ускорений. При линейном ускорении до 5000 м/с2 продолжи-
тельность испытаний не менее 3 мин. в каждом направлении, а при
линейном ускорении свыше 5000 м/с2 продолжительность испыта-
ний не менее 1 мин., если не требуется большого времени для конт-
роля и (или) измерения параметров изделия. По окончании испыта-
ний проводится внешний осмотр, проверка механических свойств
изделия и измерение параметров, которые должны удовлетворять ус-
тановленным требованиям.
Перед включением центрифуги необходимо повернуть платфор-
му на 360° и проверить плавность ее хода, а также наличие зазора
между выступающими частями и кожухом или ее ограждением, кото-
рое должно обеспечить безопасность работы и возможность визуаль-
ного наблюдения при испытании. В программе и (или) методике
испытаний следует указывать, в каком состоянии должно находиться
изделие в процессе испытаний и когда следует проводить контроль
рекомендуемых основных параметров. В качестве параметров надо
выбирать такие, по изменению которых можно судить об устойчиво-
сти к воздействию линейного ускорений изделия в целом (например,
уровень шумов, искажение выходного сигнала или изменение его
значения, целостность электрических цепей и т.д.).
Возможны следующие способы проведения испытаний:
• изделие в процессе воздействия линейных ускорений находится
под электрической нагрузкой и при этом осуществляется конт-
14*
419
роль его параметров или контроль параметров проводится толь-
ко после прекращения указанного воздействия;
• изделие в процессе воздействия линейных ускорений не нахо-
дится под электрической нагрузкой и контроль параметров про-
водится после прекращения указанного воздействия.
7.4. Испытания на воздействие акустического шума
7.4.1. Условия испытаний
и применяемое испытательное оборудование
Воздействие акустического шума на изделия в условиях реальной эк-
сплуатации приводит к необходимости его воспроизведения при про-
ведении лабораторных испытаний. Лабораторная испытательная ус-
тановка предназначена для воспроизведения случайного акустического
шума и акустического тона меняющейся частоты в заданном частот-
ном и динамическом диапазонах с возможностью осуществления руч-
ного и автоматического управления.
Лабораторная установка (рис. 7.22) состоит из источника акус-
тического шума 7; рупора 2, являющегося акустическим согласую-
щим устройством, обеспечивающим согласование сопротивления
излучения источника с акустическим сопротивлением окружающей
среды; камеры 6, в которой испытуемое изделие подвергается дей-
ствию акустического шума; системы 5 формирования и управления
спектром акустического шума; измерительного микрофона 3; средств
измерения 4 значений параметров испытательных режимов.
Рис. 7.22. Структурная схема лабораторной установки для испытаний на
воздействие акустического шума
Основными параметрами, характеризующими установки акусти-
ческого шума, являются следующие:
1. Уровень звукового давления — до 170 дБ с плавной регулиров-
кой в пределах 90—170 дБ.
420
2. Отклонение уровня звукового давления от заданного. Оно долж-
но быть не более ±3 дБ (иногда данный параметр определяют как
допустимую погрешность по уровню звукового давления ±5%).
3. Случайный акустический шум в диапазоне частот 125—10 000 Гц
(белый шум).
4. Форма спектра акустического шума (рис. 7.23).
5. Акустический тон меняющейся частоты в диапазоне частот
125-10 000 Гц.
6. Продолжительность воздействия звукового давления. Она дол-
жна быть не менее 5 мин.
Рис. 7.23. Форма спектра акустического шума, измеряемого в третьокгав-
ных полосах частот по ГОСТ 20.57.406—81: I, ..., V — степени жесткости
Для некоторых установок необходимо рассматривать характерис-
тику направленности, представляющую собой зависимость звукового
давления, развиваемого источником на заданной частоте f или в по-
лосе частот со средней частотой/о в точке свободного поля, которая
находится на определенном расстоянии от рабочего центра, от угла
между рабочей осью источника и направлением на указанную точку.
В качестве источников акустического шума наибольшее приме-
нение получили акустические генераторы, принцип действия кото-
рых основан на преобразовании энергии сжатого воздуха в акустичес-
кую энергию, на модуляции воздушного потока электропнев-
матическим возбудителем, на использовании электродинамических
громкоговорителей.
Акустические генераторы, преобразующие энергию сжатого воздуха
в акустическую энергию, подразделяются на две основные группы: с
дискретным и с непрерывным (широкополосным) спектром частот.
421
Принцип действия указанных акустических генераторов заключа-
ется в том, что непрерывный воздушный поток модулируется путем
попеременного открытия и закрытия отверстий на его пути, в ре-
зультате чего изменяется уровень звукового давления. Указанная мо-
дуляция может реализовываться с помощью сирен и элекгропневма-
тических возбудителей.
Схема акустического генератора с дискретным спектром частот,
получаемым с помощью однороторной сирены, приведена на рис.
7.24. Воздух под давлением подводится к форкамере 7, по одной из
стенок которой располагаются сопла. Число сопл и шаг их распреде-
ления по окружности соответствуют числу и шагу отверстий в роторе
(диске) 2 От их числа зависит диапазон частот звуковых давлений.
Между ротором и торцевой частью сопел имеется зазор, который по
возможности должен быть минимальным (не более 0,05 мм), чтобы
уменьшить утечку воздуха через него и повысить КПД всей системы.
Рис. 7.24. Однороторная сирена
422
При вращении ротора электродвигателем 8, питаемым тиристор-
ным источником 7, площадь сечения струй воздуха, истекающего из
сопел, периодически изменяется, в результате чего изменяются га-
зодинамические параметры струй, приводящие к пульсации давле-
ния в рупоре 3 и появлению колебаний воздушной среды. Частота
колебаний f определяется числом оборотов ротора и числом сопел в
форкамере. Изменение частоты (тона) в определенных пределах до-
стигается изменением числа оборотов привода ротора, а ее поддер-
жание — с помощью системы автоматического управления электро-
двигателем, получающей исходную информацию с датчика 9 числа
оборотов. Точность поддержания частоты должна быть не ниже 1,5%.
В систему воздухоснабжения сирены входят: источники сжатого
воздуха; ресивер 4, обеспечивающий снижение давления до рабочего
значения; дроссель 5 для регулирования расхода воздуха; задвижка 6;
элементы автоматического регулирования давления воздуха в подво-
дящей магистрали.
Рабочий диапазон давления воздуха в форкамере порядка 104—
3 • 105 Па. Увеличение давления сверх указанного нецелесообразно,
так как интенсивность звукового давления при этом возрастает незна-
чительно. Следует иметь в виду, что в однороторной сирене может
возникать акустический резонанс, собственная частота которого оп-
ределяется геометрическими размерами форкамеры.
Иногда при вращении ротора в форкамере могут возникать пуль-
сации давления, для уменьшения которых ее внутреннюю поверх-
ность облицовывают звукопоглощающим материалом.
Акустический генератор с широкополосным спектром частот, реа-
лизуемым с помощью многороторной сирены, позволяет получить
случайный акустический шум в заданном диапазоне частот с требуе-
мым уровнем давления.
Отличие многороторной сирены от однороторной в том, что в
ней используется несколько роторов, каждый из которых имеет раз-
ное число и размеры отверстий для прохода воздуха, причем отвер-
стия по окружностям роторов располагаются с нерегулярным шагом,
а сами роторы вращаются с различной частотой. Вращение роторов
может осуществляться от разных электродвигателей или от разных
приводов, приводимых во вращение одним электродвигателем, вра-
щение которого посредством ряда шкивов и клиноременной переда-
чи передается роторам. Кроме того, возможно параллельное и соос-
ное расположения роторов. При параллельном расположении каждый
ротор работает с отдельным соплом. Такая конструкция получила
название сирены фон Герке.
Рабочий диапазон давления воздуха перед ротором — от 5 • 104 до
3,5 105 Па. Для сирен данного типа КПД, определяемый отношени-
423
ем пневматической мощности (сжатый воздух) к акустической, со-
ставляет примерно 8—10%. Недостатком многороторных сирен явля-
ется сложность автоматического управления, обеспечивающего вос-
произведение требуемого спектра шумов.
Акустические генераторы высокоинтенсивных звуковых полей, осу-
ществляющие модуляцию воздушного потока электропневматическим
модулятором, обеспечивают получение регулируемого спектра коле-
баний в диапазоне частот 20—5000 Гц. В основе принципа действия
модулятора лежит возбуждение механических колебаний модулирую-
щей конструкции с помощью электрогидравлического или электро-
динамического вибровозбудителя. В зависимости от используемого
вибровозбудителя исходный сигнал, задаваемый с помощью низко-
частотного электрического генератора, предварительно усиленный и
отфильтрованный, поступает на электрический усилитель мощности
и далее в обмотку катушки исполнительного устройства золотника
электрогидравлического вибровозбудителя или в обмотку подвижной
катушки электродинамического вибровозбудителя. При подаче ис-
ходного электрического синусоидального сигнала образуется система
акустических колебаний с постоянной амплитудой заданной часто-
ты. При подаче исходного электрического случайного сигнала обра-
зуются акустические колебания давления с различной амплитудой и
со случайным периодом следования во времени. Изменение соответ-
ствующей настройкой коэффициентов усиления полосовых фильтров
позволяет регулировать в полосах спектральную плотность электри-
ческого звукового давления.
Использование электродинамического возбудителя позволяет ре-
ализовать высокочастотные акустические генераторы.
Для создания акустических шумов могут использоваться профес-
сиональные электродинамические громкоговорители, различающиеся
по способу излучения (диффузорные с непосредственным излучением
и рупорные) и по воспроизводимому диапазону частот (узко- и широ-
кодиапазонные). Диффузорные громкоговорители требуют специаль-
ного оформления, образующего акустическую излучающую систему.
Важными показателями, характеризующими электродинамичес-
кий громкоговоритель, являются: КПД т|, стандартное звуковое дав-
ление рст, оцениваемое на расстоянии 1 м от громкоговорителя по
направлению его рабочей оси при подведении мощности 0,1 Вт, а
также его АЧХ. Область нижних частот ограничивается собственной
резонансной частотой громкоговорителя, а в области высоких частот
за счет роста индуктивного сопротивления подвижной катушки на-
блюдается подъем АЧХ. В результате АЧХ громкоговорителя полу-
чается неравномерной. Для ее выравнивания в области низких частот
улучшают конструкцию подвесов громкоговорителя, а в области вы-
424
соких частот применяют специальные рупорки. Кроме того, совер-
шенствуют конструкцию подвижных катушек.
У электродинамических громкоговорителей возможно возникно-
вение нелинейных искажений, основными причинами которых явля-
ются нелинейная зависимость деформации (сжатия и растяжения)
подвеса диффузора и центрирующей гайки от приложенной силы, а
также неоднородность магнитного поля в воздушном зазоре, прояв-
ляющаяся в ее уменьшении к краям зазора. КПД диффузорного гром-
коговорителя невелик, что обусловливается незначительным сопро-
тивлением излучения диффузора (вследствие его малых размеров по
сравнению с длиной излучаемой волны).
Ввиду малой поверхности излучения диффузорные громкогово-
рители не имеют явно выраженной направленности, хотя в области
высоких частот она становится более заметной. В в простейшем слу-
чае такой громкоговоритель устанавливается на плоский экран, вы-
полненный из доски или фанеры толщиной 10-20 мм, что улучшает
воспроизведение низких частот и не оказывает влияния в области сред-
них и высоких частот.
Для одновременного увеличения звукового давления и получения
заданной направленности создают акустические системы, которые
состоят из нескольких диффузорных громкоговорителей, расположен-
ных на расстоянии друг от друга в несколько раз меньшем расстояния
до объекта испытаний. При этом звуковые давления всех громкого-
ворителей складываются:
Pl = А + Р1 +-+Рп-
С целью получения равномерной направленности в горизонталь-
ной плоскости, т.е. одинакового звукового давления в любом направ-
лении на заданном расстоянии от источника (громкоговорителя), со-
здают систему с громкоговорителями, расположенными радиально
по окружности в одной плоскости.
Для увеличения звукового давления, повышения КПД и получе-
ния заданной направленности излучения источников акустических
шумов возможно применение рупоров. Для воспроизведения свобод-
ного и диффузного полей шума в лабораторных условиях необходимо
создание специальных камер. Камеры, позволяющие воспроизвести
свободное поле, называют камерами бегущей волны, или безэховыми,
а камеры, воспроизводящие диффузное поле, — реверберационными,
или камерами отраженных волн.
Испытательная камера бегущей звуковой волны представляет со-
бой трубу (акустический волновод) с жесткими стенками прямоу-
гольного или круглого сечения, обеспечивающую распространение
плоской бегущей волны (рис. 7.25).
425
Рис. 7.25. Испытательная камера бегущей звуковой волны: 1 — воздушный
фильтр; 2 — сирены; 3 — рупоры; 4 — место для установки испытуемых
изделий; 5 — акустический волновод; 6 — глушитель; 7 — звукопоглощаю-
щие клинья; 8 — виброизоляторы; 9 — панель для крепления испытуемых
изделий; 10 — генератор; 11 — формирующие фильтры; 12 — усилитель
мощности; 13 — задвижки; 14 — дроссель (гидродинамическое сопротивле-
ние потоку); 15 — ресивер
Для исключения отражений звуковых волн в торце трубы разме-
щают звукопоглощающие клинья, обеспечивающие максимальное по-
глощение звуковой энергии в области частот от 60 Гц и выше за счет
плавного увеличения акустического сопротивления. Клинья изготов-
ляются из волокнисто-пористых материалов, помещаемых в специ-
альные чехлы. При этом рекомендуется следующее соотношение
высоты, ширины и толщины клиньев: 1 : 0,4 : 0,13. Клинья устанав-
ливают основаниями вплотную друг к другу на небольшом расстоя-
нии от стены. Такие конструкции имеют коэффициент поглощения
а = 0,98—0,99. В результате звуковое поле в камере приближается к
свободному.
Конструктивно труба (акустический волновод) выполняется же-
лезобетонной или в виде металлической сварной конструкции. Раз-
меры поперечного сечения трубы выбирают в зависимости от габа-
ритных размеров испытуемых изделий. При прямоугольной форме
сечения акустического волновода отношение его ширины к высоте
рекомендуется брать не менее 1:5.
Реверберационные камеры характеризуются образованием в них
сложного колебательного движения воздуха. Законы распределения
колебательной скорости частиц воздуха определяются свойствами ис-
426
точника звука, геометрическими размерами и формой камеры, спо-
собностью материала стен, потолка и пола поглощать акустическую
энергию. Геометрические размеры и форма реверберационной каме-
ры выбираются в зависимости от размеров и формы испытуемых из-
делий. При этом главным является получение в камере диффузного
поля, средняя плотность энергии звуковых колебаний которого была
бы одинаковой по всему объему камеры.
В принципе камера может иметь форму куба или параллелепипе-
да. Однако надо учитывать, что от размеров и формы камеры зави-
сят число и частота резонансов объема воздушной среды в камере.
При форме камеры в виде куба, когда линейные размеры одинако-
вы, или в виде параллелепипеда, когда возможна кратность размеров
сторон, число резонансных пиков уменьшается, а их амплитуды воз-
растают, в результате чего звуковое поле становится менее равномер-
ным. Для повышения равномерности звукового поля в камере в фор-
ме параллелепипеда рекомендуется брать следующие соотношения
линейных размеров высоты, ширины и длины: 2:3:5 или lx = 1;
ly = v2/x; lz = >[ilx. При этом вероятность совпадения частот мини-
мальна.
Для повышения степени диффузности поля камеры относительно
небольших объемов (менее 1000 м3) строят в виде неправильных четы-
рех- или пятиугольников (рис. 7.26). Размер л должен превышать наи-
больший габаритный размер не менее чем в 2 раза и выбираться из
следующего ряда: 0,5; 1,25; 3 м. Конструкции реверберационных ка-
мер должны обеспечивать минимальное поглощение акустических
шумов внутри камеры. С этой целью камеры делают из бетона с пос-
ледующим покрытием цементной штукатуркой, поскольку указан-
ные материалы имеют малый коэффициент поглощения а = 0,015—
0,025. Все внутренние поверхности камер полируют и красят. Для
Рис. 7.26. Схема реверберационной камеры
427
повышения диффузности поля за счет изменения времени ревербера-
ции применяют звукопоглощающие или рассеивающие конструкции.
В качестве звукопоглощающих используют деревянные щиты, пло-
щадь которых может быть определена по формуле
5 = 0,161-^7
аТ ’
где V — объем помещения; а' — реверберационный коэффициент
поглощения; Т — время реверберации.
Время реверберации камеры Т должно по возможности превы-
шать 1,5 с. Оно будет тем больше, чем выше твердость поверхности
камеры и ниже его поглощающая способность. Для обеспечения рас-
сеивания на внутренней поверхности камеры устанавливают специ-
альные жесткие клинья.
Однородность и интенсивность звукового поля, воздействующе-
го на испытуемое изделие в камере, существенно зависят от места
расположения источника излучения в камере и его расстояния до из-
делия. Наиболее целесообразным расстоянием между источником
шума и изделием является 2К1/3/з. Хорошие результаты дает разме-
щение источника вблизи одного из углов камеры, а испытуемого из-
делия на расстоянии примерно 1/4 от всех стен.
Необходимо отметить, что при появлении в звуковом поле одной
или нескольких преград волновая картина меняется вследствие воз-
никновения отраженных волн. Количественно энергия отраженной
волны существенно зависит от размеров и звукопоглощающих свойств
преграды. В результате уровень звукового давления изменяется с
изменением расстояния между источником и изделием. Установле-
но, что при расположении источника на стене камеры средняя ин-
тенсивность звука возрастает в 2 раза, а при установке в углу камеры —
в 4 раза по сравнению с установкой источника в центре камеры.
Кроме рассмотренных конструкций камер возможно создание
камеры с воспроизведением звукового давления в «ближнем» поле с
использованием так называемых «поверхностей излучения». В этом
случае в качестве источника акустического шума могут использовать-
ся громкоговорители, располагаемые в шахматном порядке на по-
толке и стенках камеры. Места, свободные от громкоговорителей,
заполняются звукопоглощающим материалом. Испытуемое изделие
располагается в центре камеры.
Площадь поверхности излучения можно условно принять равной
поверхности эквивалентной полусферы с радиусом г = -jS/ilit), где
S — площадь поверхности излучения. Источники излучения должны
428
размещаться на поверхности с соблюдением следующих условий.
Отсчетное расстояние d и расстояние между источниками излучения h
выбирают в зависимости от размеров испытуемых изделий Z. При мак-
симальном размере изделия / > 0,25 м d= 1; 3; Юм, а при / < 0,25 м
4/ < d < 1 м. При высоте испытуемого изделия Я или расположении
его в пределах указанной высоты расстояние между источниками из-
лучения h выбирают равным Я/4, но не менее 0,25 м.
При желании получить свободное поле в условиях полигона не-
обходимо, чтобы источник акустического шума располагался на глад-
кой, плохо отражающей поверхности, а испытуемое изделие — в во-
ображаемой полусфере, окружающей источник, за пределами которой
не имеется отражающих преград. Радиус полусферы должен быть
достаточно большим, чтобы обеспечивалось выполнение условий
«дальнего» поля.
7.4.2. Методы испытаний на воздействие акустического шума
Испытаниям на воздействие акустического шума подвергаются изде-
лия, имеющие немонолитную структуру. Испытания проводятся двумя
основными методами: методом воздействия на изделие случайного аку-
стического шума и методом воздействия на изделие акустического тона
меняющейся частоты. Выбор метода в принципе определяется усло-
виями эксплуатации изделия. Испытательное оборудование в общем
случае выбирается в зависимости от метода испытаний.
При выборе камеры необходимо учитывать, что ее минимальный
требуемый объем, обеспечивающий воспроизведение диффузного
поля, зависит от геометрических размеров источника и длины волны
самой низкой частоты, рассматриваемой при испытаниях. В случае
измерений в октавных полосах можно воспользоваться формулой,
устанавливающей соотношение минимального объема камеры V и
длины волны \), соответствующей средней частоте самой низкой ок-
тавной полосы: V > ЗАо. При проведении измерений в третьоктав-
ных полосах формула имеет вид: V > 9AjJ.
Крепление изделий или приспособлений с изделиями выполняют
таким образом, чтобы обеспечить передачу акустических шумов к ис-
пытуемым изделиям с минимальными искажениями. Выбор способа
крепления зависит от геометрических размеров изделия. Малогаба-
ритные изделия, наибольший габаритный размер которых в закреп-
ленном состоянии не превышает 40 мм, крепятся на приспособле-
ниях в положении, соответствующем наиболее опасному способу
крепления из всех предусмотренных для эксплуатации. При этом для
испытаний некоторых изделий могут использоваться специальные мон-
429
тажные платы. Резонансные частоты приспособлений или других
средств крепления должны быть вне диапазона акустических шумов,
т.е. не ниже 20 кГц и не выше 16 Гц. Крепление изделий, габарит-
ные размеры которых не превышают 300 мм, может выполняться с
помощью системы подвески на эластичных растяжках (резиновые
шнуры, полосы и т.д.). Крупногабаритные изделия с наибольшими
размерами (более 300 мм) могут устанавливаться на рамы и специ-
альные столы с амортизаторными опорами. Изделия, имеющие соб-
ственные амортизаторы, крепятся непосредственно на них. При этом
резонансная частота системы изделие-амортизатор не должна превы-
шать 25 Гц, что обеспечивается жесткостью монтажных плат и кре-
пежных приспособлений.
Звуковое давление, создаваемое в камере, измеряется с помо-
щью измерительных микрофонов, которые могут иметь два функци-
ональных назначения. Для поддержания заданного уровня звукового
давления при испытаниях в камере может быть установлен конт-
рольный микрофон, включенный в замкнутую систему автоматичес-
кого регулирования. Для определения уровня звукового давления,
непосредственно воздействующего на испытуемое изделие в камере,
возможно использование нескольких измерительных микрофонов.
Важным является правильное размещение микрофонов в камере, ко-
торое определяется выбором их оптимальной угловой ориентации от-
носительно источника звука, расстоянием между микрофоном и ис-
точником, а также особенностями источника. Угловая ориентация
микрофона характеризуется углом, составленным его рабочей осью и
направлением на источник звука. Увеличение этого угла приводит к
падению чувствительности микрофона на высоких частотах. Выбор
расстояния / от источника звука до микрофона в основном определя-
ется свойствами камеры и может быть найдено по эмпирической фор-
муле, м:
, 1 fkV~
TV300’
где Т — время стандартной реверберации камеры; к — коэффициент
объемности звука (для симфонического оркестра 10—20); V — объем
камеры, м3. Можно воспользоваться и упрощенной формулой
/ = Ч^-
3
Испытание изделия на воздействие случайного акустического шума
может проводиться с помощью любой из рассмотренных ранее уста-
430
новок. Установка должна обеспечивать получение случайного акусти-
ческого шума в диапазоне частот 125—10 000 Гц при уровне звукового
давления, соответствующем требуемой степени жесткости (табл. 7.7).
Уровни звукового давления
Таблица 7.7
Степень жесткости Акустический шум, дБ Акустический тон меняющейся частоты, дБ
I 130 120
II 140 130
III 150 140
IV 160 150
170 160
При использовании реверберационной камеры изделие распола-
гают в ее средней части. Число измерительных микрофонов, уста-
навливаемых в камере, зависит от размеров и формы изделия. Для
изделий больших габаритных размеров рекомендуется проводить из-
мерения в шести точках, а для изделий, у которых наибольший габа-
ритный размер не превышает 20% длины наименьшей стенки каме-
ры, — в трех точках. Измерения проводят в точках, отстоящих на 0,3 м
от изделия, при условии, что изделие находится на расстоянии бо-
лее 0,6 м от стенок камеры или посредине между изделием и стенкой
камеры. Желательно, чтобы расположение измерительных микро-
фонов в пространстве было равномерным. Значение звукового дав-
ления определяют как среднее арифметическое результатов измере-
ний (ГОСТ 20.57.406-81). Согласно рекомендации Международной
организации технических норм и стандартов, результаты измерений
могут быть определены как среднее значение по пространству квадра-
тов средних квадратических значений звукового давления, вычислен-
ных в точках измерений. Точки измерений выбираются так, чтобы
всем участкам измерений соответствовали равные площади:
п п
где рт — среднее измеренное звуковое давление; п — число точек
измерения; pt — звуковые давления, измеренные в различных точках.
Возможна оценка среднего звукового давления в относительной
форме:
431
где р0 = 2 10 5 Па — опорное звуковое давление.
При испытании на воздействие акустического тона меняющейся
частоты используется камера бегущей волны. Изделие располагают
по геометрической оси излучателя так, чтобы сторона изделия с боль-
шей площадью поверхности была бы направлена к излучателю. Из-
делие закрепляется на гладкой, плохо отражающей поверхности, выше
которой не имеется отражающих преград. Если излучатели в камере
расположены (условно) на поверхности воображаемой полусферы,
изделие располагается в ее центре. Для обеспечения условий «даль-
него» поля радиус полусферы должен быть достаточно большим, т.е.
таким, чтобы при удвоении расстояния от источника шума до испы-
туемого изделия уровень звукового давления уменьшался на 6 дБ.
Для грубой оценки можно считать, что условия «дальнего» поля су-
ществуют на расстоянии от источника, превышающем самую длин-
ную волну или же в 2—3 раза линейные размеры изделия.
При испытании указанным методом функции контрольного и
измерительного микрофонов объединяются. Микрофон устанавли-
вается на расстоянии 5 см от изделия в плоскости, перпендикуляр-
ной к геометрической оси изделия, проходящей через его середину.
При этом параметры испытательных режимов должны поддерживать-
ся постоянными с допускаемым отклонением ±3 дБ. Испытания про-
водят воздействием тона плавно изменяющейся частоты в диапазоне
125—10 000 Гц от низшей к высшей и обратно (один цикл). При этом
в диапазоне частот 200—10 000 Гц уровень звукового давления должен
соответствовать указанному в табл. 7.7. На частотах ниже 200 и выше
1000 Гц уровень давления должен быть снижен на 6 дБ/окг. относи-
тельно уровня на частоте 1000 Гц. Продолжительность испытаний —
30 мин., если для контроля параметров изделия не требуется большего
времени.
Испытания проводят под электрической нагрузкой. При этом
измеряют параметры, по изменению которых можно судить об устой-
чивости изделий к воздействию акустических шумов. Регистрация
проверяемых параметров и их последующее сравнение с первоначаль-
ными значениями позволяет оценить результат испытаний. Помимо
измерений параметров проводится визуальный осмотр для выявления
механических повреждений.
При разработке методики испытаний на воздействие акустичес-
ких шумов необходимо учитывать: характеристику испытуемого изде-
432
лия (габаритные размеры, форму, материал изделия), характерис-
тику средств испытаний (испытательного оборудования, средств из-
мерений и других технических средств), данные о местах установки
измерительных микрофонов, метеорологические условия в камере и
другие специфические требования.
7.5. Комбинированные испытания
7.5.1. Условия испытаний на комбинированное воздействие
внешних факторов и применяемое
испытательное оборудование
В условиях реальной эксплуатации, хранения и транспортирования
изделия подвергаются одновременному воздействию ряда внешних
факторов, что требует осуществления комбинированных испытаний.
Комбинированные испытания могут быть механическими, климати-
ческими, механоклиматическими и др.
К комбинированным механическим испытаниям относятся испыта-
ния на совместное воздействие линейного ускорения и вибрации,
требующие создания испытательного оборудования, объединяющего
вибростенд с центрифугой. Возможны два варианта: установка цент-
рифуги на стол вибростенда или вибростенда на стол центрифуги.
При размещении центрифуги на столе вибростенда 1 (рис. 7.27)
для получения определенного суммарного ускорения необходима ка-
чественная балансировка изделия 4 и противовеса 2. Ответственны-
ми элементами конструкции являются упорный подшипник 5 и кол-
лектор токосъемника, являющийся продолжением приводного вала 3
и обеспечивающий подведение и съем сигналов с испытуемого изде-
лия. Подобная установка позволяет получить вибрации с ускорением
до 25g в диапазоне частот 25—2000 Гц, действующие перпендикуляр-
но к направлению действия линейного ускорения до 15g.
При размещении электродинамического вибростенда на столе 2
центрифуги с гидравлическим приводом 1 (рис. 7.28) важным требо-
ванием, предъявляемым к такой установке, является обеспечение
статической и динамической балансировок стола центрифуги. Для
этого на противоположных концах стола размещают два идентичных
вибростенда 3. Питание к вибростендам подводится с помощью кол-
лектора токосъемника 7 с контактными кольцами из серебряного
сплава. Подача гидравлической жидкости к гидроприводу вращаю-
щейся центрифуги осуществляется через шарнирные соединения 8.
Испытания можно проводить при линейных ускорениях и вибраци-
433
2
3
4
Рис. 7.27. Центрифуга на столе вибростенда
Рис. 7.28. Вибростенд на столе центрифуги
434
ях, действующих по оси, нормальной к направлению линейного ус-
корения.
Иногда возникает необходимость испытаний на воздействие виб-
рации, действующей в других направлениях, но при этом не допус-
каются вибрации по оси, касательной (тангенциальной) к направле-
нию вращения стола, из-за возникновения деформации кручения,
действующей на стол центрифуги. В данном случае необходимо под-
вижную катушку вибростенда удерживать в центрированном положении
в магнитном поле при расположении оси вибрации в одной плоско-
сти с направлением линейного ускорения. Для этого при нормальных
гравитационных нагрузках используется пневматическая пружина, же-
стко связанная с подвижной системой. Предотвращение приложе-
ния моментных нагрузок на стол центрифуги случайным образом по
отношению к приложению постоянно направленных перегрузок обес-
печивается специальным зажимом 4 для стягивания вибрационных
стендов в местах, соответствующих центру тяжести. В конструкции
стяжного приспособления 6 предусмотрена также возможность пред-
варительного механического напряжения стола центрифуги, для кон-
троля которого используется тензометрический датчик 5. Для одно-
временного воздействия механических и температурных факторов
испытуемое изделие 10обертывается изоляционным материалом, про-
питанным согревающей или охлаждающей жидкостью. Уровень виб-
ронагружения фиксируется вибропреобразователем 9.
К комбинированным климатическим испытаниям можно отнести
составное циклическое испытание на воздействие температуры и влаж-
ности. Эти испытания проводят для выявления отказов, которые
вызываются явлением, иногда называемым «дыханием». Ему под-
вержены изделия относительно больших габаритных размеров, име-
ющие зазоры между уплотнениями и металлическими конструкциями
или между уплотнениями и проволочными выводами. Наличие зазо-
ров приводит к проникновению в них влаги (воды), которая, замер-
зая при пониженной температуре, вызывает их увеличение. Этим
испытаниям должны подвергаться, в частности, изделия, имеющие
полости, которые образуются при опрессовке пластмассой.
Для реализации указанных испытаний используют термовлагока-
меры, которые должны обеспечивать выполнение следующих усло-
вий:
• повышение температуры от —10±2 до +25±2°С за время не более
90 мин. и от 25±2 до 65±2°С за время 1,5—2,5 ч;
• понижение температуры от 25±2 до — 10±2°С за время, не более
30 мин. и поддержание температуры — 10±2°С в течение 3 ч;
• поддержание относительной влажности 93±3% при постоянной
температуре и 80—96% во время пониженной температуры.
435
Термовлагокамеры построены на тех же принципах, что и каме-
ры тепла и влаги. Возможно построение термовлагокамер с нагревом
за счет циркуляции воздуха, нагретого косвенным способом в тепло-
обменнике, и увлажнения инжекционным способом — барботирова-
нием (рис. 7.29), а также с косвенным нагревом нагревателями за
рубашкой камеры и увлажнением, аналогичным указанному выше
(рис. 7.30).
Рис. 7.29. Термовлагокамера с косвенным термостатированием и увлажне-
нием за счет барботирования: 7 — термодатчик регулировки температуры; 2 —
вентилятор; 3 — регулятор температуры; 4 — осушитель; 5 — теплообмен-
ник; 6, 11 — холодильная установка; 7 — испаритель холодильной установ-
ки; 8 — воздушный насос; 9 — воздушный фильтр; 10 — измеритель количе-
ства воздуха; 12 — термостат термоносителя; 13 — канал циркуляции воздуха;
14 — насос термоносителя; 75 — электронагреватель
Комбинированно-последовательное испытание на воздействие хо-
лода, пониженного атмосферного давления и влажного тепла имити-
рует условия, возникающие в неотапливаемых и негерметизирован-
ных зонах летательных аппаратов. Поскольку с увеличением высоты
температура и давление убывают, то при подъеме летательного аппа-
рата происходит интенсивное охлаждение всех изделий, находящихся
в некомфортных зонах. При спуске во влажную атмосферу давление
и температура повышаются и изделие покрывается инеем. Образо-
436
1
2
Рис. 7.30. Термовлагокамера с косвенным термостатированием, нагревате-
лями в зарубашечном пространстве камеры и увлажнением за счет барботи-
рования: 1 — вентилятор; 2 — нагреватель; 3 — осушитель; 4 — холодильная
установка; 5 — увлажнитель; 6 — воздушный фильтр; 7 — измеритель коли-
чества воздуха; 8 — воздушный насос; 9 — термостат термоносителя; 10 —
насос термоносителя
вавшаяся при оттаивании инея влага или вода проникает внутрь изде-
лия, чему способствует разность давлений. Оставшаяся в изделии
вода при соответствующих условиях превращается в лед. Если испы-
туемое изделие имеет движущиеся части, то вследствие образования
льда перемещение их может быть нарушено. Поэтому в испытатель-
ной камере должны быть предусмотрены средства контроля за этими
перемещениями. Следовательно, в процессе испытаний необходимо
сначала воспроизвести воздействие холода и пониженного атмосфер-
ного давления не ниже 1 кПа, а затем воздействие повышенных влаж-
ности и давления.
Для проведения указанных испытаний необходимо иметь термо-
влагобарокамеру, позволяющую соответственно воспроизводить ис-
пытательные режимы, предусмотренные при испытаниях на воздей-
ствие пониженной (повышенной) температуры и пониженного
атмосферного давления, а также относительной влажности более 95%.
437
Увлажнение осуществляется подачей водяного пара в рабочий объем
камеры. Кроме того, камера должна иметь нагревательные прибо-
ры, позволяющие нагревать ее до 35°С за период времени, не превы-
шающий 1 ч.
В основе построения термовлагобарокамеры лежат принципы,
используемые при создании термовлагокамер и барокамер. В термо-
влагобарокамерах при пониженном давлении нагрев может осуществ-
ляться только через рубашку (стенку камеры), так как принудитель-
ное перемещение воздуха в данном случае неэффективно. Для
одновременного установления пониженного давления, температуры
и влажности воздуха с относительно высокой стабильностью воздей-
ствия данных факторов наиболее целесообразно осуществлять кос-
венный нагрев камеры с расположением нагревателей за рубашкой
камеры (рис. 7.31).
Указанное сочетание внешних воздействующих факторов предъяв-
ляет определенные требования к системе регулирования. Непрерыв-
ное увлажнение или осушение воздуха в камере создает искусствен-
ное натекание воздуха, которое должно постоянно компенсироваться
Рис. 7.31. Термовлагобарокамера: 1 — вентилятор; 2 — датчик температуры;
3 — система регулирования; 4 — вспомогательный воздушный насос; 5 —
вентиль; 6 — увлажнитель; 7 — водяной насос; 8 — вакуумный насос; 9 —
холодильная установка; 10 — измеритель количества воздуха; 11 — воздуш-
ный фильтр; 12 — смеситель со свежим воздухом; 13 — термостат; 14 —
насос термоносителя; 75 — нагреватель
438
работой вакуумного насоса и комбинацией клапанов, регулирующих
давление в камере. Наличие вакуума в камере приводит к тому, что
температуру точки росы увлажненного воздуха при нормальном дав-
лении необходимо пересчитывать, так как в вакуумной камере опре-
деленное количество водяного пара распределяется в большем про-
странстве, чем при нормальном давлении. Так, например, воздух
при нормальном давлении 101,5 кПа (760 мм рт. ст.) и температуре
точки росы т = + 50 °C имеет абсолютную влажность 82 гм”3, а при
пониженном давлении, т.е. при 50,7 кПа (380 мм рт. ст.), абсолют-
ная влажность будет 41 гм”3, что соответствует т = 36 °C. Для ув-
лажнения или обезвоживания из системы циркуляции воздуха отво-
дится часть воздушного потока и пропускается через устройство
увлажнения или обезвоживания.
Измерение влажности воздуха в рассматриваемых камерах целесо-
образнее проводить с помощью аспирационного психрометра в канале
отходящего воздуха испытательной камеры, т.е. в канале засасывания
вакуумного насоса. Такие конструкции являются вакуумно-надеж-
ными. Для непрерывного измерения и регистрации целесообразно
использовать хлористо-литиевый датчик, который обеспечивает ре-
гулировку влажности при изменении температуры точки росы на
±0,5...±1 °C, что соответствует ±3...±5% относительной влажности.
Психрометр и хлористо-литиевый датчики обеспечивают заданную точ-
ность при давлениях до 53,4 кПа (400 мм рт. ст.), а воспроизводимые
результаты измерения — при давлении до 26,7 кПа (200 мм рт. ст).
При измерении температуры необходимо учитывать уменьшение
коэффициента теплоотдачи, что приводит к увеличению времени
реакции термометра на изменение температуры по сравнению с ус-
ловиями нормального атмосферного давления и к тому, что нагрев
осуществляется в основном посредством излучения. Наличие простран-
ственной нестабильности температуры в вакууме и увеличение влия-
ния теплопроводности приводят к росту погрешностей измерений.
К недостаткам термовлагобарокамер следует отнести указанное
выше определенное натекание, а также загрязнение воздуха в камере
испарениями рабочей жидкости насоса и вентилей, пылью и водой,
содержащимися в нагнетаемом воздухе при восстановлении давления
до нормального значения.
Комбинированные механоклиматические испытания предусматри-
вают совместное воздействие вибрации и тепловлажностного факто-
ра. Получили распространение комбинированные испытания на воз-
действие сухого тепла или холода и синусоидальной вибрации.
Испытаниям могут подвергаться тепловыделяющие и нетепловыделяю-
щие изделия. Комбинированное воздействие повышенной темпера-
туры и вибрации иногда приводит к повышению температуры сопря-
439
женных поверхностей за счет трения, вызываемого вибрацией, что в
свою очередь ухудшает некоторые механические свойства изделия.
Комбинированное воздействие вибрации, повышенных темпера-
тур и влажности приводит к росту интенсивности отказов вследствие
попадания влаги внутрь вакуумированных объемов (например, в элек-
тровакуумных приборах), вызывая последующее снижение герметич-
ности уплотнительных частей. Кроме того, оно обусловливает уско-
рение процессов коррозии, ухудшающих качество заземления и
повреждающих защитные покрытия, что приводит в ряде случаев к
электрическим отказам. Комбинированное воздействие пониженной
температуры и вибрации может вызвать изменение свойств у многих
материалов. Будучи гибкими и эластичными в нормальных услови-
ях, они под действием холода становятся хрупкими и жесткими, что
изменяет их реакцию на воздействие вибрации.
Для реализации,комбинированных механоклиматических испыта-
ний необходимо специальное оборудование, позволяющее воспроиз-
водить воздействие климатических факторов и вибрации. С этой целью
в едином комплексе совмещают климатическую камеру и вибростенд,
к которому предъявляются следующие основные требования:
• герметичность уплотнения между камерой и подвижными час-
тями вибростенда, что обеспечивает паронепроницаемость, а
следовательно, исключает изменение температуры и возник-
новение конденсации влаги;
• вакуумонепроницаемость при работе камеры в режиме пони-
женного атмосферного давления;
• отсутствие механической связи вибростенда через уплотнение с
камерой, что исключает, с одной стороны, передачу колеба-
ний вибростенда на камеру, а с другой — изменение характера
нагрузки вибростенда и соответствующее изменение частот и
амплитуд вибрации;
• тепловая изоляция камеры, исключающая теплообмен через уп-
лотнение и обеспечивающая постоянство температуры в камере.
При соединении камеры с вибростендом надо учитывать, что
камеры имеют относительно большую толщину изоляции стенок (100—
150 мм), а это приводит к необходимости иметь в ряде случаев доста-
точно длинный плунжер (более 170 мм), что дает возможность раз-
мещать стол вибростенда в камере так, чтобы его верхняя кромка не
опускалась ниже уровня пола камеры. Имеется ряд конструктивных
решений относительно совместной работы испытательной камеры с
вибростендом: например, соединение жестко установленного вибро-
стенда без плунжера с перемещаемой в вертикальной плоскости ка-
мерой и в горизонтальной плоскости агрегатной частью (на специ-
альных роликах) (рис. 7.32, а); жестко установленные камера и
440
Рис. 7.32. Возможные конструкции комбинированных камер испытаний на
климатические и вибрационные воздействия: а — неподвижный вибростенд
и перемещаемая в вертикальной плоскости камера; б — перемещаемый виб-
ростенд и неподвижная камера; в — неподвижный вибростенд и поднимае-
мая камера; 1 — вибростенд; 2 — стол вибростенда; 3 — климатическая
камера; 4 — ролики для перемещения агрегатной части; 5 — агрегатная часть;
6 — ролики для перемещения камеры или вибростенда; 7 — демонтируемый
плунжер вибростенда; <У — гидравлическое устройство (подъемник); 9— воз-
душные каналы, соединяющие агрегатную часть с камерой
агрегатная часть и перемещаемый на роликах вибростенд с демонти-
руемым плунжером (рис. 7.32, б). Для испытаний изделий больших
габаритных размеров и массы может использоваться специальная каме-
ра, имеющая гидравлическое устройство, обеспечивающее ее подъем
над неподвижно установленным вибростендом (рис. 7.32, в).
Для соединения плунжера с камерой или корпуса вибростенда с
камерой необходимо создать соединяющие элементы, удовлетворяю-
щие сформулированным выше требованиям. Как указывалось, для
реализации некоторых соединений нужен специальный плунжер дос-
таточно большой длины, жестко соединенный со столом вибростенда
и проходящий через теплоизоляцию. При выборе материала плунже-
ра следует учитывать, что плунжер должен обладать большой жестко-
стью, иметь малую массу, быть низкотеплопроводным. Указанные
требования весьма противоречивы.
441
Плунжеры могут изготавливаться из магниевых сплавов и корро-
зионно-стойкой стали. Для сохранения неизменными значений па-
раметров испытательного режима камеры и исключения влияния вос-
производимых в ней воздействий климатических факторов на конст-
рукцию вибростенда необходимо предусмотреть специальную изоля-
цию. С этой целью между стенкой (полом) камеры и плунжером, а
также между стенкой и корпусом вибростенда помещают уплотнение
из губчатой резины или полиуретановой пены. Достоинствами пос-
ледней являются ее паронепроницаемость и влагоустойчивость благо-
даря наличию закрытых пор. Указанные уплотнения дополняют плос-
кими или тарельчатыми мембранами, защищающими подвижную
систему вибростенда от загрязнений, а также действия конденсиро-
ванной влаги и инея. При размещении изоляции между стенкой (по-
лом) камеры и корпусом вибростенда отпадает необходимость в со-
здании плунжера, однако возникает задача герметизации внутренних
полостей вибростенда, что требует соответствующих соединений между
вибростендом и камерой.
Современное комбинированное испытательное оборудование ос-
нащается системой автоматического регулирования и управления,
использующей цифровой задатчик программы, построенный на мик-
роЭВМ. Автоматический регулятор вибрации обеспечивает цифро-
вую установку заданного режима испытаний и его индикацию.
7.5.2. Методы проведения комбинированных испытаний
Разработка методов комбинированных испытаний основывается на
знании условий реальной эксплуатации, когда изделие одновремен-
но подвергается воздействию нескольких внешних факторов. При этом
очевидно, что разработка таких методов должна базироваться на ис-
пользовании определенного испытательного оборудования. Хотя выше
была обоснована целесообразность комбинированных механических
испытаний на совместное воздействие вибрации и линейных ускоре-
ний, однако ни серийно выпускаемого испытательного оборудова-
ния, ни стандартизированных методов испытаний пока еще нет, по-
этому рекомендации по методике их проведения не приводятся.
Рассмотрим принципы, положенные в основу методов комбини-
рованных климатических и механоклиматических испытаний, реко-
мендуемых стандартами МЭК.
Во всех методах предусматриваются испытания на воздействие
изменений температуры. При испытаниях нетепловыделяющих изде-
лий температуру в камере в процессе испытаний измеряют с помо-
щью контрольных датчиков, входящих в ее конструкцию. При испы-
таниях тепловыделяющих изделий необходимо найти температурную
442
измерительную точку на изделии, в которой в последующем должны
проводиться измерения температуры. Для определения этой точки
изделие размещают в камере, имитирующей «свободный обмен воз-
духа», и устанавливают температурный режим, соответствующий за-
данной степени жесткости. Осуществляют выдержку в течение вре-
мени, требуемого для установления стационарного режима. Находят
самую горячую точку на поверхности испытуемого изделия, регист-
рируют полученную температуру и принимают эту точку за измери-
тельную.
Если не имеется камеры, способной имитировать условия «сво-
бодного обмена воздуха» при повышенной температуре, то изделие
располагают в камере или помещении, где оно защищено от воздей-
ствия солнечного света и сквозняка, включают питание и после дос-
тижения теплового равновесия определяют самую горячую точку.
Температура в этой точке не должна превышать допустимой темпера-
туры нагрева изделия.
Рассмотрим метод испытаний на составное циклическое воздей-
ствие температуры и влажности, который рекомендуется применять
для ускоренного определения способности изделий выдерживать раз-
рушающее воздействие циклических изменений температуры при
высокой влажности, чередующихся с воздействием холода. Особен-
ностью составных циклических испытаний является непрерывность
процесса воздействия различных внешних факторов, в то время как в
других случаях при переходе от испытаний на воздействие повышен-
ной (пониженной) температуры к воздействию повышенной влажно-
сти предусматривается стабилизация изделия, т.е. выдержка его в те-
чение определенного времени в нормальных климатических условиях.
Этому виду испытаний следует подвергать изделия, в конструкциях
которых могут возникать отказы, обусловленные так называемым «ды-
ханием» — явлением, отличным от абсорбции и заключающимся в
проникновении воды в трещины и зазоры конструкции изделия. При
отрицательных температурах вода замерзает, что, как правило, при-
водит к отказам. Процесс «дыхания» наиболее часто проявляется в
изделиях, имеющих сравнительно большие объемы, заполненные
воздухом или газом, а также зазоры между уплотнениями и металли-
ческими конструкциями или между уплотнениями и проволочными
выводами, допускающие проникновение воды.
Для изделий, опрессованных пластмассой или имеющих детали
из пористого материала, характерны явления абсорбции и диффу-
зии, поэтому к ним составное циклическое испытание не применя-
ется. От других методов оно отличается тем, что помимо цикличес-
ких изменений температуры при высокой влажности предусматривается
чередование воздействия холодом.
443
Таким образом, данный вид испытаний по сравнению с другими
циклическими испытаниями характеризуется большей жесткостью
режима за счет следующих факторов: большего числа колебаний тем-
пературы или «всасывания» за некоторый интервал времени; больше-
го диапазона температурного цикла; большей скорости изменения тем-
пературы в пределах температурного цикла; включения ряда перепадов
температур до отрицательных значений и этапов с выдержкой при
температуре ниже нуля.
В случае испытаний изделий под электрической нагрузкой выде-
ляемое ими тепло не должно вызывать заметного повышения темпе-
ратуры камеры и тем самым влиять на режим испытаний.
Процесс испытаний начинается с предварительной выдержки
(рис. 7.33), включающей, в зависимости от необходимости, перио-
ды сушки, увлажнения, стабилизации и первоначальных измерений.
Далее изделия помещают в термовлагокамеру и подвергают установ-
ленным воздействиям. Выдержка изделия при внешних воздействиях
складывается из десяти циклов «температура—влажность» (если не пре-
дусмотрено другое число), продолжительностью 24 ч.
Каждый такой цикл выдержки состоит из нескольких этапов.
Различают два вида циклов выдержки с различными этапами воздей-
50 -
40 -
б)
30 -
Скорость охлаждения
не определяется
20 - Период предвари-
тельной выдержки
ю К Период _, _ Период Первоначальные
сушки * [^стабилизации К измерения
0 12 24
Сч
Рис. 7.33. Режим предварительной выдержки: а — с последующим воз-
действием холода; б — без воздействия холода
444
ствия влажности и последующим воздействием холода (рис. 7.34, а)
и без воздействия холода (рис. 7.34, б).
В течение любых пяти из первых девяти циклов изделия должны
быть подвергнуты воздействию холода после воздействия влажности
(этапы a—f). Выдержка в условиях холода может проводиться в той
же или в отдельной камере. Остальные четыре из первых девяти цик-
лов осуществляются без выдержки в условиях холода. В последнем
цикле, следующем по окончании этапа «температура—влажность», в
камере поддерживаются температура 25±2 °C и относительная влаж-
ность 93±3% в течение 3,5 ч, после чего проводятся заключительные
измерения.
Заключительные измерения электрических параметров и провер-
ка механических характеристик могут проводиться на следующих эта-
пах:
• при высокой влажности в последнем цикле;
• непосредственно после извлечения изделий из камеры в усло-
виях, аналогичных первоначальным измерениям;
• после периода сушки в нормальных атмосферных условиях в
течение 24 ч.
Комбинированно-последовательное испытание на воздействие пони-
женных температуры и атмосферного давления, а также влажного
тепла в основном предназначено для изделий, применяемых в лета-
тельных аппаратах, особенно в неотапливаемых и негерметизирован-
ных зонах. При подъеме ЛА, когда температура и атмосферное дав-
ление понижаются (первый этап), детали и уплотнения из эластомеров
затвердевают и сжимаются, что может привести к отказам. При спуске
ЛА атмосферное давление и влажность повышаются, изделия покры-
ваются инеем, который при возрастании температуры оттаивает и в
виде воды проникает в зазоры, трещины и через уплотнения. В свя-
зи с этим рассматриваемые испытания проводятся в два этапа: на
первом этапе осуществляют воздействие холода и пониженного ат-
мосферного давления, а на втором — пониженного атмосферного
давления и влажного тепла.
Распакованное изделие при температуре 20 °C помещают в каме-
ру в выключенном состоянии и устанавливают в положении, огово-
ренном в нормативной документации.
На первом этапе температуру воздуха в камере понижают со ско-
ростью, не превышающей 1 °C-мин.-1, до значения, выбираемого
из ряда, предусмотренного для испытаний на воздействие понижен-
ной температуры. После достижения заданной температуры и уста-
новления теплового стационарного режима проверяют функциони-
рование изделия, для чего проводят требуемые измерения. При
постоянной низкой температуре понижают атмосферное давление в
445
Рис. 7.34. Режим выдержки в условиях влажности: а — с последующей выдержкой в условиях холода;
б — без последующей выдержки в условиях холода
камере со скоростью, не превышающей 15-103 Па - мин.-1, до значе-
ния, выбранного из ряда, предусмотренного для испытаний на воз-
действие пониженного атмосферного давления. Вновь, как и в пре-
дыдущем случае, проверяют функционирование изделия.
На втором этапе при постоянном заданном значении атмосфер-
ного давления повышают температуру в камере с приблизительно
постоянной скоростью до +30 °C за период времени не более 1 ч и
одновременно вводят в камеру пар со скоростью, достаточной для
образования инея. После достижения температуры 0—5 °C, когда иней
на изделии растает, давление в камере восстанавливают до атмос-
ферного за 15—30 мин. При этом температура в камере повышается
до температуры в лаборатории или до +30 °C. Поддерживая темпера-
туру на заданном уровне и относительную влажность более 95%, про-
веряют функционирование изделия.
Испытания завершаются процессом восстановления, при кото-
ром изделие остается в камере до тех пор, пока температура не дос-
тигнет значения, соответствующего нормальным атмосферным усло-
виям. После этого производят внешний осмотр изделия и измеряют
все предусмотренные нормативной документацией параметры.
Комбинированные испытания на воздействие повышенной (понижен-
ной) температуры и вибрации (синусоидальной) проводятся с целью
определения пригодности тепло- и нетепловыделяющих изделий к
эксплуатации и транспортированию в условиях воздействия повышен-
ной (пониженной) температуры в сочетании с вибрацией. Методика
этих испытаний состоит в сочетании методик испытаний на воздей-
ствия повышенной (пониженной) температуры и синусоидальной
вибрации. Помимо требований нормативной документации на изде-
лие необходимыми данными для проведения комбинированных ис-
пытаний являются частота механических резонансов изделия и тем-
пературная измерительная точка для тепловыделяющих изделий.
Указанные данные могут быть получены в ходе соответствующих раз-
дельных испытаний на воздействие синусоидальной вибрации и на
температурные воздействия. Если же раздельные испытания не про-
водились и интересующие данные отсутствуют, то возникает задача
их определения. Далее изделие закрепляется на столе вибростенда в
камере, причем к креплению предъявляются особые требования по
обеспечению тепловой изоляции тепловыделяющих изделий от стола
вибростенда. Для выполнения этих требований крепления изготов-
ляют из материалов, имеющих низкую удельную теплопроводность.
В нормативной документации на изделие должно быть указано,
в каком направлении (направлениях) изделие следует подвергать воз-
действию вибрации. Процесс испытаний на воздействие повышен-
ной (рис. 7.35) или пониженной (рис. 7.36) температуры и синусо-
447
идальной вибрации начинают с предварительной выдержки (если это
предусмотрено нормативной документацией).
При испытаниях тепловыделяющих изделий определяют темпе-
ратурную измерительную точку в каждом изделии и температуру в
ней, если она не была получена ранее в процессе испытаний. Про-
водят первоначальные измерения параметров (операция I), после чего
изделие закрепляют на столе вибростенда в положении, установлен-
Температура в камере \ Температура в лаборатории Перво- началь- ные изме- рения
Вибрация —
Проверка рабо-
тоспособности
и (или) внеш-
ний осмотр
Выдерж-
ка
ста-
нов-
ление
Вос- I Заключительные
измерения
I II III IV V VI VII
а)
Температура
в камере
Вибрация
Изделие
включено"
Проверка рабо- .
тоспособности
и (или) внеш-
ний осмотр
Выдержка
Температура
в лаборатории
Выбор измери-
тельной точки
и определение
температуры
в ней
Первона-;
чальные
измере-
ния
zzzzzzzzzzzz
7/////7Л
TEL
Длительности
испытания^
Восстановле-
ние
Заключи-
тельные
измерения
1Ч|
Операции
I II III IV V VI VII
б)
Рис. 7.35. Режим комбинированных испытаний на воздействие повышен-
ной температуры и вибрации (синусоидальной): а — для нетепловыделяю-
щего изделия; б — для тепловыделяющего изделия;---------температура
поверхности изделия;-------температура в камере; * — промежуточные
измерения
448
ном нормативной документацией. Если предусмотрено проведение
испытаний изделия на воздействие вибрации в нескольких направле-
ниях, то процесс выдержки повторяют для каждого из заданных на-
правлений. В случае, если до комбинированных испытаний изделие
< Первона-
Температура
в лаборатории
Проверка рабо- •_
тоспособности
и (или) внеш-
ний осмотр
Выдержка
Вибрация
Температура
в камере
чальные
измере-
ния
Восста-
нов-
ление
Длительность
испытания
Температура
в лаборатории
Вибрация
Изделие
включено
Заключи-
тельные
измерения
I II III IV V VI VII Операции
Температура
в камере >
Выбор измери-
тельной точки
и определение
- температуры
в ней
'ZZZZZZZ
а)
Проверка рабо- -
тоспособности .
и (или) внеш-
ний осмотр
Первона- Выдержка
чальные
измере-
ния
Восстанов-
ление
Заключи-
тельные
измерения
В Z 1’ZZZ ZZZZZZZZJ 'XZZZZZZZZZZZ
Длительность
испытания* *
I II III IV V VI VII
б)
Рис. 7.36. Режим комбинированных испытаний на воздействие понижен-
ной температуры и вибрации (синусоидальной): а — для нетепловыделяю-
щего изделия; б — для тепловыделяющего изделия;--------температура
самой горячей точки на поверхности изделия;---------температура в
камере; * — промежуточные измерения
449
не подвергалось раздельным испытаниям на воздействие температуры
и вибрации, то их следует выполнить в соответствии с установленной
методикой. После достижения изделием теплового равновесия его под-
вергают воздействию вибрации одним из рекомендуемых методов, ука-
занных в нормативной документации на изделие (операция II).
Затем изделие, не меняя его положения, испытывают на воздей-
ствие повышенной (пониженной) температуры (операция III) без
вибрации. При испытании тепловыделяющих изделий температуру в
камере повышают до значения, при котором температура в измери-
тельной точке будет отличаться от ранее установленной не более чем
на 2К. После этого проверяют работоспособность изделия.
Далее осуществляют комбинированное воздействие вибрации и
повышенной (пониженной) температуры. При этом в нормативной
документации должно быть указано, в каком состоянии находится
изделие: включенном или выключенном (операция IV). Через уста-
новленный интервал времени проверяют работоспособность изделия,
после чего выключают вибрацию, нагрев (охлаждение), а также пи-
тание изделия. Изделие остается в камере до момента установления в
ней нормальных атмосферных условий (операция V), при которых
происходит восстановление (операция VI). В заключение (операция
VII) производят визуально внешний осмотр, измеряют параметры и
проверяют механические характеристики.
Определенный интерес представляют комбинированные испыта-
ния на воздействие тепловлажностного фактора и пыли. В условиях
реальной эксплуатации пыль наслаивается в основном в сухом виде.
Однако за сухими периодами часто следуют периоды с повышенной
влажностью воздуха, поэтому возникает необходимость проверки спо-
собности изделия работать в запыленном и влажном состояниях. Рас-
смотрим два возможных варианта комбинированных испытаний.
В первом варианте предполагается, что в состав пыли в есте-
ственных условиях входят споры плесневых грибов, поэтому после
проверки изделия на воздействие пыли целесообразно подвергнуть
его в запыленном состоянии испытаниям на грибоустойчивость, но
без внесения в камеру дополнительных спор. При оценке результатов
испытаний необходимо учитывать свойства изделия в отношении стой-
кости к плесневым грибам.
Во втором варианте изделие после испытаний на воздействие пыли
помещают в камеру влажности и подвергают испытанию на воздей-
ствие повышенной влажности в постоянном режиме. Применение
циклического режима с конденсацией влаги нецелесообразно, так
как при конденсации влаги частицы пыли могут быть смыты.
При указанном виде испытаний очевидно возрастание пробоев
по поверхности. Однако эффективность реализации обоих вариантов
450
комбинированных испытаний зависит от состава пылевой смеси. Эк-
сплуатация изделий в помещениях производственного и бытового на-
значений требует включения в состав пылевой смеси органических
аэрозолей.
Целесообразность проведения комбинированных испытаний за-
висит от стадии жизненного цикла изделия. Очевидно, что на на-
чальном этапе разработки изделия целесообразно проверять его на
определенные виды воздействия, что позволит быстрее выявить воз-
можные причины отказов. Однако уже при реализации доводочных
испытаний возможно выполнение комбинированных методов.
Внедрение комбинированных испытаний на стадии производства
позволяет сократить их длительность по сравнению с обычными и
приблизить процессы воздействия к реальным условиям эксплуата-
ции. Практическое применение комбинированных методов испыта-
ний требует использования более дорогого и сложного оборудования
и средств измерения, а также разработки новых совершенных мето-
дов испытаний.
Контрольные вопросы
1. Сформулируйте основные требования, предъявляемые к виброис-
пытаниям изделий и средствам испытаний.
2. Перечислите виды виброустановок по принципу действия вибровоз-
будителя (вибратора).
3. Перечислите основные параметры и характеристики вибростендов.
4. Перечислите основные достоинства и недостатки электродинамичес-
ких виброустановок.
5. Перечислите основные достоинства и недостатки электрогидравли-
ческих виброустановок.
6. Какие методы испытаний на воздействие гармонической вибрации
используют в практике виброиспытаний изделий?
7. Какие методы испытаний на воздействие случайной вибрации ис-
пользуют в практике виброиспытаний изделий?
8. Назовите основные виды виброиспытаний изделий, а также их цели
и задачи.
9. На какие типы разделяют ударные установки по характеру воспроиз-
водимых ими ударных воздействий?
10. Сформулируйте цели и задачи ударных испытаний.
11. Назовите основные параметры, характеризующие центрифуги.
12. Перечислите основные параметры, характеризующие установки аку-
стического шума.
13. Какими методами проводят испытания на воздействие акустическо-
го шума?
14. Какие испытания относят к комбинированным механическим ис-
пытаниям? Назовите их достоинства и недостатки.
15*
Глава 8
ЛЕТНЫЕ ИСПЫТАНИЯ АВИАЦИОННОЙ
И РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
8.1. Летные испытания изделий авиационной техники
8.1.1. Краткий исторический обзор развития методов
летных испытаний самолетов
Как самостоятельное направление мировой авиационной науки тео-
рия летных испытаний самолетов возникла в конце 20-х годов. К
этому времени в Советском Союзе и за рубежом в летно-испытатель-
ную и летно-исследовательскую работы включаются большие группы
авиационных специалистов, как теоретиков, так и практиков.
В 30-х годах в ЦАГИ* широко используется физический натур-
ный эксперимент, изучаются в полете особенности динамики само-
лета, основные виды маневров, условия нагружения конструкции в
полете, разрабатываются методы определения поляры самолета и ко-
личественной оценки его устойчивости, управляемости и маневрен-
ности, а также методы определения взлетно-посадочных характерис-
тик, начинаются работы по изучению штопора и флаттера самолета.
Создаются первые оригинальные методы приведения летных характе-
ристик самолета к стандартным атмосферным условиям. Все более
расширяется фронт летно-исследовательских работ, совершенствуются
методы летных испытаний самолетов.
В 40—50-е годы начинают особенно интенсивно разрабатываться
методы летных исследований неустановившихся форм движения са-
молетов, проводятся прочностные и аэродинамические исследова-
ния. Совершенствуются методы приведения летных характеристик
самолета к стандартным и расчетным условиям полета, а также мето-
дика определения количественных характеристик устойчивости, уп-
равляемости и маневренности самолетов и их летно-технических ха-
рактеристик.
На 40-е годы приходятся и первые попытки полета на скоростях,
близких к скорости звука, работы по созданию отечественных реак-
тивных самолетов. Первый советский ракетоплан РП-318-1 конструк-
* Центральный аэрогидродинамический институт.
452
ции С.П. Королева с жидкостным ракетным двигателем РДА-1-150 был
поднят в воздух 26 февраля 1940 г. летчиком-испытателем В.П. Фе-
доровым. 15 мая 1942 г. летчик-испытатель Г.Я. Бахчиванджи совер-
шил первый полет на истребителе БИ-1 конструкции В.Ф. Болхови-
тинова с жидкостным ракетным двигателем Д-1А-1100.
Первые натурные данные об особенностях полета с околозвуко-
вой скоростью в условиях, когда отрицательное влияние сжимаемо-
сти воздуха резко возрастает, были получены в начале 1943 г. в
процессе полетов самолета БИ-1. Было установлено, что в около-
звуковом диапазоне скоростей при появлении на крыле и оперении
зон сверхзвукового течения воздушного потока возможны чрезвы-
чайно сильные изменения устойчивости и управляемости самолета.
Зарубежный опыт кратковременной эксплуатации самолетов Ме-262
(1943—1945 гг.) и ряд тяжелых происшествий на самолетах Ме-262 и
«Сандерболт», связанных с самопроизвольным затягиванием их в пи-
кирование, не давали оснований для оптимизма. Различные нару-
шения устойчивости и управляемости и прежде всего затягивание в
пикирование, казалось, стали непреодолимым барьером на пути ос-
воения мировой авиацией около- и сверхзвуковых скоростей. Поэто-
му в первые послевоенные годы усилия советских ученых и конструк-
торов были направлены в первую очередь на изыскание более
совершенных аэродинамических форм скоростного самолета.
Первые обнадеживающие результаты были получены в ходе про-
водившихся под руководством профессоров И.В. Остославского и
Н.С. Строева летных исследований на крылатых моделях и экспери-
ментальном самолете Ла-160 — первом отечественном реактивном
самолете со стреловидным крылом (конструкция С.А. Лавочкина,
1946). Проведенные исследования показали, что стреловидная фор-
ма крыла и оперения существенно смягчает наблюдающиеся в около-
звуковом диапазоне чисел М опасные явления в устойчивости и уп-
равляемости самолетов.
В 1947—1949 гг. происходит бурное развитие отечественной ре-
активной авиации и массовое освоение ее летным составом. Советс-
кие конструкторы, используя опыт, полученный в ходе летных ис-
следований, создают совершенные по своим аэродинамическим
формам и летным данным самолеты со стреловидными крылом и опе-
рением. Появляются серийные реактивные самолеты конструкции
А.С. Яковлева, А.И. Микояна, С.А. Лавочкина, А.Н. Туполева,
оснащенные отечественными турбореактивными двигателями.
Решающий штурм «звукового барьера» развернулся в 1949 г. Осе-
нью 1949 г. впервые в отечественной практике на серийном самолете
МиГ-15, в режиме пологого пикирования с полной тягой двигателя
453
летчики-испытатели С.Н. Анохин и А.М. Тютерев в двух последова-
тельных полетах превысили скорость звука и достигли числа М = 1,01.
Первая половина 50-х годов ознаменовалась глубоким вторжени-
ем авиации в область сверхзвуковых скоростей, определением прак-
тически всех основных количественных характеристик новых реак-
тивных самолетов. Фундаментальные исследования этих лет позволили
выявить и изучить все известные в настоящее время характерные осо-
бенности поведения скоростных самолетов при около- и сверхзвуко-
вых скоростях, на больших высотах и при воздействии на конструк-
цию ЛА больших аэродинамических нагрузок. Были открыты новые
явления, ранее неизвестные в отечественной и зарубежной летной
практике. В последующие годы этот опыт помог успешно преодо-
леть основные трудности, стоявшие на пути массового освоения лет-
ным составом военно-воздушных сил и аэрофлота современных вы-
сокоскоростных самолетов.
Серьезные работы по изучению особенностей полета с около- и
сверхзвуковой скоростью на больших высотах и по обобщению опыта
этих полетов, а также по совершенствованию методики летных испы-
таний и экспериментальной базы проводились в этот период и за ру-
бежом, в частности в США, Англии и Франции.
Творческий труд научных работников, конструкторских коллек-
тивов, летчиков-испытателей, инженеров и техников сыграл реша-
ющую роль в успешном освоении летным составом, притом в корот-
кие сроки, поступившей на вооружение в 50-е годы мощной
сверхзвуковой техники, что обеспечило советской авиации одно из
ведущих мест в мире.
В 50—60-е годы в практику летных испытаний широко внедряют-
ся методы получения всех основных характеристик самолета из запи-
сей неустановившегося движения, а также новые, более совершен-
ные виды измерений и обработки материалов летного эксперимента.
Широко практикуется создание специализированных летающих лабо-
раторий и экспериментальных самолетов, а также математическое,
полунатурное и натурное моделирование. Начинают разрабатываться
методы летных испытаний авиационных комплексов и авиационных
систем. В практику летных испытаний внедряются специализиро-
ванные системы автоматизированной обработки материалов экспе-
римента, позволившие не только ускорить сам процесс получения
необходимой информации, но и использовать различные математи-
ческие методы, которые ранее не находили достаточного примене-
ния из-за их сложности. Интенсивно развиваются методы упреждаю-
щего и оперативного моделирования на ЭВМ и специализированных
летающих лабораториях, а также оперативного управления ходом лет-
ного эксперимента. Совершенствуются формы организации, техни-
454
ка проведения эксперимента, оборудование (в том числе и контрольно-
измерительная аппаратура), методы получения уже в ходе самого эк-
сперимента (т.е. в реальном масштабе времени) всех необходимых
для оценки самолета характеристик.
Значительна роль летного эксперимента в разработке и совершен-
ствовании объективных методов оценки характеристик самолетов и
авиационных комплексов. Натурный эксперимент все еще остается
наиболее надежным путем получения достоверной информации о ре-
альных возможностях скоростного самолета, его динамических свой-
ствах, управляемости и пилотажных качествах и тем более о эффек-
тивности авиационного комплекса в целом.
Испытаниям опытных изделий нередко предшествуют широкие
летные исследования на специализированных летающих лаборатори-
ях и самолетах-аналогах, а также на динамически подобных свободно
летающих крупномасштабных моделях. Прочный фундамент совре-
менной методологии летных испытаний ЛА заложен отечественными
учеными. Особенно значителен вклад В.С. Ведрова, И.В. Остослав-
ского, М.А. Тайца.
Летные испытания, играющие весьма важную роль в отечествен-
ной практике для оценки основных характеристик ЛА и их соответ-
ствия требованиям наземных испытаний и исследований, как прави-
ло, за рубежом имеют значительно меньшее значение. Действительно,
осуществление на практике принципа «испытывай все перед поле-
том» дает возможность до 80% характеристик получить на земле. Сто-
имость 1 ч летных испытаний почти в 100 раз выше 1 ч наземных,
поэтому покупатели, вложив немалые акцепты, ждут скорого полу-
чения самолетов,.чтобы начать прибыльную эксплуатацию. Воисти-
ну «время — деньги».
В этих условиях период летных испытаний рассматривается не
как созидательный, познавательный этап, а лишь как контрольный
зачетный, открывающий путь для получения дивидендов авиакомпа-
ниями и фирмами-производителями. В этом видят основной смысл
летных испытаний, поэтому их стремятся провести как можно быст-
рее, максимально комплексно, сосредоточившись лишь на тех ви-
дах, которые с достаточной уверенностью нельзя смоделировать в
наземных условиях.
Считая летные испытания большей частью потерянным време-
нем, фирмы все же признают их важным моментом подтверждения в
реальных условиях высоких характеристик ЛА, осуществляя второй
основополагающий принцип —- «летай перед тем как продавать». Как
правило, результаты летных испытаний дают лишь 5—7% разброса по
сравнению с наземными испытаниями и расчетными данными.
455
Основные особенности проведения летных испытаний, напри-
мер в США, состоят в следующем:
• главный упор делается на крайние режимы по безопасности и
надежности для максимального «открытия» областей безопас-
ной эксплуатации и подтверждения расчетных данных (в пер-
вую очередь большие углы, флаттер, посадка на больших уг-
лах, обледенение и др.);
• по требованиям федеральных авиационных властей (FAA) и по-
купателей проводится демонстрация фактических запасов по на-
дежности, прочности и безопасности (экстренное торможение
на взлете, покидание пассажирами аварийного самолета и др.)
в сравнении с расчетными нормами;
• наземные демонстрации эксплуатационной технологичности про-
водятся с хронометражем операций;
• резко сокращено время летных испытаний (до 9~ И месяцев) с
одновременным повышением их качества.
Сокращение времени летных испытаний осуществляется за счет:
• проведения основного объема испытаний (80 %) в наземных
условиях, максимально приближенных к эксплуатационным;
• организации, планирования и управления летными испытания-
ми как части комплексной программы производства самолетов;
• одновременного использования нескольких самолетов (до 5) с
четким разделением целей и объемов испытаний;
• использования нескольких аэродромов с различными климати-
ческими условиями (при интенсивном налете каждого самолета
35—40 летных часов в месяц);
• интенсивного (с циклом 3—4 месяца) подключения к испыта-
ниям серийных самолетов;
• комплексирования, насыщенности и целенаправленности про-
грамм летных испытаний, обеспечивающих их эффективность
и качество;
• четкой методологической направленности программ и подчи-
ненности задачам сертификации по нормам FAA (30 %), т.е.
из 1500 полетов примерно 300 являются зачетными для под-
тверждения требований по нормам FAA;
• установки мощного автоматизированного экспериментального
оборудования на борту самолета для получения информацион-
ного массива данных и обработки в реальном масштабе време-
ни;
• сопровождающего моделирования полета на земле в реальном
масштабе времени;
• широкой автоматизации регистрации и обработки данных как
на земле, так и в полете, позволяющей получить через 3 ч пос-
456
ле полета полную информацию о результатах, а также исполь-
зования быстродействующих ЭВМ и дисплейных станций в ре-
жиме диалога «борт—земля»;
• умелого использования сопутствующих факторов (подключение
к наземным испытаниям летчиков-испытателейна ранней ста-
дии, благоприятные климатические условия, высокоавтомати-
зированная система управления воздушным движением и др.).
8.1.2. Методологические основы летных испытаний самолета
Современный скоростной самолет — это сложная динамическая систе-
ма, поэтому окончательная проверка его отработанности возможна толь-
ко в полете. Основной задачей, решаемой при проведении летных
испытаний, является определение характеристик: летно-технических;
устойчивости и управляемости; аэродинамических; маневренности;
силовой установки; бортовых систем; прочностных; метрологичес-
ких; внешних условий.
От качества и полноты информации, получаемой при летных
испытаниях самолета, от четкости и скорости анализа поступающих
при этом данных во многом зависит своевременное выявление и уст-
ранение всех его недостатков, способных в дальнейшем снизить безо-
пасность полетов либо существенно ограничить его летно-эксплуата-
ционные возможности. Поэтому вопросы методологии летных
испытаний современного скоростного самолета приобретают перво-
степенное значение.
Одной из важных задач методологии становится научный поиск
таких условий (процедуры) проведения летного эксперимента, кото-
рые позволили бы существенно сократить потребный объем испыта-
тельных полетов, не снижая при этом доказательной ценности экс-
периментальных материалов. Недостаточная ясность в отношении
того, как задавать такие условия, неизбежно приводит к увеличению
фактического числа испытательных полетов, а в отдельных случаях и
к более серьезным просчетам в работе.
Факторы, учитываемые при летных испытаниях самолетов. К
числу главных факторов, которые необходимо учитывать при летных
испытаниях современных скоростных самолетов, относятся следую-
щие:
1. Особенности летной эксплуатации самолета:
• большие диапазоны «рабочих» скоростей самолетов, высот, чи-
сел М и скоростных напоров;
• существенное влияние сжимаемости воздуха на все аэродина-
мические характеристики самолета при полетах с около- и сверх-
звуковой скоростью;
457
• существенное влияние упругих деформаций конструкции на аэро-
динамические характеристики самолета при больших скорост-
ных напорах;
• слабое демпфирование возмущенного движения самолета при
полетах на больших высотах;
• преобладание неустановившихся видов движений самолета над
установившимися;
• появление новых эксплуатационных режимов полета, требую-
щих высокой точности пилотирования при движении с боль-
шой скоростью на очень малых высотах (с отслеживанием рель-
ефа местности);
• появление таких эксплуатационных режимов, при которых пе-
риоды свободных продольных и боковых колебаний самолета
уменьшаются менее чем до 1 с;
• преимущественное использование самолета в составе того или
иного авиационного комплекса.
2. Особенности летательного аппарата:
• большое многообразие внешних форм и аэродинамических схем
скоростных самолетов;
• новые аэродинамические и весовые компоновки самолетов;
• заметное изменение в течение полета массы и инерционных
характеристик самолетов;
• способность маневренного самолета развивать значительные ус-
корения положительного и отрицательного знака в связи с его
высокой тяговооруженностью и наличием мощных тормозных
устройств;
• новая силовая установка реактивного типа;
• бустерная высокоавтоматизированная система управления.
3. Особенности внешней среды (земной атмосферы):
• нестационарность;
• сжимаемость и инерционность воздуха;
• изменение с высотой всех физических параметров воздуха;
• большая разреженность на высотах более 20—30 км.
Учитывая указанные особенности летной эксплуатации и конст-
руктивного исполнения современных скоростных самолетов, а также
особенности земной атмосферы, можно сделать три важных методо-
логических вывода:
1. Определяемые в полете характеристики самолетов необходимо
приводить к расчетным (стандартным) условиям полета и состояния
атмосферы.
2. При летных испытаниях скоростных самолетов необходимо оп-
ределять зависимости их характеристик устойчивости и управляемос-
ти от числа Мполета (оценка влияния сжимаемости воздуха), скоро-
458
стного напора или индикаторной скорости (оценка влияния упругих
деформаций конструкции) и высоты полета (оценка влияния изме-
нения плотности воздуха) для всех возможных в эксплуатации вари-
антов загрузки и конфигураций такого самолета и сопоставлять ре-
зультаты эксперимента с «эталонной» по характеристикам
устойчивости и управляемости моделью самолета.
3. Условия проведения летного эксперимента (с учетом всех воз-
можных особенностей динамики и управляемости скоростного само-
лета), так же как и виды контрольных маневров и подлежащие опре-
делению характеристики необходимо регламентировать, чтобы
обеспечить всестороннюю оценку нового летательного аппарата при
ограниченном числе испытательных полетов.
Таким образом, для качественного и быстрого проведения лет-
ных испытаний скоростных самолетов требуется регламентировать ус-
ловия и методы летного эксперимента, обеспечить максимальную доб-
ротность и информативность каждого опыта, а также иметь хорошее
представление как о наиболее вероятных изменениях динамических
свойств и управляемости такого самолета в различных условиях поле-
та, так и о допустимых пределах изменения указанных свойств в слу-
чаях передачи ЛА в массовую эксплуатацию. Успех летно-испыта-
тельной работы еще во многом зависит от интуиции испытателя,
наличия у него достаточного практического опыта и прочных знаний
основ методологии.
Классификация областей возможных значений исследуемых пара-
метров движения самолета и областей режимов полета. Значения
любого параметра движения самолета, в общем случае меняющиеся
во времени (в широких пределах), можно представить множеством
точек в л-мерном евклидовом пространстве SR и само пространство
разделить при этом на ряд характерных зон (рис. 8.1), определяющих
[70]:
• 91э — эксплуатационные значения этих параметров, когда
|^/ (0 - доп \
• 91г — граничные значения параметров, когда
i пред >
• — такие значения параметров, которые соответствуют опас-
ным формам движения ЛА при (/) > пред •
Индексом «пред» обозначены предельно допустимые по услови-
ям безопасности значения параметров движения ЛА, а индексом
459
Рис. 8.1. Классификация областей возможных значений параметров дви-
жения ЛА и областей режимов полета (I — основная, II — эксплуатацион-
ная, III — предельная области режимов полета самолетов)
«доп» предельно допустимые значения этих параметров при массо-
вой эксплуатации.
На рис. 8.1 внешние граничные поверхности Lfa пред) опреде-
ляют потенциальные (предельные) возможности самолета как ЛА по
каждому из основных параметров его движения (/), а внутренние
L (£/ доп) — реализуемые при массовой эксплуатации возможности
этого самолета.
Внутренняя часть пространства SR3, замкнутого граничными по-
верхностями L доп), включает в себя все возможные в нормаль-
ных эксплуатационных условиях полета значения параметров движе-
ния (/)| доп , соответствующие как основной области режимов
полета (I), так и эксплуатационной (II). В соответствии с установ-
ленной классификацией областей режимов полета первая определя-
ется значениями скорости, высоты полета, перегрузки и углов атаки,
необходимыми для выполнения основных задач целевого назначения
самолета, а вторая — допустимыми в массовой эксплуатации ЛА зна-
чениями этих параметров.
Пространство, заключенное между внутренними и внешними
граничными поверхностями, содержит только такие значения пара-
метров движения летательного аппарата (/), которые соответствуют
предельной области режимов полета (III). Последняя определяется
обычно такими значениями скорости ЛА, высоты полета, перегруз-
ки и угла атаки, выход за которые недопустим по условиям безопас-
ности полета.
460
Вне замкнутого пространства, за внешними граничными поверх-
ностями пред) находится опасная область различных критичес-
ких с точки зрения динамики и управляемости ЛА состояний (форм)
движения самолетов <Ккр.
Общие принципы формирования требований к характеристикам
устойчивости и управляемости современных самолетов. При форми-
ровании требований к характеристикам устойчивости и управляемос-
ти современных самолетов необходимо учитывать как основное эксп-
луатационное назначение и массу ЛА, так и специфику решаемых в
полете задач. Нормы летной годности (НЛГ) гражданских самоле-
тов, авиационные правила (АП) самолетов и другие аналогичные
отечественные и зарубежные документы устанавливают такой уро-
вень характеристик устойчивости и управляемости самолетов, кото-
рый обеспечивает успешное решение соответствующих целевых задач
на каждом из этапов полета — от взлета до посадки включительно.
Все современные самолеты в зависимости от эксплуатационного
назначения и величины их массы подразделяются на три класса:
• маневренные (I класс);
• ограниченно маневренные (II класс);
• неманевренные (III класс), в том числе со взлетной массой
менее 100 т (Ша) и со взлетной массой более 100 т (Шб).
В зависимости от целевых задач самолета и характера выполняе-
мого задания все этапы полета подразделяют на категории А, Б и В.
Этапы полета, на которых требуются точное управление траектори-
ей, точное слежение и быстрое маневрирование, относят к катего-
рии А. Взлетно-посадочные этапы полета, на которых не требуется
быстрое маневрирование, но необходима высокая точность управле-
ния траекторией полета, относят к категории Б. Наконец, те этапы
полета, на которых не требуются точное слежение и быстрое манев-
рирование, но может потребоваться точное управление траекторией
полета, относят к категории В.
Для оценки качества выполнения требований к устойчивости и
управляемости самолетов все нормируемые характеристики подраз-
деляют на три уровня.
Уровень 1 соответствует такому случаю, когда характеристики ус-
тойчивости и управляемости самолета хорошо согласуются с требова-
ниями рассматриваемого этапа полета.
Уровень 2 отвечает случаю, когда характеристики устойчивости и
управляемости самолета обеспечивают выполнение задач этапа поле-
та при некотором снижении эффективности их реализации и увели-
чении нагрузки на летчика.
461
Уровень 3 относится к случаю, когда характеристики устойчивос-
ти и управляемости не обеспечивают эффективного выполнения за-
дачи или обеспечивают управление самолетом с чрезмерной нагруз-
кой на летчика.
Предполагается, что ухудшение любой нормируемой характери-
стики устойчивости и управляемости ниже 3-го уровня недопустимо
в расчетных условиях полета (включая и предельную область режимов
полета) как при нормальном состоянии самолета, так и при отказах
в системе управления.
В задачу летных испытаний современного авиационного комп-
лекса (АК), наряду с установлением уровня технического совершен-
ства и формального соответствия его характеристик техническому за-
данию (ТЗ), входят выявление и интегральная оценка возможностей
и эффективности комплекса.
Достаточно полно летно-эксплуатационные возможности совре-
менного АК могут быть охарактеризованы лишь совокупностью боль-
шого числа показателей, учитывающих его назначение и условия при-
менения. Она обычно включает как временные показатели, опре-
деляющие продолжительность безотказной работы АК, потребное
время для восстановления нормальной его работы после тех или иных
отказов и затраты времени на выполнение всех основных операций в
ходе решения свойственных ему задач, так и систему количественных
показателей, характеризующих зоны действия АК в различных эксп-
луатационных условиях, его тактические возможности, а также сте-
пень автономности самолета (работы без регулярного получения ин-
формации от наземного пункта управления), его помехозащищенности
и независимости от погодных условий и времени суток.
Общие принципы оценки динамических свойств и управляемости
современного самолета при летных испытаниях. Обобщение опыта
летных испытаний нескольких поколений отечественных около- и
сверхзвуковых самолетов различных конструктивных схем и назначе-
ний открыло путь для целенаправленного совершенствования всего
процесса оценки динамики и управляемости новых скоростных само-
летов в интересах дальнейшего повышения эффективности и каче-
ства их испытаний, доводки и сертификации (рис. 8.2). Важным
методологическим результатом проведенного анализа и обобщения
является теоретическое обоснование возможности:
1) формирования единого подхода к оценке устойчивости и уп-
равляемости новых скоростных самолетов при их испытаниях и серти-
фикации, определяющего основные задачи и направление летно-ис-
пытательной работы, а также условия допуска самолетов к массовой
эксплуатации;
462
Рис. 8.2. Стратегия поиска и изучения особенностей динамики и управля-
емости опытного самолета при летных испытаниях и установление допус-
тимых эксплуатационных границ
463
2) унификации условий и методов проведения летного экспери-
мента для всех основных групп самолетов;
3) более четкого и обоснованного задания потребного объема до-
казательной информации при летных испытаниях каждого нового са-
молета.
Единый подход к оценке устойчивости и управляемости совре-
менных самолетов предусматривает строгое соблюдение следующей
процедуры испытаний:
• установления условий проведения летного эксперимента с уче-
том как конструктивных особенностей и целевого назначения
испытываемого ЛА, так и необходимости раздельной оценки
влияния на его динамику и управляемость сжимаемости возду-
ха, упругих деформаций конструкции (аэроупругости и умень-
шения плотности воздуха на больших высотах);
• всестороннего и преимущественного анализа переходных про-
цессов (а не только записей квазиустановившихся и установив-
шихся режимов полета);
• первоочередного выявления и изучения особенностей динами-
ки и управляемости испытываемого самолета и связанной с ними
специфики пилотирования ЛА;
• первоочередного выявления, изучения природы и устранения
дефектов динамики и управляемости такого самолета;
• тщательного анализа поведения ЛА и условий его пилотирова-
ния на режимах, близких к крайним эксплуатационным;
• определения паспортных количественных характеристик устой-
чивости и управляемости только для характерных и крайних экс-
плуатационных режимов полета при обязательной оценке само-
лета в таких эксплуатационных условиях, при которых наиболее
вероятны особенности и критические явления в его динамике и
управляемости;
• проверки поведения испытываемого самолета за пределами на-
мечаемых эксплуатационных ограничений;
• изучения подлежащих летной проверке критических режимов
такого самолета до начала его массовой эксплуатации;
• установления эксплуатационных ограничений только по факти-
ческим результатам летных испытаний самолета и с учетом воз-
можных для серии отклонений по его основным характеристи-
кам;
• проведения контрольных (сертификационных) полетов только
после завершения на самолете доводочных работ и программы
испытаний на устойчивость и управляемость.
Выработанная на такой основе общая стратегия летных испыта-
ний обеспечивает более экономную и качественную оценку нового
464
самолета. Она устанавливает, что и как следует определять при ис-
пытаниях и сертификации нового самолета, на чем следует при этом
сосредоточивать основное внимание, чего добиваться, чем руковод-
ствоваться при введении эксплуатационных ограничений и в каких
случаях необходимо изучать также и критические режимы этого само-
лета. Общая стратегия предусматривает:
1. Выделение из всего множества точек (/) основной (I), экс-
плуатационной (II) и предельной (III) областей режимов полета,
потенциально наиболее неблагоприятных по характеристикам устой-
чивости и управляемости испытываемого ЛА, и особое внимание к
ним (обычно это крайние условия полета по углу атаки, числу М,
скоростному напору и угловой скорости крена, области околонуле-
вых углов атаки, трансзвуковых скоростей и взлетно-посадочные ре-
жимы).
2. Установление определенной последовательности проведения
испытательных полетов при оценке динамики и управляемости ново-
го скоростного самолета и минимального потребного объема доказа-
тельной информации для передачи ЛА в массовую эксплуатацию.
Это строгая очередность проведения летного эксперимента в ос-
новной, а затем в эксплуатационной и предельной областях режимов
полета (с постепенным расширением допустимых для каждой облас-
ти пределов изменения основных параметров движения ЛА, опреде-
ляющих граничные условия его эксплуатации, с оценкой для каждой
области режимов полета нормируемых характеристик устойчивости и
управляемости и выполнением всех свойственных новому самолету
операций) и такой объем получаемой в полете информации, кото-
рый надежно подтверждал бы:
а) отсутствие в динамике и управляемости нового самолета кри-
тических явлений при всех расчетных условиях его эксплуатации и
нормальном функционировании бортовых систем и двигателя, а так-
же сохранение требуемого уровня характеристик устойчивости и уп-
равляемости в особых случаях полета;
б) соответствие нормируемых характеристик устойчивости и уп-
равляемости этого самолета принятому эталону;
в) достаточность принятых ограничений для безопасной эксплу-
атации нового самолета.
3. Установление таких эксплуатационных ограничений, которые
обеспечивали бы в дальнейшем требуемый уровень безопасности по-
летов (в любых эксплуатационных для данного ЛА условиях его при-
менения и при возможных ошибках пилотирования или отказах от-
дельных бортовых систем и установок) без чрезмерного ограничения
летно-технических возможностей нового ЛА.
465
4. Установление критерия, по которому должен решаться воп-
рос о необходимости проведения дополнительных испытательных
полетов в критической для ЛА области изменения параметров его дви-
жения.
Главным содержанием испытательных полетов, таким образом,
является:
• изучение всех особенностей динамики и управляемости нового
самолета и оценка степени их влияния на пилотирование;
• поиск критических явлений в динамике и управляемости ново-
го самолета, оценка их влияния на безопасность полетов и пи-
лотирование, полное их устранение в нормальных условиях по-
лета и максимальное смягчение в особых случаях;
• установление соответствия действующим нормам (эталону) ос-
новных количественных характеристик устойчивости и управ-
ляемости самолета во всех подлежащих контролю точках про-
странств 9?э и SRr;
• установление предельно допустимых значений параметров са-
молета при его массовой эксплуатации;
• подтверждение достаточности защиты самолета от непреднаме-
ренного превышения устанавливаемых для него эксплуатаци-
онных ограничений при возможных ошибках пилотирования или
отказах отдельных бортовых систем, а также двигателя;
• уточнение инструкции летчику по пилотированию ЛА;
• уточнение внешних границ предельной области режимов поле-
та. Оценка условий и безопасности непродолжительного пре-
бывания ЛА в этой области.
Указанные выше задачи должны быть отражены в программе за-
водских испытаний каждого опытного самолета. Конечной целью
сертификационных полетов является контрольная проверка соответ-
ствия характеристик самолета действующим нормам и техническому
проекту, а также достаточности его защиты в крайних эксплуатаци-
онных условиях полета.
Общие принципы установления допустимых границ летной эксплу-
атации самолета. Главная задача таких испытаний — окончательная
корректировка эксплуатационных ограничений и оценка надежности
защиты ЛА от непреднамеренного опасного их превышения при руч-
ном пилотировании и в случаях отказов отдельных функциональных
систем. Обычно такую защиту самолету обеспечивают хорошая ус-
тойчивость и управляемость, различные виды сигнализации или даже
специальные устройства, активно препятствующие развитию крити-
ческой ситуации, а также соответствующее ограничение величины
предельно допустимых при массовой эксплуатации параметров дви-
466
жения самолета и резервирование жизненно важных элементов бор-
товых систем.
Летный эксперимент предусматривает оценку:
• устойчивости и управляемости испытываемого самолета в край-
них эксплуатационных условиях его применения, включая пре-
дельную область режимов полета;
• устойчивости и управляемости этого самолета в крайних эксп-
луатационных условиях при раздельных имитациях возможных
отказов бортовых систем и двигателя;
• величины «гарантийных» запасов доп до значе-
ний , соответствующих предельным по безопасности ус-
ловиям полета;
• достаточности внешних признаков и сигнализации для уверен-
ного предотвращения непреднамеренного превышения устанав-
ливаемых эксплуатационных ограничений, а также необходи-
мости дополнительного использования на самолете активных
средств защиты (автоматов безопасности);
• границы устойчивой работы силовой установки.
В области SRr граничных значений параметров движения самоле-
та (см. рис. 8.1) особого внимания заслуживают «точки», позволяю-
щие установить такие пределы превышения намечаемых эксплуата-
ционных ограничений, которые не приводят к немедленному
возникновению опасной ситуации. По ним уточняются границы пре-
дельной области режимов полета, а также величины гарантийного
запаса по каждому из параметров, определяющих граничные для мас-
совой эксплуатации условия применения данного ЛА.
При подготовке к подобным испытаниям эксплуатационные ог-
раничения первоначально задаются по результатам исследований мо-
дели самолета в аэродинамических трубах и в свободном полете и
выполненных далее расчетов и моделирований на пилотажном стен-
де. Однако окончательная их корректировка производится только по
материалам летных испытаний после тщательного изучения особен-
ностей динамики и управляемости испытываемого самолета как в
эксплуатационной, так и в граничной областях значений параметров
его движения.
При анализе материалов летных испытаний и установлении эксп-
луатационных ограничений для нового скоростного самолета необхо-
димо особенно строго руководствоваться следующими положениями:
1. Во всем эксплуатационном диапазоне изменения параметров
движения самолета при нормально работающих бортовых системах и
силовой установке характеристики устойчивости и управляемости са-
467
молета должны быть не ниже второго уровня, а в случаях вероятных
отказов систем или двигателя — не ниже третьего уровня.
2. Для всех расчетных условий применения самолета, в том чис-
ле и наиболее тяжелых крайних, должны быть обеспечены соответ-
ствующие гарантийные запасы доп по каждому из
параметров, определяющих внешнюю границу предельной области
режимов полета.
3. Выход самолета за внешнюю границу предельной области ре-
жимов полета не должен приводить к немедленному развитию того
или иного критического режима или к возникновению другой опас-
ной ситуации.
4. Должны существовать хорошо заметные летчику естественные
или искусственно созданные признаки приближения ЛА к внешней
границе эксплуатационной области режимов полета, перехода ее,
приближения к внешней границе предельной области режимов поле-
та и выхода на нее, а также хорошо заметные признаки перехода ее и
начала критического режима.
5. При любых эксплуатационных условиях полета все нормируе-
мые характеристики устойчивости и управляемости испытываемого
ЛА должны удовлетворять требуемому стандарту.
* 6. Необходимый для установления эксплуатационных ограниче-
ний экспериментальный материал должен быть получен при допус-
тимых в эксплуатации наиболее неблагоприятных сочетаниях массы,
центровки и моментов инерции самолета для всех штатных вариантов
его конфигурации и во всем диапазоне допустимых высот, чисел М и
скоростей полета.
Общие принципы приведения летных характеристик самолетов к
стандартным атмосферным и расчетным условиям полета. На лет-
ные характеристики современных самолетов существенное влияние
оказывают фактическое состояние в момент выполнения испытатель-
ных полетов как самого летательного аппарата (отклонения от приня-
тых в качестве номинальных его формы, массы, моментов инерции,
положения центра масс и параметров силовой установки), так и внеш-
ней среды (отклонения от принятых в качестве стандартных парамет-
ров атмосферы).
При летных испытаниях самолетов влияние первой группы фак-
торов в принципе может быть исключено, если в ходе эксперимента
строго следить за адекватностью фактического и номинального со-
стояний ЛА. Однако на практике это не всегда удается выполнить.
Влияние второй группы факторов, связанных с нестационарностью
параметров атмосферы, практически никогда не может быть исклjo-
468
чено полностью и должно соответствующим образом учитываться при
обработке материалов летного эксперимента.
Расчетные операции, связанные с учетом влияния указанных
выше факторов на исследуемую летную характеристику самолета,
обычно называют приведением этой характеристики к стандартным
атмосферным и заданным эксплуатационным (расчетным) условиям
полета.
Для приведения летных характеристик к стандартным расчетным
условиям необходимо знать, как влияют на аэродинамическое со-
противление самолета, тягу двигателя и расход топлива изменения
атмосферных и эксплуатационных условий полета.
Методы приведения летных характеристик самолета к стандарт-
ным атмосферным и заданным эксплуатационным (расчетным) ус-
ловиям обычно базируются на общих положениях теории подобия рас-
сматриваемых форм его управляемого движения (режимов полета).
Как известно, теория подобия опирается на учение о размернос-
тях физических величин и служит основой физического моделирова-
ния, а также базой для правильной постановки и обработки экспери-
ментального материала. Она устанавливает соответствующие критерии
подобия, которые представляют собой безразмерные комбинации из
размерных физических параметров, определяющих рассматриваемые
системы (явления, процессы). Равенство однотипных критериев для
таких двух систем (явлений, процессов) — необходимое и достаточ-
ное условие их физического подобия. Последнее означает, что в оди-
наковые моменты времени в одинаковых точках пространства значе-
ния параметров, характеризующих состояние одной системы (явления,
процесса), будут пропорциональны значениям соответствующих па-
раметров другой системы.
В тех случаях, когда в рассматриваемых системах (явлениях, про-
цессах) осуществляется равенство не всех, а лишь некоторых незави-
симых критериев подобия, говорят о неполном, или частичном, по-
добии только по этим критериям (например, по числу М, числу Re и
т.п.). Такой случай наиболее часто встречается на практике. Напри-
мер, при динамическом подобии реализуется подобие систем дей-
ствующих сил или силовых полей различной физической природы
(сил давления, вязкости, тяжести и т.п.). Подобие двух потоков газа
или жидкости требует наличия геометрического, кинематического и
динамического подобий. Подобие тепловых процессов предполагает
подобие соответствующих полей температур и тепловых потоков и т.д.
В общем случае подобие движений двух геометрически подобных
друг другу ЛА с геометрически подобными двигателями и с подоб-
469
ным распределением масс обеспечивается при выполнении в одина-
ковые моменты времени следующих условий:
• взаимного равенства их углов тангажа, крена и рыскания;
• сохранения неизменными в течение рассматриваемого отрезка
времени отношений скоростей и других параметров движения
обоих ЛА.
Однако при приведении летных характеристик современного са-
молета к стандартным значениям во многих случаях возможно огра-
ничиться лишь условиями частичного подобия режимов полета, по-
скольку обычно при этом рассматривается установившееся движение
одного и того же самолета (с неизменными геометрическими разме-
рами) в воздушной среде, для которой считаются константами ко-
эффициент адиабаты х и газовая постоянная R. Такие режимы поле-
та считаются подобными в любой рассматриваемый момент времени,
если в обоих движениях самолета соответственно одинаковы углы
атаки и скольжения, числа М полета, углы отклонения органов уп-
равления и приведенные частоты вращения ротора газотурбинного
двигателя. При таких условиях постоянство указанных параметров
обеспечивает подобие обтекания самолета (и следовательно, подо-
бие по действующим на него силам) и подобие режимов работы
двигателя.
Соответствующие критерии подобия позволяют в таком случае
четко задавать требуемую процедуру проведения летного эксперимен-
та и обработки полетных записей, поскольку они устанавливают функ-
циональную связь между величиной летной характеристики самолета
и условиями, при которых она определяется в ходе испытаний.
Вследствие большого разнообразия типов ЛА и двигателей на
практике применяют различные методы приведения летных характе-
ристик к стандартным условиям. Однако все методы приведения,
как правило, базируются на результатах летного эксперимента и в
основе их лежат только достаточно хорошо подтвержденные практи-
кой общие теоретические или экспериментальные зависимости.
При выборе метода приведения обычно руководствуются следую-
щими соображениями:
• все необходимые для приведения вспомогательные данные дол-
жны определяться непосредственно в ходе летных испытаний
самолета;
• сам летный эксперимент, связанный с получением этих дан-
ных, должен быть простым и нетрудоемким;
• используемые для приведения летных характеристик алгоритмы
также должны быть достаточно простыми и достаточно общи-
ми;
470
• при выборе стандартной высоты и метода приведения главным
определяющим фактором является максимальное уменьшение
вводимых в расчет численных поправок.
8.1.3. Методическая подготовка летных испытаний
Методическая подготовка летных испытаний авиационного комплек-
са и современного опытного самолета многопланова. Она обычно
включает следующие виды работ:
• поисковые расчетно-теоретические исследования с использова-
нием современной вычислительной техники;
• упреждающий лабораторный и летный эксперименты на моде-
лях самолета и макетах отдельных его систем, эксперименты с
наиболее важными реальными системами, установками и эле-
ментами бортового оборудования и наземного обеспечения по-
летов;
• разработку информационно-измерительной системы (ИИС) и
уточнение состава бортового и наземного экспериментального
оборудования для испытываемого изделия, обеспечивающих
получение в необходимом объеме всей потребной информации;
• методическую отработку процедуры наземной подготовки опыт-
ного изделия, бортовых и наземных систем к первому вылету
самолета и к последующим испытательным полетам;
• методическую отработку процедуры наземной подготовки эки-
пажа к первому вылету и летным испытаниям ЛА;
• разработку программы летных испытаний опытного изделия и
оперативного плана организации работ с завершением их в за-
данные календарные сроки.
При выполнении этих работ должны быть учтены следующие со-
ставляющие наземной подготовки современного самолета и авиаци-
онного комплекса к летным испытаниям:
1) объем технической документации, требующий для детального
ознакомления с нею значительного времени;
2) число участвующих в испытаниях специалистов различного
профиля;
3) объем наземных работ и летного эксперимента;
4) стоимость опытного изделия и оборудования и относительно
малый его ресурс, материальные затраты на один час испытательно-
го полета (стоимость ЛА, стоимость и быстрая амортизация опытных
систем, число участвующих в испытаниях высококвалифицирован-
ных специалистов и т.д.);
5) число подлежащих регистрации параметров (до 103 и более).
В сочетании с высокой стоимостью одного часа испытательного по-
471
лета последнее обязывает тщательно планировать эксперимент, жест-
ко регламентировать минимальный объем потребной информации,
четко управлять летным экспериментом, по возможности комплек-
сировать полетные задания, автоматизировать процесс обработки эк-
спериментального материала, а в перспективе и летный эксперимент;
6) широкое применение для проведения поисковых теоретических
исследований и оперативного моделирования в ходе летного экспери-
мента современных ЭВМ, в том числе и для оперативного просмотра
возможных альтернативных решений и поиска как оптимального, так
и наиболее рациональных резервных вариантов;
7) необходимость определения количественных характеристик пре-
имущественно из записей неустановившегося движения ЛА или быс-
тро протекающих переходных процессов.
Анализ проведенных расчетов и экспериментов. Итогом расчетно-
теоретических исследований и экспериментов при подготовке летных
испытаний опытного изделия является предварительная оценка ожи-
даемых характеристик самолета (авиационного комплекса) в целом и
получение исходных данных для разработки программы летных испы-
таний опытного изделия и поиска путей ее оптимизации.
Упреждающий лабораторный и летный эксперименты всегда пред-
шествуют испытаниям опытного изделия. Они проводятся в аэроди-
намических трубах и на свободно летающих моделях самолета, на
макетах и специальных установках, на пилотажных стендах с экипа-
жем, на летающих лабораториях и в отдельных случаях даже на ана-
логе опытного ЛА.
Своевременное завершение в полном объеме этих работ является
важной предпосылкой для быстрого и качественного выполнения в
дальнейшем программы летных испытаний опытного самолета. Осо-
бенно важно при этом своевременно:
1) изучить представленную конструктором техническую докумен-
тацию для выявления характерных особенностей опытного изделия,
ознакомления с установленными конструкторским бюро на время его
испытаний летно-эксплуатационными ограничениями, с указания-
ми по проведению наземной и летной эксплуатации ЛА и его систем,
с инструкцией летчику и экипажу по действиям в особых случаях по-
лета;
2) изучить на моделях и моделирующих установках (математичес-
ких и физических моделях, пилотажных стендах и летающих лабора-
ториях) особенности динамики, управляемости, специфику край-
них расчетных и критических режимов нового опытного изделия;
3) отработать на стендах и летающих лабораториях все жизненно
важные системы ЛА, а также включаемые в систему управления ав-
томатические устройства;
472
4) подготовить и установить на самолет информационно-измери-
тельную систему и необходимое экспериментальное оборудование;
5) выполнить на самолете до начала его полигонных испытаний
комплекс контрольных измерений и калибровок, предусматриваемых
программой наземной подготовки к первому вылету;
6) отработать на соответствующем пилотажном стенде (тренаже-
ре) приемы управления самолетом и его системами, а на опытном
изделии всем членам экипажа детально ознакомиться со своими ра-
бочими местами.
Завершающим этапом этой фазы наземных подготовительных ра-
бот является составление таблицы подлежащих оценке характеристик
опытного изделия и установление очередности их определения.
Определение состава экспериментального оборудования. Главным
элементом экспериментального оборудования опытного изделия обыч-
но является его ИИС, объединяющая контрольно-измерительную
бортовую и наземную аппаратуру, автоматические средства сбора
информации, ее переработки и представления результатов проведен-
ного исследования. Она может также включать в себя систему управ-
ления летным экспериментом, с помощью которой обеспечиваются
как текущий контроль качества пилотирования и выдерживания лет-
чиком заданных условий выполнения эксперимента и оперативное
изменение при необходимости самого задания, так и более высокий
уровень безопасности проведения испытательного полета.
В состав экспериментального внештатного оборудования само-
лета в зависимости от характера и целей испытаний могут быть вклю-
чены:
• специальные бортовые указатели, позволяющие летчику непо-
средственно контролировать изменение параметров, определя-
ющих заданные условия проведения летного эксперимента;
• специальная сигнализация (световая, звуковая, тактильная) для
своевременного предупреждения летчика о том, что величина
контролируемого параметра движения ЛА приближается к пре-
дельно допустимому значению;
• аппаратура для киносъемки спектров (картины) обтекания час-
тей самолета воздушным потоком, показаний приборов, реги-
страции действий летчика или просматриваемого экипажем воз-
душного пространства и т.п.;
• аппаратура для измерения упругих деформаций элементов кон-
струкции самолета;
• автоматы безопасности (ограничители предельных режимов по-
лета) — специальные устройства, активно предотвращающие
непреднамеренное превышение летчиком установленных огра-
ничений;
473
• специальные устройства для принудительного вывода самолета
из критического режима (противоштопорные и тормозные па-
рашюты, противоштопорные ракеты и т.п.).
Определение условий проведения летного эксперименте. В ходе
методической подготовки летных испытаний опытного изделия уточ-
няются условия их проведения и процедура организации работ. При
этом обычно руководствуются результатами расчетно-теоретических
и лабораторных исследований, выполненных на этапе подготовки
изделия к летным испытаниям.
Важными условиями, неуклонное соблюдение которых в сово-
купности может заметно повысить качество испытаний новых скоро-
стных самолетов и уровень безопасности проведения на них летного
эксперимента, являются:
• своевременное завершение в требуемом объеме всех обязатель-
ных программ наземных испытаний самолета и исследований;
• своевременное определение потребного для испытаний в задан-
ные сроки числа опытных экземпляров самолета, ритмичный
ввод их в работу и обеспечение высокой интенсивности поле-
тов;
• унификация методов подготовки, контроля, проведения лет-
ного эксперимента и обработки экспериментального материа-
ла. Четкое определение круга решаемых задач для каждого из
проходящих испытания экземпляров самолета, очередности про-
ведения планируемых экспериментов и допустимых отклонений
параметров движения от номинальных значений, а также фор-
мы представления результатов проведенных испытаний;
• своевременная и тщательная отработка программ наземных и
летных испытаний ЛА и соответствующей документации, а также
алгоритмов и программ получения экспресс-информации и пол-
ной обработки экспериментального материала;
• тщательный подбор летного экипажа, который должен обла-
дать высоким уровнем технической, летной и методической
подготовки, а также опытом работы во взаимодействии с соот-
ветствующими наземными службами;
• высокий уровень профессиональной и методической подготов-
ки всех участвующих в испытаниях специалистов наземных служб;
• активное управление ходом летного эксперимента с использо-
ванием для этого совершенных специализированных ЭВМ;
• организация и четкое планирование всех работ, связанных с
подготовкой и проведением летных испытаний самолета, а так-
же с обработкой экспериментального материала;
• эффективное и широкое использование совершенных ИИС,
обеспечивающих получение всей необходимой информации в
474
ходе самого эксперимента в реальном масштабе времени и со-
ответствующем графическом оформлении.
К важным условиям повышения эффективности и качества каж-
дого испытательного полета, кроме того, относятся:
• оперативное моделирование для своевременного и четкого оп-
ределения условий проведения каждого сложного эксперимен-
та и допустимых по соображениям безопасности и качества его
выполнения отклонений от полетного задания, просмотра воз-
можных альтернативных решений и выбора наиболее приемле-
мого;
• своевременная и тщательная проработка на земле полетного за-
дания с обязательным анализом результатов ранее проведенно-
го эксперимента и с «проигрыванием» возможных критических
ситуаций в планируемом полете;
• соблюдение принципа постепенности перехода от простого эк-
сперимента к сложному и особенно тщательная подготовка к
экспериментам, проводящимся вблизи предполагаемых эксп-
луатационных границ, в области около- и сверхзвуковых ско-
ростей ЛА, достаточно больших положительных углов атаки,
околонулевых и отрицательных углов атаки, а также в тех слу-
чаях, когда впервые достигается та или иная скорость, высота
полета, число М, угол атаки или перегрузка.
В целях повышения ритмичности работы и максимального со-
кращения сроков испытаний полеты проводятся одновременно на
нескольких экземплярах ЛА. В США число одновременно участвую-
щих в испытаниях самолетов гражданского и военного назначения в
настоящее время колеблется соответственно в пределах 3—5 и 8—12.
Ритмичность поступления их на летные испытания в среднем равна
одному-двум месяцам. Для увеличения объема информации, полу-
чаемой в каждом испытательном полете, на этих самолетах, кроме
того, нередко осуществляется дозаправка топливом в воздухе. Начи-
нается она обычно с четвертого-пятого испытательного полета. Ши-
роко применяется также управление летным экспериментом.
Разработка программы летных испытаний опытного самолета.
Структурно программы летных испытаний опытных самолетов обыч-
но подразделяются на следующие пять иерархических уровней:
1. Типовая программа испытаний самолетов данного класса. Она
является основой для разработки общей программы испытаний опыт-
ного самолета.
2. Общая программа испытаний опытного самолета, которой
руководствуются (после ее утверждения) при составлении отдельных
рабочих программ для каждого из летающих экземпляров опытного
самолета.
475
3. Рабочая программа испытаний отдельного экземпляра опыт-
ного самолета и его функциональных систем. Ею руководствуются
(после утверждения) при подготовке программ каждого испытатель-
ного полета (полетных заданий).
4. Специальная комплексная программа целевых испытаний опыт-
ного самолета, выходящая за рамки рабочих программ и включаю-
щая в себя программы доводочных, контрольных, ресурсных, кли-
матических и других видов испытаний. Ею руководствуются (после
утверждения) при подготовке соответствующих заданий на каждый
испытательный полет.
5. Программа испытательного полета (полетное задание, запи-
сываемое в полетный лист), которая жестко регламентирует для лет-
чика-испытателя условия и методы проведения каждого из заданных
экспериментов.
При разработке общей программы испытаний опытного самолета
в центре внимания должны находиться следующие вопросы:
• поиск и выявление всех индивидуальных особенностей нового
ЛА, его силовой установки, бортовых систем, оборудования,
а также целевого применения, не отраженных в типовой про-
грамме для их соответствующего учета при подготовке общей и
рабочих программ испытаний опытного самолета;
• поиск наиболее эффективных методов проведения летного экс-
перимента, связанного с установлением соответствия характе-
ристик ЛА техническому заданию и действующим нормам и
определением крайних (допустимых по условиям безопасности
полета) пределов изменения наиболее важных параметров его
движения;
• установление наиболее рациональной последовательности вы-
полнения испытательных полетов по программе;
• определение потребного числа экземпляров опытного ЛА и числа
полетов на каждом из них;
• выработка мероприятий по предотвращению непроизвольного
выхода ЛА за устанавливаемые ограничения как в ходе испыта-
ний, так и при последующей эксплуатации, а также указаний
по выводу его из возможных критических ситуаций;
• максимальное сокращение времени, необходимого для выпол-
нения общей программы испытаний опытного ЛА в требуемом
объеме.
Программа летных испытаний является основным рабочим и юри-
дическим документом, регламентирующим процедуру и объем про-
водимых на ЛА экспериментов. Она в краткой и ясной форме опре-
деляет цели, объем, условия и методы проведения испытаний ЛА
476
как в процессе наземной подготовки испытаний и первого вылета,
так и в ходе летных испытаний этого изделия. Что касается структу-
ры программы, то она обычно включает следующие разделы:
1) цели испытаний (исследований);
2) краткие сведения о самолете и его особенностях;
3) методика проведения испытаний;
4) состав экспериментального оборудования;
5) объем и характер наземных работ (экспериментов);
6) объем и характер летного эксперимента (с указанием задавае-
мых контрольных маневров и условий проведения экспериментов:
опорных высот, скоростей ЛА, чисел М, перегрузок, центровок и
конфигураций ЛА, а также режимов работы силовой установки и по-
требного числа испытательных полетов и затрат полетного времени);
7) летные ограничения (с указанием как основных ограничений
при выполнении испытательных полетов — максимально допустимых
величин индикаторной скорости ЛА и числа М, углов атаки и сколь-
жения, перегрузок, так и предельно допустимых погодных условий —
горизонтальной видимости, высоты облачности и ее плотности, силы
бокового ветра и ветра при взлете и посадке ЛА, состояния взлетно-
посадочной полосы).
К программе обычно прикладывают также указания экипажу о дей-
ствиях в особых случаях полета (при возможных отказах силовой уста-
новки, отдельных систем, элементов автоматики, указателей, проти-
вообледенительной системы и т.п.), а также при появлении тех или
иных (ожидаемых) особенностей в динамике и управляемости ЛА.
Одновременно с программой летных испытаний ЛА разрабатыва-
ются рабочий (оперативный) план и график испытаний, которые
регламентируют порядок, сроки и фронт наземных и летных экспе-
риментов и распределение их между отдельными экземплярами опыт-
ного изделия для своевременного и качественного выполнения об-
щей программы испытаний в планируемые сроки.
Программу заводских испытаний опытного изделия составляет
ведущий инженер совместно с ведущим летчиком-испытателем и спе-
циалистами испытательной бригады и согласовывает с заказчиком.
Подготовка алгоритмов обработки материалов летного экспери-
мента. В соответствии с составленным перечнем сертифицируемых
характеристик самолета и его функциональных систем разрабатывают-
ся алгоритмы обработки экспериментального материала и уточняются
задания на подготовку программ автоматизированной обработки.
При разработке алгоритмов обработки следует исходить из того,
что характерной чертой летных испытаний опытного самолета явля-
ется исследовательское творческое начало. Оно обусловливается необ-
477
ходимостью производить комплексно сравнительную оценку реаль-
ного объекта с его расчетной моделью, изучать и объяснять обнару-
живаемые в ходе экспериментов непредусмотренные проектом осо-
бенности и явления, доводить характеристики реального объекта и
его систем до проектных и при этом выявлять и оценивать предельные
возможности испытываемого объекта. Поэтому программа летных
экспериментов и алгоритмы обработки полетных записей должны быть
достаточно гибкими, чтобы при необходимости можно было в ходе
испытаний корректировать и даже изменять порядок опытов, алго-
ритмы и программы обработки экспериментального материала, объем
и характер вводимой и выводимой информации.
Кроме того, структура разрабатываемых алгоритмов должна быть
достаточно простой, позволяющей сравнительно быстро перераба-
тывать всю полетную информацию на находящихся в эксплуатации
специализированных ЭВМ, а часть ее обрабатывать в темпе самого
эксперимента (т.е. в реальном масштабе времени). Разрабатываемые
алгоритмы должны при этом обеспечивать непосредственное опреде-
ление в ходе автоматизированной обработки полетной информации
всех сертифицируемых характеристик испытываемого самолета, си-
ловой установки, бортовых систем и оборудования с требуемой точ-
ностью.
Подготовка программ автоматизированной обработки материа-
лов летного эксперимента. Программы автоматизированной обработки
экспериментального материала разрабатываются в строгом соответ-
ствии с заданием, в котором должны быть указаны: принятые алго-
ритмы обработки; тип используемой измерительной аппаратуры; под-
лежащие обработке участки записи регистраторов; особенности самой
обработки лент магнитных накопителей (необходимость сглаживания,
прореживания); условия проведения обработки и синхронизации по
времени; форма представления результатов обработки и расчетов.
К заданию на разработку программ прикладываются также: все
необходимые для их составления исходные данные об испытываемом
самолете (его масса, координаты центра масс при различных запасах
топлива на борту, моменты инерции, основные геометрические па-
раметры ЛА, предельные и предполагаемые изменения параметров
движения ЛА, данные об аэродинамических и волновых поправках
приемника воздушного давления и т.п.), его силовой установке, си-
стеме управления (кинематические характеристики, характеристики
загрузочных и триммирующих устройств, жесткостные и частотные
характеристики системы, передаточные числа автоматов стабилиза-
ции и законы их регулирования и т.п.) и о всех других проходящих
испытания системах ЛА; о составе, характеристиках и размещении на
478
самолете измерительной аппаратуры (схема ее размещения и коорди-
наты датчиков перегрузки относительно центра масс самолета, крос-
сировочная таблица распределения параметров по каналам регистра-
торов, градуировочные характеристики датчиков и согласующих
устройств и т.п.) и другие данные (например, перечень программ
обработки материала, рекомендуемые масштабы для отображения на
дисплее результатов обработки и построения графиков, порядок раз-
мещения на графиках параметров и т.п.).
Задание на автоматизированную обработку полетных записей кон-
трольно-измерительной аппаратуры обычно содержит:
1) перечень параметров, подлежащих первоочередной обработке
и экспресс-анализу. Этот перечень должен обеспечивать: оператив-
ный контроль качества работы летчика и системы измерений; прове-
дение оперативного анализа замеченных летчиком особенностей по-
ведения ЛА и в связи с этим — своевременное уточнение плана
очередного испытательного полета; выявление на полетных записях
всех характерных отрезков времени, для которых необходимо будет
произвести обработку в полном объеме с большим числом парамет-
ров и определение величины самой исследуемой характеристики ЛА
или его систем;
2) перечень параметров, подлежащих оперативной (ускоренной,
так называемой первичной) обработке, более информативный, чем
предыдущий. Этот перечень должен обеспечивать проведение углуб-
ленного анализа и расчетов с целью получения количественных дан-
ных для оценки степени зачетности выполненного полета, при необ-
ходимости — корректировку плана очередного задания, а также отбор
материалов для выполнения дальнейших расчетов и проведения так
называемой вторичной обработки;
3) перечень параметров, подлежащих полной (вторичной) обра-
ботке в установленные (в ходе первичной обработки) отрезки време-
ни. Этот перечень должен обеспечивать расчет сертифицируемой ха-
рактеристики испытываемого ЛА или его исследуемой системы и
представление ее в канонической форме (в виде соответствующих гра-
фиков или таблиц);
4) шифр программ, по которым должна производиться обработ-
ка экспериментального материала;
5) указания о форме представления результатов обработки, мас-
штабах и порядке расположения материала на графиках или в табли-
цах.
479
8.1.4. Организация и планирование летных испытаний
опытного самолета
Типовая интегральная структура летных испытаний современного
опытного самолета. Правильная организация летных испытаний пред-
полагает выработку рациональной организационной структуры и эф-
фективной системы управления, способных во взаимодействии наи-
лучшим образом, т.е. в планируемые сроки и с высоким качеством,
решить все поставленные перед ними задачи. В состав такой органи-
зационной структуры входят: комплексная испытательная бригада спе-
циалистов различного профиля, приданная ей группа планирования
и контроля, службы эксплуатации, управления экспериментом и об-
работки полетной информации, наземные и летающие лаборатории,
стенды, оптические и радиотехнические наземные средства, а также
соответствующая производственная база. Все это в совокупности по-
вседневно обеспечивает нормальный ход испытаний опытного само-
лета.
Типовая интегральная структура летных испытаний современно-
го опытного самолета обычно включает следующие элементы:
• опытное изделие (несколько экземпляров опытного самолета);
• летающие лаборатории и специализированные самолеты, обес-
печивающие испытательные полеты опытного изделия (сопро-
вождение, зондирование атмосферы, калибровка приемника
воздушного давления, ретрансляция, киносъемка, оптимиза-
ция характеристик испытываемого ЛА и др.);
• наземную испытательную базу (аэродром, ангары, лаборато-
рии, производственные подразделения, технические средства
подготовки самолета к испытательному полету, зоны полетов,
испытательные трассы, средства управления экспериментом,
воздушным движением и др.);
• измерительно-информационную систему, которая охватывает:
а) контрольно-измерительную аппаратуру на опытных изде-
лиях и на самолетах, обеспечивающих программу испытаний;
б) средства сбора, обработки информации и представления ее
в соответствующем виде; в) подсистему управления летным
экспериментом;
• программу испытаний опытного изделия;
• методику проведения испытаний опытного изделия, обеспечи-
вающую решение всех задач, поставленных программой летных
испытаний;
• средства электронного, физического и полунатурного модели-
рования, необходимые для планирования экспериментов, опе-
ративного анализа результатов проведенных опытов, повыше-
480
ния безопасности испытательных полетов и получения всех не-
обходимых по ходу испытаний опытного изделия данных;
• летный экипаж опытного изделия и экипажи самолетов, обес-
печивающих программу испытаний;
• испытательную бригаду специалистов, непосредственно прово-
дящих испытания опытного изделия, а также технический пер-
сонал наземных служб, обеспечивающих программу испытаний;
• службу управления и планирования испытаний, обеспечиваю-
щую своевременное поступление на аэродром в установленные
сроки и подготовку к испытаниям каждого из запланированных
экземпляров опытного изделия, а также ритмичную и согласо-
ванную работу специалистов на всех летающих экземплярах опыт-
ного изделия в соответствии с программой летных испытаний.
Функции управления и планирования летных испытаний опытного
самолета. В общем процессе испытаний опытного изделия система
управления должна обеспечивать четкую координацию работ и взаи-
модействие между всеми участвующими в них группами специалис-
тов, служб и звеньев рассмотренной выше организационной структу-
ры (т.е. между специалистами испытательной бригады, летными
экипажами, специалистами и техническим персоналом наземных
служб подготовки и обслуживания испытательных полетов и техни-
ческим персоналом, выполняющим на опытных самолетах производ-
ственные доработки) для наиболее успешного и быстрого решения
основной задачи. Такое управление называют обычно целевым.
Главными функциями целевого управления являются планирова-
ние испытаний, их технико-экономическое обеспечение, организа-
ция, координация работ и контроль за ходом испытаний опытного
изделия.
Одной из центральных функций системы управления испытания-
ми опытного самолета является их технико-экономическое обеспече-
ние. Последнее предполагает:
• создание и подготовку соответствующих лабораторий и стендо-
вой базы для проведения опережающих и сопутствующих ис-
следований в интересах создаваемого ЛА (такие исследования
проводятся согласно перспективному плану научно-исследова-
тельских и опытно-конструкторских работ);
• создание и подготовку соответствующих лабораторной, стендо-
вой и полигонной баз для испытаний самого опытного изделия
и его функциональных систем;
• создание и подготовку запланированного числа экземпляров
опытного самолета, а также определенного резерва двигателей,
элементов функциональных систем и бортового оборудования;
• подготовку (создание) соответствующей метрологической базы;
481
• соответствующее методическое обеспечение испытаний;
• привлечение к испытаниям больших групп специалистов;
• материально-техническое обеспечение всех работ, проводимых
в интересах создаваемого ЛА и связанных с постройкой запла-
нированного числа опытных самолетов, их испытаниями и до-
водкой.
Планирование испытаний уже с этапа прогнозирования облика и
характеристик ЛА предполагает четкое определение их главных целей
с учетом действующих норм и назначения ЛА. Только после этого
следует приступать к разработке комплексного плана проведения ра-
бот, планов технико-экономического обеспечения и финансирова-
ния испытаний опытного изделий.
Перспективный комплексный план испытаний опытного само-
лета должен предопределить необходимый объем опережающих и со-
путствующих научно-исследовательских и опытно-конструкторских
работ, а также объем наземных и летных работ, связанных с довод-
кой, испытаниями и сертификацией как основных функциональных
систем и оборудования, так и опытного изделия в целом. Обычно в
ходе перспективного планирования используют имеющиеся статис-
тические данные по наземным и летным испытаниям прототипа дан-
ного самолета. Это повышает достоверность разрабатываемого плана.
Оперативные планы испытаний составляются на основе разрабо-
танного перспективного плана после его утверждения. В них конк-
ретизируются виды работ на всех этапах подготовки и летных испыта-
ний опытного самолета, уточняются их трудоемкость, последовательность
и условия выполнения, а также распределение работ между отдель-
ными экземплярами самолета.
Основные этапы летных испытаний опытного самолета и их за-
дачи. Испытания опытных самолетов (авиационных комплексов АК)
обычно проводятся в три этапа, которые в зависимости от ставящих-
ся перед ними задач получили следующие наименования:
1. Этап заводских (предварительных) испытаний.
2. Этап государственных (приемочных) испытаний.
3. Этап эксплуатационных испытаний.
Заводские испытания являются начальным (предварительным)
этапом такой работы, которая проводится под руководством конст-
руктора ЛА и включает в себя:
• различные виды наземных испытаний — лабораторных (в том
числе и на летающих лабораториях), стендовых, ресурсных,
полигонных;
• математическое и полунатурное моделирование;
• летные испытания самого опытного самолета.
482
Основные задачи заводских испытаний:
1. Доводка опытного образца до состояния, обеспечивающего
безопасность выполнения на нем полетов по программе летных испы-
таний и нормальную работу всех его функциональных систем и обо-
рудования в расчетных условиях применения ЛА.
2. Определение и всесторонняя оценка наиболее важных техни-
ческих и летно-тактических характеристик нового ЛА, а также харак-
теристик его систем и оборудования для установления степени их со-
ответствия техническому проекту и действующим нормам.
3. Летная проверка опытного образца в условиях установленных
ограничений и оценка условий полета в случаях раздельных отказов
как двигателя, так и всех жизненно важных систем ЛА.
4. Предварительная оценка надежности и эксплуатационного
совершенства нового ЛА (АК).
В ходе заводских испытаний проверяются и отрабатываются так-
же средства наземного обслуживания ЛА, контрольно-проверочная
аппаратура и уточняется возможность обеспечения базирования ЛА
во всех заданных техническим заданием (ТЗ) условиях. Кроме того,
отрабатываются и проверяются алгоритмы и программы обработки
экспериментального материала, а также соответствие конструкторс-
кой и эксплуатационной документации требованиям действующих
стандартов, комплексно оценивается готовность нового ЛА (АК) и
комплектующих его изделий для передачи на государственные испы-
тания, уточняются временные рекомендации и инструкции по эксп-
луатации ЛА на период испытаний.
По результатам заводских испытаний принимают решение о воз-
можности передачи опытного изделия на государственные испыта-
ния.
Вторым важнейшим этапом летных испытаний опытного самоле-
та (АК), по результатам которого принимают решение о запуске его в
серийное производство, являются государственные (приемочные)
испытания. Их проводят представители заказчика после успешного
завершения этапа заводских испытаний и устранения конструктором
выявленных дефектов ЛА. В ходе государственных испытаний в со-
став испытательной бригады могут привлекаться и представители про-
мышленности.
Основные задачи государственных (приемочных) испытаний:
1. Установление соответствия тактико-технических данных, ос-
новных летно-такгических, боевых и эксплуатационных характерис-
тик опытного изделия техническому заданию.
2. Определение и регламентация условий, обеспечивающих бе-
зопасность полетов.
16*
483
3. Определение пригодности нового ЛА и всех комплектующих
его изделий для запуска в серийное производство и массовой эксплу-
атации.
К моменту окончания государственных испытаний должны быть
завершены все виды специальных испытаний по обеспечению безо-
пасности полетов, в том числе изучены возможные критические ре-
жимы ЛА, критические явления, связанные с отказами отдельных
бортовых систем, определены характеристики прерванных и продол-
женных взлетов, оценены запасы устойчивости работы силовой уста-
новки в различных эксплуатационных условиях применения ЛА, оце-
нены условия аварийного покидания ЛА, определена возможность
эксплуатации ЛА на грунтовых аэродромах (если она предусматрива-
ется), а также проведены стендовые огневые испытания системы
пожаротушения.
По итогам государственных испытаний составляют акт, содержа-
щий оценку достоинств и недостатков нового ЛА. Заключение о при-
годности для массовой эксплуатации дают с учетом результатов всех
испытаний и исследований, проведенных к моменту окончания госу-
дарственных испытаний.
Завершающим этапом летных испытаний опытного самолета (АК)
являются эксплуатационные испытания. Их проводят представители
заказчика с целью изучения наиболее характерных особенностей лет-
ной и наземной эксплуатации ЛА, его силовой установки, бортовых
и наземных систем и оборудования, оценки их эксплуатационного
совершенства и надежности, выявления условий, обеспечивающих
высокую эксплуатационную эффективность ЛА (АК), регулярность и
экономичность полетов, оценки физиолого-гигиенических условий
жизнедеятельности экипажа и пассажиров. Оценивается также при-
годность вспомогательного оборудования и технических средств, уточ-
няются регламенты технического обслуживания ЛА (АК), руководства
по летной эксплуатации и технике пилотирования, эксплуатацион-
но-техническая документация, а также трудоемкость обслуживания
нового изделия, потребные для этого численность и квалификация
инженерно-технического персонала. Кроме того, отрабатываются
методика обучения летных экипажей и наземного инженерно-техни-
ческого персонала, обеспечивающая быстрое освоение нового ЛА.
По фактическим результатам испытаний уточняют реальные эксплу-
атационные нормы расхода топлива, масел, смазочных материалов,
специальных жидкостей и газов, запасных материалов.
Эксплуатационные испытания проводят на нескольких экземп-
лярах опытной серии после успешного завершения этапа государствен-
ных испытаний.
484
Виды специальных испытаний опытного самолета. К специаль-
ным видам летных испытаний опытного самолета (АК) обычно отно-
сят все выходящие за рамки общей программы работ (общей про-
граммы испытаний) испытательные полеты, выполняемые с целью:
• оценки ЛА после произведенных на нем конструктивных дора-
боток для устранения обнаруженного критического явления в
динамике и управляемости или дефекта в работе его систем или
оборудования;
• уточнения допустимого в эксплуатации (по условиям безопас-
ности и ресурса) уровня статических и динамических нагрузок
на конструкцию ЛА и уровня вибраций (прочностные испыта-
ния);
• установления допустимых сроков непрерывной эксплуатации
ЛА, его функциональных систем и оборудования, а также пре-
дельных сроков эксплуатации ЛА (ресурсные испытания);
• оценки возможности и особенностей эксплуатации ЛА на грун-
товых аэродромах, заснеженных или залитых водой полосах (если
таковая предусматривается);
• оценки поведения ЛА при возникновении различных критичес-
ких ситуаций, связанных с вероятными отказами отдельных
бортовых систем (особые случаи полета);
• изучения возможности и особенностей эксплуатации ЛА при
очень низких или очень высоких температурах воздуха, повы-
шенной влажности и т.п. (климатические испытания);
• изучения тех или иных критических режимов ЛА (при значениях
параметров его движения, превышающих предельно допусти-
мые по безопасности полета);
• оценки поведения самолета и условий его пилотирования в ус-
ловиях обледенения крыла или оперения;
• оценки поведения ЛА при вероятных отказах элементов сило-
вой установки в различных условиях полета (в том числе опре-
деления характеристик прерванных и продолженных взлетов);
• оценки устойчивости работы силовой установки и ее систем в
различных условиях полета и применения ЛА;
• оценки условий аварийного покидания ЛА;
• оценки характеристик ЛА после его модификации;
• установления соответствия характеристик серийного образца ис-
пытанного ЛА его опытному эталону и постоянного поддержи-
вания их на требуемом уровне (контрольные испытания).
Все подобные виды испытаний проводятся по специальным про-
граммам. Подробный перечень вопросов, решаемых в ходе таких ис-
пытаний, обычно регламентируется соответствующими соглаше-
ниями между конструктором опытного изделия и заказчиком.
485
К наиболее характерным видам специальных испытаний серий-
ных образцов относятся: испытания доработанных или модифициро-
ванных образцов; ресурсные; прочностные; климатические; изуче-
ние особенностей поведения ЛА и оценка его устойчивости и
управляемости на больших углах атаки, при сваливании и в режиме
штопора; изучение особенностей поведения ЛА и условий его пило-
тирования в особых случаях полета; контрольные испытания.
Самолеты головной серии подвергаются контрольным испытани-
ям с целью:
• общей оценки проведенных после завершения государственных
испытаний (и других видов испытаний) конструктивных изме-
нений и доработок, а также эксплуатационного совершенства
серийного образца ЛА;
• проверки соответствия тактико-технических данных и летно-
технических характеристик серийного ЛА техническим услови-
ям, прилагаемым к договору на поставку заказчику;
• утверждения эталонного образца для серийного производства.
В ходе контрольных испытаний получают также материалы для
отработки инструкции экипажу, эксплуатационной документации и
оценки средств наземного обслуживания ЛА.
Последующие контрольно-серийные испытания проводят перио-
дически через определенные интервалы времени (по согласованию с
конструктором ЛА) с целью:
• текущего контроля качества серийного производства;.
• подтверждения требуемого соответствия выпускаемых промыш-
ленностью серийных ЛА и комплектующих изделий установ-
ленному образцу (договору на поставку);
• оценки вносимых конструктором дополнительных изменений в
конструкцию ЛА или комплектующие изделия;
• установления эталона для текущего серийного производства.
Принцип определения потребного числа испытательных полетов и
экземпляров опытного самолета. При расчете потребного для выпол-
нения общей программы испытаний опытного самолета числа поле-
тов должны учитываться:
• проектные данные испытываемого ЛА;
• специфика его целевого применения;
• резерв времени на эксперимент в каждом испытательном полете
(по запасу топлива, допустимому времена непрерывной работы
двигателя на форсированном режиме и времени непрерывной
работы бортовой измерительной аппаратуры) при заданной
программе проведения самого эксперимента;
486
• необходимость обеспечения в каждом испытательном полете
высокого качества эксперимента и требуемого уровня безопас-
ности;
• общий планируемый объем экспериментов по программе испы-
таний опытного изделия.
На основании этих данных уточняют рациональные методы и про-
цедуру проведения экспериментов (диапазоны и опорные значения
высот, чисел М, скоростных напоров или индикаторных скоростей
ЛА, углов атаки и скольжения, угловых скоростей и перегрузок, ре-
жимы работы силовой установки, конфигурацию и загрузку ЛА).
Затем, зная средние затраты времени на выполнение каждого из зап-
ланированных экспериментов, общее планируемое число опытов,
порядок их проведения и время экспериментирования в каждом по-
лете, рассчитывают среднее число полетов, которые необходимо
выполнить по программе летных испытаний.
К рассчитанному подобным образом потребному числу испыта-
тельных полетов обычно прибавляют резервные в объеме, не превы-
шающем 15—20% общего числа целевых полетов, которые требуется
выполнить для определения всех сертифицируемых характеристик са-
молета, его силовой установки, бортовых систем и оборудования.
При установлении потребного числа экземпляров опытного са-
молета обычно принимают в расчет следующее:
1) время, в течение которого надо полностью завершить общую
программу испытаний ЛА и обязательные виды испытаний по специ-
альным программам;
2) общее число планируемых по этим программам испытатель-
ных полетов (включая и резервные);
3) ожидаемую среднюю частоту выполнения полетов в течение
месяца для каждого проходящего испытание экземпляра ЛА;
4) возможность эффективно использовать в ходе испытаний сис-
тему управления летным экспериментом и заправку топливом в воз-
духе;
5) ожидаемую частоту поступления на аэродром подготовленных
к летным испытаниям второго, третьего и последующих экземпляров
опытного самолета;
6) размеры финансирования данной программы.
8.1.5. Управление летным экспериментом
и автоматизация процесса испытаний опытного самолета
Принцип построения и основные задачи систем управления летным
экспериментом. Задачи управления летным экспериментом могут
решаться лишь с помощью специализированной информационно-из-
487
мерительной системы. Бортовая часть этой системы должна иметь
следующие основные элементы:
• систему сбора и преобразования бортовой измерительной ин-
формации;
• радиотелеметрическую станцию передачи данных с борта испы-
тываемого самолета на наземную часть системы приема и обра-
ботки информации;
• систему контроля, предназначенную для диагностики бортовой
системы измерения и управления ею;
• бортовые магнитные накопители, регистрирующие основную
часть измерительной информации, необходимой для сертифи-
кации ЛА, его функциональных систем и оборудования (при
вторичной обработке) и для контроля работы радиотелеметри-
ческой станции;
• бортовую цифровую вычислительную машину (БЦВМ), исполь-
зуемую для расчета непосредственно на ЛА наиболее важных,
необходимых экипажу параметров, а также для управления ин-
формационно-измерительной системой сбора данных;
• бортовую систему индикации наиболее «критичных» парамет-
ров и отображения той части информации, которая непосред-
ственно используется для принятия решения при управлении
летным экспериментом.
Наземная часть этой системы имеет следующие основные эле-
менты:
• систему приема и регистрации информации с борта испытыва-
емого ЛА;
• многопроцессорный комплекс, используемый для обработки
данных в реальном масштабе времени, а также для полной об-
работки материалов летных испытаний, укомплектованный под-
системой отображения и управления (позволяющей передавать
необходимые для контроля и управления результаты обработки
на экраны графических и аналого-цифровых дисплеев) и под-
системой автоматического анализа;
• систему связи, обеспечивающую передачу на борт ЛА данных
внешнетраекторных измерений, управляющих команд руково-
дителя эксперимента по координации работ участников экспе-
римента, а также связь между операторами;
• систему документирования в графической и цифровой формах
результатов эксперимента (физических значений параметров дви-
жения ЛА, состояния его функциональных систем и оборудо-
вания), управляющих команд и состояния экранов дисплеев.
Обработка материалов летных испытаний в системе управления
экспериментом может производиться в следующем порядке. Перед
488
началом эксперимента (заданного режима) определяют средние зна-
чения минимального числа контролируемых параметров и осуществ-
ляют допусковой контроль заданных параметров. При этом время,
необходимое для получения средних значений параметров, не долж-
но превышать 0,5 с. Затем обрабатывают в реальном масштабе време-
ни те же параметры, но уже в ходе выполнения заданного контрольного
маневра. Одновременно рассчитывают некоторые косвенные зави-
симости, которые используются в ходе дальнейшей обработки для
уточнения программы очередного эксперимента. Полная обработка
материалов летных испытаний для определения всех сертифицируе-
мых характеристик самолета, его функциональных систем и оборудо-
вания выполняется после завершения полета.
К основным задачам системы управления летным эксперимен-
том обычно относят:
• диагностику состояния системы измерения;
р- анализ кондиционности получаемого в ходе летного экспери-
мента материала;
• контроль безопасности испытательных полетов, в том числе и в
ходе выполнения каждого опыта;
• указание допустимых диапазонов изменения величины иссле-
дуемого параметра (характеристики);
• непосредственное оперативное управление самим процессом вы-
полнения заданных контрольных маневров (операций, режи-
мов, опытов);
• опережающее и сопровождающее моделирование;
• оперативное планирование очередного эксперимента.
Управление летным экспериментом позволяет сократить сроки
летных испытаний опытного самолета, повысить безопасность поле-
тов и качество получаемого экспериментального материала. Эффект
от применения подобной системы достигается благодаря увеличению
объема экспериментов, выполняемых качественно в каждом испыта-
тельном полете, и оперативному планированию порядка их проведе-
ния, а при необходимости и изменению как порядка, так и самой
программы опытов при одновременном повышении уровня безопас-
ности каждого испытательного полета.
Существенного эффекта в ходе летных испытаний опытного са-
молета можно добиться, сочетая следующие формы управления лет-
ным экспериментом:
• текущий контроль чистоты выдерживания летчиком заданных
условий проведения эксперимента (в первую очередь жесткий
контроль качества выполнения указанных в полетном листе ти-
повых маневров и операций), по результатам которого ведущий
489
инженер и летчик-испытатель убеждаются в зачетности этого
опыта или необходимости его повторения;
• оперативную корректировку качества пилотирования в ходе са-
мого эксперимента, заключающуюся в быстрой передаче лет-
чику-испытателю соответствующих команд (и отсутствующей у
него информации) с целью обратить внимание на недостаточ-
но строгое соблюдение условий выполнения полетного задания
и предотвратить необходимость его повторения;
• текущий контроль выполнения условий безопасности полета и
быструю передачу летчику-испытателю соответствующих команд
с целью предотвратить возникновение критической ситуации
или непреднамеренное превышение летных ограничений;
• оперативный количественный анализ поступающей экспресс-
информации для оценки качества и зачетности проведенного
эксперимента, уточнения программы очередного опыта и при-
нятия обоснованного решения о возможности дальнейшего из-
менения параметра, оказывающего определяющее влияние на
исследуемые процессы, явления или характеристики ЛА.
Указанные формы управления летным экспериментом приемле-
мы для любых эксплуатационных условий полета, а также при иссле-
дованиях различных критических режимов самолета. В предельной
области режимов полета лишь более жестко задают условия проведе-
ния эксперимента (допустимые изменения определяющего параметра
в ряде последовательных опытов, высота полета, на которой прово-
дится эксперимент, центровка ЛА, режим работы силовой установки
и т.п.) и более жестко регламентируют как допустимые отклонения
контролируемого параметра (характеристики) от заданного значения,
так и характер допустимых отклонений органов управления. За внеш-
ней границей предельной области режимов полета жесткие требова-
ния предъявляют к соблюдению определенной последовательности и
к темпу отклонения рулей в заданном направлении и на заданную
величину.
Требования к общему математическому обеспечению системы уп-
равления летным экспериментом. Математическое обеспечение вы-
числительного комплекса должно иметь развитую структуру, позво-
ляющую операторам и руководителю испытаний своевременно
получать всю необходимую информацию для эффективного контроля
и управления летным экспериментом. Поэтому к общему математи-
ческому обеспечению системы управления летным экспериментом
предъявляют соответствующие требования на разработку:
а) языка программирования, обеспечивающего простоту как об-
щения, так и отображения;
490
б) транслятора, обеспечивающего перевод рабочей программы в
программу, состоящую из машинных команд ЭВМ;
в) библиотеки стандартных программ, включающей в себя об-
щую библиотеку и библиотеку пользователя;
г) операционной системы, облегчающей пользователю отладку
программы и сам процесс получения результатов обработки, отобра-
жения и управления.
При разработке прикладного математического обеспечения сис-
темы управления летным экспериментом должна быть предусмотрена
возможность решения таких задач, как:
• ввод данных летного эксперимента как по телеметрическому
каналу связи, так и с лент бортовых магнитных накопителей;
• обработка материалов летных испытаний, отображение, доку-
ментирование и хранение результатов обработки;
• одновременное отображение текущей и априорной информа-
ции и данных, получаемых путем расчетов на ЭВМ;
• сигнализация при достижении любым из контролируемых пара-
метров соответствующего уровня заданной величины (напри-
мер, 0,75 максимально допустимого значения);
• обеспечение высокой надежности работы как бортовой, так и
наземной частей системы управления летным экспериментом.
Математическое обеспечение современных систем управления
летным экспериментом включает операционную систему реального
времени, обеспечивающую режим обработки телеметрической ин-
формации с магнитных накопителей. Предусматривается автомати-
зация настройки системы на обработку, управление потоком данных
в системе, контроль и диагностику неисправностей, общение экспе-
риментаторов с системой и другие операции.
Существует несколько различных режимов функционирования
систем обработки: реального масштаба времени; обработки между
очередными опытами; пакетной обработки после проведения экспе-
римента; настройки оборудования и программного обеспечения.
Прикладное математическое обеспечение состоит из библиотеки
модулей и рабочих программ, выполняющих расчеты физических зна-
чений параметров, вычисление заданных критериев и показателей,
оценку выхода контролируемых параметров за допустимые пределы,
отображение на дисплеях, документирование и регистрацию резуль-
татов обработки и т.д.
Алгоритмы обработки оптимизируют по быстродействию с за-
данной точностью вычислений. Для этого используют предваритель-
ные вычисления, рекуррентные формулы, метод скользящего базо-
вого интервала, распараллеливание вычислительных алгоритмов,
сокращение команд переадресации и передач управления.
491
Перспективы полной автоматизации летного эксперимента при
испытаниях самолетов. Возможность жесткой унификации условий
и методов летной оценки динамических свойств и управляемости са-
молетов одного класса, их высотно-скоростных, маневренных и дру-
гих характеристик требует автоматизации самого процесса управле-
ния опытным самолетом во время эксперимента при его испытаниях
и сертификации.
Полная автоматизация летного эксперимента при испытаниях
самолетов предполагает:
• широкое применение специализированных высокопроизводи-
тельных вычислительных систем, обладающих большой памя-
тью и развитым математическим обеспечением;
• разработку специального бортового устройства (модели летчи-
ка-испытателя с исполнительным приводом и соответствующим
набором программ выполнения контрольных маневров, опера-
ций, тестов, бортовой ЭВМ и блоком безопасности, с пуль-
том управления и соответствующей индикацией), способного
обеспечить летчику-испытателю возможность эффективно уп-
равлять ходом эксперимента и оперативно оценивать его резуль-
таты. Летчик в этом случае сможет полноценно выполнять фун-
кции бортового инженера-оператора, задающего (в соответствии
с планом испытательного полета), уточняющего и при необхо-
димости меняющего программу эксперимента на основании не
только своих наблюдений за поведением самолета, работой фун-
кциональных систем и оборудования и личных профессиональ-
ных ощущений, но и анализа регулярно поступающей к нему
на бортовой дисплей информации от ЭВМ и наземного центра
управления (по телеметрическому каналу связи);
• разработку достаточно гибких алгоритмов управления летным
экспериментом и мини-программ первичной обработки инфор-
мации в реальном масштабе времени;
• жесткую регламентацию как последовательности операций в ходе
обработки всего потока поступающей информации, так и фор-
мы представления конечных результатов.
Все указанные меры могут дополнительно повысить эффектив-
ность летного эксперимента, сократить сроки проведения испытаний
новых скоростных самолетов и время их доводки, заметно повысить
качество и безопасность каждого испытательного полета, уменьшить
физическую нагрузку на летчика.
492
8. 1. 6. Сертификационные летные испытания самолета
В идеале сертификационные летные испытания должны проводить-
ся на самолете, который полностью соответствует типовой конструк-
ции, предназначенной для регулярной эксплуатации и заявленной
на сертификацию. Однако на практике самолеты, поступающие на
летные испытания, отличаются по отдельным компонентам (напри-
мер, составу оборудования, состоянию двигателя, компоновке или
составу систем) от такого самолета. Чаще всего соответствуют типо-
вой конструкции последние (серийные) экземпляры из поступаю-
щих на летные испытания. В связи с этим сертификационные лет-
ные испытания планируются и распределяются между экземплярами
самолета по тематике таким образом, чтобы максимально использо-
вать возможности каждого экземпляра.
Сертификационные летные испытания состоят из комплекса ис-
пытаний самолета и его систем, силовой установки и пилотажно-
навигационного оборудования в нормальной эксплуатационной об-
ласти полета и комплекса специальных испытаний, относящихся к
критическим или расчетным условиям и режимам. По действующей
системе первая группа испытаний проводится опытно-конструкторс-
ким бюро (ОКБ) совместно с летно-испытательным институтом
(ЛИИ), а вторая — ОКБ совместно с ЛИИ и Государственным науч-
но-исследовательским институтом гражданской авиации (ГосНИИГА).
Результаты испытаний по спецпрограммам идут в зачет государствен-
ных испытаний самолета.
Распределение тематики сертификационных летных испытаний
между пятью-шестью самолетами, обычно участвующими в летных
испытаниях, увязывается с состоянием типовой конструкции конк-
ретного экземпляра. Так, например, на первом экземпляре после
завершения предварительных испытаний проводятся летные испыта-
ния на больших углах атаки. Следовательно, этот самолет должен
быть типовым по аэродинамическим характеристикам, системе уп-
равления, характеристикам газодинамического тракта двигателя и его
компоновке в гондоле.
Сертификационные летные испытания пассажирского (транспорт-
ного) самолета начинаются с испытаний на больших углах атаки а.
Это связано с тем, что параметры сваливания играют чрезвычайно
важную роль в назначении эксплуатационного диапазона параметров
полета, режимов работы силовой установки, самолетных систем и
оборудования для всех этапов полета. Следовательно, сертификаци-
онные испытания самолета по большому комплексу требований норм
летной годности (НЛГ) могут проводиться после детального исследо-
вания характеристик самолета на больших углах атаки.
493
Возможность проведения испытаний на больших углах атаки с
точки зрения безопасности обеспечивается результатами испытаний
модели самолета в аэродинамической трубе, результатами предвари-
тельных испытаний самолета и целым комплексом мер методическо-
го и экспериментального характеров. К мерам экспериментального
характера в данном случае относится установка устройств (противо-
штопорного парашюта и др.), обеспечивающих при необходимости
принудительный вывод самолета из сваливания.
К мерам методического характера относится выработка последо-
вательностей увеличения в испытаниях угла атаки, изменения высо-
ты полета, числа М, центровки, режима работы двигателей и др.,
сопровождающаяся детальным анализом материалов полета.
Прогрессивным шагом в таких испытаниях является применение
системы управления летным экспериментом, которая способствует,
с одной стороны, обеспечению безопасности испытаний, с другой
— повышению интенсивности и качества проведения этих испыта-
ний.
Нормы летной годности самолета предусматривают детальные ис-
следования на больших а характеристик устойчивости и управляемос-
ти и характеристик системы управления самолета, критерии которых
сформулированы в НЛГ, а также работоспособности и газодинами-
ческой устойчивости двигателя, функционирования системы сигна-
лизации. В соответствии с требованиями НЛГ указанные испытания
производятся для всех конфигураций самолета в установленных РЛЭ
диапазонах масс, центровок, высот, чисел М и режимов работы дви-
гателей. Типовая программа предусматривает испытания в режимах
торможения в прямолинейном полете и на виражах при выполнении
«дач» руля высоты со всеми работающими двигателями и при одном
выключенном двигателе. На основании результатов испытаний на
больших углах атаки устанавливаются угол атаки сваливания ас и мак-
симально допустимый угол атаки адоп.
Угол адоп является эксплуатационным ограничением для само-
лета, о приближении к которому в полете должна предупреждать сиг-
нализация. Угол ас определяется как предельное ограничение для
самолета. В эксплуатации самолет должен быть защищен от непред-
намеренного выхода на ас характеристиками динамики самого само-
лета, системы управления и системы сигнализации. РЛЭ запрещает
экипажу при эксплуатации преднамеренный вывод самолета на адоп.
Взлетно-посадочные летные характеристики. Типовая програм-
ма включает значительный объем летных сертификационных испыта-
ний по оценке взлетно-посадочных (ВПХ) и летных (ЛХ) характери-
стик, устойчивости и управляемости. Эти испытания проводятся на
494
самолете, который соответствует типовой конфигурации, по край-
ней мере в части аэродинамики, средств управления, тяговых и рас-
ходных характеристик двигателя, средств торможения при пробеге.
Эти характеристики определяются во всем диапазоне ожидаемых
условий эксплуатации по высоте, скорости (числу М), взлетной, по-
садочной и полетной массам, конфигурациям самолета, режимам ра-
боты двигателя и систем силовой установки. Учитываются также от-
казы функциональных систем, влияющие на ВПХ и ЛХ для всех
конфигураций самолета. При этом, если для ВПХ условия летной
годности обеспечиваются соответствующими параметрами траекто-
рии движения самолета, то для ЛХ наряду с траекторными парамет-
рами первостепенное значение приобретает расход топлива. В этом
случае расход топлива оценивается не только как экономический по-
казатель, но, что особенно важно, и как критерий безопасности по-
лета. Проводимый на основании расчетов и летных испытаний поиск
оптимальных режимов полета с точки зрения минимизации расхода
топлива оказывает существенное влияние на качество определения
потребного запаса топлива на полет.
Устойчивость и управляемость. Определение характеристик ус-
тойчивости и управляемости при сертификации самолета играет осо-
бо важную роль. Показатели устойчивости и управляемости относят-
ся к числу основных критериев, определяющих летную годность
(безопасность) самолета. Устанавливаются три уровня требований к
устойчивости и управляемости, относящихся к эксплуатационной об-
ласти, областям между эксплуатационными и предельными ограни-
чениями и области предельных ограничений.
В соответствии с этим устанавливаются и диапазоны углов ата-
ки, перегрузок, высот, скоростей (чисел М), в пределах которых
определяются характеристики устойчивости и управляемости для всех
конфигураций самолета в сочетании с максимальными значениями
взлетной и посадочной масс и предельными значениями центровки
самолета.
Нормы летной годности предусматривают определение характе
ристик управляемости при несимметричном выключении одного и
двух двигателей (для самолетов с тремя и большим числом двигате-
лей). Рассматриваются также отказы (маловероятные и крайне мало-
вероятные) других функциональных систем, влияющих на усилия.
Основными испытательными режимами являются разгоны и тормо-
жения самолета, «дачи» руля высоты, элеронов и руля направления,
скольжения.
Управляемость на взлетно-посадочной полосе. Нормами летной
годности устанавливаются требования к характеристикам управляе-
мости самолета в процессе взлета, посадки и руления. Требования
495
должны подтверждаться летными испытаниями и направлены на обес-
печение возможности движения самолета в пределах установленной
взлетно-посадочной полосы (ВПП) без выкатывания на боковые и
концевые полосы безопасности. При этом рассматриваются отказы
критического двигателя (продолженные и прерванные взлеты), а также
отказы других систем, влияющие на характер движения самолета,
которые происходят чаще, чем крайне маловероятные. Подтвержде-
ние соответствия самолета указанным требованиям проводится при
летных испытаниях во всем диапазоне ожидаемых условий эксплуата-
ции, в том числе при максимальной скорости бокового ветра и со-
стоянии ВПП, разрешенном для эксплуатации самолета. Основны-
ми испытательными режимами в данном случае являются «импульсы»
руля направления и выполнение «змеек» путем последовательного
отклонения руля направления в противоположные стороны.
По результатам указанных выше сертификационных летных ис-
пытаний оформляются технические отчеты. В этих отчетах должно
быть отражено соответствие рассмотренных характеристик самолета
нормам по каждому пункту НЛГ.
Двигатели, оборудование, отдельные агрегаты самолетных систем.
Они проходят сертификацию по принципу «до установки на самолет»
по результатам стендовых испытаний и испытаний на летающих лабо-
раториях. Однако НЛГ предусматривают также проверку выполнения
требований к двигателю и оборудованию в самолетной компоновке,
требований к системам силовой установки и самолетным системам,
которые относятся к сертификации самолета. Соответствие этим тре-
бованиям оценивается в процессе летных сертификационных испыта-
ний самолета. Поэтому типовая программа предусматривает комплекс
летных испытаний самолета, в которых определяются характеристики
двигателя, оборудования и самолетных систем, непосредственно свя-
занные с характеристиками, компоновкой и ожидаемыми условиями
эксплуатации данного самолета, с действиями экипажа по управле-
нию ими в полете. По двигателю — это испытания по определению
газодинамической устойчивости в области до предельных углов атаки,
характеристик запуска, защищенности от попадания посторонних
предметов с ВПП. По оборудованию — это испытания по определе-
нию работоспособности и точности самолетовождения, автоматичес-
кого управления, эргономических качеств средств индикации и уп-
равления.
Самолетные системы (система управления самолетом, механиза-
цией крыла, шасси, гидравлическая система, система жизнеобес-
печения и др.) не проходят сертификации до установки на самолет,
так как в окончательном виде они собираются уже на реальном са-
496
молете. Летные испытания для них нередко являются основным ви-
дом испытаний. Поэтому в типовой программе достаточно подробно
изложены виды и условия проведения испытаний.
Одним из общих видов летных испытаний, которым подвергают-
ся перечисленные функциональные системы при сертификационных
испытаниях самолета, является оценка летной годности самолета при
их отказных состояниях.
Отказобезопасность. Установление летной годности при отказах
функциональных систем — одна из важнейших задач сертификацион-
ных летных испытаний самолета. Целью этих испытаний является
определение последствий отказов, т.е. видов особых ситуаций.
Из всех расчетных случаев, на основании которых проводится
исследование летной годности при отказах, рассматриваются отказы
функциональных систем, этапы полета и особые условия эксплуата-
ции (ОУЭ), относящиеся к программе летных испытаний. Осталь-
ные расчетные случаи анализируются на основе экспертных оценок
(наиболее простые случаи) и исследуются на стендах. Желательно,
чтобы расчетные случаи, предназначенные для летных испытаний/
предварительно были бы оценены на стендах. В программу летных
испытаний включаются расчетные случаи, которые предварительно
(экспертно) оцениваются как усложнение условий полета (УУП),
сложные (СС) и аварийные (АС) ситуации. Это те случаи, по кото-
рым должны быть выработаны методы пилотирования в эксплуата-
ции и дана летная оценка.
Уместно обратить внимание на то, что расчетные случаи, свя-
занные с аварийной ситуацией, в летных испытаниях проверяются
при ограничениях условий, которые обеспечивают безопасность по-
лета (без возникновения реальной АС). Вполне естественно, что
при исследовании в полете любых отказов (в том числе и приводящих
к УУП и СС) должна обеспечиваться безопасность полета.
Наряду с этим следует иметь в виду, что важным элементом ме-
тодики летных испытаний по оценке последствий отказов функцио-
нальных систем является идентификация условий возникновения и
распознавания отказа в летных испытаниях и при эксплуатации само-
лета. Реализация этой задачи обеспечивается в процессе испытаний
на основе следующих методических принципов:
1) имитация отказов производится непосредственно изменением
характеристик функциональных систем;
2) имитируется внезапность возникновения отказа;
3) вводятся специальные задержки (запаздывания) в действиях
экипажа.
497
Имитация отказов функциональных систем в полете может про-
изводиться различными способами, а именно с помощью:
• пульта введения отказов, позволяющего осуществлять воздей-
ствие непосредственно на функционирование исполнительных
элементов систем подачей специальных управляющих сигналов;
• штатных органов управления функциональными системами;
• доработки конструкций систем перед испытательным полетом.
Конкретный способ выбирается исходя из противоречивых тре-
бований: с одной стороны, необходима достаточно полная имитация
характеристик реального отказа, с другой — требуется обеспечить бе-
зопасность испытательного режима и минимизировать объем работ
по подготовке воздушного судна к эксперименту. Для получения до-
стоверных оценок предпочтительным является использование пульта
отказов, позволяющего обеспечить внезапность отказов, своевремен-
ное снятие имитируемого отказа при выходе самолета на опасные
режимы или при появлении других (случайных) отказов, сокраще-
ние продолжительности испытаний за счет последовательной имита-
ции различных отказов в одном полете.
Обеспечение внезапности возникновения отказа достигается спе-
циальным построением эксперимента, при котором:
• в одно полетное задание включается набор различных отказов
без информирования летчика о последовательности и режимах,
при которых они будут вводиться;
• обнаружение и распознавание отказа производится летчиком
(или другими членами экипажа) только по поведению самоле-
та, перемещению рычагов управления, срабатыванию штатных
средств сигнализации, показаниям приборов; при этом для обес-
печения безопасности испытаний один из пилотов (не пилоти-
рующий самолет) должен быть полностью информирован о мо-
менте и условиях введения отказа.
Очевидно, что почти полная внезапность может быть достигнута
введением отказа при выполнении экипажем задания, не имеющего
отношения к данному отказу. Однако такой подход практически не
применим для летных сертификационных испытаний и пригоден толь-
ко для испытаний на пилотажном стенде и проведении специальных
исследований.
Внезапность возникновения отказа на практике обуславливает
определенную задержку между срабатыванием сигнализации об отка-
зе (или заметным изменением параметров движения при работающей
системе) и началом действий экипажа по парированию отказа.
В методах оценки соответствия НЛГ на основе опыта эксплуата-
ции установлены временные задержки (запаздывания), которые сле-
498
дует использовать при проведении в полете исследований последствий
отказов.
Климатические испытания. Изменения атмосферных условий ока-
зывают непосредственное влияние на характеристики полета самоле-
та (ВПХ и ЛХ), работоспособность и характеристики его функцио-
нальных систем. В связи с этим в ОУЭ устанавливаются граничные
значения параметров атмосферных условий, в пределах которых дол-
жна быть обеспечена летная годность самолета: граничные значения
температуры наружного воздуха на высоте аэродрома и на крейсерс-
кой высоте, высоты аэродрома, скорости ветра, в том числе его бо-
ковой составляющей на высоте аэродрома, турбулентности, обледе-
нения, грозовой обстановки и др. Однако на практике в климатические
испытания включаются лишь испытания при граничных (расчетных)
значениях температуры воздуха и высоты аэродрома. Остальные па-
раметры атмосферных условий рассматриваются в специальных про-
граммах по обледенению, отказобезопасности и др.
Климатические испытания имеют комплексный характер, так как
включают определение ВПХ и ЛХ, работоспособности и характерис-
тик двигателя, систем управления и систем силовой установки, сис-
тем жизнеобеспечения и отказобезопасности. Климатические испыта-
ния достаточно сложны не только методически, но и организационно.
Организационные трудности связаны с тем, что эти испытания про-
водятся чаще всего в экспедиции, т.е. вне основного аэродрома ба-
зирования — в условиях крайне высокой и низкой температур и вы-
сокогорья. Это приводит к дополнительным материальным затратам
и увеличению продолжительности испытаний. Методические труд-
ности в значительной мере связаны с особенностями регулирования
двигателя при расчетных значениях температуры наружного воздуха и
высоты аэродрома и их влиянием на методы определения ВПХ и ЛХ,
характеристик двигателя, системы кондиционирования и др. Допол-
нительные сложности возникают при внешнетраекторных измерени-
ях. Появляется проблема зачетности результатов летных испытаний
при условиях, когда, например, максимальное (минимальное) зна-
чение фактической температуры воздуха и максимальное значение
высоты аэродрома неполностью совпадают с расчетными значениями.
Достоверность применяемых методов пересчета зависит от вели-
чин ДГ = 7,расч. - 7ф, АН = Ярасч. ~ ГДе ^асч , -Ярасч.’ ^ф> ^ф
расчетные и фактические значения температуры воздуха и высоты
аэродрома.
Методы определения соответствия НЛГ допускают поправки:
АТ < 5 °C и АН < 200 м. Действующие методы испытаний и приведе-
ния ВПХ и ЛХ к заданным условиям, основанные на теории подо-
499
бия, и расчетно-экспериментальные методы позволяют вводить по-
правки на ДТ > 5°С и АН > 200 м. Однако отсутствуют эксперименталь-
ные данные о допустимых (по точности определения ВПХ и ЛХ) ДТ и
ДН. Следует иметь в виду, что введение поправок существенно ус-
ложняется также из-за влияния увеличения (в жарких и холодных ус-
ловиях) отбора воздуха от двигателя системой кондиционирования.
Обледенение. Летные испытания в условиях обледенения также
представляют комплексную задачу. Как известно, обледенение ока-
зывает опасное влияние на аэродинамические характеристики само-
лета, работоспособность двигателя и других систем. Опыт эксплуата-
ции показывает, что в условиях обледенения имеют место тяжелые
летные происшествия. В связи с этим на самолетах устанавливается
противообледенительная система (ПОС). Нормы летной годности
предъявляют серьезные требования к надежности таких систем и обес-
печению безопасности полета самолета в условиях обледенения, в
том числе при отказах ПОС. Они определяют сочетания влажности
воздуха и температуры (связанных с интенсивностью обледенения),
при которых должен быть испытан самолет в полете. Ведь ограничить
ОУЭ самолета отсутствием обледенения не представляется возмож-
ным ввиду случайности характера его проявления.
Нормы летной годности и типовая программа предусматривают
испытания в сухом воздухе, при проведении которых оцениваются
параметры ПОС. В таких же условиях проверяется динамика полета
самолета при установленных (на носках крыла, стабилизатора, киля)
имитаторах льда. Форма и место размещения имитатора определяют-
ся на основе испытаний модели самолета в аэродинамической трубе,
а двигателя — на специализированном стенде. Результаты этих испы-
таний используются для предварительной оценки влияния обледене-
ния на характеристики самолета (устойчивость и управляемость вплоть
до критических углов атаки, ВПХ и др.) и главным образом для подго-
товки к летным испытаниям в натурных условиях. Летные испытания
в натурных условиях при различных уровнях интенсивности обледе-
нения, в том числе при интенсивном обледенении, являются ис-
ключительно ответственными и небезопасными. Поэтому важную роль
играют предварительные испытания, надежные метеорологические
данные накануне полета и сама методика проведения испытаний,
учитывающая желательность последовательного приближения к усло-
виям интенсивного обледенения и критическим режимам полета.
Категории посадочного минимума. Посадочный минимум само-
лета является одним из важных элементов в составе ожидаемых усло-
вий эксплуатации, оказывающий большое влияние на эффективность
(регулярность) эксплуатации. Современные низкие посадочные ми-
нимумы (I—III категорий Международной организации гражданской
500
авиации — ИКАО) обеспечиваются на основе сочетания характерис-
тик системы захода на посадку (включающей не только бортовые сред-
ства, но и наземные радиотехнические и светотехнические систе-
мы) и маневренных свойств самолета. Требования к сертификации
автоматических систем посадки изложены в документах ИКАО. При
отработке и установлении посадочного минимума важную роль игра-
ет решение задачи по обеспечению требуемого ИКАО уровня безо-
пасности посадки.
При сертификации самолета наряду с оценкой соответствия тре-
бованиям НЛГ пилотажно-навигационного и радиотехнического обо-
рудования, характеристик посадки и ухода самолета на второй круг
дается комплексная оценка посадки самолета в автоматическом и
директорном режимах управления (до высоты принятия решения об
уходе на второй круг, соответствующей категории посадки).
Первый этап летных испытаний проводится с применением сис-
темы, имитирующей устанавливаемый минимум посадки; второй —
в условиях реального посадочного минимума. Летные испытания про-
водятся на аэродроме, оборудованном радиотехнической и светотех-
нической системами, сертифицированными для соответствующей
категории посадки.
8.2. Летные испытания изделии
ракетно-космической техники
8.2.1. Содержание задач баллистико-навигационного
обеспечения управления изделий РКТ
на этапах летных испытаний и применения
Среди многообразия проблем, связанных с обеспечением эффектив-
ности разработки и безаварийной эксплуатации изделий РКТ, мож-
но выделить два значительных класса:
• обеспечение надежного баллистико-навигационного обеспече-
ния (БНО) испытаний и применения изделий РКТ;
• достоверный анализ характеристик изделий РКТ по результа-
там летных испытаний (ЛИ).
При этом под изделиями РКТ понимаются ракеты, их головные
части (ГЧ) и космические аппараты (КА) как элементы ракетных
(РК) и ракетно-космических (РКК) комплексов. В зависимости от
рассматриваемых задач под летным испытанием может подразумеваться
как единичный эксперимент (пуск и полет ЛА независимо от постав-
ленной цели), так и совокупность таких экспериментов.
501
Разработка научно-методического обеспечения решения назван-
ных проблем является прерогативой научной дисциплины «Экспери-
ментальная баллистика». В рамках экспериментальной баллистики
(ЭБ) рассматриваются следующие научно-технические задачи:
• определение движения изделий РКТ по результатам измерений
текущих навигационных параметров (ИТНП);
• анализ летно-технических характеристик (ЛТХ) по результатам
измерений параметров состояния и геофизических условий при-
менения РКТ;
• оценка и анализ показателей целевого применения или основ-
ных ЛТХ РКТ по результатам летных испытаний;
• разработка моделей и методов БНО испытаний и применения
изделий РКТ.
Прикладная часть ЭБ направлена на решение баллистических воп-
росов специального технического обоснования (СТО) перспектив раз-
вития КА и выработки требований к новым объектам, баллистичес-
кое проектирование средств (в соответствии с разработанными
требованиями), а также на оперативное баллистико-навигационное
обеспечение управления КА.
При решении баллистических вопросов специального техничес-
кого обоснования и выработки требований к КА проводится анализ
современного состояния и научно-технического прогнозирования тен-
денций развития баллистических характеристик, определяются бал-
листические возможности создания средств, исследуется их динами-
ческая устойчивость и уровень требований к точности знания
параметров гравитационного потенциала Земли, моделей атмосферы
и др.
При баллистическом проектировании КА разрабатываются соот-
ветствующие разделы в технических предложениях и проектах, созда-
ется специальное программно-математическое обеспечение решения
баллистико-навигационных задач, решаются целевые задачи, опре-
деляются баллистические данные (ИБД).
При непосредственном баллистико-навигационном обеспечении
(БНО) управления КА проводится совокупность научно-методичес-
ких и организационно-технических мероприятий по определению про-
странственно-временных параметров движения для управления КА
на всех этапах полета, планированию и обеспечению работы борто-
вых систем, наземных специальных и управляющих комплексов, а
также для решения других баллистических задач.
В широком смысле БНО рассматривают как составную часть ра-
бот, проводимых при создании КА, подготовке и проведении их ис-
пытаний и штатной эксплуатации. Оно оказывает влияние на всю
502
совокупность работ, связанных с разработкой и созданием комплек-
са стационарных и подвижных систем, средств обмена данными, ком-
плексов переработки информации.
Оперативное БНО на всех этапах испытаний и эксплуатации КА
предусматривает решение следующих основных задач:
• выведение КА на заданную траекторию движения;
• определение и прогнозирование параметров движения КА;
• проведение динамических операций;
• создание, поддержание, восполнение орбитальных группиро-
вок КА;
• спуск и посадка КА (или его элементов);
• контроль работы систем КА;
• определение БНО для планирования средств, привлекаемых для
управления служб;
• научно-прикладные эксперименты.
Оперативное БНО занимает особое место в автоматизированных
системах управления (АСУ) КА, так как ему присущи все универ-
сальные черты самостоятельного контура управления, реализующего
совокупность информационных функций, программирования режи-
мов управления, выработки и реализации управляющих воздействий.
Реализация этих функций осуществляется на основе данных, получа-
емых в процессе решения множества баллистических задач, которые
условно можно разделить на четыре класса [101]:
1. Задачи определения параметров движения и уточнения пара-
метров математической модели (идентификации), используемой для
описания движения КА, с учетом системы управления движением.
Основными задачами этого класса являются:
• статистическая обработка измеренных текущих навигационных
параметров (ИТНП) для определения вектора состояния КА,
корректирующего импульса и согласующих коэффициентов, ис-
пользуемых в математической модели движения;
• расчет данных для выполнения динамических операций, свя-
занных с проведением коррекции траектории;
• расчет данных на проведение спусков.
Результаты решения этих задач зависят от характеристик борто-
вой аппаратуры, измерительных средств, аэродинамических характе-
ристик КА и являются исходными данными для решения всех других
классов задач. Особенность этих задач заключается в том, что они
решаются оперативно в определенной последовательности путем мно-
гократных приближений по оперативно выбираемой стратегии. Ре-
шение задач основано на оптимизации целевой функции, как прави-
ло, в жестком временном режиме, зачастую при противоречивых
ограничениях.
503
2. Задачи оценки летно-технических характеристик КА, точнос-
тных характеристик результатов решения задач первого класса, а так-
же наземных и бортовых измерительных средств навигационного
обеспечения. К основным задачам этого класса относятся:
• априорная (апостериорная) оценка точности определения и про-
гнозирования движения КА;
• оценка точности работы двигательной установки, систем ори-
ентации и стабилизации;
• контроль и оценка точности работы бортовых алгоритмов реше-
ния баллистико-навигационных задач;
• априорная оценка точности реализации коррекции, спусков и
других операций.
Как правило, решение этих задач основано на применении мето-
да статистического моделирования с использованием результатов
ИТНП, оценок параметров орбиты, статистических характеристик
исходных данных и осуществляется непосредственно после решения
соответствующих задач первого класса.
3. Задачи расчета данных для планирования работы наземных
служб, участвующих в управлении и контроле КА. Основными зада-
чами этого класса являются расчет зон радиовидимости, целеуказа-
ний, времени баллистического существования КА, освещенности,
положения КА на траектории в заданных точках, положения и ори-
ентации КА относительно заданных ориентиров, форм обмена между
взаимодействующими организациями, данных для ввода баллисти-
ческой информации в бортовую аппаратуру и других условий.
4. Задачи для обеспечения целевого применения КА.
Оперативному БНО как самостоятельному контуру управления в
АСУ КА присущ целый ряд специфических свойств и особенностей,
основными из которых являются следующие:
1. Оперативность получения результатов, диктуемая потребнос-
тями технологических процессов управления КА более высокого иерар-
хического уровня и в первую очередь работой его бортовых систем и
средств.
2. Высокая точность результатов решения баллистических задач,
вытекающая из необходимости обеспечения наилучшего качества уп-
равления. В самом деле, например, неудовлетворительная точность
определения движения КА приведет к некачественному слежению за
КА с помощью наземных или плавучих измерительных средств, так
как целеуказания для антенн будут содержать большие погрешности.
Кроме того, планирование и реализация управления полетом также
будут выполняться некачественно, поскольку времена входа в зоны
радиовидимости станции слежения будут вычислены с большими
погрешностями. При расчетах параметров маневров КА погрешности
504
знания траектории приведут к ошибкам вычисления этих параметров
и отразятся на затратах бортового топлива, так как погрешности вы-
полнения маневров должны компенсироваться изменением парамет-
ров последующих маневров.
3. Надежность результатов баллистических расчетов, являющая-
ся следствием того, что их погрешности приводят к необратимым
процессам на борту КА и, как следствие, влияют на качество про-
граммы полета. Так, сбои в расчетах времен радиовидимости КА со
станции слежения приводят к срывам сеансов связи с КА и программ
управления, реализуемых во время этих сеансов.
4. Циркуляция в контуре оперативного БНО больших массивов
информации. Ежесуточно в контур могут поступать результаты сотен
сеансов измерений текущих навигационных параметров (ИТНП) и
выдаваться потребителям десятки форм обмена.
5. Массовый характер баллистических расчетов, проводимых од-
новременно по нескольким КА, зачастую в реальном масштабе вре-
мени.
6. Широкий круг взаимодействующих организаций, использую-
щих результаты БНО.
7. Технологичность процессов оперативного БНО, характеризу-
емая относительной стабильностью перечня решаемых задач для кон-
кретного типа КА.
8. Использование большого комплекса разнообразных техничес-
ких средств, включая ЭВМ, средств приема и передачи данных, ото-
бражения и контроля. Комплекс технических средств обеспечивает
автоматизацию обработки информации и расчета требуемых баллис-
тических данных.
9. Четко определенный предмет исследования как самостоятель-
ный системный раздел управления и информационного обеспечения
АСУ КА.
Анализ особенностей и специфических черт контура оператив-
ного БНО показывает, что ему присущи все признаки сложной си-
стемы:
• содержит большое количество различных элементов;
• является информационной сетью, в которой циркулируют боль-
шие потоки информации;
• имеет замкнутое поле управления со связями с внешней средой
— сверхсистемой, под которой подразумевается АСУ КА;
• посредством управляющей информации обеспечивает саморе-
гулирование;
• характеризуется свойством эмерджентности по отношению к
подсистемам, анализ которых возможен только при изучении
всей системы как целостного образования;
505
• является иерархической структурой, в которой сочетаются прин-
ципы централизованного и децентрализованного управления;
• имеет входы и выходы — на вход поступают заявки на проведе-
ние расчетов по БНО КА, данные ИТНП, исходные баллисти-
ческие данные, а на выходе получаем результаты решения бал-
листических задач в виде документов заданной структуры.
Отметим также, что важным признаком контура оперативного
БНО как системы является наличие в нем людей как активных эле-
ментов.
С учетом перечисленных особенностей, свойств и признаков под
системой оперативного БНО будем понимать комплекс средств, фун-
кционирующих под единым управлением с целью получения в тече-
ние заданного времени и с заданной точностью совокупности балли-
стико-навигационных данных, необходимых для управления КА
различного целевого назначения.
Систему оперативного БНО с точки зрения теории массового об-
служивания можно представить в виде сложной организационно-ди-
намической системы открытого типа с параллельно-последователь-
ным расположением элементов и принудительным по времени
поступлением заявок на проведение работ по оперативному БНО уп-
равления КА.
S.2.2. Летно-технические характеристики ЛА
Под летно-техническими характеристиками (ЛТХ) понимается ком-
плекс основных показателей, которые имеют ЛА и его системы в
различных условиях полета на всех участках траектории и которые
позволяют на основе определенной системы критериев оценить спо-
собность ЛА решать поставленные задачи целевого применения.
При рассмотрении конструктивных характеристик агрегатов и
бортовых систем ЛА имеет смысл выбирать такие критерии, которые
отражают достигнутый уровень показателей целевого применения или
основных ЛТХ, например области гарантированного достижения це-
лей, ограниченной минимальной (МД) и максимальной прицельной
дальностей (МПД), точности стрельбы. В свою очередь в качестве
критериев анализа основных ЛТХ могут выступать интегральные оцен-
ки эффективности или вероятность выполнения задач целевого при-
менения в заданных условиях.
Таким образом, предложенное определение ЛТХ охватывает как
характеристики отдельных агрегатов и систем, так и показатели целе-
вого применения ЛА в целом.
Летно-технические характеристики являются функциями конст-
руктивных параметров агрегатов и систем, а также геофизических ус-
506
ловий целевого применения ЛА. Данные параметры и условия (в силу
значительного числа случайных факторов на этапе производства, под-
готовки и применения ЛА) имеют случайную природу. В связи с
этим очевидна случайная природа самих ЛТХ и необходимость обес-
печения требуемого их уровня с заданной вероятностью.
Для анализа показателей целевого применения ЛА в условиях
эксперимента могут использоваться обобщенные характеристики и
параметры моделей рассматриваемых показателей. Совокупность
таких показателей может быть представлена в виде структурной схе-
мы (рис. 8.3).
Основные ЛТХ (показатели целевого применения ЛА)
Обеспечивающие характеристики
Гарантийные
запасы топлива
Предельное
рассеивание
Обобщенные характеристики целевого применения ЛА
в условиях пуска
Отклонения точек падания
от точек прицеливания
Остатки топлива в ДУ
Избыток кажущейся
скорости
Расчетно-экспериментальные
оценки составляющих промаха
ЛТХ (конструктивные характеристики агрегатов и систем ЛА)
Рис. 8.3. Показатели целевого применения ЛА
Под максимальной прицельной дальностью полета ЛА понимает-
ся наибольшая сферическая дальность от точки старта до точки при-
целивания, при пуске в которую в заданных геофизических условиях
с требуемой вероятностью обеспечивается топливом работа двигатель-
ной установки (ДУ) и ее выключение от системы управления (СУ).
507
Под минимальной прицельной дальностью полета ЛА понимает-
ся наименьшая сферическая дальность от точки старта до точки при-
целивания, при пуске в которую функционирование агрегатов и сис-
тем ЛА осуществляется в соответствии с требованиями документации
главного конструктора и выключение ДУ последней ступени ракеты
обеспечивается по команде от СУ с вероятностью не менее требуе-
мой.
Для ракет с разделяющимися головными частями МПД и МД
определяются до центра условного прямоугольника разведения эле-
ментов боевого оснащения с заданными сторонами и порядком обхо-
да целей.
Требуемый уровень МПД с заданной вероятностью обеспечива-
ется гарантийным запасом топлива на борту ЛА. Достоверное опре-
деление МД достигается надежной оценкой показателей стабильнос-
ти конструктивных характеристик агрегатов и систем ЛА и учетом
избытка топлива.
Точностные характеристики ЛА определяются размерами облас-
ти рассеивания точек падения боевого блока (ББ) относительно то-
чек прицеливания в заданных условиях целевого применения с требу-
емой вероятностью. При этом рассматриваются точность и кучность
попаданий ЛА. Точность попаданий определяется максимальными
значениями систематических ошибок подготовки данных на пуски ра-
кет, которые не удалось выявить в ходе экспериментальной отработ-
ки ракетного комплекса (РК), и характеризуется положением центра
группирования точек падения элементов боевого оснащения (БО) от-
носительно точек прицеливания. Кучность попаданий — рассеива-
ние элементов БО ракет относительно центра группирования, обус-
ловленное отклонениями конструктивных характеристик ракет от их
номинальных значений, не выявленными на этапе подготовки дан-
ных.
Уровень точностных характеристик ЛА, учитываемый при пла-
нировании целевого применения, определяется величиной предель-
ного рассеивания точек падения элементов БО относительно точек
прицеливания.
Конструктивные характеристики агрегатов и систем ЛА (в том
числе весовые, энергетические, аэродинамические, характеристики
СУ) используются в расчетных математических моделях анализа по-
казателей целевого применения ЛА в штатных условиях, а также в
специальных условиях для выявления причин возможных нештатных
ситуаций.
508
8.2.3. Общие условия летных испытаний
и особенности задач экспериментальной баллистики ЛА
Выполнение летных испытаний ракетно-космической системы (РКС)
зависит от состояния экспериментально-испытательной базы (ЭИБ)
полигонов, уровня методического обеспечения. В рамках экспери-
ментальной баллистики рассматриваются методическое обеспечение
анализа ЛТХ ЛА (а именно, ракет, головных частей, КА как элемен-
тов РК и РКК) и задачи организации испытаний. Целью испытаний
являются баллистическое обеспечение измерений характеристик со-
стояния ЛА и безопасности на трассе полета при проведении экспе-
риментальных пусков. Обеспечение достоверного анализа ЛТХ по ре-
зультатам летного испытания представляет актуальную задачу, так
как завышение показателей целевого применения ЛА приводит к не-
выполнению поставленных задач, а занижение — к неэффективному
целевому применению. Важность рассматриваемых баллистических
задач организации испытаний также очевидна, так как достоверность
анализа ЛТХ и уровень ущерба экологической безопасности окружа-
ющей среды при испытаниях ЛА во многом определяются качеством
их решения. Задачи экспериментальной баллистики РК, привлекае-
мые математические модели и методы их решения представлены на
рис. 8.4.
Содержание задач анализа определяется интересами оценки адек-
ватности расчетных математических моделей показателей целевого
применения ЛА реальным условиям и предполагает всестороннее ис-
следование характеристик состояния ЛА и их систем, а также оцени-
вание ЛТХ по результатам летных испытаний.
Задачи БНО измерений направлены на гарантию качества функ-
ционирования полигонного измерительного комплекса (ПИК) при
проведении экспериментальных пусков ЛА и предполагает подготов-
ку программ работы и целеуказаний измерительным средствам, а также
решение баллистической измерительной задачи на этапе первичной
обработки измерений.
Обеспечение безопасности на трассе полета ЛА предполагает оцен-
ку размеров располагаемых зон падения отделяемых элементов конст-
рукции и решение связанных с этим задач. При разработке методов и
алгоритмов решения задач экспериментальной баллистики учитыва-
ются следующие факторы:
• случайная природа ЛТХ и геофизических условий применения
ЛА, вызванная физической неопределенностью значительного
числа случайных факторов, имеющих место на этапе производ-
ства, подготовки и применения ЛА;
509
Рис. 8.4. Задачи экспериментальной баллистики РК, привлекаемые
математические модели и методы их решения
510
• неточность измерений характеристик состояния и геофизичес-
ких условий применения ЛА вследствие случайных ошибок ра-
боты средств ПИК;
• нестационарный характер изменения ряда ЛТХ в течение поле-
та, требующий их представления в виде некоторых формальных
моделей, например многочленных;
• некорректность задач по Адамару—Тихонову вследствие косвен-
ного характера измерений и ограниченных возможностей ЭИБ
полигонов по планированию испытаний в различных режимах
(в том числе близких к предельным).
Происхождение рассмотренных факторов, содержание и направ-
ления разработки методического обеспечения решения задач экспе-
риментальной баллистики связаны со следующими особенностями
условий проведения летных испытаний:
• совершенствованием образцов ЛА, расширением и повышени-
ем требований к ним, что фактически означает расширение
перечня анализируемых характеристик;
• существующими средствами полигонного измерительного ком-
плекса, которые не обеспечивают требуемую точность измере-
ний в интересах решения ряда задач анализа;
• ограниченностью выбора геофизических условий испытаний,
не позволяющей планировать летные измерения в различных
режимах (в том числе близких к предельным);
• отсутствием измерений ряда характеристик состояния ЛА в свя-
зи с финансовыми и договорными ограничениями;
• сокращением общего числа испытаний, требующим повыше-
ния достоверности анализа характеристик ЛА в единичных экс-
периментах.
Проведенный анализ показывает, что успех в решении задач эк-
спериментальной баллистики РКС достигается с помощью максималь-
ного учета условий проведения летных испытаний и корректного ис-
пользования всей имеющейся информации об ЛТХ ЛА в алгоритмах
анализа.
8.2.4. Измерения характеристик состояния
и геофизических условий целевого применения ЛА
Для анализа ЛТХ на этапе летных испытаний привлекаются данные
траекторных, телеметрических, агрометеорологических и наземных
измерений характеристик состояния и геофизических условий целе-
вого применения ЛА. Сведения о точности и дискретности измере-
ний некоторых практически значимых характеристик представлены в
табл. 8.1. В табл. 8.1 обозначены:
511
Таблица 8.1
Данные о точности и дискретности измерений характеристик состояния
и условий применения ЛА
Измеряемые характеристики Частота измерений Предельные погрешности измерений
15изм./с 0,1 м/с
vn> К 2 изм./с 0,1 м/с
2 изм./с 10 м
V, ф, ф 15 изм./с 1,5угл. мин.
100 изм./с 3%
50 изм./с 2%
8. 50 изм./с 2%
Рк 100 изм./с 0,8%
Go 50 изм./с 0,1%
P(h) 1—5 изм./км 2 мбар
ДА) 1—5изм./км 0,7 град.
Л(й) 1-5 изм./км 0,7 град.
U(h) 1—5 изм./км Зугл. град.
— проекции вектора кажущейся скорости центра масс
ЛА на оси гироскопической геоцентрической системы координат
(ГГСК);
Ч’ \ ~ проекции вектора скорости центра масс ЛА в ГГСК;
£, т], £ — координаты центра масс ЛА в ГГСК;
v, ф, <р — приборные углы тангажа, рыскания, вращения ЛА;
сох, (Оу, сог — проекции вектора угловой скорости ЛА относитель-
но центра масс на оси связанной систем координат;
«х, пу, nz — значения продольной и поперечных перегрузок;
512
5,, i = l,...,/oy — углы отклонения органов управления от нейт-
рального положения, /оу — количество органов управления;
рк — давление в камере сгорания ДУ;
Gq — начальная масса ЛА;
р(А), T(h), A(h), U(h) — атмосферное давление, температура
воздуха, азимут и скорость ветра на высоте h.
Характеристики измерений имеют важное значение как с пози-
ций общей методологии анализа ЛТХ, так и для практики. Априор-
ные сведения и допущения о статистических характеристиках погреш-
ностей измерений являются основой для выбора критерия и метода
оценивания характеристик ЛА. Отметим следующие особенности
моделей погрешностей измерений:
• из-за случайных ошибок в работе средств ПИК имеются неточ-
ности измерений. Законы распределения погрешностей изме-
рений в общем случае неизвестны;
• погрешности измерений Д, как правило, аддитивно связаны с
неизвестными истинными значениями измеряемых величин:
Z = у + Д, реже на практике встречаются мультипликативные
и сдвиговые погрешности;
• погрешности измерений могут содержать существенные мед-
ленно меняющиеся Дм и автокоррелированные быстро меняю-
щиеся Дб составляющие (встречаются и другие определения —
регулярные и сингулярные составляющие). Медленно меняю-
щиеся составляющие представляются в виде некоторых фор-
к
мальных моделей, например многочленных: Дб =
У=1
где dj — параметры; ср;(/) — базисные функции модели.
8.2.5. Характеристика задач баллистического обеспечения
летных испытаний
Оценка и анализ ЛТХ ЛА в ходе летных испытаний достигаются в
результате обработки данных, предоставляемых полигонным изме-
рительным комплексом. Организация испытаний связана с решени-
ем многих организационно-технических задач, важнейшей из кото-
рых является обеспечение безопасности на трассе полета. Поэтому в
рамках экспериментальной баллистики рассматривается целый класс
задач (рис. 8.5), связанных с обеспечением работы средств ПИК и
предотвращения несанкционированного ущерба окружающей среде в
513
Задачи баллистического обеспечения
летных испытаний
Рис. 8.5. Задачи баллистического обеспечения
летных испытаний
результате летных экспериментов. Представим краткую характерис-
тику задач баллистического обеспечения летных испытаний.
Исходными данными для подготовки целеуказаний измеритель-
ным средствам и программ измерений являются кинематические па-
раметры траектории ЛА, геодезические координаты местоположения,
максимальная дальность действия и минимальный угол места, при
котором возможно функционирование измерительного пункта (ИП).
По приведенным данным строится зона видимости ИП, определяет-
ся время входа ЛА в зону видимости и выхода из нее (время сеанса
измерений), азимут и угол места антенных устройств в момент входа
ЛА в зону видимости и программа их изменения в течение времени
пролета ЛА через зону видимости (целеуказания). Далее по этим дан-
ным формируется программа сопровождения ЛА антенными устрой-
ствами ИП (программа измерений).
Важность баллистической измерительной задачи позволяет назвать
ее задачей № 1 экспериментальной баллистики. Содержание методов
и алгоритмов ее решения определяется составом измерений, харак-
тером информации об условиях измерений, а также объемом выбор-
ки измерений, полученным в конкретном сеансе.
514
В интересах обеспечения безопасности на трассе полета ЛА пла-
нирование летных экспериментов осуществляется с учетом наличия
таких участков местности, которые по своей природной, демографи-
ческой и экономической инфраструктуре пригодны для отчуждения
под районы падения отделяемых элементов конструкции ЛА. Опре-
деление потребных размеров таких районов осуществляется по анало-
гии с расчетом предельного рассеивания элементов БО относительно
точек прицеливания. При этом в качестве расчетной точки падения
отделяемого элемента в эксперименте назначается точка, соответству-
ющая номинальным условиям полета ЛА и соответствующего эле-
мента. Расчетные предельные отклонения реальных точек падения
отделяемых элементов от номинальных определяются в соответствии
с принятыми математическими моделями и системами наиболее значи-
мых возмущающих факторов. Такими факторами являются: отклоне-
ния ЛТХ и геофизических условий применения ЛА от расчетных, а
также факторы, действующие после выдачи команды на отделение
элемента от ЛА (например, наличие импульса последействия ДУ,
разброс аэродинамических характеристик элемента от номинала, воз-
мущения в процессе отделения). В силу того что рассеивание отде-
ляемых элементов конструкции ЛА относительно расчетных точек про-
исходит под воздействием значительного числа факторов примерно
одного порядка, полагают, используя центральную предельную тео-
рему, что случайные координаты точек падения элементов подчине-
ны нормальному закону распределения. Вследствие данного предпо-
ложения в качестве фигуры расчетной зоны падения используется
эллипс с направлением полуосей в условной системе координат, ана-
логичной используемой при анализе рассеивания элементов БО. Для
проверки адекватности расчетных длин полуосей эллипса рассеива-
ния реальным длинам используются данные геодезической привязки
мест падения элементов конструкции. В интересах повышения опе-
ративности их поиска осуществляется прогнозирование координат
точек падения по результатам траекторных измерений.
Контрольные вопросы
1. Охарактеризуйте роль летных испытаний при разработке самолетов.
2. Какие характеристики самолета оцениваются в летных испытаниях?
3. Какие главные факторы необходимо учитывать при проведении лет-
ных испытаний самолетов?
4. Что такое основная, эксплуатационная и предельная области режи-
мов полета?
5. Перечислите уровни нормируемых характеристик устойчивости и
управляемости самолета.
17-
515
6. Что означает приведение летных характеристик самолета к стандарт-
ным атмосферным и расчетным условиям полета?
7. Какие виды работ включает методическая подготовка летных испы-
таний?
8. Перечислите уровни программы летных испытаний опытного само-
лета.
9. Охарактеризуйте основные элементы информационно-измеритель-
ной системы управления летным экспериментом.
10. Какие задачи решаются при управлении летным экспериментом?
И. В чем заключается цель сертификационных летных испытаний са-
молета?
12. Перечислите задачи баллистического навигационного обеспечения
управления космического аппарата.
13. Дайте характеристику общих условий решения задач БНО управле-
ния КА.
14. Что понимается под летно-техническими характеристиками ЛА?
15. Дайте классификацию ЛТХ.
16. Перечислите задачи экспериментальной баллистики.
17. Какие математические модели используются при решении задач
экспериментальной баллистики?
18. Измерения каких параметров используются при анализе ЛТХ?
ЧАСТЬ III
ФОРМИРОВАНИЕ
РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
Глава 9
ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ
РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
9.1. Обобщенная структурная схема формирования
результатов испытаний
При любых испытаниях, как известно, определяются характеристи-
ки свойств продукции (объекта испытаний), т.е. параметры или (и)
показатели качества: целевого применения, надежности, эргономи-
ческие, технологические, экологические, безопасности и др. Но-
менклатура показателей качества продукции детально представлена в
ГОСТ 22851. При этом различают два вида параметров и показателей
качества ОИ:
• измеряемые — физические величины и производные от них;
• неизмеряемые — плотность компоновки, удобство пользования,
рациональность формы и др.
В качестве измеряемых, контролируемых и управляемых высту-
пают параметры следующих видов: температура, давление и вакуум,
влажность, линейные и угловые, световые и оптические, акустичес-
кие, электрические и магнитные, электромагнитные и радиотехни-
ческие, уровень, объем, расход, состав и концентрация физико-
химических свойств вещества, сила, масса, скорость и ускорение,
ионизирующее излучение, аэродинамические и комбинированные и
др. (см. ГОСТ 26001).
Параметры ОИ могут быть постоянной величиной, случайной
величиной, детерминированной функцией, случайной функцией. Как
правило, техническое состояние ОИ характеризуется случайным век-
тором показателя качества (параметров):
1И(/) = 1И0(/) + 31Г>
519
где Hq — вектор номинальных значений; 8РК — вектор отклонений
параметров от их номинальных значений Wq с ковариационной мат-
рицей Кцг.
На Й^г) ОИ устанавливают предельно допустимые значения —
верхнее и нижнее Ww или допуски:
Л^ = ^в-^н.
При этом, как правило, условиями годности изделия по резуль-
татам контрольных испытаний являются:
РГ(/)е ДИ^; (9.1)
р{И'(/)еАИ',7’н}>/’р,
где Тн — установленное время безотказной работы, или наработки;
Р_ — требуемая вероятность безотказной работы.
Известно, что испытания проводятся с целью получения (в нор-
мированных и управляемых условиях) информации о фактическом
качестве разрабатываемой и выпускаемой продукции и принятия на
этой основе соответствующих решений. При этом (с точки зрения
получаемых результатов) выполняются следующие процедуры (см.
ГОСТ 15.001 и ГОСТ 24525.2):
• определение действительных значений показателей качества про-
дукции {определительные и (или) исследовательские испытания)',
• оценка соответствия качества продукции установленным требо-
ваниям (контрольные испытания);
• оценка уровня качества и технического уровня продукции (сер-
тификационные испытания);
• прогнозирование изменений показателей качества продукции
при ее изготовлении и эксплуатации;
• выявление доли скрытых дефектов в продукции.
Испытаниям могут подвергаться отдельные образцы, в том числе
единичные, партия образцов, выборка из этой партии, тип образцов.
Рассмотрим обобщенную структурную схему формирования ре-
зультатов испытаний, показанную на рис. 9.1.
В процессе испытаний на ОИ воздействуют:
• управляющие воздействия (задаваемые в пределах Ун -Ув)и посту-
пающие от средств управления (СУ) на ОИ с погрешностью Ai;
• испытательные воздействия, имитирующие эксплуатационные
факторы (задаваемые в пределах Иц-Ив) и поступающие от
имитаторов (И) с погрешностью Аз;
• воздействие на ОИ энергопитания (гидравлического, пневмати-
ческого, электрического и др.), задаваемое в пределах Эн -Эв
520
Рис. 9.1. Обобщенная структурная схема формирования
результатов испытаний
и поступающее от системы энергопитания (СЭП) с погрешно-
стью Дз;
• воздействия условий наземных испытаний (ВУНИ — температу-
ры, влажности, загрязненности окружающего ИС или комп-
лекс воздуха и др.), изменяющиеся в пределах <рн — <Рв (могут
быть измерены с погрешностью Д4).
Параметры ОИ поступающие на вход средства измерений
параметров (СИП) с помехой , измеряются последними с по-
грешностью Д5. Получаемые при этом оценки V(t) параметров ОИ
вместе с внешними данными для расчета оценок ВДРО (Di), извес-
тными с некоторыми погрешностями Д^, являются основой для оп-
ределения (оператор Fj) показателей качества И^(() ОИ (с допусти-
мой погрешностью расчета Д7). Полученные оценки показателя
качества вместе с внешними данными для расчета результатов
определительных испытаний ВДР WqH , известными с некоторыми
погрешностями Д§ , в ряде случаев могут служить основой для опре-
деления (оператор Т^) показателей качества более сложного вида
521
И^(/). При этом допускается погрешность расчета Д9 . Тогда оценка
W1 показателя качества ОИ будет известна с суммарной (доверитель-
ной) погрешностью
Д01 =T(Ai,A2>^3>^4>^5-^6>a7>a8-a9) • (9.2)
Так, при выполнении ряда предположений (независимость со-
ставляющих, одновершинное распределение и др.) дисперсию по-
грешности результата можно представить в виде:
_2 V 2
/=1
где = (Д; - дс/ )/ ta — дисперсия погрешности определения /-х со-
ставляющих; Д,- — доверительная погрешность определения /-х со-
ставляющих; Kj — коэффициент весомости z-й составляющей; ta —
коэффициент для нахождения доверительных границ; Дс,- — система-
тическая погрешность.
Результат W ± Дщ испытаний образца продукции в виде числа яв-
ляется окончательным при определительных и (или) исследовательс-
ких испытаниях. При распространении результата W на выборку,
партию и (или) тип продукции производится обобщение результатов
испытаний отдельных образцов (оператор Г3), например вычисляется
среднее арифметическое значение (WT) или выбирается наилучшее
значение (sup ^). При этом допускается методическая ошибка
±Дю. В случае необходимости вычисляется (с ошибкой ±Дц) про-
гнозируемое значение Wn показателя качества ОИ (оператор F^.
При контрольных испытаниях используются расчетные данные,
известные с погрешностью Д12, и внешние данные ВДР с по-
грешностью Д13 и выполняется логическая операция «И» — оценка
W сравнивается с допуском Д IF на этот показатель, т.е. с его допу-
стимыми значениями Wn, (оператор f5). При этом, как извест-
но, формируемые решения «ОИ соответствует ТУ» (Г) или «ОИ не
соответствует ТУ» (НГ) будут известны с некоторой достоверностью
(см. ГОСТ 19919), характеризуемой риском поставщика (изготови-
теля) и риском потребителя (заказчика).
При распространении результата контрольных испытаний образ-
ца на выборку, партию или тип продукции используется определен-
ный алгоритм обобщения (оператор F6).
При сертификационных испытаниях полученные показатели ка-
чества ОИ обязательно.должны сопровождаться регистрированными
сведениями о том, при каких уровнях испытательных воздействий
522
были зафиксированы показатели качества ОИ. Для этого в испыта-
тельных стендах и комплексах предусматриваются средства измере-
ний и анализа воздействий (СИВ). Измерительные преобразователи
(ИП), например виброизмерительные преобразователи (ВИП), в за-
висимости от целей испытаний могут располагаться либо непосред-
ственно на имитаторе (например, платформе вибратора) и тогда со-
ответсвующие контролируемые параметры поступают в СИВ с
некоторой помехой ^в], либо располагаться на ОИ и тогда (как по-
казано на рис. 9.1) соответствующие контролируемые параметры по-
ступают в СИВ с некоторой помехой ^В2.
Параметры воздействий (В), поступающие на вход СИВ, изме-
ряются последними с погрешностью . Получаемые оценки пара-
метров воздействий вместе с внешними данными Д3, известными с
некоторыми погрешностями Д15, являются основой для определения
(оператор F7) точностных характеристик реализованных воздействий
(ТХРВ). В данном случае допускается погрешность расчета Д^.
В заключение отметим, что представленные на рис. 9.1 опера-
ции измерений и контроля существенно отличаются друг от друга и
от операций испытаний ОИ. Действительно:
• при измерениях оценивают физические параметры или их труп-
пу (косвенные измерения), тогда как предметом оценки при
испытаниях и контроле являются показатели качества объекта
испытаний в целом;
• при измерениях получают результаты, характеризующие отдель-
ные параметры образца продукции, в то время как при испыта-
ниях формируют результаты, характеризующие партию и (или)
тип продукции в целом;
• метод измерений предполагает обязательно средства измерений,
тогда как при испытаниях и контроле оценку качества продук-
ции и (или) ее технического уровня нередко формирует экс-
перт или группа экспертов.
Как известно, при испытаниях помимо измерений используют
измерительный и статистический контроль, а также расчетный, ор-
ганолептический и регистрационный методы оценки качества ОИ.
При этом результатами измерений являются количественные оценки
значений параметров продукции, а при испытаниях, кроме того,
получают альтернативные заключения и статистические выводы (в
том числе и качественные).
С точки же зрения погрешностей и ошибок испытаний специ-
фичным для сертификационных испытаний является:
• иерархическое обобщение погрешностей от параметров продук-
ции до образца, выборки, партии и типа в целом;
523
• взаимосвязь точностных характеристик испытаний с показате-
лями статистического контроля (ГОСТ 2073; ГОСТ 18242 и др.),
технологических операций (ГОСТ 16305 и др.), экспертных ме-
тодов оценки качества продукции.
Рассмотрим точностные характеристики результатов испытаний,
базируясь на изложенной выше обобщенной структурной схеме их
формирования (см. рис. 9.1) и на анализе отечественной и зарубеж-
ной нормативной документации в области точностных характеристик
испытаний.
9.2. Точностные характеристики результатов испытаний
В отечественной и зарубежной нормативной документации различа-
ют следующие точностные характеристики методов испытаний ОИ:
их чувствительность; адекватность; точность результатов; достоверность
результатов; правильность результатов; повторяемость результатов; вос-
производимость результатов. Кроме того, испытания характеризу-
ются также продолжительностью, быстродействием, стоимостью и
эффективностью.
Чувствительность метода испытаний — это такое свойство испы-
таний, которое характеризуется минимальной величиной или мини-
мальным изменением оцениваемого при испытаниях параметра или
(и) показателя качества ОИ, при которых (в заданных условиях) по-
лучается искомый результат с требуемой точностью (см. ГОСТ 23480,
ГОСТ 17.1.4.01, ГОСТ 18442, ASTM - 2188 и др.).
Адекватность метода испытаний — это свойство испытаний, ха-
рактеризуемое соответствием условий испытаний ОИ предполагае-
мым условиям его эксплуатации.
Очевидно, что на испытательном стенде невозможно одновре-
менно воспроизводить все действующие на ОИ в процессе эксплуата-
ции факторы ни по их составу, ни по характеристикам их изменения
во времени, тем более что определенная часть эксплуатационных фак-
торов подчиняется законам нестационарных случайных процессов,
требующих для их реализации в процессе испытаний значительных
затрат. С этой точки зрения применяемые в промышленности испыта-
тельные стенды (ИС) и осуществляемые ими процессы генерирования
испытательных воздействий можно рассматривать как физические мо-
дели, в которых лишь с некоторым приближением моделируются (ими-
тируются) условия эксплуатации испытуемых объектов. В связи с
этим важнейшей задачей при практическом использовании той или
иной физической модели рассматриваемого вида является определе-
ние ее адекватности, т.е. идентичности, близости физической моде-
524
ли (по определенным признакам и показателям) к реальным услови-
ям эксплуатации, так как использование неадекватной физической
модели снижает достоверность результатов испытаний, что может при-
вести в конечном счете к аварийным ситуациям в процессе эксплуа-
тации ОИ, невыполнению программы полета, травмированию или
гибели людей, экономическим потерям и другим нежелательным по-
следствиям.
Причинами неадекватности рассматриваемой физической моде-
ли (ИС и процессов генерирования испытательных воздействий) мо-
гут быть:
• ограничения по числу и виду одновременно имитируемых эксп-
луатационных факторов, а в том случае, когда состав имитиру-
емых факторов на ИС для испытания того или иного изделия
определен, различные допущения, связанные с выбором ис-
ходных предпосылок (по виду используемых закономерностей,
точности и др.), принимаемых при разработке реализуемых на
ИС процессов генерирования испытательных воздействий;
• погрешности измерений и обработки измерительной информа-
ции и другие причины неадекватности.
Рассмотрим более детально следующие характеристики испыта-
ний: точность, правильность, повторяемость, воспроизводимость и
достоверность.
Точность результатов (метода) испытаний. Точность результата
или метода испытаний — это характеристика близости результата ис-
пытаний ОИ к истинному (при теоретическом рассмотрении) или дей-
ствительному (при эксперименте) значению оцениваемой величины.
Действительно, при определительных и (или) исследовательских
испытаниях находят, в частности (прямыми или косвенными изме-
рениями), численное значение параметра или показателя качества W
образца продукции. За результат определения (измерения) часто при-
нимают различные оценки W этого показателя: среднее арифмети-
ческое значение по п наблюдениям величины VK, средний размах,
выборочную медиану или другие эффективные и несмещенные оцен-
ки величины И< При этом точность результата, следуя идеологии
ГОСТ 16263, — это мера близости W к истинному (действительно-
му) значению искомой величины.
Величина, обратная точности, называется погрешностью резуль-
тата е:
e = W-W^ (9.3)
где — действительное значение W (например, показание образ-
цового прибора).
525
Погрешность, как известно, содержит две составляющие: Дс —
и случай-
систематическое отклонение W от И^, т.е. Дс = W - ,
ные разбросы отдельных наблюдений W2,...,l¥n вокруг W, т.е.
дисперсию сп результата или ее оценку . Дисперсию и (или)
построенный на ее основе доверительный интервал Дд в статистике
называют точностью оценки величины W.
В отечественных и зарубежных стандартах используется большая
номенклатура показателей точности результатов испытаний: погреш-
ность (или точность) определения результата, иногда с указанием
доверительной вероятности (ГОСТ 16746, ГОСТ 14263 и др.); средняя
квадратическая погрешность (ГОСТ 20782, ГОСТ 8. 207, МИ 23-
74, ASTME-177, ASTME-225 и др.); доверительная погрешность (ГОСТ
16263) или интервал суммарной погрешности (ГОСТ 8.011, МИ 217);
требуемая от и гарантируемая ог точность (МИ 23); коэффициент
точности метода контроля (ГОСТ 8.010):
Ах=4х5^(2ДИ0‘1,
(9.4)
где Za — квантиль; Д W— допуск на величину W.
Широко используется также коэффициент вариации (ГОСТ 16745,
ГОСТ 20522, PC 1483, МИ-165, ASTME-225):
rw = S^W~l
где — оценка .
Значение определяется, в частности, по формуле (ASTME-
246, ASTME-225 и др.)
(9.6)
где dj — разность между результатом определения и W, т.е.
d^Wi-W.
В ГОСТ 16123 S'jy, определяемая по (9.4), названа погрешнос-
тью метода измерений и характеризует повторяемость измерений, а в
ИСО 2591 — точностью метода анализа.
Коэффициент вариации (9.5) называется коэффициентом отклоне-
ния (ASTME-246); относительной допустимой погрешностью Да опре-
526
деления ИЙ (PC 1463); относительной доверительной ошибкой (ГОСТ
13216, ГОСТ 17510, ГОСТ 12997, ГОСТ 17638, ГОСТ 19489 и др.):
= (W-WtW)/w, (9.7)
где W — точечная оценка W, И^(Н) — верхняя (нижняя) доверитель-
ная граница W, соответствующая определенной доверительной веро-
ятности Рд .
Выражение (9.7) можно представить в виде (см. ГОСТ 11.004):
=ZaSl₽(wV^f‘, (9.8)
откуда следует, что 5^ — это относительный доверительный интер-
вал для выборочного среднего значения. При этом предполагается
отсутствие систематических погрешностей.
Правильность результатов (метода) испытании. Характеристи-
ка степени близости к нулю систематических погрешностей результа-
тов измерений по ГОСТ 16263 называется правильностью измерений.
Поэтому правомерно назвать правильностью результатов определи-
тельных испытаний характеристики близости к нулю систематичес-
ких (в том числе неисключенных систематических) отклонений оценки
результатов определительных испытаний от их истинного или дей-
ствительного значения. Однако правильность результатов испытаний
в отечественных стандартах в настоящее время не нормируется и не
оценивается. На необходимость использования такой характеристи-
ки при аттестации методов измерений и испытаний с использовани-
ем образцовых средств измерений (в частности, стандартных образ-
цов веществ и материалов) указывается в [20, 21].
Повторяемость результатов (метода) испытаний. При прове-
дении повторных испытаний образца продукции (по единой методи-
ке, в неизменных условиях, одним и тем же средством испытаний, в
практически одинаковых условиях и одним и тем же испытателем) их
результаты будут, как правило, отличаться друг от дру-
га, оставаясь в пределах установленного допуска [ JPM, И'].
Характеристика испытаний, отражающая близость друг к другу
результатов повторных испытаний продукции, выполненных по од-
ной методике в неизменных условиях, называется повторяемостью
результатов испытаний. Эта характеристика стандартизована в ГОСТ
20242, ИСО 2602, BS 5497 и др. Сопоставление определения повто-
ряемости, данное в ГОСТ 20242 и ASTME-28, с определением, при-
веденным в ГОСТ 16263, показывает их полное совпадение. Однако
в ГОСТ 20242, ГОСТ 16122, ИСО-2602, BS 5497, ASTME-177 это
527
понятие называется повторяемостью, а в ГОСТ 15258, переводах
ASTME-173, ИСО 2592 и некоторых других — сходимостью. По на-
шему мнению, термин «сходимость» — это результат ошибочного пе-
ревода и в используемом смысле не имеет права на применение. Кроме
того, этот термин в математике и статистике имеет совершенно дру-
гой смысл.
В ГОСТ 16123 показателем повторяемости служит относительная
средняя квадратическая погрешность результатов отдельных наблю-
дений:
(9.9)
В ASTME-173 для характеристики изменяемости результатов еди-
ничного анализа в одной лаборатории используются два показателя:
• оценка повторяемости:
(9.10)
• стандартное отклонение повторяемости:
1 п Л Л
=*!-£(»!.-^2,)-(К -Ж2), (9.11)
п >=1 ’
где И1/, И^2,- — данные z-x наблюдений из результатов соответственно
первого и второго анализов (пробы №1; №2); — результаты
первого и второго анализов; jtj = 0,886-J»/(« -1) и — коэффициен-
ты, значения которых приведены в ASTME-173.
В ГОСТ 11123, ГОСТ 20242, ИСО 2592, ИСО 2591 и др. пока-
зателем повторяемости выступает «расхождение» (выраженное в про-
центах) между результатами двух последовательных определений (из-
мерений) параметров, полученных одним испытателем с вероят-
ностью 0,95.
В BS 5497 для нормирования и оценки внутри- и межлаборатор-
ных расхождений, характеризующих точность метода испытаний
(Precision of test methods), принята более тонкая модель. В этом стан-
дарте оцениваются вариации повторяемости (8Г), внутрилаборатор-
ных (fy) и межлабораторных (5f) расхождений или соответствующие
им оценки — Sp Sw, SL. Далее оценивается параметр повторяемос-
ти (Repeatability):
528
Dn=2,&3Sr, (9.12)
который не только имеет самостоятельное значение, но и является
компонентом воспроизводимости R.
Воспроизводимость результатов (метода) испытаний. Результа-
ты испытаний (в частности, измерений и анализа) одного и того же
образца продукции, выполненные по одной методике, но в различ-
ных условиях (разными средствами одного типа, разными испытате-
лями, при различных климатических условиях) могут существенно
(значимо) различаться. Этому свойству повторных испытаний (в ча-
стности, измерений) продукции соответствует особая характеристи-
ка — воспроизводимость (Reproducibility) результата (метода) (ГОСТ
16263, ГОСТ 20242, ГОСТ 23603, РДМУ 109, ASTME-173, ASTME-
177, ASTME-28, ИСО 2592, ИСО 259, BS 5497 и др.).
В качестве показателей воспроизводимости методов испытаний
выступают: расхождение между результатами повторных испытаний
(ГОСТ 20242, ГОСТ 8764, ГОСТ 976, ГОСТ 15079, ГОСТ 11122,
МИ 23, ИСО 259 и др.), т.е. интервал, накрывающий указанные
результаты с некоторой (обычно 0,95) доверительной вероятностью;
разница результатов или разность результатов (ASTME-173, ИСО 2599);
дисперсия воспроизводимости (ГОСТ 23603, РДМУ 109). В после-
днем документе она определяется как
1 т /
(9.13)
где т — количество параллельных (повторных) экспериментов; W=,
W — значение параметра в у-м эксперименте и его среднее арифме-
тическое значение по всем т экспериментам.
В ГОСТ 23603 дисперсия воспроизводимости определяется как
средняя дисперсия эксперимента:
N т
(9.14)
где N— число наблюдений в каждом эксперименте. При этом в обо-
их случаях предварительно проверяется статистическая гипотеза об
однородности дисперсий (критерий Кохрана). Если дисперсии от-
дельных экспериментов однородны, то их можно объединить, т.е.
пользоваться формулами (9.13) и (9.14).
529
В ASTME-173 используются три показателя воспроизводимости:
• стандартное отклонение воспроизводимости:
(9.15)
где Dn — параметр повторяемости, определяемый по формуле (9.12);
кх = 0,88б7л/(л -1);
1 П Л Л
DB = W# ; (9.16)
• оценка воспроизводимости:
(9.17)
где £3 — коэффициент, являющийся функцией л (л = 8 - 20);
• коэффициент воспроизводимости:
AB=(^JFK-1)100%, (9.18)
где ИЛ = 0,5(РК1 +И>2).
Иначе определяется воспроизводимость в области частотных из-
мерений, передачи информации и формирования сигналов. Так, в
ГОСТ 15855, ГОСТ 8.129 и др. введена «относительная погрешность
воспроизведения» действительного значения частоты:
1
и-1Ц Г0 >
(9.19)
где Wq — номинальное значение параметра W.
При этом показатель (9.19) характеризует изменчивость парамет-
ра W (например, частоты сигнала) от включения к включению, от
образца к образцу и т.д. В теории связи используется характеристика
«точность воспроизведения сообщений».
Достоверность результатов (метода) испытаний. Достоверность
результатов (метода) испытаний — это характеристика контрольных
испытаний, отражающая соответствие получаемых при испытаниях
результатов их действительным значениям. Аналогичным приведен-
530
ному является определение термина «достоверность оценки результа-
та эксперимента», приведенное в ГОСТ 15895. Это — «устойчивое
соответствие результатов эксперимента действительному значению
оцениваемой величины при произвольном числе экспериментов, осу-
ществляемых в одинаковых управляемых условиях».
Показателями достоверности результатов контрольных испыта-
ний являются принятые в теории контроля безусловные вероятности
ошибок контроля первого (Рл 0) и второго (Рн 0) рода, которые на-
зываются ложным и необнаруженным отказами, а также условные
вероятности ошибок первого а и второго Р рода и производные от
них (см. ГОСТ 19919). Упомянутые выше вероятности Рло и Рно
образуются в результате взаимодействия объекта со средством испы-
таний с погрешностями в окрестностях границ поля допуска [W^,
WB] или предельных значений.
В некоторых стандартах одинаковые по смыслу показатели дос-
товерности называются по-разному. Так, в ГОСТ 13216, ГОСТ 19489
и др., т.е. в стандартах по надежности, вероятности Рл о и Рн о на-
зываются риском изготовителя (а) и риском потребителя (Р). При
этом а и р по каждому показателю качества являются исходными
данными для планирования контрольных испытаний. В этих стан-
дартах рекомендуется устанавливать <х = 0,1 и р = 0,2.
В отдельных стандартах используются также названия: вероятно-
сти ложного и необнаруженного отказов (ОСТ ГО. 091. 034), услов-
ные вероятности ошибок первого и второго рода (PC 1483, ОСТ
100030).
Между условными и безусловными рисками, как известно, су-
ществуют следующие зависимости:
а ~ Л.о/О ?)> Р ~ -^н.о/4’
(9.20)
где q — уровень дефектности изделия по его оцениваемому показа-
телю качества.
Точность испытательных стендов и комплексов. Испытатель-
ные стенды и комплексы в большинстве случаев представляют собой
достаточно сложные, крупногабаритные и энергоемкие совокупнос-
ти взаимосвязанных и совместно действующих технических устройств,
предназначенных для:
• установки и закрепления в заданном положении объекта испы-
таний;
• создания испытательных воздействий, имитирующих факторы
и нагрузки, действующие на ЛА в процессе эксплуатации;
531
• определения количественных и качественных характеристик
объекта испытаний как результата испытательных воздействий;
• управления процессом испытаний;
• питания ОИ и ИС или комплекса гидравлической, пневмати-
ческой, электрической и другими видами энергии.
Как видно из рис. 9.1, все перечисленные выше технические
устройства (входящие в состав ИС или комплекса) вносят свою долю
погрешностей в окончательный результат определительных, конт-
рольных и сертификационных испытаний. Однако для ИС и комп-
лексов (как и вообще для испытательного оборудования) единых тре-
бований к их точности нет. Существуют общепромышленные методы
оценки контроля отдельных технических устройств, входящих в со-
став ИС или комплекса, но далеко не всех.
В существующих стандартах наиболее полно отражены общие
методы оценок метрологических характеристик (MX) средств изме-
рений (систематической Дс и случайной Д° составляющих погрешно-
сти, характеристики погрешности Д, функции влияния диапазо-
на измерений и др.) и точностных характеристик (ТХ) средств
автоматизации. Так, ГОСТ 8.508 регламентирует:
• определение MX свойств средств измерений и средств автома-
тизации (проверка существенности систематической и случай-
ной составляющих погрешности, вариации, дрейфа, корреля-
ции отсчетов погрешности, нормальности закона распределения);
• выбор методики оценки (контроля) MX средств измерений и
ТХ средств автоматизации (временного интервала между отсче-
тами выходного сигнала, последовательности операций подачи
образцовых сигналов, объема выборки);
• выбор алгоритма обработки информации, соответствующего за-
данной (установленной) совокупности метрологических и точ-
ностных свойств средств измерений и средств автоматизации
при оценке (контроле) их MX или ТХ;
• непосредственную оценку показателей точности и достовернос-
ти оценки (контроля) MX средств измерений и ТХ средств ав-
томатизации;
• оценку показателей и достоверности оценки (контроля) MX
средств измерений и ТХ средств автоматизации.
ГОСТ 8.401 устанавливает общие положения деления средств из-
мерений на классы точности, способы нормирования MX, комп-
лекс требований к которым зависит от класса точности средств изме-
рений, и обозначения классов точности. Система подтверждения
метрологической пригодности измерительного оборудования приве-
дена в международном стандарте ИСО 10012-1.
532
Для имитаторов эксплуатационных факторов единых требований
к точности установки, поддержания и воспроизведения ими испыта-
тельных воздействий нет. В каталогах на это оборудование иногда
указываются: точность поддержания (температуры ±10 °C, ±20 °C ...),
точность измерения и поддержания погрешность задания и под-
держания ... с некоторой цифрой в % часто без указания доверитель-
ной вероятности (см. ГОСТ 20 497, ГОСТ 10370 и др.).
В качестве примера рассмотрим точностные характеристики ими-
таторов вибрационных нагрузок, действующих на ЛА в процессе экс-
плуатации. Такими имитаторами являются вибрационные ИС (назы-
ваемые также вибрационными установками) и комплексы.
Наиболее широкое применение для вибропрочностных испыта-
ний изделий нашли ИС с использованием электродинамических виб-
раторов, имеющих целый ряд существенных достоинств: они позво-
ляют воспроизводить случайные вибрации в широком диапазоне частот;
обеспечивают получение высоких частот колебаний (до 25 кГц) и зна-
чительной выталкивающей силы (в том числе и на верхних пределах
частотного диапазона); предусматривают плавное регулирование ко-
лебаний в процессе испытаний (без дополнительного усложнения кон-
струкции); имеют высокие износостойкость и надежность; позволяют
создать вибраторы для испытаний объектов большой массы (при ис-
пытаниях объектов малой массы на платформы устанавливают допол-
нительные грузы); обеспечивают получение как гармонических, так
и случайных колебаний.
Пределы допускаемых погрешностей воспроизведения ускорения
(перемещения) электродинамическими вибрационными ИС (установ-
ками) при воспроизведении однокомпонентной гармонической вибра-
ции оценивают в процентах с доверительной вероятностью 0,9 по
формуле (ГОСТ 25051.3):
8 = ±0,95^ + 51чх + 8? + + 5? •
Здесь 80 — предел основной относительной погрешности вибромет-
ра; 5ачх — предел неравномерности АЧХ виброметра;
8
-1\100%
— предел дополнительной погрешности измерения от наличия выс-
ших гармоник, определяемой при измерении среднего квадратичес-
кого значения параметра; Кт к — наибольшее значение коэффициента
гармоник в контрольной точке в рассматриваемом диапазоне частот;
533
_ ^П.К^О.П
— предел дополнительной погрешности измерения от наличия попе-
речных составляющих; Кп к — наибольшее значение коэффициента
поперечных составляющих в контрольной точке в рассматриваемом
диапазоне частот при соответствующей нагрузке; Коп — относитель-
ный коэффициент поперечного преобразования ВИП;
8, = KtbT
— предел дополнительной погрешности измерения от изменения тем-
пературы стола вибростенда; Kt — коэффициент температурной чув-
ствительности ВИП, %/°С.
Коэффициент поперечных составляющих определяют в номи-
нальном диапазоне частот при постоянных значениях ускорения и
(или) перемещения, составляющих не менее 0,3 верхних пределов
номинальных диапазонов ускорения и (или) перемещения установ-
ки. Коэффициент поперечных составляющих установки определяют
по результатам измерений в трех точках крепления как наибольшее из
значений, полученных для всех исследованных точек крепления. При
этом для каждой точки крепления в данном режиме работы коэффи-
циент поперечных составляющих определяют по формуле:
где ах и а — ускорения и (или) перемещения в двух направлениях,
взаимно-перпендикулярных друг к другу и к рабочей оси вибростен-
да; а — ускорение и (или) перемещение вдоль рабочей оси вибро-
стенда.
При вибропрочностных испытаниях наибольшую трудность пред-
ставляет установление, обеспечение и контроль требуемых точност-
ных характеристик математически моделируемого и физически реа-
лизуемого вибратором энергетического контура спектра случайной
вибрации вибрационного ИС (ГОСТ 28220 (СТ МЭК 68-2-34), ГОСТ
28223 (СТ МЭК 68-2-37), ГОСТ 28222 (СТ МЭК 68-2-36), ГОСТ 28221
(СТ МЭК 68-2-35). Случайная вибрация (наряду с синусоидальной
вибрацией) является основным видом испытательного воздействия
при вибропрочностных испытаниях (в том числе и сертификацион-
ных) изделий авиакосмической техники. Трудность установления и
обеспечения точностных характеристик при вибропрочностных испы-
таниях объясняется сложностью математического аппарата, исполь-
534
зуемого для задания случайной вибрации, сложностью алгоритмов
обработки и анализа информации для определения действительных
значений параметров случайной вибрации (на платформе вибрацион-
ного ИС, на приспособлении — переходнике для закрепления ОИ
или непосредственно на самом ОИ). Испытательный вибрационный
стенд при этом является имитатором тех случайных вибраций, кото-
рые воздействуют на изделия в процессе их эксплуатации.
На основе проведенного выше анализа и обобщенной структур-
ной схемы формирования результатов испытаний (см. рис. 9.1), сфор-
мируем следующий комплекс точностных характеристик испытаний,
включающий:
• точность результатов определительных испытаний;
• достоверность результатов контрольных испытаний;
• повторяемость результатов повторных испытаний;
• воспроизводимость результатов повторных испытаний;
• точность средств измерений при испытаниях;
• точность средств автоматизации управления процессом испыта-
ний;
• точность характеристик источников энергии;
• адекватность и точность имитаторов, обеспечивающих создание
испытательных воздействий.
В заключение отметим, что рассмотренная на рис. 9.1 схема и
сформированный на ее основе комплекс точностных характеристик
испытаний обеспечивают единый подход к разработке методов испы-
таний больших сложных технических систем.
Контрольные вопросы
1. Перечислите погрешности, возникающие при формировании резуль-
тата испытаний.
2. Дайте определения чувствительности и адекватности метода испыта-
ний.
3. Дайте определение точности, достоверности, правильности, повто-
ряемости, воспроизводимости результатов испытаний.
4. В чем состоят различия между определительными, контрольными и
повторными испытаниями?
5. Приведите примеры точностных характеристик определительных,
контрольных и повторных испытаний.
Глава 10
ФОРМИРОВАНИЕ РЕЗУЛЬТАТОВ
ОПРЕДЕЛИТЕЛЬНЫХ ИСПЫТАНИЙ
10.1. Оценивание одномерных стационарных
детерминированных параметров единичного образца
10.1.1. Основные определения и свойства оценок
Определительные испытания — это испытания, проводимые для оп-
ределения значений характеристик объекта с заданными значениями
показателей точности и (или) достоверности (ГОСТ 16504—81). Ис-
ходя из общей схемы формирования результата испытания (см. рис.
9.1) целью определительных испытаний можно считать получение
статистических оценок основных параметров изделий. При этом вы-
бор используемых оценок зависит от специфики объекта испытаний
(единичного образца или партии продукции), характера исследуемых
параметров (детерминированный — случайный; стационарный — не-
стационарный; одномерный — многомерный).
Термин «оценивание» относится к классу статистических методов,
которые используются с целью получения представления о значении
одного или нескольких параметров с максимально возможной точно-
стью.
Пусть дана выборка наблюдений Z\, zn, полученная из гене-
ральной совокупности, распределение которой известно с точнос-
тью до параметра 9. Используя указанные наблюдения, необходимо
определить 9, которое можно было бы взять в качестве значения
параметра 9 (точечная оценка), или интервал [ 9В, 9Н ], о котором
можно утверждать, что он с заданной вероятностью содержит это
значение (интервальная оценка).
Поскольку наблюдения являются случайными, то результаты на-
блюдений (статистики), используемые для оценки параметра 9, для
отдельных выборок будут отличаться от истинного. Поэтому нельзя
найти оценку, принимающую для всех возможных выборок значе-
ния, близкие к 9. В этих случаях рекомендуется ограничиваться та-
кой процедурой оценивания, которая давала бы «хорошие» результа-
ты в среднем при многократном ее использовании или имела бы
большую вероятность «успеха».
536
Основными свойствами, которым должны удовлетворять иско-
мые оценки, являются состоятельность, несмещенность и эффек-
тивность.
Состоятельность — свойство оценки параметра сходиться по ве-
роятности к его истинному значению при увеличении числа наблю-
дений п этого параметра, т.е. limP^0-0>el = O.
Несмещенность — свойство оценки не иметь систематического от-
клонения от истинного значения параметра, т.е. Af|0] = 0 . Услови-
ем состоятельности несмещенной оценки является D 0
п —> °°.
Эффективность — свойство оценки обладать наименьшей диспер-
сией D 0 среди всех возможных оценок.
Можно показать, что при некоторых общих условиях среднеквад-
Г/л \2“
ратическое отклонение М (0-0)
ложительным числом, зависящим от функции распределения P(z/0)
О при
ограничено снизу некоторым по-
объема выборки п и смещения оценки Ь = М 0 -0, т.е.
М 0-0
(1+db/de)2
(10.1)
пМ
rdln?(z/0)
эе
Г/- \2'
Для несмещенной оценки М (0-0)
= D 0 и
Д0]>---
пМ
(Ю.2)
(dlnP(z/e)
ае
Приведенные неравенства (10.1), (10.2) носят название неравенств
Рао-Крамера. Если в (10.2) достигается равенство, то дисперсия
оценки D Q = достигает своего наименьшего значения и оцен-
ка 0 является эффективной. Эффективностью любой другой оценки
называется отношение Dmin
0 Id 0 . Если имеется единственная
537
несмещенная оценка с наименьшей дисперсией, то ее называют не-
смещенной оценкой с равномерно наименьшей дисперсией.
Общей характеристикой точности статистических оценок являет-
ся средний риск. Для вычисления среднего риска необходимо задать
функцию потерь — некоторую функцию от оценки и истинного значе-
ния оцениваемого параметра.
Наиболее распространенными функциями потерь являются:
• простая п(в, в) = с-5(0-б), где с>0, 5 - дельта-функция;
• квадратичная п(0,0)=(0-0) ;
• равная модулю ошибки п(о, б)= 0-0 ;
О |0-0| <£
1 0-0 ££.
• прямоугольная П (0, 0) =
Среднее по всем возможным выборкам значение функции потерь
носит название условного риска: r(0)= j п(0, Q\P(zltydz. Точечная
оценка, минимизирующая условный риск при квадратичной функ-
ции потерь, называется оценкой наименьших квадратов.
В случае линейной зависимости между 0 и z оценки наименьших
квадратов являются линейной функцией измерений Z- Эти оценки
асимптотически нормальны и обладают свойствами состоятельнос-
ти, несмещенности, эффективности для широкого класса распреде-
лений P(z/0), имеющих конечные вторые моменты. Простота их на-
хождения и многообразие модификаций сделали эти оценки наиболее
распространенными в практике обработки данных измерений и ис-
пытаний.
Мода распределения P(z/0) минимизирует условный риск при
простой функции потерь и носит название оценки максимального прав-
доподобия. Оценки максимального правдоподобия также асимптоти-
чески нормальны и обладают асимптотическими свойствами состоя-
тельности, несмещенности и эффективности. Однако при малых
объемах выборок эти свойства могут не сохраняться. В том случае,
если плотность вероятности (функция правдоподобия) может быть
представлена в виде P(z/0) = PiT/Q)g(z), несмещенную оценку с ми-
нимальной дисперсией всегда можно найти в виде функции доста-
точной статистики, если последняя существует (где Т — достаточная
538
статистика, такая, что условное распределение величины z при за-
данном значении Т не зависит от 0). Способ нахождения этой оцен-
ки состоит в следующем: если 0 — некоторая несмещенная оценка
параметра 0, то M[ti/T(z)] и является искомой оценкой.
Если оценка максимального правдоподобия единственна, она
зависит от измерений только через достаточную статистику. В этом
случае способ нахождения оценки максимального правдоподобия сле-
дующий: если уравнение M[T(z)] = T(z) имеет решение 0, то 0 —
оценка максимального правдоподобия.
Если об оцениваемом параметре есть некоторые априорные све-
дения, описываемые априорным распределением 7^(0), то услов-
ный риск осредняют по параметру 0 и получают средний риск:
R= j J n(o,e)P(z/e)/’o(0)dz4/0.
—со —со
Оценки, полученные из условия минимизации среднего риска,
называются байесовскими, так как основаны на формуле Байеса, со-
гласно которой P(z/0)/’o(0) = P(Q/z)P(z). Так, математическое ожи-
дание апостериорного распределения P(0/z) минимизирует средний
риск при квадратичной функции потерь, а мода этого распределе-
ния — при простой функции потерь.
Перечисленные оценки являются наиболее распространенными
в практике обработки данных испытаний. Заметим, что при нор-
мальном законе распределения P(z/0) оценки наименьших квадра-
тов, максимального правдоподобия и байесовские совпадают.
В табл. 10.1 приведены примеры получения несмещенных и эф-
фективных оценок стационарных одномерных детерминированных
параметров различных распределений, в табл. 10.2 указаны области
применения различных распределений.
10.1.2. Определение точности оценок одномерных стационарных
детерминированных параметров
В связи с тем, что наблюдения являются случайными величинами,
функции наблюдений, используемые«для оценок параметров распре-
делений, также представляют собой случайные величины, описыва-
емые некоторыми законами распределений вероятностей.
Все рассмотренные выше оценки асимптотически нормальны,
поэтому их точность при выборках большого объема можно характе-
ризовать дисперсией. При выборках малого объема, когда отклоне-
539
Примеры получения эффективных и несмещенных оценок
одномерных стационарных детерминированных параметров
Таблица 10.1
Модель измерений Закон распределения погрешности измерения Метод оценки
наименьших квадратов (н.к.) максимального правдоподобия (м.п.) несмещенная оценка с равномерно-минимальной дисперсией
1 2 3 4 5
Z,= Л/+6/5 где М — неизвестная посто- янная величина; 8. — погрешность измерений Нормальный закон распределения: 1 f 8П A6J- т-exp* 2 , У2ло 2а 2 а — известно Функционал: п 52 = ^(Z/-JW)2 /=1 Условие min функционала: -2 £ игЛ0 = о /=1 Оценка н.к.: /=1 Функция правдоподобия: (Ч2па) ( п 1 X (Zf-M? /=1 х ехр - 0 1 2а J Уравнение м.п.: п Л Z (?(-лп=о ° /=1 Оценка м.п.: п /=1 < ► Функция правдоподобия: P(Z/M, ст2) = 1 ( лЛ/21 (-'Ыв)п | 2<? J Г ( п п м хехр j • 2а /=1 /=1 1 \ Z Достаточная статистика: п /=1 Математическое ожидание: /=1
Продолжение табл. 10.1
1 2 3 4 5
Несмещенная оценка с равномерно-минимальной дисперсией и
м=- г /=1
2 а — неизвестно Оценка н.к. дисперсии: i fa- „2 <=1V 7 Система уравнений м.п.: •4 Z (^-Л0=о, ° ы Достаточные статистики: Г1^ = Ег/! T2(z) = Y Zt /=1 /=1
0" л-1 п -ла2 + 2й/-^)2 = 0 /=1 Математические ожидания: ^[7^)] = л (№ + <?)
Оценки м.п.: fl М[Т2(?)] -п М + па г
iiz_ 1 V* Af- л xL £/ > /=1 Несмещенные оценки с равномерно-минимальными дисперсиями: и
п А2 1 V , Гл2 Л /=1 м=- л i Ё /=1
Q > м II 3 1 1 I М а । а 1 1
Продолжение табл. 10.1
LZl
to
1 2 3 4 5
Экспоненциальный закон распределения: Р U/X) = Хехр(-Ц), л/к,]=7=е, Л Рк,1 = е2 Оценка н.к.: /=1 Функция правдоподобия: п 2л Z чЛ Г Л^е)- ехр - и и Уравнение м.п.: л 0 0 Оценка м.п.: /=1 Достаточная статистика: ад=Е *> i= 1 Математическое ожидание: М[7Ш] = л0 Несмещенная оценка с равномерно-минимальной дисперсией: А 1 л i= 1
Окончание табл. 10.1
1 2 3 4 5
Биномиальное распределение: и? Оценка н.к.: п /= 1 Функция правдоподобия: P(m/n,R)~ пА (п - т)! Уравнение м.п.: т_ R 1-Л" Оценка м.п.: Я = — п Функция правдоподобия: R Р (т/п, R) = exp т In + 1 — R + И1п(1-Д) + 1П ml (л - т)! Достаточная статистика: Математическое ожидание: Несмещенная оценка с равномерно-минимальной дисперсией: Л= — п
сл
Таблица 10.2
Применение непрерывных распределений
Распределение Применение Примеры Примечание
Нормальное Основное распределение мате- матической статистики. Широ- кое его применение обусловле- но центральной предельной теоремой (распределение сум- мы случайных величин стремит- ся к нормальному независимо от формы распределения каж- дой величины при довольно об- щих условиях). Распределение погрешностей измерительных приборов, ха- рактеристик партии систем, погрешностей позиционирова- ния станков численно-про- граммированного управления (ЧПУ) и промышленных робо- тов и т.п. Имеются таблицы значений интегральной функции нор- мального распределения, его плотности и квантилей. Ос- новные методы статистичес- кого анализа основаны на до- пущении о нормальности рас- пределения.
Гамма-распре- деление Основное распределение мате- матической статистики для слу- чайных величин, ограниченных с одной стороны. Описывает время, необходимое для появ- ления ровно к независимых со- бытий при условии появления событий с постоянной интен- сивностью. Часто использует- ся в теории массового обслужи- вания и теории надежности. Распределение времени между повторными калибровками при- боров, моментами пополнения запасов комплектующих эле- ментов, времени безотказной работы системы с резервными компонентами. Имеются таблицы значений интегральной функции рас- пределения. Частными случа- ями являются распределения: Эрланга, экспоненциальное и х2-
Продолжение табл. 10.2
Экспоненциаль- ное Частный случай гамма-рас- пределения и распределения Вейбулла. Распределение времени безот- казной работы сложных нере- зервированных систем, времени использования комплектующих элементов, когда они подвер- гаются начальной приработке, а профилактическое обслужи- вание позволяет заменять эле- менты до их износа.
Бета-распределе- ние Основное распределение мате- матической статистики для слу- чайных величин, ограниченных с обеих сторон. Применяется при решении многих приклад- ных задач. Распределение доли совокуп- ности, заключенной между наименьшим и наибольшим значениями выборки. Распре- деление суточного производ- ства продукции, времени до завершения работ. Имеются таблицы значений интегральной функции рас- пределения. Частными случа- ями являются равномерное, треугольное и параболическое распределения.
Равномерное Частный случай бета-распреде- ления. Описывает вероятность того, что случайная величина находится в определенном ин- тервале, когда эта вероятность пропорциональна длине интер- вала. Распределение систематичес- кой погрешности измерений, априорное распределение в задачах байесовского оцени- вания. Имеются таблицы равномерно распределенных случайных чи- сел.
сл
Продолжение табл. 10.2
Логарифмически- нормальное Описывает распределение слу- чайных величин, логарифм ко- торых распределен по нормаль- ному закону. Статистическая модель процессов, обусловлен- ных большим числом мульти- пликативных ошибок. Распределение времени безот- казной работы транзисторов некоторых типов, степени из- носа к определенному момен- ту времени.
Вейбулла Распределение времени безот- казной работы при самых раз- нообразных интенсивностях отказов. Распределение экс- периментальных значений для минимальных элементов, взя- тых из п значений, имеющих распределение, ограниченное слева. Распределение времени безот- казной работы конденсаторов, реле некоторых типов. Частными случаями являются рэлеевское и экспоненциаль- ные распределения.
Рэлеевское Распределение радиальной ошибки, когда ошибки по двум взаимно-перпендикуляр- ным осям независимы и нор- мально распределены относи- тельно нуля с одинаковыми дисперсиями. Распределение радикальной погрешности позиционирова- ния станков ЧПУ и промыш- ленных роботов (ПР). Ампли- туда огибающей шума при ис- пользовании линейного детек- тора. Частный случай распределе- ния Вейбулла.
QO
Окончание табл. 10.2
Коши Распределение отношения двух независимых нормированных нормальных случайных вели- чин. Распределение отношения нормированных отсчетов шу- ма. Распределение tg q, когда q имеет равномерное распре- деление. Распределение не имеет ко- нечных моментов.
Экстремальных значений Предельная модель для распре- деления максимальных или минимальных значений, взя- тых из п случайных величин, имеющих распределение экс- поненциального типа (нор- мальное, гамма-распределе- ние и пр.). Распределение прочности на разрыв некоторых материа- лов, напряжения пробоя кон- денсаторов. Имеются таблицы значений интегральной функции распре- деления.
LZ1
ния от нормальности могут быть значительными, универсальной ха-
рактеристикой точности является доверительный интервал такой, что
Р{9Н < 0 < 0В} = Y,
где 0Н, 0В — нижняя и верхняя доверительные границы; у — довери-
тельная вероятность.
В табл. 10.3 приведены примеры определения точности оценок.
Как следует из выражений, приведенных в таблице, использовать
дисперсию в качестве характеристик точности целесообразно лишь
при нормальном распределении с известной дисперсией, поскольку
в остальных случаях дисперсия оценки оказывается зависимой от не-
известной оцениваемой величины. Доверительный интервал являет-
ся универсальной характеристикой точности.
10.1.3. Основные понятия статистических гипотез
Статистическая гипотеза — это утверждение относительно одного
или более параметров распределения случайных величин или о самой
форме распределения. Процедура проверки гипотез — правило, кото-
рое позволяет для любого множества наблюдений Zi,—,Zn получить
решение: принять или отклонить проверяемую гипотезу Но (нулевую
гипотезу).
Полезно представить множество выборочных значений Zi,--,zn в
виде точки л-мерного пространства. Тогда точки, для которых гипо-
теза Но отклоняется, относятся к критической области со.
Ошибки, допускаемые при проверке гипотез, разделяют на два
типа:
• ошибка первого рода — отклонение гипотезы Но, когда она вер-
на;
• ошибка второго рода — принятие гипотезы Но, когда верна ка-
кая-либо другая (альтернативная) гипотеза Яг
Вероятности ошибок первого и второго родов характеризует дос-
товерность статистического решения. Вероятность ошибки первого
рода равна P{zi,—,zn принадлежит а|Яо} = а. Величина а называ-
ется уровнем значимости, или размером критической области. Веро-
ятность ошибки второго рода равна 1- P{z\,—,zn принадлежит
<о| Я1} = р и зависит от гипотезы ЯР Вероятность Р называют опера-
тивной характеристикой по отношению к Я,, а величину 1 -Р —
мощностью критерия.
548
Таблица 10.3
Примеры определения точности оценок одномерных стационарных детерминированных параметров
Закон распределения Оценка Дисперсия Доверительный интервал
1 2 3 4
Нормальный закон распределения:
2 о — известно л /=1 А 2 2)[ЛА=— п « А где _ оу2— квантиль нормального распределения
2 а — неизвестно , Со м II II а 3 1 ~ J Л М а 1 >> 1 to (д-1) п Л/н-Л< ^-„/2( 1 А Мъ ~ - а/2 ( Ч где — квантиль [ _2 л — 1) 50/-7л, л — 1) 50/^л, /-распределения _ 2 S2 П
§ - в i - 1 1 A 1 OJ Л 44 к К ? II II ° Я гч в • э О К • 'о 5 ° и 2 . » X1-0C/2W 2 S^n & в 2 ’ [ 2 [ди % -распределения
Окончание табл. 10.3
Uh
Uh
о
1 2 3 4
Закон распределения Рэлея ф> и а I- 1М а А 02 Л[е] = - * 20л 0И- 2 л 20л 0н~ 2 42(2") ь
Биноминальный закон распределения и <<< д 1Д1 = * (1„~ ® 1 где В Л г= 0 г-0 ' ’ где В*=ВХ (d,n-d+X) R^B (d+l,n-d) k dFx [2d, 2(n-d+V)] (n-d+l) + dFx [2d, 2(n-d+l)] ’ (d+l)f' Wd+l), 2(n-d)] " (л - d) + (d+ 1)/Vj [2(d +1), 2(л - d)] ’ . , В — квантили В-распределения; 1 ~2 “1 , F — квантили F-распределения -т2 Yj
Гипотезы бывают простыми и сложными. Гипотеза называется
простой, если она точно определяет распределение случайной вели-
чины, в противном случае она называется сложной.
Для принятия решений относительно проверяемых статистичес-
ких гипотез используют критерий значимости. Последний основыва-
ются на принципах практической достоверности и практической не-
возможности.
Событие, которое при заданном комплексе факторов обязатель-
но произойдет, называется абсолютно достоверным событием. Абсо-
лютную достоверность можно установить лишь теоретически, путем
логических умозаключений. Сюда относятся в основном математи-
ческие истины и некоторые выводы точных наук. Большинство прак-
тически достоверных событий не являются абсолютно достоверны-
ми, однако вероятность их осуществления достаточно высока.
Из принципа практической достоверности вытекает принцип прак-
тической невозможности: события с очень малыми вероятностями
можно в практических приложениях считать невозможными. Прак-
тическая невозможность осуществившегося события отвергает случай-
ность его появления и заставляет пересмотреть исходные предпосыл-
ки при вычислении вероятности его появления, т.е. пересмотреть
исходную гипотезу.
Использование принципа практической невозможности для до-
казательства неслучайного появления события с малой вероятностью
называется принципом значимости. Проверка статистических гипотез
в соответствии с принципом значимости осуществляется следующим
образом. Выбирается уровень значимости а и соответствующая ему
вероятность 1 - а. По этой вероятности, используя нулевую гипоте-
зу о распределении случайной величины у, представляющую собой
функцию выборочных значений Zi,—,zn, находят квантили Уа/2 и
У1-а/2, такие, что Р{у < у^} = а/2 ; 7»{у < } = 1 -а/2. Значе-
ния Уа/2> У1-а/2 называются критическими, а неравенства У < У'а/2 и
У > У1-а/2 образуют критическую область проверяемой гипотезы. Если
измеренное значение у0 попадает в критическую область, нулевая
гипотеза отвергается; если же выполняется неравенство
Уа/2 % У\-а/2 , (Ю.З)
то такой разброс в рамках нулевой гипотезы может быть объяснен
эффектом случайности и нет оснований отвергать проверяемую гипо-
тезу. Заметим, что первое решение (гипотеза неверна) гораздо более
категорично, чем второе (гипотеза не отвергается). Поэтому в прак-
551
тических задачах, решаемых методами теории проверки статистичес-
ких гипотез, большое значение имеет правильный выбор нулевой ги-
потезы.
Полученный критерий (10.3) является двусторонним. Если одно
из неравенств У < Уа/2 или У > У\-а/2 заведомо невозможно, приме-
няют односторонний критерий, например у0 < У]_а.
Требования к уменьшению ошибок первого и второго родов про-
тиворечивы: уменьшение уровня значимости сопровождается сниже-
нием мощности. Чтобы разрешить это противоречие, задают уровень
значимости и максимизируют мощность критерия по отношению к
альтернативной гипотезе.
Аналитически поставленную задачу можно сформулировать сле-
дующим образом: требуется так выбрать критическую область, чтобы
J...jP(zi,..., zn I Ho)dzi-.dzn =a;
(0
[...[P(^i,...,zn | H^dzi -dZn = max-
J J (0
(0
Решение этой задачи получают с помощью леммы Неймана-Пир-
сона, согласно которой искомая критическая область определяется
из отношения правдоподобия:
₽(?!>•••> Zn I Яр)
PUb-.., Zn \Н1) ’
где к выбирается из условия обеспечения заданного значения а. По-
лучаемый критерий называют критерием отношения правдоподобия.
10.2. Робастное оценивание параметров
Существенным недостатком рассмотренных оптимальных оценок яв-
ляется их чувствительность к засорению исходного распределения
(наличию аномальных измерений — сбоев, неисключенной система-
тической погрешности). Существует класс так называемых робаст-
ных (устойчивых) оценок, эффективность которых мало изменяется
для различных распределений или в случае засорения исходного рас-
пределения.
Простейшей робастной оценкой является выборочная медиана (Me):
| (^(л/2) + ^(л/2-i)) - четное п,
5((л+1)/2) - нечетное п,
552
где Z( ) обозначает упорядоченные по величине измерения в выбор-
ке объема п (порядковые статистики).
В табл. 10.4 приведены значения эффективности выборочного
Iя
среднего =
л/=1
Zj и выборочной медианы для нескольких уровней
засорения при нормальном исходном и различных засоряющих рас-
пределениях.
Таблица 10.4
Сравнение эффективности выборочных среднего и медианы
при различных видах засорения
Вид засорения е 0 0,05 1
Нормальное Z 1 0,808 1
распределение Me 0,637 0,669 0,637
Распределение Z 1 0,682 0,5
Лапласа Me 0,637 0,894 1
Равномерное z 1 0,362 0,063
распределение Me 0,637 0,781 0,835
Распределение z 1 0,282 0,032
Коши Me 0,637 0,765 0,811
Как следует из анализа табл. 10.4, эффективность выборочного
среднего существенно зависит от вида и уровня засорения. Эффек-
тивность же выборочной медианы зависит от засорения в значитель-
но меньшей степени. При исследовании свойств приведенных оце-
нок использовалась математическая модель засорения Тьюки, которая
описывается распределением
Лг) = (1-е)Ф
где Дг) — интегральная функция распределения засоренного изме-
рения; Ф(.) — функция стандартного нормального распределения;
г — вероятность (уровень) засорения.
В табл. 10.5 и 10.6 приведены основные робастные оценки,
которые являются сильными конкурентами оптимальных оценок и
привлекают к себе все большее внимание. Однако практическое ис-
пользование этих оценок пока невелико вследствие недостаточной изу-
553
Таблица 10.5
* :i: н
Робастные оценки математического ожидания
Оценка Аналитическое выражение Свойства оценки
Минимаксная Хубера (при наихудшем засорении) с минимальным по модулю асимптотическим смещением 1Г 2 z L Выб 2 + z < / \ (п+1 Г 2 орочная медиана п VI — +1 , где п — четное; л* , где п — нечетное Состоятельная асимптотически несмещенная оценка для симметричного засорения. Смещение ~ 1,253 е для произвольного засорения
с минимальным средним квадратом смещения II 1 1 1 1 <^г Й- *?* V V I* X V + | II + 1 1 1 7 । А V £ - ш фш ш Д кг Н' Состоятельная, асимптотически несмещенная оценка для нормального симметрично засоренного распределения по модели Тьюки е= 0 0,01 0,05 0,1 0,2 0,5 DM 1 0,96 0,81 0,67 0,5 0,145
Урезанная урезанное среднее п — т Т*~п-2т i=m+ 1 где т = Дал], а — степень урезания, — порядковые статистики Состоятельная несмещенная оценка для нормального симметрично засоренного распределения по модели Тьюки (а = 0,1) е = 0 0,025 0,05 0,1 0,15 -^-= 1,06 0,815 0,679 0,538 0,474
Продолжение табл. 10.5
ил
ил
ил
Оценка Аналитическое выражение Свойства оценки
Урезанная среднее по Виндзору я^ II а я-т+1 /= т + 2 L • е < 0,2 0,05 £ а £ 0,15 • Свойства оценки аналогичны свойствам урезанного среднего
Линейные комбинации порядковых статистик Ходжеса- Лемана Выборочная медиана попарных средних То же
Хогга ^1/4) — среднее л/4 наименьших (наибольших) значений — среднее оставшихся наблюдений >
Выборочная медиана Me Свойства приведены в табл. 10.4
Быстрая Двухточечное среднее 2 К» + где i 27%; j ~ 73% (выбраны из условия максимальной эффективности) Свойства оценки аналогичны свойствам выборочной медианы
Среднеквантильный размах 1г 1 2 П(1/4)+ ^3/4)^ То же. Эффективность для незасоренного нормального распределения 0,81
Окончание табл. 10.5
Оценка
Аналитическое выражение
Свойства оценки
Эвристическая
Оценки Форсайта, определяемые
п
р
из условия min ^5, , 5, — невязки
/=1
При Р= 1,5 обеспечивается хороший компромисс между
эффективностью и робастностью
Бивес-оценка:
£ = 9,
о = Me | z{ - Me |
Асимптотическая дисперсия:
Свойства оценки аналогичны свойствам оценки Хубера
Робастные оценки дисперсии и среднеквадратичного отклонения
Таблица 10.6
Оценка Аналитическое выражение Свойства оценки
Минимаксная Хубера с минималь- ным по модулю асимптотическим смещением Выборочная медиана Й,- Me)2 Me ' 2 , а где а= w0/75 = 0,675 Состоятельная, асимптотически несмещенная оценка для симметричного засорения. Смещение - 1,1664 ео для произвольного засорения
Виндзорированная выборочная дисперсия t q > S в । 1 и 9 О i 1 Н- ~ £ n-m E [а» -ф . /=/я + 1 J 2 2 -.I Свойства оценки не приведены
Медиана абсолютных отклонений Ме|г,-Ме| То же
Средняя абсолютная ошибка i е = 0 0,01 0,05 0,1 0,15 0,25 Dd -^=1,14 0,695 0,491 0,525 0,592 0,729 S
L/1
ценности их свойств для ряда типовых распределений, а также более
сложной их реализации для выборок большого объема в темпе по-
ступления измерительной информации.
10.3. Сравнительные характеристики и рекомендации
по использованию различных методов получения
результатов определительных испытаний
Большое разнообразие возможных оценок результатов испытаний
выдвигает необходимость сравнения свойств и областей рациональ-
ного использования различных оценок. Решение данной задачи в
настоящее время далеко от завершения, однако по наиболее употре-
бимым в практике оценкам имеется ряд последних результатов, при-
веденных в табл. 10.7. Кроме рассмотренных оценок следует отме-
тить простые эмпирические оценки, полученные методом моментов.
Метод моментов заключается в приравнивании аналитических выра-
жений математического ожидания и дисперсии различного вида рас-
пределений их выборочным средним оценкам с последующим вы-
числением параметров распределений.
Проиллюстрируем возможности применения метода моментов для
оценки параметров гамма-распределения:
/ (z/X, а) =
X“z“ 'exp{-Xz}
Методом максимального правдоподобия находим оценки макси-
мального правдоподобия:
1
24 (а-1/2)
Совместное решение полученной системы уравнений можно по-
лучить только методом последовательных приближений. Методом
моментов получим:
откуда X = z/Sq', & = z2/Sq.
558
Сравнительные характеристики и рекомендации по использованию различных методов
получения результатов испытаний
Таблица 10.7
Оценка Дисперсия оценки при распределении Рекомендации по использованию
нормальном прямоугольном треугольном Коши Лапласа
Выборочное среднее (средне- арифметическое) о2/л а2/л, 2 (Z>-д)2 где о - X лл Конечное значение дисперсии отсутствует Состоятельная, несмещенная оценка, эффективная для всех распределений, имеющих линейную зави- симость математического ожидания от параметра распределения. Чувстви- тельна к наличию аномальных измерений
Выборочная медиана тс о2 2 п — — я2 4л Малочувствительна к наличию аномальных измерений, чувствительна к асимметрии распределения
Середина размаха 2/2 \ о ТС 4 log п 6 С1J ’ где 1 1 1 с.—1+ _+...+ 1 2 п -1 (»-а)2 2(л + 1)(л + 2) гч 'S' 1 к 4- 2 2 2 О ТС 12 Состоятельная, несмещенная, эффективная для прямоугольного распределения
Окончание табл. 10.7
Оценка Дисперсия оценки при распределении Рекомендации по использованию
нормальном прямоугольном треугольном Коши Лапласа
Среднекван- тильный раз- мах 2 1,21 — п — — — —— Малочувствительна к нали- чию аномальных измерений, чувствительна к асимметрии распределения
Выборочная дисперсия <?/(2л) - Состоятельная, несмещенная, эффективная для нормально- го распределения, чувстви- тельна к наличию аномаль- ных измерений
Средняя абсолютная ошибка «3 | Я 1 KJ - Состоятельная, несмещенная, эффективная для распределе- ния Лапласа, малочувстви- тельна к наличию аномаль- ных измерений
Выборочный размах 2 ( 2 \ о п log п 6 C2J 2 (л - 1) Л 5 (Р “ О) (л + 1) (л+ 2) гч S' 1 К 1 ’Ф Состоятельная, несмещенная, эффективная для прямоуголь- ного распределения; для нор- мального распределения эф- фективность высока при малых выборках
Примечание. Прочерки в таблице означают, что найти соответствующие данные не удалось.
В результате получено простое решение. К сожалению, точность
оценок с помощью метода моментов не исследована. Эти оценки
могут использоваться в качестве начального приближения оценок мак-
симального правдоподобия.
10.4. Многомерные задачи оценивания
Совместное оценивание ряда параметров или проверка статистичес-
ких гипотез относительно совокупности этих параметров составляет
содержание многомерных статистических методов. Один из подходов
к решению данной задачи заключается в построении доверительного
интервала для каждого из исследуемых параметров, характеризуемых
доверительной вероятностью yz, такой, что совместное нахождение
истинных значений параметров в соответствующих доверительных
интервалах выполняется с заданной вероятностью Уз = Пу,, i = 1,...,к.
В общем случае совместная доверительная вероятность у связана
с доверительной вероятностью по каждому из параметров в отдельно-
сти неравенством Бонферрони:
у^1-£(1-у,), 1-у,-> (1-у3)Д.
/«1
При независимости исследуемых параметров общая доверитель-
к
ная вероятность у = П у, , откуда у,- = Иуз-
/=1
При коррелированных параметрах для определения у(- применяет-
ся метод Тьюки, согласно которому
у>Р[тах|СА,|<САу(Л,л-1)], !</<£,
где U: =——,1 — статистика Стьюдента; z,, — оценки наи-
меньших квадратов; Щ(к, л-1) — квантиль распределения максиму-
ма абсолютных значений к стьюдентовских статистик.
При известном коэффициенте корреляции между любыми пара-
ми параметров общая доверительная вероятность
561
где (к, п -1) — квантиль распределения максимума абсолютных зна-
чений к стьюдентовских статистик с учетом коэффициента корреля-
ции.
Доверительный интервал на каждый из параметров при использо-
вании данного подхода определяется из соотношения z, ±U^_y.^2c[zi ] •
В табл. 10.8 приведены значения квантилей для у3 = 0,95
в одно- и многомерном случаях. Рекомендуется выбирать метод, обес-
печивающий наиболее узкие доверительные интервалы.
Таблица 10.8
Значения Ц1-у(.)/2 для вз = 0,95 в одно- и многомерном случаях
при использовании различных методов
к Независимые параметры Неравенство Бонферрони Метод Тьюки (л = 60)
р=0 Р=0,2 Р = 0,4 Р = 0,5
1 1,64 1,64 1,64 1,64 1,64 1,64
10 2,58 2,58 2,64 2,61 2,55 2,5
20 2,75 2,82 2,88 2,85 2,77 2,71
При использовании многомерного подхода общая достоверность
решения, определяемая ошибками первого и второго родов, суще-
ственно снижается. Например, для независимых параметров имеем:
а = 1-П (1-а/); ₽ = 1- П(1-р,).
/=1 /=1
Поэтому в практике проведения испытаний существует тенденция
использования обобщенных параметров, являющихся некоторой из-
вестной функцией одномерных параметров. При выборе такого обоб-
щенного параметра строится доверительный интервал на этот пара-
метр. Такой доверительный интервал оказывается, как правило, более
узким, чем при применении первого подхода, однако не позволяет
обнаружить, по какому именно частному параметру не выполняются
требования.
Для подтверждения требований к совокупности параметров удоб-
но использовать комбинацию указанных подходов: сначала проверка
ведется по обобщенному параметру и в случае несоответствия требо-
ваниям производится анализ каждого из показателей в отдельности.
562
Проверка по обобщенному параметру может осуществляться с ис-
пользованием Т2-критерия Хотеллинга. Если в одномерном случае
z —Mfz]
для нормального распределения случайная величина t =---- J: J
s/Jn
- F-распределе-
s/4n
2 f Z -M[z]
имеет ^-распределение, а величина t - -------
ние, то по аналогии для оценок ZT = ||fi,Z2II векторного параметра
9Т = 01,..., 0^1 строится Т2-критерий Хотеллинга:
Т2 = п (Z - М )Т (s2)"’ (Z - М),
где S2 =---ZTZ — дисперсионная матрица;
— ^1 Zfc
— матрица центрированных измерений;
Zkn Zk
М‘ = ||A/j,..., || — строка средних значений параметров.
Если верна нулевая гипотеза М - М3, то статистика Т2 ———
£(л -1)
имеет распределение Фишера F(k, п-к) с к, (л - к) степенями сво-
боды. Для оценок некоррелированных параметров /^-критерий можно
упростить:
к
T2=Y
Zj М [-^i ]
i=l
Критерий Т2 можно использовать как непосредственно, так и
для построения критерия подтверждения требований к обобщенному
параметру 9, представляющему собой линейную комбинацию одно-
к
мерных параметров: 9=^Х,0|, где X, — весовые коэффициенты. В
i=i
этом случае статистика
Ь-М 0
где О = £ , А/[0] = X,- Mi,
1=1 1=1
563
к
о2 [fl] = ^А.Г-о2!^], будет иметь распределение Фишера £(1,л-1) =
i=i
= t2 (л -1) .
Таким образом, легко построить доверительный интервал на обоб-
щенный параметр fl±f1_a/2(n-l)flLfl]- Более сложным является слу-
чай нелинейной зависимости обобщенного параметра от одномерных
параметров: и = ек).
По аналогии с линейным случаем можно построить оценку
fl = fl(e) • Моменты этой оценки определяются по следующим соот-
ношениям:
М
fl
е,=м(е,
о2^),
е,=м е,
из о =Е чг
е, =м е,-
Н4 A =Z
е, =м е,
Нетрудно показать, что при нормальных законах распределения
оценок одномерных параметров оценка обобщенного параметра так-
же нормальна, однако имеет смещение
564
Действительно, для нормального распределения третий и чет-
вертый моменты соответственно равны = 0, ц4 = За4. При
Мз(6.)=0’ Цз(о) = 0, т.е. равен нулю. Четвертый момент
2
Г al V1 Эд о 4 /А \ rV V1 до 2/а \ 2 (а \
H4pJ = Z тг 47- ° (е.)° Ы-
1=1^1 ) ,=17=1^1 J J
'* j
Заметив, что
получим Цд [о] = Зо4 [•&]. При проведении расчетов неизвестные зна-
чения м
заменяются обычно их оценками 0,-.
Исследования точного (когда оно существует) и приближенного
решения показали, что приближенная дисперсия всегда не меньше,
чем точная (равенство достигается в линейном случае). Это дает оп-
ределенную гарантию того, что достоверность принимаемых на основе
приближенного подхода статистических решений будет несколько за-
нижена.
10.5. Методы определения оценок
нестационарных параметров
Приведенные материалы по определению результатов испытаний
предполагают их постоянвгво при проведении выборочного экспери-
мента. Однако процессы, протекающие при функционировании тех-
нических систем, часто являются существенно нестационарными.
Статистический анализ нестационарных процессов чрезвычайно
сложен. Поэтому для получения инженерных результатов нестацио-
нарный процесс представляется в виде композиции неизвестных по-
стоянных параметров и известных функций времени. При этом наи-
более распространена полиномиальная аппроксимация:
о(')=£оу/у(/),
У=1
(Ю.4)
565
где 0 • — неизвестные постоянные коэффициенты; fj (/) — известные
функции времени.
В качестве функций fj (/) часто выбирают различные степени
аргумента t. В этом случае зависимость (10.4) в дискретной форме
для /-го интервала времени имеет вид:
0(/ДГ) = ©о + ®10'ДО + ••• + 0* у гДе ' = t 2> •••
Для удобства дальнейших выкладок запишем зависимость (10.4)
в матричной форме:
Ф = Т0,
где dT = ...,ОлII — вектор значений оцениваемого нестацио-
нарного параметра;
1 Д/ ... (Д/)*
1 /Д/ ... (Ш)*
1 лД/ ... (лД/)Л
— матрица известных функций;
— вектор неизвестных параметров; п — чис-
ло дискретных моментов времени; Jt+1 — число неизвестных парамет-
ров, т — индекс транспонирования.
Модель измерений в рассматриваемом случае носит название си-
стемы условных уравнений:.
ZT = JT0 + 8T,
где ZT = ||zi,„.,Zp„.,zn|| — вектор измерений нестационарного пара-
метра; 6Т = ||8i,...,5,8И|| — вектор ошибок измерений.
Неизвестные параметры 0 находят методом наименьших квадра-
тов (м.н.к.) из условия минимизации функционала:
S2 = (Z - X0)T e>(z - *0),
где ш — матрица весовых коэффициентов.
Если априорная информация о статистических характеристиках
ошибок измерений отсутствует, то со = 1л (единичная матрица).
566
При многомерном нормальном законе ошибок измерений
5~7V(O, q2g),
где 0 — нуль-вектор математических ожиданий; q2G — ковариаци-
онная матрица ошибок измерений, выбирается <о = la G) — весо-
вая матрица.
Если ошибки измерений статистически независимы, то со явля-
ется диагональной матрицей
При равноточных измерениях а2 =...= а2 =...= о2 имеем ш = 1/а2.
Оценки наименьших квадратов находятся решением системы нор-
мальных уравнений
-2(z-Xe)TcaX =0
или
XW0 = XTcaZ,
откуда 0 = fxB(oxj fxB<»zj.
Точность оценок наименьших квадратов характеризуется диспер-
/А\ / Д 1
сионной матрицей £>10) = 1Х <bZ1 .
Оценкой наименьших квадратов искомого показателя О в /-й мо-
мент времени является оценка Dlfy) = XjDfQyXj , где Xj —
i-я строка матрицы X.
В табл. 10.9 приведены примеры использования полиномиаль-
ной аппроксимации. При аппроксимации полиномом возникает воп-
рос о выборе степени этого полинома. Обычно аппроксимацию на-
чинают с использования простейших полиномов (нулевого или первого
порядка), а затем, по мере необходимости, порядок повышают.
567
Таблица 10.9
Примеры использования полиномиальной аппроксимации
нестационарных параметров
Вид параметра Пример устройства Математическая модель Оценки наименьших квадратов
Изменение линейных размеров изнашиваемых частей Кран, вентиль, задвижка «(*) = fy* х м пЫ ^ = Х'2д/2; /=1 X^Z = У, /г,Д/; <=1 п 0i=-id—; 1 п У«2д* 1=1 izi *» = п’, Р2 /=1
Изменение усилий резания Шлифование абразивной лентой «(*) = 01**, где к — известно п Q — 1=1 . 01- п 1=1 л*р’Ч йл =—— п я2к /=1
При этом необходимо построить критерий для проверки адекват-
ности выбранного полинома или обоснования перехода к более слож-
ному виду. В том случае, если дисперсия погрешности измерений
568
известна, для проверки адекватности используемой модели исполь-
зуется статистика
Хо = 52(л-Л)/о2.
При неизвестной дисперсии погрешности измерений использу-
ется статистика
где Sq — остаточная сумма квадратов неполной модели; sf — оста-
точная сумма квадратов следующей по сложности модели.
Гипотеза адекватности используемой модели принимается, если
Хо «ли fo <Fi-a(n-k, n-k-V).
Применение неадекватной модели приводит к смещению оцени-
ваемых параметров. При малом временном интервале смещение бу-
дет незначительным. На этом свойстве основаны модификации ме-
тода наименьших квадратов, «забывающие» прошлые данные. При
использовании метода скользящего среднего оценка вычисляется из
соотношения
т
= j<m',
J=l
т j>m,
i=j-m
где т — некоторое выбранное заранее число «забываемых» измере-
ний. Дисперсия этой оценки определяется как о(о0)=— ст2.
' ' т
Применяются также алгоритмы, основанные на рекуррентной фор-
ме метода наименьших квадратов, например алгоритм с экспоненци-
альной памятью, для которого получаем рекуррентную оценку вида
®0i — ®Oi-l ®0i-l )•
(Ю.5)
где a — некоторая заранее выбранная константа сглаживания.
Поскольку операция (10.5) проводится одинаково для всех изме-
рений, запишем выражение (10.5) с учетом более ранних наблюде-
ний:
Оо, = az, + (1 - a)0O1_i = az, + (1 - a) 0Oi_2 +a
(^i-l ®i-2
i-1
= a £ (1 - a)j Zi-j + (1 - a) Boo-
;=o
569
Таким образом, оценка 0а является линейной комбинацией всех
измерений с весовыми коэффициентами, убывающими по геометри-
ческой прогрессии.
Так как (1-а)' = е-,-1п(1~а)> данный алгоритм носит название опе-
ратора с экспоненциальной памятью. Дисперсия оценки с экспонен-
циальной памятью при небольших значениях а имеет вид:
Возможны и другие модификации метода наименьших квадра-
тов, например число т в методе скользящего среднего может опреде-
ляться не заранее, а в процессе оценивания из условия адекватности
полинома нулевого порядка. Так, при известной дисперсии погреш-
ности измерений о2 случайная величина -9oi)/c имеет нормаль-
ное распределение n(o, поэтому статистика (zi-0oi)/° М0‘
жег быть использована для текущего выбора числа т: если выполняется
неравенство
(Zi - 0Oi )/а U1_а/2 >
то точка Zj включается в обычную оценку метода наименьших квадра-
тов, в противном случае происходит переход на алгоритм скользяще-
го среднего.
Для получения рекуррентной формы метода наименьших квадра-
тов дисперсионную матрицу, полученную по z-м измерениям, пред-
ставляют в виде двух слагаемых: первого, зависящего от измерений
до i -1 включительно, и второго, зависящего от /-го измерения:
Из теории матриц известно следующее матричное соотношение:
(1р + ЛЯ)’1 = Ip - A (Iq + ВА)~' В,
где А — матрица размера p*q',B — матрица размера q*p \ Ip> Iq —
единичные матрицы размера рхр, qхq соответственно.
Воспользовавшись этим соотношением, получаем рекуррентное
уравнение для дисперсионной матрицы:
570
При q = 1 и ш= 1/а2 выражение в скобках представляет собой
скаляр и дисперсионная матрица имеет вид
Для получения рекуррентного выражения оценок представляем в
виде двух слагаемых оценку , полученную по i измерениям:
ё/=Д(Л7ц..;^./+Л7^).
Отсюда с учетом выражения для дисперсионной матрицы имеем:
0; — 0;_1 +-Z----------
о2+ад_1х/г
или
0, = 0|-i + DiXi (Hi (Zt -ЛГД-i).
Рекуррентная форма метода наименьших квадратов совпадает с
выражением фильтра Калмана.
В [27] показано, что оценки наименьших квадратов являются
состоятельными, несмещенными эффективными оценками парамет-
ров линейной модели при произвольном распределении погрешнос-
тей измерений, имеющем конечные значения дисперсии.
10.6. Учет объема партии продукции
При определении оценок параметров партии продукции необходимо
учитывать, что выборка формируется не в результате повторных из-
мерений на одном образце, а в результате измерений на нескольких
образцах, при этом предполагается, что параметр постоянен для всех
образцов партии.
Кроме того, накладывается условие возврата в партию каждого
измеренного образца. На практике это условие не выполняется, что
571
нарушает независимость измерений и приводит к перераспределению
их вероятностей. Для больших объемов партии этим обстоятельством
можно пренебречь и производить оценку по приведенным в предыду-
щих разделах формулам.
Малый объем партии приводит к изменению свойств среднеариф-
метических оценок:
izr 1 iz rv i N-nc1 1гГс21 N л-1 2
M[z\ = M; D[z] = —— — ; MlS£l = ---------о2
N -1 n Jn -1 n
где N — объем партии; D I?2 ] = 2a4 (n -V)(N -n)/(Nn2)]. Если ввес-
ти «экв =л[(ЛГ-1)/(ЛГ-л)]> то
ОД = <т2/лэкв; л/[^2]=и?№ ^о2; д[52]2^ -^ст2,
Лэкв «экв
т.е. свойства оценок без учета и с учетом объема партии при Лд^ < л
совпадают. Таким образом, с учетом объема партии ту же точность
оценивания можно получить при существенно меньшем объеме вы-
борки.
10.7. Оценивание случайных параметров
в партии продукции
При испытаниях образцов партии продукции оцениваемые парамет-
ры, как правило, не остаются постоянными от образца к образцу, а
меняются случайным образом вследствие неизбежной неццентичнос-
ти отдельных образцов. Модель измерений в этом случае имеет вид:
Zij = М + Tj + ,
где М— среднее значение параметра; ~ jV(o, сг^) — нормально рас-
пределенная величина, характеризующая разброс параметра относи-
тельно среднего значения от образца к образцу; 8л - N (0, о2) — нор-
мально распределенная случайная погрешность измерения.
Случайный разброс характеристик образцов и случайная погреш-
ность измерений могут быть разделены путем проведения специаль-
ного однофакторного эксперимента. Однофакторный эксперимент
572
заключается в проведении п дублирующих измерений на каждом из а
образцов. Данные однофакторного эксперимента сводят в табл. 10.10
и анализируют методом однофакторного дисперсионного анализа.
Таблица 10.10
Данные однофакторного эксперимента
Номер образца/Номер измерения 1 j
1 г11 ^ln
i
А ^а! zaj
Для каждого образца находятся среднеарифметические оценки:
Находятся также оценки по всей совокупности измерений:
Полученные таким образом частные и общие средние имеют со-
ответственно следующие математические ожидания и дисперсии:
D[z,] = <n2 + <&/п\
Af[z] = M;
м Г$Л = м Г^о 1 = <*о;
D z~\ = <5^ j а + ап.
Таким образом, частные средние являются несмещенными оцен-
ками параметров, однако они несостоятельны, так как при п ~
# 0. Общее среднее является несмещенной состоятельной оцен-
кой, поскольку при л -> оо , л -> о*» = 0.
573
Для получения оценки дисперсии случайного разброса сформи-
руем статистику
математическое ожидание которой равно ло? + <Jq.
Если случайная величина Fo = S2/Sg , имеющая распределение
Фишера Fc (а-1), а(л-1) степенями свободы, не превышает соот-
ветствующего квантиля Fo < Ft_a [в -1, а(п -1)], то случайный раз-
брос параметра меньше погрешности измерений и им можно пренеб-
речь.
Плотность /’-распределения Фишера определяется двумя степе-
нями свободы V] и v2. Следует отметить два крайних случая:
• Vj = 1 — /-распределение превращается в распределение квад-
рата стьюдентовской случайной величины t с v2 степенями
свободы;
• v2 ->00 — F-распределение стремится к распределению случай-
ной величины X2(vi)/vi-
В статистических таблицах приводятся только квантили F-pac-
пределения F]_a(vi, v2) при различных v1( v2, а. Квантили Fa по-
лучаются из табличных значений по соотношению Fa (v|, v2) =
= Fl-a(vl’vz)-
При проверке нулевой гипотезы = О используется односторон-
ний критерий, так как всегда выполняется условие S? > Sq. Если
„2 о
дисперсия погрешности измерении о0 известна, то гипотеза а* = О
проверяется с использованием критерия %2, являющегося частным
случаем F-критерия при числе степеней свободы знаменателя, рав-
ном бесконечности:
Хо = (о - 1)-У2/оо < Xl-a(fl " О-
Если нулевая гипотеза отвергается, т.е. разброс параметра зна-
чителен, возникает необходимость оценки дисперсии этого разброса.
Несмещенной оценкой дисперсии случайного разброса парамет-
ра является оценка а2 = S2 -Sq /п с приближенным (у - 2a) % -ным
доверительным интервалом:
574
АА2/(пА +1) < ст2 < ВВ^пВ +1),
где
Sl/Sl
^_0/2[а-1,о(л-1)]
Si / 502
Fa/2[o-l,«(«-!)]
S'!2 (a -1) .
4 =
Sfa-l)
Ха/гО2-1)
Оценка ct2v/(ct^)2 имеет приближенное %2-распределение с чис-
лом степеней свободы
у-
Si/п Sq/п
а-1 а(п-1)
(S2 /л)2
При известной погрешности измерений слагаемое -Цт—— - 0.
а(п -1)
В случае отсутствия дублирующих измерений характеристики слу-
чайного разброса и случайной погрешности измерений разделить не
удается.
Эту схему измерений можно применять при наличии высокого
класса точности измерительной аппаратуры, когда погрешность из-
мерений существенно меньше разброса исследуемого параметра.
10.8. Принятие решений по результатам
определительных испытаний
10.8.1. Проверка гипотез о параметрах
нормального распределения
Задача принятия решений по результатам определительных испыта-
ний формулируется как задача проверки статистических гипотез, ко-
торая тесно связана с интервальным оцениванием. Рассмотрим эту
связь на примере проверки гипотезы о параметрах распределений.
Действительно, доверительным интервалом, в котором с веро-
ятностью у находится неизвестное истинное значение математичес-
кого ожидания М, является интервал M±k^D[M], где квантиль к
зависит от распределения оценки М и доверительной вероятности у.
575
Из выражения для доверительного интервала в соответствии с кри-
терием значимости следует, что при нулевой гипотезе М = М3 допус-
тимым интервалом значений оценки является интервал М3 ±k^D[M].
Слишком большие значения оценки М > М3 +к^в[м] позволяют при-
нять гипотезу М> М3, а слишком маленькие М <М3 -к>1о[м] —
гипотезу М < М3. Ошибка первого рода составляет при этом а = 1 - у.
Ошибка второго рода р может быть определена, если задана альтер-
нативная гипотеза. Последнюю подбирают в каждом конкретном слу-
чае в удобном для расчетов виде в зависимости от распределения оцен-
ки М.
Зная ошибки первого и второго рода, можно рассчитать объем
выборок, необходимый для обеспечения требуемых значений этих
ошибок.
Проверка гипотезы о значении математического ожидания нор-
мального распределения. Вид правил для проверки гипотезы о значе-
нии математического ожидания нормального распределения зависит
от наличия априорной информации о дисперсии.
1. Дисперсия ст2 известна. Областью принятия нулевой гипотезы
Hq. М = М3 является область
М-U\_a/2<3/4п < z £ М3 + U\_a/2O/4п .
При z> M3 + U\_a/2<3l4n принимается гипотеза М > М3, при
z < Мз -Ui-b^/Jn — гипотеза М < М3. Используются также од-
носторонние критерии:
• для гипотезы М >М3 z>M3 + и^ас/4п;
• для гипотезы М < М3 z £ М3-и\_а<з/4п.
В этих случаях наиболее просто рассчитывается ошибка второго род а
(рис. 10.1). Альтернативная гипотеза Н\ задается в виде М = М3 + 8
(для М > М3) или М = М3 - 8 (для М < М3), где 8 — расстояние
между нулевой и альтернативной гипотезами.
При альтернативной гипотезе М = М3 + 8 в соответствии с опре-
делением ошибки второго рода
p = ?{f <М3 + и}_аа/уП/М = М3 + 8}.
576
P(z)
Рис. 10.1. Проверка гипотезы о значении математического ожидания
Отсюда с учетом распределения оценки z получим:
(z-M3-8)/(o/^) = £Zp.
Учитывая, что критическое значение определяется выражением
(z-A/3)/(o/V«) = ^i_a, имеем:
(10.6)
где 8/0 — относительное расстояние между нулевой и альтернативной
гипотезами, характеризующее точность статистического решения.
Такое же выражение получается, если рассмотреть альтернатив-
ную гипотезу М = М3 - 8. Полученное выражение (10.6) позволяет
при заданных значениях а, 0,8/а априорно до проведения измерений
рассчитать необходимый объем выборки п (табл. 10.11).
Случайные значения статистики | f _ мз \/(c/Jn) могут оказать-
ся как больше, так и меньше граничного значения U^_a. Если
Z - М3\/(а/4п)> U\_a, то принимается альтернативная гипотеза
Af > Л/3, а если z - ЛГ3|ДаД/л) < -Ui_a —
то гипотеза М < М3, при
этом отношение 8/о будет больше, чем рассчитанное по формуле
(10.6). Если
z -M3\/(a/4n^<Ui_a,
то величина 8/о будет меньше
577
Таблица 10.11
Объем выборки, необходимый для проверки гипотезы М = М3 при различных а, р, S/о и известной дисперсии S1
6/G а=0,005 а=0,01 а=0,025 а=0,05
₽ =0,01 0,05 0,1 0,2 0,5 0,01 0,05 0,1 0,2 0,5 0,01 0,05 0,1 0,2 0,5 0,01 0,05 0,1 0,2 0,5
1,1 20 15 13 10 6 18 13 11 9 5 16 11 9 7 4 13 9 7 6 3
1,2 17 13 11 9 5 15 11 9 7 4 13 9 8 6 3 11 8 6 5 2
1,3 15 11 9 7 4 13 10 8 6 4 11 8 7 5 3 10 7 5 4 2
1,4 13 9 8 6 4 11 8 7 6 3 10 7 6 4 2 8 6 5 4 2
1,5 11 8 7 6 3 19 7 6 5 3 9 6 5 4 2 7 5 4 3 2
1,6 10 7 6 5 3 9 7 5 4 3 8 5 5 3 2 7 5 4 3 2
1,7 9 7 6 4 3 8 6 5 4 2 7 5 4 3 2 6 4 3 3
1,8 8 6 5 4 2 7 5 4 3 2 6 4 4 3 2 5 4 3 2
1,9 7 5 5 4 2 6 5 4 3 2 5 4 3 3 2 5 3 3 2
2,0 6 5 4 3 2 6 4 4 3 2 5 4 3 2 4 3 3 2
2,1 6 4 4 3 2 5 4 3 3 2 4 3 3 2 4 3 2 2
2,2 5 4 3 3 2 5 4 3 2 2 4 3 3 2 4 3 2 2
2,3 5 4 3 3 2 4 3 3 2 2 4 3 2 2 3 2 2 2
2,4 5 3 2 2 2 4 3 3 2 4 3 2 2 3 2 2 2
2,5 4 3 3 2 2 4 3 2 2 3 2 2 2 3 2 2
3,0 3 2 2 2 3 2 2 2 2 2 2 2 2
3,5 2 2 2 2 2 2 2 2 2
4,0 2 2 2 2
табличного значения, требования к точности и достоверности реше-
ния обеспечены и проведение дальнейших измерений излишне.
Таким образом, зависимость между объемом выборки, точнос-
тью и достоверностью решения позволяют осуществить текущее пла-
нирование последовательной процедуры принятия статистического
решения.
2. Дисперсия а2 неизвестна и оценивается по той же выборке. Об-
ластью принятия нулевой гипотезы является область
М3 ~ h-a/2^^М3 + ti_a/2S/4п.
При альтернативной гипотезе М = М3 + 5 случайная величина
(z - М3 - 8)/(50 /4п ) имеет /-распределение Стьюдента с (л -1) сте-
пенями свободы, а случайная величина (z. - M3)/(S0/Jn) — нецент-
ральное /-распределение Стьюдента с параметром нецентральности
Ул8/а. Используя нормальную аппроксимацию нецентрального /-рас-
пределения (л > 10), получим:
В табл. 10.12 приведен объем выборки в зависимости от 8/а при
различных значениях аир. Как следует из таблицы необходимый
объем выборки в этом случае несколько больше, чем при извест-
ной а2.
Полученные решающие правила можно получить также с исполь-
зованием критерия максимального правдоподобия.
3. Построение критерия максимального правдоподобия для провер-
ки гипотезы HQ: М = М3 против альтернативной гипотезы Н\:
М = М3+ 8 (а2 известно).
Отношение правдоподобия Н\ и Яо
. ехр
. ехр
19*
579
cz»
оо
о
Таблица 10.12
Объем выборки, необходимый для проверки гипотезы М = М3 при неизвестной дисперсии а2
и различных значениях а, р, 5/о
5/а а = 0,005 а = 0,01 а = 0,025 а = 0,05
р= 0,01 0,05 0,1 0,2 0,01 0,05 0,1 0,2 0,01 0,05 0,1 0,2 0,01 0,05 0,1 0,2
1,1 24 19 16 14 21 16 14 12 18 13 11 9 15 11 9 5
1,2 21 16 14 12 18 14 12 10 15 12 10 8 13 10 8
1,3 18 15 13 11 16 13 11 9 14 10 9 7 11 8 7
1,4 16 13 12 10 14 11 10 9 12 9 8 7 10 8 7
1,5 15 12 11 9 13 10 9 8 11 8 7 6 9 7 6
1,6 13 11 10 8 12 10 9 7 10 8 7 6 8 6 6
1,7 12 10 9 8 И 9 8 7 9 7 6 5 8 6 5
1,8 12 10 9 8 10 8 7 7 8 7 6 7 6
1,9 11 9 8 7 10 8 7 6 8 6 6 7 5
2,0 10 8 8 7 9 7 7 6 7 6 5 6
2,1 10 8 7 7 8 7 6 6 7 6 6
2,2 9 8 7 6 8 7 6 5 7 6 6
2,3 9 7 7 6 8 6 6 6 5 5
2,4 8 7 7 6 7 6 6 6
2,5 8 7 6 6 7 6 6 6
3,0 7 6 6 5 6 5 5 5
3,5 6 5 5 5
4,0 6
п
2о2 In К
или
Zi - п(2М3 + 5)
> 2О2 In К.
Таким образом:
n[2z - 2М3 - 8] > — In К или z>k’.
Необходимо выбрать такое значение К’, чтобы P{z > K'/Hq} = а.
Поскольку при справедливости гипотезы Но z~N(M3,c2’ln), то
(К' - М3)/(с/4п) = Ui_a, откуда К' = М3 +Щ-а<з/4п.
В результате проведенных выкладок получаем решающее прави-
ло для принятия решения М = М3+Ь: z> М3+ U\_acl4n, такое же,
как и при использовании критерия значимости.
Построенный критерий является наиболее мощным по отноше-
нию к заданной простой гипотезе Так как определенная крити-
ческая область не зависит от 8, то данный критерий будет наиболее
мощным при произвольном выборе альтернативной гипотезы.
10.8.2. Интервальное задание требований к параметру
На практике достаточно часто требования к параметрам задаются в
виде некоторого допустимого интервала [Мз1, Л/з2], причем этот ин-
тервал пересекается с доверительным интервалом [Л/н, Л/в] (рис. 10.2).
Рис. 10.2. Пересечение допустимого интервала с доверительным
Для подтверждения требований в такой форме строится несиммет-
ричный доверительный интервал, соответствующий доверительной
вероятности у = Yi + у2 -1, где У| и у2 определяются из соотношений:
мз2 = z +Uyia(z),
Мз1 =z-Uyici(z).
581
При этом оценка должна находиться в интервале [Л/з1, Л/з2]. Если
определенная таким образом вероятность у > у3, то требования счита-
ются подтвержденными; если у < у3, то требования не подтверждают-
ся.
10.8.3. Подтверждение требований к случайному параметру
Требования к случайному параметру формируются в виде требований к
математическому ожиданию и к дисперсии случайного разброса иссле-
дуемого параметра. Подтверждения требований к математическому
ожиданию полностью аналогичны материалам разд. 10.8.1 и базиру-
ются на использовании доверительного интервала z ± Л—<х/2 (v)^(^) • При
этом можно выделить следующие практически важные частные слу-
чаи:
• дисперсия случайного разброса превышает дисперсию погреш-
ности измерений: (хо > Х1-а. > ^-а), &(z) = Si/ап, v=а -1;
• дисперсия погрешности измерений превышает дисперсию слу-
чайного разброса: (хо <Xi-a> Fo<fi-ab
При неизвестной дисперсии погрешности измерений в этом случае
имеем д2(г) = 5’о/ОЙ' v = a-l, а при известной — 6(z)=Oq, v = «=,
*1-а/2 =^l-a/2-
Подтверждение требований к дисперсии случайного разброса па-
раметра проверяется в случае принятия альтернативной гипотезы
и формируется в виде статистической гипотезы < 0^3. Областью
принятия нулевой гипотезы < о^з является область, определен-
ная неравенством
6? ^[x?-a(v)O?3]/v-
Ошибка второго рода рассчитывается из условий:
*?v/°?3 = X?-a; ^?v/(&*?3 ) = Хр (V),
где 8 = <^исг/о*3, откуда 8 = x?-a(v)/xp(v)-
В табл. 10.13 приведены зависимости, связывающие точность
статистического решения 8 с вероятностью ошибок первого а и вто-
рого Р родов и числом степеней свободы v. К сожалению, в этом
случае число v не выражается явной зависимостью от числа образцов
а и числа измерений л и не может быть использовано для выдачи
582
Таблица 10.13
Значения 5 расстояния между нулевой и альтернативной гипотез
для различных а, 0, v
V а=0,01 а=0,05
0=0,01 0,05 0,1 0,5 0,01 0,05 0,1 0,5
1 42240 1687 420,2 14,58 244,50 977 243,3 8,444
2 458,2 89,78 43,71 6,644 298,1 58,4 28,43 4,322
3 98,79 32,24 19,41 4,795 68,05 22,21 13,37 3,303
4 44,69 18,68 12,48 3,955 31,93 13,35 9,92 2,826
5 27,22 13,17 9,369 3,469 19,97 9,665 6,875 2,544
6 19,28 10,28 7,628 3,144 14,44 7,699 5,713 2,354
7 14,91 8,524 6,521 2,911 11,35 6,491 4,965 2,219
8 12,20 7,352 5,757 2,736 9,418 5,675 4,444 2,112
Q 10,38 6,516 5,198 2,597 8,103 5,008 4,059 2,028
10 9,072 5,89 ’ • 4,770 2,484 7,156 4,646 3,863 1,964
12 7,343 5,017 4,159 2,312 5,889 4,032 3,335 1,854
15 5,847 4,211 3,578 2,132 4,78 3,442 2,925 1,743
20 4,548 3,462 3,019 1,943 3,802 2,895 2,524 1,624
24 3,959 3,104 2,745 1,842 3,354 2,63 2,326 1,563
30 3,40 2,752 2,471 1,735 2,927 2,367 2,125 1,492
40 2,874 2,403 2,192 1,619 2,516 2,103 1,919 1,418
60 2,358 2,046 1,902 1,49 2,11 1,831 1,702 1,333
120 1,829 1,661 1,58 1,332 1,686 1,532 1,457 1,228
рекомендаций к объему выборки. Однако такая возможность появля-
ется в практически важном частном случае при известной дисперсии
погрешности измерений. В данном случае гипотеза о? £ о?3 эквива-
лентна гипотезе п<з\ +oq < + oq, а для проверки можно исполь-
зовать решающее правило
с2 < Х?-а(а-1)(”вЗт+во)
583
Ошибка второго рода рассчитывается при этом по формуле
5 = лот ист + °о/ло?3 + = x?-a(fl - 1)/Хр(а - 1),
откуда с вероятностью р выполняется равенство:
<*?3 п <*?з
Таким образом, задавая допустимую точность статистического
решения 8, ошибки первого а и второго р родов, можно рекомендо-
вать количество образцов а и число п измерений на каждом образце.
10.9. Сравнение объемов выборки при оценивании
и проверке статистических гипотез
Соотношения между точностью статистических решений, ошибками
первого и второго родов и объемом выборки позволяют проводить
априорное (до получения экспериментальных данных) планирование
необходимого объема испытаний. Из этих соотношений может быть
определен также априорный доверительный интервал, т.е. такой ин-
тервал, в котором с заданной вероятностью будет находиться истин-
ное значение оцениваемого параметра при фиксированном объеме
испытаний. При этом задача планирования объема испытаний фор-
мируется как задача обеспечения доверительного интервала заданной
ширины.
При получении экспериментальных данных граничные значения
ТТ 2 (?-Л/3)
c/i_a, Xi-a и пр. заменяются полученными статистиками
(оД/л)
S2 (п - 1)/о3. Такая замена основана на следующем соображении: при
изменении уровня значимости а всегда можно добиться выполнения
равенства ^i_aKp = (z - Л/з)/(5Д/й) - 1)/<^з = Xj_a и опре-
делить критическое значение а^, при котором гипотеза принимает-
ся. Отметим, что малые значения свидетельствуют о плохом со-
ответствии между проверяемой гипотезой и экспериментальной
статистикой и наоборот. Поэтому значения могут использоваться
как возможная мера достоверности принимаемого статистического ре-
шения. После измерения априорные доверительные интервалы пе-
реходят в апостериорные, совпадающие с доверительными интерва-
584
лами, определенными в теории оценок. Ниже приведены процедуры
такого перехода.
1. Проверка гипотезы о значении математического ожидания нор-
мального распределения с известной дисперсией. Точность статистичес-
кого решения характеризуется соотношением 8/ст = (Ui_a - U^)/4n, а
(1 - 2р)% -ный априорный доверительный интервал будет равен Му ± 8.
При замене U[_a статистикой (z - Му)/(с/4п) получаем выражение
Z+Up/Jn <М< z-U^G/Jn,
совпадающее с выражением для у%-ного доверительного интервала
при р = (1-у)/2.
2. Проверка гипотезы о значении дисперсии нормального распреде-
ления. Точность статистического решения характеризуется соотноше-
ниями:
• для гипотезы о2 < oj: 8i = xi-a/Zp i
• для гипотезы о2 > 8j = Xa/Zl-3> а значение (1-2р)%-ного
доверительного интервала будет находиться в пределах 82ст2 <
< ст < 8j ctj.
При замене Xi-a статистикой 52 (л - D/03 получаем
52(л - 1)/х?-р о2 S2(n - 1)/хр,
совпадающее с у%-ным доверительным интервалом при Р = 1 - у/2.
Естественно, что априорные доверительные интервалы, рассчи-
танные до получения экспериментальных данных, не уже, чем апос-
териорные доверительные интервалы. В некоторых сравнительно ред-
ких случаях апостериорный доверительный интервал не зависит от
экспериментальных данных (оценка математического ожидания при
известной дисперсии). Объем испытаний в таких случаях целесооб-
разно планировать из условия обеспечения заданной ширины апосте-
риорного доверительного интервала ^[_^у2 оД/й.
585
Контрольные вопросы
1. В чем различие между точечной и интервальной оценками?
2. Дайте определение состоятельности, несмещенности и эффективно-
сти оценок.
3. Как связаны между собой функция потерь, условный и средний
риски?
4. Какими свойствами обладают оценки наименьших квадратов, мак-
симального правдоподобия и байесовские?
5. Какие характеристики точности оценок вы знаете?
6. Что такое доверительный интервал и доверительная вероятность?
7. В чем различие между процедурами оценивания и проверкой стати-
стических гипотез?
8. Какие ошибки допускаются при проверке статистических гипотез?
9. В чем состоит принцип значимости?
10. В чем различие между оптимальными и робастными оценками?
11. Приведите примеры оптимальных и робастных оценок.
12. Какие методы получения результатов определительных испытаний
вы знаете?
13. Какие основные подходы используются при решении многомерных
задач?
14. Каким образом нестационарные задачи приводятся к стационарным?
15. Когда применяются метод наименьших квадратов по полной выбор-
ке и его рекурентная форма?
16. Какой эффект дает учет объема партии продукции?
17. Для решения каких задач используется дисперсионный анализ?
18. Можно ли принимать решения по результатам определительных ис-
пытаний?
Глава 11
ФОРМИРОВАНИЕ РЕЗУЛЬТАТОВ
КОНТРОЛЬНЫХ ИСПЫТАНИЙ
11.1. Допусковый контроль
11.1.1. Основные понятия допускового контроля
Техническое состояние ЛА определяется совокупностью параметров,
характеризующих способность его систем выполнять заданные функ-
ции. Различают две группы параметров:
• функциональные (ФП), являющиеся непрерывными аналоговы-
ми сигналами;
• сигнальные (СП), изменяющие свое состояние скачком и харак-
теризующиеся только шумя значениями (0 и 1).
Соответственно из всего комплекса задач, решаемых при опреде-
лении технического состояния ЛА, можно выделить основные:
• допусковый контроль функциональных и сигнальных парамет-
ров;
• групповой контроль сигнальных параметров;
• контроль ненаблюдаемых параметров (задачи идентификации,
диагностики, расчет эффективности и т.д.).
Различают следующие виды технического состояния: исправное
и неисправное; работоспособное и неработоспособное.
Исправным состоянием системы ЛА называется состояние, при
котором она удовлетворяет всем требованиям, установленным нор-
мативной документацией.
Работоспособным состоянием системы называется состояние, при
котором она способна выполнять заданные функции, сохраняя зна-
чения контролируемых параметров в установленных пределах.
Понятие исправности шире понятия работоспособности. Рабо-
тоспособная система удовлетворяет не всем требованиям, а лишь тем,
которые связаны с обеспечением ее нормального функционирова-
ния. При этом часть требований, например относящихся к внешне-
му виду, может не удовлетворяться. В результате контроля прини-
мается решение о том, в каком состоянии находится проверяемая
система в момент проверки. Если выявленное в процессе контроля
изменение параметров объекта приводит к частичной или полной
невозможности его использования по назначению (потере функцио-
587
нальных свойств), то объект признается негодным. При сохранении
функциональных свойств объект признается годным.
При допусковом контроле решение о годности или негодности
систем ЛА принимается по результатам измерений в зависимости от
того, находится ли контролируемый параметр в допустимых пределах
(допуск) или выходит за их границы.
Допуском на контролируемый параметр называются границы зна-
чений параметра, при которых проверяемая система исправна в тече-
ние требуемого времени в заданных условиях работы. Допуск может
быть односторонним (нижнее ун или верхнее ув предельное отклоне-
ние от номинального значения параметра) и двусторонним [ун, ув].
Допуски устанавливаются для обеспечения основных функцио-
нальных показателей систем ЛА, исходя из назначения этих систем и
условий их применения. Различают допуски: арбитражный (для па-
раметров разрабатываемой системы), производственный (для парамет-
ров изготавливаемой системы), эксплуатационный (для параметров
эксплуатируемой системы), ремонтный (для параметров ремонтируе-
мой системы). Так, эксплуатационный допуск — это такие установ-
ленные опытным и расчетным путем границы [ун, ув], в которых
должно находиться значение контролируемого параметра у, чтобы
система выполняла требуемые функции в течение заданного време-
ни при определенных условиях эксплуатации с заданной вероятнос-
тью Д).
Таким образом, допусковый контроль состоит в том, чтобы уста-
новить, находятся ли значения контролируемых параметров в поле
эксплуатационного допуска или выходят за его пределы.
Наиболее общей характеристикой контроля является достовер-
ность, которая характеризует способность аппаратуры контроля пра-
вильно отражать реальное состояние контролируемой системы.
Погрешности измерений параметров могут привести к ошибочным
решениям, т.е. неисправная система признается годной, а исправ-
ная — негодной. Очевидно, вероятность принятия неправильного ре-
шения при контроле уменьшается с ростом точности измерений.
Однако повышение точности измерений связано с увеличением зат-
рат на совершенствование измерительных средств, вследствие чего
контроль с очень высокой степенью достоверности принимаемых ре-
шений оказывается экономически нецелесообразным. В связи с этим
возникает задача обоснования рациональных требований к точности
контрольно-измерительной аппаратуры, удовлетворяющей определен-
ным требованиям по достоверности контроля. Для решения этой за-
дачи необходимо исследовать влияние погрешности измерений на ве-
роятностные характеристики результатов контроля. Поэтому наряду
с алгоритмами допускового контроля в математическом обеспечении
588
систем обработки данных испытаний необходимо предусмотреть рас-
чет показателей достоверности решений, принимаемых на основа-
нии результатов контроля.
11.1.2. Показатели достоверности результатов контроля
В результате проведения допускового контроля возможны четыре
состояния: 1) исправная система признается исправной; 2) исправ-
ная система признается неисправной; 3) неисправная система при-
знается исправной; 4) неисправная система признается неисправной.
Обозначим вероятности этих состояний соответственно Рр Р2, и
Р4. Перечисленные состояния образуют полную группу событий,
поэтому сумма их вероятностей равна единице: 7^ + Р2 + Р3 + Р4 = 1.
Вероятности и Р4 характеризуют правильные решения, поэто-
му вводится вероятность правильного решения: = Р± + Р4. Вероят-
ности Р2 и Р3 характеризуют ошибочные решения, поэтому вводится
вероятность неправильного решения: РИ = Р2 + Р3. Вероятность Р2
называют вероятностью ложного отказа и обозначают Рл 0, а вероят-
ность Р3 — вероятностью необнаруженного отказа и обозначают Рно.
При этом выполняются соотношения:
А + ^л.о А» ^н.о + ^4 — 1 ~ Rfy
где Rq — априорная (до проведения контроля) вероятность исправного
состояния системы.
Вводят также вероятность решения «годен»: РГ = + Р3 и решения
«негоден»: Рт = Р2 + Р4, а также апостериорные вероятности (после
проведения контроля) исправного и неисправного состояний системы:
где Рд1, Ра2 характеризуют вероятности исправного и неисправного
состояний системы при принятии решения «годен», a Pfl3 и Р^ — то
же, но при принятии решения «негоден».
Используют также условные вероятности браковки исправной
системы a = /5i 0//% (ошибка первого рода) и принятия неисправной
систему р = Рн 0 /(1 - Rq ) (ошибка второго рода).
Все перечисленные вероятности характеризуют в той или иной
мере достоверность принимаемых в результате контроля решений. При
этом для потребителя систем наиболее важны апостериорные показа-
тели достоверности Pfll и Pfl4, характеризующие состояние системы
после проведения контроля.
589
Для разработчиков систем контроля наиболее важны условные
показатели достоверности аир, характеризующие саму систему кон-
троля без учета свойств контролируемого объекта.
Все рассмотренные показатели функционально связаны между
собой, поэтому достаточно рассчитать вероятности Rq, Рло н Рно,
чтобы получить численные значения остальных показателей.
11.1.3. Контроль функциональных параметров
Расчет вероятностей ложного и необнаруженного отказа при контро-
ле функционального параметра. Пусть измерение z представляет со-
бой аддитивную смесь истинного значения параметра у и погрешнос-
ти измерений 8: z = у + 5.
Контролируемый параметр у описывается плотностью распреде-
ления Значения априорных вероятностей исправного и неисп-
равного состояний рассчитываются по формулам:
Л Ун
Д) = J fi(y)dy-, 1-Д) = J fi(y)<fy+ J fi(y)dy-
Ун — У»
Формулы для расчета вероятностей ложного и необнаруженного
отказов имеют следующий вид:
№ Ув~У « Ув-У
^н.о = J J f(y,8)d8dy+j J f(y,8)dbdy,
— Ун-У Ун Ун-У
где fly, 8) — совместная плотность вероятностей контролируемого
параметра у и погрешности измерений 8.
При независимых параметре и ошибке измерения совместная плот-
ность представляет собой произведение: f (у, 8) = Д (у)Д (8) и форму-
лы для Рл о и Рн о примут вид (рис. 11.1):
У Ув ~У
Л.0 = - J /1(У) J /2(5)^;
Ун Ун-У
(11.1)
^н.о = J /1 (у) J /2 (5) d&dy - j Д (/’f Д> (5) d8dy. (11 -2)
— J'h-J' Ун~У
590
а) б) в)
Рис. 11.1. Графики, поясняющие определение ошибок первого (а)
и второго (б, в) рода
В практике контроля систем ЛА наиболее часто принимается,
что параметр у распределен по нормальному закону или по сильно
усеченным законам, которые хорошо аппроксимируются равномер-
ным распределением. Погрешности измерительных приборов в боль-
шинстве случаев также распределены по нормальным законам, а по-
грешности измерений, определяемые делениями шкалы отсчета, —
по законам равной вероятности.
Рассмотрим три наиболее часто встречающихся случая возмож-
ных сочетаний законов распределения контролируемого параметра у
и ошибки измерения 8.
Первый случай. Контролируемый параметр и ошибка измерения
распределены по нормальному закону:
(у-ту)2
(11.3)
2oJ
(11.4)
где ту — математическое ожидание контролируемого параметра у;
оу — среднеквадратическое отклонение параметра у; о — среднеквад-
ратическое отклонение погрешности измерения 8.
Проведем замену переменных: 8/о = /; у - ту J <5у = z- В этом слу-
чае формулы (11.1) и (11.2) с учетом (11.3) и (11.4) принимают вид:
^л.о=Ф(*в)-Ф(*н) + Л; (11-5)
591
н.о
(11-6)
1»
Г ( J. ж
J exp -—at — интегральная функция стандартного
О V 2 >
где Ф(х) = -=
нормального распределения (функция Лапласа);
*н = (Унк*=Ув-тУ1<5у\ \ = o/oj,.
Для симметричного относительно математического ожидания до-
пуска к^ = -кд = к вероятности Рл 0 и Рн о определятся соотношени-
ями:
Рлл=2Ф(к)-Р1;
(И.7)
Рн.о=2ф(а/>/1+^)-7,2>
(118)
(Л ~ к)2
2
Ф(г)</г.
Как следует из анализа приведенных выражений для вероятнос-
тей ложного и необнаруженного отказов, значения этих вероятнос-
тей полностью определяются шириной допуска к, значением апри-
орной вероятности Rq, а также соотношением дисперсии погрешности
измерений и дисперсии контролируемого параметра. Значение веро-
ятности Rq определяется требованиями к качеству функционирова-
ния систем и не может быть изменено. Следовательно, обеспечение
приемлемых значений Рл о и Рн 0 может быть достигнуто путем подбо-
ра соответствующих средств измерений.
В случае, когда требования к точности оказываются нереализуе-
мыми, обеспечение показателей достоверности контроля достигает-
ся либо проведением дублирующих измерений, либо введением кон-
трольных допусков, отличных от эксплуатационных. При использовании
дублирующих измерений в качестве результата измерения контроли-
1 п
руемого параметра принимается его среднеарифметическое у = - У у,,
ni=\
592
имеющее в п раз меньшую дисперсию, чем дисперсия средства изме-
рения. Сужение контрольного допуска приводит к снижению веро-
ятности необнаруженного отказа и увеличению вероятности ложного
отказа, а его расширение — к увеличению Рн 0 и снижению Рл 0.
На рис. 11.2 приведены номограммы зависимостей вероятностей
Рл 0 и Рн 0 от величины относительной ошибки измерения £ для раз-
личных значений к, С помощью номограмм можно определить значе-
ния ошибок первого и второго родов, если известны статистические
характеристики контролируемого параметра и погрешности измере-
ния, а также задан допуск на контрольный параметр. Номограммы
позволяют решать и обратные задачи. Например, как обеспечить за-
данную величину вероятностей ошибок Рл 0 и Рн 0 при известном от-
носительном допуске к.
а) б)
Рис. 11.2. Зависимости Рл 0 (а) и Рн о (б) от £ для различных значений к
при нормальном распределении у и 5
Пример. Пусть контрольный допуск равен к = уъ-ту1<зу =2ау1<5у = 2 и
необходимо, чтобы в процессе контроля вероятность Рно не превысила
0,0031. Из номограммы следует, что эту задачу можно решить, подобрав
соответствующим образом допустимую величину £, что соответствует выбо-
ру аппаратуры контроля с соответствующими данному значению £ точност-
ными характеристиками. В данном случае относительная погрешность из-
мерения £ не должна превышать 0,08.
Второй случай. Контролируемый параметр у распределен по за-
кону равной вероятности, ошибка измерения 8 — по нормальному
закону:
fl _ _
—, ту-а < у < ту+а',
<2а у
0, у < ту - а, у >ту+ а;
(11.9)
593
Л (5) =
(11.10)
Выражения (11.1) и (11.2) с учетом (11.9) и (11.10) примут вид:
(НН)
(11.12)
J = Лв - ^н- Здесь учте-
но, что а = -УЗоу.
Для симметричного допуска на контрольный параметр выраже-
ния (11.11) и (11.12) примут вид:
+
594
На рис. 11.3 приведены номограммы зависимости Рл 0 от величи-
ны относительной ошибки измерения £ для различных значений к
при равномерном распределении у и нормальном распределении 8.
Рис. 11.3. Зависимость Рл 0 от £ для различных к при равномерном распре-
делении у и нормальном распределении 8
Третий случай. Параметр у и погрешность измерения распреде-
лены по законам равной вероятности:
/1 (у) =
_1_
• 2о’
О,
к.
ту - а £ у $ ту + а,
у<гпу-а, у>ту+а,
Л(5) = W
y-b^8<y + b,
1
(11.13)
(11.14)
О, 6<у-Ь, 8>у + Ь.
Формулы для вычисления вероятностей ошибок Рл о и Рн о при
различных соотношениях и т|, где т| = уъ - ту]4?>ау = к/Л, приве-
дены в табл. 11.1. Вывод выражений осуществлялся при следующих
2
ограничениях: ту =0; - кн = к3 = к.
Здесь предполагается выполнение условий, связанных с характе-
ром распределения у и 8: а = -До; b = \П>су.
595
Таблица 11.1
Формулы для вычисления вероятностей Рп 0 и Рн 0
Соотношение £ и ц ^Л.О Аго
п > 1; £<г)-1 0 0
п>1; ^>т|-1 0
п<1; £>п-1 [2^-(1-п)](1-п)/Ч
п<1; £<п-1 V4 V4
На рис. 11.4 приведены номограммы зависимостей вероятностей
ложного Рл 0 и необнаруженного Рн о отказов от относительной ошибки
измерения | и относительного контрольного допуска т| на функцио-
нальный параметр, построенных по формулам табл. 11.1.
Четвертый случай. В рассмотренных случаях не учитывалась ста-
тистическая связь между контролируемым параметром у и погрешно-
стью измерений 8, характеризуемая коэффициентом корреляции г.
Для коррелированных параметров у и 5 совместная плотность вероят-
ностей определяется соотношением
и выражения (11.11) и (11.12) можно привести к следующему виду:
^л.о ~ Ф (^в ) - Ф (^н ) + >
На рис. 11.5 приведены номограммы зависимостей Рло =
= Рл>0 и Рн 0 = Рн 0 (£,£,г) для симметричного относительного
контрольного допуска:
596
a)
Рис. 11.4. Зависимости Рло (а) и Рн о (б) от £ для различных значений к
при равномерном распределении у и 5
где
597
а) б)
Рис. 11.5. Зависимости Рл 0 (а, б) и Рн о (в, г) от £ для различных
значений к и г при нормальном распределении у и 5
Оптимизация контрольных допусков при контроле функциональ-
ных параметров. Приведенные в предыдущем параграфе результаты
позволяют определить, какой должна быть точность измерений при
контроле, чтобы был обеспечен заданный уровень ошибок первого и
второго родов. Однако такая точность может оказаться практически
нереализуемой. Тогда возникает необходимость в поиске методов обес-
печения предъявляемых к процессу контроля требований. Одним из
возможных методов уменьшения вероятности принятия ошибочных
решений в результате контроля является введение так называемых
контрольных допусков, отличающихся от эксплуатационных. Систе-
ма будет считаться годной при контроле по одному параметру, если
результат измерения z удовлетворяет условию у* < г < , где у^ и
у* — соответственно нижняя и верхняя границы контрольного поля
допуска.
Если контролируемый параметр у и погрешность измерения 8
аддитивны, т.е. z = у + 8, то границы контрольного допуска выража-
ются через границы эксплуатационного допуска
598
Ун =Ун+е; Ув =Л-е,
где е — величина изменения контрольного допуска по отношению к
эксплуатационному; за положительное направление ее изменения
принимаем сужение контрольного допуска (рис. 11.6).
Рис. 11.6. Схема расположения допусков
Процедура принятия решений (параметр в поле или вне поля до-
пуска) представляет собой процесс получения оценки параметра и
сравнения ее с контрольным допуском. Выносится решение «пара-
метр в поле допуска», если оценка лежит внутри контрольного до-
пуска, и «параметр вне поле допуска», если его оценка находится
вне контрольного допуска. На основании этого принимается реше-
ние о годности и негодности контролируемого объекта.
Для расчета вероятностей ложного и необнаруженного отказов
(Рл 0 и Рн 0) с учетом изменения контрольного поля допуска на про-
веряемый параметр у можно воспользоваться следующими соот-
ношениями:
У. Ун-У+е
^л.о = ]/1(у) J fl (5)^5+ J /2(5)</6 dy,
Ун
Тн-Т-е
Ун Уъ-У-Ь * Ув-Д'-Е
’н.о=]/1(У) J /2(8)^+J/l(y) J fi^dbdy.
Ун-У+е У» Ун-У+е
(11.15)
(11.16)
Рассмотрим конкретный случай. Пусть случайные величины у и
5 статистически независимы и подчиняются нормальным законам рас-
пределения, т.е. их плотности вероятностей удовлетворяют соотно-
шениям (11.3) и (11.4). Тогда при симметричном эксплуатационном
допуске на контролируемый параметр формулы (11.15) и (11.16) при-
мут вид:
599
(П.17)
7л. о _ 2Ф(Л) Pj,
*н.о
(11.18)
где Р7 =
р = ув - е - myl(5y — отно-
сительный контрольный допуск на параметр у.
Если проверка параметра осуществляется по контрольному до-
пуску, совпадающему с эксплуатационным, т.е. р = к, то выраже-
ния (11.17) и (11.18) совпадут с (11.7) и (11.8).
Из номограмм, построенных для зависимостей вероятностей
ошибок Рло и Рно от величины контрольного допуска (рис. 11.7),
видно, что уменьшение контрольного допуска приводит к снижению
вероятности необнаруженного отказа РК 0, однако при этом возрас-
тает значение вероятности ложного отказа Рл 0. При расширении
контрольного допуска на проверяемый параметр происходит обрат-
ный процесс.
а) б)
Рис. 11.7. Зависимости Рл о (а) и Рн о (б) от р для различных к и Е, при
нормальном распределении у и 5
В связи с этим возникает задача поиска величины контрольного
допуска, которая соответствовала бы заданным значениям вероятно-
стей ошибок Рл 0, Рн 0, или определения контрольного допуска, оп-
600
тимального в смысле выбранного критерия. Таким критерием может
служить средний риск R, который является наиболее общей характе-
ристикой достоверности контроля и учитывает как ошибки в функ-
ционировании системы контроля, так и влияние этих ошибок на
эффективность проверяемой системы:
к = JJ п \Q (у), q (*)] f (у, x)dydx,
где П[С(у),^(х)] — функция, учитывающая потери, которые соот-
ветствуют каждой комбинации истинного состояния проверяемой сис-
темы и принятого в результате контроля решения; f (х, у) — совмест-
ная плотность распределения значений параметров у и х; Q(y) —
функция, характеризующая разбиение состояний контролируемого
объекта на классы, различимые при контроле; q(x) — функция ре-
шений, определяющая алгоритм принятия решения при обработке
получаемой информации; П — область определения величин у и х.
Средний риск учитывает потери, которые могут иметь место при всех
комбинациях ситуаций, связанных с состоянием контролируемой
системы и решениями контролирующей аппаратуры.
Конкретный вид R зависит от функции потерь, характер которой
удается определить на основе анализа определенной задачи, стоящей
перед аппаратурой контроля. Для получения R целесообразно пред-
ложить следующий подход.
На основе априорных данных о функции потерь величину средне-
го риска разлагаем на отдельные составляющие, которые определяют
риск с точностью до постоянных множителей, не зависящих от точ-
ности аппаратуры контроля. Для иллюстрации этого подхода рас-
смотрим простейшую модель, в рамках которой можно описать фун-
кцию потерь. Пусть в процессе выполнения поставленной задачи
контролируемая система проверяется по принципу «годен— негоден»
некоторого параметра у.
Функцию потерь можно представить в виде квадратной матрицы
П = {Пу}, в которой на пересечении строки с номером /, соответ-
ствующим состоянию контролируемого параметра, и столбца с но-
мером у, соответствующим принятому решению, находятся потери
Пу. Аналогично составляется матрица Р = совместных вероят-
ностей того, что имеют место состояние i параметра и принятое ре-
шение j:
601
Средний риск определяется как сумма произведений элементов с
одинаковыми индексами матриц П и Р:
- XX
i J
Таким образом, средний риск для случая, когда потери при пра-
вильных решениях считаются нулевыми, можно записать следующим
образом:
R ~ П1Л.0 *"
(1119)
Оптимальная величина изменения контрольного допуска е* на
проверяемый параметр определяется из условия минимизации сред-
него риска R.
Функция R = Л(е), удовлетворяющая соотношению (11.19), яв-
ляется непрерывной на интервале изменения е и дифференцируемой
во всех точках этого интервала. Поэтому расчет изменения контрольно-
го допуска е, при котором достигается минимум функции R, можно
осуществить из условия
dR/de = 0.
(11.20)
Запишем уравнение (11.20) с учетом (11.19):
^-(П1Рло+П2Рн.о) = 0
ае
и выразим ошибки первого Ря 0 и второго Рн 0 рода через соотноше-
ния (11.15) и (11.16). После дифференцирования функции R полу-
чим:
“П21/(№ " 6 *) + / (.Ун + 6* )] +
+(П1 + П2) //1(у)[/2 (ун -У + е*) + /2(Ув -у-е‘)]^ =0. (П-21)
Ун
оо
где J(5) = J fx (у) /2 (8 - y)dy.
—со
Можно показать, что при переходе через точку е* производная
функции R меняет свой знак на противоположный. Следовательно,
средний риск в точке е* имеет экстремум (минимум). Рассмотрим
602
три наиболее характерных варианта распределений случайных вели-
чин ошибки измерения и проверяемого параметра.
Первый случай. Контролируемый параметр и ошибка измерения
распределены по нормальному закону, т.е. плотности вероятностей
этих случайных величин удовлетворяют соотношениям (11.3) и (11.4).
Уравнение (11.21) в этом случае принимает вид:
ехр
Рн
П2 [
= ~—dexP
2(П1+П2)[
(11.22)
где рн = (ун + е* - ту )/су; рв = (ув -£* -ту )/су.
Пусть на контролируемый параметр назначается симметричный
эксплуатационный допуск, тогда уравнение (11.22) упрощается:
ф р(1 + ^2) + р*] + ф р(1 + ^2)-рН = П2 ,
[ ^/1 + £2 J j + Ъ2 J П!+П2’
(11.23)
где к* = -ка = к; рв = “Рн = Р* •
Если ошибки первого и второго родов одинаково опасны, то при-
нимается = П2 = 1, ив качестве критерия оптимальности можно
выбрать сумму вероятностей ошибок и потребовать ее минимума. Этот
критерий носит название критерия Котельникова, или критерия иде-
ального наблюдателя.
Для этого случая построены номограммы (рис. 11.8, а), из кото-
рых следует, что в большинстве случаев для обеспечения минимума
среднего риска контрольные допуски необходимо расширять относи-
тельно заданных эксплуатационных значений. Однако существуют
такие соотношения эксплуатационного допуска и уровня погрешно-
сти измерений, при которых минимум среднего риска можно дос-
603
р* £=3 2,5
а) б)
Рис. 11.8. Зависимости р* от £ для различных к при:
а — нормальном распределении у и 5; б — равномерном распределении у и
нормальном распределении 5
тичь лишь сужением контрольных допусков относительно эксплуа-
тационных. Например, при £=Зи£ = 0,3 для удовлетворения тре-
бованиям критерия Котельникова необходимо, чтобы р = 3,27. С
другой стороны, при к = 0,5 и £ = 1 контрольный допуск р* = 0,4363
(см. рис. 11.8,д).
Пример. Пусть на контролируемый параметр назначен симметричный
эксплуатационный допуск к" = ув -ту = 2ву. Ошибка измерения имеет
среднеквадратическое отклонение о = 0,6о^. Необходимо определить вели-
чину контрольного допуска р*. Вычислим относительные величины к и £:
к = к'/ау = 2х5у1<5у = 2£ = а/оу = 0,6оу/оу = 0,6.
Из номограммы на рис. 11.8,а определим, что для найденных значений
к и £ р* = 2,72 и, следовательно, относительное изменение контрольного
допуска v = к - р = -0,72. Знак минус означает, что допуск на контро-
лируемый параметр необходимо расширить.
Второй случай. Контролируемый параметр распределен по зако-
ну равной вероятности, ошибка измерения — по нормальной зако-
ну, т.е. выполняются соотношения (11.9) и (11.10).
При подстановке (11.9), (11.10) в уравнение (11.21) получаем
следующий результат:
П2
П| 4- П2
(11.24)
604
Для симметричного эксплуатационного поля допуска выражение
(11.24) имеет вид:
_П2
П1 +п2
(11.25)
Результаты расчетов, проведенных на ПЭВМ в соответствии с
соотношением (11.25), представлены на рис. 11.8,6, из которого вид-
но, что в рассматриваемом случае минимум среднего риска будет до-
стигаться только при суженных контрольных допусках.
Третий случай. Параметр и погрешность измерения распределе-
ны по законам равной вероятности (11.13) и (11.14).
Формулы для расчета вероятностей Рл 0, Рн о ложного и необна-
руженного отказов с учетом изменения контрольного допуска на па-
раметр сведены в табл. 11.2.
Таблица 11.2
Формулы для расчета вероятностей Рл 0 и Рно
Соотношение £ и е ^Л.О ?н.о
т) > 1; £ < п -1 0 0
т|2 1;^>т|-1 [Ч + Г-61-1)]2/(4О 0
т]<1; £>1-п + 2у)/4 [2$ - (1 - п) - 2у] (1 - ц)/(4О
ц<1; £<1-т| а + 2у)/4 а-2у)/4
Рассмотрим четыре варианта определения оптимальной величи-
ны у = е/д = е/(у/3ау), минимизирующей критерий Котельникова при
различных значениях т] и е (см. табл. 11.1):
1.Я = 0.
[^T-(n-i)]2. as fo+T-n-ij „
4Е, ’ Эу 4$
Таким образом, при т] > 1 и > т] -1 относительная величина
изменения контрольного допуска у* = т] -1 - £ или р* = (1 + lj)/v3.
(11.26)
605
Функция (11.26) не имеет экстремума по у, но так как R > 0, то
в качестве оптимального у* принимается значение, при котором сред-
ний риск достигает наименьшего значения R = 0 (рис. 11.9):
V ч-25 (I - п) - (1 - П)2
2(5+11-1)
R к
Y
Рис. 11.9. Зависимость R от у при равномерном распределении у я 8
для е<1, ^>1~т|
4. R = ^/2, т.е. величина среднего риска при р<1и^<1-т)не
зависит от у.
Приведем далее уравнение, полученное для расчета оптималь-
ной величины контрольного допуска и учитывающее корреляцион-
ную зависимость между у и 8, для нормальных плотностей вероятно-
стей /1 (у) и /2 (8). Пусть эксплуатационный допуск на параметр
является симметричным, тогда уравнение оптимальной величины кон-
трольного допуска будет иметь вид:
П2
п! +П2
(11.27)
При коэффициенте корреляции г= 0 уравнение (11.27) совпада-
ет с (11.23).
606
Исследуем уравнение (11.27) при ГЦ = Щ = 1. Обозначим его ле-
вую часть через F. Функция F = F (р) будет иметь максимум при р = 0.
В этом случае из (11.27) находим:
(11.28)
При определенных соотношениях к, £ и г уравнение (11.28) может
не иметь решения. Пользуясь таблицей значений функции Ф(х) =
2л
ехр<!—— (табл. П.З), решим его:
I ~
о I J
kjl + ^r + t,2/feVl - г2) = 0,6744,
откуда
, 0,6744>/1-г2
71Д2 + 2г/^ + 1
Таблица 11.3
Таблица значений Ф(х)
X Ф(х) X Ф(х) X Ф(х)
0 0,0000 1,1 0,3643 2,2 0,4861
0,1 0,0398 1,2 0,3849 2,3 0,4893
0,2 0,0798 1,3 0,4032 2,4 0,4918
0,3 0,1179 1,4 0,4192 2,5 0,4938
0,4 0,1554 1,5 0,4332 2,6 0,4953
0,5 0,1915 1,6 0,4452 2,7 0,4965
0,6 0,2257 1,7 0,4554 2,8 0,4974
0,7 0,2580 1,8 0,4641 2,9 0,4981
0,8 0,2881 1,9 0,4713 3 0,49865
0,9 0,3159 2 0,4772 4 0,499968
1 0,3413 2,1 0,4821 5 0,499997
Номограммы для р*, определенного уравнением (11.27), анало-
гичны номограммам рис. 11.8,д. Таким образом, и при учете корре-
ляционной зависимости между контролируемым параметром и по-
грешностью измерения существует некоторое граничное значение
607
эксплуатационного допуска к, выше которого необходимо осуществ-
лять только расширение контрольных допусков. Это граничное зна-
чение определяется из соотношения (11.29) и имеет вид
к > 0,6744л/1 — г2.
(11.30)
При значениях эксплуатационного допуска, определяемых нера-
венством (11.25), оптимальный контрольный допуск р* будет боль-
ше эксплуатационного допуска на параметр, т.е. допуск необходимо
только расширять. Если же
к < 0,6744V1 - г2,
то оптимальным будет или расширенный, или суженный контрольный
допуск в зависимости от величины а при
к ^(l - г2) (о, 455 - Л2) + nt
0,455(1 -г2)-Jt2
(11.31)
контрольный допуск будет равен нулю, т.е. при соотношениях и к,
определенных неравенством (11.31), погрешность аппаратуры конт-
роля становится слишком большой по отношению к заданной вели-
чине эксплуатационного допуска и вероятность принятия правильно-
го решения снижается до минимума.
11.1.4. Контроль сигнальных параметров и групповой контроль
Расчет вероятностей ложного и необнаруженного отказа при контро-
ле сигнальных параметров. В случае контроля сигнальных парамет-
ров погрешности измерения отсутствуют. Принимается, что исправ-
ная система контроля безошибочно определяет изменение сигнального
параметра. При таком допущении вероятности возможных состоя-
ний после проведения контроля описываются формулами:
Д = Л)Л:.к> = Д)0 ~ Дг.к)>
А’О-Лра-Л.к); Р4=(1-Л))Л:.к>
где Rc к — вероятность исправного состояния системы контроля. Эта
вероятность рассчитывается исходя из принципа действия и структу-
ры системы контроля.
Расчет вероятностей ложного и необнаруженного отказов при груп-
повом контроле параметров. Выведем выражения вероятностей лож-
608
ного и необнаруженного отказов в случае допускового контроля двух
параметров, а затем методом математической индукции распростра-
ним полученный результат на произвольное число параметров.
При групповом контроле проверяемые параметры стараются вы-
бирать некоррелированными, что существенно упрощает расчет по-
казателей достоверности. Система ЛА считается исправной, если оба
контролируемых параметра находятся в пределах поля допуска. Та-
ким образом, решение «годен» принимается, если по обоим пара-
метрам выдается решение «годен». При контроле двух параметров
число возможных состояний после проведения контроля возрастает.
Для большей наглядности возможные состояния двух параметров
и их вероятности при групповом контроле сведены в табл. 11.4.
Таблица 11.4
Возможные состояния двух параметров при нрупповом контроле
Результат контроля Параметр I Параметр II
в пределах допуска вне допуска в пределах допуска вне допуска
Годен 1 2 3 4
Негоден 5 6 7 8
Вероятности соответствующих состояний имеют вид:
1) (1-ccj);
2) Д = J
3) P3 = (i-Oi;
5) P5 =R2 (l-a2);
б) Д = ^2a2;
7) P7 =(l“/?2)₽2»
8)Л=(1-*2)(1-₽2).
Система контроля выдает решение «годен» при следующих ком-
бинациях результатов контроля по отдельным параметрам: 1-3, 2-3,
1-4, 2-4. Из них сочетание 1-3 соответствует правильному решению,
а сочетания 2-3, 1-4, 2-4 определяют необнаруженный отказ.
Система контроля выдает решение «негоден» при следующих ком-
бинациях результатов контроля по отдельным параметрам: 5-7, 5-8,
6-7, 6-8, 1-7, 1-8, 2-7, 2-8, 3-5, 3-6, 4-5, 4-6. Из них сочетания
6-8, 5-8, 6-7, 2-7, 2-8, 1-8, 3-6, 4-5, 4— 6 соответствуют правиль-
ному решению, а сочетания 5-7, 1-7, 3-5 определяют ложный отказ.
В результате проведенного анализа несложно с учетом независи-
мости контролируемых параметров рассчитать вероятности ложного и
необнаруженного отказов:
609
При подстановке соответствующих значений вероятностей по-
лучим:
Л.0 = Я2а2 + R[ (1 - ai) Л2а2 + Л2 (1 - а2) =
—/?|Л2^1 0 а1)0 аг)] —Л) П(Л» ^л.о/)’
1=1
^н.о =0_Л)Р1^2(1_а2) + Л0“а1)О_^2)₽2 +0-^1)Р1(1-^2)Р2 “
=П(Л-Л.о
/=1
Н.О /
2
где Rq — ^Я2, Л.0 i ~ Rj&j'
Применяя изложенную методологию вывода для трех, четырех и
т. д. параметров, получим расчетные формулы для общего случая
контроля параметров:
л.о
т
= Д) “П ( Д “ Део i )»
i=l
ДеО
т
= П ( Д “ Део i
1=1
+ Део
т
i) “ П (Д ” Део / )•
/=1
На практике часто случается, что ряд параметров не контролиру-
ется. Для неконтролируемых параметров вероятность ложного отказа
равна нулю, а вероятность необнаруженного отказа — (1 -Rj).
Учет полноты группового контроля достигается при записи фор-
мул ложного и необнаруженного отказов для всех параметров, опре-
деляющих качество функционирования системы ЛА, и подстановке
значений вероятностей неконтролируемых параметров.
Пример. Рассчитать вероятности ложного и необнаруженного отказов груп-
пового контроля т независимых параметров для следующих данных: парамет-
ры и погрешности измерений распределены по нормальному закону; допуск
симметричный: kni = kBj = 1; RQi= 0,8413; = g/g, =0,1; к = 10.
По номограммам определяем значения Рл 0/ и Рн 0/- отдельного пара-
метра: Рло/- =0,02; Рно/- =0,018. Затем рассчитываем искомые вероят-
ности:
610
Рл 0 = 0,841310 -(0,8413 -0,02 )10 =0,038;
Рно =(0,8413 - 0,2 + 0,018)10 -(0,8413 - 0,02)10 =0,0338.
Таким образом, значения вероятностей ложного и необнаруженного
отказов при групповом контроле выше, чем при контроле отдельного пара-
метра.
11.1.5. Оценка эффективности донускового контроля
При определении целесообразности контроля того или иного пара-
метра следует руководствоваться соотношением потерь при отсутствии
контроля и при его наличии. В первом случае потери определяются
при использовании неработоспособного объекта контроля и могут быть
приняты пропорциональными априорной ненадежности П2(1-Т$)).
Во втором случае потери определяются как при использовании нера-
ботоспособного оборудования, когда ошибочно принято решении «го-
ден» П2р(1-Т^), так и при наличии ошибочно забракованных объек-
тов контроля П|а/^.
Таким образом, эффект от контроля можно охарактеризовать
коэффициентом эффективности контроля:
э = п2(1-л>) = 1
П2Р(1 ~ Л)) + П1<х/5) о . П; Л) „
р П21-^
На рис. 11.10 приведены графики зависимости этой функции от
априорной надежности 7^ для различных значений П[/П2 , а и р.
Как следует из приведенных зависимостей, рекомендуется при-
нимать только такие условия контроля, которые соответствуют ха-
рактеристикам, поднимающим коэффициент эффективности выше
требуемого уровня Э_ = const. Кроме того, контроль целесообразен
не для любого априорного значения вероятности работоспособного
состояния объекта контроля, а только для конкретной области суще-
ствования 0 < Rq < Лотах > определяемой как требуемым коэффициен-
том эффективности, так и соотношением потерь Щ/Щ. Таким обра-
зом могут быть получены границы области реализации контроля для
различных значений Э, аир.
Приняв дополнительно, что применение изделий с низкой на-
дежностью не допускается, можно сузить пределы для априорной
вероятности 7^, т.е. Лишп < А) < Ahnax •
20*
611
a) 6} в)
Рис. 11.10. Зависимость коэффициента эффективности Э от вероятности
Rq безотказной работы объекта контроля при различных П1/П2 и а,р:
а — а = 0,015; Р = 0,9; б— а = 0,01; Р = 0,05; в— а = 0,001; Р = 0,005
Необходимым условием реализации контроля является неравен-
ство Э> 1, которое равносильно неравенству
П1 Л)
П2 1-Ло
откуда вытекает требование к рациональному соотношению ошибок
первого и второго рода:
П1 ЛЬ J-p
П21 “ Ло ос
Достаточным условием реализации контроля является обеспече-
ние требуемого коэффициента эффективности Э. Откуда следует об-
щее условие
П! ,1/Э-р
П2 1-Ло а
и полезные частные условия
В<1
П2 1-Л) Эа’ Р Э*
В случае, когда нет информации о соотношении потерь П1/П2,
они принимаются равными. Для частного случая одинаковых потерь
612
от ложного и необнаруженного отказов рационально выбрать а = 0.
В результате получаем рекомендации по выбору ошибок первого и
второго рода:
• необходимое условие: 7?о/(1 - Яц) < (1 - а)/а, откуда а < 1 - 7^;
• достаточное условие: а < (1 - Rq )/Э.
В практических приложениях не всегда удается обосновать поте-
ри от неправильных решений. В таком случае в качестве показателя
эффективности контроля широко используется апостериорная надеж-
ность объекта контроля:
ЯЬ(1-а)
ЛЬ(1-а) + р(1-Ло) t р 1-V
1-а Ло
Для достижения высокого значения этого показателя должно вы-
полняться условие
которое при выборе а = Р приводится к неравенству а « Rq.
На рис. 11.11 приведена графическая зависимость Ра2 = f(Ro)
при а = р = 1 - Rq (I).
Как следует из приведенной зависимости, уже при Rq > 0,5 обес-
печивается повышение апостериорной надежности по сравнению с
Рис. 11.11. Зависимость апостериорной надежности от априорной
613
априорной, т.е. контроль эффективен. При уменьшении ошибок
аир увеличивается крутизна кривых (II, III) и тем самым повыша-
ется эффективность контроля.
11.2. Методы выборочного контроля
В итоге операции контроля необходимо выяснить, соответствует ли
техническим требованиям изделие или оно дефектно. Будем рассмат-
ривать только случаи, когда изделия делятся на годные и дефектные
без ошибок. Если контрольная операция не разрушительная и сто-
имость ее невелика, то в этих случаях очень часто применяется сплош-
ной контроль (проверяются все изделия).
В тех случаях, когда общие расходы, связанные со сплошным
контролем, велики либо контроль носит разрушающий характер, при-
меняется выборочный контроль.
Наибольшее распространение в практике получили три метода
выборочного контроля продукции: однократной выборки; двукрат-
ной выборки; последовательного анализа. Каждый из этих методов
имеет свои преимущества и недостатки. Общим для них является то,
что испытаниям подвергаются не все изделия, а лишь некоторая слу-
чайная выборка из партии изделий. По результатам испытаний или в
ходе испытаний вырабатывается решение: о принятии партии изде-
лий, ее браковке или продолжении испытаний.
Использование методов выборочного контроля связано с введе-
нием понятий «риска ложной браковки партий», состоящих из удов-
летворяющих предъявляемым требованиям изделий, и «риска лож-
ной приемки партий», содержащих не удовлетворяющие требованиям
изделия. В случае формирования случайных выборок можно при об-
щем небольшом количестве дефектных изделий в партии отобрать на
проверку значительное число дефектных, что приведет к ложному
решению о браковке хорошей партии (ошибка первого рода, или риск
поставщика а). Возможна и другая картина: партия содержит боль-
шое число дефектных изделий, но в выборку попадает их мало. В
этом случае будет принята плохая партия (ошибка второго рода, или
риск заказчика р). Такого рода ошибочные решения при выборочном
контроле неизбежны. Задача состоит в такой организации выбороч-
ного контроля, чтобы ошибочные решения принимались весьма ред-
ко. Для этого необходимо определять и задавать параметры принято-
го метода контроля.
Одной из наиболее важных вероятностных характеристик выбо-
рочного контроля является так называемая оперативная характерис-
614
тика, под которой понимают функцию n(q), равную вероятности
принятия партии, содержащей долю дефектных изделий q = D/N, где
D — число дефектных изделий; N — число изделий в партии. При
этом предполагается, что каждый метод выборочного контроля реа-
лизуется с системой правил, определяющих план контроля, а под
дефектными понимаются такие изделия, для которых уровень надеж-
ности ниже требуемого.
На рис. 11.12,а представлены общие виды идеальной и реальной
оперативных характеристик выборочного контроля партии изделий.
Качество партии измеряют долей засоренности ее дефектными изде-
лиями q. Использовав понятие оперативной характеристики, мож-
но задать различные численные показатели метода выборочного конт-
роля.
Рис. 11.12. Оперативная характеристика контроля:
1 — идеальная; 2 — реальная
В соответствии с требованиями по надежности, выполнение ко-
торых подтверждено конструкторскими и приемочными испытания-
ми, может быть установлен такой уровень содержания дефектных из-
делий q^, что партии с числом дефектных изделий q<qKp считаются
удовлетворяющими требованиям по надежности и их следует прини-
мать. В случае, когда q > q^~, партия изделий считается не удовлет-
воряющей требованиям и подлежит браковке. В этих условиях было
бы желательно использовать метод с оперативной характеристикой,
обладающей идеальными свойствами (см. рис. 11.12). Идеальная опе-
ративная характеристика равна единице при всех q < q^ и равна
нулю для всех q > q^. Однако таких методов для контроля надежно-
сти не существует. Они могут быть созданы только после разработки
принципиально новых методов индивидуального измерения надеж-
615
ности образцов с достаточно высокой степенью точности без расхо-
дования ресурса испытываемых образцов.
В реальных условиях не представляется возможным однозначно
делить партии на удовлетворяющие и не удовлетворяющие требова-
ниям по надежности. Практически всегда возникает зона неопреде-
ленности, когда невозможно сделать конкретные заключения отно-
сительно приемлемости уровня надежности изделий в данной партии.
В таких условиях изделия в партии считаются заведомо удовлетворя-
ющими требованиям по надежности, если q < q\, и заведомо плохи-
ми, если q > q\. При этом > 01-
Поскольку оперативная характеристика при выборочном контро-
ле является монотонно убывающей функцией и неизбежны ошибоч-
ные решения при контроле надежности, желательно, чтобы оши-
бочные решения принимались как можно реже. Для этого необходимо,
чтобы вероятности этих решений были невелики. По определению
вероятность принятия партии, содержащей q^ дефектных изделий,
равна л(^1). Тогда вероятность непринятия партии изделий с данным
равная 1-л($1), есть величина риска поставщика а. От плана
контроля требуется, чтобы л(^) > 1 - а при q < q\.
Вероятность принятия партии изделий, содержащей число де-
фектных изделий q'Z.qi, не больше л^). Вероятность л(^) = ₽ назы-
вается риском заказчика. От плана требуется, чтобы л(^)^Р при
9^91-
Риск поставщика а и риск заказчика Р являются основными па-
раметрами планов контроля, характеризующими качественный со-
став партий поступающих в эксплуатацию изделий.
11.2.1. Контроль методом однократной выборки
Метод однократной выборки заключается в следующем. Из партии
объемом N отбираются случайным образом для испытаний п(п< N )
изделий. Если число обнаруженных дефектных изделий среди п ис-
пытанных равно d (л) < г, где г — целое число, называемое приемоч-
ным, то партия принимается. Если же d (п) > г, то партия бракуется.
Следовательно, планы типа однократной выборки характеризуются
двумя параметрами — объемом выборки п и приемочным числом г.
По результатам контроля надежности может приниматься одно
из следующих трех решений:
1) принять оставшуюся часть партии без дальнейшего контроля;
2) отвергнуть оставшуюся непроверенной часть партии без конт-
роля;
616
3) провести сплошной контроль оставшейся части партии, раз-
делив таким образом изделия на годные и дефектные, и принять год-
ные.
Предположим, что выборочный контроль производится на боль-
ших партиях изделий, так что распределение отказов в выборочной
партии хорошо аппроксимируется биномиальным распределением.
На практике такое допущение оправдано при объеме выборки п > О, IN.
Если обозначить через q долю дефектных изделий в партии, то опера-
тивная характеристика плана контроля, основанного на однократной
выборке л(^), определится по формуле
(11.32)
1=0
где г — максимально допустимое число дефектных изделий в выбор-
ке, при появлении которого партия еще принимается (приемочное
число); q — доля дефектных изделий в партии; С‘п — число сочетаний
из п по i.
Соотношение (11.32), строго говоря, справедливо в предполо-
жении, что партии изделий бесконечно велики. Однако теория бес-
конечно больших партий довольно хорошо применима и к сравни-
тельно малым партиям. Но для числа дефектов х в выборке размером
п из партии, содержащей N изделий, из которых D дефектных изделий,
более точным является не биномиальное, а гипергеометрическое рас-
пределение. Вероятность получить х дефектных изделий в выборке
объемом п в этом случае определяется из следующих соображений.
Поскольку число дефектных изделий в партии равно D, то х де-
фектных изделий могут быть выбраны Ср способами. Оставшиеся в
выборке (п - х ) изделий являются годными и могут быть выбраны из
общей совокупности (N -D) способами, число которых равно .
Следовательно, выборка может быть сформирована в составе х де-
фектных и (п - х ) годных изделий СрС^Л) способами. Независимо
от числа х дефектных изделий выборка объемом п из партии в N эле-
ментов может быть сформирована Сц способами. Полагая, что при
формировании выборки элементы отбираются случайным образом,
что обеспечивает равную вероятность любого состава выборки из
возможных, вероятность получить х дефектных изделий в выборке
размером п можно определить по формуле
Р(х) = CxDCnN-*D/CnN.
(11.33)
617
Если по-прежнему обозначить q = D/N и учесть, что Л = Nq, то
оперативная характеристика при выборочном контроле малых партий
изделий определится формулой
«(«) = i CJCJ-.j/Cy- (1134)
х=0
Вообще говоря, учет конечных размеров партий (точная теория)
приводит к несколько меньшему риску заказчика в сравнении с тем,
который был определен на основании биномиального распределе-
ния. Это объясняется тем, что оперативные характеристики планов
выборочного контроля, основанные на гипергеометрическом распре-
делении, имеют большую крутизну в средней части, чем основан-
ные на биномиальном распределении. Это показано на рис. 11.13.
Рис. 11.13. Сравнение оперативных характеристик:
-------------биномиальное распределение;
о о о — гипергеометрическое распределение
Следовательно, риски заказчика и изготовителя при использовании
гипергеометрического распределения несколько меньше, чем соот-
ветствующие риски, определяемые с помощью приближенной тео-
рии.
Следует отметить, что оперативная характеристика для гипергео-
метрического распределения в действительности определена на мно-
жестве дискретных точек с абсциссами 0; l/N', 2/N',...\ (N - 1.
Это значит, что точное определение величины ?2> соответствующей
риску заказчика Р, по уравнению л(<?2) = Р невозможно. Как прави-
ло, в этих случаях используют соответствующие интерполяционные
формулы. Обычно считается, что точную теорию следует привлекать
тогда, когда размер выборки не превышает 10—25% партии. Однако
618
эти рекомендации также зависят от требований к точности оператив-
ной характеристики.
Учитывая, что виды контроля, основанные на однократной вы-
борке, характеризуются только двумя параметрами — объемом вы-
борки п и приемочным числом г — и оба эти параметра связаны
единой функциональной зависимостью вида (11.32), на оперативной
характеристике может быть указана только одна независимая точка,
по которой может производиться контроль надежности. В качестве
этой точки может быть выбрано значение числа дефектных изделий
в партии или значение этой же величины, равное q2 (см. рис. 11.12).
В первом случае планы выборочного контроля основываются на за-
данном риске изготовителя а, во втором случае — на заданном риске
потребителя р.
Большинство лиц, не занимающихся статистикой, интерпрети-
руют qj как приемочный уровень качества и полагают, что если они
установили, например, = 0,01, то в результате контроля получают
продукцию, в которой относительное число дефектных изделий близко
к 0,01. В действительности, например при п = 5 и г = 0, вероят-
ность приемки партии с числом дефектных изделий q = 0,01 равна
0,95. При q = 0,05 вероятность приемки партии равна 0,75. Следова-
тельно, контроль методом однократной выборки, основанный на за-
дании риска изготовителя а, не является приемлемым, так как не
гарантирует от поступления в эксплуатацию партий с большим чис-
лом дефектных изделий.
При реализации планов с заданным уровнем Р интересы заказчи-
ка обеспечиваются очень просто. Можно ввести величину q2 такую,
при которой партия с числом дефектных изделий q S q2 почти навер-
няка будет забракована (мала вероятность Р). Устанавливая величину
q2, заказчик имеет возможность избавиться от продукции неприем-
лемого качества.
Большинство видов контроля при методе однократной выборки
основано на установлении величины q2. В этом случае основное со-
отношение между величинами q2 и р определяется через вероятность
приемки партии n(q) и имеет вид л(?2) = Р- Далее, так как n(q)
является монотонно убывающей функцией величины q, то для партий
с качеством q2 ниже качества q2 (q2 > q2) имеет место соотношение
7с(^з)<р. Графическое изображение метода однократной выборки
представлено на рис. 11.14. В планах метода однократной выборки
величина q2 устанавливается таким образом, чтобы качество прини-
маемой продукции с большой вероятностью было выше q2.
Из изложенного выше следует, что между величинами ql и q2
существует определенная взаимосвязь, если фиксированы размеры
619
го+1
Зона браковки
Зона приемки
ЛЬ"1 «Ь Ло+1 п
Рис. 11.14. Графическое изображение
метода однократной выборки
выборки п и приемочное число г. Эта взаимосвязь устанавливается
на основе расчетов по приведенным выше оперативным характерис-
тикам при одних и тех же значениях рисков а и р, а также одинако-
вых значениях N, п, г.
11.2.2. Контроль методом двукратной выборки
Метод двукратной выборки заключается в следующем. Из партии
объемом N случайным образом отбирается Л| элементов (первая вы-
борка). Если число обнаруживаемых дефектных изделий d (пу) < q,
то партия принимается, а если d(nO>ri, то партия бракуется, при
этом г2 > q. Если же q < d(n^) £ г2, то производится вторая выборка
П2- Если общее число обнаруженных в двух выборках дефектных из-
делий + лг) £ гз, то партия принимается, а если d(n[ + лг) > гз,
то партия бракуется. Графическое изображение метода двукратной
выборки показано на рис. 11.15.
Браковка
г2+1
Продолжение
испытаний
Приемка
Рис. 11.15. Графическое изображение
метода двухкратной выборки
620
Планы контроля называются усеченными, если г2 = гу Найдем
уравнение для оперативной характеристики усеченного плана. Для
этого отметим, что в соответствии с изложенным выше партия изде-
лий может быть принята, если наступит одно из двух несовместных
событий или а2. Событие ах состоит в том, что для первой выбор-
ки выполнится условие d . Событие а2 заключается в том, что
для двух последовательных выборок одновременно выполняются ус-
ловия d (л1 + П1) < /j и d(nx) > . Это значит, что вероятность прием-
ки партии по данным выборочных испытаний при доле дефектных
изделий, равной q, определится по формуле
А9) = Ра\+Ра2, (П-35)
где — вероятность события Рв2 — вероятность события а2.
Первое слагаемое в правой части формулы (11.35), определяю-
щее вероятность приемки партии по данным однократного выбороч-
ного контроля, является оперативной характеристикой планов конт-
роля по однократным выборкам. Следовательно, вероятность Рв1
будет оперативной характеристикой планов однократной выборки.
Второе слагаемое в правой части формулы (11.35), являющееся
вероятностью приемки партии по второй выборке, требует специаль-
ного рассмотрения. Обозначим вероятность появления d(nx) отказов
в первой выборке объемом Л| через Р(d^), а вероятность появления
df/i}) отказов во второй выборке через P(J2).
Вероятность Pai = P(dl). Вероятность Ра2 определяется для тех
d(wj), для которых выполняется условие </(«j) > Гр При любом
удовлетворяющем этому условию, партия изделий при второй вы-
борке будет принята, если d(ri[ +/%) = d(щ) + d(ф) < Тогда при
фиксированном J(Wj) вероятность принятия партии изделий по ре-
зультатам повторной выборки, как и прежде, определится по фор-
муле
(11.36)
Границы суммирования в выражении (11.36) установлены из ус-
ловия + din^) < г2, определяющего возможность принятия
партии по результатам второй выборки. Тогда вероятность Раъ Учи-
тывающая допустимые значения d(n() в пределах r\+d{n\)^ri,
может быть рассчитана по формуле
621
rf(»l)=ri+l </(л2)=0
(11.37)
В тех случаях, когда гипергеометрическое распределение может
быть заменено биномиальным, уравнение для вычисления вероятно-
сти Ра2 упрощается и принимает вид
У У £'“(Л1)£'“(П2)^</(Л1)+^(Л2)0 _^у,1+л2~^(л1)+^(л2) (Ц38)
Графическая оперативная характеристика плана выборочного кон-
троля, рассчитанная по формуле (11.35), представлена на рис. 11.16.
Форма кривой, определяющая изменение вероятности Ра2> является
весьма типичной для методов двукратного выборочного контроля.
я(?)А
Рис. 11.16. Оперативные характеристики
плана выборочного контроля
Из графиков на рис. 11.12 и 11.16 следует, что вторая выборка
будет решающей при выявлении партий изделий с q, незначительно
меньшим ^2- Партия изделий с высоким уровнем надежности будет
принята по результатам испытаний первой выборки, а изделия с низ-
кой надежностью будут почти наверняка забракованы по результатам
проверки первой выборки.
Аналогичным образом можно рассмотреть свойства контроля ме-
тодом многократных выборок. При этом будут соответственно до-
622
бавляться новые члены в уравнение (11.35) и увеличиваться число
компонентов оперативной характеристики. При многократном выбо-
рочном контроле используется, как и раньше, уравнение = ₽•
11.2.3. Контроль надежности
методом последовательного анализа
Под последовательным выборочным контролем иногда понимается
многократный контроль на основе планов, описанных выше. Но,
как правило, это название приписывается методам контроля, осно-
ванным на разработанной Вальдом [16] теории последовательного ана-
лиза. В данном случае размер выборки — случайная величина, а для
установления процедуры контроля необходимо задать в технических
условиях приемлемый и относительно неприемлемый уровни надеж-
ности и gj) с соответствующими им рисками (риски изготовителя
а и заказчика Р).
В обычном методе последовательного анализа для принятия ре-
шения о партии, предъявляемой к приемке, изделия отбираются и
испытываются последовательно одно за другим. Если после испыта-
ния определенного количества изделий суммарное число отказавших
изделий не превышает некоторого приемочного числа q, которое
зависит от числа испытываемых изделий, партия принимается. Если
же приемочное число превышено, то либо проверка продолжается
далее, либо партия бракуется, если суммарное число отказавших из-
делий превышает некоторое браковочное число г2.
С ростом количества испытываемых изделий приемочные и бра-
ковочные числа увеличиваются таким образом, чтобы вероятность
браковки партии с относительной долей дефектных изделий q± оста-
валась близкой к некоторой заранее выбранной величине риска изго-
товителя а. Увеличение приемочных и браковочных чисел должно
обеспечивать, кроме того, величину вероятности приемки партии с
долей дефектных изделий #2, независимой от объема испытаний и
близкой к заданному значению риска заказчика (3.
При контроле надежности продукции методом последовательно-
го анализа задаются четыре параметра: q2, а и р. В основе лю-
бого последовательного выборочного контроля, базирующегося на
методе последовательного анализа, лежит расчет вероятностей при-
емки и браковки партии изделий при заданных параметрах ql9 q2, а
и р и наблюдавшемся числе отказов при объеме выборки п.
Если при объеме выборки п число отказов оказалось равным при-
емочному числу изделий то вероятность, соответствующая доле
дефектных изделий qv равна С„[q[[(1 -q\)n~r{ . Партия будет приня-
623
та, если эта вероятность при любом значении п не будет превышать
величину 1 - а, т.е. когда будет выполняться неравенство
С?^(1-?1)Л’Г1 <1-0.
(11.39)
Приемочное число отказов q в свою очередь связано с парамет-
рами <?2 и р неравенством
ОД (l-®)'”'1 Р-
(11.40)
Так как в неравенствах (11.39) и (11.40) неизвестной является
одна и та же величина г1( то для ее определения целесообразно ввес-
ти отношения правдоподобия вида
(11.41)
Если неравенство (11.41) выполняется, то партия принимается.
Переходя в выражении (11.41) к равенству и логарифмируя, получа-
ем линейное уравнение, связывающее приемочное число q и объем
выборки п, в виде
г 1п[р/(1-а)] , я1п[(1-?1)/(1-?2)] (1142)
1 ln{[?2 (1 -91)]/[?! (1-02)]} 1п{[92 (1-?1)]/[?1
Производить вычисление этого выражения после испытания каж-
дого образца нет необходимости, так как на его основе до проведе-
ния испытаний по известным параметрам плана контроля легко оп-
ределить допустимые значения q в зависимости от п. Графически
соотношение (11.42) задает линию приемки партии изделий.
Если при объеме выборки п установлено, что число отказов рав-
но браковочному числу изделий г2, то вероятность, соответствующая
доле дефектных изделий <?2, равна Cfiq^ (1 - ?2)Л-Г2 • Величины q2 и г2
будут соответствовать заданным условиям браковки партии при дан-
ном п, если выполняется условие
C^(l-q2)n~r2 ^1-P. (11.43)
Аналогично по отношению к q^ имеем
ОДа-01)""1
(11.44)
624
что позволяет получить условие
(11.45)
Если условие (11.45) выполняется, то партия бракуется. Пере-
ходя в выражении (11.45) к равенству и логарифмируя, получаем
линейное уравнение, связывающее браковочное число г2 с объемом
выборки п, в виде
ln[(l-p)/ct] t nln[(l-ft)/(l-ft)]
1п{[?2(1 - ft)]/[ft(1 - ft)]} In {[ft(l - ft )]/[ft (1 - ft)]}’
Соотношения (11.41) и (11.42) дают граничные условия приемки
и браковки, представляющие собой линейную зависимость чисел q
и г2 от объема выборки п. Таким образом, при контроле надежно-
сти можно пользоваться простым графиком, показанным на рис.
11.17, на котором вероятность приемки партии с q = 0,04 равна 0,95
(а = 0,05), а вероятность браковки партии с ft < 0,1 равна 0,9 (Р =
= 0,1). При этом плане контроля потребитель имеет 90%-ную гаран-
тию в том, что ft не превышает 0,1, т.е. надежность принимаемых
изделий с вероятностью 0,9 не ниже 0,9.
Рис. 11.17. Типовой график метода последовательного анализа
Планы контроля качества и надежности серийно изготавливае-
мой продукции, основанные на методах последовательного анализа,
находят широкое применение в практике.
625
Контрольные вопросы
1. Какие из показателей достоверности допускового контроля являются
основными?
2. Чем вызвана большая номенклатура показателей достоверности до-
пускового контроля?
3. В чем состоит различие контроля функциональных и сигнальных
параметров?
4. Почему контрольные допуски отличаются от эксплуатационных?
5. Увеличиваются или уменьшаются ошибки при групповом контроле
параметров?
6. Как можно охарактеризовать эффективность допускового контроля?
7. В каких случаях применяются методы сплошного и выборочного
контроля?
8. Что такое оперативная характеристика?
9. Какие методы выборочного контроля вы знаете?
10. Что такое метод и план контроля?
11. Сравните преимущества и недостатки контроля методами однократ-
ной, двукратной выборки и последовательного анализа.
Глава 12
ФОРМИРОВАНИЕ РЕЗУЛЬТАТОВ
ПОВТОРНЫХ ИСПЫТАНИЙ
12.1. Сравнение результатов двух повторных испытаний
При проведении повторных испытаний однотипной продукции имеет
место проблема воспроизводимости, в связи с чем появляется необ-
ходимость расчета, нормирования и оценки расхождения результатов
таких испытаний [31]. При этом под воспроизводимостью результа-
тов понимают такое их свойство, когда каждый повторный результат
статистически незначимо отличается от предыдущего (термин «зна-
чимость» — по ГОСТ 15895-77). Одной из задач этой проблемы яв-
ляется выбор и стандартизация показателей воспроизводимости ре-
зультатов повторных испытаний.
В [42] обосновано предположение об индивидуальности распре-
делений результатов повторных испытаний. Действительно, так как
в зависимости от вида повторных испытаний, т.е. от того, где и в
каких условиях они проводятся (в одной и той же лаборатории, в
одинаковых условиях, одними и теми же методами, средствами и
испытателями или в различных лабораториях, в различных условиях,
различными средствами и методами), результаты этих повторных ис-
пытаний могут иметь различное распределение или при одинаковых
видах распределения — существенно различные параметры. А это
означает статистическую неоднородность получаемых при испытани-
ях результатов [84]. Поэтому оценка воспроизводимости должна сво-
диться к известной в статистике задаче проверки гипотезы о тожде-
ственности законов распределений — гипотезы однородности
результатов, а показатели воспроизводимости целесообразно искать
среди мер близости законов распределений этих результатов (так на-
зываемых критериев однородности) [41].
Рассмотрим этот вопрос на основе анализа применяемых на прак-
тике параметрических и непараметрических критериев однородности.
Параметрические критерии требуют большего количества апри-
орной информации, в частности необходимо знать вид сравниваемых
законов распределения. Задача проверки гипотезы однородности сво-
дится к задаче проверки равенства параметров этих распределений.
Для нормального распределения все применяемые критерии можно
свести к четырем случаям (табл. 12.1). Первые три из них относятся
627
Критерии проверки однородностей двух нормальных распределений
Таблица 12.1
№ Гипотеза Априорная информация Статистика Решающее правило Возможные показатели воспроизводимости
I Сравнение математи- ческих ожиданий of И 02 известны l*i ~ *zl rri |*1 - x2|. — ±1; a ^1 = / n\ + / ^2
II 2 _„2 °! неизвестны Syjl/щ + l/nj 5 (nj-ps}+(„2-1)31 Л1 + Л2 - 2 l*i ~ *z| л sji/ni+i/ъ l~^2 l*i - *г|. £i ; a ^1 = h-a/2^^ / Л1 + 1 / ^2
III Oj *О^ неизвестны т2 11-а/2^п1^1 , ~ nt + «2 1*1 - *11 * ^l-a/l l*i" *г|. I. 2i. a Ai = ^1-0/2
IV Сравнение дисперсий И 4$2 известны еч^ гчеч sl/s2 <, Fl_a(n{,n1) 0 <Ne4 Д II
к проверке гипотезы о равенстве математических ожиданий. В пер-
вом случае предполагается, что дисперсии Oj и о? исходных сово-
купностей сравниваемых выборок объемом и л2 известны, во вто-
ром — дисперсии равны, но не известны, в третьем — дисперсии не
равны и не известны. Четвертый случай предусматривает сравнение
дисперсий.
Для каждого случая в табл. 12.1 приведены рабочие формулы для
определения статистики критерия и решающих правил, где: jq и х2 —
выборочные средние повторных испытаний; S? и S2 — выборочные
дисперсии; М{ и М2 — сравниваемые математические ожидания; Uy, t
и F — квантили стандартных распределений нормального, Стьюден-
та и F- распределения Фишера при доверительной вероятности у [41,
74].
Поскольку все приведенные выше статистики I—III основаны на
сравнении выборочных средних, имеющих в силу центральной пре-
дельной теоремы асимптотически нормальное распределение для лю-
бого распределения исходных генеральных совокупностей, то эти ста-
тистики оказываются мало чувствительными к отклонениям от
нормальности. Поэтому они могут применяться для оценки воспро-
изводимости на уровне средних для широкого класса одномодальных
распределений.
В отличие от указанных выше статистик статистика для сравне-
ния дисперсий (IV) чувствительна к отклонениям от нормальности.
Однако и она имеет асимптотически нормальное распределение, хотя
и отличное от того, которое имеет место при нормальном распреде-
лении.
В том случае, когда распределение исходной совокупности изве-
стно, представляется возможным использование приведенной статис-
тики при измененном числе степеней свободы п{ н n2< равных [38]
1щ-3<т7
где ц4 — четвертый момент распределения. Для п2 формула анало-
гична.
Анализируя рассмотренные выше статистики, нетрудно заметить,
что в качестве показателей воспроизводимости целесообразно исполь-
зовать:
• нормированный модуль разности выборочных средних:
Лх = |х, -x2|^i
(12.1)
629
• нормированное отношение выборочных дисперсий
s'=Sl(slK2y', (12.2)
и (или) уровень значимости а, где Kt и К2 — коэффициенты (см.
табл. 12.1).
Первые два показателя (Дх и з*) имеют ясный физический смысл
и не требуют пояснений. Возможность применения третьего показа-
теля для оценки воспроизводимости объясняется следующим.
Уменьшая уровень а в решающих правилах (см. табл. 12.1), все-
гда можно добиться принятия гипотезы однородности, причем боль-
шим расхождениям между X] и х2 или S? и S2 (плохая воспроизво-
димость) будут соответствовать малые уровни значимости. При этом
минимальная величина уровня значимости, при котором для опреде-
ленных значений xb х2, gf, S2 будет выполняться условие однород-
ности, может быть принята в качестве критического значения пока-
зателя воспроизводимости. Соответствующие этому значению
расхождения результатов испытаний называют критическими. В этом
случае с вероятностью а результаты испытаний относятся к одному
закону распределения.
Непараметрические критерии (расстояния, перестановок, ранго-
вые) не требуют знания законов распределения исходных совокупно-
стей, однако они более трудоемки в вычислениях и индивидуальны
по отношению к различным видам неоднородности. Кроме того, они
требуют таблиц специальных распределений, которые имеются лишь
в узкоспециальных изданиях и для практических целей недостаточно
полны. Поэтому из всего многообразия непараметрических критери-
ев рассмотрим лишь те, статистики которых вычисляются достаточно
просто и (или) допускают нормальную аппроксимацию. Основные
характеристики этих критериев сведены в табл. 12.2, где mjn — ча-
стота попадания исследуемой величины в интервальный вариаци-
онный ряд; pi — теоретическое значение вероятности попадания слу-
чайной величины в этот интервал; г — число интервалов (г > 8); п —
объем выборки.
Критерии расстояния (Смирнова, х2) используют в качестве ра-
бочих статистик различные меры расстояния между сравниваемыми
функциями распределения и при достаточном объеме выборки
(л > 50) позволяют обнаружить практически любое отличие между
ними [77]. Критерий Смирнова основан на сравнении функций рас-
пределения Fln[ (%[), F2 (х2 ) двух выборок {х„ }, {х2/} объемом п{ и л2
соответственно. При этом большой объем вычислений при исполь-
630
Непараметрические критерии однородности
Таблица 12.2
Группа критериев Вид критерия Статистика критерия Решающее правило
Критерии расстояния Колмогорова- Смирнова = SUP *1=*2 * А-а = ы ~ £ Л + "2 JJ
К) II 1М'1 / \ / -^-А Pi 1 । еч—< X VI гч
Критерии перестановок Знаков Число знаков т п 1 т~2 + 2 । । |гч । । ^^l-a/2
Серий Число серий г - 2я1”2 . 1 2 2 Г2я1”2 К] <и п уп 1 а/2
Инверсий Число инверсий А 2 2 1 1 К>| Н- NJ 1 1 -1 А-а/2
Инверсий упрощенный Число инверсий А* 1 ю| а 1 1 рл-1
Ранговые критерии Сиджела—Тьюки Сумма рангов меньшей выборки 1?! А - 0» 5«[ («J + ^2 + 1 {«[MA + «2 + 1)’ ) + 0,5| 1/12 - ^1-а/2
Манна—Уитни Сумма рангов для одной из выборок А - 0,5л[(Л1 + ^2 + + «2 + 1) нМ:„ 1/12 0/2
Уилкинсона (л1=л2) То же 7 - 0,5л1(л1 + + 1 4- П2 + п2) ) + 0,5| ]1/12 -£/|-а/2
зовании данного критерия связан с необходимостью построения ва-
риационных рядов и пропорционален квадрату объема выборки. При
п2 -> °° критерий Смирнова трансформируется в критерий Колмого-
рова, требующий знания так называемого эталонного распределения
[77]. Критерий X также требует знания эталонного распределения,
однако он не нуждается в построении упорядоченных вариационных
рядов, поэтому более экономичен в вычислительном отношении.
Кроме того, квантиль X2 -распределения допускает нормальную апп-
роксимацию [77] и позволяет проверить гипотезу однородности, ког-
да эталонное распределение известно с точностью до к параметров,
оцениваемых по той же выборке. В этом случае число степеней сво-
боды выбирается равным г - к -1, а неизвестные параметры оценива-
ются методом «минимум X2 ».
Критерии перестановок (знаков, серий, инверсий) используют
тот факт, что при выполнении гипотезы однородности все переста-
новки упорядоченных значений смеси случайных величин из двух
выборок равновероятны. При применении этих критериев последо-
вательности сравниваемых результатов испытаний {xlz}, {*2/} °бъе-
диняют в одну последовательность {xz}.
Статистикой критерия знаков является число случаев, когда
xz > х0, где х0 — некоторая заданная величина (например, медиана).
Эта статистика при фиксированном объеме объединенной выборки п
имеет биномиальное распределение, а задача проверки гипотезы од-
нородности сводится к задаче проверки гипотезы о значении пара-
метра биномиального распределения р = 0,5. Статистикой критерия
серий является общее число серий г в объединенной упорядоченной в
порядке возрастания последовательности, т.е. число последователь-
ных данных из первой и второй выборок [94].
Статистикой критерия инверсий является общее число инверсий
А в объединенной неупорядоченной последовательности, т.е. число
случаев, когда последующий член статистического ряда меньше пре-
дыдущих членов этого ряда. Задача проверки гипотезы однородности
в этом случае так же, как и для критериев знаков, сводится к задаче
проверки гипотезы о параметре биномиального распределения р = 0,5
[37]. При необходимости сокращения вычислительных затрат исполь-
зуется также упрощенный критерий инверсий, когда последователь-
ный член ряда сравнивается не со всеми предыдущими членами, а
только с соседним [37].
Ранговые критерии (Сиджела-Тьюки, Манна-Уитни, Уилкинсо-
на) применяются в тех случаях, когда удобно использовать не сами
результаты испытаний, а их ранги при расположении данных в опре-
632
деленном порядке. При применении этих критериев последователь-
ности сравниваемых данных {xj}, {л^} объединяют в одну упорядо-
ченную в порядке возрастания последовательность. Статистикой кри-
терия Сиджела-Тьюки является сумма рангов для выборки меньшего
объема 7?], причем ранг 1 приписывается наименьшему значению,
ранг 2 — наибольшему, ранг 3 — предыдущему наибольшему и т.д.
Статистикой критерия Манна-Уитни является сумма рангов для од-
ной из сравниваемых выборок при расположении объединенной пос-
ледовательности в порядке возрастания [93]. Критерий Уилкинсона
является частным случаем критерия Манна-Уитни при ni = [93].
Критерии знаков, инверсий и Манна-Уитни позволяют обнару-
жить монотонные изменения в функциях распределения. Критерий
серий позволяет обнаружить колебательный тренд, критерий Сидже-
ла-Тьюки используется для проверки воспроизводимости по диспер-
сиям. Ранговые критерии и критерии перестановок можно приме-
нять даже при малых выборках (п < 10), при п £ 10 все они допускают
нормальную аппроксимацию.
Перечисленные непараметрические критерии требуют наличия
таблиц специальных распределений достаточной для практики пол-
ноты, а также сравнительных характеристик по мощности и эффек-
тивности критериев, позволяющих произвести рациональный выбор
того или иного критерия.
В отечественной и зарубежной литературе вопросы мощности и
эффективности непараметрических критериев освещены недостаточ-
но полно и сводятся в основном к сравнению эффективности этих
критериев с соответствующими параметрическими критериями, ис-
пользуемыми для нормального распределения. Ниже приведены зна-
чения асимптотической относительной эффективности (АОЭ) ряда
непараметрических критериев для нормального распределения:
Критерий АОЭ
Знаков....................................0,63
Инверсий..................................0,98
Манна-Уитни...............................0,95
Сиджела—Тьюки.............................0,61
Однако АОЭ, например, критерия Манна-Уитни для у-распре-
деления равна 3, для логистического распределения — 1,1, для пря-
моугольного распределения — 1 и для любого распределения не ме-
нее 0,864.
Предлагаемый подход заключается в замене непараметрического
критерия эквивалентным параметрическим, не требующим предва-
рительного предположения о нормальности, и последующей нормаль-
633
ной аппроксимации этого критерия с целью аналитического опреде-
ления его мощности и эффективности.
Для рассмотренных выше критериев эквивалентный параметри-
ческий критерий может быть построен с использованием биномиаль-
ного распределения с одним и тем же значением его параметра. Про-
иллюстрируем предлагаемый подход на примере наиболее простого
критерия знаков.
Статистикой критерия знаков является число случаев т, когда
выборочное значение оказывается больше некоторой фиксированной
величины. В качестве этой величины чаще всего используют выбо-
рочную медиану. Тогда для объема выборки п статистика критерия
имеет биномиальное распределение, а задача проверки гипотезы од-
нородности сводится к задаче проверки гипотезы о заданном значе-
нии параметра биномиального распределения р = 0,5.
Используя нормальную аппроксимацию с поправкой на непре-
рывность, получим решающее правило для принятия гипотезы одно-
родности в виде неравенства
\т-п/2\-1/2 ТТ
4~п/2
где — квантиль стандартного нормального распределения уровня
значимости а/2. Мощность критерия в этом случае может быть запи-
сана в аналитическом виде:
^(p-Q,5)-Ua/2/2\ + ф 14ii(p-f),5) + Ua
у/р(р -1) J Ф[ yjp(p-l)
Как видно из приведенного выражения, мощность критерия яв-
ляется функцией трех аргументов: размера критерия а, «расстоя-
ния» между проверяемой и альтернативной гипотезами и объема вы-
борки п. Если бы удалось зафиксировать «расстояние» между
проверяемой и альтернативной гипотезами для ряда критериев, то
для сравнения мощности и относительной эффективности этих кри-
териев заданного размера достаточно было бы сопоставить необходи-
мые объемы выборок.
Анализ перечисленных выше критериев позволяет произвести
такую фиксацию «расстояния» между проверяемой и альтернативной
гипотезами. Так, например, статистикой критерия инверсий явля-
ется сумма числа инверсий А членов неупорядоченного статистичес-
кого ряда, составленного из ординат случайного процесса:
п и
/=1 j=/ + l
634
где t/(xz,xy) =
1 при xz > х •
J
О при Xj < Xj
Эта величина также имеет биномиальное распределение, не за-
висящее от характера исходного распределения, со средним значе-
нием и дисперсией:
M[A\ = Np- Р[Л] = ^(1-р),
где р — вероятность появления инверсий при единичном наблюде-
нии; N = п(п-1)/2. Нулевой гипотезе однородности, как и для кри-
терия знаков, соответствует значение параметра биномиального рас-
пределения р = 0,5.
Следовательно, для сравнения мощности и относительной эф-
фективности этих критериев достаточно сравнить эффективные числа
измерений.
В задачах оперативной обработки измерительной информации
часто используют упрощенный критерий инверсий, когда каждое вновь
поступившее измерение сравнивается не со всеми предыдущими, а
только с соседними. Эффективное число измерений для этого кри-
терия N = л -1. Аналогичные рассуждения можно провести относи-
тельно критериев Манна-Уитни и его частного случая — критерия
Уилкинсона, а также критерия Сиджела-Тьюки. Статистиками этих
критериев являются суммы рангов выборок меньшего объема при объе-
динении двух сравниваемых выборок в порядке возрастания их эле-
ментов. Эти статистики имеют одно и тоже распределение, хотя
ранжирование при использовании критериев Манна-Уитни (Уилкин-
сона) и критериев Сиджела-Тьюки различно.
Ниже приведены формулы для расчета эффективного числа из-
мерений N в случае использования различных критериев при одном и
том же объеме выборки.
Критерий
Знаков ...................................
Инверсий..................................
Инверсий упрощенный.......................
Уилкинсона ...............................
Сиджела-Тьюки.............................
Формула
N=n
N = n(n-l)/2
N = n-1
N = л2/4
N = n?/4
Итак, на основе предложенного подхода можно рекомендовать
критерий инверсий, обеспечивающий заданную мощность при наи-
меньшем объеме выборки.
Анализ непараметрических критериев однородности показывает,
что сами статистики этих критериев не позволяют сформулировать
635
удобные показатели воспроизводимости, так как не имеют физичес-
кого смысла. Наиболее рациональным и общим показателем воспро-
изводимости в данном случае может служить уровень значимости.
Таким образом, применение методов математической статисти-
ки при проведении испытаний продукции позволяет одновременно с
проверкой однородности результатов повторных испытаний на осно-
ве использования известных статистических критериев проводить оцен-
ку воспроизводимости этих результатов. В качестве показателей вос-
производимости удобно использовать: нормированный модуль разности
выборочных средних (12.1), называемый интервалом воспроизводимо-
сти', нормированное отношение выборочных дисперсий (12.2), назы-
ваемое коэффициентом разброса воспроизводимости и (или) уровнем
значимости (12.3). При этом в случае отсутствия априорной инфор-
мации о виде и параметрах законов распределения результатов испы-
таний для оценки воспроизводимости желательно использовать уро-
вень значимости. Результаты повторных испытаний целесообразно
считать воспроизводимыми, если они статистически однородны при
выбранном значении уровня значимости.
При появлении информации о виде и (или) параметрах законов
распределения результатов, если уровень значимости 0,05<а<0,5,
целесообразно дополнительно использовать интервал воспроизводи-
мости или (и) коэффициент разброса воспроизводимости. Такая двух-
этапная процедура оценки воспроизводимости потребует небольших
дополнительных расчетов.
12.2. Сравнение результатов нескольких
повторных испытании
Сравнение результатов нескольких повторных испытаний представ-
ляет собой задачу многомерного статистического анализа. Традици-
онным путем решения задач данного класса является сведение мно-
гомерной задачи к одномерной. При этом наиболее прост и удобен
математический аппарат дисперсионного анализа.
Моделью измерений в случае различия нескольких повторных
испытаний является:
ХУ + £у >
где Ху — j-e измерение в z-м повторном испытании (/ = 1,л); /и0 —
общее среднее; — эффект фактора различия повторных испытаний
(/ = 1, а); ^у ~ Л^(о, Oq) — ошибки измерения, распределение
которых принимается нормальным с нулевым математическим ожи-
636
данием и равными дисперсиями о^; а — число сравниваемых повтор-
ных испытаний; п — одинаковый объем выборки в каждом из повтор-
ных испытаний.
В дисперсионном анализе рассматриваются модели эффектов
фактора двух видов, а именно: модель постоянных эффектов, при ко-
торой Tz представляет собой некоторое детерминированное значение,
и модель случайных эффектов, при которой т;- имеет нормальный за-
кон распределения.
а п _ 2
Рассмотрим квадратичную форму £ \х& -х) , где оценка об-
_ । а п /=17=1
щего среднего х = — Эта форма разбивается на две состав-
ил"." v
ляющие:
а п
а п
у
=(я-1)Х5?+яЕ(л/-х)2’
где оценки среднего и дисперсии в отдельном повторном испытании
соответственно равны:
п
1 п
п ^ Ху '’
В дисперсионном анализе формируются две статистики:
1) 5? = —У (?• -х) с математическим ожиданием Л/Гу?! =
°-1Ь1 „ а
= лег + On (для модели случайных эффектов) или М S? =-Ут; +
т и L 1 J Я-1"
+Oq (для модели постоянных эффектов);
2) с математическим ожиданием М Sq = Oq.
а /=1
Проверка воспроизводимости результатов повторных испытаний
проводится с использованием /^-критерия Фишера. При гипотезе
воспроизводимости ( tz =0 или = 0) отношение /Sq имеет
637
распределение Фишера с [а-1, а(л-1)] числом степеней свободы,
т.е. sf /Sq ~ F [о - 1,а (п -1)], и решающим правилом для принятия
гипотезы воспроизводимости является неравенство S?/Sq < F, ,
где F^ — квантиль распределения Фишера уровня значимости а.
При принятии альтернативной гипотезы (невоспроизводимости)
показателем воспроизводимости может служить величина S? -Si/n,
являющаяся оценкой эффекта фактора различия повторных испыта-
ний —У т? (модель постоянных эффектов) или (модель слу-
а ~11=1
чайных эффектов).
Приведенный подход легко обобщается на случаи неравен-
ства дисперсий ошибок измерений и неравенства объемов выбо-
рок повторных испытаний. Так, в случае неравенства дисперсий
Oq., имеем:
п
М S\ = + - X °0/ — м°Дели случайных эффектов;
а /=1
1 V 2
~ ао/ — для модели постоянных эффек-
а /=1
тов;
о»-
Предположим, что число степеней свободы а(л-1) велико (бо-
лее 120). Тогда оценку Sq можно заменить на истинное среднее зна-
1 а
чение Qg = — У, Oq; и статистика S\ /Sq будет иметь, например для
ai=l
модели случайных эффектов, математическое ожидание и дисперсию
соответственно равными:
М
чГЧ
а э
2(44)
,J “«Г
638
Распределение этой статистики при нулевой гипотезе = 0 —
приближенно X -распределение с числом степеней свободы
a-i i
a-l а
ср
Обозначим минимальную из дисперсий Oqz как а максималь-
ную — Ладр Тогда
min
1 а-
При изменении дисперсий на 100% (к = 2)
Результаты расчета числа степеней свободы (v) при различном
числе повторных испытаний (а) сведены в табл. 12.3.
Таблица 12.5
Результаты расчетов числа степеней свободы
а 40 25 10 3
V 36 22 8 2
Таким образом, при равных объемах выборок для повторных ис-
пытаний неравенство дисперсий не оказывает значительного влия-
ния на результаты дисперсионного анализа.
Проанализируем влияние неравенства объемов выборок ni повтор-
ных испытаний. В этом случае математические ожидания статистик
дисперсионного анализа определяются соотношениями:
Следовательно, при нулевой гипотезе = 0 распределение статисти-
ки Sf /Sq не изменяется. Совершенно другая картина получается при
одновременном неравенстве дисперсий и объемов выборок п-.
639
i
»=i
У. rtjGQj = — средневзвешенная дисперсия.
»=1
Статистика /Sq в этом случае будет иметь следующие матема-
тическое ожидание и дисперсию:
М
L°o J
Таким образом, математическое ожидание статистики /Sq при
нулевой гипотезе равно 1 тогда и только тогда, когда средневзвешен-
ная дисперсия равна средней дисперсии, т.е. когда все гц равны.
Поэтому приведенные алгоритмы следует дополнить критерием срав-
нения дисперсий, например критерием Бартлета:
где В = 2,303 v
•g^2 -Zv/ig*y? 5 V = EV»;
1=1 (=1
640
Гипотеза равенства дисперсий отвергается, если В С > xf_a-
При равенстве числа степеней свободы vf можно использовать
критерий Кохрана:
g = max5?/^ S}.
/ /=1
Квантили специального распределения статистики g, зависящего
от числа повторных испытаний а и числа степеней свободы vz, табу-
лированы. Нулевая гипотеза равенства дисперсий отвергается при
превышении статистикой g соответствующей критической точки g1-a.
Контрольные вопросы
1. Когда используются параметрические и непараметрические крите-
рии проверки статистической однородности?
2. Перечислите возможные показатели воспроизводимости результатов
двух повторных испытаний в параметрическом и непараметрическом случаях.
3. Каковы условия применения дисперсионного анализа для оценки
воспроизводимости результатов нескольких повторных испытаний?
4. Что такое модели постоянных и случайных эффектов?
5. Возможно ли применение аппарата дисперсионного анализа при на-
рушении исходных предпосылок?
Глава 13
ФОРМИРОВАНИЕ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
НА НАДЕЖНОСТЬ
13.1. Основные показатели безотказности
Отказ технической системы — это случайное событие, обусловлен-
ное большим числом непредсказуемых факторов. Время от момента
включения оборудования до его первого отказа также представляет
собой случайную величину.
Наиболее общей характеристикой надежности является вероят-
ность безотказной работы P(t) = Р{т > /} — вероятность того, что на-
работка до первого отказа превысит некоторое время t. Вероятность
безотказной работы — монотонно убывающая функция в интервале
(0,1). Часто вводится также показатель q (t) = 1 - P(t) — вероятность
того, что отказ произойдет после включения оборудования через про-
межуток времени, не превышающий t. Это монотонно возрастаю-
щая функция времени.
Скорость изменения вероятности безотказной работы характери-
зуется плотностью вероятности момента первого отказа'.
dt
dP(t)
dt '
Вероятность безотказной работы однозначно выражается через
плотность вероятности:
Р(/) = |со(/)Л.
t
Использовать в качестве показателя надежности функцию време-
ни неудобно, поэтому вводятся некоторые параметры, определяю-
щие эту функцию:
• средняя наработка до отказа, или среднее время безотказной ра-
боты,
гср=р®(')л=
О t
642
• интенсивность отказов
Интенсивность отказов имеет характерную для различных этапов
жизненного цикла системы форму. На начальном этапе приработки —
это убывающая функция, на этапе нормальной эксплуатации — кон-
станта и, наконец, при износе оборудования — возрастающая функ-
ция.
Основные выводы статистического анализа надежности получе-
ны для случая 1 = const, когда вероятность безотказной работы
Р(/) = ехр {-!/}, т.е. соответствует экспоненциальному распределению
времени безотказной работы.
13.2. Оценивание показателей надежности
Испытания на надежность могут проводиться по одному из основных
планов (ГОСТ 16504-74):
[Л77г] — без замены отказавших образцов и прекращением испы-
таний после отказа заданного числа образцов г,
[jVAfrj — с заменой отказавшихся образцов и прекращением ис-
пытаний после отказа заданного числа образцов г,
[NMT\ — с заменой отказавших d образцов и прекращением ис-
пытаний в заданный момент времени Г,
[NUT\ — без замены отказавших d образцов и прекращением
испытаний в заданный момент времени Т.
В табл. 13.1 приведены выражения для точечных и интерваль-
ных оценок среднего времени безотказной работы (средней наработ-
ки на отказ) и интенсивностей отказов для перечисленных планов.
План [7V77r]. Плотность вероятности того, что в моменты време-
ни /],...,/z,...,/r откажут 1,..., /,..., г образцы, а остальные образцы в
интервале времени (О, /г) не откажут, имеет вид
21*
643
Таблица 13.1
Выражения точечных и интервальных оценок средней наработки на отказ и интенсивности отказов
для различных планов испытаний на надежность
План Суммарная наработка Несмещен- ная точеч- ная оцен- ка средней наработки на отказ Интервальная оценка средней наработки на отказ Несмещенная точечная оценка интенсивности отказов Интервальная оценка интенсивности отказов
NUr X Г,+(«-/•)/, /=1 г X(i_Y)/2(2r) г -1 Х(1-т)/2 (2г) Хд-ууг (2г)1 • J
NMr ntr г г -1 *z »
NMT пТ г + 1 2/z г X(|_T)/2 (2r) Х(1+т)/2 (2r + 2)1 2/j. 2/j
NUT ^ti + (n-r)T 1=1 *z г + 1 г - 1 »
л!
где множитель -----г учитывает возможные способы наступления г
из п событий, а множитель е
представляет собой вероятность
того, что в момент окончания испытаний (л -г) образцов остались
работоспособными.
Логарифмируя, дифференцируя соответственно по 71, или 1 и
приравнивая результат к нулю, получаем точечные оценки максималь-
ного правдоподобия для среднего времени безотказной работы Т‘
и для интенсивности отказов X: = где — суммарная наработка.
Для анализа свойств оценок 71 и X необходимо получить их рас-
пределения. Для этого вводим новые переменные: Jj = /р Y2 = t2 - /р
...; Yr = tr^. Тогда плотность вероятности P(tx, ..., /г) преобразуется
к виду
P(Yl,...,Yr) = rike~nXYi (п- 1)Ле-Х(л“1)У2...(л- г+ 1)Хе‘Х(л-г+1)Г'-
и будет представлять собой произведение экспоненциальных распре-
делений P(Yi/'k) = (n-i+ 1)Хе-(л-,+1)х1' с параметрами (л-/ + 1)1.
Таким образом, переменные Ур..., Yr — независимы.
Заметим, что выборка Ур..., Yr неоднородна, так как парамет-
ры распределений составляющих ее элементов различны.
Переходом к переменным Z( = (л - i +1) Yf преобразуем выборку
в однородную с постоянным параметром X экспоненциальных рас-
пределений составляющих ее элементов. На основе связи между экс-
поненциальным и у-распределением нетрудно получить следующий
результат:
Е(л-/+1)^- =L//+(«-r)/r
/=1 /=1
т.е. сумма случайных величин (л - i +1) Yt имеет у-распределение I рода:
645
c математическим ожиданием M [/х] = гТ^ и дисперсией = гТд.
Отсюда следует, что оценка 7L = t^jr несмещенная, так как М
ср
= Af[/I]/r = r7’cp/r = 7’cp и имеет дисперсию Д[^]/г =
= гГф/г2 =1%/г-
В соответствии с неравенством Рао-Крамера вычисляем:
и проверяем условие £>Гтср J = 1/7.
Отсюда следует, что оценка эффективна. Для определения
свойств оценки X найдем математическое ожидание:
e-Wx<ft
о
Заменой переменной Y - Хь. получим
гХ lYr~2e~Y
r-lJ (г-2)!
dY,
где подинтегральное выражение представляет собой интеграл от плот-
ности у-распределения, равный единице.
Таким образом, М
гХ
г-1
т.е. оценка X — смещенная.
646
Дисперсия оценки X определяется как
Вычисляя J = г)с, убеждаемся, что эта оценка неэффективна.
Нетрудно получить несмещенную оценку X' = (r-l)/fz с дисперсией
р[х'] = Х2/(г-2)<7)[х].
Используя плотность распределения суммарной наработки, оп-
ределяем доверительные интервалы для параметров 71, и X. Введя
переменную 2гТср/Тср = -2/£/Тср = 2Х/Е путем преобразования плот-
ности вероятности 7’(/z/7’Cpk получим х2-распределение:
Отсюда, задаваясь доверительной вероятностью у, определяем у%-
ный доверительный интервал для Т'
2*S < у <
XQ+y)/2 (2г) Х(1-у)/2 (2г)
и для X:
Х(1-у)/2 (2г) Х(1-у)/2 (2г)
2гг " “ 2/у
Л*
где X(i_T)/2 (2r). X(i+7)/2 (2г) ~ квантили х2-распределения.
Зная оценки среднего времени безотказной работы или ин-
тенсивности отказов X, можно дать оценку вероятности безотказной
работы:
Заметим, что даже при несмещенных оценках X оценка R сме-
щена вследствие нелинейной ее зависимости от X. Однако для высо-
конадежных изделий вероятность безотказной работы — линейная фун-
кция интенсивности отказов R (?) = 1 - X/, поэтому оценка Я (/) = 1 - X/
будет несмещенной.
Подстановкой в выражение для R(t) нижних и верхних границ
для Тср или X определяются у%-ные доверительные границы для ве-
роятности безотказной работы:
647
е //Гсрв < R (z) < е '/Гсрк; е'х«' < R(t) < е'1*1.
План [ЛЛ/г]. Если отказавшие изделия заменяются, то выборка
интервалов между отказами становится однородной. Любой элемент
этой выборки подчиняется распределению
P{Yil'k) = nU~nXY< =-^—e~nYilTcf,
7 ср
а совместное их распределение имеет вид
P(rv..., Гг/Х) = ПР$ /X) = (п/Т^ = (ritf exp{-«XZr}.
Логарифмируя, дифференцируя соответственно по 7J_ или X и
приравнивая результат к нулю, получим точечные оценки максималь-
ного правдоподобия для среднего времени безотказной работы Т’.
п
и для интенсивности отказов X: X = r/Zj.
Свойства оценок полностью идентичны свойствам оценок плана
[МП
План [АГМ7]. Плотность вероятности того, что в моменты време-
ни Zj,..., tr откажут 1,..., г образцы, а в интервале времени (Zr 7)
отказов не будет, для плана [NMT\, по аналогии с планом [NMr\,
запишется как
P(z1,...,zr/X)= П лХехр{-лХ(^- -Z(_1)}exp{-flX[7’ -Zr]} =
= (лХ)г ехр{-лХТ},
где сомножитель ехр{-лХ(Т -Zr)} определяет вероятность того, что в
интервале (Zr, 7) отказов не произошло.
Логарифмируя, дифференцируя по X и приравнивая результат к
нулю, получим точечную оценку максимального правдоподобия для
интенсивности отказов X: X = г/пТ = r/Zj и для среднего времени бе-
зотказной работы Т •
Для анализа свойств полученных оценок используем известную
связь между экспоненциальным и пуассоновским распределениями.
Если наработка на отказ является случайной величиной, распреде-
648
ленной по экспоненциальному закону с параметром X, то число от-
казов в интервале длительностью t является случайной величиной,
распределенной по закону Пуассона с параметром X/, т.е. если
Р(/) = Хехр{-Х/}, то Р(г) = (Х/)г ехр {—Хг}/г!
Рассматривая вероятность наступления отказа в элементарных
интервалах Yi и учитывая, что сумма г случайных величин, имеющих
распределение Пуассона с параметром X,, также имеет распределе-
г
ние Пуассона с параметром X = У Х(- в интервале времени (0,7), по-
лучим /-1
Р(г/пкТ) =
(rikT)r ехр{-лХ7’} (Х/х)г ехр{-Х/£}
г! г!
с математическим ожиданием M[r] = rikT = Xz£ и дисперсией D[r] =
= лХТ = Х/т.
Вычисляя математическое ожидание и дисперсию оценки X по
формулам
М X = Л/[г]/(пТ) = мХТ/(лТ) = Х,
D Гх] = D [г]/(лТ)=лХт/ (п2Т2 ) = Х/пТ = Х/гЕ
и проверяя равенство J = пТ]\ устанавливаем несмещенность и эф-
фективность оценки X.
Можно показать, что несмещенной точечной оценкой Т— явля-
ется оценка
=nT/r+l = t^/r+l.
Используя известную связь между интегральными функциями
распределения Пуассона и ^-распределения, нетрудно получить
у%-ный доверительный интервал для Т'
2tz < 2rz
x(1+y)/2 (2r + 2) " Р X(i_y)/2 С2'')
и для X:
Х(1-т)/2 (2г) < < Х(1+т)/2 (2г + 2)
План [NU7]. Плотность вероятности того, что в моменты време-
ни Гр..., tr откажут 1,..., г образцы, а в интервале времени (гг, 7)
отказов не будет, запишется, по аналогии с планом [NUr], как
649
if ft) —
n!
(n-r)!
Kr exp
ti+(n-r)T
Оценки максимального правдоподобия для X и 7^ имеют вид:
^ = гЛх'> Tcp=h!r-
Исследования свойств полученных оценок в этом случае сложно,
так как оба сомножителя г и являются случайными величинами.
Однако для надежных изделий доверительные интервалы для интен-
сивности отказов 1 и среднего времени безотказной работы опре-
деляются аналогично случаю плана [NM7], Оценкой вероятности
безотказной работы при использовании плана [NUT] является несме-
щенная эффективная оценка вероятности R = l-r/n, основанная на
описании вероятности наблюдения г отказов в выборке объемом п с
биноминальным распределением
P(r/n,R) = —^— Rn~r(l-R)r,
ri(n-r)i
с математическим ожиданием М[г] = nR и дисперсией 7)[г] = лЛ(1 - Л).
Доверительные границы для вероятности безотказной работы
определяются по соотношениям:
Д<Л(л-4)’^ =Yp (13Л)
71 +Ъ =1"Т
13.3. Подтверждение требований к интенсивности отказов
или среднему времени безотказной работы
при автономных испытаниях
При проверке требований формируются: нулевая гипотеза Яо: X > Х3
или Трр <Т3 и альтернативная гипотеза Н^. X < Х3 или 7^ > Т3.
В соответствии с выражениями доверительных границ интенсив-
ности отказов получим решающее правило для принятия альтерна-
тивной гипотезы:
650
ИЛИ /z > %12_a (v)
3
где значение /z и число степеней свободы о зависят от плана испыта-
ний. Так, для планов типа [NM(U)r] имеем о = 2г, а для планов типа
[NM(U)T] — v = 2г + 2. Точность принятого статистического реше-
ния определяется по формулам
Хз _ Х1-а (ъ) или Гср _ Х1-а (и)
— — —z------ или -----— —_-----.
Х ХрС°) Гсрз Хр(«)
В табл. 13.2 приведены значения показателя точности статиста-
-2 (и)
ческого решения К = ' при ошибках первого и второго рода
хр 0)
a = р = 0,05 и различном числе отказов для планов типа [NM(U)r] и
[NM(U)T].
Таблица 13.2
Значения показателя К в зависимости от числа отказов
г г [NM(U)r]
1 58,4 13,35 6 4,02 3,6
2 13,35 7,7 7 3,6 3,3
3 7,7 5,67 8 3,3 3,07
4 5,67 4,65 9 3,07 2,89
5 4,65 4,02 10 2,89 2,75
Таким образом, планы [NM(U)7] характеризуются меньшей по-
грешностью принимаемого статистического решения.
Пример. Испытываются 50 изделий, получено 5 отказов и зафиксиро-
ваны моменты их возникновения: = 19 ч, г2 = 43 ч, Г3 = 87 ч, Г4 = 91 ч,
/5 = 100 ч.
В табл. 13.3 приведены результаты расчетов суммарной наработки сред-
него времени безотказной работы, интенсивности отказов и ее 90%-ной
односторонней верхней доверительной границы для рассмотренных планов.
651
Таблица 13.3
Результаты расчетов показателей надежности для различных планов
План ^ср’Ч Х,ч 1 Хв,ч-1
NMr 4840 968 0,827 10"3 1,65 10"3
NMr 5000 1000 0,8 10-3 1,6 IO"3
NMT 5000 1000 1 • 10-3 1,95 IO-3
NMT 4840 968 0,827 • IO"3 1,89 103
Таким образом, в зависимости от плана испытаний максималь-
ная вариация оценок интенсивности отказов составляет 25%, а вари-
ация верхней доверительной границы — 20%.
13.4. Подтверждение требований к интенсивности отказов
или среднему времени безотказной работы
при комплексных испытаниях
Пусть система состоит из к последовательно соединенных блоков, каж-
дый из которых может испытываться как в комплексе с системой, так
и автономно. Требования к интенсивности отказов сформулированы
для системы в целом. Необходимо сформировать правило подтверж-
дения требований к интенсивности отказов блоков, обеспечивающее
подтверждение требований к системе в целом. Формирование пра-
вил подтверждения требований к блокам без учета статистических
свойств оценок показателей надежности состоит в распределении тре-
бований к системе между отдельными блоками и автономном незави-
симом подтверждении требований к блокам.
Так, если заданное значение интенсивности отказов системы
Х3 = 0,1 ч-1 и система состоит из 10 равнонадежных блоков, то в
соответствии с таким подходом требуемые значения интенсивности
отказов блоков составят Х3/. = 0,01 ч-1, а система будет считаться удов-
летворяющей заданным требованиям, если выполняется условие
'xmin > %1-а (и)/2Ч = 50%1-а (v)>
т.е. при а = 0,05, о = 2г = 4 суммарная наработка блока должна
превышать 667,5 ч.
Учет статистических свойств оценок показателей надежности су-
щественно изменяет полученный результат.
652
Для планов типа [NM(U)r] случайная величина ц. = имеет
X2-распределение с числом степеней свободы 1). =2г., а случайная
к
величина 2 У Xz/Zz- в соответствии со свойствами х2-распределения
i=l к
будет иметь х2-распределение с числом степеней свободы и = У dz.
Таким образом, можно записать: /=1
Х(1--г)/2 <Ъ) * 2Х У* ^(21+7)/2 (v).
1=1
откуда, заменяя fZz- на /Zmin, из значений /zz, получим выра-
жение для у%-ного доверительного интервала суммарной интенсив-
ности отказов:
к
/=1
Х(21-ТУ2 W
2^Ешах
^Xmin
к
Для планов типа [NM( U) 7] случайные величины rz- и У, имеют
i=l
к
распределение Пуассона с параметрами соответственно lz/Zz- и У Xz/Z/.
/=1
Используя аппроксимацию распределения Пуассона х2-распре-
делением, можно записать:
откуда, заменяя на /Zmin, /2тах из значений получим выра-
жение для у%-ного доверительного интервала суммарной интенсив-
ности отказов:
Исходя из выражений для доверительных границ суммарной ин-
тенсивности отказов системы получим следующее условие приемки
системы:
653
^Zmin > Xl-a
к к
где для планов [NM( U)r\ v = 2^/j, а для планов [NM( U)N\ v = rt + 2.
/=1 /=1
Так как %^_а (г>) оказывается всегда меньше ^%[_а (v,-), то необ-
ходимая суммарная наработка при комплексном подходе, основан-
ном на использовании требований к суммарной интенсивности, су-
щественно ниже, чем при автономном подходе. Особенно большой
эффект достигается при испытаниях высоконадежных блоков и ма-
лом числе наблюдаемых отказов. Пусть отказы г, = 2 наблюдались
лишь в одном из блоков, по другим блокам отказов не было, тогда
требования к суммарной наработке блоков составят /£min > 66,75 ч,
т.е. в 10 раз меньше значения, полученного при автономном подходе.
13.5. Выбор плана испытаний на надежность
Сравнение планов с заменой и без замены отказавших образцов. Сум-
марная наработка при использовании планов с заменой отказавших
образцов всегда больше, чем без замены. Действительно, для плана
[Л77г] имеем:
Г
tj +(n-r)tr <rtr+(n- r)tr = ntr.
1=1
Аналогично для плана [NUT] получим:
г
+(л-г)Г < rtr + (n-r)T = пТ -r(T -tr)<,nT.
i=l
Однако планы с заменой требуют большего объема испытывае-
мых образцов: (л + г) вместо л. Если на испытания без замены поста-
вить (л + г) образцов, то суммарная наработка в этом случае будет
больше, чем у плана с заменой объема л. Действительно:
г г
+[л-т-г]гг =ntr + ^ti >ntr.
1=1 1=1
Аналогично
г г
+[л-г-г]Т = пТ + >пТ.
/=1 /=1
654
Таким образом, для планов с фиксированным числом отказов,
когда значение г известно заранее, нецелесообразно использовать
замену отказавших образцов.
Сравнение планов с заданным числом отказов и заданным време-
нем испытаний. Планы с заданным временем испытаний предъявля-
ют более жесткие требования к величине суммарной наработки:
'l >Х1-а («)/(2Хз)>
так как число степеней свободы у = 2г + 2 у них больше, чем у пла-
нов с фиксированным числом отказов у = 2г. В табл. 13.4 приведены
значения квантилей %2- распределения для а = 0,05 и у = 2г + 2, у = 2г
при различном числе отказов г.
Таблица 13.4
Значения %j_o (2г + 2), Xi_a (2г) при различном числе отказов г
Г 1 2 3 4 5 6 7 8 9 10
Xi.a (2г) 5,99 9,49 12,59 15,51 18,31 21,03 23,67 26,3 28,87 31,41
X 1 R NJ 9,49 12,59 15,51 18,31 21,03 23,68 26,3 28,87 31,41 33,92
Однако планы с фиксированным временем испытаний позволя-
ют, в отличие от планов с фиксированным числом отказов, произ-
водить подтверждение требований при отсутствии отказов (г = 0),
что делает их удобными для высоконадежных изделий. В этом случае
легко рассчитывать необходимое число образцов для испытаний:
'’zf-aW/PM')-
Так, при a = 0,05 X, = 0,1, Т= 10 ч, п > 3.
Сравнение продолжительности испытаний. При использовании
плана [TWr] продолжительность испытаний tr определяется r-й по-
рядковой статистикой в выборке /1(..., tr. Вероятность того, что ис-
пытания продлятся дольше заданного времени То, определяется со-
отношением
В.(п-г + 1,2)
P{tr>T.) = -ft----—- = В( л, Р3, г-1 ,
' л (л - г+ 1,2)
где Вр, В — неполная и полная бета-функции; — интегральная
функция бета-распределения; Р = еЗадаваясь значением этой
о
655
вероятности, можно при фиксированных п, г определить время То
или при фиксированном времени Го — сочетания п, г.
При использовании плана [AGWr] случайная величина т = tr •
имеет х2- распределение с 2г числом степеней свободы. Следова-
тельно, вероятность того, что испытание продлится дольше заданно-
го времени То, определится соотношением
P{h>T^ =
1-у
при х?(2г)Тср/(2л) = То или х?(2г)/(2л) = Х37о.
Задаваясь значением Х3Т0 = - In и вероятностью у, можно оп-
ределить необходимые сочетания лиг.
В табл. 13.5 приведены результаты расчетов комбинаций п и г
при заданном значении вероятности для планов [7VZ/r] и [JVAfr],
обеспечивающих с вероятностью у время испытаний, меньшее То.
Таблица 13.5
Число испытаний п изделий для различных у, R39 г
и планов испытаний [AT7r] и [Л/М*]
План r y=0,9 Y= 0,95
*>=0,9 0,95 0,99 0,9 0,95 0,99
1 1 2 11 1 1 6
NUr 2 6 11 55 4 8 36
3 12 23 120 9 17 100
1 1 2 11 1 1 6
NMr 2 5 11 54 4 7 36
3 11 22 111 8 16 82
13.6. Подтверждение требований
к вероятности безотказной работы
При подтверждении требований к вероятности безотказной работы
может быть использована одна из трех нулевых гипотез:
1) R<R3, 2) R>R., 3) R = R~
о о * о
соответственно при альтернативных гипотезах R > R3, R < R3, R * R3.
656
Решающими правилами, соответственно, являются:
1) 2) 3) ^(у^Я^ЯДу),
где (у), (у) — у%-ные доверительные границы (односторонние
или двусторонние).
Отметим, что двусторонние доверительные границы в этом слу-
чае не являются симметричными и находятся по статистическим таб-
лицам из условия получения наикратчайшего доверительного интер-
вала. На практике наиболее часто используются односторонние
решающие правила. При этом выражения доверительных границ по-
лучаются из (13.1) при yj = 1 или у2 = 1. В табл. 13.6 и 13.8 приведе-
ны критические значения л'р п2 при числе наблюдаемых отказов d = О
и d=l и различной доверительной вероятности у для 1-й и 2-й нуле-
вых гипотез.
Таблица 13.6
Число испытаний Лр необходимых для принятия гипотезы Я >
при различных значениях вероятности безотказной работы
с различной доверительной вероятностью
А Число испытаний при у, равном
0,1 0,2 о,з 0,4 0,5 0,6 0,7 0,8 0,9 0,95
rf= 0
0,95 3 5 7 10 14 18 24 31 45 58
0,99 10 22 35 51 69 92 120 160 229 298
0,995 21 44 70 101 138 183 241 321 460 598
0,999 115 242 387 556 693 916 1024 1609 2303 2996
0,9999 458 969 1549 2218 6932 9163 12040 16094 23026 29965
rf= 1
0,95 И 17 23 28 34 40 49 59 77 93
0,99 55 96 116 140 168 202 244 299 388 473
0,995 120 194 233 280 336 404 488 598 777 947
0,999 600 953 1143 1373 1647 2022 2439 2994 3889 4742
0,9999 6235 9549 11457 13752 16784 20223 24392 29942 38896 47437
657
о\
СП
оо
Значения вероятности Яр
необходимые для реализации числа испытаний из табл. 13.6
Таблица 13.7
R3 Значение вероятности 7^ при у, равном
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
</=0
0,95 0,983 0,989 0,992 0,994 0,996 0,997 0,9978 0,0088 0,9988 0,9991
0,99 0,994 0,9976 0,9985 0,9989 0,9992 0,9994 0,9995 0,9996 0,9997 0,9998
0,995 0,997 0,9988 0,9992 0,9995 0,9996 0,9997 0,99978 0,9998 0,99988 0,9999
0,999 0,9995 0,9997 0,99978 0,9999 0,99992 0,99994 0,99995 0,99997 0,999978 0,99998
0,9999 0,9998 0,9999 0,99996 0,99997 0,99999 0,999994 0,999996 0,999997 0,999998 0,999998
rf=l
0,95 0,966 0,978 0,984 0,987 0,989 0,991 0,992 0,994 0,995 0,996
0,99 0,993 0,996 0,9965 0,997 0,9978 0,998 0,9985 0,9988 0,9991 0,9992
0,995 0,997 0,998 0,9985 0,9988 0,9989 0,9991 0,9992 0,9994 0,9995 0,9996
0,999 0,9997 0,9996 0,99975 0,9997 0,99978 0,9998 0,99935 0,99988 0,99991 0,99992
0,9999 0,99993 0,99996 0,999965 0,99997 0,999978 0,99998 0,999985 0,999988 0,999991 0,999992
Если при данном числе отказов п > nt, то принимается альтерна-
тивная гипотеза А > А3, при л < л2 принимается гипотеза R < R3.
Точность статистического решения в данном случае характеризуется
величинами: при проверке 1-й гипотезы — (Aj — Aj); 2-й гипотезы —
(R3 — R2), где Ар А2 определяются при заданной ошибке второго
рода по формулам
=3;
^гцл-г)! v '
при подстановке в них числа испытаний лр л2, определенных из
условий RH(y) = R3 или Ав(у) = А3. В табл. 13.7 и 13.9 приведены
значения Aj при d = 0 и А2 при d = 1, 0 = 0,05 и различной довери-
тельной вероятности.
13.7. Подтверждение требований к вероятности
безотказной работы партии изделий
При выборочном контроле партии продукции задается допустимое
число отказов d3 или уровень дефектности q3 = D/N, равный 1 - R3. В
этом случае используется гипергеометрическое распределение
P(d/n,N,D) = ^d'^~d
\л /
где N— объем партии; D — число дефектных изделий в партии; л —
объем выборки; d — наблюдаемое в выборке число отказов:
(Р\ z Д! . /АГ\ . N' .
\d) d'.(D-d)'.’ л!(У-л)!’
N - D\ (АГ-Р)!
n~d / (n-dy.[(N-n)-(D-d)]'.'
659
о\
о\
Таблица 13.8
Число испытаний п2> необходимых для принятия гипотезы R <
при различных значениях вероятности безотказной работы с различной доверительной вероятностью
*3 Число испытаний п2 при у, равном
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
0,95 45 31 24 18 14 10 7 5 3 1
0,99 229 160 120 92 69 51 35 22 10 3
0,995 460 321 241 183 138 101 70 44 21 6
0,999 2303 1609 1204 916 693 556 387 242 115 30
0,9999 23026 16094 12040 1963 6932 2218 1549 969 458 299
Таблица 13.9
Значение вероятности ^2> необходимое для реализации числа испытаний из табл. 13.8
*3 Значение вероятности R2 ПРИ 7» равном
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
0,95 0,936 0,908 0,883 0,847 0,807 0,741 0,652 0,549 0,368 0,05
0,99 0,987 0,981 0,975 0,968 0,957 0,943 0,918 0,873 0,741 0,368
0,995 0,993 0,990 0,987 0,984 0,978 0,971 0,958 0,934 0,867 0,607
0,999 0,9987 0,9981 0,9975 0,9967 0,9957 0,9946 0,9923 0,9877 0,9743 0,905
0,9999 0,99987 0,99981 0,99987 0,99967 0,99957 0,9986 0,9981 0,9969 0,9935 0,99
При N оо гипергеометрическое распределение стремится к
биномиальному. Оценка вероятности выполнения задачи в этом
случае совпадает с оценкой параметра биномиального распределе-
ния R = \-dln = m/n, однако имеет меньшую дисперсию: /)[/?] =
R(\-R)N-n D
= —----Решающим правилом при проверке гипотезы q q3
(соответственно R < R3) при альтернативной гипотезе q < q3 (или
R > R3) является qB > q3, где верхняя доверительная граница qB = DB/N
определяется из соотношения
P{r<J}= ^P(r/n, N, 2)в)=1-у.
г=0
Так как таблицы интегральной функции гипергеометрического
распределения имеются лишь в узкоспециальных изданиях, для прак-
тических расчетов используется биномиальная аппроксимация. При
d = 0 и d = 1 имеем следующие простые формулы, позволяющие
рассчитать критический объем выборки:
</ = 0
</ = 1
В табл. 13.10 и 13.11 приведен критический объем выборки при
различной доверительной вероятности у, числе дефектных изделий D
и числе отказов d = 0 и d =1. Прочерки в таблицах означают, что
объема партии не хватает для принятия решения. В правой графе
каждой таблицы приведен объем выборки при использовании бино-
миального распределения, рассчитанный по формулам:
Как следует из сравнения данных таблиц, учет объема партии,
особенно для мелкосерийного производства, приводит к существен-
ному снижению необходимого объема испытаний.
661
Таблица 13.10
Число испытаний л, необходимых для принятия гипотезы q < q3,
при различных значениях уровня дефектности
с различной доверительной вероятностью
4з Y N Биномиальное распределение
60 100 600 1000 10000 20000
d=0
0,95 0,05 0,8 25 28 32 32 32 32 32
0,98 0,02 0,9 32 37 44 46 46 46 46
0,8 41 56 75 78 81 81 81
0,995 0,005 0,9 46 69 103 109 115 115 115
0,8 60 99 301 370 451 456 460
0,999 0,001 0,95 60 100 499 950 2589 2783 2996
0,9999 0,0001 0,95 60 100 500 1000 9450 15528 29957
d=i
0,95 0,05 0,8 43 50 58 59 60 60 60
0,98 0,02 0,9 43 59 74 76 78 78 78
0,8 — — 136 143 149 150 150
0,995 0,005 0,9 — — 169 181 194 194 195
0,8 — — — 584 756 767 777
0,999 0,001 0,95 — — — — 3942 4323 4742
0,9999 0,0001 0,95 — — — — — — 47437
Таблица 13.11
Значение вероятности необходимое
для реализации числа испытаний из табл. 13.9 (d = 0)
Яз Y N Бино- миальное распреде- ление
60 100 600 1000 10000 20000
0,95 0,05 0,8 0,9984 — — — — — 0,9988
0,98 0,02 0,9 0,9988 — — — — — 0,9988
0,8 0,9335 — — — — — 0,99935
0,995 0,005 0,9 0,3555 — — — — — 0,99955
0,8 0,9388 — — — — — 0,99988
0,999 0,001 0,95 0,948 — — — — — 0,99998
0,9999 0,0001 0,95 0,999996 0,999996 0,99997 — — — 0,999998
662
Контрольные вопросы
1. Какие показатели безотказности вы знаете?
2. При каких условиях время безотказной работы описывается экспо-
ненциальным распределением?
3. Какие планы испытаний на надежность вы знаете?
4. Дайте рекомендации по применению планов испытаний на надеж-
ность.
5. Когда нужно учитывать объем партии продукции?
Глава 14
МЕТОДЫ ПОВЫШЕНИЯ ТОЧНОСТИ
РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
14.1. Системный подход к планированию
объемов испытаний подсистем
Традиционно при проведении испытаний подсистем требования к ним
определяются путем декомпозиции требований к системе в целом.
При большом числе подсистем такие автономные требования настолько
ужесточаются, что подтверждение их по проводимому на практике
объему испытаний становится нереальным. Так, если требуемая ве-
роятность безотказной работы изделия составляет 0,9, то при числе
подсистем к = 10 их надежность должна быть 0,99, а при к — 100 —
0,999. Для подтверждения одной девятки с доверительной вероятно-
стью 0,9 достаточно испытать изделие 23 раза, для двух девяток — 230
раз, а для трех девяток — 2303 раза.
Системный подход к планированию объема испытаний подсис-
тем позволяет избежать лавинообразного нарастания требуемых объе-
мов испытаний. Он заключается в построении оценок и доверитель-
ных интервалов показателей эффективности системы по известным
оценкам показателей эффективности подсистем и обосновании тре-
бований к объему их испытаний, исходящих из анализа свойств оце-
нок системы в целом.
Подтверждение требований к вероятности выполнения задачи.
Пусть вероятность выполнения задачи R связана с аналогичными ве-
роятностями для подсистем Rt мультипликативной зависимостью:
к
R= П А.
/=1 7
Далее пусть в результате проведения автономных испытаний получе-
ны данные по каждой подсистеме {т^ лД, i = 1,..., к. Необходимо
определить оценку вероятности R и ее точность. Оценка вероятности
выполнения задачи для каждой подсистемы определяется по частоте
успешных исходов:
k=miini-
664
Оценка вероятности выполнения задачи системой в целом опре-
деляется в соответствии с принятой моделью:
„ к „
R=X\ Rj.
Точность этой оценки характеризуется у%-ным доверительным ин-
тервалом [Ajp /у, где
ЭКВ’ ^ЭКВ’ У)> ^в^экв> «*экв’ У)
при лэкв = min{wz}, /Пэкв =/{лэквЛь I ~ делая часть [88].
Интересен частный случай, практически важный для высокона-
дежных систем, когда при автономных испытаниях не наблюдалось
отказов ни по одному виду подсистем (mi = л(). Тогда для изделия в
целом выполняется лгэкв = лэкв и нижняя доверительная граница
рассчитывается из соотношения
У?"”3 = 1 - у.
В этом случае легко обосновать объем испытаний, необходимый для
подтверждения требований как к системе в целом, так и к отдельной
ее подсистеме:
«экв =п,=1п(1-у)/1п^.
Проанализируем принципиальное отличие предложенного под-
хода от сложившейся практики задания требований к каждой подси-
стеме путем дробления общих требований к системе.
Пусть заданная вероятность выполнения системой поставленной
перед ней задачи составляет Л, = 0,9, а доверительная вероятность, с
которой необходимо подтверждение данного требования, у = 0,9. Си-
стема состоит из 10 последовательно соединенных подсистем. Тради-
ционный путь заключается в нахождении требований = i^R^ = 0,99
и определении объема испытаний
п,=1п(1-у)/1пАй =230.
При применении предложенного системного подхода необходи-
мый объем автономных испытаний рассчитывается исходя из требо-
ваний к системе в целом и составляет л(- = In (1 - у)/1п Л, = 23.
Подтверждение требований к среднему значению. Пусть показа-
тель эффективности системы представляет собой сумму показателей
эффективности подсистем:
М = ^mj-
j=\
665
Измерение показателей эффективности происходит в соответствии
с моделью Ху = nij + by, где by ~ N10, Oy j — нормально распреде-
ленная случайная погрешность измерения с нулевым математичес-
ким ожиданием и известной дисперсией <Ту. Оценкой показателя эф-
фективности ntj является среднеарифметическая оценка
при этом у%-ный доверительный интервал определяется по формуле
*7 -И(1+т)/2>ЯА - mJ ~
Суммируя доверительные интервалы для подсистем, получим
оценку показателя эффективности системы, рассчитанную по резуль-
татам автономных испытаний:
к _ к Г-——— к к _ к —
Z xj - “(l+T)/2 X ^j/nJ ' W7 ~ Xj + «(l+T)/2 Z ^j/nj •
7=1 7=1 7=1 7=1 7=1
Перейдем к усиленным неравенствам
л\х7 +и(1+т)/2
7^/л7 ) •
’ J' J 'min
> М,
I м,
max
выполнение которых обеспечивает выполнение исходного равенства.
Из усиленных неравенств немедленно следуют требования к ма-
тематическим ожиданиям подсистем при автономном подходе:
Sfe+“(l.7)/2lR7vL'
где = MJ п.
JI
При системном подходе строится закон распределения оценки
к
х = У, X/, представляющий собой нормальное распределение с мате-
7=1 к А:
магическим ожиданием М=2^пу и дисперсией ^оу/лу.
В соответствии с нормальным законом распределения у%-ный
доверительный интервал при системном подходе запишется в виде
-и
666
Требования к показателям эффективности подсистем определя-
ются в этом случае как
(*/ -* ^7 * (*7 + “(i+y)/2>/^7(4))min •
Таким образом, дисперсия оценки х-, определяющая ширину
доверительного интервала и соответственно погрешность принимае-
мого статистического решения, при системном подходе в 4к раз мень-
ше, чем при автономном.
Подтверждение требований к дисперсии. В рассматриваемой в
предыдущем разделе аддитивной модели принимались известными
дисперсии Оу (/= 1,..., л). При неизвестных дисперсиях требование к
математическому ожиданию может быть дополнено требованием к
дисперсии.Таким образом, имеем о2 = ^Оу.
;=1
Оценкой дисперсии оу, полученной по результатам автономных
испытаний, является оценка вида
SJ = ----7 2- (xiJ ~ )2’
"J ~17=1
при этом статистика Sj (nj -1)/оу имеет х2-распределение с (л.- -1)
степенями свободы, а соответствующий доверительный интервал
находится в пределах
*?/ (”/ 0 < ^2 < *$7 (nJ О
Х(1+у)/2 (Л7 ~ 0 Х(1-у)/2 (Л7 “ О
В качестве оценки дисперсии системы естественно принять ве-
личину
. к
№ = X S],
1-1
Эта оценка в соответствии с правилом Сэтгервейта [27] может
быть аппроксимирована х2‘РаспРеДелением с числом степеней сво-
боды v, рассчитываемым по формуле
667
В зависимости от конкретных значений оценок Sj величина v
меняется в диапазоне
и достигает своего наибольшего значения при равных 5?, . При
этом у%-ный доверительный интервал для дисперсии системы имеет
вид:
п
Последовательно заменяя Sj на S?и 5?^, получаем тре-
бования к дисперсиям отдельных подсистем:
ушах
у nun
Так как v, как правило, оказывается больше, чем (лу - 1), сис-
темный подход обеспечивает определенное сужение доверительного
интервала. Конкретная величина выигрыша от использования сис-
темного подхода рассчитывается после получения эксперименталь-
ных данных (табл. 14.1).
14.2. Использование априорной информации
для сокращения объема испытаний
14.2.1. Байесовский метод оценивания
В процессе проектирования сложных систем в результате проведения
теоретических расчетов, математического и полунатурного модели-
рования, различного вида испытаний, а также использования опыта
проектирования аналогичных изделий накапливается значительная
информация о надежности и эффективности разрабатываемого изде-
лия.
668
Таблица 14.1
Зависимость оценок показателей эффективности системы от оценок показателей эффективности подсистем
Математи- ческая модель Оценка показателей эффективности подсистем Оценка показателей эффективнос- ти системы Доверительный интервал Объем испытаний
автономный подход системный подход
1 2 3 4 5 6
1. Вероят- ность без- отказной работы к /?=П*, 1=1 S*| е* 1 II 1=1 ^вС^экв» ^ЭКВ» Y) (^ЭКВ » ^ЭКВ » Y) 'Ъкв =min{nI} ^экв = ^0 — ^экв^П лз =0,9 Y = d- Ъ = 293 Л,,. =0,99 0,95 = 0 ni min =
2. Интен- сивность отказов к 1=1 Планы [NU(M) 7] Ъ = г,/‘^ Планы [W(3/)r] Ъ = (ri - O/'z, >> II Планы [NU(M)7] f к А (к Х(1-у)/2 X(l+y)/2 у <=1 7 < Л < У <=1 J Л3=о,1 у = г = /г min = 370 zmin у =0,01 0,95 = 0 А. = 37 х min
Планы [MWr] ( ‘ 1 ( * 'I Х(1-у)/2 ri %(1+у)/2 _Л_£=1— V 1=1 ' ^Emax ^Emin
Окончание табл. 14.1
1 2 3 4
3. Диспер- сия к _2 _ V гг2 О — О, »=1 и II л? । ЛИ 05 Ю II IM* О, -•Ю S2» <, о2 £ s\ X(1+7)/2(v) X(1-T)/2(v) (к V= J=L_J_
к min (л,- -1) £ v S £(щ -1) >=1
4. Среднее значение к М = £ mt i=l 1 П л* 1=1 к М = i=l - h-ajl (и “ 0s2 ) * м 5
равны
гц равны
Г _Х1-а(”;-!) „ _.Х1-а(*^-*)
а = 0 = 0,05
л = 5; 10; 20
Ki=13,3; 5; 2,9
Gi равны
гц равны
1 г1-а/2
2 л-1
а = 0 = 0,05
5/о = 3; 1,2
л =15; 55 л = 5; 10
К сожалению, эта информация разнородна, т.е. оцениваются
различные показатели эффективности как подсистем, так и системы
в целом, измерения параметров и характеристик системы произво-
дятся с различной точностью, испытания осуществляются в различ-
ных условиях и пр. Все это затрудняет использование имеющейся
обширной априорной информации и требует разработки математи-
ческих методов получения комбинированных (объединенных) оце-
нок показателей надежности и эффективности изделий.
Байесовский метод оценивания основан на использовании наи-
более полной априорной информации об оцениваемом показателе
R в виде априорного распределения неизвестного оцениваемого
параметра J\R) и плотности распределения измеряемых характе-
ристик как функции неизвестного показателя (функция правдопо-
добия) Дх/Я) [25].
Метод базируется на формуле Байеса, котрая позволяет опреде-
лить апостериорную плотность вероятности неизвестного показателя
P(R/x), являющуюся наиболее полной характеристикой оценки R и
содержащую как априорную, так и статистическую информацию.
Согласно этой формуле апостериорная плотность вероятности:
Р(Я/х) =
P(R)P(x/R)
Р(х)
где Р(х) = j P(R)P(x/R)dR — безусловная
плотность вероятности из-
п
мерений; Q — область задания показателя R.
Общей характеристикой точности байесовских оценок является
средний риск. Для вычисления среднего риска необходимо задаться
функцией потерь, которая в общем случае является некоторой функ-
цией оценки и истинного значения оцениваемого показателя.
Наиболее распространенными функциями потерь являются:
• простая функция потерь Tl(R,R) = C-b(R-R), где константа
0 0,5 — дельта-функция;
• квадратичная функция потерь П(Л, R) = (R-R)2;
функция потерь, равная модулю ошибки П(Я, R) = R- R;
прямоугольная функция потерь П(Я, R) =
О R-R <е;
1 R-R >е.
671
Среднее по всевозможным выборкам значение функции потерь
носит название условного риска'.
r(R) = J П(Я, R)P(xlR)dx.
—<х>
Средний риск получается усреднением условного риска по всевоз-
можным значениям оцениваемого параметра:
W = J r(R)P(R)dR.
а
В качестве байесовских оценок могут быть приняты различные
характеристики апостериорного распределения, которые минимизи-
руют средний риск при той или иной функции потерь. Такими наи-
более распространенными характеристиками являются мода, медиа-
на и математическое ожидание апостериорной плотности вероятности.
Апостериорная мода минимизирует средний риск при простой
функции потерь. Эта оценка обладает свойствами, аналогичными
свойствам хорошо известной и широко используемой в практике ста-
тистического анализа оценки максимального правдоподобия. Апос-
териорная медиана минимизирует средний риск при функции потерь,
равной модулю ошибки. Апостериорное математическое ожидание
минимизирует средний риск при квадратичной функции потерь.
Минимальный средний риск при этом равен дисперсии оцениваемо-
го параметра.
Действительно, средний риск при квадратичной функции потерь
запишется как
W = J J (R-R)1 P(R) Р(х/R)dRdx
Q—oo
ИЛИ
W = jj (R-R)2P(R/x)P(x)dRdx =
Q—oo
[Я/х]+/)[Я/х]-2Л/[Я/х]Я+/Г P(x)dx.
При выборе R = Л/[Л/х] получим выражение для минимального
среднего риска:
оо
W = J Z)[P/x]P(x)Jx = Z)[x].
—oo
672
Для унимодальной и симметричной апостериорной плотности
вероятности все три приведенные оценки совпадают. В'частности,
это имеет место при нормальном распределении.
При несовпадении указанных оценок чаще всего применяют апо-
стериорное математическое ожидание, что объясняется в основном
более простой вычислительной процедурой построения оценки М [R]х]
и определения ее точности. Кроме того, эту оценку называют оцен-
кой равного риска, так как при выборе R = M [Л/х] вероятности зна-
чений R, больших и меньших R, одинаковы. Поэтому апостериорное
математическое ожидание в качестве оптимальной байесовской оценки
не дает предпочтения ошибкам в зависимости от их величины. При
необходимости придания большей значимости малым ошибкам ис-
пользуется мода, а большим ошибкам — медиана.
' При практическом использовании байесовских оценок априор-
ное распределение P(R) чаще всего определяют на основе обработки
данных испытаний изделий-аналогов. Это так называемый эмпири-
ческий байесовский подход. Опишем типичную ситуацию для эф-
фективного применения данного подхода. Пусть по результатам ис-
пытаний некоторого изделия получена оценка исследуемого показателя
R\. По результатам испытания второго изделия получена оценка ана-
логичного показателя R%. Вследствие действия ряда неучтенных слу-
чайных факторов оценка R2 отлична от Д. Другими словами, суще-
ствует диапазон возможных значений параметра R, в котором он
изменяется случайным образом. Неопределенность в значениях R
можно описать априорной плотностью вероятности P(R). Заметим,
что при рассмотрении задач такого рода необходимо исключить изме-
нение показателя по какому-либо неслучайному закону. Ниже при-
водится методика эмпирического байесовского подхода [16].
В соответствии с формулой Байеса имеем:
1. P(R/x) = P(R)-{—------------,
J P(R)P(xl/R)dR
a
где X| — некоторое выборочное значение из распределения P(x/R).
2. P(R!^ = Ptf/x,) (
Q
где x2 — следующее выборочное значение x, независимое от Xp а
полученная ранее плотность распределения P(R/x\) используется в
качестве нового априорного распределения.
673
3. По известной выборке хп} при помощи 5-функций стро-
ится эмпирическое распределение
1 п
Р3{х) = -^^х,х{).
п 1
4. На основе использования равенства Рэ(х) = j P(Rlx)P3(x)dR
а
строится эмпирическое априорное распределение
1 п
p3(R)=-Yg(R,xi),
ni=l
где g(R, х) = ГР(Я/х)] — ядро, обратное f\x/R).
Таким образом, усилия, связанные с преодолением априор-
ной неопределенности, сводятся к решению интегрального уравне-
ния относительно РЭ(Р) .
Помимо статистических данных априорное распределение мо-
жет строиться на основе данных экспертных оценок: оно представля-
ет собой в этом случае субъективное распределение вероятностей. При
отсутствии априорных данных, необходимых для построения априор-
ного распределения, процедура построения оценки неизвестного по-
казателя R может основываться на минимаксном критерии. Мини-
максной называется оценка, для которой верхняя граница условного
риска не превосходит верхних границ при любых других оценках.
Вальд доказал, что минимаксная оценка является байесовской
оценкой при априорном распределении оцениваемого показателя, для
которого средний риск имеет наибольшую величину [16] . Он пока-
зал также, что байесовская оценка, для которой условный риск не
зависит от R, является минимаксной. Однако это условие является
необходимым, но не достаточным, и общего метода нахождения наи-
менее благоприятного априорного распределения, к сожалению, не
существует. В этой связи представляются чрезвычайно интересными
результаты построения наименее благоприятных априорных распре-
делений в смысле максимума энтропии [35].
Анализ данных результатов привел к практически важному выво-
ду: все наименее благоприятные априорные распределения, обеспе-
чивающие максимум энтропии, являются «самовоспроизводящими-
ся» распределениями, т.е. распределениями, вид которых не меняется
после коррекции на основе экспериментальных данных в соответствии
с методом Байеса. Комбинация этого свойства с использованием
эмпирического байесовского подхода позволяет построить удобную
674
инженерную методику определения априорных распределений, из-
ложенную ниже.
1. Функция правдоподобия выражается через ядро, зависящее
как от измерений х, так и от оцениваемого показателя R и соответ-
ствующего нормирующего коэффициента, зависящего только от из-
мерений х:
P(x/R) = K(x)f(x/R),
где К — нормирующий коэффициент, который определяется соотно-
шением
ад=7—-—•
J f(x/R)dR
я
2. Апостериорная плотность вероятности представляется в виде
РЩх) = A(x)B(R)f(x/R),
где нормирующий коэффициент А(х) определяется соотношением
Л(х) = -------------.
J B(R)f(x/R)dR
я
Условие «самовоспроизводимости» может быть удовлетворено
исходя из предположения представимости априорной плотности ве-
роятности в виде P(R) = С(х)f (x/R), где в качестве ядра используется
ядро функции правдоподобия /{x/R), а нормирующий коэффици-
ент определяется как С(х) =
3. В результате проведенных выкладок апостериорная плотность
вероятности может быть представлена в виде
Р(Л/х) = K(x)f(x'/R)f(x/R) = K(x)f(x"!R),
где х означает априорные «измерения», полученные при испытани-
ях изделий-аналогов; х" определяется покомпонентным сложением,
а нормирующий коэффициент рассчитывается по формуле
_________1_________
J/(x'M)/(x/j?)J/?’
22*
675
Проиллюстрируем применение данной методики для ряда част-
ных случаев, широко встречающихся в практике получения результа-
тов испытаний.
Оценка математического ожидания нормального закона распре-
деления при известной дисперсии. Наиболее просто байесовская оцен-
ка строится для математического ожидания нормального распределе-
ния в случае, когда известна дисперсия. Тогда функция правдоподобия
имеет вид
Р(х1,...,хл//ях,Лх) —
. * 1 п п -
где = 1/о*; х = - £ xz; Sx2 = £ (х/ - х) .
тт 71 / = 1 / = 1 Z-
Для данной функции правдоподобия самовоспроизводящимся
априорным законом распределения также является нормальное рас-
пределение
Р («х) = (2<1/2 ех₽{-1 Аг До («х - )2 }(Ax«0 )V2
с математическим ожиданием Mq [mx ] = хо и дисперсией [тх ] =
= VMx-
Если в качестве априорной информации используются данные
предварительных испытаний объема л0, параметр априорного рас-
пределения хо определяется как хл = —Хх,-. Используя формулу
«о i=l
Байеса, получим апостериорное нормальное распределение:
= (2л) ехр{—уАхЛоб0”х — Хоб) |(^х^об)^>
где йоб = п0 + л, хо6= (холо + хп)/(пц + л).
В качестве оценки математического ожидания принимаем апос-
териорное математическое ожидание Л/[/их] *об‘ Точность этой
оценки характеризуется апостериорной дисперсией = УАхиоб-
Проводя аналогичные выкладки, нетрудно получить байесовскую
оценку математического ожидания тх при различных значениях дис-
персий Оц # о*, обусловленных, например, различием точностных
характеристик средств измерений. В этом случае объединенная оценка
имеет вид
676
а ее точность характеризуется дисперсией
хй1<?{хй)+хъ1<?(х)
Оценка дисперсии нормального закона распределения при извест-
ном математическом ожидании. В том случае, если математичес-
кое ожидание известно, а необходимо оценить дисперсию, функция
правдоподобия записывается в виде:
P{xi,...,xnjmx,hx) = (2я)""/2 ©)ф|-|ахжУх2|л^'^2,
с2 V1 /
ГДО Sx = -2Axi~mx)
Для данной функции правдоподобия самовоспроизводящимся
априорным законом распределения является у-распределение 2-го
рода:
1 fl э 1 < 1 > У*»/2-11 э
= („д/2-1)!еХР 2JI 2I 2Ло5°
с математическим ожиданием Mq [Ах ] = 1/Sq и дисперсией Д [Ах ] =
= 2/йо(‘5о) •
Апостериорное распределение представляет собой также у-рас-
пределение 2-го рода:
P(At//nx,x1,...,x„) =
= (^/2-l)!eXP
| 2 Ах^’об^об j
Y*o6/2“1 i
7
где = «о + л, S& = (SqHq + 52лу(л0+л).
В качестве оценки неизвестной дисперсии принимаем апостери-
орное математическое ожидание
Ш] = ^г
%
или М = 5^.
677
Точность этой оценки характеризуется апостериорной дисперсией
В [Ах ] “ 2/Лоб (^об )
ИЛИ D Q
/ 2 \2 /
= 2 [^об у у^об •
Совместное оценивание математического ожидания и дисперсии
нормального закона распределения. Наибольшую сложность представ-
ляет случай совместного оценивания математического ожидания и
дисперсии. Для этого случая функция правдоподобия имеет вид:
ехр< -1)52 -^^nfx -тх)2 >hxn!2
1 п I п П
где x = -^Xj-9 S2 =----*)2(л > 1); S2 =0 (п = 1).
/=1 /=1
Для данной функции правдоподобия самовоспроизводящимся
априорным законом распределения является гамма-нормальное рас-
пределение
Р(/ихЛ) = (2л) 1/2 ехр{-^Дх-лоС/Их -^о)2}х
х (Ъъ )V2 exp {-1 A^vo 5o }(| Ало $ )V°/2 1 ,V°^
1 2 J'z ' (v0/2-l)!
с параметрами xq, n§, Sq, vq =nq-1.
Апостериорное совместное распределение представляет собой
также у-нормальное распределение с параметрами
*об = (^ + хл)/(ль + л); лье = ль +л; vo6 = «об-1;
5о («о -1) + S2 (л -1) + (х - х0 )2 «o«/("o + л)
ло +л-1
Апостериорным одномерным распределением являются:
• /-распределение Стьюдента для математического ожидания
Р(Л1х/Х1,...,Хл) =
5(1/2 лоб/2)
678
с математическим ожиданием М[тх] = и дисперсией D[mx] =
- (^об /поб ) (Vo6 /Vo6 2 ),
• гамма-распределение 2-го рода для
= (Уоб/2-1)! exP{(-vo6/2)^^}{(vo6 /2)М& }Vo6/2-1 (Vo6 /2)^
с математическим ожиданием М [Лх] = 1/5^ и дисперсией £>[йх] =
= 1
l/[(Vo6/2)(5&)2
Оценка вероятности успешного выполнения задачи. Для фиксиро-
ванного числа испытаний п и случайного числа успешных исходов т
функция правдоподобия описывается биномиальным распределением:
Р(т/п, R) = ч, Яи(1 - R)n~m
Для данной функции правдоподобия самовоспроизводящимся
априорным законом распределения является 0-распределение
Р(Л) = 5(Уо,По)ЛТо’1(1-Л)’10’1
где 5(уо,т|о) = ПУо + По)/Г(Уо )Г(Ло) — 0-функция;
Г(у) = [ ху 1 exp{-x}dr — у-функция, которая при целых значениях у
равна (у-1)!.
Апостериорная плотность вероятности P(R/m,n), полученная
после уточнения априорной информации опытными данными по
формуле Байеса, представляет собой p-распределение P(Rjm,ri) =
= 5(у,т|)7?у-1(1 - где новые параметры р-распределения опреде-
ляются по априорным и экспериментальным данным: у = уо + /л;
ц = т]о+л = /п.
Выражения для апостериорного математического ожидания и дис-
персии имеют вид:
Я = у/(у+т|); <S2(R) = Уп/[(У+т|)2(У+П + 1)
679
Для фиксированного числа отказов d и случайного числа испыта-
ний до получения заданного числа отказов функция правдоподобия
описывается распределением Паскаля:
Р(>М = Ы
(а -1)!(л-а)!
где q = 1 - R — вероятность невыполнения задачи.
Априорное самовоспроизводящееся распределение для данной
функции правдоподобия также представляет собой Р-распределение:
/’(<7)-5(Уо>По)<7Яо"1а-?)70-1-
Все остальные соотношения аналогичны случаю использования
биномиального распределения.
Байесовский метод оценивания по точности является оптималь-
ным, однако он имеет существенное ограничение: в общем случае
байесовские оценки могут быть смещенными. Покажем это на конк-
ретном частном примере байесовской оценки вероятности успешного
выполнения задачи по частоте. Байесовская оценка вероятности ус-
пешного выполнения задачи имеет вид:
в т Уо+/л
где параметры Уо = Уо +т1о = ио являются аналогами числа предва-
рительных испытаний Пц и числа успешных предварительных испыта-
ний WIq.
Оценка Д может быть представлена в виде линейного объедине-
ния априорной и экспериментальной информации:
Д=^_д,+_1_Дкс,
Л()+Л Hq+П
где Ro = тц/nQ; Д,кс = т/п.
Математическое ожидание этой оценки
M[RX] =
«О
ль+л
^[АксЛ------^[^эксЬ
ло+л
Таким образом, байесовская оценка позволяет правильно оце-
нить исследуемый показатель только при условии М[ Rq ] = М[ Дкс ] = R.
Полученное условие является условием статистической однород-
ности объединяемых априорных и экспериментальных данных, а эф-
680
фективное применение байесовского метода требует предваритель-
ной проверки этого условия. Критерии статистической однородности
и соответствующие решающие правила хорошо известны в математи-
ческой статистике.
При .выполнении условия статистической однородности априор-
ных и экспериментальных данных для подтверждения требований к
исследуемому показателю R достаточно проведения необходимого
объема более простых и дешевых предварительных испытаний. Та-
ким образом, целью проведения наиболее сложных и дорогих заклю-
чительных испытаний является только проверка статистической од-
нородности объединяемых данных. Такая идеология приводит к
резкому сокращению объема последних. В табл. 14.2 приведены бай-
есовские оценки ряда показателей эффективности.
14.2.2. Метод линейного объединения оценок
Объединенная оценка ищется в виде комбинации полученных по ре-
зультатам предварительных испытаний различного вида несмещен-
к
ных оценок хр..., хк [79]: Х& =£а,х,-. Из требования несмещенности
«=1
объединенной оценки находим условие, которому должны удовлетво-
к
рять весовые коэффициенты а,-: ^а, = 1.
»=1
Конкретные значения коэффициентов ос* находятся из условия
минимума дисперсии объединенной оценки:
1 / 1
“'’Wflytx,)]'
/ 1=1
Нетрудно показать, что метод линейного объединения оценок яв-
ляется частным случаем байесовского оценивания. Действительно, в
примере с оценкой вероятности выполнения задачи имеем оценку, по-
лученную по результатам предварительных испытаний Л] =т\1п±, и оцен-
ку, полученную по результатам заключительных испытаний R2=mx/nx.
Дисперсии этих оценок:
<?(А)=ла-Л)/«1; ^(А)=л2а
Из условия несмещенности оценок R\ и R2 имеем:
M[R\ ] = M[R2 ] = R\ = R2 = R-
681
оо
Байесовские оценки ряда показателей эффективности
Таблица 14.2
Показатель эффективности Оценка Точность оценки
Среднее значение у - *1Л1 + *2^2 и1+л2 Известная дисперсия D(x) = g2/(«i ^п2) у%-ный доверительный интервал Х ^(1+Т)/2 J Л1 + J т ” Х ' ^(1+Т)/2 J Л[ + Неизвестная дисперсия ^-W2(«<+W2-D^i+/j2^< - 1 $2 ^X + t^/2^+n2~lU
Дисперсия flf +«2-1 + П2 - 1) <^ < ^2(л1 + л2“0 Х(1+Т)/2(Л1 + "2 -!) " " Х(1_т)/2(«1 + «2 -1)
Окончание табл. 14.2
Показатель эффективности Оценка Точность оценки
Вероятность безотказной работы * di “Ь i/o щ, + п2 Y1 + 72 -1 = Y
Интенсивность отказов <ч С4 2^ + + е Л4" II << *(l-r)/2 / 2(Z1| + ^2 ) Л - Х(1+у)/2 / 2(ГЕ, + %)
оо
Из условия минимума дисперсии объединенной оценки получаем:
«I = л1/(«1 +«г); “2 = «2/(я1 +«г)-
В результате выражение для объединенной оценки имеет вид
Л = —д+—а2
+л2 «1+л2
и совпадает с выражением для байесовской оценки.
14.2.3. Обобщение байесовской оценки
при учете неоднородности объединяемых данных
При оценке исследуемых показателей байесовским методом предпо-
лагалась статистическая однородность априорной и эксперименталь-
ной информации. Однако отличие условий испытаний на различных
этапах экспериментальной отработки изделий может привести к неод-
нородности собираемой статистической информации. Байесовский
метод может быть легко обобщен на этот случай [89]. Для такого обоб-
щения рассмотрим две гипотезы:
• однородности U с вероятностью Р( U);
• неоднородности U с вероятностью Р(й) = 1- Р(и).
Тогда в соответствии с формулой полной вероятности апостериорная
безусловная плотность вероятности запишется в виде:
P(R/X) = P(R/X, U)P(U) + РЩХ, U)P(U).
Если выполняется гипотеза однородности U, то плотность веро-
ятности P(R/x, U) есть байесовская апостериорная плотность вероят-
ности. Если выполняется гипотеза неоднородностей U, то целесооб-
разно вообще отказаться от использования априорной информации и
оценку показателя производить только по экспериментальным дан-
ным.
Из выражения для безусловной апостериорной плотности легко
получить формулы для оценки и ее дисперсии:
R = R6P(U)+R3K[1-P(U)],
где Дкс — оценка максимального правдоподобия; R$ — байесовская
оценка;
D[R] = D( Д ]P2(U)+ОДкс ][1 - P(U)]2.
Из приведенного соотношения можно также найти выражение
для доверительных границ, например для нижней доверительной гра-
ницы:
684
J P(R/x) dR = P(U)\ P(R/x, U)dR + [1 - P(U)]^ P(R/ x, U)dR.
0 0 0
Проиллюстрируем метод учета неоднородности объединяемых
данных на конкретном примере оценки вероятности успешного вы--
полнения системой поставленной перед ней задачи. В этом случае,
используя условие приемки системы RH = R3 и переходя от интегра-
лов к суммам, согласно правилу аппроксимации ^-распределения
биномиальным распределением получим выражение для доверитель-
ной вероятности у, с которой подтверждается гипотеза R > Я,:
P(U) £ л+л0 я3^+"_Ч1-Яз)г+[1-ЛЮ1Ё(" я3й-г(1-я3)г =W,
г=0 ' ' г=0' 7
где
(1-ЛзГ =1-Уо и
f (;И’г(1-я,)г=1-уэкС
г=0' 7
— соответственно выражения для доверительных вероятностей, с ко-
торыми подтверждается заданное значение показателя только по экс-
периментальным данным и по объединенным данным.
При отсутствии отказов в предварительных и последующих испы-
таниях (d = d0 = 0) это выражение приобретает вид:
Р( U)R2+no + [1 - P(U)]R? = 1" Y
или я; = (1 - у)/(1 - P(U) + P(U)(1 - Yo)) = 1 - Уэкв,
где у0 — доверительная вероятность, с которой подтверждается за-
данное значение показателя Я, при проведении предварительных
испытаний; уэкв — доверительная вероятность, с которой достаточно
подтвердить заданное значение показателя Я1 при проведении после-
дующих испытаний для того, чтобы обеспечить подтверждение R3 с
доверительной вероятностью у по объединенным данным предвари-
тельных и последующих испытаний.
Поскольку знаменатель приведенного выражения всегда меньше
единицы, то значение уэкв всегда меньше у. Следовательно, учет
априорной информации всегда позволяет сократить число заключи-
тельных испытаний. В табл. 14.3 приведены результаты расчетов не-
обходимого числа заключительных испытаний, необходимых для под-
685
Таблица 14.3
Число испытаний, необходимых для принятия гипотезы R >
при различных значениях Р(0, у0
P(U) Число испытаний при Pj = 0,9 и у0, равном
0 0,1 0,2 о,з 0,4 0,5 0,6 0,7 0,8 0,9 0,95 0,99
0,1 229 228 227 226 225 224 223 222 221 220 219 218
0,2 229 227 225 223 221 218 217 215 211 209 208 208
о,3 229 226 223 220 217 213 209 205 202 198 196 194
0,4 229 225 221 217 211 207 202 196 190 185 181 179
0,5 229 224 218 213 207 201 193 186 178 170 165 161
0,6 229 223 217 205 196 186 175 184 152 152 145 139
0,7 229 222 213 202 193 185 174 162 147 130 120 112
0,8 229 221 211 200 191 178 164 147 128 103 87 73
0,9 229 219 209 198 190 177 160 145 109 64 37 9
0,95 229 219 208 194 185 169 152 87 37 0 0
0,99 229 218 207 194 180 165 145 112 73 8 0 0
0,999 229 218 207 193 179 161 139 109 69 1 0 0
Число испытаний при 7^ = 0,99 и у0, равном
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95 0,99
0,1 298 297 296 295 294 293 292 291 290 289 288 287
0,2 298 296 294 292 290 287 286 284 280 278 277 277
0,3 298 295 292 289 286 282 278 274 271 267 265 263
0,4 298 294 290 286 280 276 271 263 259 254 250 248
0,5 298 293 287 282 276 270 262 255 247 239 234 230
0,6 298 292 286 274 265 266 254 233 221 221 214 208
0,7 298 291 282 271 262 254 244 231 216 100 189 181
0,8 298 290 280 271 259 247 233 216 197 172 156 142
0,9 298 288 278 267 254 238 221 197 192 133 106 78
0,95 298 288 277 263 249 234 214 181 172 106 68 9
0,99 298 287 276 263 248 230 208 179 156 77 18 0
0,999 298 287 276 262 247 229 207 178 142 70 2 0
686
тверждения заданного значения показателя при различной степе-
ни неоднородности априорных и экспериментальных данных.
При практическом использовании данного метода вероятность
Р( U) неизвестна и оценивается как нормированный критический уро-
вень значимости, на котором принимается гипотеза однородности
объединяемых данных, т.е. P(U) = - ан)/(ав - ан). Нижним
значением уровня значимости ан является рекомендуемый при про-
верке статистических гипотез уровень 0,05-0,1. Верхний уровень для
двусторонних решающих правил составляет 0,5; для односторонних
ав = 1.
В заключение следует отметить, что рассмотренный метод при
определении вероятности P(U) на основе обработки статистических
априорных и экспериментальных данных не исключает полностью
проблему смещения объединенных оценок.
14.2.4. Метод параметрических функций
Если априорное и апостериорное распределения не являются само-
воспроизводящимися, точное аналитическое выражение для байесов-
ских оценок отсутствует или оказывается исключительно сложным, а
реализация соответствующего вычислительного алгоритма — громоз-
дкой процедурой. В связи с этим возникает задача построения таких
алгоритмов объединения априорной и экспериментальной информа-
ции, для которых основная расчетная часть осуществлялась бы зара-
нее (до получения экспериментальных данных). Очевидно, указан-
ные расчеты должны охватывать параметры, являющиеся носителями
априорной информации относительно оцениваемого параметра. Схема
вычисления таких параметров не всегда эквивалентна (в смысле вели-
чины критерия качества) байесовским операторам и может рассмат-
риваться с позиций аппроксимации последних.
Одно из направлений теории аппроксимации байесовских опера-
торов заключается в использовании модели вида [79]
Л - Xq +^1^эКС,
а также ее частных случаев (аддитивной и мультипликативной моделей):
/? = Хо+А)кс’ ^ = \А>кс’
где Лэкс — экспериментальная оценка; Xq, Xj — параметрические
функции, зависящие от априорной информации и определяемые на
основе использования тех или иных критериев оценок.
Рассмотрим процедуру построения параметрической аппрокси-
мации байесовских оценок на конкретном примере оценки вероятно-
687
сти успешного выполнения задачи при использовании мультиплика-
тивной модели.
В качестве экспериментальной оценки принимаем оценку мак-
симального правдоподобия вероятности по частоте А^кс = т/п. Най-
дем параметрическую функцию из условия минимума среднего
риска:
W = ^R-R)2 P(R)P(m/n, R)dR,
О т
где функция правдоподобия представляет собой биномиальное рас-
пределение P(mln, R) =-—----Rm (1 - R)n~m с математическим ожи-
т\(п-т)\
данием M[m]=nR идисперсией Р[/и] = nR(l-R).
Производя вычисления среднего риска, получим:
P(m/n,R)P(R)dR =
О ml п)
2М-+*1^г P{R}P(mln,R)dR=
Л л2
2
О 1
А(1 д)~|Ъ>(д^=
=м{л2]-2Х1Л/[л2]+Х? m(r2)
П
m(r2) M(R)
п п
Дифференцируя полученное выражение среднего риска по Xj и
приравнивая полученную производную нулю, находим выражение для
параметрической функции Хр
1+[а<(Л)-М(л2)]/лЛ/(а2)’
где M(R), М(1&) — моменты априорного распределения.
Таким образом, для построения оценок методом параметричес-
ких функций нет необходимости знать вид априорного распределе-
ния, достаточно знать его моменты, которые могут быть найдены
эмпирическим путем.
688
Сравним полученные оценки с байесовскими и оценками макси-
мального правдоподобия.
Пусть априорное распределение равномерное в интервале [0, 1].
Тогда байесовская оценка будет иметь вид R~ =(1+т)/(2+п). Сред-
ний риск, соответствующий этой оценке, = 1/(6л+12). Средний
риск для оценки максимального правдоподобия W = 1/(6л).
И, наконец, средний риск оценки, полученной методом пара-
метрических функций, определится соотношением FK = l/(6«+3).
Таким образом, оценка занимает по точности промежуточное по-
ложение между байесовской оценкой и оценкой максимального прав-
доподобия.
14.2.5. Метод коррелированных процессов
Метод коррелированных процессов представляет собой разновидность
метода линейного объединения априорных и экспериментальных оце-
нок [73]. Рассмотрим основные положения этого метода.
Обозначим через X искомый р- мерный вектор вероятностных ха-
рактеристик системы, а через р-т -мерный вектор вероятностных
характеристик ее модели: X = M[R]; p = M[S], где R, S есть р-, т-
мерные векторы, компоненты которых представляют собой некото-
рые функции от значений процессов в системе и ее модели.
Оценки 1 и р. векторов X и ц, найденные по независимым стати-
стическим испытаниям, определяются соотношениями:
Значения R., S • получены при одних и тех же внешних воздей-
ствиях. Точное значение ц модели может быть найдено аналитичес-
ки. Задача состоит в построении оптимальной оценки Л вектора X по
значениям векторов X, Ц. Оценку Л будем искать в классе линейных
оценок Л = АХ+В|1+Сц, где А, В, С — некоторые матрицы размера
(рхр), (рхт) и (рхт) соответственно.
Для Z-го компонента вектора Л имеем:
Л,- = А'.Х+ВДг+С'.ц,
где А,, В(-, Cj — матрицы-строки, образованные из соответствующих
матриц.
689
Матрицы Az, Bz, Cz определим из условия несмещенности ком-
понента Az и минимума его дисперсии. Условие несмещенности имеет
вид: М [д] = AZX + Bzg + Czp = X. Отсюда получим выражение оценки:
1 п
=^~ Ci (Д - и) при А,- = - X R,; •
л;=1
Матрицу С,- найдем из условия минимума дисперсии оценки:
о,[л,]=м (л,-л()2
Вводя обозначения
п
|оЛу=м[(Х,.-х/)(д-и)г
-DJ5=M (Д-ц)(Д-ц) ,
п L J
получаем
D, =
- 2D„C,r
+с,оюсГ
откуда искомая матрица Cz определяется как С,- = D^D^.
Окончательно имеем выражение объединенной оценки:
А/ =
На практике и Dyy неизвестны и определяются статистичес-
кой обработкой экспериментальных данных:
А 1 ✓ Л \ Т Л Т
VRS---1. (R. -M(Sy =1S(S,. -g)(S; -ц)г.
п >1 " >1
Выигрыш в точности объединенной по методу коррелированных
процессов оценки рассчитывается по формуле
ri =(1_гЛУг5л) *’
где коэффициент корреляции = ^Rs/yl^RR^ss
Ограничения при использовании данного метода вытекают из его
исходных предпосылок:
• одинаковые внешние условия при исследованиях модели и ре-
альной системы, что практически никогда не выполняется вслед-
690
ствие невозможности учесть на модели весь комплекс реальных
возмущений;
• снижение вследствие замены точных значений их оцен-
ками выигрыша в точности, который может быть
оценен в ряде частных случаев, например при нормальном рас-
пределении исследуемых показателей.
14.2.6. Выбор комбинированного метода оценивания и рекомендации
по его использованию
Анализ приведенных методов получения объединенных (комбиниро-
ванных) оценок с использованием априорной и экспериментальной
информации позволяет рекомендовать байесовские оценки как наи-
более теоретически обоснованные, оптимальные по точности. На рис.
14.1 и в табл. 14.4 приведено сравнение по точности различных мето-
дов получения объединенных оценок для априорного равномерного
распределения, функции правдоподобия — биномиального распре-
деления.
14.2.7. Планирование объема испытаний
при использовании байесовского метода
Байесовский метод оценивания в традиционной форме используется
для анализа результатов испытаний и не приспособлен для решения
задач планирования. Действительно, методика байесовского оцени-
вания показателей эффективности системы основана, по существу,
на использовании эмпирического байесовского подхода, при кото-
ром априорная плотность распределения Р(Л) определяется по пред-
варительным экспериментальным данным. Такой подход применим
лишь в случаях, когда оцениваемый показатель эффективности при
переходе на следующий этап отработки не измеряется по какому-либо
неслучайному закону. При выполнении этого условия для подтверж-
дения заданной вероятности достаточно проведения необходимого
объема предварительных испытаний, последующие испытания для
уточнения полученной априорной оценки не требуются.
Таким образом, целью проведения последующих испытаний мож-
но считать проверку гипотезы о стационарности параметра Л, кото-
рая, как будет показано ниже, сводится к проверке гипотезы стати-
стической однородности априорных и экспериментальных данных.
В том случае, если результаты последующих испытаний оказы-
ваются однородными с принятым априорным распределением, па-
раметры которого выбраны из условия подтверждения по априорным
данным заданного значения показателя эффективности с необходи-
691
1 2 4 6 8 10 л
Рис. 14.1. Сравнение по точности различных методов получения объеди-
ненных оценок: а — зависимость среднего риска IKor объема выборки л; б —
зависимость объема испытаний п для подтверждения заданного значения
кривая 1 — метод максимального правдоподобия, кривая 2 — метод пара-
метрических функций, кривая 3 — байесовский метод, кривая 4 — байесов-
ский метод при учете неоднородности
692
Объединенные оценки показателей эффективности, полученные разными методами
Таблица 14.4
Метод получения оценок Алгоритмы получения оценок Свойства объединенной оценки Выигрыш в точности Характеристика
Байесовский метод оценивания Q где Pq(K) — априорное рас- пределение; P(X/R) — фун- кция правдоподобия измере- ний Нормальное биномиальное распределение: 1 /=1 Оценка по объединенной выборке (л0 + л): р _ *0 р . п р W и и Лд + Л Пц +п где Яо,ЯэКС — априорная и экспериментальная оценки Условие несмещенности: Л/[^] = Л/[^КС] = Л Оценка обеспечивает минимум среднего риска fK=]dxj П(Ы)Р(Х/ЮР0(Я#Я -СО -со при квадратичной функции потерь п(я,я)=(я-я)2 Степень уменьшения дисперсии зависит от вида распределения и соотношения между величиной и точностью априорной и экспериментальной оценок Имеется развитая теория байесовского оценивания. В качестве априорной информации может быть использована как статистическая, так и экспертная информация. Обеспечение несмещенности байесовских оценок требует проверки статистической однородности объединяемых данных
Продолжение табл. 14.4
Метод линейного объединения п A>6=Z«(A’ /=1 Rj — составляющие оценки; CLj — весовые коэффициенты Условие несмещенности: Л ^az=l;M Д = R, / = /=1 Условие эффективности: 1 / 1 7 Ы / /=1 где dj — дисперсия оценки Д- При равных dj do6 _ 1 к Частный случай байесовской оценки
Обобщение байесовских оценок при неоднородных объединяемых данных д)б=^+(1-р)4с, где Р — вероятность од- нородности объединя- емых данных Величина смещения для оцен- ки по объединенной выборке: Д = ±Р-^-8(Р), где 5(Р) — погрешность стати- стического решения об одно- родности. При Р->1 Д->0 do6 _pl t Дэкс Дэкс +(l-p)2 (ниже точности байесовских оце- нок) Требует (на основе использования критериев статистической неоднород- ности) расчета вероятности Р
Метод коррелиро- ванных процессов Дэб = ^Дкс + + СЯ, где Rq — модельная оценка; R — известное при модели- ровании истинное значение: А Лб=4кс-^-№-л). Условие несмещенности: Б + С=0 Условие эффективности: С = Ао/4хР где Z)10 — ковариация между экспериментальной и модель- ной оценкой; 2)00 — дисперсия модельной оценки ^об _ 1 4.КС I-'2’ где г = t ^10< । — >/А|Дх) коэффициент кор- реляции В качестве априорной информации могут быть использованы только резуль- таты моделиро- вания с извест- ным истинным значением R
Окончание табл. 14.4
1 п Аэкс Л/=1 До=“2l(a?kc/ - ДКс)(^Ь/-^ 1 п l Дю =-£№/-*)> ni=\ л 1 п Д)=-5Л/ ni=\ Замена истин- ных неизвест- ных Z)10, Dqq их оценками приводит к снижению точности объединенной оценки
Метод параметри- ческих функций А)б = ^0 + Аэкс ’ *об ~ ^0 + ^экс ’ Д>б ""Аже’ А.]Д0 — параметрические функ- ции, определяемые на основе априорной информации из ус- ловия обеспечения желаемых свойств оценок При мультипликативной модели из условия среднего риска для биномиального распределения X 1 , m(r)-m(r2) nMte] И'об _ 6л ^ЭКС 3(1 +2л) ^об _ 6(л+ 2) «"б 3(1 + 2л) (ниже точности байесовских оценок) Автоматически учитывает воз- можную неодно- родность объе- диняемых данных. Пара- метрические функции имеют сложную нели- нейную зависи- мость от момен- тов априорного распределения, полученную лишь для про- стейших случаев
мой доверительной вероятностью, требования к показателю эффек-
тивности можно считать подтвержденными.
В качестве статистики для проверки гипотезы однородности при
подтверждении требований к вероятности выполнения задачи может
быть использовано число успехов т при проведении испытаний. Тео-
ретическим законом распределения этой величины является безус-
ловное распределение Р(т), учитывающее как априорную, так и эк-
спериментальную информацию. Слишком малые или слишком боль-
шие значения т говорят о том, что экспериментальные данные не
согласуются с принятым априорным законом распределения эффек-
тивности. Однако использование такой статистики не позволяет пла-
нировать число испытаний.
Более удобной в этом отношении является статистика — число п
испытаний до получения заданного числа отказов. Если число отка-
зов d зафиксировано, а число испытаний является случайной вели-
чиной, то функцией правдоподобия является распределение Паскаля
где q = 1 - R — вероятность отказа.
Априорным распределением для вероятности отказа является Р-
распределение с параметрами у0, ц0 :
р(?)=2?(Уо,т1о)<?11о’1(1-?)То_1.
Безусловное распределение числа испытаний до заданного числа
отказов d представляет собой бета-паскалево распределение:
?(/>) - J НМЫ* =
j (rf-DKnj-DKTo-!>!(»+%+По-1)!
Значения нижней и верхней границ критической области опреде-
ляются из условия:
|Вер{л> лв} = у1,
[Вер{л< лн} = 1-у2,
где у. + у, -1 = у — заданная доверительная вероятность.
Так как таблиц бета-паскалева распределения не существует, то
для практических расчетов удобно использовать биномиальную апп-
роксимацию интегральной функции бета-паскалева распределения при
условиях d « п, т|0 « у0 +т|0, п « у0 +т|0 —1, rf + H0 « max{y0 +ц0,л}:
696
«n+Yo+Ло-^
и W1
Для верхней границы с учетом дискретности распределения
имеем:
Вер {л £ л,,} = 1 - Вер{л :£«,,}+Вер(лв) = у1,
где Вер^)
Минимальное число испытаний, необходимое для проверки ста-
тистической гипотезы о соответствии-экспериментальных данных ап-
риорному распределению, будет не менее пн. Для высокоэффектив-
ных изделий необходимое число испытаний удобно рассчитывать,
исходя из числа испытаний до получения первого отказа.
При выборе d = 1 формула для односторонней нижней границы
преобразуется к простому виду:
+ Yo +П0-1)Г° =1-Y.
откуда находим
лн
Простой вид д ля нижней границы получается также при т|0 = 1:
Yo-
Нетрудно видеть, что при у0 = - dQ, т|0 = d0 +1 полученный
критерий проверки статистической однородности совпадает с крите-
рием проверки равенства параметров двух биномиальных распределе-
ний. В табл. 14.5 приведены критерии проверки статистической од-
697
о\
чО
оо
Критерии проверки однородности параметров ряда распределений
Таблица 14.5
Распределение Исследуемый параметр Безусловное распределение измерений Решающее правило
Паскаля R Бета-паскалево распределение (^ + П0-1)!(У0+яв-</-1)!(л-1)!(У0-|-Я0-1)! (d - 1)!(п0 "1)!(л-</)!('Уо -1 )!(л + То + По -1)! d0 = 0 d= 1
Нормальное т Нормальное распределение (2л)-1/2 ехр{-1 (х - Xq )2 ^«об^АоЛоб )V2 l^-^ol °о7Уль+1/л~1-0/2 ’ «i-a/2 — квантиль нормально- го распределения
о2 Обратное p-распределение 2-го рода: , 7\п!2-\( п ,У*>/2 (.S’2) —502 p(s2/s02) = Z1 1 —гХ v ' 0 / D( 1 1 „ у»/24-По/2 B 2П’ 2”° S2 +-^-S2 ' «о ° \ v J 52 с 2 “ ^1-а(л,Ло)’ Э0 ^1-а — квантиль распределе- ния Фишера
Окончание табл. 14.5
т, а2 Для математического ожидания: • условное относительно S2 /-распре- деление Стьюдента с параметрами *0’ + ’ >1о + л-2 п J (^+л-2); • безусловное относительно & /-рас- пределение Стьюдента с параметрами - г (1 н х0; 50 — + - , л-1 ла л к 7 |х-*о| < -1) + *У2(л-1) Пц+П \ Ло+л-2 л,, * '1-^2 ("O'*-Я"2)- 6-о/2 — квантиль распределе- ния Стьюдента с «0+я N "о"
Для дисперсии: • условное относительно х обратное р- распределение 2-го рода с параметра- ми с 2/ 1Uz- - \2 щ , , (Л 1)+(х хо) _ . „ 2( 1)1 2«Ь. • безусловное относительно х обрат- ное p-распределение 2-го рода с пара- метрами 2(л-1), 2(^-1), п1 s: сч в? + т' — 1 о sP IX sT i 1 i а sr а 1 еч । ttT" Cz? VI м VI сч гч ^1^0 еч х“"'4
нородности априорных и экспериментальных данных для ряда других
распределений, выведенные на основе предложенного подхода и со-
впадающие с известными в математической статистике критериями
однородности параметров распределений.
Контрольные вопросы
1. Какие виды априорной информации вы знаете?
2. В каком виде используется априорная информация при байесовском
оценивании?
3. Каково условие несмещенности байесовских оценок?
4. Какие еще методы объединения априорной и экспериментальной
информации вы знаете?
5. Дайте рекомендации по применению различных методов объедине-
ния априорной и экспериментальной информации.
6. Как обосновать объемы испытаний при использовании байесовского
метода?
7. Какие критерии статистической однородности вы знаете?
Глава 15
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ
ТОЧНОСТНЫХ ХАРАКТЕРИСТИК ИСПЫТАНИЙ
ПРИ ФОРМИРОВАНИИ РЕЗУЛЬТАТОВ
СЕРТИФИКАЦИОННЫХ ИСПЫТАНИЙ
САМОЛЕТОВ
15.1. Сертификация авиационной техники
и ее производства
Вся авиационная техника подлежит обязательной сертификации.
Процедуры сертификации авиационной техники и ее производства
изложены в «Авиационных правилах» (ч. 21, разд. A—G), выпущен-
ных Межгосударственным авиационным комитетом. Эти правила
разработаны рабочей группой Авиационного регистра и введены в
действие Советом по авиации и использованию воздушного простран-
ства, который был создан в соответствии с межгосударственным «Со-
глашением о гражданской авиации и об использовании воздушного
пространства», утвержденным 27.12.1991 г. Правила устанавливают
обязательный для выполнения предприятиями, организациями и дру-
гими юридическими и физическими лицами государств, подписав-
ших указанное Соглашение, порядок сертификации и контроля за
соответствием гражданских воздушных судов и их компонентов дей-
ствующим нормам. Правила сертификации учитывают накопленный
опыт сертификации авиационной техники, стандарты и рекоменда-
ции Международной организации гражданской авиации (ИКАО) и меж-
дународную практику в области летной годности воздушных судов.
Межгосударственный авиационный комитет (МАК) — постоянно
действующий исполнительный орган, утвержденный независимыми
государствами, уполномоченный ими осуществлять в пределах своей
компетенции реализацию «Соглашения о гражданской авиации и об
использовании воздушного пространства», направленную на обеспе-
чение безопасности полетов воздушных судов.
Авиационный регистр МАК (АР МАК) — компетентный орган
МАК, осуществляющий деятельность в области летной годности и
процедур сертификации воздушных судов, их компонентов, произ-
водства авиационной техники, годности международных и категори-
701
рованных аэродромов и их оборудования к эксплуатации, охраны
окружающей среды от воздействия авиации с выдачей соответствую-
щих сертификатов, свидетельства и эквивалентных им документов.
Сертификационные работы проводят сертификационные цент-
ры, назначаемые АР МАК, о чем уведомляются соискатели серти-
фиката. Сертификационные работы проводятся под руководством и
под контролем Авиарегистра в соответствии с действующими метода-
ми определения соответствия или методами, разработанными орга-
низациями и предприятиями, проводящими сертификационные ра-
боты. Указанные методы подлежат одобрению Авиарегистром и
включаются в программу сертификационных работ.
Порядок сертификации авиационной техники, содержащей про-
граммное обеспечение, определяется Директивным письмом Авиа-
регистра от 25.11.1997 г. Это письмо разработано в связи с введением
в действие квалификационных требований КТ-178А «Требования к
программному обеспечению бортовой аппаратуры и систем при сер-
тификации авиационной техники» и устанавливает порядок взаимо-
действия разработчиков авиационной техники, Авиарегистра МАК и
его рабочих органов в процессе создания и сертификации авиацион-
ной техники, содержащей программное обеспечение.
В организации разработчика авиационной техники должна дей-
ствовать независимая инспекция, которая осуществляет контроль за
соблюдением процедур сертификации, согласование результатов сер-
тификационных работ, контроль качества производства, приемку
экземпляров авиационной техники и др. Сотрудники независимой
инспекции имеют статус представителей Авиарегистра.
Результатом сертификации комплектующего изделия (КИ) явля-
ется получение свидетельства годности или одобрительного письма
Авиарегистра, которое дает право использовать данное КИ на само-
лете в соответствии с его квалификационным базисом.
Процедуры одобрения производства авиационной техники опре-
деляются «Авиационными правилами» и директивным письмом Авиа-
регистра от 9.01.1998 г. «Сертификация производства комплектую-
щих изделий». Серийное изготовление КИ, на которое выдано
свидетельство годности, может осуществляться только при условии
одобрения Авиарегистром МАК производства этого КИ. Для получе-
ния свидетельства об одобрении производства Изготовитель должен
подать заявку установленной формы в Авиарегистр.
Большое значение в обеспечении безопасности полета имеют
нормы летной годности (НЛГ). Каждый вновь создаваемый самолет
должен получить сертификат летной годности, после чего он может
702
быть допущен к эксплуатации. НЛГ содержат минимальные государ-
ственные требования к летной годности самолета и определяют ту
часть безопасности полета, которая обеспечивается самолетом и эки-
пажем, пилотирующим самолет в соответствии с указаниями «Руко-
водства по летной эксплуатации».
Первое издание «Норм летной годности гражданских самолетов
СССР» (НЛГС) было введено в действие в 1967 г. В дальнейшем,
после внесения в них пяти изменений, НЛГС стали именоваться
НЛГС-1 (1972). Второе издание «Норм летной годности гражданских
самолетов» (НЛГС-2) было введено в действие в 1974 г. В период
1975—1980 гг. эти нормы были полностью внедрены в практику ра-
боты промышленности, гражданской авиации и Авиационного реги-
стра и сыграли важную роль в создании, сертификации и эксплуата-
ции нового поколения отечественных пассажирских самолетов, в
повышении уровня их безопасности, а также в накоплении отече-
ственного опыта применения на практике требований к летной год-
ности. По результатам этой работы с учетом новых требований ИКАО,
опыта совершенствования зарубежных и национальных НЛГ, разви-
тия авиационной науки и техники было подготовлено и введено в
действие третье издание «Норм летной годности гражданских самоле-
тов СССР» (НЛГС-3, 1984), которые в 1985 г. были приняты страна-
ми-членами СЭВ в качестве «Единых норм летной годности граж-
данских транспортных самолетов» (ЕНЛГС).
Сравнительный анализ НЛГС-3, Федеральных авиационных пра-
вил США (FAR) и Западноевропейских авиационных правил (JAR)
показал, что установленные ими уровни безопасности практически
эквивалентны. По отдельным требованиям имеются различия между
указанными НЛГ, содержащими менее или более жесткие требова-
ния к некоторым характеристикам. Однако наиболее существенным
является отличие НЛГС-3 от FAR и JAR по структуре расположения
требований и их нумерации, что затрудняет понимание отечествен-
ных НЛГС за рубежом. С 1990 г. была начата работа по сближению
НЛГС с нормами США и Западной Европы по структуре и содержа-
нию требований с учетом обеспечения конкурентоспособности оте-
чественных воздушных судов.
Рассмотрим примеры использования точностных характеристик
при формировании результатов сертификационных испытаний само-
летов на соответствие нормам НЛГС-3 применительно к системе уп-
равления как одной из наиболее сложных и ответственных бортовых
систем самолета.
703
15.2. Анализ методов подтверждения соответствия
точностных характеристик систем управления самолетов
нормам летной годности
Требования к точностным характеристикам систем автоматического
управления движением самолета подразделяются на две группы. Пер-
вая группа регламентирует эксплуатационные требования, наруше-
ние которых не приводит к возникновению особых ситуаций в поле-
те. Они нормируют вероятность (lij = 0,95) невыхода параметров
движения самолета из сравнительно узкой трубки отклонений. Во
вторую группу входят требования, определяющие уровень безопас-
ности полета. Область допустимых значений характеризуется пре-
дельно допустимыми изменениями параметров движения самолета
(Я, =0,9999-0,9999999).
Соответствие системы предъявляемым требованиям оценивается
на основе проведения независимых статистических испытаний в ожи-
даемых условиях эксплуатации с учетом вероятности их реализации:
математического моделирования, полунатурных и натурных испыта-
ний.
В табл. 15.1 приведен перечень требований первой группы к са-
молеты ТУ-204 и ИЛ-96.
Требования к перечисленным точностным характеристикам зада-
ются в вероятностной форме в виде одного из следующих условий:
Р — ^д} — Я}>
Р^д}
Р{хд1 <х<Хд2}>Лз,
(15.1)
где хд, хд1, х_2 — допустимые значения точностных характеристик;
Tfj — заданное значение вероятности (чаще всего = 0,95). Тре-
бования должны быть подтверждены с доверительной вероятностью
у = 0,9.
Таким образом, общее правило подтверждения требований к ве-
роятности выполнения условий (15.1) находится путем построения
толерантного интервала:
где р(х) — плотность распределения вероятности характеристики х.
Различают параметрические и непараметрические толерантные
интервалы.
704
Таблица 15.1
Перечень точностных характеристик управления самолетов ИЛ-96 и ТУ-204
Режим Точностные характеристики
Совмещенное управление (фаза стабилизации) Установившаяся ошибка стабилизации углов курса, крена и тангажа
Стабилизация высоты Установившаяся ошибка стабилизации высоты
Посадка: заход на посадку приземление пробег Отклонения скорости полета, отклонения относительно равносигнальных зон Продольный разброс точек касания, боковое отклонение Величина послепосадочного пробега
Курсовая зона Ошибка стабилизации расчетной траектории захода на посадку в горизонтальной плоскости
Уход на второй круг Ошибка стабилизации на продолженной оси взлетно-посадочной полосы Ошибка стабилизации нулевого крена Точность отработки программы по скорости в установившихся режимах
Взлет Отклонение от оси взлетно-посадочной полосы в процессе разбега при нормальном и прерванном взлете Ошибка стабилизации на продолженной оси взлетно-посадочной полосы Ошибка стабилизации нулевого крена Точность отработки программы по скорости на установившихся режимах
Стабилизация числа оборотов Точность отработки заданного числа оборотов
Стабилизация скорости и числа М Ошибки стабилизации заданных приборной скорости или числа М на режимах маршрутного полета
Параметрический толерантный интервал зависит от р(х). Так,
для нормального распределения N(m, о2) с неизвестными парамет-
рами /лип2 двусторонний параметрический толерантный интервал
имеет вид:
p(x)dx > R3 ►
705
1 Л 1 п ~ ~
где х = — У, х,-; S1 = — - У (х - х Г — оценки параметров m и <г.
л,=1 «-hti
В том случае, когда А = Х,^, В = — порядковые статисти-
ки, толерантный интервал не зависит от р(х) и является непарамет-
рическим:
P{P(X(s))-Ptf(r))^3}=r.
Так, при выборе s = п (и — объем выборки), г = 1 непараметрический
толерантный интервал имеет вид
(л-1, 2) = у,
где In — неполная бета-функция, или
^2)! Нл'2(1-г)* = 1-Ъ
т.е. nR"~i -(л-1)Л^ = 1 — у.
Для одностороннего непараметрического толерантного интерва-
ла наименьшие целые значения п должны удовлетворять неравенству:
Проведем анализ ряда статистических методов, которые исполь-
зуются в настоящее время или могут быть использованы в перспекти-
ве для подтверждения требований к точностным характеристикам.
Непараметрический метод подтверждения требований к точнос-
тным характеристикам (метод «проходит — не проходит*). Этот
метод основан на использовании в качестве статистической моде-
ли получения информации биномиального распределения вероят-
ности, описывающего вероятность появления d отказов при про-
ведении п независимых испытаний с постоянной вероятностью
успешного исхода R.
P(d/n\R) = Rn-d{\ - я/; </ = 0,...,л; л = 1,...
В качестве оценки неизвестного параметра R используется со-
стоятельная несмещенная эффективная оценка вероятности по час-
тоте: R = \-d/n. Дисперсия этой оценки d(r) = R(A-R)/n нелинейно
зависит от самого оцениваемого параметра и неудобна для характери-
стики точности. Поэтому для определения точности оценки исполь-
зуется универсальная характеристика точности — доверительный ин-
706
тервал, определяемый в соответствии с уравнениями Клоппера-Пир-
сона:
^оН(л-г)!
E-i7^4i^“ra-V=Yi.
^0г!(л-г)!
где Лц, R* — соответственно нижняя и верхняя доверительные грани-
цы; у| + у2 -1 = у — доверительные вероятности.
Односторонние интервалы, используемые в дальнейшем, полу-
чают из условия у. = 1 либо у2 = 1.
Подтверждение требований к точностным характеристикам сис-
тем управления формулируется в виде решающих правил при провер-
ке следующих статистических гипотез:
Нулевая гипотеза
R 5 R3 (гипотеза недоверия)
R s R3 (гипотеза доверия)
Альтернативная гипотеза
R> п (приемка системы)
R< R. (браковка системы).
Соответствующие решающие правила имеют вид:
• правило приемки системы
• правило браковки системы
dt-i^K-r<y-v>r
Г^г\(п-гу.
Выбор нулевой гипотезы имеет решающее значение. Так, ошиб-
ка первого рода (риск изготовителя) при принятии гипотезы прием-
ки составляет значительную величину (а = у), в то время как ошиб-
ка второго рода (риск заказчика) достаточна мала (р = 1 - у). При
принятии гипотезы браковки риск изготовителя а = 1 - у, а риск за-
казчика р = у.
Приемка и браковка системы требуют проведения различного
объема испытаний. Например, при отсутствии отказов для принятия
системы с R3 = 0,95 и у = 0,9 необходимо провести 46 испытаний;
забракована система быть не может, так как при d = 0, RB = 1. При
23*
707
одном отказе для приемки системы требуется уже 77 испытаний, а
для ее браковки достаточно трех испытаний. Заметим, что левая
часть решающего правила приемки представляет собой значение ин-
тегрального закона распределения случайной величины d при R = Ry
Таким образом, вероятность получения числа отказов, меньшего
или равного d, при приемке системы мала (< 1 - у). Для того чтобы
при данном объеме испытаний п реализовалось число отказов d с
достаточно большой вероятностью, истинное значение Л должно быть
существенно большим, чем Л,. Это значение может быть определено
из соотношения для верхней доверительной границы при подстанов-
ке в нее приемочного значения п:
гТог!(л-г)!
Аналогично, для того чтобы реализовалось число отказов, необ-
ходимое для браковки системы, истинное значение вероятности R
должно быть существенно меньше заданного значения и может опре-
деляться из соотношения для нижней доверительной границы при
подстановке в нее браковочного значения п:
f =1“У-
Так, для приведенных выше числовых значений такие «запасы» веро-
ятности R составляют:
• при приемке системы, если d = 0, то R = 0,9988; если d =1, то
R = 0,995;
• при браковке системы, если d =1, то R = 0,368.
Поэтому при проведении испытаний, как правило, ни принять, ни
забраковать систему непараметрическим методом не удается, можно
лишь построить достаточно широкую интервальную оценку искомой
вероятности.
Однако системы автоматической посадки самолетов ИЛ-96 и ТУ-
204 были сертифицированы в соответствии с правилом «проходит —
не проходит», что свидетельствует о больших «запасах» по точност-
ным характеристикам этих систем и возможности расширения допус-
тимых условий их применения.
Параметрический метод подтверждения требований к точност-
ным характеристикам. При этом методе требуется более полная ин-
формация о статистических свойствах исследуемой характеристики,
поэтому объем испытаний меньше. В том случае, если известен за-
кон распределения исследуемой характеристики х, подтверждение тре-
708
бований к вероятности нахождения характеристики в допуске прово-
дится аналитически и не требуются испытания вообще. Так, для од-
ностороннего допуска Р{х < хд} > 7^ и нормального закона распре-
деления характеристики х ~ N(m, о2) решающее правило приемки
системы имеет вид:
/и+^о<хд,
где U— квантиль стандартного нормального распределения.
Однако при проведении испытаний параметры т, а2 неизвестны
и оцениваются путем обработки данных испытаний:
1 п
где xz — измерения оцениваемой характеристики в /*-м испытании
(/ = 1,.
Для получения решающих правил приемки и браковки системы
необходимо знать распределение случайной величины z = x+Ks, где
коэффициент К >U
учитывает отличие статистических оценок от
истинных значений оцениваемых параметров.
В [27] показано, что случайная величина z приблизительно нор-
мальна начиная уже с п >5 и имеет математическое ожидание
M[z] = m + K<s и дисперсию
Д [z] = о2 [1/л + 2/( 2 (п -1))],
что позволяет построить нижнюю доверительную границу:
2(л -1)
Потребовав UK = К + U,V. - +-------, получим, что с вероят-
'у и 2(п-1)
ностью у случайная величина х + Ks>tn+Uв о. Следовательно, усло-
709
вие х + Ks < хд обеспечивает с вероятностью у подтверждение требо-
вания R > /?з приемки системы.
Так, для = 0,95; у = 0,9; Uj^ = 1,645 значение коэффициента К
изменяется от 3,4 (л = 5) до 1,703 (л = 1000).
Для получения условия браковки системы рассмотрим верхнюю
доверительную границу:
(К')2
2(л—1)
11 (К')2
Потребовав Un = К’+U,_4.I—+——-—, получим, что с вероятно-
'ул 2(л-1)
стью у случайная величина x + K's <т+Un с. Следовательно, усло-
вие х + Ks > х. обеспечивает с вероятностью у выполнение условия
R < R3 браковки системы.
Для приведенных выше значений R3, у значение коэффициента
А"'изменяется от 0,933 (л = 5) до 1,584 (л = 1000).
Для сравнения непараметрического и параметрического методов
рассчитываем «запасы» вероятности выполнения задачи для л = 46:
• приемка системы R = 0,99;
• браковка системы R = 0,867.
Таким образом, «запасы» в этом случае существенно меньше или
достигаются при значительно меньшем объеме испытаний, составля-
ющем для данного примера:
• приемка системы d = 0, л = 14;
d = 1, л = 25;
• браковка системы d = 1, л = 2.
Преимущества параметрического подхода растут с увеличением
требуемой вероятности выполнения задачи. Так, при R3 = 0,99;
у = 0,95 имеем:
• приемка системы d = 0, пк п = 229;
d= 1, лн п = 388, лп п = 36;
• браковка системы d = 1, лнп = 10, лпп = 6,
где пи п, лнп — соответственно объемы испытаний при параметри-
ческом и непараметрическом подходах.
Таким образом, параметрический метод подтверждения требова-
ний к точностным характеристикам систем автоматического управле-
710
ния позволяет существенно сократить необходимый объем испытаний
и может быть рекомендован для внедрения в практику испытаний.
Многомерные задачи подтверждения требований к точностным ха-
рактеристикам. При подтверждении требований к точностным ха-
рактеристикам нескольких параметров необходимо построить много-
мерный толерантный интервал. Индивидуальные требования к вероят-
ности Я,,- и доверительной вероятности у, связаны с общими вероят-
ностями Я, и у совместного выполнения требований соотношениями
; уj = 4/у — для независимых параметров;
1 - > (1 - Я, )/k; 1 - yz> (1 - у)/к — для коррелированных пара-
метров с неизвестным коэффициентом корреляции (неравенство Бон-
феррони [27]), где к — число исследуемых характеристик.
Так, для 7^ = 0,95, у = 0,9, к = 5 индивидуальные требования рав-
ны = 0,99, yz = 0,99 и для их реализации необходимый объем вы-
борки составляет уже п = 473 (двусторонний или толерантный интер-
вал) и л = 298 (односторонний толерантный интервал).
Для преодоления лавинообразного увеличения объемов испыта-
ний в многомерном статистическом анализе разработан ряд приемов.
При этом базовой идеей является сведение многомерной задачи к
одномерной.
Наиболее интересные для практических приложений результаты
основываются на следующей теореме Р.С. Судакова [88]: если
f (х) = f (xj,.... хк) — арифметическая функция, которая возрастает по
каждой своей переменной в области определения и является симмет-
рической (т.е. не изменяет своих значений при любой перестановке
аргументов х,-, j = 1,..., А;), то статистика у = /(0„иП. •••. 0min) является
нижней у-доверительной границей для значения у = /(бр..., в*), а
у = f (®max*"’’ ®шах) является верхней у-доверительной границей для
значения У = /(®1>—> 0*), где 0 = (0р..., 0*) — оцениваемый параметр,
%>= mutely> - >9*у)> = шахл(01г... 0^), 0Уу = (0у7)-у-ниж-
няя (верхняя) доверительная граница для параметра 0j = 1,..., к.
Рассмотрим ряд практических приложений этой теоремы. В ре-
шаемой задаче совместная вероятность выполнения требований к точ-
ностным характеристикам связана с вероятностями выполнения тре-
бований к каждой отдельной точностной характеристике мульти-
к
пликативной сверткой R = П Я,.
Пусть подтверждение требований осуществляется автономно для
каждой z-й характеристики, при этом проводится nt- испытаний и ре-
711
гистрируется отказов. Тогда непараметрической оценкой вероят-
ности Ri является оценка вида Rj - а оценкой общей вероят-
Л к Л
ности R — расчетная оценка R = П А( .
Согласно результатам Р.С. Судакова, оценка R может быть пред-
ставлена в виде: R = l-dm/n-n, где п = mink], d = (1-Я)л_ —
округлены до следующего целого числа.
Первый вывод, который можно сделать из полученных результа-
тов, — это нецелесообразность проведения различного числа испы-
таний л(, т.е. должно выполняться условие гц = ... = пк = л.Другой
интересный вывод может быть сделан на основе рассмотрения двух
частных случаев: </( = 0 (/ = 1,..., к) и d\ = 1, </2 = ••• dk = 0.
Для варианта dj = 0 эквивалентное число отказов </экв = 0 и
доверительные границы для совместной вероятности R совпадают с
доверительными границами для частных вероятностей Rj.
Таким образом, объемы испытаний, необходимые для подтвер-
ждения всех частных вероятностей выполнения требований к отдель-
ным точностным характеристикам, совпадают с объемом испытаний,
необходимым для подтверждения требований к совместной вероят-
ности.
Для варианта dj = 1 эквивалентное число отказов d3KB = 1 и дове-
рительные границы для совместной вероятности R совпадают с дове-
рительными границами для «слабого» звена Ар
Рассмотренный подход нетрудно применить к параметрическому
случаю. Известно [27],что случайная величина К = (хд -х)ЛУ уже при
л > 5 имеет приближенно нормальное распределение с математичес-
ким ожиданием UR (квантиль стандартного нормального распределе-
ния) и дисперсией D = \/n+-1)), что позволяет построить до-
верительные границы для UR.
П ft
(1 т)/2 у п 2(л-1) R ” W2 у л 2(л-1)
Сравнивая между собой нижние доверительные границы всех ча-
стных вероятностей А(, можно определить «слабое» звено. Если тре-
бования к совместной вероятности R подтверждаются для этого зве-
на, то они подтверждаются для всех остальных частных вероятностей
и для совместной вероятности в целом. Рассмотренный подход по-
712
зволяет избежать лавинообразного увеличения объемов испытаний в
многомерном случае.
Использование порядковых статистик для демонстрации характе-
ристик выдерживания траектории при заходе на посадку. В качестве
характеристики выдерживания траектории при заходе на посадку тя-
желых самолетов в [29] предлагается использовать максимальные от-
клонения от линии курса и глиссады, возникающие между 90 и 30 м
и записанные с помощью регистрирующей аппаратуры.
В предположении нормальности распределений вероятностей
отклонений от линии курса и глиссады с нулевыми средними значе-
ниями максимальные отклонения х (без учета знака) в течение опре-
деленного интервала захода описываются распределением Рэлея:
Р(х)
* -*W)
"о2
Состоятельной, несмещенной, эффективной оценкой парамет-
ра о2 распределения Рэлея является оценка вида:
где — максимальное отклонение, зарегистрированное в каждом
заходе; п — число заходов на посадку.
Точность оценки характеризуется дисперсией Z)(d2) = o4/(2 л) или
доверительным интервалом д22лД2_а/2 <о2 <д22ух2/2, где Х^/2»
Х1-а/2 — квантили х2-распределения уровней а/2,1-а/2 соответ-
ственно.
При демонстрации характеристики выдерживания траектории за-
даются: Ад — порог сигнализации тревоги; Р(х^ = 0,95 — вероятность
появления максимального отклонения, не большего заданной вели-
чины х^; у = 0,9 — доверительная вероятность.
Вероятность P(xq) определяется соотношением
„2 /Н/т2^
Р(х0) = 1-е оД °<
Для P(xq) = 0,95 имеем х0/о0 = 2,4477.
По данным [28] пороги сигнализации тревоги х^ = 75 мка для
глиссады и х0 = 25 мка для курса, а заданные значения параметра о
будут соответственно: о0 = 30,64 — для глиссады и о0 = 10,21 — для
курса.
713
Для подтверждения требований к параметру о2 могут быть ис-
пользованы как точное распределение оценки о2, так и ее нормальная
аппроксимация. При использовании точного х2-распределения ре-
шающим правилом является б2(In)/Oq <%2_а(2п) при уровне значи-
мости 1 - а = у, где а характеризует ошибку первого рода (вероятность
забраковать годную систему).
Планирование объема испытаний осуществляется из условия обес-
печения заданных значений вероятностей ошибок первого и второго
рода и заданной точности статистического решения, характеризуе-
мой расстоянием 8 между нулевой (о2 = <jg) и альтернативной
(о2 = 8oq ) гипотезами.
При альтернативной гипотезе статистика 62(2«)/(8qq)~ %2(2и)
имеет х2-распределение.
Зависимость между а, 0, 8, п определяется из соотношения
е Х?-а<2я)
Хр(2«) ’
где р характеризует ошибку второго рода (вероятность принять негод-
ную систему).
В табл. 15.2 приведены значения 5 при различных а, Р, п.
Таблица 15.2
Значения 8
п а = 0,01 а = 0,05
р =0,01 р = 0,05 р = 0,01 р = 0,05
5 9,072 5,89 7,156 4,646
10 4,543 3,462 3,802 2,895
20 2,874 2,048 2,516 2,103
30 2,358 2,046 2,110 1,831
60 1,829 1,661 1,686 1,532
При п > 30 можно использовать нормальную аппроксимацию х2-
распределения (Х2-v)/V2v ~ t/(0,l), где v — параметр х2-распределе-
ния, ЦО, 1) — стандартное нормальное распределение. Тогда слу-
чайная величина (о2 - Qq ) >Гп /<Jq - U(0,1) и решающие правила прини-
мают более простой вид:
714
— для нулевой гипотезы,
а /\®°оJ 1 + t/p/v л — для альтернативной гипотезы.
Отсюда необходимый объем выборки
-ьиЛ
1-а
П =
Так, при выборе а = р = 0,05 (у=0,9), 8 = 1,1 имеем п = 46.
При жестком ограничении числа испытаний для демонстрации
характеристик выдерживания траектории может быть применен дру-
гой подход, также основанный на использовании порядковых стати-
стик.
Расположим измеренные в каждом заходе на посадку максималь-
ные отклонения в порядке возрастания их значений х^, Х/2\,..., х,пу
При этом функция распределения наибольшей порядковой статисти-
ки Х/Лх задается формулой
где Р(х) = 1-ехр{-х2/(2а2)}.
Решающее правило для демонстрации характеристик выдержива-
ния траектории сформируем в виде
, ? Ц) пр^ Т»
ЛлЬ) = ^о>
где приемочное значение х0 п < х0 обладает тем свойством, что при
выполнении условия \П) хо пр требование к вероятности непревы-
шения максимальным отклонением порога сигнализации тревоги счи-
тается подтвержденным с заданной доверительной вероятностью.
В результате поведения простейших математических операций
получим:
*0 пр _ /1п(1 —^/1 —у)
Хо у 1п(1-Р0)
hn(i- ^1-у)
В табл. 15.3 приведены значения множителя J при
различных значениях п, у, Ро.
715
Таблица 15.3
Значения множителя ~7\—
V 1п(1-Р0)
п у = 0,9 у = 0,95
Ро= 0,95 Ро = 0,99 Ро = 0,95 Ро = 0,99
10 0,72 0,582 0,67 0,541
30 0,932 0,752 0,886 0,714
50 1 0,821 0,975 0,787
Таким образом, появляется принципиальная возможность демон-
страции соответствия при малом объеме сертификационных летных
испытаний.
Применение выборочного метода при проведении сертификацион-
ных летных испытаний систем автоматического управления посад-
кой самолетов. Существующими отечественными и зарубежными тре-
бованиями к точностным характеристикам систем автоматического
управления посадкой тяжелых самолетов нормируется вероятность не-
выхода основных параметров движения (угловых отклонений от ли-
нии курса и глиссады, скорости захода на посадку) из заданной об-
ласти допустимых значений. Для демонстрации соответствия этим
требованиям должно выполняться необходимое число летных испы-
таний «в условиях, с приемлемой точностью представляющих дей-
ствительные эксплуатационные условия, и должен быть охвачен диа-
пазон изменения параметров, влияющих на поведение самолета при
посадке» [29, 95].
В общем случае ожидаемые условия эксплуатации самолета при
выполнении посадочных операций по II категории определяют следу-
ющие факторы: ветровые возмущения, посадочный вес, центровка,
конфигурация самолета, разброс скоростей захода на посадку, раз-
брос характеристик радиотехнических средств посадки, разброс па-
раметров системы автоматического управления, начальные условия
выполнения режима, высота аэродрома, температура наружного воз-
духа.
В летных испытаниях не представляется возможным организо-
вать полностью рандомизированный эксперимент, т.е. реализацию
факторов случайным образом в соответствии с их законами распреде-
ления вероятностей, однако можно и целесообразно выделить не-
сколько характерных, задаваемых с определенной вероятностью, слоев
изменения этих факторов, например [53]:
716
• ветер продольный попутный, штиль или умеренный встреч-
ный, сильный встречный;
• ветер боковой умеренный или сильный;
• посадочная масса малая, средняя, большая;
• центровка передняя, средняя, задняя;
• скорость захода на посадку пониженная, нормальная, повы-
шенная;
• курсо-глиссадный радиомаяк трех категорий.
Математической основой обработки информации, полученной в
такой «расслоенной» выборке, является выборочный метод [27].
Пусть рассматриваемая совокупность объема Nq разделена на к
слоев объемом каждый. Из каждого слоя извлечена выборка объе-
ма при этом суммарный объем выборки обозначим ль = Тог-
да оценка математического ожидания М совокупности определяется
соотношением [27]
где %, = — >, Ху — среднеарифметическое для /-го слоя; Ху -j-e вы-
ni 7=1
борочное значение измеряемой величины в /*-м слое.
Дисперсия этой оценки
1 * о
^0 '=1
где Z)[x,] = (1/л,- -I/A^ct2, ст2 = ——j- X (xij ~mi)2’ mi ~ математичес-
кое ожидание z-го слоя.
Таким образом:
При пропорциональном отборе и большом объеме исходной со-
вокупности Nq принимается
ni/n0 = Ni/N0 = Pi’
717
где Pj — вероятность /-го слоя, и выражения оценки математического
ожидания и дисперсии этой оценки преобразуются к виду
(15.3)
Если бы случайная выборка объема л0 была взята из всей сово-
купности без учета разбиения на слои, то дисперсия среднеарифме-
тической оценки была бы
где
«о = /Лт Z Z h " )2 = лДл [ Е «)2
о /=1 у=1 о L/-1 /=1
= X М? + X Pi (mi -
/=1 /=1
(15.4)
Таким образом, из сравнения (15.3) и (15.4) видно, что диспер-
сия оценки математического ожидания при разбиении на слои ока-
зывается меньше, чем в случае выборки из всей совокупности.
При неизвестной величине тл,- имеем
Помимо пропорционального отбора в выборном методе приме-
няется оптимальный отбор.
Рассмотрим опять формулу (15.2). От объемов выборки в ней за-
висит только сумма
Оптимальным выбором и? можно добиться минимума дисперсии
Задача оптимизации ставится следующим образом:
718
ст/2
^=ПИЧ’
Yni=Q-
Эту задачу можно свести к задаче поиска безусловного минимума фун-
кции + <*к> положив пк=п0-п1-п2-...-пк_1.
1=1 ni t /=1 J
Приравняв производные этой функции по л- нулю, получим:
Pj°j 1п2=Рк<*к1”к> J = кг -1.
Это условие означает, что должны быть пропорциональны рд,
/к
откуда окончательно находим: лу- = п$ PjGj 2Л°г
7 i=i
Заметим, что оптимальный отбор использует более полную ин-
формацию в виде дисперсий слоев, которая может быть получена на
этапе математического моделирования. Для иллюстрации приведен-
ных методов отбора рассмотрим гипотетический пример.
Пусть исследуемый фактор имеет нормальный закон распределе-
ния вероятностей с математическим ожиданием М = 0 и дисперсией
во =1. Минимально необходимый объем сертификационных летных ис-
пытаний составляет 46. Разделим весь диапазон изменения фактора
на три слоя: малое значение с вероятностью 0,1; среднее значение с
вероятностью 0,8; большое значение с вероятностью 0,1. Пропорцио-
нальный отбор при округлении до целого числа испытаний дает следу-
ющие значения объемов выборок в каждом слое: = л3 = 5; «2 = 36.
Для определения дисперсий в соответствующих слоях рассматрива-
лись усеченные нормальные распределения. Дисперсии усеченных нор-
мальных распределений определим по формуле ст?с = К(F(a),F0))<Jq,
где коэффициент К зависит от вида усечения; F(a), F[b) — значения
функции распределения случайной величины, соответствующие ниж-
ней и верхней границам усечения; значения коэффициента Л"для стан-
дартного нормального распределения табулированы [59].
Для рассматриваемого случая имеем: о? = о? = 0,438oq; о2 = 0,?12gq
и соответственно Л| = л3 =4; л2 =38.
719
Таким образом, пропорциональный отбор рекомендует большее
число испытаний при крайних наиболее неблагополучных значениях
исследуемого фактора и может быть рекомендован при планировании
сертификационных испытаний.
15.3. Анализ методов проверки адекватности
математической модели возмущенного движения самолета
результатам сертификационных летных испытаний
Большая стоимость проведения летных сертификационных испыта-
ний заставляет постоянно искать пути сокращения их объема. Одним
из таких путей, широко используемым как у нас, так и за рубежом,
является объединение результатов моделирования и летных испыта-
ний с целью повышения достоверности принимаемых на их основе
решений о соответствии характеристик самолета нормам летной год-
ности [29]. При этом полноправное использование результатов моде-
лирования требует прежде всего проверки адекватности математичес-
кой модели самолета.
При проверке адекватности математической модели самолета
выделяют два аспекта: детерминированный и статистический. Будем
исходить из того, что уравнения движения самолета с системой уп-
равления, составленные по результатам аэродинамических продувок
и ожидаемых характеристик используемой аппаратуры (с учетом ре-
зервирования и работы системы контроля), адекватно отражают ди-
намику процессов управления, а в проверке нуждается математичес-
кая модель, используемая для статистического моделирования с целью
оценки точностных характеристик систем автоматического управле-
ния. При этом полный диапазон возможных изменений оценивае-
мых параметров движения самолета делится на области: больших оши-
бок управления (±4-5о) и малых ошибок управления (±2-Зо).
Рассмотрим область малых ошибок управления.
Действующие на самолет возмущения чаще всего являются нор-
мальными случайными процессами. Динамическая система «само-
лет-система управления» в малом диапазоне изменения ее перемен-
ных квазилинейна и обладает свойством нормализовать проходящие
через нее сигналы. Все это позволяет в диапазоне (±2 - Зо) считать
распределение ошибок управления нормальным [52]. Статистичес-
кое моделирование проводится с учетом имевших место в летных ис-
пытаниях случайных факторов (масса, центровка, ветер и т.д.) как в
части диапазона их изменения, так и частоты появления различных
720
уровней. Летные испытания статистически независимы и охватыва-
ют ожидаемые условия эксплуатации. Будем считать, что математи-
ческая модель и реальный объект статистически подобны (статисти-
чески однородны), если расчетные и опытные выборки извлечены из
одной и той же генеральной совокупности.
Биномиальный закон распределения генеральной совокупности.
Исходной информацией при использовании биномиального закона
распределения для определения вероятности нахождения исследуе-
мой характеристики в допустимом диапазоне, оцениваемой по час-
тоте этого события, является число испытаний и отказов dq при
статистическом моделировании и числа испытаний п и отказов d в
летных испытаниях. Если оцениваемые вероятности 7?q, R не равны,
т.е. если Rq * R, то вероятность события (Ц>, d) представляет собой
совместную вероятность двух независимых событий dQ и d:
P(dQ, d) = Л°! J j n'- Rn-d(\-R)d.
0 d0!(«0-d0)!^ 4)7 d\(n-d)\
При Rq — R результаты моделирования и летных испытаний мо-
гут быть объединены, что приводит к объединению выборок (rf0 + d),
(л0 + л) и совместной вероятности
P(d0+d) =
____________Ц) +я)-______________^(Ло+п)-(«/о+</) ц _ ^(d0+d)
Ц) +</)![(л^ +л)-(</0 +</)]!
Отношение этих вероятностей при Rq = R имеет гипергеометри-
ческое распределение:
P(dQ,d)
P(dQ +d)
Если альтернативной гипотезой является гипотеза R<Rq, то об-
ластью принятия нулевой гипотезы Rq = R является область, ограни-
ченная условиями
где D = dq+d,a — выбранный уровень значимости.
721
Используя биномиальную аппроксимацию гипергеометрическо-
го распределения, получаем:
откуда при выборе d = 1 имеем простое соотношение для планирова-
ния числа летных испытаний:
= а.
Таким образом, для принятия гипотезы однородности минималь-
ное число летных испытаний до первого отказа должно определяться
равенством:
« = «0
Так, при а = 0,1; z/o=O; Лд=46 имеем л = 5.
Достоверность принимаемых решений характеризуется вероятно-
стями ошибок первого а и второго |3 рода (вероятностями ошибоч-
ных приемки и браковки). Для определения значения р необходимо
задать альтернативную гипотезу и соответствующее ей распределение,
что в общем случае при произвольных d и d§ сделать достаточно сложно
и не позволяет получить аналитическое решение.
Нормальный закон распределения генеральной совокупности. Тра-
диционные критерии статистического подобия двух выборок, извле-
ченных из нормально распределенной генеральной совокупности,
основаны на сравнении дисперсий и математических ожиданий [52].
Дисперсии считаются равными, если выполняется правило (крите-
рий Фишера):
$1 /*$2 ~ (Л1 “ Ъ ”2 “ 9 ’
(15.5)
где выборочные оценки дисперсий соответственно определяются как
Xj — значение исследуемого параметра в z-м эксперименте (вычисли-
тельном или летном);
722
n1; «2 — объемы выборок; /’^(«j-l, «2-1) — квантиль распределе-
ния Фишера с («j-l, «2“1) числом степеней свободы уровня (1-а); в
числитель помещается большая из оценок Sy >
Для сравнения математических ожиданий используется одно из
следующих правил:
• при принятии гипотезы равенства дисперсий
1*1-*11
S>l(nl+n2)/nln2
-h-a/2^nl +л2~2)>
(15.6)
где 5,2=[5'12(л1-1)+5'2(л2-1) /(ny+r^-iy, ty_a(Пу + «j-2) — квантиль
распределения Стьюдента с (Пу + - 2) числом степеней свободы уров-
ня 1-а/2;
• при принятии гипотезы неравенства дисперсий
1*1 -х2|
(15.7)
где число степеней свободы v определяется в соответствии с прави-
лом Сэтгервейта:
и в зависимости от конкретных значений Sy и 52 меняется в диапа-
зоне min{«j, «2}- v -(л1+л2-2)-
Применение решающих правил (15.5) и (15.7) в случае статисти-
ческой неоднородности сравниваемых выборок позволяет выявить ис-
точник неоднородности — систематические или случайные ошибки.
При проверке равенства дисперсий альтернативную гипотезу удоб-
но представить в виде ву = 3а2- Тогда зависимость между а, 0, 5, Пу, «2
определяется из граничных соотношений:
723
sf /^2 = ^1-а(л1 -1. «2 “
5j2 /552 = /р(Л| -1, «2 _1)-
откуда «расстояние» между нулевой и альтернативной гипотезами
5 = -1’”2 -t «2 -1).
Таким образом, при принятии гипотезы равенства дисперсий с
вероятностью 0 эти дисперсии могут различаться в 5 раз. Таблица
15.4 иллюстрирует зависимость величины 8 от п1 = л2 = п ПРИ
а = 0 = О,О5.
Таблица 15.4
Зависимость коэффициента 8 от v
V 10 20 30 40 60 120
8 8,870 6,240 4,392 2,860 2,354 1,828
При проверке равенства математических ожиданий альтернатив-
ную гипотезу удобно задать в виде = /и2 + 5- Тогда при альтернатив-
ной гипотезе статистика — -----
‘У7(Л1+И2)/(й1Л2)
имеет нецентральное Z-pac-
пределение с параметром нецентральное™ —, ——
Нецентральное распределение уже при п > 5 хорошо аппрокси-
мируется нормальным распределение, т.е.
где Ф — интегральная функция стандартного нормального распреде-
ления.
724
Окончательно имеем:
_8 *1+^2
1-а/2 ^«2
yjl + tl-a/2 /[ 2<л1 + ^2 “ 2)]
Таблица 15.5 иллюстрирует зависимость величины 8/о от = п
при а = 0 = 0,05.
Таблица 15.5
Зависимость отношения 8/а от л
п 106 27 13 8 6 5 4 4
Ь/а 0,5 1,0 1,5 2 2,5 3,0 3,5 4,0
Из численных значений, приведенных в табл. 15.4 и 15.5, вид-
но, что необходимый объем испытаний определяется задачей срав-
нения дисперсий.
Рассмотренные критерии имеют один существенный недостаток:
раздельное сравнение дисперсий и математических ожиданий приво-
дит к снижению достоверности принимаемых решений, так как
l-az = (l-aj )(1-а2), где ара2 — уровни значимости при проверке
равенства дисперсий и равенства математических ожиданий. Так, при
выборе cq = а2 = 0,1 а х= 0,19, т.е. увеличивается почти в 2 раза.
Закон распределения Рэлея генеральной совокупности. В [29] для
демонстрации соответствия характеристик выдерживания траектории
при автоматической посадке предлагается использовать максималь-
ные отклонения от линии курса или глиссады, имеющие при введен-
ных выше допущениях распределение Рэлея:
Р(х) = 1-ехр{-х2/(2о2)}.
Параметры о2 и о2 двух выборок считаются равными, если вы-
полняется правило: о2 /о2 < /j_a (2^, 2и2), где выборочные оценки
параметров распределения Рэлея имеют вид:
725
Зависимость между а, 0, к, л,, л2 определяется из граничных соот-
ношений
61/62=Л-а(2й1-2л2)’
&1/(8д2) = /р(2л1-2й2>’
откуда находится расстояние между нулевой и альтернативной гипо-
тезами:
8 = Л-а(2л1-2л2)/^(2л1>2л2)-
В табл. 15.6 приведены значения 8 в зависимости от Л] =л2 =л
при а = 0 = 0,05. Сравнение табл. 15.4 и 15.6 показывает, что оценка
параметра распределения Рэлея производится по «двойной» выбор-
ке. Это приводит к уменьшению необходимого объема испытаний и
повышению достоверности статистического решения.
Таблица 15.6
Значение 8 в зависимости от л
n 5 10 20 30 , 60
5 4,646 2,895 2,103 1,831 1,532
Проверка адекватности с использованием толерантных интерва-
лов. Проблема множественного сравнения может быть решена пере-
ходом на сравнение толерантных интервалов.
Так как оценка К = (хд-х)ЛУ имеет приближенно нормальное
распределение с математическим ожиданием М[АГ] = UR и дисперси-
ей D[K] = 1/л+АГ2/2(л-1),то задача сравнения статистической одно-
родности двух выборок сводится к сравнению двух математических
ожиданий при известных неравных дисперсиях. Соответствующее ре-
шающее правило имеет вид:
|JV*2|/7A^ ^-0/2- (15-8)
При использовании решающего правила (15.8) альтернативная
гипотеза задается в виде URl = UR2+&UR. Тогда зависимость между
а, 0, Д1/п1, Лр л2 определяется из граничных условий
откуда получим b.URj ^I\+D2 =Ul_ai2 -Un-
726
В табл. 15.7 представлена зависимость величины RlJDj + Z>2
от «j = л2 = л при а = р = 0,05.
Зависимость 6.URI от л
Таблица 15.7
п 44 11 5 3 2
\]Dl+ D2 0,5 1,0 1,5 2 2,5
Для сопоставления полученных результатов приведем их к еди-
ной шкале путем вычисления ошибки при оценке вероятности на-
хождения исследуемого параметра в заданных пределах. Результаты
проведенных вычислений при заданных Д, = 0,95 и = «j = 40 сведе-
ны в табл. 15.8.
Таблица 15.8
Зависимость ошибки в оценке вероятности от метода
Метод Сравнение дисперсий Сравнение математи- ческих ожиданий Сравнение параметров распределения Рэлея Сравнение толерантных множителей
Оценка вероятности 0,7167 0,799 0,789 0,9267
Ошибка в оценке вероятности 0,2395 0,151 0,161 0,0233
Таким образом, метод сравнения толерантных множителей при
проверке адекватности математической модели возмущенного движе-
ния самолета имеет существенное преимущество перед остальными
методами.
Универсальный показатель степени адекватности. Рассмотрение
приведенных критериев проверки адекватности математической мо-
дели результатам испытаний показывает, что для каждого закона рас-
пределения степень адекватности характеризуется конкретным пока-
зателем (разность математических ожиданий, отношение дисперсий,
разность квантилей распределения), что неудобно для сравнения и
выдачи рекомендаций по использованию этих критериев.
727
Универсальный показатель степени адекватности, робастный к
виду критерия, может быть получен на основе анализа влияния уров-
ня значимости 0<а<0,5 на процедуру принятия решения об адек-
ватности. При а -> 0 область принятия гипотезы адекватности рас-
ширяется, и любые данные моделирования и испытаний признаются
принадлежащими одной выборке. Таким образом, если гипотеза адек-
ватности принимается при малых значениях а, то соответствующая
степень адекватности мала. Аналогично, если гипотеза адекватности
принимается при больших значениях а->0,5, степень адекватности
велика. Следовательно, критическое значение а^, при котором еще
принимается гипотеза адекватности, может служить универсальным
показателем степени адекватности. Проиллюстрируем предлагаемый
подход на наиболее простом примере биномиального распределения.
Пусть п = л0, тогда = 0,5; при = 46, п = 1 ~ 0,02. Более
наглядными являются нормированные значения а* = /0,5. Тогда в
первом случае а* = 1, а во втором — а* = 0,04.
Показатель степени адекватности необходимо учитывать при объе-
динении данных моделирования и испытаний. Для такого объедине-
ния рассмотрим две гипотезы: адекватности с вероятностью а* и
неадекватности с вероятностью 1-а*. Тогда в соответствии с форму-
лой полной вероятности получим, например, для биномиального
распределения
^ = ^кс(1"а*> + ^оба*’
где = (/Яд +т)/(пц+п) — оценка, полученная в результате объеди-
нения данных моделирования и испытаний (т$ = n0-d0, m = n-d);
Акс = т/п ~ оценка, полученная только по результатам летных ис-
пытаний.
Аналогично получим правило подтверждения требований к за-
данной вероятности с использованием нижней доверительной гра-
ницы
(1 - а*) £ ——R?~r (1 - Л )г +
* 0* + ^)! пЛ+Ло-/-/! П \Г 1
+а Z т-------(1-ЯзУг = 1-у.
г=0 гКл+Ло-г)!
При отсутствии отказов (d = = 0) это выражение приобретает
вид
(1-а*)/гз"+а*/?3л+"о=1-у,
728
откуда = (1-у)/1-а* +а*(1-у0) = 1-уЭкв’ где ^°=l“Yo — пРа"
вило подтверждения заданного значения 7^ при проведении модели-
рования объема л0; Уд, V» Уэкв — соответствующие доверительные ве-
роятности.
Поскольку знаменатель 1 - а* + а* (1 - у0) всегда меньше единицы,
значение уэкв всегда меньше у, следовательно, объединение инфор-
мации всегда позволяет сократить число летных испытаний.
В табл. 15.9 приведены результаты расчетов числа лад, летных
испытаний до первого отказа (d = 1), необходимых для проверки
адекватности, и пл — для подтверждения требований к вероятности
= 0,95, у = 0,9 по результатам объединенных испытаний при
л0 = 46, dQ = 0.
Таблица 15.9
Результаты расчетов числа летных испытаний лад и пл
лад 5 10 20 30 46
а 0,2 0,35 0,57 0,74 1
Уэкв 0,87 0,85 0,8 0,66 0
ил 41 36 31 20 0
Нетрудно видеть, что лад = ил ~ 25, т.е. « и0/2 хватает и для про-
верки адекватности и для подтверждения заданного значения вероят-
ности при условии, что это значение подтверждено результатами
моделирования.
Контрольные вопросы
1. Какие точностные характеристики систем управления вы можете на-
звать?
2. Дайте определение толерантного интервала.
3. Чем отличаются толерантные и доверительные интервалы?
4. Чем определяется выбор того или иного метода подтверждения соот-
ветствия точностных характеристик нормам летной годности?
5. Какой подход используется при проверке адекватности математичес-
ких моделей систем управления результатам летных испытаний?
6. От чего зависит степень сокращения объема летных испытаний при
использовании результатов моделирования?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Авиационные правила. Ч. 25: Нормы летной годности само-
летов транспортной категории. МАК, 1994.
2. Авиационные правила. Ч. 21: Процедуры сертификации авиа-
ционной техники. МАК, 1994.
3. Александровская Л.Н., Афанасьев А.П., Лисов А.А. Современ-
ные методы обеспечения безотказности сложных технических систем.
— М.: Логос, 2001.
4. Александровская Л.Н., Кузнецов А.Г., Хлгатян С.В. Непарамет-
рический и параметрический методы подтверждения требований к
точностным характеристикам систем автоматического управления //
Мир авионики. 2001. №1.
5. Александровская Л.Н., Кузнецов А.Г., Мазур В.И., Хигатян С.В.
Анализ методов подтверждения соответствия точностных характерис-
тик систем управления самолетов нормам летной годности // Парт-
неры и конкуренты. 2001. №8.
6. Александровская Л.Н., Аронов И.З., Круглов В. И., Шолом А.М.
Сертификация сложных технических систем. — М.: Логос, 2001.
7. Александровская Л.Н., Аронов И.З., Касаев КС. и др. Управ-
ление качеством и сертификация изделий авиакосмической техники//
Новые наукоемкие технологии в технике. Т. 18. — М.: ЗАО НИИ
«ЭНЦИТЕХ», 2001.
8. Александровская Л.Н., Аронов И.З., Касаев КС. и др. Управ-
ление качеством и сертификация изделий авиакосмической техники//
Новые наукоемкие технологии в технике. Т. 19. — М.: ЗАО НИИ
«ЭНЦИТЕХ», 2001.
9. Александровская Л.Н., Аронов И.З., Касаев КС. и др. Техно-
логии обеспечения качества больших сложных технических систем//
Новые наукоемкие технологии в технике. Т. 20. — М.: ЗАО НИИ
«ЭНЦИТЕХ», 2001.
10. Аронов И.З., Бурдасов Е.И. Оценка надежности по результа-
там сокращенных испытаний. — М.: Изд-во стандартов, 1987.
11. Беляев Ю.К. Статистические методы обработки результатов
испытаний на надежность. — М.: Знание, 1982.
12. Бендат Дж., Пирсон А. Измерения и анализ случайных про-
цессов. — М.: Мир, 1971.
13. Братухин А.Г., Сигалев В.Ф., Сироткин О.С. Обеспечение
качества и сертификация производства авиационной техники сред-
ствами мониторинга. — М.: Машиностроение, 1997.
14. Бонн Б., Хуань К. Дж. Многомерные статистические методы
для экономики. — М.: Мир, 1980.
730
15. Бусленко Н.П. Моделирование сложных систем. — М.: На-
ука, 1968.
16. Вальд А. Последовательный анализ. — М.: Физматиздат, 1960.
17. Вибрация в технике. Справочник / Ред. совет: В. Н. Чело-
мей (пред.) и др. — М.: Машиностроение, 1981.
18. Городецкий В.И. Элементы теории испытаний и контроля тех-
нических систем. — Л.: Энергия, 1978.
19. ГОСТ 16504—81. Испытание и контроль качества продук-
ции. Основные термины и определения.
20. ГОСТ 25051.2—82. СГИП. Представление, обработка, оценка
точности и оформление результатов испытаний. Общие требования.
21. ГОСТ 8.508—84. Метрологические характеристики средств
измерений и точностные характеристики средств автоматизации ГСП.
Общие методы оценки и контроля.
22. ГОСТ 8.061—80. ГСП. Прямые измерения с многократными
наблюдениями. Методы обработки результатов наблюдений. Основ-
ные положения.
23. ГОСТ 8.401—80. Классы точности средств измерений. Об-
щие требования.
24. ГОСТ 18242—72. Качество продукции. Статистический при-
емочный контроль по альтернативному признаку. Одноступенчатые
и двухступенчатые корректируемые планы контроля.
25. Де Гроот М. Оптимальные статистические решения. — М.:
Мир, 1974.
26. Дейвид Г Порядковые статистики. — М.: Наука, 1979.
27. Джонсон Н., Лион Ф. Статистика и планирование экспери-
мента в технике и науке. Методы обработки данных. — М.: Мир,
1980.
28. Евланов Л.Г. Контроль динамических систем. — М.: Наука,
1979.
29. Единые западно-европейские нормы летной годности. Все-
погодные полеты. JAR-AWO.231.
30. Загрутдинов ГМ. Достоверность автоматизированного конт-
роля. — Казань: Изд-во Казанского университета, 1980.
31. Закс Ш. Теория статистических выводов. — М.: Мир, 1975.
32. Инженерные методы исследования ударных процессов /
Г.С. Батуев, Г.И. Болдырев, Ю.В. Голубков и др. — М.: Машино-
строение, 1977.
33. Испытания жидкостных ракетных двигателей / Под ред. проф.
В.Я. Левина. — М.: Машиностроение, 1981.
34. Испытательная техника. Справочник: В 2 кн. / Под ред.
В.В. Клюева. — М.: Машиностроение, 1982.
731
35. Каган А.М., Линник Ю.В., Рао С.Р. Характеристические за-
дачи математической статистики. — М.: Наука, 1972
36. Камалов В.С. Производство космических аппаратов. — М.:
Машиностроение, 1982.
37. Кендал М., Стюарт А. Статистические выводы и связи. —
М.: Наука, 1973.
38. Кендал М., Стюарт А. Многомерный статистический анализ
и временные ряды. — М.: Наука, 1976.
39. Кенуй М.Г. Быстрые статистические вычисления. — М.: Ста-
тистика, 1979.
40. Кокс Д., Хинкли Д. Теоретическая статистика. — М.: Мир,
1978.
41. Крамер Г. Математические методы статистики. — М.: Мир,
1978.
42. Крешук В.В., Александровская Л.Н. О статистических показа-
телях воспроизводимости результатов повторных испытаний продук-
ции // Надежность и контроль качества. 1982. №8.
43. Крешук В.В., Струнская М.М. Систематизация и выбор по-
казателей достоверности измерительного контроля неединичной про-
дукции // Измерительная техника. 1983. №1.
44. Крещук В.В., Александровская Л.Н., Крупнов В.В. Методы
нормирования и оценивания точностных характеристик единичных
испытаний продукции. — М.: ВНИИКИ. 1984.
45. Левин Б.Р. Теория надежности радиотехнических систем. —
М.: Сов. радио, 1976.
46. Луарсабов К.А, Пронь Л.В., Сердюк А.В. Летные испытания
жидкостных ракетных двигателей. — М.: Машиностроение, 1977.
47. Мазурский М.И., Меерович Г.Ш., Степаненко А.Н. Сертифи-
кационные испытания самолетов. — М.: Машиностроение, 1993.
48. Малинский В.Д., Бегларян В.Х., Дубицкий Л.Г. Испытания
аппаратуры и средств измерений на воздействие внешних факторов.
Справочник / Под ред. В.Д. Малинского. — М.: Машиностроение,
1993.
49. Летные испытания ракет и космических аппаратов / Под ред.
Е. И. Кринецкого. — М.: Машиностроение, 1979.
50. Макгомери Д.И. Планирование эксперимента и анализ дан-
ных. — Л.: Судостроение, 1980.
51. Месарович М., Мако Д., Такахара И. Теория иерархических
многоуровневых систем. — М.: Мир, 1973.
52. Методика оценки соответствия точностных характеристик
систем автоматического управления эксплуатационным требованиям
по вероятности недопустимых ошибок управления. — М.: Летно-ис-
след. институт им. М.М. Громова, 1993.
732
53. Методические указания по проведению сертификационных
летных испытаний самолета ИЛ-96-300 № 96002, оборудованного си-
стемами ВСУП-85-4 и ВСУП-85-1 в составе комплекса КСЦПНО в
режимах захода на посадку по категории II и ухода на 2-й круг. —
М.: Летно-исслед. институт им. М.М. Громова, 2000.
54. Методы отработки научных и народно-хозяйственных ракет-
но-космических комплексов / Под общей ред. В. Ф. Грибанова. —
М.: Машиностроение, 1995.
55. Миленко Н.П., Сердюк А.В. Моделирование испытаний ЖРД.
— М.: Машиностроение, 1975.
56. Миллер IL, Нойман П., Шторм Р. Таблицы по математичес-
кой статистике. — М.: Финансы и статистика, 1982.
57. Миттаг X. Статистические методы обеспечения качества. —
М.: Машиностроение, 1995.
58. Мостеллер Ф., Тьюки Дж. Анализ данных и регрессия. —
М.: Финансы и статистика, 1982.
59. МР248—87. Методы оценивания точности результатов испы-
таний машин. — М.: Госстандарт, ВНИИНМАШ, 1987.
60. Мхитарян В. С. Статистические методы в управлении каче-
ством продукции. — М.: Финансы и статистика, 1982.
61. Надежность и эффективность в технике. Справочник: В 10 т.
Т. 6: Экспериментальная отработка и испытания / Под ред. Р.С. Су-
дакова и О.И. Тескина. — М.: Машиностроение, 1989.
62. Натурный эксперимент / Под ред. Н. И. Баклашева. — М.:
Радио и связь, 1982.
63. Недайеода А.К. Теоретические основы натурной отработки
ракет-носителей. — СПб.: Политехника, 1996.
64. Недайеода А.К. Технологические основы обеспечения каче-
ства ракетно-космической техники. — М.: Машиностроение, 1998.
65. Недайеода А.К., Шолом А.М. Факторы и условия полета ра-
кетной и космической техники. — М.: МГАТУ, 1995.
66. Окрепилое В.В., Колпышее Ю.Н. Испытания — основа обес-
печения качества и конкурентоспособности продукции. — Л., 1988.
67. Основы испытаний летательных аппаратов / Под ред. Е.И. Кри-
нецкого. — М.: Машиностроение, 1989.
68. ОСТ 92—1496—84. Комплексная система норм испытаний
при производстве основных изделий отрасли и их частей. Основные
положения.
69. Паноеко Я. Г. Основы прикладной теории колебаний и уда-
ра. — М.: Машиностроение, 1976.
70. Пашковский И.М., Леонов В.А., Поплавский Б.К. Летные ис-
пытания самолетов и обработка результатов испытаний. — М.: Ма-
шиностроение, 1985.
733
71. Полухин Д.А., Орещенко В.М., Морозов В.А. Отработка пнев-
могидросистем двигательных установок РН и КА с ЖРД. — М.: Ма-
шиностроение, 1987.
72. Приборы и системы для измерения вибрации, шума и удара:
Справочник / Под ред. В.В. Клюева. — М.: Машиностроение, 1978.
73. Пугачев К.И. Комбинированные методы определения веро-
ятностных характеристик. — М.: Сов. радио, 1973.
74. Пустылъник Е.И. Статистические методы анализа и обработ-
ки наблюдений. — М.: Наука, 1968.
75. Разумный В.М. Оценка параметров автоматического контро-
ля. — М.: Энергия, 1975.
76. Райфа Г., Шлейфер Р. Прикладная теория статистических
решений. — М.: Статистика, 1977.
77. Рао С.Р. Линейные статистические методы и их примене-
ния. — М.: Наука, 1968.
78. Роббинс Г. Эмпирический байесовский подход к статистике//
Математика. — М.: ИЛ, 1964.
79. Романенко А.Ф., Сергеев Г.А. Аппроксимативные методы ана-
лиза случайных процессов. — М.: Энергия, 1974.
80. Румшинский Л.З. Математическая обработка результатов экс-
перимента. — М.: Наука, 1971.
81. Сапожников В.М. Монтаж и испытания гидравлических и
пневматических систем летательных аппаратов. — М.: Машинострое-
ние, 1979.
82. Саркисян С А., Ахундов В.М., Минаев Э.С. Большие техни-
ческие системы. — М.: Наука, 1977.
83. Сборочные, монтажные и испытательные процессы в произ-
водстве летательных аппаратов / В.А. Барвинок, В.И. Богданович,
П.А. Бордаков и др. — М.: Машиностроение, 1996.
84. Сирая Т.Н. Методы проверки статистической однородности
групп наблюдений (обзор) // Труды метрологических институтов
СССР. 1977. Вып. (200) 260.
85. Статистические задачи отработки систем и таблицы для чис-
ловых расчетов показателей надежности / Под ред. Р.С. Суданова.
— М.: Высшая школа, 1975.
86. СТП 171 33-81. Лабораторно-стендовая отработка изделий.
Общие требования, организация и порядок проведения.
87. Судаков Р. С. Избыточность и объем испытаний технических
систем и их элементов // Испытания технических систем и их элемен-
тов. — М.: Знание, 1980.
88. Судаков Р.С. Теория испытаний. — Киев: Изд-во МО СССР,
1985.
734
89. Судаков Р.С. Испытания технических систем. — М.: Маши-
ностроение, 1988.
90. Сухинин С.Н., Никитин Е.Н. Испытательные комплексы для
прочностной отработки аппаратов. — М.: Воениздат, 1989.
91. Технология сборки и испытаний космических аппаратов / Под
ред. И.Т. Белякова и И.А. Зернова. — М.: Машиностроение, 1990.
92. Требования к программному обеспечению бортовой аппара-
туры и систем при сертификации авиационной техники. — М.: МАК,
1997.
93. Уилкс С. Математическая статистика. — М.: Наука, 1967.
94. Химмелъблау Д. Анализ процессов статистическими метода-
ми. — М.: Мир, 1973.
95. Циркуляр США АС-25-7-ХХ. Система автоматического уп-
равления
96. Червоный АЛ., Лукьященко В.И., Котин Л.В. Надежность слож-
ных систем. — М.: Машиностроение, 1972
97. Чернышев А. В. Технология монтажа, испытаний и контроля
бортовых систем ЛА. — М.: Машиностроение, 1977.
98. Чернышев А.В. Проектирование стендов для испытания и кон-
троля бортовых систем ЛА. — М.: Машиностроение, 1983.
99. Шалыгин А. С., Палагин Ю.И. Прикладные методы статисти-
ческого моделирования. — М.: Машиностроение, 1986.
100. Шеффе Г. Дисперсионный анализ. — М.: Наука, 1980.
101. Экспериментальная баллистика ракетно-космических средств
/ В.В. Бетанов, Л.Н. Лысенко и др. — М.: Военная академия РВСН
им. Петра Великого, 2000.
102. Элементы теории испытаний и контроля технических сис-
тем / Под ред. Р. М. Юсупова. — Л.: Энергия, 1978.
Учебное издание
Александровская Лидия Николаевна
Круглов Виктор Иванович
Кузнецов Алексей Григорьевич
Кузнецов Валерий Александрович
Кутин Андрей Анатольевич
Шолом Анатолий Михайлович
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИСПЫТАНИЙ
И ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА
СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
Учебное пособие
Редактор Е.В. Комарова
Оформление А.М. Ефремова
Компьютерная верстка О.Г. Лавровой
Корректор Н.Г. Давыдова
Подписано в печать 26.08.2002. Формат 60x90/16
Бумага писчая. Печать офсетная
Печ. л. 46,0. Тираж 2000 экз. Заказ № 4272
Издательско-книготорговый дом «Логос»
105318, Москва, Измайловское ш., 4
Отпечатано с готовых диапозитивов
во ФГУП ИПК «Ульяновский Дом печати»
432980, г. Ульяновск, ул. Гончарова, 14
По вопросам приобретения литературы обращаться:
105318, Москва, Измайловское ш., 4
Тел./факс: (095) 369-5819,369-5668, 369-7727
Электронная почта: universitas@mail.ru
Дополнительная информация на сайте htth://logosbook.ru
• ТЕОРЕТИЧЕСКИЕ ОСНОВЫ КОНТРОЛЯ
И ИСПЫТАНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
• ИСПЫТАНИЯ НА ВОЗДЕЙСТВИЕ ФАКТОРОВ
И УСЛОВИЙ ЖИЗНЕННОГО ЦИКЛА ИЗДЕЛИЙ
АВИАЦИОННОЙ И РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
• ФОРМИРОВАНИЕ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
Учебные издания серии
«Учебник XXI века»
удостоены диплома XIII
Московской международной
книжной ярмарки