


















































































































































































































































































































































Author: Алекссев К.Б. Бебенин Г.Г.
Tags: техника средств транспорта летательные аппараты космические аппараты
Year: 1974


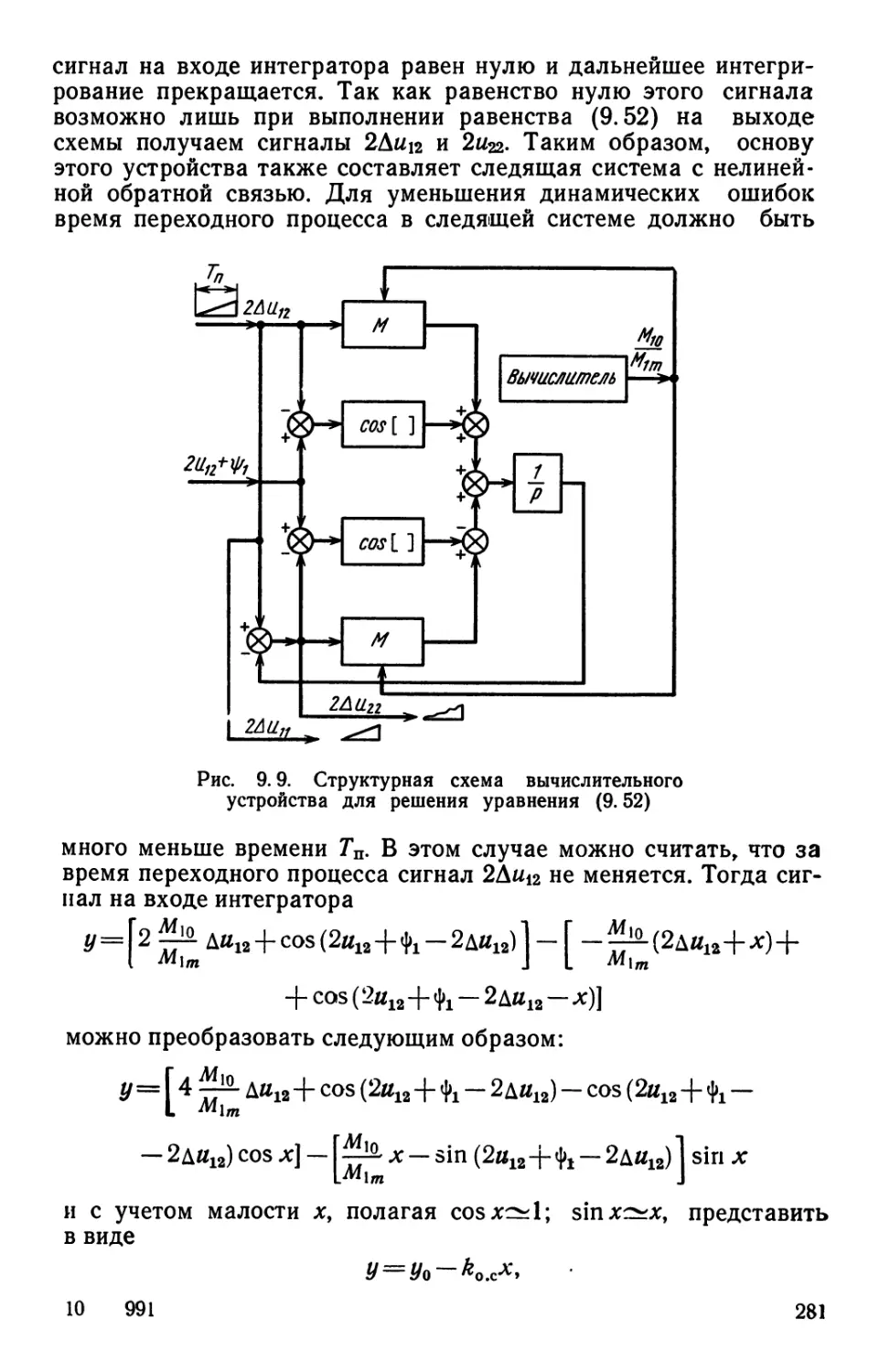
Text
К. Б. АЛЕКСЕЕВ,
Г. Г. БЕБЕНИН
УПРАВЛЕНИЕ
КОСМИЧЕСКИМИ
ЛЕТАТЕЛЬНЫМИ
АППАРАТАМИ
Издание второе,
переработанное и дополненное
Москва
«МАШИНОСТРОЕНИЕ»
1974
А 47
УДК 629. 78. 051
Алексеев К. Б., Бебенин Г. Г. Управление космическими
летательными аппаратами. М., «Машиностроение», 1974, 340 с.
Книга знакомит читателя с основными принципами управления
космическими летательными аппаратами (КЛА). В ней описаны
элементы систем управления КЛА и изложены методы исследования
этих систем. В частности, рассмотрены вопросы применения
гироскопических устройств и инфракрасной вертикали для
построения базовой системы отсчета на борту КЛА, приведено исследование
пространственной ориентации аппарата с помощью
двигателей-маховиков и моментного магнитопривода. Показана возможность
использования в целях управления гравитационного и магнитного
полей Земли. Кратко рассмотрены основные вопросы оптимального
управления ориентацией КЛА.
Книга рассчитана на инженерно-технических работников,
специализирующихся в области управления космическими летательными
аппаратами. Она может быть полезна также студентам и аспирантам
вузов соответствующих специальностей.
Табл. 6, ил. il79, библ. 65.
А 31904—149 <лл _
А 149—74
038(01 )-74
©Издательство «Машиностроение», 1974г.
ПРЕДИСЛОВИЕ
Среди многочисленных проблем освоения космоса большое
значение имеет проблема управления космическими
летательными аппаратами.
Первые полеты человека в космос, запуски автоматических
станций к Луне и планетам Солнечной системы, использование
искусственных спутников Земли для решения целого ряда
прикладных задач (связь, навигация и др.) стали возможными
благодаря успешному решению задач управления этими
аппаратами. Бесспорно, что управление космическими аппаратами будет
неуклонно совершенствоваться.
С момента выхода в свет первого издания книги в освоении
космического пространства достигнуты значительные успехи. Эти
успехи стали возможны благодаря бурному развитию
космической техники, нашедшему свое отражение в создании постоянно
действующих систем метеорологических и связных спутников,
космических аппаратов, способных осуществлять встречу на
орбите спутника Земли и Луны, производить мягкую посадку на
поверхность Луны, Марса и Венеры и т. д.
Управление космическим аппаратом, как известно, включает
в себя маневрирование (управление движением центра масс) и
ориентацию (управление движением вокруг центра масс).
Последние достижения в теории и практике маневрирования
космических аппаратов нашли отражение в книге, написанной с
участием авторов [3].
Настоящая книга знакомит читателя с основными
принципами управления космическими летательными аппаратами, а
также с последними достижениями науки и техники в данной
области. К этим достижениям в первую очередь относятся разработка
теории и методов расчета комбинированных систем ориентации
с маховиками и моментным магнитоприводом (в том числе
самонастраивающихся систем ориентации), а также разработка
нового метода экстенсивного управления ориентацией.
Материал первых шести глав знакомит читателя со
свойствами космического летательного аппарата как объекта управления,
а также с особенностями и характеристиками элементов систем
управления такими объектами. В последующих главах изложены
991
3
принципы построения систем управления и даны инженерные
методы их исследования.
В книге освещены принципы построения систем управления
космическими летательными аппаратами и методы их
математического исследования, рассмотрены способы ориентации
космических летательных аппаратов, основанные на использовании
различных физических свойств окружающей среды, а также
описаны устройства, применяемые в указанных системах.
Изложение материала рассчитано на читателя, имеющего
математическую подготовку в объеме вуза и знакомого с основами
теории автоматического регулирования.
Авторы считают своим долгом выразить глубокую
благодарность специалистам А. Г. Чеснокову, А. П. Разыграеву, Ю. А.
Карпачеву за полезные советы, а также инж. В. А. Бобкову,
любезно предоставившему материал по методике исследования
динамики систем ориентации с магнитоприводом с использованием
расчетной модели геомагнитного поля.
Авторы будут признательны читателям, которые сочтут
возможным выслать в адрес издательства свои критические
замечания.
ВВЕДЕНИЕ
Выдающиеся достижения науки и техники в Советском Союзе
сделали возможным запуск искусственных спутников Земли,
космических кораблей с человеком, полеты автоматических станций
к Луне и планетам. Все это открывает перед человечеством
новые безграничные возможности познания Вселенной.
Изучение активности Солнца и эволюции звезд, свойств и
состава космического излучения и межпланетного пространства,
познание природы Луны и планет солнечной системы при
кажущейся на первый взгляд отвлеченности этих знаний имеет
большое практическое значение. В частности, исследование
физической сущности излучение Солнца и звезд облегчит решение
задачи управления термоядерными реакциями в земных
условиях. Установление взаимосвязи между явлениями, происходящими
в космосе и на Земле, позволит более точно и на более
продолжительное время предсказывать погоду и т. п.
Проведенные в настоящее время исследования с помощью
геофизических и метеорологических ракет, искусственных спутников
Земли и межпланетных автоматических станций представляют
собой лишь первый этап в осуществлении вековой мечты
человечества о полетах к другим мирам.
Запуск первого в мире советского искусственного спутника
Земли, осуществленный 4 октября 1957 г., ознаменовал начало
эры космических полетов. Важными историческими вехами на
пути освоения космоса явились успешные запуски первой
искусственной планеты солнечной системы в январе 1959 г. (станция
«Луна-1») и станции «Луна-2», доставившей 14 сентября 1959 г.
на Луну вымпел с гербом Советского Союза.
12 апреля 1961 г. летчик-космонавт Ю. А. Гагарин на
космическом корабле «Восток» совершил беспримерный полет вокруг
земного шара и благополучно возвратился на родную Землю.
Нам, современникам первого в мире космонавта, трудно оценить
все значение совершенного им подвига, открывшего эру
покорения человеком Вселенной.
За выдающимся полетом Ю. А. Гагарина последовала целая
серия полетов советских и американских пилотируемых
космических кораблей типа «Восток», «Восход», «Союз», «Меркурий»,
«Джемини» и «Аполлон». Из этих полетов в качестве этапных
5
можно выделить полет космического корабля «Восход», во время
которого А. Леонов совершил первый выход в открытое
космическое пространство (март 1965 г.), полет космического корабля
«Аполлон-11» с экипажем в составе Н. Армстронга, Д. Коллинза
и Э. Олдрина, в результате которого в июле 1969 г. была
осуществлена высадка первой экспедиции в составе космонавта
Н.Армстронга и Э.Олдрина на поверхность Луны, эксперименты
с первой долговременной орбитальной станцией «Салют» с
экипажами в составе Шаталова В. А., Елисеева А. С,
Рукавишникова Н. Н, и Добровольского Г. Т., Волкова В. Н., Пацаева В. И.
Дальнейшее развертывание научных исследований по
изучению космоса потребовало создания более совершенных
конструкций межпланетных станций и искусственных спутников Земли.
В результате была осуществлена целая серия полетов лунных
автоматических станций, в которых решались такие задачи, как
мягкая посадка на лунную поверхность («Луна-9»), выход на
орбиту спутника Луны («Луна-10»). Автоматические станции
«Луна-16» и «Луна-20» совершили мягкую посадку на
поверхность Луны и возвратились на Землю с образцами лунного
грунта. Успешно функционировали на поверхности Луны
передвижные лаборатории «Луноход-1» и «Луноход-2». Совершили мягкую
посадку на поверхность Венеры автоматические станции «Вене-
ра-7» и «Венера-8», а на поверхность Марса — станции «Марс-3»
и «Марс-6». Продолжительное время функционировали
искусственные спутники Марса «Марс-2», «Марс-3» и «Марс-5».
Эти выдающиеся достижения человеческого разума
свидетельствуют о высоком уровне развития советской науки и техники.
Полеты в космическое пространство показывают, что тайны
Вселенной становятся все более доступными человеку.
Осуществление космических полетов неразрывно связано с
развитием ракетной техники, так как запуск космических
аппаратов производится с помощью многоступенчатых ракет.
Возможность космических полетов с помощью ракет впервые
получила глубокое научное обоснование в классических трудах
талантливого русского ученого Константина Эдуардовича
Циолковского (1857—1935 гг.). Значительный вклад в развитие
ракетно-космической техники внес выдающийся ученый и инженер,
академик Сергей Павлович Королев. Идеи К. Э. Циолковского и
его последователей в настоящее время успешно претворяются в
жизнь советскими учеными и инженерами, работы которых
позволили последовательно осуществлять намеченную сложную
программу космических полетов.
В большинстве случаев при выполнении своего полета
космический летательный аппарат должен быть определенным образом
ориентирован в пространстве. Если первые искусственные
спутники, предназначавшиеся для научного исследования космоса,
были неуправляемыми, то последующие спутники и межпла-
6
нетные станции имели на борту комплекс устройств,
обеспечивающих заданную ориентацию их в пространстве.
В сообщении ТАСС о запуске второго космического
корабля — спутника Земли указывалось на решение сложнейших
научно-технических проблем, которые обеспечивали управляемый
полет космического корабля и спуск его на Землю в заданный пункт
с большой точностью. Фотографирование обратной стороны
Луны с помощью автоматической межпланетной станции стало
возможным благодаря автоматической системе, ориентации на ее
борту. При помощи этой системы было прекращено вращение
станции вокруг ее центра масс, возникшее в момент отделения
от последней ступени ракеты-носителя. Станция заняла
определенное положение по отношению к Луне, при котором стало
возможным фотографирование ее обратной стороны. В последующих
полетах системы управления космических летательных
аппаратов решали еще более сложные задачи.
Сигналы, вырабатываемые измерительными устройствами,
воздействовали на систему, управляющую угловым движением
станции вокруг ее центра масс. Ориентация станции
сохранялась в течение всего времени фотографирования Луны. После
окончания фотографирования система ориентации была
автоматически отключена, и всей станции было придано вращение с
постоянной угловой скоростью, обеспечивающей благоприятный
тепловой режим и нормальное функционирование
установленной на ней научной аппаратуры.
Из сказанного видно, что система автоматического
управления играет важную роль в решении задач, поставленных перед
космическим летательным аппаратом. По принципу построения
такая система является замкнутой системой автоматического
управления. Поэтому ее функциональная схема включает в себя
объект управления (космический летательный аппарат),
измерительные устройства, выдающие информацию о параметрах
движения объекта, усилительно-преобразующие устройства,
формирующие требуемый закон управления движения объекта, а
также управляющие устройства, обеспечивающие создание
необходимых сил и моментов.
Условия полета в космическом пространстве,
характеризующиеся полным или частичным отсутствием атмосферы, явлением
невесомости и, как правило, большой продолжительностью
полета, определяют особенности, присущие только системам
управления космических летательных аппаратов. Это привело к созданию
принципиально новых устройств систем управления угловыми
движениями и движением центра масс аппарата. В частности,
вследствие малости внешних возмущающих моментов оказалось
возможным применение в качестве управляющих устройств
специальных реактивных двигателей, двигателей-маховиков и
устройств, использующих энергию солнечного излучения. В
качестве неизвестных ранее измерительных устройств можно назвать
7
инфракрасную вертикаль, фотоследящие измерители
направления на Солнце, различные астрономические приборы и т. д.
К устройствам и элементам системы управления космическим
аппаратом предъявляются повышенные требования в отношению
надежности, точности работы, массы и потребляемой энергии.
Достаточно сказать, что от надежности системы управления
зависит успешное выполнение поставленной задачи. Для создания
систем, отвечающим таким требованиям, необходимо хорошо
знать особенности их работы в специфических условиях
космического полета. Разумеется, что по мере освоения космоса наши
знания об этих особенностях будут пополняться новыми
данными. Однако уже в настоящее время довольно четко выделились
наиболее характерные особенности систем управления угловыми
движениями космических летательных аппаратов, что отражено
в настоящей книге.
I КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ
1 КАК ОБЪЕКТ УПРАВЛЕНИЯ
Часть
ГЛАВА I. КОСМИЧЕСКИЙ ПОЛЕТ
И ЗАДАЧИ ОРИЕНТАЦИИ
Обширная программа космических исследований включает в
себя в качестве основных направлений:
— исследование околоземного космического пространства;
— исследование Луны и планет солнечной системы;
— медико-биологические исследования.
Реализация этой программы предусматривает создание
космических аппаратов различного функционального назначения
таких, например, как искусственные спутники Земли, орбитальные
автоматические станции, пилотируемые космические корабли
и т. д.
Наиболее характерным случаем движения КЛА любого вида
является полет в поле тяготения какого-либо небесного тела —
Земли, Солнца, планеты или естественного спутника. Это не
означает, что на него не действуют силы тяготения других
небесных тел, но на определенных участках траектории они настолько
малы по сравнению с силой тяготения рассматриваемого тела,
что при изучении движения КЛА в первом приближении их
можно исключить из рассмотрения.
Все планеты и их естественные спутники, как правило,
имеют неровную поверхность и неравномерное распределение масс.
Поэтому их поле тяготения является очень сложной функцией
координат КЛА. Некоторые небесные тела имеют атмосферу,
которая оказывает сопротивление движению аппарата.
В первом приближении считают, что небесное тело является
однородным и имеет сферическую форму с постоянной
плотностью, а сопротивление атмосферы пренебрежимо мало. При этом
движение центра масс КЛА, которое называется невозмущенным
движением, происходит в центральном поле сил.
Траектория невозмущенного движения, или орбита, является
плоской кривой второго порядка (коническим сечением).
Плоскость орбиты проходит через центр тяготения, который является
одним из ее фокусов.
Если воспользоваться полярной системой координат,
плоскость которой совмещена с плоскостью орбиты, то расстояние
9
КЛА от центра тяготения определяется известным уравнением
кривой второго порядка
1 + е cos Ъ
(l.i)
где е — эксцентриситет орбиты;
Ь — истинная аномалия, отсчитываемая от направления в
точку с минимальным значением г, которая называется
перицентром (перигеем, если движение происходит в
поле тяготения Земли),
до направления в
текущую точку орбиты;
** р — фокальный параметр эр-
2а биты, определяемый
равенством
р=а(1— е2)
(1.2)
(а— большая полуось орбиты).
Важно отметить, что в
зависимости от эксцентриситета,
величина которого определяется
начальными условиями,
существуют различные виды орбит. Учи-
Рис. 1.1. Виды'орбит и характер- тывая> , что обычно начальная
ные точки эллиптической орбиты .точка (точка вывода КЛА на
(П—перигей; А—апогей; FAi и F2— орбиту) является перицентром
фокусы: (перигеем), указанная зависи-
/-круговая: ^-эллиптическая; 3-пара- МОСТЬ МОЖеТ бЫТЬ ПОеДСТаВЛена
болическая; 4 — гиперболическая г
соотношением
e=Vl + (V0/Vlo)*[l-(Vno/V0f]y
где V0 — начальная скорость КЛА;
Vio, Viio — первая и вторая космические скорости на
расстоянии г от центра тяготения, которые в общем
случае определяются формулами:
Vn = V*ln Кпо-У>/г=]/21/
ю
(ц — постоянная тяготения).
Из приведенных соотношений следует, что если 1/0=Ую1 то
е=0 и орбита является круговой. При этом КЛА движется с
постоянной для данного радиуса г скоро'стью Vi. Поэтому
скорость Vi называют также круговой скоростью. Если Vio<Vo<
< Vno, то 0<е<1, что соответствует эллиптической орбите. При
y0=Vno получим параболу, так как е=1, а при Ко>^по
—гиперболу, так как е>1. Указанные орбиты и характерные точки
эллиптической орбиты показаны на рис. 1.1.
Ю
1.1. Виды космических летательных аппаратов
Космические летательные аппараты (КЛА) в зависимости от
траектории полета принято классифицировать следующим
образом:
— аппараты, выполняющие полет по орбите спутника Земли;
— аппараты, выполняющие полет к Луне;
— аппараты, выполняющие полеты к планетам солнечной
системы.
К первому виду КЛА относятся пилотируемые космические
корабли, орбитальные пилотируемые станции, а также
беспилотные искусственные спутники Земли (ИСЗ). Их невозмущенное
движение происходит по эллиптической орбите с фокусом в
центре Земли.
При движении по такой орбите скорость КЛА определяется
формулой
V = \/ -4l + *2 + 2£cos&). (1.3)
Радиус-вектор г вращается в инерциальном пространстве с
угловой скоростью
v=l/ -^(l + ecos»)2. (1.4)
Из формулы (1.3) видно, что скорость КЛА изменяется от
максимального значения в перигее до минимального значения в
апогее.
Указанный характер движения объясняется тем, что
суммарная энергия КЛА не меняется и происходит ее периодическое
перераспределение. В перигее КЛА имеет максимальную
кинетическую энергию и минимальную потенциальную. При движении к
апогею потенциальная энергия растет, а кинетическая падает.
В апогее КЛА имеет максимальную потенциальную и
минимальную кинетическую энергию. Далее происходит обратный
переход, а после прохождения перигея картина повторяется.
В ряде случаев эллиптические орбиты КЛА имеют очень
малый эксцентриситет (у кораблей типа «Союз», например, он не
превышает 0,01). Подобные орбиты принято называть
околокруговыми или просто круговыми. В случае идеальной круговой
орбиты радиус-вектор КЛА вращается в пространстве с постоянной
угловой скоростью
y*=VvJF* (1.5)
Область применения КЛА, движущихся по орбитам ИСЗ,
очень быстро расширяется. В частности, беспилотные КЛА
стали широко применяться для решения ряда конкретных практиче-
п
ских задач. Связные ИСЗ обеспечивают передачу радиосигналов
на глобальные расстояния. Аппаратура ретрансляции,
устанавливаемая на борту ИСЗ, позволяет передавать телевизионные
программы, проводить одновременно большое число телефонных
переговоров и телеграфных передач. Метеорологические ИСЗ
постоянно собирают и передают на Землю информацию о
состоянии погоды в различных районах земного шара. С помощью
геодезических спутников удается решить сложную задачу
взаимной привязки геодезических сетей различных континентов.
Представляет интерес применение ИСЗ для обеспечения
точной навигации в любую погоду. Так как положение спутника
может быть известно с высокой точностью в любой момент
времени, то при наличии приемной станции, определяющей свое
положение относительно ИСЗ, можно установить ее
местонахождение на Земле с точностью лучших астронавигационных средств.
Сочетание ИСЗ и соответствующих радиотехнических средств
представляет собой новый тип навигационной системы.
По мере изучения космоса и совершенствования систем
управления КЛА могут появиться и иные возможности
практического применения ИСЗ.
Широкое применение находят ИСЗ и для проведения научных
исследований в космическом пространстве. Следует отметить
очень важную тенденцию, которая наметилась в последнее
время,— создание специализированных ИСЗ, предназначенных для
проведения определенного круга исследований. Например, для
астрономических наблюдений за пределами земной атмосферы
создаются орбитальные астрономические обсерватории. Задачи
изучения солнечной активности решаются с помощью
геофизических станций, выводимых на орбиты ИСЗ. Наряду с указанными
основными задачами на этих ИСЗ проводится ряд других
научных исследований, таких как определение плотности и
температуры атмосферы на больших высотах, изучение магнитного и
электрического полей Земли, космического излучения и т. п.
Для проведения комплексных научных исследований и
решения некоторых задач прикладного характера с участием
человека используются орбитальные пилотируемые научные станции.
Их функционирование в течение длительного времени
обеспечивается транспортными кораблями снабжения, которые
производят периодическую смену экипажа станции, доставку на Землю
результатов проведенных исследований, а на борт станции
необходимых материалов, «продуктов питания и топлива, замену
некоторой аппаратуры и т. д.
В последние годы КЛА стали выполнять полеты к Луне и
планетам Солнечной системы. Траектории их движения
описываются достаточно сложными уравнениями. Для того, чтобы при
изучении траекторий таких КЛА можно было использовать
теорию невозмущенного движения, вводится понятие сферы действия
малого небесного тела относительно большого. Например, Луны
12
относительно Земли, Земли или планеты назначения
межпланетного КЛА относительно Солнца. Когда КЛА находится в
пределах сферы действия малого тела, его движение рассматривается
в системе координат с началом в центре масс этого тела. Такие
системы координат называются селеноцентрическими или плане-
тоцентрическими (геоцентрическими). В первом приближении
действием других небесных тел пренебрегаем, а поле тяготения
малого тела считаем центральным. Тогда КЛА будет двигаться
относительно этого тела по одной из рассмотренных выше орбит,
а расчет параметров движения выполняется с использованием
формул невозмущенного движения.
За пределами сферы действия движение КЛА
рассматривается в системе координат, связанной с центром большого тела. Для
лунных КЛА — это геоцентрическая система координат, а для
межпланетных — гелиоцентрическая.
Если рассматривать движение КЛА в системе координат,
связанной с малым телом, то его траектория невозмущенного
движения определяется ускорением gM. Большое тело будет
оказывать возмущающее воздействие с ускорением
ёв. б=8б —g6.M,
где gc — гравитационное ускорение КЛА, создаваемое боль-
__ шим телом;
£б. м — гравитационное ускорение, действующее со стороны
большого небесного тела на малое.
Степень возмущающего воздействия большого тела на
движение КЛА относительно малого тела будет зависеть от
отношения возмущающего ускорения к гравитационному ускорению,
создаваемому малым телом, т. е.
1^в.б1 _ IJ6~ £б.м|
Ы Ы
Если же рассматривать движение КЛА в системе координат,
связанной с большим небесным телом, то возмущающее
воздействие будет оказывать малое тело. При этом возмущающее
ускорение будет
Sb.m == ёьл ^Гм.б'
где gu. б — гравитационное ускорение, действующее со стороны
малого небесного тела на большое.
Соответствующая степень возмущающего воздействия
определится аналогично предыдущему случаю
I^b.mI _ IJTm — £м.б! ■
Ы Ш
Сферой действия малого небесного тела по отношению к
большому небесному телу принято считать границу области, в преде-
13
лах которой степень возмущающего воздействия большого тела
на движение КЛА в системе координат, связанной с малым
небесным телом, меньше, чем степень возмущающего воздействия
малого тела на движение КЛА в системе координат, связанной с
большим телом. Следовательно, равенство
1^м — #м.б1 _ ко — ge.vA
gt gu
является уравнением сферы действия малого небесного тела.
Решение этого уравнения позволяет найти радиус сферы действия
где L — расстояние между небесными телами;
Мм — масса малого тела;
Мб — масса большого тела.
Значения радиусов сферы действия, подсчитанные по
последней формуле, приведены в табл. 1.1.
Таблица 1.1
Небесное тело
/?*, млн. км
Земля
0,93
Венера
0,62
Марс
0,58
Луна
0,066
Ко второму виду КЛА относятся как беспилотные
автоматические станции, так и пилотируемые космические корабли для
высадки экспедиций на поверхность Луны. Вначале лунные КЛА
выводятся на орбиту спутника Земли, затем с помощью
ракетного двигателя производится старт с этой орбиты и переход на
орбиту перелета к Луне, которая должна удовлетворять двум
условиям: пересекать орбиту Луны и обеспечивать прибытие КЛА
в точку пересечения одновременно с Луной. Орбиты перелета
могут быть эллиптическими, параболическими и
гиперболическими. В энергетическом отношении более выгодны эллиптические
орбиты. Однако при полетах по таким орбитам предъявляются
более высокие требования к точности выдерживания скорости при
старте с орбиты ИСЗ. Поэтому обычно для перелета к Луне
используются орбиты, близкие к параболической. Для этого при
старте с орбиты ИСЗ аппарату сообщается вторая космическая
скорость.
Для устранения ошибок орбиты перелета предусматриваются
корректирующие маневры. Количество таких маневров зависит
от требуемой точности выдерживания конечных параметров,
которая определяется решаемой КЛА задачей.
Наименее жесткие требования к точности имеют место при
решении задачи попадания КЛА на поверхность Луны без
ограничения скорости и места прилунения. Более высокие требования
14
предъявляются к точности орбиты перелета при решении задач
облета Луны в заданном диапазоне высот и прилунения КЛА в
определенном районе ее поверхности.
По мере приближения к Луне КЛА попадает в ее сферу
действия. Дальнейшее движение удобно рассматривать в
селеноцентрической системе координат. Это движение обычно происходит
по гиперболической орбите, фокус которой совпадает с центром
Рис. 1.2. Виды орбит КЛА
вблизи Луны (Oi — перицентр
орбиты попадания; П2 —
перицентр орбиты облета):
/—гиперболическая орбита
попадания; 2—гиперболическая орбита
облета; 3—эллиптическая орбита
Рис. 1.3. Схема полета с
посадкой на поверхности
Луны:
/—точка схода лунного корабля
с орбиты спутника;
2—перицентр переходной орбиты
снижения; 3—точка посадки на
лунную поверхность;
4—положение базового корабля в
момент посадки лунного корабля;
5—встреча лунного корабля с
базовым на орбите спутника;
6—эллипс снижения
Луны. При этом в зависимости от решаемой задачи (рис. 1.2)
орбита либо пересекает поверхность Луны (орбита /), либо
имеет перицентр на определенной высоте Нп над лунной
поверхностью. В'первом случае при мягкой посадке, которая впервые
была выполнена советской автоматической станцией «Луна-9»,
на определенной высоте включается двигатель, осуществляющий
торможение КЛА. Во втором случае КЛА может облететь Луну
(орбита 2) и перейти на орбиту обратного перелета к Земле
(после выхода из сферы действия Луны) или перейти на орбиту
спутника Луны (орбита 3). Последний переход осуществляется
за счет маневра торможения, так как при движении по
гиперболической орбите КЛА движется со скоростью, большей второй
космической. Подобная задача впервые была решена в полете
советской автоматической станции «Луна-10» — первого
искусственного спутника Луиы.
15
При осуществлении высадки экспедиции на поверхность
Луны КЛА предварительно выполняет переход на орбиту ее
спутника. В определенной точке этой орбиты от КЛА отделяется
специальный лунный корабль, оснащенный посадочной и взлетной
двигательными установками. Первая обеспечивает его снижение
и мягкую посадку КЛА (рис. 1.3), вторая — взлет и выход на
исходную орбиту спутника для встречи и стыковки с базовым
кораблем. Подобная схема использовалась в полетах
космических кораблей «Аполлон». После стыковки экипаж лунного
корабля переходит в базовый корабль, который затем отделяется
и стартует с орбиты спутника, переходя на гиперболическую
орбиту отлета.
Осуществление автоматических и пилотируемых полетов к
Луне с возвращением на Землю представляет сложную
техническую проблему. Успешному решению этой проблемы
способствовали запуски к Луне автоматических станций «Зонд-5»
и «Зонд-6». Важнейшим результатом полетов этих станций была
отработка двух вариантов 'возвращения на Землю
аппаратов, входящих в атмосферу со второй космической скоростью.
Так при полете «Зонда-6» была проверена система
управления спуском с использованием аэродинамического качества
спускаемого аппарата, которое определяется отношением
подъемной силы к силе аэродинамического сопротивления. Такая
система управления позволяет осуществить более пологую траекторию
спуска с меньшими перегрузками, увеличивает дальность полета
и расширяет маневренные возможности аппарата. Проблема
возвращения космического аппарата на Землю после облета Луны
связана с весьма высокими требованиями к точности управления.
Коррекция траектории при подлете к Земле космического
аппарата должна быть выполнена с высокой точностью с тем, чтобы
он вошел под необходимым углом в относительно узкий
«коридор» входа в атмосферу.
Верхняя граница «коридора» определяется предельно пологой
траекторией, при которой еще произойдет захват аппарата
атмосферой и спуск на поверхность Земли. Нижняя граница
определяется предельно крутой траекторией, при полете по
которой еще выполняются ограничения по перегрузкам и тепловым
потокам.
Рассмотренные виды КЛА: ИСЗ и лунные космические
аппараты движутся в околоземном космическом пространстве,
границей которого принят радиус сферы действия Земли, равный
930000 км. Полеты за пределами этой сферы выполняют КЛА
третьего вида, предназначенные для научных исследований
планет солнечной системы и межпланетного пространства.
Невозмущенное движение межпланетных КЛА в пределах
сферы действия Земли происходит по гиперболической орбите.
Затем КЛА переходит на орбиту перелета к планете назначения.
Обычно это эллиптическая орбита с фокусом в центре Солнца.
16
Она должна удовлетворять требованиям, аналогичным
требованиям к орбите перелета к Луне. По мере приближения к
планете КЛА входит в ее сферу действия. Последующее движение
межпланетного КЛА, аналогичное движению лунного
космического аппарата, удобно рассматривать в планетоцентрическои
системе координат. При этом траектория полета является
гиперболической орбитой, один из фокусов которой совпадает с
центром планеты. В зависимости от конечной цели полета могут
Рис. 1.4. Схема полета автоматических межпланетных
станций «Венера-5» и «Венера-б»:
/—орбита Земли; 2—орбита станции; 3—орбита Венеры
иметь место все три варианта движения, показанные на рис. 1. 2.
Принципиальная схема посадки на поверхность планеты в
пределах ее сферы действия аналогична схеме посадки лунного
корабля.
На рис. 1.4 приведена схема полета автоматических
межпланетных станций «Венера-5» и «Венера-6». Оптимальные
траектории полета к Венере, выбранные исходя из минимальные
затрат энергии и ряда других соображений, обеспечивали
продолжительность полета соответственно 131 и 127 суток. Для этих
станций на трассе полета была проведена однократная
коррекция траектории.
Невозмущенное движение КЛА по орбите однозначно
определяется шестью параметрами, которые называются ее
элементами. В качестве элементов орбиты обычно используются
большая полуось (или фокальный параметр), эксцентриситет и время
прохождения перигея (в общем случае перицентра), а
также три элемента, определяющие положение орбиты в
пространстве. Эти элементы обычно отсчитываются в инерциальной
системе координат с началом в центре тяготения.
В геоцентрической системе координат ОХ{Х2Х3 (рис. 1.5), ось
ОХ3 которой направлена по оси вращения Земли в сторону Се-
17
верного полюса PN, ось OXi — в точку весеннего равноденствия *г
а ось ОХ2 — так, чтобы получить правую систему координат **г
положение орбиты определяется долготой восходящего узла,
наклонением и аргументом перигея.
Долгота восходящего узла Q, которую иногда для краткости
называют просто долготой узла, — это угол, отсчитываемый в
плоскости экватора против часовой
стрелки, если смотреть с Северного полюса,
от направления в точку весеннего
равноденствия до направления в точку
В — восходящий узел орбиты (точка
Н — нисходящий узел). Этот угол
может изменяться в диапазоне 0<Q<
^360°.
Наклонение орбиты / — угол,
отсчитываемый против часовой стрелки,
если смотреть со стороны восходящего
узла, от плоскости экватора до
плоскости орбиты. Этот угол в зависимости
от начальных условий находится в
пределах 0^/^180°. При /=0° и /=180°
орбита называется экваториальной
(плоскость орбиты совпадает с
плоскостью экватора), а при /=90° —
полярной (плоскость орбиты проходит через полюсы).
Аргумент перигея со — угол, отсчитываемый в плоскости
орбиты по направлению движения от направления в восходящий
узел до направления в перигей. Аргумент перигея изменяется в
пределах 0^0)^360°. С учетом этого элемента в ряде задач для
определения положения космического аппарата на орбите вместо
истинной аномалии используется аргумент широты а=со+#.
Учет отклонения реального поля тяготения от центрального,
воздействие атмосферы и полей тяготения других небесных тел
производится за счет введения дополнительных возмущающих
ускорений. Ввиду их относительной малости реальную
траекторию в каждой ее точке заменяют идеальной орбитой, которая
касается реальной траектории (оскулирует) в рассматриваемой
точке. В результате действие возмущающих ускорений сводится
к изменению элементов оскулирующей орбиты. Изменения
элементов орбиты, которые имеют тенденцию накапливаться с
течением времени, называются вековыми возмущениями орбиты.
Рис. 1.5. Элементы орбиты:
/—экватор; 2—проекция орбиты
на невращающуюся Землю; у -•
точка весеннего равноденствия
* Точка у на экваторе воображаемой небесной сферы (сфера бесконечно
большого радиуса, построенная относительно центра Земли), в которой Солнце
в процессе его видимого с Земли годичного движения переходит из южной
полусферы в северную.
** В последующем будут применяться только правые системы координат,
без соответствующих оговорок.
18
1.2. Формулировка задачи ориентации КЛА
Проведение большинства научных исследований в космосе
предполагает вполне определенную ориентацию углового
положения КЛА в пространстве. Необходимость в подобной
ориентации возникает также в ряде наиболее важных технических
применений КЛА. В общем случае угловое положение КЛА может
быть задано взаимным расположением двух систем координат,
направление осей одной из которых устанавливает требуемую,
а другой, жестко связанную с аппаратом, действительную
ориентацию аппарата. Первую из этих систем координат принято
называть базовой системой отсчета, вторую — связанной системой
координат.
Базовая система отсчета может быть либо неподвижной, либо
вращающейся известным образом в инерциальном
пространстве. В том и другом случае выбор направления ее осей
производится с учетом их технической реализации, исходя из
функционального назначения и траектории полета КЛА.
Выбор связанной системы координат также не является
произвольным. Наиболее часто оси этой системы совмещают с
осями главных моментов инерции аппарата, что существенно
упрощает аналитическое описание динамики его угловых движений.
Кроме того, эти оси, как правило, совпадают с осями симметрии
аппарата, ориентация которых в пространстве должна быть
строго определенной. При наличии на борту КЛА подвижных
механизмов, перемещающихся и изменяющихся масс расположение
главных осей инерции по отношению к строительным осям (оси
симметрии) корпуса КЛА может изменяться. В этих случаях
система связанных осей относится к основной неизменяемой части
конструкции КЛА.
Угловое положение КЛА, при котором одноименные оси
связанной и базовой систем совпадают, соответствует случаю
идеальной ориентации. Поскольку в общем случае эти оси не
совпадают, задачу ориентации КЛА можно определить как задачу
совмещения осей связанной системы координат с осями базовой.
Понятно, что для решения данной задачи движение аппарата
вокруг собственного центра масс должно быть управляемым.
Такое управление позволяет придать КЛА любое требуемое
положение в пространстве и поддерживать это положение при
действии на аппарат различных возмущающих моментов. При этом
можно выделить два характерных режима управления. Первый
соответствует процессу приведения осей связанной системы
координат к осям базовой системы отсчета. Если рассматривать
этот режим с момента отделения КЛА от ракеты-носителя, то
он включает в себя:
— торможение (гашение) начальной угловой скорости;
— поиск физических ориентиров, используемых для
технического воспроизведения базовой системы отсчета;
19
— поворотный маневр с целью совмещения осей базовой и
связанной систем координат.
Второй режим, называемый обычно режимом стабилизации,
предназначен для поддержания требуемой ориентации КЛА с
заданной точностью. В случае когда базовая система отсчета
является подвижной, вращательное движение КЛА в этом режиме
состоит из невозмущенного движения, описываемого законами
вращения осей базовой системы; и возмущенного движения,
обусловленного действием на аппарат различных моментов. При
устойчивом режиме
стабилизации КЛА отклонение
связанной системы координат от
базовой в процессе
возмущенного движения ограничено. Для
математической формулировки
задач управления ориентацией
КЛА введем систему
координат 0*б1*б2*бз (рис. 1.6) с
единичными векторами (базисом)
ё, определяющую положение
осей базовой системы отсчета
в инерциальном пространстве,
и связанную систему
координат 0*1*2*3 с базисом Т.
Положение координатных
осей 0*1*2*з в системе
координат 0*б1*б2*бз определяется
углами Эйлера 8i, 62, ез, которые
будем называть углами крена, рыскания и тангажа
соответственно. Тогда связь между базисами устанавливается
матричным равенством
ё=А1, (1.6)
где А — матрица направляющих косинусов, определяемая
выражением:
cos £2 cos£3 —cos z\ cos e2 sin £3 4- sin £1 sin £2
A = '
Рис. 1. 6. Базовая и связанная
системы координат
Sin £3 COS £1 COS £3
-sin £2 cos £3 cos £1 sin £2 sin £3 + sin £1 cos £2
cos £j sin £2 4-
-4-sin £1 cos £2 sin e3
—sin £j cos £3
cos ei cos £2
При малых углах ej (когда sinej=8j; cosej=l) матрица А
принимает более простой вид
А =
1 -ез
s* 1
Ч
1
(1.7)
Если обозначить угловую скорость вращения базиса ij
относительно базиса ej через о)от, которая в связанной системе ко-
20
ординат определяется выражением:
шот=^Ji + V2 + "Уз » (1-8)
где co1=e1-fs2sin e3;
a)2==s2coseicose3"bs3 sm ei>
о>8 = е3 cos e± — е2 sin ex cos e3>
или при малых углах Bj и угловых скоростях tj в первом
приближении
то для устойчивости процесса стабилизации должны
выполняться условия
1еу1 ^ етах»
lim [ «>ordt=0\ 1 (1. 10}
'«—oJ
Кт1 ^ |ёЛ+ Hh+ Hh\ < «W
где етах — максимальная ошибка ориентации, являющаяся
малым УГЛОМ, таким ЧТО Sinemax —emax; COSemax—1; Ютах— МЯКСИ-
мальное значение угловой скорости КЛА в процессе
стабилизации, которое также является малым; tCT — продолжительность
стабилизации.
Максимальные значения етах и сотах определяются требова-
нияхми задачи, решаемой КЛА в режиме стабилизации.
Задача приведения КЛА в положение заданной ориентации
формулируется следующим образом. Из некоторого (в общем
случае произвольного) состояния, определяемого начальным
ортогональным базисом Тн_и моментом количества движения
(кинетическим моментом) КНу КЛА за некоторое время tK переводится
в состояние, определяемое конечным базисом Тк и моментом
количества движения Кк, при ограниченном управляющем моменте
|Му|<Муо. (1.11)
На практике различают два вида управляемых движений
КЛА. Первый вид соответствует приведению КЛА в положение
заданной ориентации после его отделения от последней ступени,
ракеты-носителя или при разделении двух КЛА (например,
орбитальной станции с кораблем снабжения) после стыковки и
совместного полета. При этом ориентация базиса ?н относительно Гк
является произвольной и, как правило, имеет место значительная
угловая скорость КЛА, а следовательно, и кинетический момент
Кн. Этот процесс принято называть режимом начальной
ориентации.
2Ь
Если перед началом поворота КЛА в положение заданной
«ориентации он стабилизировался относительно другой базовой
системы отсчета, определяемой базисом 1К\ то в этом случае
взаимное положение базисов iK' и iK легко определяется. Кроме
того, на основании условий (1. 10) можно полагать #н^0, если
базовая система отсчета вращается с малой угловой скоростью
(чаще всего это именно так). Соответствующий режим
ориентации получил название переориентации или поворотного
маневра.
1.3. Ориентация КЛА при проведении научных
исследований и решении прикладных задач
При проведении астрономических экспериментов орбитальной
.астрономической обсерваторией требуется исключительно
высокая точность ее ориентации в направлении на наблюдаемую
звезду. В этом случае базовая система отсчета является инерци-
«альной. Считается, что при использовании главного телескопа в
качестве источника
информации об углах ej может быть
обеспечена ориентация ИСЗ
с точностью 0",1 [52].
Для перехода к
наблюдению новой звезды требуется
выполнить поворотный маневр.
Предположим, что главный
телескоп установлен по оси Ох\
(рис. 1.7). В общем случае
плоскость, проходящая через
«Zj эту ось и наблюдаемую звезду,
не совпадает с координатными
плоскостями. Поворотный
маневр может быть выполнен
либо путем двух
последовательных поворотов: первый
поворот вокруг оси Ох\ до
совмещения указанной плоскости с плоскостью Оххх2 (при р<45°)
или с плоскостью 0*1*3 (при р>45°), а второй поворот вокруг
•соответствующей связанной оси на угол а, либо путем одного
эквивалентного поворота вокруг некоторой мгновенной оси.
В соответствии с теорией конечного поворота для реализации
маневра второго типа система управления должна строитося
по принципу экстенсивного управления [27].
Орбитальная геофизическая станция ориентируется таким
образом, что одна из ее осей, например, ось Ох\ направлена на
Солнце и в течение длительного времени стабилизируется в этом
направлении. На ориентацию двух других осей особых
ограничений обычно на накладывается. Следовательно, в этом случае
'Рис. 1.7. Схема поворотных маневров
при астрономических экспериментах
22
используется солнечная базовая система отсчета, одна ось
которой направлена в центр Солнца, а две другие занимают
произвольное положение в инерциальном пространстве.
В процессе орбитального движения ИСЗ будет периодически
входить в тень Земли, и Солнце из поля зрения измерительнога
устройства будет исчезать. При выходе из тени в результате
ухода оси Охх от заданного направления появится некоторый
угол а, для устранения которого необходимо выполнять
поворотный маневр одним из описанных выше способов.
Данная базовая система отсчета вращается с угловой
скоростью обращения Земли по орбите вокруг Солнца, совершая
полный оборот примерно за 365 суток. Следовательно, ее угловая
скорость составляет примерно 2' в час и за время движения ИСЗ
по освещенной части орбиты угол поворота соответствующей
оси базовой системы отсчета является незначительным. При
выполнении поворотного маневра угловые скорости ИСЗ будут, по*
крайней мере на порядок, превышать указанную скорость.
Поэтому при исследовании процессов ориентации ИСЗ можно
считать такую базовую систему отсчета инерциальной.
Ориентация на Солнце используется также на отдельных
достаточно продолжительных участках полета многих
пилотируемых КЛА, а также автоматических лунных и межпланетных.
станций для подзарядки солнечных батарей. При этом для
снижения уходов оси, перпендикулярной плоскости солнечных
панелей, КЛА сообщается вращение вокруг указанной оси для
придания ему гироскопических свойств. Положение оси
периодически корректируется системой управления. Учитывая невысокие
требования к точности ориентации (уходы могут доходить до^
20°) и сравнительно большие скорости поворота при выполнении
коррекций, солнечную базовую систему отсчета в данном случае
также можно считать инерциальной.
Инерциальная базовая система отсчета применяется и npir
проведении других экспериментов, не связанных с
необходимостью постоянного наблюдения земной поверхности. В этом случае-
КЛА также придаются гироскопические свойства за счет
вращения вокруг одной из связанных осей.
Наряду с инерциальной широко применяется орбитальная
базовая система отсчета. Одна из ее осей направлена по местной*
вертикали, а вторая по перпендикуляру к плоскости орбиты.
Подобная ориентация требуется для проведения экспериментов,,
связанных с наблюдением некоторых объектов на земной
поверхности и при решении прикладных задач. Она применяется на
геодезических, метеорологических, навигационных и некоторых
связных ИСЗ, а также на пилотируемых КЛА, движущихся по
орбитам сяутника Земли. При этом требования к точности
ориентации могут изменяться в широком диапазоне. Они составляют
от нескольких градусов (~5°) до долей градуса, когда требуется
прецизионная ориентация.
2&
В качестве примера в табл. 1.2 приведен перечень
возможных орбитальных базовых систем отсчета, определяемых обычно
в зависимости от используемой вертикали. Направление второй
оси в плоскости местного горизонта (в соответствии с выбором
той или иной вертикали) совпадает, как правило, с направлением
движения спутника (трансвер-салью). Три наиболее
характерных случая выбора такого направления приведены в табл. 1.3.
Ниже системы, представляющие комбинацию направлений,
указанных в табл. 1.2 и 1.3, будем обозначать соответственно п, т.
Таблица 1. 2
по
i пор.
1
2
3
Базовая система
отсчета
Геоцентрическая
Географическая
Гравитационная
Направление оси
По геоцентрическому радиусу (по линии
центр масс — центр Земли)
По нормали к международному земному
эллипсоиду
По нормали к эллиптической
эквипотенциальной гравитационной поверхности,
проходящей через центр масс КЛА
Таблица 1.3
по
пор.
1
2
! з
Направление оси в плоскости
местного горизонта
Направление движения КЛА в прецесси-
рующей плоскости орбиты, видимое
наблюдателем, неподвижным в инерциальном
пространстве
Направление движения в мгновенной
орбитальной плоскости, видимое
наблюдателем, связанным жестко с Землей и
находящимся непосредственно под КЛА
Направление движения в мгновенной
орбитальной плоскости, видимое
наблюдателем с прецессирующей плоскости орбиты
Примечание
Каждое из указанных
направлений может
относиться к любой базовой
системе отсчета,
приведенной в табл. 1.2
Выбор той или иной базовой системы отсчета зависит от
характера решаемой задачи, которая определяет требования к
ориентации. Например, система т=2 применяется в тех случаях,
когда КЛА необходимо ориентировать по направлению видимого
с борта перемещения объектов земной поверхности. С другой
стороны, базовая система отсчета непригодна, если угловые отклоне-
24
ния КЛА в этой системе нельзя измерить с необходимой
точностью.
Учитывая, что в системах п=1, 2, 3 максимальные
относительные отклонения оси не превышают 12х, в большинстве
случаев их различие существенного значения не имеет. Это
различие следует принимать во внимание, если максимальная ошибка
ориентации соизмерима с указанной величиной. Поэтому в
дальнейшем будем использовать геоцентрическую орбитальную
базовую систему отсчета, которая вращается в плоскости мгновенной
орбиты с угловой скоростью, определяемой формулой (1.4).
Вокруг этой оси орбитальная система отсчета
поворачивается в соответствии с возмущениями плоскости орбиты, при этом
движение системы включает колебательные движения (их
период равен периоду обращения КЛА) с малой амплитудой и
постоянное вращение, определяемое прецессией орбиты. Угловая
скорость прецессии на несколько порядков ниже орбитальной
угловой скорости. Она не превышает 3—4 град/сутки. Поэтому при
исследовании динамики процессов ориентации вращение базовой
системы отсчета, обусловленное прецессией орбиты, обычно не
учитывают. Указанные выше колебательные движения имеет
смысл учитывать лишь в отдельных случаях прецизионной
ориентации. В последующем будем учитывать лишь вращение
базовой системы отсчета в плоскости орбиты.
1.4. Ориентация КЛА при маневрировании на орбите
Пилотируемые КЛА, автоматические лунные и межпланетные
станции в процессе орбитального полета выполняют
разнообразные маневры. При этом необходимо обеспечить определенную
ориентацию вектора тяги управляющего двигателя относительно
вектора скорости. На некоторых КЛА сопло двигателя
устанавливается в карданном подвесе («например, на лунной кабине
корабля «Аполлон»). В этом случае необходимое направление
вектора тяги относительно базовой системы отсчета может
достигаться как поворотом Корпуса КЛА, так и поворотом сопла
относительно корпуса. Однако углы поворота сопла ограничены
величиной в несколько градусов, так как при больших углах
поворота на КЛА будет действовать значительный возмущающий
момент. Поэтому необходимое направление тяги чаще всего
достигается соответствующим поворотом корпуса КЛА.
Многие маневры требуют ориентации вектора тяги по линии,
совпадающей с вектором скорости. К таким маневрам
относятся [3]:
— увеличение скорости КЛА для увеличения высоты его
геоцентрической орбиты;
— разгон лунного или межпланетного КЛА при переходе с
орбиты спутника Земли на орбиту перелета;
25
— торможение лунного или межпланетного КЛА в
перицентре его селеноцентрической или планетоцентрической орбиты для
перехода на орбиту спутника Луны или планеты назначения;
— торможение лунного или межпланетного КЛА при
выполнении мягкой посадки на поверхность Луны или планеты;
— разгон лунного или межпланетного корабля при переходе
с орбиты спутника соответствующего небесного тела на орбиту
обратного перелета к Земле.
При выполнении маневров коррекции орбиты, в частности,
орбит перелета к Луне (планете) или к_3емле, вектор
управляющей тяги FY должен быть
направлен под определенными углами: ам
к вектору скорости в плоскости
мгновенной орбиты и рм
относительно этой плоскости (рис. 1.8).
Маневры коррекции очень крат-
ковременны и близки к
импульсным маневрам [3]. Завремя
импульса вектор скорости поворачивается
на малый угол. Поэтому для
ориентации вектора тяги может
использоваться инерциальная базовая
система отсчета, при этом наряду
с применением измерителей
направлений на звезды могут
применяться измерители
направлений на Солнце и
планеты.
Предположим, что с помощью указанных измерительных
устройств на борту КЛА реализована инерциальная базовая
система отсчета 0*б1*б2*бз с базисом ejHkjII, (/=1> 2, 3). Введем
промежуточную систему координат Охп\ХП2Хпз с базисом en=lknj||.
Требуемое положение вектора тяги или соответствующей
связанной оси (будем считать, что это продольная ось Ох\)
определяется углами av и ру, т. е.
^n = cos av cos pKinl+ sin p^„a+ sin av cos pj^n3.
Зная матрицу А направляющих косинусов промежуточной
системы координат относительно базовой системы отсчета можно
найти углы си, <*2, <х3, определяющие требуемую ориентацию
вектора тяги. Действительно,
cos аг=eF • ех=A eF п-ег;
COS &2 == &F' &2 == + *■€р п • #2>
cos a3=eF>es= AeFn • е3.
Выполняя указанные математические операции, находим
Рис. 1. 8. К ориентации вектора
тяги при выполнении маневров
коррекции орбиты (п —
нормаль к плоскости орбиты)
26
cos аг=ап cos av cos $v + л12 sin fV+#is sin av cos pK; 1
cosa2=a21cosavcos^ + a22sin ^-fa^sin aKcospK; \ (1.12)
cos a3=a31 cos av cos 3K-fa32sin Рк + азз s*n av cos Pv'
Направляющие косинусы, определяемые выражением (1. 12),
позволяют вычислить углы крена и тангажа (или рыскания), на
которые необходимо повернуть КЛА при последовательном
выполнении двух плоских поворотных маневров.
В самом деле, измеряя на борту КЛА углы ei, 82, ез,
определяем единичные векторы (см. рис. 1. 6)
1г= cos e2 cos £3ег-f-sin s3£2 — sin s2 cos e3e3; )
72=(sin Si sin e2 — coseiCOseaSinsg)^-]- I
+ cos ex cos s3 e2 -f- (sin sx cos e2-f- 1
-f- cos ex sin e2 sin e3) e3 )
в базовой системе отсчета. Перпендикуляр к плоскости,
проходящей через единичные векторы lF и 1\ (рис. 1.9), определяется
единичным вектором
- _eFXh
e$ — ~z — •
\eF X i\\
Первый поворотный маневр производится по крену на угол
рм=arccos(*р. /2)=arccos (epX i] • 72) (1.14)
\\ерХ1\\ )
или на угол 90° —рм при рм>45°. Затем выполняется поворот
вокруг оси 0*з или Ох2 (при рм>45°) на угол
ам = arccos (e^Ix). (1-15)
Подставляя в выражения (1. 14) и (1. 15) направляющие
косинусы вектора eF из уравнений (1.12) и выражения (1.13),
нетрудно вычислить углы рм и ам по известным значениям углов
вь 82, ез, av, Pv элементов матрицы А.
Если система управления строится по принципу экстенсивного
управления, то направляющие косинусы (1. 12) и матрица (1.6)
позволяют определить направление оси эквивалентного поворота
в связанной системе координат и найти потребный угол поворота.
Более подробно этот вопрос будет рассмотрен в гл. X.
Вектор скорости КЛА вращается в пространстве с малой
угловой скоростью (не более 4 град/мин). Учитывая, что
орбитальные маневры выполняются, как правило, в течение долей
минуты, при исследовании динамики процессов ориентации при
включенном двигателе маневра можно полагать, что КЛА ста-
27
билизируется относительно инерциальной базовой системы
отсчета.
При решении задач встречи для управления относительным
движением двух кораблей необходимо, чтобы двигатель
активного корабля создавал тягу по линии визирования пассивного
Рис. 1.9. К определению
параметров поворотных
маневров для выполнения
коррекции орбиты
™бз Х6г
Рис. 1. 10. Схема ориентации в
визирной базовой системе_отсчета:
Vc6— скорость сближения;
V60K—боковая скорость; V0T—относительная
скорость
корабля и по перпендикуляру к ней в плоскости наведения
(плоскость, проходящая через вектор относительной скорости F0T)
[3]. Для этого активный корабль ориентируется в визирной
базовой системе отсчета (рис. 1. 10). Ось Охы направлена по
линии визирования в сторону пассивного корабля, а ось 0*62 в
плоскости наведения по направлению вращения линии визирования.
__ Визирная система координат вращается с угловой скоростью
сов. Вектор о)в лежит в плоскости 0*61*63 под небольшим углом к
оси 0*бз. Следовательно, основная задача системы ориентации
состоит в отслеживании вращения оси Охъ\ вокруг оси 0*бз. По
оси 0*62 система функционирует в режиме стабилизации.
ГЛАВА II. ДИНАМИКА ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ
КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
При полете по траектории на КЛА действуют различные
возмущения. Эти возмущения представляют собой внешние и
внутренние вращающие моменты. Внешние моменты обусловлены
взаимодействием аппарата с окружающей средой (атмосферой,
гравитационным и магнитным полями и т. д.). Внутренние
моменты возникают в результате относительного движения
отдельных частей КЛА.
Влияние внутренних моментов на вращательные движения
КЛА является наиболее характерной его особенностью как объ-
28
екта управления. Гироскопическая связь подвижных частей,
а также изменение положения центра масс и моментов инерции
механической конструкции при ее вращении вызывают
появление внутренних моментов и при решении многих «земных»
инженерных задач. Однако в этих задачах внутренние моменты
несоизмеримо малы в сравнении с внешними моментами,
действующими на конструкцию, поэтому их влиянием в большинстве
технических приложений пренебрегают. Применительно к КЛА такое
пренебрежение не всегда оправдано вследствие малости внешних
моментов, поэтому предварительно необходимо проводить
сравнительную оценку внешних и внутренних моментов. Такая оценка
производится на основе известных методов аналитической
механики. При этом возможны два случая:
— внутренние моменты отсутствуют или в сравнении с
внешними моментами пренебрежимо малы;
— внутренние моменты соизмеримы с внешними моментами
или являются основной причиной вращательных движений КЛА.
В зависимости от того, какой из этих случаев соответствует
данному КЛА, и проводится соответствующее исследование его
динамических свойств. В первом случае КЛА представляется
абсолютно твердым телом, во втором — системой твердых тел.
С выбором той или иной механической модели аппарата
связаны различия в выводе дифференциальных уравнений его
вращательных движений.
Увеличение размеров и усложнение геометрической формы при
ограничении весовых характеристик КЛА приводит к
уменьшению его конструктивной жесткости. Не рассматривая здесь
модель такого деформируемого КЛА, отметим, что эта модель
представляет собой сложную механическую систему, состоящую
из нескольких упруго связанных между собой твердых тел.
2.1. Кинематические соотношения
Дифференциальные уравнения движения КЛА вокруг центра
масс могут быть записаны как в связанной, так и в базовой
системах координат. И в том, и в другом случаях они не дают
полной картины вращательных движений КЛА, поскольку взаимное
расположение указанных систем координат остается
неопределенным. Поэтому эти уравнения дополняются кинематическими
соотношениями, устанавливающими связь между
относительными угловыми скоростями и угловыми отклонениями осей
связанной и базовой систем координат.
Определение взаимного углового положения двух
ортогональных систем координат может быть произведено с помощью:
— углов Эйлера — Крылова;
— направляющих косинусов;
— кватернионов (параметров Родрига — Гамильтона);
— параметров Кэли — Клейна.
29
До последнего времени при решении задач ориентации
использовались углы Эйлера — Крылова. Во-первых, эти углы
могут быть непосредственно измерены при помощи гироскопических
устройств, содержащих карданов подвес. Во-вторых, число
степеней свободы 'вращательных движений КЛА равно числу углов
Эйлера — Крылова, что, естественно, делает наглядной их
геометрическую интерпретацию. Однако при некоторых
относительных положениях указанных систем координат (особые случаи)
использование углов Эйлера — Крылова для описания
неограниченных вращательных движений КЛА теряет физический смысл.
Кроме того, преобразования кинематических соотношений,
полученных с помощью этих углов, связаны с выполнением
громоздких тригонометрических операций. Последние два обстоятельства
объясняют причину широкого распространения на практике
направляющих косинусов, особенно после того, как для задания
требуемой ориентации стали использоваться звездные визиры и:
солнечные датчики, а для определения кинематических
соотношений— цифровые вычислительные машины (ЦВМ). Хотя
трехмерная матрица направляющих косинусов содержит девять
элементов, она оказалась более удобной для вычислений на ЦВМ»
чем углы Эйлера—Крылова. Учитывая, что кватернионы и
параметры Кэли—Клейна пока не нашли широкого практического
применения, ограничимся при 'выводе кинематических
соотношений углами Эйлера—Крылова и направляющими косинусами.
Как показано в предыдущей главе, наиболее характерными
системами отсчета при ориентации КЛА являются инерциальная
и орбитальная системы координат. При этом достаточно
учитывать вращение последней системы в плоскости орбиты.
Вращением плоскости орбиты, обусловленным возмущениями, можно
пренебречь, поскольку оно происходит значительно медленнее
угловых движений КЛА в процессе ориентации и вращения
орбитальной системы координат. Решение задач сближения на
конечном участке встречи производится, как правило, при почти
компланарных орбитах сближающихся кораблей. Поэтому можно
считать, что визирная система координат также вращается в
плоскости орбиты невозмущенного движения пассивного корабля.
То же самое можно сказать и о базовой системе отсчета,
обеспечивающей ориентацию относительно вектора орбитальной
скорости. Одним словом, для общности исследования движений
КЛА вокруг центра масс в качестве базовых систем отсчета
целесообразно принять инерциальную (невращающуюся) и
орбитальную системы координат. Для удобства перехода от одной
системы координат к другой свяжем инерциальную систему
координат 03 АоДоАз с началом в центре Земли с плоскостью
орбиты. Направим ось Х^ в восходящий узел орбиты, а ось Х03 —
перпендикулярно к плоскости орбиты, как это показано на
рис. 2. 1. Здесь же изображена орбитальная система координат
0x01^02^03 с началом в центре масс аппарата. Оси x0i и лгог дан-
30
ной системы совершают вращательные движения вокруг оси лг0з
с угловой скоростью обращения КЛА по орбите. Ось х02
составляет с осью Лог угол, равный углу и — аргументу широты.
Взаимное расположение орбитальной базовой и связанной
систем координат определяется углами Эйлера — Крылова еь £2
и ез. Подвижная базовая система координат Ох^х^бз может
не совпадать с орбитальной. В общем случае ее оси составляют
Рис 2.1. Расположение базовых Рис. 2.2. Расположение связанной и
систем координат инерциальной базовой системы координат
с осями орбитальной системы координат углы % (/= 1, 2, 3). При
этом углы i|)i и а|)2 остаются в процессе движения КЛА по орбите
постоянными и определяют направление оси *бз по отношению
к оси л:0з. Угол г|)з, отсчитываемый в плоскости орбиты, может
быть представлен как функция аргумента широты, т. е. г|)3=/(и).
При выполнении первого поворота вокруг оси Лоз взаимное
расположение подвижной базовой и связанной систем координат
задается углами ei, ег и ез*, где е3* = ез — f(u). Если подвижная
базовая система отсчета является орбитальной, то
f(u)=u и бз* = е3 — и.
Из рис. 2. 2 получаем следующие соотношения между
угловыми перемещениями и производными по времени от этих
перемещений по отношению к системе 03 Л^ХоЛз при а|)1=<ф2=0:
о)1=£1 —egsin e2;
(«2= е2 cos гг + ез sin гг cos s2;
<*>з= —e^os £j sin e2—s2sin e1-|-^3COse1cos e2.
31
В процессе управления ориентацией углы ei, ег и ез, а также
угловые скорости гг, s2 и s3 поддерживаются малыми. Поэтому,
пренебрегая членами второго порядка малости, полученные
выражения можно упростить. Учитывая, что г3=е3 —/(и),запишем
эти выражения в виде
to.
03,
(2.1)
Если подвижная базовая система координат является
орбитальной, для которой f(u)=u и f(u) = u=v, то вместо (2. 1)
имеем
°i=8s+ve2;
о)„ = е« —vs
= So—V.
(2.2)
Полученные с помощью углов Эйлера — Крылова
кинематические соотношения (2.1) и (2.2) используются в дальнейшем
при выводе дифференциальных уравнений вращательных
движений КЛА.
Определим теперь кинематические соотношения в случае
применения матрицы направляющих косинусов, для чего
воспользуемся формулой (1.6). Можно показать, что выполняемое по
этой формуле преобразование однозначно и линейно, причем
матрица А ортогональна, т. е.
АА*=1,
где Ат — транспонированная матрица,
/ =
1! °
0 1
|0 0
0 1
0
11
— единичная матрица
Зададим радиусом-вектором q неизменную в связанной
системе координат точку D. Принимая угловую скорость базиса I
относительно базиса ё, равной со, будем иметь выражение для
линейной скорости данной точки:
Индекс «/» означает, что выражение для скорости
рассматривается в связанной системе координат. Представим это выражение
следующим образом:
32
где
S(«)=
0
Ш8
">2
—»d m, 1
0 0>ц
—(flj 0 [
— кососиммгтричзская матрица.
Значения радиуса-вектора q и скорости V в базисах I и е
связаны очевидными соотношениями:*
Qi = AQe и Vi = AVe, где V^ = u-
Поскольку точка D неизменна в баз ice /, то С/=0 или
Данное равенство справедливо для любой неизменной точки в
базисе 1У поэтому
Отсюда следует,
Л = 5(о))Л, причем ААТ=/.
Таким образом,_матрица направляющих косинусов А и вектор
угловой скорости о вращения КЛА в базовой системе отсчета
связаны полученным кинематическим соотношением.
2.2. Дифференциальные уравнения
вращательных движений КЛА как твердого тела
Движение аппарата вокруг собственного центра масс могут
быть описаны в рассматриваемом случае векторным уравнением
Эйлера в инерциальной
и в связанной
—=М (2.3а)
dt '
*£+i»XK = M. (2.36)
at
системах координат.
Здесь М — вектор главного момента сил, действующих на
аппарат.
Для развернутой записи приведенных уравнений обратимся
к выражению для кинетического момента аппарата
где /=||/яте|| — матрица моментов инерции (/г, т=1, 2, 3).
Здесь Jnm(n=m) —главные моменты инерции;
2 991 33
1пт(пфт) —центробежные моменты_инерции.
Составляющие вектора угловой скорости со и матрицы
моментов инерции / определяются, как правило, в системе координат
Ох^Хз, жестко связанной с КЛА.
При рассмотрении движений аппарата в инерциальной
системе координат необходимо знать значения составляющих вектора
© и элементов матрицы / по осям данной системы. Эти
составляющие и элементы вычисляются по формулам
ие = Ай; Je = A7JAy
где Л = ||апт11 — матрица направляющих косинусов,
определяющих взаимное расположение инерциальной и связанной систем
координат (я, т= 1, 2, 3). *
Поскольку направляющие косинусы апш являются функциями
времени, то составляющие матрицы моментов инерции Je
меняются со временем и уравнения движения, полученные из
векторного уравнения (2. За) в проекциях на оси инерциальной
системы координат, будут иметь чрезвычайно сложный вид.
Поэтому на практике широко используется уравнение (2.36),
Проектируя это уравнение на оси связанной системы координат,
имеем
з
S [У^^ + (Ул+2^Шл+1-/л+1'^л+2)с°^ = Жл' /г-=1,2,3.
В качестве примера приведем развернутое выражение одного
из уравнений данной системы, положив п= 1,
+ Лз032шз ~ Л^^з — JtoPi °з — Jti»\) = Mv
Из данного выражения следует, что уравнения, описывающие
движения КЛА относительно осей подвижной системы
координат 0*1*2*3, являются взаимосвязанными и существенно
нелинейными.
В случае, когда оси *4, *2 и *3 совпадают с осями главных
моментов инерции, т. е. /Пт=0 при пфт, и матрица /=||/пп|| =
= !i/nll приобретает диагональную форму, из уравнения (2.36)
получаем динамические уравнения Эйлера:
dt
at
(2.4)
34
Отметим, что уравнения Эйлера интегрируются в квадратурах
только при отсутствии внешнего момента, т. е. при
Mi=M2=Mz=0.
Но и в этом частном случае они позволяют определить вектор
угловой скорости со только в системе координат, жестко
связанной с аппаратом. Для описания движения КЛА в общем случае
необходимо знать зависимость Af4, М2 и М3, а также <oi, (02 и <оз
от мгновенного положения связанной системы координат
относительно базовой. Эти зависимости устанавливаются с помощью
видоизмененных углов Эйлера еь гг и ез, которые
рассматриваются как функции времени. ^
Система трех дифференциальных уравнений первого порядка
(2.4) при задании Мг=/г(еь е2, ез*), где /=1, 2, 3, и трех
кинематических уравнений (2.1) определяет шесть функций a)\(t),
о)2(0> юз(0* £i(0> £2(0> е3(0> К0Т0РЫХ Достаточно для описания
движений аппарата в рассматриваемом случае. Приведенные
рассуждения справедливы, когда базовая система координат
является инерциальной.
При использовании подвижной базовой системы координат
движение КЛА будем по-прежнему рассматривать в
инерциальной системе координат 03 Л^Аг^оз, введенной в разд. 2. 1. В
случае малых угловых отклонений КЛА от положения заданной
ориентации и их производных после подстановки выражений (2. 1)
в уравнения (2.4) и очевидных преобразований получаем
;• i ^з — ^2 >2е i (Л + h + /3) >; 1 ss _ Щ .
cii } J НЛ ; J4~tJH г- >
j\ j\ j\
c2
4 «M
Ci ~ /3) >2e (/1 + /2-/3) ym 7ff _ ^1
Jo Jo
сз~"У r~ »
'з
(2.5)
wf=f(a).
Решение данной системы уравнений определяет положение
связанной системы координат относительно базовой с учетом
движения последней. Если базовая система координат является
орбитальной, то для круговой орбиты, когда/(а) = » = л*0 и f(u)=Q,
имеем
(2.6)
«1-
£2"
£3 =
1 J\ + /2 — Лз * I
Г , V0s2 -(■
J\
14
_м3
h
h—h .,2. _ м\ . 1
h~X^~~h,
h — h %л. Щ . |
J 2 •'2
2*
35
Из полученных уравнений видно, что угловые движения КЛА
по крену (ei) и рысканию (ег) взаимно связаны, тогда как
движение по тангажу (ез) в первом приближении можно
рассматривать независимо от движений по крену и рысканию. Указанная
связь объясняется наличием угловой скорости поворота базовой
системы координат в плоскости орбиты, что приводит к
появлению гироскопических эффектов, выражающихся в виде
гироскопических перекрестных связей (членов с ег и ei) в уравнениях
крена и рыскания.
Следует иметь в виду, что полученные дифференциальные
уравнения дают неполное представление о динамических
свойствах аппарата, поскольку физическое содержание внешних
моментов осталось пока не раскрытым.
Для динамически симметричного аппарата (/1=/2=/3)
уравнения (2. 6) приобретают вид
В ряде случаев уравнения (2.5) и (2. 6) могут быть еще более
упрощены, если принять допущение о сравнительно быстром
протекании переходных процессов в системе управления (по
сравнению с вращением базовой системы отсчета). Так, например,
в случае орбитальной базовой системы отсчета при выполнении
условия п = — > 20 (где Т = — период обращения КЛА
Ml \ V
по орбите, эксцентриситет которой esg;0,05; tn — заданное время
переходного процесса) уравнения (2.6) можно записать в виде
з/ = ^-, /=1,2,3. (2.7)
Одно из уравнений (2. 7) часто используется при синтезе
одноосных систем управления ориентацией.
Как видно из упрощенных уравнений (2.7), КЛА
представляет собой чисто инерционную модель с независимыми угловыми
движениями относительно базовой системы отсчета. Такая
модель оказывается полезной на начальной стадии проектирования
системы управления ориентацией аппарата, когда производится
предварительный выбор ее структуры, причем управляющие
моменты значительно превосходят по величине возмущающие
моменты.
Рассмотрим вывод уравнения угловых движений
вращающегося КЛА. Стабилизация аппарата путем придания ему
вращения относительно одной из главных осей моментов инерции
широко используется на практике. Как правило, такой КЛА
является телом вращения. С учетом данного обстоятельства, принимая
за ось вращения ось х3, имеем /i=/2 и уравнения (2. 4)
запишутся в виде:
36
d<*\
dt
d&2
dt
d&3
, (/3-/2)
1 /1
, (Л-/з)
' h
Af3
"VV
/1
dt
(2.8)
В течение сравнительно коротких промежутков времени
угловую скорость о)з можно считать постоянной. Тогда, полагая
Мз=0 и обозначая о)3=(Озо,
имеем:
dt J\
— (°-1)«)зо«>1=:-7-
dt Jo
(2.9)
/3
где а=-2-.
Из геометрического
построения на рис. 2.3, иллюстрирующего
отклонения аир оси вращения
от положения требуемой
ориентации в инерциальной системе
координат ОхюХ2о*з<ь находим
кинематические соотношения
Рис. 2.3. Схема ориентации
вращающегося аппарата
co1=acospcosX-(-psin X;
соа= — a cos p sin Х + р cos X;
)+asinp, где X=a)30^.
(2. 10)
w3—wso
Умножая первые два равенства (2. 10) последовательно на
sinX и cosX и производя операции вычитания и сложения,
получим
a cosp=oo1cosX — a)2sin X;
(3=0)! sin X+oo2cosX.
(2.11)
Данные уравнения определяют эволюцию оси вращения
аппарата по отношению к принятой базовой системе отсчета. В
случае, когда cos p~l, первые два уравнения (2.9) можно
объединить и записать в виде одного комплексного уравнения
АНУУв^^^Ч
(2.12)
где
37
При синтезе системы управления вращающимся КЛА наряду
с рассмотренным используются также другие пути составления
и формы записи дифференциального уравнения движения оси
вращения.
2.3. Дифференциальные уравнения вращательных
движений КЛА как системы твердых тел
Приведенный в разд. 2.2 вывод дифференциальных
уравнений движений КЛА основывался на предположении, что аппарат
является абсолютно твердым телом. Однако это предположение,
как уже отмечалось, справедливо не всегда. Иногда проявляется
заметное влияние внутренних
моментов, возникающих в результате
относительного перемещения отдельных
элементов и частей конструкции
аппарата. К числу таких элементов
относятся, в частности, подвижные
антеины, установленные на корпусе
КЛА, колеблющиеся массы,
различные вращающиеся и поворотные
устройства для измерения параметров
движения и научных экспериментов,
циркулирующая по трубопроводам
жидкость и т. д. Причиной
возникновения внутреннего момента КЛА
может быть также перемещение
членов экипажа.
На возможность использования внутренних моментов для
управления угловыми движениями КЛА впервые было указано
К. Э. Циолковским. Аппарат при наличии подвижных элементов
конструкции и устройств представляет собой систему твердых
тел. Вывод дифференциального уравнения движения КЛА в этом
случае существенно усложняется.
Только для ограниченного числа конкретных примеров
составного аппарата удается получить обозримые дифференциальные
уравнения и выявить влияние внутренних моментов на его
вращательные движения. Особенно просто находится решение при
установке на КЛА вращающихся подвижных частей, не
изменяющих его моменты инерции и положение центра масс.
Векторным дифференциальным уравнением угловых движений КЛА,
представляемого системой твердых тел, является уравнение
(2.3а). При записи этого уравнения в скалярной форме
возникают трудности определения кинетического момента системы
Рис. 2.4. Схема деления
аппарата на отдельные части
(ц. м. —-центр масс системы)
38
твердых тел с учетом их относительного движения. Представим
КЛА состоящим из основного несущего тела (корпус) 50 с
массой т0 и отдельных носимых тел S2- с массами щ (/= 1, 2,..., N).
Будем предполагать, что упругая связь между движущимися
частями и корпусом отсутствует, а угловое движение аппарата
ограничивается его вращением вокруг центра масс. Из первого
предположения следует, что КЛА должен рассматриваться как
система твердых тел. Второе предположение позволяет
упростить математические выкладки.
Зададим вращательное движение несущего_тела в инерциаль-
ном пространстве вектором угловой скорости о) связанной
системы координат Ох\Х2Хъ с началом в центре масс тела 50
(рис. 2. 4) *.
Движение носимого тел£ Si в системе координат OxtX2Xs
зададим радиусом-вектором qu определяющим положение центра
масс тела S*, и относительной угловой скоростью о*.
Пусть / — тензор инерции тела S0 относительно его центра масс;
Ji—тензор инерции тела Si относительно осей
связанной системы координат OiXi\Xi2xiz с осями,
параллельными соответствующим осям систем координат
Ох\Х2х^ и началом О* в центре масс тела 5г-; • i
qo — радиус-вектор, определяющий положение центра
масс всей системы носимых тел аппарата
относительно центра масс тела (корпуса) S0.
Используя принятые обозначения, получим следующее
выражение для кинетического момента КЛА относительно его центра
масс:
/Г=/5+2'/(«+«/)+т70Хсо+ 2 m/te-Co)X(Q/-Qo)>
/=1 /-1
(2. 13)
где
N
Qo = -^ , m=m0+\jm/.
Выполняя векторное умножение в правой части выражения
(2. 13), после несложных преобразований получим
— -. N __ ±. _ N *.
/C=ya) + 2y/(co + (0/) + ^oXQo-QoX 2 m/^~
/-1 /=i
* Поступательное движение не рассматривается, так как в первом
приближении оно не возбуждает в движущихся частях вращательных колебаний,
способных воздействовать на угловые движения корпуса КЛА.
39
N
- 2 т& X Qo + 2 m& X Qi- (2-14)
Точками над векторами в выражениях (2. 13) и (2. 14)
обозначают производные по времени в абсолютном пространстве.
Замечая, что
где Vt = Qi ~ скорость изменения q* в системе координат
Здесь 1^=^ — скорость изменения q0 в системе координат
0*1*2*3, или скорость центра масс системы тел
Si по отношению к телу 50,
выражение (2. 14) можно привести к виду
L *-i J /-1
+ 2m^X^/-^QoXV", (2.15)
где
j'i = mi(QiQiJe^QiQi)—тензор инерции материальной точки с
массой, равной массе /-го тела и
совпадающей с его центром масс,
относительно системы 0*1*2*з;
У0=ш(СоСоЛ~6оРо)—тензор инерции материальной точки с
массой, равной массе системы и
совпадающей с центром масс системы,
относительно системы координат_0*!*2*з.
Тензор инерции, являющийся множителем при со в выражении
(2. 15), изменяется с течением времени и его можно представить
как сумму постоянной /с и переменной Jv частей
N N
Л+Л=^+2 у/+2 mite&Je-QiQi)-m (е<>с<Л-е<й>). (2.16)
/-1 /-1
При жесткой связи носимых тел Si с телом 50 тензор
инерции будет определяться только постоянной частью /с, и
уравнение движения может быть записано в виде:
dt
40
^-+»XV=^
При движении тел S* относительно тела S0 появляется
переменная часть тензора /г, наличие которой обусловлено
следующими факторами:
1) изменением проекций тензора инерции движущихся частей
Ji на оси хц, xi2, xi3, параллельные осям х±9 *2,*з- Эти проекции
остаются постоянными, если вектор угловой скорости со* тела 5?-
совпадает с его осью симметрии и неподвижен по отношению к
телу S0;
2) изменением центров масс тела S*, при котором не
происходит смещения центра масс_;всей системы. Это изменение
определяется членами mt {QiQiJe—QiQi)\
3) изменением моментов инерции, возникающим от смещения
центра масс системы и определяемым членом fn(q0Q0Je— q0q0).
Подставляя выражение (2. 15) с учетом (2.16) в уравнение
(2.36), получим следующую форму уравнения угловых
движений КЛА с движущимися частями:
(2.17)
Производную по времени в правой части этого уравнения
можно интерпретировать как действующий на тело момент,
который обращается в нуль, если положенье носимых тел S*
относительно несущего тела S0 неизменно. Этот момент является
внутренним моментом, обусловленным движением носимых частей.
Отметим, что уравнение (2. 17) является векторным
дифференциальным уравнением относительно переменной о>. Однако
некоторые малые члены в правой части также содержат со. Строго
говоря, эти члены нельзя рассматривать как внутренний момент,
воздействующий на тело 50. Правильнее было бы перенести их
в левую часть уравнения и интерпретировать как некоторое
параметрическое возмущение. При приближенном анализе малые
члены, выражающие параметрическое возмущение, можно
оставить в правой части, угловую скорость со заменить
приближенной функцией времени, а сами^ члены рассматривать как
приложенный внутренний момент ЛТВ. Тогда уравнение угловых
движений запишется следующим образом:
Je~+»XJC»=M-MB. (2.18)
at
Данное уравнение может быть представлено в скалярной
форме, если разложить векторы по осям системы координат Ох&гХг.
Укажем некоторые требования, которым должна удовлетворять
эта система координат. Во-первых, ориентация тела 50 должна
задаваться непосредственно ориентацией осей системы коорди-
41
нат OjtiJt2*3. Ориентация основного тела представляет главный
интерес, без которого исследование угловых движений теряет
всякий смысл. Во-вторых, оси системы Ох\Хгхъ должны быть
главными осями инерции всей системы для постоянной части тензора
инерции. При таком выборе системы Ох\ХгХ$ уравнение (2.18)
приводится к уравнениям Эйлера (2. 4).
Таким образом, уравнения (2.4) могут быть использованы и
при исследовании динамики движения КЛА вокруг центра масс
с учетом моментов, возникающих от движения частей самого
аппарата. Определение последних составляет важную задачу
такого исследования.
2.4. Внутренние моменты, действующие на КЛА
Развернутое выражение для внутреннего момента,
действующего на КЛА и создаваемого движущимися частями его
конструкции, согласно (2. 17) и (2. 18) имеет вид
-mQ0X(uXF)-m(UXQo)XF, (2.19)
* * _*.
где Jv, Jh to. —произзодные по отношению к телу S0, причем
* _
_ _ ©/==<o/-f»x «>/;
Wt и W —ускорения центра масс тела St и центра масс
системы тел по отношению к телу 50.
Учитывая, что
Q, X (»Х F,)+(»X g,)X V,=»X («i X Vi)'>
в*Х(«ХЮ+(«Хо,)Х^=«Х(воХ^).
можно представить выражение (2.19) в виде:
^в=^+^+^ХЛ^+2 1Л«1+Л«/+(»+«|)Х^л+
/-1
+ mrQiX^i + m^X(QiXVi)}-rnQQXW-m^X(QoXn
(2.20)
Рассмотрим физический смысл каждого члена полученного
выражения в отдельности:
42
у со— инерционный момент, возникающий от
углового ускорения тела 50, действующего на
мгновенное значение оставшейся переменной
части тензора инерции;
у i — кажущийся момерт, который испытывает
наблюдатель, вращающийся вместе с телом 50 и
возникающий в результате изменения во вре-
мени тензора инерции;
шХЛги)—центробежный момент, выражающий
тенденцию части тела, характеризуемой переменной
частью тензора инерции, располагаться своей
«длинной осью» вдоль вектора угловой
скорости;
у ю — инерционный момент, возникающий при
наличии' углового ускорения тела S2- относительно
S0 в системе координат, связанной с телом S0;
у © — кажущийся момент,* обусловленный
изменением тензора инерции /-го тела, испытываемый
наблюдателем, вращающимся вместе с телом
Si\ эти изменения возникают вследствие
изменения проекций J г на оси Ох\Х2Х$9 связанные с
телом 50;
о>/ X Jp*i — центробежный момент, выражающий
наблюдаемую в системе координат Si тенденцию
тела устанавливаться своей «длинной осью»
вдоль вектора относительной угловой
скорости со»;
(о X Л03/ — момент, равный и противоположный по знаку
моменту, заставляющему вектор
кинетического момента «сопровождать» тело S* при его
вращении; Ло* — кажущийся кинетический
момент тела S* при вращении вокруг его
центра масс по отношению к телу 50;
iriQi X W/ — инерционный момент, приложенный к телу 5Э
и обусловленный линейным ускорением тела
_____ 5г- относительно 50;
я^ХСб/Х У/)- момент, аналогичный aXJim, так как rriiQiX
XVi — кажущийся'кинетический момент тела
S{ при его поступательном перемещении
относительно тела S0V
mQoX W — fnu>X (CoX У) —момент, аналогичный двум
предыдущим членам, вычисленным для тела S*, если "
систему тел рассматривать как частицу с
массой т, расположенной в центре масс системы.
43
Если начало системы координат, связанной с телом S0,
совместить с центром масс системы, то, как легко видеть,
последние члены исчезнут.
Таким образом, для определения моментов, действующих на
корпус КЛА под влиянием внутренних движущихся частей,
необходимо:.
1. Найти тензор / относительно принятой системы координат.
2. Описать поступательное и вращательное движения
носимых тел и найти тензоры Ju h' и /0.
лг
3. Составить выражение J+2(Л,+^/)~~Л>и представить его
/-1
в виде суммы /c+/v.
4. Найти рассмотренные выше члены выражения (2. 19),
выбрав новую систему координат OxiX2x3, B которой тензор
инерции /с является диагональным, и разложить Мъ по осям этой
системы.
Для иллюстрации методики определения внутренних
моментов рассмотрим три примера.
Пример 1. Допустим, что материальная точка Si с массой т4 (рис. 2. 5)
движется поступательно относительно основного тела S0 с массой т0 по
прямой, проходящей через центр масс системы. Примем следующий закон
изменения расстояния Qt точки Si от начала системы координат Ох\Хг%г\
Ql = [l+*(')] Qlo»
где Qio — среднее значение Qt за большой промежуток времени;
е (/) — функция времени, среднее значение которой за сравнительно
большой промежуток времени равно нулю.
Радиус-вектор Qo, определяющий положение центра масс системы двух
тел относительно центра масс тела S0» найдем при заданном законе движения
тела Si из соотношения
<to= —[l+*(0]Qio.
т
где т — rno+mi — масса системы.
Определим выражение для /+/i+/i'+/o, считая значение тензора
инерции / тела Sq известным. Для точки St имеем:
/1=0, /; = mi(QiQ1/tf-Q1Qi)=[l+e(0]2/1'0;
h = т (QoQoh — QoQo) =* ^ [1 + * (О]2 J [о »
где
/j0 = m\(Qi0Q]0Je — QioQio);
/;o-^o = -^-[i+e(/)]2/;0.
Следовательно,
Ic + JV=J+J'- j0 = / + -^- [1 + s (О]2/;0.
ТП
44
откуда
/„ = -^-[2е(<) + е2(0]/;о.
т
По условию линия движения точки 54 проходит через общий центр масс
и через центр масс тела 50. Поэтому два последних члена в выражении
внутреннего момента (2. 20) равны нулю. Итак,
at
где Ъ — угловая скорость вращения тела S0 в инерционном пространстве.
Рис. 2. 5. Схема
поступательного движения невесомого
тела (ц. м. — центр масс
системы)
Рис. 2.6. Схема аппарата с
маховиком
После подстановки в это уравнение значения Jv согласно (2.20) получим
Ms = — [2е (t) + е2 (/)] [/;0^ + * х J[fi\\ +
т
+ 2-^-7(011+^(0]^-
т
Так как линия движения дополнительной массы проходит через центр
масс системы, то, казалось бы, внутренний момент должен отсутствовать.
В действительности, как показывает последнее выражение, этот момент
появляется при наличии угловой скорости тела вследствие изменения момента
инерции.
Пример 2. Пусть носимое тело представляет собой обычный маховик,
вращающийся с угловой скоростью Q вокруг своей полярной оси, которая
по отношению к несущему телу S0 сохраняет неизменное направление. Центр
масс маховика также неподвижен в теле S0 (рис 2.6). В этом случае
проекции тензора инерции /4 на оси системы Ох^хз являются постоянными
величинами, не равными нулю. Тензоры // и /0 также постоянны, поскольку
радиусы-векторы q» и q0 остаются неизменными. Таким образом, положение
центра масс системы не меняется, поэтому переменная часть тензора равна
нулю. Следовательно, три первых и три последних члена в выражении
момента (2.20) равны нулю. Обозначим через /и и /э соответственно полярный
и экваториальный моменты инерции маховика. Тогда
Л = ЛАЛ + /э'Уе + ^с'с»
45
где ^; /с — единичные векторы, образующие с единичным вектором in правую
систему координат.
Учитывая, что в системе координат 0\х2хг Q=Qin, а также /i =
=0, согласно (2 19) получаем
MB = /nQ7n + /nQ(*x7„).
Первый член правой части обусловлен угловым ускорением маховика
относительно тела SQf второй — гироскопической связью между вращением
маховика и телом S0 и эквивалентен моменту, возбуждающему прецессию
кинетического момента вращающегося маховика при вращении тела «So-
Допустим, что_ось вращения маховика ia и ось вращения тела SQ
совпадают, т. е. о)=со/п. Тогда o)Xin=0 и выражение для внутреннего момента
будет иметь вид
ЖВ = /ПШП.
Если обозначить момент инерции тела 50 относительно оси iu через /0,
получим уравнение
do*
/0 —- = м-мв,
at
или в скалярной форме
ddi
It
= М-/П
dQ
dt
(2.28)
Это уравнение используется при исследовании систем управления
угловыми движениями КЛА по одной оси с помощью маховика.
Пример 3. С помощью маховиков можно управлять движением КЛА
вокруг его центра масс в пространстве относительно трех осей. Поскольку
вращательные движения маховиков не изменяют положения центра масс и
моменты инерции КЛА, выражение для внутреннего момента в этом случае
может быть получено без введения тензора инерции. Итак, предположим, что
КЛА состоит из корпуса и трех вращающихся маховиков, обладающих
осевой симметрией. Точки подвесов и оси вращения маховиков неподвижны
относительно корпуса, причем центр масс КЛА совпадает с центром масс
корпуса.'Введем связанную систему координат Ох^хз, оси которой являются
главными осями инерции корпуса. Допустим, что ось вращения первого
маховика «Si совпадает с осью xiy второго
S2—с осью х2 и третьего $з—с осью
дез (рис. 2.7). Отметим, что при
такой ориентации осей вращения
маховиков главные оси инерции КЛА
совпадают с главными осями инерции
корпуса.
Обозначим моменты инерции КЛА
относительно главных осей,
вычисленные в предположении, что маховики
жестко связаны с корпусом, через Л, /2»
/з, осевые моменты инерции
маховиков— через /i, /2, /з, проекции на ^ти
же оси вектора угловой скорости КЛА
(о в инерциальном пространстве — через
wi, 0)2, (Оз, вектора угловой скорости
маховиков Q относительно корпуса — через
Qi, Q2, ^з- При этих обозначениях
выражение для вектора кинетического мо-
Рис. 2. 7. Схема аппарата с
тремя маховиками
46
мента запишется в виде
Представив моменты инерции КЛА в виде
/2=/*2+/2;
/з=/*з4/з,
где /xi, /*2, /хз —моменты инерции корпуса вместе с маховиками без учета
соответствующих осевых моментов инерции маховиков,
получим __ _
К =• [/xl»l + Л («1 + Ql)l 'l + VjO*1 + /2 ("2 + 22)] *2 +
Н- [Jx&>3 4- 'з (w3 4- Qz)] h*
Откуда находим
/rl-^+[('*> +/3)-
dt
-(Лг2 4-/з)]«2®1 =
= All — /1 — H- /2W3Q2 — /з<«>22з;
a/
■ (^3 4- /3)] wi«3 =
=Af2-/2 v "; ; +/3^^3-/1^1;
at
(lb)*
Ija -r + [{1л + h) - Vxi + /1)] wiw2 =
at
= Л13-/а
flf(a)3 + 23)
+ 1\ь>2&\ —/2«l22
(2.29)
В правые части этих уравнений перенесены члены, содержащие только
моменты инерции вращающихся маховиков. Хотя эти члены содержат
угловые скорости и__ускорения корпуса, назовем их проекциями вектора
внутреннего момента Мв на оси системы OxiX2x3. Действительно, если положить
Q1 = Q2=Q3=0, то данная система уравнений будет иметь форму
уравнений Эйлера. i
Рассмотрим каждое слагаемое внутреннего момента относительно оси х\.
r d(Q\+b>\)
Первое слагаемое — 1\ представляет собой момент инерцион-
dt
ной реакции маховика, приложенный к корпусу КЛА. Величина этого
момента, пропорциональная абсолютному угловому ускорению маховика (поэтому
член 1\ — нельзя перенести в левую часть уравнения), определяется осе-
dt
вым моментом, приложенным к маховику, со стороны двигателя, приводящего
его во вращение. Второе и третье слагаемые /2O3Q2 — /зЙ30)2 являются
проекциями гироскопического момента, возникающего вследствие вынужденной
прецессии маховиков S2 и 5з при вращении КЛА. Аналогичное значение
имеют слагаемые проекции вектора внутреннего момента на оси х2 и jc3.
В большинстве случаев угловые ускорения аппарата малы по сравнению
с угловыми ускорениями маховиков. Поэтому в первом приближении будем
считать
dt
dt
41
Тогда выражения для проекций внутреннего момента на оси связанной
системы координат приобретают вид:
dQ\
at
dQ2
at
dQ3
AfB3 = — /3 —— + /^1 — /20^2,
at
(2.30)
или в векторной форме
dH
dt
+ a>X
*).
где Н=IiQiii+h&2h+h&ziz — вектор кинетического момента маховиков.
2.5. Внешние моменты, действующие на КЛА
Наряду с внутренним на КЛА действуют внешние моменты,
создаваемые гравитационным, магнитным, электрическим
полями, сопротивлением атмосферы, давлением солнечных лучей и
ударами метеоритных частиц. Величи-
а каждого из этих моментов
различна для различных участков траек-
х03 тории полета и зависит также от
размеров, формы и других свойств
конкретного летательного аппарата.
Рассмотрим в отдельности перечисленные
выше виды внешних моментов.
Гравитационный момент возникает
в результате взаимодействия КЛА
с полем гравитации небесного тела.
Таким телом для околоземного
аппарата является Земля, для
межпланетного корабля — Земля, Солнце и
планета. Гравитационный момент
представляет собой постоянно
действующее на КЛА возмущение, которое
может оказывать существенное влияние
на его динамические свойства как
объекта управления. Для упрощения
выкладок при выводе выражения для этого момента
предположим, что:
— гравитационное поле является ньютоновским
центральным полем сил;
— линейные размеры аппарата несоизмеримо малы по
сравнению с расстоянием до притягивающего центра;
— оси связанной системы координат Ох&ъХг являются осями
главных моментов инерции аппарата.
Рис. 2.8. К определению
гравитационного момента
48
Применительно к Земле первое допущение означает
пренебрежение сжатием Земли, а также неоднородностью и
неравномерностью распределения ее массы.
Движение КЛА по орбите будем рассматривать в системе
03X0iXo2Xoz. Выделим в аппарате элемент объема dv с массой
dm, как это показано на рис. 2.8. Здесь rv и qv
радиусы-векторы, определяющие положение выделенного объема относительно
центра масс Земли и центра масс КЛА соответственно.
Гравитационная сила, действующая на массу dm9 определяется по
формуле
dOv=~^2^dm,
где \i — гравитационная постоянная (равная для Земли
398602 км3/с2).
Следовательно, гравитационный момент, действующий на
выделенную массу, будет
dMrp=QvXdQ,= - UvX -£ ^) dm,
а полное значение момента, приложенного к КЛА, равно
Мгр-
= jrfAfrp=j,(feX^f)<'«. (2-31)
где
s=l, 2, 3.
dW
Так как производные —- определены в подвижной системе
то вычисленное по формуле (2.31) значение вектора
момента не связано с угловым положением КЛА в базовой
системе отсчета. Для устранения данного недостатка формулы
разложим функцию — в ряд Тейлора в окрестности центра
dxs
масс аппарата
5ie^+y^J^L+... (*= 1,2,3) (2.32)
dxs dxs* j^Ji dxsdxk
и ограничимся двумя первыми членами разложения. После
подстановки полученного выражения в формулу (2.31) имеем
49
После выполнения операции векторного умножения под
знаком интеграла получим
V U-l
3 3 1 - —
(2.33)
или
H^+i (/■)=■
Ль
*+/
Ws+ltk(r)=
dW(r)
dxs+tdx*
Функции W8(r) и Wsk(r) заданы для конкретной точки (центра
масс) аппарата и от его объема не зависят. Поэтому при
интегрировании эти функции можно вынести за знак интеграла.
В силу выбора осей системы OxiX2xz при вычислении интеграла
в правой части равенства (2. 33) члены вида \ xsdm и J х<хк(1т
V V
равны нулю, а члены вида
J (^+1 + ^5+2) dm=Js
V
представляют собой главные моменты инерции, так что
выражение (2.33) приобретает вид
ЛГ
гр—Zu (Л+2 "
5-1
■Js+iW.
5+1/ w 5+1,5+2
{г) is
(2.34)
Для получения расчетного выражения гравитационного
момента выразим Ws+i>3+г(г) через значения Wnm(r) в базовой
системе координат О*о1*<в*оз. Вначале воспользуемся системой
O3X0\X(aXQi, в которой
W*(r)=-7=== * ;
V (г cos и + Д*1)2 + (г sin и + ДЛ"2)2 + ДЛ|
|—1+3 sin3 к 3 sin и cos a 011
3 sin и cos и — 1 +3 cos2 и 0 •
0 0 l|
Переходя от системы 03 ЛмЛ'огЯ'оз к системе Олг01*о2*оз, получаем
-3v2 0 0
Wsk(r)= || о -6v2 О
О 0 -3v2
50
Взаимное расположение систем 0*01*02*03 и OXiX2x3 задается
матрицей направляющих косинусов у. С помощью этой матрицы
находим
^+1,5+2 {r) = W°22 (Г) Y2,,+lY2,*+2>
а также
з
Мг? = W°22 (Г) ^ (Л+2 ~ Л+l) Y2.s+lY2,5+2^ =
5-1
=- 3v2 (У3 - Л) Y22Y2A - Зл?2 (Л ~ Л) Y21Y2J2 -
-3v2(A-A)Y2iY22V (2.35)
Для малых угловых отклонений имеем
Мг? = - 3v2 [(У3 - Л) Mi - (Л ~ Л) eis2^2 - (Л - Л) Мз]>
или, пренебрегая малыми второго порядка,
Дф= -3v2 [(/3-Л)М1+(Л-"Л)^з]. (2.36)
Следовательно, величина составляющей гравитационного
момента по каждой оси пропорциональна разности моментов
инерции относительно двух других осей. Если аппарат является телом
вращения, причем Л=/з, а Лт^/г, то, полагая ei=e2=0,
получим (рис. 2. 9)
Y23=0; Y2i=cos e3; Y22=sin 83
и
Mrp=Y v2A/sin 2s3J3, (2.37)
гдеА/=/2 — /i.
При А/>0 под действием момента продольная ось будет
поворачиваться в направлении местной вертикали.
Рассмотрим в качестве примера идеальную гантель,
состоящую из двух шаров одинаковой массы т, соединенных стержнем
длиной 2qp, которая движется по некоторой орбите вокруг
притягивающего центра 03 (рис. 2.10). Массу стержня будем
считать пренебрежимо малой. На каждый шар будут действовать
силы тяготения
Плечи этих сил относительно центра масс легко находятся из
подобия треугольников
#i=—Ьх; а2=—Ь2.
Л ?2
51
Так как 61=62=ег sine3, то
rQrSine3 . л Грг Sin e3
CL\ — » #2 —
и суммарный гравитационный момент, действующий на гантель,
будет
Л?гр=^1а1 — 02^2=lxrmQrsin £з
6ц1
Рис. 2.9. Системы координат Рис. 2.10 Схема аппарата
для тела вращения типа «гантель»
Так как моменты центробежных сил Gui и Gn2 в первом
приближении взаимно компенсируются, то этот момент будет
единственным. Учитывая, что бг<Л можно принять
Г\ = Г—Qr COS Ез; Г2 = Г+QT COS 83.
После подстановки в выражения момента и разложения в ряд
по степеням — cos e3 с точностью до малых первого «порядка
находим
ЖРР~ 3 -^-mg? sin ea. (2.38)
гг
Учитывая, что v2= -Jj и 7r=2mQ? (момент инерции гантели),
полученное выражение можно привести к виду (2.37).
Аэродинамический момент возникает в результате
взаимодействия корпуса КЛА с потоком свободных молекул,
составляющих верхние слои атмосферы (>130 км). В зависимости от вы-
52
U 4Г
соты орбиты, скорости движения и геометрической формы КЛА
влияние этого момента на вращательные движения аппарата
может быть различным.
Наибольшее влияние оказывает момент аэродинамических сил
сопротивления, возникающих от столкновения КЛА с
молекулами, при несовпадении его центра масс с центром давления.
Значительно меньшее влияние имеет момент сил аэродинамической
диссипации, обусловленный наличием угловой скорости корпуса
КЛА относительно молекулярного потока. Потенциальным
источником аэродинамических возмущений является также
градиентный и тепловой эффекты. Первый эффект вызывается
неодинаковой плотностью атмосферы в различных точках корпуса
аппарата (ближе к Земле — плотнее). Второй эффект связан
с наличием собственных тепловых скоростей молекул.
Возмущающее действие этих эффектов на КЛА пренебрежимо
мало в сравнении с аэродинамическим моментом сил
сопротивления и указанные эффекты, как правило, не учитывают. При
вычислении вектора аэродинамического момента обычно исходят
либо из теории свободного молекулярного потока, когда
отношение длины свободного пробега молекулы к характерному
размеру аппарата >2, либо из предположения ньютонианского потока.
В первом случае выражения для момента чрезвычайно громоздки
и сложны. Для КЛА, имеющего осесимметричную форму, при
малых углах атаки а выражение для аэродинамического
момента, действующего относительно тангажнои оси, может быть
представлено в виде
Ма=Мааа, (2.39)
где
Здесь т* — коэффициент аэродинамического момента,
зависящий от геометрических характеристик КЛА,
соотношения температур поверхности аппарата и
окружающей среды и коэффициента молекулярной
скорости;
q — плотность атмосферы.
Во втором случае при малых углах атаки и скольжения для
определения величины аэродинамического момента можно
по-прежнему пользоваться выражением (2.39). Однако при этом
М1=схуПш£$£-,
где уя д — расстояние между центром давления и центром масс
КЛА;
S — характерная площадь (обычно площадь миделева
сечения, к которой отнесен сх);
53
сх — коэффициент лобового сопротивления, который
принимается равным 2.
Эта формула используется для предварительной оценки
аэродинамического момента на высотах от 130 до 600 км. Ошибка в
оценке не превышает ~ 10%.
Магнитный вращающий момент образуется в результате
взаимодействия геомагнитного поля с магнитным полем КЛА.
Величина этого момента определяется по формуле
Ч,=*«ХЯ. (2-42)
где Дм — вектор эквивалентного магнитного диполя КЛА;
В — вектор индукции геомагнитного поля.
Выражение для вектора эквивалентного магнитного диполя
аппарата можно представить в виде
^м=^м.о + ^м.н>
где dM.b — вектор магнитного диполя собственной
намагниченности аппарата, образованный токами и постоянными
магнитами в приборах, остаточной намагниченностью
элементов конструкции и оболочки;
dM.n — вектор магнитного диполя, образованный
намагничиванием ферромагнитных материалов аппарата в
геомагнитном поле.
Вычисление составляющих d^. 0 и <2м.н производится для
конкретных аппаратов. Записать их расчетные выражения в общем
случае затруднительно. Наиболее простые выражения могут быть
записаны для осесимметричных аппаратов, если полагать, что
магнитопроницаемые элементы аппаратов обладают свойствами
симметрии относительно той же оси. Другими словами, если
аппарат симметричен относительно оси xz> то dM.o=dM. oh и <7м.н=
=^м.н*з, причем dM.H=ki(B-is)iZy где k\ — постоянный
коэффициент, включающий в себя объем оболочки аппарата.
Таким образом, момент
ЛГм = (5м.о + ?„л)Х^ (2.43)
может быть вычислен для каждого положения КЛА на орбите,
если известны значения составляющих вектора магнитной
индукции на оси_связанной системы координат и угловое
положение векторов dM.о и 4нВ этой же системе. Для осесимметрич-
ного аппарата выражение (2. 43) приобретает вид
^ = ко + *1(в'У]'«Х2. (2.44)
При вращении КЛА с токопроводящей оболочкой в
геомагнитном поле в ней наводятся вихревые токи, которые создают
момент Мм. в, противодействующий вращению и уменьшающий
кинетический момент КЛА. Для оценки этого момента токопро-
54
водящие элементы конструкции КЛА и его оболочку
приближенно отождествляют с замкнутым круговым контуром.
Геометрия контура такова, что создаваемый ею момент может
иметь составляющую, перпендикулярную кинетическому
моменту аппарата, и вызвать его прецессию. Точный расчет
составляющей, которая вызывает прецессию, осложняется изменением
геометрии данного контура при движении аппарата по орбите.
Основной эффект от действия момента, создаваемого в
результате взаимодействия геомагнитного поля с вихревыми токами»
проявляется в торможении угловой скорости вращения КЛА.
В общем случае тормозящий момент вихревого тока,
действующий на проводящую оболочку вращающего аппарата, может
быть описан выражением
^M=-*u*?2», (2.45)
где kx в — постоянный коэффициент, определяемый свойствами
проводящего материала и геометрическими
свойствами аппарата;
#12 — составляющая вектора В, приближенно равная состав
ляющей, нормальной к оси вращения.
Следует иметь в виду, что Bi2 является функцией времени в
связи с вращением магнитного поля Земли вокруг оси ее
вращения, аномалиями магнитного поля Земли, постепенным уходом
оси вращения КЛА и изменением параметров орбиты,
обусловленным сплюснутостью Земли.
Потери магнитной энергии в ферромагнитных материалах
вследствие гистерезиса также способствуют торможению
вращения КЛА. Однако эти потери сравнительно малы по сравнению
с потерями на вихревые токи. Оценка магнитных моментов
должна производиться в каждом случае с учетом магнитных
эффектов бортового приборного и силового оборудования.
Момент от давления солнечных лучей. Величина рс
солнечного давления ня расстоянии Д от Солнца определяется формулой
где с — скорость света,
Е0 — величина потока энергии светового давления на
расстоянии R0 от Солнца.
Взаимодействие светового потока с поверхностью аппарата-
имеет сложную природу, и точные аналитические выражения
для оценки момента от давления солнечных лучей не пригодны
для практических целей из-за их сложности. Приближенно
выражение для этого момента можно записать в виде
55.
м„
\т
/cos28 — d\ sin 28sin 3.
(2.46)
где S — площадь проекции освещенной части поверхности
аппарата на плоскость, перпендикулярную к потоку;
es — единичный вектор направления на Солнце;
Уц. д — расстояние от центра масс до центра давления.
Для аппарата, имеющего форму конуса (рис. 2. И), момент
определяется формулой
2
Влияние момента светового давления на угловые движения
КЛА, обращающегося по орбите вокруг
Солнца, может быть значительным.
Момент от ударов метеоритных
частиц. Возможным источником внешних
возмущений, действующих на КЛА,
являются метеоритные частицы. В
настоящее время нет достоверных данных
относительно вероятности возникновения
возмущающих моментов от столкновения
аппарата со спорадическими частицами.
Приближенная оценка влияния этих
частиц, основанная на ряде вполне
приемлемых допущений, показывает, что
среднее значение этого момента за
промежуток времени порядка одного года очень
мало. В некоторых случаях, в частности,
при попадании КЛА в поток частиц, их
удары могут привести к появлению сравнительно большого
импульса момента, однако подобная ситуация крайне редка и чпе-
вата гораздо большей опасностью, связанной с
разгерметизацией. Поэтому обычно в практике проектирования систем
управления КЛА эти явления учитывают при оценке надежности.
Реактивный момент. Струя газа, возникающая в результате
истечения газа из корпуса КЛА, воздействуют на него
посредством реактивной тяги
Рис. 2.11. Действие
солнечных лучей на
конический летательный аппа
рат (ц. м. — центр масс)
P=cW„
(2. 47)
dm
где с= количество газов, отбрасываемое струей от аппа-
dt
рата в единицу времени;
Wq — эффективная скорость истечения газов.
Реактивная тяга, линия действия которой находится на
удалении (плече) / от центра масс КЛА, создает момент
ДМ=Р/.
Для определения момента от утечки необходимо
просуммировать моменты, создаваемые каждой струей. Как величина тяги,
так и ее плечо в данном случае являются величинами
случайными, поэтому и момент утечки будет величиной случайной. Его
56
вероятностные характеристики могут быть получены только после
проведения большого количества экспериментов.
Тяга, развиваемая ракетным двигателем, предназначенным
для выполнения маневров, должна проходить через центр масс,
чтобы не нарушать его ориентацию. Однако за счет неизбежных
ошибок при монтаже двигателя, смещения центра масс в
процессе орбитального движения и целого ряда других факторов,
не поддающихся точному учету, возможно отклонение линии
Рис. 2. 12. Схематизированные летательные аппараты:
а—диск массой 4950 кг; /i=/2=1400 кгс • м • с2; /3=
=3350 кгс • м • с2; б—диск с пирамидальным
стабилизатором, масса и моменты инерции те же, что у диска (а),
L=22,8 м; а=60°; в—гантель, масса каждого шара 2475 кг;
L=9,l мм
действия тяги от ее расчетного направления (так называемый
эксцентриситет тяги). В результате может появиться момент.
Хотя эксцентриситет тяги, как правило, очень мал, при
значительной величине тяги момент может оказаться существенным.
Поскольку двигатели при маневре будут включаться на
сравнительно небольшое время, то можно считать, что на КЛА будет
действовать импульс реактивного момента, стремящийся
нарушить его ориентацию.
Возможно также создание реактивного момента специально
для управления ориентацией КЛА. В этом случае для
уменьшения тяги, которая, как видно из формулы (2.47), связана с
расходом топлива, необходимо увеличить плечо /. Такие двигатели
устанавливаются на поверхности спутника, а в некоторых
случаях даже выносятся на специальных штангах за его пределы.
Рассмотренные выше внешние моменты, создаваемые
окружающей КЛА средой, могут либо способствовать ориентации,
либо нарушать ее, т. е. оказывать возмущающее воздействие.
Для правильного учета влияния того или иного момента
необходимо оценить характер изменения этих моментов в зависимо-
57
сти от высоты полета. Поскольку величины большинства
моментов зависят от формы КЛА, воспользуемся тремя
идеализированными схемами (рис. 2. 12), которые характеризуют предельные
(максимальные и минимальные) значения момента.
На рис. 2. 13 показаны области действия некоторых внешних
моментов в зависимости от высоты КЛА над земной
поверхностью.
Нижние границы областей соответствуют диску, верхние
границы для гравитационного
М,кГс-м
/О2
и внутреннего моментов —
гантели, аэродинамического
момента и моментов от
давления солнечных
лучей и ударов
метеоритов — диску со
стабилизатором (алюминиевое
покрытие) .
Последние три момента
определены в
предположении, что угол атаки, угол
наклона основной
отражающей поверхности аппарата
к направлению солнечных
лучей и направлению
движения метеоритов равен 20°,
причем расстояние между
центром масс и центром
давления принято равным
0,3 м.
Для КЛА с малой высотой орбиты наибольшее значение
будут иметь аэродинамический и гравитационный моменты. Момент
от давления солнечных лучей будет очень мал. Для аппарата с
высотой орбиты >200 км большое значение имеет
гравитационный момент, а на очень больших высотах серьезную роль будет
играть момент сил давления солнечного излучения.
При анализе процесса ориентации представляет также
значительный интерес частотный спектр внешних моментов. При этом
существенную роль играет принятый способ ориентации,
определяемый базовой системой отсчета.
2000 U 000 6000 А/с//
I Момент от внутренних
1 движущихся масс
I Аэродинамический момент
| Гравитационный момент
i момент от дабу?енил
солнечных лучей
ППШШ Момент от ударов метеоритов
Рис. 2.13. Моменты, действующие на
аппарат при полете около Земли
ГЛАВА III. МЕТОДЫ И СИСТЕМЫ
ПАССИВНОЙ СТАБИЛИЗАЦИИ
Анализ внешних моментов, создаваемых окружающей
средой, показывает, что при соответствующем проектировании КЛА
за счет выбора его формы, размеров и распределения масс в
соответствии с принятой базовой системой отсчета можно создать
58
такие условия, когда эти моменты будут оказывать
стабилизирующее влияние на угловые движения КЛА. В этом случае
совмещение связанных осей с осями базовой системы отсчета
осуществляется под действием указанных моментов без использования
специальных управляющих устройств. Применение последних
связано с неизбежными затратами энергии, запасенной на борту
КЛА в том или ином виде. Методы стабилизации, основанные
на использовании внешних моментов, создаваемых окружающей
средой, не требуют подобных затрат. Поэтому такую
стабилизацию принято называть пассивной. Сюда относится также
стабилизация одной оси КЛА в пространстве за счет придания ему
вокруг оси постоянной угловой скорости, так как в процессе
стабилизации также не требуется использование энергии
бортовых источников.
Целесообразность применения того или иного метода
пассивной стабилизации (того или иного внешнего момента)
определяется выбранной базовой системой отсчета, так как каждый
момент стабилизирует угловые движения КЛА относительно
определенной системы координат. Гравитационный момент
стабилизирует КЛА в орбитальной системе координат,
аэродинамический — в скоростной системе координат, магнитный —
в магнитной системе координат, а момент давления солнечных
лучей — в солнечной системе координат. С другой стороны,
возможность использования конкретного метода зависит от условий
полета КЛА и, в частности, от высоты. Поэтому каждому методу
свойственен определенный диапазон высот (см. рис. 2. 13), в
котором этот момент играет преобладающую роль.
Для повышения стабилизирующего действия момента могут
применяться специальные меры (например, установка
стабилизатора). Это позволяет повысить его интенсивность по
сравнению с другими моментами и свести к минимуму их
возмущающее влияние на процесс стабилизации. Кроме того, указанные
меры позволяют несколько расширить область применения того
или иного метода по сравнению с областями применения
соответствующих моментов, показанных на рис. 2. 13. Совокупность
подобных устройств с устройствами пассивного демпфирования
колебаний КЛА называется системой пассивной стабилизации.
3.1. Гравитационная стабилизация
Гравитационный момент стремится совместить одну из
главных осей КЛА с направлением гравитационной вертикали.
Однако вследствие малости момента следует ожидать сравнительно
невысокой точности ориентации (несколько градусов), и разницей
между гравитационной и геоцентрической вертикалью можно
пренебречь. Поскольку составляющие гравитационного момента
по осям орбитальной системы зависят от моментов инерции КЛА,
59
рассмотрим прежде всего условия, при которых принципиально
возможна устойчивая ориентация.
Предположим, что КЛА движется по круговой орбите и на
него действует только гравитационный момент, а все остальные
моменты равны нулю. Тогда линеаризованные
дифференциальные уравнения угловых движений (2. 6) после подстановки
выражения для гравитационного момента (2. 36) и приведения
подобных членов примут вид
yis1 + 4vo(y3-A)ei + Vo(A+^-^3)e2=0;
J%4+fo(Jb-Ji)4-vMi + J%-JMV*i=b \ (3. 1)
Лез+3vo (А—Л) ч=О-
Рассмотрим характеристическое уравнение полученной системы
дифференциальных уравнений:
+ (Л+У2-У3)2)]р2+^4о(У3-У2)(Уз-/1)}=0. (3.2)
Это уравнение не содержит членов с нечетными степенями /?, что
указывает на отсутствие демпфирования в системе.
Следовательно, угловые движения КЛА под действием гравитационного
момента не могут быть асимптотически устойчивы. Однако при
соответствующем выборе моментов инерции система (3. 1) будет
находиться на границе колебательной неустойчивости, т. е. КЛА
будет совершать незатухающие гармонические колебания около
некоторого равновесного положения с амплитудой, зависящей от
начальных условий. Для этого характеристическое уравнение
(3. 2) должно иметь три пары чисто мнимых корней.
Вследствие большой практической важности условия
устойчивости рассмотрим его более подробно. Уравнение (3.2)
распадается на два уравнения:
y8P2+3v2o(yi-y2)=0; (3.3)
AA^+v2o[4y2(y3-y2)+yi(y3-A)+(A+A-^3)2l^2+
+ 4v20(y3-yi)(y3-y2)=0. (3.4)
Уравнение (3.3) описывает движение КЛА по углу тангажа.
Для обеспечения устойчивости этого движения в указанном
выше смысле необходимо и достаточно, чтобы выполнялось
неравенство
/i>/2. (3.5)
Уравнение (3.4) описывает связанные между собой движения
по углам крена и рыскания. Для выполнения условия
устойчивости необходимо, чтобы коэффициенты этого уравнения были
60
положительными. Свободный член уравнения будет
положительным в случае совместного выполнения неравенств:
/з>/г» Js>J\
или
откуда с учетом неравенства (3. 5) получим два условия:
h>Ji>h\ (3.6)
/1>/2>/з. (3.7)
Если моменты КЛА удовлетворяют условию (3. 6), то
нетрудно убедиться, что коэффициент при р2 в уравнении (3. 4) также
будет положительным. Следовательно, это условие является
необходимым условием устойчивости.
Чтобы биквадратное уравнение (3. 4) имело две пары чисто
мнимых корней, соответствующее квадратное уравнение должно
иметь только действительные отрицательные корни. Это
возможно, если детерминант уравнения (3. 4) будет больше нуля.
Анализ достаточности условия (3.6) для устойчивой стабилизации
показывает, что оно всегда выполняется [1].
Физически это условие означает, что гравитационный момент
стремится ориентировать КЛА так, чтобы ось наименьшего
момента инерции совпала с местной вертикалью, ось наибольшего
момента инерции—с перпендикуляром к плоскости орбиты (с
бинормалью) и ось промежуточного момента инерции — с
направлением движения, перпендикулярным первым двум (с трансвер-
салью). Другими словами, обеспечивается трехосная ориентация
КЛА в орбитальной системе координат. При отклонении от
базовой системы отсчета гравитационный момент будет оказывать
восстанавливающее действие.
Анализ возможности устойчивой стабилизации при моментах
инерции, удовлетворяющих условию (3.7), показывает, что она
обеспечивается лишь в определенной ограниченной области
значений моментов инерции [1]. Значения моментов инерции при
этом должны быть довольно близкими. Эффективность такой
стабилизации будет очень низкой. Поэтому условие (3.7) можно
рассматривать как вспомогательное и использовать тогда, когда
ориентация КЛА обеспечивается другими методами, скажем
активными. В этом случае не всегда окажется возможным
обеспечить условие (3. 6). Однако в любых условиях желательно, чтобы
гравитационный момент не только не нарушал ориентацию КЛА,
но и в какой-то мере способствовал ей. В такой обстановке
условие (3.7) может оказаться чрезвычайно полезным.
Так как в дифференциальных уравнениях (3. 1) отсутствуют
демпфирующие члены, при выполнении условия (3. 6) КЛА будет
61
совершать незатухающие колебания. Частота колебаний по
тангажу может быть найдена из уравнения (3. 3)
*03 = V0l/-
3(/i-/2)
(3.8)
Частота взаимно связанных колебательных движений по
крену и рысканию представляют собой модули чисто мнимых корней
характеристического уравнения (3.2)
*oi=v0 /of5[(l + 3a + ap)- V (1 + За+сф)2- 16а?];
./o2=v0 V0yb [(1 + За + сф)+ |/'(Т+"За+ар)2-16ар],
•^3— ^2 . о ^3 — Л
(3.9)
где а=———— ; р= _ инерционные параметры КЛА.
Из формул (3. 9) видно, что колебания КЛА по крену и
рысканию состоят из длиннопериодическои составляющей с частотой
xgi и короткопериодической составляющей с частотой хо2.
Следовательно, решения первых двух уравнений (3. 1) имеют вид
г1 = А11 sin х01/ + Ви cos х01/ + Аг1 sin х02* + B2l cos *02t. (3.10)
Связь между постоянными интегрирования Ли, Л42, Л2ь Л22 и
Biu ^i2, Вгь #22 может быть установлена подстановкой решения
в одно из первых двух уравнений (3. 1). Из первого уравнения,
например, находим
Алл =
тп
*02£20 — Д*2£10
Л12— d-i
л21=
^1*02 — ^2Х01
^2*02£10 + £20
*и=
Ц*2*02£Ю + 620
^2*02 — d\lQ\
^2^02 — ^1*01
*Ql£2Q —"VlP
D ,/ X02£2Q — ^2£10
«1^02 — ^2*01
^1*02 — «V^Ol
g*l*-Ql£l0
^2%02 — ^1%01
А
21"
В*2= — ^2
Ц*1*01£Ю + £20
«*2*02 — ^1*01
*Q1£2Q —^1£10
^1*02 — ^01
(3.11)
Здесь е10, е20, s10, е20 — соответственно начальные
отклонения и угловые скорости относительно орбитальной базовой
системы отсчета;
dx=-
4vn<x — %
01
d^=-
4v%a — %*
02
. -. (3.12)
vo*oi (1—«) v0x02(l —a)
Формулы (3. 11) определяют амплитуды колебаний КЛА по
крену и рыоканию и, в конечном счете, точность недемпфирован-
62
ной гравитационной стабилизации. Поэтому желательно иметь их
возможно меньшими.
Приведем знаменатели в формулах (3.11) с помощью
выражений (3.12) к виду
j л A v0a / %02"~ х01 \ .
Ai = ^o2-^oi=4—— \—\—— Ь
*01х02 \ 1 — О '
*2 — х2
. . х02 *01
Дг—"2*02 "~ a iyoi — ~Гл 1^ •
Yo(l—a)
При хо1 = >со2 имеем A!=A2=0 и амплитуды колебаний
стремятся к бесконечности. Однако при выполнении условия (3. 6)
всегда хо2>хоь Для увеличения Ai и Дг целесообразно, чтобы
частоты xoi и йог отличались возможно больше. Для оценки их
возможных значений примем 2а=1 + р, что соответствует средним
реальным величинам параметров а и р из области устойчивости.
В этом случае частоты хм и х0г являются функциями параметра
р. Соответствующие расчеты по формулам (3. 9) показывают, что
существенное «разнесение» частот достигается при рз>1.
Представляет особый интерес частный случай
гравитационной стабилизации, когда а=р=1. При этом, как видно из
выражений (3.9) — (3. 11), движения по крену и рысканию
независимы. Колебания по крену происходят с частотой 2vo, а по
рысканию — с частотой vo. Это объясняется тем, что в уравнениях
(3. 1) при а=р=1 исчезают члены перекрестной гироскопической
связи, в результате чего она разбивается на три независимых
уравнения, описываюшдх угловые движения КЛА по крену,
рысканию и тангажу соответственно.
Формулы (3.11) показывают, что амплитуды угловых
колебаний зависят от начальных отклонений и угловых .скоростей
КЛА относительно базовой системы отсчета. При определенных
значениях указанных начальных условий амплитуды колебаний
могут достигнуть таких величин, при которых линеаризация
дифференциальных уравнений недопустима. Более того, эти условия
могут быть таковы, что КЛА будет как бы «проскакивать»
положение требуемой ориентации. В самом деле, если ось КЛА,
скажем ось х2, повернется относительно вертикальной оси
орбитальной системы координат (оси х02) на угол, больший я/2, то
гравитационный момент не только не будет препятствовать
отклонению, а наоборот, увеличит угловую скорость. В результате
ось х2 будет непрерывно вращаться.
Очевидно, что лишь при определенных начальных значениях
углов и угловых скоростей гравитационный момент сможет
предотвратить вращение КЛА и обеспечить стационарные
колебания (с постоянной амплитудой) относительно базовой системы
отсчета. Соответствующие условия носят название условий
захвата КЛА. Для анализа этих условий необходимо решить полные
63
нелинейные уравнения вращательных движений КЛА после
подстановки в них выражения гравитационного момента в общем
виде. Такое решение вследствие чрезвычайной сложности
уравнений можно выполнить лишь на цифровой вычислительной
машине. Однако для оценки условий захвата в одном практически
очень важном частном случае возможно аналитическое решение
задачи.
Рассмотрим движение КЛА, являющегося телом вращения
(/1=/з), по углу тангажа. Предположим, что в начальный
момент /о=0 КЛА имеет угловые скорости
а)ю=а)ао=0' <»*о=Ч(0)=*о
и углы
е1(0)=е2(0)=0;е3(0)=ео.
Будем считать, что на КЛА действует один гравитационный
момент, который в данном случае определяется формулой
(2. 37), а все остальные внешние моменты равны нулю. Из
третьего уравнения (2. 6) с учетом формулы (3. 8) имеем
;*8=-^-sin2e8. (3.13)
Интегрируя полученное уравнение по безразмерному времени
/2
находим, принимая ез=е,
(■^У = «о. + соз2е, (3.14)
где е0#=| —J —cos 2e0 —обобщенное начальное условие.
Левая часть уравнения (3. 14) является существенно
положительной величиной. Это налагает соответствующее ограничение
на его правую часть. Поскольку cos2e является знакопеременной
и ограниченной по модулю величиной, то непрерывное вращение
КЛА возможно лишь при ео* ^ 1. В противном случае угол е
должен изменяться в пределах
—8др ^ 8 ^ 8пр,
где предельное значение ещ>=0,5 arccos(—e0*).
Следовательно, при этом прекращается вращение КЛА и
наступает колебательный режим его угловых движений. Условие,
при котором наступает такой режим,
80* <1
характеризует захват КЛА.
64
Подставляя в это неравенство выражение для ео* и переходя
к производной по /, после несложных преобразований получим
условие захвата
(4/02<0>5(l + cos2s0). (3.15)
Неравенство (3. 15) накладывает ограничение на начальную
угловую скорость ео в зависимости от начального отклонения ео
КЛА от базовой системы отсчета, при которой возможен его
захват. Как видим, эта область существенно зависит от
собственной частоты хоз- Это вполне
естественно, так как хоз характеризует
эффективность гравитационной
стабилизации по тангажу. Кроме того,
с увеличением ео уменьшаются
допустимые значения ео*
приближаясь к нулю при е0-^90°.
Эффективность гравитационной
стабилизации может быть
существенно повышена за счет
применения специальных устройств,
позволяющих существенно увеличить
значение хоз. В частности, для этой
цели могут использоваться
выдвижные стержни с грузами на концах,
которые подобно гантели создают
гравитационный момент,
поворачивающий КЛА так, чтобы совместить
ось стержней с вертикалью.
Устройство подобного типа получило
название «вертистат» и прошло
практическую проверку на ряде спутников (например, американские
спутники «Анна» и «Траак»). Стержни изготовляются из ленты
(сталь или бериллиевая бронза), которая наматывается на
катушку и крепится на поверхности КЛА. Вследствие
предварительного напряжения лента после освобождения (когда КЛА
находится на орбите), сматываясь с катушки, сворачивается
в трубку, образуя стержень. Роль груза играет катушка, на
которую лента до этого была намотана.
Для демпфирования колебаний в системе гравитационной
стабилизации вводится дополнительный (демпфирующий) стержень
с грузами на концах. В исходном положении этот стержень
устанавливается относительно основного стержня под углом 90° и
имеет с ним и соответственно с корпусом КЛА упругую и, дис-
сипативную связи.
Принципиальная механическая схема подобной системы
гравитационной стабилизации приведена на рис. 3. 1. Используя
формулу (2.36), нетрудно получить следующие выражения для гра-
Рис. 3. 1. Схема-системы
гравитационной стабилизации:
/—КЛА со стабилизирующим
стержнем; 2—демпфирующий стержень
3—демпфер; 4—Пружина
3 991
65
витационных моментов, действующих в плоскости орбиты:
Мт= — 3vl{Jn — 712)s — на продольный стержень и корпус
КЛА (основное тело); (3.16)
yWrp2= — 3vo(721 — Лг)£д —на поперечный стержень, (3.17)
где Jij — момент инерции /-го стержня относительно у-й оси
(/=1,2;/=1,2,3);
vo — средняя угловая скорость обращения КЛА;
е, 8Д — углы отклонения основного и демпфирующего
стержней от осей орбитальной системы координат.
Существенный интерес представляет анализ динамики
системы стабилизации с учетом эксцентричности орбиты. Для малых
эксцентриситетов общее выражение для гравитационного
момента (2. 35) может быть разложено в ряд по степеням
эксцентриситета. Основные члены этих разложений определяются
формулами (3. 16) и (3. 17). Ограничиваясь в разложении членами
первого порядка малости, получим возмущающий момент,
обусловленный эксцентриситетом орбиты,
M3~2/13evosinv0*. (3. 18)
С учетом моментов, определяемых выражениями (3. 16),
(3.17) и (3.18), а также демпфирующего момента и момента
реакции пружины, действующего на основное тело,
где kn — коэффициент жесткости пружины;
&ш — коэффициент демпфирования,
а также аналогичных моментов, действующих на
демпфирующий стержень, дифференциальные уравнения вращательных
движений (2. 6) рассматриваемой системы тел в плоскости орбиты
в операторной форме примут вид
/rs + a„(ft/>+cH6-8a) + e = —-J—+вв + /»0+ав&(е0-гдв);
р1 -f- Y I ^
Р%-(Ьр+с)(-,-гл)+^гл==^-+гл0+рга0-Ь(г0-гл0). &
р1 + Y2 /
Здесь р — оператор преобразования Лапласа по безразмерному
времени
'-У8*1^*
безразмерные коэффициенты определяются следующими
формулами:
b=—-—^— коэффициент демпфирования;
V0'23V 3(/ц —/i2)
66
с= s — коэффициент жесткости пружины;
3v20/23(/l,-/l2) ^
Y=i/ —; ?2i=—» a21=—^- —инерционные параметры,
у 3 Pi /13
где
^ 13 '23
Характеристическое уравнение системы (3. 19) имеет вид
pb+aibp3+a2p2+azbp + aik=0i (3.20)
где
a1=l + a2i; a2=l + P21+ (l + a2i)c;
a3=l+a2ip2i; a4=P2i+(l + a2iP2iK.
Одна из основных задач синтеза системы пассивной
стабилизации состоит в минимизации амплитуды установившихся
колебаний за счет соответствующего выбора параметров.
Заметим, что демпфирующий стержень очень близок к
идеальной гантели (/22=/2з; /21—0) и р2~— 1. Так как при
проектировании КЛА с системой пассивной стабилизации типа «верти-
стат» стремятся к тому, чтобы моменты инерции Jn = Jiz
значительно превышали /i2, коэффициент Pi получается близким к
единице. Тогда, полагая Pi=l и f$2= — 1, можно существенно
упростить уравнения (3. 19) и (3.20).
Применяя критерий Гурвица — Рауса к характеристическому
уравнению (3. 20), находим условия устойчивости
Р>о; «2i<i; г"^-<с<т^-- <3-21)
1 —«21 1 — <»21
Решение уравнений (3. 19) для установившегося режима имеет
вид
e=eiC0SYT+e2sinyt.
Здесь
_ 2e(AiA3-A3A4) .
_ 2е(.А1А2 + А3А4)
2 ЧА+А\) '
где
^-f-^O-Saii)-™-]; Л2=с(1 + а21)-^-;
'/г
3* 67
Л3=6(1 + а21)/КЗ; At = -^ (l-2a2l\
Амплитуда колебаний
,=^«1 + «1 (3.22)
при c=-j (l + a21)
стремится к нулю, если Ь—>0. Из условия устойчивости (3.21)
находим, что при этом (X2i^ 1/7.
Анализ выражения (3.22) на экстремум одновременно по Ь и
с с учетом действительных значений b и условия (3.21)
показывает, что при ct2i<0,5 имеют место два экстремума:
— минимум гт в диапазоне
3(1 +021)
— максимум ет в диапазоне
с< 4
3(1 —2а2|)
При a2i>0,5 для действительных значений b имеет место
только один экстремум в диапазоне с^(4/3) (l + ci2i) и этот
экстремум является минимумом. Однако этот минимум всегда
больше минимума, соответствующего a2i<0,5.
Интересно отметить, что для любых значений c^i и с
амплитуда колебании уменьшается по мере уменьшения демпфирования,
а в диапазоне
0<а21<^-
4 —3с
при ^""ST
амплитуда колебаний стремится к нулю при b—уО.
Очевидно, что уменьшение демпфирования приведет к
затягиванию переходного процесса установления требуемой
ориентации КЛА относительно местной вертикали. Следовательно, выбор
параметров системы стабилизации должен производиться из
условия компромисса между минимумом амплитуды колебаний и
минимальным временем переходного процесса.
Время уменьшения «начальной амплитуды на величину 1/е
может быть определено по формуле [46}
U 0,09188
Т С
где £ — модуль действительной части корня
характеристического уравнения (3. 20), ближайшего к мнимой оси;
Т — период обращения.
68
1,5
1,0
0,5
V
\
\
V^
0 0,25 0,5 0,75 1,0 1,25 £m/e
Рис. З.2. График
минимального времени демпфирования
Математически условие указанного выше компромисса может
быть сведено к минимизации функционала
е
где ke — весовой коэффициент.
Однако аналитическое решение этой задачи осложняется
трудностью задания величины кг и
невозможностью получения выражения для
£. Поэтому были выполнены серии
расчетов на ЭВМ, по результатам
которых построены графики зависимости
te от <x2i для ряда значений ет/е. По
точкам этих графиков,
соответствующим минимуму te для данного
значения Ет/е, выявлена зависимость
минимального времени демпфирования и
соответствующей постоянной времени
от ет/е, которая представлена на
рис. 3.2. По мере приближения гт к нулю кривая устремляется
в бесконечность. Справа она асимптотически приближается к
постоянному минимальному времени переходного процесса te=
=0,137 при гт/е=2,245.
3.2. Стабилизация вращением
Ориентация одной оси КЛА в пространстве, как отмечалось
выше, может быть обеспечена приданием аппарату вращения
вокруг этой оси. Вследствие гироскопического эффекта КЛА
приобретает тенденцию к сохранению неизменного направления оси
вращения. Действие на него различных внешних моментов в
длительном полете приводит к уходу оси вращения от ее
начального положения в пространстве. В результате требуемая
ориентация КЛА нарушается и возникает необходимость ее коррекции.
В течение коротких промежутков времени влиянием внешних
моментов можно пренебречь. В этом случае угловые движения
вращающегося КЛА определяются значением угловой скорости,
перпендикулярной оси вращения. Последняя возникает как при
выводе КЛА на орбиту, так и при его раскрутке.
Рассмотрим движение КЛА, считая его абсолютно твердым
телом и пренебрегая действием внешних моментов. При этом
будем полагать, что оси связанной системы координат Ох\Х2Хз
являются главными осями инерции. Тогда векторы угловой
скорости и кинетического момента КЛА могут быть записаны
следующим образом:
»=«£ + «&+«£; _ J (3 23)
69
где iu Гг, h — единичные векторы системы координат Ох&гХ^
(Oi, <02, о)з — проекции угловой скорости.
Представим выражение для кинетического момента в виде
К = К (8А + V.+Vs). (3.24)
где
К=У J Wi + Л^1 + ^з^з;
6ь <Ь, Оз — направляющие косинусы вектора К в системе
координат OxiX2a:3.
Как известно из механики, кинетическая энергия твердого
тела определяется формулой
2Е=«)К.
Подставляя сюда выражения (3.23) для о) и (3.24), находим
Учитывая, что
/с х /с /с
получим
2£=/С2(^ + ^+-^). (3.25)
Задача стабилизации вращением состоит в том, чтобы
обеспечить устойчивое совмещение вектора кинетического момента КЛА
с одной из главных осей инерции. С другой стороны, известно,
что свободное движение твердого тела (при отсутствии внешних
моментов) стремится к состоянию минимума кинетической энер-
гии,_и это состояние является устойчивым. Совмещение
вектора К с одной из главных осей инерции, например с осью х3,
определяется условиями
8з=1; 01=02=0.
Минимум Е при этом, как видно из выражения (3. 25),
достигается, если момент инерции относительно этой оси является
наибольшим, т. е.
То же самое можно сказать, если мы поставим задачу
совмещения вектора К с другой осью. Следовательно, в интересах
обеспечения устойчивой стабилизации вращением момент инерции
относительно соответствующей оси КЛА должен быть
наибольшим.
Предположим, что в результате раскрутки космическому
аппарату сообщена угловая скорость вокруг одной из главных осей
70
инерции и момент инерции относительно этой оси является
наибольшим. Будем считать такой осью ось х3. Однако вследствие
ошибок системы управления раскруткой и наличия начальных
возмущений космический аппарат будет иметь относительно
небольшие угловые скорости по другим осям. Рассмотрим характер
движения КЛА в этом случае, полагая /1=/2=/э, причем /э</з.
Такое допущение вполне оправдано тем, что в большинстве
случаев КЛА, стабилизированные вращением, представляют осесим-
метричное тело. Кроме того, это допущение значительно упрощает
математические выкладки: общая
картина движения несущественно
изменяется по сравнению со
случаем, когда /1=7^/2. В
рассматриваемом случае удобно пользоваться
понятием экваториальной угловой
скорости о)э, перпендикулярной оси
симметрии (оси собственного
вращения). Тогда выражения для
кинетического момента и кинетической
энергии могут быть записаны в виде
Рис. 3.3.
К стабилизации
вращением
'' 2>+Л(°з).
2
э^э-
(3. 26)
Угол у между вектором кинетического момента и осью х3
собственного вращения (рис. 3. 3) получил название угла нутации.
Он может быть вычислен по формуле
sin y =
К
Из выражения (3. 26) находим
,2 2
и,следовательно,
sin2 Y:
h~h \
(2£У3-/С2)
2£/3-/<2 >
К*
(3.27)
Для абсолютно твердого тела Е=const, поэтому,
дифференцируя по времени выражение (3. 27), получим
sin ycosyy = 0-
Поскольку y^O при о)э¥=0, то y=0» или Y=const-
В соответствии с законом сохранения кинетического момента,
последний остается неподвижным в пространстве при отсутствии
внешних моментов. Таким образом, результирующее движение
71
КЛА складывается из собственного вращения относительно оси
хъ и конического движения этой оси вокруг вектора
кинетического момента К, которое называется прецессией. Коническое
движение, или прецессия КЛА, представляет собой качение конуса
*з0<о, связанного _с КЛА и вращающегося с угловой скоростью
<йп по конусу КО®, сохраняющему неизменное положение в
пространстве и вращающемуся с угловой скоростью со*,
направленной вдоль вектора К (рис. 3. 4). Линия касания этих двух
конусов является мгновенной осью вращения КЛА, или линией
действия вектора угловой скорости со, равной сумме векторов о)п
И (Oft.
Рис. 3.4. Схема движения КЛА,
стабилизированного вращением
Из подобия треугольников ОАВ и ODE на рис. 3. 4 имеем
OB = AB
OE~DE '
НО
0B=J^9; ОЕ=*э;
AB=J&>9; Z)£,=(o3-|-a)/l.
Следовательно,
Осюда находим
J э ^з
0)3
a>3 + u>n
(3. 28)
Из треугольника ODE можно получить следующее выражение
для экваториальной угловой скорости:
или после подстановки формулы (3. 27)
__ 'а
=-Tw3t&Y.
(3.29)
72
Если КЛА не является телом вращения, т. е. 1\ф1ь то,
приведенная выше интерпретация результирующего движения остается
без изменений, только ось вращения х3 будет двигаться по
асимметричному конусу.
Теперь, когда понятны основные закономерности угловых
движений вращающегося КЛА, представляемого абсолютно твердым
телом, несколько усложним задачу. Допустим, что внутри его
корпуса имеются подвижные относительно корпуса части
(демпфер), преобразующие кинетическую энергию относительного
движения в тепло. Другими словами, будем считать КЛА системой
твердых тел.
Пусть масса подвижных частей настолько мала, что их
движение относительно корпуса не вызывает ощутимого изменения
моментов инерции КЛА. Рассеивание энергии при перемещении
подвижных частей приводит к уменьшению суммарной
кинетической энергии КЛА. Для выяснения влияния рассеивания энергии
на прецессионное движение КЛА продифференцируем по
времени выражение (3. 27)
sin у cos YY= (-Т^ГТГУ ^Г' (3' 3°)
Поскольку JS>J9, a£<0, то
Y<0 и y{t)->0.
Итак, рассеивание энергии в относительном движении
подвижных частей приводит к уменьшению амплитуды колебаний КЛА
(нутации). Следует иметь в виду, что уменьшение угла
происходит в результате сближения оси собственного вращения с
вектором кинетического момента К, т. е. за счет отклонения КЛА от
положения заданной ориентации. Из выражения (3. 30) также
следует, что момент инерции относительно оси вращения должен
быть максимальным, так как в противном случае, при /з</&,
угол y возрастает.
Величина энергии Д£, подлежащая рассеиванию, может быть
определена разностью энергии двух состояний КЛА — при
наличии прецессии (y=^0) и без прецессии (y=0). Учитывая, что
кинетический момент КЛА за время работы демпфера практически
остается без изменений, величину рассеиваемой энергии
приближенно можно найти следующим образам. При наличии
прецессионного движения кинетическая энергия КЛА равна
После исчезновения прецессии кинетическая энергия
минимальна:
73
Значение угловой скорости ю/ определяется из условия
постоянства кинетического момента в обоих состояниях КЛА, т. е.
откуда находим
С учетом последнего равенства имеем
Подставляя сюда значение для соэ согласно выражению (3.29),
получаем формулу
которая используется при расчете демпфирующих устройств.
Если на вращающийся КЛА действует внешний момент, то
изучение его движения существенно усложняется. В этом случае
оно определяется векторным дифференциальным уравнением
(2. 3), интегрирование которого встречает серьезные трудности и
выполняется обычно при введении некоторых допущений.
Наиболее просто движение вращающегося КЛА описывается, когда
принимаются меры к стабилизации величины кинетического
момента.
Предположим, что_за счет специально создаваемого системой
раскрутки момента Мс величина кинетического момента не
меняется, т. е.
Тогда дифференциальное уравнение движения принимает
вид (2.12), в котором М — вектор момента, равный разности
вектора главного момента и вектора Мс.
Это означает, что кинетический момент КЛА вращается в
пространстве (прецессирует) с угловой скоростью со в плоскости,
перпендикулярной вектору внешнего момента. Если вектор М
является возмущающим, то указанная прецессия вызывает уход
от положения заданной ориентации. __
Для коррекции положения вектора К (и оси ©ращения КЛА)
система управления формирует управляющий момент, который
возвращает ось вращения в положение заданной ориентации.
Подобная система управления получила название системы
коррекции.
74
3.3. Другие методы стабилизации
Аэродинамический момент оказывает стабилизирующее
воздействие на угловые движения КЛА при ориентации в
скоростной системе координат. При этом линия, проходящая через его
центр масс и центр давления, будет совмещаться с
направлением вектора скорости. Вследствие вращения атмосферы вместе с
Землей этот вектор будет повернут по отношению к вектору
орбитальной скорости на некоторый угол Аф. Максимальное
значение этого угла соответствует пролету КЛА над экватором. Для
полярной орбиты с высотой 200 км оно составляет 3°30'.
С уменьшением наклонения орбиты этот угол будет
уменьшаться, и для экваториальной орбиты он равен нулю. Поэтому
в тех случаях, когда требования к точности ориентации
невысокие, указанным отклонением базовой системы отсчета от
скоростной системы координат можно пренебречь. Если орбита к тому
же имеет малый эксцентриситет (порядка 0,05), то в качестве
базовой системы отсчета можно принимать орбитальную систему
координат. Последнее объясняется тем, что максимальное
значение угла 6 наклона вектора скорости к горизонту при ^^0,05
не превышает 3°.
Поскольку величина аэродинамического момента даже на
малых высотах (порядка 200 км) невелика, необходимо
использовать стабилизаторы. Рассмотрим ориентацию КЛА под
действием аэродинамического момента с использованием плоского и
шарового стабилизаторов. Будем считать, что масса
стабилизатора пренебрежимо мала по сравнению с массой КЛА, так как
при использовании достаточно легкого материала (например,
алюминия) масса стабилизатора будет составлять около 5%
массы КЛА. Кроме того, будем полагать, что аэродинамическая
сила, действующая на КЛА, значительно меньше
аэродинамической силы, действующей на стабилизатор. Поэтому
аэродинамическими и гравитационными моментами (величины одного
порядка), действующими на КЛА, будем пренебрегать по сравнению
с аэродинамическим моментом стабилизатора. Для простоты
исследования не будем учитывать вращение базовой системы
отсчета и используем упрощенные уравнения движения по углам
рыскания и тангажа
Jiik=Mi (/=2'3)- (3-31)
В случае шарового стабилизатора момент Ми равный
произведению аэродинамической силы Q=cx$CTq на плечо /sine,
(рис. 3.5), будет
Mt= —cxScrql sin e|f (3. 32)
где сх — коэффициент лобового сопротивления, который для
высот до 480 км можно приближенно считать равным 1,5;
75
5СТ — площадь диаметрального сечения шара стабилизатора;
q— скоростной напор (или динамическое давление).
Для плоского стабилизатора (рис. 3.6) аэродинамическая
сила
Q=cxSCTq\sinell
где SCT—площадь стабилизатора, является величиной
постоянной, не зависящей от угла е*. Умножая эту силу на плечо Ism ей
находим
М{=— cxSclql | sin s, | sin е,. (3. 33)
Рассмотрим динамику процесса ориентации при
использовании шарового стабилизатора. Для этого подставим выражение
Рис. 3.5. Схема шарового аэро- Рис. 3.6. Схема плоского
динамического стабилизатора аэродинамического стабили-
(ц. м. — центр масс; ц. д. — затора (ц. м. — центр масс;
центр давления) ц. д. — центр давления)
(3.32) в уравнение (3.31) и приведем последнее к виду
(индекс iопускаем)
e+*osine = 0, (3.34)
где ^CjS^ql/J. (3.35)
Интегрируя это уравнение с учетом начальных условий е(0) =ео;
е(0)=е0, находим
е2= е§+2*о (cos в — cos е0). (3.36)
Аналогично случаю ориентации с использованием
гравитационного момента захват КЛА возможен при условии
^<V2(l + cose0).
Существенно отметить, что в данном случае область захвата по
начальному отклонению значительно больше, чем при
гравитационной стабилизации. При одинаковых собственных частотах хо
примерно вдвое расширяется область захвата и по начальной
угловой скорости.
76
Практический интерес представляет лишь часть этой
области, когда амплитуда колебаний не превышает л/2. Условия
реализации таких колебаний могут быть найдены из равенства
(3. 36), если положить е=0 и е=я/2. В результате получим
-Й- < |/2cose0. (3.37)
Область, ограниченную этим условием, будем называть
областью практического захвата.
При выполнении условия (3. 37) КЛА по рысканию и
тангажу совершает незатухающие колебания, которые могут быть
найдены из уравнения (3.34) в предположении малости углов е.
При этом имеем
ё + Х§£ = 0.
Решение данного уравнения с учетом начальных условий ео и ео
имеет вид
e = £msiR(V + <Po)>
где
sm = ^eo+(e0/*0)2; cp0=arctg ^ х0) .
Амплитуда колебаний зависит от начальных условий.
Поэтому стабилизатор целесообразно вводить в действие (а он может
быть сделан надувным) после предварительной начальной
ориентации КЛА и гашения его угловой скорости с помощью
специальных демпфирующих средств. В процессе ориентации также
могут применяться демпфирующие устройства для уменьшения
амплитуды колебаний.
Проанализируем ориентацию КЛА с использованием
плоского стабилизатора. В этом случае подстановка выражения (3. 33)
в уравнение (3.31) дает более сложное по сравнению с (3.34)
дифференциальное уравнение (индекс / также опускаем)
t+*5|sine|sine = 0. (3.38)
В результате интегрирования находим
^=e?+|s0| —^ sin 2 |е0| — |е| +-^sin 2|е|, (3.39)
• • •
где е = е/х0; e0=s0/y0.
*
Так как е2 величина существенно положительная, захват
имеет место в том случае, когда правая часть выражения (3. 39)
больше нуля. Нетрудно убедиться, что это условие выполняется
при любых начальных условиях в* диапазоне углов 0<|е|<я.
Это означает, что теоретическая область захвата при использо-
77
вании плоского стабилизатора является неограниченной в
пределах я. Однако практически представляет интерес область
начальных условий, при которой максимальная амплитуда
колебаний не превышает л/2, т. е. область практического захвата.
*
Полагая в равенстве (3.39) е=0 и е = я/2, .находим область
захвата, которая ограничивается неравенством
<
/ *
■|s0|+-i-sin2|sel.
(3.40)
Условию (3.40) соответствует область, несколько меньшая
области, соответствующей шаровому стабилизатору.
1000
1000
2-
2S
р
\
ч\
ч
Ч>
tsN4
v/\.
Ч£
^
10'
10
'l/ЪЩЕ 10~1
v j
Направление
Стабилизатор
Рис 3. 8. Схема шарового солнечного
стабилизатора (ц. м. — центр масс;
ц. д. — центр давления)
Рис. 3. 7. Характеристики шарового
(/) и плоского (2) стабилизаторов
(Тк — период колебаний):
а0 = 20°
а0 = 40°
В реальных условиях полета базовая система отсчета
вращается в пространстве, что, вообще говоря, должно
учитываться в левой части уравнения (3.31). Кроме того,
аэродинамический момент зависит от углов атаки и скольжения. Это также
должно учитываться при точном решении уравнения (3. 31). В
результате уравнение становится настолько сложным, что его
решение возможно лишь с помощью вычислительной техники.
Решение этого уравнения при использовании рассмотренных
выше стабилизаторов для двух частных случаев (начальные углы
атаки ао=20 и ао=40°) показывает, что КЛА совершает
колебания с периодами, зависящими от хо. Соответствующие графики
представлены на рис. 3. 7.
Сравнение эффективности шарового и плоского
стабилизаторов показывает, что в установившемся режиме величина
лобового сопротивления шарового стабилизатора больше, чем плоско*-
го (при одинаковой площади). Поэтому последний оказывается
менее эффективным. Однако плоский стабилизатор вызывает
меньшее замедление движения КЛА. Поэтому для сравнительно
78
малых высот рекомендуется применять плоский стабилизатор,
а для сравнительно больших — шаровой, когда он не будет
оказывать существенного влияния на торможение КЛА.
Для КЛА с большой высотой орбиты (несколько тысяч
километров) момент, создаваемый давлением солнечных лучей,
может превосходить по величине и гравитационный, и
аэродинамический моменты (см. рис. 2. 13). Поэтому он может
использоваться в качестве стабилизирующего момента при ориентации в
Стабилизатор
\
\
-а
1
г
1
ЗД 1
■=*\ 1
то\ 1
•хЛ 1
F\ 1
<ъ\ |
^\ г
■*\ 1
со\ 1
•С-Ч 1
^Л 1
"^Л 1
^\^
P)l1|
tf.tf.V
j
■^о°
/\
F
"°
I
i
1
Рис. 3.9. Схема
конического солнечного
стабилизатора (ц. м. — центр
масс)
Рис. 3. 10. Схема
плоского солнечного
стабилизатора (ц. м. — центр
масс)
солнечной системе координат. В этом случае спутник будет
оснащаться специальными стабилизаторами, которые могут иметь
шарообразную, коническую и плоскую формы. Произведем
сравнительную оценку эффективности указанных стабилизаторов при
тех же допущениях, которые были сделаны при исследовании
аэродинамической стабилизации. Тогда моменты, создаваемые
стабилизаторами, можно определить по формулам:
Л44.=л/?шР</ sin £/ —для шарового
стабилизатора (рис. 3.8);
М,= -^ (— bcos*b + l) sin 28sin *
для конического
стабили = - abpc (l + — ) |sin ej sin
лизатора (рис. 3.9),
полагая в формуле
(2.46) </=—/, так как
центр масс КЛА
находится впереди конуса;
-для плоского
стабилизатора (рис. 3. 10).
79
Подставляя эти формулы в уравнение (3.31), получим
следующие дифференциальные уравнения (индекс i опускаем)-:
e + *ouiSin £ = 0 —Для шарового стабилизатора,
2 яЛш/>сг.
где 4ш = ^р-\ (3.41)
где
e + x0Ksins = O—для конического стабилизатора,
У20к =*l£s(i+J-bcos2b\ sin 2S; (3.42)
s + ^on)sin e|sin s = 0 —для плоского стабилизатора,
где <=^(/+А). (з.43)
Уравнения, соответствующие шаровому и коническому
стабилизаторам, полностью совпадают с уравнением (3.34). Поэтому
для оценки области захвата можно использовать выражение
(3.37) с учетом формул (3.41) и (3.42). Уравнение для
плоского стабилизатора также аналогично уравнению (3.38) и область
захвата может рцениваться с помощью соотношения (3.40) и
формулы (3.43).'
Мерой эффективности того или иного стабилизатора могут
служить частоты х0ш, х<ж, *оп. Сравнение частот х0ш и хоп при
/?ш=— и а=Ъ показывает, что они очень близки. Прежде чем
переходить к сравнительной оценке частот хош и хок, определим
углы б, при которых хок минимально.
Если /=0, то, как легко видеть, хок имеет максимум при
6=30°. Приравняв нулю производную dxoJdd, получим
уравнение для определения бт, при котором хок имеет максимальное
значение в случае /=^=0:
-±bcosbm sin Ьт sin 2 K + (y bcos2 8m + ') 2cos2Sm = 0,
откуда
■"■-//(тГ+тт+'-г
При /—^oo 6m—>45° и, следовательно, при произвольных
значениях b и / угол б целесообразно выбирать в диапазоне
30°^б^45°.
Полагая 6cos6=2/?m (стабилизаторы имеют примерно
одинаковые габариты), находим
гдех=///?ш.
80
^-=1/ -tg*U- J.
%0ш f « \ 1 + * /
Щ
го
Диапазон изменения иок/хош в зависимости от х показан на
рис. 3.11. Он ограничен кривыми, соответствующими
предельным оптимальным,значениям угла б.
К#£ видим, частоты в данном слу- Ък
чае также очень близки.
Следовательно, по эффективности
использования для ориентации все три
стабилизатора можно считать
эквивалентными. Однако с точки зрения
конструктивного решения шаровой и
плоский стабилизаторы являются, по- 0}9б\
видимому, более предпочтительными.
Стабилизаторы должны иметь скла- °>30\
дывающуюся конструкцию с целью
уменьшения размеров КЛА при
выводе на орбиту. Применение надувной
системы позволяет легко развернуть
шаровой стабилизатор на орбите.
Плоский стабилизатор можно
устанавливать в свернутом (в виде
рулона) состоянии и развертывать на орбите с помощью
несложного пружинного устройства. Развертывание конического
стабилизатора конструктивно осуществить, по-видимому, довольно
сложно.
0£5\
О 1
Рис. 3.11. Диапазон
изменения Хок/иош в зависимости
от х
3.4. Способы пассивного демпфирования
Проведенный выше анализ дифференциальных уравнений
угловых движений КЛА, полученных без учета взаимодействия с
окружающим его магнитным полем, свидетельствует об
отсутствии естественного демпфирования. Однако движение КЛА в
магнитном поле Земли вызывает появление в металлических
элементах его конструкции вихревых токов, которые оказывают
демпфирующее воздействие на колебательное и вращательное
двюкёния КЛА. Рассеивание кинетической энергии КЛА может
проявляться также в виде магнитных гистерезисных явлений
(энергетические потери на перемагничивание). В результате
величина и направление его кинетического момента —
претерпевают изменения, характеризуемые затуханием колебаний и
собственного вращения. Для усиления этого эффекта на КЛА
устанавливаются специальные демпфирующие стержни из магнитного
материала с большой петлей гистерезиса. Рассмотрим динамику
процесса ориентации КЛА с ферромагнитными стержнями,
предполагая для простоты наличие вращательного движения
относительно одной оси. При вращении стержня в магнитном поле
Земли напряженность rto его продольной оси будет изменяться по
закону
H=Hmsir\(ut,
81
где со — угловая скорость вращения стержня;
Нт — амплитуда напряженности.
На линейном участке кривой намагничивания стержня с
достаточным приближением можно считать, что магнитная
индукция также изменяется по гармоническому закону
B=Bmsm<ut,
где Вт — максимальная величина магнитной индукции в
стержне (осредненная по длине), определенная при
максимальной напряженности поля Нт.
Предположим, что стержень представляет собой цилиндр
диаметром dc и длиной I. Величина наводимой в нем ЭДС
самоиндукции будет
Е=
dt
10
-8
где Ф — магнитный поток вдоль стержня в Мкс.
В соответствии с определением магнитного потока имеем
ф (t)=nr\ Вср sin urf,
(3.44)
где гс — радиус стержня;
5Ср — амплитуда, полученная в результате осреднения
максимальных значений магнитной индукции Вту
наводящей вихревые токи, за период обращения КЛА.
Следовательно,
:яг?5сро)10-8созоо/.
(3.45)
Если вокруг стержня расположить замкнутую катушку, то
изменение магнитного потока в стержне будет наводить в
катушке ток, что приводит к увеличению энергии рассеивания.
Расчет энергетических потерь как за счет вихревых токов,
так и за счет магнитных гистерезисных явлений усложняется
тем обстоятельством, что магнитная индукция изменяется по
длине стержня, принимая максимальное значение в центре и
резко падая на его концах. Равномерность распределения
магнитной индукции по длине
стержня возрастает с увеличением
отношения l/dc.
Кроме того, если имеется
несколько стержней, то на близком
расстоянии друг от друга между
ними возникает взаимодействие,
которое учитывается введением
определяемых опытным путем
Рис. 3.12. К демпфированию за коэффициентов kB, kv и kK соот-
счет вихревых токов ветственно для демпфирования
82
посредством вихревых токов, гистерезисных явлении и стержней
с закороченными катушками.
Применение магнитных материалов с соответствующими
характеристиками и определенной геометрической формы
позволяет существенно увеличить интенсивность торможения
собственного вращения КЛА с помощью вихревых токов. Выделим в
цилиндрическом стержне элемент объема dv (рис. 3. 12) площадью
S=ldrc и длиной 2кгс. Электрическое сопротивление такого
элемента
dR=Q %* ,
ldrc
где q — удельное сопротивление.
Тогда мощность потерь dN или скорость рассеивания энергии
-2Li , выделяемой вихревым током в рассматриваемом элементе
dt
объема стержня, после осреднения за оборот КЛА по орбите
может быть вычислена по формуле
\dt ) dR 4q
Полная величина мощности, рассеиваемой в стержне,
находится путем интегрирования полученного выражения по всем
цилиндрическим элементам от гс=0 до rc=dc/2. В результате
имеем
dt 64Q ср
Для КЛА, снабженного п стержнями с коэффициентом
эффекта взаимодействия стержней kB, мощность потерь
выражается следующим соотношением:
N=—k^\
где
- JtlQ-16 W4/Q2 и „
£x=———ас1всрвяп-
Таким образом, скорость рассеивания энергии за счет
вихревых токов пропорциональна квадрату угловой скорости КЛА.
Зная выражение для мощности потерь, легко определить
вращающий момент М, прикладываемый к КЛА,
М= — = -k1«>. (3.46)
со
Если считать, что этот момент является единственным
внешним моментом, действующим по одной из главных осей КЛА, то
справедливо уравнение
dt l
83
Отсюда находим
-Т' (3.47)
где wo — начальное значение угловой скорости КЛА при t=Q.
Таким образом, демпфирование вращательного движения
КЛА посредством вихревых токов вызывает экспоненциальное
уменьшение угловой скорости.
Рассмотрим демпфирующее воздействие на вращательное
движение КЛА потерь на гистерезис при перемагничивании
ферромагнитного стержня. При этом будем полагать, что КЛА
вращается вокруг одной из главных осей, перпендикулярной оси
стержня. Потери на гистерезис в данном случае за один оборот
КЛА определяются известным соотношением
где v — объем стержня, тогда средняя скорость рассеивания
энергии будет
Здесь
]HdB=ST,
f
где 5Г — площадь петли гистерезиса.
В результате потери энергии на гистерезис за единицу
времени для п стержней с коэффициентом эффекта взаимодействия
ftr находятся по формуле
dt 4я г г
Вводя коэффициент демпфирования за счет гистерезисных
явлений
k2=-^vnS„
4я
получим
dt a
Выражение для вращающегося момента, приложенного к
КЛА, будет
M=-L?9i-=-kt. (3.48)
(о dt
Сравнивая его с выражением (3. 46), заключаем, что момент,,
противодействующий вращению КЛА в случае рассеивания энер-
84
гии за счет гистерезисных явлений, не зависит от угловой
скорости вращения.
Из дифференциального уравнения с учетом выражения
(3.48) находим, что уменьшение угловой скорости КЛА по
сравнению с некоторым начальным значением (о=шо при t=0
определяется по формуле
о)=о)0—b-t. (3.49)
Отсюда находим время полного торможения
Сравнивая выражения (3.47) и (3.49), замечаем, что при
fe1==^2 гистерезисное демпфирование значительно эффективнее.
Для увеличения коэффициента демпфирования материал
стержня должен обладать наибольшей площадью петли
гистерезиса 5Г.
Демпфирование может производиться также с помощью
стержня с закороченной катушкой, в которой при вращении в
геомагнитном поле генерируется ЭДС
к dt
или с учетом выражения (3.44)
Е= — wKnr2ci»Bc9\0-8 cos < (3.50)
где док — число витков катушки.
Мощность, рассеиваемая катушкой, определяется по формуле
dt K
где i — ток в катушке;
RK — активное сопротивление.
Если принять импеданс катушки равным
где LK — индуктивность обмотки катушки,
то
dQs = ЕЩК
dt z*
Подставляя в это выражение значения для Е согласно
равенству (3.50), принимая (cos2G)f)cp=l/2 и учитывая, что установ-
85
лено п стержней, получим выражение для средней за один
оборот мощности потерь
dQ3 kKnf!Kwl(arl)2Blp*40-K
dt ~ Rl+^Ll
где S2p — средняя для орбиты величина квадрата
максимальной магнитной индукции, взаимодействующей с закороченной
катушкой.
Допустим, что Як^со2/^2, тогда, обозначая
kB=kKnR7lw2K (яг?)25с2р10-16,
имеем
dt 3
Вращающий момент, приложенный к КЛА, будет
to dt 3
При тех же начальных условиях, что и в предыдущих случаях,
из дифференциального уравнения (2. 5) находим
-*'
о)=о)0е
Учитывая, что при установке на КЛА стержней с
закороченными катушками энергетические потери складываются из потерь
на вихревые токи, на гистерезисные явления и токи в катушках,
торможение осуществляется посредством комбинированного
магнитного демпфирования, и следовательно,
dQ =dQx . dQ2 , dQ3
dt dt dt ' dt
Результирующий вращающий момент, приложенный к
спутнику, будет
<o \ dt ' dt ' dt J
а дифференциальное уравнение (2. 5) запишется в виде
dt 12 3
После распределения переменных и интегрирования получаем
V *| + *8 / *1 + *3
86
Отсюда легко находится время торможения tT, в течение
которого угловая скорость уменьшается до нуля,
tT = —t- lnfl+"o(*1+*3)1.
Сравнивая полученное выражение с выражением (3.49),
замечаем, что при относительно слабом действии на вращение КЛА
вихревых токов и закороченной катушки, когда
оба выражения практически совпадают, так как \п(\+х)с±х при
х<;1. Если вихревые токи и закороченная катушка создают
начальный момент, равный моменту от гистерезиса, т. е.
цр (&1 + *з) _ 1
н '
то время торможения уменьшается более, чем вдвое по
сравнению с действием одного гистерезиса.
Для демпфирования колебаний в системе гравитационной
стабилизации вместо поперечного стержня, соединенного гибкой
связью с основным телом, могут применяться магнитные
стержни с большой петлей гистерезиса. Подобная система
используется на американском геодезическом спутнике LIDOS, орбита
которого имеет сравнительно большой эксцентриситет (в=0.2).
Спутник обладает асимметричным эллипсоидом инерции за счет
четырех солнечных батарей.
Для подобных спутников представляет значительный интерес
выявление условий, при которых возможно осуществление
гравитационной стабилизации (захват стабилизирующих стержней
гравитационным полем), влияние давления солнечных лучей и
теплового изгиба стержней на колебания и диапазон
устойчивости. Оценка этих факторов может быть выполнена по
результатам моделирования системы пассивной стабилизации спутника
LIDOS [38].
Результаты моделирования показывают, что устойчивость
гравитационной стабилизации обеспечивается при эксцентриситете,
не превышающем 0,355 для любой формы ИСЗ.
Изменение истинной аномалии от 0 до я приводит к
нарушению симметрии диапазона устойчивости. При di~0,l, e=0,2 и
начальных условиях по углу тангажа в перигее орбиты ез(0) =0,
ез(0)=0,74 рад/с в системе устанавливаются колебания с
амплитудой 0,26 рад (15°). Максимальная амплитуда колебаний
составляет 24°.
Существенно отметить, что эллиптичность орбиты
сказывается лишь на колебаниях по тангажу и не влияет на колебания по
крену и рысканию. Однако наличие возмущающего момента от
солнечного давления, изменяющегося с двойной орбитальной ча-
87
стотои, может вызвать резонансные явления с возмущающим
эффектом эллиптичности орбиты, которые приводят к
значительным колебаниям по крену, переходящим в беспорядочное
вращение.
Наличие крестообразно расположенных панелей солнечных
батарей приводит к тому, что давление солнечных лучей
вызывает вращательные движения по рысканию со скоростью 1 или 2
оборота за виток и за счет перекрестных связей колебания по
крену в пределах 6°. Движение
по рысканию является полезным,
так как сглаживает тепловые
флуктуации ИСЗ.
Исследования показали Г38],
что оптимальные характеристики
системы гравитационной
стабилизации могут быть получены
при наличии стержней длиной
18 м с грузами 2,27 кгс на
концах. Наиболее эффективное
демпфирование обеспечивается
четырьмя магнитными стержнями
длиной 1,45 м. Дальнейшее
увеличение количества стержней
практически не дает эффекта.
Захват гравитационным
полем такой системы успешно
осуществляется при е<0,1. При больших значениях
эксцентриситета захват произвести не удается. Так, при е=0,2 он возможен
лишь в непосредственной близости к апогею. В интересах
обеспечения захвата дополнительно устанавливается электромагнит.
Создаваемый им момент противодействует гравитационному
моменту и приводит ИСЗ в зону устойчивости. Процесс захвата
длится в течение примерно 8 мин, после чего электромагнит
отключается, (и .под действием системы гравитационной
стабилизации КЛА начинает совершать устойчивые колебания.
Для демпфирования нутационных колебаний вращающегося
КЛА может применяться пассивное демпфирующее устройство,
схема которого показана на рис. 3. 13. Демпфер состоит из
цилиндрического корпуса, ось которого перпендикулярна оси
вращения КЛА. Внутри корпуса находится дискообразная масса
>Лд, свобода перемещения которой ограничена упругой связью,
создаваемой пружиной и силой вязкого трения. Нутация
вызывает колебания массы демпфера, в результате которых за счет
силы вязкого трения происходит рассеивание энергии нутации
и гашение колебаний корпуса КЛА.
Совместим ось демпфера с плоскостью XiX$. Тогда момент,
создаваемый демпфером и_приложенный к КЛА по оси x2t будет
Рис. 3.13. Схема
демпфирующего устройства:
/—цилиндрический корпус;
2—дискообразная масса; 3—пружина
88
Здесь F^— сила упругой связи и вязкого трения, действующая
на массу /пд, которая может быть представлена в виде
^д = — клХт — кдХт, (3.51)
где kK— жесткость пружины;
£д — коэффициент демпфирования.
Подставляя это равенство в выражение для момента,
находим
Будем считать, что масса тд достаточно мала и при ее
максимальном отклонении от оси вращения момент инерции КЛА
изменяется незначительно и им можно пренебречь. Тогда с учетом
полученного выражения дифференциальные уравнения (2.9)
можно преобразовать следующим образом:
<°i—т1оа>осо2=0^
где
г — k* а — ^L у2— Ь- • п — 1— о— ^=^
2 у knmn J тл J
Эти уравнения необходимо дополнить дифференциальным
уравнением движения массы демпфера, которое согласно принципу
Деламбера может быть записано в виде
т,хт=Гл+Рп1. (3.53)
Здесь Fui — составляющая инерционной силы по оси хи
вызываемая переносным ускорением, которая может быть найдена
следующим образом:
Л,1= - rn [(iA+iJ2) X Wi+"3) +
+К*«+V)5 - <°2 (*/Л+i'h)] \
После выполнения операций умножения векторов имеем
Fm = >Яд [(«о§ + w?) *т ~ /<V>i — to2] • (3.54)
Значением о>22 по сравнению с ©о2 можно пренебречь вследствие
малости. Тогда после подстановки выражений (3.51) и (3.54)
в уравнение (3. 53) и выполнения несложных преобразований
получим
^ + 2^m + (^-(«2o)^m+Z(o0(o1+^2=0. (3.55)
Устойчивость вращательного движения КЛА с демпфером
определяется характеристическим уравнением системы
дифференциальных уравнений (3.52) и (3.55), которое имеет вид
89
(3.52)
/?4+axf+а2р2+а3р -f а4=О, (3.56)
где
^=2^(1+ ад/); а5=(1 + ад/)х2-(1-т]20)«)20; J (3 5?)
а1=25дПв«5«д(Лв+лд/); а4=Ло<»о [(Л0 + ^)хд-т1оа)о]. J
Проанализируем необходимые условия устойчивости а;>0,
/=1,2,3,4.
На основании выражений (3. 57) получим два условия для
выбора хд:
?>-j2-r ПРИ
40 + Дд'
;.2Д> ы при
Л0>0;
Л0<0,
(3.58)
По1 — ал'
где Хд=Хд/о)о.
Относительная сила приведенных неравенств различна в
зависимости от |т)о| (соотношения между моментами инерции
КЛА). При малых | т|о | более сильным является первое
неравенство и приближенно дает хд^соо. При |г)о|, близком к
единице, а также при |т|о|>1 более сильным становится второе
неравенство, которое в этом случае также дает хд>соо-
Правда, существует особый случай при т)0<0, когда |г|о| =
= ад/, который должен быть исключен. Для этого при т]0<0 и
|г)о| <С 1 необходимо обеспечить условие
ад/>|тю|.
Достаточное условие устойчивости
#3(fli#2 — #з) — а\2а^>0
после подстановки выражений (3. 57) и выполнения несложных
преобразований приводится к виду
-По[1+1Й+(1 + Пв)ад/](1-По)>0. (3.59)
Как видим, возможность выполнения достаточного условия
устойчивости в значительной мере определяется соотношением
моментов инерции КЛА, которое характеризуется величиной г\^
Учитывая, что
0 / /
и для тела цилиндрической формы
/о_ 6
/ 3+(^/Г0)2
90
где Ь0 — длина цилиндра;
г0— радиус цилиндра,
имеем —1<т]о<1. При этом имеется 'возможность широкого
выбора параметров демпфера. Необходимо лишь обеспечить
выполнение условия (3.58).
Характер ликвидации начальных угловых скоростей КЛА по
осям Xi и х2 определяется распределением корней
характеристичного уравнения (3. 56). Оценим возможность реализации
граничного апериодического переходного процесса, который имеет
место при наличии кратных корней. В этом случае
характеристическое уравнение принимает вид
Сравнивая это уравнение с уравнением (3. 56) и пренебрегая
в выражениях (3. 57) членами ад/ вследствие их малости,
получим следующие условия для выбора параметров:
4= Ло (*д- 1); 4?о-= 25дт|£д;
бх§=х^+(ло— О; 4т/0=2$дхл,
где хо=хо/соо. _
Решая совместно эти уравнения, находим, что хд должна
выбираться в соответствии с равенством
^д=0,03т10+1,
или хд2= 1 + 33,97 т]о. _
В обоих случаях значения хд выходят за пределы области
устойчивости, так как при т|о<0 не обеспечивается выполнение
условия (3.58). Это означает, что граничный апериодический
переходный процесс реализовать невозможно. Следовательно,
характеристическое уравнение (3. 56) имеет либо два
отрицательных действительных корня, либо пару комплексных сопряженных
корней с отрицательной вещественной частью. В результате
переходный процесс состоит или из двух затухающих экспонент и
затухающей синусоиды, или из двух затухающих синусоид.
11 ЭЛЕМЕНТЫ СИСТЕМЫ УПРАВЛЕНИЯ
Часть
ГЛАВА IV. ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
Методы пассивной стабилизации, кратко рассмотренные в
предыдущей главе, позволяют обеспечить вполне определенную
ориентацию одной оси аппарата в пространстве. Однако такая
ориентация не всегда отвечает целям полета и назначению КЛА.
В ряде случаев возникает необходимость в ходе полета изменять
(а иногда и неоднократно) ориентацию аппарата. Решение этой
задачи может быть обеспечено с помощью замкнутой системы
управления, которая должна располагать комплексом приборов
и устройств, предназначенных для построения базовой системы
отсчета на борту аппарата и позволяющих измерять его угловое
отклонение, скорость и ускорение по отношению к осям базовой
системы отсчета. С этой целью могут применяться различные
гироскопические приборы, акселерометры, инфракрасные и
оптические устройства, а также астрономические измерительные
системы.
В данной главе рассматриваются принципиальные вопросы
устройства и применения в системах управления угловыми
движениями КЛА перечисленных приборов, числовые
характеристики которых приводятся только для сравнения и
приближенной оценки.
4.1. Гироскопические измерительные устройства
(датчики)
Для измерения угловой скорости КЛА применяется
двухстепенной (скоростной) гироскоп с механической или
электрической пружиной, которая создает противодействующий момент,
пропорциональный отклонению рамки от исходного положения.
Затухание переходного процесса скоростного гироскопа
обеспечивается демпфером. Динамические свойства определяются
передаточной функцией колебательного звена. Для измерения углового
отклонения КЛА как интеграла угловой скорости используется
двухстепенной (интегрирующий) гироскоп. Такой гироскоп в
отличие от скоростного гироскопа не имеет пружины. В
поплавковых гироскопах демпфирование осуществляется жидкостью.
Одновременно достигается существенное улучшение характер!!-
92
стик за счет уменьшения момента сухого трения. При этом
скорость ухода интегрирующего гироскопа может быть снижена до
0,0005—0,001 град/ч [64].
С помощью интегрирующих гироскопов можно создать гиро-
платформу, стабилизированную в инерциальном пространстве.
Для стабилизации по трем осям необходимы три интегрирующих
гироскопа. Для пояснения принципа действия такой платформы
рассмотрим схему одноосной стабилизации с одним
интегрирующим гироскопом (рис. 4. 1). При отклонении платформы /
относительно инерциальнои системы координат на угол ч|5Лл поплавок
гироскопа 2 поворачивается
относительно корпуса на угол р=
= &фпл, где й>1. Поворот
поплавка измеряется потенциомет-
рическим (или индукционным)
датчиком 4, сигнал от которого
через усилитель 3 подается на
двигатель 5. Вращение двигателя
прекращается, как только
устранится угол отклонения
платформы. Подобная отработка
происходит относительно трех осей
подвеса платформы. Рис. 4. 1. Платформа с интегриру-
Известные американские ин- ющим гироскопом:
ТегркруЮЩИе ГИрОСКОПЫ ТИПа /—платформа; 2-гироскоп; 3-усили-
GG-4, GG-5 И GG-6 Обладают СО- ТеЛЬ: *-датчик: Электродвигатель
ответственно кинетическими
моментами в 10, 100 и 1000 гс см с. Угловая скорость ухода
стабилизированной платформы при этом может быть снижена до
0,02 град/ч, а чувствительность гироскопа к угловому
отклонению может достигать (1/600)°.
Одним из недостатков, описанных выше, так называемых
роторных гироскопов является их ограниченная надежность,
обусловленная наличием вращающихся частей. Для систем
управления КЛА, рассчитанных на непрерывную работу в течение
длительного времени, этот недостаток представляет весьма
серьезную проблему. Эту проблему можно решить, используя новые
физические принципы построения гироскопов
(электростатические, электромагнитные, вибрационные и т. д.).
Большие перспективы имеют оптические гироскопы. Схема
такого гироскопа с оптическим квантовым генератором (ОКГ)
в качестве источника излучения световых колебаний показана на
рис. 4. 2. Из оптического генератора выходят два луча, один идет
по часовой стрелке, другой — против. С помощью зеркал 3 оба
луча направляются на фотоприемник ФП, где образуют
интерференционную картину. Перед фотоприемником устанавливают
узкую щель так, чтобы на приемник попадала либо темная, либо
светлая полоса. Если теперь все устройство привести во враще-
93
ние вокруг оси, перпендикулярной к плоскости рисунка, то
интерференционная картина начнет перемещаться. Длина оптического
пути для одного луча увеличится, а для другого уменьшится,
т. е. произойдет сдвиг фаз. Перед фотоприемником будут
проходить светлые и темные полосы, и на его выходе возникнет
переменный ток. Частота тока будет пропорциональна скорости
вращения. На рис. 4. 3 показана конструктивная схема оптического
гироскопа с ОКГ. Последний выполнен в виде равностороннего
Рис. 4. 2. Схема оптического ги- Рис. 4.3. Оптический гироскоп с коль-
роскопа (3 —зеркало; ФП— цевым ОКГ в монолитном исполнении:
фотоприемник; ОКГ —ОПТИЧе- /_аНод; 2-сферическое зеркало; 3-ка-
СКИЙ квантовый генератор) тод; 4—полупрозрачное зеркало;
5—фотоприемник; 6—призма; 7—диафрагма; 8— *
зеркало; 9—активное вещество
треугольника и изготовлен в виде монолитного куска
плавленного кварца. Три зеркала-резонатора расположены по вершинам
треугольника. Через одно из зеркал сигнал подается на
фотоприемник. Внутренние полости заполняются гелий-неоновой смесью.
Для возбуждения газового разряда на анод и катод подается
напряжение 1 кВ. Оптический кольцевой генератор работает на
волне 0,6328 мкм. Кроме высокой чувствительности и
стабильности, оптические гироскопы обладают невосприимчивостью к
линейным ускорениям (в том числе гравитационным) и имеют
малое время готовности к работе (1—2 с).
Некоторые сравнительные данные оптического и роторного
гироскопов приведены в табл. 4. 1.
Для измерения угловых отклонений КЛА в инерциальной
системе координат могут применяться свободные трехстепенные
гироскопы. В этом случае для пространственной ориентации
достаточно иметь два гироскопа. Специфической областью приме-
94
нения трехстепенного гироскопа в системах ориентации КЛА
является измерение направления перпендикуляра к плоскости
орбиты, которое совпадает с вектором орбитальной угловой
скорости. Поэтому рассмотрим некоторые принципиальные особенности
определения направления вектора орбитальной угловой скорости
с помощью такого гироскопа.
Таблица 4. 1
Наименование
параметра
Чувствительность
Время готовности к
работе
Уход гироскопа
Оптический
гироскоп
10~3 град/ч
1—2 с
5-6
угл. с/сутки
Роторный скоростной
гироскоп
Ю-1 град/ч (для серийных
гироскопов)
10_3 град/ч (для прецизионных
гироскопов)
3—10 мин (на раскрутку ротора)
0,1 угл. мин/мин
Введем орбитальную базовую систему отсчета Ох01Х02х0з,
связанную с КЛА систему координат OxiX2x3 и систему Ох^х^я,
жестко связанную с
внутренней рамкой гироскопа *12|
(рис. 4.4). Будем считать,
что все три системы
координат имеют общее начало
в центре масс КЛА, с
которым совпадают также центр
масс и точка подвеса
гироскопа. Взаимное
расположение осей базовой и
связанной систем координат,
рассмотренное ранее (см.
рис. 1.5), сохраняется зд^.сь
без изменений. Совместим
ось Ол'з с осью фигуры
гироскопа, а ось 0*ц —
с осью вращения
внутренней рамки. В положении
заданной ориентации КЛА одноименные оси 'всех систем
координат совпадают, а в общем случае предполагается, что как углы,
так и скорости изменения углов между этими осями остаются
малыми. Угол поворота внутренней рамки гироскопа
относительно оси Охи обозначим через си, а угол поворота наружьой
рамки вокруг оси Ох\2 — через аг. Единичные векторы по
координатным осям обозначим соответственно через in, Г12, hz-
Рис. 4.4. Схема расположения
свободного гироскопа относительно
базовой системы отсчета
95
(4.1)
Вектор кинетического момента ротора гироскопа Н направим
вдоль отрицательной оси Ох^ так, что
Н=— Hits,
где Н=const.
Для малых углов и угловых скоростей отклонений КЛА по
отношению к осям базовой системы координат [29]
ш1 = е1 + V0S2» «>2 = Ч — V0 *V ^З = Н — V
Из рис. 4.4 следует, что составляющие угловой скорости оси
фигуры гироскопа равны
o)u=(dx cos <х2 -f аг — со3 sin q2 cos ax;
(012 = ^2 COS а1 + a2 + ^З Sin ai'
u)13=а)х sin a2 — <*>2 s^n ai cos a2+(0зcos aicos a2-
Подставляя значения coi, co2 и co3 и учитывая малость углов
at и аг, получаем
wii = h + ai + v0(e2+<*2);
a)i2=22+a2-v0(s1 + a1);
a)13=S3~V0-
Ось фигуры гироскопа, установленная в направлении вектора
орбитальной угловой скорости, сохраняет свое положение, если
£1-f-a1=s3+a1=0; e2+a2==e2+a2=0,
или ai=—еь ct2=—8г.
При ацф—8i и аг¥=—е2 ось фигуры гироскопа не совпадает
с первоначальным заданным ей положением, причем текущие
значения ошибок по крену <р4 и курсу <рг определяются
следующими очевидными равенствами:
q>i=ei+'(Xi; <p2=62+ct2.
С учетом этих равенств перепишем выражения для
составляющих угловой скорости оси фигуры гироскопа по осям базовой
системы координат в виде
a)ii=Ti + VoT2; (J)i2= — VPi+W ^13=^3 — V
Определим теперь выражение для кинетического момента
гироскопа К. В проекциях на оси ОхцОх^Ох^ имеем
К=УцШцГц+A2<*Wi2+(Лз(01з - н) 713,
где /и, /i2, /13 — моменты инерции гироскопа.
96
Ограничиваясь исследованием прецессионного движения оси
фигуры, пренебрежем инерционностью рамок гироскопа и примем
кинетический момент гироскопа равным кинетическому моменту
его ротора, т. е.
K=Ki3ii3\ /Ci3=—Н.
Дифференциальное уравнение возмущенного движения оси
фигуры приобретает в данном случае (Кп=К\2=0) очень
простой вид:
—#coi2=Мц; Я(0ц=Мп,
где М11, М12 — моменты внешних сил.
Подставляя сюда значения сон, coi2 и замечая, что при
cosai^l момент Mi2«M2, получим исходную для дальнейшего
анализа систему уравнений
tfvoft - Яср2=Мn; J ^4 ^
Рассматривая применение свободного гироскопа без
приложения к осям подвеса каких-либо корректирующих моментов,
будем считать Мц и М2 возмущающими моментами, вызывающими
нежелательные уходы гироскопа. Для современных гироскопов
эти моменты малы по абсолютной величине, т. е.
Ми = АМиМ2=АМ2.
Отметим, что AMi и АМ2 включают в себя не только
моменты, связанные с несовершенством конструкции гироскопа и
технологии его изготовления (сухое трение, дебаланс масс и пр.), но
и возмущения, обусловленные вращением базовой системы
отсчета относительно осей O*0i и Ох02, которые в дальнейшем
анализе не учитываются.
Для постоянных значений AMi и АМ2 при <Pi = <P2=0 находим
установившиеся ошибки по крену (<piy) и курсу (ф2У) , .
АМ{ АМ2 • v '
Следовательно, постоянный момент, приложенный к оси
одной из рамок гироскопа, не вызывает его прецессии относительно
оси другой рамки, т. е. нарушается закон прецессии. Это
объясняется орбитальным движением гироскопа с угловой скоростью
vo, вследствие чего в уравнениях (4.2) появляются члены #vo<pi
и #v0<P2, компенсирующие действие моментов ДМ4 _и АМ2.
Определим характер движения конца вектора Н (оси
фигуры) при постоянных значениях АМХ и ДД42.
Решая уравнения (4.2), получаем
Д<Р2= — ?2У cos V-f <ply sin V,
4 991 97
где Дф1=ф1—<р1у; Лф2=ф2 — фгу — отклонения оси фигуры от
установившегося положения.
Исключая из полученных равенств время t9 находим
уравнение траектории конца вектора Н на единичной сфере
(картинной плоскости) :
(?2уА?1-Т1уД?а)2+(?1УД?1-?2УА?а)2=(?12у-^у). (4.3)
Нетрудно показать, что при <р1У=И=ф2у траектория представляет
собой эллипс с полуосями
A«e= |?iy — ?2y\l A?«=i?iy+?ау1
\ I
ч
Рис. 4. 5. Траектории движения оси фигуры в
случае, когда eiy и еау имеют одинаковый знак:
«jryX* •**<*
*ху<* *yy>Q
и центром в точке <pi=q>iy; ф2=Фгу. Оси эллипса составляют с
координатными осями углы 45°. Отметим, что при vo*=0 эллипс
проходит через начало координат.
Траектории движения оси фигуры представлены на рис. 4. 5
я 4.6.
Имея траектории движения конца вектора, для рассчитанных
конкретных значений q>iy и <ф2у можно определить полное
максимальное угловое отклонение оси фигуры фшах, характеризующее
ошибку гироскопа. Эта ошибка, очевидно, будет равна величине
радиуса-вектора точки касания эллипса с окружностью,
имеющей центр в точке О. Легко видеть, что <pmax<2|q>iy+<p2y|, если
«Piy и ф2у имеют одинаковый знак, ифтах<2 ]ф1У—ф2у|, если зна-
ки ф1У и фгу разные.
Если ф1У=ф2у, то из (4.3) получим
Дф1=Аф2-
«98
В этом случае траекторией будет прямая, составляющая угол
45° с осью 0<pi. Ось фигуры будет двигаться в плоскости,
проходящей через вектор орбитальной угловой скорости (точка О) и
направление оси фигуры, соответствующее установившимся
значениям ошибок (точка Oi при ф2>0 и точка 02 при фг<0).
Легко видеть, что в данном случае
A?i = Д?*= /2?2 sin (V —^)
Следовательно, ось фигуры будет совершать
движения с амплитудой 172|<Р2| относительно
колебательные
точек Ох и Оъ-
Рис. 4. 6. Траектории оси фигуры в случае
когда eiy и е2у имеют разные знаки:
ejry>(* шуу<*
-ejry<<* £*/у>0
Как следует из рис. 4. 5, максимальное отклонение оси фигурьЕ
от направления вектора орбитальной скорости будет
которое характеризует полную, или суммарную, ошибку
гироскопа.
При ф1У=—*ф2У из (4.3)> получим
Д<Ф1=—Aq>2,
что соответствует движению на картинной плоскости по прямой,
составляющей с осью Q<pi угол —45°. При q>yi>0, <ргу<0
колебания оси фигуры будут происходить относительно точки 0\т а при
<piy<0, ф2у>0 — относительно точки 02.
ЕСЛИ ф!у = —ф2у, ТО
A?2=~A%=l/2cp2sin (V + -^)
4*
99
Максимальное отклонение оси фигуры фшах, характеризующее
полную ошибку, будет то же, что и при <р1у=<р2у.
Основной трудностью, возникающей при использовании
свободного гироскопа для курсовой ориентации КЛА, считается
установление его оси фигуры в соответствующем положении,
поскольку последнее само подлежит определению. Поэтому
гироскоп должен быть чувствительным к направлению вектора
орбитальной угловой скорости [31]. Это обеспечивается приложением
к оси внутренней рамки момента, пропорционального углу и
угловой скорости отклонения рамки относительно оси Охц.
Полагая
где k0, ki — передаточные коэффициенты, подставим эти
выражения в уравнения (4.2). Переходя к операторной форме записи
при нулевых начальных условиях, имеем
Hv^ — Hfy^ -(AoVK-b ^Mv
Следует иметь в виду, что момент реакции гироскопа, равный
—Мн, будет приложен к корпусу КЛА и войдет в правую часть
уравнения его движения вокруг центра масс по крену. В
результате уравнения (4. 4) и уравнения угловых движений КЛА
оказываются связанными и исследование возмущенного движения
оси фигуры гироскопа существенно усложняется. Для устранения
этой связи примем, что управляющий момент по крену,
приложенный к КЛА, компенсирует момент реакции гироскопа, т. е.
движение КЛА по крену не зависит от момента Мц. При этом
предположении можно рассматривать углы си и аг как две
независимые переменные и записать уравнения (4. 2) в виде
[k1p+'(HvQ + kQ)]a1-Hpy2=--Hv0e1+bM1;
Нрах - tfv0cp2= - Нргх + дМ г
Здесь подлежат определению cti и аг, а движение КЛА по
крену 8i является возмущающим воздействием. Из
характеристического уравнения этой системы
"■1*+^Н-«1'+£)|-0
следует, что момент, приложенный к оси внутренней рамки
гироскопа, обусловливает устойчивость собственных движений оси
фигуры. Под собственными движениями здесь понимаются
прецессионные колебания оси фигуры, так как нутационные
колебания не учитываются, если пренебречь инерционностью рамок
гироскопа.
(4.4)
(4.5)
100
Решения уравнений (4. 5) относительно <xi и <рг в операторной
форме будут:
(/>2 + V?)e,
р АМ2 | VpAAli 9
D И "*" DH '
ft=
/?(*!/>+ £р) «! , [^/? + (Яу0+^о) AM2 />_ ДАЛ
D
Я
+
НЮ
(4.6)
где£>=/?2+2|,хр+х2;
g — коэффициент относительного затухания;
х — частота собственных (прецессионных) колебаний.
Влияние постоянных возмущающих моментов АМг и АМ2 на
положение оси фигуры в данном случае подобно их влиянию в
случае свободного гироскопа. Ошибки в установлении оси
(выставке) гироскопа по курсу и крену определяются
возмущающими моментами АМг и ДМ2 и движениями КЛА по крену.
Для постоянных значений- AMU АМ2, ei=eio и 82=820
установившиеся ошибки по курсу и крену будут:
ДЛ*2
<Ply:
*0Е1
ДМ,
»Ч'+^) "Ч1+^)
(4.7)
Если гироскоп будет разарретирован при наличии постоянных
по времени ошибок в ориентации осей связанной системы
координат Ох^Хз по крену и курсу, то ось фигуры гироскопа
установится по вектору орбитальной угловой скорости v<> с
погрешностями, определяемыми равенствами (4.7). Основной интерес
представляет ошибка по курсу в переходном режиме. Принимая
для простоты A<M2=AMi=0, £2<Cl и переходя во втором
уравнении (4.6) к оригиналу при ei=eio и 82=820, получаем
ср2= —-Ц2- [*!* sin (*/ + /)+К sin x*] e-**',
где
Т2=а2(/)-£ао; y = arctgf—М •
Отсюда видно, что <рг—^0 при возрастании t, однако
затухание переходного процесса вследствие малости х и £ происходит
очень медленно.
Постоянные значения ei и ег приняты для более наглядной
иллюстрации свойства оси фигуры гироскопа устанавливаться
по вектору орбитальной угловой скорости. В действительности
углы ei и ег представляют собой гармонические функции времени.
Выражение для <рг(/) в этом случае будет содержать дополни-
101
тельную установившуюся ошибку, также являющуюся
гармонической функцией времени, но отмеченное выше свойство оси
фигуры сохранится.
Таким образом, трехстепенной гироскоп с упругим
ограничением одной степени свободы может быть использован для
построения оси ориентации КЛА в плоскости местного горизонта.
Назовем такой гироскоп гиробинормалью. По принципу действия
гиробинормаль напоминает обычный гирокомпас. Но если
выравнивание гирокомпаса по местной вертикали делает его
чувствительным (вследствие вращения Земли) к положению оси фигуры
по отношению к плоскости меридиана, то для гиробинормали
ориентация спутника по местной вертикали необходима для
задания вектора орбитальной угловой скорости, а приведение оси
фигуры к направлению бинормали достигается упругой связью
одной рамки гирокомпаса с корпусом КЛА.
Отличие свободного гироскопа от гиробинормали заключается
не только в способности последнего «чувствовать» направление
вектора орбитальной угловой скорости, но и в динамических
свойствах.
Если предположить, что возмущающие моменты АМ4 и ДМ2
являются стационарными функциями времени, то, как показано
в работе [1], ось фигуры свободного гироскопа будет иметь
постоянный уход (среднеквадратические ошибки нарастают с
течением времени). Это явление объясняется динамическими
свойствами свободного гироскопа как системы, находящейся на
границе устойчивости.
Для гиробинормали учет случайных составляющих
возмущающих моментов при тех же предположениях приводит к
увеличению ошибки определения заданного направления, однако
ухода со временем не будет, так как свободный гироскоп с
ограничением одной степени свободы является устойчивой системой. *
4.2. Акселерометры
Акселерометры применяют для измерения линейных и
угловых ускорений. Линейный акселерометр является основным
элементом современных инерциальных систем навигации,
основанных на измерении абсолютного ускорения. Угловой акселерометр
может использоваться в системах ориентации КЛА в тех редких
случаях, когда формирование управляющего сигнала по углу и
скорости его отклонения оказывается недостаточным и требуется
введение сигнала, пропорционльного угловому ускорению.
Наиболее широкое применение в космической технике
получили линейные акселерометры. Чувствительным элементом
такого акселерометра является груз массой та. При воздействии на
КЛА внешних сил вдоль измерительной оси акселерометра груз
перемещается. Его перемещение является мерой ускорения,
воздействующего на КЛА.
102
Рассмотрим движение чувствительного элемента
акселерометра с учетом всех действующих на него сил. Для этого
воспользуемся теорией относительного движения. В качестве
переносного будем рассматривать движение КЛА (в общем случае
любого подвижного объекта, имеющего акселерометр) и
связанной с ним системы координат Ох\Х2х3, начало которой поместим
в центр масс аппарата (рис. 4.7), в инерциальном пространстве,
которое характеризуется системой координат ОДо^оАз-
Движение системы OxiX2x3 относительно системы 00ЯоА>2^оз опреде-
Рис. 4.7. К выводу дифференци- Рис. 4.8 Схема перемещения чув-
ального уравнения движения чу в- ствительного элемента акселеро-
ствительного элемента акселеро- метра
метра
ляется изменением величины радиуса-вектора г, скоростью F,
линейным ускорением ю, а также угловой скоростью со и угловым
ускорением £.
Масса чувствительного элемента /па (считаем ее точечной)
имеет возможность совершать поступательные движения вдоль
его оси измерения (лга), имеющей в общем случае произвольное
направление в системе координат Ох\Х2х3 (рис. 4._8). Ее текущие
координаты определяются радиусом-вектором q, а положение,
соответствующее нулевому сигналу на выходе, вектором q0. Из
рис. 4. 8 следует очевидное равенство
Q=Qo+*a^a> (4.8)
где ёа — единичный вектор оси #а;
ха — смещение массы акселерометра от положения,
соответствующего нулевому выходному сигналу.
Согласно принципу Даламбера относительное движение
массы акселерометра описывается следующим дифференциальным
уравнением:
103
где w0T — относительное ускорение массы та в системе
координат 0*i*2*3;
Fa — суммарный вектор внешних сил, действующих на
чувствительный элемент;
Fu — переносная сила;
FK — кориолисова сила.
Если учесть, что
где wu — переносное ускорение, которое равно ускорению той
точки аппарата, в которой в данный момент времени
находится масса та;
г^к — кориолисово ускорение;
ga — ускорение массы та под действием внешнего гравита-
_ ционного поля;
^и. с — результирующая сила, создаваемая измерительной
системой акселерометра;
J^tp — сила трения;
^в. п — сила внутреннего притяжения массы та со стороны
аппарата,
то имеем
таЪ0Т=maga+Ри.с + FTP + FBU - mawn - m>a.
Из механики известно, что ускорение любой точки тела
можно представить в виде суммы ускорений
wu=гдп. п+й>п. в + wn. ц,
где wu. п — поступательное ускорение;
г»т в — вращательное ускорение;
й>п. ц — центростремительное ускорение,
причем
wnM=w; ^„.b=cXq; »п.ц=«>Х(«>Хо)- (4-9)
Тогда дифференциальное уравнение движения массы та
запишется в виде
^а^от=^а + ^и.с+Лр + ^вл1~^а^-^а(^1Г.в+^п.ц+^к).
(4. 10)
С другой стороны, движение центра масс КЛА описывается
следующим дифференциальным уравнением:
mw=mg+FHr -Fu c -7^—"FBeP,
где Рят — суммарный вектор негравитационных сил,
действующих на аппарат (тяга двигателя, аэродинамическая сила и т. п.).
Подставляя это уравнение в уравнение (4. 10), получим
104
«„= —i- FHT + (ga-g)+ (-L+-4 Fn* +
+ f—+— VFtp+^.J-(»».+*h.«+w«)- (4.11)
\ma m /
Обычно ma<cm, поэтому 'в уравнении (4.11) членами \\т
будем пренебрегать по сравнению с 1/та. Рассматриваемый
акселерометр предназначен для измерения ускорений летательного
аппарата под действием внешних сил. Первый и второй члены
правой части уравнения (4. 11) как раз и представляют эти
ускорения; второй член обеспечивает получение необходимой
передаточной функции акселерометра; а остальные являются
источниками ошибок измерения *. С учетом сказанного представим
уравнение (4. 11) в виде
т /гаа
где
та
Как видно из уравнения (4.12), акселерометр не измеряет
ускорение внешнего гравитационного поля, а измеряет лишь
ускорения, создаваемые негравитационными силами. Правда,
при движении по поверхности Земли или вблизи нее
(аэродинамические летательные аппараты) его величина постоянна и
может быть заранее учтена. Поэтому указанное ограничение
практически не ощущалось до последнего времени. Однако с началом
космических полетов, когда аппарат на большей части
траектории движется под действием лишь гравитационного ускорения,
это ограничение стало играть исключительно важную роль.
Из уравнения (4.12) следует, что при /^=0 и Дй;=0**
акселерометр будет реагировать на величину Ag, представляющую
разность гравитационных ускорений точки пространства, в
которой находится в данный момент центр масс КЛА, и точки, в
которой находится масса акселерометра (если эти точки совпадают,
то Ag=0). Эта величина может служить мерой градиента
гравитационного поля. В самом деле, если линия, соединяющая
указанные точки, совпадает с направлением гравитационного
поля, то при р<Сг имеем
— — — dg -
* Кроме этого, существуют еще ошибки преобразования перемещения
массы акселерометра в электрический сигнал.
** Методическая составляющая этой ошибки может быть скомпенсирована
при наличии информации об угловой скорости и ускорении КЛА.
105
dg
где ——модуль градиента гравитационного поля;
dr
^ — единичный вектор. _
Величина q заранее известна, а так как в этом случае Ag=
= (g& — g)eg, то следующее скалярное равенство
позволяет определить величину градиента.
В современной научно-технической литературе описывается
ряд предложений по использованию акселерометра для
измерения градиента при создании инерциальных навигационных систем
для КЛА. С помощью несложных расчетов можно показать, что
на высотах до 500 км измерение градиента возможно при
удалении акселерометра на расстояние до 1 м, если его
чувствительность имеет порядок Ю-8—Ю-9 g. Если удалить акселерометр на
расстояние до 100 м, что принципиально возможно в условиях
космоса за счет создания специальных выдвижных штанг, то
потребная чувствительность составит Ю-6^. Это уже вполне
реальная чувствительность, которую, по-видимому, можно получить
в ближайшем будущем. Однако для высот 10000—4000 км такая
чувствительность даже при удалении акселерометра на 100 м
явно недостаточна, и возможность измерения градиента
гравитационного поля на этих высотах выглядит весьма проблематично.
Прежде чем перейти к дальнейшему анализу акселерометра
проведем некоторые преобразования членов, входящих в
уравнение (4. 12). Дифференцируя выражение (4.8) по времени в
системе координат 0*1*2*3, находим
^=f=v; (4.13)
Сила, создаваемая измерительной системой, коллинеарна с
направлением ёа. Следовательно, можно записать
Л,.с = ^„.с(*а> «*.)*а, (4.14)
где F*, с (*а, ia) — функционал, обеспечивающий формирование
нужной передаточной функции акселерометра.
Проектируя уравнение (4. 12) на направление ёа с учетом
равенств (4.13) и (4. 14), находим
ХШ — ^н.с (■*.. «*.)= — *>х+ *gx+ Д*>х. (4. 15)
_ _ma
F е
где kwx=—s£-s измеряемое ускорение негравитационных
т
сил, действующих на КЛА.
Остальные члены правой части уравнения (4. 15)
представляют источники ошибок измерения. Обычно акселерометры рас-
106
полагаются вблизи центра масс КЛА. Поэтому &gXy
вращательное, центростремительное и кориолисово ускорения, а также
ускорения, обусловленные 'внутренним притяжением, пренебрежимо
малы, и основным источником ошибок является сила сухого
трения.
При Agx=Awx=0 получим уравнение идеального
акселерометра
ха - — Влл (*а, ха) = —wx.
ffla
В простейшем случае, когда
и.с \**а' •*а/== ^п*^а ^д**а»
где сп — коэффициент жесткости механической или
электрической пружины;
kg — коэффициент демпфирования,
имеем
ха+2$axaia+%lxa =—wx, (4.16)
где &а =
2Усптя " V т
k* ; xa= j/_£iL.
/cnma а У
Отсюда находим передаточную функцию акселерометра
WAP)=^ = — Г (4. 17)
Видоизменяя функционал Ри.с(ха> *а)» можно получить и
другие виды передаточной функции, в том числе и
передаточные функции интегрирующих акселерометров. Для этого
достаточно исключить пружину (сп=0).
Тогда передаточная функция (4. 17) принимает вид:
где—7\,.а=1/2 £аиа—постоянная времени интегрирующего
акселерометра.
Заметим, что вследствие малости или кратковременности
действия негравитационных ускорений на КЛА интегрирующие
акселерометры получили достаточно широкое применение в
космической технике.
Основу измерительного устройства системы управления
современных и перспективных КЛА составляет инерциальный
измерительный блок, состоящий из гиростабилизированной платформы,
на которой устанавливаются три акселерометра (по трем
измерительным осям).
107
4.3. Инфракрасные измерительные устройства
Основным элементом орбитальных базовых систем отсчета
является вертикаль. Реализация гравитационной, географической
или геометрической вертикали является чрезвычайно сложной
задачей. Однако если рассматривать Землю как сферу, то все
три вертикали совпадают. В этом случае вертикаль можно
определить пересечением как минимум двух взаимно
перпендикулярных плоскостей, каждая из которых является биссектрисой
двухгранного угла, образованного
плоскостями, проходящими через центр масс КЛА,
и касательными к поверхности земной
сферы. Следовательно, для определения
вертикали указанным способом
требуются устройства, определяющие положение
плоскостей, касательных к поверхности
Земли.
Рассмотрим возможные методы
построения вертикали на борту КЛА,
основанные на использовании инфракрасного
излучения земной поверхности.
Метод линейного сканирования. Для
пояснения принципа действия
измерительного устройства, построенного по
этому методу, обратимся к рис. 4.9, на
котором показана его работа в одной
плоскости. Поле зрения приемника
инфракрасного излучения перемещается
в вертикальной плоскости. Вначале
приемник воспринимает излучение
пространства над горизонтом» а затем под ним. При переходе поля
зрения через линию горизонта происходит скачок теплового
излучения и соответствующий скачок сигнала чувствительного эче-
мента, что приводит к изменению направления движения поля
зрения приемника. При обратном переходе через горизонт снова
происходит скачок излучения и соответствующее изменение
направления движения поля зрения. В результате ось приемника
колеблется около касательной к земной поверхности (приемник
осуществляет линейное сканирование горизонта). Второй такой
же приемник осуществляет сканирование горизонта с
противоположной стороны. Следовательно, биссектриса угла,
образованного осями этих приемников, определяет плоскость,
проходящую через центр Земли и КЛА. Два аналогичных приемнька
осуществляют сканирование горизонта в перпендикулярной
плоскости и определяют вторую плоскость, проходящую через
центр Земли и КЛА. Пересечение полученных плоскостей дает
местную вертикаль. Так как положение сканирующих устройств
относительно осей КЛА является вполне определенным, устрой-
Рис. 4.9. Схема работы
инфракрасной вертикали
в одной плоскости:
Oj—центр Земли (или
другой планеты); О—центр
масс КЛА; OOi—вертикаль;
0*2—линия отсчета
вертикали на КЛА; К—касательная;
СЛ—сканирующий луч
108
ство позволяет определить углы его отклонения относительно
местной вертикали Pi и рг. В плоскости имеем (см. рис. 4.9)
и аналогично для другой плоскости
(4.19)
Точность определения углов pi и Рг будет, очевидно, зависеть
от точности определения положения горизонта (точности
определения углов "у/; Уи Y27; Уг)- Неровности земной поверхности
приведут к появлению методических ошибок измерения. Если
расстояние до горизонта составляет 2000 км, то возвышенность
высотой 3 км изменит угол наклона линии визирования на величину
порядка 5'. Так как горные районы обычно ограничены по
горизонту, эта ошибка может быть уменьшена за счет осреднения
показаний визира. Если применить оптическую систему с
искажением изображения, которая имеет широкий горизонтальный и
узкий вертикальный углы зрения (горизонтальное сжатие
изображения), то визир осреднит неравномерность поверхности.
Точность прибора будет также зависеть от вертикального угла поля
зрения. При использовании такой оптической системы с
искажением изображения этот угол зрения может быть сделан очень
малым.
Метод кругового сканирования. Прибор, работающий по
этому методу, состоит из двух сканирующих систем с узким лучом.
Обе системы одновременно осуществляют круговое сканирование
пространства во взаимно перпендикулярных плоскостях.
Центральная линия луча каждой сканирующей системы вращается с
постоянной угловой скоростью (с постоянным периодом
сканирования Гск). Плоскости сканирования жестко связаны с корпусом
КЛА и пересекаются по линии отсчета вертикали 0x2 на борту.
Из рис. 4. 10, а видно, что углы отклонения КЛА относительно
местной вертикали, как и в предыдущем случае, будут
определяться формулами (4. 19).
Магнитный датчик, установленный на сканирующем
механизме, создает последовательность опорных импульсов, показанных
пунктиром на рис. 4. 10, б. Ширина опорного импульса равна
времени прохождения сканирующего луча через сектор опорных
импульсов. Во время обзора планеты лучом на выходе
чувствительного элемента сканирующей системы появляется сигнальный
импульс, обозначенный на рис. 4. 10, б сплошной линией. Обе
последовательности импульсов поступают на электронный
генератор прямоугольных импульсов. Напряжение на выходе
генератора 'появляется в момент окончания опорного импульса, а в
момент 'появления сигнального импульса происходит отсечка
напряжения. Таким образом, на выходе генератора появляется
109
лоследовательность импульсов с амплитудой Е и длительностью
хи причем
г — Jl г
%1~ 360 #«-
Второй генератор создает последовательность импульсов той
же амплитуды, но длительностью
360
т — Jl T
п
I nil
шщ
и=шщ
ю
Рис. 4.10. Схема работы инфракрасной вертикали по
•методу кругового сканирования (Ot — центр Земли или
другой планеты; О — центр масс КЛА; OOi —вертикаль;
Ох2 — линия отсчета вертикали на КЛА;
К—касательная; СЛ — сканирующий луч; СОС —сектор опорных
сигналов):
«—схема сканирования; 6—импульсы напряжений
(/—последовательность опорных и сигнальных импульсов;
//—последовательность импульсов на выходе первого генератора;
III—последовательность импульсов на выходе второго генератора)
Осреднение полученных последовательностей импульсов дает
соответственно напряжения
1 Тск 360 Jl г Тск 360 J1
Вычитая почленно эти равенства, с учетом выражений (4. 19)
получим
Е
где
h
180
Таким образом, напряжение на выходе сканирующего
устройства пропорционально углу отклонения от вертикали в
рассматриваемой плоскости.
В другой плоскости сканирования аналогично получим на-
пряжение, пропорциональное 0*:
AUt=ktft.
НО
Так как угол отклонения оси КЛА от вертикали определяется
путем осреднения импульсов, необходимо иметь возможно
большую частоту импульсов (скорость сканирования). При большой
скорости вращения сканирующей системы (порядка 200 об/с)
чувствительный элемент должен обладать относительно быстрой
реакцией. Желательно также, чтобы чувствительный элемент мог
работать без охлаждения до очень низкой температуры.
Указанным требованиям удовлетворяет сурмянисто-индиевый элемент
фотоэлектромагнитного типа [48]. При диаметре оптической
системы 25 мм и фокусном расстоянии 38 мм для получения угла
зрения 2° потребуется чувствительный элемент площадью 1 мм2.
Основным источником ошибок измерения вертикали по
методу кругового сканирования является излучение Солнца* Если в
оптическую сканирующую систему попадут прямые или
отраженные солнечные лучи, то, несмотря на применение фильтра,
значительно ослабляющего солнечное излучение, последнее будет
оказывать сильное воздействие на чувствительный элемент, так как
его интенсивность значительно превосходит интенсивность
теплового излучения земной поверхности. Попадание в систему
солнечного излучения приведет к появлению ложного импульса на
выходе и «ослепит» чувствительный элемент, который в течение
времени порядка 1 мс будет не в состоянии реагировать на
излучение земной поверхности.
Ложный импульс может быть сравнительно легко устранен
введением в схему дикриминаторного каскада, реагирующего на
длительность импульса (импульса от непосредственного
излучения Солнца очень кратковременный). За время «ослепления»
(«1 мс) сканирующий луч повернется при скорости
сканирования 200 об/с на 72°. Поэтому в случае, когда угол между
направлением на Солнце (в плоскости сканирования) и ближайшей
касательной к земной поверхности меньше 72°, соответствующая
сканирующая система будет давать значительные погрешности
в определенной вертикали. Такое положение будет создаваться
на определенном участке орбиты, где соответствующую систему
можно отключать. Этот участок можно уменьшить за счет
уменьшения угловой скорости сканирования, т. е. уменьшения угла
«ослепления». В течение времени отключения можно
использовать запоминающее устройство, обеспечивающее запоминание
скорости изменения соответствующего угла (Pi или рг).
Метод конического сканирования. Этот метод аналогичен'
линейному сканированию. Он также основан на колебаниях
узкого луча относительно линии горизонта. Одновременно
происходит вращение луча по конусу (рис. 4. И) двигателем 5.
Излучение попадает на мозаичный чувствительный элемент, сигналы
которого управляют углом у раствора конуса за счет поворота
приемника излучения / в рамке 2 двигателем 3 и совмещением
оси вращения с вертикалью. В установившемся режиме поле
зрения приемника совершает синусоидальные колебания относи-
ш
тельно линии горизонта, а ось конуса совпадает с направлением
вертикали.
Моделирование базовой системы отсчета. Инфракрасные
измерители вертикали могут использоваться для коррекции
положения платформы, моделирующей плоскость местного горизонта.
Для этого достаточно по осям подвеса платформы установить
двигатели, используемые в следящей системе для отработки сиг-
Рис. 4. 11. Схема работы верти- Рис. 4. 12. Двухстепенной
кали по методу конического гироскоп с осью подвеса
сканирования: по местной вертикали
/—приемник излучения; 2—рамка
карданного поДвеса; 3—двигатель
поворота приемника излучения; 4—
ось вращения сканирующего узла;
5—двигатель вращения рамки
налов рассогласования положения платформы и местной
вертикали.
Если на горизонтальную платформу установить
двухстепенной гироскоп с осью подвеса по местной вертикали, то
орбитальная угловая скорость поворота платформы в инерциальном
пространстве вызовет появление момента на опорах подвеса
гироскопа (рис. 4. 12)
Afr = //vsin рф.
Под действием момента Мг вектор кинетического момента
будет поворачиваться. Считая угол р<ь малым и пренебрегая
моментом трения, получим р"ф + *$$ф=0.
Здесь х2=—^-,
где /э — экваториальный момент инерции гироскопа, откуда
следует, что ось гироскопа будет совершать колебания с частотой хг
и амплитудой, определяемой начальными условиями. При доста-
112
точно точной начальной выставке оси гироскопа по вектору
орбитальной скорости амплитуда колебаний будет малой и гироскоп
может использоваться как средство измерения углов рыскания
КЛА.
Чтобы платформа могла продолжать слежение за местным
горизонтом при временном отсутствии сигналов сканирующих
устройств, в следящие системы отработки углов рассогласования
вводят контуры запоминания скорости коррекции платформы.
Измерение углов отклонения КЛА от базовой системы отсчета
(тангажа, крена и рыскания) осуществляется соответствующими
Рис. 4. 13. Влияние характера
поверхности на точность измерения вертикали
(а — сферическая поверхность планеты;
б — поверхность с неровностью):
без учета рефракции;
с учетом рефракции
датчиками по оси подвеса наружной рамки, оси подвеса
платформы в рамке и оси подвеса гироскопа на платформе.
Методические ошибки измерения вертикали. Несферичность
планеты, неровность ее поверхности, влияние атмосферы, а также
собственные погрешности измерительных устройств приводят к
появлению ошибок. Рассмотрим более подробно первый вид
источников ошибок с учетом статистических свойств горизонта.
Статистическое распределение вероятностей уровня для
Земли и Луны может быть аппроксимировано следующей функцией
(h — высота в км) [1]:
Fk(h)=l-ktr" а</г<оо;|
Fh{ji)=Mh 0<A<a. J
С учетом затенений, создаваемых горами, для земной
поверхности имеем £=0,29; а=0,1; М=7,32.
Точных данных по распределению вероятностей уровня для
Луны не имеется. Для приближенной оценки предположим, что
90% поверхности Луны имеет высоту меньше 1 км и только 0,5%
поверхности имеет высоту более 4 км, что качественно
согласуется с имеющимися данными [39]. Тогда £=0,27; а=1; М=0,9.
Одним из источников ошибок является рефракция,
качественное влияние которой показано на рис. 4. 13. Для сферы
вследствие симметрии рефракция не дает существенной ошибки. При
наличии с одной стороны сферы возвышенности рефракция
частично компенсирует вносимую ею ошибку.
113
В результате влияния неровности лунной поверхности
получим ошибку определения вертикали в двух плоскостях
A^i — A/i h\ — h\
APi = - —
ДР2 =
2 2/г2— #2'
ДЛ — ДЛ Л2 ~" Л2
2 //-2 _. #2
Г
(4.21)
где A/, /*i — высоты наблюдаемого горизонта в одной плоскости;
Ыу h2 — высоты наблюдаемого горизонта в другой
плоскости.
Полная ошибка определения вертикали в двух взаимно
перпендикулярных плоскостях при малых Д01 и ДРг определится
выражением
& = УЩ+Щ. (4.22)
Как видно из выражений (4.21), плотность вероятностей для
APi и дрг будет определяться плотностью вероятностей для
k — h'i-hi (/=1,2).
Пользуясь законом распределения вероятностей (4.20) для
Луны, можно найти ошибку определения вертикали с заданной
достоверностью, например
Задаваясь величиной вероятности, в данном случае/7^(^)=
=90%, находим соответствующее значение Ъ\ (90%) =0,735 км.
Подставляя это значение в формулу для Дрь определяем ошибку
APi с достоверностью 90%. Приведенные рассуждения
справедливы также для Др2.
Для оценки полной ошибки в определении вертикали
подставим в выражение (4.22) значения для APi и Др2, в результате
получим
4940
дРл(90%)=—zzzzzr B минутах дуги.
/Г2 _ Д2
Соответствующий график приведен на рис. 4. 14.
На точность определения вертикали Земли будут
одновременно влиять рефракция и неровности поверхности, причем
суммарная погрешность будет
АР/ = *!_ L-1*; _е-Ч ('= *• 2)-
2/г2— #2 LC C J
114
Для определения пределов достоверности Дрг* необходимо
найти распределение вероятностей переменной
-ьн,
-bh.
Используя функцию распределения F(h)y нетрудно получить
плотность вероятностей для r\=e~~bh, которая имеет вид
(—0
/4(ti)=ct|V
А(л)=
D
0<ti<e-e»;
е-в,<Л<1,
где
с-—, и- ь .
£fi(90'/,)
О
4
J
2
1
0
н
Н
0,1 0,2 Ofi 1,0 2,0 5,0 10
(r-R) 10'] КМ
Рис. 4. 14. Зависимость
полной ошибки
измерения вертикали Луны от
высоты над ее
поверхностью
0,1 0,2 0,5 1,0 2,0 5,0 10
(r-RHO'fr
Рис. 4. Ы5. Зависимость
ошибки измерения
вертикали от сплюснутости Земли
в функции высоты над
поверхностью
Определение плотности вероятностей для т|* может быть
выполнено на цифровом вычислителе. Аналогичные рассуждения
могут быть проведены для другой плоскости.
Для сплюснутой планеты с большой полуосью 7?а и
эксцентриситетом еп ошибка определится формулой
Д?я =
elR\
4г2
■Sincpr
где <рг— географическая широта текущей точки.
Если наблюдателю неизвестна широта <рг, то ожидаемую
величину Дри можно определить следующим образом.
Предположим, что значения <рг равномерно распределяются в пределах от
я/2 до —я/2. Тогда соответствующая плотность вероятностей
будет
я
115
Отсюда с достоверностью 90% находим максимальную
полную ошибку измерения вертикали, вызываемую сплюснутостью
планеты
e2R2
дрБ(90%)=816-^- в минутах дуги.
Зависимость величины Ар (90%) от высоты (г — R) для
Земли (еп=0,0819, i?a~6378 км) приведена на рис. 4. 15.
Как следует из приведенных выше описаний принципов
действия инфракрасных измерительных устройств, они реагируют
на перепад теплового излучения Земли и космического
пространства, иными словами, на инфракрасный горизонт. Его
неравномерность и нестационарность, обусловленная различной
интенсивностью излучения отдельных участков земной поверхности,
влиянием теплового излучения облаков, приводит к
дополнительным ошибкам измерения вертикали. Эти ошибки являются
случайными, причем их величины зависят от используемого
спектрального диапазона излучений. Для выявления соответствующих
стационарных составляющих ошибки и достаточно достоверного
определения формы Земли, наблюдаемой в различных
спектральных диапазонах, а также для получения информации об
изменении этой формы во времени требуется большой объем
экспериментальных исследований.
4. 4. Астрономические измерительные устройства
и оптические визиры
Астрономическими измерительными устройствами называются
приборы, устанавливающие на борту летательного аппарата
направления на небесные светила (Солнце и звезды). Основу
астрономических измерительных устройств составляет обычно
фотоэлектрическая следящая система, которая позволяет в течение
всего полета выдерживать направление на светило с высокой
точностью.
Для получения трехосной ортогональной системы координат
в инерциальном пространстве необходимо иметь две фотоследя-
щие системы, непрерывно совмещающие свои оптические оси с
направлениями на две звезды. Угол между этими направлениями
желательно иметь около 90°, что обеспечивает минимальное
влияние погрешностей слежения на точность стабилизации системы
координат. При непродолжительной ориентации в инерциальной
базовой системе отсчета (например, на участках коррекции
орбиты лунного и межпланетного КЛА) вместо одной из звезд можно
использовать Солнце (направление на Солнце в этом случае не
успевает существенно измениться). Для межпланетного КЛА
фотоэлектрическая система, следящая за Солнцем, может
служить указателем гелиоцентрической вертикали, обеспечивая
построение гелиоцентрической базовой системы отсчета на его бор-
116
ту в процессе движения по орбите перелета. Астрономическое
измерительное устройство в виде одной фотоэлектрической
следящей системы (за звездой) может использоваться в сочетании
с устройствами построения вертикали в качестве базы для
отсчета углов рыскания в орбитальных системах координат
(астрокомпас) .
Условия работы фотоследящих систем в космическом
пространстве и у поверхности Земли существенно различаются.
У поверхности Земли на работу фотоследящей системы влияет
освещенность фона (неба), вредные сигналы от освещенных
облаков и ярких тел, таких, как Солнце или Луна, находящихся
вблизи поля зрения. В дневных условиях пеленгование звезд у
поверхности Земли вследствие сильного фона неба чрезвычайно
затруднено. В космическом пространстве фон неба и освещенные
атмосферные облака отсутствуют, что существенно облегчает
работу фотоследящей системы.
Однако в космическом пространстве существенные помехи
работе астрономических средств оказывают солнечные лучи,
отражаемые элементами конструкции КЛА. Для уменьшения их
влияния могут применяться соответствующие защитные
приспособления типа бленд.
Фотоэлектрическую следящую систему рационально
использовать в качестве корректора уходов гироскопического
стабилизатора. Такое сочетание позволяет получить высокое качество
переходных процессов фотоследящей системы и длительную
память, необходимую при временном прекращении видимости
светил вследствие различных эволюции КЛА или других причин.
Фотоэлектрические системы современных авиационных астро-
ориентаторов и секстантов, следящие за звездами не слабее
третьей звездной величины, обладают погрешностями порядка
долей угловых минут. На КЛА условия работы фотоследящих
систем значительно лучше, чем на самолетах, поэтому при
должном повышении качества элементов конструкции можно ожидать
снижения погрешностей до единиц или долей единиц секунд
дуги.
В качестве примера практического построения
астрономических измерительных устройств рассмотрим устройство,
предназначенное для измерения направления на Солнце [60] и
состоящее из точного и грубого измерителей. Точный измеритель имеет
малый угол зрения и работает по принципу фотоследящей
системы. Грубый измеритель с большим углом поля зрения
предназначен для приближенного определения направления на
Солнце. Он жестко крепится на КЛА, и его выходное напряжение
пропорционально отклонению оси прибора от направления на
Солнце.
Точный измеритель (рис. 4. 16, а) состоит из оптической
системы, фотодетектора, калибровочной лампы и электронного
блока. Оптическая система, состоящая из телескопа с первичным
117
зеркалом, проектирует изображение солнечного диска на
детектор (рис. 4.16,6). Детектор, который располагается за
первичным зеркалом, состоит из трех кремниевых фотоэлементов Ф1,
Ф2, ФЗ с внутренним фотоэффектом. Каждый фотоэлемент
занимает сектор с углом 90° от центра детектора. Ток каждого
фотоэлемента / пропорционален падающему на него световому
потоку
/=&фф
Угол поля зрения
Рис. 4.16. Точный измеритель:
а—конструктивная схема точного измерителя:
/—солнечные элементы; 2—блок предварительных
усилителей; 3—калибровочная лампа; 4—детектор; 5—
электронный блок; 5—полупрозрачное зеркало; 7—пер-
вичное зеркало; 8—вторичное зеркало;
б—проекция изображения Солнца на детекторе (С—
Солнце; Ф1, Ф2, ФЗ—фотоэлементы)
(&Ф — крутизна характеристики фотоэлемента), а величина
светового потока Ф пропорциональна освещенной площади S
фотоэлемента и освещенности Ее, производимой Солнцем,
G>=EqS.
Следовательно, обозначая ki=k$Ec, можно записать
I=kiS.
Когда телескоп направлен точно в центр Солнца, освещенные
площади фотоэлементов равны Si=S2=S3 и, если фотоэлементы
имеют одинаковые характеристики, то
/1=/2=/3.
При отклонении оси телескопа от направления в центр
Солнца происходит смещение изображения солнечного диска
относительно центра детектора. В результате освещенные площади
фотоэлементов будут различны и появятся разности токов
Mx=Il-I2=ki(Sl-S2);
AIy=h — h=ki (S3 — S2),
118
ч
пропорциональные отклонению оси телескопа от направления в
центр Солнца. Сигналы ошибки А/* и А/у поступают в
соответствующие электромеханические следящие системы, которые
возвращают телескоп к положению нулевого сигнала.
Диск Солнца можно считать кругом с точностью 0,01". Так
как положение центра диска определяется выравниванием
освещенных площадей фотоэлементов, оптическая система не
нуждается в тщательной фокусировке.
Выше было принято, что фотоэлементы имеют одинаковые
характеристики, тогда как в
действительности крутизна характеристик
(&Фь &Ф2, £фз) может быть различна.
Кроме того, характеристики
фотоэлементов меняются со временем, а
также от изменения температуры.
Поэтому требуется периодическая
калибровка детекторов, которая может
производиться путем одинакового
освещения фотоэлементов специальным ^ „ ,_ т, л
Y у „ Рис. 4. 17. Изображения дис-
источником (например, неоновой лам- ка Солнца без £аски (в) и с
пой). Тогда Фы=Фл2=Фьз=Фл и раз- маской (б)
ности токов (сигналы) запишутся
в виде
Alxk = I\ — /2=Ф&(&ф1 — &ф2);
Alyk=h — h=Q>k (&фз — £ф2),
где Фк — световой поток, падающий на фотоэлемент при
калибровке.
Если полученные при калибровке сигналы использовать для
изменения сопротивлений в цепях соответствующих
фотоэлементов, то тем самым можно обеспечить идентичность их
характеристик. После этого сигналы, возникающие при работе
измерителя, могут использоваться для ориентации оси телескопа в
направлении на Солнце.
Поскольку в основе измерения отклонения оси телескопа
лежит изменение освещенных площадей фотоэлементов,
рассмотрим, как меняется освещенная площадь при малых отклонениях.
Обозначим освещенную площадь фотоэлемента при центральном
положении изображения солнечного диска на детекторе через
So, а изменение площади при малом отклонении оси телескопа
от центра Солнца через AS. В соответствии с рис. 4. 17, а можно
записать
&S=ic0±Ac)ARt
д>
где Со — длина окружности изображения; Ас — ее малое
приращение; /?д — радиус изображения солнечного диска; А/?д —
малое приращение.
119
Если Д/?д<#д, то AS<S0 и S=S0±AS очень трудно
измерить по сравнению с 50.
Применение криволинейной маски, закрывающей часть
сектора фотоэлемента (рис. 4. 17,6), позволяет получить
значительно большее относительное изменение Асу а следовательно, и AS.
В работе [60] показано, что таким путем можно получить
изменение площади в 5% при отклонении центра изображения на 3".
Грубый измеритель (рис. 4. 18) обладает большим углом зрения
Луча
Солнца
Рис. 4. 18. Конструктивная схема
грубого измерителя:
/—электронный блок; 2—прямоугольный
элемент оси Х\\ 3—калибровочная лампа; 4—
треугольный фотоэлемент оси х2; 5 —
солнечный экран; 6—солнечные элементы;
7—цилиндрические линзы; 8—треугольный фотоэлемент
оси Х\; 9—полупрозрачные зеркала;
10—прямоугольный фотоэлемент оси х2
Рис. 4. 19. Схема
оптической системы:
/—цилиндрическая линза; 2—
полупрозрачное зеркало; 3—
прямоугольный фотоэлемент
4—треугольный фотоэлемент
и имеет четыре фотоэлемента, размещенных в тени экрана,
имеющего вид усеченного конуса. Угол наклона конуса выбирается
из условия, чтобы фотоэлементы грубого измерителя полностью
попадали в тень в пределах угла зрения точного измерителя.
Оптическая система (рис. 4.19) имеет два одинаковых канала,
в каждом из которых находится цилиндрическая линза 19
направляющая солнечные лучи на полупрозрачное зеркало 2,
которое 50% светового потока пропускает на прямоугольный
фотоэлемент 3 и 50% отражает на треугольный элемент 4. Отношение
светового потока на этих фотоэлементах ФТр/Фпр характеризует
относительное положение Солнца по соответствующим осям.
Фирмой General Precision разработаны модели подобных
измерителей, которые имеют следующие основные характеристики.
1. Точный измеритель:
угол зрения 1°
расчетная точность 3"
диаметр первичного зеркала 12,2 мм
(светосила 1/6)
диаметр изображения солнечного диска на детекторе 2,54 мм
120
расстояние от детектора до первичного зеркала . . 25,4 мм
площадь фотоэлемента . 5 мм
спектральный диапазон 0,4—1,15 мкм
максимальная чувствительность на длине волны . . 0,8 мкм
диапазон рабочих температур от --65
до 4-1/0
2. Грубый измеритель:
угол зрения 30
расчетная точность lo
размеры линз 1X2 см
фокусное расстояние 5 см
габариты
диаметр 5и>° мм
длина Ю1,6 мм
масса 226'8 г
потребляемая мощность 400 Вт
На пилотируемых КЛА широко применяются оптические
визирные устройства. Они либо обеспечивают экипаж
информацией о приближенном направлении осей базовой системы
отсчета, либо используются экипажем для визирования наземных,
космических объектов или небесных светил. В последнем случае
астрономические измерения, выполняемые экипажем, использу-
Периферии-
мое поле ■—■ ■—■
Рис. 4. 20. Оптические схемы визира:
а—с линзовым экраном; б—без линзового экрана
121
flepucpepi/UHOe
поле
ются для коррекции гиростабилизированной платформы,
моделирующей инерциальную базовую систему отсчета.
Примером оптических визиров первого типа может служить
оптический ориентатор, который используется для ориентации
КЛА в орбитальной базовой системе отсчета. Оптические схемы
прибора приведены на рис. 4. 20, которые определяют два
режима работы:
— режим работы с линзовым экраном (рис. 4. 20, а);
— режим работы с рассеивающим экраном (рис. 4.20,6).
В первом случае достигается максимальное светопропускание.
Однако при этом для работы с прибором космонавт (точнее его
глаз), должен
располагаться в фокальной плоскости
АА'. Второй режим не
накладывает жестких
ограничений на положение
космонавта. Он может восприпи-
централь- мать информацию практиче-
ное поле Ски из любого положения
в области, ограниченной
характеристиками его зрения.
Прибор имеет два поля
зрения: периферийное и
центральное. Первое
воспринимает излучение
земной поверхности вблизи
горизонта, а второе — в лре-
делах небольшого телесного
угла относительно
оптической оси.
Изображение по периферийному каналу воспроизводится в
восьми круглых окнах, расположенных по периферии лицевой
части прибора (рис. 4.21). Если КЛА ориентирован по местной
вертикали, то линии горизонта во всех окнах располагаются по
центру. Отклонения от вертикали по крену и тангажу приводят
к смещениям этих линий в горизонтальном и вертикальном
направлениях соответственно. Прибор позволяет фиксировать
отклонения и их знак. Величина отклонений определяется сугубо
приближенно, так как градуировка отсутствует.
С помощью центрального поля космонавт может по углу
наклона линий «бега» земной поверхности относительно курсовой
черты определить угол между продольной осью КЛА и вектором
его путевой скорости. Здесь также определяется отклонение и
его знак.
Из вышеизложенного следует, что прибор моделирует
орбитальную базовую систему отсчета, которая может быть
классифицирована с помощью табл. 1.1 и 1.2 как система п=1,
т=2.
Периферийное
поле
Рис. 4.21. Лицевая часть оптического ви
зира
122
Если требуется ориентация в системах т=\ или т=3, то
максимальная ошибка (на экваторе) ориентации по углу
рыскания составит около 3°.
В качестве примеров оптических визирных устройств
второго типа рассмотрим приборы КЛА «Аполлон» [11].
Широкоугольный сканирующий телескоп базового корабля
имеет угол зрения 60° при единичной кратности увеличения.
Рис. 4.22.
Конструктивная схема
сканирующего телескопа:
/—поворотная призма;
2—оптический узел
Рис. 4.23.
Оптико-кинематическая схема секстанта:
/—разделитель луча;
2—неподвижные зеркала; 3—направляющее
зеркало; 4—привод оптической
системы; 5—привод направляющего
зеркала
Принцип действия телескопа иллюстрируется его упрощенной
схемой, приведенной на рис. 4. 22. Сканирование линии
визирования осуществляется поворотом призмы и вращением всего
оптического узла. Вращение оптического узла обеспечивает
поворот плоскости визирования и ее совмещение с направлением на
визируемый объект. Поворотом оси визирования достигается ее
совмещение с указанным направлением. При этом производятся
угловые измерения с точностью 4', которые снимаются с
датчиков углов поворота.
123
Для более точных измерений на базовом корабле
используется секстант, который имеет два визирующих луча с узким полем
зрения 1,8° при 28-кратном увеличении изображения.
Принцип действия секстанта иллюстрируется упрощенной
схемой, приведенной на рис. 4.23. Разделитель луча
(полупрозрачное зеркало) направляет один луч по оси оптической
системы, а второй луч перпендикулярно на неподвижные зеркала,
образующие прямой угол и изменяющие направление луча на
Рис 4. 24. Оптическая схема телескопа лунного корабля:
/—направляющая призма: 2—объектив; 3—первая фокальная плоскость; 4—диафрагма;
5— набор линз; 6—бериллиевое зеркало; 7—координатная сетка; 8—вторая фокальная
плоскость; 9—окуляр; 10—глаз наблюдателя
180°. Направляющее зеркало отражает этот луч под необходимым
углом к основному лучу. Этот угол может изменяться до 57°.
Указанные лучи образуют плоскость визирования, которая может
поворачиваться приводом оптической системы на 360°. Поворот
второго луча в этой плоскости производится приводом
направляющего зеркала.
При выполнении навигационных измерений определяется угол
между направлением на звезду и горизонтом (Земли или Луны)
или угол между направлением на звезду и на известный
ориентир на поверхности Земли или Луны. Измерение угла
производится совмещением изображений (горизонта и звезды или
ориентира и звезды) путем поворотов плоскости визирования
(оптической системы) и подвижного луча (вращение направляющего
зеркала). При этом центральные линии полей зрения обоих лучей
совмещаются с направлениями на визируемые объекты, а
соответствующие датчики отсчитывают искомые углы.
Телескоп лунного корабля имеет поле зрения 60° при
9-кратном увеличении. Принцип действия телескопа иллюстрируется
оптической схемой, приведенной на рис. 4. 24. Световой сигнал
от звезды через объектив, набор линз и зеркало поступает на
координатную сетку, наблюдаемую через окуляр. Космонавт
поворотом сетки помещает изображение звезды между смежными
124
радиальными линиями. После этого угловые координаты звезды
считываются цифровым счетчиком и поступают в вычислитель.
Телескоп имеет габариты 880X320X185 мм и массу 11,3 кг.
4.5. Радиотехнические и ионные
измерительные устройства
Для определения местной вертикали на борту КЛА наряду
с инфракрасными могут применяться радиотехнические
измерительные устройства. В последних используется метод активной
радиолокации. Поэтому нет необходимости в визировании
горизонта планеты. Достаточно визирования нескольких точек ее
поверхности. Рассмотрим два возможных
способа построения вертикали
радиолокационным методом.
1. Четырехлучевое устройство
основано на измерении дальности до земной
поверхности в четырех направлениях,
составляющих постоянный угол с
плоскостью, перпендикулярной к
направлению приборной вертикали. Измерения
производятся в двух взаимно
перпендикулярных плоскостях. Принцип действия
устройства в одной из плоскостей
иллюстрируется схемой на рис. 4.25.
Разность AL дальности Lu
измеренной по радиолучу 1, и дальности L2,
измеренной по радиолучу 2, является
мерой угла а отклонения приборной
вертикали ООг от местной
вертикали. На основании рис. 4.25
имеем
Рис. 4.25. Схема работы
четырех лучевого
устройства (О — центр масс
КЛА; OOi—местная
вертикаль; ООг —
приборная вертикаль):
/, 2—радиолучи
M=L1-L2=2H
jsin a cos 3
[sin(a + p)][sin(p — a)]'
где Н — высота полета КЛА;
a — угол между приборной и местной вертикалями.
Обозначая #/sinf$=L0 — дальность до земной поверхности
по лучам 1 и 2 при а=0 и полагая а малым, в первом
приближении получим
a=(0f5tgP)-^-.
(4.23)
Следовательно, при малых отклонениях от вертикали угол a
пропорционален разности измеренных дальностей. Формула
(4. 23) может быть использована для градуировки индикатора
вертикали.
2. Устройство с коническим сканированием основано на
вращении сканирующего луча вокруг приборной вертикали под
постоянным углом. В результате луч описывает в пространстве
конус. При отклонении приборной вертикали от направления
местной вертикали измеряемая дальность будет изменяться от
минимальной Lmin ДО
максимальной Imax. ОчеВИДНО, ЧТО ТОЧКИ
земной поверхности а и а\
соответствующие этим дальностям
(рис. 4.26), лежат в плоскости
отклонения.
Сигнал дальномера в
процессе сканирования будет иметь
колебательный характер (рис.
4.27). При малых углах а эти
колебания будут близки к
гармоническим, а их амплитуда
пропорциональна разности
Д L = Lmax—^0 — Lq—L\
Рис. 4. 26. Схема работы
устройства с коническим сканированием:
О—центр масс КЛА; OOi—местная
вертикаль: ООг—приборная вертикаль; Л—
вращающийся луч
mln.
Используя геометрические
соотношения из рис. 4.26 для
малых а, находим
AL=(L0ctgP)a. (4.24)
Следовательно, амплитуда колебаний выходного сигнала
дальномера пропорциональна углу отклонения приборной вертикали
относительно местной вертикали. По фазе минимального (или
максимального) сигнала относительно некоторого опорного
направления можно определить положение плоскости отклонения
на борту КЛА. При необходимости можно определить
отклонения в связанной системе координат по формулам
ai~acosi|j; a2~asin\|),
I
Y
1
X AL
/ fc
2
yS* ^
7Г Текущйуг
вращения луча
Рис. 4. 27. Характер изменения сигнала дальномера
126
где си — отклонение в плоскости, проходящей через опорное
направление (например, угол тангажа);
ct2 — отклонение в перпендикулярной плоскости (угол
крена).
Подставляя в эти формулы равенство (4.24), находим
AL
<*i = (tgpCOS<}))_;
a2=(tgf*sin<],)-^.
(4.25)
Рис. 4.28. Схема работы ионного
измерительного устройства:
Л 2— ионные ловушки
Если угловая скорость сканирования значительно превышает
угловые скорости КЛА, то за один цикл сканирования угол \|)
практически не изменится. В результате, как видно из формул
(4.25), углы отклонения приборной вертикали
пропорциональны измеренной амплитуде
изменения дальности. Они также, Ъ\^\
как и формула (4.23), могут jO>\fi
быть использованы для градуи- д«
ровки индикатора вертикали. ^-^Г^ 17п~1 **V
Аналогично инфракрасным
измерительным устройствам
радиотехнические измерители
вертикали обладают методическими
ошибками, которые обусловлены
несферичностью Земли и
неровностью ее поверхности. Для вычисления этих ошибок могут быть
использованы соответствующие формулы разд. 4.4.
Единственная особенность, которую при этом нужно учитывать при оценке
влияния неровности поверхности, состоит в том, что
инфракрасные устройства визируют горизонт Земли, а радиотехнические
устройства измеряют дальности до точек земной поверхности,
значительно удаленных от горизонта. Поэтому необходимо
высоты, входящие в законы распределения вероятностей (4.20),
связать с ошибками определения дальностей, что не представляет
принципиальных затруднений.
При полете КЛА в пределах ионосферных слоев для
определения направления вектора скорости относительно продольной
оси можно использовать ионные измерительные устройства.
Чувствительными элементами подобных устройств являются две
пары ионных ловушек в двух взаимно перпендикулярных
плоскостях.
Принцип действия устройства в одной плоскости
иллюстрируется схемой на рис. 4.28.
Каждая ловушка располагается под углом относительно
продольной оси КЛА. Если предположить, что скорость
теплового движения ионов пренебрежимо мала по сравнению
127
со скоростью КЛА, то потоки ионов, попадающие в ловушки
1 и 2, определяются формулами
/i=AiHeHV^iCOs(p — a);
J2=n1/[enVSJl2cos(^ + a);
где пи — концентрация ионов;
еи — заряд иона;
5Л1 и Sn2 — площади ловушек.
Разность потоков лри 5Л1=5л2=5л определятся формулой
ДУ=У1 — J2=2nHellVSJl sin psina.
При малых а и р=30° получим
Д/—(яиеи^л)а.
Следовательно, разность потоков и соответствующий
выходной электрический сигнал
Ди=£(лиеиУ5л)а. (4.26)
где k — коэффициент усиления усилителя.
Если выходные сигналы ионных ловушек перед сравнением
усиливаются логарифмическими усилителями, то выходной
сигнал устройства имеет вид
, « cos (8 — a)
cos(p + a)
При малых углах а и (3=30° получим
Aw^0,5fca. (4.27)
Сравнивая выражения (4.26) и (4.27), замечаем, что последний
способ преобразования сигналов ионных ловушек более
предпочтителен, так как выходной сигнал не зависит от плотности
ионного потока, скорости полета и площади ловушек.
Однако это положение строго справедливо при одинаковых
коэффициентах усиления логарифмических усилителей. В
действительности такая зависимость будет иметь место, хотя и в
меньшей степени, чем в первом случае. Это определяет
сравнительно невысокую точность ионных измерительных устройств.
ГЛАВА V. УСИЛИТЕЛЬНО-ПРЕОБРАЗУЮЩИЕ
УСТРОЙСТВА
Рассмотренные в предыдущей главе измерительные
устройства позволяют определить параметры, характеризующие угловое
положение, скорость и ускорение КЛА в инерциальном
пространстве. С помощью датчиков (потенциометрических, индукционных
128
и др.) эти параметры преобразуются в электрические сигналы.
Перед подачей на исполнительные органы управляющих
устройств, создающих необходимые моменты, сигналы с
датчиков измерительных устройств, как правило, усиливаются и
преобразуются в соответствии с принятым алгоритмом (законом)
управления.
Наличие нескольких различных режимов управления
современных КЛА, осуществляемых по различным алгоритмам,
потребовало решения логических задач, обеспечивающих переход от
одного режима к другому. Это достигается применением
устройств, выполняющих различного рода логические операции.
Усилительно-преобразующие устройства должны иметь
малые габариты и массу, отвечать требованиям высокой
надежности и работать при значительных изменениях температуры,
перегрузок и т. п.
Возросшие требования к точности управления, увеличение
объема и сложности задач по преобразованию сигналов
датчиков обусловили применение цифровых вычислительных машин в
системах управления. Цифровые вычислительные машины
позволяют, кроме того, осуществлять функциональные преобразования
сигналов измерителей, выполнять логические операции и
формировать командные сигналы. Бортовые цифровые вычислительные
машины становятся центральной частью систем управления
современных и перспективных КЛА.
5.1. Усилительные устройства
Для усиления электрических сигналов в системах управления
КЛА применяются релейные, магнитные и полупроводниковые
усилители.
Релейные усилители наиболее просты и удобны в
эксплуатации, имеют малый вес и габариты. В связи с тем, что
контактные релейные усилители обладают недостаточной надежностью и
ограниченным сроком службы в последнее время большое
внимание уделяется разработке малогабаритных, экономичных
бесконтактных релейных усилителей с использованием
ферромагнитных материалов и полупроводников.
Магнитные и полупроводниковые усилители наиболее полно
отвечают требованиям, предъявляемым к элементам систем
управления КЛА. Они долговечны и надежны, мало чувствительны
к перегрузкам и вибрациям, просты в изготовлении, всегда
готовы к действию и обладают высоким коэффициентом усиления.
Применение высококачественных магнитных материалов
позволяет уменьшить габариты и массу магнитного усилителя, а его
инерционность может быть существенно уменьшена повышением
частоты питания, введением внешних и внутренних связей, а
также его использованием совместно с электронным и
полупроводниковыми усилителями.
5 991
129
Магнитные усилители относятся к классу параметрических
усилителей. Нелинейными элементами в магнитных усилителях
являются дроссели с насыщающимися сердечниками. Энергия
электрического выходного сигнала получается за счет энергии
источника питания переменного тока, а управление выходным
сигналом осуществляется путем намагничивания дросселей ам-
первитками управляющих обмоток.
Рис. 5. 1. Схемы однотактных магнит- Рис. 5.2. Схема маг-
иых усилителей без обратной связи с нитного усилителя с
последовательным (а) и параллель- обратной связью по
ным (б) включением нагрузки току (w0. с—допол
нительная обмотка
обратной связи; В1,
В2 — выпрямители)
На рис. 5.1 приведены схемы так называемого однотактного
магнитного усилителя без обратной связи. Сопротивление
нагрузки может быть включено как последовательно с рабочей
обмоткой, так и параллельно. В последнем случае для
поддержания постоянства тока питания 1\ последовательно с рабочей
обмоткой включается большое балластное сопротивление Re.
Усиливаемый ток /у уменьшает индуктивность обмоток w~, что
вызывает уменьшение тока /н в параллельно включенной
нагрузке^.
Схемы с параллельным включением нагрузки применяются
редко, так как вследствие потерь на балластном сопротивлении
/?б коэффициент полезного действия усилителя уменьшается,
а наличие в выходной цепи короткозамкнутого контура
вызывает увеличение инерционности (постоянной времени).
Для улучшения характеристик в магнитных усилителях
широко применяются внешние и внутренние обратные связи. На
рис. 5. 2 приведена схема магнитного усилителя с обратной свя-
130
зью по току. Выпрямленный ток цепи нагрузки подается в до-
полнительную обмотку w0. с для создания дополнительного
магнитного поля, усиливающего поле сигнала. Характеристики
такого усилителя при различных коэффициентах обратной связи
k0.c=w0.clw~ показаны на рис. 5.3. Для смещения
характеристики усилителя используется постоянный ток /см, получаемый от
выпрямителя В2 (см. рис. 5.2). Наибольшее применение полу-
Рис. 5. 3. Характеристики Рис 5. 4. Схема двухтактного магнит-
магнитного усилителя с об- ного усилителя
ратной связью по tokv пои
различных коэффициентах
обратной связи
чила положительная связь по току. При k0. C>1 магнитный
усилитель превращается в бесконтактное реле с петлеобразной
(релейной) характеристикой. Из характеристик, приведенных на
рис. 5.3, видно, что изменением коэффициента обратной связи
можно управлять током нагрузки магнитного усилителя. Это
обстоятельство используется при разработке быстродействующих
магнитных усилителей с минимальной инерционностью.
Двухтактные магнитные усилители (рис. 5. 4) представляют
собой два дифференциально включенных однотактных
усилителя. Увеличение тока 1г в плече одного усилителя
сопровождается уменьшением тока в плече другого. При изменении
полярности управляющего сигнала фаза выходного напряжения
меняется на 180°. Наряду с дифференциальной схемой применяются
также мостовая и трансформаторная схемы двухтактных
усилителей.
Магнитные усилители используются также для
преобразования управляющего сигнала постоянного тока в сигнал
переменного тока с целью дальнейшего усиления при помощи последнего
5* 131
электронных или полупроводниковых усилителей переменного
тока. Такие магнитные усилители называются модуляторами.
Полупроводниковые усилители. Полупроводниковые триоды
(транзисторы) широко применяются в
усилительно-преобразовательных устройствах.
Коэффициент усиления одного каскада на транзисторе (тюлу-
проводниковом триоде) обычно не превышает 30—40 дБ, а в
некоторых случаях оно снижается до 10—20 дБ. Зачастую
требуется значительно большее усиление, что вынуждает прибегать к
многокаскадным схемам усилителей, общее усиление которых
равно произведению коэффициентов усиления всех каскадов:
В случаях, когда выходная мощность усилителя превышаег
5—10% мощности, расходуемой на питание последнего (выход:
ного или оконечного) каскада, этот каскад называют мощным
усилителем, а все предшествующие каскады, в которых мощность
сигнала пренебрежимо мала по сравнению с мощностью
расходуемой на их питание, объединяют под общим названием
предварительного усилителя.
Экономичность питания усилителя часто зависит в основном
от экономичности мощного оконечного каскада, в связи с чем в
этом каскаде широко применяются двухтактные схемы. При
этом к предшествующему каскаду могут предъявляться
специфические требования: либо он должен осуществлять переход от
однотактной схемы усиления к двухтактной, либо развивать
значительную мощность, либо осуществлять требуемое соотношение
между выходным сопротивлением предварительного усилителя
и нелинейным входным сопротивлением оконечного каскада.
В этих случаях предпоследний каскад называют предоконечным.
Мощным средством достижения высоких качественных
показателей усилительных устройств является отрицательная
обратная связь. Ее широко применяют для снижения нелинейных
искажений, стабилизации коэффициента усиления, расширения
полосы усиливаемых частот, понижения выходного сопротивления
и повышения входного сопротивления, снижения фона. Кроме
того, регулирование глубины обратной связи позволяет
осуществлять регулирование коэффициента усиления, частотной
характеристики и динамического диапазона, причем это регулирование
сопровождается изменением других качественных показателей
усилителя. Значительно реже используются положительные
обратные связи, позволяющие повышать усиление, обострять
частотные характеристики избирательных усилителей, поскольку
положительная обратная связь оказывает дестабилизирующее
влияние.
Мощный транзисторный усилитель (рис. 5. 5) имеет к. п. д.,
достигающий 45%. В нем обычно применяется
трансформаторная связь с нагрузкой, включается транзистор по схеме с общим
132
эмиттером (рис. 5.5, а). В схеме с общей базой (рис. 5.5,6)
максимальная отдаваемая транзистором мощность практически
такая же, но коэффициент усиления ниже и мало выходное
сопротивление транзистора, так что почти неизбежно применение
второго, входного транзистора. Зато в схеме с общей базой меньше
нелинейные искажения.
yLBb/xod
Рис. 5.5. Схема мощного транзисторного
усилителя (Ек — напряжение на коллекторе)
Схема двухтактного каскада с последовательным
включением транзисторов (рис. 5. 6, а) позволяет обойтись без выходного
транзистора. Избавиться от необходимости иметь отвод от
средней точки источника питания позволяет схема с включением
нагрузочного сопротивления через разделительный конденсатор Ср
(рис. 5.6, б).
Ряд схем двухтактных усилителей, не требующих применения
трансформаторов, основан на использовании транзисторов с
дополнительной симметрией, т. е. сочетаний структур р — п — р и
*-2Ь
Выход
Рис. 5.6. Схема двухтактного усилителя с
последовательным включением транзисторов (£к — напряжение на
коллекторе)
п — р — п. Ценным свойством этих схем является возможность
применения непосредственной связи между транзисторами, что
позволяет использовать их в качестве усилителей постоянного
тока, уменьшить частотные и нелинейные искажения, сократить
количество деталей, повысить экономичность.
133
Практическое осуществление различного рода схем
бесконтактного переключения стало возможным лишь благодаря
использованию характерных особенностей полупроводников.
Полупроводниковый триод (транзистор), работающий в режиме
переключения, обладает следующей характерной особенностью:
рассеиваемая <в ней мощность весьма мала как в режиме отсечки
(ток коллектора близок к нулю), так и в режиме насыщения
(напряжение коллектор — эмиттер близко к нулю). Если переход
из одного режима в другой происходит достаточно быстро,
средняя мощность, рассеиваемая в триоае,
остается малой (в десятки раз меньше
мощности в нагрузке). Такой
импульсный режим работы триодов применяется
'^в мощных оконечных каскадах
усилителей для управления электродвигателем
постоянного тока, применяемым для
привода маховиков в системе управления
КЛА.
В качестве примера рассмотрим авто-
• колебательный релаксатор (мультивиб-
Рис. 5.7. Схема автоко- ратор), -схема которого приведена на
лебательного релаксато- рис. 5.7. Так как в данном случае связь
ра (мультивибратора) между триодами емкостная, ни один из
них не может находиться в запертом
состоянии в течение неограниченного времени. Поэтому
приведенная схема не имеет состояния устойчивого равновесия.
Предположим, что ток триода Т2 (рис. 5. 7) вследствие флюктуации
несколько увеличился. При этом уменьшится напряжение на его
коллекторе, что вызовет практически такое же уменьшение
потенциала базы триода Т1. Это приведет к уменьшению тока триода
Т1 и возрастанию напряжения на его коллекторе. В результате
потенциал базы триода Т2 повысится, а ток, протекающий через
него, дополнительно возрастет. Следовательно, случайная
флюктуация тока любого из триодов (в данном случае Т2) имеет
тенденцию нарастать. В конечном счете триод Т2 будет открыт»
а триод Т1 заперт. Это состояние также неустойчиво, так как по
мере зарядки конденсатора С1 через сопротивление R и триод
Т2 наступает такой момент, когда напряжение на базе Т1
соответствует отпиранию этого триода. Отпирание триода Т1, как
показано выше, сразу же приведет к запиранию триода Т2 и т. д.
Таким образом, приведенная схема находится в
автоколебательном режиме, генерируя последовательность прямоугольных
импульсов.
На рис. 5.8 приведены графики изменения напряжений на
коллекторе UK и базе Uq одного из триодов. Графики для
второго триода аналогичны, различие состоит лишь в том, что когда
один триод открыт, другой — заперт.
Широкое применение полупроводниковые диоды и триоды на-
134
ходят в бесконтактных релейных элементах, основное отличие
которых от обычных контактных реле состоит в том, что они
имеют много входов и один выход, а контактные реле обычно,
наоборот, один вход и много выходов. Эта особенность бесконтактных
полупроводниковых приборов релейного типа обусловила их при-
менение в разного рода логических схемах, которые будут
рассмотрены ниже.
«
ttl
П_ПА
щ
Рис. 5.8. Графики
изменения нагюяжений в
мультивибраторе
Рис. 5.9. Бесконтактная триггерная
схема
Рассмотрим в качестве примера бесконтактную триггерную
схему, которая воспроизводит работу самоблокирующего
контактного реле (рис. 5.9). Как известно, триггер имеет два
устойчивых состояния. Переход из одного устойчивого состояния в
другое вызывается управляющим сигналом. Предположим, что
триод Т2 проводит ток. Следовательно, на выходе Ах имеется
напряжение, определяемое потенциалом точки N (напряжение
питания), а на выходе А2 напряжение отсутствует (потенциал
точки А\ равен потенциалу точки Ni). При подаче на вход
импульса напряжения схема опрокинется, т. е. триод Т1 будет
открыт, а триод Т2 заперт. Потенциал точки Ах станет равным
потенциалу точки Nu а потенциал точки Л2 — потенциалу точки N2.
Следовательно, напряжение на выходе Ai будет равно нулю, а на
выходе Л2 появится напряжение, равное напряжению питания.
5.2. Счетно-решающее устройство
Закон управления обычно представляет собой сумму
сигналов, пропорциональных регулируемой величине, производным и
интегралу от нее. Поэтому при формировании закона
управления возникает необходимость выполнения определенных
математических операций над сигналами, поступающими с датчиков
измерительных устройств. Для этой цели в системы управления
включаются специальные счетно-решающие устройства
непрерывного или дискретного действия.
135
Основными элементами наиболее распространенных
линейных счетно-решающих устройств являются сумматоры,
интеграторы и дифференциаторы.
Наиболее простой способ суммирования состоит в том, что
сигнал (напряжение £Л) с каждого датчика подается на общее
сопротивление Ro через добавочные сопротивления Ri (/=1, 2,
3...) и R, включенные в цепи отдельных датчиков Д. На рис. 5. 10
приведены схемы суммирования трех сигналов с параллельным
(а) и последовательным (б) включениями датчиков.
б)
Рис. 5. 10. Сумматор напряжений с параллельным
(а) и последовательным (б) включениями датчиков
Обозначая через У0, Yiy Yn..., У* проводимости общего и
добавочного сопротивлений, запишем основное соотношение,
связывающее напряжение на выходе сумматора с напряжениями
(сигналами) датчиков, в виде
N
ивы*= '-' N • (5.1)
/-1
Добавочные сопротивления уменьшают ток, проходящий через
общее сопротивление и датчик, что нередко спрямляет выходную
характеристику датчика и уменьшает потребление электрической
энергии. Изменением этих сопротивлений можно регулировать
величину сигнала, подаваемого с датчика на общее
сопротивление, и обеспечить настройку системы управления. Кроме того,
добавочные сопротивления уменьшают связь между датчиками,
что особенно важно в случае, когда внутреннее сопротивление
самого датчика (например, потенциометрического) существенна
изменяется в процессе работы.
Для получения разности или суммы напряжений можно
использовать также дифференциальные (двухтактные,
транзисторные и магнитные) усилители. При этом достаточно иметь
несколько входных обмоток, включенных при суммировании
согласно и при вычитании — встречно.
136
Одна из возможных схем электромеханического интегратора
показана на рис. 5. И. По принципу действия интегратор
является замкнутой системой автоматического регулирования, что
позволяет существенно уменьшить погрешности интегрирования.
Напряжение с тахогенератора точно компенсирует входное
напряжение. В результате скорость вращения пропорциональна
£/вх, а выходное напряжение пропорционально углу поворота
движка потенциометра 5,
т. е. интегралу от входного
напряжения.
Передаточная функция
интегратора имеет вид
Ц*ых(Р)
'ЧГш(Р)-
^вх (Р) Р
(5.2)
Здесь ku — передаточный
коэффициент интегратора;
Wn(p) — передаточная
функция, определяющая
динамические погрешности
интегратора, имеющая
следующую структуру:
U6d/x
Рис. 5. 11. Схема электромеханического
интегратора:
/—двигатель; 2—тахогенератор; 3—усилитель;
4—редуктор; 5—потенциометр
wr.(/>)=
*2(Г2/>-М)
/?2 + 2£ч/? -f *2
(5.3)
где
х — собственная частота, зависящая от статических и
динамических характеристик двигателя и тахогенератора;
Т2 — постоянная времени тахогенератора.
С улучшением динамических свойств двигателя и
тахогенератора (с уменьшением их постоянных времени) передаточная
функция (5. 3) приближается к единице, а выражение (5.2)
можно записать в виде
^ вых (Р)
^вх (Р)
(5.4)
Формула (5. 4) определяет передаточную функцию
идеального интегрирующего звена. В качестве дифференциаторов широко
применяются электрические корректирующие контуры.
Принципиальная схема простейшего дифференцирующего контура
приведена на рис. 5.12. Она имеет следующую передаточную
функцию:
м{р)=-Ц-,
Тр + 1
(5.5)
где T=RC — постоянная времени.
137
При формировании закона управления по сигналу и
производной применяется корректирующий контур (рис. 5. 12, б),
передаточная функция которого имеет вид
Wlp)^- Uw^pi) — TP+l
где
V*l(P)
T=R2C; kx-
4f'+1)
(5.6)
#2
/?l
Чем больше значение ku тем в более широком диапазоне ча-
т
стот можно пренебречь в знаменателе членом р по сравнению
к\
с единицей и, следовательно, с большой точностью
воспроизвести на выходе контура заданный закон управления.
Г
Увых Vox
9—1—CZD
t RZ
R1
ивых
i
-i
6)
Рис. 5.12. Дифференцирующие
контуры:
а—простой дифференцирующий контур;
б—контур для формирования сигнала,
пропорционального входному напряжению
и производной от него
11
Uex
и
ш.
"7
Uбык
Л
Рис. 5. 13. Эквивалентная
схема корректирующего
контура
Учитывая высокие качества корректирующих контуров
(надежность, долговечность, простота и т. д.), проанализируем более
подробно те погрешности, которые вносят параметры этих
контуров при выполнении операций интегрирования и
дифференцирования. Для этой цели рассмотрим обобщенную электрическую
цепь, показанную на рис. 5. 13, где через Z\(p) и Z2(p)
обозначены полные сопротивления цепи и через ZH(p) —полное
сопротивление нагрузки.
Выражение для передаточной функции данной цепи может
быть записано в виде
W(p)=
^вых (Р)
У\{р)
U»Ap)
ГаС/фч-
у\(р)Уи(р).Х
Г*0>)
где Yx{p)-.
1 ; Уг(р)=^т-:\ у.(р>
1
Z\(P) Z2(p)
ные проводимости цепи нагрузки.
138
ZAP)
(5.7)
— оператор-
Если в рабочем диапазоне изменения частот <о входного
сигнала проводимости цепи и нагрузки удовлетворяют условию
ПСМ + ГнО»)
то из (5. 7) получим
Если принять
Г2(»
«1.
U.
У\(Р)
У2(р)
LL
(5.8)
(5.9)
УЛР) = тг* Y^P)=C^ Кн=^-,
А1 АН
го схема на рис. 5. 12 сводится к интегрирующему контуру и при
выполнении условия
1 1
R\ + R*
>С
«1
(5.10)
получим
ил
ТР
где T=RiC\ — постоянная времени контура.
Для выполнения условия (5.11) необходимо выбирать
постоянные времени контура Т и нагрузки Tn=RnCi по
возможности большими.
Погрешность интегрирования (или дифференцирования)
можно определить как разность между текущими значениями
выходного напряжения в идеальном £/ВЫх.ид и реальном UBblx(p)
контурах.
На основании выражений (5.7) и (5. 9) имеем
^выЛР)--
У\(р)
Уо(р)
"М-
У\(р)
1
У2(Р)
1 +
У\{р)±УАр)
У2{Р)
Тогда с учетом условия (5. 10) находим
■ил(р).
(5.11)
Л^)^'^^^^
Полученное выражение определяет изображение абсолютной
погрешности счетно-решающего элемента типа пассивного
электрического контура. В случае интегрирующего контура для
входного напряжения в виде ступенчатой функции переход к
оригиналу при нулевых начальных условиях дает
Д'Лых(/>):
1
RiR«
R\+R*
~и«м-
139
Отсюда следует, что абсолютная погрешность при ступенчатом
входном сигнале растет с увеличением времени интегрирования^
уменьшением постоянной времени цепи и сопротивления
нагрузки.
Увеличение постоянной времени цепи желательно с точки
зрения уменьшения погрешности. Однако при этом уменьшаете»
выходное напряжение. Это противоречие можно устранить
включением усилителя с большим коэффициентом усиления
последовательно с рассмотренным контуром.
5.3. Логические устройства
В задачу счетно-решающих устройств входит также
выполнение различных логических операций. Рассмотрим некоторые
примеры технической реализации логических функций типа «ИЛИ»„
«И», «НЕ».
Схема типа «ИЛИ» представляет собой смеситель, который
позволяет подключить к общей нагрузке некоторое количестве?
Рис. 5.14. Диодная схема типа Рис. 5. 15. Схема типа «ИЛИ»
«ИЛИ» на транзисторах
источников напряжения (импульсов) одинаковой полярности. На
рис. 5. 14 приведена схема такого типа на трех диодах. Если на
один из входов схемы, например 1, подается отрицательный им-
пульс Uu диод Д1 отпирается и на выходе также появляется:
отрицательный импульс. Если сопротивление нагрузки
значительно больше выходного сопротивления датчика входного сигнала
(в данном случае /?Вых i) и сопротивлением диода можно
пренебречь, то амплитуды выходного и входного импульсов можно
считать равными. При этом остальные диоды получают
отрицательное смещение и влиянием сопротивлений других датчиков
можно пренебречь (соответствующие ветви можно считать
разомкнутыми). При одновременной подаче сигналов на несколько
входов амплитуда выходного импульса будет равна наибольшей
из амплитуд входных импульсов. Для работы схемы с
положительными импульсами достаточно изменить полярность
включения диодов.
140
Схема типа «ИЛИ» на трех транзисторах приведена на
рис. 5. 15. При отсутствии входных сигналов напряжения на
базах поддерживаются на уровне, обеспечивающем работу триодов
в области отсечки (сопротивление коллектор — эмиттер велико),
и выходное напряжение практически равно нулю.
Положительный сигнал на базе одного из триодов (например Ui) открывает
соответствующий триод (сопротивление коллектор — эмиттер
становится близким к нулю) и выходное напряжение становится
примерно равным напряжению питания (£/вых~£А)). Одним из
достоинств таких схем является способность полупроводниковых
гриодов работать при очень малых питающих напряжениях
(1,5 В). Максимальное число полупроводниковых триодов в
схеме на рис. 5. 26 ограничивается в основном током утечки
(сопротивлением коллектор — эмиттер в состоянии «Выключено»).
При большом токе утечки разность уровней выходного
напряжения может оказаться недостаточной для срабатывания
устройства.
Схема типа «И» является схемой совпадения. Она имеет два
или больше входов, на которые подаются сигналы одинаковой
полярности, и один выход. Выходной сигнал появляется только
тогда, когда сигналы подаются на все входы одновременно.
Описанные выше схемы типа «ИЛИ» можно преобразовать в схемы
типа «И». Для этого необходимо, чтобы при отсутствии входных
сигналов диоды (или триоды) были открыты (проводили ток) и
входные сигналы обеспечивали бы их запирание. Следовательно,
длительность выходного импульса определяется временем
перекрытия входных импульсов, т. е. временем, в течение которого
все входы находятся под напряжением.
На рис. 5. 16 показана схема типа «И» на трех диодах
положительных входных импульсов. При отсутствии входных сигналов
все диоды открыты. Будем считать, что выходные сопротивления
датчиков сигналов равны нулю и диод ДО отсутствует. Тогда
^вых=0. При одновременной подаче на все входы
положительных импульсов с амплитудой, равной Ua или большей, диоды
запираются и на выходе появится импульс с амплитудой £/а. Если
хотя бы на один вход не буден подан импульс, соответствующий
диод будет открыт и выходное напряжение будет по-прежнему
равно нулю. Если некоторые входные напряжения меньше £/а, то
амплитуда выходного напряжения будет равна наименьшей
амплитуде входного импульса, так как при увеличении выходного
напряжения до величины наименьшего входного сигнала
соответствующий диод откроется и выходное напряжение после этого
упадет до нуля.
В реальной схеме (ЯвыхФО) и при отсутствии полного
совпадения может появиться выходной импульс (при закрытии
одного или нескольких диодов). При условии </?вых<-/? величина
этого импульса много меньше импульса, соответствующего полному
совпадению, однако в схеме типа «И» даже такой импульс часто
141
является нежелательным. Для его устранения включают диод
ДО, на который подается опорное напряжение Uou. Пока все
диоды не будут заперты, выходное напряжение будет всегда
поддерживаться на уровне Uou. При одновременном запирании всех
диодов будет заперт и диод ДО, причем ивых=и&.
fybfX7 Д1
Рис. 5. 16. Диодная
типа «И»
схема
и,*
Рис. 5. 17. Схема
типа «И» на
транзисторах
Схема типа «И» на трех транзисторах представлена на
рис. 5. 17. При отсутствии входных сигналов выходное
напряжение равно нулю, и только при одновременной подаче импульсов
на базы трех триодов выходное напряжение становится равным
напряжению питания.
Схемой типа «НЕ» называется инверторная схема (рис. 5. 18),
изменяющая полярность импульса и имеющая только два
устойчивых состояния.
otzi\ пл
с
о
и6ых
JL 1
ITHJIL-J^
Рис. 5. 18. Схема типа «НЕ»
Основным элементом схемы является инвертирующий
импульсный трансформатор Тр. При отсутствии входных импульсов
диод Д закрыт, так как на его катоде имеется положительное
напряжение U0. После зарядки емкости С до напряжения UQ по
цепи RC — вторичная обмотка трансформатора диод будет
находиться под нулевым напряжением. При этом сигнал на выходе
схемы будет UBhLX=U0. Входной импульс откроет диод, емкость
быстро разрядится и выходное напряжение упадет до нуля. По
окончании входного импульса диод закроется и выходное
напряжение после зарядки емкости снова станет равным UQ.
142
ГЛАВА VI. УПРАВЛЯЮЩИЕ УСТРОЙСТВА
Для ориентации и стабилизации КЛА в качестве
управляющих устройств, применяются двигательные установки,
создающие управляющие внешние и внутренние моменты относительно
соответствующих осей аппарата. К таким установкам относятся
малогабаритные реактивные двигатели, двигатели-маховики,
силовые гироскопические устройства и моментныи магнитопривод.
Реактивные двигатели создают управляющий момент за счет
реакции струи газов, истекающих из сопла, ось которого
располагается на некотором удалении (плече) относительно центра
масс КЛА. Для получения возможно большего момента сопла
располагаются либо на поверхности КЛА, либо выносятся на
специальных штангах за его пределы.
Двигатели-маховики и силовые гироскопические устройства
создают управляющий момент за счет изменения момента
количества движения маховиков или гироскопов, вращающихся
внутри КЛА. Применение подобных управляющих устройств
возможно лишь в условиях космического полета.
Принципиально новым управляющим устройством, появление
которого связано с развитием техники космических полетов,
является моментныи магнитопривод, который создает управляющий
момент за счет взаимодействия геомагнитного поля со
специально созданным внутри КЛА магнитным полем. Последнее может
создаваться электромагнитами или постоянными магнитами,
установленными на КЛА.
Таким образом, управляющие устройства, использующие
реактивные двигатели и моментныи магнитопривод создают
внешний момент. Двигатели-маховики и гироскопические устройства
создают внутренний момент.
6.1. Реактивные двигатели
Для управления вращательными движениями КЛА
применяются специальные малогабаритные двигательные установки
сравнительно малой тяги. Они получили название двигателей
ориентации. Эти двигатели принято делить на три группы:
1) жидкостно-реактивные двигатели обычного типа;
2) однокомпонентные двигатели;
3) струйные (газовые) сопла.
Двигатели первой группы применяются на тяжелых КЛА,
когда требуется тяга свыше 50 кгс. Одновременно эти двигатели
могут применяться для точного координированного управления
движением центра масс на конечном участке сближения
(причаливании) двух КЛА или для обеспечения мягкой посадки на
поверхность Луны. В последнем случае создается система
двигателей, позволяющая управлять шестью степенями свободы КЛА.
Для этого достаточно иметь 12 двигателей — по 4 двигателя в
143
каждой координатной плоскости (рис. 6. 1), которые
обеспечивают создание положительных или отрицательных моментов
вокруг оси xs (включаются одновременно двигатели 1, 3 или 2, 4),
положительных или отрицательных сил, приложенных к центру
масс по оси Х\ (включаются одновременно двигатели 3, 4 или
1, 2). Для повышения надежности система обычно содержит
большее количество двигателей, чем это необходимо. Так,
например, на лунной кабине КЛА «Аполлон» устанавливаются 16
двигателей. Для управления всем
комплексом и базовым кораблем
используются 28 двигателей.
Включение того или иного
двигателя производится логическим
блоком с учетом потребностей в
создании моментов вокруг той или
иной оси и управляющих сил по
той или иной оси. Логический блок
получает также информацию о
работоспособности отдельных
двигателей и выдает команды на
включение с учетом отказов того или
иного двигателя. При этом встает
задача разработки логики выбора
двигателей (сопел) для включения,
обеспечивающей оптимальность
процесса ориентации.
Основным достоинством жидкостно-реактивных двигательных
установок является большой удельный импульс (удельная тяга),
который представляет собой отношение тяги к секундному
весовому расходу топлива (рабочего тела). В результате для
получения тяги определенной величины расход топлива ЖРД должен
быть меньше, чем у двигателей второй и третьей групп. Для
наиболее перспективных химических топлив с большой теплотворной
способностью, таких, например, как соединения фтора, бора,
водорода и т. д., предельная величина удельного импульса
составляет 380—420 с [56].
Недостатком является сравнительно большая масса и
сложность конструкции. Поэтому при сравнительно малом полном
импульсе (произведение тяги на суммарное время включения)
вес самих двигателей становится определяющим, а повышенная
сложность конструкции делает их неконкурентноспособными с
двигателями второй и третьей групп. Считается, что применение
ЖРД в системах ориентации целесообразно при полном
импульсе свыше 4500 кгс-с [52].
Однокомпонентные двигатели создают тягу путем разложения
химических соединений в камере с катализатором. Реакция
протекает со значительным выделением тепла, и образующийся при
этом газ, истекая через сопло, создает тягу.
Рис. 6. 1. Схема расположения
двигателей ориентации
144
Схема однокомпонентной двигательной установки приведена
на рис. 6. 2, а. Рабочее тело (топливо) *, хранящееся в баллоне 3,
под действием сжатого газа подается к камере 5. Управление
непосредственной подачей рабочего тела в ту или иную камеру
для создания момента нужного знака вокруг соответствующей
оси КЛА осуществляется электромагнитным клапаном.
Включение и выключение последнего производится системой
управления.
0^0.
В 5 Ь
рЫ2Н-ЕЫС!
4- 5 В
а)
1 )—К
в k I k в
р—Е-ча—□
Рис. 6. 2. Схемы двигательных установок (а — однокомпонентная
установка; б — установка на сжатом газе):
/—баллон со сжатым газом; 2—редукционная камера; 3—баллон с рабочим телом;
4—электромагнитный клапан; 5—камера; 6—сопло
В качестве рабочего тела в двигателях подобного типа нашли
применение перекись водорода (Н2О2) и гидразин (N2H4). В
первом случае в качестве катализатора используется перманганат
натрия, а во втором — специальный состав Shell 405 ABCG [56].
Перекись водорода дает удельный импульс около 150 с, а
гидразин — около 200 с, следовательно, последний более экономичен.
Недостатком гидразиновой системы является повышенная
токсичность.
Двигательные установки третьей группы наиболее просты по
устройству. Схема подобной установки приведена на рис. 62, б.
Сжатый газ из баллона 1 на пути к соплу 6 проходит через
редукционную камеру 29 где его давление снижается до рабочего,
и электромагнитный клапан 4, работа которого регулируется
системой управления. Подобные двигательные установки наиболее
эффективны при малых полных импульсах — не выше 220—
250 кгс-с [51]. Их эффективность может быть повышена
различными методами нагрева газа.
* Термин «рабочее тело» является более общим, применимым ко всем
рассмотренным типам двигателей ориентации. Однако для краткости в
последующем будем использовать термин «топливо», хотя он, строго говоря, не
применим к однокомпонентным двигателям и газовым соплам.
145
Рис. 6. 3. Эквивалентный импульс тяги
В качестве рабочего тела могут использоваться водород, гелий,
метан, азот и воздух. Водород и гелий дают наибольшие
значения удельных импульсов, приближающиеся к удельным
импульсам однокомпонентных двигателей. Однако в связи с малым
молекулярным весом они требуют больших баллонов для хранения.
Двигательные установки на метане, азоте и воздухе более
предпочтительны. Их «весовые характеристики «примерно равнозначиьь
Воздух является самым дешевым и обеспечивает наименьшую
массу двигательной установки.
Его удельный импульс
составляет около 70 м/с [51].
Рассмотренные устройства
с реактивными двигателями
управляют ориентацией КЛА
путем 'изменения времени
включения двигателей с
помощью электромагнитного
клапана, осуществляющего
подачу топлива. Установлено,
что нарастание и спад тяги
после включения и
выключения двигателя происходят по
экспоненциальному закону и могут быть описаны уравнениями:
Р=Р0(\—е-'{т») — нарастание тяги;
/>=Р0е-//г<> — спад тяги,
где Г0 — постоянная времени (считается, что она одинакова как
при нарастании, так и при спаде тяги); t — время,
отсчитываемое от момента включения и выключения двигателей. В
результате двигатель создает импульс тяги, показанный на рис. 6. 3.
Исследование систем ориентации, использующих такие
двигатели, значительно упрощается, если экспоненциальное
нарастание и спад тяги заменить простым временным
запаздыванием, равным по величине 'постоянной времени. При этом
действительный импульс тяги заменяется эквивалентным по величине (по
площади) прямоугольным импульсом, начало которого сдвинуто
на время Т0. Такое предположение приводит к тому, что в
процессе анализа получается несколько завышенный расход
топлива по сравнению с действительным, так как полная величина
тяги (в связи с экспоненциальным законом ее изменения)
никогда не достигается.
Величина момента, создаваемого двигателями ориентации,
обычно определяется из условий потребного времени переходного
процесса в режиме начальной ориентации или поворотного
маневра, а также требуемой точности в режиме стабилизации. Зная
величину момента Мг- и расположение сопел, можно найти значе-
146
ния секундных расходов рабочего тела (топлива) для каждого
/-го сопла
где / — удельный импульс (считаем его одинаковым для всех
сопел);
U — плечо действия тяги /-го сопла.
Тогда расход топлива 2-м соплом будет
mii = mihi=——. (6.2)
Общий расход системы двигателей ориентации, имеющей
п сопел, определяется суммой
1 VI Ши
mt=— ж
Jg
s^.
Выражение (6.3) может быть использовано для расчета
потребных запасов топлива двигателей ориентации. При этом
следует еще учитывать необходимый гарантийный запас. Как
видно из выражения (6.3), потребные запасы топлива растут с
увеличением суммарного времени включения сопел и,
следовательно, времени ориентированного полета. Это является
ограничивающим фактором их применения на КЛА с очень большим
временем функционирования.
6.2. Двигатели-маховики и силовые
гироскопические устройства
В настоящее время достаточно широко применяются
управляющие устройства, использующие маховики. Для привода
маховиков могут применяться двигатели различных типов, однако
наиболее приемлемы в условиях космического полета
электрические двигатели как с точки зрения возможности получения
первичной энергии, так и в отношении удобства управления.
Наряду с общими требованиями, предъявляемыми к любому
устройству для КЛА (высокая надежность, долговечность, малая
масса и габариты, малое потребление энергии), основным
требованием, предъявляемым к двигателю, приводящему маховик,
является хорошая регулировочная характеристика в широком
диапазоне скоростей. Рассмотрим с этих позиций различные
электрические двигатели, имея в виду, что возможность
применения этих двигателей для данной цели в настоящее время еще
недостаточно исследована [25].
Наиболее распространенный в обычных условиях
асинхронный двигатель с короткозамкнутым ротором, как известно, обла-
147
дает плохими регулировочными свойствами. Управление
скоростью около нулевого значения или в диапазоне малых скоростей
сопровождается чрезмерным перегревом.
Угловую скорость вращения синхронного двигателя можно
регулировать, изменяя частоту напряжения. Однако синхронный
двигатель, 'как и асинхронный <с кюроткозамкнутым ротором, имеет
плохую регулировочную характеристику при малых угловых
скоростях, в особенности при скоростях, близких к нулю, так как при
этом необходимо уменьшать частоту питающего напряжения до
нуля. Регулирование частоты вращения синхронного двигателя
возможно только при уменьшении ее не более чем на 30% от
максимальной. Дальнейшее уменьшение частоты вращения приводит
к интенсивному нагреванию якоря.
Наиболее подходящим с точки зрения регулировочной
характеристики является двухфазный асинхронный двигатель.
Регулирование частоты вращения такого двигателя осуществляется
изменением напряжения в обмотке управления, что позволяет
плавно изменять скорость вращения от нуля до максимальной.
Основным достоинством двухфазного асинхронного двигателя
является возможность обеспечения постоянства
электромагнитного момента в широком диапазоне изменения скорости
вращения. Его моментная характеристика близка к линейной по
меньшей мере на 80% ее диапазона. Коэффициент полезного действия
при максимальной выходной мощности составляет около 30%.
Единственный недостаток такого двигателя состоит в том, что
его обмотка возбуждения питается непрерывно. Уменьшение
мощности холостого хода возможно соответствующим
перераспределением мощностей обмоток возбуждения и управления.
При наличии усилителя мощности в цепи обмотки
управления можно принять отношение мощности, потребляемой
обмоткой возбуждения, к мощности, потребляемой обмоткой
управления, равным 4:1.
Момент, создаваемый двухфазным асинхронным двигателем,
можно выразить следующей формулой:
MA=cu[2UJJ-±-(Ul+U*)],
где см — коэффициент момента;
UB — напряжение на обмотке возбуждения;
U — напряжение на обмотке управления;
(Ос — угловая скорость синхронного вращения;
Q — угловая скорость маховика.
Будем считать, что
U=Uo+AU;
Й = Й0+ЛЙ,
148
где U0 и Йо — напряжение на управляющей обмотке и угловая
скорость маховика, соответствующие
установившемуся режиму;
AU и Ли — относительно малые приращения.
Тогда выражение для Мж можно представить в виде
Здесь
Мд=Мдо+АМд.
(6.4)
M»=cu[2UJV.-^(U*+Ul)]9
Ь-с £-±f£
KQ См .
В качестве исполнительных устройств систем
автоматического управления в настоящее время широкое распространение
получили двигатели постоянного тока с независимым
возбуждением. Это объясняется хорошо известными преимуществами
двигателей постоянного тока (небольшие потери мощности, малые
масса и габариты). Для привода маховиков применяются
двигатели с постоянными магнитами, поток возбуждения которых
можно считать величиной постоянной. Тогда напряжение на
обмотке якоря ия=и (управляющее напряжение) и ток якоря
определятся из соотношения
/ —и—е
где RR — сопротивление обмотки якоря;
е — противо-ЭДС в обмотке якоря, причем е=сеФ£1\
се — конструктивная постоянная, определяемая параметрами
обмотки якоря.
С учетом приведенных соотношений выражение для момента
примет вид
л«-«-(т--£-■)•
Предположив снова, что
U^Uo+AU; Q = Q0'+k\Q,
представим Мд=Мл0+АМд,
где жд0=Смф(-|±--^-2);
AMJ[t=kuAU—k2AQ,
149
причем ки=-сы—-\
и Ф2
** = СиС9—.
Таким образом, независимо от типа электрического двигателя,
используемого для привода маховика, приращение момента
определяется единой формулой (6. 4). Оно пропорционально
приращению управляющего напряжения и изменению угловой
скорости маховика. Зависимость момента от управляющего
напряжения является рабочей характеристикой, а коэффициент kv
определяет ее крутизну.
Наличие щеточно-коллекторного узла у двигателей
постоянного тока обычного исполнения ограничивает длительность
применения последних. Успехи в разработке интегральных схем и
усовершенствование конструкции датчиков положения ротора
позволили создать высокоэффективные бесщеточные двигатели
постоянного тока. Эти двигатели обладают следующими
преимуществами по сравнению с двигателями переменного тока при
использовании для привода маховиков [25]:
— высокий к. п. д. (свыше 90% для самого двигателя и
свыше 75% Для всей системы, включая обеспечивающую
электропику) ;
— почти нулевые потери мощности в режиме холостого хода;
—7 высокая надежность, большие возможности по
резервированию и длительный срок службы.
Кроме того, величина момента как при разгоне, так и при
торможении маховика практически не зависит от скорости. Это
означает, что в выражении (6. 1) коэффициент йа может быть
принят равным нулю. Рабочая характеристика бесщеточного
двигателя очень близка к линейной во всем диапазоне угловых
скоростей.
В качестве примера рассмотрим электроннокоммутируемый
двигатель фирмы Space Technology [44]. Этот двигатель имеет
две обмотки, подключенные к одинаковым электронным
устройствам, предназначенным для коммутации напряжения,
подаваемого на обмотки. Магнитный поток поля возбуждения
измеряется двумя балансными мостами (датчиками Холла). Каждый мост
управляет соответствующей электронной схемой, состоящей из
трштерной цепи, которая «опрокидывается» при изменении
направления потока и подключает обмотку в нужное время к
соответствующему напряжению.
Двигатель с импедансным коммутатором (рис. 6. 4) состоит
из неподвижного якоря 3 и ротора 7, на которых крепится
постоянный магнит 2, маховик 1 и сердечник импеданского
коммутатора 5. На магнитном сердечнике импедансного коммутатора
установлены три пары обмоток 4У смещенных на 120° (сечение
А — Л). Каждая пара состоит из обмотки возбуждения и сиг-
150
нальной обмотки. Обмотки возбуждения питаются переменным
напряжением стабильной частоты, а в сигнальных обмотках
наводится ЭДС с основной частотой, равной частоте напряжения
возбуждения. Амплитуда этого напряжения будет зависеть от
расположения подвижного сердечника 6 относительно данной
обмотки. Следовательно, напряжение в сигнальных обмотках
модулируется по амплитуде с .частотой, определяемой угловой
скоростью ротора. После демодуляции напряжения каждой
из сигнальных обмоток (рис.
6.5) получаем трехфазную
систему напряжения со сдвигом
120°. Эти напряжения
однозначно характеризуют поло-
1 т
2
ч
J '
Рис. 6.4. Двигатель с импеданс-
ным коммутатором:
/—маховик; 2—постоянный магнит; 3—
якорь; 4— коммутирующие обмотки; 5—
сердечник коммутатора; 5—подвижной
сердечник; 7—ротор
Рис 6.5. Блок-схема
двигателя с импеданс-
ным коммутатором:
/—импедансный
коммутатор; 2—трехфазный
демодулятор; 3—стробиру-
ющая схема; 4— ротор с
маховиками; 5—обмотки
двигателя
жение постоянного магнита (т. е. потока возбуждения)
относительно якоря и управляют стробирующей схемой, которая
коммутирует якорные обмотки. Таким образом, стробирующая
схема как бы выполняет роль коллектора, тогда как импедансный
коммутатор с трехфазным демодулятором (выполняют роль щетки
обычного двигателя постоянного тока. Для питания обмоток
возбуждения импеданснсю коммутатора используется генератор-
электрических колебаний.
Другим примером бесщеточного двигателя постоянного тока,
используемого для привода маховика, является двигатель
фирмы General Electric [25]. Его схема для двухполюсного варианта
приведена на рис. 6. 6. Он состоит из ротора (постоянного
магнита) /, статора с двумя взаимно перпендикулярными
обмотками 2, двух датчиков Холла 3, установленных в зазоре между
15*
111мм
ротором и статором, и двух усилителей мощности 4, которые
обеспечивают питание обмоток статора.
Датчики Холла определяют угловое положение ротора.
Напряжение на выходе датчиков пропорционально току в цепи
питания. Так как усилители обладают линейной характеристикой,
величина момента,
создаваемого двигателем, так же
пропорциональна току в цепи
питания датчика (входному
сигналу). В качестве усилителя
мощности используется
усилитель с широтно-импульсной
модуляцией. Это объясняется
тем, что он обладает очень
высоким к. п. д. при всех
уровнях выходных
напряжений и сравнительно прост по
Рис. 6.6. Схема двухполюсного ва- Рис. 6.7. Конструктивная схема бес-
рианта бесщеточного двигателя:
4—ротор; 2—обмотки статора; 3—датчики
Холла; 4—усилитель мощности
щеточного двигателя:
/—узел крепления двигателя; 2— кожух
маховика; 3—датчики Холла; 4—ротор
двигателя; 5—статор двигателя;
6—маховик; 7—установочная плоскость;
8—электронный блок; 9—штепсельный разъем;
10—кожух
устройству, обеспечивает высокую степень линейности
характеристики и стабильности тока в обмотках статора. Кроме топ),
подобный усилитель обладает уникальной способностью
аккумулировать энергию торможения маховика, даже если противо-
ЗДС двигателя ниже напряжения источника питания. Это
обусловлено, эффектом накапливания энергии индуктивными
обмотками двигателя во время одной части цикла и разрядки этой
152
энергии в виде «индуктивного толчка» во время второй част»
цикла модуляции.
Примерная конструктивная схема управляющего маховика с
бесщеточным двигателем рассмотренного типа показана на
рис. 6.7. Следует отметить компактность конструкции. Он имеет
в 10 раз меньшие потери мощности и примерно на 20%
меньшую массу по сравнению с маховиком аналогичной конструкции,
использующим двигатель переменного тока. Наиболее высокими?
показателями эффективности обладает шестиполюсный
двигатель.
Накопленный опыт по проектированию маховиков с
бесщеточными двигателями показывает, что с увеличением радиуса
маховика при фиксированной величине момента инерции его масса
уменьшается (25]. Однако при этом возрастает масса кожуха.
В результате для каждого момента инерции существует
оптимальное значение радиуса маховика, определяемое следующей
эмпирической формулой:
rM=17,2a/o.»f (6.5)
при котором суммарная масса маховика и кожуха минимальна»
Последнюю можно рассчитать по формуле
тм==7,78УМ71. (6.6)
Заметим, что в формулах (6. 5) и (6.6) параметры имеют
следующие размерности: гм — см, / — кгс-см-с2, тм — кг.
Для определения пусковой и пиковой мощности могут быть
использованы следующие зависимости:
Япуск=0,00103Мдв90;
(6.7)
ЯПИК=0,00113Л/ДВ20,
где Qo — рабочая угловая скорость двигателя.
Массу электронной части и соответствующие потери
мощности можно оценить по формулам:
тэ=0,45 + 0,00607Я1ШК;
(6.8)
ЯЭ=0,5 + 0,2РПИК.
Параметры в формулах (6. 7) и (6. 8) имеют следующие
размерности: мощность — Вт, момент — кгс-см, угловая скорость —
об/мин.
Приведенные формулы (6. 5) — (6.8) позволяют производить
оценочные расчеты основных параметров двигателей-маховиков.
Рассмотренные схемы далеко не исчерпывают возможных
вариантов технических средств, обеспечивающих создание
внутренних реактивных моментов. Достаточно перспективным
управляющим устройством подобного рода является шаровой маховик,
153
создающий одновременно управляющие моменты относительно
трех осей [63]. Вся система представляет собой асинхронный
двигатель с тремя статорными обмотками, расположенными по
внутренней поверхности сферического корпуса в трех ортогональных
плоскостях, и ротором (маховиком) в виде полого шара из
электропроводящего материала. Для предохранения от
соприкосновения со статорными обмотками (моментными катушками) шар
удерживается внутри сферического корпуса в свободно
подвешенном состоянии, что не вызывает больших затрат мощности в
условиях полной и частичной невесомости. Подвеска,
центрирующая шар в пространстве между катушками, может быть
выполнена с помощью газовых подшипников, неоднородного
высокочастотного магнитного или электрического поля.
Для получения выражения момента, создаваемого шаровым
маховиком, воспользуемся теорией асинхронных двигателей с
полым ротором. При вращении однородного магнитного поля с
индукцией В с угловой скоростью о относительно шара
возникает момент М:
м _ 2я5г4д)Д2Ю-9
3el1 + U^)J
где г — радиус шара;
б —толщина стенки шара;
q — удельное сопротивление материала шара.
Полагая —'-——=<*>т, приведем выражение момента к виду
4лг5
М = *2г* Г 2a>/g)m I
4 h+W^n)2 J'
откуда следует, что для конкретных значений Виг
максимальный момент получается при со=(от. Максимально возможный
момент, создаваемый шаровым маховиком, определяется
значениями Виг.
Влияние материала шара на величину создаваемого им
управляющего момента легко устанавливается из выражения для
кинетического момента шара
где у — плотность материала.
ПрИ (0\ = (От ПОЛУЧИМ
K=2-lfflr*w
Отсюда видно, что материал шара должен иметь максимальное
значение ду.
Вращение магнитного поля в любом заданном направлении
осуществляется соответствующим изменением токов
возбуждения в статорных обмотках.
154
M-10'i гс-см
№
300
г=30 en
г=25сн
г=20сп
Шаровой маховик обладает рядом достоинств по сравнению
с обычными маховиками, установленными по трем осям:
позволяет управлять угловыми движениями аппарата вокруг трех осей
одновременно, гироскопически не связан с корпусом, отсутствие
подшипников повышает надежность конструкции.
Для снятия накопленного кинетического момента шарового
маховика целесообразно использовать магнитное поле Земли.
При этом выбор магнитной индукции поля статорных обмоток В
и радиуса шара г производится следующим образом. Подсчиты-
вается осредненная по времени величина результирующего
возмущающего момента МВу
действующего на аппарат. Эта величина
должна быть меньше момента
шарового маховика, соответствующего
индукции В, равной индукции
магнитного поля Земли. Для круговой
орбиты спутника с высотой 650 км
и углом наклона к экватору 45°
минимальное значение магнитной
индукции составляет 0,25 Гс. Из
условия M^Mi определяется радиус
шара.
На рис. 6.8 показана
зависимость момента шарового маховика,
возникающего при взаимодействии
с магнитным полем Земли, от
угловой скорости о)1 и радиуса шара.
Заметим, что угловая скорость coi не равна со. Для примера взят
алюминиевый полый шар с толщиной стенки 0,5 см.
Для создания внутренних управляющих моментов в системе
управления КЛА могут применяться также гироскопические
устройства. Независимые моменты по каждой связанной оси
может создавать устройство, состоящее из трех спаренных двухсту-
пенных гироскопов (рис. 6.9). В исходном положении
кинетические моменты гироскопов направлены в противоположные
стороны перпендикулярно оси управления (оси у), и их сумма равна
нулю. При поступлении сигнала от системы управления момент-
ный двигатель 2 поворачивает гироскопы, основания которых
имеют механическую связь через зубчатые секторы 3, на равные
углы а. В результате по оси управления возникает кинетический
момент
Hy=2Hsina. (6.9)
В процессе поворота к корпусу КЛА прикладывается
внутренний момент
Afy=2#cosaa. (6. 10)
Сумма проекций кинетических моментов на ось х
по-прежнему будет равна нулю. Если пренебречь нутацией гироскопов, ко-
200
100
0 W 80 120 оог рад/с
Рис. 6.8. Зависимость
момента шарового маховика
от угловой скорости для
нескольких значений радиуса
шара
155
торая обусловливает момент динамической реакции по оси,
перпендикулярной плоскости рисунка, то можно считать, что данное
устройство создает один момент по оси */.
Рис. 6.9. Схема гироскопического устройства с двумя
спаренными гироскопами:
/—гироскоп; 2— моментный двигатель; 3—зубчатые секторы
Для создания управляющих моментов по трем осям с
помощью таких устройств потребуется шесть двухстепенных
гироскопов. Вместо этого могут использоваться три трехстепенных
гироскопа. Подобное управляющее устройство (рис. 6.10) было
использовано для ориентации долговременной орбитальной
станции Skylab [47]. Система при этом обладает избыточностью,
так как полный отказ одного
из гироскопов не приводит
к выходу из строя
управляющего устройства в целом, а
лишь несколько снижает его
возможности по величине
создаваемых управляющих
моментов. Максимальная
величина кинетического момента
каждого гироскопа составляет
275 кгс-м-с (при моментах
инерции станции /i=0,97X
ХЮ6 кгс-м2; /2=0,6Ы07 кгсХ
Хм2; /3=0,6-107 кгс-м2).
В некоторых случаях,
например, на спутниках,
рассчитанных на функционирование
в течение нескольких лет,
считается возможным применять
управляющие устройства, основанные на комбинации свойств
маховика и гироскопа. Маховик с большим моментом инерции
вращается с почти постоянной скоростью вокруг оси, исходное
положение которой совпадает с осью Олг3, ориентируемой в
орбитальной системе координат по перпендикуляру к плоскости
Рис. 6. 10. Схема гироскопического
устройства с трехстепенными
гироскопами:
/—ротор; 2—карданный подвес;
3—моментный двигатель
156
орбиты (рис. 6. 11, а). Управление ориентацией по углу тангажа
осуществляется путем небольших изменений скорости вращения
маховика относительно некоторого среднего значения за счет
момента динамической реакции, возникающей при разгоне и
торможении. Для управления по осям крена и рыскания могут
использоваться реактивные двигатели.
Рис. 6.11. Схемы управляющих устройств с ги-
ромаховиком: (а — гиромаховик без
карданного подвеса; б — гиромаховик с двухстепенным
карданным подвесом):
/—гиромаховик- 2—двигатели управления по углу
рыскания; 3—датчик вертикали; 4—двигатели
управления по крену; 5—карданный подвес
Маховик может устанавливаться в двухстепенном подвесе
(рис. 6.11,6). Повороты вектора кинетического момента
маховика под действием моментных двигателей, установленных по
осям карданного подвеса, обеспечивают управление ориентацией
по осям крена и рыскания за счет возникающих при этом
гироскопических моментов. Учитывая, что для устройств, схемы
которых приведены на рис. 6. 11, характерно наличие существенного
кинетического момента по оси Хз, обусловливающего
значительные гироскопические моменты по осям Х\ и х2, подобные
управляющие устройства получили название гиромаховиков.
Считается, что в некоторых случаях роль гиромаховика
может, играть часть КЛА, в которой размещается оборудование,
не требующее определенной ориентации [53]. Такие КЛА назы-
157
ваются аппаратами с двойным вращением. Одна часть его
вращается со сравнительно большой скоростью, а вторая
ориентируется в орбитальной базовой системе отсчета и, следовательно,
в среднем вращается с орбитальной угловой скоростью.
6.3. Моментный магнитопривод
Рассмотрим возможные схемы построения моментного магни-
топривода с электромагнитами. В этом случае наиболее удобно
управлять величиной момента за счет изменения токов в
катушках. Постоянные магниты, как отмечалось выше, применяются в
режиме начальной ориентации в качестве устройства пассивного
демпфирования.
В зависимости от требований к ориентации КЛА
конструктивные выполнения магнитопривод а и способы управления
создаваемыми им моментами
могут быть различными. Одна
из возможных схем магни-
топровода, предназначенная
для пространственной
ориентации аппарата, состоит
из трех плоских катушек,
трех магнитометров для
измерения магнитного поля
Земли и вычислительного
устройства. Электрическая
энергия, необходимая дчя
работы устройства,
поступает от бортового
источника электропитания,
например, от солнечной батареи.
Расположение катушек
и магнитометров
относительно осей системы
координат 0*1*2*3, связанных с КЛА, схематично показано на
рис. 6.12. Вектор управляющего момента М, создаваемый маг-
нитопроводом, определяется по известной формуле
Рис.
6. 12. Схема моментного
привода:
магнито-
7—силовые катушки: 2—магнитометры;
3—вычислительное устройство: 4—генератор
напряжений
м=амхв,
(б.П)
где <2м— вектор магнитного диполя катушек;
В — вектор магнитной индукции магнитного поля Земли.
Ток, протекающий через катушку, электромагнитная ось
которой совпадает с осью Х\, обозначим Л; с осью х2 — через h\
с осью *3 — через /3. Тогда магнитный диполь каждой катушки
запишется в виде
Kq f—AZo, I =z 1, Z, O,
158
где п и S — соответственно число витков и площадь витка,
принимаемые одинаковыми для всех катушек.
Следовательно, суммарный вектор магнитного диполя
^м = flU'i + dbJ 2 + я?мз'*з
задан, если известны токи, протекающие через катушки.
Составляющие вектора магнитной индукции
B=Bj1 + Bj%+BjZ9
измеряемые магнитометрами, изменяются в процессе движения
КЛА, причем закон их изменения во времени может быть
предсказан заранее весьма приближенно. _
Следовательно, зная текущее значение В, можно определить
величину dM, необходимую для_приложения к аппарату
требуемого управляющего момента М9 если составляющие последнего
Ми М2, М3 известны. Допустим, что углы и угловые скорости
отклонения аппарата от положения заданной ориентации измерены.
Тогда по результатам этих измерений можно вычислить значения
Ми М2, М3, которые требуется приложить к КЛА для
устранения его отклонений.
Для определения dM произведем векторное умножение слева
на В обеих частей формулы (6.11). В результате имеем
BXM = du(B^)-B(d^B). (6.12)
В положении заданной ориентации КЛА момент со стороны
магнитопривода отсутствует, что возможно, когда dM=0 или
векторы dM и В параллельны. При отклонении аппарата от
заданного положения момент, равный нулю, дает та составляющая <?м>
которая параллельна В. Полагая эту составляющую равной
нулю, можно минимизировать потребление электрической
энергии. Так как другие составляющие dM при этом будут
перпендикулярны вектору В, условие минимизации можно записать в виде
dM-B=0.
Подставляя это условие в выражение (6. 12), получим
ВХМ=ВЧы
откуда dM=k(BXM),
где k=\/B2.
Проектируя полученные выражения на координатные оси,
находим значения для токов
/s=1T(B1M2-B2Ml),
По
159
которые необходимо пропустить через катушку для создания
требуемых значений управляющих моментов. Согласно этим
выражениям вычислительное устройство производит операции
умножения и алгебраического сложения. Изменение коэффициента k
вследствие изменения индукции магнитного поля Земли может
быть учтено при проектировании замкнутой системы управления
угловыми движениями КЛА введением контура самонастройки.
Для измерения индукции магнитного поля Земли в направ-
ЖЕ
Ш
Рис. 6. 13. Схема магнитометра и диаграмма
напряжения генератора
лениях осей Ох\Х2х3 используются магнитометры различных
типов. Рассмотрим магнитометр, состоящий из ферромагнитного
сердечника с малым гистерезисом и двух обмоток (рис. 6. 13).
Сердечник устанавливается вдоль оси, в направлении
которой должна быть измерена индукция. Магнитный поток в
сердечнике складывается из потока, создаваемого током в обмотках,
и потока магнитного поля Земли. Одна обмотка подключается к
генератору, который вырабатывает напряжение иГу нарастающее
линейно, начиная с большой отрицательной величины и кончая
большим положительным значением. Когда магнитодвижущая
сила от нарастающего сигнала достигнет величины
магнитодвижущей силы поля Земли, магнитный поток в сердечнике изменит
свое направление. При этом во второй обмотке появится
импульс напряжения. Зная время At от момента прохождения
нарастающего сигнала через нуль до момента U появления
импульса, легко определить геомагнитную индукцию в направлении
данной оси. Пороговая чувствительность таких магнитометров
составляет ~0,5-10~5 Гс, тогда как геомагнитная индукция на
высоте 35 000 км равна примерно 1,6-Ю-1 Гс. Измерение магнит-
160
ной индукции производится при отсутствии токов в катушках во
избежание влияния магнитного поля последних.
Наряду с рассмотренной схемой непрерывного включения маг-
нитопривода может применяться схема дискретного включения,
когда те или иные электромагниты включаются на сравнительно
небольшие отрезки времени, в течение которых направление
вектора геомагнитной индукции существенно не меняется. Для
создания момента по одной из осей КЛА (например, оси Охх) время
включения магнитопривода должно выбираться с таким расче-
Рис. 6. 14. Схема формирова- Рис. 6. 15. Схема магнитопри-
ния момента магнитоприводом вода с тремя электромагнитами
том, чтобы при этом вектор В лежал в плоскости,
перпендикулярной этой оси (рис. 6. 14). Следовательно, идеальные условия
включения магнитопривода для создания момента по £-ой оси
соответствуют условию
В{=0. (6. 13)
Для того, чтобы при данном значении диполя dM создать
максимальный момент, необходимо, чтобы
dM.B=0, (6.14)
т. е. вектор диполя также долже^ лежать в указанной
плоскости на перпендикуляре к вектору В.
При наличии трех электромагнитов по трем связанным осям
КЛА (рис. 6.15) выполнение условия (6. 14) достигается
распределением токов электромагнитов, обеспечивающих следующие
значения диполей по связанным осям Xj и л*:
dMj = dM COS (рви
(6.15)
dMh=dM sin (рви
где фвг — угол, отсчитываемый против часовой стрелки, если
смотреть с конца оси Хи от оси xh до вектора В.
6 991 161
Величина диполя dM в выражениях (6. 15) определяется
потребной величиной момента Mi по оси Охг.
Схему включения электромагнитов можно упростить путем
создания по каждой из связанных осей Xj и xk диполей dM
постоянной величины. В этом случае для выполнения условия
(6. 14) включение диполя по оси Xj или xh для создания
момента по оси Xi необходимо производить в моменты, когда вектор В
коллинеарен с осью хь, или Xj соответственно. Нужное
направление момента Mi обеспечивается за счет знака диполя
(направления тока к катушке электромагнита).
Последний способ формирования управляющих моментов
позволяет использовать магнитопривод из двух электромагнитов
для создания моментов по всем трем осям. Например,
достаточно использовать электромагниты по осям Xj и Xk на рис. 6.15.
При этом, когда вектор В коллинеарен с осью Xi включение
электромагнита по оси Xj позволяет создать момент по оси xh,
а включение электромагнита по оси хк — момент по оси Xj. Для
создания момента Мг- могут использоваться оба электромагнита
(электромагнит по оси х^ когда вектор В совпадает с осью х^
или электромагнит по оси л*, когда вектор В совпадает с осью
Xj). Заметим, что_в подобной схеме при одинаковой частоте
совпадения вектора В со всеми тремя связанными осями возможная
частота создания момента по оси х\ будет вдвое больше.
Достоинство второй схемы по сравнению с первой, помимо
меньшего числа электромагнитов, состоит в большей простоте
формирования диполя dMy так как оно достигается с помощью
простейших релейных элементов включения электромагнитов при
выполнении условий (6. 13) и (6. 14). Однако при этом
существенно меньше располагаемая частота включения магнитопривода
по всем трем осям. В самом деле, если в первом случае
достаточно совпадения вектора В с одной из координатных плоскостей,
чтобы выполнялись условия (6. 13) и (6. 14), то во втором случае
необходимо его совпадение с одной из координатных осей.
Из выражения (П12) для составляющих вектора
геомагнитной индукции видно, что независимо от базовой системы отсчета
условие (6. 13) выполняется лишь мгновенно в отдельные
моменты времени, соответствующие определенным точкам орбиты.
В реальных условиях магнитопривод в течение конечных отрезков
времени £и создает импульс момента. Эти отрезки времени,
очевидно, должны определяться некоторым минимально допустимым
(пороговым) значением индукции по /-й оси. Таким образом,
реальное условие включения магнитопривода соответствует
неравенству
—Ba^Bi^Bn. (6. 16)
Пороговое значение Ви индукции может быть выбрано с
учетом следующих соображений. Наличие индукции по 1-й оси при
162
включении магнитопривода создает нежелательные моменты по
осям Xj и Xk, величины которых определяются равенствами
\Mj\ = \dutBt\);
\MK\ = \dmiBi\.
Пороговое значение индукции может быть выбрано из условия,
чтобы наибольший из них не превышал максимального значения
внешнего возмущающего момента.
Условие (6.14) в течение /и может выполняться, если
регулируется величина токов в катушках электромагнитов по /-й и
&-й осям в соответствии с равенствами (6.15). При релейной
схеме включения электромагнитов условие (6. 15) будет
выполняться исключительно редко и в течение бесконечно малого
промежутка времени. Поэтому в качестве реального условия для
второй схемы целесообразно принять
(du-B)<(du.B)m, (6.17)
где (dM-B)m — допустимое значение скалярного произведения,
при котором величина момента при данном значении dM не очень
существенно отличается от максимального значения.
Для оценки влияния некоторых конструктивных параметров
магнитопривода, использующего электрические катушки без
железных сердечников, на его весовые характеристики и
потребляемую мощность преобразуем выражение для магнитного диполя
dM = nSI
следующим образом.
Электрическая мощность Р, потребляемая катушкой, связана
с током / известным равенством
P=PR,
где /?= е — омическое сопротивление;
/ — длина витка катушки;
su — площадь поперечного сечения провода;
q — удельное сопротивление.
С учетом выражения для массы катушки
mk=nesny,
где у — плотность, найдем
'=i/z=-i/—•
у R т у yq
Следовательно,
s_ /КГ
/ у Y6
6* 163
Максимальное значение dM для определенных значений Р и
тк будет при максимальном отношении S/1. Это справедливо для
круглой катушки, у которой
S _ DK
где DK — средний диаметр катушки.
Итак,
£>к л /Ртк
>мтах л у yQ
& м max л I /
Произведение уд характеризует материал провода катушки.
Максимальное значение управляющего момента равно
Mmax = uM max * В
или, подставляя значение для В над экватором,
143-106 DK Г'Рщ'
Мт„=
W[
к
(6371 + Я)з 4 у YQ
Пользуясь этой формулой, можно подсчитать максимальный
момент магнитопривода, имеющего заданную массу, подобрать
конструктивные размеры, мощность и характеристики материала
провода катушек для каждого конкретного случая. Вместе с тем
из этой формулы следует, что в целях экономии массы и
потребляемой энергии для создании момента определенной величины
материал катушек магнитопривода должен иметь максимальное
значение уд. Кроме того, диаметр катушки должен быть
возможно больше. Этого можно достичь укладкой катушек по
внешней поверхности КЛА.
Диполь электромагнита с железным сердечником выражается
через магнитную индукцию внутри сердечника Вм (Гс) и его
объем Vc (см3) следующей формулой:
</м=0,25.10-4 BMVC. (6.18;
Для создания индукции 5М обмотка электромагнита должна
создать ампервитки
л/=10хс/сЯм, (6.19)
где /с —длина стержня;
ис — коэффициент, зависящий от магнитной проницаемости
материала стержня и отношения его длины к диамет-
РУ^с
Ампервитки являются мерой потребной электрической
мощности. С увеличением lc/Dc величина ис уменьшается
(одновременно уменьшается и хс/с) и приближается постепенно к своему
минимальному значению для вытянутого сфероида. Поэтому счи-
164
тается целесообразным электромагниты с железным сердечником
изготавливать с большим отношением lc/Dc.
При заданной допустимой плотности тока величина /
пропорциональна площади проводника, и левая часть выражения
(6. 19) может служить мерой массы обмотки электромагнита.
Существенно отметить, что она возрастает с увеличением
индукции Вм. В то же время, как видно из формулы (6. 18), масса
стержня тем меньше, чем больше Вм при определенном диполе
г/м. Следовательно, суммарная масса электромагнита имеет
минимум при некотором значении Вм.
1
2
3
4
Рис. 6. 16. Функциональная схема демпфирующего
устройства:
/—магнитометр; 2— гистерезисный генератор; 3—усилитель
мощности; 4—электромагнит
Значительный интерес представляет также использование мо-
ментного магнитопривода для демпфирования вращательных
движений КЛА путем моделирования петли гистерезиса [57].
Функциональная схема подобного управляющего устройства по одной
оси КЛА приведена на рис. 6. 16.
Сигнал от магнитометра, измеряющего составляющую Вг
вектора геомагнитной индукции по оси хи поступает в
гистерезисный генератор, на выходе которого появляется ток
/ii=f(B«).
Этот сигнал поступает в усилитель мощности, который
пропускает через обмотку электромагнита, установленного по оси хи
ток, создающий дипольный момент dMi. Функция /(54)
подбирается таким образом, чтобы дипольный момент dMi изменялся в
зависимости от индукции (напряженности) геомагнитного поля
в соответствии с петлей гистерезиса (рис. 6. 17).
Предположим, что КЛА вращается вокруг оси jc3. Дипольный
момент dMh взаимодействуя с составляющей вектора
геомагнитной индукции Bi2 в плоскости 0*i*2, создаст момент по оси *з
(рис.6. 18):
M3=dMiBi2 sin у.
За один оборот КЛА по оси Ох\ будет действовать некоторое
среднее значение момента
^зсР=-^ф^м1^12 5т cprfcp. (6.20)
165
Учитывая, что составляющая геомагнитной индукции по оси х%
равна
5!=512со8ф,
пренебрегая изменением Bi2 за один оборот КЛА, имеем
dB\c^—В i2 sin <pd<p
и выражение (6. 20) приводится к виду
М
-=-ir#""'^'=-ir-
<**/*
Рис. 6. 17. Петля
гистерезиса
Рис. 6. 18. Схема формирования
демпфирующего момента
где L\ — площадь гистерезисной петли электромагнита,
установленного по оси Xi (см. рис. 6. 17).
Таким образом, величина замедления пропорциональна
площади петли гистерезиса.
Основу схемы управляющего устройства на рис. 6. 16
составляет двухканальныи гистерезисныи генератор, схема которого
приведена на рис. 6. 19. Его первой ступенью является предуси-
литель, который усиливает сигналы магнитометров и
обеспечивает необходимую крутизну петли гистерезиса. Вторая ступень
представляет собой гистерезисныи элемент, который состоит из
тороида с катушкой возбуждения и чувствительного элемента с
эффектом Холла, помещенного в зазор тороида. Последний
изготовляется из высокогистерезисного материала. Сигналы пред-
усилителя поступают в обмотку возбуждения тороида и наводят
в нем поле, в 1000 раз превышающее интенсивность
геомагнитного поля при малом коэффициенте усиления и в 3900 раз —
при большом коэффициенте усиления.
Чувствительный элемент определяет плотность магнитного
потока в сердечнике. Его сигналы усиливаются дифференциальным
усилителем, который является третьей ступенью гистерезисного
генератора. Выходной сигнал последнего формирует
необходимый дипольный момент электромагнита, который изменяется в
166
зависимости от составляющей геомагнитной индукции по этой
оси в соответствии с одной из четырех петель гистерезиса. Выбор
той или иной петли производится путем изменения коэффициента
усиления предусилителя и усилителя мощности.
N7
1 1 3
Рис. 6. 19. Схема гистерезисного генератора:
/—предусилитель; 2—гистерезисный элемент;
3—дифференциальный усилитель: 4— чувствительный элемент
(П—переключатель коэффициента усиления предусилителя; Д—датчик Холла)
Исследования показывают, что остаточный магнетизм в то-
роиде может в последующем создавать значительные
возмущающие моменты [57]. Чтобы исключить этот нежелательный эффект
по окончании демпфирования тороид размагничивается подачей
на него синусоидального напряжения с частотой 5 Гц и медленно
затухающей амплитудой. Полное размагничивание происходит
примерно за 30 с.
Ill ИССЛЕДОВАНИЕ СИСТЕМ
111 УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ
Часть
ГЛАВА VII. СИСТЕМЫ УПРАВЛЕНИЯ
С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ
Основное достоинство систем управления ориентацией с
реактивными двигателями состоит в том, что они могут создавать
управляющий момент в любой среде независимо от наличия каких-
либо полей, атмосферы и прочих факторов. Подобные системы
стали применяться в самом начале космических полетов. Система
формирует независимые моменты по всем трем осям КЛА.
Поэтому системы ориентации с реактивными двигателями могут
применяться на всех типах КЛА в различных режимах
ориентации: при начальной ориентации, поворотных маневрах и
стабилизации.
Характерная особенность систем ориентации с реактивными
двигателями состоит в их сравнительно большом
быстродействии. Это обусловлено относительно большими моментами,
создаваемыми управляющим устройством. Поэтому при исследовании
процессов ориентации в таких вращающихся системах
координат, как солнечная или орбитальная, центробежными моментами
и моментами гироскопической связи, обусловленными вращением
базовой системы отсчета, можно пренебрегать и использовать
уравнения объекта в виде (2.7). Внутренними возмущающими
моментами обычно также пренебрегают. В первом приближении
внешние возмущающие моменты за исключением моментов от
эксцентриситета тяги двигателей маневра тоже можно не
учитывать вследствие их сравнительной малости.
Наибольшее применение получили системы ориентации,
использующие релейный усилитель (реле) для включения и
выключения электромагнитных клапанов управляющих устройств. При
этом могут применяться релейные схемы в «чистом» виде и схемы
с импульсной модуляцией выходного сигнала релейного
усилителя.
7.1. Релейная система ориентации
Обычно параметры такой системы выбирают из условия
обеспечения заданной точности при минимальном расходе топлива.
Допустим, что в качестве измерительного устройства системы
168
используется свободный гироскоп, а включение и выключение,
двигателя производится электромагнитным клапаном (рис. 7. 1).
Управление работой клапана осуществляется с помощью трех-
позиционного реле, характеристика .которого показана на рис. 7.2 в
зависимости от знака и величины тока iy напряжение на выходе
реле равно + w0, 0, —щ в данной или обратной последовательно-
<Шл
°еле
Электро
\ма2ншпныа\
клапан
свободный
гироскоп
\Реактидные\
двигатели
i^i
Объект
(спутник)
Рис. 7.1. Блок-схема релейной системы управления (iK — ток
на входе клапана; h — секундный расход тока)
сти и подпоследовательности. Соответственно управляющий
момент Му, прикладываемый к аппарату, имеет одно из трех
возможных значений +М0, 0, — М0. Предположим вначале, что
привод клапана является безынерционным. Это означает, что
переключения реле и момента (тяги) происходят одновременно.
Кроме того, примем, что тяга, создаваемая двигателем, остается
неизменной в течение процесса управления, а действие на КЛА
и
^ —■
1
1
V
'
1
1
0
1
'
j
i
i
!
Lcp
1
u$
'
4^
Рис. 7.2. Характеристика релейного усилителя
(t'oT—ток отпускания; tcp— ток срабатывания)
внешних и внутренних моментов пренебрежимо мало. Запишем
дифференциальное уравнение (2.7) в виде
d4
= И,
(7.1)
где t=i/ -p-/ —безразмерное время;
м*
"=1Г=У^
м.
169
В зависимости от динамического состояния систем
управления и принимает одно из трех значений +1, 0, —1. Последнее
удобно выразить в виде функции тока /у на входе реле. В
предположении безынерционности привода электромагнитного
клапана из уравнения (7. 1) и рис. 7.2 следует (в безразмерном
времени), что
diy,
при
при
-^>0:
dv
— 1 при /у > /ср;
О при -Х/ср<*у</ср;
+ 1 при /у< —Х/„
di
"ср'
dv
<0:
е =
(7.2)
+ 1 при /у<-/ср;
О при — /ср<*'у<>./ср;
— 1 при /у>Х/ср,
где Л=4^.
Для определенности примем следующие начальные условия
е(0)=ео>Ае; 8(0)=е0=0,
где Ае — порог чувствительности системы по углу отклонения.
Интегрируя уравнение (7. 1) с учетом начальных условий,
получим исходные выражения
Т2
i(T) =
при #= — 1;
е(т)=const при и=0\
^(х)=Ч + ~ ПРИ «= + Ь
dx
где s(t)= — для 'лостроения фазовых траекторий на фазовой
dx
плоскости с координатами
•(*); ee(t)=i(t). (7.3)
Рассмотрим закон управления по углу отклонения е КЛА ог
заданного положения ориентации, когда
где &д — крутизна датчика свободного гироскопа,
ky — коэффициент усиления усилителя.
170
На рис. 7.3 построены фазовые траектории для системы с
данным законом управления. Гистерезис реле представляется на
фазовой плоскости как смещение границ, при которых может
произойти включение и выключение реле (рис. 7.3, а). В этом
случае КЛА совершает колебания с возрастающей амплитудой
и частотой. Такая система динамически неустойчива. При
уменьшении гистерезиса реле до нуля система переводится в режим
автоколебаний с параметрами, определяемыми начальными
условиями (рис. 7. 3, б).
- Линии выключения
Рис. 7.3. Фазовый портрет системы при начальном отклонении
е(0) и угловой скорости е(0)=0:
а—без учета запаздывания; б—без учета запаздывания и гистерезиса
реле; в—с учетом запаздывания и гистерезиса реле
В любой реальной системе имеется запаздывание, которым
не всегда можно пренебречь. Для учета запаздывания при
анализе системы необходимо измерить время на фазовой плоскости.
Безразмерное время, необходимое для перемещения
изображающей точки из одного положения на фазовой плоскости в другое
по траектории с постоянной скоростью ес, определяется
отношением
KI
где 8i и 82 — координаты начальной и конечной точек
перемещения.
На параболическом участке фазовой траектории, когда
движение изображающей точки из одного положения в другое
происходит с постоянным ускорением, безразмерное время
определяется абсолютной величиной разности ординат начальной и
конечной точек.
Построение фазового портрета системы с учетом временного
запаздывания реле Гр приведено на рис. 7. 3. Здесь тр=Г, • ' —-
Vt
171
а также принято, что запаздывание при включении и
выключении реле одинаковое. Из графика следует, что запаздывание
способствует установлению в системе расходящихся колебаний.
Для обеспечения устойчивости системы вводят закон
управления по углу и угловой скорости отклонений КЛА. Такой закон,
в частности, может быть получен с помощью
дифференцирующего контура. Пусть передаточная функция контура имеет вид
(5. 6). Тогда значение для тока управления в обмотке реле в
операторной форме определится выражением
/у= kyWK(p)uy =ky 1 + ТтР иу,
где иу — напряжение, снимаемое с датчика углового гироскопа.
Учитывая, что ау=£де, получим
ч=к±Ц^^ (7-4>
1+—Р
где
kykji
Для построения фазовых траекторий необходимо найти
уравнения линий переключения реле, так как теперь они не будут
прямыми, параллельными оси ординат. Линия включения
определяет переход от движения изображающей точки с постоянной
скоростью (и=0) к движению с постоянным ускорением (и=
= ±1). Поэтому ее уравнение может быть получено решением
уравнения (7. 4) при входном сигнале, изменяющемся с постоян-
• • y •
ной скоростью. Полагая e=et или е (/?)=£ (так как е=
Pi
=const), находим
L{p)=b
U(l-b^) P(l+±P)\
или, переходя к оригиналу,
^в4'+*"(^ !~е J (7#5>
Линия выключения определяет переход от движения
изображающей точки с ускорением (и,= ±1) к движению с постоянной
скоростью (и=0). Ее уравнение определяется решением
уравнения (7. 4) при входном сигнале, изменяющемся с постоянным
ускорением е. Полагая е = -— или г (/?) = —, получим
2 />з
172
и,переходя к оригиналу,
/у==лГ£ + 11-(Л1— l)s—_^_(Лг1— l)(l_e~^')e J. (7.6)
Заметим, что при попадании изображающей точки на линию
переключения в уравнениях (7.5) и (7. 6) в соответствии с
условиями (7. 2) должны выполняться равенства:
/у=±/Ср и /у=±/от (7.7)
или
/у /у
Т=±«сРит=±.0Т.
Знак плюс соответствует линиям переключения в правой
полуплоскости, а знак минус — левой полуплоскости. При этом со-
• ответственно е= н= 1.
В большинстве практически важных случаев угловые
колебания КЛА происходят с периодом, намного превышающим
постоянную времени Т. Поэтому экспоненциальными членами в
уравнениях (7.5) и (7. 6) можно пренебречь. Следовательно,
установившиеся значения границ включения и выключения реле
определяются уравнениями прямых линий:
±еСр=е+аес; (7.8)
±е0Т=г+аес±аЬ> (7.9)
где а= Л_ ту _JL,*=_(/ _jl.
Уравнения (7.8) и (7.9) получены без учета запаздывания
в срабатывании и отпускании реле и электромагнитного
клапана, а также экспоненциального нарастания и спада тяги. Как
показано в разд. 6. 1, последнее может быть заменено
эквивалентным запаздыванием, равным постоянной времени Т0 нарастания
и спада тяги. Тогда с учетом запаздывания Гр реле и клапана
можно представить общее запаздывание системы в виде суммы:
Га =^ + 7*0,
или Ts =Тр+То.
Учет суммарного запаздывания при построении фазового
портрета системы производится так же, как и ранее, но по
отношению к линиям переключения, определяемым уравнениями
173
(7.8) и (7.9). Допустим, что включение реле (без учета
запаздывания) произошло в точке с координатами ei и eci (рис. 7.4).
удовлетворяющими уравнению (7. 8), т. е.
±8Cp=ei + #eci.
Вследствие запаздывания те включение тяги произойдет позже
в точке Г с координатами ei = £i+eciTs и есг Следовательно,
линия включения тяги повернется относительно линии включения
реле по часовой стрелке. Учи-
Линия включения реле тш 6ктченая
тяга
Линия Выключения
тяги-
Рис. 7. 4. Влияние запаздывания на
фазовой плоскости
тывая, что есГ = 8сь исключим
из уравнения линии
включения реле
Тогда, освобождаясь от
индексов, получим уравнение линии
включения тяги
±eCp=8+ai8C, (7.10)
где а\=а—те.
Выключение реле произой-
ЛииРнпяп"лЛрЮ~&ет в точке 2 с координатами
82, 8С2, которые определяются
уравнением (7.9). Выключение
тяги произойдет в точке 2'
с координатами
ченияреле
£2=е2+£с2*2±
С>=ес2 ± Т2-
Отсюда
е2=£2—ес2Т2+ —; ec2=ec2 + Tv;.
Подставляя эти значения в уравнение линии выключения
реле и опуская индексы, получим уравнение линии выключения
тяги
±80T=8+aiec±a2, (7. И)
где а2=а(Ь — тБ) + т|/2.
На рис. 7. 5 показан фазовый портрет системы, построенный
с учетом запаздывания та. Легко показать, что при этом в
сравнении с предельным циклом, построенным без учета
запаздывания, период автоколебаний уменьшается, но одновременно
возрастает амплитуда колебаний и угловая скорость.
174
Выбор параметров дифференцирующего контура. Введение
дифференцирующего контура обеспечивает устойчивый
предельный цикл, характеристики которого определяются параметрами
контура. С другой стороны, полный расход топлива является
непосредственной функцией частоты автоколебаний и времени
включенной тяги за цикл. Поэтому для уменьшения расхода
топлива период автоколебаний должен быть как можно
больше, а время включения тяги за цикл — как можно меньше.
Безразмерное время включенной тяги твк за цикл пропорционально
Рис. 7.5. Фазовый портрет системы с
дифференцирующим контуром и с учетом запаздывания
максимальной безразмерной угловой скорости предельного
цикла, т. е.
Твк=4|ес. вк|.
Безразмерное время выключенной тяги за цикл будет
где евк, ес. вк — безразмерные значения углового отклонения и
угловой скорости предельного цикла (в момент включения тяги).
Учитывая, что в установившемся предельном цикле
6выкл==6вк> ^с- выкл== 6с. вк>
где евыкл, ес. выкл — значения углового отклонения и угловой
скорости в момент выключения тяги,
из выражений (7. 10) и (7. 11) имеем
еср + еот — а2
(7.12)
еср — еот + 02
175
Используя полученные соотношения, а также равенства (7. 2) и
(7. 7), можно представить выражения для твк и тВыкл в виде
гвк=—[O-^Kp+aJ;
"выкл
--Ьах
(1 + Х)еср— а2
откуда
(1 — Х)еср + а2
1 [(1-*Кр+Я2р
2а\ (1 4- Х)еср — а2
(7. 13)
На рис. 7. 6 представлены графики, построенные по
соотношению (7.13). Из этих графиков видно, что отношение твк/тВыкл
может быть минимизировано.
Условие минимума расхода топлива можно представить в
виде
сср
зх
а2 1 — Х2
При выполнении этого условия получим
Твк _ 4(1—А) а2
*выкл [(1+Х)а,р
Входящие в правую часть последнего выражения величины
К ts, / обычно известны, а коэффициент ki при допустимом
отношении полезного сигнала к шуму составляет величину
порядка 10. Поэтому экономичность системы (отношение твк/тВыкл) в
основном определяется
йг^выкп
1,0
0,5
0,05
0.01
NA-1
4
й>
$/
$>
0,5 10
50 100
500 &
"2
РИС. 7.6. ЗаВИСИМОСТЬ Т„кл/Твыкл ОТ
параметров системы
постоянной времени Т
дифференцирующего
контура и величиной
управляющего момента М0.
Один из этих параметров
может быть найден
исходя из требуемой
точности стабилизации,
которая при отсутствии (ипи
малости) возмущающего
момента определяется
амплитудой
автоколебаний. Другой параметр
может быть найден из
дополнительных условий,
например, возможностей
реализации требуемой
величины Т или
необходимого времени выполне-
176
ния поворотного маневра на заданный угол (это время
определяет величину М0).
Для определения амплитуды гт автоколебаний найдем
уравнение траектории движения на участке с включенной тягой.
Преобразуя дифференциальное уравнение (7. 1) с помощью
равенства (7.3)
и интегрируя его в правой полуплоскости (и=—1) с начальны
ми условиями еВк и ес. вк» получим уравнение параболы
£с2.вк-6?=-2КК-г),
которое при ес=0 и е
лебаний
Приравнивая гт величине максимально допустимой ошибки
стабилизации и выражая евк и ес. вк с помощью равенств (7. 12)
через параметры системы, можно получить условия для выбора
величин Т и М0.
Оценим влияние внешних возмущающих моментов на
фазовую траекторию предельного цикла. Как показано в гл. II,
возмущающий момент может иметь постоянную составляющую,
которая в некоторых случаях (например, возмущающий момент
за счет эксцентриситета тяги двигателя при выполнении
маневров) достигает существенной величины, соизмеримой с
управляющим моментом. Некоторые моменты, создаваемые окружающей
средой (например, гравитационные и аэродинамические,
пропорциональны отклонению космического аппарата от базовой
системы отсчета. Рассмотрим, каким образом их действие скажется
на изменении формы и параметров предельного цикла.
Постоянный возмущающий момент на одной половине
периода автоколебаний будет складываться с управляющим моментом.
В результате на КЛА будет действовать момент
M>MQt
что приведет к уменьшению времени включения тяги и кривизны
соответствующего параболического участка траектории. На
другой половине периода автоколебаний, наоборот,
М<М0
и время включения тяги, а также кривизна параболы
увеличиваются. Кроме того, как видно из уравнений (7.8) и (7.9), при
этом изменятся углы наклона линий включения и выключения к
= ет позволяет найти амплитуду автоко-
л
е =е 4- £с,вк
wm вк I о
177
оси абсцисс. В первом случае наклон уменьшится, а во втором —
увеличится (рис. 7. 7).
С другой стороны, в промежутках между включениями
движение будет происходит не по прямой, параллельной оси
абсцисс, а по параболе, параметры которой определяются величиной
постоянного возмущающего момента Мв0. Для их определения
рассмотрим дифференциальное уравнение движения на этом
участке
мв0
е = - .
"to
М0
£сбыкл \ \
Рис. 7.7. Фазовая траектория с учетом постоянного
возмущающего момента:
— невозмущенный предельный цикл;
. — при возмущающем моменте;
при стабилизирующем моменте
Перейдем к безразмерному времени х=\/ —-'• Тогда с
учетом равенства (7. 3) дифференциальное уравнение можно
привести к виду
dz
Mrs
Отсюда находим
с м0 ^ с-выкл м0 выкл'
Где бвыкл И 8с. выкл координаты точки фазовой траектории в
момент выключения тяги.
Полученное уравнение определяет параболу с вершиной в точке
+ е„ыкл (7-14)
вО
и фокальным параметром Мв 0/М0.
178
Очевидно, что включение тяги в левой полуплоскости не
произойдет, если ео'^— еср. Соответствующая траектория показана
пунктиром на рис. 7. 8. Одностороннее включение тяги на
основании равенства (7. 14) будет при условии
Mt
вО
MQ
>
2(ес
л)
Г10 z Vecp + евыкл/
При дальнейшем увеличении Мъ0 предельный цикл в делом
может стать односторонним (изображающая точка не переходит
ось ординат). Равенство (7. 14) дает следующее условие (ео'^0)
одностороннего предельного
цикла
м,
вО
Мп
>
2ен
Траектория такого
предельного цикла показана на
рис. 7.8 сплошной линией
Внешний момент,
пропорциональный углу е, может
быть, вообще говоря,
возмущающим и стабилизирующим.
Запишем его в виде
MB=±MBie.
Здесь плюс соответствует
возмущающему, а минус —
стабилизирующему моменту;
Мв\ — градиент момента по углу е. В этом случае в промежутке
между включениями в безразмерном времени имеет место
следующее дифференциальное уравнение движения:
Рис. 7.8. Фазовый портрет при
одностороннем включении:
при стабилизирующем моменте;
—— при возмущающем моменте
= +
Решая его при начальных условиях ев, ес. выкл находим
S2 -Е2 =
с.выкл с
мп
'(•J—')
или в канонической форме
+ — =1,
(7.15)
где
г=е2 x^i-e2 •
с с.выкл ' %я выкл'
г.=-
Мп
мл
с.выкл в
При знаке минус (возмущающий момент) уравнение (7.15) описы-
179
вает гиперболу, а при знаке плюс (стабилизирующий момент) —
эллипс с большой полуосью гв ( ——<^ 1 ) и малой полуосью Гг.
\ Щ I
При включенной тяге суммарный момент, действующий на
КЛА, будет
М=— M0sign e±MBi8.
Рис. 7.9. Влияние возмущающего и
стабилизирующего моментов на фазовую траекторию
-—нсвозмущенный предельный цикл;
— . . при возмущающем моменте;
при стабилизирующем моменте
Учитывая, что MBi<M0, а изменение угла за время
включения невелико, член МвХг можно заменить некоторым средним
значением MBieCp. В результате при возмущающем моменте Мв\
величина М уменьшится, а при стабилизирующем — увеличится,
что приведет к соответствующему изменению кривизны фазовой
траектории (рис. 7. 9).
7.2. Оптимизация релейной системы в режиме
плоского поворотного маневра
Проведенное в предыдущем разделе исследование релейной
системы на фазовой плоскости позволило найти параметры
системы, при которых минимизируется расход топлива в режиме
стабилизации, когда в системе устанавливается предельный цикл
автоколебаний. Однако такой выбор параметров системы не
обеспечивает оптимального управления в других режимах
ориентации. К числу таких режимов относится, в частности, режим
переориентации (поворотного маневра) космического аппарата,
когда осуществляется переход к ориентации относительно новой
базовой системы отсчета. Такой переход должен выполняться за
возможно кратчайшее время. При заданном времени выполнения
маневра необходимо, чтобы расход топлива был минимальным.
Аналогичные условия оптимальности имеют место в режиме
начальной ориентации.
180
Эффективным методом синтеза релейных систем в указанной
выше постановке является принцип максимума Понтрягина. Для:
иллюстрации его применения рассмотрим случай плоского
поворотного маневра (вокруг одной оси), для чего представим
уравнение (7. 1), системой двух дифференциальных уравнений
первого порядка:
(7. 16)
£с(т)=и(т).
Пусть начальное состояние системы, соответствующее началу
процесса управления в момент времени т=0, характеризуется
значениями
е(0) =е0=^0; 8с(0)=8со^О.
Рассмотрим задачу минимизации расхода топлива, которая
является наиболее общей. Решение задачи заключается в
выборе такого управления и*(%), которое переводит систему в
течение заданного конечного времени тк из начального состояния
е(0) = (ею, его) в конечное состояние е(тк) при минимальном
расходе топлива на управление. Для определения критерия
оптимальности в данном случае необходимо знать зависимость
секундного расхода топлива от управления ы(т). Для релейных,
систем управления ориентацией с реактивными двигателями
секундный расход топлива тт и управляющий момент М0 связаны
однозначной зависимостью
Л*о = —> (7.17)
Яо
где <7о — постоянный коэффициент.
При использовании двигателей переменной тяги эти
зависимость может быть представлена в виде соотношения
rhT=ml0f(\u\) 0<1и|<1,
где /(|«|) —существенно положительная функция, причем
'/(0)=0, /(1) = 1
и f(\u\)>\u\ при 0<|и|<1. (7.18)
Теперь критерий оптимальности определяется функционалом
S=[/(\u\)dx.
■J"1'
Функция Гамильтона будет
"=^с + <!>а«-/(1«|). (7.19)
181
Из уравнений для сопряженных параметров
ti(t)=0; fc(T)=-«MT)
заходим ^ (t)=ф10; фа (т) = - ф10т + V
Применительно к функциям (7.19) принцип максимума дает
равенство
♦^*-/(|я*|)=тахИ^-/(|«|)1.
Из этого равенства с учетом условия (7. 18) находим
оптимальное управление и* в виде функции параметра г|>2
и* =
0 при |<Ы<1;
+ 1 при ф2> 1;
— 1 при ф2< — 1.
Предельная
парабола
Рис. 7. 10. Оптимальные фазовые траектории
Замечаем, что оптимальное управление является релейным,
причем управляющий момент имеет три значения, равные ±Мо
я 0. Поскольку гЫт) является линейной функцией времени, то
изменение и* (т) во времени представляет собой
неповторяющуюся последовательность значений +1; 0, —1 или их любую
последовательность. На рис. 7. 10 показала оптимальная траектория
при начальном состоянии системы е(0) = (ео, есо).
Неопределенность постоянных г|)ю и грго приводит к необходимости
определения на фазовой плоскости моментов переключения с учетом
начального состояния системы и условия прохождения
оптимальной траектории через начало координат. Построение
оптимальной траектории в случае, когда е(0) = (ео, есо) проводится
следующим образом. Допустим, что оптимальное управление
изменяется вовремени как последовательность значений (—1; 0; +1),
(—1; +1), что легко устанавливается при заданном начальном
«состоянии системы из физических соображений. Тогда, начиная
от момента т=0, оптимальное управление будет
Л82
й*(т)=
— 1 при 0 < т < хг;
О при t1<t<t1+t2;
+ 1 при (т1 + т2)<т1<(т1 + т2+т8),
где Ti, T2 и тз — продолжительность временных интервалов, в
течение которых и* (г) остается постоянным.
Обозначая
ё(Т1)=(е1, ес1);
ё(Т1 + Т2) = (е2, ес2);
•(t1 + t1 + tI)=(0, 0)
(7.20)
И Требуя, ЧТОбы Тк = Т1+Т2 + Тз,
из кусочно-непрерывного решения системы уравнений (7.16)
находим
Т2= » *8— £cl
ес1
= ±..2
S« =
2 "«*'
В соответствии с равенством (7.20) получаем следующее
алгебраическое уравнение линии переключения в четвертом
квадранте:
-f U + (*K-«coKl + «l = 0.
(7.21)
Нетрудно убедиться, что это уравнение параболы, вершина
которой имеет координаты
(*к — £ср)2
6
Тк — ес0
Пересечение этой кривой (кривая 2) с параболой,
проходящей через начало координат (кривая 1) дает точки с
координатами
(*k~scj)2
8
&с*'
•£с0
(7.22>
= * =0
Существенно отметить, что координаты вершины параболы и*
первой точки пересечения однозначно определяются величиной
тк, а также начальной угловой скоростью ес о и не зависят от
начального отклонения.
183.
Первоначальное движение (и=—1) происходит по параболе
(кривая 3)
Решая это уравнение при e=ei и ес=ес i совместно с
уравнением (7.21), находим координаты точек пересечения параболы 3
с параболой 2
«а = -■*=**. ± y K(TK-ec0f-4s0. (7. 23)
Очевидно, что точка переключения соответствует знаку « + ».
Решение имееет смысл при
*2-2vc-«2o-4eo>o- (7-24)
Это соотношение приводится к виду
К-*к1)К-*к2)>о,
где т-Ь2=sc0 + ]^2s20+4s0.
Учитывая, что rKi>0, а Тк2<0 условие (7. 24) выполняется
лишь при
*к>*к1=£сО+]Л£с20+4£0'
Сравнивая выражение (7. 23) при tk=tki с соответствующим
выражением (7.22), замечаем, что существует предельный
случай, когда все три параболы имеют одну общую точку (в*, £с*),
причем параболы 2 и 3 в этой точке касаются. Следовательно,
при
*к < \* = £со+ УЯ^РЫ (7. 25)
условие минимизации расхода топлива не выполняется и
оптимизация осуществляется по критерию максимального
быстродействия (время тк# является минимально возможным при
заданных начальных условиях ео и есо), так как движение
происходит лишь по параболам 3 и /. Действительно, минимальное
время поворотного маневра может быть достигнуто при полном
использовании энергетических возможностей двигателей
(последовательное чередование разгона и торможения).
Минимизация расхода топлива возможна, если потребное
время начальной ориентации больше времени поворотного
маневра, соответствующего максимальному быстродействию, за счет
включения промежуточного участка движения по инерции. При
заданном значении тк* для каждого есо имеется вполне опреде-
184
ленная парабола 2, и условие (7. 24) выполняется при
определенных начальных отклонениях
л
£о<-
/ *к* + еС0 у
Это выражение определяет область начальных условий,
допускающих минимизацию расхода при данном тк. На рис. 7. 11
показана парабола, которая делит правую полуплоскость на две
части. Слева располагаются точки ео, есо, допускающие
минимизацию расхода при *к>тк*> а справа—точки, для которых
задача минимизации расхода
не имеет смысла, так как
система может быть
переведена в состояние е(тк) = (0, 0)
по двум параболам 3 и 1
с постоянно включенными
двигателями за время
Для второго квадранта
линии переключений
находится зеркальным
отображением линии, полученной
в соответствии с уравнением
(7.21), относительно начала
координат (поворотом
соответствующей кривой на
угол я).
Наряду с определением
оптимальных траекторий
при различных начальных состояниях системы практический
интерес представляет установление зависимости расхода
топлива от параметров системы. Эта зависимость вычисляется по
формуле
тт = тт4к=?оЛУвк> (7.26)
где tBK — время работы системы с включенной тягой.
Рассмотрим режим «чистого» поворотного маневра, когда
ес0=0. Из построения на рис. 7. 10, находим
TK=2ti+t2,
где
Ш-1К
^
^5
Тк
J
I
V\? 5
^jV\
^^*С N.
)
.г
к
>
I »
Рис. 7.11. Область начальных условий,
допускающих оптимизацию по расходу
топлива
е2 —ei
~ е0 + А
ео-
Ч
ecl €cl *1
Отсюда находим безразмерное время работы сопла
1-
/
1
4 |e0 j
185
или
<«='■(!-j/l
4/|e0|
M0t2K
где tK — фиксированное время перехода системы из начального
состояния (ео, 0) в конечное (0, 0).
Подставляя последнее выражение в формулу (7.26), получим
т,
-т
'{х-\/
4/Ио|
м*£
(7.27)
Учитывая, что в случае, когда оптимальное управление
обеспечивает максимум быстродействия, минимальное время tHmsn
определяется формулой (7. 25) при ес0=0:
к mil
=JML
м0
тТ |
Qo^omin^K
0,5
м
Т1
Л
>.
4—
Мо/Мо
'omin
Рис. 7. 12. График зависимости расхода
топлива ОТ Mo/Mq min
Полагая в формуле (7.27) /к=*ктиь находим
*Kmin
(7. 28)
Полученная формула определяет расход топлива при
оптимальном по быстродействию законе управления.
Введем управляющий момент M0min, который аналогичным
образом переводит КЛА в конечное состояние за время *к.
Величина этого момента определится равенством
Momin
Тогда с учетом выражения (7. 17) формула (7. 27)
приводится к виду
гот
._ М0
['-/'-^f}
Из графика рис. 7.12 видим, что с увеличением M0fM0mio
186
правая часть последнего равенства быстро сходится к своему
пределу, равному 0,5. Следовательно, в пределе имеем
где т\ б — расход топлива в случае, когда поворот
производится за то же время /к, что и при управлении, соответствующем
максимуму быстродействия.
Следовательно, оптимизация управления с использованием
критерия минимального расхода позволяет вдвое уменьшить
расход топлива по сравнению с критерием максимального
быстродействия при одном и том же времени Ь* выполнения
поворотного маневра. Однако это время /к достигается за счет применения
управляющего устройства с большим значением М0.
7.3. Импульсные системы ориентации
Значительная экономия в расходе топлива по сравнению с
релейной системой ориентации, особенно в режиме стабилизации,
достигается при использовании импульсной схемы (рис. 7. 13).
Импульсный элемент генерирует последовательность импульсов
напряжения, осуществляющих включение электромагнитных
клапанов и создание импульсов тяги нужного знака. В результате
производится импульсная модуляция управляющего момента.
импульсный
элемент
Электромагнитный
клапан
Двигатель
Рис. 7. 13. Блок-схема импульсной системы
Импульс момента, приложенный к КЛА, изменяет его
кинетический момент или угловую скорость (если пренебречь
изменением момента инерцни на время действия импульса) на величину
Д*с=^„м> (7-29)
где *им — время действия импульса момента.
При этом, как видно из выражения (6.3), будет
израсходована определенная масса топлива
Дтт=^им. (7.30)
Из формулы (7. 29) следует, что в такой системе можно
управлять угловой скоростью аппарата (путем изменения tUM) и
поэтому устойчивый предельный цикл автоколебаний можно по-
187
лучить при отсутствии сигнала по угловой скорости (в пределах
зоны нечувствительности соответствующего датчика). Величина
угловой скорости предельного цикла определяется минимальной
длительностью импульса и может быть сделана значительно
меньше, чем в релейной системе. Это приводит к уменьшению
относительного времени включения сопла за предельный цикл,
а следовательно, и к уменьшению расхода топлива.
ау — ив
-±®
tfflict
Lo.c
^[Щ
1+ТкР
«#
авх
и
ив\
0
I
1 I
Ч
[Щ
j ♦_
1 \
I uhh \
Аил
—4
F^ ;
\jhp
j
"о
,
|/"2|
Ч
i
1
1 *
—^»
Рис. 7.14. Схема импульсного элемента и
диаграмма напряжений
Возможны следующие методы импульсной модуляции:
частотный, широтный и комбинированный. Последний метод имеет две
разновидности, которые носят названия псевдоскоростной
модуляции и модуляции импульсными коэффициентами. Они отличя-
ются лишь способом технической реализации. Наибольшее
практическое применение нашел комбинированный метод псевдоско-
ростной модуляции, основанный на применении в качестве
импульсного элемента релейного усилителя, охваченного гибкой
отрицательной обратной связью в виде инерционного звена
(рис.7.14,а) [51].
При появлении управляющего сигнала £/у, превышающего
напряжение UCp срабатывания релейного усилителя, на выходе
последнего появляется постоянное напряжение £/0, которое одно-
188
временно поступает на вход инерционного звена. Это приводит
к экспоненциально нарастающему напряжению U0. c обратной
связи на выходе инерционного звена, и напряжение UBX на входе
релейного усилителя начинает уменьшаться. Когда UBX
уменьшится до величины напряжения U0T отпускания, напряжение
f/вых на выходе усилителя становится равным нулю.
Напряжение обратной связи начинает уменьшаться по экспоненциальному
закону (стремится к нулю), что приводит к соответствующему
увеличению входного напряжения. При £/Вх= £Л>р включается
реле и ивых=и0; напряжение обратной связи увеличивается до тех
пор, пока не достигнет величины U0T. В результате при
постоянном значении Uy образуются автоколебания, и на выходе
возникает последовательность импульсов длительностью /и с частотой
где tn — промежуток времени между соседними импульсами.
На основании рис. 7.14, б имеем
bUt-LU^kJJb-LUJ (l -е~~^>;
отсюда
*и=Гк1п ffi-ff ; (7.32)
/п=Гк1п^-, (7.33)
где Тк и kK — постоянная времени и коэффициент усиления
контура обратной связи.
Введем обозначения
kKU0 kKU0
Тогда формулы (7.32) и (7. 33) могут быть преобразованы
так:
1 — х + *о .
1-х '
/и=7уп.
*„=7\,ln
X
а частота следования импульсов будет
л— '
J^-x + x^
(1—х)(х—х0)
189
Как видим, основные параметры импульсного элемента —
длительность импульсов и частота — зависят от х0 — относительного
гистерезиса релейного усилителя (по отношению к напряжению,
подаваемому на вход инерционного звена) их — относительного
значения входного сигнала. При х—А имеем tn—►<», a tn —*0.
Если x<.x0t то включения реле вообще не происходит, а в случае
х=х0 частота также равна нулю, но при конечном значении t^
На выходе появляется лишь одиночный импульс. Это означает,
что импульсный режим управления имеет место при условии
*о<х<1.
Когда входной сигнал находится в пределах, при которых
tJTK<^l и tJTK<^l, соответствующие экспоненты в выражениях
(7.31) можно линеаризовать. В результате с учетом
обозначений (7. 34) получим
*«=ТК
*о
1 + х0 — х
т хо
■ к
X
Х(\ + Х0—х)
j. «г* ° •
*п — J к »
X
/и х0(1+х0)Тк
Таким образом, среднее за период следования импульсов
время включения системы
1 + *0
пропорционально входному сигналу х. Поэтому подобную
систему ориентации называют иногда псевдопропорциональной (или
псевдолинейной). Расчеты, выполненные по формулам (7.32) п
(7.33) показывают, что и в общем случае, когда O^jc^I,
зависимость (7. 35) выполняется с достаточно высокой для практики
точностью.
Приближенную оценку переходных процессов в такой системе
можно производить с использованием эквивалентной линейной
модели. Действительно, среднее значение управляющего момента
будет
МСр=М0Тим,
где Тим — относительное (среднее за период) значение
длительности импульса момента.
Учитывая, что в переходном процессе £и существенно
превышает /nmm, можно считать, что за время tu тяги двигателя
достигает установившегося значения; следовательно,
и на основании формулы (7. 35) имеем
Мс9^^^х. (7.36)
Р 1+*о
190
Полагая, что управляющий сигнал формируется в
соответствии с законом управления
uv
A^S «2£ ~Г ^1sk»
(7.37)
где ек — значение командного сигнала,
и принимая х0~0, Дн2~иу, получим структурную схему,
приведенную на рис. 7. 15. Здесь
k —%L
kKu0
(7.38)
Соответствующая передаточная функция по командному
сигналу 8К будет
к^м
<МР)=
Jp2 + b2kMP + k{kM
1
/(; U
М 1 1
Р—Н — г
\ р [
Рис. 7. 15. Структурная схема эквивалентной модели
импульсной системы
Это передаточная функция колебательного звена, анализ
которой не представляет трудностей. Произведем выбор
передаточных чисел из условия приближения передаточной функции ФК(р)
к стандартной функции колебательного звена
Тогда получим
/>2 + 2e*0/? + %g
k*M=y2. ^L = 25x0.
Принимая \=I-2l ^ при начальных условиях е(0)=ео, е(0) =
— сон и ек=0 находим
где
е= £0(slri <V+cos а0/)+—sin (ХоЛе""*',
б = [сон cos a0t — К+2а0е0) sin a0t] е-"<>',
(7.39)
а,
_ хо
"/2 '
191
Оценим расход топлива в режиме поворотного маневра (гоФ
Ф0У сон=0). В результате подстановки выражений (7.39) в
формулу (7.36) с учетом равенств (7.34), (7.37) и (7.38) имеем
Мс? = — к^мЧ*"*0' (cos a</ — sin аоО-
Будем полагать, что переходной процесс в системе
заканчивается за время £к~я/<хо (при этом е^О,05ео). Тогда,
подставляя выражения для Мср в формулу
'к
m,=q0\\M^\dt
6
и выполняя интегрирование, находим
или с учетом того, что &1&м=хо2/=2 /ао2
тт~4,09-^М. (7.40)
Соответствующие вычисления при tv>n/ao показывают, что
это не вносит существенных изменений в коэффициенты форму
лы(7.40).
Сравнивая полученную формулу с формулой (7.28),
замечаем, что расход импульсной системы при данном tK совпадает с
расходом релейной системы, оптимальной по быстродействию.
Правда то же самое tK в импульсной системе, очевидно, требует
большего значения М0.
В режиме стабилизации, когда в каждый данный момент
имеют место самые разнообразные начальные условия,
производить вычисления моментов переключения, реализующих
принцип максимума, не представляется возможным. Учитывая
также простоту реализации рассмотренной импульсной схемы,
последней следует отдать предпочтение. К тому же наличие
запаздывания и гистерезиса реле не позволяют обеспечить
расходы, которые можно было бы получить в схеме с идеальным реле.
С другой стороны, режим импульсной работы данной схемы
ограничен на фазовой плоскости некоторым ромбом, который
нетрудно построить, используя условие
Чрезмерное расширение зоны импульсной работы за счет
увеличения kKu0 нежелательно, так как это приведет к сокращению
длительности импульсов на выходе реле. В результате за время
/и тяга не будет достигать установившегося значения (неполное
использование возможностей управляющих двигателей). Кроме
192
гого, систему нельзя уже считать линейной и полученные
результаты будут несправедливы. Следовательно, размеры зоны
должны выбираться так, чтобы она охватывала область возможных
отклонений по е и е в режиме стабилизации и, главное, область
возможного установления предельного цикла, определяемого
линиями переключения соответствующей релейной схемы.
За пределами импульсной зоны система будет вести себя как
обычная релейная система. При этом время входа в указанную
зону может оказаться очень длительным (при больших
начальных отклонениях по е и е). Соответственно резко возрастает и
расход топлива. Этот недостаток может быть устранен при
больших начальных отклонениях схемой, оптимальной по
быстродействию, которая используется лишь за пределами импульсной
зоны.
По окончании переходного процесса в системе
устанавливаются автоколебания. При отсутствии внешнего возмущающего
момента устанавливается симметричный предельный цикл,
который характеризуется минимальным импульсом. Его длительность
определяется условиями срабатывания электромагнитного
клапана.
В реальных условиях полета на КЛА действует внешний
возмущающий момент, который приводит к нарушению симметрии
предельного цикла. Учитывая, что величина возмущающего
момента меняется сравнительно медленно, будем считать, что в
пределах одного периода предельного цикла на аппарат
действует постоянный момент. При этом система ориентации будет
создавать импульсы момента только одного знака
(противоположного знаку возмущающего момента).
Устойчивый предельный цикл автоколебаний будет в том
случае, когда импульсы управляющего и возмущающего моментов
за период автоколебаний равны, т. е.
ЛМим = Мв(*им + *п).
Отсюда
Предположим, что величина М0 выбрана из условия, чтобы
предельный цикл не выходил за границу нечувствительности
датчика угловой скорости А8р. Следовательно, в режиме
автоколебаний систему можно считать разомкнутой по сигналу е.
Пренебрегая изменением угла е (следовательно, и напряжением иу)
за время tm будем считать
Поскольку в данном случае происходит лишь одностороннее
включение сопел, угол отклонения КЛА от базовой системы
отсчета, соответствующий моменту включения, характеризует сме-
7 991
19а
щение предельного цикла (ошибку стабилизации). Напряжение
%вкл, при котором происходит включение сопла может быть
найдено, если к Диь определяемому 'линеаризованным
равенством (7.43), добавить напряжение срабатывания. В результате
имеем
Ну вкл = * А [( 1 + *о) Jf ~ *о] + «ср-
С учетом закона управления (7.37) получим смещение
s,~*^(i+x0)^+^. (7.42)
Так как kKuc/ki и u0T/ki имеют размерность угла, причем первый
соответствует углу е0. с, при котором управляющий сигнал иу
равен напряжению кки0 на входе инерционного звена в цепи
обратной связи, а во второй — углу е0т, при котором иу=и0Ту то
выражение (7. 42) можно представить в виде
е# = г0.с(1+х0)^2-+еот. (7.43)
Для повышения точности стабилизации, естественно, нужно
стремиться к. уменьшению еот (напряжения отпускания реле —
его зоны нечувствительности) и гистерезиса. При заданных
характеристиках реле смещение тем меньше, чем меньше MJMQ
и во.с (напряжение на входе обратной связи). Однако
возможности уменьшения г0. с ограничены. В самом деле, при очень
малых е0. с система может стать неустойчивой (при отсутствии
сигнала по е). В результате устойчивый предельный цикл
образуется за пределами зоны нечувствительности датчика угловой
скорости и рассматриваемая импульсная схема вырождается в
обычную релейную схему с датчиком угловой скорости.
Расчеты, проведенные в работе [51] для случая М0//=
=0,45 мрад/с2, позволяют оценить нижний предел е0. с на
основании областей устойчивости, построенных на рис. 7. 16.
Графики на рис. 7. 16, а показывают влияние напряжения
срабатывания (eCp=Wcp/&i) при начальной угловой скорости ео~4 мрад/с,
а графики на рис. 7.16,6 — влияние начальной угловой
скорости КЛА при 8Ср=1/. Из приведенных графиков видно, что
система остается устойчивой, если ее параметры находятся в
пределах 8ср^2', е0.с^Ю', Г„=2—10 с при ео<4,35 мрад/с.
Уменьшение 80. с приводит также к увеличению /и, так как при
данном значении гистерезиса реле х0 возрастает с уменьшением
напряжения kKu0. В этом нетрудно убедиться, если сопоставить
формулу (7.34) для Хо с выражением (7.35).
Экономия в расходе топлива системой ориентации с газовыми
соплами достигается также при использовании логических
устройств, обеспечивающих формирование нескольких линий
194
переключения [51]. Принцип действия такой систему удобно
проиллюстрировать на фазовой плоскости (рис. 7. 17).
Включение сопел происходит лишь в тех случаях, когда знаки угла г
и угловой скорости е совпадают, т. е. в первом и третьем квад-
10 Тн, с
Рис. 7. 16. Области устойчивости импульсной
системы
рантах фазовой плоскости. Первое включение (в первом
квадранте) происходит тогда, когда е>еь второе включение — если е>е%
и т. д. При каждом включении создается определенный импульс
момента, который выбирается таким образом, чтобы за время
включения клапана потреблялся минимум мощности...
Уменьшение расхода топлива такой системой в переходном
процессе достигается за счет того, что сопла не включаются,
когда КЛА сам возвращается . 4
* А */ Ь *
« *
т?
Шт
к положению заданной
ориентации (во втором и
четвертом квадрантах фазовой
плоскости). Характерной
особенностью данной
системы является то, что она не
требует -информации о
величине угловой скорости
(достаточно знать лишь ее
знак). Кроме того,
гистерезис линий переключения
играет положительную роль, так как позволяет исключить
ошибочные срабатывания электромагнитного клапана за счет ошит
бок измерительного устройства.
-c3-c2-cf
Рис. 7. 17. Фазовая траектория
системы с несколькими линиями
импульсного переключения
7*
195
Бри проектировании подобной системы очень важно
исключить многоимпульсный предельный цикл. Для этого необходимо
правильно выбрать величины импульсов, соответствующих
каждой линии включения. Рассмотрим вначале случай двух линий
переключения, обозначая соответствующие импульсы момента
Lx и 1г.
Поскольку каждый f-й импульс приводит к изменению
угловой скорости аппарата на величину
Рис. 7. 18. К оценке возможности появления двух-
импульсного предельного цикла
на фазовой плоскости (рис. 7. 18) можно выделить три области.
Области / и 3, очевидно, соответствуют начальным условиям,
при которых устанавливается одноимпульсный предельный цикл,
и лишь при начальных условиях в заштрихованной области 2
возможно появление двухимпульсного предельного цикла. Такой
предельный цикл появляется лишь в том случае, когда Де2> дех
или L2>Li. Следовательно, возможность появления
двухимпульсного предельного цикла исключается при условии
L2<U
Трехимпульсный предельный цикл в системе с тремя
линиями переключения (рис. 7. 19) устанавливается в том случае,
когда третий импульс больше суммы двух первых или равен
этой сумме. Чтобы исключить возможность появления трехим-
пульсного предельного цикла, необходимо выполнить условие
L3<U + U
Установление соответствующего одноимпульсного
предельного цикла показано на рис. 7. 19 пунктиром.
По-видимому, нет необходимости в дальнейшем
рассмотрении примеров с большим числом линий переключения для того,
чтобы обосновать условие, исключающее появление многоим-
196
пульсных предельных циклов. Многоимпульсный предельный
цикл может быть исключен, если
-л+1
<2**-
(7.44)
/-1
Таким образом, при выполнении условия (7.44) в системе
устанавливается предельный цикл с амплитудой автоколебаний
•? U
€f €2 €3
т
з*
И
-Ь -Ъ -Ъ
Рис. 7.19. К оценке возможности появления трех-
импульсного предельного цикла
8ь соответствующей первой линии включения. Величина угловой
скорости предельного цикла равна
а'к 2 "" 2/ *
Важной задачей при проектировании такой системы является
правильный выбор количества линий переключения. В ряде
случаев считается достаточным иметь три линии импульсного
переключения управляющего момента. Однако учитывая
возможность появления значительного возмущающего момента
(например, при включении ракетного двигателя для выполнения
орбитального маневра), с которым не в состоянии справиться малые
импульсы, необходимо при некотором значении угла е^ер
переходить к релейному режиму работы системы. В этом случае в
систему вводится информация от датчика угловой скорости с
зоной нечувствительности Д£р.
7.4. Релейные системы коррекции
вращающегося КЛА
Действие внешних моментов на КЛА, стабилизированный
вращением, приводит с течением времени к отклонению оси
вращения от заданного положения в пространстве. Поэтому на
вращающихся КЛА, рассчитанных на длительное время полета,
устанавливается система коррекции, восстанавливающая их
ориентацию. Наряду с этим система коррекции обеспечивает гаше-
197
ние начальных угловых скоростей КЛА по осям,
перпендикулярным оси его вращения, начальную ориентацию и поворотные
маневры оси вращения.
Характер движения оси вращения в режимах начальной
ориентации и поворотного маневра одинаков. Поэтому при
исследовании динамики системы коррекции различия между режимами
не производится.
К особенностям системы коррекции вращающихся КЛА в
первую очередь относится проявление гироскопического эффекта и
необходимость приложения к аппарату корректирующего момен-
Рис. 7.20. Схема расположения сопел на аппарате:
1—пара сопел, создающая момент вокруг оси хц 2—пара сопел,
создающая момент вокруг оси х2
та в определенных точках цикла вращения. Последнее
обстоятельство делает исключительно целесообразным применение
релейных и импульсных систем коррекции.
При исследовании этих систем предполагается постоянство
угловой скорости вращения, так как за время коррекции ее
изменение пренебрежимо мало. Как правило, вращающиеся КЛА
представляют собой осесимметричкое тело (/1=/2), причем ось
симметрии (ось хг) совпадает с осью вращения.
Перейдем к рассмотрению релейной системы коррекции.
Схема размещения устройств системы коррекции может иметь
несколько конструктивных вариантов. В качестве примера на
рис. 7.20 приведены два возможных варианта. В первом
варианте (рис. 7. 20, а) используются две пары реактивных
двигателей, жестко связанных с вращающимся КЛА. Оси сопел
совмещаются с главными осями инерции. Двигатели создают упра!вля-
ющие моменты М\ и М2 по осям х\ и х2 соответственно. Эти
моменты ограничены по модулю
|Af||<Mio; |M2|<M20. (7.45)
Поскольку моменты инерции по осям Х\ и х2 одинаковы будем в
дальнейшем полагать М2о=Л4ю.
198
Во втором варианте (рис. 7.20, б) используется одна пара
двигателей, которая создает момент вокруг одной оси. Для
определенности будем в дальнейшем считать, что момент М2
создается вокруг оси Хг. При этом также выполняется условие
(7.45).
Рассмотрим возможность использования описанных устройств
в релейной системе коррекции для ликвидации начальных
угловых скоростей КЛА по осям, перпендикулярным оси вращения.
Влиянием возмущающих моментов при этом будем пренебрегать,
так как они значительно меньше моментов, создаваемых
двигателями. Пренебрегая также запаздыванием и гистерезисом реле,
на основании дифференциальных уравнений (2.9) имеем
Лх—(У—у0) «v^ = — м10 sien «v
У<*>2+(У —- У0) и)^ = — М10 sign o)2.
Введем безразмерный параметр
иН£*-1 ('=1.2),
Alio
где 4,=^,
и перейдем к безразмерному времени т=у)осоо/. Тогда, обозначая
дифференцирование по т в целях краткости записи по-прежнему
точкой, можно преобразовать дифференциальные уравнения
следующим образом:
У1-Уг= — sign У±; (7 47)
J^+#i=-sign*/2.
Проанализируем полученные уравнения на фазовой плоскости
в координатах: уи у2. Для этого прежде всего определим вид
фазовой траектории в различных квадрантах.
В первом квадранте (*/i>0, у2>0) уравнения (7.47)
запишутся так:
У1-У!=-1; (7 48)
У% + У1= — 1-
Отсюда получаем уравнение
У1+&=-1-
В результате интегрирования находим
У21 = У21н+ у1-у2г-2у1 + 2у1ю
199
где #ih, j/iH — начальные значения #i и yt для рассматриваемого
квадранта.
Подставляя это выражение в первое уравнение (7.48),
получим
tfl + $+2y1-2yt+ 1 - 2#1н - yl- y2lH=0.
Вычисляя инварианты полученного уравнения кривой второго
порядка, нетрудно убедиться, что она представляет собой
окружность, центр которой имеет координаты
#п=—l;#2i= + l.
Рис. 7.21. Участок фазовой Рис. 7.22. Фазовая траектория при ис-
траектории пользовании первой схемы коррекции
Соответствующий участок фазовой траектории показан на
рис. 7.21.
Во втором квадранте (#i<0, #2>0) фазовой плоскости,
выполняя аналогичные действия, находим, что фазовая траектория
является окружностью с центром в третьем квадранте и
координатами
#12=—1; #22=—1.
Соответственно в третьем квадранте (#i<0, #2<0) имеем
окружность с центром в четвертом квадранте и координатами
#13=1; #2з=—1>
а в четвертом квадранте тоже окружность с центром в первом
квадранте и координатами
#14=1; #24=1.
На основании проведенного исследования можно построить
фазовую траекторию для начальных условий #ю и #го, которые
равны соответствующим величинам для первого квадранта
(рис. 7.22). Как видим, величины угловых скоростей #i и #2 по-
200
степенно уменьшаются стремясь к нулю, что свидетельствует об
устойчивости системы. С учетом зоны нечувствительности
измерителей угловые скорости будут уменьшаться не до нуля, а до
соответствующих граничных значений.
Система коррекции, использующая управляющее устройство
второго типа (см. рис. 7. 20, б), может рассматриваться как
частный случай предыдущей системы при Mi=0. При этом
уравнения (7.47) могут быть записаны в виде
У1 — У2=0\
У2+У1=— sign y2.
(7.49)
Из первого уравнения для всех квадрантов получаем
равенство
1/1 = 1/2,
с учетом которого интегрирование второго уравнения (7.49) для
различных квадрантов позволяет получить уравнения участков
фазовой траектории:
У2г + у1 + 2у1-2у1^
У2гн — У21*=0-
в первом и втором квадрантах;
у\+у\ — 2#! + 2у1н+2у1н — у и — угн=0 — в третьем и четвертом
квадрантах,
которые описывают окружности с центрами, имеющими
координаты
УП = У\2 = — 1; |/21 = |/22 = 0
И 1/13 = ^14=1; #23 = #24=0
соответственно. В результате можно построить фазовую
траекторию (рис. 7.23) при начальных условиях ую и #2<ь равных
соответственно #ih и #2н для первого квадранта. Эта траектория
также свидетельствует об
устойчивости релейной системы
коррекции в режиме ликвидации
начальных угловых скоростей,
Исследуем рассмотренные вы-
ше варианты релейной системы
коррекции с целью определения
оптимальных в отношении
быстродействия законов
управления, обеспечивающих
ликвидацию вращения КЛА вокруг осей
Х\ и х2. При этом в соответствии
с тем порядком, в котором они
анализировались ранее, будем
называть их первой и второй
схемой коррекции.
Рис. 7.23. Фазовая траектория при
использовании второй схемы
коррекции
201
В первой схеме с учетом ограничения (7. 45) представим
управляющие моменты в виде
-^=Й1(т); ^=«a(t),
где Ui(x) и Иг(т) безразмерные функции времени (управления),
удовлетворяющие условию
Мт)|<1; |щ(т)|<1. (7.50)
Тогда дифференциальные уравнения можно записать следующим
образом:
У1 — У2=и1(х); У2+У1=и2(%). (7.51)
В качестве критерия оптимальности примем минимум
функционала
4dx=
V
Рассматриваемая задача является обычной задачей, решаемой с
помощью принципа максимума Понтрягина. Гамильтониан в
этом случае имеет вид
"=l + yAW-yA(t)+«1(T)tl(t)-e1(T)fc(t)f (7.52>
где сопряженные функции \|)i(t) и грг(т) определяются
уравнениями
дУ2
Решая эти уравнения, находим
ti(0=tiocost+^sin т;
fc(') = — tiosin t + фгоcost,
где г|5ю=г|)1 (0); 1|)2о=я|?2(0).
Минимум гамильтониана по ux(t) и и2(/), удовлетворяющий
ограничениям (7. 50), имеет место при
«i(t)=-sign{t1(t)}=a1=± 1; (754>
«2W==~sign{^2(t)}=«2=± 1.
Уравнения (7.53) и.(7.54) обеспечивают оптимальность
управления в отношении быстродействия. Из этих уравнений
следует, что управления не меняют знак в течение промежутка вре-
202
мени Дт, не превышающего половину периода изменения
функций i|:i(t) иг|?2(т), т. е.
Дт^я.
Моменты переключения управлений сдвинуты по фазе на Дт/2^
г^я/2. Поэтому, если переключение Ut(x) производится на
интервале
Tl^T^T2,
где Т2—Т1 = Дт=я,
то уравнение u2(t) будет переключаться в момент
После интегрирования уравнений (7.51) с учетом равенств
(7. 54) имеем
yi-«i=(»io-«i)cost + (yle+«l)sin т; ^
Уз + и1=- (Ую - й2) sin т+(у20+ях) cos т.
Исключая время т, находим уравнение фазовой траектории
(yi-u2f+(y2+ulf=(y10^u2f-\-(y20+u1)\ (7.57)
которое, как было показано выше, описывает окружности,
расположенные в соответствующем квадранте в зависимости от щ
и ы2. Переход от одной окружности к другой определяется
линиями переключения. Если в обычной релейной системе такими
линиями являются координатные оси, то в этом случае это
будут более сложные кривые. Уравнение линий переключения
может быть найдено из уравнения (7.57). В самом деле, точка,
лежащая на линии переключения, должна удовлетворять
уравнению (7. 57), причем ее координаты являются начальными
условиями для участка траектории, расположенного в следующем
квадранте. Кроме того, линии переключения должны проходить
через начало координат. Следовательно, для нахождения
уравнения линии переключения достаточно в этом уравнении
принять
#1=02=0; у10^Уг*; У2о=У2*>
где ух*, у2* — координаты текущей точки на линии
переключения.
Подставляя эти равенства в уравнение (7.57), получим
(Ух— u2f+(y2* + u1f=2. (7.58)
Время движения между двумя точками фазовой траектории
можно найти, решая уравнения (7.56) относительно sin т.
t = arcsin («'-«2)(yao + «i)-(lfa + gi)Clfio-g2). (7# 59)
(#10-И2)2 + (!/20 + И1)2
203
Если уравнение (7. 56) записать в системе координат с началом
в центре окружности, то можно убедиться, что время т
движения из точки (#1н, #2н) в точку (уи у2) определяется углом т (см.
рис. 7.21) поворота радиуса-вектора фазовой траектории.
На основании равенства (7.55) можно утверждать, что
уравнение (7. 58) определяет линию переключения лишь на участке
длиной я/2. В самом деле, при движении по линии переключение
Рис. 7.24. Линии переключения для Рис. 7.25. Минимальные изохроны
первой схемы первой схемы
из начала координат переход из одного квадрата в другой
осуществляется лишь с переменой знака одного управления.
Поэтому, если обозначим момент прихода изображающей точки на
фазовой плоскости в начало координат через тз, а момент
переключения через ti, то
(тз — т0=я/2.
Линия переключения на следующем участке может быть
найдена из того же уравнения путем переноса начала координат в
конечную точку предыдущего участка. Координаты этой конечной
точки могут быть найдены из выражения (7.59), если положить
т=я/2; yi=y2=0.
Таким образом, могут быть построены линии переключения в
требуемом диапазоне угловых скоростей, определяемом их
начальными значениями. Вид этих линий показан на рис. 7.24.
Использование законов управления (7. 54) позволяет
осуществить переход в начало координат за минимальное время 4un-
Геометрическое место точек на фазовой плоскости, из которых
переход в начало координат осуществляется за минимальное
время, называется минимальной изохроной. На рис. 7.25 пока-
204
зано семейство изохрон для нескольких значений ттш.
Приведенные кривые можно использовать для оценки времени
гашения угловых скоростей он и (02 для КЛА различных
конструкций, определяемых параметром т)о, а также при различной
величине управляющего момента о>о и угловой скорости М ю.
Указанные обстоятельства свидетельствуют об универсальности этих
изохрон. При их использовании предварительно необходимо от
начальных угловых скоростей сою и сого перейти к yi0 и уго в со-
Рис. 7.26. Оптимальная фазовая траектория при
использовании второй схемы
ответствии с равенством (7. 46). После нахождения tmin
достаточно поделить полученный результат на "КЛо^о, чтобы
определить tm\n.
Вторая схема коррекции может по-прежнему
рассматриваться как частный случай первой схемы при
М1==0.
Полагая в уравнениях (7.57) и (7. 58)
"i=0; ti2(x)=u; M20=M0y
получим уравнение траектории
(yi — и)*+.у2*= (у10 — и2)2+*/2о2 (7.60)
и уравнение линии переключения
(У1*-и? + у1*=2.
На рис. 7. 26 показаны линии переключения и фазовая
траектория при одноосном управлении.
205
Аналогичным образом на основании выражения (7.59)
находим время движения
^arcsin
Q/lO-«)2-t-02O
Минимальные изохроны для одноосного управления при М0=
= Mi0 приведены на рис. 7. 27.
Произведем оценку расхода топлива в рассмотренных
системах коррекции. Так как масса газа, выбрасываемого соплом,
будет
тт=т0 — т,
где пц — масса КЛА до
включения двигателя, то формула
(2.52) примет вид
э dt
Учитывая, что величина тяги,
развиваемая соплом, равна
Рис. 7. 27. Минимальные изохроны
одноосного управления при k0—2
I
масса израсходованного топлива
за время переходного процесса
определяется равенством
""" \АЛ\
dt.
mxS
_ fm,n \м\
-i
Отсюда, зная, что \М\ = const, находим
\Щ
w3i
ттБ = -^-7/т1П.
Следовательно, для каждой из рассмотренных выше схем
коррекции, полагая скорости истечения Wb и плечи / одинаковыми,
имеем
тТъ--
mTs=
^ю + М20
^lmin — первая схема;
^2min — вторая схема.
Как видим, сравнительный расход топлива определяется
минимальными изохронами.
В предположении, что
или
206
Mi0 + M2o=M0,
2M10=Af0,
сравнивая соответствующие графики на рис. 7.25 и 7.27,
находим, что первая схема экономичнее второй. Это объясняется тем,
что в рассматриваемом случае (2Mi0=^M0) величина
суммарного вектора момента в первой схеме больше, что приводит
соответственно к меньшему времени коррекции.
В заключение следует отметить, что в реальных условиях
любая схема имеет запаздывание, гистерезис и зону
нечувствительности. Все это приводит к появлению предельного цикла
нутационных колебаний, для гашения которых могут применяться
пассивные методы демпфирования, рассмотренные в гл. III.
7.5. Импульсные системы коррекции
вращающегося КЛА
Приложение импульса управляющего момента к
вращающемуся КЛА вызывает прецессионное движение оси вращения в
пространстве. Данное обстоятельство может быть использовало
как для заданного поворота оси вращения, так и для коррекции
ее отклонения от положения требуемой ориентации. Рассмотрим
вначале возможные способы решения первой задачи.
Допустим, что jj начальном положении (/=0) вектор
кинетического момента Н совпадает с осью вращения КЛА. При
действии на него импульса управляющего момента Li возникает
прецессия вектора Н вокруг суммарного «вектора
кинетического момента
H2=H-^Ll9
причем H-L\=0.
При отклонении оси вращения КЛА на заданный угол а к нему
прикладывается второй импульс момента
L^=-ti — Hi.
В результате кинетический момент КЛА после действия двух,
импульсов управляющего момента будет равен его начальному
значению Н. Тем самым обеспечивается требуемый поворот оси
вращения на угол а. Для осуществления такого поворота
должны быть известны векторы импульсов управляющих моментов.
Из приведенных выше равенств следует, что
\L\ = \I2\ = L,
так как в противном случае конечное_значение вектора
кинетического момента КЛА не будет равно Н.
Для вывода аналитических соотношений, характеризующих'
описанный поворот, и для определения векторов L\ и Z2 введем
три системы координат: инерциальную OXxX2Xz и полусвязанные
с КЛА системы Ох^х21х^ и Ох?х22хъ2 (рис. 7.28).
207
Верхние индексы 1 и 2 введены для различия ориентации осей
указанных систем координат в начальном и конечном
положениях КЛА. Оси х$х и *з2 совместим с осью вращения.
Предположим, что импульс L\
прикладывается вдоль
отрицательного направления оси х\
в момент, когда плоскость
Х\хх£ совпадает с
плоскостью Х\Х3, причем ось Хъ
совпадает с вектором
суммарного^ кинетического *мо-
мента Нъ. Угол между
осями Хз1 и Х3 равен в этом
случае углу нутации, см.
(7.28). Ось х\2
располагается в плоскости измерения
угла а, так, что поворот
КЛА осуществляется
вокруг оси х2х.
Наконец, вектор L2
действует в плоскости Xz2Xz пер-
Рис. 7.28. К ориентации оси
вращения КЛА в инерциальной системе
координат
пендикулярно оси х32 (рис.
7.29). Единичные векторы
*з hj3% определяющие
начальное и конечное положения вектора Н в системе координат
OX\X2Xz с единичными векторами осей ей ё2> h могут быть
представлены в виде
1\= sin y^i + cos уё3;
-о - - (7-bl)
/ 3= sin у cos <|#i+sin y sin ф£2+cos ye3,
где г|) — угол прецессии.
Связь между углами a, y» *Ф находим из скалярного
равенства
cos а =7з • i\=sin2 Y cos <|>-\- cos2 Y-
Отсюда получаем
a
sin —
sinv= — • (7.62)
sin
±
2
Из этого равенства следует, что возможны два способа
реализации поворота оси вращения КЛА. Первый способ
соответствует условию ч|з=я. При этом согласно равенству (7.62) угол
нутации должен быть равен
(7.63)
Y=-
¥ 2
208
Поскольку
Li=Htgy, (7.64)
то характерной особенностью данного способа, является
зависимость величины импульса управляющего момента от значения
угла поворота а.
Во втором способе угол нутации остается постоянным. Его
значение принимается равным
¥«=%■. (7.65)
Рис. 7. 29. Определение вектора импульса момента
Lz и скорости прецессии Юп^
а—ориентация вектора импульса момента U в инерци-
альной системе; б—действие на_вращающийся КЛА
импульса Lx
где ат — максимально возможный угол поворота оси вращения
КЛА, что предполагает изменение угла прецессии в пределах
если требуемый угол поворота a<Um. В этом случае величина
импульса момента L4 остается неизменной при различных углах
поворота а. Для сравнения указанных способов поворота
вращающегося КЛА введем матрицы преобразования координат.
Переход от системы Oxilx2lxzl к системе OXiX2Xz производится с
помощью матрицы
cos у 0 sin у I
An—
О 1 О
— siny 0 cosy
где y= в первом способе;
Y=— — во втором способе.
209
Преобразование координат при переходе от системы ОХ\ОХ2Х$ к
системе Ох^х22Хз2 является более сложным. Для его
определения получим вначале выражения для единичных векторов и2 и
122. Учитывая, что ось х22 перпендикулярна плоскости х31Хз2,
находим
72 '3
'2=ТЙ
i\Xi\
i1 v72l
l3 Л *з
или согласно равенству (7.61)
sin 2y
я-
sin 2y sin ф -
; cos ^-1)^2
sin2 у sin 6
*3э
2 sin a x 2 sin a " sin a
где sina = |sina|, так как а<я.
Единичный вектор п2 находится из* очевидного соотношения
72
<1=«2Х« =
sin y
sin a
[ 1 — cos ^)cos2 y + sin2 Y sin2 ф]^ —
—-(cos2 Y + sin2Ycos^)sin ф£а-| sin 2y(l —cos<|0*8}.
Таким образом, матрица преобразования координат при
переходе от системы OXiX2X3 к системе Ох\2х22х32 будет
^02"
№-% [(1 — cos ф) cos2 Y+
sin a
-f sin2 y sin2 ф)
sin 2y sin ф
2 sin a
sin y cos ф
sin y sin ф , о 1 sin y sin 2y
I ^—(cos2Y+ LX
":— 2 sin a
X(l-cos<|0
sin2 y sin ф
sin a
+ sin2Ycos^)
sin 2y
2 sin a
■(1—СОБф)
sin vsiri ф
sin a
cosy
Матрица перехода от системы Ох£х£х£ к системе Охх2х22Хз2
равна произведению полученных матриц А0\ и AQ2
A2i—А01А02-
а
12
а
\а,
21
а.
22
13
*23
1а31 ^32 ^33
Здесь
аи=
sin 2y
а
12"
2 sin a
sin y sin ф
sin a
[(1 — cos ф) cos 2y + sin2 y sin2ф|;
(cos2 y + sin15 y cos Ф);
210
a13 = ^^-[2(l-cos^)cos2Y + sin2Ysin2^];
sin a
sin у sin ф .
#21 — : *
sin a
#22= Г"2У (1—cos^); a23 = 0; я31=-(1 —cos<|>)sin y cosy;
2 sin a
a32=sin Ysin <|>; a33=sin2YCOS^+cos2Y,
где y = —; ф = я — первом способе;
Y=Ym=— — во втором способе.
Преобразование координат выполняется вычислительной
машиной, расположенной на борту КЛА или на Земле. Во втором
способе когда ^фп это преобразование исключительно
громоздко, что можно отнести к недостаткам данного_способа.
Определим теперь ориентацию вектора L2 в инерциальной
системе координат. Из геометрического построения на рис. 7. 28
и 7.29, а находим
L2=L [cos y cos tyet-f cos y sin tye2 — sin ye^[.
С помощью обратной матрицы ЛоТ1 можно найти направление
вектора L2 в системе Oxi1X2iXzi или, умножая L2 на матрицу Л02,
в системе 0*12х22х32. При первом способе поворота (г|?=я)
вектор Z/2 располагается в плоскости ОХ^Хг и определяется
выражением
Z/2=—L (cos уё\ + sin уёг),
в то время как
Li=L(—cosyei+smyez).
Величина импульса характеризует затраты топлива на
ориентацию; поэтому сравним величины импульсов, требуемых для
реализации рассматриваемых способов управления. Если в
первом способе величина импульса зависит от потребного угла
поворота оси вращения и определяется формулами (7. 63) и (7. 64),
то во втором способе величина импульса постоянна и зависит,
как видно из формул (7. 64) и (7. 65) от максимально
возможного угла поворота aw. Следовательно, первый способ является
наиболее экономичным.
В ряде случаев не менее важной характеристикой является
время выполнения маневра tM. Произведем сравнительную
оценку величины /м для обоих рассматриваемых способов.
Под действием импульса Li КЛА получает угловую скорость
- £i
211
Раскладывая ее по направлению осей 0XZ и Охгх (см. рис. 7.29,6),
с учетом формулы (7. 64) находим угловую скорость прецессии
Н
/cos Y
Время Заполнения маневра будет
а
я/ cos —
/м1=—== при первом способе на основании равенства
и (7.63);
ф/ cos —
/ 2=-¥- = при втором способе, учитывая равенство
н (7.65).
Отсюда получаем
V'm2 /
а
я cos —
^cos —
где на основании формул (7. 62) и (7. 65)
а
2
а
sin -
ф=2 arcsin-
sin —
2
Полученным соотношениям соответствуют графики,
приведенные на рис. 7. 30. Для сравнения на рис. 7. 31 построены
графики отношения потребных величин импульсов моментов,
которое на основании выражений (7.63), (7.64) и (7.65) может быть
подсчитано по формуле
Из приведенных графиков видно, что второму способу
управления соответствует меньшее время маневра, которое тем меньше,
чем меньше отношение а/ат. Однако это достигается за счет
значительного увеличения расхода топлива, характеризуемого
отношением величин импульсов моментов. Поэтому второй способ
предпочтителен лишь тогда, когда ко времени маневра
предъявляются очень жесткие требования, а требования экономичности
отступают на второй план.
Рассмотрим теперь задачу стабилизации оси вращения КЛА.
Проведенные выше исследования способов управления выполня-
212
лись «в предложении совпадения оси собственного вращения
КЛА с вектором его кинетического момента. В
действительности несмотря на наличие демпфирования ось вращения КЛА
совершает коническое движение относительно вектора
кинетического момента. Если потребный угол поворота оси вращения
t Mj/tMl
а, град
Рис. 7. 30. Графики зависимости
*м2
=/i(«) и Ф=/«(а)
существенно превышает угол раствора конуса, то сделанное
выше предположение вполне допустимо. В режиме стабилизации,
когда осуществляется периодическая коррекция уходов оси
вращения от положения заданной ориентации, эти углы соизмеримы.
1-мг
11
10
8
6
2
15 30 45 60 75 90 ос,граД
Рис. 7.31. Графики отношения потребных
величин импульсов моментов
ГГГП
|\\
\\
\\
V
\
*^.
«пГЗ(
[8
«?*-
90°<Хт=120°
Исследования процессов коррекции малых отклонений оси
вращения от положения заданной ориентации, в результате
которого разработана схема субоптимального управления,
выполнено в работах (53, 54]. Известно, что наиболее высокие показатели
2ia
по надежности имеет система управления, в которой обеспечено
единство логики управления на всех режимах ее
функционирования. Поэтому при решении проблемы коррекции КЛА,
стабилизированных вращением, важно обеспечить правильное
сочетание оптимальности управления малыми отклонениями оси
вращения от положения заданной ориентации с управлением ее
поворотами на значительные углы при необходимости изменения
ориентации. Удачное обобщение указанной выше схемы
субоптимального управления малыми
углами проведено в работе [54].
Особенность предложенного в
этих работах закона управления
состоит в одновременном
управлении ориентацией и коническим
движением оси вращения.
В общем виде задача
ориентации в предложенной схеме
формулируется следующим обра-
ч7 зом: необходимо продольную
ось вращения дез, вокруг которой
КЛА вращается со скоростью
Ф, перевести в положение Х$
(рис. 7.32).. Положение оси х3
Рис. 7.32. Схема ориентации оси определяется углами а, р. Мо-
©ращения относительно базовой менты инерции относительно про-
системы отсчета г г • ж
дольной оси /о и поперечной оси /
удовлетворяют условию
/о>/.
Угол раствора конуса оси вращения считается малым
(несколько градусов). Он в основном определяется размером конуса,
возникающего в процессе начальной ориентации после отделения
от ракеты-носителя. Для начальной ориентации могут быть
использованы описанные в разделе 7. 4 схемы управления.
Управление в предлагаемой схеме производится созданием
серии импульсов момента по оси #2. Под действием каждого
импульса центр конуса на картинной сфере смещается на
величину
ДС=-А, (7-66)
где
/со
<1>=-^-Ф.
/
Управляющие импульсы практически не увеличивают
раствора конуса, определяемого радиусом г на картинной сфере, так
как они прикладываются случайным образом относительно фазы
конического движения (одни увеличивают конус, а другие —
уменьшают).
214
Предположим, что ошибки ориентации аир определяются
дискретно и синхронно в каждую половину цикла вращения.
Синхронно с ними определяются а и р. В п-м цикле движение
КЛА полностью определяется координатами с^, рп точки Sn и
скоростями ап и рп. Касательная скорость точки Sn на
единичной сфере будет
HU = (i2 + g) = r>)-
Чтобы определить координаты центра конуса Сп, необходимо
найти направление Sn'Cn. Очевидно, что оно совпадает с
направлением вектора _
±RnXvn (дляФ^О),
где Rn — радиус-вектор точки.
Вводя вспомогательный угол Хп в соответствии с равенством
tg\,=!*-, (7.67)
находим направляющие конусы векторного произведения
RnXVn
01я = ± sin рл sin Хл + sin ап cos ря cos Хл;
hn= ± cos Ря sin К ± sin an sin ?n COS V» (7- 68)
В3п = ± cos an cos Хя.
Тогда координаты центра конуса можно определить из
следующих выражений
8шаСй = 8тая-гАя;
\а И __ cos ап Sin ?n + ^6^ .^ gg
Сп cos ancos?n-^ rп^1П
Выражения (7. 66) — (7. 69) составляют основу для
определения последовательных положений конуса прецессии в системе
управления с обратной связью. Закон управления является
итеративным. Он определяет последовательность подачи импульсов,
в зависимости от положения текущего круга прецессии
относительно возможного диапазона его конечного положения,
определяемого зоной нечувствительности системы. Последний
представлен на картинной плоскости кругом Е с радиусом 2АС и
центром в точке Oi (рис. 7.33). В интересах максимального
быстродействия системы этот круг должен быть максимальным &
пределах заданной точности ориентации.
Взаимное положение кругов может быть разделено на
следующие 4 класса;
— класс Л, соответствует кругам, внешним с кругом Е\
215
— класс Б, соответствует кругам, касающимся с внешней
стороны или пересекающим круг Е, исключая при этом точку
Ох или проходя через нее;
— класс В, соответствует кругам, включающим и
пересекающим круг £, включая точку 04;
— класс Г, соответствует кругам, внутренним к кругу Е.
Класс^ б
Рис. 7.33. Возможные относительные положения круга прецессии и
кругов
Очевидно, что конечная цель управления состоит в переводе
круга прецессии любого класса в круг класса Г.
Принадлежность круга прецессии к тому или иному классу
определяется сравнением dn и 1п точек Sn и Сп относительно 0±.
Эти расстояния определяются выражениями
cosdfn=cos<an cos pn; cos /n=cos acncos Pen,
которые легко получить из прямоугольных сферических
треугольников на рис. 7. 32.
Стратегия управления основана на следующем положении:
любой (круг прецессии может быть сведен к кругу класса Г при его
первоначальном преобразовании к кругу класса Б. Действитель-
216
но, круг класса А всегда может быть сведен к кругу класса Б
последовательностью импульсов, сдвигающих центр круга в
направлении точки Oi вдоль большого круга, проходящего через
точки С и 04. Подобные импульсы будем называть импульсами
1-го типа. Круг класса В сводится к кругу класса Б
последовательностью импульсов (импульсов 2-го типа), каждый из
которых смещает точку С в направлении точки Sn/, приложения
импульса.
Для круга класса Б при dnf>ln производится прямой спуск к
точке Oi. Если dn/^/n, то управляющие импульсы
прикладываются так, чтобы каждый импульс (импульсы 3-го типа) сдвигал
центр Сп на АС вдоль биссектрисы угла 0iCn5n/. При наличии
импульсов 3-го типа круг класса Б никогда не переходит в круг
класса А или В.
Описанные выше условия и соответствующие типы импульсов
сведены в табл. 7. 1. Таблица определяет структуру логической
схемы, которая формирует закон управления и функционирует
в следующей последовательности:
Таблица 7.1
Условия
тя</„-2ДС
l/„ + T„<2ACl
,. ^ , / '« + т" < 2АС(
Я>/я1/п+т„>2ДС
Класс
круга
А
Б
Б
Е
В
Тип
импульса
1
Свободное
движение
3
Свободное 1
движение I
2
1) устанавливает текущий круг прецессии по дискретным
значениям ошибок положения и скорости;
2) определяет его принадлежность к тому или иному классу
и формирует управляющий импульс соответствующего типа.
Учитывая предположение о малости хп и АС, можно
утверждать, что при поворотах на значительные углы на большей
части фазы управления движение происходит по кругу класса Л.
Поэтому в результате приложения импульсов 1-го типа точка Со
будет перемещаться в точку Oi вдоль дуги большого круга 000i.
Если бы использовалась двухимпульсная схема управления,
обеспечивающая минимальный расход топлива, то первый
импульс смещал бы точку Со по касательной С0Сх к большому
кругу CqOx до тех пор, пока плоскость, перпендикулярная к
большому кругу 500ь и биссектриса угла SqOOx не пересекутся в
точке Сь Когда ось'вращения совпадаете направлением 00ь при-
217
кладывается второй импульс, который совмещает точку Ct с
точкой Oi вдоль сегмента CiOi, касательного в точке 04 к большому
кругу C0Oi. Таким образом, маневр завершается совмещением
с осью вращения вектора кинетического момента.
Расход топлива в двухимпульсной схеме пропорционален
длине C0C+CiOi, а в описанной схеме — длине дуги C0Oi. Так как
при больших углах C001=CoCi + Ci.01, то расход в
предложенной субоптимальной схеме для движения по кругу класса А будет
меньше. При малых углах C0Oi«C0Ci + CiOb и обе схемы
примерно эквивалентны. Поэтому можно считать, что в общем
случае расход топлива будет близок к расходу в оптимальной схеме.
ГЛАВА VIII. СИСТЕМЫ УПРАВЛЕНИЯ
С ДВИГАТЕЛЯМИ-МАХОВИКАМИ
И ГИРОСКОПИЧЕСКИМИ УСТРОЙСТВАМИ
С появлением КЛА, предназначенных для длительного
функционирования в космическом пространстве и требующих
постоянной ориентации, стали применяться системы с
двигателями-маховиками и гироскопическими устройствами. .Это объясняется
тем, что суммарная масса управляющего устройства и
эквивалентная масса (в соответствии с потребной мощностью)
источника энергоснабжения (например, солнечных батарей) в данном
случае не зависят от продолжительности работы системы. В то
же время аналогичная характеристика систем управления с
реактивными двигателями увеличивается с ростом
продолжительности ориентировочного полета. Кроме того, при этом возрастает
потребное количество включений реактивных, двигателей, что
приводит к снижению надежности системы. Поэтому для КЛА,
требующих длительной ориентации, применение систем с
двигателями-маховиками или гироскопическими устройствами
оказывается более рациональным.
Для пространственной (трехосной) ориентации в системе
управления используются три двигателя-маховика, которые создают
внутренние моменты по трем связанным осям. Подобная система
получила наиболее широкое применение. Наряду с этим могут
применяться системы с одним шаровым маховиком, а также
системы, использующие описанные выше управляющие устройства
с гиромаховиком или силовыми гироскопами.
Существенной особенностью систем ориентации такого вида
является наличие перекрестных гироскопических связей между
каналами управления. Это значительно осложняет исследование
динамики процессов управления.
218
8.1. Характерные динамические особенности
систем ориентации с маховиками
и гироскопическими устройствами
Рассмотрим одноканальную систему ориентации с
двигателем-маховиком, пренебрегая перекрестными гироскопическими
связями. Такая постановка вполне оправдана при выполнении
плоского поворотного маневра (вокруг одной оси), а также в
некоторых частных случаях режима стабилизации.
С учетом дифференциальных уравнений объекта управления
(2. 7) и уравнений (6. 4) можно составить обобщенную
структурную схему системы управления, которая приведена на рис. 8. 1.
л.
к,
Мд \мгр
1
\
-1
р
мр=-щ
* Л
,J fhft
VP\L
'ь-в>
Г
\Q
1
с
Рис. 8. 1. Обобщенная структурная схема
системы управления
Алгоритм управления, представленный на схеме функционалом
Ф(е, е), определяется при решении задачи синтеза для
определенного режима управления.
Рассмотрим вначале реакцию двигателя-маховика на
постоянный сигнал управления (£/y=const). Решая дифференциальное
уравнение (6.4), находим
д9 = д2* (l-e гд),
(8.1)
где
Uy — М тр/6л
Л2*~" kQ* ; Гд~~*л*с*
*Д*2
Очевидно, что максимальное быстродействие двигателя по
отработке сигнала управления достигается при условии
/-?->MB или -*- = еП1
(8.2)
где Едтах — максимальное потребное ускорение в режиме
поворотного маневра.
Приведенные условия соответствуют работе двигателя на
линейном участке экспоненты (8.1) во всем диапазоне рабочей
характеристики двигателя.
219
Введение этого условия объясняется тем, что конечная цель
двигателя-маховика в режиме стабилизации состоит в
компенсации внешних возмущений. При выполнении условий (8. 2)
систему можно считать разомкнутой по AQ, так как влияние
соответствующей обратной связи на динамику системы не успевает
проявиться.
Учитывая, что объект управления описывается двойным
интегрирующим звеном, в режиме стабилизации алгоритм Ф(е, е)
целесообразно принять в виде следующего закона управления:
Ф(е, i)=At+*|i. (8.3)
Передаточная функция системы с учетом условия (8. 2) примет
вид
W(p)=-l&-= 1Л 5-, (8.4)
где AfBa =МВ+Мтр — суммарный возмущающий момент.
Так как выражение (8. 4) соответствует передаточной функции
колебательного звена, коэффициенты k\ и k2 закона управления
могут быть найдены из условий
5=0,707 и *,=JL ,
*к
где tK — заданное время переходного процесса.
Существенно отметить, что момент трения на валу двигателя
оказывает влияние на динамику системы, аналогичное
внешнему возмущающему моменту. По окончании переходного
процесса реакции системы на постоянный момент Мъъ в системе
устанавливается ошибка
- - BS (8.5)
уст Mi '
которая находится из выражения (8. 4) при /?=0.
Как показано «в разделе 2.5, внешний возмущающий момент
обычно содержит постоянную Мв,п и периодическую Мв^
составляющие. Следовательно его можно представить в виде
Мв=Мв.п+Мв~. (8.6)
Здесь
/-1
220
MB^=2MBm/sin (foJ+%1),
где AfB mi — амплитуда f-й гармоники;
tfo i — начальная фаза /-и гармоники;
(ом — основная частота изменения момента.
В большинстве случаев <dm=vo, причем AfBmi>MBWU- (*>1).
Момент трения является величиной примерно постоянной. Поэтому
Мвъ также может описываться выражением (8.6) с включением
в AfB. п момента трения.
При достаточно большом быстродействии системы, когда хо
существенно превышает основную частоту сом изменения внешнего
возмущающего момента, формула (8. 5) может быть
использована и для оценки точности стабилизации при воздействии на
систему переменного возмущающего момента с частотой о>м.
Нетрудно убедиться в том, что включение в закон управления
i
(8.3) дополнительного сигнала k0 f srf/ по интегралу делает
о
систему астатичнои к постоянной составляющей возмущающего
момента. При этом ошибка стабилизации может быть
вычислена по формуле
6уст~ Mb "
Если учитывать только основную гармонику, то амплитуда
скорости изменения возмущающего момента равна ымМв mi.
Следовательно, максимальная ошибка стабилизации
пропорциональна амплитуде и частоте изменения возмущающего момента.
В установившемся режиме стабилизации двигатель-маховик
создает внутренний момент, равный по величине внешнему
возмущающему моменту, т. е.
—/Q=MB.
Подставляя в это равенство выражение (8.6), после
интегрирования находим
-cos(/o)M/ + t0/)]}. (8.7)
Из выражения (8. 7) видно, что угловая скорость маховика
содержит постоянную составляющую, периодическую
составляющую с частотой (Ом и составляющую, которая нарастает
пропорционально времени действия момента Мв.п. Наличие последней
составляющей приводит к так называемому насыщению
маховика, поскольку его скорость ограничена некоторым предельно
допустимым значением Qmax- При достижении этой скорости
маховик становится неработоспособным. Насыщение имеет место
221
также у гироскопических управляющих устройств. В процессе
создания управляющего момента гироскоп прецессирует и ось его
ротора может отклониться на предельно допустимый угол. При
этом он также становится неработоспособным.
Для восстановления работоспособности махоиика его нужно
затормозить, а гироскоп возвратить в исходное положение. Одна-
ко в процессе торможения к КЛА будет прикладываться
возмущающий момент, пропорциональный замедлению маховика.
Компенсация этого возмущения производится дополнительным
Г,
=Е
ВУ
г
1
1
1
1
L
ИУ
Основная система
ВУ
У
УУ
--U-
I
УУ
\МР^
L.
Система разгрузки
.J
Рис. 8.2. Блок-схема комбинированной системы
ориентации первого типа (ИУ — измерительное
устройство; ВУ — вычислительное устройство; У —
усилитель; УУ — управляющее устройство)
управляющим устройством, которое создает внешний момент.
Полученная в результате этого система ориентации реализует
комбинированный метод ориентации, поскольку она основана на
комбинированном применении управляющих устройств,
создающих внешние и внутренние моменты. Поэтому подобные системы
называются комбинированными системами ориентации.
Контур управления, включающий управляющее устройство,
которое создает внутренний момент, будем называть основной
системой управления. Она обеспечивает ориентацию спутника с
требуемой точностью. Контур управления, управляющее
устройство которого .создает внешний момент, назовем системой
разгрузки. На нее, помимо задачи снятия накопленного
кинетического момента управляющим устройством основной системы,
может также возлагаться функция грубой ориентации в
аварийных ситуациях.
Комбинированные системы ориентации можно различать по
двум признакам: по принципу применения системы разгрузки и
по принципу действия управляющего устройства последней.
По принципу применения системы разгрузки различают три
типа комбинированных систем ориентации. В системах первого
типа (рис. 8.2) периодически с учетом величины и знака
накопленного кинетического момента происходит включение системы
разгрузки, которая, прикладывает к КЛА постоянный внешний
222
момент. Этот момент оказывается возмущающим по отношению
к основной системе. Знак его выбирается с таким расчетом,
чтобы гашение возмущающего момента основной системой
производилось за счет уменьшения ее кинетического момента
(торможение маховика или поворот гироскопов в исходное положение).
Длительность включения системы разгрузки определяется
величиной накопленного кинетического момента основной системы,
при котором осуществляется разгрузка.
В комбинированных системах второго типа (рис. 8. 3)
система разгрузки представляет собой самостоятельную систему ори-
ч*\ву
ЗУ
У
яшт^ш^
УУ
1
1
Система разгрузки _j
Рис. 8.3. Блок-схема комбинированной системы
второго типа
ентации, т. е. систему автоматического управления с обратной
связью. В этом случае после включения системы разгрузки
основная система отключается (ее контур размыкается), и за счет
приложения соответствующего момента к управляющему
устройству этой системы снимается накопленный им кинетический
момент. При использовании маховиков это осуществляется
приложением тормозного момента со стороны приводного двигателя
(или специальной муфты). Если в основной системе
используются гироскопические управляющие устройства, то под действием
моментных двигателей оси прецессируют в исходное положение.
Изменение кинетического момента можно рассматривать также
как возмущающий момент. Следовательно, в динамическом
отношении рассмотренные типы систем эквивалентны. Однако
последняя система, по-видимому, обладает большей надежностью, так
как в аварийных ситуациях система разгрузки может выполнять
функции основной системы ориентации. Правда, с помощью
несложных технических средств и в первой системе можно
предусмотреть возможность перехода системы разгрузки в режим
основной системы ориентации. Учитывая, что в основном режиме
работы этой системы периодическое включение основной системы
в процессе разгрузки отсутствует, надежностью указанной
системы будет бЪлее высокой. Поэтому первую схему с дополнитель-
223
ным устройством аварийного включения следует считать
предпочтительной.
В качестве устройства аварийного включения системы
разгрузки может быть использовано релейное звено с зоной
^чувствительности, через которое проходит сигнал управления,
формируемый в соответствии с отклонением КЛА от базовой
системы отсчета. Зона нечувствительности выбирается с таким
расчетом, чтобы при выходе ошибки ориентации за допустимые
пределы происходило включение системы разгрузки.
Соответствующая блок-схема приведена на рис. 8. 4.
t
|_ Блок_ включения
1
' 1 1>
j I
1
-F
ВУ
Систем
У
а разгрузка
У У
Рис. 8.4. Блок-схема комбинированной системы ориентации с
устройством аварийного включения
В системах третьего типа ориентация осуществляется
одновременно как с помощью основной системы, так и с помощью
системы разгрузки. В системе разгрузки управляющий момент
формируется не только в соответствии с отклонением спутника
от базовой системы отсчета, но и в соответствии с накопленным
кинетическим моментом. Отличие этой системы от системы, схема
которой "приведена на рис. 8.4, состоит в том, что в данном
случае система разгрузки работает непрерывно в соответствии с
текущими значениями кинетического момента и отклонений КЛЛ
от базовой системы отсчета, а не дискретно, при достижении
указанными параметрами определенных допустимых значений.
При проектировании комбинированных систем с дискретным
включением системы разгрузки очень важную роль играет
правильный выбор допустимого кинетического момента основной
системы. С увеличением этого значения увеличиваются
энергетические затраты основной системы ориентации. Однако
одновременно за счет уменьшения частоты включения системы
разгрузки (увеличивается время накопления допустимого значения
кинетического момента) снижаются ее энергетические затраты.
Ввиду того, что зависимость тех и других затрат от указанного
параметра является нелинейной, очевидно, существует минимум
суммарных энергетических затрат. Это оптимальное значение
допустимой величины кинетического момента зависит от целого
224
ряда факторов и должно определяться в каждом конкретном
случае самостоятельно с учетом характеристик управляющего
устройства основной системы и системы разгрузки.
Предположим, что включение системы разгрузки
производится при некотором критическом значении кинетического момента
/СКр маховика. Для уменьшения затрат энергии угловую скорость
маховика (или кинетический момент гироскопического
устройства) целесообразно гасить не до нуля, а до максимального
значения периодической составляющей в выражении (8.7).
Работоспособность системы при этом обеспечивается выбором Qmax»
превышающей амплитуду периодической составляющей, т. е.
/Q >
1 *max ^
cos(/<V + <|»/
(8.8)
В этом случае маховик (гироскопическое устройство)
воспринимает на себя периодическую составляющую возмущающего
момента, а система разгрузки — постоянную составляющую. Для
такого управления в системе разгрузки может быть использован
релейный элемент. Его напряжение срабатывания соответствует
/СКр, а напряжение отпускания — значению кинетического
момента, определяемого правой частью неравенства (8.8).
Комбинированные системы ориентации можно также
различать по принципу действия управляющего устройства,
используемого в системе разгрузки. Для этой цели могут применяться либо
реактивные двигатели, либо моментный магнитопривод. При
использовании для разгрузки реактивных двигателей
комбинированная система строится, как правило, по первой или второй
схеме, поскольку они требуют кратковременного включения
системы разгрузки, что соответствует наиболее экономичному
режиму работы двигателей. Моментный магнитопривод может
применяться в комбинированной системе люб.ого из трех
рассмотренных типов.
8. 2. Оптимизация одноканальной
системы с маховиком
Рассмотрим одноканальную систему управления с маховиком
в режиме поворотного маневра КЛА по крену, оптимальную в
отношении быстродействия и потребления энергии. При этом
будем считать КЛА абсолютно твердым телом и пренебрегать
действием на него внешних возмущающих моментов, а также
моментом сопротивления на валу двигателя-маховика. Тогда
дифференциальные уравнения системы КЛА — маховик запишутся
следующим образом:
8 991
225
/[e,W+iiW] = -A*pW. (8.9)
где /,3=/!—/.
Принимая для простоты нулевые начальные условия, из
уравнений (8. 9) находим
^.W=—j Hit).
Знак минус в полученном равенстве можно опустить, так как он
отражает лишь тот факт, что угловые скорости и ускорения КЛА
противоположны по знаку угловым скоростям и ускорениям
маховика.
Подставляя это равенство (знак минус опускаем) в
уравнение (6. 4), получим
ТиЧ+Ч=Ь,иг (8.10)
где ку=ки — .
Вводя безразмерное время x=t/TM и безразмерное угловое
отклонение КЛА по крену
kyUyoTM
преобразуем уравнение (8. 10) так:
Ух=У2> (8 И)
У1=-У«+и(т),
d Uy
где (.) = —; а(т) = - .
ах и у тах
Для удобства дальнейших исследований уравнения (8. 11)
целесообразно преобразовать с целью приведения их к
уравнениям с разделенными переменными. Для этого введем новые
переменные £i и г2, связанные с переменными yi и уг
соотношениями
г1=У1+У*> (8. 12)
После подстановки соотношений (8.12) в уравнения (8.11)
имеем
гг = и{т); (g 13)
г%=—г%(х)-а(т).
Выберем управление и(х) таким образом, чтобы поворот КЛА
226
из начального состояния (г10, 0) в конечное (0, 0) осуществлялся
за минимальное время. В переменных у\ и у2 это означало бы
поворот из начального состояния (*/ю, 0) в конечное (0, 0).
Гамильтониан для данной задачи будет
H=^i(x)u(x) — яЫт) te + a(t)]— 1,
причем \i?i (т) =0;
^(т)— г|?2 (т) = 0.
Отсюда г|)1 =a|)io=const;
ip2=i|>2oe\
Применяя принцип минимума, находим
я* (т)=sgn («h - ф2)=sgn (ф10 - <foe*).
Из последнего выражения следует, что и*(т) может изменяться
только один раз от +1 до —1 или наоборот. Этой информации
вполне достаточно, чтобы найти оптимальные траектории
процесса и установить моменты переключения управления двумя
способами: либо анализом траекторий фазовой плоскости, либо
непосредственным интегрированием уравнений (8.11) или
(8. 13). Проиллюстрируем применение указанных способов для
решения данной задачи. Из уравнений (8. 13) получаем
дифференциальное уравнение фазовых траекторий.
dz2(x) _ z2(x) t
dzx (т) и (т)
Отсюда, разделяя переменные, находим
dz^ = -dzx(x).
z2(x) 1V }
u(x)
Полагая u(x) = + l и учитывая, что Zi(0)=Zio, 22(0)=0, после
интегрирования имеем
«1(t)=e"I*l(t)"*le,-l.
В соответствии с этим выражением на рис. 8. 5 изображены
интегральные кривые. Они представляют собой при различных
значениях zi0 семейство логарифмических кривых, ассимптотически
стремящихся
к z2(x)= — 1 при [z1(x) — z10\—> + <х> и
к *я(т)= + 1 при [^(т)-^]—-f оо.
Уравнение кривой, проходящей через начало координат, будет
ln[l+z2(T)]=-z,(t),
или z1(t)=e""*l(x)—1.
8* 227
Это уравнение можно представить в виде
Z1(T)+Sgn22(T)ln[l + |22(x)|] = 0
Аналогичным образом, полагая и(х) =—1, получаем
г2(т)=1-е-1г,(т)-г'01
(8. 14)
Рис. 8.5. Интегральные кривые
процесса управления
Интегральные кривые в этом случае ассимптотически
стремятся к 22(т) = + 1 при [z{(t)— zl0]—->+оо и к г2(т)=—1
При [2i (Т)— 210Ь— ОО. ПрИ 2ю = 0
интегральная кривая проходит
через начало -координат. Построим
траектории оптимального процесса
для принятых начальных условий.
На рис. 8.5 эти траектории
выделены жирными линиями. Они
предоставляют собой отрезки логарифми-
7 ческих кривых. На участке 1—2
управление а(т) =—1. В точке 2
происходит переключение
управление с и(х)=—1 на ы(т) = +1.
Дальнейшее движение изображаюшей
точки идет по кривой с уравнением
(8.14). Эта кривая является
одновременно и линией
переключения.
Анализируя характер движения изображающей и точки,
можно записать следующее выражение для функции оптимального
управления:
«*(T)="-sgnfz1 + (sgn2rt)In [1 + ^(1)1]],
которая практически может быть воспроизведена нелинейным
генератором.
Определение оптимального времени перехода системы в
конечное положение произведем интегрированием системы
уравнении (8.11). На первом участке, когда и(т)=—1, */2(0)=0
#i(0)=*/io, имеем * V '
ЫТ)=02(Т); JM*)=— 02(Т) — 1,
отсюда Уа(*) = се'-1
или с учетом значения у2(0)=0 и */2(т) = (1 — ет)
</i(T) = (l-e-)+i,i0-T
При t=Ti происходит переключение управления на и(х) = + 1
Интегрируя уравнения (8. 11) при начальных условиях
У1(*1)=(1-е^) + */10-т1;
y2(ti)=(e-^-l),
228
получаем
Л(т)=(1-2еч)е-+1.
При т=тк, где Тк — время окончания процесса управления,
имеем
yi(tJ=-(l-2e,1)(e"^-e-x0 + (tK-t1) +
+ (1-е-т*)-т1+*/10=0;
у2(тк)=(1-2еТ1)е-тк+1 = 0, (8.15)
Откуда находим tk=2ti — #ю.
Подставляя тк в первое равенство (8. 15), получим
*i=</io + ln(l+ 1Л-е-Ч.
В результате, оптимальное время перехода в начало
координат, соответствующее начальному отклонению t/ю, определяется
выражением
тк=у1в+21п(1+|Л-е-Ч. (8.16)
Зависимость тк от ую представлена графиками на рис. 8. 6.
Из этих графиков видно, что по мере увеличения yi0 она
приближается к линейной. Начиная с */го—6 выражение (8. 16)
приближается к
тк^ 1,4+У ю.
При выполнении условия (8.2) уравнения (8.9) могут быть
представлены в виде
/l38i=Mp;
(8.17)
/VJp = —/Ид = —RyUy
или е,=ес; (8 18)
где
и у max
М р = — М д = — ky Uу
ei=ec;
•
8с = —U,
d % /Ьуиутж
{)—^' х-у ~гг
t.
Уравнения (8. 18) полностью совпадают с уравнениями
(7. 16). Следовательно, в этом случае алгоритм управления,
оптимальный по быстродействию, полностью совпадает с
соответствующим алгоритмом для реактивных двигателей, а линия
оптимального переключения является параболой, проходящей
через начало координат.
229
Учитывая, что мощность, потребляемая электродвигателем,
пропорциональна квадрату напряжения на входе, ее
безразмерная величина может быть представлена в виде
Р=-£- = /(и)=и
Ртах
и при 0<u<l,0<f(u)<l.
10
8
6
U
2
0 0 0,1 0^ йб 0,8 1,0 „
i li 1 j 1 \ую
О 1 k 8 8 10
Рис. 8.6. Зависимость тк от #ю
Следовательно, управление, оптимальное по энергетическим
затратам при заданном тк, аналогично оптимальному управлению,
обеспечивающему минимум расхода топлива реактивными
двигателями. Это означает, что фазовая траектория включает участок
движения по инерции с выключенным электродвигателем.
Выключение двигателя происходит на параболе, определяемой
уравнением (7. 21).
8.3. Системы трехстепенной ориентации
При ориентации КЛА относительно вращающейся базовой
системы отсчета возникают перекрестные связи между каналами
управления за счет гироскопических моментов. Эти моменты
появляются в результате того, что угловые скорости юь со2, соз
включают соответствующие проекции угловой скорости базовой
системы отсчета. Это обстоятельство обуславливает
необходимость одновременного рассмотрения процессов управления
ориентацией по всем трем осям с учетом перекрестных связей.
230
Проанализируем такую систему в наиболее характерном
случае, когда в качестве базовой системы отсчета используется
орбитальная система координат. Будем полагать, что КЛА движется
по околокруговой орбите (v~vo). В качестве исходных
воспользуемся уравнениями (2.6), которые с учетом выражений (2.36)
для гравитационного момента могут быть представлены в виде
(8.19)
/,«a«3^(yl-y1)t,=Af1 + Жвз,
где Miy M2, Mz — составляющие суммарного вектора внешних
моментов, исключая гравитационный;
M'oV М'в2> Ж^з—составляющие внутреннего момента,
создаваемого маховиками, которые определяются
выражениями
з) ^г] 5
^bi = ^/,1+/[(v0s1-s2)Q3-(v0
М'в2=Мр2+1 [(v0s2 + •',) 23+ (v0 -е3) 2J;
^=^+/[(^-4) 21+(v,+;,)21].
(8.20)
Последние выражения получены на основании равенства (2. 30)
после подстановки составляющих угловой скорости КЛА в
соответствии с равенствами (2. 2).
Представим угловые скорости маховиков следующим
образом:
22=22о+а22;
2з=2зо+А23,
(8.21)
где йю, Q20, изо — угловые скорости, соответствующие
невозмущенным угловым движениям (идеальной
ориентации);
Лйь А&2, Л£2з — малые приращения угловых скоростей,
необходимые для ликвидации отклонений
КЛА от базовой системы отсчета
Обозначим
MPio = -'2M;
Ж,
р2(Г
■ /а
20»
^Рзо=-/2э
АМр1= —/Д^;
АМр2= — /д22;
дМрз= — /дЦ,- J
(8.22)
231
Если в дифференциальных уравнениях (8. 19) после
подстановки выражений (8. 20) перейти к невозмущенному движению,
которое соответствует ei=Ei = Ei=AQ\=Mi = 0 (/=1, 2, З), то с
учетом принятых обозначений имеем
Мрю — v0/Q2o=0; MP2o+v0/Qio=0; Mp3o=0.
Тогда подставляя равенства (8.21) и (8.22) в выражения (8.20)
и ограничиваясь членами первого порядка малости, находим
м'л=bMpl+/Q30(voh-s2)+'22o^-Vaq2; I
Ж;2=дЛТр2+ /23o(4 + v0s2)-/21oS3 + Vo/A21, (8.23)
M'^bM^-frivol! _e2)-/Q20(£1+v0s2). )
Уравнения управляющих устройств по каждому каналу
управления примем в виде (8.17). Тогда выражения (8.22)
примут вид
дЛТр1= — kv b!Jx — дЛ7с1; |
ЬМП= - киьи2 - ьМсъ (8. 24)
дМрз= —^Af/з-АЛГе,. I
Кинетический момент КЛА с маховиком по оси х3 будет
^3=A(£3-v0) + /920 + /A23,
а при невозмущенном движении
/Сзо=—^3Vo + Я2зо-
Так как согласно закону сохранения кинетического момента»
Кв=Ко. То
/3e3 + /AQ3=0,
откуда
А2,= -^Н-
Принимая также по аналогии
aq2= -4
'2»
после подстановки этих равенств и (8. 24) в выражения (8. 23)
находим
М'л= - *c,A«i + /aao(v0ei - 4) + v0/rt+^»i8-- ±Mcv
Afi=-M^+/Qae(ei + Vo61)-Vo/1S1-/210Se--AA*ci;
Мвз= - М^з - /210 (voS! - е2) - /9М (ех+ v0;2) ~ АМс3.
232
Примем законы управления по каждому каналу в виде (8. 3).
Передаточные числа &ц, k\2y &i3, £21, ^22, &23 при этом выберем
так, чтобы декременты затухания g и собственные частоты щ
системы по всем трем углам были одинаковыми. С учетом таких
законов управления подстановка полученных выше выражений в
уравнения (8. 19) дает
I ^30 + V0 (/1 - J3) I /Й20
. -, , •«,=x0sllc4-(*1;
4 + 2^2 + [4+v20^A-v0^-230]s2-
h
1 ^210 ' 2 1
гз+ 2;х0г3 + х0г3
/Q
H-v.
"II
/3
/Q20
'гз
^o ;
/Q
lo;
*2 +
' ^20 2 1
'о-г_£2=х°£зк + ^
*3
(8. 25)
где
IV
Mj — AMC j
(i=U 2,3).
Из этих уравнений видно, что поворот базовой системы
отсчета приводит к изменению собственной частоты системы по углам
крена и рыскания, а также к появлению перекрестных
гироскопических связей между всеми каналами управления. В случае,
если моменты инерции КЛА различаются незначительно, это
влияние мало, особенно при выполнении условия
xo>v0. (8.26)
Поэтому в дальнейшем членами уравнений, содержащими vo
будем пренебрегать.
Гироскопические моменты приводят к перекрестным связям
по всем трем каналам управления. Для оценки влияния этих
связей необходимо решить систему уравнений (8.25)
относительно одного из углов (например, угла тангажа). Введя
обозначения
а
12
а,
а,
_^зо
/i
h
_ Л220
л13~
_^20 .
21
*23_
_IQl0
31"
а.
_^ю
32"
233
запишем уравнения (8. 25) в операторной форме
(р*+2&оР + *о) h+ai2P4-aiBP4=*ohK+ IV
(p*+%*oP+*l) 4-<i2iP4 + amPh=*2o4K+ W } (8- 27>
(Р2 + 2fy>/> + *о) h + азгРН - ад2РЧ=*h3K + Р3-
Главный определитель системы уравнений (8.27)
представится как
Д(/>)=
/72 + 2$Х0/7+4
—а^Р
Ч\Р
<*>пР
/;2 + 2$уо/7 + х2о
— ^32^
—апР
а^Р
/?2 + 2£У0/7 + 4|
Если учесть, что
п п п п п п — /230 /S^0 /S20 /Q30 ^Q2Q ^Ю_Л
«i2^23a3i"~ aisa2ia3i—"7 ? 7——:г7т: "7 Г" — и>
J\ J2 «/3 «Ч *2 '3
то главный определитель можно привести к виду
Мр)=(р2 + Ъ*оР + *1) [(р2+Ъ*оР+*оУ+
+ (013^31 + ^12021 + ^23^32) Pi
Вычислим теперь определитель
I /?2 + 2?х0/? + х2 а12р
АвЫ= -aw Р2 + %*оР + *о
I «Si/7 —032^
= Х20 [(/72 + 2$Xo/7+X2o)2 + 01202l/].
Таким образом, передаточная функция системы по углу
тангажа с учетом перекрестных гироскопических связей
«*</» ЗК ' А (/>) '
Развернутое выражение этой передаточной функции после
подстановки вычисленных выше определителей А(р) и Дз(р)
примет вид
0
0
2
*0
X
1(/>2+:
/?2 + 2£%0/> + %2
(р2 + 2£х0/7 + %2)2 + «12*21/*
(/?2+ 2£%о/? + %§)2 + (013^31 + Л12«21 + ^23^32) Р2
(8.28)
234
Функцию Фкз(Р) можно представить в виде произведения двух
передаточных функций
Фкз(р)=Фк(р)Ффз(р).
Функция
Фк(/>)- p2 + 2ZxQp + r?o .
совпадающая с передаточной функцией (8. 4), описывает
поведение системы в предположении отсутствия перекрестных связей,
а функция
ф (/?2 + 2$%оР + *р)2 + 012^21/>2
Ф3 (Р2 + 2^0Р + *о)2 + (013^31 + 012021 + 023032) Р2 '
которую можно рассматривать как функцию эквивалентного
фильтра характеризует степень приближения Фкз(Р) к Фк(р),
определяемую гироскопическими моментами маховиков.
Устойчивость системы в целом будет определяться
устойчивостью эквивалентного фильтра, характеристическое уравнение
которого имеет вид
РА + Ц*оР3+ [2х20(1 + 2$2) + а2] ^ + 4^+х4о=0,
где а2 = 013031 + ai2#2i + Я23Я32.
Условия устойчивости запишутся так:
Vo {4**3 [2х20 (1 + 2£2) + oj - Vo) - 1б£2 х60 > О,
ИЛИ 4|Хо2 + «2>0.
Если принять 1=0,707, то условие устойчивости примет вид
*2о>-^-.
Следовательно, фильтр дает ограничение собственной
частоты системы только снизу. На максимальное значение
собственной частоты, а следовательно, и передаточного числа ki3,
гироскопические моменты ограничений не налагают, и оно
определяется характером нелинейных звеньев в самой системе
управления.
Нетрудно показать [1], что параметр а2 является существенно
положительной величиной. Следовательно, условие устойчивости
не накладывает ограничений на выбор собственной частоты
системы, так как оно выполняется при любых значениях хо.
Передаточные функции системы по каналам курса и крена
с учетом перекрестных гироскопических связей также могут быть
представлены в виде произведения двух передаточных функций:
Фк1(р)=Фк(р)Фф1(/>) —по крену;
Фк2(р) =Фк(р)Фф2(р) — ПО Курсу,
235
где Фф1 — передаточная функция эквивалентного фильтра по
крену;
Фф2 — передаточная функция эквивалентного фильтра па
курсу.
Выражения передаточных функций эквивалентных фильтрок
запишутся так:
(/?2+2£%0;? + %р)2 + акаъчР1
(jga + 2g%0/? + *jj)2 + Д1зДз1/>2
Ф*ЛР)= ,_„ , „,., _ , 242 , . .. П0 КРеНУ'
Фф2(А)= ,_0 , .... . , 2ч2 . _ .о П0 КУРСУ-
Из этих выражений видно, что результаты проведенного
анализа устойчивости системы по тангажу справедливы также для
каналов курса и крена. Динамика угловых движений системы
характеризуется приведенными передаточными функциями,
имеющими одинаковые полюсы, но не равные нулю. Однако можно
показать, что последнее обстоятельство не сказывается
существенно на времени переходного процесса.
Оценим характер влияния перекрестных гироскопических
связей на переходный процесс в системе. Числитель и знаменатель
выражений Фф(р) различаются только множителями при р2.
Следовательно, функция Фф(р) в области низких и высоких
частот близка к единице. Это означает, что гироскопические
моменты будут оказывать влияние на переходный процесс ликвидации
малых угловых отклонений от базовой системы отсчета только
на его среднем участке.
В конце переходного процесса влияние гироскопических
моментов будет проявляться слабо, причем оно может быть
уменьшено путем увеличения собственной частоты системы х02.
Следовательно, такие показатели качества переходного процесса, как:
время регулирования и перерегулирования при соответствующем
выборе ко практически не зависят от влияния перекрестных
связей, вызванных действием гироскопических моментов. Эти связи,
можно не учитывать при исследовании динамики системы
управления малыми угловыми отклонениями КЛА от орбитальной
базовой системы отсчета.
Приведенный выше анализ по оценке перекрестных
гироскопических связей на переходные процессы в системе ориентации
справедлив лишь при выполнении условия (8.26). В том случае*
когда собственная частота соизмерима (или даже меньше) с
угловой скоростью vo, соответствующими членами в уравнениях
(8.25) пренебрегать нельзя. Кроме того, уравнение
управляющего устройства в этом случае целесообразно принимать в виде
(6. 4), так как имеет место система ориентации с малым
быстродействием.
236
Полагая, что система разгрузки обеспечивает выполнение
условия
выражения (8. 23) можно записать в виде
Af^=AAfpf + vo^91 + /280(i1 + voea);
Мвз=дЛ1рд.
Подставляя эти выражения с учетом равенства (8. 24) в
уравнения (8. 19), получим
= - Кг? Д# 1 - *мзЧД^2 + М91;
A4+vS[A-A-/^]4"Ve^1+y1-ye+/^)i1 =
Л^з + 3vo(71-y2)e3= -АМ8/А^8 + Л*э».
где
Мэ1=Мх — / дЖс1 — /v0A^Wci'
/Лэ2=Ж2-/дМс2+^0А^2с;
^эз=^з-/А^сз.
Нормализуем полученную систему уравнений. Для этого
введем новую независимую переменную t=v<^, разделим левые и
правые части уравнений на /ivo2 и обозначим
х—ь —1 • х— k —2- х — k ^Ь
Л1 — Лм1 , » Л2—Лм2 , 1 л3—ЛМЗ / '
/lV0 /iV0 /lV0
J2 . J3 . 1 . ^*30
*x2=: "7~ ' хз—~t~ » x=y.g у2 i; x30 — — ;
I] J\ J\V0
^=-4; ™2=—^f-; /W2=—^-
/,V5 /ivg /,v§
В результате уравнения при нулевых начальных условиях в
операторной форме примут вид
b2 + (4x + 4-x30)]31~(x--^3o)^2="^i-^2+/Wi;
237
\ЧР* f (* + Ч — -*зо)] Ч + (* — «*») />ei = — A*i + *i + лц: (8. 29)
[*з/>2 + 3(1- х2)] s3= - рх3+ т3,
где
_ d
dv
Последнее уравнение, описывающее движение по углу
тангажа, не зависит от первых двух, и его исследование не
представляет трудностей. Для управления по этому каналу можно
принять закон управления
*з=&1зе3.
В этом случае уравнение может быть представлено в виде
(^2 + ^оз^ + 4з)е8=-^,
где
*з
х2 — з 2 • 2£х —-^-
хоз — ° » ^?зхоз —
*3 *3
тационным моментом, а система
Собственная частота системы полностью определяется грави-
ориентации играет роль
демпфера. Синтез такой
системы сводится к
выбору &1з,
обеспечивающему необходимое
затухание. При этом можно
воспользоваться
соответствующими
рекомендациями разд. 8.1.
Наибольший интерес
представляют первые два
уравнения системы (8.29),
которые описывают
взаимно связанные
движения по крену и
курсу. Соответствующая
структурная схема
приведена на рис. 8.7.
Чтобы сделать эти уравнения независимыми, представим х%
и х2 как функции еь ег, 8i, 82 вида
Рис. 8. 7. Структурная схема системы
управления с перекрестными связями
(8.30)
*i== <7ii (p) ei + ?t2 (р) е2;
*2 = <721 (р) 81 + ?22 (Р) 822,
где Яи(р) (1>, /=1. 2) —оператор, окончательный выбор
которого производится из условий независимости анализируемых
уравнений.
238
Подставляя законы управления (8.30) в уравнения (8.29),
получим
(уо2+4% - ^+4) Sl - (х - Хзо) рн=
= — Ч1\(Р)р^1-Я1г{р)РЧ — ^1{Р)Ч-Я^{Р)Ч-\-гп1;
(xip2 + *2 + *-X30)ei+(x—Xa0)Ph =
= -<?п(Р)РН-<1м(Р)РЧ-{-<?п(Р) Ч+Яп(Р) 4+ Щ.
(8.31)
Для независимости этих уравнений должны выполняться
условия
(* -хза)рч=Яп{Р)РЧ+Ят{Р) Ч>
(х - хж) р&! = - qn (p) рЧ+qn (p) ги
откуда
д12(р)= <*-**UP-1nW) . {р)=_Ь-*гь)р-Яи(Р)
/> Р
Подставляя эти значения в уравнения (8. 31), находим
(/Т^Х-Хда+^-^-Хзо)/*^!?!! (/>)/> +
+ (*-*зо)Р-?..(/» j6i_^ (*-*riP-1niP) + ft|(/>)J ,t+jSi.
(X2p2 + *2 + * ~ *3o) e2 + (* ~ -*8o) />S1 =
Таким образом, выполнение условий, наложенных на выбор
<7i2 и (72ь приводит к следующим независимым уравнениям:
(pP+9ii(p)P^b-x„ + 4) + qn{p)]t1=pni1;
[*2/> + ?22(/>)](/>2+ l)s2 = /7m2.
При этом получим структурную схему, приведенную на
рис. 8. 8.
Следует обратить внимание на то, что хотя уравнения (8. 32)
независимы, последнее из них содержит член (р2+1). Это
означает, что характеристическое уравнение для движения КЛА
вокруг оси *2 имеет два мнимых корня, и, следовательно,
независимо от структуры оператора q^ip), характеризующего закон
управления, будет иметь место условие нейтральной
стабилизации по углу рыскания. Таким образом, независимость
уравнений приводит к тому, что управление крена не влияет на движе-
239
ние КЛА по углу рыскания, но при этом движение по углу
рыскания становится неуправляемым.
Заметим, что движение по углу крена независимо от выбора
закона управления (структуры оператора q&ip)) будет
устойчивым, если выполняется условие кз — хг>0 (или /з>/г),
которое соответствует наличию стабилизирующего гравитационного
момента по углу крена.
Все это приводит к
необходимости исследования
связанных уравнений
(8.29). Наибольший
интерес для исследования
представляет случай,
когда х3>1, а х2<1, так
как при этом КЛА под
действием
гравитационного момента будет
совершать колебания около
вертикальной оси дачге
при отсутствии
управляющего момента.
Рассмотрим более
сложные законы
управления
"и
рт2
-чрйМ
I 1 п„(п) I
\хгр
1 ЧггМ
н
Н-^
/ 1
Рис. 8. 8. Структурная схема системы
независимого управления по крену и
рысканию
где
*i-?ii(^K + <7i2(/>)s2 +—;
Р
хг = Яъ{Р)ч + Я*{Р)Ч —.
Р
?u(/>)=*ii+*ei—;
р
(8.33)
Следовательно,
?22 (Р) = ^12+^02 •
Р
Р*х = Ям (Р) РЧ + Ян (Р) РЧ + х*
Р*2 = Яп (Р) РЧ + ?22 (Р) РЧ — Xv
Соответствующая структурная схема показана на рис. 8. 9.
Подставляя эти выражения в уравнения (8.29), находим
[р2 + knp+(4х + 4 - х30 + k01)] ег - [х - хв0 - д1% (р)\ £2
• тл
[ър2+k12p+(х + х2 - х30 -
Если принять
" *м)1 Ч + [* — -**30 + ^21 (Р)] Ч = "V
240
qi2(p) =x — X30; Q2i(p) = — х + *зо,
то система уравнений разбивается на два независимых
уравнения, которые могут быть представлены в виде
где
(/?2 + 2$1x01/?+>.oi)s1=m1;
(8.34)
(/?2 + 2$A,/i + *02)4 =
тпъ
я/01 — 4х -}- 4 д*80 -f- #01;
Л02
х2
_% + *2 —*30 + 601 .
х2
^5i* 01 — ^11» ^£2*02 — 12 •
Рис 8.9. Структурная схема системы с перекрестными
связями по интегралам от кинетических моментов
маховиков
Таким образом, законы управления (8. 33) позволяют
осуществлять независимое управление по каналам крена и курса.
Передаточные числа k0l и k^ обеспечивают получение
необходимых собственных частот и, следовательно, времени переходного
процесса. Требуемые значения декрементов затухания могут быть
получены выбором передаточных чисел ku и k\2.
Соответствующие рекомендации приведены в разд. 8. 1.
Определим реакцию системы на действие возмущающих
моментов. Соответствующие изображения Лапласа при нулевых
начальных условиях на основании уравнений (8. 34) имеют вид
241
mi(p)
*l(/0=-o , о... , , .2
£2(/>) =
/>2 4- 2$i%oiP 4- *oi
(8.35)
*2(/>2 4- 2^o2P 4-x22)'
С учетом начальных условий соответственно имеем
1 P2-h 25ix01p + х2! "*" /?» + 2gixoiP + *oi
m2(/7) , (p + 2fa»Q2)«2(0) + t2(0)
(8.36)
4 *2 (/>2 + 2fc%02/> + xg2) ^ /?2 -b 262x02P + *?
02
Выражения (8.35) и (8.36) дают достаточно полное
представление о динамических свойствах системы управления, они
столь широко используются в теории регулирования, что
надобности в переходе к оригиналам не возникает.
Можно с уверенностью сказать, что принятые законы
управления отвечают предъявляемым требованиям к системе
ориентации. Они обеспечивают как независимое управление по
каналам, так и заданное качество переходного процесса. Для оценки
возможности реализации таких законов управления обратимся
к выражениям (8. 33). Исключая в первом равенстве х2, а во
втором х\9 найдем
р*хг + хх = [qxг(р)р2 + qnp] h + [ЧпР2 + Ягг(Р)Р] «*
P2x2+x2=[q2lp2^qn(p) р\н + [Яы{Р) Р2-ЯпР\ч-
Отсюда, с учетом начальных условий
х (р\— к\\Р2 + (Ьр\+Я2\)Р*\(Р) | (?12/?2 + А?12/> + *о2)е2(/>)
р2+1 "Т" р2 + 1
[k\\P + (fepi + q2\)] ei (0) + k\ 1 s'i (0) (q]2p + k]2) Ч (0) + 'qX24 (0).
Р2 +1 р* 4-1
(8.37)
х (п)= (42\Р2 — кир — к01)г](р) , [k]2(p) + (k02 — qn)]P4(P)
(^21JP —^ll)£l(0) + ^2l£l(0) [*12/> 4- (602 ~ ?12>] £2 (0) + k\&2 (0)
/?2 4- 1 /?2+ 1
Определим изменение безразличных кинетических моментов
маховиков хх и х2 при действии на КЛА типовых возмущающих
моментов в случае нулевых начальных условий. Подставляя в
выражения (8.37) значения для г±(р) и е2(р), согласно
равенствам (8. 35) получим
242
x tp\ = [b\\P + (*oi + <?2\)] Рт\ (Р)
I (ЧпР2 + knp 4- k02) m2 (p) .
*%(Р)
*2 (Р2 + 1) (р2 4- 2£2*02Р + *о2)'
_ (Я2\Р2 — k\\p — k0i) mi (/?)
(8. 38)
(P2 + 1)(p2 + 2£ix0iP+^oi)
I [h2P 4- (^Q2 — ^12>] РМ2 (P)
^2(p24-l)(p2 + 2^224-x22)•
Рассмотрим следующие типовые возмущения.
1. Единичный импульс
mi(p)=m2(p) = l.
2. Единичный скачок
Р
3. Единичное синусоидальное воздействие (с частотой
орбитального движения)
гп±(р)= Щ{р)=-^— •
Рг 4-1
В первом случае
^ /„\ [Ь\\Р + (кр\ +Я2\)]Р | gi2/>24-fei2p4-fe()2
(Р2 4- 1)(/>2 4- 2^о\Р + *&) *2 (/>2 4- 1) (р2 4- 2£2х02р 4- %&)'
СО
00
^ /~\ ^2iP2 — ^пР — ^01 1 [&12P 4-(&Q2 — дп)] Р
(Р2 4- 1)(/>2 4-2^X01^ 4- 4) %а(Р2 4- 1)(/^2 4- 2i2x02/?4- %&)
и переходя к оригиналу, находим
^(t)=/?1sin (т+^ + Л^е-^sin j|/T3|2Xoit + eu] +
+ Af1e*-^«i'sin [|/Т^хоат + 621];
(8.40)
x2(x)= R2 sin (t+x2)+N2e^^sin |/rzi52XoiT+
+ 612] + M2e-^o,*sin [|/Т=1|у02т+е22],
где коэффициенты Ru R2, Nu N2> Mu M2 могут быть получены
путем разложения выражений (8.39) на элементарные дроби.
Из равенства (8. 40) следует, что после отработки возмущающе-
243
го действия импульсивного момента маховики совершают
незатухающие синусоидальные движения. Эти движения должны
учитываться как начальные условия при последующем анализе
реакции системы на заданный момент. Для этого выражения
(8. 39) должны быть переписаны так:
х 1р\— [*ПР2 + (»щ +12\)]Р I gl2/>2+*l2/> + *02 I
(P2 + 1) (p2 + «iXo,^ + xg,) Xj (p2 + 1) (p2 + 252*02p + **,)
, ^i(0)-ic,(0).
+ P2 + 1 *
4i\P2 — k\\p — kol | [k\iP + (.k\* — q\o)] p .
x2{p)-
(P2 + 1) (p2 + 2&iw + *щ) ' *2(P2 + J)(/>2 + 2e2*02/> + *ог)
. px2(0) + i2(Q)
P* + i
Во втором случае
x („)— fell/> + (*0l + ?2l) | gi2/>2 + ft|2P + fr)2
(/>2 + 1) (/>2 + 2S,x0,p + *2j) x2/>(/>2 + 1)(р2 + 2g2xo2 + x&)'
(8.41)
^ (р)= 4l\P2—b\\p — k(]\ i 6i2/> + (£q2 — q\l)
/>(/>2 + 1) (P2 + 28,x0lP + x20l) x2 (P2 + J) (,2 4- 262x02p + *&,)
И
*i(*)=#i sin (t + x^ +N^-1™ sin [|/Т^у01т+ 9U] +
+ Mx sin [|/-ТТГр2Уо2Т + е21]е-^о2х + 51;
(8.42)
x,(t)=/?1sin (t + y2)-b 7V2e--^o2xsin [j/rl-?Jxeit + els] +
+ M2sin j/TZTJ2xo2t + 022je-^o2x_L52,
где коэффициенты /?ь /?2, #ь N2, Мь М2 могут быть найдены
путем разложения выражений (8.41) на элементарные дроби
о £()2 о ~k0\
*1— —• »>2-——•
Х2Х02 X0l
Из равенств (8. 42) следует, что после отработки
возмущающего действия скачкообразного момента маховики приобретают
постоянные угловые скорости Si, S2 и скорости, изменяющиеся по
синусоидальному закону с амплитудами R\ и /?2 соответственно
и с частотой орбитального движения vo. Отметим здесь, что
244
вследствие орбитального движения КЛА угловые скорости
маховиков не нарастают со временем при действии постоянного
возмущающего момента.
В третьем случае
х (п)— [k\\P +(k0\ +Я2\)] Р I Я\2Р2 +k\2p + k02
(Р2 + I)2 (Р2 + Ъ\Ч\Р + *oi) %2 (Р2 + Щр2 + 2fexo2p + ъ202)
х 'гЛ — Я2\Р2 — Ьир—к0\ , [k\2P + (k02 — q\2)] Р
(Р2 + I)2 (Р2 + 2^ W + Цг) ^ Х2(Р2 + 1)2(р2 + 2£2W + *и)"
Изображения *i(p) и Хг(р) содержат кратные корни. Отсюда
+ Af1e-b«..x sin []/b^f*02T + 621];
^iW = (/?nt + /?e)sin (t + x2)+ Л^е-^sin [yT=Tf ^t-f-
+ 0„] + Af.e-*--* sin []/T^T2 v02t + в22].
Нарастание угловой скорости маховика при воздействии
возмущающего момента с орбитальной частотой объясняется наличием
резонанса. В самом деле, как видно из уравнений (8.38),
характеристическое уравнение системы распадается на два, одно из
которых р2+1=0 соответствует собственным движениям с
частотой обращения КЛА. Это объясняется введением
интегральных перекрестных связей по кинетическим моментам в законы
управления (8.33). Указанное уравнение совпадает с
характеристическим уравнением свободного гироскопа, применяемого для
курсовой ориентации спутника. Следовательно, результаты
исследования движения оси фигуры гироскопа под действием
возмущающих моментов в виде стационарной случайной функции
времени, приведенные в гл. IV, применимы к данной системе. Это-
означает, что воздействие на КЛА случайных возмущающих
моментов в виде стационарной случайной функции времени
приведет к нарастанию среднеквадратических значений кинетических:
моментов маховиков с течением времени.
8.4. Системы управления с гиромаховиками
Рассмотрим некоторые динамические особенности систем
управления с гиромаховиками, схемы которых приведены на
рис. 6. 11. Как уже отмечалось, наиболее характерной
особенностью таких управляющих устройств является наличие
существенной гироскопической связи между каналами управления по
крену и рысканию. Это, с одной стороны, усложняет задачу их
исследования, а с другой — позволяет использовать для управле-
24S
ния в канале рыскания сигналов датчика вертикали по крену.
Для управления углом тангажа при использовании гирома-
ховиков могут быть использованы результаты, полученные в
разд. 8. 1. Поэтому основное внимание в последующем будет
уделено исследованию взаимно связанных каналов управления по
крену и рысканию.
При использовании гиромаховика, схема которого приведена
на рис. 6. 11, а, управляющие моменты по крену и рысканию,
создаваемые реактивными двигателями, формируются в
соответствии с законами
Мг= — k cos a (7>i + ei);
М2= - k sin а (7^+ej), (8.43)
где k — коэффициент усиления;
а — установочный угол реактивных двигателей;
Тк — постоянная времени дифференцирующего контура.
Подставляя выражения (8. 43) в первые два уравнения
системы (8.29) с учетом того, что xi=x2=0, пренебрегая влиянием
гравитационного и центробежного моментов и полагая
^/voA— ~ ^зо» имеем
[р2 + (k cos <хтк) р + (лг30 + k cos a)] ex — x30/?s2=mBl;
(8.44)
K^ao--*sinaTIC)p+(*sina)]e1 + (x1 + ^e)et==mlli.
Характеристическое уравнение системы (8. 44) может быть
представлено в виде произведения полиномов второго порядка,
описывающих высокочастотные и низкочастотные движения [9].
Собственные частоты и декременты затухания этих движений
определяются формулами
1 f k cos a t TK f Nkcos a
%M~^V ~nr; Si_T|/ ~ir~'•
где N
Mx30
l
1 + Hyj2k cos a
Обычно угол a мал (составляет несколько градусов). Тогда
лри выполнении условий [9]
Я »max[4v0(/3--/2); ^(Л + У,-/,); M^-Ji)^}
Acosa^>4v0///x2
246
КЛА ориентируется по углу рыскания с установившейся ошибкой
57,ЗМв2
v0tf
(8.45)
Здесь МВ2 — постоянная или медленно меняющаяся
составляющая возмущающего момента.
Существенная особенность данной схемы состоит в том, что
она обеспечивает устойчивую ориентацию КЛА по углу
рыскания при отсутствии соответствующего датчика. Задаваясь
потребной точностью ориентации по рысканию, можно из формулы
(8.45) найти необходимую величину кинетического момента
маховика.
В пределах зоны нечувствительности реактивных двигателей
устанавливается нутация маховика. Ее амплитуда зависит от
минимального импульса,
создаваемого двигателями.
Однако уменьшение
последнего влечет за собой
увеличение
длительности цикла их включения.
Нутацию можно было 5ы
исключить введением
управляющего момент-
ного гироскопа, но это
повлечет за собой
снижение надежности при
длительном
функционировании системы.
Простейшая
модификация данной схемы
достигается введением
карданного подвеса маховика, ось которого совмещается с осью Х\..
Рамка подвеса отклоняется в соответствии с ошибкой
ориентации по крену. Для ее периодического возвращения в
первоначальное положение требуется система разгрузки, использующая1
магнитопривод или реактивные двигатели.
Принципиально аналогичный результат достигается в схеме,
приведенной на рис. 8. 10, где наряду с большим маховиком,,
обеспечивающим гироскопическую устойчивость, используется
малый маховик по оси х2. Сигналы по крену в этом случае
изменяют либо его скорость, либо поворачивают ось (маховик
установлен в карданной рамке).
Ошибка ориентации по углу рыскания по-прежнему
определяется формулой (8.45), которая обеспечивает выбор
кинетического момента Н большого маховика. Собственные частоты и
декременты затухания, связанные с передаточными числами
законов управления в основном контуре и в системе разгрузки,
выбираются с учетом заданного времени переходного процесса
Рис. 8. 10. Схема управления с
дополнительным малым маховиком:
/—гиромаховик; 2—реактивные двигатели системы»
разгрузки; 3—датчик вертикали; 4—маховик
управления по рысканию; 5—электромагнит системы'
разгрузки
247
w условий ограничения массы и потребной мощности системы
разгрузки.
Расчеты показывают [55], что для ИСЗ на синхронной
орбите система разгрузки должна создавать момент порядка
Ю-6 кгс-м. Если для этой цели используется магнитопривод, то
он должен иметь массу 1,35—2,7 кг при потребной мощности
1—2 Вт. *
В системе управления, использующей гиромаховик с
двухстепенным карданным подвесом (см. рис. 6.11,6), управление по
крену и рысканию
обеспечивается поворотом соответствующих
рамок подвеса на углы у\ и Y2
(рис. 8.11). Характерной
особенностью этой схемы является
необходимость устранения
взаимного влияния поворота рамок на
движение КЛА по крену и
рысканию.
Для исследования динамики
процессов ориентации в такой
системе можно по-прежнему
воспользоваться уравнениями (8.29)
с заменой х^о на *—*зо> так как
кинетический момент гиромахо-
вика направлен вдоль
отрицательного направления оси лг3.
При этом
Рис. 8.11. Схема поворота рамок
карданного подвеса гиромаховика
v0J{ v0/
Учитывая, что составляющие
кинетического момента
гиромаховика на оси Х\ и Х2 выражаются через углы прецессии
равенствами
HtCb-Hyx Н2=НУи
можно записать
Xl = —*30Y2J *2 = *30Yl-
Подставляя эти выражения в первые два уравнения (8.29),
•имеем
[Р2 + (4х + 4+*ao)J h - (* + x„)p*t - .%Yi - jr^py2 = тг;
_ (8.46)
[y.2/72 + (x + x2 + x30)] s2 + (x + Хз0) ргх + x30p\1 + X30y2 = m%.
Анализ полученных уравнений показывает, что
неуправляемые движения (yi=Y2=0) характеризуются двумя
собственными частотами
*ог
*30
— И X '"*»'
У *2
248
Так как *зо>1, а И2 близка к единице, первая частота
соответствует «быстрым» (высокочастотным) движениям, а вторая —
«медленным» (низкочастотным) движениям. Первая частота
соответствует нутационному движению гиромаховика, а вторая
медленным поворотам (с орбитальной угловой скоростью)
связанных осей в инерциальном пространстве.
Через каждую четверть периода обращения ошибка
ориентации по рысканию (неизмеряемая) переходит в ошибку
ориентации по крену (измеряемую). Учитывая это обстоятельство,
синтез контуров управления по крену и рысканию производится из
условия разделения движений на «быстрое» по крену и
«медленное» по рысканию, что достигается применением специального
развязывающего вычислителя [55]. В этом случае исследование
движения по крену можно провести независимо от движения nj
рысканию и первое уравнение (8.46) примет вид
P2ei — х30ру2=т\.
Принимая закон управления
Р\2=kaei+kupzu
получим дифференциальное уравнение второго порядка
(р2 + Хзок12р + Хзокн)г\ = ти
которое достаточно подробно рассмотрено в разд. 8. 1. Задаваясь
собственной частотой xoi и декрементом затухания £i на
основании формул
*oi— У л зо^ш $i— 2 I/ и
можно определить передаточные числа ku и k\2 закона
управления.
При синтезе «медленного» контура можно пренебречь
ошибкой ориентации по крену. Тогда уравнения (8.46) принимают
вид [55]:
- *зоРЧ + *3oYi - *зо/^2= Щ;
(8 AT}
[Ч? + (* + *2 + *80)] £2 + -Wl + A-30Y2 = Щ-
Из второго уравнения следует, что обеспечение демпфирования
по рысканию необходимо выполнить условие
•*WYi + *зо Y2 - /и«р = ~ КРЧ,
где т2р — момент, создаваемый системой разгрузки по оси х2.
Решая его совместно с первым уравнением, находим
РЪ^--У* + *m(Yi- "Y8 —mIp)„ (8.48)
-КЗО
249
где к21=— глубина перекрестной связи между каналами
*зо
управления
mlp — момент, создаваемый системой разгрузки по
ОСИ Х\.
При законе управления поворотом внутренней рамкой (8.48)
второе уравнение (8. 47) сводится к виду
где т2в — возмущающий момент по оси рыскания.
Нетрудно убедиться, что если принять
то в системе обеспечивает декремент затухания $2= 1/1^2,
соответствующий минимальному времени переходного процесса при
заданной собственной частоте.
ГЛАВА IX. СИСТЕМЫ УПРАВЛЕНИЯ
С МОМЕНТНЫМ МАГНИЮ ПРИ ВОДОМ
Взаимодействие искусственно создаваемого магнитного
диполя с индукцией геомагнитного поля широко используется для
управления ориентацией околоземных КЛА. В первую очередь
это относится к аппаратам, стабилизируемым вращением, а
также к аппаратам, основные задачи по обеспечению заданной
ориентации которых выполняют электромеханические системы
управления. Примерами последних могут служить системы,
содержащие в качестве исполнительных устройств двигатели-маховики.
Основное достоинство таких систем с магнитоприводом связано
с возможностью их нормального функционирования в течение
длительного времени. Необходимая для этого энергия поступает
от солнечных батарей, что исключает запасы топлива на борту
КЛА. С другой стороны, вектор индукции В геомагнитного поля
существенно изменяется в процессе орбитального движения,
причем характер изменения его составляющих по связанным осям
зависит от выбора базовой системы отсчета. Момент магнито-
привода, прикладываемый к КЛА, создается в результате
взаимодействия двух векторных компонентов, один из которых
представляет собой сложную функцию времени. Данное
обстоятельство определяет трудности аналитического исследования таких
систем.
250
9.1. Принципиальные особенности систем управления
с магнитоприводом
На начальной стадии проектирования систем ориентации с
магнитоприводом пользуются упрощенной моделью
геомагнитного поля с последующей проверкой предварительных
результатов исследования по точной модели с помощью ЭЦВМ. Тем не
менее, к ответам на принципиальные вопросы управления
ориентацией посредством магнитопривода можно подойти с общих
теоретических позиций. С этой целью воспользуемся уравнением
сохранения кинетического момента КЛА в инерциальной системе
координат
^ = MB + AfM, (9. 1)
at
где Мъ — вектор возмущающего момента;
Мм — вектор момента магнитопривода.
Ограничиваясь рассмотрением непрерывного управления^
примем магнитный диполь равным
где ky — передаточный коэффициент управляющей части
системы.
Тогда момент магнитопривода будет
и уравнение (9. 1) можно переписать в виде
dt
Для исследования устойчивости процесса управления
ограничимся исследованием однородного уравнения
dK
-ky(KXB)XB. (9.2)
dt
Умножив данное уравнение скалярно на К, получаем
dK j£= l tf/Ci=_k (кХв)2. (9.3)
dt 2 dt
Для анализа устойчивости воспользуемся прямым методом
Ляпунова и примем в качестве функции Ляпунова определенно
положительную функцию
V= — AT2.
2
251
Тогда вместо уравнения (9. 3) имеем
-=-~*И*х*1
Используя это уравнение докажем, что решение уравнения (9. 2)
асимптотически устойчиво. Согласно теореме, приведенной в
работе [12], если существует определенно положительная функция
V такая, что V<0 вне М и V<0 на М, где М — множество,
не содержащее целых траекторий, кроме точки О, то положение
равновесия в точке О асимптотически устойчиво. Согласно
уравнению (9.2) таким множеством является множество (КХВ) =
= 0, так как передаточный коэффициент &у>0. Найдем условия,
при которых это множество не содержит целых траекторий. Из
уравнения (9.2) следует, что на множестве М производная
=0 и вектор К постоянен по величине и направлению.
Очевидно, в случае /гуФ0 множество М содержит целые траектории
системы_(9. 2), если только векторы К и В коллинеарны, т. е.
вектор В в инерциальных координатах также постоянен по
направлению. Следовательно, система непрерывного управления с
магнитоприводом обеспечивает асимптотическую устойчивость
процесса управления на всех орбитах, где направление вектора
индукции геомагнитного поля в инерциальном пространстве не
остается постоянным. Полученный вывод можно распространить
на процесс разгрузки электромеханических исполнительных
устройств. Действительно, уравнение движения КЛА вокруг
собственного центра масс будет
^- + ^f- = MB + MM. (9.4)
at at
Учитывая, что изменение кинетического момента корпуса
аппарата вызвано действием инерционных моментов маховиков,
уравнение разгрузки можно представить в виде
dt вТ^ м
Принимая MM=dMXB=ky(HXB)XBf после подстановки в
уравнение (9. 4) имеем
dH -.Mu+k7(HXB)XB. (9.5)
dt
Доказательство асимптотической устойчивости процесса
разгрузки при выбранном законе управления проводится в
соответствии с уравнением (9. 5) аналогично тому, как это было
сделано в предшествующем случае. Таким образом, система
управления с магнитоприводом обеспечивает асимптотическую
252
устойчивость процессов ориентации КЛА и разгрузки маховиков
при условии, что изменение вектора кинетичесекого момента
аппарата по направлению происходит медленнее чем изменение
вектора индукции геомагнитного поля. В подавляющем
большинстве случаев это условие выполняется. Для ответа на вопрос о
качестве системы управления с магнитоприводом рассмотрим
принципиальные особенности ее структуры. Для этого перепишем
уравнение (9. 1) в связанной системе координат
dK
dt
-\-«ХК=мв+мш
или с учетом того, что dM=ky(KXB)y
dK ■ 5x*=^.+M*X"5)X*.
dt
(9.6)
Представим векторные произведения, входящие в уравнение
(9. 6) следующим образом:
KXB = SXK\
(9.7)
Здесь 5j и S2 кососимметричные матрицы, равные соответственно
S,-
0
-Вг О
В2 —В1
В3 —В
2
Вг
О
О
О
-О),
Постановка выражений (9. 7) в уравнение (9. 6) дает
S3K,
dt
(9.8)
где
S3=kySl+ 52=
куВфъ — u>3
kyBxB^ —co2
kyB2B3-^ -k7(B*+Bl)\
Отсюда наглядно видно, что система управления с
магнитоприводом представляет собой динамическую систему с
переменной структурой. Следовательно, получить количественную
оценку ожидаемого качества процесса управления ориентацией в
общем случае затруднительно. Решение уравнения (9.8) может
быть найдено численным методом при задании действующих на
КЛА возмущающих моментов. Аналитическое решение можнс
получить в том случае, если элементы матрицы 53 не зависят от
253
времени. Следовательно, решение надо искать в такой системе
координат, которая вращалась бы с постоянной угловой
скоростью, причем вектор индукции в этой системе должен быть
постоянным по величине и направлению. Поскольку угловая
скорость о и модуль вектора В переменны, заключаем, что такой
системы координат не существует. Таким образом, оценка
качества ориентации при управлении системой с магнитоприводом
может быть получена путем численного решения
дифференциального уравнения (98) в каждом конкретном случае.
Законы формирования моментов, создаваемых
магнитоприводом, могут быть различными. Однако в каждом случае
космического полета должны выполняться вполне определенные
требования, а именно:
— использоваться физические свойства магнитопривода при
создании управляющего или разгрузочного момента;
— влияние магнитного поля катушек или электромагнитов
на показания магнитометров и бортовых приборов должно быть
ограничено;
— масса, потребляемая энергия и надежность системы
должны отвечать решаемой задаче управления.
Выполнение этих требований осуществляется с учетом
используемой схемы управления.
При использовании магнитопривода для разгрузки маховиков
важное значение имеет выбор критической величины
кинетического момента маховиков. Так как эта величина Якр отражает
действие на КЛА внешних возмущений, она может быть
определена интегрированием дифференциального уравнения
вращательных движений КЛА вокруг центра масс, которое в данном
случае запишем в виде
^(y5+^) + «X(^ + ^) = Af. + Afp, (9.9*
где Л — вектор кинетического момента маховиков;
Л/в — главный вектор внешнего возмущающего момента;
Мр — вектор разгрузочного момента.
Интегрирование уравнения (9.9) затрудняется наличием не-
линейного члена соХ (Ло+Я). Однако можно обойти эту
трудность, рассматривая вращательные движения КЛА в инерциаль-
ной системе координат. В качестве такой системы, пренебрегая
прецессией орбиты, выберем систему координат 03 Х^Хо2Х03.
С помощью обратной матрицы Л-1 уравнение (9. 9) перепишем
теперь следующим образом:
JL. [А-ЧЯ+7Т)=А-Нмл+мр)-
Как правило, возмущающий момент Мв является
периодической функцией времени, изменяющейся с частотой, равной или
254
кратной частоте орбитального движения. Поэтому, разлагая
А~^М в ряд Фурье, представим
А-*Мв=Мо+М*,
где fv — составляющая момента, среднее значение которой за
_ период обращения равно нулю;
Mq — постоянный момент.
Таким образом, получаем следующее уравнение:
— [А-Ч^+^)]=^о+Му+Л-М7р,
dt
интегрирование которого в пределах от tx до t (t>ti) дает
A-*U+ А-^Н = у-^)М0+ Г Mvflft +
+ j A~Wpdx + AT1 [/«4+//1]. (9. 10)
где ЛГ~\ wi^i — значения соответствующих параметров в
момент времени /4;
х — переменная интегрирования.
Записывая полученное решение (9. 10) с помощью матрицы
Ai опять в связанной системе координат, найдем выражение для
вектора кинетического момента
_ t * __
Я=-Уо)+(/~/1)ЛЖ0+Л [Mvdx + A f Л-1Жр^т +
+ ЛЛГ1(~У«)1+Я1), (9.11)
накапливаемого маховиками в интервале (t — ti).
И£ полученного выражения следует, что конкретное значение
для Н может быть получено, если в заданных пределах
интегрирования известны /, о)1, Мв, И?. __
Зависимость кинетического момента маховиков Н от
величины импульса разгрузочного момента I A f A~xM^dx 1 позволяет
Н
оптимизировать выбор критического значения кинетического
момента #Кр, накапливаемого маховиками за время
интегрирования. Для этого примем, что импульс разгрузочного момента
прикладывается к аппарату в начале каждого витка (оборота по
орбите). Если началу первого витка соответствует время U *, то
* Следует иметь в виду, что для каждого канала управления время /4
может быть различным.
255
выражение для разгрузочного момента может быть записано с
помощью функции Дирака так:
жр=-^±
v0
r8['-(''+if)!-г«т'- 5 'Н^')]*
U+^i
(/ = 0, 1,2...л).
Величину импульса Li+i разгрузочного момента найдем из
условия компенсации I за время | действия на КЛА посто-
V v0 /
янной составляющей внешнего момента, начального значения
кинетического момента и кинетического момента, накопленного
к концу /-го витка. В соответствии с принятым законом (9. 12)
за-один виток аппарата по /+1 орбите к нему прикладывается
один импульс в начале этой орбиты или в конце /-й орбиты.
Интегрируя' предпоследний член в правой части выражения
(9. 11) при
,l+*L/<t</l+*L(/+l)
v0 v0
с учетом равенства (9.12), получим
A °f A-1M?dT=AATlIi+u
так как вследствие периодичности матрицы А:
Следовательно, выражение (9. 12) для кинетического момента
маховиков Я на (п+ 1)-м витке приобретает вид
(//)я+1= ~У«)+ A j М4% + Ц—Ь) АМ0 +
256
Полученная формула определяет вектор кинетического момента
маховиков при известном (выбранном) импульсе разгрузочного
момента Li+\ на каждом витке.
Маховики предназначаются для отработки периодических
возмущений. Поэтому изменение кинетических моментов
маховиков носит периодический характер и среднеквадратическое
значение он2 величины кинетического момента Hi+\ в конце
каждого /-го витка будет постоянным. Это позволяет выбрать
величину импульса разгрузочного момента из_условия минимизации
среднеквадратичного значения величины #г+1 в пределах одного
оборота КЛА по орбите. Выражение для среднеквадратичной
величины Нш определяется следующим образом:
где (H)l+i — транспонированный вектор.
Приведенное выражение инвариантно к матричному
преобразованию А. Поэтому вычисление &н может быть произведено
как в инерциальной системе, так и в системе координат,
связанной с аппаратом.
Из условия минимума среднеквадратичной величины
кинетического момента
до2н да2н до2н
d(Li+]){ d(Li+])2 д(/-/+1)з
находим
м--(/+п
Ях+/<
п +1 2я J
t^i
u+Z-o+u
v0t„ J L V v0 / J
или после интегрирования последнего члена этого выражения
_ __ _ vo
Zi+1=-//,-ya>1+J5Li41 V /corft- — АгМ0. (9. 14)
2я J v0
«.+2=-/
*о
9 991 257
Полученная формула определяет величину потребного
импульса момента, который должна обеспечить система разгрузки.
В этой формуле первые два члена обусловлены компенсацией
начальных возмущений аппарата. Третий член представляет
собой среднее за период обращения значение кинетического
момента КЛА, а последний член равен величине накопленного за один
виток кинетического момента маховиков под действием
постоянного внешнего момента.
Заметим, что из всех членов, входящих в выражение (9.14),
наибольшее значение имеет последний. Действительно,
начальные возмущения будет иметь существенное значение лишь на
первом витке включения системы разгрузки. Кинетический
момент КЛА (третий член) обусловлен малыми отклонениями от
базовой системы отсчета, и при нормальной работе маховиков
он пренебрежимо мал.
Подставляя значение для Li+i согласно формуле (9. 14) в
выражение (9. 13), находим критическое значение кинетического
момента маховиков в конце /г-го витка
(77кр)я+1= -/ш+ А \ УЙГ,<*т +J!L A \ A-4Zdx +
«И л
+ [*-*!--^-(n+l)]i4Af0
(9. 15)
В качестве примера вычислим потребный импульс
разгрузочного момента при следующих предположениях. В момент
включения разгрузочного устройства (t=ti)
(*>! =
т. е. КЛА находится в ориентированном положении в
орбитальной системе координат. Причем,
77i = #п sin (v0\ + ф) Ix + Hlt cos (Vi + ф) Тг + Я1373.
Относительно оси х& действует постоянный возмущающий
момент (реактивный момент, обусловленный утечкой газа из
корпуса аппарата, или аэродинамический момент), т. е.
Мл =
О
О
\МЛ
258
По формуле (9. 14) определяем величину потребного
импульса разгрузочного момента. Учитывая, что в данном случае (Л =
v0
'о
2л J
получим
A1M0 = Moi3,
v0 v0
или, в проекциях на оси xiy х% и *з,
(L1)1=-M11sin(v0t1 + ^; (I/+1)1=0;
(^i)2= -^12 sin (v^+ф); (Z/+1)2=0;
vo vo
В случае, когда в разгрузке маховиков по осям х\ и х2 нет
необходимости, величина импульса определяется последними
равенствами
Z,+1=-—лу3.
v0
По формуле (9. 15) находим критический запас
кинетического момента, накопленный маховиками,
(Якр)Л+1= —*L Л*073= -ГЛуз, (9. 16)
vo
а при отсутствии разгрузки маховиков по осям Xt и х2
(Якр)я+1= -TJx-TMjr (9.17)
Таким образом, в данном случае критическое значение
кинетического момента пропорционально величине внешнего
возмущающего момента (постоянной составляющей) и периоду
обращения. Следовательно, при выборе маховика необходимо
производить предварительную оценку внешних моментов,
действующих на аппарат.
Величина кинетического момента, определяемая формулами
(9. 15), (9.16), (9. 17), должна быть меньше предельного
значения кинетического момента маховика, обусловленного его проч-
9* 259
ностью и возможностями приводного двигателя. Необходим
определенный запас кинетического момента, учитывающий
недостаточную достоверность предварительных сведений о величине
возмущающего момента, а также начальных возмущений.
9. 2. Применение моментного магнитопривода
для пространственной ориентации
Проведем исследование системы ориентации с магнитоприво-
дом КЛА обращающегося по околоземной круговой орбите. Маг-
нитопривод представляет собой три катушки, три
магнитометра, установленные в аппарате, как это показано на рис. 6. 12, и
вычислительных устройств. В состав системы входят также дат-
йщ
Устройство,
коммутирующее тон
//
£.
мм*
J катушки
\ I
Вычислитель
ВУ7
/У/ П/
ГТг
I и*
Аппарат
Измерительные
устройства
•
и\
л.
€t
•т
t £г*
1^
Рис. 9. 1. Блок-схема системы управления с магнитоприводом
чики угловых отклонений КЛА от положения заданной
ориентации в орбитальной системе координат. При малых угловых
отклонениях аппарата ei, 62 и ез, рассматриваемых в дальнейшем,
будем считать, что проекции вектора магнитной индукции В поля
Земли на оси орбитальной системы координат #01*02*03 равны
соответствующим проекциям на оси связанной системы координат
*1*2*з, так что
где
B1=B0s'm^Mcos(u—лм);
В2= — 2£0sin £м sin (и — Лм);
B3=B0cos^
u=vot\
(9. 18)
|м — наклонение к магнитному экватору.
На КЛА действует возмущающий момент Мв=\Мви Мв2,
Мвз|т. Блок-схема системы ориентации изображена на рис. 9. 1.
Принцип работы системы заключается в следующем. На основе
измеренных значений угловых отклонений аппарата ei, €2 и ез,
а в случае необходимости и угловых скоростей отклонений ei, г%
260
и е3, в вычислительном устройстве ВУг определяются требуемые
значения управляющих моментов MTyV MTyV M*3.
Одновременно с помощью магнитометров измеряются текущие значения
составляющих индукции магнитного_поля Земли Ви В2 и 53.
Вычисленный управляющий момент Жу должен быть равен
действительному управляющему моменту Му, прикладываемому к
аппарату со стороны магнитопривода. Поэтому в вычислительном
устройстве ВУ2 определяется величина тока для каждой катушки
магнитопривода, при котором выполняется данное условие, т. е.
Му=Му. Этот ток пропускается затем через соответствующую
катушку. Исходным выражением для определения токов /4, /2 и
/з в катушках служит векторное равенство
Wy=d«XB>
или в скалярной форме записи
Му i=dM шВ{+2 — dM naBi+и (9. 19)
где Pi=nSWIi (t=l,2, 3 — составляющие (вектора Р диполь-
ного момента катушек;
п и S — число витков и площадь сечения катушек (все
катушки одинаковы) соответственно.
Определитель системы алгебраических уравнений (9. 19), что
можно легко проверить, равен нулю. Это означает, что одно из
уравнений является следствием двух других. Следовательно, из
трех токов /ь /2 и /з независимыми будут только два. Возьмем
в качестве независимых токов h и /2. Тогда из равенства (9. 19)
находим
Вх , 1
т
1 В3 3 B3Sn У2'
' _ В2 г , 1
."-^/'+Ж5ГЖ»- (9'20>
Отметим, что для создания управляющего момента Myi
относительно оси хи необходимо пропускать ток /2 через катушку,
установленную по оси х2 и наоборот. Ток /3 можно изменять
произвольно, в частности, можно положить /з=0. Таким образом,
моментный магнитопривод позволяет обеспечить независимое
управление угловыми движениями КЛА только по двум каналам.
Данное обстоятельство является физической особенностью
магнитопривода как управляющего устройства системы ориентации.
Пропуская через катушки, установленные по осям Xi и х2
токи, определяемые в соответствии с формулами (9.20), получим
^yi=^ My%=M*yV а МуЪфМ-уЪУ
причем Му3= --|L Myl —^МуШ.
9* 991
261
Отсюда следует, что управление по крену и рысканию вызывает
возмущение угловых движений аппарата по тангажу. Для
устранения этого возмущения необходимо дополнительное
управляющее устройство, например, газовые сопла или маховики. Будем
считать, что управление по каналу тангажа осуществляется с
помощью одного из указанных управляющих устройств.
Принимая в качестве независимых токов 1Х и /3 имеем
/1=*!-,,+.^2_; /з=_^/2_^.
Учитывая закон изменения составляющих вектора магнитной
индукции В, согласно выражениям (9. 18) заключаем, что
реализация независимого управления по каналам крена и тангажа
сложнее, чем по каналам крена и рыскания, когда 53=const.
Поэтому проведем исследование динамики систем по последним
двум каналам, используя дифференциальные уравнения (3.1) с
учетом действующих на КЛА моментов:
У1ё1+4го(/з--Л)е1 + ^о(Л + Л"-Л)'£2=^у1 + Жв1;
(9.21)
Л,£2 + ^о(Л-Л)е2-^0(У1 + У2-Уз)£1=^у24-ЖВ2,
где Afyi и М72 — управляющие моменты, создаваемые магнито-
приводом;
Мв1 и МВ2 — возмущающие моменты, действующие на
аппарат и представляющие собой случайные
функции времени.
Представим уравнения (9. 21) в более удобном виде
Lxl(P) Ч + 1<12(Р) £2="V+ mBi'
~-^12Ы£1 + ^22(^)£2=^у2+^в2э (9-22)
где
£и(/>)=/>2 + 4(р-а); Р=-1-$г1
v0 at
La{p)=(l + a-®Pi Р=-£-
«./=-% (п = У, b;i=l, 2).
Поскольку движения КЛА по углам крена и рьгокания
взаимосвязаны, примем следующие законы управления:
my2= - Wn (р) н - Wn (p) e, (9.23)
262
где Wy(p) (/, /=1, 2)—передаточная функция управляющей
части системы.
Рассмотрим два закона управления:
статический №ц(р)=ац+Ьлр (9.24)
и астатический
ЧГи(р)=±(аи+Ьир + си/?}9 (9.25)
где ац, bij, dj — передаточные числа системы, выбор которых
производится из условий обеспечения устойчивости и
требуемого качества переходного процесса.
Формирование этих законов управления осуществляется с
помощью комплекса измерительных устройств, определяющих
угловые отклонения, скорости и ускорения отклонений аппарата от
положения заданной ориентации. Подставляя выражения (9. 23)
в уравнения (9. 22), находим
(^ii+^ii)4 + (A2-^i2)^=mBl; | 9 2б
-(^i2-^21)e1 + (Z22+U722)62=mB2. j
Полученные уравнения характеризуют динамические
свойства замкнутой системы ориентации в режиме стабилизации.
Полагая, ЧТО Wi2=W2l = Li2,
представим эти уравнения в виде
(/?2 + 2£2x2/? + x2)£2 = mB2, j
где %\=ап + 4 (р — а); 2 $Л=Ьп;
(9. 27)
22-
а
Поскольку в задачу системы ориентации входит также
выполнение различных угловых маневров КЛА, то дополним правые
части уравнений соответствующими управляющими сигналами
ei* и ег*. В результате, имеем
(/;2 + 2$1xl/7+x2)e1 = x^ + mBl;
(9. 28)
(р2 + 2£2*2/?+%1) е2 = уф* -f тв2.
Введение управляющих сигналов е* и е* означает
практически, что через катушки, установленные по осям Х\ и х2,
пропускается ток, определяемый отклонениями КЛА ei и г2 согласно
законам управления (9. 24), и дополнительный ток, необходимый
для осуществления заданных маневров. Величина дополнитель-
9** 263
ного тока по каждому каналу находится по формулам (9.20).
Только вместо М^х и Мту2 подставляются расчетные значения
моментов, необходимых для выполнения указанных маневров.
Уравнения (9. 28) имеют одинаковую структуру, поэтому
рассмотрим одно из них, например, первое. Вначале оценим
потребные значения силы тока в катушках при действии
детерминированного управляющего г* и случайного возмущающего гпв1
сигналов. Передаточная функция системы по сигналу управления
будет
у?
£1 l (9.29)
Оптимальный переходный процесс по отношению к
управляющему сигналу получается путем соответствующего выбора
относительного коэффициента демпфирования gj и собственной
частоты xi. Коэффициент демпфирования выбирается в пределах
|1=0,7-М, а частоту xi находим из условия получения задан-
. 2я 2л
ного времени регулирования tp = или, так как v0= ,
где Т — период обращения аппарата, /р=Г/хь Допустим, что
КЛА представляет собой шар (сс=р=1) диаметром d=3 мм,
его период обращения Т=90 мин, а момент инерции /i=
=5000 кгс/м2. Примем также, что катушка магнитопривода (без
железного сердечника) имеет площадь 5=7 м2 и число витков
№=100. Из первой формулы (9.20) при /3=0 находим силу
тока в катушке
или
Мр /,v^yI
SnBa SnB*
поскольку M^l = Myl.
Для приближенной оценки маневренных возможностей КЛА,
управляемого магнитоприводом при действии управляющего
сигнала 8i* преобразуем выражение закона управления
myi=(aii + bitp)Ei
с помощью уравнения (9. 29) следующим образом:
(«и+ *п/>)*1еГ 9*
ту1=-т-т: г-х1£г
/>2 + 2е,%,/? + %^
264
После подстановки полученного значения для myi в
равенство (9. 30) имеем
Если принять И1=10, что соответствует времени
регулирования /р=9 мин, и конкретизировать заданный угловой маневр
аппарата как разворот по крену на угол gi*=0,104 рад=6° на
участке орбиты, где составляющая магнитной индукции В3=
=0,2-10~4 Вб/м2, то из формулы (9.31) находим /г=4,8 А.
Большая сила тока в катушке магнитопривода при развороте
КЛА свидетельствует о недостатке рассматриваемого способа
управления. Более рационально выполнять разворот аппарата
при отсутствии позиционных сигналов в законе управления
(а11=0). В этом случае КЛА разворачивается с постоянной
угловой скоростью /78i*, причем
п* 2£рч -„«^ ■*
1 Р + ЪухГ1 v0
то
Та к как ту1=en/?s* = еп —
/ _ /ivc8n :*
у SnB3
Если взять для примера ei*=0,2-10~-3 рад/с (при этой скорости
разворот на 6° осуществляется за 9 мин) и учесть, что ец =
=2gtxi=20, тогда /у= 1,66 А.
Отсюда следует, что при прочих равных условиях разворот
КЛА с постоянной угловой скоростью требует в три раза
меньшего тока, чем разворот при неотключенных позиционных
сигналах.
Очевидно, что при отключенных позиционном и скоростном
сигналах можно осуществить разворот при меньших значениях
• *
силы тока в катушках. В самом деле, если myi=p2s*= , то
v2
Задаваясь ei*=0,78-10-6 рад/с2 (что соответствует развороту
КЛА на 6° за 9 мин) и принимая для S, п и Вг прежние значения,
найдем/у=0,28 А.
Следовательно, разворот целесообразно осуществлять при
отключенных позиционных и скоростном сигналах, создавая
управляющий момент, пропорциональный постоянному угловому
ускорению. Поскольку сила тока пропорциональна квадрату
частоты xi (или, что все равно, обратно пропорциональна квад-
265
рату времени регулирования), то уменьшив, например, частоту
в два раза, получим в четыре раза меньшую силу тока.
По окончании разворота следует опять перейти на
выбранный закон управления.
Для астатического закона управления (9.25) первые два
уравнения системы (9. 22) принимают вид (предполагается, что
Ll2=Wi2=W2i)
(9.32)
где
*\--=kn\ -A.*? = ец + 4 (Р — a); ЛЛ = т|и;
^2=*22» ^2У*2== (е22~Гг U> ^*ix2==^22#
В астатической системе, описываемой уравнениями (9.32),
можно получить переходные процессы, подобные процессам в
статической системе, рассмотренной выше. Основным
преимуществом астатической системы является то, что постоянные
моменты, действующие на КЛА, не вызывают изменения угловых
координат.
Рассмотрим поведение статической и астатической систем
управления под действием случайных возмущающих моментов mBi
и тв2.
В работе [6] показано, что эти моменты имеют стационарные
случайные компоненты со спектральной плотностью
интенсивности вида
4а 2V
5в(со)= ■"-, (9.33)
где у и (Хв2 — плотность распределения вероятности и дисперсия
сигнала mBi.
Найдем дисперсию ошибки статической о\2 и астатической а22
систем при возмущающем моменте (9. 33), воспользовавшись
первыми уравнениями (9.22) и (9.32). Имеем
— оо
+ оо
L- ||Ф'(у«))|25в(«>)^, (9.34)
1
о
2
где Ф(/со) и Ф'(/со) —передаточные функции по возмущающему
моменту статической и астатической систем.
266
Предположим, что передаточные числа kiu en и т)ц систем
управления выбраны из условий обеспечения заданного
переходного процесса при детерминированных управляющих сигналах,
например, из условий кратности корней. Тогда передаточные
функции будут
1Ф(»12 = , . \.а: 1ф,(>>)12= , ,"" м ■ (9.35)
.2\2
(0)2 + 0,2)
(о>2 + о>2)
w2\3
Подставляя (9.35) и (9.33) в (9.34) и производя вычисления,
найдем
*? = ■
2 + Х
;* -^
где
»} (1+Х)2 ' 2'
qB Х(3 + Х)
coj 4(1 + X)3'
о>1
/7
1у1
I2
zYOjZ
1\0,1
Lyi
п 1
/2
Для сравнения реакции сга-
тической и астатической систем
на случайные возмущения
рассмотрим отношение дисперсий
л
8
Рис. 9. 2. Зависимость
среднеквадратичных значений токов от К
П =■
4 1 +
ЗХ + Х2 /
На рис. 9. 2 построен график функции я (А,).
Видно, что астатическая система слабее реагирует на
стационарные случайные возмущения, чем статическая. При этом, чем
выше частота coi, тем больше проявляются преимущества
астатической системы.
Определим среднеквадратичные значения токов в катушках
при действии на систему случайных возмущений вида (9.33).
Полагая, что управляющие сигналы еА* отсутствуют, можно
написать для статической
Л*2
+ »
'у1 = "аГ^ \(kn+hiH®U«)\2SB(<»)d* (9.36)
и астатической систем
+ оо
/2
где
_ М2 \ 1 6ц +sil> + ,qii,/2<o2
— 00
M=J1yyBznS.
Ф'(» $»<*», (9.37)
267
Пользуясь тем, что
|*и + «117«оГ=«}+4«?и
k\\ + £11> + "У1пЯ<«>2
>
0)2
и производя вычисления интегралов (9.36) и (9.37), найдем
i*=MW 2+ЗХ л2 -Ж2о28 + 27Х+ЗЗХ2 .
у1 в (1+Х)2 У2 в 4(1+Х)3
На рис. 9. 2 построены кривые, дающие представление о
зависимости токов от параметра X. Большее потребление тока в
астатической системе обусловлено тем, что при прочих равных
условиях эта система обеспечивает лучшее качество
регулирования (более слабая реакция системы на случайные
возмущения).
Если при выборе системы управления с моментным магнито-
приводом основным является качество регулирования, то
следует предпочесть астатическую систему с высокой собственной
частотой (малое X). Если же более важным является малое
потребление энергии на регулирование, то следует брать статическую
систему управления.
Для оценки величины среднеквадратичного значения токов в
катушках при случайных возмущениях заметим, что
составляющие AfBi, Мв2, Мъ3 редко превосходят 10~7 ,кгс-м [6]. Поэтому
беря для (тв верхнее значение зв= —, получаем
3/,v2
Следовательно, система управления в режиме стабилизации
потребляет ток на три-четыре порядка меньше, чем в режиме
управления.
Выше было установлено, что с помощью магнитоприводов
можно управлять только двумя угловыми координатами
спутника. Для управления третьей координатой (в нашем случае
углом тангажа) следует применять другие системы управления*
например, систему с реактивными соплами или маховиками.
9.3. Система коррекции вращающегося К Л А
Для коррекции углового положения вращающегося КЛА
широкое применение получили системы управления с магнитоприво-
дом. Силовая часть магнитопривода содержит в данном случае
одну токовую катушку (или электромагнит), вектор магнитного
диполя которой dM совпадает с осью вращения. Поэтому система
управления характеризуется простотой конструкции и высокой
268
надежностью, что особенно важно для КЛА, рассчитанных на
длительное время активного существования. Основная функция
системы заключается в приложении к аппарату управляющих
моментов относительно двух осей, перпендикулярных оси
вращения и сохраняющих неизменную ориентацию в пространстве.
Это предполагает определенное изменение тока в катушке маг-
нитопривода, которое должно учитывать и отклонение оси
вращения КЛА от заданного направления, и текущее значение
вектора индукции геомагнитного поля. Такое изменение тока может
быть достигнуто двумя способами: автономным и неавтономным.
В первом способе обработка результатов измерений углового-
положения оси вращения и составляющих индукции
геомагнитного поля для выбора программы изменения тока в катушке
производится на борту КЛА, во втором — на Земле. Рассмотрим
принципиальные особенности указанных двух способов
построения системы управления с магнитоприводом.
Как уже отмечалось, величина управляющего момента,
создаваемого магнитоприводом, зависит от тока в катушке и значения
вектора индукции геомагнитного поля, которое определяется
положением КЛА на орбите.
Будем рассматривать это положение для первого способа в
орбитальной базовой системе координат Ох^х^Хю. Пусть ось х$
связанной системы координат Ох^х2хъ совпадает в положении
заданной ориентации с осью *оз. Оговорим допущения, положенные
в основу дальнейшего исследования. Во-первых, отклонение е
оси вращения (оси х3) от заданной ориентации (ось *оз)
принимается малым, причем кинетический момент собственного
вращения аппарата /Со значительно превышает его возможное
приращение А/С в процессе управления^ так, что текущее значение
данного момента K(t)=K0+AKc^Ko. Во-вторых, значения
проекции вектора индукции геомагнитного поля на оси х0$ и л;3
практически совпадают. В-третьих, аппарат представляет собой
абсолютно твердое осесимметричное тело вращения (Ji=J2). И
наконец, в-четвертых, влияние возмущающих воздействий на
динамику процесса управления считается несущественным.
Проекции вектора индукции В на оси базовой системы коор-
динатопределяют равенствами (П. 11). Вектор магнитного
диполя dM токовой катушки будет
dn=dJ3=dM —
или, учитывая, что Кс^Ко9
аы=^К. (9.38)
Поскольку действием возмущающих моментов пренебрегают*
то дифференциальное уравнение управляемого движения КЛА
запишется в виде
269
dK -n
dt
= MV
Ко
кхв,
«ли
где
dt Ко
Г К
(9.39)
Л
Ко
, (*, = *)•
Рис. 9. 3. Расположение систем координат при
управлении вращающимся аппаратом
Введем вспомогательную систему координат О^гЕз с началом
в центре масс КЛА. В момент начала процесса управления
(/=()) ориентация осей |ь £2 и £3 данной системы определяется
следующим образом: ось £з совпадает с осью *оз, ось g2 с
проекцией вектора кинетического момента К на плоскость *oi*o2
<рис. 9.3). Угол между осями £3 и л;3 в данный момент времени
(/=0) обозначим 8о. В результате прецессии аппарата, возника-
Рис. 9.4. Положение вектора кинетического момента К в
системе |i|2?s:
а—в момент начала управления (*=0); б—в процессе управления
270
ющей при отработке этого угла, проекция вектора К на
плоскость Jtoi*o2 будет иметь две составляющие Кц и К&
(рис. 9.4). Тогда, рассматривая уравнение (9.39) в системе
0gi|2?3, имеем
his =
К
Is
5=1, 2,3,
причем
Аи<1, Л*2«1, А68^1.
(9.40)
Обозначая проекции вектора индукции В на оси Ь> Ъ и £3,
через В^и В& и £5з соответственно, перепишем уравнение
(9. 39) в виде
dh
где
5Й=
dt
0
— £$з
#£2
V$A
/Со
(9.41)
#£3
о
В g2
0
Поскольку Л^з^^1, в дальнейшем будем рассматривать первые
две составляющие вектора Я, считая, что изменение Лез
пренебрежимо мало. Тогда вместо уравнения (9.41), эквивалентного
трем скалярным уравнениям, можно записать
dh„
dt
Btsh
£3^52'
/Со
В&\
dhi2 du R
^д
61
Ко " Ко
Полагая, что начальное отклонение ео оси вращения,
показанное на рис. 9. 3, имеет знак минус и учитывая малость
абсолютных значений Ац и %, получаем следующие решения
полученных уравнений:
Аа =-£-[-«•*»+£»]*;
Ко
так как
%= — £о
ВцТ,
Ко
е0 при t=0.
Здесь т определяет временной интервал, в пределах которого
изменением составляющих вектора индукции геомагнитного
поля можно пренебречь. Поэтому значения этих составляющих в
271
выражениях (9. 42) при /=0 и t=x принимаются одинаковыми,
T.e.Bes(0)=ficS(t) (5=1,2,3).
4i
*,
£2
Имея в виду, что /?а= -тг-=е1> Л*2=-1- = sa, окончательно
^0 ^0
имеем
i(0=-«o+-7T-^it.
(9.42)
Эти выражения характеризуют изменение ошибки
ориентации в процессе управления,
которое удобно представить
на фазовой плоскости с
координатами ei и 62 (рис. 9.5).
Заштрихованная окружность
на данном рисунке обозначает
область допустимых
отклонений ед оси вращения. Система
управления включается при
е>ед. Задача управления
будет решена в том случае, если
траектория изображающей
точки пересекает область
допустимых отклонений
(сплошная линия на рис. 9.5).
Пунктирная линия иллюстрирует
неправильное формирование
закона управления. Наилучшее
решение будет получено при ei = 0. Это возможно при
В#=В&0. (9.43)
Следовательно включение магнитопривода следует
производить в моменты времени, когда выполняется данное условие.
Понятно, что за время одного включения произвести поворот
аппарата на угол ео затруднительно, и вместо равенства, которое
следует из выражения (9.42)
Рис. 9. 5. Траектория
изображающей точки на фазовой
плоскости iig2
d«x-
е0#0
будем иметь
272
Таким образом, последовательным включением магнитопри-
вода можно обеспечить коррекцию углового положения оси
вращения. Поскольку величина магнитного диполя dM неизменна,
задача управления заключается в определении временных
интервалов включения и выключения токовой катушки магнитопри-
вода.
Измерение #$з производится магнитометром, установленным
по оси вращения. Другие два магнитометра располагаются в
экваториальной плоскости КЛА. С_их помощью измеряются
проекции #4 и В2 вектора индукции В на вращающиеся связанные
оси хх и х2. В моменты времени L = N и L = N , где
v0 2v0
N—порядковый номер орбиты, показания этих магнитометров
соответствуют значениям составляющих вектора индукции по
осям орбитальной базовой системы координат, причем #1~Б0ь
а В2^0 при t=tu и В2=Во2, a #i=0 при t=t2. Тогда, зная
плоскость начального отклонения оси вращения ео и находя угол у
(см. рис. 9.3), вычисляем составляющие #ц, В& и В& по
формулам
#и = #oicos Y — #02 sin Y;
в&= #oisin v+#02cos y;
#ез = #оз.
Эти значения сохраняются при расчете системы неизменными
в течение времени т включения токовой катушки. В свою
очередь, время включения выбирается с учетом наклонения и
высоты орбиты, исходя из допустимого изменения составляющих
вектора индукции порядка 10—20% от начальных значений.
Допустим, для простоты, что y=0> T- е. плоскость отклонения оси
вращения совпадает с плоскостью *о2*оз и
Bis=BQsi 5=1, 2, 3.
Тогда из условия (9. 44) находим (см. рис. 9. 3)
—2#0sin / sin 2u=fi0cos / ео.
Откуда 2и = — a resin c g* e0.
За время ti одного включения токовой катушки начальное
отклонение уменьшится и станет равным
4* = h(xi)=4—7г #оsin*cos—-arcsin —^-s0Ti-
/Co 12.
Полученное значение ошибки является начальным для
следующего процесса коррекции положения оси вращения и т. д.
Рассмотрим теперь второй возможный способ построения
системы управления при оговоренных выше допущениях. Будем
273
считать, что угловое положение оси вращения задается в инер-
циальной системе координат 03 Х{Х2Х3 с началом в центре масс
Земли.
Для определения ориентации оси вращения КЛА в системе
координат 03 Xi0X2oXzo введем полусвязанную систему координат
О*10*2о*зо (базовую систему отсчета) с началом в центре масс
КЛА. Совместим ось г30
с требуемым положением
оси вращения, а ось *ю
направим параллельно
плоскости О3*ю*2о (рис. 9.6). Оси
#ю, *2о и хго во вращени
КЛА не участвуют.
Система координат
0*юХ2о*зо получена
поворотами системы координат
*2 03XiqX2oXzo вокруг оси Хго
на угол ф! и вокруг оси *ю
на угол ф2.
Переход от системы
координат 03XioX20Xzo к
системе 0*10*20*30
производится с помощью
равенства
Рис. 9. 6. Взаимное расположение
систем координат для автономного
управления осью вращения
Dx =
| *10, *20, #301 Т = ^11 ^Ю> ^20, -^301 Т,
cos cpx sin cpx О
— sin cpx cascp2 cos cpx cos <р2 sin <
sin cpx sin cp2 — cos cpx sin cp2 cos <
Так как вектор геомагнитной индукции задан составляющими на
оси системы координат 03 Х\Х2Х3 в соответствии с равенствами
(1.30), переход от которой к системе 03Х10Х20Х30 определяется
матрицей
Лоа—
cos 2 — sin 2 0
sin 2 cos 2 О
О 0 1
для преобразования индукции В к системе координат О*ю*2о*зо
потребуется матрица
cos (2 — срх) — sin (2 — «pj О
sin (2 — cpjcoscfe cos (2 — срх) cos <p2 sin <p2
— sin (2 — cpx)sincp2 —cos(2—«pjsin^ coscp2
L/q— U^Aq2 '•
274
Осуществляя преобразование вектора В с помощью этой
матрицы, находим
ю
а>
В10 = £xcos (2 — ft) — В2 sin (2 — ft);
В20 = Вг sin (2 — ft) cos ft + Z?2 cos (2 — ft) cos cp2+ #8sin cp2;
££0= — £xsin (2 — ft) sin cp2 — £2cos (2 —ft) sin cp2 + B3 cos cp2;
Приведем выражения (1.30) с учетом равенств (1.31) к виду
— (sin uM cos 2и ~\- cos иы sin 2а) —
— 0,5 sin #Msin aj;
Z?2==ZJSJ— cos/ sin £M(cosaMcos 2tt-f sin #Msin 2u — cosuj —
-sin<pMcos eMJ;
/?, = /?,„—sin /sin !jM(cos#Mcos2# + sin #Msin 2#) + coscpM . |
Пренебрегая отклонением оси вращения (оси катушки магни-
топривода) от оси лг3о, примем
dM~rfMe3. (9.46)
Тогда на основании выражений (9. 45) и (9. 46) находим
составляющие моменты по осям системы координат ОлдогоХао
Mi=-dMB20; M2=dMBl0; M3=0. (9. 47)
, 44) для Вы и В20 после подстанс
ясных преобразований запишем в в
В10=В# (at sin 2u-\-b1 cos2u-\-c1)\
(9.48)
B20=B#(a2sin 2ti-\-b2zos2u-\-c2),
Выражения (9. 44) для 540 и В2о после подстановки равенств
(9. 46) и несложных преобразований запишем в виде
где
ах=—^sin$M[cos«Mcos(2-ft)+cos/sin«Msin(2-ft)];
&х = —sin$M[sin«Mcos(2--ft) — cos / cos им sin (2 — ft)];
c1=sin cpMcosaM sin (2-ft)-0,5 sin £M[sin «M cos(2 — ft) —
— cos / cos им sin (2 — ft)];
Q
a2=— sin £M [cos / sin aM cos (2 — ft) cos <p2 —
— cos#M sin (2 — ft)coscp2-f-sin /sin #Msin cp2;
275
b2= — sin ^[sin йм sin (2~~ <Pi)coscp2-fcos/cos#Mcos(2 —
— cpjcos^-f sin /cos#Msincp2];
c2=cos cpM sin cp2 —sin cpM cos зм cos (2 — cpx) cos % —
— 0,5 sin $M [sin uu sin(2 — cpx) cos <p2-|- cos i cos #M cos (2 — cpjcos^-b
-f- sin i cos #M sin cp2.
При обеспечении заданной ориентации оси вращения КЛА
(<Pi=const, ф2=const) коэффициенты в равенствах (9.48)
изменяются вследствие вращения Земли и прецессии орбиты.
Скорость вращения Земли, как правило, много меньше
орбитальной угловой скорости. Поэтому в первом приближении
вращением Земли можно пренебречь. Угловая скорость прецессии
орбиты мала даже по сравнению со скоростью вращения Земли.
Углы ф! и фг являются постоянными. Следовательно, изменение
коэффициентов а±, а2, Ьи 62, си с2 за один оборот КЛА по
орбите можно осреднить и считать их постоянными величинами,
которые могут быть найдены путем предварительных расчетов.
После каждого оборота КЛА в расчетные значения
коэффициентов вносятся необходимые коррективы.
С учетом равенств (9. 48) выражения (9. 47) после несложных
преобразований могут быть представлены в виде
^i=Mlmsin(2a+-^)+yW10;
М2=М2т sin (2и+ ф2) + М20, (9.49)
где
М1т= - dMS* УЩ+»\ M2n=dMB* уГ^+Ц;
М10=—аиВ*с%: M90=duBtc1;
^1=arctgi^-; <|>2=arctg-^-.
Отсюда следует, что момент относительно каждой поперечной
оси КЛА (не связанной с ним) изменяется по синусоидальному
закону с удвоенной частотой обращения. На рис. 9.7 показаны
примерные графики изменения моментов М4 и М2 в зависимости
от и. По этим графикам определяется требуемое изменение
тока, протекающего через катушку магнитопривода. Так как на
КЛА устанавливается одна катушка, момент относительно оси
хх прикладывается в то время, когда момент относительно оси %г
равен нулю, и наоборот. Такое распределение управляющих
моментов возможно за счет соответствующего выбора моментов
включения тока в катушке, так как графики моментов
относительно осей Xi и х2 имеют сдвиг по фазе. Другими словами,
276
управляющие моменты по осям х{ и х2 должны прикладываться
в различных точках орбиты, характеризуемых аргументом
широты и.
Для задания точки коррекции по оси х2 (точки приложения
момента М2) необходимо определить аргументы широты щ2 и и^
при которых Mi=0. Это условие на основании выражения (9. 49)
или
М10=М1тб1П(2и2+'М = 0,
Мь
М\щ
■sin(2et+t1)=0.
(9. 50)
Рис. 9. 7. Графики формирования импульсов
моментов в зависимости от и
На рис. 9. 7 показана величина импульса момента
(заштриховано), прикладываемого к аппарату по оси х2. Аргументы широты
ыц и и2и определяющие точки приложения момента по оси хи
находятся аналогичным путем с помощью уравнения
м
20
Щт
•sin(2»1-h^a) = 0.
(9.51)
В дальнейшем в качестве опорной точки будем использовать
точки с аргументами широты ui2 и ип (по осям х2 и Xi
соответственно).
Необходимо также задать длительность времени приложения
каждого момента, а точнее пределы изменения аргумента
широты относительно опорных значений, определяемых уравнениями
(9.50) и (9.51). Указанные пределы по каждой оси должны,
очевидно, выбираться одновременно из двух условий:
1) суммарный импульс момента за время включения
относительно рассматриваемой оси должен быть максимальным;
277
2) суммарный импульс момента относительно другой оси
должен быть равен нулю.
Применительно к оси х2 второе условие имеет вид
«1*+Д«в*
f M1du=Oi
где Aui2— определяет точку начала включения магнитопривода
(относительно точки определяемой аргументом
широты ui2);
А1122 — определяет точку орбиты, в которой происходит
выключение магнитопривода.
Подставляя в это уравнение соответствующее равенство
(9. 49) и выполняя интегрирование, находим
2 ^L A012+cos(2a12+<W--2Aar2)= -2 -^ ди22 +
+ cos (2ип + <Ь + 2 дя22). (9.52)
Совместное решение уравнений (9. 50) и (9. 52) определяет
целое семейство пар значений Aui2 и Аи^. Однозначность решения
требует привлечения дополнительного условия.
Импульс момента М2 в пределах от ui2 — Ащ2 до U\2+Aui2
определяется как интеграл
L2= j M2du.
После подстановки выражения (9. 49) для М2 и интегрирования
имеем
12 = Ж20(Ай]2+Ай22) + ^[со5(2и12+ф2--2Дй12)--
— cos (2aia+ф2+ 2д#22)].
Дополнительным условием для выбора Aui2 и Ди22 является
максимум импульса L2 или функции
/«(Д«1«, ДЯ22)=2^(Д012+Ди22) +
+ [cos {2и12+% - 2ди12) - cos (2и12+ф2+ 2ди22)]. (9.53)
Аналогичным путем могут быть найдены соответствующие
условия включения магнитопривода для создания моментов по
оси Xt:
— уравнение (9.51), определяющее опорную точку
включения (и:1);
278
— уравнение, определяющее пределы включения, при
которых 1,2=0:
2-^aLA«u + cos(ai11 + fc--2Ae11) =
= -"217^д^1 + со8(2й11 + Ф2+2аи21); (9.54)
— функция
Afio
Л(даш дя21) = 2 —12-(Д«11+Ай11) +
+ [cos (2au + ti - 2 дии) - cos (2я u -f <fc + 2дя 21)], (9.55)
максимум которой дает третье дополнительное условие.
Решение уравнений (9.50), (9.51), (9.52), (9.54), а также
определение максимума функций (9.53) и (9.55) могут быть
выполнены заранее для каждого витка орбиты и параметры иц9
Лип, Аи2и а также и{2у Ai/12, АЫ22 введены в бортовую программу
включения магнитопривода. Однако вследствие возмущений
геомагнитного поля основные члены выражений (9.49), такие как
Мю, M2q Mimt M2m, i|>i и г|)2, могут существенно меняться.
Поэтому более целесообразным считается метод управления,
основанный на вычислении указанных выше параметров в процессе
движения КЛА по орбите. В этом случае по результатам измеренной
геомагнитной индукции бортовыми магнитометрами необходимо
производить статистическую экстраполяцию ее изменения в
процессе орбитального движения, т. е. постоянно вычислять
коэффициенты в выражениях (9.48).
Точность этих вычислений может быть повышена за счет
измерений углов ei и г2 отклонений оси вращения. Кроме того,
требуются счетно-решающие устройства для решения уравнений
(9.50), (9.51), (9.54), (9.55), а также для определения
максимума функций (9.53) и (9.55). Рассмотрим возможные
принципы построения таких счетно-решающих устройств на примере
оси х2 (для определения щ2у Ащ2 и Аи22). Для оси хх
потребуются аналогичные устройства.
Для решения уравнения (9. 50) может применяться
устройство, структурная схема которого приведена на рис. 9. 8. Основу
устройства составляет следящая система с синусной обратной
связью. При этом определяется точка орбиты с щ2 (или wj2 —
=я — ui2), так как момент изменяется с удвоенной частотой
обращения). Двузначность решения, выражающаяся в
определении точки невозможна, потому что в этой точке система будет
неустойчивой. В самом деле, уравнение следящей системы имеет
вид
М\о , . dx
Мш .. dt
279
В установившемся режиме имеем
dx_
dt
и на выходе системы получаем решение уравнения (9. 50)
Для анализа устойчивости линеаризуем уравнение системы
относительно опорной точки
№t
Вычислитель
I *4q il^K
I ^ifei /> | | |
I \slnU\ ■
\Xo=2ut2+y/f
Рис. 9. 8. Структурная схема вычислительного
устройства для решения уравнения (9.50)
dLu
dt
Полагая
[jL/i^L)] =o, получим
I du \M\m /Jii-et
cos(x0) д#=0.
du
~~dt
Система будет устойчивой при cosa:0<0, а это возможно лишь
в точке (см. рис. 9. 7) с аргументом широты и& (или и&) и
невозможно в точке с аргументом широты и<&.
Уравнение (9. 52) может решаться устройством, структурная
схема которого приведена на рис. 9. 9. На вход устройства
поступает сигнал 2^12+фь который может быть получен с выхода
предыдущей схемы, а также поисковый пилообразный сигнал
длительностью ТПу который может быть получен от генератора
стандартных пилообразных сигналов. Этот сигнал характеризует
линейное изменение величины 2Aui2. Проходя через правую и
левую части вычислительной схемы, он преобразуется в сигналы,
определяемые соответствующими членами уравнения (9.52), за
исключением того, что в правую часть уравнения входит Ai/22,
а не Aui2. Последнее приводит к появлению сигнала на входе
интегратора, выходной сигнал х которого поступает
дополнительно к сигналу 2Au\2 на вход правой части вычислительной
схемы. Очевидно, что при
x0=2Au22 — 2 Aw 12
280
сигнал на входе интегратора равен нулю и дальнейшее
интегрирование прекращается. Так как равенство нулю этого сигнала
возможно лишь при выполнении равенства (9.52) на выходе
схемы получаем сигналы 2Аи\2 и 2^22. Таким образом, основу
этого устройства также составляет следящая система с
нелинейной обратной связью. Для уменьшения динамических ошибок
время переходного процесса в следящей системе должно быть
2</,2Щ
г-4 W-H eosll
гдщ
гдип
£-»» ^^\
.-^1
Рис. 9.9. Структурная схема вычислительного
устройства для решения уравнения (9.52)
много меньше времени Гп. В этом случае можно считать, что за
время переходного процесса сигнал 2A«i2 не меняется. Тогда
сигнал на входе интегратора
У = \2 ТГ Aai2 + cos(2a12 + ^-2Aa12)l-4 _^(2A«lt+*)+
I мХт j L мХт
+ cos (2и12+фх — 2 ди12 — х)]
можно преобразовать следующим образом:
У=f 4 7Г- да12 + cos (2^i2+ti — 2 А«и) - cos (2«i2+<K —
— 2Дй12) cos x] — \ —^ x — sin (2и12+ <h — 2 Дй12) 1 sin x
lM\m J
и с учетом малости х, полагая cosjc~1; sinx~x, представить
в виде
10 991
281
где у0=4(——)A#t2 —постоянный входной заданный
\М\т/ сигнал следящей системы;
£ос = ——+sin(2#I2-|-ti--2A#l2) — коэффициент обратной связи.
В результате выполненных преобразований структурная
схема следящей системы примет вид, показанный на рис. 9.10.
Дифференциальное уравнение следящей системы
at
показывает, что система устойчива при k0. c>0. Сравнивая
выражение для k0, с с выражением (9. 49) для Мх замечаем, что
k -Jk-
Из рис. 9.7 следует, что в точках, соответствующих u=Uiz
(или им), при Aui2>0 условие устойчивости выполняется. В
точках с u=U22 при Л«12>0 имеем k0, c<0 и система неустойчива.
Заметим, что схемы счетно-решающих устройств,
приведенные на рис. 9. 8 и 9. 9, при желании могут быть приспособлены
для вычисления а^ (и и'22). В этом случае для обеспечения
устойчивости следящей системы достаточно поменять знак
сигналов обратной связи.
Схема, приведенная на рис. 9. 9 (как впрочем и предыдущая
схема), может быть выполнена в дискретном варианте. В этом
случае на 'вход системы по Аи\2 вместо непрерывного
пилообразного сигнала подается серия импульсов, линейно
модулированных по амплитуде. Период следования импульсов должен
быть не меньше времени переходного процесса в следящей
системе.
Для определения значений Aui2 и At/22, соответствующих
максимуму функции (9.53), может применяться вычислительное
устройство, структурная схема которого приведена на рис. 9.11.
Левая верхняя часть схемы обеспечивает формирование функции
ЫАи12, Дигг), которая затем поступает на вход
дифференцирующего устройства. Сигнал с выхода последнего осуществляет
запирание вентилей В, на входы кото-
рых поступают сигналы и\2—Аи\2 и
—*,U\2+Auo2. При достижении функцией
f2(Au\2, AU22) максимума сигнал на
выходе дифференцирующего
устройства становится равным нулю, вентили
открываются и пропускают
соответствующие сигналы и\2—AW12 и и\2+Аи22
л ,л „ на запоминающие устройства ЗУ.
Рис. 9.10. Структурная схе- Включение магнитолпиволя лля
ма вычислителя для дис- включение магнитопривода для
кретного варианта разгрузки коррекции по оси Х2 производится си-
^
р
282
стемой, функциональная схема которой показана на рис. 9.12
Вычислитель ВУ0 производит вычисление текущего значения
аргумента широты и подает его на схему сравнения СС (стро-
бирующая схема). Одновременно на эту схему додаются
сигналы с запоминающих устройств предыдущей схемы. Сигнал на
выходе схемы сравнения появляется при
а при
U = U\2 — AWl2,
2АЩ
гип+$
2ЛЩ
UfZ+AU22
Рис. 9. И. Схема для определения Aai2 и Аи2г
происходит отсечка этого сигнала. В результате образуется
импульс тока, включающий магнитопривод на время
Д/=
Att 12 + Д#22 ^и2
v0 v0
Аналогично производится включение магнитопривода для
коррекции ПО ОСИ Х\.
Как видно из проведенного исследования, в системе
коррекции применяется сравнительно большое количество
вычислительных устройств. При этом не рассматривались операции, выпол-
ип-Аи
ВУо
СС
Сигмам
включения
Auzz
Моментный
магнитопривод
М
Рис. 9. 12. Функциональная схема для
включения магнитопривода
10*
283
няемые вычислителем ВУ0, входными сигналами которого
являются элементы орбиты. Кроме того, измерение элементов орбиты
и отклонений оси вращения КЛА от заданного направления,
определяемых углами 8i и 82, удобнее производить с помощью
наземных средств. Поэтому считается целесообразным
вычислительное устройство располагать на Земле, включая и выключая
ток в катушке магнитопривода по радиокомандам с Земли.
Возможная блок-схема такой системы управления
изображена на рис. 9. 13. Вычислительное устройство выполняет все
описанные выше операции и определяет время коммутации тока в
катушке магнитопривода. Вычислительное устройство на основе
Параметры
орбиты
Требуемое значение
\сгъо \е7^о
1ороиты
£
Вычислительное
устройство
М, е,
Мг с2
/Mf du=0;uf2;u22
/Mzau=0)u11-)uz1
\м1\
*<Ь-
Сг
переключающее
устройство
канала осих2
и12)и22
Мг
Переключающее
устройство
канала оси х7
«11, "21
Кодирующее
устройство
кодирующее
устройство
Дешифратор
Т
Приемник
i
командный
передатчик
Передатчик
информации
Телеметрическое
кодирующее
устройство
командный
приемник
п
Дешифратор
Блок коммутации
тока по осих01
блок коммутации
тока по осахt
Схема
измерения
углового
положения
■—gssj кат усика \*—I
Спутник
Рис. 9.13. Блок-схема системы коррекции положения оси вращения спутника
информации об измеренных угловых координатах оси вращения
КЛА определяет ее отклонения ei и ег от базовой системы
отсчета.
Соответствующие сигналы подаются в переключающие
устройства, напряжения с выходом кодируются и передаются на
борт КЛА. Здесь принятый сигнал усиливается, преобразуется
и поступает на соответствующий блок коммутации тока через
катушку.
В результате по каждой оси
действуют импульсы моменюв
со средними за период
обращения значениями
1
1+Д«1
Ж1СР=— ^ Mxdu\
M2dti.
^2ср =
2я J
(9.56) х,
Рис. 9. 14. Заданное и возмущенное
положения аппарата
Для дальнейшего
исследования системы управления будем
считать угловое отклонение оси
вращения от заданного
положения малым. На рис. 9.14
показано заданное *зо и возмущенное х3 положения оси вращения
КЛА. Углы между осями Х\ и Хи х2 и Х2 обозначены
соответственно через ei и 62. Если учитывать только кинетический
момент Н КЛА относительно оси вращения, то дифференциальное
уравнения угловых движений запишутся в виде
Нн=-М,
2ср>
(9.57)
Мг2=М1с?.
Средние значения моментов в правых частях полученных
уравнений относительно осей Xt и х2 вследствие малости углов
г\ и 82 можно принять в первом приближении равными
соответствующим моментам относительно осей хю и х^.
Определим число оборотов аппарата м, потребное для
устранения некоторого постоянного углового отклонения оси
вращения. Интегрируя уравнения (9.57) и заменяя время
выражением
2лп
t-
получим
кл
2 tfVn
lcp»
285
откуда для заданных ei и ег находим число оборотов п
аппарата вокруг Земли, необходимое для коррекции оси вращения,
2лМ2ср ' 2шИ1ср
Предполагается, что основная погрешность такой системы
будет определяться точностью измерения углового отклонения
оси вращения КЛА от заданного положения. Для более
наглядного представления о возможностях рассмотренной системы
управления приведем числовой пример.
Аппарат, стабилизируемый вращением, и катушка магнито-
привода имеют следующие параметры:
Масса 90 кг
Радиус инерции 300 км
Угловая скорость 10 об/мин
Диаметр катушки 760 мм
Число витков 200
Сила тока 100 мА
Параметры орбиты равны:
наклонение *=45°
высота круговой орбиты А=480 км
долгота восходящего узла Q=0
Полагая <рм=0, а углы, определяющие заданное положение
оси вращения аппарата ф1=<р2=45°, определим число оборотов
КЛА вокруг Земли, необходимое для коррекции отклонения оси
вращения, равного ei=2°.
1. По формулам (9.49)
М^^Я* [1,75 sin (2и + 0,543)-0,194];
^2=^M8fi* IU59 sin (2я-0,34)+0,53].
Из условий (9.35), (9.38), (9.39) получаем
ии — Аиц=—1,23 рад, иц+Аи2\=—1,04 рад.
2. Подставляя в выражение (9. 57) среднее значение
управляющего момента относительно оси xiy вычисленное по формуле
(9.56), находим
8i=3,52-10~3 п рад,
а так как ei=2°, то
2
п= ^ ю витков.
57,3-3,52.10-3
9.4. Комбинированная система управления
с магнитоприводом
Обеспечить точность ориентации КЛА порядка одной и менее
минуты в течение длительного времени с помощью системы с
реактивными двигателями крайне затруднительно. Во-первых, тре-
286
буются недопустимо большие запасы топлива, во-вторых,
нелинейность характеристики управляющего устройства порождает
в системе (см. гл. VII) автоколебательный режим.
^ Электромеханические системы управления, обладающие
линейными характеристиками управляющих устройств и
потребляющие энергию солнечных батарей, позволяют преодолеть указан-
и-*ЧшЩ{ШН
Рис. 9.15. Блок-схема электромеханической системы управления
с контуром магнитной разгрузки
ные трудности. Разгрузка управляющих устройств таких систем
от накопленного ими кинетического момента может
производиться с помощью магнитопривода. В этом случае энергетическое
ограничение продолжительности активного существования КЛА
практически устраняется. На рис. 9. 15 приведена одна из
возможных схем трехосной электромеханической системы с
двигателями-маховиками и контуром магнитной разгрузки
Отклонения углового положения КЛА от заданной ориентации
определяются тремя углами е,, е2 и е3) измерение которых
производится специальными датчиками (ИУ8). Для усиления электрических
сигналов этих датчиков Ues служат усилители-преобразователи
(У118), обеспечивающие формирование требуемых законов
управления &а (s=l, 2, 3). у
Контур магнитной разгрузки состоит из трех датчиков
угловой скорости: тахогенераторов (Ts) двигателей-маховиков (D.)
287
трехкомпонентного магнитометра, измеряющего составляющие
индукции геомагнитного поля (Bs) по связанным осям КЛА и
трехстержневых электромагнитов (ЭМ8), расположенных на
корпусе аппарата — по одному на каждый канал управления
ориентацией. Управление контуром магнитной разгрузки
осуществляется при помощи сигналов тахогенераторов £/т s,
пропорциональных скоростям вращения маховиков Q8 и сигналов
трехкомпонентного магнитометра UMS, пропорциональных составляющим
вектора индукции геомагнитного поля Bs (5=1, 2> 3). В ряде
случаев могут использоваться также усиленные сигналы
датчиков угловых отклонений КЛА от положения заданной
ориентации Us. Требуемые значения токов в катушках электромагнитов
определяются по этим сигналам в вычислительном устройстве
(ВУ).
Возможны два способа разгрузки маховиков от
накопленных ими кинетических моментов — непрерывный и дискретный
(релейный или импульсный). При первом способе изменение
токов в катушках электромагнитов производится по сигналам
тахогенераторов, магнитометров и датчиков угловых отклонений
непрерывно. Во втором способе разгрузочный момент
прикладывается к аппарату тогда, когда скорости маховиков превышают
фиксированные значения. Каждый из этих способов имеет свою
недостатки и преимущества. Так, с точки зрения точности
ориентации непрерывное управление является более
предпочтительным, поскольку в сравнении с релейным не имеет зоны
нечувствительности. Однако это управление может привести к разгрузке
периодической составляющей кинетического момента, а
следовательно, к дополнительному расходу энергии.
Для более конкретного представления об особенностях
расчета контура магнитной разгрузки рассмотрим вывод разгрузочного
момента магнитопривода Mps. Предположим, что по каждой оси
этот момент пропорционален суммарному напряжению
усилителя-преобразователя и тахогенератора, т. е.
Mps=k?sUiSi s=l9 2, 3, (9.58)
где Uis=U3-\-UTs;
&р т — передаточный коэффициент по разгрузочному
моменту. —
Выходные сигналы магнитометров UMS и электромагнитов
dMS примем равными соответственно
^ms=%A> (9.59)
где kMS — крутизна сигнала магнитометра по 5-й оси
dMs=kQSIs- (9.60)
Согласно формуле (6. 11) с учетом выражений (9.58), (9.59) р
(9. 60) получаем
288
Js=kss {Uus+lU*s+2 — ^M5+2^Ss+1),
(9.61)
где
*ps
6bs = —— коэффициент усиления ВУ по каждой оси (s=
*м**э.с£2 =1,2, 3).
Из выражения для kBs следует, что коэффициент усиления
контура магнитной разгрузки по моменту равен
После подстановки значений Js в формулу (6.3) находим
следующее выражение для разгрузочного момента в проекциях на
связанные оси:
М„=k0s [(B*+l + Bl+2) U*s - BsBs+1U,s+l - BsBs+2'hs+2],
5=1,2,3, (9.62)
где kos=kylskBsk9S.
Полученные выражения не совпадают с исходными
выражениями (9. 58) в силу наличия взаимосвязи между каналами
разгрузки. Влияние этих связей характеризует второе и третье
слагаемые в выражениях (9.65). На рис. 9.16 представлена
структурная схема контура магнитной разгрузки непрерывного
действия. Множители
k0s(Bl+1 + B>s+2),
представляющие собой значения
коэффициентов усиления по
разгрузочному моменту
относительно 5-й оси, пропорциональны
сумме квадратов составляющих
вектора индукции по двум
другим осям. Составляющие вектора
индукции по связанным осям
КЛА.при движении его по
орбите изменяются как по
величине, так и по знаку.
Для иллюстрации на рис. 9.17
приведены графики изменения
составляющих вектора В по осям
КЛА, ориентированным в
пространстве следующим образом:
ось Х2 направлена на полюс мира,
ось хг в точку весеннего
равноденствия. Наклонение орбиты
принято равным 60°. На основе
этих графиков на рис. 9.18
построены кривые изменения ОДНО- рис. 9. 16. Структурная схема кон-
го из слагаемого коэффициента тура разгрузки
</п
U*
BfBz
в\Щ—Н$>
гМВгВ3
*рг
М*
<Pf
В,В,
ti+m—*ф
Ц ВгВ3
V2
ЛЬ
foe
B,B3
BZB3
MD
7pS
ef+Bl\—няЧЭ^
289
усиления по разгрузочному моменту (£*+1 + £^+2), s=l, 2, 3.
Как видно из построения, эти слагаемые изменяются в широком
диапазоне, что приводит к существенному изменению коэффици-
Рис. 9. 17. Зависимость изменения В{ от времени
ентов усиления контура магнитной разгрузки. Поэтому при
расчете трехосной электромеханической системы с магнитоприводом
необходимо учитывать как изменение коэффициентов усиления,
так и наличие взаимного влияния каналов магнитной разгрузки.
Сложность выражений для составляющих вектора индукции
900 1800 2700 3600 Ь500 t,G
Рис. 9. 18. Зависимость изменения (5/+1+jSf+2)
от времени
геомагнитного поля затрудняет решение данной задачи и
вынуждает либо производить численное интегрирование уравнения с
переменными коэффициентами (9.8) на ЦВМ, либо
использовать расчетную модель геомагнитного поля, позволяющую опи-
290
сать динамику процесса магнитной разгрузки дифференциальным
уравнением с постоянными коэффициентами.
На начальной стадии проектирования контура магнитной
разгрузки, когда необходимо определить его структуру и основные
рабочие характеристики, второй путь решения задачи
оказывается более предпочтительным.
При этом расчетные соотношения получаются при
рассмотрении процесса магнитной разгрузки во вспомогательной^ системе
координат Ogi!^. Выражение для вектора индукции В
расчетного геомагнитного поля в этой системе имеет вид (П. 16)
В = В»
3/2 sin /
О
—cos /
которое удобно представить следующим образом:
В* = В*
COScp
О
—sin ф
(9.63)
(9.64)
где B* = B0Vl+ 5/4sin*£,
tg<p=2/3ctg/.
Углы ф и / изменяются в_пределах 0-=-я/2. Отметим также, что
вектор угловой скорости со. системы Ogi&gs в инерциальном про
странстве равен
О
О
-2v0)
Введем безразмерное время (аргумент широты) u=v0t и
приведем уравнение (9. 6) с учетом выражения (9. 64) к виду
*l = m + SH,
du
(9.65)
- Mr
где т-
vo
-возмущающее воздействие;
-Xsin2<p —2 — Xsincpcos<
2 -X О
- X sin cp cos cp 0 —X cos2 cp
5=
1=
кВ**
*о
(9.66)
коэффициент усиления контура магнитной разгрузки.
Перепишем полученное уравнение в операторной форме
тлеЯ(р)=т(р)+Н(0).
(9.67)
291
(Я (0) — начальное значение вектора кинетического момента
маховиков.
Решение данного уравнения будет
Н(р)=Ф(р)-Ч?(р), (9.68)
где
Ф(р)^~ии1 ',7=1.2,3;
А
A=^3^2X/?2+(^2+4)/;+4Xcos2X;
An=(/>+W/>+xcos2cp);
Азз=(^+^)(^ + ^т2ср+4);
д1а= — д21= — 2(/? + Xcos2cp);
А13= -A31=Xsincpcoscp(/?+X);
А2з= — А82= — X sin 2cp.
Определитель Д матрицы Ф(р) представляет собой
характеристический определитель исследуемой динамической системы.
Из характеристического уравнения этой системы
д(^)=^з_)_2Х/7+(А + 4)/?+4Хсо52ср=0
получаем следующие условия устойчивости контура магнитной
разгрузки:
Х>0, coscp^O, 2X(X2-f-4)>4Xcos2cp.
Последнее неравенство выполняется при любых <р и Х>0.
Следовательно, контур магнитной разгрузки устойчив на всех
орбитах, кроме экваториальных, где ер=я/2. Это условие
устойчивости совпадает с условием, полученным выше (см. разд. 9.1)
прямым методом Ляпунова.
Для вычисления переходных процессов необходимо вычислить
корни ак характеристического уравнения А(р)=0. В случае
отсутствия кратных корней при Мв=0 имеем
з
Н{и) = V _JL_[A//(aft)]tf(0)ee*u /=1,2,3; /=1,2,3. (9.69)
С помощью матрицы направляющих косинусов решение Н (и)
можно записать в требуемой базовой системе координат.
Исследование переходных процессов контура магнитной разгрузки
практического интереса не представляет, поскольку основная
функция магнитопривода заключается в гашении кинетического
момента маховиков в установившемся режиме. Поэтому важно
определить величину этого момента и оценить необходимые для
292
данной цели энергетические затраты при заданных параметрах
контура магнитной разгрузки, например, коэффициенте усиления
X. Можно, наоборот, произвести выбор коэффициента усиления Л,
исходя из допустимой величины накапливаемого кинетического
момента.
Синтезу системы управления ориентации предшествует
обычно анализ возмущающих моментов, действующих на КЛА.
Допустим, что этот момент определяется своей постоянной
составляющей и двумя первыми гармониками, кратными частоте
обращения аппарата по орбите, т. е.
Д,=^ов+Л/1в*т V+^2Bsin 2V (9.70)
или в нормализованной форме
тв = —i=т0в + т1в sin v0t+т*2в sin 2vJ.
vo
Для иллюстрации методики исследования установившегося
режима рассмотрим случай полярной орбиты (<р=0), для которого
имеем:
д«=/К/>+*); Дзз=(/>+х)/>+4;
Ai2= — A2i= — 2(/^+Х); д18=д31=д28=д32=0.
В соответствии с выражением (9.69), используя_ полученные
значения А и А/у, находим составляющие вектора Н(и) в
системе Oii&j&j:
//^==p2 + xp + 4[(/y+X)^1""2mg2l;
Я^2 = п2л.| ^Л^Ъ + Р*"*)* (9-71)
Из приведенных выражений видно, что на полярной орбите
разгрузка маховиков в плоскости орбиты не зависит от
разгрузки маховика, ось вращения которого перпендикулярна этой
плоскости. Проанализируем особенности разгрузки в плоскости
орбиты.
Допустим, что направление действующего на КЛА
постоянного внешнего возмущения совпадает с направлением трансверса-
ли в точке восходящего узла. В системе Ogi&gs это возмущение
запишется следующим образом:
I cos 2и I
т0=т0
sin 2а
0
293
(9.72)
откуда
Тогда в установившемся режиме будем иметь
Ни{и) = т0(—cos2u-\ sin 2u\ ;
2
Нф{и) = Щ — sin 2и,
л
Нт//52=0 при X—►оо;
НтЯЕ1 = — m0su\2u при X—>оо.
Увеличение коэффициента усиления приводит к уменьшению
угла между вектором кинетического момента и вектором
индукции. При этом кинетический момент в плоскости орбиты
стремится к 1/2 т0.
В системе OXmXq2Xqz составляющие кинетического момента в
плоскости орбиты изменяются согласно выражениям
HXi = m0 (y+~4~ Sin 4U) ;
Нх% = п\ъ I —-+ — cos4A (9.73)
Годограф кинетического момента представляет собой окруж-
МЛ 2
ность радиуса 1/4 т0, смещенную на величину —т0 в направ-
А
лении действия векового возмущения тй0 и на величину —ш0 в
направлении вращения вектора индукции. На полярной орбите
разгрузка кинетического момента в плоскости орбиты
осуществляется только диполем ^мез(^мхз)» направленным по
бинормали к плоскости орбиты, причем в случае непрерывного
управления
d„v=k4i2B* = ±rv0Hi2. (9.74)
в*
Подставляя сюда выражения для Н& из выражения (9. 72)
получаем
^з=—Af0sin2«.
в*
Итак, при компенсации векового возмущающего момента в
плоскости орбиты вектор кинетического момента повернут
относительно возмущающего воздействия в направлении
орбитального вращения, причем с увеличением коэффициента усиления X
кинетический момент уменьшается в направлении возмущающе-
294
го момента, а магнитный диполь и энергопотребление контура
магнитной разгрузки от коэффициента усиления не зависят.
Допустим, что действующее на КЛА возмущение т имеет
постоянное направление в орбитальной системе координат,
например совпадает с положительным направлением оси *oi. В
системе 0^1^г|з это возмущение представится следующим образом:
mi=m1
cos и
sin и
О
В соответствии с уравнениями (9. 72) в установившемся
режиме имеем:
//«(«)=
т,
Х2 +9
[6Acostf + (X2-9)sin/*];
Нi2{u)=-^- [3cos и + Х sin и]
wv ; Х2+91 ' J
.75)
или в орбитальной системе координат
"«(«)=
пц
(4.5Л+ l,5Xcos 2й + 0,5Х2 sin 2и);
Х2
Я02 («)=—^i- (9 -0,5Х2 - 1,5Х sin 2и+0»5Х2 cos 2и).
Из приведенных выражений видно, что в орбитальной системе
координат вектор кинетического момента можно представить
совокупностью двух векторов: неподвижного и вращающегося с
двойной орбитальной скоростью. Модули и фазы этих векторов
зависят от коэффициентов усиления X. На рис. 9. 19
представлены годографы кинетического момента в плоскости орбиты при
возмущении тх и различных коэффициентах усиления. При
изменении от нуля до бесконечности неподвижный вектор описы-
3
вает полуокружность радиуса —т1э смещенную относительно
начала координат вдоль оси *02 на величину —mv Модуль
вращающейся составляющей кинетического момента при этом изме-
1
няется от нуля до — mv
На рис. 9.20 представлены полученные из выражений (9. 73)
зависимости предельных значений кинетических моментов
max //, max НХ1 и max НХ2 от коэффициента усиления X (гра-
Ш\ Hit Hti
фики 1, 2 и 3 соответственно). Поскольку справедливы
равенства limmax-!^!- =1,0; Urn max ^-=0,5; limmax '^Ж. =i,o,
Х-юо Ш\ X-»-oo Ш\ X-*oo ГП\
295
Ну/т,
trfdx
т,
•И
1,0
0,8
0,6
0,2
' Га-
0.
1,°
■0,8
0,1
~°>6~С>У^п~
'Л
У
"К
»
Щ
-ор
Ф
sQjU
х^
s(
-0.5
* J)
^Н?х
Г"
Ki
[л)
»-оо
к У"
1
*ч>>,
^
И
рР;^
[«7
Рис. 9. 19. Годографы
кинетического момента при возмущении т\
для различных Л:
/—годо£раф вращающейся
компоненты Н при Л=5; 2—годограф
постоянной составляющей Н в
функции Я
/
2
3
^ i
8 10 12 Л
Рис. 9.20. Влияние возмущения т4 на величину
кинетического момента:
/ — max |//|; 2 — max \НхХ\\ 3 - max \Нх2\
296
из графика 1 следует, «в частности, что при действии
возмущающего момента тх кинетический момент невозможно уменьшать
путем увеличения коэффициента усиления управляющей часта X.
Из равенства (9. 74) с учетом выражения (9.75) находим
я?мг<*=3—■ (3cosa + Xsina).
Энергопотребление Q контура магнитной разгрузки можно
определить приближенно по формуле
О
где и — коэффициент, учитывающий конструктивные параметры
электромагнитов.
Подставляя в эту формулу значения для dMXz получаем
Отсюда следует, что с увеличением коэффициента усиления X
энергопотреблене контура магнитной разгрузки растет.
Характерно, что увеличение X не позволяет уменьшить кинетический
момент.
ГЛАВАХ. СИСТЕМЫ ЭКСТЕНСИВНОГО УПРАВЛЕНИЯ
ОРИЕНТАЦИЕЙ
Как было отмечено выше, задача управления ориентацией
заключается в сохранении или изменении углового положения
системы координат, жестко связанной с КЛА, по отношению к
базовой системе отсчета. Существующее решение данной задачи
предполагает измерение отклонений КЛА от положения
требуемой ориентации и устранение этих отклонений путем
приложения к аппарату управляющих моментов. В большинстве случаев
измерение углового рассогласования между одноименными
осями связанной и базовой систем координат производится в
координатных плоскостях последней и, в частности, в плоскостях
крена, рыскания и тангажа. Управляющие моменты
прикладываются к КЛА относительно связанных с ним трех
ортогональных осей. При этом закон управления по каждой оси
выбирается с учетом величины и скорости изменения соответствующего
углового отклонения.
Рассматривая данный метод построения систем управления
ориентацией с общих позиций классической механики, легко
установить, что он является реализацией одного из двух воз-
297
можных способов поворота твердого тела. Действительно,
согласно теореме Эйлера, любое число поворотов твердого тела
вокруг разных осей, проходящих через одну точку,
эквивалентно одному повороту относительно оси, проходящей через ту же
точку. Другими словами, требуемое изменение углового
положения КЛА может быть произведено либо тремя
последовательными поворотами на определенные углы вокруг осей, жестко
связанных с аппаратом, либо одним поворотом относительно оси
эквивалентного вращения (оси Эйлера). В зависимости от
способа изменения углового положения возникающая при этом
задача управления имеет два принципиально различных
решения. Одно из них, соответствующее первому способу, составляет
в настоящее время основу построения большинства активных:
систем ориентации. Этому способствует как принятое
определение заданной ориентации аппарата в пространстве (по
направлению связанных с аппаратом осей), так и наличие
исполнительных устройств систем ориентации, способных создавать
управляющие моменты, прикладываемые к КЛА вокруг неизменных,
по отношению к нему осей.
Другое решение задачи управления, вытекающее из второго
способа, нашло ограниченное применение, поскольку его
физическое содержание определяется пока только кинематическими
соотношениями.
Что же (касается динамических соотношений, то до
последнего времени они были совершенно не изучены. В
первую очередь это объясняется трудностью решения задачи
управления движением КЛА вокруг произвольной оси из-за
существенной нелинейности динамических уравнений Эйлера.
Линеаризация последних, облегчающая синтез систем ориентации при
малых угловых отклонениях аппарата от положения требуемой
ориентации, оказывается несправедливой при выполнении КЛА
различных поворотных маневров. Ниже рассматриваются
кинематические и динамические соотношения второго способа
изменения углового положения аппарата, на основе которых дается
обоснование принципу экстенсивного (направленного)
управления ориентацией.
10. 1. Принцип экстенсивного управления
Сущность данного принципа состоит в выборе ограниченного
по величине вектора управляющего момента из условия
движения КЛА относительно оси Эйлера. При этом определение
положения оси Эйлера в связанной системе координат, величины
результирующего угла и направления поворота КЛА
производятся с помощью цифровой вычислительной машины. Эта
машина используется также для вычисления программы изменения во
времени управляющих моментов, прикладываемых к КЛА отно-
298
сительно связанных с ним трех ортогональных осей. Вычисление
производится на основе решения дифференциального уравнения
движения КЛА вокруг заданной оси.
Для более четкого представления о принципе экстенсивного
управления рассмотрим в качестве примера управление
разворотом осесимметричного аппарата, стабилизированного вращением.
Пусть ось хг связанной системы координат Oxi*2*3 совпадает с
осью вращения, требуемая ориентация которой задается
направлением OS на Солнце (рис. 10. 1). Отклонение оси х3 от этого
направления представляет собой ошибку ориентации е. Введем
вспомогательную систему координат Ogi^ с единичными
векторами осей ё\, еч и ёз.
Ось £3 совместим с осью
хъ, а ось g2 направим
перпендикулярно плоскости
jc35. Система Olfah ,не
участвует во .вращении
КЛА вокруг оси *з, но
подвижна относительно
оси £г, направление
которой в пространстве
неизменно по отношению
к плоскости x$S. Другими
словами, задача
управления заключается в
устранении ошибки ориентации
путем поворота КЛА
вокруг оси £2. Для
осуществления такого поворота к
КЛА должен быть приложен управляющий момент Mn=Afne2,
величина, знак и время действия которого выбираются с учетом
ютработки заданной ошибки. При наличии угловой скорости 8
возникает гироскопический момент Мг=/зсоз8ёь где /3 — момент
инерции, о)з — угловая скорость вращения КЛА вокруг оси хъ
Действие этого инерционного момента приводит к прецессии оси
вращения, в результате чего плоскость x3S изменяет свою
ориентацию. Для устранения прецессии_к аппарату необходимо
приложить компенсирующий момент Мк=—Мт. Таким образом, для
выполнения поворота КЛА вокруг инерциальной оси & к нему
должен быть приложен вектор момента МУ=МП+МК, одна
составляющая которого Mn=MyCOs6 обеспечивает коррекцию,
а другая iWK=Afysin8 — стабилизацию углового положения оси
вращения. Здесь 0 — представляет собой угол наклона
результирующего вектора момента Му к оси |г. Поскольку
управляющие моменты Mi и М2 создаются относительно связанных осей
хх и *2, определим их зависимость от момента Му. Для этой цели
воспользуемся уравнением (2.9), пренебрегая действием на КЛА
Рис. 10. 1. Ориентация вращающегося
аппарата на Солнце
299
возмущающих моментов и полагая постоянной скорость вращения
(<Оз = й)зо),
-77- + (а-1)0)аа)зо=-г-;
^._(а-1)0)^30=—-,
/з
где о=—2- .
Из построения на рис. 10. 2 следует, что
а)1= е sin а>8(^; а>2= е COS <*>з0^
и приведенные уравнения преобразуются следующим образом:
А I ' ^ All
£ Sin ay -f aa)30s cos «W^ -Г" ;
Ь4
«2Г2*
/
Sr
V\ 1
fc
l"*
i*
u^r
0
s^x.
ь
Рис. Ю. 2. Направления действия
управляющих моментов
г COS ay — aa>30e sin a>30* = — ,
'2
откуда
У% = Mx sin o>30t-\- M2 cos oj30/;
•V*>#s = ^1cos °W — ^2 sin o)30/.
С другой стороны,
yl6 = A*u = Afycose;
Ла)зо£ = Мк=Му sin 6.
Из последнего уравнения при Му=const находим, что
jWv
cos(
^зо
и,сравнивая с первым уравнением, получаем
db __ /3(030
dt /j
После интегрирования имеем
Следовательно, дифференциальное уравнение поворота КЛА
вокруг оси ^2 будет
Му /„
£=—— COS-^ojs0^,
300
причем
Му cos —- u30t=Мг sin о)3(/ -f М2 cos о)з0^;
Ж sin -р <*>^=Мг cos о>30* — ЛТ2 sin <оз0/,
отсюда Mг=Му sin (а + 1) а>з0*;
AT2=AJycos(a+l)«y.
Здесь Му определяется исходя из оптимального в известном
смысле решения задачи управления с учетом ограничения Ми Мъ
по величине.
Приведенные выкладки иллюстрируют принцип экстенсивного
управления для одного частного случая, когда выбор
управляющих моментов производится из условия поворота вращающегося
КЛА в заданном направлении.
Переходя к общему случаю трехосной ориентации,
сформулируем задачу управления. Пусть взаимное расположение
связанной 0x1*2*3 и базовой инерциальной OXiX2X3 систем
координат задано тремя видоизмененными углами Эйлера ei, 82 и е$
(рис. 10.3). Граничные условия, фиксирующие начальное (^=0)
и конечное (t=T) угловые положения КЛА в пространстве,,
примем соответственно равными
«|(0)=«,.; М0)=0; (Ю.1а>
в|(Г)=;£(Г)=0. (10.16)
Определим программу изменения во времени ограниченных по
величине моментов Ми М2 и М3, прикладываемых относительно
осей хи Х2 и Xz соответственно, при которой перевод КЛА из
начального положения (10. 1а) в конечное (10. 16) осуществляется:
т
1) за минимальное время, т. е. когда ^=min;
о
2) за заданное время Т с минимально возможными
энергетическими затратами Q.
Оценка энергетических затрат производится по формуле
Q=J2*iN*. (10-2>
где
Mi
Mmi
Mmi — максимально допустимое значение момента (/=
= 1,2,3);
ki — размерный коэффициент (максимальный удельный
весовой расход газа f/mi), что предполагает исполь-
301
зование для создания управляющих моментов реактивных
двигателей. При использовании двигателей — маховиков синтез
системы экстенсивного >п-
ly равления производится из
7 условия обеспечения
максимального быстродействия.
И в том и в другом случае
КЛА представляется
абсолютно твердым телом
причем оси Х\, х2 и хг являются
главными центральными
осями его эллипсоида
инерции. Предполагается также,
что влияние внешних
возмущений на вращательные
движения КЛА
пренебрежимо мало. Как первое, так и
второе допущения относятся
к числу используемых
обычно при решении
подобных задач. Дополнительные
допущения оговариваются особо. Основное внимание обращается
на выявление потенциальных возможностей экстенсивного
управления ориентацией и на получение расчетных соотношений
для определения его наиболее характерных показателей.
Рис. 10.3. Расположение
«базовой систем координат
оси Эйлера
связанной и
для выбора
10.2. Кинематические и динамические соотношения
Для описания углового положения аппарата в пространстве
широкое применение получили углы Эйлера — Крылова и
направляющие косинусы.
Кроме других возможных кинематических параметров (см.
гл. II), ориентацию КЛА можно определить также посредством
«единичного вектора е9 положительной оси эквивалентного
вращения и углом поворота ср вокруг этой оси. Найдем
аналитические выражения для системы данных параметров. Для этого
лолучим вначале «матрицу направляющих косинусов. Л = ||аг;11,
i, j= 1, 2, 3. Из построения на рис. 10. 3 имеем:
1
^12=coss1sin e2-{-sin e^in e3cos£2;
#13= sin ex sin e3 — cos ex sin e3 cos s2;
#21= — cos e8 sin s2;
#22=cos ех cos e2 — sin sx sin s2 sin e3;
а9л=sin ег cos s2 -f- cos ex sin e3 sin s2;
a*
31
-- sin e,
■81'
a32= — cas e3 sin e2;
(10.3)
302
Поскольку матрица а является ортогональной ее можно
привести к канонической форме. Наличие последней
свидетельствует о том, что преобразование трехмерного пространства,
заданное матрицей А, заключается в повороте этого пространства на
угол ф вокруг оси, определяемой вектором ё9. Согласно теорий
линейных ортогональных преобразований угол поворота и
направляющие косинусы Vi (/=1, 2, 3) вектора ё? определяются-
формулами
ср=arccos — (ап+ав+ а33); (10.4)
., д32 — g23 . 1
2
013
2
Я21
sin <p
— Д31
sin 9
— 012
Вектор е9 = |vi, V2, гз|т представляет собой собственный
вектор матрицы А, соответствующий собственному значению +1 ю
определяемый при ее приведении к каноническому виду.
Поскольку матрица А характеризует взаимное расположение двух:
систем координат, то естественно, что
Из данного равенства следует, что ориентация от
эквивалентного вращения в связанной и базовой системах координат
определяется одними и теми же направляющими косинусами v*,
значения которых не изменяются при повороте КЛА на угол <р.
Положительное направление вектора е9 и знак угла поворота
(sgn<p) могут выбираться произвольно. Для управления
поворотным маневром важно выбрать направление разворота КЛА
по наикратчайшему пути (<р^я). Это направление можно
установить следующим образом:
1) по формулам (10.5) находится ориентация вектора ё9;
2) составляется определитель, столбцами которого являются
составляющие векторов а, Ъ и ё?, причем а — произвольный
вектор, неколлинеарный вектору ё9, а Ъ=Аа\
3) в зависимости от знака определителя
к
\аг
к
К
Ьг
h
Vil
va
vs|
вращение вокруг оси Эйлера при переходе от систем Ох&гХъ и
OXxX2Xz будет соответствовать вращению винта, ввбрачиваемо-
зоа
го в направлении положительной оси вращения, правого при
^S<0 и левого при S>0. _
Вектор абсолютной угловой скорости КЛА со должен
совпадать с осью эквивалентного вращения, положение которой в
пространстве будем считать неизменным, т. е.
о) = ср^, (10.6)
з
где ^р=2 vj5;
is (5=1, 2, 3)—единичные векторы осей системы ОХ1Х2Х3.
Условие (10. 6) должно обеспечиваться соответствующим
приложением к аппарату по связанным осям хи х2 и х3
управляющих моментов Мь М2 и М3. Вектор результирующего
управляющего момента М равен
и;ли М=Мёт.
где Af=VrAfJ+Af|+Af|;
ёт=М/М — единичный вектор.
Для определения величины и направления вектора М (или ёт)
воспользуемся динамическим уравнением Эйлера
dt
где K=J(o — вектор кинетического момента;
НА ° ° II
/— 0 У 0 i матРИ1*а моментов инерции КЛА в системе
II0 О2 У31| 0XlX%**9
Поскольку направление вектора о задано, то, зная матрицу
моментов инерции, можно найти направление вектора
кинетического момента
_ jK=J^=Jye9={J1v1i1 + /2v2r2+y3v3^) Ъ (Ю- 9)
или К=Кек,
где K=JKy\
JK= V (Avi)2+(Av2)*+(/3v3)2;
з
•ёк= \^ ——Ts —единичный вектор кинетического момента.
304
Из сравнения выражений для единичных векторов е9 и ёк
следует, что векторы со и К для динамически несимметричного
аппарата не совпадают. Угол между этими векторами может быть
вычислен по формуле
/
cosa=e9-eK=-*-; (10. 10)
или
sina=|^X^I=77 '
где
J9=J1yl+Av2+Лгз~~ момент инерции аппарата относительно
оси Эйлера;
Л=>/(Л-Л)^2М + (У1-"У3)^^з2 + (Л--Л)2^2--МОМеНТ ИНеР-
ции аппарата относительно оси, расположенной в экваториальной
плоскости.
Введем единичный вектор ёэ, перпендикулярный вектору ё9 в
плоскости векторов ё9 и ёк, и представим
где К9=К £<р=У<р<р;
(10.11)
Из данного выражения легко найти составляющие вектора ёэ
по осям связанной системы координат
5-1
Второе слагаемое в левой части уравнения (10.8) представляет
собой гироскопический момент
При заданных направлениях векторов со и К согласно
равенствам (10.6) и (10. 11) можно записать
Здесь ет = е9Хеэ —единичный вектор гироскопического
момента, для которого с учетом выражений для е9 и еэ имеем
J=l 5 = 1 5=1
(10.14)
305
При вращении аппарата вокруг оси эквивалентного вращения
ориентация единичных векторов ё9> ёэ, ёг и ёк <в связанной
системе координат остается неизменной. Однако в базовой системе
координат только вектор ё© остается неподвижным, тогда как
векторы ёэ, ёг и ёк изменяют свою ориентацию. В частности, вектор
€К движется по поверхности конуса, угол при вершине которого
о определяется равенством
a=arctg-r-.
«р
Это движение вектора кинетического момента является
следствием требуемого вращения КЛА. Оно возможно при
соответствующем выборе направления вектора управляющего момента
М, для определения которого запишем уравнение (10.8) в
проекциях на оси связанной системы координат, имея в виду
равенство (10.6)
Avi?+(Л - Л) V2V3<P2=Щ
J%*a+(Л - Л) vw2=м2;
Л Vf+(Л - Л) ViV«tf2 = М3.
(10.15)
Отсюда находим
^=^l*<Pl|/l+^-. (Ю.16)
что позволяет определить направляющие косинусы р* единично-
__ з _
го вектора момента em=^? $sis по формуле
р,= ^ sgny-+ (Л+а — /i+i)v<+iv/+ay» t (Ю>17)
'«V l+w J^V 1+W
Характерно, что изменение знака ускорения (sgn<p) приводит к
изменению только одной составляющей направляющего
косинуса рг-. Это означает, что направления оси действия вектора
момента при разгоне КЛА (ср>0) и его торможении (ср<0) из-за
наличия гироскопического момента не являются взаимно
противоположными.
Вектор ёш располагается в плоскости векторов ёк и ёг,
направление которых однозначно определяется выбором
положительной оси эквивалентного вращения. Действительно,
смешанное произведение
306
L 5=1 5=1
(/5+2— ^+l)Vs+lVj+2<P21-: v
ls/\
(h+2 — ^5+1)
5+lVS+2'$
i, =0.
Обозначим угол между векторами управляющего М и
кинетического К моментов через 0. Величина этого угла
определяется равенством
з
cosB=eM.eK=\)
"I'V1^ «i/i+i- J
хж
5-1
!&Ll=-
sgny
1/, *
(10.18)
Отсюда находим
и устанавливаем, что
tge=
hf
Uv
(10.19)
cp>0 при 0<8<-|-;
cj>'<0 при — <9<я; [
cp=0 при б= —.
(10.20)
Последний случай свидетельствует о том, что вращение КЛА
с постоянной угловой скоростью вокруг оси ё> требует
приложения к аппарату управляющего момента. Этот момент
компенсирует гироскопический момент, возникающий при вращении
динамически несимметричного КЛА вокруг произвольной оси.
Равенство (10. 19) позволяет представить выражение (10. 17)
для направляющих косинусов fr следующим образом:
где
(10.21)
Ъс
(// + 2— Л-и)
v/+iv,+1; &/ = |*/|.
307-
или, в развернутой форме записи,
pi=[im.+ ('з-/2)у2уз tgelcosO;
I J К ^э J
Рис. 10.4. Выбор направления вектора Рис. 10. 5. Изменение знака уп-
управляющего момента: равляющего момента при
а) 9> 0; o<e<£-; *"**
б) *<р< 0; 0<e < y
Отсчет угла 8 производится от положительного направления
вектора кинетического момента. Если отсчет угла производится
от отрицательного направления кинетического момента, то углы
рг- изменяют знак. Это означает, что составляющие вектора
момента М при <р<0 проектируются на связанные оси,
направления которых противоположны тем, которые использовались при
Ф>0.
Геометрическая интерпретация полученных выше
результатов, касающихся выбора направления вектора управляющего
момента, дана на рис. 10. 4.
Таким образом, задание оси эквивалентного вращения
позволяет определить в связанной системе координат направление оси
действия вектора управляющего момента М. Максимальная
величина этого вектора в неявном виде может быть найдена без
308
решения дифференциального уравнения движения КЛА. Для
этого обозначим максимальный по модулю направляющий
косинус ^ (i=lf 2, 3) через ps*. Если предельно допустимые
значения моментов по связанным осям Mmi одинаковы, то
максимальное значение модуля вектора М будет
Й1тах=%= - *ш . (Ю. 22)
Р, |(a, H-A, tg в) cos в|
при этом
Ms=Mms^; (10.23)
Ms+1 = Mms^±l-, 5=1,2 и 3,
К /=1,2.
Если предельно допустимые значения моментов Mmi разные, то
h |(e/ + */tge)cose|inex
При Mms<Mms+u
где Mms+i (i=l или 2) —наименьший по величине момент,
и
MmS+i
№*
IP.
5+11
при Мт8>Мт8+{.
В процессе выполнения поворотного маневра угол 9
изменяется, что влечет за собой изменение направления ет и
величины вектора момента М (рис. 10.5). Поэтому определение
зависимости данного угла от времени необходимо для построения
системы экстенсивного управления ориентацией.
10.3. Вывод дифференциального уравнения
движения и синтез оптимального управления
Вектор управляющего момента И, обусловливающий
вращение КЛА вокруг оси Эйлера, определяется согласно
выражениям (10.9) и (10. 13) уравнением
J&K+JJfl=M. (10.24)
Отсюда следует, что вектор М включает в себя две
составляющие, первая из которых М\=1к<рёк обеспечивает требуемый
закон изменения угла <р во времени, а вторая M2=Ja<f>2eT —
компенсирует возникающий при этом гироскопический момент. Это
309
обстоятельство позволяет записать векторное уравнение (10.24)
с учетом направления М в скалярной форме
ср'=— cos в; (10.25)
где ср2= sin 8;
м=\м\.
При одинаковых предельно допустимых значениях моментов,
когда справедливо соотношение (10. 23), вместо (10.25) имеем
— на участке разгона (О^0< —):
9
*k\<*s +bs tg<>\
•2= ^tj9 (10.26)
на участке торможения [ — < б <; л )
м,
<Р=
(10.27)
./»|e* + Mge|
Выбор текущего значения угла fl (t) должен производиться из
условия совместности уравнений (10.26) и (10.27). Это условие
означает, что
Мй
=А|/ Mm.** , (10-28V
dt V .,|a, + *,tge|
^|a* + **tg6| dt V .3\as + bsigb\
откуда
или
db 2/MmS'3 ,/■ = = ;
" jKZ ^«gBfa+^tge|cos«et
db
= 2^M"»r> dt. (10.29)
Ytg 6 \as + ?, tg 0| cos2 0 3Ka
Интегрирование полученного уравнения будем проводить для
случая, когда выражение максимального по модулю
направляющего косинуса $* имеет вид
p;=(«,+*,tge)cose,
или (10.30)
p;=(*,-*,tge)cose.
310
Здесь отсчет угла 9 производится от положительного (при
<р>0) и отрицательного (при <р<0) направлений вектора
кинетического момента. Отметим также, что, если первое выражение
(10.30) определяет ps* на участке разгона КЛА, то второе —
на участке торможения, и наоборот.
Выполняя интегрирование уравнения (10.29) с учетом
выражений (10.30) при 0^/^/s и 0<6<QS, где U и 6S неизвестные
яока фиксированные значения, определяем соответственно
tg0(/) = -^sh2^;
(10.31)
tge (/)=-£*. sin2 я/,
h
ГДе П= ^Mmssbs
-!Kas
Подставляя полученные значения для tg 0 (./) в первое
уравнение системы (10. 26), получаем
Т= , MZ , при £=(*,+ *,* в) cos в;
JvCLs СП* tit
(10.32)
?=, Мт\ , при r, = {ae-b,\gb)cosb.
J kcls cos2 ni
Полученные уравнения характеризуют динамические
свойства КЛА при экстенсивном управлении. Их следует дополнить
граничными условиями. Учитывая, что движение КЛА с
ускорением ф>0 соответствует уменьшению угла <р, эти условия
можно записать так:
<Р(0)=-<р0; ?(0)=0;
(10.32а)
Ч>(Т)=у(Т)=0.
Правые части уравнений (10.31) представляют собой
известные функции времени, вид которых зависит от граничных
условий, текущего углового положения и значений моментов инерции
КЛА. С другой стороны, они определяют в любой момент
времени максимальные допустимые значения управляющих
воздействий на КЛА. Данное обстоятельство позволяет использовать для
синтеза системы экстенсивного управления принцип максимума
Понтрягина.
Синтез управления, оптимального в смысле
максимального быстродействия
В соответствии с принципом максимума перевод КЛА из
начального состояния (10. 1а) в конечное (10. 16) за минимальное
311
время Тт осуществляется одним переключением максимального
по величине управляющего момента. Время переключения
*е(0, Т) находится из решения уравнений (10.31) с учетом
граничных условий (10.32а). Без нарушения общности положим,
что asbs>0 так, что при t^h
E = (a,+ &,tge)cose,
(10.33)
где 0<в(/)<в(/1)э
причем б(ф
:arctg-2ish2^.
Тогда дифференциальное уравнение движения КЛА в
интервале 0^/^j/i будет
й?2ср
м„
1
откуда
При /=/1э когда
?i=
dP JKas c№nt
dt J^asn
- rn I MmS
Jf(asn
(10.34)
Inch nt.
To"
Jf(asn^
Inch ntx\
&s
^rctg-^-sh2/^,
^5
(10.35)
происходит переключение управляющего момента. При этом
первая составляющая Mi=JKq> изменяется по величине и
направлению (меняет знак на противоположный), тогда как величина и
направление второй составляющей М2=/оФ2 остается без
изменений. Величина управляющего воздействия в момент перехода
от разгона КЛА (ti+) к его торможению (/i_) определяется
равенствами
при t=tl+
Mm=-
(as
Mm = -
MgeOcosO!
M„
(10.36)
при t=tx-..
(as — bstgb\)cosb2
Во втором случае угол 9 отсчитывается от отрицательного
направления вектора К и 02 равно его значению при U-. Из
условия компенсации гироскопического момента M2=Mmsin8 в
моменты времени ti+ и t\- получаем
tgBi = tge2
as+bstgb\ as — bstgb2
312
что определяет
te9 = <*stgb\
или, с учетом (10.33),
ва= arctg-^ sh2nt . (10.37)
2 &^ l+2sh2^! V '
Значение угла Q2 является начальным для участка
торможения (h^t^T). Имея в виду равенства (10.31) и (10.37),
находим
tg9(t)=£-sin*[* — n(t-tj\9 (10.38)
bs
где x=arctgth/tf1.
Поскольку в (Г)=0, то из выражения (10.38) следует, что
tgn(T-t1)=thntv (10.39)
Движение КЛА на участке торможения при tgG,
определяемом выражением (10.38), будет
&* _ Mms
dt* JKas cos2 [x — n (t —1\)]
откуда
т4+^|1«[«-»('-У-18«):
dt J/(asn
JkW2
Mms
thntiit — t,).
Jxasn
В соответствии с постановкой задачи, при t=T ф(Г)=0,
9(П=-%+^1п—^__=0.
Из последнего условия получаем второе уравнение для
определения h и Т.
Таким образом,
chnt\ _л м.
exp
ms
CQSn(T—t\)
Отсюда находим время переключения управляющего
воздействия
^-Larctgl/th-^o
п V Mms
11 991 313
и минимальное время Тт, необходимое для осуществления
поворота аппарата на угол <ро, равное
Тх
=^[arctgl/th^^^ + arcth i/th isSfiSBL I.
Последнее выражение не изменится, если на участке разгона
аппарата ps*= (as — bs tg 0)cos 0. Что же касается момента
переключения, то он определяется в этом случае по формуле
/1=-L arctg l/th ^^Ро (10.40)
п у Мт§
Расчетные формулы для t\ и Тт «получены в предположении,
что максимальное значение направляющего косинуса |}s*
сохраняется в течение всего процесса управления. Однако это
предположение может быть нарушено при изменении индекса |5S* на
участке разгона или торможения КЛА. При этом интегрирование
уравнения (10.29) и уравнений (10.32) следует производить по
участкам, соответствующим максимальному по величине
направляющему косинусу. Принципиальных трудностей здесь не
возникает, но решение получается более громоздким и теряет свою
наглядность. Из соображений простоты изложения данный случай
не рассматривается.
Выражения для моментов, обеспечивающих поворот КЛА за
минимальное время и прикладываемых к аппарату по
связанным осям, имеют вид
— на участке 0</<*1э когда £*=(a5-|-66.tg6)cos6:
Ms=Mms; (10.41)
as+i + bs+i — sh2 nt
as ch2 nt
5=1,2,3, /=1,2;
— на участке /i</<7\ когда $*=(as — bstgb)cosd:
Ms=Mms;
\as.+ bs+i -^- sin2 [arctgth nt— n (t —1\)]\
JVl =Mms J ^ L_ , (Ю.42)
s+l ms as cos2 [arctg th nt\—n(t*-t{)]
причем направление оси приложения момента Ms=Mms
определяется с учетом полного выражения для максимального по
модулю направляющего косинуса.
В соответствии с выражениями моментов Мг- и Mmi формулу
(10.2) для вычисления расхода рабочего вещества на управле-
314
ние поворотным маневром можно представить в виде
Т / 2
Q=^OTm+^^W, (Ю.43)
где Um= С/™, s=l,2, 3,
или, с учетом соотношений (10.41) и (10.42),
(','• Г жЧ 1**+' + **+< Т" sh2n'l 1
«-"■Uf'+Sh-^!—
0 L /=1 J
л+
/
У
-%
t-t
-ч
1
\
Л
ь
I
4>i
t-r
о —'
Mm при t,
Рис. 10.6. Траектория изображаю- Рис. 10.7. Изменение модуля управ-
щей точки на фазовой плоскости ляющего момента во времени
при максимальном быстродействии
+
\as+i + bs+\ —sin* [% — n(t—t\)] л
Ь. dt\-
as cos2 [r. — n(t —1\)]
т r 2
0 L /-i
/*Л <*sn ' bsn
I /-1
+
/-1
bsn
(10.44)
На рис. 10. 6 показана траектория движения изображающей
точки на фазовой плоскости <р=/(<р). Как известно, при
оптимальном, © смысле быстродействия, развороте аппарата вокруг
оси его главного момента инерции время переключения
управления ti=Tm/2. В отличие от этого случая при аналогичном
развороте вокруг оси Эйлера ti=£Tm/2. Кроме того, направления
оси действия момента М до и после переключения не являются
И"
315
взаимно противоположными. На рис. 10. 7 показан характер
изменения во времени модуля управляющего момента.
Синтез управления, оптимального с точки зрения
минимальных энергетических затрат
Для перевода КЛА из начального положения (10. 1а) в
конечное (10. 16) за заданное время Т требуется согласно
принципу максимума два переключения максимального по величине
управляющего момента.
Обозначим моменты
переключения через tx и ti+t2,
причем
T=t{ + t2+tz> (10.45)
где /з — время торможения
аппарата (рис. 10.8).
В интервале/i^/^/i f/2
аппарат вращается с
постоянной угловой скоростью
<P('l)=<P('l + *2).
Однако, как отмечалось выше, для компенсации
гироскопического момента к аппарату должен прикладываться
управляющий момент. Из фазового портрета управляемого движения КЛА
в соответствии с уравнениями (10. 26) имеем
— при /=/4:
t=
z1
-<Р -<Ро ~<f
t,
t=t,l
ь
-9
9
\
h
I
\r=tf+tz+t3 ^
\o <p
Рис. 10. 8. Траектория изображающей
точки на фазовой плоскости при
заданном времени маневра
СР(/1) = ^1:
м„
<P('i) = ?i=-<Po
— при t=t1Jr /2:
<?(*1 + *2) = у2 =
JKasn2
th tlt^
Inch ntx\
(10.46)
J/<asn
th ntx;
(10.47)
T('i + 'i)=ft=
To"
Mn
lnch/i^-
м„
th nt±tt.
J/(asn2 x ' Jxasn
Здесь принимается, что максимальное по модулю значение
направляющего косинуса вектора момента при 0^/^/i+/2 равно
£=K+Mge)cos6.
Движение КЛА на участке tt + t%^.t^T описывается
уравнением
м
ms
JKas cos2 [% — п (t — t\)]
(10.48)
316
где x=arctgth nti, причем, как это легко показать,
tbnti=tgnt3. (10.49)
Интегрирование данного уравнения с учетом начальных
условий (10.47) дает при t=T:
9(7-)=0;
?(r)=-^+7^lnch^+7^th^-7^lncos^
Из последнего выражения находим
Мк***ь -nfbnt^b). (10.50)
V Mms }
Дополняя это соотношение равенствами (10.45) и (10. 49),
получаем систему трансцендентных уравнений для определения /ь
h и U.
Аналитическое решение данной системы в общем случае
затруднительно. Для использования графическогоспособа решения
равенства (10.49) и (10.50) удобно представить в виде
th2nt±=th [*&**** -nthnt^T-tx-n arctgthntj 1 .
L Mms j
Ограничимся приближенным решением, справедливым при
thnti=ntt и tgnts=ntz, т. е. когда h=t3. В этом случае Т=
=2/i+4 и согласно соотношению (10. 50)
chnt] =cxp (il^H^l.
cos ntz
JKas4o __j. j.
Mms
Отсюда находим
• =Z-[i — l/"l 8/*g*?o 1
1 4 L К Г2Л**, J
=— [l-L 1/ 1 8/*fl*?o 1
2[ TK ™*«* J
(10.51)
Эти выражения определяют моменты переключения управления
в зависимости от фиксированного времени маневра и
граничных условий.
Заметим, что для управления плоским разворотом КЛА
вокруг одной из его главных, центральных осей инерции на угол
<р(н имеем [33]
1 2 I У тшту 2 [У тшту
где / — момент инерции;
317
Мт — максимальное значение управляющего момента.
Подставляя в формулы (10.50) выражения для J к и aSJ
а также полагая для сравнения /=/s<p01=<p0vs и Мт=Мт<!,
легко показать их идентичность формулами (10.51).
Моменты, прикладываемые к аппарату по связанным осям
при Ог^/^i и t\+t2<t<T, определяются так же как и в
рассмотренной ранее задаче [см. (10.41) и (10.42)]. В интервале
О^^/i и t\+t2<t^T модуль управляющего момента будет
М _ Mmstgb{ _ Aim^ tg e2
т as + bstgb! as-bstgb2
С другой стороны, из условия компенсации гироскопического
момента
Мт=/Э<р2,
или с учетом равенства (10.46)
Mm=-^itfntly
где &,=р; при в=-£-
(10.52)
Отсюда моменты, прикладываемые к аппарату по связанным
осям, равны
Mi=_Mm±_th2nti.bh /=if2,3. (10.53)
bs
Расход рабочего вещества на управление вращением КЛА с
постоянной угловой скоростью определяется выражением
з
Q=Mm.Umitfntx У btt2. (10.54)
*• 1st
На участках разгона и торможения КЛА затраты рабочего
вещества вычисляются по формуле (10. 44).
Таким образом, изложенное аналитическое решение задачи
экстенсивного управления поворотным маневром позволяет
получить требуемую программу изменения во времени управляющих
моментов. Реализация этой программы связана с большим
объемом арифметических операций, что предполагает использование
в системе ориентации вычислительной машины.
10.4. Синтез системы экстенсивного управления
с двигателями-маховиками
Экстенсивный (направленный) поворот КЛА может быть
реализован системой управления, в качестве исполнительных
устройств которой используются двигатели-маховики. Посколь-
318
ку динамические свойства КЛА в этом случае имеют
принципиальные отличия от свойств аппарата при управлении
реактивными двигателями, приведем вывод дифференциального уравнения
его вращательного движения. При этом будем считать, что
направление оси Эйлера ё9 в связанной системе координат 0*1*2*3,
величина <р и знак угла поворота sgn<p аппарата заданы. При
этом оси вращения маховиков совпадают с осями хи х2 и х3,
причем определение главных моментов инерции КЛА относительно
этих осей производится при заторможенных маховиках.
Одинаковые для всех маховиков значения их полярных моментов
инерции обозначим через /м. Для осуществления экстенсивного
поворота вектор абсолютной угловой скорости КЛА должен
совпадать с осью Эйлера, т. е. должно выполняться условие (10.6)
Тогда вектор кинетического момента корпуса КЛА будет (10.9)
где
* л-1
л-1
Результирующий вектор Н кинетических моментов системы трех
инерционных маховиков находится из очевидного равенства
M=/MJlQ„Tn.
л-1
Согласно закону сохранения кинетического момента при
начальных нулевых условиях имеем
или, с учетом выражений для К и Я,
л-1
Учитывая, что векторы К и Н равны и противоположно
направлены, уравнение (10.54) можно записать в скалярной форме.
Для этого представим
Н = 1Н 2 2/« = /«2***> (Ю.56)
Л-1
319
где.
/"»
2s=l/ V 22 —модуль результирующей угловой скорости ма-
* 7^х ховиков;
Л-1
Л*
2
Сравнение значений для единичных векторов ёк в
выражениях (10.9) и (10.56) дает
й — Q" — J»Vn
Ря~ о. " U э
откуда
2„=^2я=рл2я. (10.57)
'к
Возвращаясь к уравнению (10.55), с учетом выражения для Н
получаем
Ф=--^2а
и после дифференцирования
Ф=--^-2я.
Используя равенство (10.57) и находя значение для
з
2Я= V ря2„, запишем эти уравнения в виде
л-1
'* Р" ' (10.58)
?~£2]«*
Допустим, что в качестве привода маховика применяется
двигатель постоянного тока с независимым возбуждением. Динамика
такого привода в предположении, что индуктивностью в цепи
якоря можно пренебречь и нагрузка на валу двигателя является
чисто инерционной, описывается уравнениями
— электрического равновесия
— мЪментов
MA=cmi*=Iu
dQn
dt
320
где Un — -напряжение в цепи якоря я-го двигателя, л= 1, 2,3;
Cq , ст — конструктивные постоянные;
гя — сопротивление цепи якоря;
/я — ток якоря;
ЛГД — момент на валу двигателя,
или одним уравнением
T^ + bn=KUn, (Ю.59)
at
где 7%=-*^-—постоянная времени;
стс2
k2= передаточный коэффициент.
С2
Напомним, что параметры двигателя с 2, ст, гя и /м считаются
одинаковыми для всех трех маховиков.
Из уравнения (10.59) находим
dQn =(kJ/n-Qn)
dt ТА
Подставляя это значение во второе уравнение (10.58), получаем
з
л-1
или, исключая отсюда Qn с помощью первого уравнения (10.58),
Л-1
Поскольку напряжение в цепи якоря двигателя и угловая
скорость маховика линейно зависимы, то
з
В U = Us
л-П **
где Us — напряжение в цепи якоря двигателя, угловая скорость
Q8 которого является максимальной.
Отметим, что максимальную угловую скорость будет иметь
тот маховик, направляющий косинус оси вращения которого
максимален (ря=р*). С учетом ограничения £/8^£/т«, где
Ums — максимально допустимое значение, уравнение (10.60)
приобретает окончательный вид
T;i+i=-kum, (ю.61)
где k=-^-ka,
um =
321
Полученное уравнение (10.61) описывает динамические
свойства КЛА при экстенсивном управлении поворотным маневром с
помощью системы инерционных маховиков. При учете
граничных условий (10. 1) они используются при синтезе системы
управления оптимального в смысле быстродействия. Прежде чем
переходить к процедуре синтеза, рассмотрим вначале
функциональные задачи вычислительного устройства, которые
необходимо решить для технического обеспечения поворота КЛА вокруг
оси Эйлера. По информации, поступающей с измерительных
устройств, по формулам (10.4) и (10.5) производится
вычисление ориентации оси Эйлера (направляющие косинусы vi, V2 и гз)>
величины угла <р и определение направления поворота. Затем
вычисляются направляющие косинусы р4, р2 и р3 вектора
кинетического момента. Если оси хх, х2 и х$ являются главными осямгс
моментов инерции, значения которых известны, то используют-
J v
ся соотношения рл= —— , п= 1, 2, 3.
Если оси *i, х2 и *з не являются осями главных моментов
инерции, то предварительно определяется матрица моментов
инерции КЛА. Определение производится в связанной системе
координат на основе равенства
/ю= — Я,
где /=||/tjlU/= 1,2,3,
откуда при начальных нулевых условиях получаем следующее
соотношение
h= НХ =- ' *=l,2f3.
]/ (S *w)2 + (2 hr>tf + (i hjvij
Из полученных значений для направляющих косинусов рп
выбираем максимальное по абсолютной величине значение В*.
Тогда максимально допустимое значение напряжения Ums подается
в цепь якоря двигателя, установленного по оси xs. К
двигателям, установленным по другим осям, подаются напряжения,
равные соответственно
// Vms. о . [Г Ums о
^5+1 — * ?s+V и 5+2 — ~ ?s+2-
К К
При таком выборе напряжений результирующий вектор
угловой скорости маховиков 2б будет совпадать с направлением
вектора кинетического_момента аппарата. Максимально допустимая
величина вектора |2slmax определяется с учетом ограничений
угловых скоростей маховиков. Если максимальная угловая ско-
322
рость каждого маховика, соответствующая напряжению i/™*»
равна QTOS s=il, 2, 3, то
К
Отсюда максимально возможная угловая скорость поворота
корпуса КЛА согласно формуле (10. 58) будет
Ъ*=--Г-^- ПО. 62)
Заметим, что знак минус означает, что направление вращения
корпуса противоположно направлению вращения маховика.
Аналогичный смысл имеет знак минус и в уравнении (10.61).
Опустим в дальнейшем этот минус, для чего примем граничные
условия равными
?(0)=?(0)=0; (10.63a)
?(Л=?К; т(П=о, (Ю.бЗб)
т. е. поворот КЛА изменяет его начальную ориентацию на
конечный угол фк.
Задачу синтеза системы управления сформулируем как
задачу, решение которой обеспечивает экстенсивный поворот КЛА
из начального положения (10.63а) в конечное положение
(10.636) за минимальное время при заданном ограничении
угловой скорости корпуса КЛА (ф^фт). При этом особый интерес
представляет выбор функции переключения и структурной схемы
системы. Как известно [26], при ограничении какой-либо
координаты объекта оптимальное управление можно рассматривать как
управление этой координатой. В данном случае такой
координатой является ф. Известно также, что алгоритм управления
должен состоять из двух интервалов ±Um и одного участка, на
котором напряжение t/i пропорционально скорости
ограничения фш.
Таким образом, необходимо максимальным управляющим
воздействием +Um разогнать корпус КЛА до максимально
допустимой скорости фт, а затем поддерживать эту скорость
постоянной. В конце управления необходимо подать управляющее
воздействие — Um. Задача сводится к определению времени
разгона КЛА, торможения и движения с постоянной скоростью.
Найдем вначале время разгона КЛА до скорости фт. Для этого
запишем решение уравнения (10.61), определяющего скорость
где а =
Т
срт=(1-е-«<.)^Л*>
1
323
Отсюда найдем
a kUm —im
Далее из решения уравнения (10.61) аналогичным образом
определяем время торможения
;а=-1_1п **-+* .
Угол поворота КЛА за время разгона <pi вычисляется по
формуле
?i=j ?(*)*=? {\-e-*t)kUmdt=kUm{t1-{\-t-*'*)T]\,
а за время торможения по формуле
t /.
ъ=\ V(t)dt=\ [-кия+(кия+ъ)е^]<Н=
о о
а
Угол поворота <pi2 за время tx и t2 будет
а
-(l-r-iJWJ,.
Наконец, угол <р3 поворота КЛА при вращении с постоянной
скоростью
Отсюда время движения с постоянной скоростью
*з— :
и общее время оптимального процесса
На рис. 10. 9а изображен алгоритм оптимального управления с
ограничением угловой скорости поворота КЛА. На участке
движения с постоянной скоростью напряжение может быть
уменьшено, как показано на рисунке. Этой скорости соответствует
напряжение
k
324
Перейдем теперь к определению функции переключения. При
ограничении значения s-й производной в системе п-то порядка
для осуществления оптимального управления необходимо иметь
N=(n — s) (s+l)^n интервалов управления и 5 участков
стабилизации Afc. Осуществить оптимальное управление с помощью
одной функции переключения \i
в таком случае невозможно.
Необходимо и достаточно иметь две
функции переключения jxi (/) и
МО- Функция \i\(t) формирует
моменты переключения для
оптимального управления координатой ф8
для «вывода ее на координату <р^ и
переключает затем систему на се-
жим стабилизации <р^. После
окончания участка стабилизации \i\(t)
снова формирует моменты переклю- 6)Лг
чения и т. д. Функция ji2(*)
формирует моменты переключения для
начала управления координатой cps.
Функция |x2(0 является задающей
по отношению к |ii(/)» т. е.
определяет знак и момент включения
fjii(^). В общем виде функции u,\(t)
и [i2(t) имеют следующий вид:
IHW=<U-T,(0-*iTf+1 ~
is(0=W'«)-tW]+*i[v(^)-tW1+
+W*-1('J-?i-lWL (Ю.64)
где |?1""f'l",+1 —постоянные коэффициенты;
tm—момент времени, соответствующий окончанию
последнего участка стабилизации ср^ах.
В функцию цг(0 входит координата ф и ее производные до
<ps~* включительно. Таким образом, каждая функция
переключения управляет только «своими» координатами. Для
рассматриваемого примера я=2, s=l, так что N=(2—1)(1 + 1)=2,
а число участков стабилизации Nc=l.
Определим \a(t) и р,2(0 согласно общим выражениям (10.64)
fti(0=?('«)-T(0=(?i+ft)-?(0-
В момент окончания стабилизации t=tm и |Х2(0=0- На
последнем интервале управления [a(t)=— q>(t), так как в конечной
точке <р=0, а функция \i2(t)=0. Обе функции \ii(t) и i^(t) воз-
Ul
а) 0
-Urn
Ф\
0<
А
Mi
0
-л
1
t,
««—•■
1
и
,
к
. fr. ,
1
Фт
р« »■
\|
^
t -
t
t
Рис. 10.9. Изменение
управляющего сигнала, оптимальной
траектории и функции
переключения
325
можно объединить в одну, так как ^(0 является задающей по
отношению к [ii(t):
1^1 (^) = Sgn [Х2 (в) [^ — ср"] = Sgn (срх + ?8) (?m — ?) ^
где |1г(0)—значение |i2(0 при /=0, знак м*(0) определяет
знак <pw.
ПОСКОЛЬКУ ф1 + фз = <Рк — ф2,
ТО М<2(0 = (фк — Ф2) — ф(0>
где q>K — установка системы, значение координаты которой
необходимо отработать.
Рис. 10. 10. Схема оптимальной системы
управления с двигателями-маховиками
График изменения управляющего сигнала, оптимальной
траектории и функции переключения изображен на рис. 10.9.
На рис. 10.10 приведена одна из возможных структурных
схем оптимальной системы с ограничением производной. Система
включает в себя блок формирования управляющих напряжения
дв'игателей-махов'иков (БФН), два суммирующих устройства
(CYi и СУ2), с помощью которых вычисляются функции
переключения jljli (/) и (и,2(0 и три релейных элемента (P3i, РЭ2 и
РЭз). В CYj происходит вычисление [i2(t) = (<pK— фг)—ф(*)-
Заметим, что текущее значение угла поворота корпуса <р(/)
может определяться путем интегрирования угловой скорости
одного из маховиков, измеряемой тахогенератором, согласно
формуле (10.58)
/ t
<р(/) = j i(t)dt= --4jL _L ^ QndL
0 0
Функция \i2(t) поступает на вход релейного элемента РЭь
на выходе которого формируются управляющие сигналы. В на-
326
чале процесса управления (*=0), когда ф(0)=0, на вход СУг
подаются в виде соответствующих напряжений
(пропорциональных фк), подлежащих отработке, и ф2=const. Поскольку \12(0)ф
фО, то P3i срабатывает и подает сигнал в СУг. В СУ2
производится вычисление [ii(0=<Pm —<р(0- Текущее значение
производной от ф(/) может вычисляться по формуле ср=—^221. Реле
P3i подключает к входу СУг -сигнал фш определенного знака.
Поскольку ф(0)=0, то РЭ2 срабатывает и подает на БФН
управляющий сигнал U=Um. На основании этого сигнала и
значений направляющих косинусов рп с выхода БФН в цепи якорей
двигателей-маховиков подаются напряжения
Ums—Г" И Ums—— '
Как только ф(/) сравняется с фт, происходит отключение РЭг
и включается РЭ3, которое переключает управляющий сигнал
U=Um на U=UU соответствующий в установленном режиме
фт=й(/1. В этом случае цепи якорей двигателей-маховиков
подключаются к напряжениям
// • // fts+l . [7 ?s+r_
uls> uls * » °1J , •
Далее идет участок стабилизации (вращение с постоянной
угловой скоростью фш). Когда |т2(0 становится равной нулю, от СУг
отключается сигнал, задающий значение ограниченной
координаты фт. При этом fxi(^) =—ф(*), т. е. функция \ii(t) изменяет
знак. В результате РЭг переключается и, реверсируя, выдает
сигнал U=—C/w, а РЭз отключается. В конце управления ф(/)=0
и отключается РЭ2. Выбор рабочих параметров релейных
элементов, а также согласование этих параметров с
характеристиками суммирующих устройств и блока формирования
напряжений двигателей-маховиков производится на основе анализа
графиков функций 'переключений. Заметим, что рассмотренная в
общих чертах схема оптимального управления экстенсивным
поворотом КЛА с помощью двигателей-маховиков является одной из
возможных. Применение бортовых вычислительных машин
может качественно 'изменить характер выполнения функциональных
операций в данной схеме.
ПРИЛОЖЕНИЕ
МАГНИТНОЕ ПОЛЕ ЗЕМЛИ
В общем случае движения КЛА по околоземной орбите
величина и направление вектора индукции В магнитного поля
Земли непрерывно изменяются. Характер этих изменений в функции
времени и элементов орбиты имеет важное значение при синтезе
систем ориентации с магнитоприводом. Рассмотрим модели
геомагнитного поля, которые используются на практике для данной
цели.
1. Точная модель определяется заданием коэффициентов
сферического гармонического ряда Гаусса, а также их временных
производных в геоцентрической системе координат [17, 19, 37, 58].
Выражение для потенциала поля, записанное с помощью
указанных коэффициентов, имеет вид
оо 00
W=a V V /-^V+1 {^cosmX+A^sin тЦР™(cos6), (П. 1)
где а — радиус Земли;
г — расстояние по радиусу от центра Земли;
■в — широта;
X — долгота, измеряемая от Гринвича;
8™ и Kl — коэффициенты Гайсса;
Р™ (cos 6) — полиномы Лежандра.
Значение первых коэффициентов Гаусса сферического ряда (П. 1)
в единицах 10"4 ЭМЕ приведены в табл. П. 1.
Таблица П. 1
*
—3957
8\
-'211
h\
581
8°2
—127
£2
296
h'
—166
&
164
н\
54
С целью физической интерпретации первых коэффициентов
предположим, что магнитное поле Земли эквивалентно полю маг-
328
нитного диполя Z)3, расположенному в центре Земли. Направим
ось диполя вдоль полярной оси Xz (рис. П. 1). В произвольной
точке О вектор £>3 создает потенциал
W =
rz
или с учетом ориентации вектора Въ,
r=-^-cose=^.PJ(cos6).
(П. 2)
(П.З)
Полагая в формулах (П. 1) и (П.З) г=а и сравнивая
полученные выражения, находим
Й-
аз
Рис. П. 1. Магнитное поле
диполя Земли, совмещенного
с полярной осью
Рис. П. 2. Магнитное поле диполя
Земли, расположенного в
экваториальной плоскости
Совместим теперь ось диполя D$ с экваториальной плоскостью
(рис. П. 2). В этом случае магнитный потенциал в точке О будет
^ = -Р31 ^1 + Д32 ^2 = ^1, ^ (CQS 6) CQS у + ^2. ^ (cos 6) sin y>
(П. 4)
где /V(cos 0)=sin 6; Dzi и Х{ — проекции векторов Лз и г
соответственно на оси Х{ (*'= 1, 2).
Сравнивая формулы (П. 1) и (П. 4) при г=а, получаем
g*- Лз ' "I"" аз
(П. 5)
Следовательно, первая сферическая гармоника точной модели
геомагнитного поля определяет поле магнитного диполя, распо-
329
ложенного_в центре Земли, причем модуль вектора магнитного
момента |25з| диполя равен
Ds=a*[(g(>? + (g'1T + (filf\V\ (П. 6)
а направление задается углами 04 и <pi, у которых
Точки, в которых ось диполя пересекает Земную поверхность,
называются геомагнитными полюсами. В настоящее время их
координаты равны 78,5° С, 69,1° 3, 78,5° Ю и 110° В, что
соответствует наклону оси диполя к оси вращения Земли на угол,
равный 115°. В табл. П. 2 приведены численные значения
сферических гармоник (в % от первой), иллюстрирующие их роль в
описании точной модели геомагнитного поля.
Таблица П. 2
Расстояние
от центра
Земли в
радиусах
Земли
1
1,2
1,5
2,0
3,0
№ гармоник
2
10,4
8,7
6,8
5,2
3,5
3
5,9
4,1
2,6
1,5
0,7
4
2,8
1,6
0,8
0,3
0,7
5
0,9
0,4
0,2
0,1
0,1
6
0,4
0,2
0,1
0,1
0,1
Сумма
гармоник
2-6
20,4
15,0
10,0
7,0
4,2
Из данных таблицы следует, что модель геомагнитного поля
в виде наклонного диполя дает удовлетворительное приближение
к точной. Характерно, что это приближение, составляющее на
поверхности Земли около 80%, возрастает по мере удаления or
Земли. Если иметь в виду использование геомагнитного поля
для управления ориентацией околоземных КЛА, т. е. для
создания управляющих моментов, а не определения углового
положения КЛА, такое приближение диапольной модели к точной
является вполне достаточной.
330
2. Приближенная модель определяется заданием ориентации
оси диполя, магнитное поле которого эквивалентно полю
первой сферической гармоники ряда (П. 1), по отношению к оси
вращения Земли (наклоненная и ненаклоненная). Учитывая
широкое использование этой модели на /практике, определим
составляющие вектора магнитной индукции геомагнитного поля,
представляемого в виде наклоненного диполя, на оси орбитальной
*з*М
Рис. П. 3. Магнитное поле наклоненного
диполя Земли
системы координат 0'х01ХоцХоз. Для этого введем в рассмотрение
две системы координат с началом в центре масс Земли: инерцио-
нальную 03 ^ю^2о^зо и систему 03Х\Х2Хг (рис. П. 3). Зададим
положение плоскости орбиты аппарата в системе 03ХкРС2оХзо
углами Q и /, а текущее положение КЛА на орбите — радиусом-
вектором г и углом и — аргументом широты.
Система координат 03 Х\Х2Хг получена поворотом системы
Х\$Х2
строения следует, что
Оэ ^ю^2о^зо на угол Q вокруг оси Х3о. Из геометрического по-
где
г=Хгег+Х2е2+Хге8,
A\=rcos#;
X2=r cos /sin и;
X,
3=rsin * sin и.
(П. 7)
Положение вектора магнитного момента диполя Земли D*
определяется в системе 03 А^Дго^зо углами фм и Йм=
= QMo — gW> где QMo — начальный угол. В проекциях на оси
системы 03 XxX2Xz имеем
331
A,i=£>scoscpMcos22;
£32= — Db cos cpM sin 2L;
D33=D3sin<pM; (П.8)
2s = 2M + 2; 2a = 20-2/;
Q0 — начальное значение угла Qs ;
Q — угловая скорость прецессии орбиты.
Магнитное поле Земли является векторным (соленойдальным)
полем, вектор магнитной индукции которого равен [37]
где V= е.А
дХх 1Л дХ2
е2-\ еъ —символический вектор (набла).
дХ$
Предста!вляя в выражение (П. 9)
В = Вхё\+В2ёг+Вгёъ,
находим
/•з
■D,
ИП.10)
дхм \ г* ' гз
где/=1,2,3,
и после подстановки равенств (П. 7) и (П. 8)
Вг = -£—£- [cos cpM cos 2L (3cos2 я—1) — 3 (cos cpM cos / sin 2S —
— sin j sin cpM) sin и cos u];
^2=^3-[—cQscp¥sin 2s(3cos2/sin2a--l) +
4rtr3
-}-3coscpMcos2acos/sin #cos#-f3sin <pMsin /cos/sin8a];
B3 = -*—2- [sin cpM (3sin2 / sin2 и — 1) -f 3cos cpM cos 22 sin / X
4яг3
X cos/sin и cos и — 3cos cpM sin 2ssin /cos/ sin2#].
Оси орбитальной системы координат направим следующим
образом: ось *(ц по трансверсали, ось *02 по радиусу-вектору г.
Тогда для проекции вектора В на оси системы Олг01*о2*оз получаем
В01= — Bxsin u-\- B2cos i cosu-{- B3sin 'cos я;
В02= Вг cos # + ^2 cos / sin я + Z?3 sin / sin я;
B0B=B2 sin / — £3 cos /
332
и после подстановки значений В\9 В2 и Въ согласно
выражениям (П. 10)
В01=-£—$-[—sin cpM sin /cos^ + coscpMcos/sin 2scos#-|-
4яг3
+ cos cpM cos 22 sin и];
В02=^—- [sin cpM sin 'sin # — cos ?м cos*sin 22 sin # +
4rtr3
-j-coscpMcos2aCOS#]; (П. 11)
^оз=т^т Isin <Рм cos ' + cos cpM sin * sin 2S].
4ЯГ*
Проанализируем полученные выражения, для чего рассмотрим
значения углов Qs и и. Как было отмечено ранее,
2Е=(2м0+20)-(ш3+£)Л
Учитывая, что скорость прецессии за один оборот аппарата
dQ = 2jt/?* / ttgfl» \
cos г,
где Дэ — экваториальный радиус Земли;
а — сжатие Земли;
go — ускорение силы Земного тяготения на экваторе;
i — наклонение орбиты;
N — порядковый номер оборота КЛА вокруг Земли,
является величиной соизмеримо малой (1/4° за один оборот при /=
=65° и А=200—300 им) ъ сравнении с угловой скоростью Земли„
в первом приближении можно принять
2а = 2м0+20 — о>3/=2ео — V»
где 2ао=2м0+20,
что не исключает введение поправок в значение угла Qs после
нескольких оборотов КЛА. Учитывая периодичность изменения
Qmo можно положить Qso=Qo- Однако следует иметь в виду,,
что от значения угла Qs зависит знак составляющих вектора
индукции.
Так в соответствии с последним равенством (П. 11)
Я03>0 при 0<2S<180°
и £0з < ° ПРИ 180°<2Е<360°,
если |sin <pM cos /| < cos cpM sin / [sin 2S|.
333.
Аргумент широты u=w+'&f где w — угловое расстояние
перицентра орбиты от восходящего узла, a ft=v/ — истинная
аномалия.
Поскольку
= а (5cos2* — 1),
то значение угла w также должно корректироваться. Для
рассматриваемого далее случая круговой орбиты w=0 и и=
=ft=vot выражения (П. 11) удобно представить в ваде
B01=B0smtMsm{u-4\M);
B02=—2B0sinsy[cos(u — r\M);
£03=-£0cos$M, (П. 12)
где
sin 5M=V^1 —(sin cpM cos i + cos cpM sin / sin 2S)2;
sin <pM sin i — cos <pM c°s i sin Qs
T)M = arctg-
cos ?Mcos ^м
1м— переменное наклонение плоскости орбиты к
магнитному экватору;
т)м — угол между восходящими узлами в плоскостях
географического и магнитного экваторов.
Для приближенной модели геомагнитного поля в виде
диполя, ось которого совпадает с осью вращения Земли, выражения
для составляющих вектора магнитной индукции на оси JCoi, x<& и
*оз, полученные из выражения (П. 12) при <рм=90, имеют вид
Z?01 = #0sin /cosи;
Z?02=-|-2£0sin /sin u\
B03=—B0cosi
(П. 13)
Модель геомагнитного поля в виде ненаклоненного диполя
используется для предварительной оценки моментных свойств
.магнитопривода в системах ориентации низкоорбитальных КЛА,
лериод обращения которых много меньше Земных суток.
3. Расчетная модель геомагнитного поля представляет собой
упрощенный вариант приближенной дипольной модели. Для ее
описания введем еще две системы координат с началом в центре
масс КЛА: инерциальную орбитальную ОХ^Х^Х^ и
вспомогательную 0|ig2|3, связанную с вектором индукции. Направим оси
J^oi и Аде по трансверсали и радиусу-вектору в точке восходящего
334
узла. Ось £i совпадает с проекцией вектора В на плоскость
орбиты, а ось J-2 отстает от оси £i на угол я/2 в направлении
орбитального движения КЛА. Пользуясь матрицей перехода от
системы OZoiX02^o3 к системе OXqiX^X^ находим, что
ВХ1=В0 |_-I-+±cos2v|sin /;
Вхг= —l~B0 sin / sin 2vQt;
В
хз-
— В0 cos /.
(П. 14)
Как видно из выражения (П. 14), вектор В описывает в
системе OX0iX02XoQ коническую поверхность. Годограф конца
вектора представляет собой окружность, параллельную плоскости
^oi^o2, причем центр этой окружности смещен относительно оси
Хоз на 7з радиуса данной окружности. Неравномерность
вращения и непостоянство модуля \В\ обусловлены этим
относительно небольшим (в сравнении с |Л|) смещением. Пренебрегая
смещением оси вращения конуса В и совмещая данную ось с оськ>
Лоз, получим расчетную модель геомагнитного поля. Вектор
индукции расчетной модели Я* в системе О^^ог^оз будет
В* = Во
— sin / cos 2v0/
2 °
3
sin / sin2vJ
2 °
—cos/
(П. 15)
и в системе Olfalz
В* = В0
— sin 1
2
0
—cos/
(П. 16)
причем вектор угловой скорости этой системы сое в инерциальном
пространстве равен
О
О
ч==
-2vn
Качественные показатели контура магнитной разгрузки (см.
гл. IX) определяются не величиной, а направлением вектора
индукции геомагнитного поля. Поэтому оценкой соответствия
расчетной и приближенной моделей может служить угол 6 между
векторами индукции В и В*. Для вычисления угла 0 можно
воспользоваться скалярным произведением единичных векторов
33л
'.-4-
|5| -/l +3sin2v0^sin2/
/1,3 ,ч . .
^—-+—cosV)suw
sin 2v0/sin/
и
\в*\
В результате имеем
cosQ=eB-eB=
/
1 +—sin2/
4
— COS I
— cos 2v0* sin i
sin 2v^sin/
-cos*
1 + — sin2 / (l + 3 sin2 2v00
/
(1 + 3sin2isin2v0/)
(l+^-Sin2|)
На рис. П. 5 представлены графики зависимостей среднего
<8Ср, среднеивадратического 9Ск, максимального 9max значений
угла в от наклонения орбиты. Из графиков видно, что среднее
О 20 ЬО 60 80 l
Рис. П. 4. Зависимость угла б от i
значение угла между векторами В и В* равно нулю, средне-
квадратическое и максимальное значения изменяются от 0 до
13,7° и от 0 до 19,5° соответственно при 0<*<я/2. Приведенные
значения свидетельствуют о приемлемом приближении
расчетной модели к дипольной в отношении сохранения направления
вектора индукции геомагнитного поля.
336
С помощью расчетной модели можно «провести синтез
системы управления ориентацией с магнитоприводом, провести выбор
параметров контура магнитной разгрузки, исходя из обеспечения
устойчивости и требуемого качества процесса разгрузки.
Предварительное задание параметров системы магнитного управления
с использованием расчетной модели геомагнитного поля
облегчает задачу их окончательного выбора по результатам решения
дифференциального уравнения системы с переменными
коэффициентами (с учетом точной модели геомагнитного поля) на
ЭВЦМ.
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев К. Б., Бебенин Г. Г. Управление космическим летательным
аппаратом. М., «Машиностроение», 1964, 402 с.
2. Алексеев К. Б., Бебенин Г. Г. К теории синтеза систем ориентации
ИСЗ с маховиками. — В кн.: Механика космического полета. М.,
«Машиностроение», 1969, с. 180—193.
3. Алексеев К. Б., Бебенин Г. Г., Ярошевский В. А. Маневрирование
космических летательных аппаратов. М., «Машиностроение», 1970, 416 с.
4. Алексеев К. Б., Боднер В. А., Збарский И. С. К теории экстенсивного
управления ориентацией. — «Известия вузов. Авиационная техника», 1972,
JMb 1, с. 3—7.
5. Алексеев К. Б., Боднер В. А., Збарский И. С. Синтез программного
экстенсивного управления пространственным поворотным маневром. —
«Известия вузов. Авиационная техника», 1972, № 2, с. 3—8.
6. Алексеев К. Б., Булекова Н. М., Васильев В. М. Система
экстенсивного управления ориентацией с шаровым маховиком. — В кн.: Задачи
динамики управления летательными аппаратами. Труды МАИ, вып. 240, 1972,
с. 127—133.
7. Алексеев К. Б., Булекова Н. М., Чесноков А. Г. Исследование
программного экстенсивного управления поворотным маневром. — В кн.:
Информационные материалы, АН СССР. Научный совет по комплексной проблеме
«Кибернетика» [Под ред. академика Б. Н. Петрова], № 6(53), 1972, с. 59—68.
8. Бебенин Г. Г. Методы наведения и управления в космическом
полете. — «Итоги науки и техники, ВИНИТИ АН СССР. Сер. Методы и
устройства навигации, наведения и управления КЛА», 1972, № 3, с. 91—108.
9. Бебенин Г. Г. Методы управления ориентацией космических
летательных аппаратов. — «Итоги науки и техники, ВИНИТИ АН СССР. Сер.
Методы и устройства навигации, наведения и управления КЛА», 1972, № 3,
с. 58—90.
10. Бебенин Г. Г. Ориентация и управление полетом. Справочник по
космонавтике. М., Воениздат, 1966, № 3, с. 178—207.
11. Бебенин Г. Г Приборы навигации, наведения и управления
космического корабля. «Apollo». — «Итоги науки и техники ВИНИТИ АН СССР
Сер. Методы и устройства навигации, наведения и управления КЛА», 1972,
с. 195—225.
12. Барбашин Е. А. Введение в теорию устойчивости. М., «Наука», 1967,
с. 25—26.
13. Белецкий В. В. Эволюция вращения динамически симметричного
спутника. — «Космические исследования», 1963, вып. 3, т. 1, с. 339—385.
14. Боднер В. А., Алексеев К. Б., Бебенин Г. Г. Вопросы динамики
одного класса непрерывных систем автоматического управления с
экстремальной самонастройкой структуры. — «Труды III Всесоюзного совещания по ав-
338
томатическому управлению (технической кибернетике), разд.
Самонастраивающиеся системы». М, «Наука», 1967, с. 165—178.
15. Боднер В. А., Алексеев К. Б., Бебенин Г. Г. Об одном классе систем
управления ориентацией искусственных спутников Земли. — «Труды
Международного симпозиума ИФАК. Автоматическое управление в мирном
использовании космоса». М., «Наука», 1969, с. 136—147.
16. Боднер В. А., Алексеев К. Б., Бебенин Г. Г. О применении момент-
ного магнитопривода для пространственной ориентации спутника —
«Инженерный журнал АН СССР», т. 4, вып. 4, 1964, с. 628—638.
17. Дорман Л. И., Смирнов В. С, Тясто М. И. Космические лучи в
магнитном поле Земли. М., «Наука», 1971, с. 67—74.
18. Дубошин Г. И. Небесная механика. М., Физматгиз, 1963, 586 с.
19. Жарков В. Н., Трубицин В. П., Самсоненко Л. В. Физика Земли и
планет. М., «Наука», 1971, с. 7—18.
20. Иоффе И. Г., Кислик Л. И. Некоторые вопросы точности ионного
метода ориентации. — «Космические исследования», 1970, т. 8, вып. 4, с. 629—
632.
21. Кленси Т. Ф„ Митчелл Т. П. Влияние сил давления излучения на
ориентацию. «Ракетная техника и космонавтика», 1964, № 3, с. 135—145.
22. Корн Г., Корн Т. Справочник по математике. М., «Наука», 1968.
720 с.
23. Лурье А. И. Некоторые задачи динамики системы твердых тел —
«Труды ЛПИ», М., Машгиз, 1960, № 210, с. 56—63.
24. Мишина А. П., Проскуряков И. В. Высшая алгебра. М., «Наука»,
1965, с. 122—128.
25. Оклэр Д. Ф. Усовершенствованный управляющий маховик для
системы угловой стабилизации космического объекта. — «Вопросы ракетной
техники», 1970, № 8, с. 64—76.
26. Олейников В. А., Зотов Н. С. и др. Сборник задач и примеров по
теории автоматического управления. М., «Высшая школа», 1969, 200 с.
27. Петров Б. Н., Боднер В. А., Алексеев К. Б. Аналитическое решение
задачи управления пространственным поворотным маневром. — «Доклады
АН СССР», 1970, т. 192, № 6, с. 1235—1238.
28. Понтрягин Л. С. и др. Математическая теория оптимальных
процессов. М., Физматгиз, 1961, с. 85—87.
29. Раушенбах Б. В., Токарь Е. Н. Некоторые вопросы управления в
межпланетном пространстве. — «Искусственные спутники Земли», 1960, № 5,
с. 41—53.
30. Рикитани Т. Электромагнетизм и внутреннее строение Земли. М.,
«Недра», 1968, с. 103—105.
31. Роберсон Р. Э. Измерение угла рыскания спутника с помощью
гироскопа. — «Труды ИФАК», АН СССР, 1960, с. 136—141.
32. Селезнев В. П. Навигационные устройства. М., Оборонгиз, 1961,
615 с.
33. Синг Д. Л. Классическая динамика. М., Физматгиз, 1963, с. 45—58.
34. Сломянский Г. А., Прядилов Ю. Н. Поплавковые гироскопы и их
применение. М., Оборонгиз, 1958, с. 8—32.
35. Фишел Р. Магнитное демпфирование угловых движений спутника
Земли. — «Ракетная техника», 1961, № 9, с. 24—27.
36. Фридлендер Г. О. Инерциальные системы навигации. М., Физматгиз,
1961, 154 с.
37. Яновский Б. М. Земной магнетизм. Изд-во ЛГУ, 1964, с. 204—207.
339
38. Anand D. К., Whisnant J. M., Pisacane V. Ц Sturmanis M. The capture
and stability of the Lidos gravity — gradient satellite in an eccentric orbit. «AIAA
Paper», No. 921, p. 8, 1969.
39. Bishop D. R. Horizon seeker errors arising out of the statistical properties
of the horizon. AAS, Preprint, No. 96, 1961.
40. Confield E. B. Accelerometers and their characteristics, Electr. Manufact.
v. 64, No. 5, 1959.
41. Demarinis L., Huttenlocher H. J. Optimising inertial reaction wheels for
spacecraft slewing and attitude control. IEE Trans, on Aerospace, v. 2, No. 2,
1964.
42. Dougherty H. J., Lelsock K. L., Rodden J. J. Attitude stabilization of
synchronaus communications satellites employing narrowbeam antennas. «J.
Spacecraft and Rockets», v. 8, No. 8, 1971.
43. Finch H. P., Leaton B. R. The earth's main magnetic field epon 1955.
О Monthly Roy. Astron. Soc. Geophis. Suppl. No. 7, 314, 1957.
44. Froelich R. W., Potapoff H. Reaction wheel attitude control for space
vehicles, IRE Transactions on Automatic Control, v. AC-4, No. 3, 1959.
45. Grawford B. S. Configuration design and efficient operation of
redundant multi-jet systems. «AIAA Paper», No. 845, p. 17, 1969.
46. Crespo de Silva Marcelo R. M. Attitude stability of a gravity-stabilized
gyrostat satellite. «Celest. Mech.», N 2, v. 2, pp. 147—165, 1970.
47. Haeussermann W. Control requiremens in US manned space station
projects. George С Marshall Space Flight Center. National Aeronautics and Space
Administration Marshall Space Flight Center, Alabama 35812, 1971.
48. Kendall P. E., Stalcup L. E. Attitude reference devices for space
vehicles, Proceeding of the IRE, No. 4, 1960.
49. Kennedy H. B. A gyro momentum exchange device for space vehicle
attitude control, «IAS Paper», No. 88, 1962.
50. Mobley F. F. Gravity — gradient stabilization results from the DODGE
satellite. AIAA Paper, No. 460, 1968.
51. Mouritzen G. Gold gas rocket propulsion. J. Aeronaut., Sci. 1971, v. 19,
No. 1, p. 55—70.
52. Paiken M., Fleizing R. Momentum control of the ОАО spacecraft
utilizing the earth's magnetic field. XIV Congress internat. astronaut, No. 32, 1963,
Paris.
53. Porcelli G. Optimal attitude control of a dual-spin satellite. «J.
Spacecraft and Rockets», v. 5, No. 8, p. 881—888, 1968.
54. Porcelli G., Connolly A. Optimal attitude control of a spinning space
body-graphical approach. «IEEE Trans. Automat. Contr.», VAC-12, 1967.
55. Scott E. D. Double gimballed reaction wheel system. Lockheed Missiles
and Space Сотр., Report, No. ASCS/2562/6211, 1970.
56. Sievers Richard W., Martin Samuel B. Development of a fluidically
controlled hydrazine roll-rate control system. «J. Spacecraft and Rockets», 1971, v. 8,
No 4, p. 317—323.
57. Tossman B. E. Magnetic attitude control system for the radioastronomy
Explorer-A satellite. «J. Spacecraft and Rockets», v. 6, No. 3, p. 239—244, 1969.
58. Vestine E. H., Laporte L., Lange I. and Sckott W. E. Garnegie Just
Wash. Pull. No. 580, p. 1—390, 1947.
340
59. Wadleigh К. H., Galloway A. J., Mathur P. N. Spinning vehicles nutation
damper. «Journal of Spacecraft and Rockets», v. 1, No. 6, 1964.
60. Wilson D. K., Wuensch R. Sim tracker with moon and planet tracking
modifications. Technical Session Preprints AAS, No. 77, 1960.
61. Whisnaut J. M., Anand D. К, Pisacane V. L., Sturmanis M. The dynamic
modeling of hysteresis and application to damping of spacecraft librations.
«AIAA Paper», No. 833, 1969.
62. «Aeroplane», No. 2536, 1960.
63. ARS Journal, v. 31, No. 8, 1961.
64. Aviation Week, v. 72, No. 18, 1960.
65. Flight, v. 77, No. 2668, 1960.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Введение 6
Часть I. Космический летательный аппарат как объект управления 9
Глава I. Космический полет и задачи ориентации 9
1.1. Виды космических летательных аппаратов 11
1.2. Формулировка задачи ориентации КЛА 19
1.3. Ориентация КЛА при проведении научных исследований и
решении прикладных задач 22
1.4. Ориентация КЛА при маневрировании на орбите 25
Глава II. Динамика вращательных движений космического
летательного аппарата 28
2.1. Кинематические соотношения 29
2.2. Дифференциальные уравнения вращательных движений КЛА
как твердого тела 33
2.3. Дифференциальные уравнения вращательных движений КЛА
как системы твердых тел 38
2.4. Внутренние моменты, действующие на КЛА 42
2. 5. Внешние моменты, действующие на КЛА 48
Глава III. Методы и системы пассивной стабилизации 58
3. 1. Гравитационная стабилизация 59
3.2. Стабилизация вращением 69
3.3. Другие методы стабилизации 75
3.4. Способы пассивного демпфирования 81
Часть II. Элементы системы управления 92
Глава IV. Измерительные устройства 92
4. 1. Гироскопические измерительные устройства 92
4.2. Акселерометры 102
4.3. Инфракрасные измерительные устройства 108
4.4. Астрономические измерительные устройства и оптические
визиры 116
4. 5. Радиотехнические и ионные измерительные устройства .... 125
Глава V. Усилительно-преобразующие устройства 128
5.1. Усилительные устройства 129
5.2. Счетно-решающее устройство 135
5.3. Логические устройства 140
Глава VI. Управляющие устройства 143
6.1. Реактивные двигатели 143
6.2. Двигатели-маховики и силовые гироскопические устройства . 147
6.3. Моментный магнитопривод 158
342
Стр.
Часть III. Исследование систем управления ориентацией 168
Глава VII. Системы управления с реактивными двигателями 168
7.1. Релейная система ориентации 168
7. 2. Оптимизация релейной системы в режиме плоского
поворотного маневра 180
7.3. Импульсные системы ориентации 187
7.4. Релейные системы коррекции вращающегося КЛА 197
7.5. Импульсные системы коррекции вращающегося КЛА .... 207
Глава VIII. Системы управления с двигателями-маховиками и
гироскопическими устройствами 218
8.1. Характерные динамические особенности систем ориентации с
маховиками и гироскопическими устройствами 219
8. 2. Оптимизация одноканальной системы с маховиком 225
8. 3. Системы трехстепенной ориентации 230
8.4. Системы управления с гиромаховиками 245
Глава IX. Системы управления с моментным магнитоприводом . . . 250
9.1. Принципиальные особенности систем управления с
магнитоприводом 251
9. 2. Применение моментного магнитопривода для пространственной
ориентации 260
9.3. Система коррекции вращающегося КЛА 268
9. 4. Комбинированная система управления с магнитоприводом . . 286
Глава X. Системы экстенсивного управления ориентацией 297
10. 1. Принцип экстенсивного управления 298
10. 2. Кинематические и динамические соотношения 302
10.3. Вывод дифференциального уравнения движения и синтез
оптимального управления 309
10.4. Синтез системы экстенсивного управления с
двигателями-маховиками 318
Приложение. Магнитное поле Земли 328
Список литературы 338
Кир Борисович Алексеев,
Геннадий Георгиевич Бебенин
УПРАВЛЕНИЕ КОСМИЧЕСКИМИ
ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
Редактор издательства £. В. Сербиновская
Технический редактор Я. Я. Скотникова
Корректор £. Я. Карнаух
Художник Л, С. Вендров
Сдано в набор 31/IV 1974 г.
Подписано к печати 11/IX 1974 г.
Т—16142 Формат 60X90Vie Бумага № 1
Печ. л. 21,5 Уч.-изд. л. 20,1
Тираж 4500 экз. Зак. 3746
Цена 1 р. 30 к.
Издательство «Машиностроение»,
107885 Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8
«Союзполиграфпрома»
при Государственном комитете
Совета Министров СССР
по делам издательств, полиграфии
и книжной торговли.
Хохловский пер., 7. Тип. зак. 991.