

















































































































































































































































































































































































































































































































































































Text
В. В.ДОБРОНРАВОВ
Н. Н. НИКИТИН
КУРС
ТЕОРЕТИЧЕСЕОЙ
МЕХАНИКИ
ИЗДАНИЕ ЧЕТВЕРТОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством высшего и среднего
специального образовании СССР в качестве учебника
для студентов машиностроительных специальностей вузов
МОСКВА «ВЫСШАЯ ШКОЛА» 1983
ББК 22,21
Д56
УДК 631
Рецензент
Кафедра Курского политехнического института
(зав. кафедрой — прс/ф. П. М. Алабужев)
Добронравов В. В., Никитин Н. Н,
Д56 Курс теоретической механики: Учебник для машино-
строит. спец. вузов. — 4-е изд., перераб. и доп. — М.:
Высш. школа, 1983. — 575 с, ил.
В пер.-. 1 р. 30 к,
Настоящий учебник написав на основе опыта преподавания курса тео-
теоретической механики в МВТУ им. Н. Э. Баумана
В четвертом издании значительно перестроено изложение разделов
«Статика» (введены элементы дедуктивного изложении материала при рас-
рассмотрении вопросов приоедения и равновесия системы сил), «Кинематика»
(о отдельный napaipa<p выделена кинематика сложного движения точкв при
переносном поступательном движении) и часть «Динамики».
Предназначен для студентов машиностроительных специальностей вузов.
1703020000—184 ББК 22.21
Д 001<<Л)-83 39~83 531
© Издательство «Высшая школа», 1974
© Издательство «Высшая школа», 1983, с изменениями
ПРЕДИСЛОВИЕ
Предлагаемый учебник является результатом многолетней препо-
преподавательской деятельности авторов в Московском высшем техничес-
техническом училище им. Н. Э. Баумана, выпускающем инженеров-конструк-
инженеров-конструкторов и исследователей по широкому кругу специальностей в области
машиностроения и приборостроения.
Относительная краткость курса потребовала тщательного отбора
теоретического материала и примеров, поясняющих основные разделы
курса. В курс включен ряд дополнительных разделов. В динамике до-
достаточно полно изложена общая теория малых колебаний механичес-
механических систем о одной и двумя степенями свободы. В аналитической дина-
динамике даны канонические уравнения Гамильтона и принцип Остроград-
Остроградского—Гамильтона. Расширена глава «Динамика твердого тела с одной
закрепленной точкой». Наряду о приближенной теорией гироскопа до-
полнигельно изложена точная теория гироскопического момента при
регулярной прецессии. В специальных главах изложены также чле-
менты теории искусственных спутников и основные сведения по движе-
движению точки переменной массы.
Четвертое издание курса существенно отличается от предыдущего.
В него внесены значительные изменения, обусловленные эволюцией
преподавания курса теоретической механики в МВТУ за последние
15 лет, где он принят в качестве основного учебника. В новой редакции
даны в «Статике» гл. 1 и 7; в «Кинематике» — 1,2,5; в «Динамике» —
2,3,6,8,10, а также часть гл. 1 и 5. Внесены изменения и в другие гла-
главы курса. Часть глав скомпонована по-новому. В некоторые из пере-
переработанных глав включены новые примеры, характерные для домаш-
домашних (курсовых) заданий, выполняемых студентами МВТУ.
Дополнительно в курс включено изложение основ механики спло-
сплошной среды, чтобы подготовить условия для последующего внесения
части из основ в курс теоретической механики (особенно определения
поля ускорений в переменных Эйлера по известному полю скоростей
в «Кинематике» и теории напряжений в «Динамике»). Основы кинема-
кинематики сплошной среды даны в разделе «Кинематика» (гл. 7). Введение в
динамику сплошной среды приведено в разделе «Динамика» (гл. 13).
Настоящий «Курс теоретической механики» предназначен для сту-
студентов высших технических учебных заведений, готовящих инженеров
конструкторского и исследовательского профилей различных специ-
специальностей. Но он может использоваться также студентами других спе-
специальностей.
Материал в учебнике распределен между авторами следующим об-
образом. В.В. Добронравов написал: в «Статике» — гл. 8; примеры 1,2 гл.
Г, пример 2 гл. 7; в «Кинематике» — гл. 6; в «Динамике» — гл. 11;
$ 10,11 гл. 6. Остальная часть курса написана Н.Н. Никитиным.
Сохранившуюся в третьем издании часть материала А. Л. Дворни-
Дворникова в связи g дальнейшей эволюцией курса теоретической механики
пришлось переработать. Она дана в четвертом издании в новой редак-
редакции.
Авторы
ВВЕДЕНИЕ
Все явления природы предетавляют собой движение различных
форм материи. В теоретической механике рассматриваются только
вещественные формы материальных объектов, таких, как материаль-
материальные тела или в более общем случае сплошные среды, в отличие от та-
таких форм материи, как заряд, электромагнитное поле и др. Материаль-
Материальность тел и сплошных сред в теоретической механике характеризуется
массой и другими величинами, связанными с ней, понятия которых вво-
вводятся в динамике.
Всякое изменение материи называют движением. Одним из
простейших является механическое движение — пере-
перемещение материальных объектов в пространстве с течением времени
без рассмотрения физических свойств движущихся материальных объ-
объектов и их изменения в процессе движения. Механическое движение
обычно входит составной частью в более сложные виды движения мате-
материи.
В теоретической механике изучаются механические
движения вещественных форм материальных объектов.
Пространство, время, как и материя, являются сложными понятия-
понятиями. В теоретической механике нгпользуются их упрощенные понятия
или модели. Пространство считается не зависящим от времени и дви-
движущейся в нем материи. Принимают, что оно обладает всеми геометри-
геометрическими свойствами эвклидовой геометрии. Время считают универ-
универсальным, не связанным с пространством и движущейся материей. Его
характеризуют каким-либо периодическим процессом, например пери-
периодом вращекия Земли.
Наиболее общим методом изучения всех явлений природы и обще-
общества является диалектический метод, который, признавая опыт источ-
источником всех наших знаний, придает большое значение абстрактному мы-
мышлению, использующему модели явлений.
В теоретической механике широко используются математические
методы, абстрактные понятия, модели явлений и законы логики, явля-
являющиеся составной частью диалектического метода.
Каждый раздел теоретической механики имеет в своей основе ряд
понятий и аксиом, имеющих опытное происхождение. Вводя новые по-
понятия и используя законы логики, получают следствия или теоремы в
форме, удобной для практического применения.
Теоретическая механика ,все время развивается. По мере углубле-
углубления наших знаний выявляются границы применимости теоретической
механики, относительность ее понятий. Выяснилось, что аксиомы или
законы классической механики Ньютона не абсолютны. Для матери-
альных тел, скорости которых близки к скорости свега, вместо класси-
классической механики следует применять механику специальной теории от-
относительности. Классическая теоретическая механика ограниченно
применима для изучения движения элементарных частиц атома, та-
таких, как электрон, прогон и др., для изучения движения которых
следует применять квантовую механику.
Теоретическая механика широко применяется в технике (авиации,
космонавтике, машиностроении, кибернетике и т. д.),\ особенно важ-
важное значение она имеот в настоящее время—время Научно-техничес-
Научно-технической революции для решения грандиозных задач, поставленных
XXVI съездом КПСС.
На базе теоретической механики возникли и успешно развиваются
многие науки, такие, как сопротивление материалов, теория упруго-
упругости, гидродинамика, газовая динамика и др. В этих науках обычно к
законам механики добавляются другие законы, характеризующие до-
дополнительные свойства материальных тел В сопротивлении материа-
материалов и теории упругости учитывается деформация тел и добавляется
закон Гука о связи деформаций с силами. В гидродинамике учитывает-
учитывается скорость деформации и используется дополнительный закон о связи
скоростей деформации и сил. В газовой динамике, кроме того, учиты-
учитывается сжимаемость газа.
Теоретическая механика имеет свою историю становления законов
и понятий. Она создавалась вместе с развитием техники под непосред-
непосредственным влиянием развития производительных сил общества и всей
человеческой культуры. Теоретическая механика берет свое начало в
глубокой древности, задолго до нашей эры.
Основы современной теоретической механики были заложены ве-
великими учеными Галилеем A564—1642) и Ньютоном A643—1727).
Дальнейшее развитие теоретической механики связано о именами
многих ученых, наиболее выдающиеся из которых Гюйгенс A629 —
1695), Даламбер A717—1783), Эйлер A707—1783), Лагранж A736—
1813) и многие другие.
Большой вклад в развитие современной механики внесли русские
ученые, такие, как Остроградский A801—1862), Жуковский A847—
1921), Ковалевская A850—1891), Ляпунов A851—1918), Циолков-
Циолковский A857—1935) и др. Своими исследованиями и открытиями они в
значительной мере содействовали развитию механики и ее приложений
в технике и естествознании. Плодотворно работают советские ученые и
сейчас, продолжая славные традиции корифеев отечественной науки.
Теоретическая механика делитбя на три части — статику, кинема-
кинематику и динамику. Статика — раздел теоретической механики, ко-
который изучает законы для сил при равновесии материальных (осо-
(особенно твердых) тел, а также преобразования систем сил, приложен-
приложенных к твердому телу. Кинематика изучает чисто геометричес-
геометрические формы механических движений материальных объектов без учега
условий и причин, вызывающих и изменяющих эти движения. В ди-
динамике изучается движение материальных объектов в зависимости
от сил, т. е. от действия на рассматриваемые материальные объекты
других материальных объектов.
Раздел I
СТАТИКА
Глава 1
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ.
сходящиеся силы
В статике твердого тела рассматриваются свойства сил, приложен-
приложенных к твердому телу. В частности, изучается приведение сложных си-
систем сил к более простому виду и устанавливаются условия равнове-
равновесия различных систем сил
Теоретическая механика, как и всякая другая наука, имеет свои
понятия и определения, которые используются для формулирования ее
аксиом и теорем. Статика базируется на аксиомах, из которых по зако-
законам логики, вводя новые понятия, получают все необходимые след-
следствия в удобной для применения форме
§ 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Материальной точкой называют простейшую модель материаль-
материального тела любой формы, размеры которого достаточно малы и которое
можно принять за геометрическую точку, имеющую определенную мас-
массу.
Механической системой называется любая совокупность материаль-
материальных точек.
Абсолютно твердым телом (или неизменяемой механической систе-
системой) называют механическую систему, расстояния между точками ко-
которой не изменяются при любых взаимодействиях. Все тела в природе
в той или иной мере деформируемы, но в некоторых задачах деформа-
деформациями тел можно пренебречь, считая тела твердыми. При рассмотрении
движения Земли вокруг Солнца ее можно считать абсолютно твердым
телом и даже материальной точкой, хотя в действительности она не
твердая, так как на ней есть океаны, воздушная оболочка и т. д.
Силой в механике называют меру механического действия одного
материального объекта на другой, например на твердое тело со сторо-
стороны других тел.
Меры действия бывают разные. Силой называют ту меру, которая,
действуя на пружину динамометра в пределах ее упругости, деформи-
деформирует эту пружину (сжимает или растягивает) пропорциональ-
н о действующей силе. Таким образом, силы различной природы оп-
определяются через линейную силу упругости. Сила характеризуется
точкой приложения, числовым значением и направлением действия,
т. е. является векторной величиной. Механическое действие материаль*
ных тел друг на друга осуществляется при их соприкосновении (дав-
(давление стула на пол в местах соприкосновения его ножек о полом) или
как действие на расстоянии при посредстве силовых полей (притяже-
(притяжение Луны Землей и т. п.).
Силу как величину векторную обозначают какой-либо буквой со
знаком вектора, например F или Р. Для выражения числового значе-
значения силы или ее модуля используется знак модуля от вектора, т. е.
\F\, \Р\, или те же буквы, но без знака вектора, т. е. F, Р.
Системой сил называют совокупность сил, действующих на рассмат-
рассматриваемое тело или в более общем случае — на точки механической сис-
системы. Можно рассматривать систему сил, приложенных к одной мате-
материальной точке.
Системой сил, эквивалентной нулю (или равновесной системой сил),
называют такую систему сил, действие которой на твердое тело или
материальную точку, находящиеся в покое или двужущиеся по инер-
инерции, не приводит к изменению состояния покоя или движения по инер-
инерции этого тела или материальной точки.
Две системы сил называются эквивалентными, если их действие
по отдельности на одно и то же твердое тело или материальную точку
одинаково при прочих равных условиях, т. е. если одна система сил
приводит твердое тело или материальную точку в какое-то движение,
например, из состояния покоя, то другая система сил, эквивалентная
первой, сообщит такое же движение. Движения, вызванные действием
эквивалентных систем сил, имеют одинаковые характеристики для
каждого момента времени. Условие эквивалентности двух систем сил
(Fu F2, ... ,Тп) и (Ft, Т2,..., Tk) выражают в форме
Gи 7г ~Р„) ел (F\, F'i, ..., F'k),
где п и k — число сил в системах.
Равнодействующей силой рассматриваемой системы сил называют
силу, действие которой на твердое тело или материальную точку эк-
эквивалентно действию этой системы сил. Равнодействующая сила обо-
обозначается R*, и условие ее эквивалентности рассматриваемой системе
сил (Fu F2,..,, Fn) выражается в виде
(R*)<*>(FU TV.., Га).
Равновесная система сил имеет равнодействующую, равную нулю.
Уравновешивающей силой заданной системы сил считается такая
сила, добавление которой к заданной дает новую еистему, эквивалент-
эквивалентную нулю. Если R*' является уравновешивающей еилой системы сил
(Fu Fjj,..., Fn), то, согласно определению, она удовлетворяет условию
В дальнейшем убедимся, что не всякая система сил имеет равнодейст-
равнодействующую и уравновешивающую силы. Есть системы сил, которые не
находятся в равновесии и не эквивалентны одной силе.
7
§ 2. АКСИОМЫ СТАТИКИ
Справедливость аксиом механики проверяется на опыте как непо-
непосредственно, так и по тем следствиям, которые из них получают.
I. Аксиома о равновесии системы двух сил. Для равновесия системы
двух сил, приложенных к точкам твердого тела, необходимо и доста-
достаточно, чтобы эти силы были равны по величине и действовали вдоль
одной прямой, проходящей через точки их приложения, в противопо-
противоположных направлениях (рис. 1). Этой аксиомой устанавливается простей-
простейшая система сил, эквивалентная нулю. Если силы F^ и F2 находятся в
равновесии, то, естественно, они образуют систему сил, эквивалентную
Рис 1 Рис 2
нулю Действие такой системы сил на покоящееся твердое тело не из-
изменяет состояния покоя этого тела. Аксиома справедлива и для сил,
приложенных к одной точке тела или одной материальной точке.
II Аксиома о добавлении (отбрасывании) системы сил, эквива-
эквивалентной нулю. Если на твердое тело действует система сил, то к ней
можно добавить [отбросить) систему сил, эквивалгнтную нулю. По-
лученная после добавления (отбрасывания) новая система сил явля-
является эквивалентной первоначальной системе сил Под действием задан-
заданной системы сил и новой, полученной после добавления (отбрасывания)
равновесной системы сил, тело будет двигаться (или находиться в покое)
совершенно одинаково при прочих равных условиях В частности, к
любой системе сил можно добавить (отбросить) простейшую равновес-
равновесную систему сил, состоящую из двух равных по величине сил, действу-
действующих вдоль одной прямой в противоположных направлениях и при-
приложенных в одной или разных точках твердого тела в соответствии о
первой аксиомой
III. Аксиома параллелограмма сил. Две силы, действующие в од-
одной точке твердого тела или на одну материальную точку, можно за-
заменить одной равнодействующей cutou, равной по величине и направ-
направлению диагонали параллелограмма, построенного на заданных силах
(рис. 2). Очевидно, справедливо и обратное. Одну силу, приняв за
равнодействующею, можно разложить по правилу параллелограмма на
две составляющие силы.
Эту аксиому долгое время в истории развития механики пытались
доказать и, следовательно, считали теоремой. Тщательный анализ та-
таких доказательств, часто очень остроумных, показал, что для этого
обязательно используются положения, принимаемые за аксиомы.
Замену двух сил одной равнодействующей силой по правилу парал-
параллелограмма называют в е_к т о_р н ы м сложением этих сил.
Векторное сложение сил Fx и F2 математически выражают так:
W* = К + f;.
Если еилы Fj и F2 направлены по одной прямой в одну или противо-
противоположные етороны, то векторное сложение переходит в алгебраичес-
алгебраическое сложение.
Модуль равнодействующей силы R* как величину векторной еум-
мы сил вычисляют по формуле диагонали параллелограмма
Применяя теорему синусов к одному из треугольников параллелограм-
параллелограмма, определяют синусы углов, которые образует равнодействующая
R* о составляющими ее силами Fx и Fa:
sin(/??) = M^ik. sm
Более предпочтительным способом определения числовой величи-
величины и направления равнодействующей силы по отношению к каким-ли-
каким-либо прямоугольным осям координат является метод проекций, который
особенно удобен в случае векторного сложения более чем двух сил.
Этот метод рассматривается дальше, при изучении систем сходящихся
сил.
IV. Аксиома о равенстве сил действия и противодействия — один
из основных законов классической механики, сформулированных
Ньютоном, —утверждает: всякой силе действия есть равная, но про-
противоположная сила противодействия. По отношению к двум матери-
материальным точкам эта аксиома утверждает, что еилы взаимодействия двух
материальных точек равны по модулю, противоположны по направле-
направлению и действуют вдоль одной прямой, проходящей через взаимодейст-
взаимодействующие точки. Материальные точки при этом могут взаимодействовать
как через посредство силовых полей, т. е. на расстоянии, так и путем
соприкосновения друг с другом, если их считать твердыми телами очень
малых размеров.
В статике эту аксиому применяют для твердых тел. Силы взаимо-
взаимодействия двух твердых тел (при взаимодействии путем соприкоснове-
соприкосновения или на расстоянии при посредстве силовых полей) равны по модулю
и противоположны по направлению. Силы действия и противодействия
всегда приложены к разным телам или к различным взаимодействую-
взаимодействующим точкам одного и того же гела.
Таким образом, в природе силы встречаются всегда по две: силы
действия и противодействия.
V. Аксиома связей. Связью для твердого тела или материальной
точки называют материальные объекты (тела и точки), которые огра-
ограничивают свободу перемещения рассматриваемого твердого тела или
материальной точки. Аксиома связей утверждает, что всякую связь
можно отбросить и заменить силой, реакцией связей (в простейшем
случае) или системой сил (в общем случае). Эта аксиома фактически
уже содержится в определении силы, но в истории развития механи-
механики это не было осознано сразу. Длительное время после формулировки
Ньютоном основных законов классической механики их применение к
несвободным твердым телам и механическим системам встречалось о
трудностями, пока не была дополнительно сформулирована аксиома
Рис 3
связей. Учитывая большое значение аксиомы связей для дальнейшего
изложения теоретической механики, оставим эту аксиому как само-
самостоятельную.
Почти все теоремы и окончательные результаты теоретической ме-
механики формулируются для материальной точки или твердого тела,ос-
тела,освобожденных от связей, т. е когда связи заменены силами реакций
связей Поэтому очень важно уметь правильно заменять отброшенные
связи силами реакций связей. Это одна из главных задач при изуче-
изучении статики, которой следует уделить наибольшее внимание.
Силы реакций связей для рассматриваемого тела или точки зависят
прежде всего от приложенных сил и от вида связей. При движении
силы реакций связей зависят еще и от характеристик движения Так,
при движении тела в воздухе сила реакции воздуха на движущееся
тело зависит от скорости движения тела относительно воздуха.
Приведем примеры связей и их замены силами реакций связей.
Если связью для твердого тела (рис. 3, а) является абсолютно гладкая
поверхность другого тела, то сила реакции такой поверхности, если
соприкосновение происходит в одной точке, направлена по нормали к
общей касательной соприкасающихся поверхностей тел независимо от
сил, приложенных к рассматриваемому телу (рис. 3, б). Сила реакции
связи N направлена в сторону, противоположную направлению, в ко-
котором связь препятствует перемещению рассматриваемого тела. Чис-
Числовое значение силы реакции при равновесии определяется приложен-
приложенными к телу силами, которые в отличие от сил реакций связей часто
называют активными силами.
Если соприкосновение происходит не в одной точке, а по некоторой
площади поверхности, то реакция такой связи сводится к системе рае-
пределенных по поверхности сил, которые в некоторых случаях уда-
удается заменить одной равнодействующей силой реакции связи. В общем
случае система распределенных сил может не иметь равнодействующей-
ю
В тех случаях, когда сила реакции связей не только по модулю, но
и по направлению зависит от приложенных сил, ее обычно расклады-
раскладывают по правилу параллелограмма на составляющие параллельно осям
координат. Через составляющие легко определяется как модуль силы
реакции, так и ее направление.
Неизвестную по модулю и направлению силу реакции создают ц и-
линдричевкий (плоский) ишаровой шарниры. Пусть име-
имеем балку АВ, находящуюся в равновесии под действием аилы F и за-
закрепленную на одном конце с помощью цилиндрического шарнира Л»
Г
л,)
РИС. 4
а на другом — катковой опоры В (рие. 4,а). Цилиндрическим шарни-
шарниром называют устройство, позволяющее балке поворачиваться в плос-
плоскости вокруг оси, перпендикулярной этой плоскости. Устройство кат-
катковой опоры ясно из рисунка. На рис. 4, 6 покязана та же балка после
освобождения от связей. Сила реакции катковой опоры направлена по
нормали к общей касательной, если поверхности соприкосновения
a)m
S)
Р
Рис. 5
Рис. 6
гладкие. Неизвестная по модулю и направлению_реакция цилиндри-
цилиндрического шарнира разложена на две составляющие X А и Y А, предполо-
предположительно направленные в положительном направлении осей коорди-
координат.
В случае шарового шарнира силу реакции раскладывают на три
составляющие, параллельные осям координат.
Гибкие связи (канаты, тросы, нити) дают силы реакции свя-
связей (силы натяжения), направленные_по касательной к гибкой евязи.
На рис. 5, а, б сила натяжения нити S заменяет действие нити на груз.
На рис. 6, а, б показаны силы натяжения провода в сечениях А я В,
действующих на часть провода АВ.
11
На рнс. 7, а, б показаны силы реакции цилиндрического шарнира
А и стержня ВС на балку АВ. Стержень ВС, имеющий на концах шар-
шарниры В и С, создает силу реакции на балку АВ только в направлении
самого стержня ВС, если на этот стержень не действуют другие еилы
между его шарнирами В и С. Действительно, если рассмотреть находя-
находящийся в равновееии стержень ВС, то на него действуют только две еи-
еилы в точках В я С. Согласно первой аксиоме, эти силы должны быть на-
направлены по одной прямой, проходящей через точки В а С. Следова-
Следовательно, сила реакции стержня Yв на балку АВ направлена по ВС, так
как действие балки на стержень дает силу, направленную по стержню.
Силы реакций дру-
а\ $) . гих наиболее часто
Ь Ъ fc ! К, ,& id встречающихся связей
/I \ Ул 1 /1 f рассматриваются в при-
;« ^ »—fc- •> -¦ мерах.
ш А хА В VI. Аксиома затвер-
затвердевания. Если деформи-
Рис 7 руемое тело находится
в равновесии, то равнове-
равновесие его без изменения системы приложенных сил не нарушится от
наложения на точки тела дополнительных связей, включая превра-
превращение деформируемого тела в абсолютно твердое. С помощью этой
аксиомы устанавливается, в частности, связь между условиями равно-
равновесия сил, приложенных к твердому и деформируемому телам.
Из аксиомы следует, что условия равновесия сил, приложенных к
твердому телу, необходимы и для равновесия деформируемого
тела. Но условия равновесия сил, приложенных к твердому телу, не
являются достаточными для равновесия деформируемого тела.
Сформулированные аксиомы и являются той основой, на которой
строится вся статика сил, приложенных к твердому телу.
Аксиомы статики характеризуют свойства сил, приложенных к аб-
абсолютно твердому телу или одной точке. Но они не учитывают матери-
материальных свойств тела или точки, характеризуемых их массой, а для те-
тела — еще распределением массы в теле, влияние которых существен-
существенно при их движении.
Совместный учет действия сил и материальных свойств тел или точ-
точки содержится в аксиомах динамики. Такие аксиомы статики, как ак-
аксиома о параллелограмме сил, о равенстве сил действия и противодей-
противодействия, аксиома связей, справедливы и в динамике. Так как в статике
рассматриваются свойства и неравновесных систем сил, под действием
которых твердое тело или точка не могу г находиться в покое относи-
относительно инерциальной системы отсчета, то для оправдания этого в ста-
статике можно считать, что зти системы сил являются частями более ук-
укрупненных равновесных систем сил, под действием которых тело или
материальная точка находится в покое или совершает движение по
инерции.
§ 3. ПРОСТЕЙШИЕ ТЕОРЕМЫ СТАТИКИ
Теорема о переносе силы вдоль линии действия. Действие силы на
твердое тело не изменится от переноса силы вдоль своей линии действия.
Пусть в точке А твердого тела приложена сила F (рис 8). К этой
силе на ее линии действия в точке В в соответствии с аксиомой II
добавим еистему сил (F', F"), эквивалентную нулю, для которой F" =
= —.F'._Bbi6epeM силу F', равную силе F. Полученная система трех
сил (F, F't F") эквивалентна, согласно аксиоме о добавлении равно-
равновесной системы сил, еиле F, т. е.
(?) со (?,"?',"?").
Система сил (F,F"), согласно аксиоме I, эквивалентна нулю, и сог-
согласно аксиоме II ее можно отбросить. Получится одна сила F', при-
приложенная в точке В, т. е. (F, F', F") со (/•").
Окончательно получаем
(F) <s> (Г).
Сила F приложена в точке А. Она эквивалентна такой же по модулю
и направлению силе F', приложенной в точке В, где точка В — любая
точка линии действия силы F. Теорема доказана. Таким образом, точка
приложения силы в абсолютно твердом теле
несущественна. Силу для твердого тела можно
считать приложенной в любой точке линии
действия. Векторные величины, которые
можно прикладывать в любой точке линии
действия, называют скользящими. Сила, при-
приложенная к твердому телу, есть вектор
скользящий. В деформируемом теле силу
нельзя переносить вдоль линии действия. Си-
Сила в этом случае не является скользящим век- - рИс. 8
тором.
Теорема о трех силах. Если твердое тело под действием трех сил,
две из которых пересекаются в одной точке, находится в равновесии,
то линии действия таких трех сил пересекаются в одной точке.
Обратная теорема неверна, т. е. если линии действия трех сил пере-
пересекаются в одной точке, то такая система сил не обязательно являет-
является равновесной.
Пусть имеем систему трех сил (Flt Fit Fa), две из которых, напри-
например Fx и Fit пересекаются в одной точке А (рио. 9). Докажем, что если
тело находится в равновееии под действием этих трех сил, то линия
действия силы F3 пройдет через точку А, т. е. линии действия трех сил
пересекаются в одной точке.
Силы Ft и Fit линии действия которых перёсекаютея в точке А,
перенесем в эту точку и заменим их равнодействующей /?12 по аксио-
13
ме параллелограмма сил. Система трех сил (Fu F2, F3) спелась к экои-
валентной системе двух сил (#la, F3), находящихся в равновесии, так
как твердое тело, на которое они действуют, по условиям теоремы на-
находится в равновесии. Согласно аксиоме I, такие две силы должны быть
Рис, 9 Рис. 10
направлены по одной прямой, проходящей через точки их приложения,
Следовательно, линия действия силы Fs должна пройти через точку
приложения силы R12, т. е. точку пересечения сил Ft и Fz, Таким обра-
образом, три силы пересекутся в одной
точке.
Теорема о трех силах позволяет
в некоторых случаях определить ли-
<*УВ нию действия неизвестной силы, при-
у/ ложен ной к твердому телу.
\. | / Пример. Дана балка А В, закреплем-
\ / ная, как >казано на рис. 10. На балку
*& действует активная сила F, направление
которой задано углом а. Определить ли-
™ис 11 нию действия силы реакции цилиндриче-
цилиндрического шарнира RA
Решение. Освободим балку от связей, заменив их силами реакций сая-
зей (рис, 11). Сила реакции стержня DC на балку АВ направлена по стержню
DC. Ее линия действия пересекается с линией действия заданной силы F
в точке Е. Согласно теореме о трек силах при равновесии балки, через точку Е
должна пройти и линия действия силы реакции RA. Ее направление определит-
определится углом р, который зависит от угла а и положения точки С:
Если АС — ВС, то Р = а,
§ 4. СИСТЕМА СХОДЯЩИХСЯ СИЛ
Рассмотрим одну из важных систем сил — систему сходящих-
сходящихся сил. Для этой системы сил следует расемотреть приведение ее к
простейшему виду и установить условия равновесия.
Системой сходящихся сил {или пучком сил) называют такую систе-
систему си 1, линии действия которых пересекаются в одной точке — центре
пучка. Сходящиеся системы сил могут быть пространственными и
плоскими, т. е. расположенными в одной плоскости.
14
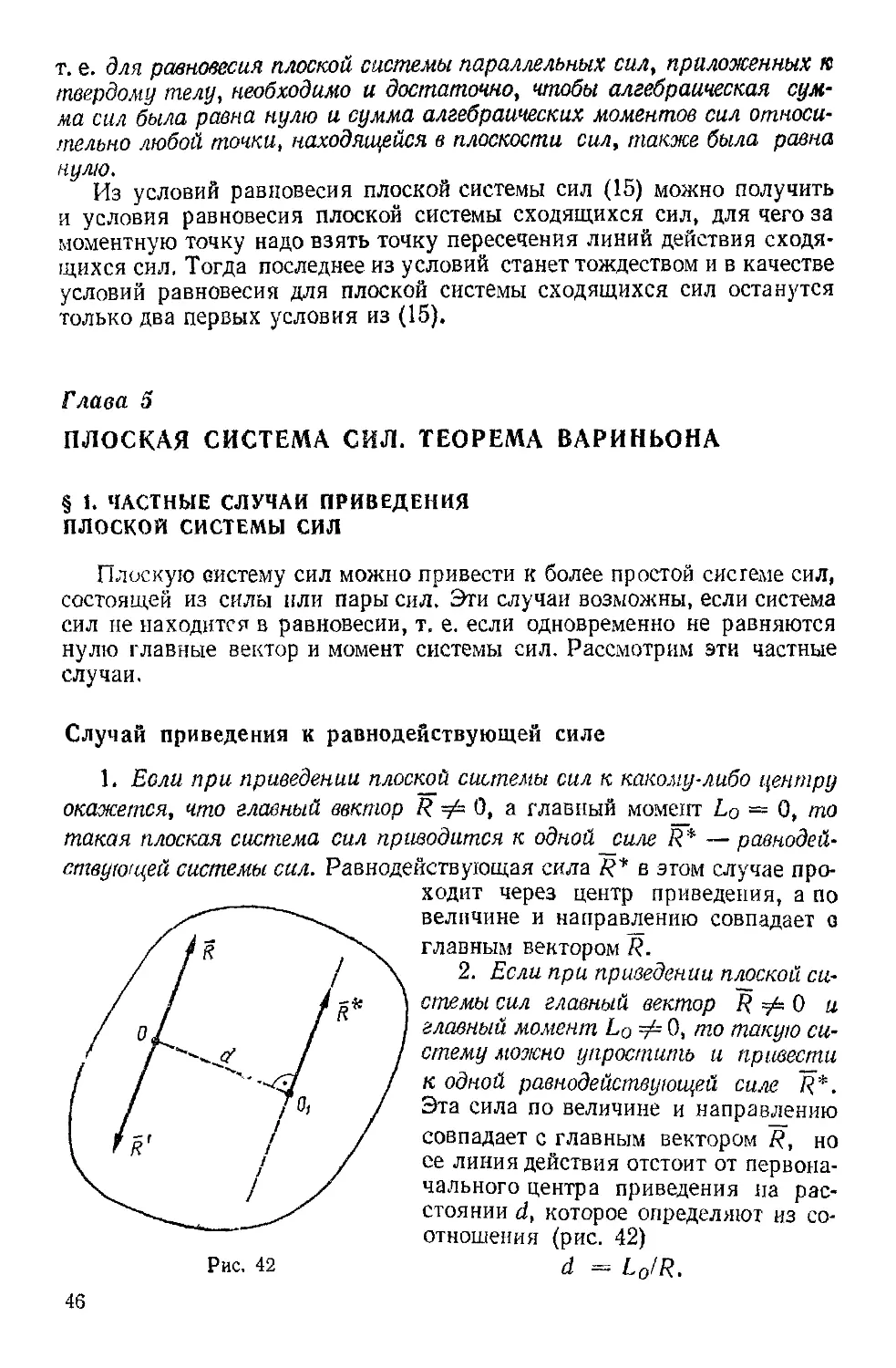
Приведение к равнодействующей силе
Рассмотрим общий алучай пробтранственной системы сходящихся
сил. Так как сила, действующая на твердое тело, есть вектор аколь-
зящий, то можно считать, что вилы системы {F~u Fl,...t Fn) приложе-
приложены в одной точке — центре пучка (рис. 12).
Применяя к первым двум еилам пучка Tt и F2 аксиому параллело-
параллелограмма, заменим их одной равнодействующей силой Rlit причем
Затем по правилу параллелограмма складываем силы /?12 я F Зц полу-
получаем их равнодействующую:
#i23 = Ru + F~s = Fl + F2 + F3
и т. д. Продолжая процесс векторного сложения сил для всех п сил,
получим
Таким образом, система п сходящихся сил эквивалентна одной силе
/?*, которая и является равнодействующей этой системы сил (рис. 13).
Процесс последовательного применения к силам правила парал-
параллелограмма, или их векторного сложения, приводит к по-
Рис. 12
Рис. 13
строению силового многоугольника из заданных сил. В силовом много-
многоугольнике конец одной из сил служит началом другой (рис. 14).
Равнодействующая сила R* в силовом многоугольнике соединяет на-
начало первой силы с концом последней, т. е. изображается замыка-
замыкающей силового многоугольника, который в общем случае является
незамкнутым. Силы в силовом многоугольнике можно изображать в
любой последовательности. От этого изменится форма силового много-
>гольника, а замыкающая не изменится; следовательно, не изменится
и равнодействующая сила.
Для пространственной системы сходящихся вил силовой много-
многоугольник является пространственной фигурой, для плоской — плоской.
15
Для плоской системы сходящихся сил равнодействующую силу можно
определить графически путем построения замыкающей силового много-
многоугольника в выбранном для сил масштабе. Для пространственной сис-
системы сходящихся сил пришлось бы силовой многоугольник строить в
пространстве из стержней.
Игак, система сходящихся сил в общем случае приводится к одной
силе — равнодействующей этой системы сил, которая изображавшей
замыкающей силового многоугольника, построенного на силах системы.
Линия действия равнодействующей силы проходит через центр пучка
параллельно замыкающей силового многоугольника.
Для аналитического определения равнодействующей силы следует
выбрать систему прямоугольных осей координат и воспользоваться из-
известной из геометрии теоремой о том, что проекция замыкающей лю-
любого многоугольника на какую-либо ось равна алгебраической сумме
проекций составляющих его сторон на ту же ось.
Так как равнодействующая сила /?* является замыкающей силового
многоугольника, или векторной суммой сил, то
R* = 2 К A)
Проецируя векторы векторного равенства на прямоугольные оси ко-
координат, согласно теореме о проекции замыкающей получим
д:= 2 ъ* ^=2 F^ & = 2 рч- B)
i=i i=\ i=i
По проекциям определяем модуль равнодействующей силы и косинусы
углов ее с осями координат по формулам
C)
cos (Я*, *) = #*/#*; cos(R*,y) = RltR*, cos (rCz) = Rs/R*. D)
В формуле C) перед квадратным корнем всегда берут знак плюс, так
как определяется модуль равнодействующей силы.
В случае плоской системы сходящихся сил одну из координатных
осей, обычно Ог, выбирают перпендикулярной силам, тогда каждая из
сил пучка даст проекцию на эту ось, равную нулю, а следовательно,
будет равна нулю и проекция равнодействующей силы на эту ось, т. е.
Условия равновесия системы сходящихся сил
Для равновесия системы сходящихся сил замыкающая силового
многоугольника, изображающая равнодействующую силу, должна об-
обратиться в точку, т. е. коней последней силы в многоугольнике должен
16
совпасть с началом первой силы. Такой силовой многоугольник назы<
вают замкнутым (рис. 15). Получено условие равновесия сходящихся
сил в геометрической форме: для равновесия ештемы
сходящихся сил, приложенных к твердому телу, необходимо и достаточ-
достаточно, чтобы силовой многоугольник, построенный из этих сил, был зам-
замкнутым Для случая трех сходящихся сил при равновесии должен
быть замкнутым силовой треугольник, построенный
из трех сил.
Для определения неизвестных сил при равнове-
равновесии более предпочтительным является использова-
использование условий равновесия системы сходящихся сил
в аналитической форме. Так как при равновесии
системы сходящихся сил равнодействующая сила
должна быть равна нулю (силовой многоугольник
замкнут), то из этого следует, чго равно нулю под-
подкоренное выражение в C), состоящее из суммы по- Рис- 15
ложительных величин. Таким образом, равны ну-
нулю квадраты каждой из величин подкоренного выражения, а сле-
следовательно, равны нулю и сами величины. Получаем условия рав-
равновесия пространственной системы сходящихся сил в аналити-
аналитической форме:
i /7-=°-' 2 F*v=°> 2 F**==o> E)
] 1
/==]
т. е. для равновесия пространственной системы сходящихся сил, при-
приложенных к твердому телу, необходимо и достаточно, чтобы суммы
проекций сил на каждую из трех прямоугольных осей координат были
равны ну 1Ю.
В случае плоской системы сходящихся сил одну из осей координат,
обычно Oz, выбирают перпендикулярной силам, а две другие оси — со-
соответственно в плоскости сил. Тогда третье условие из E) превратится
п
в тождество ^ Flz s~ 0. Отбрасывая его, получаем
? 2
t=i t=i
т. е. для равновесия плоской системы еходящихся сил, действующих на
твердое тело, необходимо и достаточно, чтобы суммы проекций этих
сил на каждую из двух прямоугольных координатных осей, лежащих в
плоскости сил, были равны нулю.
Проецирование силы на оси координат
Если дана сила F, то ее проекции на прямоугольные оси координат
вычисляются по формулам
Fx = FJ=F cos (F\x)\ Fy = F.~j = F cos (F?y);
Fa = F-k=Fcos (F, z),
17
где i, /, k — единичные векторы, направленные по осям координат.
Косинусы углов силы а осями координат удовлетворяют условию
eos2 (ТО) + cos2 (Р~, у) + cos" (F^z) = 1.
Из трех углов независимыми являются только два.
При проецировании силы на прямоугольные оси координат целесо-
целесообразно использовать тоже два угла. Для этого предварительно силу
разлагают на две взаимно перпендикулярные еоставляющие, одна из
которых параллельна какой-либо оси координат, например Ог, а дру-
другая находится в координатной плоскости
двух других осей, в нашем случае — коор-
координатной плоскости Оху (рис. 16). Полу-
Получаем
F =
F
xv.
Проецируя векторы векторного равенства
на координатные оси, имеем
Fx — F sin a cos р\ Fy = F sin a sin C;
Fz — F cos a,
Рис 16
так как
/\х„ =
При проецировании использованы только два угла: аир.
Векторные величины Fs> Fy, Fz называются составлягощи-
м и силы F по осям координат. Скалярные величины F x, Fy, Fz являют-
являются проекциями силы F на оси координат. Таким образом, силу на оси
координат проецируют обычно в два приема. Сначала ее проецируют
на одну из осей и на координатную плоскость двух других осей. Про-
Проекция силы на плоскость является вектором. Этот вектор затем прое-
проецируют на оси координат, расположенные в плоскости.
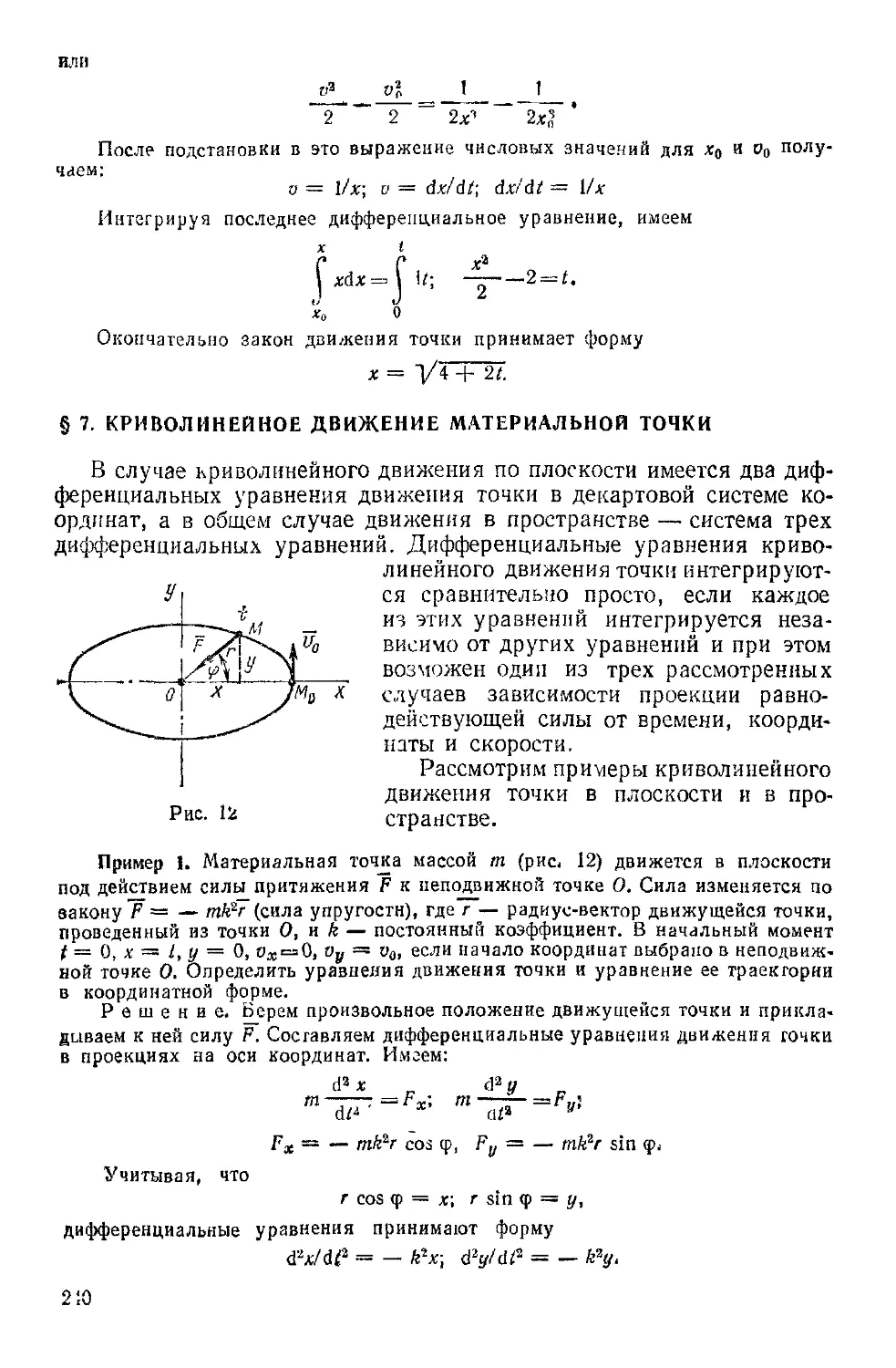
Пример 1. Тюбинг радиусом 12 дм и силой тяжести 2 кН накатывается на
выступ высотой 6 дм (рис. 17, а). Определить силу F, направленную под углом
45"" к горизонту, достаточную для перемещения тюбинга через выступ. Перекаты-
Перекатывание тюбинга начинается при такой силе F, когда сила реакции опоры в точке В
равна нулю.
Решение, Для определения силы F следует рассмотреть равновесие
тре? сил, приложенных к тюбингу (рис. 17, б), — силы F, силы тяжести тюбин-
тюбинга Р и силы^реакции выступа RA. Сила реакции RA направлена по нормали и
поверхности тюбинга, т. е. по его радиусу.
Решаем задачу геометрическим и аналитическим способами. При решении
геометрическим способом строим силовой многоугольник, который при
равновесии сил должен быть замкнутым (рис. 17, в), Сила Р образует извест-
известную сторону силового многоугольника, Вторая сторона многоугольника—сила
RA — начинается в конце вектора Р и составляет с ним угол 60°, Искомая сила
направлена к горизонту под углом 45° и является третьей стороной силового мно-
гоугольиика.
18
Рис. 17
Проведем через начало вектора Р_линию, параллельную силе F, а через ко-
конец — линию, параллельную силе RA. В результате построен замкнутый си-
силовой многоугольник, стороны которого равны силам, действующим на тюбинг,
По теореме синусов для треугольника составляем два уравнения:
F/sin 60°= P/sin 75° = НАЫт 45°!
из них находим: F = 1,79 кН; RA = 1,46 кН.
Решаем теперь задачу аналитическим способом. Для этого вычис-
вычисляем суммы проекций приложенных к тюбингу сил на оси координат и прирав-
приравниваем их нулю. Получим:
F cos 45° — RA cos 30° = 0j
+ RA sin 30° — P = 0,
= 0;
2 Flx
2 Fiy = 0; F sin 45'
Из этих уравнений находим
те же значения для сил F и
RA.
Пример 2. Самолет наби-
набирает высоту с постоянной ско-
скоростью под углом 60° к гори-
горизонту. Сила тяжести самолета
Q = 45 кН, сила сопротивле-
сопротивления воздуха движению само-
самолета R' — 8,1 кН. Горизон-
Горизонтальный ветер создает допол-
дополнительное сопротивление R" =
= 3,2 кН. Определить значе-
значения подъемной силы Р и силы
тяги двигателя Т, принимая,
что все силы пересекаются в
Дентре тяжести самолета и об-
образуют равновесную систему
сил (рис, 18), так как движе-
движение самолета равномерное и
прямолинейное,
-Рис. 18
Решение. Для плоской системы сходящихся сил имеем два уравнения
равновесия:
2 Fix = 0S R'cos 60° + Р cos 30е + R" — Г cos 60° = 0; (а)
2 рь, = 0; — #' cos 30q -f- P cos 60" — Q -f Г cos 30° = 0, F)
Умножим первое уравнение на cos 60°, а второе — на cos 30° и, вычитая из по-
полученного уравнения второе, получим
R' cos2 60° -Ь «"cos 60° — Т cos2 60° + R' cosa 30° + Q cos 30° — T cos 30" = 0,
откуда Т = 48,73 кН. Из (а) находим значение подъемной силы Р = 19,8 кН.
Глава 2
МОМЕНТЫ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ Й ОСИ
Для рассмотрения различных систем сил необходимо ввести поня-
понятия алгебраического и векторного моментов силы относительно точки
и момента силы относительно оси. Введем эти характеристики дейст-
действия силы на твердое тело и рассмотрим их свойства.
§ 1. АЛГЕБРАИЧЕСКИЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
При рассмотрении плоской системы сил, приложенных к твердому
телу, используется понятие алгебраического момента силы относитель-
относительно точки.
Алгебраическим моментом силы относительно точки называют про-
произведение модуля силы на плечо силы относительно этой точки
(рис. 19), взятое со знаком плюс или
минус.
Плечом h силы F относительно точки
называют кратчайшее расстояние между
этой точкой и линией действия силы,
т. е. длину отрезка перпендикуляра,
опущенного из точки О на линию дейст-
действия силы F.
Обозначим Мо (F) или Мо алгебраи-
алгебраический момент силы F относительно точ-
точки О. Тогда
Мо (F) - ± Fh, A)
Еели сила стремится вращать тело вокруг моментной точки (точки,
относительно которой вычисляют алгебраический момент силы) про-
против часовой стрелки, то берем знак плюв, если по часовой стрелке —
знак минуе
Алгебраический момент силы представляет собой произведение си-
силы на длину (в СИ — Н-м).
Из определения алгебраического момента силы относительно точки
следует, что он не зависит от переноса силы вдоль ее линии действия.
Алгебраический момент силы относительно точки равен нулю, если
20
Рис. 19
линия действия силы проходит через моментную точку. Сумма алгеб-
алгебраических моментов относительно точки двух равных по величине,
но противоположных по направлению сил, действующих вдоль одной
Прямой, равна нулю. Численно алгебраический момент относительно
точки равен удвоенной площади треугольника, построенного на силе
/Ш и моменгной точке:
Мо (П « ± 2 пл. Д ОАВ. B)
§ 2. ВЕКТОРНЫЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
При рассмотрении пространственной системы сил, приложенных к
твердому телу, применяется понятие векторного момента силы относи-
относительно точки.
Векторным моментом силы относительно точки называют вектор,
приложенный в этой точке и равный по модулю произведению силы на
плечо силы относительно этой точки. Векторный момент силы на-
направлен перпендикулярно плоскости, в которой лежат сила и момент-
ная точка, таким образом, что с его конца можно видеть стремление
силы вращать тело против движения часовой стрелки (рис. 20).
Плечом h силы относительно точки О называют кратчайшее рассто-
расстояние от этой точки до линии действия силы.
Условимся векторный момент силы F относительно точки О обо-
обозначать Mo(F), а его числовую величину \Мо (F)\. Тогда, согласно оп-
определению,
\M0(F)\ =Fh.
Как и для алгебраического момента, векторный момент r-илы от-
относительно точки равен удвоенной площади треугольника, построен-
построенного на силе и моментной точке:
\М0 (F)\ = 2 пл. ДОЛИ.
Справедлива формула
Mo (F) = 7xF, C)
где г — радиус-вектор, проведенный из моментной точки О в точку
приложения силы или любую другую точку линии действия силы.
Чтобы убедиться в справедливости формулы C), достаточно пока-
показать, что г х F по величине и направлению выражает векторный мо-
момент силы относительно точки О, если для построения векторного про-
произведения силу F перенести параллельно самой себе в точку О. По оп-
определению векторного произведения двух векторов известно, что
\ГхЩ = Fr sin {7, I).
Как показано на рис. 20, г sin {r, F) = h, причем это равенство
справедливо для любой точки линии действия, куда проведен радиус-
вектор г. Итак, _
|7х 7[=*Fh,
21
что совпадает с векторным моментом силы относительно точки О. Век-
Вектор ~х F, как известно, перпендикулярен плоскости, в которой рас-
расположены векторы г и F, т. е. плоскости треугольника ОАВ, которой
перпендикулярен и векторный момент Mo (F)-
Направление г X F тоже совпадает с направлением Mo(F) За-
Заметим, что векторный момент силы относительно точки считается
вектором, приложенным к этой точке.
Рис 20
Рис 21
Векторный момент силы относительно точки не изменяется от пере-
переноса силы вдоль ее линии действия. Он станет равным нулю, если ли-
линия действия силы пройдет через моментную точку.
Если сила F дана своими проекциями Fx, Fy, Fz на оси координат
и даны координаты х, у, г точки приложения этой силы (рис. 21), то
векторный момент относительно начала координат, согласно формуле
C), после разложения по осям координат вычисляем по формуле
M0(F) =
x у z
+ (xFy—yFx)k,
D)
где i, j, k — единичные векторы, направленные по осям координат.
Используя формулу D), можно выделить проекции Mo (F) на оси
координат:
E)
Модуль векторного момента Mo{F) и косинусы углов его с осями ко-
координат определяем по формулам
\M0{F)\
В формулах (б) числовую величину вектора
ком плюс
берем со зна-
зна§ 3. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Моментом силы относительно оси называют алгебраический мо-
момент проекции этой силы на плоскость, перпендикулярную оси, от-
относительно точки пересечения оси в этой плоскостью (рис. 22). Момент
силы относительно оси считается положительным, если проекция си-
силы на плоскость, перпендикулярную оси (проекция силы на плоскость
является вектором), стремится вращать тело вокруг положительного
направления оси против часовой стрелки, и отрицательным, если она
Стремится вращать тело по часо-
часовой стрелке. Момент силы, напри-
например, относительно оси Ог обозначим
Mz {F). По определению,
Мг (F) = Мо (Тп) = ± hFn, G)
где Fn — вектор проекции силы
F на плоскость Я, перпендикуляр-
перпендикулярную оси Ог, а точка О — точка пе-
пересечения оси Ог с плоскостью П.
Из определения момента силы
относительно оси следует, что вве-
введенный выше алгебраический мо-
момент силы относительно точки
можно считать моментом силы от-
относительно оси, проходящей через
эту точку, перпендикулярно плоскости, в которой лежат сила и мо-
ментная точка. Момент силы относительно оси можно выразить через
площадь треугольника, построенного на проекции силы Fn и точке
пересечения О оси с плоскостью:
Рис. 22
±2 пл. АОА1В1.
(8)
Mz (F) = d
Из формулы (8) можно получить следующие важные свойства мо-
меита силы относительно оси.
23
1. Момент силы относительно оси равен нулю, если сила параллель-
параллельна оси. В этом случае равна нулю проекция еилы на плоскость, пер-
перпендикулярную оси.
2. Момент силы относительно оси равен нулю, если линия действия
силы пересекает эту ось. В этом случае линия действия проекции еилы
на плоскость, перпендикулярную оси, проходит через точку пересече-
пересечения оси в плоскостью и, следовательно, равно нулю плечо еилы Рп ог-
носительно точки О.
В обоих этих случаях ось и сила лежат в одной плоскости. Объеди-
Объединяя их, можно сказать, что момент силы относительно оси равен ну-
нулю, если сила и ось лежат в одной плоскости
§ 4. СВЯЗЬ МОМЕНТА СИЛЫ ОТНОСИТЕЛЬНО ОСИ
С ВЕКТОРНЫМ МОМЕНТОМ СИЛЫ ОТНОСИТЕЛЬНО
ТОЧКИ НА ОСИ
Используя формулу (8), имеем (рис. 23)
\MZ(F)\ = 2 пл. АОА,ВХ. (8')
Векторный момент силы F относительно точки О, взятой на пересе-
пересечении оси Ог с перпендикулярной плоскостью П, выражается в виде
\M0(F)\= 2пл. АОАВ. (9)
Векторный момент Мо (F) направлен перпендикулярно плоскости
треугольника ОАВ. Аналогично для другой точки Oj оси Ог
\MOl {P)\= 2 пл.
A0)
причем векторный момент Мо (F) направлен перпендикулярно плос-
плоскости треугольника ОгАВ. Треугольник ОА1В1 является проекцией
треугольников ОАВ и OtAB на
плоскость П. Из геометрии из-
известно, что площадь проекции
плоской фигуры равна площади
проецируемой фигуры, умножен-
умноженной на косинус угла между плос-
плоскостями, в которых расположены
эти фигуры. Угол между плоско-
плоскостями измеряется углом между
перпендикулярами к этим плос-
плоскостям Перпендикуляром к плос-
плоскости треугольника OAxBt являет-
является ось Ог, а перпендикулярами
к плоскостям треугольников ОАВ
и О^АВ —соответственно вектор-
векторные моменты Ж о (F) и MOi (F).
Таким образом, пл. АОА А =*
= пл. АОАВ cos а, где а — угол
Рис. 23 между вектором Мо (F) и осью Ог.
24
Отсюда по формулам (8') и (9)
Мг {F)= | (Mo (F) | cos a = МОг (F), A1)
причем знак Мг (F) полностью определяется знаком cos a.
Аналогично,
пл. А ОА1В1 = пл. АО^В cos au
т. е.
М, (F) = | Мо, (F) | cos он = МOl2 (F), A2)
где С^ — любая точка на оси Ог.
Формулы A1) и A2) отражают искомую связь между моментом силы
относительно оси и векторными моментами силы относительно точек,
лежащих на этой оси: момент силы относительно оси равен проекции
на чту ось векторного момента силы относительно любой точки на
оси
Эту зависимость между моментом силы относительно оси и вектор-
векторным моментом силы относительно точки на оси можно принять за оп-
определение момента силы относительно оси.
§ 5. ФОРМУЛЫ ДЛЯ МОМЕНТОВ СИЛЫ ОТНОСИТЕЛЬНО
ОСЕЙ КООРДИНАТ
Используя связь момента силы относительно оси о векторным мо-
моментом силы относительно точки на оси, можно получить формулы для
вычисления моментов относительно осей координат, если даны проек-
проекции силы на оси координат и координаты точки приложения силы.
Для оси Ох
mx(F) = mOx(F).
Согласно E),
МОх = У?г — zFv.
Следовательно,
Mx(F) = yFt-zFv.
Аналогично для осей Оц и Ог
MV(F) = zFx — xFz; Mz (F) = xFy — yFt.
Окончательно
Mx(F) = yFt-zFv; My (F) = zFs- xFz; MZ(F) =
= xFy — yFx. A3)
По формулам A3) можно вычислить моменты силы относительно
прямоугольных осей координат.
По этим формулам получаются необходимые знаки для MX(F),
My (F), Mz (F), если проекции силы Fx, Fv, Fz на оси координат и ко-
координаты х, у, г точки приложения силы подставлять в них со знаками
этих величин.
25
При решении задач момент силы относительно оси часто получают,
используя его определение, т. е. проецируя силу на плоскость, пер*
пендикулярную оси, и вычисляя затем алгебраический момент этой
проекции относительно точки пересечения оси о этой плоскостью.
Глава 3
ПРИВЕДЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ.
ТЕОРИЯ ПАР СИЛ
§ 1. ПРИВЕДЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ
К РАВНОДЕЙСТВУЮЩЕЙ
Приведение двух сил, у которых линии действия параллельны,
к одной силе — равнодействующей, или сложение этих сил, позволя-
позволяет получить способ приведения любой системы параллельных сил к
простейшему виду. Кроме того, сложение двух равных по модулю, но
противоположных по направлению параллельных сил приводит к вве-
введению понятия пары сил.
Параллельные силы, направленные в одну сторону
Пересечем линии действия параллельных сил Fi и F2, приложен-
приложенных к твердому телу, прямой АВ и перенесем их в точки пересечения
этой прямой с линиями действия
сил (точки Л и В на рис. 24).
Приложим в точках Л и В рав-
равные по модулю, но противополож-
противоположные по направлению силы Sl и 52,
образующие систему сил, эквива-
эквивалентную нулю. Сложив отдельно
силы по правилу параллелограмма
в точках Л и В, получим две силы
R1 и R2t линии действия которых
пересекутся в точке D. После пе-
переноса этих сил в точку D разло-
разложим каждую из них на две состав-
Рис 24 ляющие по направлениям, парал-
параллельным силам ^и F2 и отрезку
прямой А В. Получим составляющие силы, соответственно одинаковые
по модулю и направлению силам в точках Л и В до их сложения, т. е.
=~SU ~S'2
= Тъ Fl'=
Отбросив_систему сил (S\, S'2), эквивалентную нулю, получим две
силы F\ и F'i, действующие вдоль одной прямой DC параллельно на-
26
правлению заданных сил FL и Ft. Равнодействующая таких сил R*
равна по модулю сумме сил F\ и F'% и направлена по DC\
R*=*F\ + Ft = F,+ Ft.
_ Сила R* и будет равнодействующей заданных параллельных сил
F} и Fu. Из подобия треугольников KDE и ADC, MDL и BDC
— = _?L --^1. -? — S« — 6'а..
DC ~" f I F, ; DC ~" F'3 ~ F,
Разделив левые и правые чаоти этих соотношений друг на друга,
получаем
^с_ F, „„„ ^C_fiC
Образовав производную пропорцию, окончательно имеем
АС ВС АВ ,1N
7Г==^Г = Ж8 A)
где
/?* = Fx + f,. B)
Таким образом, две параллельные силы, направленные в одну сторону,
имеют равнодействующую силу, параллельную им, равную по модулю
их сумме и направленную в ту же сторону. Линия действия равнодей-
равнодействующей силы расположена между линиями действия заданных сил
и делит отрезок прямой между линиями действия этих сил на части,
обратно пропорциональные силам, внутренним образом.
Если две параллельные силы, направленные в одну сторону, мож-
можно заменить одной равнодействующей, то и любую силу можно разло-
разложить на две параллельные ей силы, направленные в одну сторону.
Применяя последовательно правило приведения двух параллель-
параллельных сил, направленных в одну сторону, к любой системе параллель-
параллельных сил (направленных в одну сторону), можно привести эту систему
к одной равнодействующей силе.
Неравные параллельные силы, направленные
в противоположные стороны
Пусть сила Ft больше силы F%. Разложим силу Fx на две параллель-
параллельные силы 7?* и РТ, направленные в одну сторону (рис. 25) Возьмем
силу F'<l, равную силе F2, и приложим ее в точке В, где приложена си-
сила Fz. Тогда силу R* определим по формуле B):
Л = R* + Ft, откуда R* = Fx — Fz.
Точку приложения С силы R* определим по формуле A), где рав-
равнодействующей силой для сил R* и F'i является сила Fx.
27
Окончательно
AC ВС
Ав
а, где
= /4 - F2.
d')
B')
Рис. 25
Таким образом, система сил {Fu F2} эк-
эквивалентна одной силе??*, которая и являет-
ся равнодействующей этих сил. Равнодейст-
Равнодействующую силу определим по формуле B'), а
точку С пересечения ее линии действия о продолжением отрезка пря-
прямой АВ —по формуле (Г).
Итак, две неравные параллельные силы, направленные в противопо-
противоположные стороны, приводятся к равнодействующей силе, параллель-
параллельной им, равной их разности и направленной в сторону большей силы.
Линия действия равнодействующей расположена за линией действия
большей силы и делит отрезок прямой между линиями действия задан-
заданных сил на части, обратно пропорциональные силам, внешним образом.
Если две неравные параллельные силы, направленные в противопо-
противоположные стороны, можно заменить одной равнодействующей силой, то
и любую силу можно разложить на две неравные параллельные силы,
направленные в противоположные стороны.
§ 2. ПАРЫ СИЛ
Пара сил и алгебраический момент пары сил
Пару сил в механике рассматривают как одно из основных понятий
наряду с понятием силы.
Парой сил называют систему двух равных по модулю параллельных
сил, направленных в противоположные стороны (рис. 26).
Пару сил можно рассматривать как предельный случай двух нерав-
неравных параллельных сил, направленных в противоположные стороны,
когда сила Fl по модулю стремится к силе F2.
По формуле B'),
R* = F, _ /?, = о.
По формуле (\')АС и ВС равны бесконечности, т е. точка Снахо->
дится в бесконечности.
Таким образом, в этом предельном случае
равнодействующая сила равна нулю, а ее
точка приложения находится в бесконечно-
<яи Но пара сил не составляет системы сил,
эквивалентной нулю.
Известно, что под действием пары сил
свободное твердое тело выходит из равнове-
Рис 26 еия. Обычно пару сил (Fu F2) прилагают к гс-
28
лу, которое должно вращаться, например к маховику вентиля при его
закрывании и открывании (рив. 27). Поэтому пару сил нельзя заме-
заменить одной силой и, следовательно, она не имеет равнодействующей,
а является такой системой сил, упростить которую нельзя. Каждая
из сил, входящих в состав пары сил, имеет свойства обычных сил.
Пара сил, действующая на твердое тело, характеризуется прежде
всего плоскостью действия, аналогично тому, как сила характеризует-
характеризуется линией действия. Плоскостью действия пары сил называют плос-
плоскость, в которой расположены силы пары.
Рис 27
Рис 28
Для количественной характеристики действия пары сил на твер-
твердое тело и указания направления, в котором пара сил стремится вра-
вращать тело в плоскости действия, введем понятие алгебраического мо-
момента пары сил.
Алгебраическим моментом пары сил называют взятое со знаком
плюс или минус произведение одной из сил пары на плечо пары сил
Плечом пары сил d называют кратчайшее расстояние между ли-
линиями действия сил пары (рис. 28).
Алгебраический момент пары обозначим М или М (Flt Fz). Со-
Согласно определению,
М = М <FU F8) = ± Fd. C)
Алгебраический момент пары сил выражается в тех же единицах,
что и алгебраический момент силы относительно точки
Ал1ебраический момент пары сил имеет знак плюс, если пара сил
стремится вращать тело против часовой стрелки, и знак минус, если
пара сил стремится вращать тело по часовой стрелке
Алгебраический момент пары сил не зависит от переноса <вил пары
Вдоль своих линий действия и может быть равен нулю, если линии дей-
действия сил пары совпадают, т. е в случае двух равных по модулю, но
Противоположных по направлению сил, действующих вдоль одной пря-
прямой. Такая система двух сил, как известно, эквивалентна нулю. Ал-
Алгебраический момент пары сил чиоленно равен площади параллело-
параллелограмма, построенной на силах пары:
М = М (Flf Fj) *= ± пл. ? ABCD = + 2 пл. ААВС =
«= dh 2 пл.А ABD.
2Э
Теорема об эквивалентности двух пар сил,
расположенных в одной плоскости
Докажем, что пары сил, расположенные в одной плоскости, по сво-
своему действию на тело отличаются одна от другой только алгебраичес-
алгебраическими моментами.
Две пары сил называют эквивалентными, если их действие на твер-
твердое тело одинаково при прочих равных условиях.
Докажем теперь следующую теорему об эквивалентности двух пар
сил: пару сил, действующую на твердое тело, можно заменить дру-
другой парой сил, расположенной в той же плоскости действия и имею-
щей одинаковый с первой парой алгебраический момент. Иначе: две
пары сил, расположенные в одной плоскости, эквивалентны, если они
имеют одинаковые алгебраические моменты.
Пусть на твердое тело действует пара сил (Fu Fs) с алгебраическим
моментом М (рис. 29). Перенесем силу F[ в точку Оъ а силу F2 в точку
О2 и проведем через точки О1 и О2 две любые параллельные прямые,
пересекающие линии действия сил пары и лежащие, следовательно, в
плоскости действия заданной пары сил Соединив прямой точки Ох и
02, разложим силы Fx в точке Ох и F2 в точ-
точке Ог по правилу параллелограмма, как
указано на рис. 29. Тогда
Рис. 29
Г"
i
/4 = F{ +
Так как силы
сил, го
и, следовательно,
F\ = —
Итак,
\Г и Г ч) <Я> (Г \,
так как
F\\
F'2\
F"u
Р% =
и F2
_
Fi =
F'i, F
F2 + F'i.
образуют
: —F\,
I) <*> (F~{, F
пару
I).
следовательно, эту систему двух сил можно отбросить.
Таким образом, заданную пару сил (Flt F2) заменим другой парой
еил (F[, F'i). Докажем, что алгебраические моменты у этих пар сил
одинаковы. Направление вращения у них одно и то же. Имеем
М « М (?ъ F2) = 2 пл. АО&А;
М' = М (Pi, Щ - 2 пл. Д OiOaB.
Но пл. А 0^2^ = пл. АОгО2В, так как эти треугольники имеют
общее основание ОгОг и равные выеоты (их вершины расположены на
общей прямой, параллельной основанию).
30
Таким образом, теорема доказана и можно сделать следующие вы-
выводы:
а) пару еил как жесткую фигуру можно как угодно поворачивать
» переносить в ее плоскости действия;
б) у пары сил можно изменять плечо и силы, сохраняя при этом ал-
алгебраический момент пары и плоскость действия.
Эти операции над парами сил не изменяют их действия на твердое
вело.
Теорема о переносе пары сил в параллельную
плоскость
Действие пары сил на твердое тело не изменяется от переноса этой
пары сил в параллельную плоскость (рио. 30).
Для доказательства этой теоремы к паре сил (Ръ~Рг) в точках Лх и
Въ где перпендикуляры, опущенные из точек А и В плоскости Пи
пересекаются параллельной
ей плоскостью Я,2, приложим
две системы сил {F\,~F\) и
{Fk, F2), каждая из которых
эквивалентна нулю, т. е.
FT = —- FT; Fj= - Fl,
Выберем силы Fi и F% так,
чтобы они удовлетворяли ус-
условиям
f\ =7i; f2 = f;:
Сложим две равные и па-
параллельные силы Fi и Ti Их
равнодействующая Ж парал-
параллельна этим силам, равна их
сумме и приложена посере-
Рис 30
дине отрезка АВг в точке О, так как складываются равные парал-
параллельные силы. Равнодействующая R' двух равных параллельных сил
Р3 и F\ тоже равна их сумме, параллельна им и приложена на «ере-
дине отрезка ВАи т. е. в точке О, где^ересекаются диагонали прямо-
прямоугольника ABAtBv Так как R = — ^', то система сил (R, W) экви-
эквивалентна нулю и ее можно отбросить
__^Таким образом, пара сил (Flt F2) эквивалентна такой же паре сил
(F'\, Fg), но лежащей в другой, параллельной плоскости. Пару сил,
«е изменяя ее действия на твердое тело, можно перенести из одной
плоскости в другую, параллельную ей.
81
Рис 31
Векторный момент пары сил
Пару сил, приложенную к твердому телу, можно охарактеризовать
плоскостью действия, моментом пары сил и направлением вращения па-
пары. Все эти элементы пары сил в пространстве можно выразить одной
векторной величиной — векторным моментом пары
аил.
Векторным моментом пары сил назовем вектор, числовая величина
которого равна произведению силы пары на ее плечо. Векторный мо-
момент пары сил направлен перпендикулярно плоскости действия пары
сил так, чтобы можно было видеть
стремление пары сил вращать тело
против часовой стрелки. Вектор-
Векторный момент пары сил условимся
временно прикладывать посередине
отрезка, соединяющего точки при-
приложения сил пары (рис. 31). Его
можно прикладывать также, как
будет доказано, в любой точке те-
тела, на которое действует пара сил.
Векторный момент пары сил (Flt F2) обозначим М или М (Flt Fz).
Согласно определению, числовое значение векторного момента пары
сил \М\ совпадает с модулем алгебраического момента пары сил и, сле-
следовательно,
\Щ = hF, = hF2,
где h — плечо пары сил.
Векторный момент пары сил численно выражается площадью па-
параллелограмма, построенного на силах пары:
\М| = М = hFt = пл. D ACBD.
Отметим простейшие свойства векторного момента пары сил: его
числовая величина не зависит от переноса сил пары вдоль своих ли-
линий действия, и он может равняться нулю, если одна из сторон парал-
параллелограмма ACBD превратится в точку, т. е. плечо пары или сила па-
пары становится равной нулю.
Векторный момент пары сил можно выразить в виде векторного про-
произведения двух векторов;
х F2 =
D)
Действительно,
\АВ х F2\=FzABsm{AB,F2),
но
АВ sin (AB,Fz)=*h
и, следовательно,
IAS x F2| = F2h,
что совпадает с модулем векторного момента пары сил.
Направления векторных произведений АВ х Ft и BAxF[ перпен-
перпендикулярны плоскости, где лежат сомножители векторных произведе-
произведений, а следовательно, и плоскости действия пары сил. Они совпадают
в направлением векторного момента пары сил М.
Эквивалентность пар сил
Сформулируем условия эквивалентности двух пар сил, используя
наиболее общую характеристику пары сил — ее векторный момент.
Известно, что пару сил можно как угодно поворачивать и перено-
переносить в плоскости ее действия; действие пары сил на твердое тело не
изменяется, если алгебраический момент пары сил остается таким же.
Следовательно, векторный момент пары сил можно переносить парал-
параллельно самому себе в любую точку твердого тела, лежащую в плоско-
плоскости действия пары сил. Так как к тому же пару сил можно переносить
в параллельную плоскость, то векторный момент пары сил можно пере-
переносить параллельно самому себе в любую точку тела, не изменяя дей-
действия пары сил на твердое тело. Поэтому векторный момент пары сил,
действующей на твердое тело, есть свободный вектор, т. е. он характе-
характеризуется только модулем и направлением, а точкой приложения у него
может быть любая точка тела, следовательно, векторный момент пары
сил не обязательно прикладывать посередине отрезка, соединяющего
точки приложения сил пары.
Итак, две пары сил, действующие на одно и то же твердое тело,
эквивалентны, если они имеют одинаковые по модулю и направлению
векторные моменты.
Теорема о сумме моментов сил пары
Сумма векторных моментов сил, входящих в состав пары, относи-
тельно любой точки не зависит от выбора точки и равна векторному
моменту этой пары сил, т.е. для пары сил (Fu F^) (риа. 32).
Мо (Fj) + Мо {?г) = Ш (Fu FJ, E)
где О — любая точка.
Эту теорему докажем, вычисляя левую часть равенства E):
Мо (Л) + Жо (Fz) = 7tx F1 + 7ixTi = Gа -7i) х Fl,
так как для пары сил
W — W
Но ' ~ " 2-
Tt — 7Х = АВ
2 Зак 1311 33
и не зависит от выбора точки О; следовательно,
Mo (Fl) + Мо (FJ = АВ X Ft,
что на основании формулы D) совпадает с векторным моментом пары
сил М. Таким образом,
~ ( М.
ем
Взяв за точку О последовательно точки А и В, по формуле E) име-
име_ _ _ _
F9) = MB(FA = M, F)
т. е. векторный момент пары сил равен векторному моменту одной из
сил пары относительно точки приложения другой силы пары.
Эта теорема имеет важное значение при
решении задач, когда надо вычислять сум-
сумму моментов сил пары относительно ка-
какой-либо точки. Для этого достаточно взять
момент пары сил, что справедливо для лю-
любой точки.
Если моментная точка О выбирается в
плоскости действия сил пары как частный
случай, справедлива теорема о сумме ал-
алгебраических моментов сил пары: сумма
алгебраических моментов сил, входящих в
состав пары сил, относительно точки, ле-
жашей в плоскости действия пары сил, равна алгебраическому момен-
моменту пары сил и, следовательно, не зависит от выбора моментной точ-
точки, т. е.
Рис. 32
М0(Рг)~М (Fu 7,). G)
Выбирая за моментные точки А и В, лежащие на линиях действия
сил пары, получаем
М А G.) = Мв (ТО - М {Flt Т2), (8)
т. е. алгебраический момент пары сил равен алгебраическому моменту
одной из сил пары относительно точки, лежащей на линии действия
другой силы пары.
Сложение пар сил
Рассмотрим случай, когда пары сил не лежат в одной или парал-
параллельных плоскостях, а расположены в пересекающихся плоскостях.
Докажем, что две пары сил, действующие на одно и то же тело и лежа-
лежащие в пересекающихся плоскостях, можно заменить одной эквивалентной
парой сил, векторный момент которой равен сумме векторных момен-
моментов заданных пар сил.
Пусть имеются две пары сил (Ги F\) и (Fz, F'2) (рис. 33), лежащие
в пересекающихся плоскостях. Эти пары сил можно получить из пар
34
сил, как угодно расположенных в пересекающихся плоскостях, путем
параллельного переноса, поворота в плоскости действия и одновремен-
одновременного изменения плеч и сил пар. Сложим силы в точках Л и В по прави-
правилу параллелограмма. После сложения получим две силы R и R'i
(9)
Силы R и R' составляют пару сил, так как они приложены в разных
Точках и 7? = — R' как равнодействующие равных, но противопо-
противоположных сил, образующих пары сил.
Итак, при сложении двух пар сил, лежащих в пересекающихся плос-
плоскостях, получается эквивалентная пара сил. Обозначим М векторный
момент пары сил (R, R'). Тогда на основании формул D) и (9)
М='ВА х R=~BA х (?1-Ь?2)=
х
Учитывая, что
ВА х F, = Мц ВА X К =
где Mt и Mz — векторные моменты заданных пар сил (Flt F{) и
(Fl, F'-i), имеем _ _ _
М = Mt -f М„, A0)
т. е. векторный момент эквивалентной пары сил равен сцмме векторных
моментов заданных пар.
Таким образом, чтобы сложить две пары сил, лежащие в пересекаю-
пересекающихся плоскостях, надо сложить их векторные моменты по правилу па-
параллелограмма в какой-либо точке тела, например в точке В, как по-
показано на рис. 33. Сложение пар сил, лежащих в одной плоскости или
параллельных плоскостях, есть частный случай сложения пар сил в
Йересекающихся плоскостях, так как в этом случае их векторные мо-
менгы параллельны и, следо-
следовательно, векторное сложение
Перейдет в алгебраическое.
Последовательно приме-
применяя правило параллелограм-
параллелограмма к каждым двум векторным
моментам пар сил, можно лю-
любое количество пар сил в об-
И,ем случае заменить одной
Парой сил, векторный момент
Которой М равен сумме век-
векторных моментов заданных
¦пар сил:
Й'
м => 2 м(.
Ряс. 33
2*
35
Если это сложение выполнять графически, особенно когда вектор-
векторные моменты пар сил находятся в одной плоскости, то векторный мо-
момент эквивалентной пары сил изобразится замыкающей векторного
многоугольника, построенного из векторных моментов заданных пар
сил.
Для пар сил, расположенных в одной плоскости, теорема об их
сложении формулируется так: пары сил, действующие на твердое тело
и расположенные в одной плоскости, можно привести к одной паре
сил, алгебраический момент которой ра-
равен сумме алгебраических моментов сос-
состав тющих пар сил, т. е.
УИ=2мг- О1')
Так же складываются пары сил,
расположенные в параллельных плоско-
плоскостях, так как их предварительно можно
перенести в одну плоскость.
Пример 1. Найги векторный момент экви-
валентной пары сил, которая получается
при сложении двух пар сил с моментами
Мг = 40 Н-м и Мг = 30 Н-м, действующих
на одно и то же твердое тело. Пары сил расположены в пересекающихся плос-
коспях, двугранный угол между которыми равен 60°.
Решение Складываем но правилу параллелограмма векторные моменты
заданных пар сил. Для модуля векторного момента эквивалентной пары сил М
имеем
Ряс. 34
= \
М2л${М1, ~1„) ==/1600 + 900+2.1200-0,5 «
_ _ =* 1/3700 = 61 Н.м,
так как угол между М, и /И2 равен двугранному углу между плоскостями дейст-
действия пар сил.
Пример 1. Пары сил с М+ = 10 И -м и Мг = 6 Н>м и противоположного на-
направления вращения находятся в параллельных плоскостях Пара, имеющая
момент М$= 3 Н-м, расположена в перпендикулярной плоскости (рис. 34).
Определить момент эквивалентной Псфьг сил.
Решение. Сложим сначала алгебраически моменты пар сил, распо-
расположенные в параллельных плоскостях. Получим пару сил с моментом /И12 =
= Mi — М2 =10 — 6 = 4 Н-м, так как моменты пар сил имеют противополож-
противоположные знаки. Пару сил с моментом MXl сложим с парой сил, имеющей момент Ма.
Так как угол между М12 и Мя прямой, то момент эквивалентной пары
Условия равновесия пар сил
Если на твердое тело действуют пары сил, как угодно расположен-
расположенные в пространстве, то эти пары сил можно заменить одной эквивалент-
эквивалентной парой сил, векторный момент которой равен сумме векюрных мо-
моментов заданных пар сил, т. е.
п
м = y м„
36
Векторный момент М геометрически изображается замыкающей век-
векторного многоугольника, построенного на векторных моментах задан-
заданных пар сил.
Для равновесия пар сил, действующих на твердое тело, необходимо
и достаточно, чтобы модуль векторного момента эквивалентной пары
еил равнялся нулю или чтобы векторный многоугольник, построенный
на векторных моментах заданных пар сил, был замкнут.
Итак, М = 0. Отсюда
(=1
A2)
Таким образом, для равновесия пар сил, приложенных к твердому
телу, необходимо и достаточно, чтобы алгебраическая сумма проек-
проекций векторных моментов пар сил на каждую из трех координатных
осей была равна нулю.
В общем случае пары сил можно уравновесить только парой сил
Я нельзя уравновесить одной силой или какой-либо другой системой
сил, отличной от пары сил.
В случае когда пары сил действуют на твердое тело, находясь в од-
одной плоскости, их можно заменить одной эквивалентной парой еил,
алгебраический момент которой
равен сумме алгебраических мо- | м, . i Мг
ментов составляющих пар сил; /^^ /-.. / Н~~-
( А |
>СЬ . .
Для равновесия таких пар
еил необходимо и достаточно,
Чтобы алгебраический момент
Эквивалентной им пары сил был
равен нулю, г. е. для равновесия
пар еил, действующих на твердое тело в одной плоскости, необходимо
и достаточно, чтобы сумма алгебраических моментов этих пар сил
была равна нулю.
Если на твердое тело действуют только пары еил, лежащие в одной
плоскости, то реакции опор, уравновешивающие заданные пары сил,
составляют пару сил. Например, если одной из двух опор тела в его
точке В является катковая опора (рио. 35), а другой — неподвижный
Шарнир в точке А, то направление реакции в шарнире А противополож-
противоположно направлению реакции в точке В, так как эти реакции составляют па-
РУ сил. Реакция катковой опоры RB перпендикулярна плоскости опо-
Рис. 35
37
ры катков и направлена вверх; следовательно, RA направлена парал-
параллельно RB вниз.
Величины этих реакций равны. Их можно найти, приравняв момент
пары сил опорных реакций сумме алгебраических моментов пар сил,
действующих на тело. Таким образом,
Глава 4
ПРИВЕДЕНИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
К ПРОСТЕЙШЕЙ СИСТЕМЕ. УСЛОВИЯ РАВНОВЕСИЯ
§ 1. ПРИВЕДЕНИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
К СИЛЕ И ПАРЕ СИЛ
Приведение силы к заданному центру
Силу можно переносить параллельно самой себе в любую точку гпвер'
дого тела, добавляя при этом пару сил, векторный момент которой
равен векторному моменту переносимой силы относительно новой точ-
точки приложения силы. Пусть инеем силу F, прило-
приложенную к твердому телу в точке А (рис. 36). Из-
Известно, что силу, приложенную к твердому телу,
можно переносить вдоль ее линии действия, от чего
действие силы на твердое тело не изменяется.
Теперь докажем, что силу можно переносить на
другую, параллельн>ю линию действия. Но этот пе-
перенос следует компенсировать добавлением соответ-
соответствующей пары сил. Приложим в точке тела В, вы-
выбранной за центр приведения, систему двух равных
по модулю, но противоположных по направлению
сил F' и F", параллельных заданной силе F. Силы
F' и F" составляют систему сил, эквивалентную нулю, и ее можно доба-
добавить к любой заданной- системе сил.
Пусть по модулю
F' = F" = F.
Тогда _ ___ _ _ _ _ _
(F) се (F, F, F") со {F, (F, F")}.
Система двух равных по модулю и противоположных по направле-
направлению параллельных сил (F, F") составляет пар) сил, которую называют
присоединенной парой сил.
38
Рие. 36
Итак, вместо силы F, приложенной в точке А, получены сила F',
равная ей по модулю и направлению, но приложенная в точке В, и при-
присоединенная пара сил (F, F"), векторый момент которой
М (F, Г) = Мв (F). A)
Процесс замены силы F силой F' и парой сил (F, F) называют при-
приведением силы F к заданному центру В. По теореме об эквивалентности
пар сил пару (F, F") можно заменить любой другой парой сил о гакнм
же векторным моментом.
Приведение произвольной системы сил к силе
и паре сил
Докажем основную теорему статики (теорему Пуансо): любую про-
произвольную систему сил, действующих на твердое тело, можно в общем
случае привести к силе и паре сил.
Такой процесс замены системы сил одной силой и парой сил назы-
называют приведением системы сил к заданному центру.
Пусть дана произвольная система сил (FL, F2,..., Fn), приложенных
к твердому телу. Выберем произвольную точку О тела за центр при-
приведения и каждую силу заданной системы сил приведем к точке О (рис.
37). Получим
{Flt Fit..., Fn) on {F[, F2,..., F'n; (Flt F{), (F2, F~l) (Fn, FT)}.
Таким образом, система из п сил заменена системой из 3« сил, т. е.
в точке О приложена система сходящихся сил (F[, F'2,..., F'n) и на твер-
твердое тело действует также система п присоединенных пар сил
Векторные моменты присоединенных пар сил, согласно формуле
A), молию выразить через векторные моменты заданных сил:
М^ = М (Ft, PI) = Mo (Fi); i = 1,2, ..., п. B)
Систему сходящихся сил (F\, F'2,..., F'n) заменим их равнодействую-
равнодействующей R, которая равна векторной сумме сил F\, F'2, ..., F'n и геомет-
геометрически изображается замыкающим векторам силового многоуголь-
многоугольника, построенного на этих силах (рис. 37).
Итак,
(F'b F2,..., П) «>(«),•
где
...... __, 1 _ П _\
39
Для системы сходящихся сил (F\, Fi,..., F'n) сила R является рав-
равнодействующей силой, а для заданной системы сил (Fu F2 ~Fn)
сила R является лишь только ее векторной суммой, или главным век-
вектором.
Главным вектором системы сил называют вектор, равный вектор-
векторной сумме этих сил. Он изображается вектором, замыкающим силовой
многоугольник, построенный на силах, т. е.
C)
1= [
Систему присоединенных пар сил {(Fu F'O, {F\, F\), ..,, (Fn, F^}
по теореме о сложении пар сил можно заменить одной парой сил (Ф, Ф')
с векторным моментом М (Ф,Ф') — Lo, который называют главным мо-
моментом. Главный момент Lo равен сумме векторных моментов присое-
присоединенных пар. Учитывая формулу B), для Lq имеем
1= V Mo(Ft).
D)
Индекс О у Lo означает, что за центр приведения взята точка О.
Итак, главным моментом системы сил относительно точки О тела
называют сумму векторных моментов всех сил системы относительно
этой точки.
Главный момент системы сил является вектором, замыкающим век-
векторный многоугольник, образованный при сложении векторных мо-
моментов сил системы относительно выбранного ценоза.
Таким образом, доказана основная теорема статики: любую систе-
систему сил, действующих на твердое тело, можно привести к силе, равной
главному вектору системы сил, и паре сил, векторный момент которой
равен главному моменту систе-
системы сил относи 'пельно точки,
выбранной за центр приведения.
В краткой форме эту георему
можно вырази i ь так:
(?i, У г, .... Г~а)«>(Д, То),
,Рис. 37
Рис. 38
40
т. е. каждую систему сил можно привести к главному вектору и глав-
главному моменту относительно произвольного центра, След> ет учитывать,
что это условная формулировка основной теоремы. Главный момент
характеризует действие на тело пары сил (Ф, Ф') (рис. 38), лежащей
в плоскости, перпендикулярной главному вектору.
Приведение плоской системы сил
Плоской системой сил, приложенных к твердому телу, называют
такую систему сил, линии действия которых лежат в одной плоскости.
Основная теорема статики справедлива для любой системы сил. Она
справедлива и для плоской системы сил, действующих на твердое тело:
любую плоскую систему сил можно в общем случае привести к силг и
паре сил.
Для плоской системы сил главный вектор R лежит в плоскости дей-
действия сил, если за центр приведения выбрать точку в плоскости дейст-
действия сил Все присоединенные пары сил тоже лежат в этой плоскости, а
следовательно, векторные моменты этих пар перпендикулярны ей
и взаимно параллельны. Главный момент Lo, характеризующий век-
векторный момент пары сил, эквивалентный присоединенным парам, пер-
перпендикулярен главному вектору. Он является векторной суммой парал-
параллельных векторов.
В этом случае главный момент равен оумме алгебраических момен-
моментов присоединенных пар и, следовательно, сумме алгебраических мо-
моментов сил относительно центра приведения.
Для плоской системы сил вместо векторного главного момента ис-
используют понятие алгебраического главного момента. Алгебраичес-
Алгебраическим главным моментом плоской системы сил Lo относительно центра
приведения, лежащего в плоскости действия сил, называют сумму ал-
алгебраических моментов этих сил относительно центра приведения.
Формулы для вычисления главного вектора
и главного момента
Для любой системы сил (FltF2,,..t Fn) главный вектор R является
векторной суммой ыпх сил:
а главный момент Lo — суммой векторных моментов сил относительно
Центра приведения:
10= 2 M0(Ft). D')
Главный вектор R геометрически изображается замыкающей сило-
силового многоугольника, построенного на заданных силах. Проецируя
41
обе части векторного равенства C') на координатные оси, для произ-
вольной пространственной системы сил получаем
s
1
E)
По проекциям определяют модуль главного вектора и косинусы его
углов с осями координат:
cos (x?R) = -^_, cos
cos {z, R) ¦¦
\R\
F)
Главный момент Lo геометрически тол?е изображается замыкающей
векторного многоугольника, построенного на векторных моментах сил
относительно центра приведения. Проецируя обе части векторного ра-
равенства D') на прямоугольные оси координат и используя связь момен-
момента силы относительно оси с проекцией векторного момента этой силы
относительно точки на оси, имеем
lOx = lx =
2
= 2
2
Модуль главного момента и косинусы ею углов q оеялш координат
равны
~_ _ ~ _ -_ _ (8)
cos(x, Lo) — LJ | Lo |, cos(y, Lo) — Lu/\Lo\, cos (г, bj) = Lj\L0\]
Если выбрать ось Oz перпендикулярно плоскости действия плоской
системы сил, а оси Ох и Оу — в плоскости сил, то главный вектор /?
будет лежать в плоскости Оху и, следовательно, для плоской йисгемы
сил
/= 1
cos
= 2
=/?л/1rU
(9)
42
Главный момент плоской системы сил перпендикулярен главному
вектору и, следовательно, параллелен оси Ог. Тогда
Lx^0, 1„ = 0, Z,0 = Z,2= 2 ^(TQ = 2 ^о(Л), A0)
где Lo — алгебраический главный момент.
§ 2. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ
Условия равновесия системы сил в векторной форме
Из теоремы о приведении системы сил к еиле и паре сил можно вы-
вывести условия равновесия системы сил, действующих на тело. Очевид-
Очевидно, что если система сил находится в равновесии, то в равновесии нахо-
находится и эквивалентная ей система, состоящая из еилы и пары сил. Что-
Чтобы такая система сил была эквивалентна нулю, необходимо и доста-
достаточно равенства нулю как силы R, так и момента пары (Ф, Ф'), равного
главному моменту Lo. Получаются следующие векторные условия рав-
равновесия произвольной системы сил: для равновесия системы сил, при-
приложенных к твердому телу, необходимо и достаточно, чтобы главный
вектор системы сил был равен нулю и главный момент виетемы сил от-
относительного любого центра приведения также был решен нулю. Иначе:
для того чтобы {Fu F2 Fn)<xQ, необходимы и достаточны условия
R = 0, Гв = 0. A1)
Условия A1) являются векторными уеловиями равновесия для
любой системы сил.
Условия равновесия пространственной системы сил
в аналшической ферме
Если при равновесии системы вил, приложенных к твердому телу,
главный вектор R равен нулю, то его проекция на каждую координат-
координатную ось также равна нулю. Это еправедливо и для главного момента
Zo. Таким образом, из векторных условий равновесия пространствен-
пространственной сис1емы сил следует шесть условий:
Rx = 0, Я„ - 0, Я, =» 0; j A2)
Lx =0, Lu = 0, Lz = 0. j
Учитывая формулы E) и G), эти шесть условий через еилы системы
выражаю 1ся а форме
A3)
43
Таким образом, для равновесия произвольной сиетемы сил, прило-
приложенных к твердому телу, необходимо и довтапючно, чтобы три суммы
проекций всех сил на оси декартовых координат были равны нулю и три
суммы моментов всех сил относительно трех осей координат также
были равны нулю.
Из общих условий равновесия для произвольной пространственной
системы сил получаются условия равновесия для частных систем сил,
приложенных к твердому телу.
Условия равновесия пространственной системы
параллельных сил
Направим ось Ог параллельно силам (рис. 39). Тогда проекции па-
параллельных сил на перпендикулярные им оси Ох и Оу будут равны
нулю и условия
n
s
окажутся справедливыми для всех систем параллельных сил, т е.
превратятся в тождеетва. Момент относительно оси Oz каждой из парал-
п .
лельных сил равен нулю, и условие ^Mz (F) = 0 тоже выполняется
для всех систем параллельных сил. Отбрасывая условия равновесия,
которые выполняются тождественно при выбранном направлении оси
Oz, и учитывая, что сумма проекций сил на
эту ось является алгебраической суммой
сил, из A3) получаем следующие три усло-
условия равновесия пространственной системы
параллельных сил;
п п п
SP — VI у? __0 VI М (р ) —О
Z
Рис. 39 т. е. для равновесия пространственной си-
системы параллельных сил, прилоокенных к
твердому телу, необходимо и достаточно, чтобы алгебраическая сумма
этих еил была равна нулю и суммы моментов сил относительно двух
координатных осей, перпендикулярных силам, также были равны нулю.
Условия равновесия плоской системы сил
Расположим оси Ох и Оу в плоскости действия сил (рио. 40). Так
п
как ось Oz перпендикулярна силам, то 2 Ftz — 0 выполняется для
всех плоских систем сил, т. е. является тождеством. Каждая из сил
расположена в одной плоскости с осями координат Ох и Оу, и поэтому
44
ее моменты относительно этих осей равны нулю. Таким образом, уело
вия равновесия
V М
1
1= 1
бтановятся тождествами. Моменты сил относительно оси Ог, перпен-
перпендикулярной силам, равны алгебраическим моментам ашх сил ошоси-
тельно точки О. Таким образом,
2 Mt(Ft) = S Mo (Ft).
i= 1 i= 1
Из A3) для плоской системы сил после отбрасывания гождесгв име-
имеем следующие 1ри условия равновесия:
2 Flx=o, 2 fi»=o, 2 Мо(Ю=о, A5)
т. е. для равновесия плоской системы сил, действующих на твердое тело,
необходимо и достаточно, чтобы суммы проекций этих сил на каждую
из двух прямоугольных осей координат, расположенных в плоскости дей-
X Q
Рис 40
Рис 41
ствия сил, были равны нулю и сумма алгебраических моментов сил от-
относительно любой точки, нахооящейвя в плоскости действия сил, так-
также была равна нулю
Для плоской системы параллельных еил (рио. 41) одну из осей ко-
координат, например Оу, можно выбрать параллельной силам Тогда
сумма проекций параллельных сил на эту ось превратится в алгебра-
алгебраическую суммы сил Проекция каждой из еил на ось Ох равна нулю;
следовательно, сумма проекций сил на ось Ох равна нулю, даже если
система сил не находится в равновесии. Это условие выполняется тож-
тождественно, и его следует отбросить
Итак, для плоской системы параллельных бил из A5) имеем следую-
следующие условия равновесия1
п п
= 0, A6)
45
т. е. для равновесия плоской системы параллельных сил, приложенных к
твердому телу, необходимо и достаточно, чтобы алгебраическая сум-
сумма сил была равна нулю и сумма алгебраических моментов сил относи-
относительно любой точки, находящейся в плоскости сил, также была равна
нулю.
Из условий равновесия плоской системы сил A5) можно получить
и условия равновесия плоской системы сходящихся сил, для чего за
моментную точку надо взять точку пересечения линий действия сходя-
сходящихся сил, Тогда последнее из условий станет тождеством и в качестве
условий равновесия для плоской системы сходящихся сил останутся
только два первых условия из A5).
Глава 5
ПЛОСКАЯ СИСТЕМА СИЛ. ТЕОРЕМА ВАРИНЬОНА
§ 1. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ
ПЛОСКОЙ СИСТЕМЫ СИЛ
Плоскую систему сил можно привести к более простой системе сил,
состоящей из силы или пары сил. Эти случаи возможны, если система
сил не находится в равновесии, т. е. если одновременно не равняются
нулю главные вектор и момент системы сил. Рассмотрим эти частные
случаи.
Случай приведения к равнодействующей силе
1. Если при приведении плоской системы сил к какому-либо центру
окажется, что главный вектор R Ф 0, а главный момент Lo — 0, то
такая плоская система сил приводится к одной_сит R* —равнодей-
—равнодействующей системы сил. Равнодействующая сила /?* в этом случае про-
проходит через центр приведения, а по
величине и направлению совпадает о
главным вектором R.
2. Если при приведении плоской си-
системы сил главный вектор R Ф 0 и
главный момент Lo ф 0, то такую си-
систему можно упростить и привести
к одной равнодействующей силе R~*.
Эта сила по величине и направлению
совпадает с главным вектором R, но
се линия действия отстоит от первона-
первоначального центра приведения на рас-
расстоянии d, которое определяют из со-
соотношения (рис. 42)
Рис. 42 d = L0IR.
46
Действительно, пусть при приведении к точке О получается глав-
главный вектор и пара сил, алгебраический момент которой равен главно-
главному моменту^ Lo. По теореме об эквивалентности пар сил, расположен-
расположенных в одной плоскости, пару сил можно поворачивать, передвигать в
плоскости ее действия и изменять плечо_и силы пары, сохраняя ее ал-
алгебраический момент. Выберем силы R', R*, входящие в пару сил, рав-
равными по величине главному вектору. Тогда плечо пары еил d определим
по формуле
d = LJR; R' = Я* = R. A)
Повернем пару сил, чтобы ее силы были параллельны главному век-
вектору R, а точку приложения силы пары, противоположной по направ-
направлению главному вектору, совместим с центром приведения 0. Тогда
G?, Я\ R~) со (&).
Так как (R, /?*) со 0, то такую систему сил можно отбросить.
Итак, систему сил, приведенную к силе с парой сил, в случае когда
R ФО и Lo ф 0, можно упростить и привести к одной силе R* — рав-
равнодействующей заданной системы сил, отстоящей от центра приве-
приведения на расстоянии
001 = d = L0IR.
Равнодействующую силу R*, приложенную к твердому телу, мож-
можно перенести в любую точку линии ее действия. Случай, когда Lo=0,
возможен, если за центр приведения О взять точку, лежащую на ли-
линии действия равнодействующей силы R*.
Случай приведения к паре сил
Если при приведении плоской системы сил к какому-либо центру
окажется, что главный вектор R = 0, а главный момент Lo ф О,
то такую плоскую систему сил можно привести к одной паре сил, ал-
алгебраический момент которой равен главному моменту системы си г
относительно центра приведения, и в этом случае главный момент
не зависит от выбора центра приведения
Если главный вектор равен нулю при приведении к одному какому-
либо центру, то он равен нулю и при приведении к любому другому
центру, так как главный вектор, являясь векторной суммой сил си-
системы, не зависит от выбора центра приведения. Главный момент не
зависит от центра приведения только в случае, когда R — 0. В дру-
других случаях главный момент системы зависит от выбора центра приве-
приведения. Если бы при R = 0 главный момент зависел от центра приведе-
приведения, то одна и та же плоская система сил была бы эквивалентна парам
сил, имеющим разные алгебраические моменты, что невозможно, так
как эквивалентные пары сил, лежащие в одной плоскости, имеют оди-
одинаковые алгебраические моменты.
Таким образом, рассмотрены случаи, которые возможны при при-
приведении плоской системы сил к какому-либо центру. Если R = 0 и
47
i0 = о, то система сил находится в равновесии; если R Ф О, a Lo=0,
или R Ф О, ЪоФ§, то система сил приводится к равнодействующей
силе; если R — О, Lo # 0, то система сил приводится к одной паре
сил.
§ 2. ТЕОРЕМА О МОМЕНТЕ РАВНОДЕЙСТВУЮЩЕЙ СИЛЫ
(ТЕОРЕМА ВАРИНЬОНА)
Для случая, когда любая система сил, приложенных к твердому те-
телу, плоская или пространственная, приводится к равнодействующей
силе, часто применяют так называемую теорему Вариньона: вектор-
ный момент равнодействующей рассматриваемой системы сил относи-
относительно любой точки равен сумме векторных моментов всех сил этой
системы относительно той же точки.
Пусть на твердое тело действует любая система сил (Fit Fit..., Fn)
(рис. 43), имеющая равнодействующую R*, т. е.
(Flt
Fn)
B)
Добавим к заданной системе сил ее уравновешивающую силу R
*'
которая равна по модулю, но противоположна по направлению равно-
равнодействующей силе R* и имеет с ней общую линию действия Тогда
(^ъ Рц •••> Ли R*) °° {R*> К*') °° 0, C)
т. е. при добавлении к системе сил уравновешивающей силы, соглас-
согласно определению уравновешивающей силы, образуется новая система
сил, эквивалентная нулю и, следовательно,
удовлетворяющая условиям равновесия системы
сил, приложенных к твердому телу. В частно-
частности, сумма векторных моментов сил этой новой
системы сил относительно любой точки О равна
нулю:
D)
но
Рис. 43
Мо (/?•') = _ Мо (/?*),
E)
так как R*' и R*— две равные и противоположно направленные силы,
действующие вдоль одной прямой. Подставляя E) в D), получаем
откуда следует теорема Вариньона
2М(
48
Если правую и левую части векторного равенства F) спроециро-
спроецировать на произвольную ось Ог, проходящую через точку О, то, учиты-
учитывая связь момента силы относительно оси с проекцией векторного мо-
момента относительно точки на оси, получим теорему Вариньона относи-
относительно оси Ог:
t= i
т. е. момент равнодействующей силы относительно произвольной оси
равен сумме моментов сил системы относительно той же оси
Для случая плоской системы сил, если точку О выбрать в плоскости
действия сил, из F) получаем
Mo{R~*)= ^Мо(Ю- (8)
/= i
Это теорема Вариньона для плоской системы еил: алгебраический
момент равнодействующей плоской системы сил относительно любой
точки, лежащей в плоскости действия вил, равен сумме алгебраических
моментов всех сил этой системы относительно той же точки.
§ 3. РАЗЛИЧНЫЕ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ ПЛОСКОЙ
СИСТЕМЫ СИЛ
В § 2 гл 4 получены общие условия равновесия плойкой системы
сил, действующих на твердое тело, в следующей форме:
2 ^,* = 0; 2 ^»у = 0; 2 MoCF.HO. (9)
Условия равновесия (9) назовем увловиями равновесия плавкой вис-
темы, сил в первой форме.
Условия равновесия плоской системы сил, приложенных к твердо-
твердому телу, можно сформулировать в других эквивалентных формах.
Существуют еще две эквивалентные формы необходимых и достаточных
условий равновесия.
Рассмотрим эти условия равновесия в виде теоремы о трех момен-
моментах и третьей формы условий равновесия.
Теорема о трех моментах
(вторая форма условий равновесия)
Для равновесия плоской системы сил, приложенных к твердому телу,
необходимо и достаточно, чтобы суммы алгебраических моментов сил
системы относительно трех любых точек, расположенных в плоскости
действия сил а не лежащих на одной прямой, были равны нулю, т. е.
2 мл(/д=о; 2 Aia(f"iHo; 2 мс(/\)=о. (">)
49
Необходимость этих условий равновесия плоской системы сил обус-
обусловлена тем, что если плоская система сил находится в равновесии, то
силы этой системы удовлетворяют условиям равновесия в первой основ-
основной форме (9). А тогда из последнего условия (9) следует, что сумма ал-
алгебраических моментов сил относи-
относительно любой точки (следовательно,
и точек А, В, С) равна нулю.
Для доказательства достаточности
условий A0) для равновесия плоской
системы сил, действующих на твер-
твердое тело, можно привести следующие
рассуждения. Так как главные момен-
моменты относительно трех точек А, В, и С
равны нулю, то для любой из этих
точек, взятых за центр приведения,
система приводится или к равнодейст-
равнодействующей, если главный вектор системы отличен от нуля, или система
сил оказывается в равновесии, если главный вектор системы равен
н>лю. Предположим, что она приводится к равнодействующей силе
R*. Тогда если выбрать за центр приведения точку А, то, используя
теорему Вариньона (8); соглаою A0) получим
Рис. 44
Выбрав за центр приведения точку В, аналогично имеем
Эти условия для равнодействующей силы /?*, отличной от нуля,
могут выполняться в случае, если линия действия равнодействующей
силы R* проходит через точки А и В (рис. 44).
Из последнего условия A0) после применения 1еоремы Вариньона
получаем
Но h Ф 0; так как точка С не находится на прямой, проходящей
через точки Л и В. Следовательно, равнодействующая сила равна ну-
нулю, что и является достаточным условием равновесия плоской системы
сил, приложенных к твердому телу.
Третья форма условий равновесия
Условия равновесия плоской системы сил можно сформулировать
и так: для равновесия плоской системы сил, приложенных к твердому
телу, необходимо и достаточно, чтобы суммы алгебраических момен-
моментов сил относительно двух любых точек, лежащих в плоскости дей~
ствия сил, были равны нулю и алгебраическая сумма проекций этих
50
на какую-либо ось плоскости, не перпендикулярную прямой, проходя-
проходящей через две моментные точки, также была равна ную, т. е.
i = 0; 2
(И)
где за ось Ох принята любая прямая, не перпендикулярная АВ. Не-
Необходимость условий A1) для равновесия плоской системы сил следу-
следует из первой формы условий равновесия (9). Первая часть теоремы о до-
достаточности условий A1) для равновесия (линия действия равнодей-
равнодействующей силы R* проходит через
точки А и В) доказывается так же,
как и в теореме о трех моментах.
Из последнего условия A1)
(рис. 45) следует, что
2 Flx = Rl = R*cas(x, R*) = 0.
Но
cos (Jc, R*) ф 0,
так как ось Ох не перпендикулярна
прямой, проходящей через точки Л Рис- 45
и В. Следовательно, равнодействую-
равнодействующая сила R* равна нулю, что и доказывает достаточноеть условий A1)
для равновесия плоской системы сил, приложенных к твердому телу.
В частном случае плоской системы параллельных сил можно сфор-
сформулировать другую форму условий равновесия этой системы сил. для
равновесия плоской системы параллельных сил, приложенных к твердо-
твердому телу, необходимо и достаточно, чтобы суммы алгебраических мо-
моментов сил относительно двух любых точек, лежащих в плоскости сил,
были равны ну но, т. е.
2
=o; 2
t= I
A2)
Точки А и В нельзя брать на прямой линии, параллельной силам.
При применении условий равиовееия A2) удобно за моментные точ-
точки Л и В брать точки, через которые проходят искомые силы, напри-
например реакции связей. В этом случае получаются такие уравнения для
определения искомых сил, в каждое из которых входит только по од-
одной неизвестной силе; эти уравнения, как правило, решаются проще|
чем уравнения, в каждое из которых входят обе неизвестные аилы.
§ 4. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ И СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ
Для любой плоской системы сил, действующих на твердое тело,
имеемся только три независимых условия равновесия, каждое
из которых не является следствием двух других. Независимые условия
равновесия можно брать в трех различных формах.
51
Следовательно, для любой плоской системы еил из условий равно-
равновесия можно найти не более трех неизвестных, а для плоских систем
параллельных и сходящихся сил — не более двух неизвестных. Ейли
в какой-либо задаче число неизвестных окажется больше числа неза-
независимых условий равновесия, то такую задачу нельзя решить метода-
методами статики без рассмотрения прежде всего деформаций тела, т. е. без
отказа от основной гипотезы статики об абсолютно твердом теле.
Задачи, в которых число неизвестных не больше числа независимых
условий равновесия для данной системы сил, приложенных к твердо-
твердому телу, называют статически определимыми. Для любой плоской
системы сил, приложенных к
твердому телу, в статически оп-
определимой задаче число неиз-
неизвестных должно быть не больше
трех, а для плоских систем па-
параллельных н сходящихся сил —
не больше двух.
Пример простейшей е т а-
тически неопредели-
неопределимой задачи приведен на
рис. 46, где представлена балка
заданной длины, закрепленная
Рис. 46 на концах с помощью двух
неподвижных цилиндрических
шарниров А и В. На балку действуют активные силы t\ и ?г. Из-
Известны также и точки приложения этих сил. Так как для цилиндри-
цилиндрического шарнира имеются две неизвестные, например составляющие
силы реакции по осям координат, то число неизвестных будет четыре,
а независимых условий равновесия можно составить только три.
Чтобы сделать задачу статически определимой, надо балку на од-
одном конце закрепить, например в помощью так называемой катковой
опоры. Тогда одна неизвестная будет равна нулю; если катковая опо-
опора находится в точке В я плоскость опоры катков параллельна oaa Ох,
то сила Хв равна нулю.
§ 5. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
Рассмотрим равновесие еил, приложенных к системе нескольких
взаимодействующих между собой тел. Тела могу г быть соединены меж-
между собой с помощью шарниров, соприкасаться друг о другом и взаимо-
взаимодействовать одно с другим, вызывая силы взаимодействия. Такую си-
систему взаимодействующих тел иногда называют сочлененной системой
тел.
Силы, действующие на рассматриваемую систему тел, можно раз-
разделить на внешние и внутренние.
Внешними называют силы, с которыми на тела рассматриваемой
системы действуют тела, не входящие в эту систему тел.
Внутренними называют силы взаимодействия между телами рас-
рассматриваемой системы.
52
Если, например, рассматриваемой системой тел является железно-
железнодорожный поезд, то внешними силами являются силы веса вагонов и
тепловоза, действие рельсов на колеса вагонов и тепловоза, силы со-
Яротивления воздуха. Внутренними силами являются натяжения в
•тяжках, еила давления газа и т. п.
Силы веса для любой системы тел, в которую не входит Земля, всег-
всегда являются внешними.
При рассмотрении равновесия еил, приложенных к системе тел,
можно мысленно расчленить систему тел на отдельные твердые тела и к
еилам, действующим на эти
тела, применить условия рав-
равновесия, полученные для од-
одного тела. В эти условия
равновесия войдут как внеш-
внешние, так и внутренние силы
системы тел. Внутренние си-
силы на основании аксиомы о
равенстве сил действия и
противодействия в каждой
точке сочленения двух гел
образуют равновесную систе-
систему сил (силы R'A и Ra,
рис. 47). Поэтому внешние си-
силы, действующие на систему
тел отдельно, без внутрен-
внутренних сил, удовлетворяют условиям равновесия еил, приложенных к
твердому телу, за которое следует принять ату систему тел.
Покажем это на примере еиетемы двух тел и плоской еистемы еил
(рис. 47). Если составить условия равновесия для каждого твердого -
тела системы тел, то для тела /
Рис. 47
п
S '
FI + R'A = 0; 2 Мо(/?/) + Мо(Ra) = 0;
для тела //
FR
2 Fi
l
A3)
A4)
Кроме того, из аксиомы о равенетве сил дейегвия а противодейст-
противодействия для двух взаимодействующих тел имеем
Ra = —Ra A5)
A6)
Если сложить A3) и A4), учитывая A5) и A6), то
k ft k
(F '1-4- V
<= 1 <= 1
SF/+ 2^"=°; v
Представленные равенства и есть условия равновесия внешних сил,
действующих на систему двух тел.
Для системы N тел в случае, когда на каждое тело действует любая
плоская система сил, можно составить ЗЛ/ условий равновесия и, сле-
следовательно, определить 3N неизвестных. Если число неизвестных боль-
больше ЗЛ/, то задача является статически неопределимой. В случае ста-
статически определимой задачи ЗЛ/ условий равновесия можно получить,
если составлять их для каждого тела отдельно, учитывая и силы вза-
взаимодействия тел, или составлять условия равновесия для любых ком-
комбинаций групп тел, в том числе и для всей рассматриваемой системы
тел. При этом внутренние силы для отдельных групп тел учитывать
не надо.
§ 6. РАСПРЕДЕЛЕННЫЕ СИЛЫ
В статике рассматривают силы, приложенные к твердому телу в ка-
какой-либо его точке, и поэтому такие силы называют сосредоточенными.
В действительности обычно силы бывают приложены к какой-либо
части объема тела или его поверхности, а иногда к некоторой части ли-
линии. Так как все аксиомы и теоремы статики формулируются для со-
сосредоточенных сил, приложенных к твердому телу, то необходимо рас-
рассмотреть способы перехода от распределенных вил к со-
сосредоточенным в простейших, наиболее часто возникающих
случаях
Распределенные вилы прежде всего характеризуются интен-
интенсив и о « т ыо распределенной силы, т. е. силой, приходящейся на
единицу объема, поверхности или длины линии. В основном встреча-
встречаются параллельные и сходящиеся распределенные силы. К параллель-
параллельным силам, распределенным по объему тела, относится вес частиц это-
этого тела. Сила давления воды на плотину относится к распределенным
параллельным силам по поверхности плотины. Сила тяжести частиц
тонкой проволоки характеризует распределенные силы по длине ли-
линии.
Раеемотрим замену сосредоточенными силами только распределен-
распределенных сил по длине линии, т. е. линейных распределенных сил. Для про-
простоты возьмем случаи, когда отрезок линии, по которому распределе-
распределены силы, является отрезком прямой, а интенсивность этих сил или по-
постоянна (силы распределены по прямоугольнику), или распределена
по линейному закону, в простейшем случае — по треугольнику. Ком-
Комбинируя эти два случая, можно получить линейное распределение ин-
интенсивности распределенной силы в более общем случае.
Параллельные силы постоянной интенсивности,
распределенные по отрезку прямой линии
Пусть на участке А В прямой линии длиной I распределены парал-
параллельные силы, интенсивность которых q постоянна (рис. 48, а). Заме-
Заменим эти распределенные силы сосредоточенными. Для этого отрезок
АВ разобъем на отрезки достаточно малых размеров по сравнению с его
54
о)
1
A
I
" t
i
\
h
Щ
¦¦ Ш
* "A\^
Рис. 48
длиной. На каждый такой малый отрезок действует сила qMt, которую
при достаточной малости длины отрезка Alt можно считать сосредото-
сосредоточенной силой. Заменяя полученную таким образом систему сосредото-
сосредоточенных параллельных сил q\lt одной равнодействующей еилой, по-
получим
s
-.qt.
1= 1
Равнодействующая R параллельна распределенным силам и при-
приложена, вследствие симметрии распределения сил, в кередине отрезка
АВ.
Если параллельные силы постоянной интенсивности q распределе-
распределены по отрезку прямой, наклоненному к распределенным аилам, то
модуль равнодействующей R таких сил равен qt. Линия действия ее,
параллельная распределенным силам, проходит через середину отрез-
отрезка (рии. 48, б). Модуль равнодействующей в этом случае не равен пло-
площади параллелограмма, образованного прямой АВ и распределенными
силами.
Параллельные силы, распределенные по отрезку прямой
с интенсивностью, изменяющейся по линейному закону
Рассмотрим распределенные параллельные силы, изменяющиеся
по линейному закону (рио. 49, а). Обычно считают, что такие силы рас-
распределены по треугольнику. Параллельные распределенные по тре-
Л
так
Рис, 49
55
угольнику силы приводятся к равнодействующей R, по модулю рав-
равной
где <7тах — наибольшая интенсивность силы. Это легко можно про-
проверить путем сложения параллельных сосредоточенных сил qlS.x%
приложенных к каждому элементарному отрезку длиной Дх. Наиболее
просто это можно сделать путем интегрирования. Действительно,
R = \\m 2 q^x
Если х отсчитывать от точки А, то из подобия треугольников
После этого, вставляя под интеграл вместо q его значение, получа-
получаем
i
— Г
<?тах *2
I
Я max.l
2
Точка приложения С равнодействующей силы смещается в сторону,
где интенсивность силы больше, и совпадает с центром тяжести пло-
площади треугольника, который находится в точке пересечения медиан,
расположенной на расстоянии Vg от основания треугольника и У9 от
его вершины А, т. е. АС = г/81. Точку приложения равнодействую-
равнодействующей силы можно также определить, вычислив момент элементарных
сосредоточенных сил qts.x, например относительно точки А, и приме-
применив затем теорему Вариньона о моменте равнодействующей силы.
Имеем
R-AC — \\m ^ xqtS.x = qxdx.
4ч^ О
П -*¦ оо
Заменяя q его значением q = ^~x, получаем
i
Q V3
>. 1.. max a
шах
Учитывая, что /? == шах , найдем
3^ 3
Если параллельные силы е интенсивностью, изменяющейся по ли-
линейному закону, распределены по отрезку прямой, наклоненному к
направлению сил (рис. 49, б), то их равнодействующая R = ?т** -
и делит отрезок АВ так же, как и в случае, когда распределенные си-
силы перпендикулярны отрезку АВ. Величина равнодействующей в этом
случае не равна площади треугольника, образованного отрезком пря-
прямой АВ и распределенными силами.
В более сложных случаях распределенных сил равнодействующую
силу и ее точку приложения обычно определяют путем интегрирования
и применения теоремы Вариньона. Величину равнодействующей в слу-
случае непараллельных распределенных сил находят так же, как и для
параллельных, только суммируют (и, следовательно, интегрируют) не
элементарные сосредоточенные силы q^h, а их проекции'на оси ко-
координат. По проекциям уже вычисляют равнодействующую силу и ко-
косинусы ее углов с осями координат.
Реакция заделки
Пусть имеем тело, например балку АВ, один конец которой А А'
заделан в стену (рис. 50, а). Такое крепление конца балки АА' назы-
называют заделкой в т о ч к е Л. Пуоть на балку действует плоская
система сил (Ръ F%,..., Fn). Определим силы, которые надо приложить
в точке (сечении) А балки, если часть балки АА' отбросить.
К части балки АА' при освобождении ее от заделки в стене при-
приложены распределенные силы. Если эти силы заменить элементарными
сосредоточенными силами и затем привести их к точке Л, то в точке
А получим силу R а (главный вектор элементарных сосредоточенных
сил #гА lt) и пару сил с
моментом /И А (главный мо- п) />
мент шносителыю точки А
элементарных сил
Момент М А называют мо~
ментом заделка.
Таким образом, задел-
заделка в отличие от шарнира
создас-i не только неизвест-
неизвестную по величине и направ-
направлению реакцию Т? 4, но еще
и пару сил с не известным
заранее моментом в заделке
М А (рис. 50, б).
Очевидно, если рассмот-
рассмотреть любую часть балки,
расчленив ее мысленно по
сечению тп, то в месте рас-
расчленения надо приложить
неизвестные силу и пару
Рис. 50
57
сил, заменяющие действие отброшенной части балки на рассматри-
рассматриваемою ее часть, причем сила и момент пары сил, действующие на
различные части балки, будут иметь противоположные направления
действия и вращения соответственно, как всякое действие и противо-
противодействие.
§ 7. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ,
ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ И СИСТЕМЕ ТЕЛ
Рассмотрим общие положения о решении задач на равновесие плос-
плоской системы сил, действующих на одно твердое тело и на систему тел.
Весь процесс решения задачи на равновесие сил можно расчленить на
ряд этапов, которые характерны для большинства задач.
К выбранному для рассмотрения телу или системе тел надо прило-
приложить все действующие силы, как активные, так и реакции связей; если
нужно, расчленить систему тел на отдельные тела или группы тел.
Если связью является абсолютно гладкая поверхность какого-либо
тела, то реакция связи в этом случае направлена по нормали к общей
касательной в точке соприкосновения в сторону, противоположную
тому направлению, в котором связь препятствует перемещению рас-
рассматриваемого тела.
Если связью является цилиндрический шарнир, позволяющий телу
вращаться вокруг его оси, то реакцию шарнира, лежащую в плоско-
плоскости, перпендикулярной оси, следует разложить на две заранее не из-
известные составляющие по положительным направлениям осей коорди-
координат. Если эти составляющие после их определения из уравнений равно-
равновесия будут иметь знак минус, го составляющие реакции направлены
противоположно положительному направлению осей координат.
Все гибкие связи (канаты, тросы, ремни и т. п.) создают реакции,
направленные по касательной к гибкой связи в данной точке.
Если связью является заделка, которая в отличие от цилиндричес-
цилиндрического шарнира не позволяет телу поворачиваться, то кроме двух не-
неизвестных составляющих реакций в этой точке надо еще приложить па-
пару сил с не известным заранее моментом заделки.
Эти же случаи связей возможны и при расчленении систем тел.
Выявление всех сил, действующих на рассматриваемое гело или
систему тел, особенно правильная замена различных видов связей их
реакциями, является одним из главных этапов при решении задач на
равновесие.
При расчленении системы тел надо следить, чтобы силы взаимодей-
взаимодействия между телами или группами тел сочлененной системы в точках
сочленения были равны по модулю, но противоположны по направле-
направлению. При рассмотрении системы тел (или их группы) силы взаимодей-
взаимодействия между телами системы (или их группы) прикладывать не нужно,
так как эти силы являются внутренними и в уравнения равновесия для
системы тел (или группы) не войдут.
После выявления всех сил надо выбрать оси координат и моментные
точки, а затем, составив условия равновесия сил в одной из форм, ре-
решить полученные уравнения относительно неизвестных.
58
Решение уравнений будет более простым, если при их составле-
составлении в каждое из уравнений добавляется по одной новой неизвестной.
Этого удается достичь, если за моментную точку брать такую, в которой
пересекаются две искомые силы. Такой точкой обычно является цилин-
цилиндрический шарнир Оси координат надо брать так, чтобы одна или две
неизвестные силы были перпендикулярны одной из осей координат и,
следовательно, параллельны другой оси. В этом случае в соответст-
соответствующее условие равновесия для одного тела войдет только одна неиз-
неизвестная сила
Приведем примеры решения задачи на плоскую систему сил.
Пример 1. Дана система двух твердых тел, соединенных с помощью шарни-
шарнира С (рис. 51). Балка АС, изогнутая под прямым углом, заделана в точке А. Кру-
Круговая арка СВ закреплена в точке В с помощью стержня, имеющего на концах
шарниры Размеры тел и приложенные силы указаны на рисунке. Дуговая стрел-
стрелка условно обозначает пару сил. Весом тел пренебречь. Определить реакции в
точкам А и В.
щт
А
Рис. 51
Решение. Заменим распределенные силы сосредоточенными. Числовое
вначсние равнодействующей силы Rx (рис. 52) распределенных по треугольнику
сил на участке АЕ определяем по формуле
1/a-3.40 = 60 кН.
Точка прчложеиия силы /?, отстоит от точки Е на — АЕ, т. е- на 1 м.
Числовое значение равнодействующей /?2 распределенных по арке радиаль-
радиальных сил определяем как произведение длины хорды BD, стягивающей дугу BD,
на интенсивность распределенных сил q, т. е.
/?2 = Ш-q = 4-20 = 80 кН,
Линия действия равнодействующей силы #2 вследствие симметрии распре-
распределения сил проходит через центр арки О, деля угол, стягивающий арку, на рав-
равные части.
Рассмотрим сначала равновесие системы двух тел, состоящие из балки АС
и арки ВС. Па зту группу гел действуют силы F, Ru R2, пара сил с моментом М,
реакции в заделке А и реакции в опоре В,
59
—г-а?
рис 52
Реакции заделки в точке
А в общем случае дают три
неизвестных: две составляю-
составляющие силы по осям координат и
момент пары сил; одна неиз-
неизвестная сила имеется в точке В.
Таким образом, имеем четыре
неизвестных, а независимых
уравнений для их определе-
определения — только три. Систему
следует расчленить (рис. 53),
приложив к каждому телу в
точке С силы действия одного
тела на другое, которые рав-
равны численно, но противопо-
противоположны по направлению.
В дальнейшем целесооб-
целесообразно на рисунках у стрелок,
изображающих силы, ставить
только буквы, обозначающие
числовые значения сил, без
знака вектора над ними, как это выполнено на рис. 53. Эго уменьшит число не-
неизвестных и, следовательно, количество уравнений для их определения.
Всего имеется шесть неизвестных, считая силы реакции в шарнире С. Со-
Составляя по три уравнения равновесия для каждого тела, можно получить шесть
уравнений для нахождения всех неизвестных. Требуется определить только четы-
четыре неизвестных—реакции в точках А и В. Поэтому составим уравнение равнове-
равновесия так, чтобы в них не входили реакции в точке С и по возможности в каждое
из них входило не более одного нового неизвестного.
Составим для тела СВ одно условие равновесия сил а форме суммы момен-
моментов сил относительно точки С. Имеем
— М — Rtf cos 30° + Кд/- = — 100 — 80-4УЗ/2 + Кд-4 = 0,
откуда Ув as 94 кН.
После эторо для всей системы тел применим условие равновесия в форме
еуммы проекций сил на осн Ох ч Оу. Получим
Хд + Rt — F cos 53° — R2 cos 30" = 05
YA _ f Sin 53° — R% sin 30° 4- YB = 0,
откуда KA = 99 кН, YA — 66 кН,
X
-X
Рис. 53
60
Для определения момента пары сил Мд в заделке достаточно применить
для тела АС условие рвновесия в форме суммы моментов сил относительно точки
С, Имеем
Fsin53".l -Rvl - ХА.3- УА-2+ Мд = О,
откуда Мд— 370 кН-м.
Если дополнительно надо определить силы Хс и Yс, то следует применить
условия равновесия для тепа СВ в форме проекций сил на оси Ох и Оу. Тогд?
— Хс — R2 cos 30° =0; — Yc — R2 sin 3(Г + Yb = 0.
Из этих уравнений получаем
Хс = 69 кН; Yc = 54 кН,
Для контроля правильности определения реакций в точках А и В следуег
составить условие равновесия, например, в форме суммы моментов сил отно-
относительно точки С для всей системы. Полученные ранее значения неизвестных дол-
должны обратить его в тождество.
Задача считается решенной, если известны проекции искомых сил на оси
координат, так как по проекциям легко определяются модули этих сил и косину-
косинусы углов сил с осями координат.
Пример 2. Для системы тел, находящихся в равновесии, определить реакцию
шарнира В (рис. 54). Необходимые данные указаны на рисунке. Стержни АЕ
и ВС, блоки и нить считать невесомыми. Трением в шарнирах пренебречь. Ду-
Дуговой стрелкой обозначена пара сил, \М\ — модуль ее алгебраического момента.
Рис. 54
Рис. 55
Решение. Рассмотрим всю систему тел, освободив ее от связей, т, е. от
цилиндрических шарниров в точках А и В. Неизвестные по модулю и направле-
направлению силы реакций этих шарниров разложим на составляющие Х"л> УА, ~ХВ, Тв>
предположив, что они направлены по положительному направлению осей коор-
координат. Неизвеспшх четыре, а условий равновесия сил для всей системы тел мож-
можно составить только три. Поэюму рассмотрим другие комбинации тел или от-
отдельные тела.
При определении Хв удобно составить условие равновесия для всей си-
системы 1ел в форме суммы моменшв сил относительно точки А. Имеем
м.
1=0
Хв-3— F.A-
\М\— Р.10=0,
или
— 2*4 — 5— 10>10= 0,
61
откуда Хв = 37,7 кН; Хв из приведенного уравнения получается со знаком
плюс; следовательно, предположение о первоначальном направлении Хв в
положительную сторону оси Ох оказалось правильным,
Другие условия равновесия сил для всей системы тел не позволяют опреде-
определить Ув, гак как в них входит неизвестная сила У А.
Рассмотрим отдельно равновесие стержня ВС (рис. 55), освободив его от
связей. В шарнире С неизвестную силу реакции заменим составляющими, на-
Рвс, 56
Рис. 57
правленными по положительному направлению осей координат, В точке J?
приложим силу натяжения отброшенной нити, которая численно равна силе тя-
тяжести груза Р и направлена по нити.
Для определения Уg составим условие равновесия для сил, приложенных
к стержню ВС, в форме суммы моментов сил относительно точки С. В это усло-
услой Х К б
р , фр у
вие не войдут неизвестные силы Хс и
Имеем
у
Кс, которые определять не требуется!
или
Ка-6 + ш/3-3 — 10-4 + 2.2 = 0.
Отсюда находим Ув = 12,8 кН. Знак «-(-* указывает на правильное^ пред-
предположения о направлении Уs.
Для приобретения опыта силового анализа в системах гел представим до-
дополнительно к рассмотренным еще несколько вариантов частей системы тел я
отдельных гел с приложенными к ним силами (рнс. 56—59). При замене О1брасы-
Рис. 58
Рис. 59
ваемых тел силами учтено, что осн блоков О и ? являются цилиндрическими
шарнирами и реакции в них следует разлагать на составляющие, параллельные
осям координат. Рассматривая силы, с которыми тела действуют друг на друга,
следует учитывать, что, согласно аксиоме статики, силы действия и противодей-
противодействия равны по модулю, но противоположны по направлению. Так, если стержень
АЕ действует на блок в точке D силами Хо и УD, направленными в положи-
положительные стороны осей координат (рис. 58), то блок будет действовать на стержень
АЕ с такими же по числовой величине силами, но направленными в отрицатель-
отрицательную сторону тех же осей координат (рис. 59).
При отбрасывании нити следует учитывать, что ее натяжение во всех точках,
при отсутствии трения в осях блоков, одинаково по модулю и направлено по ка-
касательной к нити Нить при этом должна испытывать только натяжение. При рас-
рассмотрении отдельного блока натяжение нитей следуем приложить в двул точках,
в которых отбрасываются части нити.
Глава 6
ТРЕНИЕ
При движении или стремлении двигать одно тело по поверхности
другого в касательной плоскости поверхностей соприкосновения воз-
возникает сила трения скольжения
Если одно тело, например цилиндрический качок, катить или стре-
стремиться катить по поверхности другого тела, кроме силы трения сколь-
скольжения из-за деформации поверхностей тел дополнительно возникает
пара сил, препятствующая качению катка. Возникновение силы тре-
трения, препятствующей скольжению, иногда называют трением первого
рода, а возникновение пары сил, препятствующих качению, — тре-
трением второго рода.
§ 1, ТРЕНИЕ СКОЛЬЖЕНИЯ
Пусть на тело действует плоская система активных сил и тело на-
находится в равновесии, соприкасаясь с поверхностью другого тела, яв-
являющегося связью для рассматриваемого тела. Если поверхности со-
соприкасающихся тел абсолютно гладкие и тела абсолютно твердые, то
реакция поверхности связи направлена по нормали к общей касатель-
касательной в точке соприкосновения и направление реакции в этом случае не
зависит от действующих на тело активных сил. От активных сил зави-
зависит только числовая величина силы реакции. В действительности аб-
абсолютно гладких поверхностей и абсолютно твердых тел не бывает.
Все поверхности тел в той или иной степени шероховаты и все тела де-
деформируемы. В связи с этим и сила реакции R шероховатой поверхно-
поверхности при равновесии тела зависит от активных сил не только по числовой
величине, но и по направлению (рис, 60)
Если силу реакции R шероховатой поверхности разложить на сос-
составляющие, одна из которых N направлена по общей нормали к по-
поверхности соприкосновения, а другая F находится в касательной пло-
плоскости к этим поверхностям, то составляющая F силы реакции явля-
является силой трения скольжения, а составляющая N — нормальной ре-
реакцией.
В теоретической механике обычно рассматривается только о у х о е
трение между поверхностями тел, т. е. такое трение, когда между
ними нет смазывающего вещества. Для сухого трения надо различать
трение скольжения при покое или равновесии тела и
?3
трение скольжения при движении одного тела по поверхности
другого с некоторой относительной скороотью.
При покое сила трения зависит только от активных сил. При вы-
выбранном направлении касательной в точке соприкосновения по-
поверхностей тел сила трения вычисляется по формуле
п
Р = У, Fn.
Аналогично, при выбранном направлении нормали нормальная ре-
реакция выражается через заданные силы
п
-л/= 2 Fln.
В 1781 г. Кулон установил основные приближенные законы для
сухого трения скольжения при покое. В дальнейшем законы Кулона
многократно проверялись другими исследователями. Но эти законы
подтверждались в случае, когда поверхности тел не вдавливались друг
в друга и шероховатость была не очень велика.
Законы Кулона можно установить на приборе, схема которого дана
на puG. 61. На этом приборе, изменяя вес гири, можно изменять нор-
нормальное давление Р (или равную ему нормальную реакцию Jj) между
}П
У///////////Л
Рис 60
Рис. 61
трущимися поверхностями. Изменяя же вес гирь Q, можно изменять
силу, которая стремится двигать тело вдоль поверхности другого тела,
являющегося связью. Очевидно, что если сила Q = 0, то тело находит-
находится в равновесии и сила трения/7 равна нулю.
Если силу Q увеличить (при этом тело не скользит по поверхно-
поверхности, а находится в равновесии), то по условию равновесия возникает?
сила трения F, которая равна, но противоположна активной силе Q.
Нормальная реакция Jj равна нормальному давлению Р. Увеличивая
силу Q при одном и том же нормальном давлении Р, можно достичь и
такого положения, кстда ничтожно малое дальнейшее увеличение силы
64
О выведет тело из ракнопеоия, заставляя его скользить по поверхно-
поверхности связи. Очевидно, будет достигнуто предельное положение, при ко-
котором сила трения станет наибольшей и не сможет уравновешивать
силу Q при ее дальнейшем увеличении. Изменяя силу нормального
давления Р, можно исследовать, как нзменяегся при этом предельная
сила трения FmsiX. Можно также исследовать влияние на предельную
силу трения площади соприкосновения тел, сохраняя при этом нор-
нормальное давление, а также влияние материала тел, характер обработ-
обработки поверхностей и другие факторы. Такие опыты позволяют проверить
законы Кулона для сухого трения скольжения.
Законы Кулона
1. Сила трения скольжения находится в общей касательной плос-
плоскости соприкасающихся поверхностей тел и направлена в сторону, про-
противоположную направлению возможного скольжения тела под дейст-
действием активных сил. Сила трения зависит от активных сил, и ее модуль
заключен между нулем и максимальным значением, которое достига-
достигается в момент выхода тела из положения равновесия, т. е.
О < F < Fmax.
2. Максимальная сила трения скольжения при прочих равных усло-
условиях не зависит от площади соприкосновения трущихся поверхностей.
Из этого закона следует, что для того, чтобы сдвинуть, например, кир-
кирпич, надо приложить одну и ту же силу независимо от того, какой
гранью он положен на поверхность, широкой или узкой.
3. Максимальная сила трения скольжения пропорциональна нор-
нормальному давлению (нормальной реакции), т. е.
/W = t'V, A)
где безразмерный коэффициент f называют коэффициентом тренич
скольжения; он не зависит от нормального давления
4. Коэффициент трения скольжения зависит от матерчяла и физи-
физического состояния трущихся поверхностей, т. е. от величины и характе-
характера шероховатости, влажности, температуры и других условии. Коэф-
Коэффициент трения скольжения в зависимости от различных условий ус-
устанавливается экспериментально. Так, коэффициент трения для кир-
кирпича по бетону равен 0,76; для стали по стали — 0,15; для дуба по ду-
дубу поперек волокон — 0,54, а для дуба по дубу вдоль волокон — 0,62.
Закон Кулона о предельной силе трения справедлив и при скольже-
скольжении одного тела по поверхности другого с некоторой относительной
скоростью. При этом коэффициент трения скольжения зависит от от-
относительной скорости скольжения. Для большинства материалов ом
уменьшается с увеличением относительной скорости скольжения, но
для некоторых материалов, наоборот, увеличивается (трение кожи о
металл).
В приближенных технических расчетах обычно считают, что коэф-
коэффициент трения скольжения не зависит от относительной скорости
екольжения.
3 Зак. 1311 05
В отличие от сухого трения трение при наличии смазывающего слоя
между поверхностями определяется распределением относительной
скорости скольжения в этом слое. В этом случае трение происходит
не между поверхностями тел, а между слоями смазызающего вещеетза.
Теория трения в смазывающем слое жидкости рассматривается в гид-
гидродинамике.
Угол и конус трения
Многие задачи на равновесие тела па шероховатой поверхности,
т. е. при наличии силы трения, удобно решать геометрически. Для этой
цели введем понятия угла и конуса трення.
Пусть твердое тело под действием активных сил находится на шеро-
шероховатой поверхности в предельном состоянии равновесия, т. е. таком
состоянии, когда сила трения достигает своего наибольшего значения
при данном значении нормальной реакции (рис. 62). В этом случае
полная реакция шероховатой поверхности R отклонена от нормали
общей касательной плоскости трущихся поверхностей на наибольший
угол.
Этот наибольший угол <р между полной реакцией, построенной на
наибольшей силе трения при данной нормальной реакции, и направ-
направлением нормальной реакции называют углом
трения.
Угол трения , ф зависит от коэффициента
трения.
Как следует из рис. 62,
tg ф =
F
¦г max
Но по третьему закону Кулона,
рнс {;2 следовательно,
tgtp = /, B)
т. е. тангенс угла трения равен коэффициенту трения.
Конусом тренач называют конус, описанный полной реакцией, по-
построенной на максимальной силе трения, вокруг направления нормаль-
нормальной реакции. Его можно получить, изменяя активные силы так, чтобы
тело на шероховатой поверхности находилось в предельных положе-
положениях равновесия, стремясь выйти из равновесия по всем возможным
направлениям, лежащим в общей касательной плоскости соприкасаю-
соприкасающихся поверхностей.
Если коэффициент трения во всех направлениях одинаков, то копуо
трения круговой. Если же коэффициент трения в различных направле-
направлениях не одинаков, то конус трения не круговой, например в случае,
когда свойства соприкасающихся поверхностей различны (вследствие
определенного направления волокон или в зависимости от направле-
направления обработки поверхности тел, если обработка происходит на стро-
строгальном станке и т. п.).
Равновесие тела на шероховатой поверхности
При равновесии сил, действующих на твердое тело, находящееся в
равновесии на шероховатой поверхности, возникает дополнительно не-
неизвестная сила реакции шероховатой поверхности — сила трения.
В случае предельного равновесия сила трения достигает своего мак-
еимального'значения и по формуле A)'выражаетея через'нормальнуго ре-
реакцию. В общем случае равновесия сила трения находится между ну-
нулем и ее максимальным значением. Поэтому соответствующие условия
равновесия, в которые входит сила трения после замены ее максималь-
максимальным значением, становятся неравенствами. После этого неизвестные
Рис. 63
Fhc. 64
находит путем совместного решения уравнений и неравенств. Для всех
неизвестных или для их части получают решения в виде неравенств.
Некоторые задачи на равновесие е учетом сил трения удобно ре-
решать геометрически с помощью конуса трения.
Можно сформулировать условия равновесия тела на шероховатой
поверхности, используя конус треиия. Если активные силы, действую-
действующие на гело, приводятся к равнодействующей силе7<?<а|, то при равно-
равновесии тела на шероховатой поверхности равнодействующая активных
вил R(a> по аксиоме о равновесии двух сил, приложенных к твердому
челу, уравновешивается полной реакцией R шероховатой поверхности
(рис. G3). Полная реакция проходит через вершину конуса, а следова-
следовательно, через вершину конуса проходит и равнодействующая актив-
активных сил.
Очевидно, при изменении равнодействующей активных сил тело
находится в равновесии до тех пор, пока составляющая Q равнодейст-
равнодействующей активных сил, лежащая в общей касательной плоскости сопри-
соприкасающихся поверхностей, не будет превышать наибольшего значения
СИЛЫ грения Fmax-
Предельным положением равновесия тела является случай, когда
силаф равна силе Fmax. В этом случае равнодействующая активных
сил ]^а> направлена по образующей конуса трения, так как Р — со-
67
оголяющая равнодействующей_активных сил по нормами — уравно-
уравновешена нормальной реакцией N, если только активные силы не отде-
отделяют тела от шероховатой поверхности. Поэтому условие равновесия
тела на шероховатой поверхности можно сформулировать так: для рав-
равновесия тела на шероховатой поверхности необходимо и достаточно,
чтобы линия действия равнодействующей активных 'ил, действую-
действующих на тело, проходила внутри конуса трения или по его образующей
через его вершину (рис. 64).
Тело нельзя вывести из равновесия любой по модулю активной силой,
если ее линия действия проходит внутри конуса трения.
" - . Рис 66
Если лштя Ае."кт5ия равнодействующей активных сил не прохо-
проходит внутри KuHjca трения или по его образующей, то тело на шерохо-
шероховатой поверхности не может находиться в равновесии (рис. 65).
Пример 1._Тело, сила тяжести которого Р = 100 Н, удерживается в равно-
равновесии силой Т на шероховатой наклонной плоскости, имеющей угол наклона
а = 45°. Коэффициент грения скольжения между телом и плоскостью / = 0,6<
Сила Т действует на тело под углом Р_= 15° к линии наибольшего ската (рис, 66).
Определить числовое значение силы Т при равновесии тела на шероховатой на-
наклонной плоскости.
Решение. К телу приложены силы N, Р, Т и сила трения F. Возмож-
Возможны два случая предельного равновесия тела и соответственно два предельных зна-
значения силы Т при двух направлениях силы трения по наклонной плоскости вниз
и вверх d зависимости от направления возможного скольжения вверх по наклон-
наклонной плоскости и вниз. Для составления уравнений равновесия только один раз
введем /j = kf, где k =» ± 1.
Составляем условия равновесия в виде суммы проекций сил на координат-
координатные оси для обоих предельных случаев. Имеем
Т cos & — F — Р sin а = 0) Г sin [5 + Л/ — Р cos а = 0.
По чакону Кулона,
F = hN = kfN.
Решая йги уравнения относительно Т, получаем
Т = Р (sin a H- kf cos а)/(cos p1 + kf sin fj),
63
Отсюда при k — -f-
P (stn a -f- f cos a)/(cos p -f / Mil E) « 102 H;
при
— 1
T3 = P (sin a — / cos a)/(cos P — f sin f>) ss 35 H.
Таким образом, сила /' при равновесии тела должна удовлегв >пягь условию
35 < Г < 102 Н.
Пример 2. Однородный тяжелый стержень А В длиной / опирается концом
А на гладкую вертикальную стену, а другим В — на шероховатую вертикальную
стену (рис. 67). Расстояние между стенами ft, причем h < /. Определить коэффи-
коэффициент трения стены /, при котором возможно равновесие стержня.
Решение. Рассмотрим случай, когда точка А стержня находится выше
точки В. Равновесие стержня невозможно, если точка А расположена ниже точ-
точки В, На стержень действуют сила тяжести Р, приложенная досередине'стержня,
нормальная реакция гладкой стены NА и реакция шероховатой стены RB, кото-
которую разложим на нормальную реакцию Nл и
силу трения FB.
Составим условия равновесия плоской си-
системы сил:
,—ЛГИ = О;
i
1
%
р
h
r
н
V |HB(F|)=0; Р/г/2—,V(sina=0.
Рис. 67
К этим условиям следует добавить неравенство для силы трения:
Из уравнений равновесия находим
= NB = N; FB= P; N = NA= Phi{21 sin a).
Из геометрических условий задачи
sin a
УР — hVL
Итак, для силы трения FR имеем уравнение и непапенетчо
FB = P; F0 < /РА/B1//' - И
Исключая из них силу трения 'F^, после сокращения на Р получаем
Искомое условие для коэ-рфициентз трения f при равновегии стержня принимает
f 2. ТРЕНИЕ КАЧЕНИЯ
Если рассматриваемое тело имеет форму катка и под действием при-
приложенных активных сил может катиться по поверхности другого тела,
to из-за деформации поверхностей этих тел в месге соприкосновения
СО
могут возникнуть силы реакции, препятствующие не только скольже-
скольжению, по и качению. Примерами таких катков являются различные ко-
колеса, как, например, у электровозов, вагонов, автомашин, шарики и
ролики в шариковых и роликовых подшипниках и т. п.
Пусть цилиндрический каток находится на горизонтальной плоско-
плоскости под действием активных сил. Соприкосновение капо с плоскостью
из-за деформации фактически проиаходит не вдоль одной образующей,
как в случае абсолютно твердых тел, а пд некоторой площадке. Если
активные силы приложены симметрично относительно среднего сечения
Рис. 68
Рис. 69
Рис. 70
катка, т. е. вызывают одинаковые деформации вдоль всей его образую-
образующей, то можно изучать только одно среднее сечение катка. Этот случай
рассмотрен ниже.
Активные силы, действующие на катки в ви кз колес (рис. 68),
кроме силы тяжести Р обычно состоят из силы Q, приложенной к цент-
центру колеса параллельно общей касательной в точке А, и пары сил с мо-
моментом L, стремящейся катить колесо, называемое в этом случае ведо-
ведомо-ведущим. Если L = 0, a Q Ф 0, ю колесо называют ведомым, и
если L Ф 0, a Q — 0, то ведущим. Ведомо-ведущими являются колеса
локомотива, идущего вторым в составе поезда.
Если активные силы, действующие на колесо, привести к точке А
соприкосновения гсагка с плоскостью, у которых не г деформации, то в
общем случае получим силу и пару сил, стремящиеся заставить каток
скользить и катиться. Следует различать чистое качение,
когда точка соприкосновения А катка не скользит по неподвижной
плоскости, и к а ч е н и е со скольжением, когда наряду о
вращением катка есть и скольжение, т. е. точка А катка движется по
плоскости. При чистом скольжении, наоборот, кагок движется по
плоскости, не "имея вращения.
Соприкосновение среднего сечения колеса с неподвижной плоско-
плоскостью из-за деформации колеса и плоскости происходит по некоторой
линии BD. По этой линии на колесо действуют распределенные силы
реакции (рио. 69). Если привести распределенные силы к точке Л, то
в этой точке получим главный вектор R этих распределенных сил с со-
составляющими N (нормальная реакция) и F (сила трения скольжения),
а также пару сил о моментом М (рис. 69). При симметричном распре-
распределении сил по лини» BD относительно точки А момент М пары сил
70
равен нулю. В этом случае нет активных сил, стремящихся катить ка-
каток в каком-либо направлении.
Приведем активные силы (P<f\ F[a\ ..., F^) в общем случае к точ-
точке Л. В этой точке получим главный вектор этих сил RM и пару сил,
момент которой равен главному моменту L (рио. 70).
При равновесии катка, т. е. когда каток не катитая и не скользит
по плоскости, активные еилы уравновешиваютвя еилами реакций свя-
связи и, следовательно,
~R^R^= у Fja); ~M = L=S> MA{F\a)).
>¦= i г= t
Изменим активные силы, приложенные к катку так, чтобы увеличи-
увеличивался момент L пары активных сил, стремящейся катить каток. Пока
каток находится в равновесии, увеличивается и равный ему по число-
числовой величине, но противоположный по направлению момент М пары
сил, препятствующий качению катка и возникающий от действия на
каток неподвижной плоскости. Наибольшее значение М достигается
в момент начала качения катка по плоскости.
Установлены следующие приближенные законы для наибольшего
момента пары сил, препятствующей качению.
1. Наибольший момент пары сил, препятствующей качению, в до-
довольно широких пределах не зависит от радиуса катка.
2. Предельное значение момента Мтат пропорционально нормаль-
нормальному давлению, а следовательно, и равной ему нормальной реакции
N:
Л4шах = 6N. C)
Коэффициент пропорциональности б называют коэффициентом тре-
трения качения при покое или коэффициентом трения второго рода. Из
формулы C) следует, что б имеет размерность длины.
3. Коэффициент трения качения S зависит от материала катка, плос-
плоскости и физического состояния их поверхностей. Коэффициент трения
качения при качении в первом приближении можно считать не завися-
зависящим от угловой скорости качения катка и его скорости скольжения по
плоскости. Для случая качения вагонного колеса по стальному рель-
рельсу коэффициент трения качения б « 0,5 мм.
Законы трения качения, как и законы трения скольжения, спра-
справедливы для не очень больших нормальных давлений и не слишком
легко деформирующихся материалов катка и плоскости.
Эти законы позволяют не рассматривать деформации катка и плос-
плоскости, считая их абсолютно твердыми телами, касающимися в одной
точке. В этой точке соприкосновения в среднем сечении катка кроме
нормальной реакции и силы трения надо приложить еще и пару сил,
препятствующую качению.
Коэффициент трения качения равен длине d, которую вычислим сле-
дующлл образом. Сложим нормальную реакцию /V с парой сил, пре-
71
пятствующей качению в момент, когда М — Л1тах. Получим ту же аи-
аилу N, но сдвинутую параллельно самой себе на расстояние
d = MmJN «= 5N/N = б.
В предельном елучае равновесия катка d ~ 6. Эту величину следу-
следует отложить в направлении, в котором активные силы стремяг«я ка-
катить каток (рио. 71).
Рис. 72
Для того чтобы каток не скользил, необходимо выполнение усло-
условия
Для заданных активных сил соответственно
D)
/= 1
Для того чтобы каток не катился, должно выполняться условие
№ <Mmhx, = 8N. E)
Для активных сил оно имеет вид
Для примера рассмотрим случай ведомого колеса, к которому кроме
силы тяжести Р приложена еще горизонтальная активная сила Q
(рис. 72).
Если каток находится в равновесии, то из условий равновесия плш-
кой системы сил, приложенных к катку, получаем
F = Q; N = р- rQ = M,
где за моментнуго точку взята точка А.
В случае отсутствия скольжения по формуле D) с учетом увловий
равновесия
Аналох ично, при отсутствии качения по формуле E)
Ю = М ?С 6Р.
72
Таким образом, при отсутствии скольжения сила Q должна удов-
удовлетворять условию Q ^ fP, а при отсутствии качения эта же сила Q —
удовлетворять другому условию:
P
Если б//- •< f, то, пока Q ^ — Р, каток находится в равновесии.
Если fP> Q^ у Р, то каток катится без екольжения (чистое каче-
качение). При Q^> fP кроме качения появляется еще и скольжение.
При Ыг > f каток находится в равновесии, пока Q < }Р. Если
— Р > Q ^ fP, он скользит не вращаясь (поступательное движение).
При Q ^ — Я наряду со скольжением возникает качение.
В случае если — — f, каток находится в равновесии, пока Q ^
^ — Р — fP. Если же Q ^ — Р = fP, то он катится со скольжением.
Обычно Ыг < / и, следовательно, для начала качения катка тре-
требуется значительно меньшая сила Q, чем для начала его скольжения.
Поэтому по мере увеличения силы Q каток сначала начинает катиться,
а при дальнейшем ее росте к качению добавляется еще и скольжение.
С точки зрения затраты энергии выгодно заменять скольжение ка-
качением. Этим объясняется преимущество шариковых и роликовых под-
подшипников по сравнению о подшипниками скольжения, если даже в них
трение и не уменьшается введением смазывающего вещества.
Аналогично трению качения можно рассмотреть и явление возник-
возникновения так называемого т рения верчения, т.е. сличая, когда
активные силы стремятся вращать тело, например в форме шара, во-
вокруг нормали к общей касательной поверхности соприкосновения.
В этом случае возникает пара сил, препятствующая верчению, при-
причем наибольший ее момент, возникающий в момент начала верчения,
также прямо пропорционален нормальной реакции. Коэффициент
пропорциональности, т. е. коэффициент трения верчения, обычно зна-
значительно меньше коэффициента трения качения.
Глава 7
ЧАСТНЫЕ СЛУЧАИ ПРОСТРАНСТВЕННЫХ СИСТЕМ СИЛ.
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
§ 1. ИЗМЕНЕНИЕ ГЛАВНОГО МОМЕНТА ПРИ ПЕРЕМЕНЕ
ЦЕНТРА ПРИВЕДЕНИЯ
При перемене центра приведения векторные моменты сил изменя-
изменяются, так как изменяются радиус-векторы точек приложения Вслед-
етвие этого изменяется главный момент. Оценим изменение главного
73
момента системы сил (Fu F.2< F,,,.., Fn). Пусть система сил приведена к
центру О и получены в этой точке главнын оекгор R и главный момент
Го (риа. 73). Выберем в качестве центра приведения другую точку О1
и вычислим главный момент ZOi рассмат-
рассматриваемой системы сил. Так как
(Fv /V.., FB)~</?, 1оУ,
то для получения главного момента Lo до-
достаточно привести к новому центру систему
(R, Хо). Силу # из точки О перенесем в
точку Ov Получим в этой точке силу
Ri = R и, согласно геореме о параллель-
Рис- 73 ном переносе силы, присоединенную пару
сил с векторным моментом MOl (R)- Век-
Векторный момент пары сил Го, вычисленный относительно точки О как
вектор свободный, можно приложить в любой точке тела. Новый
главный момент относительно точки О1 по правилу сложения пар
сил является векторной суммой моментов Lo и MOl (R), т. е.
Го, -=Г0 + MOl (R)\ LOl — Го = MOl (R). A)
По формуле для векторного момента силы имеем
Mot = дГо х R = -OOt X R.
С учетоп этого A) примет форму
Lot=--To~o6iXR. B)
Итак, главный момент системы сил при перемене центра приведения
изменяется на векторный момент главного вектора R, приложенного
в старом центре приведения, относительно нового центра приведения
Ov
§ 2. ИНВАРИАНТЫ СИСТЕМЫ СИЛ
Инвариантами в статике называются такие величины для рассмат-
рассматриваемой системы сил, которые не изменяются при изменении цент-
центра приведения. Одним из инвариантов является главный вектор, так
как в любом центре приведения он выражается векторной суммой сис-
системы сил. Еели в одном центре приведения О главный вектор R, а з
другом 0! он Ru то
R = R» C)
Таким образом, главный вектор системы сил является векторным ин-
инвариантом. Для одной и той же системы сил он не зависит от выбора
центра приведения.
74
Из векторного равенства C) следует, что равны модули н аооекцин
главных векторов на любые оси координат, т. е.
R — /?i> Rx —
C')
Для получения второго, скалярного, инварианта используем фор-
формулу B)
Lot =10—00! XR.
Умножая обе части этого равенства скалярно на Ru причем в правой
части при умножении вместо Rlt согласно C), возьмем R, получим
или
D)
так как смешанное произведение векторов, содержащих два одинако-
одинаковых множителя R, равно нулю, т. е.
Соотношение D) является вторым скалярным инвариантом: скалярное
произведение главного момента на главный вектор не зависит от центра
приведения. Второй скалярный инвариант можно выразить в двух дру-
других эквивалентных формах, если раскрыть скалярное произведение
векторов в D). Обозначая проекции LOl на оси координат Ltx, LJy,
Llz, а проекции Lo соответственно Lx, Ly, Lz, второй инвариант мож-
можно выразить в форме
Liх Riv ~Ъ Liy Riv + Llz Ru =
= LxRx + LyRy+L1Rt. D')
Кроме того, формуле D) можно придать вид
LOlRi cos a1 = Lo R cos a,
где ax — угол между векторами LOl и Ru
a a — между Lo и R (рис. 74). После сокра-
сокращения на /?j = R получим
— Lo cos a. D")
Рис. 74
В этой форме второй инвариант утверждает, что проекция главного
момента на направление главного вектора не зависит от центра при-
приведения.
Если главный момент в каждом центре приведения разлож:;гь на
две взаимно перпендикулярные составляющие, одна из которых на-
направлена по главному вектору, то, учитывая, что главные векторы в
различных центрах приведения параллельны, согласно D") получим
Ъо.^Ъ'о, E)
75
где Lbl — составляющая главного момента Lo, no направлению глав-
главного век юра Rlt a Lo — составляющая главного момента Lo по направ-
направлению главного вектора R. Соотношение E) является следствием пер-
первого и второго инвариантов.
Рассмотренные инварианты C) и D) являются независимыми, т.е.
из одного из них не следует другой. Комбинируя эти инварианты, мож-
можно получить другие, зависящие от них инварианты.
§ 3. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПРОСТРАНСТВЕННОЙ
СИСТЕМЫ СИЛ
Произвольная система сил приводится к силе, рачной главному век-
вектору R, и паре сил, векторный момент которой равен главному момен-
моменту Lo- В зависимости от их модулей и взаимного направления, т. е. уг-
угла а между ними, можно произвести дальнейшие упрощения.
Приведение к паре сил. Если R = О, to Ф 0, то
система сил приводится к одной паре сил, причем главный момент в
этом случае, согласно B), не зависит от центра приведения. В рассмат-
рассматриваемом случае оба шшзрианта системы сил равны нулю, т. е.
Я = 0; Г Л - 0.
Приведен че к равнодействующей. Возможны
два случая.
I. Если R ф 0, Iо — 0 (первый инвариант R Ф 0, второй —
L*oR = 0), то система приводится к равнодействующей силе R*, рав-
равной по модулю и i „правлению главному вектору R, т. е.
Линия действия равнодействующей силы в этом случае проходит через
центр приведения.
2. Если R Ф 0, Lo Ф 0, но a — 90°, т. е. Lo -LR (перпый инва-
инвариант R Ф 0, второй — Lo • R — 0), то система сил тоже приводит-
приводится к равнодействующей, причем опять
R* = R.
Но линия действия равнодействующей силы R* отстоит от центра при-
приведения на расстоянии d = L0IR. Действительно, в этом случае имеем
силу и пару сил в векторным моментом Lo, причем силы пары можно
считать раеположенными в одной плоскости о силой jR7 так как вектор-
векторный момент пары перпендикулярен силе R (рис. 75). Поворачивая и
перемещая пару сил в ее плоскости, а также изменяя силы пары и ее
плечо, при сохранении векторного момента можно получить одну из
сил пары R', равной по модулю, но противоположной по направлению
76
главному сектору R. Другая сила пары R* и будет равнодействующей
силой. Действительно,
(R, То) «(^, Я*, F)«o (Я*), #* = /?,
так как система двух равных по модулю, но противоположных по на-
направлению еил (R, R') со 0 и может быть отброшена. Таким образом,
рассматриваемая система сил оказалась эквивалентной одной равно-
Рис. 75
Рис. 76
Рис. 77
действующей силе R*, которая ио модулю и направлению совпадает
с главным вектором R. Плечо пары сил (R'R*) определяется из усло-
условия
d = L0IR,
так как R = R' = R*. Отрезок d определяет кратчайшее расстояние
от центра приведения О до линии действия равнодействующей силы R*.
Первый случай является частным случаем второго, когда за центр
приведения О взята точка, расположенная на линии действия равно-
равнодействующей силы.
Приведение к дина м е, Динамой в механике называют
такую совокупность силы F и пары сил (Fu F[), действующих на твер-
твердое тело, у которой сила перпендикулярна плоскости действия пары
сил (рис. 76). Используя векторный момент М пары сил (Fu F[), можно
также определить динаму как совокупность силы и пары, ц которых си-
сила параллельна векторному моменту пары сил (рис. 77). Сила F и
векторный момент пары сил М могут быть направлены как в одну, так
и в противоположные стороны.
Рассмотрим теперь случай, в котором R Ф 0, Еоф0 п векторы
Lo и R не перпендикулярны. В этом случае оба инварианта не равны
нулю, т. е.
Покажем, что система сил в этом случае приводится к динаме, причем
элементами динамы являются сила Rt= R и момент пары Lt =
= Locosa, где а—угол между векторами Lo и Я. Действительно, после
приведения системы сил к центру О получим главный вектор R и глав-
77
ный момент Lo- Косинус угла а между ними можно определить, выра-
выражая скалярное произведение векторов Lo и R в двух формах:
^ж + L,, RX) -f- Lz Rz
^
Lo ко cos a — LxKv + Lv 1<}/ -tLzk2, cos a
Разложим главный момент Lo на две взаимно перпендикулярные сос-
составляющие Ly и L2, одна из которых Lt направлена по главному
вектору 7? (рис. 78). Имеем
Lo cos a
Векторный момент пары сил L2 перпендикулярен главному вектору
. Такая система силы R и пары с моментом L2 приведется к одной си-
силе #! = R, линия действия которой находится от точки О на расстоя-
расстоянии
d ()
R R '
Рассматриваемая система сил заменилась эквивалентной систе-
системой сил, состоящей из силы /?г и пары сил с векторным моментом Llt
который как свободный вектор можно перенести из точки О в любую
точку, в том числе и точку Ог на линии действия силы Rt. Кратко ре-
результат можно выразить в форме
(R,Lo)^(Rt, Q,
причем система сил (Ru Lx) является динамой. Сила Rl и векторный
момент пары Lx есть элементы динамы:
RlS=R, Lt = Locos a = *"**+t-uRy + LtRt ^ (8)
R
Линия, по которой направлена сила динамы Rly называется цент-
центральной винтовой осью. Во всех точках винтовой оси,
принятых за центры приведения, система сил приводится к одной и гой
же динаме. Расстояние от центра приведения О до центральной винто-
винтовой оси
d—Lo sin alR.
Если брать за центры приведения точки на поверхности цилиндра,
осью которого является центральная винтовая ось, то главные момен-
моменты относительно таких центров будут одинаковы по модулю и состав-
составляют одинаковый угол с образующими цилиндра. Эти главные момен-
моменты состоят из одного и того же момента Llt входящего в состав динамы,
и моментов L2, перпендикулярных Lx и по числовой величине пропор-
пропорциональных расстоянию центра приведения от центральной винтовой
оси.
78
Совокупность, сил, образующих динаму, можно заменить двумя
скрещивающимися еилами. Для этого следует одну из сил пары R"
совмеетить о точкой приложения вилы Rx и сложить о этой силой
(рис. 79).
Рассмотрены все возможные елучаи, кроме случая R = О, /Го=0.
Это случай равновеаия системы вил, расемотренный ранее. Таким об-
образом убедились, что только при обращении в нуль главного вектора
и главного момента система может находиться в равновесии, т. е.
обращение в нуль главного вектора и главного момента не только не-
необходимо для равновесия системы сил, но и достаточно.
Рис. 78
Рис. 79
Из рассмотрения частных случаев приведения систем еил следует,
что при приведении системы сил к равнодействующей силе R* эта еила
равна и параллельна главному вектору 7^. Но линия действия равно-
равнодействующей может не проводить через центр приведения, в котором
приложен главный вектор. Если главный вектор не равен нулю, то рав-
равнодействующей может и us быть, если система приводится к динаме.
§ 4. УРАВНЕНИЕ ЦЕНТРАЛЬНОЙ ВИНТОВОЙ ОСИ
Предположим, что в центре приведения, принятом за начало ко-
координат, получены главный вектор R и проекциями на оси координат
Rx, Ry, Rz и главный момент Lo с проекциями Lx, Lv, Lz. При приве-
приведении системы сил к центру приведения Ог (рис. 80) получается дина-
ма в главным вектором /?] = R и главньш моментом LOl. Векторы LOl
и Rlt как образующие динаму, параллельны и поэтому могут отличай-
отличайся только скалярным множителем fe0. Имеем
o, = k0 R,
(9)
так как Rt = R. Главные моменты LOl n LOt согласно B), удовлетво-
удовлетворяют соотношению
xR.
B')
7Э
Подставляя LOl из B') в (9), получим
(9')
Координаты точки О1( в которой получена динача, обозначим х, у, г.
—>
Тогда проекции вектора ООг на оси координат равны координатам x,yt
г. Учитывая это, (9') можно выразить в форме
(9")
t j k
x у г
/?/?/?
где I, /, k — единичные векторы осей координат, а векторное произве-
произведение ООу X R представлено определителем. Векторное уравнение
z\
it
Рис 80
Рис 81
(9") эквивалентно трем скалярным, которые после отбрасывания к0
можно представить в виде
Lx — (tjRz— zRy) ^ Lv — (?Rr— xRz) = Lz — (xRy- >/R^
Rr Ry Rz
Линейные для координат х, у, z уравнения A0) являкмси уравне-
уравнениями прямой линии — центральной винтовой оси Следовательно,
существует прямая, в точках которой система сил приводится к дина-
ме.
Пример 1. По ребрам куба длиной / = 3_^i действуют силы Fi = F2 = 2 Н,
F3 = 1 Н (рис 82). Привести систему сил Flt F2, F3 к простейшрму виду
Решение. Выберем точку 0 — начало координат — ча центр приведе-
приведения и вычислим главный вектор JR и главный момент LOi Для проекций этих век-
торзв на оси координат имеем:
(Fl) = F2l=b Н-м;
--~—$ Н.м.
80
Числовые значения главного вектора и главною момента соответственно
Н; io=j/"L» + L« + L|=» 1/45«6,8 Н-м.
Определим угол а мелду векторами Lo и /?. Для этого образуем их скаляр-
скалярное произведение, которое выразим в двух следующих формах:
Г0.7? = LQ-R- cos a = LXRX + LyRy + LZRZ,
или
1/45-3-cosce= 0-2+ 6-1 + (— ЗМ,
Отсюда получаем cos a = 0, т, е. векторы Lo и R взаимно перпендикулярны,
Система сил в этом случае приводится к равнодействующей, которая по модулю
и направлению равна паяному вектору, т. е. R* = R, R* = R — 2,3 Н
Крат'пишее расстояние от точки О до линии действия равнодействующей
Грис. 82)
й — Lq/R = 6,8/3 да 2,3 и,
Пример 2 Вертикальппй вал со шкивом имеет силу тя кести Q = 2 кН,
Вал закреплен подшипников А и подпятником В (рис. 83) На вал намотан ка-
канат, к которому с помощью блока прикреплен груз еллой тяжести Р. Параллечь-
ные ветви ремня, накинутого на шкиь, имеют Е1атяже^ия 7\ = 1,5 и Г2 = 3 кН,
Рис 82
Рис. 83
Они составляют с горизонтальноГг осью координат Оу угол а = 45. Определить
реакции подшипника и подпятника, а также силу тяжести груза Р при равнове-
равновесии, если диаметр вала d— !0 см, радиус шкива R ~ 45 см и а — 50 см. Грением
В подшипнике, подпятнике и на оси блока пренебречь Канат считать невесомым.
Решены е. Рассмотри"! равновесие вала со шкивом, освободив его ог
свячен Реакция подшипника RA имеет проекции ХА и YА на оси координат,
реакция подпятника RB дает три проекции: Хв, Yв, 7в Сила натяжения ка-
каната Р равна силе тяжести груза и напразлена по канату.
81
Составляем шесть условии равновесия дтя пространственной c.jcicu сил
ц, 71, Т.2, Ял, кв и Р, приложенных к валу со шллзом. Имеем;
S fj* = °i xa+xb- Ti sin а-Га sin я _0;
S cos а-f-r2 cos «+/>== 0;
(a)
(б)
[в)
(г)
(Д)
i
Из уравнений (в) и (е) соответственно находим: ZB — 2 кН, Р == 13,5 кН-
Подставляя значение YB из (г) в (б), получаем
0; -ХА,За-Хва = 0;
2Р - 3YA + Р
+ Га) cos a = 0.
(ж)
Из (ж) имеем для Уд = — 11,6 кН. Из системы уравнецлн (а) и (д) попучаем
А'л -= — 1,6 кН, Хв= 4,8 кН.
Пример 3. К балке А В, один конец которой заделай в сечении А, в точке В
приложена вертикальная сила Р (рис. 84, а). К балке АВ в сечении С пол пря-
прямым углом жестко прикреплена балка CD. В концевом сечении балки CD в пло-
плоскости, параллельной координатной плоскости Ауг, действует пара сил с мо-
моментом М = Ра. Размеры тел и направление вращения пары сил указаьы на
рисунке. Определить силу
и момент пары сил в за-
заделке.
Решение. Р; осмат-
осматриваемые вместе балки А В
и CD освобождаем от свя-
связей. Заделка для прост-
пространственной системы сил
создаст неизвестны.; силу
RA с проекциями на оси ко-
ордипаг ХА, YA,ZA и пару
сил с векторным моментом
МА, проекции которого на
Ах,
Рис. 84
координатные оси — М
Мл,,, МА, (рис. 84, б),
В общем случае имеем
шесть неизвестных. Для их
определения составляем
шесть условий равновесия
пространственной системы
сил,
При проецировании
сил на оси координат пары
сил учитывать не надо,
так как сумма проекций па-
82
ры сил на любую ось равна нулю. R уравнения равновесия л in моментов сил
относительно осей координат следует включать проекции векторных моментов
пар сил на эти оси. Для удобства проецирования пару сил в концевом сече-
сечении балки CD представим ее векторным моментом ~М. который в рассматри-
рассматриваемом случае направгтен по балке CD параллельно оси Ах.
Составляем условия равновесия. Получаем:
Учитывая, чю М — Ра, из этих уравнений имеем:
*л =0; YA = 0; ZA = Pi
МАх = Pa; MAv = Oj MAz = О,
Задача считается решенной, если определены проекции неизвестных аипч
%А и момента пары сил МА на какие-либо прямоугольные оси координат^
§ 5. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПРОСТРАНСТВЕННОЙ
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
В отличие от произвольной системы сил пространственная система
параллельных сил не приводится к динаме, так как для нее главный
вектор и главный момент в общем случае взаимно перпендикулярны.
Для доказательства этого рассмотрим пространственную систему па-
параллельных сил, для которой главный вектор и главный момент не
равны нулю. Выберем за центр приведе-
приведения точку О — начало декартовой системы
коордннат, ось Oz которой направим па-
параллельно силам (рис. 85). Тогда проекции
главного вектора на оси координат
г\
V P
Г — ? Г i
'0,
так как параллельные силы перпендику-
перпендикулярны этим осям. Только проекция глав-
главного вектора на ось Ог в общем случае
Рис. 85
не равна нулю. Она равна алгебраической сумме параллельных
сил, т. е.
Следовательно, главный вектор R параллелен оси Ог.
Для проекций главного момента на оси координат иуеем:
i
Проекция главного момента на ось Ог равна нулю, так как каж-
каждая сила параллельна эгой оси.
Таким образом, главный момент расположен в плоскости Оху,
перпендикулярной главному вектору, направленному по оси Ог.
В этом случае система сил приводится к равнодействующей.
Для системы параллельных сил возможны следующие частные слу-
случаи приведения: _
R = 0, Хо ф О
— система приводится к паре сил;
R ф 0, То = 0 или
^^0, То?=0
— ciicicta пр "ог'1.гся к равнодействующей силе;
R = 0, Го =0
— имеем равновесную систему сил.
Если главный вектор не равен нулю, то система параллельных сил
приводится только к равнодействующей силе, параллельной главному
вектору и равной ему по величине.
§ 6. ЦЕНТР СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
Для систем параллельных сил, приводящихся к равнодействующей,
введем понятие центра параллельных сил. Для
этого предположим, что на твердое тело действует система параллель-
параллельных сил (Ft, Fit..., Fn), приводящаяся к равнодействующей, силы ко-
которой приложены в точках Аи Аг, .... Ап. При введении понятия цент-
центра параллельных сил считаем силы приложенными в точках твердого
тела. При переносе сил вдоль линий действия положение центра парал-
параллельных сил изменяется.
Определим линию действия равнодействующей R* параллельных
сил для заданного направления этих сил. Затем через точки приложе-
приложения параллельных сил проведем взаимно параллельные оси, перпен-
перпендикулярные силам. Повернем параллельные силы вокруг этих осей на
общий угол в одном и том же направлении (рис. 86). Получим новую
систему параллельных сил (F\, F'2, ..., F'n). Равнодействующая этой
н
системы параллельных сил R*' равна по модулю равнодействующей
силе /?*, так как при повороте числовые величины параллельных еил не
изменялись.
Линии действия двух равнодействующих сил R* и R*' пересекут-
пересекутся в точке С, которая и называется центром параллельных сил. Если
равнодействующую силу R* приложить в точке С вместо Clt то при по-
повороте заданных параллельных сил (Fi,F2,..., Fn) на угол a она повер-
повернется на тог же угол а вокруг оси, проходящей через точку С и парал-
F, л*
Рис 85
Рис. 87
лельноД осям, вокруг которьгх поворачиваются заданные параллель-
параллельные силы. Оси поворота параллельных сил должны быть перпендику-
перпендикулярны параллельным силам.
Центр параллельных сил не зависит от угла поворота и на-
направления параллельных осей, вокруг которых поворачиваются парал-
параллельные силы. Из определения центра параллельных сил следует, что
его положение зависит ог точек приложения параллельных сил. По-
Поэтому параллельные силы следует считать приложенными в точках
твердого гелэ
Получим формулу для определения радиус-вектора центра парал-
параллельных сил, если известны параллельные силы и радиус-векторы то-
точек их приложения. Для этого выберем единичный вектор I, парал-
параллельный силам. Тогда каждая из параллельных сил
Ъ = F.I
где Ft — алгебраическое значение силы. Оно положительно, если сила
Ft направлена в одну сторону с единичным вектором /, и отрицательно,
если направление силы противоположно направлению единичного век-
вектора.
Для равнодействующей силы параллельных сил соотве1С1венно име-
имеем
R*=
S Ft =7
85
Так как система параллельных сит, но предположению, приводится к
равнодействующей, то к ней можно применить теорему Вариньона от-
относительно точки О:
i A1)
Для векторных моментов еил относительно точки 0 имеем
где гс — радиус-вектор центра параллельных сил, проведенный из
точки О; rt — радиус-вектор точки приложения силы Fu проведен-
проведенный из той же точки (рис. 87).
Если подставить эти значения векторных моментов сил в (И), то по-
после переноса всех слагаемых в левую часть равенства и вынесения за
скобку общего множителя / пол\ чим
2 Ft- 2 rtFi)x~l = 0. (IV)
1= \
Так как центр параллельных сил, а следовательно, и его радиус-век-
радиус-вектор не зависят от направления параллельных сил, характеризуемого
единичным вектором /, то условие A1'. должно выполняться при лю-
любом направлении этого вектора. Это возможно только при обращении
в нуль векторной величины, стоящей в скобках, т. е.
или
гс= 2 hFtl 2 Ft. A2)
/= i / '= i
По формуле A2) определяют радиус-вектор центра параллельных сил,
если заданы эти силы и их точки приложения.
Так как алгебраические значения параллельных сил входят и в
числитель и в знаменатель A2), то Гс не зависит от того, какое из двух
направлений параллельных сил считается положительным.
В проекциях на оси координат из A2) получаем:
2
с- | yt Ft I 2 Fi'>
По формулам A3) вычисляют координаты центра параллельных
сил Хс, Ус> гс. бели известны алгебраические значения параллельных
сил Ft и координаты точек приложения этих сил Xt, Уи г4.
86
Векторную величину
2?
называют статическим моментом системы параллельных сил отно-
относительно точки О, Алгебраические величины
SOyz= V XtF,; SOxz^ 2 Vi Ft> So«= 2 гг/7'
называются статическими моментами относительно координатных
плоскостей. Для плоской системы параллельных сил, расположенных,
например, в плоскости Оху, вводят понятие статических моментов от-
относительно осей координат Ох и Оу по формулам
п п
Sov = 2 Xi Fi> S°* ^ 1i ytfi'
Статические моменты параллельных сил относительно точки и ко-
координатных плоскостей определяются по единому правилу: алгебраи-
алгебраические значения сил умножают на расстояния от точек приложения
сил до точки или плоскости и результаты суммируют. Расстояния от
точек приложения сил до координатных плоскостей есть величины ска-
скалярные; это соответствующие координаты этих точек. Расстояния от
точки О до точек приложения параллельных сил берутся векторные.
Ими являются радиус-векторы точек приложения параллельных сил,
проведенные из точки О.
§ 7. ЧАСТНЫЕ СЛУЧАИ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Равновесие твердого тела с двумя закрепленными точками
Твердое гело с двумя закрепленными точками А и В имеет непод-
неподвижную ось вращения, проходящую через эти точки. Пусть тело нахо-
находится в равновесии под действием приложенных сил (Fu F2,..., Fn).
Освободим тело от связей, приложив в закрепленных точках А и В,
рассматриваемых как шаровые шарниры без трения, неизвестные по
модулю и направлению силы реакций jR д и RB. Эти силы разложим на
составляющие, параллельные осям координат X А, Y А, Z А и Хв, YB,
ZB, и для освобожденного от связей тела составим шесть условий равно-
равновесия сил. Обозначив АВ через h (рио. 88), получим:
2
= 0; 2
i
=O; 2 M
i
87
Пять первых уравнений сс.ржат неизвестные реакции закреплен-
закрепленных точек, поэтому их назыноюг i/ралненччии равновесия. В последнее
(шестое) уравнение входят только заданные сипы и не входят неизвест-
неизвестные силы реакций. Такие соотношения, которым должны удовлетво-
удовлетворять при равновесии тела только одни заданные силы, называют
уеловиями равновесия. Тело в рассматриваемом сиучае и i^er одну сте-
степень евободы, оно может только ьращаться вокруг оси Ог (ось АВ).
Приложенные силы удовлетворяют тоже одному услолию рпвновесия.
Сумма моментов заданных сил относительно оси Ог обращается в ноль.
В остальном приложенные силы могут быть
любыми. Изменяя систему приложенных
сил так, чтобы они удовлетворяли при этом
условию равновесия, получим в соответст-
соответствии g уравнениями равновесия каждый раз
свои силы реакции.
Неизвестных реакций шесть, а уравне-
уравнений для их определения только пять и,
следовательно, только пять неизвестных
можно определить. Из рассмотрения урав-
уравнений равновесия убеждаемся, что нельзя
по отдельности определить Z л и ZB, мож-
^ сз но определить только их сумму ZА + Zs.
Задача нахождения сил реакций является
статически неопределимой. Для того чтобы ее сделать статически оп-
определимой, в одной из точек вместо шарового следует установить ци-
цилиндрический шарнир. Если цилиндрический шарнир поместить
в точке А, то ZA = 0, так как реакция цилиндрического шарнира
перпендикулярна его оси; в рассматриваемом случае перпендикуляр-
перпендикулярна оси Ог. После этого неизвестных реакций останется только пять.
Столько же уравнений имеется для их определения.
Твердое тело с одной закрепленной точкой
Тело с одной закрепленной точкой имеет три степени свободы.
Оно, например, может вращаться вокруг каждой из трех осей коор-
координат, проходящих через закрепленную точку. Если твердое тело а
одной закрепленной точкой А, принимаемой за шарнир, освободить
от этой связи, то для еоставляющих силы реакций связи X А, Y A, Z А
и приложенных к телу еил (Ръ Тг> ..., 7п) можно составить следующие
шесть условий (рис. 89);
п п
2
i= 1
В этом случае имеем три уравнения равновесия с тремя неизвестны-
неизвестными. Задача статически определимая. Приложенные силы удовлетво-
удовлетворяют тоже трем условиям равновесия — равна нулю суммы моментов
приложенных сил относительно каждой из трех осей координат В эти
условия не входят неизвестные силы реак-
реакций. Существует много разных систем сия,
удовлетворяющих этим трем условиям. Для
каждой из таких систем приложенных сил
получим свои реакции связи.
В рассмотренных дв^х случаях число усло-
условий равновесия, которым должны удовлет-
удовлетворять заданные силы при равновесии твер-
твердого тела, совпало с числом степеней свободы
этого тела. Это справедливо и для свободного
твердого тела, у которого шесть степеней сво-
свободы и соответственно шесть условий равно-
равновесия для сил. При изучении аналитической статики, которая изла-
излагается вместе с аналитической динамикой (в одной главе), увидим,
что число степеней свободы не только для твердого тела, но и для
механических систем совпадает g числом условий равновесия для за-
заданных сил, если связи, наложенные на систему, удовлетворяют не-
некоторым специальным условиям.
Глава 8
ЦЕНТР ТЯЖЕСТИ ТЕЛ
§ 1. ОПРЕДЕЛЕНИЕ ЦЕНТРА ТЯЖЕСТИ ТЕЛА
На все тела, расположенные в области притяжения Земли, дейст-
действует сила этого притяжения. Если тело разбить на отдельные элемен-
элементарные частицы малых объемов, то на каждую малую частицу будет
действовать сила земного притяжения. При изучении многих явлений,
происходящих под действием силы притяжения Земли, можно считать,
что Земля представляет собой однородный шар. Тогда земное притяже-
притяжение, действующее на любую материальную точку, выразится силой,
приложенной к этой материальной точке и направленной к центру
Земли.
Рассмотрим тело, находящееся непосредственно у поверхности
Земли. Предположим, что размеры этого тела настолько малы срав-
сравнительно с радиусом Земли, что силы земного притяжения, действую-
действующие на элементарные частицы тела, можно считать параллельными
между собой.
Сформулируем понятие центра тяжести тела при принятых допуще-
допущениях. Центром тяжести тела называют точку, являющуюся центром
параллельных сил тяжести, приложенных к отдельным элементарным
частицам тела. Если тело является абсолютно твердым, го его центр
тяжести есть неизменная точка относительно тела.
89
Центр тяжести представляет собой геометрическую точку. Во мно-
многих случаях центр тяжести тела может находиться в пространстве,
вне тела, например центр тяжести обруча — цилиндрического тын,
ограниченного поверхностями радиусов Rl и R2. Центр тяжести мо-
может находиться и в самом теле, совпадая g одной из его точек.
Рассмотрим тело, имею-
имеющее объем х. Разобьем что
тело на элементарные часги-
цы и обозначим вес каждой
из них APt. Будем иметь си-
систему параллельных сил тя-
тяжести с центром параллель-
параллельных сил С. Этот центр па-
параллельных сил и является
центром тяжести тела
(рис. 90). Линия действия си-
силы веса Р проходит через
центр тяжести.
Как известно, положение
центра параллельных сил
можно определить по формуле
Рис 90
A)
где суммирование происходит по всем элементарным частицам тела.
Здесь гс — радиус-вектор центра тяжести; rt — радиус-вектор ?-й
частицы в теле. Знаменатель представляет собой вес тела 2АРг = Р.
Сила тяжести частицы равна произведению массы частицы Am* на
ускорение g, т, е. АР, = &.tntg.
Если частица имеет объем Дт4, то
где р; — объемная плотность.
Если тело представляет собой материальную поверхность, то
Amt =
Здесь рг — поверхностная плотность;
поверхности.
В случае материальной линии
площадь элемента
где pi — линейная плотность; А1( — длина элемента линия.
Если рассматриваемое тело является однородным, то плотность
одинакова во всех точках; она сократится в формуле A), если в нее
подставить ДР{ A
Формулы, определяющие положение центра тяжести для объема,
в пределе выражаются объемными интегралами:
B)
где т —объем тела; гс — радиус-вектор центра тяжеати; xCt t/c, гс —
координаты центра тяжести.
Для определения центра тяжести поверхности применяют следую-
следующие формулы:
(8)
Я xda Я ч
(а) . (о)
, УС
и а
где а — площадь всей поверхности.
Для определения центра тяжести линии справедливы формулы
nil
?с=
х<М
D)
где / — длина липни.
Числители в приведенных формулах называются ст-ттичрскими
моментами объема, площади или длины тела относительно точки (ве(ч-
торная величина) или относительно координатных плоскостей.
В частности, для плоской материальной фигуры, расположенной
в плоскости Оху, выражения статических моментов площади соответст-
соответственно относи 1ельно Ох и Оу имеют вид
jj xda = хсо; jj ydo = у„а.
()
(S3)
(а)
jj
(о)
§ 2. МЕТОДЫ НАХОЖДЕНИЯ ЦЕНТРОВ ТЯЖЕСТИ
Центры тяжести симметричных однородных пел
Пользуясь свойствами линейных, поверхностных и объе «чмх ин-
интегралов, легко установить следующие положения:
а) если однородное твердое тело имеет плоскость геометрической
симметрии, то центр тяжести этого тела иаходтся в этой плоскости
симметрии;
91
б) если однородное твердое тело имеет ось геометрической симмет-
симметрии, то центр тяжести находится на этой оси;
в) еели однородное твердое тело имеет центр геометрической еим-
метрии, то центр гяжогти вовпадает е этим ценiром симметрии.
Метод разбиения тела на части
Положение центра тяжеати тела можно определить, если разбить
его на такие конечные части, центры тяжести коюрых известны. Пред-
Предположим, что имеются три такие части:
ть тп, т;П. Центры тяжеати отдельных
частей обозначим Си С2, С3 (рис. 91).
Вес всего тела разделится на три от-
отдельные силы Положение центра гя-
жести всего тела можно определять по
формулам
Рис. 91
где т = tj + тп + тш.
Аналогичные формулы можно получить для координат хс, Ус, ?с
центра тяжести. Таким же путем можно определить и положение цент-
центров тяжестей поверхностен и линий, разбивающихся на конечные ча-
части.
Метод оч.чиат11
масс
Предположим, что твердое тело имеет пустые полости, т. е. полости,
в которых нет массы. Пусть, например, пустая полость (рис. 92) име-
имеет объем тп; координаты центра ее тяжести С2, хг, уг, г, (если чту
полость заполнить веществом) нг8 — радкус-яектор ее центра тяже-
тяжести. Центр тяжести тела, фактически заполненного материей (без тц),
обозначим С, а объем этого тела х. Вообразим теперь, что пустая полость
заполнена Рассмотрим сплошное тело
(без пустой полости), объем которого х\\
Tt == х + тц;
центр тяжести этого тела обозначим Сг.
Используя метод разбиения на части,
можно выразить радиус-вектор центра
тяжести всего объема ti в таком виде:
отсюда
Рис 92
—т„).
92
Таким образом, определен радиус-вектор центра тяжести тела о
пустой полоотыо.
Для координат центра тяжести соответственно имеем?
¦TI1
F)
Если тело имеет две пустые полости, то в числителе и знаменателе
приведенного выражения прибавляются по два слагаемых со знаками
минус и т. д.
§ 3. ЦЕНТРЫ ТЯЖЕСТИ ПРОСТЕЙШИХ ТЕЛ
Цещр тяжести площади треугольника и дуги окружности
Разобьем треугольник на отдельные полоски малой ширины, па-
параллельные одной из сторон треугольника. Каждую полоску (рио. 93)
можно рассматривать как прямоугольную, так как площади треуголь-
треугольных остатков на ее краях представляют собой бесконечно малые ве-
величины второго порядка сравнительно с площадью всей полоски.
Центр тяжести каждой полоски лежит на ее середине.
Таким образом, вес всего треугольника распределяется как бы вдоль
соответствующей медианы треугольника, проходящей через середины
всех полосок. Иначе: каждая точка медианы имеет вес, равный весу
соответствующей полоски. Следовательно, центр тяжести треуголь-
треугольника лежит на медиане BD
Разобьем теперь треугольник на полоски параллельно стороне
ВА. Центр тяжести лежит на медиане СЕ. Следовательно, центр тя-
тяжести находится на пересечении
медиан. Точка пересечения медиан,
как известно, отстойi от середины
каждого основания треугольника
на расстоянии х/3 соответствующей
медианы или на расстоянии l/3/i
от основания, где h — высота тре-
треугольника 'от соответствующего
основания.
Рис. 93
Рис. 94
93
Отметим, что этим методом нельзя наиги положение центра тяже-
тяжести тела, маеса которого распределена по периметру треугольника.
В таком случае следует определять центр тяжести трехточечной маа-
совой системы, течки которой расположены в серединах сторон тре-
треугольника (в ел>чае его однородности) и массы равны маврам соот-
соответствующих сторон треугольника.
Установим положение центра тяжести однородной дуги окружно-
окружности, имеющей угол 2а. Центр тяжести С находитея на оси вимметрии,
которую принимаем за ось Ох; требуется определить только хс
(рис. 94), Выражение статического момента дуги относительно оеи Оу
lxc= \ xdl.
Ав
Вводим полярные координаты:
R cos 9, d/ = Яd9; I = 2Ra,
Тогда
2Raxc= \ RcosQRdQ,
— ос
откуда
()
а
Центр тяжести дуги полуокружности получается при ос = я/2:
хс = 2#/я.
Центр тяжести площади кругового сектора
и объема конуса
Разобьем круговой сектор на элементарные одинаковые секторы.
Вследствие малости каждого сектора можно считать его основание
(элементарную дугу окружности) прямолинейным. Поэтому центр тя-
тяжести каждого сектора лежи г на расстоянии ^ h от основания или на
22
g-ft, т. е, на j R от вершины О. Таким образом, вес всего сектора рав-
2
номерно распределится по дуге окружности радиусом =• jR q тем же
центральным углом 2а. Центр тяжести дуги находим по вышеприве-
вышеприведенной формуле, которая для этого елучая имеет вид
*с=?я iiL«. (8)
3 а.
Определим центр тяжести обьема конуса, имеющего ось симметрии
(рис. 95). Начало координат помещено в вершине конуеа. Ось Ог, на
которой располагается центр тяжести, направляем внутрь конуеа.
Тогда
= i
; x =s — oh.
94
Здесь а — тощчдь основания конуса; h — его высота; dx = o'dz,
где о' — площадь сеченлм конуса с коирдинсиой г.
При этом
аЧа = z»/fc»;
следовательно,
с1т =
2adz; -±
О
= \z
г2 dz,
з , i ,
откуда Zc — т". считая от вершины конуса, или -Л от центра тя-
жестн основания конуса.
Пример 1. Определить центр тяжести заштрихованной площади детали
(рис. 96).
Решенье. Эту площадь можно рассматривать как фигуру, составлен.
ную из прямоугольника с высотой 8 см и основанием 4 см, из которого снизу вы.
резана площадь полукруга радиусом 3 см, а сверху добавлен треугольник, имею.
У
Рис. 96
щий высоту 8 см и основание 3 см. Площади фигур (прямоугольник, треугольник,
полукруг) и координаты их центров тяжести:
а, = 32 см'2; Xi = 4 см; yt — 2 см)
ст2 = 12 сма; *2 = 8/3 см; уг — И/3 cwj
а3 = nRV2 = 4,5зх см2; х3 — 4 см; у3= R (sin а/а) = б/f см.
Для координат центра тяжесги заштрихованной площади имеем:
cixXx + Oj^ — ста з 32.4 + 12.8/3—4,5я-4
32+12-4,5я
32.2+12.14/3— 4,5я.6/я
32+12—4,5п
«3,4 см;
=» 3,3 см.
Пример 2. Один из блоков установки состоит из прямоугольного бруска
размерами 32 X 32 X 25 см (рис. 97). Брусок изготовлен из особого парафино-
парафинового сплава, В бруске высверлено гнездо диаметром 10 см и глубиной 15 см.
В гнездо вставлена металлическая пробка, сила тяжести которой 10Q Н. Найти
положение центра тяжести всего блока.
Решение. Для нахожде-
нахождения центра тяжести всего блекл
следует прменить дза меюда:
метод разбиения на части и ме-
метод отрицательных масс. Тело
разделяем на парафиновую часть
всего бло<а и металлическую
пробку. Определив их центры
тяжести, находим искомый-центр
тяжести.
Для нахождения центра гя-
жести парафинового тела с пустой
полостью применим метод отри-
отрицательных масс. Нет необходимо-
необходимости искать отдельно центр тяже-
тяжести тела с пустой полостью, а
можно найти положение центра
тяжести сразу трех тел: парафи-
парафинового бруска, пустой полости и
металлической пробки. При этом
координаты центрд тяжести пустой полости и металлической пробки совпа-
совпадают. Удельная сила тяжести парафина равна 7,5-10—э Н/см3.
Подсчитываем силу тяжести парафинового бруска в целом:
/>! = yvh = 7,3-Ю-3-32-32-25 = 192 Н.
Сила тяжести вынутого парафина из полости для пробки
Р2 = (и-102/4)-7,5- Ю-3-15 = 8,85 Н.
Сила тяжести металлической пробки
Р3 = 100 Н.
Составим предварительно вспомога/ельную табл. 1.
Таблица 1
Рис. 97
Элемент
Парафиновый брусок
Вынутая пробкя . .
.Металлическая нроб-
Р, Н
192
—8,85
100
283,2
X. СМ
16
22
22
Рх, Н-см
3070
— 195
2200
5075
у, см
12,5
8
8
Ру, Н • см
2400
—70.3
800
3129,2
Р.. Н см
3070
—217
2450
5303
Координат всего тела находим по формулам
3070 — 195 + 2200
18 см;
Раздел II
КИНЕМА ТИКА
ВВЕДЕНИЕ
В кинематике изучается движение материальных объектов (точки,
твердого тела, сплошной среды) без рассмотрения причин, вызывающих
или изменяющих это движение. Такое изучение движения материаль-
материальных объектов не требует учета материальных характеристик этих
объектов — массы, моментов инерции и др.
В кинематике рассматривают такие характеристики движения, как
скорость и ускорение точки, угловые скорость и ускорение твердого
тела и др.
Движение материальных объектов, в частности материальной точ-
точки, совершается в пространстве при изменении времени. Пространство
в классической механике считается эвклидовым, не зависящим от вре-
времени и движущихся в нем материальных объектов. Время принимает-
принимается универсальным, не связанным и пространством и не зависящим как
от движения наблюдателя, е точки зрения которого рассматривается
движение материального объекта, так и от движения самого матери-
материального объекта.
Движение материального объекта веегда следует рассматривать
относительно какого-либо твердого тела — тела оточета, т. е.
движение является относительным. G телом отсчета скреп-
скрепляют систему осей координат, например декартовых, принимая ее за
виетему отсчета, относительно которой рассматривается
двткение материального объекта. Системой отсчета для трехмерного
эвклидова пространства не может служить одна точка, линия, или
плоскость, а должны быть три оси, не обязательно прямолинейные, но
не лежащие в одной плоскости.
Независимость времени от движения означает, что во воех системах
отсчета, произвольно движущихся друг отновительно друга, оно одно
и то же, если за начало отсчета выбрано общее для них еобытие.
В кинематике сплошной среды телами отсчета, относительно кото-
которых рассматривается движение, могут быть также деформируемые те-
тела,
В курсе теоретической механики обычно изучаются движение точ-
точки и твердого тела. Соответственно кинематика делится на кинемати-
кинематику точки и кинематику твердого тела. В настоящем курсе дополни-
дополнительно излагаются также основы кинематики сплошной среды.
Ззк 1311
97
Глава 1
КИНЕМАТИКА ТОЧКИ
В кинематике точки рассматриваются характеристики движения
точки, такие, как скорость, ускорение, и методы их определения при
различных способах задания движения. Важным в кинематике точки
является понятие траектории. Траекторией точки называется геоме-
геометрическое место ее последовательных положений в пространстве с те-
течением времени относительно рассматриваемой системы отсчета.
По виду траекторий движения точки делятся на прямолинейные
и криволинейные. Форма траектории зависит от выбранной системы
отсчета. Одно и то же движение точки может быть прямолинейным от-
относительно одной системы отсчета и криволинейным относительно дру-
другой. Например, если с летящего горизонтально Земле с постоянной
скоростью самолета отцеплен груз, то, пренебрегая сопротивлением
воздуха и учитывая только действие силы тяжести, получим б каче-
качестве фаектории движения центра масс груза относительно самолета
прямую линию, а относительно Земли — параболу.
§ 1. СКОРОСТЬ ТОЧКИ
Одной из основных характеристик движения точки является ее
скорость относительно выбранной системы отсчета, которая изображе-
изображена в виде декартовой прямоугольной системы координат (рис. 1).
Положение движущейся точки М относительно рассматриваемой
системы отсчета определяется в момент времени t радиус-вектором г,
который соединяет неподвижную
точку О о этой точкой. В другой
момент времени (, = t 4- At дви-
движущаяся точка займет положение
Мх .и ее радиус-ректором будет ~тх.
За время At радиус-вектор движу-
движущейся точки изменится на Аг =
Средней скоростью vep точки
за время At называют отношение
т. е.
гср = Af/At.
Средняя скорость параллельна вектору Аг. В общем случае она за-
зависит от времени осреднения At. У нее нет конкретной точки прило-
приложения на траектории.
Введем скорость точки v в момент /, которая оп-
определяется как предел средней скорости, если промежуток времени,
за который определяется средняя скорость, стремится к нулю, т. е.
v = lim оср = lim Ar/At — dr/d/.
Д?~>0 Д1-*0
98
Скорость точки направлена в сторону ее движения по предельному
направлению вектора Д7 при At, стремящемся к нулю, т. е. по предель-
предельному направлению секущей ММи которая совпадает а касательной к
траектории в точке М. Таким образом, скорость точки равна первой
производной по времени от ее радиув-вектора. Она направлена по ка-
касательной к траектории в сторону движения точки.
Начало радиус-вектора движущейся точки можно выбрать в лю-
любой неподвижной точке. На рис. 1 представлен случай, в котором ра-
радиус-вектором является также р о началом в точке О'. Радиус-векторы
г и р имеют одинаковые изменения Дг и Др за время Д? и поэтому
v = drldt — dp/dt. A)
Размерность скорости получаем из A):
[v] = длина/время = мЛз.
Чаото скорость выражают в км/ч; км/ч = 3,6у м/а.
Для характеристики переменного вектора используют понятна
его годографа. Годографом вектора называют геометрическое место
его концов, если переменный вектор в различные моменты времена
откладывать от одной и той же общей точки.
п)
Рис. 2
Траектория точки, очевидно, является годографом радиуо-векто-
ра г или р (рис 1). Последовательные положения вектора г в различ-
различные моменты времени откладываются вэтомалучае от точки О, а векто-
вектора р — от точки О'.
Первая производная по времени от радиуа-вектора есть окороать
точки, направленная по касательной к траектории. Следовательно,
параллельно касательной к годографу направлена первая производ-
производная по скалярному аргументу от любого переменного вектора.
Годографом вектора екороати является кривая
линия, на которой располагаются концы этого вектора в различные мо-
моменты времени, если их начала совместить в одной общей точке. Для
построения годографа вектора скорости выбираем точку, например Ох
(рис. 2, б), и начала векторов скорости для различных моментов вре-
времени переносим в эту точку, ие изменяя их величии и направлений.
4* 99
Каждой точке траектории М (рие. 2, а) будет соответствовать своя изо-
изображающая точка М' на годографе вектора скорости (рис. 2, б). Мас-
Масштаб для скоростей при построении годографа вектора скорости мо-
может быть выбран отличным от масштаба для скоростей, изображаемых
в точках траектории. При движении точки по траектории соответст-
соответствующая ей изображающая точка движемся по годографу вектора ско-
скорости.
При равномерном движении точки по прямой годографом вектора
скорости является одна точка; при неравномерном движении — от-
речок прямой, параллельный траектории.
§ 2 УСКОРЕНИЕ ТОЧКИ
Пусть движущаяся точка М в момент времени t имеет скорость о.
В момент времени tt = t -j- Д^ эта точка занимает положение Ми
имея скорость v± (рие. 3, а). Чтобы изобразить приращение скорости
Л г/ ia время At, перенесем вектор скорости сг параллельно самому се-
себе в точку М.
Средним ускорением точки acv за время Д/ называют
отношение Avlht, т. е. аср = Д v/At.
Среднее ускорение точки параллельно приращению скорости Аи.
Как и средняя скорость, среднее ускорение не имеет на траектории
конкретной точки приложения и изображено в точке М условно. В об-
общем случае среднее ускорение зависит от времени At.
«ср
•Cfi
P,ic 3
Ускорением точки а в момент времени t называют
предел, к которому стремится среднее ускорение при Д/, стремящемся
a — lim aCD = lim AvjAt — dv/dt.
B)
Таким образом, ускорение точки равно первой производной по времени
от скорости точки.
100
Приращение скорости Av и, следовательно, среднее ускорение на-
направлены внутрь вогнутости траектории. Так же направлены и их
предельные значения при Д^, стремящемся к нулю. Поэтому ускорение
точки направлено тоже внутрь вогнутости траектории. Кроме того,
ускорение как первая производная по времени от скороети, по свойст-
свойству годографа вектора, параллельна касательной к годографу вектора
скорости (рис. 3, б).
Размерность ускорения в СИ получаем из B):
[а] = [v\/[U =s скорость/время = м/с-2 = м-с~3.
§ 3. ВЕКТОРНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Движение точки относительно рассматриваемой системы отсчета
при векторном способе изучения движения задается радиус-вектором
тэтой точки (рис. 4). Движение точки считается заданным,'если из-
известен радиус-вектор движущейся точки как
функция времени, т. е.
г =7@. C)
Задание векторного уравнения
движения C) полностью определяем
движение точки.
Траекторией точки является годограф ра-
радиус-вектора. Скорость точки направлена по
касательной к траектории и вычисляегся, со^ /
гласно ее определению, по формуле /
7. D) /
Для ускорения точки соо!ветственно имеем
_ _ _ _ Рис- 4
а - dv/dt = da 7jdt2 -= т. E)
Таким образом, если движение точки задано векторным способом, то
скорость и ускорение вычисляются по формулам D) и E).
Определение скорости и ускорения точки вводится к чисто матема-
математической задаче вычисления первой и второй производной по времени
от радиуа-вектора этой точки. Для практического вычисления скоро-
скорости и ускорения обычно используют координатный и еотеатвенный Gno-
собы изучения движения. Векторный способ ввиду его кратковти и
компактности удобен для теоретичеекого изложения кинематики точки.
§ 4. КООРДИНАТНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Задание движения и траектория
Движение точки можно изучать, используя любую систему коорди-
координат. Рассмотрим случай декартовых прямоугольных овей координат,
которые являются также системой отсчета, относительно которой рас-
рассматривается движение точки. Движение точки в декартовых коорди-
101
натах считается заданным, если известны координаты точки как не-
непрерывные, дваждьг*дифференцируемые>рункции времени (рис. 5), т. е.
заданы уравнения движения точки в декарто-
декартовых координатах:
х = и @. y**h @. * = fa (t). F)
Уравнения движения точки в декартовых координатах полностью оп-
определяют движение точки. Они позволяют наши положение точки, ее
скорость и ускорение в любой момент времени. Уравнения движения
F) есть также уравнения траектории точки в
параметрической форме. Параметром является время t.
М
Гис 5
Рис. 6
Уравнения траектории в координатной
форме т F) получают исключением параметра t. Исключая время,
например, из первых двух уравнений и затем из в юр ого и третьего,
получим уравнения двух поверхностей:
Ft (х, у) = О, F2 (у, г) - 0.
Это и есть уравнения траектории в координатной форме. Траекторией
является линия пересечения двух поверхностей Эти поверхности яв-
являются цилиндрическими, так как их уравнения не содержат одной из
координат: первое — координаты г, второе — координаты х. Ось пер-
первой цилиндрической поверхности параллельна оси Ог, второй — оси Ох.
Исключая время из уравнений движения в другом порядке, полу-
получим траекторию точки как линию пересечения двух других цилиндриче-
цилиндрических поверхностей, например
Fx (х, у) «. 0, F, (х, г) = 0.
При исключении параметра t из уравнений движения могут быть по-
получены отрезки линий или точки, которые не содержатся в уравнениях
F). Эти дополнительные точки не следует считать точками траектории.
Пример. Даны уравнения движения точки на плоскости
х = b sin2 kt, у = с cos2 Ы,
(а)
где Ь, с, k — положительные постоянные величины. Определить уравнение
траектории точки в координатной форме.
Решение. Уравнения движения (а) есть уравнения траектории точки
в параметрической форме с параметром t. Исключим его из уравнений движения
102
Для этого достаточно сложить правые и левые части уравнений, разделив прад«
варительяо первое уравнение на Ь, а второе — на с. Получим
так как
xtb + у/с — 1,
sin2 kt-V cos3 kt = 1.
(б)
Уравнение (б) есть уравнение прямой, отсекающей на осях координат отрезки
b н с (рис. 6).
Из уравнений (а) следует, что координаты хну все время положительны и
* < Ь, У ^ с, т. е. они могут изменяться только в пределах 0 s^ * < ?>, 0 < у < а.
Точки прямой, для которых х > b и у > с, не содержатся в уравнениях двима-
ния (d), и они дополнительно появились при исключения параметра t. Их не сле-
следует включать в траекторию.
Траектория точки М0М в координатной форме выражается уравнением
и двумя неравенствами:
xtb + ц/с = 1, 0 ^ х < Ь, 0 < у < с,
Скорость в декартовых координатах
Разложим радиув-вектор и скорость точки на составляющие, па-^
раллельные осям координат (рис. 7). Получим:
где *\ и, г — координаты точки М; i, /, fe — единичные векторы осей
координат; vx, vy, vz — проекции скорости на оси координат.
Учитывая G), согласно опре-
определению скорости имеем
v =
(8)
Рис. 7
Рис, 8
так как 1,7, ~г не изменяются при движении точки М. Точки над ж, у,
г означают их производные по времени. Сравнивая G) и (8), получаем
для проекций скорости на декартовы оеи координат следующие фор-
формулы:
vx =
= x; vy = dy I At =y, vt = dz/d* = г.
(9)
Проекция скорости точки на какую-либо координатную овь ршнщ,
первой производной по времени от соответствующей координаты этой
точки. По проекциям определяют? числовую величину (модуль) ско-
103
рооти и косинусы углов вектора скорости с осями координат:
cos (и, х) = vjv=x/v; eos(y", г/) = «v/y =-- yjv;
со? (у, г) = иг/у = г/и.
Если точка движется в плоекости, то, выбрав оси координат Ох
и Оу в этой плоскости, получим:
г = const = 0, уг = г=0, y^ — x, vy—y, v — xi+yj.
Соответственно,
у = Vх1 + г/2; cos (у, х) = x/v; cos (у, у) — yjv.
Для прямолинейного движения точки координатную шь, например
Ох, направляют по траектории (рие. 8). Тогда у = const = 0 и г =*
— eonst = 0, у = 0, г = 0. Проекция скорости и ее модуль опреде-
определяются по формулам
ья = х, v= \х\.
Уравнение годографа вектора скорости
Известны уравнения движения точки в декартовых координатах.
Получим уравнения годографа вектора скорости. На рис. 9, а изо-
изображены траектория точки и несколько векторов скорости в выбран-
выбранном масштабе для различных моментов времени, а на рис. 9, б пред-
Рис. 9
ставлен годограф вектора екоростн этого движения. Точке М (х, у, г}
на траектории соответствует точка Mt (xlt ylt гх) на годографе вектора
скорости.
Координаты точки Mi, согласно определению годографа, выражают-
выражаются через проекции вектора скорости на оси координаг ОуХуу^у по фор-
формулам
Xi = vXi; yL = vyi; zx - vZl.
Если оси координат для годографа вектора скорости параллельны со-
соответствующим осям координат, относительно которых заданы урав-
уравнения движения точки, то
Параметрические уравнения годографа вектора «корос-ти принимают
такую форму;
Исключая из этих уравнений параметр t, получим уравнения годогра-
годографа вектора скорости в координатной форме.
Годограф вектора екорости дает наглядное представление о ско-
скоростях движущейся точки в разные моменты времени. Он также позво-
позволяет определить направление вектора ускорения, так как ускоре-
ускорение параллельно касательной к годографу вектора екорости.
Ускорение точки в декартовых координатах
Разложим ускорение точки на воставляющие, параллельные осям
декартовой сиетемы координат. Получим
k, (И)
где ах, ау, az — проекции уекорения на координатные оси. Соглаено
определению ускорения и формулам G) и (8), имеем
а = dv/dt = (d/d/) (vxl + vy f+ v, k) = (dvjdt) Г+
+ (dvy/dt)j+(dvjdt)k^xl + "yj+'zk. A2)
Сравнивая A1) и A2), получаем формулы для проекций ускорения на
оси декартовой системы координат:
ах — dvjdt — "х; ау — dvuidt — у; az — uvzldt = "г. A3)
Проекция ускорения на какую-либо координатную овь равна второй
производной по времени от соотееттвующгй координаты движущейся
точки.
Числовую величину ускорения и косинусы углов вектора уакоре-
ния g осями координат определяем по формулам
а= | а | = Vai + а* + а\ = Vx* + "у* + 2а;
_-¦-- _*""• .. *^ ..
cos (а, х) = aja = х(й; cos {а, у) = ау/а = у\а\ eos (a, z) = aja - z[a.
При движении точки по плоскости оси Ох н Оу выбирают в этой пло-
плоскости. Тогда z = const = 0 и az = г = 0. Формулы для ускорения
и его проекций на оси координат примут вид
ах=х; ау =
Соответственно
а = V'x* + у2; cos (a, x) ="x[a; cos (а, у) = у /а>
100
Для прямолинейного движения OGb Ох направим по траектории
точки. Тогда у = const = 0, z = eonst — О и ау = у = 0, ах =а г =з 0.
Формулы для ускорения и его проекции на ось Ох принимают вид
a = xi; ax — х.
Соответственно для числовой величины ускорения имеем
а — \х\.
Прпмер. Движение точки в плоскости Оху задано уравнениями
х = b sin Ш\ у = d cos at,
где b, d и со — постоянные положительные величины, Определить уравнение
траектории в координатной форме, модули скорости и ускорения точки в момент
времени t = п/Bш), а также уравнение годографа вектора скорости.
У
1 И,
al
0
4—
J
г*
X
-""
M
IS
к
Рис. 10
Решет е, Уравнение траектории в координатной форме ггаходим исклю-
исключением времени из уравнений движения. Для этого делим первое уравнение на
Ь, второе —на d, возводим в квадрат и складываем. Получаем уравнение эллип-
эллипса (рис. 10, о) с полуосями bad
хУЬ1 + y^ld2 = 1,
так как
sin2 is>t + cos3 a>t = I.
При I — л/Bсо) точка имеет координаты х — Ь, у — 0, т, е. занимает поло»
жение Мо, Определяем проекции скорости и ускооения. Имеем:
vx = « = Ьи cos o)f, vv = у =* — dco sin ю.',
ax = л; = — 6(о3 sin ffli = — и2*, ву ~ у — — rfw4* cos coi = — ш2(/,
Для момента времена t — п/Bсо)
По проекциям устанавливаем направление скоиости по касагечьной к тра-
траектории и направление ускорения по радиус-вектору к точке О. Изображаем
эти векторы в точке Л'Ц и дополнительно в точках Л? и Л^.
Еслч выбрать для i одографа векгора скороои оси Охх^ и 0^ соответствен-
соответственно параллельными осям Ох и Оу, то для его текущих координат имеем
106
Исключая из этих параметрических уравнений годографа вектора скорости вре-
время t, получим следующее его уравнение в координатной форме:
На рис. 10, б отмечены три изображающие точки годографа М'в, М' и М[, со*
ответствующие точкам траектории Мо, М и Mi, а также указаны иаггра^леиия
ускорений в этих точках. '
§ 5. ECTFXTBEHHblH СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Естественный способ задания движения
При естественном способе задания движения задаются траектория
и закон движения точки по траектории. Движение точки рассматри-
рассматривается относительно фиксированной системы отсчета. Задание траек-
траектории относительно выбранной системы отсчета осуществляется раз-
различными способами: уравнениями (возможно, вместе g неравенствами),
словесно или в виде графика (в каком-либо масштабе). Например, мож-
можно сказать, что траекторией автомобиля, принимаемого за точку, явля-
является дуга окружности радиусом 10 км и т. д
Для задания закона движения точки по траектории необходимо вы-
выбрать на траектории точку О, принимаемую за начало отсчета расстоя-
расстояний (рис. 11), Расстояния в одну сторону от точки О п.) траектории вчи-
вчитаются положительньгеи (например, вправо), в другую — отрицатель-
отрицательными. Кроме того, следует задать начало отсчета времени. Обычно за
/ = 0 принимают момент времени, в который движущаяся точка про-
проходит через точку О, или момент начала
движения. Время до этого события счи-
тается отрицательным, а после него — -
положительным.
Если в момент времени t движущая-
движущаяся точка занимает положение М, то за-
закон движения точки по траектории за-
задается зависимостью от времени расстоя- р с 11
ния s, отсчитываемого от точки О до
точки М, т. е. s = f (t). Эта функция
должна быть непрерывной и дважды дифференцируемой. Расстоя-
Расстояние s берется по траектории, какой бы сложной ни была фор-
форма траектории. Это расстояние не имеет прямого отношения к прой-
пройденному точкой пути за время t, так как за начало отечета расстояний
может быть выбрана, в частности, и конечная точка пути. К тому же
движение точки может быть колебательным вокруг начальной
точки О.
От задания движения в декартовых координатах можно перейти к
его заданию естественным способом. Закон движения точки по траек-
траектории в дифференциальной форме через декартовы координаты выра-
выражается в виде
107
я после интегрирования — в конечной форме
f
если
h <Q, y = f, @, z = f, (/).
За начало отсчета расстояний принята точка траектории, в которой на-
находится движущая точка в начальный момент времени. Знак у квадрат-
квадратного корня определяется выбором направления положительных и ог-
рицательных расстояний.
Скорость точки при естественном способе
задания движения
Пусть движение точки задано естественным способом, т. е. заданы
траектория точки и закон ее движения по траектории s ~ fjt). Вы-
Вычислим скорость точки. Для этого используем радиус-вектор г движу-
движущейся точки, начало которого находится в неподвижной точке 0х
(рис. 12). При движении точки ее радиус-вектор изменяется с течением
времени, а следовательно, он изменяется в за-
р ~-\v-j висимости от расстояния. Используя опреде-
ление скорости, имеем
о- ——
(is
ds
it
___.)/
или с = si, где т = d/"/ds Е5ектор т направ-
направлен по касательной к траектории как произ-
производная от вектора по скалярному аргументу и
является единичным вектором. Модуль эюго
вектора равен единице, как предел отношс-
Рис 12 ния длины хорды |Дг| к длине стягивающей
ее дуги \As\ при стремлении ее к нулю.
Единичный вектор т всегда направлен по касательной к траектории
в сторону возрастающих (положительных) расстояний независимо от
направления движения точки. При ds > 0 направления векторов т
и йг совпадают. Вектор dr в этом случае направлен в сторону возра-
возрастающих расстояний. Если точка движется в сторону убывающих рас-
расстояний, то ds < 0 и направления векторов т и dr противоположны.
Но вектор dr направлен в сторону убывающих расстояний, а следо-
следовательно, вектор т опять направлен в сторону возрастающих расстоя-
расстояний.
При s > 0 вектор скорости направлен по т, т. е. в сторону воз-
возрастающих расстояний; при s<0 он имеет направление, противо-
противоположное т, т. е. в сторону убывающих расстояний.
108
Величина ut = s называется алгебраической скороетью точки.
Ее можно считатьЦпроекцией скорости на положительное наггравление
касательной к траектории, совпадающее в направлением единичного
вектора т.
Естественное задание движения точки полностью определяет ско-
скорость точки по величине и направлению. Алгебраическую скорость на-
находят дифференцированием по времени закона изменения расстояний.
Единичный вектор т определяют по заданной траектории.
Геометрические понятия.
Дифференцирование единичного вектора
Радиус кривизны и соприкасающаяся плоскость. В точке М кри-
кривой линии проведем касательную Мт (рис 13), В другой близкой точ-
точке кривой Ми отстоящей от точки М на расстоянии As, построим ка-
касательную МгХх. В общем случае пространственной кривой касатель-
касательные Мт и М{ъх будут скрещиваться. Проведем в точке М прямую ли-
линию Мт'ь параллельную М^. Угол Д<р между линиями Мх и NH\
Рис. 13
Рис. 14
называется углом смежности. Кривизной кривой k в точке М называют
предел, к которому стремится угол смежноати, приходящийся на еди-
единицу расстояния As, при As, стремящемся к нулю, т. е.
k = lim A<p/As= dfp/ds.
As-»0
Радиусом кривизны кривой р в точке М называют величину, обрат-
обратную кривизне кривой в этой точке, т. е.
р — Ш =а ds/dcp.
Вычислим радиуе кривизны дуги окружности радиусом R. Дуга
окружности длиной s, опирающаяся на центральный угол <р, выража-
выражается зависимостью (рие. 14) s =з Rq>. Для радиуса кривизны имеем
р == ds/d<p ==: R,
т. е. для окружности радиув кривизны в каждой еа точке один и тот
же и совпадает о радиусом окружности.
109
Участок кривой из малой окрестности какой-либо ее точки лучше
всею аппроксимирует по сравнению с дугами других окружностей
элемент дуги окружности, радиус которой равен радиусу кривизны
кривой в рассматриваемой точке.
Для определения понятия соприкасающейся плоско-
плоскости проводим вспомогательную плоскость через две пересекающиеся
прямые Мх и Мх[ (см. рио. 13). Предельное положение этой плоскости
при совпадении в пределе точки Мг с точкой М называется соприкасаю-
соприкасающейся плоскостью кривой в точке М.
В случае плоской кривой соприкасающейся плоскостью для всех
точек кривой является сама плоскость, в которой расположена эта
кривая.
Естественный трехгранник. Построим в точке М кривой линии
естественные оси этой кривой (рис. 15). Первой естествен-
естественной осью является касательная Мх. Ее положительное направление
совпадает с направлением единичного вектора касательной т, направ-
направленного в сторону возрастающих расстояний.
Перпендикулярно касательной Мх располагается нормаль-
нормальная плоскость кривой. Нормаль, расположенная в со-
соприкасающейся плоскости, называется главной нормалью. Она явля-
является линией пересечения нормальной плоскости с соприкасающейся
плоскостью. По главной нормали Мп внутрь вогнутости кривой на-
направим единичный вектор п. Он определяет положительное направле-
направление второй естественной оси.
Нормаль, перпендикулярная главной нормали, называется би~
нормалью. Единичный вектор Ь, направленный но бинормали так, чтобы
три вектора т, п и b образовывали правую систему осей координат,
определит положительное направление третьей естественной оси.
Три взаимно перпендикулярные оси Мх, Мп и Mb, положительные
направления которых совпадают с направлениями единичных векто-
векторов т, га, Ь, называются естественными осями кривой. Эти оси образуют
в точке М естественный трехгранник. При движе-
движении точки по кривой естественный трехгранник движется вместе с точ-
точкой как твердое тело, поворачиваясь вокруг вершины, совпадающей с
движущейся точкой.
Дифференцирование единичного вектора. Вычислим производную
от единичного вектора по скалярному аргументу. В кинематике точки
скалярными аргументами обычно являются время и расстояние по
траектории. В качестве единичного вектора выберем т, направленный
по касательной к траектории, и вычислим его производную по вре-
времени.
Производная dxldt перпендикулярна самому единичному вектору
т. Для доказательства этого используем тождество
7т = 1.
по
Дифференцируя по времени обе части этого тождества, получим
At
Каждый из сомножителей этого выражения не равен нулю, поэтому век.
торы dx/6t и т перпендикулярны друг другу. Это справедливо для лю-
любого другого вектора, числовая вели-
fj\ чина (модуль) которого постоянна.
Направим по вектору dx/dt еди-
спр.пл. ничный вектор п. Тогда
dx/df =
at
Л ^ СиПр. ПА
Рис. 15
Годографом вектора т является кривая, расположенная на сфере еди-
единичного радиуса, так как единичный вектор изменяетея только по на-
направлению (рис. 16).
По определению модуля производной от вектора имеем
— lim
|Дт|
Д1-М) I *<1
Длина малой хорды |Дт| с точностью до малых величин более высокого
порядка равна длине дуги, которую стягивает хорда, т. е.
где Лф — угол, опирающийся на эту дугу. Используя это выражение,
получим
— = [jixi ^^lim 'z=~ ' •
d? Д(—>0 1 Л/1 д^-*0 | ^ I I d^ |
Подставляя это значение в A4) и используя выражение для радиуса
кривизны и переменную s, получим
ИГ
dtp
ИГ
П =
dcp
~7
ds
At
П — ¦
п.
A5)
Радиус кривизны р считаем положительным.
Вектор dx/dt и совпадающий с ним по направлению единичный
вектор it направлены параллельно предельному положению вектора
ill
Лт при &.t, стремящемся к нулю, т. е. они расположены в соприкасаю-
соприкасающейся плоскости кривой. Единичный вектор п перпендикулярен век-
вектору т, направленному по касательной к кривой. Следовательно, век-
вектор п направлен по главной нормали кривой в сторону ее вогнутости,
так как в эту сторону направлено предельное положение вектора Дт.
Если имеем любой другой вектор Ь с постоянным модулем, то для
него остается справедливым все, что было получено для единичного
вектора, только радиус годографа следует заменить его модулем Ь.
Полечим
rj/
п. A5')
где п — теперь единичный вектор, перпендикулярный вектору Ь и
направленный параллельно db/dt.
Формулу A5') можно выразить векторным произведением:
db/dt = о) х Ъ,
где о) — вектор угловой скорости поворота вектора Ь, модуль которо-
которого (со | = |Aф/сМ|. Вектор угловой скорости (о следует направить пер-
перпендикулярно плоскости, в которой расположены векторы Ь и п, при-
причем гак, чтобы g его стрелки увидеть поворот вектора Ъ к п в этой
плоскости на угол 90° против часовой стрелки. Подробнее понятие век-
вектора угловой скорости дается при рассмотрении вращения твердого
тела вокруг неподвижной оси и в других случаях ею движений.
Ускорение точки при естественном способе
задания движения
Учитывая, что для скорости точки имеем
~v — sx~vzx, A6)
в соответствии в определением ускорения и A5) получаем
так как s9 = уа и dx/cM направлен внутрь вогнутости траектории па-
параллельно единичному вектору главной нормали п.
Получено разложение ускорения точки по осям естественного трех-
трехгранника. Часть ускорения
называетея касательной составляющей ускорения, Другая часть уско-
ускорения
112
называется нормальной составляющей ускорения. Она направлена
внутрь вогнутости траектории, т. е. в сторону положительного на-
направления единичного вектора главной нормали п, так как внутрь вог-
вогнутости траектории направлено полное ускорение. Таким образом, ус-
ускорение точки
a = at + an. A8)
Из A7) получим формулы для проекций ускорения на еетевтвенные
оси. Имеем:
ar = s — dvx/dx, а„ = у"а/р, аь = 0. A9)
Проекция ускорения на положительное направление касательной,
совпадающее g направлением единичного вектора т, называется ка-
касательным ускорением, а на главную нормаль, направленную по еди-
единичному вектору п, — нормальным ускорением. Проекция ускорения
на бинормаль, направленную по единичному вектору Ъ, равна нулю;
следовательно, ускорение точки расположено в соприкасающейся пло-
плоскости траектории. В этой плоскости находятся единичные векторы
касательной и главной нормали.
Учитывая ортогональность й,ийл (рио. 17), в соотве!йтвии в A8)
имеем
a = Va3t + a^, tga=«|a,|/an. [B0)
Нормальная составляющая ускорения ап всегда направлена внутрь
вогнутости траектории. Касательная составляющая ах при s>0 на-
направлена в положительную сторону касательной, т. е. по направлению
единичного вектора т, а при ь<С 0— в отрицательную, противополож-
противоположно т.
При s>0hs>0 векторы скорости и касательной составляющей
ускорения направлены в одну сторону — по т. Движение точки явля-
является ускоренным в положительном направлении касательной к траек-
траектории. При s'<0 и s<0 опять векторы скороети и касательной со-
бтавляющей ускорения имеют одинаковые направления и, следова-
следовательно, движение точки является ускоренным, но в отрицательном на-
направлении касательной к траектории. _
Если s > 0 и s < 0, то вектор скороети направлен пот, а вектор ка-
касательной составляющей ускорения противоположен ему по направ-
направлению. Движение точки является замедленным в положительном на-
направлении касательной к траектории. При s < 0 и s > 0 имеем замед-
замедленное движение точки в отрицательную второну касательной к тра-
траектории точки.
Случаи обращения в нуль касательного ускорения получают из
условия
0.
ИЗ
Это условие выполняется все время, пока v = \vt\ = Gonst, т. е. при
равномерном движении точки по траектории любой фор-
формы. Касательное увкврение обращается в нуль также в те моменты
времени, в которые алгебраическая скорость ог достигает экстремума,
например максимума или минимума. Для изображенного на рис. 18
изменения алгебраической скорости в зависимости от времени касатель-
касательное ускорение равно нулю в моменты времени tx и t2. При колебаниях
маятника (рис. 19) эти моменты соответствуют его прохождению через
точку А. При движении маятника в одну сторону алгебраическая ско-
скорость в точке А достигает максимума, при движении в обратном на-
направлении — минимума.
Случаи обращения в нуль нормального ускорення следуют из ус-
условия
ап =. vVp = 0.
Это условие выполняется при р = оо, т. е. при прямолинейном дви-
движении точки. При движении точки по криволинейной траектории
р = оо в точках перегиба, в которых происходит изменение выпукло-
выпуклости траектории па вогнутость и наоборот
(рис. 20). Нормальное ускорение обращается
также в нуль в моменты времени, в которые
v = 0, т. е. в моменты изменения направ-
направления движения точки по траектории Для
маятника такими моментами являются момен-
моменты отклонения маятника на наибольший угол
как в одну сторону, так и в другую. Эти мо-
моменты соответствуют мгновенным остановкам
маятника.
Случаи обращения в нуль касательного и
нормального ускорений, а также общие фор-
формулы для них показывают, что касательное
ускорение характеризует изменение вектора
скорости по .величине, а нормальное — по
направлению.
Пример. Точка М движется по дуге окружности
радиусом R по закону s — R sin <в/, где ш = const.
Начало отсчета расстояний и времени, а также на.
114
Рис. 20
правлениа положительных расстояний указаны на рио, 21. Определить скорость
и ускорение точки в момент времени /, а также их значения в точка траектории
Aft, в которой скорость обращается в нуль, и в точке О,
Решение. Скорость и проекции ускорения на естественные оси опреде-
определяем по формулам A6) и A9). Имеем:
vx = s = Rw cos cat, at = s = — /?co3 sin at,
an = vVp = tf-co2 cos2 at/R = /?ш2 cos3 at.
Скорость обращается в нуль, если cos со/ = 0, т. е. в момент времени t\ =
= зт/Bа>) и другие моменты времени, которые в этом примере не рассматриваются.
При tt = я/Bй), Ti e. в момент изменения направления движения точки, имеем
ах = — /?со2, ап = О,
Подставляя в формулы для vx, ax и ап значение t = 0, получим:
vx = R<±>, ax = 0, ап = i?@2.
Касательное ускорение в этот момент времени обращается в нуль, так как алге-
алгебраическая скорость достигает своего максимума.
Частные случаи движения точки
Равномерное движение. При равномерном движении точки по тра-
траектории любой формы v = const, следовательно, постоянна и алге-
алгебраическая скорость ух, которая может отличаться от v только знаком.
Так как
ds/dt — vx,
то
t
ds = uxd/, s=vx f dt~Vti,
если принять при t = 0 s — 0.
Равнопеременное движение. Равнопеременным движением называ»
ют такое движение по траектории любой формы, при котором касатель-
касательное ускорение ах = const. Движение является равноуакорен-
н ы м, если алгебраическая скорость vx и касательное ускорение а,
имеют одинаковые знаки. Если vx и а% имеют разные знаки, то движение
является равнозамедленным.
Получим формулы для алгебраической скорости и расстояния при
равнопеременном движении. Имеем:
о»
следовательно,
vx = «о + axt, B1)
если принять при t = 0 ut = и0.
Так как и„ = ds/df, то с учетом B1)
( t
f ds = v0 f
oo
&
116
если при t = 0 s = 0. Выполняя интегрирование, получим
^. B2)
Из B1) и B2) можно определить любые две неизвестные величины,
если известны остальные три величины, входящие в эти формулы.
§ 6. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ В ПОЛЯРНЫХ
КООРДИНАТАХ
Рассмотрим движение точки по плоскости. В этом случае движение
можно задать в полярных координатах. Для этого примем какую-ли-
какую-либо точку О плоскости за полюс и проведем из^нее полярную ось, напри-
например ось Ох (рив. 22). Положение движущейся точки М на плоскости из-
известно, если заданы радиус-вектор г
и полярный угол ф как функции вре-
времени, т. е.
г = h (О, Ф = h @- B3)
Полярный угол считается положи-
положительным, если он откладывается от
полярной оси до радиус-вектора про-
0 х тив часовой стрелки. Радиус-вектор
как расстояние от точки О до точки
Рнс- 22 М принимает только положительные
значения.
Уравнения B3) называются уравнениями движения точки в поляр-
ных координатах. Они являются также уравнениями траектории точ-
точки в параметрической форме. Если из B3) исключить параметр — вре-
время I, то получим уравнение траектории в полярных координатах:
F (г, Ф) = 0.
Введем единичный вектор г°, направленный по радиус-вектору
от полюса 0 к точке М. Тогда
Для скорости v получаем
— d/ ci , —« &r -jj , dr"
V d/ dT дГ ~dT *
Согласно A5), для производной по времени от единичного вектора
имеем
где вместо единичного вектора п введен единичный вектор р°, направ-
направление которого получается поворотом вектора г° на 90° в положитель-
116
ном направлении угла ф, т. е. против часовой стрелки (риа. 22). Послэ
этого для скорости точки получаем
0. B4)
Это разложение скорости точки на радиальную vr и трансвероальную
(поперечную) vp составляющие, т. е.
B5)
где
Для проекций скорости на оси, положительные направления ко-
которых совпадают а направлениями единичных векшров Т9 и р°. из
B4), получаем
vF = r, vp = r<p. B6)
Они соответственно называются радиальной и трансверопльной ско-
скоростями. В зависимости от знаков произвочных г и ф радиальная и
трансверсальная скорости могут быть как положительными, так и
отрицательными.
Используя B4), определяем ускорение точки в полярных коорди-
координатах. Имеем
а = dvldt = (d/сЮ (г ?> + г^).
Выполняя дифференцирование, получим
Для производной по времени от единичного вектора р° имеем
dp°/d* = ф (— 7°),
так как вектор р° поворачивается о той же угловой екороотью ф, что
и вектор г°, а единичным вектором, по которому направлен вектор
d/3°/d/, является вектор (— г°).
После подстановки в выражение для ускорения производных or
единичных векторов и объединения слагаемых имеем
B7)
Получили разложение ускорения точки на радиальную аТ и трановер-
еальную ар составляющие, т. е.
а = аг+Ър, ar = (r—rq?)P>, ар=(г<р + 2г'<р)р°.
Для проекций ускорения на оои Or и Ор получаем
"B8)
117
Ускорение ат называется радиальным, а ар — трансверсальныя.
Трансверсальное ускорение можно выразить также в форме
Это выражение для трансверсального ускорения широко исполь-
используется при рассмотрении движения планет и искусственных спутников
Земли.
Радиальная и трансверсальная составляющие ускорения взаимно
перпендикулярны, поэтому
а = VaT+aJ. B9)
Отмстим, что для неподвижных осей координат Ох, Оу и Ог спра-
справедливы формулы
ах — dvjdt, av = dvu/dt, az = dvjdt.
Для подвижных осей Or и Op, как следует из B6) и B8), аг и ар не
равны производным по времени от vT и vp.
Частные случаи. 1. Если <р==
,.. ?" Af) = const, то имеем прямолинейное движе-
движение по прямой Or. В ^том случае <р = О,
Ф = 0 и из B6) и B8) получаем:
vr = г, ор*= 0, v = |г|,
аг = г, ар ¦= 0, а == |>|.
Эти величины совпадают с ранее получен-
полученными выражениями для них при изучении
движения точки в декартовых координатах.
Рис- 23 Только расстояние г следует заменить на
координату х.
2. При /¦ = const (рие. 23) получаем движение точки по окруж-
ноати. В этом случае г = 0, г = 0. Из B6) и B8) имеем:
v, = 0; ур = гф; у = r|rp|;
аг = —гф2; ар = /<р; а = Уа.2 + а» = т У\р2 + ф4.
В этих формулах ф является угловой скоростью вращения радиуо.
вектора, а ф — его угловым ускорением.
Пример 1. Движение точки задано в полярных координатах уравнениями
г = I A + cos (ai), ф = (at,
где /hcd — постоянные величины. Определить уравнение траектории, скорость
и ускорение точки в полярных координатах для момента времени to. момента вре-
времени t = 0.
Решение. Исключая из уравнений движения параметр t, получим сле-
следующее уравнение траектории в полярных координатах:
г = I A + cos ф);
это уравнение кордиоиды (рис. 24).
118
Проекции скорости и ускорения на полярные оси определяем по формулам
B61 и B8). Имеем: * V У
ог=г = —/со sin at,
'2 A -[-cos щ<) = 2/и cos (col/2),
= г—rq>2 = —/со3 A + 2 cos coif), ар = гф+2г'ф'= —2/ш3 sin
2 cos со/K + 4 sinJ ш* =. to3
cos wi."
Для момента времени t = О из этих формул получаем:
ог =0; fp = 21(о; v = |ор| = 21@}
аг = — 3/со2; ар = 0; о = \аг\ = 3/оаа.
Векторы скорости и ускорения для моментов времени t и t = 0 изображаем на
рисунке.
Пример 2. Движение точки задано в прямоугольной система коирдиь.ат
уравнениями
х = 4 sin tf, у = 3 cos 2/,
где я, # — в метрах, время / — в секундах.
Определить уравнение траектории в координатной форме, а также скорость,
ускорение, касательное и нормальное ускорения, радиальную и трансверсаль-
ную составляющие скорости и радиус кривизны траектории в момент t = л/6 с.
Изобразить на рисунке траекторию, скорости и ускорения в указанный момент
времени,
Рис. 24
Рис. 25
Решение. Уравнения движения представляют собой уравнение траек-
траектории в параметрической форме Для определения уравнения траектории в ко-
координатной форме следует иа уравнений движения исключить время t. Имеем:
х = 4 sin t} sin t => ж/4;
у — 3 cos 2t — 3 (cos 4 — sin* 0 = 3A—2 sin* t),
следовательно, у = 3 A — rV8). Это уравнение параболы. Не вое
точки параболы являются точками траектории. Так как при любом значении (
имеем |sin t\ ^ 1 и |cos 2t\ < 1, то из уравнений движения получаем дополни-
дополнительные ограничения для координат точек траектории \х\ Щ А, \у\ ^ 3.
Таким образом, точки траектории удовлетворяют условиям
у = 3 A - х*/8); 1*1 ^ 4; \д\ < 3.
Часть точек параболы, не являющихся точками траектории, дополнитель»
но появилась при исключении параметра L В уравнениях движения эти точки не
содержатся.
Мл рис. 25 приведена траектория точки. Траекторией является только часть
параЗолы ABC,
119
Определяем проекции скорости н скорость в любой момент времени:
vx¦»я = 4 cos t) [iy=yo=—6sin2t;
При / = п/6
i/д. =4 cos я/6 =2 T/3~as3,5 м/с; vw = — 6 sin л/3=-— 3 ~\/lias— 5,2 м/с»
Проекции ускорения в любой момент времени определяем по формулая
ая = я = — 4 sin *; ау = у = — 12 cos 2*.
При t = я/6
аж=— 2 м/с*; а„=—6 м/с2; а=.|/а|+а|"=1/40«6,3 м/с*.
Для модуля кавательиоро ускорения при t = п/6 о имеем;
\а%
do
df
— 16.2 cos t sin i + 36*2 sin 2< cos 2f.2
Нормальное ускорение при t = п/6 о
-Л}-j/
196
40—-— =5 м/с3.
1 о
Для вычисления радиальной екорооти предварительно определяем ради у о-
вектор
+ дъ = У 16 sina t + 9 cos« 2t.
16.2 sin ? cos*— 9t2.2 cos 2< sin 2t
Тогда при / = п/6 о
= —Уз75«—0,3 м/о.
Трансверсальнуга скорость при i =• я/6 о определяем по формуле
I Ор | =.}/¦»»—о* = 1/39—3/25 «6,2 м/о.
Координаты движущейся точки при i = я/6 с
По координатам отмечаем положение движущейся точки на траектории и,
выбрав масштабы, изображаем векторы скорости и ускорения по их проекциям.
Для радиальной составляющей скорости Ь~г учитываем ее направление, Противо-
Противоположное единичному вектору г°, так как vr имеет знак минус.
Для траисверсальной составляющей скорости vp определена только число-
числовая величина. Из рис. 25 следует направление вектора "пр. Оно противоположно
направлению единичного вектора р° (направление р° получается поворотом на
90° вектора г° против часовой стрелки). Следовательно, vp надо взять со знаком
минус, т. е. tip = — 6,2 м/с.
Для проверки правильности определения vp можно исгюль.здвать формулы
vp — /-ф, ф = arctg у/я.
120
Нормальное ускорение ап всегда направлено внутрь вогнутости траектории.
Направление касательного ускорения а% определяем по ^ и ап; оно оказалось
направленным по вектору скорости, Следовательно, точка в рассматриваемый
момент времени движется ускоренно. Если дополнительно принять ча положи-
положительное направление касательной ее направление по вектору скорости, то про-
проекцию ускорения на касательную следует взять со знаком плюс, т, е, ах =
= 3,9 м/с2.
Определим радиус кривизны траектории в момент времени /= л/6 d Все
необходимые величины для этого уже имеются. Получим
р = vVan — 39/5 sw 7,8 м.
§ 7. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ В ЦИЛИНДРИЧЕСКИХ
И СФЕРИЧЕСКИХ КООРДИНАТАХ
При движении точки в пространстве иногда используются ци-
цилиндрические оси координат.Юни получаются|добавлением к полярным
координатам на плоскости координаты г, отсчитываемой вдоль непод-
неподвижной оси Ог, перпендикулярной плоской™, в которой расположены
полярные оси координат (рис. 26).
Положение точки М определяют заданием трех ее цилиндрических
координат как функций времени:
Г = fx (t); Ф = /2 (t); г = /, @.
Разложение векторов скорости и ускорения на составляющие, па-
раллельные осям цилиндрической системы координат Or, Op, Ог, вы-
выразятся в следующей форме:
; C0)
г, C1)
где 7°, р°, Ъ — единичные векторы, на-
направленные по осям цилиндрической
системы координат. Оси Or и Ор распо-
расположены в одной плосковт о осями Ох
и Оу.
Представим радиус-вектор р точки М
как сумму двух векторов, т. е.
_ _» —* _ _ Рис. 26
р^ОМ' +М' M = rr° + zk.
Скорость точки получим дифференцированием радиуо-вектора р по
времени:
~ dp d ,..Thn
di dt
Первое слагаемое в этом выражении вычислялось при выводе форму-
формулы B4) для скорости точки в полярных координатах. Было получено
(d/cU) К) = г? +
121
Во втором слагаемом псютоянный по модулю и направлению единич-
единичный вектор Ъ можно вынести за знак производной. Для скорости полу-
получается следующее разложение на составляющие, параллельные осям
цилиндрической системы координат:
1 = 7г° + гуро + zk. C2)
Сравнивая C2) с C0), получаем формулы для проекций скорости на
цилиндрические оси координат:
уг = г; vp — rip; vz — г. C3)
Так как составляющие скорости vr, vp и х)г, параллельные осям
цилиндрической системы координат, взаимно перпендикулярны, то для
модуля скорости имеем
Ускорение точки получим дифференцированием по времени вектора
скорости!
~а=~=4- (г7°+г(р р°)+т-(г /7)-
di at t\i
Первое слагаемое в этом выражении вычислялось при выводе ускоре-
ускорения в полярных координатах:
at
Во втором слагаемом при дифференцировании выносим вектор k за
знак производной. Объединяя результаты дифференцирования, полу-
получим еледующее разложение ускорения на составляющие, параллельные
осям цилиндрической системы координат;
C4)
Сравнивая его с C1), получаем формулы для проекций ускорения на
цилиндрические оси координат:
aT = r—rep2; ap = rq> + 2rq>; аг~г. C5)
Составляющие ускорения ап ар, аг взаимно перпендикулярны, по-
поэтому для модуля ускорения имеем
а =
= V(r
Приведем без вывода формулы для скорости и ускорения точки
в сферических координатах. Сферическими осями координат называ-
называются взаимно перпендикулярные подвижные оси Or, Оф и 00, парал-
параллельные единичным векторам?,., ?q>. eg, которые для наглядности изо-
изображены в движущейся точке М вместо точки О (рис 27).
123
Движение точки в сферической
системе координат задается уравне-
уравнениями
г = fx @; ф = /«@; 9 = /8 @.
Разложение скорости и ускорения
на составляющие, параллельные осям
сферической системы координат, вы-
выражаются формулами
v — vT Tr + Щ /ф + vq Iq;
'• Рис. 27
Для проекций скорости и ускорения на оси сферической системы ко;
ординат имеем:
L_ JL (/-2fficos39);
rcos 0 cU
rdt '
Модули оклоости и ускорения по ортогональным проекциям опре-
деляюгся kj выражений
Глава 2
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 1. СТЕПЕНИ СВОБОДЫ И ТЕОРЕМА О ПРОЕКЦИЯХ
СКОРОСТЕЙ
Числом степеней свободы твердого тела называют число независи-
независимых параметров, определяющих положение тела отновштльно расема-
триваемой системы отсчета.
Движение твердого тела во многом зависит от чиола его степеней
свободы; тело о одним и тем же числом степеней свободы может совер-
совершать различные движения, не похожие друг на друга. Свободное твер-
твердое тело в общем случае имеет шесть степеней свободы. Действитель •
но, положение тела в пространстве относительно какой-либо системы
координат, например декартовой, определяется заданием трех его
точек, не лежащих на одной прямой. Расстояния между точками в
твердом теле должны оставаться неизменными при любых его движе-
движениях. Это накладывает на координаты фиксированных точек три ус-
условия. Девять координат должны удовлетворять трем уравнениям.
123
Получаем только шесть независимых координат, которые можно за-
задать произвольно. Оставшиеся три координаты определятся из урав-
уравнений для расстояний между точками.
В качестве независимых параметров можно взять любые шесть ко-
координат точек или шесть других независимых параметров, которые
являются функциями координат
трех или большего количества то-
точек тела. У свободной точки три
степени свободы и соответственно
три независимых параметра, на-
например ее координаты х, у, г. Точ-
Точка, которая движется по непод-
неподвижной поверхности, имеет две
степени свободы. При движении
Рис. 28 точки по неподвижной кривой точ-
точка имеет одну степень свободы.
Справедлива теорема: при любом движении твердого тела проек-
проекции скоростей точек на прямую, соединяющую эти точки, равны
(риа. 28).
Для доказательства теоремы используем зависимость радиус-век-
радиус-векторов точек А и В:
Возведем обе части в скалярный квадрат. Имеем
(гв—7а) Gв—п) = Т\ (Р = /3),
но / = const для твердого тела. Дифференцируя по времени это выра-
выражение, справедливое для любого момента времени, получим
Заменив в этом равенстве
йгл/dt = vA, drBl<lt — vB, гв—га=1,
получим
27@в — Va) — O, или Ivb — Iva.
Раскрывая скалярные произведения векторов и сокращая на /, имеем
vB cos fJ = v A cos a.
Теорема доказана. Очевидно, все точки тела, расположенные на пря-
прямой АВ, имеют одинаковые проекции скоростей на эту прямую.
Имеется два простейших вида движения твердого тела, комбиниро-
комбинированием которых можно получать другие, более сложные его движения.
Такими движениями твердого тела являются поступательное движение
и вращение вокруг неподвижной оси.
!24
§ 2. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным движением твердого тела называют такое его дви-
движение, при котором любая прямая, жестко скрепленная с телом, оста-
остается параллельной своему первоначальному положению в каждый мо-
момент времени. Очевидно, достаточно, чтобы это выполнялось только
для двух непараллельных пря-
прямых, скрепленных с телом.
Поступательно движутся педа-
педали у велосипеда относительно его
рамы во время движения, поршни
в цилиндрах двигателя внутреннего
сгорания относительно цилиндров,
кабины колеса обозрения в парках
относительно Земли.
Траектории точек у поступа-
поступательно движущегося твердого тела
могут быть не только прямыми, но
и любыми кривыми, в том числе
окружностями.
Свойства поступательного движения характеризует следующая тео-
теорема: при поступательном движении твердого тела траектории еко-
росши и ускорения точек тела одинаковы.
Если выбрать две точки А а В твердого тела, го радиуе-векторы этих
точек удовлетворяют условию (рис. 29)
Рас. 29
АВ.
A)
Для любого твердого тела вектор АВ является постоянным по модулю,
а при поступательном движении он не изменяется и по направлению.
Уравнение A) показывает, что годограф радиус-вектора точки В,
являющийся траекторией этой точки, сдвинут по сравнению с годо-
годографом радиус-вектора точки А (траектория точки А) на повтоянный
вектор А В. Если этот сдвиг осуществить, то обе траектории совпадут
всеми своими точками. Такие траектории считаются одинаковыми.
Если продифференцировать по времени. A), справедливое для лю-
любого момента времени, то получим
_ йА | d
В этом отношении drBldt — vB, dr Jdt = vA. Кроме того, для постоян-
постоянного по модулю и направлению вектора А В -гт (АВ) = 0. Таким обра-
образом, для любого момента времени имеем
Ъв = v д. B)
Дифференцируя по времени B) и учитывая, что
dvB/dt — ав, dvAldt = ал,
12Б
получим
ав = ад. C)
Теорема о поступательном движении твердого тела полностью доказа-
доказана.
Движение твердого тела, для которого векторы скоростей точек
равны только в один момент времени, а не все время, называется
мгновенным поступательным движением. Для мгновенного поступа-
поступательного движения ускорения точек в общем случае не являются оди-
одинаковыми.
Поступательное движение твердого тела полностью характеризует-
характеризуется движением одной точки тела. Для задания этого движения достаточ-
достаточно знать координаты какой-либо точки тела как функции времени,
т. е.
x = h{t)\ !/ = /,(/); г = М0. D)
На движение отдельной точки тела при поступательном движении ни-
никаких ограничений в общем случае не накладывается. Следовательно,
твердое тело, вовершающее поступательное движение, имеет три сте-
степени свободы и уравнения D) считаются уравнениями поступатель*
ного движения твердого тела. Для изучения поступательного движения
твердого тела достаточно использовать кинематику одной точки.
§ 3. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ОСИ
Угол поворота, угловая скорость и угловое
ускорение
Вращением твердого тела вокруг неподвижной оси называется та-
такое его движение, при котором две точки тела остаются неподвижными
в течение всего времени движения. При этом также остаются непод-
неподвижными все точки тела, расположенные на прямой,
проходящей через его неподвижные точки. Эта пря-
прямая называется осью вращения тела.
Если А и В — неподвижные точки тела (рио. 30),
то осью вращения является ось Ог, которая может
иметь в пространстве любое направление, не обяза-
обязательно вертикальное. Одно направление оси Ог прини-
принимается за положительное.
Через ось вращения проведем неподвижную плос-
плоскость По и подвижную П, скрепленную с вращаю-
вращающимся телом. Пусть в начальный момент времени
обе плоскости совпадают. Тогда в момент времени t
положение подвижной плоскости и самого вращающе-
вращающегося тела можно определить двугранным углом между
плоскостями и соответствующим линейным углом ср между прямыми,
расположенными в этих плоскостях и перпендикулярными оси вра-
вращения. Угол ф называется углом поворота тела.
128
Положение тела относительно выбранной системы отсчета полно-
полностью определяется в любой момент времени, если задано уравнение
Ф = / @, E)
где / @ — любая, дважды дифференцируемая функция времени. Это
уравнение называют уравнением вращения твердого тела вокруг не-
неподвижной оси.
У тела, совершающего вращение вокруг неподвижной ogh, одна
степень свободы, так как его положение определяется заданием только
одного параметра — угла ф.
Угол ф считается положительным, если он откладывается против
часовой стрелки, и отрицательным — в противоположном направле-
направлении. Траектории точек тела при его вращении вокруг неподвижной
оси являются окружностями, расположенными в плоскостях, перпен-
перпендикулярных оси вращения.
Для характеристики вращательного движения твердого тела вокруг
неподвижной оси введем понятия угловой скорости и углового ускоре-
ускорения. Алгебраической угловой скоростью тела в какой-либо момент вре-
времени называют первую производную по времени от угла поворота в этот
момент, т. е. dq>/dt ~ ф. Она является величиной положительной при
вращении тела против часовой стрелки, так как угол поворота возра-
возрастает с течением времени, и отрицательной — при вращении тела по
часовой стрелке, потому что угол поворота при этом убывает.
Модуль угловой скорости обозначают со. Тогда
со « |d(p/df| = |ф|. (б)
Размерность угловой скорости устанавливаем в соответствии G F):
[со] = угол/время = рад/о = о.
В технике угловая скорость — это частота вращения, выраженная
в оборотах в минуту. За 1 мин тело повернется на угол 2кп, если п
— число оборотов в минуту. Разделив этот угол на число секунд в ми-
минуте, получим
ю0-, = 2ягаоб/шш/60 = ллоб/шш/30 « 0,1гаоб/ман. G)
Алгебраическим угловым ускорением тела называют первую произ-
производную по времени от алгебраической скорости, т. е. вторую произ-
производную от угла поворота d2(f/dt2 — q>. Модуль углового ускорения обо-
обозначим е, тогда
е = |ф|- (8)
Размерность углового ускорения получаем из (8):
[е] = угловая скорость/время = радАзг = с"*2.
Если ф > 0 прн ф > О, то алгебраическая угловая екорость воз-
возрастает о течением времени и, следовательно, тело вращается ускорен-
ускоренно в рассматриваемый момент времени в положительную сторону (про-
(против часовой стрелки). При ф<0 и ф<0 тело вращается ускоренно
в отрицательную сторону. Если ф < О при ф j> 0, то имеем замедлен-
127
ное вращение в положительную сторону. При <р > 0 ф < 0, т. е.
замедленное вращение совершается в отрицательную сторону.
Угловую скорость и угловое ускорение на рисунках изображают
дуговыми стрелками вокруг оси вращения. Дуговая стрелка для уг-
угловой скорости указывает направление вращения тела, а дуговая стрел-
стрелка для углового ускорения — направление, в котором увеличивается
алгебраическая угловая скорость. Для ускоренного вращения дуговые
стрелки для угловой скорости и углового ускорения имеют одинаковые
направления, для замедленного — их направления противоположны.
Частные случаи вращения твердого тела
Вращение называется равномерным, если со = const. Алгебраиче-
Алгебраическая угловая скорость отличается от модуля угловой скорости только
знаком. Поэтому она тоже постоянна и при интегрировании ее можно
вынести за знак интеграла. Имеем
если принять q> — 0 при t — 0.
Вращение будет равнопеременным, если s = const. Алгебраическое
угловое ускорение при этом тоже постоянно. Его при интегрировании
можно вынести за знак интеграла. Имеем
если
Так
то
ф-
как
Фо при t
ф) = ф;
= 0.
dф
?
dec
J
ф»
ф = Фо + Ф^.
= ф; ф-фь + ф*.
t t
i = d>nfd/;4-ro Udt
если ф = 0 при I ь= 0.
В общем случае, если ф не постоянно,
128
Ф= Г (fit; ф= f(fd/.
Скорости и ускорения точек тела
Известно уравнение вращения твердого тела вокруг неподвижной
оси ф = f (t) (рио. 31). Расстояние s точки М в подвижной плоскости
/7 по дуге окружности (траектории точки), отсчитываемое от точки М„,
расположенной в неподвижной плоскости, выражается через угол «р
зависимостью s = йф, где h — радиуо окружности, по которой пере-
перемещается точка. Он является кратчайшим расстоянием от точки М
Рис. 31
Рис. 32
до оси вращения. Его иногда называют радиусом вращения точки. У
каждой точки тела радиус вращения остается неизменным при враще-
вращении тела вокруг неподвижной оси.
Алгебраическую скорость точки М определяем по формуле
= s =
Модуль скорости точки
v — ha. (9)
Скорости точек тела при вращении вокруг неподвижной оси пропор-
пропорциональны их кратчайшим расстояниям до этой оси. Коэффициентом
пропорциональности является угловая скорость. Скорости точек на-
направлены по касательным к траекториям и, следовательно, перпенди-
перпендикулярны радиусам вращения.
Скорости точек тела, расположенных на отрезке прямой ОМ, в со-
соответствии с (9) распределены по линейному закону. Они взаимно па-
параллельны, и их концы располагаются на одной прямой, проходящей
через ось вращения.
Ускорение точки разлагаем на касательную и нормальную со-
составляющие, т. е.
а — а\ + ап.
Касательное и нормальное ускорения вычисляются по формулам
Oj — s = hq>', ап = иа/р = /iaoaa//i = /ко3,
так как для окружности радиус кривизны р =» h (phg. 32). Таким об-
образом,
HAe; an=ftcoa; a =
6 Зак. 13Ц
A0)
129
'
Касательные, нормальные и полные ускорения ToqeK, как и ско-
скорости, распределены тоже по линейному закону. Они линейно зави-
зависят от расстояний точек до оси вращения. Нормальное ускорение на-
направлено по радиусу окружности к оси вращения. Направление ка-
касательного ускорения зависит от знака алгебраического углового ус-
ускорения. При ф > 0 и ф > 0 или ф <_0 и ф < 0 имеем ускоренное
вращение тела и направления векторов а, ни совпадают. Если ф и ф
имеют разные знаки (замедленное вра-
вращение), тоо, и о направлены противо-
противоположно друг другу.
Обозначив а угол между полным
ускорением точки и ее радиусом враще-
вращения, имеем
tg ос = \at\/an — е/со2, A1)
так как нормальное ускорение ап всегда
положительно. Угол а для всех точек
тела один н тот же. Откладывать его
следует от ускорения к радиусу враще-
вращения в направлении дуговой стрелки
углового ускорения независимо от на-
направления вращения твердого тела.
Пример. Диск / вращается вокруг непод-
рис, 33 вижной оси, проходящей через его центр Ог
перпендикулярно плоскости диска, по закону
Ф = t — t2 рад (рис. 33) и приводит во вра-
вращение диски 2 и 3, имеющие общую неподвижную ось вращения и жестко
скрепленные друг с другом.
Определить угловые скорости дисков, а также скорости и ускорения точек
их соприкосновения А в момент времени t = 5 с, если радиусы дисков rt = 20 см,
f2 = 30 см, г3 — 20 см, скольжение между дисками отсутствует.
Решение. Определяем алгебраические угловую скорость и угловое
ускорение диска 1, имеем
ф = 1 — 2/, ф" = — 2.
В момент времени /=5 с соответственно
ф = — 9 1/с; coj = |ф| =; 9 1/с;
'ф = _ 2 1/с2; Bt ~ |ф| = 2 1/с2.
В этот момент времени дуговые стрелки для угловой скорости щ и углового ус-
ускорения Ej диска / следует направить в сторону, противоположную положитель-
положительному направлению угла q>, так как алгебраическая угловая скорость и угловое
ускорение оказались отрицательными.
Скорости и касательные ускорения точек соприкосновения дисков 1 и 2
при отсутствии скольжения между ними одинаковы. Поэтому
v = г,со, = г2ш3; v — /-jcoj = !80 см/с;
|ах| = rtet = r282; |ят| = nei = 40 см/Л
Кроме того,
со3 — г1а>1/г2 = 6 1/с; s2 = r^lr^ = |ot|/ra == 4/3 я» !,3 1/с2,
130
Дуговые стрелки для со2 и е2 следует иаправчть в стороны, противополож-
противоположные дуговым стрелкам для щ и f^ соответственно.
Диски 2 и 3 жестко скреплены друг с другом, поэтому их угловые скорости
и угловые ускорения одинаковы, т, е»
ша = ю2 = 6 1/с! ег = е3 « 1,3 !/с*.
Определяем нормальные ускорения точек А дисков 1 а 2, Для диска 1 полу-
получаем
20.81 =-1620
,2 м/о2.
Для диска 2 соответственно
a^2 =r3<»1 =• 30• 36 =• 1080 см/с» = 10,8 м/с2.
Полные ускорения этих точек:
КГ ~ 16,2 м/с*; aA
10,87 м/с».
Векторы скоростей и ускорений точек А дисков / и 2 и составляющие уско-
ускорений этих точек изображены на рис. 33.
Векторы угловой скорости и углового ускорения
Введем понятия векторов угловой скорости и углового ускорения
тела. Если k — единичный вектор оси вращения, направленный в ее
положительную сторону, то векторы угловой бкоровти о> и углового
ускорения е определяют вы-
выражениями <г
со = ф/е; е = ф&. A2)
Так как fe — постоянный по
модулю и направлению век-
вектор, то из A2) следует, что
в = d<o/df.
A3)
Рис. 34
При ф> 0 и ф>0 нап-
направления векторов со и е сов-
совпадают. Они оба направлены
в положительную сторону оси
вращения Ог (рис. 34, а). Если ф > 0 и ф <С 0, то они направлены
в противоположные стороны (рис. 34, б). Вектор углового ускорения
совпадает по направлению g вектором угловой скорости при уекорен-
ном вращении и противоположен ему при замедленном.
Векторы ш и е можно изображать в любых точках оои вращения.
Они являются векторами скользящими. Это их свойство вледует из
векторных формул для скоростей и ускорения точек тела.
5» 131
Векторные формулы для скоростей и ускорений
точек тела
Выразим скорость, касательное, нормальное и полное ускорения
точки тела в векторной форме. Скорость точки по модулю и направле-
направлению можно представить векторным произведением (рив. 35):
О я (О X Г,
A4)
где г — радиус-вектор точки М, проведенный из произвольной точки
оси вращения Ог, например точки О. Выражение A4) называется
векторной формулой Эйлера. Убедимся в справедливости этой форму-
2
лы проверкой. Действительно, вектор со х г перпендикулярен пло*
скости, в которой расположены векторы, входящие в векторное про-
произведение. По направлению он параллелен скорости v, направленной
по касательной к окружности. Модуль векторного произведения
| со X г | = cor ып (со, r) = (oh = и,
так как г sin (со, г) = h Таким образом, векторное произведение
со х г по модулю и направлению определяет скорость точки. Следует
только считать этот вектор приложенным в точке М; он не зависит от
точки приложения вектора со на оси вращения, а 1акже точки оси, в
которой помещено начало вектора г. В частности, в качестве радиус-
вектора г можно использовать вектор h, направив его из точки Оц
в точку М.
Из определения ускорения и векторной формулы Эйлера имеем
dt
dt
dt
At
132
X г"+а> х? A5)
Учитывая, что
получаем
Первое слагаемое в A5) является касательным увкорением, а вто-
второе — нормальным, т. е.
ат = ехг; a^MX^aXffflX^-W. A6)
В справедливости A6) убеждаемся вычислением их правых чавтей.
Имеем
| е х г | = er sin (е, г) — eft,
что совпадает с касательным ускорением. Направление вектора в X г
параллельно вектору касательного ускорения (рис. 36).
Для векторного произведения со X у имеем
| ю X v\ — cow sin (со, v) — № = ftco2 = an,
так как векторы со и у взаимно перпендикулярны. Направление век-
вектора со X у параллельно вектору нормального ускорения и направле-
направлено от точки М к оси вращения, поэтому
ал — — %
если условиться вектор /г направлять от оси вращения. Справедли-
Справедливость формул A6) установлена.
Из определения скорости точки известно, что
v = dfl6t,
где г — радиус-вектор точки, проведенный из любой неподвижной
точки, в частности из любой точки на оси вращения гела, вращающе-
вращающегося вокруг неподвижной оси. Но скорость точки при вращательном
движении тела определяется по векторной формуле Эйлера
1) = а> х г.
Сопоставление двух формул для вкороати точки дает формулу для
вычисления производной по времени от вектора п
drldt = ш X 7. A7)
В этой формуле вектор г имеет постоянный модуль, так как соеди-
соединяет все время две точки твердого тела. Вектор сз, являясь угловой
скоростью вращения твердого тела вокруг неподвижной оаи, выпол-
выполняет также роль угловой скорости вращения вектора г, жевтко скреп-
скрепленного g телом.
13?
Формула A7) остается справедливой также для вектора г, начало
которого находится в любой точке тела, а не только на оси вращения.
По этой формуле вычисляется производная по времени от любого век-
вектора, величина которого постоянна.
§ 4. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Основные понятия
Для изучения некоторых, более сложных видов движений твердого
тела целесообразно рассмотреть простейшее сложное движение точки.
Во многих задачах движение точки приходится рассматривать отно-
относительно двух (и более) систем отсчета, движущихся друг относитель-
относительно друга. Так, движение космического корабля, движущегося к Луне,
требуется рассматривать одновременно и относительно Земли и отно-
относительно Луны, которая движется относительно Земли. Любое дви-
движение точки можно считать сложным, состоящим из нескольких дви-
движений. Например, движение корабля по реке относительно Земли мож-
можно считать сложным, состоящим из движения по воде и вместе с теку-
текущей водой.
В простейшем случае, сложное движение точки состоит из относи-
относительного и перекосного движений. Определим эти движения. Пусть
имеем две системы отсчета, движущиеся друг относительно друга. Если
одну из этих систем О^у^
(рис. 37) принять за основную или
неподвижную (ее движение относи-
относительно других систем отсчета не
рассматривается), то вторая систе-
система отсчета Охуг будет двигаться от-
относительно первой. Движение точ-
точки относительно подвижной
системы отсчета Охуг называется
относительным. Характеристики
этого движения, такие, как траекто-
траектория, скорость и ускорение, назы-
называются относительными. Их обо-
_ значают индексом г; для скорости
и ускорения vr, ar. Движение точки относительно основной, или
неподвижной, системы отсчета Оххху^х называется абсолютным
(или сложным). Его также иногда называют составным движением.
Траектория, скорость и ускорение этого движения называются абсолют-
абсолютными. Скорость и ускорение абсолютного движения обозначают буквами
v, а без индексов. Переносным движением точки называют движение,
которое она совершает вместе с подвижной системой отсчета, как точ-
точка, жестко скрепленная с этой системой в рассматриваемый момент
времени. Вследствие относительного движения движущаяся точка в
различные моменты времени совпадает с различными точками тела
S, с которым скреплена подвижная система отсчета. Переносной ско-
7
Рис- 37
134
ростью и переносным ускорением являются скорость и ускорение той
точки тела S, с которой в данный момент совпадает движущаяся точка.
Переносные скорость и ускорение обозначают Ъе, Ъв.
Если траектории всех точек тела S, скрепленного в подвижной си-
системой отсчета, изобразить на рисунке (см. рис. 37), то получим се-
семейство линий — семейство траекторий переносного движения точки
М. Вследствие относительного движения точки М в каждый момент ¦
времени она находится на одной из траекторий переносного движения.
Точка М может совпадать только о одной точкой каждой из траекторий
этого семейства переносных траекторий. В связи о этим иногда считают,
что траекторий переносного движения нет, так как приходится счи-
считать траекториями переносного движения линии, у которых только
една точка фактически является точкой траектории.
В кинематике точки изучалось движение точки относительно какой-
либо системы отсчета, независимо от того, движется эта система отсче-
отсчета относительно других систем или нет. Дополним это изучение рас-
рассмотрением сложного движения, в простейшем случае состоящего из
относительного и переносного. Одно и то же абсолютное движение,
выбирая различные подвижные системы отсчета, можно считать состоя-
состоящим из разных переносных и соответственно относительных движений.
Сложение скоростей
Определим скорость абсолютного движения точки, если известны
скорости относительного и переносного движений этой точки. Пусть
точка совершает только одно относительное движение по отношению
к подвижной системе отсчета Охуг и в момент времени t занимает на
траектории относительного движения положение М (рис. 38). В момент
времени t + At вследствие относительного движения точка окажется
в положении Мъ совершив перемещение MMt по траектории относи-
относительного движения. Предположим, что точка участвует только в одном
переносном движении. Тогда за время At вследствие этого движения
вместе с системой координат Охуг и относительной траекторией она
переместится по некоторой кривой на ММ2- Если точка участвует од-
одновременно и в относительном и переносном движениях, то за время
At она переместится на ММ' по траектории абсолютного движения
и в момент времени t + At займет положение М'. Если время At
мало и в дальнейшем переходят к пределу при Д^, стремящемся к ну-
нулю, то малые перемещения по кривым можно заменить отрезками хорд
и принять их за векторы перемещений. Складывая векторные переме-
перемещения, получаем
MM'/At == MM2/Ai + лСм'/At-, М2М'
В этом отношении отброшены малые величины более высокого поряд-
порядка, стремящиеся к нулю при Д?, стремящемся к нулю. Переходя к пре-
пределу, имеем
135
Пределы величин, входящих в это соотношение, являются соответст-
соответственно скоростями абсолютного, переносного и относительного движе-
движений точки, т. е.
— ,. MM' — ,.
v= hm 5 ve= lim
¦i»»a
Д>-*0
д<
Следовательно, A8) примет форму
v = vg
A9)
Получена так называемая теорема сложения скоростей: скорость
абсолютного движения точки равна векторной сумме скоростей пере-
переносного и относительного движений этой точки. Так как в общем слу-
случае скорости переносного и отно-
относительного движений не перпенди-
перпендикулярны, то
V = V Ve+
__
2vc Vr COS (Ve, Vr).
A9')
Рис. 38
Рис. 39
Пример. Капля дождя падает вертикально вниз со скоростью v относитель»
по Земли (рис. 39). Определить траекторию и скорость относительного движения
капли по отношению к автомобилю, движущемуся прямолинейно со скоростью и
по горизонтали к Земле.
Решение. Движение капли считаем сложным, состоящим из перенос-
переносного вместе с автомобилем и относительного по отношению к автомобилю. По
теореме сложения скоростей,
В рассматриваемом случае ve = и и v перпендикулярна и; следовательно,
tg а — и!щ vr = Vй2 + <
Траектории капель дождя наклонены к вертикали под углом а. На рисунке пунк-
пунктиром показаны следы капель дождя, т, е. траектории относительного движения
на боковом стекле автомобиля, если оно расположено в вертикальной плоскости.
При очень большой скорости автомобиля по сравнению со скоростью капли
дождя
tg a == u/v
стремятся к бесконечности, а угол а — к предельному значению, равному 90°,
Относительная скорость капли дождя в_ пределе равна и противоположна ско-
скорости автомобиля, т, е. (Уг)Пр = — и»
136
Сложение ускорений при поступательном
переносном движении
Определим ускорение абсолютного движения в частном случгКе по-
поступательного переносного движения. Общий случай сложения уско-
ускорений при произвольном переносном движении рассматривается в
гл.5. Для любого переносного движения справедлива теорема сложения
скоростей
Если подвижная система отсчета Охуг движется поступательно относи-
относительно неподвижной О^х^у^, то по свойству поступательного движения
все точки тела, скрепленного с этой
системой, имеют одинаковые ско-
скорости и ускорения, равные скорости
и ускорению начала координат под-
подвижной системы координат точки О.
Следовательно, для скорости и уско-
ускорения переносного движения имеем
Выразим относительную скорость в
декартовых координатах. Получим -^
1
vr = vr
ru j + vrz k = xi + yj + zk,
где t, /', k — единичные векторы, направленные по подвижным осям
координат, а х, у, г — координаты движущейся точки относительно
этих осей (рис. 40). Подставляя в теорему сложения скоростей значения
переносной и относительной скоростей, имеем
По определению абсолютное ускорение выражается производной
по времени от абсолютной скорости, т. е.
~ == (d/d<0 {vo + xi + yj+ zk),
а =
причем изменение абсолютной скорости v и других векторов v0, i, /,
k следует учитывать по отношению к неподвижной системе осей коор-
координат ОхХхУ^. Выполняя дифференцирование, получим
а = &vnl&t + xi + у I + zk; dvo/dt = ао = ав,
B0)
так как производные по времени от единичных векторов равны нулю*
При поступательном движении подвижной системы отсчета они не
изменяются ни по модулю, ни по направлению. Используя B0) и вы-
выражение для относительного ускорения в декартовых координатах
137
получим следующее выражение для теоремы сложения ускорений точ-
точки при поступательном переносном движении:
Ъ-а9 + аг, B1)
т. е, абсолютное ускорение точки при поступательном переносном дви-
движении равно векторной сумме ускорений переносного и относительно'
го движений,
В общем случае переносное ускорение ае и относительное аг на
перпендикулярны, поэтому
a = у a}-\- a) -f 2ae ar cos (ae, ar).
B1')
Глава 3
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Плоским движением твердого тела называют такое его движение,
при котором каждая его точка все время движется в одной и той же
плоскости. Плоскости, в которых движутся отдельные точки, парал-
параллельны между собой и параллельны одной и той же неподвижной
плоскости. Поэтому плоское движение твердого тела часто называют
плоскопараллельным движением. Траектории точек тела при плоском
движении являются плоскими кривыми.
Плоское движение твердого тела имеет большое значение в техни-
технике, так как звенья большинства механизмов и машин, применяемых
в технике, совершают плоское движение.
Вращательное движение твердого тела
вокруг неподвижной оси можно считать
частным случаем плоского движения.
При изучении плоского движения, как
и любого другого, необходимо рассмотреть
способы задания этого движения, а также
приемы вычисления скоростей и ускоре-
ускорений точек тела.
Пусть твердое тело совершает плоское
движение, параллельное неподвижной
плоскости По (рис. 41). Тогда любая пря-
прямая, перпендикулярная этой плоскости и
жестко скрепленная своими точками с дви-
движущимся телом, будет двигаться поступательно, т. е. все точки этой
прямой движутся одинаково.
Следовательно, для изучения движения точек, лежащих на рассма-
рассматриваемой прямой, достаточно изучить движение одной точки этой
прямой, например точки М. Рассуждая аналогично для любой другой
прямой, перпендикулярной плоскости Пй и скрепленной с движущимся
твердым телом, можно сделать вывод, что для изучения плоского дви-
движения твердого тела достаточно изучить движение точек этого тела,
138
Рис. 4!
лежащих в какой-либо плоскости П, параллельной неподвижной
плоскости Яо, т. е. точек тела, лежащих в сечении рассматриваемого
тела плоскостью П и образующих плоскую фигуру.
Таким образом, для изучения плоского движения твердого тела до-
достаточно изучить движение плоской фигуры в ее плоскости, параллель-
параллельной неподвижной плоскости Пд. Положение фигуры на ее плоскости
полностью определяется положением отрезка прямой линии, жестко
скрепленной с этой плоской фигурой. Различные по форме твердые
тела, совершающие плоское движение, имеют в сечениях разные пло-
плоские фигуры. В общем случае за плоскую фигуру примем всю плоскость
и, следовательно, рассмотрим движение этой подвижной плоскости по
другой, неподвижной плоскости.
§ 1. УРАВНЕНИЯ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Для задания положения плоской фигуры на плоскости относитель-
но системы координат Ovx^yx, лежащей в плоскости фигуры, достаточ-
достаточно задать на этой плоскости положение отрезка ОМ (рис. 42), скреп-
скрепленного с фигурой. Положение отрезка ОМ относительно системы ко-
координат О1х1у1 определится заданием координат какой-либо точки
этого отрезка и его направления. Например, для точки О нужно задать
координаты хп, у0, а направление задать углом \\>, который образует
отрезок ОМ с какой-либо осью, например О1х1 или ей параллельной
осью Ох[. Вместо угла гр можно взять угол между любой другой осью
или отрезком, скрепленными с плос-
кой фигурой, и осью ОуХи например
угол ф. Тогда i|) = ф -{- а, где а не
зависит от времени Таким образом,
уравнения движения плоской фигуры
в ее плоскости, а следовательно, и
плоского движения твердого тела от-
относительно системы координат O
имеют вид
х0 - h @;
@; ф = /з (Q.
Рис. 42
Положение любой точки М плос-
плоской фигуры относительно подвижной
системы координат Оху, скрепленной
с этой движущейся фигурой и лежа-
лежащей в ее плоскости, полностью определяется заданием координат
х и у точки М, которые при движении плоской фигуры в ее плоско-
плоскости не изменяются с изменением времени. Между координатами точки
М в двух системах координат О1х1у1 и Оху существует следующая за-
зависимость (рис. 42):
*i = *о + г cos <а + ф); У! = Уо + г sin (а + ф),
где г — длина отрезка ОМ и а — постоянный угол между отрезком
ОМ и осью Ох.
139
Раскрывая косинус и синус суммы двух углов и учитывая, что
г cos « = х; г sin a = у, получаем окончательные формулы в следую-
следующем виде:
#i — хо + х cos Ф — У s'n Ф1 У\ ~ У о + У cos Ф + х sin ф. A)
Формулы A) являются уравнениями движения точки плоской фи-
фигуры относительно системы координат OjXitfi.
Эти формулы позволяют определить координаты любой точки пло-
плоской фигуры по заданным уравнениям движения этой фигуры и коор-
координатам ее точки относительно подвижной системы координат, скреп-
скрепленной с движущейся фигурой.
Используя векторно-матричную символику, A) можно выразить
в форме
Pi - Ро + А/, (Г)
где А — матрица поворота на плоскости:
д —
СОЭф
§ 2. РАЗЛОЖЕНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
НА ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЯ
Любое движение твердого тела, в том числе и движение плоской
фигуры в ее плоскости, бесчисленным множеством способов можно раз-
разложить на два движения, одно из которых переносное, а другое — от-
относительное. В частности, движение плоской фигуры в ее плоскости
относительно системы координат О&Уг, расположенной в той же пло-
плоскости (см. рис. 42), можно разложить на переносное и относительное
движения следующим образом. Примем за переносное движение фигу-
фигуры ее движение вместе с поступательно движущейся системой коорди-
координат Ох[у'\, начало которой скреплено с точкой О фигуры, принятой за
полюс. Тогда относительное движение фигуры будет по отношению к
подвижной системе координат Ох[у{ вращением вокруг подвижной
оси, перпендикулярной плоской фигуре и проходящей через выбран-
выбранный полюс О.
Для доказательства этого достаточно показать, что плоскую фигу-
фигуру в ее плоскости из одного положения в любое другое, в том числе и
бесконечно близкое первому, можно перевести двумя перемещения-
перемещениями — поступательным перемещением в плоскости фигуры вместе
с каким-либо полюсом и поворотом в той же плоскости вокруг этого
полюса. Рассмотрим два любых положения плоской фигуры I a II
в ее плоскости, определяемые двумя положениями отрезка АВ, скреп-
скрепленного с этой фигурой (рис. 43).
В общем случае, когда отрезок А В в одном положении не паралле-
параллелен тому же отрезку в другом положении, из рис. 43 следует, что пло-
плоскую фигуру действительно сначала можно переместить поступатель-
поступательно, например вместе с точкой А этой фигуры, причем скрепленный с фи-
фигурой отрезок А В займет положение AtBi, и затем повернуть фигуру
вокруг точки Ах на угол ф до совпадения Аф'у с AtBt.
140
В частном случае, когда отрезок А В параллелен отрезку АХВЬ
угол ф равен нулю и, следовательно, вращательного перемещения
в этом случае не будет. Очевидно, что в общем елучае, когда ф не рав-
равно нулю, сначала плоскую фигуру можно повернуть на угол ср вокруг
точки А, а затем переместить поступательно. И наконец, совершая пло-
плоское поступательное перемещение вместе g точкой А, фигуру можно по-
поворачивать вокруг этой точки так, чтобы в момент совпадения точки
А с точкой Аг эта фигура повернулась на угол ср.
Действительное плоское перемещение фигуры из положения /
в положение // может быть любым, но его всегда можно заменить дву-
двумя простыми плоскими перемеще-
перемещениями— поступательным и враща-
вращательным — так, чтобы конечное
положение плоской фигуры в обоих
случаях было одним и тем же.
Действительное перемещение фи-
фигуры в ее плоскости из одного поло-
положения в другое, бесконечно близ-
близкое к первому, в пределе можно точ-
точно заменить двумя элементарными
простыми плоскими перемещения-
перемещениями — поступательным и вращатель-
вращательным. При этом поступательное пе-
перемещение фигуры вместе с какой-либо ее точкой является перенос-
переносным движением плоской фигуры, а вращение фигуры вокруг подвиж-
подвижной оси, перпендикулярной плоскости фигуры и проходящей через вы-
выбранную точку, — относительным движением.
Поступательное перемещение зависит от выбора точки фигуры, вме-
вместе с которой совершается это поступательное перемещение, в то вре-
время как угол поворота вокруг полюса не зависит от выбора полюса.
На рис. 43 показаны случаи, когда за полюсы выбираются снача-
сначала точка А, а затем точка В. Штриховой линией указаны положения
плоской фигуры после поступательных перемещений вместе о точка-
точками А и В.
§ 3. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ ТЕЛА
ПРИ ПЛОСКОМ ДВИЖЕНИИ
Для характеристики вращательной части плоского движения твер-
твердого тела вокруг подвижной оси, проходящей через выбранный по-
полюс, аналогично случаю вращения твердого тела вокруг неподвижной
оси можно ввести понятия угловой скорости со и углового укоренИя е.
Если угол поворота вокруг подвижной оси, проходящей через полюе,
обозначить ф, то
а ~ |dq>/d/|; в =* |dco/d/| =. |dVd*2|.
Так как вращательная часть движения не зависит от выбора полю-
полюса, то и характеристики этой части движения — угловая скорость и
угловое ускорение — также не зависят от выбора полюса. Следова-
141
тельно, для заданного плоского движения фигуры в данный момент
они одинаковы относительно подвижной оси, проходящей через лю-
любую точку фигуры.
При плоском движении тела угловую скорость и угловое ускоре-
ускорение можно считать векторами, направленными по подвижной оси, пер-
перпендикулярной плоскости фигуры и проходящей через выбранный
полюс. Вектор угловой скорости со при плоском движении фигуры на-
направлен по подвижной оси так, чтобы с конца его стрелки можно было
видеть вращение фигуры против часовой стрелки. Вектор углового ус-
ускорения а при ускоренном вращении фигуры совпадает о направлением
вектора угловой скорости со, а при замедленном вращении эти векто-
векторы имеют противоположные направления. Так как со и 8 не зависят от
выбора полюса па плоской фигуре, то, следовательно, их можно прило-
приложить в любой точке фигуры, не изменяя модулей и направлений этих
векторов, т. е. со и е являются свободными векторами. Вектор углово-
углового ускорения является первой производной по времени от вектора уг-
угловой скорости, т. е. е = dco/cM.
§ 4. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Применяя к плоскому движению теорему о сложении скоростей
для какой-либо точки В фигуры, получаем
VB — &Ве ~\- УВг> B)
где vB — абсолютная скорость точки В плоской фигуры относитель-
относительно системы координат, по отношению к которой рассматривается дви-
движение фигуры; vBe — скорость точки В от переносного поступатель-
Рис. 44
ного движения фигуры вместе, например, с точкой А этой фигуры
(рис. 44, a); vBr — скорость точки В в относительном движении, кото-
которым является вращение плоской фигуры вокруг точки А о угловой ско-
скоростью ш.
Так как за переносное движение выбрано поступательное движе-
движение вместе с точкой А, то у всех точек плоской фигуры одинаковы пера-
142
носные скорости, совпадающие с абсолю тнсй скоростью точки Л,
т. е.
VBe = VA.
Скорость относительного движения, в случае когда оно является
вращательным движением, равна
vBr = a>AB.
Скорость vBr расположена в плоскости движущейся фигуры и на-
направлена перпендикулярно отрезку АВ, соединяющему точку В с по-
полюсом Л. Эту относительную скорость мож-
можно выразить в виде векторного произведе- м\
ния
оВг = ю х АВ,
где угловая скорость со считается направ-
направленной по подвижной оси вращения, про-
проходящей через точку Л и перпендикуляр-
перпендикулярной плоскости фигуры. Относительную
скорость vBr обозначим vBA. Это обозначе-
обозначение показывает, что скорость относитель-
относительного движения точки В получается от вра- Рис 45
щения плоской фигуры вокруг подвижной
оси, проходящей через точку Л, или просто вокруг точки Л. Форму-
Формулу B) можно выразить в виде
где
= v А + vBA,
= ®АВ
C)
D)
и вектор vBA перпендикулярен отрезку А В я направлен в сторону
вращения плоской фигуры (рис. 44, а). Используя C), можно постро-
построить в выбранном масштабе треугольник скоростей для точки В
(рис. 44, б).
Таким образом, скорость какой-либо точки фигуры при ее плоском
движении равна векторной сумме скорости полюса и относительной
скорости этой точки от вращения фигуры вокруг полюса. Формула C)
выражает зависимость между скоростями двух любых точек тела при
плоском движении в любой момент времени.
Пример. Колесо радиусом R (рис. 45) катится со скольжение_м по прямой
линии, имея в рассматриваемый момент времгни скорость центра v0 и угловую
скорость со. Определить в этот момент времени скорости точек М, Р и N, распо-
расположенных на концах вертикального и горизонтального диаметров
Решение. Дтя точки М скорости vM^ и vQ направлены по одной пря-
прямой, Следовательно,
vmo>
где
vM0 = со -ОМ = ох/?.
143
Для точки Р скорости Vp0 и v0 противоположны по направлению, по-
поэтому
°р ~ °о — vpo>
причем
°ро = ш-°р = aR-
При качении колеса по прямой линии без скольжения скорость точки Р
равна нулю и, следовательно, в этом случае скорость центра и0 и угловая ско-
скорость <и связаны соотношением
°О ~ °РО = <°Rt
Отсюда можно выразить угловую скорость через скорость центра О колеса и его
радиус:
со = vp0 ЮР = V(JR,
В точке N скорости vN@ и v0 взаимно перпендикулярны, следовательно,
где
vno = ю-OiV —
Отметим, что при качении колеса по прямой без скольжения скорости точен
обода колеса не направлены по касательной к ободу, за исключением самой верх-
верхней его точки М
Формулу C), устанавливающую зависимость скоростей двух точек
плоской фигуры, можно получить непосредственным дифференциро-
дифференцированием по времени векторного равенства
гв = г а +
справедливого для любого момента времени (см. рис. 44, а).
При дифференцировании векторов учитываем их изменения отно-
относительно основной, неподвижной системы координат Охх-фХъ т. е. вы-
вычисляем полные производные от этих векторов. Имеем
At At At
Очевидно, &7B?dt =* vB, drjdt — vA — скорости точек В и Л.
Вектор АВ соединяет две точки плоской фигуры и, следовательно, не
изменяется по модулю при движении плоской фигуры. Производную по
времени от такого вектора как вектора постоянного модуля по скаляр-
скалярному аргументу можно выразить в форме
— (ЛВ) = й х АВ,
Где ю — вектор угловой скорости вращения АВ, а следовательно, и
плоской фигуры, с которой скреплен вектор АВ.
Окончательно
Vb = va-\-o> x АВ.
144
Если ввести обозначение v
B A
со X АВ, то
o>
т. е. получаем формулу C).
§ 5. МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
В каждый момент времени при плоском движении фигуры в ее
плоскости, если афО, имеется единственная точка этой фигуры, ско-
скорость которой равна нулю. Эту точку называют мгновенным центром
скоростей. Обозначим ее Р.
Для доказательства этой теоремы достаточно указать способ на-
нахождения мгновенного центра скоростей, если известны по модулю
и направлению скорость
какой-либо точки О плос- щ п„
кой фигуры и угловая ско-
скорость этой фигуры в рас-
рассматриваемый момент вре-
времени Пусть вращение .
происходит по часовой
стрелке (ф <. О и со = |tp |)
( )
(рис. 46). Скорость точки
Р плоской фигуры равна
нулю, если скорость полю-
полюса О и скорость от враще-
вращения вокруг полюса О в этой
точке равны по модулю, но противоположны по направлению. Эти
точки лежат на перпендикуляре к скорости ио в точке О. В других
точках векторная сумма двух векторов не может быть равна нулю.
Итак, если vP = v0 + vP0 = 0, то vP0 = — v0', vP0 — vo.
Ho
vP0 = wOP;
следовательно,
OP = VpO/(i> = Void*.
Таким образом, мгновенный центр скоростей находится на перпен-
перпендикуляре к скорости v0, проведенном из точки О, на расстоянии ОР =
Рис 46
Мгновенный центр скоростей является единственной точкой пло-
плоской фигуры для данного момента времени В другой момент времени
мгновенным центром является уже другая точка плоской фигуры.
Если мгновенный центр известен, то, приняв его за полюс и учиты-
учитывая, что скорость его в этом случае равна нулю, согласно C) и D)
для точки А фигуры имеем
«а = Vap', va = vAP = а>АР, E)
где АР —расстояние от точки А до мгновенного центра скоростей.
145
По направлению скорость vA в этом случае перпендикулярна от-
отрезку АР. Для точки В, аналогично,
vB = ©В/5, F)
причем скорость vB перпендикулярна отрезку ВР
Из E) и F)
со = vJAP = Уд/S/5 G)
и
vAhB = Л/VBP. (8)
Следовательно, если мгновенный центр скоростей известен, то
скорости точек плоской фигуры при ее движении в своей плоскости вы-
вычисляют так же, как и в случае вращения фигуры в рассматриваемый
момент вокруг своего мгновенного центра скоростей с угловой скоро-
скоростью со.
Для нахождения скоростей точек тела при его плоском движении
обычно предварительно находят мгновенный центр скоростей. Но мож-
можно применить формулу, выражающую зависимость между скоростями
двух точек тела.
Рассмотрим способы нахождения мгновенного центра скоростей.
Существует два основных способа его нахождения из механических
условий задачи и по скоростям точек плоской фигуры
В некоторых случаях удается сразу указать точку плоской фигуры,
скорость которой в рассматриваемый момент равна нулю. Эти точки
в таких задачах и являются мгновенными центрами скоростей. Так, в
случае качения без скольжения одного тела по поверхности другого
неподвижного тела точка соприкосновения поверхностей тел и являет-
является мгновенным центром скоростей.
Например, при качении без скольжения колеса по неподвижной
прямой линии (см. рис. 52) и одного колеса по неподвижному другому
колесу (см. рис. 61) мгновенный центр скоростей находится в точках
соприкосновения колеса с прямой и соответственно колеса с колесом.
В общем случае, если известны скорости двух точек плоской фигуры
(рис. 47), мгновенный центр скоростей находится на пересечении пер-
перпендикуляров к скоростям этих точек.
В случае, когда точки лежат на общем перпендикуляре к скоростям
этих точек, скорости точек параллельны и концы их лежат на одной
прямой, проведенной через мгновенный центр скоростей (рис. 48 и
49), так как скорости точек пропорциональны расстояниям от этих
точек до мгновенного центра скоростей. Если скорости двух точек,
расположенных на общем перпендикуляре к этим скоростям, еще и
равны (рис. 50), то имеем мгновенное поступательное движение пло-
плоской фигуры, при котором скорости всех точек фигуры одинаковы по
модулю и направлению. Угловая скорость плоской фигуры при мгно-
мгновенном поступательном движении равна нулю, и в этом случае, со-
согласно формуле G), мгновенный центр скоростей находится в беско-
бесконечности.
Заметим, что при мгновенном поступательном движении только ско-
скорости точек одинаковы, а их ускорения в общем случае различны. Не
146
может быть случая, когда скорости двух точек, не лежащих на общем
перпендикуляре к скоростям, не равны друг другу по модулю, но па-
параллельны (рио. 51), так как для него не выполняется теорема о про-
проекциях скоростей двух точек тела на прямую, соединяющую эти точки.
Рис. 47
Рис. 48
Рис 51
Рис. 52
Пример. Колесо радиусом R (рио. 52) катится без скольжения по непод-
неподвижной прямой, имея скорость центра "v0, Определить скорости точек Л4, N
и L обода колеса в данный момент времени.
Решение. Мгновенный центр скоростей в этом случае находится в точ-
точке Р соприкосновения колеса с прямой. Угловая скорость колеса определяется
но формуле G):
ш = Vq/OP =
По формуле E) для скоростей указанных точен имеем
так как
MP = LP = RV2,
Скорости точек колеса направлены по перпендикулярам к отрезкам прямых,
соединяющих мгновенный центр скоростей с рассматриваемыми точками.
147
§ 6. ВЫЧИСЛЕНИЕ УГЛОВОЙ СКОРОСТИ ПРИ ПЛОСКОМ
ДВИЖЕНИИ
Угловую скорость плоской фигуры при плоском движении можно
вычислить, согласно ее определению, как
со = |dcp/d/|.
Затем ее можно определить по формуле G):
со = vJAP = vB/BP.
Чтобы определить угловую скорость, надо скорость какой-либо
точки плоской фигуры разделить на расстояние от этой точки до мгно-
мгновенного центра скоростей. На-
Направление вращения определяем
по направлению скорости какой-
либо точки, считая, что плоская
фигура в данный момент вра-
вращается вокруг мгновенного
центра скоростей g угловой ско-
скоростью со.
Угловую скорость при плос-
плоском движении можно вычислить
путем предварительного нахож-
дения скорости какой-либо точ-
точки плоской фигуры от вращения
фигуры вокруг другой ее точки, принятой за полюс, например vBA или
vCA. Тогда угловая скорость, согласно формуле D),
й = vBAIAB =s vcaIAC.
Знак угловой скоросги определяют по направлению относительной
скорости какой-либо точки фигуры от вращения фигуры вокруг дру-
другой ее точки, выбранной за полюс.
Применяют и другие способы определения угловой скорости. Так,
если предварительно установить зависимость угла поворота плоской
фигуры от линейных и угловых величин других плоских фигур тож-
тождественным соотношением, то, дифференцируя его по времени, полу-
получаем соотношение, из которого иногда удается определить искомую
угловую скорость. Этот способ используют часто для нахождения за-
зависимости угловых скоростей отдельных звеньев плоских механизмов.
Пример. В кривошипно-шагунном механизме (рис. 53) даны длины кривоши-
па г, шатуна / и расстояние h от оси вращения кривошипа до направляющей пол.
зуна В. Установить зависимость между угловыми скоростями кривошипа а> и
шатуна o>i при любом положении механизма.
Решение. Положение кривошипа ОА определяется углом ф, а шатуна
А В — углом i|>. До тех пор пока q> < я/2, справедливо тождество
г sin ф + к = I sin f.
Дифференцируя это тождество по времени, получаем
i cos> фф = / eos Tfifi
148
Но |ф| == со, |if| = <%; следовательно,
Г(О COS ф = Jfflf COS 1|),
Полученное соотношение и является искомой зависимостью между угловы-
угловыми скоростями кривошипа и шатуна. При h = 0 имеем частный случай криво-
шипно-шатуиного механизма. Если дополнительно I = г, то ip = q> и a>i = со.
Направления вращений кривошипа и шатуна противоположны друг другу. При
вращении кривошипа против движения часовой атрелки шатун вращается по ча-
часовой стрелке,
§ 7. УСКОРЕНИЯ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Рассматривая плоское движение плоской фигуры как сложное, со-
состоящее из переносного поступательного вместе с полюсом А и отно-
относительного вращательного вокруг А, по теореме о сложении ускоре-
ускорений для точки В имеем
ав = аВе + аВг. (9)
Так как переносное движение является поступательным вместе
с точкой .4 фигуры, то переносное ускорение
О-Ве — па-
Относительное ускорение аВг точки В от вращения вокруг полюса
А обозначим аВА. После этого формула (9) принимает вид
~ав=ЪА + ~аВА, A0)
т. е. ускорение какой-либо точки плоской фигуры при плоском движе-
движении равно векторной сумме ускорения полюса и ускорения этой точки
от вращательного движения плоской фигуры вокруг полюса.
Ускорение от относительного вращательного движения вокруг по-
полюса, как и в случае вращения тела вокруг неподвижной оси, состоит
из касательной и нормальной составляющих а%вл и а"вА:
(И)
Причем
A2)
A3)
(a%Af = ЛВ]/е2 + со*. A4)
Касательное относительное ускорение а\А направлено по пер-
перпендикуляру к отрезку АВ в сторону дуговой стрелки углового уско-
ускорения е (рис. 54, а). Нормальное относительное ускорение а%А со-
соответственно направлено по линии АВ от точки В к полюсу А. Нако-
Наконец, полное относительное ускорение аВА составляет с отрезком АВ
угол а, тангенс которого можно определить по формуле
| = |el/a>". (i5>
149
Из формулы A5) следует,
что угол а для всех точек
плоской фигуры одинаков.
При ф > 0 угол а от ускоре-
ускорения аВА к отрезку В А надо
откладывать против часовой
стрелки. При ф < 0 его надо
откладывать по часовой стрел-
стрелке, т е. во всех случаях неза-
независимо от направления враще-
вращения фигуры угол а всегда надо
откладывать в направлении
дуговой стрелки углового уско-
ускорения. В соответствии с A0)
и A1) можно построить в вы-
выбранном масштабе многоугольник ускорений для точки В (рис. 54, б).
Формулу A0), определяющую зависимость ускорений двух точек
плоской фигуры, можно получить непосредственным дифференцирова-
дифференцированием векторного равенства для скоростей, справедливого в любой мо-
момент времени. Имеем
Ув = Уд + со X АВ.
Продифференцируем по времени обе части этого равенства, учиты-
учитывая изменения векторных величин относительно неподвижной системы
координат (полные производные). Получаем
Рис. 54
At
At
dt
Здесь dvB/dt = aB, dvA/dt = аЛ — ускорения точек В и А отно-
относительно неподвижной системы координат; dco/cM = е — угловое ус-
ускорение плоской фигуры. У вектора АВ постоянный модуль; следо-
следовательно, его производная по времени выражается в форме
— (АВ) -mx AS.
d/
Объединяя подученные результаты, получаем
а/з — аА + 8 х А В + ю х (ю х АВ).
Рассуждения, аналогичные тем, которые проведены для скорости
vBA, позволяют сделать вывод о том, что
? X ~АВ = аЪА; to X (ю х АВ) = © x~vBA =^anBAl
т. е. е X АВ и а) X (<о X АВ) являются соответственно касательным
и нормальным ускорениями от вращения плоской фигуры вокруг точ-
точки А. Следовательно,
= а
О-ВА +
150
Пример. Колесо радиусом R катится со скольжением по неподвижной пря-
прямой, совершая плоское движение (рис. 55), Ускорение центра колгса в рассма-
рассматриваемый момент времени равно а0, а угловая скорость ч урловое ускорение
колеса со и е. Дуговые стрелки для шив направлены по часовой стрелке, т, е,
Ф < 0 и ф < 0, Определить в этот же момент времени ускорения точек М, N
и Р, расположенных на концах вертикального
и горизонтального диаметров обода колеса.
Решение, Ускоренна точки М, при«
няв за полюс точку 0, определим по формуле
и аналогичным формулам для точен N и Р.
Для касательного и нормального ускорений
точки М от вращения колеса вокруг точки
О имеем
Ускорение ахм0 перпендикулярно отрезку
ОМ и направлено в сторону, указываемую
дуговой стрелкой в, а ускорение ajyo иаправ- рИС- 55
лено от точки М к полюсу О и аналогично
для точек N и Pt
Так как для точки М ускорения а0 и ахм0 направлены по одной прямой,
то, сложив их предварительно, получим две перпендикулярные составляющие
ускорения точки М и, следовательно,
Для точки N ajjo = а^0, a
Окончательно для точки N имеем
= а^0, так как ON = ОМ — R.
Для точки Р соответственно
В случае качения колеса без скольжения точка Р является мгновенным
центром скоростей и скорость точки Р в'любой момент времени равна нулю. Ско-
Скорость точки 0 можно определить но формуле
v0 = ОРю = Raj,
Дифференцируя по времени обе части этого тождества, получим 6v,-/dt =
«= R (doo/dO или uq = uq = Re, так как точка О движется прямолиаеинол и
Учитывая, что
имеем
аРО ~ 0Ps — R& = ао>
=0.
Следовательно, при качении колеса по прямой без скольжения
151
т. е, ускорение мгновенного центра скоростей, скорость которого равна нулю,
не равно нулю.
Если угловое ускорение не задано, то при отсутствии скольжения колеса
по прямой его можно определить по формуле
г — ajR,
§ 8. МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
В каждый момент движения плоской фигуры в своей плоскости, если
а и г не равны нулю одновременно, имеется единственная точка этой
фигуры, ускорение которой равно нулю. Эту точку называют мгновен'
ным центром ускорений. Обозначим ее Q. Для доказательства этой
теоремы предположим, что известны по модулю и направлению ускоое-
Рис 5S
Рис. 57
ние какой-либо точки плоской фигуры, угловая скорость и угловое ус-
ускорение этой фигуры. Пусть ф -< 0 (рис. 56). Мгновенный центр уско-
ускорений лежит на линии, проведенной под углом а к ускорению точки,
тангенс которого вычисляем по формуле
tg а = е/со2.
При этом угол а надо отложить от ускорения а0 в направлении
дуговой стрелки углового ускорения е, т. е. в рассматриваемом случае
по часовой стрелке. Только в точках этой прямой ускорение а0 и ус-
ускорение от вращения aQ0 могут иметь противоположные направления
и одинаковые значения, т. е.
и тогда
Но
= «о + aQ0 = О,
ачо = — а0.
аао = OQVt* + со* = а0;
следовательно,
OQ = aQO/Ve2 + со* = ао/Т/е2 + ©*.
152
Из приведенного доказательства следует, что мгновенный центр
ускорений является единственной точкой плоской фигуры, ускорение
которой в рассматриваемый момент времени равно нулю. В другой
момент времени мгновенный центр ускорений находитоя в общем слу-
случае в другой точке плоской фигуры.
Если мгновенный центр ускорений известен, то, выбрав его за по-
полюс, для ускорения точки А плоской фигуры по формуле A0) получаем
а А = aQ + aAQ = aAQ,
так как
и, следовательно,
Уё7 A6)
Ускорение аА направлено под углом а к отрезку AQ, соединяю-
соединяющему точку А с мгновенным центром ускорений в сторону дуговой
стрелки углового ускорения е (рис 57).
Для точки В, аналогично,
ав = BQ Уе2 + ш* A7)
и ускорение ав также направлено под углом а к отрезку BQ.
Из формул A6) и A7) имеем
aAlaB = AQ/BQ, A8)
т. е. ускорения точек плоской фигуры при плоском движении пропор-
пропорциональны расстояниям от этих точек до мгновенного центра ускоре-
ускорений.
Итак, суммируя результаты, получаем, что ускорения точек пло-
плоской фигуры при плоском движении можно определить так же, как и
при вращательном движении плоской фигуры вокруг мгновенного центра
ускорений с угловой скоростью со и угловым ускорением е.
Для вычисления скоростей точек плоской фигуры при плоском дви-
движении принимают, что плоская фигура вращается вокруг мгновенного
центра скоростей, а для вычисления ускорения следует считать, что она
вращается вокруг мгновенного центра ускорений.
При качении без скольжения колеса по прямой (см. пример в §7)
получается, что ускорение мгновенного центра скоростей не равно
нулю; следовательно, в общем случае мгновенные центры скоростей и
ускорений являются различными точками плоской фигуры.
Ускорения точек плоской фигуры при плоском движении, подобно
скоростям точек, можно определять двумя способами: по формуле A0),
выражающей зависимость ускорений двух точек плоской фигуры, и
по формуле A6), используя мгновенный центр ускорений. Обычно
мгновенный центр ускорений, кроме частных случаев, когда угловая
скорость или угловое ускорение равны нулю, располагается на пло-
плоской фигуре так, что трудно определить расстояния от него до рассма-
рассматриваемых точек фигуры. Поэтому определение ускорения точек реко-
рекомендуется вычислять по формуле A0).
153
Рассмот1им способы нахождения мгновенного центра ускорений
как в частных, так и в общем случаях.
1. Пусть известно, что угловое ускорение в = 0, а угловая скорость
со Ф 0. Очевидно, это возможно в случае, когда плоская фигура вра-
вращается в своей плоскости о постоянной угловой скоростью или когда
угловая скорость достигает относительного наибольшего или наимень-
наименьшего значения. В этом случае для угла а
tg а = е/со2 = 0
и, следовательно, угол а = 0.
Мгновенный центр ускорений лежит на прямой линии, по которой
направлено ускорение какой-либо точки плоской фигуры (рис. 58). Так
как эго справедливо для любой точки фигуры, то, следовательно, мгно-
Рис 58
Рнс 59
венный центр ускорений лежит в точке пересечения прямых линий, по
которым направлены ускорения точек плоской фигуры. Ускорения то-
точек плоской фигуры в этом случае направлены к мгновенному центру
ускорений, так как они состоят только из одной относительной нормаль-
нормальной составляющей от вращения вокруг мгновенного центра ускорений.
Если известно ускорение, например точки А, то мгновенный центр
ускорений можно найти по расстоянию AQ:
AQ = аА/со2.
Эта формула получается из A8) в случае, когда угловое ускорение
равно нулю.
2. Пусть угловая скорость со = 0, а угловое ускорение е Ф 0.-
Это возможно при мгновенном поступательном движении.
Тогда
tg а = е/со2 = оо
и, следовательно, угол а — прямой. Его надо откладывать от уско-
ускорения точки в направлении дуговой стрелки углового ускорения. Мгно-
Мгновенный центр ускорений лежит на пересечении перпендикуляров к
ускорениям точек плоской фигуры, проведенных из этих точек (рис. 59).
Если известна числовая величина ускорения какой-либо точки А, то
расстояние от А до мгновенного центра ускорений можно вычислить по
формуле AQ — аА/е, которая получается из формулы A6) при ы == 0.
154
3. В общем случае, когда угловая скорость <а и угловое ускорение
е известны и не равны нулю, для угла а имеем
tg а = е/со2 ф 0.
Мгновенный центр ускорений лежит на пересечении прямых линий,
проведенных к ускорениям точек фигуры под одним и тем же углом
а, причем угол а нужно откладывать от ускорений точек в направле-
направлении дуговой стрелки углового ускорения независимо от направления
угловой скорости плоской фигуры
(см. рис. 57). Если известно ускоре-
ние, например точки А, то расстояние
от точки А до мгновенного центра
ускорений можно найти по формуле
A6), т. е.
AQ = a
+ со*
4 Пусть в данный момент времени
известны ускорения двух точек плос-
плоской фигуры: Л и В (рис. 60). Укажем
способ нахождения мгновенного цент-
центра ускорений в этом случае. По фор-
формулам A0)—A3), приняв за полюс
точку А, имеем
A9)
где
Рис 60
Проецируя левую и правую части векторной формулы A9) на
две взаимно перпендикулярные оси Вх и By, получаем
ав cos р = аА cos у -f- АВа2; ав sin р = аА sin у 4- АВ&,
где р и у — известные углы соответственно между ускорениями ав
и аА и положительным направлением оси Вх.
При принятом направлении оси Вх проекцию а%д на эту ось
надо вэять со знаком плюс, так как пва направлена всегда от точки
В к полюсу А. Проекцию ускорения пва на ось By предположитель-
предположительно возьмем с плюсом, считая дуговую стрелку е в рассматриваемом слу-
случае направленной против часовой стрелки. Определяя со2 и е, легко на-
находим:
а2 = (ав cos р — а А cos у)/А В; е = (ав sin Р — а А sin y)IAB.
Естественно, что в реальных случаях величина со2, найденная из
полученной формулы, должна оказаться положительной. Знак же уг-
углового ускорения е определяется знаком правой части формулы для е.
После того как найдены е и со2, задача нахождения мгновенного
центра ускорений сводится к уже рассмотренному случаю 3.
155
§ 9. ОСНОВНЫЕ СПОСОБЫ ВЫЧИСЛЕНИЯ УГЛОВОГО
УСКОРЕНИЯ ПРИ ПЛОСКОМ ДВИЖЕНИИ
При вычислении уакорений точек фигуры при плоском движении
необходимо знать угловое увкорение. Рассмотрим некоторые приемы
его определения.
1. Если известен угол поворота или угловая скорость в зависимости
от времени, то угловое увкорение в определяем путем дифференциро-
дифференцирования их по времени, т. е.
2. Обычно требуется определить угловое ускорение в какой-либо
момент времени по другим величинам, известным в этот же момент вре-
времени. В этом случае угловое ускорение тоже можно получить путем
дифференцирования угловой скорости по времени, считая ее для вы-
вывода формулы известной функцией времени. Угловую скорость можно
найти по формуле G):
со = vJAP,
где А — точка плоской фигуры; Р — мгновенный центр скоростей.
Дифференцируя со по времени, получаем
dt АР At df \AP
В случаях, когда АР постоянно,
е = аУАР, B0)
так как
е « }da/dt\; а\ = \6vA!At\,
где а\ — касательное ускорение точки А.
Так, например, при качении колеса без скольжения по неподвиж-
неподвижной прямой линии (см. рис. 55), если за точку А взять центр колеса О,
то, учитывая, что он движется прямолинейно, получим
в = a0IR,
так как в этом случае
ОР — R = const и аи = а0,
где R — радиуе колеса.
При качении без скольжения одного колеса по неподвижному дру-
другому колесу сначала установим зависимость между угловой скоростью
«>! подвижного колеса и угловой скоростью со кривошипа ОА (рив. 61).
Учитывая, что мгновенный центр екоростей подвижного колеса лежит
в точке соприкоеновения колес, получаем
^J^^I±^I±Lt B1)
АР Г г
гле R — радиуо неподвижного колеса; г — радиуа подвижного колеса.
15S
Дифференцируя по времени B1), имеем
так как
B2)
гг —
е =
Из сравнения B1) и B2) видно, что евязь между угловыми вкоро*
стями и угловыми ускорениями колее полностью аналогична. Это
справедливо и для углов поворота колее, если нулевые их значения вы-
выбрать в один и тот же момент времени.
Рис. 61
Рис. 62
При внешнем зацеплении дуговые стрелки угловой скорости и уг-
углового ускорения подвижного колеса совпадают е дуговыми стрелка-
стрелками соответственно угловой скорости и углового ускорения кривоши-
кривошипа О А.
При внутреннем зацеплении колес дуговые стрелки со и е колеса
и кривошипа имеют противоположные направления.
3. Иногда угловое ускорение е можно найти путем проецирования
на оси координат известного по направлению ускорения, например
точки В, если ускорение какой-либо другой точки А и угловая ско-
скорость фигуры со известны или их можно вычислить предварительно.
Так, если ускорение точки В
ав = аА + аЪА + а?А, B3)
то, проецируя обе части B3) на ось Ох, перпендикулярную ускорению
аБ, получаем соотношение, из которого можно определить угловое
ускорение, если другие величины, входящие в это соотношение, из-
известны.
Определим этим способом угловое ускорение линейки эллипсогра-
эллипсографа АВ (рис. 62). Эллипсографом называют механизм, в котором одна
точка А его линейки движется только по оси Ох, а другая В — по
оси Оу. Линейка эллипсографа обычно приводится в движение враще-
вращением кривошипа ОС вокруг оси О, причем точка С лежит на середине
линейки и описывает окружность с центром в точке О, а точки части
157
линейки ВС описывают всевозможные эллипсы, заключенные между
окружностью и прямой Оу. Точки части линейки АС соответственно
могут описать набор эллипсов, заключенных между окружностью и
прямой Ох.
В эллипсографе, когда ускорения точек А а В направлены соответ-
соответственно по осям Ох и Оу, проецируя B3) на Ох, получаем
О = аА + АВа2 cosy — ЛВв sin <p, B4)
так как
апВА = ЛЯ©2; avBA = АВе.
Соотношение B4) и служит для определения углового ускорения
линейки эллипсографа АВ, если все другие величины в этом соотноше-
соотношении известны или их можно предварительно определить.
Описанным выше приемом удобно определять угловое ускорение
шатунов в различных кривошипно-шатунных механизмах, когда у ша-
шатуна есть точка, движущаяся прямолинейно.
Если известны ускорения двух точек А и В плоской фигуры по мо-
модулю и направлению в какой-либо момент времени, то путем проеци-
проецирования соотношения B3) на два взаимно перпендикулярных направ-
направления, одно из которых удобно направить по АВ, получим два урав-
уравнения для определения угловой скорости и углового ускорения
(см. п. 4 § 8).
Наоборот, по угловой скорости и угловому ускорению из этих
уравнений можно найти числовые величины ускорений точек А и В,
если известны направления ускорений этих точек.
4. В задачах (см. § 6, рис. 53), где зависимость между угловыми
скоростями различных тел можно установить путем дифференцирова-
дифференцирования по времени тождественных соотношений между углами поворота,
зависимость между угловыми ускорениями часто можно получить пу-
путем двукратного дифференцирования по времени этих тождеств. Так,
после первого дифференцирования в рассматриваемом случае
Г COS фф = / COS ¦Щ.
Дифференцируя вторично, имеем
— г sin ффа + г cos фф = — I sin Щ* -\- I cos Щ.
Так как гх = Щ — угловое ускорение шатуна АВ и е = [ф| —
угловое ускорение кривошипа О А, то
— г©2 sin ф + re cos ф = — 1<а\ sin \J> + I et cos ty.
Если дополнительно известно, что угловая скорость © кривошипа
О А постоянна, т. е. е == 0, то
— гсо2 sin ф = — t(H\ sin if -j- tei cos ip.
Отсюда можно определить угловое ускорение шатуна в зависи-
зависимости от углов ф и i|> и угловых скоростей со и щ.
158
Пример. Центр колеса 1 радиусом R = 50 см движется влево по закону
s = 25/3 — bfi см (рис. 63)i Колеса /и 5, связанные спарником 2, катятся без
скольжения. На спарнике находится эллипсограф, Кривошип 3 эллипсографа
вращается по закону <р = 2 sin (я/i)t рад. Размеры звеньев: CM=V2 ОС => 200 см>
BF = BE = АВ — 40 см, В момент времени (= 1 с положение механизма оп-
определяется углами р = 45" иф, = 30 . Для этого момента времени определить
скорости и ускорения точек О, В, F (ползуна), D и угловые скорости и ускорения
всех звеньев механизма. Построить многоугольники скоростей и ускорений то-
точек, Направление угловых скоростей и угловых ускорений указать дуговыми
стрелками. Найти также положения мгновенного центра ускорений колеса 5
и мгновенных центров скоростей звеньев /, 3, 4, 5, а для звена 4 — положение
мгновенного центра относительных скоростей по отношению к спарнику 2,
Рис. 63
Рис. 64
Решен и е 1. Определение скоростей точек и уг-
угловых скоростей звеньев. Определим скорости точек для момен-
момента времени (= 1 с. Для точки О имеем
= s = 75*2 —
= 50 см/с.
Точки О, А, С принадлежат спарнику 2, который движется поступательно'
Его угловая скорость ш2 = 0 и скорости всех точек спарника одинаковы но мо"
дулю и направлению, т. е.
= VA = v
c>
50 см/с.
Для вычисления скорости точки D примем точку С за полюс. Имеем
vd = VC + °dc-
Так как колесо 5 катится без скольжения, то его мгновенный центр скоро»
стей находится в точке Рн; для колеса / он находится а точке Р±,
Угловая скорость колеса 5 вычисляется по формуле
щ = vc/CPR = 50/50 = 1 с.
Колесо 5 вращается против часовой стрелки, что устанавливается по ско-
скорости точки С и положению мгновенного центра скоростей. Колесо 1 имеет га-
кую же угловую скорость, т. е щ = ю5 = 1 с, _
Для vDC имеем vDC = CDco5 = 50 см/с, Скорость vDC перпендикуляр-
перпендикулярна отрезку CD н направлена в сторону вращения колеса (рис. 64). На рисунке
приведен также треугольник скоростей для точки D, построенный на основа-
основании векторной формулы для скорости i>D.
Проецируя обе части векторной формулы для vD на оси координат, полу-
получаем:
= vc-rvDG cos 45° =50+25
cm/cj
*vDC sin 45° =25 Y'2 ж 35 см/с;
159
Для определения скорости UD можно также использовать мгновенный центр
скоростей — точку Ре. Тогда 0о => DPsu>s и vD направлена перпендикулярно
отрезку прямой Pf,D в сторону вращения колеса.
Для точки В кривошипа 3 (рис. 65), приняв точку А этого кривошипа аа
полюс, получим
Угловая скорость звена 3 «g = |q>|. В момент времени I = 1 о
л п п"\/2
2-2
«1,2 1/с.
Так как ф имеет знак плюс, то звено 3 вращается против^асовой стрелки. Для
vBA имеем vBA — АВыя = 40-1,2 = 48 см/с. Скорость vBA перпендикулярна
отрезку прямой АВ и направлена в сторону вращения звеиа 3,
Рис. 65
Рис. 66
Выбоав оси координат, проецируем обе части векторной формулы для Ъв
на эти оси. Тогда
vBx=vA~^vBAcosb0° =50 + 48-0,5=»74 CM/Cj
оВг/=свлcos30° ==48-0,5 Уз%к41 см/с;
^=1/^+0^ ж 93 см/с.
Треугольник скоростей для точки В приведен иа рис, 65,
Мгновенный центр скоростей звена 3 — точка Р3 — находится на перпен-
перпендикулярах к скоростям точек, в частности на перпендикуляре к vA, т. е. на ли-
линии, параллельной By. Расстояние до мгновенного центра скоростей от точки А
АР„= ол/о>8 = 50/1,2 = 42 см.
Скорость vB перпендикулярна отрезку ВР3,
Вычислим скорость точки F линейки эллипсографа 4, приняв за полюв точ.
ку В этой линейки (рие. 66):
160
Направление скорости vp известно — по оси Fx, так как точка F принад-
принадлежит еще и ползуну, скользящему по спарняку 2, а спарник движется только
поступательно в горизонтальном направлении Fx, Проецируем ~пр на оси коор-
координат, предполагая, что она направлена в положительную сторону оси Fx. Тогда
vf=>vBx+vPB cos 60°
0 '^vBy~vfb cos 3°° = 41 — vPB .0,5
Из последнего уравнения получаем
yFBe=uBs,/cos30° = 41-2/V3;«48 см/с.
Подставляя vPB в первое уравнение, имеем
vp= 74 + 48-0,5 = 98 Ыс.
Скорость vp получена из уравнений со знаком плюс; следовательно, пред
положение о направлении vp правильно.
Угловая скорость звена 4
со„ = vPB/BF = 48/40 = 1,2 с"»,
По направлению скорости vpB и положению точки В определяем направят
ние вращения звена 4. Это звено вращается по часовой стрелке. Аналогично,
приняв за полюс точку В, можно определить скорость точки Е.
Мгновенный центр скоростей звена 4 — точка Р4 — находится на пересече-
пересечении перпендикуляров к скоростям его точек. Скорость vp точки F направлена по
оси Fx; следовательно, точка Pi расположена на оси Fy, на расстоянии от точ-
точки F
FPt = УрУйL = 98/1,2 = 82 см.
Учитывая направление вращения звена 4, определяем положение точки Р4,
Мгновенный центр скоростей относительного движения звена 4 по отно-
отношению к спарнику 2 — точку Р42 — можно определить как точку пересечения
перпендикуляров к относительным скоростям точек Е и F звена 4. В относитель-
относительном движении скорости этих точек направлены по поступательно движущимся
направляющим АЕ и AF. Пересечением перпендикуляров к этим направляющим
в точках Е и F является точка Pi2,
2. Определение ускорений точек и угловых ус-
ускорений звеньев. Точка О движется прямолинейно и, следовательно,
ее ускорение при t = 1 с
где s = 150;— lOOt3 = 50 см/с; величина s положительна; следовательно,
ускорение^ направлено по оо. Таи как спарник 2 движется все время посту-
поступательно, то е2 = 0 и ускорения всех точек одинаковы по числовой величине и
направлению, т. е.
аА=^ас = а0\ ал = яс = ао=50 см/с».
Приняв за полюс точку С (рис. 67), определяем ускорение точки D по фор-
формуле
где аде = CD(al = 50 см/с3; ускорение адС направлено от тотки D к по-
полюсу С. Ускорение axDc = CDe^, причем ахос направлено в сторону дуговой
стрелки е5 и перпендикулярно
6 Зак. 1311
При определении углового ускорения колеса
Б учтем, что <о5 = ус/СР6 для любого момента
времени. Следовательно,
du
d'
¦ +vc
dt
В рассматриваемом случае СРЪ — R — const и
|dwc/d*l=a?=ac = 50 сы/са.
Поэтому
bk)* -*-%-' »*•
Угловое ускорение колеса / (см. рис. 63) такое
же, как и у_ колеса 5, т. е. ех = %. Учитывая на-
направление ас и положение точки Р6, получаем на-
направление дуговой стрелки для еб против часовой
стрелки. После этого а^с = CDeb = 50 см/с2.
На рис. 67 приведен многоугольник ускорений для точки D, построенный на
основании векторной формулы для aD. Для определения числового значения
ускорения aD проецируем его на координатные оси, учитывая направления со-
составляющих ускорений. Имеем
°ш =" аС + аЪс Cos 45° + °Ьс sin 45° = 50+25 V2+25 /2"= 120 см/са;
Рис. 67
i sin 45°— п
= 25 V2—25 1/2=0.
Следовательно, ao = |aOx| = 120 см/с3 и ускорение ao направлено по оси Dx,
Определяем положение мгновенного центра ускорений колеса 5 — точки
Qs- Для этого вычисляем
tg a» = ee/fi>I = 1,
т. е. a5 = 45°, Откладывая угол а5 от ускорения ~aD, напраплениого яо оси
Dx, по направлению дуговой стрелки es определяем положение точки Qb, вычис-
вычислив расстояние
2%е 84 см.
Для определения ускорения точки В звена 3 (рис. 68) примем за полюс точ»
ку А этого звена. Имеем
где а%А — А Ви| == 56 см/с2. Ускорение а%А направлено от точки В к полю-
полюсу А.
Угловое ускорение звена 3 s,= |cp|. При /= 1 с
ла я; тт2!/?
»--— ЧпТ/ = -^—0.9 1/с..
Знак минус у Ц> показывает, что дуговую стрелку для углового ускорения сле-
следует направить по часовой стрелке. После этого ахБА = АВъ^ = 5и-0,9 =
= 45 см/с3.
162
Выбрав оси координат, проецируем ав на эти оси, учитывая направленна
составляющих ускорений. Получаем:
aBx=aA+a%Acos30°— авл cos 60° = 50+28 Уз~—45-0,5» 76 смус*;
«*& = — a%Asin30° — авл sin 60° =. — 28—45 Т/з~.0,5«-66 см/о*;
Приняв за полюс точку В звена 4 (рис. 69), определяем ускоренна точки Р,
этого звена по формуле
404,4 = 56 см/о2з aFB
Ускорение apg направлено от точки Р к полюсу В; арВ X Ярв' Проеци*
руем ар на оси координат, учитывая, что точка F движется прямолинейно я,
следовательно, ее ускорение направлено по ее прямолинейной траектории — k
9\
Рис. 69
оси Fx. При проецировании предполагаем, что оно направлено в положительную
сторону оси Fx> Дуговую стрелку неизвестного углового ускорения звана 4
предполагаем направленной против часовой стрелки и соогветотвенно этому на»
правляем а.рВ. Имеем
Fx= aF =aBx-\~aFB cos30°—аРВ cos 60° =76+28 Уз—20e4j
sin 30° + aJBsin 60° = —66+23+20e4
a
Из последнего уравнения определяем е4 = 38/34 = 1,1 1/с3. Тан как 84 из ураа*
нения получается положительным, то предположение о направлении дуговой
стрелки для него против часовой стрелки оказывается правильным. Подставляя
значение et в первое уравнение, получаем
ар = 7G + 28/3 — 2084 = 76 + 48 — 22 = 102 см/с»,
Из этого уравнения значение для ар получается со знаком плюс. Следова*
телыю, ар действительно направлено в положительную сторону оса Fx,
G» 153
70
§ 10. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ ПЛОСКОЙ
ФИГУРЫ
Поняше мгновенного центра скоростей плоской фигуры при пло-
плоском движении можно ввесги, используя теорему о конечном переме-
перемещении плоской фигуры. Фигуру в ее плоскости из заданного положения
I в любое другое положение II (рис. 70) можно перевести одним поворо-
поворотом в .шой плоскости вокруг точки Р,
называемой центром конечного вращв'
нин
Пусть в положении / плоская фи-
фигу ра характеризуется отрезком АВ,
скрепленным с фигурой, а в положе-
положения // этот отрезок займет положение
А А-
Рассмотрим случай, когда АВ и
А1В1 не параллельны. Можно дока-
доказать, чго центр конечного вращения
Р находится на пересечении перпендикуляров СР и DP, восставленных
ич сере хин отрезков ААг и ВВ1 Для ->того докажем, что заштрихо-
заштрихованные треугольники АВР и /4xBtP равны по трем сторонам; АР =
— А±Р как гипотенузы в равных прямоугольных треугольниках АСР
и Л,СР, гак как по построению точка С есть середина отрезка AAlt
а СР — общи л катет треугольников Аналогично, рассматривая рав-
равные треугольники ВОР и BXDP, получаем ВР = BtP; АВ — А1В1 —
по условию.
Для перевода плоской фигуры из положения / в положение //
достаточно совместить между собой равные треугольники АВР и
А,ВУР Это можно осуществить одним поворотом треугольника АВР
в его плоскости вокруг вершины Р При этом если сторону АР до сов-
мешения со стропой АгР повернуть на угол <р, ю сторону ВР до совме-
совмещения со стороной ВгР следует повернуть на угол ip, равный углу (р,
так как углы ср и гр состоят из общего для них угла |3 и одинаковых
углов а, лежащих в равных заштрихованных треугольниках против
равных сторон.
Итак, если отрезок АР повернуть вокруг Р на угол <р, то отрезок
ВР при этом повернется на тот же угол и в том же направлении, что
и отрезок АР, и, следовательно, точка А совпадет с точкой Аи а точ-
точка В — с точкой В1г т. е. отрезок А В совпадет всеми своими точками
с отрезком ArBx.
В случае когда отрезок АВ параллелен отрезку АуВк1 перпендикуля-
перпендикуляры СР к АА1 и DP к BBt параллельны и, следовательно, пересекают-
пересекаются в бесконечности. В этом случае Р следует считать находящимся в
бесконечности и плоскую фигуру из положения / в положение // мож-
можно перевести поступательным перемещением, что соответствует поворо-
повороту фиг>ры вокруг бесконечно удаленной точки.
§ 11. МГНОВЕННЫЙ ЦЕНТР ВРАЩЕНИЯ. ЦЕНТРОИДЫ
Для двух бесконечно близких положений плоской фигуры вместо
центра конечного вращения получим так называемый мгновенный центр
вращения. Любое плоское перемещение фигуры можно приближенно
заменить последовательностью вращательных перемещений вокруг
своих центров конечного вращения. В пределе плоское перемещение
фигуры можно заменить бесконечной последовательностью элементар-
элементарных мгновенных поворотов вокруг мгновенных центров вращений,
расположенных в определенной последовательности.
Отсюда следует, что любое плоское движение фигуры можно заме-
заменить последовательностью мгновенных вращений, совершаемых за тот
же промежуток времени, что и рассматриваемое плоское движение.
Можно ввести угловую скорость вращения вокруг мгновенного центра
вращения или, точнее, вокруг мгновенной оси, проходящей через
мгновенный центр вращения и перпендикулярной плоскости дви-
движения
При плоском движении фигуры мгновенный центр вращения пере-
перемещается как в неподвижной, так и в подвижной плоскости, скреп-
скрепленной с движущейся плоской фигурой.Геометрическое место мгновен-
мгновенных центров вращения на неподвижной плоскости называют непод-
неподвижной цеитроидой, а геометрическое место этих же мгновенных цент-
центров вращения на подвижной плоскости, скрепленной с движущейся
фигурой, — подвижной центроидой. Для каждого плоского движения
фигуры существуют свои две центроиды — подвижная и неподвижная.
Очевидно, что точка плоской фигуры, с которой в рассматриваемый мо-
момент совпадает мгновенный центр вращения, имеет скорость, равную
нулю; следовательно, она является в то же время мгновенным центром
скоростей.
При плоском движении фигуры подвижная центроида катится без
скольжения по неподвижной центроиде. Эта теорема позволяет плоское
движение твердого тела рассматривать как качение без скольжения
одной плоской кривой по другой.
Центроиды нашли применение в некоторых вопросах кинематики
механизмов. Рассмотрим пример нахождения центроид.
Пример. Стержень А В длиной I концами скользит по двум взаимно пер-
перпендикулярным прямым (рис. 71). Найти центроиды этого движения стержня АВ,
Решение. Скорость точки А может быть направлена только по О^А,
а точки В — только по ОХВ, так как траекториями этих точек являются указан-
указанные прямые. Восставляя перпендикуляры в точках Л и В к этим направле-
направлениям, получаем положение точки Р, которая и будет мгновенным центром скоро-
скоростей на подвижной плоскости, скрепленной со стержнем и мгновенным центром
вращения на неподвижной плоскости. Из рисунка видно, что Oj>P = / = const во
все время движения, как диагональ прямоугольника. Следовательно, неподвиж-
неподвижная центроида является окружностью радиусом I с центром в точке Oj.
На подвижной плоскости Аху, скрепленной со стержнем АВ, точка Р об-
обладает аналогичным геометрическим свойством, так как ОР = О^Р/2 = 1/2 =
= const, поэтому подвижной центроидой является окружность радиусом 1/2 с
центром в точке О.
При качении подвижной окружности по неподвижной концы А я В диаметра
окружности движутся прямолинейно соответственно по прямым OiA и O^Bi
Повернув на произвольный угол вокруг точки Oj в плоскости чертежа оси ко-
165
ордмиат OtXiSft и рассмотрев этот случай после закрепления осей координат в но-
новом положении, можно убедиться, что центроидами являются те же окружности^
Следовательно, другие две точки подвижной окружности движутся прямолиней-
прямолинейно и т д
Таким образом, все точки подвижной окружности движутся по прямым ли-
линиям, проходящим череч центр неподвижной окружности Ох Это свойство точек
-подвижной окружности можно использовать для преобразования вращатель-
вращательного движения в поступательное
В общем случае движения плоской фигуры мгновенный центр ско-
скоростей — точка Р — и мгновенный центр ускорений — точка Q —
являются различными точками этой фигуры (рис. 72) Эти точки сов-
совпадают, если плоское движение вырождается во вращательное движе-
движение вокруг неподвижной оси.
Рис. 71
Рис. 72
Выберем точку А плоской фигуры и отметим точки Р и Q. Поста-
Поставим задачу — указать формулы, по которым можно вычислить проек-
проекции ускорения точки А на оси Ах и А у, Ах' а Аи'. Ось Ах перпенди-
перпендикулярна оси Ау и Ах' _1_ Ау'. Точка Q является мгновенным центром
ускорений. Следовательно, ускорение
и пАу> направлено всегда к точке Q; проекция ускорения на перпенди-
перпендикулярное направление Ах'
а ах- = a%AQ = AQe.
Точка Р является мгновенным центром скоростей Скорость точки
А перпендикулярна АР, а скорость всегда направлена по касательной
к траектории. Следовательно, ось Ах есть касательная к траектории
и проекция ускорения на нее является касательным ускорением и вы-
вычисляется по формуле для касательного ускорения
Ось Ау перпендикулярна касательной; следовательно, это главная
нормаль траектории. Проекция ускорения на это направление вычисля-
вычисляется по формуле для нормального ускорения
166
Если аДу> 0, то траектория точки обращена выпуклостью к точка
Р\ если аАу <С 0, то вогнутостью.
Кажется, что у точки А два различных нормальных и касательных
ускорения. Но а\ и ак — касательное и нормальное ускорения аб-
абсолютного движения точки А по отношению к неподвижной система
координат (на рис. 72 не показана), *а а\0 и anAQ — соответственно
касательное и нормальное ускорения относительного движения точ-
точки А по отношению к подвижной системе координат, движущейся по-
поступательно относительно неподвижной вместе с точкой Q. Переносное
ускорение точки А совпадает с абсолютным ускорением точки Q, а оно
равно нулю, так как эта точка фигуры является мпювенным центром
ускорений.
Глава 4
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ,
НЕПОДВИЖНОЙ ТОЧКИ.
ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТЕЛА
Вращением твердого тела вокруг неподвижной точки называют та-
такое движение, при котором одна точка тела остается все время непод-
неподвижной. Это вращение часто называют сферическим движением твердо-
твердого тела в связи с тем, что траектории всех точек тела при таком движе-
движении располагаются на поверхностях сфер, описанных из неподвижной
точки. Тело, совершающее вращение вокруг неподвижной точки, име-
имеет три степени свободы, так как закрепление одной точки тела умень-
уменьшает число степеней свободы на три единицы, а свободное тело имеет
шесть степеней свободы. Одной из главных задач при изучении
вращения тела вокруг неподвижной точки является установление ве-
величин, характеризующих это движение, т. е. углов Эйлера, угловой
скорости, углового ускорения, и вывод формул для вычисления ско-
скоростей и ускорений точек тела.
§ 1. УГЛЫ ЭЙЛЬРЛ. УРАВНЕНИЯ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Три степени свободы, которые имеет тело при вращении вокруг не-
неподвижной точки, требуют для задания положения тела относительно
какой-либо системы координат трех независимых величин. Эти три
величины, или параметра, можно задать различными способами. В те-
теоретической механике наибольшее применение получили так называе-
называемые углы Эйлера, рассмотренные ниже.
Через неподвижную точку О твердого тела проведем неподвижную
систему координат ОххУ^, ошосительно которой будем рассматривать
движение тела (рис. 73). Другую систему координат Oxyz скрепим с
телом, вращающимся вокруг неподвижной точки О. Для задания поло-
положения движущегося тела относительно системы координат Ох^у^г
1G7
следует задать относительно этой системы координат положение дру-
другой, подвижной системы координат Oxyz, скрепленной с движущимся
телом. Для этой цели Эйлер предложил три независимых параметра —
углы Эйлера.
Первый из этих углов — угол прецессии ty — определяет положе-
положение линии узлов ОК, которая является линией пересечения коорди-
координатных плоскостей Ох\У\ и Оху относительно неподвижной координат-
координатной оси Oxv Для изменения этого угла тело должно вращаться вокруг
координатной оси Оги которую называют осью прецессии. Положение
У,
Рис. 73
Рис. 74
линии узлов при движении тела изменяется как относительно непод-
неподвижной системы координат Ох^ухгх, так и относительно движущегося
тела, т. е. подвижной системы координат Oxyz. Угол а|) от положительной
части оси Ол'х до положительного направления линии узлов ОК счи-
считается положительным, когда он отсчитывается против часовой стрелки,
если смотреть с положительного направления оси Ozv За положитель-
положительное направление на линии узлов ОК выбираем то ее направление, с ко-
которого поворот оси Ozx к оси Ог на наименьший угол виден происходя-
происходящим против часовой стрелки.
Вторым углом Эйлера является угол между координатными пло-
плоскостями Оххух и Оху, Его измеряют углом 0 между перпендикулярами
к этим координатным плоскостям, которыми являются оси Oz1 и Oz.
Угол G отсчитывают ог оси Ozt до оси Ог в положительном направлении,
если направление поворота оси Oz с положительного направления ли-
линии узлов ОК происходит против часовой стрелки.
Угол 6 называют углом нутации, а ось ОК, вокруг которой вра-
вращается тело при изменении угла 0, соответственно называют осью
нутации или линией узлов.
Для полного определения положения рассматриваемого тела от-
относительно системы координат Охху^х нужно задать угол между под-
подвижной осью координат Ох и положительным направлением линии
узлов ОК — угол собственного вращения <р. Угол <р от линии узлов ОК
168
до оси Ох считается положительным, если вокруг оси Ог поворот оси
Ох от линии О/С виден происходящим против часовой стрелки.
При изменении угла ф тело вращается вокруг гак называемой оси
собственного вращения Oz, перпендикулярной плоскости, в которой ле-
лежат прямые О/С и Ох, образующие этот yrcvi. Таким образом, угол
<р определяет положение подвижной координатой оси Ох относитель-
относительно линии узлов О/С.
Углы Эйлера широко применяются в теории гироскопов Движе-
Движение гироскопа, т. е. симметричного тела, имеющею неподвижную точ-
точку на оси симметрии и быстро вращающегося вокруг этой оси, в общем
случае можно представить состоящим из трех движений (рис. 74):
вращения с большой угловой скоростью вокруг оси симметрии, или
оси собственного вращения, при котором изменяется угол собствен-
собственного вращения ф, вращения гироскопа вместе со своей осью симметрии
вокруг неподвижной оси Ozlt при котором изменяется угол прецессии
\|з. Третье движение совершает ось симметрии, которая, участвуя в пре-
прецессионном движении, описывает коническую поверхность с вершиной
в неподвижной точке, а вследствие изменения угла нутации 0 описы-
описывает в общем случае волнистую поверхность.
Если угол 9 не изменяется, то коническая поверхность является
круговым конусом. Если коническую поверхность пересечь плоско-
плоскостью, перпендикулярной оси прецессии, то получится кривая линия,
на которой возможны узловые точки, или точки возврата. Известно, на-
например, что земной шар кроме собственного вращения вокруг своей
оси еще прецессирует и совершает нутационное движение.
В технике особенно важное значение имеет так называемая регу*
лярная прецессия, когда угловые скорости вращения вокруг оси соб-
собственного вращения и вокруг неподвижной оси прецессии постоянны
и угол между этими осями (угол нутации) остается тоже постоянным.
При вращении тела вокруг неподвижной точки в общем случае
изменяются все три угла Эйлера: ip, G и ф. Углы Эйлера являются неза-
независимыми параметрами, или обобщенными координатами,
характеризующими положение тела с одной неподвижной точкой отно-
относительно неподвижной системы координат. Задание трех углов
Эйлера для тела, вращающегося вокруг неподвижной точки, как функ-
функций времени является необходимым и достаточным для полного опи-
описания такого движения тела.
Итак, для определения положения тела с одной неподвижной точ-
точкой в любой момент времени надо задать углы Эйлера как однозначные
функции времени, т. е. ф = Д. (t); G ~ /a (t); q> — f3 (t). A)
Уравнения A) являются уравнениями вращения твердого тела во-
вокруг неподвижной точки. Если эти уравнения заданы, то в любой мр-
мент времени известно положение твердого тела относительно системы
координат Ox\yxzx.
Отметим, что углы Эйлера не являются единственной комбинацией
трех независимых углов для тела, имеющего одну неподвижную точ-
точку. Существуют и другие комбинации углов, определяющих положение
одной системы координат относительно другой.
169
§ 2. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ ТВЕРДОГО ТЕЛА.
ИМЕЮЩЕГО ОДНУ НЕПОДВИЖНУЮ ТОЧКУ
Тело, имеющее одну неподвижную точку, из одного положения в лю-
любое другое можно перевести одним поворотом вокруг оси, проходящей
через неподвижную точку. Эту ось называют осью конечного вращения.
Положение тела с неподвижной точкой относительно некоторой си-
системы отсчета можно полностью определить, если задать на какой-
либо неподвижной сфере, описанной из неподвижной точки тела, поло-
положение сферической фигуры, скрепленной с этим телом. За сфериче-
сферическую фигуру можно принять любую часть поверхности сферы таким
же радиусом, что и радиус неподвижной сфе-
сферы, который обычно принимают равным еди-
единице. За сферическую фигуру можно принять
также всю сферу единичного радиуса.
При движении тела вокруг неподвижной
точки скрепленная с движущимся телом сфера
единичного радиуса движется по неподвиж-
неподвижной сфере того же радиуса. Положение сферы
полностью определяется заданием на этой
сфере дуги большого круга, скрепленной со
сферой.
Пусть положение / тела характеризуется
дугой большого круга АВ, описанной из не-
неподвижной точки тела, а в положении // —
Рис> 75 той же дугой, но в другом положении на
сфере A-J5X (рис. 75). Аналогично тому, как
находится центр конечного вращения для плоской фигуры при плос-
плоском перемещении, найдем точку Р на сфере в случае тела, имеющего
одну неподвижную точку. Для этого соединяем точки А с At и В с Вг
дугами большого круга, проведенными из неподвижной точки тела и
целиком лежащими на неподвижной сфере. В серединах дуг ААХ ВВХ
из точек С и D проводим сферические перпендикуляры, т. е. дуги боль-
большого круга СР и DP, касательные к которым перпендикулярны
в точках С и D соответственно к касательным дуг ААг и BBt.
Эти перпендикуляры, лежащие на сфере, пересекутся в точке Р.
Из равенства прямоугольных сферических треугольников BDP и
DBiP, имеющих общий катет DP и равные катеты BD и DBit следует,
что гипотенузы этих сферических треугольников гоже равны, т. е.
точки В и В1 равноудалены от точки Р.
Аналогично доказывается, что точки А и А1 тоже одинаково уда-
удалены от точки Р. Если повернуть заштрихованный сферический тре-
треугольник АВР вокруг оси, проходящей через точку Р и неподвижную
точку О, то этот треугольник, перемещаясь по сфере, совпадет всеми
своими точками с равным ему по трем сторонам сферическим треуголь-
треугольником AiByP, так как сферический угол на сфере, на который надо
повернуть вокруг ОР дугу АР до совпадения с дугой АгР, равен сфе-
сферическому углу на той же сфере, на который надо повернуть дугу ВР
до совпадения с дугой В^Р.
170
Итак, путем поворота вокруг оси, перпендикулярной поверхности
сферы и проходящей через точку Р и, следовательно, проходящей
также и через центр сферы, где расположена неподвижная точка, те-
тело можно переместить из одного положения в любое другое. Для каж-
каждых двух положений тела получаются соответствующая точка Р и,
следовательно, соответствующая ось конечного вращения, проходящая
через эту точку и неподвижную точку тела.
§ 3. МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ. АКСОИДЫ
Ось, вокруг которой следует вращать тело, имеющее одну непод-
неподвижную точку, для перевода его из одного положения в друюе, бес-
бесконечно близкое первому, называют мгновенной осью вращения (или
мгновенной осью) для данного момента времени
Любое движение тела вокруг неподвижной точки можно заменить
последовательностью вращений вокруг совокупности мгновенных осей.
Геометрическое место мгновенных осей относительно неподвижных
осей координат, по отношению к которым рассматривается движение
тела, называется неподвижным аксоидом. Неподвижный аксоид явля-
является конической поверхностью с вершиной в неподвижной точке тела,
так как все мгновенные оси проходят через неподвижную точку.
Геометрическое месго mi новенных осей в движущемся теле пред-
представляет подвижный аксоид, являющийся также конической поверх-
поверхностью. Для каждого движения твердого тела вокруг неподвижной
точки имеется пара аксоидов. При этом, когда тело совершает враще-
вращение вокруг неподвижной точки, подвижный аксоид катится по непод-
неподвижному без скольжения, так как общая образующая этих аксоидов
в каждый момент времени служит мгновенной осью, вокруг которой
вращается тело и, следовательно, все точки оси в рассматриваемый мо-
момент времени неподвижны Если подвижный аксоид катится без сколь-
скольжения по неподвижному аксоиду, то осуществляется движение тела
вокруг неподвижной точки.
Очевидно, что при плоском движении твердого тела конические ак-
соиды являются цилиндрическими поверхностями, которые в пересече-
пересечении с плоскостью движения плоской фшуры образуют центроиды для
этой фигуры.
Практически понятие аксоидов используется для классификации
видов прецессионных движений гироскопов.
§ 4. УГЛОВЛЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
ПРИ ВРАЩЕНИИ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Так как движение тела, имеющего одну неподвижную точку, в
каждый момент времени можно считать вращением вокруг мгновенной
оси, то в качестве величин, характеризующих это движение, можно
ввести мгновенную угловую скорость и мгновенное угловое ускорение
вращения твердого тела вокруг неподвижной точки. Очевидно, вводи-
вводимая угловая скорость является векторной величиной, направленной
в каждый момент времени по соответствующей мгновенной оси, и при
471
использовании правой системы координат вектор угловой скорости а
направлен по мгновенной оси так, что с направления этого вектора
видно вращение тела вокруг мгновенной оси против часовой стрелки.
Модуль вектора угловой скорости можно выразить через элементарный
угол поворота Аф вокруг мгновенной оси за время М:
I ДФI
д<->о Л<
Элементарный угол поворота Аф, аналогично случаю вращения
тела вокруг неподвижной оси, следует рассматривать как угол между
двумя положениями в моменты / и t-\- M подвижной плоскости,
скрепленной с телом и проходящей через мгно-
мгновенную осьчв момент времени t.
Введенный таким образом вектор угловой
скорости со характеризует угловую скорость вра-
вращения вокруг мгновенной оси, направление
мгновенной оси и направление вращения тела
вокруг этой оси. Вектор угловой скорости со
можно прикладывать в любой точке мгновенной
оси (рис. 76).
За вектор углового ускорения 8 при враще-
Рис. 76 нии тела ВОКруГ неподвижной точки принимают
вектор, который характеризует изменение угло-
угловой скорости а в данный момент как по числовой величине, так
и по направлению. Известно, что такой характеристикой является про-
производная по времени от вектора угловой скорости со. Таким образом,
угловое ускорение
8 = dco-W.
Так как угловая скорость может изменяться по модулю и направ-
направлению, то в общем случае угловое ускорение не направлено по мгновен-
мгновенной оси, а имеет направление как производная по времени от вектора
(о, параллельное касательной к годографу этого вектора. Условимся
угловое ускорение е изображать в любой точке прямой, параллельной
этой касательной годографа со, но проходящей через неподвижную
точку тела.
§ 5. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
При рассмотрении вращательного движения тела вокруг неподвиж-
неподвижной оси получена векторная формула Эйлера, по которой скорости
точек тела полностью характеризуются общей для всех точек тела уг-
угловой скоростью вращения и расположением точек тела относительно
оси вращения.
Формула Эйлера справедлива и для случая вращения твердого тела
вокруг неподвижной точки. В этом случае в каждый момент времени
172
тело вращается вокруг мгновенной оси, проходящей через неподвиж-
неподвижную точку, с угловой скоростью со, направленной по мгновенной оси.
Точки тела, лежащие на мгновенной оси, имеют скорости, равные ну-
нулю, как и в случае неподвижной оси вращения.
Следовательно, линейные скорости точек тела при вращении во-
вокруг неподвижной точки можно вычислять также по векторной форму-
формуле Эйлера, как и в случае вращения вокруг неподвижной оси, только
радиус-вектор каждой точки удобно проводить из неподвижной точки
тела, хотя, как и в случае вращения вокруг неподвижной оси, его мож-
можно проводить из любой точки мгновенной оси.
Итак, скорость v какой-либо точки М тела (рис. 77), по векторной
формуле Эйлера,
B)
Модуль скорости
О =5 ft) X Л
v = ov sin (со, г) = "со/г,
C)
где h — кратчайшее расстояние от рассматриваемой точки до мгновен-
мгновенной оси.
Таким образом, скорости точек тела пропорциональны расстоя-
расстояниям от этих точек до мгновенной оси. Направление скорости какой-
либо точки тела перпендикулярно плоскости, в которой находятся век-
векторы со и г, а следовательно, перпендикулярно отрезку h.
Рис. 77
Если требуется найти модуль угловой скорости тела в определен-
определенный момент времени, то для этого, согласно C), достаточно разделить
скорость какой-либо точки в этот же момент времени на кратчайшее
расстояние от этой точки до мгновенной оси.
Мгновенную ось в конкретных задачах часто находят из механиче-
механических условий задачи, т. е. в рассматриваемый момент времени она всег-
всегда проходит через две неподвижные точки тела. Так, если движущее-
движущееся тело касается в какой-либо точке неподвижной поверхности друго-
173
го тела и при этом нет скольжения, то мгновенная ось проходит через
эту неподвижную в данный момент времени точку.
В случае качения без скольжения одного конуса по другому не-
неподвижному конусу (рис. 78) мгновенной осью является та общая об-
образующая этих конусов ОА, вдоль которой в данный момент времени
они касаются друг друга. Если, например, скорость v0[ точки Ot
известна, то угловая скорость подвижного конуса
со = Vojh — v0J(H sin a),
где Н — ООх и а — угол полураствора подвижного конуса.
Проекции угловой скорости тела со как на подвижные, так и не-
неподвижные оси координат можно определить также через углы Эй-
Эйлера как функции времени, характеризующие положение тела относи-
относительно неподвижной системы координат.
Если спроецировать правую и левую части B) на координатные оси,
то получим формулы Эйлера для проекций скоростей vx, vy и vz:
vx = v>yZ — и>гу; vy — &гх — со^г; vt = ©^ — &ух, D)
где х, у, г — координаты точки тела, скорость которой определяется.
Если взять точки тела, лежащие на мгновенной оси в рассматри-
рассматриваемый момент времени, то для них скорости равны нулю, а следова-
следовательно, приняв равными нулю vXJ vy, vz, из D) получим следующие
уравнения для координат этих точек:
№yZ — Ь>гу = 0; агх — (охг — 0; &ху — а>1/х — 0.
Эти уравнения можно представить в виде
х/<лх = у/со у = г/сог. E)
Для определенного момента времени формула E) является урав-
уравнением мгновенной оси. Если же величины, входящие в E), рассматри-
рассматривать как функции времени, то она будет представлять собой уравнения
подвижного или неподвижного аксоида (в параметрической форме)
в зависимости от того, в какой системе координат она составлена.
Если х, ц, г являются текущими координатами точки мгновенной
оси относительно подвижных осей, скрепленных с движущимся телом,
а сож, cuj,, юг — проекции угловой скорости тела на эти оси, то формула
E) является уравнением подвижного аксоида
Если вместо подвижных осей координат взять неподвижные оси,
относительно которых рассматривается движение тела, и проекции
угловой скорости тоже взять на эти оси, то тогда формула E) будет
уравнением неподвижного аксоида.
Скорость какой-либо точки можно вычислить как первую произ-
производную по времени от радиус-вектора г этой точки. С другой стороны,
скорость точки тела, вращающегося вокруг неподвижной точки, мож-
можно вычислить по векторной формуле Эйлера B) Следовательно, про-
производная но времени от радиус-вектора любой точки твердого тела,
вращающегося вокруг неподвижней точки, определится по формуле
ЪгШ = © X г. F)
174
Длина радиус-вектора г как расстояние между двумя точками твер-
твердого тела является постоянной величиной при движении этого тела.
Следовательно, равенство F) можно рассматривать как формулу для
вычисления производной по времени от вектора, модуль которого по-
постоянен, и изменение этого вектора происходит только вследствие вра-
вращения его с угловой скоростью со вместе с телом вокруг неподвижной
точки.
Если взять подвижную систему координат Oxyz, скрепленную с те-
телом, которое вращается вокруг неподвижной точки с угловой скоро-
скоростью о, то для единичных векторов i, j, k, направленных по этим осям
координат, как для векторов, модули которых постоянны, на основа-
основании F) имеем:
Ai/dt — w X I; A}(At — со х /'; Ak/At = со х "k . G)
Формулы G) называют формулами Пуассона,
§ 6. УСКОРЕНИЯ ТОЧЕК ТЕЛА ПРИ ВРАЩЕНИИ ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ
Формулу для ускорения какой-либо точки М тела, вращающегося
вокруг неподвижной точки, нельзя получить, непосредственно исполь-
используя формулу для ускорения при вращательном движении вокруг не-
неподвижной оси, так как в рассматриваемом случае угловое ускорение
е в общем случае не направлено по оси вращения, а следовательно, и
по со. Во всем остальном формулы для ускорения в этих случаях пол-
полностью аналогичны.
Формулу для ускорения какой-либо точки тела М можно получить
путем дифференцирования по времени вектора скорости, учитывая,
что скорость вычисляют по формуле B). Выполняя это дифференциро-
дифференцирование, получаем
а = diildt = da/dt X 7 + со X dr/dt.
Так как _ _
dco/di = e; dF/dt — v = со X Г,
а = 8х7 + «ХЙ. (8)
Формулу (8) часто называют формулой Ривальоа,
Часть общего ускорения точки
авр = е X 7 (9)
называют вращательным ускорением, а другую часть
а00 = со X v A0)
— осестремительным ускорением. Следовательно, формула (8) примет
а = авр + аос, A1)
175
т. е. ускорение точки тела, вращающегося вокруг неподвижной точки,
равно векторной сумме вращательного и осестремительного ускорений.
В общем случае вращательное и осестремительное ускорения не
перпендикулярны; следовательно, модуль ускорения а вычисляют как
диагональ параллелограмма по формуле
2авр fln
с)-
A2)
*occos(flBP,
Рассмотрим вращательное и осестремительное ускорения по от-
отдельности. Вращательное ускорение вычисляют по формуле (9), ана-
аналогичной формуле B) для скорости точки. Только здесь вместо угловой
скорости со входит угловое ускорение е. Поэтому вращательное уско-
ускорение авр направлено аналогично скорости v, если тело вращается в
рассматриваемый момент времени с угловой
скоростью, равной угловому ускорению е.
Модуль вращательного ускорения авр опре-
определяют аналогично модулю скорости v [см.
формулу C)]:
авр = h.e, A3)
где ht — кратчайшее расстояние от точки тела
до линии, по которой направлено угловое
ускорение е (рис. 79).
Формула A3) для авр получается из (9):
авр = |е X г | = иг sin(s, rj^
Рис. 79
где г sin (в, г) = hv
Из A3) следует, что вектор углового ускорения е расположен на
прямой линии, проходящей через неподвижную точку В противном
«лучае эта точка имела бы не равное нулю вращательное ускорение.
Модуль осестремительного ускорения а00 можно получить из фор-
формулы A0):
йО0 = |(дХ v\ —cousin (со, v) = coo = /icoa, A4)
так как угловая скорость со перпендикулярна скорости v.
Осестремительное ускорение направлено по перпендикуляру к
мгновенной оси, опущенному из точки, для которой оно вычисляется,
т. е. по отрезку h, так как, являясь векторным произведением со и у,
оно перпендикулярно плоскости, где находятся эти векторы, и имеет
направление вектора этого векторного произведения Если ввести век-
вектор h, направленный по перпендикуляру от мгновенной оси к рассма-
рассматриваемой точке, то
«ос = —~Ьаг. A5)
В случае вращения твердого тела вокруг неподвижной оси угловое
ускорение и угловая скорость направлены по этой оси; тогда расстоя-
расстояния h и hx равны друг другу. Следовательно, вращательное ускорение
176
превращается в касательное ускорение, а осестремительное — в нор-
нормальное или центростремительное ускорение
Таким образом, вращение тела вокруг неподвижной точки можно
рассматривать как более общее движение, чем вращение тела вокруг
неподвижной оси.
§ 7. ВЫЧИСЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ
Для вычисления ускорения точек тела необходимо знать угловое
ускорение в. Рассмотрим два основных способа его вычисления.
1. Если известны проекции угловой скорости на подвижные или
неподвижные оси координат ах, ау1 шг, то проекции углового ускоре-
ускорения на те же оси определяют по формулам
&х = dax/dt; гу = dwy/dt; sz — dcajdt. A6)
По проекциям легко найти модуль углового ускорения и косинусы
его углов с осями координат.
2. Другой способ определения углового ускорения е основан на
его разложении на две взаимно перпендикулярные составляющие.
Если ввести единичный вектор со0, направленный по со, ю
со = юсо°;
i = du/dt == (dm/dO ш° -f со ((WVd/). A7)
Составляющая е1 полного углового ускорения вх — -^ со0 направ-
направлена по вектору со, когда dco/d/ > 0, и противоположно ему при
do/d/ < 0.
Составляющая е2 полного углового ускорения еа = со -~- всегда
перпендикулярна со, так как производная по времени от единичного
вектора со0 есть вектор, перпендикулярный дифференцируемому еди-
единичному вектору и, следовательно, перпендикулярный вектору а>.
Составляющая углового ускорения ех является полным угловым
ускорением при вращении тела вокруг неподвижной оси, так как со-
составляющая е2 в этом случае равна нулю. Вычислим составляющую уг-
углового ускорения е2. Часто угловая скорость постоянна по модулю и
изменяется только по направлению. В этом случае составляющая
е, = 0 и полное угловое ускорение совпадает о еа.
Если же угловое ускорение et не равно нулю^то его можно вычис-
вычислить отдельно и затем, сложив с составляющей е2, определить полное
угловое ускорение е. Итак, если угловая скорость постоянна, то
- - d«°
177
В этом случае воспользуемся определением углового ускорения
через угловую скорость непосредственно:
Учтя, что со = const, и применив затем формулу, аналогичную про-
производной по времени от радиус-вектора [см. формулу F)], когда радиус-
вектор постоянен по длине, будем иметь
da/dt = ~®е X
A8)
где сое — угловая скорость вращения дифференцируемого по времени
вектора со, т. е. угловая скорость вращения мгновенной оси, по которой
направлен вектор со. Модуль углового ускорения можно найти анало-
аналогично скорости точки, т. е.
8 = (OjCOp, A9)
где расстоянием h является с^ — кратчайшее расстояние от конца век-
вектора со до оси, по которой направлена угловая скорость сов (рис. 80).
Вектор углового ускорения е пройдет через неподвижную точку
и будет параллелен касательной к годографу вектора со. Окончатель-
Окончательно направление в берут в coot-
ветствии 'с формулой A8),
т. е. по направлению враще-
ния мгновенной оси в зависи-
мости от угловой скорости сов.
Рис. 80
Рис. 81
Рассмотрим теперь пример на вычисление угловой скорости, угло-
углового ускорения и линейных скоростей и ускорений точек тела, вра-
вращающегося вокруг неподвижной точки.
Пример. Круговой конус / с углом раствора 2а катится без скольжения по
внутренней стороне неподвижного конуса // с углом раствора 2$ (рис. 81).
Скорость точки Ох подвижного конуса постоянна и равна о; ООХ = Н, Определить
угловую скорость и угловое ускорение подвижного конуса, а также скорости и
ускорения точек А я В этого конуса.
178
Решение. Мгновенной осью конуса / является образующая ОА, Если
скорость точки Of направлена во внешнюю сторону от плоскости ОАО^, то угло-
угловая скорость конуса са направлена по мгновенной оси от точки О к точке Л, Мо-
Модуль угловой скорости
<о = v/OiM — vl(H sin a) = const.
Скорость точки А равна нулю, так как эта точка находится на мгновенной
оси, Скорость точки В можно получить по формуле
2Нsin а=2г/.
a (H sin a)
Скорость vB перпендикулярна плоскости OLB и направлена от нее во внешнюю
сторону.
Угловое ускорение е вычисляем по формуле A9):
& = щ(ое.
Годографом вектора <о является окружность радиуса a>t:
tt>j = и sin p1 = v sin pV(// sin a).
Если рассмотреть плоскость, в которой находятся мгновенная ось ОА, ось
подвижного конуса OOi и ось неподвижного конуса ОО2 (плоскость рисунка),
то при движении конуса / эта плоскость вращается вокруг оси неподвижного
конуса ОО2, расположенной в указанной плоскости, а следовательно, вокрур
этой оси вращается и мгновенная ось ОА, находящаяся в этой плоскости.
Угловую скорость этого вращения а>е можно определить, если скорость
какой-либо точки этой плоскости, участвующей только во вращении вокрур 00%
и не имеющей другого движения, разделить на кратчайшее расстояние от этой
точки до оси 002- Очевидно, что отмеченными выше свойствами обладают все
точки, расположенные на оси подвижного конуса ОО±. Выбрав на этой ося
точку Оь имеем
<ве = и/OjC,
где 0±С—кратчайшее расстояние ог точки Ох до ООг. Так как
0^= Н sin ф —а),
то
ме = v/[H sin ф — а)\.
Таким образом, окончательно
v sin l) о Ф sfn [5
8 =
Я sin a И sin (p1—a) № sin a sin ф—а) '
Так как скорость точки Oj направлена от рисунка во внешнюю сторону,
то мгновенная ось ОА вращается вокруг 00% по часовой стрелке и, следователь-
следовательно, угловое ускореннее направлено перпендикулярно плоскости О А С во внешнюю
сторону.
Ускорение какой-либо точки подвижного конуса можно определить по фор-
формуле
Для точки A h — 0 и поэтому аоа = fta>3 = 0, Для вращательного ускоре»
ни я имеем
__ ад sin р" Я Ф sin p"
ир l~~ Hi sin a sin (ji—a) cos a H sin a cos a sin ($—a)
Ускорение яВр, а следовательно, и полное ускорение этой точки аА направлена
перпендикулярно ОА и находятся в плоскости ОАО^. Q положительного направ-
направления вектора в можно видеть направление а^ против часовой стрелки^
Для точки В
аос=да
=co2-SL==
H2 sin3 a
oi sin |i
H sin rx
о sin p"
вг Я2 sin a sin (P —a) cos а - H sin a cos a sin (p* — a)
Ускорение аОо направлено по BL от точки В к ючке L а ускорение яВр —
перпендикулярно ОВ Полное ускорение точки В вычисляется как диагональ
[ рамма, построенного иа а00 и аВр, т. е.
-2аосавр cos 2а =
Wsi
sma P 4 sin p cos 2a
cos2 a sin2 (Р —a) cos a sin (fl — a)
Отметим, чго угловую скорость а>е можно получить, если угловую скорость 5,
направленную по мгновенной оси, разложить по правилу параллелограмма на
две составляющие по осям подвижного и неподвижного конусов Тогда состав»
ляющая по оси неподвижного конуса и будет угловой скоростью юе.
§ 8. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ СВОБОДНОГО
ТВЕРДОГО ГЕЛА
Разложение движения свободного твердого тела
на поступательное и вращательное
Рассмотрим общий случай движения свободного твердого тела, т. е.
тела, имеющего шесть степеней свободы. Покажем, что самое общее
движение свободного твердого тела можно представить состоящим из
поступательного движения вместе с какой-либо точкой тела и враща-
вращательного движения вокруг этой точки.
-х:
Рис. 82
Положение тела относительно какой-либо системы координат
полностью определяется заданием трех точек тела, не лежащих
на одной прямой, или заданием треугольника, скрепленного с телом
(рис. 82). Треугольник ABC, а следовательно, и тело, скрепленное о
180
ним, из одного положения / в любое другое положение // можно пере-
переместить одним поступательным перемещением вместе с какой-либо
точкой тела (например, точкой А, когда подвижная система координат
Ax[y[z[ перемещается поступательно) и поворотом относительно под-
подвижной системы координат Ax[y[z[, т. е. вокруг оси, проходящей через
эту точку.
Поступательная часть перемещения тела зависит от выбора точки,
вместе с которой перемещается тело, а вращательная часть перемеще-
перемещения вокруг оси или вокруг точки не зависит от выбора точки. Посту-
Поступательную часть перемещения можно поменять местами с вращательной
частью и, наконец, их можно выполнять одновременно, т. е. пока тело
совершает поступательное перемещение из одного положения в другое,
за это же время можно осуществить и поворот тела вокруг точки на
требующийся угол.
Если два положения тела бесконечно близки, то истинное элемен-
элементарное перемещение свободного твердого тела можно заменить элемен-
элементарным поступательным перемещением вместе с какой-либо точкой
тела и элементарным поворотом вокруг мгновенной оси, проходящей
через эту точку, осуществляемыми за то же время, что и истинное пе-
перемещение тела.
Любое движение свободного твердого тела, таким образом, мож-
можно заменить совокупностью поступательных движений вместе с какой-
либо точкой тела и вращений вокруг этой точки, совершаемых за
то же время, что и истинное движение. Поступательное движение вме-
вместе с точкой тела и подвижной системой координат Ax[y{zi явля-
является переносным движением, а движение тела относительно этой под-
подвижной системы координат, являющееся в каждый момент времени
вращением вокруг своей мгновенной оси, проходящей через эту под-
подвижную точку тела, есть относительное движение.
Итак, любое движение свободного твердого тела можно составить
из поступательного движения вместе с подвижной системой координат
и сферического движения относительно этой системы координат. Для
относительного сферического движения можно ввести угловую ско-
скорость со и угловое ускорение 8, которое является первой производной
по времени от со, как в случае вращения тела вокруг неподвижной
точки.
Угловую скорость и угловое ускорение относительного вращатель-
вращательного движения вокруг какой-либо точки тела называют в общем слу-
случае угловой скоростью и угловым ускорением свободного твердого те-
тела. Эти величины не зависят от выбора точки тела. От выбора точки те-
тела зависит только переносное поступательное движение тела.
Уравнения движения свободного твердого тела
В общем случае для определения положения свободного твердого
тела относительно системы координат 01дг1г/121 достаточно задать отно-
относительно этой системы координат положение другой системы коорди-
координат Ox[y[z[t движущейся поступательно относительно первой систе-
системы вместе с какой-либо точкой О рассматриваемого тела, и углы Эй-
181
лера, определяющие положение системы координат Охуг, скрепленной
с движущимся телом, относительно системы координат Ох[у{г[
(рис. 83).
Для простоты предположим, что оси Ох{, Оу[, Ог[ соответствен-
соответственно параллельны осям 0гхъ О1У1, Oizx. Таким образом, положение сво-
свободного твердого тела относительно системы координат OiX^tjiZ^
полностью определяется, если относительно этой системы задать ко-
координаты точки О тела как однозначные функции времени и углы
Эйлера подвижной системы координат Охуг, скрепленных с движущим-
движущимся телом, относительно системы координат Ox[y{z{, поступательно
движущейся вместе с точкой О аела:
*о = h V), у о = h {t)\ *о = f в @; l> = U @: в = h @; ф = h @- B0)
Уравнения B0) являются кинематическими уравнениями движения
свободного твердого тела в общем случае его движения. Этих урав-
уравнений шесть, т. е. столько, сколько степеней свободы у свободного
твердого тела. Первые три уравнения B0) определяют переносное дви-
движение тела вместе с точкой О, вторые три уравнения определяют враща-
вращательное движение вокруг этой точки.
Первые три уравнения для рассматриваемого движения свобод-
свободного твердого тела зависят от выбора точки О тела; последние три
уравнения (углы Эйлера) не зависят от выбора точки О, вокруг кото-
которой рассматривается вращение тела.
Скорости и ускорения точек свободного твердого тела
в общем случае
Так как движение свободного твердого тела в общем случае мож-
можно представить как сложное движение, то и скорость, и ускорение ка-
какой-либо точки М этого тела можно вычислить соответственно по гео-
182
ремам сложения скоростей и ускорений (рис. 84). Так, для скорости
v точки М
V =
Vr.
Переносным движением является поступательное движение тела
вместе с точкой О этого тела. Следовательно, скорости поступатель-
поступательного переносного движения одинаковы у всех точек тела и равны ско-
скорости vQ точки О. Относитель-
Относительное движение есть вращение
вокруг точки О, и, следователь-
следовательно, скорость относительного дви-
движения можно вычислить по век-
векторной формуле Эйлера:
vr ~ со X г,
где г — радиус-вектор точки М,
проведенный из точки О; со —
угловая скорость вращения тела
вокруг точки О или подвижной
мгновенной оси, проходящей рис. 84
через точку О.
Окончательно для скорости точки М получим следующую формулу;
~v — ~v0 + со X 7. B1)
Формулу B1) можно получить непосредственным дифференцирова-
дифференцированием векторного равенства
7 = Ро + У,
справедливого для любого момента времени. Возьмем полные про-
производные по времени от обеих частей равенства, учитывая измене-
изменения векторов ошосительно неподвижной системы координат О^х^у^.
Имеем
dp/dif -= dpo/dt + drjdt.
Здесь dp/d/ = v, dpo/dt = vo — скорости точек тела М и О соот-
соответственно. Модуль вектора г как отрезка, соединяющего две точки
тела, не изменяется при движении этого тела. Следовательно, по фор-
формуле производной по времени от вектора посгоянного модуля получа-
получаем _
dr/d/ = fflXr.
Объединяя полученные результаты, имеем формулу B1):
v = vo + со X г.
Так же как и при плоском движении твердого тела, часть скорости
То х7" можно истолковать как скорость от вращения тела вокруг точ-
точки О.
183
Ускорение а точки М (рис. 85) в частном случае, когда переносное
движение является поступательным, определяем по формуле
а = яР -Ь в-г'
Ускорения переносного движения всех точек тела равны ускоре-
ускорению а0 точки О, так как за поступательное переносное движение при-
принимается движение вместе с точкой О.
Ускорение относительного движения, как и при вращении тела
вокруг неподвижной точки, состоит из вращательной и осестремитель-
нои составляющих, т. е.
аг =~8Хг + ахиг = с'хг+& xfaxr), B2)
где е — угловое ускорение тела.
Окончательная формула для ускорения точки М свободного тела
в общем случае его движения имеет вид
х(иХ''), B3)
или на основании формулы Ривальса
а^Гю+а^'+а™, B4)
где
Формулу B3) можно получить непосредственным дифференцирова-
дифференцированием векторного равенства для скоростей B1), справедливого в любой
момент времени. Вычисляя полные производные по времени, при опре-
определении которых учитываются изменения векторов относительно не-
неподвижной системы координат, получаем
+1г
_3десь dv/dt — a, 6vo/dt = а0 — ускорения точек М и О; dw/ctf =
— 8 — угловое ускорение.
Учитывая, что вектор г является вектором постоянного модуля
имеем
url&t =(ох7.
Окончательный результат выразится в форме
'а = ао+8 х г -г со х (со х г).
Заметим, что если в кинематике свободного твердого тела в ка-
качестве точки О можно брать любую точку тела, то в динамике в качестве
такой точки оказывается выгодным выбирать центр маге тела.
При выборе различных точек тела в качестве полюса изменяются
скорость и ускорение полюса. Угловая скорость и угловое ускорение
при этом не изменяются. Докажем это для угловой скорости, исполь-
используя B1).
184
ал'
1
1
\j
Pi/
¦—¦————-
/V
\
j-yi
Рис. 85
Рис. 86
Пусть Л я В — две точки свободного твердого тела (рис. 86). При-
Приняв за полюс точку А, для скорости точки В имеем
= vA + «д X АВ ,
B5)
где wA —уповая скорость вращения тела вокруг точки А. Анало-
Аналогично, приняв за полюс точ^у В, для скорости точки А получим
В A
AB,
B6)
где а>в — угловая скорость вращения тела вокруг точки В. Из B5)
и B6) имеем
сол X ЛВ == <
А~В = О
для любых двух точек свободного твердого тела. Эти точки можно вы-
выбрать так, чтобы АВ не было параллельно вектору {(аА — со?). Тогда
получаем
(ОА—ШВ=0; (ОА = «? = «>,
B7)
т. е. угловая скорость свободного твердого тела не зависит от вы-
выбора полюса. Она инвариантна по отношению к выбору полюса.
Так как равенство B7) справедливо для любого момента времени,
то, дифференцируя его по времени, получим
т. е. вектор углового ускорения свободного твердого тела тоже не за-
зависит от выбора полюса.
185
Глава 5
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ
§ 1. АБСОЛЮТНАЯ И ОТНОСИТЕЛЬНАЯ ПРОИЗВОДНЫЕ
ОТ ВЕКТОРА. ФОРМУЛА БУРА
При рассмотрении сложного движения точки в общем случае пе-
переносного движения приходится рассматривать изменение векторных
величин с течением времени по отношению к системам отсчета, движу-
движущимся друг относительно друга. Одно изменение имеет векторная ве-
величина относительно подвижной системы отсчета, движущейся отно-
относительно другой, неподвижной, и другое — относительно неподвижной
системы отсчета. Неподвижной системой отсчета считается система,
движение которой относительно других систем отсчета не рассматри-
рассматривается.
Введем обозначения производных от векторных величии при рас-
рассмотрении их изменения относительно различных систем отсчета,
движущихся друг относительно друга. Для любого вектора b (t) его
производную по времени по отношению к неподвижной системе отсче-
отсчета называют полной (или абсолютной) производной и обозначают dbldt.
Производную по времени при учете изменения-вектора b относитель-
относительно подвижной системы отсчета называют относительной (или локаль-
локальной) производной и обозначают "dbldt или (dbl<it)r.
Установим зависимость между полной и относительной производ-
производными по времени вектора b и величинами, характеризующими движе-
движение подвижной системы отсчета относительно неподвижной. Для это-
этого разложим вектор Ь на составляющие, параллельные осям подвижной
системы координат. Имеем
b = bj + bu] + bj. A)
Изменение вектора Ь относительно неподвижной системы координат
OiXifjiZi в зависимости от времени состоит из изменения его проекций
bx, by, bz на подвижные оси координат и изменения единичных векто-
векторов i, j, k подвижных осей вследствие движения подвижной системы
координат относительно неподвижной. Вычислим полную производ-
производную по времени от вектора Ь, используя A). Получим
Первые три слагаемых учитывают изменение вектора b при неизмен-
неизменных i, /, к и поэтому составляют относительную производную, т, е.
61 6t At ' 6t (O)
186
Рис. 87
Производные по времени единичных векторов определим по формулам
Пуассона
Ai/At — aXi; dj/dt = со х /; dk/dt — а хЪ,
так как эти векторы не изменяются от поступательного движения со
скоростью v0 вместе с подвижной системой отсчета (рис. 87). ВекторТо
есть угловая скорость вращательной части движения вокруг точки О
подвижной системы координат относительно неподвижной. Подстав-
Подставляя эти значения производных еди-
единичных векторов в B) и вынося со за
скобки, получим
dbldt = Ab/dt + ax(bx'i + bu'j + bz k)
или, учитывая A),
АЪ/At^db/dt + uxb. D)
Получена формула зависимости
производных вектора Ъ в двух систе-
системах отсчета, движущихся друг отно-
относительно друга. Эта формула назы-
называется формулой Бура.
Известно, что произвольное движение системы координат как сво-
свободного твердого тела можно представить как поступательное движе-
движение вместе с полюсом, например о точкой О, и вращение вокруг этой
точки. Из формулы Бура следует, что поступательная часть движения
вместе с полюсом не влияет на зависимость между производными, а
влияет только вращательная часть движения.
Рассмотрим частные случаи.
1. Если вектор Ъ не изменяется относительно подвижной системы
координат, то его относительная производная ЪЬ/dt = 0 и по формуле
D)
db/dt =~(ЬхЪ.
Это формула для производной от вектора постоянного модуля, доказан-
доказанная ранее для радиус-вектора при вращении вокруг неподвижной ogh.
Она справедлива для любого вектора при произвольном движении под-
подвижной системы осей координат. В рассматриваемом случае со не толь-
только угловая скорость вращения подвижной системы_ координат, но и
угловая скорость вращения вектора Ь, так как вектор Ь можно при этом
считать скрепленным с подвижной системой координат.
2. Если вектор Ъ не изменяется относительно основной системы ко-
координат, то полная производная db/dt — 0 и, согласно D), его относи-
относительная производная
1Р7
3. Если Ь = fern, т. е. вектор b все время параллелен вектору уг-
угловой скорости со, то ш х b — О и
В частности, если b = со, то
у JJUC И
= e.
Полная и локальная производные также равны друг другу в те
моменты времени, в которые вектор b параллелен вектору угловой ско-
скорости @.
§ 2. СЛОЖЕНИЕ СКОРОСТЕЙ
Если О&у^х — неподвижная система осей координат, a Oxyz —
подвижная (рис. 88), то, как известно, абсолютным движением точки
называют ее движение относительно неподвижной системы осей коор-
координат, а относительным — ее движение относительно подвижной.
Переносным движением точки называют ее движение в рассматривае-
рассматриваемый момент времени вместе с под-
подвижной системой осей относительно
неподвижных. Относительные ско-
скорость и ускорение обозначают V,
и аг, переносные — ve и ав, а абсо-
абсолютные — v и а. Другие характе-
характеристики этих движений снабжаются
соответствующими значками.
Движение подвижной системы
осей координат относительно не-
неподвижной можно охарактеризо-
охарактеризовать скоростью ее поступательного
движения vQ, например вместе а
точкой О и вектором угловой ско-
скорости о) ее вращения вокруг О Пусть точка М движется относитель-
относительно подвижной системы координат. Получим теорему сложения ско-
скоростей. Для этого проведем векторы риг, характеризующие положе-
положение точки М относительно неподвижной и подвижной систем осей
координат и вектор р0 точки О. Для любого момента времени
7 = То + Т.
Продифференцируем по времени это векторное тождество, учитывая
изменения векторов относительно неподвижных осей координат, т. е.
вычислим полные производные. Получим
Рис. 88
dp/d* = dpo/d* + dr/df.
E)
188
По определению, dp/dt — v является абсолютной скоростью точки М,
upoldt = v0 — абсолютной скоростью точки О. Для вычисления dr/di
применим формулу Бура. Имеем
Относительная производная dr/dt = vT является относительной ско-
скоростью точки М по отношению к подвижной системе отсчета, а ю"—
угловая скорость вращения подвижной системы отсчета и, следова-
следовательно, радиус-вектора г, если бы он в рассматриваемый момент времени
был скреплен с подвижной системой осей координат. Таким образом,
из E) получаем
t*~= v~o + «"x f + vr, F)
Скорость
Ve — V0 + Й" X Г
является скоростью точки свободного твердого тела, скрепленного
с подвижной системой координат, с которой в данный момент совпа-
совпадает точка М в движении тела относительно неподвижной системы осей
координат. Это есть переносная скорость точки М Из F) получаем
следующую теорему сложения скоростей для точки:
~v = Fe + 7Т, G)
т. е. скорость абсолютного движения точки равна векторной сумме
переносной и относительной скоростей.
§ 3. СЛОЖЕНИЕ УСКОРЕНИЙ ТОЧКИ В ОБЩЕМ СЛУЧАЕ
ПЕРЕНОСНОГО ДВИЖЕНИЯ
Абсолютное ускорение точки определим вычислением полной про-
производной по времени от абсолютной скорости F). Имеем
dvn den — — dr dvr
Для полных производных от векторов г я vr применим формулу Бура.
Получим
dr/dt = dr/dt + w х г; dvr/dt = dyr/<tt +© X v~r-
Учитывая, что
получим для абсолютного ускорения
a =ao + exr'-T-»x(wx7) + a,+ 2(coxwr)- (8)
В этой формуле первые три слагаемых составляют ускорение точки
свободного твердого тела в общем случае его движения вместе с под-
подвижной системой осей координат относительно неподвижной. Первое
189
слагаемое а0 — ускорение точки О, 8 X f и и X (ш X г) — соот-
соответственно вращательное и осестремительное ускорения точки М, если
бы она двигалась только вместе с подвижной системой осей координат,
не имея в рассматриваемый момент времени относительного движения.
После этого (8) примет вид
~а =~ае +~аг + ак, (9)
где _ _ _
ая =• 2 (со X i/r). A0)
Ускорение аи называется ускорением Кориолиса. Иногда его также на-
называют добавочным (или поворотным) ускорением.
Формула (9) выражает теорему сложения ускорений точки, или
кинематическую теорему Кориолиса: абсолютное ускорение точки яв-
является векторной суммой трех ускорений — переносного, относитель-
относительного и Кориолиса.
Переносное ускорение рассматривалось при изучении движения
свободного твердого тела. Относительное ускорение изучалось в кине-
кинематике точки. Его можно выразить в двух формах в зависимости от
способа задания относительного движения. При координатном способе
задания в декартовых координатах
ar ^
где х, у, z — координаты движущейся точки относительно подвижной
системы осей координат; i, /, k — единичные векторы этих осей. При
естественном списобе задания движения
а г —а*-\-а?,
причем
a*-=dvr/dl =sr; a'f~vf/pr,
где sr — расстояние от начала отсчета до точки по траектории отно-
относительного движения; рг — радиус кривизны этой траектории. В част-
частном случае, когда переносное движение есть вращение вокруг непод-
неподвижной оси, переносное ускорение
где касательное переносное ускорение
al = /is,
причем h есть кратчайшее расстояние от движущейся точки до оси вра-
вращения. Нормальное переносное ускорение
Абсолютное ускорение в этом случае
а = а? +Ъс + at + о? + о*. A1)
190
§ 4. УСКОРЕНИЕ КОРИОЛИСА
Рассмотрим ускорение Кориолиса и его свойства. Оно определя-
определяется формулой A0)
а„ = 2 (сое X vr).
Угловую скорость вращательной части подвижной системы отсчета,
т. е. угловую скорость переносного движения, заменили на~а>е.
Ускорение Кориолиса является результатом взаимного влияния
двух движений — переносного и относительного. Часть его (юв X оР)
получается вследствие изменения переносной скорости точки из-за
относительного движения. Другая его часть, тоже [а>д X vT), есть ре-
результат изменения относительной
скорости вследствие переносного
движения. Это следует из анализа
формул при выводе абсолютного
ускорения.
Модуль ускорения Кориолиса
в соответствии с A0) определяется
выражением
e, v,).
A2)
Рис. 89
Для определения ускорения Ко-
Кориолиса очень удобно правило
Н. Е. Жуковского. Оно основано
на формуле A0). Пусть имеем точ-
точку М, движущуюся с относительной скоростью vr (рис. 89). Построим
плоскость /7, перпендикулярную угловой скорости переносного вра-
вращения сои, и спроецируем vT на эту плоскость. Проекцию обозначим
v*. Она является вектором; ее модуль
и; = t>,sin(coe, vT).
Ускорение Кориолиса выразится в формг
а а = 2соеу?.
A2')
Учитывая A0) и A2'), получаем следующее правило Жуков-
Жуковского: модуль ускорения Кориолиса равен удвоенному произведению
угловой скорости переносного вращения на модуль проекции относи-
относительной скорости на плоскость, перпендикулярную оси переносного вра-
вращения; чтобы получить направление ускорения Кориолиса, следует век-
вектор проекции относительной скорости vr повернуть на 9СР вокруг
оси, параллельной оси переносного вращения в направлении этого вра-
вращения.
Рассмотрим случаи обращения в нуль ускорения Кориолиса. Из A2)
следует, что ап — 0, если1
1) сое = 0, т. е. переносное движение является поступательным;
191
2) vT = 0, т. е. в те моменты времени, в которые происходит изме-
изменение направления относительного движения;
3) sin (соР, vr) = 0, т. е. когда скорость относительного движения
vr параллельна угловой скорости переносного вращения и>е.
Следует отметить, что при различном разложении одного и того же
абсолютного движения точки на переносное и относительное получим
разные ускорения Кориолиса.
Пример 1. Шар радиусом /? = 1 м вращается вокруг вертикальной оси
Ог' по закону ср = 2t — fi рад. По меридиану шара движется точка М по закону
s = я<а/4 м (рис. 90, а). Расстояние s отсчитывав гея "от точки Мо. Определить
абсолютные скорость и ускорение точки М в момент времени t = 1 с,
Рис. 90
Реше н и е. За переносное движение примем вращение точки вместе а
шаром вокруг оси Ог1. Тогда опюсятельным движением будет движение точки
по меридиану шара.
Определим положение точки М на меридиане в момент времени t — 1 с,
Имеем S(__i = я/4 м; так как R = 1 м. то положение точки также определяется
углом широты а = л/4.
Вычислим угловые скорость и ускорение переносного движения. Получаем
Ф = 2 — З/2; при (= 1с ф = — 1 1/с. Угловая скорость со = |ф| = 1 1/а,
Знак минус у <р показывает, что вращение шара происходит по часовой стрелке,
т. е. в отрицательную сторону.
Так как ф = — 6i и при t — 1 с <р = — 6 1/с, то угловое ускорение а =
= |<р| = 6 1/с. Знак минус у ф указывает, что оно направлено по движению ча-
часовой стрелки, т. е. в сторону вращения шара. Так как знаки у ф и ф одинаковы,
то вращение шара в рассматриваемый момент времени является ускоренным.
Абсолютную скорость определяем по формуле
t/=oe-f- vr.
Скорость переносного движения при t = 1 с
ve = гш = Яш cos а = У2/2 я0,7 м/с.
192
Скорость относительного движения аг = |s|, где s'= nt/2, При /= 1 о
s_=» я/2 = 1,6 м/с. Следовательно, ур = 1,6 м/с. Знак «+» у ^указывает, что
аг направлено в сторону возрастания s.
В рассматриваемом случае ve направлена по касательной к параллели шара
И перпендикулярна vT, которая направлена по касательной к меридиану. Следо»
вате гьно,
о=Т/"о|| + ^=»1/0,5+2,6ж1,8 м/с
Так как переносное движение является вращением шара вокруг непод-
неподвижной оси, то абсолютное ускорение определяем по формуле
+«;+«„• (а)
Переносное нормальное ускорение
а^—гай=/?<оа cos a —1/2/2 я»0,7 м/са.
Ускорение а" направлено по кратчайшему расстоянию к оси вращения, т. е.
по линии MOi. Переносное касательное ускорение а* перпендикулярно а" я
направлено в соответствии с направлением углового ускорения по vg. Модуль
переносного касательного ускорения
а\ ~ re = Яг cos a = 3 V2 » 4,2 м/с2.
Относительное нормальное ускорение
а? =г^/р =»;?//? =2,6 м/с".
Ускорение а" направлено к центру кривизны траектории относительного дви-
движения, т. е. к центру шара О, Относительное касательное ускорение axr — \s\,
где s = л/2 = const == 1,6 м/с2. Следовательно, а) = 1,6 м/с2. Так как s положи-
положительно, то а/ направлено в сторону возрастающих значений s по касательной к
траектории относительного движения, т. е. по относительной скорости. Относи*
тельное движение оказалось ускоренным в рассматриваемый момент нремени.
Ускорение Кориолиса определяем по правилу Жуковского. Его модуль
ак = 2ow*, где v* — проекция vT на плоскость, перпендикулярную оси перенос-
переносного вращения Ог', Имеем
v* => vT sin a = 1,61/2/2 « 1,1 м/с.
После этого ак~ 2-1-1,1 = 2,2 м/с», Чтобы определить направление ак, следует
вектор проекции относительной скорости о* на плоскость, перпендикулярную оси
переносного вращения, повернуть вокруг оси Мг, параллельной Ог', на 90а
в сторону переносного вращения, т. е. по часовой стрелке. Получаем, что ускоре-
ускорение Од направлено в ту же сторону, что и ускорение а?.
Для определения абсолютного ускорения выбираем прямоугольные оси ко-
координат Мхуг и проецируем обе части векторного равенства (а) на эти оси, учи-
тывая направление составляющих ускорений (рис, 90, б), Получаем:
cosa—aj sin a ==0,7+2,6-0,7 —1,6-0,7 =в 1,4 м/с*;
аг=—a^sina—ajcosa=.—2,6.0,7—1,6.0,7=.—2,9 м/с2.
Модуль абсолютного ускорения
a=y"aj + aJ-tra*=.V2,0 + 41 +8,4- 1/IU4 = 7,2 м/с2.
Г Зак. 13U
1ЭЗ
Пример 2, Колечко М, надетое на стер-день, движется в плоскости Оху,
согласно уравнениям (рис, 91)
х = 3 A + cos nt)\ у = 4 — 8 sin л{,
где х, у — в см, i — в с, Стержень может вращаться вокруг оси Ог, Определить
в момент времени t = 0,5 с угловую скорость и угловое ускорение стержня, а
также скорость и ускорение движения колечка по стержню.
Решение. Положение колечка М в момент времени t — 0,5 с определя-
определяется координатами
щ = 3 (I + cos я/2) = 3 см; ih = 4 — 8 sin я/2 = — 4 см.
Примем движение колечка вместе с вращающимся стержнем за перенос-
переносное. Тогда его движение по стержню будет относительным двмжением<
У'
Рис 91
Рис 92
Рис. 93
Вычислим проекции на оси координат абсолютных скорости и ускорения
колечка для любого момента времени. Имеем:
t'> vu=y = —8ncosjit;
Для момента времени t = 0,5 с получаем:
vx = — Зя« — 9,4 см/с; vy=O; а =
% = 9,4 см/с;
а« =78,9 см/с2
По проекциям изображаем векторы абсолютных скорости и ускорения в
рассматриваемый момент (рис. 92).
По теореме сложения скоростей для колечка,
Скорость переносного движения ve перпендикулярна стержню ОА, а скорость
относительного движения иг направлена по стержню. Разлагая абсолютную ско-
скорость v по этим двум направлениям, получим
ve = v sin ф; vr = v cos w,
Но
поэтому
ve — 7,5 см/с; vT = 5,6 см/с.
Угловая скорость вращения стержня определяется по формуле
to = vel0M = 7,5/5 = 1,5 1/с,
194
В соответствии с направлением vg изображаем на рисунке дуговую стрелку для
угловой скорости.
Так как переносное движение является вращением стержня вокруг непод-
неподвижной оси, то в этом частном случае по теореме сложения ускорений для аб-
абсолютного ускорения имеем
*=»# + 3; +«?+?+««• (а)
Вычисляем отдельные составляющие абсолютного ускорения а и изображаем
их на рис. 93. Для модуля нормального переносного ускорения 7i" получаем:
о? = ОМ-оJ =11,3 см/с2,
Ускорение а" направлено к оси переносного вращения —» точке О. Составляющая
переносного ускорения а* по модулю неизвестна, но по направлению она перпен-
перпендикулярна а", Предполагая дуговую стрелку для в направленной против часовой
стрелки, изображаем на рисунке ускорение ~а^,
Нормальная составляющая относительного ускорения aj? = 0, так как от-
относительное движение колечка по стержню является прямолинейным. Касатель-
Касательная составляющая относительного ускорения в рассматриваемом случае равна
полному относительному ускорению, т. е. aj = аг. Предположим, что ат направ»
лена от точки М к А.
Ускорение Кориолиса ак определяем по правилу Жуковского. Для его мо-
модуля имеем aL!= 2ШУ*, где 17* — проекция относительной скорости vr на пло-
плоскость, перпендикулярную оси переносного вращения Ог. В рассматриваемом
случае и* = vr, поэтому ак = 2<эдг = 16,8 см/сг. Направление кориолнсова ус-
ускорения ак получаем поворотом на 90° вектора у* по направлению дуговой стрел-
стрелки о вокруг оси, проходящей через точку М параллельно оси вращения стерж-
стержня Ог.
Для проецирования векторов, входящих в уравнение (а), выберем оси ко-
координат Мх'у*, Имеем:
для Мх' —asinq)=ar — а";
для My1 acos<p =a] + aK.
Из этих уравнений определяем неизвестные ускорения аг и aj:
аг= —a sin <р+я" =к—51,8 см/с2;
a? = a cos ф — aK»30,5 см/с2.
Ускорение аГ получилось отрицательным; следовательно, предположение
о его направлении оказалось неверным. В действительности аг направлено про-
против предположенного его направления.
Ускорение aj оказалось положительным. Предположение о направлении ду-
дуговой стрелки для 8 подтвердилось.
Угловое ускорение стержня определяем но формула
195
Глава 6
КИНЕМАТИКА СЛОЖНЫХ ДВИЖЕНИЙ
ТВЕРДОГО ТЕЛА
Сложным движением твердого тела называют такое его движение
по отношению к неподвижной системе отсчета, которое составляется
из относительного и переносного движений. При этом все кинематиче-
кинематические характеристики движения тела по отношению к неподвижной си-
системе отсчета выражаются через характеристики относительного и
переносного движений тела.
Относительным движением твердого тела называют его движение
по отношению к некоторой подвижной системе координат Oxx'y'z'.
Для выяснения переносного движения тела в каждый момент времени
следует считать тело жестко скрепленным с подвижной системой от-
отсчета; движение этой подвижной системы отсчета по отношению к не-
неподвижной системе отсчета является переносным движением тела.
Абсолютным движением тела называют его сложное или результи-
результирующее движение по отношению к неподвижной системе отсчета.
Следует отметить, что границы этого тела можно расширять и рас-
рассматривать не движение тела по отношению к некоторой системе от-
отсчета, а движение всего пространства, связанного с телом по отноше-
отношению к другому пространству, связанному с неподвижной системой от-
отсчета.
§ 1. СЛОЖНЫЕ ПОСТУПАТЕЛЬНЫЕ ДВИЖЕНИЯ
Если тело находится в двух одновременных поступательных дви-
движениях — относительном и переносном, то абсолютное движение те-
тела тоже является поступательным и его скорость равна геометриче-
геометрической сумме скоростей относительного и переносного поступательных
движений.
Предположим, что абсолютно твердое тело (S') движется посту-
поступательно относительно системы координат Охх'у'г\ а система OiX'y'z*
движется поступательно относительно неподвижной системы коор-
координат Oxyz (рис. 94). В этом случае тело имеет два движения: посту-
поступательное движение относительно системы Охх'у'г' (относительное дви-
движение) и поступательное движение вместе с системой Oxx'y'z' относи-
относительно неподвижной системы координат Oxyz (переносное движение).
Докажем, что абсолютное движение тела (S") тоже является по-
поступательным.
Обозначим vx скорость некоторой точки В тела в относительном
его движении, иг — скорость точки В в его переносном движении.
Абсолютная скорость точки В
V ~ Vx + V2.
Установим, что для любых точек тела абсолютные скорости и ус-
ускорения геометрически равны и параллельны в каждый момент вре-
времени.
196
Так как в поступательном движении каждая точка твердого тела
перемещается с такой же скоростью, с какой движется любая другая
точка этого тела, то скорости всех точек тела в относительном движе-
движении, являющемся поступательным движением, одинаковы и равны vt.
Аналогично, скорости всех точек тела в переносном поступательном
движении тоже одинаковы и равны v2. От сложения равных по величи-
величине и параллельных векторов получаются
равные и параллельные векторы, поэтому
в каждый момент времени абсолютные ско-
скорости всех точек тела v равны по величи-
величине, параллельны и направлены в одну сто-
сторону. Это справедливо и для ускорений
точек тела.
Применяем теорему о сложении ускоре- у У'
ний для каждой точки; при этом учтем, что
ускорение Кориолиса для каждой точки
тела равно нулю, так как переносное дви-
движение является поступательным. Так как
в каждом поступательном движении твер- / *
дого тела ускорения всех точек в каждый ^
момент времени тоже равны между собой,
то очевидно, что и ускорения всех точек Рис- 94
тела в его абсолютном движении равны
между собой и это общее ускорение можно считать ускорением всего
тела в данный момент времени. Обозначая аъ аг, а относительное, пе-
переносное и абсолютное ускорения, имеем
~а = ах + аг.
Таким образом, абсолютное движение тела является поступатель-
поступательным. Этот результат можно сформулировать иначе: совокупность
двух одновременных поступательных движений твердого тела кине-
кинематически эквивалентна некоторому одному {абсолютному) поступа-
поступательному движению, причем скорость абсолютного поступательного
движения и его ускорение соответственно равны геометрической сумме
скоростей или ускорений обоих данных поступательных движений.
Условно все это для скоростей можно представить в виде
(vlt wa) со о, у = vx + v2.
Очевидно, полученный вывод можно обобщить и на случай сово-
совокупности нескольких поступательных движений тела Тогда получим
следующее соотношение:
(Ё>1, Уа. •"• vn) V>V,
где
197
Здесь скорость абсолютного поступательного движения тела, эк-
эквивалентного первоначальному множеству одновременных поступатель-
поступательных движений fa, у2, ..., vn), является главным вектором данной си-
системы векторов vt. Это характерно и для ускорения абсолютного по-
поступательного движения
п
а — 2 Q' •
i— I
§ 2. СЛОЖНЫЕ ВРАЩАТЕЛЬНЫЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Приведение мгновенных вращательных движений
твердого тела вокруг осей, пересекающихся в одной точке,
к простейшему движению
Предположим, что тело, например цилиндр, вращается в данный
момент времени вокруг оси 0гг с угловой скоростью а1 (относительное
движение), а ось Ozt вращается вокруг 0гг с угловой скоростью ©2
(переносное движение) (рис. 95).
Возьмем какую-либо точку В цилиндра или жестко скрепленного
с ним пространства. По теореме о сложении скоростей, абсолютная
скорость точки В
Обозначим гв — ОВ радиус-вектор точки В, проведенный из точ-
точки пересечения осей Ог, и Огг в точку В. Тогда относительная скорость
vb, по формуле Эйлера,
~(П 77 v 7
VJB = <UjL X Гв,
а переносная скорость
V[j = СО 2 X fB
Следовательно, абсолютная скорость
vB = 1>в Ч~ Vb = сох X Гз 4* М2 ^ гз == (Mi Н" ша) X гБ. B)
Обозначая
hi = COj -J- 02, C)
имеем
о"а =13 X гВ| D)
где мгновенная угловая скорость Q направлена по диагонали парал-
параллелограмма, построенного на w1 и со2.
Отложим вектор Q из точки О и рассмотрим прямую OD, по кото-
которой он направлен. Если точка В* пространства, жестко скрепленно-
198
го с вращающимся цилиндром, находится в данный момент времени на
прямой 0D, то ее абсолютная скорость по формуле D) равна нулю:
_ _ ~ЬВ, =~& х~гв* — О, E)
так как векторы Q и гв* коллинеарны.
Итак, абсолютные скорости всех точек пространства, жестко скреп-
скрепленного с вращающимся цилиндром, находим по формуле D), причем
абсолютная скорость тех из них, которые в данный момент находятся
на прямой OD, равна нулю. Следовательно, два одновременных вра-
вращения вокруг пересекающихся
осей g мгновенными угловыми
скоростями <% и соа кинематиче-
кинематически эквивалентны одному вра-
вращению с мгновенной угловой
скоростью Q, равной геометри-
геометрической сумме (ох + w2. Мгновен-
Мгновенная ocjb абсолютного вращения
проходит через точку пересече-
пересечения складываемых угловых ско-
скоростей и направлена по Q.
Если тело одновременно
имеет любое число последова- Рис. 95
тельных вращений вокруг мгно-
мгновенных осей, пересекающихся в одной точке О, с угловыми скоро-
скоростями со1( со.2, .,., «„, то абсолютным движением является также мгно-
мгновенное вращение вокруг оси, проходящей через точку О с угловой
скоростью, равной геометрической сумме угловых скоростей данных
вращений, т. е.
(со1( со2, ..., со„) оо п,
причем
Q = ш
Абсолютная угловая скорость Q равна главному вектору системы
векторов угловых скоростей всех данных вращений. Вектор Q прило-
приложен в точке пересечения всех со?.
Таким образом, имеется полная аналогия между процессом приве-
приведения системы сходящихся сил в статике твердого тела и приведе-
приведением системы мгновенных угловых скоростей тел к простейшему виду.
Применяя теорему о приведении вращений вокруг пересекающихся
осей для каждого момента времени, т. е. для каждого положения тела,
можно установить характер всего непрерывного движения тела.
Приведение мгновенных вращательных движений
твердого тела вокруг параллельных осей
Угловые скорости щ и со2 направлены в одну сторону. Предполо-
Предположим, что диск S' вращается с угловой скоростью со2 вокруг оси А А'
перпендикулярной его плоскости, а вокруг оси ВВ', жестко скреплен-
19Э
ной с диском и параллельной оси АА', вращается цилиндр о угловой
скоростью 1о1 (рис. 96). (Ось ВВ' следует считать мгновенной, так как
она изменяет свое положение в абсолютном пространстве.)
Угловая скорость м2 == |d^/df|, а угол Мр отсчитываетея от непод-
неподвижного в пространстве луча AL до вращающегося вместе с диском
луча АВ. Угловая скорость мх = |dcp/d/|, а угол ср отсчитывается от
вращающегося с диском луча Л В до некоторого луча BL', жестко
скрепленного с цилиндром.
Каждая точка цилиндра находится в двух движениях: во враща-
вращательном движении вместе с диском с угловой скоростью со2 (перенос-
(переносная угловая скорость) и во вращательном движении цилиндра вокруг
со,
Рис 96
Рис. 97
его оси с угловой скоростью и>г (относительная угловая скорость).
Предположим, что оба вращения происходят в одну сторону, например
против часовой стрелки, тогда векторы угловых скоростей сох и оо2
параллельны и направлены в одну сторону. Найдем абсолютное дви-
движение цилиндра, которое, очевидно, является плоским.
Плоское движение представляет собой непрерывную последова-
последовательность мгновенных вращений вокруг мгновенных центров вращения
для различных моментов времени. Покажем сначала, что мгновенный
центр вращения подвижной плоскости основания цилиндра находится
на прямой, соединяющей обе оси вращения, между осями и на расстоя-
расстояниях от осей, обратно пропорциональных соответствующим угловым
скоростям.
Обозначим С искомую точку (рис. 97). Ее абсолютная скорость рав-
равна нулю в данный момент времени. Действительно, по теореме о сло-
сложении скоростей для точки в сложном движении ее абсолютная ско-
скорость равна геометрической сумме скоростей относшельного и переноа-
ного движений:
Обозначим гг и г2 радиус-векторы точки С относительно точек В
и А, причем точку С выберем так, чтобы
со,
г А — ю-
200
Но
Следовательно,
fc = Щ X ~гг +Ja2 х г2.
Так как векторы гх и г2 имеют противоположные направления, то
и рассматриваемые векторные произведения имеют противоположные
направления по прямой, перпендикулярной плоскости, в которой на-
находятся оси обоих вращений. Модули же векторных произведений рав-
равны между собой по условию выбора точки С. Таким образом, геометри-
геометрическая сумма векторных произведений равна нулю, т. е. скорость точки
С равна нулю; скорость любой другой точки С" прямой СС также равна
нулю.
Абсолютное движение рассматриваемего тела (цилиндра) представ-
представляет собой мгновенное вращение вокруг оси, параллельной осям обоих
данных вращений. Ось абсолютного вращения проходит через точку
прямой, соединяющей оси вращений, находящуюся между этими ося-
осями на расстояниях от них, обратно пропорциональных угловым ско-
скоростям. Обозначим Q вектор абсолютной угловой скорости. Для на-
нахождения модуля этого вектора и его направления рассмотрим скорость
vB точки В, лежащей на оси относительного вращения тела. С одной
стороны, эта скорость
'~vB — ~со2 x AB;
с другой стороны,
~^ __ 'q х СВ.
Приравнивая оба векторных произведения
¦(й2 X АВ = Q X СВ,
получаем, что вектор Q направлен в ту же сторону, что н вектор ю2,
а следовательно, и вектор щ. Приравнивая модули векторных произ-
произведений, имеем
1@,1 АВ = |Q| СВ,
откуда
-)¦
I I ло I
' 2| св '
св ' 'V св
Так как АВ = АС + СВ, то, производя деление и учитывая, что
АС/СВ = К|/|со2|, найдем
|Q| = IffljJ + |со2|.
201
Это доказательство аналогично доказательству теоремы о приве-
приведении двух параллельных сил, направленных в одну сторону в статике
твердого тела, и, следовательно, его результат можно выразить в ана-
аналогичной форме:
где
причем
О,
Q = щ -f со2,
= Ы +
Рассмотрим случай, когда угловые скорости ^ и "со2 параллельны,
но направлены в противоположные стороны, т. е. относительное и пе-
переносное вращения имеют противоположные направления. Предпо-
Предположим, что ]<ва| > |<иг|. Проводя все рассуждения, как при рассмот-
рассмотрении случая приведения вращений с параллельными осями к одному
вращению, найдем, что точка С (рис. 98), через которую проходит ось
абсолютного вращения, располагается на линии В А, за большей по
числовой величине угловой скоростью на расстояниях от осей этих
вращений, обратно пропорциональных их угловым скоростям.
'шг
Рис.
Рис. 99
J,
Угловая скорость абсолютного вращения совпадает по направле-
направлению с угловой скоростью с большей числовой величиной. Модуль
абсолютной угловой скорости равен разности модулей угловых ско-
скоростей:
(«!, со2) coQ; 0 = 0)! + оJ
но
|Й| = К| - К|; AC/ВС =
Таким образом, статическая аналогия о приведением двух парал-
параллельных сил к равнодействующей силе имеется и в данном случае.
Рассмотрим пару вращений. Так же как и в теории параллельных
сил в статике, необходимо рассмотреть случай, когда угловые ско-
скорости относительного и переносного вращений численно равны, но
имеют противоположные направления.
202
Систему двух противоположно направленных вращений вокруг па-
параллельных осей с равными по модулю угловыми скоростями называют
парой вращений.
Предположим, что твердое тело находится в двух мгновенных вра-
вращениях с угловыми скоростями со! и со2, причем со2 = — "cbj, т. е. уг-
угловые скорости щ и со2 характеризуют пару вращений (рис. 99). Аб-
Абсолютная скорость любой точки тела (точки В)
где
v{p=coj х аГв; dSP = й2 х А^в;
отсюда
АВ Ш2 х Л2В=<"о, X А^В—(«х X
Но
Следовательно,
откуда
= «1 X Аг Л2.
Итак, скорость точки В не зависит от ее положения в теле. Поэтому
скорости всех точек тела в данный момент времени равны между со-
собой и параллельны, т. е. пара вращений кинематически эквивалентна
мгновенному поступательному движению со скоростью
tj = ©! х А?А2 = щ х ( — А^АД = Л3 Ах х «1 = р X coi,
где
т е.
Следовательно, из определения момента пары векторов
окончательно получаем
Таким образом, пара мгновенных вращений твердого тела экви-
эквивалентна мгновенному поступательному движению со скоростью, рав-
равной векторному моменту данной пары угловых скоростей.
203
Наоборот, если дано поступательное движение тела ?0 скоростью
а, то его можна заменить парой мгновенных вращений (со, -—_со). При
^том плоскость пары перпендикулярна вектору v, а модуль со и^плечо
пары d находятвя в завиаимости, определяемой соотношением jco| d =»
= |у|, т. е. после произвольного выбора одной из величин \<л\ и d
другая определяется однозначно. Таким образом, существует беско-
бесконечно много различных способов замены поступательного движения
тела со скоростью v некоторой парой мгновенных вращений.
Объединяя все случаи сложения мгновенных вращений твердого
тела, заключаем, что приведение к простейшему движению мгновенных
вращений тела как вокруг пе-
1
Педаль
Большая
зубчатая
звездочка
Рис.
ресекающихся, так и вокруг
параллельных осей аналогич-
аналогично приведению пространст-
пространственной системы сходящихся
и параллельных сил в стати-
статике твердого тела, причем от-
относительная и переносная уг-
угловые скорости соответствуют
приводимым силам, а абсо-
абсолютная мгновенная угловая
скорость соответствует равно-
равнодействующей силе.
Рассмотрим педаль велоси-
велосипеда (рис. 100). Велосипедист
сообщает педали поступатель-
поступательное движение со скоростью v. С помощью кривошипа А В эта ско-
скорость раскладывается на пару вращений. Одно вращение через боль-
большую зубчатку передается на заднее колесо велосипеда, и благодаря
этому велосипедист перемещается вместе с велосипедом. Второе вра-
вращение есть вращение педали относительно оси кривошипа в точке В.
При этом вращение педали относительно оси кривошипа (а также
относительно самого кривошипа) противоположно по направлению
первому вращению; их угловые скорости численно равны. На рис. 100
скорость v изображает вертикальную составляющую абсолютной ско-
скорости педали.
§ 3. ПРИВЕДЕНИЕ МГНОВЕННЫХ ПОСТУПАТЕЛЬНЫХ
И ВРАЩАТЕЛЬНЫХ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА
Совокупность вращательного и поступательного
движений в случае, когда скорость поступательного
движения перпендикулярна оси вращения тела
Предположим, _что тело врасается в данный момент времени о уг-
угловой GKOpCGT'JO со вокруг оси, жестко скрепленной а другим телом,
имеющим поступательное движение со скоростью vOt перпендикуляр-
204
-о/
Рис. 101
ной вектору угловой скорости со перво-
первого тела (рис. 101). Точка О — точка вто«
рого тела, через которую проходит ось
первого тела.
Заменим поступательное движение
второго тела, т. е. переносное поступа*
тельное движете для первого тела, па-
парой вращений v0 со (со', — со'); при этом
угловые скорости этой пары вращений
подберем таким образом, чтобы со' = со.
Тогда плечо d этой пары будет d =*
~ \vo \lM, так как вектор v0 есть мо-
момент эквивалентной пары вращений. Эта
пара ^вращений располагается в плоскости, перпендикулярной век-
вектору v0, т. е. в плоскости, проходящей через вектор со. Направление
векторов (со', — со') соответствует направлению векторного момента
этой пары, т. е. вектора v0. __
Переместим пару вращений (со7, — со') так, чтобы вектор (— со')
проходил через точку О, т. е. оказался противоположным вектору со.
Тогда система векторов (со, — со') будет эквивалентна нулю, так как
два одновременных вращения тела вокруг одной и той же оси с угло-
угловыми скоростями, численно равными, но имеющими разные направле-
направления, образуют систему движений, кинематически эквивалентную нулю,
т. е. не сообщающую телу никакого движения. У первого тела остает-
остается только одно движение — вращение с угловой скоростью со7 вокруг
оси, сдвинутой на величину d сравнительно с первоначальной осью
вращения, т. е. условно
(со, v0) со {со, (со', — со')} со со'.
Приведение поступательного и вращательного
движений твердого тела при произвольном
направлении скорости поступательного движения
Допустим, что скорость v0 поступательного движения твердого
тела направлена под некоторым углом а к оси вращения тела, т. е. к
вектору со. Произведем все те операции,
которые выполняются в статике твердо- vl><
го тела при приведении системы трех
сил — силы и пары сил — к динамиче-
динамическому винту. Разложим поступательное
движение со скоростью v0 на два посту-
поступательных движения со скоростями vx и
у2, из которых^ одна vt направлена
вдоль вектора со, а другая v2 — пер-
перпендикулярно со (рис. 102). т~ш рис, юг
-й'
205
Совокупность движений (со, иг) приведем к одному вращению с уг-
угловой скоростью со' = со, но вокруг оси, сдвинутой на расстояние d.
Первоначальная совокупность движений (со, v0) приведется_к двум
движениям: к вращательному движению q угловой скоростью со' и по-
поступательному движению со скоростью vu параллельной оси вращения,
т. е.
(©lf по) 'Л {СО, Й, U2)} СО (СОЬ yj.
При этом d — ju^|/|col. Совокупность таких движений (со*, ух)
называют винтовым движением (кинематическим винтом).
Общий случай приведения произвольной совокупности
движений твердого тела к простейшему движению,
Статические аналогии
Методы приведения системы нескольких одновременных вращатель-
вращательных и поступательных движений одного и того же твердого тела имеют
полную аналогию с методами приведения в статике твердого тела
системы сил и пар сил, приложенных к телу, к простейшей системе
сил. Аналогом силы, приложенной к твердому телу, — скользящего
вектора в статике, в кинематике является скользящий вектор — угло-
угловая скорость вращения тела вокруг оси.
Моменту пары сил соответствует момент пары вращений, выражаю-
выражающий скорость поступательного движения, эквивалентного кинемати-
кинематически данной паре вращений. Процесс приведения системы скользящих
векторов к простейшей системе одинаков как в статике, так и в кине-
кинематике. Поэтому сформулируем общий вывод: совокупность какого угод-
но числа одновременных вращений и поступательных движений твер-
дого тела можно привести к двум одновременным движениям — к вра-
вращательному и поступательному.
Предварительно заменим каждое поступательное движение тела
соответствующей эквивалентной парой вращения. Тогда вся первона-
первоначальная система движений окажется совокупностью одних вращений.
Угловая скорость Q результирующего вращательного движения
равна главному вектору всей системы угловых скоростей, включая
угловые скорости, появляющиеся при замене поступательных движе-
движений парами вращений. За точку приложения вектора Q можно при-
принять любой центр приведения О. Тогда результирующее поступатель-
поступательное движение тела будет иметь екорость v0, равную главному моменту
относительно центра О системы векторов, выражающих угловые ско-
скорости первоначально данной системы вращений, т, е.
(й>1, ©2 сой; щ, vlt ..., vK)co
«>[й>г> Щ, ..., ®й, («e+i, — «е+г)> (а>е+г\ —Юе+г). ••• '
20п
где
rt _
Очевидно,_что_по_ аналогии со статикой и в данном случае имеются
инварианты Й и Й-и0 = |Qj |oo| cos а по отношению к центру приве-
приведения системы приводимых движений.
От величины этих инвариантов зависит окончательный вид простей-
простейшего движения, к которому можно привести все данные движения.
В частности, если Г2-а0 отличен от нуля, то вся система движений при-
приведется к кинематическому винту. В то же время наличие инварианта
О является строгим доказательством того, что в теории плоского дви-
движения тела и произвольного движения тела в пространстве угловая ско-
скорость не зависит от выбора полюса, через который проходит ось мгно-
мгновенного вращения, а следовательно, от него не зависит и угловое уско-
ускорение тела.
Основные свойства винтового движения тела
Винтовое движение называют перманентным, если Q = const и
v0 = const при изменении t. Любая точка В тела в этом случае во все
время движения остается на поверхности круглого цилиндра, описы-
описывая винтовую линию (рис. 103).
Пусть в начале движения точка нахо-
находится в положении Во (х0> Уо> Щ- Если
точка В совершает только вращательное
движение, то для произвольного положения
В можно составить следующие кинематиче-
кинематические уравнения этого движения:
хв ~- г cos ф; ув — г sin q>,
или
ибо
где
д'в = г cos (Ш 4- Фо);
ув = г sin (Ш + ф0),
F)
и ф ==
Ряс. 103
— Й; dcp =
ф0 = const.
Но за тот же промежуток времени / точка может двигаться парал-
параллельно оси z со скоростью v; следовательно, она поднимается на высоту
z = В'0В = хЛ.
F')
Уравнения F) и F') представляют собой параметрические уравне-
уравнения винтовой линии.
* Значение ф0 здесь отрицательно.
207
Полный оборот каждая точка на теле делает за время Т = 2n/Q.
Расстояние !г, на которое поднимается точка за время одного оборота,
называется шагом винта:
h=vT, или h = v— =2np,
во
где р называют параметром винта:
р — u/Q = const.
Глава 7
ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Сплошной средой считают деформируемые тела, различные жидко-
жидкости, не очень разреженные газы. Понятия скорости и ускорения точки
сплошной среды такие же, как и в кинематике одной точки. В кинема-
кинематике сплошной среды роль точки отводится малой частице этой среды.
Рассмотрим задания движения сплошной среды и получим формулы, по
которым вычисляются скорости и ускорения точек сплошной среды.
Движение сплошной среды может быть изучено двумя методами,
один из которых — метод Лагранжа — является обобщением метода,
применявшегося в кинематике одной точки. Движение в методе Лагран-
Лагранжа задается в переменных Лагранжа. Другой метод — метод Эйлера —
широко использует концепцию теории поля. При этом движение за-
задается и изучается в переменных Эйлера. При рассмотрении движения
сплошной среды преимущественно используется полевой подход,
базирующийся на методе Эйлера и соответственно использующий пере-
переменные Эйлера.
§ 1. ПЕРЕМЕННЫЕ ЛАГРАНЖА И ЭЙЛЕРА
Переменные Лагранжа. В выделенном объеме сплошной среды каж-
каждая его точка (малая частица) в фиксированный момент времени, на-
например t = 0, имеет координаты х0, у0, га или другие параметры а,
Ъ, с, которые являются функциями этих координат
а — <Pi (х0, у0, г0); Ь = ф2 (*„, у0, г0); с = <ps (х0, у0, г0),
допускающими вторые производные по всем переменным. Параметры
а, Ь, с, гак же как и х0, у0, г0> дают возможность отличать одну точку
сплошной среды от другой. В разные моменты времени / различные
точки сплошной среды характеризуются четырьмя независимыми пере-
переменными а, Ь, с, t, которые называются переменными Лагранжа.
Для задания движения сплошной среды в переменных Лагранжа,
как и в случае одной точки, достаточно задать декартовы координаты
х, у, г всех точек сплошной среды или их радиус-векторы г, но уже как
функции четырех переменных Лагранжа
x — h (а, Ь, о, t); у ~ft (а, Ь, с, t); г = /3 (а, Ь, о, t)
208
или
7=7{a, b, с, t).
В кинематике одной точки, которая рассматривалась ранее, ис-
использовались переменные Лагранжа для этой точки. Параметры а, Ь,
с не применялись, так как не было других точек, от которых следовало
отличать рассматриваемую точку. Оставалась зависимость координат
точки или ее радиус-вектора только от времени. Для сплошной среды
задание параметров а, Ь, с позволяет выделить конкретную точку. Раз-
Разным значениям этих параметров соответствуют различные точки сплош-
сплошной среды.
Если движение сплошной среды задано в переменных Лагранжа,
то скорости и ускорения в этих переменных определяются по обычным
формулам кинематики точки:
о~= d7/dt
или
vx — dxldt; vy = ду/dt; vz — dz/dt;
или
ax = d2x/dt2; ay => dPyldP; аг =
Производные по времени t вычисляются при фиксированных значе-
значениях переменных а, Ь, с, т. е. частные. Величины х, у, г или г мож-
можно также дифференцировать по каждому из переменных а, Ь, о.
В методе Лагранжа объектом изучения являются сами точки дви-
движущейся сплошной среды.
Переменные Эйлера. В механике сплошной среды, особенно для
жидкостей и газов, а также в теории поля преимущественно исполь-
используются метод Эйлера и соответственно переменные Эйлера. В методе
Эйлера рассматриваются не фиксированные точки сплошной среды,
а точки пространства, занятые движущейся сплошной средой. За не-
независимые переменные принимают время t и декартовы координаты
точки М пространства х, у, г или другие параметры, характеризующие
различные точки пространства. Четыре независимые переменные вели-
величины х, у, г, t называют переменными Эйлера.
Различные векторные и скалярные величины, характеризующие
сплошную среду, как, например, скорость, ускорение, плотность и т. п.,
рассматривают как функции этих переменных. В случае сплошной
среды изучаются поля скалярных и векторных величин, характери-
характеризующих движущуюся сплошную среду и ее свойства. Изучаются рас-
распределение этих величин по точкам пространства, занятого сплошной
средой, и их изменение с течением времени.
По известному векторному полю скоростей сплошной среды, задан-
заданному в переменных Эйлера v = v {x, у, г, ?)» можно определить вектор-
векторное поле ускорений а в этих переменных. Получим соответствующую
формулу. Движение сплошной среды в переменных Эйлера считается
известным, если задано поле скоростей в этих переменных. Согласно
23}
определению ускорения точки сплошной среды, находящейся в какой-
либо точке, пространства М (х, у, г) в момент времени t, следует рас-
рассмотреть положение этой точки сплошной среды в момент времени
t + ЛЛОнавэГот момент вследствие движения сплошной среды ока-
окажется в другой точке пространства М±_с координатами х + Ах, у +
-f- Ау, г + Az и будет иметь скорость^, зависящую от координат
этой новой точки пространства Мх и времени t + At. Изменение ко-
координат рассматриваемой точки, сплошной на Ах, Ау, Аг, произошло
вследствие изменения времени на At, поэтому
__ Разложим скорость ух в ряд по степеням величин Ах, Д#, Az, At:
Vi — v (х +_Ах, у + Ау, г + Az, t+ At) ~1> (х, у, z, t) + (dvldx) u,t X
X Ал; + (dvfdy)M,t Ay + (dv/dz)M,t Az + (dv/df)M,t At + ....
Индексы М и t у производных указывают на то, что они берутся в точ-
точке М (х, у, г) пространства в момент времени t. Согласно определению
ускорения а точки сплошной среды, находящейся в точке пространст-
пространства М в момент времени /, имеем
— ,. i>i— v / dv \ , ( да \ .. Ах ,
о М ' I dt JM_ t \ дх JMttM^o
-^L\ Цт ig-+ Jg-1 Hm-^-. B)
Остальные слагаемые ряда в пределе обращаются в ноль. Подставляя
A) в B) и опуская для краткости индексы М и t у производных, полу-
получаем
а =¦ (dvldt) + vx (dvldx) -f- vf/ (dvldy) + vz (dvldz). C)
В проекциях на координатные оси имеем
ах = dvjdt + vx (dvjdx) + vv (dvjdy) + vz (dvjdz);
av = dvy/dt + vx (duy/dx) + vu (dvvldy) + vz (dvyldz); C')
az = dvjdt + vx (dvjdx) + vy (dvjdy) + vz (dvjdz) .,
По векторной формуле C) вычисляют поле ускорений в перемен-
переменных Эйлера, если известно поле скоростей. В эту формулу входит
dvldt — локальная производная от вектора скорости
и группа слагаемых vx (dvldx) + vy (dvldy) + vz (dvldz), представляю-
представляющая собой конвективную производную от этого век-
вектора. Полное изменение вектора скорости о течением времени, т. е.
ускорение, обозначим Dv/Dt.
Локальная производная dvldt характеризует изменение вектора
скорости v в точке М (х, у, г) пространства вследствие изменения толь-
только одного времени при неизменных х, у, г. Полная производная DvlDt
равна локальной производной dvldt в тех точках пространства, в кото-
которых скорость в рассматриваемый момент времени равна нулю.
210
Группа слагаемых, представляющая конвективную производную,
учитывает изменение вектора скорости, вызванное переносом рас-
рассматриваемой точки сплошной среды самой движущейся средой.
Рассмотрим частные случаи.
1. Если v = v (х, у, z), т. е. поле скоростей стационарно,
то dvldt = _0 и_а" — DvlDt = vx (дЫдх) + vy (dvldy) + vz (dvldz).
2. При v = v (/) ди/дх = dv/ду = dv/дг — 0 и а =» DvlDt = dvldt.
3^_Если v = const, то dvldt = 0, dvldx = dvldy — dvldz =s 0 и a*=s
= DvlDt = 0.
По формуле (З) вычисляют полные, или субстанциальные, произ-
производные по времени в переменных Эйлера от любых векторных или ска-
скалярных величин, характеризующих сплошную среду. Пусть, на-
например, известно скалярное поле плотностей р (л:, у, г, t) сплошной сре-
среды. Рассуждения, аналогичные приведенным при выводе формулы для
ускорения, приведут к полной производной от р по времени U
DpIDt — dpldt + vx (dpldx) + vy (dpldy) + vz (dpldz).
Если сплошная среда неподвижна, т. е. vx = vy = vz = 0, то полная
производная по времени от любой векторной или скалярной функции^
характеризующей сплошную среду, согласно C) равна локальной про-
производной.
Преобразованием конвективной производной из C) можно полу-
получить другое выражение для ускорения (формула Лэмба—Громеко):
а"= dvldt + V (а72) —~п X rot ~v, D)
где rot о — вихрь вектора скорости, aV — символи-
символический оператор Гамильтона:
дх ' ' ду ' дг '
/, /, k — единичные векторы, направленные по осям декартовой систе-
системы осей координат. Вихрь вектора скорости определяется выражением
Г Т I
а а д
дх ду дг
Vx Vy Vz
ду дг
В дальнейшем используется также вектор со, определяемый как поло-
половина вихря вектора скорости:
со = Va rotD. F)
211
В проекциях на оси координат
дог
_ ' / jgy dvx \
г~ 2 1"аГ ау Г
Для выяснения физического смысла rot v рассмотрим несколько
примеров вычисления его по заданному полю скоростей.
О
Рис. 104
Рис. 105
Пример 1. Сплошная среда совершает плоское движение, параллельное оси
Ох, с постоянной скоростью v (рис. Ю'Ц. Имее_м vx = и = const; y^ = 0; »г= 0*
По формуле E) для вектора вихря Q = rot v имеем:
dy
—^
dz
дг
дх
дх
ду
Следовательно, Q =rot o= 0 во всех точках пространства, занятого движущей-
движущейся сплошной средой.
Пример 2. Сплошная среда совершает плоское движение, параллельное оси
Ох, со скоростью, распределенной по линейному закону (рис. 105). Траектории
точек сплошной среды являются прямыми линиями, параллельными оси Ох,
В этом случае
vx = чу; vv = 0; vz = 0,
где п = tg a = const. Имеем:
¦=0; Qz=-
дх tiy
Таким образом, во всех точках потока сплошной среды
Q = rot v = Qxi -f-Ц, /+QZ A = — nk,
где k — единичный вектор, направленный по оси Ог.
Пример 3. Точки сплошной среды движутся по круговым траекториям a
центрами на оси Ог и скоростями, обратно пропорциональными радиусам окруж-
окружностей (рис, 106), т, е, v = п/г, где п = const* Имеем:
так как
212
vx = — v sin ф = — щ1гг\ vy — v cos ф = nx/r2; vz = О,
sin ф = y/r\ cos ф = xlr,
где х, у — координаты точки, По формуле E),
о до:) д"х
дх ди
п 1пх х \
тан кан хъ + Ф — гг,
Следовательно, п ~ rot v — 0 во всех точках потока кроме точки г = О,
для которой вычисления непригодны, так как в этой точке скорость обращается
в бесконечность.
Рис. 106
Рис. 107
Пример 4. Сплошная среда вращается как твердое тело вокруг неподвижной
оси Ог с угловой скоростью <в0. Скорости точек тогда распределены по линейно-
линейному закону (рис. 107), т. е. v = aar, В этом случае
vx = — v sin ф = — (йоу; vv = v cos cp = щх; vz = 0*
По формулам для вихря скорости имеем:
?^ = 0; Qy=0; Qz=-^~ _-^5.
—(— йзо)=2соо.
Следовательно,
Q =rot о =2соо k.
где fe — единичный вектор, направленный по оси Ог, Во всех точках потока
rot v имеет постоянную величину и постоянное направление, параллельное оси
Ог, в том числе и в точке О, где г = 0 и v = 0. Угловая скорость
С00 =
= СО,
т.е. половина вихря вектора скорости является вектором угловой скорости вра-
вращения твердого тела вокрцг неподвижной оси.
§ 2. РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ В МАЛОЙ
ОКРЕСТНОСТИ ТОЧКИ ПРОСТРАНСТВА
Пусть известны скорость в точке О в момент t и производные от
нее по координатам в этот же момент времени (рис. 108). Получим фор-
формулу для вычисления скорости в этот же момент времени в любой дру-
другой точке М из малой окрестности точки О. Так как скорости в точках
М и О рассматриваются в один и тот же момент времени, то удобно вы-
выбрать начало осей координат, относительно которых изучается движе-
движение сплошной среды, в точке О.
213
Точки М пространства из малой окрестности точки О отличаются
друг от друга только координатами х, у, г или радиус-вектором г.
Скорость в какой-либо точке М для фиксированного момента времени
является функцией координат этой точки х, у, г. Разложим v (x, у, г)
в степенной ряд по координатам х,у,г, огра-
ограничиваясь слагаемыми первой степени по
этим переменным и пренебрегая слагаемыми
второй и более высоких степеней, предпола-
предполагая, что ими можно пренебречь по сравне-
сравнению g сохраняемыми слагаемыми для доста-
достаточно малых х, у, г. Получим
И(х, у, г) = гГ(О, 0, 0) + (ди/дхH х +
+ 0И/ду)о у + (дд/дгH г, G)
Рис. 108 __
где v @, 0, 0) = v0 — скорость в точке О.
Индекс О у производных служит указанием
на то, что они вычисляются в точке О пространства, В дальнейшем
его будем опускать. В проекциях на координатные оси из G) имеем
Vx = Vox +
Vy = VOy +
дх
~дх~
dvz
~дх~
х-
fax „ i dvz
ду
dvu
dvz
+
z;
dvy
~дТ
dvz
z.
G')
Введем компоненты тензора скоростей деформации S в точке О
выражениями
е =
е —
2 V дг
dv,.
дх
ду '
дг
ду
дг
(8)
Тензор скоростей деформаций удобно представить в форме таблицы
или матрицы:
214
Компоненты тензора скоростей деформаций, характеризующие дви-
движение сплошной среды, зависят от точки пространства и направления
осей координат. Тензор S является симметричным тензором, так как
согласно формулам, определяющим его компоненты,
Для таких симметричных тензоров в линейной алгебре доказывается»
что в каждой точке существуют такие прямоугольные оси координат,
называемые главными осями, для которых тензор принимает диагональ-
диагональную форму:
К о
•5 = 1 0 е2 0
\о о ,
где еи е.г, е3 — компоненты тензора скоростей деформаций для глав-
главных осей. Известно также, что сумма диагональных компонентов явля-
является инвариантом. Она не изменяется при повороте осей координат в
рассматриваемой точке, т. е.
е%% + evv + егг = ех + еа -f е3.
Скалярная величина
ехх + eyv + е„ — dvx /дх + dvjdy + dvjdz
называется дивергенцией (расхождением) вектора скорости и обознача-
обозначается div v. Таким образом, по определению,
div v — dvjdx -f- dvvldy -f- dvjdz.
Величины elt ea, e3 определяются из уравнения собственных зна-
значений тензора S как его корни, т. е. как корни кубического уравнения
для е:
еуу е
=0.
Известно, что числу соответствует геометрический образ, точка
на числовой оси. Вектору соответствует прямолинейный отрезок.
Тензору S, компоненты которого имеют два индекса, можно поставить
в соответствие поверхность второго порядка, которую называют эл-
эллипсоидом скоростей деформаций. Такие тензорные поверхности
дальше будут рассмотрены для тензоров инерции и напряжений по-
поверхностных сил.
Применим для производных по координатам от проекций вектора
скорости на оси координат тождественные преобразования Коши,
215
прибавляя и вычитая одинаковые величины и используя F') и (8).
Имеем
(r(
ду 2 \ ду дх } 2 \ дх ду
~~ 2 [ дг ' дх )+ 2 [ дг дх
vy dvx
дг 2 \ дг ду j 2 V ду дг
dv7 1
Уг *
дх 2 \ дх дг j 2 \ дг дх
ду 2 \ ду дг j 2 \ ду дг
Из G') с учетом этих преобразований получаем
x-+ ezy у
В векторной форме A1) примет вид
~Ъ = по + "ю х7 +"уд, AГ)
где Ид называется скоростью деформации. Проекции скорости дефор-
деформации на оси координат определяют по формулам
A2)
По формуле AГ) вычисляется скорость в момент времени / в лю-
любой точке М пространства из малой окрестности точки О, если в этот
же момент известны скорость, вихрь скорости и тензор скоростей де-
деформаций S в точке О. Формула AГ) является обобщением на случай
сплошной среды формулы B1) (см. § 8 гл. 4) для скорости точки сво-
свободного твердого тела в общем случае его движения. Для твердого тела
Од = 0. Кроме того, для сплошной среды роль угловой скорости вы-
выполняет половина вихря вектора скорости в точке О.
Рассмотрим скорость деформации ид. Для простоты пусть мы вы-
выбрали такую точку О, в которой в рассматриваемый момент времени
v0 ~ 0 и со = 0. Тогда для скорости в какой-либо точке М из малой
окрестности этой точки согласно AГ) имеем
v = од, A3)
216
или в проекциях на оси координат
у +exz г ;
z.
» «w0«« ,
Если в точке О еххф0, а все остальные компоненты тензора скоростей
деформаций равны нулю, то из A3') получаем:
= 0; vz =* 0.
A4)
Из A4) следует, что точки сплошной среды из малой окрестности точ-
точки О, находящейся в плоскости Оуг, имеют вкорости, равные нулю,
так как для них х = 0. Точки, расположенные в плоскости, параллель-
А
Ц,
-X
Рис. 109
Рис. 110
ной этой координатной плоскости на расстоянии х в положительном на-
направлении оси Ох, имеют одинаковые скорости, пропорциональные х
и направленные параллельно Ох, если ехх > 0, и в обратную сторону,
если ехх <С 0. Для точек плоскости, параллельной Оуг, но отстоя-
отстоящей от нее на —х, скорости имеют противоположное направление.
Таким образом, ехх — vjx в малой окрестности точки О характери-
характеризует скорость расширения (ехх > 0) или сжатия (ехх < 0) частицы
сплошной среды, приходящуюся на единицу расстояния в направле-
направлении, параллельном оси Ох (рис. 109). Аналогично, еуу и егг характери-
характеризуют относительные скорости растяжения или сжатия, приходящиеся
на единицу расстояния, в малой окрестности точки О, в направлениях,
параллельных осям координат Оу и Ог.
Допустим, что ехи ф 0, а все остальные компоненты тензора ско-
скоростей деформации равны нулю. Тогда из A3') следует:
vх = ехуу; vv = exyx; vz = 0.
Это показывает, что точки сплошной среды из малой окрестности точ-
точки О, расположенные в плоскости Оуг, в частности на оси Оу, для ко-
которых х = 0, имеют скорости, параллельные оси Ох. Эти скорости рас-
распределены по линейному закону (рис. 110) и направлены в положитель-
положительном направлении этой оси, если еху > 0, и в обратную сторону, если
еХу <! 0. Аналогично, точки, находящиеся в плоскости Охг, в частно-
217
стн на оси Ох, имеют скорости, распределенные по линейному закону
и параллельные оси Оу. Если ехч >¦ 0, то точки части сплошной среды
из малой окрестности точки О, находящиеся в момент времени / на
осях координат Ох и Оу и образующих прямой угол, в следующий мо-
момент времени расположатся на прямых линиях, образующих острый
угол. Если еху < 0, то прямой угол превратится в тупой. Таким об-
образом, величина еху = vjy = vy/x характеризует относительную ско-
скорость скоса углов в плоскости Оху. Соответственно exz и еуг характе-
характеризуют относительные скорости скоса углов в плоскостях Охг и
Оуг, приходящиеся на единицу длины.
В общем случае, если все компоненты тензора скоростей деформа-
деформации отличны от нуля, рассмотренные эффекты в окрестности точки О
наложатся друг на друга. Так как точка О является произвольной точ-
точкой пространства, в котором движется сплошная среда, то все изло-
изложенное применимо для малой окрестности любой точки.
§ 3. ЛИНИИ И ТРУБКИ ТОКА
При рассмотрении движения сплошной среды и применении пере-
переменных Эйлера используется понятие линий тока, т. е. линий,
в каждой точке которых в рассматриваемый момент времени векторы
скоростей параллельны касательным этих линий. Если вектор Аг
в какой-либо точке линии тока направлен по касательной к этой ли-
линии, то, по определению линии тока, он должен быть параллельным
вектору скорости v в этой точке. Два параллельных вектора отличают-
отличаются друг от друга только скалярным множителем k (положительным или
отрицательным). Следовательно,
dF= kv~ A5)
Если проекции вектора dr на оси координат есть dx, Ay, dz, то в про-
проекциях на эти оси выражение A5) примет форму
dx = kvx\ dy ~ kvy; iz = kvz.
Отбрасывая произвольный множитель k, эти уравнения можно пред-
представить в следующем виде:
vx(x,y,z,t) vv(x,y,ztt) oz(x,y,z,t) '
Два уравнения A5') относительно координат х, у, г для фиксиро-
фиксированного момента времени t являются дифференциальными уравнения-
уравнениями семейства линий тока. После интегрирования этих уравнений по-
появятся произвольные постоянные, различным значениям которых
соответствуют разные линии тока. На фиксированной линии тока в
рассматриваемый момент времени находятся разные точки сплошной
среды в отличие от траекторий. Для стационарного движе-
движения, при котором вектор скорости не зависит от времени, семейство
линий тока совпадает с семейством траекторий. Для нестационарного
движения это разные семейства линий.
218
Линии тока являются векторными линиями для векторного поля
скоростей точек сплошной среды. Аналогичные векторные линии мож-
можно получить для любого другого векторного поля, например вектор-
векторного поля вихря вектора скорости и т. п.
Если выбрать в пространстве, в котором
движется сплошная ереда, какой-либо замкну-
замкнутый контур L (рис. 111) и через каждую его точ-
точку провести свою линию тока, то получим
трубку тока. Сплошная среда не может
выходить из трубки тока через боковую ее по-
поверхность, так как в ее точках, состоящих из Рис. ill
линий тока, скорости точек сплошной среды
направлены по касательным к поверхности трубки тока. Сплошная
среда может входить и выходить из трубки тока только через ее тор-
торцовые сечения. Трубки тока используются для формулировки некото-
некоторых интегральных форм теорем о движении сплошной среды.
§ 4. ПОТОК И ЦИРКУЛЯЦИЯ ВЕКТОРА СКОРОСТИ
Поток вектора скорости. Выберем в пространстве, в котором движется сплош-
сплошная среда, неподвижную поверхность относительно рассматриваемой системы
отсчета. Разобьем ее на малые элементарные площадки площадью AS. (рис. 112).
Потоком вектора скорости и через элементарную площадку AS, определяемую
внешней нормалью Мп, называется скалярная величина vnAS, где vn =
= v cos (и, п)—проекция вектора скорости на внешнюю нормаль к площадке. Для
замкнутой поверхности внешней нормалью в каждой ее _ /„
точке называют нормаль, которая направлена во'внеш- У /-
шою часть объема, ограниченного поверхностью. Для
незамкнутых поверхностей дополнительно уславли-
уславливаются, какое направление нормали считать внешним.
Потоком Q вектора скорости v через воображаемую по-
поверхность S называют скалярную величину
dS- Ш) Рис.112
Для вычисления потока можно получить другие выражения, если учесть, что
vn = vn=v-l -cos (и, п) = vxnx-\-Vyny-^-vznz,
где п — единичный вектор, направленный по внешней нормала, а пх, пу, nz —
его проекции на декартовы оси координат. Для них имеем:
rtK = l-cos (n, х); пу = \-cos(n, у); nz = \ -cos (л, г).
Кроме того,
AS• cos (n, х) = Ay dz; dS-cos (n, у) =dz 6.x; dS-cos {n, z) —Ax Ay."
После этого для потока получаем
О. = Л оп AS = ] [ [vx cos (n, x) -\.vy cos (n, у) + uz cos (n, г)) AS =
(S) (S)
= f \ {vx Ay Az +y,, Az Ax -\-vz Ax Ay). A6')
(S)
219
Наиболее часто используемое выражение для потока получают применением
формулы Гаусса—Остроградского для преобразования интеграла по задгкнугой
поверхности S в интеграл по объему V, ограниченному этой поверхностью:
-""- —"^ -Гч
[/?.cos(rt, х)-i-q-cos (я, y)+r-cos (n, 2)]dS =
¦
где p, q, r — любые функции переменных Эйлера, имеющие частные производ-
производные. Замкнутая поверхность должна быть прн этом достаточно гладкой. Если
принять р = vx, g = Vy, r = v2, то, применяя A7) для потока через замкнутую
поверхность, имеем
&х cos (я. х) +vy cos (п, у)-\-огcos {п, г)\ AS =
Д ft-S-^-fc-
Но
dvz ,. -
и поэтому
A8)
S) (S) (И)
Для вектора вихря скорости поток через замкнутую поверхность равен иу-
лю, так как с учетом формул для проекций вектора вихря на координатные осн
имеем
divQ - х
Из A8) для потока AQ через элементарную замкнутую поверхность, ограни-
ограничивающую объем А К, приближенно имеем
AQ = div ~v- A V.
Отсюда получаем для дивергенции вектора скорости
_ AQ ;
div а= Пт <
av-*o AV
Т. е. дивергенцию вектора скорости в какой-либо точке можно рассматривать
как предел потока ввкгора скорости через замкнутую поверхность, приходя-
приходящегося на единицу объема, ограниченного поверхностью, при стягивании объема
в эту точку.
Циркуляция вектора скорости. Для введения понятия циркуляции вектора
скорости по какому-либо контуру следует выбрать контур /, разбить его иа эле-
элементарные участки длиной А1. Тогда циркуляцией вектора скорости о по элемен-
элементарному контуру dl называют величину aTd/, где vt — проекция вектора скоро-
скорости на положительное направление касательной к контуру I в рассматриваемой
точке (рис.1 [3)i За положительное направление касательной к контуру, если кон-
контур замкнутый, выбирают то направление, при обходе контура в котором огра-
220
ничейная контуром поверхность остается слева.
Для незамкнутого контура о положительном
направлении касательной уславливаются до-
дополнительно. Циркуляция по всему контуру
j
(О
A9)
Для вычисления циркуляции можно полу-,
чить другие формулы, если учесть, что
Рис. 113
где % — единичный вектор в положительном направлении касательной к конту»
РУ> а тя> ty, Tz — его проекции на декартовы оси координат. Учитывая, что
получим
<их = 1 -cos (х, ж); %у = 1 .cos (т, у); тг = 1 -cos (x, г)?
d/cos(T, х)=Aд;; d/ cos(t, y)=>dgi dl cos(t, z) = dz,
/л ^*^ *^"*» i^S
vx dl = J [Cjj cos G, JcJ+fj; cos (т, </) +ог cos (т, г)] d/ ¦
= 1 (^
A9')
где г — радиус-вектор, проведенный из начала координат в точку М контура!
Поэтому имеем
Таким образом,
J yTd2= f (fa.
(О С)
J »«d^.
(О
A9")
Для замкнутого контура можно применить формулу Стокса, преобразующую
интеграл по контуру в интеграл по поверхности, натянутой на этот контур:
С _ --• -Г- — -
} [pcos(t, x)-\~qcos(x, y)+rcos(т,
(О
(S)
B0)
221
Если принять р = vx, q = vu, r = vz, то, применяя B0) для замкнутого контура,
имеем
J t,cos(t, y) + u2cosG, гI ri/
(S) "
JJ L\ дУ дг
-И
Учитывая, что
"ix ду дГХ ^Jz дГ' Qz="Tx ду
являются проекциями вихря скорости, для циркуляции по замкнутому контуру
получим
Г= f "o.Td/=.fJroty-7;d5. B1)
(t) (S)
Если rot v = 0, т. е. движение сплошной среды является потенциальным,
то циркуляция при таком движении по замкнутому контуру равна нулю, если
контур не охватывает2рчек, в которых вихрь скорости отличен от нуля.
Для вектора силы F циркуляция по какому-либо контуру является работой
силы ira этом контуре.
Раздел III
ДИНАМИКА
Глава 1
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ И УРАВНЕНИЯ
ДВИЖЕНИЯ ТОЧКИ
§ 1. ВВЕДЕНИЕ
В динамике изучаются механические движения материальных объек-
объектов под действием сил. Простейшим материальным объектом являет-
является материальная точка. Это модель материального тела любой формы,
размерами которого в рассматриваемых задачах можно пренебречь
и принять за геометрическую точку, имеющую определенную массу.
Более сложные материальные объекты — механические системы и
сплошные тела — считают состоящими из материальных точек. Сплош-
Сплошное материальное тело представляют состоящим из малых по сравне-
сравнению с размерами самого тела частиц, на которые мысленно разбивает-
разбивается тело. Каждую такую частицу считают материальной точкой.
Сила, как известно, является одной из мер действия одного тела на
другое. В качестве силы берут векторную меру, модуль которой при
действии, например, на пружину динамометра пропорционален де-
деформации пружины в пределах ее упругости. Свойства сил, приложен-
приложенных к твердому телу и одной точке, рассматривались в статике. В ди-
динамике силы оцениваются по их динамическому действию, т. е. по изме-
изменению ими характеристик движения материальных объектов.
Движение материальных объектов всегда следует рассматривать
относительно определенной системы отсчета. Оно совершается в про-
пространстве с течением времени. В классической механике, в основу ко-
которой положены аксиомы Ньютона, пространство считается трехмер-
трехмерным, эвклидовым пространством, свойства которого не зависят от дви-
движущихся в нем материальных объектов. Положение точки в таком
пространстве относительно какой-либо системы отсчета определяется
тремя независимыми параметрами или координатами точки. В об-
общей теории относительности свойства пространства зависят от нахо-
находящихся в нем материальных объектов и их движения.
Время в классической механике универсально. Оно не связано о
пространством и движением материальных объектов. Во всех систе-
системах отсчета, движущихся друг относительно друга, оно протекает
одинаково. В теории относительности пространство и время связаны
друг с другом. Они рассматриваются как единое четырехмерное про-
пространство — время. Время при этом зависит от того, в какой системе
отсчета оно рассматривается. В классической механике время опреде-
223
ляется по какому-либо периодическому процессу, как, например, вра-
вращение Земли вокруг своей оеи, колебания маятника часов и т. д.
Все положения динамики получают из ее аксиом, используя зако-
законы логики и вводя удобные для применения понятия. В основу клас-
классической механики положены аксиомы Ньютона, которые были даны
в его труде «Математические начала натуральной философии», опубли-
опубликованные впервые в 1687 г. Классическую механику часто называют
механикой Ньютона в отличие, например, от механики теории относи-
относительности.
Для формулировки акеиом Ньютона необходимо дать определение
инерциальных оивтем отечет а, для которых справед-
справедливы аксиомы Ньютона. Достаточно предварительно определить одну
исходную или основную инерциальную систему отсчета. В дальней-
дальнейшем будет показано, что инерциальных систем отсчета бесконечно мно-
много. Ньютон считал, что существует абсолютное, неподвижное про-
пространство, с которым и следует скрепить исходную инерциальную си-
систему отсчета. Ньютоновское определение абсолютного пространства
породило споры и возражения. В настоящее время целесообразно опре-
определить исходную инерциальную систему отсчета как систему осей
координат, начало которой находится в центре Солнца, а оси направ-
направлены на одни и те же удаленные звезды все время. Такую систему ко-
координат называют гелиоцентрической. Ее использование в качестве
инерациальной системы отсчета, как показывает опыт, не приводит
к заметным погрешностям.
§ 2. ОСНОВНЫЕ АКСИОМЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
Всякая система аксиом должна быть полной и независимой, т. е.
отдельные аксиомы не должны, например, быть частным случаем или
следовать из других аксиом. Аксиомы классической механики (или
ее законы) не являются независимыми. Они не образуют и замкнутой
системы, удовлетворяющей условию полноты и другим требованиям,
предъявляемым к системам аксиом. Предпринималось немало попыток
заменить систему аксиом Ньютона более совершенной системой, но
эти попытки не были успешными. Поэтому примем за основу аксиомы
Ньютона в современной их форме применительно к простейшей модели
тела — материальной точке.
Первой аксиомой, или законом .классиче-
.классической механики, является закон инерции, который
был открыт еще Галилеем: материальная точка, на которую не дей-
действуют силы или действует равновесная система сил, обладает спо-
способностью сохранять свое состояние покоя или равномерного и прямо-
прямолинейного движения относительно инерциальной системы отсчета.
Материальная точка, на которую не действуют силы или действует
равновесная система еил, называется изолированной материальной
точкой.
Равномерное и прямолинейное движение точки называют движе-
движением по инерции. Частным случаем движения по инерции
является покой точки, при котором скорость ее равна нулю. Первая
224
аксиома содержит в себе утверждение, что простейшее материальное
тело, а следовательно, и любые другие материальные тела обладают
свойством инерции, с. е. свойством сохранять свое прямолинейное
и равномерное движение относительно инерциальной системы отсчета.
Согласно Ньютону, все материальные тела обладают врожденной спо-
способностью сопротивляться изменению своего движения по инерции.
Это внутрегшее свойство всех материальных тел, зависящее только от
самих тел и не зависящее от присутствия в пространстве других тел.
При движении материальной точки по инерции ее ускорение равно ну-
нулю. Ускорение точки, таким образом, является мерой отклонения ее
движения от движения по инерции.
Вторая аксиома, или основной закон дина-
динамики, принадлежащий Ньютону, устанавливает зависимость ускоре-
ускорения точки относительно инерциальной системы отсчета от действующей
на нее силы и массы точки: ускорение материальной точки относитель-
относительно инерциальной системы отсчета пропорционально приложенной ic
точке силе и направлено по этой силе (рис. 1). Если F есть приложенная
к точке сила и а — ее ускорение относительно инерциальной еистемы
отсчета Охуг, то основной закон можно выразить в форме
та = Т. A)
Положительный коэффициент пропорциональности т, характеризую-
характеризующий инертные свойства материальной точки, называется инертной
массой точки. Инертная масса в классической механике считается ве-
величиной постоянной, зависящей только от самой материальной точки
и не зависящей от характеристик ее движения, т. е. скорости и ускоре-
ускорения. Масса также не зависит от природы силы, приложенной к точ-
точке. Она одна и та же для сил тяготения, еил упруговти, электромагнит-
электромагнитных сил, сил трения и других сил.
В отличие от инертной массы масса, входящая в закон тяготения
Ньюгона
„ „ тМ
Г — и—-—t
называется гравитационной массой. В этом законе G — постоянная тя-
тяготения; т, М — гравитационные массы притягивающихся точек ил —
расстояние между ними. Гравитационные массы т и М в этом зако-
законе выполняют роль своеобразных зарядов, если сравнивать закон
тяготения о законом Кулона для взаимодейетвия покоящихся электри-
электрических зарядов. G большой степенью точности экспериментально уста-
установлена эквивалентность инертной и гравитационной маев.
Массу обычно определяют по силе тяготения Р и ускорению ввв-
бодного падения g у поверхности Земли. Согласно A), в этом случае
имеем
mg=P; m = Plg. B)
Это определение массы широко используется в механике Ньютона.
Основной закон механики является также критерием, который по-
позволяет устанавливать, какую силу следует считать приложен-
8 Зак. 1311 225
ной к материальной точке. Сила, приложенная к материальной
точке, всегда имеет материальный источник в виде других материаль-
материальных тел, которые действуют на точку путем контакта при непосредст-
непосредственном соприкосновении с ней или на расстоянии через посредство
силовых полей. Приложенная к точке сила должна создавать у нее уско-
ускорение относительно инерциальнои системы отсчета в соответствии с ос-
основным законом динамики. Только приложенная сила является при-
причиной ускорения точки в классической механике. Это определяет
наблюдателя, с точки зрения которого следует судить в механике
Рис. 1 Рис. 2
Ньютона о взаимодействии тел, определяющих силы. Таким наблюда-
наблюдателем является наблюдатель, находящийся в инерциальнои системе
отсчета,
Из A), если сила F — О, следует, что ускорение а — О, т. е. мате-
материальная точка имеет постоянную по числовой величине и направлению
скорость относительно инерциальнои системы отсчета. В основном
законе содержится часть утверждения аксиомы инерции. Другая часть
этой аксиомы о свойстве инерции материальной точки и всех других
материальных тел в основном законе динамики не содержится.
Третья аксиома, или закон о равенстве сил
действия и противодействия, определяет свойство
сил взаимодействия между двумя материальными точками с точки
зрения инерциального наблюдателя: силы взаимодействия двух мате-
материальных точек равны по величине и противоположны по направлению
(рис. 2), т. е. _ _
Fi =~-F* C)
независимо от удаления точек друг от друга. Эти силы в классической
механике считаются действующими вдоль одной прямой. Если не тре-
требовать эгого, то и силу Лоренца, возникающую при действии одного
электрического заряда на другой, движущийся заряд, можно считать
тоже силой взаимодействия.
Если сила действия, например Fu изменяется, то синхронно с ней
должна, согласно C), изменяться и сила противодействия. Это воз-
возможно для любых расстояний между взаимодействующими точками
только при условии, что силовое взаимодействие распространяется
мгновенно, т. е. с бесконечно большой скоростью.
Четвертая аксиома, или закон независимо-
независимого действия сил (закон суперпозиции сил), не является са-
226
мостоятельной аксиомой, если принять, что силы, действующие на
материальную точку, складываются по правилу параллелограмма.
Эта аксиома следует из аксиомы сложения сил. Закон независимого
действия сил утверждает: при одновременном действии на материаль-
материальную точку нескольких сил ускорение точки относительно инерциаль-
ной системы отсчета от действия каждой отдельной силы не зависит
от наличия других приложенных к точке сил и полное ускорение равно
векторной сумме ускорений от действия отдельных сил. Между силами
нет взаимного влияния друг на друга в создании ускорения точки.
Если к материальной точке приложена система сил Flt F2, ..., ~Fn, то
согласно этой аксиоме ускорение от действия каждой из этих сил опре-
определяется по A):
таг = Fx\ та2 = F^\ ...; тап — Fn. D)
Ускорение при одновременном действии всех сил является векторной
суммой ускорений, созданных отдельными силами, т. е.
а= i a*. E)
Суммируя D) и используя E), получаем основное уравне-
уравнение динамики точки:
ml- 2 К E)
k=\
Закон независимого действия сил следует понимать как закон су-
суперпозиции сил, т. е. как закон сложения ускорений от действия от-
отдельных сил. Это не означает, что приложенные к точке силы являются
независимыми, особенно если среди приложенных сил есть силы реак-
реакций связей, которые всегда зависят от активных сил.
Основное уравнение динамики точки остается справедливым и для
несвободной материальной точки, на которую наложены связи.
Следует только в число приложенных сил включить и силы реакций
связей.
Аксиомы классической механики и их следствия хорошо согласуют-
согласуются с результатами опытов для не очень больших скоростей движения
по сравнению со скоростью света в пустоте. Для скоростей движения,
сравнимых со скоростью света, следует применять механику специаль-
специальной теории относительности, для которой классическая механика яв-
является ее первым приближением при малых скоростях.
§ 3. СИСТЕМЫ ЕДИНИЦ
Основной закон динамики A) показывает, что единицы ускорения,
массы и силы связаны между собой, а потому нельзя выбрать их неза-
независимо друг от друга. Размерность ускорения, в свою очередь, выража-
выражается через размерности длины и времени. Таким образом, единицы
длины, времени, массы и силы должны определяться с учетом основ-
основного закона динамики. Независимыми из них являются только три
я* 227
величины. В общепринятой СИ в качестве единицы времени принята
секунда (с), длины—метр (м), массы—килограмм (кг). Для них сущест-
существуют эталоны. Единица силы — ньютон (Н) — является производной
от указанных независимых единиц. Сила в 1 Н равна силе, сооб-
сообщающей телу массой в 1 кг ускорение, равное 1 м/с2
Существуют и другие системы единиц, как, например, абсолютная,
или CGS, и техническая. Абсолютная система единиц отличается от
СИ тем, что в ней используются более мелкие единицы. За единицу
длины принят 1 см, за единицу массы — 1 г. Тогда сила выразится
в динах: 1 дина = 1 г>1 см/с2; 1 Н = 105,дин.
В технической системе единиц в качестве независимых принимают-
принимаются: для времени — секунда, длины — метр и для силы — кило-
килограмм-сила (кгс). Единица массы является производной от этих еди-
единиц. Масса выражается в технических единицах массы (т. е. м.). Одну
техническую единицу массы имеет тело, которое под действием силы в
1 кгс получает ускорение в 1 м/с2. Из B) получаем, что массу в 1 т. е. м.
имеет тело, сила тяжести которого равна 9,8 кгс.
§ 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
Используя основной закон динамики, можно вывести дифферен-
дифференциальные уравнения движения материальной точки в различных си-
системах координат. По аксиоме о связях и силах реакций связей можно
получить дифференциальные уравнения движения и несвободной точки
так же, как и для свободной, только ко всем приложенным к точ-
точке силам надо добавить силы реакций связей.
Силы реакций связей при движении точки могут зависеть в общем
случае не только от вида наложенных на точку связей и приложенных
к ней сил, но и от характера ее движения, например от ее скорости при
движении в воздухе или в какой-либо другой сопротивляющейся сре-
среде. В дальнейшем не будем делать различия между свободной и несво-
несвободной материальными точками. Обозначая равнодействующую всех
заданных сил и сил реакций связей F, а массу точки т, получаем
пга = F. G)
Из кинематики точки известно, что ускорение а выражаегся через
радиус-вектор г (рис. 3):
Дифференциальное уравнение движения материальной точки в век-
векторной форме имеет вид
«?--* ,е,
Если спроецировать обе части уравнений G) или (8) на координат-
координатные оси, то можно получить дифференциальные уравнения движения
точки в проекциях на эти оси.
228
В декартовой системе координат в общем случае
тах = Fx\ mav — F у; таг = Fz.
Проекции ускорения на координатные оси можно выразить через
вторые производные по времени от координат движущейся точки:
__ Avx_ __ №x_ Avy _ _d«y_ # _ Avz_ _ _<Рг_
х~ At ~~ АР ' uy=*~At ~A~F * z~ At ~~A~F'
Дифференциальные уравнения движения материальной точки в пря-
прямоугольной декартовой системе координат имеют вид
А'х
т
At*
т
(9)
Частные случаи. Если известно, что материальная точ-
точка движется в одной и той же плоскости, то, принимая ее за коорди-
координатную плоскость Оху, имеем
d2r. = Fx; m^L^Fu. A0)
Aft
Так как 2 = 0, то, следовательно, Fz = 0.
Ъ
Рис. 3
Рис. 4
В случае движения точки по прямой линии, направив по ней ко-
координатную ось Ох, получим одно дифференциальное уравнение пря-
прямолинейного движения точки
АН D (И)
т =1
Так как при движении у = г = 0, то, следовательно, F„ = Ft = 0.
Для естественных подвижных осей координат (рио. 4), проецируя
обе части G) на эти оси, получаем:
тах =
тап
Fn; таь = Fb,
где а„ а„, аь и Fx, Fn, Fb — соответственно проекции ускорения и рав-
равнодействующей силы на касательную, главную нормаль и бинормаль
229
к траектории в рассматриваемом положении движущейся точки. Учи-
Учитывая, 410
ат = dVdf; ап = vVp; аь = О,)
где р — радиус кривизны траектории, дифференциальные уравнения
движения точки в проекциях на естественные оси имеют вид
d2s с
т — rt;
A2)
m — = Fn;
Р
Второе уравнение из A2) можно преобразовать:
ds _ у3 v __ ds I dtp
dtp ' р о 6t ds/d<p At '
где diffdt — угловая скорость вращения касательной к траектории
дьи^ущейся точки и, следовательно, d<p — угол смежности между
картельными в двух бесконечно близких точках.
Дифференциальные уравнения A2) можно представить в виде
«-?- = Л; ^iWn; 0 = Fb. A20
Эта форма дифференциальных уравнений движения течки удобна
при исследовании некоторых случаев полета снарядов и ракет, особен-
особенно по траектории, лежащей в плоскости. Тогда ф будет углом между
касательной к траектории и любой осью, лежащей в плоскости траек-
траектории.
Дифференциальные уравнения движения точки можно представить
в любой другой системе координат. Для этого надо знать выражения
проекций ускорения на эти оси координат.
§ 5. ДВЕ ОСНОВНЫЕ ЗАДАЧИ ДИНАМИКИ ТОЧКИ
Используя дифференциальные уравнения движения материальной
точки в той или другой сперме координат, можно решать две основ-
основные задачи динамики точки.
Первая задача. Зная массу точки и ее закон движения, можно най-
найти действующую на точку cuiy Действительно, если, например, за-
заданы уравнения движения точки в декартовой еиаеме координат
x = h @; y = fi @; ^ = /а (О,
то проекции силы на оси координат определяются из дифференциаль-
дифференциальных уравнений движения точки (9), т. с.
rr = in — m —— ; F,. = m
* dl* dt' ' u
<u> ' • dp a* '
F -m d'2 -m d3^
2 df2 di2 '
Зная проекции силы на координатные оси, легко определить модуль
силы и косинусы углов силы с осями координат.
230
Пример 1. Точка, имеющая массу m (рис. 5), движется а плоскости Оку
так, что уравнениями ее движения являются
* = a cos Ы\ у = Ь sin kt,
где a, b, k — постоянные величины и t — время.
Найти силу, под действием которой точка совершает это движение,
Рис. 5
Рис. 6
Решение, Найдем уравнение траектории точки в координатной форме,
исключая время из уравнений движения:
хУаг + уЧьъ = cos2^ + sins kt = I.
Траекгорией точки является эллипс с полуосями а и Ъ, На основания диффереи»
циальных уравнений движения точки A0)
—т№ a cos kl\
нли, вводя координаты движущейся точки,
—m№ b sin kt
.mk3 r,
где r — радиус-век гор движущейся точки. Косинусы углов силы F с осями ко»
ординат
cos (Р, х) = FJF =- ~x/r; gos (F, у) =*Py/F =. —у//-.
Отсюда можно заключить, что сила F имеет направление, противоположное вей*
тору г.
Окончательно _
Пример 2, Точка, имеющая массу т (рис» 6), движется иэ состояния покоя
по окружности радиусом R с постоянным касательным ускорением ах, Опреде-
Определить действующую на точку силу в момент, когда она пройдет по траектории рас-
расстояние si = Ry2.
Решение. Применяя дифференциальные уравнения движения точки я
проекциях па естественные оси, имеем:
о»
Fx-=maxi Fn = tn~ , F6=0«
231
Так как движение происходит с постоянным касательным ускорением
без начальной скороч-i, ю
v = axt, s = ах№.
Тогда
В момент, когца s = RY'2 = axf/2, axt2/R = 2}/2 и, следовательно,
a!/4//?2 = 8. Тогда
F = oTm /l + 8 = 3 max,
Тангенс угла а между радиусом окружности и силой F
Fr тас R R /E,
&<l~ t " tVR axt - 2yjR V '
Из рассмотрения первой задачи динамики точки видно, что по за-
заданной массе точки и уравнениям ее движения сила полностью опре-
определяется как по величине, так и по направлению
Вторая задача. По заданной массе и действующей на точку силе
необходимо определить движение этой точки. Рассмотрим решение
этой задачи в прямоугольной декартовой системе координат. В общем
случае сила F, а следовательно, и ее проекции на координатные оси
могут зависеть от времени, координат движущейся точки, ее скорости,
ускорения и т. д. Для простоты ограничимся случаем зависимости
силы и ее проекций на оси координат от времени, координат н скорости.
Дифференциальные уравнения движения точки (9) имеют вид
m^-=Fx(t, х, у, г, х, у, z); m—?-=Fv{t,x,y,z, x, у, г);
Q( 01
m—— ^~" /ч I /* У // У У II ?\
1 2\6» Л» iji **У л* У* ?/•
Для нахождения уравнений движения точки в декартовых коорди-
координатах необходимо проинтегрировать систему трех обыкновенных диф-
дифференциальных уравнений второго порядка. Из теории обыкно-
обыкновенных дифференциальных уравнений известно, что решение одного
дифференциального уравнения второго порядка содержит две произ-
произвольные постоянные. Для случая системы трех обыкновенных диффе-
дифференциальных уравнений второго порядка имеется шесть произвольных
постоянных: Clt С2, С3, С4, Съ, Cs.
Каждая из координат х, у, г движущейся точки после интегрирова-
интегрирования системы уравнений (9) зависит от времени t и всех шести произ-
произвольных постоянных, т. е.
х ~ 11 ('I Си С2, Сз, С4, С5, С,);
и = f (t' С С С С С С V I n"i\
у /2 \t, oi, u2) ь з, u4, ь5, oej, |- ^lo;
у — f ltm С С Г С С С \
232
Если продифференцировать уравнения A3) по времени, от опре-
определяются проекции скорости точки на координатные оси:
vx = х = fi (t; Clt С„, С„, С4, С5, С);
^ = у = /a (*; Сь Са, С„, С4( С„ С); A4)
иг = 2 = /з (f; Clt Ся, С3, С., С5, С).
Таким образом, задание силы не определяет конкретного движе-
движения материальной точки, а выделяет целый класс движений, характе-
характеризующийся шестью произвольными постоянными. Действующая сила
определяет только ускорение движущейся точки, а скорость н положе-
положение точки на траектории могут зависеть еще от скорости, которая со-
сообщена точке в начальный момент, и от начального положения точки.
Так, например, материальная точка, двигаяеС вблизи поверхности
Земли под действием силы тяжести, имеет ускорение g, если не учиты-
учитывать сопротивление воздуха. Но точка будет иметь различные скорости
и положение в пространстве в
один и тот же момент времени и
различную форму траектории в
зависимости от того, из какой
точки пространства началось
движение и с какой по величине
и направлению начальной ско-
скоростью.
Для выделения конкретного
вида движения материальной
точки надо дополнительно задать
условия, позволяющие опреде-
определить произвольные постоянные, *
которых в общем случае будет Рис. 7
шесть. В качестве таких усло-
условий обычно задают так называемые начальные условия,
т. е. в какой-то определенный момент времени, например при t = О
(рис 7), задают координаты движущейся точки х0, у0, г0 и проекции
ее скорости vOx, vQy, vOx:
x = x0; У — Уо, 2 = г0; х = vOx; у = vOv; z = v0.
A5)
Используя эти начальные условия и формулы A3) и A4), получаем
шесть следующих уравнений для определения шести произвольных
постоянных:
Хо — /1 (О! Сii Са, С3, Ci, Cs, Ce);
Уо — /а @; Си Са, С3, С^, Cs, Св);
го == / з @i w> Сг, С3, Cj, C3, Сц)',
^ох = f'\ @; Clt С2, ..., С8);
vai) — /2 @; Съ С2, ..., Со);
Voz =* f'i @; с» с2,.,., се).
233
A6)
Если система уравнений A6) удовлетворяет условиям разреши-
разрешимости, то из нее можно определить все шесть произвольных по-
постоянных.
Начальные условия в форме A5) определяют единственное решение
системы дифференциальных уравнений (9') при соблюдении соответст-
соответствующих условий теории дифференциальных уравнений. Условия з
других формах, как, например, задание двух точек, через которые
должна проходить траектория движущейся точки, могут дать или не-
несколько решений, удовлетворяющих этим условиям, или не дать ни
одного решения.
При движении точки в плоскости Оху имеется два дифференциаль-
дифференциальных уравнения движения. В решения этих уравнений входят четыре
произвольные постоянные. Постоянные определяются из начальных
условий
t = 0; х = х0; у = у0; к = иох; у = v9v.
В случае прямолинейного движения точки имеется только одно
дифференциальное уравнение и в его решение входят две произвольные
постоянные. Для их определения необходимо задать начальные усло-
условия:
t == UJ X == Xq] X === Vqx*
Задача интегрирования системы дифференциальных уравнений C)
при заданных начальных условиях в общем случае является довольно
трудной. Даже в простейшем случае прямолинейного движения, когда
имеется только одно дифференциальное уравнение, его решение уда-
удается выразить точно в кьадратурах лишь при определенной зависи-
зависимости силы от времени t, координаты х и скорости v. Поэтому важ-
важно определение таких соотношений из системы уравнений (9), кото-
которые являются следствиями этой системы и в которые входят произ-
производные от координат точки только первого порядка. Такие соотно-
соотношения, например, в виде / (t; x, у, z; x, у, г) = С называют первыми
интегралами системы дифференциальных уравнений (9).
Если из системы (9) удается найти три независимых первых инте-
интеграла, то задача интегрирования упрощается, так как вместо интегри*
рования системы дифференциальных уравнений второго порядка доста-
достаточно проинтегрировать систему трех дифференциальных уравнений
первого порядка, которую представляют эти первые интегралы.
В дальнейшем будет рассмотрен способ получения первых инте-
интегралов дифференциальных уравнений движения точки из так называе-
называемых общих теорем динамики в некоторых частных случаях движения
точки.
Для выяснения особенностей решения второй основной задачи ди-
динамики, имеющей прикладное значение, рассмотрим ее решение как для
случая прямолинейного, так и криволинейного движения материаль-
материальной точки.
234
§ 6. ОСНОВНЫЕ ВИДЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТОЧКИ
Дифференциальное уравнение прямолинейного движения точки
вдоль оси Ох, согласно A1), имеет вид
^ x.v), A1')
если рассматривается случай зависимости силы только от времени, ко-
координаты и скорости.
Начальные условия можно задать в форме t = 0, х = х0, vx = vu.
Наиболее важные случаи прямолинейного движения материальной
точки получаются тогда, когда сила Fx постоянна или она зависит тояь-
ко от времени, или от координаты х, или от скорости v. Если сила по-
постоянна, имеем случай равнопеременного движения, т, е. движения
с постоянным ускорением. От времени сила зависит обычно, когда ее
изменяют путем регулирования, например регулируют силу тяги са-
самолета изменением режима работы его двигателей.
Силу, зависящую от координаты х, могут создать сжатая или растя-
растянутая'пружина и другие упругие тела при их деформации. Силы, за-
зависящие от скорости движения, — это прежде всего силы сопротив-
сопротивления, когда материальная точка движется в какой-либо среде, на-
например в воздухе, воде и т. д.
Отметим, что в перечисленных случаях интегрирование дифферен-
дифференциального уравнения A1г) выполняется наиболее просто и его можно
довести до конца в квадратурах. В более общем случае, если сила од-
одновременно зависит от времени t, координаты х и скорости и, в боль-
большинстве случаев дифференциальное уравнение можно проинтегриро-
проинтегрировать лишь приближенно.
Рассмотрим примеры на составление и интегрирование дифферен-
дифференциального уравнения прямолинейного движения точки. Эти примеры
позволяют выявить некоторые особенности решения таких задач. Ни-
Ниже приведены примеры, когда сила зависит только от времени, или от
скорости, или от координаты.
Пример I. При разгоне грузового автомобиля (рис. 8) из состояния покоя на
прчыолинейном горизонтальном участке пути избыток тяги над силой сопротив-
сопротивления возрастает прямо пропорционально времени, увеличиваясь за каждую се-
секунду на 1 кН накипая от начала движения автомобиля. Сила тяжеои автогооиля
равна 70 кН. Найти уравнение движения автомобиля.
Решение. Проведем ось Ох по направлению движения автомобиля, при-
приняв за начало координат начальное положение автомобиля в момент трогания с
места.
В произвольном положении автомобиля, отличном от начального, например
koi да х > 0, приложим к автомобилю силы F, Р, N а составим дифференциальное
уравнение движения. Левую часть уравнения берем со зегзком плюс, а знак пра-
правом части определяется чнаком проекции равнодействующей силы на ось Ох,
Дифференциальное уравнение примет вид
Р А* х
Приняв g х 10 м/с2, дифференциальное уравнение можно представить в виде
235
Учитывая, чго
получаем
dVd/s = tvldt.
iv/dt— Lt/7,
Разделяя в уравнении переменные и выполняя интегрирование, находим
для скорости
Так как у = 0 при ^ = 0, то, подставляя эти значения в выражение для v,
получаем для постоянной интегрирования
Ci= 0.
Внося значение Q в формулу для скорости и учитывая, что v = &xJ& }
получаем следующее дифференциальное уравнение движения;
d* 1
At = 14 1 '
Раздел 1я в уравнении переменные и интегрируя его, имеем
14 3
¦+с,.
При t — 0 х = 0 для данного выбора начала координат. Из формулы для
х определяем постоянную интегрирования: С2 = 0.
Таким образом, получено следующее урав-
уравнение дБижения автомобиля:
х = *»/42.
Пример 2. Точка массой т (рис. 9) падает
вертикально вниз без начальной скорости под
действием силы тяжести, испытывая силу сопро-
сопротивления воздуха R, модуль которой пропорцио-
N
0
—? t~a
i
X
¦ х
Р
¦ п'
Рис. 8
Рис. 9
нален квадрату скорости и массе точки, т. е. R = kmv2, где k — постоянный
коэффициент. "Найти уравнение движения точки.
Решение. Направим ось О# по вертикали вниз, выбрав ча начало коор-
координат положение точки в момент начала движении. В этот же момент считаем
t = 0. В произвольный момент времени прикладываем к точке действующие на
нее силы~Р и R и составляем дифференциальное уравнение ее движения. Имеем
m
rx
tag—
23«
Скорость в этом случае можно определить в зависимости от времени t или
от координаты х, используя подстановки
d2 х dv dv
dfi dt Ax
Последняя подстановка позволяет исключить из дифференциального уравнения
время при определении скорости. Эта подстановка получается из первой умно»
жеиием и одновременным делением на dx:
dv dv dx dv
dt dx it dx
Используя первую подстановку, получаем дифференциальное уравнение
движения точки в следующем виде:
dvldt = k (gl k — v2).
Разделяя переменные н беря интегралы от обеих частей, имеем
Г
J
g/k
—ti*
Для того чтобы не искать дополнительно произвольную постоянную инте-
интегрирования, интегралы возьмем определенные, сохраняя верхний предел пере-
переменным для последующего интегрирования, а для нижних пределов используя
следующее условие: при t — 0 v — 0. Выполняя интегрирование и подставляя
пределы, получаем
\(~\/7ГГь ri) л(~\/7ГГь-игУ\ . с
dt
или
-п. ) —
-V
Vg/k— °
-1п
Vg/k + u
т. e.
Потенцируя и решая относи1ельно v, получаем
¦ thCVgk-t). (a)
Переходя в (а) к пределу при /, стремящемуся к бесконечности, имеем
Для достижения предельной скорости [ребуется бесконечно большое время. Кан
покепьшают бопее подробные расчеты, скорость, близкая к предельной, устанав-
устанавливается довольно быстро.
Отметим, что для свободного падения парашютиста вблизи Земли без рас-
раскрытия парашюта предельная скорость равна 50—60 м/о| для авиационной бом-
бомбы она составляет 200—300 м/с.
237
Для нахождения закона движения подставляем в (а) вместо скорости и
ее значение dxldt. Тогда
Интегрируя это уравнение, после разделения переменных имеем
х i
или
Пример 3. Материальная точка массой т (рис. 10), брошенная вертикаль-
вертикально вверх g поверхности Земли со скоростью и0, движется под действием силы
притяжения Земли по закону тяготения Ньютона. Определить зависимость ско-
скорости точки от ее расстояния до центра Землн,
Решение, Направив ось Ох по прямолинейной траектории, выберем
начало координат в центре Земли, Тогда для силы тяготения, согласно закону
Ньюгопа, имеем
Р
•In сЬ(УгЫ)['=(!/*) [ci
Постоянный коэффициент k можно выразить через другие величины, в частно-
частности, k — GMm, где М — масса Земли и G — универсальная постоянная тяготе-
тяготения. Для рассматриваемого случая удобнее k выразить из условия, что на по-
поверхности Земли сила тяготения Р переходит в силу тяжести Р = mg, Прирав-
Приравнивая F и Р при х = R, получаем
mg = k/R*<> k = mgR\
где g — ускорение силы тяжести у поверхности Земли; R — радиус Земли.
Подставляя полученное значение k в выражение для силы, имеем
F -
Составляем дифференциальное уравнение движения точки, Получаем
Знак минус в правой части этого уравнения определяется знаком проекции
силы F на ось Ох. Проекция этой силы является отрицательной для положитель-
положительных значений х, рассматриваемых в этом примере,
Исключая время из дифференциального уравнения подстановкой
d» х do
dP ~*V dx '
получаеьг
do gR*
v _ —a j
Разделяя переменные и беря от обеих частей определешше интегралы с уче-
учетом, что прн х = R v = »о> имеем
или
238
Отсюда
Если определить наибольшее расстояние хтах в зависимости от скорости
при v = 0, то из последней формулы получим
Из этой формулы видно, что хтах увеличивается с ростом о0 и при v% = Y~2gk~
расстояние #max увеличивается до бесконечности. Следовательно, точка, брошен-
брошенная с поверхности Земли со скоростью v$ — ~\/2gR,
р с срс v
не возвратится па Землю, Приняв g
R = 6,4 • 10° м, получим
v'6 = УЩ « 11,2 км/с.
\/2gR,
9,8 м/с2,
Скорость aj называют второй космической ска*
ростью. Это наименьшая скорость, которую дол-
должен иметь космический корабль для полета к дру-
другим планетам Солнечной системы.
Рис. 10
Рис. И
Наименьшую скорость космического корабля, при которой он становится
спутником Земли, называют первой космической скоростью. Она равна прибли-
вительно 8 км/с (см. гл, 11).
Пример 4, Материальная точка массой т (рис, 11) движется под действием
силы притяжения к неподвижной точке О. Эта сила изменяется обратно пропор-
пропорционально кубу расстояния между точками и пропорциональна массе точки ли
Коэффициент пропорциональности равен единице, В начальный момент / = 0,
хв = 2 м и у0 =я 0,5 м/с, Определить закон движения точки.
Решение. Выбирая за начало координат точку 0 для силы F лри поло-
жительном х, имеем
F == mix3,
Учитывая направление силы F, составляем дифференциальное уравнение
движения точки;
После преобразования левой части дифференциального уравнения оно при.
пимает форму
do _1
° 17 = F" '
Разделяя переменные и интегрируя это уравнение, имеем
о»
239
или
t.3 vl I _ 1
2 - 2 ~ 2л1 ~~ 2*;=
После подстановки в это выражение числовых значений для х0 и v0 полу-
получаем:
а = 1/х; о — dx/dt; dx/dt = 1/л:
Интегрируя последнее дифференциальное уравнение, имеем
Хо О
Окончательно закон движения точки принимает форму
х = У 4"+7.
§ 7. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
В случае криволинейного движения по плоскости имеется два диф-
дифференциальных уравнения движения точки в декартовой системе ко-
координат, а в общем случае движения в пространстве — система трех
дифференциальных уравнений. Дифференциальные уравнения криво-
криволинейного движения точки интегрируют-
интегрируются сравнительно просто, если каждое
иэ этих уравнений интегрируется неза-
независимо от других уравнений и при этом
возможен один из трех рассмотренных
случаев зависимости проекции равно-
равнодействующей силы от времени, коорди-
координаты и скорости.
Рассмотрим примеры криволинейного
движения точки в плоскости и в про-
Рис- 1'г странстве.
Пример 1. Материальная точ^а массой т (рис, 12) движется в плоскости
под действием силы притяжения F к неподвижной точке О. Сила изменяется по
закону F = — mk2r (сила упругости), где г — радиус-вектор движущейся точки,
проведенный из точки О, и k — постоянный коэффициент. В начальный момент
f = о, х = /, у = О, Оя; = 0, Оу = v0, если начало координат выбрано в неподвиж-
неподвижной точке О. Определить уравнения движения точки и уравнение ее траекгорни
в координатной форме.
Решение. Берем произвольное положение движущейся точки и прикла-
яиваем к ней силу F. Составляем дифференциальные уравнения движения точки
в проекциях на оси координат. Имэем;
Fx = — mAV cos ф, Fy = — mk2r sin
Учитывая, что
r cos <p = х; г sin <p == у,
дифференциальные уравнения принимают форму
210
Для интегрирования этих уравнений можно применить подстановки
АР * dx ' dP ~°y~
или интегрировать их как линейные дифференциальные уравнения с постоянны-
ми коэффициентами. Выполним интегрирование уравнений, используя подста-
подстановки. Имеем
> хс
vx dvx = —№ xdx
о I
или
Аналогично, для уу
Учитывая, что
vx = dx/dt} vv =
имеем
dx/dt — kYl2 — x2; dy/df
Эти дифференциальные уравнения интегрируются путем разделения пере-
переменных:
Выполняя интегрирование и подставляя пределы, получаем
X I)
arcsin arcsin I —kt. arcsin arcsin Ъ — Ы
I ve/k
или
—- =sin ( kt-\-— j=cos kt) ——~
I \ 2 / i'alk
Уравнения движения, таким образом, имеют вид
х = I cos kt; у = (vjk) sin kt,
Возводя в квадрат cos kt и sin kt, получаем уравнение траектории точки в
координатной форме:
хЧР + tfy-ilvl = 1,
Траекторией является эллипс с полуосями I и ojk,
Пример 2. Материальная точка массой т (рис. 13) брошепа с поверхности
Земли со скоростью v0 под углом а к горизонту в вертикальной плоскости. Найти
уравнения движения точки, если сила сопротивления воздуха, направленная
против скорости, пропорциональна скорости и массе, т. е. R = kmv, где k —
постоянный коэффициент пропорциональвости.
Решение. Задачу удобно решать в прямоугольной декартовой системе
координат, начало коюрой выберем в точке бросания, а ось Ог направим по
вертикали вверх. Оси Ох и Од расположатся в горизонтальной плоскости.
Для определенности предположим, что начальная скорость v0 располагает»
ся в плоскости Оуг. Возьмем положение движущейся точки а момент t, когда ее
241
координаты х, д, г и их первые производные положительны, и приложим силы,
действующие на точку. Таких сил_две: сила тяжести Р, направленная по верти-
ьачи вниз, и сила сопротивления R, направление которой противоположно на-
гравлению скорости точки у. Равнодействующая сила
F — Р
kmv,
R, причем R —
Для проекций равнодействующей силы F па оси координат, считая, что в
выбранной точке vx, vy, vz положительны, имеем:
Г х = — kmvx
Fy=—
= — kmy;
Fz— — mg — kmuz = — mg — kmz,
Знаки минус у проекций силы сопротивления указывают на то, что их знаки
противоположны знакам проекций скорости, принятым положительными,
Рис. 13
Дифференциальные уравнения движения точки примут вид
-mkx;
6г и
=>-mky\
d2 2
(a)
При данном выборе осей координат имеем следующие начальные условия:
t = О3 х = 0; у == 0j 2 = 0j vx — 0; vy — vu cos aj vz = v0 sin a, F)
Каждое дифференциальное уравнение системы можно интегрировать в рас-
рассматриваемом случае отдельно, независимо от других уравнений. После сокра-
сокращения на массу дифференциальные уравнения примут вид
dvx/dt = — kvx\ doj/d/ = — kvy; AvJ&t — — g — kuz, (в)
Разделяя переменные и интегрируя каждое из уравнений системы, полу-
получаем:
In vx = — kt + In Сц !п vy = — kt + In C2; In (vz + g/k) — — lit + In C3,
или
e~kt
E vz = -g/k+C3 e
(r)
Подставляя в (г) начальные значения для vx, vy, vz, получаем уравнения
для определения произвольных постоянных Сг, С2, С3:
О = Ci; v0 cos a = Са; у0 sin a = — g/k + C3i
242
Следовательно, постоянные интегрирования имеют следующие значения;
Cj = 0) С3 = иа cos а; С3 = glk + а0 sin а,
Подставляя значения постоянных интегрирования в (г) и заменяя проекции
скорости на оси координат производными от координат по времени, получаем:
djc/d^ = 0; dyldt = va cos a-e~kt\ }
= (g/k + t;0 sin a) e~m — glk, )
Разделяя переменные з (г') и интегрируя каждое дифференциальное урав-
нение первого порядка, имеем
_ — с0 cos a
^Cj </ = e-
— (g/k + vusin a) e~kt —^-
(Д)
Подставляя в (д) начальные условия, получаем уравнения для определения
постоянных интегрирования С4, С5, С6:
Отсюда
C4 = 0; C3 = (y0 cos a)/k; C9 = (l/fe) {glk + ou sin a),
Подставляя значения постоянных в (д), получаем
—e-w)—-|-i. (e)
Уравнения (е) являются искомыми уравнениями движения точки. Прова*
дем некоторые исследования движения точки,
Из уравнений движения (е) путем предельного перехода при k, стремящем»
ся к нулю, можно получить уравнения движения точки под действием только
одной силы тяжести, Обозначим координаты точки в этом случае х%, ди Zp Что*
бы получить Xi, yi, г-i из (е), нужно раскрыть неопределенности по правилу Ло-
питаля. Для т получаем
a«lim
lim=
k-*Q dkldk
= va cos a Iim —-— =a v0 t cos a.
ft-t-0 I
Прежде чем переходить н пределу в г, преобразуем его в виду
q(\— e"*ft!— kt) yosina-(l— e**ki)
ая +
После чтого
kt (d/dfe) A -йтаМ)
iirn щщ
243
Окончательно имеем следующие уравнения движения точки под действием
одной силы тяжести:
Н = 0; tJi — vat cos a; Zj = vat sin а — g*V2»
Если из этих уравнений исключить время t, то получим уравнение траекто-
траектории точки в координатной форме (см. рис. 13):
(ж)
^0; *=**«—
Траекторией является парабола, расположенная в плоскости хг = 0.
Если в (ж) принять z-l = 0, то уг при этом будет горизонтальной дально-
дальностью /, которая определяется по формуле
I = Bvl cos a sin a)/g = (tig sin 2a)/g. (з)
Из (з) следует, что наибольшая горизонтальная дальность 1тах получается
при угле бросания a = 45°:
Прн других углах а одну и ту же дальность / можно получить, как это следует
из (з), бросая точку под углом а к горизонту или под тем же углом а к вертикали
с той же самой скоростью va-
§ 8. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
Как уже известно, основной закон динамики для несвободной ма-
материальной точки, а следовательно, и ее дифференцильные уравнения
движения имеют такой же вид, как и для свободной точки, только к
действующим на точку силам добавляют все силы реакций связей. Есте-
Естественно, что в этом случае движения точки могут возникнуть соот-
соответствующие особенности при решениях первой и второй основных
задач динамики, так как силы реакций связей заранее не известны
и их необходимо дополнительно определить по заданным связям, на-
наложенным на движущуюся материальную точку.
При решении первой основной задачи динамики действующая
на точку равнодействующая сила определяется по заданному движе-
движению точки из дифференциальных уравнений ее движения. Затем из
этой равнодействующей силы по заданным связям выделяют силу реак-
реакции связей. Таким образом получается задача о разложении известной
силы на ее составляющие.
Полную силу реакции точки при ее движении обычно разлагают на
две составляющие. Составляющая силы реакции связей, уравновеши-
уравновешивающая заданные силы, приложенные к точке, называется стати-
статической реакцией. Другая составляющая полной силы реакции, завися-
зависящая только от движения точки под действием заданных сил, называет-
называется динамической реакцией. Она уравновешивает силу инерции движу-
движущейся точки.
При решении второй основной .задачи динамики, когда по за-
заданным силам и начальным условиям требуется определить движение
несвободной точки, часть сил, действующих на точку, а именно все
силы реакций связей, заранее не известны и их необходимо определить
по заданным связям в процессе решения задачи. Таким образом, вто-
вторую основную задачу динамики для несвободной материальной точки
можно сформулировать так:
244
по заданным силам, начальным условиям и связям, наложенным на точ-
точку, определить движение этой точки и силы реакции связей.
Рассмотрим решение этой задачи для движения точки по поверхно-
поверхности и кривой линии. Дифференциальные уравнения при этом выра-
выражают в той системе координат, которая наиболее соответствует конкрет-
конкретной задаче. Разберем постановку и решение задачи в прямоугольной
декартовой системе координат.
Движение точки по поверхности
Пусть гладкая неподвижная поверхность, по которой движется
точка массой т под действием данной силы F, задана уравнением
/ (х, у, г) = 0, где х, у, г — координаты движущейся точки. Так как
рассматриваемая поверхность является гладкой, то сила трения от-
отсутствует. Обозначив N неизвестную нормальную силу реакции по-
поверхности, получим следующие дифференциальные уравнения движе-
движения точки по поверхности:
m^r=Fx + Nx; m?jL-Fa + Ny; m^L = Fx + Nt. A7)
Из дифференциальной геометрии известно, что косинусы углов
внешней нормали к поверхности с осями координат, а следовательно,
и силы N, параллельной главной нормали, можно вычислить по фор-
формулам
где
V \дх
Таким образом,
, = tf cos (лГг) =™
A8)
Обозначив X = N1 А/ и подставив значения Nх, Ng, Nz из A8)
в A7), получим:
Эти дифференциальные уравнения называют дифференциальными
уравнениями Лагранжа первого рода для движения несвободной мате-
материальной точки. Из этих трех дифференциальных уравнений и одного
24»
конечного уравнения — уравнения поверхности / (х, у, г) — 0 — мож-
можно найти четыре неизвестных — координаты точки х, у, г и неопре-
неопределенный множитель Лагранжа к как функции времени и произволь-
произвольных постоянных интегрирования. Произвольные постоянные опреде-
определяют из начальных условий.
По найденному неопределенному множителю Лагранжа к легко оп-
определить силу реакции поверхности N = ХА/, которая в общем случае
зависит от времени.
Если поверхность не гладкая, то кроме нормальной силы реакции
возникает предельная сила трения f max, проекции которой надо до-
добавить в правые части дифференциальных уравнений движения точки.
Эго добавление усложнит решение задачи, но задача и в этом случае
принципиально разрешима, так как наряду с добавлением неизвест-
неизвестной силы добавляется и конечное уравнение, связывающее эту силу
с нормальной реакцией:
где k — коэффициент трения.
Так как сила трения скольжения всегда направлена против скоро-
скорости, то проекции этой силы на оси координат можно представить в
виде
рх р rniliTv} F Vx F
J max — 'шахLuo \"» Л' — l шах ~ ' ma
аналогично,
¦
рУ p V . pz F
i max — l max -,/ . ¦ .„ » ' шах — —r max ^
у xi-\-y'i-\-Si I
Учет силы трения значительно усложняет задачу интегрирования
дифференциальных уравнений движения несвободной материальной
точки.
Движение точки по гладкой кривой линии
Кривую неподвижную линию в пространстве можно рассматривать
как линию пересечения двух поверхностей: fx (х, у, г)=0 и /2 (х, у,г) — 0.
Эти поверхности создадут для движущейся точки две нормальные
реакции Ni и N'г, и поэтому полная реакция кривой линии N ==
Дифференциальные уравнения Лагранжа первого рода движения
точки цо кривой линии имеют вид
A9)
246
где соответственно
1 _JV*. 1 .
Присоединяя к дифференциальным уравнениям Лагранжа первого
рода A9) два конечных уравнения поверхностей Д (х, у, г) = 0 и
/а (*, У. г) = 0, получаем пять уравнений для определения пяти ве-
величин х, у, г, %ъ Хг как функций
времени. Таким образом, и в этом
случае поставленная задача может
быть разрешена. Она принципиаль-
принципиально разрешима и при учете силы
трения.
Если при рассмотрении этой за-
задачи за оси координат взять есте-
естественные оси, то дифференциаль-
дифференциальные уравнения движения точки
по гладкой кривой примут вид
РИС. 14
0 = Fb + Nb, ^ B0)
где FT — проекция силы F на каса-
касательную; Fn и Nn — проекции сил
на главную нормаль; Fb и Nb —
проекции сил на бинормаль ир —
радиус кривизны кривой линии.
Из первого дифференциального уравнения системы B0) независимо
от двух других уравнений можно найти закон движения точки и, сле-
следовательно, скорость точки v. После этого из двух оставшихся урав-
уравнений B0) можно определить проекции неизвестной нормальной реак-
реакции N соответственно на главную нормаль и бинормаль.
Пример. Материальная точка массой т (рис. 14) движется под действием си-
силы тяжести по внутренней части поверхности сферы радиусом R вблизи усгойчи-
вого положения равновесия. В начальный момент при t = 0 к = х0, у — 0,
vx = Q, v,j =Оо- Ось Ог направлена по вертикали вниз, а Ох и Од расположены
в горизонтальной плоскости. Начало координат находится в центре сферы. Опре-
Определить движение точки и силу реакции сферы на точку. Эта задача известна кан
задача о сферическом маятнике.
Решение. Дифференциальные уравнения движения точки по поверх-
поверхности сферы имеют вид
tnx —
IL
дх
fll'J-
df
df
дг
N/Af.
247
К дифференциальным уравнениям (а) следует добавить уравнение поверх-
поверхности сферы (уравнение свяаи):
/ (х, у, г) = #а — хг — у% — г2 = 0.
Тогда
Qfldx = — 2х\ dfldy = — 2у; df/dz = — 2г;
так как
У*2 + у* + г2 = #¦
Подставляя в уравнения (а) значения производных dfldx, dfldy, df/dz, имеем:
тх = —2а*; ту = — 2Ку, тг = mg — 2Яг. (а')
Эту систему уравнений (а') и надо интегрировать. Для этого обычно из этих
уравнений прежде всего исключают неизвестную %, учитывая, что производные
от нее не входят в (а'). Система уравнений сложна для интегрирования, Проин-
Проинтегрируем ее приближенно. Для получения первого приближения сохраним толь-
только первые степени величин x/R, ylR н пренебрежем их квадратами в выражении
для г:
г = У/?2 - (а-2 + I/2).
Разлагая выражение для г по формуле для бинома, получаем
Полагая7 в третьем уравнении системы (а') г = R и г = 0, имеем
mg — 2KR = 0; Я, = mg/BR),
т. е.
Подставляя значение % в первые два уравнения системы fa'), получаем:
* = ——*; у=——у или jc'+~jc = O; y+-^-y=O.
Решения этих дифференциальных уравнений (см. § 7, пример 1), зависящие каж-
каждое от двух постоянных интегрирования, имеют вид
х = Cj sin (yi77j-/+ С2); у = Cs sin (\/glR't+ C4)< F)
Дифференцируя их но времени, получаем
x = Ct Уg/~R¦ соч (УglR-t + Cz); у =СЯ i/g/ft-cos (У§7^ t+Ct). (в)
Используя начальные условия из (б) и (в), получаем следующие уравнения
для определения постоянных Clt C2, С3, С4:
(г)
Из второго и третьего уравнений системы (г) находим, что С( = 0 и С2 =
= л/2. Подставляя эти значения в первое и четвертое уравнения, имеем
После этого искомые уравнения движения точки при принятом допущении
принимаюi вид
х = xoshi У glR-t; у = У Rig -v0 cos УцГк t; z^R.
248
Если исключить из уравнений движения время t, то получим уравнение
траектории точки в координатной форме:
хУх* + gy4{Rvl) = l; z= R,
т. е. траекторией в принятом приближении является эллипс, расположенный в
плоскости г = R с центром, находящимся на оси Oz.
Не следует считать, что система уравнений (а') проинтегрирована с точно-
точностью до членов первого порядка xlR и y/R, так как дополнительно принято
г = 0. Если интегрирование выполнить с точностью до указанных слагаемых,
приняв за первое приближение полученное решение, то вместо эллипса получится
незамкнутая кривая,'близкая на первом витке к эллипсу. Движение по такой не-
незамкнутой кривой можно воспроизвести, если полученный эллипс будет повора-
поворачиваться равномерно с определенной скоростью в сторону движения точки*.
Глава 2
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ
ТОЧКИ
§ 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ОТНОСИТЕЛЬНОГО
ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Во многих задачах динамики рассматривается движение матери-
материальной точки относительно системы отсчета, движущейся относитель-
относительно инерциальной системы. Дифференциальные уравнения движения
материальной точки относительно таких подвижных, в общем случае
неинерциальных, систем отсчета получают
из уравнений движения точки относитель-
относительно инерциальной системы отсчета и кине-
кинематической теоремы Кориолиса о сложе-
сложении ускорений.
Имеем инерциальную систему отсчета
Oi#ii/izi и материальную точку массы т., /# У ~п
на которую действуют приложенные силы ' ' '
? и N (рис. 15), где F — равнодействую-
равнодействующая заданных активных сил; N — равно-
равнодействующая сил реакций связей. Если ^ис- 15
й"— ускорение точки относительно инер-
инерциальной системы отсчета (абсолютное ускорение), то согласно урав-
уравнению движения точки в векторной форме имеем
nia = 7 + N. A)
Если ввести другую, неинерциальную, систему отсчета Охуг, которая
в общем случае может двигаться относительно инерциальной как
свободное твердое тело, то по теореме сложения ускорений имеем
а = ае-Ьй, + а"к, B)
* См.: Собрание трудов академика А. Н, Крылова, вып. III. Математика,
ч. I. Изд, АН СССР, 1949, с. 333.
249
где ае, ап ан — соответственно переносное, относительное и кориоли-
сово ускорения. ^
Подставляя значение абсолютного ускорения а из B) в A) после
переноса слагаемых, кроме та„ из левой части в правую, получим
таТ = Г+^+Ф, + Фв> C)
где Фе = — tnae; Фк = — так называются соответственно пере-
переносной и кориолисовой силами инерции. Получена
динамическая теорема Кориолиса, или урав-
уравнение относительного движения точки в вектор-
векторной форме: материальная точка движется относительно неинерциаль-
ной системы отсчета так же, как и относительно инерциальной,
только к приложенным активным силам и реакциям связей следует до-
добавить переносную и кориолисову силы инерции.
Силы инерции Фе и Фв являются поправками на не-
инерциальнооть системы отсчета. Для инерциальной систе-
системы отсчета они равны нулю, так как в этом случае абсолютное и от-
относительное движения точки совпадают. Переносная и кориолисова
силы инерции участвуют в создании относительного ускорения совер-
совершенно так же, как и приложенные силы со стороны материальных тел.
Но эти силы инерции по определению приложенных сил классической
механики не приложены к материальной точке, так как не участвуют
в создании ее ускорения относительно инерциальной системы отсчета.
Если координаты движущейся точки относительно подвижной си-
системы координат Охуг в момент времени t есть х, у, г, то в проекциях
на подвижные оси координат формула C) примет форму
+ Ф
еи
C')
Это дифференциальные уравнения движения точки относительно под-
подвижной системы координат в проекциях на декартовы подвижные оси
координат. Они отличаются от дифференциальных уравнений абсо-
абсолютного движения относительно инерциальной системы отсчета толь-
только наличием поправок на неинерциальность системы отсчета.
§ 2, ЧАСТНЫЕ СЛУЧАИ
Относительное движение по инерции. Если материальная точка
движется относительно подвижной системы отсчета прямолинейно и
равномерно, то такое движение называют относительным движением
по инерции. В этом случае относительная скорость ог постоянна по
числовой величине и направлению, а потому относительное ускорение
аг = 0. Из C) следует в этом случае
Т + Ы + Фе + Фв = 0. D)
250
Это условие для сил при относительном движении точки по инер-
инерции.
Относительное равновесие. При покое материальной точки относи-
относительно подвижной системы отсчета ее относительные скорость и уско-
ускорение равны нулю, т.е. vr = 0 и аг = 0. Ускорение Кориолиса тоже
равно нулю, так как
ак = 2 (со х vr).
Из C) пол} чаем условие относительного равнове-
равновесия для сил:
7 + N + Фе = 0. E)
При абсолютном движении по инерции или абсолютном равнове-
равновесии относительно инерциальнои системы отсчета имеем для сил одно и
ю же условие F + N = 0. Условие относительного равновесия для
сил отличается от условия относительного движения по инерции.
Инерциальные системы отсчета. Переносное ускорение в общем
случае вычисляется по формуле
ае = й, + s X г + ш X (и X г),
где а„ — ускорение точки, принятой за полюс, например начало ко-
координат подвижной системы координат; со — угловая скорость вра-
вращения подвижной системы координат вокруг выбранного полюса;
е = dco/di — угловое ускорение этого вращения иг — радиус-вектор
движущейся точки относительно выбранного полюса.
Пусть подвижная система отсчета все время движется относитель-
относительно основной инерциальнои системы поступательно, равномерно и пря-
прямолинейно. В этом случае переносная и кориолисова силы инерции рав-
равны н>лю, т. е.
Фе = — тав = 0; Фк = — так =¦ 0,
так как при поступательном движении со = 0 и s = dco/cM = 0. При
равномерном и прямолинейном движении а0 — 0. Таким образом, в
этом случае из C) получаем уравнение относительного движения
таг = 7 + N, F)
которое совпадает о уравнением движения относительно инерциал>-
ной системы отсчета A).
Все подвижные системы отсчета, которые движутся поступатель-
поступательно, равномерно и прямолинейно относительно основной инерциальнои
системы отсчета, называются тоже инерциальными. Относительно
всех инерциальных систем отсчета получаются одинаковые уравнения
движения материальной точки. Ускорения материальной точки отно-
относительно всех инерциальных систем отсчета одинаковы.
Отсутствие принципиальной возможности каким-либо механическим
опытом, основанным на наблюдении за движением материальных тел,
отличить одну инерциальную систему отсчета от другой находится в
251
основе принципа относительновти классической ме-
механики —принципа Галилея—Ньютона, который утверждает: все
механические явления в различных инерциальных системах отсчета про-
протекают одинаково, или никаким механическим опытом нельзя обнару-
обнаружить инерциальное движение системы отсчета, участвуя вместе с ней
в этом движении. Наоборот, неинерциальную систему отсчета можно
обнаружить и отличить одну от другой по поправкам на неинерциаль-
ность.
Скорости материальной точки относительно различных инерциаль-
инерциальных систем отсчета разные, но нет возможности из наблюдений за дви-
движением материальной точки в различных системах отсчета сделать ут-
утверждение, какая из инерциальных систем
отсчета является основной, неподвижной, а
М какая — подвижной.
v , В специальной теории относительности
jl ]У имеет место принцип от н ос и тел ь-
/of 7q ~x 1 /z xt>X ности Эйнштейна, который утверж-
/ ^ дает: все физические явления во всех инерциаль-
? ных системах отсчета протекают одинаково.
i~t Физические явления кроме механических
Рис 16 включают также электромагнитные про-
процессы.
Возьмем две инерциальные системы отсчета: Oxxxyxzx и Охуг
(рис. 16). Примем, что система отсчета Охуг движется относительно
OiX^yZi с постоянной по модулю и направлению скоростью v параллель-
параллельно оси OiXi, причем в начальный момент времени при t = 0 начала ко-
координат и соответствующие оси координат совпадают. В соответствии
е концепцией классической механики время для обеих систем коорди-
координат одно и то же. Нетрудно видеть, что координаты какой-либо точки
М в двух инерциальных системах отсчета связаны соотношениями па-
параллельного переноса. Имеем:
х = Xi — vt; у = yt; z = гх; t = tx. G)
Эти соотношения называются преобразованиями Галилея в частном
случае движения двух инерциальных систем отсчета друг относитель-
относительно друга.
Преобразования Галилея не изменяют формы уравнения движения
точки A), т. е. оно инвариантно по отношению к преобразова-
преобразованиям Галилея.
§ 3. ДВИЖЕНИЕ ТОЧКИ ОТНОСИТЕЛЬНО ЗЕМЛИ
Для неинерциальной системы отсчета уравнение движения мате-
материальной точки под действием силы отличается от уравнения движения
относительно инерциальных сиаем отсчета. Согласно C), оно им^ет
форму
^ \.фя. (8)
252
Наличие поправок на неинерциальность систем отсчета в виде сил инер-
инерции Фе и Ф„ позволяет установить неинерциальность системы отсчета
и отличить эти системы отсчета одну от другой.
Система отсчета, скрепленная g земным шаром, не является инер-
циальной. Земной шар движется относительно гелиоцентрической
инерциальной системы отсчета. При рассмотрении движения матери-
материальных тел относительно Земли должны проявлять себя эффекты, свя-
связанные с неинерциальностью системы отсчета. Земной шар движется
относительно гелиоцентрической системы отсчета как свободное твер-
твердое тело. Его центр перемещается по эллиптической орбите, близкой
к окружности. Кроме того, он вращается вокруг оси, проходящей че-
через его центр, с почти постоянной по величине и направлению угловой
скоростью, совершая один оборот за сутки. Угловая скорость враще-
вращения Земли
к> = 2л/B4-60-60) « 0,00007 с-1,
т. е. величина малая по сравнению с единицей.
В общем случае переносная сила инерции
Фе = — тае = — т [а0 -+- е X г + со X (со X г}\,
где а0 ускорение центра земного шара относительно гелиоцентриче-
гелиоцентрической системы отсчета; г — радиус-вектор движущейся точки, прове-
проведенный из центра Земли. Ускорение а0 с очень большой степенью точ-
точности можно считать равным нулю, так как центр Земли движется но
эллиптической орбите очень больших размеров. Угловое ускорение в
можно тоже считать равным нулю, так как со считаем постоянным
вектором. Оставшаяся часть переносного ускорения w X (и х г)
пропорциональна со2, т. е. величина малая по сравнению с величинами
порядка со для не очень больших расстояний г. Величиной порядка
а является сила инерции Кориолиса
Фк = — таа = —m-2(coxyr),
где vr—скорость материальной точки относительно Земли. Таким
образом неинерциальность системы отсчета, скрепленной о Землей,
проявляется главным образом через влияние силы инерции Корио-
Кориолиса, если рассматривается движение материальной точки вблизи
Земли, при котором г не очень велико. Рассмотрим несколько при-
примеров этого влияния кориолисовой силы инерции.
Маятник Фуко. Если подвесить на длинной нити груз достаточ-
достаточно малых размеров, то действующая на него сила F будег состоять
из силы притяжения Р к Земле, направленной к центру Земли, и
силы натяжения нити S (рис. 17, а). Эти силы расположены в од-
одной вертикальной плоскости П (рис. 17, б). Если начальные откло-
отклонение и скорость груза тоже находятся в плоскости П, то маят-
маятник при колебаниях должен все время находиться в плоскости Я»
неподвижной относительно гелиоцентрической системы отсчета. Зем-
253
ной шар поворачивается относительно этой системы отсчета о угло-
угловой скоростью со. Следовательно, плоскость П по отношению к Земле
должна поворачиваться в сторону, противоположную Земле, с угло-
угловой скоростью со, если маятник подвесить на северном полюсе. Для
маятника па широте tp угловая скорость вращения плоскости коле-
колебаний маятника равна со sin ср. На экваторе эта скорость равна
нулю.
Если тело маятника имеет выступ, который при колебаниях может
оставлять след, например на песке, то этот след при движении маят-
маятника в одну сторону будет отличаться от следа при движении в прота-
протаРис. 17
воположную сторону нз-за вращения Земли. Это отличие тем больше,
чем длиннее ншь маятника. Фуко в 1857 г. использовал маятник дли-
длиной 1 — 67 и. В СССР маятник Фуко имеется в Исаакиевском соборе
в Ленинграде. Маятник Фуко наглядно демонстрирует вращение Зем-
Земли относительно инерциальной системы отсчета.
Отклонение движущихся тел вправо в северном полушарии. В Се-
Северном полушарии из-за дополнительного действия силы инерции Ко-
риолиса, вызванной вращением Земли, все движущиеся тела долж-
должны смещаться в правую сторону, если смотреть в направлении движе-
н!гя. Пусть материальная точка движется со скоростью vr относитель-
относительно Земли по касательной к меридиану g севера на юг (рис. 18). Опре-
Определим проекцию о[ этой скорости на плоскость, перпендикулярную оси
вращения Земли. Повернув вектор v'f вокруг оси, параллельной оси
вращения земного шара, на 90° в направлении его вращения, получим,
согласно правилу Жуковского, направление ускорения Кориолиса
ак по касательной к параллели с запада на во:ток. Сила инерции Ко-
Кориолиса Фк = — так соответственно направлена с востока на запад,
т. е. вправо от направления движения. Действие такой силы вызовет
у движущейся точки дополнительное ускорение относительно Земли
в направлении этой силы, а следовательно, и ее перемещение, если точ-
точка движется в течение некоторого времени. Движение точки может
254
иметь направление, отличное от касательной к меридиану. Важно,
чтобы оно имело отличную от нуля проекцию скорости^ на плоскость,
перпендикулярную оси вращения земного шара.
Если рассмотреть поступательное движение железнодорожного ва-
вагона, то для него сила инерции Кориолиса пройдет через центр его
тяжести слева направо, если смотреть по движению вагона. Это приве-
приведет к увеличению давления на правый рельс и к его уменьшению на ле-
левый. На двухколейных железных дорогах правый рельс изнашивает-
изнашивается быстрее левого.
Для частички воды в реке действие силы Кориолиса слева напра-
направо, если смотреть по течению реки, приведет к прижиманию этой ча-
частички к правому берегу, способствуя большему его подмыванию. Пра-
Рис. 19
вый берег рек в Северном полушарии более подмыт, чем левый на пря-
прямолинейных участках реки. Этот эффект известен в географии как за-
закон Бэра. На закруглениях реки вследствие центробежных сил
инерции может оказаться подмытым и левый берег.
Действие силы инерции Кориолиса на летящие самолеты, ракеты,
снаряды, движущийся воздух, морские течения приводит к их откло-
отклонению в правую сторону в Северном полушарии. В Южном полушарии
отклонение будет в левую сторону. Сила инерции Кориолиса способ-
способствует образованию циклонов, антициклонов, вихрей, смерчей и т. д.
Если в каком-то месте образовалось пониженное давление, например
вследствие местного нагревания воздуха, то к этому месту начнет дви-
двигаться воздух из мест с повышенным давлением. Сила инерции корио-
кориолиса отклонит движущиеся частички воздуха вправо, создав мест-
местный вихрь (рис. 19), а для больших масс воздуха — циклон. Аналогич-
Аналогично в местах с повышенным давлением образуются антициклоны.
Отклонение падающих тел к востоку. Рассмотрим в Северном полу-
полушарии тело, падающее вертикально вниз под действием силы тяжести
без начальной скорости. Действие силы инерции Кориолиса в этом слу-
случае в первом приближении сведется к отклонению падающего тела к во-
востоку. Действительно, если скорость тела v, направлена по вертикали
к центру Земли, то ее проекция на плоскость параллельного круга на-
направлена к центру этого круга (рис. 20). Ускорение Кориолиоа ак
255
соответственно направлено по касательной к параллели на запад, а
сила имерции Кориолиса Фк — по касательной к параллели на восток.
Она вызовет отклонение падающего тела к востоку. Как показывают
расчеты, это отклонение при падении g высоты 160 м составляет при-
приблизительно 2,8 см при ф =» 50°, что хорошо согласуется с результата-
результатами опытов.
Пример. Внутри трубки с гладкой поверхностью находится шарик массой
т — 1 кг (рнс. 21). Шарик притягивается к неподвижной точке О трубки силой,
пропорциональной расстоянию шарика до этой точки. Коэффициент пропорцио-
пропорциональности с = 4,9 Н/м. Трубка наклонена к вертикальной оси Ozt под углом
а = 60° и вращается вокруг этой оси с постоянной угловой скоростью со = 1 о.
В начальный момент шарик находится в точке Мо на расстоянии М0О = 2,4 м
и имеет скорость относительно трубки v9 =
= lG-м/с. Определить закон движения шари-
шарика по трубке, принимая его за точку, силу дав-
давления шарика на стенку трубки и силу при-
притяжения в момент времени t = л/2 с.
Решение. Выберем систему подвиж-
^у ных осей координат Охуг, вращающихся вме-
л сте с трубкой; ось Ох направим по трубке,
Уравнение движения шарика отиоситель-
но подвижной системы координат в вектор-
векторной форме имеет вид
ma^P+N+F + Фс + Фк
В проекциях на подвижные оси
динат
шх = —F — Р cos a + Фе sin а;
0 = Ny — Р sin а — Фе cos а;
коор<
0
Фк
Здесь Р = mg—- сила тяжести шарика; N — сила реакции трубки; F — сила
притяжения; Фе, Фк — переносная сила инерции и сила инерции Кориолиса,
Учтено, что у — const = 0, г = const = 0и, следовательно, у = г = 0. Ось Ог
направлена параллельно силе Фк, а ось Оу вместе с другими осями образует
правую систему осей координат»
В рассматриваемом случае
Уз"
—-
х<
F = сх— 4,9 х\ g— 9,8 м/с2.
Подставляя эти значения сначала в общем виде в уравнения движения,
после простых преобразований получаем:
"х + (а'т — <в? sin а) х = — g cos а; Nv — m sin a(g + xioz cos ajj
Nz = — 2mmx sin a.
Подставляя в эти уравнения числовые значения величин, имеем:
25G
Интегрируем дифференциальное уравнение. Оно является линейным.неод-
линейным.неоднородным; следовательно, его решение
х = Ч + *>2>
где Xi — общее решение однородного уравнения} дга — частиое~решение неодно-
неоднородного уравнения, правая часть которого постоянна. В качестве частного реше-
решения можно взять постоянную хъ — — 4,9/4 = — 1,2. При подстановке значения
х% в дифференциальное уравнение убеждаемся, что оно обращает уравнение
в тождество, т. е. является его частным решением.
Общее решение однородного уравнения х± определяем из уравнения
Ч + 4*f = О,
Его характеристическое уравнение
AA+4= 0.
Корни этого характеристического уравнения чисто мнимые, A.j>2 == ± 21. Реше-
Решение однородного уравнения, зависящее от двух постоянных ' интегрирования
Cj и С2, можно выразить в форме
xt = Ct cos 2^ + Са sin 2t
Следовательно,
x = xt + хг = Ct cos 2t + C2 sin It — 1,2}'
x = — 2Cj sin 2/ + 2Ca cos It,
Начальные условия задачи:
t = я/2 с;«=1,= -2,4»! *==?»„= 10 м/с.
Подставляя их в выражения для х и х, получаем следующие уравнения дли опре-
определения постоянных интегрирования:
_ 2,4 ==¦ — Ci — 1,2; 10 = — 2С2, или Cf = 1,2} Са = — 5.
Уравнение движения шарика с учетом постоянных примет вид
х = 1,2 (cos 2* — 1) — 5 sin 1i; x = — 2,4 sin 2f — 10 cos 2t.
При < = п/2 с
ж = 1,2 {cos л — 1) — 5 sin ix = — 2,4 M} x = — 2,4 sin ix — 10 cos я = 10 м/с.
Подставляя эти значения к а х в выражения для Nv и Nz, имеем
Ny = П/3/2) (9,8 — 1,2) = 7,3 Н5 Nz = — УЗ-10 = 17,3 Н.
Давление шарика N' на трубку равно по модулю силе реакции трубки на
шарик. Поэтому
Сила притяжения F при / == п/2 с
F = в|*| = 4,9«2,4 = 11,8 Н.
§ 4. НЕВЕСОМОСТЬ
Динамическая теорема Кориолиса позволяет рассмотреть состоя-
состояние невесомости, которое, в частности, возникает при движении кос-
космических кораблей как искусственных спутников Земли. При рассмо-
рассмотрении невесомости материальной точки целесообразно ее представ-
представлять как твердое тело, имеющее поверхность, которой оно может со-
соприкасаться-о другими телами. Будем предполагать, что скорости и
9 Зак, 1311 257
ускорения всех точек тела одинаковы, а реакции соприкасающихся
тел приводятся к равнодействующей.
Под невесомостью такой материальной точки понимают от-
отсутствие давления этой точки на каждое из тел, с которымсша может
соприкасаться, В частности, невесомая материальная точка ае давят на
площадку весов {яе имеет веса), находящихся в покое по отношению
к той системе отсчета, относительно которой покоится материальная
точка-
Систему отсчета, относительно которой материальная точка находит-
находится в покое и, следовательно, имеет относительно нее скорость и уско-
ускорение, равные нулю, назовем собственной системой отсчета ма-
материальной точки. Все величины относительно этой системы отсчета
условимся обозначать специальным индексом «*»,. Тогда имеем о,\ «&»
а* я т. д. Естественно, что v* и а* равны нулю.
Невесомая материальная точка (тело), прикрепленная на пружине
к любому телу, покоящемуся относительно ее собственной системы от-
отсчета, не деформирует эту пружину. Учитывая, что давление точки на
какое-либо тело по модулю совпадает с силой реакции тела на эту
точку, невесомость наблюдается при равенстве нулю силы реакции от
любого тела, соприкасающегося с рассматриваемой невесомой мате-
материальной точкой.
Если в общем случае рассматривать невесомость материального
тела, а не точки, то реакции окружающих его тел сведутся к распре-
распределенным силам по поверхности его соприкосновения с этими телами.
Сила реакции, отнесенная к единице площади поверхности соприкос-
соприкосновения (напряжение силы реакции), должна при невесомости тела
быть равна нулю в каждой точке'его поверхности. Это является усло-
условием невесомости для любого тела, не обязательно твердого.
Для абсолютно твердого тела при его невесомости вместо равенства
нулю напряжения поверхностной силы в каждой точке его поверхности
соприкосновения достаточно равенства нулю главного вектора и глав-
главного момента этих сил относительно любого центра приведения.
Ограничимся рассмотрением невесомости материальной точки, т. е.
абсолютно твердого тела, для которого все повер-хностные силы при-
приводятся только к одной равнодействующей силе —реакции тел, сопри-
соприкасающихся с ним. Невесомость материальной точки не связана с си-
системой отсчета или с наблюдателем, находящимся в той или иной си-
системе отсчета. Но для выявления сил, действие которых испытывает
материальная точка, выберем ее собственную систему отсчета, по от-
отношению к которой ее относительные скорость и ускорение равны нулю,
т. е. v* — 0 и а* = 0. В этом случае сила инерции Кориолиса тоже рав-
равна нулю и для сил выполняется условие относительного равновесия
1 + N + Ф* = 0,
где F — равнодействующая активных или заданных сил от тел, не
соприкасающихся с точкой; 1/ — равнодействующая реакция от всех
соприкасающихся е точкой тел и Й = — mat — переносная
инерции в собственной системе отсчета рассматриваемой точки.
258
Из условия относительного равновесия сил
— N = 7 + Ф*.
_ Согласно определению невесомости, N — 0 и, следовательно,
F + Ф1 = 0.
Таким образом, условие невесомости через силы можно выразить
как N = 0 или как F -f- Ф*й = 0, т. е. для невесомости материаль-
материальной точки необходимо и достаточно, чтобы равнодействующая актив-
активных сил от материальных объектов, не соприкасающихся с точкой,
вместе с переносной силой инерции в собственной системе отсчета рас-
рассматриваемой точки образовывала равновесную систему сил.
Согласно теореме о сложении ускорений, абсолютное ускорение
в общем случае определяется по формуле
~а=~ав Jr~ar +~ая.
Если абсолютное ускорение рассматривать относительно инерци-
инерциальной системы отсчета, а в качестве подвижной системы отсчета вы-
выбрать собственную систему отсчета, то v* — 0, а* — 0, а» = Q и, сле-
следовательно, а — а%. Сила инерции в инерциальной системе отсчета
Ф = — та, таким образом, совпадает с переносной силой инерции в
собственной системе отсчета Ф*е = — та*. Учитывая, что Ф% = Ф,
условие невесомости можно выразить как F + Ф — 0, т. е. как
уравновешивание силой инерции в инерциальной системе отсчета равно-
равнодействующей сил от действия тел, не соприкасающихся с невесомой ма-
материальной точкой.
Проверим выполнение условия невесомости для материальной точ-
точки, находящейся в космическом корабле, который движется поступа-
поступательно относительно Земли в качестве ее искусственного спутника за
пределами атмосферы. За инерциальную систему отсчета можно при-
принять систему отсчета, скрепленную с Землей.
Пусть материальная точка неподвижна относительно космического
корабля. Тогда собственной системой отсчета будет система отсчета,
скрепленная с кораблем. Силой от действия тел, не соприкасающихся
с точкой, является сила тяготения Земли F = mg, где т — масса точ-
точки и g — ее ускорение, создаваемое силой тяготения. Сила инерции
точки в ее движении относительно Земли Ф = — та совпадает с пере-
переносной силой инерции Ф\ — — та*, где а* — переносное ускорение
точки от поступательного движения вместе с собственной системой от-
отсчета, скрепленной с космическим кораблем.
Если корабль не испытывает действия других сил, кроме силы тя-
тяготения Земли, то его ускорение от этого тяготения тоже равно g,
так как ускорения от силы тяготения не зависят от масс тел, а зависят
только от_расстояния этих тел до центра Земли. Таким_ образом,
а*е — а — g и, следовательно, условие невесомости точки F + Ф = 0
выполняется. Материальная точка будет находиться в невесомости и,
9* 259
следовательно, не должна оказывать давления на любое тело, движу-
движущееся вместе о космическим кораблем.
В космическом корабле, который кроме поступательного движения
имеет также и вращение, каждая из материальных частиц корабля не
находится в состоянии невесомости, хотя весь корабль как целое на-
находится в состоянии невесомости. Для него главный вектор и главный
момент поверхностных сил равны нулю, так как нет тел, с которыми
корабль соприкасается своей поверхностью.
Материальная точка внутри кабины корабля находится в состоянии
невесомости, пока она не соприкасается со стенками корабля и о дру-
другими телами, скрепленными с кораблем.
Кажется, что для невесомости тела необходима невесомость каждой
его точки. Это приводит к требованию отсутствия взаимных давлений
между точками тела или к отсутствию внутренних напряжений в теле.
Но такие напряжения всегда имеются при невесомости вследствие ес-
естественной связи точек тела друг с другом, на которую можно влиять,
например, термообработкой, изменением температуры и т. д. При неве-
невесомости тела как целого не обязательно отсутствие даже дополнитель-
дополнительных напряжений, создаваемых движением тела. Достаточно равенства
нулю напряжений в точках поверхности тела, создаваемых другими,
соприкасающимися телами (связями), а для абсолютно твердого тела —
равенства нулю главного вектора и главного момента поверхностных
сил.
В невесомости находятся земной шар и другие планеты Солнечной
системы, их спутники, если пренебречь действием на них метеоритов,
космического излучения и т. д
В состоянии невесомости находилось бы свободно падающее тело
вблизи Земли, если бы не было действия воздуха. Невесомость можно
создать искусственно вблизи Земли в герметизированной кабине ле-
летательного аппарата, заставив его с помощью двигателей совершать по-
поступательное движение с ускорением g, равным ускорению от силы при-
притяжения Земли.
Глава 3
ГЕОМЕТРИЯ МАСС
§ 1. ЦЕНТР МАСС
При рассмотрении движения твердых тел и других механических
систем важное значение имеет точка, называемая центром масс. Ес-
Если механическая система состоит из конечного числа материальных
точек N с массами ти та ты, радиус-векторы которых, прове-
проведенные из одной и той же точки О, — 7и 72, ..., F" (рис. 22), то цент-
центром масо называется геометрическая точка С, радиус-вектор которой
¦Гс определяется выр'ажением
_ Л _
260
N
где М =s 2^й — масса системы. Обозначая декартовы координаты
материальных точек {хъ уи zj), {хъ уг, z2), .,., (xN, yN, zN), из A)
проецированием на декартовы оси координат получим следующие
формулы для координат центра масс:
N N N
хс — 2 т* хъГм* Ус ~ 2 ть ydM'¦> гв — 2 т» z»/vW• (г')
*=1 u=i *=i
Центр масс является не материальной точкой, а геометриче-
геометрической. Он может не совпадать ни g одной материальной точкой систе-
системы, как, например, в случае кольца.
Центр масс системы характеризует рас-
распределение масс в системе.
Векторная величина j5o = 2ть':ь
называется статическим моментом
массы относительно точки О. Скаляр-
N
ная величина SOyZ = 2 mh^k называет-
ся статическим моментом массы отно-
относительно координатной плоскости Oyz.
^v Рис. 22
Величины Soxz = 2 гПиУь. и S0X9 —
= *?mhzh являются соответственно статическими моментами массы
ft=rl
относительно координатных плоскостей Охг и Оху.
Радиус-вектор и координаты центра масе через статические моменты
массы выражаются формулами
Если механическая система представляет собой сплошное тело, то
"его разбивают на элементарные частицы g бесконечно малыми массами
dm и g изменяющимся от частицы к частице радиус-вектором г.
Суммы в пределе переходят в интегралы. Формулы A) и (Г) при-
принимают форму
~гс = J 7dm/M, B)
хс = I xdm/M; ус = J ydtn/M; zc = J" zdm/M, B')
где M =s / dm — масса тела.
Для однородных сплошных тел dm =s pAV; M = pV, где р — плот-
плотность тела, общая для всех элементарных частиц; dV — объем элемен-
элементарной частицы; V — объем тела.
Для тел типа тонкого листа, которые можно принять за однород-
однородные материальные поверхности, dm = psdS; M — psS, где ps —
поверхностная плотность; dS — площадь поверхности элементарной
частицы; S — площадь поверхности.
261
Для тонкой проволоки, которую можно принять за отрезок линии,
dm = Pidl, M = ptl, где pz — линейная плотность, 61 — длина эле-
элемента линии и / — длина отрезка линии.
В этих случаях определение центра масс тел сводится к вычисле-
вычислению центра масс объемов, площадей и длин линий соответственно.
§ 2. МОМЕНТЫ ИНЕРЦИИ
Для характеристики распределения масс в телах при рассмотрении
вращательных движений требуется ввести понятия моментов
инерции.
Моменты инерции относительно точки и оси
Моментом инерции механической системы, состоящей из N матери-
материальных точек, относительно точки О называется сумма произведений
масс этих точек на квадраты их расстояний до точки О (рис. 23), т. е.
N
Момент инерции относительно точки часто называют полярным момен-
моментом инерции, В случае сплошного тела сумма переходит в интеграл
и для полярного момента инерции имеем
Jo = J йЧт, C')
где dm — масса элементарной частицы тела, принимаемой в пределе
за точку; d — ее расстояние до точки О.
Моментом инерции Jx системы, материальных точек относитель-
относительно оси 01 называется сумма произведений масс этих ттек на квадра-
] ты их расстояний rh до оси 01 {рис, 23), т. е.
В частном случае сплошного тела сумму следует
заменить интегралом:
Jt = I гЧт. D')
Моменты инерции одинаковых по форме од-
Рис. 23 нородных тел, изготовленных из разных мате-
материалов, Отличаются друг от друга. Характери-
Характеристикой, не зависящей от массы материала, является радиус инерции.
Радиус инерции рг относительно ос« 01 определяется по формуле
р, « VTJM, E)
где М — масса тела.
Момент инерции относительно ogh через радиув инерции относи-
относительно этой оси определяется выражением
Jt = Mpl f6')
262
В справочниках по моментам инерции приводят таблицы значений
радиусов инерции различных тел.
Формула E') позволяет считать радиус инерции тела относитель-
относительно оси расстоянием от этой оси до такой точки, в которой следует по-
поместить массу тела, чтобы ее момент инерции оказался равным моменту
инерции тела относительно рассматриваемой оси.
Моменты инерции относительно оси и точки имеют одинаковую
размерность — произведение массы на квадрат длины (кг-м2).
Кроме моментов инерции относительно точки и оси используются
также моменты инерции относительно плоскостей и центробежные
моменты инерции. Эти моменты инерции удобно рассмотреть относи-
относительно координатных плоскостей и осей декартовой системы коорди-
координат.
Моменты инерции относительно осей координат
Моменты инерции относительно декартовых осей координат Ох,
Оу и Oz и их начала — точки О — определяются выражениями
(рис. 24):
= 2 mk{yl + zl); Ju =
rnh
= 2 tnh (*j + yl); F)
G)
где xk, yk, Zh — координаты материальных точек системы. Для
сплошных тел эти формулы примут вид
г3) dm; Jy = f (г2
dm;
Из приведенных формул следует зависимость
2J0 = JX + Jy + Jz.
(8)
Если через точку О провести другую систему декартовых осей коорди-
координат Ox'y'z', то для них по формуле
(8) получим
2J0 = J
x>
(8')
Из сравнения (8) и (8') следует, что
Jx + JU + Jz = Л' + Jy- + Jz:
Сумма моментов инерции относа-
тельно декартовых осей координат не
зависит от ориентации этих осей »
рассматриваемой точке, т. е. являет-
является величиной, инвариантной по отно-
отношению к направлению осей коор-
координат.
г1
Рис. 24
263
Для осей координат Oxyz можно определить следующие три цент-
центробежных момента инерции:
N
2
ftl
N
*=1
N
- 2
ftl
Центробежные моменты инерции часто называют произведениями инер~
ции.
Моменты инерции относительно осей и точек — величины положи-
положительные, так как в них входят квадраты координат. Центробежные мо-
моменты инерции содержат произведения координат и могут быть как
положительными, так и отрицательными. В отличие от осевых центро-
центробежные моменты инерции зависят от точки, в которой выбраны оси ко-
координат.
Центробежные моменты инерции имеют важное значение при рас-
рассмотрении давлений- на подшипники при вращении твердого тела во-
вокруг неподвижной оси и в других случаях.
Кроме рассмотренных моментов инерции иногда используются мо-
моменты инерции относительно координатных плоскостей Joxy> Jouz<
Jozx, которые определяются выражениями
N
= 2
N
= 2
*1
N
= 2
§ 3. ТЕОРЕМА О МОМЕНТАХ ИНЕРЦИИ ОТНОСИТЕЛЬНО
ПАРАЛЛЕЛЬНЫХ ОСЕЙ (ТЕОРЕМА ШТЕИНЕРА)
Установим зависимость между моментами инерции системы отно-
относительно параллельных осей, одна из которых проходит через центр
масс. Пусть имеем две системы прямоугольных, взаимно параллельных
осей координат Oxyz и Cx'y'z'. Начало
системы координат Cx'y'z' находится в
центре масс системы (рис. 25).
По определению момента инерции отно-
относительно оси имеем
Рис. 25 JCz- "= 2_
где тк — масса точки Mkt a xh, yh, zh и x'k, yl, z% — координаты этой
точки относительно Систем координат Oxyz и Cx'y'z' соответственно.
Если обозначить хс, ус, г0 координаты центра масс относительно си-
системы координат Oxyz, то для взаимно параллельных осей координаты
одной и той же точки Mk связаны соотношениями параллельного
переноса
= х'к + хс', yk — y'k + Ус', zfe = z* + гс,
2C4
Подставим эти значения координат в выражение момента инерции
J oz- После преобразований получим
N N
В этом соотношении ^ mk — М — масса системы, 2
N
~Mxq = Q и ^тку'ь — Мус = 0, так как *с=0 и ус—О вследствие
того, что по условию центр масг находится в начале координат этой
системы координат.
Величина xb + yb = d2, -где d — расстояние между осями Oz
и Cz'. Окончательно
Jo, =Jcz> + MiP.
Связь моментов инерции относительно двух параллельных осей,
одна из которых проходит через центр масс, составляет содержание так
называемой теоремы Штейнера или Гюйгенса—Штейнера: момент
инерции системы относительно какой-либо оси равен моменту инер-
инерции относительно параллельной оси, проходящей через центр масс,
плюс произведение массы системы на квадрат расстояния между эти-
этими осями.
Из теоремы Штейнера следует, что для совокупности параллель-
параллельных осей момент инерции является наименьшим относительно оси,
проходящей через центр масс.
Если взять ось О& параллельной Oz, то для Лнее получим
где dx — расстояние между параллельными осями Охгх и Cz*.
Исключая момент инерции Jczr из двух последних формул, получим
зависимость моментов инерции относительно двух параллельных осей,
не проходящих через центр масс:
Установим изменение центробежных моментов ийерции при парал-
параллельном переносе осей координат. Имеем
Л N N N
N
2 ть-
N N N
Учитывая, что ^mhylZz=JyZ', yimk2k=Mzc, ^тку1
N
^тк = М, Получаем
Jyz = JV'z' + Мус Zq + MZC Ус + Мус Zc,
265
где ус* 2с — координаты центра масо относительно системы коорди-
координат Cx'y'z*. Аналогичные формулы получаются для двух других цент-
центробежных моментов инерции:
JzX =Jz'z' 4- MzcXe4-Мхе г'о -Ь Мгс хс;
Jxy ~Jx-y+ Мхв Ус + Мус хс + Мхс ус.
°*
Так как начало системы координат Сх'у'г' находится в центре масс,
то х'с = 0, у'с = 0, г'с = 0 и тогда
Jyt = Jy'z'-bMycZa>, Jzx=Jt'x'+M2cxc; Jxu**Jx'y>+Mxcye; A0)
т. е. центробежные моменты инерции при параллельном переносе осей
координат из любой точки в центре масс изменяются в соответствии
о A0)."
Если производится параллельный перенос осей Ojtf^Zj из точки
Ох в центр масс, то согласно A0) имеем:
+ Mxicylc. A0')
Исключая из A0) и A0') центробежные моменты инерции JyZ', Jz'x-,
Jx-u'r получим формулы для изменения центробежных моментов инер-
инерции при параллельном переносе осей координат из точки Ох в точку 0:
—xe yc),
где (х1С, Ую, Zic) и (xc, yc, zc) — координаты центра масс в двух си-
системах взаимно параллельных осей координат.
§ 4. МОМЕНТЫ ИНЕРЦИИ ПРОСТЕЙШИХ ОДНОРОДНЫХ ТЕЛ
Моменты инерции тел сложной формы часто удается вычислить,
если их предварительно разбить на тела простой формы. Моменты инер-
инерции сложных тел получают, суммируя моменты инерции частей этих
тел. Получим формулы для вычисления моментов инерции некоторых
однородных простейших тел.
Однородный стержень
Имеем однородный стержень длиной / и маесрй М (рио. 26). На-
Направим по стержню ось Ох. вычислим момент инерции стержня отно-
относительно оси Oz, проходящей перпендикулярно стержню через его
конец. Согласно определению момента ииерцни сплошного тела отно-
относительно оси, имеем
Jozs*\xadtn=*p \ x*dx,
(О п
так как dm =s pdJf, где р = МИ — плотность стержня.
266
Вычисляя интеграл, получаем
Таким образом,
(И)
z
л
1
1
A !
_,. x ^
С
,,. l __>
к
Рис. 26
Момент инерции стервеня относительно оси Сг', проходящей через
центр масс и параллельной оси Oz, определяется по теореме Штейнера:
Следовательно,
+ М<Р, где d2 = (//2J - W.
12
т. е.
12
A2)
Прямоугольная пластина
Прямоугольная тонкая пластина имеет размеры / и Л и массу М
(рис. 27). Оси Ох и Оу расположим в плоскости пластины, а ось Oz —
перпендикулярно ей. Для определения момента инерции пластины от-
относительно оси Оу разобьем пластину на элементарные полоски шири-
шириной dx и массой dm =* phdx и про-
проинтегрируем по х от 0 до /. Полу-
Получим
I
Рис. 27
так как phi = М.
Аналогичные вычисления для оси Ох дадут
= М
12»
так как эта ось Ох проходит через середину пластины.
Для определения момента инерции пластины относительно оси
Oz следует предварительно вычислить момент инерции отдельной за-
заштрихованной полоски относительно параллельной оси О'г' по форму-
267
ле A2) для стержня и применить затем теорему Штейнера. Для
ментарной полоски имеем
dm— + х* dm.
Интегрируя это выражение в пределах от 0 до /, получим
Итак, для моментов инерции пластины относительно осей коорди-
координат получены следующие формулы:
A3)
Круглый диск
Имеем тонкий однородный диск радиусом R и массой М (рис. 28).
Вычислим момент его инерции J0 относительно точки О. Этот момент
инерции для тонкого диска совпадает с моментом инерции J'г отно-
относительно координатной оси Oz, перпендикулярной плоскости диска.
Разобьем диск на концентрические полоски шириной dr, принимаемые
в пределе за материальные окружности. Масса полоски равна ее пло-
площади 2nrdr, умноженной на плотность р ==
= M/inR*), т.е. dm — p • 2nrdr. Момент одной
полоски относительно точки О равен r2dm. Для
всего диска
Jo =
М R
Г г2 dm = р.2л Г
J J
п о
г8 dr
D4
= р.2я—=j
4
Рис. 28
Таким образом,
Jz = JQ » MR*I2.
A4)
Для осей координат Ох и Оу, расположенных в плоскости диска, в си-
силу симметрии Jx = ./„, Используя (8), имеем 2JO =* Jx + Jy + Уг,
но Jz~Jo> поэтому
j _ т _ »
MR*
A5)
В случае тонкого проволочного кольца или круглого колеса, у ко-
которых масса распределена не по площади, а по его ободу, имеем
MR2 - MRV2.
A6)
268
Круглый цилиндр
Для круглого однородного цилиндра, масса которого М, радиус R
и длина / (рио. 29), вычислим прежде веего его момент инерции отно-
еительно продольной оси симметрии Oz. Для этого разобьем цилиндр
плоскостями, перпендикулярными ogh Oz, на тонкие диски массой dm
й толщиной dz. Для такого диска мо-
момент инерции относительно оси Oz равен
-к- dm. Для всего цилиндра
м м
Рис. 29
т. е.
У, = MR42. A7)
Вычислим момент инерции цилиндра относительно его поперечной
оси симметрии Су. Для этого разобьем цилиндр поперечными сечения-
сечениями, перпендикулярными его продольной оси, на элементарные диски
толщиной dz. Момент инерции элементарного диска массой dm =*
= nR2pdz относительно оси Су, по теореме Штейнера, 6т -^- + dmz%.
Чтобы получить момент инерции всего цилиндра относительно оси
Су, следует проинтегрировать полученное выражение по г в пределах
от 0 до 112 и результат удвоить. Получим
М Ц2
Г
Г
о
Ц
Г
о
Но nRHp = М — масса цилиндра. Следовательно,
J0B = М (Я2/4
Таким образом, момент инерции цилиндра относительно его попе-
поперечной оси симметрии получается как сумма моментов инерции отно-
относительно этой оси диска и стержня, массы которых равны по отдель-
отдельности массе цилиндра. Диск получается из цилиндра симметричным
сжатием его о торцов до срединной плоскости при сохранении радиуса,
а стержень — сжатием цилиндра в однородный стержень, расположен-
расположенный по оси цилиндра, при сохранении длины.
Шар
Пусть масса шара М,- радиус R (рио. 30). Разобьем шар на концен-
концентрические сферические слои радиусом г и толщиной dr. Масса такого
слоя dm = pdV, где р = -у — ¦„ »3-, dV — объем слоя, равный
произведению площади поверхности сферы радиусом г на толщину слоя
dr, т. е. dV = inrdr. Таким образом, масса элементарного слоя dm =»
d 2
269
Для момента инерции шара относительно
его центра О имеем
м r
j0 = Г г» дт = р4л Г г* dr = Р4я -^- = -|-
(f о
т. е.
Рис. 30
A8)
Для осей координат, проходящих через центр шара, в силу симме
J J J Н J J + J + J 3J 3J
р р
трии Jx = Jy = Jz. Но
= 3JZ. Следовательно,
2J0 = Jx
р, у
= 3JX — 3Jy =
A9)
§ S. МОМЕНТЫ ИНЕРЦИИ ОТНОСИТЕЛЬНО ОСЕЙ,
ПРОХОДЯЩИХ ЧЕРЕЗ ЗАДАННУЮ ТОЧКУ
В заданной точке О выберем декартову систему осей координат
Oxyz. Ось 01 образует с осями координат углы а, р\ у (рис. 31). По оп-
определению момента инерции относи-
относительно оси 01 имеем 2
N
k=l
или для сплошных тел
J, = j d2dm.
В дальнейшем используется опре-
определение B0). Сплошные тела считают-
считаются разбитыми на N малых частей,
принимаемых за точки.
Из прямоугольного треугольника OAkMk получаем
dl =rl — (OAhf, B1)
где r% = х\ + yl 4- z%, xh, yh, zh — координаты точки Mh. Отр_езок
OAh является проекцией радиув-вектора rk = xj + yj + zhk на
ось 01. Для получения проекции вектора rk на ось 01 его следует ум-
умножить скалярно на единичный вектор этой оаи /° за i cos a +•
+ / cos p + At cos у. Имеем
ис'
OAh— 7й-7е = (л:^1 + yd + zhk)<{i cos а + 7COS
= д;й cos а -Ь г/й cos Р + г„ gos y-
B2)
270 '
Умножая в B1) г%, выраженный через координаты точки Mh, на еди-
единицу в виде cos3 a + cos2 0 4- cos2 у = 1 и используя значение B2)
для ОАЬ, получим
dl = {xl + yl +Л) (cos»a+cos2р + cos2 у)—
— (xh gos a + yk cos p + zh cos yf = (yl + zl) cos8 a +
+ (г* + x\) cos2 p-f-{jci-j- y|) cos2 у — 2yfe zft cos p cos у —
y cos a—2xft^ftcosaeosp. B3)
Подставляя B3) в B0) и вынося косинусы углов за знаки сумм,
имеем
—2cosycosa 2 тьгъхн — 2cosacosp 2
Учитывая, что
(d l) ( )
2 "Ч (d + zl) = /,; 2 m^ (z* + x*) = Jff- S
t=i *=i *«=»]
— моменты инерции относительно осей координат, а
N N N
'^imhyhzh = Jgi\ 2 ть zhXh = Jzx, S mhxhyh-Jxy-~
— центробежные моменты инерции относительно тех же осей, получим
Jl== Jх cos2 a + ^„ cos3 P + Jz cos2 v — 2Jj,z cos p cos у — 2JZX x
X cos v cos a — 2/jcj, cos a cos p. B4)
Для определения момента инерции /, кроме углов а, р, у, определяю-
определяющих направление оси, необходимо знать в точке О шесть моментов
инерции: Ja, Jи, Jz, Jvz, Jzx, Jxv Их удобно расположить как элемен-
элементы единой таблицы или матрицы:
-Jyx JB -J,A. B5)
Матрица, или таблица B5), составленная из осевых и центробеж-
центробежных моментов инерции относительно декартовых осей координат, на-
называется тензором инерции в точке О. В тензоре инерции условились
центробежные моменты инерции брать со знаком минус. Компоненты
тензора инерции (отдельные осевые или центробежные моменты инер-
инерции) зависят не только от выбора точки, но и от ориентации осей ко-
координат в этой точке.
271
Для определения момента инерции относительно какой-либо оси,
проходящей через заданную точку, для рассматриваемого тела необ-
необходимо иметь тензор инерции в этой точке и углы, определяющие на-
направление оси с осями координат.
§ 6. ЭЛЛИПСОИД ИНЕРЦИИ
Для характеристики распределения моментов инерции тела отно-
относительно различных осей, проходящих через заданную точку, ис-
используется поверхность второго порядка — эллипсоид инер-
инерции. Для построения этой поверхности на каждой оси 01 (рис. 31),
проходящей через точку О, откладывают от этой точки отрезок
ОК = 1/V7J. B6)
Геометрическое место концов отрезков ОК расположится на поверх-
поверхности, которая называется эллипсоидом инерции. Получим уравнение
эллипсоида инерции. Для этого выразим косинусы- углов а, р\ у че-
через координаты х, у, z точки К. Имеем:
; cos v = ~- = VTrг.
Подставляя эти значения косинусов углов в B4) и сокращая на J[t
получим уравнение поверхности второго порядка:
Jxx2 + Jvy2 + Jzz2 — 2Jyzyz — 2Jzxzx — 2Jxyxy = 1. B7)
Это действительно уравнение эллипсоида, так как отрезок ОК имеет
конечную длину для всех осей, для которых моменты инерции не об-
обращаются в нуль. Другие поверхности второго порядка, например
гиперболоиды и параболоиды, имеют бесконечно удаленные точки.
Эллипсоид инерции вырождается в цилиндр для тела в виде прямоли-
прямолинейного отрезка, если точка О расположена на самом отрезке. Для оси,
направленной по этой прямой линии, момент инерции обращается в
нуль и соответственно отрезок ОК равен бесконечности.
Для каждой точки О имеется свой эллипсоид инерции. Эллипсоид
инерции для центра масс тела называют центральным эллипсоидом
инерции. Оси эллипсоида инерции (его сопряженные диаметры) назы-
называются главными осями инерции. В общем случае эллипсоид инерции
имеет три взаимно перпендикулярные главные оси инерции. Они яв-
являются его осями симметрии.
В случае эллипсоида вращения все прямые, расположенные в эк-
экваториальной плоскости эллипсоида, перпендикулярной оси вращения,
будут главными осями инерции. Для шара любая прямая, проходящая
через его центр, есть главная ось инерции.
Моменты инерции относительно главных осей инерции называются
главными моментами инерции, а относительно главных центральных
осей инерции — главными центральными моментами'ТГнерции
Если уравнение эллипсоида инерции отнести к его главным осям
Ox', Oy', Oz', то оно примет вид
Jjt-xtt + Jy!/'i+Jt-z"='U B7й?
272
где х', у', z' — текущие координаты точки, расположенной на эл-
эллипсоиде инерции, относительно главных осей инерции; Jx-, Jv>> Jz- —
главные моменты инерции. Уравнение эллипсоида инерции B7') не
содержит слагаемых с произведениями координат точек. Поэтому
центробежные моменты инерции относительно главных осей инерции
равны нулю, т. е.
Jy' г> —О; Jz' х> =U; Jx> у' = 0.
Справедливо и обратное утверждение, что если центробежные моменты
инерции относительно трех взаимно перпендикулярных осей равны
нулю, то эти оси являются главными осями инерции. Обращение в
нуль трех центробежных моментов, инерции является необходимым и
достаточным условием того, что соответствующие прямоугольные оси
координат есть главные оси инерции.
Главные моменты инерции часто обозначают Jlt J2, J% вместо
JV» JУ» J*'m Лля главных осей инерции формула B4) принимает форму
/, == Jx cos a + У3 cos Р + J з cos y- B4')
§ 7. СВОЙСТВА ГЛАВНЫХ ОСЕЙ ИНЕРЦИИ
Теорема 1. Если одна из декартовых осей координат, например Oz
(рис. 32), является главной осью инерции для точки О, а две другие
оси Ох и Оу — любые^ то два центробежных момента инерции, содер-
содержащих индекс главной оси инерции Oz, обращаются в нуль, т. е.
/я = 0 и Jyz = 0.
Главная ось инерции Oz является осью симметрии эллипсоида инер-
инерции. Поэтому каждой точке эллипсоида, например М @, у, г), соот-
соответствует симметричная относительно этой оси точка М' @, — у, г).
Подставляя в уравнение эллипсоида инерции B7) последовательно
координаты этих точек, получим
Jsy* + Jzz2 - 2Juzyz = 1; /, {-yf + Jj? - 2JVi (-у) г -> 1.
Вычитая из первого уравнения второе, имеем
— 4Jyzyz = 0.
Так как всегда можно выбрать точки, для которых у и г отличны от
нуля, то Jyz = 0.
Аналогичные рассуждения для двух симметричных относительно
оси Oz точек N'(x, 0, z) и N' (— х, 0, г) приводят к заключению, что
Jхг = 0. В аналитической геометрии при исследовании уравнений по-
поверхностей второго порядка доказывается обратное утверждение, что
если Jxz = 0 и JVz = 0, то ось Oz есть главная ось. Таким образом,
обращение в нуль центробежных моментов инерции ]хг и 3Уг являет-
является необходимым и достаточным условием, чтобы ось Oz была глав-
главной осью инерции для точки О.
Теорема 2. Если однородное тело имеет плоскость симметрии,
то для любой точки, лежащей в этой плоскости, одна из главных-
осей инерции перпендикулярна плоскости симметрии а две другие
главные оси инерции расположены в этой плоскости.
273
Для доказательства теоремы выберем в плоскости симметрии /7
точку О и в ней оси прямоугольной системы координат Oxyz, причем
ось Ог направим перпендикулярно плоскости симметрии (рис. 33).
Тогда каждой точке тела Mh (хк, yh, zk) массой тк соответствует
Рис. 32
Рис 33
симметричная относительно плоскости П точка M'k (xk, yh, — zh)
с такой же массой. Координаты точек Мн и M'k отличаются только зна-
знаком у координат zh.
Для центробежного момента инерции Jуг имеем
(ii)
так как часть тела (I), соответствующая точкам с положительными ко-
координатами 2ft, одинакова с частью тела (II), у которой точки имеют
такие же координаты zh, но со знаком минус. Аналогично доказыва-
доказывается, что
Так как центробежные моменты инерции Jyz и J хг обращаются
в нуль, то ось Ог есть главная ось инерции для точки О. Другие две
главные оси инерции перпендикулярны оси Ог и, следовательно, рас-
расположены в плоскости симметрии.
Центр масс однородного симметричного тела находится в плоско-
плоскости симметрии. Поэтому одна из главных центральных осей инерции
перпендикулярна плоскости симметрии, а две другие расположены
в этой плоскости.
Доказанная теорема справедлива и для неоднородного тела, имею-
имеющего плоскость материальной симметрии
Теорема 3. Если однородное тело имеет ось симметрии или неодно-
неоднородное'тело имеет ось материальной симметрии, то эта ось является
главной центральной осью инерции
Теорема доказывается аналогично предыдущей. Для каждой точки
тела Мh с положительными координатами xk, yh> zh и массой mh су-
существует симметричная относительно оси точка g такой же массой н
274
такими же по величине, но отрицательными координатами — хь, — yh,
+ *bi если осью симметрии является ось Ог. Тогда
N
так как суммы по симметричным относительно оси частям тела (I)
и (II) отличаются друг от друга только знаком у координаты хк.
Аналогично доказывается, что J^ = 0.
Таким образом, ось Oz является главной осью инерции для любой
точки, расположенной на оси симметрии тела. Она есть главная цент-
центральная ось инерции, так как центр масс нахо-
находится на оси симметрии.
Теорема 4. Главные оси инерции для точки
О, расположенной на главной центральной оси
инерции, параллельны главным центральным
осям инерции (рис. 34).
Выберем в точке О главной центральной
оси инерции Cz систему декартовых осей коор-
координат Ox'y'z', взаимно параллельных главным Рис, 34
центральным осям инерции Cxyz. Тогда коор-
координаты точки тела Мк в двух системах осей координат будут связа-
связаны между собой формулами параллельного переноса осей
*' — xk> Уь ~ Уъ\ z'b — ~к — Лж
где h — ОС. Используя эти формулы, вычисляем центробежные мо-
моменты инерции JU'z', J г: х- и J' х>у-•. Имеем
N N N
k=l k=l 4=1
так как
N Я
4=1 г 4=1
где М — масса тела и уа — координата центра мава относительно си-
системы координат Cxyz.
Аналогично получаем
Если С — центр масс системы, то хс = 0 и уа =* 0. Для главных
центральных осей инерции центробежные моменты инерции равны
нулю, т. е.
/», - 0; hx = 0; JXB = 0.
Используя полученные формулы при этих увловиях, имеем:
Jg'z'=O; J2-x' — Q; Jx'U' = 0.
Следовательно, оси Ox', Oy't Oz' есть главные ови инерции для произ-
произвольной точки О, расположенной на главной центральной оси инерции
Сг. Теорема доказана.
275
Из доказанной теоремы в качестве следствия получаем» глав-
главная центральная ось инерции является главной бсью инерции для
всех своих точек. Действительно, главная ось инерции Ог' для точ-
точки О, лежащей на главной центральной оси инерции Сг, совпадает
с этой осью. Главная ось инерции таким свойством не обладает.
Главные оси инерции для точки Ои расположенной на главной оси
инерции точки О, не параллельны главным осям инерции для этой
точки. Они в общем случае повернуты относительно этих осей.
§ 8. ОПРЕДЕЛЕНИЕ ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ
И НАПРАВЛЕНИЯ ГЛАВНЫХ ОСЕЙ
Пусть известны компоненты тензора инерции в точке О относитель-
относительно осей координат Oxyz. Для определения направления главных осей
инерции в точке О используем уравнение эллипсоида инерции относи-
относительно этих осей
Ф (х, у, г) =
+ JZ22 — 2Jyzyz—2Jzxzx—2Jxyxy—l «=» О
Если оси координат Ox'y'z' являются главными осями инерции, то
радиус-вектор г точки М эллипсоида инерции, расположенной на глав-
главной оси инерции, например оси Ог' (рис. 35), направлен по нормали к
эллипсоиду, т. е. параллельно вектору grad ср, который, согласно его
определению, вычисляется по формуле
Параллельные векторы отличаются друг от друга скалярным мно-
множителем, который обозначим 2J. Тогда для параллельных векторов
г и grad ф и их проекций на оси координат
имеем:
2 J~r = grad ф; B8)
2J-x = ду/дх; 23 • у = ду!ду;
2J-z = дф/dz. B8')
В этих уравнениях х, у,? являются координата-
координатами точки конца вектора г, проведенного из точ-
точки О вдоль какой-либо главной оси инерции для
Рис. 35
этой точки
Для частных производных из B7) получаем:
= 2Jx-x — 2 Jxy-y — 2Jxz-z\ ду/ду = — 2Jxy>x +
-h 2 Jv*y — 2 Jyz'Z; dy{dz =— 2 Jzx>x — 2 J'чъ*у + 2 Jt*z.
Подставляя их значения в B8') и перенося все слагаемые в левую часть,
после объединения и сокращения на общий множитель получим еле-
276
дующую систему уравнений для определения координат х, у, г точки
Mt находящейся на главной оси инерции:
(Jx-~J).x—Jxy.y--Jxz.z = (
B9)
Так как B9) является однородной системой линейных уравнений,
то Отличные от нуля решения для координат х, у, z получаются толь-
только при условии, что определитель этой системы равен нулю, т. е.
¦К
= 0. C0)
JZV
'ух "в — " — "
J гх •> гУ •> г —
Это кубическое уравнение для определения / называется уравнением
собственных значений тензора инерции
В общем случае имеется три различных действительных корня ку-
кубического уравнения Ju /2, Ja, которые являются главными момента-
моментами инерции. Действительно, если ось Ох совпадает с главной осью инер-
инерции, то для точки М эллипсоида инерции, расположенной на этой оси,
у = 0 и 2 = 0. Первое уравнение B9) принимает вид
(Jx — J)-x=* 0.
Так как х Ф 0, то Jх — J = 0 и Jx = J, которое следует обозна-
обозначить Jv Аналогично можно получить Jv = J = Jг, Jz = J = /3,
если оси Оу и Oz — главные оси инерции.
Подставляя в B9) J = Jlt получим только два независимых уравне-
уравнения дгга определения координат точки х, у, z эллипсоида инерции, со-
соответствующих главной оси инерции, для которой главный момент
инерции есть /х. Третье уравнение системы будет следствием двух дру-
других уравнений, так как определитель этой системы равен нулю. Из
B9) можно найти только две величины, например xh и ylz. Они опре-
определят, направление вектора гх вдоль главной оси инерции, момент инер-
инерции относительно которой есть Jt. Модуль радиус-вектора гх остается
неопределенным. Аналогично определяются направления векторов
гй и г8 вдоль двух других главных осей инерции, для которых главные
моменты инерции равны /2 и /3. Можно доказать, что векторы rlt
Ft и rs, направленные вдоль главных осей инерции, взаимно перпенди-
перпендикулярны.
Таким образом, если известен тензор инерции для осей Oxyz, то
Можно определить как направление главных осей инерции, так и глав-
главные моменты инерции. Для главных осей инерции тензор инерции B5)
Принимает форму
/Л о о\
(/)= 0 /, 0 . B5')
277
§ 9. ВЫРАЖЕНИЕ КОМПОНЕНТОВ ТЕНЗОРА ИНЕРЦИИ
ЧЕРЕЗ ГЛАВНЫЕ МОМЕНТЫ ИНЕРЦИИ
Определим компоненты тензора инерции в точке О относительно
осей координат Охуг, если в этой точке известны главные моменты
инерции относительно главных осей инерции Ох'у'г', т.е. Jt — JV»
Ja = Jg't Jz — Jzr- Предположим, что ориентация осей координат
Охуг относительно главных осей инерции Ох'у'г' задана таблицей уг-
углов:
0*;
Оу,
0г\
i
1
Ox'; T
«i
аа
а3
Оу-. 7'
Pi
Р*
Рз
Oz'i ft'
Vi-
V«
Vs
Осевые моменты инерции относительно осей Ох, Оу, Oz через глав-
главные моменты инерции определяются по формуле B4'). Принимая по-
последовательно за ось 01 оси координат Ох, Оу,
Oz, получим
, — Jx> cos*
Рис. 36
Для выражения центробежных моментов
инерции через главные моменты инерции
используем формулы преобразования коорди-
координат точек тела при повороте осей координат
вокруг точки О (рис. 36)._Эти формулы получим проецированием на
оси Охуг радиус-вектора rk точки Mk, разложенного предварительно
на составляющие, параллельные осям двух систем осей координат
в точке О, Имеем
C2)
где xh, yk, zh — координаты точки Mk относительно системы осей
координат Охуг, a x'k, y'k, z'k — относительно Ох'у'г'. Проецирование
вектора на какую-либо ось прямоугольной системы координат экви-
эквивалентно скалярному умножению этого вектора на единичный вектор
оси. Умножая обе части C2) последовательно на единичные векторы
осей координат i, j, Ъ и учитывая таблицу углов для осей, получим
276
= rk't~(x'kil + y'k /' +z* k*)*i = х'к
+ y'k cos Pi + z'k cos Yi;
='a '7= № + #*7' + г* Л7) •/"= ** cos а
cos
+ г/fe cos p3 + zi cosy,.
Используя C3) для центробежного момента инерции Jxg, имеем
+ ( 2 m* ^ ]
C0S Pi C0S
S
C0S "Й C0S %•
так как центробежные моменты инерции относительно главных осей
инерции равны нулю, т. е.
Оси координат Одг и 0^/ взаимно перпендикулярны, поэтому косинусы
их углов удовлетворяют условию
cos ax cos а2 + cos pt cos pa + cos Yi cos Ya — 0
или
cos Yi cos Y2 ~ — (c°s «i cos а 2 -f- cos px cos p1 a).
Используя это соотношение для исключения величины cos Yi cos y*
и добавляя в первом слагаемом C4) под знаком суммы {y'k —y'k) =0,
а во втором (xk'z — x'k) = 0, после объединения слагаемых а одинако-
одинаковыми произведениями косинусов получим
[х'н + у?) —y\mk {у? + г|я) | cos at cos oj +
д
= Г S
Г S
La-i
cos a! cos a2 + GZ. — /„>) cos pt oos p2,
1?) (aа)
где
4=1
279
— главные моменты инерции. Аналогично получаются выражения для
J иг и Jzx> Итак, имеем
Jsy — (Jtt—Jx>)cosatcos«2
' —>V) cosp\cospY>
' — /j,')cos|32cos E8;
JZX={JZ' — JrjC
Формулы C1) и C5) дают выражения всех компонентов тензора
инерции для осей координат Охуг через главные моменты инерции, если
известны углы этих осей с главными осями инерции. В приложениях,
встречаются частные случаи j когда одна из осей координат Oxyz сов-
совпадает с главной осью инерции.
Если ось Ох совпадает с главной осью инерции Ох' (рис. 37), то
Jxy = Jx'u = 0; Jzx = Jzs- = 0.
Это же можно получить из C5). Необходимые для вычисления углы
соответственно равны:
= 90°, а3 = 90°, р2 = а, Р3 = 90° -а.
Из C5) имеем
— Ух' —J«')cos « sin a =
2
sin 2a.
C5!)
В формуле C5') с плюсом следует брать главный момент инерции с
индексом той оси, на положительное направление которой указывает
дуговая стрелка поворота осей Оуг на угол a < 90° до совпадения с
Реи. 37
осями Oy'z'. В рассматриваемом случае поворот осей Оуг вокруг Ох до
совпадения с главными осями производится от оси Оу к оси Oz; следо-
следовательно, с плюсом следует взять главный момент инерции J'z и о ми-
минусом Jy'.
Если оси расположены, как на рис. 38, то дуговая стрелка поворота
осей Оуг до совпадения с главными осями инерции Oy'z' на угол а <
<С 90° направлена к отрицательному направлению оси Ог. Поэтому в
C5') Jz' следует взять со знаком минус, а Jy— со знаком плюс, в
чем нетрудно убедиться, используя C5) и таблицу углов. Имеем:
= ое;
90°
а;
J , __ / г
JUz — (Jz- — Jy') cos a (—sin a) =(/„• — Jt>) cos a sin a = y '" sin 2a.
280
Аналогично при совпадении осей Оу с 0уг и повороте осей Охг во-
вокруг Оу до совпадения с осями Ох'г' на угол р < 90° от Ог к Ох в на-
направлении против часовой стрелки имеем:
J*'—J*
При совпадении осей Ог и О/ и повороте осей вокруг Ог на угол
< 90° от Ох к Оу против часовой стрелки получим:
y*7'
Глава 4
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ И СИСТЕМЫ
§ 1. ПРОСТЕЙШИЕ СВОЙСТВА ВНУТРЕННИХ СИЛ СИСТЕМЫ
Механической системой называется любая совокупность материаль-
материальных точек.
Внешними силами механической системы называются силы, о ко-
которыми действуют на точки системы тела и точки, не входящие в рас-
рассматриваемую систему.
Внутренними силами механической системы называют силы взаи-
взаимодействия между точками рассматриваемой системы.
Внешнюю силу, приложенную к какой-либо точке системы, обозна-
обозначим Fie), а внутреннюю Fi!>. Заметим, что внутренние и внешние силы
могут включать в себя как активные силы, так и силы реакций связей.
Рассмотрим некоторые простейшие
свойства внутренних сил, действующих на
всю механическую систему в любом ее со-
состоянии. Докажем, что главный вектор всех
внутренних Сил системы и главный мо-
момент этих сил относительно произвольной
точки равны нулю при любом состоянии
системы, т. е. при ее равновесии- и при
произвольном движении.
Пусть система состоит из N точек, Рис. 39
где N — любое конечное число (рис. 39).
Условимся пределы у суммы не ставить, когда суммирование произ-
производится по всем N точкам системы. Если рассмотреть какие-либо
две произвольные точки системы, например Мх и М2, то для них F</> +
+ Яа'> = 0, так как силы действия и противодействия всегда равны
друг другу по модулю, противоположны по направлению и действуют
вдоль одной прямой линии, соединяющей взаимодействующие точки.
1 Главный вектор внутренних сил /?<'> состоит из векторной суммы та-
281
ких сил действия и противодействия, так как вся система состоит из
нар взаимодействующих точек. Следовательно,
В проекциях на координатные оси
= 0. (Г)
Внешние силы тоже являются силами взаимодействия, но для них
силы действия приложены к точкам рассматриваемой системы, а силы
противодействия приложены к телам и точкам, не входящим в эту сис-
систему. _
Рассмотрим теперь сумму моментов сил F[l) и FW относительно точ-
точки О. Легко видеть, что
Mo (Fp) + Mo (П'>) = О,
так как обе силы имеют одинаковые плечи и противоположные направ-
направления векторных моментов. Главный момент внутренних сил L^1 от-
относительно точки О состоит из векторной суммы таких выражений, рав-
равных нулю. Следовательно,
Xg> = Шо (И°) - 27ft х W = 0. B)
н соответственно в проекциях на координатные оси
=O. B')
§ 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
Пусть даны внешние и внутренние силы, действующие на систему,
состоящую из N точек (рис. 40). Если к каждой точке системы прило-
приложить равнодействующую силу внешних сил ?1*) и равнодействующую
силу всех внутренних сил /*!'', то для любой ft-й точки системы мож-
можно составить дифферен-
дифференциальное уравнение движе-
движения, например в векторной
форме, т. е.
Рис, 40
k~l,2,...,N. C)
Систему N дифферен-
дифференциальных уравнений C)
называют дифференциаль-
дифференциальными уравнениями движе-
движения механической еишемы
в векторной форме. Если
спроецировать векторные
дифференциальные уравне-
ни я C) на прямоугольные декартовы оси координат, то получим си-
систему 3N дифференциальных уравнений, описывающих движение то-
точек механической системы.
Для нахождения движения механической системы по заданным си-
силам и начальным условиям для каждой точки системы нужно проин-
проинтегрировать, следовательно, систему ЗЛГ дифференциальных уравне-
уравнений. Эту задачу не удается точно решить в общем случае даже для од-,
ной точки. Она исключительно трудна в случае двух материальных
точек, которые движутся только под действием сил взаимодействия по
закону всемирного притяжения (задача о, двух телах) и совершенно
неразрешима в случае трех взаимодействующих точек] (задача о трех
телах).
Задача интегрирования дифференциальных уравнений механичес-
механической системы еще сложнее, если на механическую систему наложены свя-
связи, силы реакций которых заранее не известны и должны быть допол-
дополнительно определены по заданным силам и связям аналогично случаю
движения несвободной материальной точки по поверхности и кривой
линии.
В некоторых случаях из дифференциальных уравнений движения
системы можно получить первые интегралы, т. е. соотношения, в кото-
которые не входят производные второго порядка от координат по времени.
Если известны первые интегралы, то задача интегрирования системы
дифференциальных уравнений облегчается. Хотя отдельные первые
интегралы и не могут полностью описать движения всех точек системы,
однако они иногда характеризуют важные стороны движения системы
в целом.
Первые интегралы системы дифференциальных уравнений-удобно
получать из так называемых общих теорем динамики, когда выполня-
выполняются некоторые дополнительные условия для действующих сил. Кро-
Кроме того, общие теоремы динамики, даже когда по ним нельзя опреде-
определить первые интегралы, дают ценную информацию о движении точки
или системы. В некоторых задачах, где не требуется полного знания
движения системы, эти сведения могут оказаться достаточными.
Общие теоремы динамики являются следствиями системы дифферен-
дифференциальных уравнений движения точки или соответственно системы то-
точек.
§ 3. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС
Количество движения точки и системы
Одной из мер движения точки или системы является количество их
движения.
Количеством движения материальной точки q называют вектор,
равный произведению массы точки т на ее скорость v, т. е.
q = то. D)
283
Количество движения точки в физике часто называют импульсом
материальной точки.
Проекции количества движения точки на прямоугольные декарто-
декартовы оси координат:
qx — mvx = тх; qy — mvy — ту, цг — тог = таг.
D')
Размерность количества движений в СИ —кг-м/с или Н«с.
Количеством движения системы Q называют векторную сумму ко-
количеств движений отдельных точек систем, т. е.
Q - 2 mhvh,
E)
и, следовательно, проекции количества движения системы на прямо-
прямоугольные декартовы оси координат
Qx =
; Qz =
E')
Вектор количества движения системы Q в отличие от вектора коли-
количества движения точки q не имеет точки приложения. Вектор количе-
количества движения точки считается приложенным в самой движущейся ма-
материальной точке, а вектор 1^ является свободным вектором.
Вычисление количества движения системы
Количество движения системы можно выразить через массу систе-
системы М и скорость центра масс vc:
Q " Mvc. F)
В проекциях на прямоугольные декартовы оси соответственно
Qx » MvCx = Мхс; Qy =» MvCu «я Myo; Qz => MvCz = Мгс, F')
где хс, ус, Zc — координаты
центра масс системы.
Выведем формулу F):
G)
где rh — радиус-вектор k-й точ-
точки системы (рис. 41).
У По формуле для радиус-век-
радиус-вектора центра масо
Рис. 41
= Мга.
(8)
Подставляя значение статического момента массы (8) в G), имеем
q(c) ^
так как масса системы М не изменяется при движении системы.
Элементарный и полный импульсы силы
Действие силы F на материальную точку в течение времени 6t
можно охарактеризовать так называемым элементарным импульсом
силы Fut. Полный импульс силы F за время t, или импульс силы S, оп-
определяют по формуле
S=pctf. (9)
о
Проекции импульса силы на прямоугольные оси координат выра-
выражаются формулами
Sx =$Fxdt; Sa=* [Fydt; Sz~ fFtdt. <9«)
о о b
Единица импульса силы —H-g.
Теорема об изменении количества
движения точки
Дифференциальное уравнение движения материальной точки под
действием силы F можно представить в следующей векторной форме:
At
Так как масса точки т принята постоянной, то ее можно внести
под знак производной. Тогда
J-(mH) = F. (Ш)
Формула A0) выражает теорему об изменении количества движения
точки в дифференциальной форме: первая производная по времени от
количества движения точки равна действующей на точку силе.
В проекциях на координатные оси A0) можно представить в виде
±- (тох) = Fx; Л. (тоу) = Fv; -j- (mvz) = Ft. A0')
Если обе части A0) умножить на dtf, то получим другую форму этой
же теоремы — теорему импульсов в дифференциальной форме:
d{m~v)=№, (И)
т. е. дифференциал от количества движения точки равен элементар-
нему импульсу силы, действующей на точку.
285
Рис. 42
Проецируя обе части (II)
на координатные оси, полу-
получаем:
d (mvx) = Fxdt; j
d(mvv) = Fy &; \ (II')
d(mvz) = F^At. J
Интегрируя обе части A1)
в пределах от нуля до t
(рис. 42)* имеем
то — пт0 — S, A2)
где v — скорость точки в мо-
момент t; v0 — скорость при
t = 0; S — импульо силы за
время t.
Выражение в форме A2) часто называют теоремой импульсов в ко-
конечной (или интегральной) форме: изменение количества движения
точки за какой-либо промежуток времени равно импульсу силы за тот
оке промежуток времени. В проекциях на координатные оси эту теоре-
теорему можно представить в следующем виде:
mvx — mvox = Sx; mvy — mvov = Su; tnvz — mvoz = Sz. A2')
Ддя материальной точки теорема об изменении количества движе-
движения в любой из форм, по существу, не отличается от дифференциаль-
дифференциальных уравнений движения точки.
Теорема об изменении количества
движения системы
Аяаллгйчно тому, как для одной материальной точки, выведем тео-
теорему об изменении количества движения для системы в различных фор-
формах. Пусть к точкам системы приложены внешняя и внутренняя силы.
Тогда для каждой точки можно применить теорему об изменении коли-
количества движения^ например в форме A0) (см. рис. 40):
~ W^).=Fi"+Fi'}, A-1,2, ...,N.
Суммируя по всем тачкам, системы правые и левые части этих соот-
соотношений и учитывая, что сумма производных равна производной от
суммы, получаем
Так как по свойству внутренних вид и определению количества дви-
движения системы
то приведенное соотношение можно представить в виде
dQIdt =* ЪТЧ\ A3)
Выражение A3) является теоремой об изменении количества движе-
движения системы в дифференциальной форме: производная по времени от
количества движения системы равна векторной сумме всех внешних
сил, действующих на систему. В проекциях на прямоугольные декар-
декартовы оси «оорданат
dQJdt « Sfft»; UQJdt - 2/ЭД A3')
dQJdt = SFg?,
т.е. производная по времени от проекции количества движения системы
на какую-либо координатную ось равна сумме проекций всех внешних
сил системы на ту же ось.
Умножая обе части A3) на At, получаем теорему импульсов для
системы в дифференциальной форме:
dQ = ZFle) it, {14)
т. е. дифференциал количества движения системы равен векторной сум-
сумме элементарных импульсов всех внешних сил, действующих на систе-
систему. В проекциях на координатные оси эта теорема примет вид
dQx = 2/fc» dt; 4Qy = 2F$ dt; dQ, = 2Ffc><H. A4')
Беря интегралы от обеих частей A4) но времени от нуля до t, вы-
выводим теорему импульсов для системы в конечной или интегралыюй
форме:
Q - Qo = 2S$T\ A5)
где Qo — количество движения системы в момент I = 0; Q — коли-
количество движения в момент /; Sjf' — импульс внешней силы, действую-
действующей на k-ю точку за время /; S^ = J /"If5 dt.
о
Теорема импульсов для системы в конечной форме формулируется
так: изменение количества движения системы за какое-либо время равно
векторной сумме всех импульсов внешних сил, действующих на систему,
за то же время.
В проекциях на прямоугольные оси соглаено A5) имеем:
Qx - Qox = 2SJS?; Qy - Qo, = 2Sfe>; Qz - QQZ =* S5^J. A5')
Внутренние силы системы не входят явно в теорему об изменении ко-
количества движения системы в любой из форм и, следовательно, не
влияют непосредственно ла изменение чкшшчества движения системы.
Они могут влиять на изменение кодичества движения только неявно
через внешние силы.
Из шеоремы об изменении количества движения дл'Я точки и системы
при некоторых условиях для внешних сил можно получить так назы-
называемые первые интегралы системы дифференциальных уравнений точ-
точки и системы. Эти первые интегралы называют законами сохранения
287
количества движения или проекции количества движения на ось. Рас-
Рассмотрим эти законы сохранения для точки и системы одновременно,
считая материальную точку механической системой, состоящей из од-
одной точки.
Законы сохранения количества движения
Законы сохранения количества движения системы получаются как
частные случаи теоремы об изменении количества движения для систе-
системы в зависимости от особенностей системы внешних сил, приложен-
приложенных к рассматриваемой механической системе, а для одной точки — от
особенностей сил, действующих на точку. Внутренние силы при этом
могут быть любыми, так как они не влияют на изменение количества
движения системы.
Возможны два частных случая.
1. Если векторная сумма всех внешних сил, приложенных к систе-
системе, равна нулю, т. е. ЪР(р = 0, то из теоремы об изменении количест-
количества движения системы, например в форме A3), следует, что
Q = const. A6)
Этот закон (точнее, частный случай теоремы) формулируется так:
если главный вектор внешних сил системы равен нулю, то количество
движения системы постоянно по величине и направлению. В проекци-
проекциях на координатные оси по этому закону
Qx = Сг, Qy = С2; Qz = C3, A6')
где Съ С2, С3 — постоянные величины.
В соотношения A6) и A6') входят производные от координат точек
по времени не выше первого порядка и не входят вторые производные
от этих координат. Следовательно, эти соотношения являются первыми
интегралами дифференциальных уравнений системы C).
2. Если равна нулю проекция главного вектора внешних сил На
какую-либо координатную ось Ох, т. е. 2?^ — 0, то из A3')
Qx = const. A7)
Выражение A7) является законом сохранения проекции количест-
количества движения системы: если проекция главного вектора всех внешних
сил системы на какую-либо ось равна нулю, то проекция количествадви-
жения на ту же ось является постоянной величиной.
Применим закон сохранения количества движения системы для объ-
объяснения принципа реактивного движения. Пусть, на-
например, система состоит из двух сочлененных твердых тел, находящих-
находящихся в покое, и свободных от действия внешних сил. Тогда для рассмат-
рассматриваемой системы количество движения все время постоянно и равно
нулю. Допустим, что при взрыве пиропатрона Действие внутренних
сил) первому телу массой Мг сообщена скорость vt. Тогда акорость вто-
288
рого тела массой М% определится из закона сохранения количества
движения:
Q = MjVt + Mtv^ = const =! 0.
Следовательно,
т.е. второе тело движется в сторону, противоположную первому телу.
Если его движению препятствует какая-либо связь, то рассматривае-
рассматриваемое тело давит на эту связь с некоторой силой по направлению скоро-
скорости и2. Эту силу называют реактивной. В реактивных двигателях она
создается за счет истечения газа с большой скоростью (около 2—2,5
км/с) из Сопла двигателя.
Теорему об изменении количества движения в той или другой фор-
форме удобно применять для решения задач именно в рассмотренных част-
частных случаях, хотя в некоторых случаях ее применяют и в общем слу-
случае. Отметим, что внутренние силы не влияют на изменение количест-
количества движения, в частности в изолированных системах, т. е. в системах,
которые' не соприкасаются с другими телами, не принадлежащими к
рассматриваемой системе, или окружающей систему материальной
средой.
В неизолированных механических системах внутренние силы, вы-
вызывая движение отдельных частей системы вследствие взаимодействия в
внешними телами или окружающей материальной средой, могут выз-
вызвать внешние силы в виде сил реакций связей или изменения активных
сил, которые могут изменить количество движения системы.
Количество движения системы может зависеть от внутренних сил
только неявно, через внешние силы.
Пример. Через изогнутую под прямым углом трубу постоянного сечения
протекает за I о жидкость массой т (рис. 43). Скорость течения жидкости и по-
постоянна и одна и та же у всех частиц жидкости, Определить силу, с которой жнд«
кость давит на участок трубы вследствие поворота потока на прямой угол.
Решение. Применим к объему жидкости, заключенному между стенка*
ми трубы и поперечными сечениями / и 2, теорему об изменении количества дви-
движения в форме теоремы импульсов за промежуток времени, равный I с. За се-
КУНДУ точки жидкости из сечения 1 сместятся на расстояние о» I и займут положе-
положение /', а точки жидкости из сечения 2 займут положение 2', По теореме импуль»
сов для выделенного объеме жидкости имеем
IF At = F-l, (a)
где Qa — количество движения жидкости, заключенной между сечениями / и 2\
Q — количество движения жидкости, заключенной между сечениями /' и 2*j
F — главный вектор распределенных сил, с которыми действуют стенки трубы
на выделенный объем жидкости,
Так как в общей части объема жидкости количества движения, входящие в
Q и Q^, взаимно уничтожаются при вычитании, то из (а) получаем
F = Q — Qo> F =• my — mv9.
10 зак. 1311 289
Сила давления жидкости F' на стенки трубы по закону о равенстве действия
и противодействия выразится в виде
F' гз _ F = mv9 — triv, (б)
Проецируя (б) на оси координат, получаем
так как у = y0. После этого
Направление силы давления F' указано на рисунке,
Если бы через сечение / жидкость Не поступала, а образовывалась внутри
трубы, как в реактивном двигателе образуются_гаэы после сгорания топлива, но
через сечение 2 она выходила (pHOi 44), то сила F' согласно (б) имела бы значение
?' == — mv.
Эта сила F1 является частью реактивной силы двигателя вследствие вы-
выброса продуктов сгорания из камеры сгорания, являющейся источником массы
газа. Другая часть реактивной свлы двигателя, равная (р — ра) s, получается
У\
-ти
2 2
*n
vtt
Рис. 43
Рис. 44
за счет разности давлений р в струе выходящего аз сопла газа и давления в ере-
ДерО! кУДа выходит из двигателя газ, Здесь s—площадь выходного сечения соп-
сопла.
Полная реактивная сила двигателя
? = mv + (р — р„) s.
По направлению реактивная сила R всегда противоположна скорости и" вы-
выходящего из двигателя газа. Для получения большой скорости выходящего газа
сопло двигателя обычно расширяют по направлению к выходному его сечению*
Теорема о движении центра масс системы
Спедствием теоремы об изменении количества движения системы яв-
является теорема о движении центра масс системы.
По теореме об изменении количества движения системы A3),
F):
Но количество движения системы можно вычислить по формуле
Q = MxJc,
где vc — скорость центра масс; М — масса системы.
290
Подставляя F) в A3) и учитывая, что масса системы постоянна, по-
получаем теорему о движении центра масс в векторной форме:
м
или
At
Мас
A8)
где ас — ускорение центра масс.
Теорема о движении центра масс формулируется так: центр масо
системы движется так же, как и материальная точка, масса которой
равна массе всей системы, если на точку действуют все внешние силы,
приложенные к рассматри-
рассматриваемой механической си-
системе.
Проецируя A8) на пря-
прямоугольные декартовы оси
координат (рис. 45), полу-
получаем дифференциальные
уравнения движения цент-
центра масс:
М
М
kxt
dfi
м
гС _
= 2ПгЛ A8')
Рис, 45
где хс, ус, гс — координаты центра маес.
Из теоремы о движении центра масо можно получить следствия,
аналогичные законам сохранения количества движения и проекции
количества движения на ось.
1. Если главный вектор внешних сил, дейвтвующих на систему, ра-
равен нулю, т. е. 2Де> = 0, то из A8) следует, что ускорение центра
масо ас равно нулю, а следовательно, скорость центра мазв vc являет-
является постоянной по модулю и направлению, т. е. центр масв движется
прямолинейно и равномерно по инерции или находится в покое. Если,
в частности, в начальный момент он находится в покое,,то он покоится
в течение всего времени, пока главный вектор внешних сил равен ну-
нулю.
2. Если проекция, например на ось Ох, главного вектора внешних
сил, действующих на систему, равна нулю, т. е.
2РЙ? = О,
то из A8') следует, что проекция ускорения ко центра маоа на эту ось
равна нулю, а следовательно, проекция вкоровти центра масс является
постоянной величиной, т. е. vCx =a хс =* const.
10*
Если дополнительно в начальный момент vCx —0, то тогда хс =*
= const, т. е. координата хс центра масс не изменяется при движении
системы.
Внутренние силы не влияют явно на движение центра масс. Они
могут влиять только неявно, через внешние силы. Следовательно, од-
одними внутренними силами, без внешних, нельзя вывести из равно-
равновесия или изменить движение центра масс системы. Но внутренними
силами для неизолированной механической системы можно создать
движение отдельных частей системы и, следовательно, взаимодейст-
взаимодействие с внешними телами,
вызывая этим внешние
силы реакций связей
или изменяя активные
силы. Это может изме-
изменить движение центра
масс или вывести его из
равновесия.
Пусть человек^стоит
на абсолютно гладкой
горизонтальной плоско-
плоскости вблизи скрепленно-
Рис 46 го с этой плоскостью те-
тела Так как на челтвека
не действуют внешние силы в горизонтальном направлении, то внут-
внутренними силами он не может вывести из равновесия в этом направлении
свой центр масс. Но человек может оттолкнуться рукой от препятствия,
т. е. внутренними силами вызвать внешнюю силу реакций препятствия
и таким образом вызвать движение своего центра масс в горизонталь-
горизонтальном направлении. Все, что движется по Земле, летает в воздухе, плава-
плавает по воде, совершает это с помощью внутренних сил, создавая внеш-
внешние силы трения на твердых поверхностях внешних тел, отталкиваясь
от воздуха или воды.
Пример 1, Два груза Pj и Р2, соединенные нерастяжнмой нитью, пере-
переброшенной через блок, скользят по боковым граням равнобедренного клинл
(рис, 46). Клин стороной ВС опирается на гладкую горизонтальную плоскость.
В начальный момент система находится в покое.
Найти перемещение клина по плоскости при опускании груза Pj на высоту
ft. Сила тяжести клина Р = 2Р4 иР,= 2Ра. Массой блока и нити пренебречь.
Решение. Внешними силами, действующими на клин вместе с грузами,
являются силы_тяжести Pt, P~2, Р и нормальная реакция горизонтальной гладкой
поверхности /V, Следовательно,
Учитывая, что в начальный момент система находится в покое, на основании
второго следствия из теоремы О движении центра масс имеем хс = const.
Вычислим ха при t — 0 и х? в момент, когда груз Рх опустится на высо-
высоту h.
Для момента t = О
*с —
292
где- Xi, xt н х — соответственно координаты центра масо по осн Ох грузов Pj,
Р% и клина.
Пусть вся система вместе с клином перемещается в положительном направ-
направлении оси Ох на величину /, пока груз Pf опускается на Л. Тогда
Pi (xt+l-h) +P, (xz+l-h) + P (х+1)
кс —
тан как грузы вместе с клином передвинутся на / вправо и по клину вдоль отри,
цательиого направления оси О* на h при заданном угле клина, равном 45°,
Так как х*с — хс — 0, то после вычи-
вычитания У
pt (/ _ h) + Рг {I — h) + PI = О, [
Отсюда
Так как величина / оказалась положи-
положительной, то клин действительно переме-
переместится вправо в положительном направле-
направлении оси Ох.
Пример 2. В электромоторе корпус
(статор) имеет силу тяжести Pt = 700 Н,
сила тяжести ротора Р2 = 300 Н. Он вра-
вращается по часовой стрелке, частота враще-
вращения его п = 980 об/мин (рис 47), Центр тя-
жести ротора вследствие его несимметрии Рис. 47
отстоит от оси вращения на расстоянии
(== 5 см.
Определить горизонтальную силу, с которой действует мотор на болты, кое*
лящие его к фундаменту, и вертикальное давление на пол,
Решение. Предположим, что при /=0 центр тяжести ротора С находит-
находится на оси Оу. Тогда в момент времени /координаты центра масс ротора
sin ф = I sin co/j уг — I cos
cos со/,
где со = ял/30 == л-980/30 = 98л/3 I/c,
Для определения давления мотора на болты и пол рассмотрим в качестве
механической системы весь мотор, для которого_виешней силой в горизонталь-
горизонтальной направлении является только действие болтов Р,_а в вертикальном иаправле-
ник — силы тяжести и нормальная реакция пола N. Выберем за начало коор-
координат центр масс корпуса мотора, Для координат центра масс Хс и ус всего мо-
мотора вместе с корпусом получим
Где mi и тг — массы корпуса мотора н ротора соогветотвеягго} х\, д\ я xv дг —
координаты их центров масс,
В данном случае центр масо корпуса закрепленного мотора является непод-
неподвижной точкой и находится в начале координат. Следовательно, х\ — 0, й = 0
и поэтому
; Ус"
293
Используя дифференциальные урвнения движения центра масс всего мото-
мотора в проекциях на координатные оси, имеем:
^JV.Pl_pif (a)
о
где F — сила действия болтовне горизонтальном направлении иа корпус мото-
мотора, направленная по оси Ох, N — нормальная реакция пола,
Так как
Р Р
*С= — n .V la/l Si" °>'> УС^—„ ld~ to' C0S Wt>
то из (а) следует
n p
F =», lafi sin »/; /V = la2 cos w'+(Pt + P4).
« 8
Сила действия мотора F' на болты и давление N' на пол
р = — F~, N' = — /7.
Наибольшие числовые значения сил F' и ЛГ:
^ах + —'«г «1000+16200 =.1
Если болтов нет, то корпус мотора может подпрыгивать вверх в на-
направлении оси Оу. Динамическое условие подпрыгивания
выразится в рассматриваемом случае как Af<CO, кинематичес-
кинематическое условие подпрыгивания есть ух >• 0.
Дифференциальные уравнения поступательного
движения твердого тела
Из теоремы о движении центра масс системы получаются диффе-
дифференциальные уравнения поступательного движения твердого тела.
Имеем _
Но при поступательном движении твердого тела ускорения всех
точек тела одинаковы по модулю и направлению, т. е. ас = а, где а —
ускорение произвольной точки тела. Учитывая это, из теоремы о дви-
движении центра масс получаем следующее дифференциальное уравнение*
поступательного движения тела в векторной форме:
Проецируя на оси координат, имеем:
мх=sFL; My=zJV, Mi=
Это и есть дифференциальные уравнения поступательного движе-
движения твердого тела в проекциях на прямоугольные оси координат.
В этих уравнениях х, у, г являются координатами произвольной точки
294
тела, в частности могут быть координатами его центра масс. Тело, со-
совершающее поступательное движение, имеет три степени свободы, и
поэтому можно составить три дифференциальных уравнения его дви-
движения
Дифференциальные уравнения поступательного движения твердо-
твердого тела аналогичны дифференциальным уравнениям движения одной
материальной точки. С помощью этих уравнений можно решать такие
же задачи, как и для одной точки.
§ 4. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
Кинетический момент точки и системы
Наряду с количеством движения в качестве векторной меры движе-
движения можно использовать кинетический момент, или момент количе~
bmea движения. Для материальной точки массой т, движущейся со
скоростью v, кинетическим моментом ko относительно какого-либо
центра О называют момент количества движения точки относительно
этого центра О (рис. 48), т. е.
ko = Mo (tnv) = г X то.
A9)
Кинетический момент ko приложен к точке О, относительно кото-
которой он вычисляется.
Рис 48
Рис. 49
Проецируя обе части A9) на прямоугольные декартовы оси, полу-
получаем кинетические моменты точки относительно этих осей координат,
если точка О является началом осей координат:
3.= Mx(mv)=m(yvz—zvs)=m(yz—zy)',
v = My (mv) — m (zvx —хог) =m(zx— xz).
К —
= m (Щ—
ух).
A9')
295
В физике кинетический момент точки иногда называют моментом
импульса точки.
Единица кинетического момента в СИ — кг«м2/с, _или Н»м«е.
Для механической системы кинетическим моментом Ко (или глав-
главным моментом количества движения системы относительно какой-либо
точки О) называют векторную сумму кинетических моментов точек
этой системы, взятых относительно точки О (рис. 49), т. е.
Ко = 27Йо (mhHh) = 2r"ft x mhvh. B0)
Кинетический момент системы Ко приложен к точке О, относитель-
относительно которой он вычисляется.
Если спроецировать B0) на прямоугольные декартовы оси коорди-
координат, то получим проекции кинетического момента на эти оси, или кине-
кинетические моменты относительно осей координат:
yhzk-~ zhyh)\
Ку =•
Кг =
~ xhzh)\
2tnh(xhyh—yhxh) ;
B0')
Кинетический момент относительно оси вращения
при вращательном движении твердого тела
Вычислим кинетический момент твердого тела относительно оси
вращения, когда тело вращается вокруг этой неподвижной оси с угло-
угловой скоростью со (рис. 50). По определению кинетического момента от-
относительно оси [(см. формулы B0')] имеем
Но при вращении тела вокруг оси vk — hka, причем количество
движения точки mh,vh перпендикулярно отрезку hh и лежит в плоско-
z сти, перпендикулярной оси вращения Oz.
Следовательно, момент количества движения
относительно оси Oz для одной точки
№г (mkvk) = hhmhvh = тМсо.
Для всего тела
т. е.
Kz = J,<o. B1)
Таким образом, кинетический момент те-
тела относительно оси вращения при враща-
вращательном движении равен произведению угловой
скорости тела на его момент инерции отно-
относительно оси вращения. Знак кинетического
момента относительно оси совпадает со" знаком
угловой скорости вращения вокруг этой оси:
у*,**;
296
при вращении против часовой стрелки кинетический момент положи-
положительный, при вращении по часовой стрелке он отрицательный.
Дополнительно без вывода приведем формулы для кинетических
моментов относительно двух других осей коорди.нат Ох и Оу, перпен-
перпендикулярных оси вращения Oz. Имеем
Кх = — Jxz®\ Ку = — /j/z«>,
где Jхг = I,mkxkkzk и Jyz = Ът^у^^ — центробежные моменты инер-
инерции.
Эти формулы можно получить как частный случай более общих фор-
формул для случая вращения твердого тела вокруг неподвижной точки.
Они могут быть получены и непосредственно.
Если ось вращения Oz является главной осью инерции для точки,
О, то Jxz — Jyz = 0 и, следовательно, К.х = Kv = 0 для этой точки.
В этом случае кинетический момент Ко относительно точки О
направлен по оси вращения. В общем случае Ко не направлен по оси
вращения, так как имеет не равные нулю проекции Кх и Ку на оси
координат, перпендикулярные оси вращения Oz.
Теорема об изменении кинетического
момента точки
Для материальной точки основной закон динамики можно предста-
представить в виде
Умножая обе части этого соотношения слева векторно на радиус-
вектор г (см. рио. 4й), получаем
7хт—=7x7. B2)
at
В правой части этой формулы имеем момент вилы относительно не-
неподвижной точки О. Преобразуем левую часть, применив формулу
производной от векторного произведения:
Но
At dt At
d/
как векторное произведение параллельных векторов.
После этого из B2) получаем
—f"x ~)~~ F
197
или
ijji-aMF). B3)
Таким образом, первая производная по времени от кинетического
момента точки относительно какого-либо центра равна моменту вилы
относительно того от центра.
Это и есть теорема об изменении кинетичев-
кого момента для точки.
Проецируя B3) на прямоугольные декартовы ови координат, по-
получаем теоремы об изменении кинетического момента точки относитель-
относительно этих осей координат:
dkjdt = Мх (Fy, dkyldt =s MV{F)\ dkjdt = Мг (f). B3')
Теорема об изменении кинетического
момента системы
Если к точкам системы приложить все внешние н внутренние вилы
(см. рис 49), то для каждой точки системы можно выразить теорему об
изменении кинетического момента в форме B3), т. е.
4" (Гн X mkVk) = 7k х F{e) +7h X Щ\ ft= 1, 2, ..., №.
at
Суммируя правые и левые части этих соотношений по всем точкам
системы и заменяя суммы производных производной от суммы, полу-
получаем
4- 27S х mk vk ^ БГА х W + 27й X FH\
at
Так как по свойству внутренних сил
а по определению кинетического момента системы
2rhxmfc vk => Ко,
то _ _
dKoldt = Srk X F[e\
Если обозначить главный момент всех внешних сил Lo, т. е.
то теорему об изменении кинетического момента системы можно пред-
представить в виде
d~Kofdt = W. B4)
Следовательно, первая производная по времени от кинетического но-
мента системы относительно какой-либо точки равна векторной сум-
сумме моментов внешних сил, действующих на систему, относительно той
же точки.
288
В эту теорему входит кинетический момент системы Ко в ее движе-
движении относительно инерциальной системы отсчета, причем кинетичес-
кинетический момент и моменты внешних сил вычисляются относительно непод-
неподвижной в этой системечотсчета точки О. Получим теорему об изменении
кинетического момента системы такого
же движения, но выберем в качестве
точки при вычислении кинетического
момента и моментов внешних сил точку
А, движущуюся относительно инер-
инерциальной системы отсчета со скоростью
Рис. 51
По определению кинетического мо-
момента системы относительно точки А
имеем (рис. 51)
К а — 2гй X mh, vh-
Вычислим производную по времени от кинетического момента К А по
правилу дифференцирования векторных произведений. Получим
dt \ dt
+ rh X
dfb - , - d»fe
—5- x mk vh + rh x mh —
2 [(vh— vA) х mbvh -f-
{e)
A'1)] = -vA X
X
так как rh ==pft—pA,
dt
dt
¦¦Vh—VAf
dl
Учитывая, что Q = H,mhvh = Af-C, получим
I dR Jut =¦ — vA X MvA + 27ft X Fis\
или _ _
Рассмотрим частные случаи этой теоремы. _
1. Если точка А совпадает с центром масо С, то Mvc X vG = 0 и
теорема принимает форму
2. Если в случае плоского движения твердого тела выбрать в ка-
качестве точки А мгновенный центр скоростей Р, то Va = vP Ф 0, так
как в рассматриваемом случае vP есть скорость движения мгновенного
центра скоростей по неподвижной центроиде, а она не равна нулю в
отличие от скорости точки тела, совпадающей g тачкой Р, которая рав-
равна нулю. Очевидно, vP + Mvc = 0, если vP параллельна ос< т. е.
если касательные к центроидам и траектории центра масс параллель-
299
ны или, что то же самое, центр масв находится на нормали к центрои-
центроидам в точке Р. Тогда
Эти частные случаи показывают, что для подвижных точек центра
масс для любой системы и мгновенного центра скоростей при плоском
движении твердого тела в рассмотренном случае теорема об измене-
изменении кинетического момента для абсолютного движения имеет ту же
форму, что и для неподвижной точки О.
Внутренние силы непосредственно не влияют на изменение кинети-
кинетического момента системы. Они могут влиять на него только через внеш-
внешние силы, т. е. неявно.
Проецируя B4) на прямоугольные декартовы оси координат, полу-
получаем теоремы об изменении кинетического момента системы относи-
относительно этих осей координат, т. е.
dKJut = L[e); dKy/dt * 4е); dKJdt = Lie\ B4')
Теорема об изменении кинетического момента позволяет изучать
вращательное движение твердого тела вокруг оси и точки или враща-
вращательную часть движения тела в общем случае движения свободного
твердого тела.
Законы сохранения кинетических моментов
Выведем законы сохранения кинетических моментов для системы,
рассматривая материальную точку как механическую систему, у ко-
которой число точек равно единице. Естественно, что для одной матери-
материальной точки все действующие на нее силы являются внешними. Воз-
Возможны следующие частные случаи теоремы об изменении кинетического
момента системы.
1. Если главный_момент внешних сил системы относительно точки
О равен нулю, т. е. ?ое> = 0. то согласно B4) кинетический момент
системы Ко относительно той же точки постоянен по модулю и направ-
направлению, т. е.
/Со = const. B5)
Этот частный случай теоремы об изменении кинетического момента
системы называют законом сохранения кинетичес-
кинетического момента. В проекциях на прямоугольные декартовы оси
координат по этому закону
Кх = С1; К„ = С2; Kt = С„ B5')
где Сь CL, C3 — постоянные величины.
Соотношения B5') являются первыми интегралами дифференци-
дифференциальных уравнений движения системы C). Закон сохранения кинети-
кинетического момента системы показывает, что одни внутренние силы не мо-
могут изменить кинетический момент системы так же, как они не изме-
изменяют ее количество движения.
300
2. Если сумма моментов всех внешних сил системы относительно
оси Ох равна нулю, т. е. L?* = 2МХ (Р[е)) = 0, то из B4') сле-
следует, что
Кх = const. B6)
Следовательно, кинетический момент системы относительно ка-
какой-либо координатной оси постоянен, если сумма моментов внешних
сил относительно этой оси равна нулю, что, в частности, наблюдает-
Рис 52
ся, когда внешние силы параллельны оси или пересекают ее. В част-
частном случае для тела или системы тел, которые все вместе могут вра-
вращаться вокруг неподвижной оси, и если при этом
= О,
то
или
К,г = Jz®—const
B7)
где Jt и со — момент инерции системы тел и их угловая скорость отно-
относительно оси вращения в произвольный момент времени t\ Jz0 и w0—
момент инерции тел и их угловая скорость в момент времени, выбран-
выбранный за начальный, например при t = 0.
Закон сохранения кинетического момента в форме B7) используют
в своей деятельности акробаты, прыгуны, танцоры и т. д. Наглядно
его можно продемонстрировать в опыте на скамье Жуковского (рис. 52).
Если человек с гирями в руках встанет на горизонтальную платфор-
платформу скамьи Жуковского, которая может вращаться вокруг вертикаль-
вертикальной оси почти без трения, и затем ему сообщить угловую скорость во-
вокруг этой оси, то
Л J
301
так как внешние силы или параллельны оси вращения (силы веса че-
человека, глрь и платформы), или пересекают ось (реакции подшипника,
если пренебречь силами трения)г
Следовательно, если человек увеличит момент инерции, например
разведением рук с гирями в стороны, то угловая скорость вращения
уменьшится, и наоборот В действительности угловая скорость хотя
и медленно, но все время уменьшается вследствие наличия сопротив-
сопротивления воздуха и трения в подшипнике скамьи.
Пример. Однородный горизонтальный диск радиусом R и силой тяжести Р
может вращаться без трения вокруг вертикальной оси Как изменится угловая
скорость диска, если первоначально стоящий на диске на расстоянии г от его оси
человек силой тяжести Pt пойдет по окружности диска радиусом г с относитель-
относительной скоростью v (рис 53)?
Решение. Пусть угловая скорость диска вначале была <в0, а потом, ког-
когда человек пошел по нему, стала <о. Так как внешние силы для системы чело-
человек—диск параллельны оси Ог (силы тяжести ~Р и Р{) или ее пересекают (реак-
(реакции RA и Rg), то
в, следовательно,
Kz = const.
Составим Kz системы для двух моментов времени и приравняем их друг
другу. Когда человек стоит, кинетический момент системы
0
После того как человек пойдет по диску, его кинетический момент станет рав-
равный кинетическому моменту от вращения вместе с диском плюс кинетический мо-
момент от относительного движения против часовой стрелки по диску, т. е.
Р Pt
Яг =Л <Н г2 m-J —п>.
в g
Приравнивая оба выражения кинетических моментов, получаем
h «4 — г*(а \ i-rv=J(o^ —
е
Отсюда
Для однородного диска
Поэтому угловая скорость
Угловая скорость диска уменьшилась на 2P1ra/(PR* + 2Ptr2). Если вместо
диска рассматривать земной шар, то движение ло нему материальных объектов
(ветры, течение воды и т. д.), которые имеют не равную нулю проекцию скорости
на касательные к параллелям, вызовет изменение угловой скорости вращения
Земли. Оиа уменьшится, если проекции скорости положительны для направления
по вращению земного шара н увеличится — если против вращения,
362
Дифференциальное уравнение вращения твердого
тела вокруг неподвижной оси
Из теоремы об изменении кинетического момента B4') получим диф-
дифференциальное уравнение вращения твердого тела вокруг непрдвиж-
ной оси Ог (рис. 54). Имеем
dKM =» 2М2 (Р[%
Для случая вращения твердого тела вокруг неподвижной оси, сог-
согласно B1),
где Jz — постоянный для твердого тела момент инерции относительно
неподвижной реи вращения; ю — угловая скорость. Учитывая это,
получаем
Если ввести угол поворота тела <р, то, учитывая, что do>/d/ = f»
имеем
Это и есть дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси Оно полностью аналогично дифференциаль-
дифференциальному уравнению поступательного ^движения
твердого тела в проекции на какую-либо ось,
например на ось Ох
В дифференциальное уравнение вращения
тела вокруг неподвижной оси вместо координа-
координаты х входит угол поворота ср, вместо массы тела
М — момент инерции относительно оси враще-
вращения Jz, вместо суммы проекций внешних сил
на ось Ох — сумма моментов внешних сил отно-
относительно оси вращения Oz или так называемый
вращательный момент внешних сил.
Реакции подшипников RA и RB оси враще-
вращения являются внешними силами, но их моменты
относительно оси вращения равны нулю, так
как они пересекают ось, кесли пренебречь сила-
силами трения.
В частном случае, когда
2М2 (Р[е)) = М° = const, то в = ср = йе}иг и const,
т. е. вращение тела происходит о постоянным угловым ускорением.
Если
(Fie>) -» № - О,
Рис 54
ТО
Ф = <ko/di = 0 и ю =з const.
зоз
Это случай равномерного вращения тела по инерции без действия
вращательного момента внешних сил.
Дифференциальное уравнение вращательного движения твердого
тела в общем случае позволяет решать две основные задачи: по задан-
заданному вращению тела определять вращающий момент внешних сил и по
заданному вращательному моменту и начальным условиям находить
вращение тела. При решении второй задачи для нахождения угла по-
поворота как функции времени приходится интегрировать дифференци-
дифференциальное уравнение вращательного движения. Методы его интегрирова-
интегрирования полностью аналогичны выше рассмотренным методам интегрирова-
интегрирования дифференциального уравнения прямолинейного движения точки.
Движение точки под действием центральной силы.
Теорема площадей
Секторная скорость. Теорема площадей. Наряду с введенными в
кинематике точки скоростью v и ускорением а можно ввести другие
характеристики движения точки, напр_имер секторные скорость и ус-
ускорение. Секторной скоростью точки vo или dafdt относительно точки
О называют векторную величину, определяемую по формуле (рис. 55)
— ..Да da ,nn,
Va — lim = , B8)
\t -» о A/ At
где Да — вектор, численно равный заштрихованной на рисунке пло-
площади, описываемой радиус-вектором г движущейся точки за время At;
направление вектора Да берется по перпендикуляру к заштрихованной-
площади так, чтобы с конца этого вектора при описании заштрихован-
заштрихованной площади видеть поворот радиус-вектора г против часовой стрелки.
Для случая движения точки по плоскости секторная скорость пер-
перпендикулярна этой плоскости, если точка О выбрана в той же плоско-
плоскости, в которой движется точка Секторная скорость всегда приложена
в той точке, относительно которой она вычисляется.
Секторное ускорение а„ можно ввести как производную по времени
от вектора секторной скорости, т. е.
Ъа =* d'a/dfi = dvjdt.
Секторную скорость можно выразить через момент линейной ско-
скорости v относительно точки О:
Vo = \ (Г X о). B9)
Векторное произведение г х и, согласно определению, имеет такое
же направление, как и иа. Следовательно, для доказательства формулы
B9) достаточно показать, что величины левой и правой частей одинако-
одинаковы. Вычислим левую часть формулы B9):
l^llim
д<-» о At
304
но
| Да | =< »/«гЛ = V/ i Ar I sin (л
Следовательно,
loJ = lim -I
&t-* о
2
J.rosinG?^
2
что совпадает с модулем векторного произведения, стоящим справа в
формуле B9).
Если движение точки происходит в плоскости, то секторную ско-
роеть можно считать алгебраической величиной. В этом случае сек-
Рис. 55
горную скорость точки часто выражают в полярных координатах.
Из формулы B9) секторная скорость
va = dafdt = g- го sin (г, о).
Но из кинематики точки в полярной системе координат на плос-
C0>
кости известно (рио. 56), что v sin (r, v) =* Vp =5 r-щ.
Следовательно,
Формула C0) выражает секторную екорооть в полярных координа*
тах в случае плоского движения точки.
Используя формулу B9), кинетический момент через секторную ско-
скорость можно выразить в виде
~ko =~r х пп> =» 2 то„. C1)
Соответственно теорему об изменении кинетичеокого момента B3)
для точки можно выразить через секторную скорость формулой
ш
C2)
В форме C2) теорему об изменении кинетического момента для
точки называют теоремой площадей.
Движение точки под действием центральной силы. Центральной
силой F называют такую силу, линия действия которой при движении
точки ее приложения проходит через одну и ту же точку О, называе-
называемую центром центральной силы
Центральная сила может быть притягивающей (направленной к
центру) и отталкивающей (направленной от центра). Так как для цент-
центральной силы момент силы относительно своего центра равен нулю,
т. е. Мо (F) = 0, то, следовательно, по теореме об изменении кинети-
кинетического момента для точки B3),
k0 = const. C3)
В проекциях на прямоугольные оси декартовой системы с началом
в точке О по C3) имеем:
kx = т iyz — гу) = Сг\ ky — т (zx — xz) — Сг; kz = m {xy — yx) =
= C,, C3')
где Cx, C2, C3 — постоянные величины.
Умножая первое соотношение C3') на х, второе на у, третье на г
и складывая, получаем О — Сгх 4- С^у + С^г, т. е. координаты дви-
движущейся точки дс, у, г удовлетворяют уравнению плоскости, проходя-
проходящей через начало координат.
Следовательно, траектория точки, движущейся под действием цент-
центральной силы, является плоской кривой, лежащей в плоскости, прохо-
проходящей через центр силы.
Так как при движении точки под действием центральной силы
k0 = const,
то, учитывая формулу C1), имеем
va = da/dt — const
и, следовательно,
v0 = <ia/d/ = const =s С C4)
или
О = Go+ Ct.
Формула C4) выражает так называемый интеграл площа-
площадей: при движении точки под действием центральной силы секторная
скорость является постоянной величиной и, следовательно, ометаемая
радиус-вектором площадь пропорциональна времени.
Учитывая формулу C0), интеграл площадей C4) в полярных коор-
координатах можно представить в виде
iSLe const. C5)
a*
306
В этой форме интеграл площадей широко используется при рас-
рассмотрении движения планет вокруг Солнца и вообще различных спут-
спутников, в частности и искусственных спутников Земли.
Теорема об изменении кинетического момента системы
в относительном движении по отношению к центру масс
Рассмотрим относительное движение системы только относитель-
относительно системы координат, движущейся поступательно вместе о центром
масс системы.
Прежде чем рассмотреть теорему, выведем формулу для вычисле-
вычисления кинетического момента системы.
Формула для кинетического момента системы. Пусть механическая
система совершает движение относительно основной системы координат
Ох^у^. Возьмем подвижную систему координат Схуг с началом в цент-
центре масс системы С, движу-
движущуюся поступательно относи-
относительно основной системы ко-
координат. Из рис. 57 следует,
тао для любого момента вре-
времени pft = рс + гк.
Дифференцируя это тож-
тождество по времени, получаем
dpft Фс rirft
_ —-
(it
ИЛИ
Рис. 57
Vk = VC + Vkr,
где yft — абсолютная скорость
точки Mk; vc — абсолютная
скорость центра масс; vhr =>
= drjdt — относительная скорость точки Мh относительно подвижной
системы координат Схуг. При поступательном движении подвижной
системы координат ее угловая скорость со равна нулю и гю формула
Бура полная производная по времени от радиуо-вектора г совпадает о
Локальной производной, равной относительной скорости.
Согласно определению кинетического момента Ко относительно не-
неподвижной точки О, для абсолютного движения системы относительно
системы координат Ox$iZx по формуле B0) имеем
Ко = 2pft X ткик.
Подставляя в эту формулу значения pft и vht после небольших пре-
преобразований получаем _
X fflfc Vhr "Г" PC X "/Wft ' "Т"
ъп)хЪс. C6)
307
В этой формуле Smft = М — масса системы. Кроме того, послед-
последние два слагаемых равняются нулю. Действительно, по определению
радиус-вектора центра масо относительно этого центра масо имеем
О = 7С = Лтк7к/М^
Следовательно, 2«tferft = 0 и последнее слагаемое в C6) тоже равно
нулю.
Другое слагаемое можно предварительно преобразовате-
преобразователе X 2/и.к -^- = рс X -?- (Smft r^).
^то слагаемое также равно нулю, так как все время ^ткгк — 0.
Формула C6) принимает следующий окончательный вид:
C7)
где К(с = 2rfc х mk vkr.
Величина /(<Г' является кинетическим моментом системы относитель-
относительно центра масо для относительного движения относительно системы
координат, движущейся поступательно вместе с центром масс, т. е.
системы координат Схуг.
Формула C7) показывает, что кинетический момент абсолютного
движения системы относительно неподвижной точки О равен векторной
сумме кинетического момента центра масс относительно той оке
точки, если бы в центре масс была сосредоточена вся масса системы,
и кинетического момента системы относительно центра масс для
относительного движения системы по отношению к подвижной системе
координат, движущейся поступательно вместе с центром масс.
Теорема об изменении кинетического момента системы в относитель-
относительном движении по отношению к центру масс. Для абсолютного движе-
движения системы и неподвижной точки О теорема об изменении кинетичес-
кинетического момента имеет вид
d/
x
Подставляя сюда значения pfe и Ко по формуле C7) и производя диф-
дифференцирование и группировку членов, получаем
^- X Мдс + рс X М. ^- + ^- = рс X те} + 27fe х Пе).
at at at
Перенося из правой части в левую первое слагаемое и учитывая,
что
Арг _ _ _
—— X Mvc = Vc X Mvc= 0
at
308
как векторное произведение параллельных векторов, после объедине-
объединения слагаемых имеем
В этой формуле выражение в квадратных скобках равно нулю на
основании теоремы о движении центра масс системы A8) и, следователь-
следовательно, формула примет вид
x
j(e)
или
C8)
где 1^=
является главным моментом всех внешних сил относительно центра
масс.
Формула C8) и выражает рассматриваемую теорему об изменении
кинетического момента системы относительно центра масс для от-
относительного движения системы по отношению к системе координат,
движущейся поступательно с центром масс, формулируемую так же,
как если бы центр масс был неподвижной точкой.
Эту теорему применяют для изучения вращательной части плоско-
плоского движения и движения свободного твердого тела вокруг центра масс.
Дифференциальные уравнения плоского движения
твердого тела
Используя теоремы о движении центра масс и изменении кинети-
кинетического момента системы относительно центра масо для относительного
движения системы по отношению к системе координат, движущейся
поступательно с центром масс, получим
дифферециальные Уравнения плоского
движения твердого тела.
В плоскости движения центра масс
тела, совершающего плоское движение,
Выберем неподвижную систему коор-
координат Oxtyu относительно .которой рас-
рассматривается движение, и движущуюся
поступательно вместе с центром масс
систему Сху (рис. 58). Пусть хс и ус —
координаты центра масс тела относи-
относительно неподвижной системы коорди-
координат. Тогда по теореме о движении цент-
центра масс получим два следующих дифференциальных уравнения плос-
плоского движения твердого тела:
где М — масса тела.
Рис 58
309
Третье дифференциальное уравнение плоского движения твердого
тела получим из теоремы об изменении кинетического момента в отно-
относительном движении по отношению к центру масс (88) в проекции на
подвижную ось Сг:
Плоское движение твердого тела можно считать состоящим из по-
поступательного движения вместе g центром масс и и вращения вокруг
подвижной оси Сг. Для случая вращения вокруг оси кинетический
момент относительно этой оси вычисляется по формуле
К(с1 - Jcz ©,
где и — угловая скорость и JCz — момент инерции тела относитель
но оси Сг.
Так как J Сг является величиной постоянной, то после подстановки
Kcl в теорему об изменении кинетического момента в относительном
движении получим
Если ввести угол поворота ф вокруг подвижной оси Сг, то получим
следующее дифференциальное уравнение
Таким образом, для твердого тела, совершающего плоское движение
и, следовательно, имеющего три степени свободы, соответственно полу-
получим следующие три дифференциальных уравнения
Мхс = SF#; Мус = 2F#; Jc, Ф = 2МС2 (F{k% C9)
С помощью этих уравнений можно решать две основные задачи!
по заданному плоскому движению твердого тела находить действую-
действующие на тело внешние силы и по заданным внешним силам и начальным
условиям определять его движение При решении этих задач должны
быть заданы масса тела М и его момент инерции.
Теорема Резаля
Теореме об изменении кинетического момента системы можно дать
следующее кинематическое истолкование. Из кинематики точки извест-
известно, что скорость точки можно рассматривать как скорость конца ра-
радиус-вектора, следящего за движущейся точкой, или как скорость из-
изменения самого радиус-вектора, если он проведен в движущуюся точ-
точку из какой-либо неподвижной точки (рис. 59). Траектория движущей-
движущейся точки при этом является годографом радиус-вектора г, а скорость
точки направлена по касательной к этому годографу и равна первой
производной по времени от радиус-вектора. Аналогично этому, и про-
производную по времени от кинетического момента можно рассматривать
как своеобразную скорость конца этого вектора при движении по годо-
310
графу кинетического момента (рис. 60). Эта скорость не является обыч-
обычной скоростью точки, так как кинетический момент имеет иную раз-
размерность, чем радиуе-вектор. Это есть скорость изменения вектора ки-
кинетического момента.
Таким образом, если обозначить и вту скорость конца кинетического
момента, т. е. и = dKo/dt, то теорему об изменении кинетического мо-
момента системы B4) можно представить в новой форме — в виде так на-
называемой теоремы Резал я:
Теорему Резаля можно сформулировать так: при движении механи-
механической системы скорость точки, совпадающей с концом вектора кинети-
кинетического момента при движении по годографу этого вектора, равна по ве-
величине и параллельна по направлению
главному моменту всех внешних сил
системы. Точка, относительно кото-
которой вычисляются кинетический мо-
момент системы и главный момент внеш-
внешних сил, одна и та же.
Рис. 59
Ряс. 60
В форме теоремы Резаля может быть сформулирована и теорема об
изменении кинетического момента в отноеительном движении по отно-
отношению к центру масс.
Теорема Резаля особенно удобна для приближенного наследования
движения быстровращающихся гироскопов.
Аналогично и теорему об изменении количества движения для вио-
темы можно сформулировать в форме теоремы Резаля для количества
движения: при движении механичеокой сиотемы вкорооть точки, еов-
падающей с концом вектора количества движения при движении по его
годографу, равна по величине и параллельна по направлению главному
тктору всех внешних сил, действующих на систему.
$ б. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Для рассмотрения теоремы об изменении кинетичеакой энергии
необходимо ввести новое понятие для вилы — работу вилы и равомот-
реть некоторые простейшие вповобы ее вычисления.
311
Работа силы
Работа силы на каком-либо перемещении является одной из основ-
основных характеристик, оценивающих действие силы на этом перемещении.
Рассмотрим элементарную работу, полную работу и мощность.
Элементарная работа
силы. Элементарная ра-
работа dЛ силы F на эле-
элементарном (бесконечно
М/х,д,-2) малом) перемещении ds
— ' ' определяется следую-
v щим образом (рис. 61):
dЛ = Fx ds, D0)
где FT — проекция силы
F на направление ско-
скорости точки приложения
силы или на направле-
направление элементарного пере-
перемещения, которое счи-
считается направленным по
скорости точки.
Элементарная работа является скалярной величиной. Ее знак оп-
определяется знаком проекции, силы Fx, так как перемещение ds при-
принимаем положительным. Прл Fx > 0 элементарная работа dA > О,
а при Ft <С О,_наоборот, d.4 <0. Так как F^ — F cos ф, где ф — угол
между силой F и направлением скорости точки v, то выражение D0)
можно представить в виде
dA = F cos
Рис 61
ds.
D1)
В этой формуле величины f и ds положительны и знак dЛ опреде-
определяется знаком cos ф. Если ф — острый угол, то dЛ положительна;
если ф тупой угол, то dA отрицательна.
Итак, элементарная работа силы равна произведению элементар'
ного перемещения на проекцию силы на это перемещение. -Отметим част-
частные случаи, которые можно получить из D1):
Ф = 0а, dA = Fds;
Ф = 90", dA = 0;
Ф = 180°, dA = — Fds.
Таким образом, если сила перпендикулярна элементарному пере-
перемещению, то ее элементарная работа равна нулю В частности, работа
нормальной составляющей к скорости силы Fn всегда равна нулю.
Приведем другие формулы для вычисления элементарной работы
силы. Из кинематики точки известно, что v = dr/dt; v = \v\ =s ds/cU.
Следовательно, ds = |dr| = vdt.
312
После этого, согласно D1), элементарная работа
йА = F\dF\ cos ф = F~dr\ D2)
Элементарная работа силы равна скалярному произведению силы на
дифференциал^ радиус-вектора точки приложения силы.
Так как dr = vdt, то согласно D2)
А А = ~Fd~r = ~F~vdt = Fdt'V. D3)
Элементарная работа равна скалярному произведению элементарного
импульса силы на скорость точки.
Если силу F и радиус-вектор г разложить по осям координат, то
F = FJ + F~j + Fjk; r = xl + y'j + zk.
Из последней формулы
d? = dxl + dy'j + dzk.
Подставляя в D2) значения F и dr, получаем
dA = F хЛх + Fydy + F,dz. D4)'
Формулу D4) называют обычно аналитическим выра-
выражением элементарной работы. Хотя выражение для
элементарной работы D4) по форме и напоминает полный дифферен-
дифференциал функции координат точки, в действительности в общем случае
элементарная работа не является полным дифференциалом. Элементар-
Элементарная работа является полным дифференциалом функции координат точ-
точки только для специального класса сил — так называемых потенци-
потенциальных сил, которые рассмотрены ниже.
Полная работа силы. Для определения полной работы силы F
на перемещении от точки Мо до точки М разобьем это перемещение
на п перемещений, каждое из которых в пределе переходит в элемен-
элементарное. Тогда работу А можно выразить формулой
Л «Ига 2 <*Лк,
где d/4ft — работа на k-ы элементарном перемещении, на которые раз-
разбито полное перемещение.
Так как сумма в определении работы является интегральной сум-
суммой определения криволинейного интеграла на участке кривой М0М,
то, используя для элементарной работы формулу D0), получаем
м
F^ds. D5)
Используя другие выражения для элементарной работы, полную ра-
работу силы можно представить также в виде
м _ _ м
Л = | F-dr = J (Fx4x + Fedy + F,dz). D6)
М
313
или
t _ _
^-vdt, D7)
где момент времени / = 0 соответствует точке Мо, а момент времени t—
точке М.
Формула D7) особенно удобна для вычисления работы силы, когда
сила известна как функция времени. Отметим, что из определения эле-
элементарной и полной работы следует:
1) работа равнодействующей силы на каком-либо перемещении рав-
равна алгебраической сумме работ составляющих сил на том же переме-
перемещении;
2у работа силы на полном перемещении равна сумме работ этой же
силы на составляющих перемещениях, на которые любым образом раз-
разбито все перемещение.
Первое свойство, очевидно, достаточно доказать только для эле-
элементарной работы равнодействующей силы.
Если сила R является равнодействующей силой системы сил (Fu
Fi,-.., Fk), приложенных к рассматриваемой точке, то она выражает-
выражается геометрической суммой этих сил. Тогда по определению элементар-
элементарной работы силы имеем
Я~ dr~= (Fj. + Fz + ... + Fh) • d7 = ~FL-d? + ?a.d7 + ... +
Первое свойство доказано.
Второе из отмеченных свойств непосредственно следует из возмож-
возможности разбиения любым образом полного промежутка интегрирования
на составляющие, причем определенный интеграл по полному проме-
промежутку интегрирования равен сумме интегралов по составляющим.
Единицей полной работы, так же как и элементарной, в СИ является
джоуль: 1 Дж = 1 Н-м.
Если проекция силы на направление скорости Fx является величи-
величиной постоянной, то из D5) получим
А = Fxs,
где s — путь, пройденный точкой.
Так как Fz = F cos ср, то последнюю формулу можно представить
в виде
А = Fs cos ф.
Следует отметить, что в этой формуле как F, так и <р могут быть пере-
переменными, но F cos ф является постоянной величиной. Это выполняется,
если F и ф постоянны. Если дополнительно угол ф == 0 или 180°, то
тогда
А = ±Fs,
314
причем эта формула применима как для прямолинейного, так и для
криволинейного движения. Для этого необходимо, чтобы сила F была
постоянной по модулю и все время направленной по касательной к тра-
траектории точки. В случае прямолинейной траектории сила F, следова-
следовательно, Должна быть все время направлена по траектории в одну и ту
же сторону.
Мощность. Мощность силы или работоспособность какого-либо
источника силы часто оценивают той работой, которую он может со-
совершить за единицу времени.
Итак, по определению, мощность
W = dAldt.
Учитывая D3) для элементарной работы, мощность W можно пред-
представить в виде
W = T~v — Fv cos ф. D8)
Таким образом, мощность равна скалярному произведению силы на
скорость точки. Из формулы D8) получаем, что чем больше скорость,
тем меньше сила при одной и той же мощности. Следовательно, если
от источника силы с заданной мощностью нужно получить большую си-
силу, то ее можно получить только при малой скорости. Так, например,
когда железнодорожному локомотиву надо увеличить силу тяги, то
для этого надо уменьшить скорость поезда.
В СИ единицей мощности является ватт: 1 Вт = 1 Дж/с.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения точки
приложения силы. Следовательно, для вычисления работы надо знать
движение этой точки. Но в природе имеются силы и примеры движения,
для которых работу можно вычислить сравнительно просто, зная на-
начальное и конечное положения точки.
Рассмотрим работу силы тяжести и линейной силы упругости, изме-
изменяющейся по закону Гука, и вычисление работы силы, приложенной
к какой-либо точке твердого тела в различных случаях его движения.
В качестве простейших примеров движения укажем случаи, когда ра-
работа равна нулю. Так, работа любой силы равна нулю, если она прило-
приложена все время в неподвижной точке или в точках, скорость которых
равна нулю, как, например, в случае, когда сила все время приложена
в мгновенном центре скоростей при плоском движении тела или все
время в точках, лежащих на мгновенной оси вращения, в случае вра-
вращения тела вокруг неподвижной точки. Эти случаи возможны в зада-
задачах, когда рассматривают работу силы трения в точке соприкоснове-
соприкосновения двух тел при отсутствии скольжения одного тела по другому. При
этом работа силы трения равна нулю. _
Работы силы тяжести. Силу тяжести Р материальной точки массой
т вблизи поверхности Земли можно считать постоянной, равной mg,
315
направленной по вертикали вниз. Если взять оси координат Oxyz,
у которых ось Ог направлена по вертикали вверх (рио. 62), то
Рх ~0',Pv =. Oj Pz = — mg.
Вычисляя работу А силы Р на перемещении от точки Мо до точки
М по формуле D6), имеем
м г.
или
= —mg (zj. —z0) = mg {zo—zl),
A = mgh,
D9)
где h = z0 — zt — высота опускания точки.
При подъеме точки высота Л является отрицательной. Следователь-
Следовательно, в общем случае работа силы тяжести Р == mg
А = ± Ph.
E0)
Работа силы тяжести равна произведению этой силы на высоту опус-
опускания (работа положительна) или высоту подъема (работа отрицатель-
отрицательна). Из формулы E0) следует, что работа силы тяжести не зависит от
формы траектории между
точками Мо wMi, и если г
эти точки совпадают, то ра-
работа силы тяжести равна
нулю (случай замкнутого
пути). Она равна нулю
также, если точки Мо и
М лежат в одной и той
же горизонтальной плос-
плоскости.
Работа линейной силы
упругости. Линейной силой
упругости (или линейной
восстанавливающей силой)
называют силу, действую-
действующую по закону Гука
(рис. 63):
F = —ст,
Рис. 62
где г — расстояние от точки статического равновесия, где сила равна
нулю, до рассматриваемой точки М; с — постоянный коэффициент—
коэффициент жесткости.
Выберем начало координат в точке статического равновесия, тогда
Fx = — ex; Ftt =-. — су; Fg = —cz.
316
После этого работу на перемещении от точки Мо до тбчки Mt оп-
определим по формуле
A—] (Fxdx + Fydy + Fzdz)= —c\ {xdx-\-ydy +zdz)=^
так как
=¦ —с f rdr,
xdx -f- ydy -f zdz = rdr,
где л2 = *2 + z/2 4- г2.
Выполняя интегрирование, получаем
А=—у(г}-
E1)
По этой формуле и вычисляют работу линейной силы упругости.
Если точка Мо совпадает сточкой статического равновесия О, то тогда
Го = 0 и для работы силы на перемещении от точки О до точки М име-
ем л 2 г-.
Величина г — кратчайшее расстояние между рассматриваемой точ-
точкой и точкой статического равновесия. Обозначим его К и назовем де-
деформацией. Тогда
Л 1- Л.». E2)
Работа линейной силы упругости на перемещении из состояния ста-
статического равновесия всегда отрицательна и равна половине произве-
произведения коэффициента жесткости на квадрат деформации. Из формулы
E1) или E2) следует, что работа линейной силы упругости не зависит
от формы перемещения и работа по любому замкнутому перемещению
равна нулю. Она также равна нулю, если точки Мо и М лежат на одной
сфере, описанной из точки статического равновесия.
Рис. 63
Рис. 64
317
Работа силы, приложенной к твердому телу. Получим формулы для
вычисления элементарной и полной работы силы, приложенной в ка-
какой-либо точке твердого тела, которое совершает то или иное движение.
Сначала рассмотрим поступательное и вращательное движения тела,
а затем общий случай движения твердого тела.
При поступательном движении твердого тела
все точки тела имеют одинаковые по модулю и направлению скорости
(рис. 64). Следовательно, если сила ~F приложена к точке Mh, то, так
как vn = v, _ _ _
dA = F »vh dt = F-vdt = F-dr, E3)
где г — радиус-вектор произвольной точки твердого тела.
На каком-либо перемещении полная работа
м _
¦ dr. E4)
м0
При вращении твердого тела вокруг непод-
неподвижной оси скорость точки М можно вычислить по векторной
формуле Эйлера (рио. 65):
о = а X г;
тогда элементарную работу силы F определим по формуле
dA = F^vdt = ?.(ю X г) d t.
В смешанном векторном произведении, которое выражается в виде
определителя, можно переставлять сомножители в круговом порядке:
F-(<oXrj, = ш-(г х ~F)
и
сМ = ш- (г х 7) dt — <й'М0 dt — со dt Mo cos a,
так как
7 X F = Мо (Р) = Мо
является моментом силы относительно точки О.
Учитывая, что Мо cos а = Мг — момент силы относительно оси
вращения Ог и «octf = dep, окончательно получаем
dA = Мг dqp. E5)
Таким образом, элементарная работа сцлы, приложенной к какой'
либо точке тела, вращающегося вокруг неподвижной оси, равна произ-
произведению момента силы относительно оси вращения на дифференциал
угла поворота тела.
Полная работа
МФ-, E6)
б
318
В частном случае, если момент силы относительно оси вращения
является постоянным, т. е. Mz (F) = const, работу определяют-по фор-
формуле
А = М&, E7)
где ф — угол поворота тела, на котором вычисляют работу силы.
Так как dA — оа-М0 (F)dt, то мощность в случае вращения твер-
твердого тела вокруг неподвижной оси
W = dA/dt = Ъ.М0 (?) = <оМг (F). E8)
Мощность силы, приложенной к вращающемуся вокруг неподвижной
оси твердому телу, равна произведению угловой скорости тела на мо-
момент силы относительно оси вращения тела.
Рис, 65
Si'
Рис. 66
Для свободного тела в общем елу чае дви-
движения скорость точки М, в которой приложена сила F (рио. 66),
следовательно,
dA = F.i
Учитывая, что
vodt = dr0 и
Имеем
dA = F'df0 + ш
Ъ = v0 + (о х /;
ctf = F.vodt + F.(aXr)
= й • (г X F) = ш
(F) dt = F-dT0 -f* сос1Шо eos oo.
Но так как Mo cos a — Ma — момент силы относительно мгновен-
мгновенной оси относительного вращения вокруг точки О и codf = dq> — эле-
элементарный угол поворота вокруг этой оси, то окончательно получаем
dA =7?.d70 + Afw(f)d9. E9)
319
Таким образом, элементарная работа силы, приложенной в какой-
либо' точке твердого тела, в общем случае движения складывается из
элементарной,работы на элементарном поступательном перемещении
вместе с какой-либо точкой тела и на элементарном вращательном пере-
перемещении вокруг этой точки.
В случае вращения твердого тела вокруг неподвижной точки, вы-
выбрав эту точку за полюс О, по E9) для элементарной работы имеем
АА = Ма (F) d ф. F0)
Поворот на угол dy следует рассматривать в каждый момент време-
времени вокруг своей мгновенной оси вращения.
Формулу E9) применяют и для плоского движения твердого тела,
только в этом случае мгновенная ось относительного вращения пер-
перпендикулярна плоскости движе-
движения и проходит через произ-
произвольную точку тела. Если в ка-
качестве этой точки берется мгно-
мгновенный центр скоростей, то эле-
элементарная работа от поступа-
поступательного перемещения равна
нулю и в этом случае элемен-
элементарную работу можно вычислить
по формуле F0), т. е. так же,
как при вращении тела вокруг
неподвижной точки.
Работа внутренних сил твер-
твердого тела. Докажем, что- для
твердого тела сумма работ внут-
внутренних сил равна нулю при лю-
любом его перемещении. Очевидно, достаточно доказать, что сумма эле-
элементарных работ всех внутренних сил равна нулю. Рассмотрим две
любые точки твердого тела: Mt и Мг (рис. 67). Так как внутренние си-
силы есть силы взаимодействия точек тела, то для этих двух точек
Рис. 67
Введем единичный вектор 1°, направленный по силе Я/'. Тогда
F[l) =7° /*/>; Fif> = -/5 Ff = _Г°F\'\
Сумма элементарных работ сил FU> и f(f>
&Ар + dAf = F[l).щ dt + Ff >v2dt=* F\l) dt (ox-7° — Ъ2-7°).
Раскрывая скалярные произведения векторов в скобках, получаем
<<> = Я/> dt (vt cos^ — v2 cosaa) = 0,
так как в кинематике твердого тела доказано, что проекции скоростей
любых двух точек твердого тела на направление прямой линии, соеди-
соединяющей эти точки, равны друг другу при любом движении твердого
326
тела. В полученном выражении в скобках стоит разность этих проек-
проекций скоростей двух точек, т. е. величина, равная нулю.
Твердое тело можно считать состоящим из пар взаимодействующих
точек, для каждой из которых сумма элементарных работ внутренних
сил равна нулю.
Суммируя элементарные работы для всех пар точек, получаем
ЪАА\1) = 0.
Как уже известно, главный вектор и главный момент всех внутрен-
внутренних сил для любой механической системы равны нулю. Сумма работ
внутренних сил равна нулю только в случае твердого тела, а для любой
механической системы в общем случае она не равна нулю.
В задачах в качестве механической системы часто рассматривают
систему сочлененных твердых тел. При вычислении работы всех сил,
приложенных к такой системе тел, очевидно, достаточно учесть работу
внутренних сил в местах сочленения твердых тел. Если твердые тела
сочленяются с помощью шарниров без трения, сумма работ таких двух
внутренних сил равна нулю, так как внутренние силы в точке сочлене-
сочленения, как действие и противодействие, равны по модулю, но противопо-
противоположны по направлению, а перемещение у точек приложения сил об-
общее.
Таким образом, сочленение твердых тел с помощью шарниров без
трения при вычислении работы внутренних сил не нарушает жесткости
системы тел, так как сумма работ внутренних сил в этих шарнирах рав-
равна нулю при любых перемещениях системы сочлененных твердых тел.
Систему сочлененных с помощью таких шарниров твердых тел при вы-
вычислении работы всех внутренних сил можно считать одним твердым
телом. Это характерно и для случая сочленения системы твердых тел о
помощью нерастяжимых нитей, канатов и т. п. В этом случае работа
внутренних сил натяжений также равна нулю.
Кинетическая энергия
Кинетическая энергия точки и системы. Кинетической энергией ма-
материальной точки или ее живой силой называют половину произведем
ния массы точки на квадрат ее скорости, т. е. /щ>2/2 или /по2/2, так как
скалярный квадрат любого вектора равен квадрату модуля этого век-
вектора. Кинетическая энергия является скалярной, положительной вели-
величиной. В СИ единицей кинетической энергии является джоуль: 1 Дж=
= 1 Н-м.
Кинетической энергией системы Т называют сумму кинетических
энергий всех точек механической системы,?, е.
Кинетическая энергия как точки, так и системы не зависит от на-
направления скоростей точек. Кинетическая энергия может быть равна
нулю для системы только при условии, если все точки системы находят-
находятся в покое.
Нэ«1зи 321
Вычисление кинетической энергии системы (теорема Кёнига). Раз-
Разложим движение^ механической системы на переносное поступательное
вместе о центром масс системы и относительное по отношению к систе-
системе координат, движущейся поступательно вместе с центром масо. Ана-
Аналогично тому, как это производилось при выводе формулы для кинети-
кинетического момента при таком разложении абсолютного движения, для
каждой точки системы Mh (см. рис. 57) имеем
Рл = Рс + rh
и соответственно
~Vh = "С + VhT,
где vkr = drk/ut является относительной скоростью точки, так как
подвижная система координат движется поступательно (со = 0) и, сле-
следовательно, полная производная по времени от rh совпадает с локаль-
локальной производной, равной относительной скорости точки.
Подставляя значение скорости uft в выражение кинетической энер-
энергии абсолютного движения системы, т. е. ее движения относительно
системы координат Ох^г^ после очевидных преобразований получа-
получаем
^^ ^^, F2)
Но
yc2/nh5kI. = ocSmfc^- = ycABOTh7fc) = 0,
так как
~Zmhrh = const = 0.
Учитывая, что 2/nh = М —масса системы, и обозначая Тр вто-
второе слагаемое в F2), имеем
Т=-^-+тР. F3)
где
. v
Величина Тсг) является кинетической энергией относительного дви-
движения системы относительно системы координат, движущейся посту-
поступательно вместе с ее центром масс, или кинетической энергией системы
относительно центра масс.
Формула F3) выражает так называемую теорему Кёнига! кинети-
кинетическая энергия системы в абсолютном движении складывается из ки-
кинетической энергии центра масс, если в нем сосредоточить всю массу
системы, и кинетической энергии системы относительно центра масс.
322
Кинетическая энергия твердого тела. При поступатель-
поступательном движении твердого тела кинетическая энер-
энергия
Т^^±^Ът^М^, F4)
так как при поступательном движении твердого тела скорости всех то-
точек тела одинаковы, т. е. vh = Ъ, где v — общая скорость для всех
точек тела.
Таким образом, кинетическая энергия твердого тела при поступа-
поступательном движении вычисляется так же, как и для одной точки, у ко-
которой масса равна массе всего тела.
При вращении тела вокруг неподвижной
оси кинетическую энергию можно вычислить, если учесть, что ско-
скорость какой-либо точки тела Mh можно выразить (см. рис. 50) как
vh = <ohk,
где hh — кратчайшее расстояние от точки Mh до оси вращения; со —¦
угловая скорость тела.
Тогда
или
T = Jt^-, F5)
где Jг — момент инерции тела относительно оси вращения Ог.
Следовательно, кинетическая энергия тела при вращателънолг дви-
движении вокруг неподвижной оси равна половине произведения момента
инерции тела относительно оси вращения на квадрат угловой скорости
тела.
Из сравнения F4) и F5) следует, что эти формулы подобны, только
при вращательном движении аналогом массы является момент инерции
тела относительно оси вращения, а скорости —¦ угловая скорость тела.
Такая аналогия между поступательным и вращательным движениями
твердого тела может наблюдаться во многих формулах, относящихся к
этим двум движениям.
При плоском движении твердого тела ки-
кинетическую энергию можно вычислить по теореме Кёнига. Так как в
этом случае относительное движение относительно центра масс (точ-
(точнее, относительно системы координат, движущейся поступательно
вместе с центром масс) является вращением вокруг центра масс с уг-
угловой скоростью о, то
С Сг 2 »
Л* 323
где JCt — момент инерции тела относительно оси Cz, проходящей через
центр масс тела перпендикулярно плоскости движения. Следователь-
Следовательно, на основании F3) для плоского движения тела имеем
T=^- + Je^- F6)
Таким образом, при плоском движении тела кинетическая энергия
складывается из кинетической энергии поступательного движения тела
вместе о центром масс и кинетической энергии от вращения вокруг
оси, проходящей через центр масс и перпендикулярной плоскости дви-
движения.
Если механическая система состоит из нескольких твердых тел, го
следует вычислить кинетическую энергию каждого тела, а затем полу-
полученные кинетические энергии сложить. Так определяется кинетичес-
кинетическая энергия системы тел.
Теорема об изменении кинетической энергии точки
Для материальной точки массой т, движущейся под действием силы
F, основной закон динамики можно представить в виде
Умножая обе части этого соотношения скалярно на дифференциал
радиус-вектора точки dr, имеем
или
mv-dv = F-dr,
где v = dr/dt — скорость точки.
Учитывая, что 6А — F-dr — элементарная работа, получаем
mv- dv — dA
Так как
nw-dv =- d {mvV2) = d (mt/72),
то окончательно
d (mv2/2) - dA. F7)
Формула F7) выражает теорему об изменении кинетической энер-
энергии для точки в дифференциальной форме: дифференциал кинетической
анергии точки равен элементарной работе силы, действующей на точ-
точку.
Если обе части F7) разделить на dt и учесть, что dAldt = W-~•
мощность, то хеорему можно также выразить в виде
324
Производная по времени от кинетической энергии точки равна
мощности, подводимой к этой точке.
Интегрируя обе части F7) от точки Мо до точки М (см. рис. 61),
получаем теорему об изменении кинетической энергии точки в конечной
форме:
ти"-
2
9
F8)
Т. е. изменение кинетической энергии точки на каком-либо перемеще-
перемещении равно работе силы, действующей на точку на том же перемеще-
перемещении.
Пример 1. Тело , имеющее силу тяжесги Я, падает беч начальной скорости
на пружину с высоты h. Найти наибольшее обжатие пружины X, если ее статиче-
статическое сжатие под действием этого тела равно ^.ст. Массой пружины пренебречь
(рис. 68).
Решение. Применим к движению тела теорему об изменении кинетиче-
кинетической энергии точки
тиУ2 — то\1% = А.
Так как о0 = 0 и при наибольшем сжатии пружины v = 0, то работа А = О,.
На тело после соприкосновения его с пружиной действуют две силы: сила тяже-
тяжести тела Я и сила упруюсти пружины Сила Р совершает работу на переме-
перемещении (h -\- к); сила упругости — на перемещении А,, Следовательно,
— —-Х,4=0.
Но так как Я = сА,0Т, то
Поэтому
с = Р1ХЛ
= 0 или Л.я —2Л,СТ X. —2Л.0Т А = 0
Решая это квадратное уравнение, имеем
Знак плюс перед корнем выбран потому, что X >А,ат. При h = 0 наиболь-
наибольшее обжатие X = 2А,0Г, т. е. при динамическом действии трута ча пружину наи-
наибольшее обжатие пружины в два раза больше ее статическою обжатия.
Рис. 68
325
Пример 2. Груэу силой тяжести Р, подвешенному в точке Ог на пружине,
статическое удлинение которой под действием груза Р раино Хст, сообщена началь-
начальная скорость "да из положения Мо верчикальноеннз (рис. 69). Определить ско-
скорость груза в положении М, если груз, принимаемый за точку, скользит по коль-
кольцу радиусом R без трения; ОО± = R и естественная длина пружины R.
Решение. Применим к движению груза теорему об изменении кинети-
кинетической энергии, взяв за начальное положение груза Ма и конечное М. Получим
_Р ^_ _Р_ _vl_
g 2 ~ g 2 = '
Работу совершают сила тяжести груза и сила упругости пружины. Нор-
Нормальная реакция кольца ЛГ все время перпендикулярна перемещению, и ее ра-
работа равна нулю. Следовательно,
В данном случав
Л = R; 'о = ДУ§ — R; n= 2R — R= R,
поэтому
После этого по теореме об изменении кинетической энергии имеем
Р * Р t'n2 „„Г. (V2-l)R 1
Р t>3 P
g 2 ~ g 2
Теорема об изменении кинетической
энергии системы
Приложив к точкам системы все внешние и внутренние силы, для
каждой точки системы можно выразить теорему об изменении кинети-
кинетической энергии F7') в форме
d(/иЛ о|/2) = Fie>-drA + Fif}• dr*, ft=l,2,..., tf.
Суммируя правые и левые части этих соотношений по всем точкам си-
системы и вынося знак дифференциала за знак суммы, получаем
или
d7 = 2d/U'L-2(Mil), F9)
где кинетическая энергия системы
326
элементарная работа внешних и внутренних сил соответственно
Формула F9) и выражает теорему об изменении кинетической энер-
энергии системы в дифференциальной форме: дифференциал от кинетичес-
кинетической энергии системы равен сумме элементарных работ всех внешних и
внутренних сил, действующих на систему.
Если обе части F9) проинтегрировать между двумя положениями
системы — начальным и конечным, в которых соответственно кинети-
кинетическая энергия То и Т, то, изменяя порядок суммирования и интегри-
интегрирования, имеем
т-та= .. .
или
¦т1 'г _. vА^ -4- 2Д''' G0)
где 4"' = f &A{iP — работа внешней силы для точки системы
Mk при ее перемещении из начального положения Mk0 в конечное поло-
полоть
жение Mh; А^ — j* d4'' — соответственно работа внутренней силы,
мы
действующей на точку Mh.
Формула G0) выражает теорему об изменении кинетической энер-
энергии системы в конечной или интегральной форме; изменение кинети-
кинетической энергии системы при ее перемеищнии из одного положения в дру-
другое равно сумме работ всех внешних и внутренних сил, действующих на
систему, на соответствующих перемещениях точек системы при том
же перемещении системы.
Частный случай. Для абсолютно твердого тела сумма ра-
работ всех внутренних сил системы равна нулю:
24" = 0.
Следовательно, теорему об изменении кинетической энергии, на-
например, в конечной форме можно представить в виде
Т - То = ЪА\. G1)
Изменение кинетической энергии твердого тела при каком-либо
перемещении равно сумме работ всех внешних сил, действующих на те-
тело, на соответствующих перемещениях точек тела при том же пере-
перемещении твердого тела.
Таким образом, в отличие от рассмотренных других общих теорем
динамики системы в теорему об изменении кинетической энергии могут
входить внутренние силы. Они не входят в эту теорему в случае абсо-
абсолютного твердого тела.
327
Пример 1. В маятнике Максвелла однородный цилиндр силой тяжести Р
и радиусом R падает вииз без начальной скорости, разматывая иить, намотанную
иа цилиндр в его среднем сечении. Определить скорость оси цилиндра в зависи«
мости от высоты ее опускания (рис. 70),
Решение. По теореме об изменении кинетической энергии цилиндра кан
твердого тела имеем
T-T0=ZA<gK
Здесь То = 0, так как в начальный момент времени цилиндр покоится!
Цилиндр совершает плоское движение. Его кинетическая энергия
Поэтому
р
8
со3
р
в
р
8
2
3
Внешними силами являются сила тяжести Р и натяжение нити S. Так кан
сила S приложена в мгновенном центре скоростей цилиндра, то ее работа равна
нулю. Следовательно,
Подставляя вычисленные величины в теорему об изменении кинетической
энергии, получаем
3 Я 2 п/
wc — > с — я &'* ¦
Пример 2. Груз М силой тяжести Q с помощью нити, переброшенной через
блок А, приводит в движение каток В, катящийся без скольжения по горизон»
талыюй плоскости (рис. 71). Блок А и каток В — однородные диски радиусом
Р,1
Рис. 70
Рис. 71
R и силой тяжести Я каждый. Коэффициент трения качения катка ft. Трением
в осях катка и блока и массой нити пренебречь.
Определить скорость груза М в зависимости от его высоты опускания. В на»
чальиый момент система покоится.
228
Решение. По теореме об изменении кинетической энергии системы, со-
состоящей из груза, нити, блока и катка, имеем
Г—ro = S^e>+2i4<k'>.
Здесь То = 0, так как вначале система покоится.
Обозначив Тъ Тг и Т3 — кинетические энергии соответственно груза, блока
н катка, получаем:
Q 0а ®А Р vb @Й
но
Ог- Сг~ g 2 J «Л^1 R « °С = °! ®Д =
Следовательно,
Так как работа внутренних сил натяжений нити равна нулю, то вообще
р ур р у,
Jf' = 0 для всей системы твердых тел, соединенных нитью. Работа сил
тяжести блока Я и реакции оси Ro равна нулю, так как эти силы приложены в
неподвижной точке О. Сила тяжести катка Р перпендикулярна перемещению, а
силы N и fTp приложены в мгновенном центре скоростей и, следова-
следовательно, работы не производят. Работу производят сила Q и пара сил с моментом
Afj,, препятствующим качению катка по плоскости, Имеем
где Ф — угол поворота катка при опускании груза М на h.
Так как
Affe = kN = kP = const, <p = h/R,
то
Подставляя значения полученных величин в теорему об изменении кинети-
кинетической энерти, получаем
2^%
Заметим, что груз имеет не только силу тяжести Q, совершающую работу,
но он еще обладает массой Qlg и, следовательно, имеет кинетическую энергию.
Теорема об изменении кинетической энергии
в относительном движении
Теорема об изменении кинетической энергии материальной точки.
Пусть точка М совершает переносное движение вместе с подвижной
системой координат Oxyz относительно основной системы координат
OiXit/iZi и относительное движение по отношению к системе координат
Oxyz (рис. 72). Абсолютным движением точки М является ее сложное
329
движение относительно системы координат О^у^. Дифференциальное
уравнение относительного движения точки М в векторной форме мож-
можно представить в виде
mar=~F + 0e + ФИ, G2)
где ФР — — тае — сила инерции переносного движения точки;
Фк = — 2т (со X vT) — сила инерции Кориолиса.
Вывод теоремы об
изменении кинетической
энергии для точки в от-
относительном движении
произведем так же, как
и вывод аналогичной
теоремы в абсолютном
движении, умножив обе
части G2), скалярно на
вектор элементарного
относительного переме-
перемещения dr, и преобразуем
левую часть полученно-
полученного выражения. Значок
~ над дифференциалом
радиус-вектора г и дру-
других векторов указывает,
что при дифференцировании надо брать изменение соответствующего
вектора относительно подвижной системы координат Oxyz. Таким
образом,
„2
~7
¦!t r
79
таг- Зг = т — • dr — mdvr • — = tndvr
At At
vr =
= d
В правую часть входят элементарные работы сил F, ФР и Фк на
относительном перемещении dr. Оказывается, что элементарная рабо-
работа силы инерции Кориолиса на относительном элементарном перемеще-
перемещении всегда равна нулю, так как эта сила перпендикулярна относитель-
относительной скорости vr и, следовательно, перпендикулярна относительному
перемещению &~r — vr6t. В выражение силы инерции Кориолиса вхо-
входит векторное произведение « х уг, а оно всегда перпендикулярно
каждому из векторов сомножителей, в частности vr.
Итак, теорема об изменении кинетической энергии точки в диффе-
дифференциальной форме имеет вид
d{mv}j2)=T' dr-f 5e• IF. G3)
Теорема об изменении кинетической энергии в относительном дви-
движении точки выражается так же, как и в абсолютном движении, толь-
только к элементарной работе приложенной силы добавляют элементар-
элементарную работу вилы инерции переносного движения на относительном
перемещении.
330
Теорема об изменении кинетической энергии системы. Для системы
рассмотрим наиболее важный случай, когда в качестве переносного
движения берется поступательное движение системы вместе с центром
масс и, следовательно, кинетическую энергию системы в абсолютном
движении можно вычислить на основании теоремы Кёнига F3):
Т = Mvc/2-\-Tc\
Теорему об изменении кинетической энергии системы для абсолют-
абсолютного движения (см. рис. 57) можно представить в виде
dpft. G4)
Так как
Р к = Рс + rh
и, следовательно,
dPfe = dp"c + d7ft,
то, заменяя в G4) dp^ и Т их значениями, получаем
G5)
По свойству внутренних сил, З/*!0 = 0.
Если теорему об изменении кинетической энергии для центра масс
выразить так же, как и для точки, у которой масса равна массе всей
системы, и эта точка находится под действием всех внешних сил, дейст-
действующих на систему, то
Отбросив в G5) эти члены, получим следующую теорему об измене-
изменении кинетической энергии системы в относительном движении по ог-
ношению к системе координат, движущейся поступательно вместе с
центром масс:
. d7k + 2IV ¦ d7ft. G6)
Сравнивая G6) с G4), видим, что теорема об изменении кинети-
кинетической энергии в относительном движении системы по отношению к
системе координат, движущейся поступательно вместе с центром
масс системы, формулируется так же, как и для абсолютного движе-
движения системы.
§ 6. ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ
Для вычисления работы силы на каком-либо перемещении в общем
случае необходимо знать закон движения точки на эгом перемещении.
Есть класс сил, для которых работа не зависит от характера движения
точки на рассматриваемом перемещении. Эти силы называют потен-
потенциальными, и они имеют важное значение в различных областях меха-
механики и физики.
331
Потенциальное силовое поле и силовая функция
Силовым полем называют часть пространства, в каждой точке ко-
которого на материальную точку действует определенная сила, завися-
зависящая от координат точки и времени. Силовое поле считают станцио~
парным, если действующие силы не изменяются с изменением времени.
Если же силы зависят от времени, то силовое поле является нестацио-
нестационарным.
Силовое поле называют потенциальным, если имеется силовая
функция U, зависящая от координат точки и времени для нестацио-
нестационарного силового поля. Через
силовую функцию U проек-
проекции силы на координатные
оси в каждой точке поля
(рис. 73) определяются по
формулам
Fx = dU/дх; Fy = dUldy;
Fz = dU/дг.
G7)
' Функцию U (х, у, z, t) назы-
называют силовой функцией.
* Из G7) следует, что сило-
Рис. 73 вая функция определяется о
точностью до постоянной, так
как для проекций силы на координатные оси требуются только част-
частные производные по координатам от этой функции и добавление по-
постоянной к функции U не влияет на значения Fx, Fy, Fz
Рассмотрим основные свойства силовой функции стационарного
силового поля. Элементарная работа
т. e.
d A = fx dx + F у dy + Ft dz = — dx + -
OK
dA = dif.
G8)
Таким образом, элементарная работа силы в потенциальном сило-
силовом поде равна полному дифференциалу от силовой функции. Иногда
это свойство силовой функции принимают за ее определение; тогда
G7) получают из G8).
Полная работа силы F на участке от точки Мо до точки Mi
м м
A— {dA— Г dil = ?/(*, у, г)—U(х0, у0, zo)=U — Ua,
т. е.
А = U - Uo>
где ?/„=?/ (*0, у * 20), U = U {х, у, z)
Следовательно, полная работа силы на каком-либо перемещении
ки равна разности значений силовой функции в конечной и начальной
332
точках перемещения и не зависит от формы траектории, по которой
оно совершается, если силовая функция является однозначной.
Из G9) следует, что работа силы в потенциальном силовом поле по
любому замкнутому пути равна нулю, так как значение силовой функ-
функции в начальной и конечной точках перемещения одинаково, если сило-
силовая функция не принимает других значений после возвращения в пер-
первоначальную точку.
Силовая функция может принимать другие значения после возвра-
возвращения в первоначальную точку в зависимости от количества обходов,
если область, ограниченная замкнутым путем обхода, содержит в себе
специальные особые точки силовой функции.
Если применить понятие вектор-градиента от скалярной функции
U
gradtf^-b/f. + SH.,
дх ду дг
где i, j, k — единичные векторы, направленные по осям координат, то
силу F можно выразить как градиент силовой функции V : F=gradt/.
Определим условия, которые позволяют по силам силового поля
устанавливать, будет ли силовое поле потенциальным.
Если силовая функция U существует, то
dFJdy = d2U/(dy дх); дРч1дх = дЮ1{дхдц).
Так как
d2UI(dy дх) = дЧЛ(дхду),
то dFJdy = dFyldx или dFjdy — dFjdx = 0.
Аналогично,
dFJdy — dFy/дг = 0; dFJdz — dPJdx =• 0.
Таким образом, полученные условия имеют вид
2Ll—Ejl.^q- Ei. — ^l±. = 0- i^L— ^^- = 0 (80)
ду дг дг дх ' дх ду
В векторном исчислении доказывается, что условия (80) не только
необходимы, но и достаточны для существования силовой функции.
Если использовать вектор вихря rot F от вектора силы F
дц дг J \ дг дх ) \ дх д
то условия (80) можно выразить более кратко:
rot F = 0. (800
Таким образом, для того чтобы силовое поле было потенциальным,
необходимо и достаточно, чтобы оно было безвихревым.
333
Непотенциальными силами являются силы сопротивления, завися-
зависящие от скорости, и силы трения. Силы Gyxoro грения не будут потен-
потенциальными, так как хотя сила трения постоянна и не зависит от скоро-
скорости, но направление силы трения от скорости зависит.
Поверхности уровня. Силовые линии
Если рассматривать точки потенциального силового поля, в которых
силовая функция имеет одно и то же значение, например U = С, то
все эти точки располагаются на поверхности, которую называют поверх-
ностью равного уровня или
поверхностью уровня.
Уравнение поверхности
уровня имеет вид
U (х, у, г) = С.
*
некоторые
поверхностей
Рис 74
Отметим
свойства
уровня.
1. Работа силы равна
нулю, если начальная и ко-
конечная точки перемещения
лежат на одной поверхно-
поверхности уровня. Действительно,
А = U — Uo.
Если начальная и конечная точки лежат на одной поверхности
уровня, то U = С/0 и, следовательно, А = 0. Работа силы на переме-
перемещении между точками Мо и М не зависит от положения этих точек на
своих поверхностях уровня. На любом перемещении между двумя точ-
точками рассматриваемых поверхностей уровня она одинакова (рис. 74).
2. Сила в потенциальном- силовом поле всегда перпендикулярна
поверхности уровня или, точнее, касательной плоскости поверхности
уровня. Действительно, пусть имеем поверхность уровня U =» Q.
Возьмем на ней две бесконечно близкие точки М и Мх и вычислим эле-
элементарную работу на перемещении dsx между этими точками!
С другой стороны,
dA = U
U(M) = О — С => 0.
Так как F и dsx не равны нулю, то eos (F, MMt) = 0 и, еледователь»
но, угол между силой F и перемещением ММи лежащий в касатель-
касательной плоскости к поверхности уровня, является прямым
3. Сила в потенциальном силовом поде всегда направлена в сторо-
сторону возрастающих значений силовой функции. Для доказательства
334
этого свойства силы возьмем точку Мг на перпендикуляре к поверхно-
поверхности уровня, восставленном в точке М в направлении возрастающих
значений силовой функции. Тогда элементарная работа на элементар-
элементарном перемещении АШ2, равном dsa, вычисляется по формуле
так как С2 > С.
Fds2 cos (F, ЛШа) ~ Cs — С > О,
Mfay.t)
Следовательно, cos (/•", АШ2) > 0; поэтому угол, равный 180°, ис-
исключается и получается, что сила F направлена по ММ2 в сторону воз-
возрастающих значений силовой ^
функции.
4. Если все силовое поле раз-
разбить поверхностями уровня на
п равных значений так, «то для
первой поверхности уровня
Ci = С/п, для второй Сг =
= 2 С/п и последней Сп =
= пС/п = С, то там, где сосед-
соседние поверхности уровня ближе
друг к другу, модуль силы F
больше, чем в местах, где по-
поверхности уровня дальше от-
отстоят друг от друга. Это свой-
свойство можно проверить, если за-
заметить, чго работа между точ-
точками любых двух соседних поверхностей в этом случае одна и та же.
Следовательно, там, где расстояние между поверхностями меньше,
сила по числовой величине больше, и наоборот.
Наряду с поверхностями уровня в силовом поле вводят понятие
силовой линии, т. е. такой линии, в каждой точке которой сила направ-
направлена по касательной к этой линии (рис. 75). Так как вектор dr о про-
проекциями на оси 6х, йу, йг всегда направлен по касательной к кривой,
то из условия параллельности dr и F следует, что
Phc. 75
dx/Fx =
= dz/Fz.
(81)
х,
Эти дифференциальные уравнения относительно координат
у, z являются дифференциальными уравнениями силовой линии.
Потенциальная энергия
В случае потенциального силового поля наряду о силовой функцией
можно ввести другую функцию, характеризующую запас- энергии в
данной точке поля, — потенциальную энергию в этой точке (рис. 76),
или потенциальную энергию материальной точки в рассматриваемой
точке силового поля.
335
Потенциальной энергией Я материальной точки в рассматривае-
рассматриваемой точке силового поля М называют работу, которую совершают силы
пьля, действующие на материальную точку при перемещении ее из точ-
точки М в начальную точку Мо, т. е.
Я = Амм0
или
П = АМм„ ~U0-V~G0-U. (82)
Постоянная Со одна и та же для всех точек поля, зависящая от того,
какая точка поля выбрана за начальную. Очевидно, что потенциаль-
потенциальную энергию можно ввести только для потенциального силового поля,
в котором работа не зависит от формы перемещения между точками
М и Мо- Непотенциальное силовое поле не имеет потенциальной энер-
энергии, для него не существует и силовой функции.
На основании G7) и (82) имеем:
р _ ви __ дп . р __ qu * дп_. „ = _aj/ дп__
х дх ~ дх ' у Ьу ду ' z дг дг
Из G8), G9) и (82) соответственно получаем
dA = dU = ~ dlJ; A = U — ?/„ = Яо — Я.
№ приведенных формул следует, что Я определяется с точностью
до произвольной постоянной, которая зависит от выбора начальной
точки, но эта произвольная постоян-
постоянная не влияет на вычисляемые через
потенциальную энергию силы и рабо-
работу этих сил. Учитывая это, формулу
(82) можно выразить так'
П = _ и + const (82')
или
П = —
Потенциальную энергию в какой-
либо точке поля с точностью до
произвольной постоянной можно оп-
Рис. 76 ределить как значение силовой функ-
функции в этой же точке, взятое со зна-
знаком минус. По существу, достаточно одной из функций Я или U.
Понятие потенциальной энергии было введено раньше, чем силовая
функция. Силовая функция более удобна, так как некоторые формулы,
содержащие эту функцию, не имеют знака минус.
Примеры вычисления силовых функций
Если вычислить силовую функцию, то на основании (82') будет из-
известна и потенциальная энергия. Вычислим силовые функции однород-
однородного поля силы тяжести, силового поля линейной силы упругости и
силового поля силы притяжения, действующей по закону Ньютона.
33G
Силовая функция однородного поля силы тяжести. Если ось Ог
(рис. 77) направить вертикально вверх, то проекции силы тяжести на
координатные оси будут равны
Рх = 0; Pv = 0; Рг = - mg.
Вычисляя элементарную работу силы Р, получаем
дА = Pxdx + Pvdy + Pzdz = — mgdz = d (— таг).
Так как элементарная работа является полным дифференциалом,
то силовое поле силы тяжести является потенциальным и силовая
функция этого поля определяется по формуле
U = — mgz 4- const. (83)
По формуле (83) определяют силовую функцию однородного поля
силы тяжести, т. е. поля, в котором сила тяжести постоянна по модулю
и направлению. Уравнение поверхности уровня U — С или z = const,
т. е. поверхностями уровня являются горизонтальные плоскости.
Рис. 77
Ряс. 78
Силовая функция линейной силы упругости. Для линейной силы
упругости (см. рио. 63) имеем:
F = _ or; Fx = — ex; Fy = — су; Fz = — сг.
Следовательно,
&А = Fxdx + Fy&y + Fzdz - — в (xdx + ydy + zdz) = — crdr =
= d (- cr42),
Так как xdx + ydy + zdz = rdr\ r2 = x2 + У2 + z*.
Силовую функцию линейной силы упругости определяют по форму-
формуU= — ?— + const = °- (хг + y> + z2) + const.
Поверхностями уровня U — С являются сферы г = const
(84)
337
Силовая функция силы притяжения по закону Ньютона. Вычислим
силовую функцию поля земного притяжения. Если выбрать начало
координат в центре Земли (рис. 78), то сила притяжения точки земным
шаром F = k/r2.
Сила ^направлена к центру Земли; следовательно, вводя единич-
единичный вектор 7° по радиус-вектору от этого центра в рассматриваемую
точку М, имеем
— г ¦— Ъ — Ь Т k —
г$ __ ' , р i ^ h ^,0 к . __ г
~ т ' ~ Т2" ~ г2 г ~ /-3
Проецируя силу Гна координатные оси, получаем:
р Lx- F =* -и- F k~z
Тогда
dA — Fx dx -\- Fv dy + Fz dz = (xdx -J- У&У + ^d2) =
так как xdx + уду + zdz = rdr; r2 = х2 + уг + г2.
Таким образом, силовая функция силы притяжения, по закону
Ньютона,
U + const = ,^k + const. (85)
г
Постоянную k для случая Земли можно выразить так;
/г = GmM =
где М — масса Земли; R — радиус Земли; g — ускорение силы тя-
тяжести на поверхности Земли; m — масса точки; G — постоянная
тяготения.
Если вместо Земли рассматривается другое небесное тело, изменя-
изменяется только постоянная k.
Силовая функция и потенциальная энергия системы
Для механической системы в потенциальном силовом поле можно
ввести силовую функцию как функцию, зависящую от координат всех
точек системы, т. е. от положения системы в силовом поле. Если систе-
система состоит из N точек, то силовая функция U (хг, уи zx\ x2, у2, г2;
...; хм, ijn, Zn) зависит в общем случае от координат всех точек. Про-
Проекции силы, действующей на каждую точку системы,
^=|^-; F*. = -jr\ Fhi=dJL>k==lt2,...,N. (86)
oxk oyh агц
338
Сумма элементарных работ всех сил, действующих на точки систе-
системы, определяется по формуле
или
2cL4ft = dU. (87)
Таким образом, сумма элементарных работ сил поля, действующих
на механическую систему ^ равна полному дифференциалу от силовой
функции. Если вычислить сумму работ, которую совершат силы поля,
действующие на механическую систему при перемещении системы из по-
положения (М0),в котором имеется силовая функция Uo, в положение
(М), в котором есть силовая функция U, то
(Af) (M)
f dAk=* §
()
f
ИЛИ
2ЛЯ = ?/ -?/„. (88)
Следовательно, сумма работ сил поля, действующих на систему прн
перемещении системы из одного начального положения в другое, рав-
равна разности значений силовой функции в конечном и начальном поло-
положениях системы.
Потенциальной энергией системы П в рассматриваемом положении
(М) потенциального силового поля называют сумму работ сил поля,
действующих на систему, которую эти силы совершают при перемеще-
перемещении системы из рассматриваемого положения в начальное положение
{Mi), т. е.
Я -» 2ЛЙ = Ut— U =¦ — U + const, (89)
где U — значение силовой функции для виотемы сил в положении
(М); f/j — значение силовой функции в начальном положении.
Из (86) — (89) следует:
W дП F _ W ^ Ш
F
k
дли dxk * дуй дуъ
V*' . V J Л 1 T Г __.« (jf7* 2/4 =4 // "шир // =5 /7 ,-r /7
Fhz;
dzk ozh
§ 7. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Закон сохранения механической энергии точки
Для материальной точки теорему об изменении кинетической энер-
энергии можно выразить в следующем виде:
tnv2l2 — mvl/2 ss A.
339
Если материальная точка движется в потенциальном силовом поле,
то
А = По-Л.
Следовательно,
m»V2 — mvl /2 = По — П, или mw2/2 + Я = «wj/2 +
+ Пв -. h,
где ft — постоянная величина.
Обозначая Е полную механическую энергию точки, состоящую из
ее кинетической и потенциальной энергий, получаем
Е = mvV2 + П = ft.
Таким образом, при движении точки в потенциальном силовом
пом ее полная механическая энергия остается постоянной величиной,
что является законом сохранения механической энергии для точки,
который и есть первый интеграл дифференциальных уравнений дви-
движения точки.
Закон сохранения механической энергии системы
Теорему об изменении кинетической энергии для системы можно
представить в виде
Т — То = 2 (А{е) + ЛУ») = 2Лк. (90)
Если система движется в потенциальном силовом поле, то
2Ла = По — П,
где П — потенциальная энергия внутренних и внешних сил, действу-
действующих на систему. Следовательно,
Т—Т0=П0 — П или Т + П = То + По = h,
где h — постоянная величина.
Обозначая ? полную механическую энергию системы, имеем
Е =Т + Я -h. (91)
Формула (91) выражает закон сохранения механической энергии
для системы: полная механическая энергия при движении системы в по-
потенциальном силовом поле внешних и внутренних сил является по-
стоянной величиной.
В случае абсолютно твердого тела работа всех внутренних сил рав-
равна нулю и, следовательно, потенциальная энергия внутренних сил
является постоянной величиной, которую можно считать равной нулю.
Тогда в (91) за потенциальную энергию следует принять только потен-
потенциальную энергию внешних сил, которая вместе с кинетической энер-
энергией является постоянной величиной. При движении изменяемой ме-
механической системы сумма кинетической энергии систему и потенци-
потенциальной энергии внешних сил не является постоянной. Она становится
постоянной только вместе с потенциальной энергией внутренних сил.
340
Механические системы, для которых выполняется закон сохранения
механической энергии, называют консервативными.
При движении точки или системы в потенциальном силовом поле,
встречающемся в действительности, когда непотенциальность связана
с действием сил сопротивления, механическая энергия изменяется,
причем она всегда уменьшается на работу сил сопротивления. По-
Потерянная системой часть механической энергии обычно переходит в
тепловую энергию. Полная энергия всех видов (механическая, тепло-
Рис 79
Рис. 80
вая, химическая и т. д ) не изменяется при движении точки или систе-
системы в любом силовом поле. При этом происходит только преобразова-
преобразование одного вида энергии в другой.
Рассмотрим теперь комплексный пример на основные виды движе-
движения твердого тела: поступательное, вращение вокруг неподвижной оси
и ллоское движение, а также вычисление количества движения, кине-
кинетического момента а кинетической энергии системы.
Пример. Груз А силой тяжести Pj = 150 Н опускается вниз, приводя в дви-
движение с помощью невесомой и нерастяжимой нити однородный диск D силой тя-
тяжести Р — 900 Н (рис. 79) Нить намотана на диск D и переброшена через блон
В силой тяжести Я2 = 140 Н. Нить по блоку не скользит Диск D имеет радиус
Л = 30 см. Он движется по горизонтальному рельсу. Коэффициент трения сколь-
скольжения между диском и рельсом / = 0,4, коэффициент трения качения 6 = 0,15см.
Блок считать однородным диском радиусом г. Трением на оси блока пренебречь.
Система начинает движение из состояния покоя.
Определить уравнения движения диска D, давление на ось блока В, коли-
количество движения и кинетическую энергию системы и кинетический момент диска
D относительно точки соприкосновения диска о рельсом через 1 с после начала
Движения.
Решение. Составим уравнения движения отдельных тел под действием
приложенных к ним сил. _
Диск D совершает плоское движение. К нему приложены вила тяжести Р,
реакция гшти Ь и реакция рельса, состоящая из нормальной реакции N, силы
трения F и пары сил, препятствующей качению о моментом L (рис. 80). Силу тре-
трения F предполагаем направленной в положительную сторону оси Ох,
При составлении уравнений моменты сил и угловые характеристики движе-
движения тел считаем положительными, если они направлены против движения часо-
часовой стрелки.
341
Для диска D имеем следующие уравнения движения:
Ь
&
где JСг — момент инерции диска относительно оси Сг, проходящей черсч центр
масс перпендикулярно плоскости диска. При сделанном выборе осей координат
Uq=s R =» const и, следовательно, ус = ус = 0.
Блок В вращается вокруг неподвижной оси С^г^роходящей через его центр
масс Сх (рис, 81). На блок действуют сила тяжести Ра, реакция оси с составляю-
составляющими Xi, Fj и натяжения нитей, число-
вые величины которых S и Sr. Диффе-
Дифференциальное уравнение вращения бло-
блока таково:
S>—5,л (б)
Рис. 81
г\
Рис. 82
где 1 с г — момент инерции блока от-
относительно оси вращения Схг.
Груз А совершает прямолинейное
движение по оси Qxz (рис. 82). К нему
приложены сила тяжести Р1 и реакция
нити, числовая величина которой Ss.
Уравнение движения груза таково:
Имеем систему пяти уравнений (а), (б), (в), в которые входят девять неиз-
неизвестных: хс, q>, фх, г, N, F, L, S, Si. Так как ус — О, то его считаем известным.
К системе пяти уравнений движения следует добавить уравнение связи
движений тел вследствие нерастяжимости нити и отсутствия ее скольжения по
диску D и блоку В.
Если переменные величины отсчитывать от начальных положений тел, то
для момента времени t для блока н груза (рис. 81, 82) получаем г = —г(р± и
после дифференцирования по времени г = — /чр,. Продифференцировав еще один
раз, имеем
'г — — гщ. (г)
Знак минус здесь и дальше ставятся для того, чтобы при отрицательном значе-
значении ф1 (вращение блок i происходит по часовой стрелке) получить положитель-
положительное значение г (движение груза вниз, р додржител>ну10 сторону оси Охг).
Так как нить не скользит по диску D и блок? В, то скорости и касательные
ускорения ючек Е диска и К блока (см, рис. 80, 81) одинаковы, т( е. хь = х^
и хЕ — *д. Но для точки К блока хк = — /-ф( и х'к — — гщ. Для точки Е
диска, приняв за полюс точку С, по формуле связи скоростей двух точек при пло-
плоском движении для произвольного момента времени имеем
*? = хс — ЯФ'
После дифференцирования по времени
хЕ = x(, — R(f,
Таким образом, получаем дополнительное уравнение связи движений:
*с — Я'ф — — "Pi- <Д)
342
Кроме того, считаем, что при движении груза А вниз диск D катится по рель-
рельсу. Условие его качения для момента пары, препятствующей качению, вырази г-
ся в форме:
Качение диска может быть как со скольжением, так и без скольжения, а по-
поэтому сила трения F пока остается неизвестной и по числовой величине, и по
направлению,
Добавились два уравнения (г) и (д) и одно из неизвестных L выразилось через
другое N. Для полной определенности задачи необходимо иметь еще одно урав-
уравнение и, кроме того, следует установить характер движения диска, т. е, будет
ли он только катиться или качение его сопровождается скольжением.
Предположим, что диск катится без скольжения, т, е. его мгновенный центр
скоростей находится в точке соприкосновения диска с рельсом. Тогда скорость
хс (положительна) точки С с учетом ее знака выражается через угловую скорость
Ф (отрицательна) зависимостью х^ = — Rq>, справедливой для любого момента
времен:'. Дифференцируя по времени это соотношение, получаем дополнительное
услолю
"хс = — tfq>, (e)
После этого уравнение (д) примет внд
2/?ф = гщ, (Д')
Уравнение (е) справедливо только при отсутствии скольжения диска в от-
отличие от других уравнений, которые не зависят от предположения о характере
движения диска.
Итак, имеем систему семи уравнений с семью неизвестными, считая, что L
уже исключено из уравнений благодаря соотношению L = 6/V.
Характер движения диска можно установить, если из полученной системы
уравнений определить силу трения и сравнить ее числовую величину с предель-
предельной силон трения Fmax;='/^' Если окажется |F| < ^тах> ТО система уравнений
не приведет к противоречию с динамическим условием отсутствия скольжения.
Предположение об отсутствии скольжения диска правильно. Если же |F| > Fmax>
то предположение об отсутствии скольжения неверно, так как требует такой си-
силы трения, которая возникнуть не может, В этом случае диск катится со сколь-
скольжением и условие (е) не выполняется. Но в этом случае \F\ = Fma^ = fN, т, е.
имеем дополнительное условие для одной из неизвестных. Число неизвестных
оказывается равным числу уравнений.
Силу трения Fmsix следует подставить в уравнения вместо F с тем знаком,
С которым получилась из уравнений не соответствующая по числовой величи-
величине сила трения F.
Определим силу трения F. Так как уа = 0, то из второго уравнения системы
(а) следует J/=Pn потому Fmax = fP = 0,36 кН, L = &N = 6Р, Определим
предварительно силы натяжения S и Si в общем случае (возможно, потребуются
эти их значения) отсутствия скольжения диска, Из уравнения (в) с учетом (г)
И (д) имеем
Si^Pi—у z = />1+-^i- r'ii^P,—-(xc—Rip). (ж)
о & &
При отсутствии скольжения, т. е. при выполнении условия (е), соотношение
(ж) выражается в форме
(ж')
343
p fi
Из уравнения (б) с учетом (ж) и значения момента инерции УСB = —'L __-
определяем S:
(з)
Таким образом, при выполнении услоэия (е) имеем
Rq>
(Щ+) (в')
8
Определим силу трения, предположив отсутствие сколжегшя, т. е, когда
для сил натяжения выполняются условия (ж') и (з')- Подставляя эти значения
Si и S в оставшиеся два уравнения системы (а) с учетом (е), после несложных пре-
преобразований получаем
8
8
Р /?2
так как момент инерции диска JСг = 4— Эту систему уравнений кратко
можно выразить в форме
ai*P Л- F = — Pi', «гФ — F = Ь, (и)
где а1 = ( + 1 + а) ^^,; , (f + ^ + ^
8
9,8 ' ' 2 ' R
Из системы уравнений (и) определяем силу трения:
Р =-
at -
ай -1
= 27,5 Н. (к)
Сила трения из уравнений получается со знаком плюс; следовательно, пред»
положение о ее направлении в положительную сторону оси Ох оказалось правиль»
ньш.
Сравнивая числовую величину полученной силы трения F с предельной си»
лой грения fraaK = /р = 0,36 кН = 360 Н, имеем \F\ < ^max- Предположен
ние об отсутствии скольжения не привело к противоречию. Диск действитель*
но катится без скольжения и хс и ф удовлетворяют уравнению (е).
Подставляя значение силы трения из (к) в первое уравнение системы (и),
получаем
_4K4 с-.
. _ _ Л
R 1340-0,3
Так как ср = const, то ф ==.<р -4-4* C%t+ Cv В начальный момент времени
<= 0, ф = 0 и ф = 0, Поэтому Сх = С2 = 0,
Ь44
Итак,
.. ft
Ф=ф— =— 2,17<»рад.
Из (е) находим
хс = — /?ф = 1,30 м-с,
Так как хс — ronst, то хс — хс L- + C<,t + C4. Ич начальных условий
1=0, яс = 0, xq = 0 получаем С3 = С4 = 0< Следовательно,
ХС -2с-у=0,65<«м.
Получены следующие уравнения движения диска D:
*с = 0,65<J м; ус = /? = 0,3 м; ф = — 2,Ш2 рад, (л)
По известным значениям хс и ф, используя (д'), (г) и условие (е), получаем
г = — гфт = — 2Rq> = 2хс; г = 2«с = 2хс ?, (м)
Реакцию оси блока б определяем из условия, что центр масс блока Cj не-
неподвижен и потому на основании теоремы о движении центра масс суммы проек-
проекций сил на оси координат Схх и С^у равны нулю. Имеем
Xi - S = 0; Y1-Pi-Sl = Q
или
Xi = S; Yt =- Рг + SI#
Определяем силы натяжения нити S и Si из (ж') и (з'):
2Р .. 2Р -4-f
?Г (Т
После этого
Давление блока на ось по числовой величине рапно реакции оси бчока Rt.
Количество движения системы Q состоит из векторной суммы количеств дви-
движения отдельных тел:
Q=Qa + Qb+Qd- (в)
Так как центр масс блока В неподвижен, то QB = 0<
Для диска D
Р _ Р .
QD^—vc; QDx= — хс; QD^=0,
Груз А двилгется в положительную сторону оси Охг (вниз); следовательно,
Проецируя (н) на оси координат Ох (направлена по горизонтали вправо)
и Оу (направлена по вертикали вверх) и используя (м), получаем
Р Р Р Р
б б ь о
При t= 1 с
QK =900.1,3/9,8 = 119; Оу = —150.2,6/9,8= —40;
345
Кинетическая энершя системы Т состоит из кинетических энергий отдель-
отдельных re л:
т = то + тв + тА.
Диск совершает плоское движение. Его кикетическая энергия при <= 1 о
Р . ф2 3 Р . 3 Р ...
4-9,8
Блок вращается вокруг неподвижной оси; следовательно, при t — 1 о
Груз движется поступательно, а потому при t = 1с
А g 2 g 2 g 9,8
Кинетическая энергия через одну секунду после начала движения системы
Т =- То \ Тв+ Тд = 117 + 24 + 52 = 193 Н-м.
Кине1ичсскии момент диска D относительно точки О рельса вычисляем по
формуле
где 4гЧ*й|=^1ф1-
Для проекции Ко на ось Ог, учитывая, что кинетический момент в на-
правлении часовой стрелки считается отрицательным, имеем
Так как плечо вектора Mv^, приложенного в точке С относительно точки О,
не зависит от выбора точки О на рельсе, то и KOz не зависит от положения точки
О. Точкой 0 может быть точка соприкосновения диска с рельсом.В рассматривае-
рассматриваемом сл\ чае КОх ~ КОу = 0, поэтому при t — 1 с
Р
PR
а ¦- р
PR
9g ' ~"сч 2g ' "c'l- 2-9,8
— 3xc\=—^— \—xrt\= r——'¦—=54H.m-c
Количество движения, кинетическую энергию и кинетический момейт мож.
но также определить из общих теорем динамики.
По теореме об изменении количества движения системы,
Система не движется в направлении оси Ог, поэтому Qz — 0.
Внешними силами системы являются силы тяжести тел Р, Рь Р^ реакции оси
блока Xi, Yi и силы реакции рельса!?, F и пара сил с моментом L. Все силы на-
346
тяжения нити являются внутренними силами системы. Для проекции внешних
сил на оси координат имеем
F + xi = 27.5 + 93 = 120,5 Н)
TF[C> = Л' + Yt - Р - Р1- Р2 = 900+251-1190= - 39 II.
Таким oopdJOM,
AQJ&i = 120,5; dQyidt = — 39 j
или
6QX = 120,5 At, dQj, - — 39 dt.
Интегрируя эти выражения и учитывая, что при 1=0 Qx = Qy = 0, полу-
получаем
Qx — 120,5 Н-с; Qy = — 39 Н-с,
что находится в соответствии с ранее полученными значениями этих величин.
По теореме об изменении кинетической энергии системы для промежутка вре-
времени от 0 до 1 с имеем
Здесь Го = 0. Кроме того, SHJj," = 0, так как силы натяжения нитей дают рабо-
работу, равную нулю.
Работа внешних сил системы ча рассматриваемый промежуток времени
2А{ке) = Pxz + F(xc + Яф) + L(f = 150-1,3—1,35-2,2 = 192 Н -м,
так как
г = -Xcfl == 1,3; ф = _ 2,2; L = SP = 0,0015-900 = 1,35 Н-м
и путь точки соприкосновения диска D с рельсом хс + /?ф = 0, при качении дис-
диска без скольжения. Другие внешние силы R, N, Xit Y± не совершают работы,
так как перпендикулярны перемещениям или приложены в неподвижной точке.
Таким образом,
Т = 2 Л И = 192 Н-м,
что хорошо мнласуется со значением Т, полученным по формуле,
По теореме об изменении кинетического момента относительно оси Ог, для
катка D
Внешними силами катка D являются силы Р, S, N, F и паря сил с чомрнтом L,
Имеем
2Л1ог(^и))= — S-2R-Pxc+Nxc — ?,==— 93-0,6 — 1,55= — „6,1 Н.м.
Так как Л' = Р, то
— Рхс + Nxc = 0-
После этого
&КОг= —56,1 At,
Интегрируя что соотношение от начального момента времени до момента, соот-
соответствующего t = 1 с, получаем
Ко,= — 56,1 Н-м-с,
Эго значение KOz мало отличается от вычисленного по формуле, Расхождение
связано о округлениями при вычислениях.
34 7
Связь
Глава 5
ПРИНЦИП ДАЛАМБЕРА. ДИНАМИЧЕСКИЕ РЕАКЦИИ
ПРИ ВРАЩЕНИИ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
§ 1. ПРИНЦИП ДАЛАМБЕРА
Принцип Даламбера для материальной точки
Законы Ньютона содержат в себе все необходимое для рассмотре-
рассмотрения движения любых механических систем. Но первоначально они при-
применялись только для рассмотрения движения свободной материаль-
материальной точки и свободного твердого тела до тех пор, пока не была допол-
дополнительно сформулирована аксиома связей. Для рассмотрения движе-
движения несвободных систем Даламбер предложил специальный принцип,
получивший название принципа
Даламбера. Этот принцип был
сформулирован в терминах «потерян-
«потерянных» движений.
В настоящее время, когда считает-
считается справедливой аксиома связей, урав-
уравнения движения несвободной мате-
материальной точки являются такими же,
как и для свободной, только к дейст-
действующим на точку активным или за-
заданным силам добавляют силы реак-
реакций связей.
Современное выражение принципа
Даламбера не отличается по содержа-
содержанию от уравнений движения мате-
материальной точки, но для многих задач оно более удобно. Принцип Да-
Даламбера для свободной материальной точки эквивалентен основному
закону динамики. Для несвободной точки он эквивалентен основному
закону вместе с аксиомой связей.
Уравнение движения материальной точки массой т относительно
инерциальной системы отсчета под действием приложенных активных
сил и реакций связей имеет вид
Тепа
Рис 83
та = F + R.
A)
Сила F является равнодействующей активных сил, R—равно-
R—равнодействующей реакций связей на — ускорением точки относительно
инерциальной системы отсчета. Назовем силой инерции материальной
точки произведение массы точки на вектор ускорения, взятое g обрат-
обратным знаком, т. е. Ф = — та. Если использовать понятие силы инер-
инерции точки и перенести все слагаемые A) в правую часть уравнения, то
получим (рис. 83)
? + Л + Ф =0. B)
348
Так как силы F, R и Ф образуют систему сходящихся сил и удовлет-
удовлетворяют условию B), то они являются системой сил, эквивалентной ну-
нулю, т. е.
{F, R, Ф) <лз 0. C)
Уравнение B) или эквивалентное ему условие C) выражает прин-
принцип Даламбера для точки: при движении материальной точки актив-
активные силы реакции связей вместе с силой инерции точки образуют равно-
равновесную систему сил.
Из B) в проекциях на координатные оси получаем три условия рав-
равновесия сил:
Fx + Rx + Ф* = 0; Fy + Ry + Фу; F, +RZ + <P2 = 0. D)
Ускорение точки относительно инерциальной системы отсчета мож-
можно разложить на составляющие по осям декартовой системы координат,
а также на касательное и нормальное ускорения и на переносное, от-
относительное ускорения и ускорение Кориолиса, если движение точки
считать сложным, состоящим из переносного и относительного. Соот-
Соответственно силу инерции Ф можно разложить на такие же составляю-
составляющие:
Ф = Фх~1 + Ф„7 + Ф? = ~Фх + ~Фп = ~Фе + ФТ + Фя. E)
Касательная сила инерции
Фт — — шах,
где аг—касательное ускорение: нормальная, или центробежная,
сила инерции
Фп = — mani
где ап — нормальное ускорение. Переносная и относительная силы
инерции, а также сила инерции Кориолиса через ускорения выражают-
выражаются соответственно так:
Фе — — шае; Фг — — mar; Фк = — так.
Аналогично выражаются через проекции ускорения на прямоуголь-
прямоугольные оси координат проекции силы инерции Фх, Фу, Фг. На силы инер-
цйи существует несколько точек зрения. Согласно первой точке зрения,
сила инерции условно прикладывается к точке, чтобы уравнению дви-
движения A) придать более удобную форму условия равновесия B). По-
Поэтому силу инерции Ф называют фиктивной, даламберо-
вой, условной и. т.д. С этой точки зрения силы инерции в прин-
принципе Даламбера не являются настоящими, реальными силами и отли-
отличаются не только от обычных сил, создаваемых действием тел, но даже
и от сил инерции в относительном движении.
Согласно другой, наиболее распространенной точке зрения, сила
инерции считается приложенной по частям к «ускоряющим» телам.
349
Для обоснования приводят следующие рассуждения. Материальная
точка движется с ускорением а потому, что на нее действуют какие-то
тела с силой, равной (F + R) (рис. 83). По закону о равенстве сил дей-
действия и противодействия материальная точка должна оказывать проти-
противодействие этим телам с такой же по величине, но противоположной по
направлению силой — (F + Я), которая, согласно B), равна силе
инерции Ф, т. е. Ф = — (F + #).
Это соотношение дает основание считать, что сила инерции прило-
приложена к «ускоряющим» телам, т. е. телам, которые сообщают точке ус-
ускорение.
Действительно, сила инерции Ф является векторной суммой сил
действия точки на «ускоряющие» ее тела. Она служит суммарной оцен-
оценкой этого действия. Однако при рассмотрении относительного движения
точки вводятся переносная Фе и кориолисова силы инерции Фк. Для
подвижного наблюдателя их следует считать приложенными к движу-
движущейся материальной точке, но для них невозможно указать материаль-
материальные тела, действием которых на точку можно объяснить эти силы.
Переносная и кориолисова силы инерции являются частью пол-
полной силы инерции Ф. Если для части силы невозможно указать тела,
которые ее создают, то это же справедливо и для всей силы инерции Ф.
Однако в рассматриваемом случае указывается материальный объект,
который действует с силой инерции Ф на ускоряющие тела. Этим объ-
объектом является движущаяся с ускорением материальная точка.
Согласно третьей точке зрения, силу инерции считают приложен-
приложенной к движущейся материальной точке, по крайней мере это справед-
справедливо для наблюдателя, который находится в собственной системе от-
отсчета этой точки. Собственной системой отсчета материальной точки
называют такую систему отсчета, относительно которой точка находит-
находится в покое, т е. относительно которой ее относительные скорость и ус-
ускорение равны нулю. В этой системе отсчета справедливо условие от-
относительного равновесия для сил
F+ Й~+<Я = О,
где Ф* = — та*е — переносная сила инерции в собственной системе
отсчета. Но в собственной системе отсчета и? = О, а; = 0 и корио-
лисово ускорение ан = 0, а тогда а = at и, следовательно, Ф ~ Ф'е.
Таким образом, принцип Даламбера есть условие относительного
равновесия для сил в собственной системе отсчета. Относительно соб-
собственного наблюдателя сила инерции Ф* приложена к движущейся
точке, а следовательно, к ней приложена и совпадающая с переносной
силой инерции в собственной системе отсчета Ф*е сила инерции аб-
абсолютного движения Ф. Силу Ф в этом случае считают дополнитель-
дополнительным действием на точку поля Вселенной. Такая точка зрения на силы
инерции требует изменения понятия приложенной силы и из-
изменения некоторых основных аксиом динамики.
350
Принцип Даламбера для системы материальных точек
Рассмотрим систему N материальных точек. К каждой точке сис-
системы в общем случае приложены равнодействующая активных сил и
равнодействующая реакций связей. Применяя принцип Даламбера
к каждой точке системы, получим
Fk_+ Rh +l>k = 0, k = 1, 2, .... N, F)
где Фк = — mkak — сила инерции для й-й точки (рис. 84).
Условия F) можно представить в эквивалентной форме:
{Fh, Rh, *ft} «> 0, k = 1,2, .... N. G)
N векторных условий F) или G) выражают принцип Даламбера
для системы: при движении механической системы активная сила и
реакция связей вместе с силой инерции составляют равновесную систе-
систему сил {для каждой точки си-
системы.
Принцип Даламбера для си-
системы по своему содержанию не
отличается от уравнений движе-
движения точек системы.
Представим равнодействую-
равнодействующую силу, приложенную к каж-
каждой точке системы, разложенной
не на активную силу и реакцию
связей, а на внутреннюю и внеш- ^^
нюю силы по отношению ко всей #
системе: рис 84
j.^ +
Тогда принцип Даламбера для системы можно представить в дру-
другой форме:
/?<> + /?<<>_h^ = о, Л=>1, 2,...,#. (8)
Из принципа Дачамбера для системы в форме F) или (8) можно по-
получить следствия в виде шести условий равновесия для сил, действую-
действующих на точки системы, и сил инерции.
Если просуммировать левые части F) по всем точкам системы, то
s ^+ i ^=0- (9)
l
s
Умножая векторно каждое из соотношений F) слева на радиус-век-
радиус-вектор точки Fh и опять суммируя по точкам системы, получаем
чл G v F ) Л- V {7и X Rt.) 4- 'V (Fi X Фь) = 0.
\ A0)
N — ,— V !
или
,v
M0{Rh)+
ft=i
351
Условия (9) и A0), если выразить их через проекции на координат-
координатные оси, дадут шесть условий рановесия, аналогичных условиям рав-
новесия сил, приложенных к твердому телу, в статике.
Если использовать принцип Даламбера в форме (8), то получим
следствия в форме
1(П()J*(^)о
так как внутренние силы системы по свойству этих сил удовлетворяют
условиям
2^0 ^
Если спроецировать A1) и A2) на координатные оси, то опять полу-
получим шесть условий равновесия для сил. Особенностью условий рав-
равновесия сил в форме A1) и A2) является отсутствие в них внутренних
сил, что делает их особенно удобными при решении многих задач дина-
динамики системы.
В действительности условие A1) представляет собой теорему об из-
изменении количества движения, а A2) — теорему об изменении кине-
кинетического момента для системы, если их представить в форме
0(^')-^=0. A2')
Сравнивая A1) с A1') и A2) с A2'), получаем формулы для вычисле-
вычисления главных вектора и момента сил инерции системы через количество
движения и кинетический момент:
A4)
Так как Q = Mvc, то для главного вектора сил инерции получаем
формулу
Здесь М — масса системы, vc и ас — скорость и ускорение центра
масс соответственно.
352
В тех случаях движения твердого тела, когда силы инерции приво-
приводятся к равнодействующей, последняя совпадает по величине и направ-
направлению с главным вектором этих сил. Но равнодействующая сил инер-
инерции необязательно проходит через центр масс тела, хотя величина и ее
направление всегда определяются по формуле A5).
Проецируя векторы из A4), на ось Ог, получаем
*™---—¦• A4')
Аналогичные формулы можно получить и для других координат-
координатных осей. В случае вращения твердого тела вокруг неподвижной оси
Ог, как известно,
Подставляя это значение Kz в A4'), имеем
.,. i_ —- __ / _. —- __ / о
ИЛИ
4Ф)= 2 Мг(Фь)=-Ле. A6)
По формуле A6) вычисляют момент сил инерции относительно оси
вращения при вращательном движении твердого тела вокруг непод-
неподвижной оси. Этот момент создают касательные силы инерции, так как
нормальные силы инерции для каждой точки тела пересекают ось вра-
вращения и, следовательно, момента не создают.
Из принципа Даламбера для системы можно получить еще одно след-
следствие — теорему об изменении кинетической энергии. Для этого ум-
умножаем (8) скалярно на drk и суммируем полученные соотношения по
всем точкам. Получаем
N _ _ N _ _ N _ _
или в других обозначениях
N N N
™*¦ fit* t^^t Я (k"i ^
Сравнивая A7) с теоремой об изменении кинетической энергии сис-
системы в дифференциальной форме
N N
2 dA%>+ 2 dA.p-dT = Q,
«2 Зак 131 г 353
получаем выражение для суммы элементарных работ сил инерции через
кинетическую энергию системы Т:
N _ _ N
Интегрируя A8), получаем
2^ = -(Г-Т0). A9)
Таким образом, сумма работ сил инерции на каком-либо перемеще-
перемещении системы равна изменению кинетической энергии на этом переме-
перемещении, взятому с обратным знаком.
Методы решения задач динамики с использованием сил инерции на-
называют кинетостатическими.
Силы инерции твердою тела в частных случаях
его движения
При поступательном движении. Если твердое
тело движется поступательно, то ускорения его точек одинаковы. Силы
инерции этих точек составляют систему параллельных сил, направ-
направленных в одну сторону. Такая система сил приводится к равнодейст-
равнодействующей силе Ф*, которая равна главному вектору, т. е.
ф* — ф = — Мас,
Линия действия равнодействующей силы инерции в этом случае
проходит через центр масс, так как главный момент сил инерции то-
точек гела относительно центра масс
_ \
Действительно, согласно следствию из принципа Даламбера A2) для
центра масс, имеем
При поступательном движении тело не совершает вращения вокруг
N _ _
центра масс- и поэтому SAfc (Fjf*) — 0, Следовательно, и L'c'' = 0.
При вращении вокруг неподвижной оси.
Если выбрать за центр приведения сил инерции точку О на оси враще-
вращения Oz, то в этой точке получим главный вектор и главный момент сил
инерции: __
Ф = — Мас; Ьоф) = —
354
Если центр масо находится на оси вращения, то Ф — 0. Проекции
главного момента сил инерции на неподвижные оси координат в общем
случае можно вычислить по формулам
?(*> = -dKJdt Ф 0; L<*> = —dKy/dt Ф 0; Lf > = —dKM = - /2е.
Моменты сил инерции L^*> и L(v*> вычисляются в следующем па-
параграфе. Они равны нулю, если ось Oz является главной осью инерции
для точки О.
При плоском движении. Выбрав за центр приведе-
приведения сил инерция центр масс, получим в этой точке главный вектор н
главный момент сил инерции. Для главного вектора сил инерции имеем
Ф = — Мас.
Для главного момента сил инерции относительно центра масс С,
который является движущейся точкой при плоском движении тела,
получим формулы, аналогичные формуле A4), выведенной для непод-
неподвижной точки О.
Согласно следствию из принципа Даламбера A2), главный момент
сил инерции относительно центра масо удовлетворяет условию
С другой стороны, из теорем об H3iMeHeHHH кинетического момента от-
относительно центра масс для абсолютного и относительного движений
имеем
dRcldt^ 2 Mc(Fie)); dKlcr)(dt^ 2
Из этих соотношений следует
Проекции И?), L^i на оси координат q началом в центре масс и
движущиеся поступательно вместе g центром масв соответственно;
где ось Сг перпендикулярна плоскости, параллельно которой совер-
совершают движение точки тела.
Моменты сил инерции L?.*> и L<?> вычисляются так же, как и при
вращении тела вокруг неподвижной оси. Они равны нулю, если ось
Сг является главной осью инерции для точки С. Это, в частности, вы-
выполняется, если тело имеет плоскость симметрии, проходящую через
центр масс и параллельную плоскости движения тела.
Пример 1. Груз А силой тяжести Pi опускается вниз по грани призмы силой
тяжеаи Р, приводя в движение груз В силой тяжести Я2 с помощью нити, пере-
перекинутой через невесомый блок С, Считая пол, грани призмы и грузов гладкими,
определить даваение призмы на пол и выступ, препятствующий перемещений
12» 355
призмы, а также нятяжение нити, Урлы наклона боковых граней призмы а я Р
(рис. 85),
Решение. Применим к системе, состоящей из призмы, грузов, нити и
блока, следствия из принципа Даламбера, составив условия равновесия внешни»
сил и сил инерции для этой механической системы. Предположим, что ускорение
груза А направлено вниз и равно а, Для абсолютных значений сил инерции гру-
грузов А я В соответственно имеем
Ф1 =——а; Ф2 =—-а.
В Я,
Направления сил инерции Ф± и Фа указаны на рисунке,
о)
О У//У///////////////////////////////////////////,
Рис. 85
Составляя условия равновесия внешних сил Pj, Р2, P, N, F и сил инерциа
~ijSt и Ф7в проекциях на координатные оси Ох и Оу, получим;
для оси Ох
для оси Оу
р р
F — a cos а — а cos 1:1=0}
8 S
Отсюда
g
>V
+P (Pi sin с—Р, sfn
(a)
Для определения силы натяжения нити S и ускорения гручов применим при-
принцип Даламбера к каждому гручу d отдельности. Для этого составим условия рав«
новесия внешних сил н сил инерции в проекциях на направление ниш для каж«
дого груча. Получим:
для груза А (рис. 85, а)
S -]-—~ а — Pt sin a =0 ;
(б')
зев
для груза В (рис. 85, б)
Гак как S' = S для случая невесомого блока.
Из (б) и (б') исключаем S и определяем <г:
S 2_ a—P slnp"=O|
юмого блока,
определяем а:
Pt sin a—P2sin p
O=g'
(б')
(в)
Очевидно, для того чтобы груз двигался вниз, должно выполняться условие
Рх sin а — Р2 sin Р > 0.
Подставляя полученное значение а в (а), получаем:
(Pt cos g+P" cos P) {Pt sin a— P2 sin ft)
Давление призмы на выступ, согласно закону о равенстве сил действия и
противодействия, F' = — F, давление призмы на пол N' ~ — N
Для определения натяжения нити S следует подставить значение ускорения
а в одно из уравнений (б). Тогда
Р, Pi P., (sin a + sin P)
Пример 2. Однородный тонкий стержень А В силой тяжести Р и длиной I
жестно скреплен с вертикальным валом 00^ под углом а (рис. 86, о). Вал 00%
вместе со стержнем А В вращается с постоянной угловой скоростью <о. Определить
реакции в заделке А стержня.
Решение. Применим к внешним силам я силам инерции стержня АВ
следствия из принципа Даламберав форме условий равновесия. Неизвестные ре-
реакцию RA и векторный момент в заделке МА разложим по осям координат.
Если разбить весь стержень на элементарные участки одинаковой длины,
то ускорения середин эгих участков распределятся вдоль стержня по линеииому
закону (рис, 86, б), так как ускорение каждой точки стержня а& = гка> , где
где
Рис. 86
357
rk _ расстояние fe-й точки до оси вращения. Следовательно, силы инерции эле-
элементарных участков стержня распределены тоже по линейному закону, образуя
треугольник. Распределенные так параллельные силы имеют равнодействующую
силу, линия действия которой отстоит от основания треугольника на расстоянии
12 —
— I по стержню и — / от вершины треугольника. Равнодействующая сила Ф*
о о
всегда равна главному вектору Ф распределенных по треугольнику сил. Для глав*
иого вектора сил инерции имеем
Ф =— Мас,
где ~aQ — ускорение целтра масс стержня, т. е. его средней точки. Таким обра*
зом,
Р Р I
g c e 2
Составим тесть условий равчовесчя сил, приняв, что стержень в рассматри-
рассматриваемый момент времени находится в координатной плоскости Ауг. Тогда соответ-
соответственно для проекций сил и моментов их относительно осей координат Ах, Ау,
А г имеем:
I 2
МАх—Р—¦ sin а—Ф*—- I cosa
Подставляя в эти уравнения значение Ф* и решая относительно нниавест-
ных, получаем:
Р I
ХА=>0; YA^~—u>2__sina, ZA^P.
pi , p i pi i ia? \
M A •=•—— sina-| /аюа 2 sin a cos a = ——-I sin a-j-——¦ sin 2a ;
Для реакции и момента в заделке имеем:
У
§ 2. ДИНАМИЧЕСКИЕ РЕАКЦИИ ПРИ ВРАЩЕНИИ ТВЕРДОГО
ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Формулы для реакций
"Твердое тело, имеющее две закрепленные точки А и В, вращается
вокруг неподвижной оси Oz, проходящей через^ эти точки, под дейст-
действием внешних приложенных сил Fu F2,..., Fn (рис. 87). Освободив
эело от связей в точках А и В, приложим к телу силы реакций связей
~Ra и Tie, проекции которых на оси координат обозначим соответст-
358
венно X А, Y д, Z А и Хв, Ул, ZB. Эти силы тоже являются внешними
силами для тела.
Приложив к точкам тела силы инерции, применим к телу следствия
из принципа Даламбера для системы, считая, что тело разбито на N
частиц (малых), принимаемых за точки. Для этого следует приравнять
нулю главныц вектор и главный момент всех внешних сил и сил инер-
инерции точек тела. Имеем
(Ял) + Mo (Rb)
= 0.
[20)
Для определения из B0) сил реакций RA и RB необходимо вы-
выразить главный вектор сил инерции Ф и главный момент этих сил Ц>Ф)
через величины, характеризующие само тело
и его вращение. Для главного вектора сил
инерции используем выражение
ф= ^ *h^ S ( — тЛ="-~М*с* B1)
где М — масса тела; ас — ускорение цент-
центра масс.
При вращении тела вокруг неподвижной
оси ускорение любой точки тела вычисляется
по формуле
oii = 8Xrk + fflX(fflx7t), B2)
где rh — радиус-вектор рассматриваемой точки; & и со — соответст-
соответственно векторы углового ускорения и угловой скорости тела, направ-
направленные по оси вращения. Для центра_масс в B2) вектор rh следует за-
заменить радиус-вектором центра масс гс.
Векторное произведение двух векторов выражается определителем,
в первой строке которого расположены единичные векторы i, j, k, на-
направленные вдоль осей координат, а в двух других строках — проек-
проекции на оси координат векторов сомножителей. Определитель можно
разложить по элементам первой строки. Получим
Рис. 87
СО X Гс =
i j k
0 0 <о
хс Ус zc
так как о»х = ю(у = 0 и coz = м. Здесь хс, Ус> zc — координаты
центра масс. Используя полученные величины для ускорения центра
масс а с, имеем
359
X г с) —
г
0
Хс
I
0
Ус
k
&
гс
+
о о
— Ща
'¦yc) + kO,
k
со
О
B20
так как вх — гу — 0, ег = е.
Из B1) g учетом B2') для проекций главного вектора сил инерции
на оси координат получаем выражения
Фу =
МаСх = Мус е + + Мхс со2;'
= — Мхс е + Мус со2;
B3)
Формулы B3) можно применять не только для главного вектора
сил инерции, но и для силы инерции отдельной точки тела. Для этого
следует массу тела М в них заменить массой точки mk, а координаты
хс, Ус, ?с центра маса — координатами xk, yh, zk точки. Так, для силы
инерции &-й точки ФЛ, согласно B3), имеем
B3 е)
Проекции главного момента сил инерции L?f на оси координат вы-
вычисляем по формулам для моментов сил относительно этих осей. Ис-
Используя B3') и вынося со и е за знаки сумм, получаем:
\ =
2
2
4=1
= &/„— @2J
yz;
где Jxt=
N
2
2
N
2
N
= 2
= 2
'*»
—цен-
тробежные и осевой моменты инерции. Получены формулы для вы-
вычисления проекций главного момента сил инерции L'gf» на координа-
координатные оси:
[Ф) , 4Ф) = е/уг -f (oVM; LT - _еУ,. B4)
360
При выводе формул B3) и B4) для проекций главного вектора и
главного момента сил инерции на оси координат не делалось никаких
предположений относительно этих осей. Они могут быть как непод-
неподвижными осями, относительно которых рассматривается вращение те-
тела, так и подвижными осями, скрепленными с вращающимся телом. По-
Поэтому эти формулы можно применять как для неподвижных осей коор-
координат, так и для осей координат, вращающихся вместе с телом.
Из B0) в проекциях на координатные оси с учетом B3) и B4) по-
получаем следующую систему уравнений для определения проекций пол-
полных реакций К А, YA,ZAnXB, YB, ZB:
+ У a + Yb -Mxc в + Мус со2 = 0;
B5)
2
ft=t
2
ft=i
2
ft=i
2
2
4 1
так как
MX(RA) +Mx(Rb)-YahA — YBhB\ Mg(RA
= —Xa hA + Xb hB.
В последнее уравнение системы B5) не входят силы реакций закреп-
закрепленных точек. Это уравнение является уравнением вращения твердо-
твердого тела вокруг неподвижной оси Oz. Из него по заданным силам опре-
определяется угловое ускорение 8, если известен момент инерции тела от-
относительно оси вращения. По угловому ускорению интегрированием
определяется угловая скорость, если известно ее значение в начальный
момент. Для определения шести неизвестных проекций сил реакций
остается пять уравнений. Система уравнений B5) не дозволяет опре-
определить каждую из неизвестных Z А и ZB. Из третьего уравнения систе-
системы можно определить только сумму этих неизвестных. Для того чтобы
из этой системы можно было определить все неизвестные, необходимо
закрепить тело в точках А и В так, чтобы неизвестных проекций сил
реакций в них было не более пяти. Этого можно достигнуть, например,
поместив в точке А подпятник, а в точке В — подшипник (рис. 88).
Для таких опор оси тела ZB = 0 и все оставшиеся неизвестные мо-
могут быть определены из системы уравнений B5).
361
Разложим полные реакции R д и RB на статические и динамические
составляющие:
Ra = Ra + Ra; ~Rb = Rb + Rb.
Статическими реакциями RaA и R'b называют части полных реак-
реакций, которые статически уравновешивают приложенные внешние си-
силы. Уравнения для их определения получим из первых пяти уравне-
уравнений системы B5), положив в них е = 0 и ю = 0. Имеем
2
4 1
hx
B6)
Это известные из статики уравнения равновесия для сил, приложен-
приложенных к твердому телу, имеющему неподвижную ось вращения. Но под
действием приложенных внешних сил тело может вращаться вокруг
неподвижной оси Ог. От вращения у точек тела возникнут силы инер-
инерции. Части полных реакций RaA я /?*, которые уравновешивают силы
инерции точек тела, называют динамически-
динамическими реакциями.
Уравнения для определения динамиче-
динамических реакций получим из первых пяти урав-
уравнений системы B5), если учтем, что прило-
приложенные внешние силы уравновешены стати-
статическими реакциями. Получим
Рис. 88
Хл + Х% + Мус ч+Мхс ш"= 0;
Уд + У%—Мхе 8 + Мус а* = 0;
YA hA - П hB + eJxl -tf Jyi = 0;
— K%hA + XaB hs + eJyt 4-со2 Jxz = 0.
B7)
Составляющих динамических реакций опор в направлении оси враще-
вращения Ог не возникает, так как у точек тела нет составляющих сил инер-
инерции в этом направлении. В неподвижных точках тела имеются только
поперечные по отношению к оси вращения составляющие динамических
362
реакций. Это справедливо при любом закреплении точек Л и В, позво-
позволяющем телу вращаться вокруг оси, проходящей через эти точки. Из
системы уравнений B7) определяются все проекции динамических ре-
реакций на оси координат.
Статическая уравновешенность
Тело, имеющее неподвижную ось вращения, называют статически
уравновешенным, если центр масс этого тела находится на оси враще-
вращения. Для статически уравновешенного тела g осью вращения Ог ко-
координаты центра масс тела хс = у с = 0. Из первых двух уравне-
уравнений системы B7) в этом случае следует:
= 0 B8)
или
R'xa^-R%. B8')
Динамические реакции для статически уравновешенного тела образуют
пару сил. Пара сил может уравновешиваться только парой сил. Следо-
Следовательно, силы инерции точек тела, уравновешивающие динамические
реакции, в этом случае тоже приводятся к одной паре сил.
Используя B8), из двух последних уравнений системы B7) получим:
Xi— y!i_^Jyi+^'lJxz . уд _
Л.А ЛВ—' —; ; , J А ~
д _
В
), B9)
hA+hB
где
Из B9) следует, что динамические реакции зависят не только от
углового ускорения, но и от угловой скорости, т. е. они возникают да-
даже при вращении тела по инерции с постоянной угловой скоростью.
Динамические реакции пропорциональны квадрату угловой скорости
как в частном случае статической уравновешенности, так и в общем
случае и при вращении тела с большой угловой скоростью могут до-
достигать довольно значительных величин.
Формулы B3) и B4) справедливы как для неподвижных, так
и подвижных осей координат. Этим же свойством обладают и фор-
формулы B7). Поэтому динамические реакции как в частном случае
статически уравновешенного тела, так и в общем случае, когда
центр масс не находится на оси вращения, можно считать вращающи-
вращающимися вместе с подвижными осями координат, если угловая скорость
постоянна. Опоры оси вращения тела будут испытывать действие ци-
циклически изменяющихся динамических давлений, что может привести
к их усталостному разрушению или разрушению от вибраций, если
собственная круговая частота мест их закрепления совпадает или близ-
близка к угловой скорости вращения тела,
363
Динамическая уравновешенность
Динамической уравновемвннистыо называется случай обращения в
нуль динамических реакций. Динамические реакции обратятся в нуль,
как следует нз B9), если равны нулю центробежные моменты инерции
Jхг и Jyz> т. е. дополнительно R статической уравновешенности ось
вращения Ог доЛжнв быть главной осью инерции для любой точки О
этой оси. Так как центр масс в этом случае расположен на этой оси, то
ось вращения при динамической уртцозешенности является главной
центральной осью инерции. При вращении тела вокруг главной цент-
центральной оси инерции динамические реакции обращаются в нуль. Сле-
Следовательно, силы инерции точек тела, создающие динамические реак-
реакции, в этом случае образуют равновесную систему сил. Главный вектор
сил инерции L^*> и L^*' равны нулю. Момент сил инер-
инери моменты сил инерции L^*> и L^*' равны нулю. Момент сил инер-
инерции L<*> при этом может быть отличным от нуля.
Главную центральную ось инерции называют свободной осью вра-
вращения — свободной ог динамических реакций опор. При вращении те-
тела вокруг свободной оси вращения могут возникнуть только статичес-
статические реакции. Если тяжелое тело вращается по инерции с постоянной
угловой скоростью вокруг свободной оси вращения, то статические ре-
реакции должны уравновесить только силу тяготения тела. При специ-
специальном дополнительном движении тела кроме вращения его вокруг оси
с постоянной угловой скоростью может возникнуть положение, при ко-
котором силы инерции точек тела приведутся к равнодействующей силе,
уравновешивающей силу тяготения. В этом случае статические реак-
реакции тоже обратятся в н^ль и подшипник и подпятник для крепления
оси вращения окажутся ненужными. Такое положение имеет место
при вращении земного шара вокруг оси и его дополнительном движении
по орбите вокруг Солнца. То же имеет место для других планет Сол-
Солнечной системы, а также при движении Луны вокруг Земли и при дви-
движении естественных и искусственных спутников планет.
Для того чтобы сделать ось вращения тела свободной осью враще-
вращения, в технике осуществляют его балансировку на специальных ба-
балансировочных установках. При этом прибегают иногда к высверли-
высверливанию в теле отверстий и при необходимости заполняют их более тяже-
тяжелым металлом, например свинцом.
Пример 1. Однородная прямоугольная пластина длиной /, шириной h и си-
силой тяжести Р может вращаться без трения вокруг горизонтальной оси Ох,
пересекающей вертикальную ось вращения в точке О (рис. 89) Пластина накло-
наклонена к оси вращения Ог на угол а и удерживается под этим углом пружиной, ко-
которая перпендикулярна оси вращения и имеет жесткость с. Пружина не дефор-
деформирована при н = а0.
Определить угол а и полные реакции подпятника А и подшипника В при
вращении пластины вокруг вертикальной оси с постоянной у!ловой скоростью
со, если А В — I — 2 м,
h = 1 м, Р = 10 кН, с = 175 кН/м, со = 20 с-1, а0 = 2°, ОА = —АВ.
Решение. Применим к пластине следствие из принципа Даламбера для
системы, приваьняв нулю сумму моментов внешних сил и сил инерции относи-
относительно оси Ох. Действие пружины tta пластину заменим силой упругости F,
364
а действие подшипника в точке О — силами реакций Yo и Ze (рис. 90), В точяе О
приложим также главный вектор сил инерции Ф, параллельный оси Оу (уско-
(ускорение центра масс ас параллельно этой оси), и главный момент эгих сил
1^ф), Имеем:
Flcosa /slna
?
=*ck=>cl (sin a— sin
(a)
F)
так как
8 = (dco/d^j = 0 и sin a « a, cos a
для малых углов а и а„, Подставляя эти значения в (а), получим следующее урав-
уравнение для определения а:
(а—(ц) — —- la~J
(a')
Центробежный момент инерции Jyz вычислим по формуле C5*) (см, § 9 гл. 3)>
Имеем
——7Г^—
sin 2
(в)
где Jy- и Jz, — моменты инерции пластины относительно главных осей инер-
инерции Од' и Ог'. Ось Оу' является осью симметрии пластины, и поэтому она есть
главная ось инерции для всех точек этой оси. Ось Ог' перпендикулярна пласти-
Рнс. 89
Рис. 90
не плоскость которой служит для нее плоскостью симметрии. Такая ось тоже яв-
является главной осью инерции для точки 0, расположенной в этой плоскости
Главные моменты инерции для пластины, согласно формуле A3) § 4 гл. 3,
соответственно:
Подставляя эти величины в (в), получим
Jyi^Wz' —Jy')a~
JLJL
365
После этого определяем а из (а')' Имеем
или
Р Р /z
(a—a0) — — la— — сшг— О
2. g 6
350
78
pi
Для определения полных реакций подшипника В и подпятника А рассмот*
рнм систему тел, состоящую из пластины, пружины и стержня А В, заменив дей«
ствие подпятника и подшипника силами реакций, разложенными на составляю-
составляющие, параллельные осям координат (рис, 91). По формулам B5) для проекций пол-
полных реакций имеем
0.
Проекции главного вектора и главного момента сил инерции вычисляем по
формулам B3) и B4), Полагая е = 0, получим
Р
Р
Т
о
(Д)
Ось 0* перпендикулярна плоскости симметоии пластины, проходящей через
ОМ перпендикулярно пластине. Следовательно, она является главной осью инер-
инерции для точки О, поэтому Jxz = 0. Кроме того, в рассматриваемом случае
Q учетом этого из (г) получаем следующую систему уравнений:
(г')
0;
—ХА.ОА+ХВ.ОВ=0.
Из первого и последнего уравнений этой системы следует
хд = хв - о,
3E6
Третье уравнение дает
Из второго и четвертого уравнений (г') имеем;
—85,3 кН.
Пример 2. Однородный круглый цилиндр силой тяжести Р = 200 Н, ра-
радиусом К — 20 см, длиной / = 80 см о помощью вала АВ вращаема вии,ур
вертикальной оси с постоянной угловой скоростью со = 20 1/с (рис. 92). Осьвра-i
И
SI
Рис, S2
щения касается поверхности цилиндра посередине образующей в точке О тая,
что отрезок ОС, соединяющий точку каоания с цеьгром масс- цилиндра, перпен»
дикулярен оси вращения, Продольная ось цилиндра наклонена к вертикали на
угол а = 45".
Определить динамические реакции подшипника А и подпятника В, если
А В = 100 см, О А = 60 см. Alaccoft вала А В пренебречь.
Решение Выберем правую систему осей координат Охуг, скрепленных
с движущимся цилиндром и началом координат в точке О. Ось Ог направим по
оси вращения, Ох — по линии, соединяющей точку О g центром масо G, ось
Оу направим перпендикулярно Ох и Ог,
Динамические реакции, согласно следствиям из принципа Даламбвра для
системы, вместе с силами инерции образуют равновесную сиотему оил, т. е. удов-
удовлетворяют условиям равновесия
Ф-0! Mo(RA)+Mo(RD)+l\f>^Q, (a)
где Ф — главный вектор сил инерции; L^' — главный момент сил инерции
относительно точки О, выбранной за центр приведения сил инерции! Главный век-
367
тор сил инерции при вращении цилиндра вокруг неподвижной оси вычисляется
по формулам
_ (
Ф = 2Ф* =, _Мас I Фу=-МаСу~-Мгхс + Мш* ус]
{Фг^-МаСг~0.
Для главного момента сил инерции справедливы следующие формулы:
- - v d#0
,2М0(Ф„) = —~-
В этих формулах М — масса цилиидра1 хс, ус, гс — координаты центра
При сделанном выборе осей координат хс — — R, ус = 0, гс = 0. Кроме
того, так как со = const, то угловое ускорение 8=0. Еще одно упрощение свя-
связано с тем.что ось Ох является главной осью инерции для точки О, так как эта
точка находится на главной центральной оси инерции Сх', поэтому Jxz = 0.
С учетом этих упрощений спроецируем векторные уравнения (а) на оси ко-
координат. Для осей Ох, Оу, Ог соответственно получим следующие пять уравнений
для определения динамических реакций подпятника В и подшипника А;
— YA-OA+YB-OB — JV7a* = Q; ХА-ОА — Хв-ОВ^0
Из второго и четвертого уравнений этой системы определяем динамические
реакции YА и Yв. Имеем
Из первого и пятого уравнений соответственно получаем
Для полного решения задачи необходимо вычислить центробежный момент
инерции JyZ, Центробежные моменты инерции вычисляются через главные цент-
центральные осевые моменты инерции.
Получим необходимую формулу. Выберем в точке С систему координат
C*i</A. оси которой взаимно параллельны осям системы координат Охуг. Коор-
Координаты любой точки цилиндра относительно этих двух систем осей координат
связаны между собой формулами параллельного переноса в направлении оси
С*! на величину СО = R:
Kh = xih—R; Ук—yik', *ft=*ift.
Так ка«
Для вычисления центробежного момента инерции fgitl в качестве вспомога-
вспомогательных осей координат возьмем главные центральные оси инерции цилиндра
Схуу'г' (оси его симметрии). Систему осей координат С'х'у'г' можно получить нз
3G8
системы СххЩг^, поворачивая ее на угол а вокруг
оси Сх'. Формулы преобразования координат любой
точки тела при повороте осей (рис. 93) можно вира-
вить в форме
Vih =Гь. cos (а+ фь) =r;; cos щ cos а—rh sin q>k sin a=
=>^^cos а—г^ sin а;
yj, sin a -\-z'k cos a,
так как
У,
Используя эти формулы, имеем
В рассматриваемом случае
a—sin3 a)
Рис 93
— z^3) cos a sin a.
как центробежный момент инерции относительно главных осей инерции Ci/'t
Cz ^
Прибавляя в выражении для Jyfa величину Bт^х'ь —Ът*лхк ) соьа sma=
«= 0, получаем
ft +г* )]~T~=—a-*1 «-
вде /г, и / < — моменты инерции относительно рлавных центральных осей
инерции Сг' и Су' соответственно. Они для цилиндра определяются но формулам
PR* ,
Итак, для центробежного момента инерции
После эгого имеем
O7
l77
Таким образом определены проекции динамических реакций ва оси коорда»
нат, т. е. поставленная задача решена.
Глава 6
АНАЛИТИЧЕСКАЯ МЕХАНИКА
В аналитической механике изучается равновесие и движение меха-
механических систем. При этом широко используется понятие возмож-
возможного перемещения точки и системы. Наиболее удобная
369
для применения форма условий равновесия и уравнений движения
системы получается при применении обобщенных коорди-
координат и обобщенных оил,
§ 1. СВЯЗИ И ИХ КЛАССИФИКАЦИЯ
В аналитической механике необходимо более подробно рассмот-
рассмотреть связи, налагаемые на точки механической системы. Механичев'
кой системой, как известно, называют любую совокупность материаль-
материальных точек. Условия, ограничивающие свободу перемещения точек меха-
нической системы, называютя связями. Математически связи могут
быть выражены уравнениями или неравенствами, в которые входят
время, координаты всех или части точек системы и их производные по
времени различных порядков. Для одной точки уравнение связи в об-
общем случае можно выразить в форме
f (х, у, г; х, у, z\ х, у, г; ...; t) = 0. A)
В дальнейшем ограничимся рассмотрением связей, в уравнения кото-
которых могут входить производные по времени от координат не выше пер-
первого порядка.
Для механичеекой системы, состоящей из jV точек, / уравнений свя-
связей представятся системой уравнений
te (xk, yk, zh; x\, y\, zh; t) = 0, ,v = 1,2,..., /. B)
Считается, что индеке k принимает все или часть значении от 1 до N как
для координат, так и для их производных.
Если в уравнения связей B) входят только координаты точек и не
входят производные от координат, то связи называются геометричес-
геометрическими. Уравнение геометрической связи для системы имеет форму
/ (хц; Уп, zft, i) = 0.
Если в уравнения связей кроме координат входят еще и их производ-
производные по времени (проекции скоростей точек на оси координат) или юль-
ко одни производные, кроме времени, то связи называются кинемати-
кинематическими. В этом случае уравнения связей являются дифференциаль-
дифференциальными уравнениями для координат точек. Из геометрических связей
дифференцированием можно получить связи кинематические. Из ки-
кинематических связей геометрические получаются не всегда, так как
дифференциальные уравнения не всегда могут быть проинтегрирова-
проинтегрированы. Иногда дифференциальное уравнение связи можно представить
как производную по времени от некоторой функции координат и, воз-
возможно, времени
После интегрирования такая кинематическая связь становится гео-
геометрической.
Все геометрические и интегрируемые кинематические связи назы-
называются голономными. Неинтегрируемые кинематические связи, кою-
370
рые нельзя свести к геометрическим, являются неголономными. Важ-
Важный класс механических систем о неголономными связями (неголоном-
ных систем) интенсивно исследуется в настоящее время, и эти исследо-
исследования еще далеки от завершения. В дальнейшем изложении система-
систематически системы с такими связями не рассматриваются.
При движении механической системы координаты точек и их произ-
производные по времени, входящие в уравнения связей, могут зависеть от
времени. Кроме того, в уравнения связей время может входить явно,
помимо координат и их производных. Связи, в уравнения которых
время явно не входит, называются стационарными или склерономными.
Если время входит явно в уравнение связи,
то связь называется нестационарной или рео-
номной. Нестационарные связи обычно реали-
реализуются посредством движущихся или дефор-
деформирующихся тел. В простейшем случае одной
точки нестационарная геометрическая связь
в форме движущейся или деформируемой по-
поверхности имеет уравнение
f (x, y,z,f)=> 0.
Связи называют неосвобождающими или двусторонними, если они
выражаются математически уравнениями, и освобождающими или од-
односторонними, еели они выражаются неравенствами. Для одной точки
М, скрепленной о концом жесткого стержня, другой конец которого
закреплен в неподвижной точке О, связь (жесткий стержень) является
геометрической, неосвобождающей (рио. 94). Ее уравнение
х2 + у2 + z2 — 1% = 0,
где / — длина стержня. Если стержень заменить нитью такой же дли-
длины, то связь (нить) будет освобождающей. Она математичевки выра-
выражается неравенством х2 + уг + г2 — Р ^ 0.
Если при движении точка М окажется от точки О на расстоянии, мень-
меньшем длины нити, то нить уже не стесняет свободу перемещения точки.
Связь освобождает точку от своего действия (пунктир на рио. 94).
В дальнейшем освобождающие связи рассматривать не будем.
Все связи можно разделить на реальные и идеальные.
К идеальным связям относятся все связи без трения. Некоторые связи
G трением тоже относятся к идеальным. Понятие идеальных связей дает-
дается после введения понятия возможного перемещения системы.
§ 2. ВОЗМОЖНЫЕ ПЕРЕМЕЩЕНИЯ
Для формулирования принципа возможных перемещений, опреде-
определяющего условия равновесия механической системы, требуется ввести
понятие возможного, или виртуального, перемещения.
Для одной точки возможным перемещением называется такое беско-
бесконечно малое (элементарное) мысленное перемещение, которое допуска-
допускается в рассматриваемый момент времени наложенными на точку связя-
связями. Для возможного перемещения не требуется времени на его совер-
371
шение. Это мысленное перемещение, которое могла бы совершить точ-
точка при наложенных на нее связях в рассматриваемый момент времени.
В отличие от элементарного (бесконечно малого) действительного пере-
перемещения точки dr, которое совершает точка за время dt под действием
приложенных сил при заданных начальных условиях и наложенных
связях, возможное перемещение Ьг определяется только связями в
данный момент Проекции возможного перемещения Ьг на оси коорди-
координат, или вариации координат, обозначают Ьх, бг/, бг, а проекции эле-
элементарного действительного перемещения на оси координат, или диф-
дифференциалы координат при изменении времени на dt, обозначают dx,
dy, dz.
Если связью для точки является, например, движущаяся поверх-
поверхность, уравнение которой / (х, у, z, t) = 0, то действительное перемеще-
перемещение точки dr за время At является в общем случае векторной суммой
перемещений по поверхности и вместе с поверхностью. Все возможные
перемещения точки бг в данный момент времени t расположатся на по-
поверхности в положении, которое она занимает в рассматриваемый мо-
момент времени. Действительное перемещение при заданных начальных
условиях и силах, которое точка может совершить от момента времени
г до момента t -j- dt, только одно. Возможных перемещений у точки в
момент времени t бесконечно много. Все они допускаются связью (по-
(поверхностью) и как отрезки бесконечно малой длины расположатся в
касательной плоскости к поверхности в точке, в которой находитсл рас-
рассматриваемая точка в данный момент времени.
Возможное перемещение 8г, как и действительное dr, является век-
вектором и потому всегда изображается направленным прямолинейным
отрезком. Очевидно, что элементарное действительное перемещение
точки принадлежит к чисчу возможных, если связь стационарна,
т. е действительное перемещение не содержит перемещения ьместе со
связью.
Возможное перемещение точки бг считают изохронной вариацией
радиус-вектрра. т. е. его полным дифференциалом, но при фиксирован-
фиксированном времени, когда изменяются (варьируются) только координаты точ-
точки. Соответственно Ьх, 6у, бг — изохронные вариации координат точ-
ки, допускаемые связями. Действительное перемещение dr является
полным дифференциалом радиус-вектора, который определяется но
изменению координат точки в зависимости от изменения времени; Ах,
Ay, dz — полные дифференциалы координат точки при изменении неза-
независимого переменного t на величину dt.
Возможным перемещением системы называют любую совокупность
возможных перемещений точек системы. В общем случае система может
иметь несколько и даже бесконечно много возможных перемещений.
Вследствие уравнений связей, наложенных на систему, не все возмож-
возможные перемещения являются независимыми. Число независимых возмож-
возможных перемещений называют числом степеней свободы системы.
Свободная точка имеет три степени свободы. В этом ел j чае возмож-
возможные перемещения (вариации) бх, 8у, бг (или выраженные через вариа-
372
ции каких-либо других координат) являются независимыми. Если точ-
точка движется по поверхности / (х, у, z, t) = О, то bx, by, bz связаны со-
соотношением
6/=|_6* + ^+!иг = О, C)
ох ду аг
которое получают разложением в степенной ряд функции / (х + Ьх,
у + by, г + bz, f) = 0 при пренебрежении слагаемыми второго и бо-
более высокого порядка по отношению к bx, by, bz. Независимых ва-
вариаций координат, а следовательно, и степеней свободы будет две.
Время при этом не варьируется, оно фиксировано. Связь между вариа-
вариациями координат не зависит от того, входит время явно в уравнения
связей или нет. Проекции на оси координат действительного перемеще-
перемещения точки их, dy, dz, если связь выражается уравнением / (х, у, z, t)=0,
в отличие от возможных определяется зависимостью
Hdx+dy + dz+Ldt=ot D)
дх ду дг dt
которая тоже получается разложением в степенной ряд функции
f (х + dx, у + dy, г + dz, t + dt) = 0 и отбрасыванием слагаемых вто-
второй и более высоких степеней величин dx, dy, dz, dt. Если точка дви-
движется по кривой линии, то степеней свободы у нее будет только одна,
так как кривую линию можно представить как пересечение двух по-
поверхностей.
§ 3. ЭЛЕМЕНТАРНАЯ РАБОТА СИЛЫ НА ВОЗМОЖНОМ
ПЕРЕМЕЩЕНИИ. ИДЕАЛЬНЫЕ СВЯЗИ
Элементарную работу силы на возможном перемещении ее точки
приложения вычисляют по обычным формулам для элементарной ра-
работы, например, ЬА — F-br = Fxbx -f- Fu&y + Ffiz, и другим форму-
формулам для элементарной работы. Для механической системы, состоящей
из N точек, к которым приложены силы, элементарная работа этих сил
на каком-либо возможном перемещении системы соответственно вы-
выразится так:
8A=^Fk-6Fk. E)'
Элементарная работа сил при этом зависит от выбора возможного пере-
перемещения системы. _
Обозначим силы реакций связей для точек системы Rh. Тогда связи
системы называются идеальными, если для любого возможного переме-
перемещения системы выполняется условие
2^-^-0. E)
k—l
Условие F) является определением идеальных связей. Важно отметить,
что это условие должно выполняться для всех возможных перемещений
системы. При этом вся совокупность связей является идеальной. Может
373
быть идеальной каждая из связей в отдельности. Приведем примеры
идеальных связей.
1. В абсолютно твердом теле точки связаны иде-
идеальными связями. Силами реакций связей в этом случае являются
внутренние силы, для которых было доказано, что сумма элементар-
элементарных работ этих сил на любых элементарных перемещениях точек тела
равна нулю.
2. Абсолютно гладкая поверхность или абсолют-
абсолютно гладкая линия, является идеальной связью дли точки.
Возможные перемещения точки с такими связями направлены по каса-
касательным к поверхности или линии. Силы реакций в этих случаях на-
направлены по нормалям к ним, т. е. перпендикулярны силам. Так, на-
например, все шарниры (поверхности) без трения, подвижные и непод-
неподвижные, являются связями, идеальными для тел, соединенных такими
связями. Шарниры без трения, как связи идеальные, эквивалент-
эквивалентны связям между точками в твердом теле.
3. Гибкие нерастяжимые связи типа нитей, кана-
канатов, тросов и т. п., соединяющих точки системы, являются связями
идеальными. В каждом сечении такой связи силы реакций (силы на-
натяжения) равны по модулю и противоположны по направлению, а воз-
возможные перемещения у их точек приложения одни и те же. Сумма эле-
элементарных работ сил натяжений для всех мыслимых сечений таких свя-
связей равна нулю.
4. Закрепленные точки системы по отдельности явля-
являются связями идеальными, так как их возможные перемещения равны
нулю.
5. Шероховатая поверхность для катков, катящих-
катящихся по ней без скольжения, при отсутствии трения качения и, следова-
следовательно, соприкосновения в одной точке или по одной линии, скорости
точек которых равны нулю, является связью идеальной. Возможные
перемещения в точке или в точках линии соприкосновения равны нулю
в каждый момент времени, гак как равны нулю скорости в точках со-
соприкосновения, как и для закрепленных точек.
§ 4. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Принцип возможных перемещений, илн принцип Лагранжа, содер»
жит необходимые и достаточные условия равновесия некоторых меха-
механических систем. Он формулируется следующим образом: для равнове-
равновесия механической системы, подчиненной идеальным, стационарным и
неосвобождающим связям, необходимо и достаточно, чтобы сумма эле-
элементарных работ всех активных сил, приложенных к точкам системы,
была равна нулю на любом возможном перемещении системы, если ско-
скорости точек системы в рассматриваемый момент времени равны нулю,
т. е.
N _ _
2 /v6rA=0, G)
374
где Fk — активная сила, приложенная к /г-й точке системы; ~rk —
радиус-вектор этой точки (рис. 95).
Докажем необходимость условия G) для равновесия сис-
системы, т. е. докажем, что если система находится в равновесии, то актив-
активные силы удовлетворяют условию G). Действительно, если механичес-
механическая система находится в равновесии, то для каждой ее точки активная
сила Fh и сила реакции связей R h удовлетворяют
условию равновесия статики для сил, приложен-
приложенных к точке:
?* + Л* = 0,Л = 1,2 N.
Умножая обе части этого равенства скалярно на
возможное перемещение точки 8rh и суммируя по
всем точкам системы, получим
4 = 1 4=»Г
N _
По условию идеальности связей, 1>Rh-brh — 0 fi для активных сил
получаем условие G).
Докажем достаточность условия G) для равновесия сис-
системы, т. е. что если это условие выполняется для активных сил, дейст-
действующих на точки системы, то система находится в равновесии при вы-
выполнении других условий принципа возможных перемещений. Теорема
о достаточности условия G) для равновесия системы доказывается ме-
методом от противного. Предполагается, что условие G) и все остальные
условия теоремы выполняются, а система вышла из равновесия. Если
теорема о достаточности справедлива, то должно возникнуть противо-
противоречие с условиями теоремы. Итак, пусть все условия теоремы выпол-
выполняются, а система вышла из равновесия. При этом по крайней мере для
одной точки системы не будет выполняться условие равновесия для сил,
т. е.
Fи + Я fc Ф 0. (8)
Дадим системе возможное перемещение. Так как связи стационарные,
то элементарное действительное перемещение для каждой точки систе-
системы под действием не равной нулю равнодействующей силы принадле-
принадлежит к числу возможных перемещений и их совокупность можно вы-
выбрать в качестве возможного перемещения системы. Скорости точек
системы в рассматриваемый момент времени по условию равны нулю;
Следовательно, элементарные действительные перемещения будут на-
направлены по ускорениям точек, т. е. по равнодействующим силам.
Умножая (8) скалярно на brh — drft, получим
Гк>0 (9)
375
по крайней мере для одной точки системы, вышедшей из равновесия.
Суммируя (9) по всем точкам системы, будем иметь
2 ^-б7*+ 2 Kfc-frfc>o. №*)
Для идеальных связей
N _ _
Поэтому из (9') получаем
N
2^
ft-1
что находится в противоречии с условием G). Следовательно, систе-
система не может выйти из равновесия при выполнении условий принципа
возможных перемещений. Принцип полностью доказан.
Без дополнительного условия о равенстве нулю скоростей точек си-
системы в рассматриваемый момент принцип возможных перемещений
утверждает только то, что равны нулю ускорения точек системы. Вмес-
Вместе с равенством нулю скоростей точек это дает равновесие системы в тот
момент, в который выполняется для активных сил условие G). При дли-
длительном выполнении этого условия система соответственно будет нахо-
находиться в равновесии тоже длительно, т. е. скорости и ускорения точек
равны нулю, если скорости точек системы равны нулю в начале интер-
интервала длительности.
В принцип возможных перемещений не входят силы реакций свя-
связей. Но его можно применять также и для определения неизвестных
сил реакций связей. Для этого связь, силы реакции которой необхо-
необходимо определить, отбрасывают (освобождают систему от этой свяаи),
заменяя ее силами реакции Эти силы добавляют к активным силам.
Оставшиеся связи системы должны быть идеальными. Иногда неидеаль-
неидеальную связь заменяют идеальной, компенсируя неидеальность соответ-
соответствующими силами. Так, если связью для тела является шероховатая
поверхность, то ее можно заменить гладкой поверхностью, добавляя
к активным силам силу трения скольжения и в более общем случае —
еще и пару сил, препятствующую качению. Связь в виде заделки
для твердого тела можно заменить неподвижным шарниром, плоским
или шаровым соответственно, добавляя момент заделки, векторный
или алгебраический. Таким образом, в принцип возможных переме-
перемещений входят в действительности не активные силы, а все приложен-
приложенные к точкам системы силы, кроме сил реакций идеальных связей, ко-
которые по условиям задач не требуется определять.
Пример 1. В механизме (рис. 96) кривошип ОА может поворачиваться во-
вокруг горизонтальной оси, проходящей через точку О.
По стержню ОА может перемещаться ползун В, шарнирио соединенный со
стержнем ВС, который может скользить вдоль вертикальных направляющих,
К кривошипу ОА приложена пара сил с моментом М; OD = L Определить при
равновесии механизма вертикальную силу F, приложенную к стержню ВС в за-
зависимости от угла ф. Силами трения и тяжести звеньев механизма пренебречь.
376
Решение. Связи в механизме стационарные и неосвоОождагощие, Они
яе имеют трения, а потому идеальные. Применим к механизму принцип возмож-
возможных перемещений:
N
2
Активными силами являются пара сил с моментом М и сила F,
Дадим системе возможное перемещение, повернув мысленно стержень 04
на элементарный угол бф в сторону возрастания угла ф. Тогда согласно принци-
принципу возможных перемещений
- М6<р + FSyc = 0, (а)
где Ьус — возможное перемещение точки С. Стержень ВС твердый, поэтому пере-
перемещения его концов В и С равны, т. е, 6ус = бг/в.
У механизма только одна степень свободы, следовательно, бф и 6ув зависят
друг от друга. Установим предварительно зависимость ув от ф» Имеем yB=l tgcp.
Путем варьировании этого уравнения
связи, аналогичного вычислению пол-
полного дифференциала от обеих частей
уравнения, получим
бф.
Подставляя это значение 5ув в (а) и вы-
вынося бф 3d скобки, имеем
/ IF \
8q> -ЛЧ — -0.
\ COS-1 q /
ДУ
Величину йф можно выбрать отличной «^'
ОТ нуля, а потому
IF
— ЛН =0 й ^ = Л
cos2 .р
Дополнительно установим зависимоегь между бф и 5ув непосредственно, не
используя процесс варьирования уравнения свячи, При повороте стержня ОА
На угол бф точка В перемести гея вместе с соответствующей точкой стержня пер-
перпендикулярно стержню на Ssj = ОВ-бф и, кроме того, ползун В передвинется
Вдоль стержня на 6s.,, для того, чтобы точка В переместилась только по вертика-
вертикали на бг/в, гак как другие направления перемещения точки Я не разрешаются
вертикальными направляющими стержня ВС. Вектор возможного перемещения
точки S изобразится диагональю прямоугольника, построечною на перемещени-
перемещениях^ и Ы2. Из прямоугольника для его диагонали ямеум
ОВ , !
или
COS
тая как
OB =
П.шмео 2 Составная балка AD состоит из двух балок АС я CD шарнирно
соединенных в точке С. Конец балки D заделан в стену (рио. 97, а). Определить
момент заделки Мо, если на балку действуюг равные вертикальные силы Ft=
«_ р _. /?8> а также момент Л! пары сил. Размеры указаны на рисунке. Силами
тяжести б^локпрене^ь. ^ ^ ^ ^ ^^ приложен„ых сйл
плоским шарниром и момл^ом заделки (рис. 97, б), Осывшиеся связи являются
377
идеальными, если пренебречь трением в шарнирах и катковой опоре. Они ста-
ционарные и неоевобождающие. Применим к составной балке (после замены за-
делки шарниром и моментом заделки) принцип возможных перемещении:
Приложенными силами являются Fu Fit Fa и пары сил с моментами М и MD,
Дадим системе возможное перемещение, повернув мысленно балку на элемен-
гаоный угол 6 ш вокруг й, Связи допускают такое перемещение Составная балка
к J займет положение, показанное на
рисунке пунктиром. Катковая опора
при этом смещается в горизонталь-
горизонтальном направлении, но приложенные
силы не совершают работы на гори-
горизонтальных перемещениях.
Согласно принципу возможных
перемещений,
—fiSsj — Л?бф -f- F%6s% +
+ Fs5s3 + MD бф1 = 0. (а)
Отрицательной является элемен-
элементарная работа тех сил, возможные
перемещения точек приложения ко-
р д7 торых противоположны направлению
1С' действия сил. Аналогично определе-
определены знаки элементарной работы мо-
моментов пар сил, Возможные перемещения б^, бз2, 6s3 следует брать как прямо-
прямолинейные отрезки, направленные по касательным к дугам окружностей, т. е.
по линиям действия сил.
У составной балки только одна степень свободы, и поэтому она имеет одно
произвольное возможное перемещение, например бф. Для остальных возможных
перемещений имеем:
Возможное перемещение точки С выражается через углы бф и i
6sc
== 2/бфь
поэтому бф< = бф.
Подставляя полученные значения возможных перемещений в (а) и учитывая,
что Ft = F2 = F3 = F, получим
бф (_ pi _ М •+- Fl + Fl + MD) = О,
Так как бф ф 0, то
— М + Fl + MD = 0,
MD= M — FL
§ 5. ОБОБЩЕННЫЕ КООРДИНАТЫ СИСТЕМЫ
Пусть система состоит из N точек и, следовательно, ее положение в
пространстве в каждый момент времени определяется ЗЛ/ координатами
точек системы, например декартовыми xk, yk, zk. Предположим, что
на систему наложены голономные связи, уравнения которых в общем
случае могут содержать и производные от координат точек, но после их
интегрирования они свелись к геометрическим и имеют форму
Ук> 2к, t) —
A0)
Z78,
Освобождающие связи, выражающиеся неравенствами, не рассматри-
рассматриваются. Таким образом, 3N координат связаны / уравнениями и незави-
независимых координат будет п = ЗЛ/ — /.
Любые п декартовых координат можно задать независимо друг от
друга. Остальные координаты определятся из уравнений связей. Вместо
п независимых декартовых координат можно выбрать любые другие
независимые параметры цъ q2,---, qn> зависящие от всех или части де-
декартовых координат точек системы. Эти независимые параметры, оп-
определяющие положение системы в пространстве, называются обоб-
обобщенными координатами системы. В общем случае они могут зависеть
от всех декартовых координат точек системы, т. е.
Qi = Q, (Xk, У к, гй), (П)
где k изменяется от 1 до jV. Задание обобщенных координат полностью
определяет положение точек системы относительно выбранной системы
отсчета, например декартовых осей координат.
У свободной точки три обобщенные координаты. Если точка должна
двигаться по заданной поверхности, то обобщенных координат
только две и т. д Используя уравнения связей A0) и выражения
обобщенных координат через декартовы A1), можно при выполнении
условий разрешимости этой системы уравнений выразить декартовы
координаты через обобщенные, т. е. получть
xk = xh (qu q2, ..., qn, t); yk - yk (qu q%, ..., qn, I); zk =
= ih (q\, 9i, ¦-, qn 0-
Соответственно для радиус-вектора каждой точки сиетемп th -
= xki + У hi + zhk получим
fh = rh (qL, q%, .... qn, t). A2)
В случае стационарных связей время явно не входят в уравнения свя-
связей. Поэтому и в A2) оно войдет только неявно, через обобщенные
координаты, если система движется. Для голономных систем вектор
возможного перемещения точки brh в соответствии о A2) мо/пно выра-
выразить в форме
AL ± § S , A3)
aq, dq dqtl ^ dq,
Система, имеющая п независимых обобщенных коордчнат, характе-
характеризуется также п независимыми возможными перемещениями или ва-
вариациями 6-7i, 8qit ..., 8qn, если связи голономны. Для голономных
систем число независимых возможных перемещений совпадает с чис-
числом независимых обобщенных координат. Следовательно, число степе-
степеней свободы голономиой системы равно числу независимых обобщенных
координт этой системы, г. е. п — 3jV — /.
Для неголономных систем в уравнения связей A0) могут входить
производные от декартовых координат точек и даже могут быть такие
¦уравнения связей, в которые входят только одни производные. Такие
379
уравнения связей наложат ограничения на вариации 8qlt 8q^ ..., 8qa
и, следовательно, уменьшат число независимых вариаций, не связы-
связывая функциональной зависимостью сами обобщенные координаты qu
qt qn. Для голономных систем в общем случае число независимых
вариаций (возможных перемещений) меньше числа обобщенных коорди-
координат. Число степеней свободы неголономной системы, равное числу неза-
независимых возможных перемеще-
перемещений, тоже меньше числа обоб-
обобщенных координат системы.
В дальнейшем рассматри-
рассматриваются только голономные си-
системы, т. е. системы с голоном-
ными связями Рассмотрим воп-
вопрос обобщенных координат на
примере простого механизма.
Рис. 98 Пусть имеем кривошипно-
шатунный механизм (рис. 98).
Его положение на плоскости вполне определяется заданием положе-
положения трех его точек О, Л и В с координатами соответственно @, 0),
{ха, Уа)Лхв, 0). Координат, не равных нулю, только 3, т.е. 3W = 3.
Можно составить два уравнения связей, учитывая постоянство длин
ОА = г и АВ = /. Имеем
'/////////Л
у% = г\ (хв
(а)
Число степеней свободы
Их трех не равных нулю координат^только одну можно задать незави-
независимо. Две другие выразятся через нее как решения уравнений связей.
В качестве независимой координаты можно выбрать любую из трех
координат хА, у а, хв или любую комбинациЕо этих координат. Нужно
только, чтобы она однозначно определяла положение механизма отно-
относительно осей координат Оху. Координаты хА и хв следует исключить.
Они неоднозначно определяют положение механизма. Удобно в каче-
качестве независимой обобщенной координаты q выбрать угол ф, т. е.
q ф~аГС8~"
Из уравнений (а) и (б) координаты хА, уА, хв можно выразить через
угол ф. Для этого следует решить эту систему уравнений относительно
координат. Удобно, не решая системы уравнений, выразить коорди-
координаты через угол ф, используя рис. 98. Получим
ха = f cos ф, уА = г sin ф, хв — г cos ф + /cos ф.
Но
= r sin ф= / sin ip; sin \\> —
sin
380
С учетом этого искомые выражения для координат принимают форму
хА = г cos ф; у а = г sin ф; хА — г cos ф + Vp—r* sin3 <р.
Нетрудно проверить, что эти значения декартовых координат удовлет-
удовлетворяют системе уравнений (а) и (б).
§ 6. ОБОБЩЕННЫЕ СИЛЫ
Определение обобщенных сил. Имеем сумму элементар-
элементарных работ сил, действующих на точки системы, на возможном пере-
перемещении системы:
Пусть голономная система имеет п степеней свободы и, следователь-
следовательно, ее положение в пространстве определяется п обобщенными коор-
координатами qx, q2, ..., qn. Тогда для 6rh, согласно A3), имеем
Подставляя A3') в A4) и изменяя порядок еуммирования по индексам
k и i, получим
где скалярная величина
называется обобщенной силой, отнесенной к обобщенной координате qi.
Используя известное выражение для скалярного произведения двух
векторов, обобщенную силу можно также представить в виде
где Fhx, Fku, Fkz — проекции силы на ogh координат; xh, yk, zk — ко-
"одинаты точки приложения Gилы Fh.
Размерность обобщенных сил. Размерность обоб-
обобщенной силы в соответствии с A4') следующим образом зависит от раз-
размерности 6<?i, совпадающей о размерностью qti
384
т. е. размерность обобщенной силы равна размерности работы силы
(энергии) или момента силы, деленной на размерность обобщенной ко-
координаты, к которой отнесена обобщенная сила. Если [qi] — длина,
го
гГ, , работа сила -длим
Ш = = = сила,
длини длина
т. е. обобщенная сила имеет размерность силы. В том случае, когда
[gi] = 1, как это имеет место, если в качестве обобщенной координаты
выбран угол, то [Qi)] — момент силы.
Этот случай часто встречается в приложениях.
Вычисление обобщенных сил. 1. Обобщенную си-
силу можно вычислить по формуле A5), ее определяющей, т. е.
2. Обобщенные силы можно вычислять как коэффициенты при со-
соответствующих вариациях обобщенных координат в выражении для
элементарной работы A4'), т. е.
N _ _ п
3. Наиболее целесообразен способ вычисления обобщенных сил,
который получается из A5'), если системе сообщить такое возможное
перемещение, при котором изменяется только одна обобщенная коор-
координата, а другие при этом не изменяются. Так, если б^^О, а осталь-
остальные 6<?2 — &?з = ... =5 6<7„ = 0, то из A5') имеем
2^-в
Индекс Qi указывает, что сумма элементарных работ вычисляется на
возможном перемещении, при котором изменяется (варьируется) толь-
только координата qv Если изменяющейся координатой является <7j> to
A7)
4. Для потенциальных сил по их определению имеем:
Fhx =» dU/dxki Fky = dU/dyk; Fkz = dU/dzk, A8)
где U — силовая функция, зависящая от координат точек системы и,
следовательно, через них — от обобщенных координат, т. е.
U — U (xk, у:„ zh) = U (<7i, qit .... (?„). A9)
В случае нестационарных силовых полей, которые дальше не рассмат-
рассматриваются, силовая функция может еще явно зависеть от времени.
382
Для обобщенной силы, согласно ее определению, g учетом A8) и
A9) имеем
Qt= 2
дхь. _._ дЦ %ft dV dzh \ дЦ
+ )
dxh dqt dyh dqt dzh dqt j d^
Таким образом, в случае существования силовой функции
Qi = dUldqt = —dn/dqt, B0)
так как потенциальная энергия системы П связана с силовой функ-
функцией U соотношением
П = —У + const.
Итак, обобщенная сила равна частной производной от силовой функции
по соответствующей обобщенной координате.
§ 7. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ
Условия равновесия системы выводятся из принципа возможных
перемещений. Они применимы к системам, для которых этот принцип
справедлив. Согласно принципу возможных перемещений, условие
n _ _
^ Fh-6rk = Q
k=\
является необходимым и достаточным для равновесия системы. Но
в соответствии с A5')
N _ _
yj ^ь• fi/'h =Qi &?i + Q-i ^Qi +...+Qn fyn. •
Следовательно, необходимым и достаточным условием равновесия яв-
является равенство
QA?i ~Ь Qi^a2 + ••• + Qn&Qn — 0- B1)
Так как обобщенные координаты независимы, то их вариации 8qu
б<7а» •¦•( S^rt являются тоже независимыми, произвольными, беско-
бесконечно малыми величинами. Можно принять б^ =^= 0, а все остальные
б^а = б<73 ~ ... = 8qn = 0. Тогда из B1) получим Qt = 0. Аналогич-
Аналогично, приняв 6G2=^0, а б91 = бGз= ¦•• ~&qn = 0, будем иметь Q2—0 и
т. д. Таким образом, из B1) получаем следующие условия равнозесия
системы:
Qi = 0, Q, =* 0, .... Qn = 0. B2)
т. е. для равновесия механической системы, подчиненной голономным,
стационарным, идеальным и неосвобождающим связям, в момент, ког-
когда скорости всех точек системы равны нулю, необходимо и достаточно,
чтобы все обобщенные силы были равны нулю,
383
О голономности связей условились при введении обобщенных ко-
координат и обобщенных сил, а также при определении числа степеней
свободы. Другие условия для связей входят в формулировку самого
принципа возможных перемещений.
В статике для равновесия свободного твердого тела, имеющего шесть
степеней свободы, было получено шесть условий равновесия для при-
приложенных к телу сил. Эти условия можно получить также, приравняв
нулю каждую из шести обобщенных сил. Для этого следует выбрать в
качестве обобщенных координат декартовы координаты х, у, z какой-
либо точки тела и углы поворота тела вокруг осей координат, прохо-
проходящих через эту точку. Обобщенные силы,
отнесенные к координатам х, у, z, превра-
превратятся соответственно в суммы проекций
приложенных сил на эти оси, а обобщенные
силы, отнесенные к углам поворота вокруг
осей координат, — в суммы моментов сил
относительно этих осей.
Условия равновесия B2) для системы,
находящейся под действием потенциальных
сил, вместе с B0) дадут следующие условия
для силовой функции:
Рис 99 Ql
Qn=dUldqn=O, B2')
г. е. все частные производные от силовой функции по обобщенным ко-
координатам равны нулю. Это является необходимым условием существо-
существования экстремума силовой функции. Таким образом, при равновесии
механической системы, находящейся под действием потенциальных
сил, силовая функция и потенциальная энергия могут достигать экст-
экстремума
Пример. Дифференциальный планетарный механизм состоит из двух шесте-
шестерен радиусами rj и га и кривошипа ОА (рис. 99) К кривошипу приложенл пара
сил с моментом М, ак шестерням 1 и 2 — пары сил с моментами Mt и М% Ме-
Механизм расположен в горизонтальной плоскости. Определить моменты пар сил
MnMi, которые следует приложить к шестерне 1 и кривошипу ОА для равнове-
равновесия механизма 1 рением в шарнирах пренебречь.
Решение. Свячи системы, осуществляемые твердыми телами и подвиж-
подвижным (точка А) и неподвижным (точка О) шарнирами без трения, являются иде-
идеальными, голономными, стационарными и неосвобождающими. Система имеет
две степени свободы Действительно, можно закрепить шестерню /, тогда криво-
кривошип ОА и шестерня 2 сохранят еще возможность вполне определенного движения*
Если дополнительно закрепить еще и кривошип ОА, то движение каких-либо
звеньев механизма уже невозможно
Выберем в качестве обобщенных координат углы поворота шестерни / и
кривошипа ОА — фц и <р, отсчитываемые от каких-либо фиксированных поло-
положений этих тел По условиям равновесия системы обобщенные силы, отнесенные
к этим координатам, равны нулю, т. е. Q^ = 0, ?>ф = 0.
Вычислим обобщенные силы по формулам
384
Индексы укззчтют, что су»ш элементарных рабо) дол (iiv ш< i н-лягчся при
изменении той oj 0.ценной координаты, которая укачана в индексе Другая обоб
щенная координата при этом не должна изменяться
К числу активных сил следует опусти пары сил с моментами М, Ми М2,
силы тяжести шестерен и кривошипа и внутренние силы"^ и ~S2 действия шесте-
шестерен друг н,) д jyr а в точке Р. Эти силы, как силы действия и противодействия, удо-
удовлетворяют условию S) — S2
Так как ме^ничм расположен в горизонтальной плоскости, то элементар-
элементарные работы сил тяжести его чвеньев равны нулю Возможные перемещения то-
точек приложения згих сил располагаются в горизонтальной плоскости, перпен-
перпендикулярной силам тяжести
Дадим шес-ерне / возможное перемещение bq>it например в сторону возраста
ния угла <уь пришв при этом ф = const Имеем
К
Элементарная работа пары сил с моментом М2 отрицательна, так как M2ji бф^>
направлены в противоположные стороны Сумма элементарных работ Si и Sz
равна нулю, гак как у них точка приложения общая и одно и то же возможное
перемещение, а сами силы равны и противоположны При <р = const углы пово-
поворота шестерен бф, и 6фB ' направлены в противоположные стороны. Перемещения
точки соприкосновения шестерен одинаковы, следовательно,
f-A
г>
Подставляя это значение Оф1г*' в (б) и сокращая на бф1, получаем
ri / /
1 Г2
Сообщим теперь кривошипу ОА оотиожное перемещение бф, например в па-
правлении момеша пары сил М, считая угол ф! постоянным. Тогда
л/
Zj rk h
В этом случае угол 6ф2 и момент М2 опять противоположны Точка соприкосно
вения шестерен Р является теперь мгновенным центром скоростей для шестерни
2. Элементарная работа сил~, и~Ь2 в 9п>м случае равна нулю дяя каждой силы
Вычислим возможное перемещение точки А как точки кривошипа ОА и тестер
ни 2, имеющей мгновенный центр скоростей в точке Р. Имеем соответственно
bsA = (/i + г2) бф = л2йф2.
Отсюда получаем
Подставляя это значение в (в) и сокращая на бф, получаем
Q_=M-AV^±^- (о')
Ф П
По условиям равновесия системы,
13 зак. ми 385
: чигыиая (б') и (с'), получаем:
или
§ 8. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
В соответствии с принципом Даламбера для любой механической
системы активные силы, силы реакции связей вместе с силами инер-
инерции удовлетворяют условию равновесия сил для каждой точки систе-
системы, т. е.
Fk + Rk + Фк = 0, к = 1, 2, .... N, B3)
где Fh — активна? сила, Rk — сила реакции связей и <Ph — сила
инерции точки. Умножая скалярно каждое из этих соотношений на
возможное перемещение точки 6rk и суммируя по всем точкам системы,
получим
2 T\'b?h+ 2 Rk-&h+ 2 ^-6^= °- B4)
к—\ k=\ к=\
Это и есть общее уравнение динамики для систе-
системы с любыми связями. Обычно его применяют для систем
с идеальными связями, для которых выполняется условие
В этом случае B4) принимает одну из форм
k=l 4=1
2 fa — ткгн)'Ьгк = 0, B5)
так как сила инерции через ускорение аи относительно инициальной
системы отсчета выражается в форме
Фь=— mkak = — tnh7k,
где rh — радиус-вектор точки.
Таким образом, согласно общему уравнению динамики, в любой
момент движения системы с идеальными связями сумма элементарных
работ всех активных сил и сил инерции точек системы равна нулю на
любом возможном перемещении системы, допускаемом связями. Общее
уравнение динамики B4) часто называют объединенным
принципом Даламбера —Лагранжа. Его можно на-
386
звать также общим уравнением меха н и к и. Оно в слу-
случае равновесия системы при гбрященни о нуль всех сил инерции точек
системы переходит в принцип возможных перемещений статики, толь-
только пока без доказательства его достаточности для равновесия системы.
Общему уравнению динамики можно придать другие, эквивалент-
эквивалентные формы. Раскрывая скалярное произведение векторов, его можно
выразить в виде
2 ЦР*Х +ФЙ1) bxh + (Fkv + Фк9) byh + (Fki + Фкг) Szft| = 0,
/, _ i
где xk, yk, zk — координаты k-Pi точки системы. Учитывая, что проек-
проекции сил инерции на оси координат через проекции ускорений на эти
оси выражаются соотношениями
фйж=— mhahx= — mkxh\ Фц„=—ткаку = —mkijk)
Фкг = —ткакг = —mh zk,
общему уравнению динамики можно придать форму
2 \{Fbx — mh xh) 8хк + (Fhv - mh yk) byh + (Fkz-mh zh) 8zh] = 0. B5')
В этом виде его называют общим уравнением динамики
в аналитической форме.
Общее уравнение динамики для систем, подчиненных голономным,
идеальным, неосвобождающим связям, дает полную информацию о
дви/кешш таких систем, т. е. из него аналогично тому, как из принци-
принципа возможных перемещений получались условия равновесия системы,
можно получить полную систему дифференциальных уравнений. Для
вывода этих уравнений следует использовать понятия обобщенных
кооо'шнат и обобщенных сил.
Пусть имеется система, подчиненная голономным, идеальным, не-
неосвобождающим связям. Предположим, что она имеет п степеней
свободы и, следовательно, ее положение в пространстве определяется
обобщенными координатами qb q2, ..., qn. Радиус-вектор каждой
точки системы в общем случае нестационарных связей зависит от обоб-
обобщенных координат и времени, т. е. rh — rh (qlt q% qn, f).
Для возможного перемещения 8rh имеем
так как время при этом считается неизменным. Подставляя B6) в об-
общее уравнение динамики B5), после перемены порядка суммирования
по к и I получим
N / N „— N
frfc
13* 387
Используя обобщенные силы активных сил Qt и сил инерции Q<*>, т. е.
Qt- S ?*•-§-» <#*' = 2 ^-§". B8)
из B7) получим общее уравнение динамики в следующей форме:
S -O. B9)
Обобщенные координаты системы независимы, вариации этих коор-
координат не только независимы, но и произвольны. Последовательно при-
принимая только одну из вариаций обобщенных координат не равной ну-
нулю, а все остальные — равными нулю, из B9) получаем следующую
систему условий:
Qt + <?<ф) = 0, i = 1, 2, .... п. C0)
Условия C0) можно назвать принципом Даламбера
для системы, выраженным через обобщенные
силы. Из C0) следуют условия равновесия системы Qt = 0, i = 1,
2, ..., п, если силы инерции точек системы, а следовательно, и обоб-
обобщенные силы инерции равны нулю.
При использовании общего уравнения динамики необходимо уметь
вычислять элементарную работу сил инерции системы на возможных
перемещениях. Для этого применяются соответствующие формулы для
элементарной работы, полученные для обычных сил. Рассмотрим их
применение для сил инерции твердого тела в частных случаях его дви-
движения.
При поступательном движении. В этом случае
тело имеет три степени свободы и вследствие наложенных связей мо-
может совершать только поступательное движение. Возможные переме-
перемещения точек тела, которые допускают связи, тоже являются поступа-
поступательными.
Силы инерции при поступательном движении приводятся к равно-
равнодействующей Ф* = —Мас — —Ма. Для суммы элементарных работ
сил инерции на поступательном возможном перемещении получим
л' ______ __
2 Фь. дгк = Ф* ¦ иг с = fi> * ¦ 6> = — Ма • 8 г,
пе бгс = бг — возможное перемещение центра масс и любой точки
тела, так как поступательное возможное перемещение у всех точек гела
одинаково; одинаковы и ускорения, т. е. ас — а.
При вращении твердого тела вокруг непо-
неподвижной оси. Тело в этом случае имеет одну степень свободы.
Оно может вращаться вокруг неподвижной оси Ог. Возможное пере-
перемещение, которое допускается наложенными связями, является тоже
поворотом на элементарный угол бер вокруг неподвижной оси.
Силы инерции, приведенные к точке О на оси вращения, сводятся к
главному вектору Ф и главному моменту LffK Главный вектор сил
388
инерции приложен к неподвижной точке, и его элементарная работа
на возможном перемещении равна нулю У главного момента сил инер-
инерции не равную нулю элементарную работу совершит только его проек-
проекция на ось вращения Цф) = — Jze. Таким образом, для оуммьт раба!
вил инерции на рассматриваемом возможном перемещении имеем
(>—
если угол бср сообщить в направлении дуговой стрелки углового ув-
корения е.
При плоском движении. Связи, наложенные на твер-
твердое тело, допускают в этом случае только плоское возможное пере-
перемещение. В общем случае оно состоит из поступательного возможного
перемещения вместе с полюсом, за который выберем центр масе, и по-
поворота на элементарный угол бф вокруг оси Сг, проходящей через
центр масс и перпендикулярной плоскости, параллельно которой мо-
может совершать тело плоское движение.
Так как силы инерции при плоском движении твердого тела можно
привести к главному вектору Ф и главному моменту L^ (если за центр
приведения выбрать центр масс), то сумма элементарных работ сил
инерции на плоском возможном перемещении сведется к элементарной
работе главного вектора сил инерции Ф = —Мас на возможном пере-
перемещении центра масс и элементарной работе главного момента сил
инерции на элементарном поворотном перемещении вокруг оси Сг,
проходящей через центр масс. При этом не равную нулю элементар-
элементарную работу может совершить только проекция главного момента сил
инерции на ось Сг, т. е. L^*1 = —Ус*8- Таким образом, в рассматри-
рассматриваемом случае имеем
если поворот на элементарный угол бф направить по дуговой стрелке
для е.
Пример 1. Центробежный регулятор вращается вокруг неподвижной вер-
вертикальной оси О\Ог с постоянной угловой скоростью со (рис. 100, а) Силы тяже-
тяжести точечных грузов Л1, и М.й равны Р, ползуна D — Q; длины стержней AiMl —
= А2М2 = MiBf = М,В2 = I, OAi — ОА2 = /(. Поперечными размерами пол-
вуна D, массами пружин, полчуна Е и всех стержней пренебречь. Коэффициен-
Коэффициенты жесткости пружин одинаковы и равны с. Длины пружин в недеформирован-
ном состоянии 1г. Определить зависимость между угловой скоростью вращения
рерулятора <в и углом <р.
Решение. Применим к регуляюру общее уравнение динамики а форме:
тая кан проекции активных сил F^ и сил инерции Фк на ось Оц равны нулю.
Активными силами являются силы тяжести Р и Q и силы натяжения пружин Р
в~?', Силы инерции следует учесть только центробежные для шаров Mt и Mt
389
(рис. 10'J, б), нк клч кр^атетыше при вращении с постоянной ynonoft c<ojjctmo
равны нулю
Связи в рксматрип levroii яадачс идгяльные, если пренебречь ситами тре-
трения Декартовы координаты точки Л-Ij — *j и гь а полчуна D — 0, г2. Тогдл при-
применение общего уравнения др памики к регулятору дасг
2ФЬх1 + 2P6?f — 2Fhxt + QSz2 = 0. Гч)
При составлении этого уравнения отдельно вычислена элементарная работа сил
на возможных перемещениях для шара /И, Чтобы учос ь элрченмрн^ю р (богу
таких же сил для шара Мг, результат надо удпоч ь Работа сил упругости пру-
жип F', приложечных к ползушке Е, равна нулю.
Рис 100
Для модулей сил инерции Ф и упругости F имеем
Ф = (Pig) (/, + I sin ср) со2, F — сК — cl sin <p,
гдр X — удлинение пружины
Для установления зависимости между вариациями коордипаг ючек получим
сначала их зависимость от угла <р
дг, = /, + / sin ср, г, = I cos ср, г2 = 2/ со« <р.
Варьируя эти зависимости имеем
6«, = / со' q^cp, 6г, = —/ sin ср6<р, бг2 = — 2 I sin <рб<р. (в)
Все вариации координги вчрачились через вариацию одного угла <р, следователь-
следовательно, система имеет одь v сгепеш свободы
Подставляя чпач* <д вп" ih ич (б) и (в) в (а), после сокращения на 2/бф
получим
(Pig) (/] + I sin ф) arl cos q —- P sin <p — c/ sin ф совф — Q sin «p = 0. (a')
Разделив обе части этого соогно ' чя на cos ф, получаем искомую зависимость
между <в и ф-
(Pig) (/f -!- I ып q) / л? — P tg ф — cl sin ф — Q tg ф = 0,
или
sin q,)
390
Пример 2. Призма А, сила тяжести которой Гх< оасположена на гладкой ю-
рнзонталыюн плоскости (рис 101), На грани призмы, наклоненной под у1ло\1
а к горизонту, расположен груз В, имеющий силу тяжести Р2. Груз В прикреп-
прикреплен к призме о помощью пружины, имеющей жесткость с. Определить движение
призмы А и груза В по призме, если в начальный момент система находилась в
покое и пружина была не деформирована. Силами ярения груза 3 о призму А
пренебречь,
Решение. Система имеет две степени свободы. В качестве обобщенных ко-
координат^ выберем в е л и а и н ы х и s. Активными силами являются силы тя-
тяжести Рь Р21 и силы упругости пружины F (рис. 102). Связи идыльные, так как
Рис 101
Рис. 102
поверхности тел гладкие. Общее уравнение динамики в обобщенных координатам
для случая двух аельней свободы можно выразить в форме
Здесь Qi и Q2 — обоб.цешше силы, отнесенные к обобщенным координатам х и s;
Q(]*' и QB*' — обобщенные силы инерции, ошесеаные к тем же координатам,
Обобщенные силы д ih координаты х вычисляем по формулам
N
3
Ьх
' J
.5
¦tot,
(б)
где Ffr— ачтнв'ыя ci^d, приложенная к k-к точке системы, и Ф/, — сила инерции.
Индекс х в числителе укрывает, iго сумму элементарных работ на возможных
перемещениях точек оо, следует вычислять при изменении только координаты х,
считая координату s при этом посюяниой. Давая возможное перемещение &х в
направлении возрастания координаты *, имеам по формулам (б) Qj = 0, так как
силы тяжести"^ н~л перпендикулярны возможному перемещению, а силы упру-
упругости (одна приложена к грузу, другая равная первой, но ей противоположная по
направлению, — к призме в точке закрепления пружины) в сумме дадут элемен-
элементарную работу, равную !улю.
Для обобщенной силы инерции соответственно имеем
Ьх
8 d
так кая проекции сил инерции призмы и груза на ось Ох
Pi P2
Ф, = к; ФгХ=* (scos л,-{-х).
ЗЭ1
Обобщен !ые силы V2 и Qa*' на возможном перемещении fis, напрзлланиом в
сторону возрастания координаты s, при неизменном значении координаты х вы»
числяем по формулам
Имеем
02=————— =.P2sina—F = PS sine —г (>„01 -f *1 = —os,
OS
так как сила упругости F= с (Квт-\- s), если s отсчитывать от положения стати-
статического равновесия груза в) ^ст — статистическое удлинение пружины под дей-
действием груза В в положении равновесия! В положении статического равновесия
действующие на груз силы находятся в равновесии. Проецируя их на ось O's,
получаем
Р2 sin а — <АСТ =¦ О,
Для обобщенной силы инерции имеем
где Ф2а — проекция силы инерции груза В на ось O's. Подставляя полученные
значения обобщенных сил в (а), получим следующую систему дифференциальных
уравнений:
р
(Pj + Pojx+Pijcosas =»0; — cs — (s'+i'cos a) =0. (а')
8
Исключая из второго уравнения (а') с помощью первого х, имеем следующее
дифференциальное уравнение для s:
Ра[^1 + Р2A - cos^a)]
или
i+ kh = 0, (г)
где
Р2 [Pj -j-P2 sin2 a]
Интегрируя (г), получим
s ¦" Cj cos kt + G2 sin kt,
Постоянные Cj_ и Ц определяем из начальных условий
Дифференцируя (г'), имеем
<; = — Сф sin kt -$-• Са k cos kt,
Из (г'} и (г*) ара \ = 0 получаем
После этого имеем
Р2 «in :
S=i ~~А,ОТ _OS kt "=i — COS
с
392
Поставляя из (г) эначен Ws в первое из уравнений (а'), почучпем следующее
дифференциальное уравнение для х:
¦ Р% k? ?lct cos та
P + P "***' Ш
sin kt+C9.
Интегрируя его, имеем
Я, k%aT cos a
Интегрируя еще раз, получим
Р% ^-ст cos ее
дс=— cos ЫА-Сл t-\-C, (л")
Постоянные С3 и С4 определяем из начальных условий
/ = 0; х = 0; i = 0,
Используя sih начальные условия, из (д') и (д") имеем
или
Я2 ^ст cos a
з = 0; 4= Р1+Р3
После этого
l\ +P?
§ 9. УРАВНЕНИЕ ЛАГРАНЖА
Из C0) получим уравнения Лагранжа второго рода, или просто
уравнения Лагранжа. Уравнения Лаграпжа первого рода — уравне-
уравнения с неопределенными множителями Лагранжа — получены для од-
одной точки в § 8 гл. 1. Уравнения Лагранжа первого рода можно полу-
получить и для системы.
Тождества Лагранжа. Для получения уравнений Лагранжа потре-
потребуется использовать три тождества. Одно из них — хорошо известная
формула дифференцирования скалярного произведения двух любых
векторов а и Ъ, т, е.
d /— r\ da -г i ~ db
la-b) = .b + a .
dt ut dt
ИЛИ
b— \a-b) — a .
At At lit
-L - д7к
Если принять за а вектор скорости vk — rh, а за о — вектор ^—, то
в соответствии с этим тождеством получим
393
Другое тождество (тождество Лагрзнжа) выражается в виде
drkldqi-= cfhi;-q.t C2)
где точки над величинами означают их производные по времени. Вели-
Величина qt — Aqil&t пазываегся обобщенной скоростью. Тождество C2)
утверждает, что «тички» (дифференцирование по времени) можно по-
поставить одновременно в числителе и знаменателе или их «сократить».
Справедливость C2) доказывается вычислением входящих в него ве-
величин и их сравнением. Действительно, в общем случае
~h = h (<7i (t), <7a @ Яп (О, 0-
При движении системы обобщенные координаты тоже есть функции
времени. Дифференцируя rh по времени как его сложную функцию,
имеем
I1
C3)
Частные производные drh/dqt и drhldt не могут зависеть от обобщенных
скоростей qt\ следовательно, дифференцирование частным образом по
qt с фиксированным номером обеих частей C3) дает только коэффициент
при этой переменной. Все остальные слагаемые при дифференцирова-
дифференцировании дад>т нули, так как они не зависят от qt с этим фиксированным
номером. Имеем
Тождество C2) доказано.
Другое тождество Лагранжа заключается в перестановке порядка
дифференцирования по времени и обобщенной координате вектора rk,
т. е.
( C4)
d/ \ dqt J dqi ' К
Для доказательства этого тождества вычислим drhldqi} используя C3)
и учитывая, что обобщенные скорости не зависят от обобщенных коор-
координат. Получим
d~h _ d*~h ¦ , д*7ъ • . д'-Th
dqi dqt dqx dqt dq7 0qt aqu
С другой стороны, drjdqt есть сложная функция времени, которая за-
зависит от него не только явно, но и через обобщенные координаты. По
правилу дифференцирования сложных функции имеем
,lh + _pL lh +... + »IL ь + JgL. C6)
dqt J dqx dqt dq2 dqt ' dqn
Порядок частного дифференцирования в смешанных производных мож-
можно изменять. С учетом этого C5) и C6) совпадают. Таким образом, вто-
второе тождество Лагранжа доказано.
Вывод уравнений Лаграижа. Для получения из C0) уравнений
Лагранжа для обобщенной силы инерции необходимо доказать спра-
справедливость следующей формулы:
C7)
где Т= V Л*И = V
— кинетическая энергия системы при ее движении относительно
н и е р ц и а л ь н о й системы отсчета.
Для доказательства C7) вычислим Q<*>, используя ее определение
через силу инерции Фк = —mkah = —mhrn. Имеем
N — N _ —
Q'0) = S Ф*-— = - ? mhrft.-^5-. C8)
Преобразуем вырал<ение
A ="r • ?rh
В соответствии с тождеством C1)
Л =
dQl At
Применим тождества Лагранжа:
dqt dqt dqt ' dt \ dqt j dqt
После этого
Подставляя это значение А в C8) и внося постоянную массу под знак
производных, а производные вынося за знак сумм, получим
Г / а N
(Ф) d / д у
2 / dq,
[ d ( дТ ) 9Т 1.
|_ dt \ dqi j dqt У
Формула C7) доказана.
355
Подставляя выражение C7) для QJ*> в C0), получим следующую
еистему уравнений Лагранжа:
• ' aqt oq,
Число уравнений Лагранжа равно числу степеней свопоты системы.
Структура уравнений Лагранжа и их составление Уравнения
Лагранжа для обобщенных координат являются обыкновенными диф-
дифференциальными уравнениями второго порядка, как и дифференциаль-
дифференциальные уравнения движения точки в декартовых координатах. Число
уравнений Лагранжа совпадает с числом обобщенных координат Дей-
Действительно, для кинетической энергии системы, используя ее опреде-
определение и формулу C3) для rk = vk, имеем
где введены обозначения
N — —
Ork Orit
^¦h~z ¦ г; i
dqb dl
1-
dl
Величины Atl, Вг, С могут зависеть от обобщенных координат и вре-
времени, но не зависят от обобщенных скоростей. С учетом этого
^ ,=
Это выражение содержит qJy т. е. производную от обобщенной коорди-
координаты только второго порядка. Другие слагаемые уравнений Лагран-
Лагранжа содержат производные от обобщенных координат не выше первого
порядка Активные силы Fh, если они не зависят от ускорений точек, не
могут дать зависимости Q, от обобщенных ускорений.
Интегрируя уравнения Лагранжа для случая заданных активных
сил, получим все обобщенные координаты как функции времени и 2«
постоянных интегрирования. Для определения этих постоянных сле-
следует дополнительно задать начальные условия, т. е., например, при
t = 0 задать
<7г = Ф, ki = Qi,
396
где qf и ft" — начальные значения обобщенных координат и обобщен-
обобщенных скоростей.
При составлении уравнений Лагранжа можно рекомендовать сле-
следующий порядок операпип
1. Вычислшь кинетическую энергию системы в ее движении отно-
относительно инерциальной системы отсчета.
2 Выбрав обобщенные координаты, число которых равно числу
степеней свободы системы, преобразовать кинетическую энергию к
обобщенным координатам.
3. Выполнить операции дифференцирования кинетической энер-
энергии, предусмотренные уравнениями Лагранжа.
4. Вычислить одним из способов, указанных в § 7, обобщенные си-
силы системы
5 Приравнять величины левой и правой частей, входящих в урав-
уравнения Лагранжа.
Уравнения Лаграижа для потенциальных сил. Если силы, дейст-
действующие на точки системы, являются потенциальными, то для обоб-
обобщенных сил справедлива формула Qt = dU/dqi. Силовая функция U
не зависит от обобщенных скоростей, поэтому производную от нее по
обобщенной скорости dU/dql — 0 можно добавить к dTldqt. С учетом
этого после переноса всех слагаемых в левую часть получим следую-
следующую систему уравнений Лагранжа:
-L(^L +^Ц-(^- +-^Ч = о, * = 1, 2 п.
At \ dqt dqt J \ dqt д(ц j
Если ввести функцию Лагранжа, или лагранжиан, по формуле
L = T+U = T — n, D0)
то уравнения Лагранжа для случая потенциальных сил примут фор-
форму
-J7T — = 0,1=1, 2,..., п. D1)
at dqi aqi
Функция Ла1ранжа отличается от полной механической энергии сис-
системы
? = Г+Я = Г-У.
Из уравнений Лагранжа для потенциальных сия и случая стацио-
стационарности связей системы можно получить ранее установленный закон
сохранения полной механической энергии
Е = Т + П = h,
где h — постоянная величина.
Циклические координаты и циклические интегралы. Функция Лаг-
Лагранжа L = Т + U в общем случае зависит от обобщенных скоростей,
обобщенных координат и времени. Если какая-либо обобщенная коор-
координата, например qJt не входит в выражение функции Лагранжа, то
для нее
/ = 0. D2)
397
Обобщенная координата, которая удовлетворяет условию D2), назы-
называется циклической. Для циклической обобщенной координаты q^ урав-
уравнение Лагранжа примет форму
В
At dq,
Из него получаем циклический интеграл уравнений Лаг-
Лагранжа:
dL/dq, = С}, D3)
где С) — постоянная величина.
В циклический интеграл могут входить производные по времени
от обобщенных координат, в том числе и производная по времени от
циклической координаты не выше первого порядка. Следовательно,
D3) в отличие от уравнений Лагран-
Лагранжа в общем случае является обыкно-
обыкновенным дифференциальным уравне-
уравнением не выше первого порядка Если
все обобщенные координаты являются
циклическими, то система уравнений
Лзграижа, имеющих второй порядок,
заменится циклическими интеграла-
интегралами, имеющими только первый поря-
порядок. Интегрировать систему уравне-
уравнений первого порядка значительно
проще, чем систему второго порядка.
Отыскание обобщенных координат,
которые являются циклическими,
имеет важное значение. Используя циклические интегралы, можно
так называемым методом игнорирования координат умень-
уменьшить число уравнений Лагранжа на количество циклических коор-
координат, не повышая при этом порядка получаемых дифференциальных
уравнений.
Другое направление в аналитической динамике состоит в отыска-
отыскании самих интегралов уравнений Лагранжа или другой системы урав-
уравнений, им эквивалентной
Аналитическая механика после Лагранжа получила большое раз-
развитие и применение в различных областях науки и техники. Ее мето-
методы особенно широко применяются в теории колебаний систем и в кван-
квантовой механике.
? (с\
р
<V
м
И
г
>-
ц
/
A?27
Рис 103
Призер. Однородный диск А силой тяжести Р = 100 Н обмотан нерастяжн-
мой нитью, которая перекинута через блок В и прикреплена к грузу D силой
тяжести Р2 = 2 Н (рис. 103). Груз D может скользить по неподвижной нак-
наклонной плоскости с углом наклона а = 30°. Коэффициент трения скольжения
между грузом и плоскостью/ = 0,3. Блок В силой тяжести Рх = 400 Н принять
за однородный диск.
Определить ускорение груза D а оси диска А, а также натяжение нити и дав-
давление на ось блока, если нить не скользит по блоку. Трением яа оси блока и мас-
массой нити пренебречь. Движение начинается из состояния покоя
Решение. Система движущихся тел имеет две степени свободы. За обоб-
обобщенные координаты системы примем перемещение s груза по наклонной плоско-
398
сти и угол ср попорота диска А. Считаем угол ф положительным против часовой
стрелки, а перемещение s — вниз по наклонной плоскости,
Спязями системы являются нигь, ось блока и негладкая наклоннчя плос-
плоскость, Если наклонную плоскость заменить силами реакции связей, та оставшие-
оставшиеся связи окажутся идеальными, но появится дополнительная степень свободы
V гр>=>а D. Можно сделать связи системы идеальными считал наклонную плос-
плоскость ицельно гладкой, а шероховатость ее поверхности и поверхности груза
/'^компенсировать силой трення. В эточ случае дополнительная степень свободы
не появится Сня>н системы окажутся идеальными и для ее дзижения молено со-
составив уравнеь.'я Тчгранжа
I дГ дТ г' д Г дТ
At (h di " & dp ^Ф ф*
Кинегичзская энер!ия системы состоит из кинетических энергий отдельных
тел:
Диск А совершает плосксе движение. Его кинетическая энергия вычисли-»
ется но формуле
Р г*
где vQ — гкорость центра масс диска; /Сг = — — — момент инерции диска
относительно оси, проходящей через центр масс перпендикулярно плоскости
диска, г — радиус дг-скэ
Блок В ыр-нцается вокрур неподвижной осп, Его кинетическая Э1иршя
где фj — угловая скорость блока; Jc г=~ ~- — «омечт инерции относитель-
относительно осп вращения, -г — радиус блока»
I руз D движекя поступательно, и его кинетическая ;>не,лия
Так как нить яераеляжи^а и не скользит по блоку, то угловая скорость бло-
блока связана со скоростью гручг соотношением s = — г%щ,
Скорость груча предполагаем направленной вниз по наклонной плоскости,
а следовательно, в начале движечия ич согтояиия покоя вниз направлено и ус-
ускорение груза. Все точки нити имеют одинаковую по числовой величине скорость
|s|j следовательно, Такую же скорость им ^ет и точка М дчека, Приняв ее ча по-
полюс, определяем скорость точки С по формуле, связывающей скорос1и двух то-
точек тела при плоском движении:
где vCM — MC-(j,
При вращении диска против часовой стрелки скорость исм напр^т^пя ч»р~и-
кально вниз, а ом — вертикально вверх при движе^.и груз! D bih ^ i
пои плоскости, Следоваи:льно5 Vq ~~ s —¦ гф»
. 3
Выражаем кинетическую энергию системы через обобщенные скорости
и координаты. Имеем
. Т Р (S-'ФJ ¦ Р* Ф2 , Pi «« , Р. Л
Вычисляем величины, входящие в левые части уравнений Лчграпжа:
дТ дТ
¦=0;
d
дТ
s /
дТ
& dip
обобщенных
s ,
3Pr3
3Pr'
сил
(p Pf
p
2 +Г>}
* g
> .. Pr
v g
следует
\ Pr
/ S
g
учитывать
- <pj
силы тяжести Р ,
_ При вычислении
Px, Р2 и силу грения F наклонной плоскости. Реакции идеальных связей (нить,
ось блока, гладкая наклонная плоскость) учитывать не нужно. Важно ыы-
брать правильное направление для силы трения F, которая всегда направлена
против скорости движения s груза D. Но направление движения груза заранее
не известно. Предположим, что движение груза направлено вниз по наклонной
плоскости; тогда сила трения будет иметь противоположное направление Ре-
Решаем задачу при этом предположении. Если получим s (в данном случае и s, так
kjk движение начинается из состояния покоя) со знаком плюс, то принятое пред-
предположение правильно. Если же ускорение s (а следовательно, и скорость s) полу-
получится отрицательным, то следует изменить направление силы трения на обратное
ненова решить задачу, так как предпола! аемое направление силы трения оказа-
оказалось направленным по движению груза, т. е. неправильно. При s = 0 движение
груза из состояния покоя начаться не может.
Установив предполагаемое направление силы трепня против движения гру-
груза вверх по наклонной плоскости, вычисляем обобщенную силу Q,s. При этом со-
сообщаем системе такое возможное перемещение, допускаемое связями, при кото-
котором угол ф не изменяется, а изменяется только обобщенная координата s на по-
положительную величину 6s, т. е. сообщаем возможное перемещение грузу в сторо-
сторону возрастающих значений s вниз по наклонной плоскости. По формуле для обоб-
обобщенной силы имеем
л (ZbAku V',sin a-fN)&s-P6_s n .,„ .. iA7 n
6s 04
idK как при ф = const перемещение точки С диска такое же, как и у точки М, а
Сила Pjl приложена в неподвижной точке, и ее элементарная работа на воз-
возможном перемещении равна нулю, так как возможное перемещение неподвижной
точки равно нулю
Нормальную реакцию наклонной плоскости определяем из условия равнове-
равновесия сил для груза D в направлении нормали к наклонной плоскости. Имеем
N — Р2 cos а = 0; W = Рг cos а,
С учетом этого
Qs — pz (sin а — / cos а} — Р.
400
При вычислении обобщенной силы Q сообщаем системе возможное переме-
шание, при котором изменяется только обобщенная координата ф на положитель-
положительную величину бф, а обобщенная координата s не изменяется. Получаем
(?t>Ah\ Pfa
Q
В этом случае точка М диска является его мгновенным центром скоростей,
поэтому 6sc = гб<р и 6sc при положительном бф направлено вниз по силе Р.
Элементарные работы других сил на этом возможном перемещении равны
нулю, так как точки их приложения остаются неподвижными при этом перемеще-
перемещении.
Таким образом, Q = Рбзс/(бф) = Рг.
Подставляя вычисленные значения в уравнения Лагранжа, получим систе-
систему уравнений
— (р + -1Г +Р2)-~ Pr=P* (sin а + /соз а)-Р;
8 \ 2 /в
8 g 2
••2
Из посчелнсго уравнения выражаем ф через s. Имеем гф = — (g + s).
о
Пoдcrdвляя это значение в первое уравнение, получаем
( j-—— -J-Pa) = P2(sin a — f cos а) — ,
g \ 3 2 / 3
или
—^—•1300=600-0,24 — 100; 8 = 0,034^ = 0,33 м/с2.
Знак плюс у s (в данном случае и у s) указывает, что движение груза D дей-
действительно направлено вниз по наклонной плоскости, как в предполагалось.
Ускорение точки С можно получить дифференцированием по времени вы-
выражения для ее скорости vc — "s — гф, справедливого для любого момента вре-
времени. Имеем dvg/dt = s-— rq>.
Так как точка С движется прямолинейно, то
Таким образом,
2 s 2
ac=w$ = s'--fe + s)=--TS="-|'.656^-SL3 м/с2.
Знак минус у ас указывает, что ускорение ас направлено вниз.
Для определения натяжения нитей применим к грузу и диску принцип Да-
ламбера. Для груза D (рис. 104), проецируя силы на ось Ох, получаем
S^+ Фг — />2 sin a + IN =0,
но
р
Ф2 = —— s; N = Р3 cos а.
ё
401
Рис. 104
Следовательно,
Рис, 105
/
= P2 I sin a — fco%a—
Рус. IGS
41,2 Н.
Для диска А (рис. 105), проецируя силы на ось Су, имеем
Р
— Р=0, но Ф~—ас.
= P\ 1——^ } = 100A— 0,656) = 34,4 II.
Поэтому
Так как центр масс блока неподвижен, то по теореме о движении центра масс
{рис. 106) следует равновесие сил, т. е.
О = Xj -Ь S2 cos a; 0 = Уг — St — P2—S2 sin a,
Из этих уравнений определяем проекции реакции оси блока X-f и У^;
X, = — S3 cos a = — 35,4 Н; К, = Р2 + St + S2 sin a = 455,1 H,
Числовая величина реакции оси блока, а следовательно, и давления Олока
на ось
Л', = У X
К? = 456,4 Н,
§ 10. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
Уравнения Лагранжа составляют систему дифференциальных уравнений
второго порядка относительно функций qt (t). Но эту сиаему уравнений можно
преобразовать в эквивалеи in\ ю систему ураьнений первого порядка относитель-
относительно 2/t функций — обобщенных координат qi и обобщенных импульсов pj,
Обобщенным импульсом в аналитической динамиь-е называют динамичес-
динамическую величиу Pi, выражающуюся через функцию Лагранжа L или через кинети-
кинетическую энергию системы Т следу^щм образом:
pt
= дТ/dJt
D4)
(=.1,2,..., п.
D5)
Систему уравнений D5) можно решить относительно <?j, которое можно вы-
выразить через pi, а следовательно, функцию L можно выразить только через pj и
нО2
Составим еще одну функцию — функцию Гамильтона:
i=\
Исключим в D6) все q\ посредством D5) и вычислим вариацию функции
H{Pi, о/. /),
G одной стороны, беря Н в виде D6), получаем
8# S 6S ?
Второе и четвертое слагаемые в сумме равны нулю на основании D4). В пер-
первом же слагаемом можно сделать замену на основании уравнений Лагранжа:
dL d dL dpi _ -
~ЩГ=*~йГ ~^=*~iT = pl'
Следовательно,
б// = _ 2pt bqt + 2Spj?V D7)
Составляем теперь выражение 6Н как функции от р{, qi, получаемой
из D6) путем исключения 'qt:
б// {рь Я1, 0=2 — б?г + 2— ЬР1 D7')
Приравниваем D7) и D7'):
^ ёlA + ^^ D8)
Z^fyj+Z ёрг^l
Так как 6<jj и bpt вследствие голономности системы независимы и равенство
D8) удовлетворяется при любых вариациях бр; и б^, то коэффициенты при 6pt и
при oqt в левой и право» частях уравнения D8) равньь Поэтому
9i = дН/dpti pi = - дН/д<ц. D9)
Уравнения D9) и называют каноническими уравнениями Гамильтона,
Пример. Рассмотрим задачу Ньютона о движении материальной точки мас-
массой т в центральном поле силы притяжения со стороны неподвижного притяги-
притягивающего тела массой М. Притягивающее тело считаем однородным шаром, и сила
притяжения направлена к центру О этого шара.
Решение. По закону тяготения Ньютона сила, действующая на точку
массой т, выражается в виде
— Mm —
где -у — постоянный коэффициент тяготения; г — расстояние от центра шара до
точки; а0 — единичный вектор радиус-вектора г точки, проведенного из центра
притягивающего шара,
Для нахождения силовой функции поля'составляем элементарную работу си-
силы тяготения. Работа отлична от нуля только на радиальном перемещении точ-
точки:
Wa~ Mm a
2 Piki = - {T + U) + 2T = T - U=E.
403
Приравнивая эту элементарную работу дифференциалу силовой Функции,
имеем
Mm
dt/=-V— Ar,
откуда
Mm
t/+K ()
+vK ()
При г = оо полагаем G = 0. Тогда постоянная С = 0. После этого
Mm
' е
Из теоремы об изменении момента количества движения точки следует, что
траектория точки при движении под действием центральной силы является плос-
плоской кривой, плоскость которой проходит через центр силы. Перейдем к поляр-
полярным координатам в этой плоскости; qt — г и q2 = ф (обобщенные координаты
точки).
Кинетическая энергия точки в полярных координатах
(б)
Вычисляем обобщенные импульсы:
ОТ . дТ
ох =—- = гаг; р% = —г" = w3 ф • <в)
дг д<р
Из (в) выражаем обобщенные скорости г, ср через обобщенные импульсы:
> = pi/m; ф = р2 /(mr2). (г)
Составляем функцию Гамильтона, выразив ее через q±, q2, px, рг:
H = ~{pl+pVri)~y^L- (д)
Замечаем, что Н = Т — U = Т + Я=? — полная энергия точки.
Канонические дифференциальные уравнения движения точки имеют вид
р\=,—дН1дг, 1
} (е)
ц=дН/др2; р2 = -<ЭЯ/д J
Вычисляем частные производные и подставляем их в уравнения (е). Получа-
Получаем:
Pi . о, . р\ Mm
r—t'> ф=^: p^~ +Y-! *=°- <»>
Из уравнений (ж) найдем г, ф, ри рг в зависимости от времени. Из послед-
последнего уравнения системы (ж) следует р.г = С%. Из второго уравнения (ж)
г2Ч> = С2, (з)
т, е, получен интеграл площадей.
Исключая рх и pt из первого и третьего уравнений (ж), получаем дифферен-
дифференциальное уравнение относительно только г.
Определив г (t) из (ж) и ф {t) из (з), получаем уравнения движения точки,
Присоединяя к (з) интеграл энергии
m ¦ Mm
~(r^rUf)-^-—^h
и исключая ? из чтих уравнений, можно найти уравнение траектории точки
' — I (Ф) в полярныл координатах,
404
§ П. ПРИНЦИП ГАМИЛЬТОНА
Действием по Гамильтону называют динамическую величину S, выражаю-
выражающуюся через функцию Лагранжа следующим образом:
1ЛН L = T-\-U=-T~n.
Таким образом, S характеризует соотношение между кинетической и потен-
потенциальной энергиями системы при ее движении. Другое соотношение следует из
закона сохранения механической энергии для консервативной системы: Т -+-
+ П = h.
Действие по Гамильтону имеет размерность произведения работы на время.
Так как L зависит от qi и <?г-, являющихся функциями времени при движении си-
системы, то S зависит не только от промежутка времени t\ — to, но и от вида функ-
функций qi и qh т. е. от характера движения системы.
Принцип Гамильтона состоит в следующем: функции qi и qt, удовлетворяю-
удовлетворяющие уравнениям Лагранжа (выражающие истинное движение системы под дей-
действием данных снл), удовлетворяют в то же время необходимым условиям экстре-
экстремальности действия по Гамильтону, т. е. действие по Гамильтону имеет макси-
максимум или минимум сравнительно со значениями во всех других возможных близ-
близких движениях системы, переводящих ее из начального положения (при / = /0)
в конечное (t — tx).
Приведем подробное доказательство для системы с одной степенью свободы.
Рассмотрим функции q* = q + ar) @, характеризующие какое-то смежное воз-
возможное движение системы с теми же граничными данными по координатам q* =
= Яа> Q\ — Q- В этом движении обозначим функцию Лагранжа L*. Слагаемое
ar) {f) представляет собой вариацию &q функции q. Функция т) (/) — произволь-
произвольная конечная, принимающая на границах интервала {1й, <х) нулевые значения.
Значение а = 0 соответствует истинному движению системы. Другие, малые,
значения а соответствуют близким смежным движениям. Таким образом, дейст-
действие S, вычисляемое для различных движений, является функцией параметра а
при заданном tx — t0:
Покажем, что для тех значений q и q, которые удовчетворяют уравнению
Лагранжа, т. е. при а = 0, производная от S по а равняется нулю, т. е. S при
а = 0 может достигать или максимума, или минимума сравнительно со всеми
другими близкими движениями при других а, отличных от нуля, но малых,
Составим dS/da по правилу дифференцирования определенного интеграла с
пределами, не зависящими от а. Тогда
с», ч= f f 3L д[ч+щ(П] dL с)[д+«п(ОП
1m4
Вычисляем S' @), приняв под интегралом везде в квадратных скобках a =
0:
^{^} E0)
405
Преобразуем второе слагаемое под знаком интеграла, составив выражение
d d
Отсюда
Заменяя второй член под интегралом в E0) его выражением из E1) получ-аем
ИЛИ
Но функция t) (t) при < = /х и < = /0 по условию равна нулю (все сравни-
сравниваемые движения имеют общие концы, т. е. общую начальную конфигурацию
данной механической системы и общую конечную конфигурацию). Таким обра-
образом, второе слагаемое в E0) равно нулю. Но в истинном движении, условно счи-
считаемом при а — 0, функции q, q удовлетворяют уравнению Лагранжа
_d__?L_ dL_
At dq dq
а следовательно, и интеграл в E2) равен нулю, т. е. S' @) = 0.
Справедливо и обратное рассуждение: для того чтобы 5' @) = 0 при любой
функции t) (t), надо, чтобы множитель при r\ (f) под интегралом также был ра-
равен нулю, т. е. из принципа Гамильтона тоже можно вывести уравнения Лагран-
Лагранжа. Чтобы выяснить, какое именно экстремальное значение принимает S —
максимум, минимум или даже вообще не принимает ни того, ни другого [что
тоже возможно при S' @) = 0], необходимо применить достаточные условия экс-
экстремума функционалов, т. е. интегралов, зависящих от линий, вдоль которых
эти интегралы вычисляются.
Эти задачи решают методом вариационного исчисления, прм!епение которого
в механике позволяет решать, в частности, задачи расчета оптимальных косми-
космических траекторий, расчеты на оптимальность в автоматике, экономике и т. д.
Глава 7
ТЕОРИЯ КОЛЕБАНИЙ
Теория колебаний механических систем —¦ один из самых обшир-
обширных и развитых разделов теоретической механики, имеющий большое
прикладное значение.
Колебательные движения встречаются во многих отраслях совре-
современной науки и техники и требуют для рассмотрения широкого ис-
использования различных математических методов.
Рассмотрим основные свойства малых колебаний меха-
механических систем с одной и двумя степенями свободы на основе приме-
406
нения уравнений Лагранжа; некоторые результаты для системы с лю-
любым конечным числом степеней свободы приведем без вывода. Меха-
Механическая система может совершать малые колебания только вблизи
устойчивого положения равновесия. Ообобщен-
ные координаты системы в положении равновесия принимают равными
нулю, т. е. отсчитывают их от положения равновесия. Тогда колеба-
колебательным движением механической системы в общем случае считают
всякое ее движение, при котором все обобщенные координаты или
часть из них изменяются не Монотонно, а имеют колебательный харак-
характер, т. е. принимают нулевые значения по крайней мере несколько раз.
Ниже рассмотрены только периодические и псевдопериодические
колебания.
Для рассмотрения малых колебаний следует дать определение ус-
устойчивости положения равновесия системы и установить условия, при
выполнении которых положение равновесия является устойчивым.
§ 1. УСТОЙЧИВОСТЬ ПОЛОЖЕНИЯ РАВНОВЕСИЯ
Определение устойчивости положения равновесия
Для наглядности рассмотрим положение равновесия на примере
одного твердого тела. Пусть таким телом является стержень А В
(рис. 107, а, б, в) с горизонтальной осью вращения, проходящей через
точку О. Стержень имеет два положения равновесия при ф == 0° и ф =
= 180°. В положении равновесия силы, приложенные к стержню,
составляют уравновешенную си-
систему сил.
Чтобы установить, будет ли
рассматриваемое положение рав-
равновесия стержня устойчивым,
следует дать стержню достаточ-
достаточно малое начальное отклонение
от положения равновесия, а в
общем случае сообщить ему еще
достаточно малую начальную
угловую скорость и рассмотреть
его последующее движение. Для
простоты ограничимся только
одним малым начальным откло-
отклонением от положения равнове-
равновесия, В отклоненном положении
силы, действующие на стержень (сила тяжести и реакция в точке 0),
уже не являются уравновешенными.
Если существует такое достаточно малое начальное отклонение
стержня от положения равновесия, при котором силы стремятся вер-
вернуть стержень в положения равновесия, то такое положение равнове-
равновесия считается устойчивым.
Положение равновесия стержня при ср = 0° (рис. 107, а) является
устойчивым, так как при начальном его отклонении па малый уго ; си-
9=180"
Рис. 107
407
лы, действующие на стержень, стермятся вернуть его в положение
равновесия.
В случае когда силы еще дальше удаляют стержень от положения
равновесия, положение равновесия является неустойчивые.
Положение равновесия стержня при ср = 180° может служить при-
примером неустойчивого положения равновесия (рис. 107, б). Силы, дей-
действующие на стержень, в этом случае стремятся отклонить его еще
дальше от положения равновесия при любом как угодно ыппом началь-
начальном его отклонении от положения равновесия.
Если стержень, получив любое малое начальное отклонение от по-
положения равновесия, остается в равновесии в новом отклоненном по-
положении, то такое положение равновесия называется безразличным-
Примером безразличного положения равновесия может служить
равновесие стержня, у которого закрепленная точка 0 совпадает с
центром масс С. В этом случае силы, приложенные к стержню, обра-
образуют равновесную систему сил при любом начальном его отклонении
от первоначального положения равновесия (рис. 107, в).
В общем случае кроме начального отклонения стержню следует
сообщить также еще и некоторую достаточно малую начальную угло-
угловую скорость. Естественно, что тогда случай безразличного положе-
положения равновесия стержня следует отнести к неустойчивому положению
равновесия, так как, получив любую малую начальную угловую ско-
скорость, стержень дальше будет удаляться с этой угловой скоростью по
инерции от своего первоначального положения равновесия.
Все изложенное о положении равновесия стержня характерно не
только для любого твердого тела, но и для любой механической систе-
системы. Наибольший интерес представляет устойчивое положение равно-
равновесия тела или механической системы, так как в таком положении рав-
равновесия тело или система могут находиться длительно, если им не со-
сообщается какое-либо возмущение.
При устойчивом положении равновесия система, выведенная из по-
положения равновесия достаточно малыми возмущениями в виде началь-
начальных отклонений и скоростей, которые сообщаются всем точкам систе-
системы или их части, совершает колебания около положения равновесия
или приближается к нему без колебаний.
При неустойчивом положении равновесия случайные возмущения
приводят к тому, что система при дальнейшем движении все дальше
и дальше удаляется от положения равновесия. Таким образом, преж-
прежде всего необходимо установить характер положения равновесия сис-
системы. Для этого требуется ввести точное понятие устойчивости поло-
положения равновесия системы.
Строгое определение понятия устойчивости положения равновесия
было дано в конце прошлого века в работах русского ученого А. М. Ля-
Ляпунова. Приведем это определение для системы с любым конечным чис-
числом степеней свободы п.
Условимся обобщенные координаты qlt qit ..., qn отсчитывать от
положения равновесия системы, т. е. принимать их равными нулю в
положении равновесия. Начальное возмущение системы состоит в об-
408
щем случае из начальных значений обобщенных координат q]t q\, ..., q?t
и начальных обобщенных скоростей qi,'q%, ..., qn.
По Ляпунову, равновесие системы называется устойчивым, если для
всякого как угодно малого положительного числа е можно ны')рать два
других малых положительных числа гI и т]2, ч если при начальных, воз-
возмущениях они удовлетворяют условиям \q? | < ци \q? | < тJ, то в даль-
дальнейшем движении механической системы выполняются у вловия \qt (t)\ <
<Г s для каждой обобщенной координаты.
Таким образом, по Ляпунову, положение равновесия считается
устойчивым, если можно задать достаточно малую область изменения
начальных значений обобщенных координат в окрестности положения
равновесия и область начальных обобщенных скоростей, для которых
величины обобщенных координат при последующем движении системы
ограничены заданной е окрестностью вблизи положения равновесия.
Ясно, что области начальных значений q? и qf, определяемые положи-
положительными числами гц и т]2, зависят от выбранной а окрестности, т. е.
самого числа е. Эти области начальных значений qf и q'i не должны со-
соответствовать % = 0 и i]a = 0, т, е. только самому положению равно-
равновесия, для которого <7° =« 0 и q? = 0.
В положении равновесия механической системы каждая обобщен-
обобщенная сила Qi равна нулю. Для случая потенциального силового поля
обобщенные силы через потенциальную энергию выражаются по фор-
формулам
Qt = —дП/dqt, i = 1, 2, ..., п.
Следовательно, в положении любого равновесия дП/дд{ = 0, поэтому
потенциальная энергия при эхом может достигать своего экстремаль-
экстремального значения.
Теорема Лагранжа—ДирихА.е
Малые колебания системы могут длительно совершаться только в
окрестности устойчивого положения равновесия системы. Поэтому важ-
важное значение имеет теорема Лагранжа—Дирихле, устанавливающая
достаточные условия устойчивости положения равновесия сис-
системы. Теорема утверждает: для устойчивости положения равновесия
системы, подчиненной голономным, идеальным, стационарным и неосво-
бождающим связям и находящейся в стационарном потенциальном
силовом поле, достаточно, чтобы потенциальная тергия в положении
равновесия имела изолированный относительный минимум.
Докажем сначала теорему для системы с одной степе-
степенью свободы, допускающую наглядную геометрическую ин-
интерпретацию. Потенциальная энергия системна одной степенью свобо-
свободы для стационарного силового поля зависит только от одной обоб-
обобщенной координаты q, равной нулю в положении равновесия. Примем
потенциальную энергию в этом положении равной нулю, т. е. П @) =
= 0. По условию теоремы в положении равновесия потенциальная
энергия имеет изолированный относительный минимум, г. е. /7inta =
409
— G7 @) = 0 и функция Я — 77 (q) в малой окрестности q = 0, при-
принимая только положительные значения, является возрастающей функ-
функцией (?, г. е. имеет вид, представленный на рис. 108.
Доказательство 1еореми состоит из двух частей. Первая часть
доказательства содержит выбор значения потенциальной энергии /7*.
Во второй асти докаливается существование пололи/тельных чисел
т}г ит]2, отличных от нуля, обеспечивающих выполнение условий устой-
устойчивости.
Для определения значений /7* зададим положительное число е на-
настолько малым, чтобы окрестность его не содержала соседних экстре-
экстремумов функции П — П (q). Рассмотрим значения функции П = /7 (</)
при q ~"s и q — —е, т. е. Я (е) и Я (—е). Из двух положительных ве-
величин выберем наименьшую, например Я (е), и примем ее за Я*. Если
при движении системы оказалось, чго потенциальная энергия
Я (<?} < Я*, то из выбора значений 77* следует, что q' < <? < е, т. е.
<7 обязательно должно удовлетворять условию |^| < в.
Для доказательства второй частп теоремы учтем, что при движении
консервативной системы и выполнении других условий теоремы о свя-
связях справедлив закон сохранения полной механической энергии
Т + II - То + /70)
где То и Я„ — значения кинетической и потенциальной энергий в на-
начальный момент. Они зависят от начальных значений q^ и q°, т. е. П0 =
- Я (?°), Го = Т W°, т»).
Кинетическая энергия системы может быть только положительной.
Поэтому из закона сохранения механической энергии получаем сле-
следующее неравенство для потенциальной энергии:
// < Го + Яо.
Это неравенство позволяет установить соответствующие положитель-
положительные числа \\х и ц^. Неравенство допускает бесчисленное количество
значений для q° и q°, удовлетворяющих ему. Действительно, неравен-
неравенства По < 77*/2 и То <Г Я*/2 обеспечивают выполнение рассматри-
рассматриваемого неравенства для потенциальной энергии. Из неравенства
По < Я*/2 получаем \q°\ <С % =^= 0, а из двух неравенств Го < Я*/2,
I4°|<rii следует |^°|<г|гт^0. Подставляя значения Г9<Я*/2 и
/7В < Я*/2 в основное неравенство, получим следующее условие для
потенциальной энергии!
П<Т0 + П.К Л*,
что в соответствии с выбором числовой величины Я* обеспечивает для
обобщенной координаты выполнение условия \q\ <C e.
Доказано, что для любого достаточно малого числа 8<0 сущест-
существуют положительные числа г\г и т)а, и если |^°I<Crji и |<7°| <.г\2, то
|<7J <с а, т. е. положение равновесия устойчиво.
Для сивтемыо двумя степенями свободы до-
доказательство второй части георемы почти не изменяется, за исключе-
исключением того, что /70 = /7 (9?, <7§) и Го = Т (q'l, q\, q\, q\), но это не вно-
410
сиг существенных изменений в последующие рассуждения. Некоторые
особенности возникают при выборе величины 77 \
Для системы с двумя степенями свободы /7 = П (qlt q^. В положе-
положении равновесия системы ^ = <?2 = 0 принимаем Я @, 0) — 0. Следо-
Следовательно, Пт1а = Я @, 0) = 0.
Потенциальная энергия Я = Я (qu q2) в малой окрестности изо-
изолированного минимума положительна, и ее зависимость от обобщен-
обобщенных координат имеет форму поверхности, изображенной на рис. 109, а.
Выберем а > 0 и рассмотрим значения потенциальной энергии
П — 77 (е, <72) к П = П (—в, <73), где q% — любое, удовлетворяющее
условию \q2\ ^ е. Зависимость Я = Я (е, q%) является уравнением
1/7
Щ)
П(*)\
\П(е)=П*
-е
о г
Рис. 108
Рис. 109
линии пересечения плоскости qx — s (плоскость /) с поверхностью
П — П (qu q2). Аналогично, /7 = 77 (—е, q2) есть линия пересечения
плоскости <7г = —8 с той же поверхностью. Из множества значений
П (е, q2) и П (—е, q2) (рис. 109, б) при изменении q2 в интервале
|(?2! ^ 8 выбираем наименьшее Пх. Затем рассматриваем П — П (qY, г)
и 77 = П (qb —е). Опять получим в плоскостях q% — 8 и q2 = —е по
кривой, аналогичной изображенной на рис. 109, б. Из множества этих
значений потенциальной энергии выбираем наименьшее Пг. Из двух
положительных величин Пх и П2 наименьшее принимаем за Я*.
Из способа выбора значения /7* следует, что если в какой-то момент
движения системы Л (дъ q^) < П*, то обобщенные координаты удов-
удовлетворяют условиям |<?il<e и |^2|< е.
Рассмотрим доказательство теоремы Лагранжа—Дирихле для
системы с п степенями свободы и, следовательно,
с <7i, foi •••><?» обобщенными координатами.
Примем в положении равновесия все qt ~ 0 и Я @, 0, ..., 0) = 0.
Тогда FImin = 77 @, 0, ..., 0) = 0. Выберем достаточно малое поло-
положительное число е > 0 такое, чтобы в 8 окрестности не содержалось
других экстремумов функции П = П {qx, q2, ..., qn). Дадим обобщен-
обобщенной координате qx значения qx = е и qt — —е, т. е |охj = e, а другие
обобщенные координаты при этом удовлетворяют условию |q-?(^s.
Из всех значений потенциальной энергии в этом случае выбираем наи-
наименьшее Пу. Затем даем ^значение \q2\ = е, а другие при изменения
удовлетворяют условию ^l^e. Наименьшее значение потенциаль-
потенциальной энергии при этих условиях обозначим 772 Продолжая этот про-
411
цесс со всеми обобщенными координатами, получим последователь-
последовательность положительных чисел Пх, П2, ..., Яп, наименьшее из которых
принимаем за Я*.
Пока при движении системы Л <С Л*, выполняется условие |<7j| <
<! а для всех обобщенных координат.
Пусть системе сообщили соответствующие начальные обобщенные
координаты и скорости и она движется. При движении консерватив-
консервативной системы, удовлетворяющей связям, указанным в условии теоремы,
справедлив закон сохранения механической энергии
т + п = т9 + л0,
где Ло-="(<7?.<# <tf> » Tt
т. е. величины, зависящие от начальных значений обобщенных коор-
¦V mhu\
динат и скоростей Так как при движении системы Т = 2 > О,
то из закона сохранения энергии следует
Л < То + По.
Это неравенство выполняется, если справедливы, например, два нера-
неравенства- /7„ < У7*/2 и То < Л*/2. Из условий /70 < П*12 получим
ряд значений qf, удовлетворяющих условию |^°| < т)ж =?^= 0, а из усло-
условия Г„ < Л*/2 и неравенства |<7,°! < г\г — ряд значений q", удовлет-
удовлетворяющих условию |<7( | <С ^2 Ф 0. Для потенциальной энергии после
чтого имеем
П < 7\, + Я„ < Л*.
Следовательно, в соответствии с выбором Л* все обобщенные коорди-
координаты удовлетворяют условию \qt\<Le
Итак, существуют такие положительные числа % и %, определяю-
определяющие область начальных значений ql и q', для которых все обобщенные
координаты удовлетворяют условию \qt |< e, т. е. положение равнове-
равновесия устойчиво Теорема Лагранжа—Дирихле полностью доказана.
В некоторых случаях установить неустойчивость равновесия мож-
можно на основании теорем Ляпунова
Приводим эти теоремы без доказательства
1 Равновесие консервативной системы неустойчиво, если потен-
потенциальная энергия системы в положении равновесия не имеет миниму-
минимума и отсутствие минимума определяется слагаемыми второго порядка
малое ги в разложении потенциальной энергин в ряд по степеням обоб-
обобщенных координат
2 Разповесие консервативной системы неустойчиво, если потен-
потенциальная энергия системы в положении равновесия имеет максимум
и наличие максимума определяется членами наименьшего порядка ма-
малости в разложении потенциальной энергии в ряд по степеням обоб-
обобщенных координат.
412
§ 2. КОЛЕБАНИЯ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Механическая система с одной степенью свободы имеет одну обоб-
обобщенную координату q и ее движение описывается одним уравнением
Лагранжа
At дц dq
Обобщенную силу Q можно считать состоящей из трех частей: Q =
== Qn -f Q* -f QB. Здесь О" — обобщенная сила потенциальных
сил. Она выражается через потенциальную энергию П по формуле
Qn = —dflldq. Потенциальная энергия в общем случае зависит от ко,-
ординат точек системы и, следовательно, от обобщенной координаты
q и не зависит от обобщенной скорости q. Для нестационарного сило-
силового поля, а также нестационарных связей потенциальная энергия
может зависеть явно еще и от времени.
В Qf*^ включим ту часть обобщенной силы, которая получается от
действия сил сопротивления, зависящих как от числовых значений, так
и направлений скоростей точек системы. В дальнейшем рассматрива-
рассматривается случай линейного сопротивления, когда силы
сопротивления точек системы пропорциональны скоростям этих точек
и направлены в стороны, противоположные скоростям.
Часть обобщенной силы QB получается от так называе-
называемых вынуждающих, или возмущающих, сил, зави-
зависящих прежде всего от времени. Ниже рассмотрен случай гармоничес-
гармонической возмещающей силы, когда QB изменяется с течением времени по
синусоидальному закону. В общем случае зависимости Q3 от времени
ее можно разложить в ряд Фурье и рассматривать дифференциальные
уравнения движения для каждого из синусоидальных слагаемых.
Собственные линейные колебания системы
Рассмотрим малые колебания системы с одной степенью свободы
под действием одних потенциальных с.чл, т. е. когда Q — Qn =
•-- —dlVdq. Считаем, что сил сопротивления и возмущающих сил нет.
Такие колебания называются собственными или свободными. Колеба-
Колебания считаются малыми, если при движении системы обобщенные коор-
координата, скорость и ускорение достаточно малы и в уравнении Лагран-
Лагранжа A) можно пренебречь всеми слагаемыми второго и более высокого
порядка относительно q, q и q, г. е. слагаемыми, в которые входят квад-
квадраты этих величин, произведения и т. д. В случае малых колебаний
системы получается линейное дифференциальное уравнение для обоб-
обобщенной координаты q. Колебания, для которых дифференциальное
уравнение является линейным, называются линейными. Малые коле-
колебания принадлежат к числу линейных. Но линейными могут быть не
обязательно малые колебания
Обычно ограничения, которые следует наложить на величины, ха-
характеризующие движение, чтобы колебания были малыми, удается
413
)станои':гь только после полного решения задачи в предположении,
что копС-ания малые Ниже рассматриваются только малые или, если
не vatHe, го линейные колебания.
Д„ >1ерен^илльное уравнение собственных линейных колебаний
системм. Для вывода из уравнения Лагранжа A) линейного уравнения
малых собственных колебаний следует кинетическую и потенциальную
энергии разложить в ряды в окрестности положения равновесия сис-
системы, где q = О
Пусть система, па которую наложены голономные, идеальные, не-
освобождающие и стационарные связи, состоит из /V точек и движется
вблизи положения равновесия. Ее киаепнеская энершя
1 /V j \
2 *=1 2 *=!
При сделанных допущениях о стационарности связей радиус-век-
радиус-вектор rh каждой точки системы зависит от времени только через обобщен-
обобщенную координату q; следовательно, гк — -э~-<7- Подставляя это rh в вы-
выражение кинетической энергии, получаем
Т ==^ V Ао^
где
N
А= 2 m
Величина А, как и rh, может зависеть только от q и не может зави-
зависеть от q. Разлагая A (q) в окрестности q = 0 в степенной ряд, имеем
Здесь и дальше индекс 0 означает, что соответствующие величины
следует вычислять при q = О
Для получения в разложении кинетической энергии слагаемых не
выше второго порядка по отношению к q и q достаточно из разложения
A (q) взять только постояннее значение Ао, которое обозначим а. При
учете других слагаемых из разложения A (q) появляются члены треть-
третьего и более высокого порядка.
Итак, выражение кинетической энергии с отбрасыванием слагаемых
третьего и более высокою порядка можно представить в виде
Т = 4,aq\ B)
Положительная постоянная а называется коэффициентом инерции.
Обычно по размерности коэффициент инерции является или массой,
или моментом инерции
Потенциальная энергия системы П для стационарного силового
поля и стационарных связей является функцией только обобщенной
414
координаты q. Разлагая ее в степенной ряд в окрестности q — 0, полу-
получаем
Потенциальную энергию Яо в положении равновесия при g = О
примем равной нулю. Величина (dfl/dqH есть значение обобщенной
силы Q в положении равновесия системы, равное нулю.
Будем считать, что в положении равновесия потенциальная энер-
энергия имеет минимум. Это является достаточным условием устойчиво-
устойчивости положения равновесия системы. В этом случае величина {д 2n/dq2H
положительна. Обозначим ее с. Постоянную о называют коэффициен-
коэффициентом жесткости или просто жесткостью.
Таким образом, отбрасывая слагаемые третьего и более высокого
порядка, имеем
П (q) - lUcq\ C)
Системы, для которых кинетическая и потенциальная энергии вы-
выражаются точно по формулам B) и C) без отбрасывания слагаемых
более высокого порядка, называются линейными. Для них вся мате-
математическая теория является такой же, как и для систем, совершающих
малые колебания, хотя колебания для линейных систем могут быть
любыми, не обязательно малыми. В дальнейшем рассматриваются
линейные колебания, в число которых входят и малые колебания.
На основании B) и C) получаем:
дТ „ дТ А дТ » дП
. = 0; —— ~ag; ——r-^aq; ———cq.
dq fy nt qq oq
Подставляя эти значения производных в уравнение Лагранжа A),
получим следующее дифференциальное уравнение малых собственных
колебаний системы с одной степенью свободы:
ад + cq — 0. D)
При учете слагаемых третьего и более высокого порядка в разло-
разложениях кинетической и потенциальной энергий в уравнении D) появ-
появляются члены второго и более высокого порядка и дифференциальное
уравнение становится нелинейным.
Получим дифференциальное уравнение прямолинейных колебаний
материальной точки, не обязательно малых. Пусть материальная точ-
точка М массой т движется прямолинейно по оси Ох под действием силы
/\ которая линейно зависит от расстояния точки от положения равно-
равновесия О и стремится возвратить точку в положение равновесия
(рис. ПО).
Поместим начало отсчета расстояний х в положение равновесия —
точку О. Сила F будет направлена к началу отсчета расстояний —
точке О. В этой точке она равна нулю. Ее проекция на ось Ох
где постоянная величина с0 — жесткость.
415
Силу F в этом случае называют линейной восстанавливающей силой.
Силы упругости, подчиняющиеся закону Тука, являются линейными
восстанавливающими силами.
Подставляя в дифференциальное уравнение прямолинейного дви-
движения точки значение линейной восстанавливающей силы и перенося
все члены в одну часть уравне-
Р f ц ния, получаем
i g j mx + СоХ = 0. E)
Уравнение E) является диффе-
р ренциальным линейным уравнением
собственных прямолинейных коле-
колебаний материальной точки.
Сравнивая D) и E), видим, что эти уравнения полностью аналогич-
аналогичны. Только в уравнение для системы вместо координаты х входит обоб-
обобщенная координата q, вместо массы — коэффициент инерции а, а
вместо жесткости с0 следует взять коэффициент жесткости с.
Интегрирование дифференциального уравнения собственных коле-
колебаний. Если разделить обе части уравнения D) иа а и обозначить по-
положительную величину с/а — fe2, то получим дифференциальное урав-
уравнение собственных линейных колебаний системы с одной степенью сво-
свободы в окончательной форме:
q + k2q = 0. F)
Постоянная величина k = Ycla называется круговой (или цикли-
циклической) частотой колебаний.
Для прямолинейных колебаний материальной точки соответствен-
соответственно имеем
х + Рх^ 0.
где fe2 = сп'т.
Размерность круговой частоты k можно установить из уравнения
F). Так как
то
11 w т м ¦<•: ! ' '~ m " ¦• *
если время t выражать в секундах. Ее размерность не зависит от раз-
размерности обобщенной координаты.
Круговая частота выражается в тех же единицах, что и угловая ско-
скорость, в частности.единица круговой частоты колебаний точки k то-
тоже с~х.
Дифференциальное уравнение F) является однородным линейным
уравнением второго порядка с постоянными коэффициентами. Его ре-
416
шение можно искать в виде q — еи. После подстановки этого выраже-
выражения в F) получаем характеристическое уравнение для уравнения F)
V + fe2 = 0.
Это квадратное уравнение имеет два чисто мнимых корня: к1Л = ±ki.
На основе теории дифференциальных уравнений решение уравне-
уравнения F) можно представить в виде
q = Сг cos kt + Сг sin kt G)
и для обобщенной скорости
q — —Сх k sin kt + Сг k cos kt.
Произвольные постоянные С1 и Сг определяются из начальных ус-
условий t — 0, q = q0, q — q0, где q0 и q0 — начальные значения обоб-
обобщенной координаты и обобщенной скорости.
Используя выражения для q и q при t = 0, получаем Сх — qa\ Сг —
= qo/k.
Подставляя их значения в G), имеем
q == q0 cos kt + -^- sin kt. (Щ
k
Уравнение (8) — одна из двух основных форм выражения собст-
собственных колебаний.
Для колебаний материальной точки соответственно
х = xQ cos kt + -r sin kt,
где х0 и vg — начальное отклонение точки от положения равновесия
и начальная скорость.
Представим выражение для q в другой, так называемой ампли-
амплитудной, форме:
q — A sin (kt + a) = A sin а cos kt + A gos а sin kt.
Из сравнения этого выражения g G) для новых постоянных получим
формулы
Сх = A sin a; Ca = A cos а.
Отсюда
А = VQ + Ci; sin a = CJA; cos а = C2/A. (9)
Иногда вычисляют tg a = Сх/Сг.
Подставляя в (9) вместо Сх и С2 их выражения через начальные
значения, получаем:
= J*L-i tg a «-%*•• A0)
Ak qa
Величину А считают положительной и называют амплитудой коле*
баний. Она определяет наибольшее отклонение обобщенной коорди-
координаты от положения равновесия, соответствующего значению g = 0.
Обобщенная координата q изменяется в пределах от -\-А до —А.
14 Зак. 1311 417
Безразмерная постоянная а называется начальной фазой колебаний.
Она является значением фазы колебаний (Ы -\- а) при t = 0. На-
Начальная фаза может изменяться в пределах от 0 до 2я. Для определе-
определения начальной фазы а по начальным условиям можно использовать
любую комбинацию двух ее тригонометрических функций нз A0), на-
например sin а и cos а По одной тригонометрической функции, напри-
например tg а, получится два различных значения для а.
Собственные линейные колебания в амплитудной форме с учетом
начальных условий можно представить в окончательной форме:
q =
Для прямолинейных колебаний точки соответственно
-?L.sin
Движение системы, определяемое (8) или эквивалентной ему амп-
амплитудной формой A1), называется гармоническим колебанием. Гар-
Гармоническими называются такие колебания, при которых обобщен-
обобщенная координата изменяется с течением времени по закону синуса или
косинуса. Изменением фазы на я/2 от синуса можно перейти к коси-
косинусу.
Собственные линейные колебания системы с одной степенью свобо-
свободы являются гармоническими. Материальная точка под действием ли-
линейной восстанавливающей силы тоже совершает гармонические ко-
колебания.
Обобщенная координата q изменяется по закону синуса, который
является периодической функцией аргумента с наименьшим периодом
2я; следовательно, и q является периодической функцией. Значение
периода колебаний т для переменной t получим из условия,
по которому добавление периода к этой переменной должно изменить
фазу колебаний на наименьший период синуса 2я. Имеем
k (t + т) + а = kt + а + 2я; х = 2я//г = 2я]/Ж. A2)
Для прямолинейных колебаний точки период т = 2пУт/с0.
Период колебаний выражается в единицах времени, например в
секундах. Величина, обратная периоду v = 1/т, называется часто-
частотой колебаний. Частота колебаний обычно определяется числом
колебаний в секунду или в герцах (Гц). Частота, равная 1 Гц, соответ-
соответствует одному колебанию в секунду.
Круговая частота k выражается через период колебаний и частоту
в форме
k = 2я/т = 2яv. A3)
Из A3) следует, что круговая частота k есть число колебаний за
время, равное 2зт с.
418
На рис. Ill представлен график собственных гармонических коле-
колебаний системы с одной степенью свободы. Он представляет собой сину-
синусоиду.
Гармонические колебания полностью определяются амплитудой
колебаний, периодом и начальной фазой. Отметим основные свойства
собственных линейных колебаний.
Собственные линейные колебания системы являются гармонически-
гармоническими. Амплитуда этих колебаний — величина постоянная и определя-
v ¦
Рис III
Рис. 112
ется начальными условиями. Период колебаний тооке величина посто-
постоянная, не зависящая от амплитуды и, следовательно, от начальных
условий.
Величина периода определяется только свойствами колеблющейся
системы, т. е. коэффициентом инерции а и жесткостью о. Независи-
Независимость периода колебаний от амплитуды называется изохронностью ко-
колебаний. Собственные линейные колебания, если нет возмущающих
сил, могут возникнуть только при начальных условиях, не равных
нулю, т. е, когда в начальный момент система имеет не равные нулю
начальную обобщенную координату q0 или начальную обобщенную
скорость q0.
Гармонические колебания точки при наличии линейной восстанав-
восстанавливающей силы возникают вследствие начального отклонения точки
х0 или начальной скорости v0, или и того и другого вместе. Гармони-
Гармонические колебания обладают той особенностью, что, возникнув однаж-
однажды в какой-то момент времени, они продолжаются сколь угодно долго
без изменения параметров колебаний, если нет других воздействий.
Но обычно колебания всегда сопровождаются возникновением сил
сопротивления, которые изменяют характер собственных колебаний.
Собственные колебательные движения, кроме графика колебаний,
можно изобразить на фазовой плоскости — плоскости переменных
q и q, которые называются фазовыми переменными. Для случая коле-
колебаний точки фазовыми переменными являются х и v — х. Построим
фазовый портрет гармонических колебаний точки. Имеем
х = A sin (kt + a); v =з х = Ak cos (kt -f- a).
14*
419
Исключая из чтих уравнений время t, получаем на фазовой плоско-
плоскости (х, v) семейство эллипсов:
v-2 ,,1
А* 1*#
Эш кривые (рис. 112), зависящие от параметра А, называют фазо-
фазовыми траекториями. Семейство фазовых траекторий зависит от амп-
амплитуды колебании, которая, в свою очередь, определяется начальными
условиями. Каждой фазовой траектории соответствует
пара начальных значений х0 и v0.
Положению равновесия точки на фазовой плоскости
соответствует начало координат х = 0, v = 0. Когда ма-
материальная точка совершает гармонические колебания,
то с течением времени изменяются ее координата х и
скоростью. Следовательно, каждому мо\енту времени
на фазовой плоскости соответствует определенное поло-
положение изображающей точки г координатами
а: и и. За время одного полного гармонического колеба-
колебания (за период) изображающая точка описывает на фа-
фазовой плоскости эллипс.
Отметим, что периодическим колебаниям на фазо-
фазовой плоскости соответствуют замкнутые фаговые траек-
траектории, и наоборот Вид фазовых траекторий характерн-
Рис. ПЗ зует устойчивость нчи неустойчивость положения рав-
равновесия, достаточную малость колебаний и т д.
Фазовые траектории для консервативной системы можно постро-
построить, используя интеграл энергии. Каждой фазовой ггjj т<>рии соот-
соответствует определенное значение полной механической .ь?ргии.
В случаях когда дифференциальное уравнение колебательного дви-
движения является нелинейным, исследование движения с нопощью фа-
фазовых траекторий — один из часто применяемых методов
Пример. Груз силой тяжести Р = 20 Н подвешен на пружине (рис. 113),
Статическое удлинение пружины под действием силы тяжести груза Яот = 5 см.
Определить движение груза, если в начальный момент удлинение пружины Д^ =
= 8 см и начальная скорость груза у0 = 10 см/с.
Решение. Груз будет двигаться прямолинейно. Направим ось Ох вер-
вертикально внич по траектории движения груза. За начало отсчета расстояний *
выберем положение статического равновесия груза, при котором сила тяжести
Р уравновешивается силой упругости пружины F. Силу упругости пружины счи-
считаем пропорциональной ее удлинению из недеформированного состояния.
Пусть груз в момент времени t находится на расстоянии х от начала отсчета.
На него действуют две силы, сила тяжести Р и сила ynpyiocTH пр^ *ины F, при-
причем
F — с (Яст + х),
где (Хст -г* х) — удлинение пружины; с — коэффициент жесткости,
В положении статического равновесия х = 0 и F = сА0Т — Р. Следо-
Следовательно, с = РАСТ.
Дифференциальное уравнение прямолинейною дв^жялья rp>ja имеет инд
N
тх=
420
Ко
N
следовательно,
m'x = — ся) x -f #** = 0) fe = У e/m.
Если за начало отсчета х выбрать не положение статического равновесия, га
уравнение собственных колебаний груза будет иметь не равную нулю постоян-
постоянную правую часть, т. е. будет неоднородным.
Решение дифференциального уравнения собственных колебаний груза на
пружине, согласно теории дифференциальных уравнений можно выразить в
форме
* =¦ Cj cos kt + С3 sin kt\ о = x = — Gf k sin kt ¦+¦ O2 * cos kt.
Постоянные Cj и Ga определяются по начальным условиям: при |= 0 hji
чальная скорость о0 =" 10 см/о задана. Согласно уоловию, *а = А/ — Я01 =»
= 8 — 5 = 3 см, начальное отклонение груза тоже известно. Круговая часто-
частота собственных колебаний груза
k = yUm = Ve/X^ == V980/5 = 14 о-1.
Постоянные Cj и О3, согласно формулам теории колебаний,
Ct о» ж0 => 3 см! О4 = Uo/* = 0,71 см.
Уравнение движения груза имеет вид
* = 3 cos 14 I ¦+ 0,71 sin 14 I см.
Приведем его к амплитудной форме. Амплитуда
Л =* Т/сТТС! = 1/9+0,50 = i,08 см.
Для начальной фазы а
sin а = Ci/A = 0,97 > 0j eos а = G^A = 0,71/А > 0,
Следовательно, угол а находится в первой четверти и по значению sin а получа»
ем а = 1,34 рад.
Уравнение движения груча а амплитудной форме
ж = 3,08 sin A4 t + 1,34) ей.
Период собственных рармонических колебаний груза
v = 2n/fe = 0,45 ci
Влияние линейного сопротивления на малые собственные
колебания системы с одной степенью свободы
Линейное сопротивление и диссипативная функция. Еели на точка
системы с одной степенью свободы кроме потенциальных еил дейетву*
ют еще силы сопротивления, то дифференциальное уравнение Лагран-
жа выразится в форме
AiL|L A4)
где Qn == дП/dq — обобщенная сила потенциальных вил; Q* —
обобщенная сила сил сопротивления.
421
Рассмотрим случай линейного сопротивления, когда силы сопро.
тивления R)t точек системы линейно зависят от скоростей этих точек,
т. е.
Rk = — Hftfft = — \>hrkt
где \ih — постоянный коэффициент сопротивления.
Вычислим обобщенную силу сопротивления. Согласно определе-
определению обобщенной силы, имеем
«•-;§»••¦?=-:§*'•-?• <15»
;§
Для дальнейшего преобразования используем тождество Лагран-
жа, полученное при выводе уравнений Лагранжа [см. формулу C2)
§9 гл. 6J:
Получим
^--|^(^-7к) = -т1^1- 05')
Введем обозначение:
3 1? = у •
= у!^3= у и*1? = у —
k '' ^ ft 2
ft = 1
Функцию Ф называют диссипативной функцией или функцией Рэ-
лея. Эта функция по своей структуре аналогична кинетической энер-
энергии системы, только в нее вместо массы точек входят коэффициенты
сопротивления.
Из A5') для обобщенной силы сопротивления имеем <2Ф = —дФ/dq.
Выразим функцию Ф через q и q. Учитывая, что
имеем
где B-flfo)-
Функция В зависит только от q и не зависит от q, так как от 'q не
зависит величина drjdq.
422
Для выяснения физического смысла диссипативной функции полу»
чим энергетическое соотношение, которому она удовлетворяет. Для
этого умножим на q уравнение Лагранжа A4)
d 0'1 дТ all дФ -<
qqq'
и выполним ряд преобразований.
Учитывая, что
T=%A{q)q\
имеем
^(q)q; q
dq dq
Аналогично,
Ф^ЧгВ
следовательно,
S<7)?; ?
A8)
<7)?; ? (?)?2Ф. A9)
д.; dq
Потенциальная энергия для случая стационарного потенциаль-
потенциального поля зависит от времени только через координат) у.
Следовательно,
ч-эГ—Т- B0)
Преобразуем первое слагаемое в A7), учитывая A8). Имеем
At dj At \ dQ } dq dS dq
Подставляя A8)—B1) в A7), получим
—^— 2Ф. B1')
At
Учитывая, что Т — функция только q и q, завиаящих от i, имеем
дТ , ОТ •¦ dT
После переноса —d/7/di в левую часть B1') и объединения слагае-
слагаемых получаем
_LBT—Г + Я)= —2Ф или -1.(Г + /7)=ч— 2Ф.
at At
Если ввести полную механическую энергию Е = Т -J- П, то окон*
чателыю имеем энергетическое соотношение
dEt&t = —2Ф. B2)
423
Это соотношение показывает, что диссипативная функция Ф харак-
характеризует скорость убывания полной механической энергии системы
вследствие действия сил линейного сопротивления. На убывание полной
механической энергии указывает знак минус в B2). Диссипативная
функция Ф, согласно A6), является величиной положительной.
Разложим диссипативную функцию в ряд в окрестности положе-
положения равновесия системы. Для этого в соответствии с A6') следует раз-
разложить в ряд по степеням q функцию В (q) в окрестности q — 0. Имеем
Подставляя это разложение в A6') и оставляя в нем только В @),
получаем
Ф = 4tB (Q)# = V#<?\ B3)
где введено обозначение \к = В @). Положительная постоянная вели-
величина ц называется оюбицетшм коэффициентом сопротивления.
Дифференциальное уравнение малых собственных движений при
действии линейно» о сопротивления. Вблизи положения равновесия
сиаемы имеем следующие выражения для кинетической и потенциаль-
потенциальной энергий и диссипативной функции:
Т = аяг12\ П = е<7а/2; Ф = [Хс?2/2.
Подставляя нх в уравнение Лагранжа
dt Qq dq
и учитывая, что
-0 -од ^в—^; Q*
0. од ^^; Q.„,
получаем следующее дифференциальное уравнение:
aq = —cq — \iq.
Это приближенное уравнение. При его получении отброшены вве
слагаемые второго и более высокого порядка
Если разделить обе части уравнения на а и ввести обозначения
fe* = с/а, 2п = }i/a, то после переноса всех членов уравнения в левую
часть получим дифференциальное уравнение движения системы в окон-
окончательной форме:
q + 2щ -Ь k2q = 0. B4)
Постоянная k = Л/ela является круговой частогой собственных
колебаний системы без учета сопротивления. Величина п = ц/ Bа)
называется коэффициентом затухания. Ее размерность такая же,
как и у круговой частоты. Вместо п иногда употребляют величину
то=1/л, которая называется постоянной времени и имеег
размерность времени.
424
Интегрирование дифференциального уравнения движения. Диф-
Дифференциальное уравнение B4) является однородным линейным урав-
уравнением второго порядка с постоянными коэффициешамн. Его решение
следует искать в форме q =¦ е'-, где постоянная К определяется из ха-
характеристического уравнения к2 + 2пк-\~№ = 0, которое получается
после подстановки решения в дифференциальное уравнение.
Характеристическое уравнение имеет два корня:
К з = — п rfc Уга» - k\ B5)
Могут представиться три случая: 1) п < k — это случай малого
сопротивления; 2) п > k — случай большого сопротирлеиия; 3) п —
— k — случай критического сопротивления. Рассмотрим эти случаи
по отдельности.
Затухающие колебания. Если п<С k, то величина под знаком квад-
квадратного корня в B5) отрицательна. Обозначим kf положительную ве-
величину (fe2 — til) Тогда kt = Vfe2 — л2 и из B5) получим следующие
значения для корней характеристического уравнения:
К,г — —п ± ^i{-
Соответственно общее решение дифференциального уравнения
"д + 2nq + k2q = 0,
зависящее от двух произвольных постоянных, выразится в виде
q == e-nt{C\ eik*l + Cl e~lk>') = e~nt (C\cos kxt -\-C2 sin^ t), B6)
где Ct, Cl и Cu C2 — произвольные постоянные.
Решение B6) можно также представить в другой, амплитудной
форме:
q = Ae-nt sin {ktt -f a), B7)
где Л и a — тоже произвольные постоянные.
Раскрывая синус еуммы, имеем
q а Ae~nt sin (ktt + a) = e~nt (A sin a cos kj + A cos a sin fe,i).
Сравнивая аго уравнение с B6), получаем формулы связи постоян-
постоянных:
Cj = A sin a; Сг = Л cos oe
или
А =* KCi + Cj; sin a = Сх/Л; cos a » C2M; B8)
tg a = C,/C2.
Постоянные Сь С2 и соответственно Л, а определяются изначаль-
изначальных условии / == 0, q = qOt q = <7„.
Дифференцируя B6) uo времени, имеем
q = _ne-nt (Сх cos kxt + С2 sin kxf) 4-
-Ь е- (—СА*Х sin M + CA cos kj). B9)
425
Используя выражение B6) для q, а B9) — для q при t — 0, полу-
получаем уравнения для определения Сг и С2:
<7о —
Из них
t = <?0 + nqjVk2
Сг = <7„; С2 == q'Q
Соответственно постоянные Л и а через начальные условия выра-
выразятся в следующей форме:
2 = Л/ q
; sina =
cos a = •
tga=-
C0)
Величина Л положительна. Она не является амплитудой. Началь-
Начальная фаза а может иметь значения в пределах от 0 до 2л.
Для выяснения изменения функции q (t) построим ее график, ис-
используя уравнение B7) Вид графика функции q == Ae~nl sin {krt + a)
(рис. 114) можно выяснить а помощью построения графиков вспомога-
вспомогательных функций 9i = Ae~ni (кривая /) и q2 = —Ae~nt (кривая 2).
Кривые / и 2 являются ограничиваю-
ограничивающими для sin (kit + а), который из-
изменяется между 1 и —1.
Таким образом, изобразив сину-
синусоиду между ограничивающими кри-
кривыми / и 2, можно составить пред-
представление о виде графика функции
q{t). На рис. 114 в действительности
представлены графики отдельных
функций q (t), -\-Ае~п1 и — Ae~nl.
Из графика функции q (t) следует,
что величины последовательных наи-
наибольших отклонений q от положения
равновесия уменьшаются с увеличе-
нулю при неограниченном возрастании
определяемое уравнением
Рис. 114
ннем времени, стремясь к
времени. В соответствии с этим движение,
B7) или B6), называют затухающими колебаниями.
Условным периодом затухающих колебаний (или периодом) назы-
называют период sin (kxt + a ). Он является периодом прохождения сис-
системы через положения равновесия, так как функции q (t) и sin (kxt -f- a)
равняются нулю одновременно. Круговой частотой sin (kxt + а) яв-
является величина kx — У/г2 — п1. Следовательно, период затухающих
колебаний
C1)
= 2n/kl = 2n/Vk2 — ri\
Период затухающих колебаний — величина постоянная, не за-
зависящая от начальных условий. Он больше периода собственных ко-
колебаний при отсутствии сопротивления т = 2л//г.
426
Из C1), разлагая Tj в ряд по степеням nJk о использованием бинома
Ньютона, имеем
)
Для очень малых n'fe по сравнению с единицей можно считать
•^«j, т.е. малое сопротивление не изменяет периода собственных
колебаний системы. В более общем случае можно использовать при-
приближенную формулу
1 2 к
В действительности функция q (t) не является периодической, так
как не существует величины т1; удовлетворяющей условию периодич-
периодичности q (t + тх) = q (t) для любого момента времени.
Определим моменты времени, в которые функция q (t) достигает
максимальных и минимальных значений. В эти моменты времени
q (t) = 0.
Дифференцируя выражение q (t) из B7) и приравнивая нулю про-
производную, получим следующее уравнение;
q = Ae~nt [—n sin (V + «) + ^cos {k-J + a)] — 0.
Так как e~nt равно нулю только при t = оо, то соответствующие
моменты времени определяются из условия равенства нулю выраже-
выражения в квадратных скобках:
—п sin (kxt + а) + kt cos (lixt + a) = 0
или
tg (kj + a) - kj/n.
Если ti — одно из искомых значений t, удовлетворяющих этому
тригонометрическому уравнению, то, учитывая, что период тангенса
равен я, все остальные искомые значения времени будут удовлетво-
удовлетворять соотношению
kxt + а =з (fex^ -+• °0 + trm
или
где m — любое натуральное число.
Таким образом, моменты времени, в которые функция q (t) дости-
достигает максимумов и минимумов, образуют бесконечную последователь-
последовательность значений
h
Из графика функции q (t) (рис. 114) следует, что между каждыми
ее двумя максимумами расположен один минимум, и наоборот. Следова-
Следовательно, два соседних максимальных значения функции q (t) наступа-
юг черёа промежуток времени, равный 2л//г1} который совпадает с пе-
427
риодом затухающих колебаний тх. Два последовательных минимума
тоже разделяет промежуток времени, равный хх.
Переменную величину Ae~nt называют условной амплитудой зату-
затухающих колебаний. Она не является максимальным значением функ-
функции q {t). Установим закон изменения условной амплитуды Ae~nt при
изменении времени на период тх. Если в момент времени tt условная
амплитуда Ах = Ле~"'% то через промежуток времени, равный пе-
периоду затухающих колебаний хи в момент (г — tx + Ч
Аг = Ae~nt> e—nxi = Ахе~пхк
Это справедливо для любых двух моментов времени, отличающих-
отличающихся на период тг. Действительно, если при tm = tx + т%х
Am = Ae~nf' e-mnx^
где т — любое натуральное число, большее единицы, го при tm+x =
= tv + (т + 1)тх
Таким образом, последовательные значения условных амплитуд в
моменты времени, отличающиеся на условный период, образуют убы-
убывающую геометрическую прогрессию Аи Л^""^; Л1е-2п'г'; ...; Л1е""'т1Т';
... со знаменателем е~"хк
Можно показать, что по такому же закону убывающей геометри-
геометрической прогрессии изменяются любые последовательные значения
функции
q = Ae~n< sin (ktt + a)
для моментов времени, отличающихся друг от друга на условный пе-
период. Так, если в момент времени tt
9i = Ae-nt* sin (kj! + а),
то для момента времени (г = tx -f тх
q2 = Ле~а'»е~"г» sin (kxtx + а) = qxe"nxi,
так как sin [kt (tx + xt) -f- a] = sin (kxtx + a), вследствие того что
хг является периодом синуса.
Аналогично, если для tm = tx + тхх
то для tm+x == tx + (m +
Поэтому последовательные значения qx, q2, ..., qm, ... образуют
убывающую геометрическую прогрессию со знаменателем е~пТ\
Так как любые два значения функции q (t), соответствующие мо-
моментам времени, отличающимся на период ть связаны соотношением
то этому соотношению удовлетворяют и два последовательных значе-
значения максимума:
Чт+1
428
Величину отношения двух последовательных максимумов
называют декрементом колебания.
Натуральный логарифм декремента колебания называется логариф-
логарифмическим декрементом колебания. Для логарифмического декремента
колебания т] имеем
г) = In D = nXv C2)
Кроме декремента и логарифмического декремента колебания часто
используется другая характеристика затухания — добротность систе-
системы Q, которая определяется соотношением
Q = k/2n, C3)
где k — частота собственных колебаний без учета сопротивления;
п — коэффициент затухания.
Логарифмический декремент колебания можно выразить через
добротность. Действительно, из C2) и C3) а учетом C1)
! —I • C4)
Таким образом, из проведенного исследования можно заключить,
что малое линейное сопротивление незначительно увеличивает период
колебаний по сравнению со случаем отсутствия сопротивления, но
сильно уменьшает последовательные значения условных амплитуд,
которые уменьшаются с течением времени по экспонециальному за-
закону.
Затухающие движения. Рассмотрим случай, когда п >• k (случай
большого сопротивления). Корни характеристического уравнения в
этом случае имеют значения
К — № = — п ± k2,
где введено новое обозначение для положительной величины
Оба корня характеристического уравнения действительны и от-
отрицательны, так как k2 < п. Следовательно, общее решение диффе-
дифференциального уравнения q -f- 2nq -f k2q = 0 имеет вид
q^d <*»' + C, A' = e-«((Ci g»i« +C2 е-1'** )t C5)
где Сг и Са — произвольные постоянные, которые можно определить
по начальным условиям
t = 0; q = q0; q = q0.
He выполняя этих вычислений, можно оценить поведение функции
q it), используя уравнение C5). Для q0 > 0 могут представиться три
случая в зависимости от знака и значения q0 (рис. 115).
При q0 >» 0 функция q (t) некоторое время возрастает до определен-
определенного максимума, а затем убывает, асимптотически приближаясь к ну-
429
лю, так как lim q (/) = 0 вследствие того, что показатели степеней Xt
t~yoa
и Х2 отрицательны (кривая 1).
При не очень больших по абсолютной величине отрицательных зна-
значениях q0 может сразу начаться убывание q (t) (кривая 2). При боль-
больших по модулю отрицательных значениях q0 функция q (t), убывая,
можег достичь нулевого значения, соответствующего положению рав-
равновесия системы, стать отрицательной и, оставаясь отрицательной,
асимптотически приближаться к нулю (кривая.?). Во всех этих случа-
случаях движение является затухающи н, неколебательным, которое иногда
называют также апериодическим.
о
Рис. 115
И
Рис. Н6
При п = k (случай критического сопротивления)
характеристическое уравнение имеет кратный отрицательный корень
Соответственно этому решение дифференциального уравнения
q + 2nq + k2q = 0 имеет вид
Я = е* {CJ + C2). C6)
Произвольные постоянные Сх и С2 определяются по начальным ус-
условиям. В этом случае при t, стремящемся к бесконечности, q (t) стре-
стремится к нулю при любых конечных значениях постоянных Сг и С2,
так как
что проверяется раскрытием неопределенности по правилу Лопиталя.
Таким образом, случай критического сопротивления тоже дает за~
тухающее движение.
При п > k движение не является колебательным и с некоторого
момента времени начинается так называемое лимитационное движениа,
при котором система асимптотически стремится вернуться к положе-
положению равновесия.
Пример. Система состоит из точечного гручя М силой тяжести Р = 200 Н,
прикрепленного к концу невесомого стержня длиной / = 90 см, другой конец
которого закреплен с помощью цилиндрического шарнира О (рис. 116). К стерж-
стержню ОМ в точке В прикреплены две одинаковые пружины, коэффициент жестко-
430
ста которых с = 20 Н/см, а в точке А — демпфер, создающий линейную силу со-
сопротивления; коэффициент сопротивления демпфера ц = 15 Н-с/см,
Система расположена в вертикальной плоскости, Статическому почожению
равновесия системы соответствует вертикальное положение стержня ОМ. В на-
начальный момент времени стержень отклонен от вертикали против часовой стрел-
стрелки на угол ф0 = 6 и отпущен без начальной скорости.
Определить движение системы и усилие в шарнире О в начальный момент
движения, если / = 90 см, /t = 40 см, считая колебания малыми. Массой пру-
пружины и подвижных частей демпфера, а также трением а шарнирах пренебречь
Решение Система имее! одну степень свободы. За обобщенную коорди-
координату примем угол ф, отсчитываемый от положения равновесия стержня ОМ про-
против часовой стрелки.
Связи системы, состоящие из шарниров, ярение в которых пренебрежимо
мало, следует считать идеальным. Для движения системы можно еотазить урав-
уравнение Ла1ранжа в форме
d дТ дТ
Кинетическая энергия системы
РФ Р (гФ')а
8 2 8 2
так как массу имеет только груз М,
Обобщенная сила состоит из двух сил: потенциальной qP = — дП /д<р и
диссипативной Q* = — дФ/df,
Потенциальная энергия равна работе потенциальных сил при перемещении
системы из рассматриваемого положения в положение равнопесия. Потенциаль-
Потенциальными силами системы являкпся сила тяжеоти Р и вила упругоотв пружин "F.
Вычисляя их работу, имеем
П = P(l~-l cos <p)+2a ~ »
Работа силы тяжести положительна, тан как точка ее приложения опускается
вниз в направлении силы при рассматриваемом перемещении,
Удлинение каждой из пружиа % = (^ ¦+• у ф, еели угол Ф считать ма-
малым. Удлинение следует считать направленным горизонтально! Обе силы упру-
госги направлены в одну сторону (одна пружина растянута, другая — сжата),
и их работа положительна,
Для малых урлов ф, отбрасывая малые третьего и более высокого порядка,
считаем cos ф =» I — фа/2. Поэтому
П = Р1 A - cos ф) + с {h + k)' Ф3 = {Pi + 2 с (h + У
Сила сопротивления
рда,1 = /:сФ Для малых фиф. Диссипативная функция Ф вычисляется так же,
как и кинетическая энергия, только вместо массы следует взять коэффициент со-
сопротивления ц. Следовательно,
Вычисляем значения величш, входящих в уравнение Ларранжа. Имеем:
op = !
431
Имея эти данные, составляем уравнение Лагранжа для случая малых колеба-
колебаний системы:
14*
или
где
_.„
200-90+2.20-703
200.902
15.40s.980
¦ 129,45;
2.200 908
Дифференциальное уравнение малых колебаний системы можно получить так-
также применяя уравнение вращательного движения твердого тела (стержень с гру-
грузом) вокруг горизонтальной оси, проходящей через точку 0:
В рассматриваемом примере n<.k; следовательно, имеем случай затухаю-
затухающих малых собственных колебаний. Решение дифференциального уравнения в
этом случае выражается в виде
ф = ~ni (Q cos kxt + C2 sin ktt) = Ae~nl
где kt = У kl — пл = У 76, 89 = 8,7 с,
Дифференцируя по времени, получаем
sin
a),
<р = _
cos ktt -b C2 sin V)
X cos kif).
При t = 0 ф = cpo= я -6 = л/30, ф = 0, Подставляя эти значения в вы-
I OU
ражения для ф и (р, имеем, я/30 = Cj} 0 = — пСг +
или
С, = я/30 = 0,105; С2 =
У| + С^ = 0,13; tga
Iki = 7,25-0,105/8,7 = 0,09;
?УС.2 = 0,105/0,09 = 1,2 > 0.
Уо
Так как sin a = Ci/C2 > 0, то угол а расположен в пер-
первой четверти. По значению тангенса находим a = 0,28 л.
Таким образом,
Ф = 0,13 в'25' sin (8,7/ + 0,28 л).
Для определения реакций шарнира О применим следст-
следствие из принципа Даламбера для стержня с грузом, составив
условия равновесия приложенных к ним внешних сил вме-
вместе о силой инерции рруза _
К отержаю и грузу приложены сила тяжести Р, сила
упругости двух пружин F, сила сопротивления R, составляю,
щие реакции шарнира Хо, Ко и составляющие силы инерции
груза Фп и Фт (рис. 117).
р
Сила инерции Фп = — /ф- = 0, так как величинчми
второго порядка пренебрегали еще при составлении линеаио-
442
to уравнения малых колебаний Если при вычислениях такие величины почу-
чаются недостаточно малыми по сравнению, например, с си 1ямч гяжесги и уц-
руроота, то допущение, что колебание малое, недостаючно точное.
Сила инерции Фт = _ /ф,
g
Сила сопротивления R = \ivA = ц^Ф*
Сила упругости F — 2 с (lt + 12) ф
Составляем условия равновесия сил в проекциях ня координатные оси Име-
Имеем
Хо — R — F — Фт cos ф = О, Уо — Р — Фх sin ф = 0.
Согласно начальным условиям, при ф — ф0 = гс/30 ф = 0-
Угловое ускорение ф определяем из уравнения движения:
ф = — klty — 2пф.
При ф = ф0 и ф = 0,
ф>) = _ ^фо _ —129,49-0,105 = — 13,6 с~а.
Кроме того, при ф == ф0
R = 0, cos ф = I; sin ф = ф0.
Учитывая это, при ф = <ри, уравнения для Хо и Yo примут вид
р ..
О i з » g о ' О
Следовательно,
Р
Хо =,2c(lt + lt) фоН %=2i20.70-0,105 +
8
JOOJO.. =
Реакция шарнира, а следовательно, и числовое значение давления на шар-
шарнир
^«205 Н.
Вынужденные колебания системы без учета сопротивления
Для возбуждения вынужденных колебаний необходимо действие
на точки механической системы возмущения в той или иной форме.
Наиболее часто встречаются случаи силового и кинемати-
кинематического возбуждений. Рассмотрим эти случаи на примере пря-
прямолинейных колебаний груза массой т по горизонтальной гладкой
плоскости (рис. 118, а) под действием пружины, жесткость которой в.
Пусть на груз дополнительно действует завиаящая от времени си-
сила Ф {() У груза одна степень свободы. Связи (гладкая поверхность)
являются идеальными. Составим для движения груза уравнение Лаг-
ранжа, приняв к за обобщенную координату, отсчитываемую от по-
положения груза, при котором пружина не деформирована. Имеем
— дГ дТ —О" л-QB
At QX Ox
433
к
гЮ
AAV
m\
^ШШШттштт/тш Х
Рис 118
Силы сопротивления отсутствуют, т. е. Q* => 0. Кинетичеекая
энершя гр^за
Потенциальная энергия и обобщенная сила
/7 = схЧ2; Q" = —дП/дх = — сх.
Для обобщенной силы QB получаем
QB = SFft • б7ь/ F*) = Фбх/ (вх) = Ф @,
где бх — возможное перемещение груза в направлении возрастания х.
Вычислим производные от кинетической энергии. Имеем:
дт _п. дТ — ¦ d дТ — '
д* дх «' д'х
Подставляя полученные величины в уравнение Лагранжа, получаем
тх = —вх + Ф \t) или тх + вх = Ф (t).
В случае гармонической возмущающей силы
qb = ф у) = н sin (pt + б),
i де Н, р и б — поатоянные величины. Уравнение движения груза при-
принимает форму
тх + вх = // sin (/ji + б).
Предположим в той же задаче о движении груза, что сила Ф — 0,
а следовательно, и QB = 0, но вместо этого задано движение конца
пружины — точки А в направлении оси Ох — в форме г = г (t)
(риа. 118, б). Составим уравнение Лагранжа для груза в этом случае.
По-прежнему
Qn = —дП/дх = —сх.
Кинетическая энергия груза
т — тр3 . ~
так как движение груза можно рассматривать как сложное, состоящее
из переносного поступательного вместе с точкой А и относительного
по отношению к теперь уже подвижной системе координат Оху. По
теореме о сложении скиростей скорость абсолютного движения v рав-
434
на сумме скоростей переносного и относительного движений, т. е.
v = z + х. Для производных от кинетической энергии имеем:
?-*^-«<*+'>-.7г?-.*+-.).
Подставляя полученные величины в уравнение Лагранжа, получим
т (х + г) = —сх; тх + сх — —пгг.
Роль обобщенной силы в эгом уравнении выполняет величина —ttiz.
Если точка А совершает гармонические колебания, то
г = г0 sin (pt + б),
где z0, р, б — постоянные величины. В этом случае
—тг = ttiZbp1 sin (pt -f 6)
и дифференциальное уравнение движения груза примет форму
тх + е* = /иг0р2 sin (pt -f б),
т. е. то же, что и в первом случае, но Я — tnzop2.
Если вместо z (t) задать скорость точки А, изменяющуюся по гар-
гармоническому закону
vA — z — 20 sin (pt + б),
то уравнение движения груза примет вид
тх + сх = тгф sin (pt + б —-2Л
и в этом случае Я = тгф.
Существенное различие этих случаев состоит в том, что при сило-
силовом возбуждении Я не зависит от круговой частоты р. При кине-
кинематическом возбуждении заданием движения г — га sin (pi + б) точки
А оно пропорционально рг, а при возбуждении заданием скорости
г = г0 sin (pt + б) точки А — пропорционально р. Силовое возбуж-
возбуждение эквивалентно возбуждению путем задания ускорения точки А.
При дальнейшем рассмотрении вынужденных колебаний ограни-
ограничимся случаем силового возбуждения.
Пусть обобщенная сила состоит из двух сил: потенциальной Qn =5
= — дП/dq = —cq и гармонической возмущающей Qa =¦
= Н sin (pt + б).
Часть обобщенной силы Q*, зависящую от сил сопротивления,
считаем равной нулю. Постоянные Я, р и б, характеризующие гармо-
гармоническую возмущающую силу, соответственно являются амплитудой,
круговой частотой и начальной фазой этой силы. В этом случае, как
и в случае собственных линейных колебаний, из уравнения Лагранжа
в предположении, что для кинетической и потенциальной энергий
справедливы формулы B) и C), получаем дифференциальное уравне-
уравнение
aq -f cq = Я sin (pt + б). C7)
435
Разделим обе части C7) на а и введем обозначения k? — da, h =
= Hia.
Здесь k — круговая частота собственных колебаний и h — отно-
относительная амплитуда возмущающей силы.
Дифференциальное уравнение вынужденных колебаний без сопро-
сопротивления в окончательной форме имеет вид
q + klq = h sin (pt + 6). C8)
Получено неоднородное линейное дифференциальное уравнение
второго порядка с постоянными коэффициентами. Его решение, со-
согласно теории дифференциальных уравнений, состоит из общего реше-
решения однородного уравнения qr и частного решения неоднородного
уравнения q2. Общее решение уравнения C8) есть сумма этих двух ре-
решений, т. е. q = q1 + q%.
Однородное уравнение для определения qu т. е. уравнение
<?i + №Q\ = 0> совпадает с дифференциальным уравнением собствен-
собственных колебаний. Поэтому его решение qx называют собственным коле-
колебанием системы. Оно может быть выражено в двух эквивалентных фор-
формах:
<?х = Сх cos kt + C2 sin kt = At sin {kt + ax). C9)
Часть движения системы, характеризуемая функцией qt, является
частным решением уравнения C8). Эту часть движения называют вы~
нужденным колебанием системы. Функция д2 определяется по-разно-
по-разному в зависимости от соотношения частот собственных колебаний и воз-
возмущающей силы.
Возможны два случая: отсутствие резонанса р Ф k и резонанс при
р = k. Рассмотрим их.
1. Случай отсутствия резонанса, В случае от-
отсутствия резонанса р Ф k и частное решение q% следует искать в той
же форме, что и правая часть _ равнения (об);
<?а = 3 sin Kpt + б). D0)
Постоянная В подлежит определению из условий, что функция qz
является частным решением уравнения C8) и, следовательно, подста-
подстановка q2 в это уравнение должна обратить его в тождество. Опредеяи '
необходимые производные по времени от q2:
<7а = Вр gos {pt + б); q2 == —Bp2 sin {pt + б).
Подставляя q2 и ее производные в уравнение C8) и перенося все
члены в одну часть, получаем следующее тождество, справедливое в
любой момент времени:
(—Врг + Bk? — h) sin {pt + б) = 0.
Так как синус переменного аргумента равен нулю не для всех зна-
значений t, то полученное тождество выполняется, если постоянный ко-
коэффициент в скобках при синусе равен нулю:
В (fea — /?2) — h = 0.
436
Отсюда
В =h! (k* — р\
Подставляя значение В в q2, получаем вынужденные колебания в
форме
Таким образом, движение системы характеризуется обобщенной
координатой q, состоящей из двух колебаний о различными частота-
частотами — собственных qx с круговой частотой k и вынужденных q, с
круговой частотой р:
Q =7iH-?2 = Q cos kt + Ct sin kt+ h- ¦¦ sin {pt +8). D2)
в*—p
В амплитудной форме
7 = 4 sin (#+«!>+ h sin (pi+ 8). [W)
k1—pl
Постоянные Сх и С2 или At и ах определяются из начальных усло-
условий t = 0, q = q0, q = q0.
Подставляя эти значения в выражения D2) для q и q при i — 0t
получаем
?o-^i+ кгН_рг sin б; ?0«Са 6 + -J2-J- сдав.
Отсюда
С1= 9о 5 sin б; С2 -А. ^2 oos б.
Амплитуда собственных колебаний Ах и начальная фаза ах через
Сх и С2 выражаются формулами
л, = VcTFcl; tg «x - сх/с2.
Следовательно, амплитуда и начальная фаза собственных колеба-
колебаний при действии возмущающей силы зависят не только от начальных
условий, но и от параметров этой силы, т. е. собственные колебания
в этом случае могут возникнуть не только из-за начальных условий,
но и благодаря действию возмущающих сил даже при нулевых началь-
начальных условиях.
Введем амплитуду вынужденных колебаний Ла=яА/(|?а — />г|).
Тогда в зависимости от соотношения между частотами вынужденные
колебания можно выразить в двух формах:
при р < k
q2 = A2s\n {pt + б);
при р > k
Й1 = — A i sin {pt + б) = Л t sin (pt -Ь б — я).
437
Следовательно, при р < k фаза вынужденных колебаний совпадает
с фазой возмущающей силы. В этом случае сдвиг фаз е между ними ра-
равен нулю, т. е. вынужденные колебания и возмущающая сила, в частно-
частности, достигают одновременно максимальных и минимальных значений.
При р >¦ k сдвиг фаз 8 = л. Действительно, сдвиг фаз как разность
фаз между возмущающей силой и вынужденными колебаниями
е = (pt + б) - (pt + 6 - я) = л.
В этом случае вынужденные колебания находятся в противополож-
противоположной фазе по 01 ношению к возмущающей силе, т. е., в частности, если
гозмущающая сила достигает максимума, то функция q2 (t) достигает
минимума, и наоборот.
Итак, вынужденные колебания системы без сопротивления при р Ф k,
возбуждаемые гармонической возмущающей силой, являются гармони-
гармоническими колебаниями с постоянной амплитудой. Их частота совпада-
совпадает с частотой возмущающей силы. Они совершенно не зависят от на-
начальных условий.
2. Случай резонанса. Резонансом называется случай сов-
совпадения частот собственных колебаний и возмущающей силы, т. е. ког-
когда р = k. При совпадении частот частное решение уравнения C8) сле-
следует искать в форме q2 — Bt cos (pt + б).
Постоянная В определяется из условия, что q2 есть частное реше-
решение уравнения C8), обращающее его в тождество. Аналогично рас-
рассмотренному случаю, подставив q2 и ее производные в C8) и прирав-
приравняв нулю постоянный коэффициент при sin (pt + б) [члены о
Bt cos (pt + б) взаимно уничтожаются], получаем В = —hi Bp). Тог-
Тогда вынужденные колебания выразятся в форме
fy D3)
Главной особенностью вынужденных колебаний при резонансе яв-
является зависимость их амплитуды от времени: Аг = lit/ Bp). Ампли-
Амплитуда вынужденных колебаний в этом случае увеличивается пропорцио-
пропорционально времени. Сдвиг фаз при резонансе, как это следует из D3), ра-
равен я/2. Круговая частота вынужденных колебаний при резонансе сов-
совпадает с круговой частотой возмущающей силы.
Заметим, что для построения графика вынужденных колебаний
при резонансе q% изменяется в пределах от q2 = А2 — fit/ Bp) до
q2 = —А2 = —htl Bp). Следовательно, согласно D3), графиком вынуж-
вынужденных колебаний является синусоида, заключенная между двумя
прямыми q{2l) = htl Bр) и q{V = —htl Bp), проходящими через точ-
ки </а = 0 и f = 0 (рис. 119).
Рассмотренный случай колебаний при резонансе без сопротивле-
сопротивления практически не встречается, так как при движении системы всег-
всегда есть силы сопротивления движению. Установленный теоретически
рост амплитуды с течением времени по линейному закону в действи-
действительности тоже не наблюдается, хотя амплитуды при резонансе дости-
достигают довольно больших значений по сравнению со случаем отсутствия
резонанса. Эта особенность вынужденных колебаний при резонансе
438
приводит к тому, что случайно возникший резонанс в машинах, уста-
установках и сооружениях (мосты, роторы турбин, полы здании и т. д.)
может привести к их разрушению.
Рис. 119
Рис. 120
Построим для вынужденных колебаний графики амплитуды и сдви-
сдвига фаз в зависимости от круговой частоты возмущающей силы. Имеем
при р ф k или
где введено обозначение А20 — h/k2 (рис. 120).
При р -*¦ k величина Л2-> °°, но при р = k эту формулу для амп-
амплитуды вынужденных колебаний применять нельзя. Справедлива
другая формула: А± = lit/ Bp).
е\
г
я/г\ \
Р<к
р>К р/К
Рис. 121
График зависимости 8 от р (рис. 121) состоит из двух отрезков го-
горизонтальных прямых и одной точки, так как при р < k б =з 0; при
р = k 8 = я/2; при р > k e = я.
Пример 1. Груз силой тяжести Р = 20 Н подвешен на пружине (рис, 122),
статическое удлинение которой под действием груза Яет = 5 см. На груз дей-
действует гармоническая возмущающая сила S = 20 sin 14 t H. В начальный мо-
момент пружина растянута на At = 6 см и грузу сообщена скорость ил = 10 см/d
Определить движение груза.
439
Решение. Направим ось Ох вертикально вниз, выбрав за начало отсчета
расстояний х положение статического равновесия^?.
Пусть в момен! времени t иозмущающая сила S направлена в положительную
сторону оси Ох. Ее следует добавить к силам тяжести Р и упругости пружины F
в. отличие от случая собственных колебаний груза на пружине!
Дифференциальное уравнение движения груза имеег вид
N
В этом случае
Л'
2 Fhx=,P-F + Si P-F=*P-c (кт+х)=*-сх,
k=t
так как
Р = Лот; k2 = cglP = 196 с; /г = 14 с.
Разделив обе части уравнения на т, получим
х + 196л- = 980 sin 14/,
Частота возмущающей силы р = 14 с совпадет с частотой собственных ко»
лебаний k = 14 с Имеем случай резонанса.
Собственные колебания
xt = Ci cos Ш + Сг sin Ut.
Вынужденные колебания в случае резонанса
Ы 980<
*г = 7Г~ cos 14/=— ——— cos I««—35/cos 14/.
Ip I-14
Общее движение груза
x — xx + x2 = Ci cos 14/ -f- C2 sin 14/ — 35 / cos 14 t
Скорость движения груза
v = к = — 14Ct sin 14/ + 14C2 cos 14/ — 35 cos 14/ + 35-14/ sinl4 i.
Подставляя в x я x начальные условия / = 0, x = x0 = M — лет = 1 cmj
ж = vо = 10 см/с (считаем »0 направледным в положительную сторону Ох),
получаем следующие уравнения для определения постоянных С, и С,: 1 = &*
10= 14С2-35. 2 "
Отсюда
С, = 1 см; С2 == 3,2 см,
Движение груза характеризуется следующим уравнением:
х — cos 14/ + 3,2 sin 14/ — 35/ cos 14/ см.
Приведем уравнение собственных колебаний к амплитудной форме. Имеем:
At = Л/С\ + С\ — 3,35 см; sin at = ClIA1 = 0,30;
cos ax = C2/Ax > 0.
Угол at находится в первой четверти. По значению синуса этого угла нахо-
находим «1 = 0,305 рад. Следовательно, уравнение движения груза в другой, ампли-
амплитудной, форме имеет вид
х - 3,35 sin A4/ + 0,305) + 35 t sin A4/ — я/2).
440
Припер 2. Система, состоящая ич ючечного груза М силой шжгггтя Р( =
=• 80 Н, невесомых стержней и пружины жесткое!ыо е = 5 Н/см, расположена
в вертикальной плоскости (рис. 123). Штанга ОА движется в вертикальных на-
направляющих по закону у0 = I sin pt, где / «=• 1,6 см, р — 8 с,
Горизонтальное положение стержня ВМ соогветствуе! полоАению сгатв-
веского равновесия системы при у0 = 0.
Определить малые движения груза М в вертикальном направленна, если U =
= 90 см, 12 =* 60 см.
В начальный момеш система находится в положении статического равнове-
сия. Стержень ВМ занимает горизонтальное положение. Угловая скорость отерж.
ня равна нулю. Груз М имеет скорость, рав-
равную нулю, и уа = 0. Трением пренебречь.
Решение. Система имеет одну степень
свободы. Выберем ча обобщенную координату
угол (р, отсчитываемый от горизонтального на-
направления против часовой стрелки.
Связями системы являются направляю-
направляющие и шарниры, трением которых пренебре-
пренебрегаем. Такие связи слецует считать идеальными»
Уравнение Лагранжа для системы выра-
вигся в форме
дц,
• Q.
Кинетическая энергия системы, в которой
массу имеет только точечный груз М, вычис-
вычисляется по формула
Рис. 123
так как движение груча Ъожно считать сложным, состоящим из переносного по-
поступательного движения вместе с точкой О со скоростью уа = lp aos pi а относи-
тельного вращательного движения а угловой окорос(ью ф вокру!? Рорячонтальной
оси Ог, проходящей через точку О перпендикулярно атаржню и гиаскости Охд.
Так кап угол tp считается малым, го скорость от вращения оокрур оси равна
<1<р и направлена вертикально вверх* По теореме сложения акороогеи, va
+ 1Ф
Для определения обобщенной силы сообщим систаме в момент с возможное
перемещение fi<p против часовой стрелки (в положительную аторону угла <р) а
вычислим элементарную работу сил на этом возможном паромещвнии в пред-
предположении, что угол ip — малая величина. Имеем
ще Р = ск — сила упруросзти пружины; \ =» Х,от
Следовательно,
{у-, — 1^)— ее удлинение,
— Я,/2 -f-
„ (уа —
так как в положении статического равновеоия момент силы гяжеогн и момент
силы ynpyrocin относительно точки О равны друг другу, т. е. Р^ = ci,01)iaj
Вычислим величины, иходящиа в ЛчШую часть уравнении Лагранжа;
iL^0;~
Г, Ы
ЗТ
После подстановки полученных значений в уравнение Лагранжа получим
s У" 1 ф =!7 2 J а ф
441
или
Но у = — 1рг sin pt, поэтому
Дифференциальное уравнение движения системы можно составить, не поль-
пользуясь уравнением Лагранжа, а применяя уравнение относительного вращатель-
вращательного движения твердого тела {стержень о грузом),с учетом момента силы инер*
циа от переносного движения.
Если ввести обозначения
-?-i-_L -?-«=,@,45+0,71).1,6 — 1,86 о",
1 Ц k )
то дифференциальное уравнение малых колебаний выразится в форме
Ф -{- k\ = h sin pt
Его решение Ф = ф! + щ, рде общее решение однородного уравнения (соб-
отвенные колебания)
Ф^ = С{ cos k> + C2 sin kl
решение кеодкородного уравнения (вынужденные колебания)
так как р ф k.
Таким образом,
cos
Ф= — Cj k sin pt 4-C2 k cos kt-\-— cos pt.
k'—p%
условия 8адачи: t = О, ф = 0, ф = 0. Подставляя эти значения
для ф и ф, получаем
или
После этого решение дифферешкального уравнения примет вид
Ф = 0,0785 sin 5,2i — 0,0505, аш 8?.
Для координаты груза М
а =¦ /j = 90 см; i/ = у* + ;,ф = 1,6 sin 8< + 90 @,0785 sin 5,2 i —
— 0,0505 sin 8 0= ?,1 sin 5,« — 2,9 uin Ы ш.
442
Влияние линейного сопротивления на вынужденные
колебания
Дифференциальное уравнение вынужденных колебаний и его ин-
интегрирование. Для выяснения влияния линейного сопротивления на
вынужденные колебания рассмотрим наиболее общий случай, когда
обобщенная сила Q состоит из трех сил- потенциальной Qn =
= —дП/dq = —cq, линейного сопротивления Q* = —дФ/dq — —pq
и гармонической возмущающей QB = H sin {pt + fi).
Подставляя это значение обобщенной силы Q = Q1 + Q* + QB
в уравнение Лагранжа A), получаем
ад + цд + cq = H sin {pt + б).
Разделим обе части уравнения на а и введем обозначения k2 —
= с/а, 2п = \ila, h = Н/а, Здесь k — круговая частота собственных
колебаний; п — коэффициент затухания и h — относительная ампли-
амплитуда возмущающей силы.
Дифференциальное уравнение в окончательной форме
q + 2nq + Wq = /i sin [pt + 6). D4)
Получено линейное дифференциальное уравнение с постоянными
коэффициентами вынужденных колебаний с учетом линейного сопро-
сопротивления.
Так как оно является неоднородным уравнением, то его решение
состоит из двух частей: qL — общего решения однородного уравнения
и цъ — частного решения неоднородного уравнения, Общее решение
однородного уравнения удовлетворяет уравнению собственных коле-
колебаний при линейном сопротивлении, поэтому его называют собственным
движением или даже собственными колебаниями, хотя это движение
может и не быть колебательным
Частное решение неоднородного уравнения q2 называют вынужден-
вынужденным колебанием. Общее движение системы характеризуется обобщен-
обобщенной координатой q, которая равна сумме qx и qz, т. е. q — qx -f q2. Ве-
Величину q называют общим вынужденным движением (или вынужденным
колебанием).
Общее решение qx однородного дифференциального уравнения
<?х -f- 2nqx + fe2<?i ~ ® B зависимости от соотношения между величи-
величинами п и k выражается в одной из трех форм:
n<k,ql-=A1 e~nl sin (У/г2—nJ 4 + at);
n > k, qx =e—' (C, e^1^^ ' + C2 е-У^=^ <).
Известно, что в любом из этих случаев из-за наличия множителя
е~'}1 qx стремится к нулю с возрастанием времени, т е. з а т у х а е т.
При малых значениях коэффициента затухания (п <С k) затухающее
движение qx носит колебательный характер, а при больших (п ^ /г)
затухание так велико, что движение не является колебательным. Сле-
443
довательно, при наличии линейного сопротивления по истечении до-
достаточного времени общее вынужденное движение q несущественно
отличается от вынужденных колебаний и можно считать, что q — qt.
Частное решение qt уравнения D4) еледует искать в форме q =•
= A sin (pt + б — е).
Постоянные А и е определяются из следующего условия! если под-
подставить q2 в уравнение D4), то оно превратится в тождество. Вычис-
Вычислим для этого производные от q^i
q% — Ар cos (pt + й — е); qt = — Ар2 sin (pt + б — е).
Преобразуем правую часть уравнения D4) так, чтобы в нее входи-
входили косинус и синус такого же аргумента, что и у функции </2. Для это-
этого следует к фазе правой части прибавить и вычесть величину е и рас-
раскрыть синуо суммы:
h sin (pt + б) = h sin [{pt + fi — e)+ el = h sin e cos (pt + б — e) -f
-b h eos e sin (pt + б — в).
Учитывая это, подставим значение <?а и его производных в уравне-
уравнение D4) и соберем члены при sin (pt + б — е) и cos (pt + Ь — е).
Получим тождество
[A (fe* — рг) —h cos e] sin (pt + б — е) +
+ [2Апр — h sin ej cos (pt + б — e) зэ 0.
Так как синуо и кооинуо переменного аргумента не равны нулю
одновременно, то тождество может выполняться только тогда, когда
каждая из постоянных в квадрашых скобках равна нулю, т. е.
А (йа — р2) — h cos е; 2Апр = h sin e.
Из этих уравнений определяем амплитуду вынужденных колеба-
колебаний А и сдвиг фаз е:
. п 2Апр А (к*—р1
А я= . , sin е = —, соь ь = —* — , tg s =5
V {k'-ptf + m i>* h h -
Inp ,
Из формулы для sin в следует, что sin » является положительной
величиной Следовательно, значения е заключены между 0 и п Поэ-
Поэтому для определения е достаточно использовать формулу только для
одной тригонометрической функции, например для tg e
Окончательная форма выражения вынужденных колебаний
<?2 = A sin (pt + б — е), D5)
где
А= h ; tge= 2"р-;0<8<я. D6)
Основные свойства вынужденных колебаний. Из D5) и D6) следу-
следуют основные свойства вынужденных колебаний при наличии линейно-
линейного сопротивления. Вынужденные колебания не затухают. Их частота
444
совпадает с частотой возмущающей силы. Вынужденные колебания а
при линейном сопротивлении не зависят от начальных условий. След( -
вательно, их нельзя возбудить с помощью ненулевых начальных усло-
условий. Для возникновения вынужденных колебаний на систему должно
действовать возмущение.
Амплитуда и сдвиг фаз вынужденных колебаний зависят от частот
собственных и вынужденных колебаний и коэффициента затухания.
Чем больше коэффициент затухания при прочих равных условиях,
тем меньше амплитуда вынужденных колебаний. Незатухающий ха-
характер вынужденных колебаний при линейном сопротивлении — глав-
главное отличие их от собственных колебаний, которые при действии ли-
линейного сопротивления всегда затухают, сохраняя колебательный ха-
характер (п < k), или затухают почти монотонно (п ^ k).
Другая важная особенность влияния линейного сопротивления на
вынужденные колебания связана с явлением резонанса В случае ре-
резонанса при линейном сопротивлении амплитуда вынужденных коле-
колебаний не возрастает пропорционально времени, как при отсутствии
сопротивления, а остается постоянной величиной. Достаточно как
угодно малого сопротивления, чтобы амплитуда вынужденных колеба-
колебаний при резонансе была постоянной, хотя, возможно, и достаточно
большой, но не переменной, возрастающей с течением времени. Это
свойство вынужденных колебаний хорошо подтверждается опытными
данными.
Исследование вынужденных колебаний. Амплитуда и сдвиг фаз
вынужденных колебаний Лиев соответствии с D6) не зависят от на-
начальной фазы б возмущающей силы. При их вычислении можно счи-
считать, например, б = л/2. Если бы возмущающая сила была постоян-
постоянной, равной амплитуде Н, то правая часть уравнения D4) была бы тоже
постоянной и в качестве часики о решения неоднородного уравнения
<?2 можно взягь постоянную величину статического смеще-
смещения <?г = Л/А;2. Проверка убеждает, что это значение <?2 удовлетворя-
удовлетворяет уравнению D4).
Если вычислять q% из D5), учитывая D6) как частный случай, со-
соответствующий р — О и б = л/2, то получим цг — {A)D^Da = Ао —
= h/k2, что совпадает со статическим смещением. Следовательно, Ло =
= hlk* можно считать «амплитудой» вынужденных колебаний при
действии постоянной возмущающей силы, совпадающей ао величине
с наибольшим значением гармонической возмущающей силы. Величи-
Величину А/А 0 называют коэффициентом динамичности.
Коэффициент динамичности характеризует относительную вели-
величину амплитуды вынужденных колебаний, т. е. показывает, во сколь-
сколько раз амплитуда вынужденных колебаний при действии гармоничес-
гармонической возмущающей силы отличается от статического смещения, кото-
которое вызывает постоянная возмущающая сила, равная по величине наи-
наибольшему значению гармонической силы.
Исследование показывает, что для достаточно малого сопротивле-
сопротивления коэффициент динамичности может быть значительно больше еди-
единицы. Проведем исследование коэффициента динамичности. Найдем,
445
когда он принимает максимальное и минимальное значения, когда
стремится к нулю и т. д.
Учитывая значения А и Ао, после преобразования получаем
А> V(^—?аJ + 4«2Р2 hlk%
D7)
Здесь введены обозначения: z = plk — коэффициент расстройки,
или относительная частота возмущающей силы; Ь — nlk — относи-
относительный коэффициент затухания. Коэффициент динамичности зави-
зависит от параметров гиб. Исследуем его изменение в зависимости от из-
изменения г при фиксированных значениях Ъ.
Из D7) следует, что коэффициент динамичности стремится к нулю
при z ->¦ оо и любом относительном коэффициенте затухания Ь.
Следовательно, и амплитуда вынужденных колебаний А стремится
к нулю, когда коэффициент & очень мал по сравнению с р (z = p/k-> оо).
В этом случае действие возмущений с большой частотой не восприни-
воспринимается колеблющейся системой и не нарушает режима собственных ко-
колебаний, которые под влиянием сопротивления для линейных
систем затухают
Это свойство вынужденных колебаний широко используется на
практике при перевозке грузов, не переносящих толчков. Грузы под-
подвешивают на таких пружинах к перевозящему их транспорту, для ко-
которых частота собственных колебаний оказалась бы малой по сравне-
сравнению с частотой возмущающих сил (толчки от стыков рельсов для ва-
вагонов, толчки от неровностей дороги для автотранспорта, вибрации
корпуса самолета от работающих двигателей и т. д.). На этом же свой-
свойстве вынужденных колебаний основано применение рессор у различ-
различных видов транспорта.
Для дальнейшего исследования коэффициента динамичности вве-
введем функцию / (г) = A — 22J 4- 4b2z2, зависящую от г и параметра Ь,
Тогда
А/Ао = МУЩ. D7')
Очевидно, что когда / (г) достигает максимума, то А/Ао имеет ми-
минимум, и наоборот. Для определения экстремальных значений / (г)
вычисляем ее производные по z:
f (z) = —4г A — г2) + 8b2z = —4г A — 2Ь2 — г2);
/" (г) = —4A— г2) + 8гг + 8Ьг = 8z3 — 4 A — 2fez — г2).
Функция / (г) достигает экстремума при тех значениях z, для ко-
которых /' (г) = 0. Из этого условия для г получаем два значения:
zx = 0; г2 = Vl — 2b2.
Так как относительная частота может быть только положительной
и равна нулю для постоянной возмущающей силы, то 1 — 2Ьг > 0; сле-
следовательно, Ъ < V2/2 = 0,7. Для таких b f" (г) < 0 при z == zlt a
поэтому функция / (г) в этом случае достигает максимума и коэффици-
коэффициент динамичности — минимума. Для г == г3 =s Vl — 26а, наоборот,
446
f" (z) > 0 и, следовательно, f (z) имеет минимум, а коэффициент дина-
динамичности — максимум.
Для значений Ь, при которых 1 — 2Ь2 = 0 (b = V2/2), Zj = z2 =
= 0 и /" (г) = 0. Дополнительные исследования третьей и четвертой
производных показывают, что в этом случае / (г) при г = 0 достигает
минимума, а коэффициент динамичности имеет максимум. Других
экстремальных значений f (z) не имеет.
Если 1 — 2?>2 < 0, то г2 становится чисто мнимым. Это можно ин-
интерпретировать как отсутствие других значений г, кроме г = 0, при
которых / (г) достигает экстремума. При г — 0 / (г) достигает миниму-
минимума, а коэффициент динамичности — максимума. С увеличением г ко-
коэффициент динамичности при 1 — 2Ьг <^ 0 монотонно убывает от свое-
своего максимума при г = 0 до нуля при г-> <х>.
Результаты исследования коэффициента динамичности изображе-
изображены графически в виде так называемых резонансных кривых, или а м п-
л и т у д н о-ч астотной характеристики еистемы
(рис. 124), зависимости А/Ао от г для различных значений относитель-
относительного коэффициента затухания Ь. При этом использованы результаты
исследования, полученные при отсутствии сопротивления, когда Ь = 0.
Проведенное исследование позволяет сделать дополнительные вы-
выводы о влиянии линейного сопротивления на вынужденные колебания.
Так, максимум коэффициента динамичности, а следовательно, и амп-
амплитуды вынужденных колебаний наступает не при резонансе, когда
г = 1 (р = k), а при значении z = za = Vl — 2b2, меньшем единицы.
Чтобы получить величину максимальной амплитуды Ашах, следует в
ее выражение D7) вместо г подставить г% = Vl — 2Ь%, что соответству-
соответствует критическому значению круговой частоты возмущающей силы
Поэтому
я "о
лта,
f 2п
Для малых Ь по сравнению с единицей приближенно
Амплитуда вынужденных колебаний при резонансе А^г получа-
получается из D7) при z = 1:
Лрез == ft/ BпА) = Ло/ B6) < Л
рез == ft/ BпА) = Ло/ B6) < Лтах,
т. е. амплитуда вынужденных колебаний при резонансе меньше макси-
мальной амплитуды, которая достигается при pKV — Vfe2 — 2n2. Кри-
Критическая круговая частота, при которой амплитуда вынужденных ко-
колебаний достигает максимума, уменьшается с увеличением коэффи-
коэффициента затухания. Величины Лшах и Лре8 тоже при этом уменьшают-
уменьшаются.
447
Исследуем влияние линейного сопротивления на сдвиг фаз. В со-
соответствии g D6)
tg в = 2npl
= 2Ъг I A — г% 0 < в < я.
D6')
Тангенс сдвига фаз е выражается простой зависимостью от г. Поль-
Пользуясь монотонностью изменения тангенса в зависимости от изменения
аргумента, легко построить график зависимости е от г при различных
фиксированных значениях Ъ. Подготовим необходимые данные, учи-
учитывая, что при отсутствии сопротивления 8 = 0 для г < 1, е = я/2 при
z—\ и е = л при г > 1.
Из D6') следует, что при 2 = 0 tg е = 0. Учитывая значение е при
отсутствии сопротивления (е монотонно и непрерывно изменяется в
Ь=0
z-p/K
6=0
Рис 124
Рис. 125
зависимости от Ь), получаем 8 = 0. При г = 1 tg г — оо и, следова-
следовательно, а = я/2, как и при отсутствии сопротивления. Когда г-»- оо,
то tg 8 -*¦ 0, что соответствует е -»- я. Если учесть дополнительно мо-
ногонность тангенса, то для 8 имеем результаты:
2 = 0, е = 0;
0<г< 1, 0< е< л/2;
г = 1, е = зх/2;
1 < г < оо, я/2 < е < я;
z^- оо, е -»- я.
Эти данные позволяют построить график изменения сдвига фаз
(фаз о-ч астотную характеристику системы) в
зависимости от относительной частоты возмущающей силы для фик-
фиксированных значений относительного коэффициента затухания
(рис. 125).
Проведенное исследование сдвига фаз показывает, что сдвиг фаз при
резонансе не зависит от линейного сопротивления. Он равен я/2.
Если при частотах, близких к резонансным (г = 1), при отсутствии
сопротивления сдвиг фаз изменяется скачкообразно, то под влиянием
443
линейного сопротивления это изменение является непрерывным и тем
более плавным, чем* больше относительный коэффициент затухания.
Общие свойства вынужденных колебаний. Отметим основные свой-
свойства вынужденных колебаний при действии линейного сопротивления.
1. Вынужденные колебания при линейном сопротивлении явля-
являются незатухающими, т. е. амплитуда их постоянна как при отсутст-
отсутствии резонанса, так и при резонансе.
2. Линейное сопротивление не влияет на частоту вынужденных
колебаний, которая совпадает с частотой возмущающей силы.
3. Вынужденные колебания при линейном сопротивлении не зави-
зависят от начальных условий, так же как они не зависят от них при от-
отсутствии сопротивления.•
4. Амплитуда вынужденных колебаний стремится к нулю быстрее
при линейном сопротивлении с увеличением относительной частоты
возмущающей силы, чем при отсутствии сопротивления.
§ 3. МАТЕМАТИЧЕСКИЙ И ФИЗИЧЕСКИЙ МАЯТНИКИ
Математическим круговым маятником называется материальная
точка, движущаяся в одной и той же вертикальной плоскости по окруж-
окружности под действием силы тяжести. Математическим маятником явля-
является груз достаточно малых размеров, подвешен-
подвешенный к неподвижной точке О с помощью невесомо-
невесомого стержня или невесомой, нерастяжимой нити
{рис. 126). Расстояние ОМ = I называют длиной
математического маятника. Положение материаль-
материальной точки М можно охарактеризовать углом q>,
отсчитываемым от вертикали — положения равно-
равновесия маятника.
Математический маятник можно рассматривать
как систему с одной степенью свободы. Связь в
виде нити или стержня является идеальной.
Выберем за обобщенную координату угол ср. Составим для маятника
уравнение Лагранжа:
Рис. 126
дТ
At
Кинетическая энергия Т математического маятника
рр Фа
Я 2 '
2
так как
v = 1у.
Активная] сила — сила тяжести Р — является потенциальной си-
силой; следовательно, обобщенная сила Q через поаенциальную
Энергию выразится в виде
Q =, —дП/ду.
*5 Зак. 13Ц *4Э
Для того чтобы вычислить потенциальную энергию в отклоненном
положении маятника, следует подсчитать работу силы тяжести при
перемещении точки М из этого положения в положение равновесия
Мй, где ф = 0. Работа равна произведению силы тяжести на высоту
опускания точки М и является положительной величиной, т. е.
П = А мм ~ Р1 A — cos ф); Q = — ЗЯ/Зф = —PI sin <p.
Вычисляем производные, входящие в уравнение Лагранжа:
дт _ дт _ рр ¦_ j_ дт _ pv ••
— О; — — ф; ф.
Уравнение Лагранжа для математического маятника после пере-
переноса всех членов в левую часть выразится в форме
ф 4--?-sirup-=0. D8)
Получено нелинейное дифференциальное уравнение. Оно не интег-
интегрируется в элементарных функциях.
В случае малых колебаний, когда ф достаточно мало, можно счи-
считать sin фйф. Уравнение малых собственных колебаний математи-
математического маятника примет вид
;;+.?-ф== о, D9)
где круговая частота колебаний k = VgV/. Его решение имеет вид
Ф =- A sin (ki + a).
Постоянные величины А и а являются амплитудой и начальной
(}азой. Период малых колебаний математического маятника
т = 2nlk = 2nVlfg. E0)
Малые колебания математического маятника являются гармони-
гармоническими. Период их колебания зависит только от длины матемагичес-
horo маятника и ускорения силы тяжести и не зависит от амплитуды
колебаний. Так как ускорение силы тяжести g зависит от широты мес-
места, то, следовательно, период малых колебаний математического ма-
маятника тоже зависит от широты.
Отмеченными свойствами, очевидно, не обладают колебания мате-
математического маятника, которые не являются малыми. Эти колебания
уже не являются гармоническими, и их период колебаний зависит от
амплитуды А.
Как показывает более подробное исследование, эту зависимость пе-
периода колебаний от амплитуды можно выразить в виде ряда:
450
Если принять sin A/2 а* Л/2 и удержать первые два члена ряда,
то получим приближенную формулу для периода колебаний в зависи-
зависимости от амплитуды;
Физическим маятником называется твердое тело, вращающееся
под действием силы тяжести вокруг неподвижной горизонтальной оси,
не проходящей через центр масс (рис. 127). Ось вращения физического
маятника называется осью привеса, а точка ее пересечения О с перпен-
перпендикулярной оси привеса вертикальной плоскостью, в которой
находится центр масс, называется точкой при-
привеса.
Физический маятник можно считать систе-
системой с одной степенью свободы. За обобщенную
координату примем угол ср между вертикалью и
отрезком ОС, соединяющим точку привеса О о
центром масс С. Считаем, что трения в подшип-
подшипниках оси привеса нет и, следовательно, связи,
наложенные на маятник, являются идеальными.
Составим для физического маятника уравнение
Лаграпжа:
AT
дТ
dtp
дП
др
Рис. 127
Кинетическая энергия маятника как твердого тела, вращающегося
вокруг неподвижной горизонтальной оси привеса Ог, определяется по
формуле
где ^ог — момент инерции маятника относительно его оси привеса.
Потенциальная энергия вычисляется так же, как и для математи-
математического маятника:
П — Ph A — cos ф) = Mgh (I — coscp),
где Р — сила тяжести; М — масса физического маятника и h = ОС.
Производные, входящие в уравнение Лагранжа:
Зф ' дф
d дГ . •¦ дП ,. . .
. == JOz ср; —- = Mgh sin
At дер аФ
Уравнение Лагранжа после деления обеих частей на Joz и пере-
переноса всех членов в одну часть принимает вид
E1)
15*
451
Его можно получить, применив к физическому маятнику дифферен-
дифференциальное уравнение вращения твердого тела вокруг неподвижной оси:
4=1
где 2 Мо* №}) = —P/isin ф.
В случае малых "колебаний sin ср « го и дифференциальное урав-
уравнение примет форму
ф
ИЛИ
Ф + /г2ф = 0, E2)
где /г2 = MghUoz = PhUox-
Если для физического маятника ввести условную длину "/ =
= Jozl (Mh), то период его малых колебаний через эту длину выра-
выразится так же, как и период математического маятника Действительно,
х = 2л Ik = 2nVjOz/(Mgh) = 2яУ/7^ F3)
Эту условною длину / = Jo*! (Mh) называют приведенной длиной
физического маятника.
Малые собственные колебания физического маятника, так же как и
математического, являются гармоническими с периодом, не зависящим
от амплитуды.
Если от точки привеса О отложить по линии ОС приведенную дли-
длину физического маятника /, то получим точку Olt которая называется
центром качаний. Для приведенной длины физического маятника спра-
справедливы следующие теоремы Гюйгенса.
1. Приведенная длина физического маятника больше расстояния
от точки привеса до центра масс, т. е. / > h. Для доказательства теоре-
теоремы применим к физическому маятнику теорему Штейнера о связи мо-
моментов инерции относительно параллельных осей, одна из которых
проходит через центр масс. Получим
^ E4)
r\h > Mh
так как отрезок ОгС = Jcz/ {Mh) — I — h > 0. Здесь JCz — момент
инерции относительно горизонтальной оси, параллельной оси привеса
и проходящей через центр масс.
2. Центр качаний и точка привеса физического маятника взаимны,
т. е. если то же твердое тело подвесить за горизонтальную ось, прохо-
проходящую через центр качаний, параллельно первоначальной оси, про-
проходящей через точку привеса, то получим новый физический маятник,
приведенная длина которого равна приведенной длине прежнего маят-
маятника, т. е. 1г =¦ I.
452
Вычислим приведенную длину lt физического маятника, у которого
ось привеса проходит через точку Ох — центр качаний прежнего ма-
маятника. Согласно определению приведенной длины, применяя теоре-
теорему Штейнера, имеем
Jc,
(lh) *
так как из E4) следует, что Jc? = Mh {I — h).
Если от точки 0х отложить отрезок /х = I, то получим точку О, т. е.
центр качаний и точка привеса взаимны. Периоды малых колебаний
физических маятников вокруг горизонтальных осей, проходящих че-
через точку привеса и центр качаний, одинаковы
Важное прикладное значение теории малых колебаний физическо-
физического маятника состоит в том, что ее можно положить в основу экспери-
экспериментального определения моментов инерции тел. Для опытного опре-
определения момента инерции тела силой тяжести Р относительно какой-
либо оси достаточно сделать эту ось горизонтальной осью привеса, оп-
определить период малых колебаний тела вокруг этой оси и расстояние
от точки привеса до центра масс. Тогда согласно E3) момент инерции
относительно iорчзонтааьной оси привеса определится по формуле
^ E5)
4п2
| 4. МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ
СВОБОДЫ (РЕЗУЛЬТАТЫ ДЛЯ ОБЩЕГО СЛУЧАЯ)
Дифференциальные уравнения малых колебаний системы с дву-
двумя степенями свободы получим из уравнений Лагранжа.
AiLJL LJLJLq,. E6)
Qi;
ut Qqx dqt dt qQi dq2
Каждая из обобщенных сил в общем случае состоит из трех сил:
обобщенной силы от потенциальных сил Q", сил сопротивления ($,
возмущающих сил Q?.
Для рассмотрения малых колебаний системы в окрестности устой-
устойчивого положения равновесия необходимо получить разложения в ря-
ряды кинетической и потенциальной энергий и диссинативной функции.
Кинетическая энергия
Кинетическая энергия системы вычисляется по формуле
N —, N —
т— V mh k У ткГк
Для системы о двумя степенями свободы, на которую наложены
стационарные, идеальные, голономные, неосвобожцающие связи, ра-
радиус-вектор каждой точки rk является функцией только обобщенных
453
координат qu q2. При движении системы обобщенные координаты qx
и q2 зависят от времени. Следовательно, производная но времени от
радиус-вектора
— дгъ • , Ьгц
dqt
Подставляя ее в выражение кинетической энергии, получаем
где введены обозначения:
N
^22= 2 «ft
Величины Лп, Л12, Л 22 зависят только от qx и q2, как и rft, и не за-
зависят от (fr и <?2. Разложим каждую из этих функций в ряд по степеням
ft и <72 в окрестности положения равновесия, приняв в положении рав-
равновесия qx — q2 = 0. Имеем для Ап
Индекс 0 здесь и далее указывает, что эти величины следует вычис-
вычислять при <?! = q2 = 0. Аналогичные разложения получаются для Л12
и Ла2. Введем обозначения:
аи — Ии)о! «12 = Mi2)e'> a22 — (^22H-
Постоянные величины ап, а12, а22 называются коэффициентами
инерции системы. Отбрасывая члены третьего и более высокого по-
порядка по отношению к qu q2, qx, q2, получаем следующее выражение
для кинетической энергии.
Однородной квадратич1Юй формой двух переменных xi и хг называ-
называют выражение вида
F — Вих\ + 2В12хух2 + В%гх\,
где Вп, В12, В22 — постоянные величины, не все равные нулю.
Квадратичная форма, которая принимает только положительные
значения в области изменения переменных хг и хг и равна нулю толь-
только при нулевых значениях переменных, называется определенно-поло-
определенно-положительной.
454
Если пренебречь слагаемыми третьего и более высокого порядка,
кинетическая энергия системы в окрестности положения равновесия
будет однородной квадратичной формой обобщенных скоростей qlt qb.
Так как кинетическая энергия всегда положительна и равна нулю толь-
только при нулевых значениях обобщенных скоростей, то она выражается
вблизи положения равновесия системы определенно-положительной
квадратичной формой обобщенных скоростей.
Для того чтобы квадратичная форма F была определенно-положи-
определенно-положительной, необходимо и достаточно, чтобы ее коэффициенты удовлетво-
удовлетворяли условиям
Вви I1' >0. E8)
°12 Й22
Получим эти условия. Пусть F — определенно-положительная
квадратичная форма. Тогда так как F > 0 при хг = 0, х1Ф0, то
Ви > 0. Аналогично из условия, что F > 0 при х2 ф 0, хг = 0, сле-
следует, что B2i> 0. Это необходимые условия определенной положи-
положительности квадратичной формы, но они недостаточны, так как F может
стать отрицательной вследствие того, что Б1а имеет достаточное по ве-
величине отрицательное значение.
Преобразуем квадратичную форму, введя переменную х = хх1хг,
если в рассматриваемой области х2 не равна нулю. В противном случав
можно поменять местами хх и хг. Квадратичная форма F примет вид
F = х\ {ВХ1хг + 2Впх + В22).
Для того чтобы F была всюду положительной в области рассмат-
рассматриваемых значений х, необходимо и достаточно, чтобы квадратное
уравнение
Впх2 + 2В12х + В22 = 0
не имело действительных корней, т. е. парабола
у = Впх2 -f- 2Bi2x + Въг,
для которой Вц >0и В23 > 0, целиком располагалась над осью абс-
абсцисс
Для этого дискриминант квадратного уравнения должен быть от-
отрицательным, т. е.
В[2 — BnB2i < 0 или BnBi2 — BU > 0.
Условия E8) доказаны.
Так как кинетическая энергия в окрестности положения равнове-
равновесия представляется определенно-положительной квадратичной формой,
то ее коэффициенты должны удовлетворять условиям E8), поэтому для
Он, «12. «22 имеем
E9)
455
аи>0, я22>0; апагг—а?2 =
Для системы о любым конечным числом степеней свободы п кине-
кинетическая энергия в окрестности положения равновесия выражается
однородней квадратичной формой
а^\ + ... + annq2n).
Условия ее определенной положительности таковы:
аи>0;
аи ап
«21 «22
«32 Й33
ап
am
a2n
ап1 ап2 ... ап
¦0.
Потенциальная энергия
Потенциальная энергия системы о двумя степенями свободы зави-
зависит только от обобщенных координат qx и q2, если силовое поле и свя-
связи стационарны. Разлагая потенциальную энергию П в окрестности
положения равновесия q1 = q2 ~ 0 в ряд по степеням qx и q2, имеем
77
= G7)О
Потенциальную энергию в положении равновесия (Я)о принимаем
равной нулю, величины (дП/dq^Q = 0, (dfl/dq2)o = 0 как значения
обобщенных сил в положении равновесия системы Окончательно,
удерживая члены второго порядка б пренебрегая слагаемыми третьего
и более высокого порядка, потенциальную энергию выразим в форме
П = V2 (cuql
Постоянные величины
F0)
си =
с12 =
называются коэффициентами жесткости
Потенциальная энергия с принятой точностью является однород-
однородной квадратичной формой обобщенных координат qx и <?2 В случае,
когда потенциальная энергия в положении равновесия имеет минимум,
т. е. положение равновесия является устойчивым, коэффициенты раз-
разложения сп, с1а, с22, как вторые производные от П по переменным q%
и <?2> при минимуме должны удовлетворять условиям
0;
0;
0.
F1)
Эти условия совпадают с условиями E8) определенной положитель-
положительности квадратичной формы для П. Следовательно, потенциальная
энергия с принятой точностью выражается определенно-положитель-
определенно-положительной квадратичной формой в окрестности своего минимума при qt =>
= q2 = 0, т. е. в окрестности устойчивого положения равновесия
системы.
456
Потенциальная энергия в случае п степеней свободы выражается
в форме
п
сггц\ + ... + cnnql).
Условия определенной положительности сведутся к условиям для
коэффициентов жесткости, полностью аналогичным условиям для ко-
коэффициентов инерции.
Диссипативная функция
_ Пусть ка точки системы действуют линейные силы сопротивления
Rk, пропорциональные скорости точек vk, т. е.
где fife — постоянные коэффициенты сопротивления.
Обобщенная сила Qf от сил сопротивления, согласно определению
обобщенной силы, если использовать выведенное в гл. 6 тождество Лаг-
ранжа
drh/dq1 = dTh/dqu
может быть выражена в форме
Пф _ V Р d7k - V „ 7 ** - а V ***^* - дф
2
Здесь Ф= ^ "^-^ — 2 ^fcrfe — диссипативная функция. Анало-
гично, Qf через диссипативную функцию выразится как
Qf = —дФ/dqv.
Так же как и в случае системы с одной степенью свободы, для сис-
системы с двумя и любым конечным числом степеней свободы можно полу-
получить энергетическое соотношение
dE/dt = —2Ф,
где Е = Т 4- П — полная механическая энергия системы.
Таким образом, диссипативная функция в общем случае характери-
характеризует скорость убывания полной механической энергии вследствие дейст-
действия линейных сил сопротивления.
Диссипативная функция по своей структуре аналогична кинети-
кинетической энергии, только в нее вместо масс тк входят коэффициенты
сопротивления nh.
Выполнив для Ф разложение в ряд в окрестности положения рав-
равновесия и отбросив члены третьего и более высокого порядка, так же
как и для кинетической энергии, получим
Ф =• V» 0*u<7i + 2ц.12ад2 + ц>я<78). F2)
Постоянные величины (.1ц, |л12, ц.22 называются приведенными коэф-
коэффициентами сопротивления.
Квадратичная форма для Ф, так же как и для кинетической энер-
энергии, по своей физической сущности является определенно-положитель-
определенно-положительной; следовательно, ее коэффициенты удовлетворяют условиям:
Mil > О! И-22 > О! ^11^22 — М-12 > 0.
Для системы з я степенями евободы дисеипативная функция вы-
выразится в форме
Приведенные коэффициенты сопротивления удовлетворяют усло-
условиям, которые полностью аналогичны условиям для коэффициентов
инерции.
Дифференциальные уравнения собственных колебаний
Если система, имеющая две степени свободы, движется только под
действием потенциальных сил, то, учитывая формулы для кинетичес-
кинетической и потенциальной энергий E7) и F0), имеем:
Яг = Q" = Т~ = ~(сы Ях.
дТ дТ п дТ ¦ • дТ
_— = — = 0; = ап qt -f- «и Qi, —
Подставляя эти значения в уравнения Лагранжа E6), получаем
линейные дифференциальные уравнения малых собственных колебаний
системы в двумя степенями свободы без сопротивления:
(«12 fa + Сц fa) + («22 fa + С22 Яг) = 0.
Механические системы, для которых квадратичные выражения для
кинетической и потенциальной энергий E7) и F0) являются точными
без отбрасывания членов более высокого порядка, называются линей-
линейными. Для линейных систем дифференциальные уравнения F3) явля-
югся точными, а не приближенными, как в случае малых колебаний.
Математическая теория малых колебаний не отличается от теории ли-
линейных колебаний. Но линейные колебания могут быть не обязатель-
обязательно малыми.
458
Для системы с любым конечным числом степеней свободы диффе-
дифференциальные уравнения собственных колебаний выразятся в следую-
следующей форме:
-f (anq2 + c12<72) + ••• + («m?» + clnqn) = 0;
-f (яга</а + 6'22Gj) + ... + (aVlqn + c2nqn) = 0
(uni?i + cnlqL) + (aniq2 + cn2q2) + ... + (a,m<7n +.cnn<7ft) = 0.
Интегрирование дифференциальных уравнений.
Уравнение частот
Решение системы уравнений F3) следует искать в форме </i — Схеи,
q2 = С2еи. Но в случае малых колебаний в окрестности устойчивого
положения равновесия все значения к, в чем нетрудно убедиться, чис-
чисто мнимые и, следовательно, решение можно искать в виде
<?! = А1 sin (kt + a); q2 = Л2 sin (ft/ + а), F4)
где постоянная k — круговая частота колебаний. Как доказано ниже,
она является действительной величиной. Постоянные А у, А^кча под-
подлежат определению. Величины А1 и Л2 называются амплитудами, а
а —начальной фазой. Вычислим производные:
<7i = —Лхк2 sin (kt + a); q2 = —A2k2 si n (kt + a).
Подставим их и значения <?i и <?2 из F4) в сиотему уравнений F3).
Получим тождества, в которых постоянные коэффициенты при
fin (kt H- а) должны быть равны нулю. Это дает систему двух одно-
однородных линейных уравнений для определения амплитуд Ау и А2:
Ах (сп — оцйа) + Л а (с„ — a12ft2) = 0;
А1 (с12 — а12&2) + Л 2 (с22 — «22^г) = 0-
Однородная линейная система уравнений имеет решения, отличные
от нуля, если определить системы равен нулю:
== 0.
С\2 ' ^12^ ^22 ^22
Раскрывая определитель, получаем уравнение частот:
(Сп - flufe2) (с22 - a2sfe3) - (с12 - a^klf - 0. F6)
Только для значений k, удовлетворяющих уравнению часгог, су-
существуют отличные от нуля значения Аи А% и, следовательно, qlt qt.
Уравнение частот, как биквадратное уравнение, в общем случае
имеет два значения для квадрата частоты №. Для системы с двумя степе-
степенями свободы, если квадратичные формы для кинетической и потен-
потенциальной энергий удовлетворяют условиям определенной положитель-
положительности E9) и F1), эти условия необходимы и достаточны для того, чтобы
45")
оба решения для й2 были действительными и положительными. Только
для действительных и положительных значений fe2 обобщенные коорди-
координаты qx и q% выражаются синусоидальной зависимостью от времени.
Для значений k2, не удовлетворяющих этим условиям, движение сис-
системы не является колебательным.
Отбрасывая отрицательные значения частот, как не дающие новых
решений и не имеющие физического значения, получаем две частоты.
Меньшую из частот обозначают felt большую — k2. Частоты kx и fe2 яв-
являются частотами собственных колебаний си-
системы. Они не зависят от начальных условий
и полностью определяются значениями коэф-
коэффициентов инерции и жесткости.
Исследуем уравнение частот. Рассмотрим
функцию
У = (сц — апх) (с22 — амх) — (с1а — a^xf,
F7)
где х = k2. Уравнение F7) является уравне-
уравнением параболы. Корням уравнения частот kf
Рис 128 и k\ соответствуют точки пересечения пара-
параболой оси абсцисс хг и хг.
Так как квадратичные формы для кинетической и потенциальной
энергий определенно-положительны, то коэффициенты инерции и
жесткости удовлетворяют условиям E9) и (&1), т. е.
Яц > 0, а22 > 0, anai2 — ah > 0; E9')
Сц > 0, с23 > 0, сис22 — с! 2 > 0. F1')
Предположим для определенности, что сп/ап <С Сга^аа- Для по-
построения параболы зададим ряд значений х и определим из F7) соот-
соответствующие значения у, учитывая условия E9') и FГ). Имеем;
х — х0 — 0, у — уо = спсгъ —
0;
«и
»—feu
^28 \ ^22
Расположив в F7) слагаемые по убывающим степеням х, получим
Так как коэффициент aua22 — ah при ха положителен, то у-*- +°°,
когда х^-оо. По полученным данным строим график параболы
(рис. 128). Из графика параболы следует, что корни уравнения частот
хх и хг располагаются в интервале
0<лгх<
т. е. парабола пересекает ось абсцисс в двух различных точках xt =
= k\ и хг = fe|, так как значения у' и у" отрицательны в точках я' =
= сп/аи и х" — ci%!a%2, что и требовалось доказать.
460
Колебание системы с частотой, квадрат которой х' = k\2 = си/а1Х
и обобщенная координата q\, получается в случае, если другая обоб-
обобщенная координата q'2 = const, т. е. при дополнительном наложении
связи на систему. Аналогично, колебание с квадратом частоты х" =
= k? = сг^а%г и обобщенной координатой qo получается при q[ —
— const, что тоже связано с дополнительным наложением связи. Час-
Частоты k[ — vcn/aXi и fe2 = У'с%%1агъ называются парциальными часто-
частотами системы. Из проведенного анализа следует, что они заключены
между главными частотами, причем наименьшая из них больше пер-
первой главной частоты. Так влияет н^ частоты дополнительное наложе-
наложение связей, при котором не изменяются коэффициенты инерции и жест-
жесткости системы.
Случай, когда хх = хъ, возможен при
х — № = сп/а1Х — сгг1а22 — схг/а12,
при этом у' — у" = 0. Парабола касается оси Ох.
В случае равных частот каждое из уравнений системы F5) являет-
является тождеством, справедливым при любых значениях Ах, А2. Система
дифференциальных уравнений F3) распадается на два независимых
уравнения — одно для qx, другое для q2. Их решения имеют вид
qx — Ах sin (kt + ах); q% = A2 sin (kt + a2).
Постоянные Ах, А2, ах, а2 определяются из начальных условий
Система в этом случае совершает гармонические колебания Каж-
Каждая из обобщенных координат qx и q2 изменяется по синусоидальному
закону независимо друг от друга с одинаковыми частотами
В случае разных частот каждой из них соответствуют определен-
определенные значения Аъ А2) а; /Ц1', А12[\ ах—для частоты^и А\*\ А^\а2 —
для частоты k2. В соответствии о этим получим по два значения обоб-
обобщенных координат qx и q2:
F8)
q\2) = А\2) sin (k21 + a2); qB2) =- ЛB2) sin (k21 + a,),
q^\ qil) составляют главное колебание для частоты kx, а q\2), q^ —для
частоты k2. Каждое из главных колебаний является гармоническим для
обеих обобщенных координат.
Система однородных линейных уравнений F5) дает возможность
определить только отношение амплитуд. Для первого и второго главных
колебаний соответственно получаем
R _
[69)
461
Отношения амплитуд в главных колебаниях pt и рз называют ко~
эффициенпгами формы. Из F8) следует, что коэффициенты формы рае*
ны отноишниям обобщенных координат в главных колебаниях:
= ^Vtf»; ря = АЬ"/А[Я> = q?'/q\*\ G0)
Коэффициенты формы Pi и р2 характеризуют формы главных коле-
колебаний. Они могут быть положительными и отрицательными. Если, на-
например, (Зг> 0, то q[l) и qV имеют одинаковые фазы; если $х < 0, то
их фазы отличаются на п.
Общее решение системы уравнений F3), учитывая G0), можно вы-
выразить в форме
G1)
Четыре произвольные постоянные А^\ А[*\ аъ а2 определяются
из начальных условий.
Итак, собственные линейные колебания системы с двумя степенями
с-ободы состоят из суммы двух главных гармонических колебаний о
частотами kx и kz.
Главные координаты
Если за новые обобщенные координаты системы выбрать ^i1' и q{*\
то главное колебание с частотой kx будет характеризоваться только
обобщенной координатой q\l), а главное колебание с частотой /г2 —
координатой q\2).
Обобщенные координаты, каждая из которых представляет только
одно главное колебание, называются главными координатами системы.
Произвольные обобщенные координаты через главные в соответствии
с G1) должны выражаться их линейными комбинациями:
ql - q\1} + <?i2>; q* - M1' + M2'- G2)
В случях равных частот любые обобщенные координаты являются
главными. Для главных координат система уравнений должна распа-
распадаться на два отдельных, независимых уравнения, как в случае рав-
равных частот.
Определив обобщенные координаты gi11 и qt1', найдем главные ко-
координаты системы. Главные координаты можно также определить,
основываясь на рассмотрении преобразования кинетической и потен-
потенциальной энергий системы.
Для того чтобы система уравнений распалась на отдельные незави-
независимые уравнения, выражения потенциальной и кинетической энергий
не должны содержать членов с произведениями переменных. Это мож-
можно потожить в основу для отыскания главных координат. Действитель-
Действительно, пусть qx и q2 — произвольные обобщенные координаты, a q*\ и ql —
главные координаты.
4G2
Попытаемся получить равенства нулю членов с произведениями в
разложениях кинетической и потенциальной энергий, приняв линей-
линейную зависимость между qu q2 и q*, q\, т. е.
<?i = ccrfi + atf3; qt = р>? + p^J. G2')
Постоянные ах и а2 включим в</'и #2, т. е. примем at — or ^ = 1.
Тогда неизвестные постоянные (Зх и р2 можно определить из условий,
что для главных координат
T = ll2(aUqr-\-ahq'P); П = Vi(eh ^« + ch ql% G3)
т. е. о*2 = сЬ = 0. Сохраним для неизвестных постоянных рх, |32 обо-
обозначения коэффициентов формы, так как в действительности они ими
и являются.
Подставляя G2') в выражения кинетической и потенциальной энер-
энергий E7) и F0), получаем
= V2 {(Ou + 2a12 р\ + ^ р?) qV + 2
G4)
"u + 2c12p24-<
Из сравнения G3) и G4), используя условия аЬ =0t C12 = О, име-
ем
ah = au + a12 (Pi + p2) + a2
C12 = cn + cia (.81 -f P2) + O2
PiPa = 0; 1
1P2 = 0, J
а также формулы связи новых и старых коэффициентов инерции и
жесткости:
«11 = «и + 2a12P! + a22p*i> «22 = flu + 2a12p2 +
Из G5) получаем
Cii + ZcuPt + c22pr, ch = cn + 2c12|i2 + с„Р1. I G
PiPa . P1-T-P2-—— Г~Г~' ^ ;
2 саг—a22 6i2 а\г^%1 агг С12
Эти соотношения позволяют построить квадратное уравнение, кор-
корнями которого являются |3Х и ра:
(«12С22 — а22с12)р2 — (с2аси — аисаа)Р + (аис1г — fl120u) = 0. G8)
Можно доказать, что корни этого уравнения вещественны.
Таким образом, коэффициенты Pi и (i2 можно определить двумя
путями: как коэффициенты формы по формулам F9) или как корни
квадратного уравнения G8).
Система уравнений малых колебаний F3) для главных координат
q*i, <?1 с учетом того, что а{2 = аЬ = 0, распадается на два независимых
уравнения:
hqi = O. G9)
4G3
Ич решения имеют вид
q'l^AVhm&U + ai); ql^A^ sin (kU + Ог), (80)
где k* и Щ, — частоты главных колебаний. Они вычисляются по фор-
формулам
k\ -УЖГМх', kl^Vdki^h. (81)
Используя G2') и (80) для произвольных обобщенных координат
q-y и qit можно получить выражения G1).
Частоты изменения главных координат совпадают о частотами
главных колебаний, т. е.
Ь\ = kx\ kl = К (82)
так как частоты не зависят от выбора тех или иных обобщенных коор-
координат. Они определяются свойствами системы и потенциальным сило-
силовым полем, в котором движется система В случае системы с двумя сте-
степенями свободы в справедливости (82) можно убедиться прямыми вы-
вычислениями, используя формулы G6).
Кажется, что по (81) вычислять частоты проще, чем из уравнения
частот F6), но предварительное отыскание главных координат пред-
представляет собой задачу, равноценную по трудности решению уравнения
частот. Главные координаты удобны для теоретических исследований,
особенно для исследования вынужденных колебаний без учета сопро-
сопротивления.
Итак, каждая из главных координат системы изменяется по гармо-
гармоническому закону, имея определенную частоту, амплитуду и началь-
начальную фазу, так же как и в случае системы с одной степенью свободы.
Этот результат остается справедливым и для собственных колеба-
колебаний системы с любым конечным числом степеней свободы. Некоторые
частоты л*огут оказаться одинаковыми, но это не приводит к резонанс-
резонансным явлениям.
Влияние линейного сопротивления на собственные колебания
Пусть qx и q% — главные координаты системы. Тогда квадратичные
формы для кинетической и потенциальной энергий содержат только
квадраты своих переменных:
Т = V2 Kanq\ + duS); П = Vi (cuq\ + c^ql)- (83)
Диссипативная функция в общем случае сохраняет член с произ-
произведением даже для случая главных координат:
Ф = % (Huff + 2ц„<ад> + ц2а^1). (84)
Подставляя эти значения Т, П и Ф в уравнения Лагранжа E6),
получаем следующую систему уравнений собственных колебаний о
учетом линейного сопротивления:
) Яг = О,*
464
(85)
Mia <?i + (й2а Яг + Маг 9а + са2 <?а) = 0. J
Коэффициенты системы уравнений удовлетворяют условиям
ап > 0, а22 > 0, сц > 0, с22 > 0; ци > 0, ц22 > 0, yin\i22 —
- \ih > 0. (86)
Использование главных координат не приводит к распадению сис-
системы уравнений на независимые уравнения, но система уравнений ста-
становится несколько проще. Решение системы (85) можно искать в фор-
форме
qt = С1в«; <7, = С2еЧ (87)
Подставляя (87) в систему уравнений^ (85) и сокращая на е", полу-
получаем
Сг (апХ2 + циЛ, + сц) + C2fx12X = 0; ]
(88)
С2 (я22Я,2 + ц,22А, + с22) = 0. J
Для тсго чтобы эта система однородных линейных уравнений отно-
штельно неизвестных Съ С2 имела ненулевые решения, должен быть
равен нулю определитель этой системы:
= 0.
я22Я2 + ц2г% + с22
Получено характеристическое уравнение для X, являющегося урав-
уравнением четвертой степени. В развернутом виде характеристическое
уравнение имеет форму
= 0. (89)
Каждому из четырех его корней Я^, Х2, Я,3» ^4 соответствуют опреде-
определенные значения постоянных Сх и С2.
Из уравнений (88) определяются не величины Сг и С2 для каждо-
каждого корня Хг, а только их отношения:
Cg» _ _ апЧ + УиК+сЛ м,%г / = 1,2,3,4.
(90)
Индекс i указывает, для какого корня %t берутся постоянные Сг и
С,.
Не проводя подробного исследования, отметим, что при выполне-
выполнении условий (86) возможны следующие варианты корней характерис-
характеристического уравнения (89) и соответственно решений системы диффе-
дифференциальных уравнений (85).
1. Корни комплексные. Они попарно сопряженные, так
как коэффициенты уравнения вещественны и имеют отрицательные
вещественные части:
А.м = —«1 ± kit; ^2,з = —«а ± k2i-
465
Этот случай получается при малом сопротивлении. Подставляя эти
значения % в (87), после несложных преобразований получаем:
+ D\*>s,lnkit]=*A\'l)e-"b «sin
q2-«-»• *[В$> cosbt + D?'sin
n-Dfe21 sin Vl^^'e-^ 'sinfof+ab1))-Mi">e-»» (sin
Здесь все В, D, A, a — постоянные величины.
Каждая главная координата является суммой двух затухающих
колебаний. Четыре из восьми постоянных Л['\ А1*\ АB1), ЛB2', а',1',
ai2), аB'\ «22> определяются из начальных условий; другие четыре —
через величины С(/>, С(/>.
2. Корни действительные. Их можно представить в
форме
причем fet < n1( /г2 < п2. Для главных координат qx и ^2 в этом случае
<?! = е-"' «(С^'е*' ' + С(,2)е-*. ') + <з-"! ((Ci31 e"=( + Ci4' е- *•');
q2 = e-Bi t (C^11 efe. * 4- С|>2> е-*<') +«-»•((С?'> е*2 Ч С^4' е-*> ')¦
Движение непериодическое, затухающее. Оно получается при боль-
большом сопротивлении.
3. Два корня действительные, а два — комп-
комплексно-сопряженные:
Для ^ и <72 получаем:
ch = e-n» f (Cb11 e*»' + Ci2) e-*« 0 + ^2" e-"*' sin (/г2
В этом случае имеем наложение затухающих колебаний на зату-
затухающее движение. Неглавные обобщенные координаты линейно вы-
выражаются через главное в соответствии с G2). Следовательно, для них
каждая из обобщенных координат является линейной комбинацией
рассмотренных трех видов движений. Аналогичное положение будет
в случае любого конечного числа степеней свободы.
Вынужденные колебания без учета сопротивления
Рассмотрим вынужденные колебания системы о двумя степенями
свободы без учета сопротивления под действием гармонических возму-
возмущающих обобщенных сил, отнесенных к главным координатам. Гар-
Гармонические возмущающие силы для других координат можно привес-
привести к гармоническим возмущающим силам для главных координат, ес-
если частоты первоначальных возмущающих сил одинаковы. Действие
возмущающих сил, имеющих разные частоты, следует рассматривать
466
по отдельности, используя свойство суперпозиции решений линейных
дифференциальных уравнений.
Итак, для главных координат qt и q% из уравнений Лагранжа E6)
получим следующую систему уравнений вынужденных колебаний:
Яи?1 + cu<7i = Hl sin (pt + 6); a22q\ + c22q2 = Я2 sin (pt + 5),
или после деления первого уравнения на ап, второго — на я22
4i + fti"<7i = К sin (pt + 6); 7, + кЦг = A, sin (pt + 8). (91)
Здесь введены обозначения для постоянных: k\ = cu/an, k\ =
— c2ilal2 — квадраты собственных частот и hx = HJdn, Кг = Я2/а22 —
относительные амплитуды возмущающих сил.
Каждое из уравнений системы (91) можно интегрировать независи-
независимо от другого уравнения. Общие решения этих уравнений, согласно
теории дифференциальных уравнений, являются суммой общих реше-
решений уравнений без правых частей (собственные колебания) и частных
решений уравнении с правыми частями (вынужденные колебания):
Я\ = ?ю + <7iB; Яг = <?2с + <7гв-
Свойства собственных колебаний ^ю и <?гс Уже рассмотрены. Они
являются гармоническими колебаниями с частотами kx и кг. Рассмот-
Рассмотрим вынужденные колебания qlB и q2B. Возможны следующие харак-
характерные случаи.
1. Частота возмущающей силы р не совпадает ни с одной из частот
собственных колебаний kt и k2. Тогда частные решения можно искать
в форме
<?ib = Ci sin {pt + б); q2B = С2 sin (pt + 6).
Подставляя это в (91) и приравнивая нулю коэффициенты при си-
синусах в полученных тождествах, имеем следующие уравнения для оп-
определения постоянных Сх и С2:
у \t a 2р + щсг = а,.
Отсюда
Сх =» V (ft? - р2); Са - hj (ki — p% (92)
Вынужденные колебания через главные координаты выражаются
в форме
<7i* = -^^ sin (pt -V S); qiB = ft/^g sin (pt + 6). (93)
Если обобщенные координаты не являются главными, то вынуж-
вынужденные колебания, согласно формулам перехода G2), будут линейной
комбинацией (92).
2. Частота возмущающей силы совпадает с одной из частот собст-
собственных колебаний, например р = kx. Это случай резонанса на
этой частоте. Решение для вынужденных колебаний можно искать а
виде
qlB « С t cos (pt + 6); q2B =* C2 sin (pt + 6). (94)
437
Подставляя (94) в систему уравнений (91), получаем уравнения
для определения постоянных Сх и С2. Из этих уравнений находим
С, = —hj Bftj); C2 = hj (kl — р2). (95)
Вынужденные колебания для главных координат выражаются в
форме
По одной главной координате получается резонанс.
Переход к другим, не главным, обобщенным координатам по фор-
формулам перехода G2) приводит к резонансу по обеим координатам.
При р ~ kx — fe2 получается резонанс по обеим главным коорди-
координатам. Для системы с двумя степенями свободы резонанс наступает
при совпадении частоты возмущающей силы с одной из двух частот
собственных колебаний.
Для системы с п степенями свободы для появления резонанса до-
достаточно совпадения частоты возмущающей силы с одной из п частот
собственных колебаний.
Влияние линейного сопротивления на вынужденные
колебания
Так как использование главных координат при учете линейного
сопротивления не ведет к существенным упрощениям системы диффе-
дифференциальных уравнений, но в то же время нарушает симметрию, то це-
целесообразно использовать произвольные обобщенные координаты qs
и q2. В этом случае кинетическая и потенциальная энергии выражают-
выражаются формулами E7) и F0), а диссипативная функция — F2).
Обобщенные возмущающие силы считаем гармоническими:
<2f = Нх sin ipt + б); (ft = /у, sin {pi + б).
Подставляя эти значения указанных величин в уравнения Лагран-
жа E6), получаем следующую систему линейных дифференциальных
уравнений вынужденных колебаний с учетом линейного сопротивления:
teuft + f^iWi + ?n?i) + (а12?2 + И12<7г + Cutfa) = #i sin (pt + 6b
(97)
(thrill + Fi2<?i + <?i2<7i) + (a22?2 + fx22V8 + ^2<72) = Н2 sin (pt + 6) J
Решение системы уравнений (97) для каждой координаты является
суммой собственных движений qlc, q20 и вынужденных колебаний qlB,
<7:
В зависимости от корней характеристического уравнения для од-
однородной системы уравнений, которая получается из (97) путем от-
отбрасывания правых частей, они могут быть линейной комбинацией за-
468
тухающих колебаний с затухающими непериодическими движениями
или этими движениями по отдельности.
Рассмотрим вынужденные колебания <71в, q2j3. Они являются част-
частными решениями системы уравнений (97). В этом случае их следует
искать в форме
Ягв = Bt sin (pt + 6) + Dx cos (pt + 8) = Аг sin (pt + 8 — ej J ,gg.
#ав — B2 sin (pi + 8) + D2 cos (pt + 8) = Л2 sin (pi + 8 — e2). J
Постоянные Bu Dlf B2, D2 связаны g постоянными Л1( Л2, elf ea
соотношениями
R —» А рос p 7~) <— __>u ein о • 1
> (99)
Ba = Л2 cos e2l D2 = —Аг sin s2 J
и соответственно амплитуды Alt Л2, и сдвиги фаз е^ 82
г = VB\ + Df; tg 8l = - D1/B1 ; I A0Q)
5х (Сц -
В^пР -
Bi (c12 —
В,и 2р -
ЯиР2) — DiVuP +
г- ^i (Сц — ОцР2) -
Й12р2) — Dx\il2p +
- Dt (c12 — а,„р2) -
В2 (с]2
1- В2[11г
В2 (с22
h Вга12
— а12р2) — D2^x
р + Da (c12 — flj.
— a2ip2)— D2p,2
p + D2 (c22 — a2
2p = Hx;
гР2) = 0;
iP = H2,
2p2) - 0.
A2 = VBI + D\\ tg s2 = — DtlBt.
Подставим (98) в систему уравнений (97). Получим тождества, спра-
справедливые для любого момента времени. Если в каждом тождестве со-
собрать отдельно члены с синусами и косинусами, то коэффициенты при
них должны быть равны нулю. Это дает систему четырех уравнений
для определения неизвестных Въ В2, Dlt D2:
A01)
Можно доказать, что эта система неоднородных линейных уравне-
уравнений, т. е. ее определитель не равен нулю ни при каких значениях р. Ре-
Решая систему уравнений A01), полностью определим постоянные Въ
Въ Du D2, а следовательно, Аъ Л2, ех, в2.
Не выполняя решения системы уравнений A01), можно сделать вы-
выводы о влиянии линейного сопротивления на вынужденные колебания
системы с двумя степенями свободы. Как и для случая системы с од-
одной степенью свободы, вынужденные колебания являются незатуха-
незатухающими гармоническими колебаниями и происходят с частотой возму-
возмущающей силы. Они не зависят от начальных условий. При резонансе
амплитуды вынужденных колебаний остаются постоянными в отличие
от случая отсутствия сопротивления.
В случае системы с п степенями свободы выводы о влиянии линей-
линейного сопротивления на вынужденные колебания остаются прежними.
Более сложные колебания совершают системы с бесконечным чис-
числом степеней свободы, как, например, различные типы сплошных сред.
В некоторых случаях их можно с достаточной точностью заменить сис-
системой с конечным числом степеней свободы.
'469
Для сплошных сред дифференциальные уравнения движения будут
уравнениями в частных производных в отличие от систем с конечным
числом степеней свободы, для которых дифференциальные уравнения
являются обыкновенными.
Пример. Два груза массами т± и т2 прикреплены к пружинам с коч}>фнци-
еньами жесткости С] и с2 (рис 129, а). Исследовать колебания системы
Решение Система имеет две степени свободы, если рассматривать толь-
только движения грузов по вертикали Примем за обобщенные координаты системы
смещения д;й и х2, отсчитываемые от положении статического равновесия центров
масс грузов вниз. Это позволяет
исключить силы тяжести грузов,
так как они в положении стати-
статического равновесия уравновеши-
уравновешиваются силами упругости пру-
пружин
Вычисляем
энергию системы.
— т1 х.
кинетическую
Имеем
-\ ш2 х'\.
Пердое глабное Второе главное
колебание колебание
Рис 129
Сравнивая ее с разложением
кинетической энергии E7), полу-
получаем значения коэффициентов
инерции.
«и = ти ai2 — 0, an ~ тг,
Для определения потенциаль-
потенциальной энергии системы следует вы-
вычислить работу, которую совер-
совершают разности сил упругости
пружин и сил тяжести грузов
при перемещении системы из рас-
рассматриваемого положения в поло-
положение равновесия. Эти разности
сит изменяются в зависимости от смещения грузов из статических положений
равновесия по линейному закону аналогично тому, как изменяется сила упру-
упругости пр.ужины при деформации из недеформированного состояния
При определении потенциальной энергии можно вычислять работу разнос-
разностей сил последовательно. Сначала вычисляем ее при перемещении груза массой
тЛ в состояние его статического равновесия на величину хх Соответствующая ра-
работа равна Ц. х\. Затем переместим груз массой т2 в положение его статического
равновесия. Для этого потребуется переместить его иа величину х2 —хх, так как
на Х\ он переместился вместе с грузом массой mx. Этому перемещению соответст-
соответствует рабога -?* (xz —Xxf.
Таким оОразом, для потенциальной энергии системы имеем
/7 ~-^*f+-j-(*.-
Зная потенциальную энергию, вычисляем коэффициенты жесткости сп
H = ct + с2;
дП1дхх — ел — с2(*2 —
дП1дхг = сА(хг — «i
= с2;
о = — са,
470
Система дифференциальных уравнений малы» собствеаных колебаний , >
примет форму
— с2х2 = 0) — c2xt + т2х2 + с2х2 = 0-
Уравчение частот, согласно F6), имеет вид
Г + 2 - т2Р) - с\ - 0,
Дня упрощения вычислений предположим, что пружины одинаковы, т. ei
Ч — сз ~ Cl Тогда уравнение частот примет форму
Bс — т^*) (с — m2k2) — Ф = О
ил»
OTj m2
Его решения таковы:
k,
У
с2
2/П! m2 V 4m* m| Щ щ'
Оба решения, как и следовало ожидать, действительные и положительные.
Есчи масса mj очень велика по сравнению с массой тг, то, приняв m^mL =>
0, получаем
. е. груз массой mi не колеблется, а груз массой т2 колеблется так, как если бы
он был прикреплен с помощью одной пружины к неподвижному телу.
Полагая массу тг бесконечно большой по сравнению с т^, имеем fej = 0;
fc2 = У 2с/пц.
В этом случае груз, имеющий бесконечно большую массу, не колеблется, а
груз массой т^ колеблется, как если бы он был прикреплен к двум неподвижным
телам на двух пружинах.
Рассмотрим случай, при котором т1= m2 = m. Система уравнений собствен-
собственных кочебаннй примет вид
тхх + 2 cxi — сх2 = 0} /я*2 — ?*i + сх2 = 0.
Уравнение частот соответственно выразится в форме
Bс — mfe2) (с — от?2) — с2 = 0
или
с» = 0.
Из уравнения частот определяем квадраты частот главных колебаний:
Коэффициенты формы в этом случае, согласно F9), имеют значения
^-^ 1
Первое главное колебание с частотой fti состоит из л^1' и jc'2n = Pi^i1'. Так
как Pf>0, то знаки смещений лг^" а 4" в первоч главном колебании одинако-
одинаковы и колебания грузов совпадают по фазе. Второе главное колебание с частотой
*а включает в себя смещения 4г) и 4г) = Pa*i4'- Так как h < °- то 8иаки
вмещений х{2^ и лг<2) противоположны. Колебания отличаются по фаза на п.
471
Формы главных колебаний можно изобразить графически, Для эюго отло-
отложим смещения грузов в главных Колебаииях вправо по горизонтали положитель-
положительные, влево — отрицательные. По вертикали отложим расстояния грузов от верх-
верхнего конца первой пружины. Для первого главного колебания смещение первого
груза изобразится горизонтальным отрезком л;^11, смещение второго груза — го-
горизонтальным отрезком х^ (рис. 129, б), Оба отрезка направлены вправо, таи
каи у них одинаковые знаки, например положительные.
Для второго главного колебания отрезок х\*1 следует отложить вправо, пред-
предполагая, что смещение х<±2) положительно, тогда #^2) надо отложить влево, тая
кая Л!B2) будет отрицательным (рис. 129, в),
Точка D пружины при втором главном колебании остается все время непод-
неподвижной. Такие точки называются узлами. Второе главное колебание имеет один
узел. Первое главное колебание узлов не имеет»
Глава 8
ДИНАМИКА ТВЕРДОГО ТЕЛА
С ОДНОЙ ЗАКРЕПЛЕННОЙ ТОЧКОЙ
Изучение движения тела с одной закрепленной точкой имеет важ-
важное значение. Во-первых, телом с одной закрепленной точкой, имею-
имеющим широкое практическое применение, является гироскоп — тело
осесимметричное. Во-вторых, движение свободного твердого тела мож-
можно представить состоящим из двух движений — поступательного вместе
с какой-либо точкой тела и вращения его вокруг этой точки. В качест-
качестве точки, вместе с которой рассматривается поступательное движе-
движение, выбирают центр масс тела, так как для него имеется теорема о
движении центра масс. К изучению движения тела вокруг, например
центра масс можно применить общие положения о движении тела во-
вокруг неподвижной точки.
§ 1. КИНЕТИЧЕСКИЙ МОМЕНТ ТЕЛА, ВРАЩАЮЩЕГОСЯ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Имеем твердое тело, одна из точек которого закреплена. Движение
тела рассматривается относительно некоторой системы координат
Охуг (рис. 130), начало которой находится в закрепленной точке тела.
Вращение тела вокруг неподвижной точки в каждый момент времени
есть вращение вокруг мгновенной оси с угловой скоростью со, направ-
направленной по этой оси. Для кинетического
момента Ко относительно неподвижной точ-
точки, согласно его определению, имеем
_ N _ _
Ко- 2 rhXmhvk,
k=i
A)
Рис, 130
где rk — радиус-вектор какой-либо точки
тела; tnh — масса точки и vh — скорость
этой точки относительно выбранной систе-
системы отсчета. Для сплошного гела роль то-
472
чек выполняют малые элементарные частицы тела, на N которых
оно разбито.
Из кинематики известно, что скорости точек тела при его вращении
вокруг неподвижной точки вычисляются по векторной формуле Эйле-
Эйлера
= (o xrft =
/ '
oa7 о
Ук '<
Xb—axzh)-\r~k((i>xyh—(o,,Xb), B)
которую в проекциях на оси координат, учитывая, что векторное про-
произведение можно представить в виде определителя, выразим в форме
Vky === ^гХк — ®x&k't ^kz === ®хУк — ^y-^ft» (^ )
где xh, yh, zh — координаты точки тела с массой mh.
Для проекции кинетического момента на ось Ох с учетом B') имеем
2 2
k=l k= 1
2
N
mhxhyk—az 2 mhxhzk. (Г)
Проекции угловой скорости co^., co^, шг вынесены за знаки сумм, так
как они не зависят от точек тела, по которым ведется суммирование.
Суммы в (Г) представляют собой соответственно осевой Jх и центро-
центробежные Jxv, Jхг моменты инерции. С учетом этого для К.х и по аналогии
для Ку и Кг получаем
По формулам C) вычисляются проекции на оси координат кинети-
кинетического момента тела относительно его закрепленной точки. Эти про-
проекции являются линейными функциями проекций угловой скорости
вращения тела на те же оси координат. Кинетический момент Ко по
проекциям определяется формулой
Ko = Kj+Kv]+cKzk. (Г)
Проекции на оси координат кинетического момента по формулам
C) можно вычислить как для осей, относительно которых рассматри-
рассматривается вращение тела (неподвижные оси), так и любых других подвиж-
подвижных осей, например скрепленных с вращающимся телом. Для непод-
неподвижных осей осевые и центробежные моменты инерции изменяются
при вращении гела и, следовательно, зависят от времени вследствие
473
изменения положения тела относительно этих осей. Для подвижных
осей, скрепленных с телом, моменты инерции являкмся постоянными,
не зависящими от времени, так как положение тела относительно
этих осей не изменяется при его вращении. В случае проецирования
кинетического момента на подвижные оси координат следует иметь в
виду, что кинетический момент вычисляется для
движения тела относительно неподвижных осей.
Если применить тензор инерции
/ т г
" х J хч хг
/
III
и учесть jn pa вило умножения тензора на вектор-
столбец со, то C) можно кратко выразить форму-
формулой
Рис 131 -п- .-
До = J(?>.
Формулы C) упрощаются для проекций кинетического момента
на главные оси инерции для неподвижной точки О. Для таких осей ко-
координат Jху = Jyz = Jzx = 0 и из C) получаем:
Кх = Jx<-*x, К у = Jy<uy; Kz = Jz<az. D)
В этом случае проекции кинетического момента вычисляются так же,
как и в случае, если бы каждая из главных осей инерции была непо-
неподвижной осью вращения тела.
Главные оси инерции для неподвижной точки О обычно подвижные
оси, скрепленные с самим вращающимся телом. Только такие оси мо-
могут быть главными в течение всего времени вращения тела Другие
подвижные или неподвижные оси могут быть главными только в от-
отдельные моменты времени
Частный случай. Если имеем тело, которое вращается
вокруг неподвижной оси Oz (рис 131), то в этом случае вектор угловой
скорости со направлен по оси вращения и его проекции на две другие
оси, перпендикулярные оси вращения, равны нулю, т е. соя = о)у =*
== 0. Так как вращение вокруг неподвижной оси есть частный случай
вращения тела вокруг неподвижной точки то по формулам C) в этом
случае имеем:
Кх = —JxtO)*; К у = —Jvt^z; Кг =* Jz®t. E)
Если ось вращения Oz является главной осью инерции для ее точки О,
io J хг — Jуг = 0 и из E) получаем:
Кх - 0; Ку = 0; Kz =» /,<а,. E')
Кинетический момент для случая главной оси направлен по оси вра-
вращения. В других случаях он не направлен по оси вращения. Ось вра-
вращения является главной осью инерции для всех своих точек, если она
является главной центральной осью инерции.
474
§ 2. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТЕЛА С ОДНОЙ
ЗАКРЕПЛЕННОЙ ТОЧКОЙ
В соответствии о определением кинетической энергии имеем
— 2 mhvh-vh. F)
Т
Если заменить один из векторов скорости vk его значением из B), то
получим
N I N -
Т~-~ Ц mft(co X Fh)-vk =— 2 tnhvh-{<* X rfc)". F')
В смешанном произведении трех векторов можно переставлять сомно-
сомножители в круговом порядке, т. е.
С учетом этого после вынесения вектора со за знак суммы получим
так как
w _ _
2 rhxmhvh = Ко -
Итак, кинетическая энергия тела, вращающегося вокруг неподвиж-
неподвижной точки, равна половине скалярного произведения угловой скорости
вращения тела и кинетического момента относительно закрепленной
точки.
Скалярное произведение можно представить в двух формах:
Так как кинетическая энергия может иметь только положительные
значения, то из G') следует cos (со, Ко) > 0s т. е. угол между мгновен-
мгновенной осью, по которой направлен вектор угловой скорости, и кинети-
кинетическим моментом относительно закрепленной точки всегда острьш.
Если в G') величины Кх, Ку, Kz заменить их значениями из C), то
получим
Г = ~- {Jx ю" + Jy со* + Jz cof — 2Jyz wg co2 — 2JXX сог соя —
(8)
т. е. кинетическая энергия тела с одной закрепленной тонкой является
квадратичной формой проекций угловой скорости на оси координат.
475
В матричной форме, учитывая (Г), кинетическую энергию можно
представить формулой
Если оси координат Охуг являются главными осями инерции для
закрепленной точки О, то Jxy = JVz = h% — 0 и (8) примет вид
Эта формула является обобщением выражения кинетической энергии,
полученного при рассмотрении вращения твердого тела вокруг не-
неподвижной оси. Согласно (9), кинетическая энергия при вращении те-
Ркс. 132
ла вокруг неподвижной точки получается так же, как при одновремен-
одновременном вращении вокруг трех неподвижных главных осей инерции, про-
проходящих через эту точку.
Проверкой можно убедиться, что как в общем случае, так и в слу-
случае главных осей инерции справедливы формулы
Кх = дТ/да
= дТ/дв>
у;
Для случая вращения тела вокруг неподвижной оси
Кг = дТ1да>г.
Пример. Диск 1 имеет закрепленную точку О (рис, 132, а). Вычислим его
кинетическую энергию, выбрав за подвижные оси координат, скрепленные с дис-
диском, главные оси инерции для точки 0. Имеем
Г = V2 (Jx <o*+Ju о>| +Jt a>i).
Мгновенная ось для диска /, по которой направлена угловая скорость "а>*
проходит через неподвижную точку О и точку соприкосновения диска с непод-
неподвижной плоскостью. Главными осями инерции диска являются ось симметрии
Ог и две любые оси Ох и Оу, перпендикулярные ей. Для этих осей имеем:
о>д; = 0; (Bff=a) cos a—a>
Момент инерции
sin
R
476
Моменты инерции относительно осей Ох и Оу вычисляем с использованием тео-
теоремы Штейнера. Имеем
Для диска (рис 132, 6}
I
JCx>
Используя эти значения моментов инерции, имеем
Jx = m (гЧ\ + Я2); Jv= m (rV4 + /?s).
Для кинетической энергии с учетом tox = 0 имеем
2
moo2
§ 3. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Динамические уравнения Эйлера вращения тела вокруг неподвиж-
неподвижной точки под действием сил получают из теоремы об изменении кине-
кинетического момента. Согласно этой теореме,
<\К0Ш =
A0)
где Ко — кинетический момент тела относительно его закрепленной
точки от вращения тела относительно инерциальной системы отсчета;
N
o' =
Рис. 133
— 2jM0 (Fi ) — векторная сумма мо-
моментов внешних сил, действующих на тело
(рис. 133). К числу внешних сил относится
также сила реакции закрепленной точки.
Если выразить A0) в проекциях на
инерциальные (неподвижные) оси коорди-
координат, то через Кх, Ку, Кг в полученные
уравнения, согласно C) в общем и D) в
частном случаях главных осей, войдут из-
изменяющиеся с течением времени моменты
инерции, для вычисления которых следует
уже знать движение тела, которое само
подлежит определению по заданным силам. Чтобы избежать этого,
Эйлер предложил проецировать векторы, входящие в A0), на под-
подвижные оси координат, скрепленные с вращающимся телом. Для та-
таких осей моменты инерции не зависят от времени.
Подготовим векторное уравнение A0) для проецирования на по-
подвижные оси координат, скрепленные с движущимся телом. Для это-
этого абсолютную производную по времени от кинетического момента не-
необходимо выразить через относительную производную, используя
формулу Бура, т. е.
:Ко, (И)
477
At
At
так как подвижная система осей координат имеет ту же угловую gko-
рость, что и само тело, о которым скреплены эти оси.
Для удобства проецирования представим векторное произведение
векторов в виде определителя g последующим разложением его по эле-
элементам первой строки, т, е.
в>Х/Со-
i
К*
= I К Кг
+ / К Кх - »* Кг) +
A2)
где I, /, Ъ — единичные векторы, направленные по осям координат по-
подвижной системы осей координат. Используя формулу A1), теорему
об изменении кинетического момента A0) представим в форме
(Ю')
В проекциях на подвижные оси координат, скрепленные с вращающим-
вращающимся телом, из A0') с учетом A2) получим
At
IT
A3)
Эти уравнения после подстановки в них значений Кх, Ку, Kz из C)
приведут к обобщенным динамическим уравне-
уравнениям Эйлера. Это еще довольно сложные уравнения. Дальней-
Дальнейшее их упрощение получается, если использовать второе предложение
Эйлера — выбрать в качестве подвижных осей координат, скреплен-
скрепленных с телом, главные оси инерции для точки 0. В этом случае Кх, Ку,
Kz определяются по формулам D). Моменты инерции по-прежнему не
будут зависеть от времени и их можно выносить за знак производных
по времени. Таким образом, из A3), используя D), получим следую-
следующие динамические уравнения Эйлера:
J.
it
с\а>г
A4)
478
К этим динамическим уравнениям Эйлера следует присоединить
кинематические уравнения Эйлера
со х = \\> sin 0 sin ф + б cos
(оу = г|з sin 0 cos ф — 0 sin
шг — ty cos 0 + ф,
A5)
которые выражают проекции вектора угловой скорости вращения
тела на подвижные оси координат, скрепленные с телом, через углы
Эйлера, г|з, 0, <р и их производные по времени ty, 0, ф.
§ 4. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Установим зависимость проекций вектора угловой скорости о> на
оси координат, скрепленные с телом, от углов Эйлера if, Э, ф и их про-
производных по времени ф, 0, ф.
Тело, имеющее неподвижную точку О, движется относительно осей
координат Охгухгх (рис. 134). С движущимся телом скреплена система
подвижных осей координат Oxyz, движение которой и характеризует
движение рассматриваемого твердого тела относительно осей ОххУ^.
Положение подвижной системы координат относительно неподвижной,
а следовательно, и положение
самого движущегося тела опре-
определяются тремя углами Эйлера:
f, 0, ф.
Изменение угла прецессии г[з,
образованного координатной
осью Охх и линией узлов ОК,
которая является линией пересе-
пересечения координатных плоскостей
Ох$\ и Оху, соответствует вра-
вращению тела вокруг оси прецес-
прецессии Огъ перпендикулярной ли-
линиям, образующим угол, с угло-
угловой скоростью ^kx, направлен-
направленной по этой оси. Здесь kx — еди-
единичный вектор оси 0гг.
При изменении угла нутации 9, заключенного между осями коор-
координат Огх и Ог, тело вращается вокруг перпендикулярной этим осям
линии узлов ОК с угловой скоростью Ьп, где п — единичный вектор,
направленный в положительную сторону линии узлов.
Изменение угла собственного вращения ф, образованного коорди-
координатной осью Ох и линией узлов ОК, приводит к вращению тела вокруг
оси собственного вращения Ог, перпендикулярной этим линиям, с уг-
угловой скоростью фй, где k — единичный вектор оси Ог.
При изменении углов Эйлера \[з, Э и ф движение тела можно рас-
рассматривать как сложное, состоящее из трех вращений вокруг пересе-
479
Рис. 134
Рис. 135
кающихся осей 0гъ ОК к Oz с угловыми скоростями #х, Qn и q>k со-
соответственно. Совокупность этих трех вращений эквивалентна враще-
вращению тела вокруг мгновенной оси с угловой скоростью со, направлен-
направленной по этой оси.
По теореме о сложении вращений вокруг пересекающихся осей име-
имеем
A6)
Определим проекции вектора угловой скорости о на подвижные
оси координат Oxyz, скрепленные с телом. Движение тела при этом рас-
рассматривается относительно неподвижной системы отсчета Ох^г^. При
проецировании на оси координат Охуг век-
векторной суммы правой части A6) следует
проецировать на эти оси каждый из сла-
слагаемых векторов.
Вектор угловой скорости ф/г направлен
по оси Oz и дает проекцию на эту ось, рав-
равную ф,так как он перпендикулярен двум
другим осям: Ох и 0у._
Угловая скорость 0я, направленная по
линии узлов, располагается в плоскости
подвижных осей Ох и Оу, и ее проекция на ось Ох равна 0cos ф, а на
ось Оу — (—9 sin ф). Знак минус у проекции на ось Оу поставлен
потому, что при изображенном на рисунке расположении осей вектор
Qn при разложении по осям Ох и Оу имеет составляющую в отрица-
отрицательном направлении оси Оу. Проецируемый вектор Qn перпендику-
перпендикулярен оси Oz, и его проекция на эту ось равна нулю.
Для того чтобы спроецировать на оси координат Oxyz вектор ijpklt
его следует предварительно разложить на две перпендикулярные со-
составляющие, одна из которых направлена по оси Oz, а другая перпен-
перпендикулярная составляющая расположится в плоскости осей координат
Ох и Оу. Имеем
где 7 — единичный вектор, направленный по линии OL. При проеци-
проецировании вектора ^\ на оси координат следует проецировать на эти оси
каждый вектор из правой части A7). Вектор г|з cos 0 • k дает проекцию
tp cos 0 только на ось Oz. Остается спроецировать вектор ip sin б • /,
расположенный в плоскости осей координат Ох и Оу, на эти оси. В
плоскости этих осей расположится также линия узлов ОК (рис. 135).
Линия OL, по которой направлен проецируемый вектор \\> sin 0 • 7, и
линия узлов взаимно перпендикулярны, так как линия узлов перпен-
перпендикулярна осям координат Oz и Огъ а следовательно, она перпендику-
перпендикулярна и линии OL, расположенной в плоскости этих осей. Угол ф меж-
между осями Ох и ОК является также углом между перпендикулярными
480
к ним осями Оу и OL. Таким образом, проекция вектора гр sin 0 • 7 на
ось Оу равна \р sin в cos ф, а на ось Ох —гр sin 0 sin ф.
Собирая вместе проекции на оси координат векторов, входящих в
правую часть A6), g учетом полученных проекций векторов из правой
части A7) получим кинематические уравнения Эйлера.
Выразим дополнительно косинусы углов оси прецессии Ozt с ося-
осями координат Oxyz, скрепленными с движущимся телом, через углы
Эйлера. По оси прецессии Огг направлен вектор угловой скорости
ф • kv Поэтому множители при tp в формулах для а>х, а>ч, а>г и есть
искомые косинусы указанных выше углов. Обозначая их для крат-
краткости Yi, ?2. Тз» получаем
A8)
Yt= cos {zlt x) =sin 9 sin ф;
Ya = cos (г, у) = sin 9 cos ф;
Ys = cos (zlt z) = cos 9.
§ б. ЗАДАЧА О ВРАЩЕНИИ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ. СЛУЧАИ ИНТЕГРИРУЕМОСТИ
Даны приложенные к телу внешние силы F\e\ F^, ..., Fie), к ко-
которым следует присоединить и силу реакции закрепленной точки (см.
рис. 133). Ограничимся рассмотрением случая сил, для которых проек-
проекции главного момента L{x\ L\f\ L\e) на подвижные оси координат,
скрепленные g телом, зависят от времени, углов Эйлера ф, ар, 0 и их
первых производных по времени ф, гр, 0 и не зависят от производных
более высоких порядков от этих величин. Если тело задано, то извест-
известны его моменты инерции относительно главных осей инерции для за-
закрепленной точки тела. Требуется определить движение тела, т. е. оп-
определить углы Эйлера в зависимости от времени. Для этого следует
проинтегрировать систему шести динамических A4) и кинематических
A5) уравнений Эйлера. При этом появятся шесть произвольных по-
постоянных интегрирования, для определения которых дополнительно
следу&т задать начальные условия, т. е. при t = 0 задать числовые ве-
величины углов Эйлера и их первых производных. Итак, следует задать:
/ =, 0; ф = ф0; \р = tp0; 0 = в0; «р =* щ; гр = ^0; G = 90. A9)
Интегрирование системы нелинейных дифференциальных уравне-
уравнений A4) и A5) при общих начальных условиях A6) — задача чрезвы-
чрезвычайно трудная. Она в общем случае начальных условий не решена да-
даже тогда, когда внешними силами являются только сила тяжести са-
самого тела и реакция закрепленной точки. Для тяжелого твердого тела,
вращающегося вокруг неподвижной точки, в трех случаях была ука-
указана система первых интегралов дифференциальных уравнений, из
которых неизвестные углы Эйлера в зависимости от времени опреде-
определяются в квадратурах, т. е. путем вычисления интегралов. Эти част-
частные случаи называют случаями интегрируемости уравнений Эйлера.
16 Зак. 1311 481
Случай Эйлера. Тело имеет любую форму, но закреплено
в его центре масс, т. е. L{xe) — L^ = L[e* = 0. В этом случае углы
Эйлера выражаются через специальные эллиптические функции.
Случай Лагранжа (случай симметричного гироскопа).
Тело имеет ось симметрии, например Ог. В силу симметрии Jx — Jv
и эллипсоид инерции для закрепленной точки будет эллипсоидом вра-
вращения. Закрепленная точка О и центр масс С расположены на оси сим-
гяегрни. В этом случае могут быть указаны шесть независимых первых
интегралов, из которых углы Эйлера вычисляются в квадратурах.
Случай Ковалевской. Долгое время не удавалось ука-
указать других случаев интегрируемости, пока русский математик С. Ко-
Ковалевская, участвуя в конкурсе, объявленном Французской академией
наук, не открыла еще один, получивший название случая Ковалевс-
Ковалевской. В случае Ковалевской Jx= Jy = 2JZ. Закрепленная точка рас-
располагав! ся на оси симметрии Ог, а центр масс находится в экватори-
экваториальной плоскости эллипсоида инерции (плоскости Оху) для неподвиж-
неподвижной точки тела.
Во многих важных случаях, особенно симметричных тел, являю-
являющихся гироскопами, уравнения Эйлера интегрируются приближенно.
Известен также ряд частных случаев начальных условий, для которых
уравнения Эйлера при движении гироскопа под действием силы тяже-
тяжести могут быть проинтегрированы точно.
§ 6. АСТАТИЧЕСКИЙ ГИРОСКОП
Гироскопом обычно называют симметричное твердое тело, совер-
щающее движение вокруг неподвижной точки О, расположенной на
оси симметрии Ог (рис. 136). Эллипсоид инерции гироскопа относи-
относительно его неподвижной точки является эллипсоидом вращения (на
рисунке он изображен штриховой линией), а любая его ось в эквато-
экваториальной плоскости, перпендикулярной оси гироскопа (например,
Рис. 136
Рис. 137
482
Ох и Оу), — главной осью инерции. Все эти оси имеют одинаковые
моменты инерции. Ось гироскопа Ог является главной центральной
осью инерции.
Крепление оси гироскопа в одной точке обычно осуществляется с
помощью рамок той или иной формы (рис. 137). Волчок, у которого
точка О движется по плоскости, совершает более сложное движение,
чем гироскоп, имеющий одну закрепленную точку на оси.
Астатическим (или уравновешенным) гироскопом называют ги-
гироскоп с неподвижной точкой в центре масс, если на него действуют
только сила тяжести и реакция неподвижной
точки. В астатическом гироскопе имеем сое-
соединение двух случаев интегрируемости —
Эйлера и Лагранжа.
Если Ог — ось симметрии гироскопа, то
для осей координат Охуг, скрепленных с гиро-
гироскопом, Jx = Jy. Для астатического гиро-
гироскопа главный момент внешних сил относи-
относительно закрепленной точки
%)
Рис. 138
так как силы тяжести и реакция закрепленной
точки проходят через эту точку О, если нет
сил трения в закрепленной точке (рис 138).
Из теоремы об изменении кинетического момента для абсолютного
движения гироскопа относительно неподвижных осей координат
dKofdt = W = О
следует, что кинетический момент относительно неподвижной точки ги-
гироскопа Ко = const. В частности, постоянной величиной является мо-
модуль кинетического момента Ко>
Если одну из неподвижных осей координат Огг направить по век-
вектору кинетического момента Ко, имеющему неизменное направление
в пространстве осей координат Ох^у^, то проекция /Со на ось Ог, как
главную ось инерции для точки О и одновременно ось собственного
вращения гироскопа, выразится в форме
Кг = Ко cos 9,
где 0 — угол между осью Огх и осью собственного вращения Ог. Он
обозначен так же, как и угол нутации. В дальнейшем окажется, что
он им и является.
С другой стороны, так как ось Ог является главной осью инерции
гироскопа для неподвижной точки О, то Кг = J^t,
Следовательно,
Jг 0)г = Ко C°S 9 И COS 0 = Jz(ilJKo-
1G*
B0)
483
Определим движение уравновешенного гироскопа, т. е. установии
зависимость углов Эйлера яр, 9, ф от времени при заданных начальных
условиях. Так как Lo} — 0, то Lx] — 1}у] = L{ze) — 0. Учитывая это
и условие симметричности Jх = Jу, получим следующие динамические
уравнения Эйлера:
— Jz) &х «г = 0; [ B1)
do).
= 0.
К ним следует присоединить кинематические уравнения Эйлера
(ох =\jj sin 9 sincp-t-0coscp;
B2)
Wy =op sin в cos ф—6 sin i
юг = ijj cos 9 + ф.
Вместо системы уравнений B1) удобнее использовать первые ин-
интегралы этой системы, один из которых получается умножением B1)
соответственно на сож, шу, «г и суммированием. После преобразований
получаем
d
+ Уг<в| = const = 2А. B3)
Это соотношение [первый интеграл системы B1)], в котором по-
постоянная обозначена 2А, выражает закон сохранения механической
энергии Т + Л = h, где Л — потенциальная энергия — постоянная,
принятая равной нулю.
Если уравнения системы B1) соответственно умножить на Jx<ox,
Jva>y, Jz°>z и сложить, то после интегрирования получается другой
первый интеграл:
Jl{®l + (ul)+Jl(*i=*cmsi = Kb. B4)
Соотношение B4) является законом сохранения кинетического мо-
момента относительно закрепленной точки.
Из третьего уравнения системы B1) следует еще один первый ин-
интеграл:
шг = const = <o?o), B5)
где соУ" — значение ooz при t = 0.
Первые интегралы B3)—B5) системы уравнений B1) можно исполь-
использовать вместо самой системы уравнений. Заменяя сог на со?о) и учитывая,
что Ко = const, из B0) получаем, что угол нутации — постоянная
величина. Действительно,
cos в = Jz(u'z0)/Ko = const = cos 0О,
484
где 9„ — значение 6 при t — 0. Так как 0 = const, то угловая скорость
нутации 9 = 0. С учетом этого система уравнений B2) примет вид
юх — if sin 90 sin ф; wy = op sin 9 cos <р; ю?0) = \|э eos 90 + ф.
B2')
Возведем первые два уравнения этой системы в квадраты и сложим.
Получим
со! + col =5 op3 sin2 90 ( sin2 <р + cos2 <р) = i|)a sin2 90. B6)
Определяя величину coi + и>1 из B3), убеждаемся, что она явля-
является постоянной, так как
©• + <в» = B/i — Jz®l0J/Jx = const. B7)
Учитывая B7), из B6) получаем
ty2 ~ (®х + со?)/ sin2 90 = const,
т. е. угловая скорость прецессии ty = const — ар0 и, следовательно,
* = W + ^о, B8)
где ф0, г|H — значения угловой скорости прецессии и угла прецессии
в начальный момент времени.
Из B2') о учетом B5) и B8) получаем, что угловая скорость собст-
собственного вращения тоже постоянная величина, так как
ф =s o^°» _гр0 cos 90 = const — ф0 B9)
и, следовательно,
Ф = <p,f + Фо» B9')
где ф0, ф0 — постоянные величины.
Движение гироскопа о постоянной скоростью собственного вра-
вращения ф, постоянной скоростью прецессии г|з и постоянным углом ну-
нутации 9 называется регулярной прецессией. Уравновешенный гироскоп,
следовательно, в общем, случае совершает регулярную прецессию по инер-
инерции вокруг направления кинетического момента Ко-
Для того чтобы уравновешенный гироскоп совершал регулярную
прецессию по инерции, т.е. без действия момента внешних сил относи-
относительно его неподвижной точки, необходимо выполнение условия
Л<Р = (Jx — Л№ cos 9. C0)
Условие C0) получено в § 3 этой главы. Оно еледует также из B9).
Если ф, ар и 9 не удовлетворяют этому условию, то для поддержа-
поддержания регулярной прецессии требуется действие на гироскоп момента
Внешних сил.
Если уравновешенному гироскопу сообщить начальную угловую
скорость ш0 вокруг оси собственного вращения, то кинетический мо-
момент гироскопа Ко, сохраняющий свое направление неизменным, бу-
485
;-ет все время направлен по этой оси. В этом случае угол нутации ра-
Еен нулю и ось собственного вращения совпадает с осью прецессии,
по которой направлен кинетический момент, сохраняющий постоянное
направление в неподвижном пространстве. Ось такого гироскопа тоже
Судет сохранять неизменным свое направление в этом пространстве.
Это свойство уравновешенного гироскопа сохранять неизменным свое
направление, например на какую-либо удаленную звезду, широко
используется в различных гироскопических устройствах, таких, как
i нроскопические компасы, автопилоты п т. д.
Действие кратковременных возмущений, действующих на гироскоп,
например вследствие движения объекта, на котором он установлен, в
ускорением в течение короткого промежутка времени, рассматрива-
рассматривается в приближенной теории гироскопа.
§ 7. ДВИЖЕНИЕ ГИРОСКОПА ПрД ДЕЙСТВИЕМ СИЛЫ ТЯЖЕСТИ
Если пренебречь силами сопротивления среды, в которой движется
гироскоп, и силами трения в закрепленной точке или соответственно
в подшипниках рамок, то кроме силы реакции в закрепленной точке
на гироскоп всегда действует сила его тяжести, Пусть в этом случае ги-
Рнс. 139
роскоп, с которым скреплена система координат Охуг (ось Ог является
осью симметрии гироскопа), движется относительно системы коорди-
координат Ох^уггъ у которой ось Огг с единичным вектором kx направлена
вертикально вверх (рис. 139).
Для силы тяжести Р, направленной вертикально вниз, т. е. против
положительного направления оси 0zlt имеем Р — —Pkx. Ее проекции
на подвижные оси координат, скрепленные о гироокопом, выразятся
в виде
Px=_/>COs(ZltX)=: -РЪ
Ри=—Р cos (С у) = — Ръ;
Рг= _Р cos B~ г) =-/>%,
C1)
где Yi» Ya> V3 — косинусы углов оси Ozx g осями координат подвижной
системы Охуг.
Главный момент внешних сил L&° относительно закрепленной точ-
точки сведется только к векторному моменту силы тяжести относительно
этой точки. Поэтому, учитывая, что хс = 0, ус = 0, га = /, и исполь-
используя C1), получим
Lf = Мх (Р) = ус Pz-zc Р„ = -zc Ру =
= Мг (Р) - хс Ри - ус Рх = 0.
Динамические уравнения Эйлера для симметричного гироскопа
{J х =5 J у), движущегося под действием силы тяжести, примут вид
do
C3)
К динамическим уравнениям следует присоединить кинематичес-
кинематические уравнения Эйлера
шх =s \[э sin 9 sin ф + 9 cos ф;
(Oj, — \(з sin 9 cos ф — 9 sin ф; C4)
со2 = г|) cos 9 + ф.
К системе уравнений C3) и C4) надо добавить формулы A8), выра-
выражающие косинусы углов Yi» Ya» Y» через углы Эйлера:
Yt = sin 9 sin ф; Ya — sin 9 cos ф; Ys — cos 9. C5)
Систему уравнений C3) и C4) о учетом C5) проинтегрируем в наи-
наиболее важном частном случае начальных условий:
t — 0; ®х = ©j, = 0; C0Z = ш0; ф — о|? =s 0; 9 =* 90, C6)
Вместо динамических уравнений Эйлера C3) целесообразно исполь-
использовать первые интегралы этих уравнений, которые можно получить из
самих уравнений или из общих теорем динамики, примененных к гиро-
487
скопу. Один из этих интегралов следует из последнего уравнения сис-
системы C3):
шг = const = Сх.
Два других первых интеграла получим применением общих теорем
динамики.
Связи, наложенные на гироскоп, при отсутствии трения в закреп-
закрепленной точке являются идеальными и стационарными. Сила тяжести,
действующая на него, является потенциальной. При этих условиях
справедлив закон сохранения механической энергии (интеграл энер-
энергии)
Т •+¦ П = const = С2
Кинетическая энергия гироскопа при J' х— J вычисляется по форму-
формуле
Потенциальная энергия П, если принять ее равной нулю, когда центр
масс находится в горизонтальной плоскости Охху\, определяется через
координату центра MacG г1С в неподвижной системе координат выраже-
й
П = Рг
1Г.
Значение zic получим проецированием радиус-вектора центра масс
г с — Ik, направленного по подвижной оси Ог, на неподвижную ось
Огг. Имеем
\
Чс = то cos (zlt z) = /у3.
Таким образом,
Я = Pzlc = Ply,.
Подставляя значения кинетичеокой и потенциальной энергий в
интеграл энергии, получим
Jx (©5 + ©J) + Л©5 + 2Р/?9 = С,.
Из теоремы об изменении кинетического момента в абсолютном
движении гироскопа относительно неподвижной оси 0г1 имеем
dtfZl Ш = Lft = О,
так как сила тяжести Р параллельна этой оси. Отсюда получаем сле-
следующий интеграл сохранения кинетического момента относительно
оси OZji
Kz, => Const = Са.
Выразим Кгг через кинетические моменты относительно подвижных
главных осей инерции Охуг для точки О:
Так как кинетический момент Ко можно разложить на составляющие
по осям_ подвижной системы координат Ко — Кх *1 + Kw • /+¦
+ Kz ' k> то Kzt можно получить проецированием векторной суммы на
ось Огл. Имеем
Кл~ Kx cos (гъ х) + Kv cos(zlt у) -f Kz cos (zlt г) =
= 4 и>х Yi + Jx «г, Y2 + h <»z Ys'-
Интеграл сохранения кинетического момента относительно оси Огх
принимает форму
Получены следующие три первых интеграла динамических урав-
уравнений Эйлера:
щ = Сг;
J* (со! + со2„) + Jf©l
Согласно начальным условиям юг = ю0, сож = соу = 0 при ^ = О,
из этих первых интегралов получаем следующие уравнения для опре-
определения постоянных Clf Ca, С3:
ш0 == бх; 7гсо§ + 2?7узо = С2; /^зо^о = С3.
Подставляя эти значения постоянных в выражения для первых ин-
интегралов, имеем
Щ — «0; C7)
Jx (о>! + со|) = 2Р/ (cos 90 — eos 9); C8)
Jx (Yi05* + Y2«») — ^2»о ( cos 60 — eos 9), C9)
так как согласно C5) и начальным условиям Yso — ?з — cos в0 —
— cos 9.
Из кинематических уравнений Эйлера C4) в учетом C5) получаем
соотношения
ю? + «oj — ф» sin2 9 + 92; D0)
Yi(O*+Y2«>tf = i{|sm20. D1)
С учетом D0) и D1) формулы C8) И C9) примут вид
Jx № sin2 9 + ?) = 2Р1 (gos 60 — cos 6); D2)
/^sin2e == Jt <o0(cos 60 — cos 9). D3)
Из последнего уравнения системы C4), приняв <oz = ю0, имеем
«о = 'Ф cos 9 + ф. D4)
489
Получена система нелинейных обыкновенных дифференциальных
уравнений D2), D3) и D4) , интегрированием которых можно опреде-
определить углы Эйлера ty, в, ф в зависимости от времени при заданных на-
начальных условиях. Это сложная для интегрирования система уравне-
уравнений. Подготовим ее для приближенного интегрирования.
В D2) левая часть положительна; следовательно, должна быть
положительна и правая часть, т. е. cos 90 — cos 9 >¦ 0. С учетом этого
из D3) для г|з имеем
^ = •/г<0° (cos 90— cos 9) > 0, D5)
J sin2 О
т. е. прецессионное движение гироскопа о угловой скоростью прецес-
прецессии ф происходит все время в одном и том же направлении, так как при
^ > 0 угол г|э возрастает с течением времени.
Определяя угловую скорость нутации 9 из D2) с использованием
D5), получим
ва= — (cose0-cos6) _^L
J J% Sin2
D6)
Так как левая часть D6) положительна, то и правая часть должна быть
положительна. Учитывая, что cos 90 — cos 9 > 0, получаем, что вы-
выражение в квадратных скобках должно быть тоже положительным,
т. е.
^cose)<l. D7)
Для создания предпосылок последующих допущений приближен-
приближенной теории гироскопа выполним приближенное интегрирование полу-
полученных уравнений для углов Эйлера в случае быстровращаю-
щ е г о е я гироскопа, для которого собственный кинетический мо-
момент Jz(n0—величина достаточно большая по сравнению о наиболь-
наибольшей величиной знаменателя 2PUх в D7). Этот случай представляет
наибольший практический интерес. Для таких гироскопов разность
cos в0 — cos 0, как это следует из D7), будет величиной малой. При
этом будет малой и разность углов G — во = м, где и — изменение угла
нутации гироскопа. В этом случае приближенно можно принять, от-
отбрасывая малые второго и более высоких порядков,
cos и = 1; sin и = и;
cos 0 = cos (80 -{- и) = cos 90 — и sin 60; sin 0 = sin 0O.
Учитывая, что 6 = dQ/dt = du/dt, из D6) получим следующее диф-
дифференциальное уравнение для определения и:
(du/dtf = <х2и ф — и), D6')
490
где введены обозначения для постоянных
а* =
Л; р = 2PUxsin Go/
Из D6') после извлечения квадратного корня и разделения перемен-
переменных получим
и ' t
_ = f
Пределы в интегралах поставлены с использованием начальных усло-
условий. Интеграл левой части вычисляется о помощью подстановки и ~*
= f> sin2 |. Выполняя интегрирова-
интегрирование, окончательно имеем
х sin Go
D8)
Подставляя значение G из D8) в
D5) с учетом принятых допущений,
получим
Jz <
И.
D5*)
Отсюда интегрированием находится
угол прецессии тр.
Для угловой скорости собственного вращения из D4) с учетом
D5') и принятых допущений имеем
Jх Sin
и.
D4е)
Из этого соотношения квадратурой получается угол ср в зависимости
от времени.
Не производя вычисления интегралов, уже можно сделать следую-
следующие основные выводы о движении быстровращающегося гироскопа.
1. Модули угловых скоростей прецессии |\р| и нутации |0| малы по
сравнению с модулем угловой скорости собственного вращения |<pj.
2. Если прецессионное движение происходит все время в одном
и том же направлении (ф > 0), то нутационное движение носит коле-
колебательный характер.
Отсюда следует, что если взять на сюи гироскопа какую-либо точку
А, то ее траектория на поверхности сферы, согласно D8), будет иметь
вид, указанный на рис. 140. При и = 0, как следует из D5'), ij? — 0,
т. е. прецессия на мгновение прекращается. В случае очень больших
значений /г(оо наибольшее изменение угла нутации «шах будет очень
малым и тогда можно принять 0 = const = 90. Если ввести постоян-
постоянную среднюю угловую скорость прецессии за рассматриваемый проме-
491
жуток времени, то движение гироскопа будет очень близким к регу-
регулярной прецессии, для которой угловые скорости прецессии и собст-
собственного вращения постоянны и прецессия происходит вокруг непо-
неподвижной оси при постоянном угле нутации. В действительности дви-
движение гироскопа немного отличается от регулярной прецессии. Дви-
Движение гироскопа, близкое к регулярной прецессии, называют псевдо-
псевдорегулярной прецессией.
§ 8. ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПА
В технике применяются гироскопы с угловой скоростью собственно-
собственного вращения порядка 2000—5000 с B0 000—50 000 об/мин). В совре-
современной технике гироскопы нашли очень широкое применение. Гиро-
Гироскопические явления проявляются при всех видах движения тела, ког-
когда это тело совершает сложное движение, содержащее в своих частях
вращательное движение. Рассмотрим основные гироскопические яв-
явления быстровращающихся гироскопов приближенно, приняв, что
гироскопу сообщена вокруг оси симметрии или оси гироскопа Ог соб-
собственная угловая скорость щ.
Основные допущения приближенной теории
При применении гироскопов в различных устройствах часто важ-
важно знать движение его оси. Собственное вращение вокруг оси обычно
задано, и угловая скорость собственного вращения при этом поддер-
поддерживается постоянной. Движение оси быстровращающегося гироскопа
можно установить по кинетическому моменту гироскопа, вычислен-
вычисленному относительно неподвижной точки, так как кинетический момент
можно считать приближенно направленным по оси гироскопа. Для
быпросрпщающегося гироскопа угловая скорость прецессии мала по
сравнению с угловой скоростью собствен-
собственного вращения и также мало изменение
угла нутации, т. е. угла между осью собст-
собственного вращения и осью прецессии.
Мгновенную угло_вую скорость гироско-
гироскопа w — «i + иа -f" ©з отвращения вокруг
неподвижной точки в первом приближении
(рис. 141) можно принять
СО ЯП Юц
где щ — угловая_ скорость собственного
вращения; со2 и йз — соответственно .угло-
.угловые скорости прецессии и нутации.
Учитывая, что оси Ох, Оу, Ог — глав-
главные оси инерции и J x~ J v, для проекций
кинетического момента па эти оси имеем:
Рис, 141 К« — «/*©*; Ку = JyOiy-, Kt — Jzcoz.
492
Так как и направлена приближенно по оси собственного вращения
Ог, то ах « 0, (йу » 0 и, следовательно,
Таким образом, для быстровращающегося гироскопа с большим
собственным_кинетическим моментом Jtmt можно считать кинетичес-
кинетический момент Ко равным по модулю собственному кинетическому момен-
моменту гироскопа Jz<ax и направленным по оси гироскопа, т. е.
Ко & Jzat. D9)
Это приближенное выражение для кинетического момента ги-
гироскопа будет точным, если ось гироскопа является его неподвижной
осью вращения.
Для решения вопроса о поведении осей таких гироскопов можно
пользоваться теоремой Резаля, позволяющей характеризовать дви-
движение конца вектора кинетического момента по известному главному
моменту внешних сил.
Для сохранения существенных свойств гироскопа угловую скорость
прецессии со2 следует учитывать, пренебрегая только угловой ско-
скоростью нутации, но при вычислении кинетического момента гироскопа
используем формулу D9).
Особенности движения оси гироскопа
Рассмотрим особенности движения оси гироскопа по сравнению с
движением оси такого же тела, не имеющего собственного вращения
вокруг оси симметрии Ог. Пусть центр тяжести в обоих случаях рас-
расположен в неподвижной точке О и трением в этой точке пренебрежем.
Если к покоящемуся телу перпендикулярно оси Oz приложена сила F
в какой-либо точке А его оси симметрии (рис. 142), то тело начинает
вращаться вокруг оси Ох, перпендикулярной плоскости расположе-
расположения силы и оси симметрии, а точка А тела начнет двигаться в направ-
направлении действия силы. Если действие силы прекращается, то тело даль-
дальше вращается вокруг оси Ох по инерции с постоянной угловой скоро-
скоростью, если позволяет крепление тела в точке О.
Совершенно иначе ведет себя быстровращающийся гироскоп под
действием такой же силы F (рис. 143), приложенной в точке А. Точка
А, согласно приближенной теории, начнет двигаться не в направле-
направлении действия силы/7, а, как это следует из теоремы Резаля, в направ-
направлении векторного момента этой силы относительно неподвижной точ-
точки О параллельно оси Ох, При этом ось гироскопа вращается вокруг
оси Оу, Действительно, гироскоп еще до действия силы имел кинети-
кинетический момент Ко =* Jte>u направленный по оси гироскопа, так как
гироскоп вращался только вокруг собственной оси Ог в угловой ско-
скоростью щ. По теореме Резаля скорость ив конца вектора Ко равна и
493
параллельна векторной сумме моментов относительно точки О всех
внешних сил LF\ т. е. ив — ГЬ°.
В данном случае
Ue) * Mo (F),
причем момент Мо (F) направлен по оси Ох.
Таким образом, скорость точки В конца вектора Ко и при приня-
принятых допущениях приближенной теории всех других точек оси гироско-
гироскопа параллельна Мо (F), что соответствует вращению оси гироскопа Ог
9)
Рис. 142
Рис. 143
или прецессии гироскопа вокруг оси Оу. Ось гироскопа прецессирует
под действием силы в направлении момента этой силы. Если момент
силы в какой-либо момент времени равен нулю, то прецессия оси ги-
гироскопа тоже прекращается. Ось гироскопа не обладает инерцией.
Для гироскопа не имеет существенного значения сила F, так как его
прецессионное движение определяется только моментом этой силы от-
относительно неподвижной точки гироскопа. Если центр тяжести гиро-
гироскопа не находится в неподвижной точке, то надо в общем суммарном
моменте сил учесть момент силы тяжести.
Сформулируем следующее правило прецессии: если к вращающему-
вращающемуся вокруг оси гироскоп;/ приложить внешние силы, создающие момент
сил относительно его неподвижной точки, то та часть оси гироскопа,
по которой направлен кинетический момент, начнет прецессировать
в направлении векторного момента этих сил.
Выведем приближенную формулу для оценки угла прецессии тр
в рассмотренном случае действия силы F. За достаточно малый проме-
промежуток времени % точка В конца вектора Ко смещается по дуге годогра-
годографа на величину
sB » нвт =з Мо (F) х = Fix =5 F%1.
494
Угол поворота вокруг оси Оу
4Д МпG)х Fxl
так как
ОЛ = Ко = Л»1-
Из E0) следует, что угол ty тем меньше, чем больше собственный ки-
кинетический момент гироскопа Jzc0j; угол if прямо пропорционален мо-
моменту импульса силы относительно неподвижной точки гироскопа.
Формулу E0) применяют для оценки действия tHa гироскоп кратковре-
кратковременных сил возмущений, когда величина т очень мала. Если собствен-
собственный кинетический момент Jz(n1 достаточно велик по сравнению с мо-
моментом импульса силы, то ось гироскопа почти не отклоняется, т. е.
на нее не влияют кратковременные импульсы сил или удары. Ось ги-
гироскопа устойчива к таким импульсам сил. Удары по оси гироскопа
не приводят к заметному ее отклонению от первоначального направ-
направления.
Гироскопический момент
Как уже известно, если на гироскоп действуют внешние силы, соз-
создающие момент относительно неподвижной его точки, то гироскоп пре-
цессирует с некоторой угловой скоростью. Если момент внешних сил
становится равным нулю, то и прецессия гироскопа прекращается.
Таким образом, для создания прецессии гироскопа по приближенной
теории требуется момент внешних сил и наоборот.
Пусть гироскоп прецессирует о угловой скоростью со2. Вычислим
момент внешних сил, вызывающих эту прецессию. По теореме Резаля,
момент внешних сил относительно неподвижной точки гироскопа
Voe) = йК0Ш = Ъв.
Так как вектор Ко, направленный по оси гироскопа, вращается
вокруг неподвижной точки с угловой скоростью прецессии (о2, то
скорость точки В, совпадающей с концом вектора Ко, вычисляется по
формуле, аналогичной векторной формуле Эйлера для скорости точки
тела при сферическом движении, т. е.
пв =*ЩХОВ = юа X Ко*
так как ОВ = Ко = Jt щ.
Для момента внешних сил L& имеем
1Ье) = щ X Ко - Jt (ш, X to,). E1)
Если к гироскопу применить одно из следствий принципа Далам-
бера, что сумма векторных моментов внешних сил вместе о моментом
сил инерции точек гироскопа равна нулю, то
Г + Loe) *= 0,
495
где L — момент всех сил инерции гироскопа относительно неподвиж-
неподвижной его точки. Этот момент L называют гироскопическим моментом.
Учитывая E1), получаем
L = — Z
ил» окончательно
L — Зг
X
= h
X (о2); ? =
X
sin 0,
E2)
где G — угол нутации, т. е. угол между осью собственного вращения
и осью прецессии.
Гироскопический момент можно представить как момент гироско-
гироскопической пары сил, с которой гироскоп действует на тела, принуждаю-
принуждающие его прецессировать под действием момента внешних сил ЪЬ'}. Обыч-
Обычно противодействие гироскопа в виде гироскопической пары сил пере-
передается на эти тела через подшипники, в которых помещена ось гиро-
гироскопа. Если эти тела или одно из них могут двигаться, то гироскопи-
гироскопическая пара сил может вызвать его движение.
Из E2) видно, что гироскопический момент может быть равен ну-
нулю, если угловая скорость прецессии ю2 равна нулю или если ось
гироскопа параллельна
оси прецессии.
Действие гироскопиче-
гироскопической пары сил полностью
определяется гироскопиче-
гироскопическим моментом этой пары,
вычисляемым по формуле
E2). Но во многих случаях
более предпочтительно оп-
определять эю действие по
правилу Жуковского, осно-
основанному на этой же фор-
формуле.
Правило Жуков-
Жуковского: если быстровра-
щающемуся гироскопу сообщают вынужденное прецессионное движе-
движение, то возникает гироскопическая пара сил, стремящаяся сделать
ось гироскопа параллельной оси прецессии, причем так, чтобы после
совпадения направления этих осей оба вращения вокруг них имели оди-
одинаковое направление.
Если какое-либо тело препятствует гироскопу двигаться так, что-
чтобы сделать его ось параллельной оси прецессии, то гироскоп давит на
это тело и закрепленную точку гироскопа.
В случае когда таким гироскопом является ротор турбины, уста-
установленной на корабле, совершающем разворот вокруг вертикальной
оси (рис. 144), гироскопическое давление воспринимается подшипни-
подшипниками турбины. Силу этого давления N определяют по формуле
N1 = L — Jz^i^z sin О
P.i; 144
496
или
N = Lit =
sin QH,
E3)
где I — расстояние между подшипниками турбины; co2 — угловая ско-
скорость поворота корабля (угловая скорость прецессии); 0 — угол ну-
нутации (в рассматриваемом случае 9 = 90°).
Техническое применение гироскопа
Из многочисленных применений прецессирующего гироскопа, дви-
движение которого легко оценить на основании правила Жуковского, рас-
рассмотрим для примера измерение угловых скоростей. Пусть гироскоп,
ось которого помещена в подшипниках, расположенных на каком-
либо летательном аппарате, совершает быстрое вращение вокруг сво-
своей оси. Если летательный аппарат поворачивается вокруг какой-либо
мгновенной оси с угловой скоростью «2, то для гироскопа эта угло-
угловая скорость является угловой скоростью прецессии и ее можно оце-
оценить по силе гироскопического давления N. Эту силу, в свою очередь,
можно измерить, например, по деформации пружины, на которой ук-
укреплен один из подшипников гироскопа
(рис. 145). Для со2 по формуле E3) имеем
щ = Nil Цгщ sin 9). E4)
В практике измерения угловых ско-
скоростей обычно используют случай, когда
9 = 90°. Если на летательном аппарате
осуществить регулирующее устройство,
которое бы с помощью, например, рулей
стремилось создать для него угловую
скорость ы2 равной нулю, то летательный
аппарат можно стабилизировать по угло-
угловой скорости относительно соответствую-
соответствующей оси. Создавая с помощью привода
соответствующее давление N на пружин-
пружинную опору, которое эквивалентно угло-
угловой скорости прецессии, этим регули-
регулирующим устройством с рулями можно
управлять летательным аппаратом. Очевидно, для полной стабилиза-
стабилизации и управления летательным аппаратом достаточно трех таких ги-
гироскопов со взаимно перпендикулярным расноложением осей.
Кроме рассмотренной стабилизации с помощью регулирующих
устройств, когда гироскоп применяют в качестве чувствительного эле-
элемента, его можно применять и для непосредственной стабилизации
артиллерийских и иных установок на кораблях, для успокоения качки,
стабилизации вагонов однорельсовой железной дороги и т. п.
Другое важное свойство гироскопа, которое нашло широкое при-
применение, — это способность сохранять направление своей оси, если
нет' приложенного к i ироскопу момента внешних сил. Тогда ось гиро-
гироскопа не прецессирует и сохраняет неизменным свое направление в
497
Рис. 145
пространстве. Это свойство уравновешенного гироскопа используют
в гирокомпасах, указателях поворота, стабилизирующих устройствах
и т. п. Для этой цели применяют гироскопы с тремя степенями свобо-
свободы, или свободные гироскопы.
Прецессия тяжелого гироскопа по приближенной
теории
Расемотрим прецессию тяжелого гироскопа (рис.146) под действием
силы тяжести. Согласнолравилу прецессии, под действием момента си-
силы тяжести Р относительно точки О гироскоп прецессирует вокруг
вертикальной оси Огг в направлении, указанном на рисунке дуговой
стрелкой. Так как в каждый момент времени
то, следовательно,
sin 9 — PI sin 9,
где I = ОС — расстояние от неподвижной точки до центра тяжести
гироскопа.
Угловая скорость прецессии
«о, == PV
E5)
Из E5) следует, что угловая скорость прецессии тяжелого гироско-
гироскопа не зависит от угла наклона оси гироскопа; она обратно пропорцио-
пропорциональна собственному кинетическому моменту гироскопа Jzwlt прямо
пропорциональна его силе тяжести и расстоянию от центра тяжести
гироскопа до неподвижной точки.
Рис. 146
Рис, 147
498
Пример. Бегуны вращаются вокруг вертикальной оси Ог с постоянной уг-
угловой скоростью cu0 (рис. 147). Сила тяжести каждого бегуна — Р, радиус —R,
радиус инерции относительно оси Ог собственного вращения — р,
Определить силу давления бегуна на дно чаши и давление бегунов на шар-
нир О по приближенной теории гироскопа
Решение. Бегун считаем прецессирующим гироскопом о осью собствен-
собственного вращения Ог и осью прецессии Ог^. Сила давления Q бегуна на дно чаши скла.
дывается_из силы тяжести бегуна и силы гироскопического давления, г. е. Q —
= Р+ N,
Предполагая, что средняя точка А бегуна неподвижна, т. е. находится на
мгновенной оси бегуна, заключаем, что ОА является мгновенной осью бегуна, по
которой направлена его угловая скорость, состоящая из скорости прецессии а>а,
направленной по оси Ог, и собственной угловой скорости бегуиа"о>1, направлен-
направленной по оси бегуна Ог,
Из подобия треугольников для угловых скоростей и линейных величин
получаем
щ/с?>а = 1/R,
Отсюда
щ = wol/R,
Рассматривая бегун как прецессярующий гироскоп о угловой скоростью
прецессии аГ0 и угловой скоростью собственного вращения~а>1И1о правилу Жуков-
Жуковского получаем, что бегун давит вниз на дно чаши с силой N, а на шарнир О —
— с такой же по числовому значению силой, но вверх» Так как в = 90°( то по
формуле E3) имеем
I glR &R
Р
так как /~ = — ра.
g
Сила давления
Давление на шарнир О от обоих бегунов направлено вверх, и его числовое
виачение
Qi^2Ni^W2 .
Если бегун является однородным диском, тор = R/"[/2 и
g
Для получения больших давлений на дно чаши применяют бегуны большего
радиуса, так как сила давления пропорциональна радиусу бегуна,
$ 9. РЕГУЛЯРНАЯ ПРЕЦЕССИЯ ГИРОСКОПА
Как известно, уравновешенный (астатический) гироскоп может
совершать регулярную прецессию по инерции без действия внешних
сил. По приближенной теории получается, что прецессия может быть
вызвана только действием внешних сил. Очевидно, допущения при-
приближенной теории позволяют рассмотреть прецессионное движение ги-
499
роскопа с точностью до некоторой регулярной прецессии, существо-
существовавшей до действия внешних сил. Если этой начальной прецессии по
инерции нет, то приближенная теория находится в соответствии с точ-
точной теорией
Рассмотрим случай регулярной прецессии гироскопа. Известно,
что регулярной прецессией гироскопа называют такое его движение,
при котором угловые скорости собственного вращения и прецессии
постоянны, прецессия происходит вокруг оси постоянного направле-
направления и угол нутации, т. е. угол между осью собственного вращения и
осью прецессии, тоже является постоянным.
Получим формулу для гироскопического момента при регулярной
прецессии и рассмотрим ее следствия.
Гироскопический момент при регулярной прецессии
В случае регулярной прецессии мгновенная угловая скорость
гироекопа
С» -^ «! + С02,
где (л1 — собственная угловая скорость, направленная по оси гироско-
гироскопа Oz; <*>2 — угловая скорость прецессии, направленная по неподвиж-
неподвижной оеи Огг (рис. 148).
Если выбрать ось Ох в экваториальной плоскости эллипсоида инер-
инерции так, чтобы она лежала в плоскости осей Oz и Огъ то для проекции
со на подвижные координатные оси Охуг, жестко скрепленные g гиро-
гироскопом, имеем:
= 0; а>г,— щ + со2 cos 9.
Определим проекции вектора ки-
нетического момента на оси Ох, Оу,
Oz, которые являются главными ося-
осями инерции для точки О. Получаем:
Кх — Jх<ях = J ха>2 sin 9;
Ку = Jy(uy = 0;
Кг — Jzaz — Jz {щ + со2 cos 6).
Следовательно, кинетический мо-
момент гироскопа относительно непод-
неподвижной точки О
a>x = со2 sin 9;
Рис. 148
-f co2cosG)A.
E6)
Гироскопический момент L как мо-
мент сил инерции гироскопа можно
вычислить по формуле
— —ив.
500
При регулярной прецессии coj = const 0 — const, сог = const;
следовательно, Kxj= const, Ky = 0. Кг — const, т. е. вектор кинети-
кинетического момента Ко постоянен по модулю и изменяется только по на-
направлению. Для того чтобы найти скорость конца этого вектора—
точки В, надо знать угловую скорость вращения этого вектора
вокруг неподвижной точки О.
Если рассмотреть плоскость, в которой лежат ось гироскопа Oz и
ось прецессии Ozx (плоскость Охг), то в случае регулярной прецессии
ось прецессии Огг является неподвижной. Лежащий в этой плоскости
вектор Ко вращается вместе с этой плоскостью вокруг оси Ozx с угло-
угловой скоростью со2, направленной по этой оси. Таким образом, по фор-
формуле, аналогичной формуле Эйлера для скорости точки тела при его
сферическом движении,
ив — со2 X Ко.
Тогда
Ъ— — «в= — ю2х Ко =/(о X ы2- E7)
Из формулы E7) следует, что момент L перпендикулярен плоскости
Охг, в которой лежат векторы со2 и Ко и, следовательно, параллелен
оси Оу, совпадающей с линией узлов.
Если в E7) вместо Ко подставить его значение из E6), то
L = J хи>% sin 8 (i X ш2) + Jz (ojj + соа cos 0) (fe X ш2).
Гироскопический момент
? = —J ха>2 sin в cos 8 -f- Jz (<»! + со2 cos Q)a>2 sin 6 —
Uzojl 4- (Jz ~ Jx)(o2 cos OJco2 sin G, E8)
так как
\i X &)a| = coa cos G; \k X co3j = co2 sin 8
и векторы (ix co2) и (fe X a>2) параллельны, но противоположны по на-
направлению. _ _
Приняв направление вектора (fe X ш2) за положителььое, после
Введения единичного вектора coj = k имеем
L = игсо! + (Jz — Уж)со2 cos 0] (со? X ©г). E9)
Формула E9) является выражением для вектора гироскопического
момента при регулярной прецессии. Гироскопический момент, как это
следует из E9), можно разложить на две составляющие V и L", где
"V = Jz(o1 (ш? X *со2) - Уг©! X "©а; F0)
I" = Uz — ^*)«2 cos 8 (©} X щ). F1)
Гироскопический момент Z/ совпадает в гироскопическим момен-
моментом, полученным по приближенной теории. Гироскопический момент
Т" является поправкой к гироскопическому моменту U в случае xoq-
501
иого вычисления кинетического момента при регулярной прецессии.
Момент L" равен нулю, если Jz = Jк (эллипсоид инерции является
шаром) и при 8 =¦ 90°, т. е. когда ось гироскопа перпендикулярна оси
прецессии.
Отметим, что L' и L" направлены в одну сторону, если
(jz — j x) cos 0 > 0, и в противоположные стороны при
V J) 6<0.
Регулярная прецессия по инерции
В случае регулярной прецессии без действия внешних сил, т, е.
регулярной прецессии по инерции, имеем
L = LF] = 0.
Отсюда, учитывая E8), получаем
L — U^Wi -f- Uz — Jx)^2 cos б^г sin 8 = 0
и, следовательно,
<о2== йщ {62)
(Jx—Jz)coaQ
Таким образом, возможна регулярная прецессия по инерции с уг-
угловой скоростью, определяемой по формуле F2), если гироскоп не
обладает шаровой симметрией (JZ^JX) иось прецессии не перпендику-
перпендикулярна оси гироскопа.
Известно, что по инерции без действия сил может двигаться мате-
материальная точка с постоянной скоростью по прямой линии и вращать-
вращаться твердое тело вокруг неподвижной оси с постоянной угловой скоро-
скоростью. К этим случаям следует добавить случай регулярной прецессии
гироскопа по инерции.
Итак, регулярная прецессия может происходить по инерции и быть
вынужденной, т. е. происходящей под действием внешних сил. В при-
приближенной теории рассматривается только вынужденная прецессия.
В точной теории регулярной прецессии расматрнвают обе эти прецес-
прецессии.
Регулярная прецессия тяжелого гироскопа
Для тяжелого гироскопа
L =, Ue) =« PI sin 9
или, учитывая значение L, из E8) получаем
[Jz щ + (Jz — JK)ci>2 cos в]со2 snl & = PI sin Э.
Отсюда угловая скорость прецессии
— Jz coi Т УЦ w? +4 (Jz - Jx) Pi cos f)
2 Vt-Jx) cos 9 V ;
502
Таким образом, регулярная прецессия тяжелого гироскопа воз-
возможна, если
Лю? + 4 Gг —/Ж)Р/cos 9 >0. F4)
Условие F4) выполняется, если величина J^ достаточно велика.
В этом случае, вычислив приближенное значение квадратного корня
из F3) по биному Ньютона, ограничиваясь первыми степенями малых
величин, получаем
l
J
Подставляя значение этого выражения в F3) и беря верхний и ниж-
нижний знаки перед корнем, имеем два приближенных значения угловой
скорости прецессии:
f h. F5)
Прецессия g угловой скоростью ©г" — медленная прецессия. Та-
Такая угловая скорость прецессии получается и по приближенной тео-
теории. Прецессия о угловой скоростью юг" — быстрая прецессия. Ее
получают, как и прецессию по инерции. Тяжелый гироскоп при вы-
выполнении условия F4) может совершать две прецессии — медленную
и быструю, близкие к рассмотренным двум прецессиям с угловыми
скоростями ю'г1' и а>22>.
§ 10. УСТОЙЧИВОСТЬ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА С ОДНОЙ
ЗАКРЕПЛЕННОЙ ТОЧКОЙ ВОКРУГ ГЛАВНЫХ ОСЕЙ ИНЕРЦИИ
Представление об устойчивости вращения тела вокруг главных
осей инерции можно составить на примере движения твердого тела,
закрепленного в центре масс и находящегося под действием только силы
тяжести и реакции закрепленной точки. Главный момент внешних
сил относительно закрепленной точки в этом случае равен нулю.
Пусть оси координат Ox, Oy, Oz, скрепленные g движущимся телом,
являются главными осями инерции для его неподвижной точки О.
Динамические уравнения Эйлера для такого тела имеют вид
jx ©ж 4- (лг—Js) ®2 ау =°;
—^J ©«©,=« 0;
F6)
Величины со, = а>у = 0, a>r = const — coo удовлетворяют уравне-
уравнениям F6), т. е. эти значения сож, а>у, юг являются решениями этих урав-
уравнений.
503
Пусть теперь телу сообщены малые возмущения в виде малых на-
начальных угловых скоростей шож и а>оу вокруг осей Ох и Оу. Если ве-
величины сож и (х>у остаются малыми с изменением времени, то вращение
вокруг главной оси инерции — оси вращения Ог — считают устойчи-
устойчивым. Если эти величины неограниченно возрастают, то вращение во-
вокруг главной оси инерции неустойчиво. Предположив, чтб вращение
вокруг оси Ог устойчиво, установим условия, которые определяют эту
устойчивость. Если вращение вокруг оси Ог устойчиво, т. е. сожи %
малы, то в уравнениях F6) можно пренебречь слагаемыми о саха>9. По-
Положив сог ?» со0, из F6) после отбрасывания малых второго порядка
получаем
Jy
F7)
Дифференциальные уравнения F7) путем дифференцирования и
небольших преобразований приводим к виду
а>х + ашх = 0; соэ + ашн — 0, F8)
где
а = (Jz-Jv)(Jt-J*) а?. F9)
При а, < 0 решения уравнений F8) имеют вид
При а > 0 они выразятвя в форме
сож = Ci cos Va . t + С2 sin Va of; ay — Q cos Va » t +
-b Cl sin Va • t,
где Cu C2, Cs, C4, Ci, Cg, С'з, C\ — произвольные постоянные интег-
интегрирования. Следовательно, при а > 0 имеем устойчивость вращения
вокруг главной оси инерции Ог. Условие а > 0 может выполняться в
двух следующих случаях:
Из этих условий следует, что вращение вокруг главной оси инер-
инерции Ог является устойчивым, если момент инерции относительно этой
оси наибольший или наименьший. В случае а <. 0 имеем неустойчи-
неустойчивость. В этом случае Jz является средним по сравнению с J х и Jy.
В гироскопических устройствах обычно применяют гироскопы, у
которых момент инерции вокруг собственной оси вращения является
наибольшим, т. е. гироскопы берутся в виде диска, а не цилиндра.
Это, во-первых, при прочих равных условиях дает больший собствен-
собственный кинетический момент, а во-вторых, как показывают исследования,
ось вращения g наибольшим моментом инерции оказывается более ус-
устойчивой к действию сил сопротивления, зависящих линейно от угло-
угловой скорости вращения гироскопа.
504
Глава 9
ТЕОРИЯ УДАРА
§ 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ И ПОНЯТИЯ ТЕОРИИ УДАРА
Ударом называют явление, при котором за малый промежуток вре-
времени, т. е. почти мгновенно, скорости части или всех точек системы из-
изменяются на конечные величины по сравнению сих значениями непосред-
непосредственно перед ударом или после не%о. Длительность удара составляет
обычно десятые и меньшие части долей секунды.
Встречаются различные по характеру случаи ударных явлений. В
простейших случаях удар проявляется как почти мгновенное наложе-
наложение или снятие связей. Примером удара, связанного g мгновенным на-
наложением связей, может служить столкновение поступательно дви-
движущегося тела с другим, например неподвижным телом. Удар,
обусловленный мгновенным снятием связей или их разрушением, мож-
можно представить как отрыв части тела при его быстром вращении вокруг
оси и т. п. Могут быть ударные явления более сложного характера, свя-
связанные, например, с периодическим на-
наложением и снятием связей (ковка,
штамповка и др ).
Изменение скоростей точек при уда-
ударе на конечные величины связано с
большими ударными ускорениями этих
точек, возникновение которых требует
больших ударных вил. Если F —
ударная сила и т — длительность, или
время, удара, то характерный график
изменения ударной силы за время удара
от момента tx до момента 4 имеет вид,
показанный на рис. 149. Ударная сила
быстро возрастает от нуля в момент на-
начала удара до максимального значения,
затем так же быстро уменьшается обычно по другому закону до нуля
в конце удара. Во многих случаях не требуетвя детального знания за-
закона изменения ударной силы. Достаточно знать только вуммарный
импульо этой быстро меняющейся силы за время удара или ударный
импульо. Ударным импульсом называют векторную величину
149
A)
Ударный импульо графически изображается на рисунке заштрихован-
заштрихованной площадью, ограниченной кривой линией изменения ударной си-
силы и осью абсцисс, по которой откладывается время.
Иногда рассматривают среднюю ударную ои-лу — по-
постоянную в течение удара силу, которая за время удара дает такой же
505
ударный импульо, как и переменная ударная сила. Средняя ударная
сила определяется из соотношения
/V - 5. B)
Большие ударные силы дают конечные ударные импульсы за малое
время удара. Средняя ударная сила, согласно ее Определению, имеет
величину порядка 1/т, т. е. при малом т является величиной большой.
Импульс неударной силы, например сиЛы тяжести тела,
за время удара имеет порядок величины т., т. е. является величиной
малой по сравнению с ударными импульсами. Поэтому импульсами
неударных сил можно пренебрегать по сравнению с ударными импуль-
импульсами.
При ударе двух тел в месте их соприкосновения возникают дефор-
деформации и, следовательно, перемещения точек тел, обусловленные де-
деформациями. Вследствие малости деформаций по сравнению с пере-
перемещениями точек тел за конечный промежуток времени перемещения
точек тел за время удара являются величинами малыми. В общем слу-
случае, если аср — средняя скорость за время удара какой-либо точки сис-
системы, испытывающей удар, то перемещение этой точки имеет порядок
величины т, так как средняя скорость есть величина конечная. Поэто-
Поэтому перемещениями точек за время удара можно пренебрегать. Счита-
Считают, что за время удара точки системы не успевают изменить свое поло-
положение, а следовательно, не изменяются радиус-векторы точек и их ко-
координаты. Если, например, тело падает на спиральную пружину, то
за время удара величина перемещения тела равна сжатию пружины за
это время. З^гим перемещением можно пренебречь по сравнению, на-
например, с перемещением тела от начала удара тела до момента наиболь-
наибольшей деформации пружины, При ударе пружину можно считать твер-
твердым телом в приближенных расчетах при рассмотрении перемещения
тела за время удара,
Явление удара широко используется в технике при ковке, штам-
штамповке, забивке свай и т. д. Эго же явление часто является нежелатель-
нежелательным, особенно при ударе деталей в машинах друг о друга вследствие
люфтов, при ударе колес транспорта о неровности дороги стыки рель-
рельсов и т. п.
Многие величины, характеризующие удар, с достаточной точностью
могут быть получены из общих теорем динамики. Рассмотрим осо-
особенности применения этих теорем к явлению удара.
§ 2. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС ДЛЯ УДАРА.
ТЕОРЕМА КЕЛЬВИНА
Пусть до удара точка М массой т двигалась по участку траектории
AM, имея непосредственно перед ударом скорость v (рис. 150). Под
действием ударной силы F и неударной F* точка изменила скорость,
которая сразу после удара стала и. После удара точка продолжает дви-
двигаться по участку траектории MB. Удар точки М характеризуется
506
почти мгновенным изменением ее скорости от v до и по модулю и на-
направлению и, следовательно, в общем случае резким изломом ее тра-
траектории в момент удара. По теореме об изменении количества движе-
движения для точки в интегральной форме имеем
ти—mv =
о
Рие 150
где т — время удара. Обозначая импульс ударной силы S и пренебре-
пренебрегая импульсом неударной силы за время удара по сравнению с ударным
импульсом, получаем следующую теорему об изменении
количества Движения точ-
точки при ударе:
ти — mv — S, C)
т. е. изменение количества движения
тонки за время удара равно ударному
импульсу, приложенному к точке.
В проекциях на оси координат имеем:
тих — тох — Sx; тии — mvy => Sy;
muz — mvz = S2. C')
Изменение скорости точки при ударе и — v = S/rn, т. е. оно параллель,
но ударному импульсу S.
Для любой механической системы, состоящей из N точек, разделим
ударные силы на внешние и внутренние. Применяя теорему об изме-
изменении количества движения для удара к каждой точке системы, полу-
получаем
/Hjj life¦""¦""нТ^ С*ь ~~ Од -у* о? j I —- 1 у Zjin^ A|
где S*.e) и Si" — ударные импульсы внешних и внутренних сил. Им-
Импульсами неударных сил за время удара пренебрегаем. Суммируя по
всем точкам системы, имеем
Обозначая количества движения системы после и до удара гоответ-
ственно:
и учитывая, что по свойству внутренних сил, в том числе и ударных
== 0, имеем
ь
507
Соотношение D) выражает теорему об изменении коли-
количества движения системы при ударе: изменение
количества движения системы за время удара равно векторной сумме
внешних ударных импульсов, приложенных к точкам системы. В проек-
проекциях на координатные оси получаем:
D')
Применяя формулу для вычисления количества движения вивтемы
через массу системы и скорость центра масв, имеем
~Q = Мис; Qo =
где М — масса системы; ис и ис — скорости центра масс до и после
удара. С учетом этого из D) получаем следующую теорему о дви-
движении центра м a g g системы;
E)
В проекциях на координатные оси она примет форму
Частные с л у ч а и. 1. Если
E')
— 0, то из D) и E) следует
F)
Q = QQ; пс = VC,
т. е. количество движения системы и скорость центра масоне изменя-
изменяются, если векторная сумма внешних ударных импульсов, приложен-
приложенных к точкам системы, равна нулю. Это законы сохранения количества
движения и движения центра масса системы при ударе.
2. Если имеется координатная ось, например Ох, для которой
2 S*kJ = 0, то из D') и E') получаем следующие законы сохранения
проекции количества движения и движения центра масс:
Qx — Qox, UCx — Vex- F')
Из C) можно получить теорему Кельвина для работы ударной силы
за время удара. Непосредственно вычислить работу ударной силы за
время удара трудно, так как ударные силы очень большие, а переме-
перемещения точек системы за время удара малы и ими пренебрегают. Тео-
Теорема Кельвина позволяет выразить работу силы через импульс силы
508
и среднее значение скоростей точки, т. е. величины конечные при уда-
ударе. Умножив C) последовательно на и и v скалярно, получим
ти2 — ти • v —~S • и; ти • v — mv* = S • v.
После сложения этих равенств и деления на 2 имеем
muV2 — тот = 1fiS • (v + п).
По теореме об изменении кинетической энергии для точки левая часть
этого равенства равна работе Л, приложенной к точке силы?. Поэтому
A = lkS'(u + ~v). G)
Это и есть теорек. а Кельвина: работа силы, приложенной к
точке, за какой-либо промежуток времени равна скалярному произве-
произведению импульса силы за тот же промежуток времени на полусумму на-
начальной и конечной скоростей точки.
Теорема Кельвина применима ко всем случаям движения точки,
в том числе и к явлению удара.
Для механической системы теорема Кельвина получается из G)
путем суммирования по всем точкам системы, т. е.
где 5ь = Sjj.e) + Si1' — импульс внешней и внутренней жп, действую-
действующих на k-ю точку.
§ 3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ПРИ УДАРЕ
Пусть материальная точка под действием ударного импульса испы-
испытывает удар. По теореме об изменении количества движения для точки
имеем _ _ _
ти — mv = S,
где у vTu — скорости точки до и после удара. Умножим это векторное
равенство слева векторно на радиус-вектор точки г, который один и
тот же непосредственно перед ударом и после него. Получаем
7 х ти — г х mv = г X S. (9)
Это соотношение выражает теорему об изменении ки-
кинетического момента для точки при ударе.
Применяя ее для каждой из N точек системы, имеем
~rh X mhu~h —7ft X mhaft =* ~rh X Sie) + гh X Sjf', k => 1( 2, ..., N,
(9')
где Sie) и Sft' — внешний и внутренний ударные импульсы, действую-
действующие на k-ю точку системы. Суммируя (9') по всем точкам системы и вво-
вводя обозначения кинетических моментов системы до и после удара и
509
векторной суммы моментов внешних ударных импульсов относительно
точки О, получим следующую теорему об изменении кинетического
момента системы при ударе:
так как
Ко = 2 П. X тк "hi КЬ0> = 2 rk Xmk vh; 2 ''а X Sie) = S^o (§&'*)',
k к к к
по свойству внутренних сил. Таким образом, изменение кинетическо-
кинетического момента системы относительно точки за время удара равно век-
векторной сумме моментов относительно той же точки внешних ударных
импульсов, приложенных к точкам системы. В проекциях на оси коор-
координат векторное равенство A0) принимает следующую форму:
— У м
k
Если удар испытывает твердое тело, вращающееся вокруг непо-
неподвижной оси Ог , и ш0 и со — угловые екорости до и после удара, то,
учитывая, что
Kz = Л»; Я'0' = Лсоо,
где /г — момент инерции тела относительно оси вращения, из (Ш')
получаем следующее изменение угловой скорости тела:
или
В A1) не входят моменты ударных импульсов реакций закреплен-
закрепленных точек оси вращения, так как они пересекают ось вращения, если
не возникают ударные импульсы сил трения в местах закрепления оси.
Частные случаи. I. Если %М0 (§1е)} = 0, то из A0) еле-
k
дует закон сохранения кинетического момента системы относительно
точки при ударе:,
Ко—Ко ^ const. A2)
510
2. Если имеется ось, например Ох, относительно которой
^ (S*8') = 0, то из A0') получаем закон сохранения кинетическо-
кинетического момента системы относительно оси при ударе:
Кх ~ К\в) = const. (I2r)
§ 4. УДАР ТОЧКИ О НЕПОДВИЖНУЮ ПОВЕРХНОСТЬ
Прямой удар. Удар называют прямым, если скорость точки v перед
ударом направлена по нормали к поверхности в точке удара М
(рис. 151.) После удара материальная точка отделится от поверхности,
имея в общем случае скорость и, направленную тоже по нормали к по-
поверхности.
Для оценки ударных свойств поверхности и тела, принимаемого
за материальную точку, введем коэффициент восстановления k. Коэф-
Коэффициентом восстановления называют отношение числового значения
скорости точки после удара к числовому значению её до удара, т. е.
k = |п|/|п| = u/v. A3)
Если k = 1, то удар называется абсолютно упругим. В этом случае
и = и и при ударе точки изменяется только направление скорости на
противоположное. При k = 0 удар считается аб^огютно неупругим.
Скорость точки при таком ударе о неподвижную
поверхность после удара и = 0. В более общем
случае абсолютно неупругого удара точки по дви-
движущейся поверхности точка после удара движется
вместе с соответствующей точкой поверхности.
В случаях, при которых 0 < k <. 1, удар называют
просто упругим (или частично упругим).
Процесс удара точки о неподвижную поверх-
поверхность можно разделить на фазу деформа-
деформации и фазу восстановления. Фа^а
деформации продолжительностью тг отсчитываете я
от момента начгла удара до момента наибольшей Рис- 151
деформации тела, которое принимается за мате-
материальную точку. В конце этой фазы скорость -пики при ударе о нэ-
подвилшую поверхность равна нулю. В течение фазы восстановле-
восстановления т2 материальная точка от момента наибольшей деформации до ее
отделения от поверхности частично восстанавливает свою первона-
первоначальную форму при упруюм ударе. При абсолютно упругом ударе
форма тела восстанавливается полностью. В случае абсолютно не-
неупругого удара форма тела совсем не восстанавливается, так как
удар имеет только одну фазу деформации. Общее время удара т =
s= тх + т2. При абсолютно неупругом ударе тя = 0 и т = тг.
На точку при ее прямом ударе о неподвижную поверхность со сто-
стороны поверхности действует ударная сила реакции поверхности N.
Она изменяется по величине в течение удара, но все время направлена
по нормали к поверхности.
511
Применим к первой и второй фазам удара точки теорему об изме-
изменении количества движения в проекции на направление внешней норма-
нормали к поверхности, за которое принимаем направление, противополож-
противоположное скорости точки до удара. Для первой фазы имеем
О - (~mv) = Slt
где Sx =s J Ndt — ударный импульо силы реакции поверхности за
о
первую фазу удара. Для второй фазы соответственно
ти — 0 = S2,
где S2 = j Ndt— ударный импульо силы реакции поверхности за
о
вторую фазу удара. Действием импульсов неударных сил за время
удара, например силы тяжести, пренебрегаем»
Итак, имеем
mv — St; mu = S2.
Огсюда
k = u/v = S2/Sv A4)
Формула A4) дает выражение коэффициента восстановления через
ударные импульсы: коэффициент восстанови»ия при прямом ударе
точки о неподвижную поверхность равен отношению числовых значений
ударных импульсов за вторую и первую фазы удара. Выражение коэф-
коэффициента восстановления через ударные импульсы, полученное при
ударе точки о неподвижную поверхность, считают справедливым и в
случае прямого удара точки по движущейся поверхности.
Полный ударный импульс S складывается из импульсо!
Sx и S2, т. е.
S = S1 + S2 = mv (l +-j-\^mv{\ + k).
При k = 1 5 = 2mv; при k = 0 S = mu. Ударный импульс при аб-
абсолютно неупругом ударе в два раза меньше ударного импульса при
абсолютно упругом ударе.
Косой удар. Удар называется непрямым или косым, если скорость
точки перед ударом направлена под углом а к нормали поверхности.
При а = 0 имеем прямой удар. Угол а (риа. 152) называют углом па-
денич. В общем случае скорость точки и после удара составит о нор-
нормалью к поверхности угол р\ который называют углом отражения.
Разложим скорости до и после удара на нормальные и касатель-
касательные составляющие:
Коэффициентом восстановления при косом ударе называют величину
k = |мп|/|ип| = ujvn. Применение теоремы об изменении количества
движения в проекции на нормаль к поверхности приводит к выраже-
выражению коэффициента восстановления через ударные импульсы
k.= ujvn = Sin/Sin,
512
где S2n и Sin — проекции ударных импульсов на нормаль к поверх-
поверхности за вторую и первую фазы удара.
В случае не идеально гладкой поверхности их < vx. В дальнейшем
принимаем, что поверхность не обладает ударным трением и поэтому
их = их. В этом случае
tgp- = MT/Mn = yT/«n; tga = aT/yn, *-" '
Эта формула выражает зависимость между углом падения и углом
отражения при различных коэффициентах восстановления и отсутст-
отсутствии ударного трения.
т?
Y
А
152
Рис. 153
Экспериментальное определение коэффициента восстановления.
Коэффициент восстановления можно определить экспериментально,
измеряя высоту, на которую поднимется тело, обычно в форме не-
небольшого шара, после прямого удара о поверхность (рис. 153), при па-
падении с заданной высоты. Если шарик падает на неподвижную поверх-
поверхность с высоты hlt то его скорость непосредственно перед ударом и =
= V2gh1. Сразу после удара скорость и шарика через вькоту подъе-
ма его над поверхностью выражается зависимостью и ~ ~V2gh2. Для
коэффициента восстановления имеем
k = ulv =
Измеряя ht при заданном hu получают значения коэффициентов вос-
восстановления для различных материалов шарика и поверхности.
Многочисленные опыты показали, что коэффициент восстановления
зависит не только от материала соударяющихся тел, но и от их масс,
формы тел, скоростей соударения и других факторов. Использование
коэффициента восстановления в расчетах (в предположении, что он
зависит только от материала соударяющихся тел) допустимо лишь в
очень грубом приближении к действительности, В более точных рас-
расчетах следует учитывать не только деформации, возникающие при уда-
ударе, но в некоторых случаях и процесс их возникновения и восстанов-
восстановления. Учет деформаций при ударе производится в задачах теории
17
Зак. 1311
51J
упругости. Методы теории упругости позволяют более глубоко про-
проникать в явления удара. В теоретической механике обычно рассматри-
рассматриваются предельные случаи абсолютно упругого и абсолютно неупру-
неупругого ударов.
% б. ТЕОРЕМА КАРНО
При абсолютно упругом ударе точки о неподвижную поверхность
в отсутствие ударного трения скорость точки может изменяться толь-
только по направлению. Числовая величина ее остается неизменной. Ки-
Кинетическая энергия точки и системы точек, находящихся в таких ус-
условиях, не изменяется за время удара. При
упругом и абсолютно неупругом ударах ки-
кинетическая энергия изменяется.
Установим изменение кинетической энер-
энергии в случае абсолютно неупругого удара
при мгновенном наложении связей для точки
и системы в отсутствие ударного трения. По
теореме об изменении количества движения
для точки (рис. 154) имеем
Рис. 154
та
mv = S,
A5)
где т — масса точки; v и и — ее скорости непосредственно до и после
удара; S — ударный импульс от действия поверхности. При отсутствии
ударного трения ударный импульс направлен по нормали к поверхно-
поверхности. Скорость точки после такого удара направлена тю касательной
к поверхности, т. е. ее проекция на нормаль ип = 0. В рассматривае-
рассматриваемом случае ударный импульс S и скорость точки после удара и взаим-
взаимно перпендикулярны и поэтому удовлетворяют условию
S . п= 0.
Учитывая это, умножим обе части A5) скалярно на и. Получим вспо-
вспомогательное соотношение
—то • и ¦+¦ тиг = 0.
A6)
При абсолютно неупругом ударе кинетическая энергия точки умень-
уменьшится на mv2/2 — ти2/2. Добавляя в это выражение величину, равную
нулю в форме A6), получим
тФ
514
Получена теорема Карно для точки о потере кинетической энергии при
абсолютно неупругом ударе и отсутствии ударного трения:
2 2 2 V ' V '
Векторную величину v — и называют потерянной скоростью. Теоре-
Теорему Карно для точки можно сформулировать в следующей форме: по-
потеря кинетической энергии точки при абсолютно неупругом ударе и
отсутствии ударного трения в случае мгновенного наложения связей
равна кинетической энергии от потерянной скорости.
Имея A7) для точки, получим теорему Карно для системы в случае
абсолютно неупругого удара и отсутствия ударного трения. Необхо-
Необходимо при этом, чтобы связи для точек системы, испытывающих удар,
создавали ударные импульсы Sh, перпендикулярные скоростям точек
после_ удара uh, т. е. чтобы для каждой точки выполнялось условие
Sh . uk = 0. Тогда для каждой точки справедлива теорема A7)
где vh — uk — потерянная скорость fe-й точки системы. Суммируя
A7') по всем точкам системы и обозначая кинетическую энергию систе-
системы до удара То, а после удара — Т, получим
где то=2^; ^=2^. A8)
к z к Л
Получена теорема Карно для системы: потеря кинетической энергии
при абсолютно неупругом ударе в случае мгновенного снятия связей и
отсутствия ударного трения равна кинетической энергии от потерян-
потерянных скоростей точек системы. Накладываемые на точки системы связи
при ударе должны создавать ударные импульсы, перпендикулярные
скоростям точек после удара. Это выполняется, если связи являются
стационарными и не создают ударных сил трения.
Теорему Карно для точки и системы можно получить также для
удара, который возникает при мгновенном снятии связей. При этом
кинетическая энергия после удара больше кинетической энергии до
удара. Потеря кинетической энергии становится отрицательной.
Ударный импульс ~Sh при снятии связи должен быть перпендикулярен
скорости точки vh до удара, так как точка двигалась согласно со
связью до удара при абсолютно неупругом ударе. Вспомогательное
соотношеггие для точки при снятии связей принимает форму
ти ¦ v — то" = 0, A6')
17* 515
а теорема Карно в этом случае имеет вид
ти* то' __ т t~-y
г
Для системы она выразится в форме
Т-Г. = 4-2 *»&-«•)'. A8')
1 k
42
При этом для каждой точки системы, испытывающей удар, должно вы-
выполняться условие Sk . vh — 0.
§ 6. УДАР ДВУХ ТЕЛ
В прикладных задачах обычно встречается удар двух тел, движу-
движущихся поступательно или вращающихся вокруг параллельных или
совпадающих осей. Рассмотрим некоторые особенности применения
общих теорем и теоремы Карно в этих случаях.
Пусть два тела 1 и 2 массами т1 и т% непосредственно до и после
удар_а движутся поступательно (рис. 155). Их скорости перед ударом
их и у2; после удара — соответственно иг и м2. У соударяющихся тел
отсутствует ударное трение. Ударные импульсы в этом случае направ-
направлены по общей нормали в месте соприкосновения, т. е. по так назы-
называемой линии удара. В случае центрального удара линия уда-
удара проходит через центры масс тел. Применим теорему об изменении
количества движения при ударе к каждому телу в отдельности. Имеем
тгих — т&х = S^; тгиг — /л2у2 = S2. A9)
При ударе двух тел Sx = —S2 по закону о равенстве действия и
противодействия, поэтому из A9) получаем
тхи1 -f т2м2 = mjWj + m2v2, B0)
т. е. количество движения при ударе двух тел не изменяется. Если удар
абсолютно неупругий, то скорости тел после удара одинаковы и равны
и. Из B0) тогда имеем
При прямом ударе двух тел скорости их vx и у2 до удара направ-
направлены по линии удара и тогда из B1), проецируя на линию удара, по-
получаем
Здесь и, vlt v2 — алгебраические значения скоростей. Для того чтобы
удар произошел, скорости тел уа и уа должны быть направлены в одну
и ту же сторону, а их числовые величины — удовлетворять условию
516
Рис. 155
Рис. 156
Для прямого центрального удара двух тел к каждому телу для пер-
первой и второй фаз применим теорему об изменении количества движе-
движения в проекции на ось Ох, направленную по линии удара (рис. 156).
Получим
тхи—mxv1 = —Si;
tnl иг—тх и = —Si;
тг и—тг %)г = 5г;
S —S- S =S'
B2)
где и — общая скорость тел в конце первой фазы; S[, S? и S", S? —
ударные импульсы соответственно за первую и вторую фазы удара.
К уравнениям B2) следует присоединить выражение для коэффициен-
коэффициента восстановления через ударные импульсы. Имеем
k = S\IS\ = S2/S2.
B2')
Получили семь алгебраических уравнений B2) и B2'), из которых можно
определить и, иъ иг, S{, S%, S'{, S%, если известны скорости до удара
vlt v% и коэффициент восстановления k. Из уравнений B2) и B2'), в ча-
частности, можно получить формулы
к.
щ+щ
l — U2).
B3)
B4)
Используя B2) и B2') и следствия из них, можно вычислить поте-
потерю кинетической энергии тел То — Т при ударе:
1 я— 1 — |
m2 v\
/ Щ и'
и\ \ _.
\
B5)
517
При абсолютно упругом ударе двух тел k = 1 и То — Т, т. е. потери
кинетической энергии не происходит. При абсолютно неупругоы уда-
ударе k — 0 и
То - Т = ^М— (и, - ьг)\ B5')
2im, + гщ)
Если использовать потерянные телами за время удара скорости
«! — и и у2 — и, то потерю кинетической энергии можно также полу-
получить в форме теоремы Карно для удара двух тел:
T.-T^-^-iv.-uf + ^-^-uf. B5")
При абсолютно неупругом ударе двух поступательно движущихся
тел для каждого тела налагаемая связь не является стационарной и
условия Sx X й"=0 и 5а X й=0 по отдельности не выполняются.
Они использовались при выводе теоремы Карно для системы. Но вы-
выполняется условие для двух тел
~S X ~и = 5t X~u +~S2 X It = 0, B6)
так как
S = S1 + Si = O,
поэтому теорема Карно B5") остается справедливой. Ее можно по-
получить непосредственно преобразованием потерянной энергии, при-
применяя следствия из B2) и B2') без использования условия B6). Условие
B6) для удара двух поступательно движущихся тел расширяет область
применения теоремы Карно.
Из теоремы Карно B5") для двух тел можно получить общую ско-
скорость тел после удара при прямом центральном )даре этих тел:
и =
Частные случаи 1. Пусть mlt пгг и vlt у2 — соответст-
соответственно массы и скорости первого и второго тела до удара, причем и.2 —
= 0.
Кинетическая энергия тел до удара в этом случае
Общая скорость после абсолютно неупругого прямого удара
и = tn^v-J (пг{ + т2).
Кинетическая энергия тел после удара
—=^ 'Пг ^^^ Щ Тр. B7)
Потеря кинетической энергии, затраченная на деформацию тел,
0. B8)
518
Если тг > mv, то, полагая mj (mx + m2) ж 1, согласно B8) имеем
т. е. почти вся энергия тел, которую они имели до удара, затрачива-
затрачивается на деформацию тел. Такой случай имеет место при ковке и в дру-
других аналогичных случаях. В этом случае т2 — масса наковальни вмес-
вместе с поковкой (они покоятся перед ударом), а т1 и иг — соответствен-
соответственно масса и скорость молота до удара по поковке. Энергия тел при ков-
ковке, которая затрачивается на преодоление различных сопротивлений
при последующем движении,
т,
т е. на преодоление сопротивлений энергия не тратится. Очевидно,
чем больше тг по сравнению с ти тем эффективнее работа молота
2 Если ш1 ^> пгг, то для потери кинетической энергии на сам удар,
считая тг1 {тх + т2)и 0, имеем
о 0
щ -\-пг,
В этом случае потери энергии на удар почти нет и вся первоначатьная
энергия затрачивается на преодоление сопротивления движению тел
после удара, так как
т1 т1 Т ~ Т
Такой случай имеет место при забивке свай, костылей, гвоздей и т. п.
Для наибольшей эффективности этих процессов должно выполняться
условие Шх ^> пгй. В этом случае пг1 — масса бабы или кувалды (мо-
(молотка) и ух — их скорость до удара, а тг и у2 = 0 соответственно мас-
масса сваи или костыля (гвоздя) и скорость до удара. Их масса, чтобы ра-
рационально ипользовалась энергия, должна быть много меньше массы
бабы или кувалды. Вся кинетическая энергия бабы или кувалды при
таком ударе не тратится на деформации при ударе, а передается свае
или костылю, которые движутся вместе с забивающими их бабой и ку-
кувалдой. Эта энергия расходуется на преодоление сопротивления движе-
движению сваи или костыля при последующем движении в среде, в которую
они забиваются.
При рассмотрении удара двух тел, вращающихся вокруг одной оси
или параллельных осей, следует применять теорему об изменении ки-
кинетического момента к каждому телу или теорему Карно. При приме-
применении теоремы об изменении кинетического момента к двум телам вмес-
вместе при вращении тел вокруг параллельных осей войдут моменты неиз-
неизвестных ударных импульсов в местах закрепления по крайней мере
одной из осей вращения. Эти моменты сами являются неизвестными.
Применение общих теорем при ударе к одному телу, вращающемуся
вокруг неподвижной оси, рассмотрено в следующем параграфе. Здесь
отметим только некоторые особенности применения теоремы Карно к
системе двух вращающихся 1ел.
51Э
При вращении двух тел вокруг одной оси (рис. 157) ОгО2 с угловы-
угловыми скоростями до удара а>1 и со2 в одном и том же направлении и момен-
моментами инерции относительно этой оси Ух и /2 можно применить теорему
Карно, если удар тел выступами при сближении абсолютно неупру-
гий. Здесь выполняется условие применимости этой теоремы для двух
тел ~S • и = 0, так как S = Sj_ + S2 = 0, хотя для каждого тела в
отдельности Sx • и Ф 0 и S2 • и ф 0. Согласно теореме Карно, имеем
И2 _ S\ v , '2 __
2 2 i 2 з
B9)
где со — общая угловая скорость тел после удара; % — со и со2 — ш —-
потерянные угловые скорости тел. После несложных преобразований
из B9) получим следующую формулу для угловой скорости тел
после удара:
A+4
(D =
Это же значение со можно получить, применяя теорему об изменении
кинетического момента относительно оси вращения для двух тел, так
как в этом случае сумма моментов ударных импульсов от действия под-
Рис. 158
шипников и от выступов относительно оси вращения равна нулю, если
отсутствует ударное трение в подшипниках и на выступах.
Если тела до удара вращались в противоположных направлениях,
то в C0) следует брать алгебраические значения угловых скоростей
тел.
Пример. Однородный прямоугольный контейнер высотой h и шириной I на-
находится па платформе, движущейся по прямолинейному пути со скоростью и
(рнс. 158). Определить условие для скорости платформы, при выполнении кото-
которого не произойдет опрокидывания контейнера вокруг его закрелленного ребра
при мгновенной остановке платформы. Крепление ребра контейнера не оказыва-
оказывает сопротивления его повороту вокруг этого ребра.
Решение. Применим к контейнеру при остановке платформы георему об
изменении кинетического момента относительно закрепленного ребра Ог при
ударе:
520
Внешним ударным импульсом является только ударный импульс So ^ действия
крепления ребра контейнера. Он пересекает ось Ог, поэтому при отсу гсгьин удар-
ударного трения
Посла мгновенной остановки платформы контейнер начнет вращаться вокруг
Ог с угловой скоростью со. Для кинетического момента контейнера относительно
закрепленного ребра имеем
Ко- = Joz м< (б)
где JQz — момент инерции контейнера относительно закрепленного ребра, До
остановки контейнер двигался вместе с платформой поступательно. Его кинети-
кинетический момент относительно оси Ог определяем суммированием кинетических мо-
моментов малых частиц, на которые разбиваем контейнер. Имеем
#Ог = 2 тьРШ = v 2 mh 4k, (в)
k >
где ffife — масса элементарной частицы контейнера и </& — координата этой
частицы по оси Оу. Но
%ткук = Мус = М.Н/2, (г)
k
где ус = ft/2 — координата центра масс контейнера по оси Оу, Подставляя зна-
значения величин из FJ, (в) и (г) в (а), получим
Jo,«>-M-yv=0. (a')
Для угловой скорости контейнера в момент остановки платформы имеем
со = МЫB JOz). (д)
Применим к контейнеру после получения им угловой скорости со в момент ос-
остановки платформы теорему об изменении кинетической энер|ии
За начальное положение примем положение контейнера срачу после его оста-
остановки по окончании удара. В этом положении его кинетическая энергия
В качестве конечного примем положение контейнера при наивысшем положении
его центра масс, т. е. положение после поворота контейнера на 90°. Чтобы контей-
контейнер не опрокинулся, необходимо угловую скорость его в этом положении при-
приравнять нулю, т. е. Т = 0.
Внешними силами для контейнера являются сила его тяжести Р = Mg и
реакция N ребра Ог. Работа силы реакции N равна нулю, Она приложена в точ-
точке оси вращения. Поэтому работа внешних сил сведется только к работе силы
тяжести при подьеме центра масс на высоту (ОС — Л/2), Ti e,
24е)= —P(OC—h!2),
к
где ОС = —~\/Р -j- А2. Подставляя все вычисленные величины в (е), получиа»
илн
52!
Оiсюда получаем для скорости платформы следующее условие, при котором не
произойдет опрокидывания контейнера:
Для момента инерции УОг по теореме о моментах инерции относительно двух
параллельных осей, одна из которых проходит череч центр м.и.1,, имеем 1qz =
= JCz -f- M• ОСг. АпалО1ично для оси О'г, па, ал,тльнон Ог,
Исключая из этих двух выражений JСг, получим
Jqz -Jo>* = m (ОС*-О'С*у, JOz = Jo,2+M (OV-O'C*). C)
Момент инерции JQ,Z определяем no формуле A3) § 4 гл, 3 для однородной
прямоугольной пластины. Эта формула справедлива в рассматриваемом случае,
только в ней следует Ли/ поменять местами. Имеем:
После этого
ft» Р\ М М
Подставляя (и) в (ж), получаем
Для случая I — h v < "lA> 1 gh- Если А = 2 м, точ< 4,6 м/сж16,б км/ч.
§ 7. ЦЕНТР УДАРА
Если по твердому телу, которое может вращаться вокруг неподвиж-
неподвижной оси, произвести удар, приложив ударный импульс S, то при вы-
выполнении некоторых условий не возникнет ударных реакций в под-
подшипниках оси вращения. Получим эти условия.
Пусть твердое тело с неподвижной осью А В, по которой направле-
направлена координатная ось Oz, имеет до удара угловую скорость а>0~(рис. 159).
К телу приложен ударный импульс S; угловая скорость изменяется и
становится равной со. Освободив тело от связей и заменив их импуль-
импульсами реакций SAnSB, применим к явлению удара теоремы об измене-
изменении количества движения и кинетического момента. Имеем
+ S?
_ C1)
•2а Мо [Ь% ) —Мо [Ь) +М0 \Sa) +М0 \?>в),
где Q и К — количество движения и кинетический момент после уда-
удара, a Qo и7@ — соответственно те же величины перед ударом.
522
Скорости точек при вращении тела вычисляем по формуле Эйлера:
Vk = СО X Гк.
Следовательно, количество движения
Q = МЪС = М (и X "гс),
де М—масса тела, а гс — радиус-вектор центра масс. Так как и и
о0 направлены по оси вращения, то
О
О со — ш„
¦«с Ус
@-
C2)
Проекции кинетического момента иа оси координат можно опре-
определить по формулам для тела, имеющего одну закрепленную точку,
но при условии, что сож = ау = 0 и сог = со.
Имеем:
— J xoi х — J ху(йу — J
—J
= —J
J уЮу — J vzi0z
Кг — —Jix®x —
Используя эти формулы, получим
C3)
Проецируя C1) на оси координат и учитывая C2) и C3), получаем
: (со — о)о) = Sx + SAx 4- SBr;
Мхе (ш — соо) == Su
О =
/„ (co-cOo^M, (S)
У1/2 (со—coo) = Mj, (S)
4- SB|/;
Я (§в);
y (Зц);
C4)
Из системы уравнений C4) определяем импульсы реакций S А и
5В и изменение угловой скорости при ударе со — со0 для заданною
тела и внешнего ударного импульса sf.
523
Определим условия, при которых удар по телу не вызывает удар-
ударных реакций в подшипниках, т. е. когда S А = SB = 0. Из системы
уравнений C4) в этом случае получаем
—Мус(в>—соо) = 5я;
C5)
JVI («-<> =
Из соотношений C5) следует: так как 5г = 0, то ударный импульс
S находится в плоскости, параллельной Оху. Выберем начало коор-
координат О на оси вращения так, чтобы импульс 5 лежал в плоскости
Оху, а координатную ось Ох направим параллельно S. Тогда ударный
импульс S пересечет ось Оу в точке K.Jlpn таком выборе начала ко-
координат и осей Sv = 0, Sx = S, Mx (S) = 0, Мч (S) — 0, так как S
параллелен Ох и пересекает Оу.
Учитывая это, из условий C5) получаем: из второго уравнения
хс = 0, из четвертого J xz — 0, из пятого J уг = 0, т. е. центр масс на-
находится в плоскости Oyz и ось вращения Oz является главной осью
инерции для точки О. Так как ударный импульс S параллелен оси Ох,
то, следовательно, он перпендикулярен плоскости Oyz, проходящей
через ось вращения и центр масс. _ _
Если ввести длину / = О/С, то Мг (S) — —IS при направлении S
в положительную сторону оси Ох. Исключая с учетом этого S из пер-
первого и шестого уравнения D0), получаем
I = OK = JJMyc. C6)
При сделянном выборе осей координат ус — расстояние от оси вра-
вращения Oz до центра масо. Если его обозначить h, то / = JJ (МЫ),
Получена формула, по которой вычисляется приведенная длина
физического маятника.
Точка пересечения /( линии действия ударного импульса g плоско-
плоскостью, проходящей через ось вращения и центр масс при отсутствии
ударных реакций в подшипниках, называется центром удара. Любой
по числовой величине ударный импульс S, линия действия которого
проходит через точку К перпендикулярно плоскости, содержащей ось
вращения и центр масс, не вызывает ударных реакций в подшипниках:
если ось вращения является главной осью инерции для точки О —
точки пересечения оси вращения с перпендикулярной плоскостью,
содержащей ударный импульс S; если расстояние от оси вращения до
линии действия ударного импульса / равно приведенной длине физи-
физического маятника; если центр удара К и центр масс С лежит по одну
сторону от оси вращения.
524
Если центр MacG лежит на оси враще-
вращения, то h — ус — О и расстояние / от оси
вращения до центра удара К равно беско-
бесконечности, т. е. в этом случае центра удара
не существует. Тогда Q — Qo — 0 и из тео-
теоремы об изменении количества движения
при ударе следует
откуда S A + SB = —S,
т. е. ударный импульс, приложенный к те- Рис. 160
лу, целиком передается на подшипники.
Пример. Дверь имеет форму прямоугольной однородной пластины (pHCi 160),
ее ширина h. Ось вращения двери закреплена в точке А с помощью подпятника,
а в точке В — подшипника. Определить положение центра удара двери, если она
открывается приложением ударного импульса.
Решение. Ударный импульс S должен быть перпендикулярен плоскости,
проходящей через ось вращения и центр масс двери, т. е< плоскости самой двери.
Плоскость, перпендиклярная оси вращения, в которой расположен ударный им-
импульс, должна дать точку пересечения О на оси вращения, для которой эта ось
является главной осью инерции. Таким свойством обладает точка, расположен-
расположенная на оси Ог, а которой пересекаются плоскость двери g плоскостью ее симме-
симметрии Оху, перпендикулярной двери,
Расстояние OK— l до центра удара К определяем по формуле для приве-
приведенной длины физического маятника
В рассматриваемом случае
Следовательно,
ус = А/2; Jz = МШ,
лда/з 2
h
Mh/2
Любой по числовой величине ударный импульс, линия действия которого пеп-
пендикулярна плоскости двери и проходит через центр удара К на расстоянии
2
от оси I = — h, не передается на подпятник А и подшипник В,
о
Глава 10
ЭЛЕМЕНТЫ КОСМОНАВТИКИ
Советский Союз является родиной космонавтики. Замечательный
советский ученый Константин Эдуардович Циолковский всю свою
жизнь посвятил обоснованию и развитию науки об овладении челове-
человечеством космического пространства. Его научная эрудиция и прозор-
прозорливость поразительны. Всего через двадцать с лишним лет после смер-
смерти К. Э. Циолковского для человечества наступила новая эра в исто-
истории — эра покорения космоса. Начало этой эры было положено в Со-
525
ветском Союзе запуском 4 октября 1957 г. первого в мире космиче-
космического летательного аппарата — советского искусственного спутника
Земли.
В изучении космоса, во всех полученных достижениях теоретичес-
теоретическая механика занимает одно из почетных мест.
Расчет сложных космических траекторий протяженностью в де-
десятки и сотни миллионов километров, способы управления полетом,
конструирование всего оборудования космических кораблей — все
это базируется на методах, разрабатываемых этой наукой.
Кратко рассмотрим основные положения свободных (баллистичес-
(баллистических) полетов космических летательных аппаратов. Теория свободных
космических полетов основана на законах Ньютона—Кеплера из об-
области небесной механики. Согласно этим законам, каждая материаль-
материальная точка, находящаяся под действием силы притяжения со стороны
одного только центра, имеет определенное движение. Это движение
зависит только от начальных условий, т. е. от того, какое положение
занимает точка в начальный момент времени, когда она находится под
действием только силы притяжения, и от того, какую скорость она
имеет в этот момент времени. На основании этих положений движется
центр масс каждого космического летательного аппарата.
§ 1. ОСНОВНЫЕ ПОНЯТИЯ
По закону тяготения, установленному Ньютоном, всякие два мате-
материальных тела взаимодействуют между собой с силами взаимного при-
притяжения, равными по модулю, противоположными по направлению и
приложенными к каждому из этих
тел: F{ = —1\ (рис. 161).
Каждая из этих сил опреде-
определяется по формуле
где Мят — массы взаимодейст-
взаимодействующих тел; г — расстояние между
ними; 7 — гравитационная по-
постоянная, равная в СИ 6,67 X
X 10-" кг • м3 • с.
Каждая из этих сил сообщает
телу, к которому она приложена,
Рис, 161 ускорение соответственно массе
тела. Точки приложения сил можно
считать совпадающими с центрами масс тел, пренебрегая размерами
тел сравнительно с расстояниями между ними.
В случае когда одно из взаимно притягивающихся тел имеет массу
пренебрежимо малую сравнительно с массой другого тела, фактически
движение совершает тело малой массы, а тело большой массы является
неподвижным притягивающим телом, по отношению к которому при-
притягиваемое тело — материальная точка — описывает определенную
526
траекторию. Все это применимо к космическим летательным аппара-
аппаратам, запускаемым в поле сил притяжения, порождаемых Землей или
другой какой-либо планетой.
Земля или любая другая планета, рассматриваемая как однородный
шар, притягивает каждую внешнюю по отношению к нему материаль-
материальную точку так, как ее притягивала бы материальная точка, обладаю-
обладающая массой всего шара и находящаяся в центре данного шара.
Применим теперь формулу A) к притягиваемой точке массой т,
находящейся у поверхности Земли. Обозначим R радиус Земли, g0 —
ускорение, сообщаемое притяжением Земли у ее поверхности. Прирав-
Приравниваем произведение массы точки на ее ускорение действующей на нее
силе притяжения:
Mm
y
Отсюда
уМ = R*g0. B)
На некигором расстоянии г от центра Земли
уМ = i*g. B')
Тогда
C)
Векторное выражение силы притяжения имеет следующий вид:
-р; Mm -j, ,.ч
F = —у г°, D)
где г° — единичный вектор от центра Земли к точке приложения си-
силы F; следовательно, проекция силы F на направление радиус-векто-
радиус-вектора г точки ее приложения
* г У " • \°)
Из уравнения E) следует, что поле сил притяжения имеет силовую
функцию
U = у , F)
и потенциальную энергию
П = -у^-. G)
Задача Ньютона состоит в следующем: найти траекторию движения
точки под действием силы притяжения к центру Земли в ее движении
по отношению к системе координат, скрепленной с земным шаром. Эту
систему координат приближенно можно считать инерциальной, так
как движение Земли по орбите вокруг Солнца почти равномерно и пря-
прямолинейно на некотором отрезке орбиты Земли вследствие большого
расстояния Земли от Солнца и большого периода обращения Земли по
527
своей орбите. При таком допущении можно пренебречь переносной си-
силон инерции и силой инерции Кориолиса и изучать движение точки
по отношению к системе координат, жестко связанной q Землей и имею-
имеющей начало в центре Земли, считая ее неподвижной.
§ 2. ПЕРВЫЕ ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ
Приведем в векторный форме динамическое дифференциальное
уравнение движения материальной точки под действием силы притя-
притяжения Земли т. е, центральной силы
та — I', (8)
где а — ускорение точки; F — сила земного притяжения.
Из теоремы о изменении момента количества движения получаем
два следствия: во-первых, очевидно, что траектория притягиваемой
точки есть плоская кривая, плоскость
которой проходит через центр притя-
притяжения; во-вторых, секторная скорость
точки vo = const. Эта постоянная оп-
определяется по начальным данным:
const = V2 Mo {оо),
/Полярная ось
где v0 — начальная скорость точки.
В плоскости траектории точки бе-
берем систему полярных координат,
в которой изучаем движение, причем
начало координат находится в цент-
центре притяжения. Тогда вектор, выражающий секторную скорость,
направлен перпендикулярно этой плоскости, а положительное направ-
направление отсчета полярных углов в движении пусть соответствует направ-
направлению этого вектора При движении притягиваемой точки по ее плос-
плоской траектории существует интеграл площадей, выражающий неиз-
неизменность алгебраической величины секторной скорости vai
В
Рис, 162
где
= k,
k -= 2va = Mo (v0) = vQh0 = voro sin ty0.
(9)
A0)
Здесь яр0 — угол между начальным радиус-вектором точки в ее на-
начальном положении Во (рис. 162) и вектором v0 начальной линейной
скорости точки
Следующим интегралом является интеграл энергии, так как дви-
движение происходит в потенциальном силовом поле; полная механичес-
механическая энергия притягиваемой точки остается в процессе движения по-
постоянной:
Т + П = /г.
(И)
528
Постоянную h найдем из начальных условий
/г = 70 + Я0) A1')
при t — О
т ти* п п — .. Мт
Подгтлгшм эти данные в уравнение A1) и введем выражение кинети-
кинетической энер1 ии в полярных координатах:
Тогда шиеграл A1) после сокращения на m примет вид
-L^+rVj-V^L^ii—v^L. A2)
2 г 2 Го
§ 3. ОПРЕДЕЛЕНИЕ ТРАЕКТОРИИ
Определим вид траектории точки из дифференциальных уравнений
(9) и A2). Для этого присоединим к уравнению (9) еще тождество
¦ __ dr / Ar A cp ,,о\
Л ср rl ф d -
Производную ср берем из (9) ф = ft/r3 и подставляем в A3). Тогда
Затем в A2) подставляем вместо ф его выражение из (9), а вместо
/его выражение из A4) и полученное уравнение приводим к уравне-
уравнению с разделяющимся переменными, предварительно разрешив его
относительно d/7dcp:
Рассмотрим движение, при котором г увеличивается с возрастани-
возрастанием ф. Преобразуем подрадикальное выражение к виду, удобному для
интегрирования. Тогда уравнение A5) приобретет вид
кЛг —. A6)
Вводим упрощающее обозначение
^^--ML-fJl^ A7)
а- также производим замену переменного (интеграции):
52J
Тогда из уравнения A6) имеем
dq>-
отсюда
Ф = arccos-^ +С. B0)
Постоянную С определяем из начальных условий. При t — 0
k уМ
Ф ф; " ^""
Тогда
Фо= arccos ~ + C,
Л
отсюда
С — ф0 — arccos —.
Или, обозначая ф0 — arccos ^ = ос, имеем
С = а. B1)
Уравнение B0) примет вид
Ф = arccos — -| а, B2)
Л
откуда
и — A cos (ф — а). B3)
Заменяя теперь и его выражением нз A8), получаем уравненнетра-
ектории в полярных координатах:
" B4)
г
1 -\-е cos (ф—а)
где
уМ уМ '
)^ B6)
§ 4. ИССЛЕДОВАНИЕ ТРАЕКТОРИИ.
ФОРМУЛЫ ДЛЯ КОСМИЧЕСКИХ СКОРОСТЕЙ
Уравнение B4) представляет собой уравнение некоторой кривой
второго порядка (конического сечения), причем начало полярной сис-
системы координат находится с одной стороны в центре притяжения (Зем-
(Земли), а с другой стороны, как показывает вид уравнения траектории в
полярных координатах, совпадает g одним из фокусов кривой второго
порядка.
530
Таким образом, центр притяжения (планета) находится в одном
из фокусов орбиты летательного аппарата при его баллистическом дви-
движении по отношению к планете. Движение называют баллистическим,
потому что оно происходит под действием только силы притяжения к
данному центру при отсутствии тяги со стороны двигателей летатель-
летательного аппарата.
Величины е, р, входящие в уравнение B4), определяют вид кривой,
ее размеры на плоскости. Одна из основных характеристик траекто-
траектории — эксцентриситет кри-
кривой е.
При е < 1, что может
быть по B6) только при
у0 < V2y~MF0, B7)
траектория является эл-
эллипсом.
При е — 1 траекто-
траектория — парабола и
0,25 (зллипс)
v0 = V2yM/r0. B8)
При е > 1, что возмож-
возможно только при
v0 > V2yM/r0,
B9)
ги-
-е=2,1 {гипербола)
Рис. 163
траектория является
перболой (рис. 163).
Чтобы траектория оказалась окружностью, начальная скорость
должна быть перпендикулярна начальному радиус-вектору г0, т. е.
¦фа = 90°*; следовательно,
k = гоио. B9')
Кроме того, должно еще удовлетворяться условие для начальной
скорости при запуске:
C0)
v0 = VyM/r0.
Тогда величина е в B6) окажется равной нулю.
Величину р в числителе уравнения траектории B4) называют па-
параметром кривой второго порядка, и она представляет собой длину
перпендикуляра к оси кривой, восставленного из фокуса, до пересе-
пересечения с самой кривой.
Для того чтобы летательный аппарат описывал траекторию вокруг
Земли, являясь ее спутником, необходимо соответствующее значение
р при данной начальной скорости v0 и данном начальном расстоянии
г0, т . е. определенное значение угла ty0. Имеются формулы, выражаю-
* Это осуществляется при запуске летательього annapaia посредством си-
систем управления.
531
тие условия для значений угла Н'о» при которых для заданной скорости,
например эллиптической, траектория не пересекает Землю.
Таким образом, установлен один из основных законов космонав-
космонавтики: если на летательный аппарат действует только одна сила притя-
притяжения со стороны некоторого пршягивающего тела то вид траекто-
траектории такого баллистического поле id полностью определяется началь-
начальными данными этого движения — начальной скоростью v0 (скоростью,
которую имеет летательный аппарат в момент прекращения работы
двигателя), начальным расстоянием г0 от центра притяжения, мас-
массой М притягивающего центра (но не массой летательного аппарата)
и направлением начальной скорости (углом ф0).
Соответственно этим данным различают следующие начальные кос-
космические скорости: круговую, эллиптическую, параболическую, ги-
гиперболическую (рис. 163). Условия для этих скоростей в виде уравне-
уравнений B7) —C0) можно представить в другой форме. Обозначая g уско-
ускорение силы тяжести на расстоянии г0 ;> R от центра Земли, восполь-
воспользуемся формулой B'). Тогда условия для космических скоростей при-
примут другой вид:
для круговой скорости
ииР = оо = УП?\ C1)
для эллиптических скоростей
У9Л = v0 <C V <?Го§', {??)
для параболической скорости
Увар = V» = V2^gi C3)
для гиперболических скоростей
У5Ш C4)
При г0 = /?(/? — радиус Земли) круговая скорость икР = Rg0
— 7,9 км/с — первая космическая скорость (g0 — ускорение свобод-
свободного падения при r0 = R).
Это наименьшая скорость, получив которую тело может стать спут-
спутником Земли. Параболическая скорость при r0 = R, упар = V2g(iR =
= 11,2 км/с. Уже при этой скорости при соответствующем я|з0 лета-
летательный аппарат удаляется в бесконечность, т. е. уходит из поля при-
притяжения Земли. Поэтому параболическую скорость называют второй
космической скоростью (или скоростью освобождения от притяжения
данным центром).
При гиперболической скорости^ равной игип = 16,7 км/с, по соот-
соответствующему направлению притягиваемое малое тело, выйдя из зоны
притяжения Земли, входит в зону притяжения Солнца с параболичес-
параболической по отношению к Солнцу скоростью, т. е. покидает Солнечную сис-
систему.
Случай круговой траектории. Из закона неизмен-
неизменности секторной екорости в случае движения точки по окружности под
действием центральной силы следует, что скорость точки постоянна
532
по числовой величине и направление ее перпендикулярно направле-
направлению полярного радиус-вектора. Точка имеет только нормальное уско-
ускорение
гср2 = ц/га, откуда ф3- = ц/г3 == const,
где [I = уМ.
Следовательно, для нахождения начальной скорости, при которой
точка описывает круговую траекторию, необходимо такое соотношение:
ИЛИ Укр —
Направление начальной скорости перпендикулярно 70. Найдем со-
соотношения между параболической и круговой скоростями. Имеем
^пар '
vRP =
откуда
^пар '^кр —
Космические скорости, как это показано выше, могут быть выраже-
выражены через g.
Выясним, каким образом можно создать епутник, неподвижный
относительно Земли, т. е. спутник, у которого радиус-вектор, прове-
проведенный из центра Земли, вращается вокруг оси Земли е той же угло-
угловой скоростью, что и Земля. Очевид-
Очевидно, что траектория такого спутника
относительно неподвижной в прост-
пространстве системы координат, имею-
имеющей начало в центре Земли, должна
быть окружностью, плоскость кото-
которой совпадает с плоскостью земного
экватора. Требуется узнать, на ка-
какой высоте над экватором следует со-
сообщить спутнику соответствующую
скорость. Эта круговая скорость при
движении по круговой орбите выра-
выражается формулой
v = Vgr,
C5)
вы-
Рис. 164
где г — R -\- h, a h — искомая
сота (рис. 164).
Точка Вх экватора, находящаяся на одном радиус-векторе со спут
ником В, имеет скорость v' = Ru>.
Скорости спутника В и точки Вг связаны соотношением
~ ~R '
На основании C)
— = — И 0=0»---.
C6)
533
По C5) и C6) составляем уравнение:
где г—искомая величина. Затем
откуда
Находим:
или rs -
6400 ——— « -i- км /с;
24-3600 9
,8 м/с2»0,01 км/сг;
j/ -= 6,8/?,
отсюда
При более точных значениях для R и g0 на экваторе h — 35 810 км.
Искусственные спутники Земли на подобных больших высотах
служат ретрансляторами телевизионных программ и промежуточными
точками в дальней, межконтинентальной телефонной и телеграфной
свяэп. Первый такой спутник «Молния 1» был запущен в Советском
Союзе 14 октября 1965 г. и использовался, например, для обмена те-
телевизионными программами между СССР и Францией. Затем были за-
запущены еще несколько искусственных спутников Земли типа «Молния»
н т. д.
Таким образом, движение искусственных спутников Земли (или
другой планеты) происходит по тем же законам, которые управляют
движением планет вокруг Солнца. Эти законы открыты Кеплером
A571—1630) в начале XVII в.- на основании наблюдений, проведенных
Тихо Браге A546—1601). Законы, носящие имя Кеплера, теоретически
доказаны позднее Ньютоном A643—1727). Имеется три основных за-
закона Кеплера:
1. Траектория (орбита) каждой планеты лежит в неподвижной от-
относительно Солнца плоскости и является эллипсом, в одном из фокусов
которого расположено Солнце
2. Прямая (радиус-вектор планеты), проходящая от Солнца к пла-
планете,„описывает равные площади в равные промежутки времени, или
иначе: секторная скорость планеты остается постоянной в процессе дви-
движения.
3. Квадраты периодов полного обращения планет пропорциональны
кубам из средних расстояний от Солнца, т. е. кубам квадратов больших
полуосей их орбипг.
ТИП
534
Но законы Кеплера не учитывают многих факторов, возмущающих
движения планет. Для планет такими факторами являются в основном
их взаимные притяжения. На движение же искусственных спутников
Земли влияют: несферичность Земли, ее сжатие, затормаживающее
действие земной атмосферы, притяжение со стороны Солнца и Луны,
магнитное поле Земли и др. Для точного расчета траекторий и законов
движения спутников следует учитывать все эти факторы.
Глава 11
ДВИЖЕНИЕ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
В современной технике возникают случаи, когда масса точки и сис-
системы не остается постоянной в процессе движения, а изменяется. Так,
например, при полете космических ракет вследствие выбрасывания
продуктов сгорания и отделения ненужных частей ракет изменения
массы достигают 90—95% общей начальной величины. Довольно зна-
значительно изменяется масса при полете современных реактивных само-
самолетов вследствие расхода топлива при работе двигателей и в ряде дру-
других случаев. Даже в такой области техники, как текстильное произ-
производство, происходят значительные изменения массы различных вере-
веретен, шпуль и рулонов при современных скоростях работы станков и
машии.
Рассмотрим главные особенности, связанные g изменением массы,
на примере движения одной точки переменной массы. Точку перемен-
переменной массы примем за геометрическую точку с конечной массой, непре-
непрерывно изменяющейся в процессе движения. Вместо точки можно рас-
рассматривать также тело переменной массы, если оно совершает посту-
поступательное движение.
§ 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
ПЕРЕМЕННОЙ МАССЫ
К точке переменной массы нельзя непосредственно применить ос-
основной закон динамики точки постоянной массы.
Дифференциальные уравнения движения точки переменной массы
получим, применяя закон независимого действия сил и теорему об из-
изменении количества движения системы. Известно, что действующая на
точку сила сообщает ей такое ускорение, которое не зависит от дейст-
действия других сил. В случае точки переменной массы кроме приложенной
к точке силы F действуют силы, вызванные отделением от точки части-
частицы массой А'М.
Считаем, что изменения скорости v точки переменной массы от дей-
действия силы F и от изменения массы точки не зависят друг от друга, или
общее изменение скорости dv в течение времени At складывается из из-
изменения скорости dyx от действия силы F при постоянной массе точки
535
и изменения скорости dv2, вызванного изменением массы точки в отсут-
отсутствие силы F.
Имеем точку переменной массы М. От действия силы F скороеть
точки постоянной массы изменяется за время dt в соответствии а ос-
основным законом динамики точки постоянной массы на
-5
t
Изменение скорости точки dv2 за время dt, вызванное изменением
ее массы в отсутствие действия силы F, определяют по теореме об из-
изменении количества движения системы постоянной массы. Так как ме-
механическая система, состоя-
2 _ щая из точки переменной мас-
v ~" сы и отделившихся от нее
частиц, свободна от действия
внешних сил, то ее количест-
количество движения является по-
постоянной величиной. Внутрен-
Внутренние силы взаимодействия точ-
точки с отделяющимися частица-
частицами не изменяют количества
движения рассматриваемой
системы. Применяя закон со-
сохранения количества движе-
движения за промежуток времени
от t до t -j- d^, имеем
Рис. 165
Qt = Qt+dt. B)
Учитываем только взаимодействие точки переменной массы с от-
отделившейся от нее частицей массы d'M за время dt и пренебрегаем дей-
действием на точку и эту частицу ранее отделившихся частиц (рис. 166).
Получаем Qt — М - v, так как в момент t имеется одна точка массой
М @, движущаяся со скоростью у относительно системы координат
Охуг.
В момент t + dt имеются точка массой М — d'M, скорость которой
v + dv2, и отделившаяся частица массой — d'M, скорость которой
и относительно той же системы координат Охуг. Количество движений
их ь момент t + dt
Приравнивая, согласно B), количества движения после сокраще-
сокращения и отбрасывания малого слагаемого второго порядка dM'dv2 по
сравнению со слагаемыми первого порядка, получаем
do,=
d'M ,- -.
536
при d'M > 0, или, включая знак минус в dM (тогда йМ < 0), имеем
«м -«-3. ,з,
м
Общее изменение скорости
dv = dvx -f- dc2,
или, учитывая A) и C),
,- ? ,, . dM .- -.
dy =— dM (и — v).
M М
После умножения обеих частей этого уравнения на массу точки М
и тления на dt получаем следующее дифференциальное уравнение
движения точки переменной массы в векторной форме:
,, dv -? , AM .- -. ...
М ~—F-i (u—v). D)
At it v
Дифференциальное уравнение D) называют дифференциальным
уравнением Мещерского. Оно было получено им впервые в 1897 г.
Если с точкой переменной массы связать подвижную систему коор-
координат, поступательно движущуюся относительно системы координат
Oxyz, то абсолютную скорость и отделившейся частицы массой dM по
теореме о сложении скоростей можно выразить как и — ve + vr.
Так как в данном случае ve — v, то относительная скорость отде-
отделившейся частицы
vr — и — v.
Подставляя значение и — ив D), имеем
¦. do fr. AM — ..,.
М =F-\ vr. D)
M ^ At K '
Если ввести обозначение ФТ= -г- vr, то D') примет вид
Величину Фг называют реактивной силой, a dM/dt является ско-
скоростью изменения массы. Она характеризует изменение массы точки
за единицу времени, например за 1 с. Поэтому реактивная сила равна
произведению секундного изменения массы точки на относительную
скорость отделения частиц массы от точки переменной массы.
В случае уменьшения массы точки с изменением времени величина
dM/dt является отрицательной, а при возрастании ее массы — поло-
положительной. При уменьшении массы точки вследствие отделения от нее
частиц реактивная сила Фг направлена в сторону, противоположную
относительной скорости отделяющихся частиц vr, а при увеличении
массы точки величина dM/dt больше нуля и реактивная сила Фг на-
537
правлена в сторону относительной скорости частиц vr. Для реактив-
реактивного двигателя скорость изменения массы dM/dt является отрицатель.
иой, равной секундному расходу массы, a vr —скорость вылета газа
из сопла двигателя.
Реактивная сила является тягой двигателя, обусловленной выбро-
выбросом газа через сопло. Она направлена противоположно скорости вылета
газа из сопла двигателя.
Проецируя обе части D") на прямоугольные декартовы оси коор-
координат, получаем дифференциальные уравнения движения точки пере-
переменной массы в проекциях на эти оси:
^ ^ | E)
Из D") или E) следует, что дифференциальные уравнения движения
точки переменной массы имеют такой же вид, как и для точки постоян-
ной массы, только кроме приложенных к точке сил действует допол-
дополнительно реактивная сила, обусловленная изменением массы точки.
Дифференциальные уравнения движения точки переменной массы
превращаются в аналогичные уравнения для точки постоянной массы,
если величина dM/dt равна нулю. Из дифференциальных уравнений
движения точки переменной массы, аналогично тому, как и в случае
точки и системы постоянной массы, можно вывести общие теоремы для
точки и системы переменной массы.
§ 2. ЗАДАЧИ ЦИОЛКОВСКОГО
Рассмотрим две задачи Циолковского: прямолинейное движение точ-
точки переменной массы под действием только одной реактивной силы и
вертикальное движение точки вблизи Земли в однородном поле силы
тяжести. Эти задачи впервые рассматривались К. Э. Циолковским.
Первая задача Циолковского
Пусть точка переменной массы или ракета движется прямолиней-
прямолинейно в так называемом, по терминологии Циолковского, свободном прост-
пространстве под действием только одной реактивной силы Считаем, что
относительная скорость vr отделения частиц постоянна и направлена
в сторону, противоположную скорости v движения точки переменной
массы (рис. 166). Тогда, проецируя D") на ось Ох, направленную по
скорости движения точки, дифференциальное уравнение прямолиней-
прямолинейного движения точки переменной массы принимает вид
АЛ ^v — a^
irk •• '—¦ '
A
At At
Разделяя переменные и беря интегралы от обеих частей, имеем
8 М
I
о»
538
где v0 — начальная скорость, направленная по реактивной силе;
Л10 — начальная масса точки.
Выполняя интегрирование, получаем
м
F)
Если в формулу F) подставить значения величин, характеризую-
характеризующих конец горения, когда масса точки (ракеты) состоит только из массы
несгоревшей части (массы приборов и корпуса ракеты) Мр, то, обозначая
т luaccy топлива, для скорости движения vx в
конце горения имеем
Н
Вводя
число Циолковского Z —
получаем следующую формулу Циол-
kobcivoio:
f 1 = f0 + Vr
+
G)
Рис 166
Из формулы Циолковского следует, что скорость
в конце горения не зависит от закона горения, т. е.
закона изменения массы. Скорость в конце горения
можно увеличить двумя путями. Одним из этих пу-
путей является увеличение относительной скорости
отделения частиц vr или для ракеты увеличение
скорости истечения газа из сопла реактивного
двигателя.
Современные химические топлива позволяют
получать скорости истечения газа из сопла реак-
реактивного двигателя порядка 2—2,3 км/с. Создание
ионного и фотонного двигателей позволит значи-
значительно увеличить эту скорость. Другой путь увели-
увеличения скорости ракеты в конце горения связан с увеличением так на-
называемой массовой, или весовой, отдачи ракеты, т. е. с увеличением
числа Z, что достигается рациональной конструкцией ракеты Можно
значительно увеличить массовую отдачу ракеты /И0/Мр путем при-
применения многоступенчатой ракеты, у которой после из-
израсходования топлива первой ступени отбрасываются баки и двига-
двигатели от оставшейся части ракеты. Так происходит со всеми баками и
двигателями уже отработавших ступеней ракеты Это значительно по-
повышает число Циолковского для каждой последующей ступени, так как
уменьшается Мр за счет отброшенных масс баков и двигателей.
Для определения уравнения движения точки переменной массы
из F) имеем
nj
j
м
639
или, выполняя интегрирование после разделения переменных и считая
х = 0 при t =з 0, получаем
(8)
dt.
M
В теоретических работах по ракетодинамике обычно рассматрива-
рассматривают два закона изменения массы — линейный и показа-
показательный. При линейном законе масса точки g течением времени
изменяется так:
М = Мо A — at), (9)
где а = const (а — удельный расход), а Мй — масса точки в началь-
начальный момент времени.
При показательном законе изменение массы
М = Мф-^. A0)
Выполняя интегрирование в (8) при линейном законе изменения
массы (9), получаем следующее уравнение движения:
[( )( f]. A1)
При показательном законе изменения массы A0) соответственно
x=vat + -^f-. A2)
Ответим, что при линейном законе изменения массы (9), если vr =s
— const, секундный расход массы
(—dM/dt) = аМ0 = const
и реактивная сила
Фт — {—dMldt)v, — aMovr — const.
При показательном законе секундный расход массы и реактивна?
сила являются переменными, но ускорение точки переменной массы
аг, вызванное действием на точку одной реактивной силы Фг, является
постоянным, т. е.
аг = Фг/М = аи, = const.
Вторая задача Циолковского
Если точка переменной массы (ракета) движется по вертикали вверх
вблизи Земли (см. рис 166), то, считая поле земного притяжения од-
однородным (g — постоянное) и пренебрегая сопротивлением воздуха,
а также учитывая все предположения первой задачи Циолковского,
получаем следующее дифференциальное уравнение движения точки:
540
После выполнения интегрирования имеет
м
Для х в зависимости от времени, если, как и в перрой тячяче Циол-
Циолковского, отсчитывать х от начального положения шчли, пол>чаем
следующую формулу:
in-^-d/. ¦ A3)
Из A3) при линейном законе изменения массы (9) получаем
x = vnl ^1 + -^- [A —at)In (I —at)+at].
1 с
При показательном законе изменения массы A0) соответственно
x = v i gtl \ aVrfi
Глава 12
ВВЕДЕНИЕ В ДИНАМИКУ СПЛОШНОЙ СРЕДЫ
§ 1. УРАВНЕНИЕ НЕРАЗРЫВНОСТИ
Для сплошной среды важное значение имеет уравнение go-
хранения массы, или уравнение неразрывно-
неразрывности Для его вывода введем понятие плотности сплошной среды. Плот-
Плотностью р в точке М пространства называют предел отношения массы
Am в элементарном объеме АV к этому объе- _
му, охватывающему точку М, при стягивании
его в эту точку, т. е. /., \/" \ ^"п
, А/и
р= lim .
Получим уравнение неразрывности. Вы-
Выберем в пространстве неподвижную замкну-
замкнутую поверхность, ограничивающую объем V
(рис. 167). Сплошная среда при своем движе-
движении относительно рассматриваемой системы
отсчета частично входит в объем, ограниченный поверхностью,
частично из него выходит. Считается, что сама выбранная поверх-
поверхность не влияет на движение сплошной среды Через элемент пло-
площади поверхности US за единицу времени входит или выходит ко-
количество массы сплошной среды pvndS (определяется знаком потока),
где п — направление внешней по отношению к объему нормали. Через
всю поверхность войдет или выйдет количество массы П pvndS. Если
(S)
это величина положительная, то получим уменьшение плотности в
541
точках объема в единицу времени на —dp/dt. В малом объеме dV это
уменьшение составит ~~dV. Bq всем объеме оно равно — JjJ jjdV.
~ р JjJ
Если масса сплошной среды сохраняется, то поток ее через поверх-
поверхность должен компенсироваться изменением плотности в рассматри-
рассматриваемом объеме, 1. е.
(V)
Это и есть уравнение неразрывности, или сохране-
сохранения мае сы, в интегральной форме.
От интегральной формы уравнения неразрывности для объема мож-
можно перейти к уравнению неразрывности в каждой точке пространства.
Для этого следует интеграл по поверхности в A) преобразовать в ин-
интеграл по объему, ограниченному замкнутой поверхностью, по форму-
формуле Гаусса—Остроградского
\ } (р соз (п, х) -f q cos (о, y)+r соз (я, z)] dS =
(S)
j J <) \ дх ду дг
В рассматриваемом случае
vn = v-n — vx пх 4- vb n,j -г v2 nz — v v cos (n, x) +
4 vv cos (n, y) 4- vz cos (n, z).
Полагая в формуле Гаусса—Остроградского р = pvx, q — pvy, r
= pvz, получим
(S) (S) (S)
pvndS= \)
(S) (S)
+(p0j)cos(Cz)JdS= fff li^-f-i^-f-^-ldF. B)
J(JJ ax ay & J
Подставляя B) в A) и объединяя интегралы в один, имеем
Ф , д (рих)
, Д(<№у> ,
(Г)
Так как (Г) выполняется для произвольного объема, то это может быть
только а том случае, если подынтегральное выражение равно нулю
в каждой точке, т. е.
д(руг) _п
]( й д дг
542
Это и есгь уравнение неразрывности сплошной
среды в дифференциальной форме.
Для несжимаемой сплошной среды, для которой плотность р =
= const, из C) получим
д^х _i. дич_..у до* _q D)
дх ду дг
или
ехх _|_ g ? .}- gzz — о.
Величина -^ -[- j^ 4- -J7. как известно, называется дивергенцией
вектора скорости v. Уравнение .неразрывности для несжимаемой сплош-
сплошной среды кратко можно выразить в форме
divo-0. D')
В более общем случае оно имеет вид
= 0". C')
§ 2. СИЛЫ ОБЪЕМНЫЕ И ПОВЕРХНОСТНЫЕ
Силы, действующие на рассматриваемую частицу сплошной среды,
разделяют па силы объемные, или массовые, и поверх-
поверхностные. Объемными силами называют силы, которые действуют
на точки объема сплошной среды со стороны других материальных
объектов, в том числе и со стороны точек самой выделенной частицы
сплошной среды. Объемную силу обычно характеризуют ее интен-
интенсивностью.
В окрестности точки М пространства рассмотрим малую частицу
сплошной среды объемом 41/. Тогда масса этой частицы приближенно
имеет значение pAF, где р — плотность в точке М. Если на все точки
выделенной малой частицы сплошной среды действует объемная сила
AF, то интенсивостью этой силы в точке пространства М является пре-
предел отношения AF к массе частицы при стягивании ее объема в точку
М, т. е.
г = пт
Объемными силами являются силы гравитационного тяготения,
силы инерции и некоторые другие силы
Поверхностными силами считают силы, которые действуют со сто-
стороны остальной сплошной среды на выделенную частицу через ее по-
поверхность. Поверхностную силу в каждой точке поверхности харак-
характеризуют ее н а п р я ж е н и е м, т. е. силой, приходящейся на еди-
543
ницу площади. Если через площадь AS малого элемента поверхности
выделенной частицы остальная среда действует с силой АР^то напря-
напряжением р в точке поверхности является предел отношения АР к AS при
стягивании AS в точку М, т. е.
- ,. ЛР
р = urn .
nfd,fi,Y)
§ 3. СВОЙСТВА ПОВЕРХНОСТНЫХ СИЛ
Поверхностные силы для выделенной частицы сплошной среды яв-
являются аналогом распределенных по поверхности сил реакций связей
для твердого тела, которые рассматривались в статике. Через каждую
точку пространства могут проходить поверхности многих выделенных
частиц сплошной среды. Возникает задача определения таких величин
в рассматриваемой точке, через которые можно выразить напряжение
на элементе поверхности любой из частиц, проходящих через эту точ-
точку. Для этого достаточно знать в точке так называемый тензор
напряжений.
Поверхности различных частиц, проходящих через рассматрива-
рассматриваемую точку, характеризуют направлениями внешних нормалей к по-
поверхностям этих частиц. У каждой частицы в какой-либо точке ее по-
поверхности имеется своя внешняя нор-
нормаль, направленная во внешнюю сторо-
сторону объема частицы.
Выделим из сплошной среды малую
частицу в форме тетраэдра О ABC с вер-
вершиной в точке О—начале координат
декартовой системы (рис. 168). Внешняя
нормаль п к наклонной площадке ABC
площадью ASn образует с осями коорди-
координат углы а |3, у соответственно, Внеш-
Внешней нормалью к площадке ОВС являет-
является отрицательное направление оси коор-
координат Ox, a ее площадь — ASX. Ана-
Аналогично, для площадки ОАС площадью
AS у внешней нормалью будет отрица-
отрицательное направление оси Оу. Для площадки ОАВ внешняя нормаль —
отрицательное направление оси • Oz, площадь ASZ.
Применим к выделенному малому тетраэдру следствие из принципа
Даламбера для системы, согласно которому векторная сумма всех сил,
действующих на точки сплошной среды в выделенном тетраэдре,
вместе с силами инерции этих точек относительно инерциальной
системы отсчета равна нулю. На точки сплошной среды в выделенном
тетраэдре действуют объемные силы. Их векторная сумма FCppcpAK,
где Fcp — средняя интенсивность объемной силы; рср — средняя плот-
плотность и AV — объем тетраэдра. Для поверхностных сил, действующих
на выделенный тетраэдр через поверхность грани ОВС, действует си-
544
Рис. 168
ла р_х ASж, где /?_х — среднее напряжение на этой поверхности. Ана-
Аналогично, _для грани ОАС поверхностная сила равна~р_и &Sy( для грани
ОАВ—р_г ASZ и для ABC — pnASn. Силы_инерции для всех точек
сплошной среды в тетраэдре равны (—рсрасрД F), где аср — среднее
ускорение. Векторная сумма сил должна быть равна нулю, т. е.
?ср Pep &V —рор аср AV + pn ASn +р_х AS* +р^у ASy + E)
Площади ASX, ASj,, AS2 на основании теоремы о связи площадей
проекции и проецируемой фигуры выражаются через площадь на-
наклонной площади ASn соотношениями
ASX = ASn cosa; ASy = A5n cos P; ASZ = ASn cos y.
Объем AV = 1!ahASn, где h — высота тетраэдра, опущенная из его
вершины О на наклонную грань ABC. Поделим обе части E) на ASn
и перейдем к пределу, устремив высоту тетраэдра h к нулю. Получим
pn + p_xcosaH-p'_tfcosp + P-Jcos7 = 0, E')
так как
lim = 1/slim/i =0
\S
/slim/
>\Sn h-*0
и слагаемые с объемными силами обращаются в нуль, если другие ве-
величины, входящие в их выражение, остаются конечными во всех точ-
точках тетраэдра. В E') входят напряжения (после перехода к пределу)
уже не средние, а те, которые действуют в точке О. Условие E') для
поверхностных сил показывает, что главный вектор поверхностных
сил для элементарного тетраэдра в пределе (при стягивании тетраэд-
тетраэдра в точку) равен нулю. Это справедливо для частицы любой формы,
так как отношение ее объема к площади поверхности в пределе стре-
стремится к нулю.
На основании закона о равенстве вил действия и противодействия
для напряжений имеем:
р-х= —рх; р-у=—ру; р.г = —рг. F)
Например, р_х есть напряжение от действия отброшенной части
сплошной среды на выделенный тетраэдр через поверхность грани
ОВС. Напряжение рх следует считать действием тетраэдра через ту
же грань на остальную сплошную среду, так как для нее внешней нор-
нормалью является положительное направление ogh Ox. Аналогично обо-
обосновываются два других соотношения из F).
С учетом F) после переноса слагаемых ео знаком минуо в правую
часть E') примет форму
рп — pxcos<x-\- ри cos р + рг gos <р. G)
18 Зяк ПИ 545
Формула G) выражает напряжение на наклонной площадке в точке О
через напряжения по трем взаимно перпендикулярным площадкам,
проходящим через ту же точку.
Если сплошной средой является идеальная жидкость, в которой
напряжениями являются только давления, параллельные нормалям
к площадкам, то, проецируя G) последовательно на оси координат Ох
Оу, Ог и считая напряжения направленными в отрицательные стороны
внешних нормалей, получим:
— |,o,Jcosa = — \рх\соъа; — |pn|cos р* -= — \рч | cosp4; — |р„ | cosy =
Таким образом,
т, е. давление р в какой-либо точке идеальной жидкости не зависит от
ориентации площадки в этой точке. Это хорошо известный закон
Паскаля.
§ 4. ТЕНЗОР НАПРЯЖЕНИЙ
Напряжение на наклонной площадке с нормалью п через напряже-
напряжения по трем взаимно перпендикулярным площадкам, нормалями к ко-
которым являются оси координат, определяется по формуле G).
В общем случае любой сплошной среды рх, ру, рг не направлены по
нормалям к площадкам, т. е. по осям координат Ох, Оу, Ог, так же как
р„ не направлено по нормали к наклонной площадке. В проекциях на
оси координат из G) получаем
G')
= Рх» cos a+ /?,,(, cos
, cosy;
Рп =pxlcas
Отметим, что первый индекс у
маль к площадке, на которой
проекции напряжений обозначает нор-
норрассматривается напряжение Второй
индекс указывает координатную ось,
на которую проецируется это напря-
напряжение.
Чтобы иметь возможность опреде-
определить рп, необходимо кроме углов а,
Р, у, определяющих направление нор-
нормали к площадке, знать девять компо-
компонентов тензора напряжений рхх,
рху, ..., ргг в рассматриваемой точке.
Тензор напряжений /7 удобно выра-
выразить в виде таблицы или матрицы:
Рис. 169
fPxx Pyx Pix 1
Л==1рх„ PVV
'xi Руг Ргг
(8)
646
Зйгачеине компонентов тензора напряжений для случая, когда они
все положительны, видно из рис. 169, на котором точки Оь О2, О „
расположенные в плоскостях /, 2, 3, следует совместить в одной точке
О Например* рХх — проекция напряжения на площадке, нормалью к
которой является ось Ох, на эту же ось, рх1) — проекция на ось Оу на-
напряжения рх н т. д.
Компоненты тензора напряжений, характеризрощие напряжения
по различным площадкам, проходящим через рассматриваемую точку,
в общем случае зависят от выбора точки и направления осей координат.
§ 5. УРАВНЕНИЯ ДВИЖЕНИЯ СПЛОШНОЙ СРЕДЫ
В НАПРЯЖЕНИЯХ
Выберем в пространстве, в котором движется сплошная среда, не-
неподвижную относительно инерциальной системы отсчета, замкнутую
поверхность площадью S, ограничивающую объем V. Эта воображае-
воображаемая поверхность не препятствует движению сплошной среды. Приме-
Применим к. сплошной, среде, которая находится в выделенном объеме в мо-
момент времени t, первое следствие из принципа Даламбера для системы.
Согласно этому следствию, векторная сумма всех действующих на точки
сплошной среды объемных и поверхностных сил вместе с силами инер-
инерции точек относительно инерциаль-
инерциальной системы отсчета равна нулю.
На элементарный объем сплошной
среды действует объемная сила
FpdV и сила инерции для него со-
соответственно (—apdV), гцеР — ин-
интенсивность объемной силы; а —•
ускорение относительно инерциаль-
инерциальной системы отсчета и р -— плот-
плотность. Для всего выделенного объ-
объема векторная сумма этих сил вы-
вырази гея интегралом по объему
'" (Т — a)pdF (рис. 170).
Рис, J70
ш
На элемент dS поверхности выделенной части сплошной среды дей-
действует поверхностная сила pndS, где рп — напряжение поверхностной
силы в точке поверхности с внешней нормалью, имеющей углы a, |J,
Y с осями координат Ох, Оу, Ог. Векторная сумма всех поверхностных
сил выразится интегралом по поверхности (Т pndS.
Согласно первому следствию из принципа Даламбера, для выделен-
выделенной части сплошной среды в объеме V имеем
(V)
(У)
547
(S
IV)
Преобразуем интеграл по поверхности в интеграл по объему. По фор-
формуле Гаусса—Остроградского, заменив под интегралом рп его зна-
значением из G), получим
A0)
О')
д'/ дг
Подставляя A0) в (9) и объединяя два интеграла в один, имеем
дх дц дг
Условие (9') выполняется ддя произвольного объема, поэтому под-
подынтегральное выражение обращается в нуль в каждой точке этого
объема. Приравнивая его нулю, получаем следующее уравнение
движения сплошной среды в напряжениях в
векторной форме, если слагаемое (—ар) перенести в другую часть урав-
уравнения;
дх ду
В проекциях на оси координат имеем
дг
(П)
раг =
дх
dpxZ
дх
dp,lv
дг
дг
(ПО
При равновесии сплошной среды ускорение а — 0 и из A1) полу-
получим еледующее условие равновесия для сил:
A2)
дх Qy дг
В проекциях на оси координат из A2) имеем
PF>
др
дх
Ух i dpzx = Qi
ду дг
Р*ч , Pw
—
дх ду
дг
дРхг , друг дргг
] f- ¦
дх ду дг
A2')
548
§ в. СИММЕТРИЧНОСТЬ ТЕНЗОРА НАПРЯЖЕНИЙ
Применим к выделенной части сплошной среды (см. рис. 170) вто-
второе следствие из принципа Даламбера, согласно которому векторная
сумма моментов относительно неподвижной точки О всех объемных и
поверхностных сил вместе с силами инерции равна нулю. Моменты
объемной силы и силы инерции для элементарного объема dV
Гх (pF~—pa)dVs
где г — радиус-вектор, проведенный из точки О в какую-либо точку
элементарного объема. Для всей сплошной среды в выделенном объеме
это дает
"х {pF — pa)]dV.
Аналогично для поверхностных сил получим и (г х pn)dS. Co-
гласно второму следствию из принципа Даламбера, имеем
(V) (i)
Преобразовав поверхностный интеграл в объемный по формуле Гаус-
Гаусса—Остроградского и используя G), получим
СГ(г"х рп) dS = jj[Gx /^)cosa-b(r x py) cos|3 + (Fxpy)co
(S) (S)
(V)
Выполняя дифференцирование векторных произведений под знаком
интеграла по объему, получим
+ ^.\] d К A4)
ду
Подставляя значение интеграла A4) в A3), после объединения слагае-
слагаемых имеем
дх су
(V)'
A3')
549
Согласно уравнению движения в напряжених
4. |i + °^~ = 0, из A3') получим
дх
t) *s %) \
A3")
Условие A3") выполняется для произвольного объема, поэтому под-
подынтегральное выражение равно нулю в каждой точке, т. е,
-?xpx + -f хр, + -?хл=0. A5)
Так как г = xi -f- у/ + гЯ, то
дг/дх — г, дг/ду— /; дг/дг — k",
где (', /, fe — единичные векторы декартовой системы осей координат.
Разлагая напряжения /?ж, /?„, /?г на составляющие по осям коорди-
координат, имеем*
A6)
„ /г
Подставляя A6) в A5) и выражая векторные произведения в виде оп-
определителей, получим
= 0 A5')
После разложения определителей по элементам первых строк и компо-
компоновки сла1аемых о множителями I, /, k имеем
{Руг — Р1У)*~+(Р*х — Рхг)Г+ {PxV — pr,x)k=0. A5")
/
1
p«
/
0
Px«
k
0
-b
0
Pt)X
i
l
к
0
4-
t
0
Ptx
i
0
k
1
P.
Ее аи вектор равен нулю, то равны нулю его составляющие по осям
координа-, 1. е.
Руг ™ Ргц1 Рхх Рхг> Рху === рух- (*'/
Соотношения A7) являются условиями симметрии тензора напряжений
сплошной среды. Оно получено в предположении, что среди поверхно-
поверхностных сил нег пар сил, моменты которых следует дополнительно учи-
учитывать в A3).
Проведем в какой-либо точке две площадки с единичными векто-
векторами пиипо нормалям к ним и напряжениями рп и рт. Проецируя
напряжение рп на направление т., получим рпт, а проецируя рт на
направление п, полечим ртп. Используя условия симметрии тензора
550
напряжений, можно получить условие взаимности напряжений по
двум любым площадкам, проходящим через об_цую точку:
Рпт = Ртп- A8)
В частности, приняв последовательно за нормаль т оси координат Ох,
Оу, Ог, из A8) получим:
Рпх == Рхп\ Рпу ~ Punt Рпг ~ Pzn-
§ 7. ЭЛЛИПСОИД НАПРЯЖЕНИЙ
Тензору напряжений, как и любому другому тензору с двумя ин-
индексами (тензору второго ранга), можно поставить в соответствие гео-
геометрический образ — поверхность второго порядка, так же как тен-
тензору с одним индексом (тензору первого ранга, или вектору) можно
поставить в соответствие прямоли-
прямолинейный отрезок, а числу (тензору
нулевого ранга) — точку на число-
числовой оси.
Пусть имеем в точке О площадку
о нормалью On, углы которой с ося-
осями-координат есть а, р, у (рис. 171).
Разложим напряжение рп, действую-
действующее па выбранной площадке, на со-
составляющие, параллельные осям ко-
координат. Получим
_ Рис 171
Pn—Pnxl+Pnyi + Pmkf О9)
где рпх, рпу, рпг — проекции напряжения рп на оси координат. Спрое-
Спроецируем напряжение рп на направление нормали On, используя A9).
Имеем
Рпп = Рпх COS а + рПу COS Р + рпг COS у. B0)
Подставляя в B0) значения рпх, рпи, рпг из G'), получим
Рпп = Рхх cos2 а + pVy cos2 р + ргъ eosa у + 2р„г gos р соз у +
+ 2ргх cos у cos а + рхч cos а cos p. B1)
Отложим на нормали On отрезок ОК, величина которого обратно про-
пропорциональна корню квадратному из модуля рпп> т. е.
OK=--l/V\JZA- B2)
Если к, у, г — координаты точки К, то
Г.х; cos (
= У\Р
см
ок ~ [р"
г
Подставляя B3) в B1) vt сокращая на \рап\, получим
Рх*.*1 + Рун'/ + /W + '2ругуг + %piXzx + 2рхуху — ±1.
B3)
B4)
551
Это и есть уравнение эллипсоида напряжений.
Получаем действительно эллипсоид, если ни по одному из направле-
направлений, проходящему через точку О, рпп не обращается в нуль. В этом
случае расстояние от точки О до точек эллипсоида не равно бесконеч-
бесконечности. В правой части B4) следует взять знак плюс в случае растяже-
растяжения (рпп > 0) и минус — при сжатии (рпп < 0).
Эллипсоид имеет три взаимно перпендикулярные главные оси. Ком-
Компоненты касательных напряжений для площадок, перпендикулярных
главным осям, равны нулю. Для главных осей Охг, Оуъ Ozx уравнение
эллипсоида напряжений принимает вид
+Р2у! + р&\ =±1, B4')
где р1г р2, р3 — нормальные напряжения для главных осей, или
главные напряжения. Тензор напряжений при переходе
к главным осям принимает диагональную форму:
/Р,О 0
п=\ о Р2 о
\0 0 pj
Для различных осей координат, проходящих через рассматриваемую
точку, сохраняет свою величину сумма диагональных компонентов,
т. е.
Рхх + Руу + Pzz = Pi + Pi + P'i- B5)
Она является инвариантом, не зависящим от выбора осей координат
в рассматриваемой точке.
Если известны компоненты тензора напряжений для любых коор-
координатных осей, то главные напряжения ръ р2, ръ определяются как
корни уравнения собственных значений тензора напряжений:
= 0. B6)
Pxx — P
Pm
Ргх
Pxy
Руу
Ргу
Р
РХ2
Руг
Ргг~Р
Это кубическое уравнение для р имеет корни ръ ръ ра. Оно аналогич-
аналогично уравнениям собственных значений тензоров инерции и скоростей
деформаций. Все эти тензоры второго ранга.
Можно получить также формулы, по которым вычисляются компо-
тенты тензора напряжений для любых прямоугольных осей координат,
если известны их направления относительно главных осей и известны
главные напряжения ръ р2, ръ. Приведем их без вывода:
Рхх = Р\ cos2 ax + p2 cos2 a3 + р3 cos2 а3; i
Руу = Pi cos2 Pj + Pi cos2 p2 + p3 cos2 p3; I B7)
Pzz = Pi cos3 ?! + Рч cos3 v2 + p3 cos2 ya; J
Pxy Pyx Pi j p1 p22p2ys3p3;
p Vz = Pzy = Pi cos px cos yt + p2 cos p cos <y2 + p3 cos p3cos y3; B8)
Ргх = Pxz s Pi cos vx cos ar + p2 cos y2 cos a24 ps cos y3 cos as. J
562
В этих формулах ось Ох имеет с главными осями ОхигОуг, Ог1 углы аи
а2, а8; ось Оу— соответственно углы р\, р2, р3 и ось Oz— углы Vi,
7г. 7з- Формулы B7) полностью аналогичны формулам C1) для момен-
моментов инерции относительно осей координат, а B8) — формулам для
центробежных моментов инерции C5) § 9 гл. 3. Это и естественно, так
как компоненты тензоров второго ранга преобразуются по единым фор-
формулам при переходе от главных осей к другим осям координат, повер-
повернутым относительно главных.
§ 8. РЕОЛОГИЧЕСКОЕ УРАВНЕНИЕ
Для различных сплошных сред зависимости тензора напряжений
от тензора скоростей деформаций отличаются друг от друга. Для уп-
упругих сплошных сред тензор напряжений зависит от тензора де-
деформаций. Зависимость между тензорами напряжений и скоростей
деформаций часто называют реологическим уравнением. Сформулируем
реологическое уравнение в тензорной форме для сплошных сред, на-
называемых жидкостями, для которых тензор напряжений не зависит от
тензора деформаций. К жидкостям относятся обычные капельные жид-
жидкости, например вода и газы. Примером газа является воздух при нор-
нормальных атмосферных условиях.
В каждой точке пространства, занятого движущейся жидкостью,
имеем тензор напряжений П и тензор скоростей деформаций S. Перво-
Первоначально были сформулированы и экспериментально проверены про-
простейшие частные случаи зависимости компонентов этих двух тензоров,
как, например, закон Ньютона для касательных напряжений. Эти за-
зависимости оказались линейными. Это привело к предположению,
что линейная зависимость соблюдается и в общем случае. Для жидко-
жидкостей эта линейная зависимость тензора напряжений от тензора скоро-
скоростей деформаций носит название обобщенного закона Ньютона или
закона Навье—Стокса.
Линейная зависимость между тензорами П и S в общем случае од-
однородной жидкости выражается в форме
П = aS + Ы, B9)
где / — единичный тензор; а и Ь — скалярные коэффициенты. Так
как зависимость между компонентами тензоров П и S предполагается
линейной, то скалярный коэффициент а не должен зависеть от компо-
компонентов этих тензоров. Он должен характеризовать жидкость. Обозна-
Обозначим этот коэффициент 2ц. Коэффициент \л называют коэффициентом
динамической вязкости. В общем случае он может иметь различные
значения в разных точках и изменяться с течением времени.
Скалярный коэффициент Ъ может линейно зависеть от компонен-
компонентов тензоров П и S, но только от таких комбинаций, которые не зави-
зависят от направления осей координат в рассматриваемой точке, т. е. он
может зависеть от линейных инвариантов тензоров
U и S. Эту зависимость можно получить из B9), приравняв линейные
инварианты обеих частей. Получим
Рхх + Руу + Ргг = 2ц {вхх -f е„„ + в„) + Ь • 3S C0)
653
так как линейный инвариант единичного тензора
/10 0
/=Ч 0 1 0
\0 0 1
равен 3. Линейный инвариант тензора S для сокращения записи обо-
обозначим 9, т. е.
дх ' ду ' а-
Коэффициент 9 называют также относительной скоростью объемного
расширения. Для b имеем
2 ". C1)
Ь iP^bPmr + Pzz) №•
Дальнейшее преобразование связано с определением статичес-
статического давления в жидкости или просто давления. Для идеальной жидко-
жидкости (жидкость без сил трения) было доказано, что рхх — руу — ргг.
Абсолютную величину р этого общего отрицательного напряжения и
называют давлением в рассматриваемой точке. В вязкой жидкости нор-
нормальные напряжения рхх, руу, ргг не равны друг другу. Естественно
определить давление р в этом случае как среднее арифметическое нор-
нормальных напряжений, взятое с обратным знаком, т, е.
Р =» — -^{рхх + Руу + Ра)- C2)
Подставляя C2) в C1), получаем
Ъ = — р — */8ц9. C3)
При таком определении давления вязкие свойства жидкости характе-
характеризуются одним коэффициентом (.1 Для некоторых жидкостей этого
недостаточно. Тогда предполагают, что давление зависит еще линей-
линейно и от относительной скорости объемного расширения 9, т. е.
= -\(РхЛ + Ру!) + Ргг) + Хд, C4)
где К' — второй коэффициент вязкости. В этом случае
Ь =* —р + КО, C3')
где X = X1 ~-^t. Если X' = 0, то X ~ — ^ц.. В дальнейшем для b ис-
используем величину C3'), как более общую. Из C3') значение Ь, опре-
определяемое соотношением C3), получается как частный случай при X =*
2
Давление р нельзя определить произвольно, так как оно должно
соответствовать определению давления в термодинамике через кине-
кинетическую энергию движения молекул.
564
Подставляя Ь из C3') в B9), получаем следующее реологическое
уравнение для жидкостей в тензорной форме:
П = 2|iS + (—р + Щ1 B9')
или
(Рхх Pxv Рхг
Рух Риу Руг
I
Ргх Ргу Рг
О
1
О 1
1.B9")
Тензорные равенства, справедливые в одной системе координат, вы-
выполняются в любой другой системе координат не только в декартовой,
но и в криволинейной, так как все тензоры при переходе от одной сис-
системы координат к другой преобразуются по одним и тем же общим пра-
правилам.
Тензорное уравнение B9") эквивалентно шести уравнениям для
компонентов. Имеем
где
Рхх = — Р + м + 2М- ехж
Ри» = —P + ^.e + 2(ieWtf;
Ргг = — р + Яе + 2цегг;
дх да дг
= рих
ргх = pxi =
C5)
еху *ух- 2 i ду . дх
C6)
¦
- = div у.
Шесть скалярных уравнений C5) выражают обобщенный закон Нью-
Ньютона или Навье—Стокса для жидкостей.
В частном случае движение несжимаемой жидкости (8 == div v == 0)
параллельно оси Ох, при котором vy =s vz = 0 и vx — v (у) (рис. 172),
для касательных компонентов тензора на-
напряжений из C5) g учетом C6) имеем ^
n dvx do,
ху lJvx хч ^у Ay '
Обозначим рху через т. Тогда закон для У
касательных напряжений выразится в
форме
~~~ LL
dv
-.....-
Рис. 172
555
Это и есть закон Ньютона для касательных напряжений в жидкости.
Для некоторых жидкостей линейной зависимости между тензорами на-
напряжений и скоростей деформаций недостаточно. Такие жидкости на-
называют неньютоновскими жидкостями.
Обобщенный Закон Гука для упругих сплошных сред тоже получают
как линейную зависимость между тензором напряжений П и тензором
деформаций S', компоненты которого выражаются по формулам C6),
только вместо вектора скорости v используется вектор смещения и, ха-
характеризующий деформацию сплошной среды. Тензор деформаций и
обобщенный закон Гука для упругих сплошных сред подробно рас-
рассматриваются в теории упругости и курсах сопротивления материалов
с элементами теории упругости Здесь ограничимся только краткими
сведениями, относящимся к обобщенному закону Гука.
Для упругих сплошных сред линейная зависимость между тензором
напряжении П и тензором деформаций S', который тоже является сим-
симметричным, аналогична B9) и выражается в форме
/7 = 2^S' + Ы, C7)
где
Ь = \ (РХХ + Руу + Ргг) - |(*в'; в' = diV п.
Величина 8' называется относительным объемным расширением. До-
Дополнительно принимают, что среднее арифметическое значение осевых
напряжений линейно зависит от относительного объемного расшире-
расширения, т. е.
*№- C8)
С учетом C8) тензорная зависимость C7) принимает вид
U = W1 + 2ц54. C9)
Если C9) выразить в компонентах, то получим обобщенный закон Гу-
Гука в следующей форме:
Pxx
Pyx
Pzx
Pxy
Pyy
PzV
Рхг\
Pyz) =
Ргг)
M'lo
0
I
0
°\
0
1 /
e e
XX Xt)
C9')
или
pxx = W -\- 2\ie'xt] рхЦ = рЧх = Ъхе'ху\
Puv -^ №' + ^Уу\ Рт = Piy = 2И^2; [ D0)
Ри = Я,0' + '2[1егг; р1Х = рЖ2 = 2,ие^.
556
Коэффициенты Я, и ц, характеризующие упругую сплошную ереду, ча-
зываются параметрами Ламе. Они связаны g модулем упругости Юн-
Юнга ? и коэффициентом Пуассона а соотношениями
а =
В случае если деформации не малы, используется нелинейная зависи-
зависимость между компонентами тензоров напряжений и деформаций.
§ 9. МОДЕЛИ ЖИДКОСТЕЙ И УРАВНЕНИЯ ДВИЖЕНИЯ
В механике ньютоновских жидкостей рассматривают различные их модели.
Наиболее простой моделью жидкости является несжимаемая идеаль-
идеальная жидкость, для которой плотность р = const (несжимаемая) и коэф»
фициент динамической вязкости ц, = О (идеальная). Другой моделью является
вязкая несжимаемая жидкость. Для нее ц = const и р =
= const. Самой простой моделью сжимаемой жидкости является идеальная сжи-
сжимаемая жидкость, или идеальный газ. Для него ц. = 0, а плотность уже
не является постоянной. Она для совершенного газа связана с давлением р и тем-
температурой Т уравнением состояния (уравнением Клапейрона)
где -R — газовая постоянная, зависящая от рода газа. Это уравнение, справед-
справедливое для обратимых процессов, считается справедливым и при движении га-
газа. Более сложной моделью сжимаемой жидкости является вязкий газ,
или вязкая сжимаемая жидкость. В этом случае от давления
и температуры зависит не только плотиосгь, но и коэффициент динамической
вязкости (величина переменная). Коэффициент динамической вязкости зависит
главным образом от температуры.
Если в рассмотренных моделях жидкостей учесть электромагнитные силы,
действующие на точки сплошной среды, то получим модели жидкостей магнит-
магнитной гидродинамики.
В случае вязкого гача полная система уравнений, характеризующая его
движение и различные процессы в нем, сложная и уравнений много, В качестве
примеров получим полную систему уравнений движения вязкой несжимаемой
жидкости, а также уравнения движения идеальной несжимаемой жидкости и
идеального газа,
Уравнения движения вязкой несжимаемой жидкости. Если жидкость вязкая
и несжимаема, то ц = const, 6 = dtv~=O и слагаемые g Я, из C5) выпадают!
Под<павляя в них значения величин из C6), получим
Используя D1), имеем
дрхх
дич
дг
dvz
Эу
dvx
D1)
где введено обозначение
их
дх*
ду*
и использовано условие несжимаемости
да,
дх
f = 0.
С помощью аналогичных преабрааований. получим
друх °Рц1 дРуъ др дргх дрг
дх ду дг ду у' дх
dPzz. dp
+ дг = дТ
Посла этого уравнения движения сплошной среды в напряжениях для вязкой
несжимаемой жидкости вместе с уравнением неразрывности приводят к следую*
щей системе уравнений:
дах 1 др ц
—-— =*гх ¦ — ¦+• - ш)х\
дг р дх р
dv>
дх '
др , Ц
1 dp a
р дг р
T
= 0.
D2)
Имеем четыре уравнения для определения четырех неизвестных vx, vg, vz, p в
зависимости от х, у, г, t Для иите1 рнрования этой системы уравнений следует до-
дополнительно задать начальные и граничные условия. Начальные условия счи-
считаются заданными,, если например при ^=0 известны во всем пространстве
функции:
vx = vx (*> У, г, 0); vv — vy (х, у, г, 0); vz = vz (х, у, г, 0)} р = р {х, у, г,0), D3)
Для установившихся движений задавать начальные условия не требуется, так
как в этом случае неизвестные величины от времени не завися!.
В качестве граничных условий для вязкой жидкости используется условие
прилипания жидкости к поверхности тел, находящихся в потоке жидкости. Если
эги тела неподвижны, то скорости жидкости на поверхности таких тел равны
нулю, а следовательно, равны нулю касательные и нормальные по отношению к
поверхности тел составляющие скоростей.
Уравнения движения идеальной несжимаемой жидкости. Для того чтобы
получить уравнения движения идеальной несжимаемой жидкости, следуег в
D2) принять \х = 0. Получим
dvx
dt,
дх
дг
диу
р дх
1 др _
Р ду
J_ 5p
о 5г
dvx
дх
¦==0.
D4)
558
Первые три уравнения D4) называются уравнения ча движения идеальной
несжимаемой жидкости или уравнениями Эйлера. Начальные условия в этом
случае задаются так же, как и в случае вязкой жидкости. Существенно изменя-
изменяются граничные условия. Вместо условия прилипания вязкой жидкости исполь-
используется условие отсутствия проникания жидкости через поверхность твердого те-
тела, при котором обращаются в нуль нормальные составляющие скоростей в точ-
точках поверхности неподвижного тела, т. е принимается что вектор скорости на-
направлен по касательной к поверхности обтекаемого тела.
Уравнения движения идеального газа. Первые три уравнения двилеиия иде-
идеального газа (или просто газа) совпадают с аналогичными уравнениями несжима-
несжимаемой идеальной жидкости, т. е.
диу dvy dvv dvy i др
at ox y oy dz P dy
D5)
2
Слагаемые с Я, выпадают из уравнений, так как принимается, что А, = — — [%,
о
а [х = 0 для идеального газа, В уравнениях D5) плотность р следует считать пе-
переменной. К этим уравнениям следует присоединить уравнение неразрывности
для газа в форме
.до ¦ ...д(рр*).... . J_(Pvy) , д
"*" + "h dz
Четыре уравнения связывают пять величии vx, vrJ, vz, p, р, зависящих от пере-
переменных х, у, г, t. Для замыкания системы уравнений следует добавить еще одно
уравнение, характеризующее процесс, связанный с движением газа. Наиболее
часто встречающимся процессом является баротроиный процеоо,
при котором давление есть функция только плошости, т. е, р = / (р). Типичным
баротропным процессом является адиабатический процесс, при котором
р = Срн, где С — константа, а тл = cpJcv — показатель адиабаты, завися-
зависящий от теплоемкостей газа при постоянных давлении ср и объеме cv.
В более общем случае давление и плотность считают связанными уравнени-
уравнением состояния Клапейрона, Появится новая неизвестная —температура Т, тре-
требующая для своего определения дополнительного уравнения Этим уравнением
является уравнение баланса энергии.
В магнитной гидродинамике, при учете электромагнитных сил, к рассмот-
рассмотренным выше уравнениям для различных моделей жидкостей следует добавить
уравнения Максвелла для электромагнитных полей в жидкости, а также допол-
дополнить начальные и граничные условия для жидкоаги условиями для электромаг-
электромагнитных величин,
§ 10. КРИТЕРИИ ПОДОБИЯ ПРИ ОБТЕКАНИИ ТВЕРДЫХ ТЕЛ
ПОТОКОМ ВЯЗКОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
Из уравнении движения жидкости как в общем, так и частных случая мол-
но получить критерии подобия, которые позволяют устанавливать
зависимости между величинами, характеризующими поток, в наиболее целесо-
целесообразной, критериальной, форме.
Два ячлеиия называются подобными, если величины одного могут быть по-
получены из соответствующих величин другого умножением на одинаковые коэффи-
коэффициенты подобия для всех сходствеьных точек и моментов времени, т. е подобчые
явления отличаются только масштабами величин, их характеризующих.
569
yll\ г'=г/Ц V =>tlT\ v'x=*vx/V\
Для подобия плавного обтекания двух тел вязкой несжимаемой жидкостью
должны быть геометрически подобны сами тела и одинаковы безразмерные урав-
уравнения движения жидкости и безразмерные начальные и граничные условия.
Преобразуем уравнения движения вязкой несжимаемой жидкости к безраз-
безразмерному виду введением в уравнения безразмерных величин как независимых
переменных, так и искомых Для независимых переменных, имеющих размер-
размерность длины, выберем характерную длину или масштаб длин /. Для тела в форме
шара в качестве масштаба длин можно взять радиус шара Для крыла самолета за
характерную длину обычно выбирают среднюю хорду крыла, являющуюся его
характерной шириной В качестве масштаба времени возьмем Т, для скоростей
— V и давлени-i — Р
Для безразмерных величин
к' =*х11\ у'
vy^Vy/V; v;=vz/V\ v' =>~vlV\
Дополнительно примем, что объемными силами являются только силы тяжести
и ось Ог с единичным вектором k направлена вертикально вверх, т, е. F~ — gk.
Переходя в уравнениях движения вязкой несжимаемой жидкости D2) к без-
безразмерным величинам и выразив для краткости первые три уравнения в вектор»
ной форме, имеем
D2')
где
VP'
есть градиент давления. Разделив первое векторное уравнение D2') на Wl,
а второе скалярное — на V/1, получим
dt'
,_¦— k-
Fr
Re V дх'2 ду'
-+¦
дг'
= 0.
D2")
I
Здесь введены следующие обозначения для чисел подобия: Sh = —- — чигло
Р VI
Струхаля, Ей = число Эйлера; Re = число Рейнольдса. Fr =
pv3 v
== ¦ число Фруда.
g«
Получены уравнения движения вязкой несжимаемой жидкости в б е ч р а ч-
мерной форме. Для подобия течений такой жидкости должны быть оди-
одинаковы полученные уравнения в безразмерной форме, а для этого необходимо
560
выполнение критериев подобия, т. е. чтобы были одинаковы для подобных тече-
течений числа Струхаля, Эйлера, Рейнольдса и Фруда
Критерии подобия имеют важное значение не только при теоретических, но
и при экспериментальных исследованиях течений вязкой несжимаемой жидко
сти. Если необходимо определить силу сопротивления R, действующую на тела
одинаковой формы при обтекании их потоком несжимаемой вязкой жидкости,
то целесообразно ввести безразмерный коэффициент этой силы (безразмерную
силу сопротивления)
где S — характерная площадь тела, например площадь поперечного сечения
(наибольшая) в направлении, перпендикулярном потоку жидкости
Для всех тел одинаковой формы имеется общая критериальная зависимость
безразмерной силы сопротивления от чисел подобия
cR = / (Sh, Eu, Re, Fr). D6)
Вид функции f полностью определяется формой рассматриваемых тел. Аналогич-
Аналогичные зависимости получаются для других безразмерных величин.
Критериальная зависимость D6) может быть получена путем использования
результатов интегрирования уравнений D2) при заданных начальных и гранич-
граничных условиях или из экспериментальных данных, получаемых обычно на моде-
модели тела, уменьшенной по сравнению с натурой той же формы
Если движение жидкости установившееся, то число Струхаля не войдет в
число критериев подобия, так как в этом случае dvldt = 0. При пренебрежении
силами тяжести выпадет из критериев подобия число Фруда. Критериальная за-
зависимость D6) тогда примет вид
cfi = f (Eu, Re) D6')
Во многих случаях число Эйлера несущественно. Оно может оказаться за-
зависящим от числа Рейнольдса. В таких случаях
cR = / (Re) =-/ (Vl/v), D6")
т, е. безразмерная сила сопротивления зависит только от числа Рейнольдса.
При установлении критериальной зависимости D6") по результатам экспе-
эксперимента на модели обтекаемого тела в диапазоне чисел Рейнольдса, имеющих
место для натуры, характерный размер которой / может быть а десятки раз боль-
больше соответствующего размера модели; большие числа Re приходится получать
за счет увеличения скорости V или уменьшения коэффициента кинематической
вязкости v или, наконец, и того и другого вместе. Для критериальной зависимо-
зависимости несущественно, за счет чего на модели будут достигнуты числа Re, характер-
характерные для натуры. Кинематическую вязкость для некоторых жидкостей V = ц/р
можно уменьшить путем увеличения плотности р, если коэффициент динамической
вязкости от плотности не зависит или зависит от нее слабо.
При учете сжимаемости жидкости появится новое число подобия — число
Маха М = V/a, где а — скорость звука в сжимаемой жидкости. Это число по-
подобия тоже войдет в критериальную зависимость типа D6).
Критериальные зависимости можно также получать, используя теорию* раз-
размерностей физических величин. Теория размерностей позволяет установить па.
раметры, от которых зависит искомая безразмерная величина. Вид функции /
и с помощью теории размерностей удается установить лишь в редких случаях,
§ 11. УСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ВЯЗКОЙ НЕСЖИМАЕМОЙ
ЖИДКОСТИ В КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ТРУБЕ
Рассмотрим ламинарное (слоистое) течение вязкой несжимаемой жидкости в
гладкой цилиндрической трубе. Примем, что движение установившееся. На этом
примере покажем, как устанавливается критериальная зависимость коэффициен-
коэффициента сопротивления грубы от числа Рейнольдса. Решение поставленной задачи
561
важно и само по себе как случай точного интегрирования уравнений движения
вязкой несжимаемой жидкости.
Для установившегося движения жидкости, пренебрегая силами тяжести,
имеем из D2) следующую систему уравнений:
до.
dv
+vAvz;
Ох
дг
где
A = ~—- +
дх2
53
дг*
D7)
К этим уравнениям следует добавить граничное условие прилипания вязкой
жидкости к стенкам трубы, т. е. обращение в нуль скорости жидкостл на стенках
трубы.
Направим координатную ось Ог по оси трубы, тогда оси Ох и Оу расположат-
расположатся в поперечном сечении трубы, имеющем форму круга радиусом R (рис. 173).
Ищем решение уравнений D7), удовлетворяющее условиям vx = vv — О,
Тогда определению подлежит vг = v (х, у, г), если решение такого вида удовлет-
удовлетворяет уравнениям движения жидкости. Из первых двух уравнений D7) получим
др/дх — 0; др/ду — 0, т. е. р = р (г), или что давление в каждом поперечном
сечении одно и то же во всех точках и изменяется только вдоль трубы. Из урав-
уравнения неразрывности при принятом допущении получаем, что dv/dz = 0,¦ т, е.
иг = v (х, у), После этого третье уравнение системы D7) примет вид
др I д*у б2 у \
~дТ =tl \~дх* ^ ду* ')'
Левая часть этого уравнения может зависеть только от г, а правая — только от
х и у. Это возможно только в случае, если и правая и левая части этого уравне-
уравнения постоянны, ъ е<
dp dp
Так как др/дг — const, то давление, приходящееся на единицу расстояния
вдоль трубы, можно выразить в виде
&г
Ра —
I
А?
=const,
где Ра — Р = Лр — перепад давлений на длине I между двумя сечениями
трубы вдоль ее оси. Знак минус поставлен потому, что движение жидкости про-
происходят только в направлении убывания давления.
Для определения v имеем следующее уравнение:
d2!» №v Ар
дх* + ду'- = tf~
Будем искать решение уравнения D8) в форме
D8)
D9)
5G2
Это значение о удовлетворяет граничному условию прилипания на стенках tdv-
бы,. так как V = 0 при х* + у2 = Ri. Остается дополнительно определи .ь
только константу А путем подстановки D9) в D8). Так как
до А-2х дч
дх = R2 ' ду ~~
то уравнение D8) примет вид
Отсюда
А.1ц
R>
2А
дх*
ay*
24
R'
А =
Используя это значение Л и вводя переменную г = "J/V + г/г — расстояние
до рассматриваемой точки от оси трубы, решение D9) можно выразить в форме
D9')
\ /?а /
где wmax — Др/?а/D|х/) — значение скорости при г = 0. т. е- на оси трубы.
Полученное выражение для v является решением поставленной задачи.
Рис. 173
Рис. 174
Определим секундный объем жидкости, протекающей через поперечное се-
сечение трубы (рис. 174). Секундный объем жидкости, проходящей через заштри-
заштрихованную площадь тонкого кольца, равен площади этого кольца 2nrdr, умножен-
умноженной на скорость движения жидкости у, т. e. 2nrvur, Через все поперечное сечение
трубы за 1 с пройдет объем жидкости
Q =¦ f 2nrvdr.
&
Используя для о выражение D9'), после вычисления интеррала получим
к
так как d (R* —
= — 2rdr, т. е.
nApR*
2
E0)
Это известный закон Гагена — Пуазейля, Секундный объем жидкости, протека»
нищей через поперечное сечение трубы, оказался пропорциональным й4, что не-
неожиданно. Кажется, чго он должен был быть иропорцноналеи площади волеречг-
hotq сечения, т. е. /?*.
563
lg\
О
Введем среднюю скорость течения жид-
жидкости ciep как постоянную по сечению трубы
скорость, при которой получается тот же се-
секундный объемный расход жидкости Q, что и
при переменной скорости v. Используя E0),
имеем
ApR*
8ц/
E1)
lg Re Сопротивление трубы можно охарактери-
охарактеризовать перепадом давления, приходящегося
Рис. 175 на единицу длины вдоль трубы, т. е, отноше-
отношением AplU Чем больше эта величина, тем
больше сопротивление трубы, обусловленное силами трения между слоями
жидкости.
Введем безразмерный коэффициент сопротивления трубы Я как безразмер»
ную величину перепада давления на единице длины Ар/1. Получим
Ар ! Р°ср
~Т= к !r 2 ' г52)
где ри^р/2 — скоростной напор, a 2R — диаметр трубы. Из E1) для Ар/1 имеем
Ар/1 = 8 iivOp/R\ E1*|
Приравнивая значения Ар/1 из E1') и E2), получаем
Отсюда имеем
1 pfcp
64
n0
64
E3)
так как ?/?i'op/v — Re — число Рейнольдса, отнесенное к диаметру трубы,
Получена критериальная зависимость коэффициента сопротивления трубы
от числа Рейнольдса, которая была предсказана 1еорией подобия течений вяз-
вязкой несжимаемой жидкости.
Из E3) логарифмированием получим
= lg 64 — lg Re.
E3')
В логарифмическом масштабе зависимость E3) выражается графически отрезком
прямой линии 1 (рис. 175). Эта линейная зависимость подтверждена многочислен-
многочисленными экспериментами. Но она выполняется примерно до чисел Re = 2-IQP. За-
Затем после некоторого переходного участка экспериментальные точки соответст-
соответствуют прямой 2. Прямая / дает закон сопротивления при ламинарном ре-
режиме течения жидкости в трубе, а прямая 2 — при турбулентном, ха-
характеризующемся интенсивным перемешиванием жидкости в поперечном к те-
течению жидкости направлении.
До чисел Re = 2-103 устойчивой формой течения в трубе является ламинар-
ламинарная форма, а для Re > 2-103 — турбулентная. Коэффициент сопротивления при
турбулентном режиме течения во много раз больше, чем при ламинарном, для
одних и тех же чисел Рейнольдса.
564
§ 12. РАСПРОСТРАНЕНИЕ МАЛЫХ ВОЗМУЩЕНИИ
В ИДЕАЛЬНОМ ГАЗЕ. СКОРОСТЬ ЗВУКА
Рассмотрим движение газа (сжимаемой жидкости) параллельно оси Ох. Та-
Такое движение газа называют одномерным. В случае одномерного движения
Vy — vz=0, vх = v (х, t) и уравнения D5) в случае баротропного процесса
принимают форму
до dv I dp
до д(ру) _Qi E4)
dt dx '
Предположим, что имеем покоя-щийся гая с параметрами о = va = Oj
Р — Poi Р = Ро. гДе Ро и Ро — постоянные величины, В начальный момент
в газе создано такое малое возмущение, при котором дальнейшее движение газа
происходит параллельно оси Ох и все величины, характеризующие движущийся
раз, зависят только от координаты х а времени U В произвольный момент време»
ни для скорости, давления и плотности имеем:
v~ v' (х, 0: Р = Ро + Р' (х, t)i Р = Ро + Р' (*, 0.
где v', p' ир' — малые возмущения скорости, давления н плотности,
Допуская, что производные от малых возмущений тоже величины малые,
линеаризируем систему уравнений E4), отбрасывая в них малые сла-
слагаемые второго и более высокого порядка. Для производных в рассматриваемом
случае имеем:
dv dv' dv dv' dp dp' dp dp'
dt dt dx dx dt dt ' dx ^ dx
Кроме того,
J_ 1 J_/ i»^-1 }_
P fo+f' Po \ Po / Po
dp d p dp d p dp*
dx dp 3a; dp dx
Разлагая в степенной ряд по р' проиаводную _?., получим
dp /d
Введем обочнячение [ — \ = а%, Эта постоянная величина действительно поло»
Vfip/o .
жительна, так как с возрастанием давления плотность возрастает, а при убыва-
убывании давления — убывает
После этого, отбрасывая в E4) малые второго и более высокого порядка, име-
имеем
Получена система уравнений (линейных) для мапых возмущений снороети и плот.
ности и' и р'.
Линеаризация уравнения р = / (р) приведет к выражению для аозмуще-
ния давления р1 = afip'*
читая
Дифференцируя первое уравнение системы E5) по t, а второе — по * и вы-
выя после этого из первого второе, умноженное на ajj/po, имеем
E6>
Аналогичным способом для р' получим такое же по виду уравнение
д2 р' д2 р
дх*
= 0.
E6')
Возмущение давления р' удовлетворяет аналогичному уравнению.
Уравнение E6) называется волновым уравнением. Если бы движение газа не
было параллельным оси Ох, то после линеаризации уравнений D5) получили бы
для р' уравнение вида
или
При по, стремящемся к бесконечности, и конечных значениях производных оно
перейдет в уравнение Лапласа
.
.
¦==0.
Волновое уравнение и уравнение Лапласа являются двумя из трех типов
основных уравнений математической физики. Они дают математическое описание
многих физических процессов.
Волновое уравнение E6) решают или методом Фурье, или используют реше-
решение Даламбера, которое для v' выражается в форме
V (х, t) = П (ёг) + /а (?гЬ
E7)
где новые переменные |t и |3 связаны oj и ( зависимостями %х = х — я„*з
|2 ss л1 -Ь aof, а /j и f2 — произвольные функции, которые следует определять
по начальным и граничным условиям. Непосредственной проверкой можно убе*
дигься, что решение E7) обращает уравне-
уравнение E6) в тождество, т, а, оно является ре-
решением этого уравнения.
Рассмотрим функции/j (|j) и /2 (g2) по
отдельности, т.е. примем сначала, что
v' = h (Si)- Если в начальный момент вре-
времени t — 0 (рис. 176) отметить начальное
возмущение v'a, соответствующее х = х0
и, следовательно, Im = хв, то а' = о'й,
если при изменении х и 11г — х ~aot—xB
остается постоянной. Отсюда получаем,
что х = х0 + aBt, т. е, что возмущение vj,
сместится за время / в положительном на-
направлении оси Ох на расстояние aot. Ско-
Скорость этого смещения постоянна и равна
а0. Таким образом, ао является скоростью
распространения в покоящемся газе малых возмущений скорости и соответствен-
соответственно всех других малых возмущений. Начальное возмущение скорости на от-
отрезке 0 ¦< х ¦< хг за время t без изменения формы сместится на расстояние aai
в положительном направлении оси Ох.
Таким образом, v' — fx (^) является волной, распространяющейся со ско-
скоростью аа в положительном направлении оси Ох. Соответственно v' = /2 (|2)
566
v'
0
*'\
1
Рис. 176
есть волна, которая распространяется с той же скоростью а0> но в отрицательном
направлении оси Ох, так как §2 -= х + aat.
Скорость распространения малых возмущений а0 называется скоростью чацка
в покоящемся газе. В движущемся газе скоростью звука называют величину а —
= у dp/dp. Она в общем случае величина переменная, зависящая и от коорди-
координат точки пространства, и от времени. Как показывают более детальные иссле-
исследования, со скоростью звука распространяются любые малые возмущения. Ко-
Конечные возмущения распространяются со скоростями, большими скорости звукл.
Такие возмущения обычно называют ударными волнами.
Если жидкость, в которой распространяется звук, несжимаема, т* е. р =
= const, то dp = 0 и а = оо.
Ньютон A687) считал, что распространение звука есть процесс изо-
изотермический, т. е. при распространения звука абсолютная температура
Т = const. Тогда из уравнения состоя*
ния Клапейрона
р = RTp = Ср,
где константа С — RT. В этом случае
а1г = dp/dp = С = pip, ви8 = УрТр,
Опыты показали, что в действительности
скорость звука больше, чем она получа-
получается по формуле Ньютона. Это расхож-
расхождение Ньютон объяснял наличием в Рас. 177
воздухе водяных паров.
Лаплас A810) предположил, что распространение звука есть п р о u e с о
адиабатный, т, е, что давление И плотность связаны уравнением
адиабаты:
р — CiP1*' С± = const; x — Ср/св.
В этом случае
1
и для скорости звука имеем
dp У р
Формула Лапласа для скорости звука дает значения, хорошо согласующиеся о
опытными данными. Таким образом, распространение звука и любых других ма-
малых возмущений есть процесс адиабатный.
Из уравнения Клапейрона р/р = RT\ следовательно, а=> 1/ х Е. =¦
' 9
= ~\/кИТ, а, е» скорость звука зависит только от абсолютной температурь^ Для
воздуха _
Va - 20, IVT.
При Т = 273 К (t = 0°С) a = 332 м/с,
Скорость звука тесно связана со средней скороатью евободноро пробега мо«
лекул vs (а да 0,7 vs).
Движение газа со скоростями v << а называют дозвуковым! В этом случав
число Маха М = о/а < 1. Движение газа при М = I называют ввуковын,
При сверхзвуковых движениях газа М > 1.
Интересна особенность распространения малых возмущений в разе, движу-
движущемся со сверхзвуковой скоростью о. Если при этом в какой-либо точке произве-
произведено малое возмущение в момент t = 0, то в любой другой момент времени t точ«
ка газа, в которой произведено возмущение, сместится вместе о движущимся га«
зом на расстояние vt, а возмущение по газу распространится на сферу радиусом
at. Все возмущения, таким образом, локализуются в конусе с вершиной в той
точке, где произведено начальное возмущение. Угол полураствора конуса а
(рис. 177) определяется из выражения
at ja_ I 1
vt v via M
При М = 1 sin a — 1 и а = я/2. При М -* оо а -» 0, т. е. все возмущение
локализуется в области, стягивающейся в отрезок прямой линии,
§ 13. ОДНОМЕРНОЕ УСТАНОВИВШЕЕСЯ ТЕЧЕНИЕ ГАЗА
ВДОЛЬ ТРУБЫ ПЕРЕМЕННОГО СЕЧЕНИЯ
Одномерное установившееся течение газа в трубе переменного сечения явля-
является некоторым приближением к действительности, так как в основу его положено
предположение, что параметры потока газа, такие, как скорость потока, давление
и плотность, одинаковы во всех точках каждого из поперечных сечений, перпен-
перпендикулярного оси трубы. Это предположение довольно хорошо соответствует дей-
действительности для элементарной трубки тока, но его применяют и для труб ко-
конечных размеров, используя средние величины по сечениям трубы.
Получим предварительно из уравнений движения газа D5) в частном слу.
чае установившегося безвихревого движения следствие в форме уравнения Бер-
нулли. Для этого выразим правые части первых трех этих уравнений D5) в фор-
форме Лэмба — Громеко. Пренебрегая объемными силами, имеем:
dvx д / v2 \ \ др
Ot дх \ 2 j о дх
at oy \ 2 j p оу
dt + дг [ 2 J-(°*u»-°»u*)- - р дг '
_ [дох до,. dvz \
Предполагая, что движение стационарное I— = —- =— = 01 и безвихре-
безвихревое (Qx = Qy = Q, = 0), получим из этих уравнений:
дх\2 )~ р дх '' ду [ 2 ) р ду J дг [ 2 j p ~дТ'
Умножая первое из этих уравнений на Ах, второе — на d#, третье — на 6г и
складывая, получим
или
dp
vAv-\ ^-=0. E8)
Р '
Это и есть уравнение Бернуллив дифференциальной форме.
Если E8) проинтегрировать от состояния газа, в котором v = v0, p = рв>
Р = Ро. ДО состояния с параметрами соответственно V, р, р, то будем иметь
уравнение Бернулли в интегральной форме:
p n
t=0- E9)
568
Интеграл в уравнении E9) зависит от уравнения, характеризующего бяро-
тропный процесс, т. е. от вида зависимости р = / (р).
Для несжимаемой жидкости р = const и уравнение Бернулли ириниыает
форму
v42 - tig/2 + pl% - Ро/р = О
или
ч2/2 + р/р = t»J/2 + р„/р = const,
Уравнение Бернулли для несжимаемой жидкости широко используется при рас-
рассмотрении многих технических задач, связанных с движением жидкости. Ею
обычно обобщают в этом случае, учитывая действие потенциальных объемных сил.
Рис. 178
Рис. 179
Для газа уравнение Бернулли E9) широко испочьчуется для адиабатических
процессов, для которых р/ра = (р/ро)и.
Преобразуем уравнение Бернулли в дифференциальной форма для ииа хак,
чтобы можно було ввести число Маха (М). Имеем
¦ , dp dp
-ip p
=0;
dp
-d1—— =
P
Av do
так как dp/dp = а2. Поделив обе части уравнения Бернулли на а2, получим
= 0,
или в окончательном виде
№!iL+!P.=o. E8')
и р
Другое уравнение, необходимое для анализа течений газа в трубе перемен-
переменного сечения, является уравнением неразрывности, или сохранения, массы» По-
Получим его непосредственно для рассматриваемой задачи (рис. 178).
Через каждое поперечное сечение трубы в случае одномерного течения про-
проходит за 1 с масса газа m = svp, где s — площадь поперечного сечения трубы,
о — скорость течения газа и р — плотность. При установившемся движении
через все поперечные сечения должна пройти одна и та же масса газа за 1 с, т. е,
m = svp — const.
Прологарифмируем это уравнение сохранения массы. Получим
In m = In s -f- In v -f- In p = In const,
Возьмем полные дифференциалы от обеих частей, считая переменными s, v, pi
Имеем
d s
do
dp
t
=0.
F0)
Это и есть искомое уравнение неразрывности для установившегося одномерного
течения идеального газа в трубе переменного сечения!
569
Из уравнения неразрывности F0) и уравнения Бернулли E8') исключим
dp/p. Получим
Это уравнение F1) называют уравнением Г ю р о и и о,
Используя уравнение Гюгонио, проанализируем характер возможных тече-
ний газа в трубе переменного сечения. Из уравнения F1) следует, что при М <S 1,
что соответствует дозвуковым течениям, знаки у ds и ао противоположны, т, в.
там, где возрастает s, в'направлении течения скорость должна убывать, и наобо-
наоборот. Для сверхзвуковых течений М > 1 знаки у ds и do одинаковы, т. е. сверх-
сверхзвуковой поток распространяется противоположно дозвуковому. Чтобы увели-
увеличить его скорость, трубу следует расширить. При М = 1 ds = 0, т. е- s достига-
достигает минимума или максимума. Можно показать, используя F1), что М = 1 мо-
может быть только в самом узком сечении трубы, где s = smxn.
Выводы о характере течений газа в трубах переменного сечения нашли при-
применение в конструкциях сопл современных реактивных двигателей, Для полу-
получения больших сверхзвуковых скоростей выходящего из сопла газа сопло снача.
ла сужают, чтобы получить звуковую скорость газа в узком сечении сопла, а
затем расширяют для дальнейшего увеличения скорости выходящего из него га-
газа (рис. 179).
ОГЛАВЛЕНИЕ
Предисловие , , , , , 3
Введение 4
Раздел I. СТАТИКА 6
Глава 1. Основеые понятия и аксиомы. Сходящиеся силы , 6
§ 1.Основные понятия и определения . . 6
§ 2. Аксиомы статики , 8
§ 3. Простейшие теоремы статики 13
§ 4. Система сходящихся сил .................. 14
Глава 2. Моменты силы относительно точки и оси 20
§ 1. Алгебраический момент силы относительно точки 20
§ 2. Векторный момент силы относительно точки .......,, 2!
§ 3. Момент силы относительно оси 23
§ 4. Связь момента силы относительно оси с векторным моментом
силы относительно точки на оси 24
§ 5. Формулы для моментов силы относительно осей координат 25
Глава 3. Приведение двух параллельных сил. Теория пар сил .... 26
j i. Приведение двух параллельных сил н равнодействующей . . 26
§ 2. Пары сил 28
Глава 4. Приведение произвольной системы сил к простейшей системе.
Условия равновесия 38
§ I. Приведение произвольной системы сил к силе и паре оил . , 38
§ 2. Условия равновесия системы сил 43
Глава 5. Плоская система сил. Теорема Вариньона ....... 46
§ 1, Частные случаи приведения плоской системы сил , 46
§ 2. Теорема о моменте равнодействующей силы (теорема Вариньона) 48
§ 3. Различные формы условий равновесия плоской системы сил 49
§ 4. Статически определимые и статически неопределимые задачи 5!
§ 5. Равновесие системы 1ел , 52
§ 6, Распределенные силы 54
§ 7. Решение задач на равновесие плоской оиотемы сил, приложен-
приложенных к твердому телу и системе тел 58
Глава 6. Треиие . 63
§ 1. Трение скольжения , 63
§ 2. Трение качения 69
Глава 7. Частные случаи пространственных систем сил. Центр парал-
параллельных сил ....... ..... 73
§ 1. Изменение главного момента при перемене центра приведения 73
§ 2. Инварианты системы сил „ , 74
§ 3. Частные случаи приведения пространственной системы сил . 76
§ 4. Уравнение центральной винтовой оси 79
571
§ 5. Частные случаи приведения пространственной системы парал-
параллельных сил .......... 83
§ 6. Центр системы параллельных сил 64
§ 7. Частные случаи равновесия твердого тела 87
Глава 8. Центр тяжести тел • • 89
§ 1. Определение центра тяжести тела 8,9
§ 2. Методы нахождения центров тяжести 91
§ 3. Центры тяжести простейших тел 93
Раздел II. КИНЕМАТИКА 97
Введение 97
Глава 1. Кинематика точки 98
§ 1. Скорость точки 98
§ 2. Ускорение точки 100
§ 3. Векторный способ изучения движения 101
§ 4. Координатный способ изучения движения . 101
§ 5. Естественный способ изучения движения 107
§ 6. Скорость и ускорение точки в полярных координатах 116
§ 7. бкорость и ускорение точки в цилиндрических и сферических
координатах ,121
Глава 2. Простейшие движения твердого тела. Сложное движение точ-
точки ..... 123
§ 1, Степени свободы и теорема » проекциях скоростей 123
§ 2. Поступательное движение твердого тела 125
§ 3. Вращение твердого тела вокруг неподвижной оси .126
§ 4. Сложное движение точки 134
Глава 3. Плоское движение твердого тела 138
§ 1. Уравнения плоского движения твердого тела 139
§ 2, Разложение плоского движения твердого тела на поступатель-
поступательное и вращательное движения 140
§ 3. Угловая скорость и угловое уакорение тела при плоском дви- '
жении .141
§ 4. Скорости точек тела при плоском движении 142
§ 5. Мгновенный центр скоростей 143
§ 6. Вычисление угловой скорости при плоском движений 148
§ 7. Ускорения точек тела при плоском движении , 149
§ 8. Мгновенный центр ускорений , 152
§ 9. Основные способы вычисления угловою ускорения при плос-
плоском движении 156
§ 10. Теорема о конечном перемещении плоской фигуры 164
§ 11. Мгновенный центр вращения. Центроиды 165
Глава 4. Вращение твердого тела вокруг неподвижной точки. Об-
Общий случай движения тела 167
§ 1. Углы Эйлера. Уравнения вращения твердого тела вокруг непод-
неподвижной точки 167
§ 2. Теорема о конечном перемещении твердого тела, имеющего од-
одну неподвижную точку 170
§ 3. Мгновенная ось вращения. Аксоиды 171
§ 4. Угловая скорость и угловое ускорение при вращении тела во-
вокруг неподвижной точки 171
§ 5. Скорости точек тела при вращательном движении вокруг непод-
неподвижной точки 172
572
§ 6. Ускорения точек тела при вращении вокруг неподвижной точки 175
§ 7. Вычисление углового ускорения 177
§ 8. Общий случай движения свободного твердого тела 180
Глава 5. Сложное движение точки в общем случае ......... 186
§ 1. Абсолютная и относительная производные от вектора. Фор-
Формула Бура 186
§ 2. Сложение скоростей 188
§ 3. Сложение ускорений точки в общем случае переносного движе-
движения 189
§ 4. Ускорение Кориолиса 191
Глава 6. Кинематика сложных движений твердого тела ...... 196
§ 1. Сложные поступательные движения 1%
§ 2. Сложные вращательные движения твердого тела ...... 198
§ 3. Приведение мгновенных поступательных и вращательных движе-
движений твердого тела .... ........ 204
Глава 7. Основы кинематики сплошной среды 208
§ 1. Переменные Лагранжа и Эйлера 208
§ 2. Распределение скоростей в малой окрестности точки простран-
пространства 213
§ 3. Линии и трубки тока 218
§ 4. Поток и циркуляция вектора скорости 219
Раздел III ДИНАМИКА 223
Глава 1. Основные положения динамики и уравнения движения точки 223
§ 1. Введение 223
§ 2. Основные аксиомы калассической механики ... ...... 224
§ 3. Системы единиц 227
§ 4. Дифференциальные уравнения движения материальной точки 228
§ 5. Две основные задачи динамики точки 230
§ 6. Основные виды прямолинейного движения точки 235
§ 7. Криволинейное движение материальной точки 240
§ 8. Движение несвободной материальной точки 244
Глава 2. Относительное движение материальной точки ...... 249
§ 1. Дифференциальные уравнения относительного движения мате-
материальной точки ................. 249
§ 2, Частные случаи 250
§ 3. Движение точки относительно Земли ., 252
§ 4. Невесомость . , 257
Глава 3. Геометрия масс 260
§ 1. Ценгр масс 260
§ 2. Моменты инерции 262
§ 3. Теорема о моментах инерции относительно параллельных осей
(теорема Штенпера) 264
§ 4. Моменты инерции простейших однородных тел 266
§ 5. Моменты инерции относительно осей, проходящих через задан-
заданную точку , 270
§ 6. Эллипсоид инерции ¦ 272
§ 7. Свойства главных осей инерции 273
§ 8. Определение главных моментов инерции и направления глав-
главных осей 276
§ 9. Выражение компонентов тензора инерции через главные моменты
инерции 278
573
Г л а в а 4. Общие теоремы динамики точки и системы 281
§ 1 Простейшие свойства внутренних сил системы 281
§ 2 Дифференциальные уравнения движения системы 282
§ 3. Теоремы об изменении количества движения и о движении цент-
центра масс 283
§ 4. Теорема об изменении кинетического момента 295
§ 5. Теорема об изменении кинетической энергии 311
§ 6. Потенциальное силовое поле 331
§ 7. Закой4 сохранения механической энергии 339
Глава 5. Принцип Даламбера. Динамические реакции при. вращении
тела вокруг неподвижной оси . . . . 348
§ 1. Принцип Даламбера 348
§ 2. Динамические реакции при вращении гаердого тела вокруг не-
неподвижной оси . 358
Глава 6. Анадшическаи механика 369
§ 1. Связи и их классификация 370
§ 2. Возможные перемещения 371
§ 3. Элементарная работа силы на возможном перемещении. Идеаль-
Идеальные саяз-и, . . . . . ^ . . 373
§ 4. Принцип возможных перемещений 374
§ 5. Обобщенные координаты системы 378
§ 6. Обобщенные силы 381
§ 7. Условия равновесия системы 383
§ 8. Общее уравнение динамики 386
§ Э. Уравнения Лагранжа 393
§ 10. Канонические уравнения . . . ^ 402
§ 11. Принцип Гамильтона . 405
Глава 7. Теория колебаний. 408
§ 1. Устойчивость наложения равновесия 40/
§ 2. Колебания системы с одной степенью свободы 413
§ 3. Математический и физический маятники 449
§ 4. Малые колебания системы с двумя степенями свободы (резуль-
(результаты для общего случая) 453
Глава 8. Динамика твердого тела с одной закрепленной точкой . . . 472
§ 1. Кинетический момент гела вращающегося вокруг неподвижной
точки 472
§ 2. Кинетическая -энергия тела с одной закрепленной точкой .... 475
§ 3. Динамические уравнения Эйлера 477
3 4. Кинетические уравнения Эйлера 4?'9
§ 5. Задача о вр'щенип твердого тела вокруг неподвижной точки.
Случаи интегрируемости 4Ы
§ 6. Астатический гироскоп 482
§ 7. Движение гироскопа под действием силы тяжесгн 486
§ 8. Приближенная теория гироскопа 492
§ 9. Регулярная процессия гироскопа 499
§ 10. Устойчивость вращения твердого тела о одной закрепленной
точкой вокруг славных осей, инерции ?03
Глава 9. Теория удара 505
§ I. Основные положения и понятия теории удара , 505
§ 2. Теоремы об изменении количества движения и о движении
центра масс для удара. Теорема Кельвина 503
§ 3. Теорема об изменении кинетического момента при ударе .... 509
§ I. Удар точки о неподвижную поверхность 511
§ 5. Теорема Карао 514
574
§ 6. Удар двух тел . , . « 51G
§ 7. Центр удара 522
Глава 10. Элементы космовавтики . 52*>
§ 1. Основные понятия 526
§ 2. Первые интегралы уравнений движения 528
§ 3. Определение траектории 5?9
§ 4. Исследование траектории. Формулы для космических скорос-
скоростей 530
Глава 11 Движение точки переменной массы 535
§ 1. Дифференциальные уравнения движения точки переменной
массы 535
§ 2. Задачи Циолковского 538
Глава 12. Введение в динамику сплошной среды ......... 51!
§ 1. Уравнение неразрывно ти > 541
2. Силы объемные и поверхностные . . . . 543
3. Свойства поверхностных сил . 544
4. Тензор напряжений , 546
5. Уравнения движения сплошной среды в напряжениях ..... 547
6. Симметричность тензора напряжений 549
7. Эллипсоид напряжений . . . 551
8. Реологическое уравнение 553
9. Модели жидкостей и уравнения движения 557
10. Критерии подобия при обтекании твердых тел 559
потоком вязкой несжимаемой жидкости .......... 559
§ П. Установившееся движение вязкой несжимаемой жидкости в
круглой цилиндрической трубе 561
§ 12. Распространение малых возмущений в идеальном разе. Ско-
Скорость звука 565
§ 13. Одномерное установившееся течение раза вдоль трубы перемен-
переменного сечения 568
) Владимир Васильевич Добронравов I
Николай Никитич Никитин
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Заведующий редакцией К. И Аногнииа Редактор М А. Алексеева Младший
редактор Т А Дорофеева Художественный редактор В И Мешалкин Тех-
Технический редактор 3 В Нуждина Корректор Г И Кострикова
ИБ № 4242
Изд N° ОТ-389 Сдано в набор 29 П 82 Подп я печать 14 03 83
Формат бОХЭО'/ie Бум. тип № 2. Гарнитура литературная Печать высокая.
Объем 36 уел печ л Уел кр отт. 36 Уч изд л 33.90 Тираж 75 000 экз
Зак 1311 Цена 1 р 30 к
Издательство «Высшая школа», Москва К 51, Неглинная ул д 24/14
Московская типография № 4 Союзлолиграфлрома при Государственном киии-
тете СССР лс делам издательств полиграфии и книжной юрювли
129041, Москва, Б Переяславская ул , 46