













































































































Author: Васильев В.Н. Гуров И.П.
Tags: компьютерные технологии оптические приборы и аппаратура кибернетика программирование компьютерная обработка интерферометрические системы
ISBN: 5-8206-0001-0
Year: 1998




Text
ББК 32.811.3
УДК 6813.01:681.787
Киста посвящен коыпьюг^щой обработке сигналов я оиечке точности н поне^оустойчи-
в*>.г>. ccjpatfootie с учетом арщпмч^лэго применения в ктсг-^.-.'М^трнчесыга С1'.-."ечи.
11]чМ'-1ль^к11ЫН11,1емлгк||^ДН1е мсд^и детернчннроэанныл и (j.jmuhj шис птцдлси -• lijmob.
Рассмотрев: особи l .ости оиерал^. одорстизыден н eliiu.:^ лч -игшис-и. Бм- олиен
л-чуии MH.S1JJJI EOMiibrui-pH'jfL if-ptfjciЛи cwhil-iOj i-Jr оиюк: 6.i^i;-.|-j преоОр^сиь.'-ля
U>\pLi:p И[ЫЬНЛа MilKCHUi'Jb^OlU !Iрч1 LlUUL.^ДобнИ. МОД^|СЙ d-Я ■:P>-L~i-"^llr P J^i|f_-. pLIUJ
Mt"H-Jlb[ H JnrOpHlHtl ."[HLlfilL-IOH 1[ ]ie.UHII,Vii..4 фнЛ[Тр£Л-1Н aCTC]';L^J^-p:HSmib_\ И СГОАнС'Ш-
ческнх сигналов. Пред-т^влены рекуррентном алгоритмы, ибеспечнаающне оселку»
вычислите [ЬН\н> йофсычьн.н.-гь при ч^чроечни лннимнчезднх адацгннны?; систем КПМЛЪ-
ЮТсрний ОбрнЙ01КН Q ри'ЧД.-ОМ ВрСМенИ.
Для с1\щ\±^><С1»ое в области компьютерных информационных,
шмершиельных и управляющих систем.
В19
Васильев В. Н.( Гуров И. П.
Компьютерная обработка сигналов в приложении к иктерферометричес-
ким системам — СПб.: БХВ — Санкт-Петербург, 1998. — 240 с, ил.
ISBN 5-Ё206-ОО01-0
БИБЛИОТЕКА
Госуларс-ЕгмчП|й
ТОНН чес к* и у к и з ер
Э
Оглавление
Предисловие . . ."-с - 14'
Введение , ....... . . Я
Системные преобразования сигналов .w,■*.♦**-...-,♦ 10
Обработка стохастических сигналов . . . . , . „ - , . . ........ , 14
Спеесок лвтсрат>рь[ .......... 17
Глава 1 [
Математические основы обработки сигналов . . . j-.*. \9
1Л- XdpJKTepHoiики индаалоп и пгумпв 19
1.2. Метлы штейнои фильтрации интерференционных енгимо! . . ^0
1Г?, Ме^атил фнлитрапш И кепстралышн анализ, . 5f
Список :пткфД1>пУ - . . - . . , 64
Глава 2
Формирование интерференционных сигналов ............. 66
2.1. Ф^тпеская мод^,ь интерферометра 66
J.2. Шум:,: и нЕгт^рфспспЛмлш^!! установке ...,.., 73
2.3. Ф-г^ироьини^: ■; |>^,-й]]ы^ интерференционных повей - . - 79
2.4. Фигсэ ichTpirjeLKd3i р^г.к трлшя иитепференииовиых сигналов н
хвракт^рч."]!!^;! приемников излучения 91
'Список литературы ]00
Глава Я
Дискретизаций и ккл^ювание интерференционных сигналов 103
3.1 Дигкр^Е^заЕ[ил и кдаятованис непрерывных сигналов 103
3.2 Д и икре порция п кпапт^нааяе распределения интенсивности в
ш^рферстшипнной Ь'арткхс 114
3,3. rU'ipi-uiiioc-ni дискретизации при нрвиом восстановлении фазы 122
Список литерлгуры .,,.,.,. 126
Птава 4
Методы обработки интерференции вных сигналов ви основе алгоритма
аяскрепюго преобразования Фурье 128
4.1. OzRftHzibiV с£ой:т]]а дискретного нрсоС разе ванн ч Фурье 128
4.2. К^\!пмо1сплэш [iji;jiH3 СЕГ^ктров интерференционных сигналов 137
4.3. Всссгаи ^епне фа^ы методом преобразования Гильберта , . , , 147
Список литературы . ..'.'../- : . .. ...:......, ....... 152
ава 5
етоды обработки вн основе алгоритма управляемого дискретного
нового сдвига - - - 153
5.1. Во.\ ^тановлслнс фазы при компьютерной обр&богкс ансамбля
BHleprfcneilHHOHEiLK -ИГНЭДПВ - ...... 153
5.2. Auu/ihj Li'rpL-iiJmcjeH метода управляемого фазового сдвига , . 160
5.-. Рекуррентный алгоритм дискретного управляемого фазового >
сдвига ............ ,^ ^ .'... \.., <" 164
Список литературы - -. ' 167
ана б *■'£"
етоды компьютерной обработки на основе стохастических моделей л -
тсрфереии ионных сигналов - 168
6.1 ПГрьГ^ткс им ".''фс рении о иных сигналов на основе правила
маьспмумэ фм|Кннон!и^ правдоподобия - 169
6.2 Ar..i.Li]s и JjhOMin :.|]пнч ннтерфереттиоъных сигналов наосноЬй
авт'юсгр—слонпоп модели - [?5
6.3. ОСрзЛчтка сиЕНшцш методами стохастической лнсьрстной *«"■
фильтр,шин ;w. ■ - -■■ - ■ <■'•■ - ■ ■* ■ - ■ /^179
64 А.-|Г,!рлтыы нелинейной Марковскойфильтр*ини ■■-_■
интерференционных сшналии : ..,,,.,_,.,. г £88
Список литературы , . ,, - .,..>■ j 200
авл 7
«стены автоматической обработки ингерференцнвнных сигналов , , 202
7.1 Ком^ы^ерная о нтнко-'-электронная система для обработки
ингсгферофамм 203
7,2. Компьютерная программа EXTR.EMA для высокоточной
реш:т?.1Ш[И экстремумов интерфкрешщояното сигнала 212
73. O^TH^'i-j-i-KTifijiiioe уеттюпсьо для коцфоля нентрнронкн линз
MCTfi-LM aFT-ci'ipTfrn интерфехнпиолкых сигналов 217
7.4 И^тсрфср^мс фичегкая chziuvj для ылл.^аноШЕСпиЯ1-
микрет' ипт^фни иоперхносгей ,' 223
Ciiikci: л:'лсра[>ры - Л - . 233
кдметный указатель. .......... j j; ... .' .,.,.... 235
Предисловие
5
■.-г.
Предисловие
Компьютерные системы обработки данных иозгучилн широкое
распространение ц научна не списан их* и на пр^никшстве Нарастающие возможности
Комнью^рНцН техники оГеецгллг.ают цз>1СОК\ю :)ф:ч_мщщ^сп- сбора, о^рэЯот-
ки и прслГ'ра.-!оплпгя данз-::^ и з^формпуюнньъ. ^^кг-.'ильхьи и уираиляю-
1них zHcizMiiXr Одн<пл 4S клжиелши4 проблем яцляе"-я ■'гттима.т.п^ч по ^алан-
ному критерию компьютерная обрдГ'еткл снгпа,г:оп. Критерием оптимальности
можс: бг.ць ч>ьс1влil"ii..ii:»4_is, бьмракш-твче т^ность или лругэд йнракте-
ри^тика ^iiCiL-МЫ cfind^^inii, 1;пр^:1^лчсчая кр\тч решаемых -siuid'i.
Настоящая книга пп^ьяшена компьютерной обр^огке витало ч в
интерферометр ir-i се к их ch,"klm,ix. При ;[\и основное внимание yju-iHi/ic* онсцхам
точное"и н ]]ом-хо>1 ].'ii'L!i^'4;]i] Mwгодов и коилью тертых алгоритмов of>pa-
ботки- чр!Т<:рфергП1|1ЮН1|ы^ ctrnsarn'i.
Иптср^х'рочетт/ч'.я в tl-4^hjkl mhjlhx jcvhiejlclkh авляск^я pa^j-: юм он гики,
в Ki"'iup[jv ii.ijpy-j|i hi успешное развитие футиаме^таль^ая паука ч ЛЕГже'Еерная
iipiiKLHKiJ R-.ici)Ka« 'нио витальность и thWh-'ih .'.urspiрер-тлвинных
приборов, реализация гршптитта бесконтактна то контнппя испелус^ьзч объектов
определяют noipacTaiti'i^ic рпиь пнпфф.ро^яфли в : о временных высоких
техз!Сг10]Иях. Хл рамс рис гики йац^-ререщ^ Шц()й Mipi^.^M н-Ч""'Сл1ым
образом (.вязаные i-чи нл-и иными своГктпами лГ.^стд н ;]С_.ес.д^от'.ч при шзмоти
фоиылсьтрич:(^г\ устройс-н. upcoGpa:y»iEEii\. раснр^.слепне сотовой -знер'
гин л поле пнтерфср^^цлг: ь снпМ-ем смертельном лиформлпщ, которые
под^с-ри^тся ьомщt?!■:pii-.ii иора'ч'тк:.
Зн^чигс.'ц.ньтс тс.1ре]"ил,^кйе [I лажимо ]!p*ik.n4ix'MiL p^jyjiti.arti, к^юрмс
иол учены мри Л'-нп.1 --.i'1'^nini ini'hi.iiTi-sMTio^dHJihiv ил^-рфср^летрЛ'г^-^ ЕП
систем, огту|\-|икопдз[|»г п нног.^тл^лс'тееых ii'iVTTijx статт.чу л рялг мо.гюграфин,
nocrwi ценим'' 1пгт^рг|ч-ром:тра\1 исрсмсщсилл m:tojbm измерения Параметров
иеуаннческсго дтжгппч. контроля фтти^итпт показателя преломпенич, от-
KJio^epinii фн рмы bi^in.^.iii' ф!1.)чта ib npv.^M -a.vj'i,^;.
Heonxaд^l^fй т-тм^пп-, 'iTii рл:счот]^:'ие -гг-реденных
лнтерферометрических спст:м псо6х:ц]гм^ рсогн г шииннн- Uhwpi'iiC^i'iiuhr-ipw.-rnu с ирлн-'^чс-
hhltm TL:opcT;i4ectj]i iiinjo^cunii )1Г'ПЧ'н фи:нкич ф|иич^гм^' и KajHjTipoft
оптики, теории оптико-электронных систем, тсарки ситпадоп. прикладной
интематики, вычислительной и вомпьютер!ЮЙ техники. ■-=
в
Компьютерная обработка сигналов
Данная кпига соперяшт сведения об основных принципах компьютерной
обработки сигналов в нмт^рферометрических системах кысокой точнее lti,
ncpciichгивнь|\ нгтолах" сСрабоки ецпи-Е.-в, что п идг^л^-'ил-) ее сгржтуру.
В паве 1 npc-i^rd клиент математические модели ^orvp^HinipoBaiiiibiA и
случайных анналов к шумов, покроенные с учешм их физический -:пролы
на псЕТ'^естатЕЕСтнчсеко!^ описания с привлеченном маремарнЧ'^ко^ иннлрата
коррелчщюппою м сн-'Мрлчыдис anJJinsJ. Рас^м.>.р^вЬ| м.:->оды ишпейнон и
НСЗЕИН'-НЧОИ фцПЬТраПЧИ ИЕЕГ^];[1'ереЕЕИ1ЮЕ|1ЕЬ|Х СНГП-ПоР.
Глава 2 гтес вящгн j рассмотрению ф|инчен;кнх т:ртзтзiее:цо:з построения ре-
алышх. EiHLtptJKpoMtipn цчки* •:[!•- it'.:. aHicHJi еч-н^ных не ] оттеков HOipc::i-
нос:-й lnlTeprJi^p^uJiiii ним* /-.ь^р^чки ыетгда^ -• ic-1 пик- фол'Электрически и
регистрация 0И1"нало1' t инюрфер^четрвл. Приведет,] ю чистые
характеристики ирнемникрн. Ti *jt >"It:i i ил, н i ■: i h ■ 'теле mem mile ml: и i i-w\ ,. rfe |Очувс|Вшсль-
ных npiiOepoi, с ^рядо.ми 1;вч:1.]0 ГПЗС;,
Д||И I'.bOJU ClilH^-IHC Ь KnMJjbK4"P HCOJX'.'JHMl' мГ^'Срах^ЛЬ з]"Н СНЕ"НУ-ЧЫ В
цифровую фирму при миш'здьньтд потерям полезной ннформадии. В главе 3
выполеесег апатии операции апти-цъ-дискрстЕ^ого н апалпто-ннфрового преоб-
pjjt'HJiiiis wHiiiEum». Дань: оценки тэи"зовь;ч п'^реншостеи в процессе
преобразования : и пил о п.
В главах 4 - п рас смотает,! методы и ani >р^-гмт.т к,ъм:;ы icpnoii обр.]5о:ки
на ос ноле нсп;1рамет рижских и параметр и чсокц* M:iic;:eii интерферон v,K ни hix
сипы^'в. Меюам перво;: ipyniELE чсновь:ило|ск m.i ^покфалыЕчй обработке
сипил'-в с иеп о. ц. японцем комнью^рцы* dJiii^'isiMOb I'wLjpoio нреоора-пда-
ння Фурт (BllnTi и явл-иотеа г, "шачтелытн ^ере тралнииоппымн, Таь.нс
мстолЕ рассмотрена в кгЕаье4. Цх достоинством является наглядность
результатов на ке\ стадиях обработки и широкая ноступггость компьютерных
пршрзмч БПФ,
В 1ю:ледпиг годьт получили распространение интерферометр и четкие сие-
темь:, в которых формируют nafbp интерференционных с нпгалор - ичвес тьтмн
дн,\рг|пымн т^сьыми ^двиммн (i;iJb;L fl. При лом гсчи^е цпсстапоиле"!
нефа! р-е достигается тц помаши :.рп- :ь\\ .ииирнтмси ■"►■''р.ю.л Mi. Не:мит.ря на
1ГР<1М H'lCCh-jTU JO- iyi\ttJl'4- H (lOr.iX 4JM JBJ-ilillH-lCTHl^^l Н_Т'р;М1П рЛИЩ-НЯ
MCi-.fa у.|р<Ж1*нЛ'"Го ф-иоя jiO сдвИ1.1ч ни Hiyii'-Jiuioqnu ociiejn.cn в отече:твец-
нсн -итера^рс, B TJMbt 5 нре^&влены ajHiipMiMbi komhi-]"ic-Pv->h обработки
с К'|ррект[Т1\ЧГ систем iTTi'icch-Ks :.Oi р:щни>, i'"n мегоад -уирЕшля^мою фа^оглго
сдь;Са, при которЕ-Е\ ре^льт^р>^мия и- .ipL* .-иостк шмер^ний г\мзы не нрсш-
nidc: тысячных дол1^"" фа^сыто тптхта. Ct.y::. ljjiiciJkdS ro'-fni'-U wo'***'Лша
для современных :.i'C_:iiHcniiiJX n|iHfiop-i,s '■ техт>.п^гмркь;кн\ ^ргне^г^в
Параметрические я."»де.|щ, оГ'Ш^Г]рннл:ыс ь млсмашческип синтетике,
статистической радиотелникс, теории управлении №,широки иснользусмьЕ в
Предисло&ие
7
последние гтлы ъ такиж областях как цвфротшй спектральнЬ|Н аанлна. до
последнего времени практичееки не применялись в задачах компьютерной
обработки интерференционных еттпчалов.
' В главе б прехчавлгиы |'е;\1|^сГРч pa^pa^or^i" метгдов и комш^п^рпмх
JUIR"»pHTMOR, П;"1СТрСС!!гЕЫХ HJ IXjK'bO ]]Г*1311'|"] УакГиМДЛЫЦ^ПГ] Пра [1J.I* ■ |:'л J--iLV" ИД,
миделчх JBj.'pcEpeCi.nj]. прингсЕшах етохагтлческой лч:-:е[Шои и но^тгз^тюй
фильтраинн ъ пространстпе состояний. Mnonie и.з предетйчленных алюритнов
я&пяются peK^jcuriiLiui], что о^еелочц^ст их иычислительигто
эффективность и досгунн ihTid построения UiidiiiHimtiX састсм коинытсрцой о6ра5т»ёИ
врсальнои м^тта^г вр-мти.
Примеры интсрфсро^отрнчсгь-их слетам высокой точности препстар.[;ны в
гла.ч. .■ При ^]...ч освели-Еты чляны^ j^i^ckihi еозланкч чтерферометрическнх
систем и к,"им.; г. ел тер ной :6[:afoTKij еит^тов.
Н:счс|ря i:j рлнооСрг^ие \\\rf\\\\>w л л правлен и ii в области ко ит курной.
обрло^Е^и ешналоь. м^ЕО'Ш и .-лянко -jopJU-JiKH ьо мн('1нх елучаях ятмяк-тся
9Х|'ЛНЫЛШ. Эт" JJn^Di]3-r lldiiwJiib^JI, 'их: ЛаНИЙЯ Unii.-i GyJL'i uOHCSllJ ДЛЯ
паучнИА coq^yjiinKHB. к in i рантов и с^дситсв, спе^налтк роющихся r ойл^ш
Еомпиот-рпых инфчрчйг,[|о:гных, нч^ери гсльггых и ynp^i'i'-fi-miix ^исесм и для
щнроко!') Kpjiii епоЕшалие ivb ь см^ж-:^^ ъйплиях.
.Иля yj;iocTBj о ^iJkOhL^L'iiiiH с кни|\и| из.ю>,е1ЕИё ц отлст1.п^х глава* япяяетоя
за>]к.н>"i bl4, чю HOiio.'iHCi" :п>чаца ах в .он ногло^оьчатс^ыгштн, coropsH более
npeino'iTTneiihiid гля ■шт^телл.
Ко»:лтя r.ii.ta co;icp*]:T :пн"оь црл'чпв-тсх^лчсскот'! .:нтератлры. я которой
тещробк*) hj'i'^chm j>l 1р^|ич,м.|к,- вилрпсы :-хх pjceMoipoiiniEC в книге.
Включенная ъ список цитируемая литература n.jii-vaaeT леги.]1,пс ознакомиться с
изнКрСЕпыми сиених^ьпымц вьщр'Ч'ами. ^афп^тыми в основцом тексте книги.
rlcKijjOpbic TCopciH'E.\hiic 1|'1.-:м|"ИЯ, 1"ермины и определения,
представленные ь KEEtrre, е;пе не :тллТ] о^ще -рикятымн. поэтому на;;й-лес важнме
формулировки выделены в тек-те v.-vth'^m.
Автсрм яьпажадг- припцатстиглстт, спе1[иалистам, любезно согласившимся
принять v^anstc "л ooc^j^juij] А1^тернл.лов pL-тсописи л. прежде чеего, проф.
В- Д. Заергпу.па н.1"е-чн,:е "^а^е'^инч по проб leva тике иите^феричетр^ческих
систем, нроф В. П Инат^ "'■а Е!Ск|иочи:ел!.ЕЕ^ ^жные метстичссгне peK.twii-
□апнн к имьс 6П нроф. Д. Ю. Тронч^нко* еделав"^^ дополноеия к чатсриш1ам
гпаьм 4.
Авторь] блшодарны j.pI,. Нг Ю. Додошн^у, вниматсльнп гг^еемстрещнему
верстку 1ЛЛВЫ 1, Дг В. Цкинихоьичу ча печешь при выполнении расистов и
участие й иолУтовко ма.орищюв pa.-\hti\z b 4, Юг P, Bo'jhwe и А. В. Сы^нн-
кову, выполнившим кОинью|Срное оформ;]Смне окончательной версии кинги.
>
8 Компьютерная обработка сигналов
Введение
Интерференционные методы измерений основываются на анализе
интерференционных картин, получаемых при сложении когерентных световых волн и
квадратичном детектировали колебаний результирующего ноля 11-5]. При
сложении колебаний с амплитудами а и фазами & интерференционный сигнал
j определяется преобразованием суммарною колебания в форме
си соа фь У + ( ^ a sin q\ У] ъ
(1)
где М - коэффициент преобразования. Результирующая фаза, очевидно, может
быть определена в Биде
tg <р = V * sin qhf/L а'ш3 ** ■ @)
Соотношения (|) и (2) иллюстрируются на рис. 1.
При фиксированных значениях at тпсрфирснционный сигнал s зависит от
разности фаз интерферирующих воли, которая определяется |СометрИческими
характер нетиками интерферометра, показателем преломления среды
распространения световых волн, свойствами источника ичлучеяня.
Разность фаз 3 = <fh - (р\ двух воли, имеющих оптическую разность хода
Л, определился выражением
S = 27iA/X-2aN, = 2jtCs^b\ (3)
где Х- длнпа волны, N, — порядок
интерференции, Q = 0.±1....- дельт
порядок интерференции, 0<й<1-
дробная доля иорядка. а = е/2п.
Из выражения (1) с учетом (3) и
свойства периодичлости трнгономет-
рических функций получим при
к= 1,2
► Re a
Рис. 1. Векторная диаграмма
комплексны* эмлитуд световых колебаний
s = iu + Jn, cos e
(4)
Введение Э
- сигнал на выходе днухлученого интерферометра и
s = SM/[l ^ Р ът2(е/2)] (5)
-сигнал на выходе многолучевого интерферометра (4 = 1, 2,,.., F0\ /'о-число
витерфернруюшнх световых волн ),
В выражевиях (4) и (5) St,, s*. и sh , F - неинформативные (сопутствующие)
параметры. Вид функций (4) и (5) показан на рис, 2.
Рис 2. Двуклучеаая (а) и мноюп^евйй (6) интерференционные аемы. Afi-
опррный.М?-измерительный отражатели; V=s„/so-
аидкостьинтерференционных понос; d = Л/2
Задача состоит в определении значений s или значений <£ в (3) но
измеренным значениям интерференционного сигнала j. С математической
точки зрения uia задача является неалиейнон обратной задачей [б—$}. которая
решается* вообще говоря, в условиях априорной неопределенности параметров
so, s„ иди sm, F, зависящих от времени и пространственных координат. Как
известно, характерной особенностью решения обратных задач является
необходимость преодоления проблемы некорректности, т. е, неустойчивости
решения при незначительные пофсщностях в исходных даипых [9], Указанные
10
Компьютерная обработка сигналов
особенности определяют специфику методов автоматической обработки
интерференционных сигналов [7]: необходимо определить сопутствующие
параметры или исключить ид влияние, выполнить нелинейное Преобразование,
исключить неоднозначность при измеревин разности фаз е и неустойчивость
при восстановлении значений нолной фазы сишала д.
Математические аспекты решения задачи восстановления фазы
интерференционных сигналов представлены в гл. |,
Для двухлучевого интерферометра характерным является узкополосный
сигнал (информационная составляющая)
i^i) = $т(д:)соз \е + 2лиах+ y(i)I , (б)
где х - независимая переменная. фу![кини зт{л) и ip(x) изменяются медленно по
сравнению с периодом 1/ив информационной составляющей, имеющей частоту
№, С учетом (4)т (б) можно определить вектор параметров
интерференционного сигнала & = (Лъ sm, £, wc)T.
На выходе многолучевого интерферометра получают сигнал более cjkjShoh
формы (5), который, однако, можно представить [5] с требуемой точностью в
виде суммы сигналов вида (ft) с кратными значениями полной фазы (кратными
частотлим):
s(x) = Su\l+2^sicos{k{£ + 2ffiwy2]}, (7)
где sit я \/ft i„,sl-2/F. 2F » Fn> 2. Поэтому далее будем рассматривать
особенности обработай сигналов (4), (б), так как полученнме результаты
естественно обобщаются применительно к сумме сигналов в (7),
На предварительном этане обработки, в частности, при подавлении
(вычитании) фоновой составляющей sa в (4) н выделении полезного сигнала (6)
обычно нсиошзуются методы линейной обработки сн1налов[раэл, 2 гл. 1). Для
устранения влияния помех импульсного характера и ложных периодических
составляющих более эффективными часто оказываются методы нелинейной
обработки, примеры Которых представлены в разд. 3 гл. \.
Системные преобразования сигналов
В зависимости от вида и обьема априорной информации о характсрисиглах
полезного сигнала и помех можно вьзделнть три основных подхода к
реализации компьютерной обработки данных [В].
При первом подходе предполагается детермиии/юванный характер значений
интерференционного сигнала ifo £, &'), где в' - вектор сопутствующих детер-
Бведение
и '
минированных параметров Помеха п считается алнитивной и имеющей нулевое
среднее значевис на интервале измерения. Операторное уравнение иптерфе-
ромстрической системы в этом случае имеет вил
S = TJ ©-,.<*, £.&) + гфс)} = аТ\*Ъхл £):■, (8)
где &i-вектор параметров линейною усреднения значений сигнала j, o-
собствепные значения оператора Т, соответствуюпше гармоническим
составляющим ингсг^фсрсипис-ии0"1 сигнала. Следовательно, задача сводится к
синтезу сравнительно простого оператора обработки, реализую идет обратные
тригонометрические функции я инвариантное) к вектору параметров ©',
Второй подход основывается на предположении об интерференционном
ситнале как реализации случайною процесса' л{х, ®) ', едс© = (е, О')7'-вектор
параметров с известной априорной iijf о ihoci ыо вероятности р(®)г Необходимо
с допуствиои погрешностью получить опенку
£ = TJs(*, £0r) + H(j)j (9)
при обработке зарегистрированной реализации случайного пропесса. Синтез
требуемого оператора обработки в (3) можс| быть выполнен на основе
достаточно обших критериев, например, правила максимума фупкциоиала
правдонояобия [11J или Других критериев, асимптотически приближающихся
по характеристикам к критерию максимума апостериорной плотности
вероятности [10].
Третий подход к реализации компьютерной обработки сигналов
применяется в тех случаях, когда апрнорпо нен.твестны даже статистические
характеристики сигнала и помехи и необходимо использовать нриншщы адаптации
измерительных систем (12]r CouiacHO этому подходу, в процессе обработки по
зарегис1рцрованным данным должны быть найдены неизвестные параметры,
характеризующие реализацию ч(х, 0), причем параметры заменяются их
оценочными значениями, т. е.
где Ф и п(х)-оненкн вектора сопутствующих параметров сигнала и шума,
соответственно, получаемые на стадии нрсявари|сльнон обработки* опредедя-
амой оператором Т^
Операториме уравнения (8)-(10) иллюстрируются схемами на рис. 3.
Во всех случаях достигаемая точность и сложность реализации
компьютерной обработки в значительной мерс определяю юя выбором адекватных
моделей Сишалов и помех в (8)-(10), т, с, решением задачи идентификации в
широком смысле |l4[. Рстевие этой задачи возможно на основе рассмотрения
12 Компьютерная обработка сигналов
*(хА&\
i
"№
а)
+ $
5(1.6)
s(x&\
\р(х)
к
т;
61
+2
р(Щ
«<-*)
sfoe&Z
|Я(*)
о
Т.
физических принципов и особенностей
построения витерферометрических
систем, проведенного в гл. 2.
И.з соотношения (4) видно* что из^за
влияния априорно неизвестных
сопутствующих параметров интерференционною
сигнала точное значение разности фаз е
не может быть нвидсно непосредственно
по единственному зарегистрирован ному на
выходе интерферометра значению сигнала
Sr Следовательно, требуется использовать
методы и устройства дхя обработки
последовательности значений
интерференционного сигнала (так называемого вектора
наблюдений), которые получены на основе
пршшипов дискретизации и квантования п" Уровню, рассмотрепых в т. 3.
Возможны две физические интерпретации вектора наблюдений для однокв-
нзльной и многоканальной иитерферометрнческих систем [7]. В одноканалъ-
ной системе регистрирую г К последовательных значений интерференционного
сигнала (4) с приращениями разности фаз Д^к), к = I К . В многоканальной
системе компоненты вектора наблюдений s(k) являются значениями ннтерфс-
рениноиного сигнала, полученными одновременно имя различных участков
интерференционной каргины или набора Л' интерференционных кзртин. При
Рис. 3. Системные преобразования
интерференционных сигналов
этом
- вля одноканальной системы и
(И)
(12)
-для многоканальной системы. В соответствии с (11) и (12) Принято различать
многомерную и многоканилъну-ю обработку сигналов.
При многомерной обработке компоненты сишала (11) могут бьпъ
определены по-ратному, например, в виде последовательности равноотстоящих
отсчетов интерференционного сигнала (6), взятых в дискретных точках
х. = кЛх, где Дх - ытаг ди^крегазации, т. е. s(k) = s(xt), как показано на рис. 4.
В свою очередь, сигнал (6) с учетом фоновой составляющей может
представлять значения яркости п сечении двумерной интерференционной картины.
Процесс компьютерной обработки дискрешой но^гсдовательности
отсчетов ингерфорениионного си]нала можно иредегашт, в виде структурной
схемы, иоказалиой на рис. 5.
Введение
П
ОД
®
-+х
. *** + *
4*
йл
'*.*
©
+ftix
itx) Если вектор наблюдений
рассматривается как совокупность
детерминированных компонентов, то операции
компьютерной обработки (определение
среднего значения, сглаживание,
выделение информационной составляющей,
определение фазы) можно
осуществлять в частотной области иди веносред-
стспенно в оЙлас|И независимой
переменной-
Методы анализа амплитудных
спектров интерференционных сигналов
при помощи алгоритмов ЕПФ подробно
рассмотрены в пи. 4.
В результате спектральной обработ-
Рис. 4. Регистрация дискретных отсче- ^ вектора наблюдевий в вине последо-
тов интерференцией но го сигнала пальности значений
интерференционного сигнала (П) обьтчно выдедиют так
называемые квадратурные составляющие:
S.(k) = b„ua[£ + 2KuJcAx+ фАх)], (13)
Цк) = sa соз[е+ 2яи*Ш+ф(Ш)], О4)
где sa - ампли *улные значения. При этом получают решение уравл сния (8) в форме
%к) = ж1в\МкуФУ\-2лн1кАх- ЖШ).
■*к
т+п{к)
Стад и шине
гдИда-г
А А
Выделение
информационной
Определение
i РяэЕергшаннс
~т! фиэм
Рис, 5. Операции обработки вектора наблюдений интерференционного сигнала
14
Компьютерная обработка сигналов
*(*-'"> yS(k-LA)
* М Л
-^ШШ
Рис. 6. Синусная, косинусная
составляющие и фаза интерференционного
си лгала
/V^-d m
Рис. 7. Операция фильтрации
значений интенсивности а
интерференционной картине путем свертки с
импульсным откликом фильтра
Квадратурные составляющие (13), (14) и соотвст^вующие им значения
фазы
t&x) = arctg sljft/sjkti
представлены в качестве примера на рис 6 для случая квадратичного изменения
фазы, коша число Точек дискретизации К велики но сравнению со случаем,
ноказадшым на рис. А.
Обработка стохастических сигналов
Прн стохастическом характере векюра наблюдений требуется вычислять
спектры мощности и корреляционные функции си|налов с не пользованием
соотношений, приведенных в гл. I, и различных алгоритмов БПФ (разд. 1
т. 4).
При дискретном изменении независимой переменной информвидоишщ
составляющая сигнала может быть выделена на фоне помехи методом
фильтрации в форме дискретной свертки
(*) = Ем')Г*(*-|)+»№-1)
= hrrB(t) + o(fe)
(16)
Введение 15
raeh = h(\\h(2.} A(L)1 -(1 -L)-вектор, компонентами которого яавлются
отсчетъГ имлульсною отклика фильтра ВД, s(k) и n(i)-(lxL) - векторы,
составленные соответствевно из компоненгов векторов наблюдений сигнала и
шума размерпопя К, согласно (И), Пример дискретной свертки (1б) дан на
рис, 7.
Другими распространенными операциями обработки являются вычисление
среднего значения сигнала
% = <s> = {sTs)1/3
и корреляционной матрицы
Во многих случаях используется аппроксимация последовательности
отсчетов (11) функцией (б), заданной в дискретных дочках, а именно,
s(k) = s*(k)+s.(k) cos [£ + 2xaJcAx+ \КШ)]. (18)
Аппроксимаиия но методу наименьших квадратов (МНК), согласно крпте-
рню
Ц£(*)-^)| = Х^(*)^т1П,
i *
приводит к следующей оценке отклонения вектора параметров
0 - (J», J„. f, uu)T:
J0 - (WnVj'W^e, (19)
где
1 cos«> - J^in^ft - зпЛкъ'юфк
- матрица чувствительности размером (4 > К), е- (1 у К)- вектор
погрешностей ацдрокспмании.
Если при переходе от сечения к сечению иитерференднонной картины
параметры ситикла (6) в последовательности отсчетов (18). Э = (s„, j™, f, uo)r,
изменяются в некоторых пределах случайным образом, то компоненты MLioro-
мерного сигнала (11) следует рассматривать как случайные всличним. Значения
яркости в дискретных точках двумерной интерференционной картины могут
быть представлены мноюмерной плотностью вероятности .значений случайной
послелователы тети.
16
Компьютерная обработка си■ налое
Если вектор наблюдений s н ьскюр параметров © являются случайными
векторами с известными многомерными плотностями вероятности, ю
оптимальная компьютерная обработка обеспечивается на основе методов стохасти-
чеекой дискретной фильтрации с учетом характеристик случайных помех.
Такие методы подроб|ю рассмотрены в гл. 6.
Обработка сигналов на основе правила максимума функционала лращюпо-
добня широко применяется в теорий связи [10, 11]. В разд. 1 гл. б рассмотрен
пример практически|tJ иснользования этого поидода дня оценняання
параметров интерференционного сигнала с квадратичным изменением фазы.
Анализ пос?|сдовательностсй случайных данных в современных системах
компьютерной обработки во мноеи* случаях ведется на осно&с нариметрилес-
кнх моделей временных радов (13], среди которых наиболее распространены
модели авторегрессии (АР) и авторе гjjec сии - скользящего среднего (АРСС),
В отличне от известного метода МНК особенностями этих моделей явалется
не минимизация '"невязок" при подгонке известной детерминирован ной функ-
нци к зарегистрированным значенидн сигнала, а получение значений сигпала
из отсчетов формирующего случайного процесса путем суммирования сто
соседних значений с весовыми коэффициентами.
В разд. 2 1л. б раскрыта процедура формирования и обработки интерфе-
рещшонных сигналов на основе АР-моделн, которая имеет преимущество в
вычислительной эффективности по сравнению с общим случаем АРСС-модели.
Основой параметрических АР н АРСС-методов обработки случайных
сигналов явлчося ыхтсматическнй аппарат стохастических дифференциалыibix
уравнений, В эюм смысле такие Методы близки к методам динамической
обработки сигналов в пространстве состояний.
Динамические модели сигналов позволяют Синтезировать оптимальные
линейные и нелинейные фильтры (разд. 3 н 4 гл. б). По своей сути нЯнамн-
ческие модели являются адаптивными к локальным нэменсимам параметров и
позволяют вести обработку широкого класса стационарных иди
нестационарных сигналов.
В адаптивных моделях нспольлустся прииинп обраший связи, поэтому
важной задачей является правильный выбор порядка модели и обеспечение
устойчивости а/норитма обработки.
На практике более простые компьютерные алгоритмы при определенных
условиях также обеспечивают высокую точность обработки. Поэтому прежде
чем не пользовать сравнительно сложные оптимальнмо алгоритмы,
представленные в пг б, полезно убедиться в том, что для поставлсвиой зацачн
аналогичные результаты нельзя получить при помощи более простых
алгоритмов.
Введение
11
г
Наглядным примером является алгоритм обработки е использованием
дискретного фазового сдвига сигналов (гл. 5). с обработкой векторного ситчала
(12). комноненты которого, ь свою очередь, могут являться многомерныци
последовательностями, зарегистрированными с разделением во времени*
Векторный интерференционный сигнал (12) при фазовых сдвигая между
его компонентами А&= л/2, к = 1. 2, 3.4 (N-4). можно представнть в форме
s = fs ,SiA.
&, = fja + J-cos e* jc + j-sin &., so- л™ cos а,,л- Smsm &J =
= [^(1).^2).^Э).^4)|.
Тогда оценку фазы можно нан!И по формуле
^ = areig ( s/St) = arclg {[sJ2) - *4(4)]/[tt(l) - Jd(3)] \.
Ввиду простоты, доступности н высокой точности алгоритма управляемого
дискретное фазового сдвига его полезло использовать в различных задачах
восстал о впення фазы сигналов.
-^ Таким образом, в книге вмнелеиы основные подходы к компьютерной
\ обработке дстсрининрованных и стохастических сигналов, представляющие
w^ методический базис дяя успешного решения задач в области интерферометрии
н смежных областях техники.
Некоторые полезные методы и комньюгериме алгоритмы обработки
сигналов, не вклгаченвые в книгу из-за ограниченного ее объема, могут быгь
непопьзоавлы более эффективно с учетом теоретических положений и
практических рекомендаций, представленных в отдельных главах книги.
Список литературы
1. Борн М., Вольф Э. Основы отикн, -М: Наук», 1973. -719 с.
2. Нагибина КМ. Интерференция и дифракция света. -Л.: Машиностроение, 1985,
-Ж с.
3. Короокевич В. П., Соболев В, С. Дубннщев Ю. Н Лазерная иптерферонетрня.
Новосибирск; Наука. 19S3. -213 с
4. Жнглипский А. Г.. Кучкнскин В, В, Реальный интерферометр Фабри-Пера -Л..
Машиностроение, 1983. - V6 с.
5. Скоков И. В, Многолучевые интерферометры в измерительной технике,-М/ Ма-
iDHHocipocHHe. 1989. - ?5о с.
6. Обратные задачи ь гомике /ГЬиред. Т. П. Болтса. -М.: Малшпостроение, 1984.
-199 с
19
Компьютерная обработка сигналов
7. Гуров И. П. Методы и техника автоматической обрабсцш сигналов в
интерференционных измерительны* системах И Измерения* кенщюль. автоматизация.
-М.:Ипформ11рнбор, 1990. Вмо, 2(74). С 69-79.
8. Васнльсн В. Н,, Гуров И- П.. Шестов А. Н, Восстаноиногас фазы измерительной
волны в продессах ндепгифнкавли интерферометрическн* систем и сшиавлв /
Доклады 2-ой Мсждуи ареной конференция "Инсюифнкапия динамических
систем и обратные 1адачи'\ СПб, 1994.
9. Тихопов А. Н.. Арсенин В. Я. Методы решения некорректных адач. - М^Наука.
1986, -287 с,
10. Ван Трнс Г. Теория обнаружения, оценок и модуляции. - М.: Сов,равло, 1972.
- Т. 1.-744С-
11. Тихонов В. И- Оптимальный прием сигналов. -М- Радио и ейязк 1983. - 320 с.
12. Адаптации в информационных оптических системах ; И. Н. Матвеев. А. П. Са-
фопов, И. Н, Троицкий И Др.; Под ред. Н. Д, Усшиона. - М.: Радио н еичл. 1984.
-344 с
13- Анлерсок Т. Стагистнчесхнгё анализ временных рядов. - М.: Мир. 1976. - 757 с.
14. Севастьянов П- U-, Туманов Н. В. Миогокритериальиая идентификация и мптя-
мизаиия технологических процессов. -Mhklk Наука и техника. 1990. -224 с.
15. Шестов Н, С Выделение оптических сигналов па фоне случайных помех. -М.:
Сов. радио, 1967.-347 с.
Глава 1. Математические основы обработки сигналов
19
Глава 1 |
Математические основы I
обработки сигналов 1
Методы компьютерной обработки интерференционных сигналов
основываются на принципах фнльтращш н оменнняния нариметров но дискретной выборке
отсчетов сигнала. Обработка осуществляется на основе математических
представлений, которые, однако, всегда являются приближением к физической
реальности. Степень приближения в значительной мере определяется
сложностью математических выкладок н. следовательно, алгоритмов компьютерен
обработки в пределах принимаемьгх моделей сигнала и нгума. Наиболее
подходящее прнближедне для измеряемой переменной величины может быть
различным в рядных случаях. Так. фотоэлектрический сигнал можно
представить детерминированной функцией наи случайной величиной в завненностн
от уроння чувствительности измерений. В свою очередь, случайная функция
может рассматриваться как реализация стиыипиарного иди нестационарного
процесса при различных интервалах наблюдения и дискретизации, Дпяес будем
учитывать (не претендуя на полную математическую строгость) специфику
процессов формирования и обработки фотоэлектрических
интерференционных сигналов, Фйуичсскими переменными, ирииямаемыми в расчет, могут быть
интенсивность света на выходе интерферометра или пропорциональные ей
зяачення напряжения на внхоле Приемника нзлученци, которые нелинейно
связаны с искомыми значениями фазы интерференционною сигнала. Этим
определяется выбор подходящих методов компьютерной обработки-
1.1. Характеристики сигналов и шумов
Типичные интерференционные сигналы (см, введение и гл> 2) можно
представить в форме
s{x) = so + Jm cos(£+ 2лыцг) (1)
для двухлучевой интерференции и
20
Компьютерная обработка сигналов
*(х) - Sm/\ : + Psin-(^/2 + m^x)] * s'a + X Лг" cos[/(£/2 + тадд)] (2)
j
пля многолучевой. Предположим, что сигнал s(x) имеет фиксированную
частоту основной гармоники иа и цачалыгуго фазу £ При достаточно большой
интенстмюсти источника света получим chih&i неизменной формы с
фиксированной амплитудой. При этом Ишсрферснинониый сигнал можно
рассматривать как детерминированную функцию переменной х. Если интенсивность
излучения источника изменяется нерегулярно и непредсказуемо от одной
реализации s(x) к другой, го форма и положение сшнала буду! нсизменньгми,
но амплитуда не может быть предсказана на основании знания ее предыдущие
значений. Нсли при переходе от одного сечения интерференционного поля к
другому параметр £ Принимает различные значения, то будет неопределенным
положение сигнала s(x)y как это показано на рис, 1, а, С математической точки
зрения задача определения параметров ИЕГтерференциоимого сигнала является
в данном случае задачей со случайными начальными условиями.
Множество все* возможных случайных функций s(x) в (1) или (2)
принадлежит случайному процессу. Отдельная реализация интерференционное
сигнала является выборочной функцией множества ' ie{x) '. Значения вь[борочной
функции ^(л) для различных сечений в точке i, (рис. 1, а} представляют собой
случайную переменную* которая флуктуирует от реализации к реализации. Для
такой переменной ми не в состоянии точно определит!, ее значение, но имеем
возможность определить функцию плотности вероятности p{s\ которая
подчиняется условию нормировки
fp(J)(fc= \.
Вероятность обнаружения значения случайной переменной я внтсрвале от s до
.т + ds ранца p{s) d$.
В рассмагрнвасмом случае вид сигнала является неизменным и каждая
выборочная функция является детерминированной, поэтому знапне ее
значения н точке *l иозволяет определи i ь значение в точке х-. Значит, можно считать,
чтъ все случайные переменные свя^анЬ] друг с прутом. Полное вероятностное
описание рассматриваемого случайного процесса определяется функцией
совместной Е1ЛОГНОСГН вероятности значений параметров p($m , £), причем
J ds+\ Jj{sM ,E)t&= 1.
-о. -сС
Глава 1. Математические основы обработки сигналов 21
Рис. 1. Представление случайного процесса в виде сечений интерференционной
картины, выборочные функции которого являются детерминированными
санкциями (а) или функциями со случайными отклонениями значений (б)
Во многих случаях можно считать, что значения амшццуиы s» и фазы £
статистически независимы, н следовательно, можно записать следующее
соотношение
P(s«.£) = p{jim)p(s), ,3)
При малой интенсивности иоочника излучения и изменяющихся значениях
пространственной плотности мощности иэпучения изменения интерференци-
22 Компьютерная обработка сигналов
□иною сигнала будут наблюдаться не только при переходе or реализации к
реализации, mi и внутри каждой реализации итерферегщионнот сигнала (рис.
1, б). Соответствующую математическую задачу следует рассматривать как
задачу со случайно изменяющимися париметрами. Описание случайного
процесса в этом случае предполагает рассмотрение нескольких случайных
переменных для определения взаимосвязи между ними, ^га взаимосвязь чаше веет
характеризуется двумя случайными переменными (в точках х, их?), совместная
плеттзеть вероятности которых pis* £ ii, xi) = р{зщ. s, X) зависит только от
разности х - Ji - *ъ еслИ эт°т интервал можно задавать произвольно.
Зпачсиия интерферснинонного сигнала (1) н (2) могут изменяться под
воздействием шумов и помех в рсшсфИруюшем устройстве. В этом случае мы
имеем дело с задачей со случайными внешними воздействиями.
Каждая из упомянутых задач имеет определяйте особенности [1]. Для
оценивания параметров интерферештонного сишала могут использоваться
различные операции обработки, например, может потребоваться вычислить
"площадь" сишала на некотором ншервалс, в частности, дин определения
значения ia В (1),
Средние значения интерференционных сигналов
Одним из самых важных и фундаментальных подходов к o6pa6oikc данных
является нахождение средних значений случайных переменных ини случайных
функций.
Среднее зпаченис <j>u в пределах конечного интервала 2Х изменения
независимой переменной определяется как
х
<s>n = -^\b{x)dx (4)
для детерминированпой или случайной функции s{x). При этом среднее
значение может зависеть от величины интервала усреднения. В случайном
процессе усреднению, гласно (4), nojnscprjcicn выборочная функция, и
средние значения для различных выборочных функпий могут отличаться Друг
от друга даже при одном и юм ке интервале усреднения.
Усреднению может может быть подвергнув также случайная неремеинаи
st(xi), где к-номер выборочной функции случайного процесса. Срелиее эна-
ченис по множеству N случайных переменных будет равно
<■*<*)>■* = ill *(*)■ (5>
Глава 1. Математические основы обработки сигналов 23
Множество случайных переменных - значений интерференционного ситна-
лд-ыожст быть получепо, в частности, при последовательном формировании
набора интерференционных картин (рис, 1, б) с определением значений
j, = j(i,) в каждой картине.
Из (5) следует, что при нростсм усреднешш значений случайной переменной
определяется взвешенная сумма, в которой "вес11 одинаков и обратно
пропорционален числу событий в множестве. При достаточно болыпом числе N
нормированный вес определяется вероятностью получения значений интерфс-
ренционного сигнала в интервале d$i, поэтому можем записать
<Ji> = J sip{s,)dsb
(°)
31пс(2иД)
Найдем среднее значение интерференционнош сигнала (1). При
детерминированном сигаапе, согласно (4)h получим
<J >2Х - Зо + ^АСО^(сА-2Ш1аХ). (7)
В (7) результирующая амплитуда информационной составляющей равна
sa = х-. sm(2mX)/(2mX) ™ J* sinv(2ihX), (8)
где функция sincor = яш(лц)/(яо). В результате усреднения, очевидно,
снижается амплитуда (8J информационной составляюгдей нрн щ з? 0. Формд иитер-
ференидонною сишала (1) не изменяется. На рис, 2 показан вид sine -функции
в (8).
При усреднения значений случайной
функции $(*) результат зависит от вида
задачи: со случайными начальными
условиями, со случайно изменяющимися
параметрами шш со случайными внешними
воздействиями, В математическом смысле
проблема сводится в общем случае к решению
линейных иди нелинейных ннффереппналь-
ных уравпендй со случайными начальными
условиями, параметрами или внешними
воздействиями [1].
Решение волновою
ннфферен(шального уравнепня определяется выражением (1)
в гл. 2. При случайных возмущениях
решение заметно усложняется, поэтому
интерференционный еи]Нал (1) или (2),
являющийся результатом квадратичного детекти-
2БД
Рис, 2, Зависимость амплитуды
интерференционного сигнала от
величины интервала усреднения
24 Компьютерная обработка сигналов
рования с^тсрпозиции случайных волн, на практике пелссообразно
аппроксимировать моделями соответственно КВазигармонического ини квазнпериоди-
ческого пропсе сон.
При случайных начальных условиях (1) преобразуется к диду
S{X) = Л) + .Ъ,СОз(£+£+2ЛЙвХ), (3)
где ^-случайные флуктуаини начальной фазы. Если эти флуктуации имеют
нулепое среднее значение, дисперсию о£ и гауссовекую инотность вероятности,
то при усреднеиди сигнала (9) получим сигнал вида (7), в котором амплитуда
sa полезной составляющей определяется выражением
^ = j« sinc(2«oX) с*р(- ^2). (10)
Таким образом, при d\ > 0 влияние случайных начальных условий еьоинтся
к дополнительному ослаблению полезнот сигнала с учетом третьего
сомножителя в {№).
Влияние случайно изменяющихся параметров sv. Jm и» в (1) проявляется,
по-раэному^ Так* при малых флуктуапнях частота но их воздействие п среднем
подобно фаэовым флуктуациям. Более сложной является опенка влияния
флуктуации мульти|ишка1иВНОГО параметра s*. В этом случае модель сигнала
принимает вид
s{x) - Jn -f J* costs + ImteX) -\-n{x)t (И)
где п(;с)-помеха, зависящая от сип]ала. Результат усреднения сшнала (11)
зависит от вида статистической пзанмосвязи полезной составляющей сигнала
и помечи.
Флуктуации постоянной составляющей sn можно рассматривать аналогично
влиянию аддитивных случайных внешних иидцейетвий. При этом в модели (11)
помеха п(х) считается статистически независимой от сигнала. В результате
усреднения получим
< 5 >ix = < Si,>1e-\-Sa С05(£-Ь2?ГЫоЛ) ■+ < П >iz , (12)
причем результирующая дисперсия шумовой гауссовской составляющей
< п >я в ацис **бслоп? шума" с нулевым Средним значением будет равна
tf = <£/{2UX), (13)
где ой, - дисперсия шума, В -ширина полосы частот, в которой осуществляется.
усреднение.
Исходя из рассроченных соображений, иптерферештонный сигнал
разбив определить как усредненную но множеству функцию
*(*) = <*<(*)>< (И)
Гпаиа 1г Математические основы обработки сигналов 25
а шум - как отклонение пыборочпой функпии sj_x) от значения
математического ожидания, т. е.
п(х) = ф)-<ф)>. (i5)
Таким образам, шум имеет нулевое среднее значение.
Одним из распространенных критериев качества интерферометрической
системы является, отношение информационной составляющей сшнала
Хс(х) = s(x) - jd
к срелпему кнйфатическому значению шума V< л2(л)>, а именно,
S/N = лС0/^<яЗД> = {<*&)> -s0y-J<[sr(x)-<sl(x)^]r^, (16)
Заметим, чго усреднение сигнала Приводит в результате к получению двух
аддитивных составляющих: информационной и фоновой
<s(x)> = <sI(!)> + <sdx)>l (П1
где
<*> = л + <ф:)>. (18)
Среднее по множеству (14), строго говори, подразумевает бесконечное число
выборочных фикций st(x), которые, в принципе. Moiyr иметь место в данной
шггерферомстрнческон системе, На практике случайная переменная в (5)
усредняется в сгределах только N выборок, поэтому результат такого усреднения
остается Случайной величиной. Флуктуации среднего для заданного N зависят
от стагнетичеыий взаимосвязи между фуппами N-выборок,
Приближение для усредненной функции как совокупности усредненных
случайных нсгяменпих (5) Можно получить из (4), но качество такого |грибли-
жения зависитш- свойства эргодиннссти, т. е. от статис]ической взаимосвязи
между значениями интенсивности света в единственной интерференционной
картине и значениями сигнала как случайной переменной в ансамбле интер-
ференпиоппы* картин. В свою очередь, ста1истическая взаимосвязь значений
сигнала как значений нескольких случайных переменных характеризуется
корреляционными свожмвами интерференционных сигналов.
Корраляционные функции интерференционных сигналов
Взаимная ^реляционная функция ещналов лУ(х) и Si(x) как реализаций
стационарного ^ргодичеекою случайного пропесса определяется выраже1Д|ем
26 Компьютерная обработка сигналов
= Щи —- Т i ф) - jpi} j ф + х) ~ *« \ & - RM ~ *ei sk.
^-,
где Д«С0 - ЪЪн ^ J *,(.*) j2(* + Л!) Л (20)
- взаимная ковариационная функция процессов [ s^{x)[ и | 8г{х) |, j&i и jcq- их
математические ожидания [2]^
В частном случае, когда \ ф) \ = \ ф) I, автоюрреляционная функция
имеет вид
Си = Ът^^- $[ф)- *ы\[ф + X)- sw\ dx = Ruiz)- slu (21)
—X
x
где Д L(tf = Jim J- } ф) Sl(x + X)dx (22)
**-*
- ковариационная функция процесса [ j,(j) \.
Для корреляниоиньй функций справедливы следующие соотношения:
Cv(-Z) = CM. <23)
C.,(-j6-GiCtf- (24)
Найдем оценочную взаимную корреляционную функцию сигналов:
Sj(x) = A coa(fL -и 2mix), (25)
si(x) = Bco-i(n + 2m&) (26)
в форме
S
£^) = ^-1*1(х)ф + Х)<Ь= (27)
= (ЛЬУ2) sinc[2(HL -и?)Х] соз(2лвд + ^ - #) +
+ (АЬУ2) sincl(ui + Ui)X\ соа(2ам^ + а + £) = (AS/2) cos(2?f и*х +■ ^4
где ,d£= # -£ь и приближенное равенство становится точным при X -> со и
Ui = И? - Uq.
Таким образом, взаимная корреляинонная функция содержит информацию
о разности фа* интерференционных сщцаловг При М = 0 и М = ^2 взаимная
корреляционная функция (27) раина соответственно
Глава 1, Математические основы обработки сигналов 21
ЫЛ) = (А ЬУ2)сой(2лад}
(28)
&«СГ) * " (4^2) *1Д(2ялл:). (29)
Из (28) получим автОкорреляидоннуы функцию информационной состав-
ляилией интерференшчоипот сигнала (1) в виде
fruCd = СИЛ) С08(2яивд5. (30)
В отличие от взаимной корреляционной функции (28) и (29) автокорреля-
днопная функция (30) пе содержит информапии о фазе интерференционного
сигнала* а онрсдслыстся сю амплитудой и частотой,
На рис, 3 иллюстрируются ковариационная и корреляпнопная функции
интерференционного ситала (i).
Оценочная взаимная корреляционная функция (27) при равенстве частот
и, = и2 = иг, имеет вид
£|зШ = {АВ/2) сы{гт&х + АЕ) + ыпс{2к2()сиъ(2тьх + е, 4- е3) . (31)
Эта функция является периодической, но амплитуда и фаза зависят также 07
второго слащеного в квадратных скобках, которое убывает по абсолютному
значению л обратной зависимости от числа периодов I/ил, укладывающихся в
интерацие усреднения 2Х. В случае, если в (27) щ * ы3, корреляционная
функция зависит от значения X
Д„<*>
с„(х)
-!/«•
Рис. 3. Автоковариационнея и евтокорре-
онцнонная функции интерференционного
ситала
и разности частот hl - из = Аи.
Следовательно, второе
слагаемое в (27) пренебрежимо мало
при условии \/и\ «2Х,
\/u2«2X, тогда как первое
слагаемое становится таковым
нрн 1Ли1»1/(2Я)-
Поэтому можно сделать
вывод» чю оценочная взаимная
корреляционная функция не
дает возможности различать
частоты Двух интерфе репа
ионных сигналов (25) и (26) я том
случае, если эти частоты лежат
в полосе частот ni нрн пой
1/(2Х) с центром в точке и,.
Таким образом, имеем:
28 Компьютерная обработка сигналов
Л«.ч (C13(2} = (Afl/2)coS(2w + ^ Ми1«1/(2Х), п?.
,!<2) \С12Ш = 0, 1-^1» 1/<ЗД. ( '
Проведенной рассмотрение можно обобщить на случай периодического
многолучевого интерференшоидого сигнала <2)h Оценочная Ковариационная функция
будет периодической с периодом основной частоты №>, взаимттые корреляаци
отдельных компонентов раним нулю. При этом достаточная близость к истинной
ковариационной функции достигается при условии 2Х«]/иП1и, где
iw = N,$# ни, N&t - эффективное число интерферирующих лучей.
Основные характеристики случайных процессов
Формирование интерферсилионньгА сигналов можно рассматривать как
непрерывный случайный процесс, поскольку случайные неременные sfa), s{xi)
и т. д. могут принимать любое значение в пределам области изменения
[ Jo - 5л, Л -I- л* 1- Фунямия распределения верояшостей такот случайного про-
песса непрерывна (рис. 4),
При фотоэлектрическом преобразовании Н кодировании значении
интерференционных сигналов при иомощи аналого-цифровых преобразователей
результирующее нредстацдение сигаалов следует рассматривать как дискретный
случайный процесс, поскольку в этом случае регистрируемые спучайнме
переменные принимают только определенные значения. В атом случае плотность
PW
»р "А
■S*"Ja
Рис, 4, Функция распределения
вероятностей значений
интерференционно гс сигнала
Рис. S. Плотность вероятности
значений интерференционного сигнала в виде
выборочных В-уровненых функций
дискретного случайного процесса
Глава 1. Математические основы обработки сигналов 29
*х
*_е
К>)
1/2
P<J>
\
Рис. 6. Модификация плотности вероятности при нелинейном преобразовании
случайного процесса
вероятности Преде! авляе i собой набор дельта-фикций (рис. 5),
удовлетворяющий условию нормировки.
Интерференционные сигналы можно рассматривать н как реализации
смешанных непрерывно-дискретных случайных процессов, например, при
нелинейном преобразовании, которое иллюстрируется на рис. б.
Как уже отмечалось, полное вероятностное описание случайного процесса
определяется функцией совместной плотности вероятности, однако лишь л
редких случаях ею возможно получить в явной форме для выгодно i и cm нала
узлов обработки, если известно вероятностное описание сигнала на их входе.
Более доступным является статистическое описание, основанное на
получении средних значений в виде статистических моментов [2к 3],
Моменты маргинального и совместного распределение с плотностяин
вероятности p(s) и p(i:, st) определяются как
/tt = <sk> = jslp{S)iis,k = 0, 1,..,,
(331
Мг= <ri*S> = jj J] jSp(Ji ,s2)dsids2, kr i = 0, l,...
(34)
Порядком момента называется значение / = k * i. Моментами первого
порядка являются средние -щаченпя <s,>, <j:>, моменты второго порядка
Представляют собой средние значения квадратов <xl> и <$$> и средине
произведения <д, £?>,
30
Компьютерная обработка сигналов
Центральные моменты характеризуют средние отклонения от средних значения
m, = <(s-scy>-l(s-styp{s)ds, к = 0,\ (35)
—П
*, г = О,1
Центральные моменты второго норялка представляют собой дисперсию
vi=<{s-stY> <37>
для одной переменной н корреляцию
т,з = < (jt - su) U2 - sk) > (ЭД
для двух переменных.
Можно показать, что справедливы соотношения:
<fr=<s1>-<S>t=<f>-sl <39)
гщг = <J] J2>-<Ji><w>s <Ji J?>-^i J« ■ HO)
Две случайные переменные являются некоррелированными, если
< I, j? > = j„i tah т- е. гп1? = О, Поэтому инсперсия суммы пекореллированных
переменных есть сумых дисперсий
Поллота статистическою описания случайного процесса зависит от знания
функции плотности вероятности. Интерференционный сигнал
s(x) = s* cos (e + 2лиоХ) (42)
со случайным изменением фазы £ можно рассматривать как реализацию
гармонического случайного процесса. Если фаза распределена равномерно на
интервале (0, 2л), то плотность вероятности имеет вид
(W2rf-J')"1, Ы<*-, (43)
О, Ы>а.,
P(j) =
где d = ^/2-дисперсия гармонического процесса (2].
График функции |1ЯОТНОСТИ вероятности (4-3) показан на рис 7.
Плотность вероятности гармоническою процесса полностью определяется
его дисперсией. При этом значения, близкие к среднему (нулевому) значению,
Глава 1. Математические основы обработки сигналов 31
рис. 7. Нормированные значения
плотности вероятности
гармонического случайного процесса
Рис* 8h Плотность вероятности
гармонического случайного процесса на фоне
аддитивного гауссовского шума
надиенее вероятны. Эю является глаьным отличием гармонического процесса
от узкополосного шума, который обычно является гауссовским даже при весьма
малой ширине спектра.
Нормированная функция маршнальной плотности вероятности по s
случайного процесса с раецредсленнем Гаусса имеет вид
0Й = [ 1/(соб)Г)} еяр[ - {* - Sn)V2oi ]. (44)
Вьгражоние вида (44) при s0 = 0 характеризует аддитивный шум п(х) с нулевьга
средним ц дисперсией с£, на фоне которого регистрируется интерференниоп-
ный сигнал j(j) (42) со случайной начальной фазой (гармонический Процесс).
Результирующая плотное гь вероятности будет равна свертке плотностей (43)
и (44). Можно показать, что плотность вероятности равна
№ =
1
(Тя лч2л
j е*Р: - [{s ~ s* cos^/(4ct,)j3 | de.
(45)
Графики (45) для различцьгл отношений сигнал-шум Q = <?,/<£ приведспы
На рнс. 8. Из графиков видпо, что при Q > 4 плотность вероятности имеет вил
Двухмодпгюй Кривой. Плотность вероятности (45) часто определяет статисты-
ческис характеристики модели (П) в задаче со случайными внешними
воздействиями.
Плотность вероятности (45) удобно определить, используя гридтис
характеристической функции flw) случайной переменной s(x), по определении?
равной
32 Компьютерная обработки сигналов
J{w) = < tupjwpis) > = < схр jwpisc) >< exp./wp(fi) > =fA.w)Mw) (46)
irpB статисгической независимости информационной составляющей s£x) и
шума л(дг) II, Э]г Это выражение можно рассматривать как теорему о
произведении Фурье-образов плотностей вероятности независимых случайных пере-
иннных [31 Для определения искомой функции p(s) можно использовать
преобразование Фурье последнего выражения
p(s) = \flw)ex.p\-jws]dw,
откуда, используя известное свойство Преобразования Фурье (см. разд. 1 гл. 4),
получаем формулу (45) и вице свертки плотностей вероятностей (43) и (44), т. е.
p(s) = p(j,).p(n). <47)
Характеристическая функция/1» определена для веся дсйс1Вительных w и
обладает свойствами:
до)= каднь
Она является производящей функцией моментов в том смысле, что
коэффициента разложения в ряд Тейлора no w являются моментами:
Предпола| аетея., что производные Дк1) при w а 0 существуют Д° порядка L
Функция J[w) есть прошволяшая функция кумулянтав т, которые
определяются выражением
и являются комбинагшями моментов, т. е.
*j=/4> Ki = fh-fi = d, ft = fi\-3/e/JL ■+ 2$
ИТ-Л.
Если вес безусловные маргинальные и совместные илогности вероятностен
случайною процесса не зависят ог выбора начала отсчета в области
определения назависимой переменной, то такой процесс называют стационарным.
Очевидно, что этому условию соответствует гармонический случайный процесс
(43). Если фаза интерференпионного сигнала (42) распределена равномерно
Глава 1. Математические основы Обработки сиiналов 33
I
I 11
1 * \^
1 ' ^-_
1 *
: ч.
i
0
i
п
• i
i
•
Ае=5л{Ъ
Рис. 9. Плотность вероятности
гармонического случайного промесса с
равномерным распределениеV фазы на интервале
(О--)
на интервале, меньшем чем
(О, 2я}, то пропесс является
заведомо нестационарным, поскольку
плотность вероятности изменяется
при сдвиге начала отсчета. На
рис, 9. иллюстрируются изменения
вина плотности вероятности При
равномерном распределении фазы
£наш1тервапе(0, я)дня.различных
фазовых сдвигов М,
Требование стаинойарности
процесса часто является более
строгим, чем это необходимо при
создании реальных интерферомет-
рическия сис|см. Поэтому чаще
используется условие
стационарности в широком смысле, которое
реализуется при допущении, что
среднее значение случайного
сигнала < s(x) > не зависит от BLi6opa
начала отсчета, а коррелящюнная
функция < s(xi) s(.Xi) > зависит
только от разности %= Х; — Хъ
Некоторые стационарные
процессы обладают свойством,
согласно которому каждая выборочная функция ансамбля hmcci еташетнческие
свойства, характеризующие весь ансамбль. Б этом случае можно
проанализировать статистические характеристики путем исследования одной выборочной
функции. Такие процессы являются эргодическими. Для эргодичееямх
случайных Процессов, как уже отмечалось, средние значения в пределах изменения
независимой переменной равны Средним но иножес |иу рсализаннй. В
частности, для статистических моментов (33) эргоднческого процесса имеем
(48)
Пропесс формирования интерфереппиппнпго сигнала вида (42) является,
вообще шворя, неэртднческим, поскольку -шачеция ця могут изменяться при
переходе от одной выборочной функции к другой, оставаясь постоянными для
конкретных выборочных функций.
2 3d» B0|
34 Компьютерная обработка сигналов
Спектральная плотность интерференционных сигналов
Обратимей вначале к представлению в частотой области неслучайны*
функций к форме прсобразовавид Фурье
ЗД = / s{x) eXp(-j2xux) dx. (49)
Согласно (49), результирующий спектр определяет ппопыосгл
распределения амплитуд в зависимое™ от частоты. Амплитудный спектр цстермттиро-
ваппого интерференционного сигнала (1) имеет вид
S(U} = sbj счр( -Jim*) dx 4- л. J cos(*-+■ 2mn#) exp( -jlnux) dx - (50)
= 2jc^»-bS-,[ <Ku-iiQ)cxp(js}±S(ii±ua)cxp(-je) \,
т. е. является суммой ipex дельта-функций. Второе и 1ретье слагаемые
содержат информацию о начальной фазе интерференционного сигнала,
Использование апалогичной математической операции преобразования
случайного сигнала возможно только при определении финитного преобразования
Фурье Jc-ой ямборочиой функции на конечном интервале
5Ди, 2Х) = \ Ф) схр(-]2шх) dx, (51)
-S
для которого обеспечивается условие абсолютной сходимости
X
-X
случайной функции s(x), нерожденной процессом с ограниченной дисперсией-
Можно "оказать, что для стационарною случайного процесса справедливо
соотношение
< ^ > = (1/2») j Jim -^^^ du. (52)
—Q
в котором величина
х-'щ 2Х
Глава 1. Математические основы обработки сигналов 35
цосит название (двусторонней) спектральной плотности случайного процесса.
Предельный переход в (53) осуществляется после усреднения п0 множеству
доборочпых функции, Hj определения следует, что спектральная инотность не
содержит информацию о фазе случайного интерференционного сигнала.
Рассмотрим спектральную плотность ннтерференпионното сигнала, яваяю-
lUCroca выборочной функцией стационарного случайного процесса
!йс s*Sm to - постоянные, а е- случайная величина, равномерно
распределенная на интервале (0, 2/Г),
'-'• Финит]Гое преобразование Фурье можно записав в вцдс
S(ut2X) = 2i0 ъ\Щ2иХ) + i„ з!пс[2(й - uq)X ] с*р<» 4- (54)
+J„ sincI2(a 4 «o)Jf] exp(-/f).
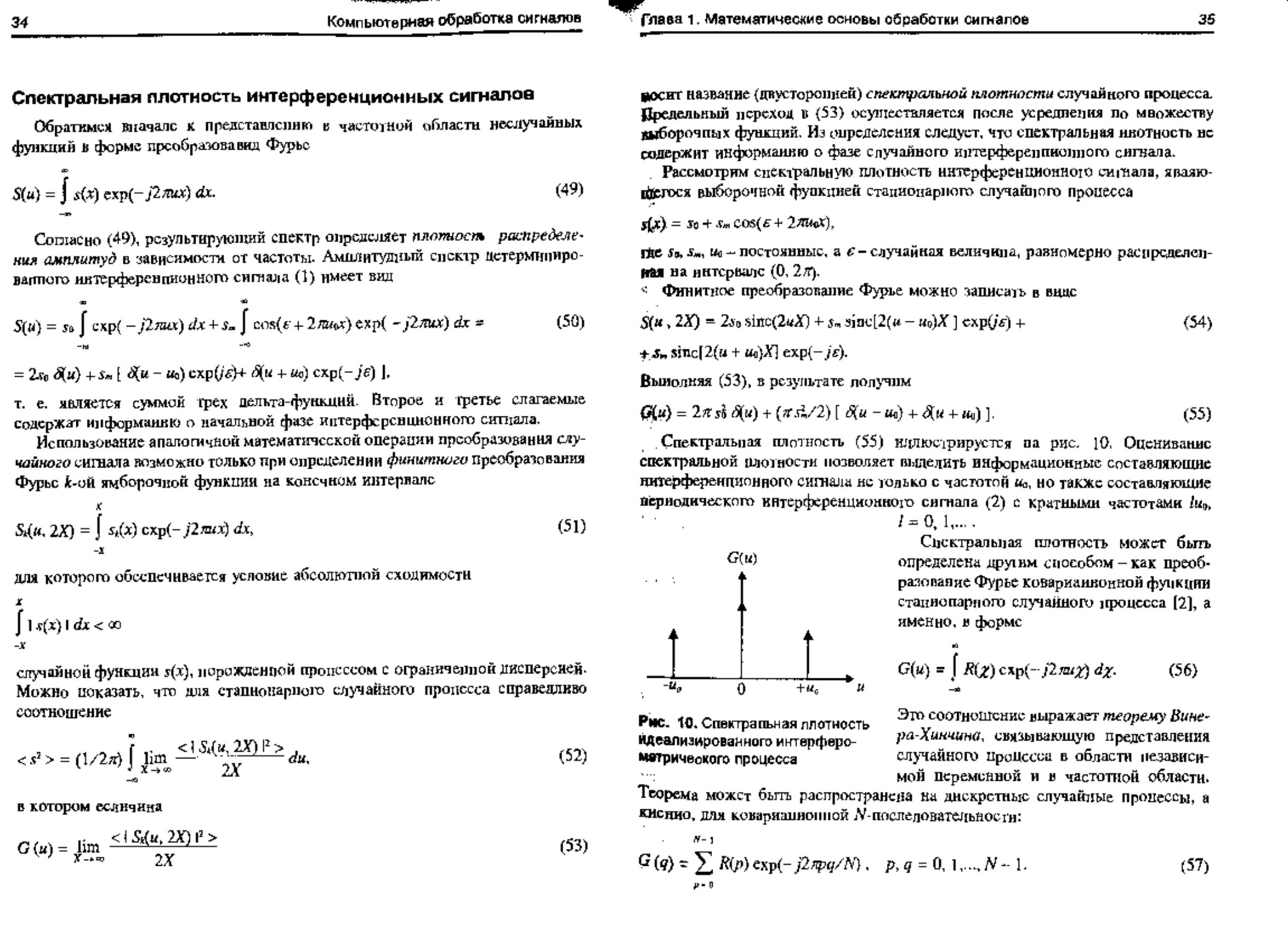
Выполняя (53)h в результате попучнм
йм) = 2?г^(5(м) + С?г^/2)Г^н-иа)4-*5Си4-ии)]. (55)
Спектральная плотность (55) иллюстрируется па рис. ]0, Оценивание
спектральной ило1нОсти позволяет вььтедить информационные составляющие
нитерференпионного сигнала не юлько с частотой иь, но также составляющие
периодического интерференционною сигнала (2) с кратными частотами 1и9,
/ = 0,1
Спектральная плотность может быть
определена дру!им способом - как
преобразование Фурье ковариационной функции
станио парного случайного процесса 12], а
именно, в форме
ад
1
-ия
0
G(u) = JR(z)cxp(-J2m.fi dZ.
(56)
4 и.
Рис. 10, Спектральная плотность
идеализированного интерферс-
Мвтрического процесса
Это соотношение выражает теорему Вине-
ра-Хинчино, связывающую представления
случайного Процесса в области
независимой переменной и в частотной области*
Теорема может быть распространена на дискретные случайные процессы, а
киснио, для ковариационной jV-последовательноеги:
с(*)-£ВДехр(-.рад/Л1), Ад = 0,1 N-1. (57)
V
36 Компьютерная обработка сигналов
При рассмотрении дпух коррелированных интерференционны* сигпалов
ji(j) и xi(x) полезно использовать понятие взаимных спектральных плотностей
этих ситалов. В этом случае вместо (56) запишем
Gia(«) = } Дц(# expC-j2^2) <fc (58)
причем Gi:{ti) = Gli(u), поскольку взаимные спектральные плотности (в
Отличие от обычных) являются, вообще говоря, комплексными функциями.
Действительная часть (58), Р]г(и), называется коспе&прапьной плотностью (коенск-
тром). а мнимаи часть - Qu{u) - квадратурной спектральной плотностью
(кьалратурнмы спектром). Взаимный спектр (58) удобно выразив через его
модуль и фаговый угол в форме
Gu(u) = | Gu(u) j expL-^И], (59)
■де
С,г(и) Wpyw) + Gfc(ii), <&0)
£li(H) = arytgl" &з(и)/Р13(и) . (61)
Замегим, что взаимный спектр содержиг информацию о соотношении фаз
ннтерфере1П1ионных сигналов: положительное значение £и(и) соответствует
запаздыванию, а ожидательное - опережению сигнала ц(х) относительно
£i(r) па частоте и, Таким образом, если частотный оютага исходных
интерференционных сигналов имеет содержательную интерпретапию, то вэаимний
спектр позволяет оценивать но (60) и (61) искомые фазовые соотношения в
интерферометрнческой снс|еме.
Дискретное предстааление корреляционных и спектральных
характеристик интерференционных сигналов
Дискретные тпачеиия интерференционного сигнала можно получить двумя
методами: регистрируя Л' последовательных отсчетов сигнала Л, л-i st-n-i
или фиксируя одновременно веточках ннгерференпионнои картины значепия
Jib Sit,..., stt, на jt-ом интервале регистр вин Н- Дискретные интерферсямиоипмс
сигналы и этих случаях удойно предо авить в секторной форме соогветешенно
как
- ,7
я» = Ы, J* i ft.ji.ii, (62)
SX= (sfoSi ito) - (63)
Гпапа 1 Математические основы обработки сигналов 37
Комнопепты векторных интерференционных сигпалов (62) и (63) могут
быть детерминированными или случайными переменными. Можно определить
ковариационную матрицу {NxN), которая харащеризует ковариапию между
каждой парой случайных переменных $(*,-), ф:г), ij = к, к-},..., k-N- 1 в
(62) в форме
R = < a* s{ > =
six* j(-tk) s(x*) sfo-i) ... s(xt) ф*+ч)
ф<-|) S(X,) s(x,, ,) j(l<-L) ... i(^-D J(JV^-,}
фд-N-i) j(Ji) J-(jfa-N-]) jfo.,) ... .*(хь n ,) J(a+ *.,)
&(U) R,(k,k-\) ... R,{k,k-N-\) ~*
A(jfc-U) R,(k-\,k-\) ... R^k-Uk-N-})
> r=
(64)
RJ,k-N-\,k) R,{k-N-\,k-\) ... Rjk-N-l^-N-l)
Корреляция в общем случае определяется как
<[s(*-)-<i<*() >][*(*)" <jfo)>l> = стя;а- (65)
где я?, of - инспереии, р$- нормированный коэффициент корреляции между
sixi) и J(aj).
При этом корреляционная матрица определяется выражением
CV = <(s»-<si>] [ <sl-<st>T]> -
Ям 0>A-i-i
Я1 Я1-У-! pi.t-*-l
СЪ-1 CJir-n-i P^-^l'-<^-^
Яь^г., Пк /й •■■ 1г1 Як .v , я(, /Л, v l* 1
Из (64) и (66) следует, чю
C=R-<sxs>T,
fll-.V-L
(66)
(67)
г Понятие корреляннопной матригал можно использовать для етаинонарных
вг Нестационарных процессов. При услоаци стационарности в широком смысле
Цолучим
С = а>
1 /л-l А-; ... А ^-1
A-l l Д-L ... pi-H-2
fl^S-i pi-V-1 ... £V, 1
(68)
Эв Компьютерная обработка сигналов
т- с, теплицеву матрицу, поскольку в атом случае Ы = dj - *г\ p? = р*-Л
i,j = k,k-] k-N.
Для векторного интерференционного еишала (63) запишем
ковариационную матрицу в форме
Bti) = <s(x)sr(x + x}> =
Ых) UX) ■■■ RUx)
С6Э)
Эта матрипа зависиг от интервала корреляции х- Ковариационная матрица (69)
полезна при исследовании многоканальных интерферометрических систем,
когда компоненты вектора s* в (66) формируются N различными процесс аци,
коррелированными друг с другом.
Заметим, что ковариационные матрипы (64) н (69) MOiyr б|>пъ определены
не для значений интерференционного сигнала, а для вектора параметров
сигнала. Такое представление удобно в том случае, если известна
параметрическая модель сигнала при его фильтрации в пространстве состояний,
определяемом областью значении вектора параметров |5] (см. также гл. 6).
Матрица вши/иных спектральных плотностей [2] ингерферсипноиньгх
сигналов j,(i) и jj(i) имеет вид
С,(й) =
G,(u)
аг(и)
<?.)(W)
Gm{u) Gm(ii) — Сц(и)
(70)
Каждый элемент этой матрицы обозначает спектральную плотность на частоте
и- Матрнча (70) веста являедея неотрицательно определенной эрмитовой
матрицей [29]. Такое спектральное Представление полезно для исследовании
стохастических сигналов мнопжанальтчх ннтерферометрических систем в
частотной области.
Б результате расеМ01рсния математических основ обработки интерферен-
цнонных сигналов можно заключить, что характеристики детермннировляньтх
и стохастических синапов Определяются» как правило, в граница* ряда
допущений. На практике веста необходимо учитывать пределы применимости
той или иной математической модели сигнала и шума.
В частности, распространен пая операция усреднения еишала (4) приводит
к уменьшению влияния аддитивного шума (15), не коррелированного с
сигналом. Однако одновременно Происходит ослабление полезною сигнала согласно
(8) и (10). Дисперсия шума снижаемся цри усреднении в соответствии с
Т|>йва 1. Математические основы обработки сигналов 39
формулой (13) в случае гауссовской плотности вероятности. В иных случаях
необходимо использовать более ofitnee соотношение (6).
Эффективность операции усреднения можно оценить iio всличиде отношения
сщнал-пгум (16). Однако необходимо иметь в вицу, что такая опенка является
(лиентировочной, поскольку не существует общепринятого определения
величины S/N, и достаточно строгую оценку качества операции обработки можно
хюлучнтъ в соотве'Еет'Вии с более обтпим j^wmfpift-и среднего риска [Ы.основ&внш
на использовании статистических характеристик сигнала и помехи.
При аналоговой обработке интерферениионных сигналов, предшествующей
вводу данных в компьютер, во мноцтх случаях целесообразно опираться на
математические вывоим корреляционного анализа- Так, наиболее распростра-
ненньш технический прием - синхронное детекти/ювание
иитерфереидионного оигнала-достаточио полно характеризуйся соотношениями (19) — (29),
если под п(х) в (19) и далее понимать опорный (эталонный) сигнал. Из (32)
исдует, что корреляционный фильтр может иметь весьма узкую полосу
пропускания, если существует возможность увеличивать протяженность
интервала обработки. Вырцисния вида (31) и (32) полезны также при анализ метода
гетеродинного детектирования интерфсрелидонцых сигналов.
Методы обработки, основанные на вычислении статистических моментов
(33) - (36) и (48) выше вюрою порядка, в настояшее время не получили
широкого распространения. Возрастающие вычислительные возможности
конньютеров позволяют использовать изессшыс и находить новые свойства
оптических с шпал об [3]. Перспективнмы подходом следует считать метод
Характеристически* функций, учитывая широкие возможности компьютерной
реляиэапин соотношений (4б), (47) на основе математического аппарата
быстрого преобразования Фурье (БПФ).
Техника БПФ позволяет эффективно использовать преимущества спект-
ральною анализа, особенно нримешпельно к узкополоснмы интерференцнои-
ным сигналам, за счет комнамносги описания детерминированного (50) или
стохастического (55) интерференционного сигнала в спектральной области.
Однако при вычислении спектров (как и корреляционных функций)
необходимо учитывать методические иотрещиоеги вычислений, возникающие при
ограниченной длине реализации и нецелом числе периодов полезного сигнала
[2> 4] (см. также гл. 4).
Б случае широкополосных ещналов, которыми являются, например, интер-
фсрсннаонНыс сишалы с нелинейно изменяющейся фазой, бояее
эффективными MOiyr бы1ь методы цифровой фильтрации непосредственно в области
независимой переменной. Если априорно известна математическая модель
сигнала, хараК1ерис|ики помех и корреляционная матрица параметров модели,
ТО эффективным методом является фильтрация в пространстве состояний [5],
40 Компьютерная обработка сигналов
которая но миогия случаях может быть выполнена на основе рекуррентных
алгоритмов обработки в реальном времени.
Известии, что наиболее совершенные системы содержат в себе узлы
аналоговой н инфровой обработки. Выбор оптимального соотношении между
ними зависит от специфики конкретной измерительной задачи. При этом
целесообразно учитывать основные соотношения, приведенные выше в
настоящем разделе,
1.2. Методы линейной фильтрации
интерференционных сигналов
Линейная система (непрерывная или дискретная) - это система, в которой
соблюдается принцип суперпозиции:
т{в5| + ^а| = яТ{л,} + *т|л}, (71)
где Т[L.' -оператор системы, а, Ъ- постоянные.
Лилейная система является инварианикой во времени, если из соотношения
Т{^(Г)} = ?гй
следует
при любых сдвигая ?. Двумерным аналогом инвариантных во времени систем
являются прастранстленно-инвариантные системы- Мождо показать, что
пространственно-инвариантными окраинами являются операции сдвига
изображения, усиления и ослабления контрастности и некоторые другие.
Любая пространственно-инвариантная операция является операцией свертки:
T[s(xry)} = ft s{£ t})h(x- $y- tf>d£d!I = **h.
(72)
1де k(x - £ у - rj) - отклик системы на нодцействие единичной ичпулъсной
функции
ЗХ>) =
ее, X = >' = О,
О, х * О, у * О
в топке (£ rj). Причем
Глава 1. Математические основы обработки сигналов 41
s(x)
*(*-*>
jj%x,y)dxdy* 1.
—П
Им1гупьсная фуцямия обладает важным
"селектирующим" свойством;
jj s&ti) 5{x-S,y-n)<K,Un = s {х. у).
h(x-$)s(x)
s*k
fr
aM\/V/V\aa,
ДискрсдНым аналогом операции свертки
(72) является преобразование
Id
ти*>я1 = £*(<>/)*(*-^-д аз)
где ^/-дискретные координа1ы точек
(пикселов) изображении, н суымнрова-
иие можно вести в бесконечных
пределах, поскольку по определению
*G"ij) - 0 т|е формата л, хЛз цементов
изображения.
Операция сьср1ки Для одномерного
случая иллюстрируется на рис. П.
Если непрерывное по'щейстние на
входе лилейной системы имеет форму
комплексной экспоненты, например,
s(x) = с*р (it), где z - комплексная величина, то выходной сигнал будет равен
п
1(х) = J ft Й) wpti (х - 51 Ц = Щг> ехр(у), (74)
Рис, 11, Операция свертки сич-
пульсным откликом системы
где
Й(г) = |адсхр(-га^
(75)
- непрерывная системная функция.
Экспоненциальная функция является собственной функцией линейной
системы, а значения системной функции - собственными значениями оператора
системы, поскольку влияние линейной системы на сигнал своди! ей к
умножению его на комплексный масш1абный множитель H(z).
42
Компьютерная обработка сигналов
Если на входе дискретной линейной системы с импульсным откликом
h (л), где п - целое чн^ло, воздействует Экспоненциальная последовательность
л(л) = г", причем z - произвольная комплексная величина, то выходной отклик
будет равен
где
№) = £адг- (77)
- дискретная системная функция 17. 8].
Системные функции (75) и (77) представляют собой соответственна
преобразование Лапласа и ^-преобразование импульсного отклика линейной
системы. В частном случае при Z-J2 пи, где } -мнимая единица, преобразование
(75) сводится к преобразованию Фурье
Щи) = р( ОД] = j ОД вхр(-^2янл) dx. (78)
-д.
При этом И(и) является частотной характеристикой системы. В общем случае
из (78) следует
//(и) = 1ВД1ехр[МЫ)],
гае модуль частотной характеристики и фаза определяются соответственно как
I Щи) I = [ Re3 \Щи)} + lm: {H{u);J\ (79)
р(и) = вга$Г\т{Щи)\/Ке:Щи}} . (80)
Обратное преобразование Фурье определяется соотношением
h (х) = Р'| Щи) | = (\/2х)\ Н(и) txpffZmtx) -to. (81)
-л.
Свойства преобразования Фурье подробно изложены в литературе [\]у [5]
и приведены ъ разделе 4.1, Отметим одно из важнейших свойств, выражаемых
теоремой о свертке:
F{s{x)*h(x)\ = F{S(x)}F\h(x)} = S(u)H(ul (82)
т, с, операция свертки сводится к умножению спектра сигнала на частотную
характернс1ику системы. Такан операция иллюстрируется на рис. ]2, Из
* - Глава 1. Математические основы обработки сигналов
43
*<*•&
®
©
S(u)
<М>
ВД
<м>
SH
<м>
ш__
в
©
All
Рис. 12. Спектральное представление операции свертки
-ФЕ*
рисунка видно, что при умножении спектра сигнала S(u) на Бше-функдню
Щи) происходит некоторое ослабление полезных спектральных составляющих.
Соотношениям (78) и (81) соответствуют днекреттп.ге аналоги: дискретное
преобразование Фурье [7, 8] ирв обработке Л'-точсчноп последовательности
значений с ища,'! a s(p) ъ ыще
я-
S{q) = ^S(p)txp(-j2*pq/N)
j.-D
н дискретное обратное преобразование
ы -1
*М = (1/Л)£%)ехр(/2*ря/Я).
(S3)
(84)
Рассмотренные представления удобно использовать при решении задач
фильтрации и оценивания параметров интерференционных сигналов. При этом
нужно учитывать следующие методические особенности.
Реальные интерференционные сишалы (1) и (II) можно представить для
одномерного случая в форме:
44 Компьютерная обработка си i налов
s(x) = j„(i)cos[£ + 2tfHflj;+ И») +st(x), (85)
где 5ь(х) - фоновая составляющая, ^х) учитывает фазовые флуктуации. В (85)
имеется i армонмческаи информационная составляющая, чго свидетельствует о
целесообразности обработки интерференционных сигналов б частотной
области. Cm нал (85) компактно характеризуется двумя значимыми параметрами-
частотой но и искомой начальной фазой й". На практике имеет место влияние
априорно неизвестных параметров 5т(х), 'fKx), и J*Cc). вследствие 40jo вид
сигнала может существенно изменяться. Это лает основания для использования
непараметрнческих методов при компьютерной обработке
интерференционных сигналов на основе аппарата преобразований Фурье (83), (84) н теоремы
Винера-Хинчина в форме (57) для определения периодичностей в
интерференционных сш налах вида (85),
После определения значимых частотных компонентов можно далее
воспользоваться парамегричеекимнмеюлами анализа выборочных функций.
Простейшим из таких методов является метод численного гщ!монического анализа на
основе модели |риго|юмсгрического ряда, содержащею М слагаемых
м
s(x) = J) 1лчсоя(2лпих) + В«5Ы2янчх) . (86)
Здесь и - известная частота основной гармоники, а коэффициенты ряда Фурье
равны
Г- ,
А, = Q./K) £ j(fc) cos(2*kj/tf), (87)
4—1»
К- I
в, = (2/К) ^ s(k) sm(2*hi/K), (88)
1де s(k)- послсдоватецьносгь дискретных отсчетов сигала. К -число точек в
последовательности, включающей целое число периодов сигнала.
Значение фазы полезной составляющей иптерферешшоциого сигнала па
частоте и определяется по формуле
£ = arctg(B/A). (89)
в которой оценки значимьк коэффициентов А и В получены из (87) и (88).
Рассмотрение подход нельзя признать ощимальным в условиях
воздействия мультипликативной помехи - огибающей i*(x) * cons! (л) в (85), поскольку
соотношения (87) и (88) минимизируют среднюю квадрэтическую погрешность
анпроксимапин (86) только ъ условная аддитивного гауссоеского шума л(*),
Слава 1. Математические основы обработки сигналон
45
Рис. 13. Влияние фазовых искажений
Па точность оценивания начальной
фазы сигнала
содержащегося в фоновой
составляющей it(x) = so + nix) и
некоррелированного с полезным сигналом-
Значительную систематическую noipcuiHOCTb 5t
могут вносить фазовые искажения itfx)
в (85) (в ряде случаев эта фазовля
составляющая является ипформациодной
функцией). При у(х) * 0 спектральный
состав интерфероншюияы* сигналов
существенно расширяется. Погрешность
Sc определения начальной фазы при ан^
нрокенмации цисальной синусоидой s
сигнала s(p) с фазовмын искажениями
иллюстрпруется на рис, 13 (17].
Если спектральный состав
интерференционного сигнала и шума априорно
известен, то возможно использование
методов оптимальной фильтрации
Винера Ц, 6]. Получение оценки .*(*)
непрерывного сигнала s(x) на фоне
аддитивного птума п(х) характеризуется соотношением
ще е{х) _ случайный сигнал ошибки, причем его дисперсия, очевидно, равна
где Сг(н)-спектральная плотность сигнала е{х). Можпо показать, что для
СТанионарных случайных процессов дисперсия d минимальна в том случае,
когда частотная характеристика системы (78) определяется выражением
Ж*) =
GM
(90)
Gju) + Gju)'
где С(ы) и Gn(w) - спектральные плотности сигнала и шума.
Следовательно, модуль частотной характеристики (79) оптимального
фильтра должен принимать большие значения на тех частотах, где сосредоточена
основная доля энергии полезного сигнала. Однако иа частотах, где значительна
энергия шума, модуль чаедетной харак!сристики уменьшается (рис. \А).
46
Компьютерная обработка си гнало а
G(u)
*■ и
Если шум янляется
мультипликативным или. ни» эквивалентно, тую п(х) я
(11) коррелирован с сигналом, то
частотная характеристика системы,
минимизирующая среднюю квадратическуто
погрешность, представляете* в форме
И(и) =
Ш")
(91)
+ и
Рис. 14.Спектрапьныелпотности
сигнала и шума и частотная
характеристика оптимального фильтра
С,(и) +■ G,(u)*G„(u)r
Во мпогих случаях спектральное
плотноелг сигнала и шума априорно
неизвестны с достаточной
достоверностью. При этом эффективное ib
фильтров (90) и (91) заметно снижается.
Влияние мультипликативного шума
и фазовых, искажений
интерференционного сигнала можно уменьшить при использовании мсгодов преобразования
Гильберта и теории аналитических сигналов [16, 17, 21],
Интерференционный сигнал (85) подвергаем* преобразованию Фурье с
получением частотного спектра, составляющие которого центрированы
относительна частот ±ио (рис. 15). Преобразование Гильберта выполггяется в
результате обратного преобразования Фурье полученною спектра, Доказанного
на рис. 15. только на положительных частотах. Известно, что спектр Ди)
комплексного аналитического сигнала ф), порождаемого информационной
составляющей s&) интерференционною сигнала, определяется соотношением
В результате преобразования Гильберта восегапанливается сопряженная ком-
нопеита sX.x) в аналитическом сигнале
se(x) = Re \z(x)l = х4х)со$[£ + 2янох+ ^x)]t
s£x) = [т(фг)| = зш(х)ят[£ + 2т*ах+ /р(х)]
(92)
(93)
(94)
- квляратурные составляющие. Из (93) и (94) получаем оцеггку фазы
интерференционного сигнала (85), выполняя операцию, подобную (89)» а именно
[х) = £ + 2яиах + ip(x) = aT0tg[se(x)/s^x)]
(95)
а 1 Математические основы обработки сигналов
47
да
ТЧ*-
.3
М-
л.
Рис. 15, Восстановление сопраженной составляющей и фэЗЬ|
интерференционного сигнала
для всех значений х. Однако, в отличие от (89), значения фазы в (95)
Вычисляются с учетом всех частотаьтх компонентов сшнала.
В зависимости от решаемой ивтерфорометрнческой задачи далее нвеложно
оценить путем линейной обработки данных (95) искомые параметры £, и* или
^сна основе подходящею Критерия, Зиметнм, что оценка (95) принципиально
свободна от влияния медленно изменяющейся по сравнению с функцией
соя(2яи(л) мультипликативной помехи s*i(x) s интерференционном сигнале-
Параметрические модели интерференционных сигналов
.¥ Нснараметричсские методьт описания статистик (па основе нонятий
спектральной плотности и корреляционных функций) и линейная обработка на
основе аппарата преобразования Фурье дают хорошие результаты при таких
исследуемых интерференционных сигналах, которые достаточпо близки к
идеализированным Моделям гармонических (периодических) сигналив, Оциако
процесс обработки яэдястся довольно трудоемким, и обработка в реальном
времени доеттнаетея е использованием сралнительно мошньгх вычислительных
средств. Спектральным Методам обработки присущи систематические погреш-
Компьютерная обработка сигналов
hocih. связанные с процедурой перехода а часютнуш область 12, 4}, которые
рассматриваются в разд, 2 гл. 4,
Во многих измерительных задачах при компьютерной обработке
интерференционных сигналов пелесообрино использовать статистический подход,
который основан па компактном параметрическом оцисанин upoijecca н
использовании моделей временных рядов [9]. При атом характеристики
спектральной плотности являются прежде всею функциями модели, а не
корреляционных характеристик процесса 14]. Параметрические модели сигаалов и
помех, при обработке данных фсбуют относителыю небольших,
вычислительных ресурсов. Другим их преимуществом является возможность более высокого
спектрального разрешения по сравнению с классическими мстоцими
спектрального апалнла.
Интерференционный сигнал
s(x) = 5ti-\-s*,cQs(G + 2uUox) + e(x) (96)
априорно содержит циклическую компоненту, причем отличие от идеальной
модели характеризуется сигналом ошибки е[х). Такая модель линейна по
неинформационным параметрам sat j*. и нелинейна но нарнметрам полной фазы
£ и но- Линеаризация ^-последовательности отсчетов сигнала модет быть
доегшнуга преобразованием
s{k) = 5ц -+- ic cos(2wjdLli) - j, sinftnunkdx) -+- е(к), (97)
где по анажнии е (95) и (94) введены обозначоаже sr= j* соз£, s, = s*sia£,
Ах - шаг дискретизации.
Пример иоследо вательности
отсчетов сигнала показан па рис- 16, а.
Модель (97), характеризующая эту
последовательность, линейна по
параметрам Ja, Xc и Smt которые можно
определить методами регрессионного
анализа. Для этого требуется лишь
априорная оценка частоты щ
(которая в процессе обработки может
уточняться).
Параметры регрессии в виде
вектора
Э = (cos£, siflf, Jfl)r, к = 1,..., К
можно оценить известным мптодом
наименьших квадратов (МНК) (9].
'*> а)
6,(к)
., *■
+ 4
Ь)
■^■Vft
Рис, 16. Последовательность отсчетов
иктерференциочного сигнала (а) и с-ста-
точн!»е разности аппроксимации (б)
;а 1, Математические основы обработки сигналов 49
Искомое значение фазы е в результате будет равно
т.е. по виду совпадает с оценкой (Н9), полученной, однако, с учетом возможных
лпкдонешй частоты гармонических составляющих. Вь(бор подходящей мо-
■влн интерференционного сигнала можно сделать на основе анализа дисперсий
^Статочныхразностей между значениями выборочной функции и значениями.
Получаемыми в результате подгонки модели (рис. ]б. б).
Если остаточные разности близки по стагисгичсскны характеристикам к
^коррелированному гауссовскому шуму, то можно считать, что выделенная
Звтермннировапная составляющая в достаточной степени адекватна истинной
|Егерфер01рамме. Если оетазочные разности имеют импульсные выбросы, то
Щебустся использовать модифицированный вариант МНК, менее
чувствительный к локальным выбросам данных, или иные робастные (устойчивые)
даопедуры оценивания (см., например. (Ю1), в том числе основанные па
(нелинейной) медианной фильтрации I12J (см. далее разд. ], 3),
Обшая шшейная модель временною ряда, пригодная для апцрокснмаицн
.^^Терминированных и стохастических интерференднонных сигналов в виде
^-точечной последовательности, имеет вид
гдс{ w(k)} - независимые одинаково рас предел еппые с.тучайные величины, т, е.
Так называемая возбуждающая последовательность (чаше всего в виде отсче-
до белого П1ума).
&1. Такая модель является моделью авторегрессии - скользящего среднего с
конечным числом параметров [4, 9J- Функциональная схема рсализнин модели
(99) показана на рис. ]7. Системная функция (77) преобразования (99) имеет
{ДОнональную форму
Щ = В{1)/А(1), (100)
Прячем
1-1
N
50
Компьютерная обработка сигналов
*•?<*)
Рис. 17. Модели авторегрессни (слараметрами/Jjn]) - скользящего среднего (с
параметрами ajn[) идеальная (а) л при наличии шума наблюдения (б) ]4[
При этом предполагается, что нули полиномов расположены внутри единичной
окружности в комплексной ^-плоскости для того, чтобы H{z) соотпетствовляа
требовапиам минимально-фазового каузального фильтра.
Согласно рис. 17. а и формуле (99), наблюдаемая последовательность
j(i) представляет собой резульш ашебраичеекого суммирования N
взвешенных значений сигнала (авюрсгрсссни) н М 4- 1 взвешенных значений белою
шума (сколь.зяптего среднего). Заметим, что при таком подходе несложно
учесть также шум наблюдения (рис. ]7. б). Принцип восстановления аиторег-
рессии -скользящего среднего основмаается на подгонке вероятностных
моделей к полученным данным на основе учета и* статистик пторого порядка
(дисперсии и корреляции).
Аппроксимация данных на основе параметрической детерминированной
экспоненциальной модели осушсствляс гея при использовании метода Прони
[4]. При этом ношинка /^-нос'ищовагельноетн данных педетея на основе
экспоненциальноги представления в форме:
|иа 1. Математические основы обработки сигналов 51
&) = ^2л,еяр[оЛ*- ])&]тз[&. + 2яи,(к~})Ах], (101)
pf-i
fe\<k<K,sBR it, - амплитуда и коэффициент затукания л-ой составляющей,
"fe-iuar дискретизапии. В отличие от модели (86). модель (101) позволяеч
^Посредственно в процессе подгонки к даннь1м оценить частот и огибающие
вставляющих синусоид-
Рассмотренные параметрнческие методы и их модификации позволяют в
црнциипе обеспечить реализацию квазиоптимальныя реккурентных
алгоритмов в реальном времепи: каждый иосдецуюший отсчет интерференционного
^ягвала на выходе фильтра является результатом линейной обработки преды-
5$Щих значений,
;%Ь Обшнн недостаток линейного нараметрического описание интерферограм-
1Ш или иной ее аппроксимации состоит в сложности адекватной
интерпретации результируюшего ряда значений интенсивности с точки зрепия
оптимального оценивания значений фазы интерферсцииоимои сигнала, В этом смысне
опредслепным преимуществом обладает рассмотренный вьциенепарамспричес-
Шй метод восстановления аргумента аналитического сигнала (95).
-* Существенно иной подход состоит в использовании принципов оценивания
Параметров интерференционного сшнала в так называемом пространстве
достояний системы, когда реализуется линейная (в общем случае - нелиней-
ам) аппроксимация последовательности значений параметров сигала, а ие
*!(Яаченнй самого сигнала [5]. Такой подход принято называть фильтрацией
Ёалмана [ML
Лилейная модель дискретного фильтра Катана определяется уравнением
системы
Щ$~А(к)в(к- l)-bw(*). (102)
гдсЭОЬ)— (] я М)-вектор-столбец переменных состояния. \{к)-{М * Л/)-мат-
tНа перехода, w(ft) - (I *М)-вектор шума, определяющий uoipciiiiiocrH моде-
, и уравнением измерений
-«(*) = <ЩЩК)+е{к), (103)
где s(A) - (1 * ф-всктор-столбен наблюдений, C(ft) -(МуК) идастная
матрица, описывающая линейные соотношения персменньгх состояния, t(k)-
Пхф-всктор пофсшностсй измерении, В (102) и (103) средние значения
(в считаются равными нулю, ковариаднонные матрицы-известпьми,
ирацессы, описывающие шумы, предполагаются некоррелированными.
Задача фильтрации состоит в юм, чтобы получить опенки ®(fc) вектора
состояния в процессе измерения цоелсдоваюльноети значений сигнала
52 Компьютерная обработка сигналов
s(l), s(2) s(ft). Теория фнль грации Калмапа позволяет использовать
рекуррентный метоц оценивания: вендор состояния определяйся на каждом шаге
дискретизации, чаще всего с использованном линейного предежн-чапия-
Структурная схема процесса дискретной фциьтрацим Калмана приведена
па рис. ] 8.
Уснлстщс
^к)
+
-1
Невязка
X
Прошел
значении
сишила
X
од
Коррекция
+
Прогноз
параметров
V
Ах
Т
Мк)
ё(к-])
Рис* ТВ. Структурная схема фи дыра Капмана
Используя оценку вскюра параметров &(к- 1) на предыдущем (к- 1)-ом
шаге и известную матрицу перехода А(£), из (102) вьгаисляют оценочный
вектор параметров на £-и шаг Щк) = &(к)Щк- 1). После получения А-го
наблюдения &(к) профилированная опенка вектора параметров корректируется
по зпачеишо невязки s(*)- Q*) А(£)ё(£- 1), путем умножения этой невязки
на матричный коэффициент усиления фильтра Калмаиа. равный
Reft) C^fc) tk'(k)t гае Re(*) ~ апостериорная ковариационная матрица
параметров, ТЦк)- ковариационная матрица ошибок измерений. Матрица Re(fc)
рассчитывается ич данных на предыдущем циге Ш(£-1) с учетом дисперсий шума
w(*) в (102) и е(*) в (103),
Вектор параметров 0 интерференционного сигнала может содержать
следующие компоненты:
причем некоторые из компонентов нелинейно связаны с компонентими вектора
наблюдения s(k). Обработка в пространстве состояний позволяет в принципе
выполнить нелинейную оптимальную финыранлю |4, 5, 14] значений фазы
интерференционного сигнала (см. разд. 4 гл. 6).
^(^ава 1. Матемнтические основы обработки сигналов 53
& Кротко рассмотрим метод линейной обработки значепий фалы
Ш = £ + 2тю+у(х), (И>4)
Предварительно восстановленных, например, методом преобразования Гиль-
бцгта. Воспользуемся в качестве иллюстрации известным методом максимума
функционала провдоподобия [б, IS} для непрерывной фазы Q04). который
■доробно рассмотрен ниже в разд. I гл. 6.
" Запишем выражение (104) для реальных условий измерений в форме
"|Ю =<(<*. в)+ *(*),
■& -
щы- ф(х,®) -известная дедермнннрованная функция, параметры которой, ой-
ййсяяемые вектором 0, требуется оценить на основе Правила максимума
функционала прандоподобня в условиях воздействия шума п(х).
Согласно [б]* it гот функционал в случае некоррелированного гауссивского
Щ/йа с равномерной спектральной плотностью G, определяется вьфажением
|Р = ехр(-(1/Ся)|[^)-Ф(^ B)Ydx). (105)
Ш&Х- интервла регистрации значений интерфереппиоппого сигнала. В случае
рйвновероятньгх значений параметров максимуму функционала (105)
соответствуют такие значения составляющих $ вектора ©, которые минимизируют
среднее квадратическос отклонение измеренных значений <р(х) or заданной
щеальной модели O^j, &), Максимум функционала достигается решением
уравнения максимального правдоподобия, причем и условиях мальи шумов это
ранецке можно представить в форме
м
Жх) - <Цх. Щ J (d/66L) Щх, ©*) dx, (106)
-i
ПК fa - априорные значения составляющих вектора параметров, однократно
#лучаемые, как правило, на стадии преднаритсльной обработки сигнала,
^-элементы конари анион пой матрицы параметров, т = 1,2 М* М-
(йймврность вектора параметров.
^Следовательно, за счет вычисления второго слагаемого в (106) проводится
У&очнение значения кашгого из М комоопентов вектора параметров для
фэкретной выборочной функции <р(х). Вьгчиеление поправки основывается на
РМЬжеиии идеальной модели Ф(х, 0) в ряд Тейлора (обычно используется
Фмаемое только первой.» порядка) и суммировании влияния отклонении
°1Дбльньтх параметров модели с учетом их статистической взаимосвязи.
■•■!'
54
Компьютерная обработка сигналов
Ашиклнчный подход реализуется при обработке в пространстве состоянии
днекроной последовательности значений сигнала s(k). В этом случае, однако,
обеспечивается дополнительное преимун^стио, заключающееся в проведении
оперативной идентификации модели на каждом шаге дискретизации,
Сущность рекуррентных мсъоаов компьютерной обработкл
интерференционных cHjnaJiOb состоит в следующем. Новая опенка вектора параметров ® на
*-ом шаге дискретизации определяется в виде суммы лредыдущей оценки м
корректирующего сла^емого* а именно
ё(}£) = e(*-l)-bA(fc)e(fc), (107)
где А(*)-ма]рипа коррекции на шаге k, t(k)- вектор ошибок линейною
предсказапия текушего значения сигнала. Погрешность предсказания с пред-
MajTiiciu на снедуюшин шаг для скалярного случая равна
е(к) = s(k)-s(k\k- 1). (108)
где s(k) - измеренное значение.
Важно подчеркнул», что рекуррентные методы эффективны при надежных
априорных оценках век.гири параметров. Качество априорных оценок оказывает
существенное влияние пъусдовия сходимости и устойчивости оценок. В общем
случае параметрической идентификации интерферециионных сшиалов
необходимо выполнение условий несмещенности
<{ё(к)\> = &,
где угловые скобки обозначают операцию математического ожидания, ©-
истинное значение, и состоятельности в среднем квадратичном
Г1т^<[[ё(к)-в][ё(к)-®]Т}> = 0.
В условиях, априорной неопределенности параметров интерференционною
сигнала и характеристик помех методы оперативной идентификации в
реальном времени Moiyr бьпь приняты за основу при разработке адаптивных
компьютерных chcicm oGpaGoiKH.
Приведенное рассмотрение методов линейной обработки
интерферециионных сигналов позволяет заключить, что не существует универсального метода
обработки, который можно было бы рекомендовать как наилучший.
Использование того нни иного подхода зависит от вина решаемой интерферомстри-
ческой задачи и следующих факторов:
■ Требуемая точность измерений и помехозашишеппосъь системы
■ Быстродействие рс|нстрирующего устройства и вычислительной системы
■ Наличие независимых каванов получения информации о характеристиках
сигналов и внешних воздействиях
■ Возможность получения надежных априорных оценок параметров ицтер-
ферепционмых сигналов
f'Jpaw 1. Математические основы обработки сигнялоа 55
Методы линейной обработки основываются на разлитом теоретическом
•''фазисе, обладают высокой точностью и широкими функциональными возмож-
■йостямн. Вместе с тем в ряде случаев целесообразны специальные методы
белшкйнон компьютерной обработки интерференционных сигналов* примеры
которых рассмотрены в следующем разделе, а также в ih. 5 и б.
И*"
-V"
1,3, Медианная фильтрация и кепстрапьный анализ
Реальные интерференционные сигналы искажаются из-за воздействия
flotocx, основными причинами возникнопеиия которых являются шумы
источника излучении, влияние спсклоь, обусловленных остаючной шероховатостью
отражающих поверхностей, а также несовершенство характернее ьсномога-
Аелыгьгд оптико-механических элементов.
'.': Можно выделить две разновидности помех: стационарные и импульсные
домехи, методы борьбы с которыми являются существенно различными. Так.
■яияннеешцнонарных помех можно значительно ослабить методами линейной
£1ьтрацци. В то же время линейный фильтр искажает и полезный сигнал, В
гностн, согласно (10), снижается амплитуда интерференционного сигнала.
Поэтому в ряде случаев целесообразно исноньзовать методы нелинейной
фильтра шш.
Рассматриваемые ниже два метода нелинейной обработки являются
принципиально различными в математическом смысне, однако каждый из них весьма
аффективен для практическою использования.
Важным преимуществом медианной фильтрации является способность х
удалению имоульспых помех практически без искажения плавно
изменяющихся последовательностей значений сигнала, длительность которых превышает
пиловину длины апергуры меднанною фильтра. Медианная фильтрация
относится к классу пелинейщ.тх методов обработки сигналов []2, 13], вследствие
чего ее применение не всс!да удастся обосновать с помошью строгих критериев
качества. Медиаппую фильтрапию в задачах подавления шумов следует считать
Эвристическим методом Il2|, однако простота вычислений и эффективность
ЧЙработки обусловили птрокое распространение этого метода [19].
', Дру1им полезным методом нелинейной обработки сигналов является кепст-
ральный анализ, основанный на логарифмическом преобразовании сигналов в
частотной области [7,20, 25]. Частогньш кепстр сохраняет информацию о полной
фазе, что является важным свойством при обработке интерференционных
сигналов, Дру1ИМ достоинством кепстралыюго анализа является возможность
выделения периодической составляющей в "пакете частот" снежною состава.
■: Рассмотрим указанные ме!ОДЫ нелинейной обработки инзерференцпонпых
сигналов более подробно.
■
56
Компьютерная обработка сигналов
Медианная фильтрация интерференционных сигналов
Одномерный медианный фильтр представляет собой "скользящее окно"
протяженностью W отсчетов, в котором Центральный эпемепт замечается
медианой (т. с. средним элементом последовате;1Ьности, упорядоченной в
порядке возрастания значений сишала в "окне"). Таким образом, операпия
медианной фильтрации А% последовательности значений сигнала
характеризуется соотношением
(109)
гае фиксированное значение я = 1. 2.... определяет апертуру фильтра.
Например, пусть п = 3, N - 5. тогда ,Ш,СД{ 0. 2, 7, 0, 3 | = 2,
Действие медианного фильтра с апертурой N = 5 элементов на
интерференционный сигнал, искаженный импульсной помехой, иллюстрируется на
рис, 19. Из рисунка видно, что происхоцит эффективное подавление
одиночных и парных импульсных выбросов сигнала-
Рис. 19. Медианная фильтрация интерференционного сигнала а условиях им-
лупьснойломехи: исходные значения сигналов (а) и значения поопе обработали)
Свойства медианною фильтра характеризуются следующими соотношениями:
mcdja^Uflmedjjti);. (ПО)
med{ so + s(k) \ = sn + raed{ s(k).', (111)
где а и jrfl - нос юянные J121-
Глава 1. Математические основы обработки ситналов 57
Онмако цри медианной фильтрации не соблюдается принцип суперпозиции;
'■W! ■*>(*) +■ *=(*) \ * nicdj *,(*) | + medj s:{k) |. (112)
Вследствие нелинейности (112) нельзя етродэ разгражечить влияние медн-
даной фильтрации на сигнал и пгум (при линейной фильтрации такая задача
.шешастеи сравнительно просто).
- Приведем данные о воздейстнын медианного фильтра на последовательпость
-^независимых одинаково распределенных случайных переменных [13], В случае
равномерного закона распределения па интервале 0<j<1 результирующая
.дисперсия равна
Jeb-u-,*i = Ъ<?,/{И + 2), (из)
дас с^-исходная дисперсия случайных переменны*, N - как н ранее
-апертура медианного фильтра-
-i . При нормальном законе распределения
eLd, -j « {n/2)&,/{N+n/2+ 1). (Ц4)
tj&N^2T\ + \,n= 0,1
<' Поскольку среднее зпаченис<£>для ^нсзанисимыхслучайньщ переменных
Имеет дисперсию df/N, то можно заключи гь, что при воэдейст&дн гауссовского
белого шума, согласно (114). эффективность медианной фильтрации при
больших N ниже на {к/1. - 1) а* 60% ею сравнению со скользящим среднигг
. ■- Медианная оценка является лучшей оценкой ио сравнению со скользящим
юредним и оптимальной оценкой по критерию минимума средней квадратичес-
ьой ошибки для случая двойного экспоненциальное распределения
J&) = ОЁ/с,) ехР(- ^2 Ь- Jol/o-,). (] 15)
при этом
Ad'(l/2)rf/(p/-1/2> (116)
* Из (115) н свойств гармонического поцесса (43) следует, что медианная
'^фильтрация может быть эффективно использована при решении задач поиска
**ш«еныя максимума интерференционного сигпала по эмпирическим гистог-
^■ммам. Медиана обеспечивает наилучшую по минимуму абсолютного откло-
-Ьсняя оценку центра распределения с плотностью вероятности (115), удов-
'Шйтаорятельно аппроксимирующей Краевые области функЕщи (A3). Для ука-
'Здшюго распределения вероятностен
tam Jjjt-лП
53
Компьютерная обработка си i на лоз
достается при л - medial,...,s#].
Медианный фильтр позволяет уменьшить влияние шумов с^екл-структуры
в интерференционных изображениях. Поскольку медианные фильтр сохраняет
монотонно изменяющиеся участки сигнала, то операция подавления
импульсного шума не вносит значительных фазовых искажений в информационную
сосгавляюнгуго,
В самом деле, согласно данным [13], дли стационарного случайного
процесса вида
.f(ifc) = j_,cou(£4-2;ojoki(),
ilic я*,-постоянная, g имеет равномерное распределение на интервале
1(1,2я], tz 1, 2.,.., К . медианный фильтр с апертурой N^5 имеет
характеристики, близкие к
характеристикам скальзяше го среднего (рис. 2П).
Влияние медиашюн фмоьтрацни на
корре л я гг ио и ные х ар а к теристик и
сигналов подробно рассмотрено в
[13].
Таким образом, медианную
фильтрацию можно рассматривать
как аффективный метод
предварительной обработки
интерференционных сигналов в условиях
импульсных помех, обеспечивающий
устойчивость последующих оценок
фазовых характеристик сигнала, ко-
Рис, 20, Уменьшение дисперсии шума горь|С ^н^аны на гипотезе о нор-
лри фильтрации методом скользящего малыЮН распределении шума,
среднего и медианной фильтрации ' '
0.4
0,2
Кепстральный анализ
Техника кецстрального анализа представляет собой пример нелинейной
обработки, которая осуществляется наиболее эффективно при помощи
компьютерных средств. Построение кепстра основано на следующем
математическом принципе. Если неполный сигнал х(х) имеет частотный спектр
5(ы), тогда его кепетр определяется выраже|гиам
K(j) = F'\US(u)\, (П7)
me Р' {■';- онерання обратно^) преобразования Фурье.
ва 1. Математические основы обработки сигналов 59
?.'. Для действительною сличала $(х) спектр 5(ы), вообще говоря, является
Удадоплексимы
ВД-Р|ф)| = ЗД|)-ь;ЗД, (Ш)
X. с- содержи! действительную и мнимую составляющие, или в
экспоненциальной форме
Яи)= 1ЗД1екрМ"). (45)
Комплексный логарифм в (117) будет равен
in S{w) = Ln I 5(м) 1 +М*)Ш (120)
*, е. является комплексной функцией частоты. Дснетви1сльная часть этой
фикции является логарифмом амплитуда, а мнимая часть характеризует
фаговый спектр. Обычно спектр интерференционного сигнала является эрми-
тово-сонряженной функцией, т. е. S(- н) = 5*(ы). нозтому Ln I S(u) I является
четной функнней, тоща как фаза д(и) - нечетная функция.
Наряду с понятием комплексного кепстра (119) можно дать следующее
■Ирвделение хепстра мощности [7] с учетом (53):
6fct) = F'|LnG(a)i. (12i)
«' Кепстр (f2l) является действительной четной функцией. Сравнение (121)
щ{5Ь) с учетом (21) показывает определенную аналошю кенстра и коррелянл-
ошой функции: обе функции опредслень! в области изменения независимой
временной л. Подобно корреляционной функнни, кенстр содержит информа-
ЮНо о периодических компонентах исходного стнала s(x).
На рис. 21. а показана выборочная функция (интерференционный сигнал),
■Иорая является суммой информ ал ионной составляющей п ложной периоди-
99СКОЙ составляющей (помехи). Такие искажения возникаю) upu паразитной
вЦтерферендии на вспомогательных элементах оптической системы, Розуль-
Жугощая спектральная плотность G(u) будет иметь максимуму на частотах
0, иъ и Ы! (рис. 21. б). Для иаентификаднн истинной составляющей с
WCTorofl ua необходимо выявить наличие ложной спектральной составляющей
[фдля последующею ее подавления, В принципе выявить скрытые пернодич-
■кти возможно на основе известного свойства корреляционной функции (30).
вЯнако решение такой задачи в условиях помех является более эо^фекти&ным
Sи использовании кепегра (12Г). Это иллюстрируется на рис. 22, из которого
ЕВщщо преимущество кецстрального анализа в сравнении с оценкой авто-
1&ВариаШ1И.
.^Другое важное свойство кепстра, которое обусловило распространение
^ого метола обработки, сое юит в возможности выполнеидд "гтрогйвос вертки".
60
Компыотернап обработка сигналон
*U)
№)
А
А
а)
■*!
6)
О
Рис. 21. Выборочная функция в виде
реализации интерференционного
сигнала на фоне периодической помехи
(а) и спектр мощности (б)
<ЭД
к
О X*
я..Of)
о
1
14
б)
рис, 22. Кепстральное представление
(а) и еатоковариационная функция (б)
интерференционного сигнала,
повязанного на рио. 21, а
т, е, устранения искажающего влияния системной функции, например, вида
(7&)(см. рис, 12),
Ситал s(x) при прохождении через систему регистрации испытывает
линейные искажения, определяемые операцией (82) свертки с импульсным
откликом системы h(x). Поэтому результирующий сигнал будет иметь вид
(Ш)
s(x) = s{x)*h{x)
или в спектральной области с учетом (82)
ЗО0 = $(н)вд.
Аналогичпое выражение для спектральной циотиости можно предстарить в
форме
&(и) = G{u)\H(u)\2. (Ш)
Логарифмирование (122) приводит к еоотношепвш
Ln 5(и) = Ln ЗД +■ Ln И{и). (124)
Учитывая свойство линейности преобразования Фурье, получим
F1(LffS(B)} = PI{Lii5fH)|4-F1|LnA{u)>
Таким образом, "протнвосвертка" в терминах комплексного кепстра
сводится к известной задаче линейной фильтрации в условиях аддитивной помехи,
представлен пой вторым слагаемым выражения (124), Аналогичный подход
т
Глава 1. Математические основы обработки сигналов
61
RcS{u)
I
Lnlo»l
six)
1_
БНС
Г3=
АЦП
БПФ
zrr
ОБПФ I
т
од
1ш5(и)
I
arcig(JmS/ReS)
ТШ
БРФ
БФК
Рис. 23. Структурная схема алгоритма вычисления кепстра сигнала
Иожно использовать и примервггельно к соотношению (123), при этом в
^результате получим сумму эффектен, аналогичных вычислению
автокорреляции (При интсрирстации I Щи) \! как нормированного сисктра мощпости).
На рис, 23 иллюстрируется принцип расчета кеисфа интерференционного
фягаала- Исходами сигнал j(jc) иодвергастся амплитудной коррекции к блоке
формировки (БНС). После операций ан алого-днфрово го преобразования
^МЦП) и быстрого преобразования Фурье (БПФ) получают действительную н
-Инимую части спектра Re S(u) и Ira S{u). Дал&& вычисляется логарифм модуля
.^эСпектра и фазовый спектр
^м) = arete [Jm S(w)/Re 5(h>J. (125)
^Значения Щ.и) с учетом знаков числи1сля и знаменателя в (125) восстапавли-
г^ается в пределах [-я, л). Вследствие этот фа.зовый спектр имеет разрЬЕВНЫн
2г*лрактер, как это показано на рис. 24, j.
62
Компьютерная обработка сигналов
Рис, 24. Развертывание фазы
Для восстановления непрерывного измс]]епии фазы н схеме рис. 23
предусматривается блок развертывания фалы (БРФ). При необходимости линейная
сое гавляющая развернуто] о фазовою спектра можетбыть скорректирована ют
удалена в блоке фазовой коррекции (БФК). Б результате обратного быстрого
преобразование Фурье (ОБ]]Ф) получаем опеЕЕКУ кепстра сигнала.
Операция развертывания фазы играет важную роль при обработке ннтер-
ферепппопЕПзГл сигналов, поэтому рассмотрим ее более подробно.
Такая операция может быть выполнена двумя основными методами: с
использован нем поправочного коэффициента и методом опенки фазы 125],
В методе поправочного коэффициента предполагается, что значение фазы
2л составляет величину поправки при сравнении соседних значений фазы.
Если изменение фазы между соседними точками составляет менее я, то
поправка не делается. Если скачок фазы превышает я, то принимается
поправка, при этом величина коррекпин А*р значения фазы в А-й точке равна
Л&к) =
1Г.
Аф 1)-2л; ^к) - ^к-\)>
^*Л) + 2лг. #*)- р(*-Г) < -т,
Аф-Х), -к<^к)-^-\)<к.
(126)
1ва 1. Математические основы обработки сигналов
63
гем, Арф) * О,
г: На рис. 24, 6 представлен вид корректирующей функции (126), а иа рис,
I, в — результирующая развернутая фала в виде непрерывной функции, Прак-
1чсски коррекция фазы (126) выполняется ггепосредственно в процессе
тсле1гия ее главны* значений по формуле (125) и идентификации скачков
Метод попрявочною коэффициента удобен своей простотой и отсутствием
1их погрешностей при обработке обычгЕЫХ сгабильпых аетерминирован-
сигналов. Однако если компьютерной обработке [годвергается интерфе-
юннын сигпал с сушественными флуктуадиими физы п предслая фазовое
га, то по]рсшности расчетов возраставп и невозможно выявить геидегщит
it Этот недостаток устраггяетея ь методе оценки фазы, основная миея
irtj заключается в линейном предсказании ожидаемого текущего значе-
фазы, с рая пении измеренного и экстраполированного значений и внесении
:и, минимизирующей разность эти* значений. Экстраполированное
*ение при линейном ггредсказании вычисляется из простого соотноцгеиия
(к}= (р(к-\) + {Аи/г)\<?,{к-\) + <р№
(127)
Ли - приращение (цо частоте) между точками *-1 и ft, а значение
пронята ф находят из известного соотношения
4- . Re S{v) ] m' S{u) - Rcr S{u) Im S(u)
™* 1ЗДИ
правка вносится в результате сравнения предсказанного в (127) значения
.*) и измеренного значения ь соответствии с критерием
{k)-(tfk)-2xm\<Q<K,
to = 0, ] иди -1 в соответствии с критерием Q. устанавливаемым по
>рным сведениям о возможных скачках фазы.
Отметим, что рассмотренные методы поправочного коэффициента и опенки
*ы применяются це только дчя развергыпаггия фазы ирн восстановлении
>вого спектра, но также н ггри определении аргумента аналитического
[ала (разя. 1. 2) в области Независимой переменной х.
В настоящем разделе нами были рассмогрены два метода нелинейной
зотки интерфсренцнонньЕХ сигналов, которые хорошо зарекомендовали
(я в [фактических разработках. Кроме этого, известны различные модифн-
методов нелинейной обработки, которые широко используются в
щьютерных алгоритмах анализа интерференционных сигналов. В качес]вс
lepos можно указать метод прямое обратеЕЕЯЯ уравнения (85) путем
[Итанна фоновой составляющей, оценивания амплитуды информационной
п
64 Компьютерная обработка сигналов
составляющей и вычисления функции арккосинуса для определения фазы [22,
271 и метод нелинейного регрессии иного анализа [23].
Анализ методов нелинейной обработки показывает, что многие из них носят
эвристический характер и их пракшческос црмисненне можно признать
целесообразным При умереппой точности поестановдения фазовых
характеристик интсрфереппноннь1к сигаалов. Исключение составляют методы
оптимальной нелинейной марковской фильтрапии [28],
Методы линейной обработки. Представленные в разл. 1. 2, миеют
существенное преимущество, заключающееся в строгом выборе и обосновании
критериев качества обработки, поэтому следует но возможности использовать
известные приемы линеаризации нелинейных задач. Поскольку методы
нелинейной обработка являются более простмин в использовании, их обычно
можно рекомендовать на стадии предварительной обработки при получении
исходных априорных опенок данных. Эффективность медианной фильтрации
определяется соотношениями (113), (114) или (117), Характеристики кенст-
ралыюй обработки можно определить на основании линейных опенок,
используя соотношения вида (124)- Полученные этими методами априорные оценки
должмы уточняться в процессе последующей оптимальной обработки.
Список литературы
|. Ахманов С. А., Дьяков Ю. Е., Чиркни А. С. Введение и статистическую
радиофизику в оптику. -М.: Наука, 198-1, -640 е.
2. Бепдат Дж,, Пнрсол А. Применение корреляционного н спектрального анализа.
-М.:Мнр, 1983.-312 с.
3. Фридсн Б, F. Вычислительине методы в теории вероятностей и статистике //В
кн,: Компьютеры в одтических исследпваннях. -М.: Мир. 19ЯЗ. С. 110-275.
4. Марпл С Л. Цифровой спектральный апалиэ и его приложении. - М.: Мнр.
1990. - 584с.
5. Иэерман Р. Цифровые системы управления. -М,: Мир, 1984. -543 с.
6. Лент Б, Р, Тсорсгичсскис основы статистической радотехникн, - М- Рвнно и
связь, im-fi55c.
7. Randall R. В. Freqnency Aealysis. Biuel and Kjacr, \9%1. - 344 R
8. Рабннер Л., Гоулл Б, Теория и причинение цифровой обработки анналов. - М.:
Мир, 1973.-848 с
9. Андерсон Т. Статистический анализ временных рядов. - М,: Мир, 1976. -757 с.
10. Хаидель Ф., Рончетти Э., Рауссеу П., Штазль Б. Робастность в cтaтиcтикe■ цед-
ЯйЛ на основе функции алии гая. -М.: Мир, 1989, -512 с-
U- Порфирьсв Л. Ф. Основы теории необразованна енталов в опгико-электрон-
ных система*. -Л.: Машиностроение, 1989. - 3&S с.
12. Прэтт У- Цифровая обработка изображений. -М.: Мир, 19S2. Т.1,2. -790 с.
13. Быстрьк? атгорнтмы в цифровой обработке изображений /Под ред. Т, С. Хузнта.
-М.; Рапной связь, 1984. -22! с.
Ч*>
пвва 1. Математические основы обработки сигналов 65
_ 14. Балакрнптан А. В. Теория фильтрапии Казана. - М.: Мирт 1988. -]б9 с.
< 15- Макс Ж. Мстоаы и техника обработки сигналов при фишческнх шмсрсиинх.
-М.: Мир, 1983. Т\1 -ЗЦ с.
i. Проблемы оптического контроле / Э. А- Витрнченьо. в. П. Лукин, Я. А-
Пушной, В, АЛЪртяковский. -Новосибирск: Наука, 199D. -351 с.
1. Гуров И. П. Поыеяоусюйчивмн фотоэлектрический мс-iiui измерение фазовых
характеристик интерференционной картины it Метрология, 1986, N7. С. 8-16.
1. Пт°в и П. Интср^рснционные тиснения и контгчть параме]ров ^омсгричес-
ких элементов На основе критерия максимума функционала правдоподобия
It Автометрия. 1992. N3. С. 99-104.
, 19. Вилькоцкна М. А.. Лично Г. П. Алгоритм медианной фильтрации для
обработки результатов топографических измерении ближних полей антенных еистеч
5Щ, it Автометрия. 1989. N С. 24-30.
$р. Гршпйнов А. Н.. Де С. Т.т Ильиных С. П., Хаядогин В. A. Количественная рас-
.. шифровка ишерферограмм па основе фдювид псевдосявитов //Автометрия.
f 1989. -NLC.3-10, -N2.C П-19,
Ф1. Гуров И. П. Методы н техника автоматической обработки сн талон в ингерфс-
"'i репцнопных измерительных системах //Итмсрепнк. контроль автоматизация. -
V М.: Информпрнбор, l99fl. Вып. 2 (74). С. 69-79.
М* Штанпель С. К.т Ептшпк Ю. А., Смшшн П. Я.. Балягин А. Б. Телевизионная
-£ установка для исследования ншерферограмм //Оптико-механическач лрамыш-
\ лениость. 1983. N4. С 29.
ИЗ. Schemiu J. В., Vest С. М. Fringe palleni recognition and iniciprcEalion using Honli-
. ' near [egression analysis Z/AppL Dpi. 1983. V.22, N18, R2S50-2S53.
ЗА* Тихонов Б. И. Нелинейные преобразования случайных процессов. - М.: Рапио и
- связь. 19Я6. -295 с.
25. Dechun Т., Xiaoleng W. Complex cepslmm and phase unwrapping analysis Ш.Shan-
ghai Jiaoioug Univenity. 1986. V.20. N6. Р.56-Й5.
3$> Васильев В. И., Гуров И. П., Шестов А. И. Восстановление фазы Иямернтсль-
, ной волны в процессах идентификапии интерферометрическня систем и енгна-
\ лов /Деклады 2-он Межд\Ийроаной конференции "Ипснтифнкацня дипамнчес-
fL, ""^ еистем и обратные задачи", С.-Пб, 1994,
Z7- Нгаябнна И. М. Интерференции и дифракндя cscja. -Л.: М ацпяюстроенне
# 1985. -332 е.
£Ж Ярлыков М, С. Миронов М. А. Марковская теория опепнвацпя случайных про-
^^ цессов, - М,: Рвшю и связь, 1993. - 461 с
§#. Хори Р.. Джонсон Ч. Магричнмй анагшэ. - М.: Мир. 19Я9. - 655 с.
-.30, Корн Г-. Корн Т- Справпчник iio мадсмнцикс для научных работникон н ипжепе-
L- рои.-М.: Наука, 197Я.-851 с
^as. Sill
66
Компьютерная обработай сигналов
Глава 2
Формирование
интерференционных сигналов
Обработка сигналив основывается на априорных сведениях,
представленных, как правило, в виде математической модели сшнала. Адекватная модель
интерференпионноги сигнала может Сыть построена* исходя ид физических
особенностей его формирования. Оптическая схема интерферометра
определяет характеристики интерферецидинного поля и, следовательно, вид интер-
фере]Щионао[0 сигнала. Известно много различных ннтерферепциомиых схем
11-7], KoTOpbie имеют характерные особенности построении, в значительной
мере оцрелеляющие специфику компьютерной обработки данных. В настоящей
главе рассматриваю гея основные принципы формирования
интерференционных сигналов, Выделены факторы, влиягашпе на достигаемую точность
интерференционных намерений'
2.1. Физическая модель интерферометра
Явления интерфереиннн можно наблюдать при сложении когерентных
световых волн. Электромагатную световую BOJHjy удойно характеризовать,
■шав пространственную И Временную завиемноети напряженности
электрического поля Е. Как известно [1], в случае монохроматического поля такая
зависннос1ь (решепие волнового уравнения) имсе] ьил
Здесь А(г) = А(г) ехр(/к-г)-комплекспаяам1глигуда волны, к- Волновой
вектор, \ k I = 2Л71/А, поверхность к т = count является волновым фронтом, п -
абсолютный показатель преломления среды, к - длина волны света в вакууме,
v = с/к -частота светопых колебаний, с - скорость света.
На рис. 1 показана обшая схема, в соответствии с ко горой осущееитякстея
интерференция волн E\(r,s) н Е?(г,г), волновые фронты которых Ц и А
сформированы соответственно в измерительном н опорном писчая иптерфе-
iBa 2Г Формирование интерференционны к сигналов 67
:. 1. Принцип формирования интерференционной картины
■■.и
^метра. Интенсивность света в выбрашюй точке иггтерферсминонной карти-
^|Ш. равна
^<(E, + £z)f£,+£з)"> Wl + /^2V/XRej<r), (2)
<Ос /, = < £i£7 >. h = < Е2Е£ i, Rej<r) - вешееттягная часть комплексной сте-
Шки когерентности [1),
fljpmeM г= Л/с, Л -оптическая разность хода интерферируюших вол», скобки
<> обозначают усрецценнс во времени. Модуль степени котерентности связан
Ъ'Ьидностыо интерфереггпионных полос V соотношением
■*г
(4)
:¥ = 2lj<r)| Ш/ц + Ь).
# дальнейшем нас будет интересовать главным обритом величина arg j(r) = S,
вторая определяется ршно>.тью фаз интерферирующих волн.
= '■ Суперпозицию электромагнитных колебании, порожденных каждой из ин-
!||рфсрирую1пих ноли, после преобразовании согласно соотношению (2) можно
Усматривать как двумерпый интерференпноннын ешнад, который регистри-
'тся приемником излучения в плоскости (£, rj) на ииходе оптической
:темы О (рис. 1),
'J Экспериментально осушсствлснне когерецт[[Ь[Х колебании, для которых
lT)*0 в (3), можс! бьць выполнено различными способами. Классический
:об получения когерентных пучков нрецложцц Френель (рис. 2). Пучки
гей, неходяши* из точечного источника а и отраженные зеркалами М, и
I, которые расположены под углом, близкий к 180", представляются выхо-
1имн из двух мнимых источников <7\ н сг3. Эти пучки когерентны, так как
►изошли ю одного источника ст. В пространстве, гае пучки ст^'-с?,'' и
68
Компьютерная обработка си талон
Рис. 2. Деление пучка по площади волнового фронта
Gf-ai" перекрываются, можсе наблюдаться интерференционная картина, Ос-
новньм отличительным свойством этой схемы яплястсл деление первнчпого
волнового фронта на две части по площади с последующим их наложением.
Этот вин интерференции называют интерференцией Фрснслч,
Иггтерферирующие волны можнп попучитъ также другим способом,
заключающимся в делсипи исходной световой волггы не ни плошали полпового
фрепта, а по амплитуде (рис, Ъ). В этом случае, как видно из рисунка, имеет
ыесто частичное огражеЕГИе падающего луча оА (ограженньш пуч Ао') и
Частичное прохождение этого луча ко вгорой отражающей поверхности. Луч
АА\ отраженный от второй поверхности и падысиджй по iraправлению Dtr",
когерентен с первым лучом Ао\ Такой ьид ннгерференпии принято назмеап.
интерференпией Ньютона- Интерференция
может наблюдаться в плоскости изображс-
° о ния объектива (рис, 1). которая сопряжена
\ / о" с плоскостью наблюдения, при этом харак-
щ. / f тер иитерфереиннонпой картины в эначи-
\ / / тельной мере определяется свойствами ис-
\1/ ]/ точннка излучения - ею Пространственной
jt "" Т7\ и временной когерентностью, а также пара-
1\ /1 метрами оптической схемы ИЕггерферомет-
\ / р3г
\ § Рассмотрим основные аспекты теории
W когерентное ги. важные дли дальнейшего нз-
Т~А~- ложеггия. Более полные сведения можно
ЕЕайти в книгах {], 7h ft].
Рис. 3, Деление пучка по
амплитуде
iBa 2. Формирование интерференционных сигналон 69
Световые колебания в точках, определяемых радиус-векторами г и г? в
■ты времепи h и h в общем случае характеризуются функцией взаимной
ерентности, которая определяется Выражением
'(л, г/, it, h) = < £i(i\. t}) Ег{п, h) >,
скобки < > обозначают >ередггеяне но ансамблю рсализапий. Для сташю-
>цых евстопыя гголей функция взаимной котерснтиости преобразуется к виду
J(pir) = <£,(r + p,* + r)ECr>0>. (5)
-с. представляет собой функпию взаимной корреляции, зависяпгую только от
иости р положения точек и разности моментов времени Т. Яа практике
то используют понятие комплексной степени когерентности у{о, г), которая
а отношению функпии взаимной когерен]ности (5) к [< £,£;>< £iEj>] ,
jjr» е. нормированной функВ и и когерентности. Зггачення I у\ изменяются от нуля
|шголная некотерентность) до едипипы (инеадьная когерентное 1ь).
gxi Примем допушенис, что комплексная степень когереггтпостн разделана по
'Тираненным, т. е.
fifo. *) = Mp)rify (б)
рассмотрим свойства пространственной и врсмегнгой кпгеренпгости. опрс-
емые соответственно множителами #(р) и y^t) в (о). Если плоскость
Юденич (£ Ц) Паходптся на расстоянии £"от источника, то, используя (5),
по показать, что модуль функпии пространственной кощрептносги равен
= 1ВД/а,
4. Функция пространственной
)герентиости
где J-, (а) - функция Бессела первого
порядка, параметр а - 2лК'Ц2 4- rj!/k^ =
= 2?rR bvafi/X, 2R - диаметр зоны
излучения. /7— угол расходимости световых
пучков.
На рис. 4 дана зависимость
LY- =Ла)- Из рисунка видно, что эначе-
Et степени когерентности, близкое к
единице, достигается 1грн маль(х
значениях а и, следовательно, малых углах Д
Таким образом, более узимй пучок,
исходящий or выбранного источника
излучения обладает более вьгеокой
пространственной корректностью.
Компьютерная обработка сигналов
В интерферометрии припято сч а гать допустим ыч значение I х> ^ 0,Е8. При
этом угол /7 должен удовлетворять условию 0<fi<,0.\6 Л/К. Следовательно* с
увеличением размера источника Необходимо уменьшить утл расходимости #
в пределах которого излучение пространственно когерентно.
Понятие временной когерентности связано с тем, что источник излучает
свет в конечном интервале длин волн, опредс/гяемом средним временем жизни
й атомов активной среды источника н возбужденном состоянии. Элементарное
колебание Е(г)ь излучаемое атомом, является монохроматическим с амплитудой
А и частотой н, i. е.
E(t) - (1/2)Гл exp(-j2w) -f A'exp (tfw)"]. (7)
однако имеет длительность т» Спектр j[v) колебания (7) с ючностьто до
комплекегю-сопряжегтггои компоненты найдем пе пользуя преобразование
Фурье в виде
Л^1г(0гсрН2лт4)Л,
(8)
т*ъ
-А'\ ъ\\А-]2л{у- va)t[dt - A-rsinc[(V- vt)rfl].
-Z.S1
УН
определяет ширину спектра
1Дефункмия smell = кшл| -]/7г[ ■]. Фикция
Av излучения (рис, 5),
Ширигга спектрального интервала Av, выраженная в сдиннпах частоты, для
рассматриваемой функции (8) ралгга
величине, обратной длительности т„ пута, из-
пучаемого атомами, т, t.Av^ \/тв.
Ширину спектрально| и интернала удобно
выразить в длинах воли, учитывая соотношение
Л| = с/Ц)Ч а мненно
ЛЯ - cAv/\i> = AvM/c. (9)
[це Л - среднее значение длины воины в
рассматриваемом спектральном интервале
АХ, с - скорость света.
Из (9) найдем длину когерентности I
v" излучения источника
Рис. $. Функция спектральной / = с/д v- - Д/АЯ.
интенсивности излучения
Глава 2. Формирование интерференционных сигналов
71
Таким образом, длина когерентности обратно пропормиональна спектральному
;рвалу, н котором излучает источник света.
Сформулируем понятия, относящиеся к ]Ъометрическим соотношениям в
[фереинионяой системе, в соответствии с общим подходом, предложен-
А. Н, Зэхарьевским [4].
Источник света или его изображение на входной диафрагме L системы будем
входами зрачком интерферегпгиопной системы. Поверхность R, ва
ш наблюдается интерферетщонная картина - полем интерференции. В от-
от обычной оптической системы будем учнтьЕВап,, что двухпучевой интср-
;тр нмеет два выходных зрачка L, и L; и два входных люка В, и В2. которые
Еготся изображениями входного зрачка L и интерференционного поля В,
ттветствегто. Лучи, ггроходащие через входной зрачох L н доетигаюшие лтоков
и В? относятся & пространству предметов. Лучи, идущие от выходных зрачков
ЕЬш интерферегщнопиою ноля В - к пространству изображений.
РассмотреЕЕные понятии Щ1люстрируются на рис. б. Из этого рисунка видно,
в пространстве предметов существуют точки Pi и Р:, которые сопряжены
определенной точкой Р в пространстве изображений. Такие точки Р, и Р?
(ьшают соответственными точками. Обеспечивая определенные условия
;вещения пар соответственных точек в пространстве предметов, можно
>рмнрова|ь заданное интерференционное поде. РассмотреииьЕе понятия удоб-
нспользовать для анализа нропсесн формирования интерференционных ещна-
ujjpfl в пространстве изображендн (рис. 1), особенно при разработке фотоэлектри-
ейеских систем регистрации интерференционной картины.
■_' Рассмотрим в качестве примера схему ггнтерферометра Маха-Цсндсра
.#рис. 7), построенного на основе принципа дс*гсния но амплитуде исходной
о=г
\ п'=>
а"
4
ч
М,
N
\ -
■ис. в. Зрачки и люки системы
Рнс, 7. Схема интерферометра
Маха-Цендера
72 Компьютерная обрнботка сигналов
свстопой волны сг Предположил, что зеркало М, по отношению к Mi
развернуто в плоскости чертежа на малый угол а. В соответствии с О),
напряженность электрического гголя световой волны в идече ст' (с точностью
до комплексно-сопряженного слагаемого) в одномерном случае определяется
как
£,(£ !) = А, схр (-;2лп) схр (-;1яйг£/л) ехр l-jz), (10)
н в плече с" определяется н вше
ВДО =^exp(-Jlлvfl). (И)
В (]0) £ обозначает разность фаз волн в точке наблюдения £=0, Из (2) получим
I = <(£, + &)(£!+ £?)"> * Ai+Ai + MAtosUH гШа^Щ (12)
Выходлой сигнал приемника нугучения, пропорциональный интенсивности
света (12) в плоскости регистрации, можно нредставип, в виде
s($) = fil = sn + s» cos(£ +2 mta0, Ч3)
где ji - постоянный коэффициент преобразования.
з9±/4А1±АЪ,л+± 2/iALA., (14)
и» = и/к - праспфанственная частота [м-1] интерференционных полое.
Если амплитуды волн в (10) и (11) изменяются в зависимости от
пространственной координаты £ точки наблюдения, г, е. А, = Ai(£). A? = А?(£), то
выражение (13) следует переписать в форме
■*(£) = ^£)+ *■■(£) cos(£+2™u£), *!5J
Это выражение представляет собой математическую модель интерфереппиои'
ною сигнала в параметрической форме.
Задачей компьютерной обработки интерференционных сигналов, как уже
отмечалось вьпгге, являсеся получение цо возможности наиболее точных
оценок отельных компонентов вектора парамефОВ ®(£) = (j0l л., £,ии)г, чаще
всего £Ч Наг по зарегистрированным значениям сигнала -*(£}■ Разность фаз г,
со1лаено (10), содержит информацию об оптической разности хода
интерферирующих волн в точке наблюдении 4 = ° Значение пространственной частоты
но, очевидно, характеризует разность угловых направлении распространения
волн- Следовательно, параметры г и но имеют важное значение для
высокоточных лииейяо-угаоамх измерений н определения связанных с ними физических
величин.
'лава 2. Формирование интерференционны* сигналов 73
.2. Шумы в интерференционной установке
При формировании интерференционных сигналов и оценивании погреш-
тей ннтерфЁромстрнчеоких систем необходимо учитывать реальные харак-
ристики оптико-мекапических и оцтико-электронных узлов. К таким ушам
осятся прежде всего источник излучения. Элементы опгической системы
ометра и приемник излучения.
В настоящем разделе представлены сведеипи о характеристиках источников
ов и помех, которые оказывают влияние па точность формировании и
вботки интерференционных сигналов.
Источники помех в интерферометрах подразделяют на принципиально
трапимые (квантовые эффект, дифракция) и обусловленные текиическн-
иричинами (несовершенство оптико-механических и электронных элемен-
и, изменения условий внешней среды н др.). Влияние технических факторов
принципе можно уменьшить до допустимой величины, однако именно они
редслиюг [фактически достигаемую точность измерений [3, 9[.
Погрешность измерения искомой разности фаз ^ записывается в виде
$*■"&= %- ft, (16)
■£|Beft- измеренное значение, а> - истинное значите. Погрешность (16) можно
^разделить на систематическую н случайную составляющие. Систематическая
,'? ^Погрешность оя, связана с неючностьш знания длины волны источника
Йзлучепия, показателя преломления среды распространения световых волн,
^Есомстричсскнми погрешностями интерферометра, интегрирующим действием
v щространатенно-временной апертуры приемника излучения. Составляющую
■■ Вргрешности Se, можно выразить соотношением
--, Se, - <Se> = <5i> -&,. (17)
|1^СлуЧайнад погрешность Ser обусловлена влиянием флуктуации и помех в
£|лемсн1эх и узлах системы, она определяется выражением
jfe* Se-- <ве> = &,- <&&. (18)
:ь угловые скобки обозначают статистическое усреднение по ансамблю
Реализаций. Характеристикой точнос]и может служить также средний квадрат
. тгклонения
[&У> * (&»У + <(&&>. (1?)
Из (17) и (IS) видно, что наиболее трудно устранить систематическую
Погрешность, поскольку в (17) истинное значение £о является пеизвестнмн.
В cooibciuibhh с цормативнЬ1ми рекомендациями, системптичсскую |[огреш-
14
Компьютерная обработка сигналов
ность на практике оценивают как случайную погрешность на множестве
серийных прибороь данного вида. Многие ннтерферометричесамс системы
являются уникваьимьш н изготавливиютея в единичных экземплярах- При этом
систематическая погрешность оценивается расчетно-экспериментальным
путем: в результате расчетов учитывают характеристики отдельных элииентив
н узлов, нсследовалльгх цезависмиыми методами* а экспериментальное оценки
точности интерферометрической системы получают При цопторньгя нзмереви-
яя, выполняемых последопательно, после полной переналадки
интерферометра.
Теория погрешностей и обработки результатов наблюдений [22, 23[ позволяет
оцепить погрешности (17) н (18) cj атлетическими методами. Однако эта теория
не дает непосредстве! гных рексмендасмй по созданию (синтезу) высокоточных
измерительных систем. Такая задача решается в [сорнн систем связи [21],
основмнающейея на методах теории вероятностей и случайных процессов. При
априорно известных статистических, корреляционных иии спектральных харак-
теристикая еншалов н помех указанная теория дает возможность синтезировать
структуру системн оптимальЕгум в смысле заданного критерия качества.
В табл. 1 приведешь корреляционные функщш сигналов и Помех в
интерференционной фотоэлектрической системе. В первой графе представлеим
статистические характеристики интерференционных картин, рассматриваемых как
реализация термонического случайного пролесса со случайной начальной фазой.
Шумы, присущие лазерному и тепловому источникам оптического
излучения, имеют типичные характеристики, приведенные в пунктах 2 и 3 таблицы.
Для лазерного источника излучения наиболее характерен высокочастотный
(свыше 10 кГц) лоренцев шум na(t): деформации резонатора вызывают дрейф
интенсивности в диапазоне 0-0,5 Гп [8]. При а гом выражения для комплексных
амплитуд интерферирующих волн нужно записать в виде
А, = [1 +лД/+ *)]! А, схр(/й), (20)
Лг = [[+Лч(;)]| А? jcxpf-^u^+v^)], (21)
где uu, уо - пространственные частоты в плоскости регистрации (£ п).
При точных измерениях необходимо учитывать влияние дифракции, вечед-
ствве которой фроцп,[ интерферирующих волн никогда ие являются циеально
плоскими. При расчетах принимают по внимание неравномерное раенренеле-
ние мощности и ограниченные поперечные размеры световых пучков. При
работе латсра в режиме генерации основной моды комплекс пая амплитуда ноля
определяется выражением (22)
Л,- A, exp{jl£> + arclg(2L/R,)-bp(£ ^)1\ (22)
Ai = Ai\ ехр[-]2л(щ%±*'аЧ)]. (23}
"лава 2. Формиронаиие интерференционных сигналов 75
L - длина оптического пути луча, R, = 1ftvA/k - конфокальный параметр,
-размер "перетяжки" „учка, р(£ ti) = ^Чг)/ЖЬ I | 1 + (RS2Lf\ -
кривизны волдопого фронта []0].
Таблица i. Характеристики помех в фотоэлектрической измерительной системе
L Физический
'процесс
Характеристики
Примечания
ференцноннан
картина
T^ImCOS \c-\-
^уЬо2-!2)--"/^!-
Гармонический случайный
процесс [T1]
2. Шуи спонтанного
*1алучения пааер-
4ioro источника
<л„(Г)> * 0. '-п{{1)> = ai ,
Дн(г)*с4с*р(-Я„М)
Лсренцеи шум с шириной
полосу Ви [Щ
Э, Шум источника
белого света
гауссов шум с шириной
nonocbi Ви и центральной
частотой и*. [111
*. Фазовыл шум
спекло в е
оптической системе
<у> = с F <.f> = t^.
Гауссов шум с длиной
корреляции fD[i2r!3]
5. Фазовые
флуктуации в
оптической системе
<4t(t)> = 0 , <ф*(т)> = ai,
.rJ
Гауссе а
некоррелированный шум с
полосой fl„[11J; #г)-
д&пьта-функцин
6L Дробовой игум
приемника излучения
<л(г> = 0, <rr(t>> = от;,
о* = 2е<5>ВП1
Лн(о= (^/2Я„)#г)
Гауссов шум с полосой
вп. Дисперсия
пропорциональна среднему
значению си тала [26]
Компьютерная обработка сигналоэ
В четвертом пункте табпипы представлены типичими характеристики
физового шумэ сцсклов, обусловленного остаточной щероховатостме
отражающих поперхностей и диффузным раессивалием света в условиях инф-
ракцин на гранипах оптических элементов интерференционной установки,
Прн наличии пгума спеклов комплексные амплитуды волн в измерительном
и опорном плечах интерферометра представляются для одномерного случая
в форме
ехр(/2лнл£} ехр(/2л?<£Ц, f24j
схр(-7:2лио& {25)
А, * rec[(£/D}
Аг = rcct(£/D)
ьде
recl(£/D) = {]„
А,
Аг
l£l<Z)/2,
-прямоугольная функция окна, которая задает границы интерферирующих
[гучков.
Влияние lypGyiiCHTnocni воздуха и некоторых вшов микровибраций mojkho
учесть, иепользуя характеристики фазовых флуктуации, припеденше в нунвд 5
табу, 1.
Дробовой шум приемника излучения, обусловленный квантовой природой
поглошення овега ь фоючувствительпом слое, охарактеризован в тестом
пункте таблинм.
Представленные в таблице характеристики шумов и помех не являются
исчерпывавшими, они должны дополняться и уточняться с учетом
особенностей конкретной интерферометрической задачи. Это относится, прежде всего,
к характеристикам шумов лазера, зависящих от типа и режима работы,
фазовым флуктуаиднм Вследствие гурбулеггпюстн. влиянию микровибраций.
При оцепипапии влияния помех и шумов целесообразно принимать
следующие допущения:
1- При точных измерениях время измерении обычно достаточно велико,
поэтому можно считать, что средние значения шума источника за время
измерения равны
<nP{i)> = <лчи" + г> = о, <nl(f)> = di,
Корреляционная функция лорепцеьа шума источника (ем. пункт 2 табл, 1)
Д„(г) ^ = о* ехр (- Ян г ) ч di
«а 2. Формиронание интерференционных сигналов 77
1К Ва < 10 кГц и г < 1 икс. что соответствует разности хода до 300 м. Такое
щближенне вьтолнястся в большинстве случаев. Апаяиз влияния характе-
к тума юлочника на точггость интерференционных измерений можно
Ьйти, например, в [Эр 8].
t При достаточно больших диаметрах интерферирующих пучков и при работе
|;центре поля наблюдения влияние спеклов уменьшается и слабо зависит от
(ости фаз £. Влияние такого шумэ и других слабых помех можно считать
юктически эквивнлеЕГтным авлитивному гауссову шуму, не коррелированному
Риртсрферепционнь1м сигналом.
, Поправка гауссова пучка в (22). равная areig {A/R,), должна учитываться при
;четах оптической системы интерферометров, предназначен иных для
?*1пыерепий повышенной точносш,
- ',f Используя данные табл, 1, выражения (20)—<25>» в ряде случаев удастся найти
^дарактеристикн и структуру системы компьютерной обработки в виде опти-
' *1ального филыра. Характеристики помех, приведенные и табл. 1. могут
".адьироваться, так как ввиду сложности интерферометррческих систем возни-
:*>1от источники погрешностей, которые зависят от настройки интерфероыстра
. ы режимов работы отдельных узлов,
.-.. При измерениях фазовых характеристик интерференционной картины
необходимо учитывав также следующие чсобенности:
I и Задача измерения разности фаз нелинейна, тогда как существующая в
; HacTOflHiec врсьш теория позволяет эффективно с и [[тезировать плодным
образом помехоустойчивые линейные системы. Исключение составляет
теория нелинейной марковской фнльтрапии [24].
■ По отношению к разности фаз е ннтерферирукшшх волн помеяи "энер-
1СтНчсской" природы нелыя считать авлитивными.
■ Платность всроя1ности случайных значений фазы часто нельзя считать
равномерной. Это означает, что исследуемые итггерферсниионные
сигналы нестамионарны даже при постоянной амплитуде.
: Данные о шумах в интерфероне три ческой системе евидетельстиуют о
. том, что их детальный анализ трудоемок и выполнить его на практике не
^'Всегда возможно. Поэтому в ряде случаев целесообразно воспользоваться
:■ «диодом центральной предельной теоремы; влияние большого чнела неза-
., висимых случайных факторов асимптотически эквивалевтно возцействию
£ гауссовского случайного процесса. Такое допущение значительно упрощает
*"|изработку ингерферометрическнх систем с минимальной случайной nojpciii-
:.цостью измерений.
Д Таким образом, модель интерференционного сигнала [15) следует преобра-
у зова!ь к виду
i
73 Компьютерная обработка сигнииов
s(x, ©) = sti(x) + sm(x)cos[s + 2mtox+ iy(x)] + rs(x), (2fi)
где К1) - фазовые флуктуации, n(x) - аадитивнын шум с нулевым средним
значением. Для упрощения формы записи независимая переменная обозначена
в пространстве предметов, что не снижает обиигости рассмотрения ври
итвестных паринетрах 01Гглческой системы.
Подчеркнем, что в (26) случайньЕс значения ip(x) и п(х) могут иметь негаус-
совскую шютность вероятности. Шум "(i) часто япляется коррелированные си
вторым слагаемым (полезггой составляющей сигнала), Типичные примеры
реализаций сишала (26) прнведсим на рис. S для случаев лилейного и квадратичной.»
измсненци фазы.
Проведенное рассмотрение показывает, что ннтерферомсфические
системы имеют о[фсделеННые осо-
JW бенности по сравнению с шн-
"' роко распространенными
радиотехническими еиетемами.
Основное отличие состоит в
том, что точность
функционирования шперферомстрнчес-
кой системы определяется [ipe-
жде ьссю физическими
особенностями формирования
интерференционного сигнала.
Влияние помех и шумов
различной физической природы,
представленных выше,
детально учитывается при
выполнении ннтерфере пилон ных
измерений повышенной точности-
Развитие новых
математических методов обработки
данных, разработка принципов
ада птапии интерферометрнчес-
кнх систем к изменяющимся
условиям измерений позволяют
сущеегвенно повысить
точность и расширить
функциональные возможности методов
компьютерной обработки ин-
Рис. В. Примеры реальных интерферен- терференллонных сишалов*
ционных сигналов
-* к
[Слева 2. Формирование интерференционных сигналов
79
1.3. Формирование случайных интерференционных
Еолей
FIj Известно, что при освешенлл негладкой поверхности когерентным излуче-
лазера наблюдается картина спеклов н вине частых мелких пятен. Размер
пятен спеклов оценивается из простой формулы |]2, 13], учитывающей
'кты цлфракднй
U*2Mtf/D, (27}
А-длина волны, / и D - соответственно фокусное расстояние и цламстр
зы. формирукипей изображение, как это ил люстр ируетси на рис. 9. Из
ка виигго. что каждая точка освещаемой негладкой поверхности рассеи-
свег в направлении наблюдения в пределах угла ~D/f. При когерентном
вялении излучение, рассеянное одной точкой поверхности, интерферирует
световыми волнами от дру1нх точек, что приводит к форылрованию
айиой картины интерференции ппидс картины спеклов. В настоящее время
"статистические и корреляциоиньк; характеристики распределения интенсив-
и фазы в картине спеклов детально изучены [ 14].
В типичных отображающих системах апертура в (27) изменяется в предела*
Ьт//1.0 до //5и\ поэтому характерный размер спеклов в плоскости наблюдении
равен примерно от 2 до 100 мки (л =- 0,й3 мкм).
&" Методы формирования случайных ннтерферснинонных полей основывагот-
ftt на совмещении полученного спекл-лоля и поля опорного излучения, в
качестве которого удобно использовать волну с плоским волновым фронтом,
"С Можно выделить дне интерфереллионные схемы: при освещении негладкой
Образец
*£?
:. 9. Схема наблюдения картины спеклов
££ Компьютерная обработка сигналов
поверхности параллельным цучком и сфокуспропанным пучком, как показано
на рис. 10, Если негладкая поверхность в схеме рис, 10, а имеет малые
локальные значения радиуса кривизны, ю интерференционные полосы, лока-
Опорный
*>*(х,у)
6)
Образец
отражатель
Рис. 1CL Схемы интерферометра Майкельсоиа (а) и интерферометра Захарьеве-
иого-Миро (6) (PD - матрица фотодетекторов)
№ана 2. Формирование интерференционных сигналов 81
янзаванньЕС на этой поверхности, получаются очень узкими и сильно искрип-
ленвыми, причем ширина, кривизна и ориецтапня полос могут изменяться при
.смещении иии поворотах образна- Подтоку сложно точно шмсри1ь смешение
■йолос. Для получения прямых неизменны* по л сирине н направлению полое
нуано с номошью объектива ефокусиронять 1сучок лучей на поверхности в
>Трчку возможно малого диаметра (рис, 10,6} и наблюдагь интерференционную
.(яртину не на поверхности объекта, а на зрачке объектива. Но при этом
lenirocTb наблвадаемой картины получается более низкой.
Показано [15], что плотность вероятности значений интенсивности в
^рнггерференпиошгой картине, сформированной в условиях влияния случайной
^^оставляющей спекл-погся, и гшотгюсть вероятности значений фазы суммарною
ТЪЬяя определяются выражениями соответственно
■^1) = (\/2<?)схр[- (I + 1у2<т]1^г/оГ)> /^0, (28)
$рАф) - (1/2л)ехр(- к) + Л7>гсод^ехр(-\"3]п» tf<V2*-cosp), (29)
£ "-tf£ ^ ^ я,
"Л-
а. гас
.-■. J i*
&&± lim-f, У <| Al \>/2
* t,
' -дисперсия значений интенсивности n карти[[е спеклов в оаутегнис опорной
волны, At, - комплексная амплитуда волны от £-ой точки поверкносш, 7,-
интенсивность опорной волны, к = iSltf, /&(■) - модифицированная функния
- Бесселя нулевого порядка.
; Щ) = (1/2 л) J txti-?/2)dy.
].. При Л = О (2В) перегонит в отргщательно-экспоненидальнос распределение,
.:, * (29) - в равновероятное раеггредсление, характерные для картины емсклоп в
-|^схеме рис У. При к>0 плотное гь вероятности (29) имеет вид колоколообраз-
^'StoH кривой, положение максимума которой совпадает со значением фазы
^рЛориой волны» При увеличении параметра г ширина кривой распределения
^"Уменьшается,
'*■ Из (2Н) и (29) следует, что при носгуиа гель ном перемещении негладкой
"верхности зарегистрированный интерференционный сигнал п огдедыюй
точке поля наблюдения является случайной величиной и будет претерпевать
^ Лмипитудные и фазовые флуктуании. Сформированный случайный иггтерфе-
J ренниоппый сигнал зависит также от условий освещения, прежде всего, от
|г *Сарактеристик источника излучения.
а-
82 Компьютерная обработка сигналов
Интерферометрические устройства с источником
монохроматического излучения одной длины волны
Pat-смотрин интерференцию измерительной волны с комплексной амплитудой
Aifr) и случайным изменением фазы #лг). 1- е.
А,(х) = recK(x/D) е*р(/2яш) ехрОУ*)]. *30)
и плоской полны в опорном плече интерферометра (рис, 10, а) с комплексной
эмдлитудой
Аг(х) = гес((я/0)еЧр(-^лш), <31)
гас и - пространственная частота. В плоскости решетрации (£ ф, удаленной
от контролируемой поверхности на расстояние £ в результате дифракции
Френеля получим лпе волны, соответствующие (30) и (31) ДЛЯ
рассматриваемого одномерпот случая, в форме
А,(# = (j/AQ ехр(-72^ХЯ) ыр(-№'/Л$ *
х{ rec{(x/D) cxpl -M*)] KP{-jJnV^ cxp[-j2x(u +■ ^/XQx ] dx,
-■I
M{§ = {j/XQ ехр(-;7я4УА)ехр(-7я£:/Л£| х
у. \ гсл{х/П) еир(- /л*3/АО expf -j2n{u - £/AQx ] dx.
—и
Pcrac tpHpyeMvio интенсивность света в интервенционной картине
1{ф - < АЛ\ >, где Az = Ai(£) ■+ Н§ > н результате интегрирования и анализа
интегралов Френели [34] можно представить выражением
/(£) = Л +/м со&4ля£ (321
Б KUTOpOM
h*l-KJ]- exp(- cv/2)] - & [1 - ехр(- в*)} <33)
К, - коэффипиент, зависящий от эффектов краевой дифракции (вычисляется
через ннтсфалы Френеля; типичные значении 1 К, \ <0.1), Я,-коэффициент,
учитывающий характеристики рассеяния и зависящий от расстояния £ до
плоскости наблюдения и корреляционной длины шероховатости поверхности.
Из (32И34) видно, чго двухлучевыс ищерфереипионные полосы в (32)
искажаются из-за случайных изменений h и L- Выражения (33) и (34) получены
Глава 2. Формирование интерференционных сигналов 63
для случая гауссовой статистики фазовых флуктуации со средним квадрати-
ческнм отклонением сг*. когда выполняется известное соотношение для
математического ожидания
<cxpJM*)] > = е*р(- <*V2) . (35)
Такая оценка обычно справедлива при условии малой шероховатости по
сравнению с длиной волны* поскольку в противном случае может не
выполняться допущение (35), и в анализе необходимо использовать соотношение
< exp(j<p) > = } Р(Ф) екр(/р) dtp.
ще р{ф) - плотность вероятности флуктуации фазы измерительной волны при
ее отражении от негладкой поверхности. Заметим, что при очень больших
даачецнях фазовых флуктуации I ^jc) I » 2т соотношение (35) выполняется.
Можно показать, что выражения вида (32)-(34) справедливы для случая
интерференции двух волн (30), В качестве наглядного примера рассмотрим
ннтерферометрическую систему дилатометра для бесконтактного контроля
теплового расширения образна с негладкой поверхностью 116]. Оптическая
схема интерферометрической системы показана на рис. II, Она
Представляет собой модификацию интерферометра Майкельсона с негладкими отра-
:жаюшнмн поверхноствыи.
При помопти светоделителя лазерный пучок расщепляется на два пучка,
одлн из которых направляется на
опорную поверхность (держатель образца),
а другой, отразившие!, от зеркала М,
падает на контролируемую
поверхность образца. Посредством нрнзмы
поля спеклов рассеянного излучения
далее налагаются Друг на друга в
плоскости регистрации. Для получения
распределения интенсивности с
максимальным контрастом размеры сцеклов,
наблюдаемых при регастраивы двух
рассеяйньк полей, должны бьгсъ
близки, для чего нужно сделать по
возможности равными длины оптическою
пути в обоих илечах интерферометра.
Измерительный пучок и опорный
пучок попадают па фотщиодлую
линейку, расстояние до кочорон от рас-
BS
Лазерный
пучок
Опорный
пучок
l\V44<4N
Рнс, 11. Оптическая схема устойства кон-
Втроля непрерывного смещения
негладки поверхности {BS- светоделитель,
&- угал паденияпучка,,1/- отражаю-
Йцая поверхность, /. - высота образца)
34 Компьютерная обработка си талон
сеивающих поверхностей подбирается так. чтобы размеры спсклов в плоскости
матрним были примерно равны размерам фотодиодов. Это исключает
пространственное усреднение на чувствительной площадке фотодиода, что могло бы
зпачшельно уменьшись Отношение сигнал-шум, В результате теплового
расширения образна изменяется разнос |ь фаз интерферирующих волн и,
следовательно* фаза внутри пятен спеклов. При этом сигналы отдельных фотодиодов
изменяются согласно выражению (32), в котором под независимой переменной
£ ь данном случае следует понимать значение расширения образца.
В системе [161 используется принцип многоканальной фотоэлектрической
регистрации и обработки ицтерфсренпионНЫХ сигналов: при помощи
аналогового демультиплс ксери, выбираются сигналы oi нескольких фотодиодов и
полаются на отдельимс интеграторы, выходные сишалы которых далее
суммируются, чти обеспечивает получение оценки математического ожидания как
среднего по ансамблю реали-децлй. По данным от различных точек можно
получать дополнительную информацию об однородности расширения образца.
Исследования показали, что результирующая погрешность итгтерферомет-
рического контроля смещения негладкой поверхности образна в
рассмотренном приборе составляет примерно Л/4, г. с, првыерно 0,15 мкм-
Исключительная простота оптической системы обеспечивает очень быструю юстировку и
делает прибор нодхоляЕПим для повседневных измерений.
Рассмотренное ицтсрфсриме1рНчеекое устройство предназначено дли
непрерывною контроля смещения петладкой поверхности и менее пригодно
для однократною определения смещения между начальным и последующим
положением нс1лздкой поверхности, В таких случаях предпочтительным
является использование метода управляемою дпекреиною фазового сдвига
опорной волны [16, 171.
Интерферометрические устройства с управляемым
дискретным фазовым сдвигом
Интерференционный сигнал, пропорциональный рачениям интенсивности
света в картине, коюрая получена при интерференции света, отражемиою иг
негладкой поверхности, и плоской опорной волне, рае^ространяющейся
нормально к плоскости наблюдения, имеет вид
*(£> = Ы£ + *4# с(в[*-ь 2т*4 + р<#], (36)
ше с- начальная фала в точке £^ 0, р<£1 - фазовые флуктуации с плотностью
вероятности (29), прн этом аддитивный шум считаем пренебрежимо малым.
Метод управляемого дискретною фазовою сдвига заключается в формиро&а-
Глава 2. Формировнние интерференционных енгналон 35
I
Скользящее среднее
, S--S,
Выхоа ч\,
., Рис. 12. Операции итерационного восстановления фазь| методом управляемого
■^ дискретного фазового сдвига
:+ ими ансамбля п неподвижных интерференционных каргим с известными
"• взаимеымн фазовыми сдвигами* т, е, согласно (36),
'<: >£$ = s№ + s„($cosle- Дф + 2яи£+ №$]. '=] * - (37)
Щ частости, когда | Л^,\ = 0, я/2, я, В л/2, из (37) получим компоненты
^векторного интерференционною сигналя s=(slr ft, j3, Si)T\
Л^в-Мб + ^^соК^).
|*k#=M# + a#sin(p(£)),
Die <p(Q обозначает фазу информационной составляюпей в (36). Значения
W£) опреяеляются из формулы
f'#(S = areigГ(а- a)/(si - s3)\ . (38)
to'
8в Компьютерная обработка сигналов
Si
VAJ^W1";
а)
Ч>
и)
Рис. 13. Интерференционные сигналы до обработки (а-г). после стнцивания
(д-з) и восстановленная фазовая функция (и}
Преобразование (38) является нелинейным, чго Дополнительно увеличивает
влияние флуктуации на полученный результат при стохастическом характере
сигналов s,.
В pa6oic 118] предложен париапт помехоустойчивого итерационного алго-
ритма компьютерной обработки интерференционных сигналов (37). получеи-
Глава 2. Формирование интерференционных сигналов а?
вых прн контроле негладких поверхностей. Блок-схема алгоритма 1|рсдстав-
дена ца рис. 12, процесс обработки иллюстрируется рие, 13.
Зарегнстрироватгые интерференционные сигналы Si j* (рис. 13, а-г)
подвергаются сглаживанию методом свертки со скользящим окном й(£) (рис, 12}.
Которое определяется выражением
;«£) =
i£J>k
(39)
шчем ширина окпа 2Ь предпочтительно должна составлять половину ширины
зенпнонных полос в (32), Полученные сигналы s' ,s\ имеют вид,
показано на рис. 13, д-з- Далее выполняется вычисление фазы д/ по
фмуле (38) для интервала (-л. я) и раэвертьЕВанне полной фазь| qfa. При
^юшичии локальных раэрьизое фазовой функими, не соответствующих целым
[периодам 2я рад. нолучениая фазоная функция ft используется илл реконст-
1нн ансамбля сигналов i "к.,., $'л. которме являются исходными для второго
таалониого цикла, В 118] показано, что итерационная обработка по схеме,
ставленной на рис. 12. дает устойчивые результаты.
^Чнтерферометрические методы с освещением
интерферометра на нескольких длинах волн
В имтерферомстрическид системах используются источники излучения на
\, трех и бодес длинах доли 11,6, 19]. Рассмотрим возможности
формирования случайных интерференпнониых полей и их анализа по значениям
^комплекс нот коэффициента корреляции между двумя полями спекдов.
полученными на двух длинах волн. Интерферометр может быть посироен на основе
'«XcMbi интерфарометра с фокусировкой измерительного пучка (рис. Ю. б).
Который освещают источником с двумя длинами волн Ai и Л. Спектральное
деление осуществляют г1ри номонШ призмы, установленной на выходе
Фферомстра. Если измеряемая поверхность в точке фокусировки пучка
:ая. значения оптической разности хода 1г связаны с двумя значениями
гы ф\ и (pi согласно формуле
- 4лг/Я, (40)
*н этом разность фаз составляет
\jP=*Pi-<pi = {Ая/Х, - Ал/к-Ъг = 4лг/л, (41)
К - эффективная длина волны, которая определяет расширенный диапазон
юзначностн измерений,
= Д]Аа/1 к, - Л? 1 » At, Аз.
(42)
88 Компьютерная обработка оитапои
В случае нетадкой поверхности формула (40) дает неточный результат из-за
случайных изменении фаз поля спсклон- Разность фаз для двух длин волн
составит
ф = ф> - qh = Ащ./Х + 8р, (43)
1Ле 5<р- случайная погрешность с математическим ожиданием < 5<р> - 0 и
плотностью вероятности вила (29), В [19) показано, что ширина кривой
плотности вероятности и, следовательно, по|рсшность определения фалы и (43)
зависит от коэффициента корреляции ичтенсиянастей
„,__. __<Ц*~<*хЬ> (44)
М [<(h-<J^>f><h- ■<fc>)41*
а именно.
■.I
Sip = [гс/Ъ - яагейв^ + aicsiu
JV"(t/2)X(^/n')]"- №
Расчеты показывают, что для получения лоиус|'имого значения среднего
квадратического отклонения фазы Ф в (43), равного 2л/10 рад, значение
коэффициента корреляции (44) должно быть не менее 0,8. Этому условию
соответствуют допустимые значештя шероховатости контролируемой
поверхности, не превышающие 1/20 от эсрфек[нвной длины волны X.
Интерферометрические устройства с использованием
источников частично-когерентного излучения
Интерферометры с частично-когерентным осиеикпием. прежде всего, интер-
феромефы белого света, широко используются для измерении щомстрнчсеких
характеристик объектов (2, 41 Сущность ингерфсромсфИческид меюдоь этого
вила заключается в том, что интерференционная карлика в схемах на рис. Ю
ноиавлстся при условии равенства оптических длил плеч интерферометра в
пределах длинь| ко1срентноСТИ, при этом положение максимума интенсивности
света (так называемая ахроматическая полоса) совпадает с точкой наибольшей
видностн интерференционных полос, как показало па рис. 14.
При частично-когерентном освещении значения комплексных составляш-
птх электрического поля измерительной н опорной имтерферируюших волн
межно выразить в форме
ВД=А,{'-г)ехр[/2^('-г)],
Е2(0 =A,<r)cxp(-j2ffVi/ + f,).
Глава 2. Формирование интерференционных сигналов вв
-зде индекс J обозначает различные волловме цуги с частотами к, т = 2z/c -
янтервил времени задержки измерительной волны при оптической разности
■хода 2z- Интенсивность света на выходе интерферометра определяется имра-
гдуекием
$Цт}= <[ £„(!} +£*(0 >, = /о + 2Г(г)еоь(2;пт+ет}.
Л№ In = <1>т не зависит от г,
: j.
$;Ш = <М0М1-$>, (Щ
функция когерентности- Выражение для интенсивности удобно записать как
^функцию смещения объекта z в форме
{z) = h + L(z)co$]2<k>z + <p(z)],
(47)
Рре Дг) н $j) являюиси функимями от ?т <Ь- = 27t/<k>, <?> - среднее значепне
*£пины волны. Из (46) видно, что функция когерентности представляет собой
^'автокорреляционную функцию, и следовательно, вил функпий L(z) и £<z)
определяется преобразованием Фурье
энергетического спектра источника
излучения,
При нормальном смещении
некоторой точки контролируемой
поверхности в положение z, = z + Az точка
максимума в (47) также сместится,
причем это смешение можно
скомпенсировать перемещением
опорного отражателя в схемах на рис. 10,
Величина перемещения опорного
отражателя при этом равна искомому
значению Az.
При контроле смещений негладких
поверхностей сложность Состоит в
том, что нулоавл оптическая разность
хода для различных точек поверх нос-
доетагается при различимх значениях Az, поэтому в (47) значения L{z) и
[z) носят стохастический характер, В некоторых точках плоскости
регистрации интенсивность спсклов может оказаться близкой к нулю. Для преодоления
гой сложности целесообразно применение устройств с многоканальной
фотоэлектрической решетрацией н пространственным разделением каналов
подобно интерферомегрнческим устройствам на основе много элементною ири-
зрмника излучения при освещении па одной длине полны.
Рис. 14. Вид интерференционного
сигнален устройстве с частачно-кодерентным
^освещением
90 Компьютерная обработка сигнапов
Многоканальные интерферометрия ее кие о птнко-электронные
системы позволяют решить дополнительную задачу восстановления профиля
негладкой поверхности [21 ]. В этом случае полезно использовать
рассмотренный выше помехоустойчивый метод управляемого дискретного
фазового сдвига для определения положения максимума вндности
интерференционных полос.
Если точка измеряемой поверхности расположена в плоскости, которая
удовлетворяет условию равенства плеч интерферометра* /(;) достигает
максимума при Z=Q. Для другой точки в плоскости Z = Zu автокорреляция
/(? - Z\) имеет едвиг. Для определения г, ir/жно найти максимум огибающей
автокоррелчпии. Можно использовать следующий способ: три раза
зарегистрировать на выходе интерфероме|ра значения Интенсивности /ь h, I, внла
(47) с тремя разными значениями фазы ^=0°. р?= 120". и ф = 240\
соответственно. Сдвиг фазы опорной волны осуществляется, напрмер, при
помощи пьезопривода. Следует учитывать, что величина р зависит oi
средней длины волны <£> источника. Искомая амплитуда переменной
составляющей интенсивности вычисляется Для различных значений z по
формуле
"Г
Uz)= 2>"-V
гис % = (1^3)^ Л. Далее несложно опрелелнть положение максимума
огибающей,
В иитерферомстрическнх устройствах с частично когерентным освещением
следует внимательно выбирать подходящий источник излучения. Длина
когерентности I должда удовлетворять условию
1дс Av- ширина спектра излучения. <т(- среднее кладратическое откнонение
Профиля контролируемой негладкой поверхности. Выноцнсние условия (48)
обеспечивает требуемую коррелянню поля спеклоп на различных длинах воли.
С другой стороны, уменьшение длины когерентности позволяет более точно
регистрировать положение максимума огибающей в (4?),
Другим условием является обеспечение достаточной пространственной
когерентности освещения, Для этого в случае неточечного источника нужно,
чтобы угиовая апертура освешечия была меньше апертуры наблюдения.
fnaaa 2. Формирование интерференционных сигналов 91
и'
.4. Фотоэлектрическая регистрация
ггерференционных сигналов и характеристики
приемников излучения
: Общие принципы и особенности фотоэлектрического преобразования ип-
рференционной картины можно классифицировать в соответствии со схе-
, преде явленной на рис. 15. Преобразование интенсивности свети может
естепятъея при усреднении но сечению светового пучка гфи широком поле
нци Приемника излучения (результирующее значение интерференционного
ала при усреднении обозначено далее угловыми скобками). Такая операпия
учитывает информацию о форме волновою фронта и ее изменениях, что в
е случаев может вызывать систематические погрешности интерференцион-
измереннй. Однако методы усреднения сравнительно ПрОС|Ы в реализации
и использовании традиционных приемников излучения итерирующего
например, фотоднодоь. Операция усреднения позволяет уменьшить
[Не адкитиицых пространственных флуктуации Яркости, имеющих высо-
пространственные частоты и нулевое среднее значение. Таким образом.
Методы этой группы пригодны 1лавнь1м образом для контроля одномерных
щ.
II
1
'■
tfi-"
i
III1
к,'
jt
Иптерферешцтпннан картнпа
]
:
Усреднение
1
<s>
<р>
1 1
Днск]1е1 н-
зация
1
JlXy,)
<Р(*-У<)
л
«о
Входное
преобразование
Сигналы
Фазовые
характеристики
15-Опернции фотоэлектрического преобразования интерфереН1»1онной картины
92 Компьютерная обработка сигналов
объектов: их размера, перемещения, среднего значения показателя
преломления среды вдоль трассы светового луча н т. п.
Методы дискретизации интерфег^ипионной каршны но сравнению с
методами усреднения более сложны, во существенно более информативны.
Информация о значениях интенсивности интерференционной картины в
дискретных точкнч вдоль одной прямой или в узлах двумерной пространствен нон
решетки позволяет определить форму и ориентапню волнового фронта в
измерительной ветви интерферометра. Такая информация, с одной стороны,
значительно раскоиряет функциональные возможности интерферометрической
системы, а с другой - позволяет вносить поправки на неилеальностъ
характеристик оптической схемы ц условий измерений. При этом достигается высокая
точность и помехозашищенноть измерительной системы^
Операцию усреднения можно описать следующими соотношениями:
^
<£>=j{<s>), (50)
Здесь N - чие;ю точек в интерференционной картине, разрешаемых оптической
системой в пределах ancpiypi,] фотолетектора, I, - заре^етрированиые значения
интенсивности све га в этих точках, fs - козффипнент,/ - операция функционал].-
ного преобразования, s- искомая разность фаз ннтерфернрутощих волн.
Из ма|ешти||ескон статистки известно 1261, чю оНенка вида (50), ввиду
нелинейной взаимосвячн s и е, является так называемой "'псевдоопенкой". которая
в общем случае несостоятельна и смешена. В противоположность этому, вметсяах
дискретизации выборочное среднее
где ь = j{sw) =j{ftl»). является соеючтельной и несмещенной оценкой, В этом
заключается притншиаяънос преимущество методов цискретизандл тперферсн-
ннонной картиньь Сравнение (50) и (51) показъв!аст, что в первом случае мы
имеем дело с одноканалъной системой, ю!да как причинп дискретизации i
реализуется в многоканальной системе регистрации [5].
Сравнительный анализ методов усреднения и дискретизации
интерференционной картины с учетом технолсиичеекнх о1раниче|гна на харакиеристики прием- '
нико в излучения показываем чю фотоэлектрические устройства, построенные па
основе принципа дискретизации, обеспечивают наиболее высокую
помехозащищенность измертельной системы. Эю преимушество особенно заметно при
лабя 2, Формирование интерференцнонньос сиiналов 93
астрации и компьютерной обработке неподвижных интерференпионпых
•картин и интерферограмм.
гоэлектрическая регистрация когерентных и
|екогерентных световых полей
Проведем краткое срапнепне методов одцокацапьной и мноцжанальной фото-
нрической penicipaujiH при различной степени когерентности освещения.
Известно, что когерентная система существенно нелинейна в отношении
5НСИВНОСТН / в отличие от некогерентной системы, а именно
h{x, у)*А(х. у)
рдля когерентной системы и
Я=\Нх.у)
*\А(х.у)
(52)
(53)
HcKoiepcHTiioft. В выражениях (52) и (53) h(x, у) обозначает фупкдиЕО рассеянии
[. зависящую от апертуры оптической системы, А(х, у) - комплексная амдля-
напряженностн поля световой волны Результат операции сверил в (52) в
[ачитсчьной мере зависит от фазовых характерна ihk вяодяших в это соотноше-
величин и существенно отличается от результата в (53),
Пусть h(x,y) = тес1(*Л>) -одномерная единичная функция окна шириной
, и регистрируется одномерная волна с косинусониальнь[м изменением
Щипзшзулы, т. е. А(л, у, 0) = a cos(2mi + <р), где 0 = (а, иь ф? - вектор пара-
*>£Ыетров, при этом из (52) и (53) соответственно получим:
£У = W2) sinc7(2^fl + cos(4mi + 2$] (54)
К01срснтной системы и
(dV2)fl + sine (4нЬ) cos(4m* + 2р)1
(55)
Некогерентной.
Если использовать известное определение контраста (нидностц) изображе-
в форме
= f Ц - Imia l/f laax + /mlo , (56)
из (54) и (55) следует преимущество когерентной системы по величине
шета в k= 1/я1пс(4ы^) раз. коюрое наиболее земетцо при большой
■женности 1Ь функции h(x) и высоких пространственных частотах и.
Обратимся к случаю чисто фазового объекта
Щх. у. &) - a e\p[^;(2mi + <р)]. При Этом согласно (52) получим
94 Компьютерная обработка сигналов
1= t?saic\2ub) (57)
для когерентной системы и, согласно (53), 1=а? для некотерентной системы.
Поскольку зшс(2м/т) < 1 {и,Ь40). то фазоиме объекты вызывают заметные
потери мощности полезной состаавлищей в когерентной системе по сравнению
с иекогерентнон
Из (54), (55). (57) следует, тго для минимизации потерь во всех случая*
требуется уменьшать величину 2ub. Если пространственная частота и задача,
то следует уменьшать размеры участков усреднения. Для увеличения общей
величины полезною зарегистрированного световою потока целесообразно
использовать многоканальную регистрацию интерферетщионныя. ентналпв,
когда осуществляется суммирование фотоэлектрических сигналов, полученных
с «скольких участков усреднения с учетом фазовых сдвиюн в (54) и (55).
Характеристики приемников излучения при одноканальной
и многоканальной регистрации интерференционных полей
Основными типами приемников излучения широкого применения для
интерферометров являются фотоэлектронный умножитель (ФЭУ) и
полупроводниковый фотодиод (ФД). ФЭУ представляет собой фогоэмессионньш плод
(ФЭД) с несколькими каскадами егорнчноэлектро иного умножения. Поэтому
ФЭД и ФД можно рассмотреть одновременно, а затем учесть известное
свойство ФЭУ, согласно которому в ФЭУ полезный сигнал ФЭД усиливается
в АР раз, а коэффициент возрастания шума при вторичной эмпесни равен
М/{М- 1}. Здесь М-среднее усиление иа каскад ( обычно М ^4 ), п-число
каскадоь (и = 4 - 6), Следовательно, преимущество ФЭУ заключается в
значительном усилений сигнала (в несколько сотен или тысяч раз) практичесим без
дополнительного увеличения шума, т. к, М/(М- 1) * 1,3 [27],
ФЭД н ФД подвержены вредному воздействии темпового тока sj> Темповой '
ток, складываясь с постоянной составляющей sa тока ухудшает соотношение \
сигнал-шум. Типичное значение темнового тока ФД состаавлет десятме доли
микроампера, а дня ФЭД - единицы и доди наноампера. Однако болмпая |
квантовая эффективность ФД ( Щ * 0,8 ) по сравнению с ФЭД ( Jfe * 0,0l)
делает поримй более предпочтительным 127). однако это преимущество прщ> i
тически удается реализовать лишь при малых пгумах источника излучеиня [2В}р !
усилителя фотоэлектрического сигнала и устройства обработки.
Эквивалентная схема подключения приемника излучения ко входным
цепям усилителя показана на рис. 16. На этой схеме Rl обозначает
Сопротивление нагрузки. С-емкоеть нагрузки, Я.-шумовое
сопротивление усилителя. Для того чтобы тс и до вой шум сопротивления нагрузки
AIcT/Rl был меньше дробового шума, нужно обеспечить, чтобы
Глава 1. Формирование интерференционный сигнапон 35
{AkTBfRj
О О
[2*{s0+ia)B]
в—
(4*77? В)
«l =t С
:. 16. Эквивалентная схеиа включения приемника оптического излучения
> 2kT/[e{se + sjf\ * 0,05/(sa + sa) при рабочей температуре 7~ = 300 К. Для
ка (st + *rf) = 1,5 мкА пеобходамо выбрать величину ft > 30 кОм.
Большое сопротивле1гае на1рузкн приводят к ограничении полосы частот
ia из-за шунтирующего действия емкости С , Ток нагрузки равен
В* = 1/(2лЛ(С)-част01а среча. Шумовой ток приемника излучения оггре-
ется выражением
~ 2e<s>Bo (см. пункт 6 табл. 1), (Щ
Пователыю, влияние цепи на1рузкн спнжаег отношение еигнал-нгум. гюэ-
выбор величины RL является компромиссом между необходимостью
гения теплового шума и расширенном полосы рабочих частот.
ь Рассмотрим особенности практической реализации принципа днекретиза-
интерференнноннпй картины. Дискре гно-аналоговое преобразование ин-
ненвности свеювого поля Состоит в регистрации значений сн-щала в отдель-
точках (пикселах) с помощью позицион но-чувствительных приемпиков
-ения. Наиболее перспективными следует считать приемпнкн излучения,
)Отазо1ИНе в режиме электронною считывании фотоэлектрического сигнала:
евнзионные трубки и твердотельные приемники излучения - приборы с
сносом заряда [31-33], Приведем краткие сведения о таких приемниках
пения, опубликованные в литературе.
Характеристики телевизионных передающих трубок подробно рассмотрсим в
нографин (29J. Наиболее высокую чувствительность и разрешающую способ-
Пь имеют трубки класса суперортшон. Однако такие трубки и фокусирующие
отклоняющие системы к ним Очень пороги, сложны в настройке, требуют
источников питания и имеют большие габариты и массу, Мадогабарит-
трубкн класса видикон более дешевы и просты в работе. Их недостатками
ются малая разрешающая Способность, нелинейность и нестабильность
96
Компьютерная обработка сигналов
развертки (до нескольких процентов), неимсокая чувствительность (несколько
люкс), неравномерность снгна-'ia по полю и малый длнамнчеекпй диапазон (не
более 30 дБ)- Указащгые недостатки ограничивают применение телевизионных
трубок ti интерферометр кн. Тем не менее, известны разработки измерительных
систем, в том числе высокоточных, для автоматического анализа
интерференционных картин с использованием телевизионных тр>бок (30].
Новые возможности цич решения задачи компьютерной обработки
интерференционных картин появились в связи с созданием линейных и
двумерных приборов с переносом заряда |31]. Их достоинствами являются
высокая стабильность параметров н надежность в работе, высокая
точность шага дискретизации (геометрическая погрешность не более
0,3 мкм), которая обеспечивается микроэлоктронной технологией
изготовления, болытюй динамический Диапазон (до Й0 дБ и более). Разрешающая
способность таких приборов в Последнее время достигла разрешившей
способности телевизионных трубок. Стоимость приборов снижается по
мере совершенствования технологии изготовления.
Серийные образцы линейных приборов с зарядовой связью (ПЗС) имеют от
нескольких сотен до нескольких тысяч элементов. В частности, 2000
светочувствительных элементов имеет отечественный ПЗС типа К 1200 ЦЛ2, 1728
элементов - один из первых прибороп фирмы Fairehild типа CCD121.
Двумерные (магричные) ПЗС содержат несколько сотен тысяч элементов.
Типичный формат ПЗС для научных исследований и обработки изображении
составляет в настоящее время 1000x1000 элемснЮВ.
Возможность использования приемников излучения ПЗС для анализа
интерференционной картины определяется тем, насколько полно они отвечают
необходимым требованиям по uiaiy дискретизации, чувствительности и
динамическому диапазону.
Интерференционный фотоэлектрический сигнал в сечении интерферешш-
онной картины ири отсутствии помех, согласно выражению (15), можно
преде гавить в форме
s - s„ + j4co&(^+- 2лиы;), (59)
где, как и ранее, но - пространственная частота полос. Если частота ил априорно
известна с достаточной точностью, то шаг дискретизации Ах сигнала (59)
определяется coraiaCHO известной теореме отсчетов: ыо< и*, шеим= ]/(2Дг)-
частота Найквиста, следовательно. Ах < l/(2uo). Например, при ширине
интерференционны* полос Л = 0,5 мм, и„ = \/A-2-W*m\ Ах < 0,25 мы. Другими
словами, требуется обеспечить не Менее двух отсчетов на интерференционной
полосе.
ава2г Формирование интерференционных сигналов
9?
', Серийные образпы приборов с зарядовой связью имеют шаг дискретизации
12 мкм и менее {321, поэтому они, как правило, обеспечипают требуемый
иискретизапин интерференционной караны.
Рассмотренное приближение теоремы отсчетов справедливо лниь при
:нии 2b«Ax, где 2b — размер отдельной чувствительной ячейки. Если
величины lb я Ах соизмеримы, то совокупность отсчетов, каждый из
>рьгх соответствует интегральному значению интенсивности в области W
квадратной ячейки), даст результат, эквивалентный ножей аиъльному ени-
"ню вндиости интерференционной картины.
Влияние соотношения между lh и Ах па различных пространственнык
ах учитывает частотно-контрастная характеристика (ЧКХ) прнемни-
нзлучения. которая представляет собой зависимость сигнала от значения
транствеинои частоты, нормализованную по отношению к сигналу с
еной частотой f33J- ЧКХ прнем|Шков излучения на ПЗС определяется в
ном тремя составляющими: геометрической, обусловленной неэффектив-
ю переноса зарядовых пакетов и обусловленной боковым (амффуэион-
) растеканием зарядов в соседние ячейки. Результирующее выражение
вил
= ^nc[(nb/Ax)(ua/um)] exp [- fkK\ 1 - соз(2лй/м1К) ( к (60)
иг,= \/Лх, /У-неэффектипцость переноса, и - число переносов па одну
ейку, АГ-число точек дискретизации, d- расстояние <uL Meeia истощения
а до обеднешю1о слои полунроводника, U - диффузионная длина в крем-
-, График зависимости (60) представлен па рис. 17 сплошной линией. Гео-
трическая составляющая ЧКХ, иредставлсимая на рис. 17 кривой I, опре-
1Стся первым сомножителем в (54). Снижению контраста не более чем на
% соответствует выполнение условия sine {2щЬ) > 0,9, откуда получим
А= h/Ax<,Q,25- Тогда допустимый размер ячейки определяется соотноше-
MHJ
*.25ЛУ21><озАх, (6])
Влияние неэффекпиеноспи переноса учитывается вторым симножиисдем в
)}. Эиа составляющая представлена на рис, 17 кривой 2. Заметим, что
'полный перенос зарядовьн пакетов вызъщаьт фаюпый сдвиг па пространст-
гой частоте и, равный
= -flnKsia(2mt/um). (62)
Эак 801
да
Компьютерная обработка сигналов
Это нужно учитывать при точных измерениях фазовых характеристик
интерференционной картины. Для случая ftnK<Q,l второй сомножитель в (60)
снижается не более чем на 20%. а фазовый сдвиг (62) составит
£г< {1,б-№ *)2?г рад,
ЧКХ растекания представлена на рис. 17 кривой 3, Результирующее
влияние всех составляющих ЧКХ эквивалентно уменьшению видности интср^
ферешгаонных полос и приводит к снижению отношения сигаал-шум.
Перейден к определению требований к чувствительности многоэлементно m
приемника излучения, предназначенного для анализа интерференционной
картины- Пли этого рассмотрим типичную онтнческую схему с
интерферометром Фнзо, показанную на рис, IS. Выбор в качестве примера такой схемы
обусловлен тем, что база такого интерферометра жестко задана, плечи прост-
ранствеино соинешены, поэтому применение приемника излучения ПЗС здесь
особенно целесообразно ] 35].
Пусть мощность излучения лазерного источника состэляст 1 мВт- После
коллиматора О, (рис Щ паркалельный пучок попадает в интерферометр Физо.
образованный двумя стеклянными инастинамн Мг и Мг . Отраженимс от них
пучки интерферируют и после разделяющей пластины через объектив 0г
попаилют на приемыик излучения. Таким образом, излучение источника
претерпевает ряд отражений от поверажоетей, выполненных из оптическое
стекла, а также иепьгтынает поглощение в нем, поэтому илотность потока
излучения на выходе обьектива Ог бупет соогьетствоватъ выражению
ЧКХ
1,0
0,8
0,6
0,4
VU
Nw
2В=0.5^—
/totf=0Tl
--L^Ousm
d=5 ыки
i 1 1 i i
0 0.1 0,2 0.3 0,4 0.5 и!ит
Рис, 17. Чветотно-кантраотная
характеристика прибора о
зарядовой связью
Рис. 1 В. Схема типичного
интерференционного фотоэлектрического
устройства с дискретизацией неподвижной
интерференционной картины
tea 2. Формирование интерференционных сигналов
99
= аЫ\ +Vcos(£ + 2*to*)] , (63)
fa [Вт/м?] - постоянная составляющая плотности потока излучения,
коэффициент пропускания светоделитель! того слоя, р - коэффициент иор-
iHOio отражения от поверхности онтнческого стекла, р1 - коэффициент
)аження от разделяющей пластины, т — число нормальных отражений от
1ей оптической снетсым. Мощность излучения, падяющего на одну чувст-
гьную ячейку, мождо найти из выражения [63):
1+Ь
'= lafab J 11 4 Vcos(£ + 2mirf)\dx =
(64)
ВД6Ч1 +Vsinc(2Wi)cos(£ + 2^rfet)l.
участкоь нитерференпнонной картины с минимальной плотностью потока
;ния (когда £ + 2^^ = (2* + 1)я; fc = 0, +l,.LL) опенка значения потока
типичных значениях параметров оптической системы V=0.4T 10 = 0,3,
*О,04, ру = 0.5, т = 6, ог«],2'10-э составит Я^в-Ю11 Вт. Этот результат
!ен в предположении, что исходный поток излучения ft распределен
шерпа между я = 10* площадками, т. е. ft = A№f&t . Для реальной сложной
:кой системы, где число т может быть велико и имеет место лнгиь
!чиос использование полного потока излучения, следует ожидать мснмпеи,
Ри величины воспринимаемого потока излучения. Примем эту величину
шР:~2чО,!Вт.
Чтобы определить размер чувствительной ячейки, обеспечивающей па-
icc значение воспринимаемого потока излучения, исследуем на экстре-
функпию (64). Тогда после дифференцирования но (2^) получим услоиде
максцыального отношения сигнал-щум в виде
\яиф = - 2тг№&
*г0№Л.
(65)
[нее соотношение не соответствует выражению (61). Это означает, что
гение Ь/Л следует выбирать и с ноля из величины потока излучения в
тетнон иггтерферетшиоиной измерительной системе. При этом получение
1Ходимой чувсгвителыгости пргг малой величине потока влечет за собой
1жение видностн. т, е, пространственного разрешения системы»
1qq Компьютерная обработке pi fflano в
Для обеспечения необходимого разрешении нри столь малых уровнях
потока излучения, кик Я* используется режим работы приемника ПЗС с
накоплением. В соответствии с данными работы {331 »oxai> получить выражу
нне для наксимальнон облученности И {фотон с'м Ц, которая обеспечивае,
на данном элементе ПЗС заданное отношение сигаал-цгум по мпщности
(S/N)r. в вине
где &, - средняя величина шума одного зарядового пакета, выраженная в числе
шумовых электронов, ^ время накопления. Поскольку связь И и Р2
определяется соотношением
И = /W(4a'Jic) ,
где ft-постоянная Планка, с-скоростъ света, величина ошошепия сигнал-
шум составит
При г= 15 мс. щ = 0& Nn = 250 получим (S/N)r* 910. Это означает, что
приемники излучения на ПЗС наиболее Пригодны для точных измерения
фазовых характеристик интерференционной картины.
Список литературы
1. Борв М., Вольф Э. Основы оптики, -М: Наука. 1973.-719 с,
2. Нагибина И. М. Илтерфереанал н аигрракпдя снета. -Л,: Машипос[роение.
1985.-332 с.
J. Хоропкевнч В. П., Соболев В. С, Дубнищев Ю- Н. Лазерная ннтерфсроиетрня. -
Ноноснбирск: Наука, 198^-213 с,
4. Захарьевский А. Н, Интерферометры. - М,: ОГюронгаз. 3 952. - 294 с.
5. Гуров И. П. Методы it техника автоматической обработки сигналов в интерфе-
реинипнных изм^игельам^ системах И Измерения, коятг*>лъ. автомат изатщя. М.:
Ипформпрнбор. 1990, Вып. 2 (74), С, 69-79.
6. Наплагад Р, liilerferunietry wnb lasers // Progress in Optics. 1987, V.24. F,]03-164.
7. Перила Я. Когерентность свети.-М.: Mnp, 1974.-363 с.
8. Измерение спектральш-частотныя п корреляционных параметров и
характеристик лазерисио излучения I Б. М. Алснцсв, М, Я. Варшавский, А. А. Вещиков и
др.- М.: Радио и связь, 1982.-271 с.
9. Картапкв А, И., Эцкн И. Ш. Методы измерения малых изменений разности фаз
а нитерференинонных устройствах ft Успехи физических наук. 1972. Т.106.
Вме-4. С, 687-72].
10. Kogebiik Н , П Т Laser beams and resonaiors It Арр]. OpL 1966. V.5, N.JO.
P. 1550.
Глава 2. Формирование интерференционных сигналов 101
-П. Ахманов С А,. Дьяков Ю- Е-, Чнркин А- С Введение в статическую равлофнзн-
ку и оптику- - М.. Наука, 198].— 640 с.
12 Фравсон М- Оптика спеклов.-М.: Мир, 19Н0. -171 с.
3. Джоунс Р., Уайкс К. Голографическая и спекл-инте]х^>ер<1М(;фин.- М.: Мир*
1986. - 327 с.
4. Теория когерентных изображении / П. А. Бакут, В, И, Мяндросов, И. Н.
Матвеев и дрг / Под ред. Н. Л. Уствоова. -М.: Радио и свод, 1987.-264 с.
5. Goodman /, W. Slatisucal properties of laser speckle patterns / In: Laser speckle
and rclalcd phenomena / J. C. Dainly, ed. Springer-Verlag, 1975. P. 9 -77.
6. Kocia Дж., Мавлжинн С, Ornwuuio П.. Пьяно Е. Измерения тепловот pacuei-
рения нри помощи спехл-ншерферометра // Приборы для цаучпых в
селедоваций. 1987, N1, С. 81-85.
7. Wyaoi J. С. Inleifcromclric optical metrology: basic [niriciplcs und new systems //
. Laser Focus. 198 V.l8. N5. P. 65-71.
B. Gu J„ Hung Y„ Cben F. Integration algorithm for computer-aided speckle inierfero-
melry // AppL Opl. 1994. V33. N23. P.530S-531?.
i Tilford C.R. Analytical procediijc Jos derennin length from fractional fringes //
Appl. Opt. 1977. V.16. N7. P.1S57-1860.
. Vry D1? Ferehei A. F, High-order stalisticaJ properties of speckle Acids and Uieir ар-
■> plication Ю rough-surface inlerferometry It J.Opi.Soc.Amer. 1986, V3. N7. Р.9Й8-
> 999.
"-Drescl Т., Haasler G., Venzke H. Three-imensmnal sensing Of rough surfaces by
coherence radai // Appl.Opi. I99V.31.N7. P.919-925.
Ван Трис Г. Теория обнаружедля, оценок и модуляции. - М-. Сов,радио, 1972.
Т.1 - 744 с.
. Баниат Дж„ Пирсон А. Прикладной анализ случавльгх данных. - М.: Мир, 1989.
-541 с.
. Тойберг П. Опенка точносач релультатов измерении. - М.: Энергоагомнздат,
1988.-89 с.
. Ярлыкпп М- С. Миронов М. А. Марковская теория оценивания случавлых
процессов. -М.: Радио и^изь, 1993.^461 с,
Ефныон А. Н., Крнворуков Е. В, Исследовапе эффектннн^ит опенок в "псевдо-
опепок" среднего при маиим числе наблюдепнй И Автометрия. 1УЙЗ. N1, С. П-
". 17,
. Ван дер Зил А. Шумы прн пзмереннях. - М.: Мир. 19?9. - 292 с.
. Вьспемнрекий А. В., Ссдсльпиков В. А. Влияние фпук1у.и|нй мошдостн
изучения лазера на процесс йл*тодетскгировання в допплеровекнх интерферометрах
//Метрология. 1980. N9. С. 30-36.
. Телевизионная астронония / А. Н. Абрамеико, Е. С. Агапов, В. Ф, Анцсимов и
др. Пол ред. В. Б, Никоноьа. -М.: Наука. 1983. -272 е.
, Micbel A. Automataalion des measures de longneur par arjalysc des bHKges inicrfc-
rennelles// Bur. Nai. Metro]. Bui. Inf. 198!. V.i. N43. Р.ЗЙ-41.
. Пресс Ф. П. Фоточувствигельные нрчбиры с Ен1рядопои связью. - М.: Рално н
связь, 1991.-262 с.
. Аксененко М. Л» Бараночников М. Л. Приемники оптического и;и]учсдля, -
М. Рапно и связь, 1987.-296 с.
102 Компьютерная обработка айналав
33. Полупроводникпвыс формирователи сигналов изображения. / Пол ред. П. йес-
оерсаиир.-М,: Мир. 1979. -573 с
34. Fietzsch К. Hilerferainelrie roil sloread slicuendem Elemenl //Oplik. 19SL Bd. 58,
H3, SJ73-192.
35. Гуров W. П. Автоматизация намерений температурного удлинения образцов в
высокоточных интерференционных дилатометрах методами машинной обработки
изображений // Метрология. 1982. N5. С 3-Й,
Глава 3. Дискретизация и квантование 1№
Глава 3
Дискретизация и квантование
интерференционных сигналов
Интерференционная картина, получаемая при сложении и квадратичном
актировании когерентных световых волн, характеризуется непрерывным изме-
интенсивностн света в поле интерференции. Преобразование полученного
■женил в интерференции нный ем тал с дискретными значениями аргумента
дискретизацией шперферешшопнои картины- Такое преобразование часто
раесмагрщщгь как резу31Ыаг линейной операции свертки. Преобретвание по
1гепрерытюго тперфере!потошюго сигнала в сигнал с конечным множеством
пни называют квантованием. Операция квантования связана с округлением
|нченнн непрерывного сигнала, поэтому эта операция ацияетси нелинейной.
Погрешность днекронзацин можно разделить на две состацня клине: погреш-
;ть усреднения п^гутри светочувствительного элемента н погрешность, обуслов-
1нная |Сомстричссквы расположением элементов дискретизации в плоскости
i,y). Эти сиетавляюгняе почетности можно исследовать ид основе матсмата-
;кою аппарата интегральных преобразований [1, 2] и конфлюентвого анализа
для детерминированных и случайных отклонений параметров дискретизации,
свою очередь, шнрешность квантования обьтчпо рассматривают как результат
детерминированной нелинейности и случайною шума квантования. При
используют статистические методы анализа [4].
В настоящей главе рассматриваются основные требования* которые необхо-
учигыватъ при дискретизации и квантовании сигналов в задаче со случай-
начальными условиями (см. разд. 1 ни. 1). Даны опенки влияния погреш-
ннскретизацин и квантования на точное п» определения фазовых характе-
;тик интерферепниоппых сигналов.
1,1. Дискретизация и квантование непрерывных
Сигналов
Пусть функция six) определяет исходный непрерывный сигнал- Операция
^кретнзации заключасюи в выполнении преобразования вида
104
Компьютерная обработка сигналов
1
а)
-Ь О
U)
О
Ь ■*
Я(л-Ш)
б)
Ах кАх (ХП
Ш {K-])\x х
Рис. 1- Прямоугольная функция
элемента дискретизации (а) и
функция дискретизации (5)
где в простейшем случае апертурная
функция элемента дискретитции h{x) имеет ннд
2Ь-шцрнка элемента дискретизации.
К-1
Ф) = ^ Z Ф " A4t)
[-0
-функция дискретизации, zlt - шаг
дискретизации. Л-нормирующий множитель,
такой, что площадь под графиком d{x) равна
единице.
Вид функций h(x) и ф) иллюстрируется
на рис. 1.
Опнал s(x) можно представить
последовательностью импульсов протяженное^^
2b = Дх, дыеющах амишлул.ы, радптде
значениям сигнала в точках {k-t-\)Axr То|ла
получим ступенчатую функцию, показанную
на рис. 2. а именно
?(*) = X *(*4*) ''С1" Aik + 4*/2).
(2)
*=ii
Рис. 2, Ступенчатая
аппроксимация непрерывного сигнала
После перехода к пределу при Ах -> 0, по-
луч ни
Такое преобразование начнется операцией свертки, коюрая имеет следующие
важные свойства:
■ дистрибутивность
а(х)*[Ь(х) +■ ф)1 = д(*)»ф) + Ф)*Ф)
■ коммутативность
a(j)*A(j) = b(x)*<i(x)
ш ассоциативное|Ь
[ф)*ф))*ф) = а{х)*[Ь(х)*с(х)] = а(х)*Ь(х)*ф).
Глава 3. Дискретизация и квантование
105
одчеркнем, что при условии существования интеграла (3) операции, свертки
вносит ограничений па ння апертурной функции элемента дискретизации
*)■
Процесс дискретизации удобно рассматривать в частотном представле-
нн, получаемом в результате преобразования Фурье исходного сигнала.
1КШЯ дискретизации определяется в частотной области следующим
ажепием:
и> = р|<ад|=и,2>и-,и,), (4,
ьо
F| - ;■ обозначает опернняю преобразования Фурье, Ua = Л/{Ах). Вид функции
и) показан на рис. 3. Таким образом, процесс выборки дискретных чпачений
гналд вызывает появление спектральных порядков kitj, k> 1.
d{x) D(u)
0 4i i 0 us
с 3- Функция дискретизации и ее частотное представление
ДискретизованнЬ|Н сигнал имеет вид произведения двух функций,
оэтому, согласии теореме о свертке, его спектр равен свер1ке спектров;
'и) = S(u)*D(u). Поскольку с учетом (4) и свойств частотной симметрии
еобразования Фурье (см. гл. 4) можно записать
■л
ы) = ад*^Х %и-кщ),
*=—■
псктр декретированного сигнала представляет собой елекгр исходного
гнала, периодически повторенного (перенесенное) по частотной оси с
агом на, как это иллюстрируется нл рис. 4, включая диапазон отрицатель-
частот.
Теорема дискретизации формулируем Слслуюшны образом:
Дли того чтобы спектр исходного сигнала в области частот (- им; и») не
ажалея в Пропессе дискретизации, необходимо и достаточно выполнение
рансысцш ш > 2им-
№в Компьютерная обработав сигналов
ч -и* О
Рис- 4. Формирование спектра при дискретизации сигнала
Спектр сигнала, очевидно, можно выразить в форме
(5)
Выделим из этого спектра чдстсчный интервал (-и У2 , и^/Т) и вьшолннм
обратное преобразование Фурьег В результате получим
s(x}= ^ $(к/и*) s\nz\ujx - к/нл)\.
Отсюда следует теорема Шеннона:
Если для частоты дискретизации ft* справедливо неравенство г^>2нц, то
сигнал s(x) восстанавливается однозначно по ею днекретньгн зиаченнци
sik/uS),k = Q,±]
Функция
атс|иЛ>- it/it,)] =
я\п[т>(х- к/ид)}
тЦх - к/иД
называется интерполяционной функцией Шеннона.
Дискретизация узкополосных сигналов
Модель типичного уакополосного сигнала имеет вид
$(*,£) = ^*) ^,(д)соз(£-ь2лвох)-ьли).
Ще So(x) -фоновая сосгавляюшая, s„{x) -огибающая, изменаюшисся медленно
но сравнсцию с периодом l/Ua, е- начальная фаза (некоими параметр) в точке
х = 0,Иц- частота, п(х)- аддитивный пгум. В результате дискретизации получаем
Глава 3. Дискретизация и квантование
5, (н+и
■"-'«с -m-+mb
-"и 0 "с
«J-"q U^+Of,
Ряс. 5. Формирование спектра при дискретизации квазипериодического сигнала
%£) = d(x) [s(x,£)*h(x)l
в этом спектр сигнала определяется выражением
[^д. £)} = 3{ы) = Я(И)*ГЗД + 5|{м - иа) + S[(u + ио) + Л(и)] ВД. (б)
сь JV(w) обозначает амплитудный спектр аддитивного шума, Н(и) - цреоб-
аэованнс Фурье апертурной фупкции элемента дискретизации. Для функции
■а (1) прямоугольной формы нулевые значенлл Щи) имеют место на частотах
= 1/(2fr).
Спектр дискретияованного сигнала имсе| вид, показанный на рис. 5, При
работке спектра обычно выделяют составляющую ■£,!> - ita).
Рассмотрим методику выбора шага дискретизации ужополосцого сигнала.
106
Компьютерная обработка а1шал°в
Если часюга на 1"армонического сигнала априорно взвестпа, то шаг
дискретизации Ах определяется согласно теореме дискретизации, а имении, нужно
выполнить условие ио<(1/2Лх), j . е, Лх < 1/2йп, Таким образом, шаг дискре-
тшации должен быть меньше половины периода гармонического сигнала.
Если частота иц не известна точно, то необходимо уменьшать шаг диск-
рс1изации с |см, 4ioGbj фазовая погре ость Зе^диоАк не превышала
допустимых значений. Например* сели нужно определить начальную фазу i
с малой погрешностью <fc<2T/10Q0 рад при дш/и0<5%, тогда
Ах < &/дщ * 0.12/щ.
Если еишал s{x) имеет протяженный спектр с градичной частотой им, то
выбор шага дискретизации определяется по теореме дискретизации:
Ах < \/2ии-
Для уменьшения влияния спектра шума, попадающсщ из соседних
спектральных порядков, нужно настолько уменьшить шаг дискретизации, чтобы °н
не превышал значения 1/[2и*.), где и„. - сое i андяющие пгума с наибольшей
частотой. Следует иметь в виду, что вследствие стилистического характера
шума можно строго определить сю спектр мощности, но не амплитудный
спектр. Поэтому результат преобразования Фурье шума может существенно
изменяться от реализации к реализации. Некоррелированный шум ныеет
спектр бесконечной прО|Яжснносги. Поэтому перед дискретизацией сигнала
необходимо выполнить пизкочасЮ|ную фильтрацию для получения
"окрашенного" шума с граничной частотой и„. < На -
Влияние формы элемента дискретизации
Операция дискретизации определяется формулой
b(x)-d{x)U{x)*h(x)}.
Выше был рассмотрен случаи ступенчатой аппроксимации нулевого порядна,
как это показано на рис. 1 Функция h(x). вообще говоря, может иметь
произвольную форму. Однако в любом случае нужно имей в виду, что форма
и протяженность функции h(x} влияют па спектр сиги ала за счет умножения
спектра этого сигнала на функпигс И{и)= F\h{x)\ (рис. 5).
Приведем просюй нрныер. Пусть h(x) = reel {x/7h). Соответствующая
функция в спектральной области будет равна
Щи) = ыС{2иЬ) = ?ifl(^.
2киЬ
В этом несложно убедиться hciюсредственимм интегрированием функции
косинуса:
Глава 3 Дискретизация и квантование
109
\/Щ J cos{2xux) dx =
Imtb
"оэтому составляюшие спектра сигнала при и > 0 будут ослаблены вплоть до
лного подавления на частоте и, = \/2Ь (рис. 5).
Таким образом, можно сделать следующие выводы.
Влияние размера элемента дискретизации на спектральную сос|Ввляюшую
частотой и тем меньше, чем меньше отношение 2Ь/Л, |це Л= ]/и- период
й составляющей.
Во избежание энергетических потерь при дискретизации пепрерьшною
|ала уменьшение размера цемента дискретизации должно сопровождаться
ответствуюшим по&ьвиепием частоня дискретизации,
нитное преобразование Фурье
Всякий реальный сигнал имеет ограниченную протяженность. При зюм
есто обычного преобразования Фурье
S (и) = \ i{j) exp(-}2шх) dx О)
- -л
сем финиетое преобразование в конечных пределах
х
S{u, 2X)=\ s(x) схр(-]2шх) dx,
-i
2Х-интервал регистрапии сигнала.
Для случая непрерывного изменения независимой переменной х можно
записать:
S(uy 2X)=\ i(*) recl(*/2T) ехр(-;2яь*) dx = S{u)*s\nc(2uX), (Я)
Отличие (fi) от идеальное преобразования Фурье (7) иллюстрируется на
с. 6 для отрезка сигнала протяжен нос ш L - 2Х. Заметим, чго середина
езка L при этом смешена по горизонтальной оси на интервал X. Согласно
войегвам преобразовании Фурье (см. гл, 4), это вызывает фазоньгй сдвиг
2гшХ, пропорциональный значениям частоты и. iro не изменяет модуль
спектра.
Для случая дискретных оiсчетов, взятых в ючках хк = kAx.r
fc=(X] 2Х/Ах, получим спектральные линии на дискретных частогах
и = к/2Х. Частота и, = ] /IX называется фундаментальной частотой
финитного преобразования Фурье.
tfP Компьютерная обработка сигналов
s{x)
1ВД1
У\),
\$,(и+0\
l*i
1
•и* О
1ЗД1
1
Щв-ИаИ
и*
sjuc(uL)
Условие для нучси
Эффект "растекания"
спектральных
порядков
Рис в. Изменение опекгра при ограниченной протяженности сигнала
При этом
S
S{ut*2X) = j s(x) cxp(-j2mw:) dxy
[9)
-к
ъ с. финитное преобразование Фурье связано с коэффициентами С ряда
Фурье, а именно:
Иначе говоря, финитное преобразование Фурье сводится к нахождению
коэффициентов ряда Фурье для функции $(л), периодически продолженной с
периодом L = 2Х (рис. 7). При пепелом числе периодов, укладьпшющихся па
отрезке L, происхоннт искажение спектра.
Квантование непрерывных сигналов по уровню
На рис. % показана нелинейная характеристика пропесса квантования,
представляющая собой сумму непрерывной (линейной) составляющей и
пилообразной фулкпии, дотирую можно описать 112] рядом Фурье:
Глава 3. Дискретизация и квантование
111
порнпднческос
продолжение
s(x)
-►со х
ёРис- 7. Трансляция отрезков сигнала ограниченной протяженности
3
5/1
Villi
-1/2
-312
-■-5/2
-* J
J(j) = s{x) ■+ X l/(tw)s\n[2njts(x)l (10)
где для иаглвляоети шаг квантования
принят равным единице.
Если квантованию подвергается
узкополосный сигнал
s{x) = зл(х) sin(£-f 2mttix),
то в результате квантования подучим
^
Ф^
+
1/2.У
/
/
/
/
61
(х) - X Л- siutl(f ■+ ^JBWf),
(11J
*S^
=1.1.5
^Г
где коэффипиенты Л, определяются дли
случая много большей амплитуды сигнала
по сравнению с шагом квантовании по
формуле
А, = (2/W*0 X соз(2Ажл - ня/2 - я/4).
Рис. В, Передаточная
характеристики устройства квантования
по уровню (а) и погрешность
квантования (б)
В результате амплитудная характеристика квантованной периодической со-
стадцяющей изменяется нелинейно, как это показано на рис. 9. Такая
нелинейность определяется "перетеканием" часги энергии исходною сигнала в
нечетные комбинационные гармоники (11) кратностью до (St/As)**, где As-
шаг квантования.
Нелинейность изменения основной гармоники при наличии фоновой со-
112
Компьютерная обработка сигивпов
сгавляющеи то, т. с при условии
Лч = 5л + ■&&> оценивается значением
3iui* (1/2я}Аз/Хм- Для получения
пренебрежимо малых фазовых погрешностей
требуется обеспечить число уровней
квантования согласно условию di/su< Se/lx,
т. с. As <(0.5..Л)-10*$*, что соотвсгствуст
разрядной сетке 7-8 двоичных разрядов.
Таким образом, можно сделать вьшод,
что наличие даже небольшого аддитивного
шума приводит к снижению гармонически к
искажений до пренебрежительно малого
уровня, если характеристика АЦП линейна,
Поэтому основное внимание следует
уделать не дроблению разрядной сетки, в
обеспечению линейности АЦП.
Совокупность значений сит ал а на входе АЦП можно рассматривать как
значения случайной величины с iLUothoctt.ki вероятности р(.ч). Coiiibcho (10),
квантованный сигнал 5 отличается от исходного сигнала на величину &. Если
сигнал рассматривается как случайный, ю погрешность & = s -s является
случайной величиной, представлаюшей собой шум квантования с плотностью
вероятное!и р(Щ п дисперсией ai = <(&)* >-
Плотность вероятности значений квантованного сигнала определяется
выражением
Рис. 9. Передаточная
характеристика устройства квантования
для максимальных значений
сигнала
1$> * 5>. а> -1),
и
т. е. является последовательностью ^функций (см. рис. 5 гл. 1), положение
которых на оси i соответствует значениям i-ых уровней квантования s,-
Множители Р, представляют собой вероятности квантовал m.ix значений
сигнала Sj,
При квантовании с округлением (рис. 8, а) и четном числе уровней N
значением : = - 1/2. значение Sh-n*i = 1/2 и т. д.
При равномерном кванювании с шагом As формулу для вычисления
ПЛ01НОСГИ вероятпосги значений квацтовоц? сигнала можно переписать в виде
J-I (I l^l-lf -1
Для анализа пропесса квантования удобно использовать характеристические
Глава 3. Дискретизация и квантовании
113
функции случайных величин (см. разд, 1 \j\- 1). Характеристическая фунажия
j(w) квантованной случайной величины может рьць вычислена при помощи
преобразования Фурье плотности вероятности p{s). Согласно теореме о свертке
с учетом селектирующего свойства ^функции в области w, Ht (12) цолучны
fiw) = 2_,/5 (и1 - iAw) sinc[ (]/я) (w - iAw)As ],
ше. как и ранее, sine a = sin (яа)/(яа). Следовательно, характеристическая
функция квантованной случайной величины определяется отсчетами
характеристической функции/, пеквантованной случайной величины j, взятыми через
интервал Aw = 2л/As. Окружение по вероятности в пределах шага квантования
As, очевидно, сводится в области w к умножению на ыпе-функцпю.
Можно показать |4[, что характеристическая функция шума квантования
имеет вид
lfJ(v) = '^ft(iAw)s\nc[(l/x)(w-iAw)As],
(13)
^Ограничиваясь зпачением i = О при условии As « t7Jt где of - диперсия значс-
аюй еитала. найдем приближенную опенку
|№0 й sinct 0/*) w^s ],
^которая соответствует характеристической функции спучайной величины.
J равномерно распределенной в пределах шага кванювания As.
Извсыно (см. разд. 1 гл. 1), что характеристическая функция может быть
разложена в ряд по моментам случайной величины. Используя это свойство,
надием дисперсию шума квантования в результате двукратного
дифференцирования:
„0 - (A)Vl2.
Если в (13) учсс1Ъ также значение характеристической функпии при i = 1,
?ыожно получить более точную опенку дисперсии шума квантовании
\4 = (Asf/n + {1/^ {Asfcxpi - 2ло?/(Аг):]. (14)
к
фтор ос слагаемое следует принимать в расчет при малом числе уровнен
^квантования, когда значение (As)2 соизмеримо с дисперсией значений
^Сигнала ctf.
114
Компьютерная обработка сигналов
3.2. Дискретизация и квантование распределения
интенсивности в интерференционной картине
Дискретизация изображений в высокоточных инГерферометрическнх сне-
гемах осуществляется главным образом двумя способами: при
электромеханическом координатном сканировании н электронном сканировании (5, 8].
Электромеханическое сканирован не осуществляется с помощь» днафраг-
ым. перемещаемой шаюьым приводом, либо на основе принципа стробирова-
ния интерференционного сигнала при непрерывном сканировании (развертке)
изображения, Преимуществами первого способа ннекретизацин янняются
возможность обработки крупноформатных изображений при большом числе
точек дискретизапии. высокая однородность преобразования в массиве точек
дискретизации, высокая чувствительность по световому потоку в каждой
отдельной точке. Недостатки электромеханического сканирования состоят в
малом быстродействии и нестабильности взаимного расположения точек ннс-
кретизлции. Эги недостатки в значительной мере устраняю гея при электронном
сканировании на основе использования телевизионных передающих трубок и
полупроводниковых мноюэцсментньгс приемников излучения, характеристики
которых приведены выше в разд. 4 гл. 2.
Приняю различать два подхода к дискретизации интерференщгоплых
полей: восстановление фазовых характеристик по единственной
интерференционной картине (или интерферограмме), которое обеспечивается при
дискретизации распределения интенсивности света, и восстановление фазовых
характерисI ик при анализе набора интерференционных картин с заданными
фазовыми соотношениями между ними, т, е. так называемом прямом
восстановлении фазы в дискретных точках []б].
Дискретизация распределения интенсивности в ннтерферограмме может
быть выполнена при невысоком быстродействии регистрирующего устройства,
в частности, с использованием приемников излучения, работающих в режиме
накопления (см. разд, 4 гл, 2). Прн анализе "жцвой" интерференнионнои
картины во избежание снижения видностн из-за смаза изображения при
микровибраниях требования к быстродействию повышаются, но остаются
умеренными: время накопления, как правило, может достигать нескольких
имллисекунд.
Прямое восстановление фазы можетбьпь выполнено при обработке набора
непрерывных ещналов, изменяющихся во времени но заданному закону, или
прн обработке набора зарегистрировалпьгя неподвижных интерференционных
картин (иптерферограмм), Неподвижные ишерференпионные картины с
заданными фазовыми соотношениями между ними получают, например, за счет
управлпемого перемещения опорною отражателя в интерферометре.
Глава Э. Диснрвгиаиция и квинтование
115
Из рассмотренных особр|цгостей процесса дискретизации сигналов следует.
что наряду с погрешностью, обусловленной физическим процессом
фотоэлектрического преобразования (дробовой шум и иные источники помех - см. разд.
2 и 4 гл. 2), в системе компьютерной обработки интерференционных сигналов
необходимо учитывать специфические составляющие погрешности. При
дискретизации рас|феделения интенсивности основными источниками noipoiu-
пости являются неравномерность чувствительности приемника излучения по
долю, отклонения размеров и шага светочувствительных элементов, шумы,
связанные с процессом считывания сигнала в мцогоэлементньгх приемликах
излучения.
, При прямом восстановлении фазы устраняются влияние неравномерности
чувствительности и некоторые составляющие шумов считывания
фотоэлектрического сигнала, однако возникают дополнительные погрешности,
связанные с неточностью фаговых сдвигов, особенно при рстстрапии
интерференционных сишалов на повышенных частотах. Общими источниками
щлрешностей являются геометрические искажения и внешние шумы, в том
числе ложная интерференция, нелинейность процесса регистрации, фоно-
име засветки и т. а.-
Рассмотрны особенности процесса цискретно-анало^вою преобразования
двумерной интерференционной картины. Пусть функция s(x,y) = &1(х,у). где
/J- постоянный коэффициент, описывает исходную непрерывную
интерференционную картину, В идеальной системе дискретизации значения
интерференционного сигнала можно представить в форме
J(ft, 0 = d(x„у,) [sfay)*h{x,y)l
где
k(x,y) = Kc4x/2b,y/2b)-^ \1[\у\1Ьь' 05)
■-апертурная функция евстцчувствительпой ячейки квадратной формы
размером 2Ь х 2Ь,
К ] Г. ]
двумерная функция дискретизации, do - как и ранее - норыдрующнй множи-
"Ь. К х L- число ючек дискретизации. Ах, Ау-шът диекретиза1щи.
Простейшим случаем применения метода идскретизании Можно считать
пользование двух фотоприемннков со смещенными на к/2 по фазе полями
ния [5). При этом используются только две точки дискретизации, г. с.
116
Компьютерная обработка анналов
К = 2, Ь= 1. В работе [6| впервые был предложец метод двумерной ннскре'™-
зации с использованием четырех приемников излучения, т. е. К = L = 2-
Недостатком простейших методов дискретизации является необходимость
задания точпых фазовых сдвигов между точками Дискретизапии в условиях
ацриорпо неизвестноi<j распределения фазы в Картине интерференции. В
этих методах прели слагается, что интерференционная картина содержи!
переменную составляющую с единственной н неизменной
пространственной частотой на (в двумерном случае-с парой частот (иог щ)), т. с.
интерференционный ситная в сечении интерференционной картины н
отсутствие Но мех определяется выражением
s = in -I- л„ cos(s + 2ли&х).
При воздействии помех интерференционная картина содержит также
дополнительные часю|Ные составляющие, и условия теоремы дискретизации для
них не выполняются. Применение простейших методов дискретизации
приводит при этом к значительным погрешностям.
Высокую помехоустойчивость ныеют методы дискретизации, в которых
выполняются опенки характеристик сигналов и помех. В этом случае шаг
дискретизации по фазе основной гармотпйи ныбирасгся заведомо значительно
меимним, чем л/2, и число точек измерения соответственно возрастает-
Учитывая выводы теоремы отсчетов, анализ методов дискретизации удобно
вести в области пространствен ных частот.
Рассмотрим вначале процесс усреднения интерференционного сигнала
вслелстипс влиядия функции (]5). Реальную двумерную интерфереипнонцую
картину представим я форме
J(*. У) = Ф* У) +■ ** сг>*1& +Л*> У)] + Щх* УУ (1 б)
где Дя,у) - распределение фазь!» и составляющая п(х,у) учитывает влияние
помех. Аддитивный шум в (16) будем считать гауееовским, причем
<fi{x,y)> = 0,<n1(x,y)> = oiR»(r)=(£c\p(-r/r%), г = {х* + у7У'г. Влияние
усреднения удобно рассмотреть в области прострдиственныд частот (и. v) с
учетом (82) из гл, ] и (16) в вдие
JC«lv) = F(*o(j:,>)+JA™]ft+Aa:,j)] + w(J:,>')} H{u.v) \ (1?>
где S(u. v) - результирующий iipocipaHCTBeHiio-часштный спектр. F (-}, как и
ранее, обозначает операцию преобразования Фурье, F} h(xT у) ■ = Н(н, v) -
оптическая передаточная функция (ОПФ). В интерференпионной системе
ОПФ определяется прсобра^ваннсм Фурье напряженности электрического
поля световых воли. Поэтому при вычислении пространственно-частотного
Плана 3. Дискретизация и квантование ц7
спектра сигнала (16), пропорционального интенсивности спаи, в формуле (17)
учиты&нс1ся квадрат модуля ОПФ,
Информационная составляющая исходного двумерного спектра имеет вид
S,(u -u^v-vo)- (1/2) F J ja схр[/(й +Дд, у)] (.smc^D) a{nc\2vD),
где 2D -поперечный размер светового пучка.
При двумерной дискретизации и прямоугольной функции ячейки,
определяемой рыражепием (15), имеем в (]7)
I Н{и. V) = ьшс2(2иЬ) зшс?(2т*). (isj
Следовательно, усреднение приводит к ослаблению соствляятоших спектра (в
том числе помех) с пространственными частотами в направлениях х и у,
\и\> \/2Ь и I v I > ]/2Ь. Это повышает помехоустойчивость по отношению к
высокочастотному влянтивному шуму, длина корреляции га которого меньше
размера 2b.
Для уменьшения случайной потрепигости требуется увеличивать размер
участка усреднение 2Ь. Однако это не всегда возможно- Во-первых, интерфе
peimnoimafl картина ограничена по протяженности значением 2D. Во-вторых
увеличение размеров участка усреднения из-за фильтрующего действия, онре
дедлемого (18), еннждет также величину ипформаниоппой составляющей
особенно при увеличении пространс1 венной частоты ш> (рис. 5), В-третьих
возрастают систематические погрешности, обусловленные влиянием фазовых
изменений волнового фронта при нелинейной функции Jfc, у) в (16). Наконец,
в-четвер[ыя, усреднение не устраняет влияния фоновой составляющей
S^u, v).
Таким образом, выбор размеров участка усреднения Предсгаьляст собой
компромисс между необходимостью снижения случайной и систематической
Составляющих погрешности. Суммарную погрешность удобно характеризовать
средним квадратом погрешности [71 в форме
*>=\\ Г 11 - Я(ы, v) ?С(и, v) + Щи, v) I* CUu^ v)l du dv.
(19)
тле С(н, v)- спектральная плотность полезной составляющей, Grfjt, У)-спек-
траль пая плотность аддитивного шума, Н{и, v) -двумерная частотная
характеристика по интенсивности.
Первое слагаемое в (1У) характеризует систематическую погрешность
усреднения полезною сигнала, а второе - случайную погрешность, связанную с
влиянием помехи. Образование ентала ошибки наглядно иллюстрируется
схемой, показанной на рис. 10.
118
Компьютерная обработка сигналов
Это соотношение можно переписать в иной форме, используя известные
автоковариапиенные функции сигнала Я(ф и шума R*(£) в виде
|ДС
A(£7) = f{ 1-ЯС«^)ГКд^^) = г1 W(n,v) '}.
^®-* ту)
Pric. 10. Схеми образования
сигнала ошибки
Уменьшить как случайную, так и систематическую соствляяющие
погрешности можно при использовании двумерной дискретизации и компьютерной
обработке иптерференпионной картины.
Отдельная чувствительная ячейда имеет
малые размеры и практически не вносит
систематической цофешности
усреднения. Набор ячеек, расположенных по
всему сечению светового тгучка^ позволяет
максимально использовать полезный
световой поток и уменьшить случайную
составляющую погрешности.
Дискретизация приводит к
образованию дополнительных спектральных
порядков (см. разд. 1), Учитывая соотношедис между пространственной частотой
ц* и шириной интерференционных полос А, щ = \/А> получны л/ип~АУАх.
Поатому при условии -Л «2D и шаге дискретизации Ах« Л/2 ино^ормацн-
онные составляющие соседних спектральных порандов практически не цере-
крываются. Однако поскольку спектральная полоса шума и*.» uQl дискрети-
знняя шума приводит к перекрытию cm спектральных порядков н появлению
дополнительной соетавлятошей в полосе полезного сигнала (рис. 5). Как уже
отмечалось, влияние шума снижается при выпоннеции предварительной
низкочастотной фимырашш сигнала.
В предьщушем разделе показано, что при дискретизации непрерывный
сигнал s(x) земеняетея рядом $(%)= г(Ь1т), гас к = 0, 1,.,. . К- 1» число точек в
последовательности равно К, а непрерьпнюе преобразование Фурье -
дискретной последовательностью £(и„) = S(n). Соответствующая пара дискретных
преобразований Фурье имеет вид
$(«„) = S(nAu) = Ах ^ sik) еяр(-У2якй/ЙГК
t-\
Глава 3. Дискретизация и квантование J19
1
s{k) = 5(Ш) = Ли X 5(и-) exp(/2**/T/W).
В рассматриваемом случае Аи/ио = A/2D. Есди в поле зрения наблюдается,
например, 20 интерференпнонпых полос, то разрешение по частоте сосгавит
0,05но, Такое разрешение часто является недостаточт.п^ Для увеличения
разрешения требуется увеличивать число точек дискретизации А', а также
доопределять функцию х(х) в Интервале, большем 2D, что может быть
источником дополнительных ио|рсшностей.
■ Указаннме трудности: в нзвесгной мере преодолеваются при выполнении
фильтрации непосредственно путем дискретной свертки последовательности
отсчетов интерференционного сигнала с апертурцой о>упкцисй элемента
дискретизации, а именно, в одномерном случае
SW = Z4'H*-0- (20)
I
Формула (20) определяет процесс дискретной (рилмрации сигнала,
Псрсдагочную о>упкцию днекретнош фильтра Н{п) можно выбрать в виде
t Щп) = тес![(|г - л„)/2л*1 =
где Им - itv/Au. Эту функнню можно далее представить в форме
■л
Н(п) .Jk + 2^A(t) еоз(2л*л), {22J
•=]
где ho = 2ли, Н(к) = 2лй sinc(2foj4) - значении импульсного отклика цЬильтра в
точках Xt = кАх. С учетом копечпого числа точек дискретизапнн выражение
(22) предствляястся в форме
К
Н&) = Ы +■ 2 £ 4fc) ^з(2я*л). (23)
ti
Для умещ^пения осцилляции, вызванных конечным числом точек
определения й{А), спад передаточной функции па дискрешых частота* выше ы.ч
следует выполнять более плавным, например, с использованием различных
весовых окон [11]. Однако это может вызывать краевые искажения из-за ослабления
полезною сигнала. Заметим, что передаточные функции виня (21) или (23) не
являю гея оптныальнымн. Вопросы оптимальной обработки пос ледова i ель нос-
тей отсчетов интерференционного сигнала рассмотрены в последуюшнх щавах.
1. 0 < п < 2nv,
0, л > 2пч,
(21)
120
Компьютерная обработка сигналов
Выше рассмотрен пропесс дискретизации детерминированных двухлучевых
ннтсрференпионньгА картин при их случайпом положении (начальной фазе)
относительно приемника излучения. Можно показать [2], что нидобньш подход
справедлив и лри дискретизации интерференционных картин, рассматривав
ымх ядк двумерные случайные поля, В частности, в этом случае справедливо
соотношение
й(н, v) = Giu. v) * I D{uT v) F. (24)
где G(u, v) - спектральная плотность дискретизированпой, a G(u, у) - исходной
иитерферсидионной картины, D{u. v) - F \d(x, у) }- результат преобразовании
Фурье функции дискретизации. Следовательно, основные вьятоды для задачи
со случайными начальными условиями обобщаются на задачи со случайными
паряметрами или внешними воздействиями на основе использования методов
спектрального и корреляционного анализа.
Погрешности дискретизации и квантования распределения
интенсивности в интерференционной картине
Погрешность диекре i изации обусловлена тем, что шаг дискретизации не
сохраняется строю петмепщ.ш. В результате получим последовательность
значений переменной составляющей интерференционного сигнала
s(k, I] = ХдСоъ[£-\-2юь\(кАх-\-&К1<) -\-2т^(1Лу +■ ду<)]. (25)
Следовательно, фазовый шум дискретизации определяется выражением
УКХ. У) = 2я(иа&, и- vuSyi)
НИН
ф, у) = л/2 (2я/Л) (<Ь, +■ Syk) sin(0+- л/Л).
где f$- угол Ориентации нормали к направлению линий экстремумов интерфе-
рет(ионных полос, определяемых (25). Наибольшее значение фсУ у) имесг при
&= л/4 - Если погрешности дискретизации в направлениях х и у не коррели-
рованы н ныешт одинаковые дисперсии, то можно считать, что
а, = (4 я/А)<7ь (26)
Пусть распределение интенсивности преобразуется в интерференционный
сигнал при помощи многоелементного приемника излучения ПЗС (см. разд. 4
гл. 2). Поскольку мнкро^лектронная технология изготовления ПЗС
обеспечивает погрешность шага дискретизации примерно £х= 0,3 мкм ]8], то при
гауссовском распределении noipe остей 0*^0.2 заш. Тогда в типичном
Глава 3. Дискретизация и квантование 121
случае интерференционных полос ширипой Л= I мм получим
<Ту * {4-10"*) 2ir рад. Следовательно, геометрическая точность ПЗС
обеспечивает получение малой погрешности измерения фазовых характеристик
интерференционной картины.
Погреазоостъ обработки последовательности отсчетов интерференционною
сигнала $(д>, у,) связана равным образом с неточностью оценивания
пространственных частот ("a vn) ц со случайными погре остями квантования вьпод-
ного стндла ПЗС по уровню, которое необходимо для цифрового
представления значений ^л,ys)t Погрешности Su = иц- иц, Sv = v0- vi> определяются
разрешающей способностью ПЗС. Дискретное представление сигнала i(-ti.yi) в
области пространсгиенных частот при помоши двумерного дискретного Фурье-
преобразования в форме
S(m, v) = X Z *(■**■ 3»i) cxp[-j7^u&/K + pl/L)] (27)
Ь0 J-О
показьшает, что разрешающая способность по частоте опредсляс1ея числом
анализируемых точек (К, L). Так, для получения относительной погрешности
5и/&,< 1-10"5 для случайного сигнала требуется иметь данные не менее чем н
2Л& точках (в направлении х). Заметам, что требуемые значения s{xtiyt}
Лстсримнированного сипгала могут быть получены интерполированием при
меньшем числе точек дискретизации интерференционной картины. Однако это
возможно при условии ограничения полосы аддитивного шума церед
дискретизацией значениями частоты Найквиста 1/{2Ах) я 1/(2Л?) (см. разд. I),
Рассмотрим iioipemnocTH, обусловленные преобразованием
интерференционных сигналов в цифровую форму, которые обсуждались в предыдущем
ршнеле применительно к обшему случаю квантования сигналов.
Выходные сигналы ПЗС квантую гея в АЦП и переводятся в цифровые коды.
Шаг квантования А: (определяющий точность преобразования) задается
разрядностью т преобразователя. Максимальное количество различных чисел,
представленньгх с помощью двоичного кода разрядности т, равно N=2M-\>
Отсюда шаг квантования составит Ач = 2sA/ft. При Цифровом представлении
шггерференциоывого сигнала остаток $, < As либо округляется, либо усекается,
В обоих случаях $ = sE + #, гас sq - пифровое значение сигнала, и погрешность
квантования заключена в следующих пределах: - 0.5 <{5,/As) <0,5 и
0<(S,yAs)< ], соответственно, при округлении и усечснни. Поскольку
значения s(x, У'/) переходят различные уровни квантования, погрешности SAXiyi)
могут считагься статистачески независимыми и распределенными равномерно
с плотностью вероятности р(<5) = \/Лч на интервалах (-As/2t As/2) при
округлении и (A, As) при усечении. Найдем математическое ожидание шума квапто-
вапия:
122
Компьютерная обработка смтапоа
-O-l
при округлении и
при усечении. Таким образом, более целесообразно использовать округление.
Олсперсия в обоих случаях будет одинакова и ранка
оУ = 114 - <Я>М$ dS = {Asfm. (28)
-"I
Гакая помеха действует надобно белому шуму. Из выражения (27) получим
следующую оценку отношения сигнал-шум
S/N ч Сй/о-л2)1-'2 = ^ - 6 дБ + 4.8 дБ.
При т = S имеем S/^V = 53 дБ & 4.5-Iff. Следовательно, представление
выходного сигнала ПЗС восемью двоичными разрядами обеспечивает достаточно
«алую случайную погрешность квантования.
3.3. Погрешности дискретизации лри прямом
восстановлении фазы
Методы примою измерения разности фаз интерферирующих волн
обеспечивают в ряде случаев более высокую точность и помехозащитноеть по
:равнеиию с методами дискретизации распределения интенсивности^ Поэтому
д^т метод измерения физической величины существенно не ограничивает
свободу выбора оптической схемы интерферометра, целесообразно вместо
рассмотренного выше Meiatia дискретизации распределения интенсивности
применить прямое восстановление фачы в дискретных точках поля
интерференции, напрвыер* методом управляемого фазового сдвига или оптического
гетеродинирования. При этом находят Кх L значений разпости фаз
интерферирующих волн в сечения пучка:
л/? ;_■?
*<М = £ ^\е + г^№ + щ] + ytx,y)\$x- кДх,у-1Ау\ (29)
fc- £•! t.-ln.
где д(-)-двумерная дельта-функция. Анализ множества значений сХ^ Г) p
[24) позволяет найти пространственные частоты (wd, v„), оценить фазовые
помехи у^Х у) и опрепелить разность фаз £.
Глава 3. Дискретизация и квантован не
123
six.y.t)
Рис* 11. Функциональная схема многоканальной интерферометрической системы
с прямым восстановлением фалы
Функциональная схема янтерферометрической системы [14J показана на
рис. П. В этой схеме сигналы на выходе оптической с нетемы интерферометра
воспринимаются познг[Н01П10-чувстВительным приемником излучения 2, ра-
ющим в режиме регистрации динамической интерференционной картины
имегошим формат К * L ячеек размером 26, Блок управления 3 обеспечваег
;ацию чувствительных ячеек и считывание сигналов, а блок 4 - измерение
Значений разности фаз, соответствующих отдельным ячейквы. На выходе
измерителя разности фаз можно получить К * L значений фазы
fc-JTI t-J-3
где
ь*-%Г.Г
JB/?.
fx, y)dxdy
•-IbfX y-lb!L
оценка информационной составляющей фазы,
lb/К ji2i/t
, 7ЫК
V-IL
p(x.y)dxdy
(30)
(31)
(32)
-оценка фазовых отклонений p(x,y) волнового фронта от идеальной
формы Дх.у). Обработка полученных значений распределения фазы (30) р
вычислительном блоке 5 позволяет определить ориентацию и форму волнового
фронта в измерителыюм идече интерферометра.
Известны фотоэлектрические измерительные системы с
дискретно-аналоговым преобразова1гаем интерференционной картины и нрвыым
восстановлением фазы, выполненные на основе телевнзиопной передающей трубки класса
]Ссектор (см., иалрвыер, [10]), Првыснецие такой трубки необходимо в тех
случаях, когда требуетсл повышенное быстродействие и высокое
пространственное разрешепие п сечении нучка, например, при контроле качества
оптических систем, и в некоторых друглх задачах восстановления волнового
фронта, Если разность фаз медленно изменяется в сечении светового пучка,
То целесообразно иецользовать твердотельные приемники излучения - фотоди-
лдные матрицы и линейки с произвольной выборкой ячеек [lrt].
Характеристики отдельной ячейки таки* приемников шлучелия блпчки к характерисгикам
124
Компьютерная обработка сигналов
фотодиода, рассмотренным в раэд, 4 гл. 2. Использование матрнпьт ячеек
позволяет повысить результирующее отношение сигнал-шум при изменения*
ориентации и формы волнового фронта.
Действительно, возможное изменение пространственной частоты ищерфс-
ренинонных полос приводит к уменьшению полезного сигнала при
интегрировании по нолю согласно соотношению (IS), Поэтому» как уже отмечалось,
требуется уменьшать размер lb ячейки» т, е. использовать Л' независимых
фотоциодиых ячеек малого размера. При этом результирующее отношение
сигиал-шум возрастает в чДО раз.
Рассмотрен особенности анализа значений <^К I) при измерениях фазовых
характеристик интерференционной картины- Отклонение распределения фазы
f{x*y} от идеализированна го обусловлено влиянием усреднения (31),
искажениями формы волнового фрон1а fix-, у) и воздействием фазовых fjK.xby). При
получении среднего значения разности фаз в сечении светового пучка в этих
условиях происходит смешение оценки равное <£&(*. у) = ^iT у) - < <р(х, у) >,
Изменения формы волновою фронта можно охарактеризовать несколькими
слагаемыми разложения в ряд Тейлора:
С'1 Су Z (Я
Негр>дпо показать, что дисперсия значений фазовой погрешности
определяется выражением
< Se{xt у) > * erv2/4KL + (1/36) [{KAxf F, ■+■ {LAyf Ft]!, (33)
где t?J - дисперсия фазовых фоуктуаций*
Из выражения (33) видно, что дисперсию значений погрешности измерения
разности фаз можно мпнвынзиривагь путем правильною выбора числа точек
дискретизации К, L. Для этого воспользуемся известными условнвыи ддч
первых и вторьгк часто! ных производпьгх |18] но Kw L. Б результате получим
a,2/(4KLY - (1/9)ГАЗД*Я + KlRAKAifYFfi] = О, (34)
crl?/(4KLy-(]/9)lL,(Ay¥F\ + K1L{AxAyyFtF>t] = 0. (35)
Их этих выражений найдем соотношение для числа точек дискретизации в
направлениях хну
Глава 3. Дискретизация и квантование
125
K = L {Ay/Ax) I ft/F, Il/?. (36)
Минимум среднего квадрата погрешности достигается при
К = (Зсг*/2^2)[ Ау/(АхУ ]' ? I Fi/П I "\ (37)
L = (3cv2V2)[ йх/Wf ]|/? I F,//? I л'\ (38)
Таким образом, выбор числа точек нискрети.зации, ео|ласно выражениям
(36М38), позволяет повысить помехоустойчивость измерительной системы с
учетом дисперсии фазовых флуктуации о*2 и искажений формы волнового
фронта F\ и F2. Например, в случае параболических искажений волновою
фронта прн условиях Ах = Ау и F, = F2 = 20 получим
K-L^SvytApIijAx)1). (Э9)
Учитывая, ч|о 0 = muo/2D, т- постоянная, погорая представлясг собой
нормированное изменение пространственной частоты в ноле наблЕОДСНив размером
2D = КЛх = LAy\ запишем
<г*/т * AratoAx. (30)
Следовательно, в этом првыерс шаг днекрегизации следует задавать в эависи-
мости от соотношения дисперсии фазовых флуктуации cv? н коэффициента
параболических искажений т для каждого среднего значения
пространственной частоты Ни. В частности, при окугствии фазовых флуктуации, т, с,
а? -► 0 шаг дискретизации можег быть сколь угодно малым Ах -> 0. Если
малы искажения формы волнового фронта, т. е, m -у 0, то таг дискретизации
можпо увеличивать. Ах -> ад, без увеличения систематической погрептости
усреднения, Меюдика оценивания погрешностей за счет анализа фазовых
характеристик интерференпиоппой KapiHHbi приведена в работе [14J,
Измеренные значения разности фаз $к,Г) дан оминались в вычислительном
блоке 5 системы (рас. 1J), после чего выполнялось их двумерное
дифференцирование для определения Пространственных частот интерферсииионпьгх
полос
2^_^*унь*ьа
ду Ау ^'
Найденные в £4lJ ил(42) величины uik) = ив + ркЛк, у(Г} = щ + ^Ш, в
которых значения Uo, v9mp, q нетрудно найти по методу наименьшие квадратов,
позволяют вычислить коэффиниенгы параболических искажений
126
Компьютерная обработка сигналов
m = 2bpA,n = 2cqA W)
Кроме этого, можно вычислить угол клина в интерферометре и угол ориснта-
Ш1и ингсрферсниионных полос, соответствен по, из соотношений
а= А((йв)а + {?о)а)1Л, &= arclg(V^
Таквы образом, обработка сигналов фатощюдной матрицы в интерферо-
ыетрической системе (рис. Ii) позволяет вводить поправки на изменение
ориентации и формы волнового фронта.
Выбор оптимального шага дискретизации Ах осуществлялся, согласии
соотношению (40), по значениям дисперсии oV значении разности фаз а
сепении пука и коэффициентов т и н, наднеппьн из выражений (43).
Рассмотренный полкан можно обобщить применитеibHO к более сложным
функциям отклонения формы волнового фронта.
Устройство прямого асе Становления фазы в дискретным точках поля* но
существу, представляет собой ьшогок анальный интерферометр. Это позволяет
измерять как среднее значение разности фаз в сечении светового пучка, так и
точно оценивать параметры волнового фронта. Число независимых параллельньгх
пространственно ршнесенных каналов и шаг пространственной дискретизации
определяются соотношением между дисперсией флуктуации фазы и дстерминн-
рованнымн отклонениями волнового фронта. При о|еутствнн фпуктуанвы фазы
шаг дискретизации можег быть малым. Если же маль1 искаже|П1я волновчш
фронта, то iuar штскретизанни можно увеличивать без увеличения систематичес-
кпй iioipcuiHoCTH усреднения по шюшади светочувствительно! о элемента.
Список литературы
1. Рсзенфельд А- Раепотновапне и обработка изображений. -Мг; Мир, 1972.-230 с.
2. ПрэттУ. Цифровая обработки изображений. - М..: Мир, 19S2- Т. 1.- ЗП с.
3. Грептилов А. А. Анализ и снигст стохастических систем. - М.:Радио и связь,
1990. - 320 с.
4. Баранов Л. А, Квантование по уровню и временная дискретизация в цифровых
сип сна л упрднцевля. - Мг; 3iiepi оаюмн-Щат. 1990. - 304 с,
5. Нагибина И. М. Исгерфсрснвля и дифракция света,-Л.: Машиностроение. 19S5.
-332 с.
6. Cook. Н. D., Mareella L. A. An aittamalic fringe соишшд inlerferoitieier For nse in
Ihe calibration of line scales /feag. liisonm. 196L Vr 650, N2. P. 129-140.
7. Allien Gr J. M,h Gay I., Joiiniei A. Sycchiouuii^ delectfon of randomly pbasemodula-
led inlerferograms '/AppL. Opl. i981. V. 20, N2. R 330-334.
&■ Арутюнов В, А., Гуров И. П.н Нагибина И- М Исследование фотоэлектрически*
преобразователей для нвтерферовпнонных н.шернтельвык систем //Оптика и
спектроскигшя. №5. Т. 59. Еын. 5. С. 1113-1117,
Глава 3, Дискретизация и квантование
127
9Г Фюншпллнпг Дж-Н Брульхарт М., Хидбер X. Р. Многоканальная система
детектирования для интерферометра Фабри-Перо //Приборы жля научных исследование
1984. т. С 7-13
10. Massie N, A, Real-lime digiial heterodyne inlerftronicuy: a system //Appl. Opt
1980. V. 19, N1. P. 154-1ЭД,
1. Капеллшш Brp КонетантлЕПинс Ar Дж., Эмилнани П. Цифровые фильтры и ик
применение, - М,; Эаертоатомнздат, 1933, -360 с.
2. Blachman N, М, Noise and its efleci nn communication. KriegCf, 1932. P, 96.
3. Петров Б. Н., Викторов В, А., Лункии Б. В., Совлуков А. С Принцип
инвариантности в измерительной технике. Мг; Наука, 1976. - 243 е.
4. Гуроа И. Л-, Нагибина И. М. Влияние параболических искажений волнового
фронта на точность фотоэлектрических интерферометров //Журнал прикладной
спектроскопии. Шб. Т .44. Ю С, 504 - 506.
- Гуров И, П. Методы и техника автоматической обработки сигналов и
интерференционных измерительных снуемая // Измерения, котропь, автоматнзания. -
М.: Информнрибор, 1990. Вые. 2 (74). С. 69 - 79.
Аксененко М. Д.т Бараночников М, Л. Прнеимнкн оптического излучение - М п
Радио н евчзь, 1987. - 296 с
7. Форсайт Д*., Малькольм М.. Моулср К, Машинные методи математических
вычислений. - М-: Мир, 1980. - 279 с.
Корн Г, Корн Т. Справочник не математике для научных работников и
инженеров.-М.: Наука, 197S.-831 с.
!•
128
Компьютерная обработке си талон
Глава 4 I
Методы обработки I
интерференционных сигналов I
на основе алгоритма дискретного 1
преобразования Фурье I
Методы анализа Сшналов в частотной области яьчяютс* широко
распространенными, поскольку позволяют эффективно использовать свойства сигна-
лов на основе Хороню разработанного матсшцн Чес кого аппарата
Преобразований Фурье. Особенности частотною описания интерференцноннъгл
сигналов были рассмотрены в гл. 1 и 3. Б настоящей главе основное внимание
уделяется компьютерным алгоритмам быстрого преобразования Фурье н их
применению для оценивания амплитудных спектров, спектров мошпости и
корреляционных функций сигначон, а юкже для постановления фазы как
аргумента аналитического си шала.
Свойства рядов Фурье н интегралов Фурье, представляющие теоретические
основы преобразоцания Фурье, известны из математических диеннплин.
Необходимые сведения можно найти, например, в Ц],
4.1. Основные свойства дискретного
преобразования Фурье
В настоящем разделе предетвляены основные формулы, определяющие
преобразование фурье и его свойства. Вначале приведем соотношения, кото-
рме характеризуют спекгральные свойства непрерывных ешиалов.
Преобразование Фурье (ПФ) действительной функции ч(х) заданной в
пределах -ю <л <•*>, является комплексной величиной
—ч
где ехр{-]2та} ^ е,/кшг - со?(2лж) - j зт(2яих).
Глава 4, Обработка на основе преобразования Фурье 129
Полагая, что соетвляяющис спектра S{u) существуют на частотах и в
интервале "» <и < -н», можно определить обратное ПФ в форме
м» = f{S{u)} = (1/2*) J S(u) схр(2?ш*) du .
(2)
Из формулы (1) очевидно, чю еиекгр действительною сишала s(x) есть
(и) = ад-;&Си)> (3)
действительная Sr{u) и мнвыая S^u) части спектра равны соответствеппо
Щи) = J s(x) соз(2тшх) dx.
(4а)
b<w) = J s(x) я!п(2лы) dx.
■ражения (3) и (4) для полярных координат будут иметь вид:
i)= S(u) | exp[-jtfu)] = S{u) crw^Hj-j S(u) sin^w),
ри этом значения модуля спектра и фазы равны соответственно
5(н)| =[%) + ад]"\
(и) = аг«В[5,(н)/5с<и)]
(«) =
S{u)
S(u)
(46)
(5)
(6а)
(бб)
О)
(8)
Заме гам, что спектр S{u) в (3) можно было бы определить также со знаком
)с в мнимой пасти, |. е,
тогда появятся знаки Mmiyc в других формулах, а именно
Щи) - - J s(x) sin(2mc) dx.
'(и)=-агс1Ё[ЗД/ЗД1.
lo избежание путапиим со знаком минус мы принимаем обычно первый
арнаит, согласно (8).
'Зач 801
130
Компьютерная обработке сигналов
Простые првысры преобразований Фурье некоторых фуикннй,
представляющих ицтерфереииио|П1ые сигналы, приведет,! в табл. 1.
Основные свойства преобразования Фурье можно кратко сформулировав
следующим образом-
L СПОЙСТВО ЛИНСнНОС|Нг
f\asl(x) + bs2{x)\ = a5,tu) + S2(u) (9J
для любых функПЕШ fi(i) и s2(x) и любых постоянных а н Ь.
2. Теорема сдвига
F [ six - 0 ' = ехр(-J2™# S{u). (10)
Сдвиг сигнала и области независимой переменной вызывает изменение
фазы, проиорининальноС значении Чисю1ы каждой сцекзральной
составляющей сигнала.
3* Повторное выполнение преобразования Фурье:
f{S(b): = s{-x) (И)
восстанавливает исходный енгнач с инверсией знака независимой переменной.
4. Теорема о производной-
EomF|j(j)| = 5(4 ю
¥{drs{xydr* = (j2miyS(u). (12)
5. Свойства четности и нечетности.
Если S(u) - Sr(u) -jS£u), то п случае, когда .s{x) четная функция, имеем
S(u) = S,(u)- чегная функция; при s(x) нечетной S(u) -- S,(u) - нечетная
функция.
6. Свойство подобия.
FUflj:)!' = (1/1 й 1)5(1*^), (13)
где и - постоянная.
7. Сохранение энерши.
ls2(x)dx^\}S(u)\2du. (14)
Из этого сljoiношения следует, что
Глава Л. Обработка на основе преобразования Фурье 131
Таблица 1. Примеры преобразований Ф±ръе
s(*)
S(u)
Иллюстрация спектра
О
Ч А
Т/АА
СО$(2яИ^}
*■ X
+5(хг+ц)'2
1/2
1
Ц
I
1) Д
и
о
sin(2^Ty)
1/2
Г
-1/2
Л ц "
-ъ
0 *
recl(V2u)
2bsinv2ub
-1/2
/
(lb
£
6 *
^iinc№-4)b]-H
+frsinc[2(J/+4)Z>]
recl(*/2A)tob(Zar^
тэг
Компьютерная обработка сигналов
J j,(i) $2(х) dx-j S\(u) Si(u) du
-ш --I
для любых сишалов J](j) и ^{л:), имеющих спектры 5,(и) и 5?{и).
S* Спектр свертки:
-i
Р|^,(Л)*^)|-Р{|5(Й 5(x-£dij = 5,{щЦи). (15)
Таким образом, преобразование Фурье, примененное к свертке двух сигналов,
рашю произведению спектроп эти* сишалов.
Дискретное преобразование Фурье
При компьютерной обрабо!ке последовательности отсчетов сишала ипчс!-
ральимс соотношения следует заменить соответствующими операциями
дискретного суммирования.
Компьютерные алгоритмы преобразования Фурье диа/реигной последома-
телъности о|счстов j(p), имеющей конечную длину Q<p^N- 1, сводят^ к
вычислению конечного числа коэффициентов S(q). &<q<,Q- 1, согласно
соотношению
JV-]
Обратимся к выражению (!) и сравнимею с (16). Формула (16) представляет
собой дискретную аппроксимацию преобразования (1). при которой функции
s(x) заменяется сгупенчатой функцией ?(}j) = s(xp) в пределах протяженносш
элемета дискретизации, гае Хр = рАх, Ах - таг дискретизации.
Таким образом, следует помнить, что выркиеннс (16) есть Приближение,
качество которого должно улучшаться при увеличении N и соответствующей
уменьшении iuaia дискретизавыи Ах.
Дискретное преобразование Фурье (ДПФ) обычно вычисляют при условии
Q = N, j. е.
%) = 5>(р)И£ (]7)
,*+
где^ = 0н1 У-ь W-- = ixp(-j2x/tf)-
Можцо Доказать, что для ялра преобра^вания (17) выполняется Следующее
тождество:
Глава 4. Обработке на основе преобразования Фурье 1ЭЗ
N-i
Nt q = 0,±N,±2N,...,
^- ю, л^о,±лгт±ж
р-0 I
При этом обратное ДПФ (ОДПФ) определяс|Ся выражением (84) гл, 1 в форме
и 1
) = (l/N)YtS(q)W>-"-
(18)
Ffl
Приведем некоторые свойства ДПФ.
, Свойство линейности:
Свойство сдвиея последовательности отчетов енщиа:
fLt<ph-0} = И^*ЗД.
Повторное вьшолнение ДПФ:
¥\S(q)' = 4-p)-
Свойсшо подобия:
F[s(ap)}= (}/a)S(q/a),
а - целое положительное число, взавыно простое с NT г. е.(д, jV) = 1,
, Сохранение энергии:
(19)
(20)
(21)
(22)
-1
W -
r<P) = (i/N)Z %)
.**
(23)
(24)
Взаимный спектр вещественных последовательностей:
£л,<Р)я<р + 0 = ЗДй(я).
Рассмотрвы ДПФ 5(^) последовательности л(р) длиной N = 2" отсчетов, тце
-целое положительное число, В Зтом случае (16) Можно свести к преобра-
вацию двух (#/2)-точечных иоеледовательностей с четными х(2р) и нечет-
Оли s(2p ч- 1) номерами, а именно:
134
Компьютерная обработки ситналон
ч/г-1 V'2-i
S(q) = £ s(2P) W -*« £ 5(2p +■ 1) W -^. (25)
С учетом равенства W*'" = - 1 получим
h/j - 1 A"'2 j
% + N/2) = ^(2p)W^-^]>\(2p4 1)^Л? = 0 tf/2-Ь (26)
Следовательно, исходное //-точечное преобразование сводится, согласно (26),
к двум (М/2)-точечным преобразованиям, N сложениям и N/2 умножениям на
W*. Далее можно заменить (Лг/2)-™чсчные преобразования на (N/4)-T0lciHbic
и Тг Д. Такая замена проводится до тех пор. пока не образуются N/2
последовательностей по два элемент. В результате элсмснил исходной
последовательности оказываются переставленными по правилу двоично -и ннерс нон
перестановки согласно новому номеру (индексу). Индекс соответствует
рефлексии ("зеркальному" офкиению) двоичною кода номера элемента в
исходной последовательности.
Вкино отметить, что обработка данных строится как рекурсивная
процедура. Б результате ДПФ свидится к m = log? N шагам, на каждом из которых 2'
преобразований по 2""' точкам выполняются в виде 2'' преобразований тго
2--*-1 тпчквы за JV сложений и /V/2 умножений. Поэтому число вычислительных
операций умножения комплексных чисел М н операций сложения
комплексных чисел А оказывается равным
М= (N/2)\ag2N, (27а)
A = NhgjN. (Ш)
Рассмотрелщщ алшрнгм носит название алюри|ма Кули-Тьюки [3J.
Исходную последовательность из jV = 2* точек можно разбить на две
цоелслова 1'сльности иным способом, а именно, на первые N/2 отсчетов ч
последние N/2 отсчетов. Тохда с учетом свойств ДПФ можно переписать
выражение (17) в виде
ЗД = У [sip) + Wf!"'2 s{p + N/2)) W\ (28)
При этом для вычисления четных отсчетов спектра получаем выражение
fin [
S(24) = '£lt<P)*s(p + N/2)]W««. q--0 Л72 - 1 (29)
Главе А. Обработка на основе преобразования Фурье 135
для нечетных отсчетов спектра - выражение
№2-'
(2q + \) = J^U(p) - s{p + N/2))W W™, q = О N/2 - 1.
(30)
г*
Следовательноh S(q) вычисляется в форме двух (^/2)-точечных ДПФ с
1Иожеинем значений элементов исходной последовател1,пости в (30) на W,
Сказанное разбиение положено в основу алгоритма Сэпди-Тьюкит назынавылго
ее алгоритмом с прореживанием по частоте. При этом ДПФ осуществляется
''форме вычислеЕгия двух (#/2)-точечных преобр азов алий при N операциях
тження и N/2 операциях умножения комплексных чисел. Поскольку
раскиньте преобразования также могут вычисляться рекурсивно, общее число
1аций определяется формулами (27).
Количество вычиелигсльных операций (27) оказываося значительно мень-
по сравнению с обычным ДПФ (16), при котором гребуе^я N1 операций
1иожения комплексных чисел. Поэтому рассмотренные вьопе алгоритмы
жучили название алгоритмов быстрого преобразования Фурье (БПФ).
В большинстве алгоритмов БПФ используется рассмотренная выше интер-
гтация данных в форме мноюмерною массива 2 х 2 * ■ ■ . * 2 = 2™, тоща как
Еодные данные нредствлясны одномерной ноелсдоватольностью. Подобный
ьод возможен и в тех случаях* когда число обрабатываемых огсчеюв
ninaN = г", г * 2, а также если N представляет собой произведение взаимно
)е|ых 4HceJi N.N2 Mi. Можно показав, чю в резульщтс несложной
:тановки отсчетов в исходной последовательности s(p) се ДПФ трансфер-
1рустся в мноюмерное ДПФ массивов размсрносщ N\ x^x.,.x^ Напри-
>, последовательность sip), состоящую из Л' отсчетов, можно преобразовать
^виду двумерного массива s{p>, p?) размерности N< •-N-.= N. При этом
Ni-l M-1
l,q1) = ^m™4£itpi>P2)W«\
rt-»
рг=0 №-1,
(31)
№1=схр(-;-2тг/Л'|)-
Lc р, = 0, „, ,/Vi - 1.
= exp(-j2n/№)'
Двумерные ДПФ (3J) можно рассматривать как одномерное /^-точечное
Шторное преобразование размерности М при замене каждой операции
[ножения на ^точечное ДПФ* а именно
ЛЗ-1
tau^) = X>^ASte).
(32)
P2=f
136
Компьютерная обработка сигналов
*и
j
*0 ^)
tfN,-l,№)
- вектор-стол бед размерности
А =
ft
ft
V WI
V WI
... №?
(1 *w,
и»нт IWl
В выражении (32) ДПФ полиномов является #?-тичсчным ДПФ, в котприм
кяжное умножение на Щ*1 заменено умножепнем на Ж|Ч|А, Последняя wj
упомянутых операций эвивалентна Nl-точсчноГиу ДПФ, п котором каждое
умножение на И*1*1 заменено умножением на И***2 ЭД|д|.
Таквы образом* в рассмотренном двумерном случае (Л', * М)-точечное ДПФ
разделяется на вычисления ДПФ коротки* последовательностей из М и Nj
точек.
EcJiii длина последователиюсти определяется црость[м числом, которое не
может быть разложено на взаимно простое сомножители, то требуется иной
подход, заключающийся в переходе к вычислениям в системе остаточных
классов [3, 4|, что позвляяет значительно уменьшить число операций
умножения. Наиболее известный алгоритмом этою вида чвляется алгоритм Винограда
(по имени автора Ш.Винограда, США). АВПФ обеспечивает вычисление ДПФ
почти на порядок быстрее (особенно для вещественны* последовательное! eii
данных), тем при использовании традиционных алгоритмов БПФ, однако
требует заметно больших объемов оперативной памяти компиютера. Другими
недостатками АВПФ являются существенное усложнение правдн перестановки
элементов обрабатываемой исследовательности и увеличение числа операции
сложения- Кроме этого, ограничение длинь1 последовательности отсчетов
реальных сигаанов множеством проецих чисел не всегда является менее жестким
условием по сравнению с дру1"ими алюрнтмамн БПФ.
В заключение приведем формулы преобразования Хартли, тесно связанного
с преобразованием Фурье 15, 6].
Интс1ралъное преобразование Хартли ещнала s(x) определяется
выражением
Sii(u) = J s(x) cas(2?mi) ах ,
Глава 4 Обработка ни основе преобразования Фурье 127
е ядро преобразования саз а - cos a -+- sin a.
Дискретное преобразование Хартли (ДПХ) с точностью до нормирующего
ожитеия есть
дм
"*Й * £ Ф) ca<2W/W).
евидно, что преобразование Хартли последовательности действительных
хсл всегда является действительным.
Связь преобразований Фурье S{u) и Хартли 5н(й) определяется простьЕМИ
тноп1еццяьш
S(u)=\SN{u) + S^-u)]/2,
S(u) = [S/fa) + М- и>|/2.
Преимуществами преобразования Хартли являются сиыметрнчность формул
ямого н обратного преобразований и возможность обойтись без комплекс-
ю представления чисед. Эти и другие свойства ДПХ обеспечивают по
авиеиию с ДПФ более высокую вычислительную эффективность при обра-
тке положительных чисел, представляющих интерференционные сигналы.
,2. Компьютерный анализ спектров
нтерференционных сигналов
Коьш||Ютсрцые проьраммы БПФ являются стандартными средстввыи лро-
аммною обеспсчедня. Па этой основе возможен эффективный компьютер-
анализ спектральных характеристик интерференционных сигналов: вьше-
'ние заданлых частотных составляющих, модификация спектров, определение
на (начальной фа^ы) сигнала, измерение фазовых спектров и т. д.
В интерферометрии используются два основных вида оптических еисгем:
уялучевые и многолучевые интерферометры. Соответственно этому, можно
едставнть две модели реальных интерференционных сшналов (ем. (1) и (2)
. 1) с различными спектральными характеристиками в форме
двудлучевой интерференции и
(33)
х, ©) = j'oOO + X ^fa) соя| J[e+2яш + ф)] f-hfl(i)
(34)
М
138
Компьютерная обработка сигналов
для многолучевой. В выражения* (33) и (14) © обозначаем вектор параметров,
п(х) - аддитивный шум. Второе слагаемое в (34) представляет собой сумму
гармонических составляющих с различными амииитулвын и кратными
частотами.
При обработке интерфиренпнонпых сигналов (33) обычно требуется
получить возможно более точные оценки фазы сигналов. Анализ сигналов (35) чаще
всею сводится к поиску положений ицтсрферснпиоииьгх эьегрсмумов |llj.
Для решения этих задач могут быть использованы метопы спектральной
обработки сигналов, обеспечиваюшие высокую помехозащищенность и
точность интерферометрнчсско|0 устройства, Однако для силтеза оптимальных
частотимх фильтров необходимо знать спектральные характеристики
полезных сигналов.
Значения интенсивности света представляют собой неотрицательные
величины и, соответственно, обрабатываемые значения интерференционных
сигналов $(х,&) в (33). (33) также являются неотрицательными.
Будем считать, что шгтерфереппиоппые сигналы предегикчены моделью
дискретной последовательности огечетов:
s(k) - sc{k) ч- ^ Jm<A) cos[/(e+ 2ш<&Ах +Мк))1 л- па{к), (35)
гае А = 0,..., К- 1, -dv-шаг дискретизации, ■Ы&) и .ч^(к)- априорно пеизвесг-
нме последовательности значений неииформатинпых параметров сигналоЕ.
Задача состоит в восстановлении значений фааы <rfk) = s + 2mt<JcAx по
зарегистрированной последовательности s(k) в условиях воздействия флуктуации фазы
и аддитивпого шума, определяемых случайными последовательностями
соответственно Ирл(Л) и njji).
Рассмофнм вначале модель (35) при М= 1, что соответствует случат
двухлучевого интерференционного сигнала
j(£) = £«(£:) л-^)со^[е + 2тьЫ^-^Пр^к)] -иъ(к). (36)
Рассмотрим некоторые свойства ДПФ, которые необходимо учитывать при
обработке JV дискретных отсчетов сигнала
Ч- L
" DFI s(x)) = S(u) = Л s(k) cxp{-jlmtk'N), (37)
где и -дискрегные значения частоты, 0< и <N- 1.
В случае вещесвыенной последовательности значений сигнала s(k) комилек-
снос сопряжение в (37) лает следующий результат:
Главе 4. Обработка не осноне преобразования Фурье 139
S \и) = £ s(k) ыр(]2яик/М) = S(-u),
к-а
т. е. 5 '(и) = Я"")- Д^я постоянной составляющей интерференционного сигнала
(компоненты с нулевой частотой) можем записать S "(0) = 5(0), т. е, эта
составляющая является веществеiпюй.
Из (37) очевидно свойство периодичности ДПФ с периодом /У, поэтому
Д#) = 5(0), т. е. N-я частотная составляющая также должна быть вещественной.
Кроме Этого, можно легко Показать, что S "{N/2) - S(N/2) и, елеловагельно,
компонента ДПФ с номером N/2 вещественна. Ей соответствует частота
Найквнста (см. гл. 3).
В некоторых компьютерных алгоритмах БПФ свойство симметрии ДПФ
вещественных последователиюстей используется в форме
S\u) = S(N-№)
(38)
.для экономии объема памяти в компьютере. Из N отсчетов сипгала обычное
БПФ формирует Л' комплексных значение спектра, которые занимают вдвое
больший объем памяти. Однако, с учетом (38). только N/2 -+- 1 из них являются
"оегговними1*. Следовательно* можно ^аномшцъ только эти отсчетм,
восстанавливая остальные но фирмулс (38). При этом упаковка выходных данньи
БПФ иногда подвергается перестановке, как это будет проиллюстрировано
вдяее на примерах спектров иитерферснимонных сигналов.
В качестве примера допустим, что сопутствующие параметры сипгала (36)
определяются формулами
W
Sb{k) = AeejtpL" (fc- kbf/ldl (39)
Л
Л
$ь,{к) = A, expf- (к - teh-)V2o?J, (40)
Ад, А> - иостоянвые.
М
w
и
* *
Рис, 1» Пример си тала вдвукпучеаом
интерферометре
[де
< iti(k) > = oi
п^(к) = 2л^д, т обозначает
отсчеты последовательности шума с
равномерной плотностью вероятности в
пределах значении [-0,5, 0,5J, rUk) -
отсчеты адли гниного г-ауееовеКоГ"
некоррелированного шума с дне
Персией, зависящей от сигнала, ft, и fu
- коэффициенты шума.
На рис. J показан вил сишала
двухлучевой интерференции (M=l)h
140
Кош1ьютерная обработка сигналов
а на рис, 2 - сигнала
многолучевой интерференции (в (35)
Раесмотрим амплитудные
спектры идеализированных
сигналов (33) (34) в
предположении отсутствия шумов,
фоуктуаций и искажений.
Поскольку
интерференционные сигналы принимают
только действительные
значения* их спектры S(u), как уже
отмечалось, являются
комплексными. В частности, если
последовательность
дискретных отсчетов сигнала
подвергается обработке на основе
алгоритма ДПФ> го в
результате получается двойной нас-
сип данных, соответствующих
действительной Re| S(u) | и мпвыой lraj S(u): частям cnCKipa.
На рис. 3 предствляеи вид модуля спектра сигнала дьудлучевой инТСрфо-
ренпин. Отметин характерную особенное1^ представления выходных данных
в использованном алюрнтме БПФ: согласно (38). нулевым значениям частоты
соответствуют крайние точки
Рис» 2. Модель сигнала в многолучевом
интерферометре
№fl
О
> и
Рис, Э. Модуль дискретною опектра сигнала в
Лвукпучевом интерферометре
юри-юнтальной шкалы
частот, а максимальным ее
значениям - середина ткали
частот. Первый пик (на
нулевой частоте) соответствует
фоновой составляющей сиг-
пала. Два равновеликих
выброса соответствуют
полезной составляющей
интерференционною сигнала (на
положи i сльньех и отрицательных
частотах).
На рис. 4 в качестве
нарядного примера цоказан вид
модуля спектра си шала ьшо-
Глава 4. Обработка на основе преобразования Фурье 141
О
с. 4- Модуль спектра сигнала в многопу-
rom интерферометре
■*■ "
год у ч свой интерференции*
который представлен на put
2, при небольших значениях
фактора речкости полое
(число составляющих М = 7).
Аналитическое описание
спектра сигнала л1*ухлучевой
интерфереинии было
рассмотрено выше в разд. 1 гп. 1.
Спектр сигнала, получаемый
при дискретизации,
определяется выражением (6J из га. 3 и
иллюстрируется ри^ 5 тд. 1-
Обратимей к
характеристикам спектра в нулевом и
±1-ых порядках ДЛСКреТИЗа-
ЦИИ.
Рассмотрим; изменение
действительной, мпимой
пасти спектра и фазового
псктра интерфереппионого сигнала s (36) при изменении начальной фазы
игнала £, как 'это показано на рис. 5.
При изменении значений с от О до л происходит увеличение составляющих
ЧБыой части спектра, Доетигаюшн* ынкснмальпых значений при £=±я/2.
ри дальнейшем увеличении е мнимая составляющая вновь Уменьшается до
уля* а действительная часть изменяет знак па противоположный- Спектр
*{и) фоновой составляющей не зависит от фазы информационной составляю-
й и явияется пеи.чменнь[М^
Фазовый спектр интерференционного сигнала иллюстрируется кривыми на
ис. fi. Фазовый спектр в окрестности частот ±и<\ япляется линейной функцией
астотмн причем утл наклона кривой фазового спектра изменяется от нуля
н L= О до значения я/и» при s=ft. Покажем это аналитически.
Согласно определению ДПФ,
.V I
1-0
ди CHniaJi s(k) вида (36) имеет ненулевую начальную сразу £, то это
оответстьусг сдвщу сигнала с нулевой фазой на m отсчеюв. Найдем выражс-
не пля ДПФ смешенного сигнала:
142
Компьютерная о&рэбогка сигналов
Re£(u) нп5(ы) и
>х
*х
*-*
Рис. 5- Эволюция компонентов комплексного спектра при изменении начальной
фазы
N- L
S\u) = ^ s(k + m) схр(- jlnuk/N) =
*=0
л-i
= Л i(A +■ ет) ехр[-_/2ли(й: + й!)/Л'] expO^*"^^.
t-r»
Эху сумму будем вычислять в два этапа, суммируя слагаемые от т до Л'- 1 И
далее от Л' до A'-l+ra. Используя свойство периодичности ДПФ.
j(iV + i + га) = i-(t + m), в результате получим
S'(u) = S(u) cxp{j2num/№)-
(41)
Глава 4. Обработка ня основе преобразования Фурье 143
Таким образом, изменение начальной фазы £=2яи*>тАх интерференционного
сигнала приводит к появлению дополни 1ельной составляющей фа-jOEUiO
спектра eu/ut. линейно зависящей от частоты и. Нетрудно заметить, что последнее
выражение справедливо также для дробных значений т.
Обратимся вновь к модели ишерференциониою cniHaJiEi с параметрами
(39), (40) и отмстим, что если в (39) к^ = 0, t- с. фоновая составляющая
является строго четной функцией, то соответствующая составляющая
спектра 5о(м) также является четной действительной функцией, не зависящей от
фазы интерференционного с и гнил» е. Значения фазы в пределах
спектральной составляющей 5((и) равны нулю. При несимметричной форме sn(x)
относительно i04KH x = 0 спектр St{ti} будет содержать также мнимую
составляющую, остающуюся неизменной при отклонениях фазы е.
Рассмотренные свойства, в принципе, молно использовать для определения
начальной фазы интерференционного сигнала (33) или дробной части порядка
интерференции й = е/2л. Для этого достаточно пилучть опенку угла наклона
фазовой функинн в полезных спектральных порядках (рис. 6). поскольку
изменению значений е.; от - 0,5 до (1,5 соответствует изменение угла наклона
фазовой функции от -х/щ до л/u., к окрестности частоты ип. Оценку частоты
ыо можно получить, например, вычислив квадраг модуля спектра
интерференционного сигнала (33) и определив положение его максимума.
При использовании алгоритмов БПФ нужно учитмвагь. что. Согласно (7)
гц, 1, число значений частоты
рШ
*"
Рис. 6. Изменения фазового спектра в
первой спектра пьном породив
Q к спектре равно часпу
обрабатываемых отсчетов N сигнала в
последовательности. Поэтому
для определения точною
положения максимума модуля
спектра может потребоваться
дополнительная обработка
(интерполяция) значений модуля спектра.
Ииторпочяцин. как известно,
заключается в определении
значений сигнала в точках, не
совпадающих с точками дискретн-
запниг Можно показать, что при
использовании ал три тмо в БПФ
несложно интерполировать
значения сингала в ючках, равноот-
еюнщих oi соседние точек
дискретизации, что эквиваленте-
144 Компьютерная обработка сиiналов
уменьшению шаШ днекретнза-
пдн тшьос. Практически ин-
герполяцню можно
выполнить, например, добавлением
между элементами массива
S(u) N комплексны?: нулей с
последующим вычислением
ОБПФ модифицированного
массива £(и) объемом 2N
комплексных чисел» как аго
иллюстрируется на рис. 1.
Для определения пробной
Части порядка интерферениии
можно использовать метод
вычисления взаимного спектра
исходное сигнала (33) и еги
копии, перевернутой
относительно вертикальной оси
координат как это показало на
рис. 8, а, б.
Взаимный спектр связан с функцией нчаимной ковариацни соотношением
(58) гл, I:
Рис. 7. Спектральная интерполяция
интерференционного сигнала
Gll{u) = lR,:(z)exV{-j2m4x}dx,
(42)
поэтому вид вданмнот" спектра Gn(u) определяется свойствами функции
Ли(#)т оценка которой Для с ипшюв, изображенных на рис, й.а, б, представлена
на рис, S. в. Поскольку функция лиШ, вообще говори, нечетная, взаимный
спектр (42) является комплексным. Соответствующий фазовый спектр,
представленный выражением (61) гл. 1. очевидным образом связан с начальной
фазой сигнала (33), как показано на рис. 8, г.
Преимуществом метода вычисления взаимного спектра является высокая
помехоустойчивость. Из рис & видно, что составляющие шума после вьпше-
лецня Йи^) значительно снижены но сравнению с исходными сигналами.
Отметим, что для получения несмещенных оценок фазы сиптала необходимо,
чтобы фоновая составляющая s0(x) и огибаюшач $щ(х) сигнала (33) были
четными функлиянм, но зависящими от е. Взаимный Спектр дискретных
последовательностей можно вычислить, используя свойство ДПФ {24).
Рассмотрим еще одну практически важную особешгость преобразования
Глава 4. Обработки на основе преобразования Фурье 145
<р(и)
яси
£+z
г)
О
-+и
Рис. 6. Сигналы с различной начальной фазой (а, 6), их взаимная ковариацион-
нан функция (а) и фазовый спектр (■)
интерференпиодных сигнаюв методом ЛЛФ, связанную с соотношением
между длиной обрабатываемой реализации сигнала и его периодом.
Пусть на выходе интерферометра зарегистрированы К отсчетов сигнала (36).
периолу которою соответствую г Г отсчетов. Обработке методом ДПФ
подвергаются N отсчетов, N*K. Далее рассмотрим результаты обработки
информационной составляющей сшнала
s(k) = jmsin(£-b2™,AiU)l (43)
где ыл = \/(ТАх). Влияние алд1гтивцой фонолой составляющей Jn ннтерферен-
гщонного сигнала можно учесть отдельно.
146 Компьютерная обработка анналов
Обозначим отношение N/T=r и наедем частотный параметр q^NuAx.
Тогда результат ДПФ (37) сигнала (43) после преобразований можпо
представить в форме
ОД -^ I ■ *^ f^ с*№) -РЬ № - ЧУ!*\ - («)
кч> 2} [ыв.[я(т - q)/N] J
2; jsra[^(r + qVN\ J
Используя (44). после простых преобразований нвйдсм
sUMf
4
(451
Hi последнего выражения видно, что третье слагаемое зависит от начальной
фазы Е интерференционною сигнала.
Первое слагаемое в (45) соответствует икформапионной составляющей
интерференционного сигнала н досягает максимума при г-* q. Второе и
третье слагаемые Предстанляюг искажении спектра, влияние которых заметно
в пределах il<r<N/2. Однако практически уже при q>5 для второе и
третьей слагаемое и г < N/2 - 5 для третье™ слагаемого Э]И помехи малы и
не превышают 5% ,vr первого слагаемого, причем прамически не зависят от Л"
Рассмотренные соотношения иллюс1рируются на рнс, У.
Влияние неравномерной фоновой составляющей sn{x) можно рассматривав
как наличие субгармоцик по отношению к ииформапионной составляющей
Sq)
5<г<Ш-5\
W. ...-Ут {'^„^М
Wuuj
|S(1)I
О N12 q
Рнс. Э. Искажения спектра, обусловленные Рис. 10- Влияние субгармо-
ограниченной длиной последовательности дан- ники при нецелом числе
пых при нецелом числе периодов сигнала периодов сигнала
Глава 4. Обработка на основе преобразования Фурье 147
Периоды субгармоник превмшают длину реализации сигнала, поэтому им
соответствуют значения параметра г< 1,
Подробнмп анализ влияния субгармоник показывает, что изменение
коэффициентов ДПФ сходно с тем. Которое наблюдается при наличии составаяю-
щих сигнала выше основной частоте, если эти составляющие характеризуются
нецелыми значениями парамофа г. Влияние рассмотренных факторов на
результаты восстановления значений физы интсрцЬеренщгонного сигнала
можно оценить из выражения (44).
Характер изменсидн первого коэффициента ДПФ иллюстрируется на рис. 10.
4.3. Восстановление фазы методом
преобразования Гильберта
В разд. 2 гл, 1 отмечалась одна из сложностей, возникающих при обработке
интерференционных сигналов; неравномерная огибающая sm{x) сигнала (33)
предетавляс! собой мультипликатеипую помеху, которая препятствует точному
восстановлению значении фазь< сигнала. Для устранения ьлияния згой перавпо-
мерпости в [7J предложен мс]Од, в котором независимо от формы нолезюн
составляющей сигнала (см. (93) гл. 1) ей ставится в соответствие сопряженная по
Гильберту составляюшая (см, (94) гл. 1). имеющая такую же огибавлцую s^x).
Поэтому вычисленные значения фазы (см. (95) гл. 1) не зависят от sm{x).
Рассмотрим особенности преобразования Гильберта более подробно.
Если имеется действительная функция s<{x), -ээ<л<вд, т0 сП можно
поставить в соответствие функцию -ч£х), определяемую преобразованием
Гильберта Н { sc(x) (,
■о
^) = Н|^)1 = |^-^ ,46)
или при использовании символа свертки
sjx) = sc(x)*(\/m).
Здесь имеется в виду главное значение цитеграла в сымсле Копт, а именно,
если lim s{x) = оэ, b< a < с, то главное значение определяется как
с а-с i
} s{x) dx = lim Г j ъ(х) dx +- f s(x) dx
Аналитический сигнал определяется комплексной функцией
Г4&
Компьютерная обработка сигналов
ix) = Sc{x)+Mx). (47)
Можно записать выражение для полярных координат
:(х) = I z{x) I е*р!М*Л-
■да
z(x) I = -^Жх)7Щ = ^) (48)
- огибающая*
ф) ^ arctg[.4,(x)/sc(x)\ (49)
- локальная фаза сигнала.
Цокольная частота определяется выражением
ф) = 0/2ff)/(difixydx). (50)
Рели спектр аналитическию сигала пьтразить как
ад - F | ф) } = F | ф) +рй(х)) = ЭД +;ЗД.
Hi обратное преобразование Фурье приводит к сленующему результату:
l(x) = Р'{ад( * 4-«(л)+,№(*). (51)
Можно заметить (ем, рис- 5 тп.4, а также рис, 15 гл^ 1), что
«■|г ;<:.
Обратное преобразование Фурье от Z(h) = 2Sr(u). и > 0, очевидно, дает ;(i)F в
котором ф) = \т №)],
Примерь! преобразовании Гильберта простых функций, представляющих
иагерференп ионные енталы, приведены в табл^ 2-
Некоторые свойства преобразования Гильберта:
1. Линейность;
Н ( asci(x) +■ Ьы(х) | = ai,i(*) + bs,i(x)
для любых stu S'i и любых постоянных о, k
2. Теорема сдвига;
Н ] .ф - а) ! = J,(* " а)
3. Повторное вычисление преобразования Гильберта;
Гпавэ 4. Обработка на основе преобразования Фурье 14$
Тшбпнцш 2. Примеры преобразований Гильберта
W)
J#)
■№)
С05(2Я^
smQTFUbft
'X
sin(2TM)
-cos(2jff4J)
1-
■1"*
1--
^^COS^Jftj)
^йп&киЛ
"\7
/\
4l
4-Л
sim/jr
]-еок*]/л
2lsin(x/2VH
150 Компьютерная обработка сиiналов
т. е. имеет место ниясрсия знака исходной функции.
4. Четность и цсчсшоетъ:
исходная четная функция ?.(i) даст нечетную л,(х) и паобороъ
5- Свойство подобия:
{]{*№)} = s&x).
б* Сохранение энергии:
а- -.
J st{x) dx = ) ф) dx.
1. Ортогональность:
jSt{x)s4x)dx*(L
8. Преобразование модулированного сигаала:
Н ' sm(x) coh(2^di) } = sm(x) цЩ2янох).
9, Преобразование свертки:
Н ( sei{x)*Sa{x)} = Sn(x)*sd.x) = s„(x)*s,-(x).
Преобразование Гильберта интерференционных сигналов
При обработке нн[ерфсрснцион]Шх сигналов используется представленное
вьвис свонспю преобразования модулированного сигнала. На практике
преобразователе Гыльберта осуществляют с помощью алюричма БПФ, используя
соотношение (52), которое связывает спекфы аналитического сигнала z(x) га
полезной составляющей интерференционного сигнала ?е(х). При этом является
важным исследование погрешностей восстановления отбавлцей н фазы каьг
модули и apiyMcHra аналитического сигнала.
При формировании аналитического сигнала (4^) с использованием eooiHO-
шения (52) неявно пpeлпoлaгaлocL вы волнение условия узконолосноети:
ширина Ли спек сра сигаала (33) мала по сравнению с частотой ип, г. t-
А*/и9« I. Эгог случай отмечен на рис. И пунктирными линиями.
Если условие узкополосности нарушается, го происходит перекрытие
спектров ятя положительных н отри нагельных частот (это показано на рис, 11
сплошными линиями). Тогда аналитический сигнал, восстановленный согласно
Глава 4. Обработка на основе преобразования Фурье
151
Рис, 11. Перекрытие первых
спектральных порядков
широкополосного интерференционного сигнала
Рис. 12. Искажение восстановленной
огибающей при перекрьгаающихся
спектральных порядках
(51) и (52), будет отличаться от точных значений, полученных непосредственно
в результате преобразования Гильберта (4б)т а именно
1{х) = z(x) +- &(л) = (1/2я)| [S(u - и„) + S-1-u - ыа)] zxp(j2mix) du.
(53)
Оценки огибающей я.(х) и фазы $(х) интерференционного сигнала, полученные
нз (4R) н (49), при этом бупут равны соответственно;
; s^x) - sm(x) {1t-2[Sz(x)/sJx)] sin^x) +- f &(i)/^(j)J? 'l'\
^) = ^) + arclg
_.[ Sz(x)/sm{x)] соы#<д)
(54)
(55)
1 + [&(хУ*т(х)] sin$»
Из рис. 11 видно, чти искажения спектра происходят па участке с наиболее
высокими частогамн спектра огибающей. Следовательно, в области
независимой переменной искажения огибающей и фазы сосредоточены на участках
внтерференпионного сигнала с наиболее резкими изменениями огибающей но
.Сравнению с периодом полезной сосгавлягошей }/цл, например, ла краях
реализации интерференинотюго сигнала конечной протяженности.
На рис. 12 показана расчетные значения отбагашей, полученные согласно
формуле (54) в краевой зоне инТ1фференционного сигнала с прамоугапыюй
огибающей. Из графиков видно, что степень искажений зависи! от начальной
фазы е. и влияние искажений заметно главным образом в узкой зоне, при
1л - D\ < 1/(2ями), где (-Д £>1-учасгок регистрации. Можно показать, что
при более плавной огибающей влияние искажений уменьшается.
152
Компьютерная обработка синапов
Список литературы
] ТолстовПП- Ряды Фурье,-М,: Шука, 1980.-381 с.
2. Макс Ж. Методы и теяинкл обработки сигналов цри фитческнх измерениях, -
М.:Мир> 1983. Т. 1.-ЭП с.
3. Нуссбаумер Г. Быегрне преобразование Фурье ц алгоритм вычисления ^uejyros. -
М.: Радио н связь, ]985- - 2*8 с
4. Макхледлап Дж. Х-> Рейдер ЧЛ1, Применение теории чисел в цифровой
обработке сигналов- - М.: Радио и связь. 1983. - 264 с,
5 Брейсуэдл Р, Пре<»браювапне Хартли.- М.: Мир, 1990. - 176 с.
(i. Тропчепко Л- Ю-, Ромапоп КХ Ф. Ал] орнтмы быстрого црсобрашьания Хартли
при различны* основания* к конвейерные структуры дня ич реаднзаюш ft Извсс-
аия пуэов. Прц6ор|х:троеиие. 1993, N4, С. 27-32.
7. Takeda М , 1иа Н., Kobaya^hi S. Foiiriei'-lransfojUi meDiod ol frmge-pauera analysis
foi compuiei-based Topography and imeiferomclry //J.Opt.Soc.Am. 1982, Vr 72r N].
P. ] 56-] 60.
8. Roddjci С Koddiei F. Incifciogram analysis using Fourier Transform jechniques it
ApplQpi. 1987. V.26. N9, P. 1668-1673.
9. Lai G , Yaiagai T. Use ihc tat Fourier naiisfoim meibnd im analysing linear and
cqimpaced Fi*ean Гпщегл // Appl. Орт. 1994. VL 33 Ю.%- P. 5935-5940.
HL Таратаковсвдп В А. Анализ нитсрфеунцрамн / В кп.: Проблемы спинческого
контроля-Новосибирск Науки, 1990. С. 40-102.
П- Гурок R П. Авюшпиаиня нреннзношдою оитнчеткого контроля па основе
анализа парадиельнь!* ьечепни иитерфершранми//Автометрия. 1995. N2- С 12-15.
12. Васильев В. Н., Гуров И. П. Оптическая интерферонегрыя и ип^рмапноппые
телнопотии Обучающие системы//Известия вузов. Приборостроение. 1996,N5-ft.
С. 20-30.
^ ■ Ггтава 5. Обработка на основе дискретного rpaaoeoFO сдвша
153
Глава 5
Методы обработки на основе
алгоритма управляемого
дискретного фазового сдвига
Метопы прямот восстановления фазы интерференционны* екподон (см.
разд. 3 гл. 3) обеспечивают высокую точность измерений и потому получили
■j широкое риспространсние fl, 3, 9]. Прямое восстановление фазы рсализу-
~ стен наиболее просто при обработке набора интерференционных сигналов,
зарегистрированных при различных известных фазовых сдвигах этих cHiHa-
£ пов. Алгоритмы обработки явлчкися мало чувствительными к перавцомер-
^-.ности рас преде леиня интенсивности в освещающем объект еистовоч пучке.
j: Другим преимуществом методов управляемого фазового сдвига является
возможность измерений фазы при малой вылноетн интерференционных
полос.
£.1. Восстановление фазы при компьютерной
^обработке ансамбля интерференционных сигналов
Методы интерферометрии управляемого фазового едшца обеспечивают
встало нле дне фазы измерительной волмы при еоиместной компьютерной
обработке нескольких массивов Интсрферомсгфически* Ланнь1х.. зарегистри-
"Оваииыя фотодетекгором, а качестве которого чаще всею используется
[ЗС-матрипа (ем. рай. 4 гЯ. 2). Фаза опорной волны последовательно
№амеия.стся па известную добавку Дф при перходс от одной интерференционной
■ Картины к другой. Сочлвегствеицо Этому" изменяются заретефировапиые
(ачения инюпеивнооти в массивах данных.
' Упрощенная схема и терферомс три ческой системы с управляемым диск-
"пщм фазовым сдвигом показана на рис. 1.
Традиционная техника интерферометрии управляемого лискрегного фазо-
)ГО сдвша основ&твается на компьютерных алгоригмах.. реализующих извест-
irij метод синхронного детектирования \\, 3|,
154
Компьютерная обработка сигналов
Лазер
УК
7
/
ргт
Обьект
IHITII'III
stx.y)
—*
Рис. 1. Схема интерферометра управляемого фазового сдпига (PZT - пьеаокера-
мический датчик шагового перемещения опорного отражателя)
Ищ-арфсрснииоиньгй cm и ал
^)-^(л) + Дт(л)соз[£-ь2ли^+^д>] (О
можно представить в виде
S(x) = SQ(X) + ф) С052ЛИ,Д + Ф) ЫПЯиЦХ, (2)
тле с точностью до знака
s,(x) = J^i) sm[e + р(л)1, (3)
.^j:) = jm(j)cos(F-h^ll. №
Квадратурные составляющие (3) и (4) содержат информацию об ошбаютей
1Ж(л) = -Й(*) + *0 (5)
и о фа.зе
ф) = £+ф) = аю£[ Ф)/Ф) ]
(ft)
Глава 5. Обработка на основе дискретного фазового сдвига
1S5
В результате линейной обработки дан ныл (6) можно получить оптимЕшьише
оценки начальной фазы Рн отклонений фозы ip(x).
Метол синхронного детектирования иллюстрируется схемой, которая
показана на рис. 2.
s,tx)
X
V^ *'"(^,)
X
V^ cos{*»,)
2
[
2
i
—► hx)
>■ Ьх)
Рис. 2. Блок-схема дискретной системы синхронною детектировании
Составляющие (3) и (4) можно найти с использованием дискретного
синхронного детектирования исходною сип юла (2) на частоте ип при синусоидальном и
косинусоидалыюм дискретных опорных сшналах, как это показано на. рие. 2.
При компьютерной обработке опорные сигналы формирузогся в N
дискретных точках на периоде изменения фазы 2я рад. Toi3ia к соответстпии с (2Н4)
и (б) чначения фазы в интерфере пи ионной картине вычисляются по очевидной
формуле
Л*,(х)йа[2я(т- \)/Щ
ф) = arcij
1=1
О)
Хф)со*[2яфп~ 1)/М
О)1ласно (7), обработке подвергаема набор ищерферепп ионных еншалов
ф) - so(x) 4 ящ(х) еоь[£+ А'р, -+2?atx + i$x)\ Ш
ре Дискретными фазовыми едпш л-мн Лдн. В частное ih, ко1ДА>
j Аф>,\ = О, я/2, я, Ъя/2, из (8) получим векторпый етидл s = (s:.s2. ы, s*f,
компоненты которою равны
1S6 Компьютерная Обработха сигналов
О
,', I'. I \ i \ Г I! 7.
■'!;\ /■■:"■''I
a) J^)
б)
1
О
1
О
;М\
V
** о
ь л Г*
'•}
+ х
■ v <! '■ t
1
1>
•J •■'
+ х О
ЬЬГ~Шь
1 ij' У
д) *<■&)
1
<• .-.
г- /I "
|, 1
иг(|
V V -
\j £ Ч Ч';
■*-!
с>
р(х).рад
я/2
О
-я/2
Т\
и
ft
Vi
Рис, 3. Операции преобразования компонентов векторного интерференционного
см тал а
S^ = So + JmCosl#(*)l,
Л = -ft + .?m sin [#(*)].
h = Sq- im^slpfa)].
Искомые величины sm(x) и $х) для всех значений независимой временной *
определяются по простым формулам
Глава 5 Обработка на основе дискретного фазового сдвига 157
зЛх) = (1/^2) ^(5,-ъ->у-1-Ь-2-иУ, (9)
tfx) = arclg[(^-^)/(.7, -i,)). (10)
На рис, 3 Показаны компоненты векторного сигнала (рис. 3. а-у), квадра-
туриые составляющие (рис.3, д, е) и фаговая функция (10).
Преобразования (5), (б) и (9), (10) являются нелинейными, поэтому
аналитическая оиенка точности определения искомых параметров сигнала П)
оказылается сложной. Целесообразно исследовать погрешности &щ и Sep.
возникающие в условиях ьоздежчвия помех при различных .значениях фа^Ь[.
Дифференцироаанис (9) и (10) дает в общем случае следующие оценки
погрешностей:
2л- 2л
<vX)=
гае &j/jj и Дг^д,. - относительные погрешности вдргисленич квадратурных
составляющих в (10),
6s, =■ 5si - Ssa>
&с - Ssi - &ъ,
в условиях ненулевой корреляции помех при преобразовании сигналов s,. и
&, = &с = V2<& (I3j
при взаимно некоррелированных помехах. В последнем случае (11) и (12)
упрощаются и принимают вид соответственно
<&* = 2(г, + д£)&, (14)
<V2>r = (1/2^ (&/i„) (л - ^,), (15)
гае .7, и ^г - нормированные на амплитудное значение квадратурные
составляющие.
При случайных изменениях фаш yfa) в (8) фоуктуаппИ составляющих i, и
st взаинмо некоррелиро ванны. Наибольшие по величине погрешности (14) к
(15) возникают, в соотвсгс1вии с (15), в точках я/4, 5л/4 и Эл"/4» 7я/4. Ввиду
достаточно сложной взаимосвязи параметров помех и параметров сигналов
проведены детальнее исследования погрешностей* результаты которых
представлен bi пиж£ в разд. 2.
158
Компьютерная обработка сигналов
Выражение (10) дает точное аналитическое решение дли расчета значений
фазы четырехмерного интерференционного сигнала,
В более общем случае выражение (#) с использованием обозначений (3) и
(4) можно переписать в выле
л, = jo + ^coa(^) + £,3inGlw), (1*)
Предположим, что размерность векторного сигнала s равна. N. Далее
воспользуемся критерием минимума средней квадратической погрешности по
интенсивности:
2_. U» +- .ъсок(^) +- л sin(^w) ~ Д'1 —> Ш[П
(П)
J=l
где д, - зJpemc фИрованнос значение интерференционного сшйала.
Коэффициенты sa,se и j, можно цайги в результате решения системы
линейных уравнений;
где
N
(18)
А{Лр) *
j:l 1-1
<-i j-i '=1
I-L
'-I
(15)
а = (jh. .я. ft)ri
Ь =
Y, л X * соз(^^д), X л sin^e*)
Ы -=L
1:1
(20)
(21)
Если машина А королю пбуешвдена, Т. t. имеет обратную матрицу, то вектор
а можно найти с достаточной точностью из (14) в виде
Оценка фазы, аналогичная (6), определяется формулой
(22)
(23)
Глава 5. Обработка на основе дискретного фазового сдвига 159
где j, и Sc - найденные в (22) Компоненты вектора (20).
Размерность iV векторною сигнала в практически используемых алгоритмах
составляет от 3 до 1 Ь Большее число фазовых сдвигов в Пределах фазового
цикла 2я рад, как правило, не использустсч из-за сложностей точное
позиционирования опорного отражателя в интерферометре (4, 6, 8], Исшчшдеами
погрешностей являются также нелинейные искажения и шумы, вносимые при
фотодетектнрованни и1Ггерферснпиониых сигналов.
Алгоритмы вычисления фачы при обработке четырех интерференципнных
картин (N = 4) с использованием формулы (]0) первоначально получили
наибольшее распрострлпение 11т 9], В результате анализ гичности вьпислений
фазы было показано [1, 4]> что более точными и помехоустойчивыми яблянпхл
алгоритмы, в которых # = 5 ... 7 и в некоторых случаях N = %... 11 [&].
i Одна из трудности, возникающих Прй обработке ин^рферешпюкпых
сигналов методом управляемого фазового сдвига, обусловлена периодичностью
функции арктангенса в (10) и (23), вследствие чего с учетом знаков квалрагур-
■ных составляющих, однозначное постановление фазь1 возможно юлько в
.^едслах одного фазового инкла -ж. q>< трал . При большем диапазоне
язмепещш полной фачы интерференционного сигнала фазовая функция чвлч-
ется разрывной. Преобразование значений приведенной фалы на интервалах
.{-л; л] н ненрерьнлю изменяющиеся значения полной фазы называется ра.т'ср-
тыванием фазы.
Обычный алгоритм развертывапич фалы носиг название метода поарааоч-
кого коэффициента и еосюиг в обнаружении скачков значений фазы между
Двумя соседними точками, превышающих значения л: рад. Добавлением или
вычитанием скачков фазы 2ттрад (т. е. внесением поправок) можно
восстановить непрерывность фазовой функнии.
Для развертьп^ания фазы в условиях лоадмьных искажений ннтерференцион-
вой картним использую ]ея разнообразные помехоустойчивые метонм обрацптплч
том числе метод линейною предсказания значений фазы (см. разд. Ъ га. 1).
Среди комцьнперпых алгоритмов развергыпапич фазы целесообразно ввше-
алюриты Р], не требующий использования функпии арктангенса при
"ислепни фазь! интерференционною ситала. Алгоритм построен на основе
воешого метода дифференциальной синус-косинусной демодуляции. Сущ-
Чь метода заключается в следующем.
Квадратурные составляющие (3) и (4), полученные, например, из (22).
подвергаются дифференцированию по независимой переменной, псрскрссзно-
умножению и вычитанию согласно выражению
di, dsc
(24)
160
Компьютерная обработке сигналов
В (7] показало, что комбинирование формул (3). (4) и (24) приводит к
выражению непосредственно для градиента фиш
g = d<p/dx.
(25)
интегрирование которого по независимой переменной позволяет найти зпаче-
нне полной фазы $х) в любой точке. Значения про изводи ьн в (24) могут бьпъ
получены в простстлем случае в форме конечных разностей (прямых или
обратных) первого порядка. Формула
(24) может быть Jicixo преобразована
примени 1Сльно к епучаю двумерной
обработки ^
На рис, 4 иллюстрируется
рассмотренный алгоритм вычисления градиента
фазы.
Дополнительное преимущество
алгоритма вычисления градиента фазы (24)
состоит в том, что пороговая селекция
полученныл значений позволяет
вылепить границы неиптерферепииопныл
областей изображения но признаку
увеличенных абсолютных значении
производной фазовой функции.
Другим достоинством алгоритма
является локальность оператора обработки,
поэтому погрешности, возникающие в
отдельных точках и обусловленные
малыми локальными значениями отношения сишал-щум и влиянием снеклов, не
распространяются на соседние отсчеты массива данных.
$(х), рад
2л
О
Рис 4, Развертывание фазы
методом синус-косинусной демодуляции
и иигнгриронания
5.2. Анализ погрешностей метода управляемого
фазового сдвига
Методы измерений с использованием интерферометров управляемого
фазового сдвига обеспечивают фазовую погрешность не более 2я/100 при
воспроизводимости результатов в несколько тысячных долен фазового цикла.
Достаточно полпмй анализ систематических погрешностей выполнен в
последнее десятилетне |1> 4, 5. 8], пачикая с результатов работы 14).
Выражение (7) дня расчетов фатм справедливо в случае, когда приращения
Jp, фазы при переходе от одной иптерференпиошюй картину к другой строго
одинаковы шгугрн одного полнот фааовпго цикла 2я рад. В дейнтви^Елъности
Глава 5. Обработка на основе дискретного фазового сдвига J61
имеют место неточности установки фазопьгя сдвигов Sq*. Тогаа выражение a;ia
интерференционного сишала (Н) можно записать в форме
, j, = J0 -i-J-,cosk + 2wtt + 4^-r£fe,I.
(2ftJ
Вычисленные значения фозь1 ц> при этом отличаются от йстинныл значений
tp на. малую величину &р = (р- ip. Вычисленные значения фазы равны.
tp= arcig(^)- arc>E"V
2_, s, cos tp,
-.Л
i*yi —
(27}
тогда с точность» до целого числа фазовых пиктов пилотность вычисления
фазы равна
nfip = arcte( ?,/£) - areig (igp) = arcjg тг^л W.
^ + .г, tg<p
C2MJ
Полагая в (26) погрешности &■ малыми, и считая- что cos(&i) = 1,
sinfffe,) а <5с, из (2Й) можно получить следующее выражение ллл noipcuinocTH
2^, &, - С cos2p - S sin2«>
,Sp= areig
i-i
Л'- Cs\ti2ip + Scos2<p '
(29)
гас
С = 2^ &i eos2<0 , S = ^ <fe s\n2tp.
и
■-I
Последние выражения можно рассматривать как формулы дня коэффициентов
разложения в ряд Фурье последовательности значен к л погрешности
& = йВД. Прн этом существенны лишь доставляющие погрешности,
коррелированные с 5in2p, и соз2де.
Нужно заметить, что погрепшость. определяемая суммой
-(1/Л)£ Да,
м
превосходит остальные составлявшие ширешноетн в (29). Однако эта сумма
ЯНЛЯС1СЯ постоянной* не зависяшей от f н поэтому ЛС1КР устраняется прн
162
Компьютерная обработка сигналов
Q.J5
О
-0.15т
обработке данных. Следовательно,
погрешность (29) определяется удвоенным
значением фа.эы 2<р.
На рис. 5 показана фазовая случайная
погрешность четырехптаговоги
алгоритма СЮ) при небольших погрешностях
S&*±x/\b{i ^3,4,5).
Компенсация погрешностей
обеспечивается при. обрабоЕке одновременно
двух векторных интерференпионпых
сигналов, имеющих по отношению друг
к ДРУГУ дополнительный фазовый сдвиг, равный яу2.
Из (26) и (27) после преобразований можно получил, формулу для расчета фазы
Рис. 5, Фазовая погрешность при
неточных фазовых сдвигах (N=4)
Nbin<p-\- 2_, <5ii cob^i- С costp- S smtp
\ \
<p = arctg(j(1/^ ) = arclg
(30)
N соъ<р- 2^S& sinp- С sin?)-i-5
cosp
:=!
Для второти немирного си шала с фазовым сдвж'ом я/1 можно Подучить
подобную формулу, в которой знакп перед коэффициентами С и S
противоположны знакам в (30).
Используя два векторных сигнала, можно вычислить фазу по формулам [4J;
9 ~ 3IClg s«±sd~ ^ costfl - S') + sin«<C - &y
где
(31)
&' = (1/2Лг)^ |Д*1Ч<ЯеН.
Г=1
5- = (1/2ЛГ) £ Г<5йг1 - ййп1 мп2<и.
Гпана 5. Обработка на основе дискретного фазового сдвига ?$з
0
t**
-0 Л
;. 6- Фазовая погрешность при
"спопьзовании двух наборов квад-
атурных сигналов
<йрт(Драд й!",й1'| - погрешности установки фазо-
q j! вых сдвигов d первом и втором векторных
сигналах. Можно показать, что
С ^ S1 * 0, при эюм погрешность
определения фалы равна arclg(^) H является
пренебрежительно малой.
На рис. G показана погрешность
вычислении согласно (31).
Сравнение значений П0|рсшностей,
представленных па рис. 5 и рис, б Нока-
зьЕВает преимущество в точности восста-
вления фaJЫ при компьютерной обработке квадратурных векторных ннтер-
реннионных сигналов согласно (31).
Полезно jaMeiHib, чго объем данных, составляющий при обработке дну*
гналов 2N массивов данных, можно уменьшить до N + 1 массивов, еелн
xtosh|e сдвиги Л(р, точно равны я/2. На этой основе разработаны молнфика-
и рассмотренных выше алгоритмов восстановления фазы с малыми погреш-
"тями [б, ЯЬ
ПогреишостН восстановления фазы могут быть обусловлены не только
чностью установки фазовых сдвигов Ащ в (27), но и шумами при
тоэлсктричеекой рс]истрании интерференционных сигналов. Влияние
мех этого вила исследовано в pa6oie [5].
При воздействии помех интерференционные сит алы отличаются от идеа-
Изироваппьтх (8) па некоторую величину &,. Тогда выражение (27) следует
редставить в виде
4JH^A
= arclg
2_, (s, + <%,) cos$*
«32}
эй этом фазовая погрешность равна
j.coscj- Sc$m<p
- arclg я ' г. ,
Яс-соврт-кь чт<р
(33)
где
!' = X (Ti ± *-)£'n ^^:I (*■ ± Af) cos <p,-
/64 Компьютерная обработка сигналов
Выражение (33) с учетом пофешпостей, представленных, в (29), можно
преобразовать к пилу [5]:
У\ St,- Ccoslip- Ssmlip- 2Сосой#^ Scsia/p
N -С з[о2-ф + $ко!12ф-\-2СоСОь<Р + £о sin«»
Из сравнения (2У) и 1^4) видно, что погрешность фогоэлокфи ческой регист-
рацнн вносит фазовую погрешность до первой гармонике, значения которой
завися.! от коэффнпиептов CD и SD в (34). равных соответственно
У &i созф - CD. У Ss, siatp, = Su- (35)
Оценки погрешностей по формулам (34) и (35) показываюi, чю фаук^уа-
тши интенсивности, коррелированные с опорными сигналами, вносят
значительно большие погрешности но сравнению с погрешностями из-за цетвчпое-
1и установки фазовых сдвигов. Такая корреляция может наблюдаться при
доминирующем влиянии дробовою шума детектирования, поэтому
компьютерной обработке докторных сигналов должна предигестопать спектральная
фильтрация нижних частот по временной области. Однако при этом следусг
учитывать спнжепне быстродействия и терферо метрической системы.
Влияние источников погрешностей висстановления фазы, определяемых
формулами (35), можно оценить неполученных д разд. 1 простых формул (12Н14)
5-3. Рекуррентный алгоритм дискретного
управляемого фазового сдвига
Метод управляемое фазового сдвига широко применяется при интерферо-
мегрическом контроле отклонений формы поверхностей с высокой точностям
[1-41, При этом модель ннтерфереттпоггтгого сигнала (I) обобщается, на
двумерный случай, И требуется восстанавливать значения фазы г(хгу) при
большом числе точек дискретизации {х,, у,).
Полученные дащпле можно рассматривать как значении векторного сигнала
paiMepHocTT.ro N, |дс Л'-число шашв фазового сдвига, KOMTioneirrbi которого, в
снов, очередь, являются многомерными массивами размерности Л" х L,
получаемыми с разделением во времени. Значении К.!- могут достигать 10 или более,
поэтому общий обьем массива данных N у. К - L при S-разрнлном кодировании
составляет несколько мсгабай.1. Современные компьютерные кинологии и
аналоговые видеокамеры обеспечивают фебуемые харакгерпстики обработки.
^Гпааа 5. Обработка на основе дискретного фазового сдвига
165
W
а)
\ /
w
I \
\J
\ I
о
т
20
л
40
б)
Л
/
/
V/
\/
\/
и
'.6
20
40
О
Вместе с тем, более точные цифровые
видеокамеры (пифровыс фотоаппараты)
умеренной стоимости ограничивают скорость
ввода данных. При атом возрастает
длительность процесса измерений, что является пе-
желательнны из-за увеличения погрештюс-
тей, коюрые возникают, например, при
воздействии изменяющихся внешних условий.
Скорость ввода и обработки данных
можно увеличить при использовании
рекурсивной п роде дуры, когда запоминается
только предыдущий кадр и анализируются
его изменения при следующем шаге
дискретного фазовоти сдвига.
Вижныии харакгеристиками
рекуррентного алгоритма являются ею точность и
усюйчивость При отклонении параметров
сигнала от идеальных.
Рассмозрим результат исследовании
рекуррентное алгоритма управляемого
дискретного фазовою сдвига, полученные
авторами.
При рекуррентной продедуре обработки
видеокадров следует перегруппировав ком-
доненты пекторною сигпата, рассматривая
пропеес измерений как многоканальный
процесс с числом параллельных каналов
К - L при Числе "текущих" точек отсчета
ii < k 5 N. Сигиал в отдельном канале определяется выражением (S),
Зная начальные условия на первом шаге^вид ешнала (&) н значения фазового
1ига Аф, можно найти опепку сшнала щ для след)тошсго шага. Эта оценка
^лтаетсд от истипдацо знача |Ш сигнала лшвеличшгуЛ^^
.(8), можно найти сответствующую полраку Ае к начальному (предыдущему)
.ОНаченню £. нсподьзовашюму для получения опенки .г, а именно
Ае^(дЕ/дх) As. {Щ
Рассмотренную процедуру можно сфот определить т1елииейным разностным
Уравнением (см, гл. б).
На рис. 7, а показан исходный сигнал при е = (1,6 рад, на рис. 7, б
прсдстшнеца рекуррентная оценка сигнала. Погрешность восстановления зна-
10
20
Рис. 7. Рекуррентное
восстановление значений сигнала при
малых помехах
766 Компьютерная обработка сигналов
50
и
50
^I'JP4
i
—Л—
г
\
1
/.
_— *
20
40
Рис- 8. Функция преобразования
отклонений сигнала в отклонения фазы
ЗД,рад
065
0.6
10
20 *
Рис. 9, Рекуррентное
восстановление фазы
0.6
--^v--
20
40
Рис. 10, Рекуррентное
восстановление значений сигнала а условиях
помех
чеинй сигнала показана на рис. 7, в. Из
рисунка видно, чго восстановление
значений сигнала с погрешностью менее
10% достигается после 5-7 шагов фазо-
boiU сдвига.
Значения производной в (36), дреоб-
разувшше отклонении сигнала в элаче-
пия поправки к оценке фазы, показаны
на рис. Я. Наибольшие по модулю
поправки: соолйС1ствул>г областям
экстремумов сигнала, где значения фазы
слабее связаны с отклонения ыл сигнала.
Восстании денные значения фазы
приведены на рис. 9. После примерно
десяти шагов фазивоп; сдвига фазовая
погрешность чвляотея пренебрежимо
малой.
Рекуррентный алгоритм является
весьма устойчивым к неточпости
априорно заданных значений начальной
фазы в широких пределах изменения
параметров сщиалов, Б частности,
рассмотренные простой рекурреттщый
алгоритм устойчиво работает При
отклонении априорноц? .значения фазы £ от
истинного в пределах ?грал.
Устойчивое 1ь алгоритма нарушается в условиях
воздействия шумов и
неконтролируемых погрешностей установки фазовых
сдвигов. Это объясняется
чувствительностью операций обращения и диффе-
рснинрованич в (3fi) к отклонениям
данных от идеальной модели.
На рис. 10-12 приведены результаты
рабо|Ь[ рекуррентного алгоритма в
условиях случайных отклонении фазовых
сдвигов в пределах ± я/]0.
На рис. li видны области
неустойчивости операпии преобразования (36),
вызывающие возрастание погрешвос-
Глаэа 5. Обработка на основе дискретного фазового сдвига
767
(Яе/ауъ
50
О
-50
L-
,- J
20 40
с. 11. Искажения функции пре-
бразованин сипи ал а
£(£),рйД
0.6
V--
20 40 к
Рнс. 12, Восстановление фазы в
условиях помет
тей (рис. 12). Начальное значение фазы принныали равным е =■ 0.
Для корректного преодоления проблемы неустойчивости рассмотренного
куррешного алгоритма необходимо использовать методы стохастической
1ьтрации сипталов, рассматриваемые в гл, б.
-писок литературы
. СгсаШ К.. Phase raeasuism-ni mi erf столкну techniques //Progiess in Opljcs 1988
V.76. Qiap 5. F, 349-383.
Lai G., Yatagai T Gcneraliicd phase-sliittin£ lnlcrferometry /J. Opt Soc Ain A
1991- V, S, N5. P. 822-827.
. Брунннг Джг X. Иытерферомс!ры со сканированием нвтерферешшониых полос
/В кн.: Оптический производственный контроль /Пол ред. Д. Малакары - М ■ Ма-
елшостроепие, 1985. С 321-345,
. Schwnler J„ Burow R., EIsaiict К. a al. Digital wave-lroBi measnijng ihteifemmetry:
some уставе error sources //Appl. Opt. 1983. V22. N21, P. 3421-3432.
- Картек Б. В., Сололкнп Ю. Н. Анализ иогренюоетен ишерения фазы интерферо-
метром с управляемым фазовым сдвигом //Ан гометрия. 1992. N6. С. 16-21.
Farrell С Т., Player M. A Phase step measurement and variable step algorithms in
phase-shifting iuleiferoinciry //Meas. Sci. Techool. 1992. Vr 3, P, 953-958.
Singh H.F Sirkis J. S. Direct exiraclbn of phase gradients from Fourier-transform and
phase-step fringe panems //AppL Op<, 1994. V. 33. N22. P. 51)16-5020.
Hjhiiio K.. Oreh B. F,b Farrant D I. Phuse shifiim; for nousimisoidal waveforms with
phase-shift eirors HI. ppi. Sot. Ащ. А. 1995. Vr 12. N4. R 76I-76S.
Wyaiu J. С huerfenimclnc optical «tetralogy: ba&ic principles and new sysmua
//Laser Focus, 1982. V. 18. N5. P. 65-71.
16Э
Компьютерная обработка сигналов
Глава 61
Методы компьютерной обработки I
на основе стохастических 1
моделей интерференционных 1
сигналов §
Стохастические модели ин[ерферснт(ионных сигналов рассмотрена в т. I.
В настоящей главе основное внимание уделено параметрическим моделям, при
этом нужно различать дпа случаи: калачу опепивцния параметров
детерминированного сигнала на фоне случайных помех и задачу фильтрации параметров
стлала, В первом случае модель сигнала является известной, но параметры
модели От реализации к реализации могут изменяться случайным образом.
Задачей компьютерной обработки является определение наиболее точнш
значений параметров, исходя из получении* данных, содержащихся в iapciiic-
трировацпоц реализации сигнала. При фильтрации требуется получить 'тек}'
[Цис"онеики значений параметров сигнал а, которые Moryi измениться отточки
к точке. Поэтому задача фильтрации является более сложной.
Методы решения задачи оценивания параметров вначале рассматриваю геи
применительно к непрерывным сигналам (разд. 1) н затем к дискретным
сигналам (разд, 2). Метод обработки на основе Правила максимума
функционала правдоподобия (разд. 1), очевидно, может быть реализован также в
дискретном варианте.
Основное отличие методов обработки на основе авторегресс и о нпой модели
(рагла, 2) состоит в гом. что в них вьптолняется подгонка стохастической модели
к зарегистрированньЕм данным, а не простая минимизация "невязок'1 при
сравнении данных с дстерминированнон Моделью.
Методы стохастической фильтрации* рассматриваемые в радд, 3 и 4.
основаны на математическим аппарате стохастических дифференциальных
уравнений. При компьютерной обработке интерференционных сигналов, как
уже о1Мечал(>сь в предыдущих ьчавах, основной 1адачен милиляс гея
восстановление фазы ещнала в дискрет ныхипках. Эти означает необходимость исполь-
- ™ """* -^! лттп.-ч1е-ля**ьык не; нненными стохастическими ра-щостнычи
Глава 6, Обработки на основе стохастических модепей 169
уравнениями (разд. 4). Для полное! рассмотрения вопроса в разд. 3
представлены основные сведения по методам пипейцой сюхас |И ческой фильтрации.
6.1. Обработка интерференционных сигналов
на основе правила максимума функционала
правдоподобия
В задачах оценивания параметров детерминированных сигналов,
подверженных воздействию аддитивных шумов, 1инроко примепяются
статистические методы обработки, основанные на использовании понятия функционала
плотности вероятности [1-3, 7J. Параметры сигнала (являющиеся в обшем
случае компонентами вектора параметров Э) считаются ноегоннными на
принижении интервала наблюдения. Сигнал является детермиинропащкпй
£ функцией, значения параметров которой имеют разброс от наблюдения к
наблюдению. Поэтому сигналы <(ж, ©) рассматриваются как
детерминированные реализации случайного процесса. Функционал плотности вероятности
£ сигнала ставит п соответствие кажиой реализации число., характсризуннисе
%■ вероятность появления этой реализации. Аналогично определяется функцио-
k нал плотности вероятности шума.
■ • Условный функционал плотности вероятности p[s^x)/&] сигнала sJ,x}>
зарегистри^оваицого при воздействии шума* оцределяею* условном
присутствия d этом сшнапс любою возможного сигнала j(x, &)г
• . С учетом теоремы умножения вероятностей можно получи гЬ выражение для
апостериорной плотности вероятности
где к — коэффициент, не зависящий от 0, рР<(®) - априорная плотность
вероятности параметра 0. Функционал плотности вероятности читается как фуи-
.. кция '^условия" & при фиксированной реализации s*(x) и представляет собой
,: функцию правдоподобия.
В уелониях высокоточных измерении полагают, что априорная плотность
вероятности p,J.B) искомого параметра равномер[[а ца интервале пеопределец-
; нос'еи, и решение по правилу максимума ацос|срнорной вероятности можпо
' замешиь решением максныальною правдоподобия [1. 2], являющимся корнем
уравнения правдоподобия в форме
170
Компьютерная обработка сшналсв
При равномерной априорной плотности вероятности и досовской
аппроксимации апостериорной плотности вероятности нижний граница дисперсии опенки,
определяемая в теории оценок нерппенством Крамера-Рао, иисст вид
гР-
гае в-опенка по правилу максимальною Правдоподобия. Погрешность
характеризуется второй ироизнодной от логарифма функции правдоподобия,
В дальнейшем будем оценивать вектор параметров ©, компонентами
которого являются скалярные параметры интерференционного с и шала: амплитуда,
частота, начальная фаза и т. д.
Булем считать вначале, что ца интервале регистрации интерференционною
сигнала вектор параметров © является неизменным, и реальный сигнал может
бьпь Представлен суммой полезной соегавляюшей и аддитивной помехи:
л(л,0)=1.С^©) + и(х), (2)
где п(х) = je +■ Дв(.к), <л(*)> = jfl, <Иа(л)> = 0. <п'(х)> = d,.
Аналотчное выражение можпо записать для случая обработки двумерного
интерференционного сигнала, зависящего от переменных (лт >'):
ф, у, ©) - sfc. у. 0) + Щх. у). О)
riie в качестве примера допустим, что
sfa у, ©) * U*. у) соз 11яё + 0-к/Ш )[{д - Xf± {у - Yf\ \ (4>
- информационная составлявшая в вндс дегерыпнированною сигнала с
квадратичным (параболическим) вменением фазы, © = [t?>X, У)г, ё = г/2лъ
п{х.у) = st + ru>(x*y) (5)
- аддитивная помеха, (X. Y) - координаты вершины параболической функции.
Переменная составляющая вная (4) характерна для случая отражения
иэмерительвой водны от сферической поверкиостн [12] и соответствует
важному для физической оптики случаю наблюдения ннтерфереппиоииой
картины колен Ньютона.
Модель интерференционного сигнала (3) можно использовать для синтеза
оптимального иптерферометрнческого устройства по правилу максимально^?
правдоподобия. Попытка решения такой задачи сделана в работе [3] для случая
фазовой функции ф, >'), линейно зависящей от координат {х.у).
При нелинейной фазовой функции компоненты вектора параметров G
целесообразно опеннвать па основе модели распределения полной фачы
,Л^,Пш
и. II <-■: т,/-Т"Чч UКИПР
Глава 6 Обработка на осноие стохастических моделей uj
ф. у) =- 2гЫ -цфг, >•, X, У) -+- Пл(л, у)ъ ,6)
где шум rt,(i, у) обусловлен отклонениями поверхности объекта от идеальной,
т. t является принципиально аддитивным с известными статж;тическиым
характеристиками, в отличие <>-г Па[х, у) в (5),
Восстановление фазы (6) может быть выполнено предварительно, например,
методом управляемого фагового сдвига, характеристики которого изложены
выше в гл. 5, Этот метод помехоустойчив по отношению к мультипликативной
помехе s-i*>>) в модели (4). Предварительная обработка позволяет получить
достаточ11г) надежные исходные априорные оценки компонентов вектора
параметров ©и = (ёп-,^и. Учу. чт^> заметно упрощает последующую обработку.
Запишем выражение (б) н более обшем виде
Ф. У) = <Р {х. У, ©) + пл{х* У)* (7)
где Ф(х,уг&)- извеегная функция, параметры которой, определяемые
вектором ©, требуется оыенитъ на основе правила максимума правдоподобия.
Функционал правдоподобия в случае нскоррелнрооаппою туссовского
шума гц с равномерной спектральной плотностью N определяется выражением
вида (105) гл. 1, т, е.
F(B) = схр j - (1/АО Я №> У) ~ tffo У> Щ2 <*и*у }. (8)
где S- анализируемый учаетчк поиерхности.
При равномерной априорной плотности вероятности значений коынопентов
вектора ©, как отмечено выше* максимуму функционала (8) соответствуют
такие значения компонентой $ вектора 6. которые минныи.зируют среднее
квадратическое отклонение измеренных значений <р{х* у) от заданной
идеальной модели ${х, у, G). Максимум функционала доститастсч решением
уравнения правдоподобия, причем в условиях малых шумов пл решение можно
представить в форме
м
% * Я* + (2/АО S ^ Я №■ У)-<Цх-У. ЩМр/оОьЖх,у, ©с) dxdy, (9)
где £^ - априорные значения, однократнц нолучепттые в результате нсзависньюй
предварительной обработки ингерфсрендиоинош сигнала, с^ -элементы
ковариационной матрицы параметров. К] = 1, 2,,.., М.
В результате дифференцирования в (9) с учетом (4) получим соотношение
для оценноании параметров фатовой функции (б) в ьиде
172
Компьютерная обработка сигналов
2) « ^ + (4Л/Л0 Я *<*, у№> + 2{j:of3 ч- ус*,)/ЯД] (fctfy + С,. (10)
i
где С, = СДЙ, 5/-ЯЛ, о>) - постоянньес.
Значения <2?t мечут быть найдены при вычислении элементов В# матрицы
Фшнера, которЬЕС имеют вид
Я* = (2/Af)}} (0/ЭД)Ф(л, J. ©X^ftW* V. €») Л*. СП)
при этим
t£ = A/del №L (12)
где Д, - алгебраическое дополнение элемента Bt,.
В результате преобразований (10)~(12), полагая, что матрима (11) является
диагональний, для анализируемого участка S = axb прямоугольной формы
получны:
% * 4* +1, J} ф. У) duly + C,t (13)
£ * it: Я *0<*. >') ^ + Си (14)
i
Коэффициенты в (13) - (15) определяются выраженняып;
kt = 4x/NB„ = l/2mib, (Iti)
fe = 1бя/ЛМЛ№= = ЬШяа% (17)
fe = ШЖШк = MR/xob\ (JR)
С = я(аг + *убЛД, G = О, = 0. (19)
Интересно отметить, чю поправка d совпадает со значепнем, по;[учсннЫм
ранее другом метолом в Ц4]г
Окрсделнм дисперсии 0&ш лояучепцьгх оценок параметров (13)-(15). Для
эго[и воспользуемся соотцошенияым (11) н (12), откуда получим
Dt = N/(%7fS), (20)
Dt = Dt= (ЗМ'вяО {АЯ/Sf. (21)
Глава 6. Обработка на основе стохастических моделей 173
причем п (21) поддаем а = Ь.
Из выражений (20) и (21) следует, чго дисперсия оценки дробной части
порядка интерференции обратно Пропорциональна площади анализируемого
участка, а дисцереии оценок координат центра интерференционной картины
зависят от квадрат отношения AR/S.
На рис, 1 иллюстрирую 1сч значения дисперсии /Л для единичной илошадл
и дисперсии Dt Оыенка положения центра интерференционной картины
является достлично точной при условии AK/S «1, Необходныо учитътпатъ,
что вследствие офаниченной разрешающей способное!» регистрируются
устройства при уменьшении R и использовании увеличительной оптический
еистемы величина 1R/S увеличивается, что ведет к офаничению достигаемой
точности нзмерепий.
Подученные результаты показывают, чго методы статистического синтеза
приводят к оценкам» которые согласуются с данными, полученными другими
независимыми расчетами. М^жни
сделать вывод, что использование
правила максимума правдоподобия
для интерферометричеекнх систем
фалнюго типа с квадратичным
распределением фазы является эффектнь-
iri.iM, причем соответствующие алги-
ригмы обработки фазовой функции
реализуются сравнительно просто.
Следует заметить, что применение
предварительной обработки
интерференционное сигнала (3) Позволяет
пупем соответствующей коррекции
получить удобные апрпорнме оценки
Х„ = У0 = 0 в (У) ц (10). В противном
случае матрица (11) не будет аиаш-
напыюй и алгоритм обработки замст-
но усложняется.
Рассмотрим показанную; на pncL 2 функциональную схему интерферомет-
рического устрой^ ва, синтезированного в соответствии с принятмм подходом,
couiaeiio соотношениям (13)-(15)г
Интерференционный сигнал s(x, у), полученный на выходе интерферометра,
подвергаете* предварительной обработке, например, восстановлению
аргумента аналитического сигнала, в результат которой цичучают распределение фазЬ1
{р(х, у) в ькде (6) при Xv = Уо = 0. Полученные -тачення $>, >•) обрабатываются
ъ ipex параллельные каналах по числу компонентов вектора параметров.
D&'ltf
10 +
1,0+
0.1 +
D;, нм"
+ 0.01
0.001
+0.0001
0,001
Ш\ м!
Рис. 1. Дисперсия оценок параметров
интерференционной картины
174
Компьютерная обработка сигналов
sfay)
Т(х. >)
Р&- У)
X
Р(* У)
>'^-д-
+
Л
Рис. 2, Функциональная схема устройства оптимальной обработки
(I -интерферометр, 2-измеритель разности фаз)
*<*)
1
1 ^-—**
1 <рь
1
1
1
1
1
■аГ2
Л
Е
с,
]
1
1
г
i
i
1
i
1
■ k
а/2"
Рис- 3. Оценивание дробной части
порядка интерференции
Процесс обработки дополнительно
нняюстрирустся па рис 3 и 4.
Рассмотренным метод может быть
использован для ком[|ькисрной
обработки интерсрерсниионных сигналов
проиэдольною вида при условии, что
ич vi- г ичиг тнпп и а па иртл mi -faa
-а/2
а/2[ х
поправка
Рис. 4- Оценивание бокового
смещения интерференционной картины
Гпава 6. Обработка на основе стохастических моделей 175
Модель Ф(-1, у, ©) фазовой функции в (7).
Заметим, что восстановление фазы tp(x, у) в гетеродинном шщ модуляци-
Опном интерферометре может быть осуществлено црН помощи
многоканальной тротоэлсктрической системы с троюдиодцой матрицей L13J, При
формировании пеподвижных интерференционных картин в интерферометрах с
управляемым дискретным фазовым сдвигом, как правело, требуется
предварительная обработка шгтсрфсреннионньтх сигналов, зарегистрированные
ПЗС-камерой (см. разд. 4 1л. 2),
6.2. Анализ и декомпозиция интерференционных
сигналов на основе авторегрессионной модели
Пусть интерференционный сигнал представлен К-точсчпой
последовательностью дискретных oTC40iobi(&)^ Авторегрессионная модель порядка N ицтер-
ферепгшоиного ситала определяется выражением (99) тл. 1 при m = О,
ДО) = 1 в виде
и
кЩ = - Ц ф)*{к - л) + w(*)t (21)
где случайная последовательное 1ь Ц'(^) имеет нулевое математическое
ожидание н дисперсию с£. Каждое значение сигнала j(fc) в исходной
последовательности является суммой отсчета детсрымннрованного тренда и случайного
отклонения Отклонения в К точках представляют собой последовательность
случаицьоЕ величин. Если отклонения имеют нормальное соаместное
распределение вероятностей и процесс {w(fc)} нвляегеа стационарным, ю параметры
этого распределения определяются заданием r (22) дисперсии случайной
велнчиым w{k) и параметрами а{п). Модель авторС|рессии (22) нысет преину-
Шсство в вычислительной эффективности по сравнению с общей моделью
ав1 opeipece ии - скользящего среднего (99) из гл. 1,
Оценивание параметров а(л) обычно основьгеаетсч на алтритме ымними-
защш средней квадрагилеской ошибки аппроксимации последовагельности
данных j(jt). который можно представить в векторно-матричпон трорме следу-
ющны выражением [4* 5].
a = (S?S)-'SrS, (23)
где
176 Компьютерная обработка сигналов
а =
а,
а.
5 =
J.4 Лл-j -
Sfl/.l Sn .
SK-\ 3i--: .
. J,
, s2
. Sx N
-
.* =
-
Jfl+1
£*4j
--.
Sa
— -i
w^ =
—
WN4
W.-uj
Wy
-
(24)
-случайный вектор, представляющий гоуссовскую формирующую
последовательность в (22).
Недостатком модели (22) является то. что она носит формализованный
характер и не oTpaaaci физической сущности процесса форыпрования сигнала
в иптерферимстрической системе. Этот цедосюток устраняется в
представлении авторегрессионной модели в иной форме
#)=2]Gf (>(*-!),
(25)
i-n
гае ССО-фукпчя Грина, которая показывает, насколько в системе при
формировании значений сиптала учитьгнается влияние стохастической
последовательности w(k) на предыдущих inaiax. Негрудно заметить, что (25) пред-
С|авляет собой операцию свертки, п которой ныпульеным отклик системы
предъявлен функцией Грнпа.
Б свою очередь, функцию Грина можно представить в форме
ОД = Sitf +&# + ... +%«Г*. (26)
гае у- т= 1 п есть корни (п степени 0 полинома авперегрессии,
характеристическое уравпетше Которого имссе вид
у- <*,/„.,-„.-<*, = О, (27)
причем для кажаого ут весовой коэффичиент %т в (26) определяется выражением
_ £1_
£т =
(у-- п)...(г->- /-0(г™- **»,) --(к*- х.)
(28)
Модель (25) осуществляет декомпозицию значений интерференционною
сигнала но различным модам в (26) и учитывает их периодичность. При
обработке данных оценивается период, амплитуда и затухание каждой моды
по отиошепию к обшей дисперсии сигнала
oi = di 4- dz -+-... -г J„,
(29)
Глава 6. Обработка на основе стохастических моделей tfi
П№
d- =
„fisfil
— +
Jjsfii.
Яи8н
^1 "frfl I" ^ "" 1-ГтГ-
ей.
(30)
Представление функции Грина в форме (26) соответствует особенностям
физического процесса формировании интерфереимионного сигнала:
стохастическая последовательность н^£), представляюшая отклонения сигнала s(k) при
случайных флуктуацияя. в результате свертки с функцией Грина (26)
определяет эволюцию процесса формирования реального сигнала.
На первом этапе компьютерной обработки нужно из (23) найти вектор
параметров авторегрессиоиной модели (22), компоненты которого далее цеоб-
кодныы дли расчета функции Грина согласно (26Н28).
Существование периодических составляющих сигнала в
последовательности s(k) определяется наличием комплексно-сопряженных корней полипома,
. определяемого (27), тогда как денствительньте корни соответствую!
экспоненциальным модам в (26).
В случае комплексно-сопряженной лары корней у„ и ymi типичный вид
моны определяется выражением
gnyL + K^fr^ = г,"&.ео9(£ + 2яш), 01)
гас шаг дискретизации сигнала принят равцмм единице,
IM = 1jU = [ji.,,1 (32)
и - (1/2л) агееоз Г {& + у^)/1{ут у^У* ],
sm = 1\ g*! = 21 g,.i \.е = arctg Г Im<£)/Ro(£) 1. (33)
, йаличие аюм1злскен<>сопряженных корней позволяет найти коэффициент
затухания модъ: по формуле
d=-[\o(7mym^y(2xu)l (34)
Близость к нулю коэффициента d показывает, что периодическая состаавлю-
|цая близка к идеальной косинусоиде.
Рассмотрим дискретную последовательность (ем. рис, 5) отсчетов
интерференционного сигнала
' Щ = s0{k) + s4k) cos v{k) = (35)
= st(k) + 2s4k) exv{j^k) \ + ls\(k) exp[-jp(i)].
Иеполь-зуя разложение сигнала (35) в форме (25), (26), можно записать
178 Компьютерная обработка сигналов
О 100 200 300 400
Рис. 5. Реальный интерференционный си тал
500 600
st(k) -+- IsAk) ехрЬМ*)] + 2$ф t\vWti)\ = ^ Rmtf. wik - i)-
(36)
Фоновая состаашношая s^Jc) может быть представлена функцией Грина в
правой части (36) в форме
С = gj/L (37)
гае уь является действительным корнем уравнения (27). Это означает, что
фоновач составляющих предстайюег собой плавно изменяющуюся функиию.
Если функння Грина определяется парой комплексuo-еопряжеиных корпей
У~, ут*и Т- е.
Gozignft + gH-iyU, (38)
то можно учесть плавные периодические изменения фоновой составляющей
При комбинировании (37) и (38) можно учесть также более сложпый вид
фоновой Составляющей.
Втирая и третья информационные составляющие в (36) представляются
функцией, соответствующей царе двух комняексно-сопряженньтх корней:
G4 = i>^+g^r*-'. + $*ft + g~yY^- <39>
где ?щ = ути цт = ц^-1, Потому грстье слагаемое в (36) можно представить
авторегресс ионной моделью первого порядка
Глава 6. Обработка на основе стохастических моделей 1?9
i
0.5
0
рад
5
0
-5
/vJV>
100
у|/|/
—■ 1
w#
200
Д/
—• ■—
tV
*А
300 400
Л'
v V
—р
/
—1
i Jl
vHW
500
Л/
V V
1
\^\
600
/1
—•——^-
к
100 200 300 400 500 600
Рис. 6. Восстановленная огибающая (а) и фаза {б) гопнала [й|
z(k) - Цк) +jsJ,k) = 2ь(к) ырЫк)) = (40)
= 2y*s*{k- l)cxp[jip(k-\)] + f>mw(k).
Искомые значения фазы интерференционного сигнала равны
tf *) = arog [ 1га Z{k)/Rc z(k) J, (41)
чго совпадает с вьфаженимми (95) гл. 1 и (49) гл. 4.
Результату обработки интерференционного ситала, показанное? на рие. 5,
методом няентификапии авторегрессионной модели (25) иллюстрируются
рис. 6.
6.3. Обработка сигналов методами стохастической
дискретной фильтрации
Ранее в пи, 4 были рассмотрены особенности обработки интерференнион-
ных сигналов при цоиоши операций свертки с импульсным откликом h(x) или,
что эквивалентно! при номошн операции умножения на персдвточную
характеристику в часюгной области H{it) = ?\h{x)j, гае F{ ■ [- операния ареобра-
ЗОвння Фурье. Часто этот метод фильтрации является более удобным.
Многие системы могут быгь цредетавлень] иным образом - посредством
дифференциальных уравнений, сьхзываюших входные данные с выходпьми,
В случае дискретных систем используются соответствующие разностные
упарнен *я.
180
Компьютерна*! обработка сигналов
Для этого подхода существенны три важттых условия.
Во-первых, если требуется наптн выходные даннме на некотором интервале
Н{х^х,)> то необходимо знать не только входные данные на этом ингервалс,
Но [акже определетптое количество начальных условий, коюрык должно быть
достаточно для характеристики того, каким образом предшествующие входпме
данные при х<хъ влияют на результат при х>Ха,
Во-вторых, целесообразно использовать попятие состояния системы, под
которым понимают минимальное количество сведении относительно предъщуших
дащплх ria входе системы, необходимое вля полного описания выходных данных при
i > лс. Переменные велнчинн которые содержат эти сведения, принято называть
неременными состояния, совокупность которых образует веюпор состояния &{х).
При строгой математической формулировке конкретной задачи Но
заданому состоянию системы в точке м и входным данньтм на интервале
(io.-Il) можно однозначно определить выходные данные и состояние
системы в точке *,. Приведенные соображения достаточно очевидна
для детерминированных систем*
Третье условие относится к вопросу формирования случайных данных, а
именно, требуется знать, каким образом характеризуются случайные входные
данные и случайные начальные условия.
Обработка данных в пространстве состояпий основывается на специальных
математических методах, которое рассыхтриваютса далее в настоящем разделе.
Теоретические основы методов стохастической фильтрации
В достаточно обшем случае предполагается, что процесс формирования
полезных данных jl(j) системы; обработки определяется стохастическим
дифференциальным уравнением пцрядка Ni
it* + аы(х) Jf-"(i) + - + <& Ч1) = Ы w(x). (42)
me s^'x) — N-ая производная от s,(x)< а„,Ы- коэффициенты, w(x) — выборочная
функпня формирующего случайного процесса. Для решения этого уравнения,
очевидно, пеобходимо знать значения st(x), —, if^'V) B начальной точке in.
Имении вто условие определяет возможность представления системы в
пространстве состояний.
Часто бывает удобнее работать с векторным дифференциальным
уравнением первого порядка, чем со скавлрным порядка N. Примем дня простейшего
случая днцейпой системы* что
ВД = six),
0-.(х) = лг>(л) = Щх),
Епава 6. Обработка на основе стохастических моделей 181
'" В матрпчио-векторные обозначениях N-мерное векторное уравнение
первою порядка иисет вид
£
- dx
где
А =
= л
0
0
-На
V^J
1
0
0
-л.
} +
0
1
0
...
О W\X)t
0 0
0 ...
»■ 1
— - Off-\
(43)
i-
В
ы
Вектор В(х) является вектором состояния данной линейной еиетеым, а
записанное выше уравнение- уравнением состояния. Вектор состояния
принимает разные значения в npvcmiiQHcmae состояний иди фазовом пространстве.
„ Данные $i[x) связаны с вектором состояния лилейной системь* выходным
уравнением вида
Ф) = се{х),
где С - (N *■ 1)-матрица, С =
. Последние два уравнения полностью
10 0... О
определяют линеинун? систему.
Для еисгем с изменяющимися парамстраым в качестве основного
представления исдодьзуются векторные уравнения я форме:
dx
= А{х)Щх)±Цх)Мх),
(44)
ъ{х) = С{х)&(х).
Задача фильтраиии формулируется следующим образом. Имеется уравнение
наблюдения
si(x) = х,(х)-ьп(х),
162 Компьютерная обработке сигналов
которое евязывает данные наблюдении j?(jc) с данными i-\(x) в условиях
воздействия шума п(х). Полезные сведения "закодированы" и заключены в
значениях параметров данных st(x), образующих многокомпонентный вектор
параметров ©. Считается, что полезные данные представляют собой значения
функции известного вида s,(x, ©).
Задачи фильтрации состоит в том, чтобы по данным наблюдений Si(x) с
учетом априорных сведений о виде сигнала Si(x, 0) и характеристиках шума
п(х) получить наилучшую по заданному критерию опенку Щх) вектора
параметров для всех "текущих" точек наблюдения.
6 случае фильтра Калмана [6] априорные сведения задаются в виде
линейных дифференциальных уравнений (43J с известными начальными
условиями.
Дифференциальные уравнения для скалярного параметра 4? запишем, исходя
из предположения, что (%х) представляс! собой олнокомпонептньга случайный
цропесс, который формируется ия белого некоррелированного гауссовскот
шума w(x), < w[x) > = 0, < w{xi) w(x«) > = (AV2) ^ I х, - х-1 ). Уравнение имеет
вил:
^ = №>$ + к(х),Щ=а. (45)
Можно показать, что скалярный случайный процесс • &(х)\, описываемый
этим уравнением, является диффузионным марковским процессом^ априорна»
плотность вероятности р(Х 0) которого опрсделнспся уравнением Фоккера-
Планка- Колмогорова
др(х, в) д1е, л , Л1 1 <?
сх
= - -ф{х, Щ р(х, &)] + - wWvp(x, &)] = L | р(х, в)}. {Щ
Здесь L|-| обозначает оператор Фоккера-Г/ланка-Колмогорова. В
рассматриваемом случае имеет место однозначное соответствие между описанием
случайного процесса | в[х) \ обоими дифференциальными уравнениями (45) н
(4h). Применительно к проблемам обработки сигналов оператор Фоккера-
Планка-Колмогорова оцределяс! эволюцию плотности вероятности
р(х. Щ случайного параметра С(х).
Уравнение, характеризующее апостериорную плотность вероятности оц-
нокомпоненшого марковского процесса, полученное Р, Л. Сгратоповнчем {&].
имеет вид
др'^ ^ *-" L [р,(х, в)} +■ [F(xb в}-< F(x, в) >] р,(хь в}, (47)
Глава 6. Обработка на основе стохастических моделей
183
Пх^-(1/^)Ых)-ф,в}У
прелставлясг собой производную по переменной х от ло)арифма функции
правдоподобия, < F(x, в)>- математическое ожидание, оп ределеяемос в форме
<F(x,Oi> = l F(x,e)p(x,e)d&.
Начальные условия для уравнения СгратоновИча определяются априорной
плотностью вероятности р(0, &) начального значения ЙР) = ва.
Апостериорная плотность вероятности рЛ*. Й содержит всю доступную
информацию о параметре #дг), Которую можно извлечь из данных наблюдения
st(x) на шпервале (0.x). Используя p,(xt &)t очевплню, нетрудно вычислюь
условное магматическое ожпланне и дисперсию параметра в.
Фильтр Калмана
Если уравнение наблюдения и фупк-пня f\(x, О) являются линейными
относительно 0, то задача опеинвання параметра в является линейной задачей
фильтрапли решение кшорой впервые получено в работах Р. Калмана и
Р. Бьюси [6, 7].
Фильтр Калмана для простейшего уравнения наблюдения
si{x)= ед+ЧД
в котором Si{x, О) = 0{х). определяется стохастическим дпфференцнальпым
уравнением
™р- = - atyx) + 2 о%х) Ых) - tm/Нъ (48)
ах
где а-постоянный коэффициент, йд)-оценка математического ожидания
нараметра О, oV(x) -ниеперсия апостериорной оценки параметра 9, Mi-
сисктральная плотность шума наблюдений.
Прн дискретной фильтрации уравнение наблюдения и уравнение состояния
имеют вин соответственно:
^*) = ОДад + п(й), (49)
Щ = A(k- \) 9ik- 1) + Мк\
гае С(к), А(к) - значения заданных функций в точках я = х,. Результирующее
уравнение для опенивання параметра 0 дискретным фильтром Калмана имеет
рекуррентный характер
184
Компьютерная обработка сигналов
§к) = А{к - 1) Ь(к - 1) 4- С{к) ctf(fc) 1Г(к) х (50)
*{5ф- С(к)А(к- l)fyk- I)],
где D(k) - дпсперсия шума наблюдения.
Фильтр Калмана, располагая оценкой Щ-\) на предыдущем шаге н
осповыцаясь на уравнении (49), прогнозирует оценочное эиачепие
А(к - 1) Щк - 1) на *-ый шаг. При получении £-го наблюдения Sj(k), ирошози-
рояаплая опенка дополнительно корректируется на значение,
пропорциональное невязке (так называемому обновляющему процежу), т, е. отклонению
прогноза С(к) А{к - 1) Ъ.к - \) от полученного значения &{к). Коэффициент
пропорциональности С(к) &Дк) D~\k), регулирующий "вес" неаязки для ОД по
сравнению с прогнозом А(к - 1) Ъ(к - 1) на^ьшают коэффициентом усиления
фильтра Калмана.
Коэффициент усиления, помимо значения известной функции С(к), опре-
дслястся также дне пстх;исйО(£) шума наблюдения и апостериорной дисперсией
o^(jt) параметра Oik). Можно показать, что cr<r(k) совпадает с квадратом
разности оиенки Щ) и истинного значения в(к), усредненным по всем
возможнь1М реализациям шума наблюден и* и. следовательно* характеризует
точность оценки на А-ом шаге,
Расмотрнм спектральные характеристики фильтра Калманаг
Известно [9], что стохастическое дифференциальное уравнение вина
dDjx) _
dx
= - авЧх) +- w(i).
(51)
ГЛе а - постоянный Коэффициент, определяет случайный процесс { в(х)}, сфор-
ымроиунный ни Gejioiu шума w(x)> причем
спектральная нлотноетт, GJu) опрепеляет-
ея формулой
1,0
С£и) =
oNti
2<да + 4я?м3)'
(52)
0 0,5 1.0 1.5 2,0 biuia
Рис, 7. Спектр мощности
"окрашенною" шума
где АЪ-спектральная плотность форииру-
rouidu 6eJioJ"J шума М*)- Согласно (48),
прос1сйШНИ фильтр Калмана выделяет из
стохастического входного сигнала ^(х)
составляющие в поносе пропускания,
определяемой (52). Впл зависимости (52)
показан на рис, 7.
Для фильтракли узкополеецого
процесса, сп мощности которого соспелегт-
Глава 6. Обработка ка основе стохастических моделей 186
чен в основном около некоторой центральной чаеюты и» в сравнительно узкой
полосе частот Дц (т. е, Аи/иа < < 1) можпо использовать фильтр второго
порядка, выходные сигналы которого определяются системой двух
дифференциальных уравнений первого порядка:
dx
= ад,
da
dx
= -2a9,{x)-bi6i.x) + tf!w(x).
(53)
где а и h- постоянные коэффициенты. Спектральная шютность случайно^
процесса (53) имеет вид
G£u} =
b'N*
(54)
lyib-lmy + a^h + lmtY + a*
при b2 > > а\ Функция (54) имеет максимумы на частотах ш = ± Ь/2ял ширина
полосы Ли определяется параметром а. Таким образом, фильтр (53) формирует
сигнал аналогично колебательному конгуру.
Система стохастических дифференциальных уравнений более высоких
порядков определяет формирующие фильтры с более сложными
спектральными характерне гиками.
Пример работы фильтра первого порядка иллюстрируется на рис. 8.
Рис. В, Обработка ситэлэ фильтром Калмана: исходный сигнал (а) и результат
{ЁИЛЬТОЭНИИ (6\
185
Компьютерная обработка сигналов
ш£\ Исходный сигнал (рис. 8, а) рассмат-
aj ринается как сумма детерминированной
синусоидальной составляющей и высо-
кочас ц?тного аддитивного туна.
Фильтр, определяемый на основе
уравнения (51), при больших эначеинях
параметра а осуществляет
низкочастотную фильтрацию (рис. 8, б). Важно
— огметить, что дстерминированиая коси-
п ' 1—* иусоплальная состакляюшая при этом
20 40 * не изменяется, однако наблюдается вди-
Оа(к) яннс HHiKOiacTOTTioiu шума в виде плав-
б) ных отклонений значений сигнала в
пределах длины реализации.
На рис. 9 показаны примеры
зависимое icH коэффициента усиления
фильтра и дисперсии значений искомой
величины #на выходе фильтра.
Представляют интерес начальные участки кривых,
1Дс происходит адаптация фильтра, Ич
\ ~ г~~* рис. 9, а вплно, что коэффициент усн-
^ ления сравнительно быстро достигас!
Рнс* 9, Эволюция динамических уетановинтнегося значения, поэтому в
параметров фильтра рад(. случаев его можно придныать
постоянным в целях упрощения структуры
фильтра. Одпако при Том возрастет дисперсия опенок искомого параметра па
начальпом участке интервала фильтрации.
Оценивание вектора параметров
Рассчотрии более общий случай векторных наблюдений, в результате
которых требуется получить оптимальную опенку вектора параметров.
Априорные сведения задаются системой стохастических
дифференциальных уравнений первого порвляа
= л,(:с)й+ «.!(*) ft+ ■■.+M^)* + W-
где i = 1 М, В вектор но-матрич ной фирме уравнение имеет вии
Глава 6. Обработка на основе стохастических моделей
187
где @ = (# &)т- вектор-столбец параметров, А[» -(М*М)- матрнна
коэффициентов, w = (wi,..., wm)t - вектор реализаций формирующее нскорре-
лированного гаугсовского случайного процесса с нулевым математическим
ожиданием и со спектральной плотностью N& в виде симметричной (М • М)-
матрицы.
Наблюдаемые данные в линейной системе определяются как
Ых) = С(х)Щх) + П(х), (5ft)
где &2(х) -(Iм /0-пектор наблюдений, С(х)- (М х К)-ма1Прица наблкгдений,
р(х) — {\ х /Г|-всктор реализаций форМИруюшс!о гауссовского
некоррелированного случайного Процесса со спектральной плотностью в виде симметричной
{К у К)-матрицы Nn(x),
Уравнение оптимальной филырапии принимает вид;
dx
= Afi + HCNi'fsj-Cfi),
(57}
^^AR + RA'-RC^rVCR + N*,
<58)
R- ковариапиоиная матрица погрешностей фильтрапии вектора парамет-
в.
Суть алгоритма остается прежней: экстраполированная согласно (57) оценка
© корректируется с учетом поступающих данных «» причем невязка
-С&) ''усиливается" пропорционально значениям магрнцы RC^N™1 . Для
шесса опенивания вектора параметров дискретным фильтром Калмаца
аведливо уравнение:
^А(£- 1)ё(^-1)+ (59)
кт)<?(к)П*'№Ык)-С(к)Щ-1)ё(к-))}.
Структурная схема фильтра Кздмана приведена на рис, 18. гл. 1.
В заключение отмстим, что рекурренгныц алгоритм Калмана особенно
беи при обработке данных в реальном времени, т, с, по мере поступления
[. Важно подчеркнуть также, что коэффициенты усиления в скалярном
d&SD и векторном R С7 No' случаях, как и дисперсию ai. и ковариационную
иду R оценок искомых параметров, можно считать не занисящиии от
ных донных. Они Moiyr быть рассчитаны заранее для всех точек к и
"сны в цвиять компьютера для использования по мере надобности. Кроме
этого, возможен переход к квазиоптимапьньгм алгоритмам, когда усиление
[ьтра устанавливают постоянным, при этом структура фильтра значительно
упп шается,
188
Компьютерная обработка сигналои
Можно показать, что фильтр Кал мал а дает наилучшие в смысле минимума
среднею квадрат нчсскоп? отклонения опенки параметров по Сравнению с
любыми другими линейнь1ми фильтрами, в том числе при негауссовых шумах,
6.4. Алгоритмы нелинейной марковской
фильтрации интерференционных сигналов
Фотоэлектрический нптерференпнонцый емшан можно представить в виде
Поспеловадельности оЮЧеюи
s(k) = .T,^jfc) + .T«(jt) со* Гг + ImtokAx + ф)~] +■ n(k).
Для наглядности последующих выкладок перепишем последнее выражение в
полых обозначениях:
j* = д*+лмсой(Ф+Ли)+К* (60)
где Ф* = Е-\- Uxt - значения фазы, xt -дискретные значения независимой
переменной, Xt^kAx, £ = 0,1 К* Я-начальная фаза в точке к = 1, U-
круговая частота, Jw-отсчсты неравномерной фоновой составляющей, .W-
значения ощбающсй интерференционных полос, NB - аилнтивиый шум,
<N*> = 0, <Ni> = oi , -Ч*-флуктуации фезы, <N^> = 0, < JVjU> » ф>-
Искомые параметры в (60) в обшем случае можно представить компонентами
вектора Э = {U, 0&|г, гае ©* - вектор-столбец параметров пели ней посты
фазовой функции.
Рассмотрим метол оценивания вектора параметров ©, главным образом
значений фазовой функции, на основе использования положений марковской
теории оптимальной нелинейной фильтрации [9—11]. Преимущество TaxoiO
подхода обьяспяется тем, что марковская теория свободна от существенных
априорных офаниченны, используемых, например, в гаусоовекой теории
нелинейной фильтрации или теории фильтрации Калмана )б].
Метод оптимальной нелинейной иискре гной фильтрации интерферометры -
ческих лунных вида (60) будет рассматриваться далее и гауссовском
приближении ц дороги порядка с получением оценки вектора параметров, которая
cooiBcrcTBycT известному критерию максимума апостериорной плотпостн
вероятности. При некоторых допущениях, обычно выполняющихся на
практике, этот критерий сводится, в частности, к критерию минимума средней
квалратической ошибки. В рассматриваемом алюритме учитывается
совместное влияние коррелированною со значениями интенсивности алаитивого шума
и фазовых флуктуации [И],
Последовательность питерфсромстричсских данных можно представить и
rbo оме:
Глава 6. Обработка на основе стохастических моделей f89
1 +
Vexp{-a)co3(^)|,
(6J)
л =-fa
где
С* - {xt - **) Ht, (ft = Ut x„ + E. (62)
Модель (61)^ можно записать в более общем виде л = J^-ti, ©*)r Bexiop
параметров© содержит цять компонентов в = (Фт (/, С, R У}7, включая
параметры С, В огибающей н значение видности V. Наблюдаемые данные с учетом
влияния шумов характеризуются выражением
3 = ^fH-Vexp(-a)cos(04 + ^plk)"
Na
(63)
Задача состоит в построении оценки вектора & на ком шаге при обработке
значений наблюдаемых ингерферометрнчееких данных (63),
Для решения задачи в такой постановке включил компоненту N^ в состав
вектора 0
и будем рассматривать в качестве полезных данных значения функции
st = st(xi„&,). Таким обраюм, реализация наблюдаемого интерферометрнчес-
кого процесса определяется моделью
<5 = J*Ctl, ©() + N*. .
(64)
Фазовые флукгувияи можно в рассмагриваемом случае описать разностным
уравнением )Я]:
JY^-fl/W + G.*^
где Gwl1- функния преобразования случайной гауесовской последовательное га
Л\ отсчетов формирующего белого шума. <N»> = О, <N*,Nr,> = й™, &m -
епивол Кронскера, а - известная постоянная.
Уравнения для дискретного оценивания вектора параметров в точке xt в
случае гауссовского приближения второго порядка [У, 11] имеют вин:
, _
eJ = ef->+Rr
£©£->
8Т(Л>,0Е1)РГ1
(65)
a-s(x,,mi)- В:
а = к' - к
_
ш
з^©!1)/^*
(66)
190
Компьютерная обработка сиiналов
гае
МИ
фф
U0
СФ
ВФ
УФ
(*.«")
К1,
СО
BU
VU
ЯгьФ NpbU
ФС
UC
СС
ВС
VC
N*C
ФВ
ив
ев
вв
VB
N^B
ФУ
UV
CV
BV
VV
Ф&*
UNPk
CN*
BN*
- ковариаплонная нлрица параметров, Ы ', К-1 - качения вектора
параметров и ковариационной матрицы п точке а, предсказанные на niaic дц,
Вг
№'
д
т '
1
д&
- ^
3№1
Б (*,, 3JT1),
-,Г
Ш Ц*1>
Р.= 01 +
iBsb-i «м *ртЛ" ааей ■
*■»-] ^*1,+ift-
(67)
(6*)
(69)
Я.Г.Ы
при этом выражения и фигурпых скобках в (67), (68) следует читать как
оператор iio птиошенню к одной последующей функции, ^-длепереия
аддитивного шума. В (69) в качестве Э и R следует использовать значения,
предсказанные на предыдущем шаге.
Выражения (65), (66) определяют яцачения для в и Rn общем случае, когда
исследуется векторный интерференционный сигнал. Для простоты вначале
будем рассматривать скалярный сигнал, тогда sr(:t(. ©£"') = s{xt, ЭР). При этом
матрица Bn. (69) состоит Из одного элемента. Алгоритм предсказании осушес-
твлястся следующим образом:
для вектора параметров и
Щ-1 = R., + (дНц/д*)^
(70)
(71)
Глава 6. Обработка на основе стохастических моделей 73 f
для ковариаплонной натрипьь В (70), (71) начальные условия считаются
случайными величинами, Ал обозначает шаг дискрстизапнн, значение которого
принимаем равным 1. Из (61), (62) имеем д&/дх = |~£Л 0, #, О, 0, -(1 +a)NpA.
Тогда первое слагаемое в (65) можпо представить в форме:
где
М =
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1-
(72)
I-единичная матрица. Дня. ковариационной матрицы можно записать
следующее выражение:
»"' = R_]{I + M,) + Mffc.l + GkcrP (73)
где
М
оооооо
10 0 0 0 0
оооооо
0 0 10 0 0
оооооо
0 0 0 0 0 0J
а =
оооооо
оооооо
оооооо
оооооо
оооооо
о о о о о с.
(74)
С учетом (61) и (62) запишем матрицу чувствительности в виде:
-Aexpl-tQ-1)2] Vsin^-'+Afe1)
0
-А С,' ехрЕ^СЛЧ (1 + Vsin(^L +ВД )1
0
0
-Асхр[- (О-'Я Vsui(-# ' -нВД )
(75)
192 Компьютерная обработка сигналов
Здесь производные от вектора параметров по компонентам £Л В, V приняты
равными нулю, так как значения этих компонентов для упрощения
математических выкладок будем считать ностояпиьеми при к = 1 К.
Раскрывая скобки в (67 >, определим значение й? как
(76]
■J-]
Из выражения (75) для матрипы чувствительности D* видно, что требуется
учитывать только производные ds/дФ и д$/вС. Поэтому можем звияезгь,
согласно (76), следующее выражение:
Bi = _ __» Дц + Дм 4- Ri,i 4- й»
дФ7
+
(77)
дФдС<- -> сО
где
дФ1
= -A expL-(a')-] Vcos(<#"L 4-ВД ).
= - А О"' ехр[- (П-1)*] ^дш(^-' 4-ВД ),
-~- - А ехр[- (а1)'] ] 1 + Усо5(ФГ' + ЛК )] - t(№)a - 1 ]■
Аналогично, учитывая в (69) только эти производные и их произведения между
собой, получпи:
В,=
'*/"
00?
да + ^о + Д!л-А1л-2Я«^ + 2Дийи + 2ДйДк +
(7S)
(2л«) Л22 + 2пк ЛТС +
+ 2Rss R& + 2Rm Дй + 2Яю Д.™) 4-
ft
4-
Rb+ Д~ [Д-, + ^ 4-Д^4-Я^ + 2Д1ПА:3 + 2Дщ Ля]+
Глава 6. Обработка на основе стохастических моделей f 93
+ ~-(Dj **т\ъг ^^* ^Е + ^Е ^т + ^» "" + 2йк Дм 4-2Ящ Дл +
+ itvin; n^j 4- 2Л-а л>7 4- itvii fljs 4- 2ллл Hjo 4- 2nmi Kis 4- 2пя /i^a 4-
4- 2ДИ Д:, 4- 2ДЩ Дм 4- 2/гг, Д>5 4- 2ДЦ Дм 4- 2Я* Д*)
Теперь (75), (76) можно переписать в виде:
В. *= &*' + R!' Dt[= - j(A, вК ') - 1/2 Я3] Л1, (79)
Ki = HS"1 (1 - D* Df Hi"1 Pi1). (SO)
Выражения (79) и (SO) определяю! опенку искомого вектора параметров 0,
при этом Ds и Bi вычисляются из (65) и (6К), cootbctcibctuio,
P^rf + DfRS'fc + l^ft,
где By определяется из (69).
Характеристики раесмо грен ноги алгоритма иллюстрируются примерзни
восстановления фа'юьой функннн интерфоренциониой картины для случаев
освещения интерферометра суперлюмннеспентным лазерным диодом Л =
ОЛЯ мкм с длиной Ксцсрентнос |И около 40 мкц (рис, 10)» плавного отклонения
форым волнового фронта (рис. 11) и отражения объектной волны oi
поверхности с остаточной шерохова гостью (рис, 12).
Из рис. 10, в ввняо, что начиная с 25-го отсчета в последовательности
интерферомстрических данныхh ко1да завершена адаптация фильтра, никоаме
значения погрешности восстановления фазы дФас превышаю i 0,012 от2лрац
и, следовательно, обеспечивается точное нападение па ахроматическую полосу
Заметим, чгосишал, показанный на рис. 10, а включает в себя еушествеипо
неравномерную фоновую составляющую, которая не учитывается явно в модели
(63). Это вызывает возникновение фаэовыя погрешностей (рис. 10, н). Однако
noipeuшости являются малыми и устойчивость работы алгоритма не
нарушается.
Надежное восстановление фазовой функции обеспечивается также при
малом числе периодов изменения интенсивности и интерференционной
картине, коша значения видпости и ширины интерференционных полос четко не
определены. Установившиеся значения фазовой погрешности не выходят за
пределы 0.012 от 2^радг (рис. И, в).
В условиях воздействия шумов спеклов цри использовании разработанного
фильтра достигается устойчивое восстановление полной фазы (рнс. 12, б). Для
Сравнения на рис. 12, в представлены результаты восстановления фалы
известным метода уп анляемого (Ьазовота сдвша при цнтп. значениях фазы со
194
Компьютерная обработка сигналов
6)
50 150 250 350 450
рис-10. Восстановление фазсвпй
функции в случае
частично-когерентного освещения интерферометра
вид сигнала (а), фазовая функция (б)
и фазовая погрешность (в)
сдвигами к/2 [5.4]. На рис. 10, в явно
пилен аффект 2 ^-неустойчивости,
характерный для метода фазового сдвига.
Этот недостаток устраняется при вс-
иользовашш рассмотренного метода
нелинейной марковской фильтрации
(рнс 12,6),
На основании представленных
результатов можно сделать следующие
выводи.
Метод марковской нелинейной
фильтрации обеспечивает
возможность определения фазовых характс-
рнешк интерференционных, картин в
широком диапазоне изменения пара-
ueipoB распределения интенсивности.
При этом достигается эффективное
уменьшение влияния фазовых
флуктуации, а также аддитивных шумов,
коре ллированных со значениями
интенсивности в иптерференииоиной
картине, па основе строях критериев
оптимальности, чго является
существенным преимуществом по сравнению с
другими методами восстановления
фазовых характернс-гик интерференпи-
енной картины.
Преимущества представленное
метода заключаются также в более
высокой точности, oicyrCTBHH 2л-1геодноз-
начпости восстановления фазы и в воз'
можноети работы в масштабе времени
постушцмшя данных. Точность
дополнительно повышается при
итерационной обработке данных.
Метод нелинейной марковской
фильтрации может быть использован
для определения фазовых
характеристик двумерных интерференционных
картин.
Гпааа 6. Обработка на основе стохастических моделей
опт ад,
0,9
0.6
0J ■
0.0
рад
\ ■ ■
9£
7,0
'ч.о
ft*
рад
0,12 '
И BJM
-0.(4
■«О
-tug
_k. I I l___-L
A)
6)
0 iQ 150 250 i50 4S0 k
!*hc. 11. Определение формы волново
^99 фронта: вид сигнала а сечении ин-
^^«рференционноЛ картины {а), фазо-
--.'*■* функция (6) и фазовая логреш-
9и<пъ(в)
*.
Рис. 12. Фильтрация фазовой функции
в условиях влияния слеклов:
интерференционный сигнал (а), фаза,
восстановленная методом нелинейной
фильтрации (6), значения фазы,
восстановленные методом управляемого
фазового сдвига {в)
19S
fSg Компьютерная обработка сигналов
Компьютерная обработка двумерных интерференционных
сигналов
Реализация двумеримх фильтров, способных учитывать сильную
корреляционную связь но второй координате при филырапии длумерныя сигналов,
является наиболее просюй, если наблюдение рассматривать как мноцжаналь-
ный процесс и одновременно обрабатывать сигналы с нескольких сечений
интерференционного изображения. Вектор наблюдений при этом мо*по
представить в виде
тле компоненты векторного сигнала, аналогично (63), имеют вид
« ^5^1+Уехр(-а)соз(<А-н^;У)
S» *
tY = Q,LZ-*K-l>
- интерференционный сшнзл, аарегисгрироланнын е сечении У* /1 - величина
у]ла наклона иитерфереппионньн полос относительно вертикальной оси
изображения* tf-число одновременно анализируемых сечепий.
Компоненты вектора параметров ® = {Ф, U, Г] вычисляются согласно
выражению
а = а-1 +£(№ D.r-fK-^D.rJt^-Sr) p-\ (82)
гае
P = ^^Rb.D,,-fK3'D11')D|l'-f(RWDlf + RMDlrjD3|]-<7J, (83)
й-значение йо компонента вектора параметров. Kj-значение элемента
ковариационной матрицы, #"' - зкетраполироваипое значение опенки i-ra
компонепта вектора параметров.
Элементы ковариационной матрицы определяются выражением
к i
R, = КГ - X (№ D" + ^ Dli) (ffi'D"+ Ki' Dil) ^'' (84)
где
D
-AVexp(- С) sin(# + /Y)
0
- YAV exp(- C*) sin(tf + iTl
Глава 6. Обработка на основе стохастических моделей 19?
В выражениях (82MS4) нндексь! ft и f (вне сумм) ния простоты записи
опушены.
Рассмотренный алгоритм по сравнению с одномерным позиоляс! получить
выигрыш в точности определении нарамс1ров интерференционного сигала. В
частном случае, когда наклон ннтерференниопных полос отсутствует (полосы
точпо перпендикулярны сечениям) двумерный алгоритм вырождаемся в
одномерный с тем отличием, что в нем осуществляется предварительное
суммирование отсчетов с онипакодныи номерами, принадлежащих ко всем сечениам.
Точносгь оиенки информационных параметров зависит от многих
факторов: от начальных значений вектора парамсгров и ковариационной матрицы,
от отношения ешнал-шум, от точности соответствия математической модслш
ннтерферограммы реальной интерферограмме, ol числа Элементов матрицы
отсчетов и т. д. Поэтому существуют сложности получения анаднтнческвх
выражении для оценки ючноепшх характеристик рассмотренного двумерною
а/пири-гма. Эти характеристики можно получить путем моделирования
сигналов и шумов и операций их обработки на основе рассмотренного алгоритма.
Исследование точностных характеристик алгоритма
обработки двумерных интерференционных изображений
Рассмотрим зависимости погрешностей восстановления информационных
параметров сишада от различных значений параметров модели и точности
задания априорных параметров.
На рис. 13 представлен идеальный (иезашумленный) двумерный еишад.
Сечения 8
Отсчеты
100
риСн 13. Двумерный интерференционны ft сигнал
196
Компьютерная обработка сигналов
Отсчеты
100
Рис. 14. Восстановленная двумерная фазовая функция
Погрешность*
рад
0.2.
0.1 .
-0.1.
Сечен ия 8
Отсчетм
100
Рис. 15. Зависимость погрешностей восстановления фазы от величины наклона
интерференционны* полос
На рис. 14 представлен график восстановленной согласно (&2)-(84) визовой
фуккчиа.
Рнссмотрснньш алгоритм обеспечивает определение не только приведенных
значений фа.1Ы в интервале (- л, я), но и развертывание полной фазы. Это
снимает необходимое ii> в дополнительной обработке фазовой функции для
Плава 6. Обработка на ооюае стохастических моделей igg
1 [огрепшоегь
рад
0.(11
Сечения
Рис* 16. Погрешность фильтрации фазы при неточных априорньог значениях
начальной фазы сигнала
устранении разрывов фазы (2 ^неоднозначности), коюрые неизбежны,
например, л алгоритмах Bocei ановления фазы аналитического еишала (см. гл. 4).
Устойчивость работм алгоритма характеризуется результатами обрабогки
гфи неточности априорных данных о неличине наклона интерференционных,
полое.
Погрешность восстановления фазовой функини иллюстрируется ряс 15.
Исследопа1гяя показали, чщ при неточном определений величины наклона
интерференционных полос в пределах 10% относительно вертикальной оси
координат изображения, ап^ритм остается усгойчивым. На середине реализации
(55-Й отсчег) погрешность в последнем (седьмом) сечении составила 0.01 рад.
На рис. 1ft представлен ]рафик зависимости Погрешности восстановления
фазовой о>ункпии при неточно виданной начальной фазе сигнала. Уже на
середине реализации (45-55 отсчеты) максимальная погрешность (по всем
сечениям) составила менее 0.01 рад. Алгоритм фпльтрацни более чувствителен
к неточности априорна заданных значений начальной фазы по сравнении с
неточностью эначеплй угла наклона интерференционных дилоС< Этот эффект
объясняется сильной чиррс.гяционпой связью по сечениям. Прн неточном
значении угла наклона полос восе ганавливасман в нервом сечении 4мза не
изменяется, Этим обеспечивается точное значение поправок к вектору
параметров и корреляционной матрипс при вычислении их по экстраполированным
значениям.
200
Компьютерная обработка сигналов
Значении погрешностей восстановления фазовой функции при воздействии
только фазовых флуктуации в ндапазоне 2ff/5 достигали 0.015 рад. При
добавлении авлитивного некоррелированного с сигналом шума при отношении
SIN * 50 погрешность возрастала до максимального значения 0.03 рал.
Как показали исследования, алшрнгм стохастической фильтрации хорошо
подавляет воздействие различных видов помех, яроявлмюшихеи в вияе фазовьтх
флуктуации и аддитивных шумов. Из полученных результатов исследовании
алгоритма двумерной обработки можно сделать вьшодъ что алгоритм является
более устойчивым к воздействию шумов» чем к неточностям определения
априорных значений параметров. При неточности априорных значений на
первых шагах фильтрации происходит авлпгивная подстройка параметров
фильтра, поэтому для повышения точности и уменьшения интервала адаптации
целесообразно осуществлять предварительную обработку с более 1очнмн
определением начальных значений параметров. Можно использовать алгоритм
фильтрации нтервияонно, ко|да вектор параметров для фнльфапнн на
следующем этапе итерации определяется результатами фильтрации всей реализации
ещнала на предыдущем этапе.
Список литературы
1. Метод максимального правдоподобия /В кн.: Справочник но нрнклавлой
статистике /Под ред. Э. Ллойда, У. Ледсрмана.-М.: Финансы и статистика* 1989, С.
281-354.
2. Фалькович С Е.. Хомяков Э, Н. Статистическая теория ил1еритсльных радпоенс-
тем.-М.: Сов. радио, 1981,-287 с.
3. Щербак й. И. Оптимальная опенка лараметров оптических сшналов по
критерию максимального прлвдоп ниобия //Иэмерительэвл техники. 19Я7, N7. С, 25-27.
4. Марпл С. Л. Цифровой спектральный анала.1 и сю приложения,-М.: Мир, 1990.
-584 с.
5. Pcndil S, M., Jordacbe N. lnierlerograTn analysis based on the daia-depcndcnl
systems melhod Гог oanomelrobgy applications //AppJ. Opl. 1995. V. 34. N29. P. oo95-
6703.
6. Балакритнан А, В, Теория фильтрации Капмаиа- - M,: Мир, 1988. - 1б9 с.
7. Равлотехвичесхие системы /Под ред. Ю. М. Касарвнива, - М.: Высния школа,
]990,-49бс
8. Сгратонолич Р. Л. Принципы адаптивною приема. - М.: Сов. ралао, 1973. -144 с.
9. Ярлыков М. С, Мпропои М, А, Марковская теория опепивания случайных дро-
пессов. - М.: Радио и снязь, 1993,-461 с,
Ю. Новоселов О. Н., Фомин А. Ф. Основы теории и patyeia ннформациопнонэме-
рнтельных систем. -М.: Маинщосгроенне, 1991. - 334 с
11, Гуров И. П., Шенннхокнч Д В. Оцрсдсдсннс фаюкьг* характеристик нцтерфе-
ревняоипой картины методом павлпейной марковской фцлырвняи //Онтякв и
спектроскопия. 1997. Т. ЯЗ. Выц. 1. С. 147-152.
Глава 6. Обработка на основе стохастических моделей
20J
12. Гуров И, П. Интерференционные измерения и контроль параметров
геометрических элеме]ггов па оспове критерия максимума функционала правдоподобия //Ав-
томстрнв. 1992. N3. С. 99-104.
13. Гурон И. П.. Нагнбнпа И, М. Влияние параболически* искажений волнению
фронта на точность фототек[рическнх интерферометров // Журнал
прикладной спектроскопии. 1986. Т. 44. N3. С. 504-506,
14. Гуров И. П.. Нагибина И. М., Павлова А. Б, Применение метода вдекретшацнн
иНУср^кренципнпоп картины авл измерения персмешевия сферической
поверхности // Оптпко-мехапнческая промьспленнос п>. 1988. N9. С. 35-37.
15. Глухов О. Д., Гурпн И. П., Прицкер В. И. Автоматическая селекция адромага-
ческои полосы не i од ом огабаюшей //Оптика н спектроскопии. 1983. Т. 54-
Вьга. 5. С. S46-850.
202
Компьютерная обработка сигналов
Глава 7 I
Системы автоматической
обработки интерференционных j
сигналов I
В течение ряда десятилетии интерференционные приборы использовались
для визуального наблюдения интерференционных картин в задачах контроля
оптических пеодлородностей* намерений геометрических величин, например,
отклонении формы и анализа мпкропрофиля поверхностен []],
В конце 60-х - начале 70-х голов были созданы фотоэлектрические приборы
для аналша интерферограмм [2]. Дальнейшее развитие лазерной техники,
широкое распространение новых типов приемников излучения, прежде всего
алнеоккиер на основе приборов с зарядовой евчзыи (ПЗС)Т сопряженных с
компьютерами, создали нреяпосыхки лля широкого распространения систем
компьютерной обработки "живых'1 иптерферснивоицых картин без их
фотографической регистрациии [2, 3].
В настоящее время разработаны многочисленные методы и алгоритмы
компьютерной обработки двумерных иитерферсинионных картин. Помимо
рассмотренных в гл. 4-6, созданы ашоритмы вмяеления фации и контуров на
иптерферофаммах, анвднза и расшифровки сложных линий интерференцией*
ных полос 14]. Значителнные успехи лосгигнуты в решении задач развертмпа-
инч подпой фазы в условиях помех и искажений полос [5, 6].
В настоящей главе представлены примеры сравнительно простых методов
компьютерной обработки иптсрференнноннЬ1х сигналов Рассмотренные
системы относятся к классу высокоточных, поэтому они функционируют при
достаточно большом объеме априорной информации и малых помехах. Однако
при рассмотрении таких систем пыхелепы харакюрные особенности их
построение, имеющие существенное практическое значение.
Представленные методы и алгоритмы относится, главнмы образом, к задачам
обработки одномерных интерфоренпиошп.гх сигналов. Обобщение на
двумерные сигналы, как извергло, во miioihx случаях не является тривиальным.
Простые примеры решения двумерных задач даны в разд. 2 (см. также [7]) и
раза. 4. Детальное обсуждение двумерных ализритмов находится вне рамок
данной khHiH, поэтому мы отсыпаем заинтересованное *> читателя к [S-10].
Использование методов компьютерной обработки одномерных
интерференционных сжналов полезно для многих задач обрабо1ки. Например, в 1адачах
интерференционных измерений перемещений требуется обработка киенно
одномерных сигналов для которых также могут быть применены алгоритмы и
использованы практические рекомендации, представленные ниже.
7.1. Компьютерная оптико-электронная система для
обработки интерферограмм
Интерференционные методы: 1имсрсний и исследований, основанные на
количественной оценке формы зондирующего волнового фронта, широко
используются в различных областях пауки и техники, В частности, эти методы
стали основными цри контроле формы поверкиостей в оптической,
электронной и .Прутах отраслях промышленности. Во Многих случаях, например, при
мшпаюших вибрациях, импульсном освещении, Повышенных требованиях к
точности контроля, для их практической реализации приходится прибегать к
фотофафнрованито интерференционной картины и измерению во многих
точках кооривнат экстремальных значений интенсивности полос flJ-I3J,
Массив измеренных данных используется для восстановления с помощью
компьютера формы волнового фронта. Восстановление осуществляется при
использовании специальных компьютерных профамм, среди которых наиболее
распространенной является про1рамма 1NTERF 113],
Для измерения Координат экстремумов интенсивности часто применяются
стандартные устройства наведения на интерференционные полосы (например,
микроскопы типа УИМ- ДИП, мпкродонситометры) или специальные
устройства, которые не всегда удовлетворит! требованики практики но такин
показателям, как погрешность измерения, степень автоматизации^ призводи-
тельность, простота н стоимость.
Ниже приводится краткое описание устройства, приндипа действия и
результатов испытаний новой онтико-электронной измерительной системы
[И]. Она лишена большинства указанных выше недостатков и алаширована
к программе INTERF и ей подобным. Ее блок-схема показана па рис, 1-
Анализируемая интерферограмма размешается на оптическом столе ]
измерительною микроскопа, в качестве которого можно использовать
микроскоп серии ДИП [!4]г Распределение интсленвпостн в проходящем свете,
обратное плотности почернения фотоэмульсии в ицтерфсрофамме, через
обьектив 2 воспринимается фоюприсшым блоком 3, содержащим мпогояле-
VfUTi'iii^ inUi»L*TTWlf h-HiiiII."t .г, .--l_—^ _. ,::
204
Компьютерная обработка сигналов
я
*з
л У
1
10
Рис. 1, Общая схема оптико-электронной системы для высокоточного анализа им-
терферо грамм
чення интерференционных экстремумов. Значения hhichchbhocth в j-ом сече-
пии интерферограммы преобразуется в цифровую форму при помоиш АЦП 4
н запоминается в буферном ОЗУ 5. Зарегистрированный интерференционный
сигаад можно наблюдать на экране осциллографа б. При помощи
параллельного интерфейса 7 данные дволятся в компьютер 8. Обрабоз-ка данных ведется
с использованием про грамм но -ал1оритмичсско1и обеспечения 9, Результатом
обработки являются значения Коориннат корней фазовой функции х^ которые
соответствуют экстремумам интенсивности в заданных сечениях
иитерферограммы. Массив хц запоминается компьютером 8 и по команде оператора
выводится па печатающее устройство 10.
Обратимся к особенностям построения отдельных узлов системы, которые
имеют существенное значение при высокоточных измерениях.
На рис. 2 показана схема построенной на основе микроскопа ДИП
оптической системы, которая обеспечивает совмещенный режим
фотоэлектрической регистрадни и визуального наблюдения иитерферограммы. Система
содержит оевстигсль 1, Предметный столик 2, сменный объектив 3, проекпиошшй
объектив 4, светоделитель 5, наблюдательную ветвь с окуляром б,
измерительную ветвь е объективом 7 и фотоприемным блоком В, отклоняющее зеркало
9. Для удобства визуального наблюдения при исходной юстировке между
объективами? и 4 помешена марка-перекрестие |0. Вес узлы, кроме об ьсктива
7, фотоприемного блока 8 и отклоняющего зеркала 9, принадлежа! микроскопу
ДИП.
AHaniuHpvcMM ИН|ерферограмма размещается на столике 2 с "привязкой"
к марке 10 при визуальном наблюдении е учетом показаний координатного
табло прибора ДИП, Позиционированием сзгигик-i 1 по координатам X и У
Плана 7'. Системы обработки сигналов
20S
— — ^ отлил
8
7
< У .
W
>»
4
\°
с
^ п
D U
10
! X -
V
^"
г 1 —^ * д
V
Рис. 2. Оптическая схема
оператор добивается совмещения центра марки и, соответственно, середины
поля зрения в измерительной ветви с центром интерферограммы, В атом
положении записывается фотоэлектрический сигнал, соответствующий пеш-
ральному сечению интерферограммы. После атого координату X фиксируют и
дальнейшие измерения ведут по сечениям интерферограмыы при различных
заданных значениях координаты Y. Сиимок-иптерферограмма цроеннрустся в
плоскость фотопрнемника с увеличением ~ Г -2\
Алгоритм автоматической обработки и анализа распределения фаз в интер-
ферограмме построен на основе результаюв исследовниий, опубликованных в
[16, |7] (см. также т. 4)г Интсрференционньш фотоэлектрический сминал,
пропорциональный ищенсивноети света, прошедшего через двухлучевую ии-
терферограмму с линейной решетрапней па фотоэмульсии, имеет вид
х(х) = So(x) +■ i^)coaUn^j 4- yfx)] 4- л(Д (1)
где si&x) - фоновая состав ля юн 1аян sjx) - огибающая информационной
составляющей^- дробная час гь порядка интерференции, у(х) - распределение фазы
206
Компьютерная обработка сигналов
(в общем случае - нелинейная фуцкпия), включающая в себя фаговые помехи,
п{х) - аддитивный шум с нулевым средним значением.
Основой алгоритма обработки является пршшип восстановления синусной
составляющей ъ(л), сопряженной по Гильбергу второму слагаемому ъ{х) в (1).
а именно:
.ф) = ^л)з1л[2яе; + \$х)), (2)
sc(x) = 5ы(:с)соа12лЕ? + $х)]> (3)
Используя (2) и (3), можно определить значения фаз во всех точках И|гтерфе-
ренниоппого поля по формуле
$0) = 2ад + ф) = ых1ф,(х)Л<(х)). (4)
В (|) и (4) по определению £f - £<0)/2я.
Таким образом, алюритм позволяет, если необходимо, использовать при
анализе интертрегхнрамм фазометрический меюд.
Вместе с тем, определяя координат точек х„ дня которых <р(х,) = 0, можно
найти, согласно (]), точные координаты экстремаль им х значений ипгенсив-
ностей интерференционных полос Исследования показали, что
восстановление корней I, фазовой функции обеспечивает повьимсине точности
приблизительно и 5 раз по сравнению с визуальным определением положений
экстремумов интенсивности по следующим причинам:
■ При восстановлении фазовой фулкции <р(х) исключается влияние sa[x) и
Мл) в (1) пля большинства реальных интерферон амм. Эксперименты
показали, что суммарная плавная неравномерность ситала,
обусловленная неравномерностью освещения, неравномерностью чуветвителл^остл
многоэлемептпого приемника излучения и Другими подобными
факторами, не превышающая -50%, вносит пренебрежительно малые
погрешности.
■ Восстановление фазы (4) выполняется без существенных априорных
ограничений на вид функции ^д) в (]), это обеспечивас! возможность
высокоточной обработки интерфсро1рамм в виде эквнднетан гньгх полос
[16J, колеи Ньютона [П] или интерферограмм иною впла,
■ Повышается отношение си|иал-шум за счет испояьзовация полной
информации о tp(x) в (4), полученной исходя из полной реализации
сигнала $(х) п (1).
Получение сопряжеццой компоненты (2) возможно несколькими способа-
мп, однако, пвиду удоос|ва спектральной фильтрации полезной составляющей
в (1), целесообразно использовав метод дискре]ни го быстрого преобразования
Фурье (емг гл. 4).
Гпааа 7, Системы обработки сигналов
207
Начало
1
Регистрация
s(x)
1
Спектр
;
Фильтрапия
1
Обратное
преобразование
Фурье
А
Оценка фазы
to
'
—+
Коррекция
данных
гт
-—'
■
Аппроксимация
1
Определение
корней
i
Координаты
зкечремумов
л
х,
1
Конеп
Рис. 3. Блок-схема алгоритма обработки сигнала а сечении интерферограммы
Блок-схема алшритма обработки прсдс|авлена на рис. 3,
Практическая реализация алгорн1ма име^т следующие особенности:
■ Оптимизация процесса фнльгрании и использование фильтров со строго
линейной фазочас!о1НОЙ характериешкой в значимой области спектра
л Использование устойчивого алгоритма силайн-аппроксимашш
полученных п (4) значений фазы <р(х) на участках непрерывности
■ Алгоритмическая коррекция даннь1х на основных эишах обработки Для
уменьшения мстоинческих по1рсшностей обработки и вычислении
Рассмотрим алгоритм комньщернои обработки интерференционных
сигналов более подробно.
При высокоточном кпн1роле амалижируются щггерфероьраммы, характер
которых априорно извести. В илтерферометрах сдвига ннтерферсчраммы
часто имеют аддь предъявленный ну рис 4. Задача состоит в нахождении
тичных значений координат экстремумоп х4 в сечениях у,.
208
Компьютерная обработка сигналов
Получаемые данные QX, у,+ 0) н Л' сечениях в общем случае следует
рассматривать как реализацию ДО-канальною ин1ерфсромстриЧсско1и процесса с
вектором параметров в. При этом вследствие статического характера изображении
допустимо получение отдельных реализаций £ с разделением ьо времени.
Ииь1ми словами, па практике jaiia4a сводится к одномерной обработке данных
в сепениях у, При пое ледова гель ном переходе ог мнении к сечению.
Модель реального секторного интерференционного сигнала имеет вин
#*, У, &) = j*X, Y) j(X, У, ©) + п(Х, У), (5J
где j(-) - априорная модель сигнала (вектор-столбец размерности N), л(-)-
аддитнвная помеха,
UX n = Uftft),(X>;> воблаегиеие^-Х/Д^-^/О],
)0 б овальных случаях
(6)
-диагональная (размерности N * N ) матрица функций. Выражение (6)
справедливо для интерферограмм с
рабочим полем в форме круга с
центром (Хгт ГгКрИС 4), которые получают
при реальных условиях освещения и
регистрации, характеризуемых
априорно неизеестнмми функциями #£•).
Согласно (5), необходимо
использовать помехоустойчивые методы
обработки, не вносящие жестких
ограничений на конкретный вид отдельной
реализации фотоэлектрически!»
сигнала. Подходящим методом является
упомянутый выше метод
восстановлении фазы аналитического сигнала.
На рис, 5 иллюстрируется процесс
восстановления фазы дня реализации
сигнала в сечении типичной интерфс-
рограммы, полученной методом
фотографирования с увеличенной экспозицией. При этом z{x, ©) обозначает j-ю
реализацию комплексного с и шала:
ХгШ
XyXjj
ХМПХ
Рнс. 4. Интерферограмм а с круговым
рабочим полем
:(л,©) = Ас(х) + 2 ^ Ai(x) ехр(;Ъ) схр(/2лАик),
(7)
!■-].?.
1дс вектор napaMcipou 0 - (Ad, ..., Ai е. не)1- Действительная и мнимая
части эюю си!нала:
Глава 7. Системы обработки сигналов
209
Rez(i, в) * st(x, &) = А соз[2т*4- ?(Х)1 (8)
]mz{x, Э) * s,{x, &) = А й1и[2лиоа: +■ р(л)1- (9)
Здесь &' = G® = (Л, ып,0д)г,. G-нелинейный оператор. В (7) параметр е
характеризует начальный сдвиг полос и интерферо|рампе относительно ее
центра. Но обозпачаст пространственную частоту полос.
Из (8) и (9) фаза определяется как
Ъ*Х, и*, &г) = вгс1е!*(Х0')А<(У, ®)1- (10)
Из рис, 6 видно, что в окрестности корней
х, фезовой функции (ДО), соответствующих
экстремумам сигнала (7), обеспечивается
выполнение условия (1/2я) (дФ/дХ) >иа, т. е.
существенно более имсокаи крутизна
преобразования по сравнению с си шалом
синусоидальной формы с частотой иа.
Чувстви1сльность метода проверялась с
помошью пробных смешений интерферог-
раммы (рис. 4) в намрпилении х па малую
величину Дх. Средние квадратичеекие
отклонения <т зарегистрированных положений
корней фазовой функции (]0) относительно
среднего смешении < Ах > от серии к серии
измерений характеризует Погрешность метода
ое/2л ~ ш,сг/2я.
л
ф
-Л
-л
2Ч
\
'ч i J
wuJ
1 //
\f J
"-»
Рис. 5. Определение координат
экстремумов ситала (а) по
положению корней фазовой
функции (в)
Рис. в. Сравнение крутизны
преобразования смещение-фаза б точках
экстремумов интерференционного сипнала двух-
лучевогО (криаая 1) и многоликого
(криваи 2) видов
210 Компьютерная обработка сигналов
Таблица 1* Экспериментальною данные восстановления корней фазовой функции
Серия
измерений
1
2
3
4
Xif ЭЛ,
5.25:34 45; 9S.45; 1S5.57; 253.03; 344.52;
429.20, 517,67; 606,21; 629.26; 776.97;
660.33,943.64
— , 34.14; 9S.40; 185 44; 262 91; 344.39;
426,61; 517 85; 606 22, 629.11; 776.64;
860.27; 943 56
— ; 3410; 96.32; 185.35; 26275; 344.25;
423.60; 517.63; 605.71; 691.88; 776 70;
860 29; 943.43
— ; 34.17; 96.37; 185.41; 262.60; 344J9;
428 67; 517.69; 605.90; 591,83; 776.81;
860 90; 943.56
Ах, эл
(t/2jt, эл
-
0.14
0 05
015
013
0.14
0.06
Полученные данные приведены в таби. 1. Число элементов инскретизапии
в сечении интцрферограммы составляло л = 1024, Заметим, что значение xi в
исходной серии измерений !, обусловленное краевым эффектом па границе
рабочего поля пптерферофаммы, отброшено при совместном анализе данных.
Из данных таблипы елсдуе], что сходимость результатов измерений
координат экстремумов интерференционного сигнала характеризуется значением
примерно 0,1 шага дискретизации, что соответствует для обрабатываемого
интерференционного сигнала (но « 0,012 эл ') малой относительной
погрешности, равной йао/2л= о(2яБ}п & ]0"3 juara полос В.
Таким образом, применение описания составляющих (8), (9) сигнала (3)
расширяет область применения помехоустойчивого метода [6h 7] для
решения задач высокоточною нахождения положении экстремумов сигналив, вил
которых показан на рис, 5- включая семейство сигналов многолучевой
и нтерфере нции.
Экспериментальные иеследовацил эффективности и точности работм
измерительной системы проводились на тестовых иптерфорограммах и
интерференционных каршнах, получетплх па реальных поверхностях с иомошью
прибора ИКЛ-МО \1\].
Глава 7, Системы обработки сигналов 21]
Тесювыс интерферограммы были ранее получены в схеме Юнга, в которой
когерентные пучки формировались и цомощью двух параллельных щелей, л
регистрация полос на фотопленку производилась без обьектива. В этом случае
искажения ширины и формы полос, которые могли быть вызваны аберрапиямп
объектива, исключались Регистрация полос па плепку осуществлялась с
различными акспо'шииямп, соответствующими линейному и нелинейному
участкам кривой почернения пленки. В последнем случае зарегистрированное
на пленке минимумы интерференционных полос имели форму острых пиков
И&1, подобньП пик;|м в максимумах полос мноизлучевых интерференционных
картин. Это обеспечивало возможность использовать в Укспсриме|[те картины
с синусоидальным и песинуеоидальним распределением интенсивности в
полосах.
В экспериментах иеполь^ювались интерферограммы с числом полос в
диапазоне 15. .20 в поле диаметром 12. ,14 мм. Неравномерность освещения в
указанном Поле достигала 50%.
Расчеты показьшанл, чго неравномерность ширины полос
интерференционной картины, полученной в схеме Юнга на поле 12.,.|4 мм, ле превышает
Ъ у- 10 6 ширины полосы. В серии выполнение измерений разброс показаний
при измерении ширины полос не выходил за пределы 0.007 ширины полосы,
что при контроле поверхностей на шггерферометрах типа Физо соответегьусг
величине менее Л/250.
Следует Отмсгип-, что точность измерении может бьтп- повышена, если для
проепировация интерференционной картины в плоскости приемника
использовать объектив, хорошо исправленный на дистореию.
Полученные при испытаниях резулыаты позволяют еделагь следующие
Д||ТвоДЬ1;
■ Измерительная система и используемый для обработки ланньзх
алгоритм имеют низкую чувствительность к неравномерному освешепию
поля интерферограммы и форме кривой распределения интенсивности
в почосах,
■ Система может быть легко приспособлена к существующим стандартна
устройствам, иредназначенпым для измерения линейных перемещений,
например, к измерительным микроскопам типа УИМ, ДИП и другим, а
пр01рамма обработки - к различным моделям компьютеров.
■ Система может быть использована для измерения интерферограмм,
полученных Мри рядовом и аттестационном контроле формы
поверхностей, аберрянией оптических еисгем, неоднородности оптических
материалов и т. д.
212 Компьютерная обработка сигналов
7.2. Компьютерная программа EXTREMA для
высокоточной регистрации экстремумов
интерференционного сигнала
В программе EXTREMA реализован вариант двумерной обработки
интерференционных сигналов, в котором использован алгоритм восстановления
фазы аналитическою сигнала, рассмотренный в предыдущем разделе.
Пример двумерной интерферограмны представлен, иа рис, 4* Если бы
интерференционные полосы были строго прямыми и параллельными, то задача
определения положения экстремумов свелась бы к одномерной. Однако на
практике полосы имеют некоторое отклонения, не всегда заметные визуально,
и именно эти отклонения содержат информацию о взаимных отклонениях
формы волнового фронта измери 1 ельной В опорной интерферирующих воли
Пч значит, об осклонсниях формы исследуемого объекта.
Для 1ПЧНОГО определения положения линий Интерференционных
экстремумов, как уже отмечалось выше в разд. I, требуется найти положения
корней х1; функций изменения фазы, восстановленных в сечениях у,
интерферограммы. Проблема состоит в том, что поле ицгерферофаммы (рис. 4)
ограничено окружностью, поэтому длина хорды изменнсгсч нри переходе от
опиши сечения у, к другому. Следовательно, изменяется полезная длин;,
реализации обраба1ывасмою интерференционного сит ал а. Учитывая
свойства преобразования Фурье (см. гл. 4), следует ожплать, что в различных
сечениях будут получелы результаты с различной точностью: более высокой
в центральном сечении ипгсрфсро1раммы н пониженной -длч крайних
сечении, длина которых мала.
Другой сложностью являем* влияние собственно краевых эффектов,
особенно в случаях, когда интерференционная полоса и линия сечения интерфе-
рограммы близко сходятся в граничной зоне интерферограммы, а также когда
интерференционный сигнал содержит нецелое число периодов.
Для преодоления этих сложностей можно исполмовать несколько подходов.
В работе [4J предложен метод экстраполяпии двумерной щцсрференнионпой
картины с получением картины с фанннамп в виде Прямоугольника. При этом
использовался метод аналитического продолжения сигнала. На практике метод
заключается в обнулении составляюышх двумерного прострапствеппо-чаеют-
ного спектра, находящихся вне малой окружности, которая охватмпаег
основную ипформациопнуга составляющую двумсрцощ снекгра.
Если положение границ иптерферифаммы известно априорно или
определено методами выхеления кшнуров (фапии) полетит фрщмента
изображения, то можно вое пил рваться более простыми алгоритмами. Например,
можно Доопределить недоеланнцие к аев^е участки в коротких сечениях
Глава 7 Системы обработки сигналоа 213
интерферограммы соответствующим в участками центрального сечения. После
выполнения преобразований Фурье и восстановления фазы интерфер01раммы
эти участки отбрасываются, и оставшиеся данные оказываются свободными от
погрешностей вычислений-
Длина нолухорды 1(у) выбранною сечения у интерферограммы, офаннчен-
ной окружностью (б), вычисляется но формуле
Ку) = (LD/y™)-Jy(y™-y)* Ш)
где L-размер поля зрения приемника излучения, приведенный к плоскости
ннтерферофаммы, D - относительный (нормированный) дииметр
интерферограммы, О <D< 1, У™,- координата верхней точки (вершины)
интерферограммы. Отрезку L соответствуют К дискретных отсчетов, поэтому значение I
округляется до ближайшего целого значения (в сторону уменьшения).
Далее вычисляются прямоуюдьние функции "окна'1:
I<t<tf/2-/или Я/2+ /<*<£,
K/2-lZk<K/2 + l. {] '
, , (l, K/2-t<k<K/2 + l, ,„-.
Сигнал, полученный в центральном сечении, tt„ преобразуется с учетом
О 2а) к виду
s?« = Sd гест (у), (13)
сигнал в сечении у, s, - к виду
s% = s,rwi(y). (К)
Дополнсннь1Й сигнал в сечении у перся преобразованием Фурье имеет вид
Ъ* = s'n*+s'fl. (15)
Здесь первое слашемое представляет собой краевые участки, завыстиованные
из центральною сечение
После выполнении преобразований по схеме рис. 3 (быстрое lipeoopasora-
ние Фурье, модификация спектра, обратное преобразование Фурье, вычисление
фазы и корней фазовой функции сигнала а>) отбрасывается корни фазовой
функнии Хь котормп не попадают в 'окно" (126).
Поскольку неизвестно, сколько корней окажется в сечении, для каждого
сечення проводится сравнение оотнпиихеч корней фезоьой функндн ^сд^для
214
Компьютерная обработка си тало в
надпрадыюто ссчснич, а именно, проверяется соответствие номеров интерфе-
ренциоппых полос (экстремумов) согласно критерию
I xlt -ды I < {\/y)KD/N = Л/Ъ = С. {Щ
1де, как и рапее, tf-обшсс число точек дискретизации, D - относительный
диаметр контура щперферограммы. М-чиело полос на интерфегхлрамме.
Если это условие не выполчистся, то проиериются условия:
ИЛИ
\х,-х,11а\<С, <17б>
и Хц присваивается соответственно познпня *(.-iv ил" ■**-№ Заметим, что
кри|срии (16) и (17) применимы для ннтерферщрамм хорошего качества.
Таким образом, результатом обработки двумерной интерферепинопной
картины является массив координат интерференциоштьтх экстремумов,
соответствующих различнмм сечениям. Дальнейшая обработка данных этого
массиве ведется о примепеиием существующих пакетов программ, которые
позволяют выполнить дскомпозиншо с оставляю! лих отклонений фазы, например,
методом аппроксимапин полиномами Цсрпике [2, 19],
Профаима EXTREMA
Программа EXTREMA разработана для оптико-электронного устройства,
которое предназначено для автомагическою высокоточного анализа двумерной
интерференционной картины, п том числе зарец1С1рИрованной на стандартной
35-миллиметре вой фотопленке, с определением координат
интерференционных экстремумов.
В состав устройства вводят снабженный объективом мпощ^ементнын
приемник излучения в вид^ фотодиодной Линейки. буферный блок намати и
индикации нд одну строку- б;юк сопряжения с компьютером типа IBM PC,
программ но-алюритмическое обеспечение (см. разл. 1).
Подсветка интерферофУммм н позиционирование по второй координаге у
выполняется на измерительном микроскопе, снабженном блоком индикации
положений позиционирования. Каждый файл данных состоит из
К = 2Щ< 2048 8-разрядныА двоичных слое данных. Значение К задается
однократно при первоначальной установке программы EXTREMA на компьютере,
Число анализируемых сечений N интерферограммы обычно равно числу полос
и устанавливается в начальном диалог.
Глава 7. Системы обработки сигналов
215
Начальные установки
Работа ведется в диалоговом режиме. Сначала .задается дата проведения
измерений:
'о elU ri о ъ
Inpul Current Pale:
03.07.95
k)K]
i
I
После ввода даты оператор получает запрос:
S е ТI г it Ц 5
ADJUST On Device Ymin =
0
н
Оператор спомошыо рушою иривола "у" микроскопа устанавливает и иоле
зрения фотодетекюра нижнюю границу контура шнерферограммы (рис, 4).
После этою оператор обнуляет показания отсчетного устройства микроскопа
При помощи специальной кнопки на его пулые управления.
Далее при появлении за[иловка
Keiri n q s
ADJUST And inpul Углах ;
40QO
OK
1
оператор проводит наведение на верхнюю Гранину контура, после чего вводи1
с клавиатуры показания табло отчетного усгройсгва микроскопа для у„#,.
Компьютер вычисляет значение ус = утшя/2 и выхает сообщение:
i Sellings I
ADJUST CENTRAL INTERSECTION = | ?0DO
|
(OKI
По этой "подсказке" оператор осуществляет наведение на центральное
сечение у,, наблюдая ja показаниями табло oi счетного устройства микроскола,
которые лопаны совпасть с указанным чначением.
216
Компьютерная обработка сигналов
Наблюдая осциллограмму сигнала па блоке индикации, оператор по
запросам компьютера
inpulQuantltyOf irilersecttdna [35 __ J | ОК
вводит значение относительного диаметра контура интерферограммы
!) = |0.6 ... 1.0] и число полос (сечений) интерфсрограммь1 N = [6 ... 20].
После окончании рабогыв начальном диало! с поЛьтов^сльмм^ет вошожностъ
испольjubai ь тесювую модель, выбрав пункт меню Formed Model, или сразу
приступить к обработке сигналов.
Обработка сигналов
Особенности формирования модели рассмотрены вьпне в разд. I, поэтому
перейдем к рассмотрению послсдова1слы1ости оперений обработки сигналов
Нажатием специальной кнопки на блоке регистрации оператор вводит в
буферное ОЗУ блока данные К точек центрального сечения. Данные,
полученные из цешрального сечения, обрабатываются и сохраняют в памяти длм
использования при последующей обработке.
На мониторе компьютера отображается информация
iTie н качестве примера указаны значения: lS-число сечений, зяелниос в
начальном диалоге, У\ = 3S67 - координата первого, начиная вверху, сечения
(очевидно, что sia коорднна-ja равна Ути -(У- \/2){y**i/N)), далее указана
выставленная реальная координата сечения, отображенная па табло отсчетноц?
уетройсща микроскопа, которая равна или близка к "подсказанному" компью-
Глава 7. Системы обработки сигналов
ТероМ значению. Реальная координата У] (и далее flpyiHe координаты иплпть
до W запоминаются r цамати компьютера.
После позиционирования Y\ после нажатия кнопки на блоке
регистрации Данные L точек первого сечения вводятся в буферное ОЗУ этого блока.
После завершения диалога ининиирустся ввод даппых в компьютер и
обработка данных сечения П и т. д.
Пользователь имеет возможность, поставив отметку в поле Show Signals
And Phase After Calculation, долучить па мониторе графическое отображф
пие исходною зарегистрированного сигнала и восстановленной фезовой
функции. По окончании просмотра следует нажать любую клавишу.
После получения и обработки данных j-ro сечеция пользователь получаст
запрос имели файла, в котором желательно coxpaHHib полученный резулыат.
Даннис в N сеченинх объединяются в двумерный массив координат щисрфе-
ренцяонных акстремумоя с контрольной проверкой соответствия порядка
интерференционных полос по критериям, подобным (1б), (17).
Программа EXTREMA написана на языке Borland С-н- и поплерживастся
оболочкой WINDOWS,
7.3. Оптико-электронное устройство для контроля
центрировки линз методом автосвертки
интерференционных сигналов
Одним из важнейших параметров, учитываемых при конструировании,
изготовлении и сборке оотнчеекнх систем является децептрировка Оптически*
поверхностей. Превышение допустимых значений коюрой вызьгвает ухудшение
качества изображения [19] Цель операции центрировки состоит в совмещении
геомефической оси (оси симметрии базовой цилиндрической поверчпостн
линзы) с ее оптической осью, соединяющей пентры кривизны обеих
сферических поверхностей. Важное значение имеют контроль операции центрировки
оптических детален и узлов и контроль оета| очной децентрнровки уже
оконча|слыю изготовленных оптических систем,
Б процессе создания оптического прибора операция центрировки произво-
интся многократной начиная с одиночных линз и склеенных лицзокых блоков,
Поэтому автоматизация процесса контроля центрировки имеет важное
значение. Известны различные негоды центрировки [19], однако наиболее точными
являются интерферометричеекис методы [20J.
Рассмотрим принцип работы цнгерферометричеекоги ус!ройстна шн
контроля центрировки линз, предложенного к [21],
Схема этого устройстьа показала на рис 7,
218
Компьютерная обработка сигналов
7
8
Рис 7. Оптическая схема устроистаа дликокгфслицекггрировки линз
Устройство солсржи| источник монохроматического излучения I, распш-
ритель снегового пучка 2, освещающего центрируемую линзу (образец) в
проходящем Свете, светоделитель 3, ля выходах которою размещены итража
теам 4 и 5, причем оптические длнмм путей в встинх ингерферомстра не равны
друг другу. В обратном ходе лучей на выходе светоделителя 3 установлен
объектив 6 и многоплеменный приеыпик излучения 7, выход которого
подключен ко сходу вычислительного блока 8, оснащенного компьютером.
В отической схеме реализован нрипнип интерферометра Соъ&а радиального
сдвига (22], при этом па выходе формируется интерференционная картина в
пиле колец Ньютона. При точной центрировке образца neHip картины колец
совмещен с пентром поля зрения приемника излучения 7- При целентрировке
эта картина имеет боковое смещение.
Интерференционный си^ал, пропорциональный интенсивности светя в
интерференционной картине при се боковом смешении а. имеет вид,
представленный па рис. 8. Из рисунка видно, что интерферон дно нпый сигнал чвляетск
симметричным и представляет собой чешую фупкпик' относительно оси,
проходящей через пентр <-и?*метрии а и совпадающей с искомой оптической
Глава 7. Системы обработки сигналов 219
2 -г
осью образна. Поэтому задача Контроля
иентрнровки сводится к определению
бокового сдвига центра симметрии,
интерференционного сишала. Важно
подчеркнуть, что в схеме рис, 7 реализуете*
принцип фазоеых измерений, чем
обеспечивается em преимущество в
точности и помехозащищенности по
сравнению с известным коллиманнониым
методом (см., например, [19, 20[), который
Рис. В. Вид интерференционного сигна- 0СНОва|1 HJ „ршщипе решетрации
смела в счеме рис. щепия световой марки по
интенсивности прошедшего цучка.
Определение сдвига сигнала рис. й к вьгчислитсльпом блоке 8 без on/iedc
ления начальной фазы сигнала целесообразно иьшоянить на основе принпипа
согласованной фильтрации [23} в форме аатосвертш сшиала [24, 25].
Преимущества прныенения метода автосвертки дня определения порядка
интерференции в интерференционной картине е постоянным шаюм полос,
подобной предстадденнон па рис. 8, а гл. 2, показаны в работе |25j. Далее
рассматривается модификация метода автоевертки применительно к
интерференционным сигналам с квадратичнмм изменением фазы.
Рассмотрны сущность метода согласованной фильтрации в форме
автосвертки синица более подробно.
Параметрическая модель сигнала в сечении интерференционной картины
колец Ньютона имеет вид
где
(18а)
х(хуе) = & + х*£оа[2ш(х-аУ/р1 + е\ (1Й6)
^известная фунамии, © = (*п, t-,. u, a./I е)т- вектор параметров, лСО-авли-
тивный шум с нулевым средним значением.
Согласованный фидьтр является оптимальным фильтром, минимизирующим
среднекиадратическую по1решность при выделении полезной составляющей
sfo Щ из смеси с шумом Qx, 0), причем нмпуяьсцая характеристика
согласованного фильтра с точностью до постоянного множителя должна представать
собой обращенную копию полезной составляющей* а именно
Л<д) = а*(-1,0). ,19}
Выходной сигнал согласованною фильтра определяется иитегралом свертки
220
Компьютерная обработка сигналов
s{z)
л/?
= ф, ®> - к{х) = \ &Xt &) Hz - х) dx, (20)
-D/3
где D - протяженность участка регистрации.
При подстановке (]9) в (20) при а= 1 в точке z = 0 получим
DU
s(0) = } ^(л, 0> dx + ДпХО) * й,р(0), (21)
где оценка взаннной ковариационной функции тдаа и сигнала близка к нулю
вследствие их статистической независимости. Таким образом, тройной сигнал
согласованного фильтра соответствует аягоковариационной функции полезной
состадляющей s{x, 0) и достшиет максимума в ьюменг ючной идентификации
этой составляющей.
Использование согласован шни фильтра, как уже отмечалось, к общем
случае предполагает знание модели сигнала, включая эдачения компонентов
вектора параметров ®- Покажим, что решение задачи определения смешения
а центра симметрии интерференционного сигнала (рис К) возможно без
априорного знания значений параметров сит ал а.
Обратимся к выражению (186), из которого видно, что лолезныв сигнал
является четной функцией, сдвинутой относительно начала координат в
области независимой неременной на величину д, т. с.
т(д,0)=Д*~я), (22а)
где
./М=Л-*>- (22G)
Это свойство позволяет использовать в (19) копию исходною
интерференционного сигнала, перевернутого oiносителыю вергикалиюй оси коорцнпат,
а именно
ВД = «-л-в.©)> (23)
Подстановка (13) п (10) приводит к выражению
*(г) = }ф-а,0)#х + Я-г,@)<*** (24)
D.J
-D/l
j x(x, 0) i(x + 2a - z- ©) dx н- ой,
Глава 7. Системы обработки сигналов 221
определяющему операцию автоевергки.
Свойством авгосиертки функции, которая удовлетворяет условиям (22)
являете* зависимое^ от параметра сдвига о. При а = 0 в (24) произвольному
сигналу й(д, 0J соответствует интеграл автосвергки
0/1
-<Z)=js(x,®)s(z-x,®)dx.
-ъ/г
В случае, если соблюдаются условия (22) и в (24) z = 2о, тоща достигаем
максимальное значение автосвертки
on
s(2a) = $s*(x.®)dx = max\s(z)l
Tin
(25)
кчторое совпадает со значением отклика (21) согласованного фильтра,
Следовательно, идентификация положения центра Симметрпл интерферон hhohhoju
ciirzjana сводится к выполнению автосвертки Jioio сигнала и нахождению
положения максимума рс^льтирующей функции. Подчеркнем, чю
соотношения (23)—(25) получены 6ej каких-либо априорных ограничений для
компонентов вектора параметров © в (16) за исключением условия (226).
Проведенное расемогрейне позволяет построй ^последовательность
операций компьютерной обработки интерференционного сигнала методом ав-
тоевертки. Этими операциями являются регистрация последовательности
дискретных 1начений сигнала, формирование второй последовательности с
f обратной перенумерацией элементов, попарное перемножение значений
^ элеменюв этих Поспелова! cjh,iюстей и суммирование цолученныч произве-
', депий. Максимальному результирующему значению цилучеппой суммы
coir ответствует такой сдвиг второй последовательности относителмго перкой.
: при котором наблюдается их совпадение но критерию минимума средпе-
,' квадратичес^ой погрешности.
; Исследования показывают, что результат автосвертки зависит от длины
обрабатмваемой реализации сищала, Поэтому интересно сравнить
погрешности вычисления координат центра симметрии дня сигналов меньшей и
большей протяженности. Во втором случае максимум автосверткн при
типичных параметрах стлала (18GJ выделяется с более высокой точностью;
для более протяженной реализации сигнала погрешности были меньше, чем
0,2% от ДлипЬ! реализации сигнала, а при меньшей протяженности noipcin-
но^ть составила менее 0,5% от длины реалюацин. Реальные сигналы могут
быть сильно искажепьэ влиянием помех (рис, 9. а), однако максимум
автосвертки рс1истрнрустся с высокой помехозащищенностью и точпостью
рис, 9, б ,
222
КО мп ьютернэА обработка сигналов
а)
-D/2
О а
ед
да j
jjfl^
б)
-У/2
О 2а
Ш г
Рис- 9, Плодный сигнал (а) и его ангосаертка (б)
ф)
а)
-Ш
О а
to)
Л/2
дУ^/Ц^
б)
/V^jM
-Ш
О 2а
£J/2
• Г-iifiW f»H
Глава 7 Системы обработки сигналов £23
При неравномерном распределении мощности в сечении освещающего
образец светового пучка (в схеме рис. 7) сигнал с квадратичным изменением
фазы имеет огибающую, близкую к гауссовской
s(x) = s0 ■*■ sm cos[2mi(x - af/p\ exp(- ax>). (26)
На рис. 10, а представлен пример реальною сигнала такого вида. Его
автосвертка так#с имеет резкий максимум (рис. 10, G), более широкий, чем в
случае сигнала с квадратичным изменением фазы, но с Примоугольиой
огибающей. Выполненные оценки погрешностей для авюсверткн сшиалов большей
и меньшей протяженности показали, что для сигнала (26) из-за более широкого
максимума метод автосвертки лает несколько худшие результаты, чем в
предыдущем случае. Для большей протяженности типичное значение noipein-
ности составило не более 0,5^ ог длины реализации сишала, для меньшей
протяженности-0,8% от длины реали^пии. Такие значения погрешностей,
согласно расчетам, являются вполне допустимыми, т. Кг соответствуют
значениям децентрировки линзы пе более 2", что в несколько раз лучше типичного
значения погрешности известного автоколлимационпого метода.
7.4. Интерферометра ческая система для
восстановления микротопографии поверхностей
Восстановление ынкротопографии поверхностей позволяет количественно
оценивать характеристики поверхностей объектов в микроэлсктрощюй
технологи, материаловедении, приборостроении и Других отраслях Производства.
Микротопография поверхности может быть определена как функция A(xty),
значения которой соответствуют высоте рельефа ы деля клея количественным
выражением геометрических своис! в поверхности, дополняя результаты
качественных наблюдений, которые распространены в микроскопии.
При восстановлении топографии поверхности требуется обеспечить
заданную точность и однозначность полученных результатов. Наиболее точньплн
методами бесконтактного контроля негладких поверхностей, как известие,
являются интерференционные методы. Можно вынегшть методы* основанные
па использовании источников е обличенной ко1Срептпостьй>, в которых
обеспечивается широкий диапазон однозначности измерений [26, 27],
Метод, рассматриваемый в данном разделе, позволяет в рсалыгам масштабе
времени восстанавливать топографию поверхности объекта. Информация о
поверхности объекта при частично когерентном освещении заключена в
вилмости интерфереяционны* полос. Обработка попученной
последовательности иптерферомстрических нанных ведется параллельно в каждой точке
изображения по мерс поступления видеокадров. Поскольку используемый
224
Компьютерная обработке сигналов
Опоршый я1
(ПрвКЖГСЯЬ fMMJj 1 '
Обраеа
943
Источник
Видеокамера
О к.
Рис. 11. Схема интерферометричеокой системы
алгоритм рекуррентный (см. разд. 4 гл. б), то необходимо запоминать только
текущий и предыдущий кадр, что значительно украшает объем памяти,
требуемый для обрабо-гки данных. В этом включается преимущество данного
алгоритма по сравнению, например, с методом, предложенным в [28], те
необходима регистрация полной последовательности кадров.
Упрощенная схема интерферометрической системы представлена на рис 11.
Излучение источника с ограниченной когерентностью разделяется на оцор-
пую волну и измерительную волну, которая освещает объект. При движении
опорного отрндагеля в Пределах длины когеренпюсти исючника на выходе
видеокамеры снимается последовательность кадров с зарегистрироъанныни
значениями интенсивности света в иоле интерференции.
На рис, 11 иллюстрируются ещналы в i-ьгл тонкая ноля ин1срференнии> где
индексом / обозначена точка, определяемая парой лцскрсцллх координат (р, д).
Глава 7. Системы обработки сигналов
225
которые являются номерами столбца и строки в магрнце обсчетов. Максимум
видности ШЕтерфсрснциопных полос в i-ой точке наблюдается при нулевой
рашосш хода световых волн в ишерферометре при соответствующем поло^е-
пии опорного отражателя. По последовательности кадров восстанавливаются
искомые характеристики поверхности объекта.
Теоретические основы метода
Выражение для интерференционного с и тала, пропорционального интеп-
еннности спета /, s = ftl, удобно записать как функцию смешения z точки
поверхности в форме
s(x> у, z) = -ф, у) + sm(x, у. z) cosL4?<jh 4- vy) 4- 2<t>z + ф, у\ Z)]. (21)
где огибающая sm(x,yti) и фаза <fix,y,z) являются функциями от z,
<к> = 2ть/<А>, <Л> - среднее значение длиим волны излурения. Можпо
показать* чю огибающая распределения интеррсивноети l„(x,y>z) вкдючас! в себя
корреляционную функцию (функцию когерентное! и излучения) и,
следовательно, конкретный вид зависимостей sm(x,y,z) и <p(x,y.z) от z определяется
цреобра-юванием Фурье энергетического спектра источника и^Гученич. Далее
будем рассматривать случай источника излучения со спектром гауееовской
формы, что является удовлетворительным приближением, например, для
источника в виде еуцсрлюминесцентного лазерного диода.
При обработке последовательности дискре!ных изображений функция s в
(27) определяется моделью векторного интерферомстрического сигнала,
причем i-ый компонент векторное сигнала регистрируегся ио совокупности ;-х
точек изображения от кадра к кадру (рис. 12). В последовательности изобра-
V'J ■
s(&,t)+n(t)
?,«:
*(ett) + n(t)
Камера
УстроЕст&о
фильтрация:
Рис- 12- Схема процесса об абот и последовательности билрокэлппр
226
Компьютерная обработка сигналов
женин, в общем случае нелинейно, содержатся измеряемые параметры*
характеризующие топографию исследуемою объекта.
Значении реального интерференционного сигнала в каждой точке
изображения в моменты времени I, можно представить следующим образом
£ = л + Bt Ы), I, 2,...; /*-] < I, < f_„ C2&>
тс
£ = Ш * = J(fr) = *(©*. '<)• 0* = ©0-).
Величин hi tit представляют собой случайную гауссо векую поелсловатень-
ность, причем
ас
-символ Кронсксра,
Измеряемые и сопутствующие параметры интерференционного сигнала
■*(©*. h) определяются вектором параметров ®(/), онгнмальную оценку коюрого
требуется получить. Определим n-мерный вектор параметров как
0(f) = [$(/), Ф(0< -" йг(017- Полагаем, что вектор параметров удовлетворяет
стохастическому дифференциальному уравнению
^ = А(®(г), /) + G(&(M п(0. (29)
Задача нелинейной фнньтрадии состоит в том, чтобы получить оценку
марковского вектора параметров 0(г) в момент времепи I при условии, что
наблюдается процесс ф). При этом / - конечная точка интервала наблюдения,
поэтому интервал наблюдений увеличивается в реальном масштабе времени по
мере поступления повой информации. Вся информация о векторе 0(f)
содержится в условной (апостериорной) плотности вероятности р{& I £(0) значений
@(1). Для практических целей обьино достаточно знать не w, а оценку вектора
параметров, оптимальную согласно выбрашрому критерию, В качестве оценки
вектора &(t) часто принимают значение, соответствующее математическому
ожиданию апостериорной алотностн вероятности.
Для отыскания приближенной оптимальной оценки ©"(') разложим функции
A(®(t), I) в ^©(f). t) в ряды Тейлора относительно оптимальной опенки Щ1):
Глава 7. Системы обработки сигналов 227
A(0^) = A(&,i) + X(U-&)—Л(в,01* +
4%%(*-Ы*-Ъ^МВ.<!*+....
;(©л) = ^=и)-ь£(я-й)т^ j(et*)ie +
" [Г
iZZw-&)(^-fe^r^j(®'0i*+---
+ 2А^^ V- v,M-; -„ад
1=] J=]
После усреднения при сохранении слагаемых до квадратичных
включительно, получим;
.^Afro^iiw^.
2 — -' тщ
teoM^SIUJ^tr <вд
г1 М
где к,, - элементы симметричной неотрицательно определенной матрицы
ошибок фильтрапии размером п х в (ковариационной матрицы), определяемой как
R(r)=<(0-e)(0-e)J>ff = },.,}(©- ё)(0-ё)г^(©л)П^ '
В моменты наблюдений h уравнения дия оценок вектор» параметров и
ковариационной матрицы имеют вид [29, 30]:
0E = et*n-A*vt1 (31а)
Ri = R|-l-K-EDrDffir^1 . (316)
В уравнениях (31а) и (316) ©£] еегь предсказанные с предыдушего inaia
значения вектора параметров.
Оптимальный фильтр, построенный в соответствии с уравпенияьш (31),
формирует оценочные значения всех компонентов вектора параметров Э(/) с
ЫинималыЮЕпзможнимнннспсрсияЬш. При^гом уравнения о прелеля и it
структуру устройства оптимальной обработки последовательности кадров, представ-
228
Компьютерная обработка сигналов
-Й
"Устройство
формирования
R
R.
к;,оде\о)р;'
S0J)
D[
*&
A<JSf,0
Й( ■ ,0^
м. ■,/)
е;
Рис. 13- Струк1¥Рная схе«а устройства, реализующего алгоритм нелинейной
фильтрации
лающих собой ин|Срфере1П|Иоцныо картины, которые формируются и
интерферометре (рИС |1) при движении опорного отражателя в пределах длины
китереитносш. Уравнение (316) определяет эволюцию вторых центральных
моментов цщрешнпстей филырапии.
Как видно Hi (316), приближенная ковариационная ма}рица Щ?) зависит от
оценки нектора параметров ©"(/) и, следовательно, от наблюдений ф). Таким
образом, величина Щ?) * вообще говоря, не может быть вьгчислена до того как
получены наблюдашя. В обшем спучас уравнения идя опенки вектора
параметров 01а) и дли матрицы noipcmHocjeii f3161 связаны между собой и должны
решаться совместно по мерс получения наблюдений £(i). Такая взаимозависи-
мость уравнений (31) является спецификой задач оптимальной нелинейной
фильтрами по сравнению с задачами линейной фильтрации Калмаяа, копна
матрицу Щ() можно опредепить japaHee и считать ^вестной.
Структурная схема ошимального в гауссовеком приближении уепэойства
нелинейной филирашм. соответствующая уравнению дли оценки вектора
параметров (33 а), показана на рис. 13.
Блок, выделенный штриховой лилией, имеет структуру, определяемую
вектором параметров, и осуществляет предсказание вектора паримстров на
следующий inai\ используя информацию, известную на данном шяпг. Из рис. 13
и уравнения (31а) пидно. чю на каждом suaic фильтрации оценка вектора
цараме1ров &1 изменяется на величину, состоящую из двух компонентов:
собственного смещения Й , DrfV (s - В2П) и смещения, обусловленного
наблюдением ffi-i Dr/V £■ При эюм указанные смешения входя* в уравнение с
лесом Р,\ в котором учтено влияние широкополосного гауссовского Шума, в
Глава 7. Системы обработки сигналов 229
нашем рассмотрении аппроксимированною рауссовским шумом л*. Коэффи-
i|He]iT передачи оптимальною фильтра является варьируемой величиной, ко-
юрач может быть определена как решение соответствующих уравнений для
ковариапио1пюй матрицы погрешностей фнльтравыи. зависящей от
наблюдения §.
Обработка изображений интерферометрии ее кого
профилометра
Для исследования алгоритма нелинейной фильтрации бьгл использован
тестовой объект с поверхностью ступенчатой формы (рис. 11)г Общая высота
объекта составляет 20 мкм, что соответствует разбросу высот, встрсчаюшемуся
У типичных поверхностей реальных объектов. Число градаций по высоте рално
15. Высота каждой ступени тесгобъекта соиавляст примерно 13 мкм.
Освещение объекта производится лазерным источником с ограниченной- длиной
когерентности. Длина волны источника равна Л- 0.7Н мкм, длнпа
когерентности 1С = 40 мкм.
При движении икорного отражателя в пределах длины когерентности
источника в каждой /й точке кадра камера раистрирует значения
интерференционного сигнала, причем вьттисияется видное Гь V,[k) интерфсрснниоппого
сишала в каждой точке интерференционной картины
V,{k) = sM{k)/s&(k). (32)
Максимум видностн совнапает с точкой 1гулевой разности кода световых
волн в интерферометре и, в общем случае, достигается ал* каждой точки i в
матрице {рл q) ири риздичцых положениях опорного огражателя. Поэтому
регистрация номера кадра к, соответствующею максимуму видностн для точек
(p. q) позволяет получить информацию о топографии поверхности
исследуемого объекта.
Задача сосюит а том, чтобы определить максимумы видностн по поелено-
ватедыюсти видеокадров. Обработка большою количества кадров требует
значительною объема памя] и, что огра^ичивае!быстродействие традиционных
систем обработки интерферомстрических данных. Прсимун|ество
рассматриваемою метода заключается в том, что в нем используется принцип
рекуррентной обработки, и в каждый mo^fcht времени требуется только два кадра -
текущий кадр и предсказан]|ый с предыдущею uiaia. При увеличении номера
кадра к система получает больше информации о процессе, т. е. вое более точно
оценивает вектор параметров. Наиболее точная опенка достигается после
обработки полною пабора кадров.
230 Компьютерная обработка сигналов
При гауссовом энергетическом спектре источника ьщдель функции видное-
ти определяется как
v.(k) = у*ыр]-а(к}1 (зз)
гас
С{к) = (к-к^,)В„ (34)
Vw, = consi - максимальное значение видпости. ^пш, - номер кадра,
соответствующий максимуму нидности. В.- постоял пин параметр, равный l/o, где а-
полуотирина огибающей интерференционного стлала. Период интерферсидн-
онных полос соответствует примерно половине длинм волны источника, что
составляет около 0.4 мкм и при указанной длине котсренпюсги h полуширина
огибаюнгсн ицтерференвьюннок* сишала включает примерно 50
интерференционных полос.
Таким образом, используемая идеальная модель ситара в j-ой точке
интерференционной картины имеет вид
?,{i) = s«l j I 4- V„,cxpl-t?(i)]costfj(jt)i, (35)
где ФЩ = (2яШ)/Р„ к = 0, 1.2 У,-частота, Р,- количество кадров,
укладывающихся на интерферешдаолной полосе, С,{к) определяется выражением
(34). Считаем периодднекреЕикании At = tt- tt-t не зависящим от к и равпым
елиниие.
Максимум видностн, соогаетствуюший нижней ступеньке объекта*
досылается па нулевом отечете диапазона изменения Положения опорного отражателя,
а максимум, соответствующий верхней ступеньке - на 210-ом отсчете. Тогда
каждой ступепьке объекта соответствует 14 отсчетов, т. е. положений опорного
отражателя, и максимальная погрешность не препь]сит 0,095 мкм.
Заметим, что при значительном разбросе высот рельефа поверхности
эффективность рабсчы алюритма может снижаться, когда этот разброс
превышает длину когерентности излучения источника. В атом случае видносхь.
соответствующая точке объекта наибольшей высоты ири малых зпачеиднх
Количества кадров изменяется слабо. Алгоритм подстраивается под такие
слабые изменения, и если максимум видности достигается иа последних кадрах,
то погрешность восстановления может бьггь недоствточио маш. В июлем
примере все максимумы вндностей попадают в область протяженностью 2<т.
При размере области более 5-6 а 1релесообразно восстанавливать топографию
поверхности объекта по частям, так чтобьр в каждой части разброс не превышал
длину когерентности изучения.
На рис. 14, а изображен промежуточный результат восстановлении
топографии поБЁрхности, полуденный после обработки 50-ти кадров при указанных
Глава 7, Системы обработки сигналов 231
Рис. 14. Последовательные стадии восстановления топографии тест-объекта
выше параметрах сканирования. Исследования показали, что примерно на
нервьи 200-х кадрах, в случаях, когда имеется недосгаточно информации для
подавления шумов, происходит адаптивная подстройка алгоритма. Примерно
на последней четверш отсчетов, koi^u пройдены все максимумы иднности,
алгоритм выходит на устойчивое приближение к действительному значению
вектора параметров (рис 14, ч). Первьгми восстанавливаются положения
максимумов ванцости, которые соответствуют вмео^ам, лежащим в центре
232
Компьютерная обработка сигналов
диапазона изменения рельефа. Это объясняется тем, что максимуму видности
оказьЕваются пройденными полностью, причем начальные значении видности
бьши пике максимальных. В этом случае система получает больше
информации о процессе, чем в случае, когда oipeirea значений видности начинается с
максимума, поскольку модель видности маеальноти лишала (33) может нмоть
только один максимум. Заметим, что данное число точек измерения можно
получить на большом или малом интервале изменения оптической ршности
хода с учетом ожидаемою разброса высот профиля поверхности, длины
ко1срентности излучения и требуемой точности фильтрации.
Потрсшпость восстановления lonoi рафии Teej-ofrbCKia дли случая,
изображенного на рис. 14, в составляет 4 отсчета, что при заданных параметра*
системы соответствует почетности около 0,4 мкМг Начальные условия филь-
раиии выбраны елучлиными, в пределах ± |0% от идеального значения комтю-
нетов нектора параметров. Такой диапазон является достаточнь™ для
практическою определения априорных оценок вектора napaMCJpos.
Фаза ицтерференпиояного си тал а также является компонентом вектора
параметров. Полому существует ьозможноегь дополнительною уючнення
положений максимумов нидности на счет" peincipauiiH нулевою значения
восстановленной фазы для ахроматической полосы.
Для обеспечения устойчивости процесса обработки нужно выполнил,
следующие условия:
■ Данные должны адекватно соответствовать априорной модели (35), при
этом количество кадров Р,, укладывающихся на интерференционной
полосе, и параметр Р„ характеризующий неравномерность огибаюрцей,
определяются исходя ит параметров источника итлучения (длины волны
и длины когерентное in). Расстояние мегкду цредл сличаемыми Крайними
максимумами видности интерференционного сигнала не должно
превышать 5-6 о; где сг- полуширина опгбаюшей.
■ Гранины допустимой погрешности априорной опенки параметра Н,
определяются в зависимости от предположительного значения этот
параметра: чем больше неравномерность огиб&шщсйр тем меньше априорно
допустимый интервал ее неонределешюсти.
При фильтрации на первых кадрах последовательности и1ображенян
существует интервал адаптивной подстройки параметров фильтрации, поэтому
существует возможность использовать алтпритм фильтрации итерационно, Koijja
вектор входных параметров для фильтрации па следующем этапе итеранни
определяется результатами фильтрации всей реализации на предыдущем этапе.
При этом теряется преимуществе оценивания вектора параметров в реальном
времени, но повышается точность обработки данных.
Глава 7. Системь! обработки сигналов 233
Алгоритм марковской нелинейной фильтрамни аффективно подавляет
помехи, проявляющиеся в виде окрашенных аддитивных шумов. Включая шум н
модель как одни ид компонентов вектора параметров, можно получить оценку
шума, и, таким образом, получить сведения о помехах в интерференционной
системе.
Разработанная мкоюкацальная интерферометрическая система
обеспечивает точность коШродя поверхностей, FFe уступагапгую точррости одноканальпон
системы [27].
Список литературы
1. Коломийцов Юг В. Интерферометры, Осиовы инженерной 1сории, Применение. -
Л,: Машиностроение, 1976, - 296 с.
2. Оптический нрои1Водственный контроль /Под ред. Д. Малакары, - М:
Машиностроение. 1985.-41)0 с,
3. KohopoulisC L. Fringe analysis of imerferograms tl Lasei Optronics. 1988. V7. N5.
P. ft5 - 70.
4. Roddier C, Ruddici F. HUeiferogram analysis using Fourier Itan^umi Techniques //
AppLOpi. 1987. V2fi. №. P. J668-J67J.
5- Bnnc D. J. Fourier fringe analysis: ihe Iwo-dijjieijiiimal phase inrwiapjjjng umhlcni //
Appl.Opi. 1991. V30. N25. P. Щ1-3632.
6. Cu&ack Rr, HunGy J. M., GnkJrcin H. T. Iiurnoved nojsc-immnue pftase-Ш]wrapping
aEgorilhm // Appl.OpL. 1995. V34r N5. P. 781-789.
7. Цгиньбннь Ч„ Цзяпсгап Ч,, Дэр&энь С, и др. Метод пространственного скшнро-
вапня и БПФ-щиоритм для анализ тиерферограмм// Военно-текничсский
журнал КНР. 19S9.N4. С.24-31.
8. Даджион П., Мерсеро р. Цифровая обработка многомерных сшыалов.-М.: Мнр
19ВВ.-488с
9. Ярославский JL П, Цифровая обработка сишалон в оптике и гопофафии. - М,
Рдляо и сиять, 1987. - 296 с
Ш- Бейтс Р., Мак-Доннсл М, Восстановление и реконструкция изображений. - М.:
Мир, 19S9.-334c-
] J. Гуров И. П., Гонко Н. А., Лухсщст И, И. Автоматизированная оп ■ ико-эленрин-
для система дин высокоточного анашка ныерферстрамм // Оптический журнал.
1994, N10, С. 14-18.
12. Справочник тсхнолога-онтикд / Пцд ред. С. М. Кузпепова и М. А. Окатова. -
Л.: Магпиноетроепне, 1983.-4П с,
13. Ган М. А., Устинов С. И.. Долгах С. Г. н дрг Ц[нсри1Сльио-вычнслнтельпьш
комплекс для ttdpaOoiKH нитерферограмм // Охтико-механическдо Цпоимищсн-
пость. [986. N6. С. 43^\5.
14. Голод С. Л-. Скворцов Ю. С Ноьыс автоматизированные устройства ЛОМО
дня коитропя размеров в аятоматизтцюьмннсш llpou imacjuc. - Л,: ЛДНТГХ [9S9.
С. 2i)-2l.
234
Компьютерная обработка сигналов
|5. Агурок И. П,, Горелик М. С, Доходен И. И. и др. Универсальный
интерферометр ИКД-Ц0 // Оптико-механическая промышленносчъ. 1990. NIL С. 61-64.
16. Гуров И. П. Помехоустойчивый грститектрический метол измерения фазония
характеристик интерференционной картины // Метролотик. 1986. N7. С 8-16.
17. Гуров И. П., Ilaijijotia А- Б. Определение положения отражающей поверхности
второю порчлка методом машщщон обработки интерференционной карейны //
Автометрия. 1990. N3. С. 30-36.
1Й. Скоков И. В„ Носков М, Ф. Нелинейная фоторегистрапия двухлучевых интерфе-
ре1Юдотшыл картин // Заводская лаборатория. 1984. Т.50. N1. С. 32-36.
19 Сокольский М. Н. Допуски и качество ошнчеекою нюбраженич. Л..
Машиностроение, 1939. -220 с.
20. Гулевскин В. Ю., Гуров И. П. Штерфе^ннионные методы и устройства
контроля цешриронкн линз //Оптический журнал. [994. N5. С 13-22
21. А.С. 1830477 РФ, МКИ G01B у/ОД. Способ контроля иептрнровкн лииз и ус-
тройспкц ю\я его осуществления / И. П. ГУров. Заявлена 22-02,91; Онубч-
30.07.03; Gshl N.28.
Zl. Sam S. С. Theory of a compact iadiaj йпсяпщ ]аьег niteilemmeter // Opl.Acla.
1970. V. 17. N2. P. 107-113.
23. Кук Ч., Бсрыфсльд М, Ралиолс'Катпюпные сигналы.-М.: Оов.рално, 1971. -
568с,
24. f"ypiifl И. П., Павлова А. Б. Согласовавлый фильгр дли ндсн1ифчкални
понижения дентра итерферендвпнной картины ti Тезисы докладов VI Всесоюзной
конференции "П^юблсим метролопРЕСкого обеспечения cneieM dfipafroiKii
измерительной информации.'" - М., 1987. С. E43-I44-
25. Gurov Г. P., Risfanova О. В, VenEying df jneasurisig accuracy of fractional part of
inlerferenCr fringec order by iulerferomeuic signal autoconvoliinon mclhod //Proc,
SPIE. 1996. V. 2969. P.381-386.
26. Гуров И. П., Ли Ган. Интсрферомс1рическиие методы и устройства контроля
смещещщ негладких поверхностей //Оптика и спектроскопия. 1998. Т. 84. N1.
С, 129-144.
27. Глухов О. Д., Гуров И. П., Првляер В. И. Автоматическая селекция
ахроматической полосы методом огибающей // Оптика и снектроскодля. 1983- Т- 54.
Вии. 5. С. 846-850.
28. Diesel Т., Hausiej G-, Ven/ke H. Three-dimensional sensing of rough surfaces by
coherence radar // А]>р|. OpL 1992. V. 31. N7. P. 919-925.
29. Ярлыков М- С. Применение марковской теории онгамальиой нелинейной
фильтрации в радиотехнике. М. : Сов. радио, 1980. - 350 с.
30. Гуров И. П.. Шелинховнч Д. В. Определение фазовых характсриегчк интерфе-
реицнонлой картины метолом нелинейной марковской фнньтратШн //GuTHKa и
спектросковля. [997. Т. S3. Выц. 1. С 147-152
Предметней указатель
235
Предметный указатель
А
авт^вертка 219, 221
алгоритм Витцрада 136
- Кули-Тынки 134
- с прореживанием по чдеюте 135
анализ численный гармонический 44
- ]ieipeccHoHHMH 48, 64
аналитическое продолжение сигнала 212
ацертура "ростраве^енно-вреиенная 73
- фильтра 56
В
вектор наблюдений 12, 196 ,
- Параметрод ДО, 15, 38, 52, 72. IG?
- сосюяння 180
HHHHOtTb 67, 88. 93, [89, 229
восстановление фазы 10, 166
- - прямое 114, [22
входной :цичок 72
-люк 72
выходной зрачок 72
Г
градиент фазы 160
д
Деление вошово!офронтаиоамшл1;удебЗ
по площади 68
детекгаровелие гетеродживое 39
- синхронное 39. 153, 155
дискретизация 13, 103
- распределения интенсивности 114
дисперсия аиостернорпая 184
- опенок параметров 172
длина когерентности 70, 90
дробная доля парилка интерференннн Я
143
3
тадача ндентпфикдлин 11
- со случайно изменяющимися
параметрами 22
- со случайными впешнпыи во гдействиимн
22
- со случайными начальными условиями 20
И
интерферометр диухлучевой 9
- ниоголучевои 9
К
квадра1урпые составляющие |3. 46, ]57
квантование 103, МО
- с округлением [32
- с усечением 121
кеьетр комплексный 5S
- моишости 59
коррелявля интенсилностей S&
кумулянты 32
М
матрица взаимных спектральных
плотностей 38
- ковариационная 37, 190
- - опенок параметров 187
- корреляционная 15, 37
- наблюдений 187
- Тедпипа 38
- чувствительности 15, 191