































































































































































































































































































































































































Author: Голованов А.П. Тюленева О.Н. Шигабутдинов А.Ф.
Tags: общая механика механика твердых и жидких тел механика динамика статика конечные элементы теория упругости
ISBN: 5-9221-0674-0
Year: 2006




УДК 531 jj Издание осуществлено при поддержке
ББК 22.2 J* dip и: Российского фонда фундаментальных
р 51 JJ исследований по проекту 05-01-14050д
Голованов А. П., Тюленева О. Н., Шигабутдинов А. Ф.
Метод конечных элементов в статике и динамике тонкостенных конструк-
конструкций. - М.: ФИЗМАТЛИТ, 2006. - 392 с. - ISBN 5-9221-0674-0.
Книга посвящена проблеме построения конечно-элементных моделей обо-
оболочек малой и средней толщины. Структурно книга состоит из трех разделов.
Первый раздел содержит анализ различных подходов построения конечных
элементов тонких непологих оболочек с точки зрения выполнения требова-
требований сходимости (совместность, представление смещений как твердого целого
и независимых деформируемых состояний). Второй раздел посвящен описа-
описанию и детальному анализу конечных элементов оболочек, построенных на
основе уравнений трехмерной теории упругости. Предлагается оригинальная
методика двойной аппроксимации деформаций по точкам суперсходимости и
показывается ее эффективность на многочисленных тестовых примерах. Дается
обобщение предложенного 9-узлового конечного элемента с биквадратической
изопараметрической аппроксимацией на случай многослойных оболочек из
композитных материалов. Приводятся примеры расчета задач статики и дина-
динамики реальных конструкций. В третьем разделе разработанный квадратичный
конечный элемент распространяется на класс физически и геометрически
нелинейных задач. Используется метод пошагового нагружения в форме мо-
модифицированной лагранжевой постановки.
Для научных и инженерно-технических работников, аспирантов, магистров
и студентов старших курсов, занимающихся вопросами применения метода
конечных элементов при расчете оболочек малой и средней толщины.
© ФИЗМАТЛИТ, 2006
© А. И. Голованов, О.Н. Тюленева,
ISBN 5-9221-0674-0 А.Ф. Шигабутдинов, 2006
ОГЛАВЛЕНИЕ
Предисловие ......................................... 7
Список основных обозначений ............................. 12
Раздел I. ВВЕДЕНИЕ В МКЭ
Глава 1. Конечные элементы тонжих непологих оболочек ...... 16
§ 1.1. Основные проблемы МКЭ в расчете тонких непологих оболочек 16
§ 1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява ....... 23
1.2.1. Геометрические параметры B3). 1.2.2. Соотношения дефор-
деформации и классификация B4). 1.2.3. Конечные элементы типа
(А). Проблемы B6). 1.2.4. Конечные элементы типа (В). Пробле-
Проблемы B8). 1.2.5. Сравнительный анализ КЭ типа (А) и (В) C0).
§ 1.3. Конечные элементы с учетом гипотезы Тимошенко ......... 34
1.3.1. Соотношения деформации и классификация C5). 1.3.2. Ко-
Конечные элементы типа (А) C6). 1.3.3. Конечные элементы типа
(В) C8).
§ 1.4. Способы построения совместных КЭ ................... 39
1.4.1. Полиномы высокой степени C9). 1.4.2. Макроэлементы
и сингулярные элементы D0). 1.4.3. Принудительная сов-
совместность D1). 1.4.4. Гибридный метод перемещений D2).
1.4.5. Смешанные конечные элементы D4). 1.4.6. Гибридный
метод сил D5).
§ 1.5. Учет смещений элемента как твердого целого ............. 47
1.5.1. Построение аппроксимаций с явным выражением смещений
элемента как твердого целого D7). 1.5.2. Коррекция матрицы
жесткости D9).
§1.6. Представление состояния «чистого» изгиба .............. 51
1.6.1. Метод штрафа E1). 1.6.2. Связанные аппроксимации
перемещений E2). 1.6.3. Сокращенное интегрирование E3).
1.6.4. Двойная аппроксимация E3). 1.6.5. Аппроксимации
с заданными деформациями E6).
§ 1.7. Вопросы представления геометрии оболочек .............. 59
1.7.1. Оболочки сложной геометрии, аналитически заданные E9).
1.7.2. Численная параметризация поверхности F0). 1.7.3. Матема-
Математические аспекты сходимости неконформных КЭ F3). 1.7.4. Плос-
Плоские и пологие КЭ F6).
Оглавление
Глава 2. Расчет тонжих непологих оболочеж МЖЭ на основе гипо-
гипотез Кирхгофа-Лмва ................................ 70
§2.1. Построение матрицы жесткости и вектора сил ............ 70
2.1.1. Аппроксимация геометрии G0). 2.1.2. Вычисление геометри-
геометрических характеристик G4). 2.1.3. Аппроксимация перемещений и
вычисление деформаций G5). 2.1.4. Составление матрицы жестко-
жесткости G7). 2.1.5. Вычисление напряжений G9). 2.1.6. Вычисление
узловых сил (82).
§2.2. Тестовые задачи. ................................ 84
2.2.1. Сжатый цилиндр (84). 2.2.2. Крыша под собственным ве-
весом (87). 2.2.3. Некоторые замечания о сходимости различных
КЭ (91).
§2.3. Расчет оболочек с дискретно-заданной геометрией. ......... 92
§2.4. Расчет периодических оболочек ...................... 94
§2.5. Расчет составных оболочек ......................... 98
Раздел II. ЛИНЕЙНЫЙ АНАЛИЗ ОБОЛОЧЕК
МАЛОЙ И СРЕДНЕЙ ТОЛЩИНЫ
ИЗОПАРАМЕТРИЧЕСКИМИ КОНЕЧНЫМИ
ЭЛЕМЕНТАМИ
Глава 3. Теоретические основы построения изопараметричесжих
жонечных элементов................................ 106
§3.1. Трехмерный изопараметрический элемент оболочки средней тол-
толщины. ......................................... 106
§3.2. «Вырождающийся» изопараметрический элемент оболочки (эле-
(элемент Ахмада) .................................... 115
§3.3. Построение явных выражений для деформаций. ........... 119
§3.4. Использование ковариантных компонент деформаций 124
Глава 4. Билинейные конечные элементы. ................. 129
§4.1. Проблемы построения и способы повышения точности ....... 129
§4.2. Метод двойной аппроксимации ...................... 141
§4.3. Четырехузловой изопараметрический конечный элемент оболоч-
оболочки 149
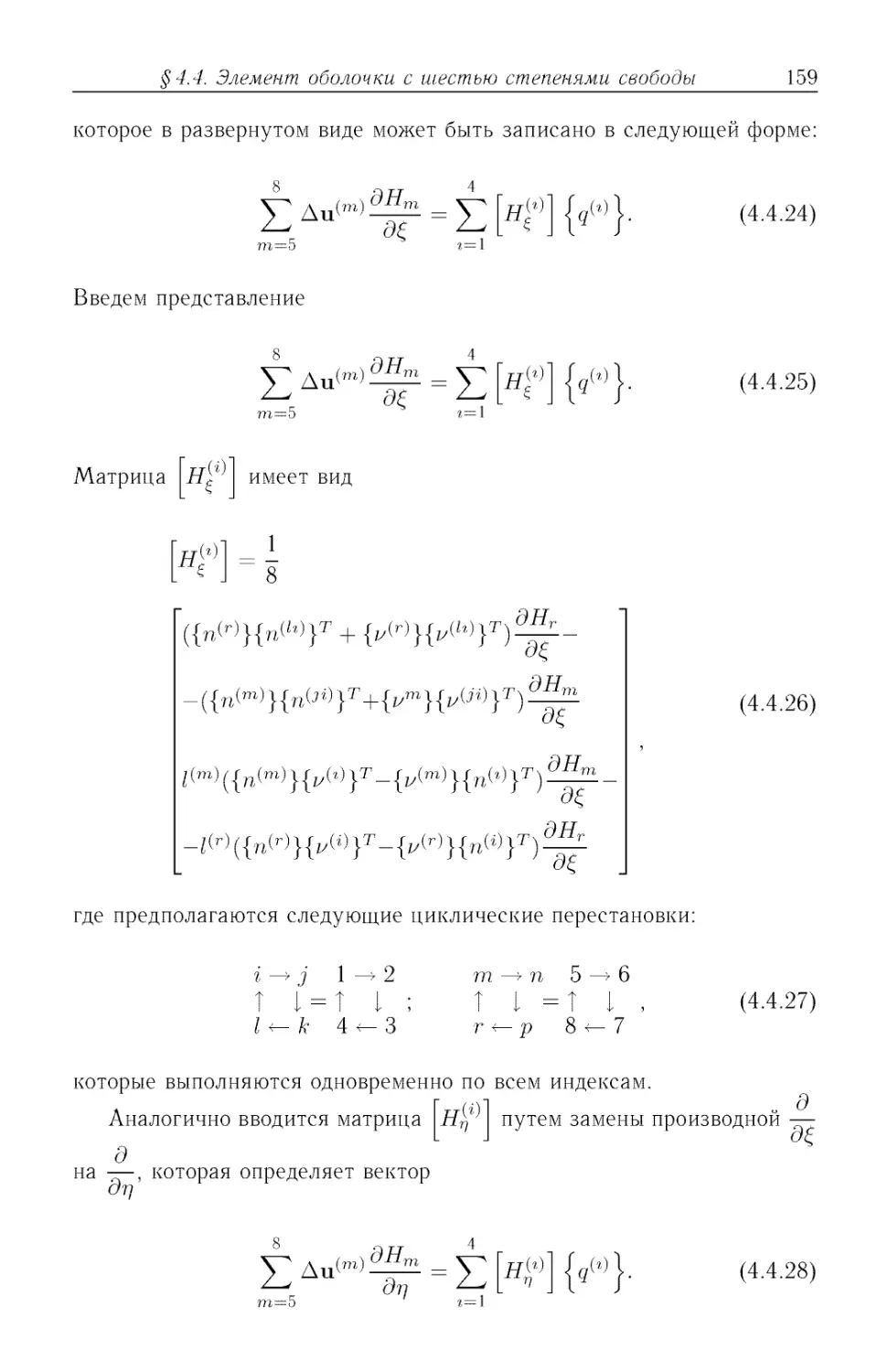
§4.4. Четырехузловой изопараметрический элемент оболочки с ше-
шестью степенями свободы ............................. 154
Глава 5. Квадратичные конечные элементы ................ 162
§5.1. Квадратичные изопараметрические элементы 162
§5.2. Анализ потери точности сдвиговых конечных элементов. ..... 181
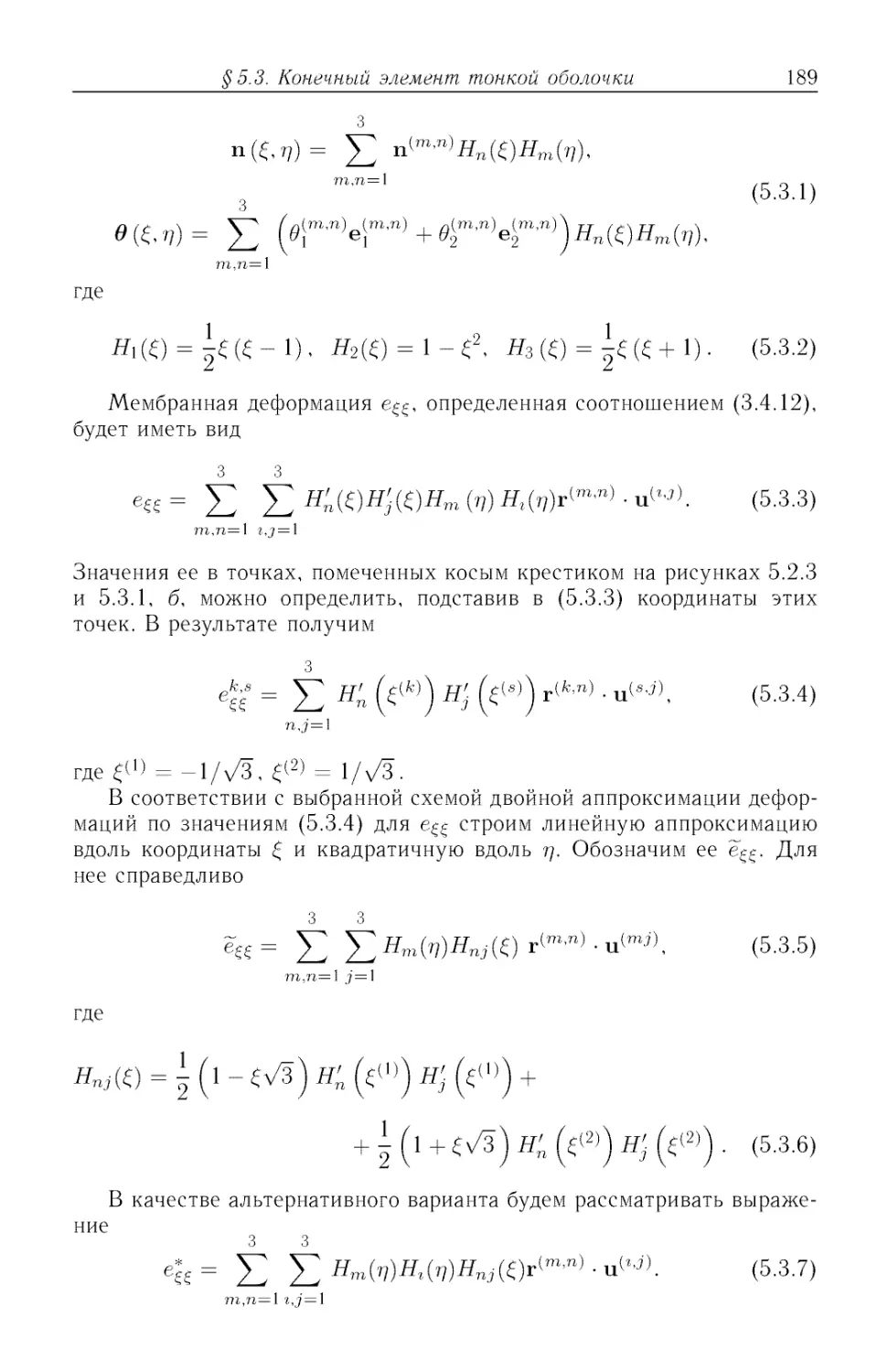
§5.3. Конечный элемент тонкой оболочки с двойной аппроксимацией
деформаций 187
Оглавление
5.3.1. Основные соотношения A88). 5.3.2. Построение матрицы
жесткости A91).
§5.4. Трехмерный конечный элемент оболочки средней толщины
с двойной аппроксимацией деформаций. .................. 194
Глава 6. Примеры расчетов ............................ 198
§6.1. Тестовые задачи. ................................ 198
6.1.1. Квадратная пластина под силой в центре A98). 6.1.2. Сфе-
Сферический купол A99). 6.1.3. Сжатый цилиндр B00). 6.1.4. За-
Замкнутая сферическая оболочка B01). 6.1.5. Цилиндрическая кры-
крыша B02).
§6.2. Исследование напряженно-деформированного состояния картера
ведущего моста грузового автомобиля .................... 203
§6.3. Расчет тройниковых соединений. ..................... 208
Глава 7. Линейные задачи динамики ..................... 212
§7.1. Постановка задачи и алгоритм решения. ................ 212
§7.2. Исследование свободных колебаний ................... 214
§7.3. Исследование вынужденных колебаний ................. 220
§7.4. Пошаговое интегрирование уравнений движения. .......... 225
7.4.1. Метод центральных разностей B25). 7.4.2. Метод
односторонних нецентральных разностей (метод Хаболта) B27).
7.4.3. Метод линейного ускорения (метод Вилсона) B29).
7.4.4. Метод обобщенного ускорения (метод Ньюмарка) B31).
7.4.5. Метод трапеций (схема Кранка-Николсона) B32).
§7.5. Условия устойчивости ............................. 233
§7.6. Примеры построения матрицы масс .................... 238
7.6.1. Построение матрицы масс КЭ тонкой оболочки B38).
7.6.2. Построение матрицы масс изопараметрического КЭ оболочек
малой и средней толщин B40).
§7.7. Примеры расчетов. ............................... 242
7.7.1. Свободные колебания цилиндрической панели B42).
7.7.2. Свободные колебания сферического купола B43). 7.7.3. Сво-
Свободные колебания квадратной пластины B45). 7.7.4. Свободные
колебания цилиндрической оболочки B47). 7.7.5. Расчет лопасти
гидротурбины B49). 7.7.6. Расчет цилиндрических оболочек
некругового профиля B51). 7.7.7. Свободные колебания сфери-
сферической панели B53). 7.7.8. Свободные колебания сферической
панели с вырезом B53). 7.7.9. Свободные колебания профиля
корытного сечения B55). 7.7.10. Расчет рекламного щита B57).
Глава 8. Расчет слоистых анизотропных оболочеж. ........... 260
§8.1. Основные положения ............................. 260
§8.2. Построение матрицы жесткости слоистого элемента 263
§8.3. Вычисление напряжений поперечного сдвига ............. 271
Оглавление
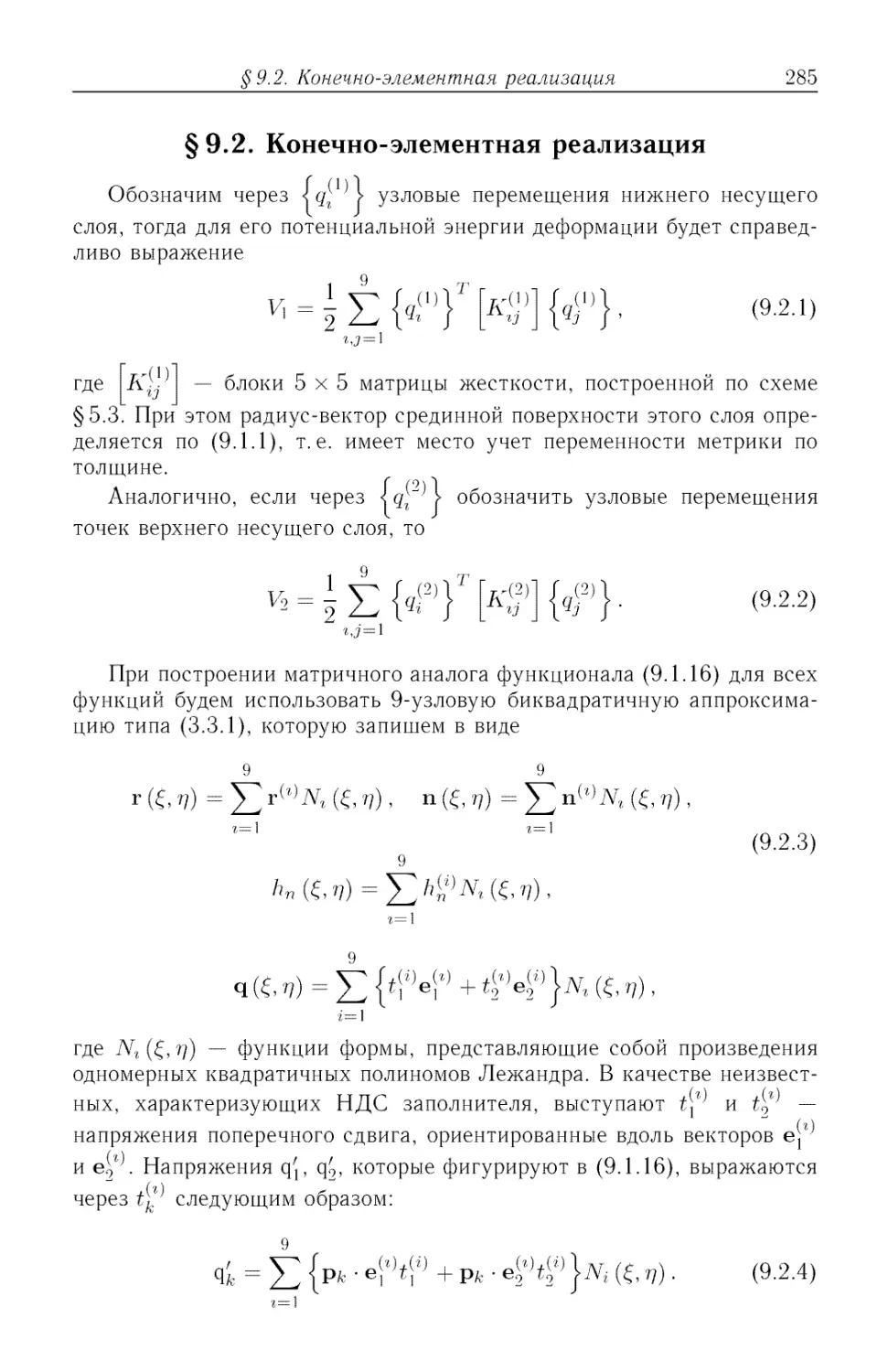
Глава 9. Расчет трехслойных оболочеж с легжим заполнителем. . . 280
§9.1. Основные соотношения ............................ 280
§9.2. Конечно-элементная реализация 285
§9.3. Числовые примеры ............................... 287
Раздел III. РАСЧЕТ СЛОИСТЫХ ОБОЛОЧЕК
С УЧЕТОМ ГЕОМЕТРИЧЕСКОЙ И ФИЗИЧЕСКОЙ
НЕЛИНЕЙНОСТИ
Глава 10. Моделирование геометрически и физичесжи нелинейно-
нелинейного деформирования оболочеж малой и средней толщины ...... 292
§10.1. Постановка задачи о геометрически нелинейном деформирова-
деформировании тела 292
10.1.1. Основные положения геометрически нелинейной теории
упругости B92). 10.1.2. Итерационные методы решения уравне-
уравнений B95). 10.1.3. Шаговое нагружение B97).
§10.2. Методика шагового нагружения многослойной оболочки. .... 303
§ 10.3. Постановка задачи о физически нелинейном деформировании
оболочки ....................................... 319
10.3.1. Основные положения теории пластического течения C20).
10.3.2. Физические соотношения для слоев C22). 10.3.3. Алгоритм
построения матрицы жесткости C25).
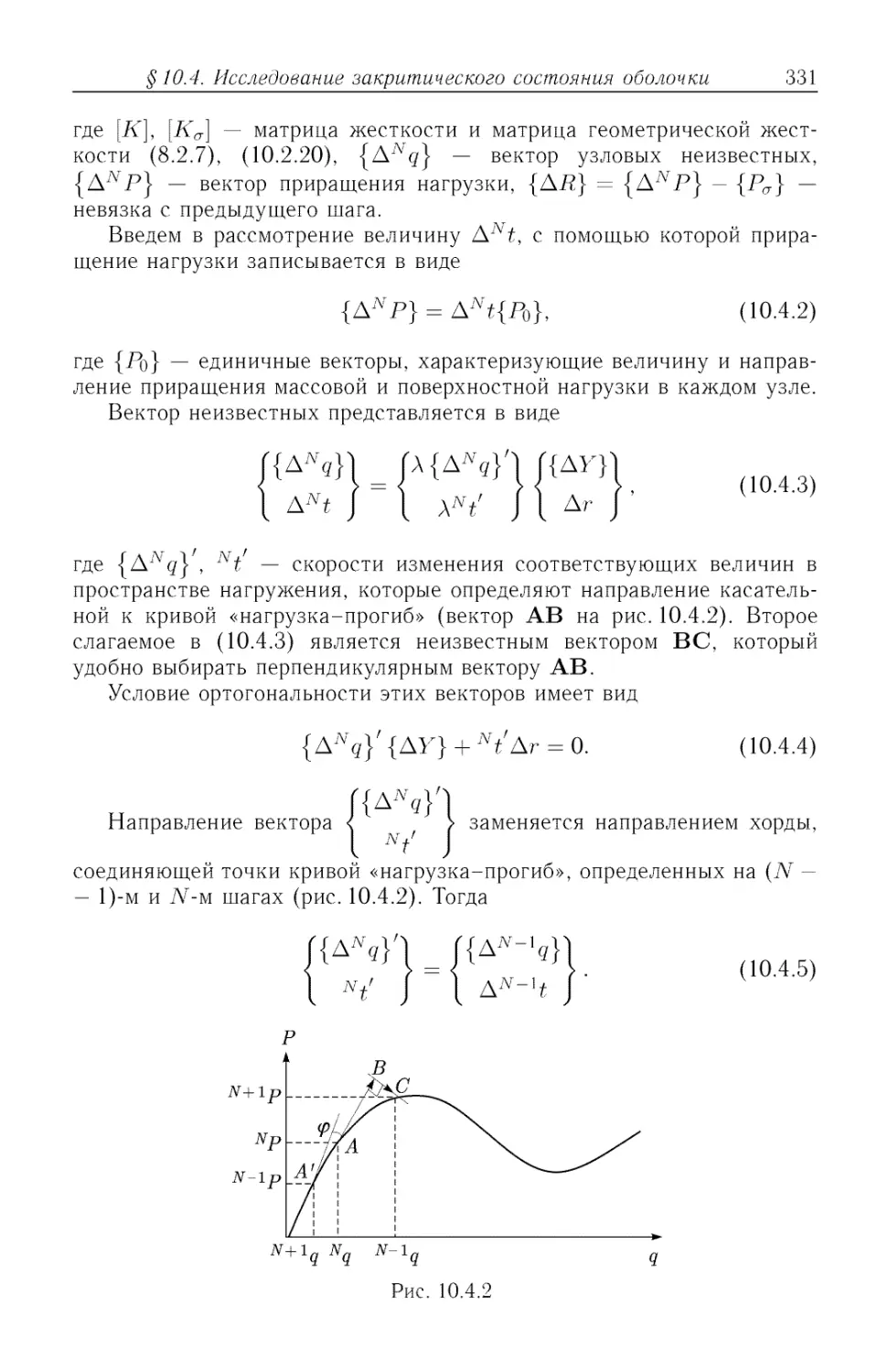
§ 10.4. Исследование закритического состояния оболочки ......... 328
10.4.1. Виды потери устойчивости C28). 10.4.2. Метод продолже-
продолжения по параметру для разработанной конечно-элементной методики
пошагового нагружения C30).
Глава 11. Числовые примеры........................... 334
§ 11.1. Расчет оболочек с учетом геометрической нелинейности 334
11.1.1. Изгиб полосы в цилиндрическую оболочку C34).
11.1.2. Изгиб изотропной цилиндрической оболочки под действием
внутреннего давления C37). 11.1.3. Ортотропная цилиндрическая
оболочка под внутренним давлением C39). 11.1.4. Деформация
однополостного гиперболоида C41). 11.1.5. Изгиб сферической
оболочки с отверстием C43). 11.1.6. Деформация бампера
легкового автомобиля C46).
§ 11.2. Расчет оболочек с учетом физической нелинейности ....... 350
11.2.1. Изгиб балки под действием равномерно распределенной на-
нагрузки C50). 11.2.2. Деформация цилиндрической панели (кры-
(крыши) под действием собственного веса (рис. 11.2.4) C52).
§ 11.3. Исследование закритического деформирования цилиндрической
панели под действием сосредоточенной силы ............... 354
Список литературы .................................... 357
Предисловие
В настоящее время метод конечных элементов становится доминирующим
среди методов, используемых для исследования самых разнообразных физиче-
физических процессов. Однако исторически он впервые был предложен для решения
задач математической физики, а наибольший его расцвет связан с пробле-
проблемами анализа прочности, жесткости, устойчивости и динамики инженерных
конструкций и строительных сооружений. Количество публикаций на эту тему
не поддается учету (не говоря о научно-технических отчетах). Подтвержде-
Подтверждением развития метода конечных элементов служат многочисленные пакеты
прикладных программ, которые появляются (и исчезают) уже на протяжении
40 лет. Самые «продвинутые» системы эксплуатируются уже десятки лет, хотя
модернизируются почти ежегодно. Рынок этой программной продукции хорошо
известен и широко представлен в литературе и маркетинговых проектах.
Настоящее издание является одним из звеньев длинной цепи публикаций,
посвященных построению конечно-элементных моделей, позволяющих иссле-
исследовать напряженно-деформированное состояние тонкостенных конструкций,
состоящих из пластин и оболочек малой и средней толщины. Следует отметить,
что применение метода конечных элементов для анализа тонких непологих
оболочек было «камнем преткновения» для многих исследователей. Этим объ-
объясняется то, что в 60-90-е годы XX века было предложено и описано более
сотни самых разнообразных конечных элементов оболочек, построенных на
основе как уравнений различных теорий оболочек, так и 3-мерных уравнений
теории упругости. Тут следует отметить, что наиболее эффективными оказа-
оказались подходы, в которых оболочка изначально трактуется как 3-мерное тело,
которое обладает некоторыми специальными свойствами, а именно: малая тол-
толщина, искривленность лицевых поверхностей, специфическое распределение
напряжений по толщине (особенно для слоистых оболочек из композиционных
материалов). Подобные элементы, называемые изопараметрическими, являются
основным расчетным инструментом в большинстве развитых информационных
систем анализа прочности (ANSYS, NASTRAN, LS-DYNA 3D, ABAQUS и др.).
Представленная вашему вниманию книга посвящена изложению современ-
современных методик построения конечных элементов тонких оболочек и оболочек
средней толщины, обладающих рядом особых свойств. Во-первых, не предъ-
предъявляются какие-либо требования к геометрии поверхности, т. е. уравнения,
определяющие срединную поверхность, могут быть, а могут отсутствовать,
и поверхность в этом случае задается в виде дискретного набора коорди-
координат точек, лежащих на ней. Во-вторых, толщина оболочки может быть как
постоянной, так и переменной. В-третьих, структура оболочки по толщине
может быть простой (однородный изотропный материал), а может представлять
собой совокупность слоев из различных материалов, включая композитные и
анизотропные.
Что касается типов расчетов, то основное внимание уделяется задачам
линейной статики и динамики. Однако то обстоятельство, что предложенный
Предисловие
изопараметрический конечный элемент с двойной аппроксимацией деформаций
демонстрирует высокую точность для любой дискретно заданной оболочки,
является залогом эффективности используемой методики для решения гео-
геометрически нелинейных задач. Действительно, в работе для моделирования
больших перемещений и поворотов применяется так называемая модернизиро-
модернизированная лагранжева постановка, в соответствии с которой на шаге нагружения
формулируется задача о линейном деформировании некоторой предварительно
напряженной оболочки под действием приращения нагрузки. При этом форма
поверхности на каждом этапе изменяется вследствие накопления деформаций.
Поэтому если точность конечно-элементной методики не зависит от формы
этой поверхности, то ошибки от искажения первоначальной геометрии не
увеличиваются.
Отметим, что все описанные методики были реализованы в виде про-
программных модулей, тщательно оттестированы и применялись для расчета
реальных конструкций. Поэтому коллектив авторов в полной мере отвечает
за представленные результаты. Структурно монография состоит из трех раз-
разделов, содержащих 11 глав. Первый раздел содержит две главы, его можно
рассматривать как обзор наиболее известных КЭ тонких оболочек, в котором
упоминаются около 80 искривленных КЭ и свыше 30 плоских. В первой главе
дается анализ проблемы построения КЭ тонких непологих оболочек. Он состо-
состоит из формулировки требований сходимости, которые для оболочек сводятся
к четырем основным проблемам: параметризации срединной поверхности (для
оболочек сложной геометрии), совместности поля перемещений, представле-
представлению смещений как твердого целого, представлению независимых постоянных
деформированных состояний и в первую очередь — чистого изгиба (§1.1).
Далее, в §1.2, 1.3, дается классификация различных КЭ тонких оболочек по
типу используемой теории оболочек и виду неизвестных компонент вектора
перемещений с анализом возможности удовлетворения в каждом случае сфор-
сформулированных выше условий сходимости. В §1.4-1.7 описываются способы
решения этих основных проблем и дается анализ возможных негативных
последствий при использовании каждого из них. Во второй главе предлагается
новая конечно-элементная модель, основанная на гипотезах Кирхгофа-Лява
и предназначенная для расчета оболочек произвольной геометрии. В §2.1
описана процедура построения матрицы жесткости и вектора узловых сил,
основанная на использовании изопараметрической кубической аппроксимации
в макрочетырехугольнике, определении неизвестных функций как декартовых
проекций вектора перемещений, численном интегрировании и использовании
тензорных соотношений теории оболочек. В §2.2 приводятся решения тестовых
задач, на которых сравнивается точность, даваемая предлагаемым КЭ, с дру-
другими, известными из литературы, элементами тонких оболочек. Показывается,
что предлагаемый элемент демонстрирует высокую скорость сходимости и при-
принадлежит к группе наиболее эффективных элементов. В §2.3 описывается воз-
возможность применения разработанной схемы для расчета дискретно-заданных
оболочек и приводится решение задачи о деформировании кронштейна перед-
передней опоры крепления двигателя автомобиля КамАЗ. Параграф 2.4 посвящен
изложению процедуры задания условий периодичности (циклической симмет-
симметрии) путем присвоения одинаковых номеров узлам, лежащим на соответствую-
соответствующих гранях, и определения в них узловых перемещений, ориентированных
относительно поверхности оболочки. В §2.5 излагается методика применения
разработанного КЭ для расчета составных оболочечных конструкций, преду-
Предисловие
сматривающая специальную матричную процедуру выполнения условий жест-
кого соединения с помощью множителей Лагранжа. В конце этого параграфа
приводятся примеры расчета рабочих колес турбокомпрессора и гидротурбины.
Во втором разделе описываются конечные оболочки, построенные с учетом
деформации поперечного сдвига и применяемые для расчета как оболочек
средней толщины, так и тонких оболочек. При этом они разделяются на
три больших класса: первый — элементы, построенные для анализа одно-
однослойных оболочек малой и средней толщины (гл. 3-7), второй — элементы,
построенные для исследования слоистых анизотропных оболочек (гл. 8), тре-
третий — элементы, построенные для расчета трехслойных оболочек с легким
заполнителем (гл. 9). Третья глава этого раздела является центральной и
посвящена изложению схемы расчета тонких оболочек произвольной геомет-
геометрии без применения соотношений теории оболочек. В §3.1 рассматривается
трехмерный изопараметрический элемент оболочки средней толщины, в этом
случае малость толщины элемента по сравнению с его линейными размерами
учитывается путем задания пониженной степени аппроксимации в поперечном
направлении, а именно линейной. Приводятся наиболее часто используемые
аппроксимации верхней и нижней поверхностей элемента. В §3.2-3.4 описана
техника построения КЭ, основанная на представлении оболочки как трехмер-
трехмерного искривленного параллелепипеда и наложении гипотез, характерных для
механики деформирования тонких оболочек (гипотеза о малости напряжений
обжатия), на этапе построения матрицы жесткости. При этом показывается,
что такого рода математические модели эквивалентны теории оболочек типа
Тимошенко с линейным изменением перемещений по толщине и учетом дефор-
деформаций поперечного сдвига.
В четвертой главе описываются билинейные конечные элементы, подробно
рассматриваются наиболее известные приемы и способы подавления излишней
жесткости таких элементов при уменьшении толщины (§4.1-4.2). В §4.3
приводится один из вариантов четырехузлового конечного элемента оболочки,
построенного на базе изопараметрической концепции, изложенной в гл. 3, и
результатов исследования аппроксимаций, приведенных в §4.1-4.2. В §4.4
описывается уточненный вариант подобного КЭ, имеющий не 5, а 6 степеней
свободы в узле (три перемещения и три вращения относительно глобальной
системы координат).
В пятой главе описываются квадратичные конечные элементы. В §5.1
описываются наиболее известные приемы борьбы с излишней жесткостью
квадратичных элементов при уменьшении толщины. В §5.2 предлагается про-
процедура анализа причин потери точности сдвиговых элементов при уменьшении
толщины и показывается существование точек минимальной погрешности ап-
аппроксимации деформации (точки суперсходимости). Параграф 5.3 посвящен
формулировке нового КЭ, в котором обнаруженные выше точки используются
как вспомогательные, для построения дополнительной аппроксимации дефор-
деформаций. Техника построения матрицы жесткости этого элемента основана на
трехмерных соотношениях теории упругости в криволинейной и декартовой
системах координат, ориентированных вдоль нормали, и численном интегри-
интегрировании по поверхностным координатам (по толщине интегралы вычисля-
вычисляются аналитически). В §5.4 приводится методика построения трехмерного
изопараметрического конечного элемента с использованием дополнительной
аппроксимации деформаций по толщине по точкам суперсходимости. В основу
10 Предисловие
его построения положены соотношения §3.1 в сочетании с использованием
ковариантных компонент деформаций.
В гл. 6 приводятся примеры расчета реальных конструкций: картера веду-
ведущего заднего моста автомобиля КамАЗ, который представляет собой штампо-
сварную тонкостенную конструкцию сложной геометрии; тройниковых соеди-
соединений. Дается сравнение численных и экспериментальных результатов.
В гл. У дается постановка и описываются способы решения динамических
задач. Приводится решение ряда тестовых задач на собственные колебания,
решаются новые задачи.
Восьмая глава посвящена обобщению предложенной в гл. 5 конечно-эле-
конечно-элементной схемы расчета изотропных оболочек на случай многослойных и анизо-
анизотропных оболочек. В §8.1 дается краткий обзор известных КЭ многослойных
оболочек, основанных на различных кинематических и статических гипотезах:
Кирхгофа-Лява, типа Тимошенко и т.д. Показывается, что наиболее удобной
для МКЭ является схема, основанная на гипотезах типа Тимошенко, т. е.
аналогичная той, которая была использована в предыдущей главе. В §8.2 опи-
описывается процедура построения матрицы жесткости многослойной композитной
оболочки с кинематической гипотезой о единой прямой нормали для всего
пакета. При этом предполагается, что в пределах элемента толщины и углы
армирования каждого слоя переменны и при переходе межэлементных границ
непрерывны. В §8.3 предлагается схема построения поперечных касательных
напряжений, непрерывных по толщине всего пакета. Эта схема основана на
интегрировании уравнений равновесия каждого слоя в напряжениях, в которых
мембранные и изгибные напряжения считаются известными и берутся из пря-
прямого расчета. На тестовых примерах демонстрируется высокая эффективность
подобной процедуры.
Девятая глава посвящена разработке конечно-элементной модели трехслой-
трехслойных оболочек с легким заполнителем и несущими слоями — представленными
оболочками типа Тимошенко (КЭ из гл. 3). Неизвестными функциями в за-
заполнителе считаются напряжения поперечного сдвига, и сопряжения слоев
для касательных перемещений выполняются путем специальной вариационной
процедуры. Приводятся примеры расчетов.
В третьем разделе проводится исследование слоистых оболочек с учетом
геометрической и физической нелинейности. В первом параграфе гл. 10 вы-
выписаны основные соотношения нелинейной теории упругости: дается понятие
перемещения точек тела, упругой деформации, вводятся тензор напряжений
Коши и напряжения тензора Пиолы-Кирхгофа (§10.1). Записывается вариа-
вариационное уравнение принципа возможных перемещений для трехмерного тела.
Далее проводится анализ наиболее известных методов решения геометрически
нелинейных задач и детально излагается шаговый метод. В § 10.2 методика ша-
шагового нагружения в трехмерной постановке задач геометрически нелинейного
деформирования распространяется на тонкостенные конструкции, состоящие
из пластин и оболочек малой и средней толщины. При дискретизации оболочки
используется элемент, описанный в гл. 8. В § 10.3 рассматривается задача
о физически нелинейном деформировании оболочки. Записываются основные
положения теории пластического течения, построены соотношения нелиней-
нелинейной теории оболочек, выписано вариационное уравнение принципа возможных
перемещений, вводится конечно-элементная дискретизация исследуемой обла-
области, формулируется постановка краевой задачи. Методика решения этой зада-
задачи основана на пошаговом нагружении и использовании текущей геометрии
Предисловие 11
в качестве отсчетной метрики. Для разграничения упругого и пластическо-
пластического деформирования используется критерий пластичности Хилла в сочетании
с предположением о малости напряжений обжатия. Распределение напряжений
по толщине зависит от механических характеристик и от вида напряженно-
деформированного состояния в каждом слое. Изгибные напряжения линейные
в пределах слоя, напряжения поперечного сдвига — квадратичные и непрерыв-
непрерывные на межслойных поверхностях.
В § 10.3 разрабатывается методика исследования закритической деформа-
деформации с помощью одного из вариантов метода продолжения по параметру. В ка-
качестве параметра принимается длина отрезка касательной к искомой кривой
в точке, найденной на предыдущем шаге нагружения. Длина касательной
меняется в зависимости от угла между касательными на двух соседних шагах
нагружения, что позволяет автоматически уменьшать приращение нагрузки
при подходе к предельной точке, а также уходить в закритическую область,
определять нижнюю предельную точку и выходить на устойчивую ветвь кри-
кривой. Отметим, что при надлежащем выборе величины параметра решение
получается без итерационного процесса на каждом шаге нагружения, при этом
удается добиться хорошего совпадения с известными результатами.
В гл. 11 приводятся результаты решения ряда задач. В §11.1 решается
серия тестовых задач с учетом геометрической нелинейности и приводится
пример расчета реальной конструкции — бампера переднеприводного автомо-
автомобиля. В §11.2 решаются тестовые задачи с учетом физической нелинейности.
В §11.3 проводится исследование закритического деформирования цилиндри-
цилиндрической панели под действием сосредоточенной силы и сравнение результатов
с результатами других авторов.
Списож основных обозначений
КЭ — конечный элемент;
$ь$2,$з — криволинейная глобальная система координат;
Гг — базисные векторы, являющиеся касательными к соответствующим
координатным линиям;
oiik — метрический тензор;
тг — сопряженные базисные векторы, лежащие в касательной плоскости и
направленные по нормали к векторам yj (г ф j);
п — вектор нормали к срединной поверхности;
bit — компоненты тензора кривизны;
Y3ik — символы Кристоффеля-Шварца;
х,у, z — глобальная декартова система координат;
i,j,k — базисные векторы глобальной декартовой системы координат;
?, т], ( — локальная криволинейная система координат (для одного КЭ);
ej , щ11 \ п^ — базисные векторы локальной криволинейной системы
координат в т-узле;
x',y',z' — локальная декартова система координат, введенная в каждой
квадратурной точке, причем ось z совпадает с нормалью к срединной поверх-
поверхности оболочки;
РьР2,рз — орты системы координат х'уу',z'\
М — число узлов КЭ;
h — толщина оболочки;
Q — объем оболочки;
S — площадь поверхности оболочки;
р — радиус-вектор произвольной точки тела;
г — радиус-вектор точек срединной поверхности;
v — вектор перемещений произвольной точки тела;
и — вектор перемещений точек срединной поверхности тела;
ui,U2,w — проекции вектора перемещений v в криволинейной глобальной
системе координат #ь#2,$з;
VxyVyyVz — проекции вектора перемещений v в декартовой глобальной
системе координат х, у, z;
ux,uy,uz — проекции вектора перемещений и в декартовой глобальной
системе координат х, у, z;
01,02 — углы поворота вектора нормали n(m) относительно e^m),e2m);
е* — вектор малых жестких смещений;
ио — вектор линейных жестких смещений;
Фо — вектор вращения;
г^ — радиус-вектор пг-то узла;
u(m) - вектор перемещения m-го узла;
^(т)^(т) _ уГЛЫ ПОВОрОта вектора n(m) относительно векторов e^m),e2m);
NmiZiV) — функции формы;
Eij — компоненты тензора деформаций Грина;
Список основных обозначений 13
Sij — линейные составляющие тензора деформаций;
s*j — нелинейные составляющие тензора деформаций;
eij — мембранные составляющие линейных деформаций;
Xij — изгибные составляющие линейных деформаций;
7гЗ — сдвиговые составляющие линейных деформаций;
°О — область, занимаемая оболочкой в начальном (недеформированном)
состоянии;
FQ — область, занимаемая оболочкой в конечном (деформированном) со-
состоянии;
Nft — произвольное промежуточное состояние;
0p,N p,N+l р — радиус-векторы этих точек в °О, ^О и ЛГ+1О состояниях;
^v — суммарный вектор перемещений в состояниях NQ;
Na'*j — компоненты тензора напряжений Пиолы-Кирхгофа;
Ndij — компоненты тензора Коши;
[К] — матрица жесткости;
[Ко-] — матрица геометрической жесткости;
{q} — вектор узловых неизвестных;
[J] — матрица Якоби;
V — потенциальная энергия деформации;
VMyVHyVc — безразмерные значения потенциальной энергии соответственно
мембранных, изгибных и сдвиговых деформаций;
W — удельная потенциальная энергия деформации;
Wh,Wm,Wc — удельная потенциальная энергия соответственно изгибных,
мембранных и сдвиговых деформаций.
Раздел I
ВВЕДЕНИЕ В МКЭ
В настоящее время для расчета оболочек предложено множество
разнообразных конечных элементов (КЭ): от простейших (плоских с
минимальной степенью аппроксимации) до сложнейших (со многими
десятками степеней свободы), основанных на самых изощренных по-
построениях. Они сравниваются между собой в решении разнообразных
задач, и оказывается, что каждый из них имеет свою область при-
применения. Например, плоские КЭ рекомендуется применять в расче-
расчетах сложных составных тонкостенных конструкций, элементы которых
представляют собой либо пластины, либо пологие оболочки. В случае
тонких непологих оболочек (особенно сложной геометрии) наиболее
эффективны искривленные КЭ тонких оболочек. Однако построение
подобных элементов встречает серьезные трудности, обойти которые
весьма затруднительно.
В настоящем разделе дается обзор, классификация и сравнитель™
ный анализ различных КЭ тонких непологих оболочек; формулируются
основные проблемы построения подобных элементов; дается разверну-
развернутое описание способов удовлетворения требованиям сходимости с ана-
анализом возможных негативных последствий каждого из них. Основные
результаты этого раздела опубликованы в монографии [72] и статьях
[56, 57, 61]. Данный раздел также можно рассматривать как обзор
наиболее известных КЭ тонких оболочек, в котором упоминается около
80 искривленных и свыше 30 плоских КЭ. Приведенная библиография
по КЭ изгибаемых пластин отнюдь не претендует на полноту, и здесь
можно привести в пример каталог элементов [313].
Глава 1
КОНЕЧНЫЕ ЭЛЕМЕНТЫ ТОНКИХ НЕПОЛОГИХ
ОБОЛОЧЕК
§1.1. Основные проблемы МКЭ в расчете тонких
непологих оболочек
В своей основе МКЭ имеет довольно простую идею расчета слож-
сложной конструкции путем расчленения ее на отдельные простейшие части
(конечные элементы), напряженно-деформированное состояние кото™
рых сравнительно легко описывается, и затем объединения их вновь
в единую конструкцию с выполнением условий равновесия и непре-
рывности поля перемещений. При теоретическом обосновании этой
схемы возможны различные подходы, среди которых наиболее строгим,
в смысле математической физики, является подход, использующий
вариационную интерпретацию метода. В этом случае МКЭ сводится
к задаче поиска экстремума некоторого функционала, пространством
неизвестных функций которого являются либо перемещения, либо уси-
усилия и моменты, либо их комбинация, т. е. величины, имеющие ясный
физический смысл [161, 162, 222, 226]. Существенным здесь является
представление функционала всей системы в виде суммы соответствую™
щих функционалов для каждого элемента.
Самой распространенной является схема МКЭ в форме метода пере™
мещений. В этом случае неизвестными функциями выступают компо-
компоненты вектора перемещений (в той или иной форме), совокупность ко-
которых будем обозначать через {v}. По этим функциям строится так на-
называемый вектор деформаций {е} с помощью соотношений деформации
{?} = №}, A-1.1)
конкретный вид которых будет приведен ниже. Здесь важно то, что
оператор [В] является дифференциальным. Решение задачи ищется
как минимум функционала Лагранжа системы
3 = V-R, A.1.2)
где V = V(e, e) — потенциальная энергия деформации (квадратичный
функционал от компонент деформаций), R = R(v) — работа внешних
§ 1.1. Основные проблемы МКЭ в расчете тонких непологих оболочек 17
сил (линейный функционал от компонент перемещений). Функционал
A.1.2) находится как сумма соответствующих значений по элементам:
т-дт). A.1.3)
Таким образом, задача сводится к построению функционала Эт для
каждого элемента.
Опыт применения МКЭ свидетельствует о чрезвычайной важности
процедуры вычисления функционала потенциальной энергии деформа-
деформации Vmj поскольку от этого зависит скорость сходимости приближен™
ного решения к точному. Эта процедура в МКЭ называется построе-
построением конечного элемента (КЭ) и является весьма сложной для тонких
непологих оболочек. Вопросы вычисления работы внешних сил Rm,
суммирования значений Эт, поиск минимума функционала Э прин™
ципиальной сложности не представляют и, как правило, упираются в
возможности вычислительной техники и качество программирования.
Разумеется, за счет мощности ЭВМ возможно добиться требуемой
точности путем сгущения сетки известных простейших КЭ, однако для
тонких непологих оболочек этот путь неприемлем, так как простей-
простейшие КЭ имеют чрезвычайно низкую скорость сходимости. Поэтому
представляет значительный интерес построение действительно эффек-
эффективных КЭ оболочек, для чего необходимо ясно представлять, какие
проблемы встают на этом пути.
Первым моментом в построении КЭ является выбор аппроксимаций
неизвестных функций, которыми в большинстве схем МКЭ являются
компоненты вектора перемещений. Согласно общим теоремам матема-
математической теории МКЭ [161, 222, 226], для сходимости приближен™
ного решения к точному необходимо, чтобы эти аппроксимации удо-
удовлетворяли определенным условиям, которые называются условиями
конформности (согласованности, совместности). Суть их состоит в том,
что неизвестные функции, аппроксимируемые во всей области (задавая
аппроксимации в каждом элементе, мы тем самым определяем функ-
функцию во всей области), должны обеспечивать существование всех ин-
интегралов в минимизируемом функционале. Например, если дифферен-
дифференциальный оператор [В] A.1.1) содержит производные от {v} не выше
первого порядка, то условие интегрируемости функционала удельной
потенциальной энергии деформации будет выполнено при {v} Е Wf,
где W\ — известное функциональное пространство Соболева в двумер-
двумерной области, основным свойством которого является интегрируемость
с квадратом функций и их первых производных. Из теорем вложения
[161, 226] известно, что С^ е Wf, где С^ — класс непрерывных
функций. Таким образом, для гарантирования сходимости необходимо
обеспечить непрерывность функций во всей области.
В случае использования уравнений теории оболочек с учетом гипо-
гипотез Кирхгофа™Лява, в соотношениях деформации фигурируют вторые
производные от прогиба w и, как следствие, условия конформности
18 Гл. 1. Конечные элементы тонких непологих оболочек
здесь более жесткие, а именно: w Е С^х\ т.е. прогиб w должен быть
непрерывен сам и иметь непрерывные первые производные. Если срав-
сравнивать сложность построения аппроксимирующих функций из классов
строение функций из С^ значительно сложнее чем
и С^ К то построение функций из С^ ' значительно сложнее, чем
из С(°).
Таким образом, первой проблемой, возникающей на пути построе-
построения КЭ, является выбор аппроксимаций для неизвестных функций,
удовлетворяющих условиям конформности, которые в свою очередь
зависят от постановки задачи. Если удается ограничиться условиями
{v} Е С^\ то сложностей нет, но если имеются условия типа w Е С^1\
то появляются сложности построения таких функций.
Другая группа требований, обеспечивающих хорошую сходимость,
связана с необходимостью точного воспроизведения состояний с посто-
постоянными деформациями. Строго говоря, для сходимости это требование
должно выполняться в пределе, однако для получения хороших ре-
результатов на редких сетках желательно, чтобы оно выполнялось при
любых размерах элемента. Для пояснения этого требования вспомним,
как определяется погрешность в МКЭ.
Обозначим: {е} — вектор деформаций, которые соответствуют точ-
точному решению задачи; {вк} — вектор деформаций, которые получаются
в результате конечно-элементного решения; {ej} — вектор деформа-
деформаций, которые могут быть получены путем интерполяции точного реше-
решения {е} с помощью выбранных аппроксимирующих функций (для пе-
перемещений). Тогда, для совместных КЭ, погрешность определяется как
потенциальная энергия от ошибки аппроксимации деформаций, т. е.
S = V(s-sk,e-ek)^V(s-sI,e-eI). A.1.4)
Эта оценка есть обычная ошибка в МКЭ [161, 218, 226]:
5 ^ a(v — vi,v — vi), A.1.5)
где —a(v,v) — функционал потенциальной энергии деформации в пере-
перемещениях uf v — точное решение, vj — его интерполянт. Все отличие
в том, что неравенство A.1.5) выписано в терминах перемещений,
а A.1.4) — деформаций.
Правую часть неравенства A.1.4) можно определить как соответ-
соответствующую сумму ошибок по элементам:
AV = V(s -eIte- в!) = J2 V^{e -eIte- ?l), A.1.6)
т
сводя тем самым все исследование к уровню отдельного элемента.
В общем случае, функция {г} может быть произвольной, поэтому
будем представлять ее в виде разложения в полиномиальный ряд от
локальных координат ? (для оболочек их две):
ГК}- A.1.7)
и=0
§ 1.1. Основные проблемы МКЭ в расчете тонких непологих оболочек 19
Величина {еп} определяется из соответствующих разложений Тейлора
функции {е} в окрестности некоторой точки с глобальными координа-
координатами $о при $о — I ^ $ ^ ^о + h гДе 21 — характерный размер элемента,
т. е. имеем
{еп} = Г^{е} = Г{Сп}. A.1.8)
В A.1.8) константы {Сп} не зависят от размеров сетки, а определяются
лишь видом напряженно-деформированного состояния. Таким образом,
для такого решения на элементе получаем представление
оо
{e} = Y,Cln{Cn}- A.1.9)
71=0
Если мы построим аппроксимации {sj} решения A.1.9) с помощью
используемых пробных функций для перемещений, то в общем случае
получим
п=0
где появляются слагаемые Ф(?){С}, соответствующие однородным ре-
решениям соотношений для деформаций. Эти слагаемые представляют
собой ошибку, обусловленную приближенным представлением смеще-
смещений элемента как жесткого целого.
Подставляя A.1.9), A.1.10) в A.1.6), получим
Vm(e - eIt e - ?/) ^ 2 ]Г Vm(en - епЬ еп - еп1)
п=0
п=()
где Mi — некоторые константы. Из A.1.11) следует, что Vm —>- 0 при
I —> 0 в случае, когда |Ф(С)| = |^о(С)| = 0 или, в крайнем случае,
Нт|Ф@|=0, lira ЫО1=0. A.1.12)
По сути дела, функции Ф(^), ^Vi(C) Д^ют величины ошибки ап-
аппроксимации заданных деформированных состояний. Если нам удается
построить такой КЭ, в котором они обращаются в нуль для возможно
большего значения параметра п (хотя бы Ф(?) = ^о(С) — ^i(C) — 0)> то>
как правило, подобный элемент дает хорошие результаты (разумеется,
если не была потеряна совместность).
Применительно к тонким непологим оболочкам проблема хорошей
аппроксимации постоянных деформированных состояний распадается
20 Гл. 1. Конечные элементы тонких непологих оболочек
на две. Первая связана с необходимостью обеспечить |Ф(С)| = 0 и
называется проблемой точного представления смещений элемента как
твердого целого. Другими словами, необходимо обеспечить, чтобы при
смещении элемента как твердого целого, которое составляет значи-
значительную часть в общем перемещении элемента, в нем не возникали
деформации и не накапливалась потенциальная энергия деформации.
Это требование в МКЭ для непологих оболочек ставится давно [118,
236, 274, 302] и экспериментально доказана эффективность тех КЭ,
в которых смещение элемента как твердого целого представляется
точно [115, 131, 136, 306].
Вторая проблема связана с представлением независимых дефор-
деформированных состояний, т. е. сводится к математическому условию
|<?г(?I = 0- Главная трудность здесь возникает в связи с малой тол-
толщиной. Действительно, для тонких оболочек потенциальная энергия
деформации складывается из двух (для теории оболочек на основе
гипотез Кирхгофа-Лява) или трех (для теории оболочек типа Тимо-
Тимошенко) слагаемых, каждое из которых имеет свою матрицу упругих
постоянных. В общем случае для изотропного материала можно запи-
записать 2
() A.1.13)
где Е — модуль упругости, h — толщина, S — площадь, L — харак-
характерный размер области, VM, VH, Vc — безразмерные значения потен-
потенциальной энергии соответственно мембранных, изгибных и сдвиговых
деформаций. Видно, что слагаемое, соответствующее изгибным дефор-
деформациям, содержит малый параметр (h/L) , который и вносит серьезные
осложнения.
Пусть ошибка в каждом из слагаемых в A.1.13) выражается через
точные значения слагаемых V*, V*, V* следующим образом:
Р12 /1\Р13
()
P21 / | \ P22 / I X P23
(i) (l) v;, A.1.14)
Определение значений коэффициентов pij не представляет особой
сложности для заданных порядков дифференциальных операторов де-
деформаций и порядков используемых полиномов для аппроксимации
перемещений [161, 222, 226]. Например, для теории оболочек типа
Тимошенко и линейных аппроксимаций всех неизвестных функций
имеем: чрц = 2 для всех г, j. В случае квадратичных аппроксимаций —
Pij = 4 и т. д.
§ 1.1. Основные проблемы МКЭ в расчете тонких непологих оболочек 21
Рассмотрим, какова величина относительной погрешности аппрок-
аппроксимаций AV/V*, где V* — точное значение потенциальной энергии
деформации для различных деформированных состояний.
1. Безмоментное состояние. В этом случае отсутствуют изгибные
и сдвиговые деформации, т.е. V* = V* = О, V* = EhSV*, и для
относительной погрешности получим
v*
zJMz
A.1.15)
2. Чистый изгиб. В этом случае V* = EhS{h/L)zV*, V* = V* =
= 0и
рп
-V
h
L
P12-2
P32-2-
3. Чистый сдвиг. В этом случае
AV . /IV13 fr\P33 ( I
т
Р23
A.1.16)
A.1.17)
Из этих соотношений следует, что выполнение требований |<^i(?)| =
= 0 не обеспечивает нормальной сходимости для состояния чистого
изгиба, так как в этом случае имеем: рц = 2 и AV/V* ~ (l/h) .
Разумеется, нельзя считать работоспособным КЭ тонкой оболочки,
имеющей такой порядок сходимости. Примером такой ситуации явля-
являются линейные сдвиговые элементы, для которых известно, что они
дают хорошие результаты лишь при размерах порядка толщины.
Подобное явление для КЭ тонких пластин и оболочек называется
«заклиниванием» (locking) и связано с появлением ложных сдвиговых
и мембранных деформаций при чистом изгибе. Изучению этого феноме-
на посвящено много работ, и далее мы остановимся на этом подробнее.
Отметим, что для КЭ, построенных на основе соотношений теории
оболочек с учетом гипотез Кирхгофа-Лява, подобная проблема извест-
известна как проблема представления «нерастяжимого изгиба» (inextensional
bending) и сформулирована в работах [302, 346, 347, 349]. Для сдвиго-
сдвиговых КЭ и КЭ, построенных на основе соотношений теории упругости,
она известна как проблема мембранного и сдвигового «заклинивания»
[301, 363, 385, 388, 407].
Помимо вышеизложенных проблем для определенного класса обо-
оболочек существует еще одна сложность. Речь идет об оболочках, по-
поверхность которых не имеет аналитического представления, так как
22
Гл. 1. Конечные элементы тонких непологих оболочек
нет такой аналитической вектор-функции, которая бы описывала ра-
радиус-вектор срединной поверхности г во всей области. В этом случае
возникает так называемая проблема параметризации поверхности обо-
оболочки [45, 126, 235].
Суть ее состоит в том, что необходимо задать радиус-вектор г как
функцию двух гауссовых координат. Причем это можно сделать двояко:
либо определить г во всей области, т. е. задать г как функцию от
глобальных параметров #i, $2 (см- Рис- 1.1.1) в виде
г =
A.1.18)
либо определить самостоятельно в пределах каждого элемента, т. е.
задать г как функцию от локальных параметров ?i, ^2 поэлементно в
виде
г =
A.1.19)
Последняя возможность на первый взгляд кажется более привле-
привлекательной, однако здесь следует обеспечить необходимую гладкость г
при переходе межэлементных границ
для гарантирования гладкости всей по-
поверхности оболочки. Это приводит к
весьма серьезным затруднениям, особен-
особенно для треугольных областей. Хотя сле-
следует заметить, что в монографии [226]
доказывается, что для равномерной схо-
сходимости нет необходимости требовать
гладкость г при переходе межэлемент-
межэлементных границ, а достаточно обеспечить ее
лишь внутри элементов. Возможно, для
сходимости перемещений этого вполне
достаточно, но в плане точности вычис-
вычисления напряжений на границах между
КЭ представляется весьма важным, что-
чтобы геометрические параметры оболочки
(метрический тензор, тензор кривизны,
символы Кристоффеля-Шварца) были едиными для соседних элемен-
элементов.
Таким образом, при построении КЭ тонких непологих оболочек
могут появиться следующие проблемы.
1. Параметризация срединной поверхности (для оболочек сложной
геометрии и дискретно заданных).
2. Обеспечение конформности.
3. Представление смещений элемента как твердого целого.
4. Представление независимых деформированных состояний (в пер-
первую очередь чистого изгиба).
У
Рис. 1.1.1
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява
23
§ 1.2. Конечные элементы с учетом гипотез
Кирхгофа-Лмва
Теория оболочек с учетом гипотез Кирхгофа-Лява в линейном
варианте хорошо разработана и подробно описана в ряде книг [44, 86,
157, 158, 233, 239], где приводятся все соотношения для различных ко-
ординатных систем. Так как целью настоящего исследования является
разработка схем расчета оболочек сложной геометрии, то изложение
будем вести в тензорном виде, как самом общем.
1.2.1. Геометрические параметры. Геометрия поверхности
определяется заданием радиус-вектора срединной поверхности:
г = г(^ь^2)- Производные
Ti = ^, i = 1,2 A.2.1)
называются базисными векторами и определяют векторы касательных
к соответствующим координатным линиям. Их скалярные произведе-
произведения определяют метрический тензор
ац = п-гк, A.2.2)
который характеризует так называемую внутреннюю геометрию по™
верхности (длины дуг, площади, углы между касательными).
Наряду с базисными векторами г^ A.2.1) вводятся сопряженные ба-
базисные векторы г\ также лежащие в касательной плоскости и направ-
направленные по нормали к векторам Tj (г ф j),
в виде
т{=а<кгк, A.2.3)
где агк — контравариантные компоненты мет-
метрического тензора:
¦ajn, A.2.4)
Сг^ — контравариантные компоненты дискри™
минантного тензора:
Рис. 1.2.1
Сгг =
1
/а
A.2.5)
Геометрическая иллюстрация приведена на рис. 1.2.1, где ri J_ r2
И Г2 ir1.
Вектор нормали к срединной поверхности п определяется как нор™
мированное векторное произведение базисных векторов:
п =
A.2.6)
24 Гл. 1. Конечные элементы тонких непологих оболочек
Внешняя геометрия поверхности определяется тензором кривизны
bik = n-rik, A.2.7)
didkr
где Tik = — вторые производные от вектора г. Существенное
(jlj'i (У и*fe
значение имеет еще одна геометрическая характеристика, зависящая
от вторых производных, — символы Кристоффеля-Шварца
Цк=т*-пк. A.2.8)
1.2.2. Соотношения деформации и классификация. Неизвест-
Неизвестной функцией при использовании теории оболочек, основанной на
гипотезах Кирхгофа-Лява, является вектор перемещений v, который
можно искать, используя два различных подхода. Первый — классиче-
ский — предполагает разложение v по базисным векторам поверхности
Ti и вектору нормали п в виде
u = ulTi + wn = щтг + wn A.2.9)
и неизвестными функциями будут прогиб w и тангенциальные компо™
ненты перемещений — либо ковариантные: щ = и • г^, либо контрава™
риантные: и1 = и • г\ В случае ортогональной системы координат, когда
ri и Г2 перпендикулярны, они совпадают, т.е. щ = и1.
Выражения для тензоров мембранных и изгибных деформаций, ис-
используемых в этом случае, имеют вид [44]
егк = 2 (ViUk + VkUi) - btkw, A 2 10)
Xik = ^V,(VfcK; + bJkUj) - b?(VkUj - bkjw),
где ViUk = Тит ~ Щкиз ~ коваРиантная производная, Щ = a^bij —
C/L/'i
смешанные компоненты тензора кривизны. Если перейти от ковариант-
ных производных к обычным, то вместо A.2.10) получим
1 (дщ дик\ j
d2w a dw ( j j \
ГЪ+w4hk> -{%д?+ЬЫ) ~
A.2.11)
„» (и
Интересно отметить, что из A.2.11) видна симметричность тензора
изгибных деформаций \%к-
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява 25
Второй подход — альтернативный — основан на представлении век-
вектора перемещений v в виде проекций на орты глобальной декартовой
системы координат х, у, z в виде
и = их\ + иу1 + uzk. A.2.12)
В этом случае неизвестными функциями будут: их, иу, uz.
Соотношения для тензоров деформаций берутся в векторном виде:
е%к = 2
1 / дт ди дт ди \
A.2.13)
1 ik г - ' "
Тождественность соотношений A.2.10) и A.2.13) следует из тождеств
_ ^г ди
V.tifc - bikw = ^р • ^-т-,
ди
A.2.14)
Widtfk ik d$j ) г d$j d$k '
ди дг
В зависимости от того в каком виде, A.2.9) или A.2.12), ищется
решение, будем обозначать тип элемента литерой (А) или (В) и далее
покажем, что имеются серьезные различия в свойствах этих типов КЭ.
Выражение потенциальной энергии деформации для обоих вариан-
вариантов записывается одинаково:
kD^se]S + XikD^sXjs] dS, A.2.15)
где D\JS, Dl J"s — тензоры соотношений упругости для мембранных
и изгибных усилий, dS = л/ай^}\й^2 ~~ элемент площади, S — общая
площадь оболочки. Для случая изотропного материала получаем про-
простейший вид V:
2, A-2.16)
26
Гл. 1. Конечные элементы тонких непологих оболочек
где е{, х{ — смешанные компоненты тензоров
= ajkeik,
Х\ = a'
A.2.17)
1.2.3. Конечные элементы типа (А). Проблемы. Исходя из
соотношений деформаций A.2.11) можно сформулировать необходимые
требования гладкости неизвестных функций щ, w, а в случае числен-
численной параметризации — и радиус-вектора срединной поверхности г. Так
как щ входят в выражения для деформации лишь под знаком первой
производной, то достаточно, чтобы щ Е С(°). Аналогично для прогиба
w Е С^ и радиус-вектора г Е С^2\ Если проанализировать сложность
построения аппроксимаций для этих функций, то наиболее сложной
является параметризация (построение функций г Е С^). Для аппрок-
аппроксимации неизвестных функций определенную сложность представляет
выполнение условий w E С^.
Для того чтобы выяснить возможность выполнения требования о
точном представлении смещений элемента как твердого целого, выпи-
выпишем в явном виде их выражения. Из общей теории оболочек известно,
что вектор малых жестких смещений имеет вид [86]:
и*(Сь6) =ио + Фо х г(?ь?2), A.2.18)
где uo — вектор линейных смещений, Фо — вектор вращения, заданные
относительно той же системы координат, в которой определен вектор
КСьСг)- Отсюда компоненты тангенциаль-
тангенциальных смещений и* и прогиба w* будут опреде-
определяться как скалярные произведения A.2.18)
с базисными векторами г^ и нормалью п:
и* = (и0 + Фо х r(?i, &)) • гг(б, 6),
ЛХП ф х A-2Л9)
Рис. 1.2.2
Из анализа этих соотношений видно, что
компоненты жестких смещений в криволи-
криволинейной системе координат имеют сложные выражения. Так, например,
для элемента цилиндрической оболочки, изображенной на рис. 1.2.2,
эти выражения будут иметь вид
и\ = щх
ФОуВ,
cos -^ - cos C
К
+
sin -|,
it
и2 = и0у ' cos — — v0z sin — —
R R
1 — cos — cos /3
R
sin | +
cos |, A.2.20)
К
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява
27
6 Ь Ь
w* = щу sin — + vqz cos — + ^oxR sin — cos C —
R R R
6
- ФОу€\ cos —
It
6
sin —.
It
Очевидно, что чисто полиномиаль-
полиномиальные аппроксимации перемещений щ, w
могут представлять эти функции лишь
приближенно.
В качестве примера рассмотрим эле-
элемент кругового бруса (рис. 1.2.3), для ко-
которого определены две деформации:
е = и' + ^, х = -™" + ^, A-2.21)
R
Рис. 1.2.3
и исследуем степень аппроксимации жестких смещений
и* = С\ sin — + С2 cos — + С3,
R R
w* = -С\ cos — + С2 sin —
R R
A.2.22)
для различных степеней полиномов, используемых для аппроксимации
смещений и, w. Для этого будем задавать в аппроксимации узловые
значения, полученные из A.2.22).
а) Кубичный прогиб w и линейное смещение и, т. е.
w = а\ + «2С + «зС2 + «4С3»
U = «5 + ^бС-
В этом случае получим
С2 R С2
б) Кубичный прогиб w и квадратичное смещение и, т. е.
w = а\ -\-
В этом случае
с) Кубичные прогиб w и смещение и, т. е.
w = ai + ol\
A.2.23)
A.2.24)
A.2.25)
A.2.26)
A.2.27)
28 Гл. 1. Конечные элементы тонких непологих оболочек
В этом случае
е/~^/?3, Х/~§/33. A-2.28)
Видно, что увеличение степени полиномов приводит к улучшению
результатов, но абсолютно точно представить смещения A.2.22) в
полиномах не удается. Совершенно аналогичная ситуация имеет место
и в двумерном случае.
Если поверхность параметризована численно и функция г имеет
полиномиальное выражение, то выражения A.2.19) будут иррациональ-
иррациональными функциями и так же, как в случае цилиндрической оболочки,
полиномами точно не представляются.
Для анализа возможности представления постоянных деформиро-
деформированных состояний необходимо построить выражения смещений, соот-
соответствующих этим состояниям. В общем случае это весьма сложная
задача, но для некоторых оболочек она подробно исследована. Напри™
мер, для цилиндрических оболочек показано, что состояния с незави-
независимыми постоянными деформациями описываются полиномами для щ,
w степени не выше второй [348]. В предельном случае цилиндрической
оболочки — круговом брусе — деформированному состоянию е = С4,
X = С5 соответствуют перемещения
и = С5Щ, w = C4R-CbR2. A.2.29)
Вероятно, в сложных случаях, в том числе и при численной па-
параметризации, построить такие решения в полиномах невозможно.
Поэтому можно предположить, что полиномиальные аппроксимации щ,
w не в состоянии точно представить независимые деформированные
состояния для оболочек произвольной геометрии.
Таким образом, для КЭ оболочек на основе гипотез Кирхгофа-Лява
типа (А), т.е. с неизвестными щ, w, имеются следующие проблемы:
— представление смещений элемента как твердого целого;
— конформность поля прогибов w G С^1\
Для оболочек сложной геометрии возникают дополнительные про-
проблемы:
— параметризация срединной поверхности класса С^\
— представление состояния «чистого изгиба».
1.2.4. Конечные элементы типа (В). Проблемы. Исходя из со-
соотношений деформаций A.2.13), в которых максимальные производные
от и и г второго порядка, можно сформулировать требования гладкости
для и и г в виде
u,rGCA), A.2.30)
По сравнению с КЭ типа (А) здесь повышаются требования гладкости
к искомым функциям, зато понижаются к радиус-вектору срединной
поверхности.
Из векторного уравнения A.2.18) следует, что выражение смещений
элемента как твердого целого имеет вид, тождественно совпадающий
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява 29
с видом функций радиус-вектора г. Следовательно, условие точного
представления смещений как твердого целого будет выполнено тогда,
когда неизвестный вектор и и вектор г выражаются через одинаковые
функции. Очевидно, что при трансцендентных выражениях г (напри-
(например, цилиндрической оболочке) и полиномах для и это условие точно
не выполняется. Однако в случае приближенного задания геометрии
и использовании одинаковых аппроксимаций для и и г (изопараметри™
ческий подход) это условие будет удовлетворяться точно.
Для того чтобы выяснить возможность представления независимых
деформированных состояний, исследуем кривой брус, изображенный
на рис. 1.2.3. Геометрически он описывается уравнениями
г = x@ (?), (O {®,
A.2.31)
n = (-z(Oi + х(Ок)/Д А = vVJ + И2 •
Векторные выражения для деформаций, аналогичные A.2.21), имеют
вид
e = r-u;, x = ^n-u// , A.2.32)
R
где R — радиус кривизны. Легко показать, что выражение смещения
бруса как твердого целого записывается следующим образом:
u*x = ai+ a3z(€), u*z = a2- а3х(?). A.2.33)
Также легко показать, что соотношения
их = а4х(^), uz = a4z(€) A.2.34)
дают деформации
е = а4, Х = 0, A.2.35)
т. е. описывают безмоментное состояние.
Решение, соответствующее «нерастяжимому изгибу», в общем слу-
случае построить трудно, но в некоторых конкретных случаях уравнений
A.2.31) его можно приближенно оценить. Например, при квадратичной
аппроксимации
= ai —:
A.2.36)
ak), A = л/а2 + 462С2
для деформаций A.2.32) справедливо выражение
Aq К
где S = 26/а, Aq = \J\ + 52^2 . Решение, соответствующее чистому
изгибу с постоянной кривизной, описывается уравнениями
и'х - S^ufz = 0, х=-т~(<*?< + О = const. A.2.38)
30
Гл. 1. Конечные элементы тонких непологих оболочек
Приближенное решение этих уравнений, с точностью до S2, имеет вид
Параметр S характеризует степень подъемности элемента и является
величиной малой, поэтому целесообразно ограничиться только первы-
первыми членами в разложении по этому параметру.
Таким образом, КЭ типа (В) имеют следующие проблемы:
— совместность поля перемещений класса С^;
— представление состояния «чистого изгиба»; для оболочек слож-
сложной геометрии появляется дополнительно
— параметризация срединной поверхности класса С^\
1.2.5. Сравнительный анализ КЭ типа (А) и (В). Для того
чтобы проанализировать, какой из типов элементов предпочтительней
и в каких случаях, проведем исследование ошибки аппроксимации
деформаций для обоих типов элементов, (А) и (В) [61]. Для этого
введем обозначения: и — вектор точного решения, и1 — аппроксимация
этого вектора.
Будем считать справедливыми следующие оценки:
(А)
щ — и] ~ Аи, дкщ — dkuj ^ Ади,
w — w ~ Aw, dkw — dkt
Adw,
A.2.40)
и,
du,
dw,
d2w.
u
dv, dkdiU ~ d2v,
dku - dku1 - Adv,
idkn1 r^ Ad2v.
A.2.41)
В случае численной параметризации оболочки истинный вектор
г, описывающий геометрию поверхности, заменяется также прибли-
приближенным г1, разницу между этими векторами определим следующим
образом:
дгг - д.т1 - А5и дгдкт -
где
В52,
С~\дгдкдпг\.
Можно показать, что
^
A.2.43)
A-2-44)
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява 31
где R — характерный радиус кривизны.
Как следствие, истинные величины Ь^ь Г^.,..., фигурирующие в со™
отношениях A.2.10), A.2.13), заменяются приближенными: b*k, Г^,...
Ошибки в них, исходя из A.2.42), можно оценить:
о
Abik ~ B(Si + S2), A6f ~ -^{5У + 52),
ri Bs Anik * A-2.45)
A{n-didkdnn)~CFi+62).
Окончательно, разница в компонентах тензоров деформаций,
4-е?=Ае>. xi-X*3 = Ax>, A.2.46)
оценивается следующим образом:
(А)
1 Г 79
— < Adu + -j(Aw + гх^) + В[Ак; + F\ + ^2)г
r
о2 о
™j2 [Ак; + Ei + S2)w] + -j2
В2 С
+ ^3[Atx+(Ei +(J2)ix] + -^2[Aw + ((Ji +E3
A.2.47)
(B)
о I A.2.48)
[A^ + (^ + 52)du] \.
Пусть di — производная по глобальной координате, т. е. di =
и положим О^ч^^ 1- Тогда А будет величиной порядка характерной
длины оболочки L. Через I обозначим характерную длину одного
элемента и будем считать отношение 1/L величиной малой.
В МКЭ для аппроксимации в пределах отдельного элемента ис-
используются полиномиальные функции. Как правило, степень макси-
максимального полного полинома определяет и степень аппроксимации, т.е.,
32
Гл. 1. Конечные элементы тонких непологих оболочек
если некоторая функция / аппроксимируется полиномом степени га, то
в пределах элемента справедливы оценки
А/ ~ ( Л dmf, Adf ~ A
m-l
m-2
A.2.49)
Используя эти оценки и тот факт, что значения функций А, В, С, и,
w, v, дги, дгт, дгу, дгг (г = 1,2,3) не зависят от размеров сетки КЭ,
так как они определяются характером напряженно-деформированного
состояния и геометрией исходной оболочки, мы можем оценить погреш-
погрешность аппроксимации деформаций как функцию степеней отношения
A/L).
Итак, пусть имеем следующие аппроксимации:
г порядка к, т. е. Si ~ ( у
к-г
m-l
I \ ( I
и порядка т, т. е. Аи ~ ( — 1 дти, Ади ~ I — I дти;
w порядка п, т. e. Aw ~ ( — J dnw, Adlw ^ [ у
p—i
A.2.50)
t; порядка р, т. е.
Тогда с учетом A.2.44) соотношения A.2.47), A.2.48) можно предста-
представить в следующем виде:
(А)
Ле?'
m—\
i Hi + i
k-2'
¦c»,z
A2
n-2
n-1
п
fe-3
A.2.51)
§1.2. Конечные элементы с учетом гипотез Кирхгофа-Лява 33
(В)
A.2.52)
Из A.2.51), A.2.52) следует, что главное слагаемое в ошибке будет
зависеть от соотношения степеней аппроксимации компонент пере-
перемещений (га, п, р) и геометрии (к) и величины, характеризующей
степень непологости оболочек (A/R). Поэтому рассмотрим несколь-
несколько случаев, для каждого из которых дадим сравнительный анализ
скорости сходимости КЭ, построенных на основе (А) или (В) под-
подходов.
Пологие оболочки: ( — *
й1 «¦¦
(А)
L
(В)
С2
? ~ С,
L
т-\
п-2
А
А
"R
к-2'
к-2'
A.2.53)
р-\
k-V
A.2.54)
l\p~2 A
к-2'
В КЭ типа (А) главная ошибка в мембранных деформациях опреде-
определяется степенью аппроксимации тангенциальных смещений щ, а в кри-
кривизнах — степенью аппроксимации прогиба w. Ошибка в аппроксима-
аппроксимации геометрии здесь незначительна. Для КЭ типа (В) все ошибки рав-
равноправны. В сравнительном аспекте, в случае равных аппроксимаций
т = п = р, все решает величина подъемистости (A/R), в зависимости
от которой большую точность дают КЭ (А) или (В). В целом они
равноправны, но если принять во внимание возможные упрощения
построения матрицы жесткости и сложности обеспечения требуемой
гладкости, то целесообразнее использовать КЭ типа (А).
2 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
34
Гл. 1. Конечные элементы тонких непологих оболочек
Непологие оболочки: ( — ) ~ 1.
. R,
(А)
Сх
L
L
k-Z
С2
(В)
Де*
к~2
—1 / 1 \ к—\
I
fc-3"
R\L
A.2.55)
A.2.56)
В этом случае ситуация более сложная. Что касается ошибки от
аппроксимации перемещений, то при равных степенях т = п = р она
в обоих случаях имеет один и тот же порядок. Это означает, что для
аналитически заданных оболочек, где нет ошибки в г, оба подхода
эквивалентны, и следует воспользоваться той схемой, реализация ко-
которой проще.
Для оболочек, параметризация которых осуществляется численно,
этот вывод неверен, так как ошибка, обусловленная различием г и г1,
имеет здесь разный порядок для мембранных деформаций, а в случае
быстрого изменения кривизны (параметр (А/КУ), и для изгибных
деформаций тоже. Из сравнения A.2.55) и A.2.56) следует, что для
достижения одинаковой точности использование КЭ типа (А) требует
аппроксимации геометрии на порядок выше, чем КЭ типа (В), а при
равной аппроксимации КЭ (В) дают лучшую точность, чем КЭ (А).
Численное подтверждение этого вывода можно найти в работе [345],
где на конкретных примерах показано, что для оболочек сложной фор-
формы, когда на них имеются участки и положительной, и отрицательной
гауссовой кривизны, элементы с неизвестными щ, гю сильно уступают
элементам с неизвестными их, иу uz при прочих равных условиях.
§ 1.3. Конечные элементы с учетом гипотезы
Тимошенжо
Уравнения теории оболочек с учетом деформации поперечного сдви-
сдвига весьма популярны при решении практических задач.
Общие положения этой теории основательно разработаны и изло-
изложены в ряде монографий [7, 177, 194]. Будем различать два вари-
варианта этой теории: первая основана на гипотезе Тимошенко о прямой
§1.3. Конечные элементы с учетом гипотезы Тимошенко 35
нормали, вторая — на заданном законе распределения касательных
напряжений по толщине. Применительно к МКЭ наиболее широкое
распространение получила первая из них, поскольку максимальный
порядок дифференциальных операторов соотношений деформаций для
нее не выше первого [12, 177, 194]. Поэтому далее будем вести речь
именно об этом варианте.
1.3.1. Соотношении деформации и классификация. Неизвест-
Неизвестными функциями будут две вектор-функции: и — вектор перемещений
срединной поверхности, в — вектор углов поворота нормали п. Так как
предполагается недеформируемость нормали (отсутствие обжатия), то
вектор в должен быть перпендикулярен вектору нормали п, т. е. лежать
в касательной плоскости.
Обычный оболочечный подход предполагает определение этих век-
векторов в виде проекций на орты криволинейных координат в виде
и = щт1 + wn = ulYi +гуп, в = 9iTl = 0*г$, A.3.1)
где щ, вг или иг, вг — ковариантные или контравариантные проекции
векторов и и в. В этом случае выражения для тензоров деформации
имеют вид
^ ^) b
Хгк = i(VA + Чк0г - Ь\екз - b{etJ),
Здесь, помимо изгибных Хгк и мембранных е^ деформаций, появ™
ляются и деформации поперечного сдвига 7гЗ-
Альтернативный вариант предполагает определение вектора пере™
мещений и углов поворота в виде
и = их\ + Uyi + uzk, в = вгг\ A.3.3)
т.е. перемещения определяются аналогично A.2.12), а углы поворота —
A.3.2).
Выражения для тензоров деформаций берутся в векторном виде:
1 / дт ди дт ди \ дт ди
2 I d'dj d$k d$k d'dj I ' % dfij dfij'
A.3.4)
1 / дг дв дг дв дп ди дп д ~
Хгк 2
Аналогично предыдущему параграфу будем разделять КЭ на два
типа — (А) и (В) — в зависимости от того, какие они имеют разреша-
разрешающие функции, A.3.1) или A.3.3).
36 Гл. 1. Конечные элементы тонких непологих оболочек
1.3.2. Конечные элементы типа (А). Проблемы. В соотноше-
ниях деформации A.3.2) фигурируют тензоры кривизны, которые, со-
согласно A.2.7), определяются через вторые производные от вектора
г. Следовательно, при численной параметризации необходимо обеспе-
обеспечить г G С^1\ Однако требования к ее точности по сравнению с КЭ
Кирхгофа-Лява типа (В) здесь выше и сравнимы с КЭ Кирхгофа-Лява
типа (А), так как для точности вычисления деформаций слагаемые при
кривизнах очень важны.
Для компонент перемещений и углов поворота, которые фигуриру-
фигурируют в A.3.2) в виде первых производных, требования гладкости мини-
минимальны:
Ui,9i,we C(o\ A.3.5)
т.е. легко выполнимы. Именно это обстоятельство является наиболее
привлекательным в подобного рода элементах.
Выражения для компонент жестких смещений и*, w* здесь совпа-
дают с A.2.19), а для вектора углов поворота в* справедлива формула
0*(a?2)=*oxn(a&) A.3.6)
откуда
0Шу,Ь) = (Фо х пF,&)) • !•<(?,,&). A.3.7)
Аналогично КЭ типа (А) из §1.2 в полиномах точно представить
эти смещения невозможно, так как выражения A.2.19), A.3.7) со-
содержат либо трансцендентные (для аналитически заданных оболочек),
либо иррациональные (при полиномиальной параметризации) функции.
В качестве примера точности полиномиальных аппроксимаций приве-
приведем результаты качественного исследования кругового бруса, изобра-
изображенного на рис. 1.2.3. Он имеет жесткие смещения A.2.22) и жесткий
поворот
в* = Щ. A.3.8)
It
Квадратичная аппроксимация всех неизвестных функций,
w = а\+ агС + «зС2? и = «4 + »бС + «бС2>
A.3.9)
О = а7 + а8С + «еС ,
дает следующие ошибки в деформациях:
е/-^-/?2, XI = 0, 7/~^|/32, A.3.10)
где 7 — деформация поперечного сдвига.
Ситуация с представлением состояний с независимыми постоянны-
постоянными деформациями и, в частности, «чистого изгиба» здесь полностью
аналогична случаю (А) из §1.2, а именно: для оболочек простой
§1.3. Конечные элементы с учетом гипотезы Тимошенко ЗУ
геометрии эти состояния точно представляются полиномами низших
степеней, для оболочек сложной геометрии это является серьезной
проблемой. В подтверждение первого утверждения приведем точные
выражения для смещений кругового бруса для заданных деформаций:
GF
е = С4, х = С5 + к—С& 7 = Сб, A.3.11)
где G — модуль сдвига, F — площадь поперечного сечения, J —
момент инерции, к — коэффициент сдвига. Линейное слагаемое в
A.3.11) появляется вследствие справедливости теоремы Журавского.
Интегрируя соотношения деформации
^, х = 0', J = 0 + ivf^^, A.3.12)
it it
получим
w = С4К - СЪК - CqK Q^Y' = ъ^ + 9
2)
= C6R- С5Щ + Cb^fie - 2R2).
A.3.13)
Видно, что действительно квадратичные полиномы A.3.9) вполне могут
представить решение A.3.13).
Следует заметить, что для оболочек сложной геометрии проблема
представления состояния «чистого изгиба» здесь значительно острее,
чем в КЭ типа (А) из §1.2. Это обусловлено тем, что ошибки здесь
появляются не только в мембранной части, но и в сдвиговой, а коэф-
коэффициенты жесткости у них соизмеримы. Следовательно, погрешность в
энергии здесь будет больше, чем в КЭ, построенных на основе гипотез
Кирхгофа-Лява, и, как следствие, точность ниже.
Следует сделать еще одно важное замечание, которое проиллю-
проиллюстрируем на примере изгибаемого бруса. Рассмотренный тип КЭ при
квадратичной аппроксимации всех неизвестных функций в случае
кругового бруса точно описывает изгибное состояние, что следует из
соотношений A.3.13). С другой стороны, если рассмотреть аналогичное
решение для прямого бруса, то состояние вида
С1 Р
X = C5 + k—C6(i, 7 = a A.3.14)
реализуется при перемещениях
38
Гл. 1. Конечные элементы тонких непологих оболочек
Из A.3.15) видно, что квадратичная аппроксимация не в состоянии
представить A.3.14), и ошибки в деформациях получаются следую-
следующими:
XI ~ X = О, И - 7 =
GFk I2
EJ 6
1-3A
A.3.16)
где 21 — размер элемента. Таким образом, при уменьшении кривизны
ошибка из «жестких смещений» переходит в «изгибное состояние», не
уменьшая своего порядка (^ I2). Этот факт можно объяснить тем, что
сдвиговые КЭ имеют дефект, не устранимый уменьшением кривизны.
В результате можем сформулировать следующие проблемы построе-
построения искривленных КЭ оболочек на основе гипотезы Тимошенко и неиз-
вестными функциями щ, 9i, w:
— представление смещений как твердого целого; для оболочек
сложной геометрии дополнительно
— представление состояния «чистого изгиба»;
— параметризация срединной поверхности класса
1.3.3. Конечные элементы типа (В). Проблемы. В КЭ, осно-
основанных на соотношениях A.3.4), помимо задания геометрии в виде
радиус-вектора г и вычисления нормали п по соотношениям A.2.6),
возможно самостоятельное задание векторов г и п. В зависимости
от этого возникают различные требования к гладкости этих функций
при численной параметризации: если задана только г, то необходимо
г е С^1\ если заданы отдельно г и п, то достаточно, чтобы г, n Е С^\
Ясно, что второй случай предпочтительней, поскольку удовлетворить
его значительно проще. Но здесь следует иметь в виду, что самостоя™
тельная аппроксимация п приводит к тому, что этот вектор перестает
быть точной нормалью к поверхности г = г (?1,^2)- Требования гладко™
сти к искомым функциям здесь минимальны:
ux,uy,uz,0i,
A.3.17)
Анализируя векторные выражения для смещений элемента как
твердого целого A.2.18) и A.3.6), можно сделать вывод, что эти смеще-
смещения и*, 0* будут точно представляться при одинаковой аппроксимации
векторов г, и и п, в. Последнее вытекает из того, что вектор 0
всегда лежит в плоскости Фхпв силу перпендикулярности 19 и п по
определению.
Таким образом, в случае изопараметрического подхода, т. е. одина-
одинакового определения всех векторов г, п, и, 0 простейшими аппроксима-
аппроксимациями класса С^\ будут автоматически удовлетворяться три условия
из четырех, сформулированных в §1.1. Именно в этом случае исполь-
использование подобных элементов целесообразно. Тут же следует заметить,
что известный изопараметрический подход к построению оболочечных
элементов по трехмерным уравнениям теории упругости [113, 245] при-
§1.4. Способы построения совместных КЭ 39
водит точно к КЭ этого класса (подробно этот вопрос рассматривается
в гл.З). В частности, далее будет показано, что подобные КЭ имеют
проблему лишь в представлении состояния «чистого изгиба».
§ 1.4. Способы построения совместных КЭ
Условие гладкости класса С^\ необходимое для построения неиз™
вестных функций в сдвиговых КЭ, затруднений не вызывает, и с
помощью обычных интерполяционных полиномов Лагранжа такие ап~
проксимации легко строятся [47, 113, 159, 206, 227 и др.]. При
построении КЭ, основанных на гипотезах Кирхгофа-Лява, полиномы
Лагранжа иногда используются для аппроксимации тангенциальных
смещений щ. Например, линейные полиномы для треугольной области
в [19, 391] или билинейные — для прямоугольной в [18, 91, 163, 215,
281, 375, 377], однако в сочетании с кубической аппроксимацией про-
прогиба эти КЭ для непологих оболочек демонстрируют плохую точность.
Более эффективными оказываются те КЭ, в которых используются
одинаковые аппроксимации для всех разрешающих функций.
Требование гладкости класса С^\ необходимое для w в
(Д)-элементах и uXj uy, uz — в (В)-элементах, вызывает необходимость
использования так называемых эрмитовых аппроксимаций, которые
в качестве узловых степеней свободы требуют не только значений
функции, но и значений ее производной.
Построение таких аппроксимаций представляет определенную
сложность, поэтому в настоящем параграфе кратко изложим те
способы их построения, которые нашли применение в КЭ тонких
оболочек, и укажем работы, где они описаны.
1.4.1. Полиномы высокой степени. Известно [47, 113, 222, 226
и др.], что для треугольных КЭ кубическая аппроксимация с узло-
выми значениями w, d\w, &2W обеспечивает непрерывность лишь w
и касательных производных от w (dsw), в то время как нормальная
к контуру производная (dnw) претерпевает разрыв на границах. Это
означает, что кубический полином дает лишь w E С^ и не обеспе-
обеспечивает требуемой гладкости. Наименьший полином, обеспечивающий
условие w G С^ — полином пятой степени с узловыми значениями w,
d\w, &2W, di&2W, d\w, д^гю в вершинах и dnw — в серединах сторон.
Подобная аппроксимация называется «треугольником Аргириса» [248].
Возможен вариант с исключением узловых неизвестных в серединах
сторон за счет наложения условий кубичности нормальной производ-
производной dnw вдоль края (такая аппроксимация называется «треугольником
Белла» [264]). Примеры использования подобных аппроксимаций при
построении КЭ типа (А) приведены в работах [49, 143, 165, 284] (щ —
кубичные, w — полином пятой степени), [288, 287] (щ, w — полиномы
пятой степени), КЭ типа (В) — [250].
40 Гл. 1. Конечные элементы тонких непологих оболочек
Для прямоугольных элементов полностью конформной (класса
является бикубическая аппроксимация с узловыми неизвестными w,
d\w, &2W, d\d2W в вершинах. Она часто применяется в КЭ тонких
оболочек, построенных по теории с учетом гипотез Кирхгофа-Лява.
Наиболее удачные элементы используют одинаковую аппроксимацию
всех неизвестных функций. Примеры таких КЭ приведены в [20, 129,
151, 223] - типа (А), [345] - типа (В).
Помимо полных бикубических аппроксимаций также используются
и усеченные аппроксимации, в которых отсутствуют слагаемые со сме-
смешанной производной d\&2W [15, 91, 215, 326, 337]. Хотя в этом случае
гладкость класса С^ сохраняется, зато теряется полнота полинома и,
как следствие, теряется свойство элемента воспроизводить некоторые
простейшие напряженные состояния. Численное подтверждение ухуд-
ухудшения свойств аппроксимаций в этом случае на примере пластины
приведено в [88].
Аппроксимации более высоких порядков известны (например,
[156]), но применяются весьма редко.
Использование полиномов высокой степени для обеспечения кон-
конформности приводит к КЭ с большим числом степеней свободы в
узлах, имеющих к тому же сложную физическую природу (вторые
производные). С позиций инженерной практики подобные КЭ, несмотря
на их высокую точность, малоперспективны, поскольку громоздки,
трудностыкуемы с другими КЭ, сложны в эксплуатации и т. д. Более
предпочтительны тут элементы, имеющие в качестве степеней свободы
производные не выше первого порядка. Простейшими аппроксимация-
аппроксимациями, удовлетворяющими этим требованиям и являющимися достаточно
точными, являются кубические полиномы. Поэтому были разработаны
специальные приемы обеспечения гладкости С^ на основе кубических
полиномов.
1.4.2. Макроэлементы и сингулярные элементы. Построение
аппроксимаций класса С^ на основе полиномов третьей степени воз-
возможно путем разбиения исходного элемента на несколько подэлементов
и определения в каждом из них собственных полиномов, коэффициен-
коэффициенты которых находятся из условия непрерывности функции и ее первых
производных при переходе всех межэлементных границ (и внешних,
и внутренних). Наиболее популярными примерами подобных макроэле-
макроэлементов являются: треугольник Клафа-Точера [47, 113, 226] и четы-
четырехугольник Fralljs de Veubeke В. [113, 297]. Процедура построения
одного из таких вариантов будет подробно изложена в гл.2.
Примеры использования макротреугольника для аппроксимации
прогиба в КЭ тонких оболочек приведены в [271, 280, 391], четырех-
угольника — [381] в КЭ типа (А), [63, 64] — типа (В).
Другой вариант построения аппроксимаций класса С^ на осно™
ве кубических полиномов состоит во включении в пробные функции
некоторых специально построенных рациональных функций. Наиболее
§1.4. Способы построения совместных КЭ
41
популярным элементом пластины подобного класса является так назы-
называемый сингулярный треугольник Зенкевича [113, 226].
Применительно к оболочкам такие аппроксимации не получили
распространения вследствие сложности построения и сравнительно
невысокой точности. Единственный вариант работоспособного искрив-
искривленного КЭ оболочек типа (В), построенный на рациональных аппрок-
аппроксимациях [304], описан в [110, 290].
1.4.3. Принудительная совместность. Как известно, при ис-
использовании кубических аппроксимаций на треугольнике имеет место
несовместность нормальной про-
производной вдоль границ, обуслов-
обусловленная квадратичным изменени-
изменением функций dnw и наличием для
ее определения лишь двух степе-
степеней свободы в вершинах. Если на
каждой границе положить одно
дополнительное условие равен-
равенства нормальных производных со
сторон двух прилегающих к ней
рис
элементов:
dwA dwE
дпА дпв
= 0,
A.4.1)
то строгая совместность будет обеспечена (рис. 1.4.1).
Для наложения условий A.4.1) используют два метода: метод мно-
множителей Лагранжа и метод штрафа. По первому методу (соответствен-
(соответственно схеме, изложенной в [102,198,342]) в функционал Лагранжа
Э =
^ I \qwdS
/1
nw)dL,
sm srn
A.4.2)
где Wm(u, u) — удельная потенциальная энергия деформации в тер-
терминах компонент перемещений, q — внешнее давление, N*, М* —
заданные граничные силы и момент, приложенные на части границы
La, сумма пот- сумма по элементам, добавляется слагаемое
fdwA dwB"
A.4.3)
где Хп — функция Лагранжа, являющаяся глобальной неизвестной
функцией для всей задачи, сумма по к — сумма по всем границам.
42 Гл. 1. Конечные элементы тонких непологих оболочек
Преобразуя сумму по границам в сумму по элементам, получим окон-
окончательное выражение для функционала:
3 = YA\\ [wro(u,u)dSf- I LwdS-+ I XndnwdL 1 -
Sm Sm Lm
- l(N*-u+(MZ-\n)dnw)dL. A.4.4)
Из A.4.4) видно, что физический смысл функций Хп — нормальные
изгибающие моменты Мп.
Матрица жесткости элемента строится обычным образом, путем
введения самостоятельные аппроксимации для компонент перемещений
и и функций Хп. В качестве примера в работах [237,396] приводится
вариант применения этого метода с функцией Хп типа дельта-функции,
т.е. слагаемое A.4.3) имеет не интегральную, а дискретную форму.
Недостаток этого метода связан с потерей глобальной матрицей
жесткости свойства положительной определенности, характерного для
большинства конечно-элементных моделей в перемещениях.
Метод штрафа предполагает наложение условий A.4.1) в виде
штрафного слагаемого. В этом случае функционал Лагранжа модерни-
модернизируется в следующий [198]:
где е — множитель, регулирующий точность выполнения условий
A.4.1). Пример приложения A.4.5) к построению КЭ тонких оболочек
приведен в [307]. Отметим, что здесь тоже есть недостаток, связанный
с увеличением ширины глобальной матрицы жесткости.
1.4.4. Гибридный метод перемещений. Следующие способы
обеспечения совместности КЭ основаны на ослаблении требований
гладкости w e С^ за счет специальных вариационных формулировок.
Один из таких вариантов называется гибридным методом перемещений
и был предложен Тонгом в [398]. Он основан на функционале, имею-
имеющем независимые аппроксимации поля перемещений внутри элемента,
перемещений на границах между элементами и множителей Лагранжа
[168, 198, 199, 255] вида
§1.4. Способы построения совместных КЭ
43
- (N* • uL - M*dnwL)dL 1, A.4.6)
где и — вектор перемещении, заданный внутри каждого элемента са-
самостоятельно; uL, dnwL — межэлементные перемещения, задаваемые
на границах элементов независимо от u; NL, M% — усилия и нормаль™
ный момент на границах, выполняющие роль множителей Лагранжа
и являющиеся самостоятельными функциями на каждом элементе.
Условиями стационарности этого функционала являются уравнения
равновесия в перемещениях внутри каждого элемента, статические
граничные условия на внешних границах La, условия межэлементной
непрерывности поля перемещений и усилий.
Построение матрицы жесткости здесь требует более сложных мат-
матричных операций по сравнению с обычным методом перемещений.
Если обозначить параметры аппроксимации вектора перемещений и
через {а}, граничных усилий NL, M% — через {/?}, межэлементных
перемещений uL, dnwL — через {q}, то на каждом элементе матричный
вид функционала Э^ будет следующим:
Э^ = \{а}Т[Н){а} + {Р*}т{а} - {P*L}T{q}+
+ {P}T[G]{q}-{f3}T[R]{a}. A.4.7)
Так как параметры {а}, {C} являются независимыми на элементе, то
путем варьирования они исключаются, и функционал A.4.7) приводит™
ся к обычному виду относительно граничных перемещений {q}, общих
для прилегающих элементов:
™ = \{q}T[K]{q} + {P}T{q} + const,
A.4.8)
где
я -
-д
'Н -
, -R
R
0
\У
)\
RT\]
0 ).
/0\l
\g)\'
1 Г/°У
A.4.9)
Процесс сборки матриц жесткости [К] и векторов сил {Р} осу-
осуществляется обычным образом по матрице индексов узловых переме-
перемещений {q}.
В качестве примера применения подобной схемы для расчета тонких
пластин и оболочек могут служить работы [331, 332].
44
Гл. 1. Конечные элементы тонких непологих оболочек
1.4.5. Смешанные конечные элементы. Весьма популярной схе-
схемой ослабления требований гладкости w e С^ является так назы-
называемая смешанная постановка, которая основана на использовании
функционала вида [198, 199, 366, 404]
* = ? Щ j [^кегк(и) + MikXikH-
- Wm{Nlk, Мгк) ~~ Р* -и
dS-
- f(N* -u-M*dnw)dL- | Mndnwdbi, A.4.10)
где W(Nlk,Mlk) — потенциал деформаций, выраженный в терминах
усилий Мгк и моментов Мгк. В A.4.10) предполагается, что на эле-
элементе самостоятельно аппроксимируются перемещения щ, w, усилия
Nlk и моменты Мгк. Варьирование A.4.10) по перемещениям щ, w
приводит к уравнениям равновесия в терминах усилий и моментов
внутри элемента и условиям уравновешенности усилий на межэлемент-
межэлементных границах. Варьирование по усилиям и моментам дает соотношения
упругости внутри элемента и условия непрерывности нормальных про-
производных dnw.
Часто используется упрощенный вариант функционала A.4.10),
в котором тангенциальные усилия не считаются независимыми, и с по-
помощью формулы Грина уменьшается порядок производных от прогиба.
Например, для пологих оболочек такой функционал будет записывать-
записываться в виде
- VtMlkVkw - Р* • и
dS- (N* • u - M*dnw)
- I Mndnw*dL+ I Msdsw*dL\, A.4.11)
Lm Lm '
где Ms — касательная составляющая изгибающего момента, dsw —
производная вдоль границы, dnw* — заданный на границе Ln нормаль-
нормальный угол поворота.
Подставляя в функционал A.4.10) или A.4.11) аппроксимации для
неизвестных функций — u, M^(Nlk), — получим его матричное выра™
§1.4. Способы построения совместных КЭ 45
жение. Сборка производится по узловым значениям как перемещений,
так и усилий и моментов.
Впервые такая схема была предложена в [310] для расчета пла-
пластин и далее весьма широко использовалась и при расчете оболо-
оболочек. Главное достоинство формулировок A.4.10), A.4.11) состоит в
возможности использования для аппроксимации неизвестных функций
u, MJ^{Nlk) простейших полиномов и в получении в качестве реше-
решения непрерывного поля моментов (и усилий). Примеры использования
функционала A.4.10) для построения КЭ оболочек можно найти в
[368, 394] (треугольник с линейной и квадратичной аппроксимацией
u, M^(Nlk), [43, 152, 247] (прямоугольник с билинейной аппроксима-
аппроксимацией u, M^(Nlk). Функционал A.4.11) для оболочечных КЭ приме-
применяется в [48,101,150,234] (треугольник с линейным и и постоянными
Мгк), [39] (треугольник с линейными Мгк и квадратичным и).
Опыт применения подобных КЭ к расчету непологих тонких обо-
оболочек свидетельствует о высокой чувствительности точности решения
к аппроксимации неизвестных функций. Например, в [404] показано,
что наличие самостоятельно варьируемых усилий Nlk существенно
увеличивает скорость сходимости.
1.4.6. Гибридный метод сил. Гибридный метод сил основан на
вариационной постановке, в которой внутри элемента и на границе
задаются самостоятельные аппроксимации функций, имеющих различ-
различную физическую природу. Впервые такая схема была предложена в
[181] для построения матрицы жесткости КЭ плоской задачи теории
упругости и далее весьма широко применялась для решения различных
задач теории упругости, пластичности, а также для расчета пластин
и оболочек. Теоретические основы построения различных гибридных
моделей изложены в [204, 255, 298, 365, 399].
Исходный вариационный принцип для всех известных гибридных
моделей применительно к расчету оболочек может быть представлен
в виде
Э* = Y, I [f [Nikeik(u) + M'kXik(n) - Wm(Ntk,Mtk) - Р* • u] dS-
(u-uL) - Мп(вп-в%) - М8(ва -в%)]Aь\, A.4.12)
где W{Nlk,Mlk) — потенциал деформаций, выраженный в терминах
усилий Nlk и моментов Мгк, определенных внутри каждого элемента
автономно; u, 6n, 9S — перемещения и граничные углы поворота, пер-
46 Гл. 1. Конечные элементы тонких непологих оболочек
сонифицированные для каждого элемента; uL, 9^, 9^ — перемещения
и углы поворота, определенные только на границах и общие для приле-
прилегающих элементов. В отличие от A.4.4), на границах здесь определены
не нормальная dnw и касательная dsw составляющие производной от
прогиба, а соответствующие углы поворота: 9п, 9S. Это делается для
того, чтобы обеспечить лучшую совместность элементов при кусочно
определенной геометрии, когда радиусы кривизны претерпевают скачки
при переходе от элемента к элементу.
Условием стационарности функционала A.4.12) являются:
— уравнения равновесия в усилиях и моментах внутри каждого
элемента;
— соотношения деформаций и физические соотношения внутри
каждого элемента;
— статические граничные условия на границе La, где заданы внеш-
внешние контурные нагрузки N*, М^;
— условия непрерывности внутренних — u, 9n, 9S — и внешних —
uL, б>^, 9^ — перемещений;
— условия межэлементного равновесия в усилиях и моментах двух
прилегающих элементов.
Выбирая некоторым специальным образом усилия, моменты и пе-
перемещения внутри элемента и задавая определенным образом гранич-
граничные перемещения, можно добиться выполнения уравнений равновесия
точно или приближенно. В зависимости от этого определяются раз™
личные гибридные модели. В подавляющем большинстве гибридных
КЭ поле напряжений строится таким образом, чтобы точно выполнить
уравнения равновесия. В этом случае функционал A.4.12) имеет более
простой вид:
Э* = J^ \ ~\ \wm(Nik, Mik) dS - \ (N* • uL - M*0%) dL+
+ to (N -и- Мпв% - M8et)dL\. A.4.13)
По сути дела, функционал A.4.13) представляет собой дополнительную
энергию (функционал Кастильяно), в который включены статические
граничные условия на La и кинематические условия на межэлементных
границах Lm.
Построение матрицы жесткости здесь включает в себя весьма
сложные матричные операции, связанные с исключением на элементе
параметров, определяющих усилия (см. §4.3). Примеры использова-
использования функционала вида A.4.13) для построения гибридных КЭ тонких
пластин и оболочек можно найти в работах [164, 246, 282, 292, 293,
299, 309, 384, 397 и др.]. Относительно точности подобных КЭ можно
сказать следующее: для пластин они демонстрируют высокую точ-
§1.5. Учет смещений элемента как твердого целого 47
ность, но для оболочек их возможности ограничены геометрией поверх-
поверхности. Действительно, уравнения равновесия в усилиях и моментах
для оболочек неканонической геометрии столь сложны, что подобрать
функции для напряжений, точно им удовлетворяющие, практически
невозможно. Поэтому для оболочек произвольной геометрии гибридные
КЭ строятся на основе функционала A.4.12), который обеспечивает
выполнение уравнений равновесия в среднем. Примеры подобного под-
подхода приведены в работах [303, 364, 403].
§ 1.5. Учет смещений элемента жаж твердого целого
Проблема учета смещений элемента как твердого целого обычно
возникает для тех КЭ, неизвестными функциями которых являются
проекции вектора перемещений на орты криволинейных координат,
т.е. элементы, разобранные в §1.2,1.3. Для элементов такого
типа (§1.2, 1.3) подобных проблем не возникает, поскольку они
используются только в сочетании с изопараметрической техникой
определения геометрии.
Если использовать чисто полиномиальные аппроксимации для щ,
w, вг в сочетании с аналитически заданной геометрией срединной по-
поверхности, то смещение элемента как твердого целого (СТЦ) представ-
представляется лишь приближенно, причем точность сильно зависит от соотно-
соотношений степеней полиномов для щ, w. Опыт расчетов свидетельствует
о том, что удовлетворительную точность дают КЭ с одинаковой ап™
проксимацией всех неизвестных функций полиномом не ниже третьей
степени для элементов, построенных на основе гипотез Кирхгофа-Лява
(щ, w), и второй — для сдвиговых элементов (щ, w, Oi). Однако,
если это приемлемо для сдвиговых элементов, так как одинаковые
аппроксимации для всех неизвестных естественны и с точки зрения
гладкости, то для КЭ типа Кирхгофа-Лява повышение степени полино-
полинома для щ несколько искусственно, поскольку для конформности оно не
требуется. Поэтому были разработаны приемы точного представления
СТЦ без увеличения количества степеней свободы на элементе.
1.5.1. Построение аппроксимаций с явным выражением сме-
смещений элемента как твердого целого. Наиболее известным явля-
является прием, предложенный Кантином и Клафом для построения КЭ
цилиндрической оболочки с 24 степенями свободы [118]. За его осно-
основу берется билинейная аппроксимация тангенциальных перемещений
и бикубическая аппроксимация прогиба в виде
щ = а\ +OJ2& +«з6 + «466, П S П
W = «9 + «10б + «Il6 + «12C? + «1366
48 Гл. 1. Конечные элементы тонких непологих оболочек
Далее вместо слагаемых, соответствующих СТЦ пластины, подставля-
подставляются выражения СТЦ цилиндрической оболочки A.2.20). В результате
получаются следующие пробные функции:
щ = а\ + «2^1 + «3С2 + щ?\?,2 — ot§R sin a\oR cos cos C
R \ R
= «5 COS — + «бб COS — + «7^2 + «8^6 - »9 sin —-
hi hi К
-aio^i sin -^ -a\\R ( 1 -cos -^cos /3 ) , A.5.2)
/t \ К J
. 6 .
w = a5 sm — +
/г
+ «6
ani
?1 sin
¦I sin ¦
R
2 +
+ «9 COS
3OS /3 + «1
«17C1C2 +
^18^2 + c
1 C°S l +
56 + 014C2 +
^19C?6 + «206C| +
Для определения 24 постоянных требуется задание шести степеней
свободы в каждой вершине, обычно это щ, щ, w, d\w, &2W ~~ щ/R,
Подобный элемент получил весьма широкое распространение при
расчете круговых цилиндрических оболочек [105, 106, 114, 137] и был
обобщен на случай цилиндрических оболочек некругового сечения
[124, 135]. Известен и сокращенный вариант этого элемента с 20
степенями свободы, что достигается за счет отбрасывания в A.5.2) под-
подчеркнутых слагаемых и уменьшением числа степеней свободы в узлах
до пяти (и\, щ, w, d\w, &2W — U2/R) [378].
В [115] описывается аналогичный элемент, но жесткие смещения
в нем представляются в виде решения однородных соотношений де-
деформации. Хотя эти выражения отличаются от A.2.20), те и другие
являются правильными, так как все они выражают СТЦ относительно
некоторой системы координат, связанной с элементом. И если выбрать
иную, чем на рис. 1.2.2, систему координат, то получим другие выра™
жения СТЦ. Главное, чтобы они давали нулевые деформации и были
линейно независимы.
Следует отметить два существенных недостатка этого способа точ-
точного учета СТЦ. Во-первых, наличие тригонометрических функций
нарушает совместность элемента вдоль криволинейной координаты.
В [236, 295] приводятся результаты исследования влияния вносимой
несовместности, и оказалось, что решение улучшается лишь для обо™
лочек нулевой гауссовой кривизны, а для сферы и оболочек вращения
имеет место ухудшение.
§1.5. Учет смещений элемента как твердого целого 49
Во-вторых, аппроксимация вида A.5.2) по отношению к A.5.1)
утрачивает способность точного воспроизведения состояния чистого
изгиба. Проиллюстрируем это на примере кругового бруса (рис. 1.2.3).
Если решение, соответствующее состоянию чистого изгиба (С = О
в соотношениях A.2.29)), подставить в качестве узловых значений
в аналог аппроксимации A.5.2) для бруса:
и = а\ cos — — «2 sin — — a%R ( 1 — cos C cos —
R R V R' A.5.3)
w = a\ sin — — Q2 cos — — a$R cos /3sin — + a^t2 + «6<63,
R R R
и разложить тригонометрические функции в ряд по углу раствора
элемента C, получим
е\ ~ ь§К—, xi ~ X = ^5- A.0.4)
Для хорошей сходимости должно выполняться условие
EJX\^>EFel A.5.5)
которое после подстановки в него A.5.4) дает неравенство
(З2 < -. A.5.6)
Как видим, оценка весьма жесткая.
В заключение этого раздела отметим, что известны способы по-
построения аппроксимаций класса С^°\ точно представляющие СТЦ
[131, 306]. И хотя их свойства недостаточно изучены с точки зрения
представления состояния чистого изгиба, на числовых примерах они
демонстрируют весьма высокую точность.
1.5.2. Коррекция матрицы жесткости. Другая возможность
точного учета СТЦ предложена в [116, 274] как прием корректиров-
корректировки уже построенной матрицы жесткости. Основные положения его
следующие.
Пусть {q} — вектор узловых степеней свободы, {Р} — вектор со™
ответствующих узловых сил, [К] — матрица жесткости, связывающая
вектор сил {Р} с вектором узловых перемещений {q}:
{Р} = [K}{q}y A.5.7)
и построенная обычным образом.
Составим новый вектор узловых перемещений {q*}, который, в
отличие от {q}, будет содержать жесткие смещения:
{q*} = {q}+[TR}{qR}, A.5.8)
50 Гл. 1. Конечные элементы тонких непологих оболочек
где {дд} — шесть компонент СТЦ, [Тд] — матрица, описывающая узло-
узловые смещения при движении как твердого целого. Здесь следует иметь
в виду, что размерность и физическая природа компонент векторов {д}
и {q*} одинакова, т.е. это узловые смещения (например, щ, щ, w,
d\w,...).
Выразим {q} из A.5.8) через {q*} и подставим в A.5.7). Тогда
получим
Так как усилия, соответствующие СТЦ, т.е. {дд}, равны нулю, то,
исключая {дд}, приходим к модифицированной матрице жесткости:
{Р} = [K*]{q*}, A.5.10)
где
{К*} = [К] - [К ¦ Гй] ¦ [If -K-Tr]-^ ¦ К]. A.5.11)
Если некоторые из жестких смещений, входящих в {дд}, уже содер™
жатся в матрице [К], то матрица [Тц]Т[К}[Тц] будет сингулярной и
не будет иметь обратной. Однако можно определить, какие из {дд}
имеются в [К], и исключить их из {qn} прежде, чем будет применен
процесс расширения матрицы.
Указанный прием является более предпочтительным по сравнению
с добавлением СТЦ прямо в пробные функции для перемещений,
что подтверждают и численные эксперименты. Так, например, для
цилиндрической оболочки КЭ, построенный на аппроксимациях A.5.1)
с корректировкой матрицы жесткости, дает более быструю сходимость,
чем элемент с аппроксимацией A.5.2).
В заключение этого параграфа сделаем несколько замечаний, каса-
ющихся проблемы учета СТЦ в искривленных КЭ.
1. В некоторых работах по построению КЭ тонких оболочек [12,
187] утверждается, что если ранг матрицы жесткости элемента г удо-
удовлетворяет равенству
г = п — 6,
где п — общее число степеней свободы на элементе, то гарантируется
точное представление СТЦ. Это не совсем верно, так как принци-
принципиальное значение имеет конкретный вид тех перемещений, которые
соответствуют нулевой энергии, поскольку они могут не совпадать
с действительными СТЦ элемента.
2. В различных курсах по теории оболочек встречаются различные
соотношения для деформаций, особенно изгибных. Как правило, все
они отличаются второстепенными слагаемыми, содержащими квадраты
кривизн. Однако применение не всех их в расчетах оболочек МКЭ
будет приводить к успеху. Дело в том, что не все соотношения для
деформаций дают строгие нули для СТЦ [289]. Так, например, в работе
[117] приведено исследование четырех вариантов соотношений для
§1.6. Представление состояния «чистого» изгиба 51
цилиндрических оболочек, а именно: соотношений Донелла-Флюгге,
Рейсснера, Новожилова и Нагди. Показано, что правильный результат
в аппроксимации СТЦ дают лишь два последних. Можно рекомендо-
рекомендовать одно простое правило для проверки выражений для деформаций:
если эти выражения имеют векторный аналог, то СТЦ представлены
точно.
§ 1.6. Представление состояния «чистого» изгиба
Проблема представления состояния «чистого» изгиба сводится, по
сути дела, к борьбе с появлением при изгибе ложных деформаций
(мембранных и сдвиговых). Тут следует отметить, что не все способы
борьбы с ложными деформациями сдвига, которых разработано очень
много для пластин, годятся для уничтожения ложных мембранных
деформаций. Это связано с тем, что для тонких оболочек (и пластин)
всякие деформации поперечного сдвига можно считать ложными, и по-
поэтому многие способы основаны на полном их уничтожении. Разумеет-
Разумеется, подобные приемы не применимы к мембранным деформациям, так
как последние играют важную роль в механике оболочек.
1.6.1. Метод штрафа. Суть этого метода состоит в уничтоже-
уничтожении в выражении энергии слагаемого, соответствующего деформациям
поперечного сдвига. В результате потенциальная энергия деформации
вычисляется в виде
jJ ^JJcdS, A-6-1)
где WH, WM, Wc — удельная потенциальная энергия соответственно
изгибных, мембранных и сдвиговых деформаций. Параметр штрафа е
берется в виде
? = А^; A.6.2)
где S — площадь элемента, А — числовой параметр, подбираемый
экспериментально. Примеры использования этого метода приведены
в работах [42, 89, 90, 300, 319, 344].
Отметим, что в ранних работах [89, 300] этот прием объяснял™
ся необходимостью улучшения обусловленности глобальной матрицы
жесткости, так как бытовало представление о том, что плохие резуль-
результаты при расчете тонких пластин сдвиговыми КЭ объясняются ухуд-
ухудшением счета вследствие плохой обусловленности матрицы жесткости.
В некотором смысле это верно, но более правильно говорить о точности
аппроксимации.
В работе [189] этот метод трактуется как способ обеспечения
совместности класса С^\ что совершенно верно с математических
позиций классического метода штрафа. Однако в плане практической
52 Гл. 1. Конечные элементы тонких непологих оболочек
реализации этой схемы расчета принципиальных различий здесь нет и
результаты будут совпадать.
1.6.2. Связанные аппроксимации перемещений. Этот способ
имеет множество разнообразных вариантов. Основными моментами его
являются:
— введение аппроксимации перемещений (обычно разной степени);
— задание условий на деформации (это либо условие в точках, либо
ограничение на их поведение в пределах элемента);
— из этих условий исключаются те или иные степени свободы, т. е.
одни выражаются через другие.
В результате получаются аппроксимации компонент перемещений,
выраженные через узловые значения не только этих, но и других
компонент перемещений (например, углы поворота выражаются через
прогиб или наоборот).
Наиболее популярны здесь две группы условий: первая — условия
на поведение деформаций поперечного сдвига вдоль некоторых линий
(обычно краев) [146, 147, 285, 286, 353]; вторая — условия отсут-
отсутствия деформации поперечного сдвига в некоторых точках (дискретное
наложение гипотез Кирхгофа-Лява). Подробно остановимся лишь на
втором, как наиболее апробированном для искривленных элементов.
Впервые метод дискретного наложения гипотез Кирхгофа-Лява был
предложен в [402] и далее широко применялся для расчета пластин
и оболочек [103, 120, 225, 262, 300, 322, 323, 351, 352, 390 и др.]. От-
личительной особенностью большинства подобных элементов является
исключение из энергии слагаемого, соответствующего деформациям
поперечного сдвига. Если сохранить это слагаемое, то для баланси-
балансировки жесткости следует воспользоваться штрафным множителем вида
A.6.2) [300].
С точки зрения полученных аппроксимаций здесь улучшение дости-
достигается за счет уменьшения (или исключения при полном отбрасывании)
ошибки в сдвиговой энергии, однако ошибка в мембранных деформа-
деформациях сохраняется.
Опишем одну из самых популярных конструкций треугольных эле-
элементов. Вводятся кубические эрмитовы аппроксимации для щ, w и
квадратичные лагранжевы для в^. Составляются условия, эквивалент-
эквивалентные наложению гипотез Кирхгофа-Лява в отдельных узлах: а) ра-
венства 713 — 723 = 0 в вершинах треугольника F уравнений), б) ра-
равенство 7s3 = 0 в серединах сторон, где 7s3 — касательная состав-
составляющая деформаций 7гЗ C уравнения). Для обеспечения совместно-
совместности составляется условие линейности нормальных компонент сдвига
7пЗ? т- е. значение 7пЗ в середине стороны определяется как среднее
арифметическое соответствующих узловых значений C уравнения).
В совокупности получается 12 уравнений, из которых узловые значения
углов поворота вг выражаются через узловые значения перемещений
щ, w. Таким образом, получаются связанные аппроксимации щ, w, 9i,
§1.6. Представление состояния «чистого» изгиба 53
учитывающие все наложенные условия. Далее их подставляют в выра-
жение для энергии и вычисляют интегралы.
Примеры подобных построений (и результаты некоторых расчетов)
приведены в [103, 225, 351, 352].
1.6.3. Сокращенное интегрирование. Для четырехугольных
(квадратных в локальных координатах ^) сдвиговых элементов типа В
широкое распространение получило использование квадратурных
формул пониженного порядка точности, а именно: для билинейного —
одноточечной, для квадратичного — четырехточечной B х 2 по Гауссу)
и т. д. Как показывают численные расчеты, этот прием увеличивает
скорость сходимости на порядок [24, 119, 286, 294, 316, 319, 322, 328,
340, 350, 361, 363, 407 и др.].
Математики это явление называют суперсходимостью и для некото-
некоторого класса задач ими строго доказано, что пониженные квадратурные
формулы увеличивают скорость сходимости на порядок [104, 338].
Причины столь существенного улучшения сходимости кроются в
выражении ошибок в деформациях, которые на примере изгиба прямо-
прямолинейного и искривленного брусьев для квадратичных аппроксимаций
представлены соотношениями A.3.16). Видно, что в точках ? = ±1/л/3
главные члены в ошибках исчезают, а именно эти точки и являются
квадратурными точками формулы Гаусса 2-го порядка. Таким образом,
если потенциальная энергия деформации вычисляется по значениям
деформаций в этих точках, то величина ошибки в энергии будет
существенно меньше и, как следствие, скорость сходимости выше.
В двумерных задачах имеет место близкая ситуация и, хотя рас-
распределение ошибок деформаций в пределах элемента более сложное,
сокращенное интегрирование и в этом случае существенно увеличи-
увеличивает точность расчета. Далее, в гл. 4, 5, будет изложено подробное
исследование свойств билинейных и квадратичных аппроксимаций на
примерах КЭ, построенных на основе уравнений теории упругости.
1.6.4. Двойная аппроксимации. Суть этого метода состоит в
самостоятельной аппроксимации деформаций (или напряжений) внут-
внутри элемента, отдельно от перемещений. При этом, если правильно
подобрать степени полиномов, можно весьма существенно снизить ве-
величину погрешности.
Вариант подобного приема был разработан А. С. Сахаровым [203,
204]. Предлагается деформации, по которым вычисляется потенциаль-
потенциальная энергия, определять в виде полиномов степени, меньшей, чем полу-
получилось бы при простой подстановке пробных функций для перемеще-
перемещений в соотношения деформации. При этом отбрасываются те компонен-
компоненты полиномов, в которые дают вклад не все слагаемые. Например, для
деформации е^ь в некоторой ортогональной системе координат, следует
взять полином либо степени слагаемого -г—> либо степени слагаемого
54 Гл. 1. Конечные элементы тонких непологих оболочек
^^w в зависимости от того, какая из них меньше. Коэффициенты
щ
этого полинома предлагается находить как интегралы вида
k(w)ujkdS, A.6.3)
где ujk — некоторые весовые функции, е^ — деформации, выраженные
через аппроксимации перемещений.
Некоторым недостатком описанной выше схемы является наруше-
нарушение исходного вариационного принципа, в результате чего для усечен-
усеченных деформаций не выполняются уравнения совместности. Математи-
Математически более строго будет использовать такой вариационный принцип,
который включал бы в себя в качестве независимых функций как
перемещения, так и деформации. Наиболее часто в качестве исходного
выбирают функционал Хеллингера-Рейсснера в виде [31, 142, 334, 335,
336, 380]
V = 111 ({х№](М - к*})
s
+ ЫТ[Щ(Ь} - {7*})) dS - R, A.6.4)
где R — работа внешних сил; {х}, {е}, {7} — векторы соответственно
кривизн, мембранных и сдвиговых деформаций, выраженные через
перемещения; {х*}» {е*}» {7*} ~~ аналогичные величины, но самостоя-
самостоятельно варьируемые.
Задавая аппроксимации для перемещений
{u} = [U]{q}, A.6.5)
получим
{e} = [Ue]{q}, Ы = [Щ]{д}. A.6.6)
Для деформаций {х*}, {е*}, {7*} задаются самостоятельные аппрок-
аппроксимации:
{*'} = [ФХ]Ы. {е*}=[ФеМ, Ъ*} = [*Ш. A-6.7)
Подставляя A.6.5), A.6.6), A.6.7) в A.6.4), получим
Нт = 1-{а}Т[Н}{а} - {a}T{G}{q} - {a}T{q}, A.6.8)
§1.6. Представление состояния «чистого» изгиба 55
где
[G] = j J
[Фх]т[А«+[*е]т[Д« + i^flDcW,}) dS.
Исключая на уровне элемента независимые параметры {а}, придем к
обычному матричному уравнению МКЭ в перемещениях со следующей
матрицей жесткости:
T1 A.6.10)
Отметим, что аналогичные соотношения для матрицы жесткости полу™
чаются при использовании вариационного принципа, описанного в [9,
22]. В этом случае выражение потенциальной энергии деформации на
элементе записывается в виде
A.6.11)
где значения {х*}? {е*}? {7*} определяются из минимума функционала
} - {х*}) + ({е}Т - {е*}Т)х
sm
Д.] ({е} - {е*}) + (Ыт - Ь*}т) [?>с] ({7} " {7*})) dS. A.6.12)
При выборе аппроксимаций для перемещений следует обеспечить
совместность и представление СТЦ. Проблема представления состоя-
состояния «чистого» изгиба решается за счет правильного соотношения
степеней аппроксимаций перемещений и деформаций. Подробно этот
вопрос разработан для пластин, но для оболочек еще не исследован
достаточно, хотя тут можно порекомендовать правило МСКЭ. В ряде
работ [31, 142, 336, 341 и др.] показывается, что этот прием эквива™
лентен использованию формул сокращенного интегрирования.
Еще один вариант метода двойной аппроксимации состоит в отдель-
отдельной аппроксимации внутри элемента только тех деформаций (сдвиго-
(сдвиговых и мембранных), которые приводят к «заклиниванию» элемента.
Причем эти аппроксимации строятся в виде полиномов по их значе-
значениям, вычисленным по обычным соотношениям в некоторых точках.
Такая конструкция получила в последнее время распространение при
линейных [176, 260, 291, 320] и квадратичных [259, 315, 324, 362]
аппроксимациях перемещений. Главная сложность в построении по-
56 Гл. 1. Конечные элементы тонких непологих оболочек
добных КЭ состоит в правильном выборе точек, по которым строятся
аппроксимации деформаций. Подробнее этот вопрос будет обсуждаться
в гл. 3.
К этой же группе методов можно отнести так называемый метод
декомпозиции мод {modes decomposition), предложенный в [389] как
способ уничтожения ложных мембранных и сдвиговых деформаций
при чистом изгибе. На основе этого метода построено несколько КЭ
пологих оболочек [266, 386, 390], его теоретическое обоснование дано
в [266, 386].
Основным моментом здесь является построение специального one™
ратора [Р], который из произвольного набора узловых перемещений
элемента {q} выделяет перемещения
соответствующие узловым перемещениям точного решения задачи
о чистом изгибе, т. е. для е^ = 0, 7гЗ = 0. В этом случае деформации
{е„} = [Ue][P]{q}, Ш = [Щ][Р]Ы A.6.14)
будут ложными мембранными и сдвиговыми деформациями, появляю™
щимися при чистом изгибе.
Для того чтобы исключить эти ошибки, функционал потенциальной
энергии деформации берется в виде
+ (ЫТ - Gи}Т) [Dc] ({7} - Ы)) dS, A.6.15)
откуда для матрицы жесткости получается выражение
[К]=\\ ([^]Т[^и][С/х] + ({Ef - [Pf) ({Ue}T[Du}{Ue} +
sm
({Ef - {Pf) ) dS. A.6.16)
1.6.5. Аппроксимации с заданными деформациями. Ориги-
Оригинальный путь построения КЭ, в которых абсолютно точно были бы
представлены как независимые деформированные состояния (включая
и состояние «чистого изгиба»), так и смещения элемента как твердого
целого, описан в работах [252, 253, 254]. Согласно этому способу
следует задавать не перемещения, по которым затем строятся дефор-
деформации, а наоборот — деформации, по которым путем интегрирования
определяются перемещения.
§1.6. Представление состояния «чистого» изгиба 57
В случае изогнутого бруса (рис. 1.2.3) подобная методика не вызы-
вызывает затруднения. Действительно, если мы, например, зададим дефор-
деформации вида
е = а4, Х = «5 + «б6 A.6.17)
то, интегрируя соотношения деформации, получим перемещения
AШ8)
w = Ra4 - R2a5 - i?2a6C-
Если добавить сюда слагаемые, соответствующие нулевым деформаци-
деформациям (жесткие смещения), то получим пробные функции перемещений
КЭ кругового бруса, описанного в работах [252, 253]. Как показывают
численные эксперименты, КЭ является самым эффективным для рас-
расчета тонких круговых непологих арок.
Для оболочек ситуация несколько иная, так как здесь не удается
построить поля перемещений таким образом, как это удалось для
бруса. Причина состоит в несоответствии числа перемещений числу де-
деформаций: для определения трех перемещений мы имеем шесть выра-
выражений для деформаций, которые не могут быть определены совершенно
независимо друг от друга, так как связаны между собой тремя урав-
уравнениями совместности деформаций. Необходимость выполнения этих
уравнений является серьезной трудностью на пути создания подобных
элементов, и поэтому известно лишь ограниченное число таких КЭ,
и то для оболочек простой геометрии (пологие оболочки и цилиндр)
[252, 254, 376, 379],
Приведем наиболее известный КЭ цилиндрической оболочки с за-
заданными деформациями Эшвела и Сабира [252, 254]. Как упоминалось
выше, деформации не являются независимыми и должны удовлетво-
удовлетворять трем уравнениям совместности, которые для цилиндрических обо-
оболочек имеют вид
_ де\2 Хп _Q
\ Щ д#№2 R " '
дхп 9х\2 1 дец 2 деи _ %22 д\\2 _ Q
д$2 д$х R д$2 R д$х ~ ' д$г д^2 ~ '
где
дщ дщ w 1 (дщ дщ
+ +
ov\ дщ R 2 \дщ vv\
d2w d2w 1 дч2 d2w
58 Гл. 1. Конечные элементы тонких непологих оболочек
Первый интеграл этих уравнений может быть представлен в виде
е\\ = а7 + «8 sin —,
К
622 =
2
Xll = al2 + ai3«i + «14^7
rt
X22 =
'Й R
( i?i #f
X12 = «20 + I «14^" + «15^
A.6.20)
Члены в скобках появляются для учета уравнений A.6.19). Очевидно,
что форма A.6.20) не является единственной. Автор работы [252]
указывает, что были испробованы два других варианта, но они привели
к тому, что матрица связи параметров а^ с узловыми перемещениями
оказалась сингулярной и не имела обратной. Вариант, описанный в
[254], имел несколько иной вид и, как показано в [252], неадекватно
представлял некоторые напряженные состояния. Поэтому в оконча-
окончательном варианте принимается форма A.6.20).
Интегрируя соотношения деформации с учетом представления
A.6.20), для перемещений получаем следующие выражения:
щ = а5 + «2-R cos Ь «4-R sin Ь «7^1 +
R R
+ (аи Д + a\gR - a2oR )— - «17^5—h «8^1 sin — - «19™^,
ri Z Kb
§2
U2 = «6 + («1 + «2^l) Sin — —
ri
+ a^i) cos — + (—a\gR + «2
ri
-«877БСШ "Б"» A-6.21)
zi /С
= —(ai + a2^i) cos — — (аз + 04^1) sin — +
ri К
a9R - al6R2) + (amR - an
§1.7. Вопросы представления геометрии оболочек 59
а,з? - аХА-ш - а{5-^ - а8— sm _,
где слагаемые е а\ -т- а$ соответствуют жестким смещениям.
Численные эксперименты показывают [136, 252], что элемент
A.6.21) является наиболее эффективным для расчета цилиндрических
оболочек, поскольку удовлетворяет двум важным требованиям, а имен-
именно: точно представляет жесткие смещения и постоянные напряженные
состояния. Кроме того, он удобен в том плане, что имеет лишь «инже-
«инженерные степени свободы», т. е. в узлах определены лишь по три переме-
перемещения и два угла поворота. Это (по крайней мере для цилиндрических
оболочек) ставит его в особое положение среди прямоугольных эле™
ментов с 20 степенями свободы по точности получаемых результатов.
Однако если оболочка отличается от цилиндрической, то, очевидно,
аппроксимации вида A.6.21) теряют смысл, так как основаны на соот-
соотношениях деформации только для цилиндрической оболочки.
К недостаткам элементов [252, 254] следует отнести несовмест-
несовместность по всем компонентам перемещений на всех гранях. Видимо, это
является препятствием построения подобных элементов для оболочек
ненулевой гауссовой кривизны, а для оболочек сложной геометрии
такой путь неприемлем в принципе, так как построить и разрешить для
них в явном виде уравнения совместности деформации практически
невозможно.
§ 1.7. Вопросы представления геометрии оболочек
В ряде случаев при постановке задачи расчета оболочек появляются
сложности с геометрическим представлением ее поверхности. Во-пер-
Во-первых, это относится к так называемым оболочкам сложной геометрии,
отличительной чертой которых является сложная форма срединной
поверхности, не допускающая простой аналитической параметризации,
и сложная конфигурация границ [45, 98, 125]. Во-вторых, весьма
большой класс оболочек вообще не допускает аналитического описания
геометрии и в этом случае производится численная параметризация
поверхности [45, 93, 125]. В-третьих, очень распространены схемы рас-
расчета оболочек, основанные на упрощении ее геометрии, в которых ис-
исходная поверхность представляется в виде набора плоских или пологих
элементов [113, 226]. В двух последних случаях возникает ситуация с
заменой исходной поверхности некоторой другой, близкой к исходной,
посредством аппроксимации радиус-вектора г срединной поверхности.
Степень возможных упрощений геометрии является весьма важной,
так как чрезмерные упрощения могут привести к потере сходимости.
1.7.1. Оболочки сложной геометрии, аналитически заданные.
Параметризация оболочек сложной геометрии сводится к построению
сетки криволинейных координатных линий и определению соотноше-
соотношений для вычисления геометрических характеристик — базисных век-
60 Гл. 1. Конечные элементы тонких непологих оболочек
торов, метрического тензора, тензора кривизны, символов Кристоф-
феля-Шварца. Известно, что любую поверхность можно параметризо-
параметризовать различными способами, т. е. для заданной оболочки существует
бесконечное множество семейств координатных линий. Из этого мно-
множества всегда можно выбрать ту систему координат, которая наиболее
предпочтительна для используемого метода расчета. Как правило, это
такая система, в которой область определения гауссовых координат ^
была бы канонической (прямоугольной, треугольной), а уравнения —
простейшими.
Вопросы, связанные с разработкой методов параметризации сре-
срединной поверхности оболочек сложной геометрии, основанные на по-
построении отображений неканонической области на каноническую и
так называемых фиктивных деформаций, рассмотрены в [126, 169].
Под «фиктивными деформациями» понимаются специальные отображе-
отображения исходной поверхности на базовую плоскость, которые трактуют-
трактуются как некоторые фиктивные деформации плоскости в искривленную
поверхность. Развитие этих идей в плане замены базовой плоскости
на некоторую базовую поверхность (как правило, простой геометрии)
и введение понятия пологости исходной поверхности относительно
базовой дано в работе [170]. Общее изложение этих идей можно найти
в монографиях [45, 125].
Другой вариант аналитического описания оболочек сложной гео-
геометрии в виде резных поверхностей приведен в [123, 201, 202]. В этих
работах также описаны конечно-элементные схемы статического и ди-
динамического расчета подобных оболочек, основанные на модели типа
Тимошенко.
1.7.2. Численнам параметризации поверхности. По определе-
определению численная параметризация поверхности означает построение ра-
радиус-вектора г для всей оболочки в виде некоторой вектор-функции.
Наиболее удобно для этой цели использовать кусочно-определенные
функции и определять радиус-вектор г в пределах некоторых подобла-
подобластей самостоятельно. В этом случае получается хорошая точность при
относительно простых вычислениях. При конечно-элементной дискре-
дискретизации каждая из этих подобластей может быть разбита на несколько
КЭ, а может быть и отдельным КЭ. Последний вариант наиболее рас-
распространен для оболочек сложной геометрии, так как здесь необходимо
весьма точно вычислять все геометрические характеристики. Поэтому
мы подробнее остановимся именно на этом варианте и рассмотрим наи-
наиболее популярные схемы аппроксимации радиус-вектора г срединной
поверхности.
1. Проекции rx, ry, rz вектора г интерполируются полиномами
Лагранжа по известным координатам N узлов, принадлежащим дан-
данному элементу. Подобный прием часто используется в сдвиговых изо-
параметрических элементах, которые будут подробно рассмотрены в
разделе И. Отметим лишь, что этот прием обеспечивает только глад-
§1.7. Вопросы представления геометрии оболочек
61
кость класса UK J, которой совершенно недостаточно для применения
уравнений теории оболочек.
2. Другой прием основывается на эрмитовой интерполяции и тре-
требует задания в узлах производных с^г, с^с^г. В общем случае радиус-
вектор представляется в виде
где [В] — матрица векторов, содержащая граничную геометрию эле-
элемента в виде координат, кривизн и закрученности поверхности в угло-
угловых точках, {/($i)}, {^(^2)} — аппроксимирующие функции. Напри-
Например, плоскость может быть представлена в виде
={!-#!,#2}
г0) гD)
гB) гC)
A.7.2)
Цилиндрическая поверхность представляется следующим образом:
,A.7.3)
где Hi{rd2) — кубические полиномы Эрмита. В общем случае строго
выпуклая поверхность требует следующего представления:
г@ гD)
гB) гC)
Я3A?2)
A.7.4)
Узловые значения производных diT можно определить различными
способами. Например, их можно вычислять на основе интерполяции по
соседним точкам, лежащим внутри элемента. В этом случае получаем
различные значения diT в одном узле для каждого из прилегающих к
нему элементов и, как следствие, имеем глобальную параметризацию
даже не класса С^\
Более правильным будет задание производных dir едиными для
всех элементов, прилегающих к данному узлу, что эквивалентно гло-
глобальной параметризации всей поверхности оболочки с помощью ло-
локально определенных функций. Простейшая схема определения значе-
62 Гл. 1. Конечные элементы тонких непологих оболочек
ний diT основана на конечно-разностных соотношениях. Например, для
узла (га, п) на рис. 1.7.1 справедливо
Qr(m,n) _ _/r(m
2
_r
(m-l,n)\
r
2 A.7.5)
Q r(m,n) _ j_/r(m,n+l) _r(m,n-l)\
Для узлов, прилегающих к границе, можно воспользоваться одно-
односторонними разностями того же порядка. Получаемая таким образом
аппроксимация г будет класса
^ С^\ и она обеспечивает непрерыв-
п+1 ность базисных векторов поверх-
ности: diT и п. Этого достаточ-
достаточно для построения строго совмест-
/ra+l,n TZOk ^
' ' ных КЗ оболочек с неизвестными
функциями ux,uy,uz.
га+1,п-1 Для получения С^-непрерыв-
ности, необходимой при исполь-
рис | у | зовании классического подхода к
построению КЭ оболочек, узловые
производные следует определять из условия равенства на межэле-
межэлементных границах вторых производных от г. Эти условия приводят
к связанной системе уравнений для сетки узлов всей оболочки, из
решения которой уже находятся неизвестные величины. Подробно этот
подход изложен в монографии [235]. С точки зрения вычислительной
математики построенная таким образом аппроксимация будет парамет-
параметрическим кубическим сплайном.
Другие способы построения аппроксимаций радиус-вектора сре-
срединной поверхности посредством сплайн-аппроксимаций изложены в
работах [125, 216, 217, 218]. Они основаны на общей теории функ-
функциональных сплайнов с определением узловых значений из минимума
специальным образом построенных функционалов. За счет этого уда-
удается существенным образом сгладить возможные осцилляции вторых
производных от г, что для оболочек является весьма важным, так как
эти производные определяют радиусы кривизны поверхности.
Опыт применения численной параметризации для расчета оболочек
свидетельствует о большой чувствительности решения к точности
аппроксимации вектора г. В частности, для элементов, построенных на
классическом подходе с неизвестными щ, w, единственно возможной
является сплайн-аппроксимация, так как более простые схемы, напри-
например использование соотношений A.7.5), дают неудовлетворительные
результаты для неравномерных сеток. Поэтому при построении КЭ
такого класса используются именно сплайн-аппроксимации геометрии.
Примеры подобных КЭ приведены в работах [127, 128, 129, 145,
243, 345].
§1.7. Вопросы представления геометрии оболочек 63
Во многих работах по построению КЭ тонких оболочек вводится
аппроксимация радиус-вектора г срединной поверхности самостоятель-
самостоятельно в пределах каждого элемента, но не оговаривается, каким образом
определяются узловые значения производных от г. В качестве примера
упомянем работы [8, 64, 215, 250, 290, 326, 337]. Подобные КЭ дают
максимальную универсальность при минимальной погрешности гео-
метрии. Действительно, для аналитически заданных поверхностей уз-
узловые значения производных diT вычисляются точно, т. е. погрешность
задания геометрии минимальна, а геометрические характеристики вы-
вычисляются по аппроксимации вектора г, т. е. единообразно для любых
поверхностей. С другой стороны, для дискретно заданных оболочек
можно использовать специальную процедуру определения узловых зна-
значений diT, что позволяет рассчитывать оболочки и такого класса.
1.7.3. Математические аспекты сходимости неконформных
КЭ. Более существенные упрощения геометрии оболочки, в которых
ее поверхность представляется в виде набора пластин или слабо
искривленных сегментов (или пологих КЭ), требуют предварительного
исследования сходимости, так как здесь возможна ее потеря. Поэтому
в настоящем разделе рассмотрим основные положения теории
сходимости неконформных КЭ, которая включает в себя этот класс
задач.
Пусть {v} — точное решение из некоторого функционального про-
пространства Н, которому соответствуют деформации {ev}. Это решение
удовлетворяет вариационному уравнению
a(v,u) = (f,u), УиеН, A.7.6)
где
s
— функционал потенциальной энергии деформации;
(/, и) = | |{/}г{«} dS + | {Р}т{и} dL
S La
— работа внешних сил.
Одновременно с A.7.6) решение {v} удовлетворяет дифференциаль-
дифференциальной задаче
{!-(?„)} = {/} A.7.7)
со статическими граничными условиями
{a(sv)}L=La = {Р}, A.7.8)
64 Гл. 1. Конечные элементы тонких непологих оболочек
где
[ \{e,:}T[D]{ev}dS = J2 \ \({l(ev)}T-{f}T){u}dS-
S Sm
Г
?
{{RT}T{u} - {MT}T{0})dL - ^{{ev)}T{u}dL, A.7.9)
сумма пот- это сумма по элементам, {и} — любая функция из Н.
Для общности будем считать, что конечно-элементное решение {v*}
принадлежит некоторому другому функциональному пространству iJ*,
причем Н* ф Н в силу возможной неконформности аппроксимаций.
Это решение удовлетворяет только вариационному уравнению
a*(v*fu*) = (f,u*), Уи*еН*, A.7.10)
A-7.11)
минимизируемый функционал, который может отличаться от точного
выражения за счет использования иных соотношений для деформаций
е* =e*(v*).
Если ввести в качестве нормы величину
A.7.12)
то будет справедливо неравенство
\\ev-e*v.\\^\\ev-e*v\\ + \\e*v.-e*v\\, A.7.13)
где {е*} — интерполянт точного решения в Н*. Это означает, что
первое слагаемое в A.7.13) есть ошибка аппроксимации деформаций
вида A.1.6).
Для второго слагаемого из A.7.13) справедливо равенство
IK. -sl\\2 = V(ev-e:,el« - s*v) +
+ V(e*v.,e*v.-et)-V(ev,e*v.-e*v), A.7.14)
откуда следует
\V(r* f* ) — V(p r* )\
I If* — p*\\ < I p я~* 11 -4- чип Г \°v*>c'v*J \ovy°u*J\ /i 71a
\\bv* ЬУ\\ ^ I bv Ь1)\\ ^ bUP II * II * \L-l-LJ)
\\\\
§1.7. Вопросы представления геометрии оболочек
65
Из A.7.10) получаем
V(e*v., <-) = (/, u*) = J ^{l(ev)}T{u*} dS+ J {{P)}T{u*} dL =
S La
= E ( j \{ev}T[D]{eu.}dS+ | ({Rt}T{u*} + {MT}T{9*})db\ .
A.7.16)
Подставляя A.7.16) в A.7.15), получаем для исходной погрешности
решения A.7.13) следующее выражение:
А2 +Аз,
где
= \\ev-e*\\,
А2 = sup —
У \\?
А3 = sup у—-
{{Rt}1 {и*} + {Мт}1 {9*})dL
A.7.17)
A.7.18)
A.7.19)
A.7.20)
Слагаемое Аь как уже упоминалось выше, есть обычная ошибка
аппроксимации деформации и может быть определена по схеме, изло-
изложенной в п. 1.1.1, т.е. для нее справедлива оценка
А ~ |ф(?)| + |<ро(?I + °@> A.7.21)
где {Ф(С)} — ошибки аппроксимации СТЦ, {<^о(?)} ~~ ошибки аппрок-
аппроксимации постоянных деформаций.
Слагаемое А2 описывает погрешность от замены точных соотно-
соотношений деформаций {е} на приближенные {е*} за счет упрощений
геометрии. В случае отсутствия этих упрощений получаем: А2 = 0.
Слагаемое Аз описывает погрешность решения от возможной несов-
несовместности аппроксимаций. Действительно, если аппроксимации из Н*
таковы, что {и*} е С^\ то
{RT}T{u*}dL) =0,
A.7.22)
а если {в*} е С<°\ то
{MTY{0*}dL ) =0.
\ьт,
3 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
A.7.23)
66 Гл. 1. Конечные элементы тонких непологих оболочек
В случае отсутствия конформности {и*} и {в*} главная часть
погрешности Аз будет определяться постоянными слагаемыми в разло-
разложении деформаций ev вида A.1.9). Действительно, из A.1.9) следует,
что
fcifc№]{ofc}. A.7.24)
fc=0 k=0
Подставляя эти соотношения в A.7.20), получим оценку
{В2}Т{в*}> dL ) + О@- A.7.25)
J
Интересно отметить, что условие
({??! }т{и*} + {В2}т{в*}) dL = О A.7.26)
широко известно в литературе по МКЭ как условие «кусочного тести™
рования» Айронса («patch test») [160, 222, 226, 296], и оно гарантирует
сходимость неконформных КЭ. С точки зрения рассмотренной выше
погрешности, действительно, условие A.7.26) обеспечивает А2 —> 0 при
I —> 0, что гарантирует сходимость решения при стремлении размера
элемента к нулю.
1.7.4. Плоские и пологие КЭ. На основе полученных в п. 1.7.3
оценок погрешности решения можно провести анализ точности некото™
рых приближенных схем расчета оболочек. В первую очередь речь идет
о моделировании искривленной поверхности оболочки набором элемен-
элементов простой геометрии, среди которых наиболее популярны плоские
и пологие КЭ. В первом случае исходная поверхность заменяется
некоторой «граненой» поверхностью и каждая из этих плоских граней
считается отдельным плоским КЭ оболочки. При увеличении числа
этих плоских граней исходная поверхность будет приближаться все
точнее и в пределе обе эти поверхности совпадут [186]. Данная схема
весьма распространена, и имеется обширная литература по описанию
и применению различных плоских КЭ [2, 26, 92, 101, 132, 176, 262,
275, 280, 328, 354 и др.].
Во втором случае предполагается моделировать исходную поверх-
поверхность в виде набора слегка искривленных сегментов [165, 271, 284,
391 и др.]. На первый взгляд этот вариант предпочтительнее, чем
плоские КЭ, так как здесь поверхность представляется точнее. Однако
опыт применения пологих КЭ свидетельствует о том, что сходимость
здесь теряется. Точнее, сходимость наблюдается, но не к точному
решению задачи, а к некоторому другому [49, 156, 321, 381]. Для
§1.7. Вопросы представления геометрии оболочек 67
выяснения причин этого явления приведем здесь оценки погрешности
для модельной задачи изгиба кругового бруса (рис. 1.2.3).
Точное решение, соответствующее СТЦ и постоянным деформаци-
деформациям, имеет вид A.2.22), A.3.8), A.3.13). Если ввести безразмерную
координату 77 (—1 ^ ц ^ 1) и ограничиться безмоментным состоянием и
чистым изгибом, то точное решение {ev} и {v} можно записать в виде
е = С4, Х = СЬ, 7 = 0, A.7.27)
и = С\ cos 7] — С2 sin 7] + С3 + C^Rrj,
w = С\ sin 77 + С2 cos 77 + C4R —
Рассмотрим два варианта расчета на основе одинаковых линейных
аппроксимаций. Первый — плоский КЭ, для которого соотношения
деформации имеют вид
e* = —¦ — v =
ПЛ or) „• n ' АПЛ
0B) -00)
2i? sin 13 ' Апл 2i? sin 13 '
A.7.29)
7пл ~
sin /3 + 2Д sin C '
где г4 , ^i , 0^ — узловые значения соответствующих компонент
перемещений. Второй — пологий КЭ, с применением соотношений
деформаций
sin ^ + 2R ^ 2Rsin C J
_
Ъол ~
21? sin /3 + 2Д sin C
Следует заметить, что подчеркнутые слагаемые в A.7.29), A.7.30)
нужно отбросить, так как их наличие вызывает эффект «сдвигового
заклинивания». Другое объяснение отбрасывания этих слагаемых мо™
жет быть основано на использовании сокращенного интегрирования по
одной точке (см. раздел II).
Если по функциям A.7.28) вычислить узловые значения и подста-
подставить их в A.7.29), получим
} Х1. = СЪ-^, 7п*л = 0. A.7.31)
68 Гл. 1. Конечные элементы тонких непологих оболочек
После разложения этих выражений в ряд по углу /3, ошибка Ai A.7.18)
имеет порядок
1 r^J fj C/5V &г -tb + -t^ J • 1 Л- • i.oZ)
С другой стороны, для соотношений A.7.30) получаем соотношения
A.7.33)
у* =
sin/Г Упл R
Здесь оценка погрешности А\ имеет вид
. A.7.34)
Из сравнения A.7.32) и A.7.34) следует, что применение пологих КЭ
дает конечную погрешность, которая не зависит от размера КЭ.
Для получения оценки погрешности А2 плоских КЭ необходимо
для линейных аппроксимаций
их = а\ + aif], uz = «2 + ot^i], 9* = as + озд A.7.35)
вычислить деформации {e*L*} по соотношениям A.7.29), что дает
е*л = а4, Хпл = «6, 7пл = «з + «5- A.7.36)
Деформации {еи*}, соответствующие точным соотношениям деформа-
деформаций:
ди% ди*
е = —— cos г) - ^^ sin г),
07] ОТ]
A.7.37)
дв* ^ ди% ди*7
X = ^^у 7 — ^ + ^^ sm V + ^т^ cos V*
07] 07] 07]
дают
е = щ cos 77 — «5 sin r/,
A.7.38)
X = «б, 7 — аЗ + «5^? + «4 Sin Г/ + «5 COS Г).
Из разности A.7.38) и A.7.36) получаем оценку погрешности
А2 - \/E{GF + ?^F). A.7.39)
Аналогично определяем подобную ошибку для пологих КЭ. Для
линейных аппроксимаций
и* = а\ + щт}, w* = «2 + «5^^ 6>* = «з + «6^7 A.7.40)
§1.7. Вопросы представления геометрии оболочек 69
деформации {в**} имеют вид
елол = 2 р 4 > Хпол = ^' 7пол = «3 + ^. A.7.41)
IX IX IX
Точные деформации {ем*} на перемещениях A.7.40) имеют вид
A.7.42)
а5 - «1 - ¦
Из A.7.42) и A.7.41) получаем оценку
/GF
A.7.43)
Видно, что А2 для пологих КЭ, аналогично погрешности А\, тоже
имеет конечную величину.
Слагаемое Аз A.7.20) в рассматриваемом случае будет отсутство-
отсутствовать, так как используемые аппроксимации совместны, а погрешность
Аз есть погрешность неконформных аппроксимаций перемещений.
Таким образом, погрешность решения на основе плоских КЭ состо™
ит из двух слагаемых: A.7.32), A.7.39), а пологих — A.7.34), A.7.43).
Сравнивая их, можно сделать следующие выводы.
1. Плоские КЭ дают сходимость к точному решению. В случае
сокращенного интегрирования ошибка погрешности аппроксимаций
меньше, чем ошибка замены соотношений деформаций.
2. Пологие КЭ не имеют гарантированной сходимости, так как верх-
верхняя оценка погрешности имеет конечную величину. При этом основная
ошибка состоит в плохой аппроксимации СТЦ (аналогичные выводы
приведены в [72]).
Глава 2
РАСЧЕТ ТОНКИХ НЕПОЛОГИХ ОБОЛОЧЕК МКЭ
НА ОСНОВЕ ГИПОТЕЗ КИРХГОФА-ЛЯВА
Одна из самых распространенных схем расчета тонких оболочек,
основанная на гипотезах Кирхгофа-Лява является, как показано в
предыдущей главе, весьма сложной в плане ее реализации МКЭ.
Несмотря на большое количество искривленных КЭ такого типа, лишь
ограниченное число их действительно эффективно в расчетах тонких
непологих оболочек. При этом эти «работающие элементы» структурно
можно разделить на две группы: первая ориентирована на канониче-
скую геометрию (как правило, цилиндрические оболочки) и представ-
представлена КЭ либо с заданными СТЦ, либо с заданными деформациями
[115, 118, 136, 236, 252, 254, 378]; вторая представляет КЭ широкого
назначения, которые основаны на изопараметрической аппроксимации
геометрии и перемещений полиномами не ниже третьей степени [15,
20, ПО, 129, 151, 156, 223, 243, 250, 326, 345, 381 и др.].
В настоящей главе предлагается новая конечно-элементная мо-
модель, основанная на гипотезах Кирхгофа-Лява и предназначенная для
расчета оболочек и оболочечных конструкций с дискретно заданной
геометрией. Отличительной особенностью этой модели является ис-
использование изопараметрической кубической аппроксимации на макро-
макрочетырехугольнике, определение неизвестных функций как декартовых
проекций вектора перемещений, численного интегрирования, тензор™
ных соотношений теории оболочек.
Основные результаты этой главы изложены: по построению и те-
тестированию КЭ — в [63, 64]; по разработке схемы расчета составных
оболочек — в [62]; по решению конкретных задач — в [79, 122, 146].
§2.1. Построение матрицы жесткости и вектора сил
2.1.1. Аппроксимация геометрии. В пределах каждого элемен-
элемента вводится локальная система координат ?i, ?2, которая переводит
искривленный четырехугольник в единичный квадрат (рис. 2.1.1, а).
§2.1. Построение матрицы жесткости и вектора сил
71
Наша задача — определить внутри четырехугольника вектор-функцию
г = гF,6)> B.1.1)
которая бы обеспечивала непрерывность ее и ее первых производных,
т.е. касательных векторов, при переходе межэлементных границ. Для
этого воспользуемся следующими построениями, используемыми для
элемента изгибаемой пластины в [297].
h
Рис. 2.1.1
Двумя диагоналями разобьем квадрат — 1 ^ ?i, <^ ^ 1 на рис. 1.2.1, б
на четыре треугольника 1-4 и в каждом из них определим самостоя-
самостоятельные аппроксимации для г в виде кубического полинома. Рассмот-
Рассмотрим для примера I треугольник и некоторую функцию g. Обозначим
{Uf =
B.1.2)
= ^Wf = @- 1,0,26,6,0,3^,266^1,0),
{U2f = -
{U22}T = — {U}T = @,0,0,0,0,2,0,0,26,66),
{Uv2f = A- {Uf = @,0,0,0, 1,0,0,26,26,0).
Тогда можем записать
B.1.3)
72
Гл. 2. Расчет тонких непологих оболочек МКЭ
где {/З1} = (/?ь/?2> •••? Ао) — вектор неопределенных параметров. Да-
Далее введем узловые значения функции g:
,т
BЛ.4)
д
где g^ — значение функции g в г-м узле, дг = ——. Тогда из условия
совпадения аппроксимации B.1.3) с узловыми значениями B.1.4) по™
лучим
B.1.5)
где матрицы [.
[Во] =
[В] =
" 1 -
2 -
0
2
1
2
0
г
А
-1
1
0
1
1
1
{
' [Б
1
0
'[В]
1
0
^2
0
1
0
2
(З1}
= \?
Ч]
{6°} +
[в] U
}l] имеют вид
1
1
3
0
3
1
3
0
0
1
[Во
-1
^2
1
0
1
2
1
].
3
. [в'1} =
7
1 -1 "
1 0
-2 3
0 0
1 1
1 0
2
3
- о
1[ВГ
1 [Во] =
¦ 1
0
0
0
1
0
0
-
-1
1
1
0
1
1
1
0
3
>
7
-1
0
1
0
1
0
1
B.1.6)
B.1.7)
Аналогично для трех других треугольников
gK(b,b) ={ЩТ {рк} (К = 2,3,4), B.1.8)
коэффициенты которых определяются аналогично B.1.5) через узловые
векторы {g®} и {gK\ (К = 2, 3,4):
B.1.9)
{g-4}T =
Легко устанавливаемое отличие будет иметь место лишь в матрицах
[В] и [Во] B.1.7).
Построенная таким образом аппроксимация обеспечивает кубичное
изменение функции g вдоль границ треугольников, которое однозначно
§2.1. Построение матрицы жесткости и вектора сил
73
определяется четырьмя узловыми значениями (функции и ее каса-
касательной производной в двух вершинах), и квадратичное изменение
нормальных к контуру производных. Для последних имеет место кон-
конформность лишь вдоль внешних границ, так как здесь имеется узел на
середине, и нет конформности вдоль внутренних границ. Для достиже-
достижения непрерывности нормальных производных на внутренних границах
необходимо наложить дополнительные условия равенства этих произ-
производных со стороны прилегающих треугольников в узлах 10, 11, 12, 13,
причем линейно независимых из них будет лишь три. Составим эти
условия для узлов 10-12.
Для 10-го узла примем
д 1
откуда получаем уравнение
где
А
А
7> "Т. 7> i
4 4 4 4
B.1.10)
B.1.11)
B.1.12)
Составляя аналогичные уравнения для 11-го и 12-го узлов и подстав-
подставляя туда соотношения типа B.1.5), получим систему уравнений
{g}, B.1.13)
где {g} — вектор узловых значений для всего четырехугольника, т. е.
B.1Л4)
Матрица [А0] в B.1.13) является неособенной и имеет вид
B.1.15)
Следовательно, можно найти [А0] 1 и выразить {g^} через {g}. Да-
Да{}
лее, подставляя это выражение в соотношения типа B.1.5) и разнося
элементы матриц [Вк] в необходимые позиции в соответствии с ну-
нумерацией узловых значений в векторах {g"K}, получим окончательное
матричное соотношение
{/Зк} = [DK] {g}
B.1.16)
74 Гл. 2. Расчет тонких непологих оболочек МКЭ
с матрицами [DK] размера 10 х 16 для каждого треугольника. В
результате, определяя в каждом треугольнике аппроксимации
2к &•&) = {U{bAi)f {DK} {g} , B.1.17)
мы получаем аппроксимации класса С^ во всей области. Эти аппрок-
аппроксимации будем далее использовать как для компонент радиус-вектора
срединной поверхности, так и для вектора перемещений.
Итак, геометрию элемента будем определять, задавая в вершинах
1, 3, 5, 7 узловые значения т^к\ д\т^к\ д2Ак^ (К = 1,3,5,7), в узлах
5>irW (К = 2, 6), в узлах 4, 8 - д2г^ (К = 4, 8). Обозначим
{х} = (xW,dix(l\d2xV\ dixV\x&\..., х^7\ dixV\ д2х^\д2х^) ,
{у} = (j,0), di
{z} = {zV\d
B.1.18)
где x, у, z — проекции вектора г на орты глобальной декартовой
системы координат I, j, k (рис. 2.1.1). Тогда для аппроксимации радиус-
вектора г (СьСг) в каждом треугольнике справедлива запись
B.1.19)
2.1.2. Вычисление геометрических характеристик. При по™
строении матрицы жесткости нам понадобятся некоторые геометриче-
геометрические характеристики.
1. Базисные векторы д^г и дгдкГ вычисляются по B.1.19) в виде
]Т{Щ,
\DK]T{Utk},
B.1.20)
где векторы {Щ}, {С/^} даются соотношениями B.1.2).
2. Метрический тензор поверхности определяется как скалярное
произведение векторов diT, т.е.
atk = дгт ¦ дкг = {Ui}1 [A] {Uk} , B.1.21)
где матрица [А] имеет вид
[А] = [D] ({x} {xf + {у} {yf + {z} {zf) [Df . B.1.22)
(не путать с B.1.13)). Дискриминант определяется в виде
а = аца22 — af2- B.1.23)
§2.1. Построение матрицы жесткости и вектора сил 75
3. Вектор нормали п находим как векторное произведение:
п = -^д\г х &2Т = пх\ + riyj + nzk, B.1.24)
уа
для компонент которого получим выражения
пх = -±= {С/, f [D] ({у} {zf - {z} {yf) [D]T{U2},
ny = -^{Ulf[D] ({z}{xf - {x}{zf) [D]T{U2}, B.1.25)
nz = -L {Ul f [D] ({*} {yf - {y} {xf) [D]T {U2} .
4. Символы Кристоффеля-Шварца определяются в виде
Цк=&т-дгдкт, B Л.26)
где д^т — дифференцирование в сопряженном базисе. Окончательно
для них справедливы соотношения
Г], = 1- (а22 {Щ}т [А] \игк} - an {U2f [A] {U*}) ,
B.1.27)
Пк = \ (au{U2}T [A] {Ulk} - а12 {Uyf [A] {Ul
Используемые далее соотношения теории оболочек позволяют обой-
обойтись только этими характеристиками, не привлекая тензоры кривизны.
2.1.3. Аппроксимации перемещений и вычисление деформа-
деформаций. Вектор перемещений и будем искать в виде проекций на те же
глобальные оси i, j, k, относительно которых определяется радиус-век-
радиус-вектор срединной поверхности г, т. е.
u = uTI + \iyi + uzk. B.1.28)
Аппроксимации для компонент их, иу, uz будем строить так, как это
описано в п. 2.1.1, т.е. в виде
[D] {их},
иу F,6) = {Uf К} = {Uf [D] {uy} , B.1.29)
76
Гл. 2. Расчет тонких непологих оболочек МКЭ
где {их}, {%}, {uz} — векторы узловых неизвестных:
г lT ( A) о A) п A) п B) G) п G) п G)
/ A) о A) 1 A) о B) G) о G) п G)
= Ц ;, д\ику \ д2иу ,д\ику J7...,uy\diUyJ, d2uyJ,
(8)
(8)
,B.1.30)
Так как система координат ?i, ^2 является в общем случае криво-
криволинейной и неортогональной, то все необходимые соотношения будем
определять в тензорном виде.
Тензоры деформаций берем в векторном виде A.2.13):
къ-Т{кд^. B.1.31)
Подставляя в B.1.31) соотношения B.1.29), B.1.27), B.1.24), B.1.25),
B.1.20), получим их матричные выражения. Прежде чем их приводить,
введем обозначения:
{Q}=
= Х22
I Xi2
тогда соотношения B.1.31) запишутся в виде
{e} = {R]{q}, {X} = [R*]{q},
где
Ru={xf{D}T{Ut}{Ut}T{D},
Rt2 = {y}T{D}T{Ut}{Ut}T{D},
Rl3 = {zf [D]T {U,t}
[D],
\D]T {{Ux} {U2f + {U2} {U\ f) [D],
\ {x
Я33 = \ {zf [D]T ({[/,} {U2f + {U2
D]T ({UX} {U2f + {U2}
[D],
T
*{ = -nx ({UH}T - Г
1
[D}>
%{U2}){D],
%{U2})[D},
B.1.32)
B.1.33)
B.1.34)
§2.1. Построение матрицы жесткости и вектора сил
77
= -nz
Rh = ~nv
UU}T - Т\г
- Г
}2
T% {U2}) [D],
Г?2 {U2}) [D],
- Г>2
2
rf2 {U2}) [D].
Выражение удельной потенциальной энергии деформации удобнее все-
всего записывать относительно смешанных компонент тензоров деформа-
деформаций:
ei=a»ekj, ^=^ХЩ, B.1.35)
где а1^ — контравариантные компоненты тензора деформаций, которые
вычисляются через атп с помощью дискриминантного тензора Стп
в виде
nij _ pimpjn fimn _ J__ /9 1 ЧШ
tt — О О dmnj ^ — j— I | 0 ' iZ.I.OOJ
Подставляя B.1.33) в B.1.35) с учетом B.1.36), получим
где
0 -
B.1.37)
B.1.38)
B.1.39)
«22
0 an ^«i2
0 ^«21 ^22
^«12 0 an
2.1.4. Составление матрицы жесткости. Выражение потен-
потенциальной энергии деформации для однородного и изотропного
материала определяется в виде
Eh
Eh3
XjXi
s. B Л .40)
Подставляя сюда соотношения B.1.37), B.1.33), можем переписать его
в матричном виде
B.1.41)
78
Гл. 2. Расчет тонких непологих оболочек МКЭ
где для матрицы жесткости [К] справедливо выражение
Eh
\К] =
T [R]T [G]T [M] [G] [R]
Здесь матрица упругих постоянных [М] зависит лишь от коэффициента
Пуассона /х, т. е.
1 /i 0 0
/i 1 0 0
0 0 0 1 -
0 0 1 -/i 0*
B Л.43)
Точно вычислить интегралы в B.1.42) не представляется возмож-
возможным ввиду сложности получаемых подынтегральных слагаемых. Поэто-
Поэтому используется численное интегрирование, т. е. интегралы заменяются
конечными суммами. При этом следует иметь в виду, что компоненты
матриц [R] R*], [G] будут разными для каждого из треугольников,
так как они выражаются через матрицу [D] (соотношения B.1.21),
B.1.22), B.1.34), B.1.39)), которая имеет свой вид для отдельных
треугольников. Поэтому в каждом треугольнике следует самостоятель-
самостоятельно вычислять интегралы по соответствующей квадратурной формуле
и затем складывать. В этой процедуре легко учесть переменность
толщин, полагая h функцией: h(^,^). Таким образом, вместо B.1.42)
получаем
#
4 N
гп=\ п=\
[я(^(тп)^
гпп)
тп) Атп)Х\
1 '^2 )\
тп) Атп)
[M]
Атп)
о
'*2 JJ
|-д* ^(mn)^(mn
где т — номер треугольника, п — номер квадратурной точки в
треугольнике, N — порядок квадратурной формулы в треугольнике,
^2./. Построение матрицы жесткости и вектора сил 79
ип — весовые множители, Qmn) — координаты квадратурных точек
в треугольниках.
В настоящей работе используется 7-точечная квадратурная формула
5™го порядка точности [222], т.е. всего в четырехугольнике подынте-
подынтегральное выражение вычисляем в 24 точках. Координаты Qmn\ ^(тп)
определяются из соотношений
^ 1 Z О |^>i Z О
.2^ ^^ 2 + 3 ?2 - 2 + 3 B.1.45)
»1 = ^^2 "~ ^3 J ?i — ^^2 + ^3
eCn) _ ^(n) _ r(n) ' 1 Jin) _ _т{п) _ j{n)
где L^ — L-координаты квадратурных точек. Координата L^ исчеза-
исчезает вследствие того, что координаты 9-й точки (рис. 2.1.1, б) нулевые.
Функция h(?\,?2) определяется для всех треугольников в виде
единой аппроксимации по значениям h^ в 8 точках (рис.2.1.1, б), т.е.
в виде
8
Мб,а) = ^(г)^(еьб), B л.46)
г=\
где
Ni = |A +6)A -6)(-1 +6 -6), N2 = ^A +Ci)(l - Cl),
^з = j(l +6)A +6)(-l +6 +6), N4 = i(l +6)A -Ф,
j BЛ.47)
iv A ЫО 6)A & 6) ^ C1 d)(i €!)
JV7 (i?0(i6)(i?i6)» iv8 (i
2.1.5. Вычисление напряжений. Вычисление результатов расче-
расчета НДС предполагается вдоль границ элементов в виде компонент
перемещений, ориентированных как вдоль декартовых осей I, j, k, так
и относительно единичных векторов нормали и и касательной т к
контуру и нормали п к оболочке (рис. 2.1.2), а также значений усилий,
моментов и напряжений на верхней и нижней лицевых поверхностях,
ориентированных относительно осей i/, т, п. Для их вычисления нам
понадобятся некоторые геометрические характеристики.
Ориентация ортов и, т, п будет для каждой грани своя. Сразу
оговоримся, что т направлена вдоль обхода элемента против часовой
стрелки (рис.2.1.2).
80
Гл. 2. Расчет тонких непологих оболочек МКЭ
III
В соответствии с формулами диф-
дифференциальной геометрии для ортов i/,
т справедливы соотношения
и = п1д\г + п2д
т = т1д\г + т2д
B.1.48)
Рис. 2.1.2
где diT определяются по B.1.20), п —
по B.1.24), B.1.25). Направляющие
косинусы касательной тг для граней
I—IV на рис. 2.1.2 будут следующими:
B.1.49)
где аи — компоненты метрического тензора, вычисленные по формуле
B.1.21). Направляющие косинусы нормали пг строятся по B.1.49)
в виде
п =
п2 = -
(апт1 +ai2r2). B.1.50)
Таким образом, в каждой точке контура мы можем вычислить как
компоненты п\ тг, так и орты контура и, т, п, вычислив необходимые
значения д^т, п, ац, а по соотношениям, приведенным в п. 2.1.2.
Исходной информацией, как в 2.1.2, так и здесь, будут компоненты
векторов {х}, {у}, {z} A.18), т.е. узловые значения п и д{г.
После решения системы алгебраических уравнений мы определяем
узловые значения {и} для всей конструкции и, как следствие, для каж-
каждого элемента. В соответствии с аппроксимацией B.1.29) мы можем
построить поле перемещений внутри элемента:
и (б, 6) = их\
uzk.
B.1.51)
Проекции их, иу, uz в интересующей нас точке вычисляются простой
подстановкой в B.1.51) координат этой точки.
Компоненты перемещений, ориентированные вдоль ортов и, т, п,
т. е. для и в виде
итт + wzn,
B.1.52)
§2.1. Построение матрицы жесткости и вектора сил 81
находятся как скалярные произведения:
Un = U • U = UXUX + UyUy + UZVZ,
иТ = и -т = ихтх + чуту + uztz, B.1.53)
w = и • п = ихпх + иуПу + uznz.
Для вычисления напряжений, ориентированных вдоль ортов и, т
(вдоль п действуют напряжения обжатия и поперечные касательные
напряжения, которыми в теории оболочек Кирхгофа-Лява пренебрегав
ют), сначала определяются мембранные усилия Nnn, NnT, NTT и изги-
изгибающие моменты Мпп, Мпт, Мтт. Для этого используются выражения
Nnn = щпкМгк, NnT = щткМгк, NTT = тгткМгк,
B.1.54)
Мпп = щпкМгк, Мпт = щткМгк, Мтт = тгткАРк
и физические соотношения
Nik = ^^^^ \a^aks + a (aika^s — aisa^k)] e -
Fh
B.1.55)
-a""aJ'z)]xj3'
После простых преобразований получаем
Г/1 \ г к / 1 2\1
NTT = j^j [(I - ц)т1ткак + /i (e| + e|)] , B.1.56)
Eh г к
(x!
[0 - M)rVfex,fe + M (x! + Xl)] , B-1.57)
/i J
Для удобства вычислений следует воспользоваться матричным ана™
логом соотношений B.1.56), B.1.57). Обозначим
{N}T = (Nnn,NTT,NnT), {М}т = (Мпп,Мтт,Мпт). B.1.58)
82 Гл. 2. Расчет тонких непологих оболочек МКЭ
Тогда с учетом B.1.33) справедливо
{N}=-r^[Gu][R}{q}, {M}= ff [Gu}[R*}{q}, B.1.59)
где
Q-99 , о о &]] / 1 о (l\9 1
i— (l-/i)n2n2 + /i— 2(l-/i)n1n2 + 2/i— п
a a a
(l-/i)n2r2 (l-^^^+n2^)
B.1.60)
Отметим, что размерность векторов {7V} — сила, деленная на длину
(iJ/м), {М} — сила (iJ), т.е. распределенная сила и распределенный
момент.
Обозначим через апп нормальные напряжения (Н/м2), действую-
действующие на кромку элемента вдоль нормали и, аТТ — нормальные напря-
напряжения (Н/м2), действующие на перпендикулярную площадку вдоль
касательной т, апт — сдвиговые напряжения (Й/м2), действующие на
этих площадках. Тогда для вектора
{(г}Т=((Тпп,(Ттт,<Тпт) B.1.61)
справедливо выражение
l ^ B.1.62)
{a}
2.1.6. Вычисление узловых сил. В ряде задач возникает вопрос
об определении узловых сил. В случае заданных распределенных на™
грузок это удобно делать на этапе построения матрицы жесткости,
вычисляя интеграл работы:
I l(Qxu
R = I l(Qxux + QyUy + Qzuz)dS. B.1.63)
s
В настоящей работе предполагается задание внешних сил Q в виде
аппроксимации по восьми узлам типа B.1.46), т.е.
1=1 г=г
г=\
B.1.64)
§2.1. Построение матрицы жесткости и вектора сил 83
где iVi(?i,?2) — функции B.1.47). Тогда для векторного аналога
B.1.63) с вектором сил {Р} вида
R = {Р}Т{и} = {Рх}т{их} + {Ру}т{иу} + {Pz}T{uz} B.1.65)
получим
{Рх} =
{2ЛЩ
Интегралы в B.1.66) вычисляются аналогично тому, как вычисля-
вычислялись интегралы в матрице жесткости, т. е. численно, по тем же самым
квадратурным формулам в виде
N 8
т=\ п=\ г=\
j-{mn) /-(mn)
J n, B.1.67)
{Ру}, {Pz} - аналогично B.1.67).
Узловые значения Qi\ Q%,, Qz для наиболее распространенных
нагрузок обычно вычисляются, но в сложных случаях могут и зада-
задаваться произвольно. Рассмотрим несколько случаев.
1. Собственный вес. Если задан вектор направления этой силы,
который постоянен в декартовой системе координат i, j, k (например,
это вектор R), то
Qx] = R{xhh{t\ Qf = R{yhh{i\ Qf = B!?hh{i\ B.1.68)
где h^ — толщина в г-м узле, j — удельный вес [iJ/м3].
2. Нормальное давление q. Как известно, нормальное давление
действует в направлении (—п), где п — нормаль к оболочке,
Qf = -qn®, Qf = -qnf, Qf = -qn®, B.1.69)
где n^ — нормаль в г-м узле, вычисленная по соотношениям B.1.24),
B.1.25).
3. Центробежные силы. Предположим, что вращение происходит
вокруг оси Z с угловой скоростью и. Тогда вектор нагрузки направлен
Гл. 2. Расчет тонких непологих оболочек МКЭ
по радиусу и пропорционален расстоянию до оси Z. Для точки с коор-
координатами хМ\ у^г\ z^l\ получим
QW = I^tOftW, л(;) = l^^WftW qW = 0> B.1.70)
0 У 9
где g = 9,81 м/с2 — ускорение свободного падения, j — удельный вес
[U/м3], hM^ — толщина.
§2.2. Тестовые задачи
В настоящем параграфе приведем решение двух широко распро-
распространенных тестовых задач, для которых имеется обширный числовой
материал, полученный на основе различных КЭ. Обычно для того
чтобы охарактеризовать свойства КЭ, даются результаты расчета одной
задачи на различных сетках. Далее, сравнивая точность, даваемую
различными КЭ на одинаковых (или близких) сетках, можно судить о
скорости сходимости данного элемента относительно других. В таком
же варианте представим и настоящий элемент.
2.2.1. Сжатый цилиндр. Одной из са-
самых распространенных задач является за-
задача об изгибе замкнутой круговой цилин-
цилиндрической оболочки со свободными торцами
под действием самоуравновешенной систе-
системы двух сосредоточенных сил (рис. 2.2.1).
Особенностью этой задачи является бли-
близость напряженного состояния чистому из-
изгибу, что, как указывалось выше, представ-
представляет определенные трудности при использо-
Рис. 2.2.1 вании МКЭ.
Наиболее обширные численные данные
накоплены для оболочки со следующими параметрами:
L = 26,2 см, R = 12,5 см, h = 0,238 см,
B.2.1)
Е = 7Л • Ю5 кг/см2, Р = 45,3 кг, ^ = 0,3125.
Аналитическое решение, полученное в предположении нерастяжи-
нерастяжимости оболочки в [230], дает значение прогиба под силой:
г^тах = ^0,275 см. B.2.2)
Конечно-элементное решение дает несколько большее значение
[116, 252, 288]
wmax = -0,289 см. B.2.3)
В табл. 2.1, 2.2 представлены значения прогиба под силой на раз-
различных сетках для 1/8 части оболочки с наложением условий симмет-
§2.2. Тестовые задачи
85
[*]
со"
oq
[288]
LO"
E
[20]
со"
[252]
со"
СО
со"
т
со"
118]
т
со"
136]
"Т
со"
^^
ш
Сет
D8)
со
см
о
G2)
,269
о
со" см?
"xf t4--
0064
2035
о о
B0)
,264
о
B4)
C6)
012
232
о о
B4)
о
о
о
1
(96
,260 (
о
D8)
754
о
о
D8)
025
о
о
—< см со
X X
X
120)
276 (
о
E0)
,281
о
F0)
279
о
F0)
72)
CD
СП
'
О
G2)
CD -xf
СО LO
О
О
¦xf
X
О
о
LO
X
[117)
см
со
о
см
о
462)
284
о
108)
2055 (
о"
D5)
,280
о
E4)
236
о
CD CM
X X
A02J
LO
СМ
о
180)
279 (
о
(9Z)
,284
о
@6)
281
о
xf
X
см
114)
in
СМ
о
144)
со
о
г-ч
о"
ю
со
ОО
см
г-~
см
о
[288)
[450)
287
о
со
X X
882
о
125)
245)
t-~ СО
ОО ОО
см см
о
150)
о
СП
см
CD h-
ОО ОО
СМ СМ
о"
150)
о
о
о
¦xf
X
о"
CD
X
CD
405)
289
о
486)
СП
ОО
см
о"
ОО
48 0
1—1
о
ОО
X
ОО
СП
[30
со"
&
xf
см
-—'
О
[401]
A'1
о"
CD
СО
со"
[205]
(I'l
[352]
см"
со"
со
396]
1
со"
со
стз
Сет1
@2)
296
о
¦xf
см
ОО
СО
о
о
D0)
см
см
01
о
,__
X
ю
,244
о
@8)
,292
о
см
X
G2)
(90)
,270
,281
о
G2)
о
E0)
249
о
E0)
,292
о
F0)
382
о
(90)
,275
,287
о
со
X
о
103)
СО
см
о
¦xf
X
108)
287 (
о
LO
X
G0)
267
о
126)
287 (
о
со
X
LO
282
о
A8)
,243
о
D5)
,264
о
см
X
135)
282 (
о
(901
(9Z)
ai
135)
189)
СО СП
ОО ОО
см см
о о
"xf t4^-
X X
CM UN, V.N
(80)
266
о
144)
260 (
о
со
X
125
245
297 (
о"
ю"
см
см
279 (
о
299 (
о"
CM xf
-н СМ
О xf
ОО ОО
см см
о
150)
261 (
о"
xf
X
А
о
со
X
со
405)
982
о
486)
о
СП
см
о"
ОО
X
Гл. 2. Расчет тонких непологих оболочек МКЭ
рии на трех гранях. Первое число в графе «параметры сетки» озна-
означает число КЭ по длине, второе — по окружности. В заголов-
заголовке КЭ помимо литературного источника последовательно показаны
степени аппроксимируемых полиномов для мембранных перемеще-
перемещений щ, прогиба w и углов поворота вг. В случае использования
уравнений, основанных на гипотезах Кирхгофа-Лява, вместо степе™
ни вг стоит прочерк. Если используются КЭ типа (В) §§1.2, 1.3,
т.е. вместо проекций щ, w определяются декартовы проекции век-
вектора перемещений их, иу, uz даются две цифры — первая сте-
степень аппроксимации и, вторая — в (если они есть), а впереди
ставится индекс В. КЭ, описанный в предыдущем параграфе, поме-
помечен *. Для смешанных КЭ впереди поставлен индекс С, для гибрид-
гибридных — Г.
Кратко опишем каждый элемент из приведенных в этих таблицах,
что можно считать обзором наиболее известных КЭ. Так как
используемые КЭ имеют различные степени аппроксимации и, как
следствие, различное число степеней свободы, то в скобках рядом
со значением прогиба приведено полное число степеней свободы для
всей задачи с учетом тех, которые исключаются за счет наложения
граничных условий.
1. A,3,-) [136] — используются билинейные аппроксимации тан-
тангенциальных смещений и бикубическая — прогиба A.5.1). Подобная
аппроксимация совместна, для цилиндрических оболочек точно пред-
представляет состояние «чистого изгиба», но плохо описывает СТЦ. В ре-
результате этот КЭ дает неудовлетворительную точность практически на
любой сетке.
2. A,3,-) [118] — используются билинейные аппроксимации тан-
тангенциальных смещений и бикубическая — для прогиба с добавлением
явных выражений для СТЦ A.5.2). Свойства этого элемента, извест-
известного как элемент Кантина-Клафа, полностью противоположны преды-
предыдущему КЭ, т.е. он несовместен, не представляет «чистый изгиб», но
точно описывает СТЦ. По точности он значительно предпочтительней
предшествующего КЭ.
3. A,3,-) [116] — используются аппроксимации КЭ №1 одно-
одновременно с коррекцией матрицы жесткости на предмет точного уче-
учета СТЦ по схеме п. 1.5.2. Этот КЭ совмещает лучшие свойства
двух предыдущих элементов, что подтверждается даваемой им точ-
точностью.
4. C,3,-) [252] — используются аппроксимации A.6.25), т.е. точно
представляются СТЦ и независимые деформированные состояния. При
расчете цилиндрических оболочек дает наивысшую точность при наи-
наименьших затратах.
5. C,3,-) [20] — используются бикубические аппроксимации для
всех трех компонент перемещений. Подобная аппроксимация совместна
и хорошо описывает СТЦ и «чистый изгиб» для любой геометрии
поверхности.
§2.2. Тестовые задачи
87
6. E,5,-) [288] — используются полиномы пятой степени в тре-
треугольнике для всех трех перемещений. Этот КЭ является высокоточ-
высокоточным и обладает высокой скоростью сходимости.
7. В C,-) [*] — описан в предыдущем параграфе.
8. C,3,™) [396] — используются кубические аппроксимации в тре-
треугольнике для всех трех перемещений с использованием принудитель-
принудительной совместности для прогиба по схеме п. 1.4.3.
9. C,3,2) [352] — используются кубические аппроксимации для щ,
w и квадратичные для вг в треугольнике с дискретным наложением
гипотез Кирхгофа-Лява по схеме п. 1.6.2.
10. A,1,1) [205] — используются билинейные аппроксимации для
всех компонент перемещений в варианте моментной схемы КЭ (п. 1.6.4).
11. A,3,2) [390] — используются линейные аппроксимации щ, ку-
кубические — w, квадратичные — в^ с дискретным наложением гипотез
Кирхгофа-Лява (п. 1.6.2) и с использованием метода «декомпозиции
мод» для представления «чистого изгиба» (п. 1.6.4).
12. A,1,1) [401] — используются билинейные аппроксимации для
щ, w, вг и вариационный принцип Ху-Вашицу с самостоятельной
в пределах каждого элемента аппроксимацией деформаций и усилий
(п. 1.6.4).
13. С( 1,1,1) [247] — используется смешанная постановка с незави™
симой аппроксимацией всех перемещений, усилий и моментов били-
билинейными полиномами (п. 1.4.5).
14. Г A,3,1) [309] — гибридный КЭ с заданными усилиями и момен-
моментами внутри элемента и аппроксимацией указанной степени компонент
перемещений лишь на границах (п. 1.4.6).
2.2.2. Крыша под собственным весом. Другой задачей, на
которой обычно апробируются конечно-элементные решения, явля-
является задача о деформировании под действием собственного веса
цилиндрической панели (рис. 2.2.2), шарнирно-опертой по криволиней-
криволинейным границам и свободными прямо-
прямолинейными гранями, со следующими z-
параметрами:
L
L= 15,24 м, R = 7,62 м,
h = 0,0762 м,
Я = 2,1 • 105 кг/см2, B.2.4)
jh = 0,044 кг/см2,
/i = 0,3125.
Рис. 2.2.2
Скорость сходимости решения этой
задачи, полученного настоящим эле-
элементом, в сравнении с другими известными КЭ представляется в виде
кривых в осях — общее число степеней свободы на разных сетках
Гл. 2. Расчет тонких непологих оболочек МКЭ
и вертикальное смещение середины свободного края (uz в т.В на
рис. 2.2.2). При этом ограничимся лишь теми элементами, которые
демонстрируют хорошую сходимость, и не будем приводить кривые,
характеризующие свойства ранних КЭ. Эти результаты можно найти
в [221, 252, 273, 378].
v~, см
§2.2. Тестовые задачи
Интересной особенностью этой задачи является сходимость к раз-
разным решениям КЭ, построенным на основе соотношений пологих и
непологих оболочек. Подобное явление отмечено многими авторами
[49, 156, 381 и др.], и были проведены специальные исследования
[321], в которых показано, что к точному решению сходятся плоские
и непологие КЭ, а те элементы, которые построены на соотношени-
ях пологих оболочек, сходятся к некоторому другому решению. На
рис. 2.2.3, где представлены упомянутые кривые, точное решение отме-
чено пунктиром, а «пологое» — штрихпунктиром.
Кратко охарактеризуем все КЭ, используя описанные выше заго-
ловки.
КЭ, построенные на основе гипотез Кирхгофа-Лмва
1. A,3,-) [280] — плоский треугольный элемент с линейной аппрок-
аппроксимацией мембранных перемещений и кубической — прогиба (макро-
(макротреугольник Клафа-Точера из п. 1.4.2).
2. B,3,-) [354] — плоский треугольный элемент с квадратичной
аппроксимацией мембранных перемещений (вводится вращательная
степень свободы в вершинах) и сингулярным кубическим полиномом
для прогиба (п. 1.4.2).
3. A,3,-) [391] — пологий треугольный элемент с аппроксимацией
КЭ № 1, отличие которого лишь в учете кривизны в соотношениях для
мембранных деформаций.
4. 5. C,3,-) [271] — пологие треугольные элементы с кубиче-
кубической аппроксимацией всех трех перемещений по схеме Клафа-Точера
(п. 1.4.2) с сохранением нормальных производных в серединах сторон
(кривая 4) и с линейными нормальными производными (кривая 5).
6. A,3,-) [378] — элемент цилиндрической оболочки с явным до-
добавлением СТЦ (аналог КЭ Кантина-Клафа [118]).
7. C,3,-) [252] — элемент цилиндрической оболочки с заданными
деформациями (аппроксимации A.6.25)).
8. C,5,-) [284] — пологий треугольный элемент с кубической ап-
проксимацией щ и пятой степени — для w.
9. E,5,-) [288] — треугольный элемент с аппроксимацией пятой
степени для всех перемещений.
10. 11. C,3,-) [381] — пологий и непологий элементы с кубиче-
кубической аппроксимацией щ и кубической аппроксимацией на макро-четы-
макро-четырехугольнике (аналогично §2.1 настоящей главы) прогиба w.
12. В C,-) [326] — КЭ с усеченной бикубической аппроксимацией
декартовых проекций вектора перемещений.
13. В C,-) — описан в предыдущем параграфе.
КЭ, построенные на основе гипотез Тимошенко
14. A,3,2) [262] — плоский треугольный элемент с линейной ап-
аппроксимацией щ, кубической — w, квадратичной — вг и дискрет-
дискретным наложением гипотез Кирхгофа-Лява по схеме п. 1.6.2 (DKT-CST
[390]).
90
Гл. 2. Расчет тонких непологих оболочек МКЭ
15. B,3,2) [275] — плоский треугольный элемент с квадратичной
аппроксимацией мембранных перемещений (вводится вращательная
степень свободы в вершинах по схеме [247] кубическим прогибом,
квадратичными вг и дискретным наложением гипотез Кирхгофа-Лява
по схеме п. 1.6.2 (DKT-LST [390]).
16. C,3,2) [103] — пологий треугольный КЭ с кубическими щ, w,
квадратичными вг и дискретными гипотезами Кирхгофа-Лява.
17. C,3,2) [352] — непологий треугольный элемент, аналогичный
КЭ № 16.
18. В A,1) [328] — КЭ с билинейной аппроксимацией перемещений
и углов поворота с одноточечным численным интегрированием (обла-
(обладает ложными СТЦ).
19. В A,1) [340] — КЭ с билинейной аппроксимацией и, 0, в ко-
котором для подавления явления «заклинивания» используются сложные
формулы интегрирования (п. 1.6.3), исключающие появление ложных
СТЦ.
20. В B,2) — КЭ с квадратичными 9-узловыми аппроксимациями
и, в с использованием интегрирования по поверхностным координатам
по схеме 3x3;
21. В B,2) — 8-узловой КЭ с интегрированием по схеме 3x3;
22. В B,2) — 8™узловой КЭ с интегрированием по схеме 3x3
изгибной и мембранной части энергии и 2x2 - сдвиговой;
23. В B,2) — 8™узловой КЭ с интегрированием по схеме 2x2;
24. В B,2) — 9-узловой КЭ с интегрированием по схеме 2x2;
25. С A,1,1) [247] — смешанная постановка (п. 1.4.5).
26. Г A,3,1) [309] - гибридный КЭ (п. 1.4.6).
Соответствующие кривые на рис. 2.2.3 построены по данным работ
[253, 294, 361, 363, 407 и др.].
Для иллюстрации точности, даваемой описанным в предыдущем
параграфе КЭ при вычислении напряжений, на рис. 2.2.4 приведена
N, кН/м
800
400
80
40
С
в
Рис. 2.2.4
Рис. 2.2.5
§2.2. Тестовые задачи 91
эпюра усилий Ny вдоль линии СВ. Треугольниками помечены резуль-
результаты, полученные с помощью этого элемента на указанной в скобках
сетке, квадратами — КЭ из [381]. На рис. 2.2.5 приведены эпюры
моментов Nx вдоль СВ. Сплошной линией обозначено точное решение,
штриховой — решение на сетке 2x1, штрихпунктиром -4x2.
2.2.3. Некоторые замечания о сходимости различных КЭ.
1. Описанный в предыдущем параграфе КЭ тонкой оболочки демон-
демонстрирует высокую скорость сходимости и входит в группу элементов,
дающих хорошую точность на весьма редких сетках в случае сложно
напряженного состояния. Однако следует признать, что состояние
«чистого изгиба» он моделирует несколько хуже, чем специальные КЭ,
ориентированные на определенный класс оболочек. Тут известно, что
для типичных форм оболочек наилучшие результаты при минимальных
затратах дают КЭ, построенные специально для этих оболочек
[115, 118, 136, 252, 254]. Хотя, с другой стороны, возможности
подобных специальных КЭ сильно ограничены геометрией оболочек.
Например, специальные КЭ круговых цилиндрических оболочек
допускают обобщение лишь на класс цилиндрических оболочек
некругового профиля [135, 236, 295]. Настоящий элемент не имеет
ограничений на класс возможных поверхностей оболочек, что является
его несомненным достоинством.
2. Среди искривленных КЭ тонких оболочек, построенных на ос-
основе гипотез Кирхгофа-Лява, оптимальную точность демонстрируют
элементы с одинаковой аппроксимацией всех неизвестных полиномами
степени не выше третьей. Элементы с малым числом узловых сте-
степеней свободы, т. е. с аппроксимацией мембранных перемещений щ
полиномами низкого порядка, дают очень плохие результаты. Способы
улучшения их свойств за счет добавления слагаемых, учитывающих
СТЦ, или построения перемещений по заданным деформациям дают
существенное ускорение их сходимости, но появляются сильные огра-
ограничения на форму поверхности. Использование аппроксимаций более
высокого порядка, в частности полиномов пятой степени, хотя и при-
приводит к наилучшей точности на малых сетках [249, 287, 288], связано
с появлением дополнительных осложнений. Во-первых, наличие значи-
тельного числа степеней свободы в узле приводит к большей ширине
глобальной матрицы жесткости. Во-вторых, в ряде случаев затрудни-
затруднительно поставить граничные условия для старших производных [226].
В-третьих, расчет составных оболочек требует выполнения сложных
условий сопряжения [155]. Использование кубических аппроксимаций
для щ и полиномов пятой степени для w дают КЭ, которые не имеют
преимуществ по точности для непологих тонких оболочек по сравне-
сравнению с чисто кубическими аппроксимациями [287].
3. Скорость сходимости плоских треугольных КЭ в сильной степени
зависит от порядка аппроксимации мембранных перемещений. Сви-
Свидетельством этому служит весьма высокая скорость сходимости тех
92 Гл. 2. Расчет тонких непологих оболочек МКЭ
элементов, в которых используются квадратичные полиномы для щ, по
сравнению с аналогичными элементами с линейными щ (кривые 1-2
и 14-15), хотя вопрос о математической строгости повышения степени
полиномов с линейных до квадратичных за счет введения лишь вра-
вращательных степеней свободы в узлах остается открытым. Например,
в [354] вводятся дополнительные предположения о постоянстве угла
в вершинах элемента, что эквивалентно предположениям о равенствах
нулю в вершинах деформаций сдвига jxy. Несмотря на это и другие
замечания, следует отметить, что современные плоские КЭ тонких
оболочек весьма эффективны и вполне конкурентны многим сложным
элементам.
§2.3. Расчет оболочеж с дискретно-заданной
геометрией
Изложенный в §2.1 настоящей главы искривленный КЭ может быть
успешно применен к расчету оболочек сложной геометрии, в том числе
и дискретно-заданных. В этом случае необходимо лишь применить
некоторую процедуру определения узловых значений производных от
радиус-вектора diY срединной поверхности.
В настоящей работе предполагается использование простейшей ко-
конечно-разностной аппроксимации касательных векторов diT по соотно-
соотношениям A.7.5).
Как указано в п. 1.7.2, использование соотношений A.7.5) обеспе-
обеспечивает гладкость г е С^1\ и этого вполне достаточно. Действительно,
если бы неизвестными функциями были компоненты вектора пере-
перемещений щ, w (КЭ типа А), то подобное определение значений д{г
приводило бы к излишней погрешности реше-
решения. В рассматриваемом случае все обстоит
благополучно, так как здесь имеем понижен-
пониженную чувствительность к точности аппроксима-
аппроксимации геометрии (см. п. 1.2.3).
В качестве тестовых были решены зада-
задачи предыдущего параграфа (цилиндрические
оболочки) при дискретном задании геометрии,
т. е. узловые значения diT определялись по ко-
конечно-разностным соотношениям A.7.5). Отли-
Отличие от варианта с аналитически вычисленными
д{г лежало в пределах 1-3% по перемещениям
"у и напряжениям.
Примером реальной конструкции, которая
была рассчитана по разработанной схеме, мо-
рис 2 з 1 жет служить кронштейн передней опоры креп-
крепления двигателя автомобиля КамАЗ. Геомет-
Геометрически он представляет собой тонкую оболочку сложной геометрии,
изображенную на рис. 2.3.1.
§2.3. Расчет оболочек с дискретно-заданной геометрией
93
Условиями закрепления принимались условия отсутствия смещений
в зоне крепления болтов и упор в направлении оси z в точке D.
Нагрузка, соответствующая реальным условиям эксплуатации, модели-
моделировалась приложением в точке С сосредоточенной силы в направлении
оси х («вертикальный изгиб») и крутящего момента с вектором вдоль
оси z. В силу симметрии рассматривается лишь половина конструкции
с нанесением соответствующих условий симметрии или антисиммет-
антисимметрии вдоль линии ABC. Помимо численных расчетов, эта конструкция
исследовалась экспериментально на основе методов хрупких лаковых
покрытий, электротензометрирования и голографической интерферо-
метрии. В результате были получены взаимосогласующиеся данные
по оценке ее НДС. Материалы этих исследований — совместные и
численные, и экспериментальные — изложены в работах [63, 79, 154].
е-105
20
0
?-105
о
-20
40
Рис. 2.3.2
Рис. 2.3.3
Приведем некоторые характерные кривые, полученные на изобра-
изображенной на рис. 2.3.1 сетке КЭ. На рис. 2.3.2, 2.3.3 приведены графи-
графики деформаций вдоль линии ABC в окрестности точки В на верх-
верхней и нижней поверхностях оболочки при «вертикальном изгибе».
Треугольниками помечены экспериментальные данные, полученные
В. В. Нехотяевым методом тензометрирования.
На рис. 2.3.4 приведены анало-
аналогичные кривые, но уже для на-
напряжений. Знак (+) соответствует
верхней поверхности, (—) — ниж-
нижней. Видно, что расчетные кри-
кривые хорошо согласуются с экс-
экспериментальными данными, что
подтверждает работоспособность
этой схемы расчета дискретно-
заданных оболочек.
Исследование НДС кронштей-
кронштейна свидетельствует о наличии
сильной концентрации напряже-
напряжений в окрестности точек В, Е, D, а опыт эксплуатации автомобиля
дает факты разрушения этого узла именно в этих зонах. Подобное
80
40
0
94 Гл. 2. Расчет тонких непологих оболочек МКЭ
совпадение служит доказательством правильности выбранной модели
схемы нагружения узла отдельно от автомобиля. Но помимо этого
совпадения, представляет интерес выяснение причины появления этой
концентрации и разработка такой конструкции, которая имела бы боль-
больший ресурс.
Анализ возможных причин концентрации напряжений в окрестно-
сти точек В, Е, D приводит к выводу о чисто геометрическом характе-
характере их происхождения. Действительно, в этих местах происходит резкое
изменение геометрии поверхности кронштейна и, в частности, гауссова
кривизна оболочки принимает отрицательное значение.
§ 2.4. Расчет периодических оболочек
Весьма широкий класс оболочек обладает тем свойством, что опре-
определенные характеристики вдоль некоторых линий совпадают. Наиболее
типичный пример — оболочки вращения под осесимметричной нагруз-
нагрузкой, у которых решение, ориентированное относительно меридиана,
одинаково по окружности для любых меридианов. Более общий слу-
случай — когда геометрия оболочки и характеристики нагрузки повто-
повторяются с определенным шагом по окружности. Здесь уже решение
повторяется лишь для некоторого дискретного набора меридианов или
других линий на поверхности оболочки. Если первый случай приводит
к одномерной задаче, то во втором имеем уже двумерную задачу.
В настоящем параграфе будем рассматривать эти классы задач с еди-
единых позиций, как задачи расчета оболочек с заданными условиями
периодичности вдоль некоторых линий. Рассмотрим оболочку, изобра-
изображенную на рис. 2.4.1, у которой по условиям геометрии и нагрузки
решения на линиях AiBi должны совпадать.
Для компонент перемещений это означает, что
A) B) (к) A) B) (к)
B.4.1)
где un , Ur , w^ — проекции вектора перемещений на орты Ui, т^,
щ (тг — вектор касательной к линии AiBi, Vi — вектор нормали
в касательной плоскости, п^ — вектор нормали к оболочке). В качестве
расчетной области будем рассматривать часть оболочки, ограниченную
четырехугольником А1В1А2В2, у которой компоненты решения ип, ит,
w на линии А\В\ совпадают с аналогичными компонентами решения
на линии А2В2. Подобные условия совпадения решения задаются в
МКЭ путем присвоения соответствующим узловым перемещениям на
этих линиях одинаковых номеров. Таким образом, получаем, что мо-
моделируемая часть оболочки геометрически является топологическим
прямоугольником, а с точки зрения перемещений — топологическим
цилиндром.
§2.4. Расчет периодических оболочек
95
А
Рис. 2.4.1
Главная сложность реализации подобной расчетной схемы с по-
помощью описанного в §2.1 КЭ — необходимость пересчета на лини-
линиях периодичности вектора перемещений от декартовых проекций к
проекциям на орты i/^, Ti, щ. Геометрическими аналогами узловых
перемещений B.1.30) будут следующие параметры:
ип = и • i/, ит = и • т, w = и • п,
ди дип
етп = и • — = —— - хит + wknT,
OS OS
ди дит
епп =
= т
ди dw
: п * ТГ™ :=:: Т^ ипкПт ~~~~ иткпт1
ds ds
ди дип ,
дп дп
ди дит
B.4.2)
^п — п * tj^ — tj^ ~~ ипкп — иткпт,
дп дп
д - л о д
где — — производная по дуге линии AiBi, — — производная по
дуге линии, перпендикулярной A^Bi в направлении орта и, кп, кт,
96
Гл. 2. Расчет тонких непологих оболочек МКЭ
кпТ — кривизны поверхности в направлении нормали к AiBi, вдоль нее
и геодезическое кручение, %, Хг ~~ геодезические кривизны линии на
поверхности [44, 45, 158, 239]. Физические величины епп, епт, ип, етп,
егг, ит являются углами поворота ортов i/, т, п относительно вектора
касательной т и нормали и.
Процедура пересчета производится на этапе построения матрицы
жесткости отдельного элемента в том случае, когда у него имеется
грань, совпадающая с одной из линий А^В^. При этом первоначально
строится обычная матрица жесткости, описанная в §2.1, относитель-
относительно перемещений B.1.30), а затем с помощью матрицы, связывающей
перемещения B.1.30) с B.4.2), она модифицируется. Для построения
этой матрицы связи используются соотношения
и = ипи + итт + wn,
ди
7h
ди
дп
— = етпи + еттт + штп,
ds
= еппи + ептт
B.4.3)
откуда получаем
ди
_
ди
п
""д1
ди
дп
ди
= n
, ди
п п п т т т
г2
д{
п1
= —-етпи - д-егтт - ^ujTn + — enni/ + ^ептт + — с^
т1
А^
B.4.4)
Для проверки подобной схемы
был решен ряд тестовых задач,
одна из которых — круглая пла-
пластина с отверстием под действием
поперечных и центробежных сил.
На рис. 2.4.2 изображена исходная
пластина и расчетная область с
разбиением по радиусу на 2 КЭ
с наложением условий равенства
компонент перемещений на гранях А\В\ и А^В^* Приведем результаты
расчетов.
Рис. 2.4.2
§2.4. Расчет периодических оболочек
97
1. Изгиб. По внешнему контуру задается условие защемления
(w,oor = 0), по внутреннему — отсутствие поворотов (иог = 0), что
эквивалентно задаче об изгибе круглой пластины с жесткой шайбой в
середине. В табл. 2.3 даны погрешности для прогиба (Sw), изгибающих
моментов Мг на внутреннем (SlM) и внешнем (S\4) контурах в процен-
процентах по отношению к точному решению с использованием 2 и 3 КЭ по
радиусу.
Таблица 2.3
Сетка
2
3
-0,14%
-0,04%
^6,23%
-3,17%
2,68%
1,01%
Рис. 2.4.3
2. Центробежные силы. Внешний контур считается свободным,
внутренний — жестко закрепленным, задана угловая скорость враще-
вращения — классическая задача о быст™
ровращающемся диске. При мо-
моделировании сегмента одним КЭ
с наложением условий периодич-
периодичности погрешность максимальных
окружных напряжений на внешнем
ободе равна +0,1 %.
На этой же задаче исследуется влияние искривленности линий
периодичности на точность решения. На рис. 2.4.3 изображены две
различные конечно-элементные сетки с одинаковыми параметрами
разбиения: первая (а) имеет прямолиней-
прямолинейные радиальные линии периодичности, вто-
вторая (б) — криволинейные. Точность по
максимальным окружным напряжениям для
а-сетки была 0,05%, б-сетки — 0,5%.
Примером реальной конструкции, рас-
рассчитанной по этой схеме, может служить
силовой колпак перспективной модели диф-
ференциала автомобиля КамАЗ. Он пред-
представляет собой тонкую замкнутую обо-
оболочку вращения, жестко закрепленную по
нижнему криволинейному контуру и нагру-
нагруженную четырьмя диаметрально располо-
расположенными сосредоточенными силами в сече-
сечении около меньшего отверстия (рис. 2.4.4). Рис. 2.4.4
В силу наличия двух плоскостей симметрии
вполне достаточно рассмотреть лишь четверть всей оболочки с наложе-
наложением условий периодичности по меридиану. На рис. 2.4.5 изображена
расчетная область с используемой сеткой КЭ, на которую нанесены
4 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
Гл. 2. Расчет тонких непологих оболочек МКЭ
0,632 МПа
0,563МПа0'453МПа
Рис. 2.4.5
изолинии расчетных напряжений на верхней (а) и нижней (б) поверх-
поверхностях.
Из анализа этих рисунков следует, что НДС этой оболочки да-
далеко от равнопрочного, так как имеет место повышенный уровень
напряжений в конической части вследствие появления здесь больших
изгибающих моментов. Цилиндрическая часть находится практически
в безмоментном состоянии, и, как следствие, напряжения там малы.
С целью определения более равнопрочной конструкции были рас-
рассмотрены варианты оболочек с переменной толщиной по меридиану,
в которых в конической части толщина была увеличена, а цилин-
цилиндрической — уменьшена. В результате был определен такой вариант,
который при увеличении веса на 20% имел снижения максимальных
напряжений на верхней поверхности на 60%, нижней — 70%.
§ 2.5. Расчет составных оболочек
При сопряжении двух оболочек необходимо обеспечить равенство
полей перемещений вдоль линий стыка всех прилегающих к нему
сегментов.
Например, для двух оболочек, изображенных на рис. 2.5.1, необходимо
обеспечить равенство
иА@ = ив@, B.5.1)
где ? — дуговая координата, иА(?) — перемещения оболочки А,
иВ@ ~ оболочки В. В случае жесткого соединения к B.5.1) добав-
добавляются условия равенства углов поворота нормали иоп относительно
векторов касательной к линии сопряжения:
<"п (О = ^п (О. B-5.2)
Наиболее типичным способом выполнения этих условий в МКЭ явля-
является введение на линиях сопряжения специальных степеней свободы,
§2.5. Расчет составных оболочек
99
Рис. 2.5.1
ориентированных относительно этих линий. Для плоских КЭ это три
смещения и три угла поворота относительно глобальной декартовой
системы координат [113]. Для оболочек сложной геометрии на лини-
линиях сопряжения вводится криволинейная система координат, которая
связана с этой линией и одной из оболочек, называемой основной,
и строятся специальные соотношения, связывающие перемещения (а
для смешанных КЭ усилия и моменты) сопрягаемой оболочки с пере-
перемещениями основной. Подобная схема используется в работах [14, 155,
224, 242 и др.].
Следует заметить, что построение условий сопряжения для КЭ
с неизвестными щ, w весьма трудоемко ввиду различия базисных
векторов diT, n для каждой сопрягаемой оболочки.
Другой способ сопряжения оболочек основан на вариационном
принципе [168] и сводится к введению в минимизируемый функционал
условий B.5.1) и B.5.2) посредством множителей Лагранжа. В этом
случае условия стыковки выполняются в интегральном смысле и их
точность зависит от степени аппроксимации на границах множителей
Лагранжа, которые имеют физический смысл усилий и моментов. По-
Подобная схема развивается в работах [172, 174, 179, 180 и др.].
В настоящей работе используется комбинация обеих схем, что
является наиболее естественным и простым для описанного в данной
главе КЭ. Действительно, так как неизвестными функциями являются
декартовы проекции вектора перемещений и, то условия B.5.1) вы-
выполняются автоматически, если вдоль линии сопряжений совпадают
узловые значения и и —, и здесь не требуется никаких дополнитель-
дополнительных построений по пересчету базисных векторов каждой оболочки.
100 Гл. 2. Расчет тонких непологих оболочек МКЭ
В настоящей работе вдоль линии стыка определяются три коорди-
координаты: 7/1, 7/2, Щ, одна из которых направлена вдоль этой линии, а две
другие лежат в касательных плоскостях прилегающих оболочек. На-
Например, для конструкции, изображенной на рис. 2.5.1, следует ввести
m = tf, m = tf = tf' m=it- B-5.3)
Узловыми неизвестными вдоль линии сопряжения берутся значения
ди ди ди
и, ^—, ^—, ^—, B.5.4)
дг)\ дщ дщ
т. е. здесь их больше, чем вдоль других координатных линий, но зато
обеспечивается тождественное выполнение условий B.5.1).
Учет жесткого соединения B.5.2) сводится к равенству
пл-^±пь.^=0, B.5.5)
где знак (±) указывает, совпадают или нет векторы та и тв- Учет
B.5.5) в настоящей работе производится путем наложения условий
B.5.5) в каждом узле дополнительно [62].
Первоначально строится дискретная модель исследуемой конструк™
ции с наложением связей B.5.1), т.е. для шарнирных соединений,
которая сводится к минимизации функционала Лагранжа
3=l-{q}T[K}{q}-{P}T{q}, B.5.6)
где {q} — глобальный вектор узловых перемещений, {Р} — глобальный
вектор узловых сил, [К] — глобальная матрица жесткости. Далее в
каждом узле, лежащем на линии сопряжения, строится условие B.5.5)
в виде уравнения для узловых неизвестных {q}. Для всех узлов это
даст систему уравнений вида
[B]{q}=0. B.5.7)
Таким образом, получаем задачу минимизации квадратичного
функционала B.5.6) с ограничениями B.5.7). Используем метод
множителей Лагранжа и сведем задачу B.5.6), B.5.7) к задаче
определения экстремума функционала
Э = \{q}T{K){q} - {P}T{q} + {\}T[B]{q}, B.5.8)
где {А} — вектор множителей Лагранжа. Условия экстремума B.5.8)
дают уравнения
f
B.5.9)
[B]{q} = 0.
§2.5. Расчет составных оболочек 101
При решении системы B.5.9) целесообразно учесть следующие
факты: во-первых, для исследуемых задач матрица жесткости всей кон-
конструкции [К] является симметричной и положительно определенной,
т. е. решение системы уравнений
[К){Щ = {В} B.5.10)
для ряда правых частей может быть весьма эффективно реализовано с
использованием разложения Холецкого
[K] = [L][L}T; B.5.11)
во-вторых, размерность вектора {q} намного больше размерности век-
вектора {А}. С учетом этого решение системы B.5.9) осуществляется
путем решения ряда вспомогательных задач:
1) решение систем уравнений
B.5.12)
2) вычисление
[D] = [B][A], {T} = [B]{R}; B.5.13)
3) решение системы
= {Г}; B.5.14)
4) вычисление вектора
ад = [Б]т{А}; B.5.15)
5) решение системы
[K}{Y} = {Q}- B.5.16)
6) окончательное решение
-{У}. B.5.17)
По указанной схеме были проведены расчеты ряда реальных кон™
струкций, некоторые из которых кратко опишем.
1. Изгиб консольно закрепленного тонкостенного стержня локаль-
локальной силой вдоль стенки (рис. 2.5.2). Для сравнения эта конструкция
исследовалась экспериментально и рассчитывалась с помощью ППП
«СУМРАК» [26, 27] плоскими треугольными оболочечными КЭ. На-
Настоящий расчет проводился тремя КЭ и имел 120 степеней свободы.
По перемещениям расхождение с расчетом плоскими КЭ (96 элементов
с 378 степенями свободы) не превышало 5%. На рис. 2.5.3 изображена
эпюра напряжений в заделке для внешней поверхности, треугольни™
ками отмечены экспериментальные результаты, полученные В. В. Нехо-
тяевым.
102
Гл. 2. Расчет тонких непологих оболочек МКЭ
10 3 кГ
-60
10 см
16 см
4 см
1300 кГ/см2
Рис. 2.5.2
Рис. 2.5.3
Рис. 2.5.4
2. Рабочее колесо центробежного компрессора под действием цен™
тробежных сил (рис. 2.5.4) [122]. При расчете рассматривается фраг-
фрагмент этой конструкции, вырезанный вдоль линий, параллельных ло-
лопатке, на основном и покрывном дисках с наложением условий перио-
периодичности вдоль этих кромок по схеме §2.4.
В зоне перехода основного диска в ступицу было наложено условие
жесткого защемления. В результате расчетов полученной конструкции,
состоящей из трех пересекающихся оболочек (фрагмента основного
диска, лопатки, фрагмента покрывного диска), было определено ее
НДС. По перемещениям (осевое смещение края обода) расхождение
с экспериментом лежало в области 10-20%. На рис. 2.5.5, 2.5.6 пред-
представлены эпюры изгибающих моментов и мембранных усилий, возни-
возникающих в лопатке вдоль линии сопряжения с основным диском.
§2.5. Расчет составных оболочек
103
м,н
80
ДМПа
40
Рис. 2.5.5
40
Рис. 2.5.6
Рис. 2.5.7
3. Рабочее колесо гидротурбины под действием центробежных сил
и давления на лопасть (рис. 2.5.7). Расчетная схема этой конструкции
полностью подобна вышеизложенной. Наибольшие напряжения имели
место на лопасти вдоль линий сопряжения. Для рабочих режимов
нагружения (заданное давление и скорость вращения) полученные
расчетные напряжения находятся в хорошем соответствии с реальными
значениями.
Раздел II
ЛИНЕЙНЫЙ АНАЛИЗ ОБОЛОЧЕК
МАЛОЙ И СРЕДНЕЙ ТОЛЩИНЫ
ИЗОПАРАМЕТРИЧЕСКИМИ
КОНЕЧНЫМИ ЭЛЕМЕНТАМИ
В настоящем разделе рассматривается схема расчета тонких оболо-
оболочек и оболочек средней толщины на основе соотношений трехмерной
теории упругости. В этом случае гипотезы, характерные для меха-
механики деформирования оболочек, накладываются на этапе построения
матрицы жесткости отдельного элемента. Подробно описываются наи-
наиболее известные приемы и способы подавления излишней жесткости
элемента при уменьшении его толщины. Большое внимание уделяется
качественному анализу используемых аппроксимаций при различных
способах построения матрицы жесткости с позиций точности представ-
представления внутри элемента нулевых и постоянных деформаций.
Глава 3
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ПОСТРОЕНИЯ
ИЗОПАРАМЕТРИЧЕСКИХ КОНЕЧНЫХ
ЭЛЕМЕНТОВ
верх.
§3.1. Трехмерный изопараметрический элемент
оболочки средней толщины
Использование изопараметрической техники построения искривлен-
искривленных КЭ, предложенной для решения плоской задачи теории упругости,
с большим успехом было перенесено на трехмерные задачи [113], и,
в частности, было предложено рассчитывать по этой схеме и оболочки
средней толщины [42, 89]. В этом случае малость толщины элемента
по сравнению с его линейными
размерами учитывается естествен-
естественным образом путем задания по-
пониженной степени аппроксимации
в поперечном направлении. При-
Примером подобного элемента может
служить 16-узловой элемент, изоб-
изображенный на рис. 3.1.1.
В декартовой системе коорди-
координат х, у, z он представляет собой
искривленный параллелепипед, у
которого верхняя и нижняя по-
поверхности существенно искривле-
искривлены, а четыре боковые грани яв-
являются линейчатыми поверхностями. Для задания пробных функций
вводится локальная система координат ?, г/, (, в которой представ-
представленный объемный элемент будет прямолинейным кубом с гранями
— 1 ^ ?, г], С ^ 1. В общем случае связь между координатами ж, у, z и
?, 7], С имеет вид
Рис. 3.1.1
N
г (О
Трехмерный изопараметрический элемент оболочки
107
N
1-С
г=1
х(г)
C.1.1)
Характерной особенностью всех подобных элементов является ли-
линейная аппроксимация по толщине оболочки. Что касается функций
формы Ni (?, 77), то их вид зависит от числа и расположения узловых
точек на верхней и нижней поверхностях элемента. Как правило, они
делятся на два больших класса: лагранжевы и сирендиповы аппрок-
аппроксимации [113]. Отличие между ними в том, что для первых аппрок™
симирующие полиномы полны и содержат все необходимые степени,
а вторые используют усеченные полиномы. Как будет показано ниже,
это приводит к весьма существенным отличиям в свойствах элементов.
Приведем аппроксимаци, наиболее часто используемыеи при по-
построении КЭ оболочек.
1. Билинейная аппроксимация
(рис. 3.1.2).
Некоторая функция g(?,r]) аппроксими-
аппроксимируется билинейным полиномом
77) =
+
+
или в виде
О, C.1.2)
C.1.3)
Рис. 3.1.2
i=\
Функции формы Ni (?, 77) имеют здесь вид
JV, = i(l-0 (l-ry), N2=l-(l+O A-7?),
iVs = - A + ?) A + 7?) , iV* = - A — ?) ( 1 + 77) .
4 4
2. Квадратичная аппроксимация сирен-
дипова типа (рис. 3.1.3). В этом случае вме-
вместо C.1.2), C.1.3) берется аппроксимация
C.1.4)
, 77) = ci
или
C.1.5)
C.1.6)
Рис. 3.1.3
i=\
108
Гл. 3. Теоретические основы построения
где
= \ A + О A - V) ( + С - V). ^4 = ^ A - г,2) A + С),
C.1.7)
+
»?) ,
= 1 A - Г,2) A -
3. Квадратичная аппроксимация лагран™
жева типа (рис. 3.1.4).
Пробные функции, в отличие от C.1.5),
содержат полный биквадратный полином:
г)) =
Рис. 3.1.4
C.1.8)
а функции формы Ni (^, rj), г = 1,..., 9, име-
имеют вид произведения одномерных квадратных полиномов Лагранжа:
4. Кубическая аппроксимация сиренди™
пова типа (рис. 3.1.5).
Пробные функции имеют вид бикуби-
бикубического полинома:
, г]) = с\
Рис. 3.1.5
C.1.10)
Трехмерный изопараметрический элемент оболочки
109
а соответствующие функции формы Ni (?, 77), г = 1,..., 12, имеют вид
= !<'-
9 (\
^32^
1
~ 32
;i-r/) [-ш + 9 <
A-г,) A-30 =
¦0A ~V) [-10 + 91
г/2)],
l + о A +»?) [-Ю + 9 (
A-С2) A+77) A+30,
C.1.11)
10
5. Кубическая аппроксимация лагранже™
ва типа (рис. 3.1.6).
В этом случае для аппроксимации функ™
ции g(?,rj) задается полный бикубический И
полином:
12
V) =
Рис. 3.1.6
C.1.12)
110 Гл. 8. Теоретические основы построения
и функции формы Ni(?,rj), г = 1,..., 16, определяются как произведе-
произведения одномерных кубических полиномов Лагранжа:
N2 = -Jg A - f) A - ЗС) A - rj) A - V),
^з = -Jg A - ?2) A + 4) A - V) A - 9r?2) ,
iV8 = -A A - C2) A + 3C) A + rj) A - 9r/2),
2f C.1.13)
^9 = 56 I1 - ^) (! - 36 A + V) A - 9r?2),
^ 1 - ?) 0 - 9^) (! + ^) (! " 9^2) .
-г?2) A - 3V),
81
=|^(l-a A+30 A -r/2) A+377).
Более сложные аппроксимации используются сравнительно редко,
поэтому здесь мы их не приводим.
Трехмерный изопараметрический элемент оболочки
111
Таким образом, задаваясь некоторым набором узлов, лежащих как
на границе, так и внутри области определения элемента относительно
координат ?, rj, мы можем построить целое семейство элементов с
различным числом степеней свободы на основе аппроксимаций вида
C.1.1) с заданным N.
Изопараметрическая концепция предполагает определение вектора
перемещений в виде, аналогичном представлению геометрии, т. е. в
виде
N
г=\
1+С
верх.
N
1-С
C.1.14)
г=\
откуда видно, что искомые функции суть значения декартовых про-
проекций точек, лежащих на лицевых поверхностях оболочки. Матрица
жесткости строится в три этапа.
1) Определяется матрица Якоби преобразования
д
дг]
д х д у д z
~щ щ щ
д х д у д z
drj drj drj
д х д у д z
J( J( J(
<
¦ д "
дх
д
ду
д
~дг
. = [J] <
' д "
дх
д
ду'
д
~d~z
C.1.15)
Компоненты этой матрицы вычисляются прямым дифференцированием
выражений C.1.1), и при этом видно, что они будут зависеть от
координат текущей точки ?, гг], (, т. е. их можно вычислять только
поточечно.
2) Строится вектор деформаций
с помощью обычных соотношений теории упругости
C.1.16)
dvx
дх
dvy
ду '
dvz
ху " Ъу " ду + дх '
C.1.17)
^z = 7 =
112
Гл. 8. Теоретические основы построения
где производные по х, у, z вычисляются с помощью матрицы Якоби J
C.1.15) следующим образом:
avx
~дх~
дг^
ду
dvx
dz
dvy
dx
dvy
dy
dvy
dz
dvz
dx
dvz
dy
dvz
~d~z
= J
-il
dvx dvy dvz
Щ Щ a?
dvx dvy dvz
drj drj drj
dvx dvy dvz
L ~д? Ж Ж
C.1.18)
3) Составляется выражение для потенциальной энергии деформа-
деформации
V =
{ef[D] {e}du,
C.1.19)
где [D] — матрица физических постоянных материала. Аналитически
вычислить все встречающиеся в C.1.19) интегралы практически невоз-
невозможно, поэтому обычно используется численное интегрирование. Так
как в области изменения параметров ?, rj, С элемент представляет собой
куб, а подынтегральные функции — полиномы, то наиболее точные
значения дают квадратурные формулы Гаусса-Лежандра по каждой из
координат ?, rj, (. При этом следует учесть, что элемент объема du
в этих координатах тоже выражается через матрицу Якоби [J] в виде
dO = det[J] dCdrjd(. C.1.20)
В результате вместо C.1.19) фактически вычисляется сумма
C.1.21)
где i, j, к — индексы суммирования по квадратурным точкам соот-
соответственно в направлении осей ?, rj, (; ^г\ rj^\ (^ — координаты
квадратурных точек; а^, Uj, uJk — весовые множители. Порядок квадра-
квадратурной формулы определяется исходя из необходимости точного вычис-
вычисления главных членов в выражении энергии. Обычно для билинейной
аппроксимации C.1.2) это 2x2x2 точки интегрирования по формуле
Гаусса-Лежандра, для квадратичной C.1.5) и C.1.8) — 3 х 3 х 2, а для
кубической C.1.10) -4x4x2 точки.
Заметим, что по мере увеличения степени аппроксимирующих по-
полиномов объем работы быстро возрастает. Это объясняется, во-первых,
Трехмерный изопараметрический элемент оболочки
113
увеличением числа квадратурных точек, а в каждой точке необходимо
построить матрицу Якоби [J], вычислить ее определитель det [J], найти
обратную матрицу [J]~ и построить выражение энергии; во-вторых,
усложнением вычисления производных от функций формы, которые
используются для определения компонент матриц [J] C.1.15) и произ-
производных A.1.18). Поэтому полиномы выше 3-го порядка как правило не
используются, а наиболее часто применяются квадратичные аппрокси-
мации C.1.5) или C.1.8).
Помимо четырехугольных оболочечных элементов, на основе ука-
занного подхода можно строить и треугольные элементы с различным
числом узловых точек (см.,
например, рис. 3.1.7). Постро-
Построение матрицы жесткости в
этом случае идентично опи-
описанному выше, а отличие
лишь в используемых функ-
функциях формы Ni(?,rj), кото-
которые здесь удобнее всего за-
записывать через L-координаты
[124], и квадратурных форму™
лах, которые для треугольной
области имеют специальный
вид. Если числа узлов точек
на боковых гранях и их рас-
расположение совпадают, треугольные и четырехугольные элементы это-
этого семейства естественным образом стыкуются друг с другом, что
позволяет с их помощью рассчитывать весьма сложные оболочечные
конструкции. При этом не вызывает затруднений учет переменности
толщины оболочки и механических характеристик материала.
Особенностью представленной группы элементов является тот факт,
что использование классических трехмерных соотношений упругости
(закон Гука) приводит к неверным решениям при отличном от нуля ко-
коэффициенте Пуассона. Поэтому в практической реализации использу-
используются модифицированные соотношения, в которых напряжения обжатия
aZ'Z' зависят только от деформаций eziz> в виде упрощенного закона
Гука: uzizi = E%ezfz?, напряжения ov^s &y'y'i Txfyf связаны с аналогич-
аналогичными деформациями ех/х/, ?yfyf, Jxfyf соотношениями, справедливыми
для плоско-напряженного состояния, т. е.
Рис. 3.1.7
-/iz
C.1.22)
а в зависимостях напряжении поперечного сдвига tx>z>, Ty/Z/ от со-
соответствующих деформаций 7ж/^/> ly'z1 вводится коэффициент Файло-
114
Гл. 8. Теоретические основы построения
на к, учитывающий различие между реальным распределением этих
напряжений по квадратичному закону и распределением, следующим
из соотношений упругости и линейных аппроксимаций перемещений
по толщине (постоянные значения). Здесь введены оси xf, yf, zf,
которые ориентированы относительно нормали таким образом, что z1
направлена вдоль нее, a xf, у1 определяют касательную плоскость к
эквидистантной поверхности. Вводятся они самостоятельно в каждой
квадратурной точке по схеме, описанной в следующем параграфе.
Таким образом, соотношения упругости принимаются в виде
где
? J =
» Ix'y' •> 1х'z' j ly'z' j »
C.1.23)
C.1.24)
C.1.25)
Е*
iE*
0
0
0
0
/iE*
E*
0
0
0
0
0
0
E3
О
О
О
О
О
О
G
О
О
О
О
О
О
О
О
О
О
О
О
C.1.26)
Здесь E* =
E
— модуль поперечного обжатия, G* — модуль
1 [i
поперечного сдвига, К — коэффициент Файлона.
Переход к деформациям и напряжениям в осях х, у, z осуществля-
осуществляется с помощью направляющих косинусов ортов рь р2, рз, определяю™
щих локальные оси х/, у1', z1. Если ввести матрицу
гп/2
C.1.27)
где
-Lp J
' Р\х
pL
Plx
РУу
Ply
РЪу
р\
9
Р2
„2
Г211 =
±Р \
Зх %Р2уРЗу
C.1.28)
C.1.29)
§3.2. «Вырождающийся» элемент оболочки (элемент Ахмада)
115
Гг121 =
IP J
PlxPly PlyPlz PlzPlx
P2xP2y P2yP2z P2zP2x
. РЗхРЗу РЗуРЗг РЗгРЗх
C.1.30)
Р\хР2у + Р2хР\у PlyP2z + P2yPlz P\zP2x + P2zP\x
P2xP3y + P3xP2y P2yP3z + P3yP2z P2zP3x + P3zP2x
. РЪхР\у + Р\хРЪу P3yP\zJrP\yP3z PSzPlx + P\zP3x _
,C.1.31)
то матрица упругих характеристик [?)], фигурирующая в соотношениях
C.1.19), C.1.21), будет иметь вид
= [Tp]T[Df] [Tp
C.1.32)
и в каждой квадратурной точке вычисляется самостоятельно.
Теперь несколько слов об области применимости таких элементов.
Как показывают расчеты, описанный в настоящем параграфе элемент
дает весьма высокую точность тогда, когда отношение его линейных
размеров к толщине не превосходит 10 [407], так как по мере утон-
утончения элемента он начинает ухудшать свои свойства (вырождаться)
и может давать неверные результаты.
§3.2. «Вырождающийся» изопараметрический
элемент оболочки (элемент Ахмада)
Описанные в предыдущем параграфе искривленные конечные эле-
элементы, построенные на основе трехмерных уравнений теории упруго-
упругости, в значительной степени можно отнести к конечным элементам
оболочек. Действительно, при их построении учитываются основные
гипотезы теории оболочек, а именно: напряжения обжатия считаются
малыми и перемещения по толщине изменяются линейно, т. е. попе-
речное прямое волокно остается прямым при деформации. При этом
учитывается поперечное обжатие, что является достоинством подобных
конечных элементов при значительных толщинах и недостатком при
малых. Как упоминается в работе [113], «наличие трех степеней сво™
боды в каждом узле приводит к большим коэффициентам жесткости
для перемещений по толщине оболочки. Это затрудняет проведение
числовых расчетов и может явиться причиной плохой обусловленности
системы уравнений, если толщина мала по сравнению с остальными
размерами». Поэтому были предложены схемы и методики построе-
построения КЭ оболочек малой и средней толщины без учета поперечного
обжатия.
Наиболее известный элемент подобного типа описан в работе [245]
и по фамилии первого автора получил название «элемента Ахмада» или
116 Гл. 8. Теоретические основы построения
«вырожденного оболочечного элемента». Последнее название связано с
представлением оболочки как вырожденного трехмерного тела.
Различные варианты построения такого рода элементов описаны
в работах [9, 29, 33, 37, 42, 87, 89, 90, 133, 200, 266, 315, 363,
407 и др.].
Элемент оболочки представляется как искривленный параллелепи™
пед в трехмерном пространстве с линейчатой поверхностью по толщине
(рис. 3.2.1). Прежде всего, вместо координат узловых точек, лежащих
на верхней и нижней лицевых поверхностях оболочки, определяются
координаты r*(m) соответствующей точки на срединной поверхности
и компоненты вектора единичной нормали п^:
Рис. 3.2.1
Тогда радиус-вектор элемента объема р определяется следующим
образом:
^ C.2.1)
где М — число узлов, Nm (?,77) — функции формы.
При определении поля перемещений внутри элемента вводятся ги™
потезы о недеформируемости в поперечном направлении и сохранения
прямолинейности волокна, перпендикулярного срединной поверхности.
§3.2. «Вырождающийся» элемент оболочки (элемент Ахмада)
117
Тогда для однозначного описания перемещений в каждой точке элемен-
элемента достаточно задать в узлах компоненты вектора перемещений точек
срединной поверхности и двух углов поворота вектора нормали п^
относительно двух взаимно перпендикулярных к нему направлений
1 е
Ри этом используются те же самые функции формы, что
1 2
и в C.2.1). В результате можем записать
, С) =
M
т=\
m (С V) "{т) + ^Ч
• C-2.2)
— вектор перемещений точек срединной поверхности,
в
где
углы поворота вектора п^ относительно векторов е|ш\ е;, , ортого-
ортогональных вектору п^.
Направление осей ei, e2, n может быть определено разными спосо™
бами, но с точки зрения точности желательно, чтобы орт п был близок
к действительной нормали к поверхности оболочки. Два других орта:
Щ, ©2, должны быть ортогональны к п.
Выбор их в значительной степени произволен. Например, в [113]
рекомендуются следующие соотношения:
= 1 х п,
= nxej,
где I — орт по оси х. Если I и п коллинеарны, то ei = j x n, где j — орт
по оси у. В других случаях более предпочтительным будет связывать
их с касательными векторами некоторых граней, например:
дР
dp
ИЛИ
dp
дг),
Op
дц
Возможны и другие варианты. Здесь следует отметить, что вектор
п, даже будучи строгой нормалью к оболочке, не будет вектором
нормали к срединной поверхности элемента. Действительно, из C.2.1)
следует, что вектор нормали в fc-м узле будет определяться как
r(j):
П:
(к)
дг]
где ^ \ V{
что вектор
drj
— локальные координаты к-го узла. Вполне очевидно,
(к) (к)
может совпасть с п
заданным независимо, лишь
в исключительных случаях, хотя они могут быть весьма близкими по
направлению.
118
Гл. 8. Теоретические основы построения
Для вычисления потенциальной энергии деформации предполагает™
ся использование численного интегрирования, т.е. от объемного инте-
интеграла производится переход к конечной сумме:
b C.2.3)
где ^k\ i]^k\ (^ — координаты квадратурных точек, Шк — весовые
множители, det [J] — определитель матрицы Якоби (элемент объема).
Так как удельная потенциальная энергия является инвариантной вели-
величиной по отношению к системе координат, то, если ввести декартову
систему координат, ориентированную относительно нормали, можно
учесть гипотезу о малости напряжений обжатия, характерную для
теории оболочек с учетом деформаций поперечного сдвига. В соответ-
соответствии с этим в каждой квадратурной точке вводится упомянутая в
предыдущем параграфе декартова система координат xf, yf, z1 с ортами
pi, р2, рз, ориентированная таким образом, чтобы орт рз совпадал с
нормалью. Для определенности будем ее выбирать в виде
Pi = 77
РЗ = 77
x д7]р\'
Р2 = РЗ X
C.2.4)
В этих осях удельная потенциальная энергия деформации может
быть представлена в виде
где
={?х'х', ?у'у', Jx'y'}, W} ={lx'z', ly'z'},
C.2.5)
C.2.6)
[D\], [D2] — матрицы упругих постоянных, соответствующих плоско-
плосконапряженному состоянию, что эквивалентно выполнению гипотезы о
малости напряжений обжатия [89, 90] и состоянию чистого сдвига.
Например, для однородного изотропного материала они имеют вид
Е
0
0
[D2] =GK
1 о
0 1
о о
C.2.7)
§3.3. Построение явных выражений для деформаций
119
Деформации C.2.6) определяются с помощью обычных соотноше-
соотношений Коши:
dy' dy' dx'
dv7j
C.2.8)
dx/ '
ly'z1
dz' dy'
В большинстве работ (см., например, [245, 293, 315, 316, 361 и др.])
для их вычисления используют преобразования
dvr> dvo.t dv7/
dx' dx' dxf
U Ux> U Vqi1 UUz'
dvr>
= [*]
dz' dz' dz1
где [J] — матрица Якоби
T' dvo.f dv7i
x, dvy>
[ЩТ, C.2.9)
drj drj drj
dvx' dvy> dvz>
dx dy dz
d^ d^ d^
dx dy dz
drj drj drj
dx dy dz
ж ж щ
[Ф] — матрица направляющих косинусов ортов pi относительно декар-
декартовой системы координат х, у, z:
C.2.10)
[Ф]=
Р\х Ply Viz
Р2х Р2У P2z
. РЗх РЗу РЪх .
C.2.11)
На основе такого подхода было построено семейство КЭ с раз-
разной степенью аппроксимации. Наибольшее распространение получили
9™узловой A.1.8) и 8-узловой A.1.5) элементы. Однако известны и
более простые, четырехузловые, и более сложные элементы. Все они
строятся одинаково и отличаются лишь количеством и видом функций
формы Ni(^,r]), а также точностью квадратурной формы.
§ 3.3. Построение явных выражений для деформаций
Исследуем связь между описанными в §3.2 соотношениями и клас-
классической теорией оболочек. Изложение будет вестись в соответствии
с работами [58, 72 ,81].
120
Гл. 8. Теоретические основы построения
Прежде всего заметим, что матрицы C.2.10) и C.2.11) могут быть
записаны в виде
до до до
Разложим векторы —-, ——, —- по ортам р^ в предположении еправед™
д^ дг] д(
ливости C.2.4). Получим
до
д^
—
до
, — =
or]
+ О2Р2
C.3.2)
где
or] д(
C.3.3)
Матрицу [J] будем искать в виде
Г 3 3
где А], А?, А^ находятся из условия
C.3.4)
C.3.5)
причем [I] — единичная матрица. Подставляя в C.3.5) выражения
C.3.1) и C.3.4) с учетом C.3.2), получим систему уравнений:
{А\р\\
х
х {Х\рг]
= [I],
или
AiA?=0; {
B2Xl2 =0;
=0;
f dAl+C2A'+C3A'=0;
+ C2Xl
= 1.
C.3.6)
§3.3. Построение явных выражений для деформаций
121
Определив отсюда А], А?, А^ и подставив их в C.3.4), получаем сле-
следующее явное выражение для обратной матрицы Якоби:
'-'Ьг
~Р2 •
ВХС2
)
рз;
А{В2Сг АХСЪ)
Р2 С2
Щ-У C-3.7)
Далее вычисляем произведения
1
АХВ2
вхс2
АгВ2С3
О
1
%
-с2
о
1
C.3.8)
dvx
dvy dvz
ж
dvx dvy dvz
дт] дт] drj
dvx dvy dvz
д( д( д(
Pi • тгг P2 • 7TT P3 • тгг
dv dv dv
Pi • -?- P2 * -?- P3 ' ^~~
or] drj drj
dv
Pi • -
d(
dv
P2TT7
dv
P3 • ~
d( J
C.3.9)
Умножая C.3.8) на C.3.9), получим матрицу производных C.2.9),
т.е.
dv
I dv
dv
—В\ дч
C.3.10)
Теперь можем в явном виде выписать векторные уравнения для де™
формаций, которые тождественно совпадают с известными векторными
уравнениями теории упругости:
dv dv dv dv
¦P2 '
C.3.11)
122 Гл. 8. Теоретические основы построения
Для справки приведем выражение элемента объема du:
^) C.3.12)
откуда следует, что
det[J] = AiB2C3. C.3.13)
Несколько слов о представлении этим элементом смещений как
твердого целого. Так как соотношения для деформаций здесь тож-
тождественно совпадают с соотношениями теории упругости, то вектор
жестких смещений
v* = vq + Фо хр C.3.14)
будет давать точные нули для C.3.11). Подставляя сюда выражение
для р C.2.1), получим
к) () ^ WJC.3.15)
Сравнивая C.3.15) с C.2.2), видим, что аппроксимации C.2.2)
могут совершенно точно представить выражение C.3.15), так как век™
торное произведение Фо х п^ всегда лежит в плоскости, определяемой
векторами е^ и е^ .
Заметим, что использование соотношений C.3.11) в практической
реализации подобных элементов позволяет в значительной мере со-
сократить объем вычислений по сравнению с применением соотношений
C.2.9).
Теперь рассмотрим несколько подробнее выражения для дефор™
маций, которые вытекают из C.3.11) при разложении их в ряд по
степеням (. При этом для простоты будем считать, что координата (
направлена строго по нормали к срединной поверхности, а нормаль
N
n = J2n(t)N*(tv) C.3.16)
г=1
строго перпендикулярна касательным в срединной поверхности:
Это обычные предположения, используемые при построении оболочеч™
ных моделей. Они эквивалентны тому, что
рз = п, С1 = С2 = 0, С3 = 1^. C.3.18)
§3.3. Построение явных выражений для деформаций 123
Если выражение C.2.2) сокращенно записать в виде
v (?,»?, С) = ч(?,»7) + ^С0 (?,»?) C-3.19)
и подставить в C.3.11) с учетом C.3.10), то, например, для деформации
ех>х> получим
1 \дР ди h dp дв!
?хх - If Щ аё + 2е-Щ Щ ' (^-20)
откуда в явном виде получаем мембранную и изгибную деформации
*" = !$¦%¦
Аналогично для деформации сдвига имеем
1 ди 1 dp Л ft n 90 ,о о ооч
^^в+С C323)
Если считать параметр Ляме А\ и производные ^^ на уровне
до дт
срединной поверхности, т. е. — = —, и отбросить подчеркнутое слага-
слагаемое, то соотношения C.3.21)—C.3.23) будут тождественно совпадать
с приведенными в работах [24, 160, 177].
Если учесть переменность базиса по высоте, то из C.3.20) и C.3.23)
для кривизн и сдвигов будут следовать соотношения
1 дт дв 1 an аи
Хх'х' ~ ~Щ~д? ' ае + If ае * Ъ?'
C.3.24)
h 1 / дв л дпЛ
Легко показать, что выражение, пропорциональное (, в C.3.24) исче-
исчезает. Действительно,
-i+s-tr!(n")sa C325)
В результате получаем деформации, точно соответствующие теории
непологих оболочек в [194].
124
Гл. 8. Теоретические основы построения
§ 3.4. Использование ковариантных компонент
деформаций
Классическая схема построения трехмерных КЭ оболочек, изложен-
изложенная в §3.2, является весьма трудоемкой и может быть существенным
образом упрощена. Во-первых, это относится к альтернативным схемам
вычисления деформаций, более экономичным, чем соотношения C.2.9).
Во-вторых, возможно избавиться от численного интегрирования по
толщине путем выделения в явном виде мембранных и изгибных де-
деформаций. Рассмотрим обе эти возможности.
Использование соотношений C.3.11) вместо C.2.9), при полной их
тождественности, дает существенный выигрыш в объеме вычислений.
Подобный КЭ описан в [75, 81, 82, 83].
В работах [24, 33, 59, 82, 160, 259, 324, 362 и др.] используются
ковариантные компоненты деформаций:
dp d
др длг
dp
dp
dp dv
dp dv
Ж ' ~д?
C.4.1)
p dv dp dv\
rj o( d( or] J
Если объединить эти деформации в векторы:
C.4.2)
то из соотношений C.3.10) и аналогичных соотношений для производ-
производных от радиус-вектора р для векторов C.2.6) получим
C.4.3)
где
В?
А\В\
2В,
0
1
В\
п
0
В\
АХВ\
1
1,-02
А,Б2
2] =
1
А\Сз
Bi
0
1
В2С3
C.4.4)
§3.4. Использование ковариантных компонент деформаций 125
2Вх ( Сх ВхСЛ -2С2 1 / Сх
Следует заметить, что этот переход от ковариантных компонент
деформаций к декартовым компонентам не является обязательным,
и в некоторых работах используются соотношения упругости в криво-
криволинейных координатах. Примеры подобных построений даны в работах
[9, 33, 87, 324].
Теперь остановимся на возможных вариантах аналитического ин™
тегрирования по толщине. В этом случае численное интегрирование
используется лишь по поверхностным координатам и в отличие от
C.2.3) справедливо
где 4V , V J ~ координаты квадратурных точек на срединной поверх-
поверхности, Qk (С) ~~ элемент объема C.3.13), Uk ~~ весовые множители.
В работе [407] предлагается в соотношениях C.2.4) считать векто™
ры pi неизменными по толщине и вычислять их на уровне нейтральной
поверхности (отсюда п не зависит от (). Тогда, подставив вектор
перемещений в виде C.3.19) в C.2.8) с учетом C.3.11) и предполагая,
что вектор п перпендикулярен векторам pi и р2, получим
h h
t-x'y' о tx'y' ^x'y' \ суъХх'у' у
где
дих? duV' I (duxi ди
е, I — р I I — ?_ Pit — I I
хх — о / ' ^у у — о / ' сх« — о 1 о / * о
их оу I \ оу да
двх> дву/ 1 (двх> дв
Хх'х' = ~7{ Г у Ху'у' = Т{ 7' Хх''у' =' ~К 1 ~~о 7" ~г~ ТГ , I у
дх! д 1/ 2 \ ду' дх! I
их1=и.Р1, иу,=и-Р2, „я, = и.рз,
uxi = и • pi, и у' = и ' Р2«
126 Гл. 8. Теоретические основы построения
Если обозначить
W}T = {ех>х>, еу>у>, 2exiy<} , {Xf}T = {Хх>х>, Ху'у', %Хх'у'} ,
C.4.9)
то после интегрирования по толщине получим
= {e'kf[Dl}{e'k}
-1
где индекс к означает, что этот вектор вычислен в точке с координата-
координатами c(fc), v{k)-
Подобная схема построения матрицы жесткости имеет как досто-
достоинства, так и недостатки. К достоинству следует отнести снижение
объема вычислений за счет уменьшения порядка квадратуры и про-
простоту соотношений C.4.7), которые по сути дела, являются соотно-
соотношениями деформаций для пластин. Недостатками этой схемы следует
считать требование перпендикулярности п к рь р2 и предположение
о неизменности векторов р^ по толщине. Последнее, известное как
условие неизменности геометрии по толщине и часто используемое в
МКЭ тонких оболочек (например, [160, 266]) приводит, как показано
в п. 3.3.3, к фактическому предположению о пологости оболочки, что
является существенным недостатком для КЭ оболочки.
Следует отметить, что использование соотношений C.4.7) в сочета-
сочетании с численным интегрированием для расчета искривленных оболочек
применяется не только в МКЭ. Примером этому могут послужить
работы [207, 208, 210].
Возможность более правильного учета изменения базиса по тол-
толщине дают ковариантные компоненты деформаций C.4.1). Действи-
Действительно, если подставить в C.4.1) перемещения в виде C.3.19) и в ана-
аналогичном виде геометрию
C.4.Ц)
то получим следующие выражения для:
— мембранных деформаций
9г ди дт ди
C.4.12)
1 f дт ди дт ди\
§3.4. Использование ковариантных компонент деформаций 127
кривизн
дт дО дп ди
+
дт дв дп ди
о?7 ^г/ дц дц
постоянных по толщине поперечных сдвигов
п ^ дт ди
дт
ди
C.4.13)
C.4.14)
где
При вычислении потенциальной энергии деформации следует вос-
воспользоваться соотношениями C.4.3), в которых можно считать матри-
матрицы [Ri] и элемент объема dQ постоянными по толщине. Это эквива-
эквивалентно условию неизменности метрики по толщине, что, как известно,
вносит погрешность порядка h/R по сравнению с 1.
В результате для интеграла C.4.10) получим следующее выраже-
выражение:
Wk (&, щ, С) AС = {ef
-1
где
{7}
{е} =
[!>,] [Ri] {e} +
, 2ес?7} Г ,
[?>2] ([Лз] W
C.4.15)
C.4.16)
128 Гл. 8. Теоретические основы построения
Отличие соотношений C.4.15) от аналогичных полученных, напри-
например, в работах [160, 266, 362], состоит в присутствии слагаемых с
матрицей [Яз\- Физически матрица [Яз] учитывает вклад в деформа-
деформации поперечных сдвигов от неколлинеарности векторов рз (нормали к
срединой поверхности) и —. Отсюда следует, что указанная добавка
позволяет определять векторы п, которые, согласно C.4.11), равны —,
отличными от строгой нормали к оболочке. Это является весьма суще-
существенным фактором при подготовке исходной информации, поскольку
позволяет задавать (вычислять) вектор п с некоторой погрешностью и
эта погрешность не будет сказываться на результатах расчета.
Глава 4
БИЛИНЕЙНЫЕ КОНЕЧНЫЕ ЭЛЕМЕНТЫ
§4.1. Проблемы построении и способы повышении
точности
В настоящем параграфе рассмотрим основные проблемы расчета
тонких пластин и оболочек на примере четырехугольного элемента
с билинейной аппроксимацией всех неизвестных функций. Начнем
изложение с пластин. Как было упомянуто в гл. 1, скорость сходимости
существенным образом зависит от геометрических размеров элементов,
и чем они тоньше, тем сходимость медленнее. Это явление носит на™
звание «заклинивания» (locking), его часто связывают с вырождением
системы уравнений [90], и обычно оно демонстрируется на примере
сравнительного расчета квадратной пластины с помощью одинаковой
сетки элементов при различных соотношениях ее длины к толщине
— ). На рис.4.1.1 приведены некоторые кривые, полученные для
hj
шарнирно-опертой пластины под действием сосредоточенной силы на
сетке элементов 4x4. Из этих четырех кривых кривая / получе-
получена стандартным образом с помощью численного интегрирования по
2x2x2 гауссовым точкам, и видно, что для тонких пластин она дает
практически неприемлемые результаты.
Исследуем причины этого явления. Прежде всего заметим, что под-
подход, изложенный в предыдущей главе, эквивалентен уточненной теории
Миндлина [268], когда потенциальная энергия деформации берется
в виде
}}G^з + 722з)^. D.1.1)
5
5 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
130
Гл. 4. Билинейные конечные элементы
1.4
0,6
0,2
'0,5
1 1,5
Рис. 4.1.1
где
Хп = -?—, Х22 = -^—,
слт с/г/
901 дв2
диу
D Л.2)
7i3 = 0\ + ^— , 723 = 02 + ™тг^-
ох огу
В качестве примера рассмотрим чистый изгиб прямого бруса, для
которого
L/2 L/2
7?з^ D-1.3)
где J — момент инерции, F — площадь поперечного сечения, К —
коэффициент Файлона. При изгибе определяются две неизвестные
функции:
Uz = W = OL\ + Q2X, 0 = «3 + Q4X, D.1.4)
по которым находятся
dO
dx
Точные значения
Хп = ~г =
ах
dw
713 = 0 + — = а2 + а3 + аАх. D.1.5)
Xi I = h = const, 713 = 0 D.1.6)
получить не удается, так как в самом лучшем случае будут лишь
Хи = Хи = fei, 713 = &1#. DЛ.7)
Если подставить D.1.7) в D.1.3), то
V = ^\ EJLk\ + ^
<^f2 1
D.1.8)
§4.1. Проблемы построения и способы повышения точности
131
тогда как точное значение V равно множителю в D.1.8) перед фигур-
фигурной скобкой.
Для того чтобы энергия D.1.8) не сильно отличалась от точного
значения, требуется выполнение неравенств
GL2
D.1.9)
которые накладывают чрезвычайно жесткие требования на размеры
элемента.
Геометрически чистый изгиб при линейной аппроксимации D.1.4)
изображен на рис. 4.1.2, из которого видно, что изгиб в данном случае
воспринимается за счет деформаций
сдвига, а для тонких балок жесткость
на сдвиг много выше, чем на изгиб. }г Г~
Именно в этом и кроется причина «за™
клинивания» элементов с линейной L
(и квадратичной) аппроксимацией при
уменьшении толщины элемента.
Для устранения этого явления
предложено множество приемов. При-
Применительно к изопараметрическим
элементам наибольшее распространен Рис. 4.1.2
ние получили сокращенное и выбо-
рочно-сокращенное интегрирование и добавление «несогласованных
мод».
Начнем с первого из них. Если вновь обратиться к соотношение
ям для деформации D.1.7), то можно заметить, что интегрирование
энергии D.1.3) с D.1.7) по одноточечной формуле Гаусса дает точное
значение
V = V = ^
D.1.10)
так как слагаемое с 7?з = Щх<1 ПРИ х = 0 исчезает. Это означает, что
чистый изгиб бруса будет точно воспроизводиться при любых относи-
относительных размерах элемента. Подобный прием был предложен в работах
[363, 407] и получил название сокращенного, или редуцированного
(reduced), интегрирования.
Примером эффективности сокращенного интегрирования для КЭ
тонких пластин служит кривая 2 на рис. 4.1.1, которая получена с по-
помощью одноточечной формулы интегрирования Ax1) [350].
Однако простой перенос балочного элемента на пластины нельзя
признать удовлетворительным по той причине, что полученный та-
таким образом элемент ненадежен. Часто решение, даваемое им, имеет
ложную осцилляцию, особенно в случаях слабосвязанных границ и в
задачах устойчивости и свободных колебаний. Причиной этого явля-
является недостаточный ранг матрицы жесткости элемента или, другими
132
Гл. 4. Билинейные конечные элементы
словами, наличие таких видов деформирования, которые дают нулевую
энергию [321]. Их обычно называют ложными жесткими смещениями
или «механизмами». Например, для элемента, предложенного в работе
[350], энергия которого вычисляется по 1 х 1 формуле интегрирования,
имеют место четыре такие формы (рис. 4.1.3).
w = О, 01 = 0] 62 = ху w = 0, 0]_ = ху, <92 = ху
Если проанализировать источник возникновения ошибок в энергии
при уменьшении толщины пластины, то он всегда находится в сдвиго-
сдвиговой части (это справедливо только для пластин). Поэтому имеет смысл
использовать различные квадратурные формулы для вычисления из™
гибной и сдвиговой частей потенциальной энергии деформации. Такой
подход называется методом выборочно-сокращенного интегрирования.
Примером его использования при билинейной аппроксимации всех пе-
перемещений служит элемент, описанный в работе [319], где предлагает-
предлагается изгибную часть энергии вычислять по 2 х 2 точкам, а сдвиговую —
по 1 х 1 точкам. Подтверждением отсутствия «заклинивания» в этом
случае служит кривая 3 на рис. 4.1.1, которая получена с помощью
подобного элемента.
Помимо этого, выборочно-сокращенное интегрирование позволяет
избавиться от некоторых ложных жестких смещений, а именно от двух
последних на рис. 4.1.3. Однако два остающихся приносят большие
неприятности и для этого элемента. Наибольшую опасность представ-
представляет первая форма (w = ху), так как вторая, как правило, устраняется
при сборке элементов в единый ансамбль. Поэтому были разработаны
специальные приемы подавления этой формы для элемента [319]. Опи-
Опишем один из них, предложенный в работе [268].
§4.1. Проблемы построения и способы повышения точности 133
Матрица жесткости исходного элемента [К*] состоит из двух сла-
слагаемых: [КИ] — матрица, соответствующая изгибной части энергии,
вычисленная по 2 х 2 точкам интегрирования, и [Кс] — матрица, соот-
соответствующая сдвиговой части энергии, вычисленная по 1 х 1 точкам.
Далее строится стабилизирующая матрица [Кн] в виде
[Кс]Aх1), D.1.11)
которая после сложения ее с [К*] дает окончательную матрицу жест-
жесткости:
[К] = [К*]+5[КИ], D.1.12)
где множитель S = rh2/А, А — площадь элемента. Параметр г вы-
выбирается на основе численных экспериментов. В [268] показано, что
для г ^ 0,01 имеет место ложная осцилляция решения, а при г ^ 0, 1
появляется эффект заклинивания. Наиболее эффективным является
0,03 < г < 0,05.
В [267] описывается другой способ построения стабилизирующей
матрицы элемента с одноточечным интегрированием всей энергии. Он
состоит во введении некоторых фиктивных деформаций, отличных от
нуля для ложных жестких смещений и нулевых, для истинных.
Введем обозначения:
{xf = {x{YKx^Kx^\x^}, {yf = {y{l\yB),y{3\y{4)},
D.1.13)
W--5 К'"
I П \Т — I /тD) _ тB) тС1) _ тC) тB) _ тD) тC) _ тС1)
Для этих векторов справедливы тождества
{Sf{H} = {Sf{B,} = {Sf{B2} = {Hf{B,} = {Hf{B2} = 0,
{xf {BX} = {yf {B2} = A, {xf {B2} = {yf {B,} = 0.
D.1.14)
Кроме того, узловые смещения
{w}T =
, {e2f =
}
D.1.15)
134
Гл. 4. Билинейные конечные элементы
соответствующие движению элемента как твердого целого, посред-
посредством D.1.13) выражаются в виде
{w*} = ct{S} + с2{у} + сф
{0?} = -<*{?}, {%*} = -
а ложные жесткие смещения представляются в виде
К}=с4{Я},
{в?} = с5 {Н} + с7 {у} , {#2Л} = с6 {Я} + с7 {х} .
Вводим фиктивную деформацию
D.1.16)
D.1.17)
D.1.18)
таким образом, чтобы на смещениях D.1.16) она исчезла, а на D.1.17)
была ненулевой. Для этого вектор {g} (вектор некоторых коэффициен-
коэффициентов) ищем в виде
где коэффициенты
находим из условия
D.1.19)
D.1.20)
т.е. из условия равенства фиктивных деформаций D.1.18) нулю для
смещений элемента как твердого целого. Из D.1.20) с учетом D.1.14)
получаем
{g}=
{B2}. D.1.21)
Аналогично вводятся фиктивные деформации и для узловых сме-
смещений {01 } И {02}'-
D.1.22)
Из этих фиктивных деформаций составляется выражение фиктив-
фиктивной энергии, которая складывается с полученными прямыми вычисле-
вычислениями. В результате получается стабилизирующая матрица вида
о
о
о
}
о
о
о
D.1.23)
§4.1. Проблемы построения и способы повышения точности 135
для вектора узловых перемещений
}
D.1.24)
Параметры /% из соображений размерности берутся в виде
D.1.25)
132 = Дз = ш
где коэффициенты rw, tq находятся из численных экспериментов.
В [267] показано, что по отношению к tq результат мало чувствителен,
а оптимальные rw будут в пределах 0,03 ^ rw ^0,1.
В случае прямоугольного элемента имеется более эффективная схе-
схема построения матрицы жесткости, свободной от механизмов [266].
Для этого сдвиговую энергию представляют в виде двух слагаемых:
2 D.1.26)
^ffL + ^1
дх\
и каждое из них интегрируют по своей формуле, а именно: Vc\ по
1 х 2 гауссовым точкам, а Ус2 — по 2 х 1 точкам. В этом случае полу-
получим элемент, свободный от заклинивания (см. кривую 4 на рис. 4.1.1)
и имеющий матрицу жесткости достаточного ранга A2 — 3 = 9).
Объяснений столь необычной схемы интегрирования может быть
несколько. Например, за основу можно взять условие представления
элементом независимых деформированных состояний, в частности, со-
стояния чистого изгиба. Другими словами, наличие ненулевой кривиз-
кривизны не должно приводить к появлению сдвига. Тогда для перемещений
w = а\ + а^х + азу + а^ху,
01 = аъ + а^х + а7у + а&ху, D.1.27)
имеем
Хп = «6
D.1.28)
713 = («2 + «s) + («4 + «7) 2/ + («б + «82/) ж,
136 Гл. 4. Билинейные конечные элементы
откуда видно, что множитель при х является паразитическим, так как
он связан с кривизной xib и от него следует избавиться. Причин же
для уничтожения слагаемого при у нет, и его целесообразно оставить.
Именно это и достигается использованием квадратурной формулы 1 х 2
для слагаемого Vc\ D.1.26). Совершенно аналогично показывается пра-
правомерность использования формулы интегрирования 2 х 1 для оценки
интеграла с 7|з-
Теперь исследуем точность, даваемую линейной интерполяцией при
поперечном изгибе бруса. В этом случае точные значения деформаций
имеют вид
XI = fci + k2x, 713= h, D.1.29)
которым соответствуют перемещения
w = -^х2 - ^x3 + fc3x + ci -с2х, е = к{х + ^х2 +с2. D.1.30)
2 6 2
Коэффициенты щ в аппроксимациях D.1.4) находятся через узловые
значения w^l\ 9^ (г = 1,2) в виде
D.1.31)
Если подставить сюда w^\ в^г\ определенные из D.1.30) при х = ±77,
то для деформаций D.1.5) получим
L2
Х\ =h, Ji3 = hJrk2— + klx. D.1.32)
Составим теперь точное и приближенное значения энергии и срав-
сравним их между собой. При этом учтем, что согласно теореме Журав-
ского,
j4' Dл-зз)
и исключим из рассмотрения слагаемые с fci, поскольку ошибка, да-
даваемая им, исправляется сокращенным интегрированием. Итак, точное
значение энергии будет равно
L/2 L/2
1 Г 1 Г
V = -EJ (k2xf dx + - GFK k\dx =
^L/2 ^L/2
±*^ + ±GFklL, D.1.34)
§4.1. Проблемы построения и способы повышения точности 137
или, с учетом D.1.33),
)^[ ^\ D.1.35)
2
Приближенное значение энергии равно
L'2 - ,,.2 . , 2 2
+ к2—) . D.1.36)
Если принять во внимание D.1.33), то получим
^ = ЪЕ™*Шкь{1 + ШК} ' DЛ-37)
Если K^Tir > 1, то
D.1.38)
V Eh2'
т.е. ошибка очень велика.
Для уменьшения этой ошибки, которая начинает сильно сказывать-
сказываться в случае достаточно тонких балок и пластин, предлагается вводить
либо модифицированный модуль сдвига [340]
G* = 1^-, D.1.39)
либо штрафной множитель [319]
D.1.40)
на который умножается энергия сдвига.
Действительно, в первом случае вместо D.1.37) получаем
' Dл-41)
т.е. V равно точному значению V D.1.35), во втором:
л\2
Х '- ~'" ' D.1.42)
138 Гл. 4. Билинейные конечные элементы
и, варьируя значения параметра г, можно также получить хорошее
приближение V и V.
В двумерных задачах можно воспользоваться аналогом D.1.39)
в виде
^Ц^Ц , D.1.43)
Ay\2Gyz
где Ах, Ay — размеры элементов в направлении осей х, у, либо ис-
использовать более сложные построения [340]. Однако наиболее часто,
особенно при аппроксимациях более высокого порядка, используется
метод штрафа [42, 89, 90, 300, 319, 344, 369].
Теперь остановимся на применении изопараметрических элементов
с билинейной аппроксимацией геометрии и перемещений для расчета
тонких оболочек. Здесь следует подчеркнуть отличие этих элементов
от элементов оболочек с учетом деформаций поперечного сдвига (о ко-
которых речь пойдет дальше) при одинаковой билинейной аппроксима-
аппроксимации неизвестных функций. Отличие состоит в том, что билинейная
аппроксимация геометрии приводит к элементу плоскому (или слегка
закрученному), механика деформирования которого тождественна из-
изгибу пластин с добавлением мембранных усилий. Именно поэтому мы
столь подробно обсуждали задачу изгиба пластины.
В работе [328] дается обобщение плоского элемента [319] на слу-
случай оболочки. Построение его производится по схеме, изложенной
в гл. 1 с использованием выборочно-редуцированного интегрирования,
т. е. формулой 2x2 для изгибной и мембранной части и 1 х 1 — для
сдвиговой. В качестве узловых степеней свободы используются три
проекции вектора и на некоторые декартовы оси и три угла поворота
нормального волокна относительно тех же осей. Для борьбы со слабой
жесткостью на кручение в касательной к элементу плоскости в случае,
когда элементы почти компланарны, предлагается добавить в выраже-
выражение энергии дополнительное слагаемое
duz, „„,.,, ,„ D л м)
которое регулирует отклонение вращения нормали 9^ от ее аналога для
изгиба пластины. Чтобы избежать «переограничения» для оценки этого
штрафного интеграла, следует использовать одноточечное интегриро-
интегрирование. Параметр г определяется экспериментально. Так, в работе [328]
рекомендуется брать г ^ 0,1.
В работе [340] описывается более сложная конструкция построе-
построения оболочечного изопараметрического элемента на основе билинейной
аппроксимации. Во-первых, для вычисления энергии сдвига исполь-
используется разбиение ее на слагаемые D.1.26) и интегрирование каждого
§4.1. Проблемы построения и способы повышения точности 139
из них производится по своей квадратурной формуле так, как бы-
было описано выше. Во-вторых, в мембранной части сдвиговая дефор-
1 (дих диу\
мация ei9 = — ^— + —^ вычисляется лишь в центре элемента
2 \ ду дх J
(? = rj = 0) и полученное значение используется для вычисления всей
мембранной энергии по 2 х 2 гауссовым точкам, в которых находятся
^хх и ^уу В-третьих, при вычислении энергии изгиба закручивание х\2
принимается в виде
Xl2 = 2xf2x2)-X^xl)) D.1.45)
где Хп ~ значение, вычисляемое по прямым формулам в 2 х 2
Ax1)
квадратурных точках, Хи ~ аналогичное значение, вычисленное
в центре элемента (? = rj = 0). В-четвертых, для устранения ошибки,
возникающей в случае тонких оболочек, вводится при помощи спе-
специальных построений модифицированный модуль сдвига вида D.1.39).
В результате этих построений получается эффективный КЭ тонкой
оболочки, свободной от заклинивания и механизмов.
Теперь опишем прием борьбы с заклиниванием без сокращения
точности квадратурных формул. Он был предложен в работе [279]
и состоит в добавлении к пробным функциям для перемещений так
называемых несогласованных мод, т.е. вместо D.1.4) берется
<4л-46)
где матрица
3x2
D.1.47)
Параметры а на каждом элементе исключаются посредством статиче™
ской конденсации, так как считается, что им не соответствуют никакие
узловые силы. В результате получается матрица жесткости обычных
размеров.
Такой элемент оказывается более эффективным за счет улучше-
улучшения аппроксимации вектора и, для чего функции N* (?, rj) следует
брать квадратичными. Рис. 4.1.4 служит иллюстрацией того, как может
быть получено точное воспроизведение чистого изгиба. Однако следует
иметь в виду, что в результате КЭ получается несовместным, со всеми
вытекающими отсюда последствиями.
140
Гл. 4. Билинейные конечные элементы
их = kxz
в = kx
uz=0
ux=0
0 = 0
их = kxz
в = кх
Рис. 4.1.4
еи = 0
% = к
Ут = кх
кг
= 0
еи = 0
В двумерном случае в [279] берутся следующие функции N* (?, г/):
- V2).
D.1.48)
Еще один способ борьбы с излишней сдвиговой жесткостью би-
билинейного элемента тонкой оболочки в виде специальной процедуры
наложения гипотез Кирхгофа-Лява предложен в [333]. Суть его состо-
состоит в том, что для каждого элемента составляются условия
я-
jy.z.dS = 0,
D.1.49)
которые для всей области могут быть представлены в виде системы
уравнений:
[C]{q} = 0. D.1.50)
Далее путем ортогонализации от узловых неизвестных q^ строится
переход к некоторым обобщенным параметрам q* , которые не имеют
ясного физического смысла и скорее ближе к коэффициентам класси-
классического разложения Ритца. Они являются проекцией исходного базис-
базисного пространства на некоторое его подпространство, ортогональное
векторам {Cj} — строкам матрицы [С] из D.1.50). Не останавливаясь
детально на построении подобного пространства, заметим, что оконча-
окончательно получается связь
{q}={T}{q,}
D.1.51)
§4.2. Метод двойной аппроксимации 141
для всей области и
Ш = [Тт] Ы D.1.52)
для некоторого га-го элемента.
Далее при сборке происходит переход от локальных неизвестных
{qm} к глобальным {д*} обычным образом:
Эт = \ {qmf [Km] {qm} - {Rmf {qm} =
= \ ЫТ [Traf [Km] [Tm] Ш ~ {Rmf [Tm] {<?*} . D.1.53)
Важное значение здесь имеет процедура построения матрицы перехода
[Т], поскольку при неудачном выборе ее глобальная матрица жесткости
может потерять ленточную структуру. Некоторые рекомендации даны
в [333].
§4.2. Метод двойной аппрожсимации
Для борьбы с явлением «заклинивания» получили весьма широ-
широкое распространение различные модификации так называемого метода
двойной аппроксимации. Суть его в следующем: деформации внутри
элемента аппроксимируются самостоятельно, отдельно от перемеще™
ний. При этом если правильно выбрать степени полиномов перемеще-
перемещений и деформаций, то можно весьма существенно понизить величину
погрешности.
Впервые подобный прием был предложен А. С. Сахаровым в его
известной моментной схеме конечных элементов (МСКЭ) [203, 204]
как способ более правильного представления смещений элемента как
твердого целого (здесь уместно вспомнить, что для оболочек жесткие
смещения являются одним из основных источников ошибок).
Поясним этот прием на примере плоского четырехугольного эле™
мента оболочки с билинейной аппроксимацией всех перемещений:
их = а\ + а^х + азу + а^ху, иу = а§ + а^х + ату + а$ху,
D.2.1)
142 Гл. 4. Билинейные конечные элементы
Если принять в качестве деформаций выражения
дих дчу
ец = —— = «2 + «41/, в22 = -^— = «7 +
+ а$у,
^^
двх двч
ХП = "ТГ™ = «14 + «161/, Х22 = ТТ" = а19
= 12-
дв„
дих
ду
диу
дх
^3 + «6 +
дв
^ D 2 2)
дву { }
h ^^ = «15 + «18 + «16^ + «201/,
ох
9uz , ч
713 = вх + — = аю + «13 + («12 + «is) У + «14^ + a\Qxy
723 = 6у + -7^ = «и +«17 + («12 + «is) х
которые точно соответствуют D.2.1), то получим элемент, подвержен-
подверженный заклиниванию при уменьшении толщины. Если в соответствии с
МСКЭ в выражениях D.2.2) отбросить подчеркнутые слагаемые, то
полученный элемент будет обладать весьма высокими качествами.
Если вспомнить описанные выше схемы интегрирования, то можно
увидеть, что они в конечном итоге уничтожают именно те слагае-
слагаемые, которые подчеркнуты в D.2.2). В самом деле, наиболее удачная
формула интегрирования сдвиговой части энергии из работ [340, 367]
использует 2 х 1 точки для 713 (уничтожаются слагаемые ацх + а\^ху)
и 1 х 2 — для 723 (уничтожаются слагаемые а\$у + а.2оху). Использова-
Использование одноточечной формулы в [340] для вычисления слагаемого ей тоже
эквивалентно исключению слагаемого ol\x + а%у в D.2.2). Для xi2
использованный в [340] прием не приводит к исключению слагаемого
а\%х + а2оу, но для тонких оболочек это не столь существенно ввиду
малой изгибной жесткости.
Приведем общее правило определения необходимой степени поли-
полинома для аппроксимации каждой из деформаций [203]: если выражение
деформации состоит из нескольких слагаемых полиномиального вида,
то степень полинома для этой деформации должна быть не выше
минимальной степени полинома, соответствующего одному из этих
слагаемых.
Следует заметить, что брать меньшие степени в выражениях для
деформаций чем те, которые требует сформулированное правило, не
рекомендуется, так как это приведет к пониженному рангу матрицы
жесткости элемента или, другими словами, к дополнительным ложным
жестким смещениям (механизмам).
Некоторым недостатком описанной выше схемы является наруше-
нарушение исходного вариационного принципа, в результате чего для усечен-
усеченных деформаций не выполняются уравнения совместности, что приво-
§4.2. Метод двойной аппроксимации 143
дит к немонотонной сходимости. Математически более строго будет
находить коэффициенты полиномиального разложения для деформаций
из условия минимума следующего функционала [9]:
П = [ [ [ D^kl [stJ - ?ij (u)] [ekl - ekl (u)]dfi, D.2.3)
где тензор ец определяется самостоятельно, e^i (u) — деформации,
выраженные через перемещения, D%^kl — тензор упругости.
Другая возможность — это использовать такой вариационный прин-
принцип, который включал бы в себя в качестве независимых функций
как перемещения, так и деформации (или усилия и моменты). Та-
Такой подход тоже известен. Наиболее часто исходным здесь является
смешанный функционал Хеллингера-Рейсснера с независимой аппрок-
аппроксимацией усилий Ntk, Ql, моментов Мгк, перемещений и и углов
поворота 0 [142, 334, 335, 341]:
Wro (Nik, Mik, Яг) - Мгкегк (u,0) - MikXik (u,0) -
u,0) - P • u] dS - I [N* • u + M* • в] dL 1, D.2.4)
где Wm (Nlk,Мгк,Q1*) — потенциал деформаций. Перемещения и углы
поворота аппроксимируются обычным образом:
Ь D.2.5)
с выполнением всех требований к их гладкости. Усилия и моменты
аппроксимируются независимо (как в МСКЭ):
Nik \
Mik } = [Ф] Щ , D.2.6)
Яг
и считаются независимыми на каждом элементе, т. е. допускаются
их разрывы при переходе от элемента к элементу. Подставив D.2.5)
и D.2.6) в D.2.4), получим на элементе
ПДт = \ ЩТ [G] {/3} - {/?f [S] {а} - {Р}т {а} , D.2.7)
откуда после исключения независимых параметров C получим матрицу
жесткости элемента в виде
[Km] = [S]T [G^1] [5]. D.2.8)
144 Гл. 4. Билинейные конечные элементы
В ряде работ [31, 142, 334, 335, 336, 341 и др.] показывается, что
подобный прием эквивалентен использованию формул сокращенного
интегрирования для устранения явления «заклинивания» в изопарамет-
рических элементах и улучшению представления жестких смещений
в оболочечных элементах.
Примером использования подобного подхода для построения про™
стого и эффективного прямоугольного КЭ искривленной оболочки с
учетом поперечного сдвига является работа [401]. Исходным пунктом
здесь является функционал Ху-Вашицу в виде
Пя™= [ [ {Wm (eik, ХгкГт) ~Nik \егк-егк{п)) -Mik [xik-Хгк (и, в)} -
s
- Ql Ы ~~ Ъз (u, 0)} - P . n}dS - I (N* • u + M* • 0) dL. D.2.9)
Все перемещения и углы поворота (их, иу, иу, 9\, 02) представляются
билинейными функциями на элементе и выражаются через узловые
перемещения, которые являются глобальными степенями свободы и
служат для стыковки элементов. Деформации, усилия и моменты пред™
ставляются в виде
еп = Дз,
Х\2 = АО, D.2.10)
713 = Ai + А2С2, 723 = Аз + /?н?ь
= Ci + С26, Ж22 = Сз + С4СЬ 5 = С5,
=с6 + с7С2, M22 = c8 + C9Ci, Я = с5, D.2.11)
Q1 = сц + С12С2, Q2 = ci3 + енб
и считаются независимыми на элементе.
Подставив D.2.10), D.2.11) в D.2.9), произведя интегрирование
(точно), исключая независимые параметры А и Q> приходим к обычной
матрице жесткости, связывающей узловые силы с узловыми перемеще-
перемещениями.
Еще один вариант метода двойной аппроксимации состоит в отдель™
ной аппроксимации внутри элемента только тех деформаций, которые
приводят к заклиниванию элемента (как правило, деформаций сдвига).
Причем эти аппроксимации строятся в виде полинома по значениям
их в некоторых точках, в которых эти деформации вычисляются по
обычным соотношениям через перемещения. Впервые такая конструк-
конструкция для оболочек описана в [270], но широкое применение получила
лишь в последнее время для сдвиговых элементов [176,260, 291, 320].
Кратко проиллюстрируем эти построения на примере четырехуголь-
четырехугольного билинейного элемента из работ [260, 291]. Этот элемент строится
§4.2. Метод двойной аппроксимации
145
по схеме, изложенной в гл. 3, но с одним отличием, а именно: дефор-
деформации 713 и 723 внутри элемента берутся в виде
713 (^ ту) =
V
V
D.2.12)
где 7^з ~~ касательные составляющие деформаций сдвига в fc-й точке,
вычисленные по обычным формулам через перемещения (рис. 3.1.3).
При вычислении потенциальной энергии деформации используется точ-
точная квадратурная формула Гаусса по 2 х 2 х 2 точкам. В результате
получается элемент, свободный от заклинивания и ложных жестких
смещений, что свидетельствует о надежности даваемых им результа-
результатов. Для суждения о точности и скорости сходимости на рис. 5.1.5 (см.
далее) приведена кривая 9, соответствующая этому элементу.
Легко показать, что подобный прием для прямоугольника тожде-
тождествен моментной схеме, описанной в начале параграфа. Действительно,
вычисляя деформации сдвига по формуле D.2.14), для D.2.2) получим
713 = «10 + «13 + («12 + «15) У,
723 = «И + «17 + («12 + «18) X,
D.2.13)
т. е. здесь отсутствуют слагаемые, отбрасываемые в МСКЭ. Интерес-
Интересно отметить, что в [291] дается вариационное обоснование подоб™
ного приема, основанное на методе множителей Лагранжа в виде
E-функций.
Проведем исследование точности би-
билинейных аппроксимаций чистого изги-
изгиба для произвольного четырехугольника
(рис.4.2.1). В этом случае деформации
Хп»Х22,Х12, 713,723 из соотношений D.1.1),
D.1.2) имеют вид
ХП — «Ь Х22 = «2,
Х12 = «з, 713 = 723 = 0.
4
D.2.14)
Рис. 4.2.1
Соответствующие перемещения, получае-
получаемые интегрированием уравнений D.1.2), D.2.14) будут иметь вид
V X
вх = с\ + а\х + аз-, ву = С2 + «з^ + «22/,
w = uz = сз -
с2у ^ а\ —
У
,2
ху
D.2.15)
146 Гл. 4. Билинейные конечные элементы
где слагаемые с коэффициентами с\, сч, Аз соответствуют смещению
элемента как твердого целого.
Зависимость между локальными и глобальными координатами име-
имеет вид
2/ = X) 2/W ^ С1 + ^(') С ) 5
D.2.16)
где ^(г\<г](г) — координаты узлов в локальной системе ?,7/, т.е.
^W^W = ±1 в зависимости от нумерации узлов в элементе
(рис.4.2.1). Для коэффициентов di справедливы выражения
г=\
d3 = -х(
+хB) _хC)+хD)^
D.2.17)
i=\
Аппроксимации неизвестных функций 9x,9y,w выбираем в виде
D.2.16), т.е.
4
г=1
Узловые значения 6х ,0у ,w^ определяются из D.2.15) после под-
подстановки значений х^г\ у^г\ полученных из D.2.16) для значений
§4.2. Метод двойной аппроксимации 147
= ?(г)} rj = rfl\ В результате получаются выражения
4
D.2.19)
гу= - — (b\ + ЬгС + ^з^? + b^rj) -
о
--5- (be + ЬбС + Ьтц + bs^T]) - — F9 + Ью^ + Ъ\ it] +
о о
где
222 2
(хB)J _ (.тC
_ хC)уC) + а.D)г/D)>
D.2.20)
Ограничимся исследованием лишь деформаций сдвига C.4.14), так
как именно они являются главным источником потери точности. Для
плоского КЭ из C.4.14) следует
dw Л дх Л ду dw ^ дх „ ду . л _ _, ч
7СС = ^7 + вя— + 0У1?, Ъс = — + вх— + ^/. D.2.21)
148 Гл. 4. Билинейные конечные элементы
Рассмотрим по очереди аппроксимации деформированных состоя-
состояний, определяемых константами с^ в D.2.14).
Чистый изгиб при «2 = «з = 0 дает
1 „ 1 ,,.,.., Л
D.2.22)
в то время как точные значения нулевые D.2.14). Определим, при
каких значениях ?, г) будут 7сс = 7??С = О-
При ? = 0 для 7сс получим выражение
^, _ 1 Г/^2 2 \ | /2 ^2 \ 21 ~ _ ~W ?IW /А О
Тсс — jg Lvx34 - хп) + vx2i - Ж34; ^ J » x*j — х - У > v*.z.
которое обратится в нуль при г/ = ±1. Аналогично, 7^с = О ПРИ С =
г/ = 0.
Чистый изгиб ai =«2=0 дает
^ ^ (d5 + 4С + ^7^/ + de?77) т (d2
5 5 4
+ - (di + d2C + 4^? + d4^) т (d6 + d8v) • D.2.24)
о 4
При С = 0 получаем выражение
7СС = 2 [(^342/34 - Х\2У\2) + (^122/12 ~ ^342/34) Г}2] , D.2.25)
которое тоже обращается в нуль при ?] = ±1. Аналогично получим
7т7С = 0 при ^ = ±1, г/ = 0.
Таким образом, можно утверждать, что деформации поперечного
сдвига при чистом изгибе обращаются в нуль, если 7сс вычислять в
точках ? = 0, rj = ±1 (помечены квадратами на рис. 4.2.1), а -у^с ~~
в точках ? = ±1, г) = 0 (треугольники на рис. 4.2.1). Это подтверждает
целесообразность применения аппроксимаций C.1.2), так как именно
эти точки являются точками минимальной погрешности аппроксима-
аппроксимаций (точками суперсходимости, или точками Барлоу).
Интересно отметить, что при аналогичном исследовании в гло-
глобальных координатах ж, у, т. е. при использовании соотношений для
деформаций 713» 723 в виде C.4.14), не удается обнаружить точки, где
713, 723 = О-
§4.3. Четырехузловой конечный элемент оболочки
149
§4.3. Четырехузловой изопараметрический
конечный элемент оболочки
В настоящем параграфе изложим построение одного из вариан-
вариантов четырехузлового конечного элемента оболочки, построенного на
базе изопараметрической концепции, изложенной в гл.З, и резуль-
результатов исследования аппроксимаций, приведенных в настоящей главе.
Геометрически он представляет собой в общем случае закрученный
параллелепипед с прямыми ребрами (рис.4.3.1).
Аппроксимация радиус-вектора элемента объема представляется в
виде C.2.1), вектора перемещений — C.2.2), где функции формы
принимаются в виде билинейных полиномов в локальных координатах
?, г] C.2.4) или
где
1
локальные координаты узлов.
D.3.1)
Рис. 4.3.1
Матрица жесткости строится на основе вычисления ковариант-
ных компонент мембранных, изгибных и сдвиговых деформаций
C.4.12)—C.4.14) и аналитического интегрирования по толщине
потенциальной энергии деформации, т.е. по соотношениям C.4.5),
C.4.15).
В результате получаем
16 гш~\
16
(т)
D.3.2)
32 ^
г,?тг=1
150
Гл. 4. Билинейные конечные элементы
= Tfi Ё
. u« + h
D.3.3)
E
г,7п=1
n(
n(
w)
l
X Ш
(m)
где
г,771=1
D.3.4)
D.3.5)
Преобразуем деформации поперечного сдвига в соответствии с ис-
исследованиями §2.2. Например, для деформации j^c принимается ее
§4.3. Четырехузловой конечный элемент оболочки
151
линейная аппроксимация rj с двумя узловыми значениями ? = 0 и
rj = dzl. После несложных преобразований получим
г,т=1
2
. D.3.6)
Действуя подобным образом, для деформации j^, которая принимает-
принимается линейной по ?, на основе значений в точках ? = ±1 и 77 = 0 получим
Е
Для деформаций e^, evv, XCC' X??^ никаких преобразований не
производим, но деформации сдвига e^v и кручения x^v принимаем на
элементе константами. Такие рекомендации приводятся в [285, 291,
320], и они подтверждаются при численных исследованиях на решени-
решениях тестовых задач. Таким образом, принимаем
kv 49 Z_^
i;m=l
Е
г,7п=1
D.3.8)
Для построения матрицы жесткости введем векторно-матричные
соотношения. Вектор узловых перемещений в г~м узле обозначим
Если обозначить
т
1%
D.3.9)
re / - Те
D.3.10)
i) (m) _|_ (
152
Гл. 4. Билинейные конечные элементы
то для вектора мембранных деформаций C.4.16) получим
4 т
{е}= J^ {^m)}{4m)} {^(г)}- D.3.11)
Для представления вектора изгибных деформаций {%} C.4.16)
необходимо ввести
\ f}m. (ш) ^ш (ш) ^m (m)
1 2 х ' 2 у '2 '
В результате получим
D.3.12)
D.3.13)
Аппроксимация вектора деформаций поперечного сдвига {7} может
быть записана в виде
4
= Е
где
amt(i)fJirn)n(rn)
^с(г)^(гшLш)
^tW (im) (m) . (г) ^ (m),(m) (m) , (г)
су S> r 2 су I г 2
Здесь
im) = i К1
D.3.15)
D.3.16)
§4.3. Четырехузловой конечный элемент оболочки 153
Если использовать соотношения C.4.3) и считать матрицы [Ri] и
элемент объема dQ постоянными по толщине, то соотношения C.4.15)
можно переписать в виде
D.3.17)
J \ / Z л—"" к J L " J к J
где
'"^ , D.3.18)
TO=1
4 T
^-|^m)| /д^)\ , D.3.19)
m=\
Потенциальную энергию деформации вычисляют в виде C.4.5),
т. е. с использованием численного интегрирования по поверхностным
координатам. Используется квадратурная формула Гаусса-Лежандра
2-го порядка по каждой из координат, в соответствии с которой
С(Ч '/?(fc)=±4f , uk=L D.3.20)
уз
В соответствии с этим блоки матрицы жесткости данного элемента
вычисляются в виде
k=\
^k){k))^k),V{k)), D-3.21)
где А\, В2, Сз — значения параметров C.3.3), самостоятельно вычис-
вычисляемых в каждой квадратурной точке.
Описанный конечный элемент обладает рядом достоинств, которые
ставят его в один ряд с наиболее известными и популярными че-
тырехузловыми элементами оболочек. В частности, он демонстрирует
154 Гл. 4. Билинейные конечные элементы
стабильную точность при уменьшении толщины и изменении формы от
прямоугольника к произвольному четырехугольнику. Для более точно-
точного описания состояния поперечного изгиба возможно (и рекомендуется
для тонких оболочек) использование модифицированного модуля сдви-
сдвига типа D.1.39).
§4.4. Четырехузловой изопараметрический элемент
оболочки с шестью степенями свободы
На базе описанного в предыдущем параграфе КЭ с билинейной
аппроксимацией всех неизвестных функций, имеющего 20 степеней
свободы (по 5 в каждом узле) можно построить уточненный вариант
подобного КЭ, но имеющего 6 степеней свободы в узле (три пере-
перемещения и три вращения относительно глобальной системы коорди-
координат). Введение дополнительной вращательной степени свободы в узле,
имеющей кинематический смысл вращения ортов еь в2 вокруг норма-
нормали п, позволяет, с одной стороны, повысить степень аппроксимации
мембранного состояния, с другой — обеспечить единообразие в сопря-
сопряжении КЭ с изломом срединной поверхности и без него.
Геометрически он представляет собой закрученный параллелепи-
параллелепипед с прямыми ребрами (рис.4.4.1), т.е. полностью подобен КЭ из
предыдущего параграфа. Таким образом, его геометрия определяется
координатами 1, 2, 3, 4 узлов (вершин) в виде C.2.1) с функциями
формы D.3.1).
Рис. 4.4.1
Аппроксимация узлов поворота, определяющих изгиб, представля-
представляется тоже аналогичным образом, т. е.
4 ,
г=\
где вектор узлов поворота нормального волокна имеет вид D.3.5).
§4.4. Элемент оболочки с шестью степенями свободы
155
Для аппроксимации поля перемещений срединной поверхности вво™
дятся дополнительно четыре узла в серединах сторон, и используются
аппроксимации иерархического типа [70]:
г=1
г=5
где
D.4.2)
, D.4.3)
что позволяет поднять степень аппроксимации перемещении до квад-
квадратичной.
Следующим этапом построения предлагаемого КЭ является исклю-
исключение степеней свободы в серединах сторон путем их выражения через
перемещения и вращения в вершинах. Для этого на каждой грани
вводится система координат (в общем случае переменная) с ортами:
т, направленным вдоль касательной, п — по нормали к срединной
поверхности и i/ - по нормали к грани в касательной плоскости
(рис. 4.4.2).
Рис. 4.4.2
Пусть г, j — корневые узлы на грани при обходе против часовой
стрелки, т — узел в середине соответствующей стороны, т.е. возмож-
возможны сочетания г, j, m следующие
г= 1, 2, 3, 4; j = 2, 3, 4, 1; т = 5, 6, 7,
D.4.4)
156
Гл. 4. Билинейные конечные элементы
Легко показать справедливость формул
п = ^[п + n J , т = —г ~
где
= т(ш) х
, D.4.5)
Если ввести на текущей границе (г rn j) локальную координату
— 1 ^ а ^ +1, то получим, что
u (а) = 1
- a2
г (а) =
|г^г>, п (а) = n<m> + |п
D.4.6)
D.4.7)
Деформация поперечного сдвига вдоль прямой (г т j) будет иметь
вид
дг
да
ди
да
. D.4.8)
В многочисленных работах [146, 147, 290, 353] показывается, что
условие постоянства деформаций поперечного сдвига вдоль сторон
(или его аналог — постоянство перерезывающей силы на стороне)
благотворно влияет на повышение точности решения. Поэтому соста-
составим эти условия для выражения D.4.8). В общем случае это два
соотношения:
= 0,
= 0.
D.4.9)
Отметим, что п^ означает «закрученность» элемента и предпо-
предполагается величиной малой (хотя бы в линейных задачах). Поэтому
конструктивным считаем первое из уравнений D.4.9) и с его помощью
получаем первое уравнение для исключения Ди^ в виде
n(m) . Ди(ш) = ^
D.4.10)
§4.4. Элемент оболочки с шестью степенями свободы 157
Следующим принимаем условие линейности касательной
составляющей вектора перемещений, что дает условие
Т(т) . Ди(ш) =а D.4.11)
Формулировка этого условия точность аппроксимации понижает, но
используется в некоторых мембранных КЭ с вращательными степенями
свободы.
Из условия D.4.11) следует, что
Au(m) = A^w)n(w) + Д4шI/(ш). D.4 Л 2)
Чтобы определить уравнение для исключения Аи„ введем в рассмот-
рассмотрение вектор вращения
П« = Of}ef} + Of ef + п{рл{1) D.4.13)
Аналогично и для j-vo узла. Далее используем следующие соотноше™
ния:
П« х п« = П«е|° - ufef = df^f + efef = 0{i) D.4.14)
= -i/W • Ow. D.4.15)
В результате уравнение D.4.10) с учетом D.4.5), D.4.14), D.4.15)
может быть переписано в виде
и{тп) = n(m) . ди(ш) =
ruw-uw|. D.4.16)
Из этого уравнения может быть получено уравнение для Аи„
путем циклической перестановки ортов п —> i/, i/ —> ^n:
m)
/]) ^п(г) -О(г)| +^i/(j4) • [u(j) -и(г)| . D.4.17)
J 8 L J
Это уравнение совместности при сопряжении некомпланарных КЭ,
т. е. при изломе срединной поверхности, когда со стороны двух приле-
прилегающих КЭ (А) и (В) в общем узле имеют место
Технология построения матрицы жесткости в значительной степени
совпадает с представленной в предыдущем параграфе. Однако имеются
и отличия. Кратко опишем основные моменты этой технологии.
158
Гл. 4. Билинейные конечные элементы
Введем векторы узловых перемещений
, г= 1, 2, 3, 4;
и
и
и
X
м
У
U)
( Аи
(m)
x
(m)
ly
(m)
D.4.19)
, m = 5, 6, 7,
углов поворота нормали
{о-}
г= 1, 2, 3, 4,
D.4.20)
в виде проекции на глобальную систему координат х, у, z, единую для
всех КЭ.
Сборку КЭ в единую конструкцию проводим по степеням свободы,
определенным в вершинах КЭ, т. е. по вектору узловых степеней сво-
свободы
{«¦•'}
D.4.21)
Степени свободы, введенные в середине сторон {Ди^ш^}, выражаются
через степени свободы в вершинах посредством уравнений D.4.11),
D.4.16) и D.4.17).
Для этого введем для векторов n, v и их разностей векторные
обозначения
@
= 4 n.
Пг
@
{«/«>} =
D.4.22)
Из соотношений D.4.16), D.4.17) с учетом D.4.11) следует представ-
представление
D.4.23)
§4.4. Элемент оболочки с шестью степенями свободы
159
которое в развернутом виде может быть записано в следующей форме:
D.4.24)
8
пг=5
Введем представление
8
Y.
iji имеет вид
ж
г=\
{,-¦>}.
дНг
7 ас
где предполагаются следующие циклические перестановки:
г -^ j 1^2
Т 1=Т I
I <- fc 4^3
Т I =T I
которые выполняются одновременно по всем индексам.
Аналогично вводится матрица
д
на ——, которая определяет вектор
ОТ]
D.4.25)
D.4.26)
D.4.27)
путем замены производной
г=\
160 Гл. 4. Билинейные конечные элементы
Рассмотрим процедуру вычисления ковариантной компоненты мем-
мембранной деформации е^:
« = Е^ (l>0)^ + Е
г=\
где
= {хМ\ у^г\ *«, О, О},
1 J D.4.30)
По аналогии
4 /
-7] Г]
= E
3 = 1 \г=1
+ {г(г)}т (^ [Я^] + ^р- [Н^])\\ {qU)}- D.4.32)
Теперь рассмотрим процедуру вычисления ковариантной компонен-
ты изгибной деформации х^:
i=\
4
Е
j=\ \г=\
tr ^ Ltr
E ^ AN^}T + |{п(г)}Г[Я^']) {gW}, D.4.33)
§4.4. Элемент оболочки с шестью степенями свободы 161
где
По аналогии
(
D.4.35)
»
Я»])))(»»}. D.4.36)
Вычисление деформаций поперечного сдвига вполне возможно ор-
организовать по схеме, изложенной в предыдущем параграфе. Это оправ-
оправданно с точки зрения качественного анализа точности аппроксимаций
этих деформаций и заложенного в настоящий КЭ условия постоянства
касательных составляющих деформаций поперечного сдвига вдоль сто™
рон. Численные эксперименты подтверждают эффективность подобного
подхода.
На основе полученных соотношений определяются аппроксимации
векторов ковариантных компонент мембранных, изгибных и сдвиговых
деформаций C.4.16), с помощью которых вычисляется интеграл по-
потенциальной энергии деформации по толщине C.4.15). Структурно он
сводится к квадратичной форме D.3.19), где векторы узловых пере-
перемещений имеют вид D.4.21). Матрица жесткости вычисляется путем
суммирования матриц типа D.3.20) по поверхностным квадратурным
точкам, т.е. в виде D.3.23).
В результате получается КЭ, демонстрирующий хорошую точность
для широкого круга задач. Главным его достоинством является наличие
степеней свободы, инвариантных к поверхности КЭ и ориентированных
относительно глобальной системы координат. Это позволяет рассчи-
рассчитывать составные конструкции с произвольным изломом срединных
поверхностей.
6 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
Глава 5
КВАДРАТИЧНЫЕ КОНЕЧНЫЕ ЭЛЕМЕНТЫ
§5.1. Квадратичные изопараметрические элементы
Квадратичный изопараметрический элемент является в настоящее
время одним из самых распространенных элементов, применяемых
для расчета реальных сложных оболочечных конструкций. Поэтому в
настоящем параграфе мы специально остановимся на некоторых его
особенностях.
Вначале рассмотрим точность, даваемую квадратичной интерпо-
ляцией, на примере изгиба прямого бруса. Пусть деформация бруса
описывается соотношениями
Хи = к\ + к2Х,
713 =
E.1.1)
В этом случае точное решение имеет вид D.1.30). Для интерполя-
интерполяции
uz = w = а\ + «2.x
E.1.2)
коэффициенты а» связаны с узловыми значениями и>(г\ 9^ следующим
образом:
=«,B),
а4 =
L
5 ( ) ( )
E.1.3)
Если вместо пР\ 9^ (г = 1,2,3) подставить их точные значения,
полученные из D.1.30) соответственно при х = —L/2,0, L/2, то при-
приближенные деформации xiu 7i3 будут иметь вид
Хп =
713 = ^з
E.1.4)
§5.1. Квадратичные изопараметрические элементы
163
Если принять во внимание формулу D.1.33), то
Е h2
1
— L jA I
713 = ~6 | 2GKI2 ~4
¦-"т
E.1.5)
откуда видно, что слагаемое cfe в E.1.4) является ложным и именно
оно приводит к заклиниванию плоского элемента при уменьшении его
толщины.
Из этого простого анализа видно, что квадратичная аппроксимация
E.1.2) точно описывает чистый изгиб, но при поперечном изгибе по™
являются ложные сдвиги, которые сильно «ужестчают» элемент. Для
устранения этого наиболее удобно сокращенное интегрирование, так
как выражение в квадратных скобках в E.1.4), E.1.5) есть полином
Лежандра 2-го порядка, а его корни и есть точки интегрирования по
Гауссу 2-го порядка. Поэтому двухточечная формула интегрирования
позволяет получить точное значение энергии.
При обобщении этого подхода (сокращении точности формулы ин-
интегрирования) на случай двумерных задач изгиба пластин и оболочек
оказалось, что элементы, построенные на основе лагранжевой и сирен™
диповой интерполяций (см. §3.1), ведут себя по-разному. Примером
тому могут служить кривые, приве-
денные на рис. 5.1.1, которые харак-
характеризуют величину максимального
прогиба квадратной шарнирно-опер-
той пластины под действием рав-
равномерно распределенной нагрузки q
[294]. Пунктиром обозначены реше-
решения, полученные на основе точно-
точного интегрирования по 3 х 3 точкам,
а сплошные кривые — сокращенно-
сокращенного интегрирования по 2 х 2 точкам.
Линия / соответствует решениям,
полученным с помощью 16 8-узло-
вых элементов сирендипова типа, а
для 2^9 элементов лагранжева типа с 9 узлами. Видно, что со-
сокращенное интегрирование благотворно влияет на точность решения,
особенно для 9-узловых элементов (лагранжева типа).
Если сравнить между собой точность, даваемую 8- и 9-узловыми
элементами, то видно, что лагранжева интерполяция в данном случае
приводит к существенно лучшим результатам. Подобное явление отме-
отмечено в литературе многими авторами [294, 356 и др.], исследования
которых свидетельствуют о том, что элементы сирендипова типа часто
не освобождаются от заклинивания с помощью сокращенного интегри-
интегрирования, особенно в случае сильно связанных границ. Это является
основным недостатком подобных аппроксимаций [261].
(wD/qL4)-102
0,41
0,39
0,37
0,35
lg L/h
Рис. 5.1.1
164
Гл. 5. Квадратичные конечные элементы
Однако 9-узловой элемент тоже не лишен недостатков. Например,
при расчете пластин на трех опорах (рис. 5.1.2) он дает сильную осцил-
осцилляцию решения, которой быть не должно. Это объясняется наличием
в ней «механизмов» (см. §4.1).
Рис. 5.1.2
Действительно, легко проверить, что для пластины при сокращен-
сокращенном интегрировании имеется четыре такие формы [316, 369]:
1. w = 0,
2. w = 0,
3. w = 0,
4. w = (l^3
- 1),
02 = A -
3х2 - 1);
-Зу2);
E.1.6)
), 01=О,
которые не дают деформаций j^, Xik-
Тут следует заметить, что первая из форм E.1.6) присутствует и
в 8-узловом элементе, однако она, как правило, не оказывает влияния
в случае для пластины (или оболочки), состоящей из нескольких
элементов.
Исключить из элемента первые три формы E.1.6) возможно за
счет использования выборочно-сокращенного интегрирования, когда
сдвиговая часть энергии интегрируется по 2 х 2 точкам, а изгибная —
по 3x3. Что касается точности, то, как показано в работе [361],
изгибная жесткость в этом случае не увеличивается, и поэтому вы™
борочно-сокращенное интегрирование является более предпочтитель-
предпочтительным с точки зрения повышения ранга матрицы жесткости элемента.
Однако остающаяся форма 4 из E.1.6) способна принести большие
неприятности, поскольку именно она ответственна за осцилляцию,
изображенную на рис. 5.1.2. Это означает, что основной недостаток
9-узловога элемента с редуцированным интегрированием сохраняется
и при выборочно-редуцированном интегрировании.
В заключение подчеркнем основные свойства квадратичных изопа-
раметрических элементов тонких пластин.
а) лагранжев элемент
1. Точное интегрирование дает завышенную жесткость, но заклини-
заклинивание наблюдается не всегда, а если имеет место, то для очень тонких
пластин и сильно связанных границ.
§5.1. Квадратичные изопараметрические элементы
165
2. Редуцированное и выборочно-редуцированное интегрирование
улучшает качество решения (в смысле жесткости), но может приво-
приводить к ложной осцилляции решения при свободных границах за счет
наличия ложных жестких смещений.
б) сирендипов элемент
1. Точное интегрирование всегда сопровождается заклиниванием
даже для умеренно тонких пластин с L/h ^ 102.
2. Редуцированное и выборочно-редуцированное интегрирование
увеличивает область применимости подобных элементов до L/h ~ 103,
однако дальнейшее утончение пласти-
ны приводит к резкому ухудшению ре-
решения, т.е. эффект заклинивания не
исчезает.
Теперь перейдем к искривленным
оболочечным элементам. Для начала
исследуем влияние кривизны на точ-
точность представления заданных дефор-
деформированных состояний. Для этого рас-
смотрим кривой брус на рис. 5.1.3.
Изопараметрическая концепция предполагает задавать ее геомет-
геометрию в виде
rw + —С
E.1.7)
где
Ni (С) = \ (С2 - С), N2
= A - с2), ЛШ = I (С2 + С)
—а
О
гC)
¦{:}•
26
a
26
А*
E.1.8)
Вектор перемещений определяется аналогично E.1.7):
V =
3
Е
г=1
E.1.9)
166 Гл. 5. Квадратичные конечные элементы
где е0 суть узловые значения вектора
1 дг
Л) = Va2 + 4b2?2, E Л .10)
з
i=\
Точные выражения для деформаций в случае E.1.7) определяются
аналогично C.3.21), C.3.24) и записываются в виде
1 дг ди I ( дит _ duz
I дв 1 дп ди 1 дв 2аЬ ( ди
E.1.11)
где учтено, что точное выражение вектора п должно удовлетворять
тождеству
1 дп - 2Ь dT E 1 12)
п /с 1 i\ д& ди*
Систему E.1.1) можно разрешить относительно неизвестных —, ,
duz
д^ дв А 2аЪ
дих _ . _л E.1.13)
duz
Щ - ав.
* 2Ь
Вводя параметр о = —, характеризующий степень непологости рас-
рассматриваемого бруса, и задав деформации xib en, 713 B виде
ец=е, 713 = 7. ^oXi = h + k2^ E.1.14)
§5.1. Квадратичные изопараметрические элементы 167
из E.1.13) получим приближенные (с точностью до ё2) функции пере-
перемещений:
J2
E.1.15)
S2
Теперь запишем деформации, даваемые аппроксимацией E.1.9):
713 =
Ы E-1.16)
Отличие E.1.16) от E.1.11) связано с тем, что точное выражение
вектора 0 для геометрии E.1.7) имеет вид
г=\
а в E.1.9) фигурирует выражение
з
«^(О<4°. E.1.18)
г=1
Функции бж, 9Z, присутствующие в E.1.16), выражаются через узловые
значения 0^ как проекции вектора E.1.18), т.е.
ех = flOAjv, (О + ^B)^2 (О + еC)^г^3 (О,
Если исходя из E.1.15) определить узловые значения их , uz , 0^,
подставив их в аппроксимации E.1.9), E.1.19) и затем в выражения
168 Гл. 5. Квадратичные конечные элементы
для деформаций E.1.16), то последние с точностью до S2 по сравнению
с единицей будут иметь вид
E.1.20)
На основании этих соотношений можно проанализировать точ™
ность, даваемую аппроксимацией E.1.9) для различных видов напря-
напряженного состояния.
а) Безмоментное состояние
В этом случае к\ = к2 = 7 — 0 и деформации E.1.20) будут иметь
ШД ец = е, 713 = <*2е?3, Мхи = Se. E.1.21)
Точное значение энергии будет иметь порядок
V « ^EFe2L, E.L22)
где L — длина элемента. Деформации E.1.21) дают приближенное
значение энергии в виде
V « Х- f.EFe2L + 5AGFe2L +
h2
Для тонких брусьев параметры <54 < 1 и E2— <С 1. Это означает,
что безмоментное состояние в данном случае моделируется весьма
точно.
б) Чистый изгиб
В этом случае е = j = к2 = 0 и деформации E.1.20) будут иметь
вид
en=fc4(l-3?2), Aoxn = ku in = к?&-5 + Э^2). E.1.24)
о о
Точное значение энергии запишется следующим образом
V « ^EJh2x^. E.1.25)
§5.1. Квадратичные изопараметрические элементы 169
Если точно проинтегрировать энергию с деформациями E.1.24), то
получим
V « \ \EJk\^ + EF52k\Lcx + GF8Ak\bc2
I [ a
¦Ji-u Ь"
E.1.26)
где q — некоторые константы. Из анализа слагаемых в фигурных
скобках следует, что наибольшую погрешность вносит второе из них.
Однако, если обратиться к соотношениям E.1.24), то видно, что от
него легко избавиться сокращенным интегрированием по двум гауссо-
гауссовым точкам, поскольку 1 — З^2 есть полином Лежандра 2-го порядка.
Следовательно, для лучшего воспроизведения чистого изгиба следу-
следует сокращать точность интегрирования в мембранной части энергии.
В этом случае хорошую аппроксимацию можно получить, если будет
выполнено
А,«1. E.1.27)
Рассмотрим, при каких относительных размерах элемента можно
Ь а
достичь этого, если принять, что — ^ —, где к — радиус кривизны.
a a R
Пусть — rsj Ю™ \ тогда E.1.27) эквивалентно
R
64 2^ -Й « 1 => % < ю2,
a2h2 R2h2 h2 h
если — ~ Ю, то — < 104, т.е. чем элемент подъемистей, тем меньше
а
должно быть отношение —.
Итак, в случае чистого изгиба хорошую аппроксимацию можно
получить при сокращенном интегрировании мембранной части энергии
и при выполнении неравенства E.1.27).
в) Поперечный изгиб
Прежде всего следует ввести аналог формулы D.1.33), которая
здесь будет иметь вид
Деформации E.1.20) можно записать следующим образом:
E.1.29)
EJ к2 к2 , 2\ , ^2 7 л
170 Гл. 5. Квадратичные конечные элементы
Аналитическое значение энергии можно представить в виде
При точном интегрировании энергии с деформациями E.1.29) воз-
возможно заклинивание из-за слагаемого — A — 3? ) в сдвиговой де™
формации 713- Если проинтегрировать сокращенно, то это слагаемое
исчезает, и
Видно, что наибольшую погрешность вносит второе слагаемое, обу-
словленное мембранной деформацией е\\ = —к^—Е,, от которого изба™
виться никак нельзя. Это означает, что поперечный изгиб представ-
представляется весьма неудовлетворительно, так как он требует выполнения
неравенства
^2<1. E.1.32)
Подведем некоторые итоги. В случае искривленного бруса поми-
помимо обычного сдвигового «заклинивания» появляется так называемое
мембранное заклинивание, которое обусловлено появлением ложных
мембранных деформаций в случае нерастяжимого изгиба. Это явление
уже известно и описано в литературе [387, 388]. Его влияние можно
несколько уменьшить, если использовать сокращенное интегрирование
для мембранной части, однако полностью обойти не удается из-за
требования E.1.32).
Если перейти к двумерным элементам оболочек, то из приведенно-
приведенного исследования можно сделать такой вывод: выборочно-сокращенное
интегрирование не уменьшает жесткости элемента, так как не устра-
устраняет эффекта мембранного заклинивания. В искривленных элементах
наиболее эффективно полное редуцированное интегрирование, когда
формула 2x2 используется для оценки всей энергии. Аналогичные
утверждения можно найти в работах [361, 387], и они подтверждаются
реальными расчетами [294].
Если эти выводы дополнить результатами исследований точности
решений, полученными лагранжевой и сирендиповой интерполяциями,
изложенными в первой части настоящего параграфа применительно к
тонким пластинам, но справедливыми и для тонких оболочек, то станет
ясна необходимость создания таких КЭ, которые бы совмещали досто™
§5.1. Квадратичные изопараметрические элементы 171
инства обоих типов аппроксимаций и не содержали бы их недостатков.
Действительно, 9-узловой оболочечный элемент с редуцированным ин-
интегрированием не заклинивает, но имеет 7 механизмов (у пластины 4):
uz = P (?) P (v), Ux=uy = 0i = 9v = 0, E.1.33)
P (jj) , ux = uy = uz = 6»c = 0
где F (С) = CC2 — l) /2 — полином Лежандра. Причем наиболее опао
ными являются первые три, поскольку они не исчезают при сборке
элементов в ансамбль и при определенных граничных условиях про™
являются в решении. Элемент 8™узловой имеет лишь два последних
механизма из A.33), которые, как правило, не проявляются в решении,
но может заклинивать при уменьшении толщины элемента.
Предложения, направленные на решение указанной проблемы, мож-
можно найти в работах [265, 266, 283, 316, 356, 395]. Например, в работе
[395] предлагается к 8-узловому элементу с 40 степенями свободы
добавить 41-ю, так называемую шаровую функцию в виде
A-С2)A-/?2), E.1.34)
ассоциированную с нормальным перемещением щг^ в центре элемента.
Считается, что этому перемещению не соответствует никакая узловая
сила, и оно исключается посредством условия
г
cbft (L)
+ 723%']^ = 0, E.1.35)
где пж/, пу1 — направляющие косинусы касательной к контуру.
В работе [356] предлагается функцию E.1.34) добавлять ко всем
перемещениям и считать эту степень свободы самостоятельной неиз-
неизвестной. Результирующая матрица жесткости будет иметь вид
E.1.36)
172 Гл. 5. Квадратичные конечные элементы
где [Kss] — обычная 40 х 40 матрица 8™узлового элемента. Фактически
этот элемент будет совпадать с 9-узловым элементом лагранжева типа,
что и подтверждают расчеты [333].
Чтобы исключить образование механизмов, элементы матрицы
[Кнн] заменяются на [К^н] при помощи простых преобразований:
КНН,Э
E Л.37)
где Si — некоторые числовые параметры, регулирующие свойства полу-
получаемого элемента. Механически эта операция эквивалентна прикреп-
прикреплению в центре элемента пружины с некоторой жесткостью S^. При
больших значениях S^ отклонения в девятом узле будут стремиться к
нулю и элемент будет обычным 8-узловым. С другой стороны, малая
жесткость S^ означает, что отклонение в центре равно остальным,
и мы получаем 9-узловой элемент. Численные эксперименты [356]
подтверждают это. Так, например, значение S^ = 1,0004 оказывается
достаточным для остановки ложных осцилляции, присущих лагран-
жевым элементам, сохраняя при этом их свойство реально описывать
процесс деформирования при уменьшении толщины элемента.
В работе [283] дается другой способ объединения свойств 8™ и
9-узловых элементов. Он заключается в объединении 8-узлового эле™
мента [К$] и 9™узлового [Kg] в матрицу, размеры которой уменьшены
статической конденсацией до 40 х 40, в виде
[К]=0[К6] + (\-0)[К9]. E.1.38)
Выбирая параметр /3, можно также управлять свойствами элемента.
Еще одна возможность совместить лучшие свойства 8™ и 9-узловых
элементов описана в работе [316]. Так как недостаток 9-узлового
элемента при сокращенном интегрировании проявляется в наличие
ложных жестких смещений для вектора и, то избежать этого можно за
счет использования сирендиповой аппроксимации для и, оставляя без
изменения углы поворота 0. И наоборот, так как недостаток 8-узлового
элемента — заклинивание сдвига, то очевидно, использование лагран-
жевой аппроксимации для углов поворота в должно благотворно повли-
повлиять на жесткость элемента. Результаты обоих рассуждений одинаковы:
и следует аппроксимировать по 8 точкам, а 0 — по 9. В работе [316]
подобный промежуточный элемент называют «heterosis» — элемент.
В работах [265, 266] описана схема построения стабилизирующей
матрицы для 9-узлового элемента с полностью сокращенным интегри-
интегрированием, аналогично тому, как было сделано в §4.1 для билинейного
элемента. Суть этой схемы состоит во введении в каждой квадратурной
точке фиктивных деформаций, отличных от нуля на смещениях вида
E.1.33) и нулевых при линейных смещениях элемента относительно
декартовых координат (сюда входят смещения элемента как твердого
§5.1. Квадратичные изопараметрические элементы 173
целого). При этом используется тот вариант построения матрицы жест-
жесткости, который был изложен в §3.4.
Введем обозначения:
{S}T = {1, 1, 1, 1, 1, 1, 1, 1, 1},
= {+1, -1, +1, -1, +1, -1, +1, -1, 0},
w), V(n))
dx' ' dx' '"'j'
E.1.39)
^m\f]M) dN2 (^m\r]M) 1
[ ду' ' ду> '¦¦¦]'
;(rO • Pl) Ni (?<m>,n(n)) , (rB) • Pi) N2 (^m\tjW) ,...},
где ?^ш\ ?]inj — координаты соответствующей квадратурной точки,
Ni(?,rj) — функции формы §3.1 C.1.9), г^ — радиус-вектор сре-
д д
динной поверхности в г-й узловой точке, ^—, т^ определяются по
oxf ду1
соотношениям, аналогичным C.3.10), рьР2 — орты осей xf,yf (в (га, п)
квадратурной точке).
Помимо обычно вычисленных деформаций C.4.7), вводятся фик-
фиктивные деформации вида
где {uk} — вектор узловых значений вектора перемещений и^г\ ориен-
ориентированного относительно ортов р^ в (га, п) точке, {Ok} — аналогич-
аналогичный вектор углов поворота:
Вектор {р^ш'п^}, который определяется в виде
2
•»•»>} = {Я} - X; ({Я}т {4™'п)}) {В^}, E.1.41)
174
Гл. 5. Квадратичные конечные элементы
(т,п)
(т,п)
ортогонален вектору
ПрИ ЛЮбыХ Ci В СИЛу Т0ЖД6СТВ
{|ш'п) }Т {5} = |вг(ш'п) }Т {Я} = {Я}т {5} = 0,
E.1.42)
E.1.43)
Это означает, что при смещениях элемента как твердого целого дефор-
деформации E.1.40) будут нулевыми.
В результате в каждой квадратурной точке потенциальная энергия
деформации определяется в виде слагаемых:
Eh л Г/ (т,п)
), v(n), с)
+
12A ^/i2;
(ш,п)
¦Ghfo
(т,п)
(т,п)
, E Л.44)
где первое слагаемое совпадает с C.4.15). Коэффициенты /^ опреде-
определяются экспериментально [265].
В [278] описывается 8-узловой конечный элемент с добавлением
несогласованных мод, т.е. с аппроксимациями вида D.1.46). В качестве
дополнительных функций предполагается взять три функции:
щ
= ^ A - if), щ
- с2),
E.1.45)
и считать их соответствующими лишь нормальному перемещению (ана-
(аналогично [395]). Если через {q} обозначить исходные перемещения
определенные в узлах, а через {q*} — дополнительные, ассоцииро-
ассоциированные с функциями E.1.45), то считается, что справедливы урав-
уравнения
Я.
Р
0
E.1.46)
Исключая из E.1.46) перемещения {q*}, придем к обычному матрич-
матричному уравнению с модифицированной матрицей жесткости:
[К*] = [Кп] ~
12]
E.1.47)
§5.1. Квадратичные изопараметрические элементы 175
При вычислении матриц [Кц], [Ки] используется сокращенное инте-
интегрирование по схеме 2 х 2, а для [К22] — точное 3x3.
Теперь остановимся на довольно сложном квадратичном изопара™
метрическом элементе оболочек — «semiloof» — элементе, предложен-
предложенном Айронсом [308, 322, 343]. Этот элемент имеет 32 степени свободы,
включающие 24 перемещения их, иу, uZj определенные в четырех вер-
шинах и серединах сторон, и 8 углов поворота в нормальном к контуру
направлении, определенные в двух гауссовых точках вдоль каждой
стороны (рис. 5.1.4). Столь необычный выбор местоположения узлов
углов поворота связан с использованием двух различных семейств
пробных функций для аппроксимации перемещений и углов поворота.
Это продиктовано необходимостью сохранения минимальной совмест-
совместности полей перемещений (в смысле кусочного тестирования [222])
при наложении специальных условий [323], исключающих излишнюю
жесткость при малых толщинах. Последние являются, по сути дела,
дискретными гипотезами Кирхгофа-Лява, изложение которых будет
дано ниже. Не вдаваясь в подробности, коротко опишем основные
этапы построения semiloof-элемента.
л
Рис. 5.1.4
В аппроксимации для вектора перемещений присутствует два се-
семейства функций формы: первое — сирендипово семейство Ni (?, 77), г =
= 1,8 C.1.7), и второе так называемое /оо/-семейство Lj (?,77)» j = 1,9,
узловые значения которых определяются в двух гауссовых точках
вдоль каждой стороны: l? = ±\,r] = ±—=), ( ? = ±—=, V — =Ы ] > и
V V 3 у V V 3 /
срединной точке ( ? = rj = 0). Явные выражения для этих функций
Lj (?,rj) можно получить исходя из следующей пробной функции:
+ c^if + cg^ (С2 - г]2) . E.1.48)
176
Гл. 5. Квадратичные конечные элементы
Помимо этого вводится «шаровая функция» E.1.34)
E Л.49)
в выражении для нормального перемещения uz>. Таким образом, вместо
C.2.2) берется выражение
Uy
v7
г=\
о
о
E.1.50)
где матрица [ф] определена как C.2.11), а матрица [Ф^] структурно
имеет вид D.1.47), т.е.
E.1.51)
Однако векторы еь ег, входящие в E.1.51), должны определяться как
в C.2.4) только для тех j, которые ассоциированы с гранями г/ = ±1.
Для тех j, которые соответствуют граням ? = ±1, следует брать
п :
х dvp
= е2 х п.
E.1.52)
Для узла в центре можно воспользоваться любым из них. Подобное
требование следует из необходимости точного выделения на каждой
грани нормальной и касательной к контуру составляющей вектора 0,
так как нормальная составляющая является глобальной степенью сво-
свободы элемента, а касательная исключается посредством наложения
специальных условий.
Требуется 11 условий, так как в E.1.50) содержатся 43 степени
свободы, а конечный вариант имеет лишь 32. Структурно они распада-
распадаются на три класса:
1) восемь вращений в /оо/™узлах (это 6>1 на гранях rj = ±1 и 6^ —
на ? = ±1) исключаются из условия отсутствия сдвига в этих точках
вдоль края элемента, т. е. jx?z> = 0 при rj = ±1 и ^x>z> = 0 при ? = ±1,
где оси xf,yf,zf совпадают с еь в2, п, определенными соответственно
либо как C.2.4), либо как E.1.52) (по сути дела, это и есть гипотезы
Кирхгофа-Лява, налагаемые в отдельных узлах);
§5.1. Квадратичные изопараметрические элементы 177
2) два вращения в центре, 6^ , в^ , исключаются из условий
¦dQ = Q, E.1.53)
J
о о
которые, по мнению автора работы [322], более предпочтительны, чем
Ix'z1 = 0, jxfzf = 0 при ? = г/ = 0;
3) прогиб в центре г^, исключается из условия
!ft = 0. E.1.54)
Вычисление потенциальной энергии деформации производится чис-
численно по квадратурной формуле Гаусса с 2x2x2 точками интегри-
интегрирования. Получаемый в результате элемент обладает весьма хорошей
точностью, но имеет два механизма. Для устранения этого рекоменду-
рекомендуется оригинальный прием комбинирования четырехточечной Bx2) и
одноточечной Ax1) формул интегрирования с весовыми множителями
0,95 и 0,2.
В [80, 81] предлагается схема «двойного интегрирования», которая
эквивалентна описанной смешанной схеме, но требует вычисления де-
деформаций лишь в 9 точках. Суть ее заключается в интегрировании
потенциальной энергии по формуле 3 х 3 х 2 с одновременным перевы-
перевычислением в каждом слое по высоте соответствующих деформаций по
схемам 2x3, 3x2, 2x2.
Допустим, что имеется некоторая функция g(?), под которой под-
подразумевается выражение для приближенных компонент деформаций,
вычисленных по аппроксимациям перемещений. Из анализа ошибок,
возникающих для них в случае квадратичных аппроксимаций [60],
следует, что данную функцию можно представить в следующем виде:
g@ = go@+a(l-42), E.1.55)
где первое слагаемое — точное значение компоненты деформации,
а второе слагаемое описывает структуру ошибок аппроксимации.
Затем строится процедура вычисления функции g(?) в квадратур-
квадратурных точках Гаусса третьего порядка, которая исключала бы ошибку
аппроксимации, т.е. уничтожала бы второе слагаемое в E.1.55).
Сначала вычисляются значения g-W (г = 1,2,3) в точках Гаусса
/з /з
с координатами ?^) = — у ^ > С^ — 0? С^ = \ т > и по ним строится
квадратичная интерполяция
з
^ Е^)Я<(О. E-1.56)
г=\
178
Гл. 5. Квадратичные конечные элементы
где
E.1.57)
Затем определяются значения g-W (г = 4, 5) в точках Гаусса с коорди-
коорди^4^ = ^^^, <^5^ = —=¦ и по ним строится линейная интерпо™
л/3 v3
натами
ляция
k=\
где
k=\
@=o
При подстановке в E.1.58) координат точек
E.1.58)
E.1.59)
получает-
ся
где
матрица А
l i=\
ij имеет
вид
Агз =
1
18
¦ 14
5
8
8
8
^4
5
14
г=\
E.1.61)
Несложно проверить, что после перевычисления по соотношениям
E.1.60) выражение для 'g не будет содержать слагаемого, харак™
теризующего ошибку аппроксимации (второе слагаемое соотношения
E.1.55)).
Таким образом, процедуру «двойного интегрирования» при вычис-
вычислении деформаций C.3.10), входящих в выражение для потенциальной
энергии, можно представить в следующем виде.
1) В 9 точках, совпадающих с точками интегрирования по формуле
3x3, вычисляются деформации в криволинейных координатах elT1 ,
(т.п) (т.п) (т.п) (т.п) /п л 1 \
ект \ 7р > l\t ' / С по соотношениям C.4.1), где m, n —
номера точек в направлении ? и ц.
§5.1. Квадратичные изопараметрические элементы 179
2) По соотношениям, аналогичным E.1.60), строятся новые дефор-
деформации, в которых будут отсутствовать ошибки, уничтожаемые инте-
интегрированием по смешанным формулам:
з
~т,п _
j=\
г=\ j=\
г=\ j=\
3) В каждой квадратурной точке по деформациям E.1.62), учитывая
соотношения C.3.2), C.3.10), вычисляются деформации C.3.11):
А\ \A\JJ2
Ъ-z' = -?т {-Сх + ^) ё« - т^-7«ч + ^тгШ, E-1.63)
которые входят в соотношения потенциальной энергии.
В заключение этого параграфа приведем данные, характеризую-
характеризующие скорость сходимости некоторых из описанных изопараметрических
элементов на примере задачи о деформировании под действием соб-
собственного веса цилиндрической панели, шарнирно-опертой по криво-
криволинейным границам и со свободными прямолинейными границами (см.
рис. 2.2.2).
На рис. 5.1.5. приведены кривые, характеризующие скорость сходи-
сходимости для различных конечных элементов, а именно:
кривая / соответствует элементу, описанному в §4.1.
кривая 2 соответствует элементам, описанным в работах [63, 64], и
приведена для сравнения точности.
180
Гл. 5. Квадратичные конечные элементы
v7, см
100 200 300
Рис. 5.1.5
400
N
кривая 8 — 9~узловому элементу с точным интегрированием по 3 х
х 3 точкам;
кривая 4 — 8-узловому с точным интегрированием по 3 х 3 точкам;
кривая 5 — 8™узловому с сокращенным интегрированием лишь
сдвиговой части энергии;
кривая 6 — 9-узловому с сокращенным интегрированием лишь
мембранной части энергии;
кривая 7 — 8-узловому с полностью сокращенным интегрированием
по 2 х 2 точкам;
кривая 8 — Э-узловому с полностью сокращенным интегрировани-
интегрированием.
§5.2. Анализ потери точности сдвиговых конечных элементов
181
Из анализа этого графика видно, что для данной задачи сокращен™
ное интегрирование только для мембранной части приводит к лучшим
результатам, чем только для сдвиговой. Однако в других случаях ситу-
ситуация может быть иной, поэтому следует признать удовлетворительным
лишь полностью сокращенное интегрирование. Причем это одинаково
справедливо как для 8-, так и для Э-узловых элементов.
В некоторых задачах Э-узловые элементы могут давать плохие ре-
результаты из-за появления ложной осцилляции решения.
§5.2. Анализ потери точности сдвиговых жонечных
элементов
Рассмотрим прямоугольный элемент изгибаемой пластины, изобра-
изображенной на рис. 5.2.1, построенный по теории типа Тимошенко с би™
квадратичной аппроксимацией прогиба и
углов поворота под действием поперечной п ^У п
нагрузки. Неизвестными функциями здесь
являются прогиб w и два угла поворота
6Х, 9у, по которым определяются изгибные
деформации
_ двх _ дб
Ххх — "^—, Хуу — -^"
дв*_ дОу_
2 \ ду дх
E.2.1)
Рис. 5.2.1
и деформации поперечных сдвигов
Ixz
dw
~дх'
dw
E.2.2)
Точное решение будем искать в виде разложения деформаций в ряд
Тейлора. Коэффициенты этих разложений, являясь значениями про™
изводных от деформаций в начале координат, должны удовлетворять
двум уравнениям совместности деформаций:
дхду ду2
\ху
дхду дх2 дх
ду
ду
^Хуу
дх
— =0,
E.2.3)
= 0,
182 Гл. 5. Квадратичные конечные элементы
и двум уравнениям равновесия:
E.2.4)
Eh3
12A-—-
= 0.
Третье уравнение равновесия содержит поперечную распределенную
нагрузку, поэтому ограничений на коэффициенты разложений Тейлора
не дает.
В результате получаем следующие разложения (для низших степе-
степеней полиномов):
Ххх = «1 + «2^ + «31/ + (%4%2 + (%5%У +
2 ац2/2 + ..., E.2.5)
Ixz = 0h2 [(a2 + as) + 2 (a4 + a6) x + («5 + «10) f/ + • • -L
E.2.6)
7з/г =/^Л,2 [(a3 +a9) + 2 (a5 +аю)а; + («6 + «и) I/+ •••],
[()]
Теперь построим интерполянт деформаций E.2.5), E.2.6). Для это-
этого, интегрируя соотношения E.2.1), E.2.2), находим поле перемеще-
перемещений, соответствующее деформированному состоянию E.2.5), E.2.6),
в виде
о 9 4
„ _ ух у х
0х = С\ + а\х + «12- + а2— + аз#2/ + а8у + «4^ +
9 Ч
х у 2/°
9 94
Оу = С2 + «12 g + а72/ + «Зу + щху + аду + «5^
E.2.7)
§5.2. Анализ потери точности сдвиговых конечных элементов 183
w = С3 + [f3h2 (а2 + as) -C\]x+ [ph2 (а3 + од) - <2г] у+
2 / \ а1 1 2 \ т 2 / \ а12]
(а4 + «б) - — \х + Э (а5 + аю) ^- зл/+
^ J L ^ J
3 2 2
г (аб + ац)——\у — а2^—tt3^ а8^—
3 4 3 2 2 3 4
1/ X XI/ X У XV У
где слагаемые с С\, Сг, Сз соответствуют смещениям элемента как
твердого целого.
Подставляя в E.2.7) координаты узлов в соответствии с
рис. 5.2.1 (ж = 0,±аж, г/= 0, ditty), находим узловые значения иМ\
0х\ 0у\ по которым строим биквадратичные 9-узловые аппрокси-
аппроксимации:
E.2i
г=\
где Ni (x, у) — известные функции формы в виде произведений одно-
одномерных квадратичных полиномов Лагранжа. Затем по этим аппрокси-
аппроксимациям находим интерполянты деформаций путем подстановки E.2.8)
в E.2.1), E.2.2). Для них будут справедливы выражения
3
Ххх = а\ +а-2Х + азу + а4^- + а5ху
I
Хуу = а7 + а$х + а$у + а\оху
2 2 '
+ 2a:ix + 2а8у + f у + у ) +
E.2.9)
184 Гл. 5. Квадратичные конечные элементы
2
at,
f
E.2.10)
l = ^2[(a3 + a9) + (a5) ( )]
Если ввести локальные координаты ?,rj (рис. 3.2.1), то для ошибок
аппроксимации деформаций получим
XL = «4^
E.2.11)
.2
2 2 2
^ I1 32) ^A 32) |
E.2.12)
На основе этих выражений можно сделать несколько важных выводов.
1. Чистый изгиб (слагаемые с аь 07,^12) квадратичные аппрокси-
аппроксимации представляют совершенно точно, что обеспечивает линейную
сходимость решения при сгущении сетки.
2. Состояние с линейными изгибающими моментами (слагаемые с
Q2, аз> ОД> од) сопровождается появлением ошибок в сдвиговых дефор™
мациях, что является причиной эффекта «заклинивания».
3. Состояние с квадратичными изгибающими моментами (слагае™
мые с а4,а5,аб,аю,ац) сопровождается ошибками во всех деформа-
деформациях.
4. Большая часть ошибок исчезает в точках ?, rj = ±1/л/3, которые
являются квадратурными точками сокращенного интегрирования по
формуле Гаусса 2x2. Именно этот факт объясняет причину улучше-
улучшения сходимости сдвиговых КЭ типа (В) при сокращенном интегри-
интегрировании.
Для сравнения проводился аналогичный анализ погрешности для
8-узловых аппроксимаций сирендипова типа. В этом случае для оши-
§5.2. Анализ потери точности сдвиговых конечных элементов
185
бок в кривизнах сохраняются соотношения E.2.11), но для сдвигов
появляются новые слагаемые:
а2 « а2
Ixz — liz = а2тг A — З^2) + аь-^г-у A — З^2) -
- а4а2хх - а6а2ух (г/ - 1) + ...,
Ъ*
- а\\а\\х - x
E.2.13)
Здесь важным является то, что дополнительные слагаемые не исчеза-
исчезают при сокращенном интегрировании. Это означает, что при прочих
равных условиях 8-узловая аппроксимация дает худшие результаты по
сравнению с 9-узловой. Этот факт известен и упомянут в § 1.6.
Как правило, в реальных задачах фор-
форма используемых КЭ является непря-
непрямоугольной, и, следовательно, результа-
результаты проведенных исследований в сложных
случаях дают не совсем реальную картину
распределения ошибок аппроксимации по
элементу. Поэтому проведем аналогичные
исследования для четырехугольной обла-
области, изображенной на рис. 5.2.2.
В этом случае зависимость между ло-
локальными (?, rj) и глобальными (х, у) ко-
координатами имеет вид
Рис. 5.2.2
S
- (ау + ахС) 1],
E.2.14)
у = ауг] + а
где С = sin /3, S = sin а. Так как наибольшую опасность представляют
ложные сдвиговые деформации, появляющиеся в случае линейно изме-
изменяющихся изгибающих моментов, то ограничимся построением оценки
ошибок только для них. При этом исследование будем проводить для
ковариантных компонент
dw
дх
Эу
9и; ^ж ^2/
9гу х дт] у дт]'
E.2.15)
186
Гл. 5. Квадратичные конечные элементы
В разложении для точного решения оставим лишь линейные слагае-
слагаемые, т. е.
Ххх =
оцх + аз г/, Хуу = «4
Хху = «7 + азх + аъу,
(a2 + а5), jyz = f3h2 (a3 + «б) •
E.2.16)
После проведения всех вычислений, которые опускаем из сообра-
соображений экономии места, получаем ошибки в сдвиговых деформациях:
\а\С
- 1) + а2
e-l)+a2xal(l+Oy(y2-l)
+
ciia
f4D2-l)+ axaya*C A + 2?) r, (f]2 - 1) +
\ (-1
i2 a2
П3Г3
, E.2.17)
^ A + СJ (Зг]2 - 1) + ^ (^ - 1) +2а1а.С& (^ - 1)] +
§5.3. Конечный элемент тонкой оболочки
187
*-!?- (\ + $ (Зг? - \) + агауа.1
(Згу2 - 1) +
f-i) + ^—(i+OtD'02-i) \ +
1/V3
1/V3
—' -о h~
--х
-Г
E.2.18)
где а* = 0, 5 (а^ + аж sin C) sin а.
Если внимательно проанализировать соотношения E.2.17), то полу™
чим, что ошибка для 7сс исчезает в точках ? = ±1/\/3 , 17 = 0; ±1, а для
7т7< — при г/ = ±1/\/3, С = 0;±1. На рис. 5.2.3 точки, в которых нет
ошибок в 7СС' помечены звездочка-
звездочками, а точки, в которых нет ошибок в
7г/О ~~ квадратиками.
Таким образом, установлено, что
и в этом КЭ существуют точки
(известные в литературе как точки
Барлоу [160]), в которых погрешно™
сти аппроксимации минимальны для
квадратичных аппроксимаций, опре-
определено их расположение для плоских
четырехугольных элементов изгибае-
изгибаемых пластин. Для искривленных эле-
элементов оболочек близкие результаты
получены в [314, 327, 362], где рас-
рассматривались распределения ошибок
в мембранных деформациях. Суммируя все исследования на эту тему,
можно сказать, что для биквадратичных аппроксимаций ошибки в
деформациях е^, %^, 7сс минимальны вдоль линий ? = =Ь 1 /\/3, а для
деформаций evv, x^? ivC ~~ вдоль линий rj = ±l/\/3 •
§ 5.3. Конечный элемент тонкой оболочки с двойной
аппрожсимацией деформаций
На основе результатов, полученных в предыдущем параграфе, мож-
можно построить весьма эффективный 9-узловой элемент, не уступающий
по точности 9-узловому элементу с сокращенным интегрированием и
свободный от понижения ранга матрицы жесткости. Идея его состоит
в вычислении деформаций в точках минимальной погрешности аппрок-
аппроксимаций и построении по этим значениям дополнительной аппрокси™
1/V3 1/V3
Рис. 5.2.3
188
Гл. 5. Квадратичные конечные элементы
мации деформаций, по которой строится матрица жесткости. Таким
образом, получаем двойную аппроксимацию деформаций на элементе:
первая — построенная по перемещениям, вторая — построенная по
значениям первой, вычисленной в определенной системе точек.
Подобная схема апробирована в работах [259, 315, 324, 362], где
деформации определяются строго в тех точках, которые получены в
§ 5.2 настоящей главы, т. е. либо ? = ± 1 /л/3 , rj = 0; ± 1, либо ? = 0; ± 1,
rj = ±1/л/3. В настоящей работе помимо этого варианта рассматри-
рассматривается также альтернативный и на основе численных экспериментов
определяется лучший вариант.
5.3.1. Основные соотношения. Интеграл потенциальной энергии
деформации вычисляется в соответствии с соотношением C.4.5), т.е.
путем численного интегрирования по поверхностным координатам и
аналитического по (. Выражения для деформаций принимаются в ви-
виде ковариантных компонент C.4.12-3.4.14), что является следствием
результатов, полученных в предыдущем параграфе. Действительно,
соотношения E.2.17) справедливы лишь для ковариантных компонент
ТСС' 7*7О для ДекаРТ0ВЫХ выражений jxz, jyz получить аналогичные
соотношения не удалось. Таким образом, исходным выражением для
построения матрицы жесткости будет C.4.15), и остается построить
процедуру вычисления векторов деформаций {е}, {х}, {j}-
Введем двойную нумерацию узлов на элементе в соответствии
с рис. 5.3.1, а.
1,1
1/V3 1/V3
Рис. 5.3.1
1/V3 1/V3
Тогда аппроксимации C.2.1) и C.2.2) можно записать в виде
m,n=l
3
J2 ¦
m,n=l
E.3.1)
§5.3. Конечный элемент тонкой оболочки 189
m>n=1 E.3.1)
\—"^ / (m n) (m n)
VS» I) — / J у 1 1
m,n=\
где
^ = l^f, Я3 @ = ^(^+1). E.3.2)
Мембранная деформация е^, определенная соотношением C.4.12),
будет иметь вид
;(ту)я<(гу)г(^)-и^). (б.з.з)
m,n=l i,j'=l
Значения ее в точках, помеченных косым крестиком на рисунках 5.2.3
и 5.3.1, б, можно определить, подставив в E.3.3) координаты этих
точек. В результате получим
n,j=l
В соответствии с выбранной схемой двойной аппроксимации дефор-
деформаций по значениям E.3.4) для е^ строим линейную аппроксимацию
вдоль координаты ? и квадратичную вдоль rj. Обозначим ее е^. Для
нее справедливо
3 3
^« = Е J2H^)Hnj@ r(m'n) ¦ u<m^, E.3.5)
т,п=\ j=\
где
\ ( ) К
. E.3.6)
В качестве альтернативного варианта будем рассматривать выраже-
выражение
3 3
eh= ? ?ят(г/)Я<(т7)Яп,-@г(ш'п).и^). E.3.7)
190 Гл. 5. Квадратичные конечные элементы
При численном интегрировании по формуле Гаусса 3x3 соотноше™
ние E.3.7) соответствует вычислению значений деформаций в точках,
помеченных косым крестиком на рис. 5.3.1, в.
По аналогии определяются два варианта изгибных х& и сдвиго-
сдвиговых 7сс деформаций:
з з
ш = J2 J2 [п(ш'п) •u(WJ) +
m,n=l j=\
i r(m,n) . (j
m,n=l i,j = 1
r(m.n) . (eW)e(iJ) +e(iJ
7} У f
m,n=l j = l
E.3.8)
[n(m'n) ¦ uii'J) +
E.3.9)
Гп(ш,п) % u(iJ) _|_
где
СB))Я;(СB)). E.3.10)
Деформации е^^, x^t]^ 7??c определяются тоже в виде двух вариантов,
вычисленных в точках, помеченных либо как ? на рис. 5.3.1, б, либо
как х на рис. 5.3.1, в. Для них справедливы выражения
m7'8=3' E-3.11)
= Е ?
§5.3. Конечный элемент тонкой оболочки 191
т,п=1 г=1
E.3.12)
3
m,n=\
3
Z^
= Е Е [п(гал) • и(г'п) +
т,n=l i=l
,nH(m,n) +e(m,nH(rn,n)
0)j Hn
E.3.13)
3 3
E [n(m>n) ¦u(8J)+г(г'п)
m,n=\ i,j=l
Деформации e^v и x^v предполагается вычислять в точках интегри-
интегрирования по формуле 2x2, т.е. при ?,rj = ±l/\/3, и далее строить
линейные аппроксимации по обеим координатам. Эта схема приводит
к соотношениям
з з
^ = 2 ?
т,п=1 i,j=\
3 3
m,n=l i=l
E.3.14)
5.3.2. Построение матрицы жесткости. Введем обозначения для
узловых перемещений:
E.3.15)
192 Гл. 5. Квадратичные конечные элементы
и аппроксимации деформаций:
з
E-3.16)
Тогда в соответствии с выражениями E.3.5), E.3.7), E.3.8), E.3.9),
E.3.11), E.3.12), E.3.14) для деформаций E.3.16) получаем по два
варианта матриц [Е^] , [G^-] , [R^]- Если строки этих матриц обозначить
через векторы {Е^-}, {G^-}, {R^-}, s = 1,2,3, то для первого варианта
справедливы соотношения
т
71=1
^j^,z(m'j),0,0}, E.3.17)
Т
= 2
т,п=\
,т Л
xSm'n^ у(т^ z(m'n) о о}
п=\
з, "' • rv
т з
m=\
E.3.18)
§5.3. Конечный элемент тонкой оболочки 193
{r\3)
Е
т,п=\
t
n=\
{ (^] {\^j) {i^ , E.3.19)
t 3
t 3
%} = H3 @ J2 P™(V) {n(^\n^Kn^'j),0,0}
n=\
аналогично можно выписать подобные векторы и для второго варианта.
Подставляя E.3.16) в выражение C.4.15), получим
j \ Е Е{«(тв)}т КУ {Л E-3-2°)
rn,n=\ i,j=l
где блоки матрицы, вычисленные в точке ^(k\^(k\ имеют вид
[K^ij\=2[Emn}T[Rl}T[Dl}[Rl}[Eij} +
+ у [С™„]Т [i?i]T [I>i] [Д1] [Gy] + 2 {[Rmn]T [R3]T + [Rmn}T [R2]T) x
x [Щ (Ш Щц] + Ш [Eij]), E.3.21)
Для вычисления поверхностных интегралов используется численное
интегрирование по формуле Гаусса третьего порядка по каждой из
координат. Таким образом, для блоков матрицы жесткости элемента
[Kmnij] будет справедливо выражение
где e(fcWfc) = -y/3/5,O,y/V5\ ^k = 5/9,8/9,5/9; A
значения параметров C.3.3) в квадратурных точках.
7 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
194
Гл. 5. Квадратичные конечные элементы
§ 5.4. Трехмерный конечный элемент оболочки
средней толщины с двойной аппроксимацией
деформаций
В работе [17] предложена методика построения трехмерного изопа-
раметрического конечного элемента с использованием дополнительной
аппроксимации деформаций по толщине по точкам суперсходимости.
В основу его построения положены соотношения §3.1 в сочетании
с использованием ковариантных компонент деформаций.
B,1,2)
,2,2)
A,1,2)
A,1,1)
A,2,1)
C,3,2)
C,3,1)
A,3,1)
Рис. 5.4.1
Введем тройную нумерацию узлов в соответствии с рис. 5.4.1. Ра-
Радиус-вектор элемента объема (материальной точки) аппроксимируем в
виде биквадратичного полинома по координатам ?, ц и линейного —
в поперечном направлении (по толщине), т.е.
3 2
E.4.1)
т,п=\ к=\
где Hm(rj) и Нп(?) задаются соотношениями E.3.2),
0-
E.4.2)
§5.4. Трехмерный конечный элемент оболочки средней толщины 195
2
3
Е Е-
то,п=1 fc=l
E.4.3)
что обеспечивает линейное изменение перемещений по толщине обо-
оболочки.
Введем ковариантные компоненты деформаций:
dp dv
dp dv
dp dv
dp dv dp dv dp dv dp dv
ac "drj+ Щ' ас' Ъс = ^]' Ж + ac" ~drj'
dp dv dp dv
7 +
Из соотношений
i
' d "
Ъх1
d
dyf
d
[ dz' J
> -
(
Л
C.3.10)
1
в
Аи
C\
АХСЪ '
следует, что
1
ВуС2 \
0
1
в2
с2
В9.Ся
0
0
1
<
¦ д "
д
дт]
д
[дС ,
d
drj
d
Если ввести в рассмотрение тензоры деформаций
(е>) =
(ех-х-
Ту^У'ж
1
то они связаны
1
27ж/
' Чу
1
2Ъ/
между
1
у' 2^а
1
' 27^
у' &z'
собой
\
z' z'
l' z'
Ле) =
следующим
1
образом
1
о ' s'
р-
1
27с'
7 2
1
2
E.4.4)
. E.4.5)
E.4.6)
E.47)
196 Гл. 5. Квадратичные конечные элементы
При вычислении деформаций E.4.4) через перемещения исполь-
используется метод двойной аппроксимации, изложенный в §4.3 для би-
билинейного и в §5.3 для квадратичного элементов тонких оболочек.
В соответствии с этой методикой деформация е^ вычисляется в точ-
точках ? = ±1/\/3; 7? = —1,0, 1; С = ±1, и по этим значениям строится
квадратичная аппроксимация вдоль координаты 77 и линейные вдоль ?
и (. Деформация evv вычисляется в точках ? = —1,0, 1; 77 = ±1/л/3;
( = ±1, и для нее определяются линейные полиномы по 77, С и квад-
квадратичные — по ?. Деформация обжатия е^ вычисляется в точках
?, ту = —1,0, 1; С — 0, что дает квадратичные аппроксимации по ?,
77 и постоянное значение по толщине. Деформация 7^ вычисляется
в точках ?, г] = ±1/\/3; ( = ±1, и определяется в виде линейных
аппроксимаций по всем координатам. Деформация поперечного сдвига
7?? вычисляется в точках ? = ±1/\/3; 77 = —1,0, 1; ( = 0, по которым
строится квадратичная аппроксимация по 77, линейная — по ? и посто-
постоянная — по (. Сдвиговая деформация 777с вычисляется при ? = —1,0, 1;
77 = =Ы/\/3; С = 0, и это дает квадратичный полином по ?, линейный
ПО 77 И ПОСТОЯННЫЙ ВДОЛЬ (.
Результатом таких построений будут соотношения
3 2
%= Е ^
i,j,m=\ k=\
,j,m=\ k=\
O L{ @) L^ @) p
3 2
i,j,m,n=\ k=l
x
3 2
E Е
°) L'k
3 2
E
,j,n=[ l,k=\
E Hi® (Рт('п)Ц @) ifc @) +
@) L'k @))
§5.4. Трехмерный конечный элемент оболочки средней толщины 197
где Hmj(?), Hmi(rj) даются соотношениями E.3.6), a Pjn(€), Pmi(v)
и т. д. — соотношениями E.3.10).
Далее эти аппроксимации подставляются в выражение E.4.7),
позволяющее вычислить деформации C.1.24), которые, в свою оче-
очередь, входят в закон Гука C.1.23) с матрицей упругих характеристик
C.1.26).
Потенциальная энергия деформаций вычисляется путем численного
интегрирования по всем трем координатам ?, rj, ( в виде, аналогичном
C.1.21), но в локальных координатах х', yf, zf, т.е.
)) }
i \ / j i \
i,j,k
x det \j U(t\vU)Xik))] ujtuj3ujk. E.4.9)
В качестве квадратур используются формулы Гаусса-Лежандра поряд™
ка 3 х 3 х 2 соответственно по координатам ?, rj, (.
Глава 6
ПРИМЕРЫ РАСЧЕТОВ
§6.1. Тестовые задачи
При тестировании рассматривалось восемь различных вариантов
описанного выше КЭ, которые идентифицируются тремя параметрами
(г1,Г2,гз). Параметр г\ обозначает тип аппроксимации мембранных
деформаций е^, ew, е^, а именно: при г\ = 1 используются е^, evr],
e^v, а при г\ = 2 — е|^, е*^, е| . Совершенно аналогично параметр
Г2 означает вид аппроксимации сдвиговых деформаций 7?<> 7?7С> гз ~~
изгибных: ХСС' Х^, Х^-
6.1.1. Квадратнам пластина под силой в центре. Рассматрива-
Рассматривается жестко закрепленная квадратная пластина под сосредоточенной
силой в центре. Для того чтобы выяснить, как влияет на точность
результатов форма элементов, будем использовать различные типы раз-
разбиений с одинаковыми параметрами сетки. На рис. 6.1.1 изображены
три типа сетки с 2 х 2 КЭ, на которые разбивается 1/4 часть пластинки
с наложением условий симметрии на соответствующих гранях.
Точное решение этой задачи для прогиба под силой дает формула
Ра2
wT =0,0224 . F.1.1)
На рис. 6.1.2 представлены кривые ошибки
5 = -—^-100% F.1.2)
§6.1. Тестовые задачи
199
в зависимости от lg (а/К) для различных вариантов КЭ.
/о
10
-10
-зо
-50
1,5 2 2,5 3 \g(a/h)
Рис. 6.1.2
Кривая / соответствует Э-узловому элементу с сокращенным инте-
интегрированием по схеме 2 х 2 на сетке а). Эта же кривая соответствует
всем вариантам настоящего элемента на этой сетке.
Кривая 2 соответствует 8-узловому элементу с сокращенным инте-
интегрированием на сетке а).
Кривая 8 соответствует вариантам A,1,1), B,1,1), B,1,2) на сетке
б), а 4 - на сетке в).
Кривая 5 соответствует вариантам A,2,1), A,2,2), B,2,2) на сетке
б), а 6 — на сетке в).
Кривые 7 и 8 соответствуют 8™ и 9-узловым элементам с точным
интегрированием по схеме 3 х 3 на сетке а).
Из анализа этих кривых следует, что наивысшую точность и ста-
стабильность по отношению к толщине и форме элементов для задачи
изгиба пластины демонстрируют 4 варианта — A,1,1), B,1,1), A,1,2),
B,1,2). Все эти варианты объединяются одной схемой вычисления
деформаций поперечного сдвига, а именно: 7ео ЪС-
Тут же заметим, что кривые 1,2,7,8 подтверждают ранее выска-
высказанное утверждение о более высокой точности и стабильности Э-узло-
вой лагранжевой аппроксимации по сравнению с 8-узловой сирендипо™
вой.
6.1.2. Сферический купол. Рассматривается свободный сфе-
сферический купол под действием системы самоуравновешенных сил
(рис. 6.1.3). Эта задача рассматривается в качестве тестовой в работе
[265], где она решается с помощью 9-узлового КЭ с сокращенным
интегрированием и специальной процедурой повышения ранга матрицы
жесткости элемента. Параметры принимались следующими:
R = 304,8 см, h= 1,2192 см,
4,8 кГ/см2, Р = 0,907 кГ, v = 0,3.
F.1.3)
200
Гл. 6. Примеры расчетов
Рис. 6.1.3
деформации е^.
Р
Из соображений симметрии рассматри-
рассматривается 1/4 часть, разбитая на три КЭ. Точ-
Точное решение для прогиба под силами дано
в [265] и равно wt = 0,0563 см.
В табл. 6.1 приведены значения погреш-
погрешности F.1.2) для различных (гьГ2,гз) и
решение [265] для аналогичной сетки. Из
этой таблицы следует, что использование
в качестве сдвиговых деформаций j^, j*^
приводит к плохой точности; мембранные
дают лучшую точность по сравнению с е|^, е*^;
вид аппроксимации изгибных деформаций влияет мало. В целом в этой
задаче хорошую точность демонстрируют те же элементы, что и в
предыдущей.
vv
Таблица 6.1
A,1,1)
B,1,1)
A,2,1)
A,1,2)
B,2,1)
B,1,2)
A,2,2)
B,2,2)
[265]
-0,4%
-81%
Оо о/
,о /о
-81%
^6,6%
-81%
-81%
+7,9%
6.1.3. Сжатый цилиндр. Для сравнения приведем решение за-
задачи из гл.2 о деформации замкнутой круговой цилиндрической обо-
оболочки со свободными торцами под действием самоуравновешенной
системы двух сосредоточенных сил (рис. 2.2.1). Так как сходимость
элементов рассматриваемого типа в этой задаче весьма высока [265,
294, 362], ограничимся сравнением погрешности решения F.1.2) лишь
для одной сетки — 2 х 2. В табл. 6.2 приведены погрешности прогиба
под силой для различных типов КЭ: (гьГ2,гз) соответствует всем
вариантам настоящего КЭ, которые дают одинаковые результаты для
всех типов аппроксимаций деформаций; 8-SER — 8-узловой элемент
с сокращенным интегрированием по работе [362]; 9-ANS — 9-узловой
элемент с двойной аппроксимацией деформаций, подобной описанной
выше [362]: элементы из работ [20, 252, 288] соответствуют элементам
№4, 5, 6 из п.2.2.1.
Таблица 6.2
(п,Г2,Гз)
-1,7%
8-SER
-15%
9-ANS
^7,3%
[252]
^3%
[20]
^28%
[288]
-1,7%
Тут же отметим, что 9-узловой элемент с сокращенным интегриро-
интегрированием в этой задаче приводит к сингулярной матрице жесткости и не
дает никакого результата [265, 294].
§6.1. Тестовые задачи
201
При уменьшении толщины настоящий элемент (гьГ2,гз) демон-
демонстрирует хорошую стабильность. Например, при h = 0,0393 см (R/h =
= 321) и Р = 0,045 кГ он дает w = 0,0629 см (оба результата на сетке
2x2) при точном значении wt = 0,0625 см [288].
6.1.4. Замкнутая сферическая оболочка. Рассматривается за-
замкнутая сферическая оболочка под действием двух самоуравновешен-
самоуравновешенных сил (рис. 6.1.4). В расчете рассматривается
1/8 часть оболочки с разбиением на 11 КЭ, как z
указано на рис. 6.1.4, и наложением условий
симметрии на всех гранях. Параметры прини-
принимались следующими:
R = 25,4 см, h = 0,0254 см,
Е = 7,03 • 106 кГ/см2, Р = 0,454 кГ.
В качестве точного решения берется прогиб
под силой: wt = 0,0105 см [335].
Особенностью этой задачи, в силу малой Рис. 6.1.4
толщины R/h = 1000, является сильная кон-
концентрация напряжений в окрестности точки
приложения силы, поэтому было использовано неравномерное разбие-
разбиение с мелкими КЭ в окрестности полюса.
В табл. 6.3 приведены значения погрешности F.1.2), даваемые каж™
дым из вариантов на одинаковой сетке, но при различных угловых
размерах КЭ (первый столбец содержит размеры элементов в градусах,
начиная от полюса).
Таблица 6.3
5°,
3°,
3°,
2°,
10°
6°,
4°,
3°,
Тип сетки
,15°, 20°,20°
11°, 20°, 20°
8°, 15°, 25°,
5°, 10°, 30°,
,20°
, 30°
35°
40°
A,
^5
11
11
9,
1,1)
,8%
,9%
,6%
5%
B,1,1)
^5,8%
9,8%
10%
6,5%
A
-'
4
4
0,
,1,2)
г,3%
,9%
,5%
12%
B
^7
3,
3,
0,
1,2)
,3%
1%
2%
8%
(ГЫ2.ГЗ)
^59%
™39%
-26%
-13%
Из анализа приведенных данных видно, что в этой задаче наилуч-
наилучшие результаты демонстрируют варианты A,1,2) и B,1,2). Тут же мож-
можно отметить, что настоящий элемент позволяет использовать весьма
нерегулярное разбиение в плане возможности сопряжения элементов,
сильно отличающихся по размерам. Это следует из того, что резуль-
результаты расчета из табл. 6.3 на одинаковых сетках по мере увеличения
градиента изменения размеров КЭ не только не ухудшаются, а даже
наоборот — улучшаются. Это присуще далеко не всем конечно-эле-
конечно-элементным схемам расчета оболочек. Например, применение численной
202
Гл. 6. Примеры расчетов
параметризации поверхности в любой форме в случае такой нерегуляр-
нерегулярности дает неудовлетворительную точность.
Выбрать один вариант, который в дальнейшем служил бы осно-
основой расчета, можно путем сопоставления результатов, приведенных на
рис. 6.1.2 и в табл. 6.1, 6.3. Видно, что наилучшим вариантом во всех
задачах является вариант A,1,2) и именно он далее использовался
в расчетах.
6.1.5. Цилиндрическая крыша. В гл.2 даны кривые сходимости
различных КЭ для задачи о деформировании под действием собствен-
собственного веса цилиндрической панели (рис. 2.2.2), шарнирно-опертой по
криволинейным границам и со свободными прямолинейными гранями.
A,1,2)
-4,1%
[361]
2,04%
[259]
-4,1%
Т а б
[265]
+ 2,85%
лица 6А
[315]
-12,6%
N, кН/м
400
^400
С
В
Рис. 6.1.5
80
40
-40
С
В
Рис. 6.1.6
Для иллюстрации точности, даваемой настоящим КЭ, в табл. 6.4
приведены значения погрешности F.1.2), полученные на сетке 2x2
элементами аналогичного типа (квадратичная аппроксимация, изопара™
метрическая концепция, численное интегрирование, соотношения тео-
теории упругости). На рис. 6.1.5 приведена эпюра нормальных к линии
С В усилий, где А помечены значения, полученные на сетке 2x1,
V — 4 х 2. На рис. 6.1.6 приведены эпюры изгибающих моментов вдоль
линии СВ: сплошная кривая — точное решение, пунктир — полученное
на сетке 4 х 2, штрихпунктир — на сетке 2x1.
При сравнении кривых на рис. 2.2.4, 6.1.5 и рис. 2.2.5, 6.1.6, видно,
что точность, даваемая настоящим КЭ, практически совпадает с эле-
элементом, описанным в п. 2.2.2.
§6.2. Исследование состояния картера моста грузового автомобиля 203
§6.2. Исследование напряженно-деформированного
состояния жартера ведущего моста грузового
автомобиля
Настоящий параграф посвящен исследованию напряженно-дефор™
мированного состояния картера ведущего заднего моста автомобиля
КамАЗ, который представляет собой штампосварную тонкостенную
конструкцию сложной геометрии [80].
При эксплуатации автомобиля картер ведущего заднего моста под-
подвергается сложной совокупности нагрузок, среди которых превали-
превалирующим оказывается изгиб в вертикальной плоскости. Как показали
результаты натурных испытаний, значительная зона средней части
балки картера при данном нагружении находится в состоянии, близком
к чистому изгибу, т. е. выполняются условия равенства нулю перерезы-
перерезывающей силы и постоянства изгибающего момента.
Рис. 6.2.1
Общий вид картера приведен на рис. 6.2.1, схема его нагружения
и эпюра изгибающего момента, соответствующая чистому изгибу при
балочной идеализации, — на рис. 6.2.2.
р
?
1
Рис. 6.2.2
Для оценки возможности применения соотношений балочной тео-
теории при определении деформаций и напряжений, возникающих в кар-
картере, было проведено специальное экспериментальное исследование.
Оно состояло в том, что на участках постоянства поперечного сечения
балки в нескольких местах по периметру были наклеены тензодатчики,
и по их показаниям установлены те зоны, где выполняются гипотезы
сопротивления материалов. Исследование показало, что в зонах I—II
204 Гл. 6. Примеры расчетов
и III—IV на рис. 6.2.1 напряжения распределены строго линейно по
высоте и постоянны по ширине балки. В данных сечениях формулы
сопротивления материалов достоверно отражают напряженно-деформи-
напряженно-деформированное состояние конструкции. В зоне П-Ш, где геометрия картера
претерпевает сильное изменение, напряженно-деформированное состо-
состояние иное. Для его определения в этой зоне (зона банджо) следует
либо применять экспериментальные методы, либо пользоваться бо-
более строгой математической моделью, привлекая соотношения теории
оболочек и моделируя картер как составную оболочечную конструк-
конструкцию. С учетом сложности геометрии этой области в плане формы
ее срединной поверхности единственным методом, позволяющим по-
получить реальные данные о ее НДС, является метод конечных эле-
элементов.
В силу симметрии рассматривается только четверть конструкции
и учитываются условия симметрии в виде отсутствия перемещений
и углов поворота вдоль соответствующих границ. В сечении III по
контуру кожуха полуоси задаются касательные (в данном случае они
равны нулю) и нормальные напряжения, соответствующие действую-
действующему в нем изгибающему моменту (рис. 6.2.2).
Таким образом, схема расчета картера заднего моста может быть
представлена в виде следующей последовательности:
1) из всего картера «вырезается» часть, НДС которой исследуется
МКЭ (на рис. 6.2.1 на этой части нанесена сетка КЭ);
2) на границах ставятся условия, отражающие либо распределение
усилий, действующих на данную зону (определяются эксперименталь-
экспериментально), либо особенности поля перемещений (условия симметрии);
3) исследуемая область разбивается на сетку КЭ, в соответствии с
которой наносится сетка узлов геометрии (в них определяется радиус-
вектор срединной поверхности) и узлов перемещений (определяются
узловые степени свободы);
4) вводится глобальная нумерация узлов геометрии (из соображе-
соображений удобства задания исходной информации) и узлов для перемещений
(из соображения минимальности ширины ленты глобальной матрицы
жесткости);
5) с чертежа снимаются координаты узлов геометрии относительно
некоторой декартовой системы координат, единой для всей конструк-
конструкции;
6) вся информация вводится на ЭВМ и обрабатывается по соответ-
соответствующей программе;
7) в результате выводится информация о распределении напряже-
напряжений по всей поверхности картера.
Следует также отметить, что кинематические условия сопряжения
вдоль линии стыка кожуха полуоси с крышкой картера (линия BE на
рис. 6.2.1) удается выполнить без введения дополнительных степеней
свободы за счет предположения о равенстве векторов п для обеих
оболочек в общих точках.
§6.2. Исследование состояния картера моста грузового автомобиля 205
На рис. 6.2.3 приведена сетка КЭ, которая применялась для оце™
ночного определения уровней напряжений. Использование в ней толь-
только 8-узловых элементов с сокращенным интегрированием привело к
излишней жесткости и требовало сгущения сетки, так как данные
КЭ чувствительны к форме и толщине. Совершенно неприемлемые
результаты дали КЭ с полным интегрированием. Применение Э-узло-
вых элементов с сокращенным интегрированием дало решение осцил-
осциллирующее, что связано с недостаточным рангом матрицы жесткости
отдельного конечного элемента. К тому же, результаты в зоне краевого
эффекта на крыше картера свидетельствовали о большом градиенте
напряжений и необходимости сгущения там сетки. Поэтому была по-
построена комбинированная сетка КЭ с сокращенным интегрированием,
в которой 8-узловые элементы располагались вдоль границ (там форма
всех КЭ регулярна), а 9-узловые — внутри области. Этот подход
оказался плодотворным и позволил получить результаты на умеренной
сетке КЭ с «двойным интегрированием».
Рис. 6.2.3
Все численные расчеты для всех видов балок и крышек картера
ведущего заднего моста проводились для нагрузки 15 кН на каждую
полуось. В силу линейности математической задачи эти результаты мо-
могут быть использованы для любого значения нагрузки путем введения
соответствующего коэффициента.
Результаты расчета приведены на рис. 6.2.4 и 6.2.5.
На рис. 6.2.4, а представлены эпюры распределения нормальных
напряжений на крыше и кожухе полуоси, действующих в направ-
направлении контура сечения (линия ABC на рис. 6.2.1). Сплошная ли™
206
Гл. 6. Примеры расчетов
80
60
40.
20
n
и
-20
-40
60
0",
-
А
-
-
-
МПа
А
п
А
\ >
\
\
\
I
I I
1/
С
/С
к
Е
F
^1/10,0
1э,о
^ 51,2
D
7,3
Рис. 6.2.4
ния соответствует напряжениям на внешней поверхности, а пунктир-
пунктирная — на внутренней. Треугольниками отмечены результаты тензо™
метрирования.
На рис. 6.2.4, б построены аналогичные эпюры нормальных на™
пряжений вдоль края кожуха полуоси, направленные вдоль этой же
линии. На рис. 6.2.4 (в — на внешней поверхности, г — на внутрен-
внутренней) и рис. 6.2.5 (а — на внешней поверхности, б — на внутренней)
приведено распределение нормальных напряжений в окружном и ме-
меридианном (для крыши) направлении соответственно в сечении, сов-
совпадающем с поперечной плоскостью симметрии картера (линия DEF
на рис.6.2.1).
На рис. 6.2.5, в, г представлены эпюры нормальных напряжений
соответственно в окружном и меридианном направлении в зоне
§6.2. Исследование состояния картера моста грузового автомобиля 207
-69.1
А75,2
44.2
Рис. 6.2.5
краевого эффекта на крыше картера (линия BE на рис. 6.2.1)
Сплошная линия обозначает напряжения на внешней поверхности,
пунктирная — на внутренней.
Из представленных графиков следует, что расхождение по напря-
напряжениям между расчетными и экспериментальными результатами не
превышает 15-20%. На основании этого можно сделать вывод, что
разработанная расчетная схема и программы, ее реализующие, отра-
отражают реальное напряженно-деформированное состояние конструкции
и могут быть положены в основу численного исследования картера
ведущего заднего моста при различных значениях его геометрических
параметров.
208
Гл. 6. Примеры расчетов
§ 6.3. Расчет тройниковых соединений
Для определения возможностей разработанной схемы производился
расчет тройниковых соединений с одной и двумя плоскостями сим-
симметрии под действием внутреннего давления. На рис. 6.3.1, 6.3.2 изоб-
изображены конечно-элементные модели рассчитываемых конструкций с
использованием 80 девятиузловых КЭ с 1802 неизвестными.
Рис. 6.3.1
Рис. 6.3.2
Если через R\,h\ и R2, Ь^ обозначить радиусы кривизны и толщины
соответственно трубы и патрубка, то для них принимались следующие
значения:
Д1 =83,21 мм, Д2 = 43,02 мм,
мм,
= 2,87 мм.
Длина трубы принималась равной 340 мм, патрубка — 127 мм.
Угол сопряжения для несимметричного соединения был равен 60°. По
торцам трубы задавались граничные условия радиального смещения,
а на границах сечения — условия симметрии.
Общая картина напряженного состояния на внешней поверхности
обеих задач изображена на рис. 6.3.3, 6.3.4. Справа приводится табли-
таблица численных результатов соответствующих значений интенсивности
напряжений по отношению к безмоментному решению.
Видно, что имеет место сильная концентрация напряжений в зоне
пересечения и практически безмоментное состояние вдали от нее.
Более детально картина напряжений в зоне сопряжения представ-
представлена на рис. 6.3.5-6.3.8. На рис. 6.3.5, 6.3.6 изображены кривые рас-
распределения напряжений на верхней и нижней поверхностях основной
оболочки (при перпендикулярном соединении) вдоль оси симметрии в
§6.3. Расчет тройниковых соединений
209
Рис. 6.3.3
Напряжения:
0,265
Напряжения:
0.153
Рис. 6.3.4
зависимости от расстояния S от линии сопряжения; его — значение
напряжения для безмоментного решения (ao = qR\/h\). Сплошная и
пунктирная кривые — соответственно осевые и окружные напряжения
из [330], квадратами и треугольниками помечены соответствующие
напряжения настоящего расчета. На рис. 6.3.7, 6.3.8 представлены
210
Гл. 6. Примеры расчетов
аналогичные кривые для соединения под углом со стороны острого
угла.
25 50 S, мм
Рис. 6.3.5
-1
-3
25 50 5, мм
Рис. 6.3.6
о/о0
а/а0
25 50
Рис. 6.3.7
S, мм
"О 25 50 S, мм
Рис. 6.3.8
Реальные конструкции тройниковых соединений как правило имеют
вдоль линий сопряжения сварной шов, размеры которого соизмеримы с
толщиной оболочки. С точки зрения механики он является подкрепля-
подкрепляющим элементом и должен играть заметную роль в распределении на-
напряжений в этой зоне. В работе [214] предполагается этот шов вместе
с прилегающими к нему оболочками считать искривленным брусом и к
нему стыковать КЭ оболочек. В [107] зона сопряжения моделируется
3-мерными КЭ, которые сопрягаются с элементами оболочек.
В настоящей работе предлагается промежуточная схема, а именно:
зона стыка представляется как отдельная подконструкция, модели-
моделируемая одним элементом оболочки переменной толщины, изображен-
изображенным на рис. 6.3.9 пунктиром. Толщина hcp определяется из геометриче-
геометрических соотношений и в общем случае зависит от угла стыковки трубы
с патрубком.
Для иллюстрации точности на рис. 6.3.10 представлены эпюры
окружных напряжений на верхней поверхности основной оболочки для
§6.3. Расчет тройниковых соединений
211
Рис. 6.3.9
10 20
Рис. 6.3.10
S. мм
симметричного соединения (труба и патрубок взаимно перпендикуляр-
перпендикулярны) под внутренним давлением со следующими параметрами:
Rl=R2 = 5 см, hi =0,15 см, /г2 = 0,23 см.
Сплошная и пунктирная кривые соответствуют эксперименту и расчету
из [214], квадраты и треугольники — результаты настоящего расчета
на двух разных сетках.
Глава 7
ЛИНЕЙНЫЕ ЗАДАЧИ ДИНАМИКИ
§ 7.1. Постановка задачи и алгоритм решения О
Если нагрузка быстро меняется во времени, то возникающие во вре-
время деформирования силы инерции могут играть существенную роль,
и их следует учитывать. Важный класс задач связан с исследованием
колебательных процессов, возбуждаемых внешними силами, что тоже
требует учета сил инерции.
Из множества возможных формулировок задач динамики механи™
ческих систем для исследования динамического деформирования МКЭ
наиболее удобным является использование принципа возможных пере-
перемещений в сочетании с принципом Даламбера. Исходным здесь являет-
является уравнение равенства работы внутренних напряжений на возможных
деформациях работе внешних сил на возможных перемещениях, кото-
которое имеет вид
{Se}T{a}dU= I I l{Svf {Q}dU+l I {Svf {P} dS. G.1.1)
о о sa
Здесь {е} — вектор деформаций, {а} — вектор напряжений, {Q} —
вектор массовых сил, {Р} — вектор поверхностных сил, действующий
на части поверхности Sa.
В соответствии с принципом Даламбера можно считать, что дви™
жущаяся механическая система (деформируемое тело) в каждый мо-
момент времени находится в состоянии равновесия, если к действующим
силам добавить силы инерции. Для сплошной среды, модель которой
принимается как базовая, силы инерции суть массовые силы, равные
по величине произведению удельной плотности на ускорение точки.
Таким образом, силы инерции определяются как вектор:
I ff 11 1 '"Y I Ci 11 I
1) Материалы §§7.1-7.5 написаны совместно с Бережным Д. В.
§7.1. Постановка задачи и алгоритм решения 213
где р — удельная плотность, j — удельный вес, g — ускорение свобод-
свободного падения,
vy I G.1.3)
у J
— проекции вектора ускорения на оси ж, у, z.
После добавления векторов сил инерции G.1.2) к массовым силам
{Q} в уравнении G.1.1) получим исходное вариационное уравнение для
исследования динамического деформирования в виде
p{6v}T{v}du+ I I \{5e}T{a}dU^ f f I {5v}T {Q} <Kl-
{Sv}T {P}dS = 0. G.1.4)
Первое слагаемое в G.1.4) может быть представлено следующим
образом:
р {Svf {v} dU = {Sqf [M] {q} , G.1.5)
J
о
где предполагается, что узловые перемещения являются функциями
времени. Матрица [М], фигурирующая в G.1.5), называется матрицей
масс и характеризует инерционные свойства исследуемого объекта.
Второе слагаемое в G.1.4) есть вариация потенциальной энергии
деформации, которая фигурирует в качестве минимизируемого функ-
функционала в задачах статики, и после применения конечно-элементной
техники имеет следующий матричный вид:
{5sf {a} dU = 5V = {Sqf [К] {q} . G.1.6)
Процедуры построения матрицы жесткости различных КЭ оболо-
оболочек подробно описаны в предыдущих главах и в настоящей главе не
рассматриваются. Третье и четвертое слагаемые можно представить
следующим образом:
{Svf {Q} dO+11 {Svf {P} dS = {Sqf {P (t)} , G.1.7)
где {Р (t)} — зависящий от времени вектор узловых сил.
Подставляя G.1.5), G.1.6), G.1.7) в G.1.4), получим
т ( (d2a (t) I \
{Sq}1 l[M] { —Чт1 } + [K]{q(t)}~ {P(t)} 1=0. G.1.8)
214 Гл. 7. Линейные задачи динамики
Так как {Sq} являются произвольно варьируемыми функциями, то
уравнение G.1.8) приводит к разрешающей системе уравнений в виде
системы обыкновенных дифференциальных уравнений второго порядка
Чтобы решение системы G.1.9) имело смысл, необходимо задать
начальные условия, которые должны определять в начальный момент
времени (без потери общности нулевой) поле перемещений {vq} и ско-
скоростей {щ}. После перехода к узловым значениям это условие сводится
к заданию
G.1.10)
§ 7.2. Исследование свободных жолебаний
Собственными, или свободными, колебаниями называется движе-
движение при отсутствии внешних сил и сил демпфирования. Система урав-
уравнений, которые описывают такие движения, получается из G.1.9), если
положить в них {Р} = 0, т. е.
} О. G.2.1)
Решение этой однородной системы ищется в виде гармонической
функции по времени:
{q(t)} = {q} sin И + ^о). G.2.2)
Подставляя G.2.2) в G.2.1) и считая, что уравнение G.2.1) должно
удовлетворяться в любой момент времени, получаем алгебраическую
задачу
[К] {q} - и2 [М] {q} = 0. G.2.3)
Такая задача в линейной алгебре называется обобщенной зада-
чей на собственные значения, и ее целью является нахождение ря-
ряда значений а^, при которых выполняется G.2.3), и векторов {<&}>
удовлетворяющих уравнению G.2.3). Число таких значений uji равно
порядку системы уравнений G.2.3), их последовательность в порядке
возрастания называется спектром собственных значений, и соответ-
соответствующие векторы {qi} называются собственными векторами. С точки
зрения механики и г являются частотами свободных колебаний, a {qi}
характеризуют формы соответствующих колебаний.
Для решения обобщенной проблемы G.2.3) в общем случае су-
существует довольно большое количество методов, описание которых
можно найти, например, в [232]. Однако их прямое применение вряд ли
§7.2. Исследование свободных колебаний 215
оправдано в задачах рассматриваемого класса (исследование свободных
колебаний деформируемых тел МКЭ). Чтобы пояснить это утвержде-
утверждение, сделаем несколько замечаний.
Во-первых, точность представления той или иной частоты колеба-
колебаний зависит от того, насколько хорошо используемая сетка КЭ описы-
описывает соответствующую форму колебаний. Опыт показывает, что удо-
удовлетворительное описание имеет место, когда в полуволну колебаний
укладывается несколько КЭ B-3 квадратичных или 5-8 линейных). Од™
нако в системе G.2.3) содержатся и такие формы, в которых полуволна
колебаний описывается одним линейным элементом или в пределах
квадратичного элемента укладывается 2-3 полуволны. Очевидно, что
говорить о точности представления таких форм не имеет смысла, так
как полученные значения частот (тем более форм) от реальных могут
отличаться в десятки раз.
Во-вторых, величина частоты колебаний зависит от формы таким
образом, что чем сложнее форма колебаний, т. е. больше число волн об-
образуется, тем выше соответствующая частота. Таким образом, наиболее
точно конечно-элементная сетка описывает нижнюю часть спектра ча-
частот, у которой формы колебаний простейшие, и в каждую полуволну
колебаний укладывается достаточное количество конечных элементов.
Точно провести границу хорошо и плохо определяемых частот затруд-
затруднительно и приходится судить об этом по виду полученных форм.
В-третьих, на практике чаще всего представляет интерес не весь
спектр колебаний (который, вообще говоря, бесконечен), а лишь часть
его, и как правило нижняя. Даже построение расчетной схемы иссле-
исследуемой конструкции, включающей деталировку геометрических форм
и физических свойств, проводится таким образом, что на ее основе
можно достоверно описывать лишь ограниченную часть реальных ви-
видов колебаний.
Таким образом, сложная задача определения всего спектра соб-
собственных частот задачи G.2.3) является излишней, и вполне доста-
достаточно ограничиться определением лишь части спектра, которая соот-
соответствует минимальным а^. Для решения этой частичной проблемы
собственных значений разработано семейство методов, известных в
литературе как методы итераций подпространств. Рассмотрим одну из
простейших схем такого метода.
1) Пусть имеется некоторая система линейно независимых векторов
г= I,— ,га, G.2.4)
размерность которых совпадает с размерностью N задачи G.2.3) и
число которых значительно меньше этой размерности (га <С N).
2) Будем искать решение задачи G.2.3) в виде линейной комбина-
комбинации G.2.4), т. е.
г=\
216 Гл. 7. Линейные задачи динамики
3) Составляется отношение Релея, определяющее квадрат частоты
колебаний, наиболее близкое по форме к приближению G.2.5)
J2 yj
to = Ц^ G 2 6)
T[M]{} ^
{q}T[M]{q} ^
т
4) Параметры /% разложения G.2.5) находятся из условия мини-
минимальности отношения Релея G.2.6), т.е. из условия минимальности по
величине определяемой частоты собственных колебаний:
дХ
Ж "
то \ / то
G.2.8)
Из условия равенства нулю числителя с учетом обозначения G.2.6)
получаем алгебраическую задачу
т
~ G.2.9)
которая по своей природе тоже является обобщенной задачей на соб-
собственные значения. Из ее решения необходимо найти спектр соб-
собственных значений А^, п = 1,... ,тп, и соответствующих собственных
векторов
|/3(«)}Т = {/3|П),4И), ... ,/??>}. G.2.10)
Отличие задачи G.2.9) от G.2.3) заключается в размерности. Как
уже упоминалось выше, число параметров /Зг существенно меньше
неизвестных в системе уравнений G.2.3).
§7.2. Исследование свободных колебаний 217
5) Любым методом решается приведенная собственная проблема
G.2.9), и находятся А^ и {/^п^}. Например, для этого можно ис-
использовать метод вращений Якоби, так как матрицы [К*] и [М*]
являются симметричными, а [К*] к тому же является положительно
определенной. Найденные значения \(п\ упорядоченные по возраста-
нию, определяют нижнюю часть спектра собственных частот колеба-
колебаний:
un = \/\M, п=1, ... ,т, G.2.11)
а соответствующие формы колебаний определяются как разложения:
t{o} G-2.12)
г=\
Точность решения G.2.11), G.2.12) целиком и полностью зависит от
качества выбора векторов {1?^}, т.е. от базиса в iV-мерном простран-
пространстве векторов, в котором ищется решение задачи G.2.3). Как правило,
весьма затруднительно сразу определить этот базис (совокупность век-
векторов |i?W}) наилучшим образом. Поэтому предусматривается проце-
процедура изменения этого базиса.
6) Определяется новая совокупность векторов < щ' >, как решения
системы уравнений
{«} {«} G.2.13)
Далее повторяются все действия начиная с пункта B). Критерием
остановки процесса является проверка вычисления величин ип (или
на уточнение их значений на двух соседних итерациях.
— спектр,
Пусть Шп — спектр, полученный после к шагов, т. е. основанный
на базисе \я^ i, oJn — спектр после к + 1 шага. Если погрешность
8 =
UJn
<е, п= 1, ... ,шь G.2.14)
то процесс вычислений останавливается и найденные значения прини™
маются как окончательные.
Отметим, что проверка G.2.14) ведется не по всему вычисляемому
спектру, а только по его части п = 1, ... ,гп\, где т\ < т. Причина в
том, что подобная процедура обладает различной скоростью сходимо-
сходимости для вычисления различных иоп. Наибольшая скорость сходимости
наблюдается для наименьшего ип, т.е. для ш^, меньшая — для ш^),
еще меньшая — для ш^ и т. д. Самая медленная сходимость наблю-
наблюдается для последнего, наибольшего по величине ш^Шху Аналогичное
утверждение справедливо и для форм колебаний. В литературе име-
218 Гл. 7. Линейные задачи динамики
ются различные рекомендации для выбора т\ по принятому га. В
частности, рекомендуют использовать формулу
mi = min B/Зга, га - 5). G.2.15)
На практике, однако, первичным является выбор числа т\ как
количества частот и форм, определенных с гарантированной точностью,
и уже по этому числу выбирается число итерируемых векторов га.
Суть описанного алгоритма хорошо соответствует названию. Дей-
ствительно, в процессе итераций меняется подпространство базисных
векторов, на котором ищется решение поставленной задачи, в направ™
лении, где располагаются действительные решения исходной задачи
G.2.3).
В качестве альтернативного алгоритма можно рекомендовать дру-
другую итерационную процедуру, основанную на сведении обобщенной
проблемы собственных значений к простой проблеме собственных зна-
значений [175]. Для этого введем в рассмотрение факторизацию матрицы
жесткости вида
[K] = [L][L]T.
Если ввести новый вектор неизвестных:
{r} = {L}T{q}, G.2.16)
то задача G.2.3) сведется к проблеме собственных значений:
[D]{r}-\{r} = 0, G.2.17)
где
[D] = [L^1] [М] [Ь~1]Т , А = 1/аА G.2.18)
Отличие задачи G.2.17) от G.2.3) в том, что теперь необходимо
искать максимальные собственные значения вместо минимальных, при-
причем матрица [D] остается симметричной. Для решения этой задачи
строится итерационный процесс, в котором участвуют га векторов,
объединяемых в матрицу [R] размера N х га, где N — размерность
задач G.2.3), G.2.17). В процессе итераций компоненты этой матрицы,
определяющие базис пространства, будут меняться, и пусть на fc-й
итерации имеем [Rk].
Тогда:
1) вычисляется матрица
[G\ = [D][Rk]; G.2.19)
2) проводится ортогонализация Грамма-Шмидта матрицы [G], т.е.
[G] = [U] [V], G.2.20)
§7.2. Исследование свободных колебаний 219
где [U] — ортогональная матрица размера N х га, [V] — верхняя
треугольная матрица га х га;
3) вычисляется матрица (квадратная)
[Q] = [V\[V)T; G.2.21)
4) методом Якоби находится ортогональная матрица преобразова-
преобразования [S] размера га х га, с помощью которой производится преобразовав
ние
[Sf [Q] [S] = diag (\\,\l,...,\2n) ; G.2.22)
5) вычисляется следующее приближение:
[Rk+1] = [U][S]. G.2.23)
По достижении сходимости по собственным значениям А^ (и, в слу-
случае необходимости, по собственным векторам {г^}, образующим
столбцы матрицы [R]), итерационный процесс останавливается. Соб-
Собственные значения исходной задачи G.2.3) определяются как
G.2.24)
а собственные векторы находятся из решения систем
G.2.25)
Отметим, что строить в явном виде матрицу [D] G.2.18) нет необхо-
необходимости, так как на каждой итерации требуется лишь операция умно-
умножения этой матрицы на другую G.2.19). Выполнение этой операции
удобно производить поэтапно, а именно:
— решается система
[L}T [G*] = [Rk]; G.2.26)
— производится умножение
[Gf] = [M] [G*]; G.2.27)
— вновь решается система
[L] [G] = [С]. G.2.28)
Так как [L] — нижняя треугольная матрица, решение систем вида
G.2.26), G.2.28) не является трудоемким.
Найденные собственные значения шп и собственные векторы {д^}
удовлетворяют условиям ортогональности относительно матрицы масс
и весовой ортогональности относительно матрицы жесткости. Эти
условия имеют вид
{}{}
G.2.29)
{^}Т[К]{дУ)}=ш^,
где Sij — символ Кронекера.
220 Гл. 7. Линейные задачи динамики
§ 7.3. Исследование вынужденных жолебаний
Задача вынужденных колебаний предполагает интегрирование си-
системы обыкновенных дифференциальных уравнений G.1.9) с учетом
начальных условий G.1.10) с заданными функциями нагрузки {P(t)}.
Одним из популярных методов решения подобной задачи является
поиск решения в виде разложения по собственным формам. В этом
случае решение ищется в виде
N
{<7(t)} = $>i(t){<7(<)}, G.3.1)
г=\
где, вообще говоря, необходимо использовать полный спектр задачи
G.2.3).
Подставляя G.3.1) в G.1.9), получаем
N
(xi (t) [M] {gW } + хг (t) [К] {qV }) = {Р (t)} . G.3.2)
i=\
Далее умножаем уравнение G.3.2) слева сначала на (д^Н , затем
т
на {q^} и т.д. В силу свойств ортогональности G.2.29) получаем
систему независимых уравнений:
xn(t)+u2nxn(t)=pn(t), n=l, ... ,N, G.3.3)
Для каждого уравнения G.3.3) можно либо сформулировать началь™
ные условия в виде
}T \Щ Ы , х°п = {q^}T [M] {qo} , G.3.5)
либо определить их из решения систем
E{«(i)b? = {»}.E{e(i) }*! = {»}¦ G-3-6)
г=\ г=\
С точки зрения механики, каждое уравнение G.3.3) с начальными
условиями G.3.5) описывает изменение во времени амплитуды соответ-
соответствующей гармоники (формы собственных колебаний). Вклад каждой
из них в суммарное решение G.3.1) определяется сравнительной вели-
величиной хп (t) по отношению к норме:
хп =
, Vxf. G.3.7)
§7.3. Исследование вынужденных колебаний 221
Очевидно, что не все гармоники дают одинаковые вклады в сум-
суммарное решение, и одни являются определяющими, другие — второсте-
второстепенными. В общем случае все определяется видом нагрузки (какие из
функций pi (t) являются наибольшими по величине) и видом началь-
начальных условий.
Весьма удобной формой представления решения уравнения G.3.3) с
условиями G.3.5) или G.3.6) является использование интеграла Дюа-
меля.
В этом случае справедлива запись
х° 1 Г
хп (t) = x°n cos (ujnt) + — sin (unt) + —\pn sin (шп (t - r))dr. G.3.8)
UJn UJn J
0
Из этого соотношения следует, что амплитуда каждой гармоники
обратно пропорциональна значению собственной частоты, т. е. наиболь-
наибольший вклад в решение будут давать гармоники (слагаемые в разложении
G.3.1)), соответствующие минимальным ип. Это позволяет ограни™
читься в разложении G.3.1) лишь некоторым количеством слагаемых
т < N, т.е. вместо G.3.1) решение искать в виде
г=\
Это обстоятельство придает дополнительную ценность описанному
в предыдущем разделе алгоритму определения именно тех собственных
частот и форм, в разложении по которым, как правило, и строится
решение в большинстве задач.
Отметим, что в этом случае система G.3.6) становится переопре-
переопределенной, и ее решение следует искать в обобщенном смысле как
минимум среднеквадратичного отклонения невязки. В результате по-
получаются следующие системы для определения х®, х®, г= 1, ...,т:
G.3.10)
В качестве иллюстрации рассмотрим задачу о вынужденных ко-
колебаниях при периодическом возмущении. В этом случае внешняя
нагрузка изменяется по гармоническому закону во времени, и ее можно
представить в виде: рп (t) = pn cos ut, где ш — частота возмущающей
силы.
222
Гл. 7. Линейные задачи динамики
Рассмотрим слагаемое в решении G.3.8), которое определяется пра-
правой частью, т.е. непосредственно интеграл Дюамеля. Опуская проме-
промежуточные выкладки, получим
1п =
Рп f
—^- cos (ujt) sin (ип (t — r))dr =
^m J
= —^- sin (ujnt) cos (ujt) cos (ипт)Aт—
UJ J
— —^- cos (unt) cos (ujt) sin (ипт)ёт =
m ^
cos (ut) — cos (unt)
= ^Pn о о
G.3.11)
Видно, что при ш -^ шп, In -^ oo, что называется резонансом, т.е.
при совпадении частоты вынужденных колебаний с частотой собствен-
собственных колебаний, амплитуда соответствующей гармоники неограничен-
неограниченно возрастает, и именно эта гармоника будет определять решение
в целом.
На рис. 7.3.1 изображено качественное поведение решения задачи
в целом при изменении частоты возмущающей силы.
(Dn
О) л
Рис. 7.3.1
Вблизи значений собственных частот ш^,ш^), ••• будут наблю-
наблюдаться резкие всплески величины решения, означающие резонансные
режимы работы исследуемой конструкции.
На основе этой картины иногда частоты собственных колебаний
определяют из решения ряда квазистатических задач, в которых пред™
полагается, что решение и вид нагрузки задаются по времени изме-
изменяющимися одинаково, т. е.
{Р (t)} = {Pq} cos ut, {q (t)} = {q} cos ut
G.3.12)
§ 7.8. Исследование вынужденных колебаний
223
Тогда из уравнения G.1.9) получаем
G.3.13)
Система G.3.13) решается при последовательно изменяющихся зна-
значениях ш и отслеживается величина |{(/о}|- Те значения и, при которых
амплитуда решения значительно превышает обычную, можно считать
частотами собственных колебаний. Как правило, при такой процедуре
находится не конкретное собственное число, а некоторый диапазон, где
оно расположено и который представляет непосредственную опасность
при эксплуатации конструкции.
Если задаться целью исследовать то, что происходит с конструкци-
конструкцией в случае, когда частота вынужденных колебаний совпадает с одной
из частот собственных колебаний (ш = шп), необходимо определить
у т у cos (ut) - cos (uni)
hm ln = hm ~ „ =
uj-^ujn uj—^ujn Ш — UJz,
= lim
Sill (((U - LOn)/2)t) Sin {{{tO + LOn)/2)t)
(u> - U>n) (u> +L0n)
tsm(((u}+un)/2)t) t
= of,,.,, \ = 1ГГsm ^
I [uj + ujn) 4a;n
-3- >
Слагаемое полученного вида называется «вековым членом», оно
характеризует степень нарастания амплитуды колебаний во времени
в резонансном режиме. На рис. 7.3.2 изоб-
изображено качественное поведение решения
в такой ситуации.
Описанная выше схема весьма эф-
эффективна при исследовании колебатель-
колебательных процессов, в которых количество воз-
возбужденных тонов колебаний сравнительно
невелико, т. е. можно ограничиться конеч-
конечным числом слагаемых в ряде G.3.1). Од-
Однако подобная ситуация не всегда имеет
место.
Например, при локализованных воздей-
воздействиях на достаточно гибкие системы как
правило возбуждается большой спектр гар-
гармоник, что приводит к необходимости удерживать значительное число
слагаемых в G.3.9). Аналогичная ситуация возникает при действии
на систему кратковременных импульсных нагрузок. В этом случае
оказывается эффективным явное выделение так называемой квазиста-
квазистатической составляющей решения. Опишем этот метод.
Рис. 7.3.2
224 Гл. 7. Линейные задачи динамики
Пусть вектор нагрузки допускает представление в виде произведе-
произведения функции от времени / (t) и амплитудной составляющей нагрузки
{Л)}, т.е.
{P(t)} = /(t){P0}. G.3 Л 5)
Введем в рассмотрение квазистатическую составляющую решения
в виде решения системы уравнений:
[K}{qcl} = {P0}, G.3.16)
и решение задачи G.3.11) будем искать в виде
i=\
где сразу отмечено, что ряд типа G.3.1) усекается. Подставляя G.3.17)
в G.1.9), получаем
N
(xi (t) [M] {<?«> } + хг (t) {К} {gW }) + / (t) [M] {gCT} +
г=1
. G.3.18)
В силу справедливости G.3.16) подчеркнутые слагаемые уничтожа-
уничтожаются. Т
Умножая уравнение G.3.18) слева на {д^} , п = 1, ...,т, полу-
получаем систему независимых уравнений типа G.3.3) в виде
xn(t)+Loixn(t) = -j(t)x^, G.3.19)
где
xc: = {q{n)}T{M]{qCT}. G.3.20)
Начальные условия для уравнений G.3.19) могут быть найдены из
решения систем типа G.3.10), но с измененными правыми частями:
G.3.21)
§ 7.4. Пошаговое интегрирование уравнений движения 225
§ 7.4. Пошаговое интегрирование уравнений движения
Весьма широкое распространение при решении задач динамики ме-
механических систем получили методы, основанные на численных мето-
методах решения систем обыкновенных дифференциальных уравнений типа
G.1.9). В этом случае решение определяется в виде совокупности всех
компонент напряженно-деформированного состояния, имеющих место
в конкретные моменты времени. Другими словами, интервал време™
ни от 0 до Т разбивается на набор дискретных значений t\,t2, ---Лп,
(О ^ tk ^ Т), и строится последовательность решений {q(tk)}. Задача
построения таких решений сводится к определению процедуры вы-
вычисления текущего значения {qk} = {q(tk)} при известных решениях
в ранние моменты времени tk-\,tk-2, ••• Опишем некоторые схемы,
которые получили распространение в практических расчетах.
7.4.1. Метод центральных разностей. Идея этого метода со-
состоит в замене первых и вторых производных по времени их ко-
конечно-разностными представлениями, в свою очередь полученными из
разложения функции в ряд Тейлора вида
At2 At3
q (tk + At) =q (tk) +q (tk) At+q (tk) -^+Q (tk) ~^~+O (At4) ,
G.4.1)
At2 At3
q (tk - At) =q (tk) ^q (tk) At+q (tk) —^'q (tk) ^+^ (At4) .
Составляя такие выражения для всех компонент вектора перемеще-
перемещений и предполагая, что
tk-At = tk-u tk + At = tk+u G.4.2)
после несложных преобразований получаем
Ш = д72 ({«*+•}- 2{?*} + Ы-i}) + О (At2) ,
i G.4.3)
Эти формулы имеют второй порядок точности, так как ошибка в них
пропорциональна квадрату шага по времени At.
Подставляем выражения G.4.3) в уравнение G.1.9) и считаем его
справедливым для момента времени t^. Это дает уравнение вида
¦^-2 [М] ({qk+i}- 2{qk} + {(?*_,}) + [К] {qk} - {Рк} = 0. G.4.4)
8 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
226 Гл. 7. Линейные задачи динамики
Из этого уравнения получаем систему алгебраических уравнений
для определения {g^+i}:
^L [МЛ {qk+l} = {Pk} _ f[K] _ JL [МЛ {qk} _
Если величина шага является постоянной, то решение систем вида
G.4.5) можно экономично организовать, так как матрица разрешаемой
системы будет одинакова для всех временных слоев. Например, можно
использовать треугольную факторизацию по схеме Холецкого:
^ [М] = [Ьд]т \Ьд], G.4.6)
которую необходимо провести лишь один раз. Тогда решения систем
вида G.4.5) достаточно нетрудоемки. В результате на каждом шаге по
времени имеем алгебраические операции, эквивалентные умножению
матрицы на вектор.
Еще более экономичной представленная схема является в случае
диагональной матрицы масс. В этом случае вычисление обратной мат™
рицы масс сводится к делению правой части на диагональное значение
матрицы [М]. Вместо второй формулы G.4.3) можно использовать
одностороннюю разностную формулу
Ш = ^ ({Як} - Ы-i}) + О (At). G.4.7)
В результате для вычисления вектора перемещений на (к + 1)-м
слое по времени получается соотношение
{дк+1}= [М-1] ({Рк} - ([К] ~ [М]\ {Чк}\ " д^г М {</*-¦}•
G.4.8)
Замена выражения для первой производной от G.4.3) на G.4.7)
дает некоторую потерю точности. Однако применение такого подхода
возможно при достаточно малом шаге по времени, величина которого
определяется не требованием точности разностной формулы, а тре™
бованием устойчивости разностной схемы. Далее этот вопрос будет
рассмотрен подробнее.
Чтобы полностью определить организацию вычислений, необходимо
задать процедуру «начала движения». Здесь можно либо определить
значение {q\} по односторонней разностной формуле типа G.4.7)
{gi} = {go} + {go}At, G.4.9)
§ 7.4. Пошаговое интегрирование уравнений движения 227
либо определить фиктивное значение {q~i} по аналогичной формуле
{tf-i} = {qo} - {4о} At. G.4.10)
Рассмотренная разностная схема принадлежит к классу так называ-
называемых явных разностных схем. Отличительным признаком таких схем
является использование уравнения движения (кинетостатики) в пред-
предшествующий момент времени для определения текущего состояния.
Действительно, для нахождения решения при t = tk+\ используются
разрешающие уравнения при t = tk. Как правило, в алгебраическом
уравнении для определения очередного решения в левой части не
фигурирует матрица жесткости. Распространение подобные явные раз-
разностные схемы получили при использовании диагональной матрицы
масс, когда можно получить формулы для «сквозного» счета по слоям
и нет необходимости решать системы уравнений на шагах.
7.4.2. Метод односторонних нецентральных разностей (метод
Хаболта). Достаточно широкое распространение получила односто-
односторонняя четырехточечная разностная формула второго порядка точности
для вычисления первых и вторых производных по значениям функции
на предшествующих слоях по времени. Она тоже основана на разложе-
разложении в ряд Тейлора вида
At2 At3
q (tk -At)=q (tk) - q (tk) At + q (tk) — - q' (tk) — + О (At4) ,
q(tk-2At)=q(tk)-q(tkJAt^q(tk)^--
+ O(At4), G.4.11)
После несложных преобразований из G.4.11) получаются выраже-
выражения для q(tk) и q(tk) через значения q(tk), q(tk — At), q(tk — 2At),
q(tk — 3At), которые применяются для всех компонент вектора пере-
перемещений. В результате получаем
Ш = д^г B Ш - 5 {<?*-!} + 4 {qk-2} - {qk-s}) + О (At2) ,
G.4.12)
Ш =g^ A1 Ш -18 {qk-i} +9 {%_2} -2 {%-з}) + О (At2) .
228 Гл. 7. Линейные задачи динамики
Подставляя G.4.12) в G.1.9) для текущего момента времени, по-
получаем алгебраические уравнения для определения текущего вектора
перемещений:
[м] + [к]^ ш = {рк} + А
Данная разностная схема принадлежит классу неявных, и, как
следствие, одно из слагаемых, определяющих матрицу системы ал™
гебраических уравнений на шаге интегрирования, является матрицей
жесткости системы. Никаких возможностей привести эту матрицу к
диагональному виду нет, поэтому при использовании подобных схем
целесообразно пользоваться согласованной матрицей масс (наиболее
точно характеризующей инерционные свойства системы). Если шаг
по времени постоянен, то можно построить и факторизовать матрицу
системы G.4.13) один раз, подобно G.4.6), и на каждом временном
слое решать соответствующие алгебраические задачи с треугольными
матрицами.
Достоинством данной разностной схемы является возможность ис-
исследования на ее основе сравнительно медленно протекающих во вре-
времени (квазистатических) процессов. В этом случае можно пренебречь
инерционными свойствами и «пробросить» в уравнении G.4.13) ела-
гаемые с матрицей масс [М]. Заметим, что в методе центральных
разностей такой возможности нет (там матрица масс играет главную
роль).
Некоторую сложность при применении данной схемы имеет органи™
зация вычислений на первых двух слоях. Здесь можно рекомендовать
следующую методику. Она основана на введении «законтурных слоев»
{g~i}, {q~2} и использовании разностных формул
Ш = А (Ы - 2 Ы + {q-i}) + o (At2),
G.4.14)
Ш = б^ B {«I } + 3 Ы ~6{q-l} + {q-2}) + О (At2) .
Выражая из этих соотношений {q^i}, {#-2} и подставляя их в
формулы G.4.12) для к = 1, получаем
Ш = А F {„ } - 6 Ы - 6 {q0} At-2 {q0} At2) ,
G.4.15)
§ 7.4. Пошаговое интегрирование уравнений движения 229
Подставляя G.4.15) в уравнение G.1.9) для t = t\, получаем систему
уравнений для определения {q\}:
{Р,} + А [М] Ы + А [М] {q0} + 2 [М] {&} , G.4.16)
которая однозначно определяется по начальным условиям G.1.10).
Далее вычисления строятся на основе решения систем вида G.4.13),
если {g^i} выразить из второго уравнения G.4.14), т.е. по {#-i}, {qo},
{qi} находятся {g2} и т.д.
7.4.3. Метод линейного ускорении (метод Вилсона). Метод
линейного ускорения, в отличие от ранее представленных, основан
не на разложении функции в ряд Тейлора, а предполагает линейное
изменение величины ускорения на интервале времени
(tk,tk+T), O^T^OAt, G.4.17)
в виде
q(tk +т) = q(tk) + ^ (q(tk + в At) - q(tk)). G.4.18)
Интегрируя G.4.18) по времени, получаем зависимости от време-
времени т скоростей и перемещений:
q (tk + т) = q (tk) +q(tk)r+ ^^ (q (tk + в At) - q (tk)),
r2 r3
q (tfe + r) = q (tk) +q(tk)T + q(tk) — + —— (q (tk + в At) - q (tk)).
G.4.19)
Подставляя вместо г значение в At, получаем уравнения для опреде-
определения значений скоростей и ускорений в момент % + 9At. В результате
несложных вычислений имеем
q (tk + 9At) = -^Ш-^ (tk) + ^
q (tk + 9At) = -2q (tk) - 9-^q (tk) + -?- (q (tk + 9At) - q (tk)) .
2 Ш G.4.20)
Уравнение движения (кинетостатики) G.1.9) составляем в момент
времени tk + 9At, подставляя в него выражения скоростей и ускорений
типа G.4.20). После несложных преобразований из него следует систе™
230 Гл. 7. Линейные задачи динамики
ма алгебраических уравнений для определения вектора перемещений
{q(tk + 9At)}:
2 Iм) + И) {Я (** + 0 At)} = {Р (tk + в At)}
^ № Ш + 2 [М] {qk} . G.4.21)
Далее найденный вектор {q (tk + 0At)} подставляется в соотноше-
соотношение типа G.4.20) для определения ускорения в этот момент времени:
- {Я ^к)}) ¦ G.4.22)
Исходные данные для следующего шага определяются из соотноше-
соотношений типа G.4.18), G.4.19) путем подстановки в них значения времени
т = At, т. е.
{qk+l} = {q (tk + At)} = {qk} + 1 ({q (tk + в At)} - {qk}),
{4k+l} = {q (tk + At)} = {qk} + At {qk} +
-{q'k}), G.4.23)
{qk+l} = {q (tk + At)} = {qk} + At {qk} +
+ ^- Ш + ^- ({<?' (tk + в At)} - {qk}).
Анализ этой схемы показывает, что наивысшую точность (At2)
она имеет при 9 = 1,4. Если использовать именно это значение,
то с точки зрения физического смысла получаем, что для опре-
определения состояния системы в момент времени tk + At составляет-
составляется уравнение кинетостатики в последующий момент времени tk +
+ 9At, (9 > 1). Это означает, что схема принадлежит классу неявных
схем, что и подтверждает присутствие матрицы жесткости в левой
части системы линейных алгебраических уравнений на шаге нагруже-
ния G.4.21).
В отличие от ранее рассмотренных схем, схема линейного ускоре-
ускорения является двухслойной, т. е. для определения очередного состояния
§ 7.4. Пошаговое интегрирование уравнений движения 231
необходимо знание лишь текущего состояния. Однако объем инфор-
информации о состоянии системы на временном слое значительно больший.
Если в схемах, основанных на разложении решения в ряд Тейлора,
используется лишь вектор конфигурации (перемещений {qk}), то в
настоящей схеме используются векторы конфигурации {qk}, скоростей
{qk} и ускорений {qk}.
Дополнительным достоинством представленной схемы является
возможность организации вычислений на основе решения системы
G.4.21) начиная с первого шага, так как начальные условия G.1.10) и
предположение {до} = 0 полностью определяют правую часть уравне™
ния G.4.21).
Для постоянного шага по времени (At = const), так же как и для
предыдущих схем, целесообразно произвести факторизацию матрицы
левой части системы G.4.21) и в дальнейшем на каждом временном
шаге решать две системы с треугольными матрицами.
7.4.4. Метод обобщенного ускорения (метод Ныомарка). Этот
метод может быть рассмотрен как развитие метода линейного уско-
рения, в котором ускорение на шаге изменения времени меняется
по линейному закону. Исходной является предложенная Ньюмарком
аппроксимация скоростей и положений в виде
q(tk + т) = q(tk) + rq(tk) + Sr2 q'(tk),
т2 G.4.24)
q(tk + г) = q(tk) + rq(tk) + у?(**) + a V'fa).
Для третьей производной используется двухслойная разностная
формула
«(**) = ^fe"(*fc + Л*) - $(**)]• G-4-25)
Подставляя в G.4.24) выражение G.4.25) при т = At, получаем
q(tk + At) = q(tk) + [A - 5)q(tk) + S q(tk + At)] At,
q(tk + At) = q(tk) + q(tk)At + |Yi - a) q{tk) +aq(tk + At)! At2.
G.4.26)
Так как в разрешающем уравнении фигурируют значения скорости
и ускорения, то из второго уравнения выражаем ускорение и под-
подставляем в первое соотношение для получения выражения скорости.
В результате получаем
q(tk + At) =
q(tk) + ( 1 - ^ ) q(tk), G.4.27)
232 Гл. 7. Линейные задачи динамики
q(tk + At) = -^Mtk + At) - q(tk)} +
Уравнение кинетостатики (движения) составляем в момент времени
tk + At, что дает систему алгебраических уравнений для определения
{q(tk + At)}. ^ти Уравнения получаются в виде
+ At)} = {P(tk + At)} ±
- i)m)ш G-4-28)
Наивысшую точность O(At2) представленная схема имеет при зна-
значениях параметров: а = 0,25, S = 0,5. Можно отметить близость этой
схемы с методом линейного ускорения, в частности, они полностью
совпадают при а = 1/6, S = 1/2, 9=1. Все замечания, сделанные к
схеме из п. 7.4.3, полностью справедливы и в настоящем случае.
7.4.5. Метод трапеций (схема Кранка-Николсона). Получили
распространение методы интегрирования системы уравнений движения
G.1.9) путем предварительного сведения их к уравнениям первого
порядка по времени. Для этого необходимо ввести дополнительный
вектор скоростей {v} и записать уравнение G.1.9) в виде
{q} = {v}, M{v} = -{K){q} + {P}. G.4.29)
Для уравнения порядка по времени вида
ax(t)=px(t)+f(t) G.4.30)
хорошо себя зарекомендовала неявная схема, в которой производная
заменяется двухслойной конечной разностью
х = Xk+lM Xk , G.4.31)
а правая часть — выражением
A - *)xfe) + (ФД+1 + A - Ф)Д). G.4.32)
При Ф = 1/2 подобная схема называется методом трапеций или
схемой Кранка-Николсона и имеет второй порядок точности.
Применение соотношений типа G.4.31), G.4.32) к системе G.4.29)
дает уравнения
§ 7.5. Условия устойчивости 233
±[M}({vk+l} - {vk}) = (ФК+1} + A - Ф)Ю) - G.4.33)
Подобная система может быть решена двумя способами: либо, вы-
выразив {vk+\\ из первого уравнения и подставив во второе, получить
уравнение для определения {q^\}, либо, наоборот, выразив {q^\}
из первого уравнения и подставив во второе, получить уравнение для
определения {г^+i}. Рассмотрим подробнее второй подход.
Из первого уравнения системы G.4.33) получаем
{Qk+i} = Ш + Ai*K+i} + At(l - *){i;fe}. G.4.34)
Подставляем {q^\} во второе уравнение G.4.33) и записываем
его относительно неизвестного вектора {t^+i}. В результате получаем
систему:
- [K]{qk} + Ъ{Рк+1} + A - Ф){Р^}. G.4.35)
Решение этой системы подставляется в G.4.34) и находится вектор
перемещений {g^+i}-
Описанная схема является неявной, так как в разрешающей системе
матрица жесткости [К] фигурирует в левой части. Она является двух-
двухслойной с определением на каждом слое вектора положения и скоро-
скоростей системы (в отличие от схем из п. 7.4.3, п. 7.4.4 нет необходимости
хранить вектор ускорений). Организация вычислений при реализации
этой схемы производится аналогично тому, как это осуществлялось
в схемах, в которых не производилось сведение уравнений второго
порядка к уравнениям первого порядка.
§ 7.5. Условия устойчивости
Помимо точности разностной схемы, большое значение имеет еще
одно свойство, называемое устойчивостью решения к различным воз-
возмущениям. Здесь следует различать два вида устойчивости: устой-
устойчивость решения непосредственно системы дифференциальных урав-
уравнений и так называемую устойчивость разностной схемы. В пер-
234 Гл. 7. Линейные задачи динамики
вом случае речь идет о том, как изменяется поведение решения во
времени при малых изменениях начальных условий. Если бесконеч-
бесконечно малое возмущение начальных условий приводит к аналогичным
(бесконечно малым) изменениям решения на исследуемом интерва-
интервале времени, то решение соответствующей задачи Коши называется
устойчивым, в противном — неустойчивым. К рассматриваемым в
настоящем разделе линейным уравнениям движения конструкций из
«классических» материалов такого рода исследования проводить нет
необходимости. Известно, что линейные задачи динамики деформи-
деформируемых тел имеют устойчивое во времени решение. Хотя следует
отметить, что учет нелинейных эффектов (больших перемещений, фи-
физической нелинейности и т.д.) может привести к соответствующим
задачам, решения которых при малых изменениях исходных данных
существенно отличаются (например, задачи о динамической устой-
устойчивости при потере несущей способности, при пластическом тече-
течении).
Вопрос об устойчивости разностных схем связан с иной причиной.
Так как на каждом шаге по времени происходит замена истинной диф-
дифференциальной задачи приближенной разностной, то получаемое ре-
решение является приближенным, т. е. вносится некоторая погрешность.
Сюда же следует отнести погрешности решения систем алгебраических
уравнений из-за округления вычислений и других причин, обуслов-
обусловленных машинной арифметикой. Эти погрешности в зависимости от
свойств разностной схемы могут накапливаться или уничтожаться.
Если ошибки по мере движения по временным слоям не нарастают,
то разностная схема называется устойчивой, в противном случае —
неустойчивой.
Проиллюстрируем один из подходов, введенный Д. Нейманом и
известный как спектральный критерий устойчивости, на примере урав-
уравнений движения G.1.9). Если представить решение в виде ряда по
собственным формам колебаний G.3.1), то получим несвязанную си-
систему обыкновенных дифференциальных уравнений G.3.3). Очевид-
Очевидно, что имеется полное подобие между решением исходной систе-
системы G.1.9) и решением систем уравнений G.3.3) в том случае, ко-
когда ряд G.3.1) полный, т.е. по всем собственным формам задачи
G.3.3).
Рассмотрим применение центрально-разностной схемы G.4.3) к
каждому уравнению G.3.3). В результате на каждом шаге вычислений
получим
G.5.1)
Здесь номер слоя к для удобства записан как верхний индекс, хотя
по смыслу он полностью соответствует п. 7.4.1.
§ 7.5. Условия устойчивости
235
Перепишем G.5.1) в виде
At2 О"
О О
Если ввести в расмотрение векторы и матрицы
. G.5.2)
(к)
(к)
Р{1
О
G.5.3)
1
О
XI =
О
о о
то уравнение G.5.2) сокращенно записывается в виде
G.5.4)
Подобная запись весьма удобна для исследования свойств любой
разностной схемы (отличие лишь в конкретном виде входящих в нее
векторов и матриц) и широко используется в соответствующих ра-
работах. По смыслу она является рекуррентным соотношением, по ко-
которому вычисляются решения исходной задачи по временным слоям.
Отметим, что в практическом плане (организации конкретных вычис-
вычислений) использование формул G.5.2-7.5.4) чрезвычайно неудобно (за
исключением явных разностных схем), так как оператор [Ап] будет
содержать в себе в явном виде матрицы, обратные матрицам в разре-
разрешающих системах уравнений (типа G.4.1), G.4.19), G.4.24), G.4.34) и
т.д.), которые в реальных задачах, появляющихся при использовании
МКЭ, не могут быть построены.
Предположим, что на некотором fc-м шаге появилась ошибка
, тогда через г шагов решение будет иметь вид
= [Апу
г-1
G.5.5)
Из правой части приведенного выражения можно выделить «истин-
«истинное» решение:
p(k+j)\
п у
G.5.6)
236 Гл. 7. Линейные задачи динамики
которое должно было иметь место при применении G.5.3), и погреш-
погрешность (ошибку)
J д ^(k-\-i) 1 Г/11*]Ло^(^I /7 ^ 7\
к которой привела исходная ошибка I Ахп \-
Эффект нарастания величин ошибки по мере движения по времен-
временным слоям целиком и полностью зависит от свойств матрицы [Ап].
Если ее норма
Р„|| < 1, G.5.8)
то ошибка не возрастает. В этом случае разностная схема считается
устойчивой и ошибки (погрешности вычислений), которые реально
появляются на каждом шаге и для каждой гармоники, не приводят к
катастрофическому росту их по величине. Ситуация ||АП|| = 1 может
считаться предельно допустимой, так как появляющиеся погрешности,
как правило, весьма малы по величине.
Условие G.5.8) можно свести к ограничению на спектральный ра-
радиус матрицы [Ап] р{Ап), которое можно записать в виде
: 1, г = 1,2, G.5.9)
где Хп , Хп — собственные значения матрицы [Ап].
Составим характеристическое уравнение для определения Хп ,
det(K]-A«[/])=0, G.5.10)
решение которого дает два корня:
Условие G.5.8) может быть выполнено, когда получаем комплексно-
сопряженные корни, т. е. при
1. G.5.12)
At<—, n=l,...,iV, G.5.13)
ш n
при котором метод центральных разностей является численно устойчи-
устойчивой схемой.
§ 7.5. Условия устойчивости
237
Для сравнения рассмотрим метод трапеций из п. 7.4.5 при параметре
Ф = 1/2. В этом случае соотношения G.4.33) применительно к уравне-
уравнениям G.3.3) приводят к системе
Если принять
,<*>
P<fc>).
G.5.14)
G.5.15)
то из G.5.14) получаем структуру соответствующей матрицы [Ап] в ви-
виде
¦ ^
-1
Л ¦
G.5.16)
Можно показать, что условие G.5.8) для G.5.16) выполняется при
любых At и положительных ип. Для этого заметим, что если ввести
единичную матрицу [Е] и матрицу
[An] =
О
G.5.17)
-1 О
которая является положительно определенной при любых шп > О, т.е.
VM^O; Мг[Лп]М>0, G.5.18)
то справедливо
G.5.19)
G.5.20)
Спектральный радиус можно определить выражением
р(Ап) = sup ¦
At,
Отсюда в силу справедливости G.5.18) получаем
р(Ап) = sup-
< 1.
G.5.21)
238 Гл. 7. Линейные задачи динамики
Таким образом, условие устойчивости метода трапеций выполня-
выполняется при любых значениях шага по времени At. Такие разност-
разностные схемы называются абсолютно устойчивыми. Из рассмотренных
выше к ним относятся схема Хаболта (п. 7.4.2), схема Вилсона
(п. 7.4.3) при в ^ 1,37 и схема Ньюмарка (п. 7.4.4) при 8 ^ 0,5 и
а^О,5(E + О,5J.
Схемы, в которых условие устойчивости имеет вид ограничения
шага интегрирования At, называют условно устойчивыми. К ним от-
носятся, как правило, явные схемы, что подтверждает условие устой-
устойчивости метода центральных разностей вида G.5.13). Следует отме-
отметить, что это ограничение является весьма жестким, так как оно
должно выполняться для всех гармоник. Как утверждалось в § 7.2,
наибольшие значения частот не имеют физического смысла и не
представляют никого интереса, однако именно они становятся опре-
определяющими при выборе шага интегрирования. Это является сильным
препятствием на пути широкого применения явных разностных схем,
так как из условия устойчивости приходится брать шаг интегриро™
вания столь мелким, что все достоинства простоты вычислений ис-
исчезают.
§7.6. Примеры построения матрицы масс
В этом параграфе рассмотрим примеры построения матриц масс
элементов, для которых ранее были построены матрицы жесткости.
7.6.1. Построение матрицы масс КЗ тонкой оболочки. Для
тонких оболочек возможно пренебречь неоднородностью распределен™
ных масс по толщине, что эквивалентно предположению о малости
инерции поворотов нормали по сравнению с инерцией смещений точек
срединной поверхности. В этом случае справедливо
^ ¦ SvdQ = j j ph-^- ¦ SudS G.6.1)
где и — вектор смещений точек срединной поверхности.
В соответствии с МКЭ интеграл G.6.1) представляется в виде сум-
суммы интегралов по элементам, каждый из которых вычисляется с помо-
помощью аппроксимаций для перемещений, используемых при построении
матрицы жесткости. Например, для КЭ из гл.2 необходимо в G.6.1)
подставить аппроксимации B.1.29), которые запишем в виде
, G.6.2)
§7.6. Примеры построения матрицы масс
239
где {их}, {иу}, {uz} — векторы узловых значений B.1.30). Подставляя
G.6.2) в G.6.1), получим
Р
= {Suxf[Mo}
где
{Suyf
, G.6.3)
= [D)T Шр1г {U} {Uf dS j [D]. G.6.4)
Интегралы типа G.6.4) вычисляются численно по квадратурным
формулам, используемым при вычислении соответствующей матрицы
жесткости.
Если обозначить вектор узловых значений
Ы = \ иУ
G.6.5)
то интеграл G.6.3) можно записать в виде G.1.5), где матрица масс
будет иметь вид
Мо 0 0
0 Мо 0
0 0
G.6.6)
Следует заметить, что через матрицу масс вида G.6.6) выражается
и кинетическая энергия оболочки. Действительно, выражение кинети™
ческой энергии по определению имеет вид
Н ydt dt
G.6.7)
240 Гл. 7. Линейные задачи динамики
Если пренебречь, как и выше, инерцией поворотов нормали и пред-
представить для перемещений аппроксимации G.6.2), то получим
[[ 1 (ди ди дФ дФ дФ дФ
к= н(^^
S
Рассмотрим процедуру построения матрицы масс для девятиузло™
вого изопараметрического элемента оболочек малой и средней толщин,
подробно описанного в §§3.2™3.4 и §5.3.
7.6.2. Построение матрицы масс изопараметрического КЗ обо-
оболочек малой и средней толщин. С учетом введенных обозначений
запишем выражение для G.6.1), обозначив его через ST:
Г Г Г е V- (+[ е h \ ^ k
JJJ ^ \ з J2 /^ j j
П *'•? \-1 / JJ
G.6.9)
Здесь, так же как и для соответствующей матрицы жесткости, идет
суммирование по квадратурным точкам, ац — определитель матрицы
Якоби (элемент площади в этих точках), Шг, ujj — весовые мно-
множители.
Распишем выражение для Iq\
id= | (w. 8ыс = | р ( й + ^св) • (su + ^cse ) d( =
h2 2-
= 2рп • Su + — р-0 • 5в. G.6.10)
4 о
Из G.6.10) получим
id = 2PJ2 {qm}T({um}T{un}){Sqn}+
m,n
i.9.
аГ/^ l^'mJ VL"x'j V"fb\) l~ M/t J' \ I.O.I I )
§7.6. Примеры построения матрицы масс
241
где Nm — функции формы. Здесь матрицы [Um], [Am] определяются
выражениями
[ит] =
Nm
0
0
0
Nm
0
0
0
Nm
0
0
0
0
0
о
G.6.12)
Й?
[Am
e
0 0 0
и и и
р(ш)/
ш)
& 1
0 0 0 e\™>Nm efi'Nrr,
L0 0 0 e\™]Nm e(™]Nn\
G.6.13)
где еЙ? , бп^ , enz — проекции векторов еп в гп™м узле на оси х, у, z
глобальной системы координат.
Тогда для G.6.9) получим
G.6.14)
где
h2
— [Ат}Т[Ап]
G.6.15)
— выражение для матрицы масс элемента.
В G.6.15) используется квадратурная формула Гаусса-Лежандра
3-го порядка по каждой координате.
Полученные в настоящем разделе матрицы масс называются согла-
согласованными, поскольку их структура (количество ненулевых элементов
и их расположение) полностью совпадает со структурой соответст-
соответствующей матрицы жесткости и, как следствие, для хранения требует
столько памяти ЭВМ, сколько ее необходимо для хранения матрицы
жесткости.
В литературе [16, 113, 160] можно встретить иные процедуры по-
построения матрицы масс, которые приводят к диагональным или блочно-
диагональным матрицам. Для некоторых задач диагональная матрица
масс имеет существенное преимущество по сравнению с согласованной,
например при численном интегрировании уравнений динамики (типа
7.1.9)) по времени с помощью явных разностных схем. В нашем случае
(будут рассмотрены задачи свободных колебаний) такого рода преиму-
преимуществ нет, поэтому в настоящей главе используются согласованные
матрицы.
242
Гл. 7. Линейные задачи динамики
§7.7. Примеры расчетов
7.7.1. Свободные колебания цилиндрической панели. Зада-
Задачей, на которой тестируются большинство конечно-элементных мо-
моделей тонких оболочек, является задача о цилиндрической пане-
панели, консольно-закрепленной по криволинейному контуру. Впервые
экспериментально и расчетно эта задача была исследована в ра-
работах [355, 284]. В дальнейшем она использовалась для тестовой
апробации различных конечных элементов в задачах динамики. Па-
Параметры панели (рис. 7.7.1): L = S = 0,3048 м, радиус кривизны
R = 0,6096 м, толщина h = 0,003048 м; характеристики материала:
Е = 0,2- 1012 Н/м2, р = 0,704- 104 кг/м3, v = 0,3. В табл. 7.1 для КЭ из
п. 7.6.2. приводится сходимость результатов по частотам собственных
колебаний.
Рис. 7.7.1
Таблица 7.1
№ тона
1
2
3
4
5
6
7
8
Разбиение
10 х 10КЭ,Гц
82,69
135,45
273,84
346,29
395,48
564,11
759,49
762,39
15 х 15КЭ,Гц
83,48
137,24
270,58
347,48
395,74
559,24
756,15
760,65
20 х 20КЭ,Гц
84,51
138,41
268,24
349,01
396,83
555,49
753,75
759,66
30 х 30КЭ,Гц
85,58
139,59
266,0
350,31
397,91
552,21
754,69
759,86
§7.7. Примеры расчетов
243
Наряду с данными эксперимента [355, 284] и проделанных с по-
помощью конечных элементов расчетов, описанных в §7.6, в табл. 7.2
приводятся результаты для собственных частот, опубликованные в ра-
работах других авторов.
Таблица 7.2
№
тона
1
2
3
4
5
№
тона
1
2
3
4
5
№
тона
1
2
3
4
5
Эксперимент
[355, 284], Гц
85,60
134,50
258,90
350,60
395,20
G. Lindberg,
M.Olson
[355], Гц
93,50
147,60
255,10
393,10
423,50
Я. Г. Савула
[202], Гц
85,10
138,00
251,70
344,80
404,90
КЭ (п. 7.6.1), Гц,
сетка 4x4
89,5
144
258
359
406
G. Lindberg,
M.Olson
[284], Гц
86,60
139,20
251,30
348,60
393,40
S. Ahmad и др.
[244], Гц
113,00
147,00
296,00
440,00
475,00
КЭ (п. 7.6.1), Гц,
сетка 2x2
91,8
149
273
388
М. Н. Серазут-
динов [209],
Гц
83,40
133,80
238,10
334,00
377,00
К. P. Walker
[400], Гц
88,60
140,90
252,60
371,50
423,20
КЭ (п. 7.6.2), Гц,
сетка 30 х 30
85,58
139,58
266,00
350,31
397,91
М. A. Bossak,
0. С. Zienkie-
wlcz [272], Гц
88,30
142,80
257,60
369,20
441,80
С. И. Богомолов
и др. [21], Гц
84,90
138,20
248,70
349,90
419,10
На рис. 7.7.2 изображены первые восемь форм собственных колеба-
колебаний для этой задачи. Бралась сетка 15 х 15 КЭ. В скобках указано
значение соответствующей собственной частоты (Гц) для элемента из
п. 7.6.2. Для каждой формы нижний край является защемленным.
244
Гл. 7. Линейные задачи динамики
1-я форма (83,48 Гц)
5-я форма C95,74 Гц)
2-я форма A37,24 Гц)
6-я форма E59,24 Гц)
3-я форма B70, 58 Гц)
7-я форма G56,15 Гц)
4-я форма C47,48 Гц)
8-я форма G60,65 Гц)
Рис. 7.7.2
7.7.2. Свободные колебания сферического купола. Рассматри-
вается сферический купол радиуса R, жестко защемленный по кон-
контуру с углом раствора 90° (рис. 7.7.3). Чис™
ленно моделировалась 1/4 часть поверхно-
поверхности, на которую наносилась топологически
прямоугольная сетка КЭ (п. 7.6.1) 4x4. На
нижней кромке задавались условия жесткого
защемления, на боковых гранях накладыва-
накладывались либо условия симметрии (для опреде-
определения симметричных форм колебаний), либо
условия симметрии и антисимметрии (для
рис jj^ определения несимметричных форм). На вер-
вершине предполагалось наличие малого от-
отверстия радиуса г, а соответствующая грань свободной. Величина
радиуса г задавалась в пределах R/r = 102 ч- 103, что давало близ-
близкие результаты. На рис. 7.7.4. изображены формы колебаний, соот™
§7.7. Примеры расчетов
245
Рис. 7.7.4
ветствующие наименьшим частотам, в виде пунктирных кривых для
вида сбоку и сверху. Рядом приведены значения отношения uj/ujq, где
и® = л/Е/pR2(l — /i2), для R/h = 100. В скобках приводятся анало-
аналогичные значения, полученные в работе [112], где решение строится
путем разложения в ряд Фурье по окружной координате и численному
интегрированию по меридиану.
7.7.3. Свободные колебания квадратной пластины. Рассматри-
Рассматривается задача о свободных колебаниях квадратной пластины. Формы
собственных колебаний шарнирнозакрепленной прямоугольной пла-
пластинки со сторонами а\, A2 удобно искать в виде выражения
7ГШ1 . 7ГТП2 ( 1 о о \
W = W{) Sill Х\ Sill Х2 [ГГЦ, ТП2 = 1, 2, О, ...).
а\
A2
G.7.1)
Выражение G.7.1) удовлетворяет кинематическим и статическим
граничным условиям, которые для края х\ = 0, а\ имеют вид (условия
Навье):
w = Mn=0. G.7.2)
Формула для собственных частот шарнирнозакрепленной пластин™
ки имеет вид
Phj
G.7.3)
246
Гл. 7. Линейные задачи динамики
Здесь D =
Eh3
цилиндрическая жесткость.
12A-z/2)
В табл. 7.3 приведены результаты нахождения с помощью КЭ
из п. 7.6.2 частот собственных колебаний для квадратной, шарнир™
нозакрепленной по контуру пластины размера 10 х 10 м, толщины
h = 0,1 м; характеристиками материала: Е = 2 • 105 МРа, v = 0,3,
р = 7,959 • 103 кг/м3, тут же приведены результаты определения частот
собственных колебаний с помощью аналитического расчета:
Таблица 7.3
№
тона
I
1
2
3
4
5
6
7
8
9
10
Разбиение
10 х 10КЭ,Гц
II
4,74
11,87
19,01
23,79
30,91
40,59
42,82
47,68
59,56
62,44
15 х 15КЭ,Гц
III
4,75
11,90
19,01
23,80
30,91
40,47
42,75
47,56
59,38
62,03
Аналитическое
решение, Гц
IV
4,77
11,92
19,07
23,83
30,99
40,53
42,91
47,68
59,59
61,98
Относительная
погрешность
(IV-III)/IV
V
0,42%
0,17%
0,31%
0,13%
0,26%
0,15%
0,37%
0,25%
0,35%
-0,08%
Таблица 7.4
№
тона
1
2
3
4
5
8 х 8 КЭ, Гц
0,819
2,04
5,06
6,59
7,42
Разбиение
10 х 10 КЭ, Гц
0,825
2,04
5,08
6,58
7,42
15 х 15 КЭ, Гц
0,83
2,04
5,11
6,56
7,43
Аналитическое
решение, Гц
0,84
2,06
5,18
6,63
7,53
В табл. 7.4 приведены результаты расчета с помощью КЭ из п. 7.6.2
частот собственных колебаний для той же пластины, но теперь жестко
§7.7. Примеры расчетов
247
защемленной по одному краю, аналогично приведен аналитический
расчет.
7.7.4. Свободные колебания цилиндрической оболочки. Рас™
смотрим цилиндрическую оболочку с параметрами: длинной образую-
образующей L = 0,305 м, радиусом R = 0,076 м, толщиной h = 0,25 • 10^3 м;
характеристиками материала: Е = 19,6 • 1010 Н/м2, р = 7,7 • 103 кг/м3,
v = 0,3. Рассматривалась 1/4 часть оболочки. На двух гранях, совпа-
совпадающих с торцевыми сечениями, ставились условия жесткой задел-
заделки, на двух других — условия непрерывности решения и симметрии
или косой симметрии поля перемещений относительно плоскостей,
ограничивающих рассматриваемую часть оболочки. На поверхность
наносилась сетка конечных элементов (п. 7.6.2).
В табл. 7.5 приведены результаты нахождения частот свободных ко-
колебаний в зависимости от разбиения, т — число волн по образующей,
п — число волн по направляющей.
Таблица 7.5
Сетка
Число волн по направляющей, п
10 11
т = 1
10 х 10
КЭ, Гц
12 х 12
КЭ, Гц
15 х 15
КЭ, Гц
1142,42
1141,0
1134,01
753,77
752,62
746,62
562,16
561,07
555,78
514,29
512,56
509,12
576,81
574,61
572,5
703,79 870,54
700,81
867,381
698,09 864,44
1066,73
1062,81
1058,93
1290,92
1282,49
1277,63
т = 2
10 х 10
КЭ, Гц
12 х 12
КЭ, Гц
15 х 15
КЭ, Гц
1276,63
1275,19
1269,32
1006,12 886,82
1003,22 884,54
997,54
878,97
891,51
887,32
882,35
986,131
982,04
977,21
1143,59
1137,72
1132,49
1345,€
1336,26
1330,17
Сравнение точности полученных результатов с известными из лите-
литературы приводится в табл.7.6. При этом сетка разбиения бралась
248
Гл. 7. Линейные задачи динамики
Таблица 7.6
Метод
вычисления
Точное
решение,
Гц
По Рэлекз-
Ритцу,
Гц
Решение
[38], Гц
Решение
[251], Гц
Решение
поМКЭ
[219], Гц
По данной
работе, Гц
Погреш-
Погрешность к
точному
Точное
решение,
Гц
По Рэлею-
Ритцу,
Гц
Решение
[38], Гц
Решение
[251], Гц
По данной
работе, Гц
Погреш-
Погрешность к
точному
3
1140
1284
1220
1431
1168
1134,0
0,52%
2505
2747
—
—
—
—
Число волн по направляющей,
4
755
794
796
872
769
746,6
1,1%
1731
1871
2086
2084
—
—
5
7
544
595
594
629
579
555,8
3,3%
7
1272
1353
1453
1460
1269,3
0,2%
6
71 = 1
533
545
541
565
538
509,1
4,4%
71 = 2
1011
1059
1106
1118
997,5
1,3%
7
593
599
595
617
608
572,9
3,4%
898
926
952
964
878,9
2%
8
717
720
718
739
753
698,1
2,6%
903
919
938
949
882,4
2,2%
9
881
883
883
905
950
864,4
1,9%
996
1006
1024
1034
977,2
1,8%
п
10
1075
1077
1079
1101
—
1058,9
1,9%
1151
1157
1178
1186
1132,5
1,6%
11
1295
1296
1301
1323
—
1277,6
1,3%
1348
1352
1376
1376
1330,2
1,3%
§7.7. Примеры расчетов
249
1 волна по образующей, 8 волн по окружности F98,1 Гц)
2 волны по образующей, 8 волн по окружности (882,4 Гц)
2 волны по образующей, 6 волн по окружности (997,5 Гц)
Рис. 7.7.5
15 х 15 КЭ. На рис. 7.7.5, 7.7.6 представлены некоторые формы соб-
собственных колебаний для 1/4 цилиндрической панели при наложении
условия симметрии и косой симметрии. В скобках указано значение
соответствующей собственной частоты (Гц).
250
Гл. 7. Линейные задачи динамики
1 волна по образующей, 12 волн по окружности A519,4 Гц)
1 волна по образующей, 9 волн по окружности (864,44 Гц)
1 волна по образующей, 11 волн по окружности A277,63 Гц)
Рис. 7.7.6
7.7.5. Расчет лопасти гидротурбины. Реальной конструкцией,
для которой определялись частоты и формы свободных колебаний,
была лопасть рабочего колеса поворотно-лопастной гидротурбины диа-
диаметра 9 метров. Геометрически это довольно сложная оболочка пере-
переменной толщины, защемленная по части контура. Она моделировалась
сеткой КЭ п. 7.6.1 размером 8x3.
§7.7. Примеры расчетов
251
48,6 D4,9 - 51,7)
69,4 F9,9 - 71,4)
84,1 (96,9 - 98,3)
Рис. 7.7.7
На рис. 7.7.7 структурно изображены формы колебаний, соответ-
соответствующих наименьшим частотам, и значения этих частот в герцах.
В скобках приводятся результаты экспериментальных исследований на
моделях, выполненных в СКБ «Гидротурбомаш» ПО «Ленинградский
металлический завод». Видно, что имеет место хорошее совпадение.
7.7.6. Расчет цилиндрических оболочек некругового профи-
профили. В работах [76, 77, 78, 124, 137] описывается разработанная
Ю. М. Кузнецовым схема определения частот и форм тонких цилин-
цилиндрических оболочек кругового и некругового профиля с различно рода
нерегулярностями. В основу расчета положены конечные элементы
цилиндрической оболочки с явным выражением смещений как твердого
целого [79] типа [118] и [252, 254].
В качестве примера приведем задачу о свободных колебани-
колебаниях жестко-защемленной цилиндрической оболочки, изображенной на
рис. 7.7.8, со следующими механическими и геометрическими пара-
параметрами: L = 2,0188 м, /i = 0,3, h = 0,1682 • 10^2 м, Е = 0,196 х
х 106 МПа, р = 0,77 • 104 кг/м3, Rx = 0,21 м, Д2 = 0,72 м, R3 = 1,215 м,
R4 = 0,43 м, <pi = 41,5°, (р2 = 21°, (рз = 21°, щ = 96,5°.
В расчете моделировалась 1/4 часть оболочки с наложением усло-
условий симметрии и антисимметрии в трех сечениях.
Основной особенностью такого рода задач является то, что вол-
волновые числа (га, п) уже не определяют однозначно частоты и фор-
формы колебаний, так как последние могут значительно отличаться от
синусоиды и иметь различные длины волн на участках большой и
малой кривизны. Поэтому целесообразно не просто приводить значения
частот и волновые числа, а иллюстрировать соответствующие формы
графически.
252
Гл. 7. Линейные задачи динамики
Рис. 7.7.8
На рис. 7.7.9 изображены 12 низших форм колебаний с одной полу™
волной вдоль образующей. Там же приведены значения частот в герцах
и волновые числа (га, п). Для сравнения внизу в квадратных скобках
приводятся частоты для аналогичных форм колебаний круговой цилин-
цилиндрической оболочки с таким же периметром образующей (R = 0,5047).
65,3 A,6)
64,9 A,6)
66,2 A,6)
67,9 A,6)
90,1 A,7)
[79,8]
92,7 A,7) 104,9 A,8)
110,6 A,8)
[88,3]
128,9 A,9) 130,8 A,9)
[106,7]
156,4 A,10) 160,4 A,10)
[160,5
Рис. 7.7.9
§7.7. Примеры расчетов
253
Из этих результатов следует, что:
во-первых, различаются симметричные и антисимметричные отно-
относительно вертикальной плоскости формы колебаний, а для гармоники
A,6) имеют место уже четыре формы;
во-вторых, изменение профиля поперечного сечения от кругового к
«грушеобразному» привело к заметному уменьшению лишь нескольких
низших частот, для которых и формы получились тоже весьма сложной
структуры с различной амплитудой и длиной полуволн по направляю™
щей. Для более высоких гармоник наблюдается уже приблизительное
выравнивание прогибов на участках разной кривизны и, как следствие,
частоты тоже изменились незначительно.
7.7.7. Свободные колебания сферической панели. Рассмотрим
задачу для жесткозащемленной по краю сферической панели со сле-
следующими характеристиками: радиусом кривизны 561 мм, диаметром
основания 508 мм, толщиной
10,4 мм, Е = 7,23 • 104 МПа,
кг/м3. Для
разбивалась
(рис. 7.7.10).
п. 7.6.2. В
10 первых
13
мм,
v = 0,3, р = 2,8 • 10;
расчета вся панель
на 5 подконструкций
Использовался КЭ из
табл. 7.7 представлены
частот в зависимости от разбиения.
На рис. 7.7.11 представлены первые
8 форм собственных колебаний.
В скобках указаны соответствую-
соответствующие собственные частоты (Гц).
Рис. 7.7.10
Таблица 7.7
№ тона
1
2
3
4
5
6
7
8
9
10
108 КЭ, Гц
1536,85
1679,09
1806,99
1950,16
1955,65
2375,57
2405,48
2451,88
2677,65
2705,84
Разбиение
192 КЭ, Гц
1557,08
1677,87
1807,99
1946,97
1956,32
2373,49
2400,89
2444,51
2669,06
2681,53
224 КЭ, Гц
1564,09
1678,99
1808,09
1953,85
1958,03
2373,67
2400,09
2446,71
2665,55
2678,96
254
Гл. 7. Линейные задачи динамики
1-я форма A564,09 Гц)
5-я форма A958,03 Гц)
2-я форма A678,99 Гц)
6-я форма B373,67 Гц)
3-я форма A808,09 Гц)
7-я форма B400,09 Гц)
4™я форма A953,85 Гц)
8™я форма B446,71 Гц)
Рис. 7.7.11
7.7.8. Свободные колебания сфери-
сферической панели с вырезом. Рассмотрим
задачу для жестко-защемленной по внеш-
внешнему краю сферической панели с квад-
квадратным в плане симметричным вырезом
с характеристиками: оболочка с радиусом
кривизны 561 мм, диаметром основания
508 мм, толщиной 10,4 мм; Е = 7,23 х
х 104 МПа, v = 0,3, р = 2,8 • 103 кг/м3.
Угол раствора между двумя противопо-
противоположными углами «квадрата» составляет
Рис. 7.7.12 26°. Для расчета вся панель разбивалась
на 4 подконструкции сеткой КЭ из п. 7.6.2.
(рис. 7.7.12). В табл. 7.8 представлены 8 первых частот в зависимости
от разбиения. На рис. 7.7.13 представлены первые 8 форм. В скобках
указаны значения соответствующих частот.
§7.7. Примеры расчетов
255
Таблица 1.\
№ тона
1
2
3
4
5
6
7
8
72 КЭ, Гц
1316,46
1443,22
1481,64
1541,65
1868,64
2551,30
2662,61
2924,05
Разбиение
128 КЭ, Гц
1320,02
1448,41
1479,09
1547,36
1865,78
2542,58
2655,08
2900,39
160 КЭ, Гц
1323,08
1451,89
1479,09
1550,35
1865,33
2541,83
2654,01
2891,89
1-я форма A323,08 Гц)
5-я форма A865,33 Гц)
2-я форма A451,89 Гц)
6-я форма B541,83 Гц)
3™я форма A479,09 Гц)
7^я форма B654,01 Гц)
4-я форма A550,35 Гц)
8-я форма B891 89 Гц)
Рис. 7.7.13
256
Гл. 7. Линейные задачи динамики
7.7.9. Свободные колебании профили корытного сечении. Рас-
Рассматривается жесткозащемленный с двух сторон профиль корытно-
корытного сечения (рис. 7.7.14) со следующими характеристиками: Е = 2 х
х 1011 Па, р = 7800 кг/м3, и = 0,3, геометрическими размерами:
а = 0,12 м, Ъ = 0,4 м, I = 2 м, толщины d = 0,01 м.
Рис. 7.7.14
Результаты для частот собственных колебаний, полученные на ос™
нове КЭ из п. 7.6.2 и найденные в ППП ANSYS по стержневой модели,
представлены в табл. 7.9.
Таблица 7.9
№ тона
КЭ из п. 7.6.2, Гц
ППП ANSYS, Гц
№ тона
КЭ из п. 7.6.2, Гц
ППП ANSYS, Гц
1
113,83
113,94
6
266,77
256,36
2
155,91
156,64
7
302,95
302,14
3
163,29
162,88
8
329,19
328,69
4
208,01
207,22
9
333,34
331,17
5
223,24
222,17
10
378,65
376,86
На рис. 7.7.15 показаны некоторые формы собственных колебаний.
В скобках указаны соответствующие частоты (Гц).
§7.7. Примеры расчетов
257
1-я форма A13,83 Гц)
5-я форма B23,24 Гц)
2-я форма A55,91 Гц)
6~я форма B66,71 Гц)
З^я форма A63,29 Гц)
7™я форма C02,95 Гц)
4-я форма B08,01 Гц)
8-я форма C29,19 Гц)
Рис. 7.7.15
7.7.10. Расчет рекламного щита. Рассмотрим конструкцию —
рекламный щит (рис. 7.7.16). Каркас этой конструкции (рис. 7.7.17)
собран из профилей корытного сечения (рис. 7.7.14). При этом для
профилей I, III, V, VI размеры следующие: b = 0,4 м, а = 0,4 м, а для
профилей II, IV: Ь = 0,4 м, а = 0,25 м.
К обеим поверхностям конструкции каркаса плотно приварены ме-
металлические листы, так что вместе с профилями они образуют единое
целое. Толщины профилей и металлического листа 0,008 и 0,003 м
соответственно. Размеры полезной поверхности щита 6 х 2,5 м; высота
стоек от земли до щита 5 м; расстояние между двумя поверхностями
щита 0,4 м; наименьшее расстояние между стойками 1,2 м.
Характеристики материала для профиля и листа совпадают: Е =
= 2 • 10й Па; v = 0,3; р = 7800 кг/м3.
9 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
258
Гл. 7. Линейные задачи динамики
§
Рис. 7.7.16
Рис. 7.7.17
Предполагается, что концы стоек вмонтированы в бетонную плиту,
идеализацией этого закрепления является жесткая заделка.
Конечно-элементная дискретизация ведется на основе КЭ из п 7.6.2.
Вся конструкция в виду ее сложности разбивается на двадцать подкон™
струкций. Полученные частоты собственных колебаний конструкции
(Гц) представлены в табл.7.10.
Таблица 7.10
№ тона
1
2
3
4
5
Значение частоты, Гц
2,82
4,56
7,30
8,94
8,97
№ тона
6
7
8
9
10
Значение частоты, Гц
11,12
12,87
14,15
16,00
16,07
Некоторые полученные формы собственных колебаний конструкции
представлены на рис. 7.7.18-7.7.21. При этом для наглядности каждая
форма отображена с нескольких сторон. В скобках указаны соответ-
соответствующие частоты (Гц).
Рис. 7.7.18. 1-я форма. B,82 Гц)
§7.7. Примеры расчетов
259
Рис. 7.7.19. 5~я форма. (8,97 Гц)
Рис. 7.7.20. 7-я форма. A2,87 Гц)
Рис. 7.7.21. 8-я форма. A4,15 Гц)
Глава 8
РАСЧЕТ СЛОИСТЫХ АНИЗОТРОПНЫХ
ОБОЛОЧЕК
Среди множества схем расчета слоистых композитных оболочек
особое место занимают схемы, основанные на МКЭ. Главное достоин-
достоинство подобных методик состоит в возможности расчета геометрически
сложных оболочек с переменными механическими характеристиками
под действием произвольных нагрузок. Однако построение эффектив-
эффективных КЭ здесь сложнее, чем для однородных оболочек, так как ко всем
проблемам, о которых говорилось в предыдущей главе, прибавляются
дополнительные, связанные с нелинейностью распределения напряже-
напряжений и перемещений по толщине.
В настоящей главе дается краткий обзор проблемы построения
многослойных КЭ при использовании различных гипотез о распре-
распределении перемещений и напряжений по толщине, описывается обоб™
щение разработанного в предыдущей главе сдвигового КЭ однород-
однородных оболочек для слоистых композитных оболочек, предлагается
специальная постпроцессорная процедура вычисления поперечных ка-
касательных напряжений путем интегрирования уравнений равновесия
в напряжениях.
§8.1. Основные положения
Проблеме исследований в области многослойных оболочек, в плане
построения различных прикладных теорий и разработки методов рас-
расчета, посвящена весьма обширная литература (см. обзоры [46, 94,
109]), которая обобщена в монографиях [5, 7, 23, 36, 95, 99, 153,
182, 192 и др.]. Следует отметить, что не все построенные теории
удобны для применения МКЭ, поэтому кратко остановимся на воз-
возможных вариантах. Основным моментом здесь будут кинематические
гипотезы о характере распределения перемещений по толщине, так как
именно от этого зависит количество разрешающих функций и порядок
максимальных производных от них.
1. Гипотезы Кирхгофа-Лява. В этом случае многослойность учи-
учитывается заданием более сложных физических соотношений между
напряжениями (усилиями и моментами) и деформациями. Конечные
§8.1. Основные положения 261
элементы такого типа построены в работах [1, 2, 100, 141, 325, 352,
370]. Они применимы лишь к тонким оболочкам с небольшим измене-
изменением упругих характеристик по толщине и соизмеримыми значениями
модулей упругости и сдвига в каждом слое. Это гарантирует малость
деформаций поперечного сдвига по сравнению с мембранными и, как
следствие, возможность пренебрежения ими.
2. Кинематические гипотезы Тимошенко. Этот подход в настоящее
время является наиболее популярным, так как здесь, с одной стороны,
достигнуты наибольшие успехи в плане построения эффективных КЭ
однородных оболочек, с другой стороны — имеется возможность учесть
появление значительных деформаций поперечного сдвига, что весьма
характерно для армированных композитов. Известно множество КЭ
слоистых оболочек, являющихся обобщением соответствующих одно-
однородных элементов. Например, в работах [10, 11, 12, 31, 138, 194,
196, 197] описаны квадратичные треугольные элементы, в [28, 220,
277, 290, 305, 370] представлены четырехугольные 8- и 9-узловые
КЭ изопараметрического типа, подробно описанные в предыдущей
главе.
Применение таких КЭ позволяет получить хорошие результаты
по перемещениям, мембранным и изгибным напряжениям в каждом
слое. С определением поперечных касательных напряжений возникают
определенные сложности [5, 30, 192], связанные с тем, что кинема-
кинематические гипотезы Тимошенко дают постоянные сдвиги по толщине и
кусочно-постоянные сдвигающие напряжения, а точное решение при-
приводит к квадратичному или более сложному закону распределения
этих напряжений в пределах каждого слоя с выполнением условий
непрерывности на межслойных поверхностях. С целью исправления
этого дефекта в [30, 31, 305] предлагается использовать смешанный
функционал Рейсснера с самостоятельным заданием напряжений. Этот
подход устраняет эффект «запирания». В работах [28, 220] пред-
предлагается строить распределение касательных напряжений по схеме,
предложенной в [192], путем интегрирования соотношений упруго-
упругости, что дает квадратичное распределение их по толщине каждого
слоя. В работе [383] используется гибридная схема с заданными
усилиями.
3. Обобщенные гипотезы Тимошенко. Этот вариант предполагает
априорное задание закона изменения поперечных касательных напря-
напряжений по толщине в виде
где jii — функции распределения этих напряжений по поверхност-
поверхностным координатам. Интегрируя соотношения Коши для деформаций
поперечного сдвига, получаем закон распределения тангенциальных
перемещений:
°
262 Гл. 8. Расчет слоистых анизотропных оболочек
где вг = Vitv — b^Uk — угол поворота нормали, Ф^ = /li/G^ — функции
деформаций поперечного сдвига,
9i(z)= \ fdz)dz.
Подставляя эти функции в соотношения для деформаций, полу-
получаем, что мембранные и изгибные деформации тождественно совпа-
совпадают с соответствующими соотношениями теории оболочек, постро-
построенной на основе гипотез Кирхгофа-Лява. Таким образом, при ко™
нечно-элементной реализации здесь возникают все трудности, при-
присущие элементам этого типа, в частности необходимость построе™
ния сложных аппроксимаций класса С^К Это приводит к появле-
появлению большого числа степеней свободы. Примеры подобных КЭ опи-
саны в [183-185, 190, 191, 193]. Следует заметить, что значительное
усложнение решения задач такими элементами по сравнению с КЭ
типа Тимошенко неадекватно получаемому при этом уточнению ре-
результата.
4. Высокоточное разложение по толщине. В этом случае пере-
перемещения по толщине представляются в виде полиномиального раз-
разложения с удержанием слагаемых более высоких степеней по срав-
сравнению с разложением Тимошенко. Следствием этого является уве-
увеличение числа неизвестных функций, что приводит к алгебраиче-
алгебраическим задачам большей размерности при весьма скромных сетках
КЭ. Очевидно, что это оправдано лишь при расчете весьма тол-
толстых пластин и оболочек. Некоторые элементы такого типа описаны
в [178, 393].
К этому же классу следует отнести те теории оболочек, в которых
число неизвестных зависит от числа слоев (монографии Болотина В. В.,
Новичкова Ю. Н. [23], Григолюка Э.И., Куликова Г.М. [95], работы
Паймушина В.Н. [171, 173]). Как правило, они построены на основе
гипотезы ломаной линии для всего пакета и широко распространены
при расчете трехслойных оболочек [96, 121, 238].
Резюмируя этот краткий обзор известных КЭ слоистых обо™
лочек, можно утверждать, что наиболее эффективной схемой
расчета тонких многослойных оболочек с умеренным градиентом
упругих характеристик по толщине является схема Тимошенко
(разумеется, что это относится только к применению МКЭ).
Дополнительным аргументом в пользу выбора именно этой схемы
является наличие разработанного сдвигового КЭ произвольной
однородной оболочки, подробно описанного в §§3.2-3.4 и §5.3,
который демонстрирует хорошую точность на весьма редких
сетках. Обобщение этого элемента на случай слоистых оболочек
и будет представлено в двух последующих параграфах настоящей
главы.
§8.2. Построение матрицы жесткости слоистого элемента 263
§8.2. Построение матрицы жесткости
слоистого элемента
Будем считать справедливыми следующие гипотезы.
1. Кинематические гипотезы Тимошенко о характере распределения
перемещений по толщине в виде C.2.1). Следствием этого будет линей-
линейное распределение деформаций в эквидистантных плоскостях C.4.6)
и постоянные значения деформаций поперечного сдвига.
2. Каждый слой является ортотропной оболочкой, и в осях ортотро-
пии а, C соотношения упругости имеют вид
Ер ( , (8.2.1)
(?/3/3 + №?)
Основное отличие настоящего многослойного элемента от описан-
описанного в §§3.2-3.4 и в гл.5 однослойного состоит в процедуре вы-
вычисления интеграла по толщине функционала потенциальной энергии
деформации в каждой квадратурной точке.
Характерной особенностью здесь является ориентация компонент
напряжений и деформаций вдоль локальной декартовой системы коор-
координат х1, yf, z' с ортами pi, p2, рз- Если предположить, что плоскость
ортотропии а, C коллинеарна плоскости xf, у' (рис. 8.2.1), то справед-
справедливы следующие соотношения:
}, (8.2.2)
где
1 ZI \ ( T*'J7i } , (8.2.3)
Ац = Еа cos4 Ф + Ер sin4 Ф + 2 (Eafi\2 + 2Gn) sin2 Ф cos2 Ф,
A22 = ^« sin4 Ф + Ep cos4 Ф + 2 (Ea/ii2 + 2Gi2) sin2 Ф cos2 Ф,
A12 = A2i = Eaiii2 ±[Еа + Ер^2 (Eafii2 + 2Gi2)] x
x sin2 Ф cos2 Ф,
A13 = A3i = [Ea cos2 ^ -Ер sin2 ^ ^(Eafil2 ]
x sin Ф cos Ф,
(8.2.4)
264
Гл. 8. Расчет слоистых анизотропных оболочек
А23 = А32 = [Еа sin2 Ф - Ер cos2 Ф
2G
\2) с
x sin Ф cos Ф,
(8.2.4)
В22 = G13 sin2 Ф + ^23 cos2 Ф, (8.2.5)
Bi2 = B21 = (G13 - C23) COS Ф Sin Ф.
Рис. 8.2.1
Считаем, что соотношения (8.2.4), (8.2.5) определяются для каждо-
каждого слоя самостоятельно и от слоя к слою меняются. Это может быть
как по причине различных значений модулей упругости в каждом слое,
так и вследствие переменности угла ортотропии Ф. Таким образом, для
каждого слоя справедливы соотношения
KI=[Afc]
W}=[Bfe]{7'},
(8.2.6)
где к — номер слоя, h — толщина, (к < С < Ск+и (к — безразмерные
поперечные координаты поверхностей раздела слоев ((\ = — 1, ?n+i =
= +1, п — число слоев).
Подставляя (8.2.6) в выражение для интеграла потенциальной энер-
энергии деформации типа C.4.10), получим
-I
= wf
De De
{'Л
5.2.7)
§8.2. Построение матрицы жесткости слоистого элемента 265
5.2..
" 12 t^^ns/e+J
\fc=l
Связь деформаций {е;}, {х;}? {jf} c узловыми перемещениями
определяется соотношениями C.4.3) и E.3.16), что обеспечивает ми-
минимальную погрешность аппроксимации деформаций (см. §5.3). При
численном интегрировании по поверхностным координатам использу-
используется квадратурная формула Гаусса-Лежандра порядка 3x3.
В соотношениях (8.2.4), (8.2.5), (8.2.8) фигурируют значения углов
ортотропии Ф^ и координат межслойных поверхностей (^ в каждой
квадратурной точке в виде самостоятельных величин. Это дает воз-
возможность обеспечить их переменность в пределах элемента путем
определения
з
г,3 = \
(8.2.9)
з
г, 3 = 1
В результате получаем расчетную схему, которая обеспечивает
непрерывное изменение геометрических и физико-механических пара-
параметров по всей поверхности оболочки. Исходной информацией для
построения матрицы жесткости слоистого КЭ является задание
а) для всего элемента:
— числа слоев,
— модулей упругости каждого слоя;
б) в каждом узле:
— векторов г, ei,e2, п,
— толщины всей оболочки h,
— углов ортотропии всех слоев Ф^,
— относительных толщин всех слоев (k+i — (к-
266
Гл. 8. Расчет слоистых анизотропных оболочек
Для определения границ применимости описанной выше модели от™
носительно геометрических размеров и различных жесткостных харак-
характеристик слоев проводилось сравнение конечно-элементного решения
задачи изгиба трехслойной квадратной шарнирно-опертой пластины
под синусоидальной нагрузкой с точным решением Л. Э. Брюккера [25].
В табл. 8.1 представлена погрешность прогиба Sw = (г^кэ — wt) /wt x
х 100%, полученная на сетке 2x2 для 1/4 пластины при различных
значениях отношений Е1/Е2 и a/h. При этом принималось, что мате™
риалы слоев ортотропны, причем Е% = Е\, и толщины их связаны соот-
соотношением h\ = /13 = 0,5/^2- Аналогичная погрешность для нормальных
напряжений ахх = ауу, действующих в центре на лицевой поверхности
под нагрузкой, представлена в табл. 8.2.
Таблица 8.1
Е}/Е2
1
10
100
a/h
-1,
-2,
-12
= 50
2%
5%
,8%
a/h = 20
-1,3%
-7,7%
-45,0%
a/h
-1,
-21
-73
= 10
0%
,4%
,8%
a/h = 5
-1,0%
-46,4%
-88,8%
Таблица 8.2
Ei/E2
1
10
100
a/h = 50
3,2%
3,0%
0,2%
a/h = 20
3,0%
1,3%
-12,7%
a/h = 10
2,5%
-3,8%
-38,4%
a/h = 5
0,1%
-20,8%
-77,0%
Анализ представленных в табл. 8.1 и 8.2 результатов приводит к
выводу о том, что область применимости настоящей схемы по напря-
напряжениям шире, чем по перемещениям. С другой стороны, напряжения
вычисляются по перемещениям. Чтобы объяснить это противоречие,
следует проанализировать, какие перемещения участвуют в вычисле™
нии тех или иных напряжений.
В описанной выше задаче хорошо определяются напряжения <тж/ж/,
Gy'y'y Tx'y'i а так как они зависят от углов поворота 6^, то, следова-
следовательно, эти углы тоже весьма точны. Напряжения поперечного сдви-
сдвига tX'Z', Ty'Z', которые вышеизложенной схемой качественно неверно
описываются, зависят от углов поворота и прогиба. Таким образом,
можно сделать вывод, что появление излишней ошибки в w связано с
некорректным описанием напряжений поперечного сдвига. Численное
подтверждение этого вывода можно найти в работах [28, 220], где по-
§8.2. Построение матрицы жесткости слоистого элемента 267
казано, что вывод коэффициентов поперечного сдвига (коэффициентов
Файлона) существенно уточняет поле прогибов.
В настоящей работе будем использовать методику построения мо-
модифицированной матрицы жесткости поперечных сдвигов, описанную
в работах [5, 30,192]. Суть ее состоит во введении вместо (8.2.6) более
сложного закона изменения напряжений {т;} по толщине в виде
К} = [Л(С)]{Ф'}, (8.2.10)
где lfk(()} — диагональная матрица с функциями Дд(С)> /fc,2(C) на
диагонали, которые характеризуют распределение напряжений tx>7j,
ryfZf по толщине в пределах fc-ro слоя. В зависимости от вида этих
функций вектор {Ф7} может быть либо вектором обобщенных дефор-
деформаций поперечного сдвига, либо вектором перерезывающих сил.
Из условия минимума функционала Рейсснера вида
+1
(Of ( [Щ1] {г (С)} - W} )d( = 0 (8.2.11)
-1
получаем связь между вектором {Ф;} и деформациями {7;}:
W}=[Srl[R]W}, (8.2.12)
где
Ck t (8.2.13)
k=\
Далее в интеграл (8.2.7) вместо напряжений {т;} (8.2.6) подстав-
подставляем напряжения {т; (()} (8.2.10) и получаем
+ 1
f (Of W} d( = {if Щ] {SY} , (8.2.14)
-1
где [D*] — модифицированная матрица жесткости поперечного сдвига,
для которой справедливо выражение
[D;] = [R]T[S]-l[R]. (8.2.15)
Эффективность подобной схемы в значительной мере зависит от
выбора функций fk,i(O- Необходимо, чтобы они были не менее чем
268
Гл. 8. Расчет слоистых анизотропных оболочек
квадратичными полиномами, учитывали различие жесткостей слоев,
обеспечивали непрерывность этих напряжений на внутренних меж™
слойных поверхностях и обращались в нуль на лицевых поверхностях.
В настоящей работе эти функции принимаются в виде
С
5.2.16)
-1
где Cf = А^ + А^2 + А^3, А^ — коэффициенты матриц упругости
k-ro слоя (8.2.4). Подобная структура вытекает из анализа однородных
уравнений равновесия в предположении одного порядка векторов:
дх1
I ду' J
5.2.17)
Параметры i\, i^ определяются из условий равенства нулю функции
fk,i (С) на верхней лицевой поверхности, что дает
5.2.18)
к=\
к=\
После интегрирования (8.2.16) получаем для функций fk,i(C) сле™
дующее выражение:
к-\
m=\
Для оценки эффективности этой методики модификаций модулей
сдвига приведем решение по этой схеме вышеописанной задачи об из-
изгибе трехслойной пластины под синусоидальной нагрузкой. В табл. 8.3
представлены погрешности для прогиба, аналогичные табл. 8.1. Значе-
Значения напряжений ах'Х', оуу/, тХ'У> практически остались те же, что и в
табл. 8.2. Сравнивая данные в табл. 8.1 и 8.3, видим, что область при-
применимости по перемещениям и напряжениям совпала, что свидетель-
свидетельствует о целесообразности применения модификации жесткости сдвига
при расчете пластин средней толщины и при больших различиях в
жесткостях слоев.
Для проверки точности в случае анизотропной структуры мате-
материала проводилось решение аналогичной задачи, в которой каждый
§8.2. Построение матрицы жесткости слоистого элемента
269
Таблица 8.3
Ei/E2
1
10
100
a/ft = 50
-1,2%
-1,5%
-1,8%
a/ft = 20
-1,3%
-1,3%
-1,0%
a/ft = 10
0,0%
-0,7%
-5,4%
a/ft = 5
2,4%
0,1%
34,0%
слой представляет собой однонаправленный композит со следующими
механическими характеристиками:
Ei = 172 • 103 МПа, Е2 = 6,9 • 103 МПа,
G23 = 1,38 • 103 МПа, Gi2 = Gi3 = 3,45 • 103 МПа, /ii2 = 0,01.
(8.2.20)
Рассматривалось два варианта укладки слоев: первый — трехслойная
с углами: Ф = 0°, 90°, 0°, и толщинами: ft/4, ft/2, ft/4; вторая —
девятислойная с углами: Ф = 0°, 90°, 0°, 90°, 0°, 90°, 0°, 90°, 0°,
и толщинами: ft/10, ft/8, ft/10, ft/8, ft/10, ft/8, ft/10, ft/8, ft/10.
В табл. 8.4, 8.5 представлены безразмерные величины
4 / 7 \ 2
WL
w =
qoh
qo
(8.2.21)
Q =
12
где go — интенсивность поперечной нагрузки, a — линейный размер
пластины, полученные на сетке 4x4 для 1/4 пластины при различных
отношениях a/ft (табл. 8.4 для трехслойного пакета, 8.5 — девятислой™
ного).
Для сравнения приведено точное решение Пагано [166] для трех-
трехслойного пакета и два конечно-элементных решения на той же сетке
из работ [138, 358].
Для иллюстрации возможности разработанной схемы расчета
неплоских объектов при различных углах армирования приведем ре-
решение задачи о деформировании стеклопластиковой шарнирно-опертой
цилиндрической оболочки под внутренним давлением со следующими
параметрами [7]:
Ех =2,15- 105
кГ
CMZ
G12 =0,21 • 105
кГ
Е2 = 1,23'
105
кГ
CMZ
(8.2.22)
CM'
•2'
В табл. 8.6 представлены значения максимального безразмерного
прогиба w = 20w/R для различных углов ориентации материала при
270
Гл. 8. Расчет слоистых анизотропных оболочек
Таблица 8.4
a/h
100
20
10
4
Тип
решения
(сетка КЭ)
4x4
[166]
[358]
4x4
[166]
[358]
4x4
[166]
[358]
[138]
4x4
[166]
W*
f a a h\
\Т 2' 2у
0,997
1,008
1,003
1,170
1,190
1,110
1,710
1,710
1,450
2,010
4,760
4,490
fa a h\
\2y2J2J
0,545
0,539
0,566
0,537
0,543
0,557
0,534
0,559
0,532
0,495
0,432
0,684
fa a h\
V2'2'4j
0,274
0,271
0,284
0,312
0,309
0,307
0,405
0,403
0,307
0,674
0,666
N)
0,0219
0,0214
0,0223
0,0231
0,0230
0,0231
0,0260
0,0275
0,0350
0,0345
0,0458
Таблица 8.5
a/h
100
20
10
4
Тип
решения
(сетка КЭ)
4x4
[166]
4x4
[166]
4x4
[166]
4x4
[166]
ш*
fa a h\
\2J2J2J
0,995
1,005
1,12
1,13
1,51
1,51
4,18
4,08
^х
fa a h\
\2y2J2J
0,545
0,539
0,538
0,541
0,525
0,551
0,496
0,649
al
fa a h\
\2'ГА)
0,437
0,431
0,445
0,444
0,460
0,477
0,494
0,612
Txy
N)
0,0219
0,0213
0,0219
0,0218
0,0221
0,0233
0,0223
0,0328
использовании оболочки двух и трех КЭ по длине. По окружности
задавался один элемент с наложением условия периодичности поля
перемещения. Также приведены результаты работы [7].
§8.3. Вычисление напряжений поперечного сдвига
271
Таблица 8.6
ф
[7]
2 КЭ
3 КЭ
0°
0,0162
0,0163
0,0163
30°
0,0269
0,0271
0,0269
60°
0,0234
0,0238
0,0235
90°
0,0093
0,00934
0,00931
§ 8.3. Вычисление напряжений
поперечного сдвига
Главный недостаток описанной выше схемы расчета многослойной
оболочки состоит в неточном представлении напряжений поперечного
сдвига. Поэтому в настоящем параграфе опишем процедуру построения
этих напряжений, основанную на интегрировании уравнений равнове-
равновесия, в которых напряжения <тж/ж/, (ту'у', тх'у> предполагаются известны-
известными и берутся из прямого расчета.
Будем считать для каждого слоя справедливыми уравнения равно™
весия в виде
д / д ,
д ,
(8.3.1)
в которых напряжения обжатия az?z' полагаются равными нулю и вве-
введены обозначения
= Р\О~х
J.3.2)
Введем вдоль толщины локальную координату ( (—1 $С ( ^ +1), с ис-
использованием которой границы между слоями задаются значениями ?&,
совпадающими с аналогичными величинами предыдущего параграфа.
Справедливы соотношения
2 д
5.3.3)
Разрешающие уравнения получим из (8.3.1) путем интегрирования
их по ( в пределах от Ск до Cfc+i сначала просто, а затем предвари-
предварительно умножив на С — (^. В результате получим уравнения равновесия
сил и моментов к-то слоя. Затем, умножив эти уравнения на рь Р2>
272 Гл. 8. Расчет слоистых анизотропных оболочек
получим скалярные уравнения, которые в предположении отсутствия
массовых сил в касательной плоскости имеют вид
д
= Ак
+
oxf oyf
= Afe —if- +
^fe / Tk+\ _ Tfe \_ 2 f ^/7/dC + pj . ^Pl [ Тж,7/ (С _
Cfc Cfc
Cfc Cfc
Cfc
где
(8.3.5)
§8.3. Вычисление напряжений поперечного сдвига 273
При выводе этих уравнений предполагаются справедливыми соотноше-
соотношения
ddx' doxtxt д(ту/ дтх'У'
Pl ' дх' ~ дх' ' Pl ' ду' ~ ду' '
(8.3.6)
д(тх' дтх<у> day' д
Р2 ' о , = п , , Р2 * о . =
Для искомых напряжений txiz>, Ty>zi введем квадратичную аппрок-
аппроксимацию по толщине в пределах каждого слоя в виде
где
tx,z, = rl,z,N\ (С) + Tkx+)Nl (С) + r^z,Nl (С),
(8.3.7)
V*' = <'z^\ (С) + ^iV* (С) + t**z,NI (С),
@ = -±- (a+i - с). ni @ = ±- (с - а),
(8.3.8)
^ (О = ту (Ск+1 - 0 (с - а) •
Подставляя эти аппроксимации (8.3.7) в уравнения (8.3.4), получим
разрешающую систему уравнений в виде
ткх,г, (-1 + b,tf,fe) +
+ тк+! A + ьхн1)
(-1 + ЬАНк)
дх' ду>
biHk) = -\Ак (^f + ^.\ , (8.3.9)
г! A + biH) = -\
274 Гл. 8. Расчет слоистых анизотропных оболочек
k I тгк г к | г. тук \ < к ь тук
Tx>z
т±,Ъ2Щ
*
;*, (-Я3*
h Л^ I дтк, / ddk, , \
— ^l^zk. I ж ^ i у у I
2 12 ^ 9z' дг/' J '
где обозначено
ft dps ft <9рз
(8.3.10)
O3 = ~~P2 * > O4 = ~~P2 * j
2 dxf 2 <9y;
fff = J iV* (C) dC, Д? = I ^ @ (C - &) dQ. (8.3.11)
Если составить подобные уравнения для каждого слоя к = 1, 2,..., п
и учесть, что значения r\,z,, Ty,z,, ..., тх,^}, тп^} являются известными
величинами как значения напряжений на лицевых поверхностях, то
получим An уравнений для определения An — 2 неизвестных. Для того
чтобы получить замкнутую систему, поступаем следующим образом.
Для двух крайних слоев вводим по два параметра: Рх,, Ру, Рх,, Р™,
которые добавляем в первые два уравнения системы (8.3.9) при к = 1
и к = п. Их можно трактовать как ошибку в значениях производных
от axtxt, (Jyfyf, тх'у>, что вполне правомочно, так как эти величины вы-
вычисляются приближенно. Выбор крайних слоев объясняется тем, что в
этих слоях напряжения ах>х>, оу^/, тХ'У> максимальны, следовательно,
и ошибки в них тоже.
§8.3. Вычисление напряжений поперечного сдвига 275
Далее составляем два уравнения вида
1
{rf}d(= [я;] G')> (8.з л 2)
-1
которые обеспечивают уравновешенность построенных напряжений и
полученных из расчета перерезывающих сил. Подставляя в (8.3.12)
аппроксимации (8.3.7) с учетом (8.3.11), получим уравнения
тк+}Нк + r*xkz,Hk) = Qx,,
2
к=\
(8.3.13)
Е (г^я? + т^Щ + r^Hl) = Qy
к=\
В результате получаем замкнутую систему из An + 2 уравнений для
определения 4п + 2 неизвестных.
Точность вычисления касательных напряжений по этой схеме в
значительной степени зависит от процедуры построения производных
от мембранных и изгибных напряжений. В настоящей работе эти
производные вычисляются следующим образом:
а) в 9 узлах вычисляются значения ov>T/, стУ'У', тх>У' на основе
аппроксимации деформаций, используемых при построении КЭ (см.
§ 8.3), исключающие явление «запирания»;
б) по этим значениям строится биквадратичная аппроксимация этих
напряжений в пределах КЭ;
в) в точках ?, г/ = ±1/\/3 вычисляются производные от ах>х>, ®у>у',
тХ'уч перерезывающие силы [D*] G) и строится система уравнений
(8.3.8), (8.3.12), из которой определяются искомые r^,z,, r^,z,\
г) по этим значениям строятся билинейные аппроксимации каса-
касательных напряжений, по которым определяются узловые величины
напряжений t?,z,, Ty,z,.
Анализ величин Ъг (8.3.9) свидетельствует о том, что по физическо™
му смыслу это суть отношения толщины h к радиусам кривизн Rik.
Для плоских КЭ они равны нулю, и связанная система (8.3.8), (8.3.12)
распадается на независимые соотношения типа рекуррентных. В этом
случае можно построить явные выражения для значений напряжений
Txfzf> Ty'z'- Проиллюстрируем это на примере напряжений t?,z,.
Если обозначить
(8.3.14)
276
Гл. 8. Расчет слоистых анизотропных оболочек
и учесть, что
Як ттк к jjk л /о о 1 с\
1 — ^2 — , -lIq — — ZA/g, ([C3.i3.10J
то система (8.3.8), (8.3.12) для напряжений rx,z, будет иметь вид
а,
1 *i
3V
n-l
к=2
Решая эти уравнения, получим
к=\ к=2
к-\
га=1
5.3.16)
^fc+1 _ \ ^ ф pi рп _ pi
х'z' — / ^m f-x1'1 х' — х'
m=\ k=\
Выражения для напряжений Ty,z, будут иметь аналогичный вид,
необходимо лишь заменить соотношения (8.3.13).
В плане реализации эта схема является постпроцессорной проце-
процедурой, которая на основании полученных по прямому расчету переме-
перемещений определяет распределение поперечных напряжений по толщине.
Для иллюстрации точности вычисления напряжений приведем решение
тестовых задач.
1. Трехслойная перекрестно армированная углепластиковая балка,
шарнирно опертая по краям, находящаяся под действием синусоидаль-
синусоидальной нагрузки.
Ее параметры:
до = 0,6895 МПа, L = 24 м, Ъ = 1 м, h = 2,4 м,
Е{ = 1,724 • 105 МПа, Е2 = 6895 МПа,
(8.3.17)
2s = 1379 МПа, Gl2 = Gi3 = 3448 МПа, щ2 = 0,25.
§8.3. Вычисление напряжений поперечного сдвига
277
L
Рис. 8.3.1
/г/3
/г/3
/г/3
На рис. 8.3.2 представлено распределение нормальных напряжений
по высоте балки в середине пролета. Сплошная линия — точное ре-
шение задачи теории упругости, пунктир — решение МКЭ из [194],
точками отмечены результаты, полученные по настоящей схеме с ис™
пользованием 4 КЭ для половины балки. На рис. 8.3.3 представлены
аналогичные кривые для поперечных касательных напряжений на краю
балки.
Видно, что нормальные напряжения практически совпадают с ре-
решением [194], которое тоже получено с помощью КЭ типа Тимошенко,
а поперечные сдвиговые напряжения более близки к решению теории
упругости.
z
/г/6
/г/6
h /9
^^
^80 -^
•
i
0 0
Рис. 8.3.2
у i
40 а., МП
a
Z
/г/6
-/г/6
-A/2(
-
) 2
Рис.
i
40
8.3.3
• i
i
0, МПа
2. Перекрестно армированная двухслойная цилиндрическая оболоч-
оболочка, один из торцов которой жестко закреплен, а другой перемещается
на заданное расстояние А. Параметры этой задачи по данным работы
278
Гл. 8. Расчет слоистых анизотропных оболочек
z h
h/2
25
О а, МПа
25 а, МПа
Рис. 8.3.4
Рис. 8.3.5
[140] после приведения по схеме [149] следующие:
Ех = 2,117 • 105 МПа, Е2 = 7,765 • 103 МПа,
G23 = 2,612 • 103 МПа, Gl2 = Gn = 3,87 • 103 МПа,
/^12 = 0,0099, L = 0,1m, ft = 2,4 м,
Ф = ±30°, Д = 0,1м, А = 0,001м.
(8.3.18)
На рис. 8.3.4 и 8.3.5 изображены эпюры окружных и осевых по-
поперечных касательных напряжений на расстоянии 1 см от защемле-
защемления. Сплошные кривые — данные работы [140], точками отмечены
настоящие результаты для случая трех КЭ по длине и одного КЭ по
окружности с наложением условий периодичности на прямолинейных
кромках.
Таблица 8.7
а
h
100
20
10
4
Тип решения
(сетка КЭ)
4x4
[166]
4x4
[166]
4x4
[166]
4x4
[166]
(о|о)
0,344
0,339
0,335
0,328
0,313
0,301
0,250
0,222
(f.o.o)
0,139
0,139
0,155
0,156
0,198
0,196
0,320
0,292
§8.3. Вычисление напряжений поперечного сдвига
279
Таблица 8.?
а
h
100
20
10
4
Тип решения
(сетка КЭ)
4x4
[166]
4x4
[166]
4x4
[166]
4x4
[166]
Txz
04°)
0,260
0,259
0,257
0,255
0,252
0,247
0,239
0,223
(fto)
0,219
0,219
0,222
0,221
0,230
0,226
0,245
0,225
3. Задача из §8.2 об изгибе шарнирно опертой многослойной
квадратной плиты из однонаправленного композита под синусоидаль-
синусоидальной нагрузкой. В табл. 8.7 и 8.7 представлены значения попереч-
поперечных касательных напряжений, полученные по предложенной схеме
на основе результатов табл. 8.4 и 8.5, в сравнении с точным ре-
решением.
Глава 9
РАСЧЕТ ТРЕХСЛОЙНЫХ ОБОЛОЧЕК
С ЛЕГКИМ ЗАПОЛНИТЕЛЕМ
Изложенная в предыдущих разделах конечно-элементная модель
многослойной оболочки хорошо описывает реальное напряженно-
деформированное состояние лишь при небольших (на один-два
порядка) отличиях механических характеристик каждого слоя. При
большом различии необходимо учитывать нелинейность распределения
перемещений по толщине всего пакета. Пример построения КЭ
трехслойной оболочки с мягким заполнителем и учетом его обжатия
приводится в настоящей главе.
§9.1. Основные соотношении
В основу предлагаемой математической модели положены следую-
следующие предположения:
а) несущие слои считаются оболочками типа Тимошенко, и для
их моделирования используется конечно-элементная модель, описанная
в предыдущей главе;
б) заполнитель предполагается легким, т. е. ненулевыми в нем счи-
считаются лишь напряжения поперечного сдвига и обжатие.
Структура трехслойного элемента изображена на рис. 9.1.1, факти-
фактически он состоит из трех КЭ: нижнего и верхнего несущих слоев и
заполнителя. Исходная информация основана на значениях радиус-век-
радиус-вектора точки срединной поверхности заполнителя г и тройки векторов еь
в2, п, которая считается одинаковой для всех слоев. Радиус-векторы
срединных поверхностей нижнего и верхнего несущих слоев определя-
определяются следующим образом:
ri =r^ -(/i3 + fti)n, г2 = г + - (/i3 + fti)n. (9.1.1)
Далее эти векторы фигурируют самостоятельно при построении
матриц жесткости несущих слоев. Сама процедура построения этих
матриц подробно описана в предыдущей главе и здесь не приводится.
Схема построения матрицы жесткости заполнителя основана на
численном интегрировании по координатам ?, rj и аналитическом по (.
В каждой квадратурной точке вводится самостоятельная декартова
§9.1. Основные соотношения
281
Рис. 9.1.1
система координат xf, yf, z' с ортами рь р2, рз, из которых рз направ-
направлен по толщине. Таким образом, достаточно выписать разрешающие
соотношения в системе х!, yf, z1 и построить алгоритм вычисления
подынтегрального (по ?, if) выражения в функционале энергии. Легко
заметить, что подобная схема была реализована в ранее описанных КЭ
настоящей и предыдущих глав.
Для заполнителя вводим предположения
х'у1
Обозначим
Из уравнения равновесия
drZ'X' ,
= 0
дх ду dz
получаем структурное выражение для напряжений обжатия:
°z>z> =Ci- Bzf,
где
В =
Из соотношений упругости
dz'
Ty'zf = Gf
дх' ду''
(9.1.2)
(9.1.3)
(9.1.4)
(9.1.5)
(9.1.6)
dz-
dvz>
dyf
дх1
(9.1.7)
282 Гл. 9. Расчет трехслойных оболочек с легким заполнителем
Для перемещений получим
дв
Z'?J
Если через vx, , vyl , vz, обозначить перемещения точек заполнителя
на нижней лицевой поверхности, а через vxt , v , , vz, — верхней, то
после несложных преобразований из (9.1.7) и (9.1.8) получим
-Bz', (9.1.9)
h (dv^ dv{z7r
G' M1 2 дх' дх' ) 12 Ez дх
h-л , Ы I dv)t' dv[,\ hi дВ
=3 ;
\2Ezdyr
Выражение для потенциальной энергии деформации заполнителя
после интегрирования по zf в пределах от —/гз/2 до Лз/2 будет иметь
вид
Щ
(9.1.10)
Условия сопряжения заполнителя с несущими слоями будем учиты-
учитывать следующим образом:
а) для нормальных перемещений жестко навязываем
= Рз-
Ч z J
(9.1.11)
где и^, 0^ — вектор перемещений и вектор углов поворота нижнего
несущего слоя, и^, 6^ ^ — верхнего;
§9.1. Основные соотношения
283
б) для касательных перемещений используем обобщенный вариаци-
вариационный принцип [167, 168], который приводит к модификации функци-
функционала (9.1.10) к виду
V? =
41 \их' их' * °х' их' ) >
dS, (9.1.12)
где vx, , v , — касательные перемещения нижнего несущего слоя на
B) B)
поверхности его раздела с заполнителем, гг, , гт, — аналогичные
компоненты для верхнего несущего слоя.
Если учесть, что
= Р1
(9.1.13)
и справедливы соотношения (9.1.9) и (9.1.11), то для функционала
(9.1.12) получим выражение
К* = V3
Л'З /2 Л-3 /2 ,
qiPs •
dx' ' 2 dx'
+ ЧгРз •
,дВ ,9
+q
Я) й2эеBЛ
т1 2 дхг I
2 a
5. (9.1.14)
В этом выражении возможны упрощения. Для этого воспользуемся
следующим преобразованием, которое справедливо для всей области:
284
Гл. 9. Расчет трехслойных оболочек с легким заполнителем
дВ ,дВ
В2 dS + ф В [q[ cos {их1) + qf2 cos {vy')\ dL, (9.1.15)
где i/ — внешняя нормаль к контуру. Теперь, подставляя в (9.1.14)
выражение (9.1.10), с учетом (9.1.11) и (9.1.15) получим окончательное
выражение для функционала:
,2 Л1 2
[q', cos (i/ж') + q^ cos (vy')\ dL+
2/13
. (9.1.16)
Следует заметить, что построенная математическая модель
совпадает с моделью, описанной в [167]. Отличие заключается
лишь в том, что в [167] используются криволинейные гауссовы
координаты и учитываются нелинейные слагаемые для сред-
среднего изгиба. Настоящий вариант основан на соотношениях в
декартовых координатах и целиком ориентирован на применение
МКЭ.
§9.2. Конечно-элементная реализация 285
§9.2. Конечно-элементнам реализация
Обозначим через I q\\ \ узловые перемещения нижнего несущего
слоя, тогда для его потенциальной энергии деформации будет справед-
справедливо выражение
где U^jj — блоки 5x5 матрицы жесткости, построенной по схеме
§5.3. При этом радиус-вектор срединной поверхности этого слоя опре-
определяется по (9.1.1), т.е. имеет место учет переменности метрики по
толщине.
Аналогично, если через I q\\ > обозначить узловые перемещения
точек верхнего несущего слоя, то
i,j=\
При построении матричного аналога функционала (9.1.16) для всех
функций будем использовать 9-узловую биквадратичную аппроксима-
аппроксимацию типа C.3.1), которую запишем в виде
Y,& *>)> п &»?) = Е
(9.2.3)
i=\
г=\
где Ni (^, г]) — функции формы, представляющие собой произведения
одномерных квадратичных полиномов Лежандра. В качестве неизвест-
неизвестных, характеризующих НДС заполнителя, выступают ц и ц —
напряжения поперечного сдвига, ориентированные вдоль векторов ej
и е^ . Напряжения q[, qf2, которые фигурируют в (9.1.16), выражаются
через цУ следующим образом:
{ } t V) ¦ (9.2.4)
i=\
286
Гл. 9. Расчет трехслойных оболочек с легким заполнителем
Подставив (9.2.3) и (9.2.4) с учетом C.2.2) в (9.1.16) и вычислив
все интегралы по квадратурным формулам Гаусса-Лежандра третьего
порядка, получим
jK'F
й'] К1}
Подробно выписать выражения для матриц < в\р > и Ф^- н^ представ-
представляется возможным ввиду их громоздкости, лишь в качестве иллюстра-
иллюстрации приведем матрицу, определяющую первый интеграл в (9.1.16):
[фУ] = Е
771,/1=1
G
GL
4-i -fk
G
У
fi fk
G'x
¦fi -fk
ft + К
С12122
\2E2
дх>
4-i 4-k
dxJ dyf
dyf dyf J
7/ =
(9.2.6)
где ^- = Pi • ev"y, 4"v"b;, ^?v't; — координаты квадратурных точек, o;m,
a;n — весовые множители, А\, В^ — параметры C.3.3).
Для КЭ всего пакета из трех слоев определим вектор узловых
степеней свободы в виде
B)
(9.2.7)
и суммарный функционал запишем в обычном для МКЭ виде
1 9 9
F = -V {Si}T [Кц] {SA - V {рг*}Т {Si} , (9.2.8)
г=\
§9.3. Числовые примеры
287
где
к
A)
¦R)
0)
R)
C)Т
R
C)
К
-B)
'ij
3B)T
в
A)
(9.2.9)
{Р^*} — вектор узловых сил, действующих на несущие слои (вычис-
(вычисляются обычным образом).
Суммарная матрица [К] имеет размер 108 х 108 и состоит из блоков
(9.2.9) размера 12 х 12. По своему физическому смыслу она не может
называться матрицей жесткости, так как уравнения Эйлера функцио-
функционала (9.2.8)
{P*} (9.2.10)
частью своей являются уравнениями равновесия (вариация (9.2.8) по
{q*}), частью — уравнениями совместности деформаций (вариация
(9.2.8) по {U}). Более того, матрица [К], оставаясь симметричной,
теряет свойство положительной определенности, а экстремум функ-
функционала (9.2.8) является точкой минимакса (минимум по перемеще-
перемещениям несущих слоев, максимум по напряжениям заполнителя). Этот
факт следует иметь в виду при решении глобальной системы урав-
уравнений типа (9.2.10), так как популярная схема Холецкого уже не
работает. В настоящей работе для этих целей реализован алгоритм
Ьт1)Ь-факторизации.
Программная реализация этой схемы предусматривает при решении
конкретных задач достаточно широкий набор возможностей. Во-пер-
вых, нагрузки (распределенные и контурные), механические и гео-
геометрические характеристики, граничные условия определяются для
каждого слоя в отдельности. Во-вторых, значения толщин слоев и
нагрузок по поверхности задаются поточечно. Эти два обстоятельства
позволяют формулировать достаточно сложные краевые задачи для
конструкций практически произвольной геометрии и структуры по
толщине.
§ 9.3. Числовые примеры
Первой задачей, на которой проверялась точность разработан-
разработанной схемы, была задача изгиба шарнирно-опертой квадратной пла-
пластины под действием равномерного давления со следующими пара-
параметрами:
hi = h2 = 0,081 см, ft3 = 0,978 см, а = 81,4 см,
кГ
кГ
кГ
кГ кГ кГ
= Е2 = 7 • 105 —«, С3 = 890,7 —^, q = 0,0507 —^,
см^ см^ см^
(9-зл)
288 Гл. 9. Расчет трехслойных оболочек с легким заполнителем
Таблица 9.1
Решение
w, см
кГ
@"хх) (Т
СМ2
кГ
Ж2' см2
1 X 1
0,302
253
208
1,37
2x2
0,285
212
174
1,37
3x3
0,283
206
172
1,38
4x4
0,283
204
172
1,38
[4]
безмо™
мент.
слои
0,283
184
1,31
[4]
экспер.
0,284
—
—
[192]
уточнен,
постан.
0,270
—
—
[192]
классич.
теория
0,254
—
—
где а — размер пластины. Выбор этих параметров обусловлен тем, что
для них есть экспериментальное и теоретическое решения [4, 192].
В табл. 9.1 представлены значения прогиба и нормальных напряжений
на лицевых поверхностях несущего слоя в центре и поперечных каса-
касательных напряжений в заполнителе в середине края, полученные на
различных сетках КЭ для 1/4 части пластины. Видно, что имеет место
быстрая сходимость как по перемещениям, так и по напряжениям,
причем для несущих слоев сходимость сверху, а для заполнителя —
снизу.
Таблица 9.2
lg(l)
1
9
о
а
h
10
5
4
3
10
5
4
3
10
5
4
3
2x2
0,9%
0,8%
1,6%
3,2%
^2,3%
0,5%
2,6%
6,1%
-0,5%
5,2%
7,3%
8,1%
4x4
0,9%
0,8%
1,6%
3,2%
^2,3%
0,9%
2,6%
6,8%
-0,3%
5,9%
8,0%
9,0%
[193]
0,0%
0,3%
0,6%
1,0%
0,1%
0,4%
0,6%
2,0%
0,1%
2,0%
3,0%
46,0%
§9.3. Числовые примеры
289
18 (i)
1
1
2
3
a
Л
10
5
4
3
10
5
4
3
10
5
4
3
2x2
6,3%
5,3%
4,8%
4,4%
3,4%
4,5%
6,4%
7,3%
4,4%
8,8%
10,2%
9,7%
T a 6 j
4x4
2,1%
1,7%
1,3%
0,8%
0,0%
1,1%
2,8%
3,7%
0,4%
5,5%
6,6%
6,4%
i и ц а 9.3
[193]
0,0%
1,4%
1,4%
3,0%
0,0%
0,8%
1,2%
2,0%
0,2%
3,0%
4,0%
46,0%
В табл. 9.2 представлена погрешность прогиба в процентах, полу-
полученная на разных сетках в сравнении с аналогичным решением из
[193]. Погрешность определения нормальных напряжений в центре
пластины на лицевой поверхности того несущего слоя, к которому
приложена нагрузка, представлена в табл. 9.3. В табл. 9.4 приведена
погрешность напряжений поперечного сдвига на краю в середине за-
заполнителя, полученная на сетке 4x4.
Таблица 9.4
\ F* 1
1
2
3
а
Л
1
1
3
= 10
,0%
,6%
,8%
а
Л
0
4
8
= 5
6%
2%
0%
а
Л
1,
6,
10
= 4
4%
2%
,3%
а
Л
3,
10
14
= 3
4%
,2%
,4%
Для определения границ области применимости построенной мо-
модели рассматривалась та же задача, что и в §9.2, а именно: задача
изгиба шарнирно-опертой квадратной трехслойной изотропной плиты
под действием синусоидальной поперечной нагрузки в сравнении с точ™
ным решением Л.Э.Брюккера [25]. Варьировались отношения Е\/Е% и
a/h при заданных отношениях толщин h^/h\ = /13/^2 = 2.
10 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
290 Гл. 9. Расчет трехслойных оболочек с легким заполнителем
Сравнивая эти результаты с аналогичными исследованиями, приве-
приведенными в [192, 193], можно отметить, что построенная модель имеет
область применимости не уже, чем описанные в [192, 193] уточненные
постановки. Что касается точности конечно-элементного решения, то
по скорости сходимости имеем лучшие результаты при практически
одинаковом количестве числа степеней свободы в узле (в [192] их
10, а в [193] — 12). Более того, с точки зрения строгости выполне-
выполнения условий сходимости настоящая схема является строго совместной
с явным представлением СТЦ и «чистого изгиба», чего нельзя сказать
о конечных элементах из [192, 193].
Раздел III
РАСЧЕТ СЛОИСТЫХ ОБОЛОЧЕК
С УЧЕТОМ ГЕОМЕТРИЧЕСКОЙ
И ФИЗИЧЕСКОЙ НЕЛИНЕЙНОСТИ
10*
Глава 10
МОДЕЛИРОВАНИЕ ГЕОМЕТРИЧЕСКИ
И ФИЗИЧЕСКИ НЕЛИНЕЙНОГО
ДЕФОРМИРОВАНИЯ ОБОЛОЧЕК
МАЛОЙ И СРЕДНЕЙ ТОЛЩИНЫ
Особое внимание в последние годы уделяется расчету слоистых
анизотропных конструкций в геометрически нелинейной постановке,
когда прогибы сравнимы с толщиной, а иногда достигают нескольких
толщин. Также актуальны расчеты таких конструкций с позиции фи-
физически нелинейной теории, когда учитываются пластические свойства
материала.
В этой главе приведены основные соотношения нелинейной теории
упругости [144], и с их помощью построены соотношения нелинейной
теории оболочек, выписаны вариационные уравнения принципа воз-
возможных перемещений относительно компонент напряженно-деформи-
напряженно-деформированного состояния или их приращений на каждом шаге нагруже-
ния, изложены некоторые итерационные и шаговые методы решения
нелинейных уравнений, вводится конечно-элементная дискретизация
исследуемой области, формулируется постановка краевой задачи.
§ 10.1. Постановка задачи о геометрически
нелинейном деформировании тела
10.1.1. Основные положении геометрически нелинейной тео-
теории упругости. Введем глобальную декартову систему координат х\,
Х2, жз с ортами ii, i2, I3. Предположим, что исследуемая оболочка
до нагружения занимает область °п (рис. 10.1.1). Произвольная точка
этой области °М имеет координаты ((}х\, °х2, °хз)> тогда радиус-вектор
этой точки можно записать в виде
°р = °xili + °x2h + °x3i3 = %-ij. (ЮЛ Л)
Повторяющиеся индексы означают суммирование.
В результате приложения внешних нагрузок тело, деформируясь,
занимает область FO, точка °М переходит в точку FM, радиус-вектор
которой
Fp = Fx{n + Fx2h + Fx3h = Fxjij. A0.1.2)
§10.1. Постановка задачи о нелинейном деформировании тела 293
Если ввести вектор перемещения точки v,
Fp = °p + v или Fxl = °xl^vl. A01.3)
Декартовы координаты °х\, °Х2, °«^з рассматриваются как переменные,
сохраняемые за этой точкой в процессе деформации, им приписывается
в дальнейшем роль криволинейных лагранжевых координат.
Компоненты тензора деформаций Грина имеют вид
где
д°х,
дуг dvj
%3
-I] '
A0.1.4)
dvk dvk
%3 d°Xj d°Xi' %3 d°Xi d°Xj
— линейная деформация и нелинейные составляющие тензора дефор-
деформаций.
Введем связь между тензорами напряжений и деформаций:
а*а = Cijki Е&/, A0.1.5)
где a*j — компоненты тензора напряжений Пиолы-Кирхгофа, отнесен-
отнесенные к площадкам искривленного в процессе деформирования паралле-
параллелепипеда (рис. 10.1.1).
Сформулируем краевую задачу теории упругости с учетом больших
перемещений. Предположим, что тело находится в равновесии под
действием массовых сил Р, внешних сил Т, приложенных на части
поверхности Sa и при заданных перемещениях на части поверхности
Su, причем S=Su+Sa, т.е.
Т = f на Sa,
Vi = (fi на Su.
A0.1.6)
A0.1.7)
FQ
Рис. 10.1.1
294 Гл. 10. Моделирование нелинейного деформирования оболочек
Запишем принцип виртуальных перемещений:
T-SvdS. A0.1.8)
°о °о
Если первоначальное состояние равновесия предварительно напря-
напряженное, принцип виртуальных работ A.1.14) запишется следующим
образом:
0Q
' Г + °Т) • Sv dS, A0.1.9)
где °Р, °Т — начальные массовые и поверхностные нагрузки, за счет
которых появились начальные напряжения °сг^.
Среди множества подходов, применяемых при конечно-элементных
расчетах оболочек с учетом геометрической нелинейности, следует вы™
делить следующие: а) составление нелинейных уравнений равновесия
относительно первоначальной метрики и их решение с помощью той
или иной итерационной процедуры; б) метод последовательного нагру-
жения, в котором структура разрешающих уравнений принципиально
не меняется, т. е. отсчетная метрика определяется по исходной неде-
формированной поверхности; в) шаговый метод, в котором разрешаю-
разрешающие уравнения на каждом этапе нагружения записываются с учетом
метрики поверхности деформированного состояния.
Основные положения этих подходов для задач теории оболочек,
а также при расчете трехмерных тел изложены в работах [35, 162,
204, 263, 311]. Каждый из этих подходов имеет свои достоин-
достоинства и недостатки, и ни один из них не может считаться универ-
универсальным.
В зависимости от постановки задачи выбирается один из упомяну-
упомянутых выше подходов. При аналитическом задании поверхности оболочки
в исходном состоянии или глобальной численной параметризации по-
поверхности [125, 235] обычно используются подходы а) и б). Примерами
таких работ служат [3, 13, 32, 40, 41, 50-52, 108, 134, 195, 229, 240,
258, 382, 392, 406 и др.].
В последнее время, особенно за рубежом, получили распростране-
распространение изопараметрические конечные элементы оболочек малой и средней
толщины (гл. 3, 5), которые не требуют предварительной параметри-
параметризации поверхности оболочки, так как основаны на представлении обо-
оболочки как трехмерного тела [72]. Проблемам обобщения этой модели
на геометрически и физически нелинейные задачи посвящено большое
количество работ: [130, 211-213, 258, 317, 318, 339, 360, 372, 392,
§10.1. Постановка задачи о нелинейном деформировании тела
295
406]. В рамках такой модели применимы все три подхода. Однако
каждый из них требует решения присущих ему проблем. Например,
первый подход требует аккуратного моделирования больших поворо-
поворотов нормального волокна [130, 256, 359, 382, 406]. Второй и третий
подходы предполагают, что шаги нагружения достаточно малы, что
позволяет ограничиться малыми поворотами при переходе из одного
равновесного состояния в последующее, что значительно упрощает
модель.
10.1.2. Итерационные методы решения уравнений. Поскольку
задачу предполагается решать в перемещениях, вариационное уравне-
уравнение A0.1.8) записывается относительно перемещений, при этом ис-
используются соотношения A0.1.4) и A0.1.5). В итоге
°о
dvm d
Hjkl \ дЧ3
д°хг д°хэ
dvn] с
dvn] dSvn .
P .
« A0.1.10)
°o
Система уравнений A0.1.10) является нелинейной. Чтобы решить ее,
необходимо использовать итерационные методы. Рассмотрим самые
распространенные из них.
Метод простой итерации. Его идея заключается в переносе нели-
нелинейных слагаемых в правую часть уравнения, тогда уравнение A0.1.10)
принимает вид
Р • 5v dU ¦
Т • 6v dS-
°о
°Q
°o
dvm dvm
душ dvm \ i dvm dvm dvm dvm
a d°xj
dU, A0.1.11)
где Sij — компоненты линейной деформации A0.1.4).
На первом шаге решается линейная задача, т. е. интеграл, содер-
содержащий нелинейные члены, считается равным нулю. Полученное при
этом решение V(o) подставляется в правую часть A0.1.11), затем снова
решается линейная задача с уточненной правой частью и определя™
296 Гл. 10. Моделирование нелинейного деформирования оболочек
ются перемещения V(i) и так далее до тех пор, пока не выполнится
условие
l|v(fc) -v(fc_i)|| <5, A0.1.12)
где 8 — заданная погрешность.
Метод простой итерации обладает медленной сходимостью, и его
можно использовать лишь в случаях слабой нелинейности.
Метод Ньютона. Представим систему уравнений A0.1.11) в виде
F(v)=0, A0.1.13)
где
F(v) = IJ}Jcw '** ¦ ** ¦**»**
T-5vdS. A0.1.14)
Идея метода заключается в том, что некоторое приближенное решение
V(^) (B начальном приближении решается линейная задача) уточняется
с помощью замены функции F(v) ее линейной аппроксимацией. Для
этого F(v) раскладывают в ряд Тейлора в окрестности решения v^)
и сохраняют только линейные слагаемые. Тогда уравнение A0.1.13)
заменяется следующим:
F(v(i)) + [J] [v-v(i)] =0, A0.1.15)
д?
где [J] = —(v(i)) ~~ матрица Якоби вектор-функции F, вычисленная
для приближения v^). Решение этого уравнения
v = v(,+ 1)=v(i)-[J-1(vw)]F(v(i)) A0.1.16)
и дает новое приближение для решения уравнения A0.1.13). Вычисле™
ния проводятся до тех пор, пока не выполнится условие A0.1.12).
Метод Ньютона обладает квадратичной сходимостью. Применение
этого метода связано с вычислительными трудностями. Во-первых,
построение линеаризованного оператора [J] на очередной итерации
является непростой задачей. Во-вторых, на каждом шаге нагруже™
ния необходимо решать систему линейных алгебраических уравнений
(СЛАУ) в полном объеме.
Метод Ньютона-Рафсона. Он является модификацией метода
Ньютона. В отличие от метода Ньютона здесь вычисление линеари-
§10.1. Постановка задачи о нелинейном деформировании тела 297
зеванного оператора [J] проводится не на каждой итерации, а через
некоторое их количество:
v(i+i) = v(i) - [J-\v{m))]F(v{i)), A0.1.17)
где [J~lV(m)] ~ обратная матрица Якоби вектор-функции F, вычис-
вычисленной для приближения V(m), причем гп < к.
Существуют модификации этих методов, однако они не получили
широкого распространения при решении задач МКЭ.
10.1.3. Шаговое нагружение. Процесс деформирования предста-
представим в виде последовательности равновесных состояний (рис. 10.1.2)
°О и FQ — области, занимаемые оболочкой соответственно в началь-
начальном и конечном деформированном состояниях, a NQ — произвольное
промежуточное состояние. Действующая нагрузка достигается после-
последовательным догружением на каждом шаге, причем количество шагов
выбирается так, чтобы на каждом из них задача была квазилинейной.
При такой постановке задача сводится к отысканию (N + 1)-го состоя-
состояния при уже определенной геометрии и с накопленными напряжениями
TV-го состояния.
Рис. 10.1.2
Как уже говорилось выше, разрешающие уравнения могут быть
получены на основе двух различных методик. Первая (б) предполага-
предполагает использовать в качестве отсчетной исходную метрику °О. В этом
случае деформации и напряжения записываются относительно системы
координат, связанной с начальным состоянием °О.
Пусть положения произвольной материальной точки тела в областях
°О, Nft и ЛГ+1О обозначены через °М, NM, N+lM соответственно,
и пусть радиус-векторы этих точек равны °р, Np, ЛГ+1 р, а их декартовы
координаты: °Xi, NXi, N+lXi (i = 1,2, 3). Обозначим через ^v и N+lv =
= ^v + v суммарные векторы перемещений в состояниях NQ и iV+1
298 Гл. 10. Моделирование нелинейного деформирования оболочек
соответственно, а через v — приращение вектора перемещений. Тогда
при переходе из состояния NQ в N+lQ имеем
(JV+1V=Wp + v. A0.1.18)
Деформации в состоянии NQ определяются компонентами тензора де-
деформаций Грина Eij A0.1.14), а в состоянии ЛГ+1О они имеют вид
Тогда приращения компонент тензора деформаций Грина имеют вид
dvk , dvk dvk /in 1 9m
1 A0.1.20)
д°хг j
Вариации деформаций вычисляются следующим образом:
2S(EtJ + А^-) = 2<*ДЕу. A0.1.21)
Принцип виртуальных перемещений для состояния Ж+1О записываем
исходя из того, что тело предварительно деформировано и имеет
накопленные напряжения N atj (второй тензор напряжений
Пиолы-Кирхгофа). Тогда
[(Na*{j + Act*,-) SAEij - (P + ДР) • 5v] du -
J
Г f(T + AT)^vd5 = 0, A0.1.22)
где Асг*^ — приращение компонент тензора напряжений Пиолы-Кирх-
гофа, Р и Т — массовые и поверхностные усилия, АР и AT —
приращения соответствующих нагрузок.
Предполагаем, что состояния NQ и ЛГ+1О расположены достаточно
близко друг к другу, чтобы приращения перемещений были малы
dvi
0 «С 1, в то время как суммарные перемещения считаются больши™
О Х>1
dNvt
ми, т.е. Q « 1. Пренебрегаем в вариационном уравнении A0.1.22) и
(У Xj
§10.1. Постановка задачи о нелинейном деформировании тела 299
в соотношениях закона Гука членами более высокого порядка малости.
После линеаризации закон Гука принимает вид
Aa*j = Сг]к1еы, A0.1.23)
где
— линейная часть тензора деформаций.
Преобразуем первое слагаемое в левой части уравнения A0.1.22),
выразив в нем компоненты тензоров деформаций и приращений напря-
напряжений через перемещения, используя закон Гука:
П = (Na*3 + Аа*3) 5АЕгз =
N * х\{х , dNvm\ dvm ( dNvm\ 0vm dvm dvm]
°°\[°j + )+[di+)
+ Tj^ijkl
dNvm\ dvm (- t д^ут\ dv
X
с i г , - lJm\ dvm t f c t dNvm\ dvm , dvm dv
X 0
A0.1.25)
Так как переход от состояния Nft к состоянию Ж+1О реализуется в
области линейной задачи, пренебрегаем подчеркнутым членом в только
что полученном соотношении.
Подставляя A0.1.25) в A0.1.22) и используя обозначение A0.1.24),
получим
1 „ / dvk dvk
J I J %3 %3
41
АР • SvdU + | I AT • EvdS+
P . SvdU + I I T • SvdS - I 1 1 Na*Jel3dU 1 . A0.1.26)
300 Гл. 10. Моделирование нелинейного деформирования оболочек
Выражение
Р • SvdU + Т ¦ SvdS - Na*JetJdU A0.1.27)
JSetJ
<J
должно быть равным нулю в силу равновесия оболочки в состоянии
NQ. Однако пренебрежение членами высшего порядка малости, о ко-
которых говорилось раньше, приводит к тому, что соотношение A0.1.27)
становится неравным нулю, следовательно, для уменьшения накопле-
накопления погрешности его желательно сохранить в правой части уравнения
A0.1.26).
Рассмотрим альтернативный вариант шагового нагружения, в ко-
котором на шаге нагружения используется измененная в соответствии
с деформированной поверхностью метрика (в).
В этом случае приращение деформаций Грина можно записать еле™
дующим образом:
^JV+l Л^+U ЛЛГЛ p>N
p
dNXj
dvt dvj dvfc dvk
x
Приращения AEij образуют модифицированный тензор приращений
деформаций Грина, ец и е** — соответственно линейная и нелинейная
составляющие деформации.
Напряжения в состоянии Nft характеризуются тензором напряже-
напряжений Коши, а приращения напряжений образуют модифицированный
тензор приращений напряжений Пиолы-Кирхгофа.
Рассмотрим в состоянии Nu бесконечно малый прямоугольный па-
раллелепипед, содержащий точку NM (рис. 10.1.3):
NXi = const, Nxt + dNxt = const, г =1,2,3. A0.1.29)
Напряжения, действующие на грани этого прямоугольного параллеле-
параллелепипеда и отнесенные к единичной площади в N~m состоянии, обозна-
обозначим через величины N®ij. Эти напряжения являются компонентами
тензора напряжений Коши. Выделим в состоянии jV+1Q аналогичный
бесконечно малый прямоугольный параллелепипед, содержащий точку
N+l
N+lxt = const, N+lxt + dN+lxt = const, i= 1,2,3. A0.1.30)
Напряжения, действующие на грани этого параллелепипеда и отне-
отнесенные к единичной площади в состоянии iV+1Q, обозначим Ndij +
§10.1. Постановка задачи о нелинейном деформировании тела 301
NQ
Рис. 10.1.3
fj. Приращения Aafj образуют тензоры приращений напряжений
Коши.
Но при переходе из состояния NQ в состояние Ж+1О прямоуголь-
прямоугольный параллелепипед A0.1.30) деформируется (рис. 10.1.4). Напряже-
Напряжения, действующие на грани этого параллелепипеда и отнесенные к из-
вестной единичной площади в состоянии Nft, обозначим Ndij + Асг^-
Приращения Асг^- образуют модифицированный тензор приращений
напряжений Пиолы-Кирхгофа.
^ + АСГ
Цз+Мз-
'ац + Ао-ц
33
%31 + АсТз!/ IT
^^^ / ^12/+ Дсг12
32
22 + Асг22
Рис. 10.1.4
302 Гл. 10. Моделирование нелинейного деформирования оболочек
Принцип виртуальной работы в состоянии Ж+1О запишется в виде
[ [ [ [(Магз + Аагз) 8АЕгз - (Р + АР) • 6v]5Q-
Nn
- I [ (Т + AT) • ?v dS = 0. A0.1.31)
Как и в первом случае, переход от NQ к Ж+1О состоянию реализуется
в области линейной задачи. Поэтому в соотношении A0.1.31) и соот-
соотношениях упругости пренебрегаем членами высшего порядка малости.
Закон Гука после линеаризации принимает вид
Aatj = Cijklskl. A0.1.32)
Рассмотрим первое слагаемое в левой части уравнения A0.1.31):
(магз + Аагз) 5АЕг] = (NatJ + Стеы) х
dvm dvm\\ \N
)) 2 ai
/ дг)к dSvi \ (dSvj dSvi \ N 1 / dvm dvm
\dNxl^dNxk) \dNxt^dNx3)^ °%з72 ^^^^
l- / dVk ¦ бдЩ ^ *l dVm dVm * A0.1.33)
В полученном соотношении пренебрегаем подчеркнутыми слагаемыми,
тогда вариационное уравнение A0.1.31) принимает вид
Ш
AP -5v dU + + I I AT •
Nal38sl3dU \ . A0.1.34)
Nu sa Nu
Как и в первом случае, слагаемое в скобках в левой части уравнения
оставляем для уменьшения накопления погрешности.
§10.2. Методика шагового нагружения многослойной оболочки 303
При решении этого вариационного уравнения мы получаем прира-
приращение вектора перемещений v, а затем определяем компоненты Асг^-
тензора приращений напряжений Пиолы-Кирхгофа.
При переходе от состояния АГ+1О к состоянию Ж+2О найденные
напряжения Пиолы-Кирхгофа (Ndij + ^aij) необходимо пересчитать
к напряжениям Коши N+l(Jij с помощью соотношения [35]:
Aag = ^
(Ш.1.35)
где
De = det [d\ = det
dNxi
dN+lx2 dN+lx3
dNxx dNxi
dN+lx2 dN+lx3
dNX9
dNX9
dNX9
A0.1.36)
Сравнивая изложенные подходы, следует отметить, что с точки
зрения объема вычислений при использовании МКЭ наиболее предпо-
предпочтительным является последний. В этом случае на каждом шаге нагру™
жения в отдельности формулируется система разрешающих уравнений,
в которой фигурируют производные относительно текущей метрики.
Это возможно лишь благодаря тому, что изопараметрический конеч-
конечный элемент не требует высокой точности описания геометрии [61].
Фактически на шаге нагружения ставится задача о предварительно
напряженном деформировании тонкостенной конструкции при задан™
ных приращениях нагрузки. Если эти приращения малы, то задача
становится линейной. Однако такое сочетание в расчетах оболочек
встречается сравнительно редко, что связано с трудностями описания
напряженного состояния при значительных деформациях. Можно от-
отметить лишь работы Ю. В. Скворцова, Х.С.Хазанова [211-213] с опи-
описанием подобной методики.
§ 10.2. Методика шагового нагружения
многослойной оболочки
Описанная в предыдущем параграфе трехмерная постановка задач
геометрически нелинейного деформирования может быть распростра-
распространена на тонкостенные конструкции, состоящие из пластин и оболочек
малой и средней толщины. При этом МКЭ используется на уровне
разбиения исходной конструкции на КЭ, т. е. каждый КЭ оболочки
представляется как трехмерное тело, у которого один из размеров
существенно меньше двух других. Гипотезы, характерные для механи-
304
Гл. 10. Моделирование нелинейного деформирования оболочек
ки деформирования оболочек, вводятся на этапе построения матрицы
жесткости, вектора сил, матрицы геометрической жесткости и других
характеристик. Для дискретизации области будем использовать де-
вятиузловой изопараметрический элемент тонкой оболочки, подробно
описанный для однослойных оболочек в §§3.2-3.4 и §5.3, и для
слоистых оболочек — в гл.8. Геометрия подобного элемента полно™
стью определяется значениями радиус-вектора срединной поверхности
Nr (см. рис. 10.2.1), некоторого единичного вектора ^п, приближенно
совпадающего с нормалью к поверхности оболочки, и толщины h,
заданными в узловых точках.
1 *е2
Рис. 10.2.1
Неизвестными узловыми перемещениями будут компоненты вектора
в виде проекций на орты глобальной системы координат, т. е.
u«=
A0.2.1)
и углы поворота в\ , 0% (всего пять степеней свободы в каждом узле).
Радиус-вектор и вектор приращения перемещений произвольной точки
оболочки через соответствующие векторы для срединной поверхности
оболочки запишутся в виде
A0.2.2)
где
6»2JVe2.
A0.2.3)
§10.2. Методика шагового нагружения многослойной оболочки 305
Переходя в исходном вариационном уравнении A0.1.34) от глобаль-
глобальной системы координат к Nxly Nx2, Nx% (см. §3.2), имеем
dQ =
АР • 5v dU + AT • 5v dSiN4
A0.2.4)
J - - /
m
где P,T — накопленные к (N + 1)-му шагу массовая и поверхностная
нагрузки, АР, AT — их приращения при переходе к (N + 1)-му шагу,
N&ij — накопленные напряжения Коши, Асг^- — компоненты тензора
приращений напряжений Пиолы-Кирхгофа.
Для удобства вычисления интегралов, входящих в уравнение, вы-
выделим в уравнении слагаемые
1
2
J4 = [ [ [( ) f )
A0.2.5)
Вычисление матрицы жесткости Ij подробно описано в §8.2 (ком-
(компоненты тензора приращения напряжений Асг^- соответствуют компо™
нентам тензора напряжений сг^- из §8.2).
Остановимся подробно на вычислении геометрической матрицы
жесткости /2 и невязки {Ц — /з).
Для проведения дальнейших преобразований переходим от скаляр-
скалярной формы записи к векторной:
306 Гл. 10. Моделирование нелинейного деформирования оболочек
A0.2.7)
где
Sl'V2
В I2 присутствуют нелинейные компоненты приращения дефор™
маций. Произведем над ними те же действия, что и над линейной
составляющей деформации (см. §§3.2-3.4).
Запишем нелинейные компоненты деформации в осях Nx\, Nx'2,
NXol
,** 1 dv'k dv'k ,** _ 1 dv'k dv'k
6 11 = 9^Г^^Г^; ?22^9
12 - 7 12
/1AOO\
AU.2.6)
,« _ ,« _ dv'k dv'k . „ ,** _ ,*, _ dv'k dv'k
Ze 13 - 7 13 - „„ / ow / . Ze 23 - 7 23 -
3
Здесь v'\, v'2, v's — проекции вектора перемещений v на орты
2, ^рз, по индексам к идет суммирование.
§10.2. Методика шагового нагружения многослойной оболочки 307
Вводя нелинейные составляющие деформаций в криволинейной си-
системе координат следующим образом:
^ 1 dv dv ^ 1 dv dv
^ 2 д? д?' т 2 дг] дг]'
A0.2.9)
dv dv ^ dv dv ^ dv dv
^ д^ дг]' ^^ д^ д(^' r^ drj д^'
можем записать связь между компонентами тензора деформаций
A0.2.8), A0.2.9) аналогично C.4.3):
{fe;**} = [i?i] {Se**} , {EУ**} = ([Л2] {^7**} + [Дз] {^**}), (Ю.2.10)
где
A0.2.11)
Описанная схема вычислений деформаций предполагает численное
интегрирование по всем трем направлениям. Для многослойных оболо-
оболочек это приводит к излишне трудоемкой расчетной схеме. Это связано
с тем, что при различии механических характеристик слоев возника-
возникает необходимость вычисления подынтегральных выражений уравнения
A0.1.34) хотя бы в одной точке по толщине каждого слоя, а слоев
может быть 5, 10, 20, 30 и более. Поэтому представляется целесо™
образным изначально разложить деформации в ряды по поперечной
координате ( с удержанием «классических слагаемых». В этом случае
удобно использовать ковариантные компоненты деформаций, тем более
что именно их применение позволяет регуляризировать расчетные схе-
схемы для избежания явления заклинивания.
Пусть
** _ ** h ^ ^ _ ^ h ^
2 . m m 2 m (Ю.2.12)
где
* _ 1 ^u 9u ^^ _ 1 ^u 6>u ^ _ 6>u 6>u
^ = 2 ac' W' m = 2^' a^' ^ = ace a^'
308 Гл. 10. Моделирование нелинейного деформирования оболочек
^ _ ди дв ^ _ ди дв
^ д^ д^' 7]V дг] д'Г]'
:) , A0.2.13)
<9и л п^ ди
,о** _ иы п ^о**
= -?-o,iT = 41-o.
Пусть
{бе**} =
A0.2.14)
Если в соотношения A0.2.10) подставить выражения A0.2.12), то
с учетом обозначений A0.2.14) получаем связь между компонентами
деформаций в системе координат Nxly Nx2, Nx% и в криволинейной
системе координат ?, г/, <^:
{} [l} ({} К W».
A0.2.15)
{6-у'**} = [Щ {«7°"} + [Щ {{5е**} + ^)
Введем двойную нумерацию узлов, тогда аппроксимации функций
^г, ^п, и, 0 запишутся в виде биквадратичного полинома E.3.1).
Запишем аппроксимации вариаций нелинейных составляющих. При
этом двойная аппроксимация не вводится, а используются соотноше-
соотношения E.3.1). С учетом этого из A0.2.13) имеем
3 3
m,n=l j=\
3 3
Kv =ЕЕ и(т'П) • 5^'j)H'm (r,) Hn (О Щ (гу) Щ (О ,
m,n=l j=l
3 3
т,п=\ i,j=l
х (Нт (г,) Н'п (О Щ (г,) Н, (О + Н'т (г/) Нп (О Щ (г/) Щ (О) ,
§10.2. Методика шагового нагружения многослойной оболочки 309
3 3
У У
3 3
E E
m,n=l i,j=l
3 3
JZ 51 [u(ro'n) ¦
x (Hm (n) H'n (g) H[ (V) Hj @ + H'm (V) Hn (О Щ (v)
3 3
S70** = У У [u<m-n> • 5e(iJ) + 5u^ ¦ в(т-п)] x
l l
rn,n=l i,j=l
3 3
V V
?n,n=l IJ=\
A0.2.16)
Перепишем эти выражения через вектор узловых перемещений:
з з т
5е*Л = > } \ q^m'n)
m,n=l i,j=\
3 3
)е*1 = У У 1 qtm>n)
m,n=l i,j=\
^|;= Е Ег"
77l,n=l i j—\
+H'm (V) Hn (О Нг (V) Щ (О {SqW } ,
310
Гл. 10. Моделирование нелинейного деформирования оболочек
=Е
rn,n=
3
=Е
3 3
Е
rn,n=l i,j=l
3 3
Е
m,n=\ i,j=l
т'п) Г ^
i]я™fa)я»(оя*fa)
3 3
?> = E E {«(mil!)}T [^'] (я»
rn,n=l i,j=l
+H'm (г,) Нп (О Щ (rj) Щ @ {SqM } ,
si°?r =
m,n=l i,j = l
'П) Y [W
Щ (r,)
3
E
m,n=l i,j=\
= E
T
нп (оя,
A0.2.17)
где {q(^)f = {u\m'n\ 4m'n), 4m'n), ^m'n), 4m'n)} - вектор узло-
вых неизвестных, а компоненты матриц представлены в виде
№] =
0
0
0
(m
(m
21
[j] =
-
0
0
0
,n) (m,n)
e12
,n) (m,n)
1
0
0
0
0
e
e
0
1
0
0
0
0
0
0
(m
13
(ra
23
0
0
1
0
0
,n)
,n)
0
0
0
0
0
e
0
0
0
0
0 _
у)
и)
0
0
4''
4з
0
0
A0.2.18)
§10.2. Методика шагового нагружения многослойной оболочки
311
[W2] =
о
о
о
о
о
о
о
о
о
(т,г,
(т,г,
L е21
e
e23
О
О
№] =
О
о
о
о
о
о
(т,п)
(т,п)
р / \ (т,п)
т,п)
(
e13
13
(т,п) р / \ (т,п) р / \
. е21 fM 42 fM
(т,п)
е23
Здесь введены следующие обозначения:
N (т,п)
el
= е
О
О
= H[{rj)Hm{ri),
7п,п).
О
О
О
О
A0.2.19)
«2 — ^21 11 т ^22 1z т ^23 16-
Таким образом, построена конечно-элементная аппроксимация
нелинейных составляющих компонент тензора деформаций.
Подставив полученные соотношения A0.2.17) в A0.2.6), получим
Ns
AlB2C3dS, A0.2.20)
где
{Щ} =
312 Гл. 10. Моделирование нелинейного деформирования оболочек
м Cfc+
J
, (Ю.2.21)
Предполагаем, что в пределах слоя напряжения {^сг^} изменяются
по линейному закону по толщине, а напряжения { т?} — по квадра™
тичному, как это принято в теории пластин и оболочек, т. е.
{c}- (Ю.2.22)
\
Рис. 10.2.2
Для получения этих законов распределения вычисляем значения
напряжений для каждой квадратурной точки ? = ?р, ?] = щ в несколь-
нескольких точках по толщине слоя: {No~fk} вычисляются на межслойных
поверхностях со стороны каждого слоя в отдельности, а {^г^} —
на межслойных поверхностях и в точках на срединных поверхностях
слоев (рис. 10.2.2). Непрерывность {nt^ на межслойных поверхностях
обеспечивается представлением их в виде (8.2.10). Затем по этим
точкам строятся соответственно полиномы первой и второй степени
A0.2.22). Тогда векторы {а}, {Ь}, {с}, {/}, {g} принимают вид
2 )
-со2
§10.2. Методика шагового нагружения многослойной оболочки 313
(з {Nr'k (a)} + {N
{ъ} =5
(а-а)
а ({^ (а)} + з {Nrk
(а+i - аJ
аа+. ({Nrk (а)} + {Nrk (а+.)} - 4
| Cl+ArUCk)}+Ct{rk(Ck+i)}
(а+i - аJ
— Ос)
ш (а+i-а)
Тогда в интегралы A0.2.21) подставляем A0.2.22) и получаем
? U{f}(d+i -ct)
+i -a)
м
т; iff} (Cfc+i - (k,
, (Ю.2.24)
314 Гл. 10. Моделирование нелинейного деформирования оболочек
h ( м 11 1
,k=l \3
Подставляя в A0.2.20) аппроксимации A0.2.17) и проводя числен-
численное интегрирование по поверхностным координатам с помощью квад-
квадратурной формулы Гаусса-Лежандра 3™го порядка, получим
(а+1 - со
3 3
= V V{g(m'n)}T[Mm'n'*'j)] |Eg(*'j)l, A0.2.25)
Z—j Z—j L L J I J
m,n=l i,j=l
где блоки матрицы геометрической жесткости имеют следующий вид:
з
p,t=\
D*Vi
H'm(riP)Hn(Zt)Hi(Vp)H'j&)) + D*3l [W2}Hm(Vp)Ht(rh
. A0.2.26)
Выражение A0.2.7) вычисляется аналогично с использованием со-
соотношений C.4.6). В результате получим
§10.2. Методика шагового нагружения многослойной оболочки
315
Nn
SNe
5NX
, A0.2.27)
где {DpD|,D|} вычисляются по формулам (9.2.6).
Если подставить в A0.2.27) аппроксимации E.3.16) и провести
численное интегрирование по поверхностным координатам, то по-
получим
N ,
з
3
Nn
m,n=\ i,j=l
)\ fSq(i,j)\
A0.2.28)
где
( p(m,n,i,j)\
M
E
P,t=i
A i
A0.2.29)
В результате проведенного интегрирования, аналитического по тол-
толщине и численного по остальным двум координатам, и стыковки
конечных элементов приходим к системе линейных алгебраических
уравнений:
[Ка\) {q} = {Р + АР} - {Ра} ,
A0.2.30)
, A0.2.31)
где 5 — общее число узловых точек тела.
Решая эту систему уравнений методом Холецкого, определяем при-
приращения перемещений, а затем и приращения напряжений, возникшие
за счет приращения нагрузки на N-м шаге. Как говорилось выше, при-
приращения напряжений представлены в виде модифицированного тензора
Пиолы-Кирхгофа. Задачей этого раздела является подготовка перехода
к следующему шагу нагружения. Для этого необходимо определить
геометрию деформированной оболочки и преобразовать тензор напря-
напряжений Пиолы-Кирхгофа в тензор Коши, т. е. отнести напряжения к
площадкам, связанным с новой системой координат для деформирован-
деформированного состояния.
316
Гл. 10. Моделирование нелинейного деформирования оболочек
Координаты точек деформированной срединной поверхности опре-
определяются радиус-вектором:
ИЛИ
A0.2.32)
Чтобы построить вектор нормали ^п к новой поверхности, можно
повернуть прежний вектор на углы в\ и 02 относительно направлений
^ei и Ne2 соответственно. Или определить его, используя уравнение
деформированной срединной поверхности A0.2.32). Оба способа лишь
приближенно определяют положение нормали в силу дискретизации
исследуемой области. Поскольку в первом способе погрешность вно-
вносится также при определении углов поворота, и она может накапли-
накапливаться с увеличением числа шагов нагружения, был выбран второй
путь как более точный.
Осуществим пересчет компонент тензора напряжений. Поскольку в
результате деформации квадратурная точка NM занимает положение
N+lM, обозначим через ж'*, х'\, х'\ координаты точки N+lM по отно-
отношению к системе координат
Другими словами,
N f N
N
iv
N
х3 с ортами pi, P2, Рз-
(i= 1, 2, 3),
A0.2.33)
где и\ — компоненты вектора перемещений в системе координат
Nx2, Nx3 (рис. 10.2.3).
Рис. 10.2.3
На гранях параллелепипеда, вырезанного для состояния
плоскостями, ориентированными относительно системы координат ^ж^,
Nx2, Nx%, действуют напряжения тензора Коши. Переход к этому
§10.2. Методика шагового нагружения многослойной оболочки
317
тензору Коши от накопленных с предыдущих шагов нагружения напря-
напряжений (модифицированный тензор Пиолы-Кирхгофа) осуществляется
с помощью формул
Dc
1
=^3ldsk (N<rja+Aaja) , A0.2.34)
где
D = det [d] = det
dxf\
dNx\ dNx\ dNxA
dNx2 dNx2 dNx2
dx'\ dxf*2 dxfl
A0.2.35)
dN4 j
Для вычисления производных, входящих в соотношения A0.2.34)
и A0.2.35), используем обычную процедуру замены производных при
переходе от одной системы координат к другой. Переходя от произ-
производных по координатам Nx[, Nx2, Nx3 к производным по координатам
глобальной системы координат Nx\, NX2, Nx3 и учитывая при этом,
что
N
г = NXi\j = xf*J
¦3>
A0.2.36)
имеем
дх'\
dNx[
дх'\
dNx'2
дх'\
dNx\
дх'*2
dNx'2
dx'*2
dNx\
dx'l
dNx'2
dx'l
где
\N
w =
A0.2.37)
N N N
Fll P\2 P13
NP2l NP22 NP23
N N N
Р3\ Р32 P33
N
N
h, j = 1,2,3.
A0.2.38)
318 Гл. 10. Моделирование нелинейного деформирования оболочек
Переход от производных по глобальным координатам к производ-
производным по криволинейным координатам ?, ту, ( осуществляем с помощью
формулы
dNx2
dN+]x2
dNx{
dN+ix2
dNX2
dN+ix2
dN+{x3
a»Z3
dNx2
dNx3 dNx3 dNx3
= \J'
-l
dN+]Xl
dZX{
dN+xx2
drj
dN+lx3
dN+ix3
drj
d(
A0.2.39)
где
8Nx2 dNx3
8Nx2
dr, dr,
dNxx dNX2
A0.2.40)
д( д( д(
Таким образом, вошедшие в соотношение A0.2.34) производные
вычисляются следующим образом:
dx'* dx'l dx'l
'* 1
dNx\
дх'*
dNx'2
дх'*х
dNx\
дх'*2
dNx'2
дх'*2
dNx\
dx'l
dNx'2
dx'l
3J
= [N1>] [J]
-1
gN + l
X\
dN+lx2 dN+lx3
dN+li
X2
dq dr,
dN+[Xl dN+lx2
d( d(
dr,
[Ntpf. A0.2.41)
§10.8. Постановка задачи о нелинейном деформировании оболочки 319
В качестве начальных напряжений в вариационном уравнении
(N + 1)-го шага нагружения A0.1.34) можно использовать напряжения
dij A0.2.34), что было проделано в работах [53, 72]. Это оправданно
при слабом изгибе. Однако при сильном изгибе вносится дополни-
дополнительная погрешность, в силу того что ни одна из координатных осей
х'\, xfl, %% не совпадает с нормалью к деформированной поверхности
и в связи с этим возникают неточности при реализации гипотезы
о малости напряжений обжатия. Поэтому в (N + 1)-м состоянии с
помощью поворота относительно начала координат (квадратурной точ-
точки NМ) вводится система координат м+хх\, N+lx2, ЛГ+1х3 с орта-
^+1 Ж+1 ЛГ+1 N+l
р
ми ^+1рь Ж+1Р2, ЛГ+1Рз, причем ось N+lxf3 направлена по норма-
нормали к деформированной срединной поверхности. Накопленные напря-
напряжения должны быть отнесены к площадкам этой системы коорди-
координат. Пересчет полученных напряжений осуществляется с помощью
формулы
NPm)(N+:Ps ¦ NPn)amn, A0.2.42)
в которой ашп вычисляется с помощью A0.2.34).
§ 10.3. Постановка задачи о физически нелинейном
деформировании оболочки О
Для большинства материалов закон Гука справедлив лишь в слу-
случае небольших уровней нагрузок, когда напряжения не превышают
определенного предела, называемого пределом текучести (или преде-
пределом упругости, пределом пропорциональности). В отличие от геомет-
геометрически нелинейных задач, здесь нелинейность имеет «физический»
характер, связанный с неупругой зависимостью между деформациями
и напряжениями.
Наибольшее распространение получили два варианта теории пла-
пластичности — теория пластического течения и деформационная теория
пластичности, являющаяся частным случаем теории течения.
Как правило, в литературе физически нелинейные задачи механики
формулируются для изотропных тел. В данной работе предпринята
попытка создания методики расчета упругопластического деформиро-
деформирования как изотропных, так и анизотропных слоистых оболочек.
Прежде всего необходимо выяснить условия, при которых возни-
возникают пластические деформации тел, или сформулировать так называе-
называемые критерии текучести. Для изотропного случая наибольшее распро-
распространение получили такие гипотезы начала текучести, как гипотезы
Треска-Сен-Венана, Мизеса-Губера, Мора-Кулона, Дракера-Праге-
ра. Для ортотропного материала создание таких критериев — более
Результаты этого параграфа получены Якушиным С. А.
320 Гл. 10. Моделирование нелинейного деформирования оболочек
сложная задача, так как до сих пор методики расчета пластичности
анизотропных сред нельзя считать разработанными до конца. При-
Пример наиболее простых форм предельных поверхностей ортотропного
материала, находящегося в условиях плосконапряженного состояния,
представлен на рис. 10.3.1.
'12
/
Ж
JY1
Рис. 10.3.1
Для разграничения зон упругого и пластического деформирования
будем принимать критерий пластичности Хилла для ортотропного ма-
материала, который является аналогом критерия Мизеса.
10.3.1. Основные положении теории пластического течении.
Для описания поведения оболочки за пределами упругости воспользу-
воспользуемся основными положениями теории пластического течения.
Будем использовать модель идеально упругопластического тела.
При простом растяжении или сжатии механическое поведение такого
материала представляется диаграммой напряжений-деформаций, изоб-
изображенной на рис. 10.3.2. Заметим, что напряжения текучести при рас-
растяжении и сжатии предполагаются рав-
равными одной и той же величине ат, т.е.
эффект Баушингера отсутствует.
Условие начала пластичности может
быть представлено в виде
Фт(^) =0. A0.3.1)
В это уравнение входят также ме-
механические характеристики материала,
определяющие возникновение пластиче-
пластических деформаций при простейших напря-
напряженных состояниях, например пределы текучести материала при одно-
одноосных растяжении и сжатии.
0
/
/
Рис. 10.3.2
§10.8. Постановка задачи о нелинейном деформировании оболочки 321
Рассмотрим основные положения теории пластического течения:
— приращение деформаций складывается из приращения упругих
и приращения пластических деформаций
dsij = de\j + dePj, A0.3.2)
— приращение пластических деформаций не вызывает изменения
объема
з
de-Q = 0, de-Q = \^dePiy A0.3.3)
i=\
— приращение упругих деформаций связано с приращением напря-
напряжений посредством закона Гука
daij = D\ykl deki, A0.3.4)
— имеет место ассоциированный закон течения
дФ
ае-- = ал——, {10.о.э)
где
Ф(агз)=0 A0.3.6)
поверхность текучести (или условие пластичности), которая по виду
совпадает с условием начала пластичности A0.3.1), dX — положитель-
положительный скалярный параметр.
Запишем соотношение между приращением напряжений и дефор-
деформаций в виде (для удобства перейдем к векторной форме записи)
{de} = (в(е)) {da} - I — \ dX, A0.3.7)
где [D^] — матрица упругих констант материала. Из этого уравнения
вытекает следующее соотношение:
{da} = Lo(e)] {de} - Lo(e)] \-~-\ d\. A0.3.8)
Для определения dX запишем равный нулю дифференциал функции
Ф из A0.3.6):
Г дФ}
dФ= I — \ {dd} = 0. A0.3.9)
Умножая A0.3.8) слева на {дФ/да} и учитывая A0.3.9), получим
т
Г , ч1 I ПИ) I Г , х 1 I Г1Ц) I
г \ dX = O, A0.3.10)
11 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
322 Гл. 10. Моделирование нелинейного деформирования оболочек
откуда
dA = кда ^ . A0.3.11)
<9cr J
Подставляя dX в A0.3.8), находим связь между приращениями
напряжений и деформаций за пределом упругости:
{da}= Шер)] {de}7 A0.3.12)
где [В^ерЦ — матрица упругопластических постоянных, элементы ко-
которой зависят от напряженно-деформированного состояния в точке
тела:
В упругой области, где dX = 0, получаем: [D^] = [D^].
Выражение A0.3.12) получено для случая так называемого ак-
активного нагружения, когда вследствие постепенного наращивания на™
грузки параметр А все время возрастает, т. е. d\ > 0. Кроме это-
этого, возможно так называемое нейтральное нагружение, при котором
Ф (а) = Ф (а + da) = 0 и разгрузка Ф (а) =0, Ф (а + da) < 0, где Ф —
функция A0.3.6). В этих случаях полагают dX = 0, [В^ерЦ = [D^].
Итак, для произвольных процессов нагружения закон связи меж-
между приращениями напряжений и деформаций A0.1.32) записывается
в форме
Г $> d\>0,
A<ji:i = I A0.3.14)
{ %
Выражение A0.3.14) является исходным при построении схем ме-
метода конечных элементов для расчета деформирования тел по теории
пластического течения.
10.3.2. Физические соотношения длм слоев. Предполагаем, что
каждый слой является ортотропной оболочкой с осями ортотропии а, C,
плоскость которых коллинеарна плоскости, содержащей оси Nx^, Nx2
(рис.8.2.1).
Соотношение между приращениями напряжений и деформаций в
упругой области определяется законом Гука (8.2.1). Таким образом,
§10.8. Постановка задачи о нелинейном деформировании оболочки 323
матрица упругих констант материала
имеет вид
Еа Eafi\2
jEy/3/i2i
1 — /^12/^21
0
0
0
1 — /^12/^21
0
0
0
^e^] из A0.3.7) в нашем случае
0 0 0
О О
0
1
0
0
0
Gaz
0
0
0
Gr.
A0.3.15)
Для разграничения упругого и пластического деформирования
воспользуемся условием начала пластичности A0.3.6), которое для
идеально пластического ортотропного материала с учетом малости на™
пряжений обжатия запишем в виде [111, 148]
JaaT
Tf3f3T
-1=0. A0.3.16)
'а/ЗТ
j3zT
Этот критерий, являющийся аналогом критерия текучести Мизеса,
был предложен Хил лом для ортотропного случая. Здесь о~аат, та/зт ~~
экспериментально определяемые пределы текучести материала при од-
одноосном растяжении-сжатии и при чистых сдвигах в соответствующих
плоскостях. Заметим, что для изотропного случая
О'ааТ = CFC{3T = ®zzT
= V 3 Та@т = V 3
TazT =
тогда условие A0.3.16) преобразуется в критерий Губера-Мизеса: Gi =
= ат, где Ui — интенсивность напряжений.
Таким образом, для получения из A0.3.12) матрицы упругопласти-
ческих постоянных, необходимо определить компоненты вектора
дФ
дФ
дФ дФ дФ дФ
дФ \т
дтрг)
которые, в свою очередь, находятся из A0.3.16) и принимают вид
дФ 2ааа ^ дФ
дФ
J ааТ
Taf3T
JCf3T
дФ
дФ
A0.3.17)
'azT
TCzT
324 Гл. 10. Моделирование нелинейного деформирования оболочек
1
где
1 1
2 + -о—
JaaT
0(-
Cf3T
zzT
Итак, мы получаем симметричную
, т
матрицу упругопластических постоянных для слоя:
= 0 , если Ф (а) < О, Ф (а) = 0 и
> = 1, если Ф (а) > О, Ф (а) = 0 и
V]
0,
A0.3.18)
^4 > °-
Здесь afj — компоненты девиатора накопленных напряжений, a Aefj —
компоненты девиатора приращения деформаций.
Осуществим переход от осей ортотропии а, C к осям Nx[, Nx2,
Nx%, в которых записано основное вариационное уравнение задачи.
Обозначим через ф угол между направлением а и осью Nxl. Тогда
A0.3.19)
где матрица [Т*] имеет вид [36, 65, 357]
[Т*] =
cos2 ф
sin ф
~~ sin 2ф
0
0
sin
cos2
sin^
0
0
ф
ф
sin ф cos ф
— sin ф cos ф
cos 2ф
0
0
0
0
0
cost/;
— sin ф
0 "
0
0
sin-0
COS'0 _
A0.3.20)
Для осуществления дальнейших выкладок определим матрицу
поблочно в виде
/ [А] [С] \
[С]Т [В]
A0.3.21)
Тогда, учитывая, что соотношения между приращениями напряжений и
деформаций определяются для каждого слоя самостоятельно и от слоя
к слою меняются из-за различных значений модулей упругости и угла
ортотропии ф в каждом слое, можем записать
A0.3.22)
§10.8. Постановка задачи о нелинейном деформировании оболочки 325
Аа'п
{Да'} = { Аа>2
<«-
&
{Ат>} =
10.3.3. Алгоритм построеним матрицы жесткости. Вычислим
для каждого КЭ интеграл 1\ A0.2.5), дающий матрицу жесткости.
Для проведения дальнейших преобразований переходим от скалярной
формы записи к векторной и от тройного интеграла к двойному:
{Aaff {Sef} + {Arff
du =
к=\
Ns
I* ({Аа'}т {Sef} + {Ar;}T {Sjf}) AiB2C3 d?ds\.
A0.3.23)
Здесь (k — безразмерные поперечные координаты поверхностей разде-
раздела слоев (рис. 10.3.3), М — число слоев.
Рис. 10.3.3
Для улучшения точности расчета оболочек малой и средней толщи-
толщины при упругопластическом деформировании матрица упругопластиче-
ских постоянных, которая связывает приращение напряжений и дефор-
деформаций, аппроксимируется в пределах слоя квадратичными полиномами
по трем точкам:
tp) (СI = Wlf\ л
D
. (Ю.3.24)
326 Гл. 10. Моделирование нелинейного деформирования оболочек
D
/(ер)
В
/(ер)
7к 2 I' I ^k 3 I ~~ матРВДы УПРУГО пластических по-
постоянных, вычисленные для fc-ro слоя в точках, ?&, ??, (k+i соот-
соответственно (рис. 10.3.3), элементы которых зависят от напряженно-
деформированного состояния в этих точках на рассматриваемом шаге
нагружения, a TV*, Щ, Щ — квадратичные полиномы вида
щ (С) =
щ (С) =
Щ (С) =
(а
(С
(а
-
-
-
(С
С)
а)
а)
(а
к-
(а
- Cfe+0
-Cfc+0'
:-ск)
A0.3.25)
Подставляя в A0.3.23) физические соотношения A0.3.22) и связь
между компонентами тензора деформаций в системе координат Nxb
Nx2, Nx% и в криволинейной системе координат ?, rj, ( C.4.16), A0.2.5),
а также учитывая A0.3.24), получим
= {е,Х,7°}
G
12
Gj2 G22 G23
^13 G23 G33 .
Se
AiB2C3d4dr], A0.3.26)
где
{e, x, 7°} =
Матрица [G] определяется поблочно в следующем виде:
[Gn] = [Rif [Не] [Д,] + [Д3]Т [Яе7] [Д,] +
}T
+ [Ri}T[He7] {Щ + [
[G12] = [Д,]т [Нех] [Д,]
[G,3] = [Rif [Яе7] [Д2]
} [Д3],
ЯХ7] [Д,],
Я7] [Д2],
A0.3.27)
[G22] = [Д,]г [Нх] [Д,
[G33] =
[G23] =
[Н
Х1]
[Д,
[Я7] [Д2],
§10.8. Постановка задачи о нелинейном деформировании оболочки 327
( ^ ^ аЬЛ
A0.3.28)
\ t ([4] ^а И] ^а [4] ^а
\ t
м
гС— 1
M
E
Здесь [Ue] — матрица мембранных местностей, [Нх] — матрица
изгибных жесткостей, [Нех] — матрица мембранно-изгибных жест-
костей, [Не1] — матрица мембранно-сдвиговых жесткостей, [НХ1] —
матрица изгибно-сдвиговых жесткостей, [Н7] — матрица жесткостей
поперечного сдвига, относительная толщина слоя А^ = (k+i — (к-
Для борьбы с потерей точности за счет сдвигового «заклинива-
«заклинивания» используем метод двойной аппроксимации для линейной ча™
сти деформации по точкам суперсходимости (§5.3). Подставляя в
A0.3.26) аппроксимации E.3.16) и проводя численное интегрирование
по поверхностным координатам с помощью квадратурной формулы
Гаусса-Лежандра 3-го порядка, получаем
3 3
Е Е {ч{т-п)\ [Kmnij][6q™j, A0.3.29)
m,n=l i,j=\
328 Гл. 10. Моделирование нелинейного деформирования оболочек
где блоки матрицы жесткости имеют следующий вид:
= ?{[
p,t=l l
X
Г G\
G\
~G\
Tfin | S
1 G12
P2 ^22
3 ^23
G13"
Gl23
G33.
AО.З.ЗО)
Вычисление матрицы геометрической жесткости и вектора невязки
осуществляется так же, как в предыдущем параграфе.
§ 10.4. Исследование зажритичесжого состояния
оболочки
IO.4.I. Виды потери устойчивости. До тех пор пока имеет место
взаимно однозначная зависимость между нагрузкой и перемещениями
точки конструкции, представленная в предыдущих параграфах мето-
методика позволяет проследить изменение напряженно-деформированного
состояния (НДС) исследуемой оболочки, последовательно увеличивая
внешние нагрузки. В случае, когда система может «прощелкивать» (те™
рять устойчивость), прямое применение этой схемы встречает серьез-
серьезные затруднения. Это связано с тем, что для таких систем характерно
наличие ниспадающих (неустойчивых) ветвей кривой «нагрузка-про-
«нагрузка-прогиб» с временным уменьшением величины нагрузки и одновременным
увеличением деформаций.
С
р>
р*
О
в/
/
а
D/
3*
р.
р*
w О
В/
/ \
б
В/
Е
Рис.
/
/
W
10.4
Р
Р*
О
.1
Для оболочек можно говорить о двух видах потери устойчивости
оболочки [6, 231]. Первый из них связан с бифуркацией (или ветвлени-
ветвлением) решения, а второй — с появлением предельной точки. На рис. 10.4.1
схематически показана зависимость нагрузки Р от характерного про-
прогиба w. Пусть нагрузка плавно возрастает от нуля, оставаясь мень™
§10.4. Исследование закритического состояния оболочки 329
ше Р*. Положение равновесия устойчиво, если прогиб определяется
единственным образом (уасток О В). При Р ^ Р* в окрестности точки
В, кроме основного положения равновесия BD, появляются одно или
несколько смежных положений равновесия BE. Точка В называется
точкой бифуркации положения равновесия. Равновесные состояния по-
после прохождения точки В могут быть как устойчивыми, так неустойчи-
неустойчивыми (неустойчивое положение равновесия обозначено штрихованной
линией). Точка В для случая, изображенного на рис. 10.4.1, а, строго
говоря, не может быть названа точкой потери устойчивости, так как
в окрестности точки В существует устойчивое положение равновесия
BE и при Р « Р* происходит перестройка формы прогиба, а дефор-
деформации резко возрастают при малом увеличении нагрузки. Во втором
случае (рис. 10.4.1, б) даже при плавном увеличении нагрузки неиз-
неизбежно происходит резкий скачкообразный переход в новое устойчивое
положение равновесия. Точка В (на рис. 10.4.1, а и рис. 10.4.1, б) явля-
является критической точкой бифуркации, а соответствующее ей значение
нагрузки Р* — критической нагрузкой.
В отличие от точки бифуркации, в критической предельной точке
(точка С на рис. 10.4.1, в) не происходит ветвления решений, однако
при переходе через нее исходная форма равновесия перестает быть
устойчивой. Физически при достижении этого состояния происходит
потеря устойчивости и система «перескакивает» в закритическое рав-
равновесное состояние, для которого характерно значительное увеличение
стрелы прогиба при неизменной нагрузке. На рис. 10.4.1, в это переход
из С в С. Ниспадающий участок CD описывает неустойчивое закри-
закритическое состояние. Физически такое состояние не реализуется, так
как малейшее возмущение приводит к перескоку системы в состояние
DF. Точка С является верхней предельной точкой. При разгрузке
система проходит через нижнюю предельную точку D, при достижении
которой происходит «перескок» DDr в первоначальное докритическое
равновесное состояние.
Полная картина деформирования тонкой оболочки при больших пе-
перемещениях значительно сложнее, чем показано на рис. 10.4.1. Во-пер-
Во-первых, участок BD содержит, кроме точки В, другие точки ветвления.
Далее, участки BE и CD могут содержать точки вторичного ветвления
и т. д. Среди этих положений равновесия будут как устойчивые, так
и неустойчивые, причем переход из одного устойчивого положения
равновесия в другое может совершаться как непрерывно (точка В
на рис. 10.4.1, а), так и скачком (точки В и С на рис. 10.4.1, б и
рис. 10.4.1, в).
Критические точки бифуркации первого типа (рис. 10.4.1, а) харак-
характерны для сжатых стержней и пластин, критические точки бифуркации
второго типа (рис. 10.4.1, б) — для тонких упругих оболочек, в которых
докритическое состояние является безмоментным, а критические пре-
предельные точки (рис. 10.4.1, в) — для пологих оболочек и тонких упру-
упругих оболочек с начальными геометрическими неправильностями, для
330 Гл. 10. Моделирование нелинейного деформирования оболочек
которых существенным является изгиб (моментное состояние) в докри™
тическом состоянии. Этот вывод сформулирован в монографии [6].
Для исследования поведения конструкции в закритической области,
т. е. после прохождения верхней предельной точки, и определения ниж-
нижней предельной точки используются различные методы. Чаще всего
это сеточные методы, применяемые либо непосредственно к двумерной
области, либо после сведения задачи тем или иным приемом к одно-
одномерной с последующим решением системы нелинейных алгебраических
уравнений [40, 41]. Столь же часто используются методы продолжения
по параметру [97].
10.4.2. Метод продолжении по параметру для разработанной
конечно-элементной методики пошагового нагруженим. Проблема
нелинейного деформирования тонких оболочек сводится к проблеме
численного исследования нелинейной системы уравнений. Ввиду труд-
трудностей, связанных с решением таких систем, наиболее распространен-
распространенным способом анализа решений является прослеживание изменения
этих решений по мере изменения некоторого выбранного заранее па™
раметра системы. Основным инструментом для решения таких задач
являются методы продолжения по параметру, изложенные в работах
[40, 41, 97, 373, 384].
В настоящей работе разработана модификация метода продолжения
по параметру применительно к МКЭ. Построен алгоритм определения
верхних и нижних предельных точек и соответствующих им критиче-
критических нагрузок, а также устойчивых и неустойчивых ветвей закритиче-
ского состояния оболочек.
Изложим суть предлагаемого метода. Считаем известными все ком-
компоненты НДС оболочки на (N — 1)-м и JV-м шагах нагружения, из-
известна также кривая «нагрузка-прогиб», построенная до k-то шага
включительно. Следует выработать методику определения величины
приращения нагрузки для перехода к (N + 1)-му шагу и решить вари™
ационное уравнение A0.2.4) для этого шага. Априорное задание при-
приращения нагрузки приведет к тому, что на каком-то шаге мы превысим
предельную нагрузку, вследствие этого не получим решения уравнения
A0.2.4), и процесс разойдется. Особенно важно уметь определять
величину приращения нагрузки при подходе к предельной точке и при
прохождении ниспадающей ветви кривой «нагрузка-прогиб».
В качестве параметра, позволяющего определить приращение на-
нагрузки на каждом шаге, возьмем длину отрезка касательной Л к кривой
деформирования (рис. 10.4.2), величина которой задается на каждом
шаге и зависит от кривизны кривой. Алгоритм построен так, что Л
уменьшается по мере приближения к предельной точке, а после ее
прохождения снова увеличивается.
Рассмотрим систему A0.3.30)
({К} + [Ка]) {ANq} = {Р} + {ANP} - {Ра} , A0.4.1)
§10.4. Исследование закритического состояния оболочки
331
где [К], [Ка] — матрица жесткости и матрица геометрической жест-
жесткости (8.2.7), A0.2.20), {ANq~j — вектор узловых неизвестных,
{А^Р} — вектор приращения нагрузки, {АД} = {А^Р} — {Ра} —
невязка с предыдущего шага.
Введем в рассмотрение величину ANt, с помощью которой прира-
приращение нагрузки записывается в виде
A0.4.2)
где {Ро} — единичные векторы, характеризующие величину и направ-
направление приращения массовой и поверхностной нагрузки в каждом узле.
Вектор неизвестных представляется в виде
A0.4.3)
XNtf J i Ar J
Nt
где {A^g} , Nt — скорости изменения соответствующих величин в
пространстве нагружения, которые определяют направление касатель™
ной к кривой «нагрузка-прогиб» (вектор АВ на рис. 10.4.2). Второе
слагаемое в A0.4.3) является неизвестным вектором ВС, который
удобно выбирать перпендикулярным вектору АВ.
Условие ортогональности этих векторов имеет вид
Направление вектора
A0.4.4)
заменяется направлением хорды,
соединяющей точки кривой «нагрузка-прогиб», определенных на (N —
— 1)-м и JV-м шагах (рис. 10.4.2). Тогда
A0.4.5)
N+lp
Np
N+lq Nq
Рис. 10.4.2
332 Гл. 10. Моделирование нелинейного деформирования оболочек
Параметр Л характеризует длину вектора АВ (рис. 10.4.2). Выбор
этой величины осуществляется следующим образом. Вначале задается
некоторое значение Л. Значение этого параметра на fc-м шаге опреде-
определяется формулой
iVA = Acos2 N<p, A0.4.6)
где угол N(f — угол между касательными к кривой, построенными в
точках А и А' (см. рис. 10.4.2). При малой кривизне угол Ncp близок
к тг и N А мало отличается от Л, а с увеличением кривизны кривой
параметр NА значительно уменьшается, что приводит к уменьшению
приращения нагрузки с приближением к предельной точке. Именно это
обстоятельство позволяет успешно пройти первую предельную точку
(верхнюю критическую нагрузку), выйти на нисходящую ветвь кривой
«нагрузка-прогиб», определить вторую предельную точку (нижнюю
критическую нагрузку) и выйти на восходящую (устойчивую) ветвь
кривой.
Уравнения A0.4.1), A0.4.3), A0.4.4) образуют систему, из которой
определяются векторы {AF}, {А^д} и параметр, характеризующий
приращение нагрузки ANt:
' ([К] + [Ка]) (Л {ANq} + {AY}) - (\ANt + Ar) {Po} = {АД} ,
{ANq}T {AY} + ANtAr = 0,
A0.4.7)
т
N~lu\, N^lU2, N~lus — координаты вектора перемещения точек сре-
срединной поверхности из (N — 1)-го состояния в JV-e в глобальной
системе координат; ^"^i, N~l62 — углы поворота вектора Nn от-
носительно двух взаимно перпендикулярных векторов ^-1е1, ^"^2;
AN~H — параметр нагрузки, характеризующий приращение нагрузки
при переходе из (N — 1)-го состояния в fc-e; {AF} = {AY\, AY2,
АУ3}, Ar — неизвестные величины.
Выразим {AF} из первого уравнения A0.4.7) и подставим во вто-
второе, тогда получим
{AF} = {G} + (АД^-1* + Аг) {Т} - А {А^д} , A0.4.8)
Все величины в правых частях соотр^тттлтт"й A0.4.8) известны с
предыдущего шага, кроме векторов {G} \ ^ ^ которые определяются
из решения систем
{КА} {G} = {AR} , {К*} {Т} = {Q0} , (Ю.4.9)
§10.4. Исследование закритического состояния оболочки 333
где
[К] + [Ка] = [КА], A0.4.10)
методом Краута. Алгоритм этого метода для решения системы уравне™
ний вида [КА] {X} = {Р} с симметричной матрицей [КА] основан на
представлении [КА] в виде произведения трех матриц:
[КЛ] = ЩТ [F] [L], A0.4.11)
где [L] — верхняя треугольная матрица, [F] — диагональная матрица,
состоящая из +1 и — 1. На прямом ходе решается система
{L]T[F]{Z} = {P}, A0.4.12)
а на обратном
A0.4.13)
({AY}}
После нахождения вектора < >, определяем перемещения
в каждой узловой точке {А^^1^} и параметр, характеризующий при™
ращение нагрузки AN~H:
|| \ (Ю4М)
При переходе к следующему шагу нагружения, так же как и в
§ 10.2, осуществляется пересчет геометрии A0.2.32) и напряжений
A0.2.34)^A0.2.42).
В следующей главе будут рассмотрены числовые задачи, демонстри-
демонстрирующие эффективность описанных выше методик.
Глава 11
ЧИСЛОВЫЕ ПРИМЕРЫ
§ 11.1. Расчет оболочеж с учетом геометрической
нелинейности
11.1.1. Изгиб полосы в цилиндрическую оболочку. Приведем
точное решение задачи нелинейного изгиба изотропной полосы, приве™
денное в монографии [144].
Деформируем полосу, занимающую область -I ^ аз ^ I,
—h < а\ < h, —Ъ < «2 ^ Ь, превращая ее в цилиндрическую панель
с углом раствора 2(р, внутренним радиусом го и внешним радиусом
г\, т.е. го ^ г ^ r\, —ip ^ 0 ^ ср, —L $С хз ^ L. Этот переход
осуществляется с помощью преобразования
z = x\ +ix2 = C(ai)et{ip/b)a2, x3 = саъ. A1.1.1)
Из уравнений равновесия следует, что
причем должны выполняться краевые условия C(—h) = го, С (К) = г\.
При отсутствии напряжений на поверхностях а\ = ±/г имеем еще
пару условий:
2/i ^ = it/%)
Здесь обозначено: А, /х — параметры Ляме, и — коэффициент Пуассона,
. A1.1.3)
Решаем уравнение A1.1.2) при указанных краевых условиях, тогда
ср / (р
sh — ai | I ch — ai
. (ph 1_г/1 cph
chT V ch-
A1.1.4)
§11.1. Расчет оболочек с учетом геометрической нелинейности 335
Деформация полосы в цилиндрическую панель осуществляется уси-
усилиями и моментами, приложенными к плоскостям в = ±(р. При этом
главный вектор усилий, действующих по нормали к этим плоскостям,
равен нулю, главный изгибающий момент
т =
b
A1.1.5)
Усилие, действующее на эти же плоскости в направлении #з, отне-
отнесенное к единице длины, имеет вид
| = (I^[(c-l)(l-^6th^/6))-,(l —
A1.1.6)
здесь Е — модуль упругости материала.
Если изгиб полосы осуществляется только за счет краевых момен-
моментов (чистый изгиб), то Q = 0, откуда следует
fl, (П.1.7)
т. е. получено относительное удлинение полосы при превращении ее в
цилиндрическую панель.
Поставим задачу изогнуть полосу длины 21, ширины 26 и тол™
щины 2h в полную цилиндрическую оболочку длины 2L с помощью
изгибающего момента. При (р = тг теоретическое значение суммарного
изгибающего момента, действующего по всей длине полосы, имеет вид
2Eh2l{\ -и)
2lm°= , J 9 ^ У , A1.1.?
G — ^ th 7) G ~~ v th 7)
где 7 = Tih/b.
Рассмотрим полосу, размеры которой 26 = 200 см, 21 = 5 см при
механических характеристиках материала Е = 0,3 • 108 Н/см2, v = 0,
жестко защемленную по торцу а^ = —Ь, на ее свободном краю а^ = 6
приложен изгибающий момент, значение которого вычислено по форму-
формуле A1.1.8). Данная постановка задачи статически эквивалентна задаче
об изгибе полосы, нагруженной торцевыми изгибающими моментами,
рассмотренной в монографии А.И.Лурье [144]. По ширине полосы
берется 20, по длине 1 КЭ. В случае, когда прилагаемая нагрузка
разбивается на 300 шагов нагружения, погрешность численного ре-
решения составляет не более 3,5%. Погрешность могла появиться за
счет конечно-элементной аппроксимации исследуемой области, а также
вследствие того, что точное решение получено в предположении, что в
процессе деформации отсутствует изменение объема тела.
336
Гл. И. Числовые примеры
о и
1=1 О
о м
EJ О
о о
2 fe
о о
2 k
О PQ
EJ О
^ b
О
О
§11.1. Расчет оболочек с учетом геометрической нелинейности 337
На рис. 11.1.1, а-в приведены результаты численного расчета для
различных толщин полосы. На рис. 11.1.2 изображен процесс деформа-
деформации полосы с увеличением нагрузки.
Рис. 11.1.2
Следует отметить, что при перемещениях, сравнимых с размера-
размерами конструкции, что имеет место в рассматриваемой задаче, поворот
системы координат, о котором говорилось в конце § 10.2, обязателен.
В противном случае приближенное решение из-за существенного на™
копления погрешностей не дает даже качественно верной картины.
11.1.2. Изгиб изотропной цилиндрической оболочки под дей-
действием внутреннего давлении. Рассматривается жестко защемлен-
защемленная по обоим торцам круговая цилиндрическая оболочка, находящаяся
под действием внутреннего давления (рис. 11.1.3). Аналогичная задача
ро = 1 кг/см ,
L = 800 см, R = 200 см,
= 0,1, Е = 2,1 • 105 кг/см2.
Ро
Bi
Рис. 11.1.3
в геометрически линейной постановке решена в работе [329], причем
авторами были построены графики распределения прогибов, усилий и
изгибающих моментов. Здесь обозначено: ро — интенсивность внутрен-
внутреннего давления, R, h, L — радиус, толщина и длина оболочки, Е,и —
модуль упругости и коэффициент Пуассона.
338
Гл. И. Числовые примеры
На рис. 11.1.4 изображено распределение безразмерного прогиба
w* = w—-^ от левого края до середины цилиндра. На рис. 11.1.5
PoR
и 11.1.6 приведено распределение усилия N* = —^- и изгибающего
:раме
w* ¦
0,8-
0,4-
момента
0,8
0,4
-
¦/
/,,,,
—— для тех ж
эо Rh
i i i i i i i i i i
0 100 200 300 L/2 0 100 200 300 L/2
Рис. 11.1.4
0,8
0,4
0,8
0,4
111111
0 100 200 300 L/2 0
Рис. 11.1.5
100 200 300 L/2
0/100 200 300 L/2
Сплошной линией изображена кривая, полученная в настоящей
работе, пунктирной — аналогичная кривая из работы [329]. Левый
график построен для R/h = 20, а правый — для R/h = 5.
§11.1. Расчет оболочек с учетом геометрической нелинейности 339
Отметим хорошее соответствие результатов как для перемещений,
так и для усилий и моментов.
11.1.3. Ортотропная цилиндрическая оболочка под внутрен-
внутренним давлением, а) Рассматривается деформация ортотропной цилин-
цилиндрической оболочки с жестко защемленными торцами под действием
внутреннего давления интенсивности ро- Радиус оболочки R = 20 см,
длина L = 20 см, толщина h = 1 см. Физические параметры задачи
вдоль осей ортотропии:
Еа = 7,5 ¦ 106 Н/см2, Ер = 2,0 • 106 Н/см2,
GaP = 1,25 • 106 Н/см2, Gaz = GPz = 0,63 • 106 Н/см2,
рар = 0,25.
Угол армирования ф — угол между осью х\ и осью ортотропии
с большим модулем упругости, в рассматриваемом случае ф = 0°.
В силу симметрии задачи рассматривается 1/4 часть цилиндра. Об-
Область покрывается сеткой 6x6, используются девятиузловые конечные
элементы. Оси ортотропии совпадают с осями координат оболочки,
причем ось 13 совпадает с осью вращения цилиндра. До нагрузки
р0 = 6,41/тг Н/см2 задача линейная, и максимальный прогиб полу-
получился равным 0,00036736 см. В работе [230] максимальный прогиб
0,000367 см, а в работе [277] - 0,0003739 см. На рис. 11.1.7 показано
поведение этой оболочки при больших прогибах. Дается сравнение
с результатами, приведенными в работах [276], [277].
6П6 КЭ, 0°
Из работы [262]
Из работы [235]
mmmtmmmt
7 8 9 10
Давление, кН/см2
Рис. 11.1.7
340
Гл. И. Числовые примеры
Наблюдается хорошее совпадение полученных в настоящей работе
результатов с кривой «прогиб-нагрузка» из работы [276].
б) На четырехслойную цилиндрическую оболочку радиуса R =
= 20 см, длины L = 20 см с ортотропными слоями одинаковой толщины
действует внутреннее давление. Общая толщина оболочки h = 1 см,
Торцы ее жестко защемлены. Физические параметры задачи и конечно™
элементная аппроксимация те же, что в предыдущем случае.
Рассмотрено два случая послойного армирования. Первый случай
при углах армирования слоев [90о/0°/0о/90°], когда во внешних сло-
слоях ось а совпадает с осью Х2, т.е. модуль упругости этих слоев в
направлении оси вращения больше. Второй случай при углах арми-
армирования [0о/90°/90о/0°], когда во внешних слоях ось Х2 совпадает с
осью Р, т. е. эти слои имеют меньший модуль упругости вдоль оси
вращения.
На рис. 11.1.8 изображены зависимости «нагрузка-прогиб»,
причем кривая / построена фактически для однослойной оболочки
[90°/90°/90°/90°] с большим модулем упругости вдоль оси вращения;
кривая 2 построена также для однослойной оболочки [0о/0°/0о/0°],
но с большим модулем упругости вдоль направляющей цилиндра;
кривые 8 и 4 соответствуют четырехслойным оболочкам той же
общей толщины с послойными углами армирования [90°/0о/0о/90°]
и [0о/90°/90о/0°]. Получен ожидаемый результат, когда при одной
нагрузке прогиб оболочки с большим модулем упругости вдоль оси
вращения больше прогиба оболочки с большим модулем упругости в
окружном направлении. Интересно, что кривые 3 и 4 для оболочек
с противоположным армированием слоев практически совпадают до
прогибов порядка 30 толщин и только затем начинают расходиться,
хотя и незначительно.
го, см
120
100
80
60
40
20
0
120 240
360
Рис. 11
480
.1.8
600
720 840
Pq, кН/см2
§11.1. Расчет оболочек с учетом геометрической нелинейности
Таблица 11.1
341
Послойное
армирование
0
45/45/45/45
0/90/90/0
Максимальный прогиб
Наст. раб.
0,00036736
0,00023426
0,00017980
[277]
0,000378
0,000240
0,000178
В табл. 11.1 дается сравнение максимальных прогибов, полученных
в диссертации и работе [277] для нагрузки ро = 6,41/тг Н/см2 при
различных углах армирования.
11.1.4. Деформация однополостного гиперболоида. Рассматри-
Рассматривается тонкая трехслойная оболочка, срединная поверхность которой
представляет собой однополостный гиберболоид вращения. Слои орто-
тропные одинаковой толщины, но с разными углами армирования ф.
Общая толщина оболочки h, высота 2Jit, радиус наименьшего сече-
сечения гт, наибольшего — го (рис. 11.1.9). Модули упругости материала
вдоль осей ортотропии Еа, Ер, угол армирования ф — угол между
осью ортотропии с большим модулем и осью Х2- Параметры оболочки,
при которых проводился расчет, приведены ниже. На оболочку действу-
действует самоуравновешенная система четырех равных сил, расположенных
в плоскости хз = 0: две сжимающие оболочку силы величины Р,
действующие навстречу друг другу вдоль одного из радиусов, и две
растягивающие силы, приложенные в перпендикулярном направлении.
гт = 7,5 м, го = 15,0 м, Нт = 20 м,
Еа = 40 • 106 кН/м2, Ер = 106 кН /м2,
Gap = Gaz = Gpz = 0,6 • 106 кН/м2,
i/a/3 = 0,25, b = hT/y/3t
hi = h2 = h = ft/3, h = 0,04m.
rT
Рис. 11.1.9
В силу симметричности задачи решение проводилось для 1/8 части
гиперболоида. Рассматриваемая область разбивалась на 64 девятиузло-
вых КЭ (8x8).
342
Гл. И. Числовые примеры
1601
А
\\ I'-
I'll V
V Ь
41
\ \
\ \
\ \
\1
\
160-
120-
-
80-
\ 40-
\ .
Р{Н)
с i
j
fj
//
f|
|
/
J
HI
III
4
i/
IВ
I
1
1
256 шагов
-2 0 2
128 шагов
4
, м
Рис. 11.1.10
1 B
С
256 шагов
4 8 -8
W, М
Рис. 11.1.11
\
\
\
\
1
160
1 120
I 80
I 40
\
i
с
i
в
I
j
1
128 шагов
гу, м
На рис. 11.1.10 представлена зависимость прогиба оболочки от при-
приложенной нагрузки в точках А, В, С, D, изображенных на рис. 11.1.9.
Углы армирования от верхнего слоя к нижнему [90о/0°/90°]. Нагрузка
Р = 160 кН, равная верхней предельной, разбивалась на 128 и 256 ша-
шагов. Сплошной линией изображены кривые, полученные с помощью
шагового метода §9.2, пунктирной — кривые, приведенные в работе
[256]. Отметим хорошее совпадение результатов.
На рис. 11.1.11 представлены аналогичные кривые для тех же точек
оболочки, но при углах армирования [0°/90°/0°].
§11.1. Расчет оболочек с учетом геометрической нелинейности
343
На рис. 11.1.12 изображена форма изогнутой поверхности гипер-
гиперболоида при вышеуказанных нагрузках и для первого, и для второго
вариантов армирования слоев.
[90707900;
70790е
Нагрузка Р= 160 кН
Рис. 11.1.12
11.1.5. Изгиб сферической оболочки с отверстием. Исследует™
ся деформация трехслойной оболочки, представляющая собой полусфе-
полусферу с отверстием в окрестности полюса (рис. 11.1.13). Слои одинаковой
толщины с одинаковыми характеристиками материала, но с разны-
разными углами армирования. Оболочка находится под действием четырех
равных по величине сил, приложенных к ее внешнему контуру. Две
действующие навстречу друг другу сжимающие силы величины F
приложены в точках А и А!, и две аналогичные растягивающие силы —
в точках В я В' (рис. 11.1.13). Радиус срединной поверхности сферы R,
общая толщина пакета — h. Размер отверстия указан на рисунке.
X,
1ь
Еа = 40 • 106 кНД
= 106 кН/м2,
aP = Gaz = GPz = 0,6 • 106 кН/:
va/3 = 0,25, R = 10,0 м,
h\ = h2 = h = h/3, h = 0,04 м.
Нагрузка F = 10/ = 320 кН.
Рис. 11.1.13
344
Гл. И. Числовые примеры
В силу симметрии рассматривалась четвертая часть полусферы, ко-
которая включает (8 х 8) КЭ. Нагрузка, приблизительно равная верхней
предельной, разбивалась на 160 шагов.
На рис. 11.1.14 приведена зависимость «нагрузка-прогиб» в точках
А и В для углов армирования [0°/90°/0°]. Сплошной линией изобра-
изображены результаты, полученные в данной работе, пунктирной — кривые,
взятые из работы [257]. Следует отметить вполне удовлетворительное
совпадение результатов. На рис. 11.1.15 приведена форма изогнутой
поверхности полусферы.
30 ^
20-
10-
А\
w 4
Рис. 11.1.14
Рис. 11.1.15
Для углов армирования [Э0°/0о/Э0°] аналогичные результаты при-
приведены на рис. 11.1.16, 11.1.17. Следует отметить, что при этом ва-
варианте армирования слоев оболочка держит существенно меньшую
нагрузку. Если в предыдущем случае верхняя предельная нагрузка
составляла порядка 320 кН, то при армировании [90°/0°/90°] — не
более 200 кН.
§11.1. Расчет оболочек с учетом геометрической нелинейности 345
20 ^
Рис. 11.1.17
Тестовые задачи показали, что описанная в § 10.2 методика реше-
решения задач изгиба многослойных оболочек из ортотропного материала
с учетом геометрической нелинейности демонстрирует свою работо-
способность и высокую точность, что иллюстрируют приведенные ре-
решения известных задач. В частности, решение задачи изгиба полосы
в цилиндрическую оболочку (п. 11.1.1) свидетельствует об отсутствии
существенного накопления ошибок линеаризации на каждом шаге.
Это обеспечивается удержанием в разрешающем уравнении A0.2.4)
слагаемого в правой части (невязки), которое корректирует решение
на каждом шаге нагружения. Численные расчеты без этого слагае-
слагаемого приводят к быстрому накоплению погрешностей, в результате
чего удается получить не замкнутую оболочку, а сегмент не бо-
более 90°.
Задачи, решенные в п. 11.1.4 и 11.1.5 (изгиб однополостного ги-
гиперболоида и сферической оболочки с отверстием), демонстрируют
возможности методики при сильно развитой нелинейности для ело™
346
Гл. И. Числовые примеры
истых оболочек со сложной геометрией поверхности. Последнее об-
обстоятельство весьма примечательно, так как на каждом шаге нагру-
жения отсчетным является текущее деформированное состояние, и
представленные на рис. 11.1.12, 11.1.15 и 11.1.17 поверхности, где
полностью соблюдены пропорции между перемещениями точек по-
поверхности и размерами всей конструкции, по сути являются началь-
ными поверхностями оболочек, относительно которых формируется
задача о последующей деформации оболочек с учетом накопленных
напряжений.
11.1.6. Деформация бампера легкового автомобиля. Для де-
демонстрации возможности методики, описанной в §10.2, приведем ис™
следование деформации переднего бампера переднеприводного легко-
легкового автомобиля (рис. 11.1.18) под действием нагрузки, равномерно
распределенной по прямоугольной площадке с центром в точке С
и размерами 10,5 см вдоль оси z и 12,5 см вдоль оси у. Нагрузка
действует вдоль нормали к срединной поверхности. Бампер прикрепля-
прикрепляется к автомобилю в шести точках, расположенных в двух плоскостях
z = const. Площадка нагружения расположена либо в середине бампера
(z = 0), либо смещена вдоль оси z на 23,0 см.
Конечно-элементная аппроксимация исследуемой области построе-
построена следующим образом. Ввиду сложности геометрии бампера он разби-
разбивается вдоль на 8 подконструкций плоскостями у = const. Две наибо-
наиболее широкие подконструкций E-я и 7-я сверху) покрыты сеткой 4 х 30,
остальные шесть A-4-я, 6-я и 8-я) — сеткой 2 х 30. Как и прежде,
используется девятиузловой оболочечный КЭ.
Известны размеры бампера (длина 131,5 см, ширина 27,0 см) и ко-
координаты узловых точек; характеристики материала: Е = 2 • 104 кг/см2,
Рис. 11.1.18
§11.1. Расчет оболочек с учетом геометрической нелинейности
347
v = 0,4; сформулированы граничные условия. Заданы местоположение
площадки нагружения, ее размеры и величина нагрузки.
2 1 О
Рис. 11.1.19
1 2
W, СМ
На рис. 11.1.19 представлены кривые, дающие зависимость между
нагрузкой и величиной смещения точек срединной поверхности вдоль
внешней нормали (прогиб конструкции) при симметричном нагруже™
нии. При этом указано, для каких точек бампера подсчитаны эти
зависимости.
q, кг/см2
-0,2 -0,1 0 ОД
W. СМ
Рис. 11.1.20
348
Гл. И. Числовые примеры
На рис. 11.1.20 при том же нагружении показаны аналогичные за-
зависимости, но для точек G и Н, лежащих на границе бампера. Анализ
рисунков показывает, что в точках С, D и G смещение происходит
внутрь конструкции (вмятина), а в точках А и В смещение наружу
(выпучивание). Смещение точки Н показывает, насколько разошлись
в процессе деформации борта бампера. Интенсивность предельной на™
грузки равна при нагружении в центре бампера 1,4 кг/см2.
Рис. 11.1.21
На рис. 11.1.21 изображена изогнутая поверхность бампера для ука-
указанной предельной нагрузки, приложенной в центре, а на рис. 11.1.22 —
для нагрузки, действующей по такой же площадке, но смещенной вдоль
Рис. 11.1.22
§11.1. Расчет оболочек с учетом геометрической нелинейности
349
оси z на расстояние 23,0 см. Установлено, что смещение площадки
нагружения на 23,0 см увеличивает предельную нагрузку на 21 %.
Далее исследуется деформация бампера, нагруженного по цен-
центральной площадке, с прежними граничными условиями, но изготов-
изготовленного из ортотропного материала с параметрами
Еа = 3,8 • 105 кг/см2, Ер = l,S- 105 кг/см2,
GaC = 0,5 • 105 кг/см2, Gaz = 0,38 • 105 кг/см2,
z = 0,31 • 105 кг/см2,
= 0,22.
0,0 0,4 0,8 1,2 1,6 2.0
W, СМ
Рис. 11.1.23
0,0 0,4 0,8 1,2 1,6 2,0
W, СМ
Рис. 11.1.24
Точка С
-3
q. кг/см2
, кг/см2 jg-.
-2
-1 0,0
W. СМ
Рис. 11.1.25
-1,6 -1,2 -0,8
Рис. 11.1.26
-0,4 0,0
W, СМ
350
Гл. И. Числовые примеры
Для первого случая угол армирования ф = 0°, т.е. модуль упруго-
упругости материала в направлении оси z больше, чем вдоль оси у, для вто-
второго — ф = 90°, и больший модуль упругости в направлении оси у. На
рис. 11.1.23-11.1.28 представлены зависимости «нагрузка-прогиб» для
точек А, В, С, D, G, Н соответственно. На каждом графике кривая /
соответствует ф = 0°, кривая 2 получена для ф = 90°, кривая 3 постро™
ена для изотропного материала с характеристиками Е = 2 • 105 кг/см2,
г/= 0,4.
э^ д, кг/см2
Точка G
-0,5 -0,4 -0,3 -0,2 -0,1 0,0
-ш, см
Рис. 11.1.27
ОД
Рис. 11.1.28
0,2
w1 см
Анализ графиков показывает, что конструкция жестче при угле
армирования 90°, т.е. ее прогибы во всех отмеченных точках меньше
по сравнению с прогибами изотропной конструкции и с прогибами
изделия с углом армирования 0°. Противоположная картина с расхож™
дением бортов бампера (точка Н). Максимальная глубина вмятины (в
точке С) достигается при предельной нагрузке 15 кг/см2, когда угол
армирования равен 90°, и 14 кг/см2 — в остальных двух случаях.
Смещение точек А и В происходит в противоположном направлении
(выпучивание) и максимальный прогиб на 20% меньше, чем в точке С.
§ 11.2. Расчет оболочек с учетом физической
нелинейности О
11.2.1. Изгиб балки под действием равномерно распределен-
распределенной нагрузки. Решается задача об упругопластическом изгибе шар™
нирно опертой балки (рис. 11.2.1). Аналитическое решение этой задачи
известно. Геометрические размеры и механические параметры следую™
щие:
1) Результаты этого параграфа получены Якушиным С. А.
§11.2. Расчет оболочек с учетом физической нелинейности
351
L=1G0cm, Ь = 10 см, Л, = 2 см, ЕЕ = 2 • 106 кг/см2,
и = 0,0, G = 8 • 105 кг/см2, <гТ = 4100 кг/см2.
Рассматриваются три этапа нагружения балки. Первый этап —
в пределах всего сечения напряжения меньше предела текучести
(рис. 11.2.1, a), q ^ АатЪЬ2/3L. Второй этап — в поперечном сечении
появились пластические зоны, но в точке, отстоящей на расстоянии
/г/4 от срединной линии балки, напряжения меньше предела текучести
(рис. 11.2.1, б), q^ НатЪК2/%L. Третий этап — пластическая зона
занимает большую часть поперечного сечения (рис. 11.2.1, в), наи™
большее значение нагрузки соответствует образованию пластического
шарнира q = 2атЬН2/L.
-I I I I I I I I I
Рис. 11.2.1
Балка разбивалась на 15 конечных элементов, количество слоев
было взято равным 10.
4,0h ^ хМ кг/см2
3,0
2,0
1,0
'0,0 2,0 4,0 6,0 8,0 10,0
W, CM
Рис. 11.2.2
На рис. 11.2.2 приведен график «нагрузка-прогиб» для точки, на-
находящейся в середине балки, а на рис. 11.2.3 — эпюры распределения
352
Гл. И. Числовые примеры
1
\
4000
-2000
-0,25
-0,50
-0,75
1,00
1,00
0 75
0,50
0,25
0,00
б
2000 4000
\
а
V
-4000 -2000
-0,25
-0,50
-0,75
-1,00
1,00
0,75
0,50
0,25
0.00
Рис. 11.2.3
нормальных напряжений по толщине в срединном сечении балки при
различных уровнях нагрузки.
Нагрузки, полученные в данной работе, совпадают с аналитическим
решением, погрешность вычислений составляет 2-5%.
11.2.2. Деформация цилиндрической панели (крыши) под дей-
действием собственного веса (рис. 11.2.4). В настоящей работе при™
водится решение данной задачи с учетом геометрической и физи-
физической нелинейности со следующими краевыми условиями: прямо™
«Диафрагма»
Свободный край
Рис. 11.2.4
§11.2. Расчет оболочек с учетом физической нелинейности
353
линейные края панели свободны, а криволинейные края оперты на
«диафрагму».
L = 7,6m, Д = 7,6м,
h = 0,076 м, а = 40°, и = 0,0,
E0 = Ei=E2 = 2,l- 105 МН/м2,
Gi2 = G13 = G23 = 1,05 ¦ 105 МН/м2,
= 4,1 МН/м ,
о
= 2,367 МН/м .
В силу симметрии задачи рассматривалась 1/4 часть крыши, кото-
которая разбивалась на 6 КЭ B х 3). Число слоев было взято равным 10.
Были построены графики зависимости прогиба точки А от нагрузки
(рис. 11.2.5). Задача была решена как для изотропного случая, так и
для различных случаев анизотропии, когда изменению подлежал один
из параметров, как это делалось в работе [357].
2,0
1,0 -
0,00
0,05
0,10 0,15
Рис. 11.2.5
0,20 0,25
12 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
354
Гл. И. Числовые примеры
На рис. 11.2.6 приводится сравнение полученного решения (на гра™
фике обозначено сплошной линией) с результатами, полученными в
работе [405] (на графике обозначено кружками), для случая, когда
материал считался изотропным.
4,0\ кН/м2
3,0
2,0
1,0
, м
0,00 0,05 0,10 0,15 0,20
Рис. 11.2.6
Приведенные выше решения известных задач демонстрируют ра-
работоспособность описанной в § 10.3 методики решения задач изгиба
многослойных оболочек из ортотропного материала с учетом геометри-
геометрической и физической нелинейности.
§ 11.3. Исследование закритичесжого деформирования
цилиндрической панели под действием
сосредоточенной силы
Рассматривается задача об изгибе цилиндрической панели под
действием нормальной сосредоточенной силы, приложенной в ее се-
середине (рис. 11.3.1). Два криволинейных края свободны, на прямо-
прямолинейных краях реализуются условия неподвижного шарнира. Ради-
Радиус цилиндра R = 2540 мм, длина L = 254 мм, модуль упругости
Е = 3102,75 Н/мм2, коэффициент Пуассона v = 0,3, половина угла
раствора панели в = ОД рад. Расчеты проведены для двух значений
толщины панели h = 12,7 мм и h = 6,35 мм.
Рис. 11.3.1
§11.8. Исследование деформирования цилиндрической панели
355
В силу симметрии рассматривается 1/4 часть панели, разбитая на
4 Bx2) девятиузловых конечных элемента. Реализуется алгоритм
решения, описанный в предыдущем параграфе.
Р{Н)
-2500
-2250
-2000
-1750
-1500
-1250
-1000
-750
-500
-250
0,00 -5,00 -10,00 -15,00 -20,00 -25,00 -30,00
W, ММ
Рис. 11.3.2
На рис. 11.3.2 для точки панели, в которой приложена нагрузка,
приводятся полученные с помощью методики, описанной в § 10.4, гра-
графики кривой «нагрузка-прогиб» (сплошная линия) при h = 12,7 мм,
и проводится сравнение с решениями Surana К. S. [392] (пунктирная
линия) и с результатами работы [371] (короткая пунктирная линия).
Верхняя критическая нагрузка, равная 2239 Н, и нижняя — 490 Н,
практически совпадают со значениями, полученными упомянутыми ав-
авторами.
Р(Н)
-800.00
-35.00
W. ММ
Рис. 11.3.3
12*
356 Гл. 11. Числовые примеры
На рис. 11.3.3 помещены следующие графики. Сплошной линией
обозначена кривая, построенная при h = 6,35 мм. Решения, полученные
Surana K.S., обозначены пунктирной линией, Sabir А. В., Lock А. С. —
пунктир с одной точкой из работы [392]. Пунктирной линией с двумя
точками изображена кривая из работы [269]. Верхняя критическая
нагрузка равна 598 Н, нижняя — 413 Н.
Эти задачи демонстрируют эффективность методики определения
закритического состояния. Для оболочки меньшей толщины удалось
получить участок, где наблюдается одновременное уменьшение на-
нагрузки и прогиба (рис. 11.3.3). Подобный участок является пробным
камнем всех подобных методик. Например, принятие на ниспадающей
ветви диаграммы в качестве ведущего параметра вместо приращения
нагрузки приращения прогиба дает кривую, обозначенную пунктирной
линией [392], не улавливающую отмеченного эффекта.
Таким образом, в § 10.4 удается провести модификацию одного
из вариантов метода продолжения по параметру, приспособив его к
конечно-элементной дискретизации задачи. Достигнуто хорошее сов-
падение с решениями, приведенными в работах [269, 371, 392] без
введения итерационного процесса на шаге нагружения.
Список литературы
\. Агапов В. П. Четырехугольный многослойный конечный элемент
для расчета пластинок и оболочек // Строительная механика и
расчет сооружений. — 1986. — Т. 1. — С. 74-76.
2. Агапов В. П. Усовершенствованный плоский многослойный тре-
треугольный конечный элемент комбинированного типа // Изве-
Известия вузов. Строительство и архитектура. — 1985. — Т. 10. —
С.31-34.
3. Агапов В. П. Основные соотношения МКЭ в статических и ди-
динамических расчетах геометрически нелинейных конструкций //
Строительная механика и расчет сооружений. — 1984. — №5. —
С. 43-47.
4. Александров А. Я., Брюккер -П q Куршин Л. М., Прусаков А. П.
Расчет трехслойных панелей Оборонгиз, 1960. — 272 с.
5. Алфутов Н.А., Зиновьев П. А., Попов Б. Г. Расчет многослойных
пластин и оболочек из композиционных материалов. — М.: Ма-
Машиностроение, 1984. — 264 с.
6. Алфутов П. А. Основы расчета на устойчивость упругих си-
систем. — М.: Машиностроение, 1978. — 312 с.
7. Амбарцумян С. А. Общая теория анизотропных оболочек. — М.:
Наука, 1974. - 446 с.
8. Аргирос Д., Шарпф Д. Теория расчета пластин и оболочек с уче-
учетом деформации поперечного сдвига на основе метода конечных
элементов. Применение матричного метода перемещений. Расчет
упругих конструкций с использованием ЭВМ. Том I. — Л.: Судо™
строение, 1974. - С. 179-210.
9. Баенхаев А. В., Болдычев В. П. К построению криволинейных
конечных элементов способа двойной аппроксимации для расчета
тонкостенных конструкций // Прочность и устойчивость инженер-
инженерных конструкций: Сб. ст. Барнаул: Алтайск. политехи, ин-т, 1983.
Вып. 4. - С. 10-18.
358 Список литературы
10. Бакулин В.Н., Каледин В. О., Кривцов В. С. Об одной конечно™
элементной модели слоистой анизотропной оболочки двоякой кри-
кривизны // XIII Всесоюзная конференция по теории пластин и обо-
оболочек: Сб. ст. - Таллин, 1983. - Ч. I. - С. 78-83.
11. Бакулин В.Н., Кривцов B.C., Рассоха А.А. Алгоритм получе-
получения матрицы жесткости конечного элемента анизотропной оболоч-
оболочки // Известия вузов. Авиационная техника. — 1983. — Т. 4. —
С. 14-18.
12. Бакулин В.Н., Рассоха А. А. Метод конечных элементов и го-
лографическая интерферометрия в механике композитов. — М.:
Машиностроение, 1987. — 312 с.
13. Бандурин Н.Г., Николаев А. П. Об определении напряженно-
деформированного состояния тонкостенных оболочек с учетом
геометрической и физической нелинейности // Прикладная меха-
механика. - 1988. - Т. 24. - № 10. - С. 46-52.
14. Бандурин Н.Г., Николаев А. П. К расчету сочлененных оболо-
оболочек с помощью четырехугольного конечного элемента с матрицей
жесткости 36 х 36 // Расчеты на прочность. Вып. 21. — М.:
Машиностроение, 1981. — С. 225-236.
15. Бандурин Н. Г., Николаев А. П., Апраксина Т. И. Применение че-
четырехугольного конечного элемента с матрицей жесткости 36 х 36
к расчету непологих произвольных оболочек // Проблемы прочно-
прочности. - 1980. - Т. 5. - С. 104-108.
16. Бате К., Вилсон Е. Численные методы анализа и метод конечных
элементов. — М.: Стройиздат, 1982, 1982. — 448 с.
17. Бережной Д. В. Искривленный конечный элемент пластин и обо-
оболочек средней толщины с учетом обжатия // Труды междуна-
международной конференции по теории оболочек и пластин. — Казань,
1996. - С. 94-99.
18. Бобров Э.Ш. Прямой метод жесткостей в расчете пологих оболо-
оболочек с непрямоугольным планом. Большепролетные пространствен-
пространственные конструкции. — М.: Стройиздат, 1972. — С. 102-131.
19. Бобров Э.Ш., Шаршукова Л.М. Матрица жесткости треугольно-
треугольного конечного элемента пологой оболочки в ортогональной системе
координат. Большепролетные пространственные конструкции. —
М.: Стройиздат, 1972. - С. 132-138.
20. Богнер Ф., Фокс Р., Шмит Л. Расчет цилиндрической оболочки
методом дискретных элементов // Ракетная техника и космонав-
космонавтика. - 1967. - Т. 5, 4. - С. 170-175.
Список литературы 359
21. Богомолов СИ., Луценко С. С, Назаренко С. А. О примене-
нии суперпараметрического оболочечного конечного элемента к
расчету колебаний лопаток турбомашин // Проблемы прочно-
прочности. - 1982. - №6. - С. 71-74.
22. Болдычев В. П. Двойная аппроксимация угла поворота при рас™
чете пластин средней толщины методом конечных элементов //
Известия ВНИИ гидротехники. - 1979. - Т. 133. - С. 68-74.
23. Болотин В. В., Новичков Ю.Н. Механика многослойных кон-
конструкций. — М.: Машиностроение, 1980. — 375 с.
24. Ботенкова Л. Г., Капустин С. А., Яблонко Л. С. Изопараметри-
ческий сдвиговой элемент для анализа оболочек общего вида //
Прикладные проблемы прочности и пластичности. Методы реше-
решения задач упругости и пластичности. — Горький, 1986. — С. 61-70.
25. Брюккер Л. Э. Некоторые варианты упрощения уравнений изгиба
трехслойных пластин // Расчеты элементов авиационных кон-
конструкций. Вып.З. — М.: Машиностроение, 1965. — С. 74-99.
26. Бурман З.И., Аксенов О.М., Лукашенко В. И., Тимофеев М. Т.
Суперэлементный расчет подкрепленных оболочек. — М.: Маши-
Машиностроение, 1982. — 256 с.
27. Бурман З.И., Артюхин Г. А., Зархин Б.Я. Программное обес-
обеспечение матричных алгоритмов и метода конечных элементов в
инженерных расчетах. — М.: Машиностроение, 1988. — 256 с.
28. Бурман Я. 3., Соловьев С. С. К определению напряжений попереч-
поперечного сдвига в конечно-элементном расчете многослойных пластин
и оболочек по модели Тимошенко // Пространственные конструк-
конструкции в Красноярском крае. — Красноярск, 1989. — С. 75-81.
29. Бусыгин В. Г. Определение матрицы жесткости четырехугольного
изопараметрического элемента оболочки // Прочность и устой-
устойчивость инженерных конструкций. Вып.З. — Барнаул, 1981. —
С.3-13.
30. Быков Е.В., Попов Б. Г. Расчет многослойных оболочечных кон-
конструкций с учетом деформаций поперечных сдвигов // Расчеты на
прочность. Вып. 30. — М.: Машиностроение, 1989. — С. 66-87.
31. Быков Е.В., Попов Б. Г. Треугольный конечный элемент много-
многослойной оболочки // Известия вузов. Машиностроение. — 1984. —
Т. 10. - С. 14-17.
32. Вагин П. П., Иванова И. В., Шишкаренко Г. А. Напря-
Напряженно-деформированное состояние упругих гибких многослойных
оболочек // Прикладная механика. — 1998. — Т. 34. — №8. —
С. 94-102.
360 Список литературы
33. Вайнберг Д. В., Сахаров А. С, Киричевский В. В. Вывод мат™
рицы жесткости характеристик дискретного элемента произволь-
произвольной формы // Сопротивление материалов и теория сооружений.
Вып. 14. - Киев, 1971. - С. 37-44.
34. Варга Р. Функциональный анализ и теория аппроксимаций в
численном анализе. — М.: Мир, 1974. — 126 с.
35. Васидзу В. Вариационные методы в теории упругости и пластич-
пластичности. — М.: Мир, 1987. — 542 с.
36. Васильев В. В. Механика конструкций из композиционных мате-
материалов. — М.: Машиностроение, 1988. — 272 с.
37. Вахитов М.Б., Сафариев М.С., Соловьев С. С. Построение и
тестирование изопараметрического четырехугольного конечного
элемента для расчета непологих оболочек средней и малой толщи-
толщины // Известия вузов. Авиационная техника. — 1989. — Т. 1. —
С. 17-21.
38. Вейнгартен. Свободные колебания тонких цилиндрических обо™
лочек. Ракетная техника и космонавтика. — 1964. — Т. 2. —
№4. - С. 167-173.
39. Виссер В. Применение криволинейного элемента смешанного типа
для расчета оболочек // Расчет упругих конструкций с использо-
использованием ЭВМ. Том III. - Л.: Судостроение, 1974. - С. 230-254.
40. Гаврюшин С. С. Численное моделирование нелинейного поведения
тонких упругих оболочек на основе многопараметрического подхо-
подхода // Труды 17 Международной конференции по теории оболочек
и пластин, Казань, 1995. - Т. 1. - Казань, 1996. - С. 185-190.
41. Гаврюшин С. С. Численное моделирование и анализ процессов
нелинейного деформирования гибких оболочек // Механика твер-
твердого тела. - 1994. - № 1. - С. 109-119.
42. Галиев К. С, Гордон Л. А., Розан Л. А. О построении универсала
ной матрицы жесткости в МКЭ // Известия ВНИИ гидротехни-
гидротехники. - 1974. - Т. 105. - С. 174-188.
43. Галилеев М. М. Схема смешанного метода конечных элементов
для пластин и оболочек // Прикладное и теоретическое иссле-
исследование строительных конструкций. — М.: Стройиздат, 1981. —
С. 26-30.
44. Галимов К. 3. Основы нелинейной теории тонких оболочек. —
Казань: Изд-во Казанск. ун-та, 1975. — 325 с.
45. Галимов К. 3., Паймушин В. Н. Теория оболочек сложной геомет-
геометрии. — Казань: Изд-во Казанск. гос. ун-та, 1985. — 164 с.
Список литературы 361
46. Галинъш А. К. Расчет пластин и оболочек по уточненным тео-
теориям // Исследования по теории пластин и оболочек. Вып. 5. —
Казань: Изд-во Казанск. гос. ун-та, 1967. — С. 66-92.
47. Галлагер Р. Метод конечных элементов. Основы. — М.: Мир,
1984. - 428 с.
48. Геррманн Л., Кэмбелл Д. Метод дискретных элементов для тон-
тонких оболочек // Ракетная техника и космонавтика. — 1968. —
Т. 6, 10. - С. 23-29.
49. Гинесин Л.Ю., Назарова М.М. Треугольный конечный элемент
для расчета тонких оболочек // XIII Всесоюзная конференция по
теории пластин и оболочек. Ч. II. — Таллин, 1983. — С. 13-17.
50. Голдманис М.В., Риекстиньш А. И., Тетере Г. А. Нелинейный
и начальный закритический конечно-элементный анализ компо-
композитных цилиндрических панелей при осевом сжатии (англ.) //
Механика композитных материалов. — 1992. — № 1. — С. 73-83.
51. Голдманис М.В., Тетере Г. А. Исследование устойчивости ани-
зотропных композитных панелей при помощи вырожденного ко-
конечного элемента оболочек в геометрически нелинейной постанов™
ке. // Механика композитных материалов. — 1989. — №4. —
С.664-670.
52. Голдманис М.В., Тетере Г. А. Исследование устойчивости оболо-
оболочек вращения из волокнистых композитов в геометрически нели-
нейной конечно-элементной постановке // Механика композитных
материалов. - 1987. - №2. - С. 286-292.
53. Голованов А. И. Исследование устойчивости тонких оболочек изо-
параметрическими конечными элементами // Строительная меха-
механика и расчет сооружений. — 1992. — Т. 2. — С. 51-55.
54. Голованов А. И. Расчет трубчатых соединений как составных обо-
оболочек // Известия вузов. Авиационная техника. — 1992. — Т. 2. —
С.83-85.
55. Голованов А. И. Исследование свободных колебаний оболочек ме-
методом конечных элементов // Исследования по теории пластин и
оболочек. Вып. 23. — Казань: Изд-во Казанск. гос. ун-та, 1991. —
С.81-85.
56. Голованов А. И. Конечные элементы тонких непологих оболочек.
Способы построения // Прикладные проблемы прочности и пла-
пластичности. Методы решения. — Н.Новгород, 1991. — С. 58-65.
57. Голованов А. И. Конечные элементы тонких непологих оболочек.
Классификация и основные требования // Прикладные пробле-
362 Список литературы
мы прочности и пластичности. Численное моделирование физико-
механических процессов. — Горький, 1990. — С. 89-96.
58. Голованов А. И. О расчете тонких оболочек трехмерными изопа-
раметрическими элементами // Исследования по теории пластин и
оболочек. Вып. 20. — Казань: Изд-во Казанск. гос. ун-та, 1990. —
С. 134-140.
59. Голованов А. И. Универсальный конечный элемент тонкой обо™
лочки // Исследования по теории оболочек. Труды семинара. —
Вып. XXV. - Казань, 1990. - С. 66-83.
60. Голованов А. И. Исследование явления потери точности при рас-
расчете тонких пластин сдвиговыми конечными элементами // Изве-
Известия вузов. Математика. — 1989. — Т. 8. — С. 21-27.
61. Голованов А. И. Сравнительный анализ различных схем расчета
оболочек произвольной геометрии методом конечных элементов //
Исследования по теории оболочек. Труды семинара. Вып. XXI.
Ч. I. - Казань, 1989. - С. 104-111.
62. Голованов А. И. Расчет составных оболочек произвольной гео-
геометрии // Проблемы механики оболочек. — Калинин, 1988. —
С. 33-40.
63. Голованов А. И. Конечно-элементный расчет оболочек с дис-
дискретно-заданной геометрией // Прочность и устойчивость обо-
оболочек. Труды семинара. Вып. XIX. Ч. П. — Казань, 1986. —
С. 69-82.
64. Голованов А. И. Новый конечный элемент для расчета произволь-
произвольных тонких оболочек // Строительная механика и расчет соору-
сооружений. - 1986. - Т. 4. - С. 21-23.
65. Голованов А. И., Бережной Д. В. Метод конечных элементов в
механике деформируемых твердых тел. — Казань: «ДАС», 2001. —
300с.
66. Голованов А. И., Гуриелидзе М.Г., Гурьянова О.Н. Расчет одно-
однородных и слоистых оболочечных конструкций с учетом больших
перемещений МКЭ // Сб. докл. XIX Междун. конф. по теории
оболочек и пластин. — Н. Новгород, 1999. — С. 45-48.
Ш.Голованов А. И., Гурьянова О.Н. Исследование геометрически
нелинейного деформирования произвольных многослойных оболо-
оболочек МКЭ // Механика композиционных материалов и конструк-
конструкций. - Москва, 2000. - Т. 6. - №3. - С. 419-435.
68. Голованов А. И., Гурьянова О.Н. Исследование геометрически
нелинейного деформирования произвольных многослойных оболо-
Список литературы 363
чек малой и средней толщин МКЭ // Известия ВУЗ. Авиационная
техника. - Казань, 2000. - №2. - С. 7-10.
69. Голованов А. И., Гурьянова О.Н. Построение разрешающих мат™
риц в шаговой схеме решения геометрически нелинейных задач
для слоистых оболочек МКЭ // Труды Международной конфе-
конференции «Актуальные проблемы механики оболочек». — Казань,
1998. - С. 47-52.
70. Голованов А. И., Касумов Е. В. Построение и тестирование 4-х
узлового конечного элемента с 6 степенями свободы // Труды
международной конференции по теории оболочек и пластин —
Казань, 1996. - С. 106-111.
71. Голованов А. И., Коноплев Ю. Г., Тюленева О. //., Шигабутдинов
А.Ф., Якушин С. А. Исследование нелинейного статического и
динамического деформирования оболочек малой и средней тол-
толщины МКЭ. // Труды XX Международной конференции «Мате-
«Математическое моделирование в механике сплошных сред. Методы
граничных и конечных элементов — BEM&FEM-2003». — СПб.,
2003. - С. 134-139.
72. Голованов А. И., Корнишин М.С. Введение в метод конечных
элементов статики тонких оболочек. — Казань, 1989. — 270 с.
73. Голованов А. И., Красновский И. Ю. Расчет композитных оболо-
оболочек на основе гипотез Тимошенко и метода конечных элементов//
Прикладная механика. — 1992. — Т. 28, 8. — С. 53-58.
74. Голованов А. И., Красновский И. Ю. Изопараметрический конеч-
конечный элемент композитной оболочки с двойной аппроксимацией
деформаций // Механика композитных материалов. — 1991. —
Т. 5. - С. 885-890.
75. Голованов А. И., Красновский И.Ю., Нехотяев В. В., Песошин
А. В., Шалабанов А. К. Численный анализ тонкостенных кон-
конструкций как трехмерных тел // Численные методы решения за-
задач теории упругости и пластичности. Материалы XI Всесоюзной
конференции. — Новосибирск, 1990. — С. 50-53.
76. Голованов А. И., Кузнецов Ю.М. Метод Рутисхаузера в конечно-
элементном анализе динамических характеристик тонких оболо-
оболочек // Актуальные проблемы механики оболочек. Казань: КАИ,
1985. - С. 6-10.
77. Голованов А. И., Кузнецов Ю. М. Свободные колебания тонкостен-
тонкостенных элементов конструкций летательных аппаратов // Современ-
Современные проблемы строительной механики и прочности летательных
аппаратов. Тезисы докладов III Всесоюзной конференции. — Ка-
Казань, 1988. — С.35-36.
364 Список литературы
78. Голованов А. И., Кузнецов Ю. М. Свободные колебания цилиндри-
ческих оболочек с системой симметрично расположенных отвер-
отверстий // Исследования по теории пластин и оболочек. Вып. 21. —
Казань: Изд-во Казанск. гос. ун-та, 1989. — С. 151-159.
79. Голованов А. И., Нехотяев В. В., Шалабанов А. К. Об ис-
пользовании оболочек как несущих элементов конструкции
грузового автомобиля // Труды XIV Всесоюзной конференции
по теории пластин и оболочек. — T.I. — Тбилиси, 1987. —
С. 361-367.
80. Голованов А. И., Песошин А. В. Трехмерный конечный элемент
для расчета произвольных оболочек // Исследования по теории
пластин и оболочек. Вып. 24. — Казань: Изд-во Казанск. гос.
ун-та, 1992. - С. 6-21.
81. Голованов А. И., Песошин А. В. Новый вариант построения трех-
трехмерного конечного элемента для анализа произвольных оболо-
чек // Исследования по теории пластин и оболочек. Вып. 22. —
Казань: Изд-во Казанск. гос. ун-та, 1990. — С. 79-90.
82. Голованов А. И., Песошин А. В. Расчет оболочек квадратичными
С0 элементами // Труды XV Всесоюзной конференции по теории
оболочек и пластин. Том I. — Казань, 1990. — С. 492-497.
83. Голованов А. И., Песошин А. В., Красновский И.Ю., Нехотяев
В. В. Расчет геометрически сложных штампованных конструкций
как оболочек средней толщины // Известия вузов. Машинострое-
Машиностроение. - 1990. - Т. 4. - С. 30-34.
84. Голованов А. И., Тюленева О.Н., Якушин С. А. Расчет тонкостен-
тонкостенных конструкций МКЭ с учетом геометрической и физической
нелинейности // Сб. докладов «Проблемы прочности и пластично-
пластичности». Вып. 64. - Н. Новгород: Изд-во ННГУ, 2002. - С. 36-40.
85. Голованов А. И., Шигабутдинов А. Ф. К расчету свободных ко-
колебаний тонкостенных конструкций // Труды XIII межвузовской
конференции. - Ч. 1. - Самара, 2003. - С. 28-32.
86. Гольденвейзер А. Л. Теория упругих тонких оболочек. — М.: На-
Наука, 1976. - 512 с.
87. Гончаренко И.Е., Кислоокий В. П., Легостаев А. Д., Сахаров
А. С, Соловей Н.А. Реализация метода конечного элемента для
непологих оболочек сложной формы // Сопротивление материалов
и теория сооружений. Вып. 24. — Киев, 1974. — С. 16-25.
88. Горбачев К. П. Метод конечных элементов в расчетах прочно-
прочности. — Л.: Судостроение, 1985. — 156 с.
Список литературы 365
89. Гордон Л. А. К расчету пластин и оболочек методом конечных
элементов // Известия ВНИИ гидротехники. — 1972. — Т. 99. —
С.168-178.
90. Гордон Л. А., Шойхет Б. А. Об одном способе численного расчета
тонких пластин и оболочек // Известия ВНИИ гидротехники. —
1972. - Т. 98. - С. 34-42.
91. Городецкий А. С. Расчет пространственных тонкостенных кон™
струкций методом конечного элемента // ЭВМ в исследованиях
и проектировании объектов строительства. — Киев: Будивельник,
1972. - С. 75-86.
Ш.Городецкий А. С, Зоворицкий В. И., Лантух-Лященко А. И.,
Рассказов А. О. Метод конечных элементов в проектирова-
проектировании транспортных сооружений. — М.: Транспорт, 1981. —
143 с.
93. Григолюк Э.И., Кабанов В. В. Устойчивость оболочек. — М.:
Наука, 1978. - 360 с.
94. Григолюк Э. И., Коган Ф. А. Современное состояние теории много-
многослойных оболочек // Прикладная механика. — 1972. — Т. 8, 6. —
С. 3-17.
95. Григолюк Э.И., Куликов Г.М. Многослойные армированные
оболочки: Расчет пневматических шин. — М.: Машиностроение,
1988. - 288 с.
96. Григолюк Э. И., Чулков П. П. Устойчивость и колебания трехслой-
трехслойных оболочек. — М.: Машиностроение, 1973. — 170 с.
97. Григолюк Э. Я., Шалашилин В. И. Проблемы нелинейного дефор-
деформирования. Метод продолжения решения по параметру в нели-
нелинейных задачах механики твердого деформируемого тела. — М.:
Наука, 1988. - 232 с.
98. Григоренко Я. М. Решение задач теории оболочек методами чис-
численного анализа // Прикладная механика. — 1984. — Т. 20, 10. —
С.3-22.
99. Григоренко Я.М., Василенко А. Т., Голуб Г. П. Статика анизо-
анизотропных оболочек с конечной сдвиговой жесткостью. — Киев:
Наукова думка, 1987. — 216 с.
100. Григоренко Я. М., Кокошин С. С. Численный анализ напряженного
состояния слоистых анизотропных оболочек на базе смешанной
модели МКЭ // Прикладная механика. — 1982. — Т. 18, 2. —
С. 3-6.
366 Список литературы
101. Григоренко Я.М., Кокошин С. С. К расчету оболочечных кон™
струкций МКЭ // Прикладная механика. — 1979. — Т. 15, 7. —
С. 3-10.
102. Грин Б., Джонс Р., Маклей Р. Обобщенные вариационные прин-
принципы в методе конечных элементов // Ракетная техника и космо-
космонавтика. - 1969. - Т. 7. - С. 47-55.
103. Датт Д. Эффективный треугольный элемент оболочки // Ракет™
ная техника и космонавтика. — 1970. — Т. 8, 11. — С. 228-229.
104. Даутов Р. 3. Суперсходимость схем МКЭ с численным интегриро-
интегрированием для квазилинейных эллиптических уравнений четвертого
порядка // Дифференциальные уравнения. — 1982. — Т. 18, 7. —
С. 1172-1181.
105. Длугач М.И., Ковальчук Н.В. Исследование напряженного со-
состояния ребристых цилиндрических оболочек с прямоугольными
отверстиями методом конечных элементов // Прикладная механи-
механика. - 1974. - Т. 10. - С. 22-30.
106. Длугач М. И., Ковальчук Н. В. Метод конечных элементов в при-
применении к расчету цилиндрических оболочек с прямоугольными
отверстиями // Прикладная механика. — 1973. — Т. 9, 11. —
С. 35-41.
107. Дробченко Б. Д. О расчете оболочечных конструкций методом
конечных элементов // Математические методы и физико-механи-
физико-механические поля. Вып. 23. - Киев, 1986. - С. 84-88.
108. Дробышевский Н.И. Модифицированный четырехугольный ко-
конечный элемент для решения двумерных задач нелинейного де-
деформирования конструкций // Известия АН. Механика твердого
тела. - 1996. - №2. - С. 152-162.
109. Дудченко А. А., Лурье С. А., Образцов И.Ф. Анизотропные мно-
многослойные пластины и оболочки // Итоги науки и техники. Меха-
Механика деформируемого твердого тела. — М: ВИНИТИ. — 1983. —
Т. 15. - С. 3-68.
110. Дюпуи Д. Применение метода Ритца для расчета тонких упругих
оболочек // Прикладная механика. Труды Амер. общества инже-
инженеров-механиков. - 1971. - Т. 37, 4. - С. 272-280.
111. Еременко СЮ. Методы конечных элементов в механике дефор-
деформируемых тел. — Харьков: Основа, 1991.
112. Заргами М., Робинзон А. Численный метод расчета свободных
колебаний сферических оболочек // Ракетная техника и космо-
космонавтика. - 1967. - Т. 5. - №7. - С. 51-58.
Список литературы 367
113. Зенкевич О. С Метод конечных элементов в технике. — М.: Мир,
1975. - 544 с.
114. Кабанов В. В., Железное Л. П. Исследование нелинейного дефор™
мирования и устойчивости цилиндрических оболочек при неосе-
симметричном давлении методом конечных элементов // Приклад™
ная механика. — 1981. — Т. 17, 5. — С. 71-76.
115. Кабанов В. В., Железное Л. П. К расчету цилиндрической обо™
лочки методом конечных элементов // Прикладная механика. —
1985. - Т. 21, 9. - С. 35-40.
116. Кантин Д. Смещения криволинейных конечных элементов как
жесткого целого // Ракетная техника и космонавтика. — 1970. —
Т. 8, 7. - С. 84-88.
117. Кантин Д. Зависимости деформаций цилиндрических оболочек
от перемещений // Ракетная техника и космонавтика. — 1968. —
Т. 6, 9. - С. 219-220.
118. Кантин Д., Клаф Р. Искривленный дискретный элемент ци-
цилиндрической оболочки // Ракетная техника и космонавтика. —
1968. - Т. 6, 6. - С. 82-88.
119. Капустин С. А., Латухин Л.Ю., Прок А.Е., Чурилое Ю.А. Точ-
Точность численного интегрирования в конечных элементах с сирен-
диповой аппроксимацией поля перемещений // Прикладные про-
проблемы прочности и пластичности. Исследование и оптимизация
конструкций. — Горький, 1987. — С. 77-85.
120. Кей СВ., Бейсинджер З.Е. Расчет тонких оболочек на осно-
основе метода конечных элементов // Расчет упругих конструкций
с использованием ЭВМ. — Л.: Судостроение, 1974. — Т. 1. —
С.151-178.
121. Кобелев В.Н., Коварский Л.М., Тимофеев СИ. Расчет трехслой-
трехслойных конструкций. — М.: Машиностроение, 1984. — 304 с.
122. Конопле в Ю.Г., Голованов А. И., Красновский И.Ю., Береж-
Бережной Д. В. Численное исследование НДС элементов турбомашин //
Газовые турбины — теория, конструирование, производство, экс-
эксплуатация. Материалы международного семинара. — Казань,
1990. - С. 52-61.
123. Копытко М. Ф., Муха И. С, Савула Я. Г. Задачи статики и дина-
динамики для оболочек сложной геометрии // XI Всесоюзная конфе-
конференция по теории пластин и оболочек. Ч. III. — Таллин, 1983. —
С. 66-71.
368 Список литературы
124. Корнишин М.С., Голованов А. И., Кузнецов Ю.М. Определение
частотных характеристик некруговых цилиндрических оболочек с
вырезами и точечными опорами // Эксплуатационная и конструк-
конструктивная прочность судовых конструкций. Восьмые «Бубновские
чтения». — Горький, 1988. — С. 55-57.
125. Корнишин М. С, Паймушин В. Я., Снигирев В. Ф. Вычислитель-
Вычислительная геометрия в задачах механики оболочек. — М.: Наука,
1989. - 208 с.
126. Корнишин М.С., Паймушин В. Н. К вопросу о параметризации
срединной поверхности пластин и оболочек со сложной грани-
границей // Прочность и устойчивость оболочек. Труды семинара. —
Вып. IX. - Казань, 1977. - С. 17-25.
127. Корнишин М. С, Якупов Н.М. К расчету оболочек сложной гео-
метрии в цилиндрических координатах на основе сплайнового
варианта МКЭ // Прикладная механика. — 1989. — Т. 25, 8. —
С. 53-60.
128. Корнишин М. С, Якупов Н.М. Сплайновый вариант МКЭ в сфе-
сферических координатах // Прикладные проблемы прочности и пла-
пластичности. Алгоритмизация и автоматизация научных исследова-
исследований. — Горький, 1988. — С. 74-80.
129. Корнишин М.С., Якупов Н.М. Сплайновый вариант метода ко-
конечных элементов для расчета оболочек сложной геометрии //
Прикладная механика. — 1987. — Т. 23, 3. — С. 38-44.
130. Коробейников С.Н. Геометрически нелинейный анализ оболочек
с учетом больших приращений поворотов // Моделирование в
механике. - 1990. - Т.4B1). - №4. - С. 119-126.
131. Косицын СБ. Метод построения базисных функций для искрив-
искривленных конечных элементов с учетом жесткого смещения // Ис-
Исследования по строительным конструкциям и их элементам. — М.:
ЦНИИСК, 1982. - С. 17-27.
132. Кравченко А. А., Садовский В. В. Построение и исследование
плоского оболочечного конечного элемента // Прикладные пробле-
проблемы прочности и пластичности. Методы решения задач упругости
и пластичности. — Горький, 1984. — С. 92-97.
133. Кудряшов А. Б., Чубанъ В. Д. Об одном подходе к построению
криволинейных изопараметрических конечных элементов оболоч-
оболочки // Прикладные проблемы прочности и пластичности. Ста-
Статика и динамика деформируемых систем. — Горький, 1981. —
С. 48-56.
Список литературы 369
134. Кузнецов В. В., Левяков СВ. Исследование нелинейного дефор-
деформирования и устойчивости форм равновесия оболочек враще-
вращения при больших перемещениях // Доклады Академии Наук. —
1997. - Т. 357. - №2. - С. 187-189.
135. Кузнецов Ю.М. НДС эллиптических цилиндрических оболочек
под действием локальных и распределенных поперечных нагру-
нагрузок // Исследования по теории оболочек. Труды семинара. —
Вып. XXI. Ч. И. - Казань, 1988. - С. 127-139.
136. Кузнецов Ю.М., Голованов А. И. Элементы с явным выражением
жестких смещений в расчете тонких цилиндрических оболочек //
Прочность и устойчивость оболочек. Труды семинара. — Вып. XIX.
Ч. II. - Казань, 1986. - С. 83-93.
137. Кузнецов Ю.М., Голованов А. И. Применение МКЭ к задаче сво-
свободных колебаний тонких цилиндрических оболочек // Исследо-
Исследования по теории оболочек. Труды семинара. — Вып. XVII. Ч. I. —
Казань, 1984. - С. 79-88
138. Кулагин СВ. Расчет слоистых композитных оболочек МКЭ //
Проблемы динамики и прочности машиностроительных конструк-
конструкций. - Казань, 1990. - С. 68-83.
139. Куликов Г.М. Деформационные соотношения, точно представ-
представляющие большие перемещения оболочки как жесткого тела //
МТТ. - 2004. - №5. - С. 130-140.
140. Куликов Г.М. Напряженно-деформированное состояние оболочек
из слоистых композитов // Журнал прикладной механики и тех-
нической физики. — 1988. — Т. 5. — С. 157-162.
141. Лагундаридзе Г. О., Мяченков В. И. Расчет конструктивно ани-
анизотропных оболочек методом конечных элементов // Расчеты на
прочность. Вып. 30. — М.: Машиностроение, 1989. — С. 182-201.
142. Ли СВ., Пиан Т. Усовершенствование метода расчета конечных
элементов для пластин и оболочек с помощью смешанного подхо-
подхода // Ракетная техника и космонавтика. — 1978. — Т. 16, 1. —
С.38-53.
143. Линдберг Д.М., Олсон М.Д. Треугольный конечный элемент вы-
высокой точности для цилиндрической оболочки // Ракетная техника
и космонавтика. — 1971. — Т. 9, 3. — С. 231-233.
144. Лурье А. И. Нелинейная теория упругости. — М.: Наука, 1980. —
512 с.
145. Малинин М.Ю., Снигирев В.Ф. Сплайны в численных методах
исследования оболочек произвольной формы // Теория и методы
370 Список литературы
исследования пластин и оболочек сложной формы. — Казань:
КАИ, 1987. - С. 102-105.
146. Малинин М. Ю., Снигирев В. Ф. Четырехугольный конечный эле™
мент пологой оболочки типа Тимошенко // Прикладные проблемы
прочности и пластичности. Статика и динамика деформируемых
систем. — Горький, 1985. — С. 61-65.
147. Малинин М.Ю., Снигирев В. Ф. Треугольный конечный элемент
пологой оболочки типа Тимошенко // Механика композитных
материалов. - 1985. - Т5. - С. 873-877.
148. Малинин Н.Н. Прикладная теория пластичности и ползучести. —
М.: Машиностроение, 1975.
149. Малмейстер А. К., Тамуж В. П., Тетере Г. А. Сопротивление по™
лимерных и композитных материалов. — Рига: Зинатне, 1980. —
572 с.
150. Матвеев А. П., Головин О. А. Расчет напряженного состояния
оболочки методом конечных элементов // Прикладная механи-
ка. - Тула, 1977. - С. 36-39.
151. Медетбеков А. М. Расчет на ЕС ЭВМ тонкостенных железобетон-
железобетонных пространственных конструкций на основе метода конечных
элементов с бикубическими перемещениями // Метод конечных
элементов в расчетах железобетонных пластин и оболочек. —
Фрунзе, 1979. - С. 3-38.
152. Милейковский И.Е. Система исходных уравнений пологих обо™
лочек при учете сдвига по толщине и решение их по методу
конечного элемента // Пространственные конструкции зданий и
сооружений. Вып.З. — М.: Стройиздат, 1977. — С. 5-10.
153. Немировский Ю.В., Резников Б. С. Прочность элементов кон™
струкций из композитных материалов. — Новосибирск: Наука,
1986. - 165 с.
154. Нехотяев В. В., Голованов А. И. Исследование напряженно-
деформированного состояния кронштейна крепления двигателя
грузового автомобиля // Исследования по теории пластин и
оболочек. Вып. 20. — Казань: Изд-во Казанск. гос. ун-та, 1990. —
С. 166-173.
155. Николаев А. П., Бандурин Н. Г. К определению напряжений в зоне
пересечения непологих оболочек методом конечных элементов //
Строительная механика и расчет сооружений. — 1986. — Т. 4. —
С. 18-20.
Список литературы 371
156. Николаев А. П., Бандурин Н.Г. К расчету оболочек методом ко-
конечного элемента // Строительная механика и расчет сооруже-
сооружений. - 1980. - Т. 5. - С. 21-25.
157. Новожилов В. В. Теория тонких оболочек. — Л.: Судпромгиз,
1962. - 432 с.
158. Новожилов В. В., Черных К.Ф., Михайловский Е. И. Линейная
теория тонких оболочек. — Л.: Политехника, 1991. — 656 с.
159. Норри Д, де Фриз Ж. Введение в метод конечных элементов. —
М.: Мир, 1981. - 304 с.
160. Образцов И. Ф., Савельев Л.М., Хазанов X. С. Метод конечных
элементов в задачах строительной механики летательных аппара-
аппаратов. — М.: Высшая школа, 1985. — 392 с.
161. Обэн Ж.-П. Приближенное решение эллиптических краевых за-
задач. - М.: Мир, 1977. - 384 с.
162. Оден Д. Конечные элементы в нелинейной механике сплошных
сред. — М.: Мир, 1976. — 464 с.
163. Оден Д. Расчет матриц жесткости дискретных элементов тонко-
тонкостенных оболочек произвольной формы // Ракетная техника и
космонавтика. — 1968. — Т. 6, 5. — С. 256-258.
164. Олман Д. Треугольные конечные элементы для расчета изгибае-
изгибаемых пластин при постоянных и линейно распределенных изгиба-
изгибающих моментах // Расчет упругих конструкций с использованием
ЭВМ. T.I. - Л.: Судостроение, 1974. - С. 80-101.
165. Олсон М.Д. Исследование произвольных оболочек с помощью
пологих оболочечных конечных элементов // Тонкостенные обо™
лочечные конструкции. Теория, эксперимент, проектирование. —
М.: Машиностроение, 1980. - С. 409-437.
166. Пагано //., Хэтфилд С. Упругое поведение многослойного двуна-
двунаправленного композиционного материала // Ракетная техника и
космонавтика. - 1972. - Т. 10, 7. - С. 98-101.
167. Найму шин В. Н. Нелинейная теория среднего изгиба трехслойных
оболочек с дефектами в виде участков непроклея // Прикладная
механика. - 1987. - Т. 23, 11. - С. 32-38.
168. Наймутин В.Н. К вариационным методам решения нелинейных
пространственных задач сопряжения деформируемых тел // ДАН
СССР. - 1983. - Т. 273, 5. - С. 1083-1086.
169. Найму шин В. Н. К проблеме расчета пластин и оболочек со слож-
сложным контуром // Прикладная механика. — 1980. — Т. 16, 4. —
С.63^70.
372 Список литературы
170. Паймушин В. Н. Соотношения теории тонких оболочек типа Тимо-
Тимошенко в криволинейных координатах поверхности отсчета // При-
Прикладная математика и механика. — 1978. — Т. 42, 4. — С. 767-772.
171. Паймушин В.Н., Демидов В. Г. Уравнения теории многослойных
оболочек со слоями переменной толщины и их применение к зада™
чам теории упругости в неканонических областях // Исследования
по теории пластин и оболочек. Труды семинара. — Вып. XVIII.
Ч. II. - Казань, 1985. - С. 54-65.
172. Паймушин В. П., Петрушенко Ю.Я. Вариационный метод иссле-
дования устойчивости пространственных оболочечных систем //
Прочность и устойчивость оболочек. Труды семинара. — Вып. XIX,
Ч. I. - Казань, 1986. - С. 4-22.
173. Паймушин В. П., Петрушенко Ю.Я., Сайтов И. Ю. Обобщенная
модель механики оболочек со слоями переменной толщины //
Прочность и колебания авиационных конструкций. — Казань,
1984. - С.37-43.
174. Паймушин В. П., Петрушенко Ю.Я. К вариационным методам в
теории оболочек сложной геометрии с приложениями к задачам
сопряжения составных оболочек // Исследования по теории обо™
лочек. Труды семинара. — Вып. XVII, Ч. I. — Казань, 1984. —
С. 4-19.
175. Парлетт Б. Симметричная проблема собственных значений. Чис-
Численные методы. — М.: Мир, 1983. - 384 с.
176. Паутов А. И. Треугольный конечный элемент для анализа изгиба
пластин с учетом деформаций поперечного сдвига // Прикладные
проблемы прочности и пластичности. Статика и динамика дефор-
деформируемых систем. — Горький, 1983. — С. 72-77.
177. Пелех Б. Л. Теория оболочек с конечной сдвиговой жесткостью. —
Киев: Наукова думка, 1973. — 248 с.
17'8. Пелех Б. Л., Марчук М.В. Метод конечных элементов при ре™
шении краевых задач для анизотропных пластин из композитных
материалов // Механика композитных материалов. — 1983. —
Т. 1. - С. 71-79.
179. Петрушенко Ю.Я. Вариационный метод исследования прочно™
сти, устойчивости и динамической реакции пространственных
конструкций, составленных из слоистых оболочек сложной гео-
геометрии // Прикладные проблемы механики оболочек. — Казань,
1989. - С.76-84.
180. Петрушенко Ю.Я. О вариационном методе исследования напря™
женно™деформированного состояния, устойчивости и свободных
Список литературы 373
колебаний составных оболочечных конструкций // Проблемы ме-
механики оболочек. — Калинин, 1988. — С. 110-119.
181. Пиан Т. Вывод соотношений для матриц жесткости элемента,
основанный на выборе закона распределения напряжений // Ра-
Ракетная техника и космонавтика. — 1964. — Т. 2, 7. — С. 219-222.
182. Пикуль В. В. Теория и расчет слоистых конструкций. — М.: Наука,
1985. - 182с.
183. Пискунов В. Г. Построение дискретно-континуальной схемы рас-
расчета неоднородных плит на основе метода конечных элементов //
Сопротивление материалов и теория сооружений. Вып. 33. —
1978. - С. 78-81.
184. Пискунов В. Г., Карпиловский B.C., Сипетов B.C., Марченко
П. Г. Реализация конечных элементов многослойных конструкций
на ЕС ЭВМ // Известия вузов. Строительство и архитектура. —
1982. - Т. 5. - С. 29-33.
185. Пискунов В. Г., Сипетов В. С. Применение метода конечных эле-
элементов к расчету неоднородных плит с различными условиями
на контуре // Известия вузов. Строительство и архитектура. —
1978. - Т.1. - С. 55-59.
186. Погорелое А. В. Внешняя геометрия выпуклых поверхностей. —
М.: Наука, 1969. - 760 с.
187. Попов Б. Г. Коррекция ранга матрицы жесткости конечного эле-
элемента // Известия вузов. Машиностроение. — 1984. — Т. 12. —
С. 3-6.
188. Постное В. А. Численные методы расчета судовых конструк-
конструкций. — Л.: Судостроение, 1977. — 280 с.
189. Пупков Л. И. Метод штрафных функций в построении совместных
конечных элементов пологих оболочек // Проблемы машиностро-
машиностроения. Вып. 21. - Киев, 1984. - С. 54-59.
190. Рассказов А. О. Расчет многослойной ортотропной пологой обо-
оболочки методом конечных элементов // Прикладная механика. —
1978. - Т. 14, 8. - С. 51-57.
191. Рассказов А. О. К теории многослойных ортотропных пологих
оболочек // Прикладная механика. — 1976. — Т. 12, 11. —
С. 50-56.
192. Рассказов А. О., Соколовская И. И., Шульга Н. А. Теория и расчет
слоистых ортотропных пластин и оболочек. — Киев: Вища школа,
1986. - 191 с.
374 Список литературы
193. Расчет неоднородных пологих оболочек и пластин методом конеч-
конечных элементов. — Киев: Вища школа, 1987. — 200 с.
194. Рикардс Р. Б. Метод конечных элементов в теории оболочек и
пластин. — Рига: Зинатне, 1988. — 284 с.
195. Рикардс Р. Б., Чате А. Г. Геометрически нелинейное докритиче-
ское состояние анизотропных оболочек // Прикладная механика.
1985. - Т. 21. - №12. - С. 68-77.
196. Рикардс Р. Б., Чате А. К. Изопараметрический треугольный ко-
конечный элемент многослойной оболочки по сдвиговой модели Ти-
Тимошенко. Ч. 1. Матрицы жесткости, масс и геометрической жест-
жесткости элемента // Механика композитных материалов. — 1981. —
Т.З. - С. 453-460.
197. Рикардс Р. Б., Чате А. К. Изопараметрический треугольный ко-
конечный элемент многослойной оболочки по сдвиговой модели
Тимошенко. 4.2. Численные примеры // Механика композитных
материалов. - 1981. - Т. 5. - С. 815-820.
198. Розин Л. А. Вариационные постановки задач для упругих си-
систем. — Л.: Изд-во Ленинград, ун-та, 1978. — 224 с.
199. Розин Л. А. Метод конечных элементов в применении к упругим
системам. — М.: Стройиздат, 1977. — 129 с.
200. Розин Л. А., Гордон Л. А. Метод конечных элементов в теории
пластин и оболочек // Известия ВНИИ гидротехники. — 1971. —
Т. 95. - С. 85-97.
201. Савула Я. Г. Представление срединных поверхностей оболочек
резными поверхностями // Прикладная механика. — 1984. —
Т. 20, 12. - С. 70-75.
202. Савула Я. Г., Флейшман Н.П. Расчет и оптимизация оболочек
с резными срединными поверхностями. — Львов: Вища школа,
1990. - 170 с.
203. Сахаров А.С. Моментная схема конечных элементов МСКЭ с
учетом жестких смещений // Сопротивление материалов и теория
сооружений. Вып. 24. — Киев, 1974. — С. 147-156.
204. Сахаров А. С, Кислоокий В. Н., Киричевский В. В., Алътенбах И.,
Габберт У., Данкерт Ю., Кепплер X., Кочык 3. Метод конечных
элементов в механике твердых тел. — Киев: Вища школа, 1982. —
480 с.
205. Сахаров А. С, Соловей Н.А. Исследование сходимости метода
конечных элементов в задачах пластин и оболочек // Простран-
Список литературы 375
ственные конструкции зданий и сооружений. Вып.З. — М.: Строй™
издат, 1977. - С. 10-15.
206. Сегерлинд Л. Применение метода конечных элементов. — М.:
Мир, 1979. - 392с.
207. Серазутдинов М. Н. Метод расчета элементов конструкций в виде
оболочек // Известия вузов. Машиностроение. — 1989. — Т. 10. —
С. 6-10.
208. Серазутдинов М.Н. Метод расчета оболочек неканонической
формы // Исследования по теории оболочек. Труды семинара. —
Вып. XXI. Ч. I. - Казань, 1988. - С. 64-70.
209. Серазутдинов М. Н. Статика и динамика тонкостенных элементов
конструкций сложной геометрии // Дисс. на соиск. ученой степе-
степени доктора физ. мат. наук.
210. Серазутдинов М.Н., Недорезов О. А. Метод и результаты расче™
та статики и динамики оболочек с использованием соотношений
теории пластин // Труды XV Всесоюзной конференции по теории
пластин. T.I. - Казань, 1990. - С. 70-77.
211. Скворцов Ю. В., Хазанов X. С. Расчет многослойных композитных
оболочек в геометрически нелинейной конечно-элементной поста-
постановке // Известия вузов. Авиационная техника. — 1992. — № 1. —
С. 6-9.
212. Скворцов Ю.В., Хазанов X. С. Конечно-элементный анализ сред-
среднего изгиба тонкой оболочки // Известия вузов. Авиационная
техника. - 1990. - № 1. - С. 13-17.
213. Скворцов Ю.В., Хазанов Х.С. Нелинейный анализ произволь-
произвольных оболочечных конструкции с использованием криволинейного
изопараметрического элемента // Известия вузов. Авиационная
техника. - 1989. - №2. - С. 15-19.
214. Скопинский В.Н. Об особенностях напряженного состояния в
области пересечения цилиндрических оболочек // Строительная
механика и расчет сооружений. — 1986. — Т. 2. — С. 19-22.
215. Скопинский В.Н. Расчет оболочечных конструкций с применени-
применением четырехугольных криволинейных элементов // Известия вузов.
Машиностроение. — 1983. — Т. 5. — С. 16-21.
216. Снигирев В. Ф. Вычисление параметров срединной поверхности
оболочки методами сплайн функций // Актуальные проблемы
механики оболочек. — Казань: КАИ, 1985. — С. 113-121.
217. Снигирев В. Ф. Построение поверхности оболочки методом
сплайн-функций // Прочность и долговечность элементов
376 Список литературы
конструкций летательных аппаратов. — Куйбышев: КуАИ, 1984. —
С. 47-54.
218. Снигирев В. Ф. Численное решение задачи параметризации для
оболочек // Пластичность и устойчивость в механике деформиру-
деформируемого твердого тела. — Калинин, 1984. — С. 102-109.
219. Снисаренко Т. В. Применение метода конечных элементов к
расчету форм и частот собственных колебаний авиационных
конструкций // Уч. записки ЦАГИ. — 1981. Т. XII, №2,
С. 137-140.
220. Соловьев С. С. Конечно-элементная модель многослойной оболоч-
оболочки с анизотропными слоями переменной толщины // Известия
вузов. Авиационная техника. — 1989. — Т. 4. — С. 71-75.
221. Стасенко И. В., Куликов Ю.А. Сравнительный анализ конечных
элементов для круговой цилиндрической оболочки // Известия
вузов. Машиностроение. — 1974. — Т. 8. — С. 162-164.
222. Стренг Г., Фикс Д. Теория метода конечных элементов. — М.:
Мир, 1977. - 350 с.
223. Сулейманова М. М. К расчету гибких непологих оболочек различ-
различного типа методом конечных элементов // Прикладная механи-
механика. - 1984. - Т. 20, №1. - С. 72-78.
224. Сулейманова М.М., Аитова Ф.С. К исследованию напряженно
деформированного состояния некруговых сочлененных цилиндри-
цилиндрических оболочек // Исследования по теории оболочек. Труды
семинара. - Вып. XXI, Ч. I. - Казань, 1988. - С. 144-151.
225. Супоницкий Л. И. Треугольный конечный элемент естественной
кривизны для расчета тонких пологих оболочек // Большепролет-
Большепролетные пространственные конструкции. — М.: Стройиздат, 1981. —
С. 185-195.
226. Съярле Ф. Метод конечных элементов для эллиптических задач. —
М.: Мир, 1980. - 512 с.
227. Твергард В. Поведение пластинок и оболочек при выпучивании //
Теоретическая и прикладная механика. Труды XIV Международ-
Международного конгресса ШТАМ. - М.: Мир, 1979. - С. 495-527.
228. Терегулов И. Г. Нелинейные задачи теории оболочек и определя-
определяющие соотношения. — Казань: ФЕН, 2000. — 335с.
229. Тетере Г. А., Крегерс А. Ф. Проблемы нелинейной механики ком-
композитов (обзор) // Механика композитных материалов. — 1993. —
Т. 29, №1. - С. 50-60.
Список литературы 377
230. Тимошенко СП., Воинов'Ский-Кригер С. Пластинки и оболоч-
ки. — М.: Физматгиз, 1963. — 635 с.
231. Товстик П.Е. Устойчивость тонких оболочек. Асимптотические
методы. - М.: Наука, 1995. - 320 с.
232. Фадеев Д. К., Фадеева В.Н. Вычислительные методы линейной
алгебры. — М.: Физматгиз, 1963.
233. Филин А. П. Элементы теории оболочек. — Л.: Стройиздат,
1987. - 384 с.
234. Филиппович А. П. Применение смешанного метода конечных
элементов в задачах об изгибе пологих оболочек // Числен™
ные методы механики сплошной среды. 1982. — Т. 13, №4. —
С.143-162.
235. Фокс А., Пратт М. Вычислительная геометрия. — М.: Мир,
1982. - 304 с.
236. Фондер Д., Клаф Р. Явное добавление смещений тела как
жесткого целого в криволинейных конечных элементах // Ра-
Ракетная техника и космонавтика. — 1973. — Т. 11, №3. —
С.62-72.
237. Харви Д., Килей С. Изгибные элементы в виде треугольных пла-
пластинок с принудительной совместностью // Ракетная техника и
космонавтика. - 1971. - Т. 9, №6. - С. 38-42.
238. Цурпал И. А., Тимуров И. Г. Расчет многосвязанных слоистых и
нелинейно-упругих пластин и оболочек. — Киев: Вища школа,
1977. - 224 с.
239. Черных К. Ф. Линейная теория оболочек. Ч. I, II. — Л.: Изд-во
Ленинград, ун-та, 1962. — 196 с.
240. Шалашилин В. И., Костриченко А. В., Князев Э.Н., Зуев
Н. Н. Продолжение по наилучшему параметру в нелинейных
статических задачах, решаемых методом конечных элементов //
Известия вузов. Авиационная техника. — 1997. — №4. —
С.18-24.
241. Экспериментальные методы исследования деформаций и напряже-
напряжений: Справочное пособие / Под. ред. Б.С.Касаткина. — Киев:
Наукова думка, 1981. — 538 с.
242. Якупов Н. М. Суперэлемент сплайнового варианта МКЭ для расче-
расчета составных оболочек сложной геометрии // Прочность и устой-
устойчивость оболочек. Труды семинара. — Вып. XIX, Ч. I. — Казань,
1986. - С. 80-93.
378 Список литературы
243. Якупов Н. М. Об одном методе расчета оболочек сложной геомет-
геометрии // Исследования по теории оболочек. Труды семинара. — Вып.
XVII. Ч. П. - Казань, 1984. - С. 4-17.
244. Ahmad S., Anderson R.G., Zienkiewicz О. С. Vibration of thick
curved shells, whith particular reference to turbine blades // J. Strain
Anal - 1970. - V.5, №3. - P. 200-206.
245. Ahmad S., Irons В., Zienkiewicz 0. Analysis of thick and thin shell
structures by curved finite elements // Int. J. Num. Meth. Eng. —
1970. - V.2, №3. - P. 419-451.
246. Alayliogly H., AH R. A hybrid stress doubly curved shell finite
element // Computers and Structures. — 1977. — V. 7, №3. —
P. 477-480.
247. Altman W., Iguti F. A thin cylindrical shell finite element based on
a mixed formulation // Computers and Structures. — 1976. — V. 6,
№2. - P. 149-155.
248. Argyris J.H., Fried /., Scharpf D. W. The TUBA family of plate
elements for the matrix displacement methods // The Aeronautical
J. - 1968. - V.72, №692. - P. 701-709.
249. Argyris J.H., Lochner N. On the application of the SHEBA shell
element // Сотр. Meth. Appl. Mech. Eng. - 1972. - V. 1, № 1-3. -
P. 317-347.
250. Argyris I #., Scharpf D. W. The SHEBA family of shell elements for
the matrix displacement method // The Aeronautical J. — 1968. —
V.72, №694. - P. 873-883.
251. Arnold R.N., Warbrton G. B. The vibrations of thin cylinders //
Proc. of institute mechanical Engineers. London, 1953. — V. 167. —
P. 62-74.
252. Ashwell D. G. Strain elements, with application to arches, ring and
cylindrical shells // Finite Element for Thin Shells and Curved
Members. - N.Y., 1976. - Ch.6. - P. 91-111.
253. Ashwell D. G. The behaviour with diminishing curvature of strain-
based arch finite elements // Int. J. Sound and Vibration. — 1973. —
V.28, №1. - P. 133-137.
254. Ashwell D.G., Sabir A.B. A new cylindrical shell finite elements
based on simple independent strain function // Int. J. Mech. Sci. —
1972. - V. 14, №3. - P. 171-183.
255. Atiuri S., Pian T.H.H. Theoretical formulation of flnite-element
methods In linear-elastic analysis of general shells // J. Structural
Mech. - 1972. - V. 1, № 1. - P. 1-41.
Список литературы 379
256. Basar Y., Ding Y., Schultz R. Refined shear-deformation models
for composite laminates with finite rotation // Int. J. Solids and
Structures. - 1993. - V. 30, № 19. - P. 2611-2638.
257. Basar У, Ding У, Schultz R. Refined finite-element models for
the finite-rotation analysis of arbitrary composite laminates //
Engineering Systems Design and Analysis. — 1992. — V. 6. —
P. 93-100.
258. Bathe K.-J., Bolourchi S. A geometric and material nonlinear plate
and shell element // Computers and Structures. — 1980. — V. 11. —
P. 23-48.
259. Bathe K.-J., Dvorkin E. N. A formulation of general shell elements —
the use of mixed interpolation of tensorial components // Int. J. Num.
Meth. Eng. - 1986. - V.22, №3. - P. 697-722.
260. Bathe K.-J., Dvorkin E. N. A four-node plate bending element based
on Mindlin/Reissner plate theory and mixed interpolation // Int. J.
Num. Meth. Eng. - 1985. - V.21, №2. - P. 367-383.
261. Bathe K.-J., Ho L.-W. Some results in the analysis of thin shell
structures // Nonlinear Finite Element Analysis in Structural
Mechanics. - 1981. - P. 122-150.
262. Bathe K.-J., Ho L.-W. A simple and effective element for analysis
of general shell structures // Computers and Structures. — 1981. —
V. 13, №5-6. - P. 673-681.
263. Bathe K.-J., Ramm E., Wilson E.L. Finite element formation for
large deformation dynamic analysis // Int. J. Num. Meth. Eng. —
1975. - V.9. - P. 353-386.
264. Bell K. A refined triangular plate bending element // Int. J. Num.
Meth. Eng. - 1969. - V. 1, № 1. - P. 101-122.
265. Belytschko Т., Liu W.K., Ong J. S.J., Lam D. Implementation and
application of a 9-node Lagrange shell element with spurious mode
control // Computers and Structures. - 1985. - V.20, №1-3. -
P. 121-128.
266. Belytschko Z, Stolarski #., Liu W.K., Carpenter N, Ong J.S.J.
Stress projection for membrane and shear locking in shell finite
elements // Сотр. Meth. Appl. Mech. Eng. - 1985. - V.51,
№1-3. - P. 221-258.
267. Belytschko Т., Tsay C.S. A stabilization procedure for the
quadrilateral plate element with one-point quadrature // Int. J. Num.
Meth. Eng. - 1983. - V. 19, №3. - P. 405-419.
380 Список литературы
268. Belytschko Т., Tsay C.S., Liu W.K. A stabilization matrix for the
bilinear Mindlin plate element // Сотр. Meth. Appl. Mech. Eng. —
1981. - V.29, №3. - P. 313-327.
269. Bergan P.G., Nygard M.K., Bjaerum R. 0. Free formulation
elements with drilling freedoms for stability analysis of shells //
Computational mechanics of nonlinear response of shell. — Kratzing
W.B., Onate (Eds.), 1990. - P. 164-182.
270. Bessseling J. F. Post-buckling and non-linear analysis by the finite
element as supplement to a linear analysis // Zeitschrift fur
Angewandt Mathematik und Mechanik. — 1975. — Bd.55, №4. —
P. 3-15.
271. Bonnes G., Dhatt G., Giroux Y.M., Robichand L.P.A. Curved
triangular elements for the analysis of shells // Proc. of the 2nd Conf.
on Matrix Method in Structural Mechanics // Wright-Patterson
A.F.B., 1968. - P. 617-639.
272. Bossak M.A., Zienkiewicz О. С Free vibration of initially stressed
solids with particular referens to centrifugal force in rotating
machinary // J. Strain Anal. - 1973. - V.8, №4. - P. 245-252.
273. Brebbia С A., Nath J.M.D. A comparison of recent shallow shell
finite element analysis // Int. J. Mech. Sci. — 1970. — V. 12,
№10. - P. 849-857.
274. Cantin G. Rigid-body motions and equilibrium in finite elements //
Finite Element for Thin Shells and Curved Members. — N.Y.,
1976. - Ch.4. - P. 55-61.
275. Carpenter N, Stolarski //., Belytschko T. A flat trian- gular shell
element with improved membrane interpolation // Communications
in Appl. Num. Meth. - 1985. - V. 1. - P. 161-168.
276. Chang Т. Y., Sawamiphakdi K. Large deformation analysis of
laminated shells by finite element method // Computers and
Structures. - 1981. V. 13. - P. 331-340.
277. Chao W. C, Reddy J. N. Analysis of laminated composite shell using
a degenerated 3-D element // Int. J. Num. Meth. Eng. — 1984. —
V.20, №10. - P. 1991-2007.
278. Choi C.-K., Kim S.-H. Stress analysis of shells by reduced integrated
nonconforming elements // «Shell, Membranes and Space Frames».
Proc. IASS symposium. - Osaka, 1986. - V. 1. - P. 161-168.
279. Choi C.-K., Schnobrich W. C. Nonconforming finite element analysis
of shells // J. Eng. Mech. Division, ASCE. - 1975. - V. 101,
№EM4. - P. 447-464.
Список литературы 381
280. Clough R. W., Johnson R.J. A finite element approximation for the
analysis of thin shells // Int. J. Solids and Structures. — 1968. —
V.4, №1. - P. 43-60.
281. Connor /., Brebbia С A stiffness matrix for shallow rectangular
shell element // J. Eng. Mech. Division. - 1967. - V. 93, №5. -
P. 43-65.
282. Cook R. D. Some elements for analysis of plate bending // J. Eng.
Mech. Division. - 1972. - V.98, №EM6. - P. 1452-1470.
283. Cook R.D., Feng Z.-H. Control of spurious modes in the nine-node
quadrilateral element // Int. J. Num. Meth. Eng. - 1982. - V. 18,
№10. - P. 1576-1580.
284. Cowep G.R., Lindberg G.M., Olson M.D. A shallow shell finite
element of triangular shape // Int. J. Solids and Structures. —
1970. - V.6, №8. - P. 1133-1156.
285. Crisfield M.A. The application of shear-constraint to the generation
of plate-elements // Finite Element Methods for Plate and Shell
Structures. V.I: Element Technology. — U.K., 1986. — Ch.6. —
P. 153-174.
286. Crisfield M.A. A quadratic Mindlin element using shear
constraints // Computers and Structures. — 1984. — V. 18, №5. —
P. 833-852.
287. Dawe D. J. Some high-order elements for arches and shells // Finite
Element for Thin Shells and Curved Members. — N.Y., 1976. —
Ch.8. - P. 131-153.
288. Dawe D. J. High-order triangular finite element for shell analysis //
Int. J. Solids and Structures. - 1975. - V. 11, №10. -
P.1097-1110.
289. Dawe D. J. Rigid-body motions and strain-displacement equations of
curved shell finite elements // Int. J. Mech. Sci. — 1972. — V. 14,
№9. - P. 569-578.
290. Dupuis D., Goel J.-J. A curved finite element for thin elastic shells //
Int. J. Solids and Structures. - 1970. - V.6, № 11. - P. 1413-1428.
291. Dvorkin E.N., Bathe K.-J. A continuum mechanics based four-
node shell element for general non-linear analysis // Engineering
Computations. - 1984. - V. 1. - P. 77-88.
292. Edwards G., Webster IL Hybrid cylindrical shell finite elements //
Finite Element for Thin Shells and Curved Members. — N.Y.,
1976. - Ch. 10. - P. 171-195.
382 Список литературы
293. Е'Has Z.M. Duality in finite element methods // J. Eng. Mech.
Division. - 1968. - V.94, №4. - P. 931-948.
294. Fezans G., Verchery G. Some results on the behaviour of degenerated
shell (D.S.) elements // Nucl. Eng. and Design. - 1982. - V. 70,
№1. - P. 27-35.
295. Fonder G. A. Studies in doubly-curved elements for shells of
revolution // Finite Element for Thin Shells and Curved Members. —
N. Y., 1976. - Ch. 7. - P. 113-129.
296. Fraeijs de Veubeke B. Variational principles and the patch test //
Int. J. Num. Meth. Eng. - 1974. - V.8, №4. - P. 783-801.
297. Fraeijs de Veubeke B. A conforming finite element for plate
bending // Int. J. Solids and Structures. - 1968. - V.4. - № 1. -
P. 96-108.
298. Fraeijs de Veubeke B. Displacement and equilibrium models in
the finite element method // Stress Analysis. — N.Y., 1965. —
P. 145-197.
299. Fraeijs de Veubeke В., Sander G. An equilibrium model for plate
bending // Int. J. Solids and Structures. - 1968. - V.4, №5. -
P. 447-460.
300. Fried L Shear in C^ and C^ bending finite elements // Int. J.
Solids and Structures. - 1973. - V.9, №4. - P. 449-460.
301. Fried I. Basic computational problems in the finite element analysis
of shells // Int. J. Solids and Structures. - 1971. - V. 7, № 12. -
P. 1705-1715.
302. Gallagher R. H. Finite element representation for thin shell instability
analysis // Buckling of Structures. — Cambridge, 1974. — P. 40-51.
303. Gellert M., Laursen M. E. A new high-precision stress finite element
for analysis of shell structures // Int. J. Solids and Structures. —
1977. - V. 13, №7. - P. 683-697.
304. Goel J.-J. Construction of basic functions for numerical utilisation of
Ritz's methods // Numerische Mathematik. - 1968. - V. 12, №5. -
P. 435-447.
305. Haas D.L, Lee S. W. A nine-node assumed-strain finite element for
composite plates and shells // Computers and Structures. — 1987. —
V.26, №3. - P. 445-452.
306. Hansen IS., Heppler G.R. A Mindlin shell element which satisfies
rigid body requirements // AIAA J. - 1985. - V.22, №2. -
P. 288-295.
Список литературы 383
307. Haugeneder E. A new penalty function element for thin shell
analysis // Int. J. Num. Meth. Eng. - 1982. - V. 18, №6. -
P. 846-861.
308. Helleu Т.К. An assessment of the Semlloof shell element // Int. J.
Num. Meth. Eng. - 1986. - V.22, № 1. - P.133-151.
309. Henshell R.D., Neale B.K., Warburton G.B. A new hybrid
cylindrical shell finite element // Int. J. Sound and Vibration. —
1971. - V. 16, №4. - P. 519-531.
310. Herrmann L.R. Finite-element bending analysis for plates // J. Eng.
Mech. Division. - 1967. - V.93, №5. - P. 13-26.
311. Hibitt Я. D., Marcal P. V., Rice I R. A finite element formulation for
problems of large strain and large displacement // Int. J. Solids and
Structures. - 1970. - V.6. - P. 1069-1086.
312. Hofmeister L.D., Evensen D.A. Vibration problems using
isoparametric shell elements // Int. J. Num. Meth. Eng. — 1972,
№1. - P. 142-145.
313. Hrobok M. M., Hrudey Т. М. A review and catalogue of plate bending
finite elements // Computers and Structures. — 1984. — V. 19,
№3. - P. 479-495.
314. Huang H.-C. Membrane locking and assumed strain shell elements //
Computers and Structures. - 1987. - V.27, №5. - P. 671-677.
315. Huang H.-C, Hinton E. A new nine node degenerated shell element
with enhanced membrane and shear Interpolation // Int. J. Num.
Meth. Eng. - 1986. - V.22, № 1. - P. 73-92.
316. Hughes T.J.R., Cohen M., Haroun M. Reduced and selective
integration techniques in the finite element analysis // Nucl. Eng.
and Design. - 1978. - V.46, № 1. - P. 203-222.
317. Hughes T. Y. R., Liu W. K. Nonlinear finite element analysis of shells:
Part I. Three-dimensional shells // Сотр. Meth. Appl. Mech. Eng. —
1981. - V.26. - P. 331-362.
318. Hughes T. Y. R., Liu W. K. Nonlinear finite element analysis of shells:
Part II. Two-dimensional shells // Сотр. Meth. Appl. Mech. Eng. —
1981. - V.27. - P. 167-182.
319. Hughes T.J.R., Taylor R.L., Kanoknukulchai W. A simple and
efficient finite element for plate bending // Int. J. Num. Meth.
Eng. - 1977. - V. 11, № 10. - P. 1529-1543.
384 Список литературы
320. Hughes T.J.R., Tezduyar Т.Е. Finite element based upon Mindlin
plate theory with particular reference to the four-node bilinear
isoparametric element // J. Appl. Mech. — 1981. — V. 48, №3. —
P. 587-596.
321. Idelsohn S. On the use of deep, shallow or flat shell finite elements
for the analysis of thin shell structures // Сотр. Meth. Appl. Mech.
Eng. - 1981. - V.26, №1-3. - P. 321-330.
322. Irons В. М. The Semiloof shell element // Finite Element for
Thin Shells and Curved Members. - N.Y., 1976. - Ch. 11. -
P. 197-222.
323. Irons B.M., Razzaque A. A furtner modification to Ahmad's shell
element // Int. J. Num. Meth. Eng. - 1973. - V. 5, №4. -
P. 588-589.
324. Jang J., Pinsky P.M. An assumed covariant strain based 9-node shell
element // Int. J. Num. Meth. Eng. - 1987. - V.24, №12. -
P. 2389-2411.
325. Jeyachandrabose C, Kirkhoef J. A high precision triangular
laminated anisotropic shallow thin shell finite element // Computers
and Structures. - 1985. - V. 21, №4. - P. 701-729.
326. Jones R. F. A curved finite element for general thin shell structures //
Nud. Eng. and Design. - 1978. - V.48, №2-3. - P. 415-425.
327. Kamoulakos A. Understanding and improving the reduced integration
of Mindlin shell elements // Int. J. Num. Meth. Eng. - 1988. -
V.26, №9. - P.2009-2029.
328. Kanok-Nukulchai W. A simple and efficient finite element for general
shell analysis // Int. J. Num. Meth. Eng. - 1979. - V. 14, №2. -
P. 179-200.
329. Kant Т., Мепоп М. P. Higher-order theories for composite and
sandwich cylinrical shells with finite element // Computers and
Structures. V.33, №5. - 1989. - P. 1191-1204.
330. Khan AS., Hsiao C. A finite element study of the effect of the
angle between two intersecting cylindrical shells subjected to internal
pressure // Computers and Structures. — 1985. — V. 21, №4. —
P. 851-857.
331. Kikuchi F., Ando Y. Some finite element solutions for plate bending
problems by symplified hybrid displacement method // Nud. Eng.
and Design. - 1972. - V.23, №2. - P. 155-178.
Список литературы 385
332. Kikuchi F., Ando Y. A new variational functional for the finite-
element method and its application to plate and shell problems //
Nucl. Eng. and Design. - 1972. - V.21, №1. - P. 95-113.
333. Kui L.X., Lui G.Q., Zienkiewicz O.S. A generalized displacement
method for the finite element analysis of thin shells // Int. J. Num.
Meth. Eng. - 1985. - V.21. - № 12. - P.2145-2155.
334. Lee S. W., Dai С. С, Yeom C.H. A triangular finite element for thin
plates and shells // Int. J. Num. Meth. Eng. - 1985. - V.21,
№10. - P. 1813-1831.
335. Lee S.W., Wong S.C., Rhin J.J. Study of a nine-node mixed
formulation finite element for thin plates and shells // Computers
and Structures. - 1985. - V.21, №6. - P. 1325-1334.
336. Lee S. W., Wong S. C, Ruberl L.F. Experience with finite element
modeling of thin plate bending // Computers and Structures. —
1984. - V. 19, №5-6. - P. 746-755.
337. Leonard J. W., Li C.-T. Strongly curved finite element for shell
analysis // J. Eng. Mech. Division. - 1973. - V.99, №3. -
P. 516-535.
338. Lesaint P., Zlamal M. Superconvergence of the gradient of finite
element solution // RAIRO Analyse Numerique. — 1979. — V. 13. —
№2. - P. 139,166.
339. Liu W.K., Law E.S., Lam D., Belytschko T. Resultant - stress
degenerated shell element // Сотр. Meth. Appl. Mech. Eng. —
1986. - V.55. - P. 259-300.
340. MacNeal R. H. A simple quadrilateral shell element // Computers
and Structures. - 1978. - V. 8, №2. - P. 175-183.
341. Malkus D.S., Hughes T.J.R. Mixed finite element methods reduced
and selective integration techniques: a unification of concepts //
Computer Meth. Appl. Mech. Eng. - 1978. - V. 15, №1. -
P. 63-81.
342. Mang H.A. Derivation of general algebraic constraint conditions for
«weak» С continuity for thin shells // Int. J. Num. Meth. Eng. —
1977. - V. 11, № 10. - P. 1593-1604.
343. Martins R.A., Owen D.R.I Structural instability and natural
vibration analysis of thin arbitraryshells be use of the Semiloof
element // Int. J. Num. Meth. Eng. - 1977. - V. 11, №3. -
P. 481-498.
13 А. И. Голованов, О. Н. Тюленева, А. Ф. Шигабутдинов
386 Список литературы
344. Mohr G.A. Application of penalty factor to a double curved quadratic
shell element // Computers and Structures. — 1981. — V. 14,
№1-2. - P. 15-19.
345. Moore C.I, Yang T.Y., Anderson D.C. A new 48 D.O.F.
quadrilateral shell element with variable-order polynomial and
rational B-splin geometric with rigid body modes // Int. J. Num.
Meth. Eng. - 1984. - V.20, №11. - P. 2121-2141.
346. Morley L. S. D. Finite element criteria for some shells // Int. J. Num.
Meth. Eng. - 1984. - V.20, №9. - P. 1711-1728.
347. Morley L. S. D. Inextensional bending of a shell triangular element
in quadratic parametric representation // Int. J. Solids and
Structures. - 1982. - V. 18, № 11. - P. 919-935.
348. Morley L. S. D.. Polinomial stress states in first approximation theory
of circular cylindrical shells // The Quarterly J. Mech. Appl.
Math. - 1972. - V.25, № 1. - P. 13-43.
349. Morris A.I A deficiency in current finite elements for thin shell
applications // Int. J. Solids and Structures. — 1973. — V. 9, №3. —
P. 331-346.
350. Mukhopadhy'ay D., Dinker D.K. Isoparametric linear bending
element and one-point integration // Computers and Structures. —
1978. - V.9, №3. - P. 365-369.
351. Murthy S.S., Gallagher R.H. A triangular thin-shell finite element
based on discrete Kirchoff theory // Сотр. Meth. Appl. Mech.
Eng. - 1986. - V.54, №2. - P. 195-222.
352. Murthy S.S., Gallagher R.H. Anisotropic cylindrical shell element
based on discrete Kirchoff theory // Int. J. Num. Meth. Eng. —
1983. - V. 19, № 12. - P. 1805-1823.
353. Nagtegaal J.C., Nakazawa S., Tateishi M. On the construction of
optimal Mindlin type plate and shell elements // Finite Element
Methods for Plate and Shell Structures. V. 1: Element Technology. —
U.K., 1986. - Ch. 14. - P. 348-364.
354. Olson M.D., Bearden T. W. A simple flat triangular shell element
revisited // Int. J. Num. Meth. Eng. - 1979. - V. 14, №1. -
P. 51-68.
355. Olson M. D., Lindberg G. M. Vibration analysis of cantilevered curved
plates, using a new cylindrical shell finite element. // Proc. of 2nd
Conf. math. meth. struct, mech., AF base Wright. Petterson, Ohio,
1968. - P. 247-269.
Список литературы 387
356. Onate E., Hinton E., Glover N. Technique for Improving the
performance of Ahmad shell elements // Applied Numerical
Modelling. - Spain, 1978. - P. 389-399.
357. Owen D. R. /., Figueiras I A. Anisotroplc elasto-plastic finite element
analysis of thick and thin plates and shells // Int. J. Num. Meth.
Eng. - 1983. - V. 19, №4. - P. 541-566.
358. Panda S., Natarajan R. Finite element analysis of laminated
composite plates // Int. J. Num. Meth. Eng. — 1979. — V. 14,
№1. - P. 69-79.
359. Parisch H. An investigation of a finite rotation four node assumed
strain shell element // Int. J. Num. Meth. Eng. - 1991. - V.31. -
P. 127-150.
360. Parisch H. Large displacements of shells including material
nonllnearity // Сотр. Meth. Appl. Mech. Eng. — 1981. — V.27. —
P. 183-214.
361. Parisch H. A critical survey of the 9-node degenerated shell
element with special emphasis on thin shell application and reduced
Integration // Сотр. Meth. Appl. Mech. Eng. — 1979. — V. 20,
№ 3. - P. 323-350.
362. Park K.C., Stanley G.M. A curved C^ shell element based on
assumed natural-coordinate strain // J. Appl. Mech. — 1986. — V. 53,
№2. - P. 278-290.
363. Pawsey S.F., Clough R. W. Improved numerical integration of thick
shell elements // Int. J. Num. Meth. Eng. - 1971. - V.3, №4. -
P. 575-586.
364. Pian T.H.H., Sumihara K. Hybrid semiloof elements for plates and
shells based upon a modified Hu-Washizu principle // Computers and
Structures. - 1984. - V. 19, № 1-2. - P. 165-173.
365. Pian T.H.H., Tong P. Basis of finite element methods for solid
continua // Int. J. Num. Meth. Eng. - 1969. - V. 1, № 1. - P. 3-28.
366. Prager W. Variational principle for elastic plates with relaxed
continuity requirements // Int. J. Solids and Structures. — 1968. —
V.4, №9. - P. 837-844.
367. Prathar C, Viswanath S. An optimally Integrated fournode
quadrilateral plate bending element // Int. J. Num. Meth. Eng. —
1983. - V. 19, №6. - P. 831-840.
368. Prato С A. Shell finite element method via Relssner's principle //
Int. J. Solids and Structures. - 1969. - V. 5. № 10. - P. 1119-1133.
13*
388 Список литературы
369. Pugh С. A., Hinton Е., Zienkiewicz О. С. A study of quadrilateral
plate bending elements with «reduced» integration // Int. J. Num.
Meth. Eng. - 1978. - V. 12, №7. - P. 1059-1079.
370. Rao K. P. A rectangular laminated anisotropic shallow thin shell
finite element // Сотр. Meth. Appl. Mech. Eng. - 1978. - V. 15,
№1. - P. 13-33.
371. Rhiu J.J, Lee S.W. An assumed strain mixed formulation for
nonlinear shell // Computational mechanics of nonlinear response of
shell. - Kratzlng W.B., Onate (Eds.), 1990. - P. 237-257.
372. Rhiu J.J., Lee S.W. A nine node finite element for analysis of
geometrically non-linear shells // Int. J. Num. Meth. Eng. — 1988. —
V.26. - P. 1945-1962.
373. Riekstins A. Analysis of the stability and post-buckling of composite
shells in geometrically nonlinear finite element formulation. —
Riga. - 1993. - 99 с
374. Riks E. Some computational aspect of the stability analysis of
nonlinear structures // Сотр. Meth. Appl. Mech. Eng. — 1983. —
V.47. - P. 219-259.
375. Sabir A. B. A extension from the shallow to the non-shallow stiffness
matrix for a cylindrical shell finite element // Int. J. Mech. Scl. —
1970. - V. 12, №3. - P. 287-292.
376. Sabir A. B. Strain-based finite elements for the analysis of
cylinders with holes and normally Intersecting cylinders // Nuclear
Engineering and Design. - 1983. - V. 76, №2. - P. 111-120.
377. Sabir А. В., Ashwell D.G. A stiffness matrix for shallow shell
finite element // Int. J. Mech. Sci. - 1969. - V. 11, №3. -
P. 269-279.
378. Sabir А. В., Lock A. C. A curved, cylindrical shell, finite element //
Int. J. Mech. Scl. - 1972. - V. 14. -№2.- P. 125-135.
379. Sabir А. В., Ramadhani F. A shallow shell finite element for general
shell analysis // Variational Meth. Eng. — Southampton, 1985. —
P. 5/3-5/13.
380. Saleeb A.F., Chang T.Y., Graf W. A quadrilateral shell element
using a mixed formulation // Computers and Structures. — 1987. —
V.26, №5. - P. 787-803.
381. Sander C, Idelson S. A family of conforming finite elements for deep
shell analysis // Int. J. Num. Meth. Eng. - 1982. - V. 18, №3. -
P. 363-380.
Список литературы 389
382. Sirno /., Fox D.D., Rifai M.S. On a stress resultant geometrically
exact shell model. Part III: Computational aspects of the nonlinear
theory // Сотр. Meth. Appl. Mech. Eng. - 1990. - V. 79. -
P. 21 -70.
383. Spilker R. L. Hybrid stress formulation for multilayer isoparametric
plate elements // Finite Element Methods for Plate and Shell
Structures. V. 1: Element Technology. — Swansea, UK, 1986. —
P. 175-199.
384. Spilker R.L. The hybrid-stress model for thin plates // Int. J. Num.
Meth. Eng. - 1980. - V. 15, №8. - P. 1239-1260.
385. Stanley G. M., Park K. C, Hughes T. J. R. Continuum-based resultant
shell elements // Finite Element Methods for Plate and Shell
Structures. V. 1: Element Technology. — Swansea, UK, 1986. —
P. 1-45.
386. Stolarski //., Belytschko T. On the equivalence of mode
decomposition and mixed finite element based on the
Hellinger-Reissner principle. Part I: Theory. Part II: Applications //
Сотр. Meth. Appl. Mech. Eng. - 1986. - V. 58, №3. -
P. 249-284.
387. Stolarski //., Belytschko T. Shear and membrane locking in curved
C(°) elements // Сотр. Meth. Appl. Mech. Eng. - 1983. - V.41,
№ 3. - P. 279-296.
388. Stolarski #., Belytschko T. Membrane locking and reduced
integration for curved elements // J. Appl. Mech. — 1982. — V. 49,
№1. - P. 172-176.
389. Stolarski //., Belytschko Т., Carpenter N. Bending and shear mode
decomposition in C^ structural elements // J. Structural Mech. —
1983. - V. 11, №2. - P. 153-176.
390. Stolarski #., Belytschko Т., Carpenter N., Kennedy J.M. A simple
triangular curved shell element // Eng. Computations. — 1984. —
V.I, №3. - P.210-218.
391. Strickland G.E., Loden W.A. A doubly-curved triangular shell
element // Proc. of the 2nd Conf. on Matrix Method in
Structural Mechanics. — Wright-Patterson A.F. В., 1968. —
P. 641-666.
392. Surana K. S. Geometrically nonlinear formulation for the curved
shell elements // Int. J. Num. Meth. Eng. - 1983. - V. 19. -
P. 581-615.
390 Список литературы
393. Surana K.S., Sorem R. M. Higher-order completely hierarchical
p-approxlmatlon curved shell elements for elastostatic analysis
of laminated composite plates and shells // Composite Material
Technology. - N.Y., 1990. - P. 273-286.
394. Tahiani C, Lachance L. Linear and non-linear analysis of
thin shallow shells by mixed finite elements // Computers and
Structures. - 1975. - V.5, №2, 3. - P. 167-177.
395. Talha M.A. A theoretically Improved and easily Implemented version
of the Ahmad thick shell element // Int. J. Num. Meth. Eng. —
1979. - V. 14, № 1. - P. 125-142.
396. Thomas G.R., Gallagher R. H. A triangular element based
on generalized potential energy concept // Finite Elementsfor
Thin Shells and Curved Members. - N.Y., 1976. - Ch.9. -
P. 155-169.
397. Tong P. A family of hybrid plate elements // Int. J. Num. Meth.
Eng. - 1982. - V. 18, № 10. - P. 1455-1468.
398. Tong P. New displacement hybrid finite element models for solid
continue // Int. J. Num. Meth. Eng. - 1970. - V.2, №2. -
P. 259-264.
399. Tong P., Plan T.H.H. A variational principle and the convergence
of a finite-element method based on assumed stress distribution //
Int. J. Solids and Structures. - 1969. - V.5, №5. -
P. 463-472.
400. Walker K. P. Vibrations of cambered hellcoidal fan blades // J. Sound.
Vlbr. - 1978. - V.59, № 1. - P. 35-57.
401. Wempner G.A., Oden L Т., Kross D.A. Finite-element analysis of
thin shells // J. Eng. Mech. Division. - 1968. - V.94, №6. -
P. 1273-1294.
402. Wempner G.A., Talaslidis D., Hwang C.-M. A simple and efficient
approximation of shells via finite quadrilateral elements // J. Appl.
Mech. - 1985. - V.49, №1. - P.I 15-120.
403. Wolf L P. Alternate hybrid stress finite element model // Int. J. Num.
Meth. Eng. - 1975. - V.9, №3. - P. 601-615.
404. Wunderlich W. Mixed models for plates and shells: principles-
elements-examples // Hybrid and Mixed Finite Element Methods. —
1983. - Ch. 11. - P.215-241.
Список литературы 391
405. Yang Т. У., Saigal S. A curved quadrilateral element static analysis
of shells with geometric and material nonlinearities // Int. J. Num.
Meth. Eng. - 1985. - V.21.
406. Yeom C.H., Lee S. W. An assumed strain finite element model for
large deflection composite shells // Int. J. Num. Meth. Eng. —
1989. - V.28. - P. 1749-1768.
407. Zienkiewicz O.C., Taylor R.L., Too J.M. Reduced integration
technique in general analysis of plates and shells // Int. J. Num.
Meth. Eng. - 1971. - V. 3, №2. - P. 275^290.
Научное издание
ГОЛОВАНОВ Александр Иванович
ТЮЛЕНЕВА Ольга Николаевна
ШИГАБУТДИНОВ Айрат Феликсович
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ В СТАТИКЕ И ДИНАМИКЕ
ТОНКОСТЕННЫХ КОНСТРУКЦИЙ
Редактор Н.Б. Бартошевич-Жагелъ
Оригинал-макет: О.В. Устинова
Оформление переплета: А.Ю. Алехина
Подписано в печать 22.12.05. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 24,5. Уч.-изд. л. 29,4. Тираж 400 экз.
Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с готовых диапозитивов
в ППП «Типография «Наука»
121099, г. Москва, Шубинский пер., 6