














































































































































































































































































































































































































































Text
ОГЛАВЛЕНИЕ
Предисловие............................................... 3
ЧАСТЬ ПЕРВАЯ
ВВОДНАЯ ЧАСТЬ
Глава 1. Определения. Описание структур и алгоритмов ИИС . . . 6
1.1. Основные определения. Области применения ИИС................... 6
1.2. Обобщенная структурная схема ИИС............................14
1.3. Описание функционирования ИИС. Содержательные логические
схемы алгоритмов.................................................. 17
Глава 2. Классификация ИИС.............................................25
2.1. Разновидности входных величин..................................25
2.2. Разделение ИИС по виду выходной информации .... 27
2.3. Классификация ИИС по принципам построения. Роль ЭВМ , 29
ЧАСТЬ ВТОРАЯ
ТЕХНИЧЕСКИЕ СРЕДСТВА ИИС
(СИСТЕМНОЕ ОБОРУДОВАНИЕ)
Глава 3. Агрегатный комплекс средств электроизмерительной техники
государственной системы промышленных приборов и средств авто-
матизации .........................................................32
3.1. Государственная система приборов. Основные положения . . 32
3.2. Агрегатный комплекс средств электроизмерительной техники 34
Глава 4. Устройства отображения и хранения информации в ИИС . 39
4.1. Индикация в ИИС...............................................39
4.2. Запись и хранение информации в ИИС............................43
Глава 5. Структуры и стандартные интерфейсы ИИС.......................48
5.1. Основные разновидности структур и интерфейсов .... 48
5.2. Протоколы и типовые алгоритмы обмена информацией ... 55
5.3. Интерфейс с последовательным выполнением операций обмена
информацией..................................................58
5.4. Приборный стандартный интерфейс..........................62
5.5. Интерфейс КАМАК......................................... 67
5.6. Интерфейсы периферийной части ЭВМ........................74
5.7. Сопоставление алгоритмов стандартных интерфейсов .... 78
5.8. Об аналоговых интерфейсах измерительной части ИИС ... 80
Глава 6. Основные характеристики средств микропроцессорной техники 82'
6.1. ЭВМ и средства микропроцессорной техники в ИИС .... 82'
6.2. Микро-ЭВМ.....................................83
6.3. Микропроцессоры ...... ... 87
6.4. Микропроцессорные комплекты интегральных микросхем ... 89'
6.5. Программируемые клавишные ЭВМ.................90
6.6. Табличные методы преобразования информации ... .92'
ЧАСТЬ ТРЕТЬЯ
АНАЛОГО-ЦИФРОВАЯ ЧАСТЬ ИИС. ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЕ
КОМПЛЕКСЫ
Глава 7. Аналоговые электроизмерительные цепи ....... 95>
7.1. Виды модуляции сигналов в ИИС.................................95
7.2. Унифицирующие преобразователи................................100
7.3. Измерительные коммутаторы амплитудно-модулированных сиг-
налов .............................................................Ю4
7.4. Защита входных измерительных цепей ИИС от помех .... 121
Глава 8. Структуры и алгоритмы аналого-цифровой части ИИС . . 126-
8.1. Основные структуры аналого-цифровой части . . ... 126=
8.2. Алгоритмы функционирования аналого-цифровой части ИИС 129
Глава 9. Измерительно-вычислительные комплексы........................143
ЧАСТЬ ЧЕТВЕРТАЯ
СТРУКТУРЫ И АЛГОРИТМЫ ИИС
А. Измерительные системы (ИС]
Глава 10. Системы измерения независимых входных величин . . . 153’
10.1. Основные разновидности систем измерения независимых вход-
ных величин................................................... 153-
10.2. Многоточечные ИС с резистивными датчиками..................155
10.3. Мультиплицированная ИС с термопарами.......................157
10.4. Сканирующие системы для расшифровки графиков . . . . 160
10.5. Акустическая система для измерения координат графических
изображений............................................... .... 166
10.6. О голографических измерительных системах .................169*
Глава 11. Многомерные и аппроксимирующие ИС.........................172
11.1. Многомерные ИС (системы для раздельного измерения взаимо-
связанных величин)............................................. 172'
11.2. Аппроксимирующие ИС................................... . 178-
Глава 12. Статистические измерительные системы.....................182’
12.1. Особенности измерения статистических характеристик случай-
ных процессов....................................................182
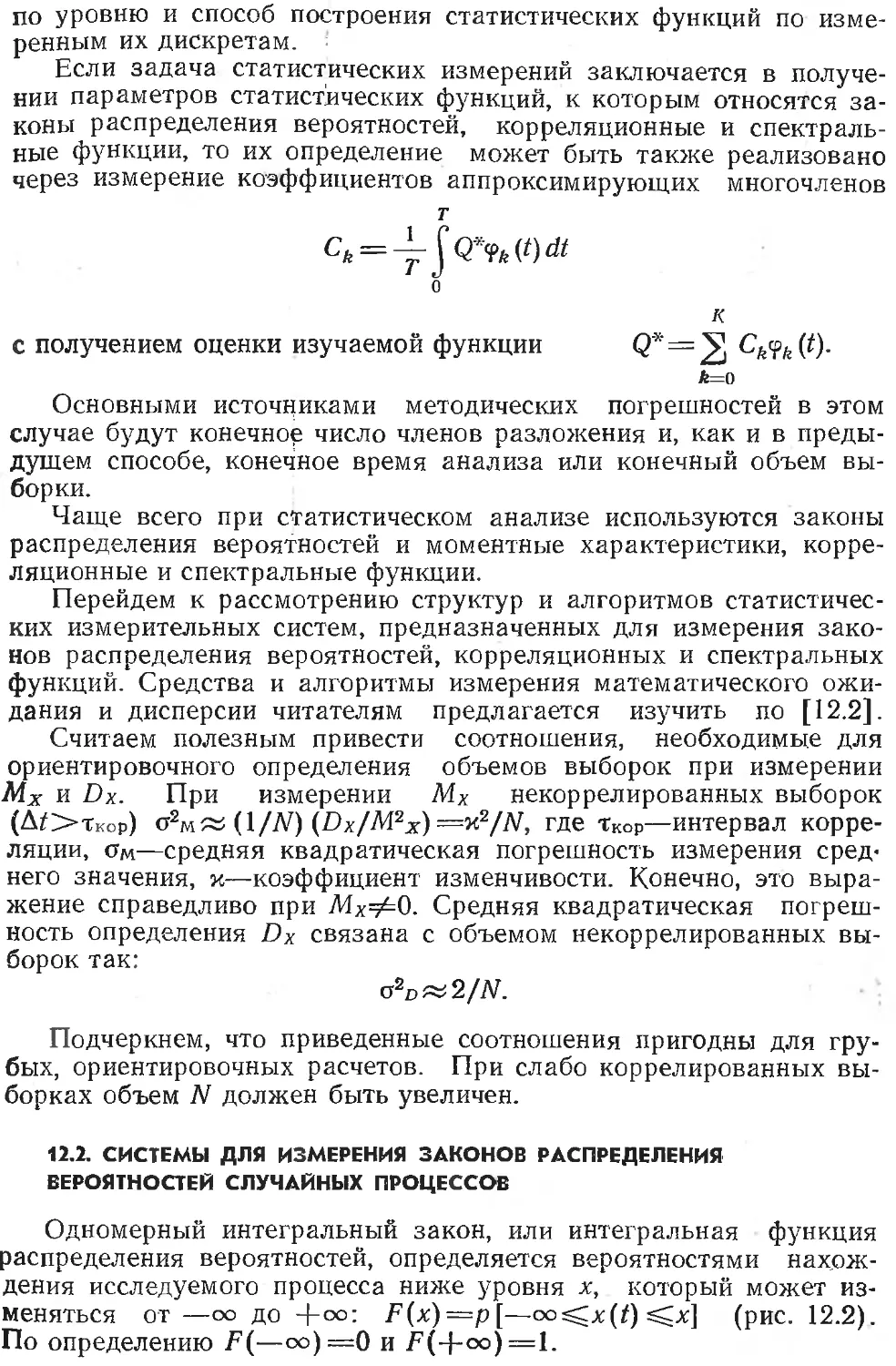
12.2. Системы для измерения законов распределения вероятностей
случайных процессов 18S
12.3. Корреляционные измерительные системы......................194*
12.4. Спектральные измерительные системы..........................211
Б. Системы автоматического контроля (САК)
Глава 13. Теоретические основы автоматического контроля . . . . 216-
13.1. Функция и основные виды систем автоматического контроля 216'
13.2. О выборе контролируемых величин и областей их состояний 221
13.3. Ошибки контроля...............................................223
13.4. Объем выборки при контроле .... 229
13.5. Организация статистического контроля..........................231
13.6. Дискретизация непрерывной контролируемой величины . . . 234
13.7. Оценка эффективности и стоимости систем автоматического
контроля............................................................230
Глава 14. Системы автоматического допускового контроля .... 242
14.1. Каналы контроля...............................................242
14.2. Устройства формирования норм и сравнения уставок с контро-
лируемыми величинами................................................245
14.3. Системы автоматического контроля параллельного и последова-
тельного действия...................................................250
14.4. Системы автоматического контроля с общей образцовой вели-
чиной ..............................................................256
14.5. Основные алгоритмы работы систем параллельно-последователь-
ного действия.................................................261
14.6. Системы автоматического контроля параллельно-последователь-
ного действия.................................................264
Глава 15. О системах технической диагностики.........................275
Глава 16. О распознающих системах....................................285
В. Телеизмерительные системы (ТИС)
Глава 17. Основные характеристики телеизмерительных систем и ли-
ний связи.........................................................292
17.1. Особенности и основные характеристики телеизмерительных
систем........................................................292
17.2. Линии связи.............................................296
17.3. Разделение сигналов в ТИС...............................299
Глава 18. Структуры и принципы действия ТИС.......................304
18.1. Аналоговые ТИС..........................................304
18.2. Цифровые ТИС (системы с кодоимпульсными сигналами) . . 311
18.3. Об адаптивных ТИС......................................... 316
18.4. Краткий обзор основных характеристик промышленных ТИС 318
ЧАСТЬ ПЯТАЯ
ВВЕДЕНИЕ В СИСТЕМОТЕХНИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ИИС
Глава 19. Содержание системотехнического проектирования ИИС . . 321
19.1. Стадии проектирования ИИС....................................321
19.2. О проектировании программного обеспечения ИИС .... 324
19.3. Об автоматизации системотехнического проектирования . . . 326
19.4. Учебное задание на системотехническое проектирование . . . 331
Глава 20. Точностные характеристики измерительных систем . . . 336
20.1. Критерии оценки погрешностей измерения входной величины 336
20.2. Оценка полной погрешности....................................339
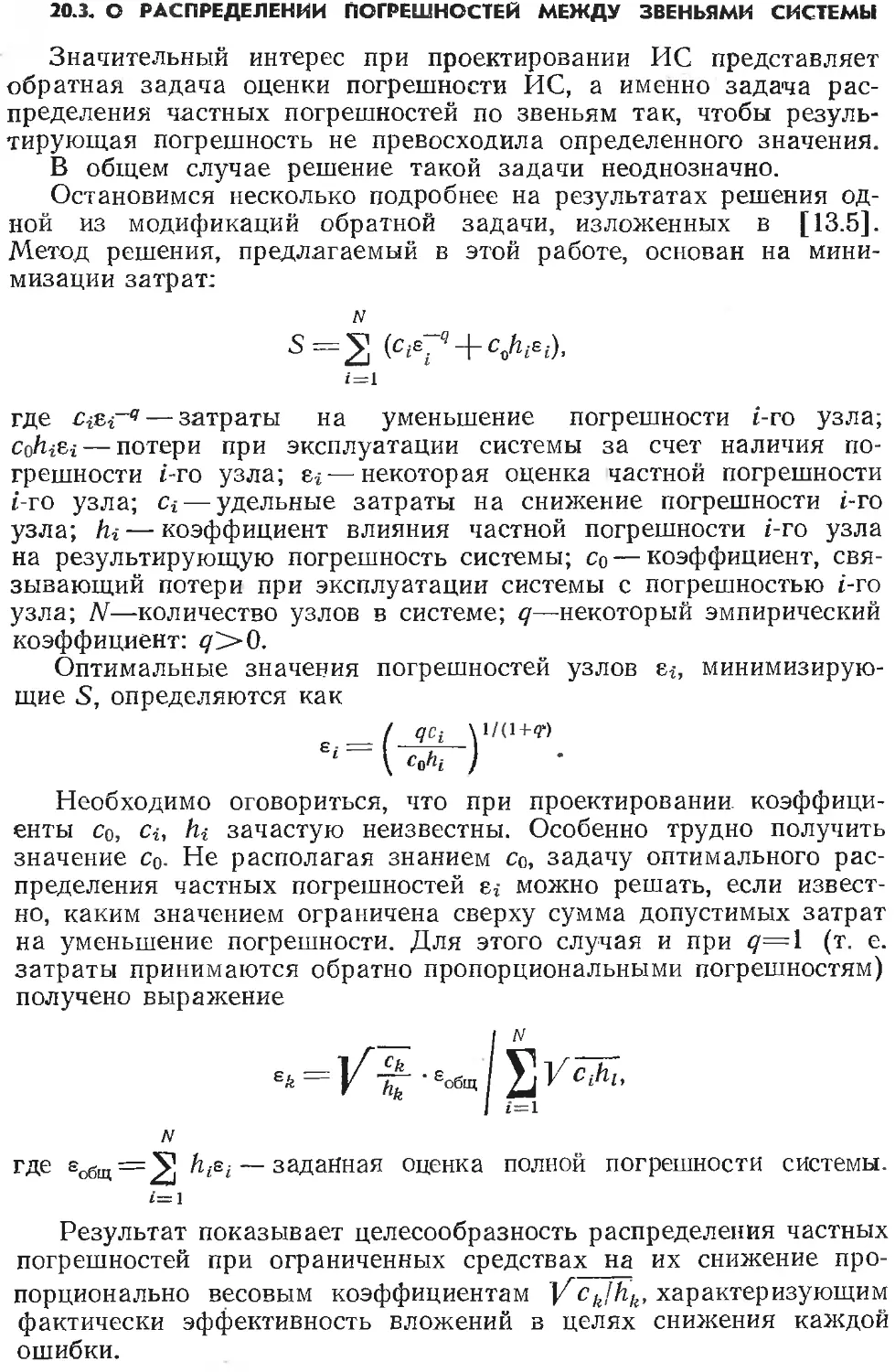
20.3. О распределении погрешностей между звеньями системы . . 345
20.4. О погрешностях квантования по уровню и округления при вы-
числениях .........................................................338
20.5. Информационные оценки........................................352
Глава 21. Временные характеристики ИИС...........................354
21.1. Определение интервалов равномерной дискретизации .... 354
21.2. Об адаптивной дискретизации...................................364
21.3. Оценка времени измерительных преобразований аналоговой
части . . ....................................... 36S?
21.4. Оценка времени работы цифровой части ИИС. Выбор ЭВЛА по
быстродействию................................................... 374
Глава 22. Нормируемые метрологические характеристики измеритель-
ных систем...............................................................
22.1. Общие положения.................................................
22.2. Нормируемые метрологические характеристики ИС ..." 383
22.3. Технические средства метрологических поверок ..... 387
22.4. Автоматическая коррекция погрешностей ИС....................391
Глава 23. Оценка эффективности и планирование измерительного экспе-
римента при проектировании ИИС.................................... 395
23.1. Оценка эффективности ИИС................................... 395
23.2. Планирование измерительных экспериментов . . . . . . 403-
Заключение ..................................................... .... 415
Приложение 1. Основные условные обозначения......................419
Приложение 2. Переходные характеристики цепочек типовых звеньев 420'
Приложение 3. Таблица экспоненциальных, логарифмических функ-
ций и интеграла вероятностей ........................................ 425
Алфавитный указатель..................................................426
Список литературы.................................................... 429
ББК 34.9 •
Ц 17
УДК 681.518.3(075.8)
Рецензент доктор технических наук профессор
Мелик-Шахназаров А. М.
Цапенко М. П.
Ц17 Измерительные информационные системы:
Структуры и алгоритмы, системотехническое про-
ектирование.: Учеб, пособие для вузов. — 2-е изд.,
перераб. и доп. — М.: Энергоатомиздат, 1985.
В пер.: 1 р. 30 к. 14 500 экз.
Рассматриваются структуры и алгоритмы функционирования
основных разновидностей ИИС, описываемые с помощью содержатель-
ных логических схем алгоритмов. Введены новые разделы, посвященные
описанию ИВК, микропроцессорных средств, стандартных интерфейсов
и других системных средств ИИС. Излагаются основы системотехниче-
ского проектирования ИИС. 1-е изд. вышло в 1974 г.
Для студентов, обучающихся по специальностям «Информацион-
но-измерительная техника» ff'«Автоматика й телемеханика».
2302010000-293 *,7ББК 34.9
051(01)-85 61-85 s s 6П2.1.081
© Энергоатомиздат, 1985
Часть первая
ВВОДНАЯ ЧАСТЬ
Глава 1
ОПРЕДЕЛЕНИЯ. ОПИСАНИЕ СТРУКТУР И
АЛГОРИТМОВ ИИС
1.1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ. ОБЛАСТИ ПРИМЕНЕНИЯ ИИС
Современная информационная техника — крупнейший раздел
технической к и б е р н ет и к и — дисциплины, изучающей об-
щие закономерности процессов целесообразного управления, полу-
чения и преобразования информации в технических устройствах.
Информационная техника имеет колоссальное и непрерывно
возрастающее значение в жизни человечества. Она решает огром-
ный круг задач, связанных главным образом со сбором, перера-
боткой, передачей, хранением, поиском и выдачей разнообразной
информации человеку или машине.
В соответствии с основными функциями информационной тех-
ники выделяются следующие ее ветви: информационно-измеритель-
ная техника, вычислительная техника, техника передачи информа-
ции (связи), техника хранения и поиска информации. Каждая из
этих основных ветвей информационной техники имеет свои осо-
бенности, принципы построения технических устройств. В то же
время они объединяются общими теоретическими основами.
Остановимся несколько подробнее на информационно-измери-
тельной технике (ИИТ). Она предназначена для получения опыт-
ным путем количественно определенной информации о разнообраз-
ных объектах материального мира.
Основными процессами, позволяющими получить такую инфор-
мацию, являются обнаружение событий, процессы счета, измере-
ния, контроля, распознавания образов, диагностики. Существует
широкое толкование этих терминов. Например, процесс измерения
связывается с введением в исследуемое явление единицы измере-
ния. Такое представление об измерении используется в математи-
ке, социологии, психологии и др. В ИИТ применяется узкое тол-
кование этих терминов, вытекающее из того, что процессы измере-
ния реализуются экспериментально, служат для получения
количественной оценки состояния материального объекта через
сравнение параметров объекта с мерой (овеществленной единицей
измерения), описанием (через количественные характеристики) за-
данного состояния.
Полезно предварительно уточнить принятое в дальнейшем из-
ложении представление об этих процессах.
Согласно ГОСТ 16263-70 измерение — это нахождение зна-
чения физической величины опытным путем с помощью специаль-
ных технических средств. В процессе измерения получается чис-
ленное отношение между измеряемой величиной и некоторым ее
значением, принятым за единицу сравнения.
Под контролем понимается установление соответствия меж-
ду состоянием (свойством) объекта контроля и заданной нормой,
определяющей качественно различные области его состояния.
В результате контроля выдается суждение о состоянии объекта
контроля.
Распознавание образов связано с установлением соответст-
-вия между объектом и заданным образом. Так же как и норма
при контроле, при опознании образ может быть задан в виде об-
разцового изделия или в виде перечня определенных свойств и
значений параметров (признаков) с указанием полей допуска.
Нужно заметить, что в целом ряде практических приложений по-
нятия контроля и распознавания образов совпадают.
Во многих случаях для восстановления нормальной работы
объекта необходимо выявить элементы, послужившие причиной его
неправильного функционирования. Такое направление развития ме-
тодов и средств контроля работы технических устройств называ-
ется технической диагностикой.
Счет, т. е. определение количества каких-либо событий или
предметов, в ПИТ относительно редко имеет самостоятельное зна-
чение и чаще входит составляющей операцией в процессы измере-
ния, контроля и т. д.
Во всех перечисленных процессах, используемых в ПИТ, име-
ются общие черты. Все эти процессы обязательно включают вос-
приятие техническими средствами исследуемы?: (измеряемых, кон-
тролируемых) величин, весьма часто с преобразованием в некото-
рые промежуточные величины, сравнение их опытным путем с
известными величинами, с описаниями состояний или свойств объ-
ектов, формирование и выдачу результатов в виде именованных
чисел, их отношений, суждений, основанных на количественных со-
отношениях.
В ИИТ наиболее важную роль играет процесс измерения,
являющийся основным путем получения количественной информа-
ции. Средства измерений известны со времен глубокой древности
(Китай, Вавилон, Индия, Египет, Греция, Рим).
Человечество пришло к необходимости выработать особые
приемы количественного выражения существенных для него свойств
объектов с помощью именованных чисел, соответствующих опре-
деленным долям выбранных мер.
К. Маркс считал, что отыскание «общественных мер для оценки
количественной стороны полезных вещей»1 являлось делом раз-
вития общества. Так возник в развитии человеческой культуры
процесс измерения, возникли средства и методы измерений, кото-
рые в дальнейшем стали одним из важнейших орудий познания
человеком окружающего его мира. Развитие науки и промышлен-
ности стимулировало развитие измерительной техники; новые до-
стижения измерительной техники оказывали влияние на развитие
многих отраслей науки и техники. «Именно измерение связывает
науку с математикой, с одной стороны, с торговлей и технической
практикой—с другой»1 2.
По существу ни одно экспериментальное научное исследование,
ни один процесс производства не может обойтись без измерений
в той или иной форме, без получения того, чго мы называем из-
мерительной информацией. В настоящее время ни у кого не вызы-
вает сомнения, что без должного развития методов и средств
измерения невозможен прогресс науки и техники. Развитие
современного научного эксперимента, включающего исследование
космического пространства и элементарных частиц материи, глу-
бин океанов и поверхности Земли, совершенствование промышлен-
ного производства и средств комплексного управления производ-
ством, развитие практически всех отраслей народного хозяйства
и оборонной техники в значительной степени зависят от своевре-
менного и качественного сбора измерительной информации, от
должного уровня и опережающего развития средств измерения.
Необходимо отметить роль метрологии в деле становления ме-
тодов и средств измерения. Метрология в начале своего развития
занималась главным образом сбором справочных данных о мерах
и единицах измерений. Современная метрология превратилась в
науку о точности измерений, о методах и средствах обеспечения
их единства.
Наряду с метрологией возникли теоретические основы изме-
рительной техники в целом и по основным видам измерений (на-
пример, электрические, оптические, механические измерения).
В теоретическом плане при создании новых средств измерительной
техники используются (обычно с необходимой доработкой в при-
кладном плане) современные достижения математики, теории
автоматического управления и телемеханики, вычислительной тех-
ники, теории связи, планирования эксперимента и др.
Здесь уместно заметить, что названные области науки в свою
очередь используют достижения теории измерений, метрологии,
измерительной техники. Встречаются обстоятельства, когда спе-
циалисты смежных областей информационной техники занимаются
решением задач, относящихся к измерительной технике. Так, на-
пример, специалисты по вычислительной технике весьма часто
занимаются созданием аналого-цифровых преобразователей, изме-
рительных коммутаторов. Но, видимо, наметившаяся тенденция
1 Маркс К. Капитал. Т. 1.—М.: Госполитиздат, 1963, с. 44.
2 Бернал Д. Наука в истории общества. — М.: Иностр, лит., 1956 —735 с.
к созданию общетеоретических основ информационной техники
приведет к определенному ограничению круга задач, подлежащих
решению в каждом из разделов информационной техники, благо-
даря получению общих решений. Однако потребности в новых ви-
дах информационной техники растут очень быстро, ставя все но-
вые задачи. Научный совет по проблемам электрических измерений
и измерительных информационных систем АН СССР произвел
анализ потребностей народного хозяйства Советского Союза в;
средствах измерений. Оказалось, что в ближайшее время необхо-
димо по крайней мере в 4 раза увеличить количество видов изме-
ряемых величин.
Но не только увеличение количества видов измеряемых вели-
чин ведет к необходимости совершенствования средств измерений.
До недавнего прошлого арсенал средств измерительной техни-
ки ограничивался неавтоматическими и автоматическими измери-
тельными приборами, предназначенными для измерения одной ве-
личины или небольшой группы однородных величин, обычно не из-
меняющихся за цикл измерения. Нужно отметить, что и в настоя-
щее время производство таких измерительных приборов составляет
заметную долю продукции приборостроительной промышленности.
В последние годы, в первую очередь в связи с резкой интенси-
фикацией и автоматизацией процессов производства, усложнением
и расширением фронта научных экспериментов, существенно изме-
нились требования к средствам измерения.
Новые требования связаны главным образом с переходом к по-
лучению и использованию результатов не отдельных измерений, а
потоков измерительной информации. Зачастую необходимо полу-
чать информацию о сотнях и тысячах однородных или разнород-
ных измеряемых величин, часть из которых может быть недоступ-
ной для прямых измерений.
Как правило, получение всего объема измерительной информа-
ции должно выполняться за ограниченное время. Если эти функ-
ции возложить на человека, вооруженного лишь простейшими
измерительными и вычислительными устройствами, то в силу фи-
зиологических ограничений он, даже при весьма значительной
тренировке, не сможет их выполнять. Решение этой проблемы пу-
тем увеличения обслуживающего персонала не всегда возможно,
а там, где это возможно, в большинстве случаев экономически
невыгодно. Уместно заметить, что из-за опасных условий экспери-
мента или вредности технологического процесса участие человека-
оператора может быть вообще недопустимым.
Таким образом, перед измерительной техникой была поставле-
на проблема создания новых средств, способных разгрузить чело-
века от необходимости сбора и обработки интенсивных потоков
измерительной информации. Решение этой проблемы привело к
появлению нового класса средств измерения—и змеритель-
ных систем (ИС), предназначенных для автоматического сбора
и обработки измерительной информации.
Аналогично можно проследить развитие других средств ИИТ,
приведшее к необходимости создания кроме ИС также систем
автоматического контроля (САК), технической диагностики
(СТД), распознавания (PC).
Совокупность перечисленных выше систем получила название
информационно-измерительных или измерительных информацион-
ных систем — ИИС [1.1]. Под ИИС понимаются системы, пред-
назначенные для автоматического получения количественной ин-
формации непосредственно от изучаемого объекта путем процедур
измерения и контроля, обработки этой информации и выдачи ее
в виде совокупности именованных чисел, высказываний, графиков
и т. д,, отражающих состояние данного объекта. Измерительные
информационные системы должны воспринимать изучаемые вели-
чины непосредственно от объекта, а на их выходе должна полу-
чаться количественная информация (и только информация) об
исследуемом объекте; ИИС существенно отличаются от других
информационных систем и систем автоматического управления.
Так, системы вычислительные, связи и управления могут получать
на входе информацию от других систем (в частности, от ИИС). Ра-
зумеется, информация, получаемая на выходе ИИС, используется
для принятия каких-либо решений, однако использование инфор-
мации обычно не входит в функции ИИС.
Далее принимается, что в ИИС объединяются технические
средства, начиная от датчиков и кончая устройствами выдачи ин-
формации, а также все программы, как необходимые для управ-
ления работой собственно системы, так и позволяющие решать
в ИИС измерительные и вычислительные задачи, а также управ-
лять конкретным экспериментом.
В ГОСТ 8.437-81 приведено следующее определение: ИИС —
«совокупность функционально объединенных измерительных, вы-
числительных и других вспомогательных технических средств для
получения измерительной информации, ее преобразования, обра-
ботки в целях представления потребителю (в том числе ввода в
АСУ) в требуемом виде либо автоматического осуществления ло-
гических функций контроля, диагностики, идентификации».
Итак, ИИС — обобщающее понятие. Под ним подразумевается
класс средств ИИТ, объединяющий системы измерения, контроля,
технической диагностики и распознавания.
Следует отметить, что понятие ИИС удовлетворяет содержа-
нию более общего понятия «система». В теории систем под систе-
мами понимаются множества взаимосвязанных элементов, пред-
ставляющих целостные образования. Системы при этом характе-
ризуются структурами (совокупностью элементов и связей между
ними, порядком элементов), функционированием (порядком про-
цессов, совокупностью реакций системы на условия внешней и
внутренней среды) и «историей» (необратимые изменения вслед-
ствие развития, старения, процессы обучения, адаптации, предва-
рительно выполненные процедуры обработки информации и т. п.).
Подразумевается, что исследование структур, функционирования
и «истории» систем не может быть произведено только с помощью
аппарата физики (что возможно при рассмотрений измерительных
преобразователей и приборов).
F В соответствии со сказанным в книге рассматриваются в пер-
вую очередь структуры и алгоритмы функционирования ИИС и их
частей — комплексов, аналого-цифровых подсистем и т. п., а в не-
обходимых случаях учитывается «история» систем.
Уместно дать краткую историческую справку развития ИИС
и указать основные области их применения.
Основная концепция нового класса средств ИИТ — измеритель-
ных информационных систем — была сформулирована в начале
60-х годов. В основу концепции ИИС уже в то время была поло-
жена системная организация совместной автоматической работы
средств получения, обработки и передачи количественной инфор-
мации. Тогда были созданы ИИС, которые можно отнести к пер-
вому поколению таких систем. Системы первого поколения харак-
теризуются централизованным циклическим получением; измери-
тельной информации и обработкой ее в основном с помощью
входящих в состав ИИС специализированных вычислительных
устройств, использованием в качестве элементной базы дискретной
полупроводниковой техники. Дальнейшая обработка информации
при необходимости в большинстве случаев производилась вне
ИИС, в универсальных ЭВМ, занятых обслуживанием и других
источников информации. Однако сложные ИИС в то время имели
в своем составе ЭВМ, выполняющие только задачи, стоящие пе-
ред этими системами.
Измерительные информационные системы второго поколения
(70-е годы) характеризуются адресным сбором измерительной ин-
формации, обработкой информации с помощью ЭВМ, входящих
в состав систем, и в меньшей степени с помощью специализиро-
ванных вычислительных устройств, использованием в качестве эле-
ментной базы микроэлектронных схем малой и средней степени
интеграции.
Широкое введение ЭВМ в состав ИИС стало возможным после
организации промышленного выпуска управляющих вычислитель-
ных машин и комплексов, а также малых ЭВМ с достаточными
вычислительными и логическими возможностями, гибким програм-
мным управлением, приемлемыми габаритами, потребляемой энер-
гией и стоимостью.
Улучшение многих характеристик ИИС было достигнуто бла-
годаря использованию больших интегральных микросхем, микро-
процессоров, микропроцессорных наборов (включая устройства
ЭВМ™ ° б°льшим объемом запоминаемой информации) и микро-
Качественно новые возможности при проектировании, изготов-
лении и эксплуатации ИИС были получены при применении стан-
дартных цифровых интерфейсов и промышленных функциональных
блоков, совместимых между собой по информационным, метроло-
гическим, энергетическим и конструктивным характеристикам.
Применение в ИИС ЭВМ и стандартных цифровых интерфейсов
привело к необходимости формального описания алгоритмов дей-
ствия систем и к резкому возрастанию роли программного обес-
печения систем.
Оказалось, что для цифровых централизованных ИИС с про-
граммным управлением можно организовать промышленный вы-
пуск универсального цифрового ядра, в которое входят цифровые
измерительные и вычислительные средства и стандартные устрой-
ства ввода и вывода цифровой информации.
Количество созданных и реально действующих в нашей стране
ИИС резко возрастает и трудно поддается оценке. Видимо их
число может быть оценено в несколько десятков тысяч.
Измерительные информационные системы находят применение
везде, где необходимо автоматическое получение опытным путем
количественной информации о состоянии объектов исследования,
причем это получение связано с выполнением массовых операций
и (или) осуществлением измерений в сложной форме, недоступ-
ной локальным измерительным приборам. Не имея возможности
рассмотреть весь огромный диапазон областей применения ИИС,
остановимся хотя бы на перечислении некоторых из них.
В измерительном оборудовании систем управления, жизнеобес-
печения и научно-исследовательских работ космических кораблей,
в наземных измерительно-управляющих комплексах все большую
роль играют ИИС. Радиотелеметрические системы космических
исследований являются важной разновидностью ИИС. Описание и
анализ таких систем даны в [1.2].
В области экспериментальной аэродинамики с помощью ИИС
производится измерение аэродинамических сил, распределения
давлений, температур, расходов газов и многих иных величин.
Экспериментальная прочность нуждается в измерении внешних
сил, воздействующих на исследуемые объекты, и реакции на их
действие (напряжения в материале, смещения и т. д.), характе-
ристик самих объектов и т. п. В обширных областях тензометрии,
динамометрии, термометрии и т. п. в качестве основных экспери-
ментальных средств применяются ИИС.
Геофизические экспериментальные исследования оснащены
многочисленными ИИС, в которых реализуются эффективные ме-
тоды исследования строения земной коры.
В океанографических исследованиях с помощью ИИС проис-
ходит измерение температур, химического состава, скоростей дви-
жения, давлений в водной среде и т. п.
Химические, физические, биологические экспериментальные ис-
следования основаны на огромном количестве разнообразных ме-
тодов и их реализаций с помощью ИИС. Это определение состава
и характеристик объектов исследования и внешних воздействий,
условий эксперимента и т. п. [1.3].
Для применения в метеорологии, для охраны окружающей сре-
ды созданы многочисленные ИИС, позволяющие получать и об-
рабатывать измерительную информацию о состоянии воздушной
и водной сред, о солнечной радиации и т. п. [1.4].
Особо, пожалуй, следует отметить ИИС, построенные для нужд
метрологических исследований и метрологического обеспечения
единства измерений в стране, так как такие ИИС должны обла-
дать высокими метрологическими характеристиками (см. гл. 22).
•Огромное поле для приложения ИИС представляют комплекс-
ные испытания машин, конструкций, приборов, оборудования. Ис-
пытания таких конструкций, как суда, летательные аппараты, дви-
гатели (внутреннего сгорания, реактивные и др.), требуют созда-
ния сложных технических средств в целях получения необходимой,
главным образом измерительной, информации. .
Медицина оснащается современными ИИС, позволяющими по-
лучать и оценивать ряд физиологических и психофизических па-
раметров человека. Можно предполагать, что количество ИИС,
применяемых в медицине, будет резко возрастать [1.5].
Уже говорилось, что в промышленности, на транспорте, в сель-
ском хозяйстве, вообще во всем народном хозяйстве страны до-
вольно широко используются ИИС [1.6, 1.7]. В связи с примене-
нием микропроцессорных средств существенно расширяются воз-
можности ИИС. Они становятся незаменимой составной частью
роботов и др. Автоматизированный контроль и испытания продук-
ции производятся в основном с помощью ИИС.
Перед тем как закончить краткий очерк основных областей
применения ИИС, нужно отметить, что реализация ИИС, особенно
встроенных в конкретную аппаратуру, установку и т. п., может
быть не выделена конструктивно и не отражена в названии. Так,
испытательный стенд, станция, аппаратура, отдельная часть АСУ
каким-либо технологическим процессом и т. п. нередко содержат
в своем составе какую-либо разновидность ИИС. Другими слова-
ми, на практике часто встречаются используемые, но не выделен-
ные особо в явном виде ИИС.
В настоящее время создается и начинает использоваться третье
поколение ИИС, в котором, как можно предполагать, более ши-
рокое применение получат системные измерительные преобразова-
тели (голографические, телевизионные, рентгенографические и т. п.),
позволяющие подобно рецепторным полям биологических анализа-
торов воспринимать поля исследуемых величин. Рассредоточение
вычислительной мощности по различным уровням и блокам ИИС
может уменьшить потоки информации, сократить общее время
обработки, повысить надежность работы системы. В ИИС будет
более широко осуществляться многофункциональная обработка
измерительной информации благодаря рациональному сочетанию
средств с жесткой структурой (аппаратная реализация) и гибкими
перестраиваемыми структурами и программами работы. Будут
созданы измерительные, контрольные и другие роботы. В быстро-
действующих ИИС, работающих в реальном времени, будут
объединены процедуры измерения и обработки информации. Су-
щественно расширится применение устройств памяти. Будут ши-
роко использоваться выпускаемые промышленностью наборы
функциональных устройств, объединяемых стандартными интер-
фейсами. Большое значение приобретут диалоговые режимы ра-
боты оператора с ИИС, В элементной базе резко увеличится доля
интегральных микросхем большой и сверхбольшой степени инте-
грации.
Следует отметить, что появление нового поколения ИИС не
перечеркивает существование предыдущего, а берет из него наибо-
лее важное и рациональное.
1.2. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА ИИС
Для описания ИИС, объяснения состава функциональных ча-
стей и элементов, их назначения и взаимосвязи в системе широко
применяются структурные схемы. Описание ИИС и входящих в
них функциональных элементов может также производиться с
помощью функциональных (разъясняющих протекающие в них
процессы) и принципиальных (представляющих соединение выпу-
скаемых промышленностью элементов систем с указанием их но-
минальных значений) схем. Следует отметить, что в связи с рас-
ширенным применением в ИИС многофункциональных интеграль-
ных микросхем принципиальные схемы могут оказаться даже
менее подробными, чем структурные.
Если структурные и функциональные схемы применяются пре-
имущественно для рассмотрения принципов построения, при си-
стемном анализе, то принципиальные схемы предназначены для
схемотехнической проработки системы.
Так как основное назначение книги связано с рассмотрением
принципов построения систем, то в ней используются главным об-
разом структурные схемы с условными графическими обозначения-
ми или с аббревиатурой названия элементов. Особенно наглядны-
ми в указанном смысле являются схемы, составленные из элемен-
тов, выполняющих типовые функциональные преобразования.
Прежде чем приступить к рассмотрению структур различных
систем, уместно привести обобщенную структурную схему ИИС
(рис. 1.1), с тем, чтобы одновременно познакомить читателя с
условными графическими обозначениями типовых функциональных
преобразователей, принятыми в книге.
В обобщенной структурной схеме показано множество датчи-
ков I, размещенных постоянно в определенных точках пространст-
ва, перемещающихся в пространстве (сканирующего типа) или
воспринимающих одновременно поле исследуемой величины, мно-
жество аналоговых 2, аналого-цифровых 3 преобразователей, циф-
ровые ча'сти 4 и 5, множество цифро-аналоговых преобразователей
6. Функциональные блоки могут соединяться между собой через
стандартные интерфейсы (см. гл. 5), технические средства которых
содержат системы шин 7.1, интерфейсных узлов ИФУ 7.2 и
устройств управления 8. На рис. 1.1 показана также возможность
соединения функциональных блоков жестко установленными свя-
зями.
Рис. 1.1. Обобщенная структурная схема ИИС
3
5~
£7.7
Устройство управления может формировать командную ин-
формацию {Фо*}> принимать информацию {/*} от функциональ-
ных блоков и подавать команды на исполнительные устройства 9
для формирования воздействия на объект исследования. Воздей-
ствия могут быть, например, в виде электрических Е7, механиче-
ских Р, тепловых Т°, оптических О, гидравлических G и акустиче-
ских А величин. Воздействия могут организовываться, во-первых,
в целях создания соответствующих условий для проведения экспе-
римента и, во-вторых, для уравновешивания величин, действую-
щих на входы датчиков. В последнем случае система называется
замкнутой с компенсационной обратной связью, а формируемые
воздействия — компенсирующими величинами.
Множество аналоговых преобразователей 2 содержит преобра-
зователи 2.1 и нормирующие преобразователи 2 2 аналоговых сиг-
налов (например, масштабные преобразователи, преобразователи
вида модуляции), коммутаторы аналоговых сигналов 2.3, анало-
говые вычислительные устройства (с обозначением F) 2.4, анало-
говые устройства памяти 25, устройства сравнения аналоговых
сигналов 2.6, аналоговые каналы связи (с обозначением КС) 2.7,
аналоговые показывающие и регистрирующие измерительные при-
боры 2.8.
Интерфейсные устройства ИФУ аналоговых блоков главным
образом служат для приема командных сигналов и передачи
информации о состоянии блоков (см. гл. 5). Например, через
ИФУ могут передаваться команды на изменение режима работы,
на подключение заданной цепи с помощью коммутатора. Между
аналоговыми и цифровыми устройствами включено множество
аналого-цифровых преобразователей 3.1 и аналоговых устройств
допускового контроля 3.2.
К цифровым устройствам 4 относятся формирователи импуль-
сов 4.1, преобразователи кодов 4.2, коммутаторы 4.3, специализи-
рованные цифровые вычислительные устройства 4.4 (с обозначе-
нием CPU), устройства памяти 4.5, устройства сравнения кодов
4.6, каналы цифровой связи 4.7 (с обозначением КС), универсаль-
ные программируемые вычислительные устройства — микропроцес-
соры, микро-ЭВМ и т. п. — 4.8.
Группа цифровых устройств вывода, отображения и регистра-
ции 5 содержит формирователи кодоимпульсных сигналов 5.1, пе-
чатающие устройства 5.2, устройства записи на перфоленту 5.3
(ПЛ) и считывания с перфоленты 5.4 (также с обозначением ПЛ),
накопители информации на магнитной ленте 5.5 (МЛ) и магнит-
ных дисках 5.6 (МД), дисплеи 5.7 (Д), сигнализаторы 5.8, цифро-
вые индикаторы 5.9.
В структурных схемах далее используются также обозначения
элементов цифровой вычислительной техники, установленные
ГОСТ 2.743-82. В частности, применяются следующие обозначения:
регистр — RG, счетчик—СТ, устройства задержки во времени —
DL, генератор — G (серии импульсов — Gn, непрерывной последо-
вательности импульсов >— GN, линейно изменяющегося сигнала —
q/, синусоидального сигнала — (jSJN,одиночного импульса —
G1}, дешифратор—'DC, триггер—?, память—М (ОЗУ—RAM,
SAM, ПЗУ—ROM, ППЗУ—PROM), мультиплексор (цифровой
коммутатор)— MUX, демультиплексор—DMX и др.
Кроме указанных на рис. 1.1 условных графических обозначе-
ний в структурных схемах используются обозначения, приведенные
в приложении 1.
Уместно отметить, что ЭВМ 4.8 могут взять на себя ряд пре-
образований, выполняемых, например, в блоках 2.4, 2.5, 2.6, 4.2,
4.4, 4.6, 5.1, а также функции управления (блок 8). Эти преобра-
зования, естественно, будут выполняться программным путем.
Конечно, не во всякой ИИС требуется присутствие всех при-
веденных на рис. 1.1 блоков. Для каждой конкретной системы
количество блоков, состав функций и связи между блоками долж-
ны устанавливаться особо.
Нужно отметить, что в технической литературе можно встре-
тить название компонентов ИИС, являющихся объединением не-
скольких функциональных блоков. Так, например, объединение
коммутаторов аналоговых сигналов и аналого-цифровых преоб-
разователей иногда называют многоканальными АЦП.
Структурные схемы содержат важную информацию о системе,,
но эта информация не позволяет судить о последовательности, ре-
жимах, вообще об алгоритмах работы данной системы. Это осо-
бенно относится к системам, основанным на использовании вы-
числительных комплексов, цифровых интерфейсов, содержащих
микропроцессоры, ЭВМ и другие многофункциональные устрой-
ства.
Таким образом, для описания функционирования систем дол-
жен быть использован соответствующий аппарат.
1.3. ОПИСАНИЕ ФУНКЦИОНИРОВАНИЯ ИИС.
СОДЕРЖАТЕЛЬНЫЕ ЛОГИЧЕСКИЕ СХЕМЫ АЛГОРИТМОВ
Вводные замечания
Описание принципа и последовательности действия средства
измерения в большинстве случаев проводится словесно, на естест-
венном языке. Оно становится громоздким для сложных измери-
тельно-вычислительных систем, что затрудняет анализ работы и
сравнение вариантов реализации таких средств измерения, за-
трудняет подготовку их программного обеспечения.
Логические схемы алгоритмов (ЛСА) [1.8, 1.9] выделяются
среди способов формального описания работы автоматических
устройств компактностью записи, возможностью представления
алгоритма с наперед установленной степенью детализации, изве-
стной связью с логическими схемами программ, возможностью-
минимизации объема некоторых видов алгоритмов.
В ЛСА применяются заранее определенные множества функ-
циональных {А.}, логических {од} операторов, а также правила
последовательности выполнения алгоритма в зависимости от
удовлетворения условий со.;. При отсутствии логических операто-
ров или при удовлетворении в них логических условий операторы
ЛСА выполняются последовательно слева направо. Если логиче-
ские операторы не удовлетворяются, то дальнейший путь выпол-
нения алгоритма может быть обозначен с помощью указательных
знаков (например, полускобок). Так, алгоритм А1|_А2а>^4з преду-
сматривает выполнение операторов Ар42, и если удовлетворяется
условие <о, то и оператора А3; если же условие со не удовлетворя-
ется, то будут повторяться операторы А2А2А2 до тех пор, пока
оно не будет удовлетворено.
К основным недостаткам ЛСА можно отнести необходимость
составления и постоянного использования списков операторов
•{А} и {со.;} с расшифровкой их содержания, отсутствие эффектив-
ных методов минимизации записи. Эти недостатки слабо прояв-
ляются при относительно простых и обостряются при сложных
ЛСА.
Наличием перечисленных недостатков можно объяснить в пер-
вую очередь то, что ЛСА в информационно-измерительной техни-
ке применялись преимущественно для рассмотрения аналого-циф-
ровых преобразований и мало использовались для описания функ-
ционирования сложных измерительных комплексов и систем.
Ниже предлагаются и рассматриваются содержательные логи-
ческие схемы алгоритмов (СЛСА), предназначенные для фор-
мального описания работы ИИС, в том числе включающих малые
ЭВМ. В СЛСА развиваются и конкретизируются идеи ЛСА при-
менительно к специфике таких систем [1.10].
При разработке СЛСА предполагалось, что они должны:
описывать функционирование как аппаратной, так и програм-
мно-управляемой частей ИИС;
отражать по возможности наглядно содержание описываемых
преобразований;
описывать не только информационные преобразования, но и
служебные операции;
служить основой для составления программ;
описывать функционирование ИИС с разной детализацией.
Условные обозначения СЛСА
В СЛСА объединяются операторы, определяющие обмен ин-
формационными . и служебными сигналами между функциональ-
ными блоками системы, а также преобразования этих сигналов.
Каждый оператор содержит указатель его назначения и конкрет-
ное содержание передаваемой или преобразуемой информации.
Операторы в алгоритме размещаются в строке слева направо и
отделяются друг от друга интервалами. В сложных алгоритмах
выделяются группы связанных между собой операторов. Для на-
глядного представления алгоритмов возможно размещать группы
операторов на отдельных строках и сопровождать их необходи-
мыми пояснениями.
Обозначения информационных преобразований в СЛСА в ос-
новном выполняются буквами латинского алфавита,_ а служебной
информации— греческого. Аналоговая величина в о щем виде
обозначается буквой х, множество таких величин — X, цифро-
вая — z, а множество цифровых величин — Z. Цифровое выра-
жение конкретной аналоговой величины представляется в ви-
де D х.
Функциональные операторы получения, преобразования, пере-
дачи, выдачи измерительной информации обозначаются !(/*).
В скобках дается конкретное содержание таких операторов. Наи-
более распространенное содержание операторов связано с опера-
тивным хранением информации S(storage), выдачей, чтением ин-
формации R (read), записью, регистрацией информации W (write),
обработкой информации F (function) и СР (compute), операция-
ми сравнения CR (comparison) и контроля CH (checking).
Обозначения операторов с перечисленными преобразованиями
над X и Z имеют вид: I(S:X), I(S:Z); I(R:X), I(R:Z);
I(W:X), I(W:Z); I (F : X), I (CP : Z); I(CR:x,-, x,), I(CR:z„ zj);
I (CH : x), I (CH :z).
Преобразование сигналов записывается с указанием входных и
выходных величин, разделенных наклонной црямой, причем указы-
вается вид преобразования информации. Передача аналоговых и
цифровых величин обозначается как I(x), I(X), I(z), I(Z).
Различаются операторы, характеризующие преобразования ин-
формации внутри блоков системы, и операторы, определяющие
процесс обмена информацией между блоками. Например, в СЛСА
Ii(xi/zi) I2(z,) I3(zi/z2) I4(z2) I5(F :z2/z3) I6(z3) I7(S:z3) опера-
торы Ii, I3, I5, I7 характеризуют преобразования внутри блоков
(Ii — аналого-цифровое преобразование, 13 — преобразование ко-
да, I5—функциональное преобразование и 17—запоминание), а
I2, Ц, Ц—передачу информации между блоками. В зависимости
от области применения можно использовать различные СЛСА.
В частности, для описания последовательности выполнения опе-
раций передачи информации по магистрали цифрового интерфей-
са можно использовать операции 12, 14, 1б, дополнив их командами,
адресами блоков и другой информацией, необходимой для орга-
низации процесса обмена информации в принятом интерфейсе..
Кроме измерительной информации необходимо передавать ад-
реса Ad* (address) блоков системы или их частей SbAd*, инфор-
мацию о времени Т* (time), режиме или диапазоне работы
L* (law). В том случае, когда передача адреса Ad* или субадре-
са SbAd* должна сопровождаться указанием на то, что переда-
ется именно адрес, это обозначается в СЛСА как Ad (Ad*) и
SbAd (SbAd*) соответственно. Подобным же образом вводятся
указатели Т и L.
Для обозначения суммирования используется знак S, вычита-
ния А, умножения П, деления г, дифференцирования d, интегри-
рования J.
Каждый из цифровых блоков может являться приемником,
источником или приемоисточником информации. Кроме этих раз-
новидностей блоков следует выделить устройство управления
процессом обмена информацией в системе и исполнительные уст-
ройства, служащие для формирования воздействий на объект изу-
чения. На рис. 1.1 показан блок управления, который обменива-
ется с блоками системы командной информацией Ф(Ф*), а также
информационными сигналами. Исполнительное устройство может
оказывать тепловые Т°, механические Р и электрические U воз-
действия на объект исследования. Компенсационные воздействия
отмечаются индексом к (см. ниже табл. 1.1).
К наиболее распространенным командам относятся Ф(К),
®(W), Ф(5), Ф(В) и Ф(Е) — «выдать», «записать», «запом-
нить», «начать» и «завершить» выполнение алгоритма соответст-
венно.
Логические операторы разделяются на операторы состояния,
условные логические операторы без переноса и с переносом по-
следовательности выполнения алгоритма.
Информация о состоянии <р характеризует состояние блока.
Если блок «готов» или «не готов» принять, выдать, запомнить ин-
формацию, то формируются сигналы <p(W), <p(W), cp(R), <p(R),
<p(S), tp(S). Подтверждение (или отсутствие подтверждения)
приема или выдачи информации осуществляется сигналами
g>(W:Z*), <p(W-Z*), tp(R:/*), tp(R:/*).
В табл. 1.1 приводятся графические обозначения и операторы,
отражающие преобразования, выполняемые основными функцио-
нальными блоками ИИС.
Кроме буквенных обозначений в СЛСА используются символы:
преобразования /; выполнения всех (параллельно) || и любого
(одного) ] из операторов, объединяемых этими символами; пере-
носа части СЛСА на другую строку X; продолжения СЛСА .. ;
установления или изменения индекса или выражения : = ; пере-
дачи импульсным сигналом по специальной шине i—i; выполне-
ния части СЛСА программным путем г~1.
Содержательные логические схемы алгоритмов записываются
слева направо в порядке выполнения операторов, команд, логиче-
ских условий, конкретное содержание которых заключается в
круглые скобки. Для объединения нескольких связанных опера-
торов (например, выполняемых одновременно) используются пря-
моугольные, а для более крупного объединения операторов -— фи-
гурные и двойные скобки.
При одинаковых частях алгоритмов можно использовать для запи-
си сокращенные обозначения, заключенные в угловые скобки <>.
Например, вместо [1ц (xq/xi) Ij2 (х>/х2) 113 (х2/х3) ] || [121 (Хо/Х1) X
Xl22(xi/x2) I23(л-г/л-з)]П • • • II [Ini(xo/Xi) 1и2(Х]/х2) (А?г/ЛГд)] мо-
жет быть записано
<Ii> : = [Iu(xoMi) Ii2(*i/*2) 113(^2/^3)]П<12>11-. .11<1п>- В ряде слу-
чаев возможна минимизация записи СЛСА объединением преобра-
зований, последовательно выполняемых внутри блоков; например,
I(xo/x'i)I(Xi/x2) может быть записано в виде 1(%о/х2).
Перенос выполнения алгоритма обозначается верхними полу-
Таблица 1.1. Обозначения ФБ и преобразований
Наименование блока Условное обозначение Наименование блока
Датчик Г 1 Kx^Xt) Преобразова- тель кодов
Аналоговый пре-
образователь
Нормирующий
аналоговый преоб-
разователь
Аналоговый ком-
мутатор
Аналоговое ЗУ
Аналоговое уст-
ройство сравнения
У словное обозначение
•— * /
Цифровой ком-
мутатор, муль-
типлексор
Цифровое
устройство
сравнения
Цифровое вы-
числительное
устройство
Мини- или
микро-ЭВМ
Аналоговое вы-
числительное уст-
ройство
KF-V
Цифровой
канал связи
Аналоговый ка-
нал связи
КС Кх)
Регистрирующий
прибор
Показывающий
прибор
Аналого-цифро-
вой преобразова-
тель
ъ них
- г
Цифровое ЗУ
— СР1
— аг 1(2)
I(W:x)
Устройство
управления
Исполнитель-
ное устройство
Цифровое ре-
гистрирующее
устройство
’ 1 ф“
ФСУ •
и,ик
Р,Рк
Г°,Г°К
I(WtZ)
П родолжснае т об л. 1.1!
Наименование
блока
Условное обозначение
Наименование
блока
Условное обозначение
Цифро-аналого-
вый преобразова-
тель
Накопитель на
магнитных дисках
Накопитель на
магнитнол ленте
Накопитель на
перфоленте
Дисплей
(экранный
пульт)
Цифровой ин-
дикатор
Индикатор ре-
зультатов кон-
троля
Таймер
Вычислитель-
ные операции
скобками Г или показывающими его направление, а место
продолжения — нижними полускобками J или ]_ Если в алгорит-
ме имеются несколько переносов действия, то они маркируются
Г- J. I •
« I
Перенос действия алгоритма в замкнутых измерительных си-
стемах (системах с обратной информационной связью) обознача-
ется с помощью полускобок, которые в этом случае показывают
жесткое соединение отмеченных мест в цепи преобразования. На-
пример, В СЛСА [1(Х1)||Ц(Хо.с)]1[(Х1—Хо.с)/Х2][1(Х2/Хо:с)_|Ц1(Х2)1
показано действие информационной обратной связи в системе.
Последовательность выполнения алгоритма изменяется, если
не удовлетворяется логическое условие го. В этом случае дальней-
шее выполнение алгоритма определяется знаками переноса. На-
пример, в СЛСА L_Ii(/*) (о (®*) Й если не удовлетворяется
условие к»*, выполняются преобразования Ii(/*) Ii(/*)... до тех
пор, пока ®* = 1, тогда происходит преобразование 1г(7*).
Если справа от условного логического оператора не стоит по-
лускобка, то этот оператор задерживает выполнение алгоритма-
до тех пор, пока не будет удовлетворено логическое условие.
Для отражения в СЛСА временных соотношений целесообраз-
но учитывать следующие рекомендации.
Преобразования над аналоговыми сигналами выполняются в
течение всего времени действия алгоритма. Преобразования дис-
кретных и цифровых величин выполняются в течение ограничен-
ного времени, а их результаты сохраняются на выходе преобразо-
вателей в течение времени, необходимого для последующих пре-
образований. Если необходимо оставить неизменным какой-либо
сигнал в течение определенного времени, то могут быть исполь-
зованы обозначения начала и окончания его действия: 1(7*)...
...1(7*), Ф(Ф*) ...Ф(Ф*) и т. п.
Если система имеет несколько ступеней иерархии, то на каж-
дой из ступеней целесообразно ввести свою индексацию сигналов.
Сигналы, связанные с определенными блоками, могут при необхо-
димости иметь индексы, соответствующие номеру блока. Сигналы,
формируемые блоком управления, желательно отмечать индек-
сом 0 (1о, Фо, ®о, фо)- Условные обозначения СЛСА сведены в
табл. Е2.
Таблица 1.2. Условные обозначения содержательных
логических схем алгоритмов
Содержание Обозначение Содержание Обозначение
Символы Преобразование сигналов Параллельное преобразо- вание (И) Выполнение любого пре- образования (ИЛИ) Перенос СЛСА Продолжение СЛСА Объединение преобразо- ваний Сокращенное обозначение Расшифровка или изме- нение содержания Передача импульсного сиг- нала Выполнение алгоритма программным путем Перенос выполнения алго- ритма / II 1 X (•> Начало и окончание дей- ствия операторов (раз- мещается над опера- тором) Отрицание, невыполнение оператора (над опера- тором) Информационные опера- торы (см. табл. 1.1) Служебные операторы Адрес Субадрес Время Режим работы, диапазон Статус, состояние Логические операторы Командные операторы Начать Завершить Записать Выдать на устройство индикации (-) 1(7*) Ad (А/*) SbAd(SMd*) Т(Г) L(A*) ?(?*) <о(<о*) Ф(Ф*) ф(В) ф(Е) ®(W) Ф(Ю
О преобразованиях СЛСА
Ниже приводится несколько общих соображений о преобразо-
ваниях VjvKZxx.
Возможно выполнение однородных операций измерительных
преобразовании параллельно (одновременно) [I,(7*) Ц...Ц1;(7*)||...
• • ЛЕг (7 ) ] и последовательно Е(7*) ...14 (7*) ... 1п (7*) во време-
ни. 1от или инои вариант СЛСА должен выбираться в результа-
те анализа времени преобразования и сложности структуры и
предъявляемых в этом отношении требований к системе.
Выполнение одинаковых преобразований из параллельных ка-
налов может быть выделено и произведено последовательно. На-
пример, СЛСА [ЦхО I(x!/Axi)|| ... ||I(Xi) I (хг/Лх,) |l.. ,||I(xn) X
Xi (xnlkxn) ]|_Ф(i: = t-J-1) I (Xlkxi) <й (i—n) . может быть пре-
образована к следующему виду:
[I(Xj) II... Ill (Xi) 11... ||I(xn) J L$(i: = H-1)X
I(Xi/kXi) (£>(i = n)“| . . .
Целесообразность такого выделения определяется в результа-
те анализа в первую очередь метрологических характеристик.
Одинаковые преобразования в последовательной цепи можно
выполнять только один раз: например, СЛСА |_O(i: = i-f-l)X
X[I(S:Di) I(S:Dj)] ®(i=n)~|... может быть преобразована
к виду:
|_Ф(i: = i+1) I(S:Dt) ®(ii=n)~|I (S:Dj),
Для частей СЛСА, содержащих большое количество однотип-
ных операций и логических условий, в целях их минимизации мо-
жет быть использован формальный аппарат преобразования логи-
ческих схем алгоритмов и т. п.
Варианты СЛСА одной и той же ИИС могут различаться сте-
пенью детализации (от объединения сложных преобразований
до совокупности простых операций), соотношением объемов ана-
логовой и цифровой частей, объемами аппаратной и программ-
ной реализаций, местом размещения канала связи в системе, по-
следовательностью выполнения операций преобразования (парал-
лельное, последовательное), применением стандартных или спе-
циализированных интерфейсов и т. п.
Вариант СЛСА системы должен выбираться на основании со-
поставления результатов анализа с предъявляемыми требова-
ниями.
Важно отметить, что при анализе погрешностей измерения
должны учитываться погрешности информационных операций
преобразования, а при анализе времени измерения должно учи-
тываться также время выполнения всех служебных и информа-
ционных операторов. Следует обратить внимание на необходи-
мость учета совместного (совмещенного во времени) выполнения
преобразований аналоговых сигналов и раздельного во времени
выполнения операций над импульсными и цифровыми сигналами.
В первом случае следует применять известные методы реше-
ния дифференциальных уравнений, а во 'втором можно ограни-
читься суммированием времен выполнения операций дискретных
и цифровых преобразований (см. гл. 21).
Глава 2
КЛАССИФИКАЦИЯ ИИС
Классификация ИИС может оказать помощь в установлении
терминологии, касающейся ИИС, и в систематизации обширного
материала по принципам построения ИИС.
В классификации ИИС должны быть отражены прежде все-
го вид входных величин и выходной информации, а также прин-
ципы построения систем.
При выборе классификационных признаков ИИС целесооб-
разно отвлечься от многочисленных особенностей, определяемых
узким назначением систем и их конструктивным исполнением, и
сосредоточиться на наиболее общих, системных отличительных
особенностях. В то же время число классификационных призна-
ков должно быть ограниченным, но достаточным для характери-
стики основных разновидностей ИИС.
Необходимо отметить, что, несмотря на важность знания мет-
рологических характеристик ИИС, употребление их в качестве
классификационных признаков связано с существенными трудно-
стями. Действительно, все метрологические характеристики (по-
грешность, быстродействие и др.) являются количественными.
В пределах диапазона действия той или иной характеристики
можно выделить ряд интервалов. Однако сопоставление ИИС по
их месту в такой системе признаков (в особенности по бинарно-
му принципу) в общем случае весьма условно. В самом деле, по-
грешность ±0,5%. при лабораторных условиях работы системы
можно считать относительно большой по сравнению с той же по-
грешностью у системы, работающей в тяжелых эксплуатационных
условиях. Видимо, сопоставление ИИС по количественным харак-
теристикам эффективно только для ИИС с одинаковым, сравни-
тельно узким функциональным назначением.
Предлагаемая классификация построена по принципу разде-
ления области, характеризуемой каждым выбранным признаком,
на две непересекающиеся подобласти.
Предполагается, что основные варианты бинарного вида при
классификации реальных систем могут дополняться их комбина-
циями. Так, например, реально существуют ИИС не только с по-
следовательным или параллельным, но и с параллельно-последо-
*вательным выполнением операций получения информации.
2.1. РАЗНОВИДНОСТИ ВХОДНЫХ ВЕЛИЧИН
На входы ИИС может поступать большое количество одно-
родных или разнородных по физической природе величин (меха-
нических, электрических, тепловых и др.) и сопутствующих им
влияющих величин (помех). Естественно, учет физических свойств
входных величин и их количественных характеристик имеет боль-
шое значение при создании и использовании ИИС. Однако в об-
щей классификации ИИС, как уже говорилось, целесообразно со-
средоточить внимание на особенностях исследуемых величин, опре-
деляющих принцип действия ИИС с точки зрения системотехники.
Классификация входных величин по таким признакам приве-
дена в табл. 2.1.
Входные величины характеризуют исходный «материал», по-
ступающий в ИИС, и, следовательно, в определенной мере позво-
ляют определить, какие оценки могут быть получены при нали-
чии этого «материала».
Таблица 2.1. Классификация входных величин (сигналов)
Классификационный признак
Клас сы
Количество величин
Поведение во времени
Расположение в простран-
стве
Характер величин
Энергетический признак
Взаимосвязь помех с вход-
ными величинами
i = 1 Неизменное Сосредоточенное в точке Непрерывный Активные Независимые помехи 1Д--2 Изменяющееся Распределенное по про- странству Дискретный Пассивные Помехи, связанные с входными величинами
Необходимо дать некоторые пояснения к классификационным
признакам входных величин.
Количество величин i определяется суммой всех (в том числе
однородных) величин. При t^2 входные величины могут быть
как независимыми, так и взаимосвязанными. Заметим, что взаим-
ная связь между исследуемыми величинами может быть весьма
разнообразной.
Входные величины могут изменяться во времени и быть рас-
пределенными в пространстве. В этих случаях следует говорить
об исследуемых процессах, временных или пространственных функ-
циях.
Под активными подразумеваются величины, способные оказы-
вать энергетические воздействия на входные устройства системы.
К ним, например, относятся электрический ток и напряжение,
ионизирующие, световые, тепловые излучения, механические си-
лы, давления и т. д.
Пассивны такие величины, как сопротивления электрических
цепей, механические сопротивления, твердость, жесткость и т. п.
В табл. 2.1 речь идет о внешних по отношению к ИИС поме-
хах. Часто они неотделимы от входных величин, так как физиче-
ски вызываются теми же явлениями. Разграничение их с изучае-
мыми величинами во многих случаях связано со значительными
трудностями. Помехи могут характеризоваться теми же признака-
ми, что и измеряемые величины; здесь же они лишь разделяются
на независимые от входных величин и с ними связанные.
Первые три классификационных признака позволяют подойти
к ориентировочному разделению областей использования различ-
ной степени сложности технических средств измерительной ин-
формационной техники (ИИТ).
В табл. 2.2 приведены основные разновидности входных ве-
личин, характеризующиеся их количеством i и аргументами (/ —
Таблица 2.2. Основные разновидности входных величии
Сосредоточенные и неизмен- ные Изменяющиеся во времени Распределенные по про- странству
q <7(0 <7(0
<7 (ЛО
{?ih=i,2 п 2 {#t (0}г=1,2, ... , и» 2 {<7; (0)1=1,2,..., п>2
{<71 (0 0)1 = 1,2, ..., П^2
время, s — пространственная координата). Заметим, что входные
величины могут быть дискретными: qi(tj, se), где 1 = 1, 2,..., п,
1=0, 1,..., N, 1=1, 2, 3.
Согласно этой таблице можно выделить характерные области-
измерение одной величины (t=l) реализуется, как правило, при-
борами; измерение множества величин {qi(t, s)}, i^2, в большин-
стве случаев реализуется ИИС.
Дальнейшая детализация области использования ИИС может
быть проведена при рассмотрении вида выходной информации и
других классификационных признаков.
2.2. РАЗДЕЛЕНИЕ ИИС ПО ВИДУ ВЫХОДНОЙ ИНФОРМАЦИИ
Функциональное назначение определяет вид выходной инфор-
мации ИИС.
По виду выходной информации ИИС прежде всего могут быть
разделены на измерительные системы, на выходе которых полу-
чается измерительная информация (именованные числа, их отно-
шения), и на системы, которые выдают количественные суждения
о состоянии исследуемых объектов, — контрольные, диагностиче-
ские, распознающие.
Остановимся на основных разновидностях измерительных си-
стем. В метрологии и измерительной технике принято считать, что
процесс измерительного эксперимента обязательно включает из-
мерительные и, как правило, вычислительные процедуры. Под из-
мерительными процедурами понимаются в первую очередь вос-
приятие входных величин и преобразование измерительных сигна-
лов, сравнение непрерывных сигналов с мерами и получение
цифровых значений этих сигналов. К вычислительным процеду-
рам относятся математические преобразования аналоговых, дис-
кретных и цифровых сигналов в процессе измерения.
Здесь уместно отметить, что специалисты в области ПИТ
большое внимание уделяли и уделяют созданию новых измери-
тельных средств, в которых совместно выполнялись бы операции
измерения и обработки информации. По существу ваттметры,,
счетчики электрической энергии, мостовые измерительные устрой-
ства, компенсаторы переменного тока, цифровые вольтметры пе-
ременного тока и т. п. являются устройствами, в которых опера-
ции измерения и обработки выполняются неразрывно. Больше
того, если проанализировать работу любого, даже простейшего
средства измерения, то в нем всегда можно найти операции обра-
ботки. Так, например, электроизмерительные магнитоэлектриче-
ские приборы, как правило, выполняют операции фильтрации и
усреднения динамических составляющих, имеющихся в измеряе-
мой величине или накладывающихся на нее.
В настоящее время в состав ИС часто входят микропроцессо-
ры, малые ЭВМ. и другие вычислительные устройства; в некото-
рых ИС измерительные и вычислительные процедуры выполня-
ются одновременно и неразрывно (см. мультиплицированные ИС,
аналого-цифровые коррелометры, функциональные аналого-цифро-
вые преобразователи и т. п.).
Однако если не ограничить объем и характер применяемых
вычислительных процедур, то область действия измерительных
систем может быть неоправданно широка.
В работе К. Б. Карандеева («Электричество», 1949) отмечает-
ся, что «измерение начинается с установления цели измерения
(искомого параметра) и оканчивается получением результата,
включая в себя, в качестве составной части, измерительный про-
цесс. ..». Под целью измерения при этом понимается физическая
величина, количественная оценка которой в конечном счете явля-
ется задачей всего исследования.
Остановимся на определении основных целей измерения.
Во-первых, измерение может быть направлено на нахождение
значений входных величин (длины, массы, температуры, тока и
т. п.).
В этом случае, если учитывать характер взаимосвязи между
входными величинами, то можно выделить ИС, предназначенные
для измерения следующих величин:
независимых входных величин X={[xi], [х2],..., [хп]}. Заме-
тим, что в этом случае процесс измерения заключается в нахо-
ждении цифровых значений этих величин;
входных величин (?i, qz, ,Цп), непосредственное раз-
дельное измерение которых невозможно.
Во-'вторых, могут быть установлены цели измерения, связан-
ные с измерением следующих физических величин:
функций от входных величин f (X) или f (DX) .
Пример-: ИС, предназначенные для измерения мощности,
скорости, удельного веса;
параметров зависимости {Д[Х(Л)]} входных величин Х(Л) =
х2(К2),... ,хп(?.п) от заданного аргумента Л=Л[,
2.2, • • • > hn-
Пр им ер: ИС, предназначенные для измерения коэффициен-
тов корреляции, спектральной плотности мощности, температур-
ных коэффициентов сопротивления и т. п.
В соответствии со сказанным целесообразно выделить ИС
независимых входных величин, ИС зависимых 'величин, ИС функ-
ций от входных величин и ИС параметров зависимостей входных
величин. Среди последних большую роль играют статистические-
ИС.
Здесь перечислены названия классов ИС, которые приняты да-
лее при изложении материала по ИС. Каждая же конкретная ИС
в названии может содержать цель измерения, например система
для измерения температур, напряжений, корреляционная или
спектральная система.
Выше были рассмотрены ИС, которые являются основной раз-
новидностью ИИС и, как правило, входят в любой из них.
Рассмотрение же контрольных, диагностических и распознаю-
щих систем производится в ч. 4Б.
2.3. КЛАССИФИКАЦИЯ ИИС ПО ПРИНЦИПАМ ПОСТРОЕНИЯ.
РОЛЬ ЭВМ
В обобщенной структурно-функциональной схеме ИИС (см,
рис. 1.1) показаны основные блоки ИИС и их взаимосвязь. Дале-
ко не всегда необходимо использовать весь приведенный на рис. 1.1
состав блоков в конкретных системах. Нужно также иметь в виду,
что для выполнения одних и тех же функций могут быть созданы-
системы, существенно различающиеся по структуре и алгоритму ра-
боты.
Число возможных структурных вариантов систем при указан-
ном на рис. 1.1 количестве функциональных устройств будет очень
большим. Классифицировать это многообразие возможных струк-
тур для ИИС в целом весьма затруднительно. Видимо, рациональ-
но рассмотреть структуры измерительных, контрольных и других
систем отдельно, в соответствующих частях книги, выделив основ-
ные функциональные элементы этих систем. В общей же класси-
фикации ИИС целесообразно остановиться на наиболее общих
принципах их построения (табл. 2.3).
Сделаем краткие пояснения к классификационным признакам--
этой таблицы.
Наличие специального канала связи, обеспечивающего передачу
качественной информации от объекта, находящегося на большом
расстоянии, приводит к необходимости решения ряда специфичес-
ких вопросов. В соответствии с этим нужно выделить специальный
Таблица 2.3. Классификация принципов построения ИИС
Классификационный признак Классы
Наличие специального канала связи Порядок выполнения операций получе- ния информации Агрегатирование состава системы Использование стандартного интер- фейса Наличие программно-управляемых вы- числительных устройств (микропроцессо- ры, малые ЭВМ и пр.) Наличие контуров информационной об- ратной связи Изменение скоростей получения и вы- дачи информации Сигналы, используемые в ИИС Структурная и информационная избы- точность Адаптация к исследуемым величинам Отсутствует Последователь- ный Агрегатирован- НЫЙ Не используется Отсутствуют Разомкнутые системы Без изменения (в реальном вре- мени) Аналоговые Безызбыточные системы Неадаптивные системы Имеется Параллельный Неагрегатирован- ный Используется Имеются Компенсацион- ные (одно- и много- контурные системы) С изменением скоростей Кодоимпульсные Избыточные системы Адаптивные системы
класс телеинформационно-измерительных систем (ТИИС)—ИИС
дальнего действия.
Выполнение последовательно или параллельно операций полу-
чения информации во многом определяет количество элементов
системы, быстродействие, надежность и т. п. Измерительная ин-
формационная система может состоять из частей, в которых после-
довательность операций получения или преобразования информа-
ций может быть различной. Естественно, в системе для перехода
от параллельного к последовательному выполнению преобразова-
ний информации и наоборот должны использоваться соответствую-
щие согласующие устройства.
Использование пригодных для совместной работы функцио-
нальных блоков агрегатных комплексов ГСП и стандартных циф-
ровых интерфейсов существенно определяет многие характеристи-
ки ИИС. Более подробно это рассматривается в гл. 3 и 5.
Наличие в составе программно-управляемых цифровых вычис-
лительных средств (микропроцессоров, малых ЭВМ. и т. п.) явля-
ется очень важным классификационным признаком. Система, со-
держащая такие средства, обладает определенной универсаль-
ностью, так как при соответствующем программном обеспечении
может (при ограниченном быстродействии) выполнять функции
систем различного назначения. Измерительные информационные
системы, содержащие такие вычислительные средства, называют
измерительно-вычислительными системами (ИВС),
а ИВС, создаваемые потребителями из стандартных устройств для
решения локальных экспериментальных задач,—л скальными
ИВС (ЛИВС).
В ИВС можно выделить универсальное ядро, в которое входят
часть аналоговых преобразователей (например, коммутаторы) г
аналого-цифровые преобразователи, часть цифровых преобразова-
телей (цифровые коммутаторы и устройства памяти), ЭВМ, набор
устройств отображения и регистрации информации, средства ин-
терфейса и устройства, формирующие воздействия на исследуемый
объект. Это ядро цифровых ИИС получило название измери-
тельно-вычислительных комплексов (ИВК). В Совет-
ском Союзе организован промышленный выпуск нескольких раз-
новидностей ИВК (см. гл. 9).
Измерительно-вычислительные системы при известных условиях
могут создаваться на базе управляющих вычислитель-
ных машин (УВМ) и комплексов (УВК), имеющих в своем:
составе ЭВМ (см. гл. 14).
В некоторых частных случаях (например, при измерении
электрических величин) технические средства ИВС и ИВК могут
совпадать, а отличие между ними будет заключаться лишь в про-
граммном обеспечении.
Наличие контура обратной информационной связи позволяет
организовать компенсационные методы измерения, позволяющие
получить более высокие точностные характеристики.
Изменение скоростей получения и выдачи информации в ИИС
возможно главным образом при использовании запоминающих
устройств (ЗУ). Оно может быть, например, применено для быст-
рого запоминания значений исследуемых величин и медленной вы-
дачи информации и наоборот.
Введение адаптации ИИС к исследуемым величинам, структур-
ной и информационной избыточности в целях повышения надеж-
ности, помехоустойчивости, точности, гибкости работы и т. п. ти-
пично для системотехники. Можно предполагать, что дальнейшее
развитие ИИС во многом будет зависеть от решения этих вопро-
сов.
Приведенная классификация используется и при необходимос-
ти конкретизируется в остальных частях книги.
Часть вторая
ТЕХНИЧЕСКИЕ СРЕДСТВА ИИС
(системное оборудование)
Глава 3
АГРЕГАТНЫЙ КОМПЛЕКС СРЕДСТВ ЭЛЕКТРОИЗМЕРИТЕЛЬНОЙ
ТЕХНИКИ ГОСУДАРСТВЕННОЙ СИСТЕМЫ
ПРОМЫШЛЕННЫХ ПРИБОРОВ И СРЕДСТВ АВТОМАТИЗАЦИИ
3.1. ГОСУДАРСТВЕННАЯ СИСТЕМА ПРИБОРОВ. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Принципиальные положения, лежащие в основе государствен-
ной системы приборов (ГСП), отражают техническую политику,
направленную на удовлетворение основных потребностей народно-
го хозяйства в современных технических средствах автоматизации
[3.1]. В настоящее время ГСП ориентируется на обеспечение по-
требностей не только промышленности, но и науки, медицины и др.
Работы по созданию ГСП в СССР были начаты в конце 50-х
годов. Основной результат этой работы характеризуется тем, что
в составе ГСП в настоящее время выпускается более 2000 типов
промышленных приборов и средств автоматизации, большое коли-
чество АСУ в промышленности выполнено на базе технических
средств ГСП, создана техническая и методологическая база (в
-области ГСП выпущено более 200 государственных стандартов,
законодательно закрепивших основные положения ГСП), необхо-
димая для дальнейшего развития автоматизированных систем
управления.
Основная идея ГСП заключается в том, что при построении
автоматизированных систем управления используются типовые
.алгоритмы измерения, контроля, диагностики, управления, реали-
зуемые на ограниченном базисе технических средств, которые мо-
гут компоноваться методом агрегатирования.
Применение принципа агрегатирования в ГСП предусматрива-
ет создание сложных устройств из более простых унифицирован-
ных изделий методом их наращивания и стыковки. Важное преи-
мущество агрегатирования связано с возможностью совершенство-
вания отдельных изделий ГСП без полного их обновления.
Состав типов устройств ГСП и их характеристики определяют-
ся параметрическими рядами изделий. При выявлении таких рядов
проводились унификация и стандартизация входящих в них изде-
лий. Эта работа привела к существенному уменьшению трудоем-
кости изготовления изделий.
ГСП—совокупность изделий, предназначенных для получения,
обработки и использования информации, обеспечивающих инфор-
мационное (метрологическое и функциональное), энергетическое и
конструктивное сопряжение изделий в автоматизированных систе-
мах управления и экспериментальных исследований, а также эко-
номически целесообразные точность, надежность и долговечность.
Для реализации информационной, конструктивной и энергетичес-
кой совместимости изделий ГСП разработано соответствующее
методическое, математическое и метрологическое обеспечение. Под
методическим обеспечением подразумеваются главным образом
рекомендации по применению ГСП для построения и использова-
ния систем управления. Математическое обеспечение совершенно
необходимо для систем с программным управлением, включающих
ЭВМ. Метрологическое обеспечение должно служить достижению
и гарантированному поддержанию уровня метрологических харак-
теристик как изделий ГСП, так и систем, созданных на их основе.
Все основные технические средства получения и обработки ин-
формации ГСП создаются в составе отличающихся по функцио-
нальному назначению, области применения или по принципу дей-
ствия агрегатных комплексов.
Агрегатные комплексы объединяют взаимосвязанные между
собой изделия по их назначению, принципу действия, основным
техническим характеристикам, конструкции и технологической ба-
зе. Совокупность этих изделий должна обеспечивать выполнение
задач, стоящих перед комплексами. В ГСП входят и выпускаются
промышленностью более 20 агрегатных комплексов. Принципы
организации, в значительной мере конструктивно-элементная база
и нормативная документация являются общими для всех агрегат-
ных комплексов. Это составляет основу для совместного использо-
вания изделий различных агрегатных комплексов.
Государственная система приборов—развивающаяся система.
В ней постоянно происходит уточнение состава агрегатных комп-
лексов, элементной базы, вопросов совместимости изделий, введе-
ние новых законодательных документов и т. п. Большинство агре-
гатных комплексов подвергалось за время существования коренной
модификации, и можно предполагать их дальнейшие изменения.
К агрегатным комплексам широкого применения, изделия которых
могут быть использованы для создания ИИС, входящих как в со-
став АСУ технологическими прогрессами, так и в автоматизиро-
ванные системы научных исследований и комплексных испытаний
сложных объектов, относятся в первую очередь агрегатные комп-
лексы^ средств электроизмерительной техники (АСЭТ), телемехани-
ческой техники (АСТТ), вычислительной техники (АСВТ), комп-
лекс технических средств локальных информационно-управляюгцих
систем (КТС ЛИУС).
В настоящее время Центральный научно-исследовательский
институт технико-экономической информации приборострое-
ния (ЦНИИТЭИ приборостроения) издает каталоги изделий I СП,
которые могут быть использованы при проектировании ИИС. Да-
лее рассматриваются лишь основные сведения о составе и особен-
ностях построения АСЭТ—агрегатного комплекса средств электро-
измерительной техники, одна из главных областей действия кото-
рого связана с созданием ИВК и ИИС.
В 1961 г. было принято решение об организации совместной
работы стран—членов Совета Экономической Взаимопомощи по со-
зданию Международной универсальной системы автоматического
контроля, регулирования и управления (УРС). Главной целью
создания УРС было обеспечение стран социализма техническими
средствами автоматизации.
Работы по УРС ведутся странами — членами СЭВ согласован-
но и в тесном сотрудничестве.
В ГДР основные положения УРС реализованы в универсальной
системе приборов и устройств для сбора, передачи, обработки и
использования информации при автоматизации технологических
процессов (УРСАМАТ).
На основе устройств УРСАМАТ созданы разнообразные систе-
мы автоматического контроля и регулирования, которые находят
широкое применение в различных отраслях народного хозяйства
ГДР. Опыт использования системы УРСАМАТ в ГДР показал ее
высокую эффективность, выражающуюся в резком сокращении
сроков разработки установок для автоматизации производственных
процессов, снижении примерно на 30% расходов на обслуживание
и ремонт и т. п.
3.2. АГРЕГАТНЫЙ комплекс средств электроизмерительной
ТЕХНИКИ
Агрегатный комплекс АСЭТ ГСП объединяет устройства сбора
и преобразования измерительной информации (первичные и уни-
фицирующие преобразователи электрических и магнитных вели-
чин, усилители, коммутаторы, аналого-цифровые и цифро-аналого-
вые преобразователи и т. п.), электроизмерительные приборы,
устройства отображения информации, измерительно-вычислитель-
ные комплексы универсального и специального назначения.
Головной отраслевой организацией по агрегатному комплексу
АСЭТ является Всесоюзный научно-исследовательский институт
электроизмерительных приборов (ВНИИЭП) Всесоюзного произ-
водственного объединения «Союзэлектроприбор» Минприбора
СССР.
По существу, большая часть электроприборостроительной про-
мышленности Советского Союза производит изделия АСЭТ ГСП.
За относительно короткий срок были реализованы АСЭТ первой и
второй очереди [3.2], разработаны и приводятся в жизнь основ-
ные положения АСЭТ третьей очереди (АСЭТ-Ш). В настоящее
время 75% всех типов электроизмерительных устройств выпуска-
ется с применением электронной техники, обеспечивается изморе-
ние 80 электрических величин. В рамках АСЭТ-I и АСЭТ-П созда-
но два поколения более 500 типов функционально и конструктивно
законченных изделий, был принят ведомственный интерфейс ЕИ-1;
элементная база ограничивалась микроэлектронными схемами с
малой и средней степенями интеграции [3.2]. Возможность исполь-
зования БИС, микропроцессорных комплектов и микро-ЭВМ, объе-
динения функциональных блоков с помощью стандартных прибор-
ного интерфейса и интерфейса КАМАК (см. гл. 5), серьезное раз-
витие устройств отображения информации—все это привело к не-
обходимости разработки и реализации АСЭТ-Ш. В АСЭТ-Ш со-
зданию системных средств, позволяющих более полно использо-
вать принцип агрегатирования и комплектовать измерительные
комплексы и завершенные системы из изделий АСЭТ-Ш, отводит-
ся центральное место [3.3].
Важная особенность современных ИИС связана с их програм-
мно-алгоритмическим обеспечением. В АСЭТ-Ш расширяется ра-
бота в этом направлении.
Многие изделия АСЭТ-Ш строятся с использованием микро-
процессорных комплектов и БИС, что может позволить создавать
на их базе двухуровневые системы с децентрализованным управле-
нием работой первой ступени (см. гл. 5).
В АСЭТ-Ш предусматривается введение системы унифициро-
ванных типовых конструктивов (УТК-2), обеспечивающих конст-
руктивную совместимость изделий АСЭТ.
Информационная совместимость изделий АСЭТ-Ш обеспечива-
ется применением унифицированных сигналов, соответствующих
международным стандартам, а также стандартных интерфейсов.
Эксплуатационная совместимость изделий АСЭТ-Ш определена
ГОСТ 12997-76 и ГОСТ 22261-76 на общие технические требования
к изделиям и ГОСТ 13216-74 на их надежность.
Разработаны системные метрологические характеристики,
определяющие метрологическую совместимость изделий АСЭТ,
создается специальная метрологическая аппаратура (см. гл. 22).
Структура АСЭТ-Ш [3.3] представлена на рис. 3.1—3.3 (где
звездочкой отмечены блоки и виды преобразований, которые вы-
полняются в интерфейсе стандарта КАМАК).
В АСЭТ-Ш предусматривается изготовление функциональных
блоков в исполнении как приборном, т. е. в завершенном конст-
руктивно и энергетически, так и модульном, позволяющем выпол-
нять назначенные функции только при объединении с соответствую-
щими блоками (питания, управления). Приборные функциональ-
ные блоки могут объединяться с помощью приборного интерфейса,
а модульные—интерфейса стандарта КАМАК.
Расширяются разработка и выпуск в АСЭТ-Ш функциональ-
ных блоков, которые выполняют заданные функции программным
способом. Такие функциональные блоки содержат, как правило, в
своем составе микропроцессоры и являются разновидностью изме-
рительно-вычислительных средств.
Измерительно-вычислительные средства позволяют существен-
но усилить функциональные возможности изделий ГСП, увеличить
удельный вес сложных алгоритмов измерения, позволяющих улуч-
шить метрологические характеристики (путем автокоррекции, са-
мокалибровки и т. д.), и получать количественные оценки зависи-
мостей и функций от входных величин. При анализе функциониро-
вания ИВС особо обращено внимание на участие процессоров в
реализации измерительных процедур, в получении результатов
измерений.
Для построения широкого класса систем необходимы унифици-
рующие преобразователи сигналов датчиков неэлектрических вели-
чин, преобразователи параметров электрической энергии и другие
аналоговые функциональные устройства. Состав таких устройств
в АСЭТ-Ш представлен на рис. 3.1. В этом комплексе предусмот-
рена довольно обширная номенклатура аналоговых измерительных
преобразователей с улучшенными характеристиками. В частности,
предполагается, что погрешность измерительных преобразователей
будет доведена до ±0,2% при постоянной времени до 0,1—0,5 с.
Предусматривается, что групповые унифицирующие преобразо-
ватели (до 30 типов) для тензометрических мостов, термопар и
термометров сопротивления будут иметь класс точности 0,2—1,0 и
время установления показаний примерно 0,1—1,0 с.
Измерительные коммутаторы (рис. 3.2) составляют около 15—
20% объема всего оборудования ИВК и ИИС.
Серийный коммутатор Ф7078 с узлом приборного интерфейса
имеет основную погрешность коммутации ±0,001 и ±0,05%., вре-
мя коммутации 5 мс и 5 мкс соответственно на контактных и бес-
контактных ключах, число коммутируемых напряжений (10 В) от
100 до 1000.
Коммутатор Ф7076 имеет примерно такие же погрешности и
быстродействие. Количество коммутируемых напряжений колеб-
лется в пределах от 32 до 16000, может быть организована матрич-
ная структура, содержащая до десяти матриц 10X10. Наработка
на отказ составляет 5000 ч.
Намечается выпуск унифицированного модульного коммутато-
ра с микропроцессорным управлением.
Развитие аналого-цифровых преобразователей (АЦП) связано
с дальнейшим улучшением технических характеристик: для
устройств поразрядного уравновешивания—14 разрядов, класс до
0,02—0,005, время измерения 40—100 мкс; для преобразователей
с аналоговым ЗУ—8 разрядов, класс 0,5, время измерения 0,05 мкс
либо класс 0,2, время измерения 3 мкс.
В АСЭТ-Ш предусматривается создание аналого-цифровых из-
мерительных блоков, объединяющих аналоговые коммутаторы,
АЦП и микропроцессоры. Нужно подчеркнуть, что, видимо, раз-
работка и выпуск аналого-цифровых измерительных блоков, обла-
дающих различными характеристиками, должны занять заметное
место в продукции АСЭТ.
J=,J~
- -F-, V>
R-> Кизоп
J=/f L/=
f/u= J= j_
u~
f
Рис. 3.1. Аналоговые функциональные устройства АСЭТ-Ш
U~, f ) Ц>, Ami Ф) В
R,L,C R,L,C
/и^ч J-j /J2.
Рис. 3.2. Аналого-цифровые электроизмерительные средства АСЭТ-Ш
Цифро-аналоговые преобразователи (ЦАП) необходимы как
для создания АЦП, так и для выполнения автоматических пове-
рок. Предусмотрен выпуск ряда таких преобразователей.
Цифровые измерительные приборы (ЦИП) представляют зна-
чительную часть изделий АСЭТ-Ш. Следует отметить, что пре-
дусмотрено создание ряда ЦИП с микропроцессорами, в том чис-
ле комбинированных.
Аналоговые устройства измерения (рис. 3.3,а) необходимы для
промышленных ИИС. Они устанавливаются на щитах и пультах
управления. Помимо традиционных направлений улучшения конст-
руктивного оформления таких устройств здесь намечена работа по
применению оптоэлектронных приборов с газоразрядными, свето-
диодными, жидкокристаллическими шкалами. Предполагается к
1990 г. заменить ими 60—70% выпуска стрелочных приборов.
Готовятся к выпуску новые самопишущие многоканальные при-
боры, в том числе двухкоординатный прибор Н307, имеющий раз-
меры поля записи 200X300 мм и погрешность ±0,5%.
В номенклатуру АСЭТ включены знакоцифровые катодолюми-
несцентные индикаторы Ф7097, содержащие 16 табло на 44 знако-
места, индикатор Ф7099, имеющий 16 каналов, шкалу на 50 деле-
'й) 5)
Рис. 3.3. Аналоговые устройства измерения (а) и представления инфор-
мации (б)
ний и цифровое табло на 6 знакомест, малогабаритный дисплей
для отображения гистограмм и результатов допускового контроля,
устройства отображения графиков, гистограмм и текста, содержа-
щих до 768 символов в кадре и 7 цветов, и другие изделия
(рис. 3.3, б).
Регистрирующее устройство на термочувствительной бумаге
Щ68401 отличается высокой скоростью печати (180 строк/мин)
при 64 разрядах в строке, цифровой магнитный регистратор—ско-
ростью записи 2 кбайт/с при записи байта в строке и продольной
плотностью записи 100 бит/мм.
В АСЭТ-Ш также предусматривается создание микроэлек-
тронных интегральных микросхем для электроизмерительной тех-
ники (пленочных резистивных схем, операционных усилителей,
стабилизаторов напряжения, АЦП, программируемых системных
устройств и т. п.).
В комплекс включены средства управления и связи между
функциональными блоками систем. К ним относятся блоки управ-
ления — ручные и автоматические (с микро-ЭВМ), групповые ин-
терфейсные узлы, расширители шин, мультиплексоры, таймеры и
т. п.
В состав АСЭТ-Ш входят ИВК, которые могут создаваться из
системных средств как в приборном, так и в функционально-мо-
дульном оформлении, налого-цифровые измерительные олоки и
ИВК будут рассмотрены в гл. 8 и 9.
.Завершая краткое описание агрегатного комплекса АСЭТ-Ш,
следует отметить, что для его дальнейшего развития нужна уско-
ренная методологическая разработка вопросов совместного выпол-
нения в изделиях комплекса измерительных и вычислительных
процедур, усиленная работа по созданию интеллектуального про-
граммного обеспечения для средств измерения с микропроцессо-
рами и ЭВМ, а также разработка изделий, основанных на исполь-
зовании больших и сверхбольших интегральных микросхем.
Глава 4
УСТРОЙСТВА ОТОБРАЖЕНИЯ И ХРАНЕНИЯ
ИНФОРМАЦИИ В ИИС
Отображение (индикация, сигнализация) — визуальное представление чело-
веку-оператору количественной информации, необходимой для его общения
с ИИС.
Регистрация количественной (измерительной, контрольной, служебной)
информации связана с записью и долговременным хранением этой информации
в форме, пригодной для непосредственного восприятия ее человеком-оператором.
Устройства оперативной памяти используются в ИИС для временного, опе-
ративного накопления информации.
Устройства отображения и хранения информации являются системным обо-
рудованием, в значительной степени определяющим качество ИИС. Поэтому це-
лесообразно сконцентрировать данные по основным типам этих устройств с уче-
том специфики их использования в ИИС, проявляющейся в массовости и много,
мерности информации, наличии ЭВМ и программируемых устройств.
4.1. ИНДИКАЦИЯ В ИИС
Индикация (визуализация) непрерывных и дискретных величин связана с их
преобразованием в линейные или угловые перемещения, изменения площади или
других параметров, удобных для зрительного восприятия [4.1, 4.2].
Информационные возможности восприятия визуальных аналоговых сигна-
лов можно оценить количеством градаций, которые уверенно различаются опе-
ратором. Приведем грубую оценку информационной возможности для следую-
щих наиболее распространенных форм аналоговых визуально воспринимаемых
сигналов: длина линии — 4—6, площадь — 3—5, ориентирование линий — до 16,
тип линий (сплошные, пунктирные и т. п.) —4-—5, цвет — до 10 градаций. Резко-
повышается информационная возможность восприятия аналоговых сигналов при
введении мер (в виде сеток, штрихов с известными расстояниями между ними
и т. п.), с которыми можно сравнивать аналоговую величину.
Типичным для индикации одной измеряемой величины является использо-
вание линейных и угловых шкал. Для одновременной индикации относительно-
ольшого количества величин в измерительных системах используются малога-
аритные измерительные и контрольно-измерительные стрелочные приборы, ли-
шейные газоразрядные индикаторы, матричные средства индикации, электронно-
лучевые трубки (ЭЛТ) и др.
Инженерно-психофизиологические оценки групповых индикаторов показы-
вают, что они позволяют оператору быстрее воспринимать информацию по
сравнению с представлением тех же величин с помощью индивидуальных шкал
и резко уменьшать размеры пультов и щитов операторов. На рис. 4.1 представ-
лены шкалы групповых индикаторов для приборов типа АСК (а), линейных
газоразрядных индикаторов (б), матричных индикаторных устройств (в) и
ЭЛТ (г—е).
Рис. 4.1. Типы шкал групповых индикаторов измерительной информации:
•а — шкалы групповых показывающих приборов типа АСК; б — газоразрядные индикаторы;
•s — матричные индикаторы; г—е •— индикация иа экранах ЭЛТ
В ИИС используются устройства отображения непрерывных сигналов с сим-
волическим представлением реальной обстановки, отражающим, например, поло-
жение движущегося аппарата относительно заданного направления [4.2].
Представляет интерес техника трехмерной индикации, позволяющая воспро-
изводить поведение измеряемых величин в пространстве или наглядно предста-
вить взаимосвязь нескольких величин.
Для построения объемных изображений используются:
вращающееся зеркало с освещением (мгновенным) определенных точек;
прочерчивание и окраска следа в объемном прозрачном составе (например,
пузырьковая камера для визуализации траектории движения частиц).
К устройствам с заранее сформированными знаками относятся оптические
проекционные устройства, световодные индикаторы, газоразрядные индикаторы,
знаковые ЭЛТ типа характрон, содержащие матрицу с трафаретами знаков, и
другие в меньшей степени используемые в ИИС устройства.
К устройствам, в которых производятся синтез и последующая визуализа-
ция знаков, относятся люминесцентные и полупроводниковые многоэлементные
индикаторы ЭЛТ и экраны [4.1, 4.2]. Индицирующие устройства с заранее
сформированными знаками описаны в многочисленной литературе.
Остановимся на широко используемых в современных ИИС универсальных
индикаторах, основанных на точечном описании отображаемых знаков или не-
прерывных величин. Для управления индикацией при этом используется цифро-
вая техника. В качестве универсального индикатора наиболее часто применяется
телевизионная ЭЛТ. Это объясняется в первую очередь высокой эффективностью'
и быстродействием катодолюминофоров, относительной простотой управления
ЭЛТ.
По стандартному телевизионному растру по горизонтали количество раз-
личимых градаций N=500h, где h — половина расстояния между соседними зна-
ками. Если знак отображается 7X5 элементами, то по горизонтали можно раз-
местить до 64 знаков.
Для ЭЛТ с отношением сторон 4/5 и расстоянием между строками 2 h ко-
личество строк равно 32. Следовательно, на ЭЛТ при принятых данных может
быть размещено Q=32-64=2048 зна-
ков. Если принять размер знаков (с
промежутками) 6X3,5 мм, то можно
для размещения 2048 знаков использо-
вать ЭЛТ с размером по диагонали
400. мм.
Чтобы изображение казалось непо-
движным, необходимо производить мно-
Рис. 4.2. Структурная схема экран-
ного пульта (дисплея)
гократную регенерацию знаков (обычно
с частотой 25 или 50 Гц) и использо-
вать люминофоры с послесвечением
в течение 30—40 мс.
Если в памяти хранить состояние
каждого элемента, то необходимо пользоваться ЗУ большой емкости (при при-
веденных данных емкость ЗУ должна быть примерно 10 Кбайт для одного'
кадра).
Уменьшить емкость памяти можно, используя микропрограммы знаков.
Для отображения как аналоговой, так и знаковой информации с помощью
ЭЛТ, для общения оператора с системой широко используются так называемые
экранные пульты-дисплеи. Экранные пульты содержат электронно-лучевые труб-
ки, устройства памяти, генераторы изображений, клавиатуру Кл для ввода
информации и управления работой пульта, включающую также устройство для
изменения положения метки-указателя на экране, светового, ультразвукового или
электронного пера П (рис. 4.2).
Серийно выпускаются экранные пульты для отображения алфавитно-цифро-
вой (например, ЕС-7061, ЕС-7063, «Видеотон-340»), графической одноцветной
(например, ЕС-7064, ЭПГ-СМ) и многоцветной (например, терминал А543-11 СМ)
информации. В них применяются электронно-лучевые трубки различных разме-
ров экрана (часто 250, 430 мм по диагонали), на котором можно разместить
1024, 2048 знаков или 1024X1024 точек. Клавиатура пультов позволяет осущест-
вить ввод букв и цифр, а также до 40 символов и других функциональных зна-
ков (обычно до 50—70 клавиш).
Экранные пульты содержат оперативную буферную память емкостью не-
сколько килобайт. Построение кадра изображения в таких пультах выполняется
за время от 1 до 60 мкс. Изображение на экране регенерируется в большинстве
случаев с частотой 50 Гц.
Большинство экранных пультов рассчитано на работу с ЭВМ на расстоя-
нии, не превышающем 20 м. Однако имеются дисплейные комплексы, объединяю-
щие работу нескольких экранных пультов — терминалов, которые могут разме-
щаться от ЭВМ на расстоянии до нескольких сот метров.
Так называемые интеллектуальные экранные пульты включают в свой со-
став микро-ЭВМ, а также стандартную периферию (накопители информации,
устройства ввода-вывода).
Программное обеспечение экранных пультов обычно позволяет выполнять
^различные режимы отображения (мигание, выделение по яркости и т. п.), до-
кументирования, редактирования и коррекции, изменять масштаб, сдвигать, по-
.ворачивать изображение, вносить дополнительную информацию и т. п.
Экранные пульты позволяют в диалоговом (интерактивном) режиме выпол-
нять графические работы, связанные с компоновкой и вычерчиванием схем, кон-
струкций, представление как статических, так и динамических изображений.
Это позволило открыть новое направление их использования — машинную гра-
фику [4.4].
Рис. 4.3. Вольт-яркостные характери-
стики видеопреобразователей:
1 — светодиоды (2—5 В, 103 А/см2); 2 — лам-
пы накаливания (5—24 В, 10—100 А/см2); 3—
электролюминесцентные пленочные элементы
(20—30 В, 0,3 А/см2); 4 — жидкокристалличе-
_кие элементы (5—30 В, 0,01 А/см2); Б — га-
зоразрядные панели (150—200 В, 0,1 А/см2)
Для оперативного взаимодействия оператора с ИИС должны иметься со-
ответствующие программы [4.1, 4.3].
К универсальным относятся также матричные индикаторы, состоящие из
матрицы видеопреобразователей, обладающих релейными характеристиками и
управляемых независимо друг от друга.
Для точечного видеопреобразования в матричных индикаторах используют-
ся светоизлучающие (лампы накаливания, светодиоды, электролюминесцентные
и т. п.) и светоклапанные (электромеханические, жидкокристаллические и др.)
элементы.
Примерные вольт-яркостные характеристики вндеопреобразователей приве*
дены на рис. 4.3 [4.4]; здесь t/ynp — напряжение управления, В — яркость, вы-
;раженная в относительных единицах. Нелинейным эффектом обладают свето-
диоды, электролюминесцентные пленочные и газоразрядные индикаторы. Для
использования в точечных индикаторах ламп накаливания и жидкокристалличе-
ских преобразователей необходимо ввести дополнительно нелинейные элементы.
'Нужно отметить, что использование светодиодов затруднено в виду большой
плотности тока, а ламп накаливания —• из-за больших постоянных времени (до
секунд).
Основным используемым свойством жидких кристаллов — прозрачных орга-
нических жидкостей — является изменение их оптических свойств (прозрачно-
сти) под воздействием электрических напряжений, тепловых потоков, давлений
и механических сил. Имеются разработки жидких кристаллов, обладающих за-
поминающими свойствами. Так как индикаторы на жидких кристаллах работают
:по принципу отражения света, то чем ярче внешнее освещение, тем лучше видны
индицируемые знаки. Основные недостатки индикаторов на жидких кристаллах
связаны с тем, что для перехода из непрозрачного в прозрачное состояние тре-
буется около сотни миллисекунд. Срок службы при работе на переменном токе
составляет около 10 000 ч.
Промышленностью выпускаются матричные индикаторные устройства на га-
зоразрядных и люминесцентных индикаторных панелях, с цифровым управлением!
и памятью. Количество элементов матричных индикаторов — от 100X100 до.
512X512, частота формирования кадров — до 130 в 1 с.
Имеются разработки трехцветных матричных индикаторов и индикаторов
с несколькими (до 32) управляемыми дискретными градациями яркости эле-
ментов.
Учитывая, что аналоговый и цифровой методы представления измерительной
информации имеют свои преимущества и недостатки, можно предположить, что
в ИИС все большее применение будет иметь смешанное аналого-цифровое пред-
ставление информации. Аналоговая форма представления информации позволяет
в компактном виде отобразить непрерывные величины; цифровое представление
информации может использоваться для измеряемых величин, значения которых
необходимо знать в процессе измерения с повышенной точностью. Матричные
индикаторы с несколькими уровнями градаций яркости могут быть использова-
ны для отображения взаимосвязей между измеряемыми параметрами. Так, на-
пример, отклонения измеряемых параметров от нормальных значений могут ото-
бражаться яркостью свечения элементов Лх; главной диагонали матрицы
A.V] я12Дх2 . . . ЧпК
a21--Vl ^-*2 , • - Я2тД п
Щ^Д-М ^г12ДХ2 • - . Д-Чг
а яркость свечения внедиагональных элементов позволяет оценить вклад соот-
ветствующих величин в отклонения измеряемых параметров.
Можно предполагать, что матричные индикаторы будут быстро совершен-
ствоваться и получать широкое применение.
Пожалуй, наиболее полно современные достижения в области универсаль-
ных средств отображения информации используются в центре управления кос-
мическими полетами. В этом отношении представляет интерес книга [4.5].
4.2. ЗАПИСЬ И ХРАНЕНИЕ ИНФОРМАЦИИ В ИИС
Регистрация аналоговой информации
При регистрации непрерывных и дискретных сигналов в большинстве слу-
чаев используются свойства изменения состояния носителя информации под
влиянием внешних механических, электромагнитных, тепловых и других воз-
действий.
В ИИТ большое применение помимо разнообразных самописцев имеют све-
толучевые и электронно-лучевые осциллографы [4.6] с регистрацией на фото-
чувствительных материалах. Выпускаемые отечественной промышленностью све-
толучевые осциллографы типов Н700, Н004, Н008М, Н010М, Н017 и др. позво-
ляют регистрировать со статической погрешностью до 2 % от 3 до 30 величин,
имеющих частотный диапазон от 0 до 5000 Гц. Чувствительность осциллографов
по току от 3,3-Юз д0 6-Ю4 мм/(мА-м). Имеются светолучевые осциллографы,
позволяющие регистрировать напряжения с частотой до 30 кГц, а также имею-
щие до 50 каналов.
Электронно-лучевые осциллографы Н023 с трубкой 6ЛО-2А позволяют реги-
стрировать с помощью фотозаписи девять аналоговых величин в частотном диа-
пазоне до 50 кГц, их чувствительность по току от 2 до 120 мм/А, по напряже-
нию 0,12 мм/В. Осциллографы Н040 имеют полосу частот до 1000 кГц и шесть
.каналов регистраций. К осциллографам выпускаются многоканальные усилители
(например, Ф720 с коэффициентом усиления 2500).
Известны попытки улучшения фотоматериалов, источников света светолуче-
вых осциллографов, применения волоконных планшайб. Промышленностью вы-
Рис. 4.4. Структурная схема гра-
фопостроителей типа ПДС
Рис. 4.5. Цифровая следящая си-
стема
пускаются светолучевые осциллографы типов Н115, К115, Н117 и др. с ультра-
фиолетовой записью на бумагу типа УФ, не требующей химического проявления,
а также с записью электрографическим способом (Н009, Н001 и др.).
Применяются электронно-лучевые осциллографы с электростатической за-
писью, обладающей по сравнению с фотографической записью некоторыми пре-
имуществами, связанными с упрощением условий хранения и способов «проявле-
ния» записанных кривых.
Весьма широкое применение в ИИС имеет электромагнитная регистрация,
часто используемая для оперативной памяти. Для регистрации непрерывных ве-
личин в качестве носителей информации используются ленты (МЛ) с ферромаг-
нитным покрытием (ширина 3,8; 6,35; 12,7; 25,4 и до 125 мм, толщина покрытия
примерно 0,02 мм, диаметр ферромагнитных зерен до 0,3 мкм, коэрцитивная
сила до 250 А/м), стальные лента (толщиной до 0,05 мм) и проволока. Послед-
ние позволяют резко повысить плотность регистрации по сравнению с пленками,
имеющими ферромагнитное покрытие. Разрабатываются способы очень плотной
записи с помощью лазерного луча (доведение температуры участков до точки
Кюри).
Использование одновременно нескольких головок записи, расположенных па-
раллельно и последовательно, позволяет регистрировать большое количество
данных (до 100 процессов).
При записи непрерывных процессов на МЛ обычно используются частотно-
модулированные сигналы: амплитудно-модулированные сигналы ввиду влияния
неравномерности покрытия, зерен в ерромагнитном материале и неравномерно-
сти движения пленки при записи и воспроизведении данных могут, если не при-
нимаются специальные меры, существенно искажаться. Для записи используется
в большинстве случаев размагниченная пленка (на магнитную головку при за-
писи подается переменное размагничивающее напряжение), а для выбора рабо-
чего диапазона записи на линейных участках кривой намагничивания подается
смещающее напряжение. Использование неразмагниченной пленки нежелательно,
так как высок уровень шумов при нулевых значениях сигнала.
Имеется возможность осуществить визуализацию магнитной записи путем
обработки ее с помощью магнитного порошка. Электрографические, термоэлектри-
ческие, электрохимические регистраторы [4.7J имеют относительно невысокое быс-
тродействие и находят применение в специализированных ИИС.
На выходе ИИС (как и ЭВМ) используются двухкоординатные графопо-
строители. Они основываются на нескольких принципах действия. По одному из
них коды на входах графопостроителей преобразуются в напряжение, которое
регистрируется автоматическими компенсаторами. На этом методе основаны вы-
пускаемые промышленностью графопостроители типа ПДС-021 (скорость реги-
страции 250 мм/с, погрешность 0,5 %, размер рабочего поля 350X250 мм),
ДРП-3 (время пробега всей шкалы +100 В — 0,5 с, погрешность +0,15 %, раз-
мер рабочего поля 800X800 мм). Структурная схема таких приборов представ-
лена на рис. 4.4. На этой схеме ССХ и ССУ — следящие системы, ВУ — вакуум-
ное устройство для закрепления бумаги. На рис. 4.4 не показано устройство для
интерполяции по осям X и Y.
Другой принцип — цифровое слежение за значением кода (рис. 4.5). Рабо-
тает цифровая следящая система следующим образом: на входы реверсивного
счетчика поступают импульсы унитарного (единичного) кода и вычитающиеся
из него импульсы от датчика обратной связи ДОС, количество которых пропор-
ционально линейному перемещению; образованный в счетчике код преобразуется
в напряжение, приводящее в движение регистрирующий элемент.
Третья возможность — построение графиков с помощью шаговых двигателей.
Имеются автоматические построители графиков с шаговым двигателем со ско-
ростью перемещения карандаша 4 м/с, дискретностью около 0,1 мм на 1 импульс
и погрешностью +0,2 мм на формате 800 X 800 мм. В них используется линей-
ный интерполятор.
Наконец, применяется развертывающая регистрация при одновременном дви-
жении регистрирующего элемента (или гребенки элементов) и носителя. Этот
метод позволяет создавать быстродействующие построители нескольких графи-
ков на одном носителе. Недостатки таких регистраторов связаны с тем, что
в них регистрация осуществляется на движущемся носителе или регистрирую-
щем органе, и поэтому регистрируется часто не точка, а короткий штрих.
С использованием решетчатой гребенки регистрирующих элементов можно
достигнуть относительно высоких скоростей регистрации (до 50 строк/с) при
погрешности примерно +0,5 % и размере по оси X около +100 мм.
В ряде случаев в качестве развертывающего устройства (зачастую для ви-
зуального наблюдения) используют ЭЛТ.
Если выполнить аналого-цифровые преобразование дискрет непрерывной
«функции времени (_ ф(г: = 1+1) I[х(t)/хЩ)] 1[х(/,)/zj, а затем сделать пре-
образование I[z.,-/Z(^)] <в(/=п) -]числовых значений в линейное положение све-
тового пятна с помощью, например, линейки светодиодов, то получится точеч-
ное изображение кривой 1(f), эквивалентное исходной величине x(f).
При правильном выборе интервалов дискретизации и скорости перемещения
носителя, на котором может регистрироваться 1(f), она будет казаться непре-
рывной. На одном носителе можно регистрировать одновременно несколько сиг-
налов.
Светодиоды могут дать световое пятно диаметром примерно 0,1 мм. Следо-
вательно, на фотопленке 35 мм могут быть размещены 256 точек и более. Зна-
чительно большую плотность записи можно обеспечить, используя волоконную
оптику.
Нужно отметить, что в направлении повышения точности, быстродействия и
плотности регистрации и улучшения эксплуатационных характеристик проводятся
интенсивные исследования.
Запись и хранение знаковой информации
Для регистрации знаковой информации используются ксерографические, фер-
рографические, электрохимические, электротермические и другие устройства [4.7].
Однако наиболее широко применяются электромеханические печатающие и пер-
форирующие устройства.
Приведем основные характеристики цифропечатающих и перфорационных
устройств.
Цифропечатающие устройства (ЦПУ) регистрируют буквенную и цифровую
информацию преимущественно на бумажную ленту.
Цифропечатающие машинки (ЦПМ) имеют электромагнитный штанговый
ударный механизм, двоично-десятичный код в них преобразуется с помощью
механического дешифратора в единичный код управления электромагнитами.
ЦПМ-6 обеспечивает печатание двух И-разрядных десятичных чисел (строк)
в секунду. Имеются ЦПМ, печатающие до 10 строк/с.
Быстродействующие ЦПМ (например, Щ68000К) обеспечивают печатание до
20—30 строк/с при 16—24 знаках в строке. Такое быстродействие обеспечивается
следующим образом (рис. 4.6). На цифровом барабане ЦБ размещаются ряды
цифровых матриц от 0 до 9 по N одинаковых цифр в строке. С помощью син-
хронизирующего барабана СБ формируется код Zjt соответствующий коду циф-
ровых матриц, находящихся на ЦБ в позиции печати. При совпадении Z, и Z,
эта цифра печатается с помощью i-ro электромагнита [I(CR:Z,, Zj) <a(Zi=Zj)
<D(W : Zi)], за полный оборот ЦБ будут отпечатаны цифры одной строки.
Быстродействие до 50—100 строк/с обеспечивают матричные ЦПУ. В ЦПУ
с количеством цифр в строке N используется неподвижный набор цифр, имею-
щий 10 строк. Строки матрицы печати состоят из одинаковых цифр: 01, 02 ...
..., 0n; 1], 12, ..., 1И; 9ь 92, .... 9w- Каждая цифра печатается с помощью
индивидуального электромагнита. Устройство управления печатью содержит
оперативное запоминающееся устройство (ОЗУ) на 10 N ячейках памяти, 10 N
устройств сравнения кодов строки и регистрируемого числа. Регистрация каждо-
го числа производится за 10 шагов перемещения бумаги. При этом на каждом
шаге делается выборка и печать цифр, соответствующих данной строке. Посколь-
ку в ЦПУ одновременно происходит регистрация 10 чисел, то печатание п строк
будет выполнено за я+9 шагов.
Для ввода и вывода алфавитно-цифровой информации применяются устрой-
ства «Консул-260» или ЕС-7077 и т. п. Их примерные данные: скорость печати
10 знаков /с, максимальное количество символов в строке 106, количество печа-
тающихся символов 92, ширина бумажного рулона 280 мм.
Для записи алфавитных и цифровых символов в ИИС используются ленточ-
ные перфораторы. Для перфорации применяется бумажная лента повышенной
прочности, позволяющая использовать ее для считывания не менее 50 раз. Дли-
на ленты 150—300 м. Шаг перфорации 2,5 мм, количество дорожек 5—8, раз-
мещение отверстий — по ГОСТ 10860-64. Таким образом, на одном рулоне может
быть записано до 100 Кбайт. Плотность записи — до 20 двоичных единиц/см2.
Выпускаются перфораторы ПЛ-320, ПЛ-150, ПЛ-80, ПЛ-20 (число означает ско-
рость перфорации, строк/с). Считывающие устройства позволяют считывать
информацию со скоростью до 1500 строк/с.
гГ—---* 1
Рис. 4.6. Структурная схема быстродействующе-
го печатающего устройства
Для записи и хранения кодоимпульсных сигналов в ИИС широко исполь-
зуются электромагнитные, полупроводниковые ЗУ, начинают применяться голо-
графические ЗУ и ЗУ на цилиндрических магнитных доменах (обозначение ЦМД
на рис. 4.7, где показаны емкость памяти основных ЗУ и время выборки [4.7]).
Остановимся на основных характеристиках ЗУ на магнитных лентах (МЛ)
и дисках (МД).
Магнитные ленты имеют длину до 750 м, стандартную продольную плот-
ность записи в МЛ 8,32 и 64 имп./мм, ширину дорожки примерно 1 мм, емкость
10® бит, скорость записи от 1 до 10 м/с, время пуска и остановки 5—10 мс,
время поиска информации десятки секунд.
ЗУ иа МД имеют емкость от 10е бит (гибкие диски) до 109 бит, количество
дисков до 25 шт., число дорожек на диске до нескольких сотен. Коммутация
дорожек в них производится путем перемещения магнитных головок с цифро-
вым управлением.
ЗУ на МД ЕС-5061 имеет 11 дисков диаметром 360 мм н обеспечивает
скорость обмена 300-103 байт/с.
Контроль четности обычно производится вдоль записи по блокам и поперек
по строкам. Допускается одна ошибка на 109 знаков. Обнаруженная ошибка
выбрасывается.
Ферритовые ЗУ имеют емкость порядка 106 байт, малое время записи и вы-
борки (5—10 мкс).
Полупроводниковые ЗУ (см. гл. 6) имеют относительно невысокие емкости
й высокое быстродействие (время записи и выборки примерно 0,1 мкс).
Время доступа, с
Рис. 4.7. Емкость памяти и время вы-
борки основных типов ЗУ:
1 — МЛ; 2 — МД; 3 — НМД; 4 — голографи-
ческие ЗУ; 5 — полупроводниковые металло-
окисные структуры; 6 — ферриты; 7 — бипо-
лярные структуры; 8 — туннельные диоды
Необходимо отметить, что в на-
стоящее время стоимость записи одного
байта для указанных ЗУ находится
примерно в такой пропорции:
1 (МЛ) : 1,5 (МД) : 10—30 (фер-
ритовое ЗУ) : 100 (перепрограммируе-
мое ЗУ).
Приведем единицы информации, при-
нятые при записи в эти ЗУ. Наименьшая
единица — разряд, затем слог (байт —
8 бит), слово (2, 3 или 4 байта), блок,
файл, наконец, самая крупная — том. В МЛ и МД сначала производится фик-
сация начала тома, затем файла и блоков, входящих в этот файл. Отмечаются
с помощью маркеров окончания блоков, файлов и тома.
Глава 5
СТРУКТУРЫ И СТАНДАРТНЫЕ ИНТЕРФЕЙСЫ ИИС
5.1. ОСНОВНЫЕ РАЗНОВИДНОСТИ СТРУКТУР И ИНТЕРФЕЙСОВ
Структуры ИИС
Все реальные ИИС могут быть представлены в виде совокуп-
ности связанных между собой функциональных блоков (ФБ).
Особенно отчетливо это видно в системах, созданных методом
проектной компоновки из выпускаемых промышленностью функ-
циональных блоков.
В [5.1] под ФБ подразумеваются структурные единицы, выпус-
кающиеся в составе агрегатных комплексов ГСП (см. гл. 3). Отме-
тим, что в номенклатуру комплексов ГСП в качестве таких единиц
входят. как однофункциональные (АЦП, ЦАП, унифицирующие
преобразователи и т. п.), так и многофункциональные преобразо-
ватели и комплексы (включая ИВК). Вообще под ФБ будем далее
подразумевать части системы, выполняющие информационные и
управляющие функции и нуждающиеся в организации совместной
и согласованной работы. При этом подразумевается, что ФБ вы-
полняют свои функции в законченном виде и для организации
взаимодействия с другими ФБ не требуется знания их внутренних
структур и особенностей функционирования.
Структура любой ИИС может быть представлена совокуп-
ностью ФБ и технических средств информационных, а также слу-
жебных связей между этими блоками.
Объединение Ф в одноступенчатой структуре может быть вы-
полнено в следующих вариантах (рис. 5.1):
- а—цепочечная структура, в которой управление работой после-
дующего ФБ производится после окончания преобразования в пре-
дыдущем ФБ. На этом рисунке выделена цепочная схема управле-
ния, включающая интерфейсные устройства (ИФУ) и шину
управления. При жестком соединении блоков схема управления
практически может отсутствовать;
б—радиальная структура, в которой управление работой ФБ
ведется централизованно от одного устройства управления;
Рис. 5.1. Основные одноступенчатые структуры:
g ~'Цепочечная; б — радиальная; в—д — магистральная; е — радиально-магистральная:
’ е, о, е с централизованным управлением; в, е — с децентрализованным управлением
в магистральная структура с централизованным управлением;
ниекц-МаГИСТРаЛЬНаЯ стРУктУРа с Децентрализованным управле-
управленГИСТРаЛЬНаЯ петлевая структура с централизованным
Упр^~Ра'аиальн°~магистральная структура с централизованным
Фис. 5.2. Двухступенчатая структура
Кроме показанных на рис. 5.1
структур можно представить
многопетлевую магистральную
структуру, структуру со сложны-
ми связями между ФБ и т. п.
При большом количестве ФБ
целесообразно организовать объ-
единенную работу нескольких
одноступенчатых подсистем (рис.
5.2). Подсистемы могут быть
реализованы и объединены с по-
мощью любого варианта из чис-
ла показанных на рис. 5.1. ЭВМ
второй ступени (часто мини-
ЭВМ) выполняет в двухступенча-
той структуре функции не только
управления, но и обработки и вы-
.дачи информации. Двухступенчатые магистральные структуры
•с распределенными микропроцессорными средствами находят все
большее применение.
Основные разновидности интерфейсов
Для работы ИИС необходимо организовать взаимодействие
•между всеми ее ФБ.
В ИИС, имеющих жесткую, неизменяемую структуру с постоян-
ным составом ФБ, как правило, совместная работа ФБ обеспечи-
вается индивидуальным сопряжением блоков друг с другом. Когда
же необходимо в процессе эксплуатации изменять структуру или
алгоритмы действия системы, унифицировать управление ФБ и об-
мен информацией между ними, то во многих случаях целесообраз-
шо использование так называемых стандартных интерфейсов (ПФ).
.Кроме того, не вызывает сомнения, что такая унификация сопря-
жения и управления ФБ позволяет существенно уменьшить трудо-
емкость проектирования, затраты на эксплуатацию, облегчить ко-
операцию работы многих изготовителей ФБ систем.
Под ПФ ИИС подразумевается совокупность правил (протоко-
лов) и программного обеспечения процесса обмена информацией
между ФБ, а также соответствующих технических средств сопря-
жения ФБ в системе.
Любая ИИС представляет объединение аналоговых, цифровых
щ аналого-цифровых ФБ. Следовательно, для ИИС нужно было бы
иметь ИФ, обеспечивающие совместное действие всех названных
‘ФБ. Однако достаточно полно разработаны лишь цифровые ИФ,
обеспечивающие совместную работу цифровых ФБ и цифровых
частей аналоговых и аналого-цифровых ФБ. Остановимся на не-
которых причинах этого положения.
В современных ИИС большая доля служебной информации, не-
обходимой для управления функционированием блоков системы,
представляется в цифровом виде. Цифровые измерительная и вы-
числительная части занимают существенную долю в ИИС, и име-
ется тенденция к их увеличению. Это определяется во многом тем,,
что промышленность выпускает относительно дешевые АЦП, в том
числе в .микроминиатюрном исполнении, обладающие неплохими
метрологическими характеристиками, ЗУ, микропроцессоры и
другие средства цифровой информационной техники. Использова-
ние таких средств позволяет приблизить аналого-цифровое преоб-
разование и цифровую первичную обработку информации к изме-
рительным цепям с датчиками и наделить ИИС рядом существен-
ных положительных качеств.
Сказанное определяет то, что далее рассматриваются в основ-
ном цифровые программируемые интерфейсы. Для краткости*
именно этот тип интерфейсов обозначается сокращенно ИФ.
Таблица 5.1. Основные признаки программируемых интерфейсов
Основные признаки Граничные состояния
а б
А. Характер управления Б. Система шин для информационных и служебных потоков сигналов В. Организация системы шин Г. Порядок выполнения операций обмена информацией Д. Типы информационных ФБ Е. Метод обмена информацией Ж. Тип используемых ЭВМ 3. Унификация конструкции И. Унификация питания Централизо- ванное Объединенная Индивидуальная (радиальная) Последователь- ный Источники Синхронный Любой Да Да Децентрализован- ное Раздельная Коллективная (магистральная) Параллельный Приемвики Асинхронный За энный Нет Нет
Перейдем к рассмотрению основных признаков классификации
ИФ. Заметим, что в табл. 5.1 производится выделение основных
признаков главным образом так называемого информационного-
ИФ, который должен обеспечить информационную совместимость
ФБ в системе.
Приведем некоторые пояснения к содержанию табл. 5.1.
В централизованном ИФ (Аа) осуществляется программное
управление работой всех ФБ и имеется возможность изменения не
только алгоритмов работы, но и состава ФБ, используемых в дан-
ной ИИС.
В ИФ с несколькими уровнями централизации должна преду-
сматриваться стандартизация сопряжений ФБ на каждом из этих,
уровней.
, В ИФ с децентрализованным управлением (Аб) обработка ин-
формации и обмен информацией между ФБ производится, без не-
посредственного участия устройства управления. В системе опре-
деляются приоритеты для каждого активного ФБ и выделяется
«судья» ФБ, определяющий в необходимых случаях последова-
тельность работы ФБ. Обычно такую роль выполняет центральный
процессор.
Система шин может быть использована для обмена как инфор-
мационными, так и служебными сигналами (объединенная систе-
ма шин, Ба). Но в некоторых ИФ для прохождения информацион-
ных и служебных потоков сигналов используется раздельная си-
стема шин, Бб). Организация обмена информацией в таких систе-
мах шин может отличаться друг от друга.
Обмен информацией между ФБ в централизованных ИИС мо-
жет быть осуществлен по индивидуальным (радиальным) или
коллективным (магистральным) системам шин. Под шинами под-
разумевается несколько линий сигналов, выполняющих определен-
ные функции (передача данных, команд, адресов и т. п.). Система
шин определяет совокупность шин, используемых в данном ИФ.
В индивидуальной (радиальной) системе шин (Ва) для обмена
информацией используются шины, связывающие блок управления
системой с каждым ФБ (см. рис. 5.1,6).
Коллективная или магистральная система шин (Вб) предусмат-
ривает ее использование для обмена информацией между ФБ пос-
ледовательно, с разделением передаваемых сообщений по времени
(см. рис. 5.1,в, г).
Следует заметить, что в ИФ используются и смешанные индиви-
дуально-коллективные системы шин, позволяющие (за счет неко-
торого увеличения технических средств по сравнению с системой
коллективных шин) упростить управление, программное обеспече-
ние и повысить быстродействие. При использовании магистральной
системы шин обеспечивается большая гибкость в изменении соста-
ва и алгоритма работы ИИС.
Операции обмена информацией между ФБ могут выполняться
последовательно (по битам) либо параллельно (по п бит одно-
временно). При последовательном выполнении (Га) таких опера-
ций для обмена информацией используется одна линия связи и
происходит разделение сигналов во времени, а при параллельном
(Гб)—несколько (^2) линий связи. В последнем случае реализу-
ется разделение сигналов в пространстве. Нужно отметить, что на
разных уровнях централизации системы при обмене информаци-
ей может использоваться разный порядок выполнения этих опера-
ций. Быстродействие и аппаратная сложность систем при после-
довательном или параллельном порядке выполнения операций об-
мена информацией существенно различаются.
Функциональные блоки можно разделить на информационные и
управляющие. Управляющие функциональные блоки (ФБУ), или
контроллеры, выполняют функции организации обмена информа-
ционными и управляющими сигналами в системе. Наличие ФБУ
характерно для систем с централизованным управлением.
По отношению к информационным потокам можно выделить
следующие основные разновидности ФБ:
ФБ—источники информации (ФБИ), предназначенные для вы-
дачи информации другим ФБ системы (Да)-, примеры ФБИ —
измерительные цепи с датчиками, устройства считывания инсрор-
мации с перфоленты и т. п.;
ФБ—приемники информации (ФБП), служащие для получения
информации от других ФБ системы (Дб); примеры ФБП—устрой-
ства индикации и регистрации;
ФБ—приемники и источники информации (ФБПИ), предна-
значенные для приема и, после выполнения определенных преобра-
зований, .выдачи информации (Да, Дб); примеры ФБПИ—АЦП,
ЦАП, функциональные преобразователи, микропроцессоры, мик-
ро-ЭВМ..
ФБИ, ФБП и ФБПИ могут быть активными (инициирующими),
выступающими инициаторами в обмене информационными сигна-
лами, и пассивными, выполняющими операции обмена информацией
только по командам, поступающим извне. Степень активности ФБ
может быть различной. Так, например, активные ФБ могут форми-
ровать при необходимости запрос на обслуживание, адреса (свой
и ФБ, с которыми нужно провести обмен информацией), прерывать
работу других ФБ и т. п.
Для передачи цифровой информации между ФБ возможно ис-
пользовать синхронный (Еа) и асинхронный (Еб) методы.
При синхронной передаче сигналов в цепи ФБИ—ФБП переда-
ча и прием производятся в фиксированные моменты времени,
определяемые синхронизирующими (стробирующими) импульсами,
при этом размер интервалов между этими импульсами несколько
превышает время, необходимое для передачи сигнала с учетом тех-
нологических разбросов и дрейфа параметров устройств, входящих
в канал передачи сигналов. Использование синхронного обмена ин-
формацией повышает помехоустойчивость передачи информации и
упрощает алгоритм действия системы.
Темп обмена информацией при асинхронном методе определя-
ется ФБП путем передачи от него на ФБИ сигнала квитирования
об окончании приема информации. Это позволяет проводить об-
мен информацией за интервалы времени, в среднем меньшие (при
том же быстродействии ФБ), чем при использовании синхронного
метода. Особенно эффективен асинхронный метод обмена инфор-
мацией при объединении в системе ФБ, имеющих различное бы-
стродействие.
Некоторые ИФ рассчитаны на то, что в системе могут быть
использованы любые средства обработки информации — универ-
сальные ЭВМ., специализированные вычислительные устройства
(Жа). Часто же ИФ обеспечивает обмен информацией в основ-
ном только с данной ЭВМ (Жб). По сути дела такие ИФ органи-
зуют ввод и вывод информации этой ЭВМ.
Следует заметить, что в последние годы изменяется идеология
построения информационных систем. До недавнего прошлого ин-
женер-системотехник при построении информационных систем,
предназначенных для сбора и обработки данных от объектов, рас-
пределенных в пространстве, использовал преимущественно схему
централизованного сбора и обработки информации с помощью
одной ЭВМ. Б таких системах обработка информации обычно произ-
водится централизованно, передача и обработка информации ве-
дутся с учетом приоритетов, передача информации —с разделе-
нием сигналов по времени, отображение информации производит-
ся на центральном пункте.
К основным недостаткам таких систем можно отнести то, что
их надежность определяется в основном надежностью централь-
ного устройства, программное обеспечение имеет большую слож-
ность, имеются затруднения с работой в реальном времени, тре-
буется большое количество линий связи в системе ввода инфор-
мации в ЭВМ.
В настоящее время усиливается тенденция построения инфор-
мационных систем, в которых функции обработки информации и
управления разделяются между многими процессорами, что обес-
печивает большую живучесть системы, позволяет повысить бы-
стродействие, несколько упрощает программное обеспечение по
сравнению с централизованными комплексами, выполненными на
базе одной ЭВМ. Для управления работой вспомогательных про-
цессоров в таких системах используются центральный процессор
и радиальное либо кольцевое объединение ФБ системы. Развитию
информационных систем такого типа способствует расширяющий-
ся промышленный выпуск мини- и микро-ЭВМ, микропроцессоров
и терминального оборудования.
Физический ИФ ИИС должен обеспечить техническими средст-
вами совместимость ФБ в системе. Для этого каждый ФБ имеет
соответствующий интерфейсный узел (ИФУ), а в системе должны
быть реализованы функции управления работой таких узлов.
(Заметим, что в технической литературе интерфейсные узлы часто,
видимо для краткости, называются интерфейсами).
В некоторых случаях физический ИФ обеспечивает конструк-
тивную и энергетическую совместимость ФБ.
Под конструктивной совместимостью (За) подразумевается
стандартизация в рамках системы используемых разъемов, плат,
модулей, стоек и других конструктивов.
Имеются ИФ, не накладывающие ограничения на конструктив-
ное оформление ФБ и их совокупности.
Унификация питания ФБ (Иа), связанная с наличием общих
источников питания на группу ФБ, существенно упрощает ФБ, но,
как правило, усложняет сами источники питания. Это объясняется
тем обстоятельством, что источники питания должны обладать
определенной универсальностью и мощностью, достаточной для
питания полного набора ФБ.
Многообразие информационных систем явилось основной при-
чиной того, что в настоящее время разработано и продолжает раз-
рабатываться большое количество ИФ [5.2, 5.3]. После тщатель-
ной оценки качеств и проверки на практике лишь небольшая часть
ИФ рекомендуется для широкого использования соответствую-
щими международными организациями (в частности, Междуна-
родной электротехнической комиссией) и оформляется законода-
тельно. Такие ИФ называются стандартными. Б Советском Союзе
введены в действие Государственные стандарты на системы интер-
фейсов [5.4, ,5.5].
Ниже ставится задача описания и сопоставления между собой
принципов построения и основных характеристик приборного ИФ
и ИФ КАМАК, ИФ малых и микро-ЭВМ, а также последователь-
ного ИФ. Такой материал предназначен для начального изучения
интерфейсов и может быть полезным при выборе типа ИФ, при-
годного для реализации в конкретных ситуациях. Конечно, для
практического использования выбранного интерфейса необходимо
его детальное изучение.
5.2. ПРОТОКОЛЫ И ТИПОВЫЕ АЛГОРИТМЫ ОБМЕНА ИНФОРМАЦИЕЙ
Интерфейсы должны включать материалы, регламентирующие
обмен информацией в системе, на основе которых составляется
соответствующая часть программного обеспечения системы.
Протокол обмена информацией должен соответствовать струк-
туре и принципам действия данного ИФ и может устанавливать
единицу обмена информацией, формат сообщения, применяемый
код, набор информационных, управляющих, сопровождающих и
вспомогательных сигналов, набор интерфейсных функций, логиче-
ские и временные соотношения сигналов, способ синхронизации,
способ формирования и идентификации запроса на обслуживание,
способ обмена сообщениями, правила адресации и способ обеспе-
чения требуемой достоверности обмена информацией.
Приведем краткие сведения о форматах информационных и
управляющих потоков [5.1]. Информационное слово должно со-
держать информационную часть, размер которой определяется
точностью измерения, и может содержать сопроводительную часть,
включающую сигналы состояния, диапазона измерения, идентифи-
катора вида информации. Сигнал адреса вводится в информацион-
ное слово при выполнении функций коммутации. Полная длина
слова от ФБИ обычно не превышает 32 бит. Передача последова-
тельным кодом производится начиная со старших разрядов, а при
параллельной передаче—младшим разрядом по линии с наимень-
шим номером.
Во временном слове текущее время (доли секунды, секунды,
Десятки секунд, минуты, десятки минут, часы, десятки часов) мо-
жет передаваться в двоичном или двоично-десятичном коде. Адрес-
ное слово (до 16 бит) должно включать условный номер изме-
ряемого параметра и (или) точки пространства. Командное сло-
во (до 16 бит) содержит начальный адрес (при магистральной
структуре передачи командных слов), команду, расширитель
команды (служит для конкретизации условий выполнения коман-
ды: уточняет диапазон измерения, уровни калибровочных сигналов
И Т. П.).
Информационные фразы содержат адресное, временное, команд-
и°е слова и одно или группу (до 64) информационных слов.
-Кадр содержит заголовок (маркер с размером кода от 15 до
32 бит)., код объекта с размером кода до 16 бит, код программы,
несущий, сведения о структуре информационной части кадра и
имеющий размер до четырех 16-разрядных слов, код порядко-
вого номера кадра и информационную часть, объединяющую це-
лое число фраз.
Используя содержательные логические схемы алгоритмов (см.
гл. 1), можно описать типовые операции обмена информацией
в ИФ.
На рис. 5.3,6 показана последовательность передачи сигналов
между ФБП и активным ФБИ, у которого интерфейсный узел име-
ет возможность формировать и идентифицировать сигналы своего
адреса Adi(l), запрос на передачу <pi(R), формировать информа-
ционное слово <I>:=Ad(l) L(L*) Т(7*) Ip), идентифици-
ровать команды ФБУ и сообщения ФБП о подтверждении приема
[Ad-fd)^)]--------------------------------------------*-
-----------------------------------------------{[Аа0(1)Ф0№][Айп(2)Ф0М)]}
-------------------------------</>z(W)-----------------
----------------------------^(W:!*)----------------*- б)
-----------------------------------------------—
-*-----------------------;---------------------------Ad0(A d 1)
------------------------------------------- - AdB(Adn).
----------------------------------------------
*----------------------------------------------------[Ad0(AdZ)d>0(W)]
----------------
-------------------------------------— [Ad0 (Z) Фв (W)]
---------------------------Vz(W) --------------
*----------------------------------------[AdoiOLg^T^jlo^)}
*--------------------------vz(W:I*)-----------г)
Рис. 5.3. Обмен информацией между ФБ и ФБП:
а схема связи; б — между ФБП и активным ФБИг в *— то же без формирования адресам
г — между ФВУ и ФБП
информации. Обозначения сигналов на рис. 5.3 расположены под
ФБ, которые их формируют, а стрелки указывают ФБ, принимаю-
щие эти сигналы. Обмен информацией начинается по инициативе
ФБИ, запрашивающего разрешение на выдачу информации
А«М1) <pi (К). Управляющий ФБ формирует командные слова для
ФБИ Ad0(l) Фо (R) и для ФБП Ado(2) <Do(W), разрешающие пе-
редать и принять информацию. После получения сигнала от ФБП
<p2(W) о готовности принять информацию ФБИ формирует инфор-
мационное слово <1>, включающее адрес Ad^l), диапазон и
режим измерения Li, время Ti и данные L. Здесь не показаны кон-
трольные, тактовые, маркерные и другие вспомогательные сиг-
налы.
Обмен информацией между активным ФБИ и ФБП, выполняю-
щими те же функции, что и рассматриваемые на рис. 5.3,6, за ис-
ключением того, что они обладают способностью не формировать,
а лишь идентифицировать свои адреса, представлен на рис. 5.3,в-
В этом случае, чтобы определить адрес ФБИ, запрашивающего
разрешение на передачу информации, ФБУ формирует последова-
тельно адреса до тех пор, пока не будет передан адрес Ad0(l).
Тогда ФБИ Ad(l) должен подтвердить, что именно им сформи-
рован сигнал ф] (R).
Если одновременно запрос <р (R) будет выдан несколькими
ФБИ, то преимущество должно быть оказано ФБИ, имеющему
более высокий приоритет. В данном случае—ФБИ, адрес которого
был передан ФБУ первым.
На рис. 5.3,6, в принято, что установление связи между ФБИ,
готовым выдать информацию, и данным ФБП определяется ФБУ.
Установление такой связи может быть организовано по инициати-
ве ФБИ. Однако тогда должны быть расширены функциональные
возможности интерфейсного узла ФБИ.
В качестве ФБИ может выступать также ФБУ (рис. 5.3,а). Тог-
да СЛСА при работе по инициативе ФБУ и при адресе ФБП, рав-
ном /, может принять следующий вид:
[Ado(/) <Do(W)] <p3(W) [Ado(O) L0(L*)X
XT0(7*) Io(/*)] <p3(W:I*).
Реализация рассмотренных процедур обмена информацией мо-
жет быть выполнена различными способами. При последователь-
ном способе обмена информацией все составляющие алгоритма
обмена информацией будут передаваться по одному магистрально-
му каналу связи. Так, например, для обмена информацией между
ФБИ и ФБП (при управляющем участии ФБУ) согласно рис. 5.3,6
алгоритм обмена информацией будет выглядеть следующим об-
разом:
[Adj(l) Ф1 (R)]{[Ad0(l) Фо(R)] [Ad0(2) X
X®0(W)]}q>2(W)[Ad1(l) LJL*) TJT*) Ii (P)]<P2(W ; A).
Некоторого уменьшения общего объема передаваемой инфор
мации при этом можно добиться жесткой регламентацией после-
довательности передачи информации в словах.
Если передача информации выполняется по предназначенным
только для этого шинам, то отсутствует необходимость в сигнале,
обозначающем вид передаваемой информации. При вызове какого-
либо ФБ из ФБУ по радиальной линии будем пользоваться обо-
значением Ad*. В этом случае для вызова ФБ достаточно одного
импульсного сигнала по этой линии.
Другим граничным способом в магистральной системе шин бу-
дет параллельный способ обмена информацией. При этом способе
для передачи каждой из составляющих алгоритма обмена инфор-
мацией используются самостоятельные каналы связи. Тогда со-
держание каждого слова без идентификаторов возможно передать
за один такт. В этом случае суммарный объем потоков информа-
ции уменьшается благодаря тому, что отсутствует необходимость
передавать указатель каждого слова I, Ф, Ad, <р, L, Т и др., так
как для этих слов выделены специальные шины. Однако при этом
количество оборудования становится весьма большим.
В большинстве существующих цифровых ИФ используется ма
гистральная система шин с комбинацией последовательного и па-
валлельного, синхронного и асинхронного способов обмена ин-
формацией. В ряде случаев, в частности для передачи адресован-
ных операторов, используется радиальная система шин.
Следует еще раз подчеркнуть, что в любых ИФ реализуются
типовые алгоритмы обмена информацией, а различия ИФ связаны
с организацией системы шин, способом обмена информацией и
возможностями интерфейсных узлов ФБ.
5.3. ИНТЕРФЕЙС С ПОСЛЕДОВАТЕЛЬНЫМ ВЫПОЛНЕНИЕМ ОПЕРАЦИЙ
ОБМЕНА ИНФОРМАЦИЕЙ
В соответствии с принятой классификацией ИФ (см. табл. 5.1)
интерфейс с последовательным выполнением операций обмена
информацией (Га), который далее будет называться последова
тельным ИФ, имеет магистральную систему шин Вб, состоящую
из одной двунаправленной или двух однонаправленных линии сиг-
налов, по которым передаются и информационные, и управляю-
щие потоки (Га).
В последовательном ИФ алгоритм обмена информацией дол-
жен содержать типовые операции, показанные на рис. 5.3. Как
уже говорилось, уменьшения объема служебной информации мож-
но добиться путем регламентации последовательности и размеров
передаваемых сигналов. Так, например, вместо последовательности
Ad (Ad*) L(L*) Т(Г*) 1(7*) можно после проведения указанной
регламентации передать Ad* L* Т* I*. Повышения быстродействия
можно добиться (не увеличивая количество линий) благодаря
использованию линий связи, обладающих повышенной скоростью
передачи информации. Так, например, для скорости передачи ин-
формации 106 бит/с при длине линии примерно 500—1000 м целе-
сообразно использовать коаксиальный кабель, а для скоростей
порядка 10-10е бит/с— волоконно-оптический канал связи.
Наличие небольшого количества линий связи в последователь-
ном ИФ позволяет выполнить их с улучшенной защитой от влияния
помех. В частности, использование скрученных и экранированных
проводов, коаксиального кабеля и других мер позволяет обеспе-
чить, как известно, достаточную для многих случаев практики за-
щиту линий связи от поперечных помех (помех наводки). Для
уменьшения влияния продольных помех (определяемых разностью
потенциалов точек заземления) могут быть применены известные
Рис. 5.4. Структурная схема системы с последовательным интерфейсом
методы гальванического разделения цепей с помощью, например,
импульсных трансформаторов, разделительных конденсаторов,
оптронов. Для улучшения помехоустойчивости в таких ИФ целе-
сообразно повышать до допустимого предела уровень используе-
мых сигналов.
Последовательные ИФ могут быть выполнены с разомкнутой
или замкнутой (петлевой) магистралью, с одноступенчатой или
многоступенчатой адресацией объединяемых ФБ. Петлевая струк-
тура магистрали (см. рис. 5.1Д) позволяет повысить надежность
работы системы, а многоступенчатая адресация — сосредоточить в
определенных местах значительное количество ФБ.
На рис. 5.4 представлена структурная схема части системы с
последовательным ИФ, имеющей разомкнутую магистраль с трех-
ступенчатой адресацией. Обмен информацией между ЭВМ, выпол-
няющей функции обработки информации и управления работой
системы, и функциональными блоками производится через интер-
фейсный узел ЯФУо- Гальваническая развязка частей системы вы-
полняется с помощью блоков БГР. Каждая ступень адресации
имеет магистральную станцию, включающую коммутатор, к т
выходам которого (т. е. соответственно т', т", т'") могут быть
присоединены ФБ или коммутаторы следующей ступени. На
Рис. 5.4 показана связь коммутаторов трех ступеней: KI, КП, КШ-
При трехступенчатой адресации в системе могут быть объедине-
ны щз фб с ПОМОщЬЮ коммутаторов по т коммутирую-
щих элементов в каждом коммутаторе (при т=64 количество ФБ
может быть около 260-103, но в этом случае должен быть исполь-
зован 4161 коммутатор).
Бели на каждой ступени используется один коммутатор, тогда
оощее количество ФБ, которое может быть объединено в системе
с тремя коммутаторами по т точек, будет равно 3m—2. Очевидно,,
такая структура целесообразна при размещении коммутаторов в.
местах концентрации ФБ. В этом случае для связи между собой'
ФБ одной ступени должна быть обеспечена возможность одновре-
менной коммутации элементов, подключающих одновременно эти
ФБ. Применением одновременной коммутации нескольких выходов:
будет организовываться связь между ФБ одной ступени или между
ФБ нескольких ступеней. На рис. 5.5,а показана организация свя-
зи между ФБ, подсоединенными к коммутаторам в точках у, 2'’
и т', на рис. 5.5,6 — у, 2', Г, т".
Рис. 5.5. Связь между ФБ с помощью коммутаторов
Уменьшения потоков информации в системе можно добиться,,
если использовать устройства обработки и хранения информации
на каждой ступени. Для уменьшения адресной информации при
организации обмена информацией между ФБ можно использовать
активные ФБ, у которых ИФУ обладают возможностью формиро-
вать адреса и хранить в памяти соответствующую программу
связи.
Остановимся на кратком описании последовательного ИФ, со-
зданного для обеспечения работы ЭВМ с относительно большим
количеством ФБ, расположенных группами с расстояниями между
ними от 100 до 500 м. Функционирование системы должно было
происходить нормально при значительном уровне помех со вре-
менем передачи одного импульса порядка 10G с.
Была использована трехступенчатая структура с коммутатора-
ми, имеющими т=64.
В этом ИФ интерфейсный узел ИФУ0 (см. рис. 5.4) выполняет
функции формирования адресов, генерирования команд и вспомо-
гательных сигналов, преобразования кодов и формирования сиг-
налов. Связь между ИФУ0, KI, КП, Kill осуществляется ио
двум кабелям Р К-75-4-11 через импульсные трансформаторы
МИТ-12, размещенные в блоках гальванической развязки БГР.
Эти трансформаторы позволяют пропускать импульсы с фронтами
в 30—50 нс.
Кодоимпульсные сигналы передаются самосинхронизирующим-
ся двуполярным кодом с синхронизацией импульсами отрицатель-
ной полярности. Амплитуда импульсов равна 12 В. На конце ка-
беля длиной 500 м их амплитуда уменьшается до 7,1 В, а приня-
тый порог различения сигналов равен 5 В.
Обозначения адреса и команды передаются пачкой положи-
тельных импульсов без сопровождения синхроимпульсов: адрес-
коммутатора первой ступени занимает семь импульсов, коммута-
торов второй и третьей ступеней — соответственно шесть и пять-
импульсов, команды принять O(W) —четыре импульса, O0(R) —
«передать» — три импульса, готовность принять <p(W) логические-
операторы или передать <р(К) информацию — два импульса.
Код адреса ФБ имеет шесть разрядов. Для повышения помехо-
защиты используется контроль четности. Для защиты схемы or
накопления одиночных импульсных помех в магистральных стан-
циях (включающих коммутаторы) предусмотрен режим стирания*
пришедших кодовых импульсов, если отсутствует синхроимпульс,,
отстоящий от них не далее чем в 1,5—2 мкс.
Интерфейсные узлы ФБ содержат схемы выделения признаков,
команд, схемы контроля по четности и взаимодействия с ФБ.
При записи информации в ФБП после приема команды AdoX
X (ФБП) Фо (W) посылается в ИФУ ответ о готовности принять.
информацию <pn(W) и открывается вход регистра приема информа-
ции. Затем после приема информационного слова Ad (ФБИ)Ъ(Б*) X
ХТ(7*) I (/*) производится проверка на четность и выдается «кви-
танция» <pn(W:/*)-
Заметим, что при выдаче подтверждения готовности и приема,
адрес может не передаваться. При передаче информации из ФБ
в ЭВМ порядок обмена информацией соответствует представленно-
му на рис. 5.3,а.
Предусмотрена организация прерывания обмена информацией
путем выделения адресов ФБ, имеющих установленные заранее-
приоритеты.
Для использования в этом интерфейсе созданы управляющие-
регистры, буферные ЗУ, несколько типов быстродействующих ЦАП
и АЦП, коммутаторов аналоговых сигналов, пульты управления'
и индикации и др.
Необходимо остановиться на последовательном ИФ RS-232, ис-
пользуемом для связи подсистем с устройством более высокого
иерархического уровня. Этот ИФ предусматривает двустороннюю-
передачу информационных сигналов по последовательному алго-
ритму, однако для передачи сигналов запроса на передачу <p(R),_
готовности к приему информации <p(W) и др. выделяются специ-
альные линии сигналов. В этом ИФ используется 25-жильный ка-
бель. Скорость передачи при расстоянии до 50 м составляет де-
сятки килобайт в секунду. При использовании специальных
Устройств (модемов) обмен информацией может производиться на
расстоянии до 1,2 км, скорость передачи информации при этом не
превышает 2,5 Кбайт/с. В настоящее время за рубежом большое-
количество микро-ЭВМ, дисплеев и подобных устройств имеет вы-
ход на этот ИФ.
В бортовом оборудовании самолетов и вертолетов используется-
последовательный интерфейс (в соответствии с ГОСТ 18.977-79).
11ередача информации в нем производится по двухпроводной би-
•филярной линии, двуполярными импульсами, со скоростью 48, 100
или 250 Кбит/с на расстоянии до 100 мм. Код признака передавае-
мой информации содержит 8 двоичных разрядов, а для передачи
данных выделяется 24 разряда. Приемники могут по индивидуаль-
ной программе выбирать из передаваемой информации определен-
ную часть.
В заключение следует подчеркнуть, что последовательные ИФ
•целесообразно использовать главным образом при необходимости
•обеспечить обмен информацией между ФБ при воздействии силь-
ных помех, а также при передаче информации на относительно
«большие расстояния при невысоких требованиях к скорости обме-
ла информацией.
5.4. ПРИБОРНЫЙ СТАНДАРТНЫЙ ИНТЕРФЕЙС
В СССР приборный интерфейс [5.4, 5.6] официально введен в
„действие.
Приборный ИФ принят IEEE в качестве стандарта 488—1975
'(78) «Цифровой интерфейс для программируемых устройств», ре-
комендован для использования Техническим Комитетом ТС-66
„Международной электротехнической комиссии. Разработчиком при-
борного ИФ является фирма Hewlett — Packard (HP) США, кото-
рая назвала этот ИФ HP Interface Bus (интерфейсная шина фир-
мы HP), или сокращенно HP-IB. На изделиях фирмы, выполнен-
ных в этом ИФ, имеется именно такое обозначение.
В соответствии с принятой в данной работе классификацией
.(Приборный ИФ обеспечивает работу системы с одним уровнем
централизации (Аа, см. табл. 5.1), имеет раздельные информаци-
онные шины и шины управления (Ба, б), относится к ИФ с ма-
гистральной системой шин (Вб), реализует байт-последователь-
;ный, бит-параллельный обмен информацией, объединяет ФБИ,
•ФБП, ФБПИ, использует асинхронный метод передачи информа-
ции (Еб). ИФ не регламентирует типы работающих в системе
.ЭВМ (Жа), конструкцию ФБ (36) и питание (Иб) приборов,
«объединяемых в систему.
Магистральная система шин (магистраль) обеспечивает парал-
лельное соединение всех ФБ и состоит из трех групп шин (рис. 5.6).
В систему могут объединяться ФБП, ФБИ, ФБПИ и ФБУ. В ка-
честве контроллера (ФБУ) часто используется микро-ЭВМ. Обыч-
:но в этом случае ЭВМ является одновременно и ФБПИ, выполняя
функции управления, приема, обработки и выдачи информации, а
также передачи ее на свои периферийные устройства. Отдельные
функции ФБУ могут быть по поручению основного ФБУ выпол-
нены и некоторыми ФБ системы.
По восьми информационным шинам передаются: командная
(информация, сопровождаемая сигналом 1 на шине ATN, в том
числе адреса приемников, сопровождаемые 1 на DIO6 и 0 на DIO7
и адреса источников, сопровождаемые 0 на DIO6 и 1 на DIO7; уни-
версальные команды и т. д„ причем линия DIO8 в командах не
1 - логическая ‘единица (не более 0,8 В)
j0~-логический нуль (не менее 2,8 В)
Х-по усмотрению пользователя
Рис. 5.6. Магистраль приборного интерфейса
используется; измерительная или служебная (например, статусный
байт) информация, сопровождаемая сигналом 0 на шине ATN.
Шины управления передачей данных используются для органи-
зации асинхронного обмена информацией между ФБП и ФБИ..
Алгоритм обмена сигналами между этими ФБ при передаче каж-
дого байта данных и соответствующая этому алгоритму времен-
ная диаграмма представлены на рис. 5.7. На схеме алгоритма1
приведена привязка операций по времени к моментам, указанным-
на временной диаграмме.
Такая процедура обмена информацией называется в прибор-
ном ИФ «рукопожатием». Содержательная логическая схема алго-
ритма «рукопожатия» (обозначения см. на рис. 5.6 и 5.7) может'
----
ФБИ
it
то tz.
ПАУ ШШ/// ФиС^)
NRFD 4>n(W)
ND А С №АС
' i/ to
ФБП
ФБИ
Рис. 5.7. Схема алгоритма и временная диаграмма обмена информацией в при-
•борном интерфейсе
ФБП
•быть описана следующим образом:
[фп (W) ||дГп (W : I) ||ФИ (W) ] £(Z*) fon (W) ||фп (W) ] X
X [Фи (W) II Фи (W) ] {In (W : Z) II [фп (W) I! ф'п (W) ]} X
Х{[фп (W : Z) ||фп (W : Z) ] [Фи (W) ||ФИ (W) ]}Х
xlB(Z*)ftn(W:Z) ||Jn(W:Z)].
•Сделаем некоторые пояснения к этому алгоритму.
После выставления сигнала Фи (W) (данные недействительны)
и сигналов о-том, что приемник не готов к приему1’ <pn('W),
информация не принята tpn(W :!*), на шинах D10” уста-
навливается байт передаваемой информации (сопровождается со-'
ответствующими сигналами идентификации вида сообщения).
После сигнала готовности к приему <pn(W) устанавливается'сигнал
достоверности передаваемых данных Фп (W) и производится прием
информации In(W:/). Завершается цикл «рукопожатия» сигналом,
подтверждающим прием tpn(W:/*), сигналом недостоверности вы-
ставленной информации <Dn(W), снятием информации с шин DIO
и выставлением сигнала <pn(W;: /*).
По шинам DIO могут передаваться байты I*, Ad*, tp* или Ф*.
Процедуру «рукопожатия» будем обозначать буквой Н с указате-
лем содержания передаваемого байта: Н.(1) — передача данных,
Н (Ad) — адреса, Н( Ф) — команды.
Процедура Н одного ФБИ может осуществляться с нескольки-
ми ФБП. В _этйх случаях на линиях NRFD и NDAC сигналы
<рп (W) и <pn(W :/*) ^огут появиться только после приема их всеми
ФБП, включая самые медленнодействующие. Нескольким ФБП,
работающим с одними и теми же ФБИ, может быть лрисвоен оди-
наковый адрес.
Заметим, что наличие сигналов логической единицы на всех
шинах от DI01 до DI05 означает команду сброса адресов ФБП
и ФБИ (при сигнале 1 на линии ATN).
Если имеется необходимость в обмене информацией со сторо-
ны активных ФБИ и ФБП, то они формируют сигнал tp(R) или
<p(W) на линии SRQ. Поиск ФБ, выдавшего сигнал на обслужива-
ние, производится ФБУ путем последовательной передачи адресов
ФБ Н [Ad (ФБ)] (обычно в порядке убывающего приоритета).
Процедура последовательного опроса будет повторяться до тех
пор, пока не будет передан адрес ФБ, запрашивающего обслужи-
вание:.
‘В приборном ИФ предусмотрен также (в целях уменьшения
времени на поиск адреса ФБ, запрашивающего обслуживание) ре-
жим параллельного опроса. В этом режиме к ФБ присоединяется
одна из линий DIO и организуется радиальная система адресных
линий. Выполняется этот режим после передачи соответствующей
команды Ф(ФП.О*) и выставления 1 на линии ЕОГ, СЛСА состоит
из последовательно выполняемых запроса на обслуживание
<pz(R|W), вызова ФБ по радиальным линиям [Ф0||Н(Фп.о)] X
X[Ad0*I||Ad0*2||...] (Adf(i) <p,(R/W)] и команды на выпол-
нение процедуры обмена информацией O0||HO(R|W). Здесь ис-
пользован знак | («или») для обозначения того, что запрос обслу-
живания может быть произведен по инициативе ФБИ или ФБП.
Программное обеспечение системы, основанной на использова-
нии приборного ИФ, должно содержать операционную часть, не-
обходимую для формирования команд, кодов сообщений и т. п.,
и прикладную часть, создаваемую для выполнения системой по-
ставленной задачи.
Программное управление работой ФБ осуществляется путем
передачи в ФБ командных сообщений об изменении режимов их
работы, пределов измерения, о выполнении ими определенных
функций и т. п. Имеются коды таких сообщений, рекомендованные
для преимущественного применения в приборном ИФ. Максималь-
ное количество их равно 128. Идентификация кодов и выполнение
предписанных ими операций производятся в ФБ аппаратным спо-
собом. Для использования в приборном ИФ рекомендуется 7-бит-
ный код по ГОСТ 13052-74.
Рис. 5.8. Система с объединением ФБ с помо-
щью приборного ИФ
Характеристики линий связи и разъемов в приборном ИФ ре-
гламентируются. Выпускаются соединительные линии (кабель с 24
жилами, 150 пФ/м) длиной 1, 2 или 4 м. Суммарная длина кабе-
лей ко всем ФБ не должна превышать 20 м. При применении спе-
циальных устройств, обеспечивающих изменение вида модуляции
передаваемых сигналов, имеется возможность обмена данными
между ФБ, расположенными до 1000 м друг от друга.
Максимальная скорость передачи информации при применении
приборного ИФ — 1 Мбайт/с при длине соединительных линий до
5 м и 250—300 кбайт/с при длине соединительных линий до 20 м
и объединении пяти ФБ в системе.
Известно большое количество разнообразных систем, основан-
ных на использовании приборного ИФ и объединяющих разнотип-
ные ФБ.
Приведем структурную схему простейшей локальной ИВС
(рис. 5.8), состоящей из микро-ЭВМ, работающей с периферийны-
ми устройствами (накопитель на магнитной ленте МЛ, клавиатура
Кл для ввода информации и цифропечатающее устройство), бы-
стродействующего цифропечатающего устройства, коммутатора
аналоговых сигналов с циклическим и адресным управлением,
цифрового измерительного устройства. Микро-ЭВМ СР в системе
не только обрабатывает информацию, поступающую от объекта
исследований, но и управляет работой системы. Интерфейсные
устройства сопряжения ФБ с магистралью приборного ИФ объеди-
нены в единый блок.
Зарубежными фирмами выпускается относительно большое ко-
личество различных устройств, основанных на использовании при-
борного ИФ, а также ФБ с соответствующими устройствами со-
пряжения. К ним относятся измерительные системы для измерений
напряжений, спектроанализаторы, цифровые дисплеи, генераторы
сигналов и т. п. Заметим, однако, что эта продукция (по количе-
ству наименований) в фирме HP занимает 10—20%.
По сравнению с последовательным приборный ИФ позволяет
получать существенно большую скорость обмена информацией
благодаря одновременной передаче как обозначения, так и содер-
жания данных, адресной и командной информации, а также пере-
даче информации по байтам. В то же время использование асин-
хронного обмена информацией позволяет объединять ФБ, имеющие
различное быстродействие.
$.5. ИНТЕРФЕЙС КАМАК
Общие положения
Система КАМАК. (САМАС — Computer Applications for Measu-
rement and Control) рекомендована к использованию Международ-
ной электротехнической комиссией. Она разрабатывалась примерно
с начала 1960-х годов под руководством Комитета ESONE «Евра-
тома», объединившего для этой цели усилия около трех десятков
научно-исследовательских учреждений ядерной физики. Совершен-
ствование ИФ системы КАМАК непрерывно продолжается: в те-
чение нескольких лет кроме начального основного варианта появи-
лись ИФ быстрого КАМАК, последовательного КАМАК, КАМАК
с микропроцессорными контроллерами и узлами сопряжения.
Далее рассматривается ИФ КАМАК, соответствующий
ГОСТ 26.201-80 [5.5]. Кроме того, описывается магистраль ветви
и последовательная магистраль КАМАК.
По принятой классификации (см. табл. 5.1) ИФ КАМАК
предусматривает: возможность построения систем с двумя и бо-
лее уровнями цемрализации (Аб); раздельные системы шин
для информационных и управляющих потоков (Бб); магист-
ральную систему шин, работающую совместно с несколькими
радиальными шинами, связывающими все ФБ с ФБУ (За,б);
параллельный порядок выполнения операций обмена информа-
цией (Гб); объединение активных ФБПИ (Да,б); синхронный
обмен информацией (Га); работу с любой ЭВМ (Жа); унифи-
кацию конструкции (За); унификацию питания (Иа).
Первая ступень централизации управления и обработки ин-
формации обеспечивается в крейте, а вторая — в ветви, которая
может объединять до семи крейтов. Возможно объединение для
совместной работы нескольких ветвей.
Описание магистрали крейта
Конструктивно крейт объединяет 25 станций, ширина каж-
дой из которых равна 17,2 мм (0,7 дюйма). Высота крейта рав-
на 200,9 мм, а глубина — 293 мм. Две правые станции в крейте
заняты ФБУ — контроллером крейта. В остальных 23 станциях
размещаются ФБПИ. Функциональные блоки могут занимать 1,
2, 3, 4, 6 или 8 станций: Каждый ФБ должен содержать интер-
фейсный узел сопряжения. Расположение ФБ в крейте может
быть любым. Адрес каждого ФБ соответствует месту его распо-
ложения в крейте.
Связь с ЭВМ может быть выполнена через контроллер крей-
та (КК); микропроцессоры и микро-ЭВМ могут быть присоеди-
нены в качестве ФБ.
Система шин и основные служебные сигналы крейта выгля-
дят следующим образом.
Шины адреса и команд. К каждой станции от КК проводит-
ся индивидуальная (радиальная) линия, обозначенная на
рис. 5.9 буквой N (Number—номер). Внутри ФБ могут быть
расположены адресуемые субблоки. Для этой цели выделены
четыре магистральные шины Аь А2, А4, Ag (Subaddress — суб-
адрес) .
Код операции, которая должна быть выполнена в ФБ, пере-
дается по пяти магистральным шинам: Fi, F2, F4, Fs, Fi6 (Func-
tion — функция). В ИФ установлено 18 типовых функций:
Ь (0) — чтение регистра, F (8) — проверка запроса, F (24) — за-
прет и т. п.
Типовое обращение к ФБ образуется в виде комбинации сиг-
налов NAF: Ad*(<PB)\\SbAd*\\®*.
№1
Крейт 7
ФБУ
(КК)
№24,25
+24В;+5В;~5В;~24В (+Z00B;i-1ZB-,-12B,-117B)
Земля. Резерв
Pi, А - сквозные шины
Pj, Ру, Рз-индивидуальные шины
1. суск-у*(г) г Запрет-3 СБ ос С)
1.3 снято-у* (4) гСответ-'Р*(а)з.КоманВа принята-уКА”)
Запрос (шлаг) ,4>*(R\WT,___________________
___________Запись W1,. •., W24________________
____________Чтение RZ4______________
Стров-сигналксЗ^отсчет'Ф^т^з^данные могут езненяться-лфт,
Fi, Гг, F4 > Fe> Fie ~ Ф"
Ал, Az, Ay, Aj-SPAll*
Пита-
ние
^управление
^Данные
' Строб-
сигналы
Адресован-
Г (\
команда
'у, Верти-
-'кальная
магистраль
№1
Крейт
№24,25 ' . A
BAd*(l)\ Контроллер If
' —1 (драйвер^ветви
I,
Г
<РБУ ~
ЮЯй. 94 —J
Рис. 5.9. Магистрали крейта и ветви КАМАК
Информационные шины. В ИФ крейта выделены однонаправ-
ленные 24 магистральные линии сигналов, обозначаемые Wi,...
.,.-,W24 (Write — запись) для записи (приема) информации и
R1,’...,R24 (Read — чтение) для чтения (выдачи) информации.
'Шины статуса (состояния). От каждой станции к КК прово-
дится индивидуальная шина, по которой от ФБ может переда-
ваться сигнал запроса (флаг) tp*(R|W).
После NAF передаются сигналы о занятости магистрали
ср*(Ф), о состоянии выбранной части ФБф(<2) и о принятии ко-
манды ф(Ф’)-
Шины синхронизирующих импульсов. По магистральной ли-
нии S1 передается синхроимпульс (строб 1) Ф (Л)’ при неиз-
менных сигналах на шинах R и W, по линии S2 (строб 2) Ф(Т’2)
передается синхроимпульс при последующем изменении сигна-
лов на шинах R и W (например, перед сбросом показаний реги-
стров)-
Шины общего управления. По магистральной шине Z (zero —
нуль) в сопровождении сигналов Т2 и <р(Ф) передается сигнал
пуска, по шине I (Inhibit)—ф*(/)—сигнал запрета выполне-
ния команды, по шине С (Clear — очистка)—ф*(С)—сигнал
сброса, очистки магистрали.
Шины питания магистральные: +24 В, —24 В, +6 В (25 А),
—6 В (25 А), две шины заземления. Кроме того, в качестве до-
полнительных могут быть использованы магистральные шины
для питания ФБ от источников +200, +12, —12, 117 В, две
шины для заземления.
Шины для нестандартных соединений: Р\—Р$. Всего систе-
ма шин крейта содержит 82 магистральные линии сигналовт
проходящих через все станции, и по 2 индивидуальные (ради-
альные) линии, идущие от контроллера крейта к каждой стан-
ции.
Таким образом, в крейте используется смешанная магист-
ально-радиальная (коллективная и индивидуальная) система
шин.
В ИФ КАМАК унифицированы 86-контактные разъемы и со-
единение всех шин с контактами разъемов.
Для детального изучения ИФ КАМАК необходимо обратить-
ся к соответствующим источникам [5.5]. Здесь же рассмотрим
лишь основные особенности функционирования магистрали
крейта.
В операциях обмена информацией на магистрали крейта уча-
ствуют, как правило, контроллер крейта и ФБИ или ФБП.
Схема передачи сигналов команды от контроллера крейта к
ФБ изображена на рис. 5.10. Команда NAF записывается в ре-
гистры контроллера. Из регистра N адрес ФБ в параллельном
коде подается на дешифратор, преобразующий этот код в сигнал
Adv на индивидуальной линии, имеющей соответствующий номер
(от 1 до 24). Заметим, что при 5-разрядном двоичном коде ад-
реса на выходе дешифратора остаются избыточные линии (от
|25 до 32), которые могут быть использованы («ложные адреса»)
|для других целей. Сигнал адреса (вызова) из дешифратора по
индивидуальной шине поступает на соответствующий ФБ. Сиг-
налы субадреса SbAd* по шине А и кода операций Ф* по шине
|F передаются по магистральным шинам в ФБ, где производит-
ся их дешифрация. На рис. 5.10 показан путь прохождения сиг-
налов команды записи в регистр 1-й группы F16, относящейся к
1лятому субблоку ФБ.
Сигнал ответа <p*(Q) по шине Q вырабатывается после де-
кодирования команды. Если эта команда связана с обменом
информацией (R или W), то этот сигнал должен формировать-
ся до сигнала 7\.
Рис. 5.10. Схема передачи сигналов команды в крейте КАМАК
Сигнал пуска по линии (г) имеет абсолютный приоритет,
по нему схема устанавливается в исходное состояние.
По сигналу сброса ф*(С) начальное состояние устанавлива-
ется для части системы. Сигнал запрета <р*(7) может запрещать
работу блока или его части.
Сигнал запроса <p*(R|W) сбрасывается после выполнения вы-
званной им команды при наличии сигнала специальной команды
F(10) (сброс запроса) или при наличии в системе сигнала tp*(Z).
В интерфейсных устройствах сопряжения ФБ имеется две груп-
пы регистров — регистры данных и регистры фиксации сигналов
управления.
В адресном режиме (ФБУ — ФБИ) выполняется следующий
порядок обмена:
[Ad* ФБИ||5М^|[Ф*] [1и(/‘) (!<Р*и (R) ] X
I________!
X[Ф*0 (Л) Но(W: I*) ] [ф*о (Т2) II1И(/*) ].
Полный цикл передачи 24 бит равен 1 мкс. Следовательно,
имеется возможность передачи информации по шинам R и W со
скоростью 24-1О6 бит/с.
Если внутри ФБ имеется несколько субблоков, могущих вы-
дать или принять информа>ци)о (например, несколько, АЦП или
коммутационных элементов), и один из субблоков выдал сигнал
запроса (флаг) <p*(R|W), то для нахождения адреса этого суб-
блока контроллер крейта выполняет последовательный опрос всех
субадресов А. Затем, только после нахождения субблока, выдав-
шего сигнал запроса, дается сигнал разрешения и производится
операция связи этого субблока с шинами R или W. Указанная
особенность обмена информацией по инициативе субблока при-
водит к увеличению времени, затрачиваемого на процедуру об-
мена информацией в этом случае.
Описание магистрали ветви
В ИФ КАМАК предусмотрена организация второго уровня
централизации управления обменом информации, который носит
название ветви (branch) или вертикальной магистрали. В маги-
страли ветви возможно объединение до семи крейтов.
Система шин и основные служебные сигналы ветви имеют
следующие характеристики (см. рис. 5.9).
Шины адреса и команд. По радиальным шинам BAcF(l) —
В Ad* (7) к каждому крейту передаются сигналы, определяющие
его адрес. Для передачи номера модуля в крейте используются
пять магистральных линий BNb BN2, BN4, BN8, BNJ6 и четыре
магистральные линии субадреса ВАЬ ВА2, ВА4, ВА8.
Для передачи кода операции (функции), которую должен
выполнить адресованный субблок, используются 5 магистраль-
ных линий BFi, BF2, BF4i BF8, BF16.
Таким образом, в ветви радиальными шипами связаны конт-
роллеры крейтов и ветви (КК и КВ), субадреса и команды пе-
редаются в двоичном коде за один такт по магистральным ши-
нам.
Информационные шины. Для записи и чтения информации ис-
пользуются 24 магистральные линии BRWi,..., BRW24.
Шины статуса (состояния). Запросы на обслуживание со сто-
роны КК передаются по радиальным линиям Btp*i(W|R), ...
...Btp*7 (W|R). Сигналы Brp*(z), В<р*(/), Btp*(C), В<р*(Ф),
Btp*(Q) аналогичны сигналам общего управления магистрали
крейта.
Резервные магистральные шины: [В<р(Ф5)1,..., В<р(Ф*)9].
Остановимся на особенностях работы магистрали ветви.
Магистраль ветви работает в асинхронном режиме. Дополни-
тельные неадресуемые команды могут быть получены путем ис-
пользования мнимых адресов (от 24 до 32).
При запросе обслуживания от КК по линии B<p*(W|R) КВ
Дает команду на считывание кода модуля, пославшего запрос.
Код модуля, пославшего запрос на обслуживание, передается по
шинам BRW. Стандарт не определяет, как использовать при
этом шину BRW. Здесь имеется возможность, например, 'при
количестве ФБ, равном или меньшем 24, сохранить линию ^за
каждым ФБ или, положим, 7 разрядов использовать для нуме-
рации крейтов, а 17 — для нумерации модуля в крейте.
Данные поступают в КВ и обратно по BRW в виде 24-раз-
рядных слов при наличии сигнала <р* (Q). . .
Максимальная длина- магистрали ветви (при согласовании
линий, наличии на линиях оконечных устройств, уменьшающих
эффекты отражения волн), порядка 25 м.
Имеются комплексы; выполненные по, трехступенчатой иерар-
хической структуре. В них третья.. ступень служит для объедине-
ния нескольких ветвей. - .
Последовательная магистраль передачи данных
При значительных расстояниях между ЭВМ и объектами (до
сотни километров) в КАМАК может быть использована последо-
вательная петлевая магистраль передачи данных, в которой ис-
пользуется однонаправленная передача данных. Очевидно, ;что
петлевая структура магистрали обеспечивает - повышенную на-
дежность работы системы.
Имеется описание последовательного интерфейса, позволяю-
щего объединить в системе до 62 крейтов (рис. 5.11). Каждый
крейт должен иметь контроллер, рассчитанный на работу в по-
следовательном режиме обмена информацией (SCC — Serial
Crate Controller), а управление
Рис. 5.11. Последовательная магист-
раль КАМАК
работой крейтов осуществляется
'с помощью блока управления
последовательной магистралью.
В функции типового блока
управления последовательной ма-
гистралью входят переупаковка
сигналов, связь с ЭВМ, иденти-
фикация заявок, промежуточное
хранение и др.
Контроллер SCC обнаружи-
вает адресованную ему инфор-
мацию и выдает ответ — код ис-
полнения и состояния.
В последовательной маги-
страли используется асинхронный принцип передачи данных. Ско-
рость передачи цифровой информации определяется протяжен-
ностью и типом линии связи: для скрученного и экранированного
провода длиной 50 м — до 5 Мбит/с, 5 км — до 100 кбит/с. Ин-
формация передается по байтам (7 бит—информация, 1 бит—кон-
троль четности) с сигналами начала и конца байта.
, Каждое сообщение начинается с адресного байта (адресуется
1до 62 крейтов). Последний байт сообщения содержит контроль-
ную сумму переданных байтов. По магистрали могут переда-
ваться 32 стандартные команды (функции). Сигнал заявки
(флаг) длиной 3 байта генерируется КК по сигналу от ФБ, что
позволяет идентифицировать крейт, блок и субблок.
-Заявки поступают в блок управления магистралью, а отту-
да _в систему приоритетных прерываний ЭВМ. Считается, что
такая организация работы более быстродействующая по сравне-
нию с непрерывным опросом- источников информации.
Для защиты от помех используются экранирование, заземле-
ние согласование характеристик линий связи, а также контроль
по четности и повторение передачи кодов. При обнаружении
ошибки команда не выполняется, и об этом сообщается в ЭВМ.
При повторном искажении команды формируется сигнал тревоги.
В последовательной магистрали могут быть использованы
коаксиальные кабели, кабели парной скрутки с двойной экрани-
ровкой, усилители и формирователи сигналов с дифференциаль-
ными входами и выходами.
Особенности использования ИФ КАМАК
Разработчики КАМАК не приводят экономических обоснова-
ний создания и использования системы, ограничиваясь качест-
венной оценкой его достоинств и недостатков.
К бесспорным достоинствам ИФ КАМАК можно отнести мо-
дульную структуру, приспособленную к гибкому построению и
относительно несложному изменению состава системы, к широ-
кой кооперации в производстве ФБ и устройств ИФ, высокую
пропускную способность, строго формализованную организацию
обмена информацией.
В то же время следует отметить относительно высокую стои-
мость ФБ и конструкций, определяемую техническими данными,
которые избыточны для наиболее часто встречающихся на-прак-
тике задач, технологические трудности в изготовлении плат и
разъемов (в крейте должно работать около 2000 контактов!),,
требование согласования разрядной сетки ИФ КАМАК с разряд-
ностью АЦП, мини- и микро-ЭВМ, микропроцессоров, отсутствие
закрепленных адресов за ФБ и т. п.
В настоящее время разнообразные ФБ, контроллеры крейтов
и ветви, линии связи, интерфейсные узлы и конструкции выпу-
скаются многими фирмами в различных странах, в том числе и
в странах — участниках СЭВ (СССР, Польша и др.). С исполь-
зованием этих устройств для проведения научных экспериментов
и испытаний создано довольно большое количество действующих
систем.
Однако имеются случаи неоправданного применения стандар-
та КАМАК для создания относительно простых и медленно дей-
ствующих устройств, где можно успешно использовать, напри-
мер, приборный ИФ.
Неоднократно производились попытки «исправить» и «упро-
стить» КАМАК. Так, например, известны работы, направленные
на перевод конструктивов в метрические меры, на упрощение
ИФ. Однако все они не имели серьезного успеха. Это объясняет-
ся, в первую очередь, тем, что при принятии этих изменений ста-'
новится невозможной кооперация изготовителей ФБ при созда-
нии ИИС.
В заключение следует отметить, что ИФ КАМАК является по
существу объединением нескольких ИФ, позволяющим решать
многочисленные запросы практики при создании новых ИИС.
Однако в ряде случаев оказывается целесообразным создавать
системы, части которых выполняются на ИФ КАМАК и прибор-
ном ИФ.
5.6. ИНТЕРФЕЙСЫ ПЕРИФЕРИЙНОЙ ЧАСТИ ЭВМ
Общие положения
Знание ИФ периферийной части ЭВМ (включая микропро-
цессоры) необходимо, во-первых, для сопряжения ЭВМ с осталь-
ными блоками ИИС, а во-вторых, для создания на базе этих ИФ
конкретных ИИС.
Далее рассматриваются ИФ периферийной части ЕС ЭВМ,
СМ ЭВМ и микропроцессорных наборов.
Следует отметить, что в периферийной части ЭВМ использу-
ются интерфейсы, в наибольшей мере учитывающие особенности
данной машины. При этом автономная работа периферийных
устройств, объединенных машинными интерфейсами, не преду-
сматривается.
В интерфейсах ЭВМ преимущественно используется магист-
ральный принцип построения с программным управлением про-
цессом обмена. Последнее приводит к относительно большому
объему соответствующего программного обеспечения.
В настоящее время наблюдается тенденция к унификации
машинных интерфейсов для всех ЭВМ, входящих в ЕС ЭВМ, ис-
пользуется один интерфейс и для СМ ЭВМ. Нужно заметить,
что эти ИФ относительно близки друг к другу и сопряжение
между ними относительно несложно, близко и программное
обеспечение этих интерфейсов.
Интерфейс ввода-вывода информации в ЕС ЭВМ
Интерфейс устройств ввода и вывода информации в ЕС ЭВМ
является стандартным для всех машин и внешних устройств, ис-
пользуемых с ними. Устройство, обеспечивающее совместную
работу внешних устройств (ВУ) с центральным процессором и
памятью ЭВМ, называется каналом ввода-вывода (КВВ) [5.7].
Канал ввода-вывода определяет направление обмена инфор-
мацией (прием команд от центрального процессора, адресацию
ВУ), производит выборку командного слова из памяти, выполне-
ние действий в соответствии с командным словом канала, про-
верку данных на четность, прием и обработку информации о со-
стоянии ВУ, формирование запросов на прерывание и т. п.
Мультиплексный КВВ обеспечивает обмен информацией с
ВУ, работающими со скоростью порядка 103 байт/с. К таким
Рис. 5.12. Интерфейс ввода вывода
ЕС ЭВМ
ф^п
ФБ1
шин-кк
АДР-К 1 AdK
УПР-К -Т Фк 1
ИНФ-К 1 1к
РА Б-К К У *
БПК-К Фк
ВБР-К(РВК-К) !
ВБР-А 1 1 ФА(^к) 1 г
ШИН(А0-А7). ШИН-АК 1 ^At^A^A
АДР-А 1 Ad а 1
УПР-А 1 Фа
И НФ-А 1 1а 1
РАБ-А ! А —Г“
' ТРБ-А 1 1
f ~т
ВУ относятся, например, ВУ
для считывания информации
с перфокарт — 500 карт/мин
(670—1340 байт/с) ВУ—для
записи на перфоленту 150
строк/с, цифропечатающие
ВУ—10—50 байт/с. Для об-
служивания столь разнообраз-
ных по быстродействию ВУ
используется асинхронный ре-
жим обмена информацией; ин-
тервалы обслуживания опре-
деляются запросами ВУ. Ка-
нал ввода-вывода может об-
служивать запрос примерно
за 30 мкс, следовательно, в
мультиплексном режиме КВВ может обеспечить до 30 тыс. запро-
сов в секунду.
В монопольном режиме мультиплексного КВВ какое-то од-
но ВУ монополизирует оборудование КВВ и оперативной памя-
ти или центрального процессора. Скорость обмена информацией
в этом случае достигает 200 кбайт/с.
Мультиплексный КВВ имеет несколько подканалов. Первые
восемь подканалов являются раздельными, предназначенными
для управления группой ВУ (до 16 ВУ), остальные подкана-
лы — неразделенные. Количество подканалов определяется объе-
мом внутренней памяти ЭВМ и принятой системой адресации.
Селекторный КВВ или канал прямого доступа в память об-
служивает одно высокоскоростное ВУ (например, накопитель на
магнитных дисках).
Система шин и сигналов интерфейса КВВ ЕС ЭВМ, а также
составляющих логической схемы алгоритмов представлена на
рис. 5.12.
Этот ИФ предназначен для обмена информацией между КВВ
ЭВМ (ФБУ) и внешними устройствами (ФБ) — абонентами. Ли-
нии, по которым передается информация от КВВ к абонентам,
обозначается буквой К, от абонента к КВВ — буквой А.
В СЛСА сигналы, предназначенные для передачи информации
от КВВ к абонентам, сопровождаются индексом К, а от абонен
тов к КВВ — А. В качестве абонента (ФБ) может быть одно'
ВУ или устройство, управляющее группой ВУ. Ко всем магист-
ральным линиям К. и А подключаются все ФБ.
Шина ШИН-К предназначена для передачи от ФБУ данных,
адресов и команд, которые должны выполнить ФБ. Сигналы по
линиям АДР-К, ИНФ-К, УПР К определяют вид информации,
передаваемой по ШИН-К (AdK, 1к, Фк)-
Но линиям РАБ-К и БЛК-К передаются общие сигналы уп-
равления: «КВВ работает» (К), «КВВ занят» (Фк).
Шина абонента имеет такое же назначение, как и шина КВВ,
за исключением того, что вместо команд по шине- ШИН-А пере-
даются сигналы состояния, по! РАБ-А — сигнал «абонент подклю-
чен» (А). У абонента имеется линия ТРБ-А запроса абоне-нта на
обслуживание <pA(W|R).
Линия ВБР-К служит для выявления адреса абонента, вы-
ставившего требование на обслуживание или для проверки под-
ключения абонента. Эта линия последовательно проходит че-
рез все ФБ. Цепь этой линии разрывается ФБ, подключившимся
к системе шин или сделавшим запрос на обслуживание. Появле-
ние сигнала на линии ВБР-А говорит о том, что ни один из ФБ
не разорвал цепь ВБР-К.
В ИФ КВВ реализуется асинхронный режим работы, т. е.
осуществляется передача информации с квитированием, с под-
тверждением приема сигналов.
Содержательная логическая схема алгоритма при передаче
информации к ФБ по инициативе ФБУ будет выглядеть:
К [AdK || Ad*A] ФК (Ad\) [А|| AdA || Ad\ ] X
XI®k|I®*k(W)][Ik||Pk]...K.
СЛСА процедуры передачи информации по инициативе ФБ
может быть представлена следующим образом:
К[Фа (R) ] Фк (Ad*а) ] [А||AdA||Ad*A] X
Х[Фк||Ф*к(И)] [IaIH*a] ...К.
—
Сигнал работы КВВ К присутствует в течение всего времени
передачи.
В ИФ предусмотрены проверка и взаимная блокировка сиг-
налов. Так, например, в ИФ может присутствовать только один
сигнал идентификации, сигналы идентификации на шинах або-
нента могут быть сброшены только после появления сигналов на
шинах ФБУ.
Для всех ФБ при выполнении любой последовательности сиг-
налов ИФ допускается время 32 мкс. КВВ обнаруживает отказ
в работе оборудования, если время перерыва в работе ИФ пре-
вышает 30 мс.
Интерфейс 2К. агрегатного комплекса средств вычислитель-
ной техники (АСВТ) ГСП
Стандартный интерфейс 2К обеспечивает сопряжение между
КВВ ЭВМ АСВТ и ФБ. Остановимся на составе шин и сигналов
ИФ 2К.
Шины для передачи сигналов от процессора или КВВ к ФБ
(выходные шины):
информационные; ШИНО-К — ШИН15-К;п- редача команд,
адресов и данных;
контрольные: КРО-К, КР1-К; контрольные разряды (один на
байт), проверка нечетности;
«Выдано»: ВД-К; сопровождает выдачу информации по
ШИН-К;
«Прием»: ПР-К; готовность КВВ к приему информации'
от ФБ;
«Выполнить»: ВП-К;
«Останов»: ОСТ-К;
«Общий сброс»: ОСБ-К
Управляющие сигналы зависят от
типа ВУ;
«Выбор ВУ»: ВБРО-К, ВБР1-К; сопровождает адресные сиг-
налы на ШИН-К; Если ВУ являются ФБИ н ФБИ, то использу-
ются соответствующие шины.
Шины для передачи сигналов от ФБ к процессору или КВВ
(входные шины):
информационные: ШИНО-Т — ШИН15-Т; передача данных,
адресов, информации о состоянии ФБ при сигнале ПР-К и соот-
ветствующего кода адреса;
контрольные: КРО-Т, KPI-Т; контрольные разряды (один на
байт);
«Отсутствие контроля»: ОК-Т;
«Готов»: ГТО-Т, ГТ1-Т, ГТ2-Т; готовность, субадрес;
«Ошибка»: ОШ-Т, 1 Информация о состоянии ФБ/
«Конец операции»: КОП-Т; J зависит от типа ВУ.
Так же как и ИФ ЕС ЭВМ, ИФ 2К — с объединенной систе-
мой шин и асинхронным обменом информацией. Интерфейс 2К
обладает несколько большей пропускной способностью из-за
большего количества информационных шин. Логические схемы
алгоритмов ИФ ЕС ЭВМ и 2К близки. Читателю предоставляет-
ся возможность составить их самостоятельно.
Интерфейс «Общая шина»
В микро-ЭВМ и некоторых мини-ЭВМ наибольшее примене-
ние находит ИФ типа «Общая шина» (ОШ). В этом ИФ исполь-
зуется магистральная система шин с раздельными (например,
ЭВМ СМ-4) или объединенными (например, «Электроника-60»)
шинами для адресных сигналов и данных, а также отдельной
шиной для сигналов управления (рис. 5.13).
Управление ИФ может производить ФБИ, организующий об-
мен информацией в данное время (ФБ памяти не могут брать
на себя управление ИФ). Выбор ФБИ, управляющего ИФ, осу-
ществляет центральный процессор, учитывающий присвоенный
этому ФБИ приоритет.
Обмен информацией в ИФ ОШ происходит асинхронно, т. е.
на каждый сигнал управления выдается сигнал его выполнения.
Логическая схема алгоритма при выборе ФБИ, которому бу-
дет передаваться функция управления ИФ, может быть пред-
ставлена таким образом: <р (R) Ф0(Ю <р(Ф). Сигнал <D0(R)
устанавливается после проверки приоритета. Сигналы поддер-
живаются до завершения предыдущей операции обмена инфор-
мацией. Операция прерывания программы со стороны выбранного
ФБИ производится центральным процессором, выдающим син-
хроимпульс Ф(Г1):
Ф(Ф) ||А/*(ФБ) ||Ф (Л).
Длительность операций «рукопожатия» зависит от быстро-
действия участвующих в них ФБ.
Адреса
Данные 1(1*). Команды Ф(Ф*). Состояние <р(<р*') _
Контрольные разряды
Управленце Ф* _______________________ ___________
Синхронизация; Т^-информация выставлена _____
Тг~исполнитель принял
_______________или выдал информацию _________
(С разным j ГГД
Запрос передачи rp*(W\R)(apuopumemoMj ___________
Разрешение передачи Ф*(УА\Р.)_____ ______________
Подтверждение выборки <p*(S\R\W) _ __________
Прерывание Ф(Е). Занято Ф(Ф)
Процессор
ФБу Фвп
Рис. 5.13. Интерфейс типа «Общая шина»
Передача данных выполняется по команде выбранного ФБ с
указанием адреса ФБ, с которым должен быть произведен обмен.
Нужно отметить, что, к сожалению, отсутствует общеприня-
тый стандарт на ИФ типа ОШ. Это приводит к тому, что суще-
ствуют многочисленные разновидности таких ИФ, а это — в свою
очередь к излишнему разнообразию аппаратных и программных
средств сопряжения ФБ с микро-ЭВМ.
5.7. СОПОСТАВЛЕНИЕ АЛГОРИТМОВ СТАНДАРТНЫХ ИНТЕРФЕЙСОВ
В последовательном ИФ производится передача по одной ма-
гистрали назначения и содержания основных видов информации:
адресной Ad, командной Ф, статусной ср информации и данных 1.
Естественный путь уменьшения объема передаваемой инфор-
мации в таком ИФ связан с жесткой регламентацией последова-
тельности и размеров сигналов.
В приборном ИФ каждый байт информации передается с по-
мощью операций «рукопожатия», реализующих асинхронный спо-
соб передачи.
Существенное упрощение обмена информацией достигается
разделением системы шин и применением индивидуальных шин
адресации и запроса на обслуживание.
Интерфейс системы КАМАК рассчитан преимущественно на
обмен информацией между ФБУ и ФБП, ФБИ и ФБУ. Передача
24 бит данных от ФБИ к ФБУ по команде последнего занимает
один цикл, по инициативе ФБИ — 2 цикла, от ФБИ до ФБП —
3 цикла. Здесь существенно увеличивается время при необходи-
мости нахождения номера субблока, инициирующего запрос на
обслуживание (может добавляться до 16 циклов).
Интерфейс периферийной части ЕС ЭВМ близок по своим воз-
можностям к приборному ИФ. Асинхронный способ обмена ин-
формацией в нем реализован взаимодействием сигналов на раз-
дельных шинах канала и абонента, обозначенных в СЛСА буква-
ми К и А.
Заметим, что произведения суммарных количеств линий и
циклов обмена у всех интерфейсов близки друг к другу; наимень-
ший размер такого произведения имеет приборный ИФ.
Широкое применение микропроцессоров (МП) в ФБ вызывает
необходимость в разработке ИФ, позволяющих организовать сов-
местное функционирование в системе большого количества МП
при предоставлении отдельным подсистемам должной самостоя-
тельности. В этой связи следует остановиться на разработках
интерфейса Fastbus [5.8] и децентрализованного мультипроцес-
сорного интерфейса [5.9].
В интерфейсе Fastbus в отличие от стандарта КАМАК пред-
усматриваются магистральная двунаправленная структура шин
с параллельной обработкой данных на уровне подсистем первой
ступени и облегченным обменом данных между этими подсисте-
мами, адресация модуля независимо от его положения в крейте,
увеличенная скорость обмена информацией (до 10 МГц).
Децентрализованный мультимикропроцессорный магистраль-
ный интерфейс [5.9] обладает следующими основными особенно-
стями: управление магистралью осуществляют (с учетом приори-
тетов) активные модули-задатчики, магистраль состоит из 32
мультиплексируемых линий данных и адресов, четырех линий
управления и трех линий синхронизации, время передачи адре-
са и данных составляет около 400 нс, при необходимости шины
управления могут употребляться для передачи данных. Структу-
ра системы, обслуживаемая этим интерфейсом, представлена на
рис. 5.14. В этой структуре предусмотрено введение в систему
дополнительных спецпроцессоров и памяти общего пользования.
По мнению авторов [5.9], этот интерфейс позволит осущест-
вить перспективную систематизацию, унификацию и стандарти-
зацию параметров интерфейса и соответствующего программно-
го обеспечения для АСУ и автоматизированных систем научных
децентрализованной
мультимикропроцессорной
Рис. 5.14. Структурная схема
системы
исследований и комплексных испытаний на довольно длительный
срок.
В заключение нужно отметить, что в теоретическом плане
«оптимизация» цифровых ИФ далека от решения.
5.8. ОБ АНАЛОГОВЫХ ИНТЕРФЕЙСАХ ИЗМЕРИТЕЛЬНОЙ ЧАСТИ ИИС
Аналоговая часть обязательно присутствует во всех ИИС и
определяет во многом их возможности и характеристики. При
этом следует различать измерительную и служебную аналоговые
части.
В большинстве случаев в служебной аналоговой части ИИС
действуют сигналы относительно высокого уровня, слабо подвер-
женные влиянию внешних факторов, параметров каналов связи.
Для этой части, видимо, можно ограничиться довольно грубым
нормированием энергетических и временных параметров сигна-
лов, а также параметров линий сигналов.
Существенно более трудная задача связана с созданием интер-
фейса аналоговой измерительной части ИИС. Это объясняется
тем, что искажение в ней измерительных сигналов может приве-
сти к резкому ухудшению метрологических характеристик систе-
мы. В связи с этим далее приводятся соображения об интерфейсе
аналоговой измерительной части ИИС.
Такой интерфейс должен обеспечить совместную работу дат-
чиков, измерительных цепей, работающих с ними, нормализую-
щих (унифицирующих) элементов, коммутаторов аналоговых из-
мерительных сигналов, входных устройств, линии связи, соединя-
ющих аналоговые ФБ, и т. п.
К наиболее важным характеристикам аналогового интерфейса
измерительной части ИИС следует отнести погрешность измере-
ния (положим, удовлетворяющую ряду ±5; ±2,5; ±1; ±0,5;
±0,25; ±0,1%’), быстродействие (положим, 5; 1; 0,1; 10-2; 10 s;
10~4 с на одно измерительное преобразование), удаление объекта
измерения от аппаратуры (например, до 5 м—внутренний монтаж,,
до 100 м — на установках, до 3000 м — в цехах, до 10 000 м — на
заводе, в распределенном производстве). Следует также оценить
уровни и характер помех, действующих в месте работы ИИС.
В аналоговой измерительной части могут быть использованы
сигналы с непрерывными и импульсными видами модуляции, ре-
ализованы структуры как непосредственного, так и компенсаци-
онного преобразований.
Видимо, для каждого вида модуляции, метода измерения,
уровня сигнала и помех и исходя из перечисленных выше харак-
теристик могут быть даны рекомендации по выбору линий связи
(тип проводов), параметров сигналов, входных и выходных со-
противлений, мер защиты от продольных и поперечных помех
(симметрирование, гальваническая развязка, бифилярная провод-
ка, экранирование, заземление, коаксиальная проводка и т. п.)„
параметров коммутационных элементов (разъемы, ключи и пр.).
Нужно заметить, что по аналоговым интерфейсам ИИС име-
ются определенные материалы: ГОСТ по унифицированным сиг-
налам, результаты многочисленных исследований измерительных
(в том числе телеизмерительных) устройств с различными вида-
ми модуляции сигналов, данные по стандартизации сопряжения
аналоговых устройств в отдельных отраслях ИИТ.
Особенно следует отметить работу, проведенную в области
стандартизации аналоговой части бортовых комплексов оборудо-
вания [5.10]. В результате ее проведения сконцентрирован и про-
анализирован большой опыт по проектированию, изготовлению и
эксплуатации аналоговой части бортовых систем летательных
аппаратов. Видимо, многие рекомендации, имеющиеся в этих до-
кументах, могут быть использованы при создании аналоговых
интерфейсов ИИС.
Нужно подчеркнуть, что при проектировании любой ИИС не-
обходимо правильно решить указанные выше вопросы разработ-
ки интерфейса аналоговой части системы.
Г лава 6
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СРЕДСТВ
МИКРОПРОЦЕССОРНОЙ техники
6.1. ЭВМ И СРЕДСТВА МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ В ИИС
Программируемые средства вычислительной техники употребляются в ИИС,
шо-первых, при совместном выполнении измерительных и вычислительных про-
цедур, необходимых для получения результатов измерения, во-вторых, для обра-
ботки измерительной информации и, в-третьих, для организации программного
управления работой ИИС. Эти функции выполняются в ИИС универсальными
.и программируемыми клавишными ЭВМ и в резко возрастающем объеме сред-
ствами микропроцессорной техники (микропроцессорами и микропроцессорными
комплектами). Перспективным представляется использование в ИИС ЗУ.
Здесь приводятся основные характеристики и излагается принцип действия
перечисленных средств вычислительной техники в таком объеме, который не-
обходим для понимания особенностей их работы в ИИС, а также для перво-
начальной оценки целесообразности использования того или иного вычислитель-
ного средства при проектировании систем и комплексов.
Необходимо учитывать, что микроэлектроника развивается очень быстро,
л поэтому приведенные в книге фактические данные могут устареть даже к мо-
менту выхода в свет этой книги.
С учетом производительности, стоимости и ряда других факторов ЭВМ под-
разделяются на группы: большие и средние, малые (мини-ЭВМ) и микро-ЭВМ.
Наиболее распространенными отечественными ЭВМ первой группы являются
ЭВМ единой системы — ЕС ЭВМ. Единая система ЭВМ представляет комплекс
программных и аппаратных средств общего назначения, причем все ЭВМ, вхо-
дящие в ЕС, обладают информационной, программной и аппаратной совмести-
мостью.
Использование ЭВМ первой группы при построении ИИС имеет ряд особен-
ностей: ЭВМ этого класса дороги, они требуют довольно больших, специально
оборудованных помещений, для их обслуживания необходим штат высококвали-
фицированных специалистов, полная и эффективная загрузка таких ЭВМ требует
значительных усилий. Исходя из этого, использование больших и средних ЭВМ
оправдано при построении сложных многомашинных ИИС, в которых таким
ЭВМ отводится роль главных. Главная ЭВМ, как правило, осуществляет управ-
ление другими ЭВМ и производит окончательную обработку информации.
Учитывая вышеизложенное, вопросы использования ЭВМ первой группы при
построении ИИС здесь не рассматриваются.
Необходимость решения задач, связанных с автоматизацией измерений, кон-
троля и управления технологическими процессами, предварительной обработкой
информации, поступающей по линиям связи, привела к появлению компактных
быстродействующих ЭВМ с коротким словом и упрощенной системой команд,
получивших название мини-ЭВМ. В нашей стране выпускаются мини-ЭВМ СМ-1,
СМ-2, СМ-3, СМ-4, «Электроника-125» и др.
Следует отметить, что мини-ЭВМ являются основой для построения ряда
управляющих и измерительных вычислительных машин и комплексов. Совре-
менные мини-ЭВМ по многим своим характеристикам мало отличаются от сред-
них ЭВМ. Действительно, быстродействие современных мини-ЭВМ достигает
106 операций/с, емкость памяти —от 4 до 256 тыс. слов, разрядность — от 12
до 32 (преимущественно 16) двоичных разрядов, количество команд — до 200,.
они имеют гибкую систему прерываний и приоритетов, при программировании
используются алгоритмические языки высокого уровня и т. д.
Особенности организации малых ЭВМ в значительной мере связаны с ко-
ротким машинным словом. Это приводит, с одной стороны, к повышению бы-
стродействия, но с другой — к сокращению количества команд и ограничению
емкости памяти, к вынужденному использованию относительной, косвенной и.
других видов адресации, к тому, что преимущественно используется одноадрес-
ный формат команд. Следует также отметить, что большие и средние ЭВМ
имеют преимущество перед малыми, а малые — перед микро-ЭВМ в области
более полного и обладающего лучшими характеристиками набора периферийных
устройств и программного обеспечения.
Микроэлектронная промышленность выпускает большое количество типов;
микропроцессоров (МП), микро-ЭВМ и микропроцессорных комплектов инте-
гральных микросхем (МПК ИС). Широкое распространение этих микропроцес-
сорных средств объясняется, в первую очередь, малыми габаритами, низкой,
стоимостью, повышенной надежностью и универсальностью, связанной с програм-
мным принципом работы [6.1].
Микро-ЭВМ (микропроцессорная вычислительная машина) — это ЭВМ, со-
стоящая из МП, полупроводниковой памяти и средств связи с периферийными,
устройствами.
Под МП понимается программно-управляемое устройство обработки цифро-
вой информации, конструктивно выполненное в виде одной или нескольких БИС,,
входящих в состав МПК ИС. Микропроцессор по своим функциям и структуре
напоминают упрощенный вариант процессора обычных ЭВМ [6.2, 6.3].
Микропроцессорный комплект ИС представляет собой совокупность микро-
процессорных и других интегральных микросхем, совместимых по информацион-
ным, энергетическим характеристикам и по конструктивно-технологическому
исполнению и предназначенных для совместного использования при построении
МП, микро-ЭВМ, контроллеров и других средств вычислительной техники.
Перейдем к рассмотрению основных характеристик этих микропроцессорных
средств.
6.2. МИКРО-ЭВМ
Известны три основные разновидности микро-ЭВМ.
Многоплатная микро-ЭВМ — это ЭВМ, выполненная на несколь-
ких платах, объединенных в единых типовых конструкциях вместе с органами
управления, индикации и источником питания. Такая ЭВМ может использоваться
как автономно, так и в качестве встраиваемого блока. Структурная схема такой
микро-ЭВМ приведена на рис. 6.1. В общем случае в состав микро-ЭВМ могут
входить: микропроцессор CPU-, генератор тактовых импульсов GN; система па-
мяти, хранящая данные и программы и состоящая из оперативного, постоянного-
и перепрограммируемого ЗУ; устройства ввода-вывода УВВ, куда входят считы-
ватели с перфолент, с перфокарт, электрифицированные пишущие машинки, дис-
плеи, графопостроители, телетайпы, пульты управления микро-ЭВМ; внешняя
память обычно накопитель на гибком магнитном диске или кассетный нако-
питель на магнитной ленте. Все перечисленные составные части соединяются
через устройства связи, обеспечивающие нормальную работу микро-ЭВМ.
Система памяти
Рис. 6.1. Структурная
гро-ЭВМ
Одноплатная микро-ЭВМ — вычислительная машина, в которой
процессор, система памяти и устройство связи с УВВ выполнены на одной
•плате. Такая микро-ЭВМ, как правило, не имеет собственного источника питания,
органов управления, индикации и предназначена для использования преимущест-
венно в качестве встраиваемого устройства.
Однокристальная мйкро-ЭВМ — БИС, содержащая процессор,
память (естественно, меньшей емкости) и каналы ввода-вывода. Такая микро-
ЭВМ применяется преимущественно в
виде встраиваемого устройства.
Пользователя в первую очередь ин-
тересует совокупность свойств и харак-
теристик микро-ЭВМ, позволяющая осу-
ществить обоснованный выбор той или
иной микро-ЭВМ.
Рассмотрим основные характери-
стики микро-ЭВМ.
Назначение микро-ЭВМ. Микро-
ЭВМ может применяться в качестве вы-
числительного или управляющего устрой-
ства, програмно-управляемого или —
нетрадиционно — с заданием алгоритма
работы аппаратным способом.
Команды в микро-ЭВМ. По функциональным признакам можно выделить
команды обработки данных, управления и пересылки. Современные микро-ЭВМ
позволяют применить от 20 до 512 команд с форматом от 1 до 4 байт. Наиболее
схема мик-
типична одноадресная команда.
Система прерываний необходима при совместной реализации нескольких
программ. При наличии такой системы выполнение текущей программы в случае
необходимости может быть приостановлено, и ЭВМ перейдет к выполнению
другой, более важной программы. Прерывание осуществляется по приходе сиг-
нала от источника прерываний, каковым может являться сигнал как от внутрен-
них блоков (и программ) ЭВМ, так и от внешних устройств. Важность отдель-
ных программ известна заранее, при этом используется приоритетный принцип.
Такая организация процесса вычисления особенно необходима при использовании
микро-ЭВМ для управления (например, аварийный режим должен вызвать пе-
реход на другую подпрограмму).
Организация ввода-вывода. Обмен данными между микро-ЭВМ и периферий-
ными устройствами осуществляется путем программно-управляемой передачи
данных или при прямом доступе к памяти. В первом случае передачей данных
управляет специальная программа, реализуемая в микро-ЭВМ (скорость пере-
дачи — одно слово за цикл выполнения программы передачи). Во втором случае
информация записывается из внешних устройств в ОЗУ без участия процессора,
причем для осуществления прямого доступа к памяти необходимо устройство
сопряжения более сложное, чем в первом случае. Следует отметить, что при
прямом доступе к памяти передача информации осуществляется, как правило,
быстрее и время записи определяется, в основном, быстродействием устройств
памяти. Режим прямого доступа к памяти используется для передачи больших
массивов данных, например из внешних ЗУ.
В большинстве микро-ЭВМ связь процессора, оперативной памяти и устройств
ввода-вывода друг с другом осуществляется через оощую магистраль
(«Общая шина»). Основными достоинствами такой организации процесса обмена
являются простота и возможность видоизменять состав оборудования (см. гл. 5).
Система адресации. Одной из важнейших характеристик микро-ЭВМ являют-
ся применяемые в ней виды адресации или способы обращения к памяти. Это
объясняется тем, что обращение к памяти является наиболее распространенной
операцией, кроме того, прямое обращение к памяти большой емкости при отно-
сительно небольшой разрядности микро-ЭВМ невозможно (действительно, если
размер слова равен байту, то непосредственно можно обращаться только
к 256 ячейкам памяти, что во многих случаях недостаточно). Поэтому в микро-
ЭВМ используются прямая, относительная, косвенная адресации с их модифи-
кациями.
Программное обеспечение. В настоящее время стоимость разработки про-
граммного обеспечения составляет 50—80 % общей стоимости разработки ЭВМ и
составляет значительную часть при разработке измерительно-вычислительных
средств.
Программирование может осуществляться на машинном языке, языке ассем-
блера, языках высокого уровня.
Ручное программирование в машинных кодах (командах) можно применять
для небольших задач. В этом случае не требуется специальных аппаратных
средств и получаются более компактные программы с эффективным использова-
нием памяти.
Основное преимущество языка ассемблера над машинным заключается
в том, что программирование на нем выполняется в символических обозначениях,
более простых, чем машинные коды. В этом случае могут использоваться как
аппаратные средства, так и специальная программа для перевода с языка
ассемблера на машинные коды. При этом программа получается более длинной,
чем в первом случае, и часть памяти занята программой ассемблера.
Языки высокого уровня (АЛГОЛ, ФОРТРАН, БЭЙСИК, PL/1 и др.) дают
возможность специалисту программировать на языке, близком к профессиональ-
ному. При этом резко ускоряется программирование, при передаче программы
с машины на машину не нужно программу составлять заново. Но зато объект-
ная программа (программа в машинных кодах) получается еще большей по
объему, чем при применении ассемблера, здесь также нужны специальные аппа-
ратные и программные средства для перевода программы на машинный язык.
Используются языки высокого уровня для крупных программ (более
1000 байт).
Различают пять основных классов средств программирования: редактирую-
щие программы, транслирующие программы (ассемблеры, компиляторы и интер-
претаторы), программы-загрузчики, моделирующие программы и отладочные
программы. Редактирующие программы облегчают создание исходной програм-
мы. Транслирующие программы переводят исходную программу на машинный
язык. Загрузчики переносят объектную программу из внешней памяти, например
перфоленты, в память микро-ЭВМ. Моделирующие программы позволяют про-
верить объектную программу при отсутствии микро-ЭВМ. Отладочные програм-
мы облегчают процесс отладки.
Все эти средства делятся на кросс-средства и резидентные средства. Кросс-
средства это программы, которые позволяют осуществить разработку программ
на другой, как правило, более мощной ЭВМ. Резидентные средства -— это про-
Таблица 6.1. Характеристики микро-ЭВМ
Тип микро-ЭВМ Структура команд* Разрядность Количество команд Количество уровней пре- рывания Быстродействие, мкс
Сложение Умноже- ние Логиче- ские опе- рации Команды управле- ния Цикл ра- боты ОЗУ
«Электроника-60» 0, 1, 2 16 81 8 4,5 40 6 1С 2,5
«Электроника С5-12» 0, 1 16 31 500 17 003 1000 600 2,5
«Электроника С5-21» 0, 1 16 31 3 20 3400 10Э 2.0 2,5
О — безадресные, I — одноадресные, 2—двухадресные.
граммы, которые выполняются на той микро-ЭВМ или МП, для которых раз-
рабатывается программа.
В настоящее время из-за ограничений памяти микро-ЭВМ и отсутствия
транслирующих программ пользователи вынуждены, в большинстве случаев, со-
ставлять программу в машинных кодах. По мере появления транслирующих
программ и увеличения емкости памяти микро-ЭВМ доля программ, написанных
на языках высокого уровня, для решения более сложных задач будет воз-
растать.
В этой книге предлагаются и используются содержательные логические схе-
мы алгоритмов, которые можно отнести в программно-выполняемой их части, —
к программам, написанных на языке типа ассемблера. Использование СЛСА
позволяет формализовать описание алгоритмов работы системы и перейти к со-
ставлению программы в машинных кодах.
Технические характеристики микро-ЭВМ, определяемые развитием электрон-
ной техники, за очень короткое время претерпевают довольно значительные изме-
нения. Поэтому приведенные в табл. 6.1 данные по микро-ЭВМ позволяют по-
лучить лишь представление об их возможностях.
В заключение следует отметить, что микро-ЭВМ в настоящее время еще
уступают мини-ЭВМ по разрядности (8—16 двоичных разрядов), быстродействию,
(до 500 тыс. операций в секунду), емкости памяти (4—64 Келов) и по составу
периферийного оборудования, однако имеют значительное преимущество по раз-
мерам и стоимости, что и определяет их все возрастающее применение.
Наличие ПДП Емкость ОЗУ ПЗУ, Келов Связь с ВУ (тип интер- фейса) Быстродейст вне КВВ, кбит/с ч о > с * CJ >.35 t- о Я Я ж аз « о х ф н я Элементная база (МПК) по
Есть От 4 до 32 Оэщая шина 1003 Много платная К581 Пакет стандартных программ, трансляторы с языков ФОР- ТРАН, БЕЙСИК, АССЕМБЛЕР, тестовые программы
Есть От 0,128 до 2 ИФЭВМ 80 Одно- платная К536, К535 Диспетчер, библиотека стан- дартных подпрограмм, тран - слятор с языков ассемблера и БЕЙСИК, профилактические тесты
Есть От 0,256 до 2 ИФЭВМ 803 Одно- платная К586, К535 Кросс-ассемблер, транслятор с языка БЕЙСИК, моделирую- щие программы
6.3. МИКРОПРОЦЕССОРЫ
В общем случае в состав МП входят арифметико-логическое устройство
(АЛУ), блок внутренних регистров, устройство управления (УУ), магистральные
шины данных и ввода-вывода и устройство, осуществляющее связь МП с внеш-
ними устройствами.
Арифметико-логическое устройство МП аппаратно выполняет несколько про-
стейших операций: сложение, вычитание, логическое И, логическое ИЛИ, сло-
жение но модулю 2, пересылку, сдвиг и др. Более сложные действия выполняют-
ся по микропрограммам и подпрограммам. Виды операций, выполняемых АЛУ,
а также состояние МП запоминаются на регистрах состояния.
Блок внутренних регистров содержит регистры общего назначения (РОИ),
команд, адреса, стек, указатель стека, индексные регистры, счетчик команд, ре-
гистр состояния, прямого доступа к памяти, накопительный регистр и т. д.
Наличие внутренних регистров резко расширяет возможности АЛУ и позволяет
повысить быстродействие МП. Следует заметить, что конкретные типы МП со-
держат различное количество перечисленных регистров. Очень часто функции
этих регистров выполняют либо РОН, либо ячейки внешней памяти или же такие
функции отсутствуют вообще.
Устройство управления МП в зависимости от способа организации управле-
ния может быть выполнено в одной из двух модификаций: функция управления
реализуется с применением либо аппаратных средств, либо микропрограммиро-
вания.
Устройство управления первого типа в зависимости от кода соответствующей
команды вырабатывает последовательность сигналов, необходимую -для выпол-
нения МП предписанной командой-операции. В таком УУ обязательно наличие
сложных в функциональном отношении дешифратора команд и блока формиро-
вания сигналов управления. При сравнительно высоком быстродействии такая
организация процесса управления имеет существенный недостаток: при необхо-
димости изменения отдельных команд или введении новой требуется передел-
ка УУ.
Второй способ организации процесса управления предполагает наличие спе-
циального ЗУ микрокоманд, хранящего набор микропрограмм, соответствующих
кодам операций. Последовательное выполнение этих микропрограмм обеспечи-
вает появление необходимых сигналов управления в МП, чем достигается вы-
полнение соответствующей операции. При таком варианте построения УУ изме-
нение состава команд сводится к замене содержимого ЗУ микрокоманд. Однако
постоянное обращение к ЗУ микрокоманд ограничивает быстродействие МП.
В различных МП используются одна, две или три внутренние шины, что
существенно влияет на характеристики МП. Увеличение числа шин приводит
к повышению быстродействия (появляется возможность выполнения операций за
меньшее количество тактов), но при этом часть площади кристалла занимается
шинами. При уменьшении числа шин операции в МП выполняются за несколько
тактов и появляется необходимость в дополнительных регистрах, правда, при
этом функциональные возможности МП расширяются.
Количество внешних интерфейсных шии у разных МП колеблется от одной
до трех. По этим шинам передаются данные, управляющие сигналы и адреса.
В зависимости от числа шин эти операции производятся за различное число
тактов, что в значительной мере определяет быстродействие МП.
У МП с тремя шинами по шине данных передаются операнды ’(числа, над
которыми осуществляются операции) и команды.
Внешняя шина адреса МП необходима для адресации к внешней памяти и
другим внешним устройствам.
По двунаправленной шине управления передаются сигналы от внешних
устройств к МП и обратно. Эти сигналы могут характеризовать состояние внеш-
них устройств. С помощью сигналов управления осуществляются запрос и разре-
шение на прерывание, а также запись и считывание информации при работе
с внешней памятью и т. п.
Структурно МП может быть выполнен в одной из двух известных модифи-
каций:
с фиксированной разрядностью обрабатываемых слов и фиксированной си-
стемой команд (например, МП из МПК К580);
с возможностью наращивания разрядности обрабатываемых слов (секциони-
рованные МП) и микропрограммным управлением (например, МП из МПК
К589).
Структура МП первого типа во многом повторяет структуру ЭВМ малой и
средней производительности. Логическая структура секционированных МП с на-
ращиваемой разрядностью существенно отличается от предыдущего типа МП.
В таком МП операционная часть (АЛУ, регистры общего и специального на-
значения, дешифратор микрокоманд и т. п.) разделена на равные части (по 2,
4, 8, 16 разрядов), которые называются секциями. Количество таких секпий за-
висит от решаемых МП задач и определяется потребителем. Устройство управ-
гления в секционированных МП реализуется в виде отдельных интегральных
микросхем большой, средней и малой степени интеграции (например, БИС микро-
программного, управленья, БИС ПЗУ микрокоманд и т. п.).
6.4. МИКРОПРОЦЕССОРНЫЕ КОМПЛЕКТЫ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ
В составе МПК ИС можно выделить следующие основные группы инте-
гральных микросхем большой степени интеграции (БИС):
БИС, на основе которых строится МП, — это так называемый базовый ком-
плект; '
- БИС запоминающих устройств, образующих систему памяти (микросхемы
ОЗУ, ПЗУ, ППЗУ);
• БЙС, осуществляющие связь между отдельными узлами вычислительного
устройства: между МП и УВВ — АЦПУ, графопостроителями, дисплеями, фото-
считыв'а'телямй, внешними накопителями информации и т. п.;
БИС, используемые при создании управляющих и измерительных комплексов,
которые осуществляют связь между МП и объектом, — АЦП, ЦАП, компарато-
ры,- преобразователи, усилители и т. п.
Таблица 6.2. Характеристики микропроцессорных комплектов
интегральных микросхем серий К580 и К589
а*. J3 ь Ь Ф а г- «CQ Ф £ ф - KPQ 6 д а. ,
С Тип МИК- Функциональное назначение о д' а ь ф К £ к « * а ш й
S ро схемы схемы < о Sss е о Ф е£о
- а S сп £ н ~ а £ Ф аг ьЗ о о сх ге Е Ь « я У и
.. - .Н IX Л!«о И д л Е s X Е - а СО
К580 КБ80ИК80 мп 8 0,5 0,8 5; 12; 48 -10-3-
К580ИК51 —5 -4-70
Последовательный пери- ферийный адаптер 8 0,5 0,4 5 48
К580ИК55
К589 Параллельный перифе- рийный адаптер 8 0,5 0,35 5 48
К589ИК1
Блок микропрограммно- 2 п 15 1,2 5 40 -10-^
К589ИК02 го управления -4-70
Центральный процессор- 2 п 14 1,0 5 28
ный элемент
К589ИК03 Схема ускоренного пе- 8 100 0,6 5 28
К589ИР12 реноса
Многорежимный буфер- ный регистр 8 2Б 0,8 5 24
К589ИР14
Блок приоритетного прерывания 4 12,5 0,8 5 ; д
КБ89АП16
Шинный формирователь 4 53 0,7 5 16
К589АП26 Шинный формирователь 4 63 0,7 п 16
К589ХЛ4 с инверсией
Многофункциональное 4 25 0,8 5 16
К556РТ4 синхронизирующее уст- ройство
ППЗУ 1 К 14 0,7 5 16
КБ56РТ5 ППЗУ 4К 12,5 0,8 5 24
К556РТ6 ППЗУ 16 к 10 1,0 5 24
К556РТ1 Электрически програм- мируемая логическая мат- рица — 20 1,0 5 28
Базовый МПК ИС может состоять из одной БИС — однокристальный МП,
двух БИС — двухкристальный МП, нескольких БИС — многокристальный МП.
В устройствах, осуществляющих связь между МП и УВВ, МП и ВУ (или
объектом), используются так называемые контроллеры, являющиеся устройства-
ми логического управления. Они могут строиться иа базе микропроцессорных
БИС и других интегральных микросхем меньшей степени интеграции.
В табл. 6.2 для иллюстрации приведены данные МПК К580 и К589, широко
используемых на практике.
Следует учесть, что при построении устройств иа базе конкретного МПК
можно использовать интегральные микросхемы, ие входящие в его состав, на-
пример ИС МПК К536 хорошо согласуются с ИС К535 и т. д. Более подробно
с этими, а также другими связанными с функционированием отдельных ИС
МПК вопросами можно познакомиться по [6.2, 6.3].
МПК имеют разрядность 2Х«, 4Хп, 8Х«, 8 и 16, включают от 3 до
12 типов БИС, имеют быстродействие от 30 до 500 тыс. операций в секунду,
мощность, потребляемая одной БИС, колеблется от 0,001 до 1,2 Вт.
При организации обмена информацией в МПК преимущественно использует-
ся интерфейс «Общая шина».
В ближайшее время нужно ожидать повышения производительности БИС,
входящих в состав МПК, создания БИС памяти емкостью до 256 Кбайт, разра-
ботки для микро-ЭВМ резидентных трансляторов языка высокого уровня, спе-
циализированных БИС (быстрого преобразования Фурье, ассоциативных процес-
соров и т. п.).
В настоящее время имеются факторы, затрудняющие применение МПК.
К таким факторам в первую очередь относятся отсутствие промышленного вы-
пуска средств отладки систем с МПК и программ их работы, неполнота выпус-
каемых МПК (в некоторых МПК нет системных контроллеров, узлов сопряже-
ния и др.), различающиеся интерфейсы в разных МПК, отставание в выпуске
АЦП, ЦАП и отсутствие миниатюрных, простых и дешевых периферийных
устройств, ориентированных на работу с МПК.
6.5. ПРОГРАММИРУЕМЫЕ КЛАВИШНЫЕ ЭВМ
При построении ИВС могут использоваться программируемые электронные
клавишные вычислительные машины (ПЭКВМ) или программируемые кальку-
ляторы [6.4]. Примером таких ПЭКВМ могут служить «Электроника-70», «Элек-
троника-70М», «Электроника С-50» и ПЭКВМ фирмы «Хьюлетт-Паккард»
(США): НР9815, НР9825, НР9830, НР9845. В ПЭКВМ программа и исходные
данные вводятся непосредственно с клавиатуры. Составление программы на язы-
ке ПЭКВМ значительно проще и удобнее для пользователя, чем аналогичной
программы для малых ЭВМ.
По своей структуре ПЭКВМ сходны с микро-ЭВМ с микропрограммным
управлением. Различие заключается в том, что ПЭКВМ обязательно имеют бло-
ки индикации и клавиатуры, что же касается интерфейсных блоков, связываю-
щих ПЭКВМ с внешними устройствами, то они представлены в значительно^
меньшем количестве, чем у микро-ЭВМ.
Чтобы яснее представить возможности современных ПЭКВМ, приведем их
основные технические характеристики [6.4]. В ПЭКВМ используются два спо-
соба представления чисел — с фиксированной и плавающей запятой, разряд-
ность__чаще всего 8—10 десятичных знаков; емкость ОЗУ — от сотен слов до
4 Кбайт и более (во многих ПЭКВМ предусмотрена возможность наращивания
емкости памяти); цикл обращения к памяти, как правило, не превышает 2 мкс,
время выполнения основных операций составляет примерно 1—100 мс. Широко
используются программируемые БИС ПЗУ для организации микропрограммного
управления; разрядность и емкость таких ПЗУ зависит от структуры и органи-
зации ПЭКВМ. В качестве периферийного оборудования используются чаще
всего печатающее устройство, иногда графопостроитель, может проводиться
работа с внешним ЗУ. Интерфейсный блок позволяет осуществить управление
внешними приборами.
Наиболее распространенными языками программирования для ПЭКВМ
являются алгебраические (формульные) и алгоритмические языки высокого уров-
ня (чаще всего язык БЕЙСИК). В простейшем случае каждой команде (опера-
тору) соответствует одна клавиша. При увеличении количества команд оператор
команды задается с помощью нескольких алфавитных символов.
При редактировании и отладке программы осуществляется вывод на инди-
катор операторов и операндов, записанных ранее в ОЗУ. Большинство совре-
менных ПЭКВМ имеет специальные клавиши для выполнения команд редакти-
рования, таких, как сдвиг программы и ее частей вперед и назад, стирание или
замена оператора или операнда, вставка пропущенного оператора или операнда
и т. д. После того как программа проверена и отредактирована, осуществляется
ее проверка в пошаговом режиме с контролем промежуточных результатов.
Только после получения ожидаемого результата программа окончательно готова.
Теперь она может быть выведена из ОЗУ по шиие данных через интерфейсный
блок на встроенный магнитный кассетный накопитель, ленточный перфоратор или
цифровую печать.
По сравнению с мини-ЭВМ ПЭКВМ имеют меньшее быстродействие и мень-
шую емкость памяти, кроме того, в них отсутствует система прерывания и менее
представительно осуществляется связь с внешними устройствами.
Меньшее быстродействие ПЭКВМ объясняется, во-первых, большой разряд-
ностью, а во-вторых, каждая команда ПЭКВМ (за исключением логических)
эквивалентна 100, а то и более командам мини-ЭВМ (например, умножение
десятичных чисел в системе с плавающей запятой, вычисление тригонометриче-
ских функций и т. д.), поэтому разница в быстродействии достигает 5—10 раз.
Оперативная память ПЭКВМ расходуется более экономно и эквивалентна ОЗУ
значительно большей емкости мини-ЭВМ.
С учетом вышеизложенного применение ПЭКВ оправдано при построении
относительно несложных и медленнодействующих ИИС, в которых обработка
информации от измерительных преобразователей осуществляется последователь-
но. Следует отметить, что в этом случае ПЭКВМ может быть использована для
проведения расчетной работы (помимо работы в составе ИИС).
Для ИИС высокой производительности, с большим составом разнообразного
оборудования, обработкой информации, содержащей большое количество логиче-
ских операций и выполняемой в реальном масштабе времени с использованием
системы прерываний, предпочтение следует отдать универсальным программируе-
мым вычислительным устройствам.
Промышленностью выпускаются специализированные управляющие вычисли-
тельные устройства типа «Электроника ДЗ-28» и «Электроника ТЗ-29», которые
построены на сочетании принципов построения ПЭКВМ и управляющих ЭВМ.
Они предназначены для обработки данных и автоматизации научно-технических
расчетов, для построения автоматизированных систем контроля и управления
и информационно-справочных систем с малым объемом данных.
Запись информации в ОЗУ может осуществляться с клавиатуры, с кассеты
встроенного накопителя МЛ, с периферийных устройств или с устройств, имею-
щих прямой доступ к памяти. Управление операциями может осуществляться
по программе, с клавиатуры и из периферийных устройств.
Рассматриваемые машины обеспечивают взаимодействие с комплексом пери-
ферийного оборудования, в состав которого могут входить различного рода
источники цифровой информации, устройства хранения, приема, выдачи и ото-
бражения информации, совместимые по интерфейсу ввода-вывода. «Электрони-
ка Д2-28» имеет интерфейс типа «Общая шина», а «Электроника Т2-39» — стан-
дартный приборный интерфейс. В качестве устройств ввода-вывода в рассмат-
риваемых ЭВМ используются указанные ранее клавиатура и индикаторное таб-
ло на 32 цифры, а также пишущая машинка типа «Консул-260.1», фотосчиты-
вающее устройство типа FS-1501 и перфоратор ПЛ-150.
Объем информации, который можно хранить с помощью МЛ на одной сто-
роне кассеты, — до 200 Кбайт, а скорость чтения — записи—около 445 байт/с.
Максимальная скорость обмена (ввод-вывод) информацией с периферийными
устройствами, число которых практически ие ограничено, равна примерно
70 кбайт/с.
Вышеуказанные ЭВМ работают с 16-разрядными двоичными и десятичными
числами в режиме с фиксированной и плавающей запятой, имеют примерно
460 программируемых команд, емкость ОЗУ от 16 К до 32 Кбайт, используют
12 типов адресации. При работе могут использоваться прямой доступ к памяти
и система прерываний, имеющая три внешних уровня прерывания (по пяти раз-
личным сигналам) и один внутренний (по сигналу некорректности операции).
В соответствии с техническим описанием ЭВМ «Электроника ДЗ-28» пример-
ное время выполнения отдельных операций составляет: для операции управле-
ния — 0,079 мс, логических операций — 0,049 мс, операций сложения, вычита-
ния — 0,77 мс, умножения, деления — 4,67 мс, вычисления тригонометрических
функций — 67 мс. ЭВМ «Электроника ТЗ-29» обладает значительно более высо-
ким быстродействием: так, например, операция сложения в ней выполняется за
12 мкс. При написании программ для «Электроники ДЗ-28» может быть исполь-
зован язык БЕЙСИК, а для «Электроники ТЗ-29» — ФОРТРАН.
Учитывая вышеуказанное, можно сделать вывод, что при построении отно-
сительно медленных ИИС с большим количеством внешних устройств, где не
требуется обработка информации в реальном времени, целесообразно использо-
вать рассмотренные ЭВМ типа «Электроника ДЗ-28» и «Электроника ТЗ-29».
К сожалению, уровень надежности этих машин пока относительно невысок
(наработка на отказ при доверительной вероятности 0,8 только не менее 1000 ч).
Однако с улучшением технологического процесса изготовления и более широким
применением БИС уже в ближайшее время будут достигнуты более высокие
показатели надежности.
6.6. ТАБЛИЧНЫЕ МЕТОДЫ ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ
Обычным в ИИС является применение ЗУ для хранения информации и со-
гласования динамических характеристик различных частей систем путем измене-
ния отношения скорости записи (в ЗУ) и воспроизведения (из ЗУ) информации.
Рис. 6.2. Матрица умножения
Заслуживает серьезного вни-
мания возможность занесения в
ЗУ по заданным адресам резуль-
татов и последующего использо-
вания подсчитанных или опреде-
ленных заранее функций от этих
адресов. При этом как бы реали-
зуется автоматический поиск го-
тового результата вычислений в
таблице.
При одноадресной реализа-
ции поле адресов Z соответству-
ет множеству значений функций
F(Z) и имеется возможность по-
лучения последовательности за-
ранее определенных результатов преобразований информации z : = Fi (z) : —
=F2[Fj(z)] ... Преобразования F, могут быть преобразованиями кодов, лога-
рифмическими, тригонометрическими и другими функциями одного аргумента..
С помощью таких преобразований может производиться, в частности, линеари-
зация результатов измерения.
При двухадресной реализации zjz2 можно отыскивать заранее определенные-
функции двух переменных: (zb z2) : =Чг1(г!, z2) : =4r2[4ri(zi, z2)] ... Если адре-
са (переменные) представлены в число-импульсном коде, то возможно исполь-
зование матричных сеток [6.5, 6.6]. Структура их будет зависеть от вида вы-
полняемых преобразований и заданных погрешностей. На рис. 6.2 представлена-
матрица умножения чисел zj и z2. При подаче сигналов на входы Zi и z2 обра-
зуется цепь, выдающая сигнал в зоне, обозначающей значение предварительно
подсчитанных произведений этих чисел. На матрице выделены зоны равных зна-
чений произведений чисел zi и z2 (например, 2X10 и 10X2, 4X5 и 5X4 и др.),
объединенных с учетом заданных погрешностей округления результата. Наиболь-
шие значения произведений всех зон показаны на матрице справа.
Для реализации заданной последовательности поиска результатов нескольких
преобразований может быть организована схема, содержащая несколько после-
довательно соединенных матриц. На рис. 6.3 показана структурная схема устрой-
ства, выполняющего поиск результата вычисления по формуле 1ЕЭф =
=zi/Fi(z2, z3)z-z,. На выходе этого устройства производится статистическая
раоотка, связанная с получением распределения реализовавшихся значений 1ЕЭф.
Значительно большими возможностями обладают реализации табличных ме-
тодов преобразования информации, оперирующие с двоичными кодами и осно-
ванные на использовании полупроводниковых ЗУ. Современная электронная про,-
ПЗуЛеНН0СТЬ выпУ(Кает полупроводниковые ЗУ различного назначения (ОЗУ,.
. ППЗУ, специальные виды ЗУ), со статическим и динамическим методами,
ныеНеНИЯ' С РазличнЬ1МИ принципами размещения и поиска информации (адрес-
. ’ ассоциативные и др.). Широкое распространение получают программируе-
мые логические матрицы ['. 7].
Подробное рассмотрение устройств с табличными методами преобразования
информации выходит за пределы настоящей книги, ограничимся лишь кратким
рассмотрением общих свойств и некоторых областей возможных применений этих
устройств в ИИС.
Основные достоинства устройств, основанных на использовании табличных
методов преобразования информации, связаны с высоким быстродействием, огра-
ниченным лишь временем завершения переходных процессов в устройстве и по-
иска готовых результатов, с повышенной надежностью работы, с возможностью
выполнения работ по подготовке таблиц готовых решений на высокопроизводи-
тельных ЭВМ и программ на языках высокого уровня.
Рис. 6.3. Структурная схема матричного устройства
Использование ЗУ с двухадресной организацией хранения информации мо-
жет обеспечить труднодостижимое другими средствами быстродействие. Для
уменьшения емкости ЗУ целесообразно исключить избыточность, связанную с на-
личием зон одинаковых результатов предварительно сделанных вычислений. Воз-
можно, что здесь окажется полезным разумное сочетание табличного метода и
программных вычислений.
Табличный метод используется в серийно выпускаемых преобразователях
двоично-десятичного кода в десятичный и обратно, двоичного кода в код управ-
ления семисегментным индикатором, в программируемых ПЗУ, где можно реали-
зовать практически любые преобразователи кодов. Запоминающее устройство
используется для хранения и формирования диагностических тестов по извест-
ным формальным описаниям объектов диагностики. Линеаризапия характеристик
датчиков, нормирование и масштабирование результатов измерения входят
.в число задач, которые эффективно решаются табличным методом.
Логические программируемые матрицы целесообразно использовать для соз-
дания устройств управления, для хранения программ-трансляторов и т. п.
В заключение можно сделать вывод, что применение табличного метода,
^реализованного в устройствах с полупроводниковыми ЗУ, может существенно
улучшить характеристики систем, упростить выполнение ряда функций благодаря
замене части программной их реализации аппаратной. Именно в сочетании про-
граммного и аппаратного выполнения функций в системах, в возрастающей роли
ЗУ можно усмотреть один из путей развития ИИС.
Часть третья
аналого-цифровая ЧАСТЬ ИИС.
ИЗМЕРИТЕЛЬНО-
ВЫЧИСЛИТЕЛЬНЫЕ КОМПЛЕКСЫ
Структура цифровых ИИС, как уже говорилось в гл. 1, со-
держит аналоговую, аналого-цифровую и цифровую части.
Аналоговая часть таких систем состоит из датчиков и измери-
тельных цепей, на выходе которых формируются измерительные-
(в большинстве случаев электрические) сигналы.
Основная задача аналого-цифровой части ИИС заключается
в выполнении совокупности аналого-цифровых преобразований.
Цифровая часть ИИС состоит из цифровых вычислительных и
управляющих средств, зачастую основанных на микропроцессор-
ной технике, устройств хранения и представления информации.
Аналого-цифровые и цифровая (преимущественно программи-
руемые) универсальные устройства, действующие совместно, обра-
зуют измерительно-вычислительный комплекс.
Ниже рассмотрим структуры, алгоритмы и характеристики
типовых устройств, из которых строятся ИВК.
Нужно отметить, что в АСЭТ и других агрегатных комплек-
сах ГСП эти устройства входят в номенклатуру нормальных ря-
дов и выпускаются промышленностью. Производство таких агре-
гатируемых устройств должно обеспечить возможность компоно-
вочного проектирования ИВК.
Г л а в а 7
АНАЛОГОВЫЕ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЕ ЦЕПИ
7.1. ВИДЫ МОДУЛЯЦИИ СИГНАЛОВ В ИИС
Информационные преобразования в аналоговых измерительных цепях мо-
гут осуществляться над сигналами, имеющими различные информативные пара-
метры, или, иными словами, над сигналами с различными видами модуляции.
В аналоговой части ИИС в качестве модулируемых величин чаще всего-
используются периодические гармонические колебания a(t)=Am cos (<j)o/-|-q>o) и
00
периодические последовательности импульсов a(t, 70)= Ф —1/г),гле
&=1
,, J An.
W — tk) = \n . ,
(О, т0< t < tk+i-
Таблица 7.1
Основное соотношение Амплитудная модуляция (AM) Угловая модуляция а (0 == А/п cos 6 (f), t мгновенное значение частоты <о = dfydt, rjkt 6 ^dt 0
Частотная модуляция (ЧМ) | Фазовая модуляция (ФМ)
Вид модули- рованного сигна- ла при произ- вольной модули- рующей функции но a(t) = А,п [1 4-mf (0] X X cos (<o0t 4-Уо). где m = ДЛ /А,п — глубина модуляции; АА — девиация г t “ 1 «(0= An COS г J [<о0 4- AoJf (/)] di 4- у0 = (о J ( 1 11 = An cost ь>0 /4-/га у f (/)Л I 4-Тор 1 L о J J где <о = <оо -|-Дсо[ (/); Ды—девиация; т -- Дм/ш0— глубина модуляции a (t) = A„cos {(oof 4- + ?о ]1 +,ге) (0]}; у = у0 + Ayf (t), ... , If (01 •*> (0 — , где ?и = Ду/у0 — глубина моду- ляции; Ду — девиация
Вид модулиро-
ванного сигнала
при f (t) =
= cbs [Q (г) 4-
+ Yo]
a(t) = Amcos (y>ot + y0) +
+ Amm cos (Qt + Yo) X
X cos (woi -J- y0) =
= A,n cos (coo/ -j- y0) +
4~ cos [(coo 2) t 4-
Amm
¥o + Yo] + ’ 2 X
<o = coo |-Zsco cos (Qt -J-Yo)!
t
6 = v>ot + <f0 + j cos (Qt -f- yo) dt = wof +
о
Дсо
+ ?o + - q— sin (Qt + Y-o);
Дсо coo
P = -q-------индекс модуляции; p. = -g-; (3;= zrzp.;
a(t) = Anl cos [wof + ¥o + P sin (Qt 4- y0)]
6 = ш0/ + ?0 -f- д? cos (Qt 4- yo);
a (t) = Am cos [<oo/ 4- y0 4-
4-Ду cos (Qt 4-Yo)]J
мгновенное значение co = wc —
— Ду2 sin (Qf4"Yo): Ды — Ду2—
девиация частоты; [J = Ду —
индекс модуляции
X is [(«о —+ fo —Yo]
Амплитудно-
частотный
спектор модули-
рованного сиг-
нала f(t) ~ О
— cos (2/ + Yo)
//77^ //77 //77^7
I 2
w0-S2 wD w0+Q
При (J-»0
A В
a(t) = Am cos(<«V + ?o)— ~cos [(<oo — S) t +
+ ¥o + Vol + cos [(“o + ^) t + ¥o + Yo]
Спектр аналогичен ЧМ, ши-
рина спектра
/ Amfi дт Amfi
(i)
(n)g~£2 UJq
При р > 0, = 0, Yo = О
tz(Z) — Ат
п
Д ((5) C0SbV+J^ 4(ЮХ
А=1
п
Хсоз (ЫО + kQ) t +2 ( — l)feX
k=i
X cos (“o —fe2) 1
> AmJk(P)
<jj0-5S2 Wo Wo+i'Q.
При 2kQ~Z)3S2.=Z&w
Таблица 7.2
Вид си тала и спектра Амллитудно-импулъсная модуляция A0=var, т0, Го. t^Q=const
Вид модули- рованного сиг- нала fe=l
Вид модули- рованного сиг- нала при f (/) = = sin Q/ a (t) = j40 p -|- m sin Qt + CO 00 + J} Ck cos kaot + -y- Ck X fe=i fe=i 00 x Sin (ka0 — Q) t + Ck X £=1 Xsin (£<o0-J-S) /j
Вид амплитуд- но-частотного спектра 5 к В п m >io ^0 1К“
Q Q 2ia)qQ
coq>2Q
Время импульсная модуляция
Ль ^ko = var» ^°’ Т0 — const
Односторонняя широтно-импульсная моду-
ляция т0 = var, Ло, То = const
ТО [ 1 +«2f (<)1
to + ^f (О =тоП +mf (*)1
В
а (/) = Ло у + Л0 у sin -у X
XSsinSH-J] У)
/г=1 п=—со
х Sin (few0 + nS) -у sin (faoo + nQ)/
To „ iiT
a (t) = Ao ~b Ao sin Qt -j-
1 о 1 о
+s
Л=1 n=—oo
X sin (to0 + /12) t —
00
k=l
i-Вк
|?jl!byTTh?y
S2 ыр~гЯ 2w0+nQ
O)o I 2w0
2w0-nQ.
8 2 < 1 % при 4 C p- ' 7
И 0,2<m X 0,4
r n<0
B2
(cOq +f2S?) J
82 "C 1% при 5-Ср г5 7
и 0,4гОи<0,8
В приведенных выражениях Ат — амплитуда; <оо и <р0 — частота и фаза мо-
дулируемого колебания; t — текущее время; th — моменты начала импульсов;
го__длительность импульсов; То—период следования импульсов.
Основные соотношения, характеризующие особенности модуляции гармониче-
ских колебаний, представлены в табл. 7.1.
При амплитудной модуляции (AM) мощность модулированного сигнала
в течение периода ш0 изменяется, ширина частотного спектра AM-сигнала при
модулирующем сигнале f (f) =cos [£2(/)+?о] равна 2Птох. AM-сигнал является
периодическим только в случаях, когда ш0 и Q кратны.
Для частотно-модулированного (ЧМ) сигнала средняя мощность примерно
постоянна. Ширина частотного спектра при индексе модуляции р=Дш/Пз>1
равна рй=Дш. При больших (3 для частотной модуляции необходимо исполь-
зовать модулируемые колебания довольно высоких частот (при Р= 10, П=
=5 кГц, т=0,5, <оо=Ю0 кГц).
При фазовой модуляции (ФМ) средняя мощность модулированного колеба-
ния также примерно постоянна. Ширина частотного спектра ФМ сигнала равна
2ЙД<р.
Отношение мощности сигнала (Рс) к мощности малой флуктуационной по-
мехи (Рп) для ЧМ примерно в 3,3р2 раза превышает это отношение для,
AM [7.1].
Сигналы AM, ЧМ и ФМ в ИИС применяются преимущественно в системах
параллельного действия.
В табл. 7.2 представлены вид модулированных импульсных сигналов и их
амплитудно-частотные спектры. АИМ-сигналы повторяют изменение амплитуды
модулирующей величины. Для односторонней ШИМ и времяимпульсных ВИМ-
сигналов длительность и частота импульсов пропорциональны значению модули-
рующей величины. При ВИМ неизбежно происходит одновременная модуляция
периода следования То и моментов th начала импульсов.
В этой таблице учитывается, что периодическую последовательность импуль-
сов можно представить рядом Фурье:
k=l
Ckcos k(£>ot
где Cft = 2sin (/гшотс/2)/(Awr0/2); ш0=2л/Т0.
При гармоническом модулирующем сигнале f (1)=Ао sin Ш в спектрах АИМ-,
ВИМ- и ШИМ-сигналов имеются составляющие, соответствующие частоте Q.
Наличие этих составляющих позволяет при демодуляции применить низкочас-
тотные фильтры. Однако для уменьшения влияния высокочастотных составляю-
щих при АИМ необходимо выполнение условия ш0>2£2, а при ВИМ и одно-
сторонней ШИМ соотношение [х=соо/П следует выбирать из условия
У 77^0
где В амплитуда сигнальной составляющей на выходе демодулятора,
а ^а>о+пй амплитуда комбинационных составляющих, которые при п<0 по-
падают в полосу пропускания низкочастотного фильтра [7.2].
В [7.1] показано значительное преимущество в смысле помехоустойчивости
ВИМ- и ШИМ-сигналов над АИМ-сигналами, что учитывается при создании те-
леизмерительных систем (см. гл. 17, 18).
Выбор вида модуляции сигналов оказывает существенное влияние на харак-
теристики, а иногда и на состав функциональных блоков ИИС. Спецификой
ИИС (по сравнению, например, с системами связи) является возможность вы-
полнения в них процедур измерения и контроля сигналов, модулированных раз-
личным способом, и отсутствие необходимости в восстановлении (демодуляции)
исходного сигнала с первоначальным видом модуляции.
Наибольшее распространение в ИИС ближнего действия в настоящее время
имеют АИМ-сигналы. Видимо, это объясняется, во-первых, простотой модулято-
ров и демодуляторов, во-вторых, легкостью восприятия АИМ-сигналов опера-
торами, в-третьих, высокими по быстродействию характеристиками аппаратуры,
работающей с АИМ-сигналами.
Следует сказать, что реализации аналоговой части измерительных систем
могут быть разнообразными в зависимости от вида модуляции измерительных
сигналов. По-видимому, одно из направлений развития ИИС будет связано
с рациональным употреблением сигналов с различными видами модуляции.
В данной главе далее рассматриваются вопросы унификации и коммутации
АИМ-сигналов, а также меры защиты входных цепей с АИМ-сигналами от влия-
ния помех [7.3—7.6].
7.2. УНИФИЦИРУЮЩИЕ ПРЕОБРАЗОВАТЕЛИ
Основное назначение унифицирующих преобразователей связано с приведе-
нием аналоговых измерительных сигналов к диапазону стандартных значений,
установленных ГОСТ 9895-78 и ГОСТ 26013-81. Применение унифицирующих
элементов расширяет возможности использования ИИС, делает их более уни-
версальными. В то же время выполнение некоторых операций унификации сиг-
налов (в частности, масштабирование) связано с введением дополнительных по-
грешностей в конечный результат измерения и контроля.
Наибольшее распространение получили унифицирующие преобразователи
AM-сигналов. В промышленном исполнении выпускаются датчики с унифициро-
ванным выходным сигналом, в которых собственно датчики объединяются
с унифицирующим преобразователем.
Основные функции, выполняемые унифицирующими элементами, сводятся
к линейным (установление нуля, температурная компенсация, масштабирование)
и нелинейным (линеаризация) преобразованиям сигналов от измерительных це-
пей с датчиками, а также к уменьшению влияния на них помех.
Унифицирующие преобразователи могут быть индивидуальными, связанными
с одним датчиком, и групповыми, работающими с несколькими измерительными
цепями. Групповые унифицирующие элементы обычно используются в системах,
имеющих коммутаторы сигналов измерительных цепей. При применении группо-
вых унифицирующих элементов особенно важно, чтобы выполнялись условия
правильного согласования их точностных и динамических характеристик с ха-
рактеристиками коммутатора и других элементов измерительного тракта.
Типичная задача, решаемая при линейных преобразованиях сигналов,
выполняемых унифицирующими элементами, заключается в следующем. Пусть
система рассчитана на работу с унифицированным сигналом, имеющим дина-
мический диапазон [0, хв] (рис. 7.1 , а сигнал бтДдатчика~тгаменяется~от xmi„
до Хтах, при этом хя>хтах—Xmin- В первом варианте для совмещения начала
динамических диапазонов ИИС и датчика к сигналу датчика должен быть до-
бавлен сигнал хтгп, а затем полученный суммарный сигнал должен быть уси-
лен в A=xa/(xmax—xmin) раз (см. рис. 3.2,6). СЛСА первого варианта, с уче-
том того что Xmin может быть разного знака, будет иметь вид I[(xmOx,
xmin)l(xmax±xmin, 0)]I[(xmGI±xmi„)A]. Возможен вариант (рис. 7.1,в), при
котором сигнал от датчика сначала усиливается, а затем совмещаются начала
шкал. В этом случае унифицирующий элемент должен выполнить преобразова-
ния, удовлетворяющие условиям
А=Хн/ (Хтах Xmin) , ---Xmin [Хв/(Хтазс Xmi n) J
СЛСА второго варианта преобразователя имеет вид
I[ (*max+*min)^=*n] I [(AXmaxiAxmin)/(Axmax^Axmin), 0] .
Для второго варианта, при котором сначала производится масштабирование
(положим, усиление сигнала), а затем совмещение начала шкал, нужно отме-
тить следующее. Если смещение динамических диапазонов (Axmaxi:Axmin) и
[0, хв] значительно, то, для того чтобы система могла воспринять такой сме-
щенный сигнал, динамический диапазон ее входных устройств должен значи-
тельно превышать динамический диапазон сигнала от измерительной цепи. Так,
например, нулевой сигнал тензодатчиков, обусловленный начальной разностью
сопротивления, может в несколько раз превышать динамический диапазон по-
лезного сигнала, вызываемого изменением измеряемой деформации поверхности.
Первый вариант приведения сигнала датчиков к унифицированному уровню
преимущественно используется в индивидуальных уницифирующих элементах,
второй — в групповых.
Случай xmin=#0 на практике встречается весьма часто. Объясняется он на-
личием термо-ЭДС холодного спая термопар, начального сопротивления термо-
метров сопротивления, проволочных тензодатчиков и соединительных линий
между тензодатчиками и термометрами сопротивления и их измерительными схе-
мами. Для компенсации температуры холодного спая при применении термопар
используется неуравновешенный мост с термозависимым сопротивлением плеча
и с омическим делителем напряжения (рис. 7.2), позволяющий получать смещаю-
щие напряжения xmi„ для различных типов термопар [хромель — копель
(X — К), хромель—алюмель (X — А), платинородий — платина (П — П)], учи-
тывающие температуру окружающей среды. Для тензодатчиков и термометров
сопротивления в унифицирующих элементах используется мост, уравновешивае-
мый перед экспериментом с помощью балансировочного узла БУ (рис. 7.3). Для
уменьшения влияния соединительных линий и внешних наводок на иих может
использоваться трехпроводная линия соединения термометров сопротивления
Rtc с остальной измерительной схемой.
Для дифференциально-трансформаторных датчиков начальное напряжение
устраняется зачастую с помощью балансировочного узла БУ, включенного в диф-
ференциальную схему (рис. 7.4). Следует заметить, что при большом числе
величин, воспринимаемых параметрическими датчиками, наличие балансировоч-
ных узлов, с помощью которых перед началом эксперимента устраняется рас-
хождение динамических диапазонов сигналов от измерительных схем с датчика-
ми, часто создает значительные неудобства, так как ручные операции баланси-
Хн <
^max-'
Чтил " “
/7"
xmax^
Рис. 7.1. К линейному преобразова-
нию сигналов датчиков:
а — динамические диапазоны шкалы и из-
меряемой величины; б — совмещение ми-
нимального значения измеряемой величи-
ны с нулевой отметкой шкалы; в — при-
ведение масштаба динамического диапа-
зона измеряемой величины к масштабу
шкалы с последующим совмещением
с нулевой отметкой шкалы
Рис. 7.2. Схема компенсации темпе-
ратуры холодного спая термопар:
RT — термозависимое сопротивление: Ra—
постоянное сопротивление
Рис. 7.3. Схема включения термомет-
ров сопротивления
ровки занимают значительное время и, кроме того, трудно обеспечить высокие
требования к стабильности балансировочных узлов в течение длительного вре-
мени. Для устранения этих недостатков применяются специальные групповые
унифицирующие устройства. Функциональная схема одного из таких устройств
приведена на рис. 7.5.
Это устройство предназначено для применения с параметрическими датчи-
ками, сигналы которых зависят от внешнего воздействия Р на объект исследо-
вания и от начальных, отличных от нуля сигналов измерительных цепей Хп: Х=
=ф(Р, Хо). Нужно отметить, что ключи и 7<3 могут находиться в замкну-
том— <рк (1) или разомкнутом — фк (0) состоянии.
При отсутствии внешних воздействий на объект исследования (Ро=О) сиг-
налы от измерительных цепей с датчиками Х^ будут определяться только на-
чальными сигналами измерительных цепей.
СЛСА этого начального этапа работы устройства будет иметь вид
Ф(В) Ф[Д=0; q>Ki(l); фК2(0); фкз(0)] I(Ao/Xoi)X
+1 (x0,7zoi) I (S : Zoi, Di) co(i=n) “|ф(E).
Затем производится измерение величины при внешнем воздействии на объект
Л: Ф(В)Ф [Л; <рК1 (°); ¥К2< 1); ?кз( 1)] L ® (*: = Ж) {[I (А/х1;)] ц [I (/?: zo;)X
X I (zo;/Xo;)]} I (xi; — xoi) I [(xi; —XoJ/zjj I (ZjJ CO (i = n) -] Ф (E)...
На выходе устройства коррекции после этого этапа формируются значения 2;*,
в которых отсутствуют начальные сигналы. С одной стороны, использование
такого унифицирующего устройства существенно облегчает требования к АЦП
Рис. 7.4. Схема включения диф-
ференциально-трансформаторно-
го датчика
Рис. 7.5. Схема коррекции нену-
левых начальных сигналов датчи-
ков
и последующим блокам системы, автоматизирует операции совмещения начала
шкал сигналов от измерительных цепей с датчиками. Но, с другой стороны,
цифро-аналоговое преобразование требует дополнительной затраты времени.
Исключение влияния начальных сигналов от измерительных цепей с дат-
чиками может быть реализовано на уровне кодоимпульсных сигналов. Тогда при
измерениях отпадает необходимость в цифро-аналоговом преобразовании:
ф (В) ф (Р = PJ L Ф (i : = i 4- *) I (A’i/xi;) [1 (хп/г1;) || I (R : zo;)] I [(zi; —
— «oi) = 1 (S D;) ы (i = n) "1 Ф (E).
Здесь операторы ®(R: zoi) и I(R:zoi) означают команду «выбрать из памяти
результат измерения начального показания i-ro датчика» и реализацию выборки
соответственно.
Усиление сигналов от измерительных цепей с датчиками выполняется в боль-
шинстве случаев с помощью усилителей постоянного тока (обычно с промежу-
точной АИМ, усилением на переменном токе и демодуляцией) и переменно-
го тока.
При применении параметрических датчиков имеется возможность выполнять
масштабирование сигналов на выходе измерительных схем с такими датчиками,
изменяя напряжение их питания. Существенно поднять уровень сигнала от изме-
рительной схемы с датчиками удается при применении импульсного питания.
К сожалению, этот путь имеет ограничения. Сверху ограничения накладываются
обычно предельно допустимыми тепловыми режимами, а снизу — уровнями
шумов.
При импульсном питании необходимо подбирать такую форму и длитель-
ность импульсов, чтобы за время действия импульса переходные процессы были
закончены и выполнены необходимые преобразования сигнала, а переходные
тепловые процессы в элементах измерительной цепи оказывали на эти преобра-
зования незначительное влияние.
Линеаризация сигналов от датчиков необходима, если шкала вход-
ного измерительного преобразователя системы линейна, а сигнал от датчика свя-
зан со значениями контролируемого параметра нелинейной зависимостью x=f(G).
Тогда после линейного преобразования сигналов, в результате которого динамиче-
ские диапазоны сигнала датчиков и шкалы системы совпадают, необходимо выпол-
нить операцию линеаризации. На практике это осуществляется либо введением по-
правок на нелинейность сигналов, либо с помощью линеаризующих устройств в уни-
Рис. 7.6. Электрическая схема ли-
неаризатора сигнала неуравновешен-
ного моста
фицирующихэлементах, в функцио-
нальных АЦП или в вычислительных
устройства системы.
Обычным приемом, используемым
в унифицирующих элементах, является
линеаризация сигналов от датчиков
с помощью функциональных преобра-
зователей (диодных цепочек, секциони-
рованных реохородов и т. п.), аппрокси-
мирующих зависимость f(0) несколь-
кими отрезками прямых линий. При
этом линеаризатор должен иметь харак-
теристику, позволяющую привести f(0)
к линейной зависимости.
Линеаризация может производить-
ся с помощью усилителей с нелинейной обратной связью, в цепь которой вхо-
дит резистивный делитель с шунтирующими диодами.
Интересен способ уменьшения нелинейности выходного сигнала неуравнове-
шенных мостов, вызываемой переменным суммарным сопротивлением мостовой
цепи и нелинейностью отношения плеч при одном датчике, воспринимающем кон-
тролируемую величину. Этот способ основан на изменении напряжения питания
моста с помощью усилителя с переменной обратной связью (рис. 7.6), благодаря
чему на плече поддерживается постоянное напряжение; при нелинейно-
сти датчика около 1 % нелинейность выходного напряжения не превышает при-
близительно 0,1 %.
Выбор типа линеаризаторов — аппаратный (индивидуальный или групповой)
либо поограммный (с использованием цифровых вычислительных устройств) —
за виси-, от количества и вида исследуемых величин, требований к точности пре-
образования и другим характеристикам.
Нужно отметить, что унифицирующие элементы выполняют зачастую ряд
дополнительных функций; к ним, например, относятся уменьшение влияния вы-
шедшего из строя датчика на последующие узлы системы, согласование сопро-
тивления датчика со входом системы (в большинстве случаев выходное сопро-
тивление унифицирующих элементов должно находиться в пределах от 100 до
300 Ом) и др.
7.3. ИЗМЕРИТЕЛЬНЫЕ КОММУТАТОРЫ АМПЛИТУДНО-
МОДУЛИРОВАННЫХ СИГНАЛОВ
Основные типы коммутаторов и их характеристики
Основное назначение коммутаторов — образование между блоками соеди-
ний, обеспечивающих прохождение сигналов в заданных направлениях. Если го-
ворить о коммутаторах предназначенных для работы в измерительной части
ИИС, то их основное назначение — связывать между собой участки аналоговых
измерительных цепей, работающие в параллельном и последовательном режимах.
Особенное значение для ИИС представляют измерительные коммутаторы, слу-
жащие для переключения аналоговых измерительных сигналов, так как к ним
предъявляются требования выполнения коммутационных операций с заданными
метрологическими характеристиками.
Измерительные коммутаторы АМ-сигиалов характеризуются следующими на-
динамическим
погрешностью
диапазоном коммутируемых величин;
коэффициента передачи аналогового сигнала
6— (Двх--/1вых) />4вх»
где Авх и Лвых — соответственно входной и выходной сигналы коммутатора;
быстродействием или скоростью коммутации; для коммутаторов эти послед-
ние параметры оцениваются количеством переключений в секунду (коммутаторы
циклического действия) или временем, необходимым для выполнения одной
коммутационной операции;
числом коммутируемых сигналов — входов п, числом выходов h и числом
одновременно образуемых каналов fe; в большинстве случаев n>hi, k^Ji, наи-
большее распространение имеют измерительные коммутаторы с /г=й=1;
количеством коммутирующих измерительных N и управляющих М элемен-
тов коммутатора; обычно при проектировании коммутаторов стремятся к умень-
шению N и М;
сроком службы, исчисляемым предельным количеством операций переключе-
ния, при котором основные характеристики коммутаторов остаются неизменными
в заданных пределах.
Коммутаторы различаются также последовательностью (программой) пере-
ключения входных сигналов. В коммутаторах могут быть реализованы цикличе-
ский и адресный режимы. При циклическом режиме коммутация производится по
заранее установленной программе с заданной коммутационной функцией, опре-
деляющей последовательность соединения входов с выходами коммутатора. При
адресной работе коммутатора последовательность переключения заранее, как
правило, не определяется. Например, при адаптивной коммутации (см. ч. 3)
адрес определяется в результате анализа состояния коммутируемых величин.
В зависимости от типа используемых в коммутаторе коммутационных эле-
ментов различаются контактные и бесконтактные коммутаторы.
Коммутационные элементы
Любой коммутационный элемент состоит из ключа и управляющего элемен-
та. Под ключом понимается двухполюсный элемент электрической цепи, который
может находиться в замкнутом состоянии, когда проводимость ключа велика,
или разомкнутом, когда проводимость мала.
В качестве ключей используются элементы, обладающие явно выраженными
нелинейными вольт-амперными характеристиками. Переход ключа из одного
состояния в другое выполняется с помощью управляющего элемента.
Наиболее важными расчетными характеристиками ключей для электрических
сигналов являются:
сопротивление или проводимость в замкнутом и разомкнутом состояниях
(г3 или z/a, гр или ур); широко используется также отношение гр/г3, которое
носит название коммутационного коэффициента;
собственные (паразитные) ЭДС и ток ключа е0 и i0, возникающие в ком-
мутируемой цепи под действием управляющих сигналов, собственных шумов,
паразитных наводок, контактных разностей потенциалов и пр.;
Динамический, диапазон, равный отношению максимальной и минимальной
амплитуд входного сигнала: Дд=Д1Пах/Лтт;
максимальная частота переключений пли время перехода ключа из одного
состояния в другое;
предельное количество переключений, до которого характеристики ключей
остаются в пределах нормального состояния.
По коммутационному коэффициенту у идеального ключа должно быть гр =
=оо, г3 = 0, ео = О, io=0. Наиболее близки к таким идеальным ключам по своим
параметрам контактные ключи, у которых гр= 108-ь- 1012 Ом; гя = 0,005ч-0,1 Ом,
собственные ЭДС имеют значения порядка долей и единиц микровольт, Дд=107.
У большинства контактных элементов, управляемых электромагнитными ме-
ханизмами (электромагнитные и поляризованные реле, шаговые искатели и т. п.),
наибольшая скорость переключений составляет от единиц до десятков переклю-
чений в секунду, предельное количество переключений не превышает 10е—107,
а мощность, необходимая для управления ключом, равна примерно 0,1—10 Вт.
Повышенными по сравнению с контактными элементами, управляемыми элек-
тромагнитными механизмами, скоростью работы и сроком службы обладают
магнитоуправляемые герметичные контакты [7.4]. Выпускаемые промышленно-
стью такие контакты могут срабатывать до 100 раз в секунду (отдельные экзем-
пляры до нескольких сотен срабатываний в секунду) и имеют срок службы,
определяемый 108 срабатываниями. Мощность управления у них порядка деся-
тых долей ватта. Ввиду того что контактная группа в таких контактных эле-
ментах миниатюрна и контактные усилия малы, сопротивление замкнутых кон-
тактов может достигать 0,1 Ом, а сопротивление разомкнутых контактов (сопро-
тивление изоляции) может быть порядка 108 Ом.
Очень большой срок службы (до 1012 срабатываний по рекламным сообще-
ниям изготовителей) имеют ртутные контакты (контакты, смачиваемые ртутью
по капиллярам). Быстродействие их относительно небольшое — примерно
10 срабатываний в секунду. Технология их изготовления сложна, стоимость вы-
сока, поэтому ртутные контакты применяются не столь широко, как магнито-
управляемые контакты.
Заслуживающими внимания характеристиками обладают коммутационные
элементы, основанные на использовании эффекта сверхпроводимости. Коммута-
ционный коэффициент их порядка 1010—1012 при сопротивлении проволоки в не-
сверхпроводящем состоянии примерно 10 Ом.
Перед разработчиками контактных коммутационных элементов стоит задача
создания элементов с быстродействием до 104—105 срабатываний в секунду, сро-
ком службы более 108 срабатываний и небольшой мощностью управления.
В настоящее время контактные коммутационные элементы применяются пре-
имущественно для коммутации параметрических датчиков и малых по уровню
токов и напряжений (порядка нескольких милливольт и долей миллиампера) при
относительно небольших скоростях коммутации.
Для построения бесконтактных коммутаторов ИИС используются элементы,
у которых под воздействием внешнего управляющего сигнала скачкообразно
изменяется сопротивление.
Как правило, бесконтактные переключающие элементы имеют большой срок
службы, высокое быстродействие, требуют малой мощности управления, но у них
относительно небольшой коммутационный коэффициент, меньший динамический
диапазон. Кроме того, они в большей степени, чем контактные элементы, под-
вержены влиянию внешних возмущений; при их использовании необходимо при-
нимать меры к разделению информационных и управляющих цепей.
Рис. 7.7. Схемы коммутаторов с последовательным (а), параллельным (б)
и комбинированным (в, а) включением коммутационных элементов
Наибольшее применение в бесконтактных коммутационных элементах нашли
полупроводниковые транзисторы и диоды. Такие элементы имеют сопротивление
в замкнутом состоянии г3 от 2 до 100 Ом, в разомкнутом гр от 10е до 108 Ом
(коммутационный коэффициент от 104 до 108), ев от 1 до 100 мкВ, i0 от 0,01
до 0,05 мкА, С от 5 до 50 пФ, частоту коммутации до 10е срабатываний в се-
кунду.
Коммутационные элементы на полевых триодах имеют г3 от 20 до 2000 Ом,
гр от 108 до 1010 Ом, близкие к нулю собственные ЭДС и токи. Частота работы
таких элементов — до 104 коммутаций в секунду.
Коммутационные элементы с применением оптронов позволяют гальванически
разделить измерительную цепь и тем самым устранить влияние продольных
помех (см. следующий параграф), но пока имеют относительно невысокие метро-
логические характеристики (г3 — до 800 Ом, гр — порядка 105 Ом, постоянную
времени — несколько десятков миллисекунд). После улучшения метрологических
характеристик можно ожидать, что оптроны будут использоваться в измери-
тельных коммутаторах.
Основная область применения электронных коммутационных элементов —
Рис. 7.8. Коммутатор с гене-
раторными датчиками
коммутация с высокими скоростями относи-
тельно больших напряжений и токов (пример-
но ±5, +10 В; +5 мА).
Погрешности коммутаторов напряжений
с последовательным включением
коммутационных элементов
Коммутационные элементы могут распола-
гаться в коммутируемой цепи последователь-
но, параллельно сопротивлению нагрузки и
комбинированным способом (рис. 7.7). Весьма
полный анализ этих разновидностей коммута-
торов выполнен в [7.5, 7.6]. Наибольшее при-
менение имеют коммутаторы с последователь-
ным включением элементов.
Рассмотрим погрешности, вызываемые
влиянием коммутационных элементов, в одноступенчатом коммутаторе с п вхо-
дами и одним выходом (ft=l).
Будем различать следующие составляющие погрешностей:
погрешности, обусловленные отличием сопротивлений rs и гр от нуля и бес-
конечности соответственно;
погрешности от собственных ЭДС ключей;
погрешность из-за вариации г3 и гр.
Ограничимся рассмотрением случая, когда все ключи коммутатора имеют
одинаковые сопротивления: r3=consty=0 и rp=-const+oo, а сопротивление на-
грузки Гп=оо.
Если коммутатор предназначен для работы с генераторными датчиками
(рис. 7.8), имеющими внутреннее сопротивление ri=r2= ... =zn=rB и ЭДС Е,,
то при замкнутом /-м ключе напряжение на выходе коммутатора
yjEj 'rbi 2 *)
/ — 1» * /
где у^ 1 /(гв-|-гР) — проводимость разомкнутых цепей для всех I, кроме /, для
которого #3=1/(гв-р'з)—проводимость замкнутой цепи.
1' Это выражение может быть представлено как
я
. __________}________ £ . ________J________t = l, ___
Х+у./уЛп_1) (П-1) -
—-------------------------- д- +
1 + (« — 1)(гВ +гз)/(/'в+''р) '
...ку. ! V
+•/+г.>/(г.+г,)(;^г'Т-'к —++’» •'
При £\=const = ..
^вык —
В случае если сопротивление нагрузки конечно и равно гн, то аВЫха=
= ивых>н/(Гн-|-Гвых), где Гв ых = 11[Уз-\~(П 1)У1] -
Погрешность, вносимая коммутатором в этом случае, будет находиться по
формуле
п
8=1 ^вых/^вх = 1 wi 1) ^/1-
Z=l. i/-i
Таким образом, суммарная погрешность будет определяться, во-первых, ко-
эффициентом передачи wjt ЭДС Е,, а во-вторых, влиянием Ег, зависящим от
коэффициента передачи ш,.
Погрешность коммутатора, изображенного на рис. 7.8, из-за наличия соб-
ственных ЭДС ключей, равных е< (i=l, 2.......п, &=j) и е3-, может быть полу-
чена по формуле
6=w jBj /Ejj-WiBi/Ei.
При использовании полупроводниковых ключей нужно учитывать остаточ-
ные токи разомкнутых ключей и остаточные напряжения на замкнутых ключах.
Если Ei—Ej, то, учитывая, что w-;-\-Wj= 1, имеем ивых=Ез.. При Е,=0 и
Ei=Ejmax на выходе коммутатора появляется напряжение, вызывающее погреш-
ность Д1—(0{Езтах> При Ej = Ejmax И Ej—О — (1 Wj'jEjmax-
Положим, £jmOx=10 В, Г3 = 0,1 Ом, Гв = 100 Ом, Гр=107 Ом, п=101 * * 4 * * * В.
Тогда
1 +(1004- 107)/( 100 +0,1). 10* 1 + 10
; Следовательно, при таких коммутационных элементах и количестве комму-
тируемых источников напряжения погрешность напряжения коммутатора недо-
пустимо велика.
Для уменьшения погрешности, вносимой wi, следует уменьшить п (так, при
п=100 в предыдущем примере AosdO-2 В).
Одни из схемных способов уменьшения этой погрешности состоит в пере-
ходе на схему двухступенчатого коммутатора, при котором п входов разде-
ляются на q групп по т датчиков (рис. 7.9).
На эквивалентной схеме рис. 7.9,а принято, что во всех q группах включены;
/-е цепи с помощью ключей коммутатора первой ступени Кь а выборка груп-
пы I и, следовательно, подключение к выходу цепи /3 осуществляются коммута-
тором Кз второй ступени.
В такой схеме резко упрощается устройство управления коммутатора первой
ступени.
Конечно, подключение только одной цепи в одной группе может не- .!
сколько снизить погрешность коммутации.
Для упрощенного приближенного расчета коммутатора может быть принята
эквивалентная схема, изображенная на рис. 7.9,6. В ней, поскольку т невелико,
а ГрЗ>г3 и Гр2>1/[(т—1) 1/(Гв+гР)+1/(гв+г3)], не учитывается влияние цепей,
параллельных включенным /-м цепям в каждой группе, а также упрощена кою
фигурация цепи группы I, подключенной к выходу.
Для этой схемы, если считать, что коммутируемое напряжение равно Ej,
а остальные напряжения — Et,
Рис. 7.9. Схема двухступенчатого коммутатора с генераторными датчиками (а)
и ее эквивалентная схема (б)
Рис. 7.10. Коммутатор компенсационного типа:
а — обобщенная схема; б — пример реализации
[Ej/(rK Ч- 2/ 3)] + [(т— !) + (<?— 1)] Ej (1/гв+Гз+ 'р) _
== ' [ 1 / <гв + 2г3) ] + [(та + <7 — 2)/(Гв + г3 + гр) ]
=---------------------------------------- £ +
1 + [(№ + 9 — 2)(гв Ч* 2r3)/(rB-|- Гз + /'р)]
Н----------------------------------------Е;.
1 ч- [(' в + Гз ч- rp)/(rB+ 2r3) (т+ <7—2)1
При заданном п выражение m-\-q—2 принимает наименьшее значение при
m=q. Положим п=104, тогда при /и = 103, </=10 оно равно m-\-q—2=1008, а при
т— jqe и ,7= 102 т q—-2=198. Если при п=104, Е;=10 В, £\-=0 В, г3=0,1 Ом,
1 Ю
гв=100 Ом, Гр=10’ Ом выбрать /и=<7=100, то До= 1 4. 107/(100-200) 10 ~50С=
= 2 102.
Уменьшение погрешности коммутации, вызванной влиянием параллельных
цепей, можно осуществить, используя методы компенсации при установлении
потенциалов на разомкнутых ключах, равных напряжению в цепи, подключенной
к выходу коммутатора (рис. 7.10,а).
На рис 7.10,6 приведен пример коммутатора, реализованного с использо-
ванием операционного усилителя УТ401Б (коэффициент усиления равен 8-103,
Л;вх=4 кОм) и полевых триодов КП103И (г3=ЗОО Ом, rp=10*° Ом). Характе-
ристики коммутатора: п=80, гв=10 кОм, /?о<=1 МОм. Для подключаемого
входа на затвор подается =-р7 (состояние разомкнуто) и и.^' =0 (со-
стояние замкнуто), для всех остальных и*1) =0 (замкнуто) и =-)Д
(разомкнуто). Для идеального усилителя и полевого транзистора нВых =
= (ROj/rs)Uj. Погрешность Д] при закорачивании /-го входа и подаче на все
остальные входы коммутатора 6 В не превышала 0,3 %.
Нужно подчеркнуть, что все приведенные расчеты коммутаторов весьма при-
ближенны и дают в большинстве случаев завышенные результаты по сравнению
с расчетами, в которых используются реальные данные. Так, по видимому, при
большом п, +Е< и равномерном распределении их вероятностей сумма ЭДС
может быть близка к нулю и могут быть внесены коррективы в результаты
расчетов при учете случайного характера га, гр, гв и т. п.
Погрешности коммутаторов параметрических датчиков
с последовательным включением коммутационных элементов
Рассмотрим погрешность, вносимую при коммутации резистивных датчиков,
к которым относятся широко используемые тензо-, термо-, фоторезисторы. У этих
датчиков сопротивление гд=г+Дг, а преобразуемая величина 0 связана с Дг=
=f(0). Нужно отметить, что для многих типов тензо- и терморезисторов Arsgr.
Выходное сопротивление коммутатора (рис. 7.11,а) при равенстве сопротив-
лений датчиков и замкнутом /-м ключе
О/Од+Гз) +('2— ОДГу+Гр) 1 Ч~ [(«— I) (гд ч-^з)/(гу ч- Гр)]
Если добиться чтобы влияние цепей, включенных параллельно коммутируемой
цепи, было меньше установленного, т. е. (н—1) (гд+гз)/(пЧ-гР)г5бо, то можно
пользоваться приближенным выражением
Гвых^гp-f-r3—(г±Дг) -f-г3.
Рис. 7.11. Размещение коммутационных элементов в мостовой цепи:
а — последовательно с датчиками; б — в индикаторной диагонали; в — в индикаторной
диагонали и последовательно с гк; г — то же с дополнительной цепью rt, г$, г
Для того чтобы выделить для дальнейших измерительных операций только
переменную составляющую гВЫх, чаще всего используется мостовая схема.
Однако значительные трудности возникают при уменьшении влияния пере-
менной составляющей ±Лг3 замкнутого коммутационного элемента. Если нет
элементов с приемлемыми характеристиками, то следует рассмотреть примене-
ние схемных методов. Кратко остановимся на нескольких нашедших примене-
ние в ИИС схемных методах уменьшения влияния коммутационных элементов.
При большом сопротивлении нагрузки или при компенсационном режиме влия-
ние коммутационных элементов может быть уменьшено до нужной степени раз-
мещением коммутационных элементов не последовательно с датчиками в плече
мостовой цепи (рис. 7.11,а), а в измерительных диагоналях мостов (рис. 7.11,6)
[7 3] По существу, при этом осуществляется коммутация напряжений. Основной
недостаток такой измерительной цепи связан с необходимостью обеспечить
питание п параллельных полумостов с изготовлением элементов мостовой цепи
(напряжение питания Z7n).
Для уменьшения мощности питания схема на рис. 7.11,6 может быть пре-
образована в схему, изображенную на рис. 7.11,в. В ней коммутационные эле-
менты располагаются последовательно с плечом гк, сопротивление которого-
можно сделать достаточно большим. При увеличении сопротивления гк можно
добиться линейности функции преобразования Дц=<р(Дг) в более широком диа-
пазоне изменения Дг по сравнению с соотношением гк=гя.
Дальнейшего уменьшения влияния Дг3 в этой схеме можно добиться, ис-
пользуя размещение коммутационных элементов в соответствии со схемой, при-
веденной на рис. 7.11,г. Сопротивление Использование этой цепи при
реальном тензометрировании с помощью проволочных тензорезисторов и комму-
тации магнитоуправляемыми контактами позволило получить погрешность ком-
мутации меньше 0,1 %-
Для уменьшения влияния сопротивлений коммутационных элементов и
соединительных линий может также использоваться схема двойного моста.
Двухступенчатые коммутаторы для сигналов параметрических датчиков, как
правило, не применяются. Для коммутации большого количества датчиков ис-
пользуются двухступенчатые коммутаторы, у которых вторая ступень комму-
тирует цифровые сигналы.
В этом и предыдущем параграфах рассматривались упрощенные эквива-
лентные схемы коммутаторов. Повышенные требования к точности коммутации
сигналов постоянного тока приводят к необходимости учета токов утечек, слу-
чайных составляющих сопротивлений, паразитных параметров. Работа быстро-
действующего коммутатора или коммутатора сигналов повышенной частоты
требует учета комплексных сопротивлений коммутируемых цепей.
Определение количества коммутирующих элементов и элементов схем
управления
Минимальное количество коммутирующих элементов Л?, равное количеству
коммутируемых сигналов п, получается в одноступенчатом коммутаторе, в ко-
тором все входы соединяются поочередно с одним выходом. По существу,
именно это обстоятельство предопределяет преимущественное применение та-
ких коммутаторов для измерительных цепей. Какое количество элементов схем
управления необходимо для одноступенчатого схемного коммутатора? Если ре-
лейные элементы, управляющие срабатыванием ключей, представляют собой
двухполюсники, то возможны варианты одностороннего (рис. 7.12) и двусто-
роннего или матричного (рис. 7.13) управления релейными элементами. Обе
эти схемы пригодны для адресного (соответственно одно- или двух каскадного)
и циклического управления. При применении матричного управления для более
четкого разделения сигналов последовательно с каждым релейным элементом
часто устанавливаются разделительные диоды (на рис. 7.13 не показаны). Если
при двустороннем управлении используется квадратная матрица, то число ее
при двустороннем управлении используется квадратная матрица, то число ее
входов Л4=2у п, где п — общее число коммутируемых точек. При п>2 ]/ п, что-
получается при п>4 выигрыш в количестве элементов управления при приме-
нении матричного управления можно оценить отношением и/2]/ n=j/ и/2; это-
особенно ощутимо при больших п (положим, п= 100, тогда это отношение бу-
Рис. 7.13. Схема двустороннего (матричного) управления
коммутатором
дет равно 5). Использование матричного управления позволяет также суще-
ственно упростить дешифраторы DCX и DC у.
Если снять ограничение на удовлетворение требования минимального коли-
чества ключей и поставить задачу создания схемы коммутатора с минимальным
количеством устройств управления, то можно прийти к многоступенчатому пи-
рамидальному коммутатору. Количество ступеней в таких коммутаторах равно
количеству двоичных разрядов, содержащихся в общем числе коммутируемых
сигналов; общее количество ключей равно Л?^2(я—-1), а ввиду использования
параллельного управления релейными устройствами одной ступени количество
двоичных элементов схем управления будет равно 7И—log2n. Если сравнить пи-
рамидальную двоичную и матричную схемы управления по количеству элемен-
тов, то их отношение равно 2l^ n/log2n. Например, при я=64 количество эле-
ментов управления уменьшится для пирамидальной схемы примерно втрое, но
количество ключей увеличится примерно вдвое. Ввиду резкого увеличения клю-
чей пирамидальные схемы почти не находят применения в измерительных
коммутаторах.
При двухступенчатых недвоичных коммутаторах п коммутируемых сигналов
разбиваются на т групп, в каждой из которых коммутируются q сигналов
(n=mq, обычно стремятся к q=p). Тогда количество ключей 77=/и(д+1)
Рис. 7.14. Двухступенчатый комму-
татор аналоговых сигналов
Рис. 7.15. Схема структуры «комму-
татор — АЦП — обращенный ком-
мутатор»
7 у
Рис, 7.16, Схема полно доступного,
матричного коммутатора
(в каждой измерительной цепи последовательно будут включаться два ключа),
а количество элементов управления (при одностороннем управлении ступенями)
Л)=т+?. Количество управляющих элементов может быть уменьшено приме-
нением на первой ступени матричного управления, одновременно обслуживаю-
щего все т групп (рис. 7.14).
В ИС может возникнуть необходимость создания коммутаторов, обеспечи-
вающих соединение любого из п входов с любым из h выходов. Если эти со-
единения можно выполнять поочередно путем организации в каждый момент
одного канала коммутации (/г=1), то применима схема «коммутатор — АЦП —
обращенный коммутатор» (рис. 7.15).
До сих пор рассматривались коммутаторы, у которых в процессе комму-
тации организовывался один канал (А=1). Универсальный полнодоступный
коммутатор должен позволять организовывать соединение любого сочетания из
п входов с любым сочетанием из h> 1 выходов; естественно, что в этом случае
/гЭН. Очевидный способ построения полнодоступного коммутатора связан с
применением матричной схемы (рис. 7.16). На рисунке не показаны управляю-
щие элементы; символы ац обозначают состояние ключей на пересечении столб-
ца i и строки / и принимают значение 0 или 1. Нужно заметить, что в таком
устройстве количество ключей N=nh, количество устройств управления М=п+
+Д а в каждом канале (в случае n>h может быть организовано k=h каналов)
будет расположен один ключ.
Алгоритмы управления коммутатором.
Коммутаторы могут работать по жесткой программе, определяемой задан-
ной коммутационной функцией. Управление его работой может производиться
от устройства управления или от импульсов, следующих через заданные интер-
валы времени и поступающих от внешнего или встроенного в коммутатор ге-
нератора. Алгоритм работы коммутатора при равномерной циклической комму-
тации, начальном состоянии <р(г=О) и управлении от блока управления
L Фо(1 : = i + 1)<р (п/0- • « (i =л)”|,
при адресной коммутации по программе блока управления
©(+=/) <р(и//) Ф(/:=/г) <р(и//г) ...
при циклической разовой работе коммутатора от синхроимпульсов
Д1) <р(и/1) <р(и/2) ... <р(и/и) Ф(Е).
Двухступенчатая циклическая коммутация может выполняться по командам
от блока управления по двум основным режимам (см. рис. 7.14).
Первый режим состоит в подключении всех i-x входов т коммутаторов
первой ступени Фо = (<7i/i'i, ..., qs/ij, , и коммута-
1 1
ции т выходных сигналов (ib..., im) с помощью коммутатора второй сту-
пени
2 1
X L Фо (1 = 1 + 1. ^д2) <?2 (W//) ы2 .(/ = т) П w (i = q) Д-
Общее время коммутации Т1 — q Основное количество опе-
раций коммутации здесь выполняется коммутатором второй ступени.
Повышения быстродействия коммутатора можно добиться, во-первых, при
во-вторых, если после коммутации /-го канала с помощью Д2 в
/-м коммутаторе будет подключен (i-J-l)-fi вход. Таким образом, можно до-
биться, чтобы общее время коммутации составляло -|- qmtitK^
Вообще, идея использования времени, в течение, которого проводится опе-
рация в одном коммутаторе для подготовки к операции коммутации в другом,
находит применение в целях повышения быстродействия.
Во втором режиме подключается j-й вход коммутатора Kg
L Фо (Г = 1+1; д^2) ?2 (m/j) X
и происходит циклическая работа коммутатора Ki
’ ’ 2 1
X L Фо (t; = t + и f (?/*) wi (« = 1 “а (/ = m) 1 •••
2 - :
Общее время коммутации
Т2 = т (Д^2.+ qKtKi).
Примеры схемных коммутаторов
Коммутация напряжений. Коммутатор аналоговый Ф240 с контактными
ключами предназначен для коммутации напряжений постоянного тока от 50 мВ
до 180 В. Выпускается несколько типов коммутаторов, различающихся количе-
ством (3 и 2) коммутационных элементов на одну коммутируемую величину и
количеством входов (от 40 до 100). В качестве ключей в коммутаторах исполь-
зуются магнитоуправляемые контакты типа РЭС-44~(три ключа) и РЭС-43 (два
ключа). Сопротивление замкнутого ключа не превышает 0,5 Ом, а термо-ЭДС —
не более 40 мкВ. Сопротивление разомкнутого ключа не ниже 108 Ом.
Входная емкость замкнутого ключа 20 пФ, разомкнутого—100 пФ. По
паспортным данным коэффициент передачи напряжения с канала на канал В=
=—20 log[(10”/P-f)+6], дБ. Здесь R — нагрузка коммутатора в омах, a f —
частота сигнала в герцах. Это выражение справедливо для Pf^lO10 и /<7105 Гц.
Время замыкания и размыкания ключа не больше 1,3 и 0,5 мс соответственно,
Рис. 7.17. Схема коммутатора Ф240
время между коммутацией • двух ключей — не меньше 0,1 мс. Частота работы
коммутатора —не более 50 Гц.
В коммутаторе предусмотрен вывод информации о номере подключенного
входа в виде кодоимпульсного сигнала в коде 8—4—2—1 и импульсов синхро-
низации. Основные режимы работы коммутатора — циклический непрерывный,
циклический разовый, адресный.
Коммутатор содержит (рис. 7.17) устройство управления, счетчики единиц
и десятков.
С приходом управляющего сигнала «Пуск» Фо (В) на вход двоично-деся-
тичных счетчиков единиц и десятков начинают поступать тактовые импульсы
Фо. (7). Двоично-десятичные коды счетчиков единиц и десятков преобразуются
в позиционные десятичные сигналы, которые усиливаются и подаются на мат-
ричные схемы управления блоков (по 20 шт.) аналоговых ключей. Для повы-
шения надежности и уменьшения сопротивления в замкнутом состоянии исполь-
зуется параллельное соединение ключей.
Коммутаторы измерительных сигналов Ф799 предназначены для коммута-
ции напряжений постоянного тока от —10 до -|-10 В. Выпускаются два типа
этих коммутаторов,, различающихся коммутационными элементами; Ф799/1 по-
вышенной точности с контактными коммутационными элементами и Ф799/2 по-
вышенного быстродействия с бесконтактными коммутационными элементами.
В качестве ключей в коммутаторе Ф799/1 используются реле РЭС-44 с магни-
тоуправляемыми контактами, а в коммутаторе Ф799/2 — интегральные пере-
ключатели 'КТ 118. Сопротивление замкнутого контактного ключа не больше
0,7 Ом, а бесконтактного ключа не больше 100 Ом. Сопротивление разомкнутого
контактного ключа не менее 5-Ю8 Ом, бесконтактного ключа не менее 108 Ом.
Количество коммутационных цепей в коммутаторе 100.
В каждой цепи могут включаться три или шесть ключей. Число ступеней
коммутации — одна или две Предел основной приведенной погрешности замкну-
того коммутационного элемента при сопротивлении нагрузки 106 Ом и зако-
роченном входе: для Ф799/1 +0,01 %, для Ф799/2 +0,1 %. Время коммутации:
для Ф799/1 —не более 10 мс, для Ф799/2— 10 мкс. Основные режимы работы
коммутатора — циклические (непрерывный и разовый), адресный и шаговый.
Структурная схема коммутаторов Ф799 в основном аналогична схеме ком-
мутатора Ф240. В каждом блоке ключей Ф799 имеется коммутационный эле-
мент, который может быть использован при организации двухступенчатой ра-
боты. Кроме того, в Ф799 имеется блок индикации номера подключенного ка-
нала.
Наиболее трудно создать измерительные коммутаторы с бесконтактными
ключами, предназначенные для переключения сигналов низкого уровня и имею-
щие приемлемые для практики погрешности. В этих случаях приходится при-
нимать специальные меры по уменьшению влияния остаточных напряжений и
токов ключей, а также цепей управления на коммутируемые цепи.
На рис. 7.18 представлена схема транзисторного коммутатора, предназначен-
ного для работы с термопарами (от 10 до 100 мВ). На этой схеме достаточно
наглядно показаны участки цепей управления и питания, требующие развязки
для уменьшения влияния цепей питания и управления на коммутируемую цепь.
Гальваническая связь между цепями управления и коммутации устраняется
здесь путем применения разделительных трансформаторов Tpt—Тр16 и раздель-
ных источников питания генераторов управляющих напряжений (ГУН). Умень-
шение влияния собственных ЭДС и токов достигается путем инверсного вклю-
чения транзисторов и подбора сопротивлений и Де (рис. 7.19).
Современные ключи, изготавливаемые методом интегральной технологии,
содержат транзисторы в инверсном включении с близкими параметрами, а влия-
ние управляющих импульсов уменьшается с помощью развязывающих дио-
дов [7.7].
Решение вопросов развязки цепей управления и коммутации, а также
уменьшения влияния остаточных токов и напряжений существенно упрощается
при построении ключей на полевых транзисторах [7.8—7.10]. Это объясняется
тем, что полевые транзисторы имеют высокое входное сопротивление (свыше
108 Ом) и практически равные нулю остаточные напряжения и токи.
Например, интегральная микросхема на рис. 7.20 содержит набор ком-
мутационных элементов на МОП-транзисторах, имеющих следующие харак-
теристики: коммутируемое напряжение до 6 В, ток стока 10 мА, г.т+ЗОО Ом,
Гр^=109 Ом, Свх^5 пФ, СВых^З пФ. Время коммутации здесь может достигать
десятков микросекунд. Диоды используются для ограничения напряжения на за-
творах до уровня, исключающего возможность пробоя диэлектрика.
Для уменьшения влияния сопротивления замкнутого ключа на выходе
коммутатора при необходимости используется усилитель с большим входным
сопротивлением (порядка 107 Ом).
Выпускаются в интегральном исполнении МОП-переключатели с числом
ключей от 2 до 16 (серии 168, 190, 590 и др.).
Объединение таких переключателей дает возможность создавать как одно-
ступенчатые, так и двухступенчатые коммутаторы с различным количеством
ключей.
Известны коммутаторы с МОП-ключами на 64 и более входов. В [7.7]
приводится описание ключей на интегральных микросхемах типа 8ПМД6; схемы
управления ключами (счетчики импульсов и дешифраторы) выполнены на ин-
Рис. 7.18. Транзисторный коммута-
тор сигналов низкого уровня
Рис. 7.19. Схема транзистор-
ного ключа
Рис. 7.20. Ключи на полевых
МОП-транзисторах
тегральных микросхемах 8ПМД4 и 8ПМД16. Ключ на двух полевых транзи-
сторах может коммутировать двуполярные сигналы. Параметры этого ключа
при управлении им от потенциального триггера 8ПМД4 следующие: г3=2-103Ом,
Гр=4-108 Ом, U0eiO, /о=0, динамический диапазон — 5 В^Пвх^З В, Ср=5 пФ.
Для уменьшения влияния относительно большого сопротивления ключа в замк-
нутом состоянии на его выходе используется согласующий усилитель, выполнен-
ный на элементах 8ПМД6, с коэффициентом усиления, близким к единице, и
входным сопротивлением более 107 Ом. Погрешность коммутации сигналов по-
стоянного тока зависит от количества коммутируемых сигналов и частоты ком-
мутирующего сигнала (при частоте коммутации порядка нескольких герц по-
грешность коммутации восьми сигналов — около 0,7%, 16 сигналов—около 1,4%,
21 сигнала — около 2,9%; при частоте коммутации 1000 Гц эта погрешность
составляет соответственно для восьми сигналов около 9%, 16 сигналов — около
19%, 32 сигналов — около 38%).
Неплохие результаты дает использование в качестве ключей интегральных
прерывателей, обладающих относительно высокими метрологическими характе-
ристиками.
Коммутация сопротивлений. Номенклатура коммутаторов, предназначенных
для подключения резистивных преобразователей, относительно невелика. Это
объясняется в первую очередь высокими требованиями к коэффициенту комму-
тации и постоянству сопротивлений ключей, из которых могут быть построены
коммутаторы. Кроме того, как это было выше показано, коммутатор должен
Рис. 7.21. Схемы мосто-
вых измерительных це-
пей с коммутацией ре-
зистивных датчиков:
а, б — двухпроводное, трех-
проводное включение термо-
компенсированного тензо-
резистора; в — включение
общего компенсационного
датчика
быть изготовлен совместно с частью изь рительной цепи, которая необходима
для подключения резистивных преобразователей.
Широкое применение имеют тензорезисторы. Они используются для иссле-
дований напряженных состояний сложных конструкций и для преобразования
в электрические сигналы механических напряжений, возникающих в упругих
измерительных элементах под воздействием внешних нагрузок. Полезное изме-
нение сопротивления проволочных тензорезисторов весьма мало и составляет
доли процента от их начального сопротивления (100—500 Ом). Нужно отме-
тить, что начальные сопротивления тензорезисторов после изготовления и при-
клеивания могут отличаться на :±2% от номинального значения. Для датчиков
без термокомпенсации ее необходимо производить схемным способом с приме-
нением компенсационных тензорезисторов, расположенных в том же месте и
находящихся в тех же условиях, что и рабочие тензорезисторы, но не испы-
тывающих воздействие измеряемых механических деформаций.
В измерительной системе К732 предусмотрена возможность двух- и трех-
проводного включения термокомпенсированных тензорезисторов (рис. 7.21,а, б),
а также использование одного (рис. 7.21,в) и двух компенсационных тензоре-
зисторов. Длина соединительных проводов (кабелей) от тензорезисторов до
коммутатора (на схеме они выделены зигзагообразными отметками)
до 50 м, при двухпроводном включении сопротивление каждого провода
должно находиться в пределах 1,750±0,01 Ом, а при трехпроводном сопротив-
ления линий не должны отличаться друг от друга более чем на ±0,02 Ом.
Количество коммутируемых рабочих тензорезисторов 127. Для коммутации
тензорезисторов используются магнитоуправляемые контакты реле РЭС-44. По-
следовательность срабатывания реле определяется управляющей матрицей
(16 строк и 8 столбцов), на которую управляющие напряжения поступают от
усилителей комбинационных дешифраторов на схемах совпадения, связанных
со счетчиками номера канала коммутации. Все электронные узлы выполнены
на интегральных элементах серии К155. Операции одной коммутации и изме-
рения занимают около 10 мс. Режимы коммутации — непрерывная и разовая
циклическая, а также адресная.
Если преобразовать параметры резистивных датчиков в активные сигналы,
то тогда могут быть использованы коммутаторы напряжений или токов. При
этом иногда удается повысить быстродействие и срок службы. Некоторые све-
дения о коммутаторах, выпускаемых приборостроительной промышленностью,
имеются в [7.11].
7.4. ЗАЩИТА ВХОДНЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ ИИС ОТ ПОМЕХ
Под помехоустойчивостью ИИС понимается их способность противостоять
вредному влиянию помех. Основные пути повышения помехоустойчивости ИИС
связаны с улучшением защиты от помех аналоговых измерительных цепей си-
стем и с уменьшением влияния помех на результат измерения, главным образом,
путем соответствующей обработки измерительной информации в ИИС.
Учитывая, что помехоустойчивость ИИС в значительной степени опреде-
ляется защитой от помех аналоговых входных измерительных цепей, далее в
сжатом виде рассматриваются основные способы такой защиты. Более подроб-
но этот материал изложен в [7.12].
Виды и источники помех
Помехи могут вызываться процессами, происходящими внутри ИИС, а так-
же влиянием внешних источников помех.
Причинами внутренних помех могут служить тепловые шумы в резисторах,
термо-ЭДС, изменение сопротивлеиия изоляции, перекрестные влияния измери-
тельных цепей, связи измерительных цепей с цепями питания. К внутренним
помехам могут быть также отнесены изменения напряжения источников пи-
тания, превышающие допустимые: пе считается помехой только кратковремен-
ное (от 1 до 30 периодов частоты сети) понижение напряжения сети питания
до 30% номинального, полный перерыв в питании может быть до 5 периодов
частоты сети (100 мс). Кроме того, через сеть питания могут проникать им-
пульсные высокочастотные возмущения (до 20 МГц) с повышенной амплитудой
и длительностью до нескольких микросекунд.
Внешние атмосферные помехи возникают в результате разрядов молний,
возникающих в большом количестве (до сотен разрядов в секунду) на Земле,
а также от электризации частиц (пыли, снега и т. и.) в атмосфере Земли.
К другому виду внешних электрических помех относятся индустриальные
помехи, создающиеся промышленными установками, радиостанциями, электро-
оборудованием автотранспорта и т. п.
Расположенные вблизи измерительных цепей электроэнергетические уста-
новки и силовая проводка питания являются основными источниками так на-
зываемых наведенных, или поперечных, помех. Эти помехи являются след-
ствием воздействия внешних электромагнитных полей, а также реактивных свя-
зей измерительных цепей с источниками помех. В свою очередь такие факторы,
как изменение сопротивления изоляции (например, от влияния повышенной
температуры), появление разности потенциалов в разных точках заземления
аналоговой измерительной цепи, тепловые шумы могут явиться источниками
помех другого вида, которые носят название продольных.
Приведем пример [7.13J, показывающий возможный уровень помех от элек-
трической нагревательной печи, имеющей общую потребляемую мощность 60 кВт.
В непосредственной близости от печи максимальное значение напряженности
магнитного поля в нашем эксперименте было равно 520 А/м, а на расстоянии
2м-— примерно 40—70 А/м, причем напряженность магнитного поля довольно
существенно изменялась по высоте. Напряженность электрического поля дости-
гала 500 В/м. На проводах длиной 5 м при расстоянии между проводами 2 мм
и расположении проводов вблизи печи на частоте 50 Гц может наводиться
напряжение помехи порядка 2-10~3 В. Если учесть, что чувствительность тер-
мопар лежит в пределах от 0,5-10-s до 7-10-5 В/°С, то становится понятной
настоятельная необходимость защиты цепей от поперечных помех.
При длине соединительной линии около 30 м и расстоянии между провода-
ми 2 мм на частоте 50 Гц в условиях промышленных помещений напряжение
поперечной помехи может принимать значения от нескольких микровольт до
десятков милливольт.
Если параллельно измерительным проводам проходят силовые провода, то
из-за наличия взаимной индуктивности ЭДС, наводимая на измерительных про-
водах, может быть найдена из выражения
е=—Mdijdt=—2-10+71 \Ti(al2a2ilalla.a) (di/dt),
где I — длина проводов; М •—коэффициент взаимной индуктивности; I— ток в
проводах; а — расстояние между проводами.
Нужно учитывать и емкостные связи между проводами. Так, при длине
соединительных линий 30 м, погонной емкости 150-10-12 Ф/м и сопротивлении
линии 100 Ом может быть получено напряжение помехи порядка 15,5-10-3 В
при напряжении на силовых проводах 220 В.
По форме помехи любого происхождения разделяются на импульсные, флук-
туационные и регулярные.
Импульсные помехи—это случайно появляющиеся импульсы (но обычно
с интервалом не менее длительности импульса) произвольной формы. При не-
зависимости времени и амплитуды импульсов помех вероятность появления К
импульсов в течение времени t будет равна рк (i) =
К I
C-Kot
(здесь До —
среднее число импульсов в единицу времени), а плотность распределения ве-
роятностей логарифмов амплитуд импульсов
f (lnr/J = (1/У2по) е~ (,п^>2/2’2.
Весьма часто форма импульсов имеет экспоненциальный характер:
y(t) = y(t)=-A0 (1 -ё~ cos <о0«).
Флуктуационные помехи — непрерывный случайный процесс, распределение
вероятностей которого близко к нормальному:
Корреляционные функции помехи часто описываются выражениями
7?^ (ъ) = а2е~а° । т ' или R* (т) = а2е~“ 1 т 1 cos <о0т.
Регулярные помехи наиболее часто проявляются в виде наведенных помех
с частотой сети и ее гармоник:
J
У (t) = Ав + 2 Aj cos (<о/ + V/).
7=1
Весьма широко используется разделение помех на аддитивные, независимые
от полезного сигнала, и мультипликативные. Аддитивные помехи y(t) могут
суммироваться с полезным сигналом x(t), а мультипликативные помехи служат
множителем этого сигнала.
Основные способы защиты от помех
Для оценки эффективности защиты от помех далее используется коэффи-
циент ослабления помех 20 log ип.вх/ип.вых, дБ.
К общим мерам уменьшения влияния помех следует отнести использование
вида модуляции сигналов, обеспечивающего нужную помехоустойчивость, и
повышение уровня полезного сигнала. Рациональный выбор вида модуляции
сигналов может быть сделан, если известен характер помех. При таком выборе
должен быть использован соответствующий материал [7.1].
Для повышения уровня полезного сигнала используется переход к импульс-
ной модуляции. Предполагается, что при переходе от AM- к АИМ-сигналу
удается сокращением длительности импульса повысить его амплитуду. Предел
такому повышению сигнала ставят тепловые, временные ограничения, а в не-
которых случаях — электрическая прочность элементов измерительной цепи. При
использовании импульсного питания измерительных цепей с тензорезисторами,
закрепленными на поверхности металлической детали с достаточной теплоем-
костью, удается повысить полезный сигнал более чем на порядок и ослабить
влияние помех до 20 дБ. Нужно отметить, что длительность импульса, постоян-
ные времени измерительной и тепловой цепей должны быть такими, чтобы за
время измерения тепловой режим изменился незначительно.
Для уменьшения влияния продольных помех используется ряд мер. Одна
из них —• гальваническое разделение частей цепи, в которых имеются места за-
земления. Гальваническое разделение производится преимущественно с помощью
трансформаторов и разделительных конденсаторов. Принцип их действия ясен
из рис. 7.22 и 7.23. Ключи могут быть как контактными, так и бесконтактными.
Гальваническое разделение измерительных цепей с помощью оптронов пока на-
ходится в исследовательской стадии.
Рис. 7.22. Измерительные схемы для уменьшения продольных помех с раздели-
тельным и компенсирующим трансформаторами:
Эр Э2 — экраны; ги, гл — сопротивления генераторного датчика и проводов; Епд — ЭДС
продольной помехи; Li, L2, L-. — обмотки компенсирующего трансформатора
Рис. 7.23. Измерительные схемы для
уменьшения продольных и попереч-
ных помех:
ТП — термопара; КТ — компенсирующий
трансформатор; С — разделительный кон-
денсатор
Рис. 7.24. Симметрирование входной
цепи
Другая мера — симметрирование входной измерительной цепи (рис. 7.24).
Напряжение от продольной помехи £пд на входе АВ: ыАв=£пд[£вх1/(£вх1 +
Ч-Ги+Гл)— Двх2/(Двх2-Нл)] при /?Вх1=/?вх2>Ги+Гл стремится к нулю. Если
соединить точку между RBXi и £пх2 с землей через высокоомное сопротивление
Ro, то можно добиться дополнительного уменьшения
Наконец, используются мостовые цепи, сбалансированные по напряжению
продольной помехи, и компенсирующие трансформаторы.
На рис. 7.22,6 представлен трехобмоточный (£;, £2, L3) трансформатор, в
обмотках £i и £2 которого наводятся напряжения, компенсирующие влияние
помехи £Пд.
Имеются трансформаторы (фирма Philips), у которых индуктивность обмо-
ток равна 400 Гн, а активное сопротивление — 240 Ом; в такой схеме происхо-
дит уменьшение продольной помехи 50 Гц примерно в 500 раз.
Защита измерительных цепей от внешних наведенных (поперечных) помех
достигается рядом мер, к числу которых относятся уменьшение длины прово-
дов за счет приближения к датчикам аналого-цифровых измерительных
устройств, а также сближение и скрутка проводов, идущих к датчикам. При
скрутке проводов ЭДС, наводимые в отдельных элементарных контурах, вычи-
таится, и благодаря этому удается уменьшить влияние поперечных помех на
измерительные провода на несколько порядков.
Применяют также магнитное и электростатическое экранирование входных
цепей от низкочастотных и высокочастотных магнитных полей. Экраны должны
иметь замкнутую поверхность, охватывающую измерительную цепь и отдельно
источники переменного тока. Части систем с разными потенциалами или имею-
щие гальванические развязки должны иметь свои экраны. Экранировка прово-
дов может ослабить наведенные помехи 50 Гц до 30 дБ.
Компенсировать наведенные помехи можно путем организации специальных
контуров. Типичные решения при этом связаны с трехпроводными схемами под-
ключения датчиков (см. предыдущий параграф), применением компенсирующего
трансформатора и др. При использовании параметрических датчиков можно
изменять полярность питания измерительной цепи и брать среднее из суммы и
разности полезного сигнала ис и помехи ut[ : [(un + «c) + (ип—ыс)]/2.
При синусоидальной наведенной помехе возможно выполнение измерений
в моменты, когда помеха принимает допустимо малый размер. При таком мето-
де удается получить значительное ослабление помехи.
Для уменьшения внутренних помех целесообразно провода питания про-
кладывать и экранировать отдельно от измерительных проводов с низким уров-
нем полезного сигнала, коммутация сигналов высокого и низкого уровней долж-
на проводиться отдельными коммутаторами. В необходимых случаях следует
использовать специальные средства защиты от перерывов питания.
Должны быть продуманы места заземления измерительных цепей. Неко-
торые из таких мест определяются правилами электробезопасности или техно-
логическими приемами монтажа элементов измерительной цепи (например, при-
соединением спая термопар к металлической поверхности). Некоторые точки
заземления могут появиться в процессе измерительного эксперимента, напри-
мер, из-за нарушения сопротивления изоляции, что может привести к органи-
зации контуров, вызывающих дополнительные погрешности. Такие контуры об-
разуются, если заземлять экраны в нескольких точках. При проектировании
системы рекомендуется составить и проанализировать схему заземления, а при
наладке — уточнить ее.
Дальнейшее повышение помехоустойчивости может быть достигнуто обра-
боткой суммы сигнала с помехой, имеющей случайный характер, в аналоговом
или цифровом виде. Наиболее часто встречающиеся здесь виды обработки —
это фильтрация и накопление сигналов, в течение которого происходит усред-
нение.
В интегрирующих аналого-цифровых преобразователях ослабление влия-
ния помех может достигать 100 дБ.
Индивидуальные фильтры, как правило, просты (обычно однозвенные
ДС-фильтры). Их частотная характеристика выбирается, исходя из спектральных
характеристик сигналов и помехи. Удобные номограммы для расчета ДС-фильт-
ров приведены в [7.14, 7.15]. Ослабление сигнала и внесение запаздывания —
наибольшие недостатки фильтрации. На практике при фильтрации и избира-
тельном усилении удается ослабить помехи на 40 дБ, а при методе накопле-
ния— иа 120 дБ.
При проектировании аналоговых измерительных цепей выбирается такой
комплекс средств защиты, при котором действие помехи не превышает заданно-
го уровня.
Глав а 8
СТРУКТУРЫ И АЛГОРИТМЫ АНАЛОГО-ЦИФРОВОЙ ЧАСТИ ИИС
8.1. ОСНОВНЫЕ СТРУКТУРЫ АНАЛОГО-ЦИФРОВОЙ ЧАСТИ
Аналого-цифровая часть (АЦЧ) ИИС состоит из аналоговых
измерительных каналов и системных аналого-цифровых устройств
(САЦУ). Аналоговые измерительные каналы предназначены для
восприятия входных величин, их преобразования в измерительные
сигналы и последующего преобразования аналоговых сигналов с
помощью измерительных цепей, а системные аналого-цифровые
устройства служат для выполнения заданного множества анало-
го-цифровых преобразований в составе самих систем.
Выделим основные элементы систем, без которых невозможно
получение измерительной информации, и на этой элементной ба-
зе определим возможные структуры АЦЧ. К основным элементам
любых АЦЧ относятся датчики и аналоговые измерительные це-
пи, которые обозначим через Д, устройства М, формирующие
значения образцовых мер, устройства сравнения аналоговых сиг-
налов и образцовых мер УС.
Устройство автоматического управления работой элементов
АЦЧ также является необходимым элементом, но в первом при-
ближении можно его считать равноценным для всех вариантов
структур и поэтому не включать в состав базиса элементов, опре-
деляющего основные структуры.
Для выявления основных структур АЦЧ предположим, что
необходимо измерить п величин. Максимальное количество дат-
чиков в этом случае должно быть равно п, минимальное — одно-
му. В последнем случае датчик должен последовательно воспри-
нимать все п величин.
Примем в первом приближении, что максимальное количество
устройств сравнения и образцовых мер равно п, а минимальное—
единице. В то же время будем подразумевать, что в некоторых
структурах при измерении отдельных величин могут быть исполь
зованы перечисленные выше способы выполнения операций срав-
нения и выдачи информации.
В табл. 8.1 показаны предельные количества основных эле-
ментов ИС и основные структуры для рассматриваемого случая.
Необходимо еще раз подчеркнуть, что здесь не представлены, но
могут быть синтезированы многочисленные промежуточные (ком-
бинированные) варианты. Следует пояснить, что под элементами
УС и М здесь подразумевается набор устройств сравнения и фор-
мирования мер, необходимых для реализации принятого алгорит-
ма аналого-цифрового преобразования [8.1]. Этот набор может
быть в измерительных каналах различным. Формирование ре-
зультата аналого-цифрового преобразования в табл. 8 1л на
рис. 8.1 не отражено, так как считается, что оно производится в
устройстве управления.
Таблица 8.1. Основные структуры АЦЧ
А. Предельные количества основных элементов структур АЦЧ
Аналоговые цепи Параллельная работа Последовательная работа
Датчики (Д) п 1 (со сканирующим уст
Устройства сравнения (УС) п ройством) 1
Образцовые меры (магазины или на- п 1
боры) (М)
Б. Основные структуры
№ струк- туры Количество элементов № струк- туры Количество элементов
д УС м д УС м
1 11 п п 5 1 п 11
2 1 6 1
3 1 п 7 1 11
4 1 8 1
Рис. 8.1. Основные варианты структур аналого-цифровой части ИИС:
° ~ ЯД—лУС—яМ; б — яД—пУС—М; е — яД—УС—М; г — Д—УС—М
Вариант структуры Тип структуры Количество элементов S
по рис. 8.1 по табл. 8.1 д УС к м СкУ
а 1 Параллельного действия (мно- гоканальная) п п — п —
б 2 Мультиплицированная п п — 1 —
в 4 Параллельно-последовательно- го действия п — п 1 —
г 8 Последовательного действия 1 1 — 1 1
На рис. 8.1 представлены структуры, нашедшие наибольшее
распространение. К ним относятся структуры АЦЧ параллельно-
го принципа действия (рис. 8.1,а), параллельного принципа с об-
щим набором образцовых мер (рис. 8.1,6), параллельно-последо-
вательного (рис. 8.1,в) и последовательного (рис. 8.1,а) принци-
пов действия. Перечисленные варианты структур на практике
имеют более или менее установившиеся названия: а—многока-
нальные, б — мультиплицированные, в — многоточечные, г — ска-
нирующие или развертывающие структуры.
В последующем рассматриваются АЦЧ систем, имеющие
именно эти структуры.
Сопоставим между собой структуры последовательного (----),
параллельного (||), параллельно-последовательного (—||—) дей-
ствия, а также мультиплицированную структуру (^ ) по количе-
ству элементов S, времени измерения Т, пропускной способности С
и вероятности безотказной работы Р (табл. 8.2). Через СкУ и К
в табл. 8.2 обозначены соответственно сканирующие и коммута-
ционные устройства.
При сопоставлении этих структур примем, что характеристики
однотипных элементов в них одинаковы и структуры отличаются
одна от другой количеством элементов и функциональными свя-
зями между ними, что все АЦЧ предназначены для преобразова-
ния и величин, размещенных в пространстве.
В табл. 8.2 приведены выражения для S, Т, С и Р с индекса-
ми, относящимися к соответствующим типам структур. Под
min С' понимается наименьшая из пропускных способностей эле-
г
Характеристики
Быстродействие Т Пропускная способность С Вероятность безотказной работы Р
тд+тус+тм п min Ci i (1 — Wm) 1
'бд+'1ус+’1м п min С; i (Рд,рус)пр1л < < < [1 — (1 Т'дРус)]'’ Рщ
’1д+и ("м+"ус~ ^к) min C; i PnjiPyCPM < р— и — < < [1 — (1 —^д)''1 РуОРН\
п ^д+^Ус+^м+^СкУ) minC£ । г Р = ^д^уС^М^СкУ
ментов системы (Д, М, УС, СкУ и К), под т — постоянная вре-
мени элементов.
Необходимо отметить, что приведенные в табл. 8.2 данные
могут быть использованы лишь для грубой оценки характеристик
структур АЦЧ и должны уточняться в зависимости от типа и ре-
жима работы систем. Так, при оценке вероятности безотказной
работы системы можно считать, что выход из строя любого из
элементов в системе последовательного действия приведет к вы-
ходу из строя всей системы. В то же время в системе параллель-
ного действия отказ одного элемента приведет только к неполно-
ценной работе системы — отказу одного из п каналов измерения.
Время работы отдельных элементов в АЦЧ различного типа не
может выбираться произвольно, между их работой должна быть
определенная взаимосвязь, которая будет ясна из дальнейшего.
Остановимся на типовых алгоритмах и особенностях функци-
онирования основных структур аналого-цифровых частей ИИС.
8.2. АЛГОРИТМЫ ФУНКЦИОНИРОВАНИЯ АНАЛОГО-ЦИФРОВОЙ
ЧАСТИ ИИС
Структура параллельного действия (многоканальная)
Содержательная логическая схема алгоритма многоканальной
структуры (рис. 8.1,а) отражает одновременную параллельную
работу п самостоятельных измерительных каналов:
[<1Ц= : Ii (х^/Хц) Ii(X]i/X2i) Ii (^i/^i)] II-• .||<In>.
Для выполнения аналого-цифровых преобразований могут ис-
пользоваться любые из алгоритмов АЦП (развертывающего, по-
разрядного, следящего преобразования, совпадения) и их разно-
видностей. При этом, конечно, должна быть произведена соот-
ветствующая логическая обработка сигналов от устройства срав-
нения и значений мер, участвующих в операциях сравнения.
Основные достоинства многоканальных структур связаны с
возможностью измерения разнородных физических величин, ис-
пользования одноканальных измерительных устройств, достиже-
ния максимального быстродействия и высокой схемной надежно-
сти.
Надежность многоканальных структур зависит от предъявля-
емых к ним требований. Если считать, что структура работоспо-
собна при исправности всех элементов, входящих в нее, то
тогда (при одинаковых измерительных каналах) вероятность без-
отказной работы такой структуры может быть относительно низ-
кой: Р|| = (АдРус-Рм)”-
Но если считать, что измерительные каналы резервируют
друг друга, то вероятность безотказной работы структуры будет
равна 1—(1—Рд РусРм)п- Реальная надежность такой структу-
ры будет находиться между надежностями этих двух крайних
ситуаций:
(РдРусРмГ^Рн < 1 - (1 - РдРусРм)"-
Основной недостаток структуры связан с наибольшим (по
сравнению с другими структурами) количеством формирующих
ее элементов.
Мультиплицированная структура (с общей образцовой
величиной)
Мультиплицированные структуры были предложены Ф. Е. Тем-
никовым в 1945 г. [8.2]. В них получил дальнейшее развитие
принцип развертывающего измерительного преобразования, ши-
роко используемый при измерении одной величины.
Отличительные выдающиеся особенности мультиплицирован-
ной структуры заключаются в том, что в этой структуре произ-
водится «коллективное» преобразование всех п аналоговых сиг-
налов от измерительных цепей за один цикл изменения образцо-
вой величины Хк и при этом могут выполняться операции преоб-
разования обработки и информации. Остановимся на свойствах
мультиплицированных структур более подробно.
При линейном во времени изменении Хк мультиплицирован-
ная структура может использоваться для коллективного преоб-
разования п AM-сигналов в ШИМ-сигналы, для аналого-цифро-
вого преобразования однородных величин без применения ком-
мутаторов, для выделения и аналого-цифрового преобразования
экстремальных сигналов, ранжирования сигналов по их размерам,
выделения сигналов, находящихся в заданных зонах, и т. п. Заме-
и известного текущего зна-
Рис. 8.2. К измерению п величии,
разделенных на р групп
тим, что цифровое управление изменением образцовой величины
дает более широкие возможности построения эффективных авто-
матических мультиплицированных структур.
В мультиплицированных структурах имеется возможность
разделения общего количества датчиков п на р групп. Каждая из
групп датчиков охватывается своим диапазоном изменения образ-
цовой величины (рис. 8.2). На выходе устройств сравнения в мо-
мент равенства измеряемой величины
чения Хк образцовой величины по-
являются сигналы, позволяющие
получить результаты преобразо-
вания.
Следует отметить, что образцо-
вая величина может быть известна
при ее формировании и (или) мо-
жет быть измерена с помощью до-
полнительного устройства.
Мультиплицированные структу-
ры особенно удобно использовать
для выявления точек поля, в кото-
рых исследуемая величина равна
заданному значению..
При необходимости выделения
и фиксации значений измеряе-
мых величин в заданных точках (адресный режим) имеется воз-
можность подключать к устройству представления информации
выходы соответствующих устройств сравнения.
Устройство формирования образцовой величины может гене-
рировать линейно зависящую от времени функцию. Тогда в муль-
типлицированной структуре производится, по существу, время-
импульсное преобразование измеряемых величин. Если генериру-
ется ступенчато нарастающая функция, например, с помощью
ЦАП, то существенно упрощается получение цифрового резуль-
тата измерения. Если образцовая величина формируется в зави-
симости от линейного или углового перемещения какого-то задаю-
щего устройства, то упрощаются возможности представления ре-
зультатов измерения в графическом виде.
Вид устройств сравнения и генераторов, формирующих образ-
цовую величину, в мультиплицированных структурах зависит
главным образом от типа модуляции сигналов.
Наиболее широко в мультиплицированных структурах использу-
ются датчики с выходными AM-сигналами. Тогда в большинстве
случаев используются устройства сравнения релейного типа, а
генератор образцовой величины формирует линейно возрастающее
во времени или ступенчатое компенсационное напряжение.
Возможно также использование сигналов параметрических
датчиков для изменения настройки резонансных контуров или ре-
жимов работы частотно-зависимых цепей, а в качестве генерато-
ра образцовой величины — генератора качающейся частоты.
Перспективно использование мультиплицированных систем,
работающих с генератором качающейся частоты, датчиками, име-
ющими выходные ЧМ-сигналы, и устройствами сравнения, фик-
сирующими равенство частот колебаний сигналов датчиков и ге-
нератора.
Известны структуры, в которых под воздействием исследуе-
мых величин изменяются и выделяются амплитудные или фазо-
частотные характеристики — особые точки (например, экстремум,
перегиб характеристики) устройств сравнения (например, резо-
нансного контура) [8.5].
Рис. 8.3. Мультиплицированная циф-
ровая структура
Рис. 8.4. Мультиплицированная
структура с использованием переход-
ных процессов
Для обслуживания объектов, размещенных на некотором рас-
стоянии друг от друга, может быть реализована предложенная
Ф. Е. Темниковым передача централизованной цифровой раз-
вертки цифро-аналогового преобразования в места установки
аппаратуры и передача сигналов срабатывания устройств срав-
нения в центр цифровой развертки (см. гл. 18).
Мультиплицированные структуры с выдачей результатов в
цифровом виде могут быть выполнены, например, по схемам,
представленным на рис. 8.3.
Номер датчика I, а также код zK компенсирующего напряже-
ния выдаются устройством управления. Цифро-аналоговый пре-
образователь формирует образцовую величину хк=/Дхк, которая
сравнивается со всеми аналоговыми сигналами {хп}. Величина j
в начале работы равна 0.
Формально мультиплицированная структура описывается так
Ф(В) {[I. (xjxj |[I2(x0Jx12) || -Il I„(xjxin)] || [[_ Ф (/:= /+1) X
XI(z7//Axk)]} {[IJCR:^, /Дхк) «>,(х„ = /Дхк) Di = 1)]|| ...X
X- ||[I„(CR:x1„, /Дхк) »„(xlh=^/AxK)I„(S:z/, Di = /z)]}X
х со (j = N) П Ф(Е).
Быстродействие мультиплицированных структур зависит от
количества ступеней N компенсационной величины и не зависит
от количества п входных величин. Если количество ступеней А=
=2т, то при поразрядном преобразовании одной величины затра-
чивается т тактов сравнения, при преобразовании п величин —
пт тактов, а при применении мультиплицированной структуры
необходимо произвести независимо от количества входных ве-
личин 2т тактов.
Если mi = 7 и т2 = 10, то при равных условиях мультиплици-
рованная структура становится более быстродействующей соот-
ветственно при «1^15 и п2^Ю0.
Погрешности мультиплицированных структур от взаимного
влияния каналов примерно такого же порядка, как и в коммута-
торах (см. гл. 7).
Применение мультиплицированных структур с параметриче-
скими датчиками может привести к необходимости организации од-
новременного питания всех измерительных цепей. В некоторых слу-
чаях мощность стабилизированного питания может достигать не-
скольких киловатт. Уменьшение мощности источника питания мо-
жет быть достигнуто применением импульсного питания, а сни-
жение требований к стабильности питания — использованием пе-
реходных процессов (рис. 8.4). В этой структуре на вход срав-
нивающего устройства подаются напряжения Uj? =Uo/?2/(/?i-(-
+^2)=^«о и Uc=iJ0 (1 — е tlRx °). В момент достижения равенст-
ва &u0 = (l — е tlRxC°)u0, t=RxC0\n(l—k) устройства сравнения
выдают сигналы, позволяющие снять отсчеты zK.
Важным вопросом, который приходится решать при примене-
нии мультиплицированных структур, является идентификация
сигналов, выдаваемых устройствами сравнения.
Типичными способами определения номера канала являются:
опрос устройств сравнения на каждой ступени /Дхк; этот спо-
соб приводит к значительным затратам времени: одна ступень об-
разцовой величины должна длиться не менее ("ус+пта), где tyc—
время срабатывания устройства сравнения, т«— время опроса,
п — количество входных величин; суммарное время Tz=N(iyc +
+ ttTa) ;
задержка ступени при срабатывании любого устройства срав-
нения и опрос устройств сравнения (суммарное время при этом
будет зависеть от распределения вероятностей входных величин);
использование табличных методов хранения адреса; этот спо-
соб может привести к наименьшим затратам времени.
В табл. 8.3 приведена классификация мультиплицированных
структур.
Структура параллельно-последовательного действия
(коммутаторная, многоточечная)
Многоточечные структуры АЦЧ (рис. 8.1,в), в которых орга-
нически сочетаются параллельный принцип получения и после-
довательный способ преобразования измерительных сигналов,
имеют, пожалуй, наиболее широкое, господствующее применение
в ИИС.
Наиболее типичная и распространенная ситуация, в которой
используются структуры параллельно-последовательного дейст-
вия, состоит в необходимости получения измерительной информа-
ции о заданном количестве однородных или разнородных вели-
чин, воспринимаемых с помощью датчиков. На многоточечные
структуры накладываются ограничения, которые связаны в боль-
шинстве случаев с требованиями последовательной (програм-
Таблица 8.3. Основные характеристики мультиплицированных структур
Признаки Характеристики признаков
Вид модуляции Характер преобразования Число каналов вывода Количество поддиапазонов Наличие времяимпульсного преобразова- ния AM Линейный?' 1 1 Да ЧМ, ФМ Нелинейный >2 Нет
мной) или выборочной (адресной) выдачи результатов аналого-
цифровых преобразований, при этом должны удовлетворяться
требования по метрологическим и эксплуатационным характери-
стикам при минимальной сложности и стоимости.
Стремление к уменьшению сложности структуры приводит к
многократному последовательному использованию отдельных
устройств измерительного тракта, а следовательно, к применению
структур параллельно-последовательного действия, которые носят
также название многоточечных структур.
Возможность последовательного выполнения аналого-цифро-
вых преобразований появляется лишь при условии, что суммар-
ное время этих преобразований не будет превышать наименьшего
интервала дискретизации преобразуемых величин.
Следует подчеркнуть, что наиболее инерционные элементы из-
мерительного канала (датчики) включены параллельно. Поэто-
му можно считать в первом приближении, что время, необходи-
мое для выполнения п аналого-цифровых преобразований, 7 =
— ’д+п(тк-Нус+тм), здесь тд, тк, -сус.тм — времена, характери-
зующие длительность преобразований датчиков, коммутации,
сравнения и формирования мер соответственно.
Для согласования частей измерительного тракта, работающих
по параллельному и последовательному принципам действия, в
таких структурах применяются коммутаторы. Поэтому иногда
подобного рода структуры называются также коммутатор-
ными.
Остановимся кратко на основных структурах многоточечных
ИС (рис. 8.5). При относительно небольшом количестве однород-
ных по физической природе источников информации («<100)
Рис. 8.5. Параллельно-
последовательные струк-
туры:
а — одноступенчатая; б —
двухступенчатая; в — трех-
ступенчатая; М — магист-
ральный канал
обычно используются одноступенчатые структуры. Функциониро-
вание одноступенчатой параллельно-последовательной структуры
(рис. 8.5,а) при циклической работе коммутатора может быть опи-
сано следующим образом:
Ф(В) [I || ... || UXoiMli) II II1 КХ)1 X
X L Ф (i: = i + 1; i0 = 0) I (X/xi;) I (xlZ/zz) I (zz) <o (i = n) "1 Ф (E).
Количество ступеней структуры определяется числом последо-
вательно расположенных узлов, в которых изменяется объем ин-
формационных каналов. Необходимо заметить, что в этой струк-
турной схеме после аналого-цифрового преобразования кодоим-
пульсный сигнал может передаваться параллельно или последо-
вательно. Но и в том, и в другом случае будем считать, что ин-
формационный канал один, и, следовательно, это обстоятельство
не влияет на определение количества ступеней системы.
Если количество измеряемых величин велико (и>100), то на-
ходят применение двух- и, редко, трехступенчатые структуры
(рис. 8.5,6, в). В ряде случаев оказывается полезным (например,
в связи с уменьшением длины соединительных линий) использо-
вание магистрального соединения, обозначенного на рис. 8.5,6, в
буквой М. Измерительные системы с количеством ступеней, пре-
вышающим три, встречаются относительно редко.
Выбор количества ступеней в структуре определяется необхо-
димостью обеспечить заданные быстродействие и точность, повы-
сить надежность работы (путем резервирования), упростить экс-
плуатацию. Об этом говорилось в предыдущей главе.
Немаловажное значение при выборе структуры имеет также
возможность (при использовании двухступенчатых структур) от-
носительно просто наращивать количество измеряемых парамет-
ров, вводя дополнительные блоки первичных коммутаторов и
АЦП.
На рис. 8.5 не показаны блоки управления, блоки памяти, ко-
торые необходимы в случае, если АЦЧ должна выдавать измери-
тельную информацию не в ритме ее получения (не >в реальном
времени проведения измерительного эксперимента), а также дру-
гие функциональные блоки, необходимые для обеспечения работы
системы.
Таблица 8.4. Классификация многоточечных структур
Классификационный признак Характеристики признаков
Количество ступеней структуры Последовательность работы Выдача измерительной информации Применяемые соединения 1 Жестко запрограм- мированная Непосредственно в процессе эксперимента Магистральные Адресная С промежуточным запоминанием Радиальные
Обобщая сказанное, можно прийти к достаточной для наших
целей систематизации многоточечных структур (табл. 8.4). Коли-
чество разновидностей таких структур велико, и помимо основных
типов, определяемых признаками, приведенными в табл. 8.4, они
различаются по видам и параметрам входных сигналов (в том
числе и по виду модуляции), по типам коммутаторов, АЦП и т. п.
Структура последовательного действия
(сканирующие системы)
В структурах последовательного действия операции получения
информации выполняются последовательно во времени с помощью
одного канала аналого-цифрового преобразования (см. рис. 8.1,г).
Рис, 8.6. Измерение месторасположения
точки на [О, £]:
— разрешающая способность датчика; L —
перемещение датчика; а — угол сканирова-
ния; h — расстояние от датчика Дя до линии
наблюдения. Варианты использования датчи-
ков: Д\ — измерение I и AZ; Д2 — измерение
сс, Z, АЛ h
Если измеряемая величина
распределена в пространстве или
объектом измерения являются
собственно координаты некоторой
точки или области простран-
ства, то восприятие информации в
таких структурах выполняется с
помощью одного так называемо-
го сканирующего датчика. Такие структуры носят название ска-
нирующих. Этот тип структур входит в более общий класс инфор-
мационных систем, называемых сканирующими системами [8.3]
и предназначенных для воспроизведения пространственных обра-
зов на расстоянии (телевидение), для разнообразных преобразо-
ваний пространственных образов в целях, например, выделения
контуров, характерных точек и т. п.
Сканирующие структуры могут классифицироваться по коли-
честву измеряемых величин. Они могут выполнять операции ана-
лого-цифрового преобразования места расположения некоторой
точки (рис. 8.6) на прямой линии L, точки или кривой на пло-
скости или в пространстве. В качестве системы координат, конеч-
но, могут быть использованы различные, в том числе нелинейные
системы. Для выявления основных закономерностей сканирую-
щих структур далее остановимся на прямоугольной системе коор-
динат) .
При исследовании параметрических полей (температур, дав
лений, механических напряжений и пр.) сканирующие структуры
должны дать количественную оценку этих параметров в заданной
системе координат.
Однако не во всех случаях необходимо знать точное количест-
венное значение величин во многих точках пространства. Иногда
достаточным оказывается найти экстремум исследуемого парамет
ра и измерить его или найти места равных значений исследуемо-
го параметра.
В сканирующих ИС в целях улучшения некоторых характери-
стик систем (например, быстродействия) довольно часто произво-
дится преобразование области сканирования и исследуемого па-
раметра в промежуточную физическую величину (например, 'в
электрический потенциал). При таком промежуточном преобразо-
вании могут выполняться и некоторые операции обработки (на-
пример, преобразование Фурье, дифференцирование и т. д.).
Очень важной является возможность визуализации таких ви-
дов излучений, как, например, тепловые, 'высокочастотные элек-
тромагнитные, рентгеновские. Это позволяет не только наглядно
представлять распределение таких параметров в пространстве, но
и использовать методы количественной оценки визуальной инфор-
мации. При промежуточных преобразованиях часто оказывается
полезным для снижения погрешностей измерения производить
одновременное преобразование неизвестной и известной образцо-
вой величин.
Сканирующие датчики могут быть выполнены таким образом,
что они при выполнении операций восприятия информации вхо-
дят в непосредственный контакт с исследуемым параметром или
областью сканирования либо воспринимают измеряемые величины
при отсутствии непосредственного контакта («бесконтактные»
датчики).
Примерами «контактных» датчиков могут служить термопары
или термометры сопротивлений, «бесконтактных» — радиационные
пирометры.
Сканирование путем перемещения «контактного» датчика Д\
(рис. 8.6) вдоль объекта измерения широко используется при
геофизических исследованиях, в океанологических исследованиях,
при изучении космического пространства и т. п.
Дистанционное сканирование с помощью «бесконтактных»
датчиков Д2 с постоянным полем их восприятия применяются
при телевизионных методах измерения геометрических размеров,
в радиолокационных системах измерения дальности, в ультразву-
ковой дефектоскопии, при измерении параметров тепловых полей
по инфракрасному излучению, при использовании лазеров для
оценки параметров высокотемпературной плазмы (рассеяние лу-
ча при этом пропорционально температуре, а изменение интенсив-
ности— плотности плазмы) и т. п.
При выделении и измерении экстремумов измеряемых величин
можно выполнять пассивное и активное сканирование. При пас-
сивном сканировании траектория движения луча предопределена
заранее и не изменяется в процессе сканирования.
СЛСА сканирующей структуры при пассивном сканировании,
т. е. при определенной заранее последовательности выполнения
преобразования входных величин (переход i:=/), может быть
представлена в виде
. |_ф(г: = /) I (8:^)1-
I
Активное сканирование связано с изменением траектории ска-
нирования в зависимости от информации об измеряемой величи-
не, получаемой системой в процессе сканирования. Активные ска-
нирующие структуры осуществляют поиск определенного значе-
ния измеряемой величины с учетом результатов пробных движе-
ний.
Нахождение экстремума измеряемой величины, распределен-
ной в пространстве и имеющей непрерывный характер, с. исполь-
зованием активного сканирования позволяет резко уменьшить
протяженность траектории сканирования по сравнению с длиной
траектории пассивного сканирования.
Когда величина х распределена в пространстве и является
функцией координат пространства уь у2, , Уп, то может быть
реализовано несколько методов поиска ее экстремального значе-
ния.
В этом случае СЛСА должна включать сбор и анализ измери-
тельной информации в целях определения наилучшего пути к до-
стижению заданной характерной области исследуемой величины.
В общем виде при нахождении экстремального значения величи-
ны х, при котором S (дх/дуг) =0, производится' оценка
(dx/dyi)] и принимается на основании установленного решаю-
щего правила заключение о продолжении или окончании поиска
экстремума. СЛСА при активном сканировании может иметь сле-
дующий вид:
установление области поиска
Ф(В)
1
сбор информации по заданной программе
х [I + 1 (^А) I (S:zz) со (i X
2
оценка близости
I
XI (СР: Z) СО [F (Z) < S] И I (S: Di, Z) Ф (Е).
Метод, при котором сканирование происходит по направлению
градиента изменения величины, называется методом градиента.
Градиент изменения измеряемой величины является вектором и
определяется следующим образом:
gradx=;^ k(dxldyi),
i=i
где к — единичные векторы осей координат у-;.
В точке экстремума grad х = 0, т. е. все частные производные
функции х 'в этой точке равны нулю. Траектория сканирования
по методу градиента определяется последовательным выполнени-
ем пробных движений, анализом направления grad х и сканирую-
щим движением в этом направлении.
Если величина х является функцией одной переменной и име-
ет одно экстремальное значение, при котором dx/dy—^, то на-
правление движения к экстремуму определяется знаком текущей
производной dx/dy (рис. 8.7).
На рис. 8.8 показано направление сканирующего движения
по методу градиента в случае поиска экстремума функции, рас-
пределенной на плоскости.
X
Рис. 8.8. К поиску экстремума
поверхности x(yi, у2) по методу
градиента
Несколько более просты в реализации, а в ряде случаев не
менее эффективны методы наискорейшего спуска, Гаусса—Зей-
деля и слепого поиска.
При использовании метода наискорепшего спуска производят-
ся определение значения и направления grad х в данной точке и
сканирование в полученном направлении до тех пор, пока произ-
водная от х по принятому направлению не станет равной нулю.
Это случится в точке касания направления движения с линией
х=const. В этой точке вновь определяется grad х и изменяется
направление сканирования (рис. 8.9).
Метод Гаусса — Зейделя связан со сканированием по прямо-
угольной координате у г до момента дх/дуг — G, движением по
другой координате и нахождением частного экстремума х
(рис. 8.10). Заметим, что этот метод используется при уравнове-
шивании мостов переменного тока.
При большом числе переменных оказывается полезным метод
случайного поиска. В этом случае траектория сканирования опре-
деляется путем анализа случайных перемещений (шагов). Если
Рис. 8.10. К поиску экстремума по-
верхности x(yi, у2) по методу Гаус-
са — Зейделя
Рис. 8.9. К поиску экстремума по-
верхности х(у\, у2) по методу наи-
скорейшего спуска
при выполнении пробного шага приращение дх/дг/г<0, то проис-
ходит возвращение в прежнюю точку траектории и выполняется
следующее пробное движение.
Аппаратурные реализации поиска экстремальных значений ве-
личин, распределенных в пространстве, разработаны для относи-
тельно простых случаев. Наиболее полно рассмотрены методы
построения «экстрематоров» для одной величины, распределенной
по участку прямой длины и по плоскости [8.4].
Следует отметить, что целесообразно во многих случаях пре-
образовать в сканирующей структуре пространственно распреде-
ленную величину в функцию времени и затем найти экстремаль-
ное значение этой функции.
Поиск и обнаружение объектов, создающих температурное по-
ле (например, движущихся объектов с тепловыми двигателями),
можно также производить методами пассивного и активного ска-
нирования. Последнее возможно, если температурное поле объек-
та находится в зоне восприятия сканирующего датчика. Если
температурное поле объекта находится вне зоны восприятия дат-
Рис. 8.11. Траектории пассивного сканирования на плоскости:
а колебательно-колебательное движение; 2 — спиральное вращательно-колебательное двн-
жение; в розеточное вращательно-колебательное движение; г — спиральное вращательно-
вращательное влияние; д — розеточное вращательно-вращательное движение: соИЛ1Т, соИГ1,
Л л Л и Л К И
кол* — круговые частоты и амплитуды колебательного н вращательного движений
чика, то должно осуществляться пассивное сканирование про-
странства, в котором может находиться объект. Траектории ска-
нирования в случае отсутствия априорных данных о вероятности
нахождения объекта в пространстве должны обеспечить равно-
мерный «осмотр» всего пространства.
Возможны различные реализации [8.3] траектории сканиро-
вания на плоскости, показанные на рис. 8.11. Выбор вида траек-
тории сканирования при отсутствии априорных данных определя-
ется, как правило, простотой аппаратурной реализации сканирую-
щего устройства.
Наибольшее распространение в технике сканирующих систем
имеет колебательно-колебательное движение.
Наличие априорной информации о распределении вероятности
нахождения объекта на площади позволяет решать задачу опти-
мальной организации сканирующих движений. Некоторые сообра-
жения по этому поводу имеются в [8.3].
Выше были кратко рассмотрены лишь наиболее распростра-
ненные способы организации поиска экстремумов унимодальных
функций без учета случайных погрешностей измерений. В то же
время реально измеряемые величины могут иметь локальные
экстремумы и другие особенности (наличие «оврагов», «гребней»
и т. п.), влияющие на выбор того или иного способа поиска; при
поиске должны учитываться мерность исследуемого пространст-
ва, погрешности измерений, изменения измеряемой величины во
времени и другие факторы.
Нужно заметить, что теория поиска находит довольно широкое
приложение в ИИС. В связи с этим при изложении материала
по структурам измерительных систем, системам распознавания
образов и системам технической диагностики используются ре-
зультаты, полученные в теории поиска.
В заключение приведем табл. 8.5, чв которой сведены основные
разновидности сканирующих структур.
Таблица 8.5. Основные разновидности сканирующих структур
Классификационный признак Характеристики признаков
Мерность измеряемых величин Характер операций из- мерения Тип сканирующего дат- чика Промежуточное преоб- разование сканируемой области Вид сканирующих дви- жений I (/) Измерение во всех точ- ках „Контактного" дейст- вия С преобразованием Пассивный 5=2 Ul> #}> {11, 171> ^2’ {11, lz> 1з, х) Измерение экстремальных значений, определение экви- потенциальных линий „Бесконтактного" действия Без преобразования Активный
Следует заметить, что собственно операции измерения в ска-
нирующих структурах могут выполняться различными методами.
Среди них наибольшее распространение имеет, пожалуй, метод
развертывающего уравновешивания.
Помимо минимального количества элементов по сравнению с
другими сканирующие структуры имеют преимущество, заклю-
чающееся в том, что канал измерения используется многократно.
Поэтому при определенной стабильности характеристик этого ка-
нала можно с повышенной точностью производить относительные
измерения величины, распределенной в пространстве.
Наиболее серьезный недостаток структур последовательного
действия — суммирование интервалов времени последовательно
выполняемых операций измерения по всем измеряемым величи-
нам— при применении современных быстродействующих средств
восприятия информации (телевизионные датчики, оптико-элек-
тронные преобразователи и т. п.) не проявляется, и во многих
случаях сканирующие структуры обладают не меньшим быстро-
действием, чем структуры параллельного действия.
Г л а в а 9
ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЕ КОМПЛЕКСЫ
Измерительные информационные системы могут создаваться
тремя основными способами.
По первому способу применяются любые, в том числе и нуж-
дающиеся в согласовании технические средства непосредственно
для решения конкретной задачи. Этот способ в большинстве слу-
чаев требует больших затрат времени и денежных вложений, вы-
сокой квалификации специалистов.
При втором способе ИИС строится опять-таки для решения
конкретной, локальной задачи из выпускаемых промышленностью
агрегатированных приборных устройств, для которых решены
вопросы их информационной и, может быть, частично, конструк-
тивной и энергетической совместимости. Объединение таких уст-
ройств в систему может производиться с помощью стандартных
интерфейсов. Подавляющее большинство ИИС создается именно
этим способом. Степень сложности создаваемых при этом ло-
кальных ИИС ограничивается в первую очередь квалификацией
специалистов (проектировщиков, наладчиков и т. п.) и наличием
достаточно представительного набора агрегатируемых функцио-
нальных модулей и приборных устройств, включая ЭВМ.
Наконец, построение систем может производиться на базе из-
мерительно-вычислительных комплексов (ИВК), являющихся ана-
лого-цифровым и цифровым универсальным ядром цифровых
ИИС.
Измерительно-вычислительные комплексы обеспечивают вы-
полнение аналого-цифровых измерительных преобразований, вы-
Таблица 9.1. Измерительно-вычислительные комплексы
Тип Процес- сор Стандартная периферия Интерфейс
ОЗУ мд Дисплей ЦПУ широкой печати
ИВК-1 СМ-ЗП 28 Келов, 1,2 мкс ИЗОТ-1370 ВТА-2000 180 КАМАК
ИВК-2 СМ-4П 64 Келов, до 128 К 2ИЗОТ-1370 ВТА-2000 СМ-6315
ивк-з СМ-3 То же, что и в ИВК-1, с графопостроителем 200X300 мм КАМАК
ИВК-4 СМ-4 То же, что и в ИВК-2, с графическим дис- плеем, планшетно-рулонным граф опостроите лем КАМАК
ИВК-7 СМ-3 То же, что и в ИВК-З ОШ
ИВК-8 СМ-3 То же, что и в ИВК-З, с графопостроителем ОШ
числительных процедур, выдачу полученной информации, форми-
рование командной и иной служебной информации, необходимой
для функционирования ИИС.
Такое универсальное ядро формируется с помощью стандарт-
ного интерфейса из аналого-цифровых измерительных устройств
широкого назначения (см. гл. 8) и программируемых средств вы-
числительной техники (см. гл. 6) со стандартными устройствами
отображения и хранения информации (см. гл. 4). Объединение
перечисленных технических средств с соответствующим операци-
онным программным обеспечением, нужным для их совместного
функционирования, и получило название измерительно-вычисли-
тельного комплекса [9.1].
Важно отметить, что для построения какой-либо конкретной
ИИС необходимо дополнить ИВК датчиками, соответствующими
измерительными цепями, исполнительными органами и другими
АЦП Коммута- тор ана- логовых сигналов ЦАП Другие функцио- нальные блоки Примечание
9 разрядов, 12 мкс 32 сигнала, 0,1—10 В 9 разрядов, 10 мкс 9 24-разрядных реги- стров. 16-разрядный счетчик. Генератор импульсов от 1 Гц до 1 МГц. Связь с телетайпом До четырех крей- тов, две стойки До четырех крейтов, три стой- ки
14 разрядов, 2 мкс; 9 разрядов, 12 мкс Релейный на 32 сигнала Два 10-раз- рядных, 10 мкс 9 24-разрядных регист- ров. 2 24-разрядных счет- чика. Таймер управления ШД. Цифровой ам- первольтметр Крейт
Крейт ИВК-2 Крейт ИВК-3 Таймер. Калибратор Погрешность ±0,015 %
Ф4221 + 10 мВ; + 100 мВ, + 10 в 3 шт. Ф799/2, 300 сигналов Ф723 Усилители Быстродействие измерительного ка- нала 830 измере- ний/с, с учетом; программног > управления—100 измерений/с
ЦВЩ1516 50 мс; 0,1, 1; 10 В ±0,05%. ±0,5% Ф799/1, 103 сигналов Калибратор 106 деле- ний, на каждом диа- пазоне ±0,03%
устройствами, а главное, прикладными программами, позволяю-
щими решать задачи, поставленные перед создаваемой ИИС.
Здесь уместно провести аналогию [9.1] ИВК с ИИС и управляю-
щих вычислительных комплексов с АСУ технологическими про-
цессами (см. гл. 14).
Возможность типизации решения многих задач ИИТ путем ис-
пользования, во-первых, электрических измерительных сигналов и
типовых (агрегатированных, совместимых) средств электроизме-
рительной техники и, во-вторых, программируемых средств вы-
числительной техники позволило обосновать и организовать про-
мышленный выпуск ИВК- Электроприборостроительная промыш-
ленность Советского Союза выпускает и разрабатывает около 50
типов ИВК-
Они создаются методом проектной компоновки из системно-
сопрягаемых функциональных блоков и устройств, выпускаемых
промышленностью в составе агрегатных комплексов ГСП и про-
дукции радиоэлектронной промышленности.
Разработка, аппаратурная доводка и программное оснащение
ИВК, проектируемых и создаваемых в специализированных орга-
низациях, конечно, должны обеспечить высокое гарантирован-
ное качество комплексов.
В табл. 9.1 приведены основные данные ИВК-1—ИВК-4,
ИВК-7, ИВК-8, имеющие назначение преимущественно для созда-
ния ИИС, входящих в автоматизированные системы научных ис-
следований и комплексных испытаний.
Основные положения, признаки классификации и общие тре-
бования к ИВК в целом и к их компонентам, а также требования
к проведению испытаний установлены ГОСТ 26.203-81.
В соответствии с этим ГОСТ ИВК представляет собой авто-
матизированное средство измерений электрических величин, на
основе которого возможно создание ИИС путем присоединения
ко входу измерительных каналов ИВК датчиков измеряемых ве-
личин с унифицированным электрическим выходным сигналом и
генерации на основе программных компонентов ИВК программ
обработки информации и управления экспериментом, ориентиро-
ванных на решение конкретных задач.
Этот ГОСТ допускает возможность модификации выпускаемых
ИВК под конкретную ИИС. Конкретизация области применения
ИВК предусматривается для проблемных (ориентированных на
конкретную область применения) и специализированных (уни-
кальных, единичных) ИВК. Типовые ИВК предназначены для
решения широкого круга типовых задач автоматизации измере-
ний. Выбор комплекса нормированных метрологических характе-
ристик ИВК производится в соответствии с ГОСТ 8.009-72 (см.
гл. 22).
Основными техническими компонентами ИВК являются изме-
рительные и вычислительные компоненты, меры, счетчики теку-
щего 'времени и средства ввода-вывода цифровых и релейных си-
гналов.
Программными компонентами ИВК являются системное про-
граммное обеспечение (программы ЭВМ и ИВК, обеспечивающие
работу ИВК в диалоговом режиме, управление измерительными
компонентами и обменом информацией между ними, проверку ра-
ботоспособности ИВК) и прикладное программное обеспечение.
Последнее включает типовые программы обработки измеритель-
ной информации, планирования эксперимента, метрологического
обслуживания ИВК. По договоренности с заказчиком разработчи-
ки ИВК могут поставлять дополнительные программы.
Измерительно-вычислительные комплексы, производимые се-
рийно, проходят государственные контрольные испытания, на ко-
торые предъявляется один экземпляр ИВК данного типа. Кон-
кретное содержание испытаний устанавливается в соответствии
с ГОСТ 8.001-80. Поверке подвергаются все измерительные кана-
лы. Может осуществляться поэлементная поверка измерительных
каналов, если элементы имеют нормированные метрологические
характеристики и имеется методика расчета характеристик кана-
ла по метрологическим характеристикам компонентов.
Измерительно-вычислительные комплексы ИВК-1—ИВК-6
представляют собой комбинацию базовых комплектов СМ-3 и
СМ-4 (без устройств связи СМ с объектом, которые обязательны
при использовании СМ-3 и СМ-4 в качестве управляющих вычис-
лительных комплексов — УВК) и крейтов КАМАК, оснащенных
различными функциональными модулями.
Базовый комплект СМ-3
Рис. 9.1. Структурная схема ИВК-З:
КК — контроллер крейта, ЦАВОМ — цифровой ампервольтомметр
Структуры ИВК-1—ИВК-6 аналогичны, поэтому достаточно
рассмотреть структуру одного типа ИВК. Измерительно-вычисли-
тельный комплекс ИВК-З (рис. 9.1) предназначен для автомати-
зации исследований, проводимых с использованием оптических
спектральных устройств. В состав ИВК-З входят базовый ком-
плект управляющего вычислительного комплекса СМ-3, крейт
КАМАК с набором функциональных и сервисных модулей (на
рис. 9.1 сервисные модули не показаны), цифровой ампервольт-
омметр (5 десятичных разрядов, до 5 измерений в секунду),
планшетный графопостроитель Н-306 (погрешность ±0,5%, ско-
рость черчения до 75 см/с).
Базовый комплект СМ-3 содержит процессор СМ-ЗП, опера-
тивное запоминающее устройство (32 Келов), алфавитно-цифро-
вой видеотерминал (дисплей) типа «Видеотон-340» (размер экра-
на 200x140 мм, число знаков 80X16), алфавитно-цифровое печа-
тающее устройство DZM-180 (180 знаков/с, 132 знака в строке),
накопители на перфоленте и магнитном диске (ИЗОТ-1370;
4,8 Мбайт).
Крейт КАМАК содержит следующие функциональные модули:
два двухканальных ЦАП (10 двоичных разрядов, 100 кГц),
АЦП (9 и 14 двоичных разрядов, 80 и 0,5 преобразований/с),
коммутатор (16 точек, до 100 переключений в секунду), два мо-
дуля управления шаговыми двигателями ШД, модули входных и
выходных регистров (24X2 двоичных разряда), счетчики импуль-
сов.
В состав сервисных модулей 'входят индикатор магистрали,
ручной контроллер, регистры и генераторы слов и т. п.
В системное программное обеспечение входят дисковая опера-
ционная система ДОС СМ, дисковая операционная система реаль-
ного времени ДОС РВ, фоново-оперативная базовая операцион-
ная система реального времени ФОБОС, программный монитор
КАМАК для организации операций обмена между устройствами
управляющего вычислительного комплекса СМ-3 и модулями
КАМАК, использующий язык ФОРТРАН-IV, тесты для проверки
функциональных элементов комплекса.
Измерительно-вычислительный комплекс ИВК-3 снабжен про-
граммами, ориентированными на обеспечение выполнения часто
встречающихся стандартных операций при спектральных иссле-
дованиях: управление спектральным устройством в режимах син-
хронного сканирования, усреднение спектральной информации и
оценка точности измерений, оперативное управление эксперимен-
том в режиме диалога, вывод спектров на дисплей, алфавитно-
цифровое печатающее устройство, графопостроитель, преобразо-
вание спектров. Наличие проблемно-ориентированного програм-
много обеспечения ИВК-3 существенно облегчает создание про-
грамм пользователя, необходимых для обеспечения работы кон-
кретной системы, основанной на использовании ИВК-3.
Приведенные материалы показывают, что ИВК-3 позволяет вы-
полнять основные функции, необходимые для проведения автома-
тизированного эксперимента в области спектральных исследова-
ний.
Приведем основные технические характеристики ИВК-7 и
ИВК-8. В ИВК-7 и ИВК-8 используется интерфейс типа «Общая
шина» СМ-3. Стандартные функциональные блоки из номенкла-
туры АСЭТ объединяются в измерительную стойку и подсоеди-
няются к магистрали «Общая шина» с помощью интерфейсных
узлов. Эти ИВК различаются составом набора функциональных
блоков.
Технические характеристики ИВК-7 (рис. 9.2): 197 каналов
коммутации напряжений ±100 мВ, ±10 В, ±100 В; быстродейст-
вие— 100 переключений в секунду (может быть существенно
увеличено); суммарная погрешность усилителя, коммутатора и
АЦП оценивается в ±0,4%.. Из этих данных видно, что ИВК-7
предназначен для измерения относительно быстро протекающих
процессов с относительно невысокой точностью.
Измерительно-вычислительный комплекс ИВК-8 (рис. 9.3) мо-
жет коммутировать 100 напряжений ±10 В, имеет погрешность
ьазобый. комплект СМ-3
Рис. 9.2. Структурная схема ИВК-7
Рис. 9.3. Структурная схема ИВК-8
измерительной цепи коммутатор — цифровой вольтметр (ЦВ) не
более ±0,1%-, время измерения без фильтра 50 мс или 400 мс и
4 с с фильтром. Выходные сигналы имеют поддиапазоны 0,1; 1,0;
10 В при количестве делений 10е, основная погрешность не более
±0,03%', а время установления выходного напряжения 20—100 мс.
Таким образом, ИВК-8 специализирован на выполнение высоко-
точных измерений, он может быть использован и для повероч-
ных- работ.
Наработка на отказ для ИВК-7составляет 0U ч, а для
ИВК-8 — 300 ч.
Системное программное обеспечение ИВК-7 и ИВК-8 реали-
зовано на основе системного обеспечения СМ-3. В нее входит
диалоговая система (ДС) СМ на языке FOCAL (отладчик, ре-
дактор и др.), дополненная программами управления и обмена с
измерительными блоками. Связь блоков измерительной стойки с
магистралью общей шины ОШ осуществляется при помощи расши-
рителя ОШ, который ретранслирует сигналы с задержкой 350 нс
и позволяет разделить магистраль ОШ на независимые отрезки
и увеличить длину кабеля до 15 м.
Опыт создания на основе ИВК довольно разнообразных ИИС
(для аэродинамического эксперимента, испытания паровых тур-
бин, газотурбинных двигателей и пр.) показывает, что в ИВК
можно относительно легко производить перекомпоновку и дора-
ботку, используя в основном штатные технические средства. Ска-
занное позволяет существенно уменьшить объем работ по созда-
нию систем. Однако объем дополнительного оборудования может
быть сравним с поставляемым в составе ИВК. Далее, отсутствие
в составе ИВК измерительных цепей, позволяющих использовать
различные датчики, затрудняет метрологическую аттестацию
ИИС. Значительный объем работ при создании ИИС на основе
ИВК пользователю приходится выполнять по созданию соответст-
вующих программных средств. Очевидно, необходимо расширить
возможность доукомплектования выпускаемых ИВК измеритель-
ными устройствами.
Можно сделать вывод, что ИВК-1 — ИВК-8 ориентированы на
автоматизацию относительно дорогостоящих экспериментов. .Мож-
но предполагать, что они могут объединять работу нескольких
оснащенных микро-ЭВМ, терминальных измерительных систем,
обладающих относительно небольшими автономными возможно-
стями.
Рассмотренные ИВК имеют стандартные структуры. Господст-
вующей среди аналого-цифровых измерительных устройств явля-
ется комбинация измерительных коммутаторов и АЦП. Кроме
того, в ИВК входят мини-ЭВЛ4 или микро-ЭВМ со стандартными
периферийными устройствами. Технические средства в ИВК объ-
единяются с помощью стандартных интерфейсов (приборного,
КАМАК) или интерфейса периферийной части ЭВМ. Измери-
тельно-вычислительный комплекс обеспечивается операционными
программами и некоторыми программами прикладного характера.
Следует отметить, что в большинстве ИВК предусмотрены
устройства, необходимые для организации внешних воздействий
на объект исследования или для изменения режима его работы,
а также сервисные аппаратура и программы.
Помимо ИВК широкого назначения получили распространение
специализированные ИВК, например для автоматизированных
стендов, предназначенных для виброиспытаний различных двига-
телей и силовых конструкций, для аэродинамических испытаний,
для испытаний и поверки радиотехнической аппаратуры и др. По
существу, специализированные ИВК приближаются к своему за-
вершенному виду—ИИС, рассмотрению которых посвящено даль-
нейшее изложение книги.
К специализированным ИВК относятся комплексы в транспор-
табельном исполнении. Они используются для полевых и промыс-
ловых исследований в геофизике, для охраны природы, в строи-
тельстве, сельском хозяйстве и т. п. Такие системы и комплексы
должны работать в режиме экспресс-анализа и иметь возмож-
ность передачи данных на мощные ЭВМ для дальнейшей обра-
ботки.
Для исследования сложных объектов в ряде случаев целесооб-
разно создавать двухступенчатые системы: на нижней ступени
использовать микро-ЭВМ, а на верхней — обеспечивать их сов-
местную работу, сложные виды обработки информации. Подоб-
ные двухуровневые системы были разработаны и использованы
для испытания сложных гидротехнических сооружений, прочност-
ных испытаний и т. п. В таких системах производились сжатие
данных, коррекция погрешностей, поверка метрологических ха-
рактеристик измерительных каналов и т. п. Очевидно, ИВК, обес-
печивающие построение двухуровневых ИИС, будут занимать
заметную долю ИВК, выпускаемых промышленностью.
Объединение в ИВК современных средств измерительной и
вычислительной техники, стандартных интерфейсов дает возмож-
ность изменять по мере надобности их состав, применять алго-
ритмы, позволяющие достигать сложных целей измерения, произ-
водить коррекцию результата измерения, выполнять поверочные
операции и т. п.
Необходимо отметить, что создание измерительно-вычисли-
тельных средств, особенно с использованием микропроцессорной
техники, — одно из основных направлений развития ИИТ. В этом
свете цифровые измерительные устройства, многоканальная ре-
гистрирующая аппаратура и другие измерительные устройства,
содержащие микропроцессорную технику, обладают повышенны-
ми интеллектуальными способностями, приближающими их к
ИВК-
Можно предполагать, что ИВК будут в дальнейшем сущест-
венно развиваться, что позволит создавать более совершенные
ИИС при ограниченных затратах времени и средств.
часть четвертая
СТРУКТУРЫ и АЛГОРИТМЫ ИИС
Рассмотрим структуры и алгоритмы основных видов информа-
ционных измерительных систем — измерительных, контрольных,
диагностических и распознающих систем, а также телеизмери-
тельных систем, включающих специальные каналы связи большой
протяженности.
Главное, наиболее существенное различие между этими систе-
мами определяется целями выполняемых ими процессов получения
информации и отражается в первую очередь в алгоритмах их ра-
боты. Системы могут основываться на использовании специализи-
рованных или универсальных многофункциональных технических
средств.
Построение систем с применением, например, таких универ-
сальных системных средств, как средства микропроцессорной
техники и информационно-вычислительный комплекс, позволяет
реализовать на них различные алгоритмы.
Однако специализированные структуры информационных изме-
рительных систем также широко распространены ввиду наличия
у них таких положительных качеств, как приспособленность к ре-
шению конкретной задачи, резкое упрощение программного обес-
печения системы, возможность достижения более высокого быст-
родействия, зачастую более простая эксплуатация.
Заметим, что специализированные структуры реализуются с
помощью аппаратных средств с жестким соединением функцио-
нальных блоков или средств, каждое из которых способно функ-
ционировать по фиксированным программам.
Анализ развития информационно измерительной техники вооб-
ще и ИИС в частности, вычислительной техники, микроэлектрони-
ки позволяет утверждать, что в дальнейшем помимо специализи-
рованных и универсальных структур будут все больший вес при-
обретать такие структуры, в которых разумно объединяются спе-
циализированные и универсальные средства.
В этой части книги обращается особое внимание на основные
алгоритмы работы систем, показываются необходимые для реали-
зации этих алгоритмов принципы построения специализирован-
ных структур и возможности использования универсальных
структур.
. Измерительные системы
Глава 10
СИСТЕМЫ ИЗМЕРЕНИЯ НЕЗАВИСИМЫХ ВХОДНЫХ ВЕЛИЧИН
10.1. ОСНОВНЫЕ РАЗНОВИДНОСТИ СИСТЕМ ИЗМЕРЕНИЯ
НЕЗАВИСИМЫХ ВХОДНЫХ ВЕЛИЧИН
Входными для ИИС являются величины, воспринимаемые дат-
чиками или другими входными устройствами системы. Ниже рас-
сматриваются измерительные системы, у которых целью измерения
(измеряемыми величинами) являются именно входные величины.
Большинство входных величин (масса, геометрические размеры
или перемещения объекта, его температура, сила, на него дейст-
вующая, и т. п.) имеют невысокую размерность, подчиняются за-
конам аддитивности, порядка и эквивалентности. Как правило, для
них имеются образцовые меры той же физической природы.
Задача таких ИС заключается в выполнении аналого-цифровых
преобразований множества величин X : I (Хо) I (Xo/Z) I (Z) и
в выдаче полченных результатов измерений I (R:Z) 11 (W:Z) 11 (S:Z).
Этот алгоритм осуществляется в большинстве случаев аналого-циф-
ровой частью ИИС, принципы действия которой описаны в гл. 8, и
присоединенными к ней устройствами отображения, регистрации и
хранения измерительной информации. Конечно, проведенный алго-
ритм может усложняться в зависимости от задач, стоящих перед
ИС. Наиболее часто в алгоритм вводятся аналоговые преобразова-
ния входных величин с целью их аналоговой регистрации
I(X0) I(X0/Xi) I(W :Х]) с возможным последующим аналого-циф-
ровым преобразованием и обработка аналоговых или цифровых сиг-
налов в целях, например, фильтрации, накопления, введения тесто-
вых и образцовых сигналов на вход ИС.
В рассматриваемых ИС основные типы измеряемых входных
величин (см. гл. 2) могут быть сведены или к множеству изменя-
ющихся во времени величин {xr-(Z) ,}1г==1э 2.п, или к изменяющейся
во времени t и распределенной по пространству S непрерывной
функции x(t, S).
При измерении непрерывная функция x(t, S) представляется
МНОЖеСТВОМ ДИСКреТ {x(ti, Sj)}i=l,2, . . . ,п; J=l,2, з.
Для иллюстрации основных принципов построения таких систем
достаточно ограничиться изучением структур и алгоритмов ИС,
производящих измерения дискрет функции x(t, S) и основанных
на использовании многоточечных, мультиплицированных и скани-
рующих структур системных аналого-цифровых измерительных
каналов (многоканальные структуры ввиду их системотехнической
простоты здесь можно не рассматривать).
Отметимз что в таких ИС программируемые вычислительные
средства используются для выполнения операций обработки ре-
зультатов аналого-цифровых преобразований, главным образом,
в целях улучшения точностных характеристик результатов изме-
рения, а также для управления работой системы.
Арсенал систем для измерения входных величин велик, и тем
не менее продолжается создание новых систем. Конечно, это от-
части объясняется различиями в требованиях, предъявляемых
к ИС в зависимости от условий измерительного эксперимента,
в котором они должны работать. Но в первую очередь это объяс-
няется большим разнообразием величин, подлежащих измерению.
Рис. 10.1. Основные параметры датчиков:
1 — датчики сопротивления — параметрические (1-1 — реостатные; 1-2 — тензорезисторы;
1-3— индуктивные; 1-4 — индукционные; 1-5 — терморезисторы; 16 — магнитоупрз гие; 1-7—
емкостные); 2 — термоэлектрические датчики; 3 — фотоэлектрические датчики; 4— счетчи-
ки элементарных частиц; 5 — электрохимические датчики; 6— датчики, основанные на
эффекте Холла; 7 — пьезоэлектрические датчики
Если даже ограничиться обзором только динамического и частот-
ного диапазонов, а также диапазона выходных сопротивлений
электрических датчиков, предназначенных для восприятия одной
величины, то окажется, что эти диапазоны очень широки. На рис.
10.1 представлены ориентировочные области выходных сигналов
(напряжений), выходных сопротивлений и инерционности сущест-
вующих датчиков.
По уровню выходного напряжения датчики можно условно
подразделить на такие группы:
с весьма низким уровнем сигнала (менее 5-Ю-5 В);
с низким уровнем сигнала (от 5-10-5 до 10~3 В);
со средним уровнем сигнала (от 10-3 до 1 В);
с высоким уровнем сигнала (более 1 В).
Наиболее распространены датчики со средним уровнем сигнала
(около 60% всех типов датчиков). Датчики, имеющие низкий и
высокий уровни сигнала, распространены примерно одинаково (по
15% типов).
Динамический диапазон выходных сигналов у большинства
датчиков не превышает 100 дБ.
Частотный диапазон большинства датчиков лежит в диапазоне
от 10 до 104 Гц. В отношении погрешностей датчиков следует от-
метить, что большинство датчиков имеют погрешности преобразо-
вания примерно от 0,1 до 0,5%.
Нужно отметить, что наиболее распространенные параметры
сигналов определяют и наибольшее количество ИС, работающих
в этих диапазонах параметров.
Кроме одиночных датчиков в ИС эффективно применяются си-
стемные датчики, воспринимающие поле величин (телевизионные,
голографические и др.).
Большие перспективы имеют удобно комплектуемые с инте-
гральной микроэлектроникой малогабаритные полупроводниковые
чувствительные элементы с частотным выходным сигналом — сен-
соры. Группа сенсоров может быть объединена с элементами ми-
кроэлектроники (включая и микропроцессор) в одной интегральной
микросхеме. Естественно, что отличающиеся друг от друга датчики
требуют разного подхода к построению измерительных схем соот-
ветствующих систем.
Из огромного разнообразия измеряемых величин по их физиче-
ской природе для рассмотрения здесь разумно выбрать величины
и воспринимающие их датчики, наиболее часто встречающиеся, но
в то же время различающиеся по основным характеристикам.
Следует подчеркнуть, что материал по системам базируется на
содержании предыдущих частей книги. Читатели должны и могут
самостоятельно дополнять этот материал, развивая его в нужном
направлении.
10.2. МНОГОТОЧЕЧНЫЕ ИС С РЕЗИСТИВНЫМИ ДАТЧИКАМИ
Если распределенная в пространстве величина воспринимается
множеством датчиков, размещенных в определенных заранее точ-
ках, то в ИС (см. гл. 7) возможно применить аналого-цифровые
устройства с параллельной, параллельно-последовательной или
мультиплицированной структурами. Такие ИС во многих случаях
представляют объединение датчиков с аналоговыми измерительны-
ми цепями, системными аналого-цифровыми устройствами и
устройствами выдачи информации; увеличивается количество ИС,
включающих средства микропроцессорной техники.
Поскольку структуры и алгоритмы многоточечных ИС довольно
однотипны, ограничимся рассмотрением выпускаемых промышлен-
ностью ИС параллельно-последовательного действия типов К-732
и К-742.
Измерительная система К-732 [7.11] предназначена для изме-
рения с помощью тензорезисторов местных деформаций, возникаю-
Рис. 10.2. Структурная схема ИВК К-732/6
щих в исследуемой конструкции при приложении внешних нагру-
зок (рис. 10.2). Структура системных аналого-цифровых
устройств — автоматических цифровых мостов — параллельно-
последовательная (многоточечная).
В целях уменьшения влияния поперечных помех мостовая цепь
питается двуполярными импульсами, а результат измерения фор-
мируется в блоке УВИ как среднее арифметическое результатов,
полученных при разных полярностях.
Цикл, включающий 2540 измерений, длится 1,3 с. Групповой
цифровой коммутатор Ф-7019 имеет циклический (непрерывный и
однократный) режим работы. Выдаются следующие сигналы: От-
счет Zt (И разрядов), значение Р нагрузки или цикла (9 разря-
дов), номер опрашиваемого канала п (7 разрядов) и номер N
моста (5 разрядов).
Регистрация информации в К-732 производится через устройст-
во управления Ф-7020 на одно из устройств: электронный фоторе-
гистратор с экрана ЭЛТ типа Н-708 (до 500 строк/с), ПЛ-150 и
ЭУМ.-23. На цифровой индикатор информация выдается только по
выбранному адресу.
В ИВК К-742 (рис. 10.3), предназначенном для автоматизации
сбора и обработки результатов измерений в процессе испытаний
элементов и конструкций на статическую прочность и выносли-
вость, предусматриваются коммутация и преобразование прира-
щений сопротивлений тензорезисторов (50, 100, 120, 200 Ом), тер-
морезисторов (10, 46, 53 Ом) типов ТСП и ТОМ. в унифицирован-
ное напряжение 0—1,0 В, коммутация и унификация сигналов тер-
мопар (ХА, ХК, ВР5/20, ПРЗО/6), коммутация датчиков трещин и
унифицированных напряжений. Длина соединительных проводов—
до 150 м.
ИВК К-742 выполняет около 2500 измерений в секунду. Шкала
АЦП содержит 13 разрядов-f-l знак, наиболее «чувствительный»
диапазон ±32,0 мВ. Устройство коммутации К-742 содержит семь
коммутаторов по 128 точек (896 точек измерения). Коммутация
выполняется с помощью МОП-микросхемы (шесть коммутацион-
ных элементов). Возможно подключение нескольких измеритель-
ных модулей К-742 к СМ-4 непосредственно. В ИВК входят также
микро-ЭВМ «Электроника-60» с ОЗУ 28 К 16-разрядных слов, на-
копитель на гибких магнитных дисках ГМД-70 емкостью'
512 Кбайт, широкое термопечатающее устройство ТПУП1
(160 символов/с), алфавитно-цифровой дисплей РИН-609; все эти
устройства объединены в универсальную терминальную станцию
АРЗНИ.
Разработано программное обеспечение метрологической аттес-
тации контроля и диагностики ИВК, типовых операций сбора и
обработки информации.
Итак, К-742 является по сути ИВК с АЦЧ, выполненной по
параллельно-последовательному принципу действия и содержащей
бесконтактные коммутаторы напряжения, преобразователь на-
пряжения в код и универсальную терминальную станцию
АРЗНИ. Возможно подключение аналого-цифровых частей К-732
или К-742 целиком к интерфейсу «Общая шина» СМ-4.
Заметим, что алгоритмы работы аналого-цифровых устройств;
с коммутаторами были рассмотрены в гл. 7. Кроме того, структура
и алгоритмы измерительной части систем автоматического контро-
ля, управляющих вычислительных машин и комплексов основаны
также на параллельно-последовательном принципе действия и
рассмотрены в гл. 14.
10.3. МУЛЬТИПЛИЦИРОВАННАЯ ИС С ТЕРМОПАРАМИ
Ограничимся рассмотрением ИС, основанной на использовании
мультиплицированной структуры и предназначенной для измере-
ния температур с помощью термопар (рис. 10.4).
Измерительная система обладает высоким быстродействием и
имеет блочную компоновку.
Рис. 10.4. Структурная схема мультиплицированной термоизмерительной
системы
В качестве датчиков используются термопары ХК и ХА, изго-
товленные из тонких (несколько десятков микрометров) проволок
ХК и ХА и имеющие малую (порядка десятков миллисекунд) по-
стоянную времени. Для уменьшения продольных помех и усиле-
ния сигналов термопар в ИС используются усилители МАА-725
с дифференциальным входом. На выходе устройств сравнения на
микросхеме 554САЗА после оптронов 249ЛП1Б применены тригге-
ры со счетным входом. Система собирается из 16 блоков по 8 ка-
налов (128 каналов).
Упрощенная СЛСА этой ИС в режиме измерений может быть
представлена в следующем виде:
восприятие и усиление (£ = 50) сигналов термопар {[(Ip'): =
lieJU^-ke,)] ||... || (Н")||... ||<1<’>)11Х;
формирование сигнала, компенсирующего влияние температуры
окружающей среды, X 11[1(Т0//?0) 1(^о/Ц)]}Х;
формирование компенсирующего напряжения UK
Х[ЦФ(/:-/+1) 1(ПК=/ДС7-Ц)]Х;
1
сравнение XUm — MCR:^, С7К)] ||... ||<1<2>>||... X
X- IKI/Bax;
запрос на обслуживание
Хсо[(Ц|Д2| ... |С7г| ... Р128)=/АС/к]Х
X{[<Р 1,1 (R) |... 1 <P8,1 (R)] II- • -II [Ф1.16(R) I...I<Р8,16 (R)}.
Далее схема приоритета опрашивает и определяет номера сра-
ботавших триггеров на данной ступени компенсирующего напря-
жения jAC7K, и производится запись этих номеров и гк, в RAM1.
Возможна запись кода zKj по восьми адресам одновременно. Затем
процедуры измерения продолжаются. По окончании процесса из-
мерения происходит перезапись данных в RAM2 и начинается но-
вый цикл, во время которого информация из RAM2 вводится в па-
мять ЭВМ.
СЛСА описанных процедур будет иметь вид:
определение и запись адреса и отсчета
X (R) L фо = = k + 1: i = const) Ad0 (k) {[SbAd (1) ||... || SbAd (8)] X
2
X{[<o(R.,K) I(Si:D£, 1; zy)]||...{[«>(R,K)I(S.:D^ 8; ?,.)]} X
2 2
X®(^=16) -|«>(/ = 1024)1 X;
(здесь для краткости использовано обозначение co(R) вместо
[<P (R) ]);
перепись информации
XI(Si:/7S2:/*) /(S2:Z*/S3bm:/*) Ф(Е).
В режиме измерения ИС позволяет производить 105 измере-
ний/с с погрешностью не более ±0,2%.. В системе достигается
ослабление продольных помех примерно на 70 дБ и поперечных
на 40 дБ. Отметим, что при применении мультиплицированных
структур может быть достигнуто еще более высокое быстродей-
ствие.
Помимо режима измерения ИС имеет режимы, позволяющие
выполнять обработку информации в процессе ее получения.
К таким режимам относятся:
нахождение и измерение минимального значения, когда при
увеличении компенсирующего образцового напряжения отмечают-
ся и регистрируются номер канала и значение минимума при пер-
вом же запросе на обслуживание:
L ф (/: = /+ 1) IKIUK = <» [(С7. | С721... | t/I2s) =
1
= П HS-z,, DZ)...;
нахождение и измерение максимального значения;
измерение величин, уровни которых находятся в заданной зоне,
образцовая величина при этом изменяется только в заданной зоне;
(сюда же относится определение изопараметрических линий);
выявление ближайшей к заданному значению измеряемой вели-
чины путем нахождения максимального или минимального значе-
ний относительно заданного.
В ИС предусмотрена работа с микро-ЭВМ «Электроника-60» и
ДЗ-28, а также сопряжение с приборным интерфейсом. Програм-
мное обеспечение предусматривает получение с помощью микро-
ЭВМ статистических характеристик и выполнение метрологических
поверок ИС.
Конструктивно ИС выполнена в двух блоках. Модульная кон-
струкция позволяет делать мультиплицированные ИС на различ-
ное количество измеряемых величин.
10.4. СКАНИРУЮЩИЕ СИСТЕМЫ ДЛЯ РАСШИФРОВКИ ГРАФИКОВ
Огромное количество графических (аналоговых) зависимостей
получается и документируется с помощью разнообразной автома-
тической регистрирующей аппаратуры. В медицине, геофизике, ме-
теорологии, при промышленных испытаниях, вообще во многих от-
раслях народного хозяйства и в научных исследованиях затрачи-
вается большое время на расшифровку аналоговых графических
изображений, т. е. на измерение параметров графиков и выдачу
результатов измерения в цифровом виде.
Для повышения производительности труда при расшифровке
графиков разработаны как специализированные, так и серийно
выпускаемые промышленностью полуавтоматические расшйфро-
вочные устройства.
В полуавтоматических устройствах основную операцию распо-
знавания кривой на общем поле записи выполняет человек-опера-
тор. Имеются расшифровочные системы, предназначенные для рас-
шифровки определенных видов записи [8.3, 10.1], работающие
автоматически с высокой производительностью при минимальном
участии оператора.
Рис. 10.5. Графическая запись функций:
a — jc(f); б — х(д)
Графическая запись измеряемых величин на плоскости может
быть в виде функций одного аргумента [в большинстве случаев —
в виде функций времени x;=x('t)] и функций двух аргументов —
z=(p(x, у) (рис. 10.5). При записи нескольких измеряемых величин
на одном документе они могут не пересекаться (рис. 10.6,а) и пе-
ресекаться (рис. 10.6,6).
Графическая запись характеризуется преимущественно ярко-
стью и цветовым тоном. Обычно яркость кривой сама по себе не
является информативным признаком. Уровень ее должен быть до-
статочным для того, чтобы положение кривой различалось с по-
мощью воспринимающего элемента на уровне шумов, образован-
ных окружающим запись фоном. Цветовой тон записи определяет
спектральные характеристики воспринимающего элемента. Иногда
используется маркировка многоканальных записей с помощью их
различного цветового тона. Минимальная толщина кривой, кото-
рая может быть обнаружена, определяется разрешающей способ-
ностью воспринимающего элемента.
При автоматической расшифровке применяются четкие изо-
бражения на бумаге, имеющей коэффициент отражения боль-
ше 0,5.
При расшифровке графиков широко используется изменение
скоростей записи и расшифровки: расшифровка обычно произво-
дится со скоростями, обеспечивающими наилучшую производи-
тельность и точность при использовании данной ИС.
Рис. 10.6. Основные виды графических записей:
а — непересекающиеся графики; б — пересекающиеся графики
Обычно графики расшифровываются, исходя из требований
восстановления непрерывной кривой. Скорость движения ленты
ограничивается обычно требованием неизменности ординаты кри-
вой в течение расшифровки. В подавляющем большинстве ИС для
расшифровки графиков используется равномерное квантование по
аргументу.
Ордината графических изображений может измеряться всеми
известными методами уравновешивания и совпадения. Однако
наибольшее применение имеет развертывающее уравновешивание
с преобразованием ординат графика в пропорциональные им ин-
тервалы времени и последующим измерением полученных интер-
валов.
Кривая на непрозрачных носителях выделяется путем восприя-
тия отраженного света, на прозрачных носителях — проходящего
света. Сканирование может выполняться непосредственно воспри-
нимающим элементом или сканирующим лучом при неподвижном
воспринимающем элементе. В качестве воспринимающих элементов
используются фотоприемники (фотоэлектронные умножители, фо-
тосопротивления, фотодиоды и фототранзисторы) с соответствую-
щими оптическими устройствами, обеспечивающими согласование
свойств фотоприемников и изображений. Источники света — лам-
почки накаливания, электронно-лучевые трубки и т. п.
Сканирующие движения обеспечиваются с помощью оптико-
механических (рис. 10.7) или электронных (рис. 10.8) разверты-
вающих устройств. Перемещающийся в направлении измеряемой
Рис. 10.7. Оптико-механические развертывающие устройства:
а — с перемещающимся фотодатчиком ФД-, б —с качающимся зеркалом КЗ и неподвиж-
ным фото датчиком; в — с перемещающимся зеркалом магнитоэлектрического вибратора
МЭВ и неподвижным фотодатчиком; Гр — график
Рис. 10.8. Электронное
развертывающее уст-
ройство:
Гр — график; Л — линза;
ФД1 — фотодатчик, вос-
принимающий отражен-
ный свет; ФДг — фотодат-
чик, воспринимающий про-
ходящий свет
ординаты фотоприемник показан на рис. 10.7,а, развертывание лу-
ча с помощью качающихся зеркал — на рис. 10.7,6, в. При при-
менении перемещающегося луча возникают погрешности расшиф-
ровки, связанные с изменяющимся отношением угла поворота
зеркала к перемещению луча по поверхности графика. Для умень-
шения этой погрешности либо делается неравномерным движение
качающегося зеркала, либо изменяется при расшифровке форма
носителя, на которой записано графическое изображение.
На рис. 10.9 графическое изображение преобразуется в фото-
проводящем слое (трехсернистая сурьма, окись свинца и др.) види-
кона в потенциальный рельеф, который при последующем режиме
коммутации преобразуется в токовый сигнал, определяемый изме-
нением потенциала фотопроводящего слоя в освещенных точках.
Выпускаемые промышленностью видиконы имеют размеры фо-
топроводящего слоя 9,5X12,5 мм, 18X18 мм с разрешающей спо-
собностью до 800 линий (50—60 линий на 1 мм) с длиной волны
0,45 до 0,6 мкм [10.1].
В настоящее время разработано и используется довольно боль-
шое количество разнообразных сканирующих ИС, предназначен-
ных для расшифровки непересекающихся, пересекающихся цвет-
ных и одноцветных графических изображений (функций времени).
Рис. 10.9. Применение видикона
для восприятия графической за-
писи:
Гр — график; В — видикон; Л — линза
Рис. 10.10. Структурные схемы расшифровки графиков
Структурные схемы ИС расшифровки одной кривой с оптико-
механическим сканирующим устройством (рис. 10.10) включают
лентопротяжный механизм ЛПМ, обеспечивающий непрерывное
или шаговое перемещение ленты, сканирующие устройства СкУ,
фотодатчики, воспринимающие начало Н, конец Д рабочего диа-
пазона графика, и фотодатчики О, отмечающие момент пересече-
ния сканирующего луча и кривой, а также генераторы пилообраз-
ных кривых G/, импульсов GN, ключи k\ и /г2 и счетчики импуль-
сов. На рис. 10.10 показаны три типичные структурные схемы. На
схеме, содержащей генератор G/, луч перемещается поперек ленты
с постоянной скоростью. При этом перемещении выделяется /-я
ордината кривой:
Ф(В) [_Ф(/: = / + 1) 1[х(0/^(У]Х
1
С помощью фотоприемников Н и О, триггера Т и ключа kit от-
крытого в течение ДД, происходит суммирование импульсов от GN
и формирование z3-:
X W/W/l Цг,.) <0(/ = ДГ)ПФ(Е).
В этой схеме суммарная погрешность 6 расшифровки зависит от
погрешности нелинейности G/, преобразований I[x(/,)/AZj) X
XI(A^/z3).
На схеме с входным сигналом z/1) удается уменьшить суммар-
ную погрешность благодаря тому, что перемещение сканирующего
луча определяется кодом Z; и не связано со временным преобразо-
ванием:
L Ф(/: = /+1) L Ф(к=«+ 1)
2 1
Хт[х(1.}=1..} -| 1{z.t D.)(fi(/ = yV)-| ф(Е).
Схема, содержащая генератор G/ и шкалу линейной меры М, вы-
полнена так, что отсутствует погрешность из-за нелинейности пре-
образования I (zzj/Zfj). Это достигается тем, что при сканировании
луч раздваивается и- один из лучей перемещается по шкале линей-
ной меры М, вызывая генерирование импульсов {е}, суммируемых
счетчиком 2:
Ф (/: = /+ 1) {I II1 = I(2/’-D/) »(/ =W) I’
Обычно значения z3- и номер ординаты либо вводятся в устрой-
ства памяти, либо регистрируются на перфоленте или печатающем
устройстве.
Основные характеристики оптико-механических устройств: ко-
личество кривых — до 30, скорость расшифровки — до 2400 орди-
нат/с, погрешность абсолютная—до ±0,1 мм, относительная—от
±0,1 % ДО ±2%, крутизна кривой — до 87°, шаг квантования — от
0,25 до 4 мм.
Остановимся на электронной ИС расшифровки графиков типа
«Силуэт». В ней используется видикон типа ЛИ-23 (спектр вос-
принимаемых волн — от 0,45 до 0,65 мкм, окно 9,5X12,5 мм, раз-
решающая способность — 50 линий на 1 мм); выдача информации
производится на перфоратор ПЛ-80. Генератор линейно возраста-
ющего напряжения работает с частотой 300 Гц. Графики представ-
ляются на бумажной ленте шириной 200—300 мм или на кино-
ленте 35 мм, линия на бумажной ленте не уже 0,5 мм, интервал
дискретизации между отсчетами — 4 или 12 мм. Выполняется счи-
тывание одной из двух или трех непересекающихся кривых. СЛСА
работы «Силуэта» в упрощенном виде:
перенос строки графика на видикон
[_ Ф(/: = /+!) Цх(1)/х(1,)]Х-,
преобразование х(/3) в z,
X I(u/Zz) с« [Z; = v(Zz)] I(Z//z/) 1 (W:’у) Ф(Е).
Значительно усложняются структуры и алгоритмы ИС при рас-
шифровке пересекающихся одноцветных графиков. Пересекающие-
ся графики применяют из-за стремления уменьшить погрешность
одновременной регистрации нескольких величин путем использо-
вания для записи всей ширины носителя. Графики могут иметь об-
щие точки при пересечении П или касании К (рис. 10.11). Если
Рис. 10.11. Пересечение й ка-
сание участков кривых
кривые не имеют особых отметок (цвет, толщина линий и т. п.),
то для расшифровки таких записей в ИС должны приниматься
специальные меры. Способы распознавания пересекающихся одно
цветных кривых сводятся к схемно-логическим и алгоритмическим
[10.1, 10.2] способам. Схемно-логические способы распознавания
применяются обычно при небольшом количестве кривых.
Рис. 10.12. К определению «опасной» близости кривых:
я—по разности ординат кривых; б — по интервалам времени между пересечениями кривых
Включение устройств или программ распознавания кривых, как
правило, производится с помощью специального блока, определя-
ющего «опасную» близость кривых. В этом блоке сравнивается
разность ординат hi с заранее установленной мерой близости в
(рис. 10.12,п); при наклонном движении сканирующего луча срав-
нивается приращение М/ с заданной величиной А (рис. 10.12,6).
Наиболее простой способ распознавания кривых на «опасных»
участках связан с определением знака производных кривых или
разностей значений их ординат (рис. 10.13).
В точках пересечения кривых (рис. 10.13,а) разность значений
ординат равна нулю, a |i6(A/)| отличны от нуля и могут быть
больше заданного уровня еь
В точке касания (рис. 10.13,6) |AZ| и вторые разности |б(А/)|
близки к нулю. Эти признаки могут быть использованы при по-
строении схемных решений.
Однако при числе пересекающихся кривых более двух схемные
решения различения ординат кривых становятся громоздкими.
и x*k+2 будут иметь следующий
Количество ис-
пользуемых ор-
динат
1
2
3
4
X k+1
ис. 10.13. Вид кривых первых и вто-
рых разностей их ординат:
а — ПРН пересечении; б — при касании
Тогда используется экстраполя-
ция кривых с помощью аппрок-
симирующих многочленов или
статистическая экстраполяция и
оценивается степень близости
реализованных ординат кривых
к предсказанным значениям.
Из аппроксимирующих мно-
гочленов часто используется
многочлен Ньютона относитель-
но невысокой (3—5) степени.
Для второй интерполяционной
формулы Ньютона при равномер-
ном квантовании и предсказании
на один и на два интервала впе-
ред предсказанные значения х*д-н
ц [10.2]:
X*k+i
2xfe—Xk—t
i+xfe_2
*k
3Xft —|
r4- 3%k _2
1 OXk—20xfe_14-15x/;_ 2—4x'/;_3
СЛСА для расшифровки двух кривых:
Х1(С₽:г^ zkv zft2, г;2){(В[[2м-г;2|<|гА1-г;1|]||Х
1
XIIю [| 2*2 2^2|<^|zft2 2fel|} [~ I(z^1/3ft2, 2^2/Z*,) J 2^2).
Увеличение количества используемых при предсказании отсче-
тов более трех-четырех может не привести к повышению точности
прогнозирования из-за влияния погрешностей составляющих.
Естественно для выполнения прогнозирования и решения во-
проса об отнесении реализованных отсчетов к определенным кри-
вым использовать микропроцессорную технику.
10.5. АКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ
ГРАФИЧЕСКИХ ИЗОБРАЖЕНИИ
Измерение и выдача в цифровом виде координат сложных гра-
фических изображений на фотоносителях, чертежах и других
документах применяются при автоматизации проектирования, в
геологии и картографии, океанологии и т. п. Часто такие измере-
ния производятся полуавтоматически с участием оператора, ука-
зывающего точки изображения, координаты которых необходимо
измерить. Для измерения координат в таких полуавтоматических
устройствах используются датчики, позволяющие координаты за-
данной точки преобразовать (в информационном смысле) в изме-
нение электрических параметров, отобразить на матричных сеточ-
ных моделях или преобразовать в интервалы времени прохождения
световых или акустических им-
пульсов между точками, опре-
деляющими измеряемые коорди-
наты.
Ограничимся далее знаком'
ством с полуавтоматической аку-
стической системой для измере-
Рис. 10.14. Размещение источника И
и приемников I7t—П3
ния координат точек на плоско-
сти (на планшете) [10.3].
Излучатель ультразвука И —
миниатюрный пьезокерамический
цилиндр — совмещается опера-
тором с точкой изображения, координаты которой измеряются
(рис. 10.14). Три приемника ультразвука ГЦ—П3 расположены на
одной прямой на известных с высокой точностью расстояниях
L/2. Использование трех приемников ультразвука позволяет
измерять не только координаты х, у, но и скорость звука в среде.
Приведем расчетные формулы для определения координат из-
лучателя. Значение k — поправки на отклонение скорости звука
от принятой при расчете — определяется из известного соотноше-
ния, заключающегося в том, что сумма квадратов сторон паралле-
лограмма равна сумме квадратов его диагоналей, т. е. по резуль-
татам измерений 1\ — /3 и параметру системы L:
£2[2/,2 + 2/22 - 4/ 32] - £2 = 0; k = L [№1* Д-ЧЦ— М*.
Поправка на реальную скорость звука позволяет уточнить резуль-
таты измерений:
1т—kli, /02—kl2, 1оз=/г1з.
Если |1—k |^0,02, то данное измерение должно быть отброшено
как ошибочное, так как такого изменения скорости звука в воздухе
в лабораторных условиях не может быть.
Координаты центра излучения сигнала определяются по фор-
мулам
х = (& _ /^)/2£ + £/2; у = VI* - х\
Источник И излучает пакеты импульсов, в которых импульсы
следуют с частотой jfj, а затем с f2. Отсчет интервалов времени
прохождения акустических сигналов от точки излучения до точек
приема производится именно с момента изменения частоты. Интер-
вал времени между пакетами импульсов превышает время про-
хождения акустических сигналов планшета по диагонали.
На рис. 10.15 показана структурная схема канала измерения
расстояния 1Г акустического измерителя координат. Она работает
как Цифровая следящая система с двойным интегрированием по
времени разности между интервалом времени, соответствующим
величине li и определяемым по сигналу акустического приемника,
и интервалом времени, пропорциональным сумме сформированных
на выходе канала кода z(/j) и скорости изменения этого кода
Рис. 10.15. Структурная схема одного канала акустического измерителя
координат
z(l'i). Алгоритм двойного интегрирования сигналов рассогласова-
ния в сочетании с прерывистым режимом работы излучателя
обеспечивает:
а) повышение точности устройства, так как фронт импульса,
по которому определяется конец измерительного интервала време-
ни, находится близко к началу пакета импульсов, т. е. наименее
искажен отраженными сигналами;
б) устойчивость устройства против акустических шумов, так
как скорость 1\ корректируется на ±1 квант 1 раз за период из-
лучения пакета импульсов;
в) работу схемы в следящем режиме без динамических ошибок
при средней скорости перемещения визира до 1 м/с.
С помощью микро-ЭВМ «Электроника-60» вводятся поправки
на скорость звука, производится вычисление х и у и устраняются
неверные результаты.
Наличие ЭВМ позволяет одновременно со считыванием коор-
динат производить дальнейшую обработку графической информа-
ции по заданной программе.
Акустическим измеритель координат позволяет считывать ин-
формацию на поле размерами 1000X1000 мм с погрешностью
примерно ±0,1 мм и обеспечивает достаточную для надежной ра-
боты защиту от помех и ошибочных действий оператора.
Акустическое устройство в трехмерном исполнении может быть
использовано в робототехнике, медицине и в других областях нау-
ки и техники.
10.6. О ГОЛОГРАФИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМАХ
Когерентные источники света (лазеры), когерентная оптика и
оптоэлектронные преобразователи образуют основу датчиков клас-
са лазерных измерительных систем (ЛИС) [10.4].
Различные методы использования лазерных системных датчи-
ков позволяют создавать ЛИС для целей локализации, гироско-
пии, измерения как линейных, так и угловых перемещений, скорос-
тей, ускорений и т. п. Практически во всех названных областях с
помощью ЛИС были получены возможности производить измере-
ния с высокой чувствительностью, в некоторых случаях—с повы-
шенной точностью. Среди методов, используемых в ЛИС, особого
внимания заслуживают методы голографической интерферометрии
[10.4, 10.5]. Эти методы сочетают в себе такие достоинства, как
бесконтактное и одновременное получение информации о состоя-
нии всех точек наблюдаемой поверхности, использование в про-
цессе измерения естественной меры—длины световой волны, из-
вес1ной с метрологической точностью, высокое пространственное
разрешение, определяемое разрешением оптических систем и в
пределе соизмеримое с длиной волны, и др. Лазерные измеритель-
ные системы, основанные на использовании методов оптической
голографии, называются голографическими измерительными си-
стемами (ГИС).
При создании ГИС, реализующих методы голографической ин-
терферометрии, возникает ряд проблем как методического, так и
аппаратурного характера. К первым из них относятся выявление
закономерностей, связывающих свойства интерферограмм с иссле-
дуемыми физическими явлениями, разработка новых методов
определения исследуемых характеристик, создание простых и на-
дежных методов обработки и расшифровки голографических интер-
ферограмм, совершенствование методик их получения и разработ-
ка необходимого математического обеспечения. Существенной так-
же является задача исследования метрологических характеристик
как отдельных звеньев, так и ГИС в целом. К проблемам аппара-
турного характера относятся проектирование специальных источ-
ников когерентного излучения, голографических установок, обеспе-
чивающих реализацию всех методов регистрации и восстановления
голограмм, разработка устройств ввода изображений в ЭВМ, спо-
собных передать информацию с требуемой точностью, и т. п.
Для решения широкого класса задач экспериментальной меха-
ники была создана ГИС [10.5]. Она содержит (рис. 10.16) стаби-
.лизированный по мощности и частоте ионный газовый лазер Л,
оптическую часть, содержащую универсальный голографический
.интерферометр, предназначенный для одновременного получения
четырех голограмм исследуемого объекта с разных направлений и
получения топографических интерферограмм объекта, а также оп-
тическую установку для восстановления интерферограмм, скани-
рующее электронное устройство быстрого ввода на диссекторе
.ЛИ-605, имеющем однострочную развертку и до 300 различимых
.линий на экран, позволяющее исследовать оптические изображе-
ния размером 18X24 мм с дискретностью 256X256 точек, устрой-
ство расшифровки голографического изображения размером
60X60 мм с большим числом элементов разложения (свыше 104)
•с электромеханическим сканированием фотоэлектронным умножи-
телем (на рисунке не показано), ЭВМ типа СМ-4 с накопителями
:на магнитных дисках МД, устройство представления Д и фоторе-
гистрации полутоновой и графической информации. Программное
обеспечение создано на языках ФОРТРАН, ФОКАЛ, БЕЙСИК-
На этой ГИС эффективно решаются задачи регистрации голо-
грамм, голографических интерферограмм, их восстановления, об-
работки и расшифровки содержащейся в них информации. Это по-
.зволяет получать информацию о частотах и формах колебаний из-
делий при их частотных испытаниях, о дефектах изготовления
конструкций, о форме поверхности сложных тел, о векторах сме-
щений точек поверхности объекта, поверхностных деформациях,
.параметрах макро- и микрорельефа поверхности и т. п.
Из перечисленного остановимся на измерении формы сложной
поверхности и перемещений объектов.
Для измерения формы сложной поверхности может быть ис-
пользован топографический метод, широко используемый в карто-
графии. Его идея состоит в том, что трехмерный рельеф представ-
ляется в виде плоского изображения с линиями равного уровня—
следами пересечения поверхности параллельными плоскостями с
постоянным шагом.
Если будет получена голограмма при использовании излучения
лазера на длинах волн 2ц и Z2, то при восстановлении голограммы
на изображении объекта образуются сечения рельефа его поверх-
ности через шаг G*=A,I7v2/212^!—Х2|. При использовании этого
метода удается получить 6* от 1 мкм до 1 мм. В изготовленной
ГИС использовался ионный газовый лазер (на аргоне и криптоне),,
позволяющий получать 16 длин волн и шаг сечений 6* от 5 мкм
до 0,5 мм. При расшифровке и соответствующей обработке (сгла-
живание по 60 точкам, определение экстремума и т. п.) можно по/-
лучить дробные части шага сечений.
Рис. 10.17. К измерению перемещения с помощью голографи-
ческой ИС
Топографическое изображение поверхности объекта может быть
успешно использовано для получения статистических характерис-
тик поверхности, для определения соответствия поверхности за-
данной норме, т. е. для выполнения процедур контроля и т. п.
Для определения перемещения точки О (рис. 10.17) на ГИС
по анализу интерферограммы, полученной в начальном и конеч-
ном положениях объекта, составляется система уравнений
di (7о-Ь7н1) =A^i2i; £/2(7o-|-7H2)=::Af22i; с1з(го~|-7нз) — N$,.
Здесь го, 7Н1, Гн2, Дз—направления освещения и наблюдения;
d—смещение в направлении наблюдения; Ni, N%, Ns,—количество’
интерференционных полос от полосы нулевого порядка объекта
(недеформируемой точки, например основания в точке О,—как на
рис. 10.17).
Четвертое уравнение йДго+пи) =УД необходимо для того,
чтобы определить направление перемещения.
Уместно сказать, что для повышения точности измерения мож-
но учитывать дробные части количества интерференционных по-
лос, используя известную зависимость интенсивности изображения
от расстояния между полосами.
Погрешность измерения очень малых перемещений (порядка
нескольких десятков микрометров) может быть около 1%.
Глава 11
МНОГОМЕРНЫЕ И АППРОКСИМИРУЮЩИЕ ИС
11.1. МНОГОМЕРНЫЕ ИС (СИСТЕМЫ ДЛЯ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ
ВЗАИМОСВЯЗАННЫХ ВЕЛИЧИН]
Если исследуемое явление или объект характеризуется множе-
ством величин X— { [х'1], [х2], [хп]} и они независимы друг от
друга (на это указывает заключение каждой величины в квадрат-
ные скобки), то можно при наличии селективных датчиков произ-
вести измерения всех [хг]. При независимых [х,], но неселектив-
ных датчиках, сигналы на выходе которых будут содержать состав-
ляющие от нескольких {х;}, встает задача выделения (ав-
тоноддизации) каждой измеряемой величины [xj. Если же эле-
менты множества X=(xi, х2, ..., х,г) между собой связаны, то
необходимость решения задачи раздельного измерения величин х,-
очевидна.
Наиболее типичные примеры таких задач связаны с измерением
массовых концентраций составляющих многокомпонентных жид-
ких, газовых или твердых смесей (положим, концентраций кислот
или щелочей) или с Измерением параметров компонентов слож-
ных электронных Цепей без гальванического расчленения.
Рис. 11.1. Схемы для раздельного измерения в соединениях треугольником
(я), звездой (б) и Rx, Сх комплексного сопротивления (в)
При известном составе многокомпонентного соединения можно
решать задачу раздельного измерения компонентов с помощью
разделения составляющих I{X=(xi, х2, ..., xn)/[xi], [х2] ,..., [хп]}
и последующего измерения автономизированных компонентов либо
путем одновременного анализа всего множества Х=(х\, х2, ..., хп)’
Суть первого способа—раздельного измерения взаимосвязан-
ных величин—заключается в организации воздействия на много-
компонентное соединение в целях выделения и измерения нужного
компонента. Для механических и химических соединений сущест-
вуют методики и средства такого расчленения: масс-спектромет-
рия, хроматография, люминесцентный аналаз, центрифугирование
и ДР- Каждая из этих методик имеет свою теоретическую и аппа-
ратурную базу.
В сложных электрических цепях (в том числе в микроэлектронном испол-
нении) для раздельного измерения параметров компонентов этой цепи созда-
ются режимы, с помощью которых происходит расчленение сложных цепей на
простые [11.1].
На рис. 11.1,а представлена схема, позволяющая произвести измерение Rx,
не разрывая треугольное. соединение сопротивлений. При Ку— 1, ив=ис Rcb=
= оо, Wx — UnRo/(Rq~VRx) И Rx=(Un—Ux)Ro/llx'
Путем выравнивания токов IX=I2 в ветви звезды с /?, и измерения напря-
жения u0=RBIx на известном сопротивлении Ro можно получить unl=IxRx +
-{-IxRo—IxRx-\-Uq= U^Rx/Ro) + 1] и Rx= (Цц1—Ио)7?о/Цо (рис. 11,6).
При использовании переходных режимов можно осуществить временное
разделение сигналов, несущих информацию- о составляющих комплексного со-
противления (рис. 11.1,6).
После подключения известного напряжения
,., 0 Г + Rx I
т - т-ргг "г [-(С.+сд«л-' ]+
I J j_ Г __ Rx
+ ехрг (Со+сх)^ ][•
При ?=0 (0) sstZnCo/fCo+Cx), а при i=<x> Ux(o°)^UuRx/(Ro+Rx). Заметим,
что при т=0,01 е_<1’01=0,99, а при т=10 е~10=45-10-6. ...
Представляют интерес используемые для раздельного измерения иные раз-
новидности инвариантных преобразователей [11.1]. . - ,г:
При анализе всего многокомпонентного соединения используется метод со-
ставления н решения системы уравнений, учитывающих взаимосвязь между вег
личинами X и множеством непосредственно измеряемых величин G, являющихся
известными функциями ф от исходных величин. Пусть имеется множество од-
п
дородных величин причем известно, что х<=1. Нужно произвести
г—1
измерение каждой величины Хг, например массы или концентрации составляю-
щих газовых, жидких, сыпучих или твердых смесей. Если заранее, например
экспериментальным путем, определены зависимости между {х4} и множеством
других отличающихся по физической природе величин К-;}™, которые отражают
измеряемые свойства исследуемого объекта, то можно составить систему урав-
нений
’ 91=Ф1 (xi, х2, ..., х„);
?2==4i2(5C1> Х2> ••> Хл)>
— Ф/(хр х2, .... х„);
Qtn — Фт (%i, х2, •.., ;
п
2 xt ~ i-
I «=1
В наиболее простых случаях при линейных зависимостях ф^ эти уравне-
ния — алгебраические.
Реализация метода возможна, если:
1) число вторичных величин подлежащих непосредственно прямым из-
мерениям, и функций ф; равно или больше числа неизвестных Хг, т. е. с учетом
п
уравнения хг=1 выполняется неравенство т^(и—1). Если m<(n—1), то
1=1
система уравнений недоопределена и задача разрешима не полностью;
2) зависимости ф,- и их производные <9ф37<9х; существуют и непрерывны на
участке возможных решений системы уравнений;
3) функциональный определитель (якобиан) системы уравнений не равен
тождественно нулю на участке возможных решений:
dgL дЯг (Яг
дх1 дх2
дЯ2 дЯг
дхг дх2 ’ ’ дх^, =£0
дЯт дЯт ( Qm
С сх2 ’ ’ дхп
По существу, это условие сводится к независимости функции ф3- и разной чув-
ствительности qt от Xi.
Приведем примеры реализации этого метода. Допустим, необходимо изме-
рить процентный состав компонентов водного раствора серной и азотной
кислот.
Если выбраны для измерения физические параметры раствора и q2 (поло-
жим, электропроводность и плотность), обладающие свойствами аддитивности,
то система уравнений примет вид
' “1-1 + «2*2 + «3*3 = <71!
Ь-lX-l + 62.х2 4- 6sx3 = q2, .
*1 + *2 4" x3 ~ 1 •
В этой системе коэффициенты ah а2, а3 и 6Ь b2, Ь3 известны; qt и q2 из-
меряются в процессе эксперимента.
Решение этой системы:
*1 —
Яг «3 п2 6?3
?2 ^2
<71----<73 П2 — с?з
61 — 63 Ь2 bs
= ki?i4-|?i'72 + ’«i;
Цу — а3 bi b3 q2 — b3
О £> н м с* а 40 СО О* Й М М 1 1 5^ 40 СО
— °2?1 4- f>2?2 4- к2»
>'3 = 1 — (Xi 4- х2).
По такому принципу работают устройства, предназначенные для измерения
концентрации алюминиевого раствора, экспрессного анализа тройных водно-
солевых растворов (по измерению плотности и коэффициента преломления) и др.
Добавим, что промышленностью выпускаются анализаторы состава осади-
тельной ванны целлофана АСВ-1, выполняющие раздельное измерение концен-
трации серной кислоты и сульфата натрия путем измерения плотности и электро-
проводности ванны и решения соответствующей системы уравнений, анализато-
ры состава щелочных растворов АСЩ-1, позволяющие через измерение плотно-
сти и электропроводности и решение системы уравнений оценить концентрации
едкого натра и гемицеллюлозы в щелочных растворах целлюлозных производств.
Нужно заметить, что помимо плотности и электропроводности часто исполь-
зуются измерения теплопроводности, вязкости, скорости распространения и по-
глощения ультразвуковых колебаний, поглощения и рассеяния радиоактивных
излучений и др.
На использовании измерений поглощения и рассеяния радиоактивных излу-
чений работают у-абсорбциометры [11.2]. При облучении анализируемого ве-
щества радиоактивным излучением часть потока поглощается, часть рассеивается
и часть проходит через вещество. Интенсивность поглощения и рассеяния зави-
сит от атомной массы элементов.
Ослабление происходит по закону /=%=/ое—где /0 — начальная интенсив-
ность излучения, pi—коэффициент ослабления излучения веществом, р—плот-
ность вещества, rf — толщина слоя вещества. Коэффициент ослабления является
функцией энергии излучения Е, атомной массы вещества А и атомного номера
вещества г. При различных энергиях излучения коэффициент ослабления зависит
от различных эффектов. При малых энергиях Е (порядка 0,1—0,01 МэВ) пре-
обладает фотоэффект (вырывание электронов из оболочки), для которого Цф~
smpi (E)z5[A, при средних энергиях (0,5^£^1 МэВ)—комптон-эффект (откло-
нение гамма-кванта)—|iIt^:(p2(A)z/A и при больших энергиях (£>1 МэВ) —
образование пар электрон — позитрон — рп^фз(Д)г2/А. Облучая и-компонент-
ную смесь поочередно от т источников у-излучения с различными уровнями
энергии Е и измеряя р, можно получить необходимые данные для составления
и решения системы уравнений.
Подобный метод, но при использовании световых потоков с разными длина-
ми волн используется для определения состава пульпы, состоящей из сульфита
магния и магнезита в воде. В качестве параметров смеси, аддитивно зависящих
от концентрации сульфита, выбраны при этом оптические свойства пульпы.
Относительная приведенная погрешность измерения концентрации MgO в диа-
пазоне 4—8 % и MgSO3 в диапазоне 7—12 % составляет не более 2 % при
изменении дисперсности частиц от 100 до 300 мкм.
На практике весьма часто связь между концентрациями компонентов и
измеряемыми параметрами носит нелинейный характер. В этом случае имеется
возможность аппроксимации этой зависимости многочленами. В [11.3] приво-
дятся данные, показывающие, что в ряде практически важных случаев измере-
ния концентрации состава сложных смесей достаточно применять приближение
многочленами третьей степени. Для алюминатных растворов (в случае измерения
электропроводности и скорости ультразвука в растворе) при введении в систему
уравнений в качестве параметра температуры погрешность определения концен-
трации с кубической аппроксимацией не превышает 1—1,5% измеряемого
диапазона.
Для i-ro компонента смеси в этом случае решение может быть найдено
в следующем виде:
Xi=6?io-f-flilZ1-|-fli2Z2-]_ai3z3-J-c!ill2l2~|_c!i22Z22-|-fli33Z32-j-fl142zlZ2-|-flil3ZlZ3-|-
“|-Я1-2з222з-|-Я1-1112234'й12222234_й1'ЗЗз2з34~й> 11221222-]-Яг2232222з“)-
-J-fiil2221Z22~|-flil33zlz32-|-Ci233Z2Z324-C1-223Z22Z3-|-C!il23ZiZ2Z3.
В реализованной на этом принципе действия контрольно-измерительной си-
стеме параллельно-последовательного действия выполняются измерение и кон-
троль состава трехкомпонентных растворов глиноземного производства в 15 сече-
ниях технологической линии за время, не превышающее 2 мин.
Для анализа состава многокомпонентных сред широко используется также
измерение реакции среды на электромагнитное многочастотное воздействие.
Такой метод анализа получил название многочастотного. Известны его при-
менения для измерения физико-химических свойств стали, влажности зерна
и т. п.
Перейдем к краткому изложению сути другого метода раздельного измере-
ния зависимых величин, который назовем условно методом моделей. Этот метод
весьма полно исследован и давно используется в электроизмерительной технике
для раздельного измерения активной и реактивной составляющих комплексных
сопротивлений и напряжений [11.4, 11.5]. Действительно, в самом общем виде
мосты и компенсаторы переменного тока содержат модель измеряемого объекта
(сопротивления или напряжения), известные параметры которой сравниваются
с неизвестными параметрами объекта. При достижении определенных соотноше-
ний между ними (в равновесном режиме — равенство этих параметров) резуль-
тат измерения определяется по известным параметрам модели.
Мостовые и компенсационные схемы переменного тока являются вариантами
реализации метода структурных моделей, используемого для раздельного изме-
рения зависимых величин. На объект исследования и модель объекта (рис. 11.2)
подается внешнее воздействие. Реакции объекта и модели Xi* сравниваются,
затем параметры модели изменяются до тех пор, пока между ними и парамет-
рами объекта не будут выполнены определенные соотношения. Метод структур-
ных моделей применительно к раздельному измерению составляющих сложных
электрических цепей осуществляется в многомерных электроизмерительных
устройствах сравнения.
В [11.6] обобщены основы построения, исследованы вопросы чувствительно-
сти, сходимости и устойчивости процессов уравновешивания при применении ите-
рационного метода, произведен анализ погрешностей многомерных электроизме-
рительных устройств сравнения. Кроме того, приведены данные о разработанных
устройствах для измерения и контроля элементов радиоэлектроники, сеточной
модели и т. д.
На рис. 11.3 показана схема измерения сопротивлений Ri, R2, Rs, Ri, схо-
дящихся к узлу О сеточной модели с помощью многомерного устройства. В мо-
мент равновесия
Rl=RKlRa/Rc; R2=—Rk%R a/Rc} Rs—RksRo/Rc', Rt^RviRa/Ro
На эти соотношения не оказывают влияния остальные сопротивления сеточной
модели.
Рис. 11.4. Структурная схема ИС с прямыми (о) и обратными (б)
перекрестными связями
Следует отметить, что при числе контуров уравновешивания, превышающем?
два, схемы и алгоритмы для раздельного измерения зависимых величин сущест-
венно усложняются. Для автоматического уравновешивания в многомерных
измерительных устройствах используются методы наискорейшего спуска, градиен-
та, Гаусса —Зейделя, описанные в гл. 8.
Задачу разделения взаимосвязанных величин в ряде случаев можно решить,,
используя введение искусственных перекрестных связей, учитывающих неселек-
тивиость датчиков или взаимосвязь измеряемых величин? в среде. На рис. 11.4,и
представлена структурная схема системы, предназначенной, для раздельного*
измерения двух величин, в которой используются прямые связи, а на рис. 11.4,6—
обратные связи. На этих рисунках W — передаточные функции датчиков, М —
.модели датчиков, Д[ и Д2 — датчики.
Для случая разделения двух переменных (рис. 11.4) прямые перекрестные
«вязи Ml2=MiWi2/W22 и M2i=M2W2i/Wii, а обратные связи Af12= (1/-Л42) X
X(W'12/U722) и M2i=(l/-Mi) (W'zi/W'n). Результирующие передаточные функции
ло каждому каналу определяются для схемы на рис. 11.4,я в виде
=Mt Wn (1—Wl2W2lfWn W22);
H2=M2 W22 (1—№12 Ц721/W'21 ,
а для схемы на рис. 11.4,6
H2=M2W22-,
Из этих выражений видно, что с помощью введения перекрестных связей
•можно осуществить не только разделение сигналов, но и их функциональное
преобразование.
Если выбрать Mi = l/W'n, и 7И2=1/11722, то работа второй схемы сводится
к так называемому методу обратных операторов.
Известно применение метода перекрестных связей для уменьшения взаимного
влияния компонентов в четырехкомпонентных аэродинамических весах с упру-
гими элементами и тензодатчиками. При этом удавалось примерно на порядок
уменьшить взаимное влияние компонентов.
Методы перекрестных связей и обратных операторов можно отнести к не-
посредственным методам разделения и измерения зависимых величин, а метод
структурных моделей — к компенсационным методам.
Видимо, возможно совместное использование метода перекрестных связей,
обеспечивающего относительно простое разделение величин, и метода структур-
ных моделей, обладающего, в принципе, лучшими возможностями по точности
.измерения. По сути дела, в таких системах используется комбинированное управ-
ление по разомкнутому и замкнутому каналам с применением принципа инва-
риантности (компенсации) системы к внешним возмущениям.
11.2. АППРОКСИМИРУЮЩИЕ ИС
Если нужно количественно оценить и при необходимости восстановить исход-
ную входную величину, являющуюся функцией некоторого аргумента, то имеется
.принципиально два пути выполнения измерений. Первый, чаще используемый,
.заключается в измерении дискрет этой величины, расположенных через опреде-
ленные интервалы аргумента, и восстановлении ее путем аппроксимации с по-
мощью многочленов невысокой степени. Второй путь связан с измерением коэф-
•фициентов многочленов, аппроксимирующих исходную функцию на всем интерва-
ле ее анализа. Естественно, что порядок аппроксимирующего многочлена при
этом должен быть более высоким. Нужно отметить, что при соответствующем
выборе типа приближающего многочлена имеется возможность не только коли-
чественного описания поведения изучаемой величины в любой точке интервала
.наблюдения, но и одновременного получения информации о некоторых свойствах
этой величины. В частности, при использовании ряда Фурье знание коэффициен-
тов ряда позволяет судить о частотном составе изучаемой функции.
Измерительные системы, позволяющие измерять коэ фициенты. приближаю-
щих многочленов, далее называются аппроксимирующими (АИС). Подчеркнем,,
что АИС относятся к системам, предназначенным для количественного описания
величин, являющихся функциями времени, пространства или другого аргумента,,
и их обобщающих параметров, определяемых видом приближающего много-
члена.
Коэффициенты аппроксимирующего многочлена зависят от изучаемой x(t)
и выбранной системы приближающих функций ср(/). Получение коэффициентов,
многочлена, аппроксимирующего исходную функцию,
Ch=Fi[x(Z), фь(0],
относится к области анализа сигналов. Эта зависимость при равномерном кван-
.V
товании по аргументу имеет вид Ck= тле /=1, 2, ..., N — по-
/=1
рядковый номер дискретных значений исходной функции x{t).
Заметим, что наиболее часто изучению подлежат процессы x(t) и простран-
ственные функции х(1).
Кроме времени и пространства в качестве аргумента в АИС употребляются
интервалы корреляции при описании корреляционной функции, частоты при опи-
сании спектральных характеристик и т. д. (рис. 11.5).
Для восстановления (синтеза) исходной изучаемой функции нужно выпол-
нить преобразование
x*(/i)=f’2[Cfe,q)h(/j)].
К
При равномерном квантовании по аргументу х*(Ч) = Ckfk
/.=()
В АИС, так же как и в других ИС, информационные операции могут вы-
полняться последовательным, парал-
лельным или смешанным способами.
Аппроксимирующие измерительные си-
стемы могут реализоваться с замкнутой
или разомкнутой информационной об-
ратной связью, в виде аналоговых или
цифровых устройств.
При создании и использовании
АИС приходится решать ряд специфи-
х(6): x(t),
Рис. 11.5. Исходные функции
ческих задач, к которым в первую оче-
редь относятся выбор типа приближающего многочлена и определение его по-
рядка, исходя из заданной погрешности аппроксимации.
Решение этих задач зависит от вида изучаемой исходной функции, заранее
известной информации о ней, от цели измерения, метрологических требований
к измерениям и т. д.
В качестве приближающих многочленов с базисными функциями <p(f) могут
быть выбраны ряды Фурье, разложения Фурье —Уолша, Фурье —Хаара, мно-
гочлены Чебышева, Лагранжа, Лежандра, Лагерра и др. Основные данные о наи-
более широко применяемых многочленах приведены в гл. 21.
Приведем примеры реализации АИС. Остановимся на использовании АИС
при измерении коэффициентов разложения Фурье — Уолша распределенной в про-
«странственепрерывной функции x(Z).Б этом важном для практики случае
исходная величина воздействует в каждый момент на датчики, жестко закреп-
ленные в узлах аппроксимации. Для первоначального рассмотрения можно при-
нять, что в процессе измерения исследуемая функция не изменяется, координа-
ты мест расположения датчиков известны с заданной точностью, а датчики вос-
принимают эту функцию в точках. Конечно, отступления от этих условий окажут
.влияние на погрешность результата измерения, но это влияние может быть оце-
нено особо.
Размещение датчиков должно быть таким, чтобы можно было описать
.исходную функцию с заданной погрешностью по полученным дискретам. Расчет
интервалов квантования может быть выполнен из соображений, приведенных
в гл. 22. Допустим, что на интервале наблюдения расположено N—2n датчи-
ков. Тогда имеется возможность реализовать алгоритм получения коэффициентов
Фурье — Уолша по формуле
N
Ck^^/2n)^ xlljjWbUi),
i=i
ггде Wk(lj) —функция Уолша.
Аппроксимирующая измерительная система разомкнутого типа при исполь-
зовании функций Уолша реализуется довольно просто.
Положим, необходимо произвести аппроксимацию пространственной кривой
воспринимаемую четырьмя датчиками, с использованием разложения
•Фурье — Уолша. Матрица коэффициентов функций Уолша Wk (Z3) третьего по-
.рядка и структуры аналоговой части АИС параллельного (а) и последователь-
ного (б) действия представлены на рис. 11.6. В параллельной структуре показа-
4
.ны цепи, необходимые для получения по формуле С\=(1/4) 2 x(lj)Wk(lj)
коэффициентов Со .и Си Поскольку функции Уолша принимают значения -|-1
•или —1, то сопротивления равны между собой.
При последовательном получении коэффициентов Со и Ci алгоритм работы
.выглядит следующим образом:
при измерении 4С3
Ф(4С0, Го) {I[x(Zi)J||I[x(Z2)]||I[x(Z3)]III[x(Z4)]J I[Jc(Z!)+x(Z2)+
-|-*(Z3)-|-x(Z4)] I(4C0);
при измерении 4Ci
Ф(4С,, Г,) {I[x(Z1)]||I[x(Z2)]||I[-x(Z3)]||I[-x(Z4)]}X
X I[x(Z1)H-x(Z2)-x(Z3)-x(Z4)] I(4CJ.
Коэффициенты разложения Уолша при этом выдаются генератором G ФУ.
На выходе аналоговой части может быть произведен анализ значимости по-
рученных и устранение несущественных коэффициентов. Помимо этого, отбор
существенных коэффициентов может быть выполнен путем оценки погрешности
восстановления с помощью сравнения восстановленной и исходной функций и
.решения о значимости полученных коэффициентов.
Если исходная функция описывается многочленом высокого порядка, то
•имеется возможность .многократного использования АИС на отдельных участках
Рис. 11.6. АИС с параллель-
ным и последовательным полу-
чением коэффициентов
Фурье — Уолша:
а — параллельное соединение; б —
последовательное соединение; в —
таблица функций Уолша
существования функции и «сшивания» кусочного описания в единое выражение.
Возможность перехода к единому выражению при использовании функций Уолша
определяется тем, что функции Уолша для удвоенного интервала увеличивают
порядковый номер, а коэффициенты при таком «сшивании» могут быть получе-
ны в виде С— (С'-f-С") /2. Это достаточно наглядно может быть проиллюстриро-
вано с использованием матрицы коэффициентов Уолша. Положим, определены
коэффициенты Сш и Си, а также Свг и С12 для двух отрезков [О, 0,5] и
[0,5, 1], содержащих по два датчика (/ и 2, 3 и 4). Тогда для отрезка [0,1]
получается
Cq= (Coi~|- Со2) /2; Ci = (Coi—Cos) /2;
C2= (Сц—|—C12) /2; С3=(Сц—Cis)/2.
Действительно, если
Coi—0,5 [х (Zi)-j х (Z2) ];
Co2=O,5[x(Z3)+x(Z4)];
Clt=0,5[x(Z,)—x(Z2)];
Cj2=0,5 [x (Z3) —x (/4) ],
то
Cc=0,25 [x (Z,) -J-х (Z2) -j-x (Z3) +x (Z4) ];
C,=0,25 [x (ZJ -j-x (Z2) —x (Z3) —x (Z4) ];
Сг=0,25 [x (lt) -x (Z2) +x (Z3) -x (Z4) ];
C3=0,25[x (Z.) —x (Z2) —x (Z3) —x (Z4) ].
После выполнения таких операций имеется возможность вновь оценить зна-
чимость и отфильтровать несущественные коэффициенты.
В Новосибирском электротехническом институте [11.7] были изготовлены
и использованы в различных целях АИС: для работы с четырьмя термопарами
(20 тыс. коэффициентов разложения Фурье — Уолша в секунду, +0,4 %); для
анализа периодических сигналов с частотой 10, 100, 1000, 10 000 Гц, + 1 %; Для
работы с четырьмя тензодатчиками (использовались многочлены Чебышева и
разложение Фурье — Уолша, производилось одновременное измерение четырех
коэффициентов, +0,5%); для работы с 64 тензодатчиками (получались 64 ко-
эффициента ряда Фурье, разложения Фурье — Уолша, Фурье — Хаара и Чебыше-
ва); для работы с тензодатчиками с применением микро-ЭВМ С5-11, «Электро-
ника-60». Кроме того, было изготовлено несколько генераторов сигналов задан-
ной формы.
К основным областям применения АИС и восстанавливающих (синтезирую-
щих) устройств относятся измерение статистических характеристик случайных
процессов (см. гл. 12) и характеристик нелинейных элементов, сжатие радиоте-
леметрической информации и информации при анализе изображений, фильтра-
ция—восстановление функции без некоторых коэффициентов [11.8], генерация
сигналов заданной формы.
Представляет интерес использование АИС для организации контроля состоя-
ния исходной функции и для распознавания образов по коэффициентам разло-
жения.
Глава 12
СТАТИСТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
12.1. ОСОБЕННОСТИ ИЗМЕРЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК
СЛУЧАЙНЫХ ПРОЦЕССОВ
Статистический анализ случайных величин и процессов широ-
ко применяется во всех отраслях науки и техники.
Для специалистов ИИТ необходимо не только уметь пользо-
ваться статистическими характеристиками при проектировании и
анализе погрешностей технических средств, но и знать методы и
принципы построения аппаратуры, предназначенной для экспери-
ментального измерения таких характеристик. Ввиду особой важ-
ности статистических измерительных систем здесь целесообразно
привести в весьма сжатом виде основные сведения о принципах
построения таких систем и дать примеры их реализации.
Для более глубокого изучения теории статистических измере-
ний, методов и средств измерения статистических характеристик
рекомендовать в первую оче-
специалистам в области ИИ 1 моя
редь [12.1, 12.2].
Для изучения материала по
статистическим измерениям от чи-
тателя требуется твердое знание
и понимание основ теории веро-
ятностей в объеме [12.3].
При экспериментальном изме-
рении характеристик случайных
процессов имеется возможность
оперировать с временной реали-
зацией ансамблем реали-
заций {%<(/)}{=1 2, ...,т При
или ансамблем реализаций
{xi(f3)} 1=1,2...,™, взятых в опреде-
ленный момент времени t}
Рис. 12.1. Реализации случайного
процесса
(рис. 12.1).
Нужно подчеркнуть, что рассмотренное далее приложимо и к
анализу случайных функций, у которых в качестве аргумента мо-
гут быть время, пространственные координаты и т. п. Заметим, что
при фиксированных значениях аргумента значения функции —
случайные величины.
Случайные процессы могут быть заданы в непрерывном или в
квантованном по времени виде. В последнем случае функция за-
дается выборкой N дискретных значений непрерывной функции,
взятых через определенный интервал времени АЛ
При анализе ансамбля реализаций, конечно, получается наибо-
лее полная информация о случайном процессе. В ряде практиче-
ски важных случаев можно ограничиться определением характерис-
тик случайного процесса по одной его реализации или по ансамб-
лю значений—это оказывается возможным, если случайный про-
цесс является стационарным и эргодическим.
В дальнейшем остановимся на экспериментальном измерении
характеристик стационарных эргодических процессов [12-4].
Полученные в результате измерения эмпирические характерис-
тики случайных процессов принято называть оценками истинных
характеристик Q*. Эти оценки сами по себе являются случайными
величинами. Поэтому при планировании статистического измери-
тельного эксперимента необходимо решать задачи получения оце-
нок характеристик с заданной погрешностью при ограничениях,
накладываемых на объем исходных данных, на время измерения,
на возможности аппаратуры и т. п.
Как известно, оценки характеристик должны ыть состоятель-
ными, несмещенными и эффективными. Состоятельной называется
оценка, вероятность отклонения значения которой от оцениваемой
величины при увеличении объема статистического материала N
стремится к нулю, т. е. P{|QW*—Q|^e}=0. Оценка называется
Л'-^оо
несмещенной, если разность ее математического ожидания и ис-
тинного значения оцениваемой величины приближается к нулю,
т. е. фактически при этом требуется, чтобы отсутствовала систе-
матическая ошибка. Смещение оценки Q* определяется как AQ*=
=Al[Q:i:]—Q. Оценка называется эффективной, если несмещенная
оценка обладает наименьшей дисперсией: minD [Q *] =
=тшЛ4{Л4 [Q*]—Q}2. Погрешность оценки Q* обычно определяет-
ся доверительной вероятностью а и доверительным интервалом
Q+e:
P(Q*-e^Q=^Q*+e)=a.
Типовой алгоритм измерения характеристик стационарного
случайного процесса по его реализации x(t) может быть представ-
лен в следующем виде:
<2*=М{Яф[х(01},
где 77<p[x(f)]—соответствующее данной оценке преобразование
исследуемого процесса. Если x(f) представлено в виде непрерыв-
ной функции, то типовой алгоритм реализуется в интегральном
т
виде: QH* [x(f)] dt, если же исследуемый процесс пред-
о
ставлен в виде N дискрет, то
N
/=1
где Af—интервал равномерного квантования x(t) по времени. Ре-
зультат преобразования Нф[х(0] при измерении математического
ожидания равен Hm[x(^)]=x(Q, дисперсии — Як[х(/)] = [х(0 —
—Мх]2, дискрет корреляционной функции Ня [х(^) ] = [х(/) —
—Мх] [х(Ц-т)— ЛГх] и т. д.
Большинство характеристик, получаемых по описанному алго-
ритму, состоятельны, несмещенны и эффективны. Исключение со-
ставляет оценка дисперсии, и для устранения смещенности она
должна быть представлена в виде
‘ N
S [х(/у)-ад/^
R(ZV-l)].
Основными источниками методической погрешности при ре-
ализации этого алгоритма являются конечное время анализа
T=NAt или конечный объем выборки N=T//\.t, квантование x(t)
по уровню и способ построения статистических функций по изме-
ренным их дискретам.
Если задача статистических измерений заключается в получе-
нии параметров статистических функций, к которым относятся за-
коны распределения вероятностей, корреляционные и спектраль-
ные функции, то их определение может быть также реализовано
через измерение коэффициентов аппроксимирующих многочленов
т
Ck = ^^k{t}dt
о
к
с получением оценки изучаемой функции Q* = 2 cwAt).
k=0
Основными источниками методических погрешностей в этом
случае будут конечное число членов разложения и, как и в преды-
дущем способе, конечное время анализа или конечный объем вы-
борки.
Чаще всего при статистическом анализе используются законы
распределения вероятностей и моментные характеристики, корре-
ляционные и спектральные функции.
Перейдем к рассмотрению структур и алгоритмов статистичес-
ких измерительных систем, предназначенных для измерения зако-
нов распределения вероятностей, корреляционных и спектральных
функций. Средства и алгоритмы измерения математического ожи-
дания и дисперсии читателям предлагается изучить по [12.2].
Считаем полезным привести соотношения, необходимые для
ориентировочного определения объемов выборок при измерении
Мх и Dx. При измерении Мх некоррелированных выборок
(А^>ткор) о2м« (1/7V) (DX/M2X) =v?/N, где тКоР—интервал корре-
ляции, Ом—средняя квадратическая погрешность измерения сред<
него значения, и—коэффициент изменчивости. Конечно, это выра-
жение справедливо при Л4х=#0. Средняя квадратическая погреш-
ность определения Dx связана с объемом некоррелированных вы-
борок так:
о2о«2/ЛГ.
Подчеркнем, что приведенные соотношения пригодны для гру-
бых, ориентировочных расчетов. При слабо коррелированных вы-
борках объем N должен быть увеличен.
12.2. СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ ЗАКОНОВ РАСПРЕДЕЛЕНИЯ
ВЕРОЯТНОСТЕЙ СЛУЧАЙНЫХ ПРОЦЕССОВ
Одномерный интегральный закон, или интегральная функция
эаспределения вероятностей, определяется вероятностями нахож-
дения исследуемого процесса ниже уровня х, который может из-
меняться от—оо до +°о: 77(х)=р[—eo^.x(t) (рис. 12.2).
По определению Е(—оо)=0 и 77(4-оо)=1.
Рис. 12.2. Функция распределения вероятностей:
а — к определению функции распределения вероятностей; б — вид функции распределения
вероятностей
Рис. 12.3. Плотность распределения вероятностей:
а — к определению плотности распределения вероятностей; б —вид плотности распределе-
ния вероятностей
Двумерный интегральный закон распределения вероятностей
стационарного случайного процесса x(t) определяется вероятностя-
ми нахождения x(t) и х(/-|-т) ниже уровней Xi и х2:
F(xb х2, т)=р[х(^).^х1; хЦ+т)^х2].
Одно- и двумерные дифференциальные законы распределения
вероятностей случайного процесса x(t)—плотности распределения
вероятностей (рис. 12.3)—определяются следующими выраже-
ниями:
f{x)=dF{x)/dx\ f(xj, х2, т) =
— d2F(xh х2, rj/dxidxz
или
f (х) dx=p [х^хЦ) sCx+dx];
f(xb х2, r)dxb dx2=p[xi^x(t) ^2
X\ —|— dx^ * x9gCx ) ~2£x2-l-dx2].
Определение вероятностей p[x(/)=Cx] и p |x<x(Z) ^x+dx)
можно производить путем суммирования отрезков времени, в те-
чение которых выполняются указанные неравенства, и отнесения
полученной суммы к времени наблюдения:
для функции распределения
F(x) = •
г-к» Т
для плотности вероятности
f(x, Дх) = Пт —-----!—.
Г->ао Т
Дл--»0
Если исследуемый процесс представлен решетчатой функцией
(в виде дискрет, размешенных через интервал дискретизации
Д^), то выражения для интегральной функции и плотности распре-
деления примут следующий вид:
F (х, N, Д/) = Нт
Л'-ж Л
f(x, N, Ы, Дх) = 1пп^--^—
Дх-*0
В этих выражениях Д/—интервал дискретизации; п—количест-
во дискрет, уровень которых меньше х для функции распределения
или находится в интервале хф-Дх для плотности распределения;
N=T/l±t—количество дискрет в исследуемой реализации—объем
выборки.
В большинстве случаев Д^ равно или больше интервала кор-
реляции исследуемого процесса.
Для определения функции и плотности распределения должен
быть получен ряд значений F (х) и f(x, Дх) в пределах динами-
ческого диапазона исследуемого процесса. Для этого динамичес-
кий диапазон разбивается на несколько интервалов квантования и
для каждого интервала квантования определяются значения F и f.
При экспериментальном определении закона распределения
вероятностей неизбежно возникают методические погрешности
обусловленные конечной длительностью наблюдения (T<Zoo) или
выборки (Л?<;оо) реализаций и конечным значением интервала
квантования по уровню Дх^=О. Именно ввиду наличия в первую
очередь методических погрешностей в результате измерительного
эксперимента получаются не точные, а приближенные выраже-
ния—оценки законов распределения вероятностей:
R(x, Т)=-|ч
f*(x, Дх, =
Т Дх
. г Пр
F (x, N, М) = —;
f*(x, N, М, Лх) = ^*—
Определение интервала квантования по параметру х произво-
дится известными способами. В зависимости от степени аппрокси-
мирующего многочлена в теории вероятностей различают пред-
ставление плотности распределения гистограммой (приближение
на интервалах квантования степенным многочленом нулевой сте-
пени) или полигоном (приближение многочленом первой степени).
Неравенства Чебышева [12.5] позволяют при заданной по-
грешности оценки законов распределения приближенно определить
время наблюдения при некоррелированной выборке, когда интер-
вал квантования А/ равен или больше интервала корреляции:
A[max|F::(x, Т) -F(x)
4/ег2
/?[шах|Г(х, Ах, Т) Ах - f (л) Ах | > ег] <
4Ге2г
Более точное определение времени анализа Т или объема вы-
борки N (при некоррелированной выборке) может быть выполне-
но, если задана относительная средняя квадратическая погреш-
ость измерения о в фиксированных точках F*(x) и f*(x, Ах) по
формулам [12.2, 12.5]:
N _ 1 —F*(x)__________1_
F~~ o2fF*(x) ~ o2fF*(x) ’
' azff*(x, Ax) '
Приближенные значения Np и Nf получены при условиях
F* (х)< 1 и Axf * (х, Ах) <С 1.
Если между выборочными значениями имеется корреляционная
связь (Д/<то, где то—интервал корреляции), то объем выборки
нужно увеличить.
Поскольку F*(x, Т) и f*(x, Ах, Т) связаны между собой из-
вестными зависимостями, то в статистических анализаторах, види-
мо, можно ограничиться только измерением Г*(х, Т) или
f*(x, Ах, Т). Аппаратурные решения для измерения F*(x, Т)
проще, чем для f*(x, Ах, Т). Однако большинство ИС делается
для измерения плотности распределения. Это объясняется тем,
что при преобразовании плотности распределения в функцию рас-
пределения погрешности получаются существенно меньшими, чем
при обратном преобразовании [12.6].
Рассмотрим основные структуры и алгоритмы ИС, измеряю-
щих дискреты функций или плотностей распределения вероят-
ностей. Такие ИС (будем называть их анализаторами вероятнос-
тей) могут быть одноканальными и многоканальными.
Одноканальные анализаторы вероятностей за цикл анализа
реализации x(t) позволяют получить одно дискретное значение
функции или плотности распределения исследуемого случайного
процесса. Для получения всех дискретных значений, необходимых
для представления законов распределения, следует последователь-
но изменять х или месторасположение интервалов квантования’
по уровню Ах и производить измерение величин F*(Xi) и
Ах)- Естественно, что при последовательном измерении всех
дискретных величин F* и f* на проведение анализа затрачивает-
ся большое время.
Рис. 12.4. Анализатор с ШИМ и аналоговым интегрированием (Х| и х2—уровни
анализа)
Рис. 12.5. Одноканальная система
для измерения функции распределе-
ния вероятностей
Рис. 12.6. Система с телевизионным
датчиком ТД для измерения распре-
деления вероятностей
Структурные схемы одноканальных анализаторов представле-
ны на рис. 12.4—12.6. Наиболее часто в одноканальных анализа-
торах, оперирующих с непрерывными сигналами и основанных на
измерении относительного времени пребывания процесса x(t), ис-
пользуется образование ШИМ-сигналов и их интегрирование в те-
чение времени Т.
Логическая схема алгоритма анализатора вероятностей, изо-
браженного на рис. 12.4 и настроенного на получение дискрет
плотности распределения вероятностей, охватывает:
начальное состояние: Ф(В) <p[xi; х2; Кл(П] Пх(01Х;
образование ШИМ-сигналов: /^{Цх^^х^/и^ Д?(х()] || 1[х(^)
^х2/ио, At (х2) ]} X;
формирование дискреты плотности распределения: Xl{[AHxi) —
— At(xz)]; н0} I ЩдЦхЛ —Д?(х2)]; Дх]1 I[S:f*(x„ Дх)]Ф(Е}.
Разрешающая способность таких анализаторов определяется
.дрейфом уровня амплитудных селекторов и формой импульсов.
<Она обычно ограничивается примерно 1/20—1/100 частью макси-
мального значения измеряемого напряжения.
Если исследуемый процесс представлен в квантованном по вре-
мени виде, используются амплитудный дискриминатор с изменяе-
мым уровнем сравнения х (рис. 12.5) и суммирующие счетчики,
на выходе которых получаются значения п и N.
СЛСА такого анализатора вероятностей:
начальное состояние: <р(х; М=0; п=0; /=0;)X;
формирование х,- и х: X Ф(/ : =/+1) 1(х/ || х)Х
счет суммарного количества дискрет j и i (с уровнем Xj^Zx):
X{I(S:D/) || [I(CR:xj, х) ofx^x) I(S : Di]}X;
выдача информации: x«(/=/V) [I(Zj) ||/(Di)] Ф(Е).
Здесь j—текущее суммарное количество всех дискрет проанали-
зированной части исследуемой реализации, a i—текущее количест-
во дискрет с амплитудой, меньшей или равной уровню анализа х.
На рис. 12.5 показан анализатор, предназначенный для изме-
рения F* (х). Предоставляем читателям возможность составить схе-
му и алгоритм анализатора такого типа, позволяющего произвести
.измерение f* (х, Ах).
По такому принципу работают одноканальные анализаторы
импульсов АИ-3—АИ-8, обладающие высоким быстродействием
(до 105 имп./с), повышенной чувствительностью (максимальное
значение амплитуды исследуемых процессов до 3—10 В).
Простотой и высоким быстродействием отличаются анализато-
ры с преобразованием исследуемого временного процесса x(t) в
пространственный сигнал х(/). Это преобразование может быть
осуществлено с помощью электронного осциллографа при подаче
ла отклоняющие пластины электронно-лучевой трубки исследуе-
мого процесса и несинхронного развертывающего напряжения.
Возможно также использование оптических систем с перемещаю-
щимися диафрагмами и фотоэлектронным воспринимающим и ин-
тегрирующим устройством либо промежуточное преобразование с
помощью телевизионного датчика ТД (рис. 12.6) с последующим
диализом полученного потенциального изображения.
Многоканальные анализаторные системы, позволяющие полу-
чать законы распределения амплитуд импульсов и интервалов
времени между ними, амплитуд непрерывных временных и рас-
пределенных в пространстве случайных процессов и т. п., широко
используются в ядерной физике, биологии, геофизике, в химичес-
ком и металлургическом производстве.
Наиболее часто реализации исследуемых процессов представ-
ляются в виде электрических сигналов и графических изображе-
ний. Как в том, так и в другом случае могут быть использованы
диалоговые, цифровые и смешанные принципы построения анали-
заторов.
В аналоговых анализаторах используются дискриминаторы,
выделяющие каналы—интервалы значений измеряемых величин,
аналоговые накопители (индивидуальные для каждого канала) и
устройства вывода (рис. 12.7). В качестве амплитудных дискрими-
наторов могут использоваться пороговые устройства (типа тригге-
ров Шмитта), фотоприемники с диафрагмами, выделяющими ка-
налы, и т. п. Обычно при использовании дискриминаторов число-
каналов не превышает 30—50. Для накопления данных в этом слу-
чае часто используются конденсаторные устройства.
Рис. 12.7. Многоканальная аналого-
вая система для измерения распре-
деления вероятностей
Рис. 12.8. Многоканальная цифровая
система для измерения плотности
распределения вероятностей
Структура многоканальных цифровых анализаторов вероят-
ностей (рис. 12.8) включает АЦП, у которого каждое деление шка-
лы связано с индивидуальным счетчиком.
В многоканальных анализаторных ИС типа АИ, предназначен-
ных для статистического анализа импульсов [12.5J, используются
в качестве интегрирующих устройств магнитные устройства памя-
ти (рис. 12.9). Результат измерения в виде кодоимпульсного сиг-
нала I (zj) в таких ИС поступает в регистр и определяет ад-
рес ячеек памяти Adz,-, в которых накапливается количество зна-
чений исследуемой величины, соответствующих каждому результа-
ту измерения. С помощью RGi к числу, хранящемуся в ячейках
памяти данного интервала АЦП, после поступления очередного
результата измерения добавляется единица. Промежуточные ЗУ
(на магнитных лентах, перфолентах, перфокартах и т. п.) исполь-
зуются для увеличения объема выборки, уменьшения потерь ин-
формации и т. д.
Весьма удобной для построения многоканальных анализаторов
является мультиплицированная структура (рис. 12.10), пригодная
для оценки параметров законов распределения как случайных ве-
личин, так и случайных функций. Здесь число ступеней выходного
напряжения ик ЦАП (число ступеней «развертки») равно числу
•интервалов группировки f*(x) или F*(x); при этом на каждом
такте ик проводятся определение числа сработавших устройств
сравнения и запись этого числа в соответствующие сумматоры,
количество которых равно числу ступеней ик. Если определение
числа сработавших устройств сравнения осуществляется путем
опроса, то в качестве сумматоров можно использовать обычные
счетчики. В зависимости от того, сбрасываются или нет каналь-
Рис. 12.10. Мультиплицированная система для измерения распреде-
ления вероятностей
Значения
► f *(х)
или F*(x)
ные триггеры в конце каждой ступени, будет измеряться f*(x)
или F* (х). Анализаторные ИС позволяют получать законы распре-
деления амплитуд А, временных интервалов В, номеров источни-
ков информации Д в различных сочетаниях (обычно не превышаю-
щих трехмерного): А, В, АА, AAA, АВ, ААВ, ВВ, АД, ВД.
Для получения й-мерных законов распределения ИС содержат
соответствующее количество АЦП и промежуточное ЗУ (на
рис. 12.9—7?A7Wi). При этом основное запоминающее устройство
разделяется на k частей.
В Советском Союзе разработаны и выпускаются анализаторы
импульсов типа АИ. Отечественные промышленные анализаторы
АИ-128-1М (А), АИ-256 (А, В, Д), АИ-1024 (АА, В, АД), АИ-2048
(А, В, АВ), АИ-4096 (АА, ВВ, АД, ВД) имеют число каналов,
равное 'соответственно 128, 256, 1024, 2048 и 4096, число
уровней квантования по амплитуде от 100 до 512 (в
АИ-4096-3-А6—до 4096), ширину временных каналов от 10~9 до
64-10~6 с, число каналов координат датчиков от 8 до 100, емкость
каналов от 104 до 1018 бит, цикл сортировки от 10 до 56 мкс.
Анализаторы АИ-4096-3 и А-2048-1 выполняют дополнительные
операции обработки сигналов: сглаживание, нормирование, раз-
ложение на элементарные компоненты и т. п. Для этого анализа-
торы имеют арифметические устройства и устройства управления,
позволяющие производить помимо основных арифметических one-
раций операции сравнения, модификации адреса, условного пере-
ход а.
Анализаторы типа АИ выпускаются в блочном исполнении.
К отдельным блокам, входящим в состав современных анализато-
ров АИ, относятся АЦП, ЗУ, АЛУ, управляющие, выходные
устройства, устройства коммутации и передачи информации.
Принцип их действия и технические характеристики изложены в
[12.5].
Рис. 12.11. Система для измерения распределения вероятнос-
тей с аппроксимацией
Для контроля правильности функционирования АИ и опреде-
ления их характеристик используются генераторы образцовых по-
токов импульсов. Разработаны генераторы точных амплитудных
значений, распределенных, например, по нормальному закону, ге-
нераторы белого шума и т. и. Предусмотрен контроль входных и
выходных устройств АИ. Разработаны тестовые программы, слу-
жащие для проверки работоспособности узлов обработки инфор-
мации АИ. В [12.5] приводятся данные измерительных комплек-
сов и центров, в которых с помощью коммутаторов и согласующих
устройств объединяются для совместной работы несколько АИ и
ЭВМ.
Следует отметить, что при работе АИ возникают специфические
погрешности, которые следует учитывать. Для этого используется
аппарат теории массового обслуживания.
Структура АИС, позволяющая получить коэффициенты много-
члена, приближающего кривую плотности распределения вероят-
ностей, представлена на рис. 12.11.
СО
Если учесть, что Мрс(£)] = J коэффициенты раз-
-00
ложения Фурье функции Ck — J <рй [л (/)] dx, a f (х) =
СО
=2 то можно принять, что Ck — M{<?k [х(/)]} [12.2].
k=0
Сигналы на выходе фильтра <рл(О ортогональны и зависят от
времени, а на выходе функционального преобразователя
<Р/г[х(О]—от исследуемого процесса.
Для графического представления необходимо, чтобы время бы-
ло связано с уровнем сигнала. Интервал между импульсами 6(0
при определении Ck должен быть больше времени усреднения.
Порядок приближения т может быть определен из анализа
средней квадратической погрешности оценки:
со т
—оо /г=1
При получении f* (х) описанным методом отсутствует необхо-
димость квантования процесса по времени, могут быть сокращены
емкость используемой памяти и время измерения.
12.3. КОРРЕЛЯЦИОННЫЕ ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
Основные определения. Методические погрешности
Для эргодических стационарных случайных процессов выраже-
ние корреляционной функции может быть записано как
т
Rx (у) — М\х (t) х (t 4-1)] = lim — f x (f) x(t -j-t) d
T^-oo T J
0
Аналогичным образом определяется взаимная корреляционная
функция двух эргодических стационарных случайных процессов:
т
Rxy (4 = lim 4г Г х (0 у (t -ф- i) dt.
0
Иногда под корреляционной функцией понимают
т
Rm, х (t) = Пт 4- ( x(t) х (t -z) dt = Rx -^Msx.
Г-»оо / J
0
В этом случае корреляционная функция случайного процесса
содержит информацию и о математическом ожидании процесса.
Экспериментальное определение корреляционной функции в
большинстве случаев связано с измерениями значений корреляци-
онной функции при различных фиксированных т(0^т<со). От-
дельное значение корреляционной функции при данном т носит
название коэффициента корреляции. При т=0 коэффициент корре-
ляции Дх(О)=£>х- при T-^-сю коэффициент корреляции для эрго
дических стационарных случайных процессов стремится к 0. Для
0<т<ос Rx(x)^Dx- Корреляционная функция является четной
функцией своего аргумента, т. е. Дх(т)=Дх(—т).
В результате измерений получаются оценки математического
•ожидания и коэффициентов корреляции, которые для непрерывных
случайных процессов и случайных периодических последователь-
ностей имеют следующий вид:
т
M*x = ~^x(t)dt-,
о
/V
X (Д = у х (/) х (t 4- т) dt;
6
Я** — v S Xl°Xi+m’
i = I
^.Y^^y^x(t)y(t }-^df,
О
N
Rx, Y (m) = ДГ X‘Vi+in'’
i = l
R*x(m)
ux
Корреляционная функция случайного процесса, отнесенная к
его дисперсии, носит название нормированной корреляционной
функции рх(т). По определению 0<Грх(т)=С1.
Проиллюстрируем вид корреляционной функции несколькими
примерами (рис. 12.12), взятыми в [12.9]. Корреляционная функ-
ция процесса x(t) =А
Rx(t)=A2 (рис. 12.12,а).
По мере уменьшения статистической связи между ординатами
реализаций случайного процесса (рис. 12.12,6, в) корреляционная
функция приближается к дельта-функции. Для нормального белого
шума корреляционная функция описывается дельта-функцией
(рис. 12.12, г).
Для синусоидального процесса корреляционная функция равна
Дх(т) = (/42/2)coson (рис. 12.12,6). Нужно заметить, что величины,
имеющие постоянное значение или периодический характер, толь-
Рис. 12.12. Виды корреляционных функций
а — постоянной величины; б — случайной величины с относительно большим интервалом
корреляции; а, е — то же, ио с меньшим по сравнению с предыдущим случаем интерва-
лом корреляции; д— синусоидальной величины
ко формально можно трактовать как случайные процессы. Их ис-
пользуют обычно для проверки коррелометров.
В прикладном корреляционном анализе довольно часто исполь-
зуется понятие интервала корреляции. Под интервалом корреляции
понимается значение аргумента корреляционной функции т0, при
котором корреляционная функция не превышает некоторого зара-
нее заданного значения е:
I pjr (т) | *Се для т^гто-
Используются также
интегральное значение
определения интервала корреляции через
корреляционной функции:
СЮ
Px('t)rf'c<S ДЛЯ
т'о
J |Рх(^)|
%* 'о
dt < е для
Выбор того или иного выражения для интервала корреляции
определяется характером прикладных задач.
Так, например, интервал корреляции то' используется при оцен-
ках математического ожидания случайных процессов, то"—при
определении шага квантования по времени непрерывных реали-
заций при осциллирующих корреляционных функциях, т0 — при
оценке эффективности оценок корреляционных функций.
Методические погрешности корреляционных измерений весьма
подробно рассмотрены в литературе [12.7, 12.8].
Остановимся лишь на тех результатах исследования этих по-
грешностей, которые необходимы для организации эксперимен-
тального определения корреляционных функций.
Погрешность от влияния квантования исследуемой величины
по амплитуде оказывается незначительной при относительно невы-
соких требованиях к точности измерения мгновенных значений.
Положим, при квантовании случайного процесса образуется шум
квантования n(t). Квантованное по амплитуде мгновенное значе-
ние случайного процесса будет равно:
д:к (/) = х (/)-}-+«(/)
В этом случае
Яхк Ь) = М [хк (0 xv (t 4- ч)] = М [к (/) к (14- -с) -f- к (0 Мх 4-
4- к (t) п (t 4- т) 4- мхх (t 4- 4 -j- 2И2Х 4- мхп (t 4- ч) 4- пv) х
X V (t + 4 4- мхп (04-«(0 «{t 4- ч)].
Если квантователь имеет шумы квантования с нулевым мате-
матическим ожиданием, то
M\Mxn(t-\-x) J =0;
М[Мхя(0]=0.
Кроме того, М[х(/)7Их]=0 и Ai[714xA:(i4-T)]=0.
Тогда
RxK (О = Rx (0 4~ Msx -J- Rxn (0 4~ Rnx (0 -г Rn (О-
При интервалах квантования Ax-CA'mnx можно полагать шум
равномерно распределенным, интенсивность шума квантования
Л4[п2] = /?и(0) = (Дх)2/12^/?и(т). При Дх/о<1 взаимная корреля-
ция шума квантования и сигнала x(t) практически может не учи-
тываться. Следовательно, RXk (t)«^Rx(т)4~Мх24" (Ах)2/12. Если
не вводить поправку на /?п(т), то оказывается, что относительная
погрешность б из-за квантования сигнала по уровню даже при
незначительном количестве квантов т имеет небольшое значение.
Так, при т = 4 б«20%; т=8 б«5%, при т=16 6=1,2%, при
/и = 32 6 = 0,3%), при т = 64 6=0,09%.
На практике в целях уменьшения влияния возможных отклоне-
ний математического ожидания и плотности распределения шума
квантования от расчетных значений обычно применяют АЦП,
имеющие от 16 до 64 делений.
При определении оценок корреляционной функции важно учи-
тывать погрешности, обусловленные конечным временем Т реали-
зации или числом дискрет N случайной последовательности. При
проектировании корреляционных ИС приходится решать также
задачу определения Т или при заданной погрешности.
Эта задача „может решаться по-разному в зависимости от пол-
ноты априорной информации о виде корреляционной функции, ко-
торая должна быть получена в результате измерения.
„Положим, известна нижняя частота сон гармонических колеба-
ний спектра корреляционной функции. Тогда [12.8], если ограни-
читься временем реализации 2Т,
/2 1 Д2
R*x (’) ~ COS COS а»нг — 6Т [ЯА (т)].
При заданной погрешности бт[ЛД(т)] можно определить Т:
6т [^ (т) ] < TJ2nT= \/2пК^.
Так, например, при бт[7?^(т) ] =0,02 /<т^г8.
Для эргодического стационарного случайного процесса с нор-
мальным законом распределения и нулевым математическим ожи-
данием при некоррелированной выборке значений анализируемого
процесса может [12.2] использоваться следующее выражение:
D [Я*А(т)1 ?2 1
Если объем выборки ограничивается техническими характери-
стиками аппаратуры, то можно усреднить результаты измерения,
полученные на отдельных участках, и тем самым уменьшить 6(т).
Более подробно эти вопросы рассмотрены в [12.2, 12.4, 12.7,
12.8]. Интервалы квантования Дт корреляционной функции по
аргументу выбираются в зависимости от допустимой погрешности
восстановления корреляционной функции. На практике при вос-
становлении корреляционной функции весьма часто используются
полиномы невысокой степени (в большинстве случаев — первой).
При линейной аппроксимации и известном значении максимума
модуля второй производной |ЛГ'| корреляционной функции имеем
Дч — ]/88р/| М" ]. Если Рх(т) = е—то Дт = (1/р)]Л88р. При
Рх ('max) ~ 0,05, tmnJ(. = 3/p количество дискрет нормированной корре.
ляционной функции я = 3/]/88р-|-1. Принимая 8р = 0,02, получаем
п = 9.
Обычно для восстановления /?А*(т) с погрешностью около 1 —
2% достаточно на отрезке самой высокочастотной составляющей
корреляционной функции взять примерно 10 дискрет, для монотон-
ной по характеру корреляционной функции достаточно взять 10—
15 интервалов Дт, для затухающей по гармоническому закону
функции — 30—40 интервалов, для двухчастотных функций — око-
ло 100 интервалов и т. п.
Наиболее существенные результаты по анализу аппаратурных
погрешностей корреляционных ИС получены в [12.1, 12.2, 12.7].
Остановимся кратко на рекомендациях, полученных в результате
этого анализа. В корреляционных ИС даже значительные внешние
влияния, если они не коррелированы с исследуемыми процессами,
мало сказываются на результатах измерении. В то же время не-
большой дрейф характеристик или возникновение помех, коррели-
рованных с x(t), может вызвать появление значительных погреш-
ностей.
Степень влияния помех и погрешностей существенно зависит
от места их возникновения в системе. В частности, центрирование
случайных величин целесообразно выполнять на входе, а не на
выходе ИС.
Точность корреляционных ИС во многом определяется их прин-
ципом действия. Цифровые ИС имеют в этом смысле большие
преимущества, при этом их сложность относительно невелика.
Следует выделить два основных метода построения корреляци-
онных ИС. Первый из них связан с измерением коэффициентов
корреляции и последующим восстановлением всей корреляционной
функции, второй — с измерением коэффициентов многочленов, ап-
проксимирующих корреляционную функцию.
По каждому из этих методов система может действовать по-
следовательно или параллельно, работать с аналоговыми или ко-
доимпульсными сигналами, в реальном времени или с измене-
нием скорости и т. и.
Корреляционные ИС с последовательным,
измерением коэффициентов корреляции
Рассмотрим методы построения систем, в которых выполняют-
ся прямые (некомпенсационные) измерения коэффициентов корре-
ляции.
Среди них наиболее распространен метод умножения. При его
реализации используются формулы
О
т
1 С0 °
о
при фиксированных значениях аргумента /гДт, &=0, 1, 2 ... На
рис. 12.13 и 12.14 показаны схемы аппаратной реализации для
измерения коэффициентов корреляции корреляционной и взаимно
корреляционной функций. Поскольку метод умножения применим
для корреляционного анализа любых стационарных случайных
процессов, то большинство корреляционных ИС построено на его
основе.
Имеются решения, позволяющие избежать операции умноже-
ния. Они связаны в большинстве случаев с заменой умноже-
ния возведением в квадрат суммы значений х и х (/+т).
Для стационарных случайных процессов
M[1(Z)+x(H-t)]2 = 2Dx[1+pHt)];
Л4{ [х (0 +% (/+т) ]2- [°х (0 -х U+т) ] 2} =
=Л4[4х°(0х°(^+т)] =4/?х (т).
Нужно, однако, заметить, что коррелометры, основанные на
таком принципе действия, не имеют преимуществ по точности пе-
ред коррелометрами с умножением, а выигрыш по простоте реа-
лизации сомнителен.
Рис. 12.13. Схема, реа-
лизующая метод умно-
жения при измерении
дискрет корреляцион-
ной функции
Рис. 12.14. Схема, реа-
лизующая метод умно-
жения при измерении
взаимно корреляцион-
ной функции
Коррелометры, построенные по полярному методу (методу зна-
косочетаний) [12.8], являются наиболее простыми, но они приме-
няются для анализа центрированных нормальных стационарных
случайных процессов. Двумерная плотность распределения нор-
мального случайного процесса
f Х2) =------------- — ехо
21X02)^1 — f2z(t)
-- * 1 Л 2
2°2 [1 - ^(т)]
где х!=х(£); х2=х(Н-т), определяются значениями нормированной
корреляционной функции. Следовательно, если найти совместную
вероятность некоторых значений x(t) и х(/Д-т) [или у(Н"т)], то
можно определить р^(т). Наиболее просто находятся вероятности
совпадения (или несовпадения) знаков случайных процессов
(рис. 12.15), сдвинутых относительно друг друга на интервал т
[12.2]:
р++ (т) =р— (т) = (112л) arccos [—р (т) ].
Отсюда р (т) =—cos 2л [р++ (т) ].
Структурная схема полярного коррелометра относительно про-
ста (рис. 12.16). Однако необходимо принимать меры по обеспе-
чению одинаковых частотно-фазовых характеристик каналов, ис-
ключению связи между ними, уменьшению дрейфа нуля во вход-
ных цепях и т. д. Выпускаемый серийный полярный коррелометр
КА-ЗД имеет погрешность не более 10%, частотный диапазон от
50 до 20 000 Гц и динамический диапазон сигналов 100 мкВ — ЗВ.
При релейном методе используются формулы
R*x (0 = М [л (0 sign к (t =)] = /2/^ °хРх (0;
Rx, у (0 = М [х (0 sign у (t -|- г)] = V2/™ °хРх. Y (0-
Коррелометры, основанные на релейном методе («значение —
знак»), обладают более высокой точностью по сравнению с поляр-
ным коррелометром и приближаются в этом смысле к коррело-
метрам, основанным на методе умножения. Следует отметить, что
при релейном методе объем выборки увеличивается примерно в
2 раза по сравнению с методом «значение — значение» и определя-
ется из следующего выражения: бр2=^(1//0т) {[л2/4рхг(т)] — 1},
где zVhk — количество некоррелированных значений исходной функ-
ции. Имеются исследования, направленные на повышение точности
полярного и релейного методов путем введения вспомогательных-
случайных сигналов и т. п.
При измерении коэффициентов корреляции с применением ин-
теграла Стилтьеса используется аналого-цифровой принцип по-
строения коррелометров в соот-
ветствии с выражением
т
Rx, у (S) — J х (0 2у (t -4- 0 dl
о
Рис. 12.15. К определению совпадения
• е
знаков х(1) и х^+т)
Рис. 12.16. Схема полярного коррелометра
В этом случае предусматривается, что производится аналого-
цифровое преобразование сигнала При равномерной шка-
ле АЦП (Az/=const) можно принять, что zv(t-]-x)=jAy. Следова-
тельно,
В соответствии с этим выражением структура коррелометра
(рис. 12.17) состоит из схемы переменной задержки по времени
сигнала y(t), простейшего АЦП, элементов И и устройства инте-
грирования, на которое сигналы подаются с соответствующими
весами, определяемыми значениями сопротивлений R. Количество
элементов И равно количеству уровней квантования и обычно не-
велико (до 10).
СЛСА для рис. 12.17 можно записать в следующем виде:
<р(х, t = 0) Ф(В) I[-*(/)ИЖ-Н)] Ш+’)М+*) = Й/1Х
ш [у (Жт) ¥= /ОДУ ± ду/21 1
x а+’)=/1д^
S: /о J к (t) dt
to
X «’[^ + ’)=7ДЛДУ ±
Верхние пределы некоторых интегралов отсутствуют, поскольку
интегрирование x(f) по этому алгоритму производится в течение
интервалов времени, пока y(t-\-x) находится в пределе соответст-
вующего уровня квантования с весами, определяемыми этими уров-
нями. Для реализации этого алгоритма следует схему на рис. 12.17
дополнить устройством, определяющим необходимость выполнения
нового аналого-цифрового преобразования.
Одним из наиоолее простых методов получения коэффициентов
корреляции является метод диаграмм рассеяния [12.8]. Он приго-
ден для анализа случайных процессов, подчиняющихся нормальному
закону распределения. Основан он на том, что сечения нормальной
плотности распределения (при заданном т) представляют собой
эллипсы, отношение главных полуосей а и b которых определяет
нормированную корреляционную функцию
Рх.у (т) = [ 1-(а[Ь) 2] / [ 1+(alb)*}.
Фигура Лиссажу, получаемая с помощью электронного осцил-
лографа, обычно имеет размытый вид. Для измерения а и b вы-
бираются линии равной яркости. Подобный метод пригоден для
ориентировочной оценки значений коэффициентов корреляции.
Компенсационные методы измерения коэффициентов корреля-
ции разработаны значительно слабее. Однако известные достоин-
ства этих методов, связанные преимущественно с возможностью
исключения ряда погрешностей, заставляют обратить внимание
на те немногие попытки, которые направлены на создание ком-
пенсационных коррелометров.
Первая попытка создания компенсационного коррелометра бы-
ла предпринята в 1958 г. [12.10].
В компенсационном коррелометре этого типа изменяется мас-
штаб x(t) в а раз (рис. 12.18). Следовательно, на выходе вычи-
тающего звена получается сигнал х(^+т)—ux(f). После возведе-
ния в квадрат (Де) и интегрирования получается
М [х (?+т) —ах (t) ] 2—Dx [ 1 +«2—2арх (т) ].
Изменением и достигается минимум этого выражения. При
этом учитывается, что d[l+a2—2арх(т) ]/da=0, а=рх(т). По-
грешности выполнения операций возведения в квадрат и интегри-
рования в таком коррелометре не оказывают существенного влия-
ния, а требования к указателю существенно упрощаются, так как
определение р(т) практически не зависит от знания точного значе-
ния минимума, равного £>х[1—Р2х(т)]. Видимо, этот метод не
получил широкого распространения ввиду трудностей, связанных
с выполнением операций минимизации выходного сигнала, на что
требуются определенные затраты времени, и ввиду зависимости
уровня минимума от значения сигналов.
Для независимого измерения коэффициентов корреляции можно
использовать квазикомпенсационную цепь, предложенную К. Б. Ка-
рандеевым и Г. А. Штамбергером и изображенную на рис. 12.19. На
устройство умножения подаются напряжения ы(/)/2и(и (£)/2)Х
X(Zk/z) —ц(^+т), а показывающий прибор реагирует на
kM[и2 (t) zvJz—и (t) и (^+т) ] =
=k \DuzK/z—Ru (т) ],
где k — коэффициент пропорциональности.
Изменяя zK1 можно добиться нулевого показания индикатора.
При этом справедливо соотношение
Ри (т) = 2к/2.
Благодаря использованию скалярных режимов измерения про-
цесс уравновешивания измерительной цепи осуществляется весьма
просто и может быть автоматизирован. Время проведения экспе-
римента практически будет определяться временем, необходимьш
для выполнения операции осреднения. Схема, реализующая этот
принцип, успешно использовалась в аппаратуре для геодезической
аэроэлектроразведки методом естественных электромагнитных по-
лей.
Рис. 12.18. Схема с минимизацией
выходного сигнала коррелометра
Рис. 12.19. Схема компенсационного
коррелометра
Имеется возможность измерения с помощью такого же метода
так называемых мнимых коэффициентов корреляции при исполь-
зовании специальных спектральных фазосдвигающих цепей, обес-
печивающих изменение фазы каждой составляющей спектра u(t)
в заданном диапазоне частот на угол л/2 без изменения исходных
амплитуд.
Корреляционные ИС с параллельным и параллельно-
последовательным измерением коэффициентов корреляции
Преимущества и недостатки ИС параллельного действия при-
сущи и корреляционным ИС параллельного действия.
Структурные схемы аналоговой и аналого-цифровой корреля-
ционных систем параллельного действия представлены на
рис. 12.20 и 12.21. Схема аналоговой системы не требует поясне-
ний. Аналого-цифровая корреляционная ИС, описанная в [12.2],
позволяет произвести одновременное измерение 100 коэффициен-
тов корреляции. Частота работы генератора импульсов от 100 Гц
до 1 МГц, максимальное время задержки создающейся регистра-
ми сдвига, при этом изменяется от 1 с до 100 мкс. Кодоимпульсный
сигнал от АЦП поступает сначала на триггерные регистры сдвига,
затем на умножающие устройства и на интегрирующие цепочки.
Измерение уровней напряжений на конденсаторах производится
после выполнения цикла анализа.
Рис. 12.20. Многоканальная аналоговая корреляцион-
ная ИС
Рис. 12.21. Многоканальная аналого-цифровая корреляционная ИС
J3 цифровых коррелометрах параллельно-последовательного
действия возможно несколько вариантов структур. Б большинстве
случаев общими элементами информационного канала являются
устройства умножения, суммирующее и ЗУ.
Корреляционная функция в цифровом корреляторе при сильно
коррелированной выборке определяется по формуле
R*X (АДг)= -1. х (JM) X (jM + АД.)
/=1
при А=0, 1, ..(т— 1).
Здесь ААт — интервал сдвига, а тАт —интервал корреляции.
При некоррелированной выборке и АД5=Ат
R*x(kte) = -L
V х (ltd) х (iM -ф- АД.) -j-
L r=0
X (^ +
N
-(-АД.) + ... -f- x(iM)x(ibtkbt)
i=N—m
В [12.7] подробно рассматриваются возможные режимы рабо-
ты коррелометров параллельно-последовательного действия. Оста-
новимся на одном из режимов работы такого коррелометра.
После аналого-цифрового преобразования (рис. 12.22) резуль-
таты измерений заносятся в регистры RGX и RGV. В запоминаю-
щем устройстве RAMX хранятся результаты измерений мгновенных
значений x(iA/), взятых через интервал времени Л/=Ат. Количест-
во в RAMX результатов измерения определяет количество измеряе-
мых коэффициентов корреляции. В течение интервала А/ произ-
водится последовательное умножение всех запомненных значений
x(iAZ) (i=0, 1, 2, ..., т) на реализовавшееся значение y(jAt). По-
лученные произведения [x(iAt)y(jAt) при i=var и /’=const] сум-
мируются и хранятся в ЗУ. После выполнения этих операций, про-
должающихся в течение АД производится измерение следующих
дискретных значений: х(т-|-1, АО и у(тА-\, kt). В запоминающее
устройство RAMX заносится значение х(т+1, АО и убирается из-
быточное. В системе имеется возможность следить за текущими
значениями коэффициентов корреляции, хранящимися в ЗУ. Обыч-
но аналого-цифровое преобразование производится с невысокой
точностью, результат измерения
представляется тремя-четырьмя
двоичными разрядами. Количе-
ство интервалов квантования кор-
реляционной функции т^100.
Устройство умножения долж-
но обладать быстродействием,
обеспечивающим выполнение т
операций 'за интервал времени АЛ
Если на выполнение операций ум-
ножения отвести 50 мкс и принять
Рис. 12.22. Схема цифрового кор-
релометра j j J - ' ;!j
т—64. то LVmin=3,2-IO-3 с. Отсюда видно, что подобный режим
коррелометра позволяет анализировать относительно низкочастот-
ные случайные процессы.
Для повышения быстродействия используются режимы работы
коррелометра, при которых Д£/то>1. Тогда количество интервалов
квантования т уменьшается, упрощается запоминающее устройст-
во RAMX, облегчаются требования (по быстродействию) к устрой-
ствам умножения. Однако для обеспечения заданной погрешности
оценки корреляционных функций необходимо увеличивать длитель-
ность реализаций случайного процесса.
До сих пор рассматривались коррелометры, предназначенные
для работы со случайными процессами, реализации которых пред-
ставлены в виде электрических сигналов. Однако большое коли-
чество реализаций может быть дано в виде графических материа-
лов. Известны коррелометры параллельного и параллельно-после-
довательного действия, выполненные с применением оптических
средств восприятия и обработки таких графических материалов.
Оптические устройства для статистической обработки графиков
позволяют обеспечить высокое быстродействие при относительно
невысокой сложности. Для корреляционного и вообще статистиче-
ского анализа с помощью оптических устройств целесообразно ис-
пользовать специальные формы представления анализируемого
графического материала (теневые графики, кодовая регистрация
и т. д.). Для статистической обработки графических материалов
весьма широко используются сканирующие ИС.
Корреляционные ИС с измерением коэффициентов многочлена,
аппроксимирующего корреляционную функцию
Оценка корреляционной функции может быть представлена в
виде аппроксимирующего многочлена
СО
fe=0
где
Т оо Т оо
G = j = j- j J x (t) X (t — t) <pft (t) dtd-z ~
oo bo
T cx>
=^t J K J x ~~ cZZcZt‘
о 0
Здесь {<рь(т)}—система базисных функций, чаще всего ортого-
нальных.
СО
fo
к (t — т) (х) d- является откликом
о
линейного ортонормированного фильтра Ф при подаче на его вход
сигнала x(t) (рис. 12.23). Следовательно, при применении цепочки
ортонормированных фильтров отпадает необходимость в специ-
альных устройствах, создающих запаздывание т. В [12.9] приве-
дены результаты исследования, направленного на создание кор-
релометров, в которых используется разложение корреляционной
функции по полиномам Лагерра. В этом случае ортогональные
фильтры должны иметь передаточную функцию
где р — оператор дифференцирования; а — коэффициент.
Рис. 12.23. Схема включе-
ния ортогонального фильт-
ра
Общий член ортогональной функции Лагерра
<?k (at) = Уа e~a'tl2,
а корреляционная функция может быть восстановлена при извест-
ных коэффициентах Ck как
. Примеры применения корреляционных ИС
Как уже говорилось, корреляционный анализ случайных про-
цессов применяется весьма широко в различных областях науки и
техники. В частности, привлекает внимание возможность исполь-
зования в ИИТ «фильтрующих» свойств, заложенных в корреля-
ционном анализе, в целях выделения полезных детерминированных
сигналов на фоне помех'.
Положим, имеются периодический (например, синусоидальный)
сигнал u(t) и стационарная случайная помеха y(t), аддитивная
по отношению к полезному сигналу и имеющая интервал корреля-
ции toy. Тогда оценка корреляционной функции x(t) = u(t)-\-y(t}>
будет равна:
Я*х 0) = j [« (0 + У (0] [« (* + т) +.К У 4- х)] dt =
и (t) и (t -J- т) dt f У (t) у (t -|- ") dt Г и (t) у (t т) dt 4~
+ [ у (0 и (t -г
Поскольку сигнал и помехи не коррелированы, то два послед-
них интеграла равны нулю. Следовательно,
Rx* (x)=Ru*(x) +Ry(x).
При x>xOvRy* (х>хОу) «О и Rx*(x>xoy)
Таким образом, проведя измерение корреляционной функции
при т>то!/, можно «отфильтровать» влияние помехи.
Значительное уменьшение времени анализа в этой ситуации;
может быть получено при применении дополнительного генератора,
повторяющего полезный сигнал (t), и измерении;
взаимной корреляционной функции процессов %(f) и x(t):
т
R*x. * (')= т- J (0 + У (0) х х W+х W Ru, х С1)-
о
Это устройство с генератором функции %(/), по существу, явля-
ется аналогом фильтра с узкой полосой пропускания при частот-
ном методе фильтрации. Подобные методы используются в целях
уменьшения влияния случайных
аддитивных помех в измеритель-
ных усилителях, для определе-
ния источников шумов (напри-
мер, в технической диагностике)
и т. п.
Автором [12.8] высказыва-
лась мысль о возможности ис-
пользования этих методов для
построения помехоустойчивых
устройств сравнения уравнове-
шиваемых измерительных цепей
с параметрическими датчиками,
поскольку питание таких цепей
имеет известный и детерминиро-
ванный характер.
Продолжаются применение и
разработка корреляционных ме-
тодов защиты от помех при гео-
Рис. 12.24. Корреляционный измери-
тель скорости проката металла
физической разведке полезных ис-
копаемых электромагнитным способом.
' Значительный класс статистических ИС — корреляционные
экстремальные ИС — основан на использовании наличия особой
точки—экстремума корреляционной функции при нулевом значе-
нии аргумента [12.11, 12.12]. Корреляционные экстремальные ИС
широко применяются в навигации, радиолокации, металлообраба-
тывающей, химической промышленности и т. д. для измерения па-
раметров движения разнообразных объектов.
Так, например, известны корреляционные измерители скорости
движения горячего и холодного металла при прокатке, судна, са-
молета и пр..' [12.13, 12.14]. Принцип их работы (рис. 12.24) за-
Таблица 12.1. Анализаторы распределения вероятностей, коррелометры
Тип Измеряемые величины и функции Число каналов Диапазон исследуемого процесса Объем выборки (ОБ); погреш- ность (д); цикл, с <Устройства вывода Источник данных
динамический, В частотный, Гц
Ф-37 Мх, F (х), f (х), Rx y (т) 4096 2 0-5-103 OB = 216 ПЛ-150, Щ68000; ЭУМ-23, Н-306 [12-7]
Х6-4 Е (х), f(x), RXtY (т) 1 40-10-3-10 0-250- Юз О? о? Дз -ч 11 II II ц 1+1+ сл — — хО ьо о ег' х® + °? ЭЛТ [12-7]
Х6-5 F (х), f (х), коэффициенты шума, энтропия 1 (100 точек) 0,5—10 0—1000-106 8Р = +20%; = + Ю% ЭЛТ, цпм [12-7]
Ф7016 ^Х,У О 2 ±1 0,02-20-Юз = ЧЬЗ*уо ЭЛТ [12.7]
АИ-128 А 128 — — — —
АИ-256 А, В, Д 256 20 9 I О4 импуль- сов/с 21е на канал; 34 -10-е с ЭЛТ, цпм [12.5]
АИ-1024 А, В, Д + АА, АВ, АД 1024 50 2-10Б импуль- сов/с 218 на канал; 10-10 ’б с ЭЛТ, цпм, пл [12.5]
АИ-4096 А, В, Д + АА, АВ, вд + вв, ВД 4096 50 2-10s нмпуль- сов/с 218 на канал; 12 -IO-6 с ЭЛТ, цпм, пл, НМЛ [12.5]
Примечание. А — плотность распределения вероятности амплитуд; В — то же времени между импульсами; Д — то же частот источни-
ков импульсов; АА, АВ, АД, ВВ, БД — двумерные плотности; ЦПМ — цифропечатающая машина.
ключается в том, что имеются два приемника ФЭг и ФЭ-2 сигнала,,
отраженного от некоторой поверхности, перемещающихся относи-
тельно нее со скоростью v, которую необходимо определить. На
выходе приемников будут формироваться зависящие от свойств
отражающей поверхности случайные процессы, сдвинутые между
собой на интервал времени тп- Если расстояние между приемни-
ками отраженного сигнала постоянно и равно d, то, измерив тп,
можно определить скорость v—dfin-
Учитывая, что корреляционная функция этих случайных про-
цессов имеет максимум при т=0, имеется возможность изменять
запаздывание случайного процесса в канале х(1—т) и добиваться
на выходе коррелометра максимального значения коэффициента
корреляции, отсчитывая при этом тп- По данным, приведенным в
[12.11], погрешность измерения скорости движения металла М
36 м/с не превышала 0,1%. Время, необходимое для получения-
результата измерения, при таких скоростях составляет (при авто-
матической работе) доли секунды.
Корреляционные экстремальные ИС используются для измере-
ния дальности нахождения объекта в воздухе и воде, т. е. как
высотомеры, измерители расстояния между объектами и т. п. Ско-
рость распространения радиоволн в воздухе Со=3-105 км/с, а
ультразвуковых волн в воде Св:=1,5-103 м/с. Следовательно, после
измерения времени запаздывания сигналов тц (в секундах) можно
получить расстояние в воздухе при локации £о=С,отц/2=:1,5-1О5Тц
(в километрах) и в воде Z,B=.1500-t4/2 (в метрах).
При использовании корреляционных экстремальных ИС для ло-
кации космических кораблей удается измерить расстояния порядка
3300 км с погрешностью ±1 м, до 2 108 км с погрешностью ±10 км
[12.12].
Выделенке сигналов на фоне шумов, измерение параметров
движения, распознавание образов, идентификация, техническая и
медицинская диагностика — вот неполный перечень областей прак-
тического приложения методики и средств корреляционного ана-
лиза.
В табл. 12.1 приведены данные некоторых выпускаемых про-
мышленностью коррелометров.
В настоящее время подавляющий объем корреляционного ана-
лиза выполняется корреляционными ИС, содержащими ЭВМ, и
локальными устройствами со средствами микропроцессорной тех-
ники.
12.4. СПЕКТРАЛЬНЫЕ ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
Основные определения
Системы спектрального анализа предназначены для количест-
венной оценки спектральных характеристик измеряемых величин.
Напомним основные определения спектпальных хапактепистик
[12.13, 12.3],
Известно, что абсолютно интегрируемые функции, удовлетво-
со
ряющие условию могут быть представлены в виде
—со
интеграла Фурье
х (t) = -j— J S (/<») e‘at die.
—ОС
Функция S(/со) называется комплексным спектром, или
спектральной плотностью амплитуд, и равна:
S (/ш) — J х (t) e~iat dt.
—GO
S(/'co) имеет случайный характер, так как соотношения между
амплитудами и фазами колебаний различных частот случайных
процессов неопределенны. Поэтому при спектральном анализе слу-
чайных процессов определяется спектральная плотность мощности
(энергетический спектр). Для стационарных эргодических случай-
ных процессов спектральная плотность мощности — математиче-
ское ожидание от периодограммы
Gx (ш) = lim-i-М [S2 (»].
Г->оо
Оценка спектральной плотности мощности
Gx* (со)=М[52(/со/Т].
Необходимо отметить, что в спектральном анализе применяет-
ся не только спектральная плотность мощности одного процесса,
но и взаимная спектральная плотность мощности реализаций двух
процессов.
В соответствии с теоремой Винера — Хинчина энергетический
спектр и корреляционная функция связаны между собой преобра-
зованием Фурье:
со СО
0х(ш) = J/?x(i)exp(—juyc)d-t= J/?x(t)cosu>Tdi;;
—00 —00
CO CO
Rx (t) = —— f Gx (<») exp (jwt) du> =- f Gx (<») cos a>tdu>.
2л J 2л J
—00 — oo
Проиллюстрируем связь между Rx(x) и G^(co) несколькими
примерами.
Если Rx(i) является убывающей функцией с увеличением т,
то Gjr(co)—функция, убывающая по мере увеличения со. Если
7?х(т) приближается к б-функции, то Gjr(co) —к равномерному
«белому шуму» (рис. 12.25). Если x(t) помимо случайной состав-
ляющей содержит периодическую составляющую с частотой ио,
то спектральная плотность мощности имеет разрыв непрерывно-
сти в точке и0 (рис. 12.26).
При т=0
ОО
Dx — М [х2 (I)] = -4— CfjA(u>)dco,
—GO
т. е. элемент Gx(co)rfco определяет составляющую М [№(/)] от
комплексной частоты со (рис. 12.27). Таким образом, спектраль-
ная плотность мощности описывает частотное распределение сред-
ней мощности случайного процесса.
Рис. 12.25. Равномерная спектраль-
ная плотность мощности (а) и соот-
ветствующая ей корреляционная
•функция (б)
Рис. 12.26. Спектральная плотность
мощности (а) и соответствующая ей
корреляционная функция (б)
При спектральном анализе использует-
ся выражение для нормированной спек-
тральной плотности мощности:
gx (со) — Gx* (со) jDx*.
Нормированная спектральная плотность
связана с нормированной корреляционной
функцией следующим образом:
gx’(cD) cos u>tda>;
При Т=0
£х(“) =
Рх (t:)C0S
оо
Рис. 12.27. К выделе-
нию элемента Gx(<i>)d(i>
Методы измерения спектральной плотности
случайных процессов
Существующие методы спектрального анализа основываются
на применении частотных фильтров или на использовании орто-
гональных преобразований случайного процесса и преобразова-
ний Фурье над известной корреляционной функцией 7?х(т).
При параллельном фильтровом анализе (рис. 12.28) наиболь-
шее применение получили полосовые избирательные фильтры-ре-
зонаторы. На выходе каждого фильтра, пропускающего узкую по-
Рис. 12.28. Схема многоканального
фильтрового спектрального анализа-
тора
лосу частот со$, после возведения в
лучается составляющая спектра
квадрат и интегрирования по-
00
Gx (о’ф) Dx (о>ф) / -J— f Л2 (о>ф) dw,
I Mt J
—00
где Л(йф) —частотная характеристика фильтра.
При последовательном анализе используются перестраиваемые
фильтры и гетеродинные анализаторы (рис. 12.29). Гетеродин-
ные анализаторы находят большее применение, так как они про-
ще в технической реализации. В них с помощью генератора пе-
риодических колебаний с перестраиваемой частотой — гетероди-
на — происходят последовательный сдвиг частотного спектра ис-
следуемой величины и выделение из него с помощью полосового
(обычно резонансного) фильтра составляющих энергетического
спектра.
Рис. 12.29. Схемы спектральных измерительных систем с перестраивае-
мыми фильтром (а) и с гетеродином (б)
Применяются также анализаторы последовательно-параллель-
ного принципа действия.
Разрешающая способность фильтровых анализаторов опреде-
ляется наименьшим частотным интервалом А/, в пределах кото-
рого смежные компоненты спектра различимы и который зависит
обычно от полосы пропускания избирательного фильтра, взятой
на уровне 0,7 максимального значения его амплитудно-частотной
хар актеристики.
При параллельном анализе время анализа 7„ар определяется
временем установления колебаний в фильтрах с заданной сте-
ленью приближения амплитуды колебания фильтра к своему мак-
симальному значению Атах=1:
TnsP=At=A/Af.
Разрешающая способность и время анализа [12.15] связаны
соотношением AfA/=A=const, показывающим, что нельзя одно-
временно улучшать обе эти характеристики.
При последовательном анализе, используемом для выявления
составляющих дискретных спектров, время анализа (при полосе
исследуемого спектра, равной f) будет равно:
7'no^=A/f/Af=/lf/(Af)2.
Для уменьшения времени последовательного анализа широко
используется изменение частотного масштаба исследуемого про-
цесса, например скорости его записи и воспроизведения, при этом
5И (/со) =/?£ (/сой),
Akf ДгрС.П
(Mf)2 k
Если £>1, то время анализа уменьшается. Для изменения
скоростей записи и воспроизведения используются магнитная за-
пись, запоминающие электронно-лучевые трубки, рециркуляцион-
ные линии задержки и т. п. Отношение скоростей k от 100 до
10 000 удается получить при анализе квантованных по времени
дискретных последовательностей и кодоимпульсных сигналов.
Отечественной промышленностью выпускаются гетеродинные
анализаторы спектра серий СЧ и СКЧ и др. [12.6], перекрываю-
щие широкий частотный диапазон исследуемых электрических
сигналов (от долей герца до десятков гигагерц).
При проектировании спектральных ИС все в большой мере
используются принцип агрегатирования и средства микропроцес-
сорной и иной вычислительной техники. В спектральном анализе
все больше используется метод быстрого преобразования Фурье.
Для спектрального анализа одиночных импульсов выпускают-
ся анализаторы параллельного действия с коммутаторами и ре-
гистрирующими устройствами (например, АСОИ-I, имеющий 8 ка-
налов, погрешность измерения суммарного значения спектральных
составляющих порядка ±20%, время анализа от 300 до 500 мс).
Бесфильтровые методы спектрального анализа в большинстве
случаев основаны на определении коэффициентов ряда Фурье.
Оценка спектральной плотности мощности при этом может быть
получена из выражения
Г Г
G*x (<«) = —-/И [S2 (/«>)] —-1—МI С к (t) cos midi -j-
M[A2 (<o)4-B2 (<»)].
Структурная схема устройства, реализующего это выражение,
приведена на рис. 12.30. При параллельном анализе анализатор
состоит из набора таких устройств, а генераторы имеют разные
фиксированные частоты. В [12.9] показана возможность выпол-
нения спектрального анализа при использовании ортогональных
Рис. 12.30. Схема бесфильтровой спектраль-
ной измерительной системы
фильтров Лагерра. Представляется возможным использование
разложения Фурье-—Уолша.
Достоинства бесфильтровых анализаторов связаны с получе-
нием высокой разрешающей способности, что позволяет их ис-
пользовать для детального анализа отдельных участков спектра.
Б. Системы автоматического контроля (САК]
Г л а в а 13
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ
13.1. ФУНКЦИЯ И ОСНОВНЫЕ ВИДЫ СИСТЕМ АВТОМАТИЧЕСКОГО
КОНТРОЛЯ
Под контролем понимается процесс установления соответствия
между состоянием объекта контроля и заданными нормами. В ре-
зультате контроля выдается суждение о том, к какой из норми-
рованных качественно различающихся областей относится рас-
сматриваемое состояние объекта контроля.
В принципе, при контроле нет необходимости знать значения
контролируемых величин. С этой точки зрения контроль являет-
ся операцией сжатия информации, устранения ненужных в дан-
ном случае сведений об объекте контроля.
Контроль может быть осуществлен везде, где имеются уста-
новленные нормы. Нормы задаются самым разнообразным обра-
зом. Так, например, они могут задаваться в виде объема кон-
кретных знаний предусмотренных программой подготовки сту-
дентов, в виде ооласти количественных значении, определяющих
нормальное состояние объекта.
В дальнейшем рассматривается лишь контроль, при котором
описания норм заданы в количественном виде с помощью анало-
говых и цифровых уставок, а результатом контроля является ко-
личественно определенное суждение о состоянии объекта кон-
троля.
Такой контроль широко применяется в промышленности при
оценке состояния сырья, процесса производства и готовой продук-
ции и называется техническим контролем.
Затраты труда на выполнение операций контроля в современ-
ном производстве очень велики. Достаточно сказать, что для обес-
печения технологического контроля ряда машиностроительных и
радиоэлектронных заводов используется до 30% рабочих, многие
изделия радиоэлектронной и радиотехнической промышленности
подвергаются полному контролю.
Конечно, область контроля с выдачей количественных сужде-
ний о состоянии исследуемого объекта не ограничивается только
техническим контролем в промышленности. Контроль окружаю-
щей среды, физиологического состояния человека, метрологиче-
ских характеристик средств измерения, контроль работоспособно-
сти эксплуатируемых технических средств —вот далеко не пол-
ный перечень объектов контроля, для которых имеются опреде-
ленные количественные нормы и выполняется или может выпол-
няться контроль с выдачей количественных суждений.
Операции контроля могут выполняться как с участием чело-
века, так и без его участия, т. е. автоматически. Уровень автома-
тизации устройств контроля может быть определен приближенно
отношением объема операций, выполняемых ручным способом, к
общему объему операций процесса контроля. Автоматическими
устройствами контроля называются обычно устройства, у которых
это отношение составляет 5%, у полуавтоматических устройств
оно находится от 5 до 50%, у ручных превышает 50%.
Не следует думать, что автоматизация контроля экономиче-
ски выгодна всегда. Она становится выгодной, как правило, по
мере увеличения количества операций и объектов контроля и со-
кращения времени, отводимого на контроль. При проведении
многочисленных однообразных проверок человек на определен-
ном этапе не может справиться с большим потоком контрольной
информации, увеличивается количество ошибок контроля, возни-
кает необходимость в автоматизации операций контроля. Автома-
тический контроль совершенно необходим, когда участие человека
в процессе контроля невозможно. Особо нужно подчеркнуть важ-
ность автоматического контроля для работы современных систем
автоматического управления.
Автоматический контроль выполняется с помощью контрольно-
измерительных приборов и систем автоматического контроля.
В системах автоматического контроля (САК) контролируется
большое количество величин или (и) выполняется значительная
обработка информации, необходимая для выдачи количественно-
го суждения о состоянии объектов контроля.
Подавляющее большинство САК базируется на использовании
элементов современной электроники. Это во многом определяется
наличием относительно хорошо разработанных методов и средств
преобразования разнообразных контролируемых величин в элек-
трические сигналы и удобством выполнения преобразований, пе-
редачи и обработки электрических сигналов. Поэтому большин-
ство реализаций САК основывается на электрическом принципе
действия.
Состояние объекта контроля может оцениваться по входным
величинам A0=x0i, Х02, -, хОп, воспринимаемым системой от объ-
екта и отражающим его свойства, или по значениям функций от
входных величин Н(А). Величины или функции которые непо-
средственно сопоставляются с уставками, называются далее кон-
тролируемыми величинами, или параметрами. Описания норм,
реализованные в виде аналоговых уставок, обозначаются через
C=ci, с2, ..., ст, а в цифровом виде — DC—Dei, Dc2 -..
Чтобы получить в результате контроля информацию о соотно-
шении между текущим состоянием объекта контроля и установ-
ленным нормальным его состоянием, любая САК должна выпол-
нять следующие основные функции: I(A0/Ai)—восприятие вход-
ных величин Л’о=хО1, х02, ..., хОп и преобразование их в сигналы,
необходимые для последующих операций А1=х11, х12, ..., х1п;
1(C), I(DC)—формирование и реализация норм в аналоговом
и цифровом видах; I(CR:A, С), I[CR:77(A), С], I(CR:Z, DC),
I[CR:77(Z), DC] —сравнение входных величин или функций от
них с описанием норм; I(CH:A), I[CH: 77(A)]—формирование
количественного суждения; I(R:CH A), I[R:CH 77(A)]—выдача
количественных суждений о состоянии объекта контроля; Ф(Ф*) —
автоматическое управление работой системы.
Системы автоматического контроля могут также выполнять
следующие функции: I (х/г) — аналого-цифровые преобразования;
I (R : A), I(R : Z) — выдачу аналоговой или цифровой информации;
I(F:A), I(CP:Z), I (F : CH A)—вычислительные процедуры над
аналоговыми и цифровыми сигналами или над результатами кон-
троля; U, Р, Т, I(Uk), 1(7?к), Ц^к)—формирование возбуждаю-
щих и компенсирующих воздействий на объект контроля, необхо-
димых для получения контрольной информации; 1(СН:СН А) —
выполнение операций самоконтроля системы.
Операторы I(DC), I(CR:Z, Dc)I(CP:Z), а также операторы
управления системой могут выполняться или формироваться как
аппаратными, так и программными средствами.
Вследствие наличия уставок и определяемых ими зон допуска
контролируемых величин такой контроль называют допусковым.
Нужно отметить безусловное родство процессов контроля и
измерения, заключающееся в обязательном наличии операций
сравнения входных или производных от них величин: при измере-
нии — с мерами (овеществленными единицами измерения , а при
контроле—с уставками.
При выполнении операции сравнения контролируемой вели-
чины с одной уставкой имеется возможность осуществить двух-
альтернативный контроль, т. е. разделить состояние контролируе-
мой величины на две области (Же, х^с), одну из которых
можно считать областью нормального состояния.
Часто может быть выделено несколько качественно различных
состояний объекта. Так, например, для технологических процес-
сов или эксплуатируемых установок помимо областей нормальных
Рис. 13.1. Способы описания норм
и контрольно-измерительной инфор-
мации:
а — через абсолютные значения; б — от
носительно номинального значения конт-
ролируемой величины
fi)
режимов могут быть выделены области предаварийных и аварий-
ных состояний, а йри дискретном производстве помимо годных
и бракованных изделий могут быть выделены различные града-
ции брака и годных состояний. Так, могут быть выделены изде-
лия с исправимым и неисправимым браком, несколько сортов
годной продукции.
В САК описания норм и контрольно-измерительная информа-
ция могут быть представлены по абсолютным значениям либо
по отклонению от номинального значения (рис. 13.1).
Сравним эти способы в случае, если значения контролируе-
мых величин равновероятны и абсолютная максимальная погреш-
ность измерения равна в [13.1].
Будем считать также, что границы зоны допуска симметричны
относительно Со, т. е. АСВ=ДСЦ=АСО, и необходимо определить,
находится контролируемая величина в зоне допуска или вне ее.
При использовании способа абсолютных значений количество
двоичных ячеек памяти, необходимое для организации операций
контроля, равно:
log снсвхтах
Е3
Реализация способа отклонений возможна при наличии ко-
личества ячеек памяти, равного:
log c<AcB(£vc)mFX
Е3
Разница между количеством ячеек памяти, требуемых для
этих двух способов, будет равна:
1о^ с^св^тах
ЕСЛИ Св Cq, Хтах
(Ах) max И сн>Лси, то
суХуХтах j
co^co (^iinax
Таким образом, при использовании способа «отклонений» вы-
игрыш в количестве элементов памяти при формировании описа-
ний норм и выдаче результатов измерения и контроля может быть
весьма существенным. Еще более значительным этот выигрыш мо-
жет быть, если измерительные цепи будут давать на выходе сиг-
нал, пропорциональный Дх=со—х.
В САК применение находят оба способа описания норм и вы-
дачи контрольно-измерительной информации.
Остановимся кратко на основных видах САК, используя об-
щую классификацию ИИС (см. гл. 2) и детализируя ее в необ-
ходимой мере с учетом специфики систем контроля.
Контролируемые величины можно классифицировать, так же
как и измеряемые величины, по количеству (п=1, п^2) вход-
ных величин, изменению их во времени, распределению в про-
странстве (сосредоточенные в точке и распределенные). Кроме
того, можно выделить зависимые друг от друга, активные и пас-
сивные в энергетическом отношении контролируемые величины.
Следует различать специализированные, предназначенные для
выполнения узконаправленных операций контроля, и универсаль-
ные САК-
Последние, как правило, содержат в своем составе програм-
мируемые вычислительные и управляющие средства (микропро-
цессоры, микро-ЭВМ и т. п.) и создаются на основе использова-
ния управляющих вычислительных машин или функциональных
блоков агрегатных комплексов ГСП, объединяемых стандартным
интерфейсом.
Различаются САК, встроенные в объект контроля, и внешние
по отношению к нему. Встроенные системы преимущественно при-
меняются в сложном радиоэлектронном оборудовании и входят
в комплект такого оборудования. Такие системы специфичны —
для их построения часто используются функциональные блоки
контролируемого оборудования. Внешние по отношению к объекту
контроля системы обычно более универсальны.
Иногда используется разделение САК на пассивные и актив-
ные (т. е. воздействующие на свойства объекта контроля) систе-
мы. В активных системах используются устройства типа подна-
ладчиков технологических процессов. Большинство же САК отно-
сится к пассивным, выдающим суждение о состоянии объекта, но
не принимающим решения об изменении этого состояния. К пас-
сивным САК можно отнести и сортирующие автоматы, так как
в них отсутствует воздействие на объект контроля, изменяющее
его свойства.
К внутренним классификационным признакам собственно САК
в первую очередь следует отнести:
выполнение контроля входных величин или параметров, являю-
щихся функцией от них;
наличие одной-двух и более уставок;
выполнение операций сравнения контролируемых величин или
параметров с уставками на аналоговом или на цифровом уровнях;
структуры системы (предельные — последовательного и парал-
лельного действия).
Целесообразно остановиться на одном важном для классифи-
кации рассматриваемых систем вопросе несколько подробнее. Дело1
в том, что в подавляющем большинстве САК выполняется процесс
измерения и на выходе систем помимо результатов контроля при
необходимости выдаются результаты измерения. Это позволяет
более подробно изучить состояние объекта. Кроме того, если опи-
сание норм в системе задано в цифровом виде, то чаще всего ре-
зультаты измерения и описания норм представляются в цифровом
виде. В этом случае результаты измерения могут быть использо-
ваны для более рационального выполнения операций контроля (в
частности, для определения частоты их проведения). Можно ут-
верждать, что большинство САК выполняют функции измерений
входных величин и в этом смысле являются одновременно и изме-
рительными системами. Операции контроля могут выполняться по-
сле измерения в цифровом виде программным путем в измери-
тельно-вычислительных системах.
13.2. О ВЫБОРЕ КОНТРОЛИРУЕМЫХ ВЕЛИЧИН И ОБЛАСТЕЙ
ИХ СОСТОЯНИЙ
Задачи выделения набора контролируемых величин и опреде-
ления областей контролируемых состояний решаются на основе
анализа свойств объекта контроля, учета особенностей его работы
и оценки возможностей САК совместными усилиями специали-
стов, создающих или эксплуатирующих данный объект контроля
и САК.
Во многих практических приложениях (например, при контро-
ле готовой продукции) контролируемые величины и области их
нормальных значений задаются заранее в соответствии с техни-
ческими или технологическими требованиями, предъявляемыми
к объекту контроля. Тогда, естественно, набор величин и их со-
стояний, подлежащий контролю, предопределен.
В общем случае состояние объекта контроля может оцени-
ваться большим количеством величин, так что встает задача вы-
бора минимально необходимого набора величин, обеспечивающего
достаточно надежную оценку состояния объекта. Одним из путей
решения этой задачи при определении работоспособности объекта
контроля является упорядочение таких величин по степени их
влияния на оценку работоспособности объекта и ограничение их
набора такими величинами, которые обеспечат заданную вероят-
ность оценки’ работоспособности.
Положим, работоспособность объекта может характеризовать-
ся величинами Xi, ..Xk- Если события, обеспечивающие рабо-
тоспособность объекта по величине xit обозначить через Ait то
вероятность работоспособности всего объекта (при зависимых
событиях Ai)
р=р(А...., А)=р(л,)р(д|л,),...
k
... , p{Ak\A1, ... , А-i) —Д A I j—i-
i=I
В этом выражении pZ(t-_I — условная вероятность безотказной
работы объекта, оцениваемая по величине хг-, вычисленная при ус-
ловии, что объект работоспособен по всем величинам от xi до
Xi~[.
В целях минимизации количества контролируемых величин
разумно для контроля первыми выбирать величины, связанные с
наименьшей вероятностью безотказной работы объекта.
Общее количество контролируемых величин можно опреде-
лить, если задана допустимая вероятность работоспособности
•Рдоп из следующего соотношения:
k, k
Рпсп^ J] Pi 1 j—I (г) JJ Pvj | y_! (г).
«=1 i=kt + l
В этом выражении pa . (i) — условная вероятность безотказ-
ной работы по j-й неконтролируемой величине к моменту времени т
окончания контроля; р( (т) — то же, но для i-й контролируемой
величины.
Отношение количества контролируемых величин к общему ко-
личеству величин, характеризующих состояние объекта контроля,
носит название полноты контроля.
A, k
При независимых событиях At paon<JJ р(Аг, т) JJ а(А> О-
i=l /=А1 + 1
При контроле функционирования и работоспособности слож-
ных динамических объектов в виде, например, совокупности
управляемого объекта и устройства автоматического управления
выбор контролируемых величин и их нормальных значений может
быть выполнен в результате анализа дифференциальных уравне-
ний, описывающих поведение системы. При таком анализе, ес-
тественно, учитываются назначение системы и критерии оценки
ее поведения. Так, для автоматически управляемых объектов зо-
ны нормальных значений величин определяются зачастую из тре-
бования поддержания устойчивости заданного режима [13.2].
Выбор контролируемых величин может также производиться
таким образом, чтобы были удовлетворены заданные достоверно-
сти контроля, временные или стоимостные критерии и т. п.
13.3. ОШИБКИ КОНТРОЛЯ
При планировании контрольного эксперимента и системном
проектировании САК широко используются методы теории веро-
ятностей и математической статистики. Круг вопросов, решаемых
при этом, довольно велик. Остановимся в этом параграфе на не-
которых общих вопросах статистического анализа процессов конт-
роля, имеющих важное значение преимущественно для контроля
технологических процессов.
Рис. 13.2. К определе-
нию доли годных и не-
годных изделий
Определение количества годных объектов контроля при за-
данных распределениях вероятностей контролируемых величин и
границах допуска продукции в случае, если погрешности уст-
ройств контроля не учитываются, особых затруднений не пред-
ставляет.
Положим, задана плотность распределения вероятностей зна-
чений контролируемой величины f(x), нижняя сн и верхняя св.
границы нормы (рис. 13.2). Тогда количество изделий годной
продукции в долях от общего количества
св
IFr= J f(x)dx,
CV
а негодной
СО %
WB — у f (х) dx-, W„ — J f (x) dx.
% -°0
Если случайная величина x распределена по нормальному за-
кону, то для подсчета 1ЕГ, 1ЕВ, 1ЕН используются таблицы инте-
грала вероятностей (функции Лапласа).
Наличие погрешностей устройства контроля приводит к спе-
цифическим ошибкам, характеризующим качество контроля.
Различаются при этом ошибки первого рода, которые носят
также название риска поставщика, или ложной тревоги, и опре-
деляют вероятность отнесения годных объектов контроля к негод-
ным, и ошибки второго рода, или риск потребителя, пропуск пе-
рехода, при наличии которых негодные изделия классифициру-
ются как годные.
Если контролируемая случайная величина х и погрешность
устройства контроля у в вероятностном смысле независимы, то
результат контроля можно получить, оперируя с композицией
плотностей распределения /(х) и <p(t/). На рис. 13.3 показаны
плотности распределения вероятностей контролируемой величи-
ны и плотности распределения погрешностей устройств контроля.
Как известно, если плотности распределения f(x) и <р(у) нор-
мальны, то плотность распределения суммы независимых случай-
ных величин будет также нормальной, математические ожидания
и дисперсии случайных величин х и у при этом складываются.
’Рис. 13.3. Плотности распре-
деления вероятностей контро-
лируемой величины и погреш-
ностей устройств контроля
Рис. 13 4. Композиция f(v) и
ф(1/)
При выполнении процессов контроля обычно справедливо ус-
ловие
(СЕ—Сн) Z>yma*-
С учетом этого условия можно найти [13.3, 13.4, 13.5]:
вероятность ошибки первого рода (риск поставщика)
Г—нг
с Г с..—х
в Н
<? (у) '1у -Г
f <?(y)dy
св х
dx\
вероятность ошибки второго рода (риск потребителя)
dx;
долю бракованных изделий как по результатам контроля, так
:и фактически
^НГ-НГ = I
—□о
jf(x) J <р(У)^ + J <p(y)dy dx-{-
с-х
сн~х со
J ?(у)^у+ J v(y)dy
dx.
Пределы интегрирования в этих выражениях определяются из
композиции плотностей f(x) и <p(z/) (рис. 13.4).
Ошибка первого рода часто определяется следующим образом:
нг/^*- Здесь в знаменателе применяются следующие выра-
жения: lFr —
В
J f W dx,
{у) dy dx или Wr =
W
СО
§f(x)dx. Соответственно ошибка
второго рода определяется р=
= Ц7нг_г/(1 — 1F*).
При вычислении вероятностей по этим формулам имеются
определенные трудности. Для практических целей представляет
интерес использование приближенных оценок этих вероятностей.
Для их вычисления приходится прибегать к численным мето-
дам интегрирования. Кривые f(x) и ср (у) разбиваются в преде-
лах утах около границ допусков на несколько частей, подсчитыва-
ются вероятности нахождения в каждой из них контролируемых
изделий (pi, pz,...,pn) и вероятности получения результатов кон-
троля (91, 92, 9п). Тогда вероятность, определяющая риск по-
ставщика, будет при симметричных кривых плотностей распреде-
ления f(x) и <р(9) выражаться суммой частных произведений ве-
роятностей pi, входящих в зону допуска, и вероятностей выхода
результатов измерений i-x значений контролируемых величин за
зону допуска. Так, например, если 7=5, то можно получить сле-
дующие составляющие вероятностей браковки годных изделий:
Wг—нг 2 [/?, (9j 4" 9з + 9з 4~ 94 4~ 9s) 4" А (<71 4~ 9а 4" 9з 4“ 9«) 4"
+ Рг (914~9а + <7з)4~ А (914“ А) 4“ А911-
Аналогичным способом можно получить численные значения
г;_г, Сг-нг.
Для приближенных расчетов используются номограммы, свя-
зывающие оценки ошибок первого и второго рода для нормаль-
ных плотностей распределения вероятностей f(x) и ср (у), средних
квадратических отклонений погрешности устройств контроля оу
и контролируемой величины ах и симметричной зоны допуска I.
Ниже приводятся номограммы, заимствованные из [13.6]. При
заданных значениях а, 1/ах по номограмме на рис. 13.5 можно
найти либо Звг/1, либо Зоу/ох. Например, при симметричном по-
ле допуска и заданных а=0,02 (р=0,01) и 1/ах=2,5 по графику
на рис. 13.5 3oy//«i0,55 или 3<Ту/сгх~ 1,6. Номограммы, связы-
вающие ошибку второго рода и 1/ах с погрешностью устройства
контроля, представлены на рис. 13.6.
Следует обратить внимание на то, что ошибки второго рода
меньше ошибок первого рода при одинаковых погрешностях уст-
ройства контроля и прочих равных условиях. Так, если 3<Зу/<зх—
= 1,6 и //о^=2,5, то 2₽« 0,002.
О 0,005 0,01 0,015 0,02 0,025 0,03 р=а/2
Рис. 13.5. Номограмма: заданы а, l/ох; находятся
3(7 у//, ЗОу/Ох
Рис. 13.6. Номограмма: заданы ₽, l/ох', находятся
Зоу/Z, 3<Уу/с>х
По номограмме на рис. 13.7 при заданных (а+₽) и I мож-
но определить допустимые погрешности контроля.
Следует отметить, что для определения ошибок контроля пер-
вого и второго рода могут быть использованы и иные методы.
Например, если известны законы распределения годных Л(х) и
негодных /г(-’с) изделий по данной контролируемой величине и
Рис. 13.7. Номограмма: заданы (а+₽), //сх; находят-
ся 3<Тт//, 3<Тг/<Тх
если они частично перекрываются (рис. 13.8), то для данной нор-
мы с можно определить вероятности отнесения годных изделий
по данной контролируемой величине в негодные и наоборот.
В [13.7] рассматриваются асимптотические приближения
оценки, также позволяющие существенно упростить вычисления
Ws— IV'e- Остановимся кратко па этих оценках.
Рис. 13.8. Плотности распределения
вероятностей годных и негодных
изделий
При принебрежении вероятностью реализации погрешностей,
превышающих длину отрезка [сн, св], т. е. при p[|j/|>cB—
—cH]^0, и симметричной относительно нуля плотности вероят-
ности величины у, т. е. при <p(z/)=q>(—у),
+?(Св) М [| у I].
2 7(св)-7(сн)
В этом выражении F — обозначение интегрального закона
СО
распределения х, a Af[|^|]= J |у|<р(у)dy — первый абсолютный
момент погрешности.
Для нормального распределения величин х и у, имеющих ха-
рактеристики Ох, Мх, Оу, Afr=O, М [| z/|] =:2ar/]/2it;
оу ехр [ — (св — Л4х)2/2о2х] + ехр [ — (ся — )2/2о\]
2ЯОХ Ф(СВ Ф(сн —
Ошибка первого рода (риск поставщика) может быть прибли-
женно определена по формуле
Wr—иг [Д (св) — F (сн)1 ^нг-г-
Выражение для IFHr_г существенно упрощается, если границы
интервала [сн, св] симметричны относительно Мх, т. е. св—Мх—
—Мх-----Cn-=kGx'-
^«г-г
°У
2по^
ехр [ — ft2/2]
Ф(Л)
Полученные выражения пригодны для решения обратной за-
дачи, т. е. по заданному значению вероятности ошибки, например
Гнг-г, возможно определение ограничений на погрешность средств
контроля:
ay = 2тох1^нг_г
Ф(^)
ехр[ —ft2/2]‘
Рассмотренный способ вычислении ошибок контроля пригоден
для использования при инженерных расчетах с погрешностью
примерно 5—10%.
В ряде случаев удобно поль-
зоваться понятиями, связанными
с достоверностью контроля. Под
достоверностью контроля пони-
мается мера определенности ре-
шений, принимаемых при кон-
троле.
Без выполнения контроля
риск изготовителя а=0, а риск
потребителя рош может быть
определен после оценки 1ГВ и WH
(см. рис. 13.2), при этом абсо-
лютная априорная достоверность
-D— 1—рош*
Рис. 13.9. Нормальное состояние
объекта контроля — площадь круга
Если контроль произведен с помощью технических средств с погре-
шностью, характеризующейся плотностью распределения в ероятностей
ср (у), то апостериорная абсолютная достоверность контроля D* =
= 1 — /С = 1 — <а* + ₽*) Обычно р*0ш < рот, и, следовательно,
Относительная апостериорная достоверность контроля
Dotb= 1 — (Рош/Рош)- Довыполнения контроля Doth — 0, а после вы-
полнения контроля Doth-^1-
Следует упомянуть, что если состояние объекта характеризу-
ется несколькими связанными друг с другом величинами, то при
выполнении допускового контроля могут возникнуть дополни-
тельные методические погрешности [13.2]. Так, если нормальное
состояние объекта контроля определяется площадью круга, ра-
диус которого R = 4- к/ зависит от размера величин xi и
Х2, то в зависимости от того, каким образом выбираются уставки
С11Н, С11В и С12н, С12в ИЛИ С21н, С21в И С22н> С22в , увеЛИЧИВЭЮТСЯ ОШИб-
ки второго или первого рода из-за того, что уставками увеличи-
вается или за счет негодных изделий число годных (заштрихо-
ванная площадь на рис. 13.9), или за счет годных число негодных
(затушеванная площадь).
13.4. ОБЪЕМ ВЫБОРКИ ПРИ КОНТРОЛЕ
Выше рассматривался случай, когда не накладывались огра-
ничения на количество объектов контроля. На практике для конт-
роля из партии изделий выбирается некоторая часть. Последова-
тельность реализованных значений xi,..., хп будет состоять из
частных реализаций случайной величины X. Предположим, что
закон распределения вероятностей этой величины нормален и
имеет параметры Мх=а и ах.
п
Оценки математического ожидания выборки — хг-//гидис-
i-i
п
Персии (с‘\)2£^2 (Xi — M*xyjn сами являются случайными величи-
i=i
нами, изменяющимися от выборки к выборке.
Определим объем выборки, необходимый для нахождения Мх*
с заданной абсолютной погрешностью ±Д:
М [ЛГх] = а;
При равенстве дисперсий математических ожиданий
D[Mx*]=Dx/n-,
С [АГх] — ох[]/~п.
Зададимся вероятностью рДОп, с' которой значения Мх*—а
должны лежать в пределах (—А. А):
р{—А< (Мх*—а) <А}=рдоп,
или после нормировки
( д ° д
• —————— I -----— -------
I П1 °х 11 °хГ^п
По таблице функций Лапласа Найдем значение-А/(ал/]Л/г ) = йдоп
’(например, при рдоп = 0,95; /1дОП = 1,96). При допуске А на значе-
ние —а| и известном ах находим необходимый объем вы-'
борки:
п & йдоА/Д2-
Например, при рдОП = 0,997, о\/А=5 п~225.
Если совокупность N контролируемых изделий ограничена, то
следует для определения объема выборки пользоваться формулой
п Лдоп Л//[(А' - 1) А2/о2х -ГЛдоп].
При 7^=500, pRon—0,997 и ох/А=5 /1^155.
Возможен несколько иной подход к определению необходимо-
го объема 'выборки. При последовательном анализе объем выбор-
ки заранее не определяется, а выполняется анализ поступающих
нарастающим образом данных о значениях контролируемых ве-
личин (по сути дела производится измерение этих величин). Пос-
ле проверки принятой статистической гипотезы принимается ре-
шение о прекращении или продолжении контрольного экспери-
мента.
Положим, распределение вероятностей величины X нормаль-
но, известны ах, значения уставок сн и св, а также ошибки пер-
вого и второго рода при контроле. Приемочные и браковочные
числа при контроле среднего значения контролируемой величины
могут быть подсчитаны по формулам
at-
—-----------Itl y-L + -Св + Св. I;
Св — св 1 — а. 2
= —— In Св ±-С-н-
Св — а 2
Здесь i=l, 2,..., N — количество последовательно контроли-
руемых объектов.
На рис. 13.10 показаны зоны брака и годной продукции, а
также зона неопределенности — продолжения эксперимента. Пос-
ле каждого измерения производится подсчет 2 хг и эта сумма
I
сравнивается спи щ. Если х^ъ, то эксперимент продол-
жается. Если 2 xf^rt, вся контролируемая партия изделий бра-
'-Рис. 13.10. Использование последо-
звательного анализа при контроле
куется, а при 2 xi<^i принимается.
i
Последовательный анализ может быть использован также и
при оценке среднего квадратического отклонения контролируемых
величин.
На практике метод последовательного анализа дает относи-
тельно большую экономию в
среднем числе испытываемых из-
делий по сравнению с фиксиро-
ванным объемом выборки. Одна-
ко при его использовании зара-
нее невозможно установить срок
окончания контроля.
Имеется возможность исполь-
зования смешанного метода кон-
троля — заранее определяется
необходимый объем выборки (п
объектов контроля), затем кон-
троль выполняется по методу по-
следовательного анализа. Если
для получения ответа о годности
партии объектов контроля по ме-
тоду последовательного анализа запланированный объем выборки
недостаточен, то производится оценка результатов контроля по
методу фиксированного объема выборки.
13.5. ОРГАНИЗАЦИЯ СТАТИСТИЧЕСКОГО КОНТРОЛЯ
Основная цель статистического контроля связана с получени-
ем статистических данных, необходимых для анализа хода тех-
нологического процесса или годности готовой продукции и для
принятия соответствующих решений.
В случае, если заданы допуски годности продукции и доли
годных и негодных изделий 1Его, ^во, 1Ено, то текущий статисти-
ческий контроль позволяет следить за ходом технологического
процесса. При изменении положения центра настройки техноло-
гического процесса (рис. 13.11) происходит изменение вероятно-
стей получения годных и негодных изделий. Для унимодальных
и симметричных относительно начального центра настройки зако-
нов распределения f(x) в случае, показанном на рис. 13.11, спра-
ведливы следующие неравенства:
ГпСГго; IEB1>WB0; ^и1<1Ен0.
Увеличение рассеяния готовой продукции приводит к деформа-
ции распределения f(x) (рис. 13.12), и при ограничениях, отме-
ченных выше, соотношения между начальными и текущими зна-
чениями вероятностей принимают вид
I^n<^ro; W'b^W'bo; ^>Й^нО-
Решения о перенастройке технологического процесса по дан-
ным статистического контроля принимаются на основании эконо-
мических соображений.
Статистический контроль можно организовать и в том случае,
когда известен результат контроля в виде градации «годен» (Г)
и «брак» (Б).
Рис. 13.11. Влияние изменения
математического ожидания конт-
ролируемой величины на резуль-
тат контроля
Рис. 13.12. Влияние изменения
дисперсии контролируемой вели-
чины на результат контроля
Наиболее простым в этом случае является определение мо-
мента переналадки по предельному значению подряд встречаю-
щихся бракованных изделий в ряду ГБГГГББГГГГБББГ...
[13.8].
Остановимся на основных методах уменьшения ошибок перво-
го и второго рода.
Если продукция признается годной без допускового контроля
или при зоне допуска [сн, св]^±3ох, то ошибка первого рода
отсутствует или пренебрежимо мала.
Уменьшения ошибок первого и второго рода можно добиться
путем многократного повторения операций контроля. Однако эф-
фективность многократного повторного контроля относительно не-
велика. Так, например, если объем действительного брака в пар-
тии изделий, контролируемый параметр которых распределен по
нормальному закону, составляет 2%-, то при нормальном распре-
делении погрешности измерений и отношении предельно допусти-
мой погрешности к ширине допуска, равном 0,2, ошибки первого
рода будут достигать после первой операции контроля 17,5%.,
после второй операции контроля над отбракованными изделия-
ми— 12%,, после третьей — 9,5% и после четвертой — 8%.
Значительно более эффективным оказывается двукратный кон-
троль, при котором при первой операции используются менее
точные, но более производительные средства, а при второй —
более точные средства контроля. Если партия изделий содержит
3% действительного брака и проконтролирована с погрешностью
(j,5 ширины допуска, то сшибка первого рода будет достигать
28%.. После второй операции контроля объем ложного брака со-
ставит 19%. Если же вторая операция контроля будет проведена
с погрешностью 0,1 ширины допуска, то объем ложного брака со-
ставит 2п/о’.
Для резкого уменьшения ошибок второго рода применяются,
гарантированные допуски: это значит, что зона допуска сн, Св
сужается до размеров, при которых р становится пренебрежитель-
но малой. Очевидно, что при этом должны увеличиться ошибки
первого рода. Для того чтобы ошибки не превышали заданного
значения, необходимо обеспечить определенную точность устрой-
ства контроля.
На рис. 13.13 приведена номограмма, позволяющая оценить не-
обходимую точность устройства контроля, если зона допуска умень-
шена на Зегу, т. е. равна I—Зоу, заданы ошибки первого рода а и
отношение зоны допуска к среднему квадратическому отклонению
контролируемой величины.
Для принятого на номограмме диапазона изменения характе-
ристики точности устройства контроля 3gy/1 максимальное значе-
ние ошибки второго рода не первышает 10~4. Чтобы ошибка пер-
вого рода не была больше, чем при допуске негарантированном,
необходимо существенно повысить точность устройства контроля
Так, например, для а-|-р=0,04, //ох'=2,5 при негарантированной
зоне допуска Зс>у//лг0,87 (см. номограмму на рис. 13.7), а для
гарантированной зоны допуска [/—Зоу] при а=0,04, £=0,0001,
//<тл=2,5 точность устройства может быть оценена выражением
Зоу//~0,3.
Типичными примерами специализированных устройств стати-
стического контроля являются устройства для автоматического
построения. гистограмм параметров радиодеталей, для получения
оценок математического ожидания и дисперсии размеров обраба-
тываемых деталей на станках и т. п.
Статистическая обработка экспериментальных данных выпол-
няется с помощью выпускаемых промышленностью статистиче-
ских анализаторов (см. гл. 15) и выполняется обязательно в
САК, содержащих универсальные программируемые вычислитель-
ные устройства.
13.6. ДИСКРЕТИЗАЦИЯ НЕПРЕРЫВНОЙ КОНТРОЛИРУЕМОЙ ВЕЛИЧИНЫ
Необходимость дискретизации непрерывных контролируемых
величин {х(£)} возникает при проведении операций контроля че-
рез некоторые интервалы времени, обусловленные, например, тем
что устройство контроля в этих интервалах загружено определе-
нием состояния других величин.
Такой контроль называется далее дискретным в отличие от
непрерывного контроля, при котором устройство контроля, не от-
рываясь, определяет состояние только данной контролируемой
величины.
Положим, что известно поведение контролируемой величины
во времени и оно описывается степенным многочленом x(t) —
= a0-}-a.it-]-azt2-\- ... Тогда для допустимого изменения
этой величины аДОп=а^~[-а212-[-...можно найти интервал
времени Л/, через который необходимо провести операцию конт-
роля состояния объекта.
Если заданы вероятность и интенсивность отказов и их связь
со временем, например, выраженная в виде экспоненциальной
функции р = е~м, то может быть определен интервал времени, че-
рез который следует произвести операции контроля объекта.
При дискретном контроле случайной величины x(t) для опре-
деления интервалов дискретизации не удается непосредственно
использовать математический аппарат теории дискретизации, при-
меняемый при измерении. Это объясняется в первую очередь спе-
цификой контроля как процедуры сжатия информации.
Произведем сравнение среднего
Рис. 13.14. Случай непрерыв-
ного контроля
времени выхода контролируемой вели-
чины за зону допуска с интервалами
дискретизации при равномерном и
адаптивном допусковом контроле.
Рассмотрим в качестве предельно-
го случай непрерывного контроля
(рис. 13.14), характеризующийся тем,
что устройство контроля фиксирует
все выходы контролируемой величины
x(t) за установленную зону нормаль-
ного состояния [сн, св]. Примем сле-
дующие допущения:
контролируемая величина являет-
ся стационарной случайной функции
ей времени с нормальной плотностью распределения вероятностей
. 1 -(лс-М )=/2з«
—-----е х *;
'время, затрачиваемое на контроль, пренебрежимо мало.
Среднее число операций контроля, фиксирующих выход конт-
ролируемой величины за [сн, св], в течение времени Т равно:
^=т
(св ЛГ^)2
J____х_
2m °х
ехр
Ч-ехр
(сн — Л1Х)2
2°2х
где 02х — дисперсия контролируемой величины, а а2х—дисперсия
ее первой производной.
Суммарное время нахождения контролируемой величины в
пределах [сн, св] равно У Мг — рТ, где р— априорная вероят
/
ность нахождения контролируемой величины в зоне [сн, св].
Среднее время между переходами контролируемой величиной
уставок в этом случае составит:
.ср — Д tj Мр
Если учесть, что
1 1 j
(св
2°2х
+ехр
(си —Л/х )а
2°2х
и обозначить 2с^./|/2т: через Ьсх, то
Д^и.Ср — "
При контроле непрерывной величины через некоторые интерва-
лы времени достоверность контроля по мере увеличения этих ин-
тервалов, естественно, снижается.
Допустим, что в момент tn выполнена операция контроля и
установлено, что контролируемая величина находится в зоне
[сн, св]. В этом случае можно считать, что до следующей опера-
ции контроля с определенной вероятностью она останется там
же. Тогда оценкой результатов контроля может служить вероят-
ность p(XeZ) того, что при t>tn контролируемая величина не
выйдет за [сн, св].
На малом отрезке времени Д£ изменение контролируемой ве-
личины может быть представлено в виде
x(tn+&t) ~x(tn) +*(М Д£,
где х(/„-|-Д/); x(tn) и x(tn) — соответственно размер контроли-
руемой величины в моменты /п-|-Д/, tn и производной контроли-
руемой величины в момент tn выполнения предыдущей операции.
Чтобы контролируемая 'величина через время Д/ вышла за пре-
делы [сн, св] через границу св, должно быть выполнено условие
x(tn) +%(Лг)Ы^св, а через границу сн— условие х(/п) +
-\-x(tn)At^.cK (рис. 13.15). Заштрихованный участок определяет
значения x(tn) и х{1п), при которых контролируемая величина
за отрезок времени не выйдет из [сн, сБ].
Значения x(tn) и x(tn) неизвестны и имеют случайный харак-
тер. Поэтому можно оценить лишь вероятностные характеристи-
ки возможности выхода контролируемой величины за время tn
до tn-vtit из зоны [сн, св]. Вероятность р(с„<х^сЕ) =р зависит
от ширины интервала /, динамических свойств контролируемой
Рис. 13 15 Композиция fi(x) и
fi(x)
Рис. 13.16. К определению
вероятности Ро(6)
величины и значения x(tn). Она может быть определена интегри-
рованием условной плотности f(x, Х|Сн<х^Св) по областям I и
II. Если распределение х также нормально, а производная нор-
мальной случайной функции для данного момента времени не за-
висит от значения этой функции, то тогда
f(x, х | сн < к < св) = f, {х | ск < к < св) U (х),
где
>) = f 1(*) If f W dx = —рф---------exp
J p V
I c*
----exp
(х-Мху
2°ах
X2
2°ах
Вероятность 1 — p может быть найдена как
(Св-Сн)/А* ГВ
(1-р)= J tA^dx J ce)dx-A
о сБ—хМ
fdx)dx f,(x|cH, cB)dxA-
\ + J f2(x)dx J ^)dx.
\ -°0 А
При малых А/ (рис. 13.16) вероятность р будет равна:
\ р0 = 1 - дг [dp id (д/)] д ,=0>
отсюда \
\ л/ = ___-~Р.о____
[dp/d(^)]^t=0 '
Дифференцируя выражение 1—р по At и подставляя его в вы-
ражение для At, можно получить допустимое значение интервала
контроля как
м ___________________________Д(1—А*)______________________
^ДОП 9
9 * {ехр[ — (св — -Mx)a/2°2xl + ехР I — (£н — Mx)2/^aSxi}
где р и р*0 — априорная и заданная вероятности нахождения
контролируемой величины на отрезке [сн, св].
При /<ох интервал квантования Л/Доп« (1—р*о)ИЪа2х- Фор-
мула для определения интервала квантования является прибли-
женной, и ее точность повышается с уменьшением ширины отрез-
ка [сн, Св].
Если задается высокая достоверность определения нахождения
контролируемой величины на отрезке '[сн, св], то время между
операциями дискретного контроля по сравнению со средним вре-
менем между переходами уставок контролируемой величины су-
щественно уменьшается.
Значительное увеличение среднего 'времени между операциями
контроля (уменьшение количества операций контроля) можно
получить, если сделать интервалы времени между операциями
контроля различными, зависящими от значения контролируемой
величины, полученного путем измерения. Используем выражения
х(/и)^[св—х(Лг)]/Аг И X(tn}^[cH—X(tn)}lAt,
полученные для дискретного контроля, и подсчитаем вероятность
их выполнения:
(cB-x)/at
А = J (V|A^ax)exPl~*72a2xW* +
(л—сн)/Д*
. + J (1 / |/"2^х)ехр[—?/2а2^]йх.
Рис. 13.17. к определению интерва-
ла дискретизации при < знании конт-
ролируемой величины
щественное упрощение
При заданной вероятности Ро
и известном (измеренном) значе-
нии х можно вычислить значение
интервала времени Д£и, на кото-
ром выполняется операция кон-
троля с измерением. Характер
зависимости ДД(х) показан на
рис. 13.17. Устройство контроля
должно работать в этом случае
в адаптивном режиме, определяя
после каждой операции контро-
ля и измерения интервал време-
ни, через который следует про-
извести следующую оценку кон-
тролируемой величины.
может быть достигнуто,
отрезками прямых,. Зна-
аппаратуры
если аппроксимировать функцию Д/И(х)
ченне интервала квантования для этого случая
где k определяется из выражения
k
2 Г / tz \
о
Среднее значение интервала квантования
Д^.ср ~ А/и maJe/2 = (//&>* ) (1 /2/г j/2-it).
Если выбрать р0=0,997, то k=3 и Д/и.ср~(1/15) (l/bc^).
Сравнив между собой интервалы квантования по времени для
трех рассмотренных случаев (непрерывный и дискретный конт-
роль, контроль с измерением) при р0=0,997, получим, что отно-
шения Д/н.ср'К Д£доп и к ДА равны 370 и 15.
В САК наибольшее применение имеют варианты непрерывно-
го контроля (при параллельной структуре системы контроля) и
дискретного контроля с постоянным интервалом квантования конт-
ролируемой величины (при последовательном использовании ка-
нала контроля).
Для приближенного определения интервала контроля при из-
вестных погрешностях устройства контроля и максимуме модуля
первой производной контролируемой величины можно воспользо-
ваться выражением
&t=ymax/\dx(t)/dt\
max-
При этом Утах можно принять, например, равным 3<jv, а
|dx(t)/dt\max определить, проведя соответствующий анализ f(x).
Мы рассмотрели выше выбор интервала дискретизации непре-
рывной контролируемой величины. При проектировании систем
автоматического контроля задачи выбора интервала между опера-
циями контроля решаются в соответствующей постановке в зави-
симости от объекта контроля. Так, при контроле нескольких вели-
чин \>дним устройством необходимо выбрать интервал контроля
по каждой величине и предусмотреть равномерное циклическое
выполнение в течение наименьшего интервала времени необходи-
мых операций по всем контролируемым величинам или организо-
вать выполнение операций контроля со своим интервалом конт-
роля для каждой величины.
13.7. ОЦЕНКА ЭФФЕКТИВНОСТИ И СТОИМОСТИ СИСТЕМ
АВТОМАТИЧЕСКОГО КОНТРОЛЯ
Как объект оценки САК весьма сложна, и оценивать ее можно
по-разному, с разных точек зрения. Так, эффективность САК. т. е.
степень приспособленности системы к решению поставленной за-
дачи, может оцениваться по информационному, статистическому,
игровому и другим критериям [13.1]. Нужно заметить, что в
большинстве литературных источников эффективность САК рас-
сматривается с точки зрения выполнения задач управления со-
стоянием объекта контроля.
Остановимся на особенностях приложения для оценки САК ин-
формационного и стоимостного критериев эффективности.
Одна из форм информационного критерия может быть выра-
жена таким образом [13.7]:
2 1/уо;(б t) — t)]
Э (t, т) = -2=1----------------,
2 v
!=1
где П1 — количество контролируемых величин; п — количество ве-
личин, определяющих работоспособность объекта контроля; обыч-
но rii<n и коэффициент полноты контроля Пк=п11п<\, в част-
ном случае tti=n и 77к—1; т) —энтропия по i-й контроли-
руемой величине:
т) =-Ч[poi(t, т) logPo;(i, т) +
+ [1—т) [log [1— Poi(t, т)]};
Pw(t, т)—вероятность работоспособности объекта по i-й величи-
не с текущего момента времени t до момента окончания процесса
контроля т; Hi{t, т) —энтропия по i-й величине объекта с си-
стемой контроля;
Hi(t, т) =•—[pi(t, т) log pi(t, т) +
+ [l.-pt(i, .T)]log[l-Pi(t т)]};
pi(t, т)—вероятностьопределения работоспособностиобъекта
при наличии системы контроля по i-й величине с текущего мо-
мента времени t до момента окончания процесса контроля т. !
В принципе, 3(i, т) может изменяться от 1 [при ni=ti и
Hi(t, т) =0] до 0 [при ti\=n и т)]. /
Приведем пример использования этого критерия [13.1 Г. Ис-
ходные данные: '
число величин, определяющих работоспособность объекта
п= 10, величины независимы; /
число контролируемых величин П1=8, следовательно,, Пк—0,8
и максимальное значение Э[(1, т)=0,8; /
интервалы рабочего времени к моменту начала контроля по
всем величинам одинаковы и равны tpi = 100 ч;
интенсивности отказов в рабочем состоянии по всем величи-
нам одинаковы и равны 7Pi=10-3 (1/ч);
интервалы времени между операциями контроля
Тр< = 1 ч;
•вероятность ошибки второго рода (необнаруженных отказов)
р*=0,004.
Определим значение энтропии объекта с системой контроля,
ля. Вероятность безотказной работы по одной величине
Poi(t) =ехр(—Tip; tpi) = ехр(—10~3-102) —0,905.
Энтропия одной величины
Hoi(t) —0,905 log 0,905=0,437.
Энтропия объекта контроля
2 Но1 (/) = 4,37; 2^ (0=3,49.
i=l i=l
Определим значение энтропии объекта с системой контроля.
Вероятность работоспособности объекта по контролируемой вели-
чине
Pi= (1—0*)ехр [—Тф/Гр,-] =0,996.
Энтропия по каждой контролируемой величине
Hi (t, т) =0,996 log 0,996=^0,0323.
Энтропия объекта контроля с системой контроля
2 Hi(i, 0^0,259.
1=1
Информационный критерий 9(t, т) будет иметь следующее зна-
чение:
Э(/, т) = (3,49—0,259)/4,37=^0,65.
\ Применение информационного критерия оценки эффективно-
сти особенно полезно при сравнении между собой нескольких си-
стем автоматического контроля.
\Об эффективности применения САК в промышленном произ-
водстве разумно судить по экономическому критерию, например>
по прибылям (или потерям) в основном процессе за достаточно
длительный отрезок времени. Естественно при этом считать, что-
полученный результат контроля должен рационально использо-
ваться\ для изменения состояния объекта контроля при помощи
управления, т. е. нужно сравнивать затраты на изготовление или-
приобретение системы и ее эксплуатацию с прибылью (или поте-
рями) производства, определяемой применением САК с известны-
ми техническими данными.
В общем случае при использовании стоимостного критерия при-
ходится минимизировать функционал
{Сс(Я)+Ж[С(е)]},
где Cc(Z/) — затраты на изготовление и эксплуатацию системы;
М[ОД] — усредненные по времени потери, вызванные ошибками
контроля.
Этот функционал может быть различным по сложности. В ря-
де случаев достаточным оказывается приближенный анализ. Так,
при сравнении систем может быть использовано суммарное зна-
чение
С=Сс4~Сп (Т) +СП (р),
где Сп(Т’) —эксплуатационные потери, зависящие от времени кон-
троля и воздействия на объект контроля в целях изменения его-
состояния; Сп(р)—потери, зависящие от вероятности работоспо-
собности объекта контроля или от вероятности его нормального-
состояния.
В простейшем случае потери СП(Т) и Сп(р) могут быть равны
Сп(Т)—аТ, a Cn(p)=b (1—р) (где р—вероятность правильной ра-
боты или нормального состояния объекта контроля).
Положим, стоимость изготовления двух систем контроля соста-
вит Сс1 = 103 руб. и СС2 = 104 руб. соответственно. Значения осталь-
ных параметров: 7’1=1 мин; Т2=0,1 мин; pi=0,9; р2=0,95; а—
=104 руб./мин; 6 = 105 руб/мин.
Тогда суммарная стоимость систем и потерь при их примене-
нии составит:
Ci = 103-|-104-1 + 105-0,1=2,1 • 104 руб.;
С2=104-Н04-0,1-|-105-0,05=1,6-104 руб.
Следовательно, применение второй системы более эффек-
тивно. - .
I лава 14
СИСТЕМЫ АВТОМАТИЧЕСКОГО ДОПУСКОВ©!© КОНТРОЛЯ
14.1. КАНАЛЫ КОНТРОЛЯ /
Под каналом контроля понимается функциональное устройство
’САК, в котором воспринимается контролируемая величина, фор-
мируются уставки допусковых зон, сравниваются текущие реали-
зации контролируемой величины с уставками и вырабатывается
суждение о состоянии контролируемой величины. Система автома-
тического контроля может содержать несколько каналов контроля.
Процедуры сравнения контролируемой величины с уставками,
-если их количество могут выполняться в каналах контроля
:(КК) параллельно или последовательно.
Рис. 14.1. Аналоговый канал
контроля с параллельным вы-
полнением операций сравнения
При небольшом количестве уставок сравнение с ними контро-
лируемой величины часто делается параллельно. В аналоговом
допусковом КК с двумя уставками (св и сн) и устройствами срав-
нения сигнал Xi от измерительной цепи с датчиками поступает на
входы аналоговых устройств сравнения (рис. 14.1). Алгоритм ра-
боты такого канала контроля после формирования сигнала х$ бу-
дет следующим:
<Т(Х, ||С)> : ={[1(хг||сн) I(CR -.Xi, сн)Х
XI (хг^с„) ] II [I (х£||св) I (CR : Xi, cB) x
X I(x^cB)]} T(F:Xi^cB, 4^cH)X
X{[o) (Ch
I(R:Xi&V)]| [<о(хг<
<си|хг>св) I(R:^gW)]}.
После выполнения контроля может быть выдано суждение о
том, что Xi находится в зоне допуска, в норме (область N), или
о том, что x.i вышло за пределы допуска.
Следует отметить, что результаты допускового контроля могут
быть получены после анализа знака разности между контроли-
руемой величиной и уставками. В этом случае алгоритм, аналогич-
'ный предыдущему, будет иметь следующий вид:
\ <1(ДХ 11С)> :={[1(411сн) 1(х«-Сн) I (CR : х,—
\ —Сн, 0) I (х,—сн=еО)]||[ОД|св) 1(Х—СВ)Х
\ XI(CR:x,—св, 0) 1(А—сва=0)].}Х
\ XI(F:Xi—с„3=:0, Хг—св^О)Х
\ Хи(4—сн>0, Xt—св<0) I(R:x^N).
Еслй же описаний норм несколько, то может оказаться выгод-
ным операции сравнения производить последовательно (рис. 14.2).
В этом случае алгоритм работы канала таков: <1(Х С) > : =
=1(хг) L Ф(/: =/+1) ЦС/Cj) I(CR:4, c3j I(S :х^сг) со(/=
=m)~l I(F :Xi^Ct, с2, ..., ст) I[R : Х-с-н (Ajм)].
Для реализации этого алгоритма необходимо иметь оператив-
ную память (оператор S) и устройство отображения, позволяю-
щее описать несколько областей контроля.
Некоторого уменьшения емкости памяти и упрощения решаю-
щего устройства можно добиться, применив два устройства срав-
нения и использовав алгоритм одновременного сравнения контро-
лируемых величин с двумя уставками. Поскольку после устройст-
ва сравнения в каналах контроля сигналы имеют дискретный ха-
рактер (типа «больше», «меньше»), то их обработку можно про-
изводить с помощью комбинационных схем или иных дискретных
вычислительных устройств.
Рис. 14.2. Аналоговый канал контроля
с последовательным, выполнением one-,
раций сравнения
Рис. 14.3.' Цифровой канал конт-
роля
Структурная схема цифрового допускового канала контроля со-
держит такие же устройства-по выполняемым функциям, как и
аналоговый канал (рис. 14.3).
Алгоритм работы цифрового канала с параллельным сравнени-
ем уставок с контролируемой величиной:- <I.(DX,||DC) > : =
=1(х,) : =1(2г||0С1) I(CR:z,-, De,)
X!l . ||<13->|| ... ||<Ira>} I(F:z,:^Dc,, .. ., z^Dcm) M(Dc,<
<z,<Dcj+1) I(R:xzeA3) ...
.. В цифровых. САК все операции хранения и формирования уста-
вок, сравнения и анализа их результатов, выдачу сигналов на
устройство отображения можно выполнять как аппаратным, так и
программным (на ЭВМ) способами.
Непрерывный контроль, при котором канал контроля непре-
рывно следит за состоянием контролируемой величины и фикси-
рует изменение этого состояния, в принципе, могут обеспечить толь-
ко аналоговые каналы контроля с параллельным сравнением кон-
тролируемой величины со всеми уставками. Конечно, в таких ка-
налах могут проявляться динамические погрешности. Но при рав-
ных условиях в смысле быстродействия используемых элементов
погрешности минимальны по сравнению с погрешностями других
типов каналов контроля.
Во всех остальных типах каналов контроля — аналоговых с по-
следовательным выполнением операций сравнения и всех цифро-
вых — необходимо учитывать дискретный характер выполнения
операций контроля. Минимально допустимый интервал времени
между операциями контроля должен определяться, исходя из ди-
намических характеристик контролируемой величины и требований
к достоверности контроля (см. гл. 21).
Выше были рассмотрены САК, у которых контролируемыми ве-
личинами являлись входные величины. Если же контролируемые
величины — функции от входных, то входные величины подверга-
ются необходимым функциональным преобразованиям, а уже затем
производится их сравнение с уставками.
Один из возможных .алгоритмов функционирования цифрового
канала в этом случае может быть таким:
Цх,/^;) [H!(zt)] {<Ii> :=I[H(^)i|DC1]X
Xr[CR:H.(Zl), DC1] I[H(^)=gDC1]}|| ...
При контроле состояния партии из п однотипных изделий, ха-
рактеризующихся величиной X и уставками сн, св, может опреде-
ляться, превышает ли количество дефектных изделий j установлен-
ную норму сп. СЛСА при этом имеет вид =г+1).Х
Xl(X/Xi) [I (CR : Xt, Сн) III (CR : %i, св)] <a (х;>св|х(<сн), X
XI (CT : j) w (i = n)"] <o (/ < сп) I (R : XeN) .
Подводя итог сказанному, можно выделить следующие основ-
ные типы каналов контроля:
аналоговые каналы контроля с параллельным и последователь-
ным выполнением операций сравнения контролируемых величин с
уставками; обозначим функции, выполняемые этими каналами,
обобщенными информационными операторами <I(X, IIС) > и
<1(Х, С)>;
цифровые каналы контроля с параллельным и последователь-
ным выполнением операций сравнения значений контролируемых
величин с уставками; обозначим функции, выполняемые цифровы-
ми каналами контроля, в виде .информационных операторов
<1 (DX, ||DC)> и <I(DX, DC)>.
Указанные типы каналов контроля являются основой для по-
строения всех САК.
14.2. УСТРОЙСТВА ФОРМИРОВАНИЯ НОРМ И СРАВНЕНИЯ УСТАВОК
С КОНТРОЛИРУЕМЫМИ ВЕЛИЧИНАМИ
Описание норм (уставок) в системах допускового контроля может быть,
;как это уже говорилось, выполнено двумя способами •— аналоговым и цифровым.
Остановимся сначала на устройствах формирования уставок в аналоговой
.форме. Если контролируемая величина преобразуется в эквивалентное угловое
«или линейное перемещение с помощью измерительного преобразователя (напри-
мер, автоматического моста или компенсатора), то уставки также весьма часто
задаются в виде линейных и угловых перемещений. При достижении контроли-
руемой величиной значения уставки формируется соответствующий сигнал.
Если контролируемая величина с помощью датчиков и унифицирующих эле-
ментов преобразована в напряжение или ток, то уставки обычно задаются с по-
мощью делителей напряжения или тока.
Устройства сравнения, аналоговых значений контролируемой величины и
уставок практически ничем не отличаются от устройств сравнения АЦП. В ка-
честве устройства, .совмещающего функции формирования уставки и сравнения,
используются соответствующие реле, порог срабатывания которых устанавли-
вается с помощью образцовых сигналов (например, опорных напряжений или
воздействий, специфических для данного релейного устройства). К такому классу
устройств можно .отнести релейные устройства, основанные на использовании
ждущих генераторов (в том числе релаксационных блокинг-генераторов), диффе-
ренциально-усилительных устройств с положительной обратной связью и т. п.
Остановимся на простых устройствах допускового контроля [8.5] с диода-
ми, имеющими приближающуюся к ступенчатой вольт-амперную характеристику.
Если на вход такого диода подать модулирующее напряжение, то ток через него
в закрытом состоянии, вызванный модулирующим напряжением, будет весьма
небольшим. В открытом состоянии сопротивление диода резко падает, и прохо-
дящий через него ток, имеющий пульсирующий характер, значительно возрастает.
Таким образом, в диоде при воздействии на него модулирующего напряжения
совмещаются функции модулятора и порогового элемента. Диод управляется
разностью между текущей реализацией контролируемой величины и уставкой.
На рис. 14.4 представлены принципиальные схемы простейших устройств допус-
кового контроля, содержащих верхнюю и нижнюю уставки, с использованием по-
тенциометрической и мостовой схем.
Генератор модулирующих колебаний может быть маломощным (порядка
десятых долей ватта), частота колебаний 50 Гц — 50 кГц, а амплитуда моду-
лирующего напряжения примерно на два порядка меньше напряжения питания.
Для фиксации результатов контроля могут быть использованы релейные эле-
менты со световым или иным сигналом, перед ними могут быть применены про-
стейшие усилители переменного тока.
Имеются реализованные устройства допускового контроля с вентильными
элементами, обеспечивающие задание до 20 уставок.
Для повышения надежности в ответственных случаях на каждой точке кон-
троля используется по нескольку датчиков (например, по три). Сигнал от каж-
дого датчика сравнивается со своей уставкой. Результат контроля определяется
по принципу голосования: например, если более половины результатов контроля
совпадают, то тогда выдается согласованный результат контроля.
Имеется довольно много типов устройств допускового контроля, построенных
на туннельных диодах, полупроводниковых диодах и транзисторах. Поиски на-
дежных, простых, точных п быстродействующих устройств допускового контро-
ля продолжаются до настоящего времени.
Если описание норм представлено в цифровом виде, то при большом коли-
честве контролируемых величин значения уставок вводятся либо в автономные
устройства памяти, либо в память вычислительной машины. Сопоставление уста-
вок с контролируемыми величинами в этом случае может быть выполнено'
в цифровом либо в аналоговом виде. В первом случае значение контролируемой
величины должно быть выражено цифровым кодом, во втором цифровое значе-
Рис. 14.4. Вентильные устройства допускового контроля:
а — потенциометрическая схема; б — мостовая схема
ние уставки должно быть преобразовано в аналоговую величину, однородную
с контролируемой. По второму способу выполняется сравнение в системе ИВ-500
(см. § 14.6).
Остановимся на сопоставлении уставки и контролируемой величины в циф-
ровом виде.
Таблица 14.1. Логические функции двоичных переменных
А в Логическое сложение (дизъюнк- ция) А \/ В Логическое умножение (конъюнк- ция) А Д В Функция равнознач- ности А ~ В Импликация 7Г\/ в Сложение по модулю два А В
с 0 0 0 1 1 0
0 1 1 п 0 1 1
1 0 1 0 О V 1
1 1 1 1 1 1 0
Следует различать аппаратурный (реализуемый с помощью логических эле-
ментов) и программный (реализуемый с помощью ЭВМ) способы сравнения ко-
дов с получением результата сравнения в виде соотношений «больше», «меньше»,
«равно» или с количественной оценкой разницы кодов; сравнение кодов может
быт'ь выполнено поразрядно или одновременно по всем разрядам. В. табл. 14.1
представлены значения элементарных логических функций для двухразрядных
двоичных переменных А и В.
Схема сравнения, выполняющая логическую функцию
[(ДоЛВо) V (АоЛВо)] Л [ И ЛВ1) V (А1ЛВ.)] Л [ И2ЛВ2) V (А2ЛВ2)] . •
позволяет установить равенство чисел А=В (A=A0AiA2 .... B=B0BiB2 ...),
имеющих одинаковое количество разрядов (рис. 14.5). Но при дискретном кон-
троле такая схема не обеспечивает надежного определения состояния, в кото-
ром находится текущее значение контролируемой величины (особенно при кон-
троле, проводимом через определенные интервалы времени).
Рис. 14.5. Схема сравнения для
определения равенства двух чи-
сел
Рис. 14.6. Схема сравнения одно-
разрядных двоичных чисел
Рис. 14.7. Схема сравнения двух-
разрядных двоичных чисел
Рассмотрим схемы, позволяющие определить соотношения между числами
А и В:-А>В, А<В или А=В.
Если А и В — одноразрядные двоичные числа, то А>В при А=1, В=0
(А>В, А/\В); А<В при А=0, В=1 (А<В, А/\В) и А = В при А=В=1 или
А=В=0 [А=В, (АЛВ)УАДВ)] (рис. 14.6).
Результаты сравнения двухразрядных двоичных чисел при определении со-
стояний А>В и А<В представлены в матричной форме (табл. 14.2). В соот-
ветствии с матрицами:
для А>В • •
(^lA^oABiABoJV^iAAoABiABoJVHiA^oABiABoJV
V (AA^oA^iAAOV A^oA^i A^o)V (-^iA^oA^iA^o) >
Таблица 14.2. Сравнение двухразрядных чисел АиВ
а) А> В
А = А,А0 В = BiBo
00 01 10 11
00 0 0 0 0
01 1 0 0 0
10 1 1 0 0
11 1 1 1 0
б) А < В
А — В = В1Во
00 01 10 11
00 0 1 1 1
01 0 0 1 I
10 0 0 0 1
11 0 0 0 0
для А<В
(Л\ AAoA^iASo) V (AiAAoABiAbo) v (AiA-^oABiABo) V
V(AiA-'ToA®! ASo) V (Ai/\Ao/\Bi/\Bq)\/ (Ai A^oA^iABo)'-
Имеется возможность минимизации числа элементарных операций. После
минимизации
для А>В
AiABiVG4iVBi)AA>;
для А<В
BiA-AiV (B.VA.)ABo.
Этим логическим функциям соответствует схема, представленная на рис. 14.7.
Для сравнения между собой чисел с количеством разрядов, превышающим два„
можно использовать пирамидальное объединение схем сравнения двухразрядных
чисел.
Результат сравнения двух десятичных кодов А и В по логике «равно» —
«больше» — «меньше» (рис. 14.8) определяется следующими логическими функ-
циями:
А<В
0AA(lBV2BV3BV ••• V9B)V1AA(2BV3BV ... V9B)V ... \/8АЛ9в;.
А>В
1aA0bV2aA(0bV1b)V V9AA(OBV1BV ••• V8B);
А=В
(Д<В)Л(Д>В).
Для сравнения кодов с единичным основанием могут быть использованы
разнообразные реверсивные и нереверсивные пересчетные схемы [14.1J.
Сравнение нескольких кодов и выделение наибольшего двоичного кода мо-
гут быть выполнены с помощью устройства (рис. 14.9), в котором начиная со.
старшего разряда из дальнейшего сравнения исключаются коды, содержащие-
нулевые значения.
Сопоставление кодов двух чисел, как говорилось выше, может быть также
выполнено путем их вычитания и анализа разности. Поскольку операции сумми-
рования выполнить проще, то в большинстве устройств сравнения суммируется
код одного числа с дополнительным (инверсный код плюс единица в младшем--
разряде) кодом другого. В сумматоре выполняется операция суммирования чи-
Рис. 14.8. Матричная схема сравнения двух одноразрядных десятичных
чисел
Рис. 14.9. Схема выделения наибольшего дво-
ичного кода
сел А и В и переноса избыточного разряда в старший разряд (табл. 14.3),
рис. 14.10). Разность чисел А и В будет иметь положительный знак, если ре-
зультат суммирования имеет избыточный разряд, и отрицательный, если резуль-
тат суммирования без избытка.
Рис. 14.10. Использование
сумматора для сравнения чи-
сел
Для примера покажем, как
Таблица 14 3. Суммирование
разрядов А и В
(индекс «доп» относится к дополнительному коду):
А = 1000000 (64)
В = 0100000 (32)
Вдоп = 1100000
В = 0100000 (32)
А = 1000000 (64)
ЛДСЛ1 1000000
(А + Ддов) = 10100000 ( + 32)
(В + Лои) = 1100000 (-32)
При вычитании из В числа А для получения абсолютного значения следует
получить дополнительный код от (В-1-Адоп).
Необходимо отметить, что существенное упрощение устройства сравнения
достигается при представлении результатов контроля по способу представления
допусков относительно номинального значения (рис. 14.11). В этом случае
устройств© сравнения оценивает лишь соотношения между
ДА, ДДв, ДДн-
Рис. 14.11. Схема сравне-
ния АД с допусками
Можно проследить сходство между способами аналого-цифрового преобра-
зования. При реализации их выполняются операции сравнения аналоговых вели-
чин, одна из которых, компенсационная, эквивалентна известному коду, и
сравнения кодов. И в том и в другом случаях выполняется ряд операций сравне-
ния в целях получения соотношений по логике «больше» — «меньше» — «равно»
между величинами. Поразрядное и одновременное по всем разрядам сравне-
ние, нереверсивный и реверсивный счет двух чисел, представленных в коде с еди-
ничным основанием, имеют аналоги в аналого-цифровом преобразовании.
14.3. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАЛЛЕЛЬНОГО
И ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ
В этой главе рассматриваются системы допускового контроля,
которые предназначены для определения состояния величин Х=
=Х\, х2, . .Xi, . . ., хп, заданного в виде зон, выделяемых уставка-
ми. Конечная цель контроля — дать количественное суждение о
том, находится состояние каждой контролируемой величины или
объекта контроля в норме или нет, т. е. выдать информацию
1(х;еА) или I (х/еЛТ), 1(ХеМ) или 1(1еА).
Алгоритмы работы допусковых САК отличаются друг от друга,
в первую очередь, по последовательности выполнения операций
контроля. В соответствии с этим различаются допусковые САК па-
раллельного, последовательного и последовательно-параллельного
действия.
Рис. 14.12. Структурная
схема многоканальной
САК
Рис. 14.13. Аналоговый канал конт-
роля с выдачей результатов контро-
ля, измерения и сигналов управле-
ния
Рис. 14.14. Цифровая САК парад
дельного действия с последователь-
ным выводом результатов контроля
и измерения
Системы автоматического допускового контроля параллельного
действия, или многоканальные САК, состоят из параллельно
'(одновременно) работающих каналов контроля (рис. 14.12).
Каждый канал контроля в таких системах работает независимо
от других каналов и выполняет функции допускового контроля
одной контролируемой величины.
Современные САК параллельного действия весьма часто позво-
ляют выдавать одновременно с результатами контроля измери-
тельную информацию как в аналоговом (рис. 14.13), так и в циф-
ровом (рис. 14.14) видах, а также сигналы, необходимые для фор-
мирования воздействия на объект контроля, например, в целях
регулирования.
Последовательный вывод результатов контроля и измерения
позволяет связать систему с ЭВМ, системой управления, с общим
для всех каналов запоминающим или регистрирующим устройст-
вом.
Рассматриваемым САК присущи достоинства и недостатки ИИС
параллельного действия: работа с разнообразными контролируе-
мыми величинами, возможность получения повышенного быстро-
действия, структурная простота и повышенная надежность систе-
мы, определяемые независимостью работы всех каналов контроля,
использование относительно простых и выпускаемых промышлен-
ностью устройств каналов контроля. Вместе с тем многоканальные
САК характеризуются наибольшим количеством элементов, входя-
щих в систему.
Многоканальные САК широко используются при управлении
технологическими процессами во многих отраслях промышленно-
сти, при эксплуатации динамических объектов и т. п.
Устройствами каналов контроля служат выпускаемые промыш-
ленностью автоматические мосты и потенциометры с устройствами
сигнализации, приборы унифицированного комплекса аналоговых
устройств общепромышленного назначения с компараторами, щи-
товые цифровые приборы с устройствами сопряжения их с цифро-
выми печатающими устройствами, формирования уставок и срав-
нения их со значениями контролируемых величин. Указанные
устройства имеют достаточно большой удельный вес среди элек-
троизмерительных приборов, входящих в продукцию АСЭТ ГСП
(см. гл. 3).
Это позволяет утверждать, что во многих практически важных
случаях удается создавать такие системы путем компоновки из
готовых, выпускаемых промышленностью устройств.
Многоканальные САК могут оказаться экономически более вы-
годными при относительно небольшом количестве контролируемых
величин, особенно если эти величины разнородны по физической
природе. Во всяком случае, при выборе готовых или проектиро-
вании новых САК вариант использования или реализации много-
канальной системы должен приниматься во внимание.
В САК последовательного действия (их также называют ска-
нирующими САК) контролируется состояние величины (например,
температуры, перемещения или освещенности какого-либо предме-
та), распределенной в одно-, двух- или трехмерном пространстве.
Кроме того, в этой ситуации могут контролироваться функции (по-
ложим, интегральные) от входной величины. Если контролируемые
величины — дискреты входной исходной величины, то координаты
точек пространства, в которых должны производиться операции
контроля, выбираются аналогично тому, как выбираются интерва-
лы контроля по времени при дискретном контроле.
Нормы здесь могут быть в наиболее простом виде общими для
всех дискрет или для нескольких дискрет, а также индивидуальны-
ми для каждой дискреты входной величины. При индивидуальном
задании нормы должны сопровождаться указанием соответствую-
щих координат точек.
Каналы дискретного контроля в сканирующих САК помимо
основных функций должны обеспечивать перемещение зоны вос-
приятия сканирующего датчика в заданную точку пространства.
Система автоматического контроля управлять последователь-
ностью выполнения операций контроля.
Если для задания контролируемой величины достаточно ука-
зать две координаты и если в системе используется цифровой ка-
нал контроля с последовательным сравнением контролируемой
величины с уставками, то алгоритм сканирующей системы можно-
представить следующим образом:
U): = (U U] 1(XJ<I(DX, DC)>X
Xl[S:xteVWl =
Кроме дискретного контроля в сканирующих САК может быть
реализован непрерывный контроль, при котором сканирующее дви-
жение датчика позволяет определить места, где контролируемая
величина выходит за пределы установленной нормы, а затем изме-
ряются координаты этой контролируемой величины. Для выпол-
нения непрерывного контроля в первую очередь рационально ис-
пользовать аналоговый канал непрерывного контроля, оператор
которого имеет вид <1(Х, ||С)>.
СЛСА для системы непрерывного контроля может быть таким:
Ф(В) |_ Ф(/„ l(xz)<l(X, ||С)> <o(xzG^)X
2
X LI(/u/DZlt||/a(/D/2t-)X
1 2
х I(W:D/jZ, DZ2Z) -| ®[var(/1Z, Z2Z)J Д ...
В этом алгоритме предусматривается сканирующее перемеще-
ние датчика var(/iZ, 1ц), непрерывное выполнение операций кон-
троля, а в случае выхода контролируемой величины за пределы
нормы — аналого-цифровое преобразование и запись этих коорди-
нат.
При непрерывном (адаптивном) контроле, так же как и при
адаптивной дискретизации при измерении, выдаются результаты
контроля в заранее не обусловленной точке пространства. Видимо,
дополнительного сжатия контрольной информации при этом не-
получается (по сравнению с дискретным контролем). Здесь можно
говорить об уменьшении общего объема используемой информации
из-за устранения при непрерывном контроле информации о коор-
динатах контролируемых величин, не вышедших за допустимые-
границы, а также о возможности повышения надежности контроля
путем непрерывного наблюдения за состоянием контролируемой:
величины.
Частным, но довольно широко распространенным типом САК
последовательного действия являются сканирующие САК для кон-
троля геометрической формы и размеров разнообразных объектов
(например, механических деталей). Контролируемыми величинами
в этом случае являются геометрические размеры объекта контроля
в заданных направлениях. Описания границ нормы при этом мо-
гут быть заданы в виде зон допустимых значений табличным спо-
собом либо образцового предмета, а также линий допускаемых
отклонений от его размеров.
Рис. 14.15. Структурная
схема цифровой сканирую-
щей САК
Остановимся на алгоритмах и структурах САК геометрических
размеров с помощью телевизионного сканирующего устройства
[14.2]. В телевизионном устройстве форма и размеры объекта кон-
троля преобразуются в соответствующий рельеф электронного
потенциала на светочувствительном слое оптико-электронного пре-
образователя, например видикона. Исходный размер х связан с
размером на светочувствительном слое х* через отношение рас-
стояния L между объектом контроля и преобразователем к фокус-
ному расстоянию F используемого оптического преобразователя
х'(—хЬ/Р.
На рис. 14.15 представлена структурная схема цифровой САК,
в которой для измерения используется времяимпульсный метод
измерения <1(х/г)>, описываемый алгоритмом
цх/х*) [i(x*/oi;i(W))] ин.
где N (t) —число импульсов, поступившее за время t. В этом алго-
ритме может быть предусмотрена компенсация нелинейности пре-
образования телевизионного устройства путем функционального
преобразования I(7V(0]. Далее реализуется алгоритм <1 (DX, DC)>
для каждой контролируемой величины и конечное суждение о со-
стоянии объекта контроля выдается после оценки результатов кон-
троля всех контролируемых величин:
LO(/:=t+l) 1(Х/хО <1(л\/з,)>Х
X<I(DX, DC)> co(i=n) “1 X
Xw(xieM, х2еЛ^2, .... xne=ZVn)X
XI(R: X<=N).
В этом алгоритме решающее устройство выдает суждение о
том, что геометрические размеры объекта контроля находятся в
норме, если контроль всех составляющих дал такой же результат.
Однако получение погрешностей измерения меньше ± 1 % ПРИ
реализации этого алгоритма труднодостижимо. Для повышения
точности в таких системах применяется, во-первых, как это дел -
ется в измерительных системах, введение одновременно с контро-
лируемой величиной линейных единичных мер в виде штрихов (до-
15__100 линий на 1 см) или калиброванных волокон (диаметром'
порядка 10—20 мкм) и счет количества единичных мер, уклады-
вающихся в измеряемый размер, а во-вторых, измерение отклоне-
ния размера от номинального значения.
Рис. 14.16. Контроль отклонения
геометрических размеров от нормы:
а — раздвоенное изображение детали; б—
сравнение с уставками
Рис. 14.17. К сравнению размеров
контролируемого изделия с зоной
допуска, показанной пунктирными1
линиями
Введение мер позволяет избавиться от погрешностей, связанных
с искажениями при преобразовании геометрических размеров в
оптоэлектронном устройстве, так как при таких измерениях при-
меняется метод совпадения контролируемых величин и набора об-
разцовых мер с получением результата измерения последователь-
ным счетом. Однако в подобного рода телевизионных системах не
удается полностью использовать разрешающую способность штри-
ховых мер ввиду ограниченных возможностей получения достаточ-
но высокого отношения полезного сигнала к шуму.
Измерение отклонения контролируемого размера от номиналь-
ного его значения может резко повысить точность измерения, осо-
бенно при больших отношениях номинального значения к откло-
нению от него. В некоторых случаях выделение отклонения дости-
гается при использовании соответствующих оптических преобразо-
ваний. Например, на рис. 14.16,а изображение относительно не-
большой по размеру L контролируемой детали «раздваивается»-
на известное расстояние Lo, затем сравнивается с допусками Л/|—
Lo—L, а не L. На рис. 14.16,6 уставки Ci и с2 установлены отно-
сительно номинального значения LH контролируемого размера..
С этими уставками сравнивается разность Д/2=£—LH.
Используя указанные пути, удается выполнить контроль диа-
метра тонкой проволоки (от 20 до 100 мкм, погрешность измере-
ний меньше ±1,5%), ширины металлической полосы, нагретой до
1000 °C и движущейся со скоростью до 2,5 м/с, с погрешностью-
меньше ±0,4% и т. п.
При массовом контроле изделий сложной формы используется
сравнение контуров контролируемого изделия и зоны допуска
(рис. 14.17). На экран одновременно проектируются линии, опре-
деляющие зону допуска, -и контур контролируемого изделия. В за-
висимости от количества импульсов, получаемых при пересечении
•контура изделия, и линий, разделяющих зоны допусков, можно су-
дить о состоянии контролируемого изделия. Так, при сканировании
но направлению I-I (рис. 14.17) будет получено два и один им-
пульс, говорящие, что слева изделие находится в допуске, а спра-
ва-больше допуска («много»), по направлению II-1I внизу — два
импульса («норма»), вверху — три импульса («мало»).
Вместо линейного сканирующего луча может быть использова-
на следящая развертка по контуру контролируемого изделия. При-
менение сканирующей развертки позволяет несколько уменьшить
-суммарную погрешность контроля.
Имеются установки, позволяющие контролировать геометриче-
ские размеры изделия с нескольких сторон одновременно.
14.4. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ С ОБЩЕЙ
ОБРАЗЦОВОЙ ВЕЛИЧИНОЙ
Режимы допускового контроля и измерения
В САК с общей образцовой величиной каждая из измеритель-
ных цепей, включая датчик, связана со своим каналом контроля,
•а с помощью общей образцовой величины могут быть заданы
уставки или сформирована компенсационная величина, необходи-
мая для измерения контролируемых величин.
При измерении контролируемых величин система работает по
алгоритму мультиплицированной измерительной системы [14.3].
Если контролируемые величины имеют относительно небольшую
дисперсию, то может оказаться целесообразным использовать из-
мерение и производить контроль, оперируя с разностью между
реализовавшимися и номинальными значениями контролируемых
величин.
Допусковый контроль в таких системах может выполняться по-
разному.
В зависимости от типа каналов контроля [<1(Х, ||С)> или
<1 (X, С)>] формируется одновременно или поочередно нужное ко-
личество уставок, которые подключаются на устройства сравнения
®сех каналов контроля. Укрупненный алгоритм выполнения про-
цедур контроля и измерения величин, вышедших за пределы нор-
мального состояния, будет иметь вид [для <1 (X, ||С)>]
Ф (В) I [С] ||с2|| ('Vol/-Vl) II • • -II (л’(т/Хп) ] X
X {[<1 (ЛГ1, Ilci; с2)> (o(xiey)X
XI(R : XiGETVHS : Dl)]|| ... X
X • • 11[<1(хи, llci; c2)> со(ппеУ)Х
XI (R: xne=JV||S : Dn)]} <p(/=0)X
X L Ф (7 =/+1) 1 (7a*k) x
X{[I(CR:xi, /Дхк)Х
X<o(xi=/AxK; Xi<=N) I (W: D/; Di)]|| ... X
X • -- |[I (CR :хп; j&xK)X
Хы'(хп=]Ахк; xn^N) I(W:D/; Dn)]}X
Xto(/=m) ~| Ф(Е).
Здесь m — количество делений Дхк — компенсационной вели-
чины.
Важно отметить, что в данной системе выполнение операций
сравнения при контроле и измерении может производиться устрой-
ствами сравнения каналов контроля. Ввиду одновременной, парал-
лельной работы всех каналов результаты контроля могут быть по-
лучены за один такт, а измерения — за число тактов, равное вы-
бранному количеству делений шкалы. Если использовать алгоритм
оценки разности контролируемых величин и номинального значе-
ния, то время, затрачиваемое здесь на измерение, может быть
существенно уменьшено.
Систему можно существенно упростить, если оставить по одно-
му устройству сравнения в каждом канале и использовать режим
последовательного сравнения контролируемых величин с уставка-
ми. Можно считать, что в этом случае используется мультиплици-
рованная измерительная система, дополненная блоками принятия
решения при контроле и отображения контрольной информации.
Общее время контроля и измерения при этом увеличивается не-
значительно— на количество тактов, необходимых для последова-
тельного выполнения операций контроля по нескольким уставкам.
Алгоритм работы системы при допусковом контроле по двум
уставкам и при отображении и регистрации величин, вышедших
за пределы нормального состояния, может быть представлен в
следующем виде:
I(X, ci) {[<I(CH :xi, Ci)>:=X
XI(CR:xb ci) I(S:xi^c1|xi<c1)]|| ... X
X...|l<I(CH:xn, С1)>} 1(Х, с2)Х
Х[<1(СН:хь с2)>||...||1(СН:х„, с2)]Х
X{w (Xi&V) [I (R : xx^N) || X
Х||Ф'(Х1/21)].. .X
X • • -II® (xne/v) [I (R : Xn^N) IIX
ХИФСМ^п)]}.
. В таких системах можно одновременно выполнять операции
контроля и измерения, изменяя образцовую величину в пределах
заданной зоны и регистрируя величины, входящие в эту зону, и
соответствующие им известные значения образцовой величины.
При таком режиме каждый канал контроля существенно упро-
щается, так как в нем могут отсутствовать решающее устройст-
Рис. 14.18. Структурная схема систе-
мы спорадического контроля
во, устройство формирования
уставок, может быть использова-
но только одно устройство срав-
нения, определяющее равенство
контролируемой и образцовой
величин.
В некоторых случаях, напри-
мер при приближении контроли-
руемых величин к опасной зоне,
полезно изменять образцовую
величину несколько шире за-
данной зоны, для того чтобы вы-
явить контролируемые величины,
которые находятся вблизи от
границ зоны.
На структурной схеме такой
системы (рис. 14.18) после
устройств сравнения показаны
и преобразователь кодов. На циф-
индивидуальные сигнализаторы
ропечатающем устройстве в случае срабатывания устройства срав-
нения регистрируются значение Zt и номер канала, отмечается
нахождение в нормальном состоянии или выход из него, при
необходимости отмечается исследуемая зона (положим, 7V).
Пусть нужно произвести оценку нахождения контролируемых
величин в зоне 20^/^25. Тогда алгоритм работы будет сле-
дующий:
Ф (В) <р (/= 19) L ф (/ : =/+1) {I (/ДМ II [<I 1 > : = X
XI ((xi) I (CR : хь /ДХк) со (%i=/Дхк)I (R : хеЛ') X
Xl(W :zb DI)] ||.. .||<In>}co(/=25)—|Ф(Е).
Рис. 14.19. Структурная схема МЦК «Центротехника»
При необходимости можно подсчитать количество контролируе-
мых величин, вошедших по своим размерам в исследуемую зону.
Очевидно, имеется возможность произвести аналогичный ана-
лиз в нескольких зонах.
При необходимости выполнения контроля на относительно
больших расстояниях может оказаться эффективной реализация
управления формированием образцовой величины с помощью
циркуляции кодов [14.3]. На рис. 14.19 показано, что на входы
устройства сравнения подаются разности контролируемых вели-
чин и номинального значения. Это может позволить пользовать-
ся относительно небольшим числом разрядов (5—6 двоичных
разрядов).
Можно предполагать, что применение САК с общей образ-
цовой величиной будет расширяться.
Режимы спорадического контроля
В большинстве САК оператор имеет возможность наблюдать
одновременно за состоянием контролируемых величин по ре-
зультатам допускового контроля, отражаемым на панели сигна-
лизации, мнемосхеме или на экране дисплея. Однако такое пред-
ставление о состоянии контролируемых величин недостаточно
для того, чтобы судить о степени их близости к интересующему
оператора состоянию. Для прогнозирования последующего со-
стояния объекта или принятия решения по управлению оператор
вынужден использовать результаты измерений, обычно выполняе-
мых периодически, по вызову или при отклонении величин от
нормального состояния. Несмотря на меры, принимаемые в САК
для облегчения обзора результатов измерения, оператор должен
затрачивать определенное время на восприятие результатов из-
мерения контролируемых величин.
В Институте проблем управления АН СССР были предложе-
ны системы спорадического контроля [14.4] (можно, впрочем,
говорить не только о системах, но и режимах спорадического
контроля, которые могут быть использованы в различных по
принципу действия системах допускового контроля).
В отличие от остальных контрольно-измерительных систем с
неизменяющимися в процессе контроля уставками в режиме
спорадического контроля оценку размера всех контролируемых
величин предлагается производить одновременно, изменяя еди-
ную компенсирующую величину, уставку или запрашивающее
воздействие. Это изменение компенсирующей величины оператор
производит по своему усмотрению, от случая к случаю, — спо-
радически, единично.
Результаты сравнения компенсационной величины с реализа-
циями контролируемых величин отображаются на коллективном
устройстве сигнализации.
Если оператор знает, какое запрашивающее воздействие им
подано в систему, то он может с помощью сигнализаторов оце-
нить значение каждой контролируемой величины. В принципе,
изменяя запрашивающие воздействия по определенным законам,
можно реализовать методы развертывающего и поразрядного
уравновешивания. Более важной является возможность имити-
ровать, например, аварийную ситуацию и оценивать степень бли-
зости к ней состояния объекта контроля одновременно по всем
величинам, изменяя запрашивающее воздействие на все конт-
ролируемые величины.
Спорадический режим контроля может быть реализован прак-
тически в любой САК- Для САК параллельного действия в этом
режиме необходимо обеспечить ввод общей компенсационной
величины и работу каналов контроля в режиме сравнения этой
величины с контролируемой:
{[Ф (хк/) I (хк/) ] III (X)} {[<h> : =1 (CR : хь хк/) X
X<o(Xi>xKj) I(R:D/)]||...||<In>}.
Проще всего режим спорадического контроля реализовать в
САК с общей образцовой величиной.
В большинстве случаев нет необходимости изменять запра-
шивающее воздействие в широких пределах. В частности, воз-
можно его изменение в пределах от номинального значения па-
раметра до его аварийного значения. В этом случае можно про-
градуировать запрашивающее воздействие в процентах от разно-
сти между аварийным и номинальным значениями величины.
Изменяющаяся компенсационная величина может быть вве-
дена в устройства сравнения вместо уставки в аналоговые или
цифровые каналы контроля. Выносные каналы контроля, нахо-
дящиеся непосредственно у объекта контроля и имеющие ввод
компенсирующей величины, авторы изобретения назвали преоб-
разователями спорадического контроля (ПСК). Системы контро-
ля с использованием ПСК, по существу, являются системами с
переменной образцовой величиной.
На рис. 14.20 показана простейшая система с параллельным
включением ПСК, а на рис. 14.21 — система с временным раз-
делением каналов и цифровым измерением. Соотношение частот
f и f/n таково, что на каждой ступени компенсационного напря-
жения происходит опрос всех ПСК- При появлении сигнала на
выходе ПСК открывается соответствующий ключ и число из
счетчика переписывается в ячейку памяти и отображается на
цифровом индикаторе. В момент цифрового измерения запраши-
вающее воздействие должно быть равно нулю.
В этой системе существенно облегчены требования к комму-
таторам и к линиям связи, что позволяет использовать такие си-
стемы при относительно больших расстояниях от объекта конт-
роля.
В целях повышения надежности работы САК в. режиме спо-
радического контроля имеется возможность периодически срав-
нивать контролируемые величины с уставкой, определяющей пре-
ельно допустимые значения этих величин. Если в режиме спо-
радического контролякакая-лиооиз контролируемыхвеличин
выйдет за эту уставку, выдается аварийный сигнал.
Анализ работы человека-оператора показал, что при спора-
дическом представлении информации в 2—5 раз уменьшается
время оценки ситуации и в несколько раз — число ошибок по
сравнению с традиционным представлением информации на циф-
ровых индикаторах.
Рис. 14.20. САК с параллельным вклю-
чением преобразователей спорадическо-
го контроля
Рис. 14.21. САК с преобразователями спорадического контроля
14.5. ОСНОВНЫЕ АЛГОРИТМЫ РАБОТЫ СИСТЕМ
ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ
Контролируемые величины многих объектов контроля — не-
прерывные функции времени. Если допустимое изменение одной
из таких величин происходит за время t, а на выполнение опе-
рации контроля данной величины затрачивается время Д/, то в
течение t— № могут выполняться операции контроля других
контролируемых величин. В предыдущей главе были получены
количественные оценки временных соотношений при таком дис-
кретном контроле. Здесь же нужно остановиться на основных
структурах и алгоритмах работы систем дискретного контроля
параллельно-последовательного действия.
В таких системах для контроля величин xj, xz,.. .,Xt,.. .,хп
используются параллельно включенные измерительные цепи с
датчиками и один последовательно используемый канал конт-
роля. Как это отмечалось для измерительных систем, при таком
включении датчиков достигается уменьшение влияния их инер-
ционности на суммарное время получения результатов измере-
ния или контроля. Поскольку измерительные цепи с коммутато-
рами в измерительных и контрольных системах аналогичны и
рассмотрены ранее, то здесь достаточно указать лишь на необхо-
димость учета особенностей эксплуатации таких цепей при конт-
роле. К таким особенностям нужно отнести в первую очередь
наличие интенсивных промышленных помех и большую продол-
жительность эксплуатации САК- При дальнейшем рассмотрении
принимается, что имеется разработанная измерительная часть,
содержащая датчики, измерительные цепи, одно- или двухсту-
пенчатые коммутаторы, индивидуальные или групповые унифи-
цирующие преобразователи для аналоговых систем контроля и
включающая кроме перечисленных функциональных элементов
также и аналого-цифровые преобразователи для цифровых си-
стем контроля.
Аналоговая САК будет содержать помимо указанной изме-
рительной части аналоговый канал контроля (рис. 14.22). Но
в отличие от канала контроля одной величины здесь в большин-
стве случаев необходимо обеспечить отображение результатов
контроля всех величин. Для этого часто используются обращен-
Рис. 14.23. САК с индивидуальными
сигнализаторами
Рис. 14.22. Аналоговая САК парал-
лельно-последовательного действия
ный коммутатор и набор индивидуальных сигнализаторов
(рис. 14.23). Этот коммутатор синхронизируется со входным ком-
мутатором таким образом, чтобы результат контроля величины
Xt отображался на i-м сигнализаторе. Режим коммутации конт-
ролируемых величин и отображения результатов контроля в
этой системе задается устройством управления. Дополнение си-
стемы показывающим и самопишущим аналоговыми приборами
может позволить выполнение измерений по вызову оператора и
аналоговую регистрацию контролируемых величин. Обычно САК
с аналоговым каналом контроля разрабатываются для конкрет-
ных объектов и компонуются преимущественно из функциональ-
ных узлов, выпускаемых промышленностью.
В контрольно-измерительных системах каналы контроля и из-
мерения могут быть подключены к одному (рис. 14.24) и к раз-
личным коммутаторам (рис. 14.25).
Рис. 14.24. САК с раздельными ком-
мутаторами каналов контроля и из-
мерения
Рис. 14.25. САК с общим коммута-
тором каналов контроля и регулиро-
вания
Алгоритм одного цикла работы централизованной контроль-
но-измерительной системы с аналоговым каналом контроля
<1(Х, || С)> может быть представлен следующим образом:
Ф(В) q>(i=l) [Ф(*: =i+l)I(X0/Xi)<I(CH : х{, || С)>Х
(Xi<=N) [I (R : СНхО ||ф (xJZi) ]I(xjzi) [I (z,) || X
Х1И(W:zib Xi^N)[w(i=n)-] Ф(Е).
В этом алгоритме использованы два обозначения:
<1(Х0/хг)> — цепочка преобразований сигналов множества
датчиков до выбранного сигнала;
<1(СН : Хг, || С)> — алгоритм работы аналогового канала конт-
роля с параллельным выполнением операций сравнения контро-
лируемой величины Xi с уставками.
Время коммутации в данном случае должно выбираться та-
ким, чтобы успевали выполняться все процедуры контроля, из-
мерения, регистрации и выдачи контрольной и измерительной
информации. Если время коммутации будет постоянным, то оно
получится избыточным для тех контролируемых величин, которые
находятся в норме. Для повышения скорости работы системы
можно использовать асинхронный режим работы. Для этого сле-
дует рассматриваемый алгоритм дополнить знаком выдачи сиг-
нала на подключение следующей измерительной цепи, если xt
находится в норме:
Ф(В) <p(i = 0) L Ф(г: = 1 + 1)-Х
1
_ 2 1
X-“(XiG^) Г- J<o(i— п) Пф(Е)-
Существенное повышение скорости работы САК можно полу-
чить за счет использования раздельной работы каналов контро-
ля и измерения (рис. 14.25).
В этом случае один из возможных алгоритмов может быть
представлен следующим образом:
Ф(В) <р(г=0) L® = l)<I(CH:xt-, ||Q> «(x.-G^X
X [I(R:Dr)||I(S:Dr)] 1) П L Ф (X=4+1) X
2
__ 2
X I (4/^) I [W: (^ II Dr || A)] «(max is) ~| Ф (E).
Здесь коммутатор канала контроля работает со скоростью,
превышающей скорость коммутатора канала измерения. После
выполнения контроля всех п величин запоминаются и отобража-
ются визуально номера контролируемых величин, отклонивших-
ся от нормы. Затем последовательно производятся измерение и
регистрация тех величин, номера которых были зафиксированы
в памяти (is — порядковый номер их в ЗУ).
Если не накладываются ограничения на время выполнения
процедур контроля, то распространенный алгоритм в этом слу-
чае предусматривает последовательное аналого-цифровое преоб-
разование всех контролируемых величин, занесение всех полу-
ченных значений в память, выполнение процедур цифрового
контроля и регистрации значений контролируемых величин, вы-
шедших из зоны допуска, и другие операции. Укрупненная СЛСА
такого алгоритма
Ф(В) <1(Х0/Х)> ЬФ(А =г+ 1)1№) 1(х;/г,) I(S:z;) х
I
X ® (г = П) q L ф (г + 1) * (*г) < I (CH:zZ1 II DC)> со (г; £/V) X
_ 2
х I(W:zt-, Dr, N) со (г = п) "|.
Числовые значения входных величин могут быть использова-
ны для выполнения различных алгоритмов контроля.
14.6. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ
ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ
Параллельно-последовательные алгоритмы допускового конт-
роля могут быть реализованы, во-первых, в САК, создающихся
потребителями для конкретных целей из соответствующих функ-
циональных блоков и устройств их сопряжения, и, во-вторых, в
универсальных системах из выпускаемых промышленностью
функциональных блоков.
Системы автоматического контроля, создающиеся индивиду-
ально для определенных объектов контроля, будем называть ло-
кальными системами автоматического контроля (Л САК).
Структура цифровых ЛСАК по существу не отличается от ло-
кальных измерительно-вычислительных систем (ЛИВС). Соеди-
нение функциональных блоков в ЛСАК может быть осуществ-
лено с помощью стандартных цифровых интерфейсов, а функции
канала контроля и управление системой могут выполняться с
помощью специализированных устройств, микропроцессорных на-
боров или ЭВМ. (Конечно, должна быть обеспечена програм-
мная реализация алгоритмов контроля.)
Промышленностью выпускаются управляющие, вычислитель-
ные машины (УВМ) и комплексы (УВК). Под машиной понима-
ется законченная цельная часть системы, а под комплексом —
та же часть системы, полученная соединением отдельных функ-
циональных блоков, состав которой может быть при необходимости
изменен и дополнен. При присоединении к УВМ или УВК изме-
рительных цепей, включая установленные на объекте контроля
датчики, и при обеспечении УВМ (УВК) необходимыми програм-
мами контроля образуется система, готовая для выполнения ал-
горитмов контроля. Если дополнительно к сказанному в системе
предусмотрено управление формированием управляющих воздей-
ствий, то с помощью УВМ или УВК может быть обеспечено ос-
новное ее назначение — автоматическое управление поведением,
изменением состояния объекта.
По УВМ и УВК имеется обширная литература, большая
часть которой посвящена рассмотрению технических средств,
алгоритмов их действия, особенностей выполнения функций уп-
равления и, в меньшей мере, функций контроля.
В дальнейшем рассматриваются основные типы УВМ и УВК
с точки зрения использования их при допусковом контроле и с
уделением особого внимания измерительной части машин и комп-
лексов.
Имеются УВМ, предназначенные для автоматического прие-
ма информации от управляемого объекта, преобразования полу-
ченной информации, сигнализации об отклонении параметров от
номинальных, выдачи кодоимпульсных сигналов и информации в
удобном для оператора виде, т. е. для выполнения контрольно-
измерительных алгоритмов. Такие УВМ называются машинами
централизованного контроля (МЦК). Этим названием подчерки-
вается, что сбор и преобразование контрольной и измерительной
информации в МЦК производится централизованно, т. е. в по-
следовательности, определяемой устройством управления, по од-
ному каналу контроля и измерения. В МЦК реализуются па-
раллельно-последовательные алгоритмы контроля. Подчеркнем,
что МЦК обычно не включают в свой состав датчики и измери-
тельные цепи к ним.
Известно более сотни моделей МЦК, разработанных за ру-
бежом и в Советском Союзе и различающихся количеством об-
служиваемых контролируемых величин, метрологическими харак-
теристиками, элементной базой и т. п.
К основным функциям и техническим характеристикам МЦК
относятся: контроль от 40 до 500 величин; допусковый контроль
по одной — четырем уставкам каждой величины; сигнализация,
измерение и регистрация величин, отклонившихся от установлен-
ных норм; периодическое, например через 10, 20, 30, 60 мин, из-
мерение и регистрация значений контролируемых величин; изме-
рение контролируемых величин по вызову оператора; связь с
ЭВМ. В ряде случаев МЦК выдает сигналы двухпозиционного
регулирования.
В дальнейшем ограничимся рассмотрением только структур-
ных схем и алгоритмов некоторых характерных цифровых МЦК
и МЦК с аналоговым каналом контроля и цифровым каналом
измерения.
На рис. 14.26 представлена упрощенная структурная схема
одной из модификаций параллельно-последовательной цифровой
МЦК типа К-200 [14.5] с каналом контроля, работающим по ал-
горитму <1 (СН : г, fl DcH, Dcb) >.
В системе предусмотрены циклический, циклический разовый
и адресный режим работы. При циклическом режиме частота
опроса напряжений при работе коммутатора от внутреннего ге-
нератора 0,5+0,1; 1+0,2; 10±2 Гц и от внешнего генератора —
до 50 Гц.
СЛСА для циклического разового режима работы при выпол-
нении операций контроля и регистрации результатов измерения
с помощью цифропечатающей машинки имеет следующий вид:
ф(В) Ф(1=1)ГФ(1: = г+1) XI(С7/«г; 1,8• 10-3) 1(щМ; 0,6-10~3)Х
Х{[1(3; 2—10/3; 10; 10-10~6) I(W;Z- 100-10~3)] ||X
ХН[<1(СН:2{, ||DcH, Dcb; 100- 10~з) Xl(R: Dcn<
^2(^Всв|г^Всв|2г<0сн)]}Х«(г=п)~] Ф(Е).
Рядом с видом производимого преобразования в СЛСА по-
казаны времена, необходимые для его выполнения. Если времена
преобразования в СЛСА не указываются, значит, ими при рас-
смотрении суммарного времени можно пренебречь. В представ-
ленной СЛСА с этой точки зрения можно было бы не указы-
вать и время преобразования кодов. В рассматриваемом част-
ном случае для реализации заданного режима работы можно
выбрать частоту внутреннего генератора 0,5 и 1 Гц.
Рис. 14.27. Структурная схема МЦК с раздельными каналами измерения
и контроля:
Коммутаторы: КК—канала контроля; КС — сигнализации; КИ — канала измерения
Наиболее быстрый режим работы системы, по-видимому, свя-
зан с измерением и записью результатов измерения на ленточ-
ном перфораторе ПЛ-150. В этом случае нормальная работа
возможна при частоте управляющих импульсов до 50 имп./с, что
следует из СЛСА:
Ф(В) ф(г = О) = 2,4- 10-3)>Х
Xl(W:zz; 15-1СГ3) со(/ = «)"] Ф(Е).
Структурная схема МЦК с раздельными каналами измере-
ния и контроля представлена на рис. 14.27. Унификация сигна-
лов от измерительных цепей в САК выполняется индивидуально
в каждом канале. В САК производятся измерение и регистра-
ция контролируемых величин при выходе их за пределы зоны
допуска. Основной алгоритм работы САК описывает выполнение
системой циклического режима допускового контроля:
1(У0/*н) {<р(Ж KCi, i=l, 2,...,40; А/)Х[1(С„, ДСЬ
АОз/Снг, Дер’, AC‘2i) || I (Ан/%нг 7 ] I [ (%нг-Cui) —AXhz] X
XI(^A*Hi) I (CH :/гАхнг, || Дер, Ac2i)]}X
индивидуальная унификация, коммутация в узле КК и конт-
Хсо (xHi^N) [I (S : Di) || Ф (хнг/zz) ||1 (R : Di) ] X
— фиксация результатов контроля;
Х<р(КИ, i) I(XH/xHi) I(xHi/z,) I(W: z,-, N, 7*; 40Ai)
— коммутация в узле КИ, измерение величины, отклонившейся
от нормы.
Здесь Сн — номинальное значение величины, a ACj и АС2 —
нижняя и верхняя зоны допуска соответственно. Время измере-
ния равно 40 Д£=4 с, т. е. такое же, какое необходимо каналу
контроля для того, чтобы проконтролировать 40 величин. Это
сделано для того, чтобы одна и та же измерительная цепь не
была подключена к каналам контроля и измерения.
Метрологические характеристики приведенных МЦК соответ-
ствуют средним данным таких машин.
Обязательными функциональными устройствами современных
УВМ (рис. 14.28) и УВД (рис. 14.29) являются малые ЭВМ или
устройства из микропроцессорных наборов, соединенные с уст-
ройством связи с объектом [14.6—14.8].
В 60—70-х годах нашей промышленностью выпускались УВМ
«Днепр-1» и «Днепр-2» (широкого назначения), специализиро-
УВМ
Рис. 14.28. Структурная схема УВМ
Рис. 14.29. Структурная схема УВК
ванные УВМтипа ИВ-500 и др. Эти машины имели относи-
тельно невысокое быстродействие (десятки тыс. операций в секун-
ду), относительно небольшие емкости памяти (примерно
4 Келов); в качестве элементной базы в них использовались дис-
кретные элементы, поэтому они имели довольно большие габа-
риты и относительно высокую стоимость. В дальнейшем были
разработаны УВМ, входящие в агрегатный комплекс АСВТ-М
ГСП. К ним относятся семейство УВМ М-40 (М-41, М-42, М-43,
М-44), М-6000, М-7000, затем семейство CM (СМ1, СМ2, СМ3,
СМ4 и др.). Кроме того, выпускаются УВМ типа «Электроника»
(К-200, К-2000, 60 и др.) и другие, не входящие в ГСП.
Технические характеристики и системное программное обес-
печение ЭВМ, входящих в эти УВМ и УВК, были описаны в
гл. 6.
Здесь уместно остановиться на специфической части УВМ и
УВК — на устройстве связи с объектом (УСО). Устройство свя-
зи с объектом осуществляет операции сбора информации от объ-
екта, включая коммутацию аналоговых и дискретных сигналов,
аналого-цифровое преобразование, и операции выдачи сигналов,
управляющих воздействием на объект, — цифро-аналоговые пре-
образования, распределение дискретных сигналов и т. п.
Остановимся на части УСО, связанной со сбором информации
от объекта контроля; назовем сокращенно эту часть УСО-И.
Первые УСО-И выполнялись специально для использования
в конкретной УВМ. В большинстве случаев принцип действия
их измерительной части — параллельно-последовательный с вы-
полнением процедур контроля в ЭВМ. При большом количестве
источников информации в измерительной части используется
двухступенчатая коммутация. В качестве типичного УСО-И мож-
но представить измерительную часть УВМ ИВ-500, показанную
на рис. 14.30 [14.8].
Сигналы от 12 групп по 40 измерительных схем с датчиками
подключаются к коммутаторам первой ступени, выходы которых
соединяются с коммутатором второй ступени.
Укрупненная СЛСА для режима периодического измерения
имеет следующий вид:
<р(/ = 1, /=1) ^(C.-i+l)[I(X1/ri;)||...||I(X//x/,f)||...X
X ...I(X12/x12Z] 1ф(/: = / + Ъ 4XilKj. i) 1 (*/, i) I(S:z/f i) x
1 2
x <n(j=12) -|ш(/ = 40)-|.
В соответствии с этим алгоритмом одновременно коммутиру-
ются все i-e входные сигналы, а затем с помощью коммутатора
второй ступени эти сигналы последовательно подключаются к
аналого-цифровому преобразователю.
Рис. 14.30. Измерительная часть УВМ ИВ-500
Режиму контроля и измерения вышедших из допуска вели-
чин соответствует следующая СЛСА:
<?(/ = 1, /=1) = 11(АГ1/х1(-)||... 111(^7^)11 -X
2
X - II 1(АГ)2/х121)1 L Ф,(/:=/+1) №)Н ,-)1Х
X<I(CH:xy>I-, cj)>^(xhi^N) 4xhllzhi) 1(5:гЛ1-; D</;TV)X
1 2
X »(j = 12) 1 40)1-
В качестве датчиков в ИВ-500 могут использоваться термо-
пары и термометры сопротивления, источники ЭДС постоянного
тока 0—50 мВ с внутренним сопротивлением не более 300 Ом,
датчики с унифицированным выходом (0—10, —10-4—ЬЮ В; 0—
5, —5-4--}-5 мА), дифференциально-трансформаторные и другие
датчики переменного тока частотой 50 Гц с выходным сигналом
0—1,0 В и более (с внутренним сопротивлением не более 300 Ом)
и 0—5 мА.
В устройствах коммутации первой ступени размещены клем-
мные колодки для подключения датчиков, мосты температурной
компенсации термопар, собственно коммутатор, устройства, обес-
печивающие получение выходных сигналов постоянного тока от
датчиков сопротивления, температурную компенсацию и компенса-
цию изменения напряжения, а также питание дифференциально-
трансформаторных датчиков.
Конструктивно в устройстве коммутации размещен и много-
предельный показывающий прибор типа ПЛМ1-01 (погрешность
±0,5 %), представляющий собой автоматический потенциометр
с десятью шкалами, сменяющимися полуавтоматически; его
входное сопротивление более 100 кОм, время прохождения шка-
лы 8 с.
Устройство коммутации первой ступени выполнено на реле с
магнитоуправляемыми контактами в пылебрызгозащищенном
корпусе, имеет скорость коммутации 5—10 переключ./с и пред-
назначено для установки непосредственно у объекта контроля.
Групповые унифицирующие (нормализующие) элементы УН
комплектуются устройствами для унификации сигналов постоян-
ного тока БН-1 и переменного тока БН-2. Быстродействие этих
элементов относительно высокое (время, необходимое для уни-
фикации, равно примерно 120 мс). Основная погрешность уни-
фицирующих элементов ±0,5 %. Унифицированные сигналы:
—5—0—5 мА и —10—0—10 В постоянного тока.
Аналоговые унифицированные сигналы от всех 12 групп по-
даются на групповой коммутатор, выполненный на полупровод-
никовых транзисторных ключах. Скорость переключения группо-
вого коммутатора (60—120 переключ./с) и управление его рабо-
той обеспечивает последовательное подключение к АЦП за один
такт коммутации первой ступени 12 одноименных датчиков. Сле-
довательно, суммарное время измерения и контроля 480 датчи-
ков определяется скоростью работы группового коммутатора и
составляет 8 или 4 с.
Аналого-цифровой преобразователь поразрядного уравнове-
шивания используется для измерения и для сравнения цифровых
уставок со значениями контролируемых параметров. (Время ра-
боты АЦП примерно наполовину занято операциями контроля.
Следовательно, быстродействие АЦП должно быть не менее
200 измерений/с.) В последнем случае цифровое значение уста-
вок преобразуется в аналоговую величину, однородную со вход-
ной величиной. Устройство сравнения АЦП служит для опреде-
ления знака разности между уставкой и контролируемой вели-
чиной.
Для каждого контролируемого параметра можно установить
по четыре уставки (две «мало — много» предупредительной и
две «мало — много» аварийной сигнализации).
Результаты контроля передаются к устройствам сигнализации,
конструктивно объединенным с устройствами нормализации. Уст-
ройства сигнализации содержат релейные устройства памяти
(действующие в течение полного цикла измерения и контроля),
местное табло сигнализации и устройства выдачи сигналов на
регуляторы.
Цифровые значения контролируемых величин подаются для
дальнейшей обработки в вычислительное устройство.
На центральном информационном пульте оператора имеются
групповые индикаторы аварийной (непрерывный сигнал) и пре-
дупредительной (прерывистый сигнал) сигнализации, адресные
переключатели, контроль уставок и параметров, вызов на реги-
страцию по адресу, управление общим вызовом на регистрацию,
контроль исправности основных блоков машины и др.
ИВ-500 имеет следующие характеристики. Цикл опроса точек
(через 5 с) от 5 до 60 с; скорость периодической регистрации
(при двух печатающих устройствах) 2 точки/с; цикличность пе-
риодической регистрации 30, 60, 120 мин; скорость регистрации
отключения 2,5 точки/с; основная погрешность измерения и конт-
роля для датчиков постоянного тока ±0,6 %, для датчиков пе-
ременного тока ±2,5 %; допускается установка нормализующих
устройств на расстоянии до 100—200 м от коммутаторов.
На блоке котел — турбина мощностью 300 МВт период при-
работки для головных машин ИВ-500 составил 4450 ч, а устано-
вившийся период — 7850 ч, среднее время восстановления ис-
правной работы после отказа составляет 2 ч.
Заметим, что наибольшее число отказов было вызвано неис-
правностями релейных и контактных устройств, а также уст-
ройств регистрации. Интенсивность отказов из-за этих неис-
правностей составляла от 3-10-4 до 20-104 1/ч. Она уменьша-
лась в 2—4 раза в установившийся период по сравнению с
периодом приработки.
Большинство УСО-И управляющих вычислительных машин и
комплексов состоит из функциональных блоков, объединяемых с
помощью цифровых интерфейсов. В состав измерительной части
входят индивидуальные и групповые унифицирующие преобразо-
ватели, коммутаторы аналоговых (напряжений и токов низкого
и высокого уровней, частотно-модулированных колебаний и т. п.),
дискретных двухпозиционных и кодоимпульсных сигналов, АЦП
и т. п.
Каждый тип УВМ и УВК в зависимости от основного назна-
чения имеет свой набор функциональных блоков, который может
поставляться в УСО-И.
Ниже в качестве примера приводится описание набора агре-
гатных модулей УСО-И УВК типов СМ-1 и СМ-2, предназна-
ченных Для использования при автоматизации технологических
процессов [14.9]. Логическая часть модулей реализована на ба-
зе микросхем серии К155, аналоговая часть — на микросхемах
серий К284, К140 и др. Модули имеют выход на унифицирован-
ный интерфейс 2К. Далее рассматриваются только модули ввода
аналоговых и дискретных сигналов (рис. 14.31).
Аналого-цифровой преобразователь А611-19 имеет входное со-
противление 2 МОм, подавление продольной помехи более 60 дБ,
основную погрешность ±0,1% и время преобразования 20 мкс.
Аналого-цифровой преобразователь А611-20 управляется про-
граммным путем. Это дает возможность использовать различные
алгоритмы, осуществлять сравнение с уставками (см. ИВ-500),
изменять время преобразования. Видимо, такие АЦП целесооб-
разно выполнять совместно с микропроцессорами. Может быть,
их полезно использовать в распределенных САК-
Коммутаторы А612-10 и А612-11 (бесконтактные) позволяют
коммутировать 32 или 2X16 источников информации. Время пе-
реключения менее 4 мкс, погрешность коэффициента передачи
примерно 0,05%, диапазон коммутируемых напряжений ±10 В
(±5 В). Модуль выборки и запоминания напряжений А613-3
(±5 В) имеет три независимых канала с операционными усили-
телями, запоминающими конденсаторами и ключами. Ключи слу-
жат для поочередного подключения запомненных напряжений к
•АЦП. Запоминающие устройства могут работать в режимах сле-
жения и запоминания. Основная погрешность при времени сохра-
нения сигнала 10 мс не превышает ±0,1%. Время запоминания
при скачкообразном изменении сигнала от 0 до ±5 В равно при-
мерно 5 мкс.
Модуль А612-12 служит для коммутации сигналов низкого
уровня (10, 20, 50 и 100 мВ) и их нормализации (до 5 В).
Коммутатор 16 дискретных сигналов (А622-8) с уровнями 6,
12 или 24 В может работать в режиме ввода инициативных сиг-
налов (с прерываниями при изменении их состояния) и по задан-
ной программе.
Для гальванической развязки цепей с дискретными сигналами
используются модули А621-1 — А621-3 с быстродействующими
оптронными переключателями, обеспечивающими сопротивление
гальванической развязки 108 Ом и проходную емкость менее
50 пФ.
Выносные измерительные нормализующие преобразователи
сигналов от термопар и термометров сопротивления (А614-7), от
дифференциально-трансформаторных датчиков (А614-2) имеют
время преобразования 1 и 50 мс и основную погрешность преоб-
разования ±0,4 и ±0,5%.,
Выносной коммутатор А612-15 позволяет коммутировать 16
трехполюсных цепей с напряжением ±10 В или током ±5 мА с
основной погрешностью ±0,05 и ±0,1%. Время коммутации 5 мс.
Выносные устройства могут быть удалены до 500—1000 м и
расположены непосредственно на объекте. Это позволяет сущест-
венно упростить коммуникации между датчиками и УВМ.
Рассмотрим 'В качестве еще одного примера машину М-40-43/2
[14.10]. Эта машина выполняет сбор и унификацию сигналов от
аналоговых и дискретных источников информации, допусковый
контроль состояния параметров непрерывных и дискретных тех-
нологических процессов, выдачу информации на мнемосхемы, пе-
риодическую регистрацию и вывод текущих значений параметров
на перфоленту, регистрацию и сигнализацию параметров, откло-
нившихся от нормы. Кроме того, М-40 может выполнять опера-
ции двухпозиционного регулирования, а также обмениваться ин-
формацией с УВМ М-400, М-6000 и др.
Машины типа М-40-43 выполнены на основе типовых ФБ и
конструкций АСВТ-М ГСП и интерфейса 2К (см. гл. 5).
Структурно М-40-43-3 (модификация, предназначенная для
контроля непрерывных и дискретных технологических процессов)
•состоит из (рис. 14.32) устройства центрального управления
(УЦУ) и УСО (ближнего действия и телемеханического'— с бло-
ками телемеханической связи — БТС). Кроме того, есть блок пе-
риферийных устройств, включающий алфавитно-цифровой дис-
плей, связанный с промышленной телевизионной установкой,
клавишные устройства ввода символьной и функциональной ин-
формации, печатающее устройство DZM-180.
Основные технические данные МЦК М-40-43:
Время выполнения команды, мкс............................... 2
Цикл чтения, записи, выборки, мкс.......................... <4
Вывод на индикацию десятичных разрядов.................. По 4
Максимальное количество знаков на экране дисплея.... До 2048
Время передачи символов, мкс............................ Ю—90
Входной сигнал постоянного тока, мА..................... 0—5
Входной сигнал постоянного напряжения, В................ 0—5
Скорость коммутации, переключений в секунду..............<4000
Класс точности измерительного тракта ..................... 0,4
Скорость передачи телемеханической информации, кбод ... 24
В агрегатный комплекс АСВТ входит МЦК типа М-60, пред-
назначенная главным образом для АСУ мощными электроблока-
ми тепловых и атомных электростанций. Эта МЦК выполняет
сбор и обработку сигналов от 4096 датчиков, сигнализацию об от-
клонении до 512 параметров, измерение 384 параметров одновре-
менно с помощью аналоговых сигнализирующих контактных при-
боров и вызов до 120 параметров (на цифровых приборах), ре-
гистрацию параметров периодическую и при выходе их за
пределы нормального состояния.
В целях уменьшения потоков информации, повышения надеж-
ности работы систем, обслуживающих несколько объектов конт-
роля, создаются распределенные САК. В них каждый объект
контроля обслуживается своей подсистемой, содержащей измери-
тельные цепи с датчиками, АЦП, устройства из микропроцессор-
ных наборов и устройства сопряжения с управляющим центром—
второй ступенью иерархической системы. Структура таких систем
аналогична структуре распределенных ИВС.
Глава 15
О СИСТЕМАХ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
Цели контроля, диагностики и распознавания образов различ-
ны: при контроле определяется соответствие текущих состояний
объектов нормам, при диагностике — места и причины неисправ-
ностей объектов, при распознавании — к каким классам относят-
ся исследуемые объекты.
Однако процессы контроля, диагностики и распознавания об-
разов имеют общую методологическую основу: в каждом из них
производятся сравнения величин, характеризующих исследуемые
объекты, с образцовыми величинами и анализ результатов срав-
нений.
Если ограничиться процессами контроля, диагностики и рас-
познавания, выполняемыми с материальными объектами, то со-
вершенно очевидной становится общность их структур и основ-
ных алгоритмов.
Для специалистов в области ИИТ, которые могут участвовать
в создании и эксплуатации систем технической диагностики и
распознавания образов, целесообразно перед специально направ-
ленным изучением этих систем ознакомиться с основами их по-
строения.
Установление факта и места неисправности в технических
объектах, а также ошибок в их программах путем определения
состояния всех элементов и связей обычно нецелесообразно или
практически невозможно. Это объясняется тем, что для такого
«стопроцентного» контроля требуются большие затраты времени,
труда и оборудования.
Особенно это относится к сложным техническим объектам
(машины, комплексы, системы), характеризующимся большим
количеством элементов и сложными связями между ними. Напри-
мер», в микро-ЭВМ, устройствах памяти и других цифровых ин-
формационных устройствах могут насчитываться сотни тысяч
элементов. Работоспособность таких объектов зависит от состоя-
ния и совместного функционирования всех этих элементов.
По-видимому, основной путь выявления неисправных техниче-
ских элементов и ошибок в реализации программ технических
объектов связан с рациональной и эффективной методикой прове-
дения операций контроля, позволяющей решить задачу диагности-
ки с допустимыми затратами. Изучение форм и закономерностей
проявления неисправностей и ошибок, разработка методов и
средств их обнаружения и локализации в объектах диагностики—
таковы основные цели технической диагностики как научной дис-
циплины.
Объекты технической диагностики могут характеризоваться ве-
личинами, имеющими непрерывный или дискретный характер.
В непрерывных объектах диагностики могут контролироваться
температурные поля (положим, инфракрасное излучение интеграль-
ных микросхем), акустические шумы (в двигателях внутреннего
сгорания), радиочастотные флюктуационные помехи (возникаю-
щие, в частности, >в радиодеталях, контактах), электрические токи
и напряжения и т. п. Восприятие информации при диагностике
объектов с непрерывными величинами, характеризующими их
свойства, производится с помощью технических средств и алго-
ритмов измерения и контроля, описанных ранее. Алгоритмы диа-
гностики при этом должны учитывать специфику исследуемых
объектов [15.1, 15.2]. В дальнейшем изложении рассматривается
диагностика дискретных технических объектов.
При создании систем технической диагностики нужно разли-
чать следующие основные этапы:
изучение объекта диагностики, связанное с выделением состоя-
ний элементов, контролируемых величин, сбор необходимых ста-
тистических и иных данных, оценка затрат труда на проверку;
построение математической модели объекта и ее исследование,
связанное с разработкой программ и диагностики объекта;
построение диагностической системы.
Отметим, что успешное создание математической модели во
многом зависит от степени знания свойств объекта диагностики
и в свою очередь определяет эффективность принятого метода
поиска неисправностей.
Дискретными объектами технической диагностики являются
технические объекты, в которых можно выделить элементы,
причем и объект, и элементы могут находиться обычно в двух
состояниях — работоспособном и неработоспособном. Если объект
содержит N элементов, каждый из которых может находиться в
двух состояних, тогда отказ объекта можно рассматривать как
одно из 'возможных —1 состояний, вызванных неработоспособ-
ностью некоторой комбинации ее элементов.
Состояние объекта представляется обычно //-мерным векто-
ром, i-й компонент которого равен 1, если i-й элемент работоспо-
собен, или 0, если он отказал. Состояние системы определяется
проведением проверок по определенным программам, называемым
программами диагностики. Совокупность проверок, достаточная
для различения состояний объекта, носит название диагностиче-
ского теста.
Различают комбинационный и последовательный поиск неис-
правностей. При комбинационном поиске выполняется заданное
число проверок независимо от порядка их осуществления. После-
довательный поиск связан с анализом результатов каждой про-
верки и принятием решения на проведение последующей про-
верки.
В некоторых моделях известны qi — вероятность выхода из
строя i-ro элемента, tt — время, необходимое для выполнения опе-
раций контроля, k—количество неисправных элементов. (Предпо-
лагается, что вероятность наличия нескольких неисправных эле-
ментов П<7г«7/.) Конечно, в зависимости от математической мо-
i
дели объекта технической диагностики используются различные
критерии оценки выполнения программ диагностики: минималь-
ное время операции локализации неисправности, минимальная
сумма частных произведений времени выполнения операций конт-
роля и вероятности выхода из строя i-ro элемента, максимальное
приращение количества информации при выполнении данной опе-
рации контроля и т. п.
Пусть имеется система, состоящая из последовательной це-
почки элементов (рис. 15.1). Тогда в зависимости от степени зна-
ния об элементах (в первую очередь вероятностей их отказов)
и особенностях их проверки (в частности, времени, необходимого-
для выполнения каждой проверки) могут существенно изменяться,
диагностические программы. В случае, если отказы всех элемен-
тов равновероятны и время, необходимое для выполнения всех
проверок, одинаково, то минимальное количество проверок может-
Рис. 15.1. Схема поиска неисправностей в последовательной цепочке элементов г
А — операция поиска неисправностей при равновероятном выходе элементов 1~8 из строя;
Б ~ операции поиска (Z—/V) при указанных вероятностях выхода из строя элементов*-
цепочки
быть получено при использовании метода «половинного разбие-
ния» (А на рис. 15.1). Известные вероятности отказов элементов
позволяют учитывать их при последовательности выполнения
процедур проверки и тем самым уменьшить минимально необхо-
димое число процедур поиска (для нахождения неисправности в
элементах 4 и 5 — две процедуры) (Б на рис. 15.1).
На практике выполнение проверок различных элементов свя-
зано с различной трудоемкостью. Если известны время t, необхо-
димое для выполнения проверки различных элементов и их со-
четаний, и вероятности их отказа р, то при отказах различных
элементов можно выбирать наиболее «экономный» диагностиче-
ский тест (рис. 15.2).
Так, например, если отказал элемент 5, то наиболее эффек-
тивный тест, выбранный по минимальным отношениям времени
проверки к вероятностям появления отказов (показанным на
рис. 15.2 в кружках), будет А—>-В—
Для диагностики параллельно-последовательного соединения
элементов при составлении диагностической программы последо-
вательного поиска одной неисправности могут быть ис-
пользованы коды проверок и коды состояний [15.3, 15.4]. Коды
проверок П/ определяют элементы, состояния которых проверя-
ются. Количество двоичных разрядов в них равно количеству
проверяемых элементов, а значение разряда, равное 0, указывает,
что данный элемент проверяется, а равное 1—что этот элемент
не проверяется (например, при ООП проверяются состояния пер-
вого и второго элементов и не проверяются состояния третьего и
четвертого). Код состояния обозначается через Кг (в нем 0 ука-
зывает, что элемент работоспособен, а 1—что его нужно прове-
рить), а инверсный код состояния — через Kt- Произведя пораз-
рядно-логическое умножение кода состояния и кода проверки,
получим новый код состояния. Если результат проверки таков,
что проверяемая часть схемы исправна, то новый код состояния
поразрядно логически перемножается (ОД 1=0; 0Д0 = 0;
1Д1—1) с новым кодом проверки. Если же проверяемая часть
Рис. 15.2. Схема выбора диагностического теста
схемы неисправна, то полученный код состояния следует инверти-
ровать и затем поразрядно выполнить логическое перемножение
с последующим кодом проверки.
Итак, основной алгоритм этой процедуры
... I (Д) Ф (Пу) [со/ (0) I(KtAII,-=K;+I) |Х
X |соу(1) I(Ki+i/A-+i)]X
X I(Ki+\|Ki+i) Ф(Пж). • •
Здесь ю(0) и © (Г) символизируют исправность или неисправ-
ность проверяемых элементов (проверяемой части схемы). На
рис. 15.3 показана простая структура, для которой коды проверок
равны: П! = 0111; П2=0011; П3=0101; П4=0100.
Начальный код состояний 7<1 = 1111. Если при выполнении ГЬ
получается результат ©2(0), то новый код состояния Кг~
=1111Д0011==0011. Если проверка П2 показала, что получается
Рис. 15 3. Диагностируемая
схема
<»2(1), т. е. проверявшаяся часть схемы неисправна, то К2=П00’
и необходимо проверить 1-й и 2-й элементы.
Если при выполнении проверки П3 выявлено, что эта часть
схемы исправна, т. е. со3(О), то /<3=Л2ДП3=0011Д0101 =0001,
т. е. неисправен 4-й элемент.
Использование кодов состоянии и проверок позволяет произве-
сти оценку возможных 'вариантов программ по заданному кри-
терию.
Все элементы схемы, охваченные обратной связью, при таком
анализе объединяются в один элемент. Если необходимо опреде-
лить исправность элементов, охвачен-
ных обратной связью, то последнюю
необходимо разорвать.
При разработке программ можно
использовать комбинированные не-
повторяющиеся проверки типа П,-П(;
IL-Пг-Пт и др.
Оценку и выбор диагностических
программ можно производить, исполь-
зуя информационные, минимаксные
или другие критерии, в наибольшей степени соответствующие ха-
рактеру объема и задач исследования.
При наличии большого количества элементов и сложных свя-
зей между ними диагностические тесты существенно усложня-
ются.
Системы технической дагностики (СТД) сложных технических
объектов, реализующие диагностические программы, которые по-
зволяют выявлять и локализовать аппаратурные неисправности
и программные ошибки, основываются на использование ЭВМ
или УВМ, обладающих достаточной емкостью памяти, соответст-
вующим быстродействием и другими характеристиками. В состав
таких СТД обязательно входят генераторы тестовых сигналов,
устройства сбора аналоговой и дискретной информации. По суще-
ству, такие СТД выполняют не только функции диагностики, но и
контроля и измерения, сопровождающиеся необходимыми вычис-
лительными процедурами.
Особую сложность для диагностики представляют цифровые
информационные устройства. Помимо огромного количества эле-
ментов и связей между ними при диагностике необходимо учиты-
вать, что в таких устройствах возможно проявление дефектов на
определенных частотах и на различных последовательностях сиг-
налов, что кроме аппаратных неисправностей имеются програм-
мные ошибки. Все сказанное настоятельно потребовало создания
новых методов и относительно простых и доступных средств диа-
гностики, удовлетворяющих требованиям как разработчиков, так
и потребителей цифровых устройств.
Такие методы и средства были созданы и реализованы в виде
так называемых анализаторов логических состояний (АЛС). При
контроле с помощью АЛС на входы объекта диагностики пода-
•ется последовательность известных двоичных кодоимпульсных
сигналов, а с выходов или обобщенного выхода объекта снима-
ются определенным образом отбираемые кодоимпульсные сигна-
лы. Эти сигналы могут сопоставляться с образцовыми сигналами,
соответствующими правильной работе диагностируемого объекта.
Результаты такого сопоставления могут использоваться для ре-
шения задач диагностики. Первые АЛС были разработаны в на-
чале 70-х годов. В настоящее время они выпускаются промыш-
ленностью во многих странах мира и получили широкое приме-
нение.
Рис. 15.4. Вариант структуры анализатора логи-
ческих состояний
Один из вариантов структурной схемы АЛС представлен на
рис. 15.4. На каждом синхронизирующем такте, реализующемся
через интервал времени AZ, на входы АЛС от объекта диагности-
ки поступают нормированные импульсы, принимающие состояние
е(0) или е(1), и импульсы синхронизации.
Совокупность состояний ец,..., eni образует слово zi-
Емкость памяти АЛС позволяет записать т слов z-t, т. е.
Z=(zb ..., zm), а на экране дисплея или другого устройства инди-
кации—визуализировать Zn={zn\, —, znm) слов, представляемых
в формате, индикации (рис. 15.5). Кроме чисел на устройстве ин-
дикации могут представляться потактовые реализации слов в ви-
де временных диаграмм (рис. 15.6).
Далее рассматриваются два режима работы АЛС с синхрон-
ной работой. Первый из них предусматривает занесение >в память
АЛС слов, реализовавшихся после установленного и маскирован-
ного кода DC3®DCm запуска (т. е. выбранного оператором кода,
у которого не принимаются во внимание определенные разряды)
и задержки на h тактов:
Ф(В) Q(DC3®DCm=DCr, t3=hM- i=0)X
X Q(i: = i+1; AZ) 1(6^,... ,eni/Zi) X
XI(Zi®DCi=DC) a)(DC=l)X
X I(2AZ) G)(2AZ=W)X
X [I (S : zi+h) ... I (S : Zi+h+m) ] X
XI(Z/Zn) I(R:Z„) Ф(Е),
где ® — сложение по модулю 2.
1 г 3^ 5 6 7 8 Э 10 11 12 13 74 15 1Б
Выходы объекта ила разряды слова
Рис. 15.5. Табличное представление сигналов
в АЛС
Рис. 15.6. Представление сигналов АЛС в виде
временных диаграмм
Второй режим позволяет запомнить и проанализировать реа-
лизации слов до такта, определяемого маскированным кодом ос-
тановки:
Ф(В) ®(DC0®DCm=DC2; ft3=&A0 i=0)X
X ф (i = i-Ь 1; ДО I (eii,.... enilzt) I (S : Zt) X
X co(zI®DC2=l) I (2AO ©(2Af=M0X
X®(S:zz) I(Z/Z„) I(R:Zn) Ф(Е).
Кроме указанных в АЛС могут быть введены режимы записи
в память образцовых сигналов, сравнения их с реализованными
сигналами с указанием адреса несовпадения, выделения заданных
реализаций и т. п.
В распространенных относительно простых анализаторах логи-
ческого состояния слова имеют от 8 до 32 разрядов, память от 16
до 256 бит на разряд, цифровую задержку до ±216 тактов, частоту
записи от 1 до 20 МГц. Часть АЛС имеют выход в стандартные
цифровые интерфейсы.
Анализаторы логических состояний используются как на ста-
дии разработки цифровых систем, так и при контроле выполнения
ими программ в реальном времени, позволяя при этом выявить
аппаратные неисправности и ошибки программ. Однако эффек-
тивно работать с АЛС могут операторы относительно высокой
квалификации.
Широкое распространение цифровых информационных уст-
ройств, особенно микропроцессоров и микро-ЭВМ, потребовало
разработки более простых и эффективных методов и средств вы-
полнения диагностических процедур. В 1977 г. в США был разра-
ботан метод, названный сигнатурным анализом. Идея его основа1
на на преобразовании (сжатии) длинной выходной двоичной
последовательности контролируемого объекта в короткое слово, на-
зываемое сигнатурой, или ключевым кодом. Сопоставление на-
бора сигнатур, полученных в различных узлах (внутренних и
внешних) контролируемого объекта, с аналогичным набором об-
разцовых сигнатур, заранее рассчитанных или полученных с заве-
домо исправного устройства, позволяет локализовать неисправ-
ный элемент с точностью, определяемой структурой объекта и
выбором контрольных точек.
В качестве ключевых кодов могут быть использованы различ-
ные характеристики двоичных последовательностей —• количество
единиц, количество переходов — изменений значений двоичных
символов на противоположные значения и т. п.
Широкое распространение получил сигнатурный анализатор,
функциональная схема которого изображена на рис. 15.7. Анали-
затор содержит 16-разрядный сдвиговой регистр (PC), устройст-
во суммирования по модулю два, устройство управления и инди-
катор.
Теоретические основы подобных устройств подробно рассмот-
рены в литературе по помехоустойчивому кодированию. Здесь
же приведем его СЛСА:
Ф(В) l_O(i: = i+l) I(eOi)<o(ez=l)X
X I (e0i®eii®egi®el2i®e16i=ei) X
X [I (^16г • == ^15i) III (^15r : ^14i) II ... X
- X- -III : = eu) III (ен : = e() ] го (г—A) “| X
XI(R:Z)®(E).
Здесь N — длина преобразуемой последовательности; Z= (e]6.v,
^15^, , eiN) — результат преобразования — сигнатура.
Сигнатура может отображаться в двоичном или шестнадцате-
ричном формате в обычной или специальной мнемонике.
Сжатие двоичной последовательности может привести к про-
пуску ошибок. Однако доказано, что применение рассмотренного
выше анализатора обеспечивает стопроцентную вероятность обна-
ружения однократных ошибок при любом N, двукратных — при
Лг<с:2т—1, где т — количество разрядов в сигнатуре. Вероятность
всех ошибок (произвольной кратности) не превышает 2~т, для
/77=16 эта вероятность составляет 0,002%, что считается доста-
точным при контроле сложных цифровых устройств. При одно-
кратной ошибке имеется возможность локализовать такт, на ко-
тором произошла ошибка.
Контроль сигнатурных анализаторов можно производить, по-
давая на вход известные последовательности двоичных символов.
Так, при подаче на вход сигнала е/=1, i—1, 2,...,N, сигнатура
полностью определяется структурой обратных связей и может
быть легко проконтролирована.
Локализующая способность сигнатурных анализаторов, види-
мо, может быть улучшена разбиением исходной последовательно-
сти на интервалы; сочетанием различных методов сжатия и анало-
гичными методами.
Завершая рассмотрение СТД, необходимо обратить внимание
на то, что резкого повышения эффективности диагностических
процедур можно добиться при проектировании объектов с учетом
их последующего диагностирования.
Глава 16
О РАСПОЗНАЮЩИХ СИСТЕМАХ
Под образом понимается наименование области в пространст-
ве признаков, в которой отображаются общие свойства выделен-
ного с определенной целью множества объектов [16.1], а под.
распознаванием образов — процесс, в результате выполнения ко-
торого определяется соответствие между распознаваемыми объ-
ектами и образами. Это соответствие устанавливается путем'
сравнения объектов и образов по признакам, характеризующим;
свойства образов, и принятия по определенному алгоритму реше-
ния о принадлежности распознаваемых объектов к тому или ино-
му образу.
Образами могут быть «море», «музыка Чайковского», «чело-
век», «круг», «буква К», «нормальное состояние объектов конт-
роля», «синусоидальное колебание», «нормальный закон распре-
деления вероятностей» и т. п.
Область интересов ИИТ связана с распознаванием техниче-
ских образов, к которым можно отнести материальные объекты и
явления, описываемые с помощью количественно определенных,
признаков, значения которых получаются экспериментальным пу-
тем.
Очевидно, что между задачами распознавания технических,
образов, автоматического контроля и технической диагностика
имеется много общего.
Однако распознавание технических образов имеет свою об-
ласть применения, связанную с отнесением объектов к тому ил»
иному образу, в отличие от контроля и технической диагностики,,
при которых оценивается текущее состояние или выявляется мес-
то или причина неисправности данного объекта. Классификация
биологических микрообъектов, распознавание радиосигналов ц
изображений (например, дактилоскопических оттисков) и т. п. —
вот далеко не полный перечень областей применения методов ц
средств распознавания технических образов.
Структура систем, выполняющих распознавание технических
образов, соответствует обобщенной структурно-функционально»
схеме ИИС (см. рис. 1.1).
Для описания системы распознавания образов (СРО) в лите-
ратуре применяется своеобразная терминология, на которой сле-
дует остановиться (рис. 16.1).
Исследуемый объект часто называется оригиналом, воспри-
нимающие элементы — рецепторами, а их совокупность — рецеп-
торным полем. Реакция рецептора на оригинал носит название'
изображения. Естественным при этом является выполнение тре-
бования информационной эквивалентности изображения ориги-
налу.
При промежуточных преобразованиях происходит фильтрация,,
заключающаяся, не только в уменьшении влияния шумов, но и в-
подготовке к последующему анализу (например, в выделении
контуров сложных фигур).
Собственно процесс опознания осуществляется в ассоциирую-
щей системе, являющейся комбинацией устройств обработки и
сравнения обработанного изображения — описания объекта — с
описанием обобщенного образа (аналог описания нормы в САК),
находящимся в устройстве памяти. Ассоциирующая система про-
изводит опознавание по определенному решающему правилу.
Далее будут использоваться следующие обозначения: Ц=
~(Qi, 0.2, —, Qt,..., Qn)—объекты распознавания; Хг=(х(1,
л',-2, xim); Zi — входные величины от объекта Qt, воспринимае-
Рецепторное
истоойство Фильтр
Изображение
Рис. 16.1. Структурная схема распознающей си-
стемы
Ассоциирующая
система
мые распознающей системой (PC), и их значения; признаки
распознавания G(FX) или G(F, Z), являющиеся функцией вход-
ных величин: q= (qlt q2, .... qh qm)-t Qo=(Qop Q02j Qoh,
—, Qok)—образы; C=(cb c2, —, Q, ..., cm)—признаки, характе-
ризующие образы; R=(Rlt..., R[t.. ,,RL)—решающие правила,
ято которым производится отнесение объектов к образам.
При распознавании основной задачей является классифика-
ция, т. е. выявление объектов, относящихся к заданным образам.
Частными случаями при этом будут выделение объектов, соот-
ветствующих и не соответствующих описанию заданного образа
(видимо, это может быть сведено к задачам контроля), нахож-
дение объекта с заданным индивидуальным описанием среди дру-
гих объектов (видимо, это может быть сведено к задачам поис-
ка), классификация (распределение) объектов по отношению к
заданным образам [16.1, 16.2].
В теории распознавания выделяется также задача таксоно-
мии, т. е. определения количества образов, на которые может
быть разделено данное множество объектов, по заданным решаю-
щим правилам. Эта задача далее не рассматривается.
Признаки распознавания должны позволять количественно
оценивать наиболее важные свойства объектов распознавания и
образов. В качестве признаков используются функции от вход-
ных величин, воспринимаемых PC от объектов распознавания. Ес-
тественно, что сами входные величины могут, если это необходи-
мо, использоваться также в качестве признаков распознавания.
Выбор признаков распознавания производится с учетом особен-
ностей решаемых задач распознавания, анализа информативно-
сти свойств объектов и образов.
Если определены признаки и границы их значений для обра-
зов, то для распознавания необходимо определить решающее
правило, по которому следует относить объект к какому-либо об-
разу.
Если образ Qo представляется областью в многомерном про-
странстве, то в качестве решающего правила может выступать
условие, чтобы расхождение координат объекта и образа в этом
пространстве не превышало заданного значения.
В зависимости от особенностей образов используются разно-
образные меры уклонения. Наиболее простой мерой уклонения
является сумма модулей разностей между координатами объекта
и образа:
т
r(Q, Qo)=2 —c/l-
i=i
В евклидовом метрическом пространстве в качестве метрики
выступает расстояние между точками Q с координатами х и Q&
r(Q, Qo)=l/ £ .
F j=i
Если r(Q, Qo) где e — допустимое уклонение, то предъяв-
ленный объект соответствует обобщенному образу Q.o. Если име-
ется несколько эталонных образов {Qofe} k—\, 2,..., К, то проце-
дура поиска эталонного образа, соответствующего данному объ-
екту, сводится к нахождению QOk, для которого
Если в пространстве образа С заданы плотности вероятностей,,
то при их интегрировании по соответствующей области простран-
ства можно определить вероятность того, что опознаваемый об-
раз принадлежит этой области.
Если известны перекрывающиеся по аргументу плотности рас-
пределения вероятностей fo(Q признака распознавания образа
Qo и f(q) объекта Q и граница а выделения области существова-
ния образа Qo, то можно определить вероятность того, что объект-
оо
Q будет отнесен к образу Q0:p(q)~ f(q)dq, а также вероят-
а
оо
ность правильности классифицировать образ Qo Р(С) = J f0(C)dC.
а
Коэффициент правдоподобия, который используется для при-
нятия решения об отнесении данного объекта к образу, Л=
=P(?)/P(Q-
Для многомерного случая плотность нормального распределе-
ния вероятностей по т признакам распознавания
т^(2^Гт12
(qj — M [qj])2
"2^
В случае определения того, относится ли данный объект Q к
«образу Qo, логарифм коэффициента правдоподобия
т
in Z {?,•} = №{<?}= £ (7И [С;] - 7И [<?,.]) q, -
f=i
т
-0,5 £ (7И[С;.]2 - М [^]2).
i=i
Решающее правило при этом выглядит следующим образом:
•если IT’{g} ^О, то Q^Q0, если же W{q} <0, то Q^Q0.
Близость между распознаваемыми объектами и образами мо-
жет быть также оценена нормированными коэффициентами кор-
реляции типа
т I Г т / т
р=2 cfli у Ё у Ё СЛ
/=1 I /=1 г /=1
При неполной априорной информации об образе установле-
ние признаков и количественное описание образов могут произво-
диться в обучаемых PC. Перед обучением энтропия системы мак-
симальна, т. е. изображение может быть отнесено к любому обра-
зу с равной вероятностью. При обучении вводится упорядочен-
ность в ответы ассоциирующей системы, и энтропия системы
асимптотически уменьшается при увеличении количества обучаю-
щих опытов до заданною значения. Ниже приводится пример
•обучающей процедуры.
На рис. 16.2 показаны линии 1-1, II-II и III-III, разделяющие
образы Qoi, Q02 и Qos попарно и полученные при неизвестных за-
ранее границах областей существования этих образов. При обу-
чении системе предъявляются последовательно образы, положим
Qoi и Qo2 (и об этом выводится соответствующая информация),
подбираются коэффициенты и определяются выражения
т т
S ai4n—bi, У ajqi2=b2- : Затем выбирается число
•1=1 1=1
.йт+ь лежащее в диапазоне min(Zii, b2) =Cam+i;Cniax(bi, b2), при
т
котором линейная функция пзд—am+i принимает для одной
i=i
зоны значение больше нуля, для другой меньше нуля и, следо-
вательно, разделяет эти зоны. Такая функция на рис. 16.2 пред-
ставлена сечением 1-1. Затем последовательно производится обу-
чение для областей 1 и 3 и нахождение сечения II-II, областей
2 и 8 и сечения I1I-III. Ни одно
из сечений не годится для раз-
деления трех областей. Поэтому
выбирается сложное сечение, по-
казанное на рис. 16.2 пунктиром.
Имеются данные, показываю-
щие, что в подобных системах
можно добиться 95—99% пра-
вильного отнесения объектов рас-
познавания 10 образов.
В пространстве рецепторов
удается разделить четко образы
лишь в небольшом числе задач.
Рис. 16.2. Нахождение линий, раз-
деляющих области
Часто признаки опознания раз-
личных образов совпадают. Поэтому возникает необходимость
преобразования пространства ответов рецепторов в другое прост-
ранство, позволяющее разделить образы более определенно.
Одна из первых попыток преобразования пространства рецеп-
торов во вспомогательное пространство сделана в так называемых
перцептронах (под термином «перцепция» в психологии и фило-
софии понимается восприятие действительности органами чувств).
Остановимся на сути работы трехслойного а-перцептрона
(рис. 16.3). Он состоит из рецепторного поля, поля ассоциирую-
щих элементов Аи ..., Ат, усилителей с переменным коэффициен-
том усиления и сумматора — решающего устройства R. Ассоци-
ирующие элементы связаны с рецепторами с помощью возбужда-
ющих (+) и тормозящих (—) связей и имеют определенные по-
роги срабатывания. Организация связей с рецепторами и пороги
срабатывания ассоциирующих элементов устанавливаются до на-
чала процесса обучения случайным образом.
Процесс обучения заключается в том, что перцептрону пока-
зывается объект класса I, при этом возбуждаются некоторые
Рис. 16.3. Схема а-перцептроне
элементы А и коэффициенты усилителей, связанные с ними, уве-
личиваются на 1. Затем показывается объект класса II и у воз-
будившихся ассоциирующих элементов уменьшается коэффици-
ент усиления усилителей. После многократно повторенной проце-
дуры обучения устанавливаются определенные коэффициенты
усиления усилителей. При «экзамене» показывается неизвестный
объект. Если сумма сигналов от А положительна, то в блоке R
принимается решение, что объект относится к классу I. Таким
образом, в перцептроне пространство рецепторного поля преоб-
разуется (с помощью организации связей и порогов срабатыва-
ния) в пространство А элементов. Совокупность значений коэф-
фициентов усиления усилителей задает в Л-пространстве некото-
рую поверхность, разделяющую объекты разных классов.
Если предположить, что каждый элемент А связан с одним
рецептором возбуждающей связью, сигнал от возбужденного ре-
цептора и порог срабатывания элементов А равны 1, то в конце
обучения значения коэффициентов усиления будут отражать, на-
сколько часто встречаются точки объекта на рецепторном поле.
Были построены и испытаны а-перцептроны с различным ко-
личеством рецепторов (256, 400, 512 и др.), элементов А (от 400
до 5000) и связей между ними (от 5 до 30).
В а-перцептронах оказываются недоступными для опознания
объекты, перемещающиеся по рецепторному полю и изменяющие-
ся по масштабу. Чтобы производить распознавание в этих случа-
ях, необходимо применение специальных алгоритмов работы си-
стемы [16.4].
Заметим, что добиться высокой правильности распознавания
образов с помощью а-перцептронов не удалось. Однако в мето-
дологическом плане, с точки зрения преобразования пространст-
ва изображения во вспомогательное пространство, идеи, реализо-
ванные в а-перцептроне, важны.
При обучении возможна реализация алгоритма коллективного
решения [16.2].
Формально задача коллективного решения описывается сле-
дующим образом: если имеются вектор входных величин X или
признаков G и частные решения sb s2,....sL, принимающиеся по
решающим правилам Ri, R2,-..,Rl, то коллективное решение есть
S—F(si, s2,...,Sl, GIX), где F — алгоритм принятия решения.
Для каждой конкретной ситуации правило Ri приводит к ре-
шению si: (G]X)eQofe, k=i, 2, ..., К. Если ввести нормирован-
ный вес для каждого решения щ, то коллективное решение
(G|X)eQofe принимается по максимальной сумме весов.
Выявление наиболее авторитетных решений может быть вы-
полнено с помощью обучения (рис. 16.4). «Учитель» здесь «вы-
дает» информацию о принадлежности поступающего множества
признаков или входных величин (G, X) данному образу. В про-
цессе обучения устанавливаются веса щ и повышается достовер-
ность S. Очевидно, во многих случаях метод коллективных ре-
шений с опытным определением весов существенно лучше равно-
мерного голосования или использо-
вания одного решающего правила.
Можно утверждать, что в системах,
распознающих технические объек-
ты, применение метода коллектив-
ного решения может быть полез-
ным.
Остановимся на примерах при-
менения распознающих систем.
Для распознавания случайных
сигналов используются в качестве
признаков спектральные плотности
мощности на некотором наборе по-
лос частот. При обучении подбира-
ются коэффициенты разделяющих
Рис. 16.4. Распознающая система
с коллективным решением
функций, при которых они принимают неотрицательные значения,
если распознается объект, относящийся к данному образу, и от-
рицательные — в противном случае.
В качестве разделяющих функций чаще всего используются
j=i
j=i
или ряд
j=i
| например, a, + £ a2qj + a3q? 'j.
V j=i /=1 J
Известны спектральные PC, использующие до 32 полосовых
фильтров.
Один из вариантов системы распознавания случайных сигна-
лов представлен на рис. 16.5 [16.4]. В этой системе признаки
распознавания qi,..., — спектральные плотности мощности
Рис. 16.5. Структурная схема системы распознавания
случайных сигналов
для пятнадцати полос частот, математические ожидания которых
Л1(^г) известны. При обучении подбирается такое значение Rj,
при котором U7(G, Л1)— X —Л1(^,)]2—RyQ^O при анализе
7=1
сигнала, относящегося к заданному образу. «Учитель» при обуче-
нии сопровождает анализируемый сигнал информацией об отно-
шении его к заданному образу (положим, в виде кода образа),
а также сообщает ограничение на размер Rj. Время анализа и
распознавания сигналов — примерно 5 мс. Коммутация аналого-
вых признаков {<?.,}, их аналого-цифровое преобразование и за-
пись значений признаков в память производятся за 15 мкс.
Количество образов может быть довольно большим: в [16.4]
описывается устройство, распознающее до 170 образов.
Голографические PC [16.5] позволяют производить распоз-
навание изображений с относительно высокой скоростью (от 103
до 106 изображений в секунду благодаря параллельному анализу
голограмм) и при малых размерах голографических фильтров
(примерно 0,1 см2 на один фильтр). Дактилоскопия, поиск хими-
ческих элементов по спектрам их поглощения, навигация по на-
земным ориентирам — далеко не полный перечень применений го-
лографических PC.
Голографические распознающие системы являются оптико-
электронными системами. В таких системах можно реализовать
полезное сочетание высокой производительности оптических мето-
дов сбора и обработки информации с логическими и вычислитель-
ными возможностями ЭВМ.
В. Телеизмерительные системы (ТИС]
Глава 17
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТЕЛЕИЗМЕРИТЕЛЬНЫХ СИСТЕМ
И ЛИНИИ СВЯЗИ
17.1 . ОСОБЕННОСТИ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ТЕЛЕИЗМЕРИТЕЛЬНЫХ СИСТЕМ
Главной отличительной особенностью телеизмерительных ин-
формационных систем (ТИИС) является наличие в них каналов
связи большой протяженности — более нескольких километров.
Виды и характеристики каналов связи, как правило, решающим
образом влияют на выбор структуры и параметров ТИИС. В та-
ких системах при протяженности каналов связи в сотни километ-
ров сооружение линии связи вместе со средствами каналообразо-
вания, включая модуляторы, демодуляторы, фильтры, усилители
и пр., обычно дороже, чем построение остальных частей ИИС, а
плата за аренду готовых каналов связи превышает все эксплуа-
тационные расходы ИИС вместе с годовыми амортизационными
расходами.
Среди функций, выполняемых ТИИС, наибольшее значение
имеют функции телеизмерения, а среди них — такая организация
процесса измерения, при которой передача измерительных сигна-
лов по каналу связи не вносит погрешностей, превышающих за-
данное значение. Именно ввиду исключительной важности функ-
ции измерения ограничимся рассмотрением только телеизме-
рительных систем (ТИС).
Современные ТИС имеют более богатую предысторию, чем
ИИС ближнего действия. До середины 50-х годов создавались
отдельные устройства с использованием амплитудно-модулиро-
ванных сигналов, проводных каналов связи и релейно-контактных
устройств. Со второй половины пятидесятых годов получили раз-
витие системы с частотной, фазовой модуляцией, а также
с импульсными видами модуляции сигналов, с применением бес-
контактных элементов и многократным использованием линий
связи. Начиная с 60-х годов при построении ТИС используются
структурная и функциональная избыточность, типизация элемен-
тов и структур, передача ПО' каналам связи кодоимпульсных сиг-
налов.
В настоящее время уровень развития ТИС определяется ис-
пользованием агрегатного комплекса средств систем телемехани-
ки (АСТТ) ГСП, основанного на применении современных ин-
тегральных микросхем, универсальных вычислительных устройств,
измерительных преобразователей и т. п.
Можно указать следующие основные направления классифи-
кации ТИС:
а) по назначению — ТИС общепромышленного назначения и
ТИС для исследований и испытаний;
б) по линиям связи — ТИС с проводными и беспроводными
линиями связи;
в) по конфигурации каналов — ТИС с разомкнутыми и зам-
кнутыми каналами связи;
г) по виду сигналов — ТИС с аналоговыми (непрерывными и
импульсными) и кодоимпульсными (цифровыми) сигналами в КС.
Изучение ТИС промышленного назначения связано с некоторы-
ми методическими трудностями, определяемыми тем, что само-
стоятельно такие ТИС создаются редко. Функции ТИС обычно
выполняются в системах телемеханики совместно с функциями
телеуправления, телерегулирования и обмена буквенно-цифровой
информацией. В реализации ТИС участвуют не только измеритель-
ные преобразователи, но и устройства, являющиеся общими для
всей системы телемеханики.
Необходимо сказать, что по ТИС имеются учебные пособия
[17.1, 17.2] и книги .[17.3—17.8], написанные на хорошем про-
фессиональном уровне. Однако в них изложение ведется со своей
терминологией, обозначениями и, конечно, с неизбежным повто-
рением некоторого материала, являющегося общим для ИИС.
Эти обстоятельства затрудняют изучение материала по ТИС, яв-
ляющегося лишь одним из разделов общего курса ИИС. В связи
со сказанным ниже приводится материал по ТИС, ограниченный
требованиями программы курса ИИС. Конечно, для специальных
дисциплин по ТИС, для их более глубокого изучения должна
быть использована соответствующая литература.
Ниже приводится несколько основных требований к телеизме-
рительным устройствам.
Устанавливаются следующие классы точности устройств ТИС:
0,25; 0,4; 0,6; 1,0; 1,6; 2,5; 4,0.
Дополнительная погрешность не должна превышать основной,
соответствующей классу точности, при изменении напряжения пи-
тания на +10 и —15% номинального значения и частоты от 49
до 51 Гц, уровня измерительного сигнала вдвое (кроме сигналов
с амплитудной модуляцией), отношения уровня амплитуды к эф-
фективному значению напряжения помех в рабочей полосе частот
устройства для аналоговых сигналов постоянного тока до 10, а
для импульсных сигналов переменного тока до (9+0,02Х
XAf) j/Af/Af (здесь А/— наибольшая ширина полосы пропус-
кания одного из индивидуальных каналов от 3 до 140 Гц и АГ —
диапазон частот устройства), внешнего магнитного поля до
400 А/м.
Дополнительная погрешность при изменении внешней темпе-
ратуры от ±5 °C до —50 °C может достигать до ±1 К, от —30 до
+50 °C — до 1 К, от —50 до +50 °C — ±1,5 К, где К —класс
точности. В зависимости от степени ответственности, телемехани-
ческие системы делятся на три группы. Устанавливаются вероят-
ности ошибок при передаче команд телеуправления (для 1-й груп-
пы— 10~*3, для 2-й—10_*°, для 3-й—10-7) и кодоимпульсных
сигналов на отсчет (соответственно 10-7, 10-6 и 10-5).
Для оценки динамических свойств аналоговых ТИС применя-
ются такие показатели, как время установления, предельная ча-
стота и частота среза. Временем установления называется время,
по прошествии которого выходная величина ТИС после скачко-
образного изменения входной величины на половину максималь-
ного значения не станет отличаться более чем на ±6% (обычно
±1%) установившегося состояния. Это время для различных
групп устройств может быть до 1 с, до 4 с, более 4 с.
На предельной частоте синусоидального входного сигнала ди-
намическая погрешность передачи устройством амплитуды не
должна превышать заданного значения, а на частоте среза ам-
плитуда выходного сигнала становится равной этой погрешности.
Детальное рассмотрение переходных процессов в аналоговой
части ТИС связано с анализом дифференциальных уравнений,
описывающих ее состояние.
Динамические характеристики кодоимпульсных ТИС не рег-
ламентированы. Наиболее широко для количественной оценки ди-
намических свойств ТИС, работающих в реальном времени, при-
меняется время, необходимое для выполнения процесса измере-
ния (включая и передачу информации по каналу связи). Для тех
ТИС, в которых происходит промежуточное запоминание измери-
тельной информации, а также для отдельных частей ТИС (напри-
мер, частей ТИС до и после ЗУ или передающей и приемной ча-
стей ТИС и канала связи) используется несколько временных ха-
рактеристик.
Помехоустойчивость, т. е. способность ТИС противодейство-
вать влиянию помех, оценивается в конечном счете погрешностью,
вызываемой влиянием помех. Эта погрешность является сложной
функцией вида и характеристик модуляции и каналов связи, ис-
пользуемых в ТИС.
В теории связи используются понятия потенциальной помехо-
устойчивости и идеального приемника, введенные В. А. Котельни-
ковым. Они связаны с оценкой дисперсии разности принимаемо-
го сигнала с шумом хр (/)=%(/)-(-£(/) и сигнала, генерируемого
в приемнике,
Д
J [xp(t)-Kdt)]2dt.
о
Идеальным считается такой приемник, у которого £>,-=0 при
идеальном синфазировании помехи и генерируемого сигнала.
Реальные приемники имеют £>/=#0. Однако, используя понятие
идеального приемника, можно сравнить между собой различные
приемники, а при известных значениях передаваемого сигнала —
оценить необходимые параметры приемника. Например, при пе-
редаче импульсов 1 и 0 кодоимпульсных сигналов
т т
л=-4 J- и (0Г dt - 4- JIи? (0 - 2С/₽ V+
о о
Если U (/) — Um, то Р. = Рр- а если U (t) = — Um, то Ц> = ЯР + Разность Г’.-Г’о: - -Г J 0 }-Dm. 0 =4-^um^up(t)dt.
о
+ U(t) + U*(t)]dt.
Поскольку помехоустойчивость ТИС зависит в первую очередь
от вида модуляции, используемой в канале связи, то ее целесо-
образно рассматривать далее в связи с соответствующими ТИС.
Остальные метрологические характеристики не отличаются от
характеристик ИИС вообще. Большое значение, чем в ИИС ближ-
него действия, имеют информационные характеристики (количе-
ство информации, скорость передачи, пропускная способность и
т. п.).
17.2 . ЛИНИИ СВЯЗИ
В телеизмерениях принято под каналом связи (КС) понимать
совокупность линии связи (ЛС), передающей (ПРД) и приемной
(ПР) частей (рис. 17.1). В простейшем случае, обычно при отно-
сительно небольших расстояниях и аналоговых сигналах, при от-
сутствии ПРД и ПР понятия КС и ЛС совпадают (рис. 17.1,а).
Различают симплексные КС, в которых обмен информацией про-
изводится в одном направлении (рис. 17,6), и дуплексные — в
двух направлениях (рис. 17.1,в).
Остановимся на основных характеристиках ЛС. Изучением ЛС
и процессами прохождения по ним сигналов занимается теория
связи. Здесь приводятся лишь основные сведения о ЛС, необхо-
димые для общего изучения ТИС. Далее рассматривается лишь
ЛС, предназначенные для обмена информацией с помощью элек-
трических сигналов. Акустические, пневматические, гидравличе-
Рис. 17.1. Виды каналов связи:
fl— совмещение КС и ЛС; б—симплексный КС; в—дуплексный КС
ские, механические ЛС используются для передачи измерительных
сигналов на небольшие расстояния в специальных условиях (на-
пример, в пределах скважины). Весьма перспективны с точки зре-
ния расширения частотного диапазона, возможности одновремен-
ной передачи информации по большому количеству КС одновре-
менно в одной ЛС, повышенной помехозащиты и т. п. оптические
линии связи. Оптические линии связи уже получили права граж-
данства и применяются в ТИС.
Проводные линии связи характеризуются следующими первич-
ными параметрами: погонными активным До, Ом/км, емкост-
ным Со, мкФ/км, индуктивным Lo, мГц/км, сопротивлениями и
погонной проводимостью (утечкой) Go, 1/(0м-км). Погонное ак-
тивное сопротивление является известной функцией от удельного
сопротивления, геометрических размеров проводов Д0=/р/4лг2,
температуры До*=Ао [1+<х(£—20)] и частоты (поверхностный эф-
фект). Напомним, что для меди а составляет 0,0039, для желе-
за — 0,0046 Ом/°С, а поверхностный эффект существенно прояв-
ляется для стальных проводов при частотах сигналов в несколь-
ко килогерц.
Погонные индуктивность и емкость двухпроводной линии
(рис. 17.2,а) равны Л0=[41п (h,/r)+fep,)10-4 и С0=е- 10~4/(361n bjr).
Как известно, магнитная проницаемость меди равна 1, желе-
за — около 140 и заметно изменяется с частотой, диэлектрическая
постоянная е воздуха равна 1.
ф- " с “Н---------
Ui Koi ^0, Ьо, Lo и2.
о-----------------—°
б)
Рис. 17.2. Двухпроводная линия связи:
а — сечение двухпроводной линии; б — распределенные параметры
двухпроводной линии
Примерные значения погонных сопротивлений двухпроводных
линий для сигналов постоянного тока при температуре 20°С сле-
дующие [17.2]:
Тип ЛС bt см d, мм F , Ом/км IOt мГн/км Сс, мкФ/км ^°ИЗ' МОм/км
Воздушная: с медным проводом со стальным проводом Кабельная 20 20 -0,2 4 4 0,5—1,4 2,84 22 190—23 1,94 9 0,5—0,7 0,006 0,036 0,03—0,88 25—125 2—5900
Погонное сопротивление изоляции /?0из очень существенно за-
висит от внешних условий (например, дождя, снега, температуры
для воздушных линий, температуры грунта для кабельных Л С).'
Относительно большие погонные активное сопротивление и
емкость кабельных ЛС определяются малым диаметром жил и
малым расстоянием между ними в кабеле.
Для двухпроводной линии связи с распределенными парамет-
рами (рис. 17.2,6) справедливы так называемые уравнения теле-
графной линии, которые изучаются в теоретических основах элек-
тротехники: Й1=Й2 ch yl-\-l2Zc sh yl и li—i2chyl-\-(U/Z.c) sh yl. За-
метим, что при относительно небольших расстояниях (/^50 км)
ch у/^1-|-(у2/2/2), sh yl^yl, и эти уравнения могут быть записа-
ны в более простом виде.
В этих выражениях использованы вторичные параметры линий
связи: коэффициент распространения или постоянная затуха-
ния (1/км)
Y = V(^0 -|- А'А) (Д> + j«-C0, = (а + /ср)
и волновое сопротивление (Ом)
zc — V (^ + iwLo)/(Go+iwCB).
При w = Q (для кабельных ЛС при частотах ниже 10 кГц) у =
—Zc[— К^о/С0’ при ю^>0 (для воздушных ЛС > 10 кГц,
кабельных> 100 кГц) y = aJ)/LoCo, Zc~yLe/C0.
Затухание мощности в ЛС оценивается в неперах (Нп): Ь—
= (1/2) In (Pi/P2), удельное затухание обозначается а (Нп/км).
Если установить номинальную мощность сигнала Ро=1 мВт=
=0,7752/600 В2/Ом, то можно характеризовать мощность сиг-
нала в неперах в любой точке ЛС: Р=(1/2)1п(Р0).
зл-ю3
Рис. 17.3. Частотные диапазоны проводных линий связи:
/ — тональные телефонные каналы; 2—надтональные каналы; 3 — высокочастотные кана-
лы на воздушных линиях; 4 — высокочастотные каналы на симметричных кабелях; 5 — вы-
сокочастотные каналы на коаксиальных кабелях
Для стальных проводных линий а^0,16 Нп/км, для медных
а=0,038 Нп/км, для высокочастотных кабельных линий связи
а^0,28у/ Нп/км (здесь f — в МГц).
Для телефонного канала Международным консультативным
комитетом по телефонии и телеграфии выделяются полосы частот
Др=4 кГц, из них от 0 до 300 и от 3400 до 4000 Гц могут быть
использованы для служебных каналов и сигналов ТИС (рис. 17.3) .
Существует аппаратура для разделения частотного телефон-
ного канала на 16 каналов для телемеханики, а также для про-
межуточного усиления сигналов, которая размещается в линиях
связи через 60—250 км.
Частотные диапазоны для проводных линий связи показаны
на рис. 17.3.
Для передачи телеизмерительной информации могут исполь-
зоваться высоковольтные линии электропередачи, оборудованные
заградительными устройствами, фильтрами, передающей и прием-
ной телеизмерительной аппаратурой (рис. 17.4). Сигналы ТИС
в воздушных линиях электропередачи передаются на частотах от
20 до 1000 кГц, в кабельных линиях электропередачи—-до 20 кГц.
Уровень сигнала в таких ЛС рекомендуется повышать до 4,5 Нп
из-за помех.
Промышленностью выпускается аппаратура, позволяющая реа-
лизовать каналы связи на линиях электропередачи [17.2]. В те-
лемеханических устройствах в качестве ЛС используют распреде-
лительные силовые сети шахт, железных дорог, местного транс-
порта, сельскохозяйственных сооружений, обычно в полосе час-
тот от 15 до 200 кГц.
Рис. 17.4. Использование высоко-
вольтной линии в качестве линии
связи
При передаче информации по
радиоканалу во избежание воз-
действия помех мощных радио-
станций и промышленных объек-
тов, а также явлений резкого
изменения уровня радиосигналов
в ТИС используется частотный
диапазон от 300 МГц и до 30 ГГц
(от метровых до сантиметровых
длин волн).
Реализуются радиоканалы с
помощью выпускаемой промыш-
ленностью приемопередающей УКВ-радиоаппаратуры, а также
аппаратуры радиорелейных линий. При этом через 40—60 км не-
обходимо использовать ретрансляционные станции.
В ТИС необходимо учитывать влияние помех, действующих на
ЛС. Атмосферные помехи вызываются разрядами молний (на Зем-
ле происходит до 100 гроз в секунду), космическими шумами, из-
менением условий прохождения радиоволн, местными разрядами
при снегопадах и т. п. Индустриальные помехи определяются в
первую очередь емкостными и индуктивными связями ЛС с вы-
соковольтными линиями электропередачи, коронными разрядами
и коммутационными процессами в линиях электропередачи, поме-
хами от мощных радиостанций и т. п.
Основные виды помех сводятся к флуктуационным и синусои-
дальным помехам различных частот, одиночным импульсам и пач-
кам (до 10—20) импульсов.
Количественная оценка помех, действующих на данную ЛС,
должна производиться с учетом конкретных условий. Для экс-
периментального получения такой оценки используется соответ-
ствующая аппаратура. Однако могут быть приведены некоторые
общие соображения. Так, например, расчетный уровень помех в
линиях электропередачи на рабочей частоте от 30 до 120 кГц в
полосе 5 кГц принимается равным для линий 35 кВ 4,5 Нп, 110 кВ
3,5 Нп, 220 кВ 2,5 Нп; среднее квадратическое значение флуктуа-
ционной помехи типа белого шума в полосе частот Af при зна-
чении спектральной плотности мощности на данной частоте. So(f)
равно Af.
Для уменьшения влияния помех в воздушных и кабельных ^ЛС
производится симметрирование, главным образом путем скрещи-
вания проводов, и экранирование, а в радиоканалах, как уже го-
ворилось, организуется связь на УКВ. - ; га’
17.3 . РАЗДЕЛЕНИЕ СИГНАЛОВ В ТИС
Временное разделение сигналов
Передача большого объема измерительной информации 'в ТИС
наиболее часто производится с помощью временного раз;еления
сигналов, т. е. последовательно во времени. В телемеханике при-
нято считать, что ТИС с временным разделением сигналов от мно-
гих источников информации относятся к многоканальным ТИС.
Временное разделение аналоговых измерительных сигналов мо-
жет быть в ТИС организовано с помощью измерительных цепей
со сканирующими датчиками или с коммутаторами.
Требования к быстродействию коммутаторов и сканирующих
устройств обусловливаются, с одной стороны, характеристиками
канала связи, а с другой стороны, видом модуляции и требова-
ниями к точности передачи сигналов. При этом необходимо учи-
тывать, что при коммутации и
Рис. 17.5. Синхронизация коммута-
торов
сканировании может изменяться
вид модуляции исходной величи-
ны (например, вместо AM —•
АИМ), что ограничение времени
передачи сигнала может сказать-
ся на точности передачи.
Для передачи информации от
разных источников информации
по одной линии связи необходи-
мо произвести унификацию сиг-
налов (см. гл. 7).
Временное разделение кодо-
импульсных сигналов может быть
организовано при подаче сигна-
лов в каналы связи с выхода циф-
ровых измерительных устройств
сканирующего типа, устройств с
коммутаторами и мультиплицированных устройств. Поскольку в
ТИС каналы связи предназначены для обмена информацией, ха-
рактер которой заранее определен, то при выполнении обмена
могут передаваться не все виды информации, предусмотренные
обычными протоколами обмена в последовательном интерфейсе
(см. гл. 5). Например, при циклическом режиме работы комму-
таторного устройства можно не передавать адресную информацию.
В целях повышения помехоустойчивости и адресации приня-
тых сигналов при циклическом режиме обмена .информаций син-
хронизируется работа коммутаторов на передающей и приемной
частях ТИС (рис. 17.5).
Если на передающей и приемной частях ТИС имеются генера-
торы импульсов тактовой частоты, обладающие высокой стабиль-
ностью по частоте и фазе в течение времени одного цикла пере-
дачи сигналов, например за цикл работы коммутатора, то доста-
точно произвести их подстройку 1 раз за этот цикл. Для этой
цели используется передача специального синхронизирующего им-
пульса ес, отличающегося от измерительных сигналов. На прием-
ном конце этот импульс выделяется с помощью схемы цикловой
синхронизации ДС и используется для подстройки генератора GN2.
Для аналоговой многоканальной ТИС с цикловой синхрони-
зацией (рис. 17.5) СЛСА будет иметь вид:
начальные условия
\ Фо(В) Фо [G/VJf, q>), GN2(f, ф), i=0] X
коммутация
X{[L®oi(» :=»+!; f, ф) Ii (ВДЦ1Х
, i
Х11[Ьф02(1: =»+l; f, ф)ф2(п/0]}Х
2
передача и прием
X [Il (Xi) IK.c(Xj*) I2(Xi*) ...]X
подстройка ге’нератора
2 -1
XMMkcfaHMM Й Ф2О1)] II [©i(ес) Й])фо(£)-
Можно управлять работой коммутатора К2 от каждой им-
пульсной посылки сигнала после коммутатора /G. Такой режим
работы носит название внутрицикловой синхронизации. Если для
измерительных сигналов с угловой модуляцией выделение импуль-
са для управления коммутатором Kj2 на приемной части ТИС мо-
жет производиться по амплитуде передаваемого измерительного
сигнала, то для импульсов АИМ нужно специально формировать
отличающийся от измерительного сигнала импульс ес. Таким об-
разом, на выходе коммутатора К, выдаются импульс и измери-
тельный сигнал (ес, Xt). Функционирование схемы (рис. 17.5) с
внутрицикловой синхронизацией (схема ВЦС) при начальных
условиях фо [G(f, ф), i=0] будет описываться следующей СЛСА:
L<Doi(i: =Ж) В (Х/ес, х,-)Х
1
1
Х1кс(<?с, хг*)о)2(ес)ф2(п/0 I2 (Xi*)ti>i(i=n; At) ”].
Обычно время, необходимое для передачи информации при
внутрицикловой синхронизации, больше, чем при цикловой.
В некоторых случаях для синхронного управления операция-
ми обмена информацией в ТИС можно использовать силовую элек-
тросеть с частотой 50 Гц.
В заключение отметим, что в передающей части ТИС с вре-
менным разделением сигналов встречаются последовательная, па-
раллельно-последовательная й, реже, мультиплицированная струк-
туры, а в приемной части — последовательная и последовательно-
параллельная структуры.
Частотное разделение сигналов -
Частотное разделение сигналов в ЛС позволяет организовать
на ней несколько независимо и параллельно действующих частот-
ных КС (рис. 17.6) j
Рис. 17.6. Частотная многоканальная ТИС
Для каждого КС выделяются полоса частот А/\ и. средняя час-
тота ft, а также защитный интервал А[3. Таким образом, каж-
дый КС занимает полосу частот (Afi-f-Af3).
Если Afj=const, Af3=const, а количество КС равно п, то час-
тотный диапазон ЛС должен быть
AfK^sn (Af+Af3) =nAf (1+m3/).
Если принять, что эффективность использования КС опреде-
ляется произведением полосы пропускания КС и полного време-
ни передачи п измерительных сигналов, то для частотного разде-
ления
AfKT=n(l+m3/).
При временном разделении минимальное время передачи сиг-
нала tn=l/fK, а защитный интервал между сигналами равен /З.и-
Тогда время передачи при временном разделении п сигналов бу-
дет равно 7’=п^и(1+т3.и). Отсюда А/кТ=п(1+т3.и). В [17.3]
делается на основании приведенных выше рассуждений вывод,
что эффективность использования КС определяется главным об-
разом размерами защитных интервалов.
Количество частотных КС не только определяется соотноше-
нием частотных характеристик линии и отдельного КС, но и огра-
ничивается наличием перекрестных помех между КС и необхо-
димостью увеличения защитных интервалов. Причинами возник-
новения этих помех являются импульсы и гармоники сигналов,
спектр частот которых перекрывает защитные интервалы, а также
нелинейные искажения КС.
N
Если в КС передается сигнал (7ВХ = cos т0 сигнал на
7=1
выходе КС в результате нелинейных искажений в нем
\ Учитывая, ЧТО COS о>/+ COS о>/=-у [COS (о^ + о>2) (+-COS (o>t—ш2)(],
cob2co(=(l/2)cos(2co/+l), в t/вых будут составляющие с суммами,
разностями, произведениями частот и т. п. При N—10 и К=3 чис-
ло' составляющих типа сумм и разностей частот равно 480, а при
д/==15 равно 1820. Все сказанное приводит к тому, что на одной
ЛС в ТИС организуются обычно не более 10 частотных КС.
Ортогональное разделение сигналов
В системах связи используется ортогональное разделение сиг-
налов, позволяющее организовать на одной линии связи несколь-
ко параллельных КС [17.8].
Ортогональные функции <р(/, 0) заданы на интервале Q—t/T
от —1/2 до +1/2 и формируются на передающей и приемной
частях ТИС (рис. 17.7). В КС передается сигнал F(0) =
п—1
— 2 хгЧ>(1, 0), являющийся функцией от всех передаваемых
i=0
измерительных сигналов. Разделение сигналов производится на
приемной части, при этом используется известное свойство орто-
гональных многочленов:
1/2
f T(t. 6)«P(O 6)rf6= 1
—i/2
И
1/2
<p(i. 6)<p(^=+i, 6)rf6 = O.
-i/2
Тогда
1/2 1/2
Xi — 1 6)^6= J k,?(l. 0) + -- +*/<Mi, 0) + --
—1/2 —1/2
-•+x„_1<p(n—1, 6)d6.
Рис. 17.7. ТИС с ортогональным разделением сигналов
Следует отметить большое разнообразие ортогональных функ-
ций, которое может быть использовано в таких ТИС (см. гл. 11).
Одна из наиболее простых реализаций ортогонального разде-
ления сигналов связана с генерированием функций Уолша, а т^к-
же синусоидальных и косинусоидальных колебаний. В последнем
случае, например при передаче четырех сигналов, формируется
F(0)=Xi V 2 sin 2л04-Х2 V2 cos 2л0-|-
-j-XgV 2 sin 4л04~Х4 cos 4л0.
Минимальное время интегрирования будет здесь определяться
наименьшей частотой.
В заключение этой главы следует сказать, что в ТИС наи-
большее распространение имеет временное разделение сигналов.
Частотное разделение иногда используется для одновременной, па-
раллельной передачи каждой кодовой комбинации. При этом каж-
дый частотный КС используется в режиме временного разделения
сигналов. Комбинированные способы разделения сигналов позво-
ляют рационально использовать их положительные, свойства
[17.4].
Глава 18
СТРУКТУРЫ И ПРИНЦИПЫ действия тис
18.1. АНАЛОГОВЫЕ ТИС
В одноканальных аналоговых ТИС (рис 18.1) канал связи не-
посредственно входит в измерительную цепь и поэтому должен
рассматриваться как аналоговый измерительный преобразователь.
Рис. 18.1. Одноканаль-
ная аналоговая ТИС:
ПРД—передатчик; Л С—
линия связи; ПР—прием-
ник; КС— канал связи
Результат измерения в таких ТИС получается на приемном
конце системы.
По каналам связи аналоговых ТИС передаются сигналы с ам-
плитудной, частотной и фазовой, а также с амплитудно-импульс-
ной, частотно-импульсной и широтно- или времяимпульсной мо-
дуляцией (см. гл. 7).
Т елеизмерительные системы с амплитудно-модулированными
сигналами
В таких ТИС используется двухпроводная линия связи, по
которой передаются сигналы в виде постоянного тока или напря-
жения. Известны логометрические измерительные схемы, в кото-
рых влияние параметров ЛС на погрешность измерения удается
существенно уменьшить. Однако для их реализации необходимо-
применять трехпроводную ЛС. Поэтому они не нашли широкого
применения в ТИС.
К основным разновидностям ТИС с амплитудно-модулирован-
ными сигналами относятся системы некомпенсационные и компен-
сационные, токовые и напряжения. В таких ТИС входные вели-
чины (неэлектрические или электрические) преобразуются в экви-
валентный по информационному содержанию унифицированный
сигнал постоянного тока. Для выполнения этих преобразований
разработан и выпускается промышленностью ряд преобразовате-
лей [17.1, 17.2]. В индукционных преобразователях угла поворота
стрелки прибора на тот же угол перемещается катушка в пере-
менном магнитном поле, а затем индуцированный в катушке пе-
ременный ток выпрямляется. Известны индукционные преобразо-
ватели, имеющие линейную зависимость выходного тока от угла
поворота в пределах от —70 до 4-70° с погрешностью ±2,5%.
Индукционные преобразователи линейных перемещений работают
в диапазоне от десятков до тысячи миллиметров и выдают ток
или напряжение. Они исполняются в виде трансформаторных дат-
чиков или преобразователей с распределенными параметрами и
имеют погрешность порядка от ± 1 до ±2,5%- В выпрямительных,
устройствах для преобразования переменных токов и напряжений
приняты меры по уменьшению погрешностей от нелинейности вы-
прямителей, от температурных влияний и от изменения частоты.
Имеется довольно большое количество разработанных преоб-
разователей активных и реактивных мощностей трехфазных цепей
в сигнал постоянного тока. Здесь можно напомнить об использо-
вании преобразователей Холла, умножителей экспоненциальных,
сигналов, квадраторов сумм и разностей сигналов и т. д.
На приемном конце в токовых некомпенсационных ТИС при-
меняются магнитно-электрические измерительные механизмы,,
имеющие линейную зависимость угла поворота подвижной части
от тока и высокую чувствительность. Высокая чувствительность,
измерительного механизма позволяет для уменьшения влияния-
изменения сопротивления ЛС на погрешности измерения вклю-
чать последовательно (обычно до ЛС) дополнительный резистор
с большим сопротивлением.
Для воздушных ЛС влияние токов утечки и сопротивлений
столь велико, что применение таких ТИС при длине ЛС больше
7—10 км может привести к погрешностям, превышающим несколь-
ко процентов. При длине кабельных линий связи1 более 20—50 kmi
погрешность ТИС также становится недопустимо большой. Для
расчета погрешностей могут быть использованы приведенные вы-
ше уравнения.
Компенсационные токовые ТИС, как известно; могут быть осно-
ваны на использовании статического или астатического регулиро-
вания.
Рис. 18.2. Компенсационные ТИС постоянного тока:
а — статическое регулирование; б— астатическое регулирование; в — ТИС постоянного на*
пряжения
При статическом регулировании (рис. 18.2,а)
7—7!*=А7; I—
kc=M/T, 7i= [(1—/Со.с)/Ло.с]/; A/=const.
При А/—>-0 теряется устойчивость.
При астатическом регулировании (рис. 18.2,6) di*/dt=K\M\
т
Л1=1—Интеграл 1\*=К.ЬС J Aldi растет до тех пор, пока
о
А/ не станет близким к нулю, и /=/*=Ло.сЛ; I\=I/Ko.c- Отсюда
видно, что при Лс<1 и /Со.с>1 в компенсационных токовых ТИС
можно добиться, чтобы изменение сопротивлений ЛС не оказы-
вало существенного влияния. Однако при этом невозможно устра-
нить влияние токов утечки.
Если в уравнении 7t — /2 (ch у/- [- (Z2/Zc) sh у/) = f2W (/) использо-
вать приближенные выражения для ch у/ 1 -{- (y2Z2/2) и shyZ=yZ,
то Г (Z) М1 + (Т2/72) + (Z2/Zc) у/]. Для ш=О,- у = ]//<&? Z ’ =
= VX/G0, и тогда ^[l^WWWZ]- При Go=0
W (Z) = 1, а при Go = 1 • 10-6 1 /(Ом- км), W (Z) 1 (7?0/2)• 10~6 Z2 Д-
ч-(г2>Ч/рХ)/.
Если принять, что (7?0/2) 10-6Z2-|-(r2/j/^) 10-3Z= 10-2, то при
7?о—20 Ом/км и токе Ц, несущем полностью информацию об изме-
ряемой величине (т. е. в отсутствие компенсационного режима),
длина линии не должна превышать 45 км.
Если же по ЛС протекает ток А/=Дс/1 или ток небаланса в
.астатическом режиме, то, очевидно, его утечки скажутся в мень-
шей степени и длина ЛС может быть увеличена.
Аналогичные рассуждения можно провести и для компенсаци-
онных ТИС постоянного напряжения (рис. 18,2в).
Итак, ТИС постоянного тока просты и дешевы, в них исполь-
зуется унифицированный сигнал в ЛС (0—1 мА, 0—5 мА) при
изменении сопротивления нагрузки в довольно широких пределах
(до 2 кОм), фильтрация входных сигналов осуществляется маг-
нитно-электрическим механизмом.
Используются ТИС постоянного тока при длине ЛС в лучших
случаях до десятков километров, при этом нужно учитывать, что
в одноканальных токовых ТИС ЛС используется неэффективно..
Анализ переходных процессов в токовых некомпенсационных
и компенсационных ТИС и рассмотрение некоторых реализаций,
таких систем приведены в [17.1].
В заключение следует отметить, что токовые ТИС отличаются
от аналогичных устройств ближнего измерения только тем, что
в них применяются ЛС с распределенными параметрами.
Телеизмерительные системы с частотно-модулированными
сигналами (частотные ТИС)
Различаются синусоидальные частотно-модулированные (ЧМ)*
сигналы и сигналы с частотно-импульсной модуляцией (ЧИМ).
Если при ЧМ информационным параметром является частота ко-
лебаний, то при ЧИМ — частота следования импульсов.
К основным характеристикам частотных ТИС относятся коэф-
фициент изменения частоты K]=fmax/fmin и ширина полосы частот
Af:==fmax fmin-
Применяются также понятия средней частоты канала f0=
= (fmax—finin')/2 и девиации частоты e=A//f0. Коэффициент Kf
выражается через е как Kf=(2+e)/(2—е).
Поскольку коэффициент распространения У(R0-[-ju>L() (G0-i~jcoC0)
резко зависит от частоты, то преимущественно применяются низ-
кочастотные системы, работающие в области подтональных частот
(до 300 Гц).
Значение К/ желательно выбирать равным примерно 1,5 [17.1].
Уменьшение Kf может привести к большой погрешности из-за
нестабильности генератора на передающей части: положим, что
Ах/хтах—6f/Af; 6f/Af=6f/(fmax—fmin) =Sf/fmax (l—fmin/fmax) —
= (6f/fmax) 1], тогда при /QC1,5 1) может из-
мениться от oo до 3, а при K/^1,5— от 3 до 1.
При /</=1,5 и Af=40 Гц е=1/2,5, а /о=А//е=1ОО Гц.
Увеличение Kf может привести к уменьшению количества ка-
налов, которые могут быть организованы в данном диапазоне
частот.
В ТИС с ЧИМ коэффициент изменения частоты может иметь,
несколько большее значение (примерно 4—10), так как для со-
хранения достаточной крутизны фронтов импульсов сигналов нуж-
но обеспечить более широкий частотный спектр КС [17.3].
Передающая часть ТИС с ЧМ-сигналами (рис. 18.3) содержит
генераторы синусоидальных колебаний, частота которых зависит
от величины, которую нужно передать по КС. Такой величиной
могут быть ток или напряжение, которые могут изменять актив-
ное, индуктивное или емкостное сопротивление RC- или £С-гене-
раторов, усилие, действующее на струнный генератор, и т. п. Для
улучшения точностных характеристик в таких генераторных пре-
образователях используются компенсационные режимы, обратные
связи и т. п.
В ТИС с ЧМ-сигналами на передающей части используются
индукционные механизмы с механическими, оптическими или элек-
трическими формирователями импульсов, мультивибраторы и бло-
кинг-генераторы.
На приемном конце для преобразования ЧМ- или ЧИМ-сигна-
лов в ток или напряжение используются аналоговые выпрями-
тельные и усредняющие (в виде
конденсаторных частотомеров)
преобразователи ЧМ-сигналов
(после приведения их амплитуды
к нормированному уровню, на-
пример, усилением и ограниче-
нием), частотозависимые цепи,
Рис. 18.3. ТИС с ЧМ-сигналами
двухконтурные резонансные це-
пи. Некоторые схемы приемных устройств представлены на
рис. 18.4.
Цифровые частотомеры в ТИС с ЧМ-сигналами применяются
редко, так как при низкой частоте сигналов время измерения с
помощью цифровых частотомеров оказывается относительно
большим. Так при f—27 Гц и 6=0,02 /f8= 1 / (27-0,02) = 18 с.
Заметим, что, видимо, можно добиться лучших результатов, исполь-
Рис. 18.4. Преобразователи частоты в ток и частоты в напряжение:
а — выпрямительный преобразователь; -б — выпрямительный преобразователь с приведени-
ем начала динамического диапазона к нулевому значению; е—конденсаторный преобра-
зователь; а —преобразователь .на .резонансных контурах
зуя цифровое измерение периодов или умноженной частоты сиг-
нала, а также измерение частоты со следящим уравновешиванием.
На рис. 18.5 представлена структурная схема ТИС с ЧМ-сиг-
налами типа ТНЧ-2, предназначенная для промышленного приме-
нения.
"Ыгшт
Рис. 18.5. Структурная схема ТИС типа ТНЧ-2
На входе ТНЧ используются индукционно-выпрямительные пре-
образователи угла поворота а в постоянное напряжение. Это
напряжение изменяет индуктивность ЛС-генератора с обратной
связью. На приемном конце после усилителя-ограничителя и
выпрямителя используются аналоговые показывающий и реги-
стрирующий приборы. Погрешность аппаратуры составляет
±2,5%, средняя частота /0=4 Гц. Дальность работы — порядка
нескольких десятков километров.
В КС могут быть использованы сочетания ЧМ или ЧИМ с дру-
гими видами модуляции. Так, в радиоканалах наиболее часто
применяются ЧМ — ЧМ, ЧИМ — ЧМ и др. Вторичная модуляция
и демодуляция выполняются в каналообразующей аппаратуре.
ТИС с времяимпульсными сигналами
Различают широтно- и интервально-импульсные сигналы
(рис. 18.6,6). Параметром, переносящим информацию, в широтно-
импульсной модуляции (ШИМ) служит длительность импульса, а
в интервально-импульсной модуляции (ИИМ, иногда ее называют
ФИМ) —интервал между импульсами.
Минимальная длительность импульса ттщ определяется воз-
можным изменением фронта импульсов, а интервал между им-
пульсами — шириной опорного импульса.
Рис. 18.6. ТИС с времяимпульсными сигналами:
а _ схема ТИС; б — широтно- и интервально-импульсный сигналы
Для времяимпульсной модуляции (ВИМ) (под которой будет'
пониматься как ШИМ, так и ИИМ) длительность интервала вре-
мени пропорциональна величине х:
Т^ТтгпЧ- max ^тгп}/ (Xmax %тгп)] (-Х—Хтгп)*
Сигналы с ВИМ могут передаваться с периодом Т^хтах-
Для белого шума s(t) среднее квадратическое отклонение
бд/(5)=У5оА/, где So — спектральная плотность мощности в час-
тотном диапазоне Af. За счет действия помехи изменяется фронт
импульсов. Для ИИМ_________одр(Ат)=о(5)/у2аНтая:А/); ШИМ
Ттах Tmzn = O (S) / (ССб7тахУ2А^бп), ЗДвСЬ &==fmax/^f, а бп-ЗаДЭН-
ная погрешность [17.3, 17.5]. Эти выражения справедливы при
относительно невысокой интенсивности помех.
Рекомендуется для ИИМ тт^=2ти.
Для повышения помехоустойчивости при ИИМ рекомендует-
ся производить оценку полусуммы интервалов времени по перед-
ним и задним фронтам, при ШИМ — отбраковку импульсов дли-
тельностью менее tmtn и паузе между импульсами менее Т—хтах.
На передающей части для преобразования измеряемых вели-
чин в сигналы ВИМ используются электромеханические преобра-
зователи угла поворота во времяимпульсные сигналы, линейные
преобразователи развертывающего типа, экспоненциальные преоб-
разователи [17.2, 17.8] и т. п.
а)
Рис. 18.7. Экспоненци-
альный преобразова-
тель сопротивления или
емкости в интервал вре
мени:
а — электрическая схема;
б — временная диаграмма
В экспоненциальных преобразователях (рис. 18.7)
!: ' = U [rz/(rt + г2)] и ис = и [1 - е-'/<Л+г») С].
Равенство достигается по прошествии т»ДС1п[(fiH-
+г2)/п] (при Гн<С-/?)- В таких преобразователях т может изме-
няться от микросекунд до десятков секунд, а преобразование мо-
жет производиться с погрешностью до ±0,1%-
В приемной части длиннопериодных ТИС (Тс от 5 до 50 с)
используются секундомеры, самописцы и пр., а короткопериодных
(Тс меньше 5 с) — цифровые измерители временных интервалов
или аналоговые измерительные приборы после обратного преоб-
разования интервала времени в напряжение или ток.
В канале связи ТИС передаваемый сигнал может иметь слож-
ный вид модуляции (например, ШИМ — ЧМ).
Итак, особенности, накладываемые на аналоговые ТИС нали-
чием каналов связи, сводятся к следующим.
В ТИС при передаче по проводному КС сигналов постоянного
тока необходимо учитывать влияние распределенных омического
сопротивления и проводимости утечки.
При передаче по проводному КС сигналов переменного тока
необходимо особо учитывать наличие реактивных сопротивлений
ИС, которые могут влиять в первую очередь на крутизну фронтов
и фазовые искажения, а также привести к существенному зату-
ханию сигналов. Повышение точности передачи в таких ТИС свя-
зано с увеличением временных параметров сигналов почти линей-
ной зависимостью.
Использование радиоканала в ТИС возможно только в том
случае, если по каналу связи передается сигнал, модулирующий
высокочастотные колебания, соответствующие частотному диапа-
зону радиоканала. Этот сигнал может быть результатом сочета-
ния нескольких видов модуляции АИМ—ЧМ, ЧМ—ЧМ, ШИМ—
ЧМ и др. Точностные характеристики при этом определяются, в
основном, параметрами первичной модуляции.
18.2. ЦИФРОВЫЕ ТИС (СИСТЕМЫ С КОДОИМПУЛЬСНЫМИ СИГНАЛАМИ]
В отличие от аналоговых ТИС в ТИС с кодоимпульсной мо-
дуляцией (КИМ) сигналов измерительные процедуры, связанные
с получением числовых значений величин, производятся на пере-
дающем конце, а в КС передаются кодоимпульсные сигналы. Наи-
более специфическим и важным для кодоимпульсных ТИС являет-
ся такая организация передачи информации по КС, при которой
была бы обеспечена надежная передача кодоимпульсных сигна-
лов и минимальная загрузка КС.
Для передачи КИМ-сигналов используются двоичные и двоич-
но-десятичные коды. Для передачи нуля и единицы служат сигна-
лы КИМ —AM, КИМ —ВИМ, КИМ —ЧМ (рис. 18.8).
Минимальная ширина импульсов ограничивается в первую 'оче-
редь частотными характеристиками ЛС ттгП^1,25 Af, для провод-
ных ЛС Af«100 Гц.
Скорость передачи измеряется величиной 1/Тт, где Тт— период
тактовой частоты, или в l/tmin.
Передача кодовой комбинации производится поразрядно, на-
чиная со старшего разряда. Параллельная передача всех разря-
дов требует наличия и одновременной работы соответствующего
количества каналов связи.
Рис. 18.8. Диаграммы кодоимпульсных сигналов с AM и
ШИМ
Рис. 18.9. Структурная схема кодоимпульсной ТИС
Структурная схема кодоимпульсной ТИС представлена на
рис. 18.9. В этом варианте схемы применена синхронизация гене-
ратора GN 2 с помощью импульса, характеризующего состояние
ес, передаваемого 1 раз за цикл передачи одного числа г. Для
преобразования параллельного кода в последовательный и наобо-
рот используют мультиплексоры. Повышение помехоустойчивос-
ти обеспечивается с помощью формирования дополнительного кода
гк на передающей части и использования его для выявления и ис-
правления ошибок на приемной части ТИС.
Содержательные логические схемы алгоритмов этого варианта
ТИС могут быть представлены в следующем виде:
начальные условия
<p[i=0; /=0; GIVi (A, <pi); GN2(fi, <Pi)J X
аналого-цифровое преобразование и формирование дополни-
тельного кода
X L ®oi(/: =/+1) Ii (X/х,) I1[x3/z=
1
= еь е2, ..., е,-, .... еп] Ii (z/zK=en+i, ..., ет)х
коммутация и передача по КС
Х{1Ьфо. G: = i + 1; L) I2 (z,, zkfei] || X
2
X II ILA2 (п= i +1; A)I2 (m[i) ]} IK C (et) I2 (S:e(-)X
2 3
X [%, (i = тГ] 11 “o2 (i = X:
цикловая синхронизация
{IL fo) (/ = m Le (ec) L (CR: Aec, C7n)«(Aec > Un) Ф02 (f.'VfJ] ||X;
проверка правильности передачи, корректировка и выдача кода
XII [12(г, zK/z]} I2(z).
Здесь Аес — амплитуда импульса.
Индекс 1 при обозначениях операторов отмечает, что они вы-
полняются на передающей части, 2 — на приемной части, а КС —
в КС ТИС. Отметим, что можно разработать несколько СЛСА
данной ТИС, различающихся, в частности, последовательностью
выполнения операторов. Столь же очевидно, что состав функцио-
нальных блоков ТИС может быть изменен. Так, например, в при-
емной части вместо устройств управления, контроля правильности
передачи, сравнения можно использовать микропроцессор.
При измерении большого количества величин X вместо комму-
таторов могут быть использованы сканирующие устройства; пред-
ставляет интерес использование на передающей части мультипли-
цированных измерительных цепей с ассоциативной обработкой
'(см. гл. 8).
В отличие от передачи аналоговых сигналов, где КС. входит в
аналоговую измерительную цепь и может вызвать дополнительные
погрешности, передача КИ сигналов связана с возможностью иска-
жения или изменения количества передаваемых импульсов. Для
кодоимпульсных ТИС нормируются вероятности ошибочного при-
ема одного отсчета (например, рОш=10~6).
Если вероятность искаженного приема р, а правильного прие-
ма q, то при передаче n-разрядной кодовой комбинации (<7+р)"=
= [(1—Р)+р]”=1- При разложении этого выражения по биному
Ньютона [(1—р) + р]”= (1—р)п-|-п(1—р)п-1р + С2п(1—р)п-2р2+
+С3И (1—р)п-3р3 + ...-\-рп.
Здесь (1—р)п—вероятность отсутствия искажений; n( 1—р) и-1р—
вероятность одиночного искажения; С2И(1—р) эт2р2— вероятность
двойного искажения и т. п. Напомним, что C„m=n!/m!(n—т)!
Если учесть, что р<С1, то каждый последующий член разложе-
ния много меньше предыдущего. При малых п имеем (1—р)п~'^
яар\ Тогда [(1— p)-f-p]n^(I—р)п4-пр+С2пр2+ ... +рп.
Для обнаружения ошибок при передаче кода по КС использу-
ется введение в передаваемую кодовую комбинацию избыточных
контрольных зарядов. Остановимся на наиболее распространен-
ных способах защиты КИ-сигналов.
а) При введении одного контрольного разряда и обеспечении
четного количества единиц в передаваемой кодовой комбинации на
приемном конце ИС имеется возможность обнаружить нечетное
количество ошибок (одиночные, тройные и др. нечетные ошибки).
Вероятность ошибки передачи при этом будет приближенно опре-
деляться вероятностью появления двойных и вообще четного коли-
чества ошибок: РОш=С2пр2.
б) Если формировать код с постоянным числом единиц, то воз-
можно обнаружение единичных ошибок, а также части ошибок
кратных POia=C2np2a, где а<1.
в) Если используется повторная передача кода, то РОш=(и/2)р2
и обнаруживаются все нечетные и часть четных ошибок.
г) При использовании кода Хемминга полное число возможных
реализаций избыточного двоичного кода с количеством разрядов п
составляет 2п/(п+1) ^2“, где и—количество информационных
разрядов. Количество контрольных разрядов k—n—и определяет
возможное число проверок на четное количество единиц в прове-
ряемых комбинациях, а значение каждого контрольного разряда
определяет четность единиц в данной комбинации.
В зависимости от количества информационных разрядов и
значения k и п равны:
и......................... 2 4 6 8 11
k......................... 3 3 4 4 5
я..........................5 7 10 12 16
Позиция контрольных разрядов в передаваемом слове равна
2‘, т. е. 1, 2, 4, 8.... Проверяются комбинации: при первой провер-
ке 1ФЗФ5Ф7Ф9 ..., при второй 2ф 3, 6Ф7, 10Ф11 .... при третьей
4Ф5Ф6Ф7, 12Ф 13ф 14ф 15... Кроме того, производится проверка
на четность всего слова.
Приведем простейший пример. Положим и—2. Разрешенные
кодовые комбинации при передаче информации разрядами на по-
зициях 3 и 5 таковы:
Позиции
I 2 3 4 5 6
0 0 0 0 0 с
1 0 0 0 1 0
1 1 1 0 0 1
0 1 1 0 1 1
Положим, принята комбинация 110001. Тогда первая проверка
дает нечетное количество единиц, вторая—нечетное, третья—чет-
ное, четвертая—нечетное. Во все неправильные комбинации входит
третья позиция. Следовательно, необходимо исправить третий раз-
ряд, т. е. 111001.
Выбрать вид защиты можно, если заданы вероятность ошибки
приема, а также характеристики КС.
Пусть [17.3] и=8 и требуется обеспечить вероятность ошибки
в передаче слова/5Ош=10-6, а КС обеспечивает вероятность ошибки
при передаче одного разряда/?. Тогда прир^10~7 Р*ош=8р—8-1()-7,
т. е. никаких мер защиты применять не нужно; при р=С10~4 и ис-
пользовании контроля на четность п=8-|-1=9, С29р2=
= (9-8-7 ! /2 ! 7 !) -10~8=3,6-10-7; наконец, при р^10-3 и исполь-
зовании кода Хемминга п—12 /5*ОШ=С312Р3=(12-11 • 10-9 !/3 ! 9 !)Х
XI 0-9=2,2-10-7.
Следует отметить, что при помехе S (/) вероятность искажения р=
S
= J f(s) ds = F (VJs). При увеличении отношения уровня сигнала
ит
к среднему квадратическому значению помехи вероятность ошибок
резко уменьшается [17.4, 17.5]. Так, при приеме двухпозиционного
сигнала идеальным приемником Um/c=8, р=1,3-10~3, а при
Пт/о=4,5 р=3,4-10-6.
Следует обратить внимание на то, что в кодоимпульсных ТИС
повышение точности передачи приводит к увеличению количества
разрядов, но это не требует больших (как в аналоговых ТИС) вре-
менных затрат.
Повышение помехоустойчивости кодоимпульсных ТИС может
быть достигнуто использованием информационной или решающей
обратной связи. Для организации работы таких систем необходимо
иметь дуплексный КС или два симплексных КС, обеспечивающих
передачу информации в двух направлениях. В ТИС с решающей
Рис. 18.10. Структурная схема ТИС с обратной связью:
® — ТИС с решающей обратной связью; б —ТИС с информационной обратной связью;
передатчик; ЛС линия связи; ПР — приемник; РУ— решающее устройство-
Ан — анализатор
обратной связью (рис. 18.10) используются избыточные коды, по-
зволяющие обнаружить ошибки на приемной части системы. Если
ошибка обнаружена, то после переспроса передача информации по-
вторяется.
В ТИС с информационной обратной связью принятая по прямо-
му КС информация передается по обратному КС, сравнивается с
той, что передавалась по прямому КС, и при необходимости цикл
передачи информации повторяется. В ТИС с информационной об-
ратной связью могут использоваться коды без избыточности.
Замкнутые ТИС создаются при повышенных требованиях к на-
дежности передачи информации.
18.3. ОБ АДАПТИВНЫХ ТИС
В адаптивных ТИС алгоритмы работы учитывают изменение
измеряемой величины или окружающих условий (воздействий).
Главные цели применения адаптивных ТИС состоят в исключении
избыточности выдаваемой системой измерительной информации
(обычно с сохранением возможности восстановления исключенной
информации) и в сохранении или оптимизации метрологических
характеристик (помехоустойчивости, быстродействия, погрешнос-
тей) при изменении условий измерительного эксперимента.
Рис. 18.11. ТИС с разностно-дискретной модуляцией
В ТИС используются рассматриваемые в гл. 21 алгоритмы адап-
тивной дискретизации и могут быть использованы алгоритмы адап-
тивной аппроксимации (гл. 11). Выигрыш в объеме передаваемой
информации в ТИС используется для передачи дополнительной
информации по каналу связи.
К специфическому для ТИС приему сжатия можно отнести пе-
редачу разностных отсчетов. Этот прием аналогичен выполнению
следящего уравновешивания непрерывных величин.
Существует несколько разновидностей этого приема:
а) передача разности x(jAt)—x[(j—1) AZ] и знака;
б) применение разностно-дискретной модуляции (РДМ) и Д-
модуляции.
При РДМ передаются приращения е3, равные —1, 0, +1, а
при Д-модуляции— равные —1, Д-1 при отсутствии приращения.
Структурная схема ТИС с РДМ приведена на рис. 18.11.
Алгоритм работы:
выборка Xi и сравнение с хк
Ф(/: =/+1; ДО [Ii(x(Z)/x5)IIL-I1(xK)] X
XIi(CR :хк, х;)Х
выдача результата сравнения
X{[coi(xK=Xj) ^(е^ОЦХ
X | [mi (Xj>xK) Ii(e3=l)] | [со1(х1<хк)Х
Xli(e3=-l)]X
получение значения измеряемой величины
При РДМ по КС передаются короткие сообщения. Для устра-
нения возможного накопления ошибок целесообразно передавать
через некоторое время на приемную часть значение zK.
Рис. 18.12. Адаптивная коммутация
При измерении нескольких величин и передаче соответствую-
щей измерительной информации с временным разделением сигна-
лов может быть использована адаптивная коммутация [17.1, 17.7].
При адаптивной коммутации в преобразователях погрешностей ап-
проксимации оценивается разность между предыдущим отсчетом и
текущим размером каждой входной величины и эта оценка пе-
редается в анализатор погрешностей, который выделяет макси-
мальное значение погрешности и выдает команду на подключение
соответствующей входной величины к аналого-цифровому преобра-
зователю (рис. 18.12).
Вместо преобразователей погрешности аппроксимации, выдаю-
щих абсолютное значение разности |Дхк| = |х(/Д£)—х(/Д/)|, мо-
гут быть использованы адаптивные временные дискретизаторы,
выдающие сигнал, когда |Дхк| достигает некоторого порогового
значения.
Заметим, что при применении адаптивной коммутации возмож-
но появление дополнительной погрешности, которая может быть
вызвана одновременным появлением нескольких сигналов, требую-
щих коммутации.
Представляется, что перспективным для адаптивного обслужи-
вания большого количества источников может быть использование
мультиплицированных измерительных схем и ассоциативная обра-
ботка информации.
18.4. КРАТКИЙ ОБЗОР ОСНОВНЫХ ХАРАКТЕРИСТИК
ПРОМЫШЛЕННЫХ ТИС
Промышленные ТИС входят в многофункциональные системы
телемеханики, выполняющие функции управления, контроля и из-
мерения и могут быть охарактеризованы следующим образом.
Современные промышленные ТИС являются адресно-многока-
нальными системами, в которых каждому объекту выделяется ин-
дивидуальный временной или частотный КС. В них производятся
объединение обслуживания групп объектов в контрольных и дис-
петчерских пунктах, циклическая передача информации между
объектами и контрольным пунктом. В таких ТИС имеются ини-
циирующие источники и приемники информации и выполняется
приоритетное их обслуживание. Для защиты от помех в них ис-
пользуются контроль четности, циклические коды и др.; коды с
исправлением ошибок имеют ограниченное применение.
При создании ТИС широко используются блочно-модульный
.принцип построения, компоновочное проектирование из унифици-
рованных блоков и устройств ГСП с расширяющимся применени-
ем микропроцессоров и микро-ЭВМ.
В агрегатный комплекс АСТТ ГСП входят несколько комплексов
телемеханики. Приведем для иллюстрации основные характеристи-
ки двух типов комплексов [17.2—17.6]:
Характеристика Комплекс ТМ-100 Комплекс ТМ-300
Га зо- и трубопроводы Крупные предприятия
Древовидный, 1000 км Радиальный, не более
20 км
50—600 300—600
Временное разделение сигналов
Назначение
КС
Скорость передачи, бит/с
Способ передачи
Помехозащита
Объем информации:
телесигна чизации
телеизмерения
Повторенчес инверсией
16—25 сигналов
5—224 величины
Код с повторением
56—120
96—225
В управляющих вычислительных телекомплексах, входящих в
-состав второй очереди агрегатного комплекса средств телемехани-
ческой техники АСТТ-2, используется микро-ЭВМ «Электрони-
ка—60». В них реализуется сжатие сигналов при телеизмерении
текущих параметров. Спорадический метод передачи в сочетании
•с предварительным экспоненциальным сглаживанием процессов
.разгружает канал связи в несколько раз по сравнению с цикличес-
кой передачей ординат временной функции. На микро-ЭВМ возло-
жено также помехозащищенное кодирование. В дополнение к тра-
диционной централизованной организации информационных пото-
ков в этих комплексах впервые реализована возможность построе-
ния информационных сетей произвольной конфигурации с
маршрутизацией сообщений и автоматическим поиском обходных
грасс при нарушении канала связи. Это потребовало разработки
довольно сложных программ. Применение микро-ЭВМ позволило-
получить значительную экономию аппаратных средств, занятых,
телеизмерениями.
Рис. 18.13. ТИС с цифровой разверткой:
ГЦР—генератор цифровой развертки
Работы по созданию теле-ИИС с использованием микропроцес-
сорной техники, несомненно, приведут к новым, эффективным ре-
шениям.
В заключение остановимся на одном перспективном пути раз-
вития больших ТИС, обслуживающих значительное количество-
удаленных друг от друга объектов исследования [17.8]. Этот путь-
связан с централизованным формированием и передачей значений:
образцовой величины, с которыми сравниваются измеряемые ве-
личины на всех объектах, обслуживаемых ТИС.
На рис. 18.13 показана ТИС с передачей из центра управления1
значений образцовой величины в виде последовательности двоич-
ных кодовых комбинаций. На объектах исследования производит-
ся сравнение переданного кода со значениями измеряемых вели-
чин, и при их равенстве передаются на центр управления импуль-
сы. При появлении импульсов е в центре управления фиксируются'
значения передаваемого в данный момент кода, а также адрес Di
объекта, выдавшего импульс.
При радиальных ЛС выявление адреса объекта, выдавшего им-
пульс, позволяющий определить значение измеряемой величины,
не представляет затруднений. При использовании магистральной
связи необходимо сопровождать импульс адресом или применять
другие способы его адресации. При очень больших расстояниях
между объектами для адресации радиоимпульсов могут быть ис-
пользованы интервалы времени их прихода.
Итак,
L Фо (г: = i + 1) 10 (гг) {[I, (CR : zi;., zf) (z1;. = zj X
X I, (e) Adx (1) Io (S: DI)] || ||[I„ (CR : znj, (г,г/ = zz) X
X I, (e) Ad„ («) Io (S : znt, D/г)]} (i = m)~\.
По сути дела здесь используется пространственная мультипли-
цированная структура, в которой применяется цифровая разверт-
ка образцовой величины. В таких структурах время преобразова-
ния зависит от количества т интервалов квантования образцовой
величины по уровню и практически не зависит от того, сколько
объектов исследований п обслуживает ТИС.
Вместо кодовой двоичной развертки может генерироваться
последовательность импульсов, а на объектах с помощью пере-
счетных схем может быть получена цифровая развертка.
Наконец, для реализации коллективной развертки образцовой
величины могут служить сигналы службы времени. Однако в этом
случае нужно предусмотреть обеспечение единого для всей ТИС
начала отсчета.
В качестве КС могут быть использованы радиоканалы как
ближнего, так и дальнего действия, работающие на одной или
различных частотах, радиальные и магистральные проводные и
оптические КС. Интересна возможность использования для пере-
дачи цифровой развертки телевизионных каналов [17.8].
Часть пятая
ВВЕДЕНИЕ В СИСТЕМОТЕХНИЧЕСКОЕ
ПРОЕКТИРОВАНИЕ ИИС
Г лава 19
СОДЕРЖАНИЕ СИСТЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
ИИС
19.1. СТАДИИ ПРОЕКТИРОВАНИЯ ИИС
Перед началом проектирования нового технического изделия
выявляются назначение, основные свойства, потребности, иногда
основные идеи реализации и другие особенности, достаточные для
принятия решения о проектировании этого изделия. В процессе
проектирования нового технического изделия предлагаются,
обосновываются, разрабатываются, оформляются и представляют-
ся в виде соответствующей документации и опытных образцов ре-
шения, обеспечивающие определенные свойства изделия при огра-
ничениях, накладываемых на его стоимость, сроки проектирования,
изготовления и т. п.
В соответствии с ГОСТ 2.103-68 выделяются следующие основ-
ные стадии разработки проекта: техническое задание (ТЗ), тех-
ническое предложение (с присвоением документации литеры П),
эскизный проект (литера Э), технический проект (литера Т), рабо-
чая документация (литера Р). Ниже приводится содержание этих
стадий применительно к проектированию ИИС и основных частей
системы.
Начальная стадия проектирования ИИС объединяет разработку
ТЗ, его согласование и утверждение. Техническое задание должно
содержать следующие основные сведения, характеризующие про-
ектируемую ИИС: основное назначение, технические характеристи-
ки, показатели качества, технико-экономические требования, ста-
дии разработки, принятые в данном проекте, и их состав, включая
программное, методическое и метрологическое обеспечение, а
также специальные требования к системе.
К основным техническим характеристикам ИИС относятся
метрологические (динамический и частотный диапазоны, погреш-
ность, быстродействие, чувствительность, порог чувствительности),
а также общетехнические (надежность, сложность, габариты, вес
и т. и.) характеристики. В ТЗ должны быть приведены критерии
оценки (показатели качества) этих характеристик.
В ТЗ, как правило, не указываются пути достижения постав^
ленных требований.
Технические задания разрабатываются и согласуются при сов-
местном участии заказчиков и проектировщиков. Доля их участия
в разработке ТЗ может быть различной и зависит от особенностей
проектируемой ИИС, ее назначения и последующего использова-
ния. Например, перед проектировщиком ИИС могут быть постав-
лены требования, направленные на выполнение задач конкретного
измерительного эксперимента, или проектировщику даются зара-
нее подготовленные ТЗ. В первом случае проектировщик на основа-
нии анализа требований конкретного эксперимента и современно-
го состояния информационно-измерительной техники должен опре-
делить характеристики создаваемой ИИС, позволяющие выпол-
нять эти требования, и согласовать их с заказчиком. Этот случай
требует наибольшего участия проектировщика. В другом случае
участие проектировщика заключается в предварительной оценке
возможности реализации этого ТЗ, а при необходимости—в его
уточнении и изменении.
В процессе проектирования ИИС может возникнуть необходи-
мость в корректировке уже согласованного и утвержденного ТЗ.
Такая корректировка может быть произведена только после соот-
ветствующего согласования с заказчиком.
Следующей основной стадией проектирования, предусмотрен-
ной ГОСТ 2.118-73, является разработка технического предложе-
ния на проектируемую ИИС. При разработке технического пред-
ложения предусматривается выполнение следующих этапов.
1. Подбор патентных материалов, определение патентоспособ-
ности проектируемой ИИС, анализ материалов по существующим
системам, наиболее близким к проектируемой по назначению и ха-
рактеристикам.
2. Предложение возможных вариантов реализации системы,
удовлетворяющих ТЗ, сравнительная оценка этих вариантов и
обоснование выбора наилучшего варианта. Варианты системы мо-
гут различаться по алгоритмам сбора и обработки информации,
техническим и программным средствам, видам используемого ин-
терфейса, модуляции сигналов и т. п. Сравнительная оценка ва-
риантов должна выполняться с учетом критериев оценки показа-
телей качества, определенных в ТЗ.
3. Разработка и анализ структурной схемы и алгоритма рабо-
ты проектируемой системы.
4. Выбор функциональных блоков (ФБ) проектируемой систе-
мы. Для создания ИИС во многих случаях целесообразно исполь-
зовать готовые, выпускаемые промышленностью ФБ, объединяемые
в систему с помощью стандартного интерфейса. Такие системы,
ориентированные на проведение конкретного измерительного экс-
перимента и включающие в свой состав мини-ЭВМ, микро-ЭВМ
или микропроцессоры, а также измерительно-вычислительные
комплексы, называются локальными измерительно-вычислитель-
ными системами (ЛИВС). Однако при проектировании ЛИВС не
всегда удается обеспечить ее всеми необходимыми ФБ и интерфейс-
ными устройствами. В этом случае разработка таких ФБ может
входить в проект системы или же выполняться вне рамок проекта.
5. Решение принципиальных вопросов метрологического, про-
граммного и методического обеспечения проектируемой ИИС.
На всех стадиях проектирования должны прорабатываться во-
просы метрологического обеспечения создаваемой ИИС, включая
не только методику использования соответствующих средств по-
верки, но, при отсутствии последних, и их разработку. В техничес-
ком предложении должны быть рассмотрены средства и методики,
пригодные для поверки проектируемой системы. Если таких
средств и методик нет, то необходимо решить вопросы выбора
варианта их создания.
Большое значение имеет создание программного обеспечения
проектируемой системы. На стадиях разработки технического пред-
ложения и эскизного проекта должны быть определены состав и
основное содержание программного обеспечения, включая в пер-
вую очередь формальное описание работы системы. На стадиях
разработки технического проекта и рабочей документации должны
быть созданы все предусмотренные ТЗ рабочие программы. Так
же как и при построении аппаратурной части ИИС, при создании
программного обеспечения желательно использовать модульный
принцип, позволяющий наращивать и совершенствовать состав
этого обеспечения.
Разработка методического обеспечения проектируемой ИИС на
стадии технического предложения может содержать рекомендации
по рациональному использованию проектируемой ИИС и т. п.
6. Рассмотрение и утверждение технического предложения. В
результате выполнения предложения должен быть обоснован це-
лесообразный путь реализации ТЗ. Предложение является основа-
нием для эскизного или технического проектирования.
Стадии разработки технического задания и технического пред-
ложения можно отнести к системотехническому проектированию
ИИС, особенностью которого является рассмотрение системы в це-
лом с привлечением соответствующего математического аппарата.
Эти стадии часто выполняются в виде научно-исследовательской
работы, и в ней участвует относительно небольшое количество вы-
сококвалифицированных специалистов.
Дальнейшие стадии проектирования выполняются обычно в
виде опытно-конструкторских работ (ОКР) и требуют привлече-
ния большего числа исполнителей по сравнению с системотехни-
ческим проектированием.
Стадия эскизного проектирования (ГОСТ 2.119-73) предусмат-
ривает создание документации, содержащей принципиальные кон-
структивные'решения, которые дают общее представление об
устройстве и принципе работы изделия. В необходимых случаях
изготовляются и испытываются макеты изделия. Эскизный проект
после согласования и утверждения служит основой для разработ-
ки технического проекта или рабочей документации. . .
Стадия технического проектирования (ГОСТ 2.120-73) связана
с созданием документации, содержащей окончательные техничес-
кие решения, дающие полное представление об устройстве разра-
батываемой системы. Технический проект служит основанием для
разработки рабочей конструкторской документации.
Завершающей стадией является стадия создания рабочей до-
кументации на проектируемую ИИС. Она состоит в разработке"
конструкторской документации на опытный образец системы (ли-
тера 01), изготовлении опытного образца, проведении государст-
венных, межведомственных или других испытаний опытных образ-
цов, последующих корректировок рабочей документации (литеры
О2, О3 ...), подготовки рабочей документации и изготовлении уста-
новочной серии и массового выпуска новой ИИС.
Стадии эскизного, технического и рабочего проектирования
можно отнести к системотехнической проработке требований ТЗ и
выбранного в техническом предложении варианта системы, т. е.
к реализации результатов системотехнического проектирования.
Проектирование конкретного изделия может содержать не все
перечисленные стадии системотехнического проектирования. Опре-
деление состава стадий выполнения данного проекта делается при
разработке ТЗ. Необходимость в стадиях эскизного, технического
или рабочего проектирования особенно внимательно следует оце-
нивать при создании ИИС путем набора стандартных ФБ, ИФ,
ИВК. Такая разновидность проектирования получила название
компоновочного. При компоновочном проектировании могут не по-
требоваться стадии эскизного и технического проекта и может
также резко упроститься стадия рабочего проекта.
Умением разработать ТЗ, предложить работоспособный вари-
ант системы и обоснованно выбрать готовые ФБ, программы и т. п.,
т. е. умением произвести системотехническое проектирование кон-
кретной системы, включая компоновочное проектирование, должны
обладать все специалисты в области информационно-измеритель-
ной техники.
Большинство ИИС может быть отнесено к системам средней
сложности. При их системотехническом проектировании могут
быть эффективно использованы как математическое, так и экспе-
риментальное моделирование.
В предлагаемом варианте введения в системотехническое про-
ектирование основная методика проектирования связана с фор-
мальным описанием функционирования системы с помощью СЛСА
и анализом, в первую очередь, погрешности и быстродействия си-
стем.
19.2. О ПРОЕКТИРОВАНИИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ИИС
Без соответствующего программного обеспечения (ПО) совре-
менные ИИС, включающие ЭВМ или средства микропроцессорной
техники, работать не могут.
Программирование управления в системах с микро-ЭВМ весьма
трудоемко, потому что необходимо преодолеть трудности, накла-
дываемые жесткими ограничениями на время реализации программ
и емкость памяти. Напрм&ер, вручную для составления программ,
содержащих порядка 1000 команд, может потребоваться 10—17 че-
ловеко-месяцев (при использовании средств автоматизации про-
граммирования это время может уменьшиться на порядок и более).
Условно ПО ИИС можно разделить на ПО, создаваемое раз-
работчиками ЭВМ и ИВК, и ПО, которое должно быть сделано
пользователем ИИС для решения конкретной задачи.
Мини-ЭВМ и в меньшей степени микро-ЭВМ оснащаются заво-
дами-изготовителями ЭВМ ПО в виде операционных систем, по-
зволяющих обеспечить многопрограммную работу с учетом прио-
ритета задач, автоматическую диагностику компонентов ЭВМ, воз-
можность программирования прикладных задач пользователя на
языках высокого уровня.
Разработчики ИВК одновременно создают операционные систе-
мы, необходимые для работы комплексов, ПО для решения неко-
торых задач, характерных для ИИС, построенных на базе ИВК.
Пользователь ИИС может применять типовые программы, разра-
ботанные для решения ряда распространенных задач (например-,
задач обработки экспериментальных данных, планирования экспе-
римента и т. д.). Но пользователю ИИС нужно обязательно со-
здавать ПО для реализации конкретных алгоритмов с помощью
системы, содержащей необходимые устройства.
Один из путей создания ПО пользователя связан с применени-
ем языков высокого уровня и с отладкой программ на больших
ЭВМ, а также программно-аппаратных средств, предназначенных
для автоматизации проектирования архитектуры и программ мик-
ропроцессорных систем. При проектировании ПО пользователя
должны быть учтены СЛСА, разработанные для решения конкрет-
ных задач. В ряде случаев при относительно несложных СЛСА и
при наличии разработанных микропрограмм выполнения компо-
нентов СЛСА в ЭВМ могут быть получены завершенные програм-
мы (см. гл. 2).
Для программирования сложных СЛСА целесообразно исполь-
зовать языки высокого уровня с последующей трансляцией в ма-
шинные коды. Эффективными в определенных направлениях явля-
ются проблемно-ориентированные языки. В частности, для про-
граммирования задач контроля и диагностики может быть полез-
ным применение языка ТЕСТ [19.1].
Если в ИИС работает одна ЭВМ, связанная с несколькими
источниками измерительной информации, то она, особенно при вы-
полнении первичной обработки информации в режиме реального
времени, часто оказывается перегруженной.
Ввиду этого и из-за упрощения (разделения) ПО, по-видимо-
му, большее распространение будут иметь двухуровневые ИВК и
ИИС. На первом уровне управление источниками информации и
первичная обработка, вшыечая сжатие информации, будут осу-
ществляться средствами микропроцессорной техники, а вторичная
обработка информации и принятие решений на дальнейшее прове-
дение обмена будут выполняться с помощью мини-ЭВМ.
Первоочередная задача, которую необходимо решать при про-
ектировании ПО, связана с рациональным распределением функ-
ций между аппаратурной частью и ПО, а следовательно, и с обо-
снованием необходимого объема ПО, с созданием унифицирован-
ного комплекса ПО, в незначительной степени зависящего от со-
става и характеристик конкретных средств ИИС, с организацией
банка ПО ИИС и т. п.
Следует подчеркнуть еще раз важность разработки для ИИС
программного обеспечения. Видимо, первым шагом к проектиро-
ванию ПО многих ИЙС будут служить СЛСА, которым в книге
уделено внимание. Для изучения материала по ПО рекомендуется
обратиться к специальной литературе (например, [19.2]).
19.3. ОБ АВТОМАТИЗАЦИИ СИСТЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
Системы автоматизированного проектирования (САПР) долж-
ны привести к резкому уменьшению затрат на проектирование
систем и улучшению их качества. Системы автоматизированного
проектирования базируются обычно на применении ЭВМ (СМ-3,
«Наири-2» и др.), обладающих большой памятью, оснащенных
устройствами ввода и вывода графической и алфавитно-цифровой
информации для осуществления диалогового режима проектиров-
щика с ЭВМ. Важной и, пожалуй, определяющей возможности
САПР проблемой является соответствующее ПО.
Автоматизация схемотехнического проектирования, включаю-
щая проектирование электронных схем, размещение элементов
схем на платах, модулях, БИС и трассировку соединений между
ними, расчет конструкций элементов и т. п., уверенно и эффектив-
но применяется на практике [19.3, 19.4, 19.12].
Серьезные результаты получены при проектировании логичес-
ких схем применительно к проектированию ЭВМ [19.5].
Имеются программы, позволяющие проводить в диалоговом ре-
жиме расчеты и конструктивную разработку некоторых типов дат-
чиков, используемые в учебных целях. Системотехническое проек-
тирование ИВК и ИИС, связанное с обоснованием в первую оче-
редь метрологических характеристик ТЗ на проектирование си-
стемы или комплекса, охватывает большое количество разнообраз-
ных методик.
В последующих главах рассматриваются необходимые для обо-
снования ТЗ методы анализа точностных и временных характе-
ристик ИИС.
Остановимся на важном этапе системотехнического проектиро-
вания — формировании технического предложения на проектируе-
мую систему. Рассматривать структуры и алгоритмы, позволяю-
щие выполнить ТЗ на проектирование системы, следует на основе
материала, изложенного в соответствующих разделах книги. Отме-
тим, что это рассмотрение и выбор наилучших вариантов структу-
ры и алгоритмов системы производятся большей частью неформа-
лизованным путем.
Если структура и алгоритм работы системы выбраны, то мо-
жет быть формально поставлена задача определения набора уст-
ройств из числа устройств, выпускаемых промышленностью (на-
пример, входящих в агрегатные комплексы ГСП) и совместимых
между собой. Решение этой задачи определяет суть метода про-
ектной компоновки систем.
Остановимся на одном из формальных путей постановки и ре-
шения задачи проектной компоновки системы.
Положим, определено, что проектируемая система должна вы-
полнить множество операций получения, преобразования, переда-
чи и выдачи измерительной информации A~(aj, а/, ..., cin).
Каждая /-я операция характеризуется заданным качеством выпол-
нения а,—(а;1, ..., а-ц, ..., а1т).
Имеется совокупность устройств B=(bi, ..., bi, bL), харак-
теризующихся параметрами ₽z(pzi, —, ₽zz, ..., Pzm, Cz) (здесь
Ci—стоимость). Устройство bi может выполнить операцию а,, если
{pz/^ajz}z=i,.... т- Таким образом, на множестве ЛХВ задано отно-
шение выполнимости операций множества А устройствами из В.
В матрице ЛХВ=Нлд11 Хи— 1, если bi выполняет операцию а, с
заданным качеством, и хц=0 в противоположном случае. Услови-
ем выполнимости всех операций из А подмножествами устройств
Bq (их может быть несколько), содержащими bi, является хц=1
для всего множества А. Затем определяется такой набор
{bi}—Bg, для которого, положим, суммарная стоимость будет ми-
нимальной: S (Bq) =minS Ci.
Далее приводится упрощенный пример комплектации простей-
шей измерительной системы с тензорезисторами и термопарами,
которая должна измерять 20 раз в секунду показания 100 датчи-
ков с погрешностью (без учета погрешности датчиков) ±0,5%,
диапазоны измерения температур от -J-50 до -)-300оС, деформа-
ции ez±100-10~5 относительных единиц; должно быть обеспечено
подавление помех на частоте 50 Гц для тензометрии не менее
40 дБ и для измерения температур (сигналы термопар Е) не ме-
нее 100 дБ. Была выбрана многоточечная структура ИС
(рис. 19.1), в которой выполняется следующий алгоритм работы:
Рис. 19.1. Структура ИС
?(i=0) {[I(61/д/?_)II... II,-....||ьк00ж00)] II [ЦТ^)||...X
X III (Л/^) |(... Ill (T100/e100)]} Фо (i: = i + 1) {[I ({Д/?}/Д/?г) X
X I (A/?t/A«t.) I (Д«г-/Д“гн)] II <! (£/^1лТУ>} {®o [Кл (е)] X
XI [Ч-;/гг (в)1 I [S(е)]} | {Фо [Кл (Т)] X
XI [Чиг/гг 1 [S:z; (Г)]} ш(i = 100) П Ф (Е).
В табл. 19.1 представлен упрощенный пример матрицы ||jc£z||,
показывающий выполнение операций (столбцы) устройствами из
комплекса АСЭТ ГСП (строки). Из решения взвешенной задачи
покрытия, в которой стоимость устройств является весом строки
в матрице [|xt-zll, был выбран набор, состоящий из вольтметра В2-22
и коммутатора Ф7100, обладающий стоимостью СХ и наименьшим
количеством типов устройств.
Возможен вариант с цифровым мостом (для тензодатчиков) и
вольтметром для измерения ЭДС термопар, однако в этом случае
С-£1.
В наборе табл. 19.1 остается непокрытым столбец, соответ-
ствующий преобразованию приращения сопротивления тензодатчи-
ка в напряжение о погрешностью ±0,1%- Такое устройство нужно
проектировать отдельно.
Следует подчеркнуть, что для большинства проектируемых си-
стем реальные матрицы ||xzz|| имеют относительно большую раз-
мерность. В связи с развитием ГСП количество устройств увеличи-
вается, а следовательно, усложняются процедуры проектной ком-
поновки систем.
Таблица 19.1. Матрица выполнения проектируемых преобразований устройств
Устройства ГСП
Назначение Модель Относи- тельная стои- мость, С1 Pi, % 32, мс Рз, ДБ I ({д/?}/дй.) «1=±0,5% а2=40 мс Тензо I (дя./дце) «1= ±0,1%
— —
Коммутатор АЦП Вольтметр Ф799-1 Ф7100 Ф240/3 Ф4833 Ф4892 Ф4890 Ф4891 Щ6800-1 Щ1516 В2-22 3,0 1,3 1,9 2,7 2,0 1,7 2,5 4,4 3,6 3,3 ±0,2 ±0,1 ±0,65 +0,05 +0,05 +0,08 ±0,1 +0,08 ±0,01 +0,025 1 1,6 20 40 1 10 0,2 40 40 20 80 40 60 40 1 1 1
Описанный путь определения набора функциональных блоков
может применяться только тогда, когда жестко заданы выполняе-
мые операции и параметры каждой из них, а следовательно, и тре-
бования к характеристикам выбираемых устройств.
Важной является задача подбора устройств, позволяющих при
работе в совокупности обеспечить заданные характеристики. По-
ложим, заданы: множество операций A=(at, а2, сц, aN):
которые должны быть выполнены системой; множество устройств,
выпускаемых промышленностью B=(bi, b2, bi, ..., Ьь), и их
стоимости (Сь С2, ..., Ci, ..., CL), суммарная погрешность бг,
время выполнения всех операций ts, рабочий диапазон D. Для
каждого устройства bi должны быть известны функции, которые
оно выполняет, Di, ti и бь
Необходимо выбрать все bi, выполняющие заданные функции
{«/} в диапазоне D с погрешностью и быстродействием 6z<6z,
ti<tz. Затем следует произвести оценку погрешности и быстро-
действия при соединении между собой устройств bt, оставляя лишь
варианты наборов, у которых погрешность и быстродействие не
превышают заданных значений.
Во ВНИИЭП был предложен метод прототипного проектиро-
вания специализированных ИВК, который позволяет более полно,
чем в ИВК широкого применения, учитывать запросы заказчиков.
Метод прототипного проектирования заключается в выделении из
прототипной системы, обладающей максимально возможной на
данное время конфигурацией и набором входящих в нее функцио-
нальных блоков и программ, необходимой структуры и программ,
удовлетворяющих требованиям ТЗ на конкретную разработку. За-
тем предусматривается доработка оперативного ПО, проведение
испытаний, анализ характеристик сформированного ИВК> его мет-
вами ГСП
Выполнение СЛСА
измерения Термоизм ерения
I (Д17е /Д£/Нг) I (д£/Н£/гЕ) 1 <{ет/ет;}> I (ет//Д17н. т) 1 <д[/и.т/гт)
«1= ±0,1% «1= ±0,5% К1= ±0,5% «1= ±0,1% «1= ±0,5%
— а2=40 мс а2—40 мс — сс2=40 мс
— аа=40 дБ — — а3=40 дБ
1
1
1 1
1 1
• 1 1
1 1
1 1 1 1
1 1 ] 1
1 1 1 ]
рологическая экспертиза и др. В результате этих работ должны
быть определены структура и оперативное ПО разрабатываемого
варианта ИВК.
На рис. 19.2 приведена схема реализованной во ВНИИЭП про-
тотипной системы. На этом рисунке АДС1 и АДС2—адаптеры дис-
танционной связи, позволяющие соединить ЭВМ СМ-4 с микро-
ЭВМ «Электроника-60» на расстоянии до 1 км коаксиальным ка-
белем и с микро-ЭВМ с устройствами измерительными, ввода и
вывода информации на 500 м витой телефонной парой. К микро-
1Рис. 19.2. Прототипная система:
АДС 1, АДС 2 — адаптеры дистанционной связи; ИФУ КАМАК и ИФУ ПМ~интерфейсные
узлы стандарта КАМАК и приборной магистрали; ИП — измерительные подсистемы
ЭВМ могут быть подключены дисплей типа ВТА, АЦПУ типа
DZM, накопители на магнитной ленте, многоточечные системные
•аналого-цифровые устройства (до 105 преобраз./с), коммутатор на
•64 точки (10 кГц, 1 В, 0,1%), таймер, интерфейсные устройства
для связи с СМ-3 и СМ-4, ЭВМ «Электроника 100/25», с крейтом
стандарта КАМАК, с приборной магистралью и др.
Создание таких прототипных систем целесообразно для обслу-
живания отрасли. Можно утверждать, что с их использованием
могут быть резко сокращены сроки, достигнута большая прорабо-
танность и завершенность проектирования ИВК.
Рассмотрим еще некоторые вопросы, связанные с автоматиза-
цией проектирования. Безусловно, целесообразно проводить рабо-
ту по созданию банков типовых структур, алгоритмов и математи-
ческих моделей, программ анализа и синтеза, имитационного моде-
лирования систем. Особенно это полезно для АСУ ТП [19.6],
имеющих много типовых решений. Имеется подготовленная систе-
ма поискового конструирования, базирующаяся на использовании
банков физических эффектов и технических решений [19.7]. Пред-
ставляется интересным распространение идей поискового конструи-
рования на проектирование систем.
Известны исследования, направленные на создание общих ме-
тодологических основ автоматизации проектирования средств из-
мерения [19.8].
19.4. УЧЕБНОЕ ЗАДАНИЕ НА СИСТЕМОТЕХНИЧЕСКОЕ ПРОЕКТИРОВАНИЕ
Особенности системотехнического проектирования удобно рас-
смотреть на примере, учебного задания на проект ИИС (это учеб-
ное задание выдается студентам старшего курса). Заданы условия
на проведение измерительного эксперимента. Необходимо соста-
вить, обосновать и согласовать с заказчиком техническое задание
на проектируемую разновидность ИИС, разработать основную
часть технического предложения по реализации сформулирован-
ного ТЗ, включая компоновочное проектирование, и защитить его.
Исходные технические условия на проведение
измерительного эксперимента
Необходимо произвести количественную оценку параметров ис-
следуемой величины (температуры, перемещения, деформации)»
распределенной по плоскости и изменяющейся во времени
x(l\, li, f). Известными являются динамический диапазон, наи-
большее изменение величины на единицу длины (Ах/A/) max и
'-Рис. 19.3. Исследуемая величина
Рис. 19.4. К определению простран-
ственной частоты
наибольшая частота изменения fmax исследуемой величины. На
рис. 19.3 показаны состояния исследуемой величины в моменты
времени и Ъ-}-АЛ С определенной погрешностью можно считать,
что в течение времени А/ состояние входной величины не изме-
нилось.
Для распределенной в пространстве величины иногда (напри-
мер, для спектрального ее анализа) вводится понятие пространст-
венной частоты, оценивающей количество периодов изменения этой
.величины, приходящееся на единицу длины. Если заданы
(Дх/Д/) max и аосолютная погрешность квантования исследуемой
величины по пространству ±Дпр, то в этом случае наибольшая
пространственная частота, 1/м,
(ft) max— 1/ (Ti) min — (Дх/Al)
max/2(±Дп₽).
За исключением особо оговариваемых случаев, можно считать,
что исследуемые величины обладают стационарными и эргодиче-
скими свойствами, подчинены нормальному закону распределения
вероятностей, корреляционная функция исследуемой величины
•близка к экспоненциальной.
Наименьший период изменения исследуемой величины (Ti)mtn—
— (2^i)min показан на рис. 19.4.
Количественные характеристики исследуемых величин приво-
дятся ниже в табл. 19.2.
Таблица 19.2. Характеристики исследуемых величии
:Ис следуемая величина Динамический диапазон Размер поля, мХм Максимальное приращение на единицу длины Макси- мальная частота изменения, Гц
Температура —1004-100 °C 1X1 50 °С,м 0,2
Температура 5Э0—1500 °C 5X5 ЗОЭ ° С/м 5
Температура 0—1000 СС 10X10 150 °С/м 1
Деформация —10“3ч- +I0 3 мм мм 1X1 2- 1СГ3 (мм,мм)/м 10
Перемещение 0—100 мм 5X5 20 мм/м 5
Перемещение —10004-+1000 мм _ 10ХЮ 200 мм/м 1
При проектировании нужно учесть, что разность потенциалов
между точками заземления исследуемого объекта и измерительной
части может достигать 0,5 В, кроме того, имеются поперечные по-
мехи высокого уровня.
Необходимо определить следующие параметры x(/i, /2, Г):
X — минимальное (сжатое) количество дискрет x(li, l2, I), опи-
сывающих распределенную по плоскости величину в заданное вре-
мя tc,.
Хп — координаты изопараметрических кривых для заданного t,
и изменяемых уровней анализа, количество уровней анализа не
менее 32;
Хэ — координаты и значения общих экстремумов при фиксиро-
ванном ti',
Хтах — координаты и максимальные значения для интервала
времени &T=N/fmax]
Mx(t) — математическое ожидание нестационарных слу-
чайных процессов по пространству и во времени;
Dx(l), Dx(t)—дисперсию нестационарных случайных процессов
по пространству и во времени;
fi(x), ft(x)—дискреты одномерной плотности распределения
вероятностей пространственной кривой и функции времени;
—коэффициенты корреляции пространственной
кривой и функции времени;
Rx\xz(M), —коэффициенты взаимной корреляции про-
странственных кривых и функций времени;
Gx-(fz), Gx (f)—дискреты спектральной плотности мощности;
R(l, t) —координаты исследуемой величины, вышедшие за пре-
делы установленной зоны, в зависимости от времени выхода t.
Желательно провести определение указанных параметров с
погрешностью 6i = ±0,5% или б2=±1,5%.
Расстояние между объектом исследования и оператором: Li=
==50 м, L2 = 50 км (проводной канал связи), Ls^lOO км (радио-
канал) ,
Индивидуальные задания содержат название исследуемой ве-
личины, цель измерения, погрешность и расстояние L. Например,
индивидуальное задание Д, X, 61, L2 предусматривает проектиро-
вание телеизмерительной системы, предназначенной для измере-
ния и передачи минимального (сжатого) количества значений де-
формаций и соответствующих координат в ограниченное время с
погрешностью не более ±0,5%.
Указания к разработке технического задания на
проектируемую систему
Техническое задание на проектируемую систему разрабатыва-
ется на основании анализа исходных технических условий на изме-
рительный эксперимент, а также дополнительных данных, которые
при необходимости могут быть получены у заказчика. Если трудно
выполнить заданные условия на современном техническом уровне,
то необходимо представить предложения по их изменению.
Погрешности результата измерений определяются совокупно-
стью методических погрешностей, зависящих от характера иссле-
дуемой величины и применяемых методов и средств измерения, а
также погрешностей проектируемой системы.
К основным источникам методических погрешностей результа-
та измерения какого-либо параметра пространственно распреде-
ленной величины можно, например, отнести:
расстояние между точками измерения, зависящее от погрешно-
сти квантования по пространству;
интервал времени, в течение которого исследуемая величина
с выбранной погрешностью может считаться постоянной;
ограниченность объема выборки дискрет исследуемой величины,
дискрет искомой характеристики (корреляционной функции, плот-
ности распределения вероятностей и т. .п.).
Естественно, значение методической погрешности результата
измерения будет различным в зависимости от конкретных особен-
ностей измерительного эксперимента. Для того, чтобы ее можно
было оценить, в ТЗ необходимо привести соответствующие харак-
теристики проектируемой системы (минимальное расстояние меж-
ду точками измерения, время измерения, количество точек изме-
рения и объем выборки дискрет исследуемой величины, количе-
ство дискрет искомой характеристики и т. п.). Если по каким-либо
веским основаниям выбранные характеристики проектируемой си-
стемы отличаются от расчетных (например, количество точек из-
мерения сокращено до практически выполнимого), в пояснитель-
ной записке к ТЗ должны быть приведены значения связанных с
этими характеристиками методических погрешностей.
Кроме этих характеристик в ТЗ должна быть представлена по-
грешность измерения собственно проектируемой системы. Эта по-
грешность будет определяться погрешностями датчиков, измери-
тельных цепей и всех иных аналоговых и цифровых измеритель-
ных преобразователей, входящих в систему. Особо следует огово-
риться, что методические погрешности, связанные с использовани-
ем датчиков, могут включаться в ТЗ по согласованию с заказчи-
ком. Если они не включены, это должно быть указано в ТЗ.
Методические указания к разработке технического
предложения на проектируемую систему
При разработке технического предложения целесообразно при-
держиваться определенной последовательности, приводимой ниже.
1. Распределить заданную погрешность и время измерения меж-
ду основными преобразованиями в системе.
2. Провести сравнение датчиков, имеющих технические харак-
теристики, необходимые для восприятия и преобразования в изме-
рительный сигнал исследуемых величин. Выбрать датчики, обла-
дающие лучшими характеристиками [7.14].
3. Рассмотреть измерительные схемы, позволяющие получить
необходимую измерительную информацию, предусмотреть меры по
уменьшению влияния продольных и поперечных помех до допусти-
мого уровня.
4. Произвести уточнение произведенного ранее распределения
точностных и временных характеристик между преобразованиями,
выполняемыми в системе.
5. Рассмотреть варианты структур систем, различающиеся по
следующим признакам:
а) алгоритму сбора информации (параллельный, последова-
тельный, параллельно-последовательный, мультиплицированный
принципы);
б) аппаратурной (специализированной) или программной об-
работке информации;
в) виду используемого интерфейса (КАМАК, приборный, по-
следовательный);
г) виду модуляции сигнала в канале связи.
При сравнении вариантов нужно составить структурные схемы
и (при необходимости) алгоритмы работы систем, оценить полно-
ту удовлетворения ими заданных технических характеристик. Вы-
бранный вариант системы должен иметь наименьшие сложность
и трудоемкость изготовления.
Если ни один из вариантов системы не удовлетворяет задан-
ным техническим характеристикам, то следует выбрать вариант,
наиболее приближающийся к их удовлетворению. В этом случае
нужно обосновать, предложить и согласовать соответствующее из-
менение ТЗ.
После выбора варианта системы нужно выполнить его прора-
ботку, включающую:
составление развернутой структурной схемы системы в при-
нятых обозначениях с указанием наименования типовых выпускае-
мых промышленностью функциональных блоков, их динамических
диапазонов и погрешностей; в случае если функциональный узел
не выпускается промышленностью, то составляются его техниче-
ские характеристики;
составление СЛСА выбранного варианта системы с выделением
на ней выполняемых программным способом преобразований, а
также времени выполнения основных операторов; желательно со-
ставить СЛСА по обмену информацией между функциональными
блоками в принятом интерфейсе.
В заключение отметим, что разработка технического предль
жения производится лишь после согласования ТЗ (следует ска-
зать, что в процессе выполнения технического предложения может
встретиться необходимость корректировки ТЗ) и что выполнение
проекта в полном объеме может потребовать значительного вре-
мени (поэтому индивидуальное задание может корректироваться
заказчиком).
Опыт выполнения проектов по приведенным выше условиям
показывает, что наибольшие трудности при этом представляет
рассмотрение погрешностей и быстродействия (включая ЭВМ) си-
стем.
Системотехническое проектирование ИИС должно опираться
на материалы теоретических основ информационной и, особенно,
информационно-измерительной техники. В настоящее время име-
ется литература, позволяющая получить знания, необходимые для
теоретического рассмотрения широкого круга вопросов, возникаю-
щих при системотехническом проектировании ИИС [19.9—19.15].
В этом разделе книги, которая, по существу, вся посвящена
системотехническому проектированию ИИС, решено привести в
сжатом виде основные теоретические материалы справочно-реко-
мендательного плана по оценкам, методам и средствам поверки
точностных характеристик и быстродействию систем.
Г л а в a 20
ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
20.1. КРИТЕРИИ ОЦЕНКИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ ВХОДНОЙ
ВЕЛИЧИНЫ
В результате измерения неизвестной входной величины х по-
лучается ее приближенное значение х* (с погрешностью е). Под
погрешностью понимается степень близости результата измерения
к истинному значению измеряемой величины.
Погрешность измерения 8 вызывается, во-первых, неточностью
изготовления аппаратуры, изменением ее характеристик во време-
ни, чувствительностью к неконтролируемым внешним мешающим
воздействиям у, а во-вторых, неточностью самого метода измере-
ния. В соответствии со сказанным можно различать аппаратур-
ную и методическую составляющие общей погрешности. Так как
факторы, вызывающие появление погрешности измерения, вообще
говоря, имеют случайный характер, то и погрешность измерения
следует рассматривать как случайную величину [20.1, 20.2].
Наиболее полной характеристикой погрешности 8 вследствие
возможности ее статистической связи с измеряемой величиной х
является условная плотность распределения вероятностей f (e|x),
которая теряет условный характер и имеет вид Дб) при отсутст-
вии такой связи. Плотность распределения вероятностей содержит
всю необходимую информацию для оценки погрешности, однако
она не всегда известна. Поэтому на практике используется неко-
торое количество параметров (показателей) этого распределения
так, чтобы эти параметры в достаточной мере характеризовали по-
грешность исследуемой системы. В качестве оценок погрешности
отдельных устройств и измерительных систем наиболее широко
применяются экстремальные, интегральные оценки и оценки, осно-
ванные на применении доверительных интервалов и вероятностей.
К экстремальным оценкам погрешности относятся:
модуль максимального отклонения
8тах==|^ %* \maxj
модуль максимальной относительной погрешности
g ._ Iх х ]тах .
' X
модуль максимальной приведенной погрешности
5, _ |х х ’ [пах
°пр х
•чпах
К интегральным оценкам погрешности (если х и х* — случай-
ные величины) относятся:
средний модуль отклонения
СО со
j f (к, х*) | х — х*| dxdx*;
—GO —СО
средний модуль относительной и приведенной погрешности
J j f(x, хй) Iх х ' dxdx'\
—ОО —со
С С f (х, хй) *х- ~х - dxdx*-,
J J Хтах
—ОО —00
среднее
квадратическое отклонение
f (х, Xй) (х — Xй)2 dxdx*
или дисперсия
De = J J (х, Xй) (х — хй)2 dxdx*.
—оо—со
Под знаком интеграла в качестве сомножителя стоит выраже-
ние совместной плотности распределения вероятностей измеряемой
величины х и ее приближенного значения х*.
Оценки погрешности, основанные на применении доверитель-
ных интервалов и вероятностей, позволяют определить, с какой
вероятностью рд погрешность системы |ед| не выходит за задан-
ные пределы ±8о:
Р {18д I ^£о} = Рд-
Для определения доверительной вероятности по заданному до-
верительному интервалу в общем случае необходимо знание плот-
ности распределения погрешности f(s):
—Ео
В частности, для нормального закона распределения
р{18Д|^о}=0,68; р{|8Д|^2о}=0,95;
р{|8д|<3о} =0,997.
Если кривая плотности распределения погрешности неизвестна,
но известна ее дисперсия DE, то при 7Ие=0 можно найти верхнюю
оценку доверительной вероятности, воспользовавшись неравенст-
вом Чебышева:
Р*д>1-ДЕ/ед2.
Оценка неравенством Чебышева дает завышенные значения до-
верительных вероятностей, особенно для малых отношений
При выборе допустимых погрешностей отдельных устройств
или систем, а также для их сравнения в ряде случаев широко ис-
’пользуются так называемые функции штрафа (потерь). Функция
штрафа определяет размер штрафа, налагаемый в случае наличия
разницы между истинным значением измеряемой величины и ре-
зультатом измерения. Разумными требованиями к функции штра-
фа могут быть:
а) любая погрешность «облагается» штрафом
%(х, х*)^э=0;
б) при отсутствии погрешности штраф равен нулю
%(х, х)=0;
в) большие отклонения х* от х «облагаются» большим штра-
фом, т. е. для x^.xi*^.x2*
к(х, Xi*)sCx(x, х2*).
В качестве функции штрафа наиболее часто используются раз-
личные оценки погрешности, взвешенные соответствующими коэф-
фициентами.
Так как в общем случае х и х* — случайные величины, тс и
функция штрафа является случайной величиной. Можно произ-
вести усреднение выбранной функции штрафа х, при фиксирован-
ном значении хг (так называемый условный риск):
g(xh Xs) = J и, (xt-, xs) f dx*,
—со
и для всех возможных значений х и х* (так называемый средний
риск):
со оо
G (х, Xs) = J J Х; (х, X*) f (х, X*) dxdxv'.
—со —СО
Для характеристики средства измерения нужно знать условную
плотность вероятностей f(x*/x) результатов измерения х* при
фиксированном значении измеряемой величины х. Считается, что
при измерении величины х, имеющей плотность распределения
вероятностей f(x), измерительная система 1 не хуже измеритель-
ной системы 2 по критерию G, основанному на функции штрафа
•х3-(х, х*), если
У y«/(x, х*)/\(х, x*)dxdx*< у ух; (х, x*)f2(x, x*)dxdx*.
•СО —со / —оо —оо
При оптимизации измерительных систем в качестве критерия
оптимальности используют средний риск, добиваясь min min Gx
У\(х, х*) (минимальный критерий) или minrnaxG(x, х*) (мини-
максный критерий). Последний критерий применяется тогда, когда
должна быть гарантирована минимальная погрешность при любых
законах распределения вероятностей f(x).
Универсальных оценок, пригодных для сопоставления между
собой различных ИС, не существует. Можно показать, что, поль-
зуясь даже одной оценкой, одно и то же средство измерения можно,
признать лучшим или худшим^ чем другое, в зависимости от вида
закона распределения вероятностей измеряемой величины.
Уместно назвать некоторые разумные области использования
тех или иных оценок.
Так, экстремальные оценки целесообразно использовать в та-
ких случаях, когда важно оценить, насколько результаты изме-
рения могут отклониться от действительного значения. Такие оцен-
ки важны при исследовании, положим, процессов, проходящих
вблизи аварийных ситуаций, при исследовании предельных значе-
ний прочности силовых конструкций и т. п.
Для оценки погрешностей измерения, предположим, количества
выпускаемой продукции при непрерывном производстве или во-
обще для оценки ИС в среднем правомерно использовать инте-
гральные оценки и оценки, основанные на применении доверитель-
ных интервалов и вероятностей.
Таким образом, соответствующие оценки погрешности должны
выбираться в зависимости от характера измеряемой величины, от
целей использования результатов измерения и свойств' измеритель-
ной системы.
20.2. ОЦЕНКА ПОЛНОЙ ПОГРЕШНОСТИ
Если составлена СЛСА системы, то в ней можно выделить пре-
образования измерительной информации, сопровождающиеся по-
грешностями.
Очень важной задачей является определение полной погреш-
ности ИИС по характеристикам погрешности этих функциональ-
ных преобразований или выполняющих их блоков..
В этой задаче можно выделить два предельных случая:
определение полной погрешности одноканальной (последова-
тельной) многоблочной ИИС;
оценка погрешности ИИС многоканальной (параллельной)-
структуры.
Вопросы определения полной погрешности ИИС смешанной па-
раллельно-последовательной структуры решены пока с недоста-
точной для практики полнотой.
Наиболее разработанной является задача определения полной
статической погрешности многозвенных последовательных измери-
тельных систем. Методы, применяемые для ее решения., зависят от
того, в какой форме заданы погрешности отдельных звеньев, за-
даны ли их законы распределения или заданы только некоторые
числовые характеристики частных погрешностей.
Рассмотрим применяемые в названных случаях методы.
Если известны аналитические выражения для законов распре-
деления погрешностей отдельных звеньев и система линейна, то
задача может быть решена с помощью методов свертки или с ис-
пользованием характеристических функций.
Пусть, например, 81 и 82 — случайные функции погрешности
двух соседних звеньев, a f (si) и ^(ег) —их плотности распределе-
ния. Тогда, если эти погрешности независимы, закон распределе-
ния суммарной погрешности 81,2 этих двух звеньев находится с
помощью свертки исходных плотностей:
ОО
-со
Применяя последовательно операцию свертки п—1 раз, где п—
количество звеньев, получаем закон распределения полной по-
грешности системы.
Использование метода характеристических функций заключа-
ется в следующем. По теореме умножения характеристическая
функция суммы независимых случайных величин определяется
как произведение их характеристических функций, т. е. в нашем
случае
п
g (М = П g (М>
1=1
где
g(М = м[е,Хе1 = j в*'1 Heidel
—со
— характеристическая функция погрешности i-ro звена; g(ks) —
характеристическая функция суммарной погрешности системы.
Выполнив затем обратное преобразование, можно найти закон
распределения полной погрешности f(sz) системы.
Следует отметить, что инженерное решение задачи определения
полной погрешности данными методами в большинстве случаев
может быть получено лишь после преодоления трудностей, связан-
ных с вычислением многомерных интегралов.
В настоящее время все большее значение приобретает развитие
методов решения задачи определения полной погрешности, осно-
ванных на математическом моделировании. К ним относятся метод
статистических испытаний (СИ) и метод деревьев логических воз-
можностей (ДЛВ). Оба метода позволяют определить закон рас-
пределения полной погрешности как в случае, когда законы рас-
пределения погрешностей отдельных звеньев заданы аналитически,
так и в случае, когда эти законы заданы в виде гистограмм.
Метод СИ является более разработанным и известным методом,
чем метод ,ДЛВ. Сущность использования метода СИ для опре-
деления полной погрешности ИС заключается в следующем. За-
коны распределения случайных первичных погрешностей форми-
руются с помощью специальных генераторов или программным
путем. Осуществляя многократный перебор случайных сочетаний
значений первичных погрешностей и определяя каждый раз полную
погрешность, можно по результатам испытаний воспроизвести за-
кон распределения полной погрешности ИС. Принципиально метод
СИ не менее точен, чем аналитические методы расчета, но для
получения высокой точности определения полной погрешности он
требует перебора весьма большого количества случайных сочета-
ний первичных погрешностей.
Использование метода ДЛВ для определения полной погреш-
ности многозвенных ИС менее известно, поэтому представляется
целесообразным отстановиться на этом методе более подробно.
Сущность метода ДЛВ заключается в следующем [20.3]. Пусть
имеется некоторое пространство логических возможностей. В этом
пространстве может быть построено так называемое дерево, пред-
ставляющее собой связный граф, в котором нет ни одного контура.
Каждой ветви дерева приписывается некоторая вероятностная ме-
ра, представляющая собой безусловную или условную вероят-
ность получения отдельных первичных погрешностей или возмож-
пого сочетания различных первичных погрешностей. Законы
распределения погрешностей при использовании метода ДЛВ пред-
ставляются в виде дискретной последовательности возможных зна-
чений первичных ошибок 8, каждому из которых приписывается
определенная вероятность. Любое отдельное сочетание случайных
значений различных первичных погрешностей представляет собой
реализацию, вероятность которой определяется вероятностями вы-
бранных значений первичных погрешностей. Каждая полученная
описанным образом реализация образует вполне определенный
путь в ДЛВ, и для нее сравнительно легко определить вероят-
ность.
Разберем на примере, заимствованном из [20.3], графический
способ построения ДЛВ. Предположим, что рассматривается си-
стема независимых случайных величин а, Ь, с, каждая из которых
может принимать несколько дискретных случайных значений щ,
,bj, ck (например, i=j=k=\, 2, 3) с заданными вероятностями р
pb , pCi В дальнейшем для простоты вместо щ, bj, ch будем писать
i, j, k.
Для независимых случайных величин процесс построения ДЛВ
можно начать с любой из них и в произвольной последовательно-
сти. Вероятность появления каждой из возможных реализаций
может быть записана так:
РRAW] =P[i]Д[ЛJРЛ =PiP41jPi,j,h-
Последние два сомножителя в приведенном выражении после-
довательно указывают выбранный путь на ДЛВ. В более общем
Рис. 20.1. Пример построения дерева логических возмож-
ностей
случае, когда случайные величины статистически зависимы, ве-
роятности р/,3 и являются условными. ДЛВ, построенное для
рассматриваемого случая, изображение на рис. 20.1.
Точка О на рис. 20.1 называется корнем дерева. Отрезки пря-
мых рг называются ветвями первого ранга, отрезки прямых —
ветвями второго ранга, отрезки прямых pi,j,k — ветвями третьего
ранга. При построении ДЛВ ветви всех рангов откладываются в
едином масштабе, поэтому схеме ДЛВ присуща определенная на-
глядность. По ветвям наивысшего ранга можно определить число
логических возможностей. Для рассматриваемого примера их ко-
количество А/=27.
Вместо изображенной на рис. 20.1 схемы ДЛВ можно соста-
вить эквивалентную таблицу, в которой отражены вероятности
каждого из путей дерева (табл. 20.1).
В общем случае изложенным образом может быть построена
схема ДЛВ с ветвями m-го ранга или составлена эквивалентная
ей таблица. При этом если через щ обозначить число дискретных
значений случайной величины с номером /, то число путей в ДЛВ
окажется равным:
где L — число случайных величин.
Т а б л п ц а20.1. Вероятности логических путей
Логический путь Вероятность Логический путь Вероятность Логический путь Вероятность
Gin Pill 02ц Рги Ози Рги
0112 Р112 'Л12 /?212 0з12 Р312
Оцз Риз 0213 Р213 O313 Рз1з
0121 Р121 O22i Рз21 Оз21 Р321
€)122 Р122 ^222 Р222 ^322 Рз22
0123 Р123 ^223 Р223 Оз2з Рззз
0131 Р131 O23i ! 231 O331 Рзз1
0132 Pl32 02g2 Р232 ^332 Рззз
0133 Р133 ^233 р233 O333 Рззз
Сами пути будут иметь вероятности, определяемые выраже-
ниями
Рщ Рnlt "
РП1П2...nL:
п,п« ... п
в зависимости от того, являются ли случайные величины связанны-
ми или независимыми в статистическом смысле.
При относительно большом количестве случайных величин или
их дискретных значений можно ограничиться одной табличной
формой записи ДЛВ, а расчеты вероятностей различных логиче-
ских путей проводить с помощью ЭВМ. По результатам этого рас-
чета может быть построена гистограмма распределения результи-
рующей суммарной величины.
Как показано в [20.3], метод ДЛВ может успешно использо-
ваться для анализа погрешностей не только линейных, но и не-
линейных систем, а также для случаев, когда случайные погреш-
ности отдельных звеньев представляют собой не случайные вели-
чины, а случайные функции.
До сих пор речь шла о нахождении полной погрешности мно-
гозвенной измерительной системы по известным законам распреде-
ления. Как же следует поступать в тех случаях, когда частные
погрешности заданы в виде некоторых числовых характеристик?
Если отдельные звенья ИС охарактеризованы экстремальными
погрешностями, то полная погрешность системы определяется про-
стым суммированием этих погрешностей. Естественно, такая оцен-
ка полной погрешности будет очень завышена.
Оценка полной погрешности может быть получена, если част-
ные погрешности отдельных звеньев заданы интегральными оцен-
ками или доверительными интервалами и вероятностями. Мето-
дика определения полной погрешности для этого случая рассмо-
трена в [20.1, 20.2].
Несмотря на некоторое различие в подходе к решению этой
задачи, по результатам проведенного анализа можно сформулиро-
вать некоторые выводы. Полная систематическая погрешность мно-
гозвенной линейной ИС находится суммированием систематиче-
ских погрешностей отдельных узлов (если, конечно, известны дей-
ствительные систематические погрешности узлов, а не их дове-
рительные интервалы, в последнем случае можно получить грубую
верхнюю оценку), а дисперсия случайной погрешности при усло-
вии некоррелированности погрешностей отдельных звеньев — как
сумма дисперсий погрешностей звеньев (в случае, если погрешно-
сти некоторых звеньев коррелированы между собой, к сумме дис-
персий добавляются удвоенные корреляционные моменты соответ-
ствующих погрешностей). При суммировании вводятся весовые
коэффициенты, зависящие от схемы включения звеньев и опреде-
ляемые как частные производные от выходной величины системы
по величине на входе данного звена. В том случае, если заданы
не дисперсии случайных погрешностей отдельных звеньев, а их
доверительные интервалы, для определения полной погрешности
необходимо знание законов распределения частных погрешностей.
По известным законам распределения частных погрешностей, до-
верительным интервалам и вероятностям можно найти дисперсии,
а затем полученные дисперсии суммировать.
Если же законы распределения частных погрешностей неизвест-
ны и заданы только их доверительные интервалы, то расчет пол-
ной погрешности становится крайне затруднительным. Из-за этого
в качестве критерия погрешности отдельных звеньев предпочти-
тельнее использовать среднее квадратическое отклонение или дис-
персию.
В заключение следует сказать несколько слов о погрешности,
с которой может определяться полная погрешность системы. В за-
висимости от решаемых задач эта погрешность должна выби-
раться разной. В обычных случаях эта погрешность может состав-
лять примерно 30% максимального значения результирующей по-
грешности.
Оценка погрешности ИС многоканальной (параллельной)
структуры может проводиться с учетом следующих соображений
[13.5]. Систематическая погрешность такой системы находится как
среднее арифметическое систематических погрешностей Ме каж-
дого из N каналов. Среднее значение случайной погрешности в
каждом из одинаковых каналов должно быть равно нулю, по-
этому равно нулю и среднее значение случайной погрешности си-
стемы в целом. Дисперсия случайной погрешности системы рав-
няется среднему значению дисперсий случайной погрешности De
в каждом канале.
Если в системе не все каналы однородны, а имеется несколько
различающихся между собой групп однородных каналов, то такие
средние показатели могут формироваться для каждой группы в
отдельности.
20.3. О РАСПРЕДЕЛЕНИИ ПОГРЕШНОСТЕЙ МЕЖДУ ЗВЕНЬЯМИ СИСТЕМЫ
Значительный интерес при проектировании ИС представляет
обратная задача оценки погрешности ИС, а именно задача рас-
пределения частных погрешностей по звеньям так, чтобы резуль-
тирующая погрешность не превосходила определенного значения.
В общем случае решение такой задачи неоднозначно.
Остановимся несколько подробнее на результатах решения од-
ной из модификаций обратной задачи, изложенных в [13.5].
Метод решения, предлагаемый в этой работе, основан на мини-
мизации затрат:
5 =2 (CiSi ? + cAsi).
где — затраты на уменьшение погрешности i-ro узла;
Cohi^i — потери при эксплуатации системы за счет наличия по-
грешности i-ro узла; е; — некоторая оценка частной погрешности
i-ro узла; Ct — удельные затраты на снижение погрешности i-ro
узла; hi — коэффициент влияния частной погрешности i-ro узла
на результирующую погрешность системы; Со — коэффициент, свя-
зывающий потери при эксплуатации системы с погрешностью i-ro
узла; N—количество узлов в системе; q—некоторый эмпирический
коэффициент: q>0.
Оптимальные значения погрешностей узлов ei, минимизирую-
щие S, определяются как
qCj \1/(1+Т)
с0/гг
Необходимо оговориться, что при проектировании, коэффици-
енты Со, Ci, hi зачастую неизвестны. Особенно трудно получить
значение с0. Не располагая знанием Со, задачу оптимального рас-
пределения частных погрешностей е, можно решать, если извест-
но, каким значением ограничена сверху сумма допустимых затрат
на уменьшение погрешности. Для этого случая и при <7=1 (т. е.
затраты принимаются обратно пропорциональными погрешностям)
получено выражение
где еобщ=2 — заданная оценка полной погрешности системы.
Результат показывает целесообразность распределения частных
погрешностей при ограниченных средствах на их снижение про-
порционально весовым коэффициентам yrck[hk, характеризующим
фактически эффективность вложений в целях снижения каждой
ошибки.
При проектировании чаще всего приходится встречаться с си-
туацией, когда часть узлов уже выбрана или, по крайней мере,
известна погрешность каких-либо узлов. Принципиально, прибе-
гая в случае необходимости к тем или иным упрощениям, можно
объединить выбранные узлы в один, поэтому в дальнейшем речь
идет об одном известном узле, например с номером N.
Далее, выбирая е-; (i=l, 2, ..., N— 1) при заданном e,N, будем
считать
Еобщ^^ЛГ,
т. е. полная погрешность системы не окажется меньше погреш-
ности заданной ее части.
При этих условиях формула для оптимального значения по-
грешности остальных узлов будет иметь вид
/ hN Ci \i/(i+?)
Ег — eN\ht cN )
i=l, 2,..., N — 1.
Если даже неизвестны абсолютные значения удельных затрат
на снижение погрешности, но удается оценить отношения удель-
ных затрат ci/cN, то последняя формула и в этом случае дает ре-
шение задачи о наиболее выгодных погрешностях ег выбираемых
узлов. Но это решение, очевидно, найти нельзя, если не удается
оценить отношения ci/cN.
Один из применяемых в таком случае эвристических подходов,
который можно назвать «экономным», предполагает необходи-
мость считаться с затратами на повышение точности узлов, не-
смотря на отсутствие сведений о связи этих затрат с повышением
точности. При этом, если отсутствует иная информация, можно
допустить, что узлы в смысле удельных затрат на уменьшение по-
грешности равноценны (с.;=сЛ-), откуда находим
/ hN \ 1/(1 НП
е‘ ~~eN
Из этого выражения следует, что при равном вкладе погреш-
ностей узлов в полную погрешность (hi-hx) «экономный» под-
ход приводит к известному принципу выравнивания частных по-
грешностей. Однако при различных вкладах hi погрешностей уз-
лов дело обстоит сложнее. Равенство всех вкладов ошибок узлов
в полную погрешность оказывается выгодным только при ^->0,
т. е. при пренебрежимо малых удельных затратах, необходимых
для снижения погрешности е<. Ближе к реальности показатель
q— 1, тогда
Другой подход, который можно назвать «страховочным», иг-
норирует затраты на снижение погрешностей в выбранных узлах.
подчиняясь стремлению уменьшить до разумного минимума их
дополнительный вклад
Ео=8общ---8 Д'
в полную погрешность.
Величину ео можно установить, руководствуясь одним из не-
скольких альтернативных принципов, которые широко применя-
ются на практике из интуитивных соображений.
Чаще всего основываются на принципе, который можно на-
звать принципом несущественного вклада. Этот принцип заклю-
чается в том, что допустимый дополнительный вклад ео назна-
чается как некоторая часть r=eo/ejv от заданной ошибки ejy,
причем такая, что значение г можно считать несущественным по
сравнению с единицей. Назначенную дополнительную погрешность
е0=гед- можно распределить между выбираемыми N—1 узлами
по принципу равных погрешностей, равных вкладов, либо, на-
конец, пользуясь «экономным» подходом.
При проектировании иногда приходится сталкиваться также
с многомерным случаем, когда заданы No узлов, каждый из ко-
торых вносит погрешность 61* в соответствующую k-ю операцию,
и предстоит выбрать погрешность 62*, добавляющуюся к погреш-
ностям 61* в k-fi операции. Для охарактеризованного случая
можно предложить принцип пропорционального вклада, заклю-
чающийся в соблюдении соотношения
е2/г/81/г=Д
где X — постоянная, одинаковая для всех k=l, ..No.
Отношение h может быть назначено по принципу несуществен-
ного вклада, если на возможность снижения погрешностей ег*
не налагаются никакие ограничения, либо исходя из имеющегося
ресурса допустимых затрат. ' Если при проектировании имеются
соображения, по которым желательно уменьшить полную погреш-
ность Б*=81*+б2* для некоторых k, то эти соображения могут
быть учтены назначением различных X, так что может быть по-
лучено
82/z/ei*=Z.ft.
Выбор между «экономным» и «страховочным» подходами опре-
деляется взглядами проектировщика на соотношение между тре-
бованиями к эффективности. ИИС и допустимыми затратами.
Возможен, по-видимому, и компромиссный подход, в котором
погрешности узлов назначаются в промежутке между теми, кото-
рые. предписываются «экономным» и «страховочным» подходами.
Для примера рассмотрим самый простой случай, когда все
hi равны между собой. «Экономный» подход в этом случае озна-
чает, что погрешности искомых узлов принимаются равными за-
данной, а «страховочный» подход при использовании, к примеру,
оценки погрешности в виде среднего квадратического отклоне-
ния и с применением принципа несущественного вклада, — что-
Бо ~ 0,1б1у.
Совершенно очевидно, что приведенные соображения полно-
стью не исчерпывают проблему распределения погрешностей по
звеньям при проектировании ИИС, однако дают возможность
осмысленно подойти к решению этой задачи. Нужно подчеркнуть,
что при оценке качества проекта системы обязательно прини-
мается во внимание, каким образом распределена суммарная по-
грешность между ее звеньями.
20.4. О ПОГРЕШНОСТЯХ КВАНТОВАНИЯ ПО УРОВНЮ И ОКРУГЛЕНИЯ
ПРИ ВЫЧИСЛЕНИЯХ
В средствах ИИТ операции квантования по уровню либо вы-
полняет экспериментатор (если используется представление ин-
формации в аналоговом виде), либо они выполняются автомати-
чески (в цифровых измерительных приборах, в АЦП, входящих
в состав ИИС).
Квантование по уровню приводит к погрешности (иногда ее
называют шумом) квантования по уровню, вызванной округле-
нием значения непрерывной неизвестной измеряемой величины до
какого-либо (обычно ближайшего) значения известной дискретной
величины. Следует заметить, что в случае, если исследуемая ве-
личина в процессе квантования по уровню изменяется во времени
или в пространстве, то появляется динамическая составляющая
погрешности квантования. Эта составляющая обычно уменьшает-
ся до приемлемого уровня путем обеспечения соответствующего-
быстродействия средств ИИТ.
В дальнейшем ограничимся рассмотрением статической со-
ставляющей погрешности квантования, считая, что измеряемая
величина в процессе выполнения операций квантования неизменна.
Наиболее распространено в практике ИИТ равномерное кван-
тование, при котором диапазон изменения значений непрерывной
величины разделен на п одинаковых частей — интервалов
квантования q.
Значения х в пределах шага квантования нужно относить к
определенному уровню квантования, обычно к верхней или ниж-
ней границе интервала квантования либо к его середине
(рис. 20.2). Погрешность квантования Lxk=kq—х является пе-
риодической функцией, изменяющейся в зависимости от значе-
ния х в пределах от 0 до —q при отнесении значения х, попав-
шего в данный интервал квантования, к нижней его границе, от
0 до -\-q—к верхней границе и от +^/2 до —^/2 — к середине
интервала квантования.
Так как х — случайная величина с плотностью распределения
f(x), то и Ах—также случайная величина, зависящая от х.
Тогда вероятность появления значения х в интервале (хь—qfo,
Xk+q/2) будет определяться вероятностью ошибки Ах*.
Рис. 20.2. к определению погрешности квантования по уровню:
а — округление к нижней границе интервала квантования; б — округление к верхней гра-
нице интервала квантования; в — округление к середине интервала квантования
Математическое ожидание Ах* а*+?/2
М [Ах*] = у (х* — х) f (х) dx. ХЬ~7/2 £ 2 q_ _ 2
Дисперсия
**+<7/2 ШЛг1- С (х -НЧМЛ Рис- 20-3' Пло™°сть — \ \^k М распределения кван- х,—7/2 туемой величины в пре- делах интервала кванто- вания
Полагая, что q<^xmax—xmin, можно считать, что f(x) постоян-
на в интервале q и равна f(xk) (рис. 20.3), т. е. f(xk)q—
xk+<ll2
= J f(x)dx. Тогда Л1[Ах*] =0, а
xk-4l2
xk+ijl2
Dl^k]=f(4) J (x~Kk)2dx=^^f(xk)q3x=
= -^2 d2lf^k)q].
Следовательно, дисперсия D [Ax*] является произведением дис-
персии равномерно распределенной в интервале q величины х
на вероятность попадания х в этот интервал. Просуммировав вы-
ражения для £)[Ах*] по всем уровням хк, получим дисперсию
погрешности квантования как математическое ожидание диспер-
сий на отдельных уровнях квантования:
я я
А = £ D [Д = -^-q^f (xk) Q-
k=I A=I
Если — 1> то Dz = q2/].2.
fe=i
Таким образом, с достаточной точностью погрешность кван-
тования можно полагать равномерно распределенной в пределах
интервала квантования случайной величиной с М [Дх*] =0 и
Ds=q2/12 (при отнесении результата квантования к середине
кванта).
Выше кратко рассматривалась погрешность при равных интер-
валах квантования по уровню. Возможна, однако, постановка за-
дачи оптимального квантования по уровню, при котором интер-
валы квантования могут быть не равны между собой. Так, на-
пример, решение этой задачи с учетом функций штрафа позволяет
получить полезные результаты.
Необходимо сказать, что проведены многочисленные исследо-
вания погрешностей квантования при учете смещения шкалы
.квантования, дрейфа и порога чувствительности устройств срав-
нения и т. д.
Приведенный же выше материал позволяет в первом прибли-
жении оценить погрешность квантования по уровню.
Применение ЭВМ связано с необходимостью оценивать ин-
струментальные погрешности, которые могут возникнуть при вы-
полнении вычислительных процедур из-за ограниченной разряд-
ной сетки машин. Наиболее подробно вопросы оценки этой по-
грешности рассмотрены в [20.4].
При выборе алгоритмов вычислений, как правило, применяет-
ся условие, чтобы абсолютная методическая погрешность вычис-
лений не превышала 2~га, где т — разрядность ЭВМ.
Операции округления в ЭВМ осуществляются обычно путем
простого усечения неучитываемых разрядов или симметричного
округления с учетом значения старшего отбрасываемого разряда.
Если / — число неучитываемых при округлении разрядов при рав-
номерном законе распределения вероятностей округления (что
справедливо в большинстве случаев при т^8), то дисперсии по-
грешности простого усечения и симметричного округления
Dy [Д2ин] =£>с.о [Дхин] (1/3) 2-2<-+» (1-2-2г).
Уже при сравнительно небольших I
Dy [Дгин] =Рс.о [Дгии] 2^/12.
Математические ожидания инструментальной погрешности длят
этих процедур округления равны:
М [Агин] у=— (1—2-9 ];
АГ[АгИи] с.о= [2-<m+z+I)].
При /^>1 данные выражения принимают вид
М [Лхин] у« — [2-<-+»]; М [AzIIH] с.о^0.
Погрешности усечения имеют отрицательный знак для любых:
арифметических операций над числами, представленными в пря-
мом и дополнительном кодах. Поэтому при большом количестве-
последовательных арифметических операций погрешности могут-
накапливаться и превысить допустимый уровень. Особенно нуж-
но производить оценку этой погрешности при разрядной сетке-
ЭВМ, близкой к разрядности т0 АЦП.
В качестве примера проведем расчет числа разрядов ЭВМ,,
исходя из условия обеспечения требуемой точности выполнения
операции умножения чисел Zi и г2, изменяющихся от 0 до 1. Дис-
персия и математическое ожидание инструментальной погрешно-
сти данной операции при равенстве числа то разрядов Z\ и z2 и
при числе усекаемых разрядов /3>1 могут быть определены из;
приведенных выше формул.
Погрешность результата умножения, обусловленная погреш-
ностями измерительных каналов, может быть рассчитана по со-
отношению
А (ZjZ2) г2Аг]Дцп z1Az2AL(n.
Если систематические погрешности и z2 измерительных уст-
ройств скомпенсированы, то математическое ожидание данной
погрешности равно нулю. Дисперсия этого выражения зависит от
дисперсии погрешностей сомножителей. Если принять, что сомно-
жители равны друг другу и количество их разрядов равно т0, то
D [А (21гг)дЦп1 = [2—2т° (№ + 12)/12№] (г/ +г22),
где K=q/<5, а о — средняя квадратическая погрешность измери-
тельного такта.
Максимальное значение это выражение принимает при Zimax=E
И Z2max— 1:
^[Д(^2)АЦП] = 2.2-2т7К.
Пусть где 8 -доля дисперсии ре-
зультата, обусловленная погрешностями АЦП, которую не долж-
на превышать дисперсия инструментальной погрешности резуль-
тата. Применение этого условия дает 2-2т/12^82-2_‘',!° >7
Х(А2+12)/12А2, или А2/2б(А2+12)^22"“2",0 = 22йт . Отсюда
AfH^]0,51og2 [К2/26(К2-{-12)] [. Здесь ]•[ означает ближайшее
сверху целое число. В частности, при /(=6 (7=60) и 6=2~4 Дт^
^>2. При более сложных вычислительных процедурах методика опре-
деления количества дополнительных разрядов остается аналогич-
ной. Что касается дисперсии инструментальной погрешности вы-
числительного устройства, то она в первом приближении может
быть определена умножением £>y[AzHH] на количество проведен-
ных арифметических процедур. В [20.4] показано, что инстру-
ментальные погрешности ЭВМ и погрешности аналого-цифрового
цреобразования оказывают наибольшее влияние на погрешность
процедур деления, особенно при большой разности размеров де-
лимого и делителя.
Расчет результирующей погрешности типовых вычислительных
процедур приведен в [20.4]. На этой основе там сформулированы
некоторые принципы рациональной организации программ вычис-
лений, позволяющие предусмотреть возможности появления зна-
чительных ошибок и получить необходимые точности вычислений
на ЭВМ.
Заслуживает внимания рекомендация иметь в арифметическо-
логическом устройстве ЭВМ при относительно несложных преоб-
разованиях информации 2—4 дополнительных (по сравнению с
разрядностью АЦП) разряда.
20.5. ИНФОРМАЦИОННЫЕ ОЦЕНКИ
Множество возможных результатов измерения конечно и мо-
жет определяться, например, при количественной оценке входной
величины х в виде N=(xmax—xmin)/E, где в — погрешность изме-
рения. Поскольку результат измерения представляется в число-
вом виде, то N—hl, где I — количество разрядов, h — основание
кода.
Для характеристики количественной информации, которая мо-
жет быть получена от данного средства измерения, более удоб-
ной часто оказывается логарифмическая мера (Хартли, 1928 г.)
7 = logM=/log h, линейно зависящая от количества разрядов I.
При измерении независимых величин (xi, - , Xk) общее количест-
во информации при применении логарифмической меры /(хц ...
..., хЦ=7(х])+ .. ,4-/(ха). При использовании двоичного кода
единицей количества информации является 7=llog22=l бит.
Если появления тех или иных результатов измерения рассмат-
ривать как случайные события, реализующиеся с известными ве-
роятностями, то неопределенность различаемых состояний харак-
теризуется в виде энтропии для дискретных Н(Х)=— 2 Р(*<)Х
i
log p(Xi) =Л4[—log р(х)] и для непрерывных Н(Х) =
СО
=Л4{—log [Цх)Дх]}= — [* f (х) log f(x)dx— log!Дх=Н*(Х) —
-СО
—logAx величин. В выражении для энтропии непрерывным вели-
—loglAx величин. В выражении для энтропии непрерывных вели-
чин f(x)—плотность распределения вероятностей X, Н*(Х) —
дифференциальная энтропия, значение log Ах может изменяться
и при Ах—>0 оно стремится к оо.
Дифференциальная энтропия равномерно распределенной на
ь
fl I
b_alog &__ аdx =
а
=log (b—а), а для нормально распределенной центрированной вели-
чины /7* (X) = log ]/ сх.
При объединении независимых величин (X, U) их энтропии
складываются: Н(Х, U)=H(X)-\-(U).
Для зависимых в вероятностном смысле величин X и U услов-
ная энтропия для дискретных величин 7/(t/|X) =—Л Uj)~X.
i i
X logp(Uj|xt) и H(X\U)= — 22 P(Xi, WjJlogpfXiluj), a
i /
для непрерывных дифференциальная энтропия H*(U\X) =
оо
= — {^f(x)f(u\x)\ogf(u\x)dxdu.
—ОС
Значение энтропии иссследуемого объекта до и после измери-
тельного эксперимента позволяет определить количество инфор-
мации, получаемое в результате проведения этого эксперимента:
/(X, U)=H(X)—H(X\U)=H(U)—H(U\X)'
Для сравнения существующих и оценки погрешностей вновь
проектируемых средств измерения удобно использовать эквива-
лентное число делений — число различимых уровней (делений)
такого измерительного устройства, в котором производится опе-
рация идеального квантования по уровню и отсутствуют осталь-
ные погрешности. Это устройство позволяет при равномерном рас-
пределении измеряемой величины получить такое же количество
информации, как и рассматриваемое измерительное устройство.
Эквивалентное число делений N3=L/Аэ=а,(-Х’ и\ где а — осно-
вание логарифма, L—динамический диапазон, Дэ—-эквивалент-
ный квант. При равномерном распределении измеряемой величи-
ны ЦХ, СУ) =logo(L/A) —Д(Х| J7), и тогда Nэ=La~H(x|t/)/А здесь
Д—деление шкалы устройства). Эквивалентный квант Аэ,
по существу, определяет энтропийную погрешность средства изме-
рения.
Для информационной оценки динамических свойств средств
измерения употребляются средняя скорость получения информа-
ции (X, U) /T бит/с и пропускная способность C=.max R. Про-
пускная способность определяет потенциально возможную макси-
мальную скорость получения или передачи информации данного
средства ИИТ (по возможным плотностям распределения вероят-
ности передаваемой величины).
Для равномерного распределения при заданной верхней час-
тоте сигнала fB и при наличии только квантования скорость по-
лучения информации 7?р=2/в log (L/Д). Это выражение является
пропускной способностью для всех f(x), ограниченных по макси-
мальному значению.
Для нормально распределенных и аддитивных помехи U и сиг-
нала X с мощностями Рп и Рс при верхней граничной частоте сиг-
нала /в
Н (X) = log ]z2^сх = -±- log 2т.еРс; Н (U) = (1 /2) log 2теРп;
Н(Х, П) = (1/2) Iog2ne(Pc+Pn); C=(n/T)[H (X)— H(X\U)],
где n=2fBT.
Следовательно, C=fB log (14-Pc/Pn), a Imax(X, U)=CT=
=fBTlog (1+Pc/Pn).
Из последнего выражения следует, что одно и то же количе-
ство информации может быть получено при различных соотноше-
ниях между fB, Т и Рс/Рп-
Информационные характеристики полезно использовать при
проектировании для согласования между собой характеристик
функциональных узлов, для сравнительной оценки вариантов и
оптимизации выбранного варианта структуры системы.
Основные вопросы, связанные с информационными оценками,
освещены в [20.5—20.8].
Г л а в а 21
ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ИИС
21.1. ОПРЕДЕЛЕНИЕ ИНТЕРВАЛОВ РАВНОМЕРНОЙ ДИСКРЕТИЗАЦИИ
Один из основных вопросов, который приходится решать при
обосновании быстродействия проектируемой системы, связан с
определением тех моментов времени, в которые нужно выполнять
процедуры измерения исследуемой величины, являющейся функ-
цией времени x(t) [21.1].
Остановимся на определении таких моментов времени, т. е.
на выборе таких дискретных значений функции x(t), по которым
возможно описание этой функции с заданной погрешностью.
При дискретизации x(t) нужно в зависимости от цели изме-
рения обоснованно выбрать критерий погрешности описания функ-
ции по ее дискретным значениям, определить характер операций
дискретизации и вид приближающей функции [21.2]. В качест-
ве критериев погрешности описания x(t) используются то-
чечные оценки погрешности (например, |Етах|—модуль мак-
симальной погрешности) или оценки приближения в среднем (ча-
ще всего о—-среднее квадратическое отклонение). Выделение
дискрет может производиться через фиксированные, чаще всего
равные интервалы дискретизации. Эти интервалы определяются
заранее на основании информации о характере исследуемой ве-
личины и цели измерения, а также от выбранной приближающей
функции. Обычно в качестве приближающих функций используют-
ся многочлены и ряды невысокой размерности. Выбор типа ап-
проксимирующих функций, так же как и критериев погрешно-
стей приближения, определяется преимущественно целью изме-
рения.
В табл. 21.1 приведены для наиболее употребляемых на прак-
тике аппроксимирующих функций выражения, позволяющие опре-
делить интервал равномерной дискретизации при заданной по-
грешности.
Полученные для приближения степенными многочленами Pn(t)
оценки интервалов дискретизации при заданной погрешности
|етИх| справедливы для точечной интерполяции, т. е. для случая,
когда погрешность приближения в узлах аппроксимации отсут-
ствует и максимальная погрешность находится между ними. При
равномерном приближении, когда на отрезке аппроксимации Т
имеются /?4-2 точек (6<6<-•-<6i+i), в которых разность
x(t)—х* (t) принимает поочередно значения ±Emax—sup |х(/)—
—x*(t) |, интервал дискретизации может быть увеличен.
Рассмотрим простейший пример приближения функции x(t) =
—t2, заданной в точках /=0, 1, 2 (/о=О; 6=1; 6=2) с исполь-
зованием интерполяционного многочлена Лагранжа.
При приближении этой функции (рис. 21.1) многочленами ну-
левой степени на отрезке (0,1) Ро(/)=О, на отрезке (1,2) Po(t) =1,
многочленами первой степени на отрезке (0,1) Pi(t)=O(t—
—1)/(0— 1)-Ы (/—0)/(1— 0)=6 на отрезке (1,2) Р1(/) = [1(/—
—2/(1—2) + [4(/—1)/(2—1)]=3/—2, многочленом второй степе-
ни P2(t) = [0(t— 1) (/—2)/ (0-1) (0-2)] + [1 (/-0) (/— 2)/(1—
-0) (1-2)] +[4(6-0) (/—1)/(2—0) (2-1)] =6.
При приближении многочленом первой степени погрешность
Ei = /2—t на отрезке (0, 1) принимает максимальное значение при
/=0,5 и равна eimax=0,25, а на интервале (1, 2)—при /=1,5.
В этом примере отрезки заданы и определялась погрешность
приближения функции с помощью степенных многочленов. При
измерениях чаще приходится решать задачу определения интер-
вала дискретизации функции по заданной погрешности прибли-
жения. Решение в этом случае возможно, если известно макси-
мальное значение модуля (/?-{- 1)-й производной аппроксимируе-
мой функции.
При нулевой степени аппроксимирующего многочлена Д6=С
I Етах | /А4ь В рассматриваемом примере при M1—2t—4: (при
/=2) и | Етах | =0,25 Д/о^О,О6 и необходимо взять 34 интервала
дискретизации.
Аппроксимация многочленом нулевой степени (ступенчатая
аппроксимация) предусматривает восстановление исследуемой
Таблица 21.1. Характеристики некоторых ортогональных базисных функций
Вид аппроксимирующей функции Составляющие базисных функций
Интерполяционный многочлен Лагран- жа п п j=0 i=0 1 * t^i См. рис. 21. 1, 21.2
Ряд Котельникова п У х(/Д/)^с_(£-1Д0 j=—n См. рис. 21.4
Приближение многочленами Чебышева первого рода К = % Ck(T)Tk(tiy, k=0 Ск(Т) = 2, i=o Л (/) = 1/K1 — /2; [ _ Д//2, Д//2] Гп (t) = cos (и arc cos t)‘, To(O=l; Л(0 = <; r2(f>=2^-l; Т3 (1) = 4/s _ St-, T^t) = 8/4 — в/2 + 1 (См. рис. 21.5, 21.6)
Приближение многочленами Лежандра К х*(9 = 2 Q(0Wy); fc=0 Q (О = x (tj) Lk (tj) 1=0 £0(/)=l; Lx(t) = t-, д2(о = 4"(3/2-1); M0 = -y(5/3-30; д4 (0 = 4-(35/*-30/2 + 3) о
Приближение многочленами Лагерра К x*(tj) = Y Ck(La) k=0 Ск(Ьа) = £х^)Ь(1)Ьак^)-, i=° k (t) = /““<?-f Л.“(0=1; £“(/)=-/ + !; £“(/) =/2 — 4/+2; £“(/)= — /3 + 9/2— 18/+ 6
Погреш- ность Информация о x(f) Определение интервала дискретизации
Для Pe(t): Му &0 < 1 етах 1 Ж
Для Py(t): м2
1 bmax 1 Му < V 8 | етах | /М2
Для P2(t): 2Hg М2 16 | етах | /М3
а Для Ре (/) и Л (0: RxW °2 = 2ДД0) 2Rx(Me)', о2 = 1,5й* (0) — 2R*X (Му/2) + 0,5Rx(My)
а f (я) M<l/2fc
а Мп+1 Решение уравнения Tn(t) — 0
0 ^п+1 1.5 02 : и+1 (Af/2)"+! 2п(п +1)1 ” 1V '
а ч.+1 1,5 оз = : Мп+у(ЬЛ/2)п+* 2” (и 4-1)! ” М ’
Вид аппроксимирующей функции
Составляющие базисных функций
I
Разложение Фурье — Уолша
Л'
k—0
сию=2
у=0
См. рис. 21.7
функции с экстраполяцией по предыдущему значению. Восстанав-
ливающее устройство при этом имеет наиболее простои вид и не
вносит запаздывания в процесс восстановления.
При равномерном приближении (штрихпунктирная линия на
рис. 21.1) интервал дискретизации может быть увеличен вдвое,
но при восстановлении исследуемой функции вводится запазды-
вание на интервал дискретизации и несколько усложняется реа-
лизация восстанавливающего устройства.
Рис. 21.1. Приближение
функции x(t)=t2 много-
членом нулевой степени
Рис. 21.2. Приближение
функции x(t)=t2 много-
членом первой степени
Рис. 21.3. Линейная ап-
проксимация
Если аппроксимация функции х(/) производится многочленом
первой степени (линейная аппроксимация), то 1 етах |/Л42,
а восстановленная функция имеет вид х* (/) =х(£;) ф- [х(6+1) —
—Х(М] UВ нашем примере Л42==2, а если |етах| =
=0,25, то A/i^l, т. е. достаточно иметь два интервала дискретиза-
ции (рис. 21.2).
При относительно больших значениях допустимой погрешности
(етах^0,02) разница между интервалами при линейной аппрок-
Продолжение табл. 21.1
Погреш-
ность
Информация о *(/)
Определение интервала дискретизации
Д/ ("+*>/2«(»+ 1) •’°2
2 < V Мп+,
симации и аппроксимации многочленами более высокого порядка
незначительна. Поэтому лишь при малых погрешностях прибли-
жения целесообразно рассматривать возможность применения мно-
гочленов со степенью п>2.
Положим, что известна корреляционная функция Д*х(т) иссле-
дуемой функции x(f) и задана среднеквадратическая погрешность
о приближения. (Напомним, что использование среднеквадратиче-
ского критерия погрешности аппроксимации возможно, если ис-
ь
следуемая функция интегрируема в квадрате, т. е. j" x2(f)dt<^ оо.)
а
Тогда, если для аппроксимации реализации случайной стацио-
нарной функции x(t) используется степенной многочлен нулевой
степени, интервал дискретизации может быть определен из выра-
жения сг2=М* [х(0 —х(tj) ]2=2R*X (0) —2R*x (ДА)
Когда корреляционная функция ДхДт) неизвестна, то значе-
ние Д/о может быть определено путем последовательного прибли-
жения к допустимому значению среднего квадратического откло-
нения.
Для линейной аппроксимации (при максимальной погрешно-
сти на середине интервала дискретизации) в соответствии с
рис. 21.3
( t — t- I2
°2 = М* <[ х (/) - х (tj) 4- [х (tj+,) - x (tj)] J =
= 1,5R*X (0) - 2R\ (Д^/2) + 0,5R\ (A\).
Нахождение значения ДА при известной функции Rx*(i>) особых
затруднений не вызывает.
По В. А. Котельникову непрерывная функция x(t), удовлет-
воряющая условиям Дирихле, с ограниченной верхней частотой fc
может быть представлена своими дискретами, следующими через
интервалы At^l/2fc:
x(f\ — V ../;AO sincoc(f—jAQ _ / J \ sinn ;2fcf —/)
' <oc(Z —j’Af) 2j \2fc/ "<2fci-/) ’
/=— CO / =—OO
Этот ряд носит название ряда Котельникова, а функция
8шл(2/с/—j)/n(2fct—j) —функции отсчетов.
На рис. 21.4 показаны произведения
х (j/2fJ [sin л (2fct—j) /л (2/с/—/) ]
для моментов времени /—1, /, /4-1.
Восстановление исходной непрерывной функции по дискрет-
ным отсчетам х(//2/с) в виде 6-импульсов через интервалы вре-
мени Д£=1/2/с может быть выполнено путем использования иде-
ального фильтра нижних частот на бесконечно большом (от —оо
.до оо) интервале времени. На практике исследуемые процессы
длятся в течение конечного времени. Следовательно, математиче-
ская модель, отображаемая теорией отсчетов, лишь приближенно
•описывает реальные физические процессы. Нужно заметить, что
•отклонение характеристик фильтра от идеальных также вносит
погрешности.
Ввиду сказанного при использовании теоремы Котельникова
на практике несколько увеличивают значение расчетной верхней
граничной частоты fc.
Известна математическая модель, в которой принимается, что
спектр сигнала отличен от нуля в пределах от —оо до оо, сигнал
имеет конечную длительность и известна его корреляционная
функция. Для этого случая доказывается, что интервал дискрети-
зации должен быть равен интервалу корреляции:
Rx(0) =
—□О
т. е. отсчеты функции по теореме Котельникова представляют со-
•бой не что иное, как ближайшие некоррелированные значения
функции.
Для аппроксимации непрерывных функций широко использу-
ются ортогональные функции и многочлены. Основные их досто-
инства связаны с тем, что коэффициенты базисных функций могут
получаться независимо друг от друга и во многих случаях они
обеспечивают хорошую сходимость.
Напомним, что система функций <р>, ..., называется орто-
гональной на отрезке [О, Т], если
р r fj t < 0; k /;
«Рй (0 Tz (0^ = , , '
J | Л; k = I.
о
Здесь Л является нормой <р&; если Л= , то функция называется
нормированной, а система ортогональных функций называется
ортонормированной. Если ф(£) определена в точках Л, ..tn, то
ее можно рассматривать как вектор n-мерного пространства с ком-
понентами Тогда функцию x(tj) можно представить в виде
**('/) = £
h=0
где
т I т
= J /г (0 к (0 % (t) dt Hk (/) %2 (/) dt
О / о
—-коэффициенты Фурье, a k(f) —весовые коэффициенты.
функции отсчета
Рис. 21.5. Размещение узлов ап-
проксимации при использовании
многочленов Чебышева
Рис. 21.6. Многочлены Чебышева
В табл. 21.1 приведены в сжатом виде данные некоторых орто-
гональных базисных функций.
Узлы аппроксимации многочленов Чебышева (рис. 21.5) опре-
деляются путем решения уравнения Tn(t)=O. Они имеют гармо-
ническое расположение (рис. 21.6), при котором узлы распределе-
ны гуще к концам отрезка наблюдения. Использование узлов Че-
бышева приводит к уменьшению погрешности аппроксимации по
сравнению с равномерной дискретизацией.
Остаточный член многочлена Чебышева равен
[(Л4„+,Г«+ 1)/2" (« + 1)П (Д^2Г+>.
W0=R0
Многочлены Чебышева во мно-
гих случаях дают лучшее и более
экономное приближение, чем дру-
гие базисные функции.
Весьма удобно для практиче-
ского использования при аппрокси-
мации непрерывных функций и в
ряде других приложений разложе-
ние функций в ряд Фурье с коэф-
фициентами Фурье — Уолша [11.8].
В рассмотренных ранее ортого-
нальных многочленах определен-
ную трудность представляет форми-
рование функций <рк(0 (в виде си-
нусов, косинусов, степенных выра-
жений и т. п.).
Разложение интегрируемой в
квадрате на отрезке' [О, Т] функ-
ции x(t) в ряд Фурье с использо-
ванием функций Уолша WK(t) вы-
полняется по формуле
к
**('/)=2 CJWW-
k=i
Коэффициенты Фурье — Уолша
Рис. 21.7. Функции Радемахера у=о
R и Уолша W (при единичной весовой функ-
ции).
Система функций Уолша образуется из функций Радемахера
(рис. 21.7). Функция Радемахера m-го порядка определяется при
целых положительных т следующим образом:
/?,„(/) —sign sin (2m+1 т/),
или
(
i ч 21 2i -J— 1
—1, если -1
(нечетные интервалы, начиная с 0);
, 2i-J-l 2i+2
1, если -t -
(четные интервалы i);
О)-1.
Здесь i=0, 1, ..., 2'71-1—1 — порядковый номер интервала зада-
ния функции
Чтобы из функций Радемахера, являющихся нечетными, полу-
чить полную ортогональную 'систему, нужно образовать произве-
дения вида (рис. 21.7).
....m.(0-^rai(0X...X^ АА-
Для построения функций Уолша может быть использовано сле-
дующее соображение. Функции Радемахера соответствуют деле-
нию отрезка [0, 7] на 2”. Следовательно, IFi, И72, W4, ИД • • рав-
ны соответственно Ri(t), Rz(t)y Rsft), Rift) ••• Формирование
промежуточных (между двоичными) значений ITfe осуществляется
в соответствии с формированием чисел в двоичном коде. Напри-
мер, W3(t)=Ri(t)R2(f)-, ^АА (AR?(t)Rt (i)-
В некоторых случаях удобно использовать обозначения Wsi и
Wci, введенные по аналогии с тригонометрическими функциями.
Процесс получения коэффициентов Фурье — Уолша соответст-
вует умножению матрицы Уолша Wn [строки этой матрицы равны
значениям функций Уолша в двоично-рациональных точках от-
резка (О, Г)] на вектор-столбец исходных данных:
х (t0)
cft=wmx
х (Q
Для определения коэффициентов выполняются операции сло-
жения и вычитания; умножения при этом отсутствуют.
Имеется возможность использовать так называемый алгоритм
быстрого преобразования Фурье — Уолша, применив преобразова-
ние Адамара для каждой пары последовательных дискрет х(А):
b
где
Н —1| | * || — матрица Адамара.
Для вычисления 2п коэффициентов Фурье — Уолша необходимо
п раз последовательно применить это преобразование, и, следо-
вательно, общее количество операций сложения и вычитания бу-
дет равно п2п.
Ряд Фурье с функциями Уолша для всякой функции x(t),
интегрируемой на отрезке [—Д//2^^Д//2], сходится к ней в
среднем.
Остаточный член для ряда равен
Мп+1 f ы V+1
2" («+ 1)! 2 J
Отсюда может быть определен интервал квантования по вре-
мени, необходимый для восстановления исходной функции с задан-
ной погрешностью.
Имеется обобщение теоремы отсчетов (теоремы Котельникова)
!на ряд Фурье — Уолша, согласно которому каждая временная
функция x(t) полностью характеризуется дискретной последова-
тельностью значений отсчетов взятых через Д/=1 /2fc=
-=T/2n+l. При этом действительно соотношение
х (О — X х (m&t) r^n (t — mAt),
т=—оо
тде
[ i -для Г;
Г2п (О = | \ 2 )
1 0 — для остальных значений t.
Между наивысшей частотой процесса и п имеется очевидная
ювязь:
fe=2«/T,
’где Т — продолжительность выборки непрерывной величины.
В заключение следует подчеркнуть, что выбор системы базис-
ных функций для аппроксимации должен производиться с учетом
сведений, которые имеются об исследуемой функции перед выпол-
нением измерения.
21.2. ОБ АДАПТИВНОЙ ДИСКРЕТИЗАЦИИ
В промышленном производстве и при проведении эксперимен-
тальных исследований увеличиваются потоки измерительной ин-
формации, требующие документирования, срочной обработки и
визуального вывода. В то же время в подавляющем большинстве
случаев информационная избыточность этих потоков велика, по-
этому имеется возможность уменьшить их интенсивность, а значит,
уменьшить емкость устройств памяти, загрузку устройств обработ-
ки и передачи данных, обеспечить более легкое восприятие опера-
тором необходимой для его работы информации.
Уменьшение потоков (сжатие) измерительной информации мо-
жет быть произведено так, что либо по сжатым данным может
'быть восстановлена исходная информация, либо такое восстанов-
ление становится невозможным, т. е. в последнем случае в про-
цессе сжатия могут быть необратимо потеряны необходимые для
этого информационные составляющие. Типичными примерами «не-
обратимого сжатия» являются процессы контроля, получения ста-
тистических закономерностей случайных процессов и т. п.
Операциями сжатия измерительной информации с сохраненн-
ом возможности восстановления исходных данных являются опе-
рации адаптивной дискретизации непрерывных измеряемых вели-
чин и их аппроксимации с помощью приближающих функций ми-
нимальной сложности. В дальнейшем изложении остановимся
главным образом на адаптивной дискретизации непрерывных ве-
личин, связанной с минимизацией числа дискрет.
В общем виде задача «квазиобратимого» сжатия измеритель-
ной информации может быть сформулирована следующим обра-
зом. Исходная функция x(t) или х(1) на отрезке [О, Г] или [0.L]
представлена с заданной погрешностью функцией ф[/,(/), щ ...
On], Величины {аг}1=1..n могут быть, например, равноот-
стоящими дискретами исходной функции. Предположим, что вос-
становление исходной функции с заданной погрешностью выполня-
ется с помощью другого набора величин {й3}3=1.м- Если M<C.N,
то можно говорить о сжатии измерительной информации.
Основными характеристиками устройств, выполняющих опера-
ции сжатия измерительной информации, могут быть коэффициенты
сжатия, погрешности восстановления и время, необходимое для
определения {65}. В качестве N при вычислении коэффициента сжа-
тия может быть принято количество равноотстоящих дискрет, обус-
ловленное, например, теоремой Котельникова. Тогда коэффициент
сжатия может быть определен как
Kr=N/M, или Ki^=l-M/N.
В случае адаптивной дискретизации для восстановления исход-
ной функции необходимо измерять также координаты реализован-
ных дискрет во времени или в пространстве. Эта операция иногда
носит название датирования отсчетов. Тогда коэффициент сжатия
уменьшится и будет равен:
K2=N/(M+M0), или К2М=1-(М+Мв) IN.
Естественно, что характеристики сжатия существенно зависят
от принятого метода (алгоритма) обработки информации.
Можно различать однопараметрическую, двухпараметрическую
и многопараметрическую адаптацию [21.3]. При однопараметриче-
ской адаптации (при заданной длительности реализации исходной
величины) в соответствии с ее видом может изменяться число ди-
скрет (узлов аппроксимации) либо при фиксированном числе
узлов может изменяться длительность реализации исходной ве-
личины.
В случае двухпараметрической адаптации изменяется как число
дискрет, так и длительность реализации. Многопараметрическая
адаптация связана не только с адаптивным квантованием по вре-
мени, но и с оптимальным квантованием по уровню дискрет.
Остановимся на случае однопараметрической адаптации исход-
ной непрерывной величины конечной и заданной длительности.
В этом случае вид приближающей функции и оценки погрешностей
выбираются заранее, а интервалы квантования по времени опре-
деляются в зависимости от текущего поведения непрерывной ве-
личины.
Частным, промежуточным между равномерным и адаптивным
квантованиями, является кусочно-равномерное программное кван-
тование (рис. 21.8). Такую разновидность дискретизации можно
реализовать, если известен характер изменения x(t) и можно вы-
делить отдельные участки, на каждом из которых устанавливаются
свои равномерные интервалы дискретизации. Выделение участков
x(t) может быть произведено по интервалам времени Т\ или по
достижении x(t) заранее установленных значений. Примеры x(t),
для которых возможно применение кусочно-равномерного кванто-
вания, могут быть найдены при исследовании процессов, имеющих
участки переходных и установившихся значений (например, взлет,
горизонтальный полет и посадка самолета; включение, установив-
шаяся работа и выключение радиоэлектронной аппаратуры). Ис-
пользование кусочно-равномерного квантования по времени в ряде
Рис. 21.8. Кусочно-равномерное про-
граммное квантование по времени
Рйс. 21.9. Схема устройства сжатия
информации
случаев может дать ощутимый эффект сжатия при простом аппа-
ратурном оформлении. Так, например, если (рис. 21.8) АЛ=А?3,
Д/2=10АЛ, 7’1=Тз, T2=8Tt, то К=кЗ,6. Однако при кусочно-равно-
мерном квантовании не учитываются особенности поведения ис-
ходной величины внутри участков, что часто не позволяет добить-
ся более полного сжатия информации.
Когда априорной информации об исходной функции недостаточ-
но для выполнения операций дискретизации с заранее определен-
ным неравномерным интервалом (а это типично для процесса из-
мерения), то применяется адаптивная дискретизация.
Суть адаптивной дискретизации заключается в том, что вы-
борка дискрет производится таким образом, чтобы при заданной
погрешности аппроксимации по этим дискретам было возможно
восстановление исходной функции с помощью заданной аппрок-
симирующей функции.
Для многоточечных измерительных систем целесообразно ис-
пользование сжимателей информации, производящих равномерную
дискретизацию функции и последующую выборку неизбыточных
дискрет. В таких сжимателях упрощается операция датирования
узлов аппроксимации, так как каждая из дискрет отделена от
другой целым числом интервалов дискретизации. Функциональная
схема таких сжимателей (рис. 21.9) содержит равномерный кван-
тователь 1 и 2, устройство памяти 3, восстанавливающее устройст-
во 4, устройство 5, формирующее зону заданной допустимой по-
грешности, устройства сравнения 6, управления 7 и выдачи коор-
динаты дискреты 8.
Восстанавливающее устройство восстанавливает значение ис-
ходной функции по выбранным дискретам, в. соответствии с задан-
ным алгоритмом, а устройство сравнения оценивает соответствие
текущего и восстановленного значений исходной функции с за-
данной погрешностью восстановления. Когда это соответствие на-
рушено, то устройство сравнения выдает сигнал на выделение
х(/А/) и времени /АЛ
Возможен цифровой вариант реализации сжимателя информа-
ции. В этом случае после квантователя должен быть расположен
аналого-цифровой преобразователь, а остальные блоки должны
работать с кодоимпульсными сигналами. В телеметрии для вос-
Рис. 21.10. Аппроксимация многочленом нулевой степени при адаптивном кван-
товании по времени:
а — с фиксированной апертурой и неизбыточной выборкой; б—с плавающей апертурой;
в — с плавающей апертурой и исправлением по предсказанному значению1
становления исходной функции наиболее часто используются сте-
пенные многочлены нулевой и первой степени с оценкой верности
воспроизведения по наибольшему отклонению. Остановимся на
особенностях дискретизации при этих условиях.
Если степень аппроксимирующего полинома п=0, то возможен
следующий алгоритм работы сжимателя (рис. 21.10,а):
Ф (В) LФ(/ ' = / + 1) {I kIII(*/-,)} X
х 1(|Дх| = |Ху — x^l) 1(С7?:|Дх|, е) X
х ® (Ах > е) п1 (W: D/, Xj = Xi) [I (S: xt) ||T(хг-_,)] X
X 05 (j = п) Ф (E).
Здесь существенные дискреты Xt имеют индекс Л Этот алгоритм
называется алгоритмом нулевого приближения с фиксированной
зоной погрешности (апертурой) и неизбыточной выборкой.
Второй алгоритм -отличается от первого тем, что при его ис-
пользовании устанавливается зона погрешности относительно каж-
дого, в том числе и избыточного, значения измеряемой величины,
и если разность между предыдущей и текущей дискретами превы-
шает заданное значение, то выдается дискрета, предшествующая
текущей. Этот случай представлен на рис. 21.10,6. На этом рисун-
ке за зону Х;+1±е вышла дискрета лу+2- Следовательно, выделяет-
ся узел аппроксимации х,+ь tj+l.
Третий алгоритм отличается от второго тем, что в нем исправ-
ляется значение выдаваемой дискреты — оно принимается равным
предсказанному значению предыдущей выборки (рис. 21.10,в).
Как и на предыдущем рисунке, за зону xj+i+e вышла дискрета
Xj+2, выделяется же узел аппроксимации лу,
На рис. 21.10 пунктирными линиями показаны предсказанные
значения величины в последующий интервал квантования, сплош-
ными линиями — интерполирующая кривая, знаком * отмечены
выделяемые дискреты.
На рис. 21.10,6, в значение предыдущей выделенной дискреты
соединяется прямой линией со значением последующей выделенной
дискреты на интервале квантования, следующем за предыдущей
выделенной дискретой. Это позволяет уменьшить погрешность при-
ближения.
Аналогичные алгоритмы можно получить для дискретизации
при применении многочлена первого порядка. Для построения зо-
ны допустимых погрешностей в этом случае необходимо запоми-
нать значения двух дискрет и формировать (предсказывать) зону
допустимых погрешностей для последующих интервалов квантова-
ния. Зона допустимых погрешностей может быть образована дву-
мя линиями, проходящими через неизбыточные дискреты
Xj+fc+e и х$—е, Xj+k—е, Л=1, 2, ...
Эта зона может быть переменной (веерной), устанавливаемой
при появлении каждой избыточной дискреты с помощью линий,
проходящих через предыдущую неизбыточную дискрету и значение
последующей избыточной дис-
креты ±е (рис. 21.11). При вы<
делении следующей неизбыточ-
ной дискреты построение для
допустимых погрешностей про-
изводится от нее. В качестве
неизбыточной выделяется дис-
крета, предшествующая дискре-
те, вышедшей за зону допусти-
мых погрешностей.
В [17.7] приводится сравнение
перечисленных алгоритмов сжа-
тия. По повышенному быстродей-
ствию, небольшому количеству
ячеек памяти и логических эле-
ментов бесспорное преимущество
имеет алгоритм нулевого приближения с фиксированной зоной до-
пустимых погрешностей и выборкой неизбыточных дискрет. Он,
однако, несколько уступает по коэффициентам сжатия алгоритмам
с нулевым и первым приближениями и переменной зоной допусти-
мых погрешностей.
До сих пор рассматривались так называемые прогнозирующие
(экстраполирующие) алгоритмы. Для сжатия информации могут
быть использованы и интерполирующие алгоритмы. В- них зоны
Рис. 21.11. Аппроксимация много-
членом первой степени прн адаптив-
ной дискретизации
допустимых погрешностей устанавливаются по значениям дискрет,,
удаленных на два и более интервала квантования, а выделение-
неизбыточных дискрет производится внутри этого участка.
Погрешности аппроксимации могут определяться по среднему
квадрэтическому критерию, тогда в алгоритм квантования должен
входить оператор вычисления текущей средней квадратической
погрешности аппроксимации.
Естественно, что при адаптивном квантовании по времени в--
качестве приближающих могут быть использованы любые из из-
вестных многочленов. Нужно отметить, что методы аппроксима-
ции ортогональными многочленами с коэффициентами Фурье в-,
определенном смысле обладают повышенной помехоустойчиво-
стью, поскольку в них используется интегрирование исходной функ-
ции.
Повышенным коэффициентом сжатия по сравнению с однопа-
раметрической адаптацией обладает двухпараметрическая адапта-
ция, позволяющая в зависимости от поведения измеряемой вели-
чины определять интервал аппроксимации и степень аппроксими-
рующего полинома.
Сжатие измерительной информации может также производиться
путем устранения некоторых коэффициентов аппроксимирующего
многочлена, полученных расчетным или аппаратурным путем.
Так, например, при разложении с помощью функций Уолша изме-
ряемой величины, близкой к синусоидальной, при погрешности
восстановления порядка 4-10-3 удалось вместо выдачи 64 отсчетов
дискретных значений ограничиться получением 20 коэффициентов
Фурье — Уолша.
Работы по адаптивной дискретизации непрерывных величин
весьма интенсивно развиваются, и можно ожидать, что в ближай-
шее время многие быстродействующие измерительные устройства,
предназначенные для получения большого количества результатов
измерений, будут комплексироваться с устройствами для сжатия
информации или адаптивно выполнять операции измерения.
21.3. ОЦЕНКА ВРЕМЕНИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАНИИ
АНАЛОГОВОЙ ЧАСТИ
Большинство ИИС содержит функциональные узлы, выполняю-
щие операции над аналоговыми (непрерывными и дискретными) и
кодоимпульсными сигналами. Для анализа быстродействия анало-
говой и цифровой частей систем могут быть успешно применены
разработанные в теории электрических цепей и автоматического
управления методы решения дифференциальных уравнений или
уравнений в конечных разностях, описывающих работу функцио-
нальных узлов и всей системы в целом. Литературы, в том числе-
учебной [21.41, по этому материалу много.
Применительно к ИИС задачи анализа быстродействия анало-
говой части наиболее полно рассмотрены в [21.5].
При системотехническом проектировании ИИС во многих слу-
чаях нет необходимости получения полного описания поведения си-
стемы во времени, а достаточно знать интервал времени, в течение
которого может быть выполнено измерение с погрешностью, не пре-
вышающей заданного значения. Такая постановка вопроса относит-
ся главным образом к разомкнутым системам с апериодическими
переходными режимами или с режимами, в которых колебательные
составляющие затухают столь быстро, что их влиянием можно пре-
небречь. Именно особенности расчета времени измерения таких си-
стем рассмотрены в этой главе.
К основным аналоговым звеньям, существенно влияющим на
время преобразования всей аналоговой части ИИС, в первую оче-
редь относятся датчики [7.2, 21.6].
Динамические режимы большинства датчиков описываются диф-
ференциальными уравнениями первого и второго порядка с посто-
янными коэффициентами.
Остановимся на температурных датчиках. Если динамический
регулярный режим таких датчиков при скачкообразном изменении
температуры среды (от 0 до 6о) описывается уравнением
TdQ (£) =60, а передаточная функция такого апериодиче-
ского (инерционного) звена 1Е=1/(Ts^l), то решениеэтогоурав-
нения 0(£)=0о (1—e~t/T). Здесь Т — постоянная времени датчика,
©(О—его температура, а 0о — температура среды, s — оператор
Лапласа.
Время, по прошествии которого 0О—0(£)^А0, бчдет равно А£=
=Пп(1/Д0).
Постоянная времени датчика Т является функцией его тепло-
емкости, коэффициента теплопередачи, геометрических размеров
и т. п.
При t=T е~//т=0,368, и, следовательно, Q(T)^0,66o (см. при-
ложение 2), а при 1/Д0=1ОО £=4,6 Т.
Значения постоянных времени для выпускаемых промышленно-
стью терморезистивных датчиков находятся в пределах от десятых
долей секунды до десятков секунд, термопар — от десятков секунд
до нескольких минут, для радиационных, яркостных, цветовых и
фотоэлектрических пирометров — порядка секунд. Имеются инфра-
красные пирометры с постоянной времени порядка десятых и сотых
долей секунды [21.6].
Выпускаемые промышленностью терморезисторы и термопары
рассчитаны на длительную их эксплуатацию. Если условие дли-
тельной эксплуатации не накладывается, то можно изготовить тер-
мосопротивления и термопары из калиброванных тонких проволок
(диаметром до 30—50 мкм) и добиться постоянных времени таких
датчиков порядка 50-10-3 с.
Если термоприемники размещены в защитной оболочке, то тогда
динамический режим такого звена может описываться уравнением
второй степени. В большинстве случаев режим этого звена апе-
риодический и передаточная функция W=kf (7\2S2-]-7’iS+l) =
=Л/(Т35-Ы) (Т4Х+1), где Т^2Т2, Т3>4=(1/2) (Л± Ю7 - 47^),
а решение имеет вид£[1—(Т\е~tlT1—T4e~t/Ti)!(Ts-]-T^].
Следует подчеркнуть, что динамический режим работы термо-
датчиков, их постоянные времени существенно зависят от условий
их использования.
Заметим, чтоб литературе (в том числе и справочной) зачастую
скупо приводятся данные о динамических характеристиках датчи-
ков. Поэтому при необходимости получения таких данных следует
применять экспериментальные методы [21.4].
Большинство дискретных датчиков относится к апериодическим
инерционным звеньям. Однако имеются датчики ускорений, скоро-
стей, давлений, углов поворота гироскопов, являющиеся колеба-
тельными звеньями второго порядка с передаточной функций W=
=k/(7’2s2+2§7’s-|-l), 0<g<l, для которой решение равно &[1—
—e~^Tsin (М+0) /КТ, где %= УГАруТ, 0 = arctg(A,7’/§).
Весьма часто именно динамические свойства датчиков являются
определяющими быстродействие всей системы. Отметим, что.
примерно на порядок [7.2] можно уменьшить постоянную времени
цепи с термодатчиками, используя известные методы коррекции
(последовательное включение корректирующих звеньев, введение-
обратных связей и производных от измеряемой температуры).
Большой выигрыш по быстродействию может быть в ряде слу-
чаев получен при использовании в ИИС вместо большого количе-
ства дискретных датчиков (типа термопар, термосопротивлений)
системных датчиков, воспринимающих одновременно поле темпе-
ратур.
Переходные процессы остальных звеньев аналоговой части
ИИС — измерительных цепей (мостовых, дифференциальных
и др.), усилителей, фильтров, коммутаторов, входных цепей ана-
лого-цифровых преобразователей и т. п. — также в большинстве
случаев могут быть описаны уравнениями первого или второго
порядка.
При системотехническом проектировании ИИС важно знать,,
каким образом будет вести себя вся совокупность аналоговых
звеньев.
Для последовательного включения звеньев (рис. 21.12,а) об-
т
щая передаточная функция U7(s) =xBbix(s) /xIIX(s) = JJ Wt-(s), для.
i —1
m
параллельного (рис. 21.12,6) lF(s)=2 tFz(s) и для встречно-па-
i=l
раллельного включения звеньев (отрицательная обратная связь,
рис. 21.12,в)
nz(s)=u7i (5)/[1+№о.+ад1,
где s — комплексная переменная.
Из многочисленных методов анализа линейных автоматических
систем выделяется метод получения передаточных функций типо-
вых звеньев по Лапласу, объединение их и нахождение решений
(оригиналов) производится по таблицам обратных преобразований
Лапласа. Для облегчения поиска нужных решений предлагается
Рис. 21.12. Структурные схемы последовательного (а), параллельного (б) и
параллельно-встречного соединения звеньев (в)
использовать следующую методику. Во многих случаях аналого-
вая часть ИИС может быть представлена в виде соединения апе-
риодических звеньев первого порядка, интегрирующих и дифферен-
цирующих звеньев, а также звена запаздывания. В табл. 21.2
представлены передаточные функции этих звеньев и их переход-
ные характеристики.
Если имеется структурная схема аналоговой части, объединяю-
щая указанные звенья последовательно, можно, используя прило-
жение 2, сразу получить оригинал, минуя преобразования, необ-
ходимые для определения полного изображения и поиска ориги-
нала по нему в обширных таблицах, содержащих большое коли-
чество изображений и оригиналов [21.4].
Положим, канал аналоговой измерительной части содержит
датчик и измерительную цепь, являющиеся апериодическими инер-
ционными звеньями, а также усилитель с фильтром и апериодиче-
ское звено второго порядка.
Апериодическое звено второго порядка может быть представ-
лено в виде последовательно соединенных апериодических инер-
ционных звеньев и n2i (см. приложение 2).
Для получения переходной характеристики (табл. 21.2) этого
соединения необходимо найти в табл. П.2.2 приложения 2 ориги-
нал изображения, кодируемого как щщщзЩ (здесь а3=«и, Щ=
=^21) •
Переходная хаоактеристика для такого соединения звеньев имеет
( N -а.Л N
следующий вид: ( 1 — 1 ) &,•; ai-l/Ti. Если Т==
— 1 с; 7’2=0,! с; 7’u:=0,5 с; 7’2i = 0,2 с; Ai=^2==^n = ^2i = U
= (1; 2; 11; 21); п=4; сг= Т{п~2} / Д (Тг - ГД то
/ '=#/
Т а 1
с----------------1_____________________1_____~ 9 R-
(7\-Tz) (Л-ЛП - о,9-0,5.0,8
Т 2.
г________________— 0 28-
(Га —Гт) (Г2 —Гц) (Га —гзт) ’ ’
Таблица 21.2. Типовые звенья и их характеристики
Тип звена; передаточная функция
Переходная характеристика
(оригинал от —1- IF j
Апериодическое (инерционное);
fef
TiS + \
W =
Интегрирующее (инерционное);
s(Tjs+ 1)
Дифференцирующее (инерционное);
kt
T-ts +
К/Т
— t
Апериодическое второго порядка;
W =--------—-----=
Ф2+ГП5+ 1
=--------Т^2Т.
(7’3is+l)(74£s+ 1) ’
7з, 4 = ± V
Л =К[1~ ^^{T3e-t/T^-\e-t/T^)]
Колебательное;
TV*+2^+1 ’
о< в< 1
h=K[i--^re ^Tsln(At+e)]
(Д1 - Л) (T'll-T'z) (Д1- Дх)
Г2
_ _ _____________y21____________ ~ . 7
21 (Д1 ^1) (Д1 -- Д) (Д1-- T'll) ’
Задавая допустимый по погрешности уровень преобразованного
сигнала, можно определить время, необходимое для достижения
этого уровня сигналом на выходе аналоговой части при подаче на
ее вход ступенчатообразно изменившегося сигнала.
Допустим, необходимо найти, за какое время уровень переход-
ной характеристики Л(/) станет равным 0,99:
0,99= 1 —2,8с- г + 0,28е~10« + 4,2е-2(— 1,7e5t.
Из приложения 3 находим, что это равенство соблюдается при
£=5 (здесь все слагаемые имеют существенно меньшее значение
по сравнению с первым членом).
Если цепочка последовательно соединенных звеньев может быть
разделена на две части, переходные характеристики которых име-
ются в табл. П.2.2, то можно использовать теорему о свертке для
получения переходной характеристики всей цепи:
t
hi‘ J hi ~ h‘
о
Заметим, что существенное упрощение при вычислениях может
быть получено, если исключить из переходных характеристик сла-
гаемые, имеющие пренебрежимо малые значения.
При параллельном соединении звеньев их передаточные функ-
ции и переходные характеристики суммируются.
Для нахождения переходной характеристики цепи с параллель-
но-встречным соединением звеньев можно воспользоваться
табл. П.2.3. В выражениях этой таблицы в числителе помещается
код прямой цепи, а в знаменателе—код цепи обратной связи.
В этих таблицах степень полинома, описывающего цепь обратной
связи, не превышает второго порядка.
При сложных соединениях звеньев и необходимости получения
частотных характеристик прохождения сигналов следует пользо-
ваться методами, изложенными в руководствах [21.4].
21.4. ОЦЕНКА ВРЕМЕНИ РАБОТЫ ЦИФРОВОЙ ЧАСТИ ИИС.
ВЫБОР ЭВМ ПО БЫСТРОДЕЙСТВИЮ
При наличии в ИИС аналоговой и цифровой частей анализ
быстродействия системы в целом может быть произведен при вы-
полнении следующего условия: аналого-цифровое преобразова-
ние и последующие операции над кодоимпульсными сигналами мо-
гут начинаться после того, как закончатся (с заданной точностью)
переходные процессы в аналоговой части, а обратное цифро-ана-
лотовое преооразование— после завершения всех цифровых опе-
раций с кодоимпульсными сигналами. Если принять это условие,
то тогда цифровую часть с точки зрения'временного анализа мож-
но считать элементом системы, вносящим запаздывание тц.
В разомкнутых ИИС время получения количественной инфор-
мации будет определяться суммарным временем аналоговых та и
цифровых тц преобразований.
Время Тц, необходимое для выполнения цифровых преобразова-
ний, может быть определено путем анализа содержательной логи-
ческой схемы алгоритмов работы данной системы.
ЭВМ, входящие в состав ИИС, в большинстве случаев выпол-
няют две основные функции: во-первых, производят вычислитель-
ные и логические процедуры, во-вторых, управляют работой функ-
циональных блоков системы, обменом информацией между ними,
процессами сбора информации от объектов исследования и выдачи
информации из системы.
Помимо этого ЭВМ в ИИС используются для метрологического
обеспечения работы систем, в телеизмерительных системах — для
защиты передачи кодоимпульсной информации от помех и т. д.
Ниже рассматриваются лишь применения ЭВМ, связанные с вы-
полнением ими основных функций.
Вычислительные, логические процедуры и операции обмена
цифровой информацией могут выполняться в реальном времени,
т. е. за некоторую долю тц интервала времени Afp, в течение кото-
рого состояние объекта исследования может с заданными погреш-
ностями оставаться неизменным. Размер такого интервала опре-
деляется в процессе системотехнического проектирования. Эти
процедуры могут выполняться в ряде случаев с некоторой за-
держкой на время Af3>A/p; однако тогда запись в ЭВМ исходных
для вычислений данных все равно должна производиться в реаль-
ном времени, а емкость памяти ЭВМ должна позволять занести
туда все необходимые данные и хранить их по крайней мере в
течение времени задержки.
Функции управления должны выполняться только в реальном
времени. При этом, естественно, время на формирование и вос-
приятие каждого служебного сигнала должно занимать опреде-
ленную, обычно меньшую часть интервала тц, которую обозначим
утц.
Таким образом, при однопрограммной работе ЭВМ каждый
интервал реального времени, отводимый для работы ЭВМ, входя-
щей в состав системы, может быть разделен на часть угц, в тече-
ние которой формируются и выполняются служебные сигналы, и
на часть хтц, отводимую на выполнение вычислительных и логиче-
ских процедур.
За время тц ЭВМ должна принять (в частности, записать в
память) массив данных 6i (за время хвгГц), произвести над ним
необходимые преобразования FGi (за время к₽тц) и выдать F(h
(за время хштц). Следовательно, ЭВМ должна обладать скоро-
стями ввода и вывода информации соответственно бт/хщГц и
l а при преобразованиях информации, выполняемых вре-
альном времени, — скоростью преобразования F6r/zj?T4.
Если известны количество элементарных операций N\, N2, ...,
необходимых для выполнения заданного преобразования, и время
выполнения этих операций п, тг, ..., то тогда нужно, чтобы было
удовлетворено неравенство
Это выражение справедливо для случая, когда разрядность
слов, поступающих в ЭВМ, меньше или равна разрядности слова
ЭВМ. Если вычислительные процедуры выполняются с запаздыва-
нием, то хкггц при расчете не учитывается.
Чтобы оценить возможность использования ЭВМ в качестве
функционального устройства системы, в первую очередь необходи-
мо иметь сведения о следующих характеристиках ЭВМ:
разрядности слова;
времени записи слова в память;
времени выдачи слова из памяти;
времени выполнения элементарных вычислительных операций
(сложения, умножения, деления и др.).
Зная количество элементарных операций, необходимых для
получения результата работы ИИС, количество операций обраще-
ния к памяти ЭВМ и формирования служебной информации с по-
мощью ЭВМ, можно определить, достаточно ли быстродействие
ЭВМ для того, чтобы все эти операции были произведены за за-
данное время Тц.
Оценка количества всех программно выполняемых операций
возможна лишь после того, как будет составлена полная програм-
ма выполнения задания в машинных кодах ЭВМ. Однако для вы-
бора ЭВМ по времени выполнения операций достаточно использо-
вать примерный подсчет объема таких операций. Для определения
этого объема могут использоваться несколько способов [21.7]. При
одном из них оценка объема элементарных операций определяется
в результате рассмотрения решенных ранее аналогичных задач.
Положим, анализ программы для решения системы п линейных
уравнений методом Гаусса показал, что необходимо провести опе-
рации: сложения 1)/3, умножения N2=n(n2— 1)/3 и де-
ления Ns—nln—1)/2. Общее количество элементарных арифмети-
ческих операций с учетом сложности A^a=Pi^i+P2^2“FP3A^3. Не-
арифметические операции увеличат общий объем до \N=K-Na,
где К — коэффициент, который в ряде случаев равен 3—4.
Если программирование велось на языке высокого уровня, то
необходимо, учитывая статистический анализ программ, ввести
еще один множитель. По данным [21.7], для языка АЛГОЛ-60
значение этого коэффициента равно 2—3.
Очевидно, подобная оценка объема элементарных операций
может быть проведена для решения системы уравнений разного
порядка. В [6.1] приведены выражения, позволяющие найти объ-
емы элементарных операций для обращения матриц, решения за-
дач линейного и квадратичного программирования, нахождения
корней полиномов.
Для экспериментальной оценки объема операций и динамики
реализации сложных программ используются так называемые из-
мерительные мониторы. С помощью таких мониторов измеряются
параметры, характеризующие загруженность или интенсивность
использования аппаратных и программных компонентов.
Аппаратные измерительные мониторы подключаются к опре-
деленным точкам шин ЭВМ, выявляют сигналы с помощью дат-
чиков (зондов, щупов), обладающих высокоомным входом, про-
изводят фильтрацию и комбинирование сигналов, подсчитывают
время и число событий.
Программные мониторы — программы, в соответствии с кото-
рыми производится анализ реализуемых алгоритмов.
При третьем способе оценка объема элементарных операций
относительно простых алгоритмов может быть произведена непо-
средственно из их анализа. Имеется несколько предложений по
форме представления алгоритмов, удобной для анализа. Так, в
[14.6] предлагается использование структурных схем программ,
представленных в виде графа, вершины которого изображают
команды, а дуги определяют логическую последовательность их
выполнения. Отмечается, что аналитическая оценка объема эле-
ментарных операций годна только для оценки в первом приближе-
нии, а в некоторых случаях вообще не может быть получена (на-
пример, если отсутствует информация о количестве циклов).
В [6.1] описывается метод упрощенного структурного програм-
мирования, при котором составляется блок-схема процесса преоб-
разования информации. Эта блок-схема содержит последователь-
ность элементарных вычислительных операций типа сложения,
интегрирования, сравнения и операций ввода и вывода информа-
ции (аналого-цифровые и цифро-аналоговые преобразования, счи-
тывание показаний и т. п.).
Перечисленные операции реализуются в виде стандартных под-
программ или микропрограмм в памяти ЭВМ. Организуется про-
грамма транслятора, содержащая таблицу адресов операторов в
порядке их выполнения. Затем интерактивная программа модели-
рования ЭВМ позволяет отладить и проанализировать исследуе-
мый алгоритм. Упрощенные структурные программы позволяют
определить количество элементарных операций, необходимых для
выполнения данной вычислительной задачи. Конечно, главное их
назначение заключается в подготовке прикладных программ ра-
боты ЭВМ.
Несколько большие возможности для подготовки прикладных
программ и оценки необходимого быстродействия и емкости памя-
ти представляют СЛСА. Нужно отметить, что при составлении
прикладных программ в машинных кодах, базирующемся на ис-
пользовании СЛСА, может быть использована методика стандарт-
ных подпрограмм. СЛСА позволяют формально описать совмест-
ную работу как аппаратной, так и программно-управляемой ча-
стей ИИС. Естественно, что для составления прикладных программ
должны учитываться только те элементы СЛСА, которые связаны
с программным управлением и выполнением операций.
Приведем пример анализа СЛСА в целях определения быстро-
действия и емкости памяти ЭВМ, участвующей в выполнении этого
алгоритма и управляющей его реализацией.
Положим, ЭВМ в составе локального ИВК (рис. 21.13) должна
не только управлять, но и производить, вычислительные процедуры,
необходимые для получения в реальном времени коэффициентов
п
аппроксимирующих многочленов = 2 И Проанализируем
2 = 1
Рис. 21.13. «Локальный измерительно-вычислительный комплекс:
а — жесткое соединение блоков; б — соединение через приборный интерфейс
СЛСА для работы с жестким соединением блоков и с объедине-
нием их с помощью стандартных цифровых интерфейсов (прибор-
ного и стандарта КАМАК).
Рассмотрим СЛСА для жесткого соединения блоков
(рис. 21.13,а):
начальное состояние (Ss относится к устройству памяти RAM)
<p[t=O; /—0; 0; S3: Иф/jli]X
X [I(xi)|| ... ИЖ) II ... IHCMJX
коммутация и аналого-цифровое преобразование ИФУ-1, И ФУ-2
хф0(В; ^0)LA(H=f+i; ОШ.РЖ; ^)Х
1
ХГДм/г,-; гАЦП) I0(S:sf; •=„)] || X
вычисление коэффициентов Cj
।----:-------
XIIILФо(/: =/ + 1; J} 10(м = х
j ,
I—1-------------------------------------------/ i-\
Х= S ггФо+г<Ф<7; суМ+тсл) S : 2 X
Z=1 ' 1 !
х % (/=тл) 1 % (i=\„) п х
регистрация коэффициентов
X I(W:c„ с2.....cm; тпеч) Ф0(Е;
Здесь Тп — время обращения к памяти; тл — время выполнения
логической операции, тум — умножения, тсл— сложения, то — пере-
дачи команды, Тпеч — печати.
Аппаратная реализация в СЛСА занимает время та=п(тк +
-Н дцП) +ттпеч, а программная реализация тГ1^/г[(то+т11+тл) +
+т (тум+тсл+тп+тл) ]. Время выполнения указанных операций в
ЭВМ должно быть известно. При объединении блоков с помощью
приборного интерфейса (рис. 21.13,6) СЛСА будет иметь следую-
щий вид (напомним, что типовая операция обмена информацией
в приборном интерфейсе обозначается буквой Н):
начальное состояние
cp(i=O, j=0; Sznp!ij=O; S3: lli|);jll)X
X [I(xi)|| ... ||I (x.) II --- IU(x„)]X
коммутация и аналого-цифровое преобразование
XL{H[Ad0(l), Oo(S); th] [Ado(O)<Do(R)]X
X H [Фо (i: =t-|-1; th) ] H[Ad0(l); ты]X
Xli(X/x{; тк); 12(х,/г,-; тАЦП)Х
XH[Ad0(2), Oo(R); th] [Ado(0)Qo(S)]X
X H [I2 (Zi) II Io (S : z;; th) ] H[Ad0(2); th] } X
вычисление коэффициентов с,
x L{H[Ad0(3), $0(S); гн] [Ado(O)<MR)l H [Фо (/: = j +1; тн] X
X H[Ad0(3), Фо(₽); .H] [Ad0 (0) Фо (S)] X
X H
( R 2 TH
H[Ad0(3);
I---:-------77-------------------1
x = S V- X
XH[Ad0(3), ®0(S); tH] [Ado(O)®o(R)]X
/ г
I Zu тн
\ i=l
X
_________ 2
X H [Ad„ (3) ; th] } % (j = m) Й X
i
X co(t = /z)~| ^(Wic,, C2,..., Cm-, щт^ФДЕ).
В этих алгоритмах [Ad0(O) <Dq(R)], [Ado(0) Ф0(5)] —местные
команды (сообщения) о том, что приборная часть блока управ-
ления ИФУ-0 принимает функции источника или приемника,
Ad0OBII или Ad0OBH — интерфейсная команда о прекращении
выполнения функций приемника и источника после операции
«рукопожатия».
Суммарное время обработки измерительной информации не
более пт (тум-|-тсл), а выполнения остальной программы
~^п (6тя-[-Тк+ дцп + 8тт н. Времена выполнения операций «ру-
копожатия» Тн зависят от быстродействия функциональных бло-
ков, участвующих в операции обмена информацией.
Рассмотрим СЛСА этого кемплекса в стандарте КАМАК.
Введем сокращенное обозначение операции обмена информа-
цией
<K(Ad*, Ф*, /*)>: =
= [Ad* || SbAd* || Ф* IIФ (/*) ] [/* I ® (R) 1 X
I----1 I I
Х[Ф(П) III (W :/*)] [Ф(Т2)ЦУ*].
На выполнение этой операции затрачивается время ткк.
Начальное состояние
cp[t = O; /=0; S3 : llipijll];
коммутация и аналого-цифровое преобразование
[1(х1)||...||(1(л/)||...|| !(*„)] Ф0(В; %)Х
X L фо(/ = f-t-1; •%) <К[Ad(1), SbAd(i); Ф*(Р); sJ )Х
X 'ск) ’САЦп) X
X?a(R:zf) (K[Ad(2), Ф*^), 1(гг), I0(S:zz); );
вычисление коэффициентов с/
X L (/ = i+1; \) (К Ad0 (3), Фо (R), ф(7; 2 ;
2 *—---1 х. »___1 /
X ^0 I '1УМ’ Тсл
(К А7О(3); 0(S);
"'‘кк
) O50(j = m; 1л)^<оо(г = п; ^Л)~]Х
X VWiCp с2. ст\ tne4) Ф0(Е; •%).
Аппаратная реализация работает в течение времени тап~
«п(тк4-т;АцП)+ц1Тпеч, время реализации программы
тпр^п[2ткк + т (то4-2ткк-[_Тум4_Тсл_[_2тл) ],
где Ткк — время выполнения операции крейта КАМАК.
Произведем сравнение затрат времени на реализацию СЛСА
для рассматриваемого случая.
Аппаратная часть реализации СЛСА у вариантов с жестким
соединением функциональных блоков и ИФ КАМАК занимает
примерно одинаковое время. У варианта СЛСА с использованием
приборного интерфейса для организации обмена информацией
между блоками необходимо дополнительное время, равное
п(5т-|-4)тк. Время тн может быть определено лишь для конкрет-
ного состава участвующих в работе блоков.
Обмен информацией в стандарте КАМАК осуществляется пре-
имущественно программным путем, и это должно быть учтено,
при выборе ЭВМ.
Результаты проведенного анализа позволяют перейти к выбо-
ру ЭВМ по быстродействию. Необходимо, чтобы тап+тпр^тц, а
следовательно, ЭВМ должна иметь быстродействие, позволяющее
обеспечить время реализации программ, не превышающее задан-
ное.
Если необходимо решать вопрос, связанный с использованием
одной ЭВМ для участия в реализации нескольких СЛСА, то в до-
полнение к анализу каждой СЛСА следует составить и проанали-
зировать СЛСА, определяющую программу такой работы системы
в целом.
Накопленный опыт позволил провести некоторые обобщения,
связанные с применением микропроцессоров и ЭВМ [6.1, 21.7].
При обработке данных и в процессах управления выполняются
примерно 5—10 вычислительных операций над каждым словом,
при научно-технических расчетах — до 100 операций.
Относительный вес операций при обработке данных: сложение
и вычитание — 51,6; умножение и деление—19,2; логические опе-
рации 5,9; сравнение — 3,2; прочие операции — 20,1.
С увеличением числа п параллельно работающих МП произво-
дительность мультимикропроцессорной системы растет по зако-
ну log2 п, а живучесть системы может повыситься на 1—2 по-
рядка.
Можно проследить тенденцию, связанную с приближением
аналого-цифровых преобразований к источникам информации и
с объединением АЦП и МП.
Если реализуемые устройством логические функции просты,
т. е. имеют небольшое число входных, выходных переменных и
внутренних (состояний, то экономичнее аппаратурная реализация
с фиксированной логикой (при условии, что обеспечивается при
этом нужное быстродействие). Если логические функции сложны
и возможны их изменения, то целесообразна микропроцессорная
реализация логических устройств.
Программирование упрощается, если программы разделяются
на модули и исключается прерывание программ.
Разработанную программу измерительно-вычислительной си-
стемы целесообразно сначала записать в ОЗУ, после отладки —
в перепрограммируемые ПЗУ, эксплуатировать некоторое время
и лишь после этого внести в ПЗУ.
Составление программ может основываться на использовании
составленных СЛСА.
В заключение этой главы нужно подчеркнуть, что ИИС могут
быть не только разомкнутыми, но и замкнутыми (компенсацион-
ными), что они могут содержать не только аналоговые и цифро-
вые, но и дискретные (импульсные) преобразователи. Поэтому
для их рассмотрения должны использоваться соответствующие
интегральные и дифференциальные методы анализа. К ним мож-
но отнести: для линейных аналоговых узлов — преобразования
Лапласа, для дискретных — Лапласа — Галуа, для цифровых уз-
лов— z-преобразования и т. п.
Основная область применения изложенного здесь материала —
приближенная оценка времени измерения на начальных стадиях
проектирования ИИС разомкнутого типа, содержащих аналого-
вую и цифровую, части.
Г л а в а 22
НОРМИРУЕМЫЕ МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
22.1. ОБЩИЕ ПОЛОЖЕНИЯ
Под метрологическим обеспечением ИИС понимается ком-
плекс мер, направленных на достижение и поддержание в этих
системах требуемой точности измерения. Метрологическое обес-
печение ИИС на стадиях их разработки, производства и эксплу-
атации решает различные задачи [22.1].
На стадии проектирования должны быть выполнены метроло-
гическая экспертиза проектов технических заданий и документа-
ции на ИИС, разработка технических средств и методик метро-
логической аттестации и поверки ИИС, государственные или ве-
домственные приемочные испытания или метрологическая атте-
стация (для ИИС единичного производства), метрологический
надзор за разработкой ИИС.
Метрологическое обеспечение ИИС на стадии производства
включает главным образом контрольные испытания и метрологи-
ческий надзор за технической документацией и технологией из-
готовления ИИС.
При внедрении ИИС, комплектуемых на объектах эксплуата-
ции из агрегатированных средств, должна проводиться метроло-
гическая аттестация измерительных каналов ИИС и методик вы-
полпенни измерении, сгги ра оты должны о язательно делаться
и для ИИС, основанных на использовании выпускаемых промыш-
ленностью ИВК-
В период эксплуатации должны быть обеспечены метрологи-
ческая аттестация ИИС в случае, если условия работы отлича-
ются от тех, при которых нормировались их метрологические ха-
рактеристики, аттестация после ремонта, периодические поверки,
надзор и контроль за применением ИИС.
Кроме перечисленного в метрологическое обеспечение долж-
ны входить методики выполнения измерений (Д^ВИ) и испытаний
(МИ). Под методикой выполнения измерения понимают рекомен-
дации по выбору технических средств и методов их применения,
а также оценок результатов измерений. Проводится работа по за-
конодательному закреплению этих методик.
ГОСТ 8.437-81 регламентирует работу метрологических служб
Госстандарта, министерств и предприятий, а также определяет
содержание основных работ по метрологическому обеспечению
ИИС.
По метрологическому обеспечению средств измерений имеется
ряд государственных стандартов [22.1—22.8]. Остановимся да-
лее на наиболее важной и ответственной части метрологического-
обеспечения ИИС, заключающейся в определении комплекса нор-
мируемых метрологических характеристик (MX) и разработке
методов и средств поверок Л1Х основной разновидности ИИС —
измерительных систем. Целесообразно также остановиться на ме-
тодах автоматической коррекции погрешностей ИС, в процессе
которой по сути дела осуществляется поверка точностных харак-
теристик ИС и поддержание их в допустимых пределах.
22.2. НОРМИРУЕМЫЕ МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ ИС
Комплекс нормируемых метрологических характеристик ИС
должен позволить с должной достоверностью оценить погрешно-
сти результатов измерений, получаемых с помощью ИС, относи-
тельно просто выполнять операции поверки и обеспечить оценку
метрологических свойств как большого количества, так и кон-
кретных экземпляров ИС данного типа.
В любой ИС можно выделить измерительный канал, т. е. со-
вокупность преобразователей информации, начиная от входа и
кончая выходом системы, и измерительные компоненты, выпол-
няющие часть преобразований канала системы. К измерительным
компонентам ИС можно отнести, например, датчики, измеритель-
ные цепи, аналоговые и цифровые устройства, линии связи и т. п.
MX измерительных компонентов ИС определяются так же, как и
для средств измерения вообще. Нормированию в ИС подлежат
MX измерительных каналов.
Методы регламентации и определения MX измерительных ка-
налов ИС следует выбирать в зависимости от особенностей си-
стем.
Нормирование Л1Х измерительных каналов предпочтительнее
регламентировать для таких выпускаемых заводом-изготовителем
ИС, которые характеризуются постоянным составом несуществен-
но разнесенных в пространстве компонентов, легким доступом
для выполнения контроля, последовательной, параллельной или
параллельно-последовательной (с небольшим количеством парал-
лельных каналов) структурой. Метрологический контроль в этом
случае осуществляется путем проверки соответствия Л1Х измери-
тельных каналов нормированным значениям.
Определение МХ измерительных каналов системы расчетным
или экспериментальным путем предпочтительнее осуществлять
для ИС, комплектуемых при монтаже на месте эксплуатации, для
ИС с существенной пространственной разнесенностью компонен-
тов, с большим числом сменных компонентов, с затрудненным
доступом к ИС в целях ее контроля.
Наконец, оценку МХ измерительных каналов системы расчет-
ным путем целесообразно устанавливать для ИС, отличающихся
переменной структурой и связями между компонентами, а также
большим количеством параллельных каналов, При этом контро-
лируются МХ измерительных компонентов, а МХ каналов опре-
деляются расчетным путем. Для определения погрешности изме-
рительного канала по известным погрешностям измерительных
компонентов следует использовать материал, изложенный в гл. 20.
Экспериментальные методы определения МХ измерительных
каналов ИС разумно применять для ИС, в которых влияние вза-
имодействия компонентов на МХ трудно оценить заранее.
В технической документации на ИС определяются условия
контроля МХ: объем выборки, допустимая погрешность измере-
ния, минимально допустимое количество точек и их расположе-
ние в диапазоне измерения, условия проведения экспериментов.
Метрологические характеристики алгоритма вычислений контро-
лируются экспериментальным или расчетным методом на пра-
вильность регламентированных значений.
Приведем соображения о нормировании МХ измерительных
каналов ИС в соответствии с ГОСТ 8.009-72.
Конкретный состав Л1Х уточняется для каждой ИС на стадии
разработки технического задания. При оценке нормируемых МХ
необходимо учитывать, что погрешности оценок МХ являются ве-
личинами второго порядка малости по сравнению с результатами
измерений. Это обстоятельство позволяет применять приближен-
ные методы оценки МХ ИС.
К нормируемым МХ основной погрешности А относятся:
моменты систематической составляющей 7И [As], D [As] или
'G [As], отражающие свойства всей совокупности ИС данного типа,
для которого они нормированы, и предельное значение погреш-
ности Asp;
D[Ло] для некоррелированной случайной погрешности Дэ;
jR&o(t) для коррелированной погрешности Ао;
предельное значение случайной погрешности от трения и гис-
терезиса Дснр (обычно D [Дои] =/70,,2/12);
. функции влияния как зависимости изменения нормируе-
мой MX от изменения влияющих величин в пределах условий
применения; если функции линейны, т. е. фдИ?) =-<4Д(;, X=const,
то МЬМ£)]=ЛЛ1(Де), а =^D (Д£) f
передаточная функция, переходная, импульсная, амплитудно-
фазовая и другие характеристики для оценки динамических
свойств (заметим, что в гл. 21 и приложении 2 приводятся мате-
риалы, позволяющие получить переходную характеристику до-
вольно сложных соединений) и время окончания переходных про-
цессов в них, а также суммарное время выполнения измеритель-
ных, вычислительных и логических процедур.
Могут нормироваться входные и выходные полные сопротив-
ления ИС для электрических величин. При измерении же неэлек-
трических величин следует выявить характеристики взаимных
влияний между объектом исследования и ИС, а затем решить воп-
рос о нормировании этих характеристик.
Помимо указанных могут регламентироваться характеристики,
специфические для данной ИС, например для телеизмерительной
системы — параметры линий связи, при которых гарантируются
установленные MX системы.
Экспериментально определяются MX измерительных каналов
конкретных экземпляров ИС: индивидуальная функция преобра-
зования, поправки к показывающим и регистрирующим устрой-
ствам измерительного канала, характеристики следующих по-
грешностей: Дхн и Дхл — границы интервала неисключенной систе-
матической составляющей и вероятности P&s или нижней границы
Pash ее допустимых значений, о(Д0), Рд0(т) или 5д0(м) —средне-
го квадратического отклонения, нормированной корреляционной
функции или спектральной плотности мощности случайной со-
ставляющей погрешности с указанием погрешности определения
этих характеристик, вариация гистерезиса.
Экспериментально определяются индивидуальные динамиче-
ские характеристики измерительного канала (передаточная функ-
ция, переходная характеристика и т. п., время реакции измери-
тельного канала), чувствительность к влияющим воздействиям,
взаимодействие между объектом исследования и измерительным
каналом, а также между измерительными каналами.
Погрешности экспериментального определения MX рекоменду-
ется выражать в виде границ интервала возможных значений по-
грешности и вероятности, с которой погрешность находится в этом
интервале.
Остановимся на нормируемых MX, . установленных во
ВНИИЭП для выпускаемых промышленностью типовых ИВК-1 —
ИВК-4, ИВК-7 и ИВК-8 (см. гл. 9) и предназначенных для ра-
боты в составе разнообразных ИИС [22.8].
После подтверждения на государственных приемочных испы-
таниях и принятия соответствующего решения были определены
Й нормированы Для ИВК следующие MX: предельное значений
основной погрешности Ар; предельные значения систематической
погрешности Asp, среднего квадратического отклонения случайной
составляющей погрешности До, вариации выходного сигнала и
быстродействия.
Числовые значения нормируемых MX для измерительных кана-
лов ИВК, состоящих из функциональных блоков, имеющих из-
вестные нормированные MX, определяются расчетным путем. При
небольшом количестве ФБ (т^4) погрешность измерительного
т
канала может быть определена по формуле Др=2 &рг ПРИ
/=1
т>4 находится наихудшее сочетание этих погрешностей, при
котором максимальна суммарная основная погрешность Д. Про-
граммное выполнение вычислительных и логических операций со-
ставляет в ИВК заметное время. Высокое быстродействие аппа-
ратных средств ИВК в полной мере не используется. Например,
в состав ИВК-2 и ИВК-4 входит быстродействующий (80-103 из-
мерений/с) АЦП, а в ИВК он может работать лишь с частотой
10-Ю3 измерений/с. В ИВК-4, ИВК-7 и ИВК-8 имеется цифровой
вольтметр Щ1516, обладающий быстродействием 25 измерений/с,
в составе ИВК он обеспечивает быстродействие 20 измерений/с.
Ввиду сказанного для оценки динамических свойств ИВК было
признано целесообразным принять количество измерений, выпол-
няемых в секунду, /д.
Как известно, знание Ц позволяет при определенных услови-
ях ограничить наибольшую частоту исследуемого процесса и оце-
нить погрешность дискретизации.
Метрологическая аттестация позволяет установить соответст-
вие MX данного ИВК установленным уровням нормируемых MX
и выдать пользователю индивидуальные значения нормируемых
MX. Очевидно, для таких сложных и дорогих средств измерения,
как ИВК, целесообразно оформление индивидуального паспорта,
содержащего значения нормируемых характеристик данного эк-
земпляра ИВК-
Программы определения нормируемых MX при эксплуатации
ИВК, написанные на языке ФОРТРАН и работающие под управ-
лением операционных систем реального времени (ОСРВ), ФОБОС
и РАФОС, позволяют управлять проведением контрольных испы-
таний, определять значения нормируемых MX в процессе работы
ИВК (контроль нормируемых MX производится в фоновом режи-
ме с низшим приоритетом), регистрировать значения измеряемых
величин и MX измерительных каналов, изменять или прерывать
проведение эксперимента, если MX вышли за допустимые значе-
ния.
Объем контрольных испытаний зависит от наличия существен-
ной случайной погрешности. Поэтому перед проведением государ-
ственных поверочных и приемно-сдаточных испытаний ИВК в
ксплуатационных условиях оценивается выборочное значение
размаха погрешности Д=А.тох—Дт/„ из 40 измерений в трех точ-
ках диапазона измерений ИВК. Если хотя бы в одной точке Д
больше двух делений шкалы преобразователя, то случайная со-
ставляющая погрешности считается существенной и тогда необ-
ходимо определение Дор.
Измерительно-вычислительный комплекс считается годным,
если все Л1Х находятся в пределах допустимых значений.
22.3. ТЕХНИЧЕСКИЕ СРЕДСТВА МЕТРОЛОГИЧЕСКИХ ПОВЕРОК
Имеются два основных пути реализации поверок, проводимых
в целях установления соответствия характеристик поверяемой
системы метрологическим нормам. Первый путь — путь а на
рис. 22.1 связан с использованием для поверки калибраторов,
формирующих образцовые сигналы, подаваемые на вход контро-
лируемой ИИС.
Второй путь — путь б на рис. 22.1 предусматривает примене-
ние образцовых приборов или преобразователей для измерения
сигналов, подаваемых на вход контролируемой ИИС, и сравнения
результатов измерения, полученных образцовыми средствами из-
мерения и поверяемой ИС.
Рис. 22.1/ Структурная
схема автоматизирован-
ной испытательной системы г*
с устройством формирова-
ния образцовых сигналов
(с) или образцовым прибо-
ром (б)
Технические средства метрологической поверки могут быть
внешними (автономными) по отношению к поверяемым ИС и
встроенными в них.
К внешним поверочным средствам, предназначенным для мет-
рологической поверки довольно широкого круга средств измере-
ний, относится специализированный ИВК Ml. Он предназначен
для программированной поверки и испытаний цифровых вольт-
метров и АЦП класса 0,02, цифро-аналоговых преобразователей
класса 0,2, аналоговых преобразователей типа Ц^/Цг), I(i/t7),
I(R/U) класса 0,25 в ряде выбранных точек канала, а также для
измерения U, 1 и R. В ИВК Ml производятся накопление ре-
зультатов поверок и определение типовых характеристик поверя-
емых устройств, визуализация полученной информации, обеспечи-
вается диалоговый режим работы с оператором. Организация вза-
имодействия приборных устройств в этом ИВК осуществляется с
помощью приборного интерфейса. Управление ИВК и обработка
информации производятся управляющим вычислительным ком-
плексом СМ-4. Метрологической основой комплекса являются ис-
точник калиброванных напряжений Ф7046 и универсальный
вольтметр Щ68003. Подключение аналоговых сигналов (100 В,
100 мА) выполняется с помощью матричных коммутаторов (8X8),
изготовленных на реле с магнитно-управляемыми контактами
(тер мо-ЭД С <10 мкВ).
Программное обеспечение комплекса содержит перфоленточную
операционную систему, работающую в диалоговом режиме с ис-
пользованием языка БЕЙСИК, и пакет тестовых программ для
проверки работоспособности ИВК. Возможность формирования
компенсационного напряжения в широких пределах, получения
оценок систематических и случайных погрешностей поверяемых
устройств с заданной достоверностью — очевидные достоинства
этого ИВК-
Основные характеристики ИВКА'И:
диапазон калиброванных напряжений от 10-6 до 103 В, основ-
ная погрешность 0,003—0,005%, время формирования 0,02—0,5 с;
диапазоны измерения напряжений от 10~5 до 103 В, тока от
10-10 до 1 А, сопротивления 10-1—10-7 Ом, погрешности измере-
ния 0,06—0,1%, время измерения 0,04—1 с.
Если поверяемое устройство не имеет встроенной ЭВМ и
средств поверки, то может быть организована поверка с помощью
внешних ЭВМ и средств поверки. Именно так организована мет-
рологическая поверка систем К-732 (см. гл. 10) при их производ-
стве. Она проводится с привлечением образцового магазина со-
противлений и с обработкой результатов измерений с помощью
внешней ЭВМ. Если оценка погрешности каждого экземпляра си-
стемы К-732 выполняется в 25 точках, распределенных равномер-
но по шкале АЦП, а количество циклов измерения в каждой точ-
ке равно 30, то при числе поверяемых каналов, равном 127, про-
изводится 9,5-104 измерений. Для получения оценок систематиче-
ских погрешностей, средних квадратических отклонений в каж-
дой точке шкалы и каждого канала необходимо выполнить более
3-105 вычислительных процедур, а это практически невозможно
сделать без ЭВМ. Заметим, что наряду с метрологической повер-
кой на заводе-изготовителе решаются задачи диагностики функ-
циональных блоков, проверки монтажа и т. п.
Поверочные средства в большинстве случаев стационарны, их
трудно перемещать к месту эксплуатации, а в некоторых случаях
невозможно использовать в условиях работы ИС, да и сами ИС
часто не переносят излишних транспортировок. Поэтому для мет-
рологической аттестации ИС создаются специализированные об-
разцовые установки с использованием ЭВМ и других устройств,
входящих в состав ИС, а также встроенные устройства для мет-
рологической поверки. Такие поверочные средства также строят-
ся с применением образцовых сигналов или средств измерения.
Наличие специализированных и встроенных образцовых
средств открывает возможность выполнения метрологической ат-
тестации ИИС на месте эксплуатации, ее периодических поверок,
а иногда поверок в процессе эксплуатации, накопления и анали-
за метрологической информации и в конечном счете поддержания
характеристик ИС на установленном метрологическом уровне.
В выпускаемых промышленностью комплексах ИВК-8
(рис. 22.2) для определения метрологических характеристик изме-
рительных каналов используется программно-управляемый образ-
цовый источник калиброванных напряжений Ф7046 (основная по-
грешность +0,003 и ±0,005%).
Рис. 22.2. Структурная схе-
ма ИВК с образцовым ге-
нератором калиброванных
напряжений Ф7046 и циф-
ровыми вольтметрами ФЗО,
Щ1516 или Щ31
Определение метрологических характеристик канала вывода
напряжений производится с помощью цифровых вольтметров
ФЗО (основная погрешность ±0,06%), Щ1516 [погрешность
±0,015±0,05 (Umax/Ux—1) %] или Щ31 [погрешность ±i0,005±
±0,001 (Umax/С%—1)%].
В эксперименте получаются разности —гг*, l\2=z2—z2*,
необходимые для вычисления оценок нормированных составляю-
щих инструментальных погрешностей.
На рис. 22.3 показана структура ИС со специализированными
образцовыми средствами [22.9]. Измерительная система предна-
значена для измерения давлений (от десятков до сотен тысяч пас-
калей) с помощью тензометрических преобразователей давления
1(р/е) 1(е/Д7?) 1(Д/?/ДЦ).
В ИС используется многоточечное системное аналого-цифровое
устройство, объединенное с мини-ЭВМ, содержащей комплект
устройств ввода и вывода информации (УВВ). Этот комплекс мо-
жет сопрягаться с различными типами тензометрических преобра-
зователей.
Периодический контроль АЦП и АЦП с коммутатором обеспе-
чивается с помощью автоматического калибратора электрических
сигналов (АКЭС), управляемого от СР и генерирующего сигна-
лы, соответствующие сигналам от тензометрических мостов.
Погрешность АКЭС (в процентах) 6,—±0,06+0,01 {UmaxlUx—
— 1), где Umax — максимальное значение, a Ux — измеряемое на-
пряжение.
Кроме того, на вход коммутатора вводятся постоянные конт-
рольные сигналы Uki, Uki и Uk*, соответствующие различным точ-
кам шкалы АЦП.
Рис. 22.3. Система для измерения давлений со специализиро-
ванным метрологическим оборудованием
*
Метрологическая аттестация и периодическая поверка датчи-
ков давления осуществляются с помощью образцового автомати-
ческого задатчика давления (АЗД) класса точности 0,05, с диа-
пазоном абсолютного давления от 0 до 2,5-10s Па и дискретно-
стью задаваемых давлений 1 -103 Па. Один из каналов каждого
пневмокоммутатора подключен к АЗД.
В результате метрологической аттестации получены метроло-
гические характеристики датчиков, коммутаторов с АЦП и уста-
новлены погрешности ИС в целом для четырех диапазонов вы-
ходного напряжения измерительных схем с тензодатчиками. На-
пример,. для диапазона 40 мВ погрешность канала ИС, состояще-
го из датчика, коммутатора и АЦП, равна б=±0,5+х0,12Х
Х(40/Пж-1) %.
В [22.9] подчеркивается, что без ЭВМ определение метроло-
гических характеристик было бы практически невозможно, так
как обработка только одного протокола, содержащего 20—30 экс-
периментальных точек, по способу наименьших квадратов зани-
мает без применения программируемых ЭВМ несколько часов.
При использовании ЭВМ это время удается сократить до несколь-
ких минут, одновременно уменьшив возможные ошибки опера-
тора.
Программы обработки метрологической информации предус-
матривают нахождение аппроксимирующего многочлена, выявле-
ние грубых погрешностей, построение гистограмм случайных от-
клонений результатов измерения.
Известен ряд измерительных систем (фирм Fluke — США, So-
lartron — Великобритания и др.) с самокалибровкой, проводи-
мой одновременно с измерениями, и соответствующей коррекци-
ей результатов-измерений [22.10].
22.4. АВТОМАТИЧЕСКАЯ КОРРЕКЦИЯ ПОГРЕШНОСТЕЙ ИС
Автоматическая коррекция погрешностей ИС в большинстве
случаев предпочтительнее констатации того, что метрологические
характеристики системы находятся в норме или вышли за уста-
новленные пределы. Такая коррекция может быть произведена
после выполнения операций определения метрологических харак-
теристик ИС. Иногда удается эти характеристики получить одно-
временно с основными измерительными и вычислительными опе-
рациями и вводить корректировку в каждый результат измере-
ния [22.11—22.13].
Остановимся на применении для целей повышения точности
измерения так называемых тестовых методов [22.11, 22.12]. При
использовании тестовых методов измеряемая величина несколько
раз изменяется заранее известным образом, по особым алгорит-
мам, без ее отключения от входа ИС. Далее составляется систе-
ма уравнений, решение которой позволяет определить коэффици-
енты су статической функции преобразования (СФП) средства из-
мерения или без определения су уточнить результат преобразова-
ния:
У(г=а,\-\-су>х-}- ... ~{-апхп~
г/i = (х) + ... 4~ап[А i (х) ]п-1;
f/„=ai+a2A,t(x) 4-... +ati [А„(х)]
Здесь yt — выходная величина измерительного преобразова-
ния; сн— коэффициенты СФП; АДх)—известные преобразования
над входной величиной х, которая должна в процессе измерения
оставаться постоянной.
Требования к составлению этой системы уравнений в основном
аналогичны требованиям, предъявляемым в многомерных ИС при
раздельном измерении взаимосвязанных величин (см. гл. 11): ко-
личество уравнений должно быть не менее количества неизвест-
ных коэффициентов су, функциональный определитель системы
уравнений не должен быть равен нулю, должны быть известны
преобразования АДх).
Наиболее простыми являются независимые аддитивные и
мультипликативные тесты: АаДх)=х-|-6г и АтоДх)=&Дх). Оказы-
вается, что при всех использование только одних АаДх) или
АтоДх) не дает возможности решить систему уравнений; для ре-
шения нужно иметь комбинацию АаДх) и АтДх), например
(п— 1)АаДх) и АтДх).
На практике наибольшее применение тестовые методы полу-
чили при кусочно-линейном представлении СФП. В этом случае
на каждом участке СФП осуществляется два тестовых воздейст-
вия: —Аа(х)=х+6 и А„п(х) ==х-|-Ах= (Н-1)х. Тогда может быть
получено уравнение
_ УгА» (х) -- у2Аа (х) . х У2 — Уг
Am (х) Аа (х) Ат (X) Аа (х)
Отсюда
*=Ку 2 — Ойл — */о)1 (W
Таким образом, зная результаты измерений yo, yi и у2, а так-
же 6 и k, можно получить скорректированный результат измере-
ния, не определяя СФП.
Если выполнить последовательно тестовые воздействия Аа(х),
Ат(х) и Да (%) Ч-An (х) (рис. 22.4), ТО х= (У2—Уо)£/[(Уз~У1) —
— (Уг—1/1)], где уо — результат преобразования х; yi, уз и уз— ре-
зультаты преобразования Аа(х), Ат(х) и Аа(х)Ат(х). На
рис. 22.4 принято, что измерительный преобразователь имеет не-
известную функцию преобразования.
Knt
СЛСА подачи тестовых воздействий
Рис. 22.4. Введение аддитив-
ных 6 и мультипликативных К
тестовых воздействий
<p[K^i(0), Кл2(0)] f(x) [Ii (х/у0) Ii(i/o)]X
ХФо[КЛ1(1), Кл2(0) [Ii[U+6)/yi] Ii{t/i))X
Х{Фо[КМО), Кл2(1)] 12 [ (x+kx) /уз} х
xi2(s-.уз)} {ф0[Ал1(1), ад]х
Х12[(х+6) (^+1)/х/з] 1з(уз)}...
Если формирование мультипликативных тестов затруднено, то
можно использовать инвертирование х (рис. 22.5,а) или его об-
ратное преобразование (рис. 22.5,6), где ОП — соответствующий
преобразователь.
Рис. 22.5. Использование аддитивных тестов (а) и обратного преобразова-
ния (б)
В первом случае, если СФП описывается степенным уравнени-
ем второго порядка и выполняются четыре преобразования,
х= (У1—У2) Я/ [ (г/з—1/4) — (У1—У2) ] •
Во втором случае измеряемая величина сначала преобразует-
ся в z/ii=aiH%+Aaix+Ai, где Aaix и Ai — мультипликативная и ад-
дитивная погрешности, затем получаются сигналы у2 при разом-
кнутых Л>1(0) и А>2(0), у3 — при КлЛ!), Л>2(0), у4—при
Кл2(0), Кл2(1).
Корректированное значение измеряемой величины при неиз-
вестных СФП первичного и обратного измерительных преобразо-
вателей
У1 —У 2
Ул~~ Уз
62
I Уз Уз
®1 (f/4 — Уз)
Ул Уз
Погрешность тестовых методов определяется в первую оче-
редь точностью формирования тестов, уровнем высокочастотных
шумов преобразователей, несоответствием математической моде-
ли реальной СФП, изменением измеряемой величины в процессе
коррекции. При выборе соответствующих значений тестовых воз-
действий! (k=/= 1, 0>О) удается при погрешности измерительных
преобразователей порядка десяти процентов получить результат
преобразования с погрешностью до 0,05%.
На основе тестовых методов коррекции погрешностей созданы
аналоговые преобразователи линейных и угловых перемещений,
масс, давлений, электрических величин. Они используются в си-
стемах контроля технологических параметров.
Основная область использования тестовых методов—повыше-
ние точности измерения при использовании низкоточных измери-
тельных преобразователей.
Рис. 22.6. Структура устрой-
ства, реализующего итераци-
онный метод коррекции по-
грешности
Применение тестовых методов в процессе измерений позволяет
в некоторых ситуациях исключить нахождение MX и введение
соответствующих поправок.
Необходимо хотя бы кратко остановиться на эффективных
итерационных методах коррекции результатов измерений [22.12].
Алгоритм аддитивной итерационной коррекции систематиче-
ской погрешности цифровых измерительных устройств (рис. 22.6)
имеет следующий вид:
измерение
1(х) Ф[Кл(П)] I(x/z0) I(S:z0);
первая итерация
{Ф[Юг(А), zkt = z0] X
X 1 (А, =< - z0) 1 (S: А,)} {Ф [Кл (U)] I (x/z.) I (г, + Д,-z/)} X
вторая итерация
X Ф [Кл (К), = г,*] I (<Лг xj 1 (x-fe3 ’zk) I (Д2 = zki - z,*) X
выдача скорректированного результата
Х{Ф[Кл([7)'] I(x/z2) I(z2+A2=z2*)} ...®(Д,<е) Цг>).
В [22.12] показано, что если результат измерения У0=х(1 +
+&)-j-Aa, где kx — мультипликативная, а Аа—аддитивная состав-
ляющие погрешности, то для n-го скорректированного результата
Уи=[х(1 — (—/г)п+1] + (—k)nAa, а погрешность 6п—(Уп—х)/х=
= (-k)”(k+Y/x).
При |&| <1, х— const, lira Уп=х, а результирующая погреш-
ность определяется погрешностью ЦАП, шагом квантования по
уровню и уровнем высокочастотной помехи, которая при этом ал-
горитме не корректируется.
По данным, приведенным в [22.12], удается скорректировать
довольно большие погрешности АЦП за несколько итераций. При
/г=0 окончательный результат получается уже после первого цик-
ла итерации. Необходимое количество циклов итерации увеличи-
вается при А->1.
Для уменьшения погрешности от квантования по уровню целе-
сообразно увеличивать чувствительность АЦП.
Если мультипликативная составляющая погрешности являет-
ся определяющей, то возможно использование мультипликативно-
го итерационного алгоритма, который предусматривает вместо
операций вычитания и суммирования в аддитивном итерационном
алгоритме операции деления и умножения. Алгоритм первой ите-
рации будет иметь вид
5(0 Ф[Кл(С/)] I(x/z0) 1(8:2„)}{Ф[Кл(К); z^z,] I^/rJX
X КоА.) I (</2/=^) I (S:g,)} {Ф[Кл(Д)] I(OzJ I(z,-a,)}.
Если в результате измерения имеется только мультипликатив-
ная погрешность, то первый скорректированный результат не бу-
дет ее содержать: z\ai=z\zk\* /zG—zii\* при zi=zo-
В ряде случаев целесообразно использование комбинирован-
ных аддитивно-мультипликативных итерационных алгоритмов.
При применении итерационных методов упрощаются вопросы
метрологической аттестации ИС, так как метрологической повер-
ке подлежит, по существу, только ЦАП, повышается точность из-
мерений до необходимого уровня. Реализация тестовых и итера-
ционных методов коррекции погрешностей в ИС, включающих
микропроцессорную технику, — эффективное средство повышения
точности измерений.
Г л а в a 23
ОЦЕНКА ЭФФЕКТИВНОСТИ И ПЛАНИРОВАНИЕ
ИЗМЕРИТЕЛЬНОГО ЭКСПЕРИМЕНТА ПРИ ПРОЕКТИРОВАНИИ
ИИС
23.1. ОЦЕНКА ЭФФЕКТИВНОСТИ ИИС
Критерии оценки технической эффективности
При разработке технического задания и технического предложения на проек-
тируемую ИИС нужно, чтобы были определены критерии оценки эффективности
работы системы и их конкретные значения. Под технической эффективностью
понимается степень приспособленности средств информационной техники к вы-
полнению поставленных задач (функций).
Эффективность оценивается критериями, или показателями, эффективности.
Выбор конкретных критериев эффективности зависит от назначения системы и
требований, предъявляемых к пей. Известны общие рекомендации [23.1—23.4],
которые целесообразно учитывать при выборе критериев эффективности. Крите-
рий эффективности должен:
отражать основное назначение системы;
быть критичен по отношению к параметрам системы, позволяющим его варь-
ировать;
обладать определенной конструктивностью, позволяющей относительно про-
сто определять его численное значение для системы;
быть достаточно универсальным, позволять сравнивать эффективность систем
одного назначения и выбирать наилучший вариант.
При выборе критерия необходимо всесторонне взвешивать назначение систе-
мы, ее взаимосвязь с другими частями, если система не автономна, последствия
того или иного выбора критерия.
В общем виде критерием эффективности ИИС является функционал
u=F(X, У),
где X=(xj, х'2,..., Д'„)—вектор, характеризующий параметры системы, которы-
ми можно управлять, а следовательно, изменять численное значение критерия;
У= (уи Уг... tjn)—вектор параметров системы, не поддающихся управлению,
но влияющих на значение критерия эффективности.
Значение критерия определяется алгоритмическими, структурными, схемными
и конструктивными решениями системы, а также условиями применения.
Число параметров, влияющих на критерий эффективности, может быть очень
велико. Но для конкретного варианта системы лишь некоторые из них в значи-
тельной мере изменяют критерий, а большая часть влияет относительно слабо или
почти не влияет. Для упрощения исследования необходимо выбирать минималь-
ное число параметров, т. е. ограничиться только существенными. Для анализа
влияния параметра на критерий могут использоваться методы корреляционного
и регрессионного анализа.
Рассмотрим примеры, поясняющие смысл понятий управляемых и неуправ-
ляемых параметров. Если критерием является точность ИИС, то управляемыми
переменными (параметрами) могут быть коэффициенты передачи отдельных ча-
стей системы, число уровней квантования, полоса • пропускания, коэффициенты
обратной связи, постоянные времени и т. д. Неуправляемыми параметрами,
влияющими на точность системы, являются окружающие условия: температура,
влажность, уровень помех, радиация и др.
Конкретное выделение параметров, в особенности управляемых, зависит от
степени детализации модели системы. При агрегатном принципе построения си-
стем следует ограничиться уровнем устройств агрегатных комплексов ГСП.
Большинство из управляемых параметров может быть изменено только
в определенных пределах.
Неуправляемые параметры полезно разделить на три группы [23.5]:
1) фиксированные, значения которых известны, но изменяться не могут;
2) случайные параметры, законы распределения которых известны;
3) неопределенные случайные параметры, для которых известны только
области изменения, но неизвестны законы распределения вероятностей.
Фиксированные факторы для конкретной системы можно не учитывать. Если
согласно проведенному выше разделению обозначить через У1 вектор случайных
неуправляемых параметров,- законы распределения которых известны, а через
У11 — вектор неопределенных случайных параметров, то выражение для и мож-
но переписать в виде
ц=Е(Х, У1, У11).
Оно может использоваться для оценки эффективности проектируемых н функ-
ционирующих систем.
При оптимальном проектировании задачей математического синтеза системы
является отыскание экстремума функционала критерия при заданных ограниче-
ниях на управляемые параметры и учете всей доступной информации о неопре-
деленных параметрах.
Ввиду многообразия аспектов, с которых могут рассматриваться критерии
технической эффективности ИИС, полезно провести их классификацию.
Обобщенным критерием эффективности называется критерий, измеряющий
общую эффективность системы в целом.
Частный критерий эффективности характеризует отдельную сторону системы.
Ои совпадает с той или иной характеристикой системы-—точности, быстродей-
ствия, надежности и т. д. Система, оптимальная по одному из частных крите-
риев, может оказаться далеко не оптимальной по другим критериям. При про-
ектировании систем необходимо стремиться не к экстремальному значению какой-
либо частной характеристики, а к общей оптимальности системы, т. е. к экстре-
муму обобщенного критерия.
Обобщенный критерий, очевидно, является функцией частных критериев:
1/=Ф(«1, «2> • •> «т).
Кроме того, обобщенный критерий в некоторых задачах можно представить
как функционал от соответствующих управляемых и неуправляемых параметров
системы. При этом особой необходимости введения частных критериев, очевид-
но, нет.
Как обобщенные, так и частные критерии могут быть качественными и ко-
личественными [23.3].
Качественный критерий характеризует, достигнута или не достигнута цель
(эффект), поставленная перед системой. Этот критерий эффективности можно
трактовать как принимающий только два значения: 1—если цель достигнута,
О — в противоположном случае; например, получена ли при измерении (контро-
ле) заданная достоверность (1) или нс получена (0). Аналогичный смысл можно
придать обеспечению работоспособности системы. Для качественного критерия,
естественно, должна быть установлена связь с параметрами системы, определен-
ные значения или интервал изменения которых позволяют получить численное
значение критерия: 1 или 0.
Количественный критерий есть некоторая величина, характеризующая выпол-
нение системой ее функций. Этот критерий принимает непрерывный или дискрет-
ный ряд значений. Примерами количественных критериев являются максималь-
ная или средняя квадратическая ошибка, быстродействие, достоверность контро-
ля, вероятность выполнения задачи в определенные интервалы времени и др.
Помимо такого разделения критериев можно еще указать выделяемый неко-
торыми авторами так называемый условный критерий [23.2]. Условным назы-
вают критерий, вычисляемый в предположении, что произошли какие-либо собы-
тия нли приняли определенные значения случайные величины, влияющие на кри-
терий эффективности. Условные критерии чаще всего используются в задачах
исследования надежности сложных технических систем. Безусловный критерий
определяется как математическое ожидание условного.
До сих пор рассматривались критерии эффективности, характеризующие си-
стему в целом. Для системы, состоящей из I подсистем (частей), общий (сум-
марный) критерий может определяться через критерии отдельных подсистем
как
ц=‘ф(ц<‘|), и<2>, ..., ^).
где n<i>=Fj(X<i), ¥<*>) (i=l, 2, ..., I), причем — вектор управляемых пара-
метров i-й подсистемы, У(£) — вектор неуправляемых параметров i-й подсистемы.
В качестве подсистем конкретной ИИС можно рассматривать части ее, вы-
полняющие какую-либо одну функцию. Так, например, в системах автоматиче-
ского контроля (см. ч. 3) можно выделить подсистемы, выполняющие функцию
контроля, периодического измерения, измерения по вызову и т. д. Эффективность
выполнения системой отдельных функций, естественно, анализируется более про-
сто, чем эффективность всей системы.
Как указывалось выше, критерий эффективности системы в общем случае
зависит не только от управляемых п неуправляемых параметров с известными
законами распределения, но и от неопределенных неуправляемых параметров
(факторов). По этой причине в ряде случаев нельзя найти даже статистические
характеристики критерия и возникает статистическая неопределенность в нахож-
дении его числовых значений.
Как правило, в литературе, посвященной эффективности систем, неопреде-
ленные факторы игнорируются и задачи вычисления критериев рассматриваются
в детерминированной либо в статистической постановке. В детерминированной
постановке каждому варианту системы с выбранной структурой и параметрами
ставится в соответствие единственное значение критерия. В статистической по-
становке выбранному варианту соответствует значение критерия с определенной
вероятностью; в этом случае говорят также о риске, возникающем из-за стати-
стического характера неуправляемых параметров. В обеих этих постановках не-
определенные факторы не учитываются, а критерий эффективности принимает
более простой вид
u=F(X, ¥<•>).
Цена этого упрощения — неточное вычисление истинного значения критерия.
В правильно сформулированной модели должны учитываться все существующие
неопределенные факторы (параметры).
Неопределенные факторы можно, разделить на две подгруппы:
а) факторы, появляющиеся из-за недостаточной изученности каких-либо про-
цессов и величин; в теории исследования операций такие неопределенности на-
зывают природными;
б) неопределенности, заключающиеся в неточном знании некоторых пара-
метров критерия эффективности; в [23.3] показано, что эти неопределенности
тоже можно относить к природным хотя это и условно.
Примером первой подгруппы неопределенных факторов являются неопреде-
ленности в законах распределения вероятностей помех, параметров вибраций,
радиационных воздействий, других внешних факторов и т. д. Примером второй
подгруппы является неопределенность в разделении общей погрешности сложной
измерительной системы на систематическую и случайную составляющие.
Неопределенности зависят от степени информированности проектировщика
системы о неуправляемых параметрах, влияющих на эффективность системы.
Увеличение информированности, например проведением специальных исследова-
ний или уточнением требований заказчика, может уменьшить влияние неуправ-
ляемых факторов на эффективность.
Основой для выбора варианта системы в условиях неопределенности являет-
ся принцип гарантированного результата [23.2, 23.3]. Суть этого принципа за-
ключается в том, что при данном критерии эффективности и данном уровне
информированности о неопределенных факторах оценка эффективности вариан-
тов системы должна осуществляться на основе получения гарантированного зна-
чения критерия эффективности.
В математической форме гарантированной оценкой эффективности является
и = inf t7 (X, У1, У11),
yn&v
где N — область изменения неопределенных неуправляемых параметров (некон-
тролируемых факторов).
Таким образом, при оценке эффективности системы в соответствии с принци-
пом гарантированного результата значение рассматриваемого критерия будет
обеспечено при любых значениях неуправляемых параметров, влияющих на
эффективность. Примером использования принципа гарантированного результата
в области измерительной техники является нормирование погрешностей измери-
тельных средств по классам точности.
Подход на основе гарантированного результата является осторожным, ио
обоснованным, если правильно учитывается вся доступная информация о неопре-
деленных факторах. Само понятие гарантированного результата зависит от при-
нятого критерия. Так, если критерием является не максимальная погрешность,
а среднее квадратическое отклонение, то гарантированной оценкой общей по-
грешности од- является
°* - у +2 2
где — средние квадратические отклонения (или их статистические оценки) от-
i
дел ь ных ела гае мых.
В соответствии с принципом гарантированного результата предполагается
максимальная корреляция слагаемых, поэтому берется Rx- х = 1 тогда av=Sa„.
Остановимся на том, что дает увеличение информированности о неуправляе-
мых параметрах, например знание не только области их изменения, но и стати-
стических законов распределения. Превращение неопределенного случайного фак-
тора Уп в статистически определенный У1 может дать следующее преимущество.
Множество N — область изменения параметра — при этом может быть заменено
меньшим множеством N', так что для вероятности обеспечивается неравенство
Р[УгеМ]^1—а, где а —достаточно малая величина, значение которой выби-
рается в зависимости от конкретной ситуации.
Для сравнительно равномерных законов распределения такая замена не дает
особенного выигрыша, так как вероятности любых Y!eF примерно одинаковы.
Но для распределений с ярко выраженной неравномерностью, например для нор-
мального, может быть получен существенный выигрыш в уменьшении степени
влияния неуправляемых случайных факторов иа эффективность.
Неопределенные факторы затрудняют оценку эффективности. В том случае,
если имеются основания считать, что подход на основе принципа гарантирован-
ного результата является слишком осторожным, может быть использовано то
или иное усреднение U по У11. Если вектор статистически определенных и не-
определенных неуправляемых параметров состоит из независимых случайных
факторов У=(/д, ..., ут), то новый, усредненный критерии имеет вид
U— J... У) fl (У1)> •••• fm (Ут) dyit dym,
где fi(yt) —плотность распределения i-ro параметра.
При этом должны быть выбраны в той или иной степени обоснованно зако-
ны распределения неопределенных факторов.
Один из способов избавления от неопределенных факторов, предложенный
Л. Гурвицем, описывается формулой
и1 = а шах и (У) ф- (I — a) mini/. (У); 0<а<1.
Y У
Величина а выбирается с тем или иным обоснованием. Если а=0, и1 опре-
деляет гарантированный результат. При этом экстремумы выбираются либо по
всей области неуправляемых параметров, либо только в области неопределенных
параметров.
Рассмотрим некоторые положения, связанные с применением критериев тех-
нической эффективности в ИИС.
1. Если получена математическая модель системы, то она может быть исполь-
зована для оптимизации системы, т. е. для точного или приближенного нахож-
дения в допустимой области значений управляемых параметров, обращающих
в максимум или минимум (смотря по постановке задачи) критерий качества си-
стемы. При этом, когда неопределенные факторы учитываются, оптимальный
гарантированный вариант системы есть такой вектор параметров Хо, для которо-
го достигается экстремум (максимум или минимум) критерия [23.3]:
inf F (Хо, У) = шах inf F (X, У).
УСА’ Х&М ГОУ
Здесь через У обозначены все неуправляемые параметры.
Если неопределенные факторы не имеют существенного значения, то фор-
мально для выбора оптимального варианта применимы классические методы ре-
шения экстремальных задач (дифференциальное и вариационное исчисление),
а для более сложных моделей — методы математического программирования —
линейного, нелинейного, дискретного, динамического, стохастического и др.
2. В современной практике разработки измерительных систем чаще всего
оптимизируют какой-либо один из частных критериев (например, точность или
быстродействие), ограничивая уровни остальных частных критериев допустимы-
ми значениями.
3. Полученное в результате оптимизации решение улучшает качество систе-
мы только тогда, когда используемая модель адекватна системе. Поэтому не-
обходима проверка решения в целях определения его соответствия реальной
действительности [23.4]. В этой связи следует еще раз подчеркнуть значение
информированности при выборе критерия и построения модели системы. При
более широком подходе к оценке роли системы ее оптимальный вариант, найден-
ный при ограниченной исходной информации, может оказаться в той или иной
мере не лучшим.
Экономическая эффективность ИИС
Экономической эффективностью технических средств называют степень соот-
ветствия их условию, заключающемуся в том, что эффект от использования
средств должен окупить затраты па их разработку, производство п эксплуата-
цию за заданное вр§мя [23.1]. Этому определению экономической эффективно-
сти должны удовлетворять и ИИС.
По принятой ЦСУ СССР классификации измерительные и контрольные
устройства относятся к основным фондам предприятий.
Экономическая эффективность ИИС должна ориентировочно определяться
на стадии проектирования в целях экономической оценки вариантов исполнения
системы и в дальнейшем после внедрения должна быть проверена и уточнена.
К основным источникам экономии от внедрения ИИС можно отнести:
увеличение объема продукции в натуральном или денежном выражении (на-
пример, увеличение выхода годных изделий);
уменьшение эксплуатационных расходов (сокращение обслуживающего пер-
сонала);
снижение трудовых затрат по эксплуатационному обслуживанию на единицу
продукции (или единицу производственной мощности).
При современном уровне технического прогресса разработка и внедрение
новых измерительных систем (аппаратуры) позволяют решить качественно но-
вые технические и научные задачи. При этом определение экономии от внедре-
ния системы может составлять задачу большой сложности.
В некоторых случаях влияние новых прогрессивных измерительных средств
не отражается прямо на экономии в натуральном и денежном выражении, одна-
ко их внедрение приводит к важным социально-экономическим последствиям:
устранению вредного и тяжелого труда, повышению безопасности работы, улуч-
шению санитарно-гигиенических условий труда и др.
Основными критериями (показателями) экономической эффективности
средств новой техники являются [23.5]:
капитальные вложения, необходимые для осуществления мероприятий по
внедрению новых средств;
сроки окупаемости капитальных вложений;
производительность труда (в расчете на одного работающего);
Себестоимость продукции объекта, иа котором используется новая техника;
сумма годового экономического эффекта.
Важнейшими из них являются приведенные затраты и срок окупаемости.
Эти показатели рассмотрим подробнее.
Полные приведенные затраты — это денежные затраты на проектирование,
производство и эксплуатацию данного варианта системы в течение определенного
промежутка времени, чаще всего года. Они определяются по формуле
ПЗ=Св+ЕнКъ,
где Кв — капитальные вложения по данному варианту; Св — эксплуатационные
расходы в течение выбранного промежутка времени; Es — нормативный коэффи-
циент эффективности капитальных вложений.
В СССР установлен единый нормативный коэффициент эффективности ка-
питальных вложений для всех отраслей £н=0,12.
Для сравнения различных вариантов ИИС приведенные затраты определяют-
ся при сопоставлении исходных данных для одного и того же числа измеряемых
(контролируемых) величин, точности измерения, быстродействия, показателей на-
дежности и др. Лучшим является вариант с наименьшей суммой приведенных
затрат.
Капитальные вложения слагаются из стоимости проектирования, стоимости
вспомогательного оборудования, оптовой цены системы и стоимости строитель-
ных сооружений. Некоторые методы укрупненного расчета капитальных затрат
иа ранних стадиях разработок и на стадии технического проектирования приве-
дены в [23.5].
Эксплуатационные расходы по данному варианту есть сумма заработной
платы обслуживающего персонала, стоимости потребляемой электроэнергии,
стоимости запасных деталей, узлов и материалов, стоимости амортизации аппа-
ратуры и здания, накладных расходов на ремонт. Все эти составляющие долж-
ны быть отнесены к одной и той же единице времени.
Оценка срока окупаемости необходима при решении вопроса о целесообраз-
ности разработки и внедрения конкретного варианта системы.
Нормативный срок окупаемости капитальных вложений является величиной,
обратной £н: Тн=1/£н. Срок окупаемости системы определяется как период вре-
мени, в течение которого экономический эффект от эксплуатации системы до-
стигает капитальных вложений в нее. Он не должен превышать нормативного
срока окупаемости.
Если при виедреиии ИИС в промышленность снижается себестоимость про-
дукции, то срок окупаемости рассчитывается по формуле
7’ок=(£2—£i)/(S2—S,).
где Kt, К2 — капитальные вложения до и после внедрения системы, руб.; Si,
S2 — себестоимость готовой продукции до и после внедрения ИИС, руб./год.
Повышение роли технико-экономической эффективности при внедрении новой
техники приводит к необходимости решения ряда методических вопросов, таких,
как разработка методов расчета эффективности для ИИС конкретного назначе-
ния, обоснование границ экономически эффективного применения такого сравни-
тельно мало изученного с экономической точки зрения класса технических
средств, как ИИС.
Совместное рассмотрение технической и экономической эффективности ИИС
При разработке систем важно не только обеспечить требуемые технические
характеристики, но и знать затраты на их получение. Поэтому в настоящее вре-
мя большое внимание уделяется проблеме общей эффективности, объединяющей
техническую и экономическую эффективность системы. Основное внимание при
этом уделяется поиску обобщенного критерия эффективности, который позволил
бы связать характеристики систем с затратами на их получение н, таким обра-
зом, однозначно охарактеризовать общую эффективность.
Полезно отметить здесь и связь этой проблемы с проблемой качества си-
стемы. Под качеством системы (изделия) обычно понимают совокупность функ-
циональных, технических и экономических характеристик, определяющих степень
ее пригодности для использования по заданному назначению. Обобщенный кри-
терий эффективности мог бы служить и единым показателем качества системы.
Рассмотрим наиболее интересные из известных нам предложений по обоб-
щенным критериям эффективности информационных систем. В качестве обоб-
щенного критерия эффективности информационных систем может быть использо-
ван показатель
т] = (Sp—Sa) /Sn,
где Sp — результат использования системы (реальный доход); Ss — затраты па
создание и эксплуатацию системы; Sn — результат применения системы при вы-
полнении всех функций и отсутствии затрат па их осуществление (идеальный
доход). Числитель в этой формуле равен прибыли, получаемой от эксплуатации
системы.
В качестве критерия эффективности систем используется вероятность выпол-
нения стоящих перед ними задач. Применительно к измерительным системам
этот критерий можно сформулировать как вероятность выполнения измерения
с заданной точностью. Соответствующее выражение имеет вид [23.2]
(п п
Powo+2 Pilli + 2 Piil,ij+ 2 Piikuijk + --
1 = 1 l./ = l ii,k=l
‘<J
i<k
• + /'1, .... nlll, >
где P, — коэффициент готовности системы; p0 — вероятность того, что все эле-
менты работоспособны; pt — вероятность отказа i-ro элемента; рц — вероятность
отказа i-ro и /го элементов; pi,п — вероятность отказа всех элементов; иэ,
id, uljt ..., ць .... и —условные критерии эффективности, равные условным
вероятностям выполнения задачи в предположении безотказности всех элемен-
тов системы, отказа i-ro элемента и т. д. Условные критерии эффективности
предполагаются независимыми от моментов возникновения отказов элементов
системы на заданном интервале времени.
При вычислении данного критерия должны быть предварительно определены
условные вероятности безотказной работы и условные критерии, которые можно
найти только на основе экспериментальных данных и опыта эксплуатации систе-
мы, что для вновь проектируемых систем в большинстве случаев затруднено.
Довольно широко распространен в технической литературе подход к кон-
струированию обобщенного критерия как к произведению частных критериев,
нормированных относительно некоторых поминальных значений показателей для
получения безразмерных сомножителей. Произвол в выборе номинальных пока-
зателей здесь очевиден, к тому же такой подход при высоком общем показателе
не гарантирует приемлемого значения какого-либо частного критерия.
В заключение следует сказать, что материал по эффективности следует
использовать при проектировании ИИС в первую очередь для их оценки и опти-
мизации [23.6].
23.2. ПЛАНИРОВАНИЕ ИЗМЕРИТЕЛЬНЫХ ЭКСПЕРИМЕНТОВ
Вводные замечания
Проведение всякого эксперимента связано с определенными затратами ма-
териальных ресурсов, денежных средств, времени, причем с развитием науки и
техники эти затраты увеличиваются (возрастают сложность п стоимость устано-
вок, увеличиваются затраты энергии и т. п.). Поэтому возникает естественная
задача такого планирования эксперимента, чтобы в результате его проведения
получать все необходимые данные при ограниченных или минимальных затратах.
Спланировать эксперимент фактически означает дать ответы на вопросы, где, как
и когда проводить измерения. На подобные вопросы экспериментатор часто
отвечает, руководствуясь своей интуицией, опытом. Однако такое интуитивное
планирование экспериментов не может, естественно, служить объективным и
надежным (гарантирующим от принятия ошибочных решений) основанием при
планировании экспериментов (особенно дорогостоящих), не может оно также
гарантировать и оптимальность эксперимента (например, получение максималь-
ного количества информации об исследуемом объекте при ограниченных затра-
тах). В связи с этим становится совершенно очевидной необходимость разработ-
ки и применения некоторых объективных методов, которые позволили бы в опре-
деленном смысле оптимальным образом организовать (спланировать) экспери-
мент. Применение подобных методов может оказаться весьма полезным и в изме-
рительно-информационной технике, особенно при создании и использовании ИИС.
Полезность применения методов планирования экспериментов в ИИТ обу-
словлена тем, что при проектировании ИИС неизбежно возникает вопрос о мо-
дели исследуемого объекта, для сбора информации о котором предназначена
проектируемая система. Другими словами, речь идет о применении методов пла-
нирования эксперимента при разработке технического задания на проектируемую
ИИС, когда приходится решать задачи выбора количества измеряемых величин,
расположения датчиков на исследуемом объекте и т. п.
При разработке технического предложения (выборе структуры системы, ее
функциональных блоков и т. п.) неизбежно приходится сталкиваться с необхо-
димостью экспериментальной проверки принятых решений (например, экспери-
ментальной проверки макетов некоторых функциональных блоков системы), т. е.
опять с задачей планирования экспериментов.
В настоящее время разработаны различные методы планирования экспери-
ментов, стандартные планы для типичных задач планирования и т. д. Все они
составляют предмет теории эксперимента или, точнее, математической теории
планирования эксперимента, причем математический аппарат, который исполь-
зуется при оптимальном планировании экспериментов, базируется па методах
Математической статистики и методах решения экстремальных задач. Изложению
теории планирования экспериментов посвящен ряд монографий [23.7—23.10].
Здесь излагаются некоторые основные идеи и методы теории планирования
экспериментов с целью привлечь к ним внимание специалистов по ИИС.
Основные идеи теории планирования эксперимента
Чтобы спланировать эксперимент, имеющий целью изучение некоторой си-
стемы (процесса, объекта), сначала необходимо достаточно ясно и четко сфор-
мулировать цель эксперимента, т. е. указать, какие именно параметры системы
необходимо измерять, какие выбрать значения независимых переменных (вход-
ных величин) и т. п. Естественно, что при этом необходимо располагать некото-
рым математическим описанием (математической моделью) исследуемой систе-
мы. В зависимости от того, какая математическая модель является подходящей
для описания той или иной системы, последние разделяют на хорошо органи-
зованные (детерминированные) и плохо организованные (диффузные, большие)
системы.
В хорошо организованных системах можно выделить определенные процессы,
зависящие от небольшого числа переменных, поддающихся изучению. Результа-
ты в этом случае можно представить в виде функциональных связей, которым
приписывается роль законов. Другими словами, хорошо организованные системы
детерминированы, и при их исследовании предполагается, что значения всех не-
зависимых переменных (факторов), кроме одной, можно поддерживать на опре-
деленном уровне, а одну переменную (каждую по очереди) варьировать в целях
установления ее влияния на интересующую нас выходную величину. Например,
при исследовании проволочного тензодатчика можно считать, что выходная ве-
личина — сопротивление тензодатчика R — является функцией двух основных
независимых переменных — температуры Т и деформации 'AZ : /?=ср(7\ Д1). Для
исследования этой зависимости можно спланировать так называемый однофак-
торный эксперимент, при котором изучается сначала зависимость R (AZ) при Т=
=const, а затем зависимость R(T) при AZ=const. Подобная методология одно-
факторного эксперимента является весьма распространенной в технике экспери-
мента, несмотря иа то, что часто оиа не имеет серьезных обоснований и не поз-
воляет получить хорошие результаты хотя бы потому, что не так уже часто
реальные системы можно считать хорошо организованными.
Чаще всего экспериментатору приходится иметь дело с плохо организован-
ными (диффузными) системами, в которых действуют многие факторы, плохо
поддающиеся стабилизации, и, кроме того, многие из этих факторов вообще
трудно заранее учесть при составлении математической модели изучаемой систе-
мы. Поэтому при экспериментальном исследовании таких систем детерминиро-
ванные модели и методы становятся непригодными, и в этих случаях необходимо
использовать статистические методы и модели, в частности, методы многомерной
математической статистики (многомерной потому, что приходится учитывать
действие многих факторов). Эти методы по существу представляют собой логи-
чески обоснованные, формализованные методы экспериментального исследования,
когда экспериментатор сознательно отказывается от детального изучения меха-
низма всех процессов и явлений, протекающих в системе. Суть этих методов
сводится к тому, чтобы изменяя возможно большее количество независимых пе-
ременных (факторов), найти оптимальные в определенном смысле условия про-
текания процесса. В этом и заключается методология так называемых много-
факторных экспериментов, при планировании которых возникают типичные зада-
чи математической статистики: выбор оптимальной стратегии эксперимента
в условиях неопределенности, обработка результатов измерений, проверка гипо-
тез и принятие решений.
Следует отметить, что при изучении даже детерминированных систем экспе-
риментальными методами из-за погрешностей результатов измерений невозможно
получить точные значения измеряемых величин, получаются лишь некоторые
оценки этих значений. Поэтому и здесь необходимо применять методы матема-
тической статистики для получения «хороших» оценок, определения их досто-
верности и т. п.
Таким образом, необходимость широкого использования идей и методов ма-
тематической статистики в экспериментальных исследованиях вполне закономер-
на, а следовательно, вполне закономерны и некоторые изменения методологии
эксперимента, возникающие под влиянием математической статистики. Это влия-
ние сказывается, в частности, в том, что изменились требования к математиче-
скому описанию изучаемых объектов. Математическая модель должна с опре-
деленной точки зрения отражать исследуемый объект. Поэтому для одного и
того же объекта может быть построено много математических моделей, отра-
жающих разные подходы к описанию свойств исследуемого объекта.
Традиционный путь построения математической модели исследуемого объек-
та можно представить следующим образом. Вначале выдвигаются некоторые
логически обоснованные предположения (гипотезы), исходя из них описывают
поведение объекта, обычно в виде дифференциальных уравнений, при весьма
малых изменениях факторов; решение дифференциальных уравнений дает инте-
ресующие нас функциональные зависимости, которые затем сопоставляются
с данными эксперимента (при этом обычно используются статистические крите-
рии и методы).
Однако при описании сложных систем не всегда имеется возможность сфор-
мулировать и обосновать некоторые априорные гипотезы, поэтому в таких слу-
чаях широко используются так называемые полиномиальные модели. Система
при этом представляется в виде некоторого «черного ящика» с доступными для
измерения входными и выходными параметрами. Задача состоит в том, чтобы
установить связь между выходным параметром и множеством входных пара-
метров системы, ничего фактически не зная о механизме явлений в системе. При
этом предполагается, что механизм этот можно описать дифференциальными
уравнениями, но из-за сложности системы даже не делается попытка составить
уравнения; предполагается, что дифференциальные уравнения можно решить, но
решение неизвестно, неизвестен даже аналитический вид функции, являющийся
решением дифференциального уравнения. В этих условиях зависимость выходного
параметра системы от входных (искомая функциональная зависимость) пред-
ставляется в виде полинома (линии регрессии), коэффициенты которого (коэф-
фициенты регрессии) определяются по данным эксперимента. Методика получе-
ния решения и анализа экспериментальных данных при полиномиальной модели
разработана в математической статистике: это регрессионный анализ, который
находит широкое практическое применение. Несколько более детально вопросы
регрессионного анализа и планирования регрессионных экспериментов будут
изложены далее.
Применение статистических методов в технике эксперимента кроме измене-
ния требований к математическому описанию исследуемого объекта привело
также к изменению привычных взглядов на постановку и проведение самого
эксперимента. Это находит свое отражение в так называемой концепции рандо-
мизации, используемой при планировании экспериментов. Суть этой концепции
состоит в том, чтобы обеспечить случайность действия различных факторов, т. е.
план эксперимента составляется таким образом, чтобы все воздействующие фак-
торы оказывали случайное влияние на изучаемое явление. Рандомизация экспе-
римента стала одним из основных приемов и одной из важнейших предпосылок
при планировании экспериментов.
Целесообразность использования рандомизированных планов обусловлена
тем, что даже систематически действующие факторы, которые трудно учесть и
контролировать, могут быть изучены (их влияние может быть выявлено) стати-
стическими методами, составляющими раздел математической статистики — дис-
персионный анализ.
Основную цель дисперсионного анализа поясним на простом примере одно-
факторного анализа, когда проверяется действие только одного фактора. Пусть,
например, одна и та же величина измеряется т однотипными измерительными
приборами и требуется установить, можно ли считать систематические погреш-
ности этих приборов одинаковыми. Другими словами, требуется проверить влия-
ние одного фактора — прибора — на погрешность результатов измерений. Вы-
полним с помощью каждого прибора серию из п измерений. Всего получим
пт результатов измерений гц, где j—номер прибора т); т— коли-
чество приборов; I— номер измерений (/=!,..., п).
Таблица 23.1. Результаты эксперимента
Измерения ! Приборы
1 2 ... / . tn
1 *11 *21 Z/1 Zini
2 Z12 222 Zj2 Zinz
i Zll Z2i zml
п Zln Я2п Zjn *mn
Среднее Zr z* zi
При эксперименте будут получены следующие результаты измерений
(табл. 23.1).
Оценка дисперсии результатов измерений (предполагается, что все результа-
ты представляют собой выборку из одной генеральной совокупности):
т п
D* (хч) т(п—\) У] (гч — zi)2-
«=11=1
Оценка дисперсии, характеризующая рассеяние средних результатов измере-
ния каждого прибора,
т
/=1
В этой формуле г — среднее арифметическое всех пт измерений.
Проверим теперь нулевую гипотезу, согласно которой центры рассеяния по-
казаний каждого из приборов совпадают (т. е. гипотезу о равенстве системати-
ческих погрешностей приборов). Если нулевая гипотеза верна, то расхождение
между и D*(zj) несущественно, если же обнаружится существенное рас-
хождение между дисперсиями, то с большой вероятностью можно считать, что
систематические погрешности приборов различны.
Идеи рандомизации и изучения рассеяния используются при применении дру-
гих методов статистического анализа — метода главных компонентов, факторного
анализа, дискриминантного анализа.
Не всегда возможно или целесообразно планировать заранее весь экспери-
мент. В этих случаях применяется стратегия последовательного эксперимента,
заключающаяся в том, что планируется сначала некоторый этап (шаг) экспери-
мента, затем производится анализ полученных данных и по его результатам
принимается решение о следующем этапе (планирование следующего шага),
в том числе может быть принято решение и о прекращении эксперимента *.
Математическая статистика внесла в теорию эксперимента идею оптималь-
ного использования пространства независимых переменных, или, как ее часто
называют, идею многофакторного эксперимента. Суть этой идеи состоит в том,
что при планировании экспериментов, в которых необходимо учитывать влияние
многих независимых переменных (факторов), экспериментатору предлагается
ставить эксперимент так, чтобы изменять все факторы сразу, тогда как при тра-
диционном планировании экспериментатор изучает влияние каждого фактора
в отдельности, изменяя только его значения при фиксированных значениях
остальных факторов. Оказывается, что такое многофакторное планирование
является более эффективным, чем однофакторное, так как позволяет значительно
уменьшить погрешности определения интересующих экспериментатора величин.
Покажем это на примере линейного регрессионного анализа.
Пусть некоторая величина х линейно зависит от т факторов у\,..., ут.
Уравнение регрессии будет иметь вид
x=i>0+biyi~j- ... -f-bmym,
где bo, bi, ..., bm — коэффициенты регрессии, которые необходимо определить
по экспериментальным данным.
Так как количество подлежащих определению коэффициентов регрессии на
единицу больше количества факторов, то к т действительным факторам необхо-
димо добавить один [(m ) 1) -й] фиктивный фактор. Будем считать, что значения
каждого фактора могут находиться только на одном из двух уровней, которые
условно будем обозначать -)-1 (верхний уровень) и —1 (иижиий уровень). При
однофакторном планировании (поочередное изменение только одного фактора)
1 Применение последовательного анализа при контроле рассматривается в
гл. 13.
дисперсии оценок коэффициентов регрессии будут равны o2.[fc,]—о2х/2?г (<AV *™
дисперсия, характеризующая погрешность эксперимента; п — число повторных
измерений при изменении каждого фактора) и, очевидно, не будут зависеть от
общего числа факторов. Если же изменять все переменные одновременно, то
оценка дисперсии каждого из коэффициентов регрессии будет вычисляться по
всей совокупности (m-j-l)n опытов, так что при некоторых условиях можно
получить оценку о2[6,] в т-|-1 раз меньшую, чем при однофакторном экспери-
менте.. Таким образом, при увеличении числа независимых переменных т, учи-
тываемых в эксперименте, эффективность многофакторного эксперимента растет
как m-ф1.
Рис. 23.1. К определению угла наклона
прямой регрессии:
а — небольшое расстояние между точками у\
и у2\ б — увеличенное по сравнению с пре-
дыдущим расстояние между точками у, и у2
Повышение эффективности многофакторного эксперимента (уменьшение дис-
персий оценок коэффициентов регрессии) можно объяснить также следующим
образом. При линейном регрессионном анализе коэффициенты регрессии при за-
данной погрешности эксперимента оА- определяются тем точнее, чем больше
радиус обследуемой сферы, т. е. чем больше диапазон изменения независимых
переменных. Например, в однофакторной задаче (рис. 23.1) чем больше расстоя-
ние между точками у{ и уъ в которых производится измерение, тем точнее
оценивается коэффициент регрессии (угол наклона прямой регрессии ab). Мно-
гофакторные планы позволяют увеличивать радиус обследуемой сферы не только
путем увеличения интервалов изменения факторов (что не всегда возможно по
условиям эксперимента), но и опираясь на свойства многофакторного простран-
ства. Действительно, в одномерном пространстве радиус обследуемой сферы
равен 1 (по-прежнему считаем, что переменные варьируются на уровнях +1),
в двумерном пространстве этот радиус равен, очевидно, К2 (радиус окружно-
сти, описанной вокруг квадрата со стороной, равной 2), в случае т-мерного
пространства радиус обследуемой сферы равен К т.
Следует, однако, отметить, что не всякий многофакторный эксперимент поз-
воляет уменьшить дисперсию оценок коэффициентов регрессии в m-j-1 раз. Этого
можно достичь только путем соответствующего планирования многофакторных
экспериментов (например, используя при линейной регрессии специальные планы,
так называемые дробные реплики).
Планирование регрессионных экспериментов
Многочисленные задачи экспериментальных исследований на математическом
языке могут быть сформулированы следующим образом: в результате экспери-
мента необходимо получить некоторое представление о зависимости интересую-
щей исследователя величины х от нескольких независимых переменных (факто-
ров) уь ..., ук. Эти переменные (факторы) задают й-мерное факторное про-
странство точек, ординатами которых являются значения yt, ..., ук. Функцио-
нальная зависимость при фиксированном х
•••> f/л)
называется функцией отклика, или поверхностью отклика.
В общем случае аналитический вид функции отклика может быть неизвест-
ным, поэтому приходится использовать полиномиальные модели, т. е. представ-
лять приближенно функцию отклика в виде полинома (такое представление,
очевидно, можно использовать и тогда, когда вид функции отклика известен):
k k k
i=l ( = 1 /=1
Результаты измерений величины при различных значениях будут, очевид-
но, случайными величинами, так как измерения производятся с погрешностями
(случайными). Поэтому значения у\, ..., Ук будут определять величину g лишь
в среднем, т. е. функция отклика будет определяться как математическое ожи-
дание Л1[Х| i/i, ..., tjk}. Задача состоит в том, чтобы по результатам эксперимен-
та оценить коэффициенты Ро, Pi • • Таким образом, функция отклика есть
М[Х|«Л, .... i/ft]=g(«/i, ..., Ук, ft, ₽1 -•)
и представляет собой уравнение регрессии; эксперименты, целью которых явля-
ется поиск оценок неизвестных параметров р0, Pi -.. (коэффициентов регрессии)
или неизвестной поверхности отклика, называются регрессионными; процедура
поиска этих оценок называется регрессионным анализом.
В дальнейшем при изложении регрессионного анализа воспользуемся матрич-
выми обозначениями. Итак, в некоторых точках ^-мерного факторного простран-
ства i/ь ... ук производятся измерения величины X, являющейся функцией фак-
торов t/ь ..., yk. Эти факторы образуют матрицу-столбец
У1
Уг
Ук
Предположим, что выполнено п измерений, результаты которых можно пред-
ставить матрицей-столбцом
*1
Х= .
хп
причем эти измерения производились соответственно в точках с координатами
Уи, Ун....УкГ, Ун, Угг, „ Ум?, Ут, Угп, .... Укп- Будем считать также, что
все результаты измерений представляют собой независимые, нормально распре-
деленные случайные величины Хъ ..., Хп с дисперсиями щ2, ..., ап2.
Уравнение регрессии можно записать в следующем виде:
А1 [А7У] = (Г, V) = 1'гф (у) = 2 Vq®q (Г),
<3=1
где
Si
е2
есть вектор оцениваемых параметров, составляющими которого являются все
коэффициенты регрессии (30> ₽ь . ., • , Pi j, ..
МП
— вектор известных функций [например, <р1(У) = 1, <р2(У)=У и т. д.].
Индекс «т» означает транспоиироваиие матрицы.
При определении оценок параметров V естественно потребовать, чтобы иско-
мые оценки обладали по возможности такими свойствами, как состоятельность,
несмещенность и эффективность. Кроме того, обычно ищут линейные оценки, т. е.
такие, которые можно представить в виде
V*=.LX,
где V* — вектор оценок; L — матрица размерностью пгХп.
Оценки, обладающие перечисленными выше свойствами, называют наилуч-
шими линейными оценками, а для их определения можно воспользоваться
следующей теоремой (см. [23.9]):
наилучшими линейными оценками для неизвестных параметров V являются
V*=T-'X,
где Т — неособенная квадратная матрица порядка т с элементами
п
TP<J = 2 14р i) чq (Yi)р, <7= 1, 2, .... т;
1=1
X — матрица-столбец с элементами
п
А?= S “^/^(У/),
/=1
(£ч= 1/от2, 1=1, 2, ..., п.
Матрица Т называется информационной матриц ей Фишера.
Матрица Т-1, обратная информационной матрице, называется диспер-
сионной, или ковариационной, матрицей D(V*) оценок V (иногда ее
называют матрицей погрешностей). Диагональные элементы этой матрицы опре-
деляют дисперсии оценок, а иедиагональные элементы — ковариации соответст-
вующих им оценок (коэффициентов регрессии).
Определение оценок в соответствии с приведенной теоремой при сделанных
предположениях означает фактически определение оценок по методу наимень-
ших квадратов. Поэтому оценки V*, полученные по последней формуле, обла-
дают тем свойством, что минимизируют диагональные элементы матрицы D(V*).
Доказано также (см., например, [23.8]), что наилучшие линейные оценки
V* обладают наименьшей дисперсионной матрицей D(V*) среди всех линейных
несмещенных оценок и определитель [D(V*)] также наименьший, т. е.
D(V*)^D(VH*)
и
[D(V*)]<[D(VB*)],
где VH — вектор любых несмещенных линейных оценок.
Так как целью регрессионных экспериментов является получение оценок ко-
эффициентов регрессии, то качество (или оптимальность) таких экспериментов
и соответствующих им планов естественно оценивать в зависимости от точности
получаемых в результате эксперимента оценок. Точность оценок V* характеризуется
их дисперсионной матрицей D[V*], поэтому критерии оптимальности планов регрес-
сионных экспериментов обычно формулируются в виде некоторых требований,
предъявляемых к дисперсионной (а следовательно, и к информационной)
матрице.
Прежде чем формулировать критерии оптимальности планов, уточним поня-
тие плана регрессионного эксперимента. Учитывая, что в общем случае в каж-
дой точке факторного пространства Yi может производиться несколько незави-
симых измерений, планом регрессионного эксперимента e(N) называется сово-
п
купиость величии (Уь и), ..., (Yn, гэт),^ ri=N, где N — общее количество
1=1
измерений.
План называется Р-оптимальным, если ои минимизирует определитель дис-
персионной матрицы (соответственно максимизирует определитель информацион-
ной матрицы), т. е. D-оптимальное планирование заключается в отыскании
min | D |
е (IV)
или
max | Т | .
• (N)
Определитель дисперсионной матрицы |О[ (его называют также обобщен-
ной дисперсией) характеризует объем эллипсоида рассеяния оценок V*, поэтому
Р-оптимальный план минимизирует объем этого эллипсоида.
План называется Л-оптимальным, если он минимизирует след Sp (сумму
диагональных элементов) дисперсионной матрицы
т
min S„D = min У Р„о.
в (N) в {N) ч=1
Л-оптимальный план минимизирует среднюю дисперсию наилучших линей-
ных оценок.
Кроме перечисленных критериев оптимальности находят применение также
минимаксные критерии (например, минимум максимальной дисперсии функции
отклика), информационные и др. Оказывается, что в некоторых частных случаях
план, оптимальный в смысле одного критерия, одновременно оптимален и по
другим критериям. Например, планы, оптимальные по минимаксному критерию,
являются также Н-оптимальными; если дисперсионная матрица имеет вид D=
=С1, где С — константа, а Iединичная матрица, то план, которому соответ-
ствует такая матрица и который А-оптимален, будет также £>-оптимальным.
Задача построения оптимальных планов регрессионных экспериментов
в общем случае является весьма сложной, поэтому ее решают обычно с исполь-
зованием ряда ограничений (например, поверхность отклика является линейной
или квадратичной функцией независимых переменных и т. д.). В настоящее
время наиболее разработана теория £)-оптимальных планов для линейной ре-
грессии.
Планирование экспериментов по выяснению механизма явления
Эксперименты по выяснению механизма явления имеют своей целью опреде-
ление математической модели, описывающей исследуемое явление (объект). При
планировании таких экспериментов исследователь обычно располагает некоторой
информацией об исследуемом объекте, и в зависимости от этой априорной инфор-
мации возникают три различные постановки задач.
1. Математическая модель объекта априори известна, т. е. известен анали-
тический вид функции отклика £(У, V') и требуется определить вектор пара-
метров
61
0/П
или же известны не только вид функции д(У, V), но и предварительные оценки
0о*, которые необходимо учитывать.
2. Известно, что функция отклика совпадает с одной из функций gi (У, V),
(У, V), ..., £Я(У, V), и требуется определить, какая из этих функций является
истинной, и оценить ее параметры. При этом предполагается, что в различных
моделях вектор параметров Vi (i=l, ..., <?) может иметь различную размер-
ность. Другими словами, перед экспериментом исследователь располагает не-
сколькими возможными моделями (гипотезами) исследуемого явления, и задача
состоит в том, чтобы поставить эксперимент, позволяющий выбрать такую мо-
дель, которая лучше всего соответствует исследуемому явлению.
3. Аналитический вид функции отклика Ё(У, V) неизвестен, но известно (по
крайней мере, предполагается), что функция отклика в интересующей исследова-
теля области может быть с достаточной точностью аппроксимирована конечным
рядом по некоторой системе наперед заданных функций (например, полиномом).
Требуется поставить такой эксперимент, который позволил бы найти наилучшее
описание функции £(У, V).
Математический аппарат планирования экспериментов наиболее полно раз-
вит для решения первой из перечисленных задач. Применительно к этой задаче
разработаны эффективные методы планирования как статических (планируется
весь эксперимент в целом), так и последовательных (поэтапных) экспериментов.
Методы статического планирования для широкого класса функций £(У, V) раз-
работаны настолько, что подобное планирование сводится, по существу, к выбо-
ру готовых таблиц, описывающих оптимальные планы экспериментов. Некоторые
трудности возникают в тех случаях, когда функция Ё(У, V) нелинейна по оце-
ниваемым параметрам V. Однако, используя линеаризацию функции — разложе-
ние ее в ряд Тэйлора в окрестности некоторой точки Vo* (точка предваритель-
ных оценок параметров), обычно удается и в этом случае решить задачу стан-
дартными методами.
Достаточно полное описание методов решения первой задачи имеется'
в [23.8], многие методы планирования и описания различных оптимальных пла-
нов можно найти в [23.7, 23.8].
Более сложной является вторая задача — планирование экспериментов по.
выбору наилучшей модели из некоторой заданной совокупности; эта задача
является, по существу, задачей дискриминации гипотез. Планирование дискрими-
нирующих экспериментов заключается в поиске таких точек У, в которых кон-
курирующие гипотезы £(У, ИО, .... £9(У, V8) давали бы разные результаты,,
т. е. результаты измерений в этих точках не должны быть инвариантны к заме-
не одной проверяемой модели другой. Здесь прежде всего возникают две основ-
ные задачи. Первая — это выбор совокупности конкурирующих моделей-гипотез.
Естественно, что лучшие результаты могут быть получены тогда, когда число,
конкурирующих моделей невелико, а их совокупность содержит истинную мо-
дель. Эту задачу должен решать специалист той облЗЪти науки, к которой
относится планируемый эксперимент. Вторая задача — выбор некоторого опти-
мального решающего правила, позволяющего принимать или отвергать конкрет-
ные гипотезы. В качестве таких правил можно использовать решающие правила,,
основанные на сравнении взвешенных сумм квадратов отклонений по критерию.
X2, правила, основанные на критерии отношения максимального правдоподобия,,
на энтропийном критерии (мера Кульбака), и т. п.
Наибольшие трудности встречаются при планировании экспериментов в тех
случаях, когда математическая модель исследуемого явления совершенно не-
известна. Оптимальные планы экспериментов при неизвестном виде функций,
£(У, И) в настоящее время еще не разработаны, н задача эта решается обычно,
с помощью некоторой последовательной процедуры, предусматривающей чередо-
вание экспериментов по уточнению параметров и дискриминирующих эксперимен-
тов. Этот процесс поиска математической модели можно представить [23.8]
в виде следующей схемы (рис. 23.2).
Блок 1 отображает экспериментальный этап работы, т. е. техническое осу-
ществление ранее спланированных экспериментов (например, некоторых предва-
рительных, «затравочных» экспериментов). Следующий этап (блок 2)—оценка
параметров V некоторой предварительной (может быть, грубой), но известной
модели £(У, V). После этого (блок 3) проверяется, согласуется ли описание
функции Ё(У, V*), где V* — вектор полученных оценок, с экспериментальными;
данными. Если согласуется, то эксперимент можно прекратить либо спланировать,
его по дополнительному уточнению оценок (или некоторой наиболее интересной
части этих оценок). На схеме, изображенной на рис. 23.2, этому этапу соответ-
ствует блок 4. Если же модель Ё(У, V) плохо согласуется с экспериментальными,
данными, то требуется пересмотр принятой модели путем более тщательного
анализа исследуемого явления и возможно построение новой модели (блок 5).
Наконец, последний этап — планирование дискриминирующего эксперимента
(блок 6), который позволил бы выяснить, какая из имеющихся моделей лучше
описывает исследуемый объект.
При реализации такой последовательной процедуры поиска моделей исполь-
зуются, естественно, методы и критерии, применяемые при решении задач по
уточнению или определению оценок параметров и по дискриминации моделей.
Однако такое поочередное решение этих задач может привести к плохим резуль-
татам (будет выбрана модель, плохо описывающая исследуемое явление). Это
связано с тем, что если выбрана неадекватная предварительная модель, то те-
ряет смысл задача уточнения оценок ее параметров, а если параметры модели
оценены грубо, то трудно осуществить правильно дискриминацию моделей.
Рис. 23.2. Схема процесса поиска мате-
матической модели:
1 — эксперимент; 2 — обработка эксперимен-
тальных данных и поиск оценок искомых
параметров; 3 — проверка согласия между
моделью и данными; 4 — планирование экс-
перимента по уточнению параметров; 5 — пе-
ресмотр модели и выдвижение конкурирую-
щей модели; 6 — планирование дискримини-
рующего эксперимента
В связи с этим возникает весьма актуальная и вместе с тем сложная задача
построения таких планов, которые были бы оптимальными и в смысле уточнения
параметров, и в смысле дискриминации моделей. Здесь необходимо решить зада-
чу выбора некоторых обобщенных критериев оптимальности. При разработке
таких критериев обычно используют некоторые функции от известных частных
критериев либо вводят новые критерии точности результатов эксперимента, учи-
тывающие одновременно информацию и по определению оценок параметров, и по
дискриминации моделей.
Обобщенным критерием первого типа может быть, например,
где М — мера, зависящая от качества дискриминации; Д — мера точности оценки
параметров; Hi, Н2— весовые множители, которые должен выбирать исследо-
ватель.
Критерий К может означать конкретно потери при неправильном решении
задачи. Тогда М будет характеризовать потери, вызванные неправильной дискри-
минацией модели, а Д — потери из-за неточного определения оценок неизвестных
параметров. При использовании таких обобщенных критериев возникает труд-
ность, связанная с выбором весовых множителей Ht и Н2.
Обобщенным критерием второго типа может быть информационный критерий
(например, среднее количество информации, приобретенной в эксперименте).
Краткое изложение методов планирования экспериментов при неизвестной
функции 5(У, V) имеется в [23.7, 23.8].
Планирование экстремальных экспериментов
Необходимость в планировании экстремальных экспериментов возникает при
решении различных экстремальных задач (задач оптимизации) в условиях, когда
исследуемые объекты (процессы) представляют собой диффузные системы с не-
известными механизмами (математическими моделями) явлений. Типичными при-
мерами таких задач являются задачи оптимизации различных химических, ме-
таллургических и биологических процессов, причем протекание каждого из них
зависит от многочисленных факторов, влияние которых на процесс трудно под-
дается функциональному описанию. Поэтому и возникает задача эксперименталь-
ного поиска оптимальных условий протекания диффузионных процессов, а сле-
довательно, и задачи планирования таких экспериментов. Таким образом, пла-
нирование экстремальных экспериментов заключается в поиске таких значений
факторов (контролируемых переменных), которые обеспечивают оптимальное
в смысле некоторого критерия протекание процесса. Например, для определен-
ного химико-технологического процесса критерием оптимальности может быть
требование максимального выхода продукта реакции, а планирование экспери-
мента будет заключаться в поиске таких значений факторов (температуры, дав-
ления, концентраций реагентов и т. п.), которые обеспечивают это требование.
Так как зависимость выходного продукта от факторов (поверхность отклика)
априори неизвестна, то в этом случае используют полиномиальную модель,
а для нахождения оптимальных значений факторов предусматривают при плани-
ровании изменения факторов в широких пределах. Однако проведение такого
многофакторного эксперимента потребует, очевидно, очень большого числа опытов,
времени и затрат. Чтобы избежать этого, планирование экстремальных экспери-
ментов основывается обычно на «шаговом» методе изучения поверхности отклика
[23.7], суть которого состоит в том, что вначале ставится небольшая серия опы-
тов для локального описания небольшого участка поверхности отклика полино-
мом первой степени, далее осуществляется движение по поверхности отклика
в направлении градиента линейного приближения, ставится новая серия опытов
и т. д. Этот шаговый процесс продолжается до тех пор, пока не будет обнару-
жена некоторая «почти стационарная» область, где линейная модель уже не-
пригодна. В этой области используются полиномы второй степени и планируется
большая серия опытов.
Таким образом, планирование экстремальных экспериментов сочетает в себе
идею движения по градиенту (крутого восхождения по поверхности отклика)
с планированием многофакторных регрессионных экспериментов для локального
описания поверхности отклика.
Следует отметить, что вопросы планирования экстремальных экспериментов
разработаны в настоящее время достаточно полно, изложению соответствующих
методов планирования и их практическому использованию посвящено значитель-
ное число работ.
ЗАКЛЮЧЕНИЕ
В данной книге систематизированы структуры, алгоритмы
функционирования и даны начала системотехнического проекти-
рования ИИС и входящих в них системных устройств. Остановим-
ся на перспективах их развития и попытаемся наметить задачи,
подлежащие решению в будущем.
В первую очередь можно выделить круг задач, связанных с
совершенствованием основных метрологических, эксплуатацион-
ных, экономических характеристик ИИС в рамках функций, вы-
полняемых существующими в настоящее время системами. Даль-
нейшее повышение точности, быстродействия, чувствительности,
надежности, уменьшение стоимости, улучшение других характе-
ристик ИИС, видимо, относятся к таким задачам.' Современная
техника реализации ИИС далека от достижения предельных зна-
чений этих характеристик (которые, кстати, строго еще не опре-
делены), и можно предполагать, что в ближайшее время будет
интенсивно продолжаться работа по их улучшению.
К этому же классу задач можно отнести разработку более со-
вершенных методов проектирования и создания как технических
средств, так и программного, метрологического и методического
обеспечения ИИС, базирующихся на развитии теории информаци-
онно-измерительной техники, применении современных средств
микроэлектроники и микропроцессорной техники, устройств, вхо-
дящих в АСЭТ и другие комплексы ГСП, и т. п.
В ближайшее время получат распространение ИИС, включа-
ющие большое количество одновременно работающих микропро-
цессоров, системы, в которых рационально сочетаются аппарат-
ные и программно-управляемые устройства.
Назрела необходимость в расширении работ по созданию бан-
ка алгоритмов типовых операций измерения, контроля и т. д., про-
грамм, структур и данных по характеристикам устройств, входя-
щих в ИИС.
.Дальнейшее развитие должна получить роботизация контроль-
но-измерительных устройств, охватывающая в настоящее время
автоматизацию выполнения вспомогательных операций установки
объектов на позиции контроля или измерения, сортировки и т. п.
Несколько типов таких контрольно-измерительных роботов выпус-
каются отечественной промышленностью. Вероятно, парк конт-
рольно-измерительных роботов должен существенно увеличиться
в ближайшие годы.
Должны умножиться исследования, направленные на создание
измерительно-вычислительных систем для интеллектуальных робо-
тов разнообразного назначения.
Нет никакого сомнения, что решение даже перечисленных за-
дач определит во многом перспективное .развитие ИИС, более
широкое их применение в народном хозяйстве и научных иссле-
дованиях.
В то же время существуют проблемы, решение которых может
существенным образом повлиять на дальнейшее развитие теории
и практики ИИС, определить их далекую перспективу. Остано-
вимся лишь на некоторых из перспективных проблем.
Прогнозируя развитие ИИС, следует обратить внимание в пер-
вую очередь на возможность расширения выполняемых ими функ-
ций и связанное с этим обстоятельством изменение состава функ-
циональных устройств и структур ИИС.
Представляется, что дальнейшее развитие должны получить
системы, выполняющие измерение и контроль при отсутствии све-
дений или при приближенном знании о виде исследуемых вели-
чин и характере взаимосвязей между ними. Анализ информатив-
ности отдельных величин и измерение наиболее информативных,
адаптация к динамическому, частотному диапазонам исследуемых
величин в целях получения их количественной оценки и необхо-
димых метрологических характеристик, выполнение измерений
взаимосвязанных величин или отдельных составляющих (при от-
сутствии заранее известных зависимостей между отдельными их
составляющими) с применением обучаемых или самообучающих-
ся систем, эффективное восприятие и количественное описание не
отдельных значений исследуемой величины, а некоторой совокуп-
ности (поля, пространства) исследуемых величин — вот далеко" не
полный перечень того, что, видимо, смогут более широко выпол-
нять будущие ИИС.
В решении перечисленных проблем немаловажную роль могут
сыграть, во-первых, осмысливание работы биологических анали-
заторных систем — прототипов ИИС в живой природе — и иссле-
дование возможностей перенесения в ИИС имеющихся там полез-
ных и новых для техники структурных, функциональных и, воз-
можно, элементных решений, а во-вторых, разработка новых
средств и методов восприятия исследуемых величин.
Перспективы развития ИИС во многом будут определяться
также расширением использования таких методов и средств вос-
приятия исследуемых величин, как оптоэлектронные, акустические,,
радиоволновые, рентгеноструктурные. Необходимо продолжить
работу по систематизации и обобщению известных физических яв-
лений, которые используются или могут быть использованы для
восприятия исследуемых величин. Требуется провести анализ по-
тенциальных возможностей метрологических характеристик этих,
явлений.
Получение новых результатов в области совершенствования
ИИС, бесспорно, имеет большое научное и народнохозяйственное
значение.
В дополнение к сказанному ранее остановимся на особенностях
учебного процесса, связанных с изучением ИИС.
Настоящая книга содержит основной лекционный материал по>
курсу ИИС. В ней систематизированы сведения по состоянию на
80-е годы о главных разновидностях ИИС, их структурах и алго-
ритмах действия, системных технических средствах, а также при-
водятся наиболее важные указания по системотехническому про-
ектированию ИИС. По техническим системным средствам приво-
дятся описания, рассматриваются вопросы их использования’
в ИИС. При этом учитывается, что большинство этих средств
изучаются в других курсах, знакомы студентам, что для их описа-
ния и анализа требуется использование системотехнических моде-
лей. Таким образом, сведения о технических (системных средствах,
даны только для того и в таких объемах, чтобы можно было,
сознательно обосновать их выбор и применение в конкретных си-
стемах. Заметим, что в некоторых книгах по системам этому мате-
риалу уделяется существенно большее внимание, чем системным
вопросам.
Предполагается, что детальное изучение системного оборудо-
вания (например стандартных интерфейсов, микро-ЭВМ) должно-
происходить на лабораторных и практических занятиях, а также
в процессе самостоятельной работы.
Однако необходимо иметь в виду, что изменение характери-
стик и возможностей системного оборудования может привести
к существенному изменению структурных и алгоритмических
принципов построения систем. Поэтому необходимо при изучении
материала этого направления дополнять его новыми данными как
на лекциях, так и при самостоятельном изучении.
Структуры и алгоритмы действия ИИС, изложенные в книге
требуют дополнительной иллюстрации на примерах структур и
алгоритмов новых современных систем. Очень полезно анализиро-
вать такие системы, используя методические подходы, изложен-
ные в книге.
Желательно для закрепления знаний и приобретения навыков
проектирования систем выполнить учебные системотехнические
системы.
В процессе проектирования должны быть обязательно преду-
смотрены разработки соответствующих программ. Напомним, что
в основу построения программ должны быть положены содержа-
тельные логические схемы алгоритмов функционирования данной
системы. По сути эти алгоритмы являются входным языком для
последующего программирования.
Формальное описание функционирования ИИС с помощью
СЛСА производится в настоящей книге впервые. Можно ожидать,
что СЛСА и их применение будут совершенствоваться. В частно-
сти, будут разработаны методы имитационного моделирования
систем с помощью СЛСА. Если это будет сделано, то тем самым
будут заложены основы САПР ИИС. Конечно, в такой САПР
должны получить развитие и эффективно использоваться банки
данных, содержащие характеристики функциональных блоков,
выпускаемых промышленностью (в первую очередь), а также
типовых решений.
Можно утверждать, что создание такого САПР будет иметь
большое значение для дальнейшего развития теории и практики
применения ИИС.
ПРИЛОЖЕНИЕ 1
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
А. Буквенные обозначения
Аналоговые сигналы
Числовое значение
Двоичное состояние, пе-
редаваемое импульсом
Множество аналоговых
сигналов
Множество чисел
Погрешность измерения:
абсолютная
относительная при-
веденная
относительная
средняя квадратиче-,
ская
Ошибки контроля:
первого рода
второго рода
Интервал задержки, кор-
реляции
Математическое ожидание
Дисперсия
Функция распределения
вероятности
Плотность распределе-
ния вероятности
Корреляционная функция
Нормированная корреля-
ционная функция
Спектральная плотность
мощности
Вероятность
Оценка статистических
характеристик
Б. Символы
Сигналы: ,
аналоговый
амплнтудно-модули-
рованный
х, у
Z
е
X, Y
Z
А
б
Т
а
М
D
F
f
р
G
Р, Р
М*, D*...
частотно-модулиро-
ванный
фазо-модулирован-
ный
импульсно-прямо-
угольный
импульсно-остро-
угольный
пилообразный
перепад напряжений
импульсный, ампли-
тудная модуляция
импульсный, частот-
ная модуляция
импульсный, широт-
ная модуляция
импульсный, фазо-
вая модуляция
импульсный, кодовая
модуляция
цифровой код
Род тока:
постоянный ток
переменный ток (низ-
кие частоты)
переменный ток
(средние частоты)
переменный ток (вы-
сокие частоты)
Фильтрация:
Нижних частот
Верхних частот
Полосовая
ПРИЛОЖЕНИЕ 2
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ ЦЕПОЧЕК ТИПОВЫХ ЗВЕНЬЕВ
В табл. П.2.1 приведены передаточные функции типовых звеньев: апериодиче-
ского звена (первого порядка), дифференцирующего, интегрирующего инерцион-
шого и колебательного звена (второго порядка). Этн звенья условно обозначены
буквами а,г—d соответственно.
Таблица П.2.1. Передаточные функции типовых звеньев
Апериодическое инерционное Дифференцирую- щее инерционное Интегрирующее инерционное Колебательное
Я j, . • • *, . • CLq ь с d
kl kbS kc kfl
Tts+ 1 s(Tcs+ 1) T^+2^Tds+ 1
Из звеньев, указанных в табл. П.2.1, могут быть образованы последователь-
ные соединения. При записи кода цепочки коды отдельных звеньев упорядочи-
ваются по алфавиту и по возрастанию индексов. В цепочке допускается объеди-
нение только двух одинаковых по постоянной времени апериодических звеньев
'Первого порядка.
В табл. П.2.2 оригиналов для наиболее часто применяемых в ИИС цепочек
(приводятся их переходные характеристики.
В табл. П.2.3 приведены переходные характеристики для параллельно-
(встречных соединений звеньев. В числителе дается код прямой цепи, а в знаме-
нателе— обратной. Переходные характеристики даны для случая отрицательной
'обратной связи. Степень полинома встречно включенной цепочки (знаменатель
щ .выражении, стоящем слева) не превышает второго порядка.
.В таблицах всюду принимается а=1/Т.
Т аблица П.2. 2. П( звеньев Соединения звеньев «1 GjGjfig зреходные характеристики последовательного соединений Переходные характеристики > ✓ Ml— eait) kfk2 [1 — Сае~“а< + (Сх В= 1 с T^ZTz-TJ' _ т\ 7*2-г, ’ 1 (Га-Гх)2 ’ 2 {Т2-Т\}*
a^a^d kfkjid (1 + Саё~^ sin(M + в) — С2е~^ + + CJQ +i)e~att]; г = г - Т* - с - Td* - 1 rifTa-ri) ’ 2 г2(Тй-Т\)* ’ d ЛгхГг8 ’ r т Г 2ГЙ2(1 — уГх) Га 1.
а^Ь со 7 I 1 т т 'г1 Ь L Г1 7 2 71 J *- т П-ь?; 0<^<1; т = ^г-; Id \Т2 КТ, . . X б — arctg 4-2arctg arctg уТа—1 УЛ—1 Y *12*й [CbtT'V + (C1 + BOe-“*5; n 1 c --C Tb T^-Tb) ’ e 1 (Д-Тб)2
а&с *12*с И +1 + Cce~act — (Cx-|-£/)e~a,S ^(3^-2^)-Tc« B_ Tx {Tc-T^ ’ Tc-7\ ' Л2(ЗТС-2ТХ) Гсз 1 (Tc-T^ ’ c (Гс-Тх)2
агЬ T bT (e-^-e ) 71 — ‘b
агс Mc( -Л-Т’с +Cle-a^t-Ссе^ + /); Л2 T,2 Cx = —— ; Cc= - - -- Ti~Tc T^Tc
Продолжение табл. 11.2.2
Соединения звеньев
Переходные характеристики
ard
Md[l — C^~vsin(M —6)—
T s 1
Q = _______7 1______Q __ * 1
1 7/(1 — 2^Тг) + 7/ ’ d лК7/(1 — 2Y7J4-7/ 1
e = arctgT^T-arctgT: Y = -7“:
7 d
0<k<l
kbabe b
Г 1 -“c' 1
M-----(e -l)+d
L “c J
kbkd [Cde~'<t sin(Xf — 6)4-Qe J;
Cd = -KTdVTd^(\-^Tb)+T^ ’
c Tb_______
b TJfS-bfTby + Tt? ’
6 = arctg X?b -; Y = -|r-; X = -—1/1— .
1 — Vb ld ld
0<gd<l
ai ••• at
а1 aq^g+i
а1 ••• aqCq+l
G1 •• aqbq+l<L
Продолжение табл. П. 2.2
Соединения звеньев
Переходные характеристики
O-tfiq+id
<-TdY>-* 1
kVr
7-9+1
9+i
/?i = (l-2Y7’i)7’d24-7’i2;
Zd .
Td ’
1
~ t, :
9+1
АД
... agCq + id
9+1
-2¥Д2 + /-У
sin (Ы + 6 -f
аг... aqd
9+1
•У.С
9+1
l-j-CT^e ** sin [Л/+ 6-|-arctg —
\ Y /
9
Ч
, ~ “Л
1в 1
Таблица П.2.3. Переходные характеристики параллельно-встречных соедине-
ний звеньев
Соединения
звеньев
Переходные характеристики
ai/kf
i + (i—e ); «= —
a^a^lkf
Д2
1 +k\kf
? “1( — C2e где —a.
— а2 — корни ура в-
T2
нения -------
1 + Vfy
В2 — В-
; с2 =
9T
TTt^7s+’=0;
B2 1
~—; Bi= —
в2-в,
0^2 Д/
k k
i । ь ь Г ' где — an —a2 —корни
1 I-
Проиолжение табл П .2 3
Соедииевия звеньев Переходные характеристики
ага^ kf Л+'Л уравнения — ± з2 4- — s 4- 1 — 0; 1 НН 1 -р с . г в2 1_ 1 в2-вх’ 2 в2—вх’ * «£
ajb/kf д / f о r> ' (е 1 —е “2 7» гДе ——а2 — корни уравнения — &2 TJbS* + (7\ + Tb + k^bk^s + 1 = 0; В£ = — ««
ai/a2 . , , , O + Cie а,г +С2е а^У, где —аь — а2 — корни 1 -j- ^1^2 Т.Т2 Т-. + т2 уравнения з2 4- — s 4-1 — 0; v I+M2 1+М2 7’2-В1 B2-Z2 __J_ 1 Вх —В2 ’ 2 Вх — Ва ’ ‘ а;
ai/b йх( 1 4- C1e~a't + С2е—К2 , где — аг, — а2 — корни' уравнения + (Л + Tb + krkb)s + 1 = 0; ть-вг В2-Гь __1_ 1 Bl —В2 2 В1—В2 ‘ а£
Cjkf —— (1 + С±е~ait — С2е—“а<), где — ах, — а2 — корни уравнения kl kk s*+ kk s+x Cl~ в 1 в : kckf RcRf *3% B2 „ 1 2 B2 —Bx 1 az
b/kf febae-^; a- 1 b + “bkf
b/<h kbiCie"^'* + C2e~ast); BL=—, где —als —aa — корни ai уравнения Г17'^2 + (7'1 + ?'Н kikb)s+ 1 — 0; Ct — c B2(BX — Ba)
продолжение таол. u.z.&
Соединения звеньев Переходные характеристики
d/kf , , , (1-pCje ,( — С2е 2*);где —аг, —«2 — корни 1 + kdkf Тс? ^dTd уравнения s2+ s + 1 - 0; 1 + Kdfif 1 -f- kdkf „ Вг B2 1 1 B2 — Вг 2 B2 — Вг * a(
ПРИЛОЖЕНИЕ 3.
ТАБЛИЦА ЭКСПОНЕНЦИАЛЬНЫХ, ЛОГАРИФМИЧЕСКИХ ФУНКЦИЙ И ИНТЕГРАЛА ВЕРОЯТНОСТЕЙ
2 ez е-г In г logic г log2 г Ф (г)*
0,01 1,010 0,990 —4,605 2,0000 —6,6439 0,0080
0,1 1,105 0,905 —2,303 1,0000 —3,322 0,0797
0,2 1,221 0,819 — 1,609 —0,6990 —2,322 0,1585
0,3 1,350 0,741 — 1,204 —0,5228 — 1,737 0,2358
0,4 1,492 0,670 —1,916 —0,3978 —1,322 0,3108
0,5 1,679 0,606 —0,693 —0,3010 — 1,000 0,3829-
0,6 1,822 0,549 —0,511 —0,2218 —0,737 0,4515
0,7 2,014 0,497 —0,357 —0,1549 —0,515 0,5161
0,8 2,225 0,449 —0,223 —0,0968 —0,322 0,5763
0,9 2,460 0,407 —0,105 —0,0458 —0,152 0,6319
1,0 2,718 0,368 0,000 0,0000 0 0,6827
1,5 4,482 0,223 0,405 0,1761 0,585 0,8664
2,0 7,389 0,135 0,693 0,3010 1,000 0,9545
2,5 12,182 8,2-20”2 0,916 0,3979 1,320 0,9876
3,0 20,085 5-10”2 1,099 0,4771 1,585 0,9973
4,0 54,598 1,83-10—2 1,386 0,6021 2,000 0,9999
5,0 148,413 6,7-Ю-з 1,609 0,6990 2,322 1—10”®
6,0 403,428 2,5-Ю-з 1,792 0,7781 2,585 -4.1
7,0 l.llO3 9-10—4 1.946 0,8451 2,807 4.1
8,0 2,98-103 33-10”8 2,079 0,9031 3,000 4.1
9,0 8,1-Ю3 12-10—8 2,197 0,9542 3,170 4.1
10,0 22-IO? 45-1O-® 2,303 1,0000 3,322 -4,1
* Интеграл вероятностей Ф (г) — —г Г ‘ « J 0 г—№7 , t = -
Автоматизация проектирования ИИС
326 '
Агрегатный комплекс средств элек-
троизмерительной техники (АСЭТ)
4, 34
Адаптивная дискретизация 364
Адаптивные телеизмерительные систе-
мы 316
Акустическая система для измерения
координат графических изображе-
ний 166
Анализаторы логических состояний
281
Аналоговые электроизмерительные
цепи 95
Аналого-цифровая часть ИИС 95
Аппроксимация 179, 355
Временные характеристики ИИС 354
Входные величины 153
Голографическая измерительная си-
стема 169
Графопостроители двухкоординатные
44
ГСП 3, 32
Диагностика техническая 7
Дискретизация-
измеряемых величин 354
контролируемых величин 234
Дисплеи 41
Измерение 7
Измерительно-вычислительные комп-
лексы 30, 143
ИВК-3 147
ИВК-7, ИВК-8 149
Измерительно-вычислительные систе-
мы 30
Измерительные системы:
аппроксимирующие 178
К-732 155
К-742 157
многомерные 172
независимых входных величин 153
Индикация в ИИС 39
Интервал корреляции 196
Интерфейсы:
аналоговые 80
КАМАК 67
периферийной части ЭВМ 74
последовательный 59
приборный 63
Информационно-измерительная техни-
ка 3
Информационные оценки 352
Каналы контроля 242
Каналы связи 296, 300, 303
Клавишные ЭВМ 90
Классификация ИИС 25
Коммутаторы измерительные:
напряжений 108
сопротивлений 113, 115
Контроль 7, 116
Коррекция погрешностей 391
Корреляционно-экстремальные систе-
мы 209
Корреляционные измерительные си-
стемы (коррелометры):
компенсационные 203
полярные, релейные 200
с аппроксимацией 207
с использованием интеграла
Стилтьеса 202
Критерий эффективности 395
Линии связи 296
Магнитные запоминающие устройст-
ва 47
Машины централизованного контро-
ля 265
— К-200 266
Методы поиска экстремумов 139
Метрологические нормируемые харак-
теристики ИИС 383
Метрология 8
Микропроцессорные комплекты 89
Микропроцессоры 87
Микро-ЭВМ 83
Мини-ЭВМ 82
Многомерные измерительные системы
172
Многофакторный эксперимент 407
Многочлены ортогональные 360
Модуляция в ИИС 95
Обобщенная структурная схема ИИС
14
Обратная задача теории погрешно-
стей 345
Объем выборки при контроле 229
Отображение информации 39
Ошибки контроля 223
Переходные характеристики 272, 420
Перцептрон 289
Планирование измерительных экспе-
риментов 403
Погрешности:
измерения 336
округления при вычислениях 348
Помехи:
источники 121
поперечные (наведенные) 125
продольные 124
Помехоустойчивость 121
Программное обеспечение ИИС 324
Пропускная способность 353
Разделение сигналов:
временное 299
ортогональное 303
частотное 301
Разложение Фурье — Уолша 362
Распознавание образов 7
Регистрация в ИИС 43
Регрессионные эксперименты 408
Ряд Котельникова 359
Системотехническое проектирование
321
Системы автоматического контроля:
допусковые 242
параллельно-последовательного
действия 261
параллельного и последовательно-
го действия 250
с общей образцовой величиной
256
Системы распознавания образов 265
Системы технической диагностики 275
Сканирующие системы расшифровки
графиков 160
Содержательные логические схемы
алгоритмов 3, 17
Сравнение кодов 247
Статистические измерительные систе-
мы:
для измерения законов распреде-
ления вероятностей 185
корреляционные 194
спектральные 211
Структуры аналого-цифровой части
ИИС:
многоканальная 129
многоточечная 133
мультиплицированная 130
сканирующая 136
Счет 7
Табличные методы преобразования
информации 92
Телеизмерительные системы:
аналоговые 304
цифровые 311
Телемеханические комплексы (ТК-100,
ТК-300) 318
Техническая кибернетика 6
Унифицирующие преобразователи 100
Управление коммутаторами 113
Управляющие вычислительные маши-
ны и комплексы 30, 269
ИВ-500 269
М-40-43 274
Устройства связи с объектом УВМ
типа СМ 272
Учебное задание на проектирование
333
Цифровые печатающие устройства
46
ЭВМ 31, 82
Эффективность ИИС:
техническая 395 ;
экономическая 400
СПИСОК ЛИТЕРАТУРЫ
В списке звездочкой отмечены материалы, необходимые при изучении курса
в первую очередь.
1.1. Карандеев К. Б. Измерительные информационные системы и автомати-
ка.—Вестник АН СССР, 1961, № 10, с. 15—18.
1.2. Катыс Г. П. Информационные системы исследовательских аппаратов.—
М.: Энергия, 1971. — 272 с.
1.3. Соколов М. П. Применение автоматических устройств в физическом
эксперименте. — М.: Атомиздат, 1969. — 472 с.
1.4. Системы получения и передачи метеорологической информации/
А. А. Кмито, Н. С. Коковин, Н. Ф. Павлов и др.—Л.: Метеоиздат, 1971.—•
472 с.
1.5. Быховский М. Л., Вишневский А. А. Кибернетические системы в меди-
цине.— М.: Наука, 1971. — 407 с.
1.6. Алиев Т. М., Мелик-Шахиазаров А. М., Тер-Хачатуров А. А. Измери-
тельные информационные системы в нефтяной промышленности. — М.: Недра,
1981.—351 с.
1.7. Алиев Т. М., Тер-Хачатуров А. А. Информационно-измерительные систе-
мы количественного учета нефти и нефтепродуктов. — М.: Недра, 1976.— 160 с.
1.8. Ляпунов А. А. О логических схемах программ. — В кн.: Проблемы ки-
бернетики.— М.: Физматгиз, 1958, вып. 1, с. 5—22.
* 1.9. Баранов С. И. Синтез микропрограммных автоматов. (Граф-схемы
и автоматы). — 2-е изд., пепераб. и доп.— Л.: Энергия, 1979. — 231 с.
1.10. Цапенко М. П. Содержательные логические схемы алгоритмов изме-
рительных систем. — Измерения. Контроль. Автоматизация, 1982, № 4, с. 3—8.
* 3.1. Государственная система промышленных приборов и средств автома-
тизации (Методическое пособие для инженерно-технических работников)/
С. Я. Борисов. Г. И. Кавалеров, А. Б. Родов и др.; под ред. Г. И. Кавалеро-
ва.— М.: ЦНИИТЭИ приборостроения, 1981. — 392 с.
*3.2. Певзнер Г. С., Цветков Э. И., Цодиков М. Б. Агрегатирование в элек-
троприборостроении (Электроизмерительные приборы, вып. 23).—М.: Энергия,
1981. — 176 с.
3.3. Иванов В. Н., Певзнер Г. С., Цветков Э. И. Развитие системных
средств электроизмерительной техники в XI пятилетке. — Измерения. Контроль.
Автоматизация, № 2, 1982, с. 3—14.
* 4.1. Смоляров А. М. Системы отображения информации и инженерная пси-
хология: Учеб, пособие для вузов. — М.: Высшая школа, 1982. — 262 с.
* 4.2. Полякова Л. В., Лейн В. М. Отображение измерительной информа-
ции.— Л.: Энергия, 1978. — 144 с.
* 4.3. Соловейчик И. Е. Дисплеи в системах в ЭВМ. — М.: Советское радио,
1979. — 248 с.
4.4. Ньюмен У., Спрулл Р. Основы интерактивной машинной графики: Пер.
с англ./ Под ред. В. А. Львова. — М.: Мир, 1976. — 574 с.
.t>. Отображение информации в центре управления космическими полста-
ми/ А. В. Милицын, В. к. Самсонов, В. А. Ходан, И. И. Литвак.—М.: Радио
и связь, 1982. — 192 с.
*4.6. Шкабардня М. С., Мартыненко Н. В. Быстродействующие самопишу-
щие приборы. — М.: Энергии, 1974.— 176 с.
4.7. Сиаккоу М. Физические основы записи информации: Пер. с нем./ Под
ред. В. Г. Королькова.—М.: Связь, 1980. — 192 с.
* 5.1. ГОСТ 22316-77. Средства агрегатные информационно-измерительных
систем. Общие требования к организации взаимодействия средств при построе-
нии систем.
* 5.2. Найман Г., Майлинг В., Шербина А. Стандартные интерфейсы для из-
мерительной техники: Пер. с нем. — М.: Мир, 1982. — 304 с.
* 5.3. Хазаиов Б. И. Интерфейсы измерительных систем.—М.: Энергия,
1979. — 120 с.
° *5.4. ГОСТ 26.003-80. Система интерфейса для измерительных устройств с
байт-последовательным, бит-параллельным обменом информации.
* 5.5. ГОСТ 26.201-80. Система КАМАК. Крейт и сменные блоки. Требова-
ния к конструкции и интерфейсу.
5.6. Интерфейс для программируемых приборов в системах автоматизации
эксперимента/ Н. И. Гореликов,' А. Н. Домарацкий, С. Н. Домарацкий и др.—
М.: Наука, 1981. — 262 с.
*5.7. Мячев А. А. Системы ввода-вывода ЭВМ. — М.: Энергоатомиздат,
1983. — 168 с.
5.8. Басиладзе С. Г. Fastbus — стандарт для быстродействующей электрон-
ной аппаратуры IV поколения (обзор). — Приборы и техника эксперимента,
1982, № 5, с. 5—24.
5.9. Децентрализованные мультимикропроцессорные системы для интегри-
рованных АСУ и САНИ/ Г. Н. Куклин; В. П. Минаев, М. А. Головашкин,
А. Г. Конюхов и др.— Приборы и системы управления, 1982, № 11, с. 8—10.
5.10. Ацюковский В. А. Построение систем связей комплекса оборудования
летательных аппаратов (Информационные основы построения систем передачи
и преобразования бортовых комплексов оборудования).—М.: Машиностроение,
1976. —250 с.
*6.1. Кагаи Б. М. Электронно-вычислительные машины и системы: Учеб, по-
собие для вузов. — М.: Энергия, 1979.—582 с.
6.2. Микропроцессорные комплекты интегральных схем. Состав и структура:
Справочник/ Под ред. А. А. Васенкова, В. А. Шахнова. — М.: Радио и связь,
1982, — 190 с.
6.3. Балашов Е. П., Пузанков Д. В. Микропроцессоры и микропроцессорные
системы: Учеб, пособие/ Под ред. В. Б. Смолова. — М.: Радио и связь, 1981.—
328 с.
6.4. Страхов А. Ф. Автоматизированные измерительные комплексы.—М.;
Энергоиздат, 1982. — 216 с.
6.5. А. с. № 120037 (СССР). Матричная схема для определения суммы и
разности двух чисел/ М. П. Цапенко, Л. Б. Талалай. Опубл, в БИ, 1959.
6.6. А. с. № 127074 (СССР). Счетно-решающее устройство на матричных
сетках/ М П. Цапенко, О. В. Улин. Опубл, в БИ, 1960, №' 6.
6.7. Баранов С. Н., Синев Б. Н. Программируемые логические матрицы в
цифровых системах. — Зарубежная радиоэлектроника, 1978, № 1, с. 65—82.
7.1. Харкевич А. А. Борьба с помехами. — М.: Физматгиз, 1963. — 276 с.
v *7.2. Электрические измерительные преобразователи/ В. Ю. Кончаловский,
Я. А. Купершмидт, Р. Л. Сыропятова, Р. Р. Харченко; Под ред. Р. Р. Харчен-
ко.— М.: Энергия, 1967. — 408 с.
*7.3. Трансформаторные измерительные мосты/ Ф. Б. Гриневич, А. Л. Гро-
хольский, К. М. Соболевский, М. П. Цапенко; Под ред. К. Б. Карандеева. —
М.: Энергия, 1970.—280 с.
*7.4. Диковский Я. М., Капралов И. И. Магнитоуправляемые контакты. —
М.: Энергия, 1970.— 1'53 с.
7.5. Универсальные электронные преобразователи информации/ Под ред.
В. Б. Смолова.—М.: Машиностроение, 1971. — 250 с......... ,
7.(5. Микроэлектронные цифро-аналоговые и аналого-цифровые преобразо-
ватели информации/ В. Б. Смолов, Е. П. Угрюмов, В. К- Шмидт и дп • Поп п₽п
В. Б. Смолова. — Л.: Энергия, 1976. — 336 с. Р > Р Д-
*7.7. Шушков Е. И. и Цодиков М. Б. Многоканальные аналого-цифровые
преобразователи.— Л.: Энергия, 1975.— 160 с.
7.8. Гутников В. С. Интегральная электроника в измерительных устройст-
вах.— Л.: Энергия, Ленингр. отд-ние, 1980. — 248 с.
7.9. Персии С. М. Основы теории и проектирования автоматических измери-
тельных систем. — Л.: Гидрометеоиздат, 1975. — 320 с.
7.10. Малиновский В. Н. Цифровые измерительные мосты. — М.: Энергия
1976.— 192 с.
*7.11. Справочник по электроизмерительным приборам/ К. К. Илюнин,
Л. И. Леонтьев, Л. И. Набебина и др.; Под ред. К. К. Илюнина. — 3-е изд. —
Л.: Энергоатомиздат. Ленингр. отд-ние, 1983.—784 с.
*7.12. Михайлов Е. В. Помехозащищенность информационно-измерительных
систем. — М.: Энергия, 1975.—104 с.
7.13. Серьезнев А. Н., Цапенко М. П. Методы уменьшения влияния помех
в термометрических цепях.—М.: Энергия, 1968. — 72 с.
7.14. Серьезнев А. Н. Измерения при испытаниях авиационных конструкций
на прочность.—М.: Машиностроение, 1976. — 224 с.
*7.15. Управляющие вычислительные машины в АСУ технологическими про-
цессами/ Под ред. Т. Харрисона: Пер. с англ./ Под ред. И. М. Шенброта,
М. В. Гальперина. — Том 1.— М.: Мир, 1975. — 532 с.
8.1. Шляндин В. М. Цифровые измерительные устройства: Учебник для ву-
зов 2-е изд.—М.: Высшая школа, 1981. — 335 с.
8.2. Темников Ф. Е. Теория развертывающих систем. — М.: Госэнергоиздат,
1963. — 168 с.
8.3. Катыс Г. П. Автоматическое сканирование. — М.: Машиностроение,
1969. — 520 с.
8.4. Нетребенко К. А. Компенсационные схемы амплитудных вольтметров
и указателей экстремума. — М.: Наука, 1967. — 108 с.
8.5. Амромин С. Д., Некрасов Л. П. Информационно-измерительные систе-
мы с частотным развертывающим преобразованием. — М.: Энергоатомиздат,
1983.— 88 с.
9.1. Кавалеров Г. И. Измерительно-вычислительные комплексы.—Приборы
и системы управления, 1977, № 11, с. 23—27.
10.1. Петренко А. И. Автоматический ввод графиков в электронные вычи-
слительные машины.—М.: Энергия, 1968. — 424 с.
10.2. Чеголин П. М. Автоматизация спектрального и корреляционного ана-
лиза.— М.: Энергия, 1969. — 384 с.
10.3. А. с. № 877584 (СССР). Устройство считывания графической инфор-
мации/ Э. К. Скворцов. Опубл, в БИ, 1981, № 40.
*10.4. Лазерные измерительные системы/ А. С. Батраков, М. М. Бутусов,
Г. П. Гречка и др.; Под ред. Д. П. Лукьянова.—М.: Радио и связь, 1981.—
456 с.
10.5. Голографические измерительные системы/ Под ред. А. Г. Козачка.—
Новосибирск: НЭТИ, 1976.—108 с.; 1978.—160 с.; 1980.—126 с.
11.1. Мартяшин А. И., Шахов Э. К., Шляндин В. М. Преобразователи элек-
трических параметров для систем контроля и измерения.—М.: Энергия, 1976.—
392 с.
11.2. Шелемин Б. В. Автоматические анализаторы состава радиохимических
сред. — М.: Атомиздат, 1965. — 294 с.
11.3. Раис О. А., Розенблит А. Б. Применение цифровых вычислительных
устройств для автоматического контроля состава многокомпонентных производ-
ственных сред (Тр. VI конференции по автоматическому контролю и методам
электрических измерений).-—Новосибирск: Наука, т. 1, 1966, с. 115—119.
11.4. Карандеев К. Б., Штамбергер Г. А. Обобщенная теория мостовых це-
пей переменного тока. — Новосибирск: СО1 АН СССР, 1961. — 222 с.
11.5. Алиев Т. М., Мелик-Шахназаров А. М., Шайн И. Л. Автоматические
компенсационные устройства переменного тока. — Баку: Азерб. гос. изд-во,
1965. — 360 с.
*11.6. Лихтциндер Б. Я., Широков С. М. Многомерные измерительные
устройства,—М.: Энергия, 1978. — 312 с.
11.7. Межвузовский сборник научных трудов НЭТИ. Измерительные инфор-
мационные системы/ Под ред. М. П. Цапенко.—Новосибирск: НЭТИ, 1973.—
142 с.; 1974,—134 с.; 1976,—168 с.; 1977,—176 с.; 1978.—184 с.; 1979—226 с.;
1981,—222 с.; 1983,—114 с.
* 11.8. Хармут X. Ф. Передача информации ортогональными функциями:
Пер. с англ.—М.: Связь, 1975. — 272 с.
* 12.1. Цветков Э. И. Основы теории статистических измерений.-—Л.: Энер-
гия, 1979. —288 с.
* 12.2. Мирский Г. Я- Аппаратурное определение характеристик случайных
процессов. — 2-е изд.—М.: Энергия, 1972. — 456 с.
12.3. Вентцель Е. С. Теория вероятностей: Учебник для вузов. 2-е изд. —
М.: Физматгиз, 1962. — 564 с.
12.4. Мирский Г. Я. Характеристики стохастической взаимосвязи и их изме-
рения.— М.: Энергоиздат, 1982.—320 с.
12.5. Курочкин С. С. Многоканальные счетные системы и коррелометры. —
М.: Энергия, 1972.—344 с.
12.6. Летунова Н. Н., Лайко Е. М. Методы и средства статистических изме-
рений. Обзорная информация. ТС-5. — М.: ЦНИИТЭИ приборостроения, 1980,
вып. 1. — 64 с.
12.7. Грибанов Ю. И., Веселова Г. П., Андреев В. Н. Автоматические циф-
ровые коррелометры. — М.: Энергия, 1971. — 240 с.
12.8. Синицын Б. С. Автоматические коррелометры и их применение. — Но-
восибирск: СО АН СССР, 1964.— 218 с.
12.9. Горбацевич Е. Д. Коррелометры с аппроксимацией. — М.: Энергия,
1971. —96 с.
12.10. Ланге Ф. Корреляционная электроника. Основы и применение корре-
ляционного анализа в современной технике связи, измерений и регулирования/
Пер. с нем. Л. М. Миримова и В. И. Тарабрина. — Л.: Судпромгиз, 1963.—
448 с.
12.11. Козубовский С. Ф. Корреляционные экстремальные системы. — Киев:
Наукова думка, 1973. — 223 с.
12.12. Белоглазов И. Н., Тарасенко В. П. Корреляционно-экстремальные си-
стемы.— М.: Советское радио, 1973. — 392 с.
12.13. Харкевич А. А. Спектры и анализ.—В кн.: Линейные и нелинейные
системы, т. 2.—М.: Наука, 1973. — 566 с.
12.14. Трахтман А. М. Введение в общую спектральную теорию сигналов.—
М.: Советское радио, 1972.— 352 с.
12.15. Романенко А. Ф., Сергеев Г. А. Вопросы прикладного анализа случай-
ных процессов. — М.: Советское радио, 1968. — 256 с.
13.1. Кузьмин И. В. Оценка эффективности и оптимизация АСКУ.—М.:
Советское радио. 1971. — 296 с.
13.2. Евланов Л. Г. Контроль динамических систем. — 2-е изд. — М.: Наука,
1979. —432 с.
13.3. Коротков В. П., Тайц Б. А. Основы метрологии и теория точности из-
мерительных устройств: Учеб, пособие для вузов. — 2-е изд. — М.: Изд-во стан-
дартов, 1978. — 352 с.
13.4. Долгов В. А., Касаткин А. С., Сретенский В. Н. Радиоэлектронные
автоматические системы контроля (системный анализ и методы реализации)/'
Под ред. В. Н. Сретенского. — М.: Советское радио, 1978. — 384 с.
13.5. Шенброт И. М., Гинзбург М. Я. Расчет точности систем централизо-
ванного контроля.—М.: Энергия, 1970. — 408 с.
13.6. Вигман Б. А., Дунаев Б. Б. Определение точности допусковых кон-
трольно-измерительных устройств. — Измерительная техника, 1963, № 1, с. П—
14.
13.7. Ефимов В. М., Мантуш Т. Н., Рабинович В. И. Оценка точности сор-
тировки.— Измерительная техника, 1968, № 11, с. 63—66.
13.8. Кардонский X. Б. Приложения теории вероятностей в инженерном де-
ле.— М.: Физматгиз, 1963.—-435 с.
14.1. Бруфман С. С. Цифровые устройства сравнения. — М.: Энергия,
1967. —97 с.
*14.2. Полонии В. С. Телевизионные автоматические устройства.—М.:
Связь, 1974. — 216 с.
14.3. Проблемы центротехники/ Под ред. Ф. Е. Темникова. — М.- МЭИ
1963. — Тр. МЭИ. Вып. 52. — 260 с.
14.4. Агейкин Д. И., Кнопов Ю. Т., Кузнецова Н. Н. Система спорадическо-
го контроля. — Приборы и системы управления, 1970, № 4, с. 40—43.
*14.5. Строганов Р. П. Управляющие машины и их применение: Учеб, по-
собие для вузов.—М.: Высшая школа, 1978. — 264 с.
14.6. Мячев А. А. Организация управляющих вычислительных комплексов.—
М.: Энергия, 1980. — 272 с.
14.7. Вальков В. М. Микроэлектронные управляющие вычислительные ком-
плексы. Системное проектирование и конструирование. — Л.: Машиностроение,
1979. — 200 с.
14.8. Информационно-вычислительная машина ИВ-500. — М.: Онтиприбор,
1967,— 12 с.
14.9. Сопочкин Л. А. Набор агрегатных модулей связи с объектом УВК
СМ-1, СМ-2. — Приборы и системы управления, 1982, № 2, с. 26—28.
14.10. Отраслевой каталог на серийно выпускаемое и перспективное обору-
дование. — ГСП: т. 4. Средства централизованного контроля и регулирования,
№ 6, вып. 1: Машина централизованного контроля МЦК М40-43. — М.:
ЦНИИТЭИ приборостроения, 1979. — 59 с.
*15.1. Мозгалевский А. В., Гаскаров Д. В. Техническая диагностика (не-
прерывные объекты). — М.: Высшая школа, 1975. — 207 с.
*15.2. Основы технической диагностики. Модели объектов, методы и алго-
ритмы диагноза. Т. I/ Под ред. П. П. Пархоменко. — М.: Энергия, 1976.—464 с.
15.3. Введение в техническую диагностику/ Г. Ф. Верзаков, Н. В. Киншт,
В. И. Рабинович, Л. С. Тимонен; Под ред. К- Б. Карандеева. — М.: Энергия,
1968. —224 с.
15.4. Сердаков А. С. Автоматический контроль и техническая диагностика.—
Киев: Техника, 1971.—244 с.
*16.1. Загоруйко Н. Г. Методы распознавания и их применения. — М.: Со-
ветское радио, 1972. — 208 с.
16.2. Васильев В. И. Распознающие системы: Справочник. — Киев: Науко-
ва думка, 1969. — 292 с.
16.3. Растригин Л. А., Эреиштейн Р. X. Метод коллективного распознава-
ния.— М.: Энергоиздат, 1981. — 80 с.
16.4. Сенин А. Г. Распознавание случайных сигналов. — Новосибирск: Нау-
ка, 1974. — 76 с.
16.5. Василенко Г. И. Голографическое опознавание образов. — М.: Совет-
ское радио, 1977. — 328 с.
* 17.1. Фремке А. В. Телеизмерения: Учебн. пособие для вузов. — 3-е
изд. — М.: Высшая школа, 1975. — 248 с.
* 17.2 Ильин В. А. Телеуправление и телеизмерение: Учеб, пособие для ву-
зов. — 3-е изд. — М.: Энергия, 1982. — 560 с.
* 17.3. Малов В. С., Купершмидт Я. А. Телеизмерение (системы промыш-
ленного применения). — М.: Энергия, 1975. — 352 с.
* 17.4. Новоселов О. Н., Фомин А. Ф. Основы теории и расчета информа-
ционно-измерительных систем/ Под ред. А. В. Фремке. — М.: Машиностроение,
1980. —280 с.
17.5. Купершмидт Я. А. Точность телеизмерений.—М.: Энергия, 1978.—
168 с.
17.6. Пшеничников В. М., Портнов М. Л. Телемеханические системы на ин-
тегральных микросхемах.—М.: Энергия, 1977. — 296 с.
17.7. Адаптивные телеизмерительные системы/ Б. Я- Авдеев, Е. М. Анто-
нюк, С. Н. Домнов и др.; Под ред. А. В. Фремке. — Л.: Энергоиздат, 1981.—
248 с.
17.8. Темников Ф. Е., Титов Е. А. Развитие информационно-измерительных
систем, работающих на принципе развертывающего преобразования. — Измере-
ния. Контроль. Автоматизация, № 3—4, 1980, с. 48—54.
19.1. Проблемно-ориентированный язык программирования ТЕСТ/ А. Е. По-
дзин, К. Ш. Ибрагимов, И. X. Корня, Б. 3. Кириленко; Под ред. И. Ф. Кли-
сторина.—Кишинев: Штиинца, 1978. — 127 с.
19.2. Виноградов В. И. Дискретные ин ормационные системы в научных
исследованиях: программное обеспечение модульных ИВС. — М.: Энергоиздат,
1981. —208 с.
19.3. Селютин В. А. Машинное конструирование электронных устройств. —
М.: Советское радио, 1977. — 384 с.
19.4. Петренко А. И., Тетельбаум А. Я. Формальное конструирование элек-
тронно-вычислительной аппаратуры. — М.: Советское радио, 1979. — 256 с.
19.5. Юрин О. Н. Единая система автоматизации проектирования ЭВМ. — М.:
Советское радио, 1976.— 176 с.
19.6. Библиотека типовых алгоритмов контроля и управления непрерывны-
ми технологическими процессами/ С. В. Егоров, В. А. Мжельская, Ю. Д. Ку-
кушкин, И. X. Хахо. — Приборы и системы управления, 1975, № 6, с. 6—8.
19.7. Автоматизация поискового конструирования (искусственный интеллект
в машинном проектировании)/ А. И. Половинкин, Н. К. Бабков, Г. Я. Буш и
др.; Под ред. А. И. Половинкина. — М.: Радио и связь, 1981.—344 с.
19.8. Шмаков Э. М. Анализ основных методов автоматизации проектирова-
ния средств измерений. — Измерение. Контроль. Автоматизация, 1980, № 3, 4,
с. 30—34.
19.9. Моисеев Н. Н. Математические задачи системного анализа. — М.: На-
ука, 1981. — 488 с.
19.10. Тищенко Н. М. Введение в проектирование сложных систем автома-
тики.— М.: Энергия, 1976. — 305 с.
19.11. Египко В. М. Организация и проектирование систем автоматизации
научно-технических экспериментов.— Киев: Наукова думка, 1978.—232 с.
19.12. Норенков И. П., Маиичев В. Б. Системы автоматизированного про-
ектирования электронной и вычислительной аппаратуры: Учеб, пособие для ву-
зов.— М.: Высшая школа, 1983, — 272 с.
19.13. Темников Ф. Е., Афонин В. А., Дмитриев В. И. Теоретические осно-
вы информационной техники: Учебн. пособие для вузов. — 2-е изд. — М.: Энер-
гия, 1979. — 512 с.
19.14. Орнатский П. П. Теоретические основы информационно-измерительной
техники.—2-е изд. — Киев: Вища школа, 1983.-—455 с.
19.15. Новопашенный Г. Н. Информационно-измерительные системы. — М.:
Высшая школа, 1977.—208 с.
20.1. Рабинович С. Г. Погрешности измерений. — Л.: Энергия, 1978. — 262 с.
20.2. Розенблат В. Я. Введение в теорию точности измерительных систем. —
М.: Советское радио, 1975. — 304 с.
20.3. Сергеев В. И. Инструментальная точность кинематических и динами-
ческих систем. — М.: Наука, 1971. — 256 с.
20.4. Соренков Э. И., Телига А. И., Шаталов А. С. Точность вычислительных
устройств и алгоритмов/ Под ред. А. С. Шаталова. — М.: Машиностроение,
1976. —200 с.
20.5. Шеннон К. Работы по теории информации кибернетики. — М.: Изд-
во иностр, лит., 1963. — 830 с.
20.6. Новицкий П. В. Основы информационной теории измерительных
устройств. — Л.: Энергия, 1968. — 248 с.
20.7. Кавалеров Г. И., Мандельштам С. М. Введение в информационную те-
орию измерения. — М.: Энергия, 1974. — 376 с.
20.8. Рабинович В. И., Цапенко М. П. Информационные характеристики
средств измерения и контроля.—М.: Энергия, 1968. — 96 с.
21.1. Ефимов В. М. Квантование по времени при измерении и контроле.—
М.: Энергия, 1969. — 87 с.
21.2. Ланцош К. Практические методы прикладного анализа: Справочное
руководство. — М.: Физматгиз, 1961.—524 с.
21.3. Ольховский Ю. П., Новоселов О. Н., Мановцев А. П. Сжатие данных
при телеизмерениях/ Под ред. В. В. Чернова.—М.: Советское радио, 1971.—
303 с.
21.4. Макаров И. М., Менский Б. М. Линейные автоматические системы
(элементы теории, методы расчета, справочный материал): Учеб, пособие для
вузов. — 2-е изд. — М.: Машиностроение, 1982. — 504 с.
*21.5. Краус М., Вошни Э. Измерительные информационные системы (ха-
рактеристические функции, критерии качества, оптимизации): Пер. с нем./ Под
ред. Я. М. Малкова. — М.: Мир, 1975. — 310 с.
21.6. Электрические измерения неэлектрических величин/ А. М. Туричин,
П. В. Новицкий, Е. С. Левшина и др. — 5-е изд. — Л.: Энергия, 1975.-—576 с.
21.7. Преснухин Л. Н., Нестеров П. В. Цифровые вычислительные машины:
Учеб, пособие для вузов. — 2-е изд. — М.: Высшая школа, 1981. — 511 с.
22.1. ГОСТ 8.437-81. Системы информационно-измерительные. Метрологиче-
ское обеспечение. Основные положения.
22.2. ГОСТ 22317-77. Средства агрегатные информационно-измерительных
систем. Общие требования к комплексам нормируемых характеристик.
22.3. ГОСТ 24130-80. Средства агрегатные информационно-измерительных
систем аналого-цифровые. Основные нормируемые характеристики.
22.4. ГОСТ 8.009-72. Нормируемые метрологические характеристики средств
измерений.
22.5. Земельман М. А. Методический материал по применению ГОСТ 8.009-73.
«Нормируемые метрологические характеристики средств измерений. — М.:
ВНИИМС, 1975.— 80 с.
22.6. ГОСТ 8.326-79. Метрологическое обеспечение разработки, изготовле-
ния и эксплуатации нестандартизованных средств измерений. Основные поло-
жения.
22.7. ГОСТ 8.438-81. Системы информационно-измерительные. Поверка. Об-
щие положения.
22.8. Современное состояние метрологического обеспечения измерительно-
вычислительных комплексов/ А. М. Лесова, И. В. Модягин, В. М. Хрумало,
М. И. Штеренберг. — Измерения. Контроль. Автоматизация, 1982, № 2 (42),
с. 15—21.
22.9. Дубов Б. С. Особенности метрологической аттестации нестандартизо-
ванных средств измерений. — М.: Машиностроение, 1979. — 40 с.
22.10. Губанова Т. Н., Шуплякова Р. М. Современные методы и средства
обеспечения единства измерений информационно-измерительных систем. Обзор-
ная информация. ТС-5.—М.: ЦНИИТЭИ приборостроения, 1980, вып. 4. — 44 с.
22.11. Бромберг Э. М., Куликовский К- Л. Тестовые методы повышения
точности измерений. — М.: Энергия, 1978. — 179 с.
22.12. Алиев Т. М., Сейдель Л. Р. Автоматическая коррекция погрешностей
цифровых измерительных приборов. — М.: Энергия, 1975. — 216 с.
22.13. Туз Ю. М. Структурные методы повышения точности измерительны
устройств.- Киев: Вища школа, 1976.—256 с.
23.1. Кузьмин И. В. Оценка эффективности и оптимизации автомати-
ческих систем контроля и управления. — М.: Советское радио, 1971. — 294 с.
*23.2. Росин М. Ф. Статистическая динамика и теория эффективности си-
стем управления. — М.: Машиностроение, 1970. — 336 с.
23.3. Гермейер Ю. Б. Введение в теорию исследования операции. — М.:
Наука, 1971. — 384 с.
23.4. Акоф Р., Сасиени М. Основы исследования операций.—М.: Мир, 1971.—
534 с.
23.5. Есиков С. Р. Методика и практика определения эффективности внед-
рения новой техники и организационно-технических мероприятий. — М.: Связь,
1977.— 49 с.
23.6. Ильичев А. В., Волков В. Д., Грушанский В. А. Эффективность проек-
тируемых элементов сложных-''Систем: Учеб, пособие. — М.: Высшая школа,
1982, —280 с.
23.7. Налимов В. В. Теория эксперимента. — М.: Наука, 1971.—208 с.
23.8. Федоров В. В. Теория оптимального эксперимента.—М.: Наука, 1971.—
312 с.
23.9. Райншке К. Модели надежности и чувствительности систем. — М.:
Мир, 1979, —452 с.
*23.10. Асатурян В. И. Теория планирования эксперимента. — М.: Радио и
связь, 1983. — 248 с.
Посвящается светлой памяти
Константина Борисовича
Карандеева
ПРЕДИСЛОВИЕ
Принципы построения первого поколения важного класса
средств информационно-измерительной техники (ИИТ) — измери-
тельных информационных систем (ИИС) — были рассмотрены в
первом издании этой книги (с подробной библиографией отечест-
венной литературы до 1972 г.). За последние годы теория и прак-
тика ИИС получили существенное развитие. Широко применяются
ИИС последующих новых поколений.
Основная цель второго издания книги заключается в система-
тизации и обобщении структур и алгоритмов работы современных
ИИС, а также в разработке и представлении материала, являю-
щегося базой для системотехнического проектирования ИИС.
Вводная часть знакомит с основными понятиями, используемы-
ми в книге, описанием содержательных логических схем алгорит-
мов (СЛСА) и обобщенной структурно-функциональной схемы, а
также классификацией ИИС. Этот материал нужно тщательно
проработать, так как без его освоения читать остальные части кни-
ги затруднительно.
Для формализованного описания алгоритмов работы систем,
позволяющего существенно уменьшить объем текстового материа-
ла и положить начало разработке программного обеспечения про-
ектируемых систем, в книге используется аппарат СЛСА, разрабо-
танный для ИИС.
В течение ряда лет в нескольких вузах страны читались лек-
ции, выполнялись курсовые и дипломные работы с применением
СЛСА. Представляется, что СЛСА могут найти применение и
в других учебных курсах, а также при проектировании и формаль-
ном описании работы информационных устройств. Действительно,
во многих случаях для описания работы устройства может оказать-
ся достаточным представление лишь структурной схемы и СЛСА
при незначительном текстовом сопровождении.
Основное назначение второй части книги —- знакомство с тех-
ническими средствами системного назначения, с особенностями их
выбора и использования в ИИС. Здесь излагаются основополагаю-
щие идеи Государственной системы приборов (ГСП), приводятся
характеристики агрегатного комплекса средств электроизмеритель-
ной техники (АСЭТ), рассматриваются средства отображения и
хранения информации в ИИС, стандартные цифровые интерфей-
сы и средства вычислительной, главным образом микропроцессор-
ной, техники, используемые в ИИС.
В третьей части книги приводятся анализ аналоговых электро-
измерительных цепей с коммутаторами и меры защиты их от по-
мех, алгоритмы и структуры аналого-цифровой части ИИС и изме-
рительно-вычислительных комплексов.
В четвертой части рассматриваются основные структуры и ал-
горитмы измерительных систем, систем автоматического контроля,
технической диагностики и распознающих систем. Кроме того,
здесь даются кратко основные сведения об алгоритмах и структу-
рах телеизмерительных систем. Отсутствие таких сведений в пер-
вом издании книги нарушало целостность предмета и затрудняло
его изучение. При проработке материала четвертой части рекомен-
дуется подбирать для его иллюстрации описания конкретных ИИС,
закрепить полученные знания и приобрести необходимые навыки
в процессе разработки учебных проектов и выполнения лаборатор-
ного практикума.
Введению в системное проектирование посвящена пятая часть
книги. В ней приведен первоочередной материал, необходимый
для составления технического задания, а также рассматриваются
особенности разработки технического предложения на систему, в
том числе методом проектной компоновки ее из готовых функцио-
нальных блоков. Кроме того, здесь даются материалы, нужные для
выбора нормируемых метрологических характеристик измеритель-
ных систем. В этой части излагается также содержание учебного
задания на системотехническое проектирование ИИС.
В результате изучения всего материала этой книги специалис-
ты в области ИИТ должны приобрести знания основных структур,
алгоритмов работы и характеристик основных разновидностей
ИИС и их частей. Объем этих знаний должен быть достаточным
для оценки метрологических характеристик, выбора и организа-
ции совместной работы функциональных блоков и измерительно-
вычислительных комплексов в ИИС конкретного применения.
Фактические данные приводятся в книге с целью ознакомить
читателей с выпускаемой преимущественно в Советском Союзе
аппаратурой. Они не являются официальным справочным мате-
риалом, но их можно использовать на начальных стадиях проек-
тирования систем.
Предполагается, что читатель должен быть знаком с теорети-
ческими основами и средствами информационно-измерительной и
вычислительной техники, а также с теорией вероятностей и мате-
матической статистикой в объеме программ технических вузов.
С учетом того, что реализации систем весьма быстро стареют,
в книге приводится лишь ограниченное количество описаний кон-
кретных ИИС. В связи с этим при изучении материала книги нуж-
но использовать описания соответствующих новейших систем.
Состав и последовательность изложения материала книги пол-
ностью соответствуют программе курса ИИС для всех специали-
заций ИИТ. Отдельные разделы книги могут быть использованы
в дисциплинах по специализации «Автоматизированные системы
научных исследований и комплексных испытаний».
Необходимо отметить, что во втором издании книги развива-
лись идеи, сформировавшиеся у автора в результате общения с
К. Б. Карандеевым и с Б. С. Сотсковым. С чувством глубокой
благодарности автор отмечает доброжелательные и полезные де-
ловые контакты при подготовке книги с Т-. М. Алиевым, Б. С. Ду-
бовым, М. А. Земельманом, Г. А. Штамбергером, Э. И. Цветковым
и с другими известными специалистами в области ИИС и инфор-
мационно-измерительной техники.
Благодарю за дружескую помощь при подготовке книги своих
коллег — сотрудников Новосибирского электротехнического инсти-
тута, особенно Б. В. Карпюка и Ю. И. Щетинина, подготовивших
материал гл. 23, П. М. Цапенко — гл. 6, Э. К. Скворцова — прило-
жения 2.
Искреннюю признательность приношу д-ру техн, наук, проф.
А. М. Мелик-Шахназарову и сотрудникам руководимой им кафед-
ды «Электроника и информационно-измерительная техника»
Московского института нефтехимической и газовой промышлен-
ности им. М. И. Губкина, а также д-ру техн, наук И. М. Шенброту
за квалифицированное редактирование рукописи книги.
Буду весьма благодарен всем читателям, приславшим свои за-
мечания и пожелания по адресу: 113114, Москва, М-114, Шлюзо-
вая наб., 10.
Автор