


































































































































Author: Вершинин Н.И. Верцайзер А.Л. Яковлев В.М.
Tags: электротехника автоматика автоматизация
Year: 1965




Text
ПО
оооооофоф©
Н.Ш&ршшшн, ЛЛЯерцащеА
&МУ(ко&/ге$
АВТОМАТИЧЕСКОЕ
РЕГУАИРОВАНИЕ
ИЗДАТЕЛЬСТВО «ЭНЕРГИЯХ
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск, 129
Н. И. ВЕРШИНИН, А. Л. ВЕРЦАЙЗЕР,
В. М. ЯКОВЛЕВ
АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ
Издание второе,
переработанное и дополненное
ИЗДАТЕЛЬСТВО «ЭНЕРГИЯ»
МОСКВА 1965 ЛЕНИНГРАД
УДК 621.3.078
В37
Редакционная коллегия:
И. В. Антик, А. И. Вертинов, С. Н. Вешеневский, Л. М. Закс,
Н. Е. Кобринский, В. С. Кулебакин, В. Э. Низе, В. С. Малов,
А. Д. Смирнов, Б. С. Сотсков, А. С. Шаталов
В книге описаны типовые автоматические
устройства и дана их классификация. Рассмо-
трены системы автоматического регулирования,
принципы регулирования и процессы, в них (си-
стемах) происходящие. Кратко разобраны типы
звеньев систем автоматики и их характеристики.
Проанализированы вопросы устойчивости систе-
мы автоматического регулирования, качество про-
цесса регулирования и средства его улучшения.
Рассмотрены принципы построения и элементы
теории некоторых типов самонастраивающихся
систем автоматического регулирования. Материал
излагается достаточно наглядно без использова-
ния сложного математического аппарата.
Книга рассчитана на широкий круг лиц, за-
нимающихся вопросами автоматизации производ-
ства и не обладающих специальными знаниями
в области автоматики.
Вершинин Николай Иванович, Верцайзер Анатолий Львович,
Яковлев Владимир Михайлович,
Автоматическое регулирование, М.—Л., издательство „Энергия*, 1965,
136 с. с черт. (Библиотека по автоматике, вып 129)
Тематический план 1965 г., № 216
Редактор К. В. Егоров Техн, редактор Н. Л. Бульдяев
Сдано в набор 5/1 1965 г. Подписано к печати 1/Ш 1965 г.
Т-03516 Бумага 84хг1081/за Печ. л. 6,97 Уч.-изд. л. 10,14
Тираж 23 500 экз. Цена 51 коп. Заказ 12
Московская типография Ns 10 Главполиграфпрома
Государственного комитета Совета Министров СССР по печати.
Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
В последние годы по основам автоматического регулирования
издана обширная учебная и научная литература. Однако использо-
вание такой литературы требует математических знаний в объеме
высшей школы.
Цель настоящей книги — первоначальное ознакомление широко-
го круга читателей с основами автоматического регулирования.
Назначение книги наложило отпечаток на изложение материа-
ла — авторы попытались сделать это в возможно доступной форме.
Основные понятия по автоматическому регулированию и принци-
пы построения автоматических систем иллюстрированы конкретными
примерами из различных областей техники и даются без сложных
математических выкладок.
За 5 лет, прошедших с момента первого издания книги, начали
применяться в производственных и других процессах самонастраи-
вающиеся системы автоматического регулирования, которые позво-
ляют значительно увеличить эффективность использования автома-
тической аппаратуры.
Рассмотрение новых систем автоматики потребовало некоторого-
увеличения объема книги. В книгу введена глава, в которой рас-
сматриваются принципы действия и элементы теории некоторых
самонастраивающихся систем автоматического регулирования.
Бурное развитие теории автоматики, внедрение новых идей и
принципов потребовали внести некоторые изменения и в другие гла-
вы книги.
Авторы надеются, что книга поможет читателю правильно по-
нять принцип действия современных автоматических устройств и
подготовит его к восприятию более фундаментальных работ в об-
ласти автоматики.
А'вторы благодарят редактора первого и второго издания книги
К-. В. Егорова, давшего ряд полезных советов по рукописи.
А вторы
СОДЕРЖАНИЕ
Предисловие.............................................. 3
Введение.................................................. 5
Глава первая. Системы автоматического регулирования 19
1. Принципы регулирования............................ 19
2. Контуры регулирования............................. 22
3. Системы автоматического регулирования прямого и не-
прямого действия...................................... 25
4. Непрерывные и прерывистые системы автоматического
регулирования 29
5. Статические и астатические системы автоматического
регулирования......................................... 37
Глава вторая. Переходные процессы в системах авто-
матического регулирования....................•........ 41
6. Типовые звенья систем автоматического регулирования и
их характеристик...................................... 41
7. Устойчивость систем автоматического регулирования . . 60
8. Качество процесса регулирования................• . 79
9. Средства улучшения качества процесса регулирования 84
Г лава третья. Самонастраивающиеся системы автома-
тического регулирования ............................. 115
10. Системы с самонастройкой программы (экстремальные
системы).....................•........................115
11. Системы с самонастройкой параметров (собственно
самонастраивающиеся системы)..........................130
12. Системы с самонастройкой структуры...............134
Литература............................................• . 136
ВВЕДЕНИЕ
'В Программе Коммунистической 'партии Советского Союза, при-
нятой XXII съездом, поставлена задача и намечены пути построе-
ния коммунистического общества в нашей стране.
«Главная экономическая задача партии и советского народа со-
стоит в том, чтобы в течение двух десятилетий создать материально-
техническую базу коммунизма» (Программа КПСС).
Создание материально-технической базы коммунизма немыслимо
без технического прогресса.
Современный период характерен широким внедрением разно-
образных машин, аппаратов и автоматических устройств.
Существует большое разнообразие автоматических устройств,
выполняющих те или иные функции по контролю и управлению
самыми «различными производственными процессами во всех обла-
стях техники.
Принципы построения и методы исследования различных авто-
матических устройств, предназначенных для контроля и управления
различными по своей физической природе процессами, имеют много
общего, конструкция и принцип действия автоматических устройств
в значительной^ мере определяются их функциональным назначе-
нием.
По своему функциональному назначению автоматические устрой-
ства можно подразделить на: устройства автоматического контроля,
автоматической защиты, автоматического привода, автоматического
регулирования, автоматические вычислительные устройства и др.
Под автоматическим регулированием подразумевается область
автоматики, которая охватывает совокупность методов и средств,
обеспечивающих поддержание в течение определенного промежутка
времени с требуемой точностью заданного состояния производствен-
ного процесса пли обеспечение хода этого процесса по заданному
заранее или задаваемому в зависимости от каких-либо условий
закону.
Устройства автоматического регулирования обеспечивают под-
держание требуемого режима работы машин-орудий, машин-двига-
телей или их совокупности без непосредственного участия человека.
За человеком остаются лишь обязанности по пуску в ход и перво-
начальной настройке данных устройств на заданный режим работы.
Иногда даже и пуск в ход может осуществляться без вмешатель-
ства человека.
Широкое практическое применение системы автоматического ре-
гулирования получили в XX в.
В настоящее время без применения автоматического регули-
рования немыслима работа многих машин и ряда промышленных
объектов, особенно в условиях комплексной автоматизации произ-
водственных процессов,
5
Широкое развитие «и применение систем автоматического регу-
лиров.ания (привело к (возникновению специальной отрасли науки —
теории автоматического регулирования. Классификация систем авто-
матического регулирования по различным признакам дана на рис. 1.
Рис. 1. Классификация систем автоматического регулирования.
а) СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ПОСТОЯННОГО ПАРАМЕТРА
На рис. 2 изображена принципиальная электрическая схема ге-
нератора постоянного тока с параллельным возбуждением. Нагруз-
кой генератора служит электродвигатель. 'Схема не имеет регул-и-
6
рующих устройств, поэтому напряжение генератора будет изменять-
ся при изменении различных факторов: момента нагрузки на 'валу
двигателя, скорости вращения генератора и др.
Рис. 2. Схема генератора постоянного
тока с параллельным возбуждением, на-
груженного двигателем.
Напряжение генератора можно определить, пользуясь
щим выражением:
следую-
—Е—I я^я—'спФ—I яЕя,
(1-1)
где U — напряжение генератора, Е — э. д. с. генератора, п — ско-
рость вращения якоря, Ф — магнитный поток, с — конструктивная
постоянная, /я — ток в цепи якоря генератора, 7?я — сопротивление
цепи якоря.
При изменении момента нагрузки на валу электродвигателя по-
требляемый им ток изменяется, вызывая изменение напряжения ге-
нератора.
Для поддержания напряжения генератора неизменным при из-
менения тока якоря /я необходимо, как следует из выражения (1-1),
соответственно изменять скорость вращения якоря генератора или
величину магнитного потока в цепи обмотки возбуждения. Обычно
поддержание постоянства напряжения генератора осуществляется
изменением магнитного потока. Для этого в цепь обмотки возбуж-
дения включается регулировочное сопротивление R (рис. 3,а), из-
меняя величину которого, из-
меняют магнитный поток.
Поддерживать напряжение
генератора можно вручную без
применения автоматических
устройств. Для этого человек
должен выполнять следующие
операции:
1. Наблюдать за поворо-
том стрелки (угол <р) вольт-
метра.
2. Сравнивать текущие по-
казания вольтметра с заданной
величиной напряжения.
3. При наличии разности
между заданной и наблюдае-
мой величинами напряжений
производить в соответствую-
щую сторону перемещение пол-
зунка П реостата R на нуж-
Рис. 3. Схема ручного регулирова-
вания напряжения генератора по-
стоянного тока.
7
ное расстояние s в цепи обмотки возбуждения так, чтобы эта раз-
ность стала равной нулю.
При регулировании напряжения вручную воздействие человека
на элементы системы показано на рис. 3,6. Эти же операции может
выполнить за человека автоматическое устройство.
Для автоматического поддержания напряжения генератора
неизменным необходимо, чтобы ползунок реостата при изменении
напряжения генератора перемещался на величину As, пропорцио-
нальную отклонению напряжения &U от заданного значения. Для
этого в рассмотренную схему необходимо ввести устройство, кото-
рое будет воспринимать отклонение напряжения от заданного зна-
чения и воздействовать в соответствии с этим на ползунок рео-
стата.
На рис. 4,а изображена схема автоматического регулирования
напряжения генератора. Работа системы происходит так: при напря-
жении генератора, равным заданному значению, ползунок реоста-
та 3, допустим, находится в положении I. При уменьшении напря-
жения генератора втягивающее усилие, создаваемое током в витках
обмотки электромагнита 2, подключенного к зажимам генератора,
уменьшится. Под воздействием пружины 4 якорь электромагнита
переместится вниз, что вызовет перемещение ползунка реостата 3
в положение II. Сопротивление цепи обмотки возбуждения умень-
шится, ток возбуждения возрастет, магнитный поток увеличится, что
вызовет восстановление напряжения.
В автоматике основные части устройства автоматического регу-
лирования и величины, подлежащие регулированию, имеют наиме-
нования.
Машины-орудия, машины-двигатели или их совокупность, у ко-
торых одна пли несколько физических величин подлежат авто-
матическому регулированию, называются регулируемыми
объектами.
Необходимость регулирования физических величин в объекте
вызывается обычно внешними возмущениями. Внешнее воздействие
на 'регулируемый объект или на всю систему регулирования, вызы-
вающее возникновение в ней переходных процессовназывается
возмущением.
'Физические величины, которые требуется поддерживать постоян-
ными или изменять по заданному закону, называются регулируе-
мыми параметрами.
В рассмотренном примере регулируемым объектом является
генератор постоянного тока, регулируемым параметром — напряже-
ние генератора, а возмущающим воздействием — изменение тока на-
грузки и изменение скорости вращения генератора.
'С точки зрения выполняемых функций любое устройство авто-
матического -регулирования можно представить состоящим из ряда
элементов.
(Элемент, воспринимающий отклонение регулируемого параметра
от заданного значения и осуществляющий на последующие элемен-
ты воздействие, величина которого находится в определенной, за-
ранее установленной функциональной зависимости от значения ве-
1 Под переходным процессом понимается любое неустановив-
шееся состояние системы регулирования, во время которого изме-
няется значение регулируемого параметра.
8
личины, на ’которую автоматическое устройство предназначено реа-
гировать, .называется измерительным элементом.
Элемент, получающий сигнал за счет отклонения регулируемо-
го параметра и оказывающий воздействие на регулируемый объект,
называется регулирующим элементом.
В рассмотренном примере измерительным элементом является
электромагнит 2 с пружиной 4, а роль регулирующего элемента
выполняет реостат 3.
Настройка
возмущающее
воздействие ।
Регулируе-
мый,
объект
L ZJ. Измерительный ।
। элемент j
!
z(t)
Регулирующий
элемент
। Автоматический
6)
Рис. 4. Система автоматического регулирования на-
' пряжения генератора постоянного тока.
Устройство, автоматически поддерживающее заданное значение
регулируемого параметра постоянным в регулируемом объекте или
изменяющее данный параметр по заданному или задаваемому за-
кону, называется автоматическим регулятором.
С точки зрения элементов, входящих в состав автоматического
регулятора, в настоящее время имеют место два взгляда. Одни счи-
тают, что автоматический регулятор состоит из измерительного и
регулирующего элементов, а другие относят к автоматическому
регулятору только измерительный элемент. Регулирующий элемент
согласно второму взгляду относят к регулируемому объекту. При-
меняемые в технике автоматические регуляторы конструктивно вы-
полняют в двух вариантах; одни содержат измерительный и регу-
лирующий элементы, а другие — только измерительный элемент.
При дальнейшем изложении мы будем изображать на рисунках
регулирующий элемент в составе автоматического регулятора.
9
Для того чтобы иметь возможность изменять величину регу-
лируемого параметра в каждом автоматическом регуляторе преду-
сматривается настройка регулятора. Внешнее воздействие, прикла-
дываемое к регулятору с целью задания значения поддерживаемой
регулятором величины регулируемого параметра, называется н а-
стройкой регулятора. На рис. 4,а настройка регулятора
осуществляется перемещением ползунка реостата 5.
Совокупность регулируемого объекта и автоматического регу-
лятора (регуляторов), объединенных для осуществления автома-
тического регулирования, .называется системой автоматического ре-
гулирования.
На основании рассмотренного примера и приведенной терми-
нологии на рис. 4,6 изображена элементная схема систе-
мы автоматического регулирования.
Схематическое изображение автоматического устройства, от-
ражающее состав и назначение элементов и взаимодействия между
ними, называется элементной или функциональной схемой автомати-
ческого устройства.
Из рассмотрения работы системы автоматического регулирова-
ния напряжения генератора постоянного тока видно, что на изме-
рительный элемент оказывается два воздействия: во-первых, воздей-
ствие регулируемого параметра x(t) регулируемого объекта и,
во-вторых, воздействие g(t) настройки регулятора. Воздействие на-
стройки регулятора g(t) является заданным или задаваемым зна-
чением регулируемого параметра автоматического регулятора. За-
дача автоматического регулятора сводится к тому, чтобы обеспе-
чить равенство x(t)~g(t). Измерительный элемент воспринимает
отклонение регулируемого параметра x(t) от заданного значения
g(t), т. е. он реагирует на величину разности g{t)—Ве-
личину е(/), показывающую, на сколько регулируемый параметр
отклонился от заданного значения, принято называть рассогласова-
нием системы. Величина рассогласования £(/) воздействует на
регулирующий элемент, который оказывает такое влияние на регу-
лируемый объект, чтобы устранить отклонение регулируемого пара-
метра от заданного значения. В системах автоматического регули-
рования при равенстве регулируемого параметра заданному значе-
нию рассогласование систем равно нулю.
Таким образом, на основании рассмотренного примера можно
сделать вывод, что данная система автоматического регулирования
имеет замкнутую цепь воздействий. Регулируемый объект воздей-
ствует на измерительный элемент, измерительный элемент — на
регулирующий элемент и последний — на регулируемый объект.
Помимо указанных элементов, система автоматического регу-
лирования может содержать ряд других элементов, которые уста-
навливаются между измерительными и регулирующим элементами,
такая система приведена на рис. '5. В отличие от рассмотренной ра-
нее системы автоматического регулирования напряжения в данной
схеме между измерительным и регулирующим элементами введены
потенциометр 3 и "электродвигатель 4. 'Введение их в схему пресле-
дует цель усилить сигнал, подаваемый измерительным элементом
к регулирующему элементу за счет внешнего источника энергии.
Система (рис. 5,а) работает так: при увеличении напряжения сверх
заданного значения усилие, создаваемое электромагнитом 2, увели-
чивается, якорь электромагнита вместе с жестко закрепленным
10
с ним ползунком потенциометра 3 поднимается вверх. Это обеспе-
чивает подачу напряжения на двигатель 4 от внешнего источника
энергии. Электродвигатель при своем вращении перемещает ползу-
нок 5 по часовой стрелке, вводя добавочное сопротивление -в цепь
обмотки возбуждения. Сопротивление цепи обмотки возбуждения
О
Рис. 5. Система автоматического регулирования напряжения генера-
тора постоянного тока.
увеличивается, ток возбуждения и магнитный поток уменьшаются,
что приводит к уменьшению напряжения генератора до заданного
значения. При этом якорь электромагнита займет прежнее поло-
жение, чем обеспечится возвращение ползунка потенциометра 3
в среднее положение и снятие питания с электродвигателя 4. В дан-
ной схеме потенциометр 3 выполняет роль преобразующего эле-
мента, а электродвигатель 4 — исполнительного элемента.
Преобразующим элементом называется элемент
автоматического устройства, осуществляющий преобразование воз-
действий, полученных от других частей устройства, выработку
величины и характера управляющего воздействия и передачу его
исполнительному элементу. Такой элемент часто выполняет функ-
цию усиления управляющего воздействия и в этом случае назы-
вается усилительным элементом.
Исполнительным элемеитом .называется элемент
автоматического устройства, осуществляющий »воздействие на регу-
лирующий элемент.
Элементная схема такой более развитой системы изображена
на рис. 5,6.
Системы автоматического регулирования напряжения генерато-
ра постоянного тока (рис. 4 и 5) обеспечивают поддержание посто-
янства напряжения при различных возмущениях *в заданных преде-
лах. Такие системы именуются системами автоматическо-
го регулирования постоянного параметра.
Помимо систем -с замкнутой цепью воздействия (именуемых си-
стемами автоматического регулирования), поддержание заданного
значения какой-либо физической величины может быть осуществле-
но и с помощью автоматических систем с разомкнутой цепью воз-
действия. В такого рода системах для поддержания постоянными
заданных величин используются 'физические свойства отдельных эле-
ментов. Такого рода системы именуются системами параметрической
стабилизации или стабилизаторами. Стабилизаторы не являются си-
стемами автоматического регулирования. К системам параметриче-
ской стабилизации относятся системы поддержания постоянства
напряжения с использованием стабилитрона [(газоразрядного ста-
билизатора напряжения), системы поддержания постоянства тока
с использованием бареттера и др.
б) СИСТЕМЫ АВТОМАТИЧЕСКОГО ПРОГРАММНОГО
РЕГУЛИРОВАНИЯ
Системы автоматического программного регулирования обеспе-
чивают изменение регулируемого параметра по заранее заданному
закону в зависимости от времени или какой-либо другой величины.
Для осуществления программного регулирования обычно используют
переменную настройку регулятора. В автоматической системе про-
граммного регулирования необходимо непрерывно воздействовать на
настройку (уставку) регулятора в процессе работы системы так,
чтобы регулируемый параметр изменялся по заранее заданному за-
кону. Для, этого настройка регулятора снабжается специальным
программным элементом, который автоматически изменяет настройку
системы по желаемому закону.
-Примером системы автоматического программного регулирова-
ния, в которой регулируемый параметр изменяется по заранее за-
данному закону во (времени, может служить система регулирования
температуры печи для термической обработки деталей '(рис. 6). Тре-
буемый характер изменения температуры печи во -времени задается
при помощи профильной рельефной диаграммы. Эта диаграмма не-
прерывно перемещается слева направо при помощи часового меха-
низма 10. Устройство, состоящее из ленты 9 и часового механизма
10, служащее для установления закона изменения величины, ха-
рактеризующей управляемый процесс, называют программным
элементом. Задаваемое изменение температуры посредством
катящегося по рельефной диаграмме ролика и тяги 6 передается
на рычаг 7, который может -вращаться вокруг оси О. Контакт 3
связан со стрелкой указателя термометра 8, который показывает
12
фактическую температуру печи. Термопара 2 термометра распола-
гается в печи /. Заслонка 5 подачи теплоносителя к печи 1 связана
с валОхМ электродвигателя 4. При несоответствии между заданной
и фактически имеющейся в печи температурой контакт 3 будет ка-
саться одного из контактов рычага 7, включая питание электродви-
гателя 4. Электродвигатель должен вращаться в такую сторону,
чтобы, перемещая заслонку 5, обеспечить требуемое изменение по-
дачи теплоносителя к печи. Это (вызовет изменение температуры
печи в соответствии с требуемым графиком. Когда требуемая по
Рис. 6. Система автоматического программного
регулирования температуры печи.
программе и фактическая температуры будут соответствовать друг
другу, контакт 3 не будет касаться контактов рычага 7 и электро-
двигатель будет неподвижен. Если изъять программный элемент и
зафиксировать рычаг в определенном положении, то данная система
программного регулирования будет вести себя как система автома-
тического регулирования постоянного параметра, в которой с -опре-
деленной точностью будет поддерживаться заданное постоянное
значение температуры печи. В рассмотренном примере регулируе-
мым объектом является печь 1, регулируемым параметром — темпе-
ратура печи, измерительным элементом — термопара 2 с указате-
лем 8, преобразующим — рычаг 7 с контактным устройством 3,
исполнительным элементом — электродвигатель 4, регулирующим
элементом — заслонка 5 и программным элементом — лента 9 и ча-
совой механизм 10. Элементная схема системы автоматического про-
граммного регулирования в отличие от элементной схемы системы
автоматического регулирования постоянного параметра содержит
в своем составе программный элемент, который непрерывно воздей-
ствует на настройку регулятора, подавая сигнал по заранее
заданному закону. В рассмотренном примере (рис. 6) регулируемый
параметр изменяется во времени.
13
Однако существуют автоматические системы программного ре-
гулирования, 'В которых регулируемый параметр изменяется по за-
данному закону не во времени, а в зависимости от какой-либо
другой величины. В качестве примера рассмотрим принцип работы
автоматической системы программного регулирования давления
воздуха внутри герметической кабины самолета. Данная система
предназначена для поддержания давления внутри герметической
кабины самолета по заранее заданному закону в зависимости от
высоты полета. На графике (рис. 7) кривая АВСД показывает за-
даваемый закон изменения давления в герметической кабине само-
лета в зависимости от высоты, т. е. P=f(H) при применении системы
автоматического программного регулирования, я кривая АВЕ —
давление в кабине без приме-
Рис. 7. График регулирования дав-
ления в герметических кабинах са-
молета.
нения регулятора. При приме-
нении автоматического про-
граммного регулирования да-
вление в кабине в зависимости
от высоты полета должно изме-
няться по следующему зако-
ну: до высоты 2 500 м давле-
ние в кабине изменяется по
кривой ABt соответствующей
закономерности изменения об-
щего барометрического давле-
ния в атмосфере, от высоты
2 500 до 8 250 м в кабине под-
держивается постоянное давле-
ние, равное 560 мм рт. ст.
(0,7 ат), что соответствует вы-
соте полета 2 500 м .(прямая
Рис. 8. Система автоматического программного регулирования
давления в герметической кабине самолета в зависимости от
высоты полета.
14
ВС). На высотах более 8 250 м система поддерживает постоянный
перепад давления между кабиной и атмосферой, равный 0,4 ат
(кривая СД). Рассмотрим принцип действия такой системы (рис. 8).
На высотах от 0 до 2 500 м система обеспечивает только вентиляцию
кабины. На этих высотах сильфон 3 разжимается настолько не-
значительно, что верхняя полость цилиндра 6 соединяется через
отверстие в поршне 4 с атмосферой. Давление в верхней полости
цилиндра 6 будет равно атмосферному, а в нижней полости — дав-
лению -в кабине, подводимому в нижнюю полость через калиброван-
ное отверстие а. С поднятием на «высоту атмосферное давление
падает и становится меньше давления в герметической кабине. За
счет разности давлений в верхней и нижней полостях цилиндра 6
•мембрана 5 поднимается вверх и открывает клапан 1. С подъемом
на «высоту до 2 500 м клапан 1 -открыт и давление в кабине изме-
няется по закону, соответствующему изменению общего барометри-
ческого давления в атмосфере. На высотах от 2 500 до 8 250 м
система должна поддерживать «в кабине постоянное давление, рав-
ное '560 мм рт. ст. ’Понизившееся давление в кабине при достижении
высоты 2500 м позволяет сильфону 3 значительно разжаться и,
подняв поршень 4, ограничить отсос воздуха из верхней полости
цилиндра 6. Этим уменьшается ргадость давления, действующая
на мембрану, и уравновешиваются силы, действующие на нее. При
этом клапан 1 закрывается. Вследствие закрытия клапана 1 давле-
ние в кабине за счет надДува возрастает, а сильфон вновь сжимает-
ся, опуская поршень 4. Этим восстанавливается отсос воздуха из
верхней полости цилиндра 6 через трубопровод 11, благодаря чему
вновь открывается клапан 1 и давление «в кабине начинает снижать-
ся. Понижение давления в кабине происходит до тех пор, пока
сильфон 3 вновь не разожмется и разъединит верхнюю полость ци-
линдра 6 с атмосферой. Это повлечет за собой закрытие клапана /.
Процесс периодически повторяется, что приводит к колебаниям дав-
ления в кабине относительно среднего значения, равного
560 мм рт. ст. в пределах допустимого. Таким образом, начиная
с высоты 2 500 м и до высоты 8 250 м, работа системы аналогична
работе системы автоматического регулирования постоянного пара-
метра. Когда разность давлений между атмосферой и кабиной до-
стигнет 0,4 ат (это происходит на высотах выше 8 250 м), система
перестает сохранять в кабине постоянное давление и избыток воз-
духа выпускается в атмосферу. Поршень 8, перемещающийся в ци-
линдре 9, подвержен действию разности между кабинным давле-
нием, подводимым к его нижней поверхности через калиброванное
отверстие Ь, и атмосферным давлением, подводимым к верхней
поверхности поршня через трубопровод 10. При достижении крити-
ческого перепада давлений (0,4 ат) поршень 8 сжимает пружину 7
и открывает клапан 2. Таким образом, избыток воздуха выпускается
.в атмосферу; начиная с высоты 8 250 м, регулятор поддерживает
постоянным перепад между давлением в кабине и атмосферным
давлением, равным 0,4 ат.
Рассмотренная система на первом этапе работы (высоты
0—2 500 м) обеспечивает режим вентиляции, на втором этапе (вы-
соты 2 500—8'250 м) работает как система автоматического регу-
лирования, поддерживая постоянное значение регулируемого пара-
метра (давление, равное '560 мм рт. ст.), и на третьем этапе под-
держивает заданный перепад давления. Система в целом является
15
системой автоматического программного регулирования, обеспечи-
вающей заданный зако'Н изменения давления в кабине (рис. 7,
кривая АВСД).
в) СЛЕДЯЩИЕ СИСТЕМЫ
Выше было указано, что система автоматического регулирова-
ния постоянного параметра служит для автоматического поддержа-
ния постоянного значения регулируемого параметра, а система авто-
матического программного регулирования предназначена для изме-
нения регулируемого параметра во времени по заранее заданному
закону.
Системы автоматического программного регулирования, в кото-
рых заданная величина может изменяться в зависимости от какой-
либо другой величины, называются следящими системами.
Рис. 9. Следящая система.
В качестве примера рассмотрим работу следящей системы, изо-
браженной на рис. 9. При повороте рукоятки управления 1 ползу-
нок 2 реостата повернется на некоторый угол айв диагонали
электрического (моста, собранного на реостатах 7?i и возникает
напряжение, поступающее на усилитель. Усиленный сигнал посту-
пает на двухфазный асинхронный двигатель 3. Электродвигатель
через понижающий редуктор 4 поворачивает регулирующий элемент
объекта 5 и ползунок 6 реостата на угол р —а. При этом напря-
жение в диагонали моста становится равным нулю и двигатель 3
останавливается. При непрерывном вращении (рукоятки управле-
ния 1 регулирующий элемент 5 управляемого объекта будет вос-
производить все изменения ее углового положения. Таким образом,
в данной следящей системе управляемый объект как бы следит
за поворотом рукоятки управления, которую в свою очередь можно
поворачивать по произвольному закону.
16
Элементная схема (рассматриваемой следящей системы изобра-
жена на рис. 10. В примере (рис. 19) задающим элементом являет-
ся рукоятка управления, измерительным элементом — электрический
мост, собранный на реостатах и /?2, преобразующим элементом —
усилитель, исполнительным элементом—двигатель с редуктором,
регулирующим элементом — орган управления 5 управляемого объ-
екта. Из данной элементной схемы видно, что указанная следящая
система, так же как и ранее рассмотренные системы автоматиче-
ского регулирования, имеет замкнутую цепь воздействий и анало-
гично системам автоматического регулирования постоянного пара-
Рис. 10. Элементная схема следящей системы.
метра и автоматического программного регулирования стремится
угол рассогласования &(/) между задаваемым gl(O и регулируемым
параметром x(t) свести к нулю. Следящие системы нашли широкое
применение в устройствах, именуемых следящим приводом.
г) САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
(Рассмотренные системы автоматического регулирования могут
работать без непосредственного вмешательства человека, поддержи-
вая регулируемый параметр постоянным в системах автоматического
регулирования постоянного параметра, изменяя его по заранее за-
данному закону в системах автоматического программного регули-
рования, или изменяя его в некоторых пределах произвольным,
заранее неизвестным образом в следящих системах.
Однако даже при правильном первоначальном выборе значения
регулируемого параметра из-за изменения характеристик регулируе-
мого объекта и других причин в изменившихся условиях эти зна-
чения регулируемого параметра уже не будут отвечать требованиям
наилучшего протекания процесса. Поэтому для приведения системы
к нормальному, благоприятному или наилучшему режиму работы
при изменении характеристик регулируемого объекта или других
причин человек должен периодически осуществлять перенастройку
системы с одного режима на другой.
IB ряд£ случаев, когда изменение условий и свойств регулируе-
мого процесса протекает медленно, перенастройку системы с одного
режима на другой нет необходимости автоматизировать. При рез-
ком и частом изменении условий и свойств регулируемого процес-
са непрерывную корректировку параметров системы удобнее вести
автом
л1гвд£тоящее вр& сисХе •АеТОМ^ГИТ ;рвЙуЙИрО] &я широкое распространение начинают получать способные сами поддерживать оптималь- ВЙН1^ 17 -
•ный режим при изменяющихся внешних условиях и характеристи-
ках регулируемого объекта.
К системам, обладающим свойством приспосабливаться к -ме-
няющимся условиям, относятся самонастраивающиеся системы авто-
матического регулирования.
В отличие от ранее рассмотренных систем, в которых процесс
регулирования сводится к ликвидации рассогласования &(^) =
® самонастраивающихся системах автоматического ре-
гулирования необходимо автоматически осуществлять поиск наи-
выгоднейших состояний системы, перестраивая ее режим работы
или параметры в соответствии с найденными оптимальными зна-
чениями.
Таким образом, самонастраивающейся системой автоматического
регулирования может быть названа такая автоматическая система,
которая осуществляет приск оптимального состояния, регулируемого
объекта и изменяет режимы работы или перестраивает параметры
(а иногда и структуру системы) в соответствии с найденным опти-
мальным состоянием.
Если -в системах автоматического регулирования постоянного
параметра, программного регулирования и в следящих системах из-
вестны направление и величина воздействия, которое надо оказы-
вать на регулируемый объект, чтобы рассогласование е’(/) свести
к нулю, то в самонастраивающихся системах автоматического ре-
гулирования для определения 'величины и направления воздействия
необходимо непрерывно вести пробные попытки, из-меняя состояние
регулируемого объекта. На основании этих попыток в результате
их анализа необходимо определить требуемое направление и .вели-
чину воздействия на объект для приведения системы к оптималь-
ному состоянию. Такой процесс регулирования является более слож-
ным, так как для его осуществления требуется -меньшее количество
необходимой начальной информации \ чем в ранее рассмотренных
системах автоматического регулирования.
С точки зрения классификации (Л. 12] самонастраивающиеся
системы относятся к системам с неполной информацией в отличие
от следящих систем, систем автоматического регулирования по-
стоянного параметра и программного регулирования, в которых
для осуществления процесса регулирования количество необходимой
'начальной информации должно быть выше, чем в самонастраиваю-
щихся системах.
Самонастраивающиеся системы автоматического регулирования
можно разделить на три основные группы:
>1) системы с самонастройкой программы;
2) системы с самонастройкой параметров;
3) системы с самонастройкой -структуры.
Принципы действия самонастраивающихся систем автоматиче-
ского регулирования рассматриваются в гл. 8.
1 Необходимая начальная информация — это совокупность све-
дений о регулируемом процессе и системе, поступающих до начала
работы в систему автоматического регулирования и достаточных
для ее функционирования.
ГЛАВА ПЕРВАЯ
СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
1. ПРИНЦИПЫ РЕГУЛИРОВАНИЯ
По принципу регулирования автоматические системы можно
разделить на системы: 1) с воздействием по регулируемому пара-
метру; 2) с воздействием по возмущению; 3) комбинированные
системы.
В системах автоматического регулирования с воздействием по
регулируемому параметру измеряется величина, подлежащая (регу-
лированию в данном объекте, затем
она сравнивается с заданным значе-
нием и при наличии расхождения
«а регулируемый объект оказывается
соответствующее воздействие, приво-
дящее к выравниванию регулируемо-
го параметра. Такой принцип регули-
рования получил в теории автомати-
ческого регулирования название ком-
пенсационного принципа Ползунова—
Уатта. Принцип Ползунова — Уатта
является основным принципом в боль-
шинстве современных автоматических
регуляторов. Впервые в мире автома-
тический регулятор был изобретен
И. И. Ползуновым в 1765 г. и при-
менен им для регулирования уров-
Рис. 11. Система автоматиче-
ского регулирования уровня
воды в котле паровой ма-
ня воды в котле его паровой машины шины.
(рис. Г1). В данной системе регули-
руемый параметр — уровень воды Н
в котле измеряется с помощью поплавка 2, являющегося измеритель-
ным элементом. Измерительный элемент — поплавок непосредственно
воздействует на регулирующий элемент—заслонку 3. Котел 1 являет-
ся регулируемым объектом. Изменение величины отбора пара Q2
из котла в паровую машину является основным возмущающим
^воздействием на регулируемый объект. Если отбор пара уменьшится,
уровень воды начнет увеличиваться, поплавок, поднимаясь, пере-
2*
19
местит заслонку, перекрывая доступ .воды в котел, и уровень бу-
дет автоматически восстанавливаться. При понижении уровня воды
ниже заданного вследствие увеличения расхода ее заслонка приот-
крывает доступ воде. Помимо изменения расхода воды, могут
быть и другие возмущающие воздействия на объект, например ин-
тенсивность топки, изменение температуры поступающей воды или
изменение температуры окружающей среды. Но независимо от того,
чем вызвано изменение уровня, данная система во всех случаях
будет одинаково действовать на это нежелательное изменение уров-
ня, автоматически восстанавливая его. Настройка регулятора на
определенную величину Н производится удлинением или укорочени-
ем стержня поплавка. Другим примером системы автоматического
регулирования с воздействием по регулируемому параметру может
служить система автоматического регулирования напряжения гене-
ратора |(рис. 4). Как -было показано во введении, данная система
обеспечивает поддержание постоянства напряжения независимо от
причин, вызвавших изменение регулируемого параметра.
Таким образом, системы автоматического регулирования с воз-
действием по регулируемому параметру будут во всех случаях
одинаково действовать на отклонение регулируемого параметра
от заданного значения независимо от того, под действием какого
возмущения это отклонение произошло. Цикл работы данных си-
стем включает измерение регулируемого параметра, сравнение его
с заданным значением и воздействие на регулируемый объект
таким образом, чтобы привести регулируемый параметр к заданно-
му значению.
В системах автоматического регулирования с воздействием по
возмущению измерение регулируемого параметра не производится,
а «борьба» с' нежелательным внешним воздействием ведется путем
замера одной из причин, вызвавших отклонение регулируемого пара-
метра от заданного значения и воздействия на регулируемый
объект таким образом, чтобы восстановить нарушенное равновесие
регулируемого объекта. Этот принцип в теории автоматического
регулирования именуют принципом Понселе—Чиколева. В схеме
регулятора напряжения при регулировании по принципу Ползунова—
Уатта -(рис. 4) измерялось отклонение регулируемого параметра-
напряжения от заданного значения и в зависимости от этого авто-
матически изменялся ток в цепи обмотки* возбуждения, приводя
напряжение системы к заданному значению. При регулировании
по возмущающему воздействию надо прежде всего выяснить, какое
возмущающее воздействие является основным, а затем установить,
как с изменением этого возмущающего воздействия должен быть
изменен тот или иной параметр системы, чтобы регулируемая ве-
личина поддерживалась постоянной. Если вернуться к вопросу
регулирования напряжения, то можно заранее рассчитать, как
с изменением скорости вращения (если считать скорость вращения
основным возмущающим воздействием) надо изменять сопротивле-
ние цепи возбуждения генератора, чтобы напряжение на его зажи-
мах оставалось неизменным. Например, практически эту систему
можно было бы выполнить следующим образом.
В цепь обмотки возбуждения ОВ\ генератора (рис. 12) необ-
ходимо включить реостат, сопротивление которого изменяется авто-
матически в соответствии с изменением скорости вращения привод-
ного двигателя. Благодаря этому можно поддержать заданную вели-
20
Чину напряжения постоянной. При применении такой системы за-
данное напряжение будет поддерживаться постоянным только
в том случае, если изменение напряжения вызывается изменением
скорости вращения. При изменении тока нагрузки генератора дан-
ный регулятор не будет поддерживать постоянным заданное зна-
чение напряжения. Можно задачу поддержания заданного значения
напряжения решить иначе, если считать, что скорость 'вращения
генератора постоянна, а основным возмущающим воздействием
является изменение тока нагрузки. В этом случае часто применяют
•в генераторах компаундирование, т. е. введение дополнительной
последовательной обмотки ОВ2, которая устраняет снижение на-
пряжения при увеличении тока нагрузки (ipnc. 13). При увеличении
Рис. 12. Система автоматического Рис. 13. Схема компаунди-
регулирования напряжения генера- рования генератора постоян-
• тора. кого тока.
тока нагрузки /н вследствие размагничивающего действия реакции
якоря и увеличения падения напряжения в якоре -генератора умень-
шается напряжение на зажимах генератора. Но увеличение тока на-
грузки вызывает рост тока в компаундирующей обмотке ОВ2, а сле-
довательно, и увеличение общего потока возбуждения, благодаря
чему напряжение генератора будет возрастать. Таким образом,
напряжение генератора может в первом приближении оказаться
независимым от тока нагрузки. При изменении скорости вращения,
температуры и других факторов напряжение на зажимах генератора
не будет оставаться постоянным. Из сказанного следует, что систе-
мы автоматического регулирования с воздействием по возмущению
поддерживают постоянство регулируемого параметра только при
изменении того возмущающего воздействия, измерение которого
обеспечивается в данной системе.
Поскольку системы автоматического .регулирования с воздей-
ствием по возмущению могут реагировать только на определенный,
заранее учтенный вид возмущающего воздействия, вполне есте-
ственно, что применение таких систем менее целесообразно, чем
применение регуляторов, основанных на принципе Ползунова—Уат-
та, особенно если существенное влияние на регулируемый объект
оказывает не одно, а несколько возмущающих воздействий. Ком-
пенсировать все возмущающие воздействия можно, только приме-
няя регуляторы, основанные на принципе Ползунова—Уатта. Одна-
21
ко, применяя эти регуляторы, Не 'Всегда удается Добиться надле-
жащей удовлетворяющей техническим требованиям работы, поэтому
в современной технике находят применение комбинированные си-
стемы, сочетающие в себе оба принципа регулирования.
'В комбинированных системах регулятор с .воздействием по
возмущению, обладая высоким быстродействием, 'компенсирует .в той
или иной мере главное ’возмущающее воздействие, на подавление
которого он рассчитан, а регулятор с воздействием по регулируе-
мому параметру решает задачу более точного регулирования, осу-
ществляя в основном компенсацию неглавных возмущающих воз-
действий.
Таким образом, объединение обоих принципов регулирования
в одной автоматической системе позволяет сочетать ней высокую
точность и быстродействие.
2. КОНТУРЫ РЕГУЛИРОВАНИЯ
Для изучения автоматических систем используются элементные
схемы. Для каждой замкнутой автоматической системы можно со-
ставить элементную схему, которая отражает его основные свой-
ства и имеет замкнутую цепь передачи воздействий, действующих
непрерывно или периодически. Замкнутые автоматические системы
могут иметь одну или более замкнутых цепей воздействия. В тео-
рии автоматического регулирования замкнутые цепи воздействий
называют контурами регулирования.
Различают одноконтурные и многоконтурные системы автома-
тического регулирования.
Одноконтурной системой автоматического регулирования назы-
ваются такие системы, в которых имеется одна замкнутая цепь воз-
действия. Пример такой системы приведен на рис. 4,6. Она состоит
из одного регулируемого объекта и одного простейшего автомати-
ческого регулятора и предназначена для поддержания неизменным
одного регулируемого параметра.
Многоконтурными системами автоматического регулирования
называются такие системы, в которых имеется более одной замк-
нутой цепи воздействия. Системы состоят из регулируемого объекта
и одного или нескольких автоматических регуляторов. Например,
при наличии одного -регулируемого объекта и одного автоматическо-
го регулятора в многоконтурной системе автоматического регули-
рования при изменении одного регулируемого параметра один из-
мерительный элемент может воздействовать -на несколько регули-
рующих элементов объекта с целью поддержания неизменным этого
регулируемого параметра (рис. 14). Различают также связанное и
несвязанное регулирование. Например, при наличии одного регу-
лируемого объекта и нескольких автоматических регуляторов
(рис. 15) в системе автоматического регулирования при изменении
нескольких регулируемых параметров каждый автоматический регу-
лятор предназначен для поддержания неизменным только одного
регулируемого параметра. Из рис. 15 видно, что система имеет
как бы два отдельных контура регулирования, не связанных друг
с другом, е. каждый автоматический регулятор работает само-
стоятельно, поддерживая соответствующий регулируемый параметр.
Такие системы автоматического регулирования называются несвя-
занными.
22
Рис. 14. Многоконтурная система автоматического регулирования.
Рис. 15. Многоконтурная система несвязанного автоматического ре-
гулирования.
23
Однако часто регулируемые параметры связаны между собой
через регулируемый объект и действие одного из автоматических
'регуляторов приводит к изменению всех регулируемых параметров.
Поэтому в ряде случаев, для того чтобы избежать нарушения 'режи-
ма работы .регулируемого объекта при действии одного из авто-
матических регуляторов, их связывают между собой (рис. 16). Та-
кой случай регулирования именуют связанным регулированием.
Рис. 16. Многоконтурная система связанного автоматического регу-
лирования.
В современных автопилотах применяется связанное регулирование,
т. е. каждый из автоматических регуляторов (по курсу, крену или
высоте) воздействует одновременно и на другие автоматические
регуляторы. Нацример, в электрическом автопилоте при отклонении
самолета от курса автопилот действует не только на руль поворо-
та, заставляя самолет вернуться на заданный курс, но также и на
элероны, заставляя самолет накреняться и производить поворот
в режиме правильного виража. Кроме того, эта связь противодей-
ствует стремлению самолета накреняться под действием скольже-
ния, возникающего при уходе с курса. При возникновении кренов
самолета автопилот действует не только на элероны, восстанавли-
24
вая заданное положение, но также и на руль ‘высоты для того,
чтобы это восстановление происходило без потери высоты, и, кроме
того, на руль по-ворота, компенсируя дополнительной перестановкой
руля влияние поворотного момента элеронов. Такого рода вспомо-
гательные связи служат для того, чтобы восстановление одних
параметров стабилизации не приводило к нарушению других.
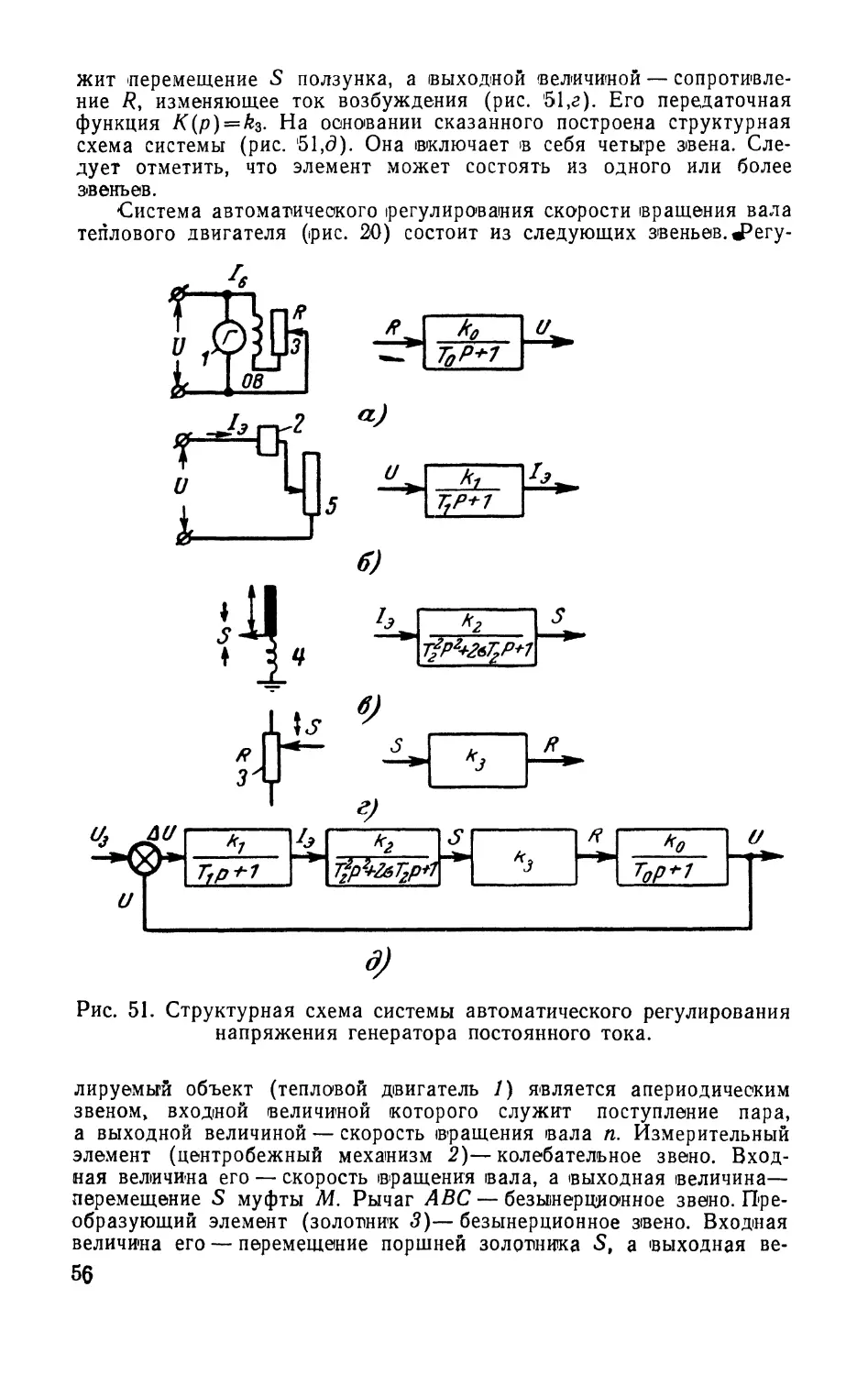
3. СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ПРЯМОГО И НЕПРЯМОГО ДЕЙСТВИЯ
а) Система прямого действия
Системой автоматического регулирования прямого действия
называется такая система, в которой воздействие измерительного
элемента на регулирующий элемент осуществляется непосредствен-
но, без привлечения добавочного источника энергии. Примерами
системы автоматического -регулирования прямого действия могут
Рис. 17. Система автоматического
регулирования уровня воды в баке.
служить следующие автоматические системы: регулирование уров-
ня воды в баке (рис. 11 и 17), регулирование скорости вращения
вала теплового двигателя, схема которого приведена на рис. 18,
и регулирование напряжения на зажимах генератора постоянного
тока (рис. 12).
На рис. 17 изображена система автоматического регулирова-
ния уровня воды в баке. Элементы системы: регулируе-
мый объект — бак /, измерительный элемент — поплавок 2, регули-
рующий элемент — заслонка 3. Регулируемый параметр — высота
уровня воды Н, внешнее возмущающее воздействие — расход во-
ды Q2 из бака, настройка — смещение поплавка 2 вдоль его стержня.
Эта система работает аналогично приведенной на рис. 11.
В данной системе автоматического регулирования измерительный
элемент (поплавок 2) непосредственно через рычаг АВС воздейст-
вует на регулирующий элемент (заслонку 5).
На рис. 16 изображена система автоматического регулирова-
ния скорости вращения вала двигателя. Элементы системы: регу-
лируемый объект — двигатель /, измерительный элемент — цент-
робежный механизм 2, регулирующий элемент — заслонка 3. Регу-
лируемый параметр — скорость вращения со вала двигателя, внеш-
нее возмущающее воздействие — момент нагрузки А1Н, приложен-
25
ныи к валу двигателя, настройка — натяжение пружины П центро-
бежного механизма 2.
Работа системы автоматического -регулирования скорости
вращения вала двигателя заключается в следующем. При увели-
чении момента нагрузки Мп яа валу сверх номинального значения
скорость вращения вала двигателя 1 уменьшается и грузы центро-
бежного механизма 2, на которые действуют силы сходятся
(опускаются). При этом муфта М центробежного механизма 2
опускается, что приводит к перемещению заслонки 3 вверх, так
как она при помощи рычага АВС связана с муфтой М. Перемеще-
ние заслонки 3 вверх вызывает увеличение подачи топлива в дви-
гатель 1. Вследствие увеличения подачи топлива скорость вра-
щения вала двигателя 1 увеличивается, приближаясь к заданному
значению.
Рис. 18. Система автоматического регулиро-
вания скорости вращения теплового дви-
гателя.
При уменьшении момента нагрузки Мн на валу скорость вра-
щения вала двигателя 1 увеличивается и все элементы системы
перемещаются в направлении, обратном описанному. В данной
системе автоматического регулирования измерительный элемент
(центробежный механизм 2) непосредственно через рычаг АВС
воздействует на регулирующий элемент‘(заслонку 5).
iB системе автоматического регулирования напряжения генера-
тора постоянного тока |(рпс. 4,а) измерительный элемент (электро-
магнит 2) также непосредственно воздействует на регулирующий
элемент (движок реостата 3).
Б рассмотренных системах автоматического регулирования пря-
мого действия регулирующий элемент 3 ‘(соответственно клапан,
заслонка или движок реостата) получает перемещение непосред-
ственно от измерительного элемента (соответственно поплавка,
центробежного механизма и электромагнита) без добавочного ис-
точника энергии. При этом любым образом возникшее нежелатель-
ное увеличение регулируемого параметра (соответственно уровня
воды, скорости вращения и напряжения) вызывает в первой си-
стеме поднятие поплавка, во второй системе — расхождение грузов
центробежного механизма, в третьей системе — увеличение тяговой
26
силы электромагнита. В результате этого регулирующий элемент,
получая перемещение, оказывает на регулируемый объект |(бак с во-
дой, тепловой двигатель, генератор) регулирующее воздействие, за-
ключающееся в первой системе в уменьшении проходного сечения
в трубопроводе подачи воды в бак, во второй системе — в умень-
шении проходного сечения в трубопроводе подачи топлива в теп-
ловой двигатель, в третьей системе — в увеличении сопротивления
цепи возбуждения генератора. Такое регулирующее воздействие
на регулируемый объект во всех рассмотренных системах вызывает
уменьшение отклонения регулируемого параметра от заданного
значения.
Таким образом, в системах автоматического регулирования пря-
мого действия энергия, необходимая для процесса регулирования,
поступает только благодаря отклонению регулируемого параметра.
Для всех трех рассмотренных систем, совершенно различных по
своей физической природе, имеет место одна и та же элементная
схема (рис. 4,6).
Воздействие '(сигнал) измерительного элемента здесь непосред-
ственно используется для перемещения регулирующего элемента.
Таким образом, системы автоматического регулирования прямого
действия могут быть осуществлены только тогда, когда сигнал,
создаваемый измерительным элементом, достаточен для непосред-
ственного воздействия на регулирующий элемент. Регуляторы пря-
мого действия, применяемые в системах автоматического регулиро-
вания, отличаются простотой конструкции, они дешевы и просты
в обслуживании, надежны в работе и по сути своей работы не
требуют источника вспомогательной энергии. Вследствие этого они
находят широкое применение в разных областях техники. Однако
регуляторы прямого действия обладают пониженной чувствитель-
ностью, малой точностью регулирования, небольшим коэффициен-
том усиления и ограниченными мощностями на выходе.
б) Система непрямого действия
Системой автоматического регулирования непрямого действия
называется такая система, в которой измерительный элемент воз-
действует на регулирующий элемент не непосредственно, а через
специальные усиливающие и преобразующие элементы, питаемые
добавочным источником энергии. Введение их преследует цель уси-
лить сигнал, подаваемый измерительным элементом к регулирую-
щему элементу, за счет постороннего источника энергии. К таким
элементам относятся усилительный (преобразующий) и исполнитель-
ный элементы. Элементная схема системы непрямого действия была
показана на рис. 5,6.
В качестве примеров системы автоматического регулирования
непрямого действия рассмотрим следующие автоматические систе-
мы: регулирование уровня воды в баке, регулирование скорости
вращения вала теплового двигателя и регулирование напряжения
на зажимах генератора постоянного тока. На рис. 19, 20 и 5,а изо-
бражены системы автоматического регулирования непрямого дей-
ствия.
Элементами системы автоматического регулирования уровня воды
в баке '(рис. 19) служат: регулируемый объект — бак /, измери-
тельный элеменд — поплавок 2, регулирующий элемент — заслонка 5,
27
преобразующий элемент — потенциометр 3 и исполнительный эле-
мент — электродвигатель 4.
Регулируемый параметр — высота уровня воды Н в баке /,
внешнее возмущающее воздействие (нагрузка)—расход воды Q2
Рис. 19. Система автоматического регулиро-
вания уровня воды в баке.
вращения вала теплового двигателя
Рис. 20. Система автоматического ре-
гулирования скорости вращения теп-
.лового двигателя.
из бака 1, настройка — смещение поплавка 2 вдоль его стержня.
Вид энергии добавочного источника питания — электрический ток.
Элементами системы автоматического регулирования скорости
(рис. 20) являются: регули-
руемый объект — тепловой
двигатель /, измерительный
элемент—центробежный ме-
ханизм 2, регулирующий
элемент — заслонка 5, пре-
образующий элемент — зо-
лотник 3 и исполнительный
элемент — гидравлический
двигатель 4.
Регулируемый пара-
метр — скорость вращения со
вала теплового двигателя 1,
внешнее возмущающее воз-
действие — момент нагруз-
ки Л4Н, приложенный к валу
теплового двигателя /, на-
стройка — натяжение пру-
жины П центробежного ме-
ханизма 2. Вид энергии до-
бавочного источника пита-
ния— гидравлическая энер-
гия, т. е. поток жидкости
под давлением»
Система автоматического регулирования напряжения генератора
постоянного тока (рис. 5,а) включает в себя следующие элементы:
регулируемый объект — генератор /, измерительный элемент — элек-
тромагнит 2, регулирующий элемент— реостат 5, преобразующий
элемент — потенциометр 3 и исполнительный элемент — электродви-
гатель 4. Регулируемый параметр — напряжение генератора, внеш-
нее возмущающее воздействие — ток нагрузки генератора, настроц-
28
ка — реостат 6. Вид энергии добавочного источника питания —
электрический ток.
Для всех трех указанных систем, совершенно различных по
своей физической природе, имеет место одна и та же элементная
схема «(рис. 5,6). В них измерительный элемент ((поплавок, центро-
бежный механизм, электромагнит) воспринимает нежелательное
отклонение регулируемого параметра ’(уровень «воды, скорость вра-
щения или напряжение генератора) и перемещает в соответствую-
щую сторону усилительный ((преобразующий) элемент (ползунок
потенциометра, поршни золотника или ползунок потенциометра).
Вследствие этого подается питание на исполнительный элемент 4
(электрический или гидравлический двигатель), который перемещает
регулирующий элемент 5 ((заслонка в трубопроводе, по которому
осуществляется доступ воды в бак, заслонка в трубопроводе, пи-
тающем тепловой двигатель, или ползунок реостата в цепи возбуж-
дения генератора). Регулирующий элемент 5 при этом воздействует
на регулируемый объект (бак, тепловой двигатель или генератор)
так, чтобы устранить нежелательное отклонение регулируемого
параметра от заданного значения.
Таким образом, в системах автоматического регулирования
непрямого действия энергия, необходимая для процесса регулиро-
вания, поступает не только за счет отклонения регулируемого пара-
метра, но и за счет добавочного источника питания. Измеритель-
ный элемент в данных системах реагирует на отклонение регули-
руемого параметра от заданного значения и воздействует на уси-
лительный (преобразующий) и исполнительный элементы, которые
за счет подводимой извне энергии воздействуют на регулирующий
элемент. Конструктивное выполнение регуляторов непрямого дей-
ствия, применяемых в системах автоматического регулирования,
более сложное, чем регуляторов прямого действия. Однако они
позволяют получать в системе автоматического регулирования лю-
бой, достаточно большой коэффициент усиления, удовлетворяющий
практическим требованиям чувствительности и точности регулирова-
ния. Сигнал измерительного элемента в регуляторах непрямого дей-
ствия может быть значительно меньшим, что приводит к более
точному регулированию.
4. НЕПРЕРЫВНЫЕ И ПРЕРЫВИСТЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
а) Непрерывные системы
•Непрерывной системой автоматического регулирования назы-
вается такая система, в которой непрерывному изменению регули-
руемого параметра соответствует непрерывное изменение механиче-
ских, электрических или других величин во всех элементах системы.
Следовательно, в ней осуществляется постоянная, непрерывная
функциональная связь между элементами системы.
Примерами непрерывных систем могут служить ранее рассмот-
ренные автоматические системы регулирования уровня воды в баке
(рис. 17 и 19), регулирования скорости вращения вала теплового
двигателя 1(рис. Г8 и 20) и регулирования напряжения на зажи-
мах генератора постоянного тока (рис. 4,а и 5,а).
29
В системе автоматического регулирования уровня воды в баке
любым изменениям уровня воды соответствует перемещение изме-
рительного элемента — поплавка 2, который воздействует на 'регу-
лирующий элемент — заслонку 3. При этом при непрерывном изме-
нении уровня воды регулирующий элемент — заслонка непрерывно
воздействует на регулируемый объект — бак 1 так, что уровень воды
поддерживается постоянным. В каждой из приведенных систем мы
-можем проследить непрерывность воздействия одного элемента си-
стемы на другой.
Таким образом, системы непрерывного регулирования характе-
ризуются тем, что в процессе -регулирования структура всех связей
в системе остается неизменной и сигналы на выходе каждого эле-
мента являются непрерывными функциями воздействия и времени.
Подавляющее большинство непрерывных систем автоматического
-регулирования относится к классу так называемых линейных си-
стем, т. е. -систем, характеризуемых линейными дифференциальными
уравнениями. Они нашли широкое применение во всех областях
техники.
б) Прерывистые системы
Прерывистой -системой автоматического -регулирования назы-
вается такая система, в которой непрерывному изменению регу-
лируемого параметра соответствует прерывистое изменение воздей-
ствий (сигналов) хотя бы в одном из элементов системы.
Прерывистые системы можно разделить на две основные груп-
пы: релейные системы и им-
пульсные системы.
Релейные системы.
Релейной системой автомати-
ческого регулирования называ-
ется такая система, которая
в своем составе среди основ-
ных элементов цепи регулиро-
вания имеет хотя бы один ре-
лейнБГй элемент. Под релей-
ным элементом подразумевает-
ся такой элемент системы, в ко-
тором непрерывному изменению
входной величины отвечает
скачкообразное изменение вы-
ходной величины, появляющее-
значениях входной величины,
элемента рассмотрим работу
электромагнитного реле (контактор), -включенного в цепь по схеме
(рис. 21). Входной величиной хвх будем считать напряжение
в управляющей цепи обмотки -реле, а выходной величиной хВых
величину напряжения -в управляемой цепи, т. е. -напряжение, пода-
ваемое на электродвигатель после замыкания контактов К реле.
Статическая характеристика электромагнитного реле как релейного
элемента показана на рис. 22, где t/Cp и t/0Tn— соответственно
напряжение срабатывания и напряжение отпускания реле. Из
рис. 22 видно, что непрерывному изменению входной величины
соответствует скачкообразное появление выходной величины,
30
Рис. 21. Схема включения элек-
тродвигателя.
ся лишь п.ри вполне определенных
В качестве примера релейного
В определении релейной системы автоматического регулирова-
ния ^ыло указано наличие релейного элемента именно как одного
из специфических элементов системы. Однако следует иметь в 'виду,
что в системы автоматического регулирования могут быть включены
различные реле’вспомогательного назначения, скачкообразность из-
менения выходных величин которых не влияет на характер процес-
са изменения регулируемого параметра. Такие системы должны быть
Рис. 22. Статическая характери-
стика релейного элемента (элек-
тромагнитного реле).
Рис. 23. Система
автоматического
регулирования ско-
рости электродви-
гателя.
процесса регулирования.
отнесены к непрерывным. Вследствие
этого рассмотрим только такие типы
релейных систем автоматического ре-
гулирования, в которых релейный
элемент существенно влияет на характер
В качестве примера релейной системы рассмотрим систему регу-
лирования скорости вращения якоря электродвигателя постоянного
тока, принципиальная схема которой показана на рис. 23. Элементы
системы: регулируемый объект — электродвигатель /, измеритель-
ный элемент — центробежный механизм 2, регулирующий элемент—
выключатель 3.
Регулируемый параметр — скорость вращения п вала якоря
электродвигателя /, внешнее возмущающее воздействие — момент
нагрузки AfH, приложенной к валу электродвигателя, настройка —
натяжение пружины П центробежного механизма 2. В данной
системе постоянство скорости вращения вала якоря электродвигате-
ля осуществляется за счет изменения магнитного потока обмотки
возбуждения. С этой целью в цепь обмотки возбуждения последо-
вательно включено добавочное сопротивление /?д, которое может
быть зашунтировано выключателем 3.
Принцип работы системы заключается в следующем. При умень-
шении момента нагрузки на валу якоря электродвигателя 1 скорость
вала увеличивается. Грузы центробежного механизма расходятся
и замыкают выключатель 3, который шунтирует добавочное сопро-
тивление 7?д, включенное последовательно в цепь обмотки возбуж-
дения. При этом 'магнитный поток возбуждения увеличивается, что
приводит к уменьшению скорости, грузы центробежного механизма
сходятся и, как только скорость вала якоря электродвигателя будет
31
равна заданному значению, выключатель 3 введет добавочное со-
противление 7?д в цепь обмотки возбуждения.
Из принципа работы системы видно, что измерительный эле-
мент 2 I(центробежный механизм) непрерывно реагирует на измене-
ние скорости вала якоря электродвигателя. Он производит непре-
рывное воздействие на последующий элемент — выключатель 3 ‘(ре-
гулирующий элемент). Однако выключатель 3 прерывно включает
и выключает 7?д в цепь обмотки возбуждения. Таким образом, ре-
гулирующий элемент является прерывным элементом релейного
характера. Последнее выражается в мгновенном включении и вы-
ключении добавочного сопротивления 7?д в цепь обмотки возбужде-
ния, что приводит к -скачкообразному изменению величины тока
возбуждения, а следовательно, и магнитного потока возбуждения.
Рис. 24. Система автоматического регулирова-
ния температуры теплового двигателя.
Релейный элемент в нашем случае может занимать лишь поло-
жения: «включено» или «отключено». Очевидно, что такого рода
элемент при работе системы будет находиться в непрекращающемся
колебательном режиме. Регуляторы систем автоматического регули-
рования, в которых имеется релейный элемент с двухпозиционными
положениями, называются вибрационными регуляторами. В нашем
примере выключатель 3 с некоторой частотой поочередно произво-
дит включение и отключение добавочного сопротивления 7?д в цепи
обмотки возбуждения и -скорость вала электродвигателя 1 при этом
имеет некоторое -осредненное значение в пределах допустимых до-
пусков работы системы.
Другим примером релейных систем может служить электроме-
ханическая система автоматического регулирования температуры
теплового двигателя, схема которой изображена на рис. 24. Элемен-
ты системы: регулируемый объект — теплообменник /, измеритель-
ный элемент — биметаллическая пластинка 2, преобразующий эле-
мент— реле 5, исполнительный элемент — электродвигатель 4, ре-
гулирующий элемент — шторки радиатора 5. Регулируемый пара-
метр — температура регулируемого объекта.
Работа системы происходит так. При изменении регулируемого
параметра (температуры регулируемого объекта 1) биметаллическая
пластинка 2 изгибается и перемещается влево или вправо; цепь пи-
тания обмотки верхнего или нижнего реле 3 замыкается. 'При этом
питание на одну из обмоток возбуждения электродвигателя 4, ко-
торый, вращаясь в соответствующую сторону, приводит в движение
32
шторки радиатора, устраняя тем самым (нежелательное отклонение
температуры регулируемого объекта. При температуре объекта,-рав-
ной заданному значению, биметаллическая пластинка устанавлм-
вается «а изоляционный промежуток полукольца. Система при этом
обесточивается.
Из работы системы можно видеть, что при перемещении биме-
таллической пластинки 2 контакты реле 3 мгновенно замыкаются и
включают питание электродвигателя 4 под полное -напряжение ис-
точ-ника питания. Ско-рость вращения электродвигателя в данной
схеме является постоянной, не- т
регулируемой величиной. Вслед-
ствие этого скорость перемеще-
ния шторок радиатора также
будет величиной постоянной.
Таким образом, в отличие
от непрерывных систем, рас-
смотренных ранее, в данной си-
стеме имеет место нарушение
непрерывности перемещения
в преобразующем элементе
(реле 5).
Прерывность работы дан-
ной системы можно показать
на графиках, изображенных на
рис. 25, где показан характер
перемещения во времени биме-
таллической пластинки х=/(0 •
‘На этой же кривой показана
также зона нечувствительно-
сти h измерительного элемен-
та системы. В соответствии
Рис. 25. Графики зависимости х—
системы автоматического регули-
рования температуры теплового
двигателя.
с перемещением биметаллической пластинки под кривой функцио-
нальной зависимости x=f(/) показаны функциональные зависимо-
сти напряжения питания электродвигателя, т. е. и скоро-
сти вращения якоря электродвигателя, т. е. Если счи-
тать, что при подаче питания на электродвигатель шторки
радиатора перемещаются с постоянной скоростью, а в зоне нечув-
ствительности электродвигатель обесточен и стоит на месте, то
график функциональной зависимости z—f(t) перемещения шторок
радиатора будет иметь вид, показанный на рис. 25 «внизу.
Из графиков 'видно, что, пока биметаллическая пластинка 2 ие
сойдет с зоны нечувствительности Л, цепь питания обмотки реле 3
разомкнута и электродвигатель 4 обесточен. Как только биметалли-
ческая пластинка выйдет из зоны нечувствительности /г, цепь пита-
ния обмотки реле 3 замкнется, электродвигатель подключится под
напряжение U источника питания и переместит шторки радиатора
в такую сторону, чтобы ликвидировать нежелательное отклонение
температуры от заданного значения. В процессе 'восстановления тре-
буемой температуры теплового двигателя в системе имеют 'место
затухающие колебания перемещения шторок радиатора.
Из рассмотрения работы и графических^зависимостей видно, что
в данной системе прерывным элементом служат реле 3 (их комби-
нация является двухпозиционной). В зависимости от величины и
знака воздействия на измерительный элемент он может подать пи-
3 Автоматич. регулирование
33
Измерительный
______элемент
L ------nfr
7 '
Регулируемый
объект
Рис. 26. Импульсная система
автоматического регулирова-
ния температуры теплового
двигателя.
тание на ту или другую обмотку возбуждения электродвигателя, что
приведет его к вращению в ту пли другую сторону, или отключить
от него питание. Следует отметить, что графическая зависимость
z—f(t) перемещения регулирующего элемента будет искажена за
счет инерционности обмоток возбуждения и движущихся частей
системы.
Импульсные системы. Импульсной системой автомати-
ческого регулирования называется такая система, которая в своем
составе среди основных элементов
цепи регулирования имеет хотя
бы один импульсный элемент.
Импульсный элемент преобразует
непрерывное входное воздействие
в ряд кратковременных импульсов
с определенным периодом их че-
редования. Таким образом, в им-
пульсной системе место релейного
элемента занимает импульсный
элемент.
Примером импульсной систе-
мы автоматического регулирования
может служить система регулиро-
вания температуры теплового дви-
гателя <(рис. 26). Элементы систе-
мы: регулируемый объект — теп-
ловой двигатель /, измерительный
• элемент — электрический мост
с гальванометром, преобразующий
импульсный элемент 3 (см. ниже),
исполнительный
тродвигатель 4,
элемент — шторки
L
*1
Гальбанометр
Импульсный
преобразующий —3
элемент
♦I
Регулирующий
элемент t
1 ’
Электродвигателе
(исполнительный элемент)
элемент — элек-
регулирующий
радиатора 5.
Регулируемый параметр — температура регулируемого объекта.
Работа системы заключается в следующем: при изменении ре-
гулируемого параметра — температуры, сопротивление Rt изменяет-
ся. Вследствие этого нарушается равновесие электрического моста,
так как сопротивление Rt вклю-
чено в одно из плеч моста, и по
гальванометру, включенному в диа-
гональ электрического моста,
потечет ток. Это приведет к пере-
мещению стрелки гальванометра.
Стрелка воздействует на импульс-
ный элемент 3, который вырабаты-
вает и подает импульсы питания
на электродвигатель 4. Послед-
ний вызовет перемещение шторок
радиатора.
В рассматриваемой системе не-
прерывность управления наруша-
ется в импульсном элементе.
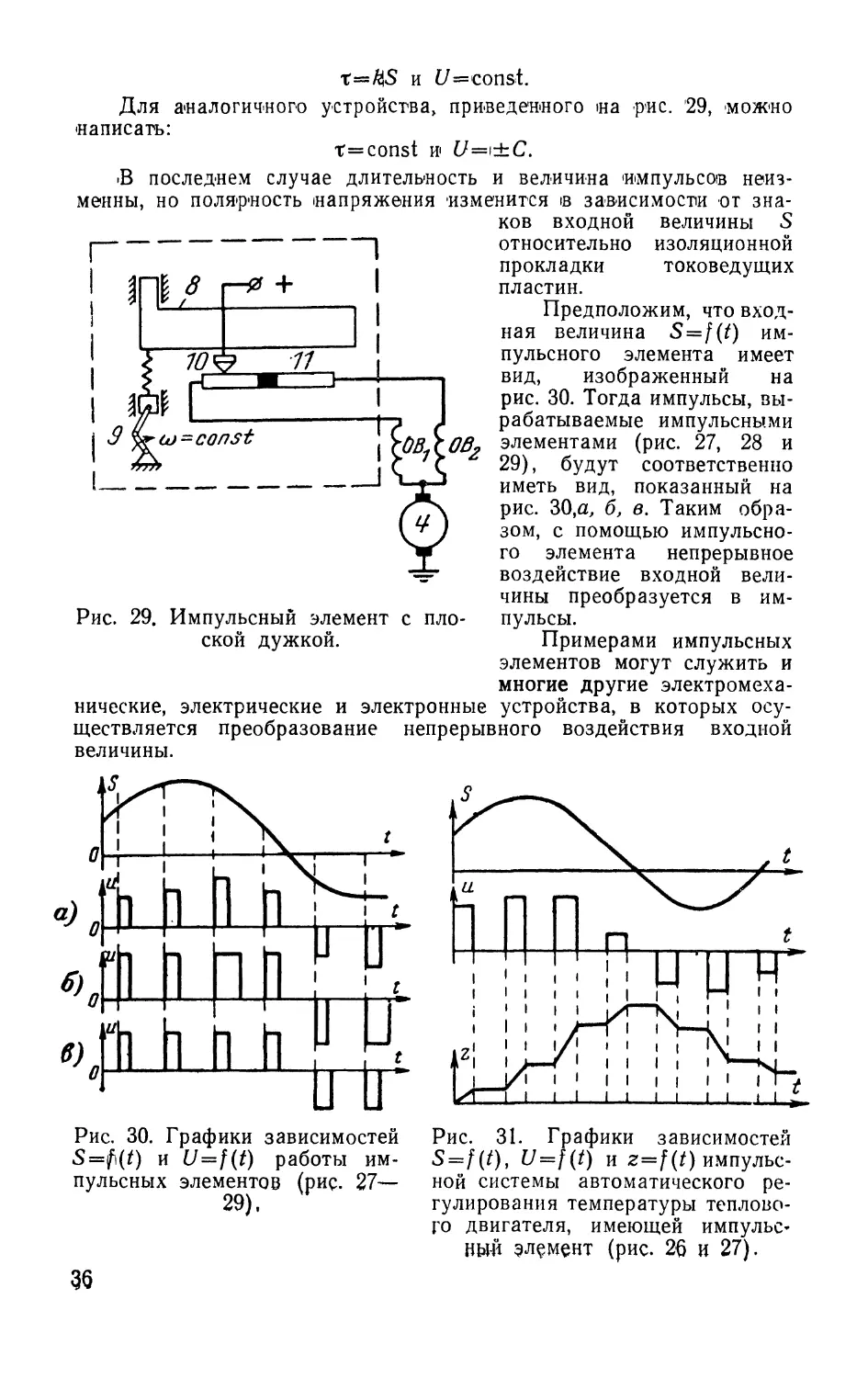
Рассмотрим устройство и работу одного из импульсных эле-
ментов, изображенного на рис. 27. Импульсный элемент представ-
ляет собой электрокинематическую систему, состоящую из падаю-
34
Рис. 27. Импульсный элемент.
Рис. 28. Импульсный элемент со
скошенной дужкой.
щей дужки 8, которая перемещается вверх и вниз при помощи -спе-
циального привода 9. Привод 9 дужки 8 совершает -вращательное
движение с заранее заданной угловой скоростью. Снизу дужки 8
имеется контактное приспособление 10, связанное со стрелкой -галь-
ванометра. При перемещение дужки 8 в-низ контакт 10 соприкасает-
ся с -сопротивлением потенциометра 11. Вследствие этого замыкает-
ся цепь питания обмотки якоря электродвигателя 4.
Работа импульсного элемента заключается в следующем: па-
дающая дужка 8, приводимая в движение приводом 9, совершает
колебания с заранее заданной, определенной 'частотой. При переме-
щении падающей дужки 8 в крайнее нижнее положение контакт 10
стрелки гальванометра -на короткие промежутки -времени соприка-
сается с сопротивлением потенциометра 11, с которого снимается
питание на электродвигатель 4.
Величина и полярность напря-
жения питания электродвига-
теля зависят от положения
контакта 10 относительно точ-
ки 0 в момент его соприкосно-
‘вения с сопротивлением потен-
циометра 11, а время импуль-
са напряжения зависит от вре-
мени замыкания контакта 10
с сопротивлениехМ 11, когда па-
дающая дужка в процессе сво-
их колебаний находится в ниж-
нем положении.
Время соприкосновения
контакта 10 с сопротивлением
11 является величиной посто-
янной и не зависит от положе-
ния контакта 10 относительно
точки 0. Следовательно, дли*
тельность импульсов напря-
жения, снимаемых с потенциометра 11 и подаваемых для питания
электродвигателя, является величиной постоянной. Величина же
импульсов изменяется в зависимости от значения входной вели-
чины S в соответствующий момент времени, т. е. от положения кон-
такта 10 относительно точки 0.
Таким образом, для работы импульсного элемента (рис. 27)
можно записать:
U=kS и т= const,
где U — величина напряжения; S — смещение подвижного контакта
относительно средней неподвижной точки 0; k — коэффициент про-
порциональности; т — продолжительность импульса.
Если на нижней поверхности падающей дужки имеются скосы,
а -вместо сопротивления 11 применяются две токоведущие пластины,
изолированные друг от друга (рис. 2*8), то импульсы напряжения
будут иметь другой характер. Длительность импульсов будет зави-
сеть от значения входной 'величины S, а величина импульсов на-
пряжения будет постоянной.
Следовательно, для работы импульсного элемента, показанного
на рис. 28, справедливо
3* 35
Рис. 29. Импульсный элемент с пло-
ской дужкой.
и Z7=const.
Для аналогичного устройства» приведенного «а рис. 29, мож-но
•написать:
г= const и £/ = 1±С.
>В последнем случае длительность и величина импульсов неиз-
менны, но полярность напряжения изменится в зависимости от зна-
ков входной величины S
относительно изоляционной
прокладки токоведущих
пластин.
Предположим, что вход-
ная величина S=f(t) им-
пульсного элемента имеет
вид, изображенный на
рис. 30. Тогда импульсы, вы-
рабатываемые импульсными
элементами (рис. 27, 28 и
29), будут соответственно
иметь вид, показанный на
рис. 30,а, б, в. Таким обра-
зом, с помощью импульсно-
го элемента непрерывное
воздействие входной вели-
чины преобразуется в им-
пульсы.
Примерами импульсных
элементов могут служить и
многие другие электромеха-
устройства, в которых осу-
ществляется преобразование непрерывного воздействия входной
величины.
нические, электрические и электронные
Рис. 30. Графики зависимостей
S=f\(t) и U=f(t) работы им-
пульсных элементов (рис. 27—
29),
Рис. 31. Графики зависимостей
U=f(t) и z=f(t) импульс-
ной системы автоматического ре-
гулирования температуры теплово-
го двигателя, имеющей импульс-
ный элемент (рис. 26 и 27).
36
Если в рассматриваемой щами импульсной системе '(рис. 26)
импульсный элемент выполнен <в 'варианте рис. 27, то закон z(t)
перемещения регулирующего элемента (шторки радиатора) может
быть изображен графически, так как показано на рис. 31. Этот гра-
фик справедлив только при том условии, что в течение кратковре-
менных импульсов регулирующий элемент движется, а в интервале
между ними он неподвижен. Наклон участков движения определяет-
ся скоростью электродвигателя и передаточным числом редуктора.
В действительности эта кривая будет несколько искажена за счет
инерционности обмотки возбуждения электродвигателя и движущих-
ся частей.
5. СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
По свойствам в установившемся режиме различают два вида
систем автоматического регулирования — статические и астатиче-
ские. В основу такого различия положена характеристика зависи-
мости между значением регулируемого параметра и величиной
внешнего возмущающего воздействия (нагрузкой) на регулируемый
объект. Она показывает точность поддержания заданного значения
регулируемого параметра только в установившихся режимах при
различных нагрузках на регулируемый объект. В общем виде функ-
циональная зависимость данных характеристик записывается так:
W(Q),
где х — установившееся значение регулируемого параметра;
Q — установившееся значение нагрузки (внешнего возмущаю-
щего воздействия).
а) Статические системы автоматического регулирования
Статической системой автоматического регулирования называет-
ся такая система, в которой регулируемый параметр при различных
постоянных по величине внешних возмущающих воздействиях на
регулируемый объект принимает по окончании переходного процесса,
т. е. в установившемся режиме, значения, зависящие от величины
внешнего возмущающего воздействия (нагрузки).
В качестве примера статических систем рассмотрим системы
регулирования уровня воды в баке, регулирования скорости враще-
ния вала теплового двигателя и регулирования напряжения генера-
тора постоянного тока (рис. 17, 18 и 4,а).
На рис. 17 изображена система автоматического регулирования
воды в баке. При постоянной величине расхода воды Q2 в единицу
времени как поплавок 2, так и заслонка 3 неподвижны. Расход во-
ды Q2 равен количеству поступающей воды Qi. При увеличении рас-
хода воды Q2 уровень воды в баке понижается, поплавок 2 -опу-
скается и перемещает заслонку 3 вверх, увеличивая открытие до-
ступа воды Qi. Вследствие этого поступление воды Qi в единицу
времени увеличивается и уровень воды в баке повышается. Равно-
весие в системе наступает тогда, когда поступление воды Qi будет
равно ее расходу Q2.
37
Следовательно, чем больше «расход воды, тем больше должна
быть приоткрыта заслонка и тем ниже в состоянии равновесия бу-
дет находиться поплавок 2. При уменьшении расхода воды Q2 за-
слонка опускается и поплавок в состоянии равновесия будет нахо-
диться выше, чем он находился до уменьшения расхода воды Qa-
(Итак, в системе автоматического регулирования уровня воды
в баке каждому установившемуся значению расхода воды соответ-
ствует определенное установившееся значение уровня воды. Следо-
вательно, при различных установившихся значениях расхода во-
ды Q2 уровень воды в баке будет различным, но близким к задан-
ному значению.
На рис. 18 изображена система автоматического регулирования
скорости вращения вала теплового двигателя. В данной системе, чем
больше будет установившееся значение момента нагрузки AfH на
валу теплового двигателя 1 '(регулируемый объект), тем большая
потребуется подача пара. Для выполнения этого условия тем на
большую величину должна открываться заслонка 3 (регулирующий
элемент). Однако при этом должно измениться и положение муф-
ты М. центробежного механизма 2 ((измерительный элемент), так
как она жестко связана с рычагом АВС. В свою очередь перемеще-
ние муфты М неизбежно связано с изменением скорости вала теп-
лового двигателя 1. При этом каждому положению муфты соот-
ветствует определенное положение грузов центробежного меха-
низма. Вследствие этого каждому установившемуся значению момен-
та нагрузки на валу теплового двигателя соответствует определен-
ное установившееся значение скорости вращения вала теплового
двигателя, т. е. при различных установившихся значениях момента на-
грузки скорость вращения вала теплового двигателя будет различна.
На фис. 4,а изображена система регулирования напряжения
генератора постоянного тока. Из принципа работы системы видно,
что различным установившимся значениям тока нагрузки соответ-
ствуют различные установившиеся значения тока возбуждения.
Различные установившиеся значения тока возбуждения обеспечива-
ются различными установившимися положениями движка реоста-
та 3. Однако для того, чтобы движок реостата 3 занимал различ-
ные установившиеся положения, в системе необходимы различные
установившиеся значения тяговой силы электромагнита. В свою
очередь тяговая сила электромагнита пропорциональна приложен-
ному напряжению. Вследствие этого каждому установившемуся тока
нагрузки соответствует определенное установившееся значение на-
пряжения генератора, т. е. при различных установившихся значе-
ниях тока нагрузки напряжение генератора будет различным.
Таким образом, можно сформулировать следующие характер-
ные свойства систем статического регулирования.
Различным установившимся значениям внешних возмущающих
воздействий на регулируемый объект соответствуют различные уста-
новившиеся значения регулируемого параметра или, иначе говоря,
равновесие системы при статическом регулировании имеет место при
различных значениях регулируемого параметра, лежащих в задан-
ных заранее пределах.
Каждому значению регулируемого параметра соответствует
единственное определенное положение регулирующего элемента.
Характеристика статического регулирования имеет вид, изобра-
женный на рис. 32. Характеристикой статического регулирования
38
называется зависимость регулируемого параметра от нагрузки при
различных установившихся режимах.
Из рис. 32 видно, что при изменении нагрузки от QMHH до ма-
ксимального значения Смаке регулируемый параметр может изме-
няться от Хмакс до Хмин. Одно из значений регулируемого параме-
тра <в этом интервале, которому соответствует (номинальное значе-
ние нагрузки Qhom, принимают
за номинальное значение хНом-
Иногда, например, хном при-
нимают равным среднему
арифметическому значению,
т. е.
•Х'макс + * мин
Яном = 2
Разность между каким-либо
установившимся значением ре-
гулируемого параметра х и ее
номинальным значением назы-
вают абсолютной статической
ошибкой:
Дх=х—Хном- ского регулирования.
Отношение абсолютной статической ошибки к номинальному значе-
нию Хном называют относительной статической ошибкой:
Дх Х— Хном
мнХ°
Хном
л «^макс Хмин
Относительную ширину зоны --------------- называют неравномер-
Хно м
ностью системы регулирования &:
Хном
Неравномерность системы считают положительной, когда устано-
вившиеся значения регулируемого параметра уменьшаются с возра-
станием нагрузки, и отрицательной, когда при возрастании нагрузки
регулируемый параметр возрастет. Чем меньше неравномерность ре-
гулирования, тем лучше система, н наоборот.
б) Астатические системы автоматического регулирования
Астатической системой автоматического регулирования назы-
вается такая система, в которой при различных по величине внеш-
ние возмущающих воздействиях на регулируемый объект отклоне-
ние регулируемого параметра от заданного значения по окончании
переходного процесса становится равным нулю. Следовательно, ве-
личина регулируемого параметра не зависит от изменения нагрузки
на регулируемый объект.
39
В качестве примера 'рассмотрим систему регулирования уровня
воды в баке |(ри<с. 19). При постоянной величине расхода воды Q2
из бака 1 в единицу времени как поплавок 2, так и заслонка 5 не-
подвижны, так как питание на электродвигатель 4 не подается. Рас-
ход воды Q2 равен количеству поступающей воды Qi. При увеличе-
нии расхода воды Q2 уровень ее в баке понижается, поплавок 2
опускается и перемещает вверх ползунок потенциометра 5, электро-
двигатель 4 получает питание и, вращаясь, приоткрывает заслон-
ку 5, благодаря чему увеличивается доступ воды Qi в бак /.Элек-
тродвигатель 4 будет вращаться и передвигать заслонку 5 вверх
до тех пор, пока ползунок потенциометра 3 не займет нейтрального
положения. ’В этом случае поплавок 2 займет положение, соответ-
ствующее заданному значению уровня воды в баке.
--------р—
।
I
I
I
I
।
Оман
; .а
Омаке
Рис. 33. Характеристика аста-
тического регулирования.
'Итакдв установившемся режиме при различных значениях рас-
хода воды Q2 из бака поплавок 2 всегда будет занимать одно опре-
деленное положение, соответствующее заданному значению уровня
воды в баке, а заслонка 5 при различных установившихся значе-
ниях расхода воды из бака будет занимать соответственно различ-
ные положения. Системы автоматического регулирования рис. 5,а
и 20 также будут являться астатическими системами автоматиче-
ского регулирования.
•На основании рассмотрения работы системы регулирования
уровня воды в баке можно сформулировать следующие характер-
ные свойства астатических систем автоматического регулирования.
Различным установившимся значениям внешних возмущающих
воздействий на регулируемый объект соответствует постоянное зна-
чение регулируемого параметра, равное заданному значению, или,
иначе говоря, равновесие системы имеет место при единственном
заданном значении регулируемого параметра.
Регулирующий элемент в конце процесса регулирования может
находиться в любом рабочем положении, обеспечивающем равнове-
сие системы регулирования.
На рис. 33 показана характеристика астатического регулирова-
ния.
Из рассмотрения статических и астатических систем автомати-
ческого регулирования следует, что астатические системы автомати-
ческого регулирования более точно поддерживают заданное значе-
ние регулируемого параметра, но имеют, как правило, по сравнению
с системами статического регулирования более сложное конструк-
тивное исполнение.
40
ГЛАВА. ВТОРАЯ
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СИСТЕМАХ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
6. ТИПОВЫЕ ЗВЕНЬЯ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
И ИХ ХАРАКТЕРИСТИКИ
а) Элементы и звенья систем автоматического
регулирования
Всякое автоматическое устройство состоит из отдельных эле-
ментов. Составная часть автоматического устройства, выполняющая
самостоятельную функцию, называется элементом автоматического
устройства. Из этого следует, что элементы автоматического устрой-
ства можно подразделить по их функциональному назначению.
В системах автоматического регулирования применяются измери-
тельный, исполнительный, регулирующий и другие элементы. Для
каждого из этих элементов можно установить математическую за-
висимость между 'рядом физических величин, обеспечивающих ре-
гулирование параметра регулируемого объекта. Наименьшее и чаще
всего встречающееся число таких физических величин в элементе
два. Например, в центробежном механизме ^измерительный эле-
мент) изменение скорости вращения вала вызывает определенное
перемещение муфты. Очевидно, что в центробежном механизме про-
исходит изменение одной величины под действием другой, т. е.
имеется определенная функциональная зависимость между скоростью
вращения вала и перемещением муфты. Происходящие в боль-
шинстве элементов преобразования одной величины в другую
имеют только одно направление. В центробежном механизме изме-
нение скорости вращения вала приводит к перемещению муфты, но
перемещение муфты какой-либо внешней силой не вызовет измене-
ния скорости вращения вала. Следовательно, элементы по происхо-
дящим в них преобразованиям обладают, как правило, свойством
направленности.
Таким образом, в элементах происходят преобразования одних
физических величин в другие в определенном направлении. Преоб-
разуемые физические величины различают между собой: одну из
них считают причиной, а вторую — следствием. Физическая вели-
чина, которая является причиной изменения другой физической вели-
чины, называется входной величиной (хвх), а физическая величина,
которая является ее ' следствием, называется выходной величиной
(*вых). Перечисленные свойства элементов—разделение их по функ-
циональному назначению и направленность преобразований в них —
позволяют изображать элементные функциональные схемы систем
автоматического регулирования и показать на схемах стрелками
направления происходящих преобразований и воздействия одного
элемента на другой (рис. 4,6, 5,6).
Разделение систем автоматического регулирования на элементы
по их функциям, по природе физических процессов или по конструк-
тивному признаку не может служить использовано при анализе их
динамических показателей.
41
Для анализа динамических свойств -систем автоматического ре-
гулирования вводится понятие — элементарное динамическое звено.
Введя понятие элементарного динамического звена систем ав-
томатического регулирования, можно всякое автоматическое устрой-
ство представить состоящим из простейших составных частей-
звеньев, отображающих динамические свойства данного автомати-
ческого устройства.
Элементарным динамическим звеном
называется устройство, переходный процесс
которого описывается линейным дифферен-
К(р) —►
циальным уравнением не выше второго по-
рядка. 1При дальнейшем изложении будем
пользоваться термином звено, подразуме-
Рис. 34. Изображение
звена.
вая под ним элементарное динамическое
звено. Звено изображается на схемах
в виде четырехугольника, слева которого стрелкой указывается
направление входной величины, справа—выходной величины,
а внутрь вписывается вид переходного процесса или выражение для
передаточной функции На рис. 34 в четырехугольнике указан сим-
вол передаточной функции.
б) Статические характеристики звеньев
Статической характеристикой звена называется зависимость
между выходной и входной величинами в различных установив-
диихся состояниях данного звена:
Хвых — /|(Хвх).
Данное уравнение называется уравнением статики или статической
характеристикой звена. Обычно статическая характеристика того
Рис. 35. Статическая ха-
рактеристика генератора
постоянного тока U=
или иного звена изображается графи-
чески. На рис. <35 изображена статиче-
ская характеристика генератора посто-
янного тока. Это так называемая ха-
рактеристика холостого хода, имеющая
функциональную зависимость и=}(13).
Выходной величиной хВых здесь служит
напряжение U генератора, а входной
величиной Хвх — ток возбуждения /в.
Как видно из рис. 35, статическая ха-
рактеристика генератора явля-
ется нелинейной. Следовательно, генера-
тор является нелинейным звеном. На
рис. 36 показана статическая характери-
стика электродвигателя постоянного то-
ка. Выходной величиной хВых здесь яв-
ляется скорость вращения п вала электродвигателя, а входной
величиной Хвх — напряжение питания U. Как видно из рисунка,
статическая характеристика криволинейная. Однако на участке аа\
статическая характеристика линейная. Вследствие этого электро-
1 Передаточная функция звена представляет собой отношение
мгновенных значений выходной величины к входной.
42
Двигатель при работе его иа, участке ай\ можно считать звеном
линейным. Следует отметить, что под линейцым звеном надо пони-
мать всякое звено, статическая характеристика которого линейна на
участке работы данного звена в данном переходном процессе.
В нашем примере, если при переходном процессе системы исполь-
зуется только прямолинейный участок характеристики aa\t то
электродвигатель является звеном линейным. Если же при переход-
ном процессе системы используется вся характеристика ЬаОа\Ьх, то
электродвигатель при этих условиях
будет представлять нелинейное
звено. На основании вида ра-
бочего участка статических ха-
рактеристик все звенья подра-
зделяют на линейные и нели-
нейные.
Рис. 37. Статическая ха-
рактеристика линейного
звена Хвых=#4”^Явх.
Рис. 36. Статическая характери-
стика электродвигателя постоян-
ного тока n=f(U).
Звено называется линейным, если его статическая характери-
стика выражается линейной функцией. !В общем виде уравнение
линейной функции выглядит так:
Хз ы х = Ц4“^^ВХ}
где а — постоянная величина, имеющая размерность Хвых;
& —постоянная величина, имеющая размерность хВЫх/хвх.
Графически данная функциональная зависимость показана на
рис. *317. Если постоянная величина а=0, то уравнение линейной
функции будет иметь вид:
Хвыхв^вх«
Величина показывает, во сколько раз изменяется установившееся
значение входной величины при передаче ее через данное звено на
его выход. Она равна £=%вьгх/хвх. Обычно величину k называют
передаточным числом или коэффициентом усиления. Оба термина
обозначают совершенно одно и то же, и в каждом частном случае
применяется обычно тот из них, который лучше подходит к техни-
ческой задаче, выполняемой данным звеном. Из приведенных выра-
жений и графика (рис. 37) видно, что величина k определяет собой
наклон линейной статической характеристики звена. Примером ли-
нейного звена может быть электрическая цепь с постоянным со-
противлением, для которой справедлив закон U=IR.
43
Если считать, что напряжение является входной величиной,
а ток — выходной величиной, то уравнение звена будет иметь вид:
Iвых R U1
= Швх.
Рис. 38. Статическая ха-
рактеристика линейного
звена /вых=^вх-
Статическая характеристика такого звена показана на рис. 38.
Другим примером линейного звена может служить рычаг.
«Звено называется нелинейным, если его статическая характе-
ристика выражается нелинейной функцией. Вид статических харак-
теристик нелинейных звеньев весьма
разнообразен. На рис. 22 и 35 соответ-
ственно показаны статические характе-
ристики нелинейных звеньев — в виде
электромагнитного реле и генератора по-
стоянного тока.
Звенья систем автоматического ре-
гулирования могут иметь как парал-
лельное, так и последовательное соеди-
нения между собой. При параллельном
соединении звеньев входная величина
является общей для всех звеньев, а вы-
ходная величина равна алгебраической
звеньев (рис. 39,а). Для получения стати-
ческой характеристики параллельно соединенных звеньев необходи-
мо построить их в одном и том же масштабе для каждого звена
и просуммировать их ординаты (рис. 39,6).
сумме выходных величин
Рис. 39. Параллельное соединение звеньев и их статические
характеристики.
При последовательном соединении звеньев выходная величина
каждого предыдущего звена является входной величиной для после-
дующего звена (рис. 40,а).
Для построения статической характеристики, например, трех
последовательно соединенных звеньев необходимо построить их
44
a)
Рис. 40. Последовательное соединение звеньев и их
статические характеристики.
в одном и том же масштабе соответственно в I, II и III (квадран-
тах. В IV 'квадранте получим результирующую, построение которой
показано »на рис. 40,6.
в) Типы звеньев и их динамические характеристики
Звенья, входящие в системы автоматического регулирования,
могут иметь различное конструктивное выполнение, различные схе-
мы и физические принципы действия, различные назначения и т. п.
Однако с точки зрения динамических свойств важное значение
имеет классификация звеньев по видам протекания переходных про-
цессов в них. В основу такой классификации положена зависимость,
связывающая входные и выходные величины звена в переходном
процессе. Если произвести классификацию звеньев по этому призна-
ку, то это позволит их конструктивное многообразие свести к не-
большому числу.
-Математическое уравнение звена в неустановившемся состоянии
(при переходном процессе) определяет значение выходной величины
в зависимости от входной величины и времени. В общем виде такое
уравнение имеет вид:
•^В Ы X == f (-^в х> ^).
Данное уравнение определяет динамические характеристики звеньев.
Динамической характеристикой звена называется зависимость меж-
ду выходной и входной величинами в функции от времени, описы-
ваемая дифференциальным уравнением.
Для определения динамических свойств звена необходимо ре-
шить его дифференциальное уравнение. Это можно выполнить при
условии, если известно изменение входной величины в функции
времени. В реальных условиях при работе систем автоматического
45
регулирования входная величина любого звена есть случайная
функция времени. В теории автоматического регулирования динами-
ческие свойства звеньев определяются несколькими типовыми зако-
номерностями изменения входных величин звеньев, отражающими
различные стороны совокупности входных случайных величин. К ним
относятся скачкообразная функция, гармоническая синусоидальная
функция, импульсная функция и др.
'Скачкообразная функция используется как типовая входная
величина звеньев при определении их динамических свойств
(рис. 41). Реально в природе не может быть мгновенных скачков
изменения физических величин во времени, а могут -быть лишь
сравнительно быстрые изменения. Они происходят за короткие про-
межутки времени, размером которых можно пренебречь, по сравне-
1 рв»
*" coost
*_____
о
Рис. 41. Типовые воздейст-
вия на звено в виде скачка.
нию с временем протекания переход-
ных процессов, вызванных ими в той
или иной системе. Поэтому мгновен^
ный скачок надо понимать так.
При /<0 воздействие на звено
равно нулю. В момент времени /=0
воздействие на звено принимает ко-
нечное, неизменное значение. При
/>0 входная величина не изменяется.
Если входная величина подается
в виде мгновенного скачка, то из-
от времени при переходном процессе
менение выходной величины
будет иметь тот или Другой вид.
'В зависимости от вида протекания переходного процесса при
нулевых начальных условиях выходной величины различают сле-
дующие основные типы звеньев: безынерционные, апериодические,
колебательные, интегрирующие и дифференцирующие.
|3вено, в котором величина на выходе пропорциональна величи-
не на входе, называется безынерционным звеном 1(иначе называют
усилительным, идеальным, пропорциональным или безъемкостным
звеном). Для него скачкообразное изменение входной величины
мгновенно передается на выход звена, причем выходная величина
с течением времени не изменяется. Зависимость между входной и
выходной величинами описывается простейшей алгебраической за-
висимостью хВых=^в1, которая совпадает со статической характе-
ристикой, где Хвых — выходная величина; хВх — входная величина;
k — коэффициент усиления или передаточное число звена.
Зависимость выходной величины от времени для такого звена
показана на рис. 42,6.
К пропорциональным звеньям относятся устройства, выполненные
в виде рычага, механической передачи, электронного усилителя,
а также преобразователи механического перемещения в электриче-
ское напряжение с помощью потенциометра (рис. 42,а).
Звено, в котором при скачкообразном изменении величины на
входе величина на выходе апериодически (по закону экспоненты)
стремится к новому установившемуся значению, называется аперио-
дическим звеном ((иначе его называют инерционное, статическое,
одно емкостное, релаксационное звено).
1К апериодическому звену можно отнести устройства типа маг-
нитного усилителя, термопары, контуры из сопротивления и емко-
сти, контуры из индуктивности и сопротивления и др. Для аперио-
46
дического звена, состоящего из сопротивления и емкости (рис, 43,а),
при подаче напряжения можно написать:
+ UBVLX = iR"{~ ^ВЫХ = t/вх.
Входной величиной является подключаемое напряжение, а вы-
ходной— напряжение, снимаемое с конденсатора.
Рис. 42. Безынерционное звено (а) и времен-
ная характеристика (б).
Рис. 43. Апериодическое звено (а) и временная ха-
рактеристика (б).
С момента подачи напряжения по цепи потечет ток i^dqldt,
где q — заряд конденсатора.
^вых
Так как <7=СмВых, то для тока будем иметь i=C—, где Съ-
емность конденсатора. Тогда получим дифференциальное уравнение
для апериодического звена:
+ (2-1)
или в операторной форме записи
(Тр4-1)МвЫХ=Свх>
где T;=RC — постоянная времени, характеризующая инерционность
звена;
p^djdt — оператор, т. е. символ дифференцирования.
Решив уравнение (2-1), получим зависимость между выходной
и входной величинами:
______________________________________
«вых = Шв/1— е т J- (2-2)
47
На «рис. 43,6 показано -изменение выходного напряжения от вре-
мени, отражающее переходный процесс для звена. Процесс перехода
к новому установившемуся состоянию звена при воздействии мгно-
венного скачка на него является одним из видов переходных про-
цессов. Математически данный переходный процесс описывается
переходной функцией, -которая является (решением дифференциаль-
ного уравнения звена при хВх = const. Следовательно, переходная
функция представляет собой реакцию звена на скачкообразную
функцию. Переходной функцией называется такая функция, которая
определяет изменение выходной величины в зависимости от времени
Рис. 44. Колебательное звено (а) и временная характе-
ристика (6).
при скачкообразном воздействии на входе звена. 'Графическое изоб-
ражение переходной функции называется временной характеристи-
кой. Для апериодического звена переходная функция выражается,
уравнением (2-2), а временная характеристика — графиком
(рис. 43,6).
Для апериодического звена любой физической природы диффе-
ренциальное уравнение в операторной форме имеет вид:
(Гр+1) ^ВЫХ = ^^ВХ) (2"3)
где k — передаточное число звена.
Звено, в котором при скачкообразном изменении величины на
входе величина на выходе стремится к новому установившемуся
значению, совершая затухающие колебания, называется колебатель-
ным звеном (иначе его называют двухъемкостное звено). К колеба-
тельным можно отнести механические устройства, обладающие мас-
сой, упругостью и вязким трением, а также электрические колеба-
тельные контуры, состоящие из активного, индуктивного и емкост-
ного сопротивлений.
Для электрического колебательного звена (рис. 44,а) дифферен-
циальное уравнение имеет вид:
п^£+2аГ^£+Ивы1=£/в1> (2.4)
где ' Т — постоянная величина; а — коэффициент затухания. Они
равны:
r— RC
Т = УЬС и ° —от"*
48
В зависимости от величины а, принимающей значения
или выходная величина будет изменяться по экспоненте
(а > 1), совершать незатухающие колебания (с=0), затухающие
колебания (а<1) и возрастающие колебания (с < 0).
При о <4 решение дифференциального уравнения (2-4) звена
дает следующее выражение для переходной функции:
^вых --- ^t/вх
1 _£jlSin(<Oof + Ф)1,
sin ф J
(2-5)
где ф = arctg- и а =. асо0;
<оо— частота собственных колебаний звена.
В общем виде для колебательных звеньев дифференциальное
уравнение имеет вид:
(Рр2+2оТр+1)Хвых=^хвх. (2-6)
Временная характеристика изображена на рис. 44,6.
Звено, в котором выходная величина пропорциональна интегралу
по времени от входной величины, называется интегрирующим звеном
(иначе его называют астатическим, нейтральным звеном).
Рис. 45. Интегрирующее звено (а) и временная характе
ристика (б).
К интегрирующему звену можно отнести: гидравлический дви-
гатель 4 ((рис. 20), у которого массой подвижных частей и силами
трения можно пренебречь, входом считать скорость подачи жидко-
сти в цилиндр и выходом — перемещение поршня; электродвигатель,
у которого можно пренебречь электромеханической постоянной вре-
мени, входом считать напряжение питания, а выходом — угол пово-
рота вала электродвигателя.
На рис. 45,а изображена схема интегрирующего звена — элек-
тродвигатель независимого возбуждения. Подключенное напряжение
будет уравновешиваться пр отивоэлектр о движущей силой и паде-
нием напряжения в цепи якоря:
U3X=E+ U л — +
При незначительной нагрузке на электродвигатель падением напря-
жения можно пренебречь и, считая магнитный поток возбуждения
неизменным, можем написать:
^ = 41—k7 или?=^ 1/„Л.
4 Автоматич. регулирование
49
где ф —угол поворота вала электродвигателя;
ke — конструктивная постоянная электродвигателя.
Так как l/Bx = const, то можно написать:
Зависимость ф=/(/) имеет вид прямой линии (рис. 45,6).
Дифференциальное уравнение для интегрирующего звена в об-
щем виде имеем вид:
^вых
..^- = kxBX или рхвых=%хвх. (2-7)
Звено, в котором величина на выходе пропорциональна скоро-
сти изменения величины на входе, называется идеальным дифферен-
С
0—11—Г—0
Щх R I Щых
&---1---0
Рис. 46. Дифференцирующие звенья.
цирующим звеном (иногда называют импульсным звеном первого
порядка).
В качестве примеров такого звена на рис. 46 приведены: успо-
коитель с пружиной в механических цепях и в электрических це-
пях — контуры, состоящие из активного и индуктивного или емкост-
ного и активного сопротивлений.
Для дифференцирующего звена, состоящего из емкостного и ак-
тивного сопротивлений (рис. 46,6), можно написать:
UBX = Uc
Проходящий ток по цепи обеспечивает заряд конденсатора. Его
duc
величина равна: 1=^——. Этот ток также создает падение напря-
dt
жения на активном сопротивлении ur = IR. Падение напряжения на
активном сопротивлении есть выходная величина. Тогда для тока
можно написать:
. rd(UBX— йВых) _ dUBX duBblX_____________^вых
* =с at r~‘
»
Данное выражение запишем в виде
г с1ивых dU^
КЬ -f-Ивых —aG
50
ИЛИ
б/ивых — dUb*
т dt +и^^1 = т~ЗГ'
Дифференцирующие звенья выполняют с малой постоянной времени
du# ы х
Т. Если величина Т весьма мала, то величиной Т —— в левой
части уравнения можно пренебречь, так как
du^-t
1 dt
Рис. 47. Дифференцирующее звено (а) и временные характе-
ристики (бив).
Тогда получим:
dU*x
^вых = Т df ИЛИ £1вых == УPUbx*
Для идеального дифференцирующего звена дифференциальное урав-
нение имеет вид:
Хъых — ^рХвх- (2-8)
Временная характеристика идеального дифференцирующего звена
имеет нид мгновенного импульса '(рис. 47,6).
При /<0, Хвых=0;
» t =0, /вых ->оо
» /X), Хвых = 0*
С учетом постоянной времени будем иметь реальное дифференци-
рующее звено. Егб дифференциальное уравнение имеет вид:
'(Tp-f- 1 )Ubhx = 7' pUBTL
или в общем виде
(Tp-f-'l) Хвых=^5ГрХвх> (2-9)
Его временная характеристика имеет вид убывающей экспоненты
(рис. 47,в), а переходная функция записывается в виде
t
, т
«^вых—лД<вх£ •
Таким образом, по виду дифференциальных уравнений и переходных
функций звенья можно подразделить на следующие типы: безынер-
4* 51
ционные, апериодические, колебательные, интегрирующие и диффе-
ренцирующие. Помимо этого, каждый из выше перечисленных типов
звеньев (независимо от его физической природы описывается одним
•и тем же видом дифференциального уравнения и имеет одну и ту
же переходную функцию. Например, электрическое и механическое
колебательные звенья (рис. 48), имея различную физическую при-
роду, описываются дифференциальным уравнением второго порядка.
Рис. 48. Электрическое (а) и
механическое (б) колебатель-
ные звенья.
Для электрического колебательного звена уравнение имеет вид;
LC + RC +«вых = t/вх. (2-10)
а для механического колебательного звена
« Т + (2-10
Механическое колебательное звено состоит из груза, пружины и
жидкостного демпфера. Груз имеет массу т, пружина характери-
зуется упругостью &пр и демпфер — вязким трением гт. Масса гру-
за ш является аналогом индуктивности L. При движении груза
с массой пг имеет место накопление кинетической энергии.
Упругость пружины &Пр будет аналогом электрической емко-
сти С. В деформированной пружине запасается потенциальная энер-
гия. Коэффициент вязкого трения гт демпфера — аналог активного
сопротивления R. Он представляет механическое сопротивление типа
вязкого трения. Поэтому в демпфере происходит рассеяние энергии.
Входной величиной служит скачок усилия Г, а выходной — переме-
щение груза S. Если ввести обозначения для электрического колеба-
тельного звена
r = /ZC и » = ?=—
2V-c
52
и для механического колебательного звена
_ -|/ т __ гт_____________гт
V knp и 2Г&Пр 2 У mkup ’
то дифференциальные уравнения (2-ГО) и (2-11) в операторной за-
писи примут вид:
(Г2р2 + 2оГр+1)«выХ = ^вх (2-12)
1И
(Г2ри2оГр+1)5вых=Рвх. (2-13)
Несмотря на то, что коэффициенты Г и ст имеют различную физиче-
скую природу, дифференциальные уравнения (2-12) и (2-13) одного
и того же порядка. Уравнение второго порядка отражает физические
процессы широкого класса (Механических, электромеханических и
электрических устройств и цепей. Эта закономерность была подме-
чена и сформулирована ‘В. И. Лениным «Единство природы обнару-
живается в поразительной аналогичности дифференциальных урав-
нений, относящихся к разным областям явлений».
Для колебательного звена любой физической природы дифферен-
циальное уравнение имеет вид:
(Т2р^ + 2бТр + 1 )Хвых = ^вх-
г) Передаточные функции звеньев и структурные схемы
систем автоматического регулирования
В теории автоматического регулирования для анализа свойств
звеньев и систем регулирования широко используются понятия о пе-
редаточных функциях и частотных характеристиках.
Передаточная функция представляет собой отношение мгновен-
ных значений выходной величины к входной /<(р)=Хвых/л:вх.
На основании сказанного передаточные функции звеньев имеют сле-
дующий вид:
Безынерционное звено К (р) = k.
k
Апериодическое звено К (р) = f ' •
k
Колебательное звено К (р) = 72^2 j~
k
Интегрирующее звено К(р) = —.
Идеальное дифференцирующее звено К (р) — kp,
kTp
Реальное дифференцирующее звено К (р) = .
С использованием передаточной функции апериодическое звено
будет иметь вид, показанный на -рис. 49.
Передаточные функции могут быть записаны для одного звена,
соединения звеньев и системы в целом. Они позволяют при опера-
53
торной записи изображать уравнения переходных процессов звёньёй
и систем, на структурных схемах обозначать звенья и являются
исходными соотношениями для частотных характеристик.
В системах автоматического регулирования используются три
вида соединений звеньев — последовательное, параллельное и встреч-
Рис. 49. Изображение
апериодического звена в
структурной схеме.
но-.параллельное (рис. 50).
Передаточная функция последова-
тельного соединения звеньев (рис. 50,а)
равна произведению передаточных функ-
ций отдельных звеньев:
^(р)=Кг(р)№(р)№(р).
При п звеньях «будем иметь:
п
K(P)=dlXi(p)-
1=1
Передаточная функция параллельного соединения З1веньев (рис. 50,6)
равна сумме передаточных функций отдельных звеньев
К(р)=/<Г(р)+/<а(р)+Кз(р) + ...
При п звеньях запись имеет вид:
к(р)=2 Kt (р).
Рис. 50. Последовательное (а), параллельное (б) и встречно-парал-
лельное (в) соединение звеньев.
54
При встречно-параллельном соединении звеньев (рис. 50,в)
передаточная функция определяется выражением
т,,л К.(р)
Знак минус в знаменателе показывает суммирование величин и
*выхв а плюс —их вычитание.
’Схема, отражающая состав звеньев !(их число и вид), характер
связей между ними и динамические свойства автоматического
устройства и служащая для исследования этих свойств, называется
структурной схемой автоматического устройства. Структурные схемы
строятся на основании элементных схем. При построении необхо-
димо сначала установить, каким звеньям соответствует данный эле-
мент, а затем соединить звенья между собой в соответствии с со-
единением элементов.
Построим структурные схемы для систем автоматического 'регу-
лирования напряжения генератора постоянного тока и скорости вра-
щения вала теплового двигателя ,(рис. 4,а, 20). Система автомати-
ческого регулирования напряжения генератора постоянного тока
включает в себя: генератор постоянного тока 1 — регулируемый
объект, электромагнит 2 — измерительный элемент, реостат 3— регу-
лирующий элемент, реостат 5 — настройка регулятора. Элементная
схема системы изображена на рис. 4,6. Для построения структурной
схемы системы выясним, каким звеньям соответствует каждый эле-
мент. Регулируемый объект (генератор) будем считать звеном, вход-
ной величиной которого является ток цепи обмотки возбуждения,
выходной величиной — напряжение. Возмущающим воздействием
может быть ток нагрузки или скорость вращения генератора, или то
и другое вместе взятое. Генератор при этих условиях может харак-
теризоваться как апериодическое звено (рис. 51,а). Его передаточная
функция имеет вид:
k3
где То — постоянная времени;1
k0 — передаточное число.
Измерительный элемент удобно разбить на две части: электри-
ческую и механическую. Электрическая часть включает в себя цепь
обмотки электромагнита 2, а также реостат настройки 5 регулятора.
Это будет отдельное звено. Входная величина его—напряжение U
генератора, а выходная величина — ток /э, проходящий по цепи об-
мотки электромагнита. Это звено — апериодическое (рис. 51,6) с пе-
редаточной функцией ^(P)ss'f^^[ Механическая часть состоит из
сердечника электромагнита 2, скрепленного с ползунком реостата 3
и пружиной 4. Входной величиной является ток /э, а выходной ве-
личиной — перемещение S ползунка реостата 3, Это звено является
колебательным звеном (рис. 51,в) с передаточной функцией К(р) =
^2
= р+1 * РегУли'РУ^ий элемент ('Реостат 3) представ-
ляет собой безынерционное звено, входной величиной которого слу-
55
жит «перемещение S ползунка, а выходной величиной — сопротивле-
ние /?, изменяющее ток возбуждения (рис. '51,г). Его передаточная
функция /<(p) = &3. На основании сказанного построена структурная
схема системы (рис. ’51,д). Она включает в себя четыре звена. Сле-
дует отметить, что элемент может состоять из одного или более
звеньев.
Система автоматического регулирования скорости вращения вала
теплового двигателя («рис. 20) состоит из следующих звеньев. «Регу-
Рис. 51. Структурная схема системы автоматического регулирования
напряжения генератора постоянного тока.
лируемый объект (тепловой двигатель 1) является апериодическим
звеном, входной величиной которого служит поступление пара,
а выходной величиной — скорость вращения вала п. Измерительный
элемент (центробежный механизм 2)— колебательное звено. Вход-
ная величина его — скорость вращения вала, а выходная величина—
перемещение S муфты М. Рычаг АВС — безынерционное звено. Пре-
образующий элемент (золотник 3)— безынерционное звено. Входная
величина его — перемещение поршней золотника S, а выходная ве-
56
личина — давление Р жидкости, 'поступающей в полость гидравличе-
ского двигателя 4. Исполнительный элемент (гидравлический двига-
тель 4)—интегрирующее звено, входной величиной которого служит
давление Р поступающей в полость жидкости и выходной величи-
Рис. 52. Структурная схема системы автоматического регулирования
скорости вращения теплового двигателя.
ной — перемещение S поршня. Регулирующий элемент .(заслон-
ка 5)—безынерционное звено. Входная величина — перемещение S
заслонки, а выходная величина — изменение подачи топлива к теп-
ловому двигателю. Структурная схема такой системы изображена
на рис. 52.
д) Частотные передаточные функции и частотные
характеристики
При классификации типов звеньев по виду дифференциальных
уравнений и переходных функций воздействие входной физической
величины на звено принималось в виде скачкообразной функции.
Однако входная величина звена может изменяться в виде гармони-
ческого колебания.
Допустим, что на вход звена подается гармоническое колебание
физической величины, изменяющейся по синусоидальному закону
xBx=^isin со/..
Поданная входная величина в виде гармонического колебания вызо-
вет на выходе звена свободные и вынужденные колебания. Свобод-
ные колебания с течением времени, по окончании переходного про-
цесса, прекратятся. На выходе звена будут иметь место лишь уста-
новившиеся вынужденные колебания, которые будут изменяться по
тому же закону и с той же частотой, что и колебания на входе, но
они будут отличаться амплитудой и фазой:
xBMx=^2;sin ((О/+|ф).
Используя символический метод записи для синусоидальных вели-
чин, входную и выходную величины звена можно представить в виде
и xBai = Ate^at+^.
Если взять отношение выходной величины к входной, то по-
лучим:
_Л2^(<1><+^_Л2^^ _ /т
Aieiat
или
К(/«) = ЛЛ
(2-14)
57
Отношение установившихся вынужденных гармонических колебаний
звена к внешнему гармоническому воздействию, записанное в ком-
плексной форме, называется комплексным передаточным числом или
коэффициентом усиления или частотной передаточной функцией.
Частотная передаточная функция есть комплексное число, мо-
дуль А которого представляет собой амплитуду выходной величины
(точнее, отношение амплитуд выходных й входных колебаний), а ар-
гумент <р— фазу (точнее, раз-
ность фаз выходных и вход-
ных колебаний).
Из полученного выражения
для частотной передаточной
функции видно, что частотная
функция зависит от параметров
звена и частоты колебаний и не
зависит от времени. На ком-
плексной плоскости комплекс-
ная величина К будет пред-
ставлять вектор, длина которо-
го равна его модулю А,
а угол, отсчитываемый от по-
Рис. 53. Изображение частотной
передаточной функции на комп-
плексной плоскости.
ложительной вещественной оси, будет равен аргументу (р (рис. 53).
Проекции на вещественную н мнимую оси равны R=A cos ср и
5=A sin ф. Тогда на основании формулы Эйлера для комплексных
чисел
cosy+jsiny
частотную передаточную функцию и модуль можно выразить в виде
алгебраической суммы вещественной и мнимой частей:
K(/(o)=A(cos<p+j sin ф)=7?+/5;
А=У + .
Кроме того, на основании рис. 53 можем определить:
5 5
tg¥ = Y Hf = arctg-£-.
Частотные передаточные функции отдельных звеньев получаются из
переходной функции заменой р на j(&.
Частотные характеристики звеньев рассмотрим на примере апе-
риодического звена. Приведем выражение частотной передаточной
функции апериодического звена (2-14) к виду общего уравнения ча-
стотной функции (2-15). Для этого умножим числитель и знамена-
тель на сопряженную со знаменателем комплексную величину
(1—Tyco) и освободимся от мнимости в знаменателе:
д u<0>“‘(7'/®+i)(l-7'/tt>) 1 + TW *
Отделив вещественную и мнимую части
k , kT<&
К (]&) = J ^2^8 j J ^2<ft2
58
и введя обозначения
k о kTfA
R — 1 + TW и S--------1 + Т’ш2
получим:
Тогда модуль А вектора К (/®) будет равен:
г k
s
а аргумент <? = — arctg соТ, так как tg у = *
(2-15)
Рис. 54. Амплитудные (а) и фазовые (б) частот-
ные характеристики.
или
Из полученных выражений для модуля А и аргумента у видно,
что они являются функциями частоты гармонических колебаний.
Тогда для К (j®) апериодического звена можно написать:
К (/») = л^= е-l
Y1 + Г2<о2
К (/«) = А (со) е~Ма).
Амплитудно-частотная характеристика звена представляет собой за-
висимость отношения амплитуды колебаний на выходе звена к амп-
литуде колебаний на входе от частоты подаваемых на вход гармо-
нических колебаний. Для апериодического звена
а график A=f(co) показан на рис. 54,а. Как видно из -выражения и
графиков для А=/(со) усиление п® амплитуде непрерывно умень-
шается с ростОхМ частоты. При 'малых частотах со ~0 апериодическое
звено воспроизводит входную величину с коэффициентом усиления &.
При со—> оо звено вообще не пропускает входную величину. Подав-
ление высокочастотных сигналов происходит тем интенсивнее, чем
больше постоянная времени Т.
59
Фазо-частотная характеристика звена представляет собой зави-
симость сдвига фаз колебаний на выходе и входе от частоты гармо-
нических «колебаний, проходящих через звено. Для апериодического
звена
,<р=—arctg со Г,
а график изображен на рис. 54,6. Вынужденные колебания отстают
по фазе от входных гармонических колебаний. Это отставание рас-
тет с ростом частоты со и постоянной времени Т.
Рис. 55. Амплитудно-фазовая характери-
стика апериодического звена.
Действительно
при со = 0 tg ср = О и = 0;
1 л
при со = у tg = 1 и ср = — у;
л
при (О —4 СЮ tg у -4 оо И ф “4 — ~2.
Амплитудно-фазовая характеристика объединяет обе предыду-
щие и аналитически представляется в комплексной форме. Для
апериодического звена
ч &________ —/arctg
у 1 _|_ е
а график показан на рис. 55. Так как тангенс отрицателен при изме-
нении со от 0 до 4-ос, то характеристика располагается в четвертом
квадранте в виде «полуокружности. При со = 0 величина А(/со) = &,
а при (о=*оо А(/о)) = 0.
7. УСТОЙЧИВОСТЬ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
а) Основные понятия об устойчивости
Ранее на конкретных примерах систем автоматического регули-
рования (рис. 4, 5, 18, 20) была рассмотрена физическая сторона
процесса регулирования. Однако знания трдькр этой стороны прр-
60
Рис. 56. Статическая харак-
теристика системы автома-
тического регулирования
(рис. 18).
цесса регулирования недостаточно для того, чтооы сделать заклю-
чение о практической пригодности той или иной системы автомати-
ческого регулирования.
Практическая пригодность системы регулирования в первую
очередь определяется устойчивостью и приемлемым качеством про-
цесса регулирования. Поэтому необходимо рассмотреть вопросы, от-
носящиеся к определению понятия устойчивости системы автома-
тического регулирования.
Существующие регулируемые объекты (генераторы, электриче-
ские двигатели, тепловые двигатели, электрические печи, паровые
котлы, двигатели внутреннего сгорания и т. д.) предназначены для
работы в том или ином производстве. Режим работы регулируемого
объекта должен соответствовать тех-
ническим требованиям, предъявляе-
мым к нему. Для того чтобы полу-
чить автоматическое поддержание
нужного режима работы, регулируе-
мый объект снабжается регулятором.
Совокупность регулируемого объекта
и регулятора, .как мы выяснили ра-
нее, представляет собой систему
автоматического регулирования. На
регулируемый объект воздействуют
различные возмущающие факторы
(возмущения). Они бывают как вну-
тренними, так и внешними. В рас-
смотренных системах (рис. 4, 5, 6,
8, 11 и 18) это будут прежде всего
увеличение нагрузки на генератор,
изменение нагрузки на валу электрического двигателя, изменение ко-
личества металла в электропечи, изменение подачи воздуха в герме-
тическую кабину самолета, изменение расхода пара из котла паро-
вой машины, изменение нагрузки на валу теплового двигателя
и т. д. Возмущающие факторы, воздействуя на объект, изменяют
режим его работы. При нарушении режима работы регулируемого
объекта регулятор оказывает такие воздействия на объект, что по-
следний восстанавливает нарушенный режим работы, конечно, с той
или иной точностью, т. е. происходит процесс регулирования.
Например, в схеме, приведенной на рис. 18, была рассмотрена
принципиальная сторона процесса регулирования скорости вращения
вала теплового двигателя. Данная система является системой стати-
ческого регулирования.
Изобразим на рис. 56 статическую характеристику процесса ре-
гулирования этой системы. Эта характеристика связывает между со-
бой значение регулируемого параметра (в рассматриваемой систе-
ме п) и нагрузки (в рассматриваемой системе Л4Н). Статическая ха-
рактеристика системы автоматического регулирования задается усло-
виями эксплуатации.
Например, точке А статической характеристики соответствует
установившийся режим работы теплового двигателя, характеризую-
щийся постоянной скоростью вращения вала п,\ при постоянной на-
грузке Мнь а точке В — установившийся редсим работы, характери-
зующийся скоростью вращения вала «з и нагрузки Мнз и т. д.
61
Кроме указанных физических величин (л и AfH), в процессе уста-
новившегося режима работы системы в различных звеньях ее дейст-
вуют и другие физические величины. Они определяют установивший-
ся режим работы отдельных звеньев системы. Все физические вели-
чины, характеризующие звенья системы, в процессе установившего-
ся режима неизменны и взаимоуравновешены, ибо в противном слу-
чае установившийся режим работы существовать не может.
Установившийся режим работы системы автоматического регу-
лирования есть состояние равновесия системы, при котором обяза-
тельно взаимное равновесие всех физических величий (механиче-
ских сил, моментов, напряжений, токов и т. д.), возникающих
в звеньях системы и участвующих в процессе регулирования.
Изучением равновесных установившихся режимов работы си-
стем автоматического регулирования занимается статика регулиро-
пзад
о м„г
Рис. 57. Статическая характе-
ристика системы автоматиче-
ского регулирования (рис. 20).
вания.
Из статической характеристики
(рис. 56) видно, что установив-
шихся режимов работы в рассма-
триваемом случае может быть
бесчисленное множество: каждому
значению нагрузки (AfH) соответ-
ствует свой установившийся ре-
жим работы системы, характери-
зующийся определенной и посто-
янной скоростью вращения вала
теплового двигателя. Этот вывод
справедлив для любой системы,
обладающей статическим регули-
рованием. Конечно, для каждой
конкретной системы будут свои
физические величины, выражающие регулируемый параметр и на-
грузку.
Выше, в схеме, приведенной на рис. 20, была рассмотрена прин-
ципиальная сторона регулирования скорости вращения вала теплово-
го двигателя регулятором непрямого действия. В контур регулиро-
вания данной системы введено астатическое звено, которым являет-
ся гидравлический двигатель 4Г обладающий тем свойством, что при
перекрытых трубопроводах Р\ и Р2 его поршень неподвижен, а при
наличии подачи жидкости в один из трубопроводов или Р2 пор-
шень непрерывно движется. При отсутствии воздействия на поршень
последний находится в состоянии безразличного равновесия. Данная
система является системой астатического регулирования. Статиче-
ская характеристика процесса регулирования в этой системе имеет
вид, изображенный на рис. 57. Из характеристики видно, что при
всех установившихся режимах работы системы, соответствующих
различным значениям нагрузки на валу теплового двигателя (при
неизменной настройке регулятора), скорость вращения вала равна
заданному значению лзад. Каждый из установившихся режимов, ра-
боты системы представляет собой равновесное состояние.
Состояния статического равновесия систем автоматического ре-
гулирования могут быть различными. Различают три вида равновес-
ных состояний (установившихся режимов работы):
а) устойчивое равновесное состояние;
б) неустойчивое равновесное состояние;
62
в) безразличное равновесное состояние.
Возможные виды равновесных состояний рассмотрим сначала на
поведении шарика, расположенного в различных точках поверх-
ности.
Случай 1. Шарик находится в углублении (рис. 58,а). В этом
случае шарик находится в устойчивом равновесном состоянии: при
малом отклонении он возвращается в исходное положение До- Дей-
ствительно, при отклонении шарика в положение Ai появится сила
Fi, которая стремится вернуть шарик в исходное положение. Легко
убедиться в том, что сила, возвращающая шар в исходное положе-
ние равновесия, возникает при отклонении в любом направлении.
Равновесие устойчивое.
Случай 2. Шарик лежит на
возвышении (рис. 58,6). В этом слу-
чае шарик находится в неустойчивом
равновесном состоянии: после откло-
нения от равновесного состояния До
шарик не вернется в исходное поло-
жение. При всяком малом отклоне-
нии шарика от равновесного состоя-
ния До> например, в положение Д1
возникает сила Fi, которая стремится
еще больше отклонить шарик от по-
ложения равновесия. Равновесие не-
устойчивое,
Случай 3. Шарцк находится
на плоскости (рис. 58,в). В этом слу-
чае шарик находится в безразличном
равновесном состоянии: после откло-
нения от равновесного состояния До
шарик займет новое равновесное со-
стояние (Д1, Дг, ..Дп). Очевидно,
что новых равновесных состояний
шарик может иметь бесчисленное
множество. Следовательно, шарик находится в безразличном рав-
новесии.
Соображения о различных видах равновесия, рассмотренные па
примерах с шариком, можно распространить и на системы автома-
тического регулирования. Действительно, какому равновесному со-
стоянию соответствуют, например, установившиеся режимы (точ-
ки Д, В) характеристик, изображенных на рис. 56 и 57.
На устойчивость системы в установившемся режиме работы
оказывают влияние как собственная устойчивость регулируемого
объекта, так и устойчивость регулятора.
Регулируемый объект считается собственно устойчивым или, как
говорят, обладает свойством самовыравнивания, если он может
устойчиво работать в заданном режиме при отсоединенном регуля-
торе, т. е. при неизменном положении регулирующего элемента, на-
пример, при отсоединении заслонки 3 от рычага АВС и ее закрепле-
нии в определенном положении (рис. 18)*.
Рассмотрим понятия, связанные с собственной устойчивостью
регулируемого объекта, на примере теплового двигателя. Для этого
прежде всего необходимо знать статические характеристики измене-
ния движущего момента теплового двигателя 2ИД и момента сопро-
63
тивления AfH в функции от скорости вращения вала, причем харак-
теристика Л4д=/(/г) получается при неизменном положении заслонки.
Пусть указанные характеристики изображаются так, как показа-
но на рис. 59,а, т. е. характеристика MH=f2(n) идет круче характе-
ристики Точка пересечения характеристик соответствует
установившемуся режиму работы (равновесному состоянию) тепло-
вого двигателя (Л4Д=А1Н) с заданной скоростью вращения вала nQ.
При таком виде характеристик вблизи заданной скорости враще-
ния nQ тепловой двигатель является устойчивым объектом и в прин-
ципе может устойчиво работать без регулятора. Действительно, при
показанных на рис. 59,а характеристиках при n>nQ и
МД>МН при л<п0. При отклонении скорости вращения в сторону
Рис. 59. Статические характеристики теплового двигателя.
n>nQ появляется момент сопротивления, превышающий движущий
момент, и скорость вращения вала уменьшается, приближаясь к за-
данному значению по- При отклонении скорости вращения в сторону
п<п0 появляется избыточный движущий момент, так как А1Д>Л1Н, и
скорость вращения вала возрастает, приближаясь к скорости п=По-
Чем больше угол 0 между касательными к характеристикам в точке
их пересечения, тем больше собственная устойчивость теплового дви-
гателя как регулируемого объекта.
Однако, несмотря на то, что регулируемый объект обладает соб-
ственной устойчивостью,‘присоединение регулятора практически ока-
зывается необходимым. Назначение регулятора — уменьшить возмож-
ные отклонения регулируемого параметра от заданного значения
в установившемся режиме работы. Наоборот, если вблизи заданного
значения скорости вращения вала п0 статические характеристики
Мл=f1i(n) и Ma—f2(n) имеют вид, показанный на рис. 59,6, то тепло-
вой двигатель является неустойчивым объектом. При малейшем от-
клонении скорости вращения вала от заданного значения п0 в сторо-
ну ее увеличения она будет все более и более возрастать или все бо-
лее и более уменьшаться (если первоначально п<по). В этом случае
работа теплового двигателя (или любого другого регулируемого
объекта) без регулятора невозможна.
Выше рассмотрены понятия, связанные с собственной устойчи-
востью в установившихся режимах работы теплового двигателя при
одном, заданном положении заслонки. Различным заданным поло-
жением заслонки соответствуют определенные характеристики 7ИД=
64
а равновесным (установившимся) режимам работы соответ-
ствуют точки пересечения данной характеристики с характеристикой
Ma=f2(n). Для статической характеристики Мд=Л(/г), показанной
на рис. 59,в сплошной линией, — это точки а и б. Вблизи точки б, со-
ответствующей скорости вращения вала п2, тепловой двигатель яв-
ляется устойчивым, а вблизи точки а, соответствующей скорости вра-
щения вала — неустойчивым. Пунктирными линиями на рис. 59,в
показано несколько характеристик Л1д=/(/г), каждая из которых
определяется заданным положением заслонки. Точки пересечения
этих характеристик с характеристикой Ma=f2(n) являются положе-
ниями равновесного состояния в установившихся режимах работы
теплового двигателя, причем из рис. 59,в видно, что при показанном
протекании характеристик Л4д=/(л) один из каждых двух установив-
шихся режимов работы будет устойчивым, а второй — неустойчивым.
Рис. 60. Характеристики центробежного измерительного элемента.
Рассмотрим равновесные состояния центробежного регулятора
скорости вращения теплового двигателя <(рис. 18).
Шпиндель регулятора, связанный посредством редуктора с валом
теплового двигателя, вращается со скоростью, пропорциональной
скорости вращения вала. Вместе со шпинделем вращаются подвешен-
ные на шарнирах грузы. Под действием центробежной силы Гц гру-
зы стремятся разойтись. Стремясь разойтись, шары поднимают муф-
ту Af. Расхождению грузов препятствуют, с одной стороны, вес гру-
зов и муфты, с другой стороны, сила сжатия пружин Гпр. Условим-
ся считать перемещения S муфты М вверх положительными, а вниз—
отрицательными.
На рис. 60,а изобразим характеристики центробежной силы Гц и
силы пружины измерительного элемента Гпр в функции хода S муф-
ты М при постоянных скоростях «1 и п2 его шпинделя. Пусть, напри-
мер, п\ и п2 — скорости вращения вала теплового двигателя, соответ-
ствующие равновесным состояниям А и В системы (рис. 56).
На рис. 60,а характеристика пружины круче характеристик цен-
тробежной силы. Пусть, например, муфта М переместится вверх от
положения S2. Сила пружины будет преобладать над центробежной
и возвратит муфту М в равновесное положение. При отклонении муф-
ты М вниз от положения S2 центробежная сила будет преобладать
над силой пружины и возвратит муфту М в равновесное положе-
ние S2.
5 Автоматич. регулирование 65
Итак, при малейшем нарушении равновесного состояния измери-
тельного элемента регулятора он вновь возвращается к нему. Следо-
вательно, состояние- равновесия — устойчивое. Аналогично рассуж-
дая, заключаем, что равновесное состояние (точка б), соответствую-
щее скорости вращения п2, также является устойчивым состоянием.
На рис. 60,6 характеристика пружины в интервале S2 совпа-
дает с характеристикой центробежной силы, полученной для скоро-
сти вращения п0. В этом интервале муфта может занимать любое по-
ложение, так как сила пружины Fnp равна центробежной, т. е.
>/?пр=/?ц. При малейшем отклонении скорости вала центробеж-
ная сила либо будет преобладать над силой пружины, либо будет
меньше и муфта М поднимется до упора вверх в первом случае или
опустится до упора вниз во втором. Равновесное состояние возмож-
но только при скорости вала п=п0, причем это равновесие безраз-
личное.
На рис. 60,а характеристика пружины более полога, чем харак-
теристики центробежной силы. Равновесные состояния точки а и б
являются неустойчивыми состояними равновесия. Действительно, от-
клоним муфту М вверх. Центробежная сила будет преобладать над
силой пружины, грузики разойдутся, а муфта М поднимется вверх до
упора. Наоборот, при отклонении муфты М вниз от равновесного по-
ложения S2 будет преобладать сила пружины и грузики опустятся до
положения, когда муфта М переместится вниз до упора. Следова-
тельно, равновесное состояние, соответствующее точке Л, является
неустойчивым состоянием равновесия. Для равновесного состояния,
соответствующего точке б, рассуждения и вывод аналогичны.
Практическое применение в системах автоматического регулиро-
вания находят регуляторы, обладающие устойчивыми установивши-
мися режимами работы.
Установившийся режим работы системы автоматического регу-
лирования является устойчивым, если она, будучи выведенной из со-
стояния равновесия, вновь возвращается к нему после устранения
возмущающего воздействия. Рассматривать установившиеся режимы
следует при постоянных нагрузке и настройке.
Равновесие в установившемся режиме работы не может пол-
ностью характеризовать систему автоматического регулирования.
Кроме установившихся процессов регулирования, различают переход-
ные процессы (неустановившиеся режимы работы).
Под переходным процессом понимают любое неустановившееся
состояние системы регулирования, во время которого изменяется зна-
чение регулируемого параметра.
Для систем автоматического регулирования устойчивость в пе-
реходном процессе должна являться обязательным свойством ее.
Устойчивость переходного процесса иногда называют устойчивостью
движения или динамической устойчивостью, понимая под этими тер-
минами один и тот же смысл.
Определение понятия устойчивости движения динамических си-
стем автоматического регулирования является более сложной зада-
чей, чем определение устойчивости в установившихся режимах ра-
боты.
Пусть, например, система автоматического регулирования скоро-
сти вращения вала теплового двигателя (рис. 18) находится в уста-
новившемся режиме работы, соответствующем точке А статической
характеристики системы (рис. 56). Нагрузке на валу A4Hi соответст-
66
вует скорость вращения П[. Пусть в момент времени/=t\ произошло
скачкообразное увеличение нагрузки на валу до значения Л[и2
(рис. 61,а). Этому значению нагрузки соответствует новый установив-
шийся режим В (рис. 56), для которого установившееся значение
скорости вращения вала п—п2 (рис. 61,6). Однако в силу инерцион-
ности подвижных частей системы переходу в установившийся ре-
жим В предшествует переходный процесс (неустановившийся ре-
жим). На рис. 61,6 неустановившийся режим работы показан пунк-
тирной кривой. Из рис. 61,6
видно, что в неустановив-
шемся режиме каждому мо-
менту времени соответству-
ет скорость вращения вала:
Т1 — Пус т 4~Ппер,
где Пуст—скорость враще-
ния, соответст-
вующая данному
установившемуся
режиму;
Ппер — переходная по-
грешность скоро-
сти, обнаружи-
вающаяся только
в переходном
процессе.
Например, для момента рис График процесса регулиро-
времени t имеем /цг) = * J г
= ^УСТ2+Дипер (рис. 61,6).
Распространяя сказанное на
системы автоматического регулирования, будем иметь в общем слу-
чае, что значение регулируемого параметра в неустановившемся
режиме в каждый момент времени равно:
X (t) —X уст (0+ хпер (0.
Движение системы из одного установившегося режима работы в
другой может оказаться либо устойчивым, либо неустойчивым. Ответ
на это дает исследование динамики процесса регулирования, т. е.
определение закона изменения регулируемого параметра в функции
времени при воздействии на систему возмущающих факторов.
Если хПер(0 стремится к нулю, хотя бы и за неограниченно
большой промежуток времени, то система автоматического регули-
рования называется устойчивой. Если же хпер(^) не стремится к ну-
лю с течением времени, то система автоматического регулирования
называется неустойчивой.
Рассмотрим понятия, связанные с устойчивостью движения, на
примере с шариком (рис. 62).
Случай 1. Шарик движется внутри трубы по внутренней ((ниж-
ней) образующей ГБ из точки А в точку В. Условно примем, что точ-
ки А и В соответствуют установившимся режимам. Причиной дви-
жения шарика из устойчивого равновесного состояния А к новому со-
стоянию В является сила Ер Предположим, что при движении шари-
5* 67
ка по образующей ГВ в силу, например, бокового толчка произойдет
отклонение шарика. При этом возникает сила Г2 (рис. 62,6), которая
стремится вернуть шарик к прежнему направлению движения. Ша-
рик, совершив несколько колебаний относительно нижней образую-
щей ГБ, вернется к устойчивому движению. Процесс восстановления
устойчивого движения и будет являться переходным процессом. Оче-
видно, что в этом случае мы имеем устойчивое движение, устойчи-
вый переходный процесс.
Случай 2. Шарик движется по верхней образующей трубы ДЕ
из точки 3 в точку Ж. Причиной движения шарика является сила F3.
Предположим, что при движении шарика по образующей ДЕ в силу,
Рис. 62. Устойчивое и неустойчивое движение шарика.
например, небольшого бокового толчка или неровностей на поверх-
ности произойдет отклонение шарика по образующей ДЕ. Возникает
сила F4 (рис. 62,в), которая стремится отклонить шарик от направ-
ления ДЕ. Очевидно, что шарик отклонится от направления ДЕ и
к нему не вернется. Это неустойчивое движение, неустойчивый пере-
ходный процесс.
Между переходным процессом при движении шарика по трубе и
переходными процессами в системах автоматического регулирования
можно провести аналогию. Для этого необохдимо под движением
понимать не только простое механическое перемещение, но и всякое
изменение состояния той или иной физической величины (напряже-
ния, скорости, тока, давления, температуры, частоты и т. д.).
Наблюдая за поведением системы автоматического регулирова-
ния при воздействии на нее ограниченного по величине внешнего воз-
мущения, можно судить об ее динамической устойчивости.
Покажем на графиках протекание переходных процессов в устой-
чивых и неустойчивых системах автоматического регулирования.
Пример 1. Система переходит из старого установившегося со-
стояния в новое так, как изображено на рис. 63,а.
68
Регулируемый параметр х, как принято говорить в этом случае,
монотонно приближается к установившемуся значению хусТ2. В тече-
ние переходного процесса хпер(0 стремится к нулю, что видно по
уменьшению ординат хпер, нанесенных в виде штриховки на рис. 63,а.
Переходный процесс носит за-
тухающий характер. Система
автоматического регулирова-
ния, обладающая подобными
переходными процессами, явля-
ется устойчивой.
Пример 2. Пусть в мо-
мент времени t—t\ в системе
автоматического регулирования
начался переходный процесс,
изображенный на рис. 63,6. Пе-
реходный процесс имеет расхо-
дящийся характер. В переход-
ном процессе хПер'(/) монотон-
но возрастает. Система автома-
тического регулирования в пе-
реходном процессе неустойчи-
ва. В этом примере имеет мес-
то, как говорят, монотонная не-
устойчивость. Итак, по виду
переходные процессы, приве-
денные в двух первых приме-
рах, являются монотонными.
Однако первый из них являет-
ся устойчивым, а второй — не-
устойчивым. Монотонные пере-
ходные процессы вида рис. 63,а
и б иначе называют апериоди-
ческими переходными процес-
сами. Если переходная погреш-
ность Хпер (/) в переходном
процессе по абсолютной вели-
чине только уменьшается, про-
цесс устойчив и монотонен.
Если переходная погрешность
Хпер(^) в переходном процессе
по абсолютной величине только
возрастает, процесс неустойчив.
Пример 3. Переходный
процесс системы протекает так,
как изображено на рис. 63,в.
Система, совершив несколько
колебаний около установивше-
гося значения регулируемого
параметра, приходит к устано-
вившемуся режиму работы. Пе-
реходная погрешность Хпер(0
Рис. 63. Виды переходных про-
цессов.
в .переходном процессе изменя-
ется как по абсолютной вели-
чине, так и по знаку. Однако
69
амплитуда колебаний уменьшается и процесс является затухающим.
Переходный процесс является затухающим. Переходный процесс по-
добного вида называют колебательным переходным процессом.
Переходная погрешность хПер(^) с течением времени стремится к ну-
лю, Процесс — устойчивый.
Пример 4. Система автоматического регулирования совершает
незатухающие колебательные движения около значения регулируе-
мого параметра хуСтг- Переходная погрешность хпер изменяется по
синусоидальному закону с постоянной амплитудой (рис. 63,г). Тако-
го вида переходный процесс является граничным между сходящими-
ся и расходящимися переходными процессами. Его следует относить
к неустойчивому, колебательному переходному процессу.
Пример 5. Система, выведенная из установившегося режима,
совершает расходящиеся колебательные движения около значения
регулируемого параметра хусТ2. Амплитуда переходной погрешности
хПер(0 непрерывно возрастает. Колебательный переходный процесс
подобного вида является неустойчивым переходным процессом
(рис. 63,д).
б) Математические условия устойчивости
Устойчивость систем автоматического регулирования определяет-
ся различными способами. К ним относятся математические условия
устойчивости, алгебраические и частотные критерии. Рассмотрим их
в применении к линейным системам, описываемым линейными диф-
ференциальными уравнениями с постоянными коэффициентами.
Г7—1------ и
- > Генератор —
а;
Рис. 64. Генератор постоянного тока как звено системы
автоматического регулирования.
Для описания дифференциального уравнения системы необходи-
мо иметь уравнения регулируемого объекта и регулятора. Составим
их для системы регулирования напряжения (рис. 4,а).
Генератор как регулируемый объект считаем отдельным звеном
системы (рис. 64). Выходная величина — напряжение U, входная —
сопротивление 7? и возмущение f. Уравнение цепи возбуждения бу-
дет иметь вид:
dK
(R + r)IB + L-^=-U. (2-16)
Напряжение генератора U, сопротивление реостата R и ток воз-
буждения /в при работе системы изменяются, т. е. являются перемен-
ными величинами.
7Q
Написанное уравнение является нелинейным, так как перемен-
ные и /в перемножаются между собой. Его можно привести к ли-
нейному виду, применив какой-либо метод линеаризации. Восполь-
зуемся методом малых отклонений. Он основан на том, что регули-
рование преследует цель поддержания регулируемого параметра
близким заданному значению. Тогда для нашего случая можем напи-
сать:
U = С/о4-ДС/;
/В=/Во4-А/В; (2-17)
) = (/?о+^) “НДС?.
В уравнениях (2-17) U, UQ и ДС/; /в, /во и Д/в; (Ro+r)
и AR — соответственно действительные и заданные значения, а так-
же отклонения напряжения, тока и сопротивления цепи обмотки воз-
буждения.
Установившемуся режиму соответствует равенство
(2?o+r)ZBo=t/o- (2-18)
Подставив уравнения (2-17) в уравнение (2-16), получим:
dAZB
(До + AR + г) /во + («о + г) + /В0А1? + А/вА/? + =-
= (/0 +АС/.
Вычитая из него почленно уравнение (2-18), будем иметь:
dA/B
(Z?o + г) А/в + /воА/? + А/вAZ? + L = ДС/.
Пренебрегая произведением Д/ВД/? как малой величиной, получим:
dAZB
(Яо + г)Д/в + /воА^+ £~гг = Аа (2-19)
Уравнение (2-19) является линейным дифференциальным уравнением
первого порядка в малых отклонениях переменных для цепи возбуж-
дения генератора.
Для цепи якоря на основании статической характеристики вида
С/=/(/в) при номинальных n=const и /я=const (рис. 6Э) с учетом
малых отклонений напряжения и тока возбуждения от заданных
значений можем написать:
Ди=Д1в tga=£A/B. (2-20)
Заменяя значения для тока Д/в в уравнении (2-19) из уравне-
ния (2-20), получим:
L d^U fR + r
k dt k ““
1 АСУ = —-/ВОА/?.
Поделив данное уравнение на коэффициент, при АС/, будем иметь:
То-^+А[/ = -М/?,
(2-21)
71
где Tt—постоянная времени генератора,
To
— передаточное число генератора,
, 7в0&
= Ro+r-k
Так как при работе системы скорость вращения и ток нагрузки
генератора изменяются, то, добавив
правую часть уравнения (2-21)
возмущение /(/), получим:
в
ка при /я=const и n=const.
dbU
T0'-^r + ^U = -k^R +
+ (2-22)
На основании вида уравне-
ний (2-21) и 1(2-22) можно
сказать, что генератор пред-
ставляет собой апериодиче-
ское звено. Регулятор мож-
но представить состоящим
из трех звеньев (рис. 66).
Входная величина для не-
го — напряжение, а выход-
ная — сопротивление регу-
лирующего реостата. Пер-
вое звено состоит из после-
довательно включенных об-
мотки электромагнита и реостата настройки. Уравнение звена в ма-
лых отклонениях напишется в виде
dMa
(Rq + Rr) Д/э + La
Поделив на (Rd +7?н), получим:
(a Lai э .
1.-5Г,+ Д/э=М^.
(2-23)
Данное звено является апериодическим.
Второе звено включает в себя сердечник электромагнита, ползу-
нок регулирующего реостата и пружину. Пренебрегая инерционно-
стью данного звена, можно написать:
Д5=М/э- (2-24)
Это безынерционное звено.
Безынерциднным звеном будет и третье звено, представляющее
собой регулирующий реостат цепи обмотки возбуждения
Д/?=М5. (2-25)
72
Уравнение для регулятора должно определять зависимость выход-
ной величины от входной. Оно получается на основании преобразо-
ваний уравнений (2-23), <(2-24) и (2-25) и имеет вид:
dbR
Т~ +ДД = М<Л (2-26)
где kp — передаточное число регулятора, равное произведению
Уравнение системы автоматического регулирования напряжения
генератора постоянного тока получается на основании уравнения
б)
Рис. 66. Электрическая схема системы и< звенья регу-
лятора.
(2-22) регулируемого объекта и уравнения (2-26) регулятора. Оно
имеет вид:
d*W dbU df
To7’-37r + (7o + n-^r+(1+Mp)A^==7'37 + f(O
или в операторной форме записи
[ToTp2+(ro+T)p+(l+^p)]At/=Tpf+f(O. (2-27)
Это уравнение является линейным дифференциальным уравнением
второго порядка, описывающим динамику системы. Порядок уравне-
ния определяется числом учтенных постоянных времени звеньев си-
стемы.
Уравнение динамики линейных систем автоматического регулиро-
вания в общем виде можно записать так:
(aopn+alpn~l+.. .+an-ip+an)x= (bopm+blpm-'l+...
... +bm-ip+bm)f (2-28)
или
D(p)x=M(p)f,
где х — регулируемый параметр;
f — возмущение;
73
а и b — постоянные коэффициенты, определяемые параметрами
системы;
пит — любые целые положительные числа.
Обычно m<n, a D(p) и М(р)— операторные полиномы.
Уравнение (2-28) является неоднородным дифференциальным
уравнением. Его решение относительно х находится как сумма двух
решений:
X (/) =Хуст (Z) +ХПер (0, (2-29)
где хПер|(0—общее решение однородного уравнения,
Ху ст (0 — частное решение, соответствующее виду возмущения.
Эти решения соответствуют установившемуся и переходному ре-
жимам:
(аорп+а1рп~' + ... +ап_1Р+ап)х=®. (2-30)
Уравнение (2-30) является однородным. Его общее решение имеет вид:
Хпвр = + C2eP‘f + ... + CnePni, (2-31)
где С — произвольные постоянные, определяемые для начальных
условий;
р — корни характеристического уравнения.
Характеристическое уравнение однородного уравнения запишется
в виде
OoPn+aiPn“1+ ... +an-ip+an = 0. (2-32)
Это обычное по виду алгебраическое уравнение.
Среди корней р2, • • •> рп могут быть как вещественные, так
и комплексные корни. Положим, что первые два корня комплексные,
третий и и-й вещественные, а все остальные корни могут быть в лю-
бом порядке комплексными, либо вещественными. В соответствии
с этим обозначим:
p1>2=ai±/co;
Рз=,а3;
Рп —
Тогда общее решение однородного уравнения примет вид:
х = Aeait sin (W1< + f) + С3е“з/+... + C„e“a/, (2-33)
где A, ip и С — вещественные постоянные, определяемые из началь-
ных условий.
В соответствии с определением устойчивости систем автоматиче-
ского регулирования последняя характеризуется свободным движе-
нием системы, которое описывается однородным дифференциальным
уравнением системы, т. е. уравнением без правой части.
Математические условия устойчивости основываются на изучении
вида корней характеристического уравнения системы.
Случай 1. Вещественные корни отрицательные, а комплексные
имеют отрицательную вещественную часть (|а<0). При этом условии
каждое слагаемое решения уравнения (2-33) с течением времени
74
уменьшается и стремится к нулю при £->оо. Если каждое слагаемое
стремится к нулю при t -> оо, то и все выражение для хпер будет
также стремиться к нулю. Переходный процесс для каждого слагае-
мого, соответствующего вещественному отрицательному корню,
имеет вид убывающей экспоненты (рис. 67,а), а для каждой пары
комплексных корчей с отрицательной вещественной частью — имеет
вид затухающих колебаний (рис. 67,6). Система при а<0 устойчива.
Рис. 67. Переходный процесс для корней характеристического
уравнения с вещественной отрицательной частью.
Случай 2. Один вещественный корень положительный (а > 0).
При этом одно из частных выражений вида Ceat с течением време-
ни будет неограниченно по экспоненте расти (рис. 68, а).
Случай 3. Одна пара комплексных корней с положительной
вещественной частью (а > 0). Одно из выражений вида Ае** sin (co^+f)
Рис. 68. Переходный процесс для корней характеристического
уравнения с вещественной положительной частью.
с течением времени неограниченно растет (рис. 68, б). Переходный
процесс имеет вид расходящихся колебаний. Таким образом, при
а^> 0 частное выражение вида Се** или Ае^ sin (со / + 0) при t -> оо
неограниченно возрастает. Общее выражение для х также неогра-
ниченно растет, если даже все остальные его составляющие с те-
чением времени будут убывать. Система при а > 0 неустойчива.
Случай 4. Одна пара комплексных корней имеет веществен-
ную часть, равную нулю (а = 0). При этом имеем пару мнимых кор-
ней pi,2=±j(d. Им соответствует член решения A sin (coZ+ip).
Переходный процесс имеет вид незатухающих гармонических ко-
лебаний (рис. 69,а). Система находится на границе устойчивости и
75
неустойчивости. Так как в переходном процессе раз возникшие коле-
бания могут в системе не затухнуть, то такую систему считают не-
устойчивой.
Случай 5. Один вещественный корень равен нулю (а=0).
В этом случае Ceat—С (рис. 69,6). При этом с течением времени
система^находится на границе устойчивости и неустойчивости. Такая
x~Astn(wb+p)
Рис. 69. Переходный процесс для корней характеристи-
ческого уравнения с вещественной частью, равной нулю.
а.)
к нулю, если все слагаемые решения
•2 .1 7 ’S
•J 8 •8
Рис. 70. Расположение корней харак-
теристического уравнения на ком-
плексной плоскости.
система неустойчива, так как ее работа на границе устойчивости
практически недопустима.
На основании изложенного можно утверждать, что:
1) при /~>оо значение регулируемого параметра x(t) стремится
однородного дифференциаль-
ного уравнения системы
стремятся к нулю;
|2)если хотя бы одно
слагаемое неограниченно
растет со временем, то не-
ограниченно растет и значе-
ние х(/);
3) для устойчивости ли-
нейной системы необходимо
и достаточно, чтобы все кор-
ни характеристического
уравнения системы имели
отрицательные веществен-
ные части.
Условия устойчивости
можно сформулировать ина-
че, не строя графиков. Для
этого изобразим корни в ви-
де точек на комплексной
плоскости (рис. 70). Точка 1 соответствует отрицательному веще-
ственному корню pi = —си, точки 2 и 3 — комплексным корням с отри-
цательной вещественной частью Р2,з=—«2±/со, точка 4 -—положи-
тельному вещественному корню Р4=а4, точки 5 и 6 — комплексным
корням с положительной вещественной частью р5)6=а5±/со, точки 7 и
8 — паре мнимых корней р7;8=±/со и точка 9 — вещественному кор-
ню, равному нулю.
Система устойчива, если корни характеристического уравнения
системы находятся в левой части комплексной плоскости.
76
Таким образом, математические условия устойчивости основаны
на определении корней характеристического уравнения системы. Если
корни известны, то вопрос устойчива или неустойчива система решен.
в) Критерии устойчивости
Для суждения о знаках корней характеристического уравнения
разработаны так называемые критерии устойчивости, применяемые
в теории автоматического регулирования. К ним относятся критерии
Гурвица, Михайлова и Найквиста.
Алгебраический критерий Гурвица основан на анализе коэффи-
циентов характеристического уравнения системы.
Сущность его состоит в следующем. Коэффициенты характери-
стического уравнения (2-32) должны быть положительными (а>0),
Кроме того, должны соблюдаться дополнительные условия, напри-
мер: для уравнения третьего порядка
> О J
для уравнения четвертого порядка
(а2а3—ага4) — aQd23>0.
Критерий Михайлова также основан на использовании характе-
ристического уравнения системы. Методика определения устойчиво-
сти системы практически сводится к следующему.
Допустим, что характеристическое уравнение системы имеет вид:,
р3+2р2+8р+5=0
Тогда операторный полином (функция) D(p) определится как
D(p) =р3+2р2+8р+5.
Заменяя р на /со, получим:
D (Jto) = (/со)3+2 (До)2+8 (/со) + 5.
Так как
(/(о)3=—/со3 и (/со)2=—со2,
то можем написать:
D (j(a )=—j со3—2 со2+8/со + 5.
Отделив действительную и мнимую части уравнения, получим:
7?(со) =5—2<о2 и «$(со)=8<о—со3,
тогда
Затем, задаваясь разными значениями со, определяют 7? (со) и S(w),
которые сведены в таблицу.
<0 0 1 1 2 1 3 4
Ж®) 5 3 —3 —13 —27
S(®) 0 7 8 —3 —32
77
Рис. 71. График изменения годографа,
построенный согласно критерию
Михайлова.
На основании полученных данных на рис. 71 построен график
изменения вектора годографа. На основании критерия Михайлова
система устойчива, если вектор годографа при изменении частоты w
от 0 до + оо, начав движение из точки положительной вещественной
полуоси, во-первых, враща-
ется только против часовой
стрелки, во-вторых, нигде
не обращается в нуль и,
в-третьих, пройдет последо-
вательно п квадрантов ком-
плексной плоскости, повер-
нувшись на угол п л/2. Для
нашего примера /г=3 и угол
равен 270° (рис. 71).
Критерий Найквиста ос-
нован на построении ампли-
тудно-фазовой характери-
стики разомкнутой системы
при изменении частоты <о от
0 до 4-оо.
Определение устойчиво-
сти системы производится
в следующем порядке. Стро-
ится структурная схема си-
стемы (рис. 72). Замкнутую
систему в одной из точек
размыкают, нарушая одну
из связей контура. Исполь-
зуя структурную схему, определяют передаточную функцию .разомк-
нутой системы. Для нашего случая передаточная функция имеет вид:
kikzk^ko k
k('”“T7F+t“‘77F+t-
Заменив р на /со, получим уравнение амплитудно-фазовой ха-
рактеристики:
k
К (/«) = + J.
Рис. 72. Структурная схема системы автоматического регу-
лирования.
Затем освобождаются от мнимости в знаменателе. Для этого
умножаем числитель и знаменатель на сопряженный множитель зна-
менателя:
k (l-T'jv) _fe(l -for,)
Л(«-Г,/в+1 (1-Т0» 1+<0*7-2 •
78
Отделяя мнимую и вещественные части, получим:
k kdiTn
к (;<О) = R (со) + JS (<о) =
1 4" СО / Q
Следовательно, вещественная и
k
R (со) =-------9 и
' 7 1 +“27^
k&r о
S(co) = —------
' 1 +
71 + &т20
Рис. 73. График изменения го-
дографа, построенный согласно
критерию Найквиста.
Подставляя значения пара-
метров То и k и задаваясь часто-
той со от 0 до +оо, определяют
величины R (со) и S(co). По данным строится амплитудно-фазовая
характеристика.
На основании критерия Найквиста система устойчива, если век-
тор годографа +К(/со) не охватывает точку с координатами (—1;/о).
На рис. 73 показана произвольная амплитудно-фазовая характери-
стика устойчивой системы.
8. КАЧЕСТВО ПРОЦЕССА РЕГУЛИРОВАНИЯ
Устойчивость движения системы автоматического регулирования
является весьма важным ее свойством. Понятие устойчивости и не-
устойчивости движения систем автоматического регулирования вклю-
чает в себя только лишь факт наличия или отсутствия затухания
переходного процесса в системе автоматического регулирования.
Устойчивость системы автоматического регулирования является
основным, но недостаточным требованием. Не всякая устойчивая си-
стема автоматического регулирования будет хороша. Затухание пе-
реходного процесса может происходить быстро или медленно, с боль-
шими или малыми отклонениями регулируемого параметра Дх от
заданного значения g(t)- переходный процесс может быть колеба-
тельным или апериодическим. Все эти факторы составляют разные
стороны так называемого «качества процесса регулирования» и тре-
буют специального исследования. В связи с возросшими общими
требованиями к системам автоматического регулирования возросли
требования и к качеству регулирования.
Под качеством процесса регулирования пони-
мают способность автоматического регулятора
поддерживать с достаточной точностью задан-
ный закон изменения регулируемого параметра.
Качество процесса регулирования тем выше, чем меньшее отклонение
регулируемого параметра Дх от заданного его значения g(t) допу-
скается регулятором и чем быстрее практически устанавливается
заданный установившийся режим.
Отсюда вытекает, что первой стороной качества регулирования
является точность поддержания заданного значения регулируемого
79
Зона
нечувствительности
Кривая a 1
Прямая 6 & уст
Рис.
жде
74. Установившийся процесс
регулирования.
всего |то, что
для
О
t
параметра, когда на систему регулирования не воздействуют какие
бы то ни было внешние возмущающие факторы. Другой стороной
качества регулирования является качество переходных процессов,
которые возникают при действии на систему различных по характе-
ру и форме внешних возмущений.
Свойства переходного процесса, определяемые максимальным
отклонением регулируемой величины Дхмакс, временем регулирова-
ния /р и формой кривой переходного процесса (апериодический, ко-
лебательный), называются качеством переходного процесса.
Качество процесса регулирования оценивается следующими пока-
зателями.
Ошибкой, которая остается по окончании пере-
ходного процесса, т. е. ошибкой в установившем-
ся режиме работы. Од-
ним из наиболее часто встре-
чающихся видов установивше-
гося режима работы является
режим, определяемый постоян-
ным значением регулируемой
величины const при по-
стоянной нагрузке на объект.
Это есть установившийся ста-
тический режим работы.
Будет ли с течением вре-
мени x{t) оставаться абсолют-
но неизменным? Это зависит от
многих причин. Будем считать,
что внешние факторы, вызы-
вающие изменение х(/), от-
сутствуют. Это означает пре-
нного установившегося режима
строго определенная и неизменная, например AfHi для x(t)—rii
(рис. 56). Однако, кроме причин внешнего порядка, на процесс регу-
лирования будут влиять внутренние факторы. Такие факторы, как
наличие сил сухого трения, люфты, несбалансированность, наличие
переменных переходных сопротивлений в электрических звеньях
и т. д., приводят к понижению точности действия отдельных звеньев
системы автоматического регулирования и, следовательно, к появле-
нию ошибки регулировайия системы в целом, которая определяет
зону нечувствительности системы автоматического регулирования 2h
(рис. 74).
Действия разного рода внутренних факторов (возмущений) обу-
словливают то, что регулируемый параметр x(t) в установившемся
режиме работы не будет точно равен какому-то предписанному зна-
чению ХуСТ. Величина зоны нечувствительности задается технически-
ми условиями, предъявляемыми к конкретной системе автоматиче-
ского регулирования. Они численно оговаривают, за какие пределы
не должны заходить отклонения фактического значения регулируе-
мого параметра Дх (кривая а, рис. 74) от требуемого значе-
ния Хуст, показанного на рис. 74 в виде пунктирной прямой б.
Обычно это отклонение не должно превышать ±5% от величи-
ны Хуст.
Для многих систем автоматического регулирования является
характерным непостоянство нагрузки на объект. В § 5 было показа-
80
но, что статическая система автоматического регулирования обла-
дает установившимся отклонением регулируемой величины от за-
данного значения в зависимости от нагрузки на объект регулирова-
ния. Это установившееся отклонение регулируемой величины на-
зывается остаточным отклонением, которое остается в системе ав-
томатического регулирования после окончания переходного процес-
са (рис. 32).
Максимальное остаточное отклонение, которое получается при
максимально возможном в данной системе отклонении нагрузки от
ее номинального значения, называется статической ошибкой системы
автоматического регулирования.
На рйс. 75 иллюстрируется процесс регулирования при скачко-
образном изменении нагрузки от номинального значения до мини-
Рис. 75< Процесс регулирования с показателя-
ми качества регулирования.
мально возможного, когда система переходит из установившегося
состояния Хуст.ном в другой установившийся статический режим
Хуст (прямая б), где б — статическая ошибка.
Если б равна нулю, то регулирование и система являются аста-
тическими. При астатическом регулировании статическая ошибка
отсутствует. /
Рассматривая процесс регулирования с позиций качества регу-
лирования, следует отметить, что последнее будет удовлетворять
предъявляемым к нему требованиям, если б^бДОп, где бДОп— допу-
стимая статическая ошибка.
Часто статическую ошибку вычисляют в процентах к номиналь-
ному значению регулируемой величины, т. е.
8
8°/о = --------100%.
-Хуст.ном
Для реально существующих статических систем статическая
ошибка не должна превышать 3—5%. Кроме установившихся ста-
тических режимов работы, для систем автоматического регулирова-
ния характерными являются так называемые установившиеся дина-
мические режимы работы. Такими режимами являются:
g Автоматич. регулирование 81
режим программного регулирования; режим' работы, когда внеш-
нее возмущающее воздействие изменяется по гармоническому закону;
режим работы, когда внешнее возмущение есть случайная функция,
заданная своими вероятностными характеристиками.
Для установившихся динамических режимов в каждый момент
времени существует разница между заданным значением регулируе-
мого параметра и действительным его значением. Эта разность и со-
ставляет установившуюся динамическую ошибку, т. е.
бдин = Яуст (О—g (0 ,
где &(/)—заданное значение регулируемого параметра;
*уст(0 — установившееся фактическое значение регулируемого
параметра.
В заключение следует отметить, что как возмущающие воздей-
ствия /(/), так и задающие $(/) в реальных сцстемах обычно не сле-
дуют по точным расчетным законам. Это приводит к появлению до-
полнительной динамической ошибки Дддин-
Тогда полная ошибка в установившемся динамическом режиме
работы, определяется как сумма:
Л=|бдин+|ДбдИН«
Качество процесса регулирования оценивается также перере-
гулированием (выбросом)—максимальным откло-
нением р е г у л и р у е м.о й величины, которое не
должно превышать максимально допустимого
значения, т. е.
А-К'макс А-£доп«
Изобразим протекание переходного процесса на графике (кри-
вая а, рис. 75). Из рисунка видно, что при /->оо наступит новый
установившийся режим, при котором регулируемый параметр ра-
вен g(t).
Переходу в новое установившееся состояние предшествует пере-
ходный процесс. В рассматриваемом случае имеем переходный про-
цесс колебательного вида. Фактическое значение регулируемого пара-
метра x(t) в переходном процессе превышает величину установив-
шегося значения хуст или, как говорят, в системе имеет место пере-
регулирование. Максимальная величина перерегулирования Дхмакс =
=Хмакс—*уст или в процентном отношении
_Хмакс-Хуст 100%;
•Хус т
здесь хМакс — фактическое максимальное значение регулируемого
параметра.
Возможным показателем качества является
также время регулирования /р, по истечении ко-
торого абсолютная величина |х(/)—хуст| не превы-
шает ширины зоны нечувствительности h. Время
регулирования определяет продолжительность переходного процесса.
Теоретически переходный процесс считается законченным, если пере-
ходная ошибка хпер'(О (на рис. 75 переходные ошибки показаны
штриховкой) станет равна нулю, но теоретически переходная ошибка
82
станет равной нулю при бесконечно большом интервале времени.
Практически временем регулирования /р называют промежуток вре-
мени (от начала переходного процесса /1), в течение которого абсо-
лютная величина переходной ошибки становится меньше предписан-
ного значения (обычно 3—5% от нового установившегося значения
регулируемого параметра). На рис. 75 в начале и конце графика по-
казана ширина зоны 2h, определяющая практическую законченность
переходного процесса.
Время регулирования /р (или иначе быстродействие системы
автоматического регулирования) зависит от вида, числа и характера
включения звеньев, входящих в данную систему автоматического ре-
гулирования, состоящую из п последовательно включенных звеньев
(рис. 76). Нарушение установившегося режима работы. вызовет
Регулирующий Регулируемый
элемент объект Измерительный элемент
Рис. 76. Замкнутая система из п звеньев.
отклонение регулируемого параметра, а затем и появление регули-
рующего воздействия, «пробегающего» по всей системе. Чем быстрее
оно «пробегает» по всей системе автоматического регулирования, тем
быстрее осуществляется процесс регулирования. Однако, чем больше
число звеньев в системе автоматического регулирования при прочих
равных условиях, тем больше времени потребуется на «пробегание»
регулирующего воздействия по всему замкнутому контуру от 1-го
до п-го звена, т. е. с увеличением числа звеньев системы быстродей-
ствие уменьшается.
Если быстродействие системы оказывается слишком малым, то
при некоторых условиях система автоматического регулирования
может оказаться технически неработоспособной и, наконец, иногда
показателем качества также считают число ко-
лебаний регулируемой величины в заданное вре-
м я. Оно в некоторых случаях не должно превышать определен-
ного значения. Это требование в соответствующих случаях сводится
к необходимости иметь апериодический (монотонный) переходный
процесс при минимальном времени протекания (кривая в, рис. 75).
Для некоторых систем автоматического регулирования выгоднее
иметь колебательный переходный процесс. Однако при этом не-
обходимо не допускать перерегулирования, т. е. обеспечить
Ломакс Лхдоп. В некоторых случаях колебательный переходный
процесс должен протекать с отсутствием нежелательных частот коле-
бания.
6* 83
9. СРЕДСТВА УЛУЧШЕНИЯ КАЧЕСТВА ПРОЦЕССА
РЕГУЛИРОВАНИЯ
Первым требованием, которое предъявляется к системам авто-
матического регулирования с точки зрения обеспечения необходимого
качества регулирования, является обеспечение статической точности.
Уменьшить статическую ошибку можно путем увеличения общего
коэффициента усиления регулятора. Для некоторых систем этот путь
можно признать целесообразным, особенно если требуется относи-
тельно невысокая статическая точность. Однако, как бы мы ни уве-
личивали коэффициент усиления, статическая ошибка все равно в ста-
тических регуляторах остается. Увеличение общего коэффициента
усиления всегда ограничено либо потому, что при больших коэффи-
циентах усиления появляются нежелательные колебания регулируе-
мого параметра в переходных процессах (и даже неустойчивость),
либо из-за технической неосуществимости большого коэффициента
усиления в данной конструкции регулятора. В связи с этим для ряда
систем автоматического регулирования этот путь исключается.
Другим путем уменьшения статической ошибки регулирования
является путь изменения схемы регулятора таким образом, чтобы
он по принципу действия не имел статической ошибки. Напомним,
что система, не обладающая статической ошибкой регулирования,
называется астатической, а регулятор — астатическим регулятором.
Принципиальная сторона астатического регулирования рассмотрена
выше. Причиной статической ошибки системы статического регулиро-
вания является то, что в установившихся режимах работы системы
каждому значению регулируемого параметра соответствует един-
ственное определенное положение регулирующего элемента /рис. 4,
17 и 18). Необходимо изменить схему регулятора так, чтобы разные
положения регулирующего элемента стали возможны при одном и
том же значении регулируемого параметра (рис. 5, 49 и 20). Дей-
ствительно, в системе автоматического урегулирования скорости вра-
щения вала теплового двигателя /рис. 18) регулирующий элемент —
заслонка 3 жестко связана посредством рычага АВС с муфтой М
измерительного элемента. Закон изменения регулируемого параметра
(скорости вращения п) изображен графически на рис. 56, где каж-
дому определенному значению скорости вращения п соответствует
единственное положение заслонки. Система обладает статической
ошибкой, что обусловлено самим принципом построения регулятора.
Попробуем эту же систему (рис. 18) сделать астатической, т. е. ли-
шенной статической ошибки регулирования. Для этого прежде всего
надо ликвидировать жесткую связь между заслонкой 3 и муфтой Af
измерительного элемента. Введем в схему промежуточный элемент —
золотник и гидравлический двигатель (рис. 20). Теперь измеритель-
ный элемент непосредственно связан с золотником, который управ-
ляет подводом масла под давлением к гидравлическому двигателю.
Отличительной особенностью гидродвигателя является то, что пор-
шень его может занимать любое положение в цилиндре при перекры-
тых трубопроводах Pi и Рг и каждое из этих положений является
состоянием безразличного равновесия (без учета силы веса поршня,
тяги и заслонки).
Если обозначить через S открытие золотника, т. е. его отклоне-
ние от равновесного положения, которому соответствует перекрытие
трубопроводов Pi и Р2> а через L — перемещение поршня гидродви-
84
гателя 4, то, исходя из условия неразрывности струи масла, будем
dL
иметь Fгде F — рабочая площадь поршня; k — коэффициент
пропорциональности, равный vb, v — скорость движения масла через
окна золотника; b — ширина окна.
(Мы получили уравнение гидравлического привода. В нашем при-
мере золотник связан непосредственно с рычагом АВС. Его отклоне-
ние пропорционально отклонению регулируемого параметра от задан-
ного значения. Однако теперь отклонению регулируемого параметра
(скорости вращения теплового двигателя) пропорциональным будет
не само отклонение регулирующего элемента (заслонки), а его ско-
рость dL/dt, т. е. теперь регулирование производится по интегралу
от отклонения регулируемой величины, так как
А? С
L = \Sdt.
Введенное нами промежуточное устройство является идеальным
интегрирующим звеном. Равновесное состояние звена возможно
только тогда, когда dL!dt=Q1 а это означает, что в установившемся
состоянии 5=0. Но значению 5=0 соответствует вполне определен-
ное состояние измерительного элемента 2 (рис. 20), а значит, и впол-
не определенное значение регулируемого параметра, одно и то же
при всех установившихся положениях регулирующего органа 4 и
нагрузки Q. Для нашего примера положению 5 = 0 соответствует по-
ложение золотника, когда трубопроводы Pi и Р2 перекрыты.
Это положение золотника возможно при единственном значении
скорости вращения и, причем поршень гидродвигателя будет зани-
мать положения, обусловленные нагрузкой, т. е. положения, завися-
щие от того, какая подача пара требуется в установившемся режиме
при данной нагрузке. Статическая ошибка регулирования отсутствует
(рис. 57).
Средствами уменьшения ошибки в установившихся режимах ра-
боты, обусловленной наличием трения, люфтов небаланса и т. д.,
являются также меры по улучшению конструкции как объекта регу-
лирования, так и регулятора. Эти вопросы здесь не рассматри-
ваются.
Статическая точность является важной стороной процесса регу-
лирования вообще и качества регулирования в частности. Другой
важной стороной процесса регулирования автоматических систем, как
уже отмечалось выше, является характер протекания переходных
процессов. Может оказаться, что рассмотренные в предыдущем раз-
деле качественные показатели не будут удовлетворяться. Улучшить
качество переходных процессов можно путем изменения параметров
регулируемого объекта или регулятора. Как правило, параметры ре-
гулируемого объекта задаются техническими условиями и изменению
не подлежат, а изменение параметров отдельных элементов регуля-
тора в допускаемых пределах не позволяет получить желаемого ха-
рактера протекания переходных процессов системы автоматического
регулирования. Тогда приходится изменять структурную схему си-
стемы путем введения дополнительных звеньев. Устройства, состоя-
щие из дополнительных звеньев и предназначенные для улучшения
динамики регулирования, образуют совокупность так называемых
85
корректирующих устройств. Корректирующие устройства в литера-
туре часто называют также стабилизирующими элементами. Коррек-
тирующие устройства в зависимости от схемы их включения делятся
на последовательные и параллельные. Включение этих устройств
возможно так, что их воздействие будет совпадать по направлению
с основным воздействием (последовательное и параллельно-соглас-
ное включение) или будет направлено навстречу основному воздей-
ствию .(параллельно-встречное включение).
а) Последовательное и параллельно-согласное включение
корректирующих устройств
Рассмотрим устройства, включенные последовательно или парал-
лельно согласно основному контуру регулирования. Эти устройства
обычно дают воздействия по производной от отклонения регулируе-
мого параметра. Однако применяются также устройства, дающие
воздействие, пропорциональное интегралу от отклонения регулируе-
мого параметра.
Дополнительное воздействие по производной от регулируемого
параметра является хорошим средством улучшения качества пере-
ходных процессов (подавляются колебания и уменьшается время ре-
гулирования). Оно широко применяется в сочетании с основным
принципом регулирования.
Регулирующее воздействие на объект в системах с регулирова-
нием по производной обычно оказывается пропорциональным не
только отклонению Лх регулируемого параметра, но также и произ-
водной от этого отклонения.
Рассмотрим эффект подавления колебаний в системе автомати-
ческого регулирования, получаемый от дополнительного воздействия
регулятора на объект. Допустим, что отклонение регулируемого па-
раметра Ах изменяется во времени, как показано сплошной линией на
рис. 77,а. По определению производная есть предел отношения при-
ращения функции Ах к приращению независимого переменного А/
при безграничном уменьшении этого последнего, т. е.
dkx кх
-~гг = lim -гг .
Величина производной d^xjdt представляет собой тангенс угла
наклона касательной к соответствующей точке кривой Ах=/(£). Дей-
ствительно, отношение Axi/Af (рис. 77,а) есть tg ср. Если безгранично
уменьшать А/, то в пределе получим производную d&xjdt, которая
по величине будет равна тангенсу угла наклона касательной, прове-
денной к точке D. Угол наклона касательной от точки к точке изме-
няется. Например, касательная, проведенная к кривой Ax=f(t) в точ-
ке О, будет иметь угол наклона больший, нежели касательная, про-
веденная к кривой в точке D. Касательная, проведенная в точке А,
имеет угол наклона, равный нулю, а следовательно, и тангенс угла
наклона, также равен нулю.
На основании приведенных рассуждений построим график изме-
нения производной dAxjdt от времени (рис. 77,6).
Если регулятор оказывает воздействие на регулируемый объект,
пропорциональное только отклонению регулируемого параметра (на-
86
пример, в системах, изображенных на рис. 5, 19 и 20), то все время,
пока х>0, т. е. на участке О АВ, регулятор вырабатывает воздей-
ствие z(t), действующее на уменьшение отклонения регулируемого
параметра. В точке В отклонение становится равным нулю. Однако
процесс регулирования на этом не заканчивается, а, как видим на
рис. 77,а, происходит отклонение регулируемого параметра в обрат-
ную сторону, т. е. накапливается отрицательное отклонение. Это про-
исходит, во-первых, из-за инерционности регулятора и, во-вторых,
из-за инерционности регулируемого объекта. Регулятор переключится
на действие в обратном направлении не в точке В, а позже — внутри
участка ВС. Инерционность регулятора способствует раскачиванию
процесса и тем сильнее, чем больше коэффициент усиления регуля-
тора.
Рассмотрим характер протекания переходного процесса, когда
регулятор дополнительно вырабатывает воздействие на объект, про-
порциональное производной от отклонения регулируемого парамет-
ра. Во-первых, регулятор вступит в действие при меньших отклоне-
ниях от исходного установившегося режима. Из рис. 77,6 видно, что
сигнал по производной имеет наибольшее значение в самом начале
переходного процесса, когда Дх равно нулю. Во-вторых, на уча-
стке ОА производная dAxjdt и отклонение Дх имеют одинаковые
знаки. В результате их суммирования уже при малом отклонении
регулируемого параметра, например при Дхь значительно меньшем,
чем Дх2, вырабатывается сигнал, достаточный для срабатывания ре-
гулятора, а при больших отклонениях это увеличивает воздействие
регулятора z(t) на объект (по сравнению с прежним), направленное
на уменьшение отклонения регулируемого параметра. Следовательно,
87
наличие сигнала по производной форсирует действие регулятора на
участке возрастания отклонения регулируемого параметра. Поэтому
вследствие более энергичного воздействия регулятора на объект
максимальное отклонение будет меньше, чем это имело место в си-
стеме с регулятором, реагирующим лишь на отклонение регулируе-
мого параметра (точка А займет положение А'). На участке АВ
отклонение регулируемого параметра уменьшается, производная ме-
няет знак. На вход преобразующего элемента поступает результи-
рующий сигнал, получающийся в результате сложения сигнала по
отклонению и сигнала по производной. Воздействие регулятора z(t)
на объект уменьшается по сравнению с регулятором, не реагирую-
щим на производную. Следовательно, наличие сигнала по производ-
ной ослабляет действие регулятора на участке уменьшения отклоне-
ния регулируемой величины. Если регулятор, работающий только
по отклонению регулируемого параметра, переключился на действие
в обратную сторону в точке В, то теперь это переключение произой-
дет раньше (внутри участка ЛВ), так как результирующий сигнал
принимает отрицательное значение внутри участка ЛВ, например
после точки Е, в которой сигнал по отклонению становится равным
сигналу по производной. Переключение регулятора на действие
в обратную сторону, когда отклонение регулируемого параметра еще
не достигло нулевого значения, полезно, так как этим или предотвра-
щается полностью, или в какой-то мере уменьшается перерегулиро-
вание. Переходный процесс может стать апериодическим (пунктир на
рис. 77,а).
Итак, наличие сигналов по производной компенсирует в некото-
рой мере инерционность в переключении регулятора на действие
в обратную сторону.
Как следует из сказанного, при наличии дополнительного воздей-
ствия по производной перестановка регулирующего элемента про-
исходит не только по отклонению регулируемого параметра в дан-
ный момент времени, но также и потому, будет ли отклонение
в последующие моменты времени убывать или возрастать и с какой
быстротой. Регулятор приобретает способность «предвидеть» разви-
тие переходного процесса и работать с опережением. Регуляторы
с воздействием по производной иногда называют регуляторами
с предварением.
Включение устройств, обеспечивающих дополнительное воздей-
ствие регулятора на объект, пропорциональное производной от от-
клонения регулируемого параметра, может осуществляться различ-
ными способами.
Рассмотрим некоторые из них.
Первый способ. В обычную^рассмотренную выше элемент-
ную схему системы вводят стабилизирующий элемент, включенный
параллельно согласно основному воздействию (параллельное коррек-
тирующее устройство), как это показано на рис. 78,а. В такой схеме
регулятор имеет два измерительных элемента, первый дает на выхо-
де воздействие, зависящее от отклонения регулируемого параметра
Дп, а второй — воздействие, зависящее от скорости изменения этого
отклонения dAnldt (такой элемент называется также дифференци-
рующим).
Покажем подобное включение измерительных элементов в систе-
ме автоматического регулирования скорости вращения вала теплово-
го двигателя (рис. 78,6). Перемещение золотника 3 в процессе регу-
88
лирования определяется не только изменением угловой скорости
вращения вала Ап (воспринимаемое элементом 2), но также и воз-
действием по производной от скорости вращения, которое осущест-
О-)
Рис. 78. Система автоматического регулирования скорости враще-
ния вала теплового двигателя с воздействием по производной.
вляется акселерометром. Приводной валик акселерометра 6 имеет на
конце резьбу 7 с большим шагом (несамотормозящуюся). Тело
с большой массой 8 имеет внутреннюю резьбу, посредством которой
оно навернуто на валик 7. Когда отсутствует угловое ускорение
то в установившемся режиме работы угловые скорости те-
89
ла 8 и валика одинаковы. Тангенциальная составляющая силы инер-
ции равна нулю, а следовательно, нет углового и осевого смещения
тела 8. Оно удерживается в нейтральном положении пружинами 9
и 10. Эти пружины установлены в цилиндре 11, который жестко свя-
зан с валиком 6.
При возникновении отклонения угловой скорости п от заданно-
го значения появляется и угловое ускорение в, а следовательно, тан-
генциальные составляющие сил инерции. Под их воздействием те-
ло 8 поворачивается на резьбе 7 валика 6, одновременно совершая
поступательное движение. При этом тангенциальные составляющие
сил инерции уравновешиваются противодействующей силой, возни-
кающей от деформации пружин 9 и 10. Шток 12 жестко связан с те-
лом 8 и одновременно с последним, перемещаясь в осевом направ-
лении, переставляет золотник 3. Как видно из рис. 78,6, рычаг АВС
является суммирующим элементом схемы. Дополнительные воздей-
ствия акселерометра на рычаг АВС в принципе были рассмотрены
выше как явления введения в принцип регулирования сигнала по
производной.
Второй способ. Стабилизирующий элемент включают в схе-
му последовательно так, как показано на рис. 79,а. В этой схеме
применено корректирующее устройство, на выходе которого полу-
чается сигнал, равный сумме двух слагаемых, первое из которых
пропорционально отклонению регулируемого параметра, а второе —
производной от этого отклонения.
Рассмотрим такое включение стабилизирующего элемента на
примере системы автоматического регулирования скорости вращения
вала электрического двигателя, принципиальная схема которой изо-
бражена на рис. 79,6.
Задача регулятора состоит в том, чтобы скорость вращения п
вала электродвигателя Д независимого возбуждения при заданной
настройке UQ поддерживалась постоянной как при изменении на-
грузки на валу электродвигателя Д, так и при других возмущаю-
щих воздействиях, действующих на систему. Здесь измерительным
элементом является тахогенератор ТГ, который выдает напряже-
ние ui, пропорциональное регулируемому параметру ((скорости вра-
щения п). Это напряжение сравнивается на потенциометре настрой-
ки Ro с заданным значением UQ. Напряжение рассогласования и2—
=|(70—Щ подается на вход стабилизирующего элемента. В качестве
стабилизирующего элемента применен дифференцирующий контур,
состоящий из R и С.
Отличительной особенностью контура RC, собранного, как по-
казано на рис. 79,6, является его свойство подавать напряжение,
равное сумме двух слагаемых, первое из которых пропорционально
отклонению й2, а второе — производной du^dt, т. е. Из~&г(н24-
du2\
)• В этом выражении и3 не равно правой части на вели-
чину (обусловленную неидеальностыо элемента), которая является
следствием его инерционности. Этой неточностью мы будем прене-
брегать. Напряжение и3 приложено к зажимам на входе усилителя
(преобразующий элемент). Усиленное напряжение щ приложено
к зажимам обмотки возбуждения электромагнитного усилителя
(ЭМУ). В зависимости от величины этого напряжения электрома-
шинный усилитель вырабатывает напряжение, а следовательно, по
90
цепи якоря электродвигателя течет электрический ток 7, который и
оказывает регулирующее воздействие.
Пусть, например, нагрузка увеличилась. Скорость вращения ва-
ла п должна уменьшиться. Пропорционально уменьшению скорости
вращения п уменьшится и вырабатываемое тахогенератором напря-
жение Wi=^in. Напряжение рассогласования и2 увеличится, что при-
ведет к увеличению напряжения и4, подводимого к зажимам обмот-
ки возбуждения ЭМУ. В свою очередь это приведет к росту электри-
ческого тока, протекающего по цепи якоря электродвигателя Д, что
Рис. 79. Система автоматического регулирования скорости вращения
вала электродвигателя с воздействием по производной.
обеспечит увеличение вращающего момента MBp=kI. Скорость вра-
щения вала увеличится. Эффект, получаемый за счет дополнитель-
ного регулирующего воздействия регулятора на регулируемый
объект и обусловленный наличием сигнала, пропорционального ско-
рости изменения отклонения регулируемого параметра (в рассмо-
тренном примере скорость вращения п), был рассмотрен выше
(рис. 77).
Третий способ. Стабилизирующий элемент вводят в эле-
ментную схему так, как показано на рис. 80, т. е. параллельно-со-
91
гласно основной цепи воздействия. Так же как и в разобранных
выше двух способах, здесь на входе преобразующего элемента по-
дается как сигнал, пропорциональный отклонению регулируемого
параметра, так и сигнал, пропорциональный производной от этого
отклонения. В этом способе стабилизирующий элемент представ-
ляет собой дифференцирующее устройство, например, дифферен-
цирующий контур, состоящий из Л и С, собранный, как показано на
рис. 81.
Рис. 80. Система автоматического регулирования с воздействием по
производной.
Напряжения нвых и цвх для такого контура находятся в сле-
С?Цвх
дующей зависимости аВЫх ^RC . Здесь, как и для ранее
рассмотренного контура, допущена ошибка, обусловленная неидеаль-
ностью элемента из-за его
инерционности.
К рассматриваемым ме-
тодам коррекции относятся
также устройства, позво-
ляющие регулятору оказы-
вать ма регулируемый объ-
ект дополнительное воздей-
ствие, пропорциональное ин-
тегралу по отклонению ре-
гулируемого параметра. Эф-
фект, получаемый от допэл-
>--------
ивт Я И
0 "• -------I----0
Рис. 81. Дифференци-
рующий контур из
R и С.
Рис. 82. График изменения откло-
нения Дх и интеграла по этому от-
клонению.
92
нительного воздействия по интегралу, можно определить, исходя из
следующих рассуждений.
Пусть отклонение регулируемого параметра во времени изме-
няется, как показано на рис. 82,а. На рис. 82,6 показано изменение
интеграла по этому отклонению. Из этого графика видно, что допол-
нительное воздействие по интегралу, пропорциональное в каждый
момент времени ординатам, отмеченным вертикальной штриховкой,
действует в одну сторону. Это означает, что когда воздействие ре-
гулятора по отклонению должно изменять направление (точка В),
дополнительное воздействие по интегралу будет действовать в сто-*
рону дальнейшего уменьшения регулируемого параметра. Это при-
ведет к тому, что амплитуда колебаний увеличится (точка С опус-
тится).
Дополнительное воздействие по интегралу дает ухудшение неко-
торых динамических качеств системы, раскачивает ее и в некоторых
случаях может сделать систему неустойчивой, однако оно ликвиди-
рует статическую ошибку, т. е. позволяет получить астатическое ре-
гулирование.
б) Параллельно-встречное включение корректирующих
устройств (дополнительные обратные связи)
Как показано во введении, всякая система автоматического ре-
гулирования обладает замкнутой цепью воздействий.
В этой цепи звено, служащее для замыкания выхода системы
с входом, образует так называемую главную или основную обрат-
ную связь. Наличие обратной связи необходимо для целей сравне-
ния текущего значения регулируемого параметра x(t) с его задан-
ным значением g(t).
В результате сравнения между собой текущего и заданного
значений регулируемого параметра получается сигнал рассогласо-
вания
е(0=£(0-^)- (2-34)
Из уравнения (2-34) следует, что текущее значение регулируе-
мого параметра х(/) звеном обратной связи основного контура по-
дается на суммирующее устройство со знаком, противоположным
знаку заданного значения регулируемого параметра g(t), в силу
чего в системах автоматического регулирования обратная связь ос-
новного контура всегда является отрицательной и называется ос-
новной отрицательной обратной связью. Очевидно, что лишь при на-
личии отрицательной обратной связи можно получить сигнал рас-
согласования, необходимый для такого воздействия на цепочку по-
следовательных звеньев от входа до выхода системы, при котором
регулятор восстанавливает регулируемый параметр до предписанно-
го значения, т. е. в системе организуется процесс регулирования.
В противном случае регулятор будет уводить регулируемый пара-
метр от заданного значения.
Для улучшения процесса регулирования часто в регулятор вво-
дят дополнительные (внутренние) обратные связи (рис. 83). Они
создают внутри регулятора дополнительные замкнутые цепи воздей-
ствий, т. е. дополнительные замкнутые контуры. Ниже будем поль-
зоваться термином «обратные связи», помня, что при этом имеются
в виду «дополнительные» обратные связи.
93
Обратной связью называется такая связь, которая, соединяя
один из последующих элементов с одним из предыдущих, образует
дополнительный замкнутый контур.
Различают положительные и отрицательные обратные связи.
Обратная связь называется положительной, если сигнал обрат-
ной связи х0.с усиливает действие входного сигнала >(имеет одина-
ковый знак с сигналом основной цепи воздействий):
<^вх1 —Хвх 4"Xo.cj
(2-35)
где хВХ1 — сигнал на входе звена, хвх— входной сигнал основной
цепи воздействий, х0.с — сигнал обратной связи.
Автоматический регулятор
Рис. 83. Элементная схема системы автоматического регулирова-
ния с основной и дополнительной обратными связями.
Обратная связь называется отрицательной, если сигнал обрат-
ной связи Хо.с ослабляет действие входного сигнала (имеет знак,
противоположный знаку сигнала основной цепи воздействий):
ХВх1 = ^вх—Хо.с« (2-36)
Сущность введения положительной обратной связи сводится
к увеличению коэффициента усиления звена (или звеньев), охвачен-
ного положительной обратной связью.
Действительно, как следует из (2-35), к входному сигналу при-
бавляется сигнал обратной связи. Ясно, что входной сигнал звена,
охваченного положительной обратной связью, будет больше входно-
го сигнала звена без обратной связи, так как при равных условиях
из (2-35) следует, что
Явх1>Хвх При Хо.с#0.
94
Если принять, что коэффициент усиления звена, охваченного
положительной связью и без нее, одинаковый, то ясно, что устано-
вившееся значение выходной величины звена, охваченного положи-
тельной обратной связью, будет больше, нежели при отсутствии по-
ложительной обратной связи. Это обстоятельство отражает преиму-
щество положительной обратной связи. Однако положительная об-
ратная связь, давая увеличение усиления сигнала, приводит к ухуд-
шению устойчивости как отдельных звеньев, охваченных ей, так и
системы автоматического регулирования в целом. В силу сказанного
положительная обратная связь находит применение по преимуще-
ству в усилителях. В системах автоматического регулирования поло-
жительные обратные связи, как правило, не используются. Поэтому
ниже под термином «обратная связь» будем иметь в виду только от-
рицательную обратную связь.
Отрицательные обратные связи, применяемые в системах авто-
матического регулирования, по своим динамическим свойствам раз-
деляются на следующие типы.
1) Жесткие обратные связи
а) безынерционная жесткая обратная связь. Это такая обрат-
ная связь, подаваемые сигналы которой х0.с пропорциональны вы-
ходной величине, т. е.
•^о.с = Р-^вых? (2-37)
где Р — коэффициент обратной связи.
Коэффициентом обратной связи Р называется величина, указы-
вающая, какая часть выходного сигнала хВых отбирается звеном
обратной связи для подачи на вход звена основной цепи в виде
сигнала обратной связи х0.с.
Из (2-37) видно, что безынерционная жесткая обратная связь
образует безынерционное (идеальное) звено. Уравнение динамики
звена является простейшим алгебраическим уравнением;
б) инерционная жесткая обратная связь. Это такая обратная
связь, уравнение динамики которой имеет вид:
fifXo.c t п
То.С dt * *^о.с ---- НвыХ
или в операторной форме записи
(Т'о.сРН-1) Хо.с = Р-^в ых> (2-38)
где То.с — постоянная времени обратной связи.
Из (2-38) видно, что инерционная жесткая обратная связь об-
разует апериодическое звено.
2) Гибкие обратные связи
а) безынерционная гибкая обратная связь. Безынерционной гиб-
кой обратной связью называется такая обратная связь, сигналы ко-
торой х0.с пропорциональны скорости изменения выходной величи-
ны хВых, т. е.
С?Хвых
Хо.с = ₽ dt
95
или в операторной форме записи
^О.С = РР-^ВЫХ| (2-39)
где dXbuxIdt — скорость изменения выходного сигнала.
Из уравнения (2-39) видно, что безынерционная гибкая обрат-
ная связь образует идеальное дифференцирующее звено;
б) инерционная гибкая обратная связь (Или изодром). Это та-
кая обратная связь, уравнение динамики которой имеет вид:
_ dXQ.c Д^Хвых
/°.С dt “Г Хо.с — ₽ dt
или в операторной форме записи
(T'o.cP+'l) Хо.с = РрХВЫХ| (2-40)
где Го.с — постоянная времени инерционной гибкой обратной связи.
Из уравнения (2-40) следует, что инерционная гибкая обратная
связь образует реальное дифференцирующее звено.
На примерах рассмотрим принцип действия отрицательных об-
ратных связей и влияние их на динамические свойства некоторых
звеньев.
в) Системы автоматического регулирования
с жесткими обратными связями
Принцип действия безынерционной жесткой обратной связи рас-
смотрим на примере ее применения в системе непрямого автомати-
ческого регулирования скорости вращения теплового двигателя.
Сначала рассмотрим систему без обратной связи <(рис. 20).
Муфта регулятора Л4 через рычаг АВС воздействует на золот-
ник 5. В золотник по трубе Рн нагнетается масло. Два трубопрово-
да Pi и Р2 соединяют золотник с цилиндром гидродвигателя 4. Пор-
шень гидродвигателя жестко соединен с заслонкой 5. Центробежный
механизм посредством редуктора соединен с валом теплового дви-
гателя 1.
Случай 1. Рассматриваемая система находится в установив-
шемся режиме работы.
Это означает, что нагрузка на объект вполне определенна и не
изменяется во времени. Потребление пара в установившемся режи-
ме работы постоянно. Скорость вращения вала п равна заданному
значению.
Постоянному расходу пара обязательно соответствует вполне
определенное, неподвижное положение заслонки 5 ((считаем, что дав-
ление перед заслонкой неизменное). Совершенно очевидно, что за-
слонка будет неподвижной, если давления масла над поршнем сер-
водвигателя и под ним будут равны между собой. Весом поршня и
заслонки пренебрегаем. Последнее возможно, если золотник 3 пере-
крывает трубопроводы Pi и Р2, т. е. нагнетательная труба Рн в уста-
новившемся режиме отсоединена от трубопроводов Р{ и Р2.
Случай 2. Пусть скорость вращения теплового двигателя уве-
личилась, например, из-за уменьшения нагрузки. Центробежные силы
грузиков элемента 2 также увеличатся — грузики разойдутся. Муф-
96
та М поднимается и с помощью рычага АВС поднимет шток золот-
ника 3. Труба Р\ окажется соединенной с нагнетательной трубой Рн-
Масло будет нагнетаться в пространство над поршнем гидродвига-
теля 4. Поршень начнет двигаться вниз. Масло из нижней половины
цилиндра по трубе Р2 будет стекать. Перемещаясь вниз, поршень
гидродвигателя опустит заслонку 5. Поступление пара в регулируе-
мый объект уменьшится и скорость вращения вала теплового двига-
теля упадет, стремясь стать равной заданной. Действительно, рав-
новесие системы возможно только тогда, когда трубы Pi и Р2 пере-
крыты золотником 3. Так как золотник жестко связан с точкой В
рычага, то положение точки В
в равновесном состоянии явля-
ется фиксированным. Положе-
ние точки С рычага АВС неиз-
менно. Следовательно, точка А
рычага в установившемся ре-
жиме может занимать также
только одно вполне определен-
ное положение. Это означает,
что муфта М элемента 2 в уста-
новившемся режиме работы
имеет одно вполне определен-
ное положение. Одному же по-
ложению муфты Af соответст-
вует одно вполне определенное
значение скорости вращения п.
Отсюда видно, что при от-
клонении регулируемого пара-
метра п от заданного значения
последний в процессе регулиро-
вания станет равным точно за-
данному значению. Это озпа-
цесса в системе автоматического
чает, что рассматриваемая си-
стема автоматического регули-
рования является астатиче-
ской.
регулирования скорости вращения
непрямого действия.
Рассмотрим переходный процесс при движении системы от ста-
рого установившегося режима к новому установившемуся режиму
работы.
Пусть в момент времени t—ti произошло резкое, скачкообраз-
ное снижение нагрузки на регулируемый объект (рис. 84,а). При
этом скорость увеличится (рис. 84,6, кривая FA). В силу этого нач-
нет работать регулятор так, как это было только что рассмотрено.
Когда скорость п двигателя 1 станет равной заданному значе-
нию, золотник перекроет трубопроводы Pi и Р2. Поршень гидродви-
гателя 4 остановится. Остановка поршня произойдет только тогда,
когда золотник, а следовательно, и муфта регулятора займут поло-
жение, соответствующее заданному значению скорости.
Однако такое выключение привода может явиться слишком
поздним, так как вследствие инерционности системы регулирования
скорость будет продолжать уменьшаться дальше, а не останется
равной заданному значению (кривая ВС).
Уменьшение скорости ниже заданного значения сопровождает-
ся отклонением золотника вниз. Золотник соединит трубу Рп с тру-
7 Автоматич. регулирование
97
бой Pz- Теперь масло будет под давлением поступать в ниж*
нюю половину цилиндра гидродвигателя, т. е. под поршень, а еле*
довательно, начнется движение поршня вверх. Поршень переме-
щает вверх заслонку 5. Количество пара, поступающего в двига-
тель, увеличивается, скорость двигателя начинает возрастать (кри-
вая СД). Остановка же поршня 4 произойдет только тогда, когда
золотник перекроет трубопроводы Pi и Лг- Это означает, что золот-
ник и муфта М займут положение, соответствующее заданному зна-
чению скорости вращения вала п (точка D). Однако в силу инер-
ционности системы скорость может продолжать расти (кривая DE).
Рис. 85. Система автоматического регулирова-
ния скорости вращения теплового двигателя
с жесткой обратной связью.
Таким образом, система будет совершать затухающие колебатель-
ные движения, причем процесс затухания колебаний может проте-
кать недопустимо долго.
Для того чтобы * предотвратить перерегулирование ВС, нужно
оключить гидродвигатель раньше, чем регулируемый параметр до-
стигнет заданного значения (внутри участка АВ). Чем раньше будет
происходить «предварительное отключение», тем меньше будет пе-
ререгулирование. Наиболее эффективным способом предварительно-
го отключения исполнительного элемента является применение об-
ратных связей.
Рассмотрим систему автоматического регулирования скорости
вращения двигателя с безынерционной жесткой обратной связью
(рис. 85).
В этом случае звеном безынерционной жесткой обратной связи
является тяга, соединяющая точку С рычага АВС с поршнем гидро-
двигателя 4.
Если в системе без обратной связи (рис. 20) на рычаг АВС воз-
действие было тольк^Ьсо стороны муфты М (точка Д), то в системе
с безынерционной жесткой обратной связью воздействие на рычаг
98
АВС оказывается как со стороны муфты М. (точка Л), так и со сто-
роны поршня гидродвигателя 4 (точка С).
Рассмотрим протекание переходного процесса (рис. 86). Пусть,
например, в момент времени /==/1 скорость вращения вала увеличи-
лась. (Муфта М центробежного механизма 2 поднимется, а вместе
с ней поднимется точка А рычага АВС. В начале переходного про-
цесса в силу инерционности системы поршень гидродвигателя 4,
а следовательно, и точка С рычага останутся неподвижными. Точ-
ка В рычага поднимется, поршень золотника 3 соединит нагнета-
тельную трубу Ри с трубой Ру. Масло под давлением поступит
в верхнюю полость цилиндра. Поршень гидродвигателя 4 начнет
двигаться вниз, а заслонка 5 по мере своего движения вниз умень-
Рис. 86. График процесса регулирования
в системе с жесткой обратной связью.
шит поступление пара в двигатель. Скорость вращения вала начи-
нает уменьшаться. Одновременно с движением поршня происходит
и движение точки С рычага АВС вниз. Если условно считать точ-
ку А неподвижной, то при опускании точки С вниз происходит вра-
щение рычага АВС по часовой стрелке вокруг точки А. При этом
точка В опускается. В отличие от системы без обратной связи мы
будем иметь в системе с обратной связью движение золотника 3,
обусловленное перемещением поршня гидродвигателя 4 в сторону,
противоположную движению золотника 5, обусловленного переме-
щением муфты М. В связи с этим отклонение исполнительного эле-
мента произойдет не в точке В (рис. 86), а раньше, например, в точ-
ке F При ПуСт2-
Покажем это на движении рычага АВС (рис. 87). Положение
рычага АВС, показанное на рис. 87, /, соответствует установившему-
ся режиму работы системы. Скорость вращения вала п равна за-
данной. Муфта М центробежного механизма занимает положение/!.
Первый этап — вращение рычага АВС вокруг точки С за
время от до начала движения поршня гидродвигателя 4
(рис. 87,2). Точка В рычага займет положение В', при котором про-
изойдет включение гидродвигателя.
Второй этап — вращение рычага АВС вокруг точки А' в те-
чение времени от начала движения поршня гидродвигателя 4 до его
остановки (рис. 87,5). Точка В рычага АВС переместится в точку В".
7* 99
Третий этап — вращение рычага АВС вокруг точки С', обу-
словленное уменьшением скорости вращения (рис. 87,4). Очевидно,
что вращение рычага относительно точки С' будет происходить в те-
чение времени от начала уменьшения скорости вращения до момен-
та отключения гидродвигателя (точка F кривой переходного про-
цесса, рис. 86). В конце третьего этапа точка В" займет положе-
ние В. Это означает, что золотник перекроет трубы Pi и Р2. Гидро-
двигатель отключится. В силу инерционности системы скорость вра-
щения будет продолжать падать (кривая FG, рис. 86).
Рис. 87. Движение рычага АВС системы
автоматического регулирования скорости
вращения вала теплового двигателя
с жесткой обратной связью.
Четвертый этап — вращение рычага АВС вокруг точки С',
вызванное уменьшением скорости вращения (рис. 87,5). Точка В ры-
чага опустится вниз и займет положение В'". Золотник соединит
трубу Р2 с трубой Рн. Теперь масло под давлением будет поступать
в нижнюю часть цилиндра. Поршень гидродвигателя 4 начнет пере-
мещаться вверх. Количество пара, поступающего в объект, увели-
чится, а следовательно, уменьшение скорости вращения из-за инер-
ционности будет тормозиться увеличением поступления энергии
в объект. В точке G кривой переходного процесса (рис. 86) умень-
шение скорости вращения приостановится.
Пятый этап — вращение рычага АВС вокруг точки A'"t
обусловленное движением поршня гидродвигателя 4 вверх (рис. 87,5).
Точка С' переместится в точку С". С движением поршня вверх под-
нимается и заслонка. Количество пара, поступающего в регулируе-
мый объект, увеличивается. Скорость вращения вала также увели-.
100
чивается из-за большей подачи пара. Одновременно с вращением
рычага АВС происходит движение золотника 3 к нейтральному по-
ложению (точка В""). Скорость перемещения поршня уменьшается
в силу постепенного перекрытия трубы Р2 золотником 3 до полного
останова.
Шестой этап — вращение рычага АВС вокруг точки С",
обусловленное увеличением скорости вращения из-за инерционности
системы. В конце периода рычаг займет положение С"4"", при ко-
тором золотник займет нейтральное положение. Произойдет останов
привода (точка Н, рис. 86). Скорость вращения п вала теплового
двигателя оказывается несколько выше заданной скорости враще-
ния Ином-
Рассмотрение переходного процесса можно продолжать и даль-
ше. Однако может оказаться, что переходная ошибка Дм либо бу-
дет отсутствовать в силу того, что дальнейший переход скорости
вращения за установившееся значение /гусТ2 не произойдет, либо пе-
реходная ошибка Дм станет меньше некоторой величины г, когда
практически переходный процесс можно считать закончившимся.
Так выглядит движение рычага АВС по этапам. В действитель-
ности рычаг АВС имеет одно результирующее движение, которое
является результатом сложения отдельных перемещений.
Из рассмотренного следует, что установившийся режим работы
возможен лишь при условии, когда перекрыты трубопроводы Р\ и
Рг, так как в противном случае регулирующий элемент 5 будет ме-
нять поступление пара в тепловой двигатель. Регулирующий эле-
мент 5 займет новое положение. Рычаг АВС после прекращения пе-
реходного процесса займет положение, соответствующее скорости
вращения вала теплового двигателя 1, отличающейся от заданного
значения на величину статической ошибки Д/г, т. е. установившийся
режим наступит при скорости вращения пуСт2» не равной заданному
значению /гНОм.
Сравнивая кривые переходных процессов, происходящих в си-
стеме автоматического регулирования скорости вращения теплового
двигателя с безынерционной жесткой обратной связью (рис. 86,
кривая /), с системой без обратной связи (рис. 86, кривая 2), ви-
дим, что введение безынерционной жесткой обратной связи приво-
дит к более быстрому затуханию переходного процесса, т. е. к уве-
личению устойчивости системы в переходных процессах и уменьше-
нию времени регулирования /р. Однако безынерционная жесткая
обратная связь превращает астатическую систему автоматического
регулирования в статическую. В рассмотренной выше системе стати-
ческая ошибка равна Д/г (рис. 86).
Наличие статизма регулирования — существенный недостаток
систем с безынерционной жесткой обратной связью.
Рассмотрим систему автоматического регулирования напряже-
ния генератора с электрической безынерционной жесткой обратной
связью (рис. 88).
Элементом электрической безынерционной жесткой обратной
связи является дополнительная обмотка 7 электромагнита, включен-
ная на напряжение w0.c, снимаемое с реостата 5.
Элементная схема системы имеет вид, изображенный на
рис. 89.
Выход звена 4 замкнут посредством звена электрической жест-
кой обратной срязй ср входом звена 2, Чтобы уяснить роль элек-
Ю1
грической безынерционной жесткой обратной связи, сначала рассмо-
трим систему без обратной связи. Для этого отбросим дополнитель-
ную обмотку 7 электромагнита. Мы получим астатическую систему
автоматического регулирования напряжения, которую рассматривав
ли ранее (см. рис. 5,а).
Равновесие такой системы возможно только при одном вполне
определенном значении напряжения генератора U. При любом от-
Рис. 88. Система автоматического регу-
лирования напряжения генератора с
электрической жесткой обратной связью.
клонении напряжения генератора от заданного значения движок
преобразующего элемента 3 не будет находиться в «нулевой» точке,
ибо лишь при заданном значении напряжения [/Зад тяговая сила
электромагнита F& будет равна такому значению противодействую-
щего усилия Гм механической пружины 8, при котором движок пре-
Рис. 89. Элементная схема системы с обратной связью.
образующего элемента 3 находится в «нулевой» точке потенциоме-
тра. Следовательно, в зависимости от знака отклонения напряже-
ния U от заданного значения 't/зад по цепи якоря электродвигателя 4
будет протекать электрический ток 1Я и электрический двигатель бу-
дет реагировать на перемещение движка преобразующего элемен-
та 8, одновременно производя перестановку движка регулирующего
элемента 5. Установившийся режим возможен только при положе-
102
нии движка преобразующего элемента 3 в точке О потенциометра.
Однако практическое применение системы без обратной связи
ограничено недопустимо длительно затухающими колебаниями на-
пряжения генератора*около t/зад.
Действительно, пусть, например, в момент времени /=/1 про-
изошло внезапное отклонение напряжения генератора U от заданно-
го значения (рис. 90). Переходный процесс на этом графике для си-
стемы, лишенной жесткой обратной связи, показан кривой 1.
Если не учитывать зону нечувствительности регулятора, то
включение электродвигателя 4 с целью перемещения движка регули-
рующего элемента 5 и образования регулирующего воздействия, на-
Рис. 90. График процесса регулирования
в системе с электрической жесткой об-
ратной связью.
правленного на уменьшение напряжения генератора, произойдет
в момент времени Электродвигатель 4 будет включен все вре-
мя, пока будет отклонение напряжения генератора от заданного зна-
чения, т. е. на всем участке О АВ. Выключение его произойдет в точ-
ке В. Но такое отключение двигателя 4 является слишком поздним,
так как вследствие инерционности системы напряжение будет про-
должать уменьшаться (или увеличиваться). Напряжение на управ-
ляющей обмотке электромагнита окажется ниже заданного (или вы-
ше заданного), а следовательно, тяговое усилие Еэ уменьшится и
противодействующая пружина переместит якорь электромагнита,
а вместе с ним и движок преобразующего элемента 3 так, что про-
изойдут включение электрического двигателя 4 и перестановка движ-
ка регулирующего элемента 5 в обратную сторону. Сопротивление
в цепи возбуждения генератора начнет уменьшаться, а ток возбуж-
дения — увеличиваться. Инерционность системы, ведущая к пониже-
нию напряжения, компенсируется увеличением напряжения из-за ро-
ста тока возбуждения. Эти два процесса приводят к тому, что в точ-
ке С уменьшение напряжения приостановится. Затем на участке CD
вновь происходит рост напряжения. Далее повторяется все снова.
Как видно из схематического рассмотрения процесса регулиро-
вания, затухание переходного процесса может происходить очень
медленно и может оказаться практически неприемлемым.
103
О
а)
Рис. 91. Измерительные элементы
регуляторов напряжения.
за счет изменения
Улучшение качества регулирования достигается введением
безынерционной жесткой обратной связи.
Эффект действия безынерционной электрической жесткости об-
ратной связи сводится к своевременному предварительному отклю-
чению двигателя 4. Отключение должно произойти до того момента,
когда регулируемый параметр достигает заданного значения.
Когда в системе с жесткой обратной связью <(рис. 88) произой-
дет увеличение напряжения генератора (начиная с момента /=/],
рис. 90), тяговое усилие элек-
тромагнита возрастет и дви-
жок преобразующего элемента
3, перемещаясь вверх, обусло-
вит включение регулирующего
элемента 5 в сторону умень-
шения напряжения генератора.
Это достигается увеличением
R в цепи возбуждения генера-
тора. Движок регулировочного
реостата 5 движется так, что
напряжение, снимаемое на об-
мотку обратной связи 7, также
возрастет. По обмотке обрат-
ной связи потечет большой
ток. Произойдет изменение ре-
зультирующей тяговой силы
тока в цепи обратной связи,
а последний «жестко» зависит от перемещения движка регулирую-
щего элемента 5. Обмотка обратной связи включена встречно обмот-
ке измерительного элемента. Следовательно, результирующее тяго-
вое усилие элеткромагнита определяется так:
F О бщ~ F'О F э о. с >
где Го б щ — результирующее тяговое усилие электромагнита;
Г'э — тяговое усилие обусловленное обмоткой 2 электромаг-
нита;
Гэо.с — тяговое усилие обусловленное дополнительной обмоткой
обратной связи 7.
Если в системе, изображенной на рис. 7,а, тяговое усилие опре-
деляется только напряжением генератора, то в системе, выполненной
с жесткой обратной связью (рис. 88), результирующее тяговое уси-
лие определяется напряжением генератора и напряжением обратной
связи «о.с, причем их действия противоположны. Отключение испол-
нительного элемента 4 теперь произойдет не в точке В, как это было
без обратной связи, а раньше, например, в точке F '(рис. 90, кри-
вая 2).
Действительно, сравним измерительные элементы системы без
обратной связи (рис. 91,а) и элемент с жесткой обратной связью
(рис. 91,6). Нейтральному положению движка преобразующего эле-
мента 3 соответствуют вполне определенные и равные значения тя-
говых и механических сил электромагнита, т. е. Гэ для измеритель-
ного элемента системы без обратной связи и ГОбщ для измеритель-
ного элемента системы с жесткой обратной связью.
104
Однако в установившемся режиме электромеханические усилия
рассматриваемых измерительных элементов должны быть равными,
т. е. •/?э=^*'общ> но ^'общ=^,э F30.c, т. е. — -^эо.с> откуда еле*
дует, что для нейтрального положения движка преобразующего эле-
мента сравниваемых систем имеем, что Это неравенство
означает, что отключение исполнительного элемента 4 в системе
с жесткой обратной связью произойдет раньше, т. е. при напряже-
нии, превышающем заданное значение, ибо в общем случае Fa^U.
В силу инерционности системы напряжение будет продолжать умень-
шаться дальше (кривая FG). Тяговая сила Fa электромагнита умень-
шится. Противодействующая пружина переместит движок преобра-
зующего элемента 3 ниже нейтральной точки О. Двигатель 4 движ-
ка регулировочного реостата 5 изменит направление вращения. На-
чиная с момента переходного процесса рис. 90 (точка F, кри-
вая 2), движок регулировочного реостата 5 вращается против часо-
вой стрелки, т. е. в сторону уменьшения дополнительного сопротив-
ления в цепи возбуждения генератора. Ток возбуждения возрастет.
Напряжение генератора приобретает тенденцию к увеличению. Од-
нако в начале кривой FG тенденция к увеличению напряжения пол-
ностью компенсируется уменьшением напряжения из-за инерцион-
ности. Лишь в точке G кривой переходного процесса скорость умень-
шения напряжения становится равной нулю. Движение системы по
инерции в точке G прекратилось.
Теперь, начиная с момента /=/3 (точка G), движение системы,
начинается в сторону повышения напряжения. Выключение регули-
рующего элемента произойдет в точке Н кривой переходного про-
цесса, причем на участке СН (кривая 2) обратная связь тормозит
скорость увеличения напряжения, так как тяговое усилие обмотки
обратной связи действует против тягового усилия обмотки измери-
тельного элемента 2. Это означает, что напряжение генератора
с меньшей скоростью своего изменения приближается к установив-
шемуся значению.
В точке Н переходного процесса результирующее тяговое уси-
лие электромагнита равно такому значению противодействующего
усилия пружины 8,‘ при котором движок преобразующего элемента 3
займет нейтральное положение .(точка О, рис. 88).
При определенных параметрах системы может оказаться, что си-
стемаостанется в состоянии, соответствующем точке Н переходного
процесса, т. е. переходная ошибка станет равной нулю, а также мо-
жет оказаться, что при некоторых других значениях параметров си-
стемы с безынерционной жесткой обратной связью переходный про-
цесс вообще может оказаться апериодическим, т. е. система из точ-
ки А будет двигаться по кривой асимптотически, приближаясь
к установившемуся режиму работы. Однако в последнем случае дли-
тельность переходного режима может оказаться недопустимо
большой.
Важную роль в характере движения системы играет эффектив-
ность безынерционной жесткой обратной связи, т. е. величина коэф-
фициента обратной связи 0.
Итак, введение безынерционной жесткой обратной связи дало
более быстрое затухание переходного процесса (это показывают кри-
вые 1 и 2, рис. 86 и 90). Однако электрическая безынерционная жест-
кая обратная связь ввела в систему статическую ошибку
8 Автоматич. регулирование 105
Отключение исполнительного элемента в системе с безынерцион-
ной жесткой обратной связью происходит при различных установив-
шихся значениях регулируемого параметра, что зависит от величины
нагрузки.
Действительно, различной нагрузке генератора соответствует
различное положение движка регулировочного реостата 5, а следо-
вательно, различное значение тягового усилия обмотки обратной свя-
зи 7.
В установившемся же режиме противодействующее усилие пру-
жины К.уст—величина определенная и постоянная. С другой сторо-
ны, в установившемся режиме Лэбщ обязательно равно /*м.уст, т. е.
^общ. уст =^м.уст =const;
Fобщ.уст = ^ э.уст-^*э.о,с.уст*
При /7э.о.с.уст=уаг, т. е. меняющейся в зависимости от нагрузки
на генератор, будем иметь различные установившиеся значения на-
пряжения генератора, так как
F э.уст==^-
Покажем далее, как влияет на динамические характеристики
наиболее характерных звеньев охват безынерционной жесткой об-
ратной связью. Сначала для рассмотрения возьмем апериодическое
звено.
Уравнение апериодического звена, охваченного безынерционной
жесткой обратной связью, будет иметь вид:
(Гр + 1)Хвых=^ (-£вх----Х0.с)?
откуда с учетом (2-37) получим:
(Тр + 1 )^В ЫХ — k (Хвх-ых)
ИЛИ
77^ВЫх+<(1 +'Р^)ХвыХ = ^ВХ. (2-41)
Разделим правую и левую часть уравнения (2-41) на (1+^₽).
Получим:
Т . k
1 + Хвых — ! ц Хвх
ИЛИ
(T'lpH-1)%в ых ^^iXbxj (2-42)
где
Т t k
Т1~ 1 + Аф и kl~ 1 + Аф*
Из (2-42) видно, что мы получили новое апериодическое звено,
у которого коэффициент усиления k\ всегда меньше коэффициента
усиления апериодического звена, лишенного охвата обратной связью,
так как
k
^1=Т+^<Л при
Точно во столько раз уменьшится и новая постоянная времени
Ть т. е. при введении безынерционной жесткой обратной связи
106
уменьшается инерционность звена, а равно и системы автоматиче-
ского регулирования в целом.
Увеличивая коэффициент обратной связи, мы можем как угод-
но сильно уменьшать постоянную времени Tj, что благоприятно ска-
зывается на улучшении качества регулирования.
Далее рассмотрим влияние безынерционной жесткой обратной
связи на свойства интегрирующего звена.
Уравнение интегрирующего звена, охваченного обратной связью,
имеет вид:
РХвЫХ—k (Хвх--Яо.с) >
откуда с учетом (2-37) получим:
рХвых — k (Хвх—$Хвых)
ИЛИ
(T'lP-}" 1)ЯвЫХ = ^1-£вХ> (2"43)
1 t 1
где Г1=тг и
Из выражения (2-43) вытекает, что интегрирующее звено, охва-
ченное безынерционной жесткой обратной связью, превращается
в инерционное (апериодическое) звено.
Как вывод следует, что если какое-либо звено (или цепь звень-
ев) имело интегрирующее свойство, то при охвате безынерционной
жесткой обратной связью оно его теряет и превращается в так назы-
ваемое позиционное звено. Это положение показано в работе |[Л. 17].
Перейдем к рассмотрению влияния инерционной жесткой обрат-
ной связи на динамические характеристики звеньев. Покажем это
на примере охвата инерционной жесткой обратной связью интегри-
рующего звена.
Уравнение интегрирующего звена, охваченного обратной связью,
имеет вид:
Цхвх- Хо.о). (2-44)
Из (2-38) определим х0.с:
р
Хо.с = 7* п I 1 «^вых» (2-45)
1 о.сР “Г 1
Подставив (2-45) в (2-44), получим:
/ \
(Т'гР2 4" T'lP 4~ 1) ^вых — ( «^вх Т o,G ]>
где
т т 1 ±
'2= ’ Ji и ’
Интегрирующее звено при охвате инерционной жесткой обрат-
ной связью превращается в апериодическое звено второго порядка
при Т^Т2 и в колебательное звено при Т^Т2 с введением произ-
водной. Эффективность введения производной определяется постоян-
ной цремени обратной связи Т0.с- Введение производной в закон ре-
8*
107
гулирования весьма полезно для улучшения процесса регулирова-
ния. Это является ценным свойством инерционной обратной связи.
В то время как инерционное запаздывание в основной цепи воздей-
ствий вредно, инерционное запаздывание в дополнительной обратной
связи полезно: оно эквивалентно введению производной в закон ре-
гулирования.
г) Системы автоматического регулирования
с гибкой обратной связью
В целях повышения устойчивости систем автоматического регу-
лирования и ликвидации статизма регулирования применяют гиб-
кие обратные связи.
Гибкая обратная связь обладает положительными свойствами
жесткой обратной связи и лишена основного ее недостатка: она не
вводит в систему автоматического регулирования статическую
ошибку.
Сущность безынерционной гибкой обратной связи заключается
в том, что она позволяет регулирующему элементу занимать раз- -
Рис. 92. Система автоматического регулирования напряже-
ния генератора с гибкой обратной связью.
личные положения в установившихся режимах при единственном
значении регулируемого параметра. Эффект действия безынерцион-
ной гибкой обратной связи рассмотрим на примере ее применения
в системе автоматического регулирования напряжения генератора
(рис. 92). Элементом электрической гибкой обратной связи являет-
ся дополнительная обмотка 7 электромагнита, включенная на вто-
ричную обмотку трансформатора обратной связи 10.
Элементная схема системы изображена на рис. 89 с тем от-
личием, что вместо элемента жесткой обратной связи 'необходимо
иметь в виду элемент гибкой обратной связи.
В установившемся режиме работы системы, когда движок ре-
гулирующего элемента 5 неподвижен, напряжение, подводимое
к первичной обмотке 9 трансформатора, постоянно, а следователь-
но, по первичной цепи 9 протекает постоянный ток. -Во второй
обмотке 10 э. д. с. не наводится. Ток обратной связи i0.c равен нулю,
108
поэтому тяговое усилие от обмотки обратной связи также будет
равно нулю.
•Рассматриваемая система (рис. 92) в установившемся режиме
работы ничем не отличается от системы без обратной связи. Это
означает, что данная система астатическая. Действительно, в уста-
новившемся режиме двигатель 4 отключен, что возможно при поло-
жении движка преобразующего элемента 3 в точке О потенцио-
метра. При этом F'a=FM=FM.yCT = const, где FM.yCTпротиводей-
ствующее усилие при нейтральном положении преобразующего эле-
мента. Из - этого равенства следует, что тяговое усилие электромаг-
нита установившемся режиме равно одному, вполне определенному
Рис. 93. График процесса регулирования
в системе с гибкой обратной связью.
по величине значению, а следовательно, и напряжение генератора
в установившемся режиме равно одному заданному значению, так
как F'3—kU=const, т. е. U —Uзад=const.
Рассмотрим теперь переходный процесс в системе, выполнен-
ной согласно рис. 92. Пусть в момент t—t\ произошло скачкообраз-
ное уменьшение нагрузки (рис. 93,а). Положим, что заданное зна-
чение напряжения равно (73ад.
С уменьшением нагрузки напряжение генератора увеличивает-
ся. Регулятор должен восстановить нарушенное равенство. В си-
стеме будет происходить переходный процесс.
На рис. 93,6 кривой 1 изображено протекание переходного
процесса в системе регулирования напряжения генератора без об-
ратной связи, а кривой 2 — в системе с гибкой обратной связью.
Начиная с момента времени /=Л, имеем увеличение напряже-
ния. Однако в системе с электрической гибкой обратной связью
увеличение напряжения происходит не по кривой ОА, а по кри-
вой OF.
Действительно, с увеличением напряжения генератора увели-
чивается тяговое усилие, создаваемое обмоткой 2 электромагнита.
Движок преобразующего элемента 3 переместится от нейтральной
точки О вверх. Включится двигатель 4, и движок регулирующего
109
элемента 5, перемещаясь по часовой стрелке, вызывает увеличение
сопротивления обмотки возбуждения генератора.
.'Перемещение движка регулирующего элемента приводит к из-
менению напряжения, прикладываемого к первичной обмотке 9
трансформатора обратной связи. Во вторичной цепи трансформато-
ра наводится э. д. с. По обмотке обратной связи 7 электромагнита
течет ток обратной связи /о.с = ^о.с/^о.с, где и0.с—напряжение,
подводимое к обмотке обратной связи 7 электромагнита; z0.c — со-
противление цепи обратной связи.
Обмотки электромагнита 2 и 7 намотаны так, что возникаю-
щее тяговое усилие дополнительной обмотки обратной связи 7
складывается с тяговым усилием обмотки 2 электромагнита, т. е.
в рассматриваемом случае имеем:
F общ=^,э4"7',э.о.с.
Движок преобразующего элемента 3 получает дополнительное пе-
ремещение вверх. Следовательно, регулирующий элемент 5 допол-
нительно увеличивает сопротивление обмотки возбуждения гене-
ратора.
В результате сказанного скорость возрастания напряжения ге-
нератора в системе с гибкой обратной связью будет меньшая по
сравнению с системой, лишенной гибкой обратной связи. В точке F
скорость возрастания напряжения равна нулю. Отклонение напря-
жения от задающего значения максимальное. Итак, в системе с гиб-
кой обратной связью первый максимальный заброс напряжения
меньше, чем в системе без обратной связи.
За время t2—/4 напряжение генератора уменьшается. Скорость
приближения напряжения к заданному значению меньше, чем
в аналогичной системе автоматического регулирования, но 'без об-
ратной связи. Роль замедлителя протекания процесса выполняет
гибкая обратная связь. С уменьшением напряжения генератора
уменьшается ^общ, движок преобразующего элемента 3 начинает
движение вниз. Однако движок регулирующего элемента 5 продол-
жает движение в сторону увеличения сопротивления обмотки воз-
буждения генератора, но скорость движения движка регулирующе-
го элемента 5 становится все меньше и меньше. Когда движок
преобразующего элемента 3 займет нейтральное положение О, т. е.
когда скорость перемещения движка регулирующего элемента 5 ста-
нет равной нулю, напряжение обратной связи также станет равно
нулю. Действие гибкой обратной связи в рассмотренном направлении
прекратится. Напряжение генератора в этот момент равно заданно-
му значению (точка G кривой 2, рис. 93,6).
В силу инерционности системы напряжение генератора продол-
жает уменьшаться дальше (кривая 2, участок GH). Преобразую-
щий элемент переключит двигатель 4. Регулирующий элемент 5 из-
менит направление отработки. Движок 5 регулировочного реостата
7? перемещается теперь в сторону уменьшения сопротивления цепи
возбуждения генератора. Как и раньше, эффект действия безынер-
ционной гибкой обратной связи сводится к увеличению скорости от-
работки движка регулирующего элемента 5, а значит, в конечном
итоге к уменьшению скорости изменения напряжения генератора.
Поэтому перерегулирование системы с гибкой обратной связью зна-
чительно меньше перерегулирования системы без обратной связи.
ПО
Далее процесс регулирования пройсходит аналогично разобранному.
По мере протекания переходного процесса эффективность дей-
ствия безынерционной гибкой обратной связи уменьшается, а в кон-
це переходного процесса вообще сводится к нулю.
Покажем влияние безынерционной гибкой обратной связи на
свойства апериодического звена. Подставив в уравнение (2-4'1), зна-
чение безынерционной гибкой обратной связи (2-39). Получим:
(7>-М)хВых=6- (Хвх—Ррхвх) (2-46)
или
(T’lP+l )Хвых = ^вх, (2-47)
где T{ = T+k$.
Из выражения (2-47) видно, что при охвате апериодического
звена безынерционной гибкой обратной связью мы вновь получаем
апериодическое звено, но с новой постоянной времени 1\>Т. Охват
апериодического звена безынерционной гибкой обратной связью при-
водит к увеличению постоянной времени звена, что является неже-
лательным. Коэффициент усиления k звена остается неизменным.
При охвате интегрирующего звена (2-44) безынерционной гиб-
кой обратной связью (2-3'9) будем иметь:
РХъ ых — k (Явх—РрХвх )
ИЛИ
Р-^В ЫХ = ^1^ВХл (2-48)
где kt — j +Aj(.
Из (2-48) следует, что мы вновь имеем интегрирующее звено,
у которого коэффициент усиления kx меньше коэффициента усиле-
ния k интегрирующего звена без обратной связи. Принципиально
важно здесь только то, что интегрирующее звено при охвате безынер-
ционной гибкой обратной связью в отличие от простой жесткой об-
ратной связи не теряет интегрирующего свойства.
Наконец, покажем влияние безынерционной гибкой обратной
связи (2-39) на колебательное звено (2-6). Получим:
IT2P2 + (Г1-|-&Р)р“|- 1]Хвых = ^вх. (2-49)
Мы вновь имеем колебательное звено. Известно, что коэффициент
при р характеризует демпфирование колебаний. Следовательно, охват
безынерционной гибкой обратной связью колебательного звена мо-
жет превратить его в апериодическое. Для этого только нужно уве-
личивать коэффициент обратной связи 0. Охват безынерционной
гибкой обратной связью особенно полезен для колебательных звень-
ев с малыми коэффициентами усиления k или по крайней мере там,
где нежелательно снижать его.
Широкое применение в системах автоматического регулирования
находит инерционная гибкая обратная связь. Она обладает преи-
муществами как жесткой обратной связи, так и безынерционной
гибкой обратной связи. Инерционная гибкая обратная связь часто
называется гибкой изодромной обратной связью или просто изо-
дромной обратной связью.
Рассмотрим действие изодромной обратной связи на примере
ее использования в системе автоматического регулирования скорости
вращения теплового двигателя, изображенного на рис. 94.
111
Данная система отличается от системы с жесткой обратной
связью тем, что вместо элемента жесткой обратной связи введен
элемент изодромной (гибкой) обратной связи, состоящий из катарак-
та К и пружины 6 (рис. 95). Цилиндр катаракта соединен жестко
с поршнем гидродвигателя 4, а поршень катаракта связан с точкой С
Рис. 94. Система автоматического регулирова-
ния скорости вращения теплового двигателя
с комбинированной обратной связью.
рычага АВС. Пружина 6 присоединена к точке С и действует на
поршень катаракта. Катаракт представляет собой цилиндр с маслам,
в котором перемещается поршень. Масло протекает из одной полости
в другую или через обводное
К поршню
гидродвигателя
Рис. 95. Изодромный эле-
мент.
отверстие, или через узкое отверстие
в поршне. Для перемещения поршня
катаракта нужно приложить усилие.
Это усилие будет тем больше, чем
меньше проходное сечение отверстий
в поршне и чем больше скорость пе-
ремещения поршня.
В установившемся режиме рабо-
ты пружина 6 расслаблена и точка С
занимает определенное фиксирован-
ное положение, не зависящее От по-
ложения регулирующего элемента 5.
Рассмотрим протекание переход-
ного процесса в системе с изодром-
ной обратной связью.
Пусть в момент времени
произошло скачкообразное уменьше-
ние нагрузки на тепловой двигатель
(рис. 96,а).
При нарушении равновесия, т. е.
установившегося режима, в рас-
112
сматриваемом случае при увеличении скорости -муфта регулятора М
поднимется и увлечет конец А рычага АВС вверх. При этом про-
изойдет соединение маслопровода Pi с трубкой Рн и поршень гидро-
двигателя 4 начнет перемещаться вниз, прикрывая заслонку (регу-
лирующий элемент) 5. Одновременно второй конец штока поршня 4
опустит вниз цилиндр катаракта К.
В начале процесса скорость движения поршня гидр о двигателя 4
•велика, так как верхняя полость цилиндра гидро двигателя 4 окажет-
ся под полным давлением нагнетающей системы. Пружина 6 изо-
дромного элемента стремится удержать поршень катаракта К, т. е.
сохранить неизменным положение точки С рычага АВС. В силу того,
что скорость перетекания масла из верхней полости катаракта в ниж-
Рис. 96. График процесса регулиро-
вания в системе с комбинированной
обратной связью.
нюю мала из-за малости калиброванного отверстия $ поршне,
Поршень катаракта опускается вниз, растяпивая пружину 6.
Это означает, что в начальный момент процесса сила торможе-
ния больше противодействующего усилия пружины 6. 'Конец С ры-
чага АВС опускается вниз (рис. 94). Происходит вращение рычага
вокруг шарнира А муфты М. При этом золотник 3 опускается вниз,
перекрывая трубу Pi, а следовательно, уменьшается скорость дви-
жения поршня гидр о двигателя 4.
Для простоты примем, что насколько точка В рычага АВС под-
нимается вверх при увеличении оборотов, настолько она опустится
вниз за счет движения катаракта вниз как жесткого тела. Нетрудно
видеть, что, условно принимая в первый момент катаракт за же-
сткое тело, мы имеем жесткую связь между поршнем серводвигателя
4 и точкой С рычага АВС. Действие такой связи нами разобрано
при рассмотрении жесткой обратной связи.
'Остановка поршня серводвигателя произойдет тогда, когда зо-
лотник 3 перекроет полностью трубу Р\.
Если в системе без жесткой обратной связи отключение серво-
двигателя происходит в точке С (кривая /, рис. 96), что соответству-
ет заданной скорости вращения, то в рассматриваемом случае отклю-
чение серводвигателя произойдет тогда, когда скорость, уменьшаясь,
113
не достигнет своего заданного значения, например, в точке D (кри-
вая 2).
На рис. 97 показано положение рычага АВС, соответствующее
установившемуся режиму (позиция 1), и положение рычага АВС,
соответствующее моменту переходного режима, когда действие изо-
дромной обратной связи как жесткой обратной связи прекратилось
(позиция 2).
Рассмотрим теперь протекание переходного процесса, обуслов-
ленное инерционностью действия изодромного элемента.
В точке D переходного процесса (рис. 96, кривая 2) пружина 6
растянута. Под действием упругих сил растянутой пружины создает-
ся разность давлений под и над поршнем катаракта. 'Масло проте-
кает в нижнюю полость. Поршень катаракта движется вверх. При
Рис. 97. Схема перемещения элементов регуля-
тора с изодромом.
этом точка С рычага АВС начинает движение к положению, соответ-
ствующему заданной скорости. Происходит вращение рычага АВС
вокруг шарнира А муфты М, Золотник приоткрывает доступ масла
в верхнюю* полость цилиндра гидродвигателя 4. Далее следует до-
полнительное движение поршня гидродвигателя 4 вниз; заслонка 5
прикрывает доступ пара в тепловой двигатель 1. Скорость враще-
ния п продолжает падать, приближаясь к заданному значению. Гру-
зики центробежного измерительного элемента 2 сходятся. Муфта М
опускается, что приводит к перекрытию трубопроводов Р\ и Р2- По
мере приближения скорости вращения п к заданному значению пзад
к положению, соответствующему заданной скорости вращения, при-
ближаются точки Л и С рычага АВС. Золотник 3 перекроет тру-
бопроводы Pi и ?2- Процесс восстановления установившегося режи-
ма закончится.
Таким образом, процесс регулирования в системе с изодромной
обратной связью можно условно представить протекающим по двум
циклам.
Первый цикл. Регулирование протекает так же, как и в си-
стеме с жесткой обратной связью. Особенностью этого цикла являет-
ся эффективное воздействие регулятора на систему, приводящее к бы-
строму приближению регулируемого параметра к овоему заданному
значению. При этом параметр не достигает заданного значения на
величину статической ошибки Дп (рис. 96, момент времени t=t2).
114
Второй цйкл. Уничтожение статической ошибки •регулиро-
вания. Достигается это действием изодромного элемента. Рычаг АВС
в конце цикла занимает положение, соответствующее установивше-
муся режиму работы. При этом регулирующий элемент 5 может за-
нимать различные положения. Отсутствие жесткой связи между
регулирующим элементом 5 и преобразующим элементОлМ 3 — основ-
ной фактор, позволяющий получить астатическое регулирование.
Этот процесс регулирования описан схематично. В действитель-
ности нет определенной последовательности перемещений и воздей-
ствий. Процесс восстановления нарушенного равновесия (переход-
ный процесс) обусловливается одновременно воздействиями, описан-
ными в обоих циклах.
Из рассмотрения процесса регулирования системы с изодромной
обратной связью можно сделать следующие выводы.
Применение изодромной обратной связи повышает устойчивость
системы автоматического регулирования и позволяет получить регу-
лирование без статической ошибки.
ГЛАВА ТРЕТЬЯ
САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
10. СИСТЕМЫ С САМОНАСТРОЙКОЙ ПРОГРАММЫ
(ЭКСТРЕМАЛЬНЫЕ СИСТЕМЫ)
Прежде-чем говорить о конкретном устройстве и принципе дей-
ствия систем экстремального регулирования, рассмотрим постановку
задачи об экстремальном регулировании в более общем виде.
В любой системе автоматического регулирования между регули-
рующим воздействием и состоянием регулируемого объекта суще-
ствует определенная функциональная зависимость, которая мо^сет
быть названа характеристикой регулируемого объекта.
Экстремальную систему можно создать только тогда, когда
характеристика регулируемого объекта имеет экстремум, отвечающий
требуемому режиму работы системы, причем для создания систем
экстремального регулирования, кроме наличия характеристики с экс-
тремумом, не требуется знания ни формы связи между состоянием
регулируемого объекта и регулирующим воздействием, ни коли-
чественных данных об этой связи.
Задача системы экстремального регулирования сводится к авто-
матическому поиску и поддержанию на найденном уровне такого
значения регулирующего воздействия, которое соответствует опти-
мальному режиму работы регулируемого объекта. Под оптимальным
режимом следует понимать такой режим работы, при котором неко-
торая функция ср регулирующего воздействия z принимает макси-
мальное или минимальное значение (рис. 98) ф(г)=фмакс или
ф(г)=1фМИн. Примером оптимальных режимов работы регулируемых
объектов могут служить: максимальное значение к. п. д. двигателя,
максимальная дальность полета самолета при минимальном расходе
115
Топли-ва, 'минимальное потребление системой энергии, 'Минимум пО-
терь в производстве и другие величины.
Предположим, имеется двигатель внутреннего сгорания, мощ-
ность которого требуется поддерживать максимальной. Известно,
что мощность двигателя является функцией расхода топлива при
постоянном отношении подач воздуха и топлива.
Рис. 98. Экстремальные характеристики регулируемых
объектов.
Здесь регулирующим воздействием является изменение расхода
топлива, а показателем экстремума — максимальная мощность. Для
получения максимальной мощности двигателя необходимо расход
топлива поддерживать на определенном уровне. Однако из-за изме-
нения внешних условий (температуры, качества топлива и др.)
Рис. 99. Экстремальные характеристики регули-
руемых объектов при разных значениях возму-
щающих воздействий.
нельзя подобрать какой-либо неизменный режим работы двигателя,
который в течение всего времени работы был бы оптимальным.
‘В процессе работы под влиянием изменения внешних условий
характеристика регулируемого объекта может деформироваться и
перемещаться по неизвестному заранее закону (рис. 99), поэтому
показатель экстремума не остается величиной постоянной, а меняет
116
свое положение. Причины, вызывающие перемещение и деформацию
характеристик, могут быть также заранее неизвестны и не контро-
лируются. Следовательно, в рассматриваемом примере отдаваемая
двигателем мощность с течением времени за счет изменения внеш-
них условий уже не будет максимальной. Точно предусмотреть тре-
буемый закон изменения максимальной мощности двигателя во вре-
мени обычно не представляется возможным. Сказанное в равной сте-
пени относится и к другим регулируемым объектам, обладающим
экстремальной характеристикой. Поэтому в процессе регулирования
необходимо периодически или непрерывно следить за режимом рабо-
ты системы, анализировать состояние регулируемого объекта и через
настройку воздействовать на регулятор таким образом, чтобы режим
работы объекта стал оптимальным.
При ручной перенастройке системы автоматического регулирова-
ния поиск показателя экстремума, и воздействие через настройку
на регулятор должен вести человек.
В системах экстремального регулирования функции человека
переданы специальному устройству, которое автоматически воспри-
нимает и анализирует состояние регулируемого объекта и осуще-
ствляет поиск показателя экстремума.
Автоматический поиск экстремума в ряде случаев ведется путем
периодического задания регулирующему элементу пробных движе-
ний и на основании этих пробных движений в результате анализа
определяется необходимое направление дальнейшего перемещения
регулирующего элемента, ведущее к экстремуму.
Из сказанного следует, что, заменив настройку в системе авто-
матического регулирования постоянного параметра (рис. 5,6) устрой-
ством, автоматически анализирующим состояние регулируемого объ-
екта и осуществляющим поиск показателя экстремума, получим одну
из возможных схем системы экстремального регулирования
(рис. <Г0(М). Сказанное распространяется и на систему автоматиче-
ского программного регулирования и на следящую систему. В этом
случае устройством автоматического поиска экстремума необходимо
заменить соответственно программный и задающий элементы.
При таком включении устройства автоматического поиска экстре-
мума в системе экстремального регулирования образуется дополни-
тельная обратная связь.
Значительно чаще устройство, автоматически анализирующее со-
стояние регулируемого объекта и осуществляющее поиск экстрему-
ма, включают в основной контур регулирования (рис. 100,6). В такой
схеме анализ состояния регулируемого объекта и выработка необ-
ходимых сигналов для работы исполнительного элемента осуще-
ствляются в устройстве формирования управляющего сигнала. Это
устройство может содержать в своем составе запоминающие элемен-
ты, элементы логического действия, дифференцирующие элементы,
фазовые дискриминаторы и др.
Экстремальным регулятором называется уст-
ройство, обеспечивающее поиск оптимального
режима работы регулируемого объекта и поддер-
жание этого режима на найденном оптимальном
уровне. Экстремальный регулятор часто называ-
ют автоматом оптимизации, автоматическим оп-
тимизатором, экстремум-регулятором или авто-
матическим экстремальным регулятором.
117
'Регулируемый объект может иметь один или несколько пока-
зателей экстремума, которые в свою очередь зависят от одной или
(нескольких переменных величин.
Случай, когда один показатель экстремума является функцией
одной переменной величины, наиболее простой и встречается до-
вольно часто. Поэтому в -процессе дальнейшего изложения будут
aj
Источник
Рис. 100. Элементные схемы систем экстремального регулиро-
вания.
рассмотрены системы, имеющие один показатель экстремума, зави-
сящий только от одной переменной величины.
Существует несколько способов нахождения экстремума.
IK ним относятся: 1) способ последовательных шагов; 2) способ
наложения вынужденных гармонических колебаний; 3) способ запо-
минания экстремума; 4) способ взятия производной.
118
Способ последовательных шагов. Поток экстрему-
ма способом последовательных шагов сводится к тому, что через
определенные интервалы времени, называемые шагами, регулирую-
щее воздействие z принудительно изменяется на величину Дг
(рис. 101,а). Полученные в начале и в конце каждого шага значе-
ния величины i<p, характеризующие состояние (регулируемого объек-
та, сравниваются между собой. Если разность <р2—Ф1=Д|Ф отрица-
тельна, то в экстремальных системах, работающих на максимум,
осуществляется реверс исполнительного элемента и последующий
шаг ведется в сторону, противоположную предыдущему.
Если же за время рассматриваемого шага величина ф увеличи-
вается, то последующий шаг осуществляется в ту же сторону, что и
предыдущий, и регулирующий элемент будет перемещаться в на-
правлении экстремума.
После прохода экстремума величина Дер меняет знак на обрат-
ный, вызывая реверс исполнительного элемента.
В результате относительно точки экстремума возникают непре-
рывные колебания.
Любое смещение характеристики регулируемого объекта, а сле-
довательно, изменение положения показателя экстремума вызовут
новый процесс поиска. Исходной точкой поиска теперь будет точка,
соответствующая значению регулирующего воздействия z3.
Таким образом, автомат оптимизации шагового типа осуще-
ствляет поиск по программе, состоящей из следующих операций:
11) подготовка схемы к очередному циклу (стирание предыду-
щих сигналов в запоминающем устройстве);
2) запоминание текущего состояния регулируемого объекта;
в)1 принудительное изменение регулирующего воздействия в ка-
кую-либо сторону на величину Дг;
4) запоминание нового состояния регулируемого объекта;
5)' сравнение состояний регулируемого объекта, полученных в на-
чале и в конце каждого шага, и в зависимости от знака разности
ф2—<Pi подготовка исполнительного элемента для соответствующего
срабатывания его при очередном шаге.
Все переключения, обеспечивающие выполнение программы поис-
ка экстремума, осуществляются так называемым тактовым генера-
тором.
1На рис. 101,6 изображена схема автоматического поиска резо-
нансной частоты контура способом последовательных шагов. Величи-
ной z в данном случае служит угол поворота ротора конденсатора С,
а величиной ср — амплитуда напряжения на колебательном контуре.
Напряжение, снимаемое с контура после детектора, через кон-
такты тактового генератора подается на запоминающее устройство,
собранное на двойном триоде (лампа Л).
Тактовый генератор представляет собой один или несколько ша-
говых искателей, приводимых в движение генератором импульсов.
Работа схемы начинается с замыкания контактов 1 шагового
искателя. При этом срабатывает реле и через его замкнутые
контакты запоминающие конденсаторы Ci и С2 разряжаются. Схема
готова к очередному циклу.
Далее тактовый генератор замыкает контакты 2 шагового иска-
теля. Реле Pi обесточивается. Напряжение, характеризующее состоя-
ние контуоа LC, подается на запоминающий конденсатор
119
Рис. 101. Экстремальная
система с поиском экстремума по способу последовательных шагов.
На третьем этапе контакты 2 шагового искателя размыкаются,
а контакты 3 замыкаются. Реле Р2 срабатывает и на двигатель Дв
подается питание через контакты двухпозиционного поляризованного
реле Р/7ь
Двигатель за время замкнутого состояния контактов реле Р2
поворачивает ротор конденсатора С на некоторый угол Ala. Настрой-
ка контура изменяется. Следующий этап работы сводится к размы-
канию контактов 3 шагового искателя и замыканию контактов 4.
Двигатель Дв обесточивается. Напряжение, характеризующее новое
состояние контура LC, подается на запоминающий конденсатор С2.
Одновременно срабатывает реле Рз> подключающее поляризованное
двухпозиционное реле РП[ к анодам лампы Л. Напряжения, подан-
ное на конденсаторы С! и С2, сравниваются между собойЛВ зави-
симости от разности напряжений на запоминающих конденсаторах
Ci и С2 реле РП\ замкнет одну из цепей управления двигателем.
Реле РП1 подключается к анодам лампы Л через контакты двух-
позиционного поляризованного реле Р/72, которое управляется тахо-
генератором Тр. Тахогенератор жестко связан с двигателем Де, по-
этому полярность напряжения, подаваемого с тахогенератора на ре-
ле Р772, зависит от направления вращения двигателя.
Сочетание реле РП\ и Р/72 представляет собой элемент логиче-
ского действия, позволяющий выбирать нужное напр-авление враще-
ния двигателя при очередном шаге с учетом его направления вра-
щения во время предыдущего шага.
Если предыдущий шаг -был -сделан системой в сторону экстре-
мума, то в элементе логического действия никаких переключений не
происходит.
Если во время предыдущего шага система ушла от экстремума,
то одно из двух поляризованных реле переключится и последующие
шаги -б&дут сделаны в сторону приближения к экстремуму.
В рассмотренном примере в течение цикла производится только
один шаг. Существуют автоматы оптимизации шагового типа, вы-
полняющие поиск по несколько иной программе, а именно:
1) запоминается текущее значение величины <р;
2) выполняется так называемый «пробный шаг», который задает-
ся через равные промежутки времени. 'Направление и величина
«пробного шага» неизменны. По окончанию действия шага регули-
руемый объект возвращается к исходному состоянию;
13) в конце действия «пробного шага» запоминается новое зна-
чение величины ср;
4) сравниваются запомненные значения величины ф ^цо начала
и к моменту окончания действия «пробного шага» и выполняется «ра-
бдчий шаг» в направлении приближения к экстремуму.
Способ наложения в ын у жд ен н ы х колебаний.
Если на- регулируемый объект подать совместно с регулирующим
воздействием сигнал, представляющий собой гармонические колеба-
ния сравнительно небольшой амплитуды, то величина ф получит
дополнительную переменную составляющую (рис. -102,а).
Как следует из рис. 102,а, при работе системы на левой части
экстремальной характеристики фаза наложенного на регулирующее
воздействие сигнала (в дальнейшем будем именовать его поисковым)
совпадает с фазой дополнительной переменной составляющей вели-
чины ф. При переходе через экстремум дополнительная переменная
составляющая величины ф изменяет фазу на 1180°.
9 Автоматич. регулирование 121
Рис. 102. Экстремальная система с поиском экстремума по способу наложения вынужденных коле-
баний.
Сравнивая фазу дополнительной переменной составляющей ве-
личины ср с фазой поискового сигнала, можно определить направ-
ление регулирующего воздействия, при котором величина ср стре-
мится к экстремуму. 'В случае работы .на экстремальной точке сиг-
нал сравнения должен 'быть равен нулю. Таким образом, для созда-
ния системы автоматического поиска экстремума по способу вынуж-
денных колебаний необходимо:
!1) специальным генератором сформировать поисковый сигнал
небольшой амплитуды и частоты и подать на регулируемый объект;
2) выделить составляющую величины ср, полученную в резуль-
тате действия на объект поискового сигнала;
’3) фазовым дискриминатором или фазочувствительным выпря-
мителем определить, в фазе или в противофазе находятся поисковый
сигнал и составляющая величины ср, полученная на выходе регу-
лируемого объекта в результате действия на объект генератора по-
искового сигнала;
4) сигналом сравнения, снимаемым с выхода фазового дискрими-
натора, управлять исполнительным элементом, причем система долж-
на быть сконструирована так, чтобы исполнительный элемент, реаги-
руя на сигнал сравнения, воздействовал на регулирующий элемент
в направлении приближения величины ср к экстремуму.
В системах экстремального регулирования, построенных на прин-
ципе наложения вынужденных гармонических колебаний, поисковый
сигнал подается непрерывно, поэтому часто такие системы именуют
системами экстремального регулирования с непрерывным поисковым
сигналом, или системами экстремального регулирования с модели-
рующими воздействиями.
Рассмотрим схему автоматического поиска резонансной частоты
контура, построенную на принципе наложения вынужденных колеба-
ний (рис. 1102,6).
Регулируемым объектом здесь является контур LCC\. Настрой-
ка контора на резонансную частоту осуществляется конденсатором
переменной емкости С, ротор которого приводится во вращение ре-
версивным двигателем Дв\. Сигнал управления двигателем Дв\ фор-
мируется в фазочувствительном выпрямителе.
Поисковый сигнал создается за счет вращения с постоянной
скоростью ротора конденсатора емкость которого сравнительно
невелика. Вращение ротора конденсатора С\ вызывает небольшие
периодические отклонения частоты контура LCC\.
Скорость вращения ротора конденсатора С{ выбирается во мно-
го раз больше скорости вращения ротора конденсатора С, и в то
же время частота поискового сигнала, получаемая за счет вращения
ротора конденсатора должна быть во много раз меньше резо-
нансной частоты контура LCC\.
После детектирования напряжение частоты поискового сигнала,
снимаемое с контура LCC\, подается на вход фазочувствительного
выпрямителя.
Синхронно с вращением ротора конденсатора Сх двигатель Дв2
вращает ротор конденсатора C'i, который имеет такую же емкость,
как конденсатор
После детектирования напряжение частоты поискового сигнала,
снимаемое с контура LiC/, подается в качестве опорного напряже-
ния на фазочувствительный выпрямитель. Работа фазочувствительно-
го выпрямителя сводится к следующему. Возникающие в двух по-
9* 123
левинах вторичной обмотки трансформатора Тр .напряжения равны
•по величине, но противоположны по фазе. Допустим, что напряже-
ние в верхней половине трансформатора Тр совпадает по фазе
с опорным, а в нижней половине — находится в противофазе с ним.
В этом случае напряжение в верхней половине трансформатора
складывается с опорным, а в нижней — вычитается из него.
В результате напряжение на лампе Л\ будет больше, чем на
лампе Л2, и ток, протекающий через сопротивление будет больше
тока, протекающего через сопротивление Rt. Падение напряжения
на R$ будет больше падения напряжения на R^. Поскольку напря-
жения и₽8 и U действуют навстречу друг другу, то на выходе
выпрямителя будет действовать напряжение, равное разности U —
—UПри изменении фазы на входе выпрямителя U% станет боль-
ше и напряжение на выходе изменит полярность.
Таким образом, на фазочувствительном выпрямителе фазы опор-
ного напряжения и напряжения, снимаемого с регулируемого объек-
та и имеющего частоту поискового сигнала, сравниваются и
в зависимости от соотношения фаз этих двух напряжений поляризо-
ванное трехпозиционное реле, включенное на выходе фазочув-
ствительного выпрямителя, замыкает управляющую цепь двигателя
Дву таким образом, чтобы перемещать ротор конденсатора С
в направлении к экстремуму.
Способ запоминания экстремума. Данный способ
поиска заключается в следующем. На регулируемый объект оказы-
вается такое воздействие, при котором величина ср стремится к экст-
ремуму (рис. 103,а). После достижения экстремума и фиксации его
специальным запоминающим устрдйством первоначальное воздей-
ствие на регулируемый объект не меняется и величина кр начинает
уменьшаться. Когда разность между экстремальным и текущим зна-
чениями <рэ—<р достигает заданной величины, направление воздей-
ствия на регулируемый объект меняется на обратное, возвращая
величину кр к экстремуму.
•В результате относительно экстремального значения возникают
непрерывные колебания. Амплитуда колебаний относительно экстре-
мума зависит от соотношения параметров системы.
На рис. 103,6 изображена схема автоматического поиска резо-
нансной частоты контура способом запоминания экстремума.
Напряжение, снимаемое с контура LC после детектора, подается
одновременно на два входа мостовой (балансной) схемы усилителя
постоянного тока. В такой схеме два плеча образованы триодами;
а два других плеча — сопротивлениями Да и Ra*t Параллельно вхо-
ду левой половины лампы включен запоминающий конденсатор Ci,
напряжение на который подается через диод Д. В измерительную
диагональ моста между точками а и б включено двухпозиционное
поляризованное реле Р/71, настроенное для работы током одного на-
правления. Реле РП[ воздействует на исполнительный элемент —
реверсивный двигатель Де, который в свою очередь вращает ротор
конденсатора С, изменяя состояние контура LC.
При подаче на оба входа усилителя одинаковых напряжений
мост уравновешен »и напряжение между точками а и б равно нулю.
Обмотка реле обесточена, и двигатель вращается в сторону увели-
чения напряжения на контуре.
124
Рис. 103. Экстремальная система с поиском экстремума по способу запоминания.
'В том случае, когдз напряжение на сетке левой половины лам-
пы Л больше напряжения на сетке правой половины, проводимость
этих ламп неодинакова. Равновесие моста нарушается. Через обмот-
ку реле РГЦ протекает ток, пропорциональный разности входных
сигналов, и реле срабатывает. Направление вращения двигателя
•меняется на противоположное.
Пусть в некоторый момент времени напряжение на контуре име-
ет значение, соответствующее величине (pi (рис. 103,а). Поскольку
напряжения, -подаваемые на оба входа усилителя, равны, то реле
РП1 обесточено и двигатель вращает ротор конденсатора С в сторо-
ну, вызывающую увеличение напряжения на контуре. Когда напря-
жение на контуре достигнет максимума и начнет уменьшаться, диод
Д запрется. Максимальное значение напряжения запоминается на
конденсаторе
Дальнейшее воздействие на объект в том же направлении пове-
дет к уменьшению напряжения на контуре. При этом на сетке пра-
вой половины лампы Л напряжение станет меньше, чем на сетке
левой половины лампы. Реле РГЦ срабатывает, изменяя направление
вращения двигателя.
'Напряжение на контуре вновь начнет увеличиваться. За счет
инерционности система пройдет точку экстремума и затем начинает
возвращаться к нему с обратной стороны. Таким образом, система
будет работать в автоколебательном режиме, следя за экстремумом.
Так же как и в схеме, осуществляющей поиск экстремума спо-
собом последовательных шагов, в данной схеме предусмотрено
устройство, позволяющее учитывать направление вращения двига-
теля Дв. Это устройство состоит из тахогенератора Тг, жестко свя-
занного с двигателем Дв, и поляризованного двухпозиционного реле
Р/72. Реле РП2 питается напряжением тахогенератора, и положение
контактов реле зависит от направления вращения двигателя. Учет
направления вращения двигателя, воздействующего на регулирую-
щий элемент, является принципиально необходимым (Л. И].
Любое смещение характеристики регулируемого объекта, а сле-
довательно, изменение положения показателя экстремума вызовут
новый процесс поиска. Исходной точкой поиска теперь будет точка,
соответствующая значению регулирующего воздействия г2.
В том случае, если новое значение показателя экстремума будет
выше прежнего, запоминающий конденсатор в процессе поиска бу-
дет дозаряжаться до напряжения, соответствующего новому зна-
чению показателя экстремума.
Если новое значение показателя экстремума будет ниже преж-
него, то запоминающий конденсатор будет в процессе поиска раз=
ряжаться по цепи /?'с.к *, /?к до напряжения, соответствующего но-
вому значению показателя экстремума.
Для простоты изложения мы рассмотрели схему автомата опти-
мизации с запоминанием максимума. Можно создать схему, в кото-
рой автомат оптимизации будет находить минимум.
Способ взятия производной. Допустим, что в системе,
имеющей экстремальную характеристику, показанную на рис. 104,а,
регулирующее воздействие z в процессе работы получило прираще-
ние Дг. При этом слева от экстремума величина у увеличится
* 7?с.к — сопротивление участка сетка — катод.
126
на Ду и отношение д^->0, а справа от экстремума — уменьшится
Ду
и отношение д^- < 0.
Если Дг б, т. е. величина z уменьшается, то слева от экстре-
мума величина у уменьшается (Ду < 0), а справа — увеличивается
Ду
(Ду>0). Таким образом, опять слева от экстремума
Ду
а справа ду- < 0.
_ Ду
Следовательно, по знаку отношения д^- можно судить о том,
на какой половине экстремальной характеристики работает система,
и в соответствии с этим воздействовать на исполнительный элемент,
приближая режим работы системы к экстремальному.
Ду
Заменяя отношение конечных приращений д^~ производной
d?
gj-, можно сказать, что для определения направления регулирую-
щего воздействия необходимо знать знак производной.
При практическом осуществлении схемы экстремального регу-
лирования способом взятия производной в систему регулирования
вводятся дифференцирующие элементы, с помощью которых вели-
чины у и z дифференцируются по времени.
Полученные в результате дифференцирования напряжения, про-
dy dz
порццональные производным *^7 и "3F’ подаются на делитель, на
dy dz
котором в результате деления на выделяется напряжение,
dy
пропорциональное (рис. 104,6”). Воздействуя этим напряжением
на цепь управления исполнительного элемента таким образом,
dy
чтобы производная все время была равна нулю, можно незави-
симо от изменения внешних условий поддерживать режим работы
регулируемого объекта оптимальным.
Существуют схемы, в которых напряжения, пропорциональные
dy dz
Производным и -jj-, подаются не на делитель, а на элемент
логического действия, в котором вырабатывается сигнал управления
исполнительным элементом в направлении приближения величины у
к экстремуму.
Пример такой схемы применительно к задаче настройки коле-
бательного контура изображен на рис. '104,в.
Напряжение, характеризующее состояние контура, после детек-
тирования и усиления подается на дифференцирующую цепочку,
127
состоящую из конденсатора Ci и активного сопротивления /?ь Лю-
бые изменения напряжения на входе дифференцирующей цепочки
будут вызывать соответствующее изменение заряда конденсатора.
Таким образом, по (величине изменения напряжения на конденсато-
ре можно судить о всех изменениях напряжения, происшедших за
некоторый интервал времени t. Нетрудно показать, что напряжение,
снимаемое с сопротивления 7?i, пропорционально производной от
напряжения UK на контуре по времени t:
dU«
uRrR'C1 ~dT"> (3-1)
здесь RiCi — постоянная времени дифференцирующей цепочки.
б)
Рис. 104. Экстремальная система с поиском
128
Чем больше RiCh тем больше «время, необходимое для того,
чтобы после изменения напряжения UK на контуре напряжение на
сопротивлении Ri точно определялось равенством (3-:1).
Напряжение URi управляет поляризованным двухпозиционным
реле РП1, цепь питания которого в свою очередь управляется поля-
ризованным двухпозиционным реле РПъ. Реле РП% питается напря-
жением, вырабатываемым тахогенератором Тг. Напряжение на за-
жимах тахогенератора пропорционально производной от угла пово-
рота оси тахогенератора по времени:
__ da
где a — угол поворота оси тахогенератора, k — коэффициент про-
порциональности.
Следовательно, тахогенератор также является дифференцирую-
щим элементом. Полярность напряжения на зажимах тахогенератора
будет зависеть от направления вращения двигателя Де, т. е. от на-
правления регулирующего воздействия.
Схема, состоящая из реле РТЦ и Р/72, представляет собой эле-
мент логического действия. Рассмотрим его работу.
Пусть в некоторый момент времени система работает на левой
части экстремальной характеристики (рис. 104,а), стремясь к экстре-
экстремума спо/Ьбом взятия производной.
129
муму. При этом напряжение на контуре растет и конденсатор С\
заряжается. 'Потенциал точки а выше потенциала точки б. После
прохода экстремума напряжение на контуре начинает уменьшаться.
Конденсатор разряжается, и потенциал точки б становится выше
потенциала точки а.
Контакт поляризованного реле Р/71 перебрасывается вниз, ре-
версируя двигатель Дв. Изменение направления (вращения двига-
теля вызовет рост напряжения на контуре, а следовательно, доза-
ряд конденсатора С\ и изменение полярности напряжения на со-
противлении Ль Потенциал точки а опять станет выше потенциала
точки б. Однако одновременно с изменением полярности напряже-
ния на сопротивлении изменяется полярность напряжения на за-
жимах тахогенератора Тг и контакты реле РП2 перебрасываются
вверх. Поэтому двигатель не реверсируется, а продолжает работать,
уменьшая величину z (угол поворота ротора конденсатора С) и
увеличивая величину <р (напряжение на контуре). После прохода
экстремума напряжение на контуре снова начинает уменьшаться
Конденсатор Ci разряжается, потенциал точки б становится выше
потенциала точки а, и контакты реле РП\ перебрасываются снова
вниз, реверсируя двигатель Дв. Продолжая подобные рассуждения,
можно показать, что вокруг точки экстремума возникают непрерыв-
ные колебания.
11. СИСТЕМЫ С САМОНАСТРОЙКОЙ ПАРАМЕТРОВ
(СОБСТВЕННО САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ)
В § 10 рассмотрены самонастраивающиеся системы автомати-
ческого регулирования, работающие в режиме поиска наивыгодней-
шей программы регулирования. Причиной поиска такой программы
является стремление получить оптимальный режим работы регули-
руемого объекта и тем самым иметь минимальные затраты мате-
риальных средств при максимально возможной эффективности дей-
ствия системы в целом.
Рассмотрим самонастраивающиеся системы автоматического ре-
гулирования, но в отличие от выше разобранных с самонастройкой
параметров регулятора.
Необходимость перенастройки параметров вызывается следую-
щими причинами.
Параметры и характеристики объекта регулирования могут из-
меняться во времени. Динамика таких объектов описывается диффе-
ренциальными уравнениями с переменными коэффициентами. Если
известны законы изменения параметров, то можно заранее по опре-
деленному закону изменять коэффициенты регулятора с тем, чтобы
в конечном итоге иметь наилучшее качество работы системы в це-
лом. При автоматическом способе перенастройки параметров регу-
лятора по определенной программе будем иметь простейшую систе-1
му с самонастройкой параметров.
В ряде случаев законы изменения параметров объекта регули-
рования неизвестны либо в силу того, что они мало изучены, либо
потому, что они зависят от случайных факторов и носят случайный
характер овоего изменения по времени. К таким объектам, напри-
мер, 'Относятся доменные и мартеновские печи, прокатные и электро-
трубосварочные станы, объекты химической промышленности, энер-
госистемы, летательные аппараты и др. Во всех случаях приходится
130
прибегать к самонастройке параметров регуляторов по заданному
показателю качества работы той или иной системы. Очевидно, что
такая система должна иметь устройство для измерения параметров
объекта регулирования. Это опознование будет полным, если опре-
деляются динамические характеристики, передаточная функция,
амплитудно-фазовая частотная характеристика, уравнение объекта
и т. п., или частичным, если определяются коэффициенты усиления,
коэффициент демпфирования объекта, передаточные коэффициенты.
Наконец, необходимость перенастройки параметров может быть
обусловлена воздействием на объект регулирования внешних возму-
щающих факторов. Эти возмущения либо вообще не поддаются
учету, либо законы изменения их носят случайный характер, так
как, возникая в результате воздействия случайных величин, они
сами становятся случайными. Случайный характер воздействия на
систему автоматического регулирования может стать причиной рас-
стройки системы, причиной появления недопустимых отклонений ре-
гулируемого параметра от заданного оптимального значения. Тогда
возникает необходимость, не изменяя структуры системы, так изме-
нять параметры, чтобы компенсировать влияние внешних возму-
щений на качество работы системы. Система как бы должна обла-
дать -способностью приспосабливаться к внешним условиям.
В самонастраивающихся системах с фиксированной структурой
способность приспосабливаться к изменяющимся внешним условиям
достигается за счет автоматической перенастройки параметров регу-
лятора без нарушения их структуры.
Йтак, автоматическая перенастройка параметров регулятора вы-
звана либо отсутствием достоверных данных о динамических пара-
метрах объекта, либо их нестационарностъю, либо, наконец, неста-
ционарностью внешних возмущающих факторов.
Система с самонастройкой параметров — это такая система, ко-
торая обладает способностью в той или иной мере приспосабли-
ваться к изменяющимся внешнцм условиям.
)На рис. 105 изображена элементная схема самонастраивающейся
системы автоматического регулирования с самонастройкой парамет-
ров. Рассматривая ее, мы легко можем выделить наличие основного
контура — контура стабилизации регулируемого параметра и допол-
нительного контура — контура самонастройки. Основной контур ни-
чем не отличается от обычного замкнутого контура, присущего си-
стеме автоматического регулирования.
Наличие- дополнительного замкнутого контура самонастройки
составляет то главное, что выделяет системы данного типа в так
называемые собственно самонастраивающиеся системы.
Контур самонастройки состоит из следующих элементов:
И) модели;
2) вычислительного устройства;
3)' исполнительного элемента.
Модель имитирует такс* динамическое поведение системы регу-
лирования, которое желательно -иметь в целях достижения опти-
мального режима работы объекта регулирования. Это поведение мо-
дели является эталоном, образцом. Чаще всего звенья модели имеют
иную физическую природу, нежели звенья реального объекта регу-
лирования, и тогда моделирование называется математическим.
Любые модели, осуществляющие математическое моделирование,
В сущности являются интеграторами дифференциальных уравнений,
131
согласно которым должно происходить движение в модели. Эти
дифференциальные уравнения составляются с учетом всех факто-
ров, действующих на систему, и, следовательно, движение модели
является эталоном. Тогда математическая модель формирует так
называемый критерий оптимальности, который вводится в вычисли-
тельное устройство.
(Кроме этого, в вычислительное устройство поступают сигналы
с входа и выхода основного контура, которые известными спосо-
бами измеряются. В вычислительном устройстве поступившие сиг-
налы подвергаются обработке, в результате которой определяется
действительный критерий качества системы.
Рис. 105. Элементная схема системы с самонастройкой параме-
тров.
На основании сравнения критерия оптимальности и критерия
качества определяется сигнал управления контура самонастройки.
Последний воздействует на исполнительный элемент (настраивающее
устройство) и параметры регулятора автоматически изменяются
таким образом, чтобы поведение системы «подогнать» к эталонному
поведению модели.
Рассмотрим принципиальную сторону работы системы с само-
настройкой параметров на примере электротрубооварочного Стана
(рис. 106).
Электротрубосварочный стан — это сложный объект автомати-
ческого управления.
На входные клети стана поступает полоса металла, из которого
по мере ее прохождения через формовочные клети ФК формуется
труба. После чего сварочный аппарат производит сварку шва. Ка-
чество трубы определяется рядом показателей, среди которых глав-
ным является качество сварочного шва. Это качество главным
образом зависит от температуры трубы в месте сварки. В свою оче-
редь эта температура зависит от толщины стенок заготовки, мате-
риала трубы, силы сварного тока /Св, величины контактного давле-
132
Ния сварочных электродов СЭ, чистоты поверхности свариваемой
трубы и материала электродов. Перечисленные параметры де явля-
ются строго стабильными: толщина металла из-за низкокачественной
холодной и горячей прокатки, чистота поверхности из-за низкока-
чественной профилактики и др.
Поэтому там, где металл толще, шов может оказаться «непро-
варенным» и наоборот, где тоньше — «прожженным». И то и другое
дает брак выпускаемой продукции.
Разработанная система автоматического управления построена
по принципу компенсации главного возмущения, действующего на
систему, — колебания толщины полосы, входящей в формовочные
клети ФК.
Рис. 106. Схема системы с самонастройкой пара-
метров на электротрубопрокатном стане.
Пусть, например, толщина заготовки строго постоянная. Тогда
достаточно вручную через задающий элемент сделать такую уставку
регулятора 'сварочного тока РСТ, при которой генератор сварочного
тока ГСТ будет вырабатывать оптимальное значение сварочного тока
/Св.опт, и получить шов по всей длине хорошего качества. Однако
в силу непостоянства толщины металла полосы необходимо изме-
нять силу сварочного тока в соответствии с отклонением толщины
полосы металла от номинального его значения.
Для этого перед формовочной клетью устанавливается измери-
тельный элемент ИЭ, предназначенный для опознавания отклонения
толщины полосы металла от нормы (заданного значения, эталона).
Это отклонение вводится в вычислительное устройство ВУц имею-
щее усилитель с изменяемыми коэффициентами усиления. Кроме
того, вычислительное устройство ВУ^ содержит блок, учитывающий
динамику регулятора. Поэтому вырабатываемое воздействие на ре-
гулятор сварочного тока РСТ получается как раз таким, которое
обеспечивает изменение сварочного тока /Св до значения, при ко-
тором качество шва оказывается высоким.
Чтобы величина сварочного тока точно соответствовала тол-
щине заготовки, в системе предусмотрены записывающая и вос-
производящая головки, между которыми протягивается ферромагнит-
133
мая лента. Скорость протяжки строго синхронизирована со скоро-
стью движения заготовки .в клетях с'тана. Отклонения толщины запи-
сываются на ленту записывающей головкой, и значения отклонений
воспроизводятся головкой воспроизведения точно через промежуток
времени, необходимый для прохождения сечения полосы от измери-
тельного элемента ИЭ до сварных электродов СЭ.
Таким образом, здесь имеются контур самонастройки, действую-
щий по отклонению главного возмущающего фактора.
Однако полученное качество шва при компенсации только
главного возмущения может оказаться недостаточным. Изменение
свойств материала ленты и электродов, чистота поверхности, кон-
тактного давления электродов могут оказать существенное значение
на качество сварного шва. Возникает необходимость подстройки
отдельных параметров вычислительного устройства ВУ{ и в первую
очередь коэффициента усиления усилителя ВУь Для этого преду-
смотрен дополнительный контур самонастройки, включающий вычис-
лительное устройство ВУ2. В него вводится сигнал, характеризующий
отклонение толщины металла от нормы и температуры в месте
сварки шва. Первый сигнал вводится от измерительного элемента
толщины ИЭ, второй — от измерительного элемента ИТ измерителя
температуры. Внутри вычислительного устройства ВУ2 заложены
эталонные значения толщины и температуры (модель). На основа-
нии сравнения параметров реальной системы с их моделями (эта-
лонами) образуется управляющий сигнал, воздействующий на под-
стройку коэффициента усиления усилителя ВУ\ до значения, при
котором управляющий сигнал от ВУ2 сводится к нулю.
12. СИСТЕМЫ С САМОНАСТРОЙКОЙ СТРУКТУРЫ
К системам автоматического регулирования с самонастройкой
структуры относятся такие системы, в которых их структура изме-
няется в зависимости от изменения внешних возмущений или внут-
реннего состояния системы.
Системы с 'самонастройкой структуры иначе называют системами
с самоизменяющейся структурой, саморегулирующимися или само-
обучающимися системами.
Изменение структуры -преследует цель достижения наилучшего
решения задачи регулирования, поставленной перед системой. Само-
изменение структуры системы практически может осуществляться,
во-первых, переключением в схеме соединений звеньев, во-вторых,
подключением новых звеньев и, в-третьих, отключением из схемы
звеньев. При этом последовательность изменения структуры системы
заранее не задается, а отыскивается в процессе работы в зависи-
мости от изменения внешних возмущений и параметров и характе-
ристик объекта. Следовательно, заранее неизвестно, какие звенья
и как вводить, какие логические и вычислительные операции произво-
дить. Кроме того, заранее неизвестен и закон регулирования. Эти
задачи выполняются управляющей машиной.
Схему самоорганизующейся системы можно представить в виде,
показанном на рис. 107.
Управляющая машина получает сигналы от задающего элемента
о состоянии регулируемого параметра, о характере возмущений и
о параметрах объекта. Управляющая машина выполняет функции
134
математическо-логические, автоматического поиска и запоминания
своих действий.
'Принципиально ее можно представить состоящей из трех ча-
стей— модели, вычислительного устройства и управляющих эле-
ментов. В целом можно утверждать, что скелетная схема самоизме-
няющейся системы аналогична схеме системы с самонастройкой
параметров (рис. !105).
В математической модели реализуется заранее тот или иной
показатель качества или критерий оптимальности. В процессе работы
в зависимости от возмущений и параметров объекта система сама
путем автоматического поиска выбирает такую структуру, которая
бы отвечала заданному критерию или показателю. Изменение сгрук-
Рис. 107. Схема системы автоматического регулирования с само-
настройкой структуры.
туры осуществляется под воздействием сигналов, вырабатываемых
вычислительным устройством и поступающих через исполнительные
элементы в регулятор.
При работе системы последовательность переключения, под-
ключения и отключения звеньев записывается (запоминается). На ос-
новании этих данных система может быть заменена более простой
системой, структура которой может быть изменена по программе,
которая была автоматически выработана в процессе работы самоор-
ганизующейся системы.
Но система, структура которой изменяется по заранее заданной
программе, будет уже несамонастраивающейся.
Таким образом, в системах с самоизменяющейся структурой за-
кон регулирования и структура их заранее не заданы и вырабаты-
ваются только в процессе работы системы с целью получения опти-
мального режима работы объекта.
В системах же с самонастройкой параметров заранее известен
закон регулирования, а изменяются не заданные заранее коэффи-
циенты регулятора. Изменение коэффициентов определяется на ос-
новании работы системы.
В заключение можно отметить, что самонастраивающиеся систе-
мы с самонастройкой программ, параметров и структуры изучаются
в сравнительно новой науке, которая получила название — техниче-
ская кибернетика.
135
ЛИТЕРАТУРА
1. Автоматизация 'Производства и промышленная электроника,
т. I, Госнаучиздат «Советская энциклопедия», 19-62.
2. Автоматическая оптимизация управляемых систем, Изд-во
иностранной литературы, 1960.
8. А й з е р м а н М. А., Кибернетика и автоматизация произ-
водства, изд-во «Знание»; 1960.
4. Воронов А. А., Элементы теории автоматического 'регули-
рования, Оборонгиз, >1954.
5. Верцайзер А. Л., Яковлев В. М., О существенных не-
достатках в определениях и терминологии автоматического регули-
рования, «Автоматика и телемеханика», 1958, т. 19, № 1, стр. 95—98.
6. Г и н з б у р г С. А., Л е т х м а н И. Я., М а л о в В. С., Осно-
вы автоматики и телемеханики, 1Госэнергоиздат, 1959.
7. Д о г а н о в с к и й С. А., Автоматические самонастраиваю-
щиеся системы, изд-во «Знание», 1961.
i8. Егоров К. В., Основы автоматического регулирования, Гос-
эяергоиздат, 1955.
9. Ивахненко А. Г., Электроавтоматика, ч. <1 и 2, Гостех-
издат УССР, 1954.
10. Ивахненко А. Г., Техническая кибернетика, Гостехиздат
УССР, 1959.
11. Ив а х н еяк о А. Г., Самонастраивающиеся системы авто-
матического регулирования, Изд-во Академии наук УССР, 1957.
42. Красовский А. А., Поспелов Г. С., Основы автома-
тики и технической кибернетики, Госэнергоиздат, ‘1’962.
13. К р у г Г. К., Круг Е. К., Электрические корректирующие
элементы в схемах автоматического контроля и регулирования, Гос-
энергоиздат, 1959.
14. Китов А. И., К р и н и ц к и й Н. А, Электронные цифровые
•машины и программирование, Физматгиз, 1961.
15. Кунцевич В. М., Системы экстремального управления,
Гостехиздат УССР, 1961
16 Н о р к и н К. Б., Система автоп од стройки передатчика с при-
менением автоматического оптимизатора, Автоматическое регулиро-
вание и управление, Изд-во Академии наук СССР, 1962.
17. П о п о в Е. П., Автоматическое регулирование и управле-
ние, Физматгиз, 1962.
118. Попков С. П, Основы следящего электропривода, Обо-
ронгиз, 1954.
119. Смирнов А. Д, Современные математические машины,
Физматгиз, 1959.
'20 С о к о л о в с к и й Ю. И., Кибернетика настоящего и будуще-
го, Харьковское книжное издательство, 1959.
21. Фицнер Л. Н., Автоматические оптимизаторы, «Электри-
чество», 1960, № 8.
<22. Т у к а ч и я с к и й М. С., ’Машины-математики, Физматгиз,
1958.
23. Уланов Г. М., Регулирование по возмущению, Госэнерго-
издат, 1960.
24. Фельдбаум А. А, Вычислительные устройства в авто-
матических системах, Физматгиз, <1959.